






















































































































































































































































































































































































































































































Автор: Бежок В.Р. Дворников В.И. Манец И.Г. Пристром В.А.
Теги: рудничный (шахтный) транспорт доставка по лаве, откатки по штрекам, подъем по стволам транспорт по поверхности учебное пособие для студентов шахтостроение издательство юго восток лтд наладка и ремонт горная механика подъемно транспортные машины
ISBN: 978-966-374-221-2
Год: 2007



В.Р. Бежок, В.И. Дворников,
И.Г. Манец, В.А. Пристром
ШАХТНЫЙ
подъем, г
В.Р. Бежок
В.И. Дворников
И. Г. Манец
В.А. Пристром
ШАХТНЫЙ ПОДЪЕМ
Под общей редакцией
Б.А. Грядущего и В.А. Корсунр
Донецк
Юго-Восток
2007
УДК 622.67
ББКИ16-5
Ш32
Рецензенты: Шатило АН. — доктор технических наук, академик Академии
горных наук России (г. Москва)
Попов Г.И. — начальник бюро шахтного оборудования ЗАО «НКМЗ»
(г. Краматорск)
Хиценко В.В. — начальник бюро горношахтного оборудования
ОАО «Донецктормаш» (г. Донецк)
Григорьев С.В. — вице-президент Научно-производственной фирмы
«Микропроцессоры, диагностика, электропривод» (НПФ «МИДИЭЛ»,
г. Донецк)
Рекомендовано к печати
секцией «Наука и перспективное развитие» научно-технического совета
Минуглепрома Украины (решение от 25 января 2007 г.)
Издано при финансовой поддержке
НПФ «МИДИЭЛ» и ООО «Полимепг» (г. Донецк)
Шахтный подъем: Научно-производственное издание / Бежок В.Р., Двор-
11132 ников В.И., Манец И.Г., Пристром В.А.; общ. ред. БА Грядущий, ВА Кор-
сун.— Донецк: ООО «Юго-Восток, Лтд», 2007.— 624 с., 494 ил., 233 библиогр.
ISBN 978-966-374-221-2
Изложены основы теории и динамики шахтного подъема, приведены технические ха-
рактеристики и конструктивные особенности элементов подъемных установок, методика
их выбора и расчета. Освещены методы эффективной эксплуатации, диагностики и ре-
монта подъемных машин, редукторов, тормозных устройств, подъемных сосудов, приво-
дов постоянного и переменного тока и другого оборудования, обобщен опыт повышения
его надежности в процессе эксплуатации. Дан анализ неисправностей оборудования
подъемных установок и методы их устранения. Рассмотрены критерии браковки и оценки
технического состояния оборудования подъемных установок, нормативный срок службы
которых истек, с целью определения возможности дальнейшей его эксплуатации.
Для инженерно-технических работников шахт, рудников, шахтостроительных, про-
ектных, научно-исследовательских, специализированных наладочных и ремонтных орга-
низаций, и может быть использовано как учебное пособие для студентов технических
вузов и техникумов по курсу «Горная механика и подъемно-транспортные машины».
УДК 622.67
ББК И16-5
ISBN 978-966-374-221-2
© В.Р. Бежок, В.И. Дворников, И.Г. Манец,
В.А. Пристром, 2007
© Общая редакция БА Грядущий, ВА Корсун,
2007
СОДЕРЖАНИЕ
Глава 1
ШАХТНЫЙ ПОДЪЕМ
В ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛАХ
1.1. Шахтный подъем — транспорт с канатной тягой.......................11
1.2. Классификация подъемных установок.................................И
1.3. Подъем в вертикальных стволах.....................................16
1.4. Подъем в наклонных стволах.......................................18
Глава 2
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
2.1. Избранные разделы теории шахтного подъема........................22
2.1.1. Уравнение динамики подъема М.М.Федорова.....................22
2.1.2. Гармонический подъем........................................25
2.1.3. Кусочно-линейные тахограммы.................................26
2.1.4. Теоретические вопросы фрикционного подъема..................28
2.1.5. Теоретические основы систем АРПТ............................41
2.1.6. Основы теории системы «сосуд-армировка».....................45
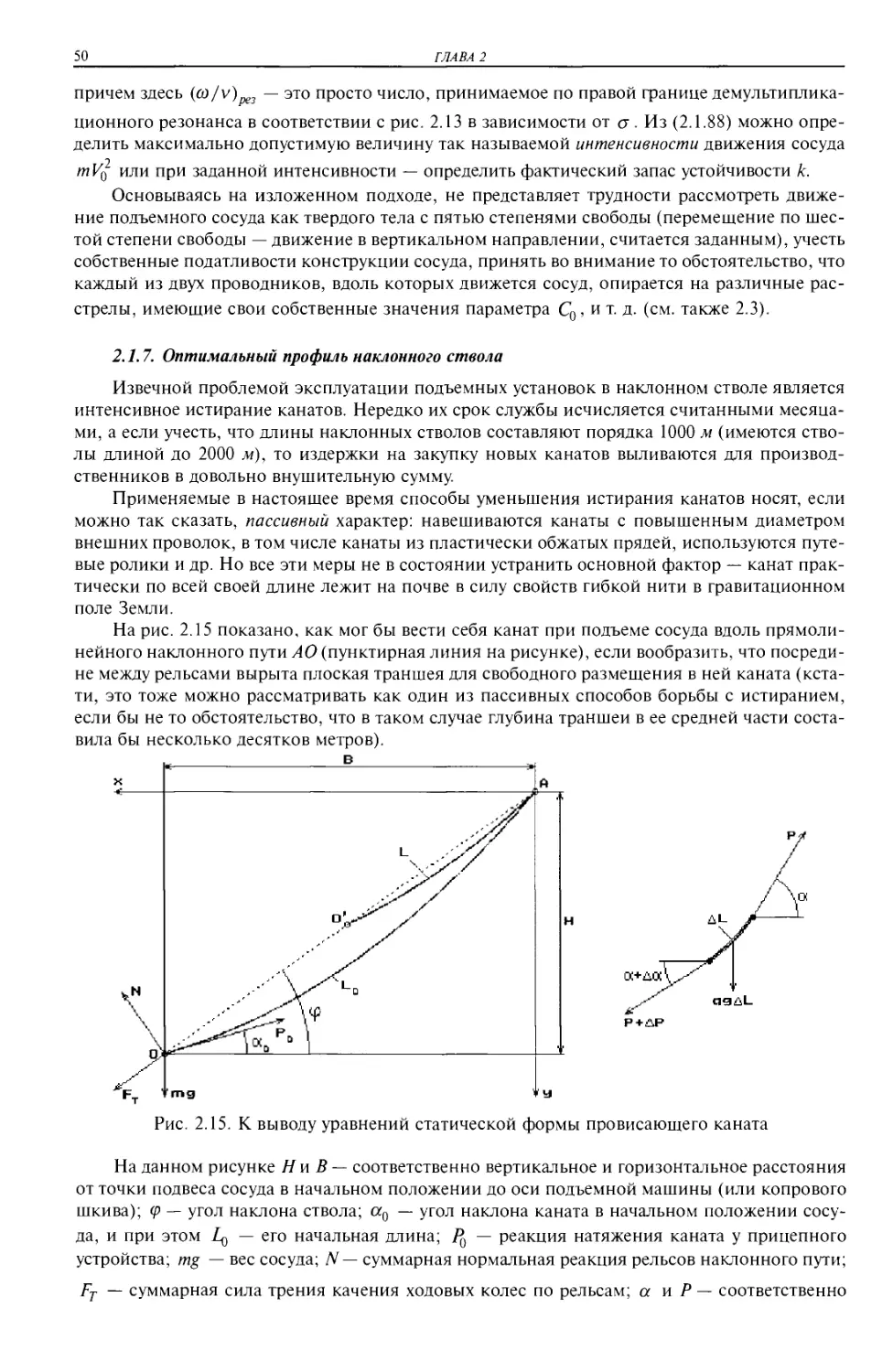
2.1.7. Оптимальный профиль наклонного ствола.......................50
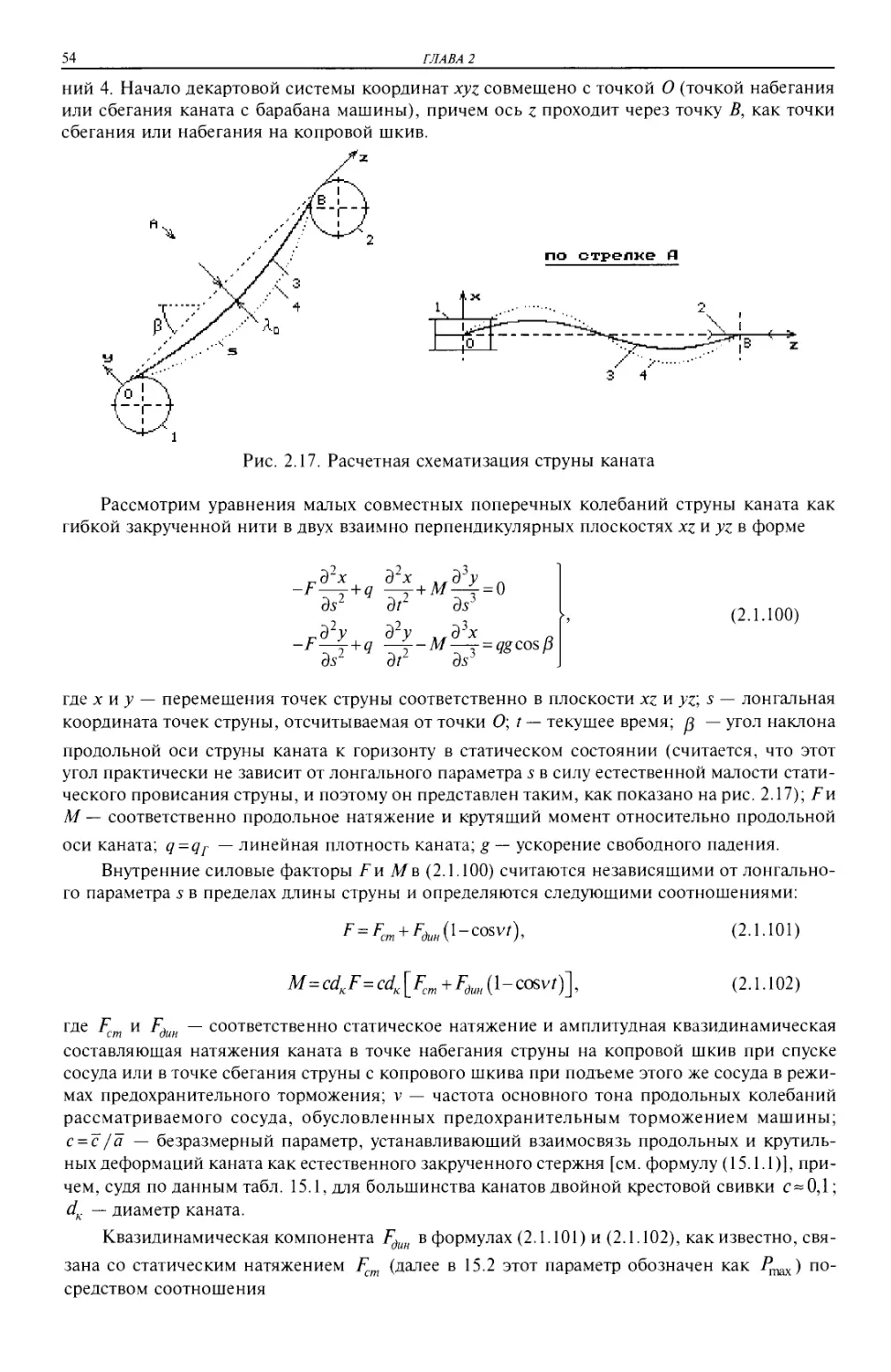
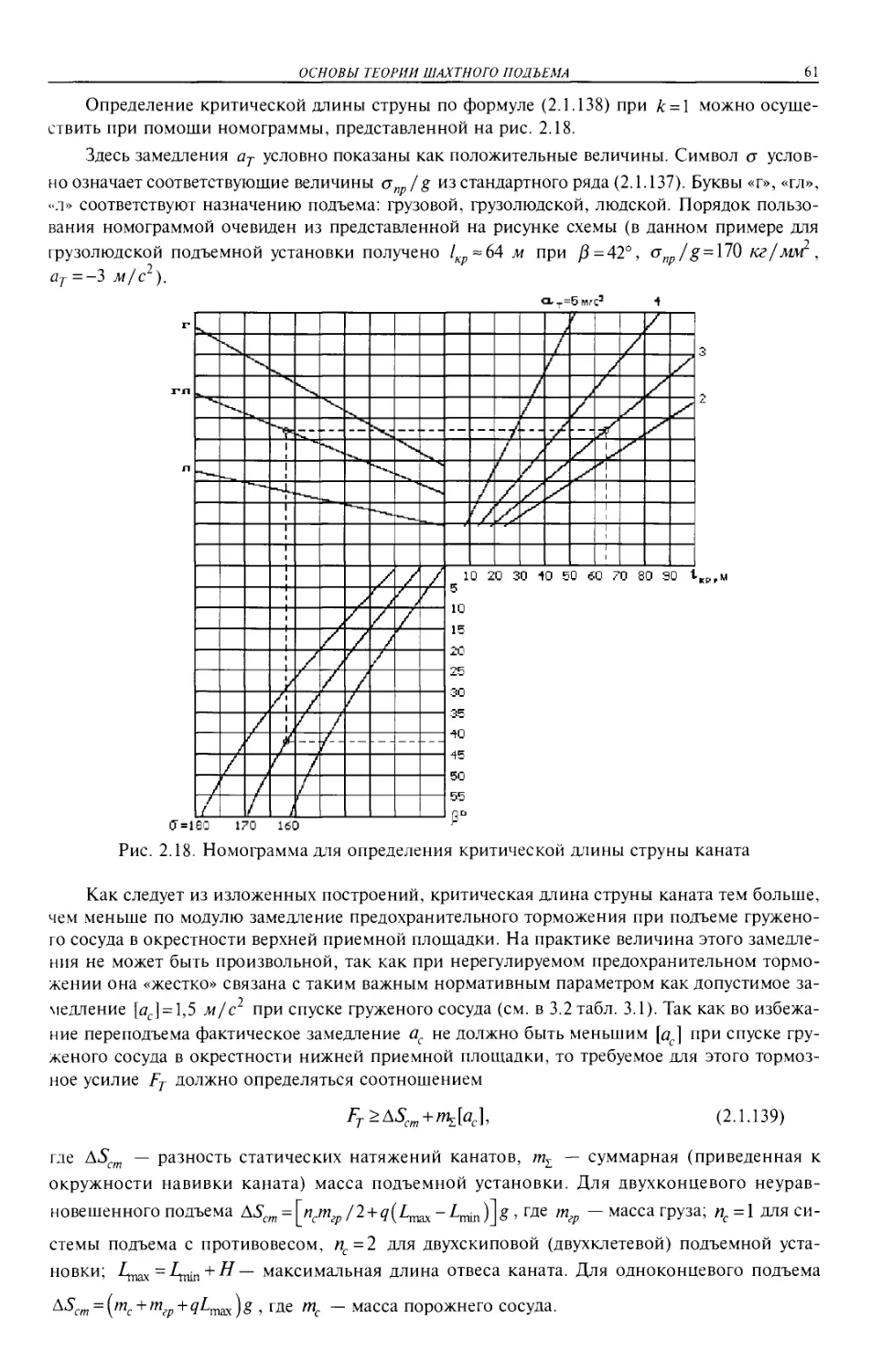
2.1.8. Критическая длина струны каната.............................53
2.2. Основы динамики шахтного подъема.................................62
2.2.1. Гипотезы, обозначения и системы координат...................62
2.2.2. Упрощенные уравнения динамического состояния................66
2.2.3. Общие уравнения динамического состояния.....................72
2.2.4. Базисные модели подъемных установок.........................76
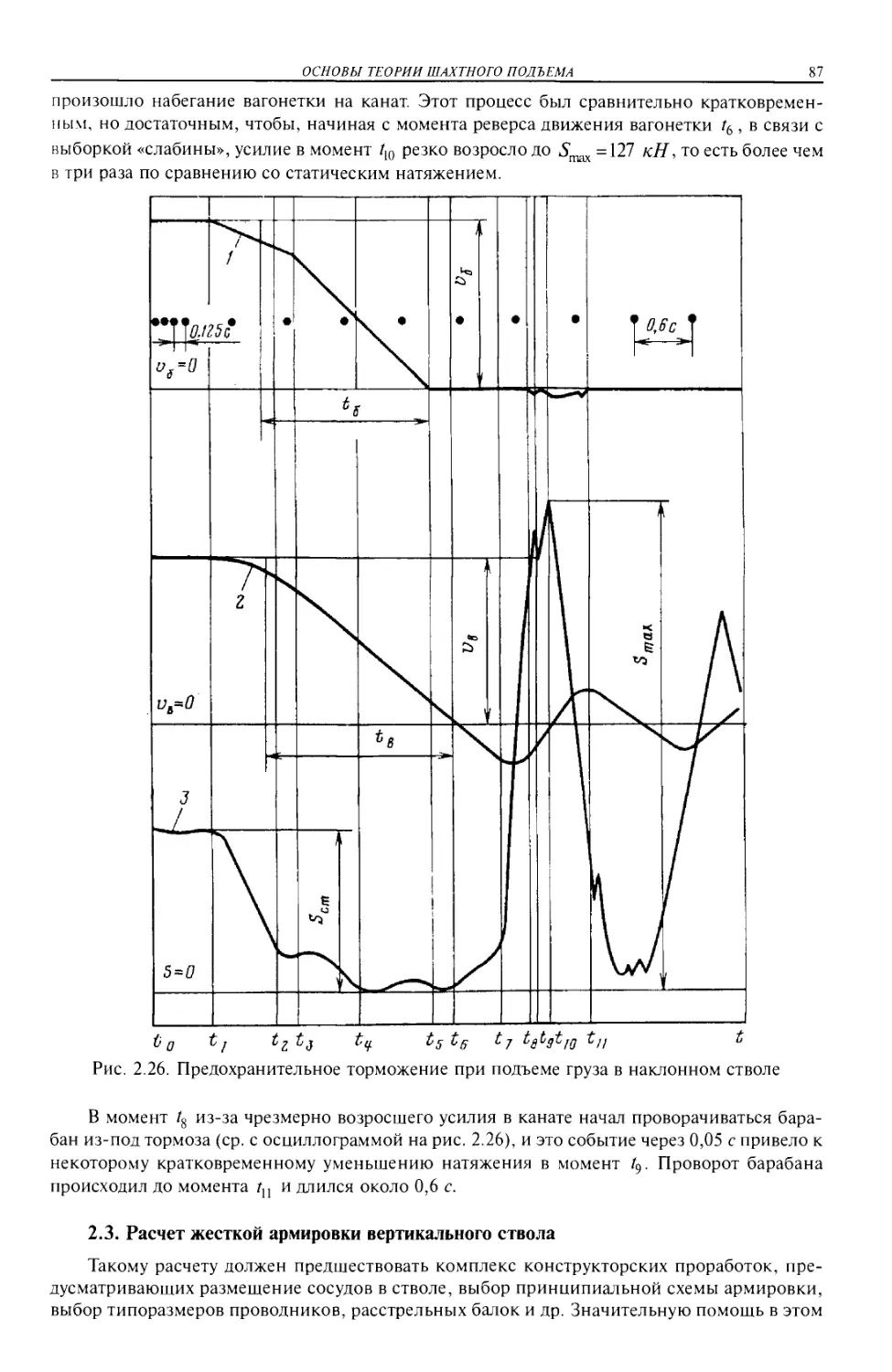
2.3. Расчет жесткой армировки вертикального ствола....................87
Глава 3
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
3.1. Основные типы подъемных машин....................................95
3.2. Выбор типоразмера подъемной машины...............................97
3.3. Подъемные машины ЗАО «НКМЗ».................................... 102
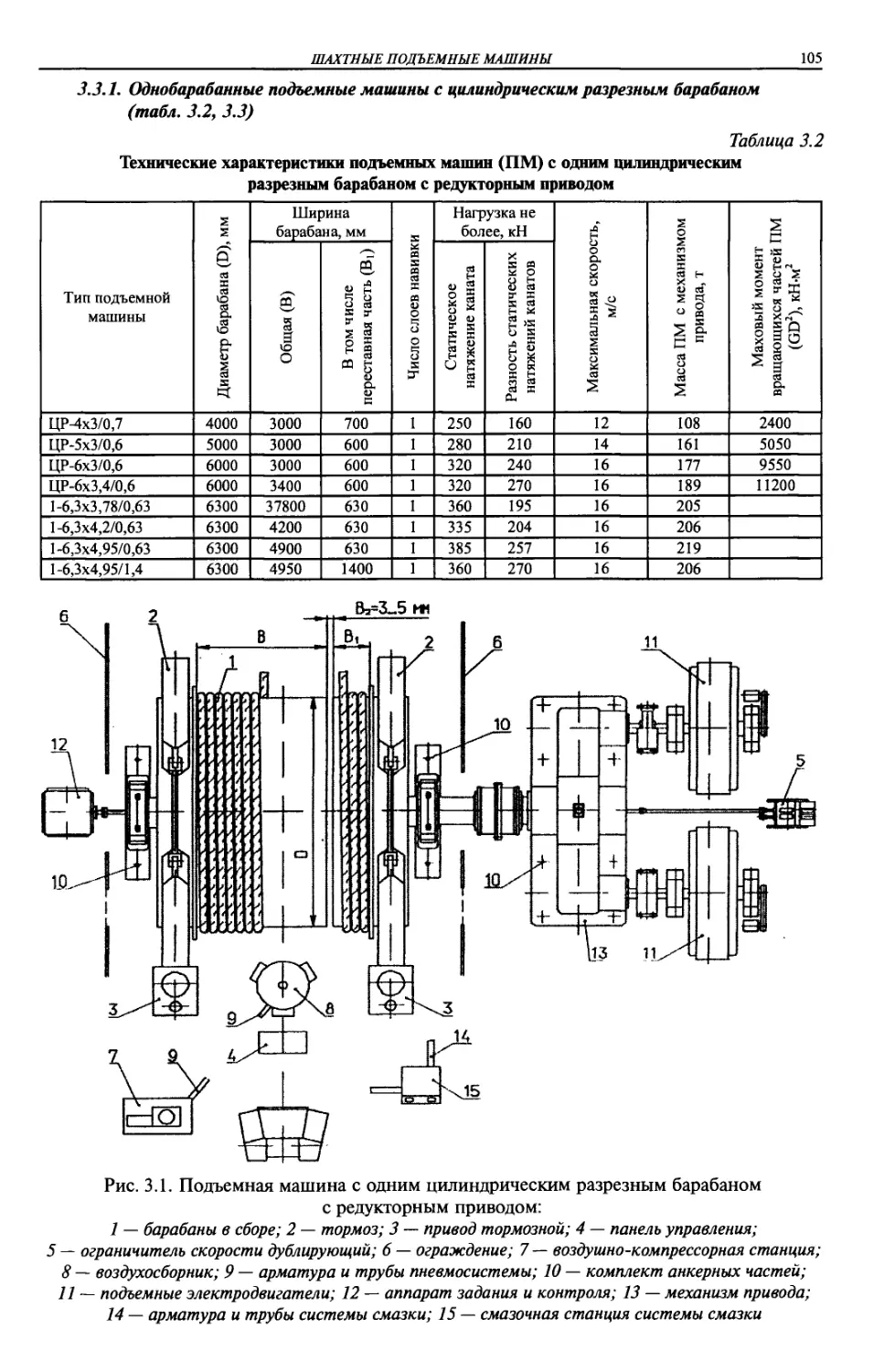
3.3.1. Однобарабанные подъемные машины с цилиндрическим
разрезным барабаном...............................................105
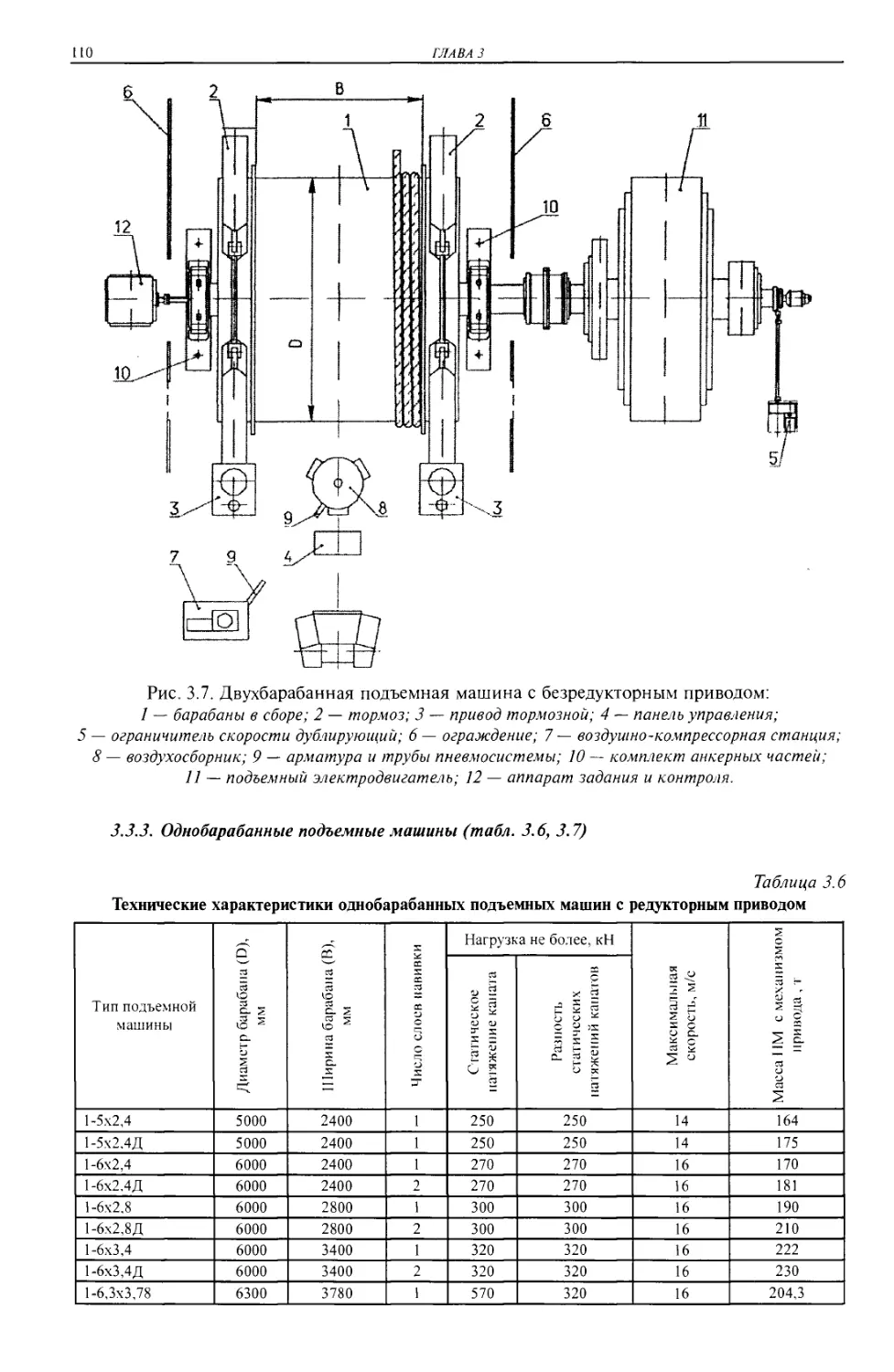
3.3.2. Двухбарабанные подъемные машины ...........................108
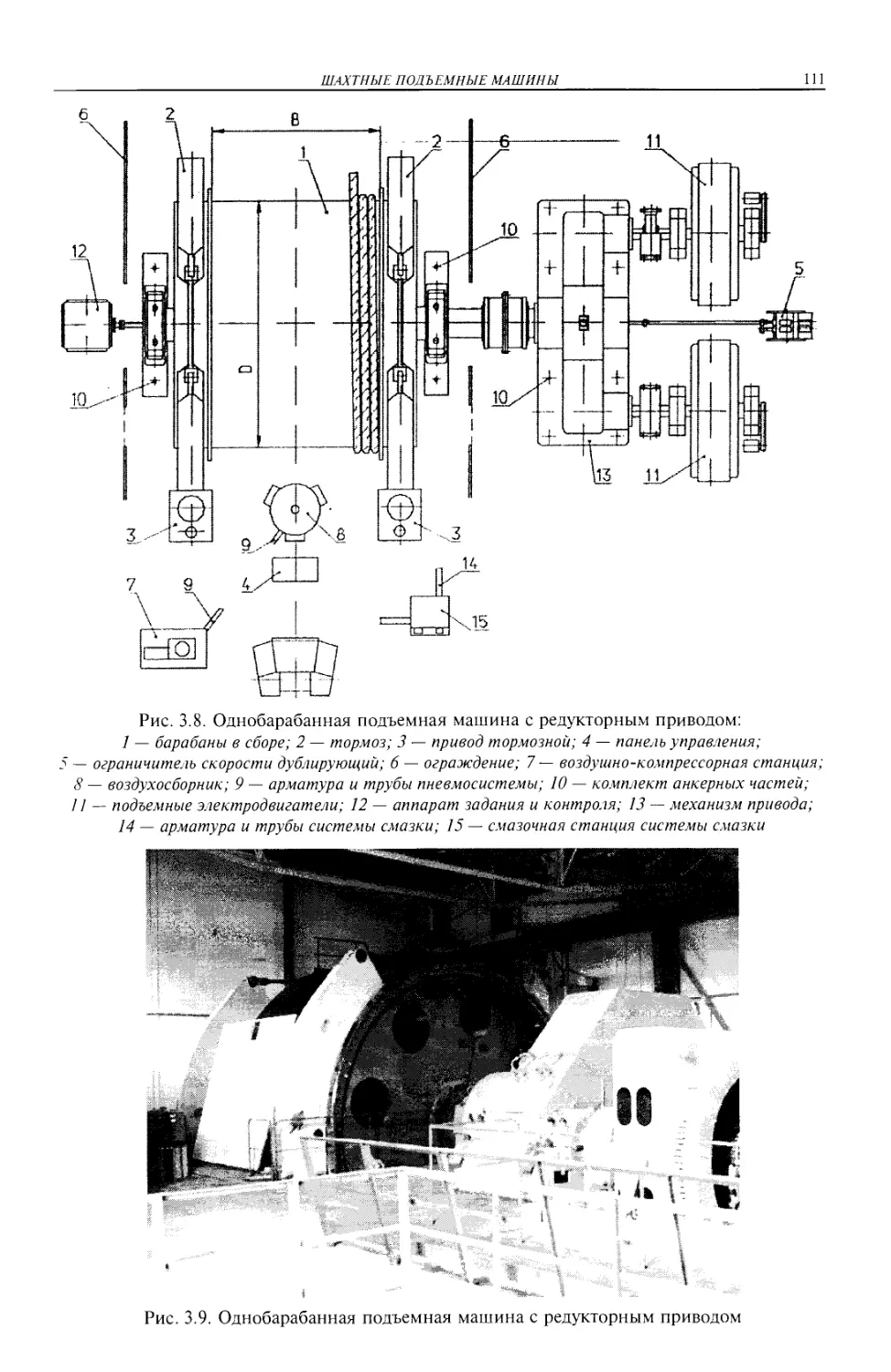
3.3.3. Однобарабанные подъемные машины ...........................110
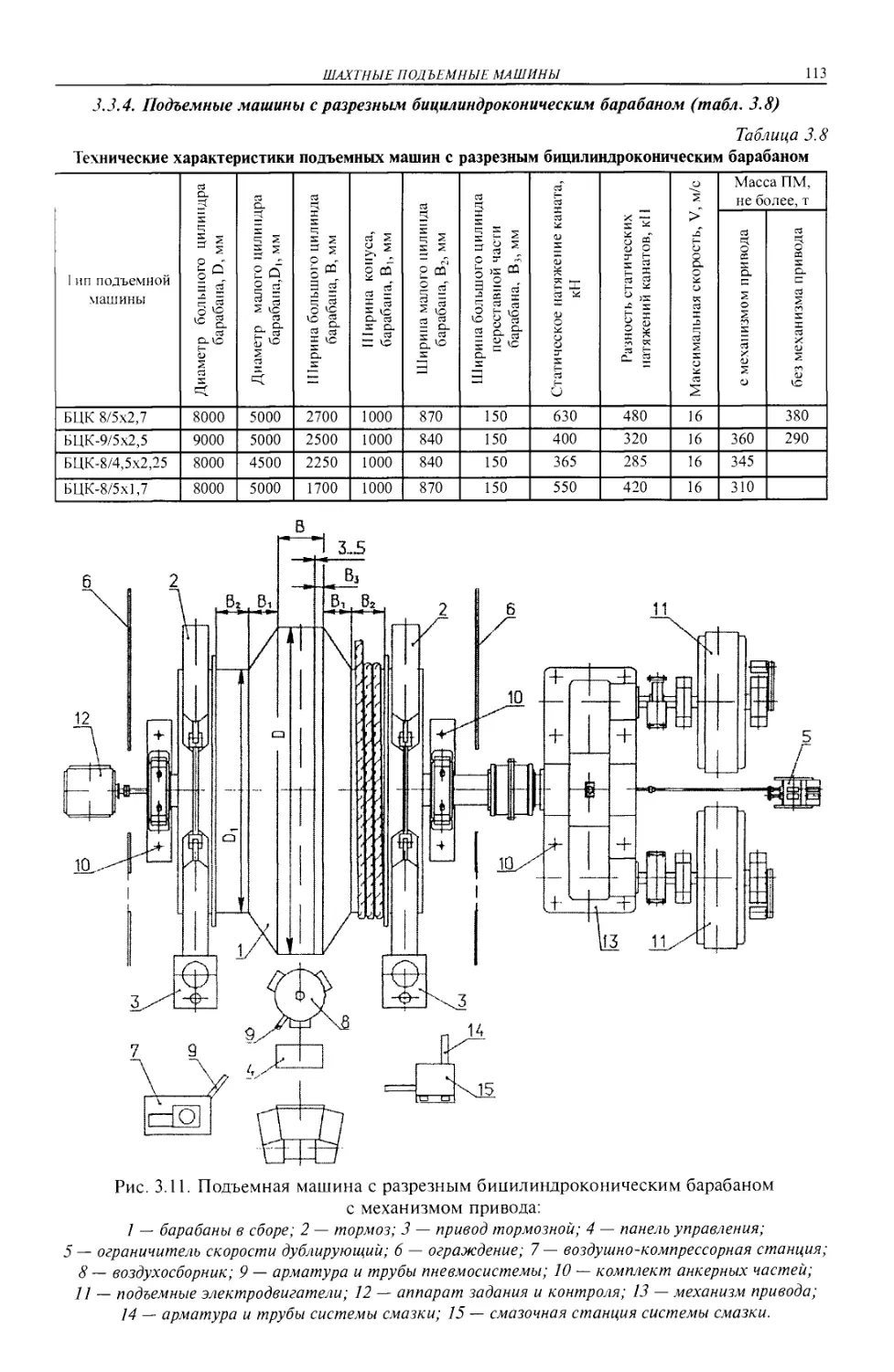
3.3.4. Подъемные машины с разрезным бицилиндроконическим барабаном.. 113
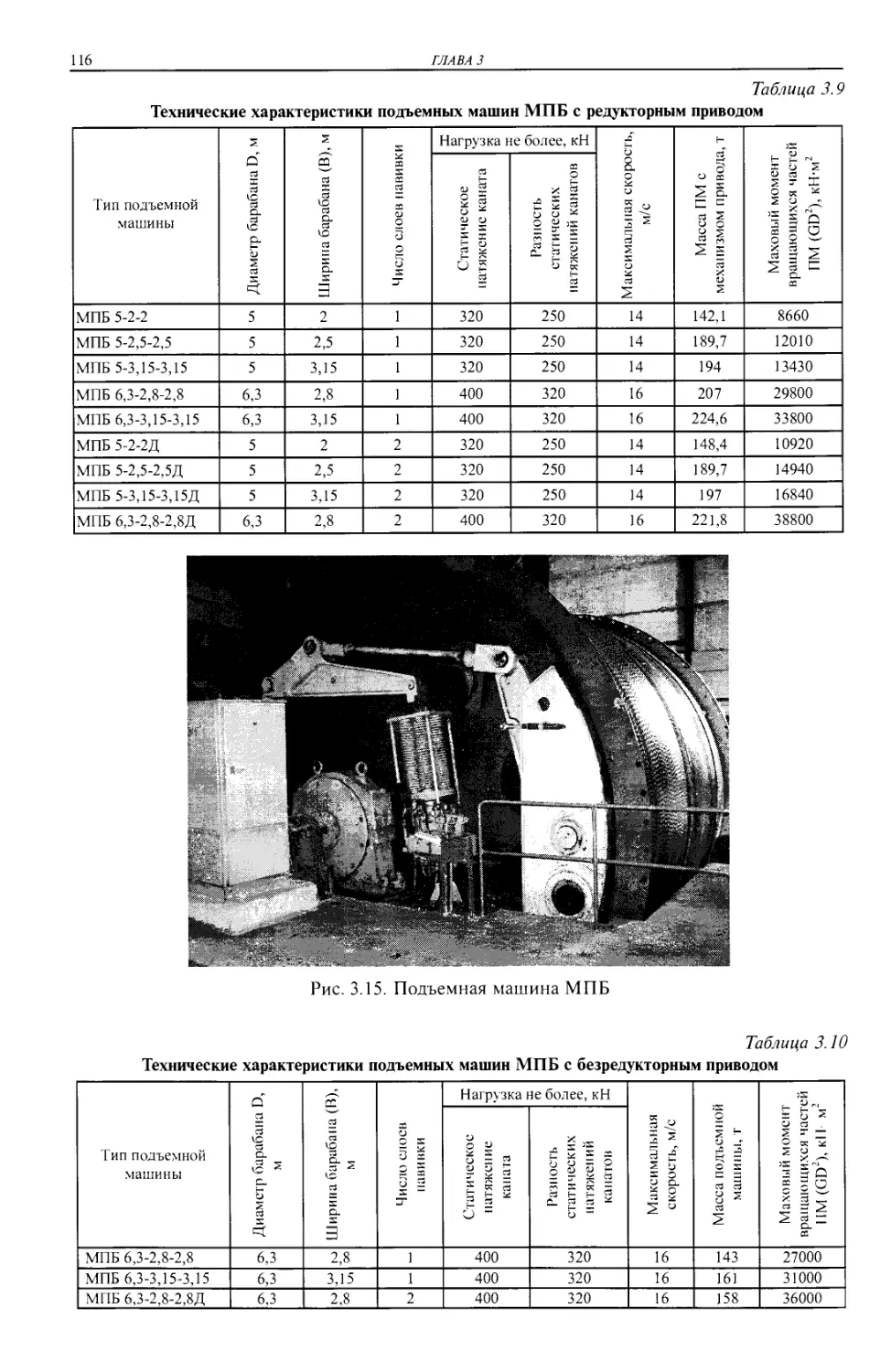
3.3.5. Подъемные машины МПБ...................................... 115
3.3.6. Подъемные машины со шкивами трения ....................... 117
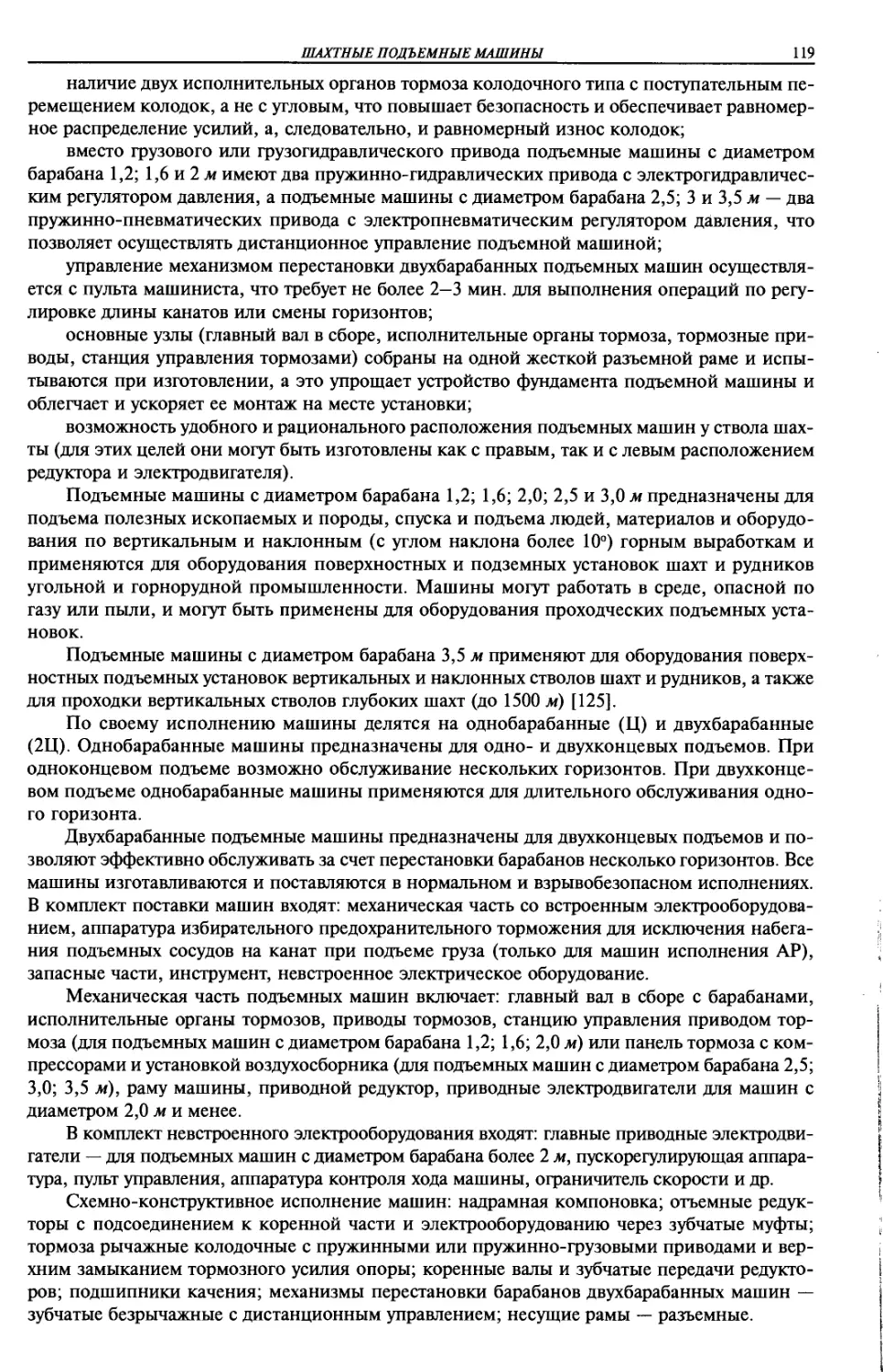
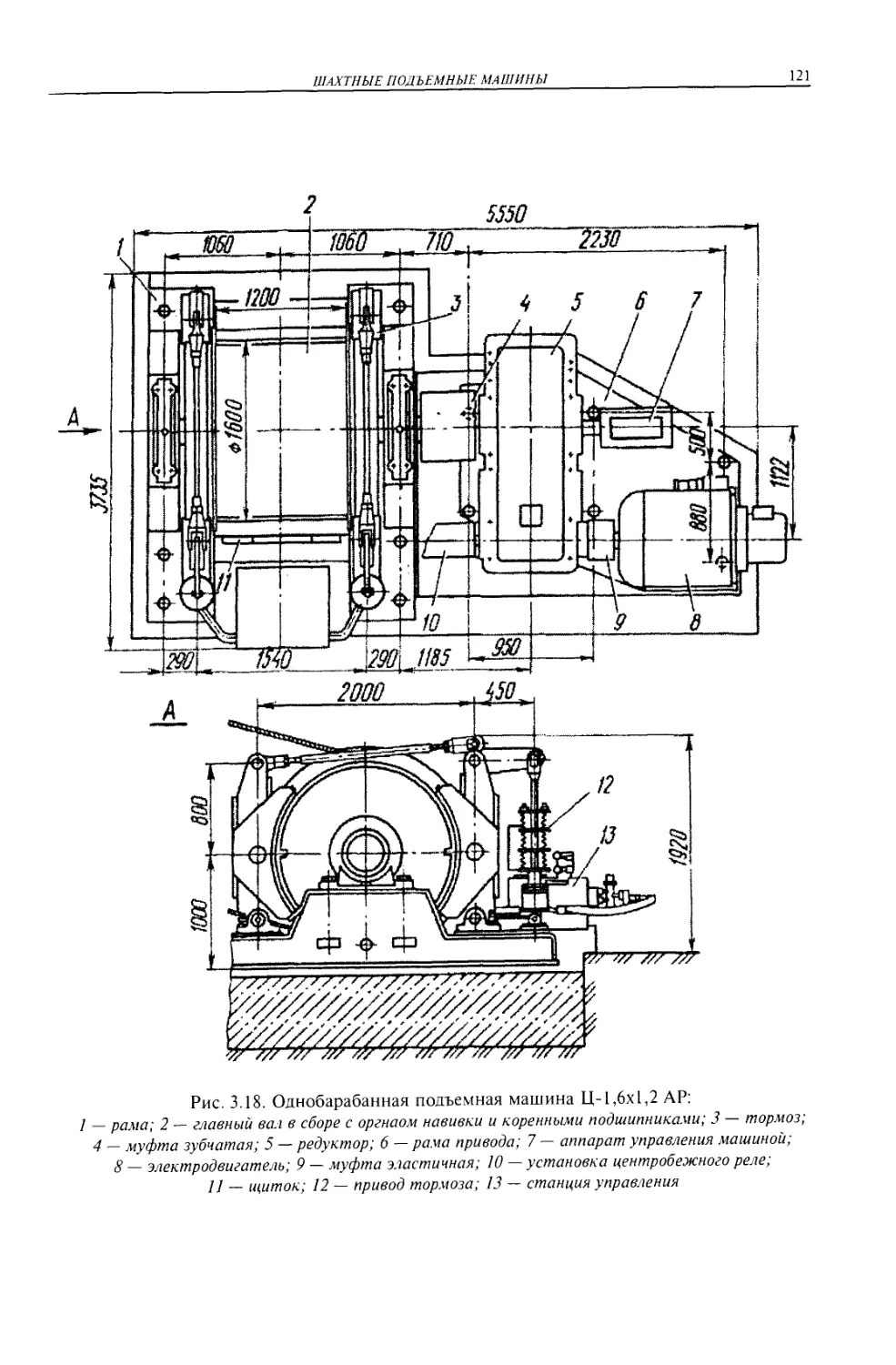
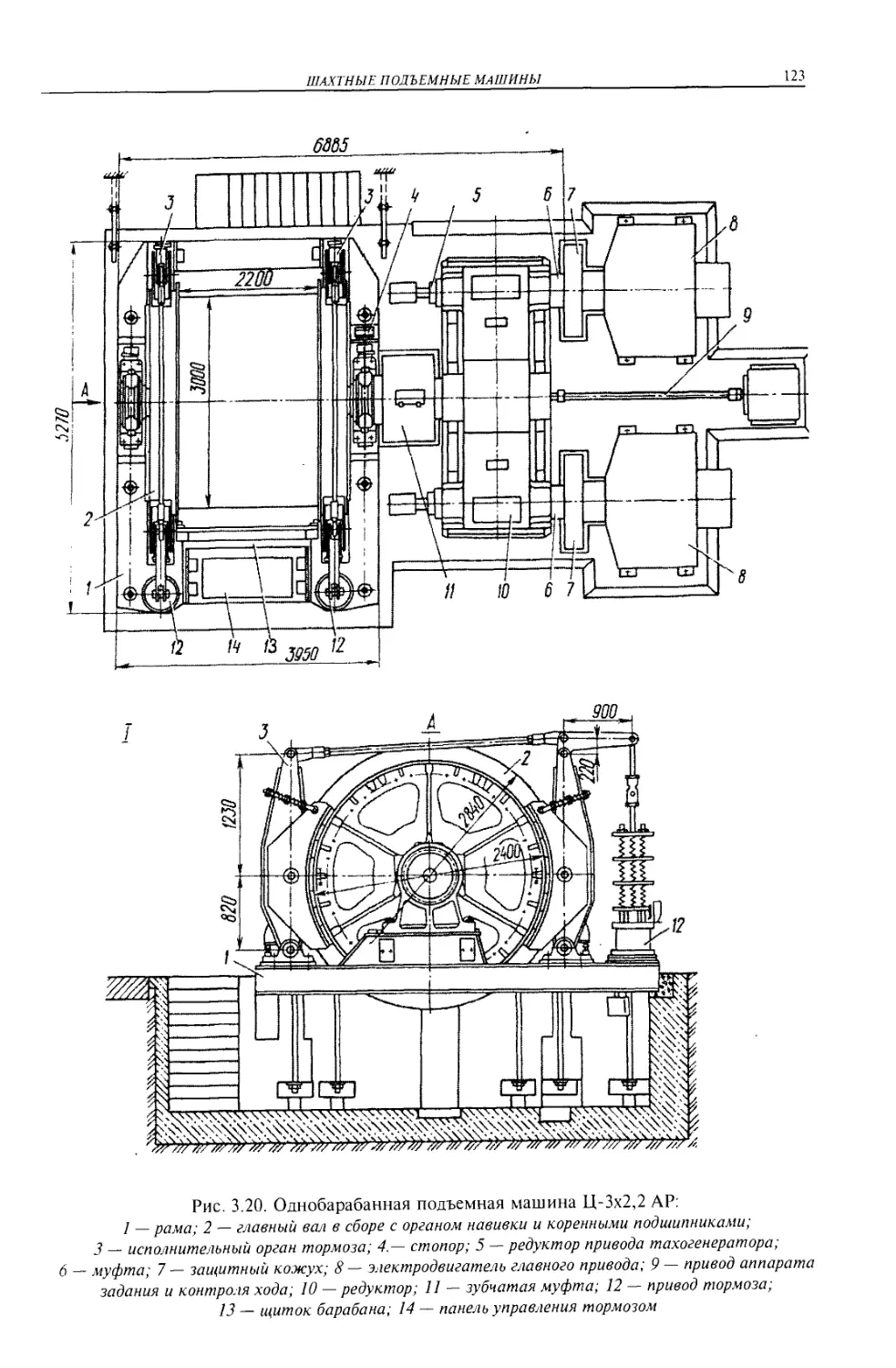
3.4. Подъемные машины ОАО «Донецкгормаш»............................ 118
3.4.1. Барабанные подъемные машины................................118
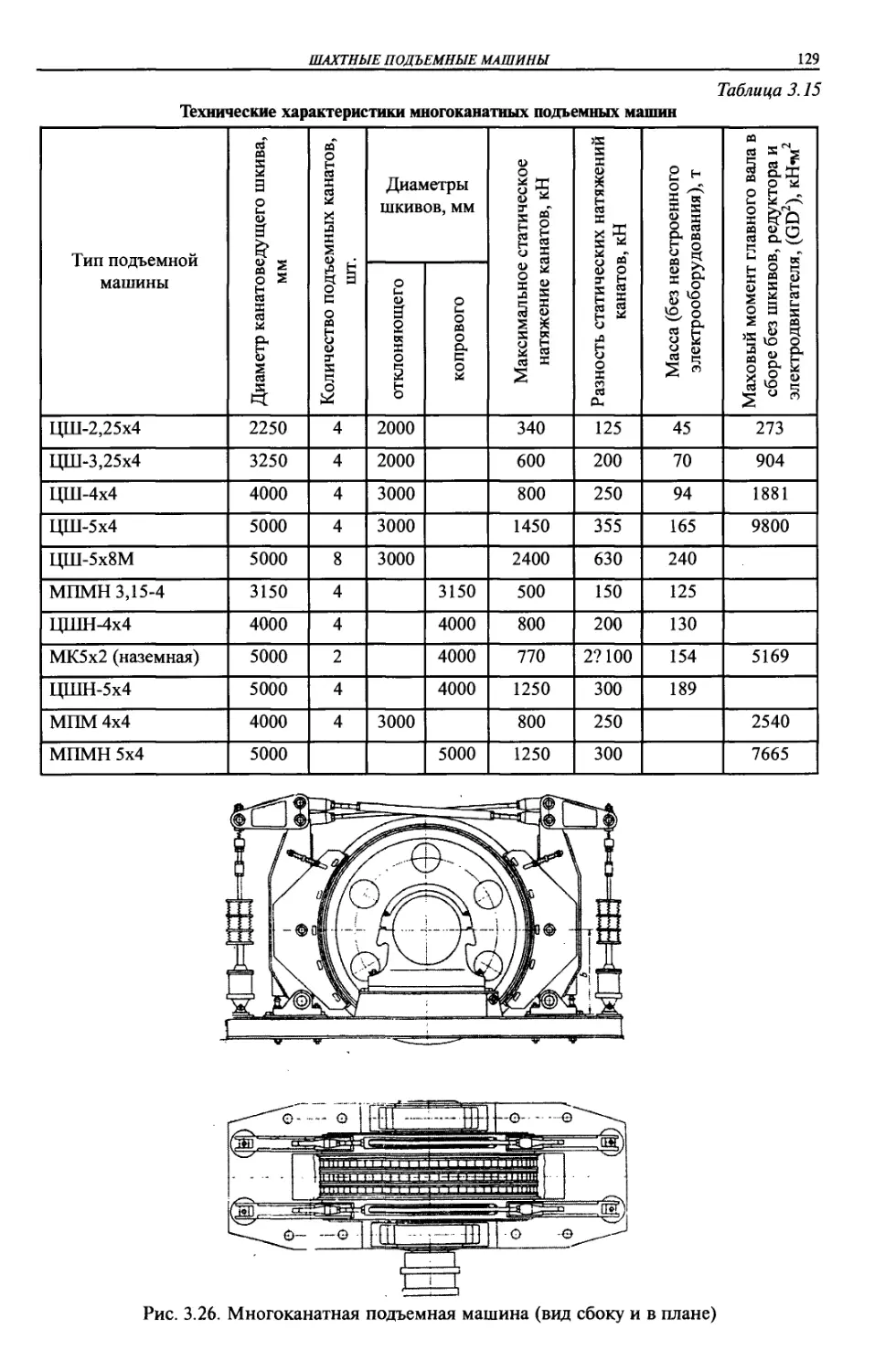
3.4.2. Многоканатные подъемные машины.............................128
3.5. Проходческие передвижные подъемные машины...................... 131
3.6. Подъемные машины индивидуального изготовления.................. 132
3.7. Парк подъемных машин Украины................................... 135
Глава 4
ОРГАНЫ НАВИВКИ
4.1. Принципиальные схемы органов навивки..............................136
4.2. Конструкции органов навивки барабанных подъемных машин............140
4.3. Канатоведущие шкивы многоканатных подъемных машин.................145
4.4. Ремонт органов навивки............................................149
Глава 5
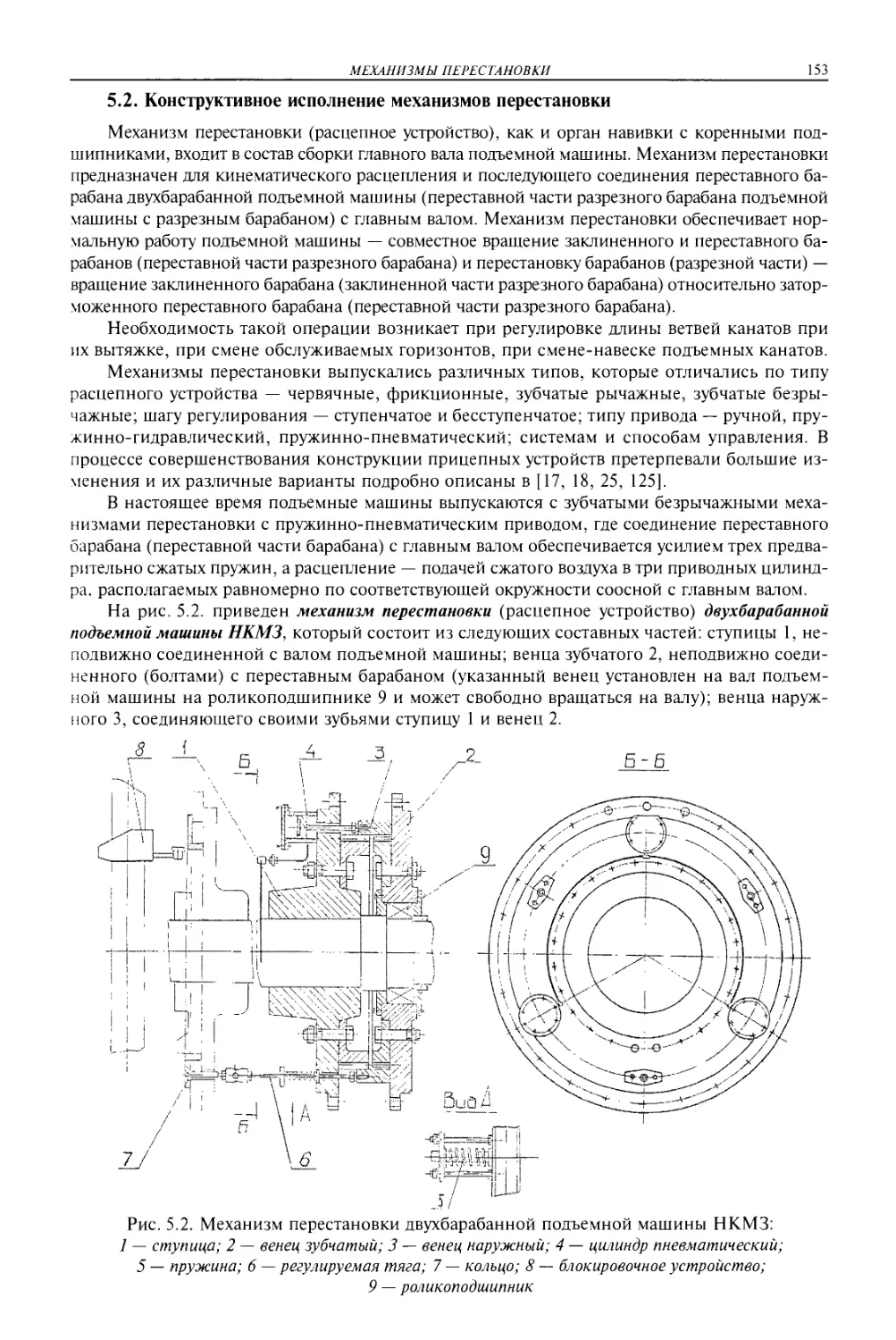
МЕХАНИЗМЫ ПЕРЕСТАНОВКИ
5.1. Принцип работы механизмов перестановки............................152
5.2. Конструктивное исполнение механизмов перестановки.................153
5.3. Порядок проведения перестановки...................................157
Глава 6
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
6.1. Общие сведения о тормозных устройствах и основные требования к ним.159
6.1.1. Исполнительный орган тормоза.................................159
6.1.2. Тормозные приводы............................................162
6.1.3. Аппараты управления тормозными устройствами..................168
6.1.4. Встроенные быстродействующие тормоза НКМЗ....................170
6.1.5. Пружинно-гидравлические дисковые тормоза Донецкгормаша.......174
6.1.6. Пружинно-гидравлические дисковые тормоза НПФ «МИДИЭЛ»........178
6.1.7. Требования к тормозным устройствам...........................181
6.2. Поверочный расчет тормоза.........................................181
6.2.1. Определение фактических нагрузок на подъемную машину.........182
6.2.2. Условия, которым должна удовлетворять величина
тормозного момента................................................182
6.2.3. Выбор величины тормозного момента............................185
6.2.4. Пример расчета параметров тормозных приводов.................186
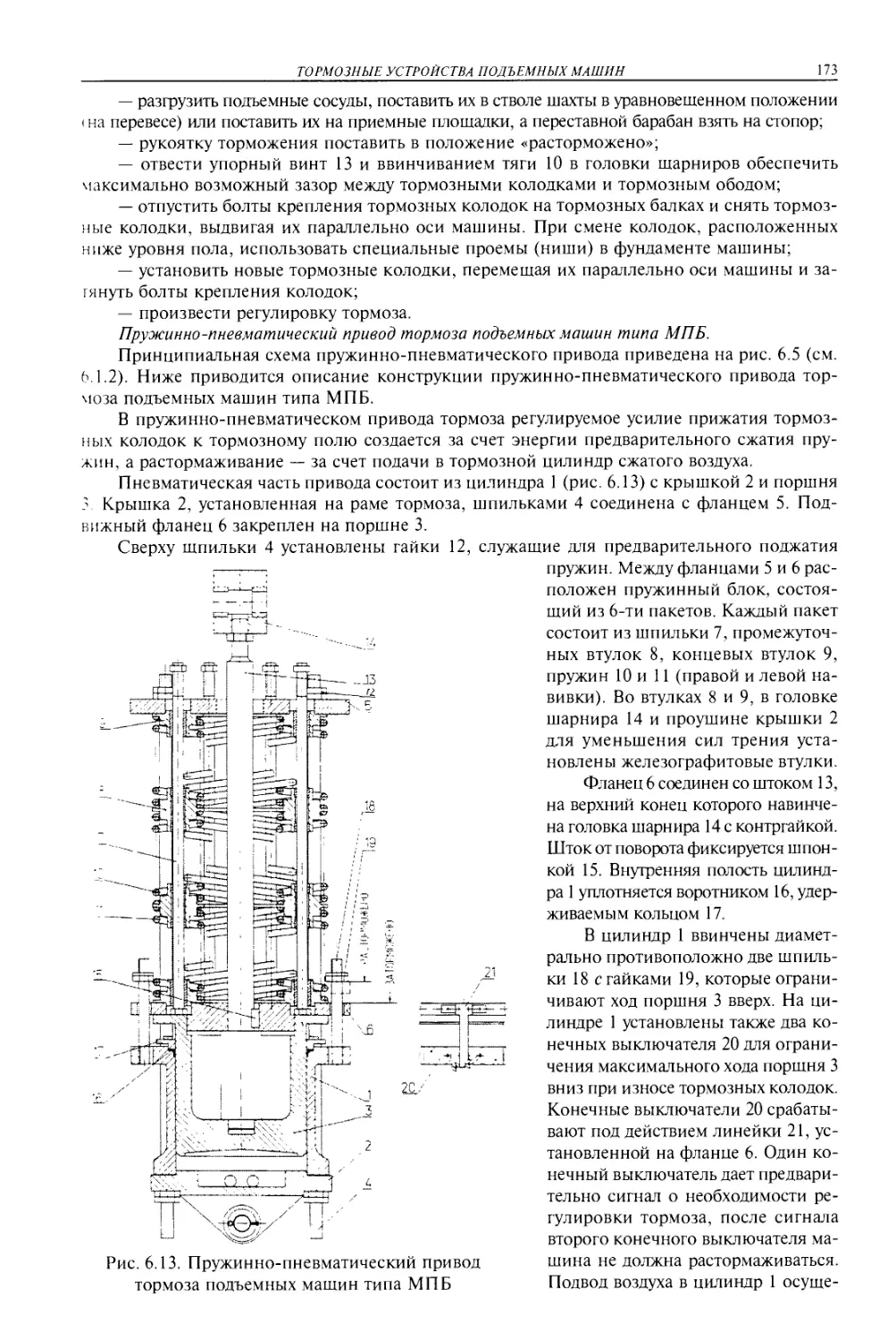
6.2.5. Пример расчета параметров пружинно-пневматического
привода тормоза...................................................188
Глава 7
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
7.1. Испытание и комплексное обследование тормозных устройств..........190
7.2. Неисправности тормозных устройств.................................195
7.2.1. Неисправности исполнительного органа тормоза.................195
7.2.2. Неисправности тормозных приводов.............................204
7.2.3. Неисправности аппаратов и схем управления тормозом...........214
7.3. Улучшение характеристик механического торможения..................218
7.4. Устройства избирательного предохранительного торможения...........223
7.5. Система автоматически регулируемого предохранительного торможения.227
7.6. Резинотехнические изделия, применяемые в тормозных устройствах....228
Глава 8
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
8.1. Валы..............................................................230
8.1.1. Конструктивное исполнение валов..............................230
8.1.2. Восстановление шеек валов....................................233
8.2. Подшипники........................................................235
8.2.1. Подшипники шахтных подъемных машин...........................235
8.2.2. Определение технического состояния подшипников качения.......237
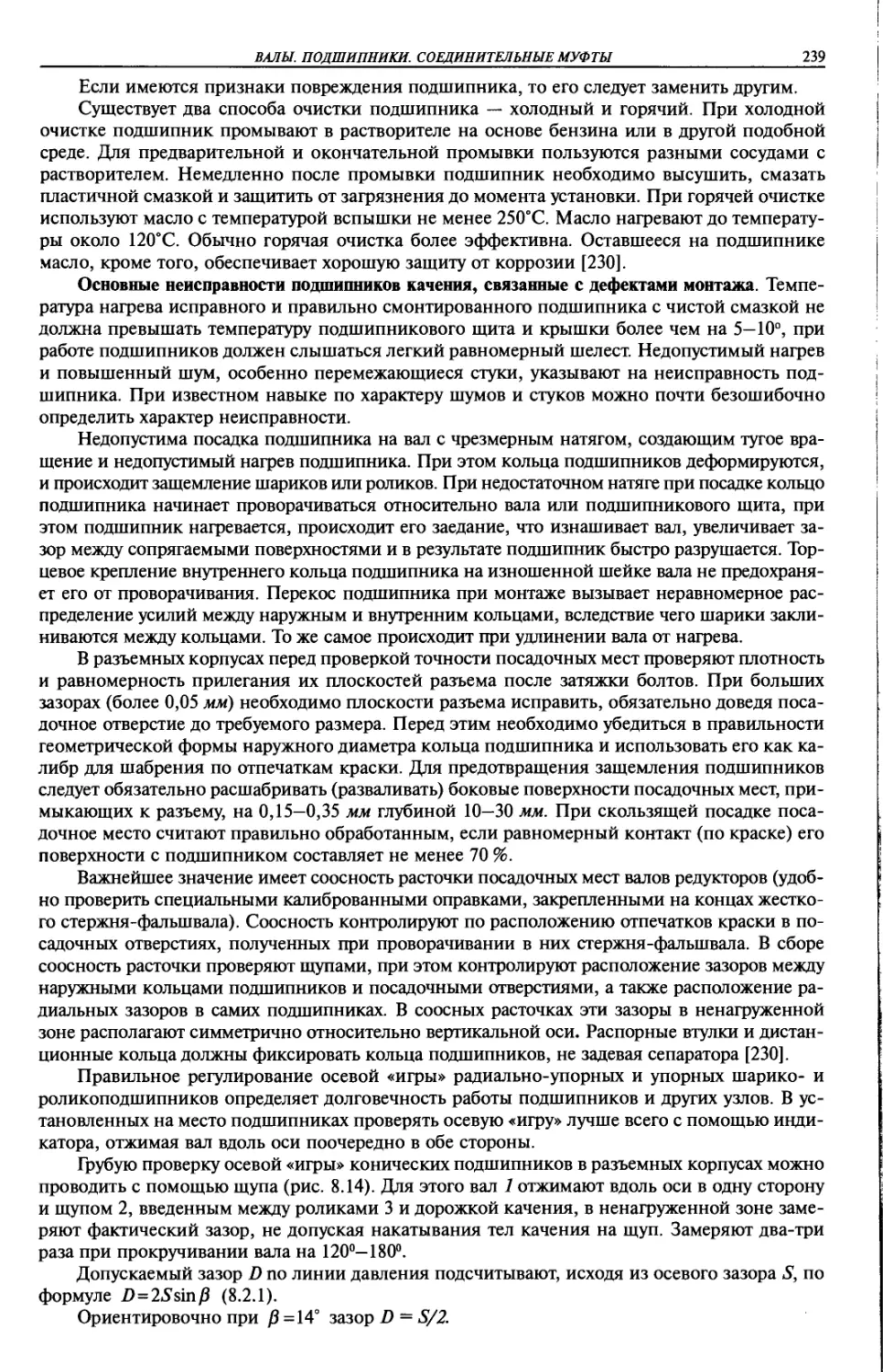
8.2.3. Основные неисправности подшипников качения...................238
8.3. Соединительные муфты.............................................240
8.3.1. Соединительные муфты шахтных подъемных машин...............240
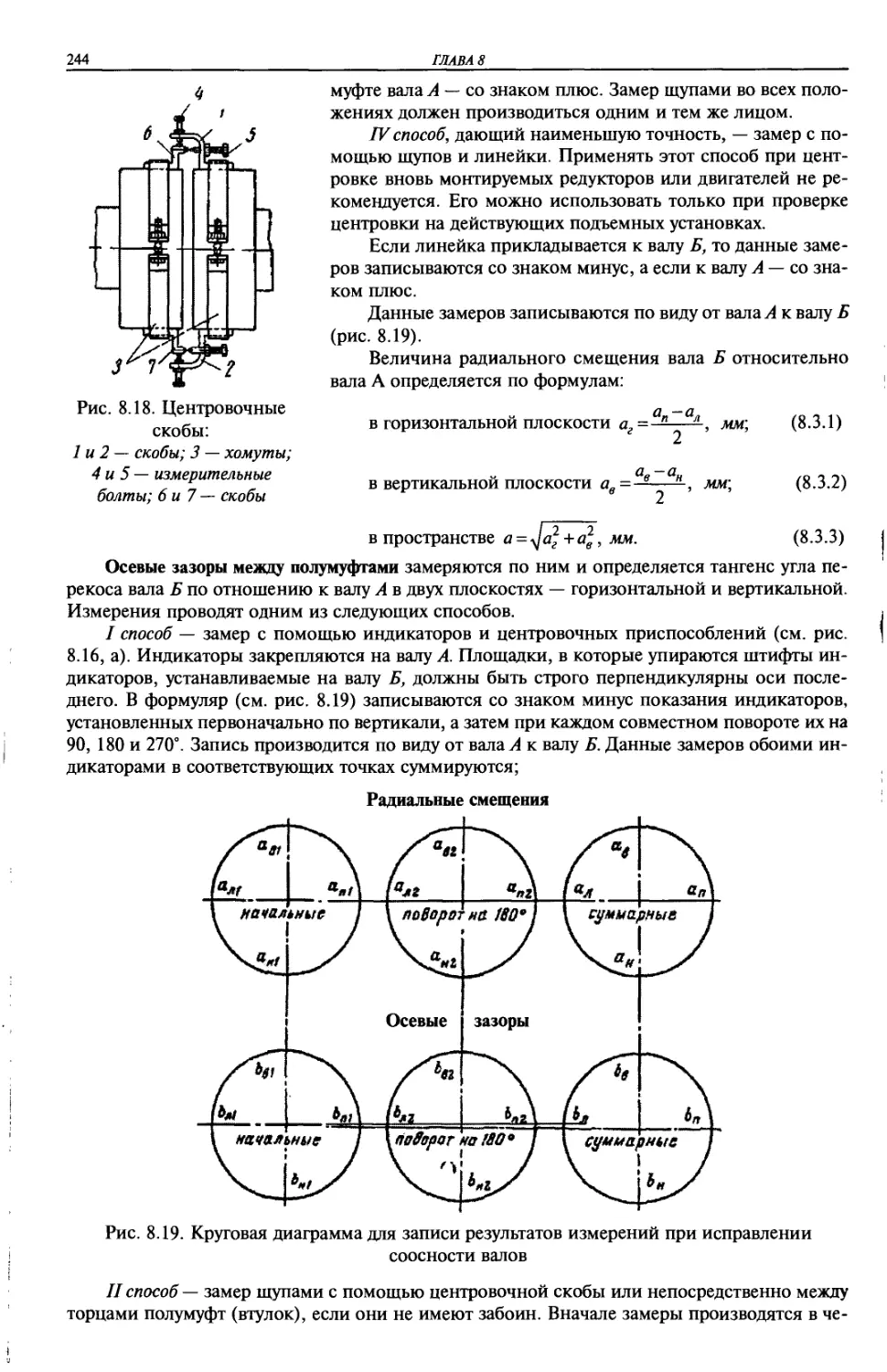
8.3.2. Проверка соосности валов...................................242
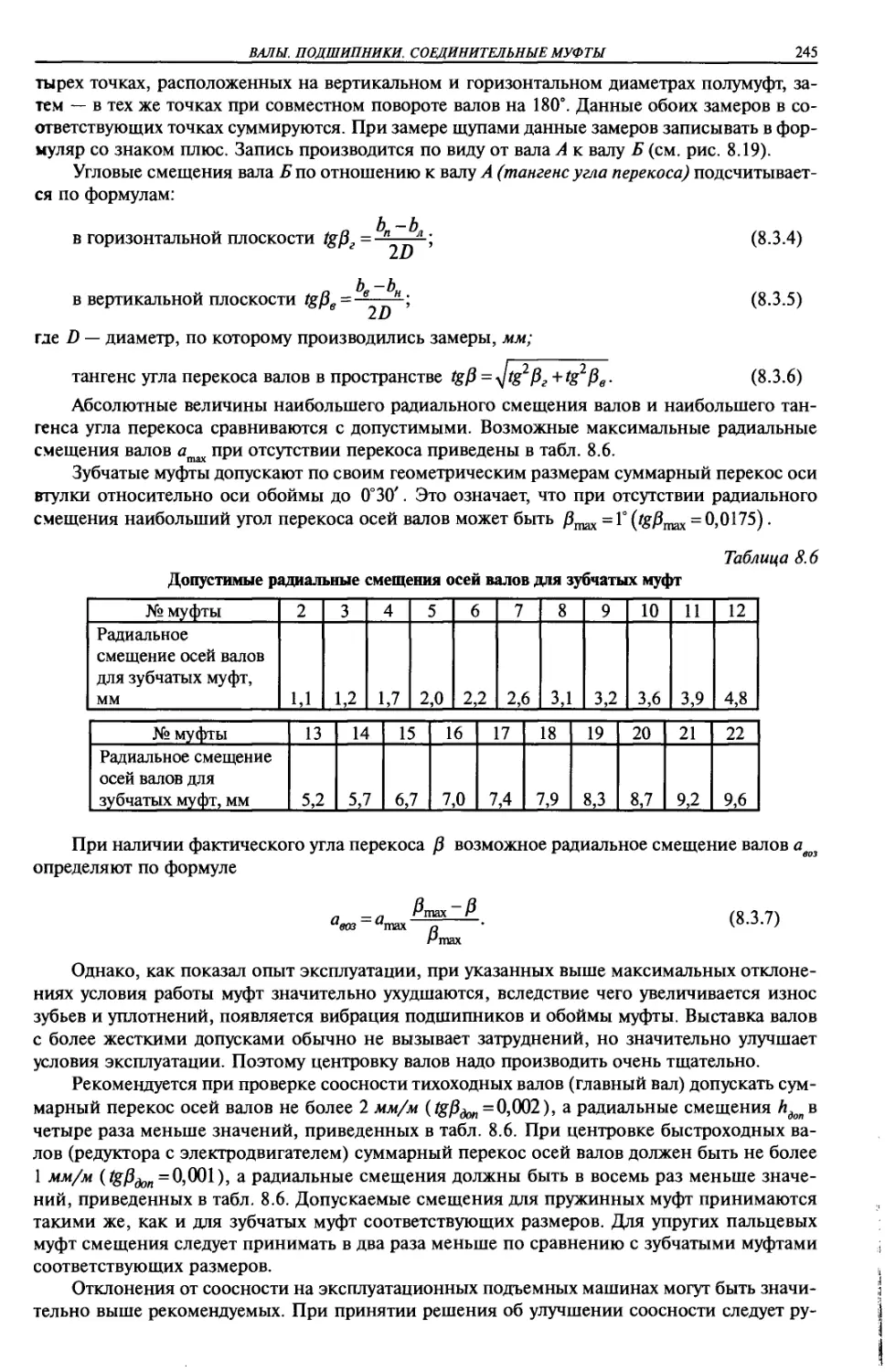
8.3.3. Основные неисправности зубчатых муфт и их устранение ......252
Глава 9
РЕДУКТОРЫ
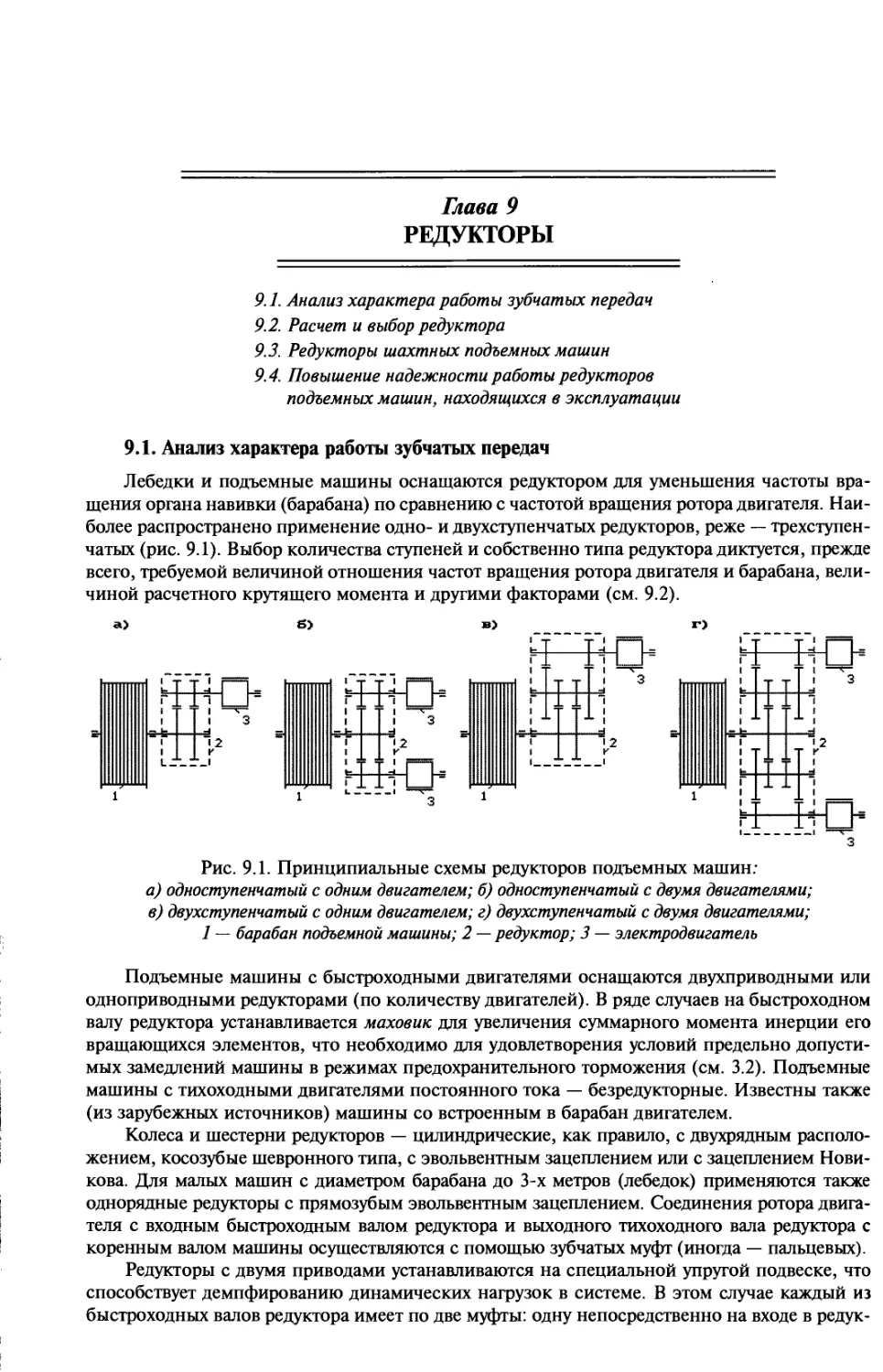
9.1. Анализ характера работы зубчатых передач..........................256
9.2. Расчет и выбор редуктора.........................................261
9.3. Редукторы шахтных подъемных машин ...............................262
9.4. Повышение надежности работы редукторов подъемных машин,
находящихся в эксплуатации.............................................264
9.4.1. Основные неисправности редукторов и способы их устранения..264
9.4.2. Улучшение качества зубчатого зацепления.....................265
9.4.3. Повышение надежности работы подпружиненных редукторов......269
Глава 10
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
10.1. Общие сведения..................................................272
10.2. Расчет и выбор электродвигателя.................................275
10.3. Расчет роторных сопротивлений...................................277
10.4. Автоматизация подъемных машин с асинхронным двигателем
с фазным ротором с металлическим реостатом в цепи ротора..............282
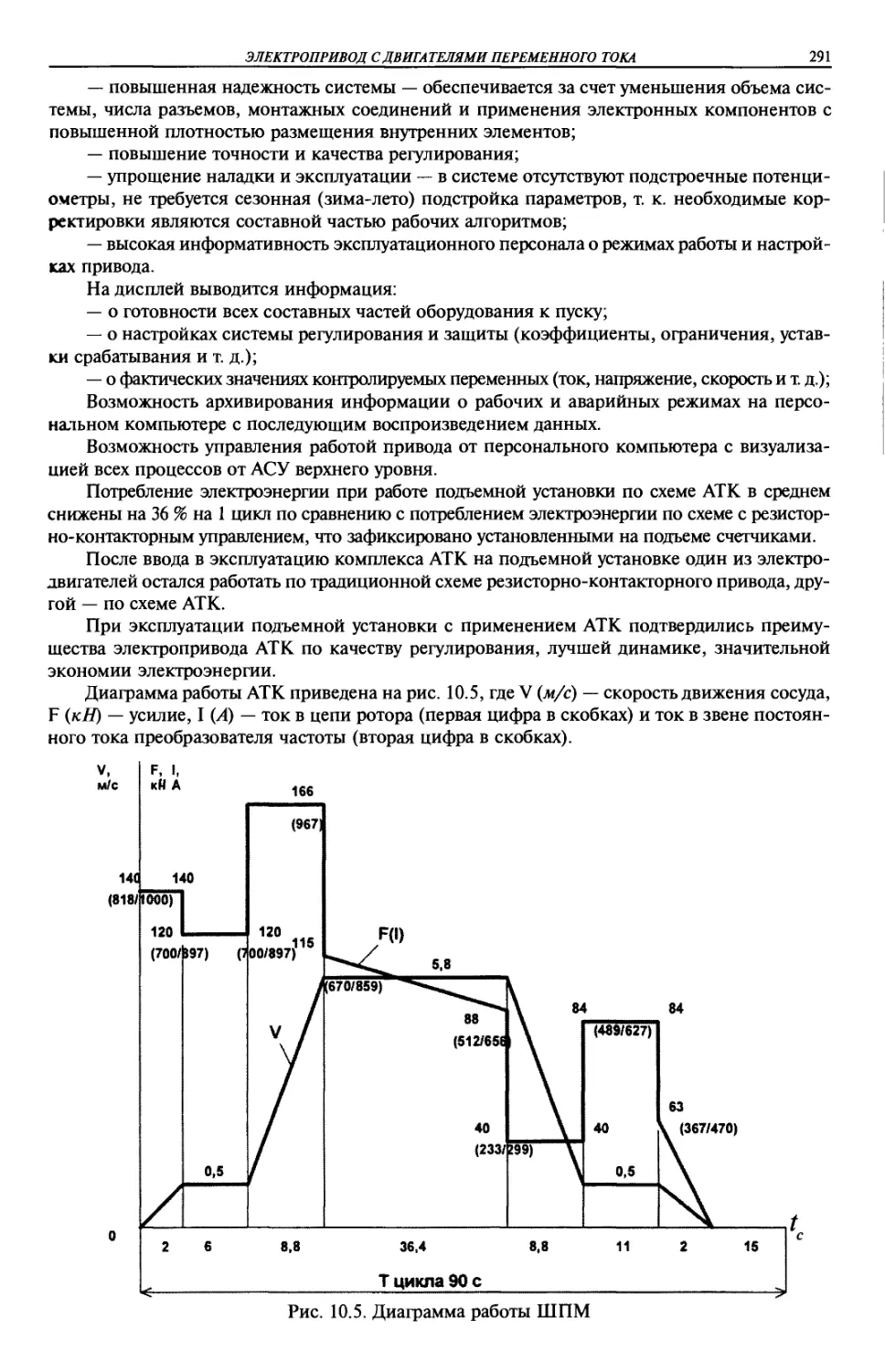
10.5. Электропривод с асинхронным двигателем с фазным ротором
с применением асинхронно-тиристорного каскада.........................288
10.6. Частотно-регулируемый электропривод с асинхронным двигателем....292
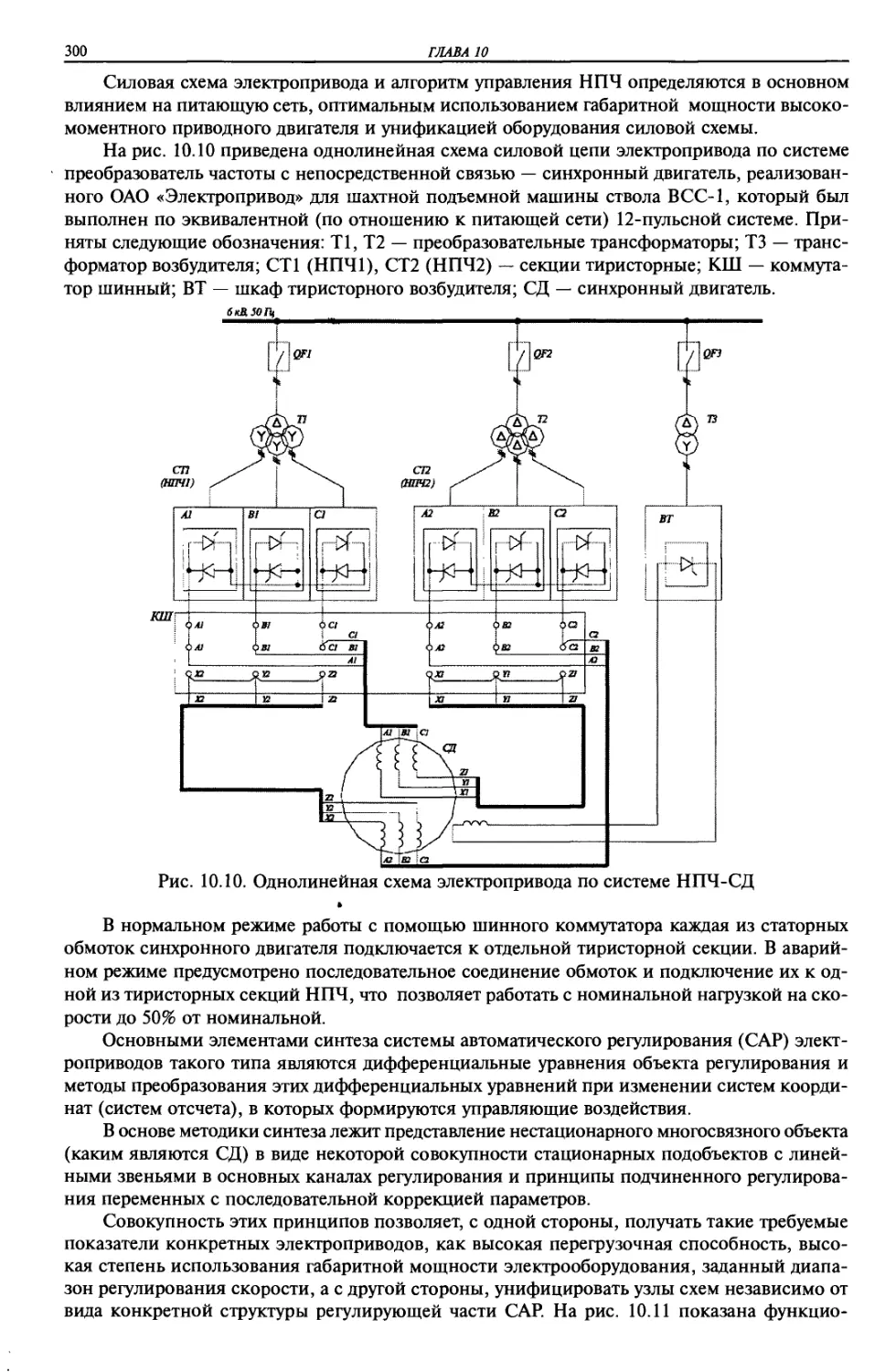
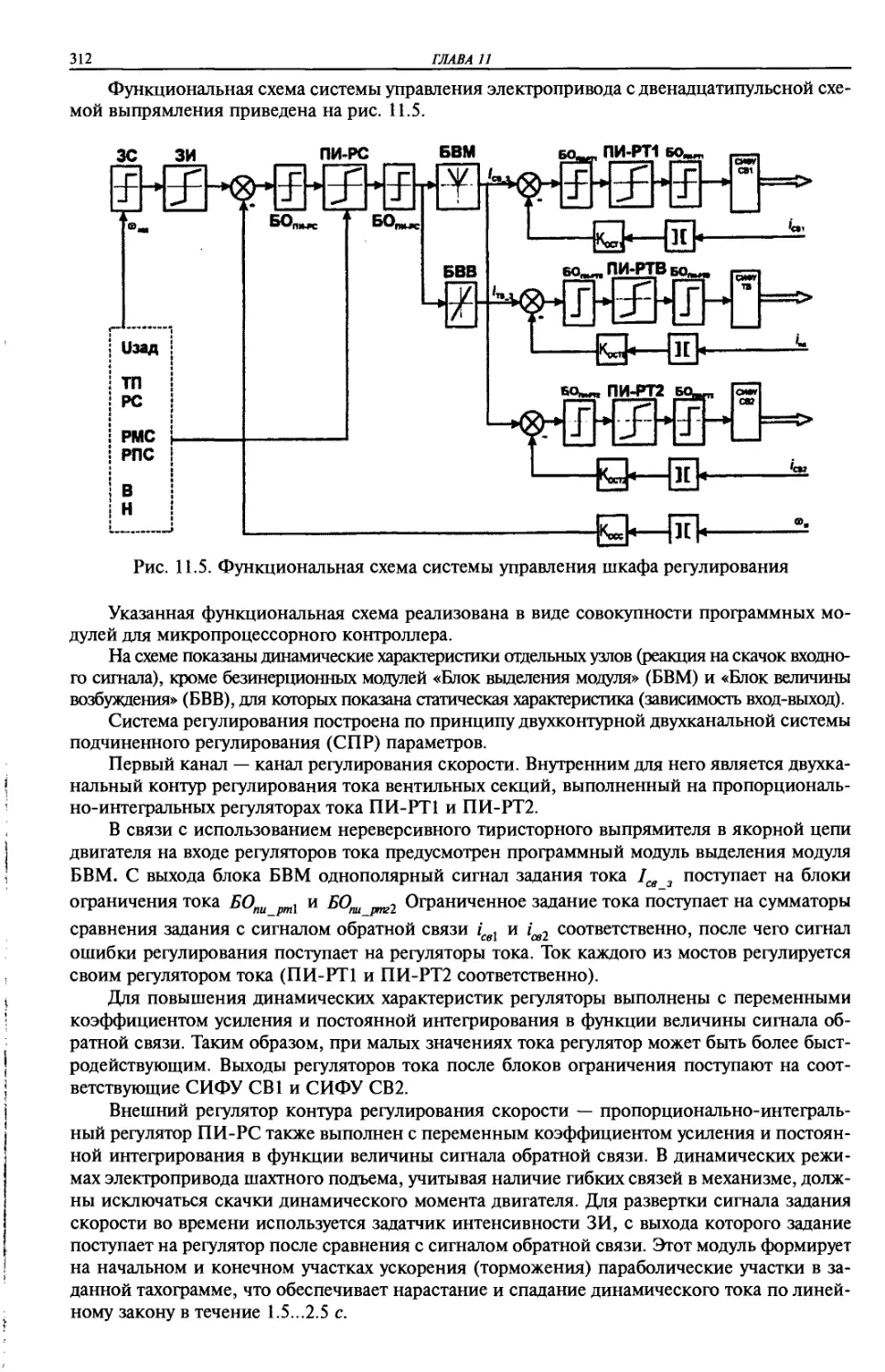
10.7. Частотно-регулируемый электропривод с синхронным двигателем.....299
Глава 11
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
11.1. Общие сведения..................................................303
11.2. Электропривод постоянного тока по системе Г-Д....................304
11.3. Электропривод постоянного тока по системе ТП-Д...................307
11.4. Резервирование питания подъемных двигателей постоянного тока....318
Глава 12
ЭЛЕКТРООБОРУДОВАНИЕ ШАХТНЫХ ПОДЗЕМНЫХ
ПОДЪЕМНЫХ МАШИН
12.1. Состояние вопроса и тенденции развития..........................322
12.2. Электропривод с асинхронным двигателем с фазным ротором
на базе устройства УВПМ-350 и КУВВ....................................323
12.3. Двухдвигательный электропривод с асинхронным двигателем
с фазным ротором на базе устройства УВПМ-350 и сервопривода
жидкостного реостата..............................................326
12.4. Электропривод по схеме асинхронного вентильного каскада
на базе устройства УВК-350........................................... 326
12.5. Электропривод с короткозамкнутым асинхронным двигателем
и преобразователем частоты ПЧВ-250................................... 328
12.6. Программно-аппаратный комплекс КПА..............................329
Глава 13
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
13.1. Общие требования к аппаратам защиты и блокировки................332
13.2. Защита от переподъема............................................335
13.2.1. Магнитные выключатели ВМ-62 и ВМ-63....................... 336
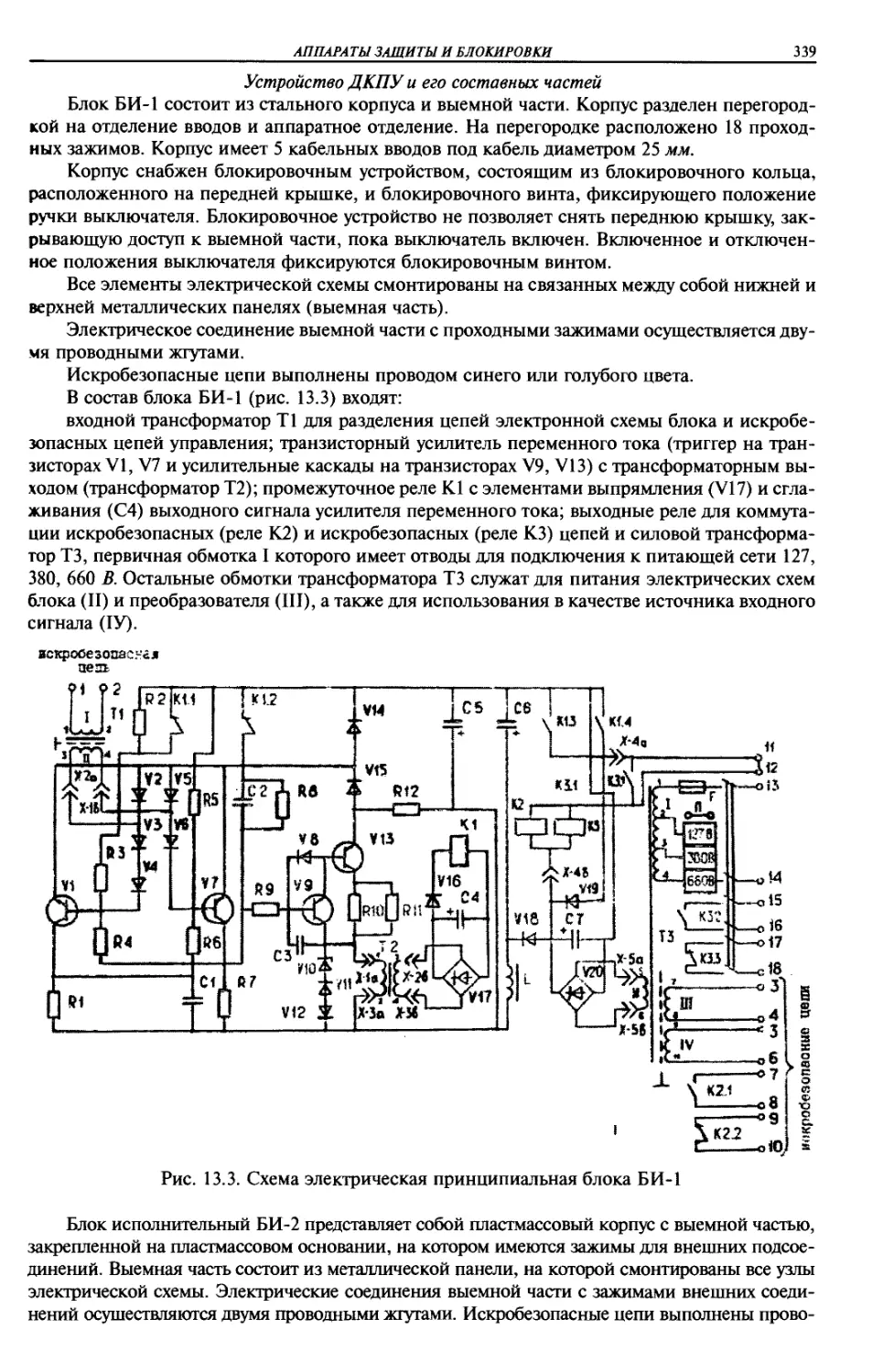
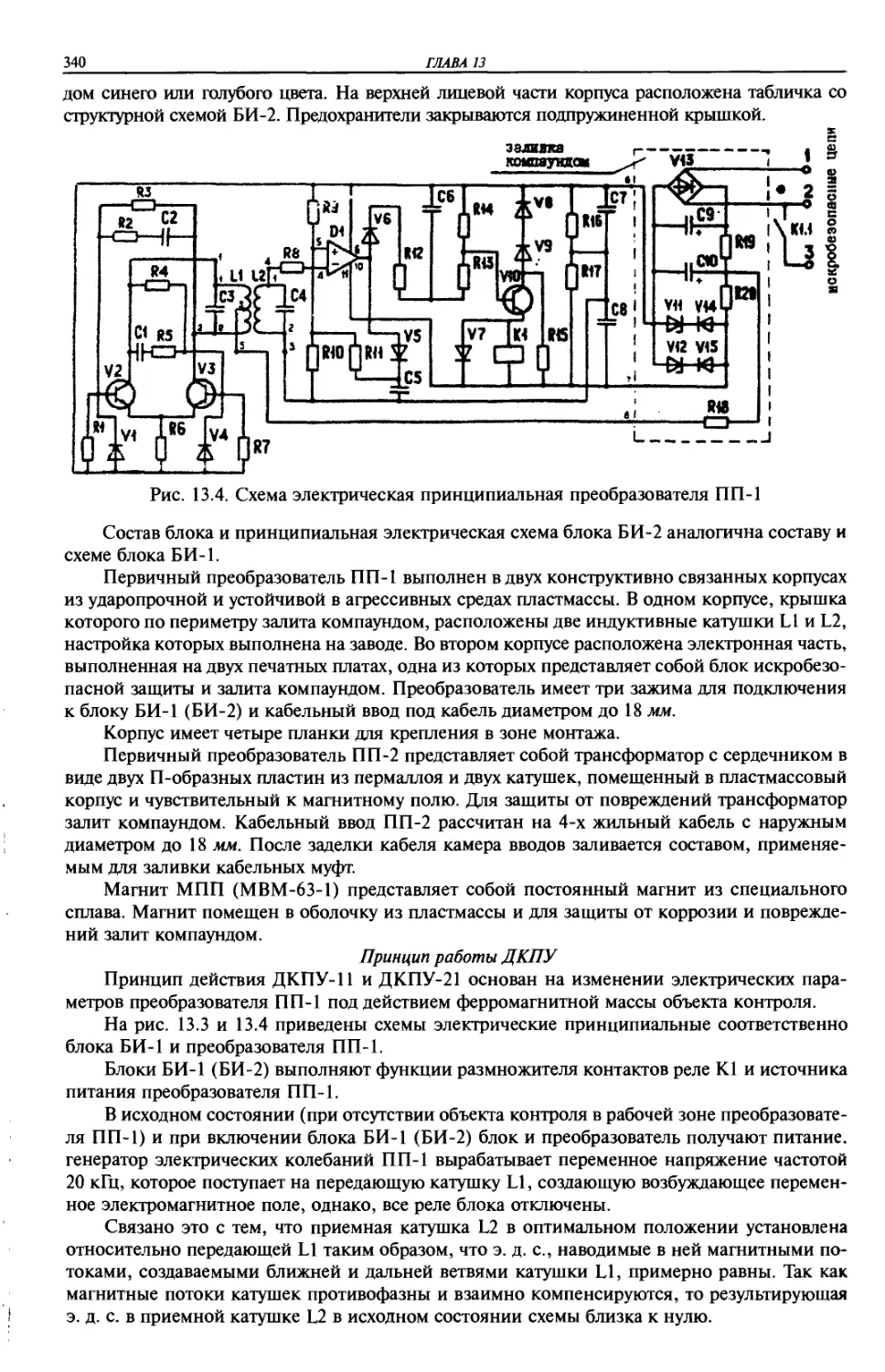
13.2.2. Датчики контроля положения ДКПУ............................338
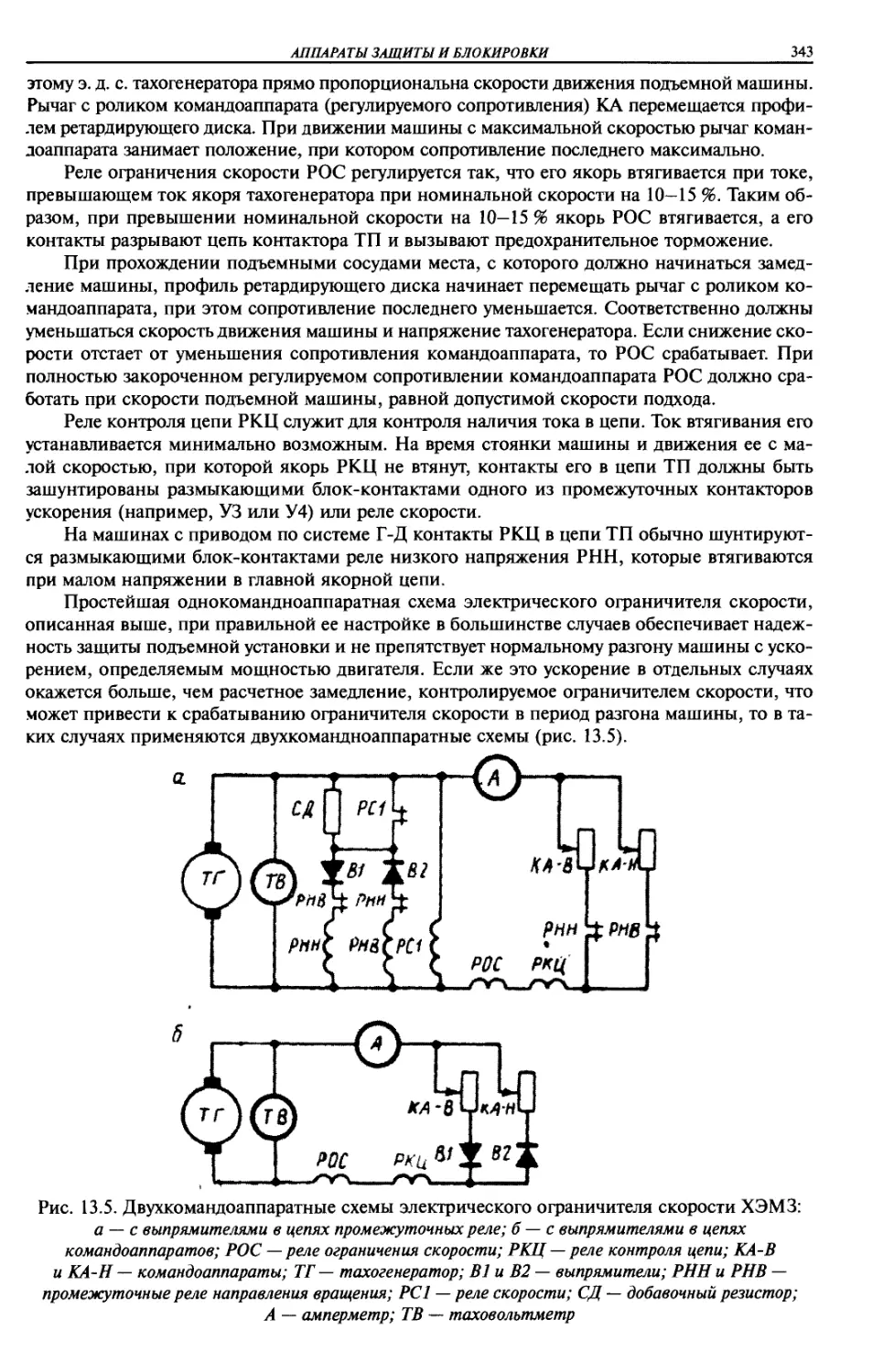
13.3. Защита от превышения скорости....................................342
13.3.1. Ограничители скорости ХЭМЗ с командоаппаратами РОС-5914... 342
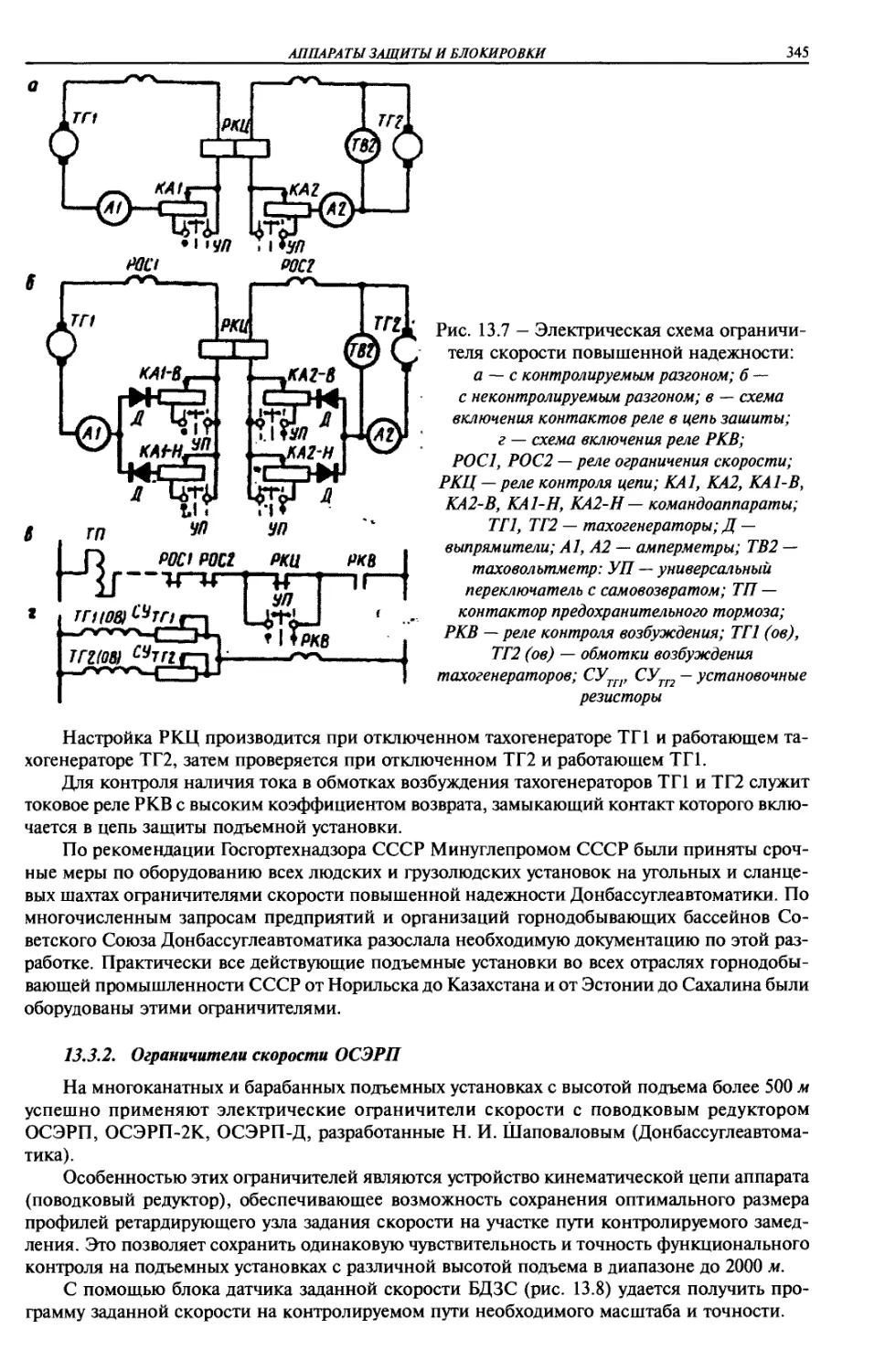
13.3.2. Ограничители скорости ОСЭРП................................345
13.3.3. Ограничитель скорости электрический ЭОС-3..................349
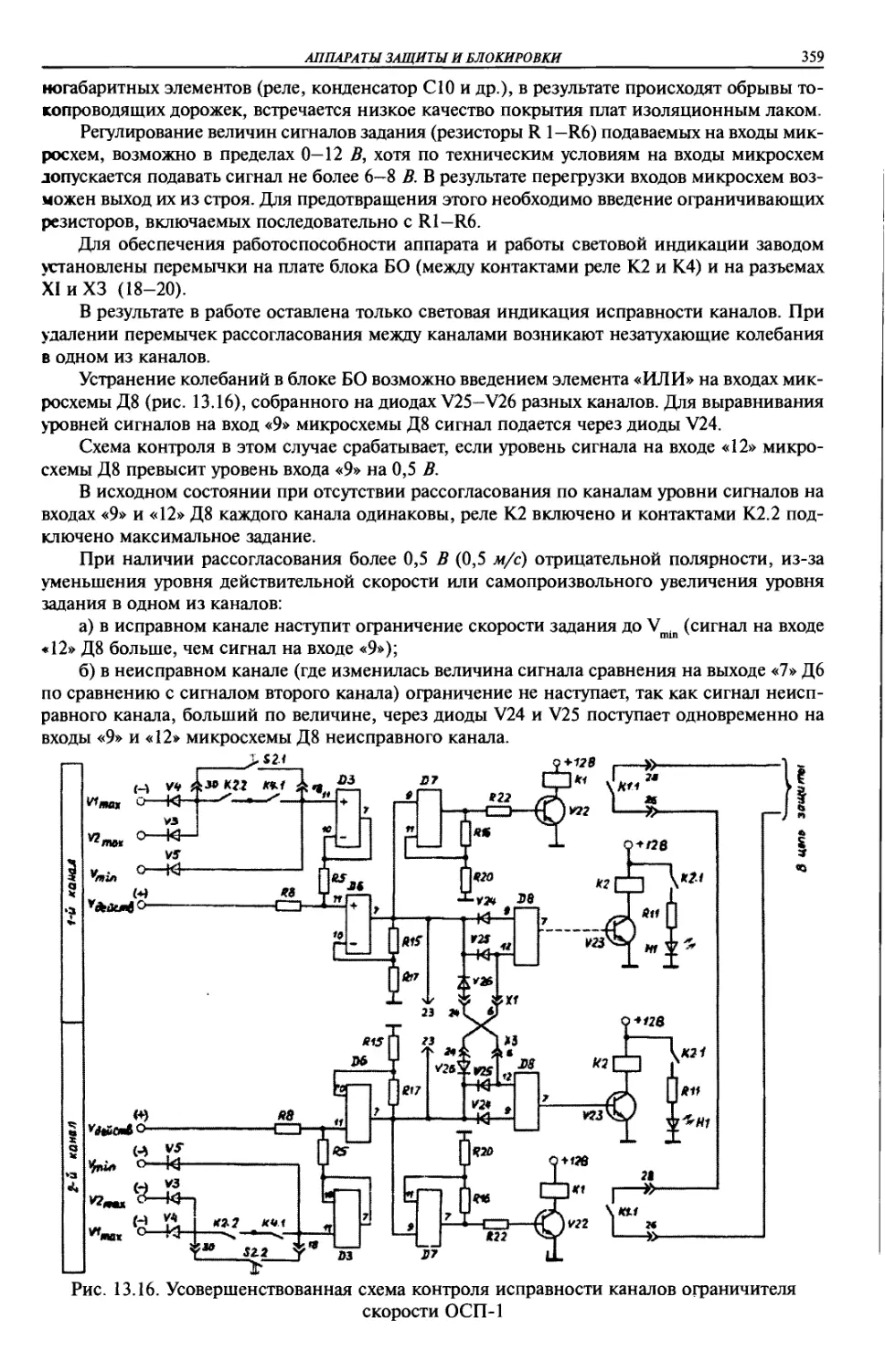
13.3.4. Ограничитель скорости ОСПМ ................................352
13.3.5. Ограничитель скорости независимый ОСН......................353
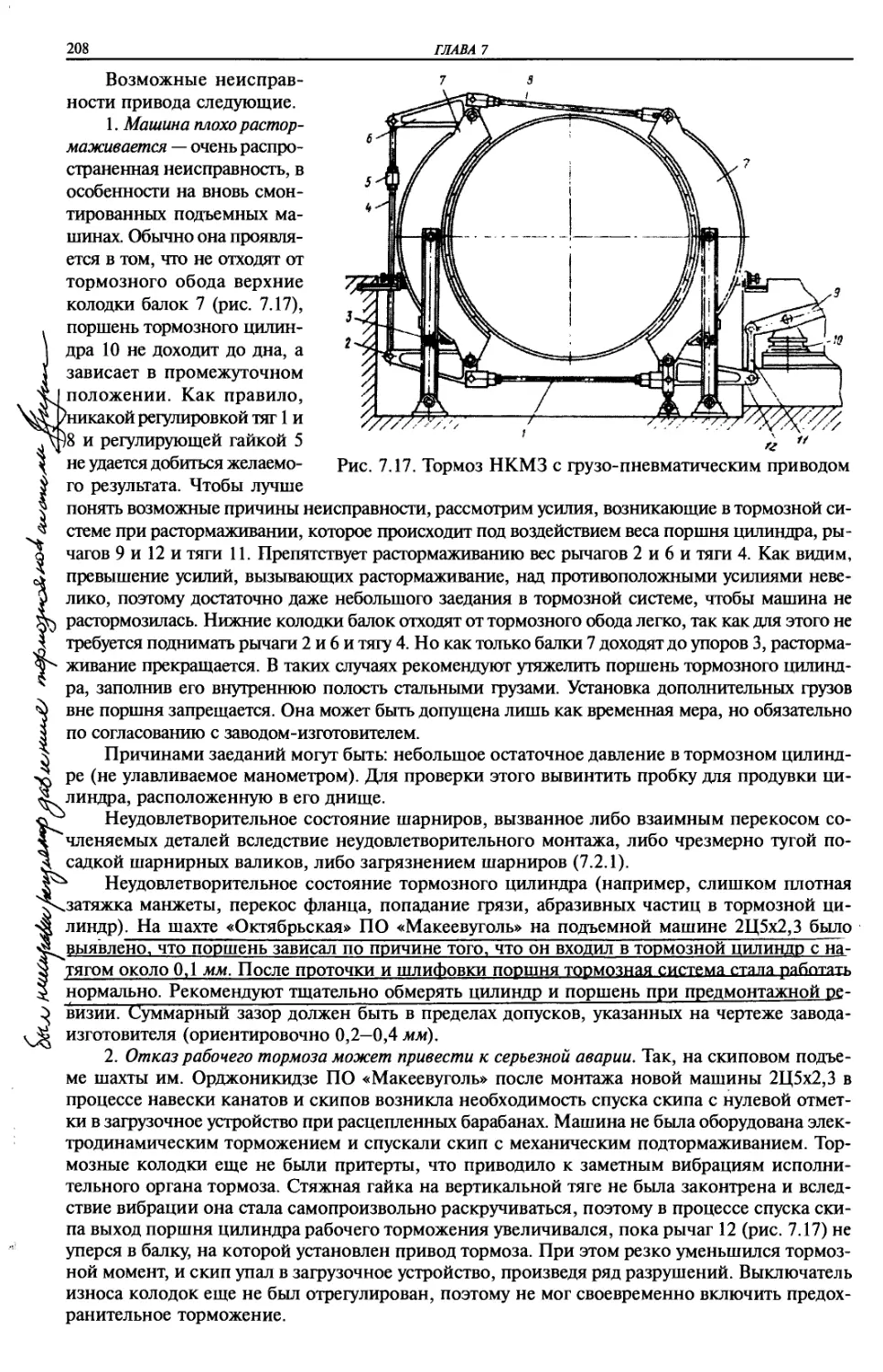
13.3.6. Ограничитель скорости шахтных подземных
подъемных машин ОСП-1...............................................357
13.3.7. Ограничитель скорости для подземных подъемных машин
с применением центробежных реле.....................................360
13.3.8. Методика расчета и построения тахограмм для наладки защиты
от превышения скорости..............................................364
13.3.9. Методика проверки ограничителей скорости...................381
13.4. Защита от провисания струны каната...............................383
13.5. Новые разработки элементов зашиты на базе микропроцессорной техники.386
13.5.1. Аппарат защиты и контроля движения АЗКД....................386
13.5.2. Автоматизированная система управления и комплексной защиты
шахтной подъемной установки, регистрации и визуализации
режимов ее работы ЗКДР..............................................389
Глава 14
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ НА ШАХТНОМ
ПОДЪЕМНОМ КОМПЛЕКСЕ
14.1. История развития стволовой сигнализации и связи .................397
14.2. Нормативные требования к системам стволовой сигнализации и связи
на шахтном подъемном комплексе..........................................398
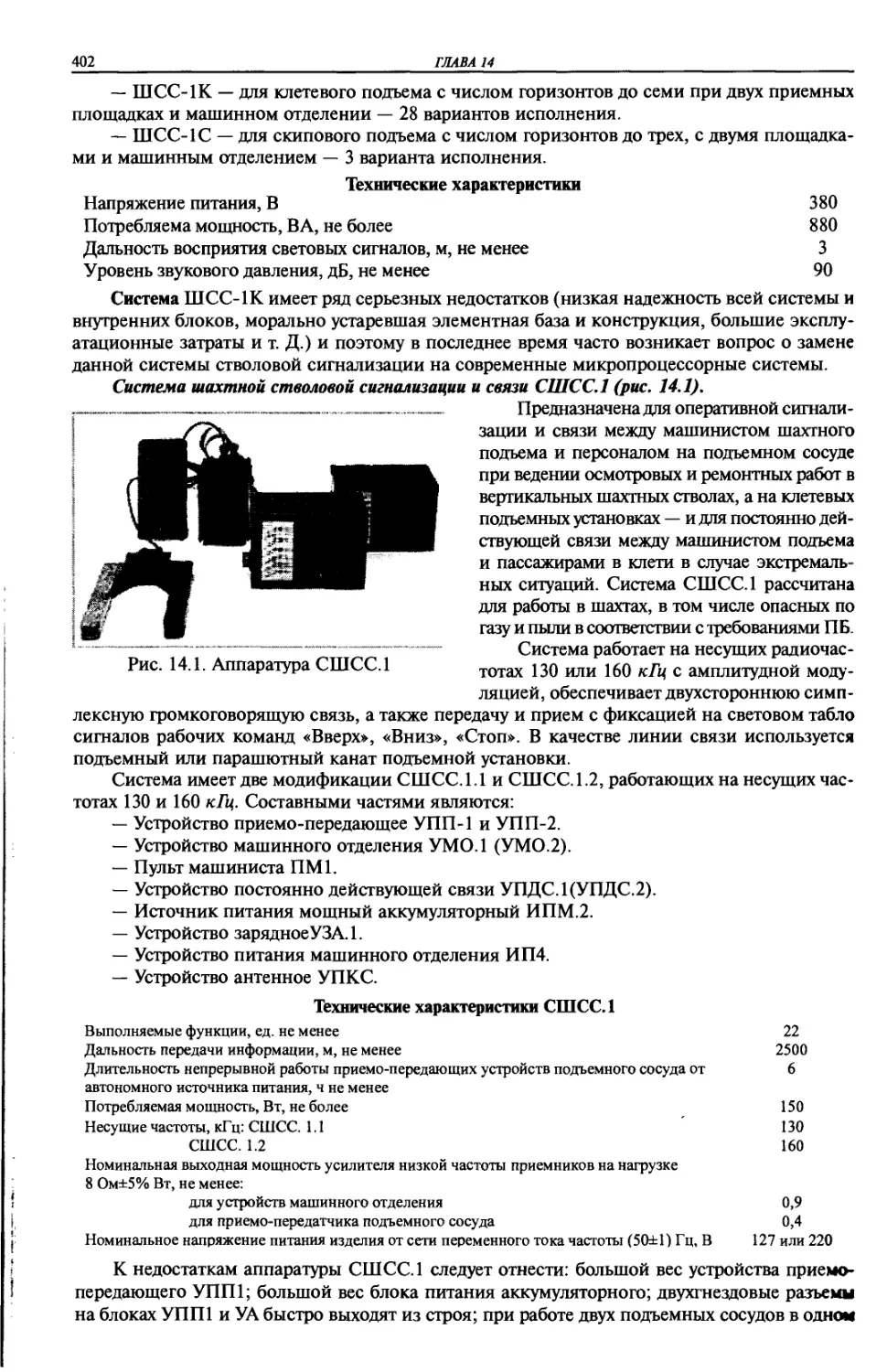
14.3. Аппаратура шахтной стволовой сигнализации и связи
(ОАО «Красный металлист», Конотоп) .....................................401
14.4. Аппаратура сигнализации и радиосвязи «Весна-СРС».................403
14.5. Система телезащиты и телесигнализации «Радуга-2».................404
14.6. Комплексы аппаратуры «Сигнал»....................................404
14.7. Оценка эффективности устройств шахтной стволовой
сигнализации и связи...................................................405
14.8. Применение современных микропроцессорных систем в стволовой
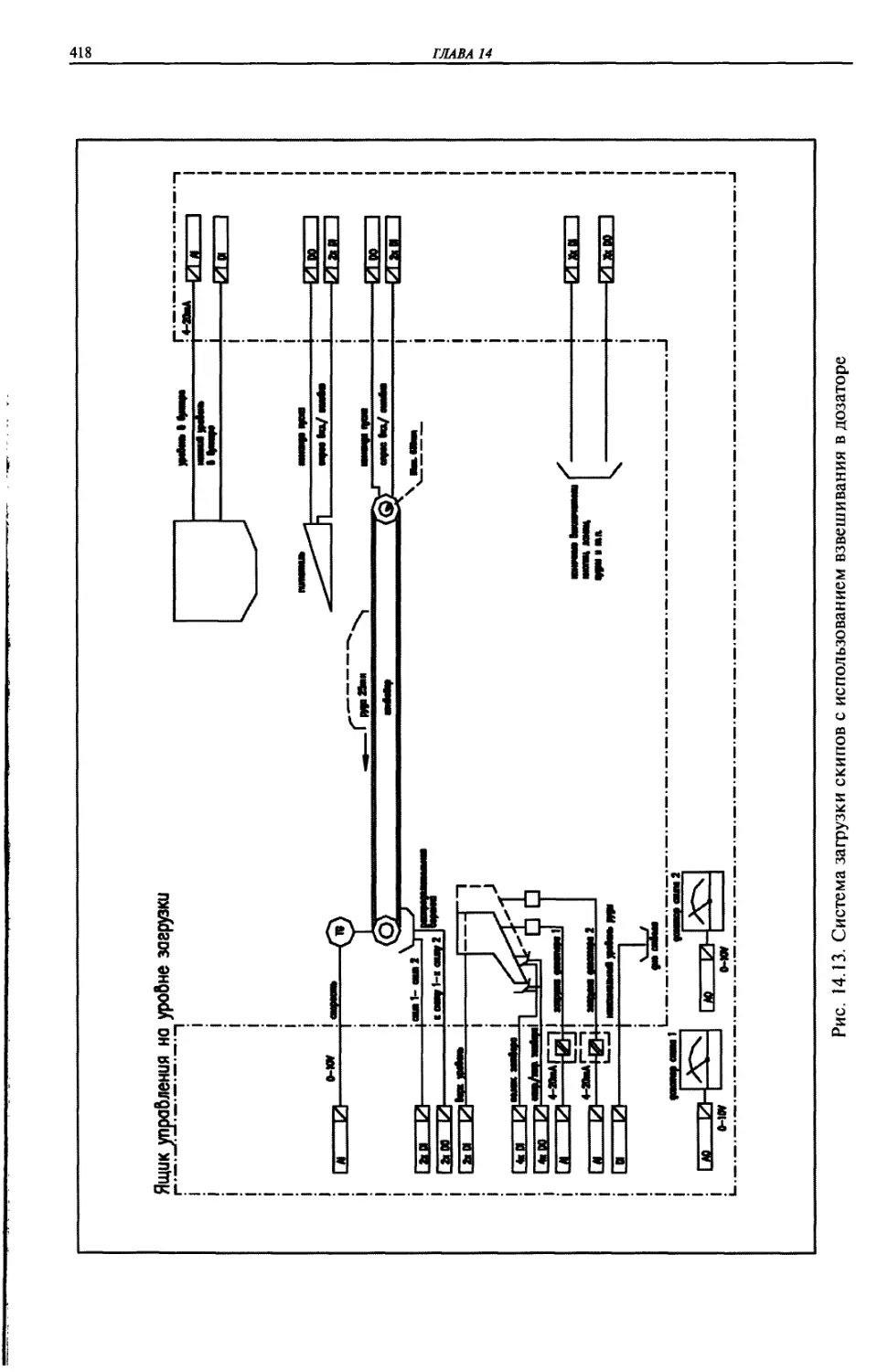
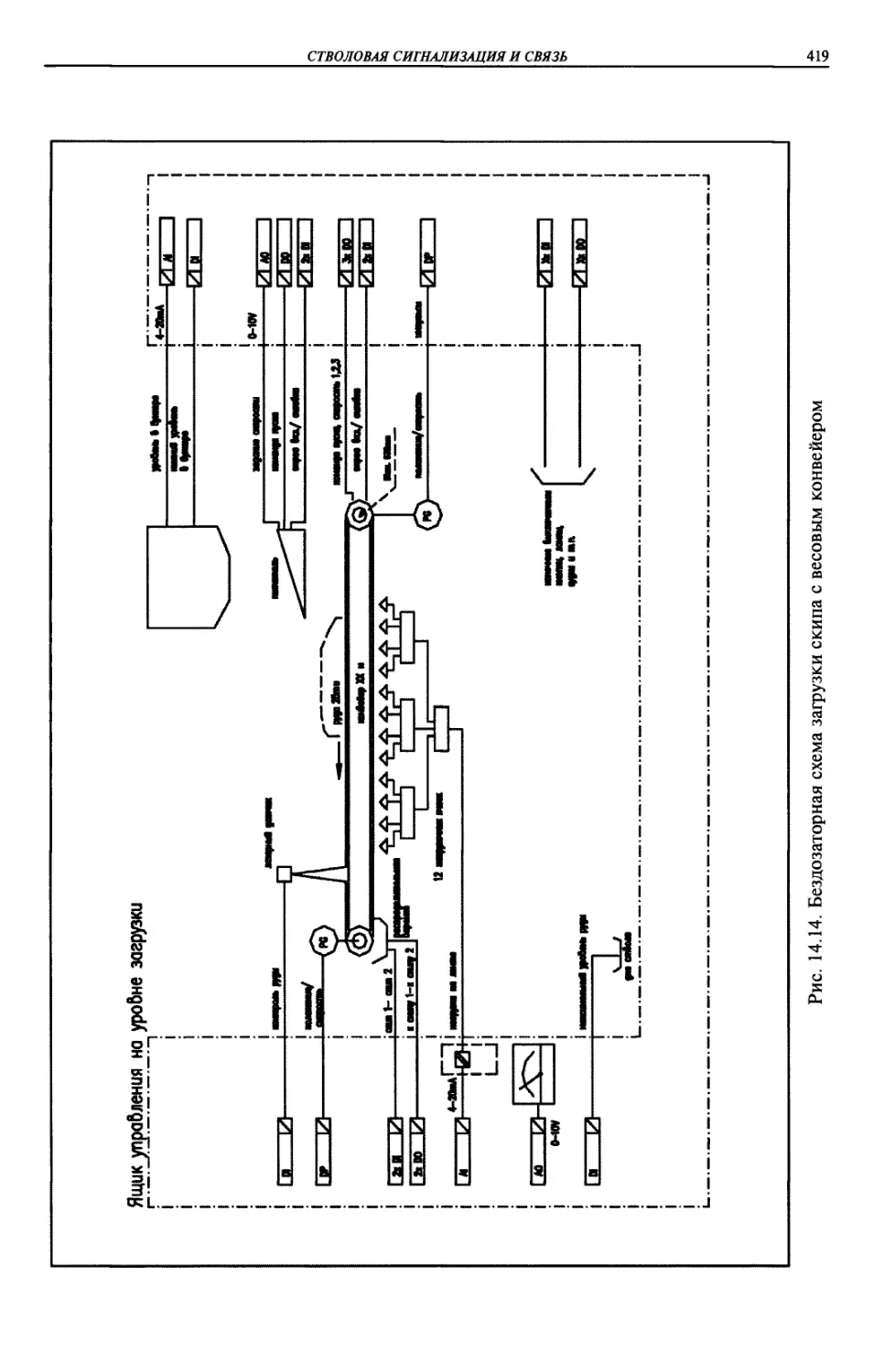
сигнализации с использованием оборудования зарубежных фирм.............411
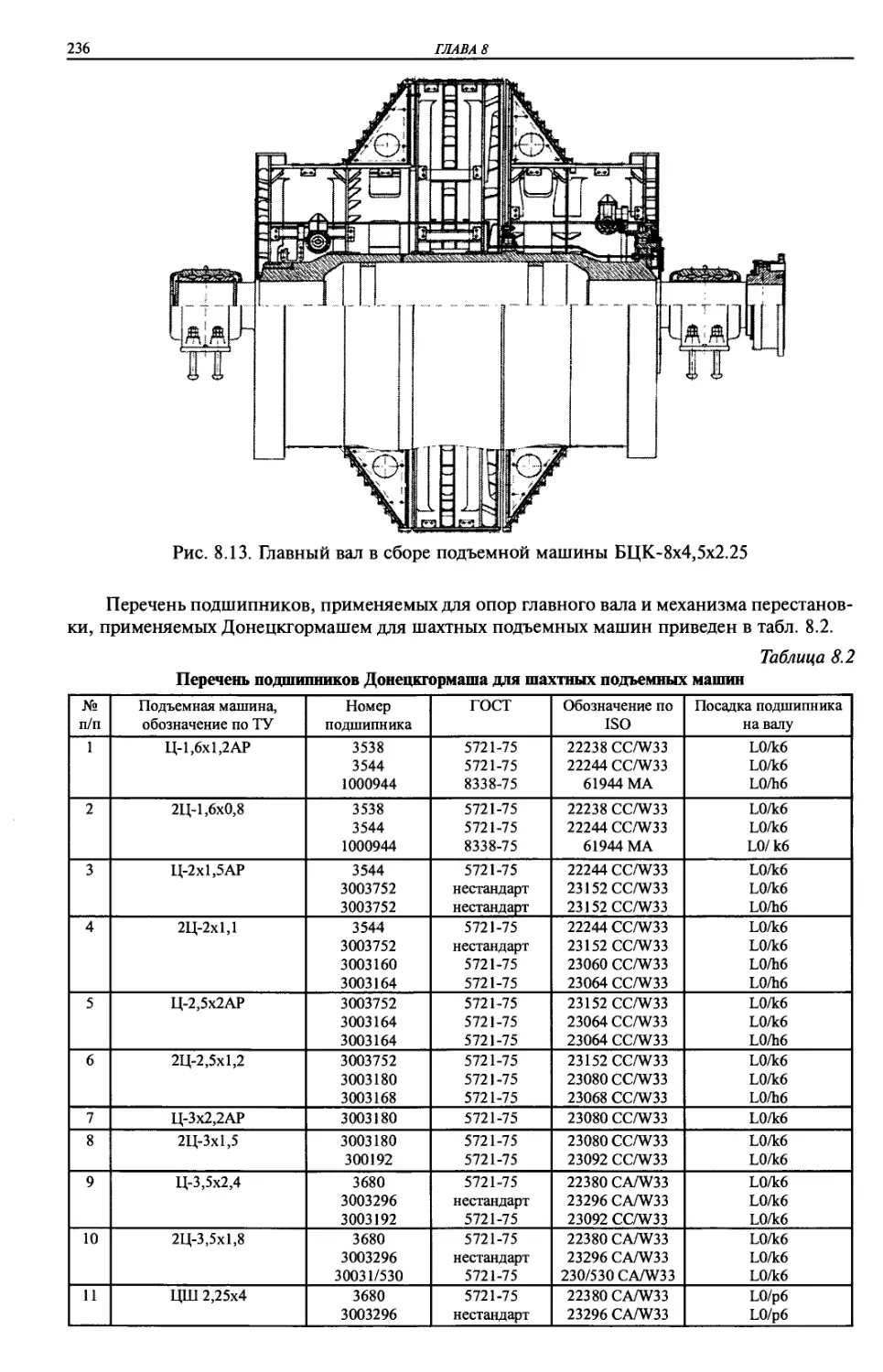
Глава 15
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
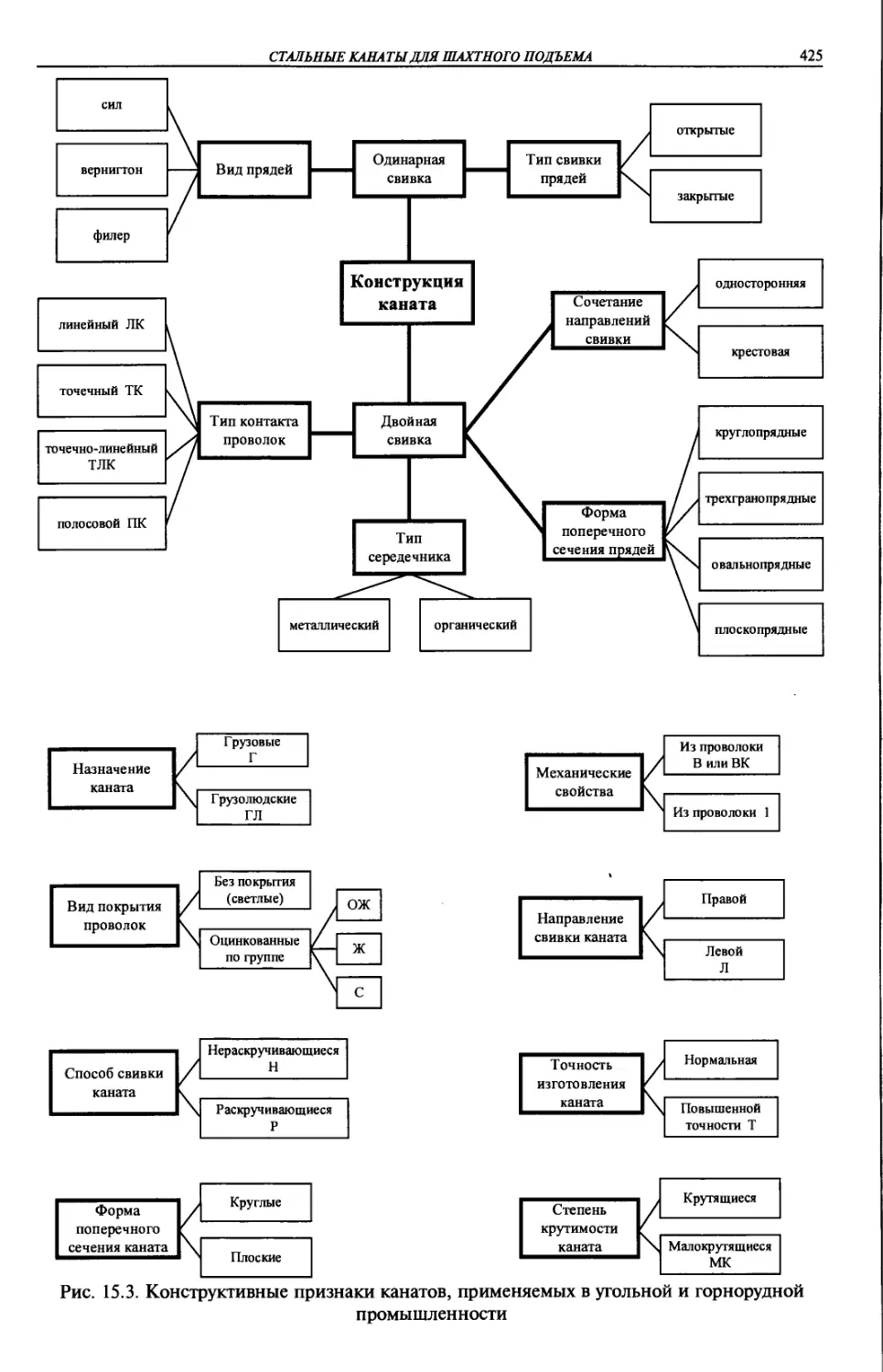
15 1. Конструктивные особенности и классификация канатов...............420
15 2 Расчет и обоснование выбора канатов...............................424
15.3. Основные требования и рекомендации по выбору канатов.............428
15.4. Контроль состояния шахтных канатов...............................430
Глава 16
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ
ПОДЪЕМНЫХ СОСУДОВ
16.1. Общие положения .................................................436
16.2. Прицепные устройства.............................................437
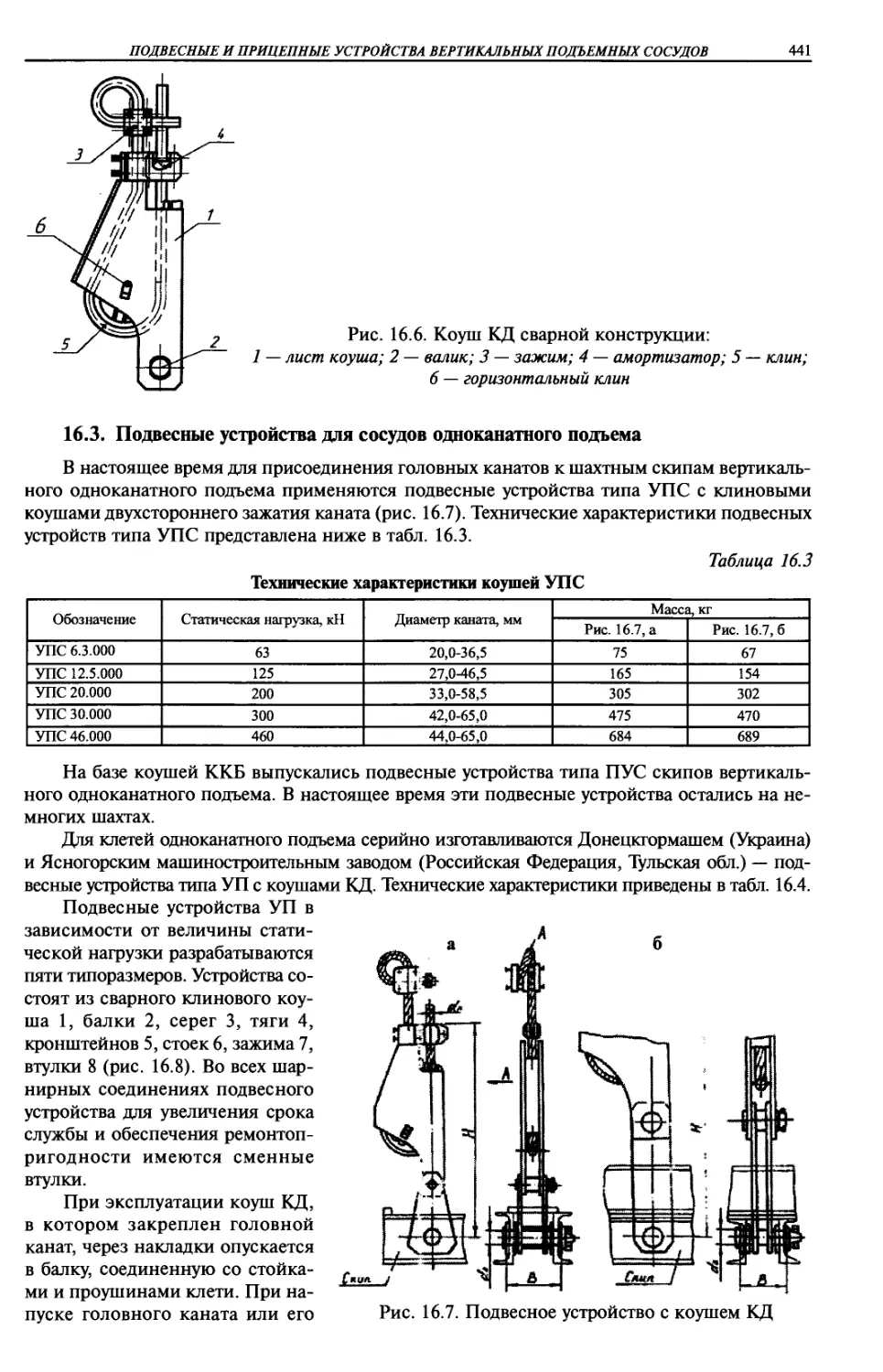
16.3. Подвесные устройства для сосудов одноканатного подъема...........441
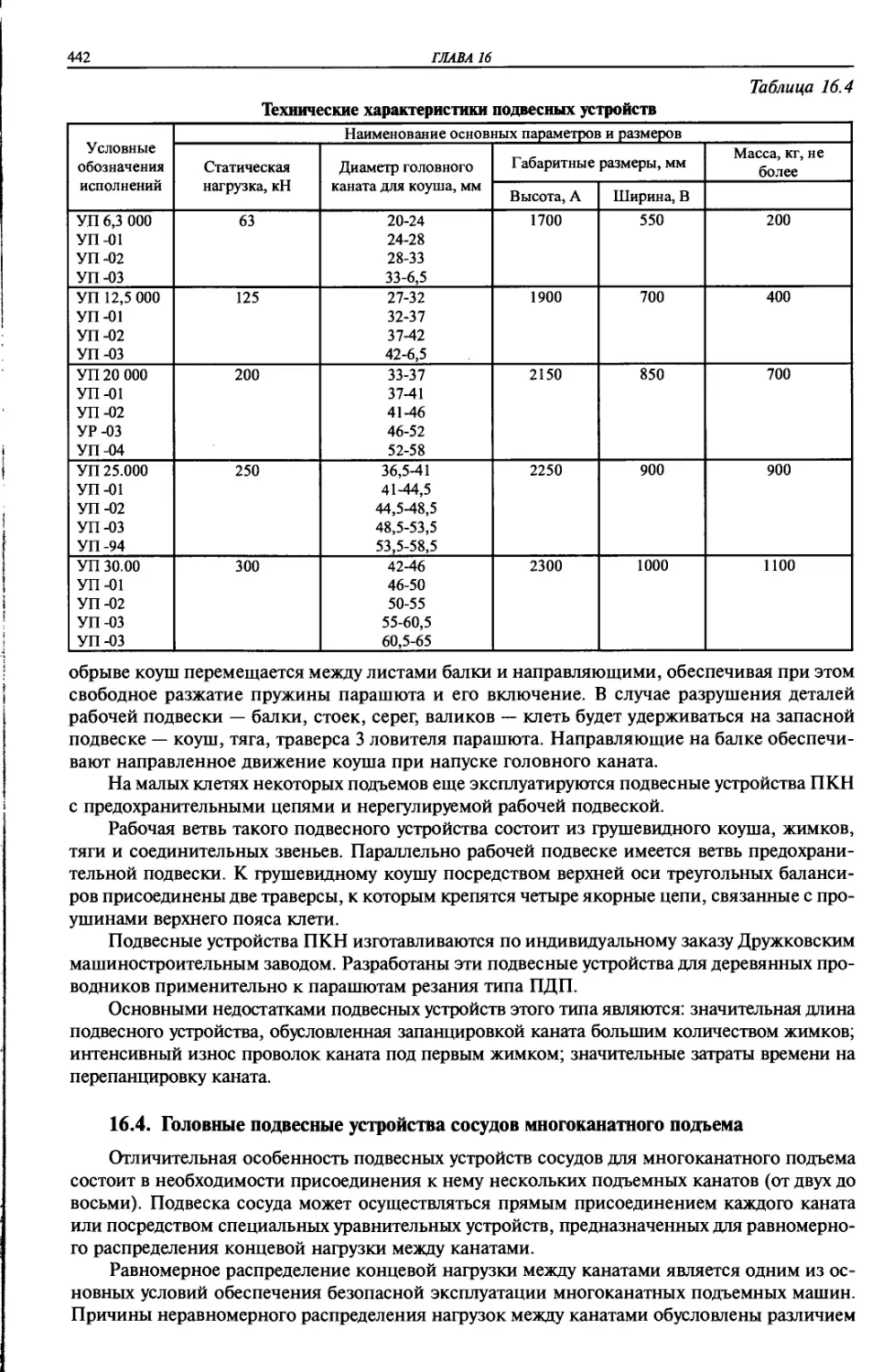
16.4. Головные подвесные устройства сосудов многоканатного подъема.....442
16.5. Подвесные устройства для круглых уравновешивающих канатов........444
16.6. Подвесные устройства для бадей проходческих подъемных установок..444
16.7. Переоборудование клетей под подвесные устройства типа УП вместо ПУМ.446
16.8. Основные направления повышения надежности и безопасности
эксплуатации подвесных устройств.......................................447
Глава 17
ПАРАШЮТЫ ШАХТНЫЕ ДЛЯ КЛЕТЕЙ И ПРОТИВОВЕСОВ
17.1. Основные положения...............................................455
17.2. Типы парашютов и принцип их работы ..............................456
17.3. Устройство и работа и его составных частей.......................459
17.3.1. Амортизаторы парашюта......................................460
17.3.2. Соединительные и направляющие муфты........................461
17.3.3. Крепление тормозных канатов в зумпфе.......................462
17.3.4. Работа парашюта ПТКА.......................................463
17.4. Настройка амортизаторов..........................................464
17.5. Проверка действия ловителя при напуске каната....................464
17.6. Регламент технического обслуживания парашютов....................465
17.7. Неисправности парашютов..........................................466
Глава 18
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
18.1. Общие сведения о подъемных сосудах (транспортных средствах)......468
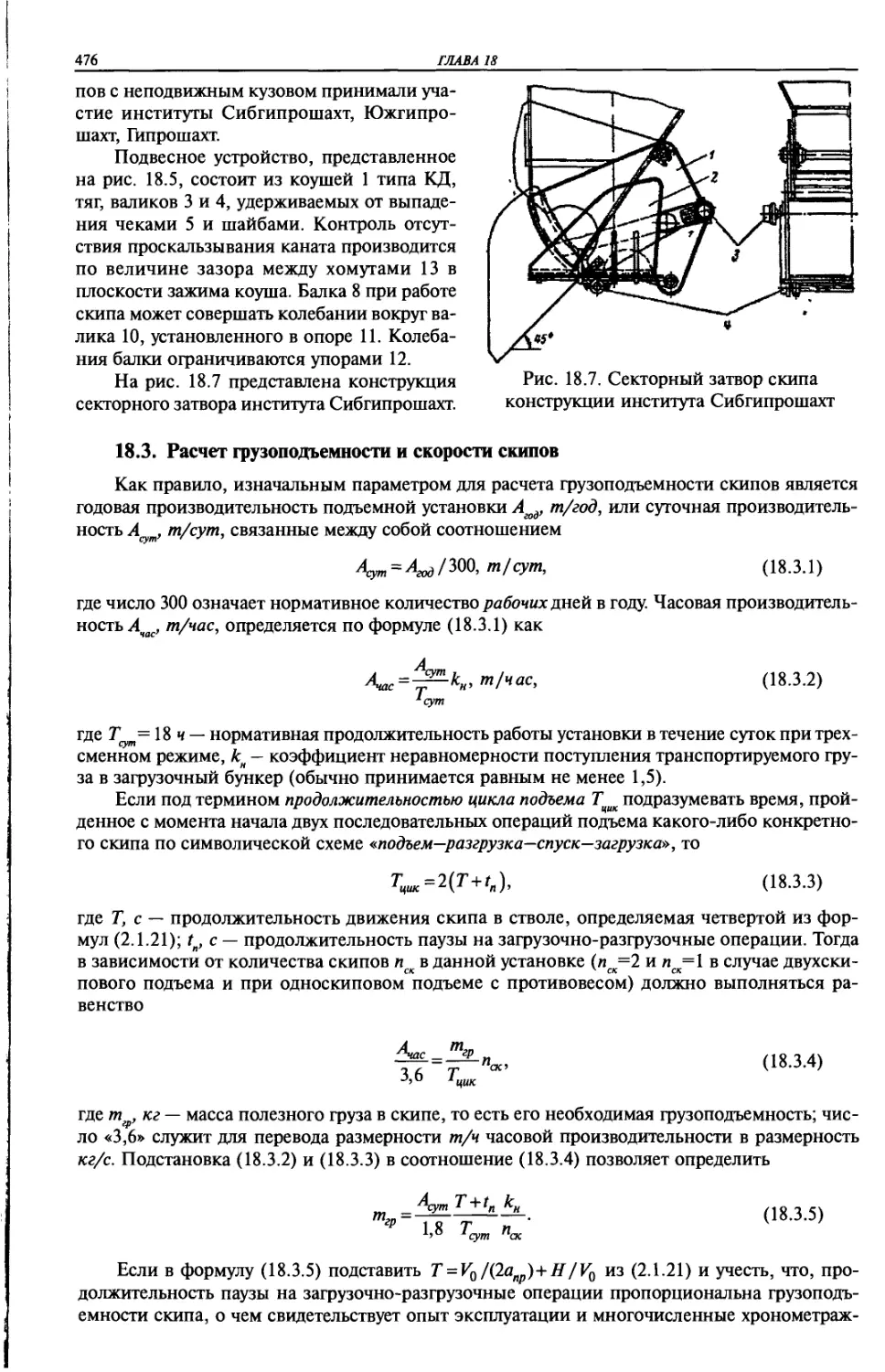
18.2. Скипы в вертикальных стволах.....................................469
18.3. Расчет грузоподъемности и скорости скипов........................476
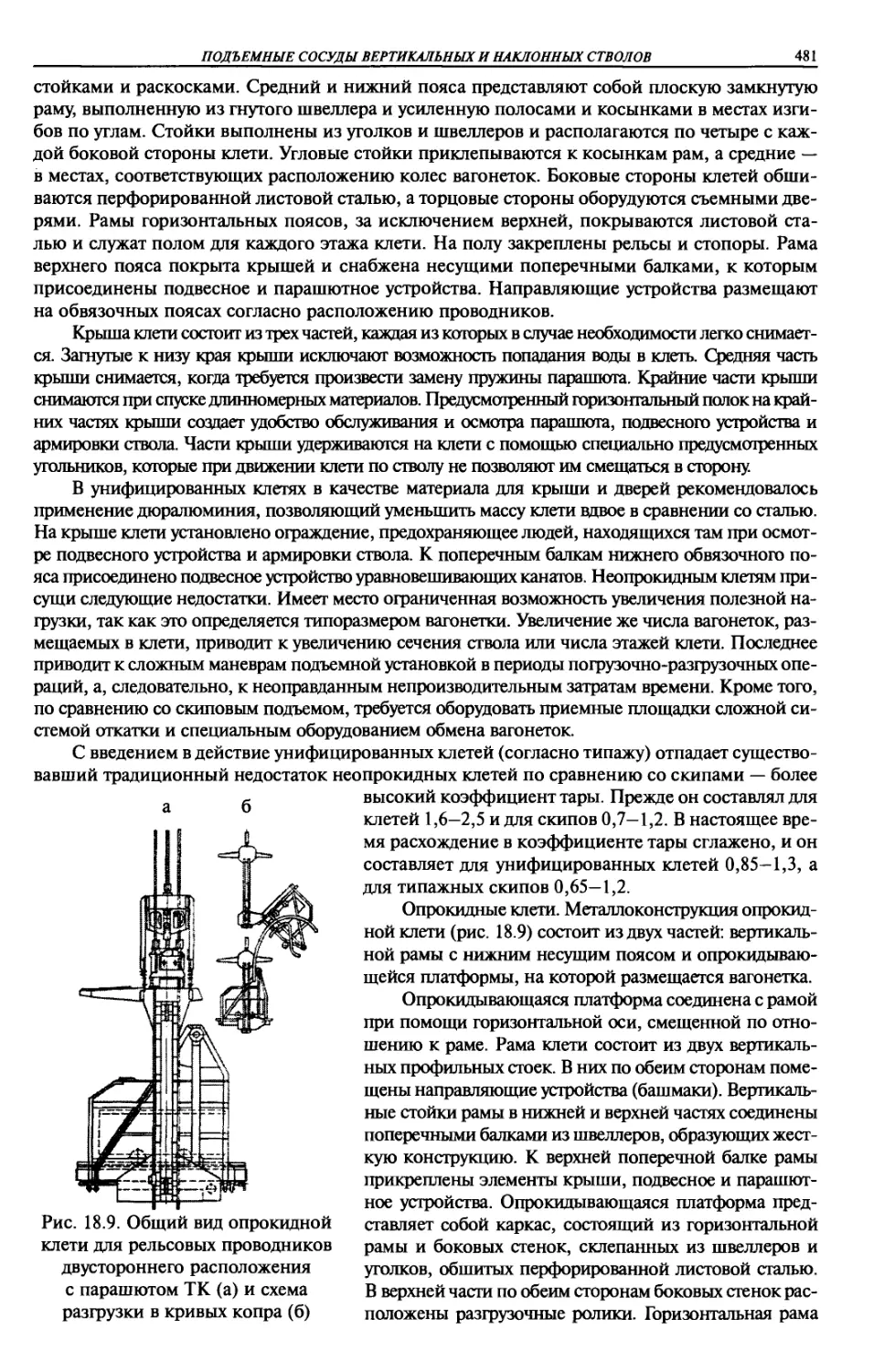
18.4. Клети в вертикальных стволах.....................................477
18.5. Противовесы......................................................485
18.6. Подъемные сосуды в наклонных стволах.............................486
18.6.1. Скипы в наклонных стволах..................................486
18.6.2. Клети в наклонных стволах..................................487
18.6.3. Вагонетки для перевозки людей..............................488
18.6.4. Грузовые шахтные вагонетки.................................488
18.7. Неисправности скипов, клетей и противовесов......................489
Глава 19
ПУТИ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ЭКСПЛУАТАЦИИ
РЕЛЬСОВЫХ ПРОВОДНИКОВ ЖЕСТКОЙ АРМИРОВКИ
19.1. Основные положения...............................................495
19.2. Мероприятия по снижению коэффициента трения
в кинематической паре «направляющее устройство скольжения
подъемного сосуда—рельсовый проводник».............................495
19.3. Технические решения по уменьшению давления
подъемного сосуда на проводники........................................500
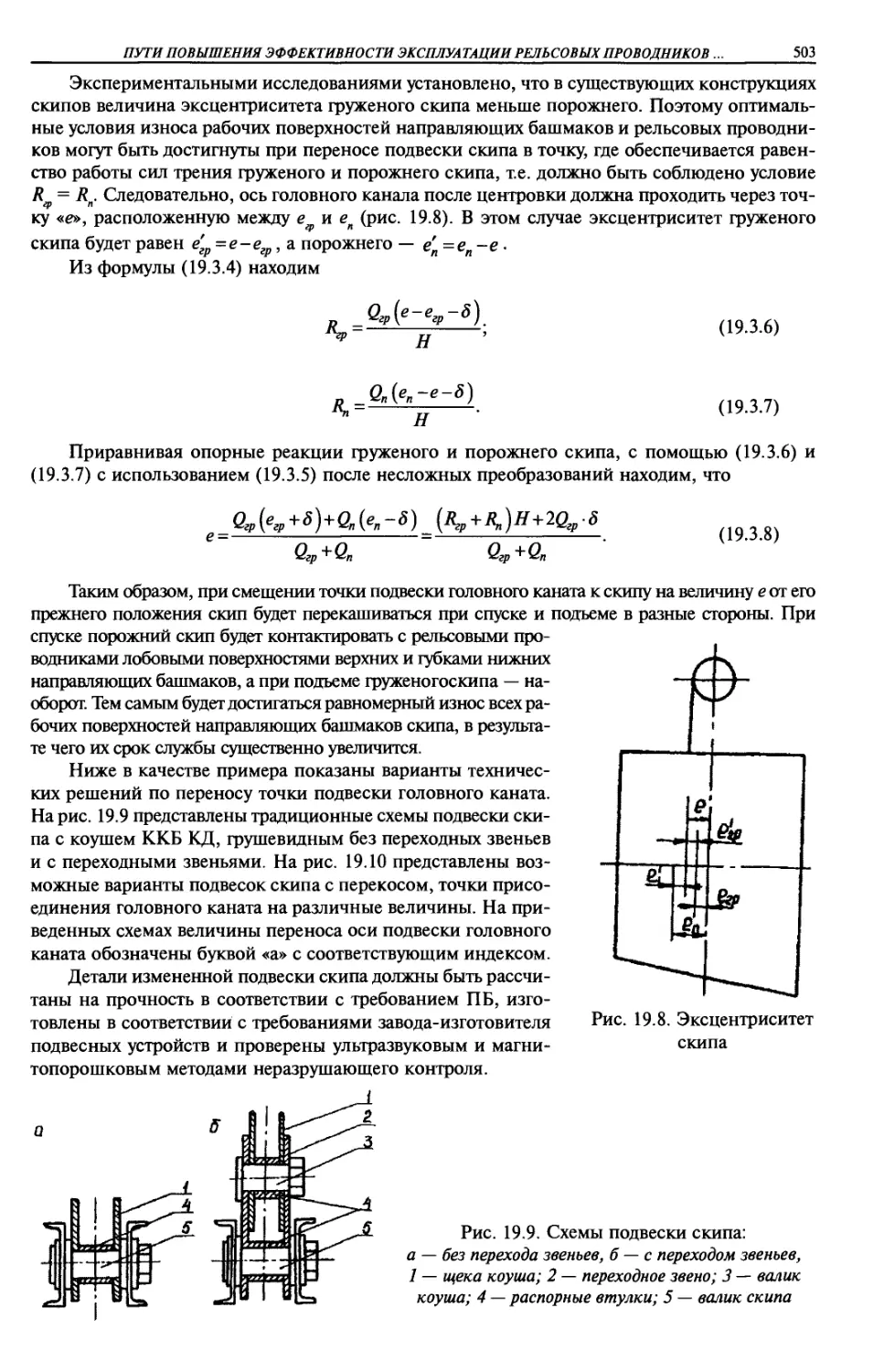
19.1.3. Центровка скипов...........................................501
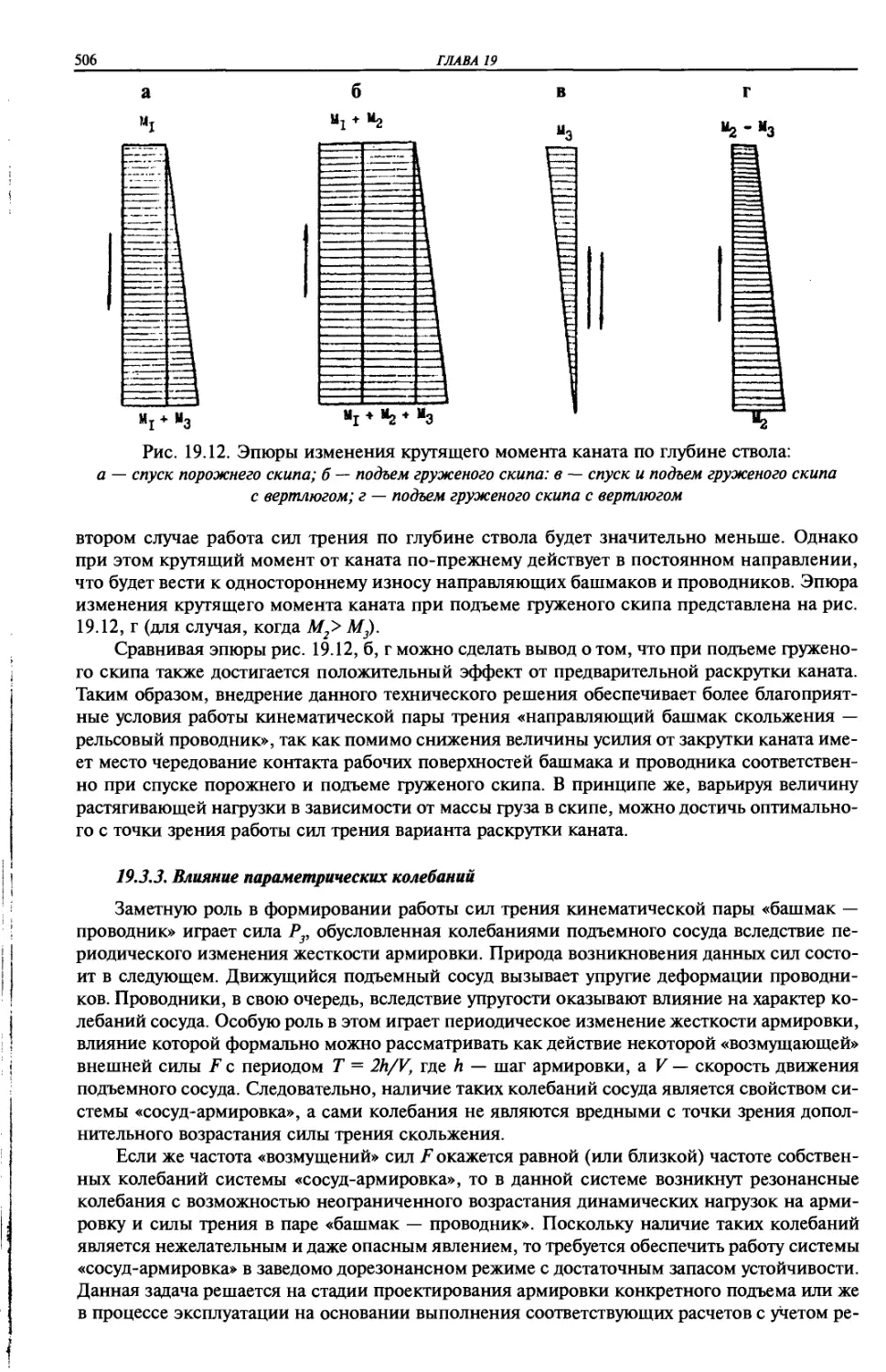
19.3.2. Действие крутящего момента каната..........................505
19.3.3. Влияние параметрических колебаний..........................506
19.3.4. Влияние искривления проводников............................507
19.3.5. Влияние аэродинамических сил...............................507
19.3.6. Влияние кариолисового усилия...............................508
Глава 20
ОБЩИЕ ВОПРОСЫ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ
И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ
2и 1 Общие понятия о механических системах, видах нагрузок,
причинах отказов и повреждений.......................................509
2о 2 Система неразрушающего контроля оборудования подъемных установок........511
20.2.1 . Понятие о методе и системе контроля........................511
20.2.2 . Дефекты, их типы и виды....................................511
20.2.3 . Классификация методов неразрушающего контроля .............512
20.3. Физические основы и принципы ультразвуковой дефектоскопии..........513
20.3.1. Ультразвуковые колебания....................................513
20.3.2. Отражение и преломление акустических волн...................513
20.3.3. Пьезоэлектрические преобразователи..........................516
20.3.4. Методы ультразвуковой дефектоскопии.........................519
20.3.5. Аппаратура для ультразвуковой дефектоскопии.................520
20.3.6. Акустический контакт и способы оценки его качества..........521
20.3.7. Технология контроля.........................................522
20.4. Магнитная дефектоскопия............................................524
20.4.1. Сущность метода.............................................524
20.4.2. Способы намагничивания деталей .............................524
20.4.3. Способы дефектоскопирования деталей.........................526
20.4.4. Магнитные порошки и суспензии...............................526
20.4.5. Основные технологические операции...........................526
20.4.6. Магнитные дефектоскопы......................................527
20.5. Капиллярная дефектоскопия..........................................528
20.5.1. Сущность метода.............................................528
20.5.2. Основные технологические операции...........................529
20.6. Ультразвуковая толщинометрия.......................................530
20.6.1. Общие сведения..............................................530
20.6.2. Сущность метода.............................................530
20.6.3. Приборы ультразвуковой толщинометрии........................530
20.7. Акустико-эмиссионный метод контроля................................531
20.8. Контроль физико-механических свойств металлов (испытание на твердость).533
Глава 21
ВИБРОАКУСТИЧЕСКАЯ ДИАГНОСТИКА, ВИБРОКОНТРОЛЬ,
БАЛАНСИРОВКА
21.1. Виброакустическая диагностика......................................535
21.1.1. Актуальность вибродиагностики шахтных стационарных установок....535
21.1.2. Параметры и обобщенные характеристики вибраций..............535
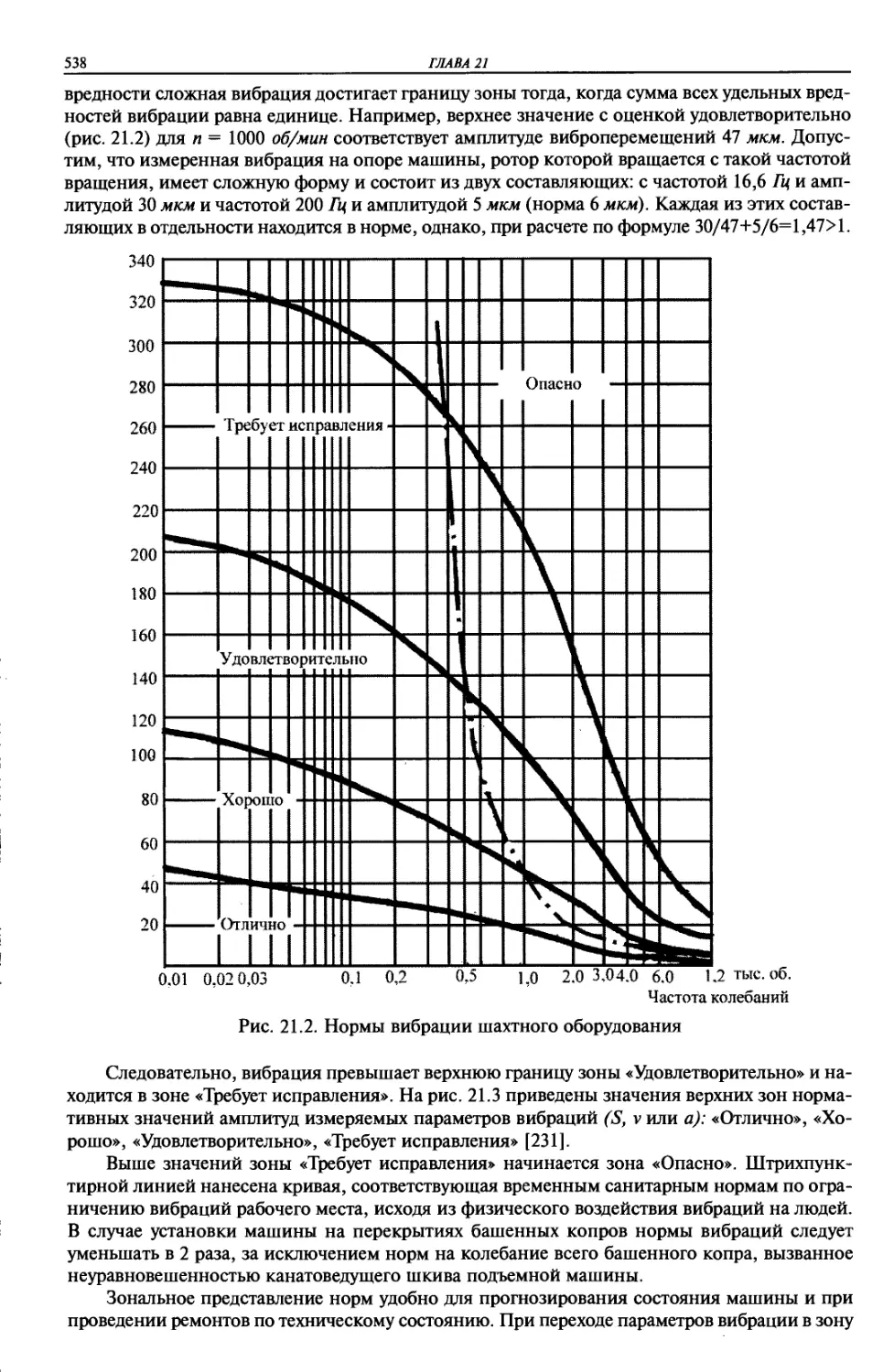
21.1.3. Нормирование вибраций.......................................537
21.1.4. Диагностирование машин по виброакустическим признакам.......539
21.1.5. Приборы вибрационной диагностики............................543
21.2. Диагностика и устранение динамической неуравновешенности
роторов шахтных стационарных машин.......................................545
21.2.1. Принципы и понятия..........................................545
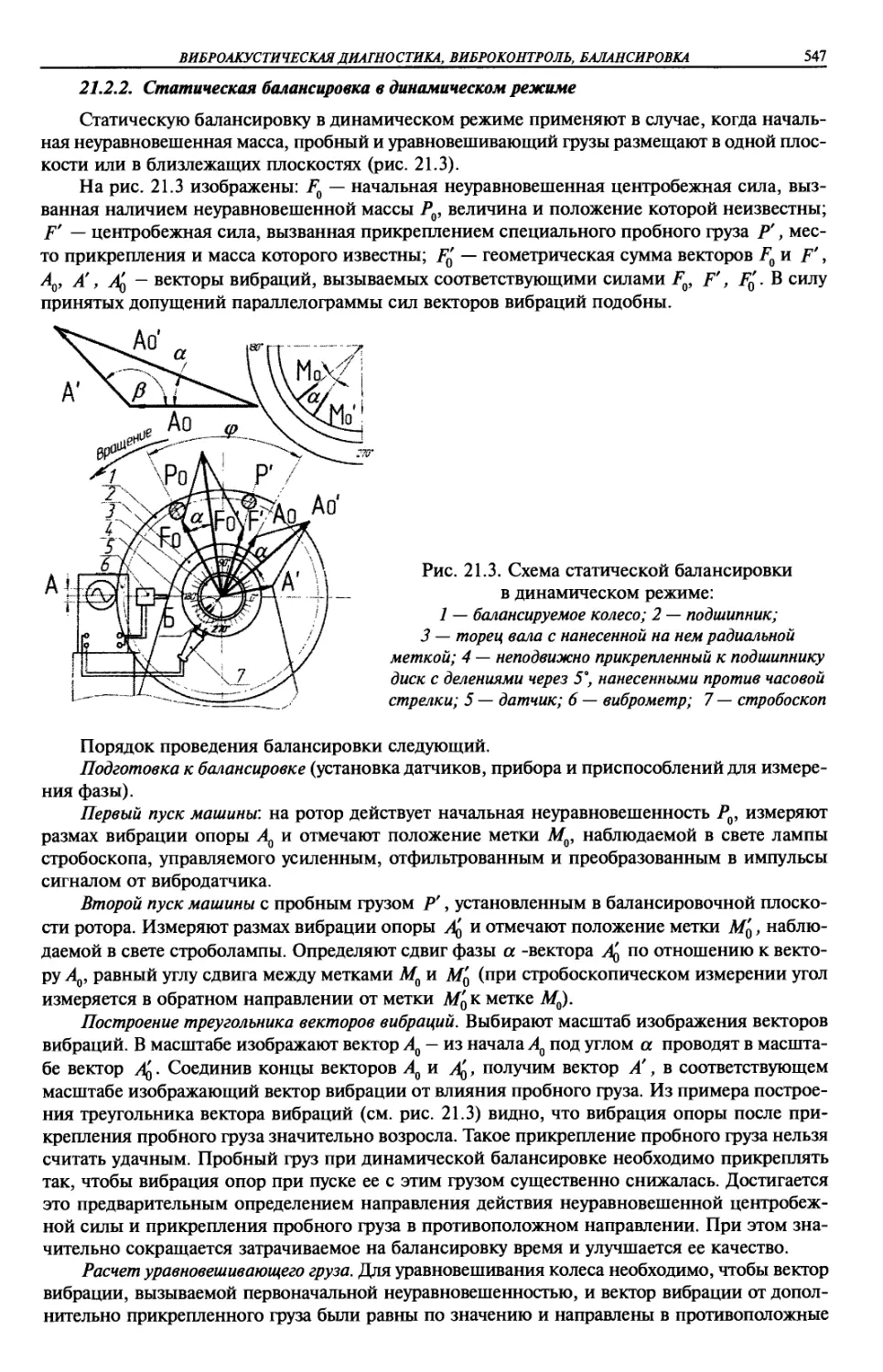
21.2.2. Статическая балансировка в динамическом режиме .............547
21.2.3. Требования к точности операций уравновешивания роторов......548
21.2.4. Подготовка к балансировке в двух балансировочных плоскостях.549
21.2.5. Выбор значения и места прикрепления пробного груза..........551
21.2.6. Динамическая балансировка в двух плоскостях.................552
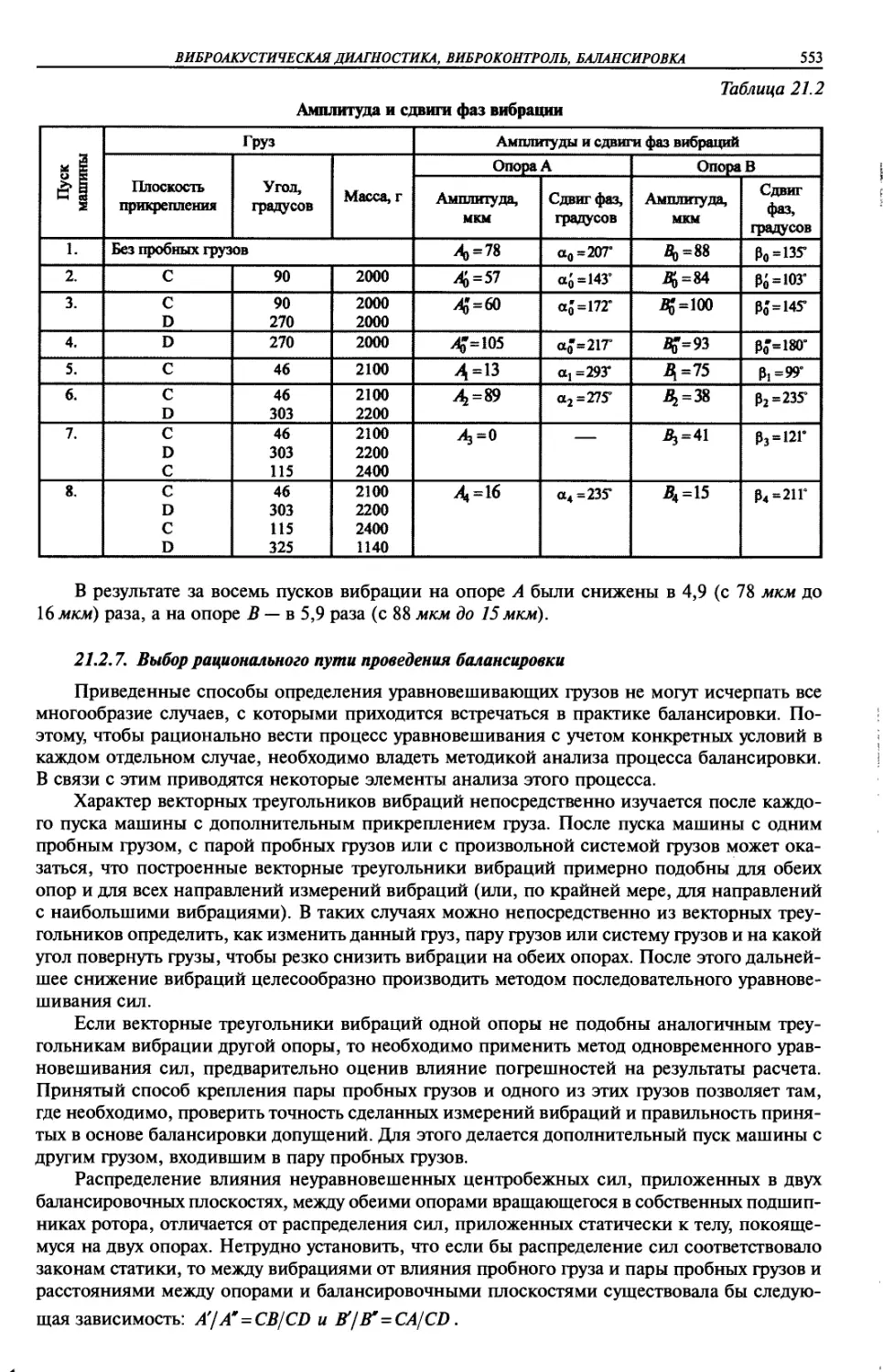
21.2.7. Выбор рационального пути проведения балансировки........553
21.3. Особенности вибродиагностики многоканатных подъемных установок.554
Глава 22
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ
ПОДЪЕМНЫХ УСТАНОВОК МЕТОДАМИ
НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ
22.1. Неразрушающий контроль деталей тормозных устройств
шахтных подъемных машин.............................................557
22.1.1. Общие сведения..........................................557
22.1.2. Ультразвуковой контроль.................................559
22.1.3. Магнитопорошковый контроль..............................564
22.2. Неразрушающий контроль подвесных и парашютных устройств........566
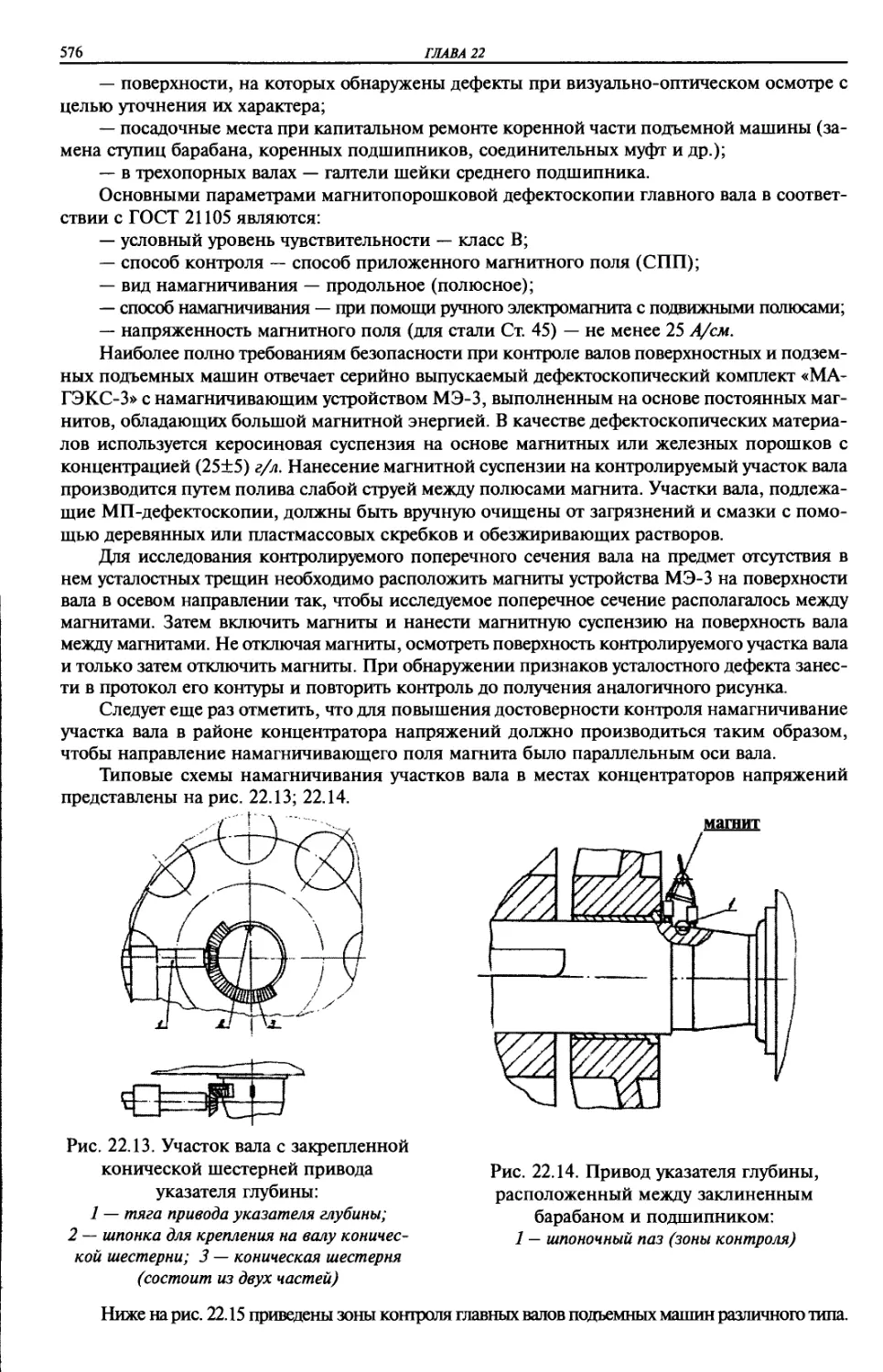
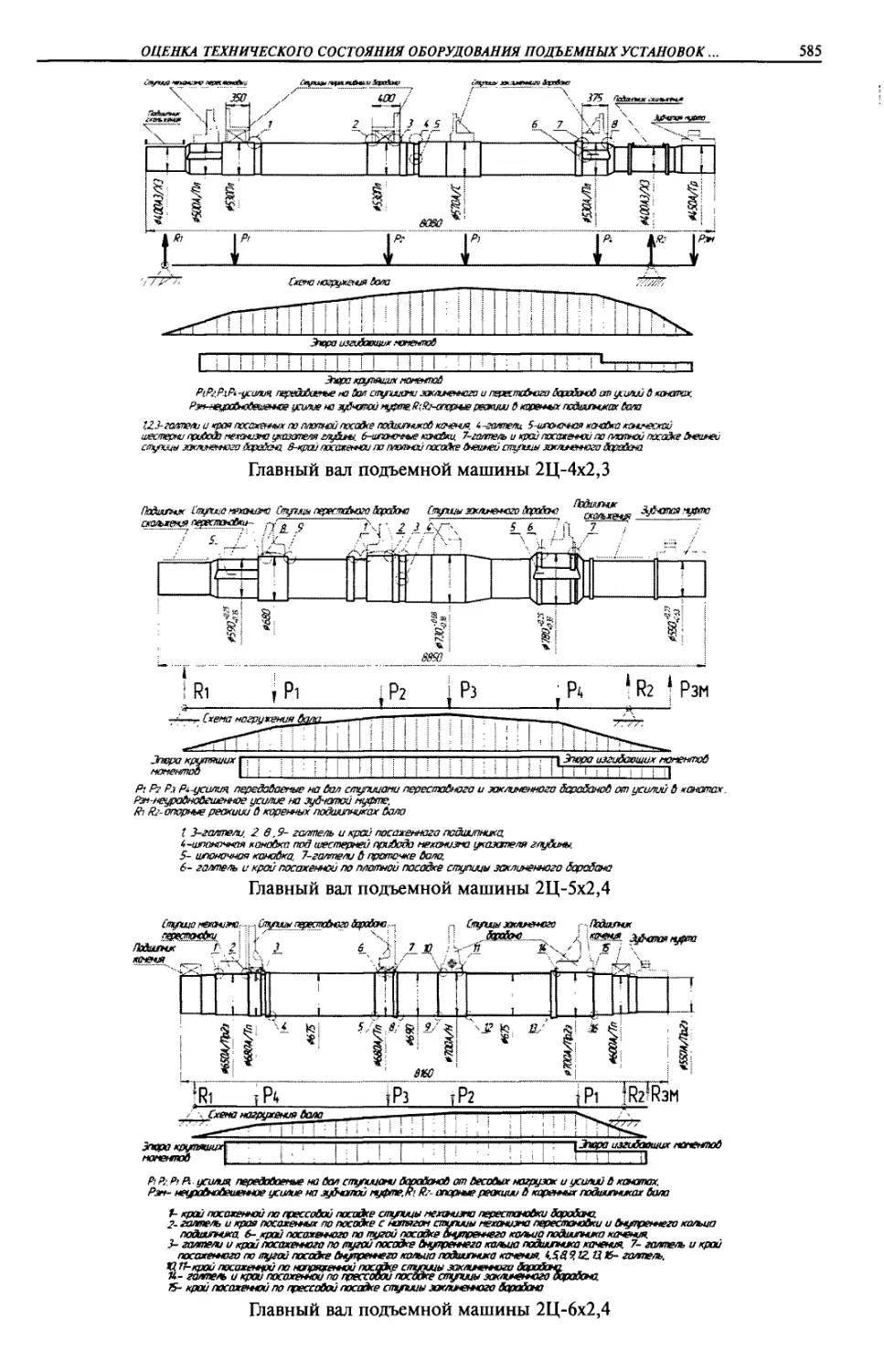
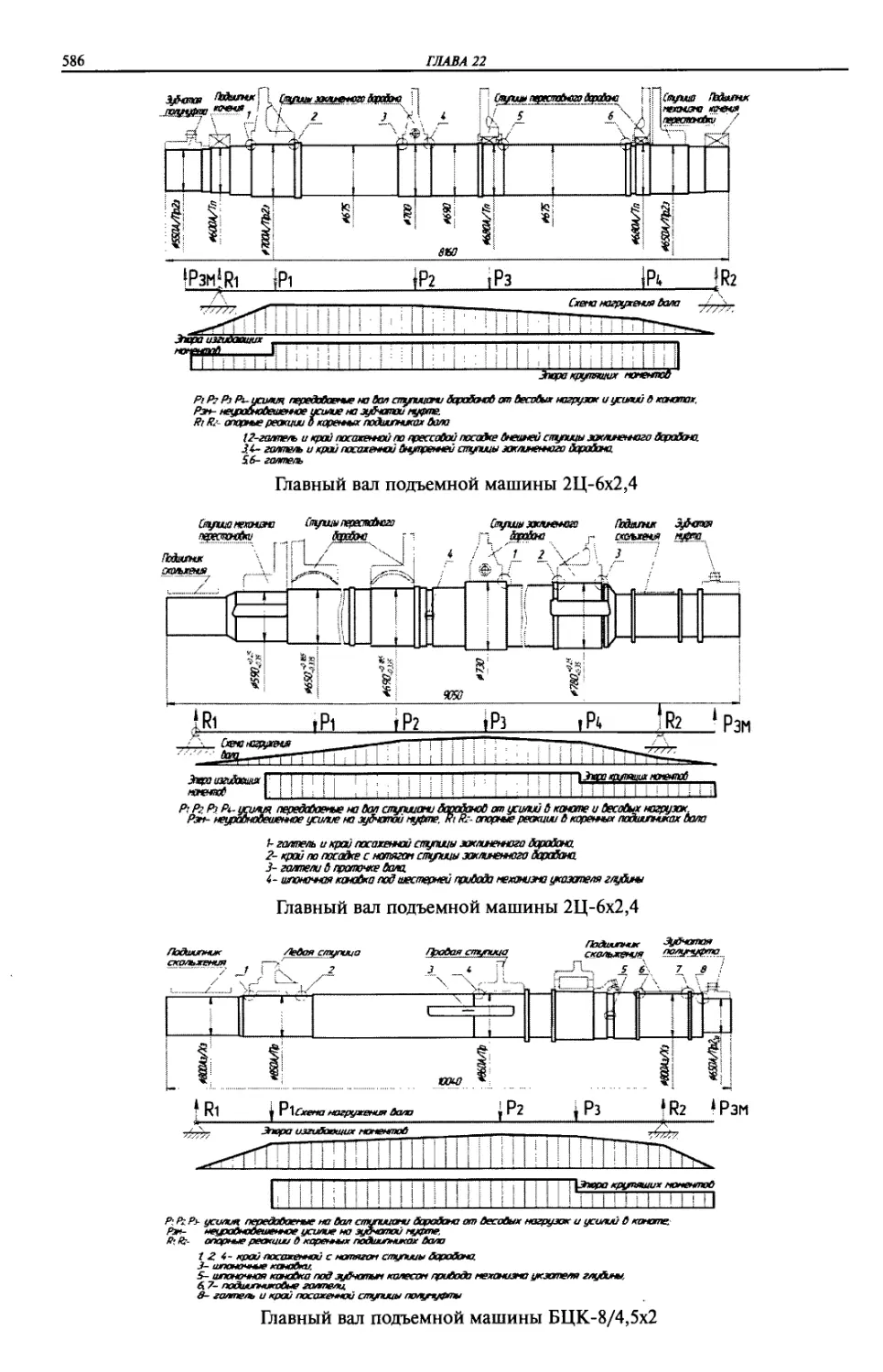
22.3. Неразрушающий контроль осей копровых шкивов....................569
22.4. Дефектоскопия главных валов....................................571
22.4.1. Ультразвуковая дефектоскопия............................571
22.4.2. Магнитопорошковая дефектоскопия главных валов...........575
Глава 23
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ
ПОДЪЕМНЫХ УСТАНОВОК, ОТРАБОТАВШЕГО
УСТАНОВЛЕННЫЙ СРОК ЭКСПЛУАТАЦИИ
23.1. Обшие вопросы эксплуатации оборудования подъемных установок....590
23.2. особенности эксплуатации оборудования подъемных установок
с истекшим сроком службы............................................591
23.3. Принципы установления критериев предельного состояния
подъемных установок с истекшим сроком службы .......................591
Глава 24
ХАРАКТЕРНЫЕ АВАРИИ НА ПОДЪЕМНЫХ УСТАНОВКАХ
24.1. Аварии, связанные с обрывом канатов............................602
24.2. Аварии на подъемных установках со шкивами трения...............607
24.2.1. Аварии, связанные со скольжением канатов................607
24.2.2. Аварии при спуске груженого скипа.......................609
24.3. Жесткая посадка клети на кулаки или посадочные брусья..........611
СПИСОК ЛИТЕРАТУРЫ....................................................614
ПРЕДИСЛОВИЕ
Важное место в решении задач, стоящих перед горнодобывающей промышлен-
ностью, занимает проблема дальнейшего совершенствования шахтного подъемного
комплекса, представляющего собой одно из ответственных звеньев технологической
цепи доставки полезного ископаемого из земных недр.
За последние десятилетия достигнут значительный прогресс совершенствования
конструкции подъемных машин, канатов, сосудов, подвесных и прицепных устройств,
парашютов, систем электропривода, аппаратов защиты и блокировки, сигнализации
и связи, армировки стволов, методов неразрушающего контроля и диагностики, все-
го оборудования шахтного подъемного комплекса, что нашло частичное отражение в
отдельных информационных изданиях или не освещено вообще.
Несмотря на солидный теоретический фонд и большой научный потенциал гор-
ной механики, отсутствие подчиненности общей идее системного подхода, разобщен-
ность имеющихся результатов — все это не дает возможности современному проек-
тировщику и механику-эксплуатационнику получать правильное представление о за-
конченной картине и сложности протекающих динамических процессов, об уровне
динамического нагружения наиболее ответственных узлов и элементов комплекса.
Предлагаемое читателю научно-производственное издание является итогом мно-
голетней работы авторов в области шахтного подъема, где нашли отражение научно-
технические разработки Научно-исследовательского института горной механики
им. М.М.Федорова, Государственной акционерной компании «Донбассуглеавтомати-
ка», ЗАО «НКМЗ», ОАО «Донецкгормаш», фирмы «МИДИЭЛ», МакНИИ, Донгипро-
углемаша, УкрНИИВЭ, технических вузов, энергомеханических служб производствен-
ных объединений, рудников и шахт, шахтостроительных, монтажных и наладочных
организаций, занимающихся проблемой шахтного подъема.
Авторы выражают искрению благодарность:
Барсук В.Г, Дацковскому Л.Х., Дубинскому А.А., Калюжному А.С., Кулик О.Е,
Курченко Е.М., Хоменко А.А., Яшарову А.М. за представленные информационные ма-
териалы;
Гальперину В.И., Жуку И.Т, Калинину В.Г, Коноплянову В.Д., Куриленко В.К.,
Овсиенко И.П., Самусе В.И., Сергиенко С.Н., Соломенцеву А.И., Трибухину В.А.,
Трифанову Г.Д., Раскиной Р.Д., Чайке Б.Н., Чехлатому Н.А., Шкляренко О.М., ко-
торые внесли ряд ценных замечаний, учтенных авторами в окончательной редакции,
а также Алексееву В.Ю., Бореевой Л.А., Калининой Н.В., Лаппо С.В., Партыке Т.С.,
Татарниковой С.С., Умновой Л.А. за оказанную помощь в оформлении рукописи.
Издание отражает широкий круг вопросов проектирования и функционирова-
ния шахтного подъемного комплекса, однако, отдельные аспекты по разным причи-
нам не нашли достаточного освещения, в частности достижения высокоразвитых за-
рубежных стран в совершенствовании шахтного подъема. Поэтому авторы будут бла-
годарны за замечания и пожелания по улучшению предлагаемой читателю книги.
Глава 1
ШАХТНЫЙ ПОДЪЕМ В ВЕРТИКАЛЬНЫХ
И НАКЛОННЫХ СТВОЛАХ
1.1. Шахтный подъем — транспорт с канатной тягой
1.2. Классификация подъемных установок
1.3. Подъем в вертикальных стволах
1.4. Подъем в наклонных стволах
1.1. Шахтный подъем — транспорт с канатной тягой
Транспорт с канатной тягой принадлежит к типу так называемого прерывного транс-
порта, когда доставка груза в конкретный пункт назначения осуществляется, так сказать,
«порциями» лимитированного объема по массе. Это обстоятельство не следует считать недо-
статком такого рода транспорта, так как во многих производственных процессах именно
порционный характер перемещения груза является единственно приемлемым и предпочти-
тельным.
Из всех промышленных транспортных систем транспорт с канатной тягой является,
пожалуй, наиболее древним, и в простейшем виде, как бы там ни было, представляет собой
устройство, сохранившее и до настоящего времени свои характерные основные признаки:
привод (мускульная сила), барабан (ворот с рукояткой), канат (веревка, цепь), сосуд (ведро,
бадья), шахтный ствол (колодезный сруб). Технический прогресс, разумеется, отразился на
всех этих элементах, но принцип подъема груза фактически остался прежним. В настоящее
время такого рода транспортное средство для перемещения грузов или людей с одного уров-
ня на другой по вертикальным или наклонным шахтным стволам называется шахтным подъе-
мом или шахтной подъемной установкой.
Шахтная подъемная установка (шахтный подъем) — основной транспортный комплекс,
который связывает подземную часть шахты (рудника) с поверхностью, предназначена для
выдачи на поверхность полезных ископаемых и получаемой при проходке горных вырабо-
ток породы, спуска и подъема людей, транспортирования горношахтного оборудования и
материалов, а также осмотра армировки и крепления ствола шахты.
Подъемная установка состоит из подъемного оборудования и горнотехнических сооружений.
К подъемному оборудованию относятся подъемная машина с приводом, канаты, копро-
вые и отклоняющие шкивы, подвесные и прицепные устройства, парашюты, подъемные со-
суды, посадочные устройства для клетей (кулаки, качающиеся площадки, брусья), загрузоч-
ные и разгрузочные устройства.
К горнотехническим сооружениям относятся сооружения, которые расположены в око-
лоствольном дворе (загрузочный бункер и камера для опрокидывателя на скиповом подъеме
или приемно-отправительная площадка на клетевом подъеме); ствол шахты, оборудованный
направляющими проводниками для подъемных сосудов на вертикальном подъеме или рель-
совыми путями для вагонеток или скипов на наклонном подъеме; надшахтные сооружения,
состоящие из копра и приемного бункера для разгрузки подъемных сосудов на скиповом
подъеме или надшахтное здание с приемными площадками и откаточными путями на клете-
вом подъеме, здание подъемной машины.
1.2. Классификация подъемных установок
Подъемные установки классифицируются по назначению, высоте подъема, расположе-
нию относительно земной поверхности, углу наклона ствола, типу и количеству подъемных
сосудов, типу органа навивки, степени уравновешенности, типу электропривода, режиму
12
ГЛАВА 1
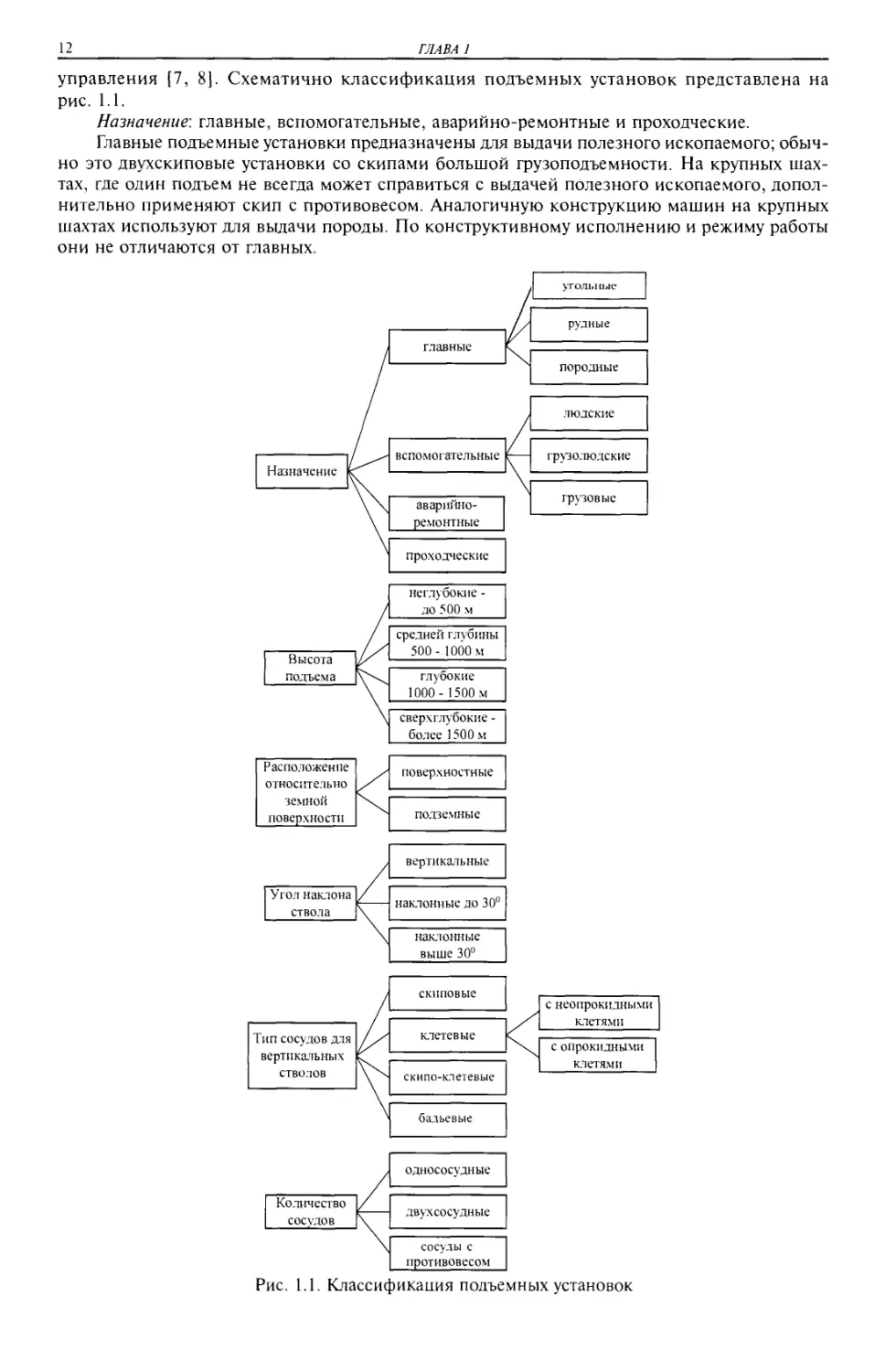
управления [7, 8]. Схематично классификация подъемных установок представлена на
рис. 1.1.
Назначение', главные, вспомогательные, аварийно-ремонтные и проходческие.
Главные подъемные установки предназначены для выдачи полезного ископаемого; обыч-
но это двухскиповые установки со скипами большой грузоподъемности. На крупных шах-
тах, где один подъем не всегда может справиться с выдачей полезного ископаемого, допол-
нительно применяют скип с противовесом. Аналогичную конструкцию машин на крупных
шахтах используют для выдачи породы. По конструктивному исполнению и режиму работы
они не отличаются от главных.
Рис. 1.1. Классификация подъемных установок
ШАХТНЫЙ ПОДЪЕМ В ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛАХ
13
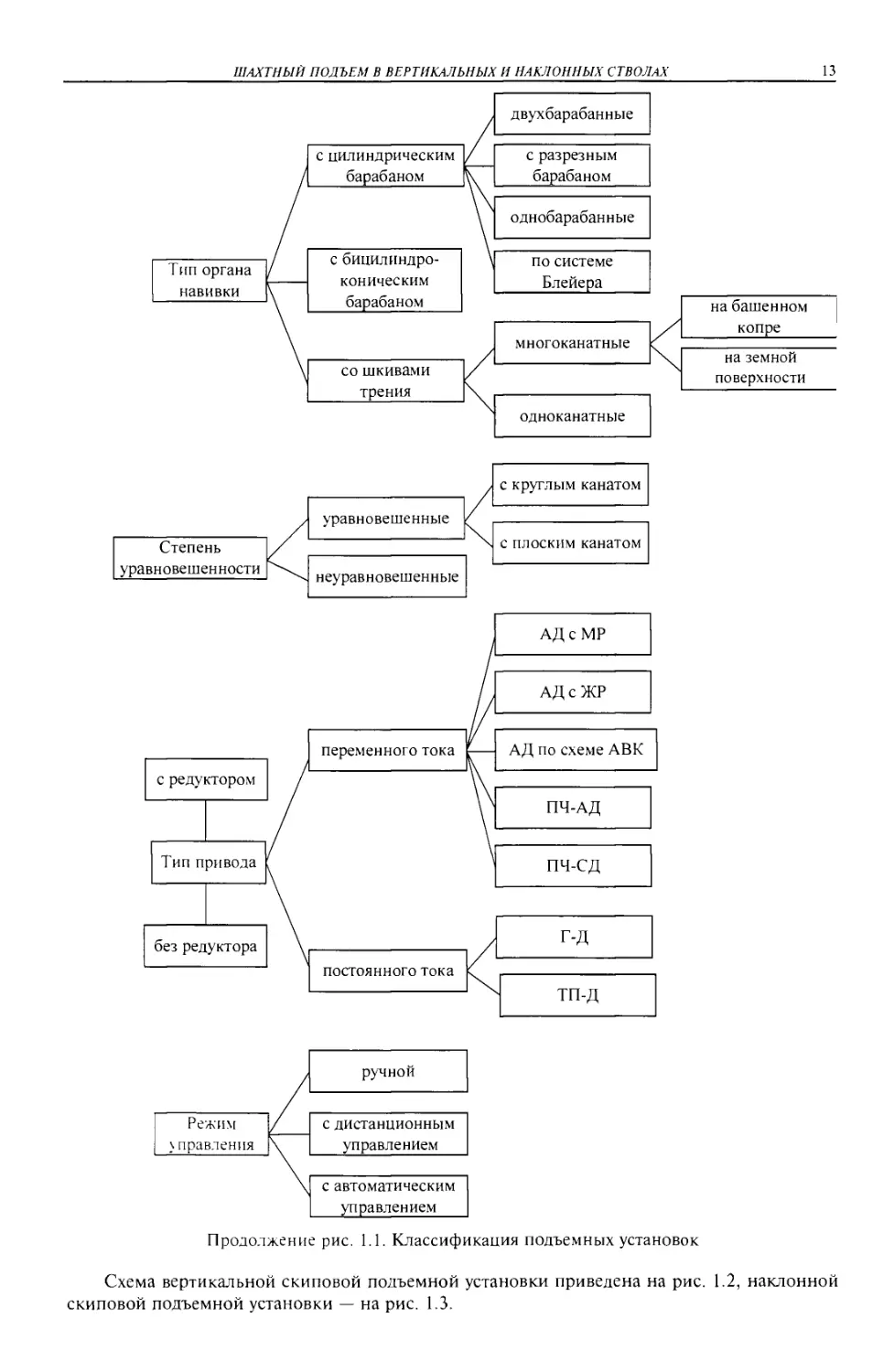
Продолжение рис. 1.1. Классификация подъемных установок
Схема вертикальной скиповой подъемной установки приведена на рис. 1.2, наклонной
скиповой подъемной установки — на рис. 1.3.
14
ГЛАВА 1
Рис. 1.2. Схема вертикальной скиповой подъемной установки:
1 — загрузочный бункер и дозатор;
2 — камера опрокидывателя; 3 — ствол;
4 — приемный бункер; 5 и И — сосуды;
6 — копровые шкивы; 7 — головные канаты;
8 — подъемная машина; 9 — здание подъемной машины;
10 — надшахтный копер
Рис. 1.3. Схема наклонной скиповой подъемной установки:
1 — камера опрокидывателя; 2 — загрузочный бункер; 3 — дозатор; 4 — скип; 5 — наклонный ствол;
6 — эстакада; 7 — разгрузочные кривые; 8 — приемный бункер; 9 — металлическая форма;
10 — направляющие шкивы; 11 — подъемная машина; 12 — здание подъемной машины
Вспомогательные — (людские, грузолюдские или грузовые) предназначены для подъема
и спуска людей, материалов и оборудования. В зависимости от количества стволов на шахте
и загруженности подъема они оборудуются двумя клетями или клетью с противовесом. Схе-
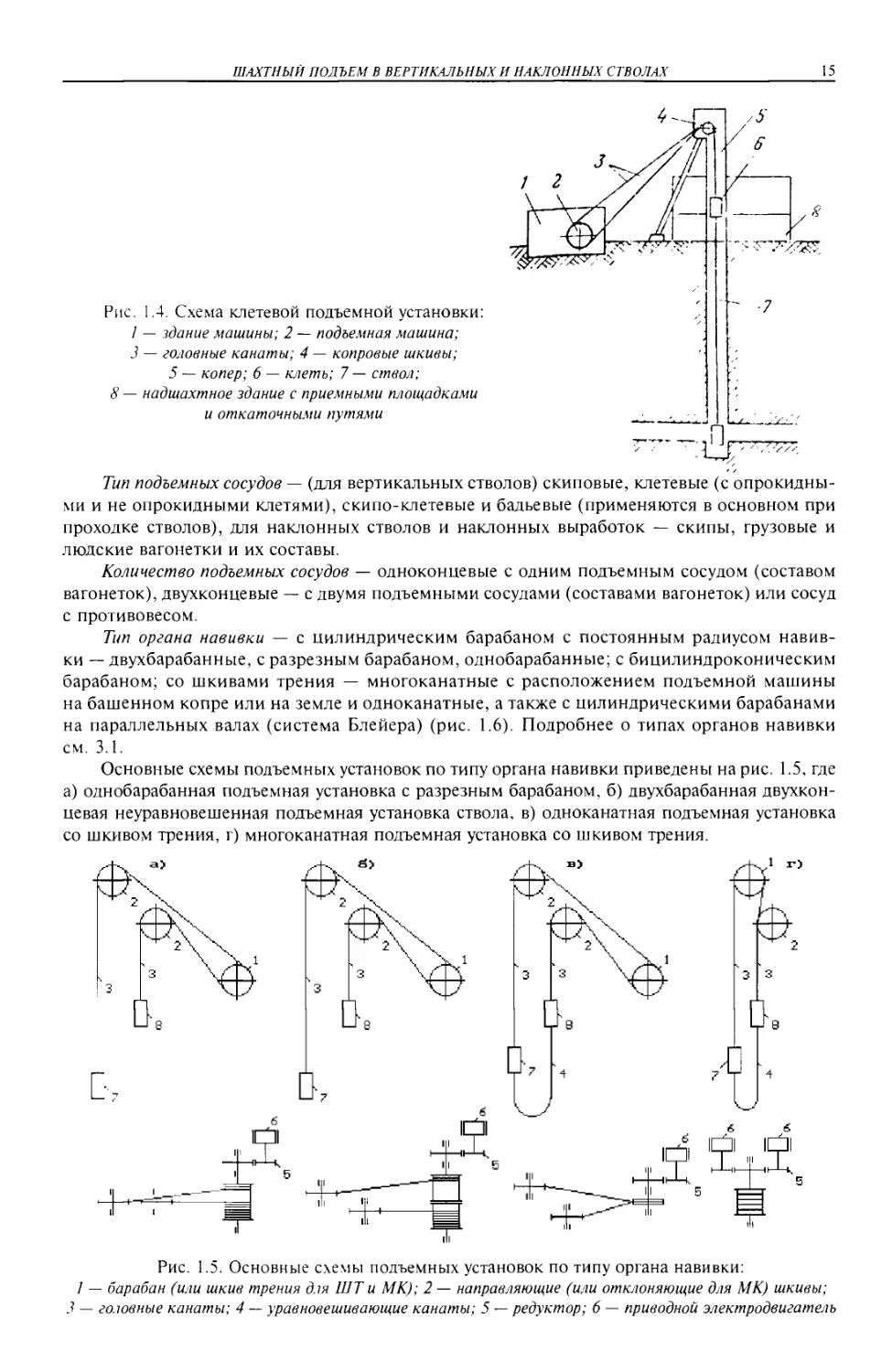
ма клетевой подъемной установки для вертикального подъема приведена на рис. 1.4.
Аварийно-ремонтные подъемы — подъемы фланговых и вентиляционных стволов, слу-
жащих для перевозки людей в аварийных случаях.
Проходческие (стационарные и передвижные). Проходческий подъем конструктивно зна-
чительно отличается от описанных выше скиповых и клетевых подъемов. Проходческая машина
оборудуется бадьей, которая движется в стволе по специальным канатным направляющим. На
поверхности направляющие крепятся к раме станка, а в стволе — к подвесному полку.
Высота подъема-, неглубокие — до 500 м; средней глубины — от 500 до 1000 м; глубо-
кие — от 1000 м до 1500 м; сверхглубокие — более 1500 м.
Расположение относительно земной поверхности — поверхностные и подземные.
Угол наклона ствола — вертикальные и наклонные (до и выше 30°).
ШАХТНЫЙ ПОДЪЕМ В ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛАХ
15
Рис. 1.4. Схема клетевой подъемной установки:
1 — здание машины; 2 — подъемная машина;
3 — головные канаты; 4 — копровые шкивы;
5 — копер; 6 — клеть; 7 — ствол;
8 — надшахтное здание с приемными площадками
и откаточными путями
Тип подъемных сосудов — (для вертикальных стволов) скиповые, клетевые (с опрокидны-
ми и не опрокидными клетями), скипо-клетевые и бадьевые (применяются в основном при
проходке стволов), для наклонных стволов и наклонных выработок — скипы, грузовые и
людские вагонетки и их составы.
Количество подъемных сосудов — одноконцевые с одним подъемным сосудом (составом
вагонеток), двухконцевые — с двумя подъемными сосудами (составами вагонеток) или сосуд
с противовесом.
Тип органа навивки — с цилиндрическим барабаном с постоянным радиусом навив-
ки — двухбарабанные, с разрезным барабаном, однобарабанные; с бицилиндроконическим
барабаном; со шкивами трения — многоканатные с расположением подъемной машины
на башенном копре или на земле и одноканатные, а также с цилиндрическими барабанами
на параллельных валах (система Блейера) (рис. 1.6). Подробнее о типах органов навивки
см. 3.1.
Основные схемы подъемных установок по типу органа навивки приведены на рис. 1.5, где
а) однобарабанная подъемная установка с разрезным барабаном, б) двухбарабанная двухкон-
цевая неуравновешенная подъемная установка ствола, в) одноканатная подъемная установка
со шкивом трения, г) многоканатная подъемная установка со шкивом трения.
Рис. 1.5. Основные схемы подъемных установок по типу органа навивки:
1 — барабан (или шкив трения для ШТ и МК); 2 — направляющие (или отклоняющие для МК) шкивы;
3 — головные канаты; 4 — уравновешивающие канаты; 5 — редуктор; 6 — приводной электродвигатель
16
ГЛАВА 1
Степень уравновешенности — статически
неуравновешенные системы, статически уравно-
вешенные системы (с использованием уравно-
вешивающих канатов — круглых или плоских)
и динамически уравновешенные (машины с пе-
ременным радиусом навивки).
Неуравновешенные и уравновешенные
подъемные установки отличаются между собой
соответственно отсутствием или наличием так
называемых уравновешивающих канатов, кото-
рые присоединяются к днищам двух подъемных
сосудов, свободно висят в стволе и служат для
статической компенсации весов переменных
длин подъемных (головных) канатов в системах
двухконцевого подъема. Одноконцевые машины
являются принципиально неуравновешенными
(к такому же типу относятся машины с бицилин-
дроконическими барабанами). Неуравновешен-
ными также могут быть двухконцевые машины
с разрезным барабаном и двухбарабанные
(рис. 1.5, а, б). Машины со шкивами трения мо-
Рис. 1.6. Схема подъемной установки
системы Блейера с барабанами
на параллельных валах
гут быть только уравновешенными для обеспечения примерно постоянного тягового усилия
(рис. 1.5, в, г). Уравновешивание в наклонных стволах, как правило, не применяется в связи
со сложностью устройства натяжных станций и их низкой надежностью.
Степень уравновешенности подъемной установки характеризуется так называемым ко-
эффициентом уравновешенности ку , определяемым соотношением
2H{gy-gr)
ку~~~0~п------’ О-2-1)
ск
где дг и qy — массы одного метра соответственно головных (подъемных) и уравновешиваю-
щих канатов (кг/м); Qep — грузоподъемность скипа, клети (кг); пСК = 2 в случае двухскипово-
го (двухклетевого) подъема и пск =1 — при односкиповом (одноклетьевом) подъеме с проти-
вовесом [см. также ниже пояснения к формуле (18.3.4)]; Н — высота подъема (м).
Тип привода — (с редуктором или без редуктора); с асинхронным электроприводом: асин-
хронный электродвигатель с фазным ротором с металлическим (АД с МР) или жидкостным
реостатом (АД с ЖР) в цепи ротора, с включением двигателя по схеме асинхронно-вентиль-
ного каскада или асинхронно-тиристорного (АД по схеме АВ К. или АТК); асинхронный дви-
гатель с короткозамкнутым ротором с преобразователем частоты (ПЧ-АД); с электроприво-
дом постоянного тока по системе генератор-двигатель (Г-Д) или тиристорный преобразова-
тель-двигатель (ТП-Д); с синхронным двигателем с преобразователем частоты (ПЧ-СД).
Режим управления — ручной, с дистанционным управлением, с автоматическим управлением.
1.3. Подъем в вертикальных стволах
Для удержания подъемного сосуда в вертикальном стволе от чрезмерных поперечных
перемещений, а также для придания сосуду нужного направления движения служат провод-
ники, которые могут быть жесткими или гибкими (канатными). Жесткие проводники выпол-
няются из рельсового проката, дерева или из специального сварного профиля, например, из
двух уголков (так называемые проводники коробчатого сечения). Возможны также сечения
незамкнутого профиля из специального проката.
Для фиксации жестких проводников в стволе служат расстрелы, представляющие собой
металлические (обычно, двутавровые или сварные коробчатого сечения) или деревянные
балки, располагаемые в одной плоскости на одинаковом расстоянии друг от друга по верти-
кали. Эта плоскость называется ярусом армировки. Геометрическая конфигурация размеще-
ШАХТНЫЙ ПОДЪЕМ В ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛАХ
17
ния расстрелов на ярусе определяется назначением ствола, а также количеством и типом
подъемных сосудов. Расстояние по вертикали между смежными ярусами есть шаг армировки,
принимаемый равным 2 + 6.V.
Расстрельные балки свободными концами заделываются в крепь ствола на расчетную
глубину (до 500 .ч.ч) путем бурения лунок в крепи с последующим бетонированием или при-
креплением болтами к специальным закладным элементам, заранее устанавливаемым при про-
ходке ствола в соответствии с проектной схемой. В местах стыков расстрелов на ярусе ис-
пользуются болтовые соединения.
Трехмерный комплекс проводников и расстрельных балок принято называть армиров-
кой ствола, поперечное сечение которой схематически изображено на рис. 1.7 [176].
а
б
Рис. 1.7. Принципиальная схема яруса армировки вертикального скипо-клетевого ствола:
1 — бетонная крепь ствола; 2 — расстрельные балки; 3 — скипы; 4 — клеть; 5 — противовес клети;
6 — проводники
На практике имеется весьма большое разнообразие схем армировок, что вызвано, отча-
сти, технологическими соображениями.
Крепление рельсовых проводников к каждому расстрелу осуществляется специальными
скобами (скобами Бриара), которые устанавливаются непосредственно над и под расстрелом.
Такими скобами крепятся две нитки проводников, располагаемых по обе стороны от расстре-
ла. В случае одинарной нитки — с другой стороны устанавливается отрезок рельса (длиной,
примерно равной трехкратной высоте профиля двутавра) или используются так называемые
односторонние скобы Бриара. Для устранения смещений проводника вдоль оси расстрела к
последнему сверху и снизу привариваются так называемые лежки с выемкой для размещения
подошвы рельса. Проводники коробчатого сечения крепятся к расстрелам с помощью болтов.
Скипы и клети, движущиеся в проводниках жесткой армировки, в качестве направляю-
щих устройств имеют рабочие жесткие башмаки скольжения или подрессоренные катучие (ро-
ликовые) направляющие, устанавливаемые на сосуде в совокупности с так называемыми пре-
дохранительными башмаками, как это схематически изображено на рис. 1.8.
Направляющие устройства устанавливаются на несущей раме подъемного сосуда вверху
и внизу. Рабочие жесткие башмаки также могут быть закрытого типа, охватывающие своими
рабочими поверхностями головку рельса. Такие башмаки применяются при так называемом
одностороннем относительно сосуда расположении проводников (чаще всего это имеет ме-
сто для клетевых подъемов). Вообще для клети, длина которой в плане превышает ширину,
как правило, в 2 + 3 раза, целесообразно применять лобовое расположение проводников, ус-
танавливаемые с двух сторон от противоположных дверей. В последнем случае при подходе
клети к концевым приемным площадкам или при остановке на промежуточных горизонтах
требуется переход на боковое расположение, изображенное на рис. 1.7, а для клети 4.
18
ГЛАВА 1
а)
Рис. 1.8. Типы направляющих устройств на сосуде:
а) с жесткими башмаками; б) с роликовыми направляющими и предохранительным башмаком;
1 — подъемный сосуд; 2 — жесткий (или предохранительный) башмак; 3 — рельсовый
(или коробчатый) проводник; 4 — расстрельная балка; 5 — боковые ролики; 6 — лобовой ролик;
7 — лежка
Предохранительные башмаки служат в качестве страхующего элемента на случай выхода
из строя роликовых направляющих, а также для ограничения чрезмерных поперечных переме-
щений сосуда, вызванных искривлениями проводников. Между рабочими поверхностями про-
водников и жестких направляющих устройств любого вида предусматриваются зазоры, значе-
ния которых регламентируются «Правилами безопасности...» [13].
Для увеличения срока службы жестких рабочих и предохранительных башмаков их из-
готавливают со специальными сменными вкладышами, обладающими повышенной износо-
стойкостью и пониженными абразивными свойствами, что способствует также повышению
сроков службы проводников (см. 19.2).
Роликовые направляющие подразделяются на две конструктивные группы: с жестким и
подпружиненным закреплением осей трех роликов на раме скипа. В первом случае ролики
имеют цельнорезиновое исполнение, благодаря чему обеспечивается эффективное демпфи-
рование малых поперечных перемещений подъемного сосуда. Во втором случае — ролики в
своей основе металлические, имеющие лишь сравнительно тонкий резиновый бандаж (шину),
а демпфирование происходит за счет рычажно-пружинной конструкции подвески роликов.
В случае канатных проводников армировки, как таковой, не существует. Проводниковые
канаты жестко закреплены в верхних их концах (на копре), а в нижних (в зумпфе) — растяну-
ты грузами для придания канатам необходимой поперечной жестокости. Опытом установле-
но, что масса груза, приходящаяся на один канат, определяется по правилу: одна тонна гру-
за — на каждые сто метров каната. В некоторых случаях (чаще всего — в период строительства
шахты) проводниковый канат жестко закрепляется внизу, а вверху он перебрасывается через
шкив, и к его концу подвешивается груз. Кинематическая связь подъемного сосуда с провод-
никовым канатом осуществляется с помощью скользящих муфт, устанавливаемых вверху и внизу
сосуда (иногда и посредине). Помимо проводниковых канатов вдоль трассы движения сосудов
навешиваются так называемые отбойные канаты, которые предназначены для предотвраще-
ния возможного столкновения сосудов и для стабилизации их поперечных перемещений.
1.4. Подъем в наклонных стволах
Подъемные сосуды в наклонных стволах и выработках перемещаются по рельсовому пути.
Путь состоит из нижнего и верхнего строения [194].
К нижнему строению относится соответствующим образом подготовленная почва вы-
работки, а к верхнему — балластный слой (балласт), шпалы, рельсы, скрепления, противо-
угоны, стыки, соединения путей, разминовки, путевые ролики.
ШАХТНЫЙ ПОДЪЕМ В ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛАХ
19
На рис. 1.9 схематически изображено верхнее строение рельсового пути с деревянными
шпалами.
Рис. 1.9. Верхнее строение рельсового пути:
1 — балласт; 2 — шпала; 3 — подкладка (лежка), 4 — костыли; 5 — рельс
Балласт 1 служит подушкой, демпфером, равномерно распределяет давление от шпал
на нижнее строение пути, компенсирует неровности нижнего строения, отводит воду, пре-
пятствует сдвигу шпал. Материал балласта должен быть прочным, упругим, не размокаю-
щим, хорошо пропускать воду, не дробиться при подбивке шпал, иметь хорошее сцепление
со шпалами. В качестве материала для балласта используется щебень твердых горных пород
(песчаник, гранит, базальт, известняк и др.) крупностью 20 + 70 мм и сортированный гравий
крупностью 20 + 40 мм. Минимальная толщина слоя балласта под шпалой — 90 мм. Обычно
балласт не укладывается на почву выработки, подверженной вспучиванию. При угле накло-
на выработки свыше 10° шпалы укладываются в канавки глубиной 2/3 высоты.
Шпалы 2 являются опорами для рельсов, обеспечивают неизменность взаимного положе-
ния рельсовых нитей, воспринимают нагрузку от движущегося состава и передают ее на бал-
ласт. Шпалы изготавливаются из дерева, железобетона или стали. Деревянные шпалы (обычно
сосновые) пропитываются антисептиками — креозотовым маслом или фтористым натрием (так
называемые пропитанные шпалы), что в несколько раз увеличивает их срок службы. На стаци-
онарных путях с продолжительным сроком эксплуатации применяются железобетонные шпа-
лы, на прочих — деревянные с пропиткой. На переносных путях применяются металлические
шпалы, изготавливаемые из прокатной стали специального профиля. Длина шпал зависит от
ширины колеи и составляет 1200, 1500, 1700 мм для узкоколейных путей и 2700 мм — для ши-
рокой колеи. Шпалы укладываются на одинаковом расстоянии друг от друга, но в местах сты-
ков расстояние между шпалами несколько уменьшается. Шаг укладки шпал вдоль пути (рас-
стояние между осями симметрии поперечных сечений шпал) обычно определяется, исходя из
массы груженого скипа или массы одиночной вагонетки с грузом. Так, количество шпал на
один километр пути при массе груженой вагонетки до 14-ти тонн принимается равным
1500...1700 шт, а при массе свыше 14-ти тонн — в пределах 1700 ... 2000 шт. Более 2000 шпал
принимать не следует из-за уменьшения «окна» между шпалами. На вспомогательных выра-
ботках рекомендуется принимать не менее 1000 шпал на один километр пути.
Рельсы 5 изготавливаются из специальной марганцовистой стали и термически обрабаты-
ваются. Рельсы от Р8 до РЗЗ (цифры означают округленную массу в килограммах одного метра
длины) применяются для колеи шириной 600, 750, 900 мм и называются узкоколейными. Для
широкой колеи, 1524 мм, применяются рельсы Р38, Р43 и выше (в шахтном транспорте исполь-
зуются редко, но широко применяются в качестве проводников в вертикальных стволах). В шах-
тах практически на всех откаточных выработках применяются рельсы Р24, а на вентиляционных
и промежхлочных выработках — Р18. В магистральных выработках на горизонтах околостволь-
ных дворов крупных шахт применяется рельсы РЗЗ.
Скрепления служат для соединения рельсов со шпалами, что осуществляется при помощи
вбиваемых в шпалу костылей 4. Как правило, с внутренней стороны рельса забиваются два кос-
тыля, а с внешней — один. Скрепления бывают без подкладок, когда рельс укладывается непос-
редственно на шпалу, и с подкладками 3 (лежками), представляющие собой стальные прямоу-
гольные пластины с поперечным пазом, устанавливаемые под подошву рельса. В свою очередь
скрепления с подкладками бывают нераздельные, раздельные и комбинированные, отличаю-
щиеся между собой способом закрепления подкладок. Скрепления с металлическими или желе-
20
ГЛАВА 1
зобетонными шпалами имеют специальную или обычную конструкцию, а в самих шпалах пре-
дусматриваются углубления, в которые вставляются деревянные пробки для костылей.
Противоугон служит для предотвращения продольного сдвига рельсов относительно шпал
и представляет собой прикрепленный к подошве рельса кронштейн, упирающийся в боко-
вую поверхность шпалы.
Стыки соединяют концы рельсов и могут быть механическими или сварными. Механи-
ческий стык осуществляется болтами и накладками, обжимающими с двух сторон стойки
смежных плетей рельсов и обеспечивающими расчетный так называемый «температурный»
зазор между их торцами. Существует множество конструктивных исполнений механических
стыков, но все они не устраняют неизбежные удары колес при наезде на смежный рельс, что
приводит к преждевременному износу и усталостному разрушению как рельсов и самих сты-
ковочных устройств, так и колесных пар. Прогрессивным способом является сварка рельсов
на стыках. Сварные стыки выполняются термитной, электродуговой, электроконтактной или
газовой сваркой. В этом случае, естественно, устраняются ударные воздействия колес на рель-
сы, что способствует увеличению сроков службы взаимодействующих элементов. Опыт экс-
плуатации железных дорог со сварными стыками свидетельствует о несостоятельности кон-
цепции «температурных» зазоров.
Соединения путей — это специальные узлы, в которых рельсовые пути разветвляются на
два или несколько направлений. Имеется ряд исполнений таких узлов, из которых наиболее
распространены поворотный круг, траверсная тележка и стрелочный перевод.
Поворотный круг обеспечивает проход состава в прямом направлении и перевод движе-
ния одиночных вагонеток в боковых направлениях. Оборудуется ручным или механизиро-
ванным приводом и, как правило, применяется в особо стесненных условиях, где невозмож-
но установить рельсовый стрелочный перевод.
Траверсная тележка обеспечивает проход состава в прямом направлении и перевод дви-
жения одиночных вагонеток на параллельный путь. Оборудуется ручным или механизиро-
ванным приводом. Траверсная тележка иногда применяется в надшахтных зданиях и редко
на поверхности.
Стрелочный перевод, как основной вид соединений рельсовых путей, допускает проход
составов в любых направлениях. Состоит из стрелки с переводным механизмом, крестовины
с контррельсами и соединительной части. Стрелочный перевод укладывается на переводных
брусьях (удлиненных шпалах).
Разминовка используется в двухскиповых системах подъема в наклонных выработках и
предназначена для беспрепятственного прохода движущихся по одной колее навстречу друг
к другу скипов, и располагается в середине ствола. Длина разминовки с учетом криволиней-
ных участков должна превосходить, по крайней мере, в три раза длину скипа или состава
вагонеток. Скорость прохода участка разминовки, как правило, снижается до 1 м/с.
Путевые ролики служат для предотвращения чрезмерного истирания подъемного кана-
та, скользящего по шпалам или по почве выработки. Ролики располагаются по центру ко-
леи, имеют длину примерно 3/4 ширины колеи, опираются на собственные подшипники
качения или скольжения, располагаемые в установленных на шпалах кронштейнах. Рассто-
яние между роликами определяется формулой:
, < 8Р (hp + rp)
Р\ q^gcoscp
(1-4.1)
где Р — минимальное натяжение головного каната в данном месте наклонного ствола; qr —
масса одного метра головного каната; <р — угол наклона ствола; гр — радиус ролика; h — рас-
стояние по нормали от оси ролика до плоскости шпал; g — ускорение свободного падения.
Важным элементом рельсового пути является участки закругления. Так как на этих уча-
стках на движущийся вагон действует центробежная сила, то наружный рельс укладывается
с некоторым возвышением над внутренним. Величина возвышения определяется по формуле
А/г =
1.4.
ШАХТНЫЙ ПОДЪЕМ В ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛАХ
21
где Sp — ширина колеи как расстояние между внутренними поверхностями головок рель-
сов, /0 — скорость движения, /?П11П — минимальный радиус закругления.
Радиус закругления R назначается в зависимости от сечения горных выработок, угла
пересечения прямолинейных отрезков колеи и принимается, как правило, постоянной вели-
чиной. Строго говоря, при большой скорости движения участок криволинейного пути дол-
жен описываться, по крайней мере, кривой четвертого порядка, в силу чего радиус закругле-
ния оказывается переменной величиной. Это вызвано необходимостью исключить резкое
изменение центробежной силы при наезде вагонетки на криволинейный участок.
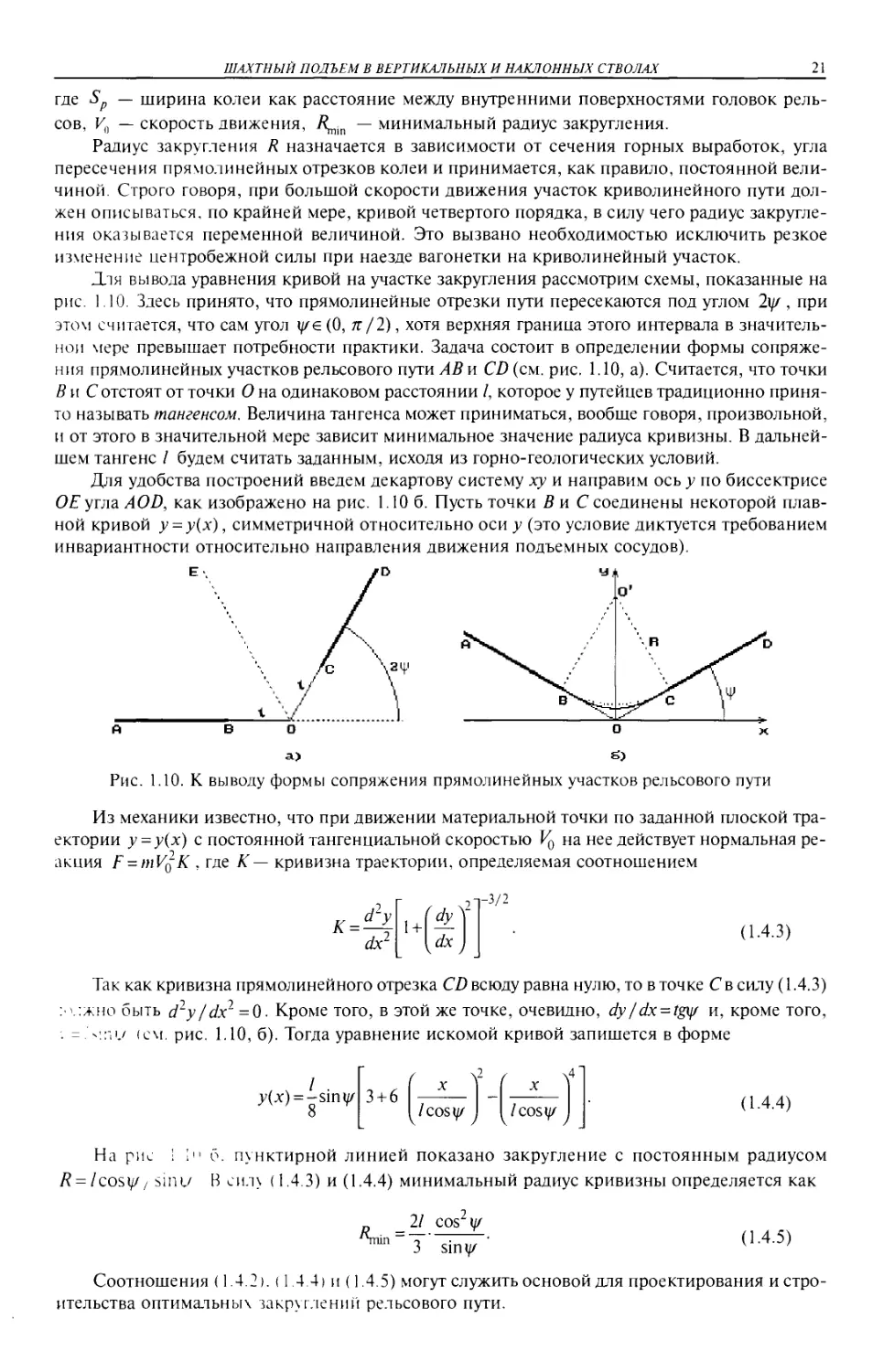
Для вывода уравнения кривой на участке закругления рассмотрим схемы, показанные на
рис. 1.10. Здесь принято, что прямолинейные отрезки пути пересекаются под углом 21/ , при
этом считается, что сам угол </е (0, тг/2), хотя верхняя граница этого интервала в значитель-
ной мере превышает потребности практики. Задача состоит в определении формы сопряже-
ния прямолинейных участков рельсового пути АВ и CD (см. рис. 1.10, а). Считается, что точки
В и С отстоят от точки О на одинаковом расстоянии /, которое у путейцев традиционно приня-
то называть тангенсом. Величина тангенса может приниматься, вообще говоря, произвольной,
и от этого в значительной мере зависит минимальное значение радиуса кривизны. В дальней-
шем тангенс I будем считать заданным, исходя из горно-геологических условий.
Для удобства построений введем декартову систему ху и направим ось у по биссектрисе
ОЕ угла AOD, как изображено на рис. 1.10 6. Пусть точки В и С соединены некоторой плав-
ной кривой у = у(х), симметричной относительно оси у (это условие диктуется требованием
инвариантности относительно направления движения подъемных сосудов).
Рис. 1.10. К выводу формы сопряжения прямолинейных участков рельсового пути
Из механики известно, что при движении материальной точки по заданной плоской тра-
ектории у = у(х) с постоянной тангенциальной скоростью на нее действует нормальная ре-
акция F = mV(;K , где К — кривизна траектории, определяемая соотношением
(1.4.3)
Так как кривизна прямолинейного отрезка CD всюду равна нулю, то в точке С в силу (1.4.3)
эыжно быть d2y/dx1 =0. Кроме того, в этой же точке, очевидно, dy/dx = lgy и, кроме того,
. 1./ (см. рис. 1.10, б). Тогда уравнение искомой кривой запишется в форме
у(х)=-sini/ 3 + 6
О
( X У
I COS I/ ,
X
/cosi/
(1.4.4)
На рис : I" б. пунктирной линией показано закругление с постоянным радиусом
7? = /cost// sinu В силе (1.4.3) и (1.4.4) минимальный радиус кривизны определяется как
21 cos2i/
3 sin I/
(1.4.5)
Соотношения (1.4.2). (1 4 4) и (1.4.5) могут служить основой для проектирования и стро-
ительства оптимальных закруглений рельсового пути.
Глава 2
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
2.1. Избранные разделы теории шахтного подъема
2.2. Основы динамики шахтного подъема
2.3. Расчет жесткой армировки вертикального ствола
2.1. Избранные разделы теории шахтного подъема
Здесь рассматриваются лишь некоторые вопросы теории, не касаясь таких важных как
динамическое состояние подъемного комплекса в целом, представляющего совокупность
взаимодействующих дискретных и распределенных по длине масс с упругими связями. Эти
специальные задачи освещены в 2.2.
2.1.1. Уравнение динамики подъема М.М. Федорова
Уравнение динамического состояния подъемной установки запишем для варианта подъе-
ма груза в вертикальном стволе. Далее полученные результаты распространим и на системы
подъема в наклонном стволе. Предварительно заметим, что искомое уравнение является ква-
зидинамическим (то есть «якобы динамическим», так как упругость канатов при выводе урав-
нений не учитывается, в связи с чем см. раздел 2.2).
На рис. 2.1 изображена принципиальная схема подъем-
ной установки, где подъемные сосуды с массами т{ и т2
показаны в исходном состоянии перед началом подъема гру-
женого сосуда (левого) . Здесь также обозначено: J — при-
веденные к точке О кинетические моменты инерции всех
вращающихся элементов, то есть барабана машины, копро-
вых шкивов, редуктора, ротора двигателя; qr и qy — массы
одного метра соответственно головных (подъемных) и урав-
новешивающих канатов; hr и hy — длины отвесов соответ-
ственно головного и петли уравновешивающего канатов в
исходном состоянии подъемных сосудов в стволе; Н — вы-
сота подъема; z — координата положения сосудов, отсчи-
тываемая от их исходных состояний; R — радиус барабана;
М — движущий момент на валу машины, развиваемый при-
водом, причем М=МЭ или М = Мэ1ред (см. 10.1) соответ-
ственно для безредукторного и редукторного привода, при-
чем — передаточное отношение редуктора; Р и Р — ста-
тические натяжения ветвей канатов соответственно в точ-
ках набегания и сбегания непосредственно у канатоведуще-
го или копрового шкива (в зависимости от типа установки) .
Заметим, что для многоканатного подъема, в котором при
нескольких головных однотипных канатов имеется также не
менее двух однотипных уравновешивающих (как одно из тре-
бований «Правил безопасности... »), погонные массы qr и qy являются суммарными для
всех соответствующих канатов.
установки в вертикальном
стволе
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
23
Момент инерции всех вращающихся элементов машины (барабана, копровых или от-
клоняющих шкивов, зубчатых пар редуктора, ротора двигателя, соединительных муфт) оп-
ределяется по формуле:
J ер ~ JJш + Jред^д' (2-1-1)
где iped — передаточное отношение редуктора; пдв — количество приводных двигателей;
Л„. JJ, — кинетические моменты инерции соответственно машины, всех копровых
(или отклоняющих) шкивов, редуктора (моменты инерции вращающихся зубчатых пар ре-
дуктора приведены к тихоходному валу), ротора двигателя. Надо заметить, что момент инер-
ции J для машин барабанного типа учитывает не только собственно моменты инерции
копровых шкивов, но и приведенные к окружностям шкивов массы поступательно движу-
щихся наклонных струн как участков канатов между барабаном и шкивами.
Суммарный момент инерции относительно точки О всех элементов установки склады-
вается из величины jgp (2.1.1) и момента инерции поступательно движущихся масс, как бы
распределенных равномерно по дуге обхвата радиуса барабана R, то есть
Л = AP + Iwi +т2 + Яг(^+^г) + <:1у(^+^у)\^2- (2-1-2)
На вращающуюся массу с моментом инерции действует, как видно из рис. 2.1, дви-
жущий момент М (это может быть также тормозной момент, прикладываемый к барабану
машины при обесточенном двигателе), момент статических сил Р1 и Р2, а также момент силы
инерции. Сумма всех этих моментов, приравненная к нулю в соответствии с принципом
Даламбера, и будет искомым уравнением динамики подъема:
J^+R^-P^M, (2.1.3)
at~
где <р — угол поворота барабана. Уравнение (2.1.3) в результате обозначений
Д/R2 =mY, М/R = F, <pR = z, (2.1.4)
причем здесь тъ в силу определения (2.1.2) называется суммарной массой подъемной уста-
новки, a F — движущим усилием привода, преобразуется также к эквивалентному виду
Статические силы Р и Р2 при смещении сосудов на величину z, как следует из рис. 2.1,
определяются соотношениями (всюду далее g — ускорение свободного падения):
д1=[щ1+^(я+^-г)+?у(/1у + <)к1 б)
Р2 = [т2 + qr(hr + z) + qy (И + hy - z)]gJ'
Для неуравновешенного двухконцевого подъема в вертикальном стволе достаточно в
(2.1.6) положить qy=Q, и тогда
Р\ = [ml+qr(H + hr-z)]g
P2=[m2+qr(hr+z)]g
(2.1.7)
Для одноконцевого подъема в вертикальном стволе, кроме условия qy = 0, естественно,
и Л =(.1. следовательно, имеем
Р\ = {mx+qr(H + hr-z)]g
Л=0
(2.1.8)
24
ГЛАВА 2
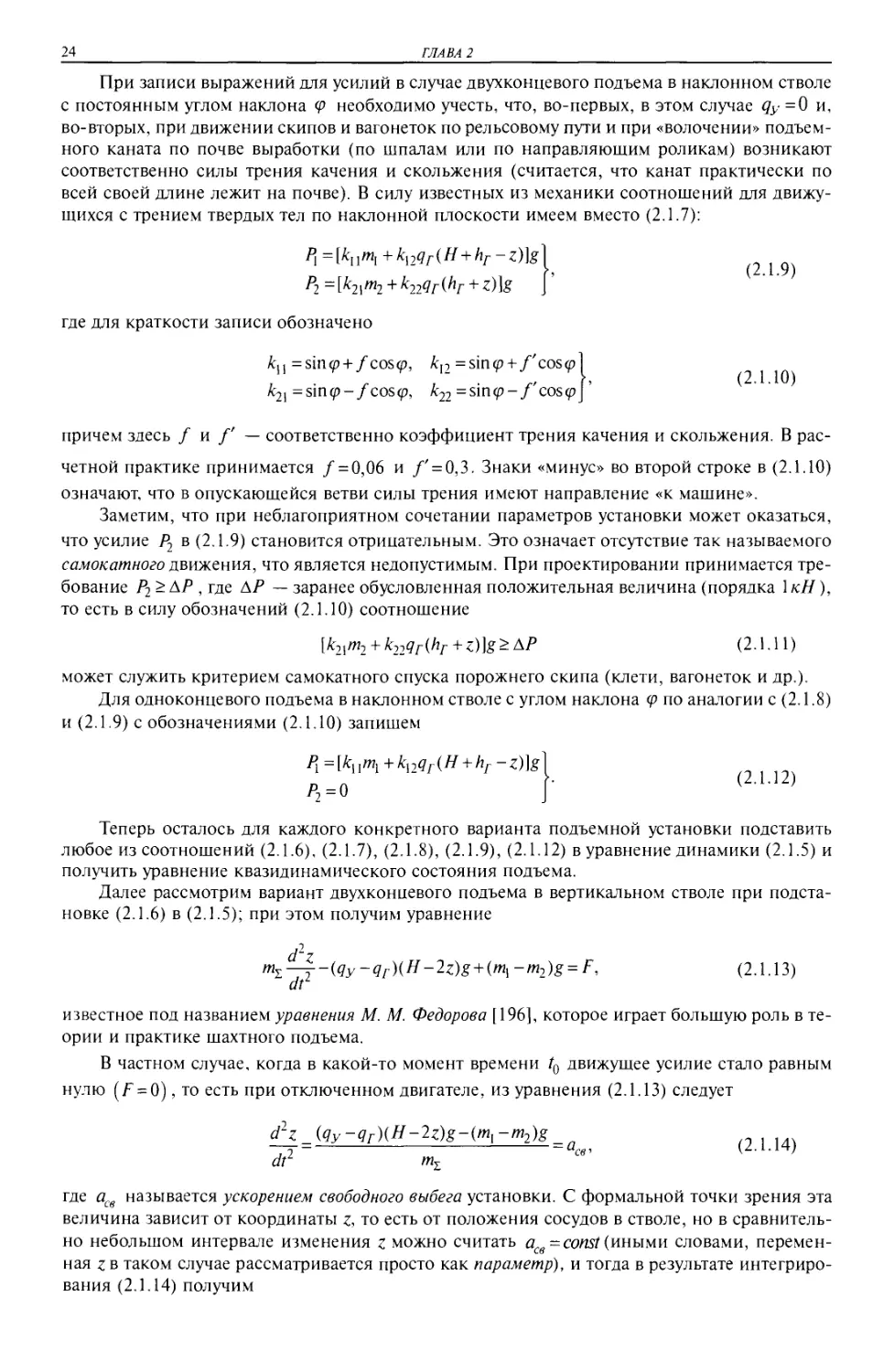
При записи выражений для усилий в случае двухконцевого подъема в наклонном стволе
с постоянным углом наклона <р необходимо учесть, что, во-первых, в этом случае qy =0 и,
во-вторых, при движении скипов и вагонеток по рельсовому пути и при «волочении» подъем-
ного каната по почве выработки (по шпалам или по направляющим роликам) возникают
соответственно силы трения качения и скольжения (считается, что канат практически по
всей своей длине лежит на почве). В силу известных из механики соотношений для движу-
щихся с трением твердых тел по наклонной плоскости имеем вместо (2.1.7):
= [кпт{ + k[2qr(H + hr -z)]g
Р2 = [k2qn2 + k22qr(hr +z)]g
где для краткости записи обозначено
=sin<p + /cos<p, kl2 = sin<p + /'cos<p
A'2| — sin —/cos <p, k22 = si n 9? — У' e°s
(2.1.9)
(2.1.10)
причем здесь f и f — соответственно коэффициент трения качения и скольжения. В рас-
четной практике принимается / = 0,06 и /' = 0,3. Знаки «минус» во второй строке в (2.1.10)
означают, что в опускающейся ветви силы трения имеют направление «к машине».
Заметим, что при неблагоприятном сочетании параметров установки может оказаться,
что усилие Р2 в (2.1.9) становится отрицательным. Это означает отсутствие так называемого
самокатного движения, что является недопустимым. При проектировании принимается тре-
бование Р2 >\Р , где \Р — заранее обусловленная положительная величина (порядка \кН),
то есть в силу обозначений (2.1.10) соотношение
[k2[m2 + k22qr(hr + z)]g>^P (2.1.11)
может служить критерием самокатного спуска порожнего скипа (клети, вагонеток и др.).
Для одноконцевого подъема в наклонном стволе с углом наклона (р по аналогии с (2.1.8)
и (2.1.9) с обозначениями (2.1.10) запишем
Д1=[^11т1+^2^(Я + hr-z)]g
P2=Q
(2.1.12)
Теперь осталось для каждого конкретного варианта подъемной установки подставить
любое из соотношений (2.1.6), (2.1.7), (2.1.8), (2.1.9), (2.1.12) в уравнение динамики (2.1.5) и
получить уравнение квазидинамического состояния подъема.
Далее рассмотрим вариант двухконцевого подъема в вертикальном стволе при подста-
новке (2.1.6) в (2.1.5); при этом получим уравнение
mL^-(qy-qr)(H-2z)g+(m[-m2)g = F, (2.1.13)
известное под названием уравнения М. М. Федорова [196], которое играет большую роль в те-
ории и практике шахтного подъема.
В частном случае, когда в какой-то момент времени /0 движущее усилие стало равным
нулю (F = 0), то есть при отключенном двигателе, из уравнения (2.1.13) следует
(2114)
dr тг
где асв называется ускорением свободного выбега установки. С формальной точки зрения эта
величина зависит от координаты z, то есть от положения сосудов в стволе, но в сравнитель-
но небольшом интервале изменения z можно считать асв = const (иными словами, перемен-
ная zb таком случае рассматривается просто как параметр), и тогда в результате интегриро-
вания (2.1.14) получим
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
25
^=и(0=ио+а„«-%),
где — начальная скорость, при которой произошло отключение двигателя. Если это со-
бытие возникло при подъеме груженого сосуда, когда т1>т1 и > 0, и при qy~qr, то,
судя по (2.1.14), асв<0, и машина останавливается в момент времени ^ocm~h~aceНа
этом основан иногда применяемый на практике способ замедления машины «на свободном
выбеге».
В неуравновешенных системах подъема, когда qy = 0, величина заведомо отрица-
тельна при z~0, но при z-Н она может стать положительной, и тогда вместо ожидаемого
замедления — машина будет разгоняться. Положение сосудов в стволе, при котором из-
меняет знак, получим из условия равенства нулю числителя в соотношении (2.1.14)
ZKp^H/2 + (mi-m1)/(2qr).
Если zKp<H или mx-m2<Hqr, то способ замедления машины «на свободном выбеге»
применять нельзя.
2.1.2. Гармонический подъем
Если считать, что в уравнении (2.1.13) F = F(t), то есть движущее усилие является изве-
стной (заданной) функцией от времени t, то (2.1.13) можно рассматривать как дифференци-
альное уравнение относительно перемещения сосудов z- В частности, наиболее простую фор-
му движущее усилие принимает в случае
f=(wil-7n2)g (2.1.15)
(заметим, что здесь разность масс фактически есть масса перевозимого в скипе полезного
груза при двухскиповым подъеме). Тогда из (2.1.13) получим дифференциальное уравнение
d z
/«z- (?у - ?г)(Я - 2z)]g - О,
dt
которое имеет общее решение в форме
JJ
z=Q coscot+Q sin®/+—(1 - cos cot),
благодаря чему для скорости движения получим выражение
—= со -С, sincot+Cj coscot+—sin®/
Л 1 2 2
где Q и С2 - постоянные интегрирования и для краткости записи обозначено
2(<?y-gr)g
V
(2.1.16)
(2.1.17)
причем считается, что qy >qr (вариант так называемых «тяжелых» уравновешивающих ка-
натов), иначе при условии (2.1.15) машина не сможет даже тронуться с места, и по этой при-
чине вариант qy<qr в (2.1.16) далее не рассматривается.
Постоянные интегрирования Q и С2 в приведенных решениях определим из условий,
что при г = 0 (в начале движения) перемещение сосуда £=0 и его скорость dz/dt = §. Тогда
Q = 0 и С2 - 0, следовательно,
26
ГЛАВА 2
Z=^-(y~<xs(0t}, ^=-^sin<y/. (2.1.18)
2 at 2
В конце движения, то есть при t = T, когда координата устанет равной //(см. рис. 2.1),
скорость сосудов, естественно, должна равняться нулю, и из (2.1.18) находим наименьший
нетривиальный корень уравнения sin «7’ = 0 как а>Т = тг , откуда
ю = л/Т. (2.1.19)
Сравнивая (2.1.17) с (2.1.19), получим выражение для продолжительности движения
подъемных сосудов от загрузки до разгрузки:
-----?----. (2.1.20)
Принцип построения изложенного способа подъема груза в вертикальном стволе с «тя-
желыми» уравновешивающими канатами, когда скорость сосудов описывается в соответствии
с (2.1.18) синусоидальной функцией, впервые предложил в 1914 г. М. М. Федоров, и такой
способ он назвал гармоническим подъемом [195].
Величина Т, вычисленная по формуле (2.1.20), должна обеспечивать требуемую произво-
дительность подъемной установки, и поэтому разность qy-qr >0, как показывают расчеты,
должна быть достаточно большой для реализации гармонического подъема при условии (2.1.15).
Возможно, по этой причине такого рода подъем не нашел до сих пор реального воплощения
на шахтах, хотя его преимущества очевидны: упрощается система автоматического управле-
ния электроприводом, нет необходимости установки в стволе датчиков начала замедления,
устраняется развитие возможных параметрических колебаний подъемных сосудов и др.
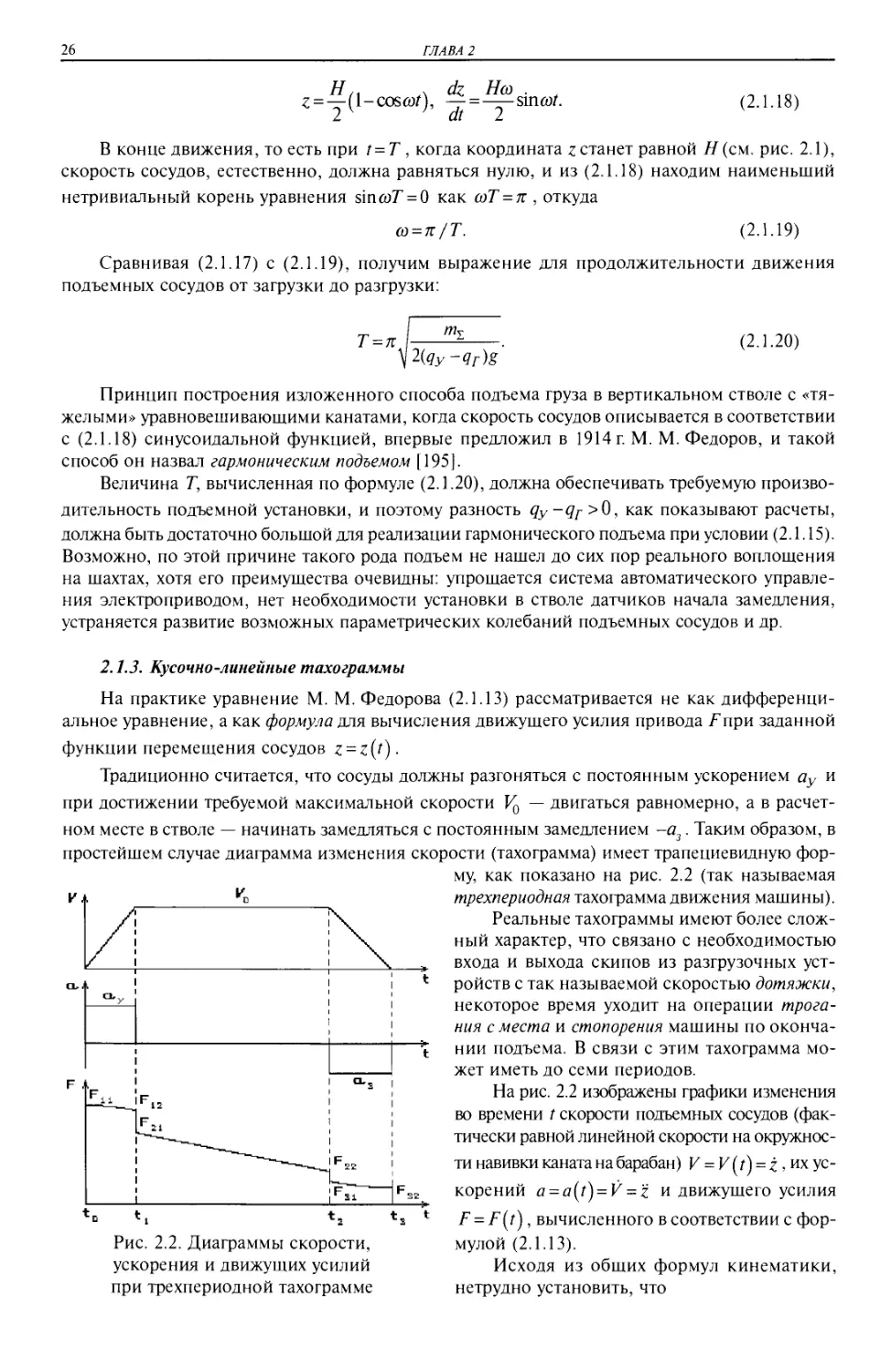
2.1.3. Кусочно-линейные тахограммы
На практике уравнение М. М. Федорова (2.1.13) рассматривается не как дифференци-
альное уравнение, а как формула для вычисления движущего усилия привода У7при заданной
функции перемещения сосудов z = z(/).
Традиционно считается, что сосуды должны разгоняться с постоянным ускорением ау и
при достижении требуемой максимальной скорости Уо _ двигаться равномерно, а в расчет-
ном месте в стволе — начинать замедляться с постоянным замедлением -аз. Таким образом, в
простейшем случае диаграмма изменения скорости (тахограмма) имеет трапециевидную фор-
Рис. 2.2. Диаграммы скорости,
ускорения и движущих усилий
при трехпериодной тахограмме
му, как показано на рис. 2.2 (так называемая
трехпериодная тахограмма движения машины).
Реальные тахограммы имеют более слож-
ный характер, что связано с необходимостью
входа и выхода скипов из разгрузочных уст-
ройств с так называемой скоростью дотяжки,
некоторое время уходит на операции трога-
ния с места и стопорения машины по оконча-
нии подъема. В связи с этим тахограмма мо-
жет иметь до семи периодов.
На рис. 2.2 изображены графики изменения
во времени t скорости подъемных сосудов (фак-
тически равной линейной скорости на окружнос-
ти навивки каната на барабан) И = И(г) = 2, их ус-
корений a = a(t) = V = z и движущего усилия
F = F(t), вычисленного в соответствии с фор-
мулой (2.1.13).
Исходя из общих формул кинематики,
нетрудно установить, что
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
27
t -0 t t -t t -т- Vq I н
Uy @3 ^0
и2 K?
йо = О,й1=-^-)й2=йз--5-)Л3=Я
2ay 2a3
(2.1.21)
где T — продолжительность движения машины; так называемое приведенное ускорение опре-
деляется формулой
НуН3
апр ~ 7
ау + а3
(2.1.22)
причем hQ, отрезки пути, пройденные сосудами соответственно к моментам вре-
мени /0, /15 /2, /3.
Как видно из рис. 2.2, функции a(z) и F(z) в узловых точках /0, /2, /3 терпят конеч-
ный разрыв, что, вообще говоря, пагубно сказывается на общем динамическом состоянии
канатов и подъемной установки в целом. При скачкообразном изменении ускорения в этих
точках, естественно, производная от ускорения
da d2V d3z ,
Р=----=---Х- =-Г = ±о°.
dt dt2 dt3
В технической механике кинематическую переменную р = p(f) принято называть рыв-
ком. Ограниченные значения рывка, то есть не равные ±°°, значительно уменьшают дина-
мические нагрузки, следовательно, способствуют увеличению сроков службы элементов ус-
тановки. В современных системах автоматического подчиненного регулирования с ограниче-
нием рывка p(z) как раз и реализуется принцип плавного изменения ускорения и замедле-
ния в точках /0, /15 t2, , что обеспечивается специальными задатчиками интенсивности, от-
рабатывающие требуемые функции перемещения, скорости и ускорения машины.
Характер изменения скорости и ускорения подъемной машины с ограничением рывка при
подъеме и последующем спуске одного из сосудов показан на рис. 2.3. Здесь предполагается,
что в точках 0, 1, 2, 3 на диаграмме скорости К(7) ускорение машины a(t) становится пере-
менным, и его производная по времени соответственно принимает постоянные значения
Р1, -р2, -Рз, р4 на интервалах т15 т2, т3, т4. В остальных интервалах р = 0, причем в интерва-
лах времени и /3 машина движется с постоянным ускорением соответственно ау и -а3, а в
интервале t2 — движение равномерное со скоростью Уо. Интервал t4 соответствует продол-
жительности паузы на разгрузочно-погрузочные операции. Как видно, в рассматриваемом слу-
чае трапециевидную форму имеет уже не диаграмма скорости, а диаграмма ускорений.
Рис. 2.3. Характер изменения скорости и ускорения подъемной машины
с ограничением рывка
28
ГЛАВА 2
Вычисления чисел т(, т2, т3 и А’ *2’ 6 основано на представлении, что на каждом из
данных интервалов перемещение машины z(?) подчиняется зависимости
если время / отсчитывается от начала соответствующего интервала, и при t = 0 параметры
К’ sh означают соответственно начальные ускорение, скорость и пройденный путь. В
силу этого несложные выкладки приводят к следующим формулам:
?! = ау / Р], т2 = ау / р2, т3=а3/р3, т4=а3 / р4,
2.1.4. Теоретические вопросы фрикционного подъема
Формула Эйлера. Возможность передачи тягового усилия силами сцепления основана на
известной формуле Эйлера, согласно которой натяжение в набегающей груженой ветви ка-
ната Рх (непосредственно у барабана) в случае скольжения каната связана с усилием в сбега-
ющей порожней ветви Р2 соотношением
Р{ = Р2ехр(ра0), (2.1.23)
где р — коэффициент трения скольжения каната по поверхности ручья барабана (канатове-
дущего шкива), а0 — угол обхвата канатом шкива трения, как показано на рис. 2.4. Вывод
этой формулы осуществим следующим образом.
На схеме рис. 2.4, а, принято, что шкив радиуса R вращается по часовой стрелке, в связи
с чем точки А и В являются соответственно точками набегания и сбегания каната. Считает-
ся, что в этих точках натяжения канатов есть и Р2. Текущий угол а положения какой-
либо произвольной точки каната в пределах его контакта с барабаном отсчитывается от точ-
ки набегания А по часовой стрелке.
Рассмотрим в декартовой системе координат ху для произвольного значения а эле-
ментарный отрезок каната, длина которого As определяется малым приращением угла Аа ,
как показано на рис. 2.4, а, причем в данном случае ось у для удобства выкладок направим
по биссектрисе угла Да , как это изображено на рис. 2.4, б.
Рис. 2.4. Расчетные схемы к выводу условия скольжения каната
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
29
Предположим, что канат на шкиве находится в состоянии скольжения, то есть он дви-
жется относительно шкива против часовой стрелки. Тогда на выделенный элементарный
отрезок каната будут приложены по его концам усилия Р и Р+ЛР , распределенное усилие
трения q по элементарной площади dK\s и распределенное нормальное давление р по этой
же плошали (считается, что q и р равномерно распределены не по дуге сечения каната, а по
его диаметру dK). Условия статического равновесия данного отрезка каната приводит к урав-
нениям
-Р cos( Ла / 2) + (Р + ДР) cos( Да / 2) + qdK\s = О,
-Psin(Aa/2)-(P + AP)sin(Aa/2) + pdK\s = Q. (2.1.24)
Элементарные преобразования в системе (2.1.24) с подстановкой Лт=РДа и с учетом
того обстоятельства, что при малой величине Да имеем cos(Aa/2) = l, sin(Aa/2) = Да/2,
дают возможность получить:
&P+qdKR&a = 0, -Р+pdKR=0. (2.1.25)
Из второго соотношения системы (2.1.25) следует, что распределенное давление каната
на футеровку шкива определяется формулой
P = P/(dKR), (2.1.26)
а первое выражение при Да^О с учетом известного соотношения q = pp для сухого тре-
ния (по закону Кулона) и с подстановкой (2.1.26) эквивалентно дифференциальному урав-
нению
dP
— + рР = 0. (2.1.27)
da
Решение уравнения (2.1.27) имеет вид Р = Сехр(-ра), где С — постоянная интегриро-
вания, которую можно определить, если из двух усилий Р{ и Р2 одна является известной.
Так, если известным является /J (при а = 0), то С=Р{, и тогда Р = Р\ ехр(-ра), и при под-
становке сюда a = a0 получим приведенное выше соотношение (2.1.23). Если же известным
является усилие Р1 (при a = a0), то С= Р2 ехр(ра0), и тогда Р= Р2 ехр[/г(а0 -а)] , и при а = 0
приходим опять-таки к формуле (2.1.23).
Для предотвращения скольжения каната усилия Р} и Р2 должны быть такими, чтобы
вместо равенства (2.1.23) заведомо выполнялось неравенство Д < Р2 ехр(/та0) или более строго
(в методологическом аспекте):
^1[М = 72ехР(Р«о)> (2.1.28)
где [кск] — допустимый запас на нескольжение каната в рамках расчета по так называемому
к-критерию (разработка НИИГМ им. М. М. Федорова), что является основой выбора и рас-
чета подъемных машин (см. 3.2).
Износ футеровки. Выполнение равенства (2.1.28) является необходимым условием для
гарантированного отсутствия скольжения каната. Но это отнюдь не означает, что во всех
точках прилегания каната к шкиву отсутствует его проскальзывание относительно футеров-
ки. Действительно, так как в силу технологических потребностей подъема, естественно, долж-
но быть Д > Р2, то относительное упругое удлинение набегающей ветви каната Е] заведомо
превосходит такого же рода удлинение в сбегающей е2 в соответствии с законом Гука, то
есть Е] >е2 . Если проследить за какой-либо точкой каната от точки набегания до точки сбе-
гания. то может показаться, что в точке сбегания канат должен как бы мгновенно относи-
тельно «сжаться».
Но в природе нет ничего мгновенного, и это относительное «сжатие» происходит посте-
пенно, начиная с некоторой точки С, как изображено на рис. 2.5. Иными словами, канат
30
ГЛАВА 2
Рис. 2.5. Дуги покоя
и скольжения на канатоведущем
шкиве
вначале укладывается на шкив по дуге ап между точками А и С без проскальзывания, и
всюду на этом интервале его натяжение (каната) остается постоянным, равным Р{. Поэтому
угол ап и называется дугой покоя.
Между точками С и В по дуге ас усилие начинает уменьшаться, пока в точке В не дос-
тигнет величины Д Следовательно, на этом интервале канат проскальзывает по шкиву про-
тив хода движения (в данном случае против часовой стрелки), поэтому дуга, соответствую-
щая углу ас , называется дугой скольжения.
Угол скольжения ас определяется из (2.1.23), где угол
а0 следует заменить углом ас, и тогда Д = Р2 ,
откуда находим
а =11пА (2.1.29)
Д ^2
а отсюда следует, что ас уменьшается при уменьше-
нии отношения kcm = PJ Р2 (кст — коэффициент ста-
тического натяжения канатов), и в предельном слу-
чае, когда кст = Р\/Р2 =1, угол скольжения вообще
исчезает. Чтобы оценить максимальную «долю» угла
скольжения ас в обшей величине угла обхвата а0
предварительно заметим, что по требованиям завода-
изготовителя максимальное значение коэффициента
статических натяжений каната кст =1,5, а так как ми-
нимальнодопустимое значение коэффициента трения
р =0,25 и минимальная величина угла обхвата а0 =л , то при помоши (2.1.29) получим
max
ас
«о
Д«о
следовательно, в не экстремальных условиях, когда кст <1,5, р > 0,25 и а0 >тг, угол сколь-
жения оказывается существенно меньшим половины дуги обхвата. Таким образом, характер
изменения натяжения каната по дуге обхвата определяется соотношением
Р{ при
Р1ехр[р(ая-а)] при
0<а<аП
аП <a<aG'
(2.1.30)
Функция (2.1.30) изображена на рис. 2.5 в форме круговой эпюры натяжений. Выраже-
ния (2.1.29) и (2.1.30) могут быть полезными при теоретической оценке и при практическом
вычислении износа футеровки канатоведущего шкива трения. В таком случае представляет
интерес определение скорости скольжения каната VCK относительно футеровки, так как имен-
но этот параметр в первую очередь определяет интенсивность износа. Относительную ско-
рость скольжения определим следующим образом.
Так как величина «сжатия» каната при ап < а < а0 обусловлена разностью усилий Д -Р(а),
то в соответствии с законом Гука это вызовет относительное «сжатие» отрезка каната длиной
(а-ал)А на величину
Л(а) = (а-ал)7?[7|-Р(а)]/(Ллк), (2.1.31)
где A = aEd^ — агрегатная продольная жесткость каната (типа продольной жесткости EFдля
сплошных стержней, если F — площадь стержня), причем здесь dK — диаметр каната, Е —
модуль упругости стальной проволоки, а — безразмерный коэффициент, значения которого
даны в табл. 15.1; Р{ — суммарное натяжение канатов.
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
31
В соответствии с (2.1.31) величина максимального «сжатия» каната в силу (2.1.30) и
12.1.29). то есть при Р(а) = Рг, определяется выражением
Лтах=асЛ(Т’1-Р2)/(Ллк).
Дифференцируя (2.1.31) по времени 7 при учете (2.1.30), получим
что представляет собой искомую относительную скорость проскальзывания каната. А так
как здесь а = ап +^V{P)dtIR, где И(г) — текущая окружная скорость канатоведущего шки-
ва, то в итоге с использованием (2.1.30) запишем
иж=^^ = -^7^-{1-ехр[-и(«я-«)]-^(«77-«)ехР[р(«я-«)]}• (2.1.32)
си
Естественно, что при а = ап (то есть в точке начала дуги покоя) из (2.1.32) следует, что
С™11'=0 , а при угле а = ас + ап = а0 (равным углу обхвата), когда /’1ехр[р(а77-а)] = /’2, име-
ем Ис^х = И(г)(7’1-7’2+расР2)/(^).
Так как величина износа футеровки 8ЮН пропорциональна скорости относительного скольжения
VCK и давления на нее канатар, то можно представить, что Ьи.1Н = ku3HVCKp, где кизн, с/Па — коэффи-
циент износа, определяемый экспериментальным путем. В эту формулу необходимо подставить (2.1.32)
и соотношение (2.1.26) для давления, где с учетом (2.1.30) следует считать, что Р= Р{ ехр[р (ая -«)],
а реальное давление каната при R = D6 /2 (D6 — диаметр барабана) есть p = 2Pj(D6dKnK), причем
пК — количество головных канатов. В результате получим следующее выражение:
<5 (а) = £
UJH \ / U~jri
2И(^2
AD6dKn2K
{1-ехр[р(ая
-«)]- р (ап-а)ехр\р (ап -а)]}ехр[р (ап
"«)]•
Считая здесь в дальнейшем, что текущая скорость V(7) = Ио , где VG — максимальная ско-
рость движения подъемных сосудов, то есть окружная скорость обода шкива, определим сред-
нее интегральное значение функции §изн (а) на интервале изменения ае \ап, а0], что сво-
дится к вычислению интеграла
1 а0
С” («)</«.
«77 «0ад
Соответствующие выкладки в итоге приводят к следующему результату:
, 2JC/!2 [5 2ца -1 . . . . .
= кюн 01 2 - + —-j— ехр(-2рас - exp (-рас ,
^>6dKnK 14 4
где угол скольжения ас определяется соотношением (2.1.29), а так как отношение Р\/Рг
(см. выше) принято называть коэффициентом статических натяжений, то есть PJР2 = кст,
представляющим собой один из основных характеристик подъемной установки и машины в
частности, то можно записать
2И0/]г Г5 21nt„-l__1
32
ГЛАВА 2
Эта формула дает величину среднего интегрального износа некоторого определенного
участка футеровки, находящегося в данный момент времени в пределах интервала угла сколь-
жения. Но так как этот участок периодически через каждый оборот барабана снова оказыва-
ется в этом же интервале, то за период одного цикла подъема (подъем груза — спуск порож-
него скипа) общее количество актов проскальзывания составит 2Я/(я£>^), где Н — высота
подъема, D6 — диаметр барабана (шкива трения) машины. Таким образом, суммарный из-
нос футеровки за один цикл подъема определится в виде
4НУД2 (5 21п^-1_______1
4С кс,
(2.1.33)
Рис. 2.6. Обобщенная
функция износа
футеровки
Выражение в круглых скобках в (2.1.33) представляет со-
бой монотонно возрастающую функцию от к, изображен-
ную на рис. 2.6 как 8(кст), изменяющуюся от 0 до 0,562 в
интервале от к =\ до кст =1,5 (это число является предель-
но допустимой величиной для машин со шкивами трения).
Значит, с увеличением к износ футеровки увеличивается,
что подтверждается также опытом эксплуатации. Из форму-
лы (2.1.33) следует также, что износ тем больше, чем больше
высота подъема Н, скорость движения У}, максимальное на-
тяжение канатов Р{ и чем меньше диаметр шкива трения D6
и диаметр каната dK. Износ футеровки, кроме того, увеличи-
вается при уменьшении агрегатной жесткости канатов Л и при
уменьшении количества канатов пК.
В связи с введением обобщенной безразмерной функции износа футеровки 8 (кст) фор-
мулу (2.1.33) перепишем как
3^_к X
иизн ^изн лгО , \ст)'
(2.1.34)
Соотношения (2.1.33) и (2.1.34) совместно с графиком, изображенным на рис. 2.6, позволяет
определить ожидаемую величину износа футеровки за N циклов подъема. Следовательно, при за-
данной нормативной величине износа представляется возможным прогнозировать срок службы
футеровки и этим самым обоснованно планировать ее замену и своевременную поставку.
Давление каната на футеровку. Одним из важных показателей, характеризующим рабо-
тоспособность футеровки, является величина среднеарифметического давления каната, при-
меняемая в расчетной практике и определяемая с помощью (2.1.26) как
Л1Д2_ = —Э—(1 + )1(
D6dKnK D6dKn v
(2.1.35)
где dK — диаметр головного каната.
Однако формула (2.1.35) не вполне корректно отражает физическую суть взаимодей-
ствия каната с футеровкой в связи с существованием дуг покоя и скольжения, и поэтому
правильнее было бы определять давление каната как среднее интегральное давление, опре-
деляемое соотношением
ринт
у у
-------- f P(a)da =--------
D6dKnKaG Jo tydKnKa0
Заметим, что здесь в соответствии с определением (2.1.30) усилия Р(а) = Рх и
P(a) = /iexp[Ju(a77-a)] даны соответственно на двух интервалах ае[0, ап] и ае[ап, а0],
и тогда искомый интеграл представится в форме
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
33
2Р. Г 1-ехрГ-р(а0-ая)]
-----— ап +------------------~
D6dKnKa0 р
а так как ап =а0-ас , значит, а0-ап -ас , то в силу (2.1.29) окончательно получим
ринт
1-—-
D6dKnK paQ к
U л К L ’ v у Ctrl у
(2.1.36)
Сравнение выражений (2.1.35) и (2.1.36) приводит к соотношению
-,_ринт Ucm
Рср 1 +
1---— In А;
^«0
'Ст к
ст
к ст 1
которое графически в зависимости от параметра кст изображено на рис. 2.7. Здесь принято
р = 0,25, а0 = 195° (расчетами установлено, что уменьшение угла обхвата до 180° практичес-
ки не влияет на зависимость р от к). Как видно из рис. 2.7, функция /1(А'С.,И) представляет
собой в интервале от к =\ до кст = 1,5 почти параболическую кривую, и оказывается, что
при больших значениях кст среднее интегральное давление может превышать среднеариф-
метическое почти на 10 %. Возможно, это и не столь большое превышение, но при работе
футеровки при предельно допустимых давлениях может сыграть важную роль. Кроме того,
величина среднего интегрального давления может послужить основанием для разрешения
некоторых спорных эксплуатационных ситуаций.
Распределение усилий в канатах. С появлением в
мировой практике многоканатных систем подъема тра-
диционно считалось, что канаты должны присоединять-
ся к сосуду при помощи уравнительных балансирных
устройств (нечто подобное коромыслам). Однако опыт
эксплуатации засвидетельствовал несостоятельность
этой идеи, и поэтому с конца 70-х годов в СССР по ре-
комендациям и разработкам НИИГМ им. М. М. Фе-
дорова практически повсеместно стали применять ски-
пы и клети с безуравнителъной системой подвески ка-
натов (за рубежом такого рода «переход» состоялся при-
мерно на 10 лет раньше). В такой системе канаты при
помощи прицепных и подвесных устройств жестко свя-
заны с обоими концевыми сосудами и образуют совме-
стно с фрикционным барабаном единую автономную
Рис. 2.7. Сравнение средних
давлений каната на футеровку
саморегулируемую систему.
Разумеется, в этом случае предъявляются повышенные требования к контролю распреде-
ления усилий в канатах, к контролю износа футеровки с необходимостью выполнения многих
специальных мероприятий, то есть всего того, что характеризует высокую культуру производ-
ства, направленную на повышение надежности подъемного комплекса. В многоканатных сис-
темах подъема с безуравнительной подвеской распределение усилий между канатами является
одним из важных эксплуатационных вопросов, так как от этого зависит не только долговеч-
ность футеровки, но и работоспособность канатов (в практике известны случаи обрывов кана-
тов из-за неравномерного их натяжения). В данном разделе рассматриваются закономерности
формирования усилий в канатах при жестком присоединении канатов к сосудам.
При идеальном распределении усилий натяжение каждого каната в набегающей и сбе-
гающей ветвях подчиняются соответственно выражениям:
^10 “ Iпк- ^20 “ ^2 !пк-
(2.1.37)
где пк — количество головных канатов. Но в природе, как известно, ничего идеального нет.
Так и в рассматриваемой системе — рассогласование натяжений происходит неизбежно из-
34
ГЛАВА 2
за различных радиусов проточки ручьев под канатами, из-за различия длин канатов в навес-
ке, из-за разбега диаметров канатов, из-за их неодинаковых жесткостных характеристик и
др. Из этого перечня самым «действенным», так сказать, фактором является различие между
фактическими радиусами проточки ручьев, что и составит предмет дальнейших теоретичес-
ких построений.
Из механики гибких упругих стержней (нитей) известно, что при повороте барабана ра-
диуса R на некоторый угол (р , например по часовой стрелке, основываясь на рис. 2.1, длина
навитой или в данном случае перемотанной части каната, натянутого с усилием в точке
набегания, для системы подъема с одним канатом составит [192].
г dz
Р + Ш/Л
где А — агрегатная продольная жесткость каната [см. пояснения к формуле (2.1.31)], при
этом считается, что z = R(p — это путь, пройденный точками барабана на окружности навив-
ки (целесообразно говорить, что z является перемещением машины). Предполагается также,
что в общем случае усилие Рх может зависеть от перемещения Z- Приближенное представле-
ние здесь возможно по причине малости величины относительного удлинения Рх/А«\.
Следовательно, длина отвесно висящего каната, если при £ = 0 она была равной H + hr
(см. обозначения к рис. 2.1), будет определена соотношением
(2.1.38)
В частности, если величиной Р{/А пренебречь, имеющей, как правило, порядок менее
10-3 по сравнению с единицей, то длина отвеса каната будет равной Ц = Н + hr - z-
Рассмотрим в связи с этим систему из пк канатов [188], каждый из которых имеет оди-
наковые длины в навеске L и одинаковые агрегатные продольные жесткости А. В текущий
момент времени предполагается, что так называемые «недеформированные» длины канатов
набегающей ветви отличаются от их среднего значения на величины . Длина Lv оп-
ределяет, собственно говоря, положение поднимающегося сосуда с координатой z (см. рис. 2.8,
где для упрощения рассуждений показан вариант двухканатной системы подъема).
Если считать, что 8Ll>0 соот-
ветствует относительному укорочению
каната, то физическая «недеформиро-
ванная» длина каждого z-го каната бу-
дет = 1^-81^. На рис. 2.8 — это от-
резки А{В{ и А2В2-
В точках набегания, то есть в точ-
ках В\ и В2 на рис. 2.8, каждый канат
имеет в данный текущий момент вре-
мени натяжение Ру = Р10+8Ру, где
8Рц — отклонение /-го усилия от иде-
ального значения />0 в обозначениях
(2.1.37), причем 8Ри >0 , если соответ-
ствующий канат набегает на ручей
большего радиуса .
В свою очередь этот радиус предста-
Рис. 2.8. Схема перемотки двух канатов:
1,2 — канаты, 3 — канатоведущий шкив, 4 — сосуд
вим как 7^. = R+8Rl, где <5/^ — отклонение /-го радиуса ручья от среднего радиуса R, и при этом
8RI >0 соответствует большему радиусу навивки соответствующего каната на барабан машины.
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
35
Таким образом, в соответствии с принятыми определениями имеем очевидные выраже-
ния для средних арифметических величин
1 "к 1 пк 1 пк
г,=-£а„
(=1 пк ;=! пк /=1
и соотношения, которым подчиняются малые отклонения от этих средних:
Х«Л,=о, Х<5Р„=0, £<>я,=о.
/=1 /=1 /=1
(2.1.39)
В связи с рассмотрением системы подъема с пк канатами выражение (2.1.38) для длины
отвеса каждого z-го каната перепишем в эквивалентной форме:
Z ( р X П
Л, = А-«А, = '/+*/-! 1-ф Т*'
Ох А )R
(2.1.40)
где. как и при записи (2.1.38), z = R(p , но теперь перемещение г определяется средним ради-
усом навивки барабана машины.
Подстановка в (2.1.40) соотношений Plt = Р}О+ЗРУ, Ri = R+8Ri приводит к следующим
выражениям
8Р±
А
ь^ц-зь^н+ь,-] 1-
А J oil
dz,
A R
7
а так как здесь во втором интеграле произведения /Л) и (3RI / R)-(Pi0/А) яв-
ляются величинами второго порядки малости по сравнению с каждым из сомножителей, то
такими составляющими пренебрежем. В результате получим
ok А ) оИ А J
(2.1.41)
Соотношения (2.1.41) являются линейными относительно малых отклонений <5Д(, 3P{i,
8Rl, поэтому, суммируя (2.1.41) по всем / от 1 до пк, получим при помощи (2.1.39):
L{ = H + hr- \ \-—\dz^H + hr-z,
ol А )
(2.1.42)
что представляет собой в соответствии с (2.1.38) общую «среднюю» длину отвесов канатов,
вследствие чего выражение (2.1.41) приобретает вид
SP.A
ok Л А )
(2.1.43)
Теперь учтем, что в соответствии с законом Гука и в связи с тем обстоятельством, что
при 8Ц,>§-, а это соответствует относительному укорочению каната, как было отмечено
выше, должно быть 8P{i /A=8L[i /Ц , и тогда (2.1.43) запишется в форме:
ol R )
(2.1.44)
причем здесь длина Ц определяется зависимостью (2.1.42).
Для решения интегрального уравнения (2.1.44) продифференцируем его по z, в резуль-
тате чего получим дифференциальное уравнение относительно малых отклонений 8Ц. :
36
ГЛАВА 2
d8L^ 8^ _8Ri
dz H+hr-z R
(2.1.45)
Из теории дифференциальных уравнений известно, что общее решение уравнения пер-
вого порядка типа (2.1.45) имеет вид
5Z.i,(z) = C/«(^) + w(z)f^^|j, (2.1.46)
где Ct — постоянные интегрирования, a w(z) — частное решение однородного уравнения
(2.1.45), то есть без правой части, причем
и(г) = ехр
- =ехр[1п(Я + /?г-z)] = H + hr~z.
При вычислении интеграла в (2.1.46) заметим, что хотя в силу беспрерывного износа
футеровки величина 8RI, строго говоря, зависит от z, однако, как говорится, функция 3Rt (z)
является медленно изменяющейся, и поэтому будем считать 8Ri = const. Тогда
и при этом общее решение (2.1.46) как решение уравнения (2.1.45) запишется в виде
8L^{H + hr-z) Ci—-j-\^H + hr-z')
К
(2.1.47)
Постоянные интегрирования определим из условий, что в начале цикла подъема канаты
поднимающейся ветви уже имели рассогласование в длинах, несмотря на принятое допуще-
ние о равенстве длин всех канатов в навеске, то есть при < = 0 положим 8LV: = 8lff>, и тогда
подстановка этих величин в (2.1.47) при < = 0 дает возможность найти
24L
Н + hr
+ _Lln(// + Ar),
в результате чего обшее решение (2.1.47) уравнения (2.1.45) приобретет форму:
8Lu=(H+hr-z)
Н + Иг
8R,.
-I--—In
R
Н + hj-
H + hr-z
(2.1.48)
Отклонения усилий 8P{i в канатах поднимающейся ветви определим с помощью соот-
ношений (2.1.48) и закона Гука 8P{j / A = 8L[i /L , что с учетом определения (2.1.42) для Ц
приводит к следующим выражениям
8РЬ = А
3№ 8R- Н + Иг
---— + —- In-------—
H + hr R H + hr-z
(2.1.49)
откуда видно, что 8Ри линейно зависит от 8Ri.
Для опускающихся канатов, благодаря принятому допущению о равенстве длин канатов в на-
веске, очевидно, 8L, =-8 Lll, так как если в процессе перемотки какой-либо z'-й поднимающийся
канат удлинился, то на такую же величину он должен укоротиться в опускающейся ветви, то есть
8Ьц=-(Н+hr-z}
3№ 8 R: H + hr
--+—- In-----—
H + hr R H + hr-z
(2.1.50)
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
37
А так как в этом случае согласно закону Гука 8РЪ/А-8^/1^, где в соответствии с
рис. 2.1 L} =hr + z , т° для приращений усилий в канатах опускающейся ветви в силу (2.1.50)
получим выражения
Теперь рассмотрим некоторый п-й цикл подъема левого груженого сосуда (см. рис. 2.1;
определение понятия цикла см. далее в 18.3). Тогда в соответствии с формулой (2.1.48) от-
клонения длин поднимающихся канатов будут описываться соотношениями
81^=(Н+ hr-z)
8^ 8R, H + hr
---------- 1П-------
H + hr R H + hr-z
(2.1.52)
где 81$ — отклонения длин к началу совершения акта подъема левого груженого сосуда в
n-м цикле, то есть при ^ = 0 в (2.1.52). К концу подъема, то есть при z = H в (2.1.52), в силу
равенств 8L[t =-8^ отклонения длин правой ветви станут равными
SE" SR,, // + *,
---д— + —- In 1-
H + hr R hr
(2.1.53)
и далее, при подъеме правого груженого сосуда, процесс изменений отклонений надо рас-
сматривать по зависимостям (2.1.52), в которых вместо 31$ подставляются 81$ как на-
чальные условия для поднимающейся правой ветви. К концу подъема правого сосуда, то есть
при z=H в (2.1.52), отклонения длин канатов в левой ветви в силу равенств ё> L^l=—S Lll
будут такими:
8l$" = -hr
H + hr
8R , H + hr
+ —-In----
R hr
представляющими собой начальные отклонения канатов левой ветви к началу (п + 1) -го цикла
подъема. Исключая отсюда 81$ с помощью (2.1.53), получим
(2.1.54)
В целях сокращения записей и для удобства предстоящих выкладок обозначим:
<5L("+1) ( hr f Н 8R- H + hr
hr hr \Jl+hr) H + hr R hr
(2.1.55)
и тогда (2.1.54) представится в следующей компактной форме:
хп+\-Яхп=У = !, 2, •••)•
Рассматривая это соотношение как уравнение в конечных разностях, общее его реше-
ние, руководствуясь известными правилами, запишем в виде
x„ = Q"+y(l-^)/(l-^),
где константу С определим из условия, что при л = 0 (подразумевается в цикле, предшеству-
ющему первому циклу подъема) х0 = 81$ / hr, и в итоге
38
ГЛАВА 2
(2.1.56)
При достаточно большом п в (2.1.56) величина qn —>0, вследствие чего наступает стаци-
онарный или установившийся режим перемотки канатов, при котором, независимо от п,
хп = y/(l-q). Возвращаясь здесь к прежним параметрам согласно обозначениям (2.1.55), по-
лучим в стационарном режиме
А /?
8I^au=(H + hr-z)^
R
hr , H + hr , H + hr
---------In--------- + In--------
H + 2/zf hf H + hp — z
8Pcma^A^------ln^±^L + ln H + hr
1; R [ H + 2hr hr H + hr-z
(2.1.57)
Аналогичные выражения запишем для канатов опускающейся ветви:
8I^=-(H+hr-z)^-
К
зр2с^=-а
H + hr-zSRj
hr + z R
hr H + hr H + hr
H + 2hr hr H + hr-z
hr H + hr H + hr
H + 2hr hr H + hr-z
(2.1.58)
Из формул (2.1.57) и (2.1.58) следует, что в стационарном режиме отклонения длин ка-
натов и приращения в них усилий не просто линейно зависят от 8RI/R, но и пропорцио-
нальны этим величинам. Для анализа 8Р£тац и ЗР^”04 рассмотрим безразмерные функции
Л(г)=-
H + hr-z
hr + z
hr , H + hr , H + hr
--- --1 n l- +1 n-L—
H + 2hr hr-----------H + hr-z
которые в обозначениях ^ = z/ H и £ =hr / Н запишем также в форме
/1 (^) =---— In
и ’ 1+2£
+ 1п
Л(<П=
£
1 + 2£
1 1+£
In—-
+ In
.(2.1.59)
1К
1 + С
! + £-£
В принятых обозначениях выражения для 8РХ1тац и ЗР^™* из (2.1.57) и (2.1.58) приоб-
ретут вид
к к
На рис. 2.9 изображены графики функций (2.1.59) для двух граничных значений пара-
метра £ : £ =0,05 (кривые 1, 3) и £ =0,02 (кривые 2, 4); при этом кривые 1, 2 соответствуют
функции fx, а кривые 3,4 — функции /2. Представленные здесь графики могут быть ис-
пользованы при выполнении расчетов разбега усилий в канатах при заданных значениях от-
клонений радиусов ручьев 8Rj/R. Заметим, что изменение величины параметра £ оказы-
вает ощутимое влияние на значения функций fx и /2 лишь в окрестностях £ =0 и £ =1.
В начале данного подраздела было отмечено, что безуравнительные системы подвески
«образуют совместно с Фрикционным барабаном единую автономную саморегулируемую
систему». И на самом деле, пусть при операции навески новых канатов было обеспечено
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
39
Рис. 2.9. Графики функций
распределений усилий в канатах
равенство всех длин канатов и равенство радиусов
проточки футеровки. Но в силу естественных, чисто
технических причин практически невозможно до-
биться строгого равенства <5/^=0, следовательно,
для тех ручьев, в которых 8R, >0, приращения на-
тяжений канатов будет возрастать. А так как суммар-
ный износ футеровки за один цикл подъема про-
порционален квадрату натяжения каната [см. фор-
мулу (2.1.34) и рис. 2.6], то скорость износа в таких
ручьях будет большей, чем в остальных. И это бу-
дет происходить до тех пор, пока натяжения во всех
канатах станут практически одинаковыми, то есть
произойдет своего рода процесс стабилизации уси-
лий. Вот почему безуравнительная система подвес-
ки и является саморегулируемой или самонастраи-
вающейся системой.
Определение усилий в канатах. Как видно из пре-
дыдущего подраздела, разбег натяжений в канатах прямо свидетельствует о разбеге радиусов
проточки футеровки ручьев. И хотя выше было сказано, что в системе со временем происхо-
дит процесс стабилизации усилий, но такие факторы, как разбег длин канатов в навеске,
разбег диаметров канатов, неодинаковая реологическая вытяжка канатов и пр., становятся
реальным «препятствием» положительному развитию предполагаемому процессу. Поэтому
контроль натяжений канатов необходимо осуществлять хотя бы для того, чтобы убедиться в
рассогласовании первоначальных длин канатов в навеске. Так, если по истечении несколь-
ких суток после навески канатов окажется, что измеренные каким-либо способом натяже-
ния имеют большие разбеги, то это явно свидетельствует о рассогласовании длин канатов. В
таком случае, ни о какой стабилизации усилий не может идти речи, а требуется элементар-
ная (хотя и трудоемкая) операция перепанцировки канатов с целью выравнивания их длин.
Заметим, что в такой ситуации проточка ручьев футеровки с целью выравнивания радиусов
навивки, к чему, как правило, прибегают механики, может только усугубить дальнейший
разбег натяжений. Это отнюдь не означает, что проточка футеровки вообще не нужна. Такую
процедуру следует производить, но с целью ускорения процесса стабилизации усилий (в осо-
бенности для футеровок с повышенной износостойкостью), и только после выравнивания
длин канатов.
Таким образом, измерение усилий в канатах является необходимой технологической
процедурой. Эта проблема является не простой, и она, по сути дела, не решена должным
образом и по настоящее время. За рубежом некоторые фирмы используют для этих целей
встроенные в подвесные устройства тензометрические, магнитоупругие датчики, силоизме-
рительные месдозы и др., однако из-за сложности передачи полученной информации на по-
верхность и удорожания подъемной установки такие средства пока не нашли широкого при-
менения.
В СССР в начале 60-х годов для измерения натяжений в канатах был создан прибор
(разработка МакНИИ), основанный на измерении частоты поперечных колебаний каната
ограниченной длины, которая (частота) непосредственно связана с натяжением. Однако из-
за сильно выраженного дисперсионного характера таких колебаний идентификация числен-
ных значений усилий приводила к неоднозначным результатам, из-за чего прибор не нашел
практического применения.
Самым простым и доступным способом измерения натяжений является так называе-
мый волновой, предложенный в конце 50-х годов шведскими инженерами (теперь этот спо-
соб иногда так и называют — шведским).
Суть этого способа состоит в следующем. Пусть вертикально висящий массивный канат
длиной L и погонной массой q-qr в нижней точке растянут силой Р. Считается, что нижняя
точка в поперечном направлении не перемешается. В окрестности подвеса верхнего конца
каким-либо способом возбуждается поперечная волна в канате (нечто подобное солитону —
уединенной волне), которая, отразившись от неподвижной концевой массы, спустя некото-
40
ГЛАВА 2
рое время дг, возвращается в исходную точку, в которой возбуждалась волна, и восприни-
мается специальным прибором. Оказывается, что величина Р непосредственно связана с ве-
личиной Дг, следовательно, по ее измеренному значению можно определить натяжение ка-
ната Р в нижнем сечении. Эту связь можно раскрыть таким образом.
Известно, что скорость поперечной волны отвесно висящего каната является перемен-
ной, зависящей от натяжения в данной точке, и определяется выражением
. \P + q(L-x)g
с(х) =--~(2.1.60)
V Ч
если х отсчитывается от верхней точки подвеса. Фазовую скорость поперечной волны опре-
делим как dx/dl = c(x'), то есть в силу (2.1.60)
* EES (2161)
dt \ q
и это соотношение будем рассматривать как дифференциальное уравнение относительно
фазовой координаты х. Интеграл уравнения (2.1.61) запишем в виде
2AyP + ^(jL-x)g = —gtyfq + С,
где С — постоянная интегрирования, которую определим из условия, что при t = 0 началь-
ная фазовая координата х = 0 (волна возбуждается в верхней точке подвеса каната). Тогда
2yJP + qgL-2^P + q(L-x)g = gt4q. (2.1.62)
Если в (2.1.62) подставить x = L , то получим
(JP + Lqg-jP),
что, очевидно, представляет собой момент времени достижения волны нижней конечной
точки. А так время прохода волны сверху вниз равно времени прохода волны снизу вверх, то
искомый интервал Д/ = 2/0, следовательно,
4
ДГ =
^P + Lqg-Jp).
(2.1.63)
Соотношение (2.1.63) представим в форме двух линейно независимых равенств:
Тогда, обозначив
Р =
16£
g(A02 ’
(2.1.64)
получим следующие выражения для натяжений каната соответственно внизу и вверху:
Т’ = ^(/3-2 + /3Ч), P+Lqg = ^(p + 2 + p-i). (2.1.65)
Этим самым задача установления искомой связи между Аг и Р решена, и формулы
(2.1.64) и (2.1.65) можно применять для контроля распределения усилий в канатах в много-
канатных системах шахтного подъема. В случае достаточно длинных канатов ( L > 600 м) из-
ложенный способ определения усилий дает удовлетворительные результаты даже при исполь-
зовании обычного секундомера с возбуждением и приемом отраженного сигнала при помо-
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
41
ши руки. Более точные измерения данным методом осуществляются специальными прибо-
рами «Унисон», «Волна» (разработки НИИГМ им. М. М. Федорова).
Формулы (2.1.64) и (2.1.65) оказываются также полезными, если на практике возникает
необходимость, например, определить величину концевой массы, которую другим способом
найти не представляется возможным.
2.1.5. Теоретические основы систем АРПТ
Радикальное решение проблемы нескольжения канатов, о чем говорится в 6.2.3, состо-
ит в создании так называемой системы автоматического регулирования предохранительным
торможением (АРПТ).
Такая система основана на принципе автоматического «слежения» за отклонениями
фактических динамических переменных подъемной машины (перемещения, скорости и за-
медления) от соответствующих заданных значений (требуемых по условиям безопасности) в
каждый момент времени. При этом в зависимости от алгебраических величин таких откло-
нений отрабатывается специальными регуляторами управляющий сигнал на пропорциональ-
ное увеличение или уменьшение тормозного усилия (такие регуляторы в теории автомати-
ческого управления называются ПИ-регуляторами).
Теоретические предпосылки принципиальной возможности реализации регулируемого
торможения основаны на том, что выражение (6.1.4) для тормозного момента MT(t), как
апериодического звена регулирования, является общим решением дифференциального урав-
нения первого порядка
_ dMT ,,
(2.1.66)
at
с начальным условием Мг(0) = 0 при t = Q .
Если правую часть уравнения (2.1.66) записать как некий функционал, «следящий» за
отклонением динамических переменных подъемной машины (то есть за текущим перемеще-
нием, скоростью и ускорением) от соответствующих заданных и заранее вычисляемых зна-
чений перемещения, скорости и ускорения, то линейные величины таких отклонений фор-
мально могут управлять текущим изменением тормозного момента. В математической ин-
терпретации это выглядит следующим образом:
_ dMT .. ..
^7 ^Т ~ ^тах
"fife
,dt
ffe'Y d2z d2z '
dt J g dt2 dt2
(2.1.67)
где z — перемещение машины (имеется в виду перемещение какой-либо точки на окружно-
сти навивки каната); z — заданный закон перемещения машины в процессе торможения;
к., kv, kw — некоторые постоянные безразмерные коэффициенты пропорциональности (ко-
эффициенты регулирования); g — ускорение свободного падения; Т — некоторая имеющая
размерность времени константа, которую определим позже. В терминах теории автомати-
ческого регулирования уравнение (2.1.67) называется уравнением с отрицательными обрат-
ными связями.
Задача решения уравнения (2.1.67) выходит за рамки круга вопросов данной книги, но
все же здесь уместно обозначить хотя бы общие контуры подхода к выяснению характера
изменения тормозного момента M(t) в процессе регулируемого торможения.
Прежде всего, заметим, основываясь на требованиях «Правил безопасности...», что ми-
нимально допустимая величина замедления при спуске груженого сосуда при его подходе к
нижней приемной площадке определяется величиной [ас] = 1,5 м/с2.
В то же время максимально допустимое замедление при подъеме груженого сосуда для
предотвращения явлений набеганий сосуда на канат, то есть для отсутствия так называемого
«подпрыгивания» груза, нормируется величиной [о„] = 5 м/с2.
Для машин в наклонном стволе указанные нормируемые параметры определяются в зави-
симости от угла наклона ствола (см. табл. 3.1 в 3.2). Для машин со шкивами трения в качестве
42
ГЛАВА 2
этих чисел могут быть величины соответствующих «критических» замедлений, при которых воз-
никает скольжение канатов [см. формулы (3.2.12)]. В дальнейшем, в зависимости от направле-
ния движения груженого сосуда в процессе предохранительного торможения под символом [о]
будем подразумевать величину [ас] или [ап]. Приняв, таким образом,
^ = [а], ^- = [a]t+VH, г=[а]'- + Ун{, (2.1.68)
dr dt 2
где VH — начальная скорость, зависящая от текущей скорости машины в момент подачи ко-
манды на торможение (то есть в момент разрыва цепи 777, и это чаще всего, хотя и не обяза-
тельно, происходит при максимальной скорости движения подъемных сосудов Pg), а также
от величины времени холостого хода тормозной системы . Иными словами, VH = Vo -a^t^,
где асв — замедление свободного выбега, определяемое соотношением (2.1.14).
Уравнение (2.1.67) в зависимости от коэффициентов регулирования k.,kv,kw может иметь
решение, ограниченное во времени, называемое устойчивым решением, а также неограниченное,
называемое неустойчивым решением. Очевидно, что эффективность регулируемого торможения
может быть лишь в области изменений параметров kz,kv,kw, порождающих устойчивые решения.
Для установления такого рода области рассмотрим уравнение М. М. Федорова (2.1.13),
которое запишем с заменой движущего усилия Т-’на тормозное усилие -MT/R (R — радиус
барабана) в форме следующего дифференциального уравнения
d2z
пр—^- + МТ /Я + ДРст = 0, (2.1.69)
dr
где АРст = -(qy -qr)(H-2z)g + (ml-m2)g — текущая разность статических натяжений кана-
тов, которая хотя и зависит в общем случае от z, но в течение сравнительно кратковременно-
го процесса торможения АРст допустимо считать постоянной величиной, рассматривая в этом
случае z как параметр.
В уравнении (2.1.69) предполагается, что тормозной момент Мг >0 — при подъеме гру-
за, и MT<Q — при спуске, причем положительное направление перемещения z считается
совпадающим с направлением скорости машины в момент времени начала торможения (воз-
можны также иные соглашения).
Таким образом, уравнение регулирования (2.1.67) необходимо рассматривать совместно
с (2.1.69) и с учетом соотношений (2.1.68).
Применим для указанных линейных дифференциальных уравнений преобразование
Карсона-Хевисайда [187], а именно, рассмотрим в области изображений следующие функции
от комплексной переменной р:
Z(p) = p]z(t)e~prdt, Z'(p) = p^z'(t)e~ptdt, M(p) = p]MT(t)e~ptdt. (2.1.70)
ООО
При этом согласно правилам и символике операционного исчисления между оригинала-
ми функций, производных и их соответствующими изображениями имеют место следующие
простые соотношения
(2.1.71)
cIMt i- 1
MT^M(p), —Z^p[M(p)-MT(Q)]
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
43
В рассматриваемом случае для простоты выкладок отсчет текущего времени t принят с
момента начала торможения, принимаемого за ноль.
Соотношения (2.1.71), основанные на преобразованиях (2.1.70), приводят дифференци-
альные уравнения (2.1.67) и (2.1.69) к системе алгебраических уравнений относительно изоб-
ражений М(д) и
^+~кр+^р2 z№=yvM
_g * о
(2.1.72)
M(p)/R + myp2Z(p) = w1(p)
где w^p), w2(/>) — некоторые вполне определенные функции переменной р, которые здесь
не выписаны, так как в данном случае не ставится цель построения общего решения относи-
тельно оригиналов z(/) и Мг(7) на основании изображающих уравнений (2.1.72), хотя это
сделать и нетрудно. Задача состоит, как говорилось выше, в выяснении условий, при кото-
рых обеспечивается изменение тормозного момента в ограниченных пределах. Для решения
этой задачи необходимо, прежде всего, составить определитель из коэффициентов левой части
системы (2.1.72) и найти так называемые его характеристические числа. Для рассматривае-
мой системы характеристические числа находятся как корни кубического уравнения отно-
сительно комплексной переменной р:
тър2(Х + рТг)+^^- ~^ + ~fp + ~'p2 =0- (2.1.73)
Кубическое уравнение (2.1.73), как известно, может иметь либо все три корня действи-
тельные, либо может оказаться, что один корень действительный и два корня комплексно
сопряженные.
Если окажется, что в первом случае хотя бы один из действительных корней является
положительным, или во втором случае действительная часть комплексных корней является
положительной, то это будет означать, что принятые параметры регулирования приводят к
неустойчивому процессу. Таким образом, необходимым условием качественного, устойчиво-
го регулирования тормозного момента является расположение всех трех корней в левой по-
луплоскости комплексных чисел.
Так как ранее было сказано, что временной параметр Т в уравнении (2.1.67) является,
вообще говоря, произвольным, то этим обстоятельством теперь воспользуемся для приведе-
ния кубического уравнения (2.1.73) к простейшему виду, не содержащим излишние констан-
ты. Действительно, если ввести безразмерные параметры
Р = = (2-1-74)
м
1 Jmax
и принять Т = рТт, то уравнение (2.1.73) приобретет следующий вид:
k3 + (ja + kw)k2 + kvk + kz = O. (2.1.75)
По физическому смыслу обратная величина параметра Д , определяемого соотношени-
ем (2.1.74), является отнесенная к g алгебраическая разность замедления свободного выбега
машины асв и замедления при подъеме груза ап, если к тормозному ободу «мгновенно» при-
ложить максимальный тормозной момент . Следовательно, свойства корней уравнения
(2.1.75), значит, и регулировочные коэффициенты kz, kv, kw, обеспечивающие устойчивое
регулирование, непосредственно связаны с величиной асв , являющейся в определенном смыс-
ле интегральной характеристикой системы «машина-тормоз».
Сделаем еще одно (масштабное) преобразование характеристического уравнения (2.1.75), а именно,
введем обозначения kz/p3 = p., kv/p2=pv, kw/p=pw, х = Л/д , итогдавместо (2.1.75) получим
44
ГЛАВА 2
x3 + (l + pw)x2 + pvx+pz=Q. (2.1.76)
Уравнение (2.1.76) для анализа несколько проще исходного (2.1.75), так как не содер-
жит в себе константу р , но в то же время физический смысл «новых» регулировочных коэф-
фициентов р pv, pw практически не изменился.
Как известно, расположение корней кубического уравнения в комплексной плоскости
зависит, прежде всего, от знака дискриминанта D = (Q)2 + (Р)3, где Q= w3 ~(wpv-р^/2.,
^ = ^v/2-w2, w = (l + pw)/3.
Так, если Z)<0 и Р<0 , то уравнение (2.1.76) имеет три действительных корня Xi,X2,x3,n
вэтом случае = -27?cos(<p/3)-w, Xj3 = 2/?cos[(^ + <p)/3]-w, где cos(p = Q/ R3, r = yj\P\sgnQ.
При D>Q и P<Q имеется один действительный корень и два комплексно сопряжен-
ных: Х[ =-2r ch(<p/3)-w, х23 = rch(<p/3)-w±z’V3rsh(<p/3), где chip = QIг3, г = ^|Р| sgn(? .
Наконец, при £)>0 и Р>0 также имеется один действительный корень и два комплек-
сно сопряженных, но они вычисляются несколько иначе, чем в предыдущем случае:
Xj =-2R sh(<p/3)-w, х23 = rsh(<p/3)-w±zV3rch(<p/3), где sh<p = 2/r3, г = sgnQ .
Следует рассмотреть также так называемый вырожденный случай, когда k.=Q (дг=0).
При этом не равные нулю корни уравнения (2.1.76) определяются согласно выражениям
2xi 2 = -(1 + + Pw)2 ~^Pv , откуда видно, что при любых величинах Z^,>0n Zq,>0 дей-
ствительная часть характеристических чисел отрицательна, следовательно, в вырожденном
случае регулирование является принципиально устойчивым.
К подобному простому выводу в отношении общего случая нельзя прийти, поэтому ре-
шение вопроса о расположении характеристических чисел на комплексной плоскости необ-
ходимо решать численным способом.
На рис. 2.10 представлена серия кривых, отражающих зависимость pv от pw при посто-
янных значениях р, указанных справа. Построение производилось с использованием при-
веденных выше соотношений путем итерационных вычислений в рамках метода последова-
тельных приближений. Каждая кривая является геометрическим местом точек, для которых
действительный корень кубического уравнения (2.1.76) заведомо отрицательный, а два ком-
плексно сопряженных корня имеют общую действительную часть, в точности равную нулю.
Таким образом, значения коэффициентов регулирования должны соответствовать точкам,
расположенным выше соответствуюшей кривой при заданном р . Например, при pz = 3 и
pv = 1 необходимо принимать р > 2. При pz = 0 устойчивость имеет место во всей области,
показанной на рисунке.
Рис. 2.10. Диаграмма взаимосвязи коэффициентов устойчивого регулирования
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
45
Приведенные на рис. 2.10 графики являются универсальными, то есть пригодными для
любой подъемной установки с любым значением ускорения свободного выбега, и, таким об-
разом, имеется возможность выяснить, как должен изменяться тормозной момент, чтобы
движение машины наименее отклонялось от заданного. В этом и состоит суть систем АРПТ.
Сложность создания таких систем состоит не столько в аппаратном обеспечении, сколько
в динамических свойствах подъемной установки — она обладает слишком большой инерци-
ей, чтобы при естественном, не слишком большом быстродействии механического тормоза
«успеть» прореагировать на изменения быстротекущих динамических процессов. Еще одна
трудность состоит в том, что торможение, основанное на выпуске сжатого воздуха из рабо-
чих цилиндров, не в состоянии своевременно перестраиваться на впуск воздуха, чтобы в пол-
ной мере отвечать требованиям следящей системы. Более того, в тормозах радиального типа
оперативный, быстро перестраивающийся процесс выпуска-впуска сжатого воздуха, если и
технически осуществим, приведет просто к неработоспособной системе, значит, остается
единственный вариант — регулируемый выпуск, что является существенным ограничитель-
ным фактором в автоматическом управлении тормозом.
Вот почему в идеальном означенном выше виде систем АРПТ пока нет, в том числе и за
рубежом, и вряд ли они когда-либо будут созданы, если исходить из тривиальных соображе-
ний практической целесообразности.
Тем не менее, системы регулирования предохранительным торможением все же разра-
батываются, следуя принципу «от простого — к сложному». Одной из простейших таких си-
стем является так называемая система избирательного торможения, в которой тормозное уси-
лие автоматически принимает одно из двух значений, необходимых раздельно для спуска и
для подъема груза. При этом требуется иметь, разумеется, специальный аппарат распознава-
ния направления движения груженого сосуда.
Такие устройства (разработка Донецкгормаш) в настоящее время получили широкое рас-
пространение на шахтах Украины, России и Казахстана на подъемных установках в наклон-
ных стволах с углом наклона до 30°, в которых явления «набегания» сосуда на канат в такой
же мере опасны и чреваты аварией с материальными убытками, как и скольжение канатов в
машинах со шкивами трения.
Реальные возможности создания эффективных систем управления и регулирования появ-
ляются в связи с применением дисковых тормозов. Их достаточно высокое быстродействие и
многомодульное исполнение дают предпосылки осуществить почти в полной мере принципы
регулирования в следящей системе с отрицательными обратными связями при дискретном
изменении величины тормозного момента. Во всяком случае, в машинах с дисковым тормо-
зом сравнительно просто реализуется так называемая система программного торможения, ос-
нованная на жестком задании последовательности и интервалов включения модулей, что на
основании опыта и теории обеспечивает приемлемый для практики режим торможения.
Именно на таком принципе была основана система управления тормозом в первой оте-
чественной машине с многомодульным дисковым тормозом, принятой в эксплуатацию на
одной из шахт Донбасса в конце 80-х годов (разработка НИИГМ им. М. М. Федорова, До-
нецкгормаш и др.).
2.1.6. Основы теории системы «сосуд-армировка»
Особенность взаимодействия сосуда с жесткими проводниками состоит в том, что бла-
годаря одинаковому расстоянию по вертикали между расстрелами (постоянному шагу арми-
ровки), жесткость проводников в поперечном направлении оказывается периодически из-
меняющейся во времени при движении сосудов с постоянной скоростью, что может являть-
ся причиной возникновения так называемых параметрических резонансов. Неоднократно было
установлено, что в результате таких явлений рельсовые проводники подвергаются значитель-
ным пластическим деформациям или разрушаются, сосуды выходят из направляющих, и
после этого армировка ствола требует капитального ремонта.
Теория параметрических явлений в шахтном подъеме была создана в середине 60-х го-
дов (НИИГМ им. М. М. Федорова), что явилось основой для разработки инженерной мето-
дики расчета армировки [179]. Отстройка от параметрических резонансов является одной из
важнейших практических задач при проектировании подъемных установок (см. раздел 2.3).
46
ГЛАВА 2
Теория основана на рассмотрении в первом ее приближении уравнения малых попереч-
ных колебаний материальной точки с массой т (массы сосуда), движущейся с постоянной
скоростью Уо вдоль балки (проводника), имеющей изгибную жесткость EJ и расположен-
ной на Nупругих опорах (расстрелах), каждая из которых имеет одинаковый коэффициент
жесткости Со, а сами опоры отстоят друг от друга на расстоянии h (шага армировки). Схема-
тизация такой модели изображена на рис. 2.11 (в действительности, разумеется, изображен-
ная здесь балка расположена вертикально). Количество опор N предполагается достаточно
большим, балка считается неразрезной, а массой балки пренебрегается. Задача состоит в
определении областей устойчивого движения рассматриваемой массы.
Рис. 2.11. Схематизация движения массы по балке на упругих опорах
В рамках принятых ограничений (рабочих гипотез) уравнение поперечных колебаний
массы т (вдоль оси у на рис. 2.11) записывается в форме
,2
m^ + C(zo)y = O, z0 = ^, (2-1-77)
где C(zq) — функция поперечной жесткости балки в точке с координатой Z = ZI) в принятой
на рис. 2.11 системе координат, то есть эта функция представляет собой коэффициент жест-
кости балки, определяемый отношением силы Р к прогибу ур, вызываемой этой силой.
Для определения областей устойчивого движения массы необходимо знать форму и струк-
туру функции C(zo) = C(Por). При достаточно большом числе промежуточных опор балки на
довольно большом интервале времени / эту функцию можно считать периодической с периодом
T=h/V0, так как именно с таким периодом чередуются во времени расстрельные балки. Следо-
вательно, уравнение (2.1.77), принадлежащее к типу уравнений Хилла, при определенных соче-
таниях параметров системы может иметь области параметрического резонанса, границы кото-
рых определяются с помощью теории Флоке-Ляпунова. Таким образом, первоочередной зада-
чей является определение функции C(zq) в рамках задачи о статической деформации балки,
периодически операющейся на упругие опоры, под воздействием постоянной силы Р.
Основываясь на правилах строительной механики тонких стержней, можно утверждать,
что упругая линия перемещений балки, опирающейся на упругие опоры и нагруженной сосре-
доточенной силой Р, описывается дифференциальным уравнением четвертого порядка
^4 = -^51(z-z0)-|y^y(^)51(z-^), (2.1.78)
где EJ — изгибная жесткость балки, z — лонгальная координата, отсчитываемая, например,
от нижнего конца проводника, z$ — координата точки приложения силы Р в принятой сис-
теме координат, kh (£ = 1, 2,..., 7V-1) — координаты упругих опор, ф (z-Zq) — импульсная
функция Дирака (эта функция всюду равна нулю, а при Z-Zq устремляется к бесконечнос-
ти). Определив с помощью (2.1.78) функцию у = y(z) и подставив сюда Z = Zq , получим про-
гиб балки yp-y(zfj), и тогда искомую функцию жесткости можно представить как
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
47
С(;о) = Р/ур = Cof(£, ст), где функция /(<!;, ст), в силу ее периодичности, определена на ин-
тервале
£=a/h = Vot/he[O, 1],
а безразмерный параметр
С0А3
6EJ
(2.1.79)
(2.1.80)
является обобщенным параметром армировки, так как содержит в комплексе все ее исходные
характеристики. В этом отношении данный параметр является своего рода критерием подо-
бия армировок, то есть две произвольные армировки подобны, если они имеют одинаковые
численные значения параметра (2.1.80).
Рис. 2.12. Семейство функций жесткости проводника
Не вдаваясь в подробности
получения решений уравнения
(2.1.78), сопровождающиеся гро-
моздкими выкладками и имеющие
узкоспециальный интерес, ограни-
чимся представлением семейства
функций /(<!;, ст) в графической
форме, как это изображено на рис.
2.12, при (7 = 2" [см. формулу
(2.1.80)], где п = 0, 2, 4, 6, 8, 10.
При малых значениях пара-
метра ст функция /(£, ст) прак-
тически не отличается от «при-
поднятой» косинусоиды и может
быть с большой точностью пред-
ставлена для целей различного
рода теоретических исследова-
ний двумя членами разложения в ряд Фурье, то есть в разложении /(<^,сг) = ^qk cos(2Att£),
k=0
где qk — коэффициенты Фурье, допустима с достаточным приближением запись
/(^,a) = ?0+?1cos(2^). (2.1.81)
С увеличением ст функция /(<!;, ст) приобретает так называемые нелинейные искажения,
делающие ее значительно отличающейся от косинусоиды, следовательно, в этих случаях не-
обходимы ее представления, в отличие от (2.1.81), тремя и более количеством членов разло-
жения. Это обстоятельство обуславливает существенные особенности уравнения (2.1.77) по
сравнению с уравнением Матье, для которого области резонанса давно изучены и построена
специальная карта зон устойчивости, известная под названием диаграммы Айнса-Стретта.
Сравнительная простота вычисления функции /(<!;, ст) дает возможность ее табулиро-
вать для широкого диапазона изменения параметра ст или непосредственно вычислять с по-
мощью ЭВМ как некоторую специальную функцию.
Умея, таким образом, вычислять f(^, ст), несложно построить с использованием тео-
рии Флоке-Ляпунова диаграмму областей устойчивого движения массы по балке на упругих
опорах, то есть диаграмму асимптотически устойчивых решений уравнения (2.1.77), которое
для этих целей в силу определения (2.1.79) запишем в форме
d'y , С0А2
dc~ mV~
сф = 0.
(2.1.82)
48
ГЛАВА 2
Суть теории Флоке-Ляпунова сводится к следующему. Если для уравнения (2.1.82) най-
ти два независимые решения У = <Р1(О и у = <р2С) с начальными условиями
<р,(0) = 1, 0!(О) = О,
<р2(0) = 0, <р2(0) = 1,
то параметрический резонанс наступает в том случае, когда квадратное уравнение
относительно Л имеет действительные корни. Этот алгоритм весьма просто реализовать на
ЭВМ, что и дает возможность построить искомую диаграмму.
Диаграмму устойчивых решений уравнения (2.1.82) целесообразно строить в координа-
тах 1псг (по вертикальной оси) и )J. = co/v (по горизонтальной оси). В этом случае
<о = J— f, v = 2rc — ,
\ т h
(2.1.83)
где f = q0 — среднее интегральное значение периодической функции /(<!;,ст), определяемое
по стандартной формуле
(2.1.84)
о
то есть считается, что «собственная» частота со массы т определена средним интегральным
значением функции жесткости [коэффициентом qt) в разложении Фурье (2.1.81)], а частота
параметрического возбуждения v равна циклической частоте чередования упругих опор про-
водника. В таких обозначениях уравнение (2.1.82) запишется в форме
гс2
(2лд)2
f
сф = 0.
(2.1.85)
Принятый выбор параметров обусловлен необходимо-
стью соответствия искомой диаграммы при мальгх величи-
нах <у с диаграммой параметрических резонансов уравне-
ния Матье. Такого рода диаграмма для первых двух облас-
тей применительно к уравнению (2.1.85) построена на
рис. 2.13 при помощи ЭВМ (остальные области настолько
узки, что не представляют интереса). Отсюда видно, что при
малых су первые две области резонанса подобны областям
резонанса известной диаграммы Айнса-Стретга.
При увеличении су крайняя левая область резонан-
са по параметру со/у существенно расширяется. Так как
этот параметр в соответствии с обозначениями (2.1.83)
содержит скорость движения массы вдоль балки в
знаменателе, то расширение области и смещение ее пра-
вой границы вправо означает уменьшение безопасной
скорости движения, обеспечивающей отсутствие параметрического резонанса.
Таким образом, первая резонансная область, называемой демулътипликационной (так как
резонансные режимы при малых значениях ст реализуются в окрестности дробной частоты
внешнего возбуждения — <о=у/2) представляет наибольшую опасность для рассматривае-
мой системы, причем правая ее граница является тем предельным порогом, который нельзя
не только «переступать», но и следует находиться правее его на некотором «безопасном» рас-
стоянии. Связано это с тем, что рассматриваемая система не является в строгом смысле линей-
Рис. 2.13. Первые две области
параметрических резонансов
при поперечных колебаниях
подъемного сосуда
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
49
ной. описываемой уравнением (2.1.82) или (2.1.85), а содержит в себе нелинейности типа
«зазор», то есть реальные, регламентированные «Правилами безопасности...» зазоры в кон-
тактной паре «башмак-проводник».
Сама по себе демультипликационная область существует независимо от наличия нели-
нейностей, однако зазоры обуславливают условия для возникновения типичных автоколеба-
ний с монотонным увеличением устойчивых амплитуд такого рода колебаний по мере при-
ближения к правой границе. Теоретически амплитуды в этом случае стремятся к бесконеч-
ности даже, несмотря на учет рассеивания энергии, в чем состоит одно из принципиальных
отличий параметрических систем от обычных систем с внешним возбуждением. Учет нели-
нейностей приводит к необходимости интегрирования уравнения типа
У
У
dc~ dt mV2 V '[ 0 при
<д
(2.1.86)
А = гпах(у) и частотного параметра оз/у
Рис. 2.14. АЧХ параметрических
колебаний подъемного сосуда
где 5 — коэффициент рассеивания энергии колебаний в рамках гипотезы внешнего вязкого
трения; функция sgn(y) означает «знаку»; А — величина зазора («на сторону») между рабо-
чими поверхностями проводников и башмаков. Цель интегрирования уравнения (2.1.86) со-
стоит в построении серии амплитудно-частотных характеристик (АЧХ) в координатах
[см. определения (2.1.83)].
Примеры АЧХ для некоторых значений же-
сткостного параметра ст [см. обозначение
(2.1.80)] показаны на рис. 2.14. Здесь вертикаль-
ные пунктирные линии символизируют правую
границу демультипликационного резонанса для
конкретно приятого значения параметра ст, ко-
торому в соответствии с диаграммой рис. 2.13
соответствует вполне определенное значение р .
Цифры на выносных линиях являются показа-
телями степени в <7 = 2” . Горизонтальная пунк-
тирная линия при Л/Д = 1 является естествен-
ной нижней (асимптотической) границей для ус-
тановившихся амплитуд колебаний.
Критерием безопасной «близости» расчетных
значений (a>/v} к резонансным (w/v)^, со-
ответствующим правой границе демультиплика-
ционной области на рис. 2.13, является, осно-
ванное на расчетах прочности проводника, ус-
ловие гпах(у) < ЗД , то есть условие А/ Д < 3 . Исходя из этого неравенства, при помощи АЧХ,
представленных на рис. 2.14, где предельное условие прочности Л/Д = 3 отображено сплош-
ной горизонтальной линией, определяется допустимый запас устойчивости параметричес-
ких колебаний подъемного сосуда:
4,875[(w/v)^-0,16] при (to/v)^<0,9,
3,6 при (<o/v) >0,9,
(2.1.87)
при помощи которого устанавливается основное условие параметрической устойчивости дви-
жения подъемных сосудов: оз/у2(1СЧ > [A](<7J/v )2^, что с учетом обозначений (2.1.83) записы-
вается в форме следующего соотношения:
С0Л2/ > 4л2тЦ,2 [кЦоз/у)2^,
(2.1.88)
50
ГЛАВА 2
причем здесь (<о/у) — это просто число, принимаемое по правой границе демультиплика-
ционного резонанса в соответствии с рис. 2.13 в зависимости от ст. Из (2.1.88) можно опре-
делить максимально допустимую величину так называемой интенсивности движения сосуда
тУ?~ или при заданной интенсивности — определить фактический запас устойчивости к.
Основываясь на изложенном подходе, не представляет трудности рассмотреть движе-
ние подъемного сосуда как твердого тела с пятью степенями свободы (перемещение по шес-
той степени свободы — движение в вертикальном направлении, считается заданным), учесть
собственные податливости конструкции сосуда, принять во внимание то обстоятельство, что
каждый из двух проводников, вдоль которых движется сосуд, опирается на различные рас-
стрелы, имеющие свои собственные значения параметра Со, и т. д. (см. также 2.3).
2.1.7. Оптимальный профиль наклонного ствола
Извечной проблемой эксплуатации подъемных установок в наклонном стволе является
интенсивное истирание канатов. Нередко их срок службы исчисляется считанными месяца-
ми, а если учесть, что длины наклонных стволов составляют порядка 1000 м (имеются ство-
лы длиной до 2000 м), то издержки на закупку новых канатов выливаются для производ-
ственников в довольно внушительную сумму.
Применяемые в настоящее время способы уменьшения истирания канатов носят, если
можно так сказать, пассивный характер: навешиваются канаты с повышенным диаметром
внешних проволок, в том числе канаты из пластически обжатых прядей, используются путе-
вые ролики и др. Но все эти меры не в состоянии устранить основной фактор — канат прак-
тически по всей своей длине лежит на почве в силу свойств гибкой нити в гравитационном
поле Земли.
На рис. 2.15 показано, как мог бы вести себя канат при подъеме сосуда вдоль прямоли-
нейного наклонного пути АО (пунктирная линия на рисунке), если вообразить, что посреди-
не между рельсами вырыта плоская траншея для свободного размещения в ней каната (кста-
ти, это тоже можно рассматривать как один из пассивных способов борьбы с истиранием,
если бы не то обстоятельство, что в таком случае глубина траншеи в ее средней части соста-
вила бы несколько десятков метров).
Рис. 2.15. К выводу уравнений статической формы провисающего каната
На данном рисунке Яи В — соответственно вертикальное и горизонтальное расстояния
от точки подвеса сосуда в начальном положении до оси подъемной машины (или копрового
шкива); (р — угол наклона ствола; а0 — угол наклона каната в начальном положении сосу-
да, и при этом Zq — его начальная длина; р.. — реакция натяжения каната у прицепного
устройства; mg — вес сосуда; N— суммарная нормальная реакция рельсов наклонного пути;
Fr — суммарная сила трения качения ходовых колес по рельсам; а и Р — соответственно
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
51
текхший угол наклона каната и его натяжение в произвольной точке; qg — вес единицы
пины каната (для сокращения записи здесь принято q = qr); х, у — принятая координатная
система отсчета; О' — некоторое промежуточное положение сосуда в стволе, при котором
длина каната равна L (вначале предполагается, что путь является прямолинейным).
На рис. 2.15 справа изображена схема действующих сил на элементарный отрезок кана-
та длиной Д£ , где ДР и Да — соответственно приращение усилия в конце рассматривае-
мого отрезка и приращение его угла наклона (указанные приращения являются алгебраи-
ческими величинами). При помощи приведенной схемы условия равновесия отрезка в про-
екциях всех сил на оси х, у запишем в виде:
(Р + ДР) cos (а + Да) - Р cos а = 0, (Р + ДР) sin (а + Да) - Р sin а = -qgkL.
При Д£—>0 в результате необходимых преобразований данные выражения сводятся к
дифференциальным уравнениям
dP nda . п dP . nda
—— cosa-P—— sina = 0 , — sma + P—cosa = -<?g,
dL dL dL dL
откуда следует, что
-^-(Pcosa) = 0, -^(Psma) = -(g-.
Общие решения этих уравнений выглядят как
Pcosa = q, Psina = C2-^gZ. (2.1.89)
где q и С2 — постоянные интегрирования. Из (2.1.89) получим
tga = (C2-qgL)/Ci. (2.1.90)
В частности, при помоши (2.1.89) с подстановкой L=L$ находим
P0cosa0=q, Posinao=q-ggq. (2.1.91)
Из (2.1.89) виден физический смысл констант Q и С2 — это проекции натяжения кана-
та соответственно на оси х и у непосредственно у копрового шкива, то есть при £ = 0. В то
же время, как следует из (2.1.91), Q и С, -qgL$ — это проекции натяжения каната соответ-
ственно на оси х и у непосредственно у подъемного сосуда, то есть при L- Lq . Значит, гори-
зонтальная составляющая натяжений каната во всех его точках остается постоянной.
Константы q и С2 получим, рассматривая условия равновесия сосуда в проекциях на
оси х, у всех действующих на него сил:
7Vsin<p + Ту cos<p-7q cosa0 = 0, /Vcos<p-FT simp + Po sina0 = mg.
А так как FT = fN , где/— коэффициент трения качения колес сосуда по рельсам [см. в
связи с этим формулы (2.1.9) и (2.1.10)], то
2V(sin<p + /cos<p)-P0 cosa0 =0, Af(cos<p-/sin<p) + P0 sina0 = mg.
Рассматривая эти соотношения как систему алгебраических уравнений относительно
неизвестных N и Ро, получим
cosa0 р-т sin<p + /cos<p
cos(a0-<p)-/sin(a0-<р)’ 0 cos(a0-<p) + /sin(a0-<р)
(2.1.92)
Соотношение для Р. из (2.1.92) теперь подставим в условия (2.1.91), с помощью кото-
рых найдем
52
ГЛАВА 2
(sin<p + f cos<p')cosan (sin<p + f cos<p')sintzn
Q=mg \ У \ 0 C2-mg \ * J 0 + ggq. (2.1.93)
cos(a0-(p)-f sin(a0-q>) cos(a0 ~(p)+f sin(a0-cp)
В формулах (2.1.93) начальный угол а0 и начальная длина каната q остаются пока не-
известными величинами, но их можно однозначно определить изложенным ниже способом.
В соответствии со схемой, приведенной на рис. 2.15, как видно, имеют место диффе-
ренциальные равенств dx = dL cos a, dy = dLsina , в силу чего и с использованием (2.1.90) те-
кущие координаты провисающего каната определяются выражениями
%(£) = / , C1 dL, у(Ь')=\-г=£г qgL dL.
0 7(Q f + (C2-qgL)1 0 7(q )2 + (C2-qgL)1
(2.1.94)
Элементарное интегрирование в (2.1.94) приводит к следующим результатам:
Q ^q2 + (C2-^g£ + qgL — C2
(£) = —ln ---/ , ?---------
7q2+q2-q
(2.1.95)
qgt
что представляют собой уравнения цепной линии в параметрической форме (в данном случае
параметром или так называемой лонгальной координатой является текущая длина каната
Ze[0, q]). При подстановке сюда L = L$ должны, естественно, выполняться условия
^tf+(C2- qgL(i )2 + qgLj - С2
№+С22-С2
(2.1.96)
S = —In
qg
-yl^ + ^-qg^)1
где Ви Н — координаты сосуда в начале движения (см. рис. 2.15). Условия (2.1.96) с учетом
определений (2.1.93) для констант q и С2 образуют систему двух трансцендентных уравне-
ний относительно параметров а0 и q.
Это, так сказать, формальный подход. В действительности же местонахождение сосуда
на наклонной плоскости с заданным углом наклона <р определяется уравнениями равнове-
сия, и поэтому заранее нельзя считать координаты В и Н известными. Известной и вполне
определенной величиной можно считать только начальную длину каната q, а одну из коор-
динат В и //требуется определить. Но в силу схемы, приведенной на рис. 2.15, Н = Btg<p , то
есть фактически два соотношения системы (2.1.96) эквивалентны одному уравнению
^Сгх+С^-^ + {С2-дёЦ2)1 ^+(C2-qgL^)1+qg^-C2
G n VoM-Q
tg<p,
(2.1.97)
из которого и определяется угол а0, в результате чего при заданной начальной длине каната
q координаты В и Я найдем при помощи выражений (2.1.96).
Теперь обратимся к вопросу построения переменного профиля пути. Одним из очевид-
ных и «напрашивающихся» способов построения такого профиля является требование ра-
венства угла наклона трассы (р углу наклона оси каната у прицепного устройства а0 во всех
точках ствола (то есть при условии (р=а0), благодаря чему формулы (2.1.93) приобретут вид
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
53
Q =/7zg(sintZQ + /cos tZg) cos tZg, С2 = mg(sina'o +f cosa'o)sina'o +qgl^, (2.1.99)
где a0 и Lq означены «штрихами», чтобы отличать их от соответствующих величин, кото-
рые они принимают в начале движения. Тогда (2.1.90) для тангенса угла наклона запишем
как
tga z ч = fflg(sinaQ +/cosao)sinaQ + gg(£^ -£)
mg (sin a'o + f cos a'o) cos a'o
В данном представлении = Ц, -LH, где LH — это навитая на барабан длина каната от
начала движения снизу вверх, если считать, что Lq — начальная длина каната, как было
ранее обусловлено. Заметим, что в (2. 8.90) при каждом «новом» значении LH параметр а'о
вычисляется как корень трансцендентного уравнения (2.1.97) с учетом представлений (2.1.99).
Таким образом, переменный профиль ствола в принятой концепции с использованием
дифференциальных равенств dX=dLcosa[r dY=dLsina'(j определяется как
X = j t/£costZQ, Y = j dLsma'o
о 0
Следует, однако, сказать, что изложенный здесь
подход к определению профиля ствола оказывается
неприемлемым, так как в начале движения сосуда
канат все же «ложится» на почву. Это обстоятельство
строго доказывается, но в данном случае ограничим-
ся так называемым численным экспериментом, ре-
зультаты которого представлены на рис. 2.16. Здесь
кривая 1 есть линия свободного провисания каната
при нахождении сосуда в точке О, в которой угол на-
клона рельсового пути равен углу наклона каната.
Кривая 2 является линией переменного профиля, по-
строенного по принятому правилу. Как видно, в дан-
ном случае канат практически по всей своей длине
располагается по почве выработки, хотя по мере про-
движения сосуда вверх зона контакта постепенно
уменьшается, исчезая вовсе при перемещении сосу-
Рис. 2.16. К расчету переменного
профиля наклонного пути
да примерно на четверть длины ствола.
Тем не менее, описанный принцип можно взять за основу применительно для началь-
ной точки ствола (точка О, в которой определяется первоначальный угол наклона а0) и за-
тем профиль пути принять эквидистантным линии свободного провисания каната (кривая 1
на рис. 2.16). Разумеется, в этом случае на всем пути движения сосуда, за исключением точ-
ки О, угол наклона каната у прицепного устройства будет несколько превышать угол накло-
на криволинейного профиля ствола, но этим расхождением можно пренебречь.
2.1.8. Критическая длина струны каната
Вопрос о поперечных колебаниях наклонной струны головного каната (его части, про-
стирающейся от барабана машины до копрового шкива) весьма актуален в связи с необхо-
димостью разработки рекомендаций по назначению при проектировании рациональных и
безопасных параметров струны — ее длины и угла наклона.
В данном разделе даются теоретические основы и описание «механизма» возбуждения
поперечных колебаний струны, опираясь на представлении о канате как естественно закру-
ченном стержне, так как именно эта особенность может быть реальной причиной взаимо-
связи динамических перемещений струны в двух ортогональных поперечных направлениях.
На рис. 2.17 схематически изображены: барабан машины 1, копровой шкив 2, статичес-
кое состояние струны каната 3, динамическое состояние каната по основной форме колеба-
54
ГЛАВА 2
ний 4. Начало декартовой системы координат xyz совмещено с точкой О (точкой набегания
или сбегания каната с барабана машины), причем ось z проходит через точку В, как точки
сбегания или набегания на копровой шкив.
Рис. 2.17. Расчетная схематизация струны каната
Рассмотрим уравнения малых совместных поперечных колебаний струны каната как
гибкой закрученной нити в двух взаимно перпендикулярных плоскостях xz и yz в форме
Э2х Э2х .тЭ3у
-F—v + q —Т+М—ф = 0
Э52 дГ Э53
Э2у Э2у d3x
~F^ + Q -^-M-y = qgcosp
ds dt ds
(2.1.100)
где x и у — перемещения точек струны соответственно в плоскости xz и yz; s — дентальная
координата точек струны, отсчитываемая от точки О; t — текущее время; Д — угол наклона
продольной оси струны каната к горизонту в статическом состоянии (считается, что этот
угол практически не зависит от лонгального параметра s в силу естественной малости стати-
ческого провисания струны, и поэтому он представлен таким, как показано на рис. 2.17); Fvt
М — соответственно продольное натяжение и крутящий момент относительно продольной
оси каната; q-qr — линейная плотность каната; g — ускорение свободного падения.
Внутренние силовые факторы Fn Мв (2.1.100) считаются независящими от лонгально-
го параметра 5 в пределах длины струны и определяются следующими соотношениями:
^ = ^ + ^«(l-cosvz), (2.1.101)
M=cdKF=cdK[Fcm+FduH(l-cosvt)], (2.1.102)
где Fcm и FdllH — соответственно статическое натяжение и амплитудная квазидинамическая
составляющая натяжения каната в точке набегания струны на копровой шкив при спуске
сосуда или в точке сбегания струны с копрового шкива при подъеме этого же сосуда в режи-
мах предохранительного торможения; v — частота основного тона продольных колебаний
рассматриваемого сосуда, обусловленных предохранительным торможением машины;
с = с /а — безразмерный параметр, устанавливающий взаимосвязь продольных и крутиль-
ных деформаций каната как естественного закрученного стержня [см. формулу (15.1.1)], при-
чем, судя по данным табл. 15.1, для большинства канатов двойной крестовой свивки с~ 0,1;
dK — диаметр каната.
Квазидинамическая компонента FdUH в формулах (2.1.101) и (2.1.102), как известно, свя-
зана со статическим натяжением Fcm (далее в 15.2 этот параметр обозначен как i^) по-
средством соотношения
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
55
FdUH = FcmaT I S, (2.1.103)
где ат — величина замедления машины при предохранительном торможении, причем счи-
тается, что ат -ас >0 при спуске и ат=-ап <0 — при подъеме данного сосуда [определения
величин ас и ап даны в 3.2 в пояснениях к соотношениям (3.2.11)]. Разумеется, в этих двух
случаях замедления различны не только по модулю, но и по знаку. Таким образом, FduH в
соотношениях (2.1.101) и (2.1.102) является алгебраической величиной.
Система дифференциальных уравнений (2.1.100) должна удовлетворять естественным
условиям по краям струны, отражающим равенство нулю перемещений в точках 5 = 0 и s = l,
где I — расстояние между точками О и В на рис. 2.17:
х(0) = %(/) = 0, у(0) = у(/) = 0. (2.1.104)
С формальной точки зрения четырех граничных условий (2.1.104) не достаточно для
системы (2.1.100) шестого порядка, и в этом отношении граничная задача (2.1.100), (2.1.104)
является не вполне корректной с точки зрения математической физики. Необходимая кор-
ректность задачи может быть достигнута, если в окрестности граничных точек канат рас-
сматривать как стержень, обладающий изгибной жесткостью.
Такой подход, однако, кроме усложнения, ни к чему существенному не приведет, тем
более что в рамках предполагаемого применения вариационных методов для решения урав-
нений (2.1.100) четыре граничные условия (2.1.104) являют собой необходимый для получе-
ния корректных решений минимум.
Известно, что угол Д практически не зависит от дентального параметра s (о чем гово-
рилось выше), тогда максимальная величина статического провисания струны, как это изоб-
ражено на рис. 2.17, определяется по формуле
я?/
^^-cos/3, (2.1.105)
°* ст
где / — длина струны каната, измеренная как расстояние между точками набегания на коп-
ровой шкив и сбегания с барабана машины. В этом случае Д является углом наклона отрезка
длиной / к горизонту.
Введя комплексную переменную Z = x + iy, систему уравнений (2.1.100) нетрудно пре-
образовать к виду
У 7^7 cP 7
-F~— + q —-iM^ = iqgCOSp. (2.1.106)
ds dr ds
где / = дЛч — мнимая единица. Таким образом, вместо системы двух уравнений (2.1.100) в
дальнейшем рассматривается одно уравнение (2.1.106). Если будет получено решение этого
уравнения Z = Z(s,t), то искомые перемещения х и у найдутся как
x = Re(Z), y = Im(Z). (2.1.107)
Решение уравнения (2.1.106), удовлетворяющее в силу (2.1.104) граничным условиям
Z(0) = Z(/) = 0, строится вариационным методом Галеркина в форме
z=Z%(z)sin^- (5е[°, d)>
k=\ '
(2.1.108)
где (pk (г) — подлежащие определению координатные функции, п — номер приближения
(например, может быть л = 1, 2, ...). Подстановка (2.1.108) в уравнение (2.1.106) дает
чз 1
К7Г S
(рк (г)cos-----> = iqgcos /3.
' кл
х 4т
*=1 V '
/ ч .. i ч • клв ,.г(кл
W)+PW) —
56
ГЛАВА 2
Умножая обе части этого выражения на функции sin(j7T5//) (у = 1, 2, и интегрируя
по интервалу определения s, получается система уравнений для определения <рД0:
кп А ? \ „ - гл п
-j-\<PkV)Cjk ^JpgDjCosp,
(2.1.109)
где у = 1, 2, ..., а безразмерные константы Cjk, Dj определяются соотношениями:
0 при
k*j
k = j >
(2.1.110)
В дальнейшем ограничимся вторым приближением метода Галеркина, и в разложении
(2.1.108) примем п-2 . Тогда, с учетом представлений (2.1.109), для координатных функций
^(0 и ф2(0 в соответствии с (2.1.110) получим систему дифференциальных уравнений:
тт
^~<p2(/) = /pg|cos/3
у} </’2(0-м/|ут(Р1(г)=0
и при этом ряд (2.1.108) приобретет вид
Z=<pj (r)sin
ns ,, . 2ns
—+ <p2(r)sin—.
(2.1.111)
(2.1.112)
Учитывая форму записи (2.1.101) и (2.1.102) для силовых факторов F и М, содержащих
гармоническую компоненту cosvt, решение системы (2.1.111) следует искать в форме супер-
позиции гармоник с частотой v/2, то есть представим
(р{ (t) = Д cosy + Bi siny + С15 <р2 (7) = Д> cos-у + jB? siny + С?, (2.1.113)
где Д, Д, Сь А2, В2, С2 — некоторые константы.
При подстановке (2.1.113) в систему (2.1.111) воспользуемся методом гармонического
баланса, согласно которому сумма амплитуд при каждой гармонике с наинизшей частотой
v/2 должна равняться нулю. В результате такого подхода получим, прежде всего, для сво-
бодных членов в (2.1.113) систему неоднородных линейных алгебраических уравнений
Q - 16/eQ = Xi, -isCx + С, = 0,
откуда находим
Q =/Л/(1 + 16г2), Q =-е1/(1 + 16£2), (2.1.114)
где обозначено:
— 4 ^7?/2 2d
F =Fcm + FduH, е = с—(2.1.115)
я Frn 3 /
Так как в силу обозначений (2.1.115) параметр £ «1, то Q = /Л и Q = -еЛ , и тогда ста-
тическая форма струны в соответствии с (2.1.112) и (2.1.113) представится в виде
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
57
_ . Л-5
z^Qsin—
_ . 2ns . . ns . 2ns А
+ C,sin---— к Zsin-----£Sin---- ,
1 I 1 1 J
следовательно, благодаря обозначениям (2.1.107), для статических компонентов перемеще-
ний точек струны каната будем иметь:
xtm = Re('m) = -fAsin —, у(7к = Irn(ztm ) = Л sin —. (2.1.116)
Отсюда видно, что по оси х (см. рис. 2.17) х™ = ±еЛ оказывается при s = l/4 и s = 3l/4,
а по оси у имеем у™' --к при s = l/2 .
Заметим, что значение Л как амплитуды статической формы струны в вертикальной
плоскости, вычисленное с помощью (2.1.115), и значение^, вычисленное по формуле
(2.1.105), при одинаковых входящих туда физических параметрах отличаются между собой
примерно на 3%, что свидетельствует о приемлемости применения метода Галеркина к рас-
сматриваемой задаче.
Для коэффициентов Ах, Въ А2, В-> метод гармонического баланса приводит к двум неза-
висимым системам однородных линейных алгебраических уравнений
(1-апд)4-16/еЛ2 =0, (1—ос12А/)^1 — I = 0,
/еЛ1-(1-«21Д)Л = ^ ]’ ^-(1-«22Д)^-0,
где обозначено
, qgl а -- qgl
" 4л:2 (Fcm + Fdu„/2)’ 12 4x\Fem + 3Fdm/2)
=__________Qgl_______ а =_____________Qgl_________
21 16тг2(^ + ^„/2)’ 22 16тг2(Сот + 3^„/2)
(2.1.118)
v2l
F =— (2.1.119)
g
Система (2.1.117), как известно, имеет нетривиальные решения в том и только в том
случае, когда определитель, составленный из коэффициентов уравнений (2.1.117), равен нулю.
При £ «1 это требование сводится к выполнению одного из равенств
1-апц = 0, l-a21Ju=0, 1—tzI2ju = 0, l-a22ju=0. (2.1.120)
С использованием обозначений (2.1.118) и (2.1.119) систему уравнений (2.1.120) приве-
дем к эквивалентной форме:
,2_4л?2(^ + ^/2) v2_4^2(Fcm + 3Fdu„/2) шип
V1 ---------’ V2 -----------------Д--------’ (2.1.121)
Ql Ql
2_167t2(Fcm + FduH/2) 2Jfa2(Fcm + 3Fdm/2)
V3 - - , V4 - . (2.1.122)
Ql QF
Числа v2, vj в (2.1.121) определяют границы так называемого демультипликационного
параметрического резонанса (для сравнения см. рис. 2.13, где рассматриваются подобные яв-
ления). Действительно, если обозначить
58
ГЛАВА 2
то при Vj <v <v2 несложно получить оценку
, h A (v У ->(. h A
со 1— < — <со~ 1 + — , (2.1.124)
< 2) I2) I 2/
что с точностью до малой величины h как раз соответствует области демультипликационно-
го параметрического резонанса для уравнения Матье.
Числа vj, V4 в (2.1.122) определяют границы второй зоны параметрического резонанса,
которая соответствует значительно большей частоте v и на этом останавливаться не будем.
Обойдем стороной также вопрос определения констант Д, Вх, А2, В2 в представлениях
(2.1.113), необходимых для получения общего решения (2.1.112).
Займемся более подробно явлениям параметрической «раскачки» струны, которая насту-
пает при выполнении условий (2.1.124). При достаточно длительном нахождении в таком ре-
жиме амплитуды колебаний струны в двух направлениях непрерывно увеличиваются во вре-
мени по экспоненциальному закону, что может, в конце концов, привести к катастрофичес-
ким последствиям. Однако в рассматриваемой системе параметрический резонанс, строго го-
воря, носит чисто символический характер, являясь, так сказать, «кажущимся» явлением.
С физической точки зрения — это своего рода внутренний резонанс, имеющий характер
биений, так как отсутствует главный фактор вообще для любого резонансного состояния —
приток периодически изменяемой энергии извне. К тому же длительность пребывания в та-
ком резонансном состоянии ограничена не столько относительной кратковременностью про-
цесса торможения, сколько объективным фактором — переменностью длины отвеса голов-
ного каната, что обуславливает неизбежное изменение частотных характеристик системы и
связанную с этим «расстройку» условий резонанса.
Вместе с тем, и как бы там ни было, выполнение условий (2.1.124) все же означает, что
система находится в каком-то особом и весьма неблагоприятном состоянии, и реализацию
такого состояния следует избегать, то есть необходимо производить отстройку от резонанса
(будем продолжать использовать этот термин). Иначе говоря, система должна быть такой,
чтобы выполнялось одно из условий отсутствия демультипликационного резонанса:
(v/2)2 >ш2(1 + /г/2), (2.1.125)
(v/2)2 <«2 (1-/7/2). (2.1.126)
Однако при выполнении условия (2.1.125) возникает опасность «попасть» в последую-
щие зоны резонанса на частотах v, 3v/2 и т. д., и по этой причине отстройку от резонанса
целесообразно производить, руководствуясь неравенством (2.1.126), которое с учетом обо-
значений (2.1.123) запишется как
ч *
или с учетом определения (2.1.103)
2 .^£ст
2ft I н
I 8 ) 8
откуда получаем условие для предельной (критической) длины струны
1<1КР
(2.1.127)
При расчете критической длины струны по формуле (2.1.127) достаточно ограничиться
рассмотрением режима предохранительного торможения при подъеме груженого сосуда в край-
нем верхнем его положении в стволе (в окрестности приемной площадки клети или места
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
59
разгрузки скипа), так как именно такой режим торможения обуславливает минимум I. Сле-
довательно, ат в (2.1.127) есть максимальное по модулю замедление машины ат<0 [см. ком-
ментарий к формуле (2.1.103)].
Квадрат «несущей» частоты v2, входящий в формулу (2.1.127), для двухконцевой подъем-
ной установки определяется, сообразуясь с принятым положением в стволе данного конк-
ретного сосуда, как квадрат наибольшего корня биквадратного уравнения
4 ^1
V - —+
q+^2 ! С2
т} т т2
) пъ+т +ггц
V +С1С2—!---7-- = 0,
т}т т2
(2.1.128)
где т{ и т2, кг — массы соответственно первого и второго сосудов (сосуд с массой тх счита-
ется груженым); т — приведенная к окружности навивки масса всех вращающихся элемен-
тов машины, включая копровые шкивы и массу головных канатов; и с2, Н/м — коэффи-
циенты жесткости соответствующих вертикальных отвесов канатов, определяемые по фор-
мулам:
a Ed; aEd^
Л Z1 — Л
* ^"2 ’
Anin + Anin + EI + 1
(2.1.129)
где в свою очередь для круглопрядных канатов двойной свивки <7 = 0,3 — конструктивный
безразмерный параметр [см. в 15.2 табл. 15.2.1 и формулу (15.2.3)]; £"=2,Об' 105, EI/мм2 — мо-
дуль упругости стали; dK, мм — диаметр каната; Zmin , м — минимальная длина вертикально-
го отвеса каната; Н, м -— высота подъема.
В связи с (2.1.129) и (2.1.128) соотношение (2.1.127) необходимо рассматривать как ите-
рационное по отношению к искомому параметру /.
Для одноконцевого подъема квадрат частоты колебаний определяется непосредственно
по формуле
1 a Ed; т + т
v =-—---------
L^+l тт
где т — масса подъемного сосуда с грузом; т — приведенная к окружности навивки масса
всех вращающихся элементов машины, включая копровой шкив и массу головного каната;
Zmin — минимальная длина вертикального отвеса каната.
В этом случае также достаточно вычислить частоту при минимальной величине отвеса
каната, а необходимое замедление аТ — определить как замедление предохранительного тор-
можения при подъеме груженого сосуда вверху.
Так как в действительности параметры в формуле (2.1.127) являются фактически взаи-
мозависимыми, то представляется возможным осуществить следующие преобразования.
Прежде всего, условимся считать, что «параметрические» поперечные колебания струны воз-
буждаются непосредственно после остановки машины, когда, как известно, продольные ко-
лебания сосудов наиболее интенсивны. Тогда квадрат циклической частоты с использовани-
ем соотношений типа (2.1.129) можно определить по формуле (с поправкой по Рэлею):
(Z + /)[m + ^(Z + /)/3]’
в которой длина отвеса Z = Zmin должна быть минимальной, чтобы величина I также при-
нимала наименьшие значения (здесь т — масса груженого сосуда). Это в свою очередь озна-
чает, что «параметрические» колебания струны наиболее опасны в режиме торможения при
подъеме груженого сосуда в верхней части ствола, то есть в окрестности верхней приемной
площадки. Статическое натяжение каната определим по формуле
Zra = (m + 9Z)g,
(2.1.131)
60
ГЛАВА 2
а так как в (2.1.130) и (2.1.131) масса груженого сосуда т значительно превосходит массу
отвеса каната qL при Z. = Z.min. то соотношения (2.1.130) и (2.1.131) можно переписать в не-
сколько упрошенной форме:
2_ a Ed2.
(L+E)m
Fcm=mS-
(2.1.132)
Линейную плотность каната допустимо с достаточной для инженерных целей точнос-
тью представить как [см. в 15.2 табл. 15.3 и формулу (15.2.8)]
q = \^qycmd2K, кг/м, (2.1.133)
где dK, мм — диаметр каната; уст = 7800 кг/м3 — объемная масса стали; для круглопрядных
канатов двойной свивки q ~ 0,493 — безразмерный параметр.
В формуле (2.1.132) учтем также, что L = = klsin/3 , где безразмерный множитель к
учитывает возможное увеличение (£ > 1) или уменьшение (к < 1) величины L^n по сравне-
нию с Zsin /3 . Этот множитель определяется по взаимному расположению по вертикали точ-
ки набегания каната на барабан подъемной машины, оси копрового шкива и прицепного
устройства каната при нахождении сосуда в окрестности приемной площадки (обычно к < 1).
Тогда подстановка (2.1.132) и (2.1.133) в (2.1.127) приведет к следующему результату:
.2
ЛИ /7т-
=0,814—^(1 + ^sin/3) 2 1 + ^-
^4 V К ) g
ы
(2.1.134)
где множитель «0,814» имеет размерность м-мм4 / кг2 и получается как результат вычисле-
ния комбинации вполне определенных констант: 2n’2106g/(o^'ycm£).
Наименьшие расчетные величины I соответствуют наиболее неблагоприятному слу-
чаю, когда аТ = -5 м/с3 (точнее, когда o7-=-g/2). При этом (2.1.134) приобретает вид:
э
YYI
lKp=Q,M7-^ + ksm/3).
Для шахт глубиной свыше 600 м допускается концевую массу т принимать такой, чтобы
выполнялось условие [см. в 15.2 формулу (15.2.3) и табл. 15.2]
Осу,./{[ту]ё)^т,
(2.1.135)
где QcyM — суммарная разрывная прочность всех проволок каната; [ту] — так называемый
условный запас прочности, принимаемый равным 8,5 для грузового, 10 для грузолюдского и
13,5 для людского подъемов. А так как [см. в 15.2 формулу (15.2.6) и табл. 15.3]
(2.1.136)
где для круглопрядных канатов двойной свивки Q- 0,389 — безразмерный параметр; <Упр —
стандартная маркировочная группа прочности каната, причем
cr„p/g = 140, 160, 170, 180, ... кг/мм2, (2.1.137)
то подстановка (2.1.135) в (2.1.134) с учетом (2.1.136) приводит к соотношению
1кр <0,123
(1 + k sin/3)
2 1Л
S
\ат\
g
(2.1.138)
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
61
Определение критической длины струны по формуле (2.1.138) при к = \ можно осуще-
ствить при помощи номограммы, представленной на рис. 2.18.
Здесь замедления ат условно показаны как положительные величины. Символ ст услов-
но означает соответствующие величины а / g из стандартного ряда (2.1.137). Буквы «г», «гл»,
<>л» соответствуют назначению подъема: грузовой, грузолюдской, людской. Порядок пользо-
вания номограммой очевиден из представленной на рисунке схемы (в данном примере для
грузолюдской подъемной установки получено /к/, = 64 м при ft=42°, о / g=VK3 кг / мм/,
ат = —3 м/с1).
<хт=бмгс5 1
ff=ieo i7o 160
Рис. 2.18. Номограмма для определения критической длины струны каната
Как следует из изложенных построений, критическая длина струны каната тем больше,
чем меньше по модулю замедление предохранительного торможения при подъеме гружено-
го сосуда в окрестности верхней приемной площадки. На практике величина этого замедле-
ния не может быть произвольной, так как при нерегулируемом предохранительном тормо-
жении она «жестко» связана с таким важным нормативным параметром как допустимое за-
медление [ас] = 1,5 м/с1 при спуске груженого сосуда (см. в 3.2 табл. 3.1). Так как во избежа-
ние переподъема фактическое замедление ас не должно быть меньшим [ас] при спуске гру-
женого сосуда в окрестности нижней приемной площадки, то требуемое для этого тормоз-
ное усилие FT должно определяться соотношением
FT >Д5ст + ^[ос], (2.1.139)
где &Scm — разность статических натяжений канатов, — суммарная (приведенная к
окружности навивки каната) масса подъемной установки. Для двухконцевого неурав-
новешенного подъема AScm = [пстгр/2 + q(Ln..a - A^^g, где тгр — масса груза; пс =1 для си-
стемы подъема с противовесом, пс=2 для двухскиповой (двухклетевой) подъемной уста-
новки; Lmax=Lmin + H — максимальная длина отвеса каната. Для одноконцевого подъема
&Scm = (mc+rn?p+qLmax}g , где тс — масса порожнего сосуда.
62
ГЛАВА 2
Рассчитанное по формуле (2.1.139) тормозное усилие будет реализовано и при торможе-
нии с подъемом груженого сосуда вверху ствола, то есть в этом случае фактическое замедле-
ние ат определяется из равенства
Ту =-Д5ст -, (2.1.140)
где для двухконцевого неуравновешенного подъема разность статических натяжений кана-
тов есть A5'c,m=[ncmt,/,/2-^(£max-4lin)]g, а для одноконцевого - bS'^^m'+m^+qL^g.
Подставляя (2.1.139) в (2.1.140), найдем для двухконцевой установки
т
-aT>[ac] + nc^g, (2.1.141)
тпр
и для одноконцевой —
1(тс+т \+qH
+ -----g, (2.1.142)
т
пр
где обозначено //=1^ -Дпи1 — высота подъема.
Из соотношений (2.1.141) и (2.1.142) видно, что по модулю замедление аТ всегда пре-
восходит величину [ас] = 1,5 м/с1, и чтобы это отличие сделать минимальным, необходимо
искусственно увеличить, в разумных пределах, приведенную массу подъемной установки. В
ряде случаев это может даже оказаться вынужденной мерой, если окажется, что \aT\>g/2
(условие «подпрыгивания» сосуда, то есть когда натяжение каната становится равным нулю).
Радикальным способом уменьшения разности |аг|-[ас] может быть применение систем
избирательного предохранительного торможения, при котором при спуске груза реализуется
тормозное усилие (2.1.139), а при подъеме — (2.1.140) с подстановкой туда аТ =-[ас] (вариант
|flrZ'|< [^d недопустим по соображениям обеспечения своевременной остановки машины). В
тех случаях, когда принятие конструктивно-компоновочных решений вынуждает необходи-
мость увеличения струны каната, следует применять машины с избирательным способом тор-
можения, выпуск которых освоен отечественной промышленностью (см. 2.1.4).
2.2. Основы динамики шахтного подъема
В данном разделе рассматриваются динамические процессы при работе подъемной ус-
тановки в эксплуатационных и аварийных режимах.
Вывод дифференциальных уравнений динамических состояний представленной на
рис. 2.19 механической системы пяти дискретных тел (два сосуда, два копровых шкива и ма-
шина с приведенными массами редуктора и ротора двигателя), связанных между собой уп-
ругими инерциальными (с распределенными массами) связями — канатами, основаны на
исследованиях проф. В. И. Дворникова и его учеников [12, 181].
2.2.1. Гипотезы, обозначения и системы координат
Построение математической модели динамического состояния подъемной установки
основываются на следующих основных упрощающих рабочих гипотезах и концепциях.
1. Все головные канаты машины считаются не крутящимися. Принимаются во внима-
ние лишь их продольные перемещения вдоль собственных продольных осей, в том числе для
наклонных струн канатов. Канат рассматривается как одномерный объект с распределенной
массой, продольной жесткостью и диссипативной характеристикой.
2. Массы ветвей уравновешивающих канатов приведены к соответствующим массам
подъемных сосудов, совершающих одномерное движение в направлении осей присоединен-
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
63
ных к ним головных канатов. Для систем подъема с машинами барабанного типа, которые в
большинстве случаев эксплуатируются без уравновешивающих канатов, это не есть упроща-
ющим предположением, а представляет собой констатацию известного факта.
3. Барабан машины (или два барабана), ротор двигателя, вращающиеся шестерни и ко-
леса редуктора (при его наличии) рассматриваются как единая бесструктурная вращающая-
ся масса, называемой массой подъемной машины.
4. Копровой шкив каждой ветви также считается как единая бесструктурная вращающа-
яся масса, взаимодействующая без проскальзывания с наклонной струной и отвесом соот-
ветствующей ветви каната.
5. Предполагается, что моменты сил трения в подшипниковых узлах шкивов и барабана
машины, а также силы трения в направляющих устройствах сосудов отсутствуют. Учет же
неизбежно имеющих место «вредных» сопротивлений производится в рамках концепции
Рэлея по гипотезе внутреннего трения.
Разумеется, изложенные упрощения нельзя считать догмой. При необходимости нетруд-
но, например, отказавшись от первой гипотезы, учесть крутильные колебания канатов, что
приведет к несколько более точным выражениям для силовых факторов и, самое главное,
даст возможность с большей достоверностью определять напряженное состояние отдельных
проволок в зависимости от конструктивных особенностей каната.
Можно отказаться и от второй гипотезы и рассматривать уравновешивающий канат как
объект с распределенной массой. А если к тому же учесть кручение каната, то этот «шаг»
значительно приблизит рассматриваемую математическую модель к реальной системе, что
позволит изучать особенности поведения каната в целом и, в частности, его петли в различ-
ных переходных динамических состояниях.
Наконец, отказ от третьей гипотезы приводит к учету структурных особенностей транс-
миссии подъемной машины и раскрывает «механизм» взаимодействия вращающегося бара-
бана машины, ротора двигателя и элементов редуктора. Этим самым представляется воз-
можным определить максимальные крутящие моменты в деталях трансмиссии и с большей
достоверностью выполнить расчет, например, главного вала машины на его усталостную
прочность и долговечность.
Итак, в силу принятой системы рабочих гипотез, рассматриваемая подъемная установка
представлена как система пяти дискретных масс (два сосуда с присоединенными к ним мас-
сами соответствующих отвесов уравновешивающих канатов, два копровых шкива и машина
с приведенными к ней массами редуктора и ротора двигателя), соединенных между собой
последовательно массивными упругими связями-канатами.
Принципиальная схематизация рассматриваемой физической модели изображена на
рис. 2.19, на котором подъемные сосуды показаны, находящимися в одном из исходных их
положений, когда груженый сосуд (зачерненный прямоугольник) только начинает подни-
маться вверх, а порожний (светлый прямоугольник) — опускаться вниз. Пунктирными ли-
ниями изображены сосуды в конечном состоянии операции подъема левого сосуда.
На этом рисунке приняты следующие условные обозначения и терминология: —
момент привода, приведенный к главному валу машины; т}, — массы поднимаемого гру-
женого (первого) и опускаемого порожнего (второго) сосудов; т$, гщ — массы соответству-
ющих копровых шкивов; пц — масса машины с учетом массы редуктора и ротора электро-
двигателя; а12 — углы наклона к горизонту струн канатов; /15 /2,..., /8 — так называемые
лонгалъные отметки или лонгальные координаты, отсчитываемые от начального положения в
стволе поднимающегося (левого) сосуда.
При этом 1Х и /2 означают координаты присоединения головных канатов соответствен-
но к первому и второму сосуду, /3 и /4 означают точку набегания головного каната на пер-
вый шкив и точку сбегания со второго шкива, /5 и If, означают точку сбегания каната с пер-
вого шкива и точку набегания на второй шкив, /7 и /8 означают точку набегания каната на
барабан машины и точку сбегания с барабана.
Очевидно, что в неподвижной системе отсчета лонгальные координаты /2 являются
переменными во времени, а /3, /4, /5, /6, Ij, — постоянными в силу конструктивной компо-
новки элементов подъемного комплекса.
64
ГЛАВА 2
Рис. 2.19. Схематизация установки и системы координат
В связи с введением системы лонгальных отметок, лонгальная эйлерова координата s,
отмечающая положение произвольной точки головного каната, будет изменяться от s = l}
вверх по первому отвесу до s = l3, далее от s-l3 вниз и влево по первой струне до s = l2, далее
от 5 = /g вверх и вправо по второй струне до 5=/6, наконец, от s = l4 вниз по второму отвесу
до s = l2 • Следовательно, se [/ь /2], и тогда
l1-\+2nTPnR6=L (2.2.1)
есть полная длина в навеске двух головных канатов (птр — количество витков трения у ре-
борд барабана, 7^ — радиус барабана), остающаяся, естественно, постоянной при любом
положении сосудов в стволе. В силу малости диаметров шкивов и барабана по сравнению с
длинами отвесов и струн головных канатов допустимо принимать /3 =/5, /4 = /6, /7 =/8.
А так как разности
=Дэ1’=А?2 (2.2.2)
являются длинами первого и второго отвесов ветвей головных канатов, изменяющиеся во
времени, а разности
(2.2.3)
представляют собой неизменяемые во времени длины первой и второй струн, то имеет место
оценка L~Lq{ + Lq2 + 7q + Аг2 • Разности 13-1{ и 12 -Ц , представляющие собой в соответствии
с (2.2.2) длины отвесов ветвей канатов, алгебраически связаны между собой, так как в силу
рис. 2.19 (/3-1[) + (12 -/4) = Lm + L02 =hx +h2 + H , где — наименьшая длина первого отвеса
каната при положении первого сосуда в разгрузке, h2 — наименьшая длина второго отвеса
каната при положении второго сосуда в разгрузке, Н— высота подъема. Таким образом, длины
отвесов Lq{ и однозначно определяют так называемое квазидинамическое положение со-
судов в стволе (истинное динамическое положение сосудов определяется их координатами
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
65
л', и х2, о чем речь пойдет ниже). В связи с этим представляется возможным эти длины
выразить посредством безразмерной координаты £ :
_Ix+H-Lfx _ L^-h} (2 24)
9 Н Н ’
Отсюда видно, что в исходном положении сосудов, когда LqX=1\ + H и Lq2 = !% (подни-
мающийся сосуд находится внизу) координата =0, а в конечном положении, когда Lq} =1^
и -hy + H (поднимающийся сосуд находится вверху) координата £ = 1. Таким образом,
область определения безразмерной координаты £ является закрытый интервал [0, 1], и в связи
с этим с помощью (2.2.4) и (2.2.2) запишем
(2.2.5)
Координату первого сосуда будем отсчитывать от его начального положения в ниж-
ней части ствола (в загрузке) и соответственно координату второго сосуда х2 — от его на-
чального положения в верхней части ствола (в разгрузке), как это изображено на рис. 2.19.
Этими координатами определяется текущее динамическое положение сосудов в стволе.
Угловые перемещения вращающихся элементов (машины и шкивов) приведем к линей-
ным посредством соотношений:
х3-фуКцЦ’ Х4-(Р4^Ш2’ *5 (2.2.6)
где <р34, <р5 — углы поворота шкивов и барабана, отсчитываемые от некоторого их начально-
го положения, что в совокупности с линейными перемещениями и х2 двух сосудов обра-
зуют систему обобщенных координат дискретных тел в рассматриваемой механической сис-
теме, совершающей одномерное движение в соответствии с рабочей гипотезой 1.
Массы сосудов тх и т2 в соответствии с принятой рабочей гипотезой 2 и с подстанов-
кой соотношений (2.2.5) определим по формулам:
тх ^mc+mep+qy[hy+hl+H-(l3-ll)]
m2=mc + mep(2-nc)/2 + qy[hy+h2 + H-(l2-l4)]
(2.2.7)
где тс — масса порожнего сосуда, тг — масса полезного груза (предполагается, что первый
сосуд — груженный), п — количество сосудов в данной установке (ис = 1 для односкиповых
или одноклетьевых, и пс=2 для двухскиповых или двухклетевых подъемов), qy и hy — со-
ответственно линейная масса и наименьшая длина отвеса уравновешивающего каната. При
отсутствии в системе уравновешивающего каната достаточно положить в (2.2.7) qy = 0.
Массы шкивов (т3, ш4) и машины (т3) с помощью соответствующих им моментов инер-
ции и масс присоединенных отрезков канатов, огибающих шкивы и барабан, определим по
формулам
т3 -^з)^Д/1 + Jз\1 ^т4 _[?г(^4 ^б)^Ш2 + а]/
m5=qr(.k-h) + J5/R6
(2.2.8)
где qr — суммарная линейная масса головных канатов, ЯШ1 и Rl//2 — соответственно ради-
усы первого и второго шкивов.
Суммарную массу подъемной установки, включающую дискретные массы
тк(к= 1, 2, ..., 5), вычисляемые по формулам (2.2.7) и (2.2.8), и включающую общую рас-
пределенную массу отвесов и струн канатов, назовем приведенной к окружности навивки
канатов массой подвижных элементов подъемной установки или просто суммарной массой,
которую с помощью соотношений (2.2.1) и (2.2.2) определим по формуле [см. также (2.1.4)]:
66
ГЛАВА 2
5
= Яг (Lc\ + £С2 + L0\ + L(n) + Ymk-
к=\
Движение тел, составляющих схему на рис. 2.19, подчинено действию на них внешних
сил различной природы. Прежде всего, на подъемные сосуды, движущиеся в вертикальном
стволе, разумеется, действуют силы их тяжести, и в соответствии с рабочей гипотезой 5 и
определений (2.2.7) можно записать:
Px=-mxg, P2=m2g, (2.2.9)
где g — ускорение свободного падения, причем эти силы в соответствии с определениями
(2.2.7) являются переменными величинами, если qy ^0 , и не зависят от положения сосудов
в стволе, если qy = 0.
В силу той же гипотезы 5, внешние силы, действующие на копровые шкивы, тожде-
ственно равны нулю. Таким образом, в дополнение к (2.2.9) запишем
Р3=0, Р4=0. (2.2.10)
На барабан машины в обычных рабочих режимах движения действует движущий момент
Мпр=1редМэ электропривода, где i д — передаточное отношение редуктора, а в режимах
рабочего и предохранительного торможения он подвергается действию тормозного момента
МТ, причем эти два момента не только не могут действовать одновременно, но и между
моментом отключения электропривода 10Э и моментом начала торможения 1ИГ имеется ин-
тервал времени, называемым временем холостого хода t^, в течение которого барабан ока-
зывается фактически свободным от внешних сил. Поэтому символически примем
iped^J / Rq
при
при
при
0<t<to3,
f03 -
fHT -
(2.2.11)
и при этом предполагается, как на самом деле имеет место на практике, что к моменту вре-
мени t03 система в целом пребывает в состоянии квазистатического равновесия.
Тормозной момент МТ считается переменным во времени и подчиняется известному со-
отношению (6.1.4). Что же касается электродвижущего момента Мэ в (2.2.11), то его необхо-
димо рассматривать как некий функционал, определяемый дифференциальными уравнения-
ми (10.2.4), (10.2.5) или (11.2.8) соответственно для привода переменного и постоянного тока.
Для привода, оснащенного асинхронным двигателем с фазным ротором, в ряде случаев (на
основании опыта исследователя) Мэ можно вычислять по формуле Клосса (10.2.3).
Принятая здесь символика в полной мере может относиться и к системам многоканат-
ного подъема с расположением машины в башенном копре, динамическое состояние кото-
рых можно формально описать, если положить ш3=ш4=0 (при отсутствии отклоняющих
шкивов) либо принять одно из равенств м3=0 или т4=0 в зависимости от того, с какой
стороны расположены отклоняющие шкивы. Многоканатная установка с наземным распо-
ложением машины формально в точности соответствует схеме рис. 2.19 при qy Ф 0 .
2.2.2. Упрощенные уравнения динамического состояния
Вначале рассмотрим так называемую упрощенную модель подъемной установки, в кото-
рой головные канаты считаются безынерционными, но обладающими упругостью. Для это-
го изображенную на рис. 2.19 физическую модель рассматриваемой установки формально
представим так называемой схемой замещения, показанной на рис. 2.20, на которой реаль-
ные упругие массивные канаты заменены безинерционными связями. Так, на рисунке связи
с коэффициентами жесткости С, и С, символизируют соответственно первый и второй от-
весы головных канатов, а связи с коэффициентами жесткости С3 и С4 — первую и вторую
наклонную струну. Учет диссипации энергии осуществляется в общепринятой системе обо-
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
61
Рис. 2.20. Схема замещения подъемной установки
значений символическими вязкими
демпферами, показанными на рисун-
ке в форме пиктограмм «цилиндр-
поршень» . Этим самым моделирует-
ся рассеивание энергии в рамках ги-
потезы внутреннего трения, о чем
говорилось в 5-ом пункте 2.2.1. Разу-
меется, в реальной системе потери
энергии возможны также из-за внеш-
него трения, но здесь эта сторона воп-
роса не рассматривается.
Для рассматриваемой упрощен-
ной модели, естественно, возникает
вопрос: каким образом учесть массу
канатов? Обычно в таких случаях ру-
ководствуются известной формулой
приведения Рэлея, согласно которой 1/3 масс отвесов канатов «присоединяются» к соответ-
ствующим массам сосудов и к массам барабанов машины. Но, во-первых, формула Рэлея
справедлива лишь в том случае, когда верхний конец каната неподвижен, и, во-вторых, не-
ясно, куда все-таки девается оставшаяся 1/3 массы канатов? Этот вопрос далеко непразд-
ный, так как при любом предпринимаемом упрощении баланс масс должен все-таки сохра-
няться. Для компромиссного выхода из такой ситуации предлагается постоянные массы на-
клонных струн канатов присоединить к барабанам машины, а переменные массы отвесов
канатов поровну присоединить к соответствующим массам сосудов и копровых шкивов.
Разумеется, такой «компромиссный» шаг является вынужденным только лишь на этапе
описания упрошенной модели и совершенно не связан с описанием реальной системы. В
дальнейшем, как будет показано в 2.2.3, учет распределенных масс канатов происходит, так
сказать, «автоматически» и не нуждается в каких-либо дополнительных гипотезах. Благода-
ря этому обстоятельству, соотношения (2.2.7) и (2.2.8) для дискретных масс рассматривае-
мой системы не претерпевают никаких изменений.
Динамическое состояние замещенной схемы, как нетрудно установить, описывается
следующей системой уравнений в матричной форме
IX+JX+KX=P,
(2.2.12)
где I, J, К — соответственно квадратные симметрические матрицы дискретных масс в при-
нятых обозначениях (2.2.7), (2.2.8), диссипативных коэффициентов, учитывающих вязкое
трение в рамках гипотезы внутреннего трения, коэффициентов жесткости упругих связей
между дискретными элементами системы:
ч 0 0 0 0 ' 0 -/12 ( 0 '
0 т^ 0 0 0 0 A 0 -1 '2 0
/ = 0 0 /и3 0 0 ; /= -A 0 0 -/32 , (2.2.13)
0 0 0 т4 0 0 -И 0 /2+/4 -/4
0 0 0 пц 0 0 -/32 -1 2 1 1 '4 /3+/4 J
f q1 о -q2 0 0 (x xl W
0 Cl2 0 -c 2 0 x2 P2
к= -q2 о q’ + q1 0 -c32 ; x= *3 ; p= P3 , (2.2.14)
0 -C22 0 cj+cj -c2, x4 p4
0 0 -c32 -C2, C3+C4, Xc \ 5 > И
68
ГЛАВА 2
причем X, Р — матрицы-столбцы перемещений дискретных тел [см. (2.2.6)] и внешних сил
[см. формулы (2.2.9), (2.2.10), (2.2.11)].
Заметим, что в обозначениях (2.2.13) и (2.2.14) верхние индексы параметров не имеют
ничего общего с показателями степени.
Строго говоря, применительно к схеме замещения рис 2.20, в матрице К, структурно
означенной первым из соотношений (2.2.14), как и в матрице J во втором из обозначений
(2.2.13), должны выполняться равенства
Cl=Cl=Ck, (fc = l, 2, 3, 4), (2.2.15)
причем [см. формулы (2.2.2), (2.2.3)]
Q =А/ Q=?VД?2’ G =у4/An, Q =у4/Д?2’ (2.2.16)
где А — агрегатная продольная жесткость канатов [177] в обозначении М. Ф. Глушко. Одна-
ко, как будет видно из дальнейших построений, в матрицах К и / целесообразно делать раз-
личие между параметрами и , а также между Ск и Ст., хотя формально для рассматри-
ваемой упрощенной модели строго имеют место равенства (2.2.15).
Наряду с матричным уравнением (2.2.1) рассмотрим без учета диссипативных членов
однородную систему
1Х+КХ = 0, (2.2.17)
которой, очевидно, удовлетворяет матрица-столбец типа
X = Фехр(/й#), (2.2.18)
где / = 7-Г, а со — некоторое число, называемое собственным для уравнения (2.2.17), или,
проще говоря, это любая из собственных частот рассматриваемой механической системы.
Постоянная матрица-столбец Ф в (2.2.18) называется собственной формой, если Ф при-
надлежит какому-либо собственному числу.
Собственные числа и формы определяются следующим образом. Подставим (2.2.18) в
(2.2.17), в результате чего получим [185]
(/Г-ш2/)ф = 0, (2.2.19)
а так как матрица-столбец Ф не может быть тождественно равной нулю, то для получения
нетривиальных решений необходимо и достаточно, чтобы
(/Г-ш2/) = 0. (2.2.20)
Соотношение (2.2.20), называемое характеристическим уравнением, в раскрытом виде пред-
ставляет собой относительно со2 алгебраическое уравнение пятой степени, которое при симмет-
рических матрицах / и К имеет, как известно, пять действительных корней a>j (j = 0, 1, ..., 4), и
этим пяти числам приводятся в алгебраическое соответствие пять собственных форм
Фу (7 = 0, 1) • 4), причем каждая матрица-столбец Фу в свою очередь состоит из пяти ком-
понент (составляющих) Фу1, Фу2. ф 3, Ф4, Ф/5 по числу дискретных масс в рассматривае-
мой системе. С физической точки зрения эти числа являются парциальными амплитудными
значениями перемещений масс на частоте .
Эти пять составляющих, каждое из которых удовлетворяет уравнению (2.2.19), с точ-
ностью до произвольного постоянного множителя являются алгебраическими дополнени-
ями к элементам, например, пятой строки в определителе, составленном из компонентов
матрицы K-cojl (номер строки не имеет значения, но для получения, так сказать, сим-
метричных результатов целесообразно принимать в данном случае именно пятую строку):
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
69
сф71 = С2С3 [(С] -т20)})(С\ +С\- т4й)2) - С22С2 ]
сФу2 = С2С2 [(С,1 -тхы2)(С‘ + С\ - т30)2) - С2С2 ]
сФуз =(с‘ -т\^>сз [(с2+ С4-т4со2)-С22С2]
сФу4 = (С2 - т2а>2 )С2 [(С/ - /и, ш2 )(С} + С] - т3со2) - С2С2 ]
сФу5 =[(С] + С4-т4со2)(С2 -m2w2)-C22C2]x
х[(с‘-mtco2)(ql +с>-m3o)2)-q2q2]
(2.2.21)
:.ie j-0, 1, ..., 4, а число с и является упомянутым произвольным (масштабным) постоян-
ным множителем, который удобно принять таким, чтобы в целом формы Фу были безраз-
мерными. Например, с использованием соотношений (2.2.16) можно принять c = qqC3C4-
В определениях (2.2.21) характеристическое уравнение (2.2.20) нетрудно записать в сле-
дующей неявной форме:
-Фу3С2 -Фу4С4 +Фу5 (С* +С]-т^2) = 0. (2.2.22)
Собственные формы Фу , если их рассматривать как некоторые векторы в пятимерном
пространстве, оказываются, если так можно сказать, «взаимно перпендикулярными» специ-
альным образом. В этом можно убедиться следующим образом. Рассмотрим соотношение
(2.2.19) для двух различных собственных чисел <wy и шк :
(^-ш2/)Фу =0, (К-й)2к1)фк=0.
Умножим слева первое из этих уравнений на матрицу Фд., а второе — на матрицу Фу ,
которые представляют собой транспонированные матрицы по отношению к Фк и Фу, то есть
являются матрицами-строками. Затем вычтем из первого полученного соотношения второе.
А так как для симметрических матриц / и К справедливы равенства Ф^_ АФу=ФуАФА.,
Фд.7Фу = Фу/ФА, то в результате получим [ы2к -й)2)фд./Фу =0 . Из этого соотношения следу-
ет, что при ^ы2 должно быть Фд./Фу =0 , что и является признаком взаимной перпенди-
кулярности векторов ФА. и Фу. При =шу2 произведение Фу /Фу равно некоторому не рав-
ному нулю числу N2, называемым нормировочной постоянной, причем само число Nj пред-
ставляет собой норму или длину вектора Фу . Таким образом, в общем случае
ф;КФ,-«дЛ^ (у, к = ®, 1, .... 4), (2.2.23)
где 8jk — символ Кронекера (8jk = 1 при J = k,n 5lk=Q при j^k\, Nk — нормировочные
постоянные, определяемые вытекающей из (2.2.23) формулой
N2k = Фк1 Фк (к -0, 1, ..., 4). (2.2.24)
Заметим, что благодаря представлению диссипативной матрицы /в виде (2.2.13), отра-
жающей, как говорилось выше, концепцию гипотезы внутреннего трения, оказывается воз-
можным допустить, в дополнение к рабочим гипотезам 2.2.1, что матрица J подобна матрице
К, то есть J = уК, где У — некоторая константа, и с использованием (2.2.23) получим до-
полнительные феноменологические соотношения:
Ф;/Ф* = 5jkN2k0)2k7 (j, к = 0, 1, ..., 4). (2.2.25)
70
ГЛАВА 2
Формальная замена восьми диссипативных характеристик yf, и у^ в (2.2.13)
на фактически один параметр у, имеющий смысл обобщенного коэффициента затухания ко-
лебаний, отнюдь не означает, что в этом отношении допускается какой-то физический произ-
вол. Скорее наоборот — лучше иметь дело с одним параметром, численное значение которого
принимается исследователями, как правило, весьма приближенным на основании интеграль-
ных оценок экспериментальных данных, чем с множеством величин такой же достоверности.
Правдоподобность такого подхода очевидна также потому, что в данном случае внутреннее
трение рассматривается для подобных однородных континуальных объектов — канатов.
Обратимся теперь к исходному матричному уравнению (2.2.12) и представим его реше-
ние в виде разложения по собственным формам
4
*(') = 1>Лу(')> (2.2.26)
7=0
где суммирование производится в данном случае по пяти корням характеристического урав-
нения (2.2.22), пока неизвестные так называемые координатные функции. Тогда в
результате подстановки этого ряда в (2.2.12) получим
4
У (/Ф7^У + JФу^у + КФ]^] ) = Р
у=о
Умножая слева это выражение на транспонированную матрицу Ф^., с использованием
соотношений ортогональности (2.2.23) и феноменологического соотношения (2.2.25) в ито-
ге придем к системе независимых неоднородных дифференциальных уравнений второго по-
рядка относительно искомых координатных функций:
2 2
(k = 0, 1, ..., 4),
(2.2.27)
где справа ФкР представляет собой обычный скаляр, как произведение матрицы-строки ФА.
на матрицу-столбец Ръ обозначениях (2.2.14):
5
ф^=Хад-
/=1
(2.2.28)
В связи с этим запишем также явное выражение для эрмитовой формы (2.2.24):
5
^к=ФУФк=^т1Фкк
;=1
(2.2.29)
Общие решения системы независимых уравнений (2.2.27) получим с использованием
интеграла Дюамеля, как обычно поступают в таких случаях:
уд(г) = ехр(-уш^) 4
cos cokt + — sin a>kt + f -—^—z
a>k ) O^kNk
exp[-}<4 (f-r)]sin4 (z-T)tZT, (2.2.30)
где обозначено a>k=cokyjl-y2a)l , которые являются фактически реализуемыми собственны-
ми частотами колебаний.
Постоянные интегрирования 4 и % в (2.2.30) определяются из условий, что при t = 0
(в момент начала движения) матрицы-столбцы У(0) = У0 и А'(0) = 4 заданы, то есть коор-
динаты всех элементов системы и их скорости в начальный момент времени считаются из-
вестными. Тогда в силу соотношений ортогональности собственных форм (2.2.23) из (2.2.26)
с помощью (2.2.30) находим
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
71
4=-Ь(ф*/х0), ’ (ф^0)+Ш (2.2.31)
Nk Nk Л
Заметим, что для рассматриваемой дискретной совокупности масс с безынерционными
связями имеют место представления (2.2.15), благодаря чему оказывается, что det К = 0 (в этом
нетрудно убедиться непосредственным вычислением). Но так как det К является свободным
членом алгебраического уравнения (2.2.22), то отсюда следует, что один из пяти его корней
тождественно равен нулю. Пусть ему соответствует порядковый номер k = Q , то есть coq =0.
Тогда этому значению корня при выполнении равенств (2.2.15) и в согласии с (2.2.21) соот-
ветствуют следующие пять компонент собственной формы Фо :
СФ01 =СФо2 = сф03 = сФ04 = сФ05
Если здесь принять для произвольной константы c = CJQC3C4 , о чем говорилось выше,
то будем иметь
Ф01 = Ф02 = Ф03 = Ф04 = Ф05 (2.2.32)
и тогда в соответствии с (2.2.15)
Nq =т{ + т2 + т3 +ш4 +т5. (2.2.33)
С учетом полученных равенств (2.2.32) и (2.2.33) уравнение (2.2.27) при = 0 с исполь-
зованием (2.2.28) и представлений (2.2.9), (2.2.10) приведется к виду
-----р1+р2+д------, (2234)
т} + т2 + т3 + пъ + т5
что представляет собой уравнение движения суммарной массы системы п\ + пъ2 + т3 + пи + пр под
действием суммарной силы Р{ + Р2 + Р5 = Р5-(пр-m2)g, то есть (2.2.34) представляет собой
ничто иное, как уравнение М. М. Федорова (2.1.13). Заметим, что в силу принятого здесь
способа присоединения масс головных канатов к сосудам, шкивам и барабанам величина
суммарной массы установки совпадает с определением (2.1.4).
Решение уравнения (2.2.27) для случая &>0 =0 проще всего получается предельным пере-
ходом а>0^0 в выражении (2.2.30) по правилу Лопиталя:
i//o(O = 4+5or + J-(Ш‘ т^~--------(t-T)dT. (2.2.35)
* пр + т2 + т3 + ш4 + т5
В итоге общее решение (2.2.26) будет выглядеть так:
4
^(0 = фо’/о(0 + Еф7^(0> (2.2.36)
7=1
где Фо — единичная матрица-столбец в силу (2.2.32). Полученное решение в форме (2.2.36)
свидетельствует о том, что движение рассматриваемой системы является, как и следовало
ожидать, инфинитным, то есть формально неограниченным. При этом на монотонное дви-
жение Фо1//о(?) как бы «накладываются» динамические либрационные составляющие Фу1//у(7)
с соответствующей частотой либрации (Оу.
В этом состоит суть способа решения системы уравнений типа (2.2.12), и столь подроб-
ное его изложение продиктовано тем обстоятельством, что, как будет показано в следующем
разделе, этот метод всецело в таком формализованном виде, но с некоторыми уточнениями,
пригоден и для систем с распределенными массами, движение которых описывается уравне-
ниями в частных производных.
72
ГЛАВА 2
2.2.3. Общие уравнения динамического состояния
Рассматриваемую модель упруго соединенных дискретных масс теперь модифицируем,
введя инерционные звенья (связи), последовательно соединяющие дискретные массы тх,
т3, пц. т4, т2 в соответствии со схемой замещения рис. 2.20. Как было сказано в 2.2.1,
лонгальная координата 5 считается возрастающей при переходе от массы к и затем от
массы к т2. С помощью этой координаты и будем исчислять местонахождение любой
точки инерционных связей и описывать ее перемещение функцией и(5,г).
Рассмотрим вначале ветвь каната от лонгальной отметки до /3 и запишем для этой
ветви волновое уравнение, которому подчиняются перемещения точек каната, в виде
Э2ф,г) 32w(v)
Л—--------qr -- 2 =qrg. (2.2.37)
05 at
Наряду с неоднородным уравнением (2.2.37) рассмотрим его в однородной записи, то
есть без правой части, как
лм (22.38)
Э52 Г dt2
частное решение которого, подобно (2.2.18), строится в форме
и(5,г) = С7/1(5)ехр(/бУ/г), (2.2.39)
где Uj^s) — собственная функция однородного уравнения (2.2.38), причем нижний индекс
1 символизирует принадлежность этой функции первому интервалу изменения 56 [4, /3];
C0j — собственная частота колебаний. Подстановка (2.2.39) в (2.2.38) приводит к уравнению
d~U
А----^ + qrco1.Uj[=t}. (2.2.40)
ds
Потребуем, чтобы функция С/у1 (5) как решение уравнения (2.2.40) удовлетворяла гра-
ничным условиям
М<,,=фЛ- (2.2.41)
где Ф -j, Ф 3 — некоторые константы как первая и третья компоненты собственного вектора
Фу ; тогда функция CZ.[ будет содержать в качестве постоянных интегрирования две компо-
ненты Фу1, Фу3 и запишется в виде суперпозиции двух линейно независимых функций:
t/yi (5) = Фу3г?у! (5,4 )-Фу1г?у1 (5,/3), (2.2.42)
где г?у[ — функции как частные решения уравнения (2.2.40), которые на интервале [4, /3],
подчиняются условиям:
z?yi(4,4) = O,
г?у1(47з) = Ч М'зЛ) = 0
(2.2.43)
Элементарное интегрирование уравнения (2.2.40), удовлетворяющее соотношениям
(2.2.43), приводит к результату
sinXo)j (s-li)
sin AtOy (/3-4)
(2.2.44)
где Л2 =qT/А, причем 1/Л есть скорость прохождения продольных волн деформаций в ка-
нате как в упругом однородном объекте с распределенной массой.
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
73
Таким образом, общее решение (2.2.42) с помощью (2.2.44) можно также представить в
ввернутой форме как
, , sin Лео, (я-/,) sinAtw, (s-A)
(/., Ы = Ф ----12.-Ф ----LL
J' у3 sinAtOy (/3-/[) 71 sin Аа>у (/3 —/[) ’
(2.2.45)
откуда непосредственно следует явное выполнение условий (2.2.41).
С помощью введенных функций (2.2.44) и представлений (2.2.42) сравним выражения для
сил упругости, действующей на массу тх в двух вариантах, когда связь ее с массой т3 безы-
нерционная, и когда она обладает инерционными свойствами, то есть является массивной.
Соответственно в первом случае парциальная реакция каната у сосуда с массой т-, на
частоте а>у определяется фактически разностью парциальных амплитуд перемещений
Ф ;1 -Фуз, умноженной на коэффициент жесткости данной ветви каната Q , или в принятой
символике с учетом равенств (2.2.15)
^^-[ФлЧ'-фрС;2]. (2.2.46)
В случае же массивного каната парциальные реакции каната у сосуда с массой тх вы-
числяются при помощи выражения AdU^jds , и в соответствии с (2.2.42) запишем
Q. =-л^[фЛ й.^-фрвл (М)]!Ц <2-2-47’
Подобно изложенному определим парциальную реакцию безынерционного каната у
шкива с массой т3 в форме
0л=[Фл<3:-Фу,С?] (2.2.48)
и для случая массивного каната
2/1 = ЛЙФ71г?71 /з 711=/з •
(2.2.49)
Сравнивая (2.2.46) с (2.2.47) и (2.2.48) с (2.2.49). приходим к выводу, что формальные
преобразования
С,=А—!-—
1 ds
(2.2.50)
1 ds
дают возможность интерпретировать коэффициенты с}, С3 как некие коэффициенты динамичес-
кой жесткости отвесной ветви каната, набегающего на копровой шкив. Элементарные вычисле-
ния по формулам (2.2.50) с использованием определений (2.2.44) приводят к выражениям:
Q1 = ЛАсОу
cosAtOy (/3-/j)
sin AtOy (/3 -11)
, С^ЛАшу
1
sinAcoy (/3 - /J
(2.2.51)
Аналогичным образом можно рассмотреть остальные участки каната, но чтобы не загро-
мождать текст рутинными выкладками приведем лишь конечные результаты.
Наклонная струна каната от /5 до /7:
cosAto, (/7-Л) э 1
-------Я 7 Сд = АЛсо,---------------------
7 sinAtOy (/7-/5)
Сз=ЛАа>,
7 sinAtOy (/7-/5)
(2.2.52)
74
ГЛАВА 2
Наклонная струна каната от /8 до /6:
С4 = ЛЛсоу
cosAto, (А-/8) 1
-------\ , С42 = Ак(»: —.
sinAtOy (Z6-Z8) sinAtOy(/6-/8)
Вертикальный отвес каната от /4 до /2:
С^=ЛАсОу
cosAtOy (/2-/4) 1
-------/------Г"? ^2 — Ал со.---------
sin AtOy (/2 - /4) sin AtOy (/2 - /4)
(2.2.53)
(2.2.54)
Физический смысл динамической жесткости состоит в том, что это есть обратная вели-
чина податливости каната, если в нем искусственно возбуждать колебания на собственной
частоте соу. Другими словами, это есть амплитуда гармонической силы с частотой to,, вызы-
вающей единичное амплитудное перемещение. В частности, при а>у—>0, как следует из
(2.2.51) — (2.2.54), в силу так называемого «первого замечательного предела» приходим к фор-
мулам (2.2.16), если учесть обозначения (2.2.2), (2.2.3) и (2.2.15).
Таким образом, формулы (2.2.51) — (2.2.54) являются удобным способом распростра-
нить полученные ранее результаты для модели с безынерционными связями на модель с инер-
ционными связями, то есть с массивными канатами.
В этом случае собственные формы вычисляются в соответствии с (2.2.21), собственные
числа определяются из уравнения (2.2.22), но при этом коэффициенты матрицы Кв обозна-
чениях (2.2.14) задаются формулами (2.2.51) — (2.2.54). А так как такие подстановки делают
характеристическое уравнения трансцендентным, то этим самым порождается бесконечный
спектр собственных чисел a>j , среди которых существует, опять-таки, одно, имеющее нуле-
вое значение (со0 = 0). Таким образом, задача о взаимодействии дискретных тел, соединен-
ных между собой безынерционными или инерционными связями, решается единообразно,
что достигнуто путем введения понятия динамических жесткостей каната (2.2.51) — (2.2.54).
Пожалуй, главным здесь является то, что решение достаточно сложной граничной зада-
чи движения дискретных тел, соединенных последовательно упругими массивными связя-
ми, свелось, по сути дела, к решению задачи о взаимодействии дискретных тел как бы с
безынерционными связями, но жесткость которых вычисляется по специальному правилу,
учитывающему массивность канатов и волновой характер распространения упругих дефор-
маций в связях. При этом условия силового сопряжения дискретных тел с массивными ка-
натами и условия непрерывности решений в узловых точках автоматически выполняются, в
связи с чем отсутствует необходимость в построении громоздкой системы уравнений гра-
ничных состояний. Кроме того, это позволяет оперировать с числами С1к'2 так же, как и для
систем с невесомыми связями.
Введение понятия динамических жесткостей каната, обуславливающих специальную
структуру матрицы Кв (2.2.14), позволяет утверждать, что матричное уравнение (2.2.12) те-
перь уже не просто отражает динамические свойства схемы замещения (см. рис. 2.20), а опи-
сывает реальный физический объект, в котором упругие связи являются массивными эле-
ментами. Тогда решение системы (2.2.12) относительно матрицы-столбца % [см. (2.2.14)] даст
возможность этим самым найти не только перемещения дискретных тел системы, но и оп-
ределить необходимые силовые факторы в точках их контакта с канатами.
Решение матричного уравнение (2.2.12), как и прежде, представим в виде разложения
по собственным формам (2.2.21)
7=0
(2.2.55)
где «/у (?) — координатные функции, и в отличие от (2.2.26) здесь суммирование ведется фор-
мально по бесконечному спектру собственных чисел [разумеется, при конкретных вычисле-
ниях верхний предел в (2.2.55) должен быть ограниченным].
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
75
В результате подстановки разложения (2.2.55) в (2.2.12) с использованием соотношений
у атональности (2.2.23) и (2.2.25) получим систему независимых неоднородных линейных
шфференциальных уравнений относительно координатных функций:
2 . 2
Vk + Y 0)kWk+^kVk=^r
Nk
(2.2.56)
;ле справа числитель представляет собой скаляр (матричный аналог скалярного произведе-
ния векторов), вычисляемый в отличие от (2.2.28) как
&кР = 1^к,Р,-Чг£ \Ukids-\Ui
'=1 /> 6
h
ds-Sx\uk3ds + S2\uMds
(2.2.57)
где 5] =sintx1, 52=sintz2 [появление этих множителей обусловлено решениями неоднород-
ных уравнений типа (2.2.37) для наклонных струн канатов], при этом а{, а2 — углы наклона
к горизонту соответственно первой и второй струн каната (см. рис. 2.19).
Нормировочные множители N% в уравнениях (2.2.56) также несколько отличаются от
их аналогов (2.2.29) и находятся в виде
5
5 (6 6 >- к )
^к = £ + Чг J ^ds + J U2klds + J U2k3ds + J U2k4ds .
i=i , к 6 6 4 .
(2.2.58)
В интегралах (2.2.57) и (2.2.58) функции (Z = l, 2, 3, 4), описывающие продольные
перемещения точек каната на соответствующих интервалах переменной s, определяются по
аналогии с (2.2.45) следующими выражениями:
Фу3 sin (л — Zj) — Фуj sin Xcoj(s -/3) Фу2 sin Лсф (5 - /4) - Фу4 sin Лео, (s - /2)
71 sinA<Oy(/3-Zj) ’ 72 sin (Z2 — Z4)
Фу5 sin Лй)у (s - /5) - Ф-3 sin Л(Оу (5 - /7) Фу4 sin Лйфф - /8) - Фу5 sin Лео, (5 - /6)
U----------------------"—“ ’ UJ4 =
sinAco,(/6 -Z8)
sinAo>7(/7 ~/5)
Как и в варианте безынерционных связей (см. раздел 2.2.2), что просто показать, нуле-
вая частота в спектре собственных частот ( <у0 = 0) соответствует инфинитному монотонному
движению системы под действием внешних сил, описываемому уравнением динамики
М. М. Федорова (2.2.34) или (2.1.13), которое, таким образом, является частным случаем об-
щих уравнений динамики шахтного подъема.
Решение уравнений (2.2.56) можно найти в квадратурах, если заведомо известен харак-
тер изменения во времени скалярного произведения Ф*кР, определяемого по формуле (2.2.57).
В большинстве же конкретных задач эти уравнения приходится решать численным спосо-
бом. В любом случае матрица X, содержащая перемещения дискретных тел Л) , определяется
с наперед заданной точностью при ограниченном числе членов разложения в форме (2.2.55).
С помощью этой же матрицы путем дифференцирования по времени функции (2.2.55) мож-
но определить скорости х, и ускорения х, любого дискретного элемента. Этим самым про-
блема вычисления динамических переменных (перемещений и скоростей) решена.
Что же касается силовых факторов, то при помощи введенных коэффициентов дина-
мической жесткости весьма просто получить общие выражения для динамических усилий,
например, у канатоведушего барабана в набегающей и сбегающей ветвях канатов:
sms = Ё(ф,5с! -Ф,,С32Ь (0. Scir! = Х(ф,5^ -Фу4<фЪ (<). (2.2.59)
7=1 7=1
Такого же рода выражения нетрудно записать для любых других точек сопряжения ка-
ната с дискретными элементами.
76
ГЛАВА 2
Итак, моделирование динамических состояний подъемной установки сводится к следу-
ющему простому алгоритму: вычисляется необходимое количество корней a>j трансценден-
тного уравнения (2.2.22) с учетом подстановок (2.2.21) и выражений для динамических жес-
ткостей (2.2.51) — (2.2.54); для каждого <уу интегрируются уравнения (2.2.56), предваритель-
но вычислив «медленно» зависящие от времени интегралы (2.2.57) и (2.2.58); наконец, по
формулам (2.2.55) и (2.2.59) или им подобным определяются в любой момент времени необ-
ходимые динамические переменные и силовые факторы в системе для последующего расче-
та и анализа.
2.2.4. Базисные модели подъемных установок
Базисной моделью будем называть механическую систему, состоящей из дискретной
вращающейся массы машины и двух линейно перемещающихся масс подъемных сосудов.
Из такого определения явствует, что в данном случае пренебрегается влиянием копровых
(отклоняющих) шкивов на общую картину динамического состояния, и эту посылку следует
рассматривать как дополнительную к перечню рабочих гипотез, изложенных в 2.2.1.
Необходимость рассмотрения таких моделей вызвана двумя обстоятельствами. Во-пер-
вых, их математическое описание является наиболее простым, и начинающему исследовате-
лю не трудно будет впоследствии перейти к рассмотрению более сложных систем. Во-вто-
рых, на основании результатов теоретических исследований базисных моделей представля-
ется возможным производить сравнительные оценки влияния не учтенных в них факторов.
Например, при изучении проблем безопасности предохранительного торможения можно
получить ответы на такие вопросы: насколько «весомым» является учет крутильных колеба-
ний канатов, стоит ли учитывать волновые процессы в уравновешивающих канатах, нужно
ли принимать во внимание колебательные процессы в трансмиссии машины, есть ли необ-
ходимость учета масс копровых шкивов и т. д.
Установка в вертикальном стволе. Схематически базисная модель такой установки изоб-
ражена на рис. 2.21. Здесь уравновешивающий канат (которого может и не быть) играет в
силу гипотезы 2 в 2.2.1, так сказать, пассивную (статическую) роль и имеет символический
смысл. Подъемные сосуды изображены в их начальном положении в стволе.
При этом /[ и /2 означают дентальные координаты
точек присоединения головных канатов соответственно к
первому и второму сосуду, а /0 означает (условно) совме-
щенные координаты точек набегания на барабан и сбега-
ния с барабана машины. Геометрический параметр hr яв-
ляется среднеарифметической величиной длин L^+lx и
+ А [см. формулы (2.2.3)], если сравнить рассматрива-
емую схему со схемой на рис. 2.19, то есть считается, что с
достаточной мерой точности
hr ~ (Ал + LC2 + Л1 + Л2)/2-
В этом случае координата Е, квазидинамического по-
ложения сосудов в стволе определяется выражением
(2.2.60)
установки
в вертикальном стволе
в силу чего массы сосудов и ш2 в соответствии с при-
нятой рабочей гипотезой 2 определим по формулам [см.
соотношения (2.2.7) и комментарии к ним]:
m^m.+m^+qylhy+^H]
т2 = тс + тгр (2-пс)/2 + qy [hy + Я(1 )]
(2.2.61)
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
77
Во вращающейся массе машины тщ учтены вращающиеся массы элементов редуктора и
ротора электродвигателя, а также «присоединенные» к ней вращающиеся массы копровых
или отклоняющих шкивов, если последние имеются.
Выражения для внешних сил, приложенных к подъемным сосудам, остаются такими же,
как и в (2.2.9), то есть с учетом (2.2.61):
Р{ = -m{g, Р2 = m2g. (2.2.62)
Движущее усилие, действующее на барабан, определяется выражением (2.2.11) (см. ком-
ментарии к этой формуле), которое в принятой символике запишем как
I ред^ Э / &б
О
-Mt/R,
при
при
при
®-t<f03’
t09~t<tHT^
fHT
(2.2.63)
Установка в наклонном стволе. Схематически базисная модель такой установки изобра-
жена на рис. 2.22. Здесь показан как бы вид сверху в направлении, перпендикулярном к плос-
кости рельсовых путей (уравновешивающий канат, естественно отсутствует). Подъемные со-
суды изображены в некотором промежуточном положении в стволе, а пунктиром — в их
модель установки
в наклонном стволе
означает «совмещенные»
Предполагается, что по всей свободной длине двух ветвей
головных канатов действуют распределенные усилия «сполза-
ния», вызванные силой распределенного веса и силой трения о
почву ствола:
/i.2=9rg(sina±/,costz), (2.2.64)
где а — угол наклона ствола, считающийся постоянным [см.
формулы (2.1.10) и комментарии к ним] . Строго говоря, это не
совсем верно, так как в окрестностях граничных точек (у сосуда
и у копрового шкива) канат свободно провисает, не касаясь по-
чвы, и на этих участках распределенные силы формально опре-
деляются соотношениями 2 = qrg sin ср', где ср' — переменный
угол наклона свободно провисающего каната. Однако этим об-
стоятельством можно пренебречь, если учесть, что длины ука-
занных участков достаточно малы по сравнению с высотой
подъема Н.
Распределенные усилия «сползания», судя по (2.2.64), всегда
направлены от барабана к сосуду (как показано на рис. 2.22), если
tg<p > /'. В противном же случае для опускающейся ветви каната
/2 < 0, а это означает отсутствие «самопроизвольного сползания»
каната вниз, если мысленно представить, что масса т2 = 0.
Как и в предыдущем варианте, на рис. 2.22 символы и /2
означают лонгальные координаты точек присоединения голов-
ных канатов соответственно к первому и второму сосуду, а /0
координаты точек набегания на барабан и сбегания с барабана.
Координата £ квазидинамического положения сосудов в стволе задается выражением
(2.2.60). Массы сосудов гщ и пг, подобно (2.2.61), определяются как
М\=тс + тгр
т2=тс + тгр(2-пс')/2
(2.2.65)
Вращающаяся масса машины tn} учитывает вращающиеся массы всех элементов редук-
тора и ротора электродвигателя, а также «присоединенные» к ней вращающиеся массы коп-
ровых шкивов, если они имеются.
78
ГЛАВА 2
В отличие от (2.2.62), выражения для внешних сил, приложенных к подъемным сосу-
дам, записываются с учетом трения качения колесных пар по рельсам [см. формулы (2.1.10)
и комментарии к ним]:
Р{ =-m{g(sin(р + f coscp), Р2 = m2g(sm<p- f cos<p).
(2.2.66)
Движущее усилие, действующее на барабан, определяется выражением (2.2.63).
Вырожденные базисные модели установок. Под этим термином подразумевается естествен-
ное состояние установки при заторможенном барабане машины. Например, если в результа-
те предохранительного торможения при произвольном положении сосудов в стволе барабан
машины в конечном итоге будет застопорен, то сосуды и точки не навитых на барабан учас-
тков канатов все еще продолжают свое движение, подчиненное «новой» фазе динамическо-
го состояния, называемым вырожденным, которое принципиально отличается от исходного
базисного состояния отсутствием массы при защемленных верхних концах канатов. Та-
кого же рода состояния испытывают канаты и сосуды при обычном рабочем режиме, когда
цикл подъема неизбежно оканчивается стопорением барабана машины.
Как будет видно из дальнейших построений, в вырожденной
системе напряженно-деформированное состояние канатов в ряде
случаев оказывается наиболее интенсивным, и этот факт, подтвер-
ждающийся многочисленными экспериментами, необходимо
принимать во внимание.
Схематически вырожденная базисная модель установки (об-
щая как для вертикального, так и для наклонного ствола) изоб-
ражена на рис. 2.23. Здесь дентальные координаты 1{ и /2 явля-
ются постоянными, равными тем соответствующим значениям,
которые они имели в исходной модели в момент стопорения ба-
рабана. В согласии с этим и массы сосудов т{, т-,, а также вне-
шние силы Ръ Р2 остаются как бы «замороженными», если до мо-
мента стопорения эти параметры изменялись каким-либо обра-
зом, например по закону (2.2.61). В то же время выражение (2.2.63)
утрачивает смысл, так как в вырожденном состоянии двигатель
отключен, а барабан неподвижен (вполне возможными малыми
деформациями обечайки, коренного вала и опорных подшипни-
ков барабана в данном рассмотрении пренебрегаем).
Итак, вырожденная базисная модель подъемной установки
представляет собой механическую систему двух дискретных масс,
каждая из которых подвешена на не связанных между собой уп-
базисная модель
установки
ругих массивных канатах, защемленных в верхних точках. Движение такой системе подчи-
нено начальным условиям и характеру диссипации энергии.
Уравнения динамических состояний базисных моделей. В силу того обстоятельства, что
элементы базисных установок в вертикальном и наклонном стволах подвержены воздействию
внешних сил одинаковой природы, то и уравнения движения с формальной стороны оказы-
ваются одинаковыми. Принимая, таким образом, за основу матричное уравнение (2.2.12),
перепишем его еще раз в такой же форме
IX+JX+KX=P,
(2.2.67)
где для базисных моделей в отличие от (2.2.13) и (2.2.14) имеют место обозначения
0 0 ' ' /1* 0 -У12 'д 0 -с? ' V
/= 0 0 , J = 0 /2 -У22 , К = 0 -с; , х = х2 , Р = Р2
И 0 "V -У22 У11 +У2 -С? -С\ cj+cS 2 Л,
причем здесь при формирования матриц I и Р следует руководствоваться соотношениями
(2.2.61) — (2.2.63) для установки в вертикальном стволе и (2.2.65), (2.2.66) и (2.2.63) для уста-
новки в наклонном стволе.
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
79
Ч гобы не повторять выкладки (см. 2.2.2), сразу же приведем выражения для трех компо-
нент собственных форм, соответствующих собственной частоте юу:
сФд = с\ (с2 - ), сФу2 = Cl (С,1 - т{а>2)
сФу0 = (С2 - ^Д69/) (Q* _ ^ю2)
(2.2.68)
ие масштабный множитель с = С\С2 [см. формулы (2.2.15)].
В определениях (2.2.68) характеристическое уравнение (2.2.20), предназначенное для
определения собственных частот колебаний юу, записывается в следующей неявной форме:
-фу1^2 - фУ2с,2+фуо (q1+q - ^ю2)=о,
или с подстановкой сюда (2.2.68) —
Ci2Q2 (С2) + Q2Q2 (Ci -"^ф2)(с1 + << -^toy) = 0.
Динамические жесткости, входящие в (2.2.68), определяются аналогично соотношени-
ям (2.2.51) и (2.2.54) по формулам:
, cosAty.f/n-A) э 1
С = ЛЛю,--------/U) q, С2 = ЛЛш,.-----------------
7 sin Люу (/0 -1{) 7 sin Люу (/0 - /1)
, cos Лео. /п) -> 1
С\ = ЛЛю,-------7 ° °7, С22 = ЧЛю,-----------------
7 sinЛюу (/2 - /0) 7 sinЛюу (/2 - /0)
(2.2.69)
где. напомним, Л2 =qr / А, причем 1/Л есть скорость распространения продольных волн
деформаций в упругом канате с распределенной массой. Подстановка (2.2.69) в характерис-
шческое уравнение приводит его к явной форме записи относительно юу :
пы): Y m\(!)i Y sin Лю :L т,
cos Лю, Д--------51пЛю,Д cos Лю, Д-----------J-a>.sinAto.L I---------------^-$тЛа>:Ъ&тЛа>,1.7
J 2 АЛ J I 7 АЛ J 7 I coj АЛ 71 72
sinAto.Zof mydj:
----- — cos Лю ,• Lr, —sin Лю, L-,
О): 72 ДЛ 7 "
J k
5П1ЛюуД
Ю,
/
со5ЛюуД
k
Ш|Ю
----вшЛю.-Д
АЛ
/
(2.2.70)
где для краткости обозначено Z1=/o-/1, /2 = /2-/0, L-l2-ly-L{+ [см. (2.2.1)]. Заметим,
что ю0 =0 удовлетворяет уравнению (2.2.70), следовательно, является одним из собственных
чисел рассматриваемой граничной задачи для инфинитной системы.
Общее решение уравнения (2.2.67) строится по аналогии с (2.2.55) в форме
2ф)=£ф//у(о,
7=0
(2.2.71)
где матрица-столбец Фу состоит из трех компонент (2.2.68), то есть символически ряд (2.2.71)
можно представить как
'%! (О
х2(0
Jo(O
Ф71
Фу2
Ф70
^•(0-
В свою очередь координатные функции в (2.2.71) являются решениями диффе-
ренциального уравнения типа (2.2.56):
80
ГЛАВА 2
Vj + У “foj + rfVj = ~^Г U = °’ !’ 2
в котором эрмитова форма в общем случае представляет собой выражение
3 /о 6
ф*/’ = Хф7Л-/1/^1 ds + f2\uj2 ds,
/=! l{ l0
(2.2.72)
(2.2.73)
где /12 определяются соотношениями (2.2.64), которые для случая размещения установки в
вертикальном стволе (а = 90°) автоматически приводят равенствам = /2 = Qfg
Множители NJ в уравнениях (2.2.72) находятся, как и в (2.2.58), в виде
з
<=1
6
ds+\u~2 ds
/о
(2.2.74)
В интегралах (2.2.73) и (2.2.74) функции (/ = 1, 2), описывающие продольные пере-
мещения точек каната на соответствующих интервалах изменения переменной s, определя-
ются следующими выражениями:
Ф 0 sin Ла>у (5 - 4)-Фу1 sin(s - /0)
sin (/0 -/[)
Фу2 sin Ла>у (s - /0) - Фу0 sin Ло>у (s - /2)
sinAtOy (/2 -/0)
(2.2.75)
Общие формулы для динамических усилий, например, у барабана в набегающей и сбе-
гающей ветвях канатов, получаются при помощи коэффициентов динамических жесткостей
(2.2.69) по аналогии с (2.2.59):
SHa6 = Ж-oG1 -ФдЧ2)’/;П Sc6ee = £(фу0С*-Фу2С22)^.(/). (2.2.76)
7=1 7=1
Динамические усилия непосредственно у прицепных устройств первого и второго сосу-
дов находятся как
^2=Х(фУ1С]-фуоС22>у(О- (2.2.77)
7=1 7=1
Таким образом, определение динамических переменных и динамических силовых фак-
торов базисных моделей сводится к следующему простому алгоритму: 1) из трансцендентно-
го уравнения (2.2.70) находится необходимое количество собственных частот (Оу, включая
со0 = 0; 2) каждому из найденному (Оу приводятся в соответствие трехкомпонентная матри-
ца-столбец Фу с помощью соотношений (2.2.68), предварительно вычислив коэффициенты
динамических жесткостей С\2 по формулам (2.2.69); 3) интегрируются уравнения (2.2.72)
параллельно с вычислением эрмитовых форм (2.2.73) и (2.2.74); 4) используются разложение
(2.2.71) для вычислений перемещений скоростей и ускорений сосудов и барабана машины и
выражения (2.2.76) и (2.2.77) для определения усилий в канатах.
Уравнения динамических состояний вырожденных базисных моделей. Несмотря на то об-
стоятельство, что в вырожденном состоянии исходная трехмассовая система фактически ста-
новится двухмассовой, далее будем по-прежнему ее считать все-таки трехмассовой, формаль-
но полагая в этом случае гп2 = 0 . Тогда такая система будет также описываться такой же раз-
мерности матричным уравнением типа (2.2.67):
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
81
ix+jx+kx=p,
(2.2.78)
I де приняты обозначения
' тх 0 О' ' у\ 0 -712 ' с\ 0 -С; ' (х ) Х1
7 = 0 т2 0 ,J = 0 /2 -/22 , £= 0 с] -А2 , х= *2 , Р = Р1
0 0 0 7 -/22 71+7^ -с2 С' + С* 0 0 V 7
причем здесь соответствующие параметры и функции отмечены знаком «~», указывающим
на их принадлежность к вырожденной системе.
Требования равенства нулю перемещений верхних концов канатов при заторможенной
машине приводят к необходимости равенства нулю всех третьих компонент собственных
форм ф^., что в силу третьего соотношения из (2.2.68) приводит к характеристическому урав-
нению относительно собственных частот щ:
(^-^й2)(с;1-^(б2)=о.
А так как и в вырожденном состоянии динамические жесткости, подобно (2.2.69), опре-
деляются по формулам
С* = ЛЛ(Уу
С2 = A)Mj
созАйу (/0 -![)
sinAd>- (Zo — Zj)
, С2 = AXa»j
1
sinAd> • (70 — )
cosAw, (А-А) 1
------Jy °', cl = Aid):---------------
sin Айу (72 - /0) sin ~ )
(2.2.79)
то характеристическое уравнение представляет собой пару независимых уравнений вида
т2&>
cos/m.L)------J-smld)iLr) = 0, cosAdj.L---J-sinAni.L =0.
72 ЛА 7^ ’ 7 ЛА 7'
(2.2.80)
Заметим, что в данном случае w0 =0 не удовлетворяет уравнениям (2.2.80), так как вы-
рожденная система является заведомо финитной.
Сами же компоненты собственных форм, в силу (2.2.68) и сказанного выше, определя-
ются, таким образом, соотношениями:
^7т=С2(С>-"¥»/), c<I)y2 = G2(G1-wi«2), Ф7о=О, (2.2.81)
где масштабный множитель с = С]С2.
Общее решение матричного уравнения (2.2.78), как и прежде, строится в форме
= (2-2.82)
7=0
где координатные функции 1/7 • (г) являются решениями дифференциальных уравнений
V77+y й21Ду+й21/7=-^- (у = 0, 1, 2, ..., оо), (2.2.83)
7V7
в которых эрмитовы формы представляет собой выражения
2 4) 6
Ф^ = Хад-/1|^1 ds+f2\Uj2 ds,
'=1 /[ /о
82
ГЛАВА 2
2
^2=^т.ф2.+^
М
/Ч . 6 .
ры ds + \u2kl
i0
(2.2.84)
и при этом [см. (2.2.75)] функции, описывающие перемещения точек двух защемленных ввер-
ху канатов, имеют вид
sinAdjy (Z2 -/0)
Ф715шЛщ7(5-/0) _Фу2 sinZtoy(5-/0)
71 sinAa>7-(/0-/J ’ J
(2.2.85)
Динамические усилия у барабана в «бывших» набегающей и сбегающей ветвях канатов,
а также усилия непосредственно у прицепных устройств первого и второго сосудов находят-
ся как
$наб ~ (ФуоС1 ~Ф /1Q2 )’/j (Z)’ $сбег ~ X (ФуО^ “ Ф^г )’/j (О’
7=1 7=1
‘VZt’Vi1 -ФУОС12>У (O’ S2 -Х(ФУ1С2 -Ф;оС22>7 (0-
7=1 7=1
Сопряжение динамических переменных. Как было отмечено выше, неизбежно наступает
такое состояние взаимодействия тормоза с барабаном, когда скорость последнего обращает-
ся в ноль, что и является моментом стопорения машины tcmon. Именно в этот момент време-
ни исходная система и превращается в вырожденную (так сказать, «расчлененную» на две
независимые подсистемы).
С математической точки зрения задача перехода исходной системы в вырожденное состо-
яние заключается в сопряжении (или сшивании) решений, описывающих динамическое состо-
яние установки, когда все ее элементы подвижны, с решениями для системы, в которой один
из ее элементов (барабан машины) неподвижен. Операция же сопряжения состоит в установ-
лении взаимосвязи динамических переменных двух различных состояний системы в конкрет-
ный момент времени, в результате чего обеспечивается непрерывность общего решения.
Итак, пусть в некоторый момент времени Zo =tcmon >0 произошло событие, состоящее в
трансформации исходной системы в вырожденную. Динамическое состояние исходной сис-
темы описывается матрицей X(z), представленной в форме (2.2.71) как разложение по мно-
жеству собственных форм. Следовательно, совокупность динамических переменных такой
системы при t = Zo есть
= ^(zo) = I>>7(Q (2.2.86)
7 )
Для вырожденной системы динамические переменные при Z = Z0 записываются по ана-
логии с (2.2.86) с помощью (2.2.82) в форме
*U)) = X<M/('o)’ P'o) = X<Mpo)- (2.5.87)
1 7
Заметим, что здесь X(z0), как и X(z0), является трехкомпонентной матрицей-столб-
цом, так как таковыми есть матрицы-столбцы Фу, определяемые соотношениями (2.2.81), в
которых третья компонента тождественно равна нулю в силу специально принятых для это-
го определений.
Условия сопряжения двух состояний в момент времени Zo приводит к очевидным равен-
ствам X(z0) = X(z0), X(z0) = X(z0), что в силу (2.2.86) и (2.2.87) эквивалентно двум матрич-
ным уравнениям
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
83
^Ф^7^о) = Цф7^(/о), £Ф7¥Ш) = ХФЛ('о)- (2.2.88)
j j j j
Дальнейшая проблема состоит в том, чтобы при известных числах </у (z0) и y/у (zo) най-
ти из (2.2.88) числа \j/j (z0) и у. (г0), являющимися начальными условиями для интегралов
\ равнений типа (2.2.83) вырожденной системы. Задача на первый взгляд кажется неразре-
шимой, так как система (2.2.88) состоит всего из шести уравнений, а требуется найти 2у
неизвестных, причем j может быть и достаточно большим числом. Но, тем не менее, ее мож-
но однозначно решить, воспользовавшись свойствами ортогональности собственных векто-
ров в форме (2.2.23), записанных применительно к матрицам фу и Фу как
Ф*/ФА. = 8jlcN2, Ф}1Фк=ё^2, (2.2.89)
где квадратная диагональная матрица I в силу обозначений к уравнению (2.2.78) отличается
от матрицы / в уравнении (2.2.67) тем, что в ней, естественно, . Нормировочные ко-
эффициенты и N2 вычисляются соответственно по формулам (2.2.74) и (2.2.84). Итак,
\ множив скалярно оба уравнения системы (2.2.88) слева на матрицу ф* / , получим в их пра-
вых частях под знаком суммирования эрмитовы формы ф^1Фк , и тогда, воспользовавшись
соотношениями ортогональности (2.2.23), получим
(z0) = 2£(Ф*/Ф, Ч- (zo), tj (zo) = ^72 X(ф?ф< ('о )> (2.2.90)
! !
что и представляет собой искомые решения. При этом скалярные образования типа (Ф*/Ф,)
в (2.2.90) записываются в виде
2 4> 6
(ф}^) = ХФ7Аш*Ф<*+М UjiU^ds + q^ Uj2Ui2ds, (2.2.91)
*=1 б б
где функции UjX и Ui2 определяются соотношениями (2.2.75), а функции UiX и Ui2 — соот-
ношениями (2.2.85).
Особо следует подчеркнуть, что в соотношениях (2.2.90) суммирование производится
по всем собственным числам, в том числе и для / = 0, чему для исходной системы соответ-
ствует «нулевая» собственная частота &>0 = 0.
В результате подстановки в (2.2.91) соответствующих выражений для функций (2.2.75) и
(2.2.85) найдем, прежде всего,
qr j UjXUtxds = ГФ,о (С)2 - С2)- Ф(1 (С/ - С‘ )1,
ix coj-cofL v
Qt j= -Г 7 2ТФ'0 (^2 ~ ^2 ) “Ф|2 (^2 -^2)],
/3 Wy-ф
где динамические жесткости С/, С2, С2, С2 и Q1, С2, С2, С2 для исходной и вырожденной систе-
мы определяются, в сущности, одними и теми же формулами (2.2.69) и (2.2.79), но для соответству-
ющих собственных частот: в первом случае из уравнения (2.2.70), а во втором — из (2.2.80). В итоге —
(&.1Ф,) = Фу^Ф^ + Фу2т2Ф,2 + (.2Ф^2 [ф,о (А2 - С2) -Ф, 1 (С/ - С‘)] +
7 ' (2.2.92)
+тДят[ф»(й-с0].
84
ГЛАВА 2
Заметим, что собственные частоты основной и вырожденной системы принципиально
различны (й2 ), и по этой причине деление на ноль в выражении (2.2.92) принципиаль-
но не может быть. Но не исключено, что при определенном, редко реализуемом, сочетании
параметров может случиться выполнение равенства aij = о~ для каких-либо i и j. Тогда будут
выполняться также равенства С2 = С2, Q1 = С/, С% = С%, С[ = С\, и в этом случае в (2.2.92) не-
обходимо просто раскрыть неопределенность типа 0/0, например, по правилу Лопиталя.
Таким образом, для сопряжения двух динамических состояний подъемной установки
имеется необходимый набор формул и соотношений, позволяющих корректно исследовать
переходные режимы, связанные с изменением структуры динамической системы.
Спектральные свойства. Прежде чем приступать к моделированию динамических состо-
яний рассматриваемых моделей, необходимо вначале изучить их спектральные свойства,
которые, как оказывается, являются далеко не тривиальными. На рис. 2.24 изображены за-
висимости первых нескольких собственных циклических частот колебаний системы (рад/с)
для исходной (а) и вырожденной (Ь) систем от безразмерной координаты квазидинамичес-
кого положения поднимаюшегося сосуда в стволе £ , определяемой соотношениями (2.2.60).
Расчеты произведены для установки в вертикальном стволе при следующих исходных
данных: машина многоканатная; высота подъема //=1000 м; наименьшая длина отвеса го-
ловного и уравновешивающего каната Иг - Иу = 20 м; агрегатная продольная жесткость четы-
рех головных канатов Д = 5,61108//; линейные массыканатов qr -qy - 33 кг/м; подъем двух-
скиповой; массы сосудов и полезного груза тс = тгр = 20000 кг; масса машины = 30000 кг.
Принятые значения параметров являются типичными для крупных подъемных установок.
Неизбежные на практике вариации указанных параметров, разумеется, могут привести к ко-
личественному изменению представленных на рис. 2.24 результатов, но отнюдь не влияют на
их качественный характер.
Рис. 2.24. Сравнение собственных частот исходной (а)
и вырожденной (Ь) систем
Данные построения выпол-
нены в результате решений
трансцендентных уравнений
(2.2.70) и (2.2.80) при изменении
координаты £ в интервале [0, 1].
Анализ приведенных на
рис. 2.24 а, графиков позволяет
придти к следующим выводам:
1) кривые, соответствую-
щие частотам исходной систе-
ме на всем интервале измене-
нии <5 взаимно не пересекают-
ся, то есть в системе явно от-
сутствуют так называемые
кратные частоты;
2) наименьшая из частот
при изменении £ практически
остается постоянной, то есть
независящей от положения со-
судов стволе;
3) вторая по величине из
частот принимает минимальное значение примерно при £ = 1/2, что соответствует положе-
нию сосудов в середине ствола;
4) собственные частоты, соответствующие кривым с номером к = 3, 4,..., почти «перио-
дически» принимают одинаковые значения при изменении £ , причем с увеличением к на-
блюдается пропорциональное уменьшение периода такого рода «циклов» ; характерным яв-
ляется также то, что «размах» частот оказывается строго постоянным для кривых с конкрет-
ным значением к>3.
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
85
Известный теоретический интерес представляет сопоставление частотных спектров си-
стем исходной и вырожденной (изменение частот для последней показано на рис. 2.24 Ь).
Заметим, что в действительности собственные частоты вырожденной системы формально
не являются функциями переменной £ , так как вырожденное состояние по своему опреде-
лению возникает лишь при заторможенной машине, когда £ -const. Но так как торможение
принципиально возможно в любом месте ствола, то в этом случае уместно говорить о пара-
метрической зависимости частот от £ . Важным также является то обстоятельство, что вза-
имное пересечение кривых на рис. 2.24 Ь, не является свидетельством возникновения крат-
ных частот в системе при некоторых значениях параметра £ . Две серии возрастающих (с
нечетными номерами) и убывающих (с четными номерами) графиков абсолютно независи-
мы друг от друга, что следует из автономности характеристических уравнений системы (2.2.80).
Из сравнения спектральных диаграмм исходной и вырожденной систем следует, что если
мысленно совместить эти две диаграммы, то окажется, что кривые рис. 2.24 Ь, можно фор-
мально получить (только в качественном отношении) с помощью кривых рис. 2.24 а, если
места «закруглений» волнообразных кривых на этом рисунке «спрямить».
Верификация математических моделей. Верификация математической модели, то есть сопос-
тавление экспериментальных данных с результатами расчета с целью доказательства состоятель-
ности и достоверности теории, необходима, как правило, для тех объектов исследования, когда
результаты моделирования достигаются путем намеренных или вынужденных упрощений исход-
ных посылок при физической формулировке задачи. Полезность верификации усматривается так-
же в том, что она дает возможность осуществлять уточнение количественных значений некоторых
основных исходных параметров системы, априори принимаемых с известным приближением (на-
пример, агрегатные жесткости канатов, массы машины, сосудов, тормозные усилия и т. п.).
В данной книге не представляется возможным осветить все аспекты верификации на
основании многочисленных экспериментальных данных, полученных различными исследо-
вателями на протяжении нескольких последних десятилетий. Поэтому ограничимся лишь
некоторыми характерными экспериментами, осуществленными при изучении предохрани-
тельного торможения подъемной машины в вертикальном и наклонном стволе.
В режиме предохранительного торможения подъемных машин со шкивами трения наи-
больший интерес представляют усилия в ветвях непосредственно в окрестности канатоведу-
щего шкива, что необходимо для оценки возможности скольжения канатов или близости к
такому состоянию. К сожалению, до сих пор редко кому из исследователей удавалось запи-
сать истинную картину изменений усилий, лишенную искажений, и по этой причине здесь
верификация производится по записи скорости машины.
На рис. 2.25 а, показана осциллограмма записи скорости машины (кривая 1) и тормоз-
ного усилия (кривая 2) в процессе предохранительного торможения (В. И. Дворников, [12]).
На рис. 2.25 б, изображены некоторые результаты моделирования этого режима.
Обращает на себя внимание не только хорошее качественное совпадение натурных и
симуляционных процессов, но и удовлетворительное их количественное соответствие. Как в
эксперименте, так и при имитационном моделировании обнаруживается характерное коле-
бательное изменение скорости машины, что является следствием интенсивных колебаний
концевых грузов. Экспоненциальный закон возрастания тормозного усилия, принятый в
математической модели, также весьма точно подтверждается экспериментом.
Интересным фактом, зафиксированным на осциллограмме, является «продергивание»
машины из-под тормоза, спустя примерно 0,7 с после полной остановки машины. Модели-
рованием с использованием приемов, изложенных в подразделе «Сопряжение динамичес-
ких переменных», это явление также подтверждается, что находится в согласии с предска-
занной в начале подраздела «Вырожденные базисные модели установок» возможностью зна-
чительного увеличения амплитуд колебаний усилий в канатах после стопорения машины.
На рис. 2.26 приведены совмещенные осциллограммы предохранительного торможения
при подъеме груза, записанные осциллографами, расположенными в здании машины и ва-
гонетке в наклонном стволе (К. И. Чебаненко, [191]). Синхронизация двух осциллограмм
осуществлялась специальными метками, наносимыми через 0,6 с.
В рассматриваемом случае процесс торможения происходил следующим образом. В ин-
тервале времени [/0, вагонетка и барабан машины двигались с постоянной скоростью
86
ГЛАВА 2
Рис. 2.25. Предохранительное торможение при подъеме груза в вертикальном стволе
Р^ = Р^=4,9 м/с. В момент времени tx произошло срабатывание предохранительного тор-
моза. В интервале времени холостого хода [ги л>] сразу же началось уменьшение скорости
барабана (кривая 1), и по истечении интервала времени нарастания тормозного усилия |72,
движение барабана стало равнозамедленным вплоть до момента стопорения машины /5.
Замедление вагонетки (кривая 2) произошло, спустя примерно 0,05 с после момента tx.
Это как раз тот промежуток времени, необходимый для прохода упругой волны расстояния
от барабана до вагонетки. Скорость вагонетки вначале монотонно уменьшалась до момента
/6 = /5 +0,21с , а затем движение вагонетки стало носить затухающий циклически повторяю-
щийся реверсивный характер.
В интервале времени |/0, натяжение каната (кривая 3) непосредственно у прицепно-
го устройства было практически равным расчетному статическому (5tm = 4l кН). В период
холостого хода [rb t2] натяжение каната вначале монотонно уменьшалось, а затем приобрело
волнообразную форму, пока в момент времени г4 не стало равным нулю, начиная с которого
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
87
произошло набегание вагонетки на канат. Этот процесс был сравнительно кратковремен-
ным, но достаточным, чтобы, начиная с момента реверса движения вагонетки tb , в связи с
выборкой «слабины», усилие в момент /10 резко возросло до 5 = 127 кН, то есть более чем
в три раза по сравнению со статическим натяжением.
Рис. 2.26. Предохранительное торможение при подъеме груза в наклонном стволе
В момент /8 из-за чрезмерно возросшего усилия в канате начал проворачиваться бара-
бан из-под тормоза (ср. с осциллограммой на рис. 2.26), и это событие через 0,05 с привело к
некоторому кратковременному уменьшению натяжения в момент /9. Проворот барабана
происходил до момента гп и длился около 0,6 с.
2.3. Расчет жесткой армировки вертикального ствола
Такому расчету должен предшествовать комплекс конструкторских проработок, пре-
дусматривающих размещение сосудов в стволе, выбор принципиальной схемы армировки,
выбор типоразмеров проводников, расстрельных балок и др. Значительную помощь в этом
88
ГЛАВА 2
может оказать специальный альбом так называемых типовых схем армировок, разработан-
ный в 80-х годах институтом «Южгипрошахт» (г. Харьков). Рекомендуется также пользо-
ваться специальной транспарантной номограммой, разработанной специалистами НИИГМ
им. М. М. Федорова.
В 2.1.6 показано, что при вполне определенной скорости движения подъемных сосудов
(К ) реализуется параметрический резонанс при взаимодействии сосуда с проводниками.
Здесь же необходимо уточнить, что такого рода резонансы могут возникать в отношении
поперечных колебаний сосуда в двух главных направлениях: в плоскости проводников дан-
ного сосуда, называемым лобовым направлением, и в перпендикулярном направлении, на-
зываемым боковым. В силу этого обстоятельства резонансные скорости у могут иметь два
различных значения, и поэтому при изложении дальнейшего материала некоторые расчет-
ные параметры будем снабжать при необходимости верхними символами «лоб» или «бок».
Устойчивость лобовых колебаний. В соответствии с изложенной в 2.1.6 теорией главней-
шей характеристикой системы «сосуд-армировка» является параметр армировки, вычисляе-
мый по формуле (2.1.80), и в рассматриваемом варианте лобовых колебаний этот параметр
запишем с учетом сказанных выше оговорок в виде
_ C-,o6h3
” 6EJ '06 ’
(2.3.1)
где Е=2,06-Ю11 Н/м1 — модуль упругости стали; J'106 =/'-10 s ,w4 — момент инерции по-
перечного сечения проводника относительно главной центральной оси, параллельной оси
расстрела, причем здесь J' — тот же момент инерции, численное значение которого обычно
в сортаментных таблицах дается в слб; h, м — шаг армировки; С5'00, Ef /м — коэффициент
жесткости расстрельной балки в точке крепления к ней проводника, то есть жесткость рас-
стрела в направлении, перпендикулярном оси расстрела.
Вычисление Cq°6 в формуле (2.3.1) является наиболее трудоемким процессом при рас-
чете армировки. Однако в некоторых случаях расчет сводится к вычислению по простейшим
формулам. Так, если расстрел по концам заделан в крепь ствола или прикреплен к другим
расстрелам (например, два крайних расстрела скипового раздела и два расстрела противове-
са для клети на рис. 1.7), то тогда, принимая в первом приближении шарнирное опирание
концов балки, параметр Ср00 определяется выражением
/-rJOO _
С'П ------ -ч ,
(2.3.2)
где J, м3 — момент инерции поперечного сечения расстрельной балки относительно цен-
тральной вертикальной оси [см. пояснения к формуле (2.3.1)]; I, м — длина расстрела «в
свету»; Ор, м — расстояние от точки крепления проводника до одной из крайних опор рас-
стрела.
Так же просто вычисляется жесткость в направлении, перпендикулярном оси консоль-
ного расстрела, заделанного в крепь ствола (консольные расстрелы в практике проектирова-
ния и строительства шахтных стволов стали применяться сравнительно недавно):
- 1 2FJ
^.100 _
Ч - /3 ’
где I, м — длина консоли от точки крепления к нему проводника до крепи ствола; множите-
лем «1,2» учитывается упругая податливость крепи ствола.
Более сложным образом определяются Ср00, когда расстрелы представляют собой мно-
гоопорные балки, например, два расстрела клетевого раздела на рис. 1.7, то есть когда на
расстреле имеются дополнительные, промежуточные упругие связи. В этом случае вычис-
ление Cq106 , в соответствии с правилами строительной механики, осуществляется по фор-
муле
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
89
( п Y1
Cq06 = ^ОО~^^Окхк >
(2.3.3)
где п — количество промежуточных опор; хк определяются как решения неоднородной сис-
темы алгебраических уравнений вида
Y(8jk+^jk)xk=5Ai=^ 2>-, п\
(2.3.4)
8jk =81д ~ коэффициенты влияния деформаций, вычисляемые по формулам (как для шар-
нирно опертой по краям балки)
причем здесь в числителе формально считается, что оу- -ак = 0, если ау < ак; оу- и ак — коор-
динаты соответствующих промежуточных опор, отсчитываемые от какой-либо крайней опо-
ры, при этом обуславливается, что — это координата точки крепления проводника к рас-
стрелу, в частности <500 в (2.3.3) есть величина, обратная правой части в (2.3.2), и ее также
можно определить по (2.3.5) при j = k = O', Ajk=Ak/- — податливости промежуточных опор,
при этом Ajk = 0, когда J±k , а при к = j податливости Д^. вычисляются в зависимости от
того, что собой представляет данная опора в каждом конкретном случае.
Так, если промежуточной опорой является заделанная в крепь ствола балка-упор (на
рис. 1.7 для расстрелов клетевого раздела таких упоров для одного расстрела два, а для дру-
гого — три), то его податливость вычисляется как
где I , Fyn — соответственно длина балки-упора (от рассчитываемого расстрела до крепи
ствола) и площадь поперечного сечения упора.
Вторым типом промежуточных опор является закрепленный на расстреле проводник
смежного сосуда (на рис. 1.7 такой промежуточной опорой для центрального расстрела ски-
пового раздела является второй из «спаренных» проводников). Податливость такой опоры
рекомендуется вычислять по формуле
Д^=/?3/(8£/'о(?).
Третьим типом промежуточных опор может быть параллельно расположенный расстрел,
связанный ригелем с рассматриваемым расстрелом. В этом случае Д^ определяется как по-
датливость второго расстрела в точке установки ригеля.
Для большинства схем армировок с двухсторонним расположением проводников рас-
стрелы, располагаемые справа и слева от сосуда, имеют различные по величине Ср00, кото-
рые обозначим, как С$°6 и . Тогда расчетная жесткость расстрела принимается равной
как среднее геометрическое значение этих величин —
fi.iod _ s^.lOO
с0 “\Ч)1 ‘с02 ’
и именно это значение подставляется в формулу (2.3.1) и далее используется во всех расче-
тах. В зависимости от величины вычисленного таким образом параметра <зло6 по графику,
представленному на рис. 2.27 (кривая 2, правая вертикальная шкала), определяется вели-
чина f , при помощи которой вычисляется относительная средняя безразмерная лобовая
жесткость проводника, учитывающая податливость конструкции подъемного сосуда (рамы
скипа):
90
ГЛАВА 2
'лоб _ J _ (J-’.OO _____
~\ + yf’ 7~ ° 720£У-Г
причем L, м — расстояние по вертикали между жесткими направляющими сосуда; л/4 —
«лобовой» момент инерции рамы скипа (для клетей рекомендуется принимать у = 0,2).
Рис. 2.27. Графики для определения основных
динамических параметров системы
«сосуд-армировка»
Параметр рмб =(a>/v)pe3, входящий
в основное условие устойчивости (2.1.88),
определяется по графику, представлен-
ному на рис. 2.27 (кривая 1, левая масш-
табная вертикальная шкала), но не в за-
висимости от ст '00 , а от величины
.-.лоб .-.лоб //, .
°экв=° /(1 + /)-
Так как основное условие устойчиво-
сти (2.1.88) получено дтя подъемного со-
суда с одной степенью свободы, то учет его
поворотных колебаний в плоскости про-
водников осуществляется посредством так
называемого обобщенного мультиплика-
тора частот лобовых колебаний ряо6, на
который необходимо умножать правую
часть соотношения (2.1.88). При этом
р"°б = 0,5
1 + Л2(1 + е2)-^l + A2(l + e2)] -4Я2
= при ^>1,
где Я2 - ml)— мультипликатор поворотных колебаний сосуда в плоскости проводни-
ков; е = (Л-5)/(Л + 5) — эксцентриситет центра тяжести груженого сосуда. Здесь также: т,
кг — масса груженого сосуда [т-т, = тс + тгр в соответствии с определением (18.3.8)];
J^, кгм2 — его кинетический момент инерции относительно центральной оси, перпенди-
кулярной плоскости проводников; А и В — расстояния по вертикали от центра тяжести гру-
женого сосуда соответственно до верхних и нижних жестких рабочих или предохранитель-
ных башмаков (в случае применения роликовых направляющих).
Следует учесть также то обстоятельство, что при лобовых колебаниях сосуд фактически
контактирует с проводниками (почти всегда) в двух точках, вследствие чего левую часть со-
отношения (2.1.88) необходимо умножить на 2.
В результате сделанных замечаний условие (2.1.88) запишется как
С^^/лобр1об>2712тУ2\кю6^р-юб^, (2.3.6)
где допустимый запас устойчивости лобовых колебаний [кло° ] определяется в принятых обо-
значениях и в согласии с (2.1.87) следующим образом:
при
при
р '06 <0,9,
рло6 >0,9.
(2.3.7)
Соотношение (2.3.6) может служить, во-первых, для определения фактического запаса
устойчивости лобовых колебаний сосуда при заданной величине интенсивности mV2 —
км6
факт.
гтюб 1,2 / лоб ~.юб
Ч) " / Р
2тг2тУ02(рло6)2
(2.3.8)
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
91
который должен быть не меньшим допустимого, определяемого по (2.3.7), и, во-вторых, для
определения максимально допустимой интенсивности
max
^лоб т.2 г лоб -.лоб
с°р 2>к
2nr2[r0d](JuJ00') k
(2.3.9)
где (/яИ? ) — расчетная интенсивность, вычисляемая по результатам расчетов 18.3 и пос-
' 'расч
ледуюших уточнений в связи с выбором редуктора и двигателя [см. 9.2, 10.2 и формулу
(10.2.13)].
Соотношение (2.3.8) применяется при проверочных расчетах существующей армировки
и действующей подъемной установки, и если оно не выполняется, то следует, руководству-
ясь опытом, либо предпринимать меры по усилению конструкции армировки, либо умень-
шить величину интенсивности, если позволяют производственные условия.
Соотношение (2.3.9) используется, как правило, при проектировании подъемного ком-
плекса, и в том случае, если это условие не выполняется, следует, прежде всего, опробовать
вариант этой же схемы армировки, но с увеличенным шагом h или с увеличенными типораз-
мерами проводников и расстрелов. Когда и эти попытки не увенчаются успехом, следует уве-
личить типоразмер подъемного сосуда при соответствующем уменьшении скорости что
может привести к ощутимому уменьшению интенсивности mV^. В этом нетрудно убедиться
следующим образом.
Рис. 2.28. Зависимость
интенсивности от массы
сосуда
Прежде всего, в формуле (18.3.7) положим тс =тгр , что
приблизительно имеет место в действительности, и тогда
тгр -m/'l. Далее вместо реальной массы груженого сосуда
т рассмотрим ее безразмерный аналог
V = m(Eanp/^Ha„p)
[см. пояснения к уравнению (18.3.6)], а вместо реальной
интенсивности тИ02 — ее безразмерное представление
К = туЦЕ/,1з2Н3а„р}.
Тогда с помощью (18.3.7) получим выражение
К(у/) = 2у/3-2щ2^щ2(2.3.10)
фактически отражающее зависимость интенсивности mVf2 от массы т. Функция (2.3.10) —
монотонно убывающая (см. рис. 2.28), причем /f(l) = 1 , а при она стремится к нулю.
Возможны также иные способы выполнения условия (2.3.9), что в каждом конкретном слу-
чае зависит от опыта проектировщика.
Устойчивость боковых колебаний. Параметрический резонанс в отношении боковых ко-
лебаний представляет наибольшую опасность и в первую очередь проявляется на практике
при неправильно рассчитанной системе.
В рассматриваемом случае параметр армировки, вычисляемый по формуле (2.1.80), по
аналогии с (2.3.1) записывается в виде
(~<бок Hi
бок _ п
~ 6EJ6OK ’
(2.3.11)
где JOOK, м4 — момент инерции поперечного сечения проводника относительно главной цен-
тральной оси, перпендикулярной плоскости расстрелов; h, м — шаг армировки; CqOK, EI/м —
коэффициент жесткости расстрельной балки в точке крепления к ней проводника, то есть
92
ГЛАВА 2
жесткость собственно расстрела в направлении его оси с учетом внецентренного приложе-
ния внешней нагрузки.
Вычисление Cqok в (2.3.11) производится по формуле
чбок
О
где F, м1 и J, л/4 — соответственно площадь и момент инерции поперечного сечения рас-
стрела относительно центральной вертикальной оси; I, м — длина расстрела «в свету»;
а^, м — расстояние до одной из крайних опор расстрела; р — плечо боковой силы как рас-
стояние от точки ее приложения к проводнику до оси расстрела (см. ниже); Ф — поправоч-
ное слагаемое, которое для проводников из рельса включительно до типоразмера Р-43 реко-
мендуется принимать равным 1500 л/-1, для рельсов Р-50 — 800 л/-1, а для коробчатых про-
водников — нулю.
Плечо боковой силы зависит от типа проводника и определяется по формулам:
b + Нгр -г/2 — для рельсов,
Ь+2Н /3 — для коробки.
где Н — высота профиля проводника, г — высота головки рельса.
Для большинства схем армировок с двухсторонним расположением проводников вели-
чины Cqok для расстрелов справа и слева от сосуда значительно отличаются между собой,
которые обозначим посредством Сц°к и С(рА’ , поэтому и параметры армировки (2.3.11) рас-
считываются раздельно для каждого расстрела:
^боккЗ сбокКЗ
a6oK=^J^ ^=±02» (2.3.12)
6EJ00K ‘ 6EJ6OK
Далее вычисляются коэффициенты относительной податливости несущей рамы сосуда:
7,=С*‘Т3/(720&Х), У2=ф13/(720£ед, (2..3.13)
где L, м — расстояние по вертикали между жесткими направляющими сосуда; м4 —
«боковой» момент инерции рамы скипа (для клетей рекомендуется принимать = у2 = 0,2 ).
С использованием (2.3.13) (2.3.12) определяются эквивалентные параметры армировки
— бок —бок . ,, \ —бок —бок //, \
сг1эга=сг1 + ^1зкв=^1 /(1 + /2)
В зависимости от этих чисел по кривой 2 рис. 2.27 (правая вертикальная шкала) нахо-
дятся два числа и /2, с помощью которых вычисляются относительные средние боковые
жесткости проводников: f°0K = fx /(l + yj, f™*- fa /(l + y2)
Параметр рбок = {a>/v}pe3 , входящий в основное условие устойчивости (2.1.88), опреде-
ляется по графику, представленному на рис. 2.27 (кривая 1, левая вертикальная шкала) в за-
висимости от .
Так как основное условие устойчивости (2.1.88) получено для подъемного сосуда с од-
ной степенью свободы, то учет его поворотных колебаний в плоскости, параллельной плос-
кости расстрелов, и поворотных колебаний вокруг центральной вертикальной оси сосуда осу-
ществляется посредством так называемого обобщенного мультипликатора частот боковых
колебаний рбок, на который необходимо умножать правую часть соотношения (2.1.88). Сам
же этот обобщенный мультипликатор определяется как наименьший корень кубического
уравнения
ОСНОВЫ ТЕОРИИ ШАХТНОГО ПОДЪЕМА
93
р3-р2[я^(1+е2)+Я2 + 1] + р[я^Я2(1 + ^2)+Я29+Я^]-[я^Я2^ = 0, (2.3.14)
где ^=mZ2/(4Jr) — мультипликатор поворотных колебаний сосуда в плоскости, параллель-
ной проводников; -mS2— мультипликатор поворотных колебаний сосуда вокруг
его центральной вертикальной оси; е = (Л - Б) / (Л + Б) — эксцентриситет центра тяжести гру-
женого сосуда. Здесь также принято: Jy, кгм2 — кинетический момент инерции груженого
сосуда относительно центральной оси, перпендикулярной плоскости расстрелов; Jg, кгм2 —
кинетический момент инерции груженого сосуда относительно центральной вертикальной
оси; S — ширина колеи как расстояние между лобовыми поверхностями двух проводников;
А и В, как было означено выше — расстояния по вертикали от центра тяжести груженого
сосуда соответственно до верхних и нижних жестких рабочих или предохранительных баш-
маков. Параметр q в (2.3.14) определяется как
9 = 1-
_.бок fdoK --бок гбок
^IokoJ1____^2жв/2
-.бок Тбок .—.бок Тбок
а1эквЛ +а2экв/2
В первом и достаточно точном приближении наименьший корень уравнения (2.3.14),
если одновременно выполняются условия Я^ > 1, Я^ > 1, можно определить по формуле
Следует учесть также то обстоятельство, что при боковых колебаниях сосуд фактически
контактирует одновременно с двумя проводниками (почти всегда) в двух точках, поэтому,
если среднюю жесткость двух проводников определить как ^C^OKfl6oK + C^OKf/OK^/2, то тогда
левую часть соотношения (2.1.88) необходимо умножить на 4.
В результате сделанных замечаний условие (2.1.88) запишется как
( г'бок гбок , гбок гбок \ ]Д „бок
(Ч л +ч л
>2^2m^2[^](^)2,
(2.3.15)
где допустимый запас устойчивости лобовых колебаний к6™] определяется в принятых обо-
значениях и в согласии с (2.1.87) следующим образом:
4,875^-0,16] при p**<0,9,
3,6 при д^>0,9.
(2.3.16)
Соотношение (2.3.15), как и в варианте лобовых колебаний, может служить, во-первых,
для определения фактического запаса устойчивости лобовых колебаний сосуда при задан-
ной величине интенсивности пгУц —
(Г'бок гбок , гбОК гбок \ 12 „бок
Л +с2 /2 )hp
“факт 2
2я2тК02(д**)
(2.3.17)
который должен быть не меньшим допустимого, определяемого по (2.3.16), и, во-вторых,
для определения максимально допустимой интенсивности
(2.3.18)
94 ГЛАВА 2
где (m/J) — расчетная интенсивность, вычисляемая по результатам расчетов 18.3 и пос-
ледующих уточнений в связи с выбором редуктора и двигателя [см., как на это обращалось
внимание выше, 9.2, 10.2 и формулу (10.2.13)].
Варианты обеспечения условий (2.3.17) и (2.3.18) достаточно подробно освещены выше
в отношении условий (2.3.8), (2.3.9), и поэтому здесь на этом специально останавливаться не
будем.
В заключение следует сказать, что изложенный в данном разделе способ и порядок рас-
чета алгоритмизирован, на основе чего разработан комплексный интерактивный программ-
ный модуль «Расчет подъемных установок главных и вспомогательных вертикальных и на-
клонных стволов угольных и горнорудных шахт» (автор проф. В. И. Дворников). Программ-
ный модуль апробирован и используется проектными организациями.
Глава 3
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
3.1. Основные типы подъемных машин
3.2. Выбор типоразмера подъемной машины
3.3. Подъемные машины ЗЛО «НКМЗ»
3.4. Подъемные машины ОАО «Донецкгормаш»
3.5. Проходческие подъемные машины
3.6. Подъемные машины индивидуального изготовления
3.7. Парк подъемных машин в угольной промышленности
Украины
3.1. Основные типы подъемных машин
Шахтная подъемная машина входит в состав подъемного оборудования и является ос-
новной частью шахтной подъемной установки. Из всех машин, применяемых при подзем-
ной добыче в горной промышленности, подъемная машина занимает наиболее ответствен-
ное место. Вынужденный останов машины фактически прекращает всю добычу шахты, при-
нося огромные убытки. Это определяет высокие требования к техническому уровню подъем-
ных машин и качеству их изготовления.
Подъемная машина (далее машина) состоит из главного вала, включающего орган навив-
ки, механизм перестановки и коренные подшипники; тормозного устройства; соединитель-
ных муфт; редуктора; электропривода; аппаратуры управления, защиты и блокировок.
Так как орган навивки (барабан или канатоведущий шкив) играет главенствующую роль,
дадим следующие определения подъемных машин по типу органа навивки.
Машины однобарабанные одноконцевые — состоят из одного цилиндрического барабана,
на который наматывается один канат с грузом на конце. Такие машины применяются, глав-
ным образом, при проходке вертикальных стволов и в наклонных выработках.
Машины однобарабанные с разрезным барабаном двухконцевые (рис. 1.5, а) — состоят из
одного цилиндрического или бицилиндроконического барабана. Концы двух несвязанных
между собой канатов закреплены у противоположных реборд, и при этом один канат нави-
вается на барабан, а второй в это время сматывается, то есть происходит одновременно подъем
и спуск двух сосудов. Обечайка барабана вблизи одной из реборд имеет поперечный круго-
вой разрез. При этом большая часть барабана жестко соединена с коренным валом, а мень-
шая, благодаря механизму перестановки, — может поворачиваться и жестко соединяться с
валом в любом положении. Эти две части барабана так и называются — заклиненная и пере-
ставная части. Машины с разрезным барабаном могут быть эффективными при обслужива-
нии нескольких рабочих горизонтов в вертикальном шахтном стволе. Однако на практике
наличие переставной части барабана используется, как правило, лишь в процессе смены-
навески канатов и для точной установки сосудов на приемной площадке основного обслу-
живаемого горизонта.
Машины двухбарабанные двухконцевые (рис. 1.5, б) — состоят из двух автономных бара-
банов. Концы двух несвязанных между собой канатов закреплены у противоположных ре-
борд разных барабанов. При этом один канат навивается на один барабан, а второй в это
время сматывается со второго, то есть происходит одновременно подъем и спуск двух сосу-
дов, как и в системе с одним разрезным барабаном. Один из барабанов жестко соединен с
коренным валом, а второй, благодаря специальному «механизму перестановки», — может
поворачиваться и жестко соединяться с валом в любом положении. Эти два барабана так и
называются — заклиненный и переставной.
96
ГЛАВА 3
Машины одноканатные (рис. 1.5, в) и многоканатные (рис. 1.5, г) со шкивами трения (ка-
натоведушими шкивами) — представляют собой шкив с одной канавкой под канат или
цельносварной барабан с несколькими кольцевыми канавками (ручьями) для такого же ко-
личества канатов. Работа таких машин основана на передаче тягового усилия силами трения
(сцепления) на участке прилегания каната к ободу шкива. Одноканатные машины такого
рода (см. рис. 1.5, в) принято сейчас обозначать символом ШТ и называть машинами типа
Кепе, (по имени немецкого изобретателя, который в 80-х годах XIX века теоретически обо-
сновал и внедрил на одном из рудников Германии первую машину со шкивом трения).
В отечественной практике, наряду с применением машин типа Кепе, используются не
только одноканатные, но и многоканатные: двух-, четырех-, шести- и восьмиканатные ма-
шины. Такие машины, при числе канатов 4 и более, как правило, устанавливаются в железо-
бетонных башенных копрах. В последнее время все чаше используются многоканатные ма-
шины с наземным расположением с металлическими копрами укосного типа, которые зна-
чительно дешевле башенных и не требуют большого срока на их возведение.
Машины «бесконечной откатки». По принципу передачи тягового усилия силами трения
основаны машины так называемой «бесконечной откатки», применяемые в горизонтальных и
наклонных выработках. В таких машинах один, специальным образом счаленный канат, обра-
зуя «бесконечную» петлю, приводится в движение шкивом трения с коническим или парабо-
лическим профилем канавки. При этом канат обвивается вокруг шкива несколькими витка-
ми, которые по мере навивки беспрерывно смешаются в осевом направлении шкива в сторону
наименьшего радиуса навивки. На противоположном конце петли имеется свободно вращаю-
щийся шкив натяжной станции, благодаря которому обеспечивается необходимая тяговая спо-
собность канатоведущего шкива. Для соединения перемещающихся вагонеток с канатом ис-
пользуются специальные захваты (крюки), накидываемые на канат вручную. Расцепление ва-
гонеток происходит автоматически или вручную при заезде вагона или состава на ответвляе-
мую часть горизонтального пути. Системы с бесконечной откаткой сохранились и применя-
ются до сих пор лишь на старых шахтах, и в проектах новых шахт не предусматриваются.
Машины с многослойной навивкой каната на барабан. Многослойная навивка каната (до
трех слоев) используются в тех случаях, когда из-за стесненных эксплуатационных условий
нет возможности применить машину с надлежащим диаметром и шириной барабана. В та-
ких системах канат подвергается дополнительному износу, часто имеет место неупорядочен-
ная укладка каната, но в ряде случаев многослойная навивка является единственно возмож-
ным средством для подъема груза с больших глубин.
С 1962 г. английская фирма Лэбус выпускает для подъемных установок барабаны со спе-
циальной нарезкой ручьев, так называемой резьбой Лэбус, которая, по утверждению фирмы
существенно улучшает условия работы канатов при многослойной навивке. Эта резьба пред-
ставляет собой кольцевую нарезку ручьев, смещенных на полшага нарезки по образующей
барабана. Ручьи соединяются между собой направляющими канавками.
В 1957 году инженер Роберт Блейер (Южная Африка) предложил использовать двухка-
натные подъемные установки с цилиндрическими барабанами для обслуживания глубоких
стволов (рис. 1.6). Каждый барабан подъемной машины при помощи промежуточной ребор-
ды разделяется на две равные по ширине секции, на которые несколькими слоями навива-
ются канаты. С каждого барабана два каната, огибая копровые шкивы, подходят к подъем-
ному сосуду и закрепляются на прицепном устройстве, выполненном в виде компенсацион-
ного блока. При пятислойной навивке канатов такая подъемная машина может обслуживать
стволы глубиной 2300 м со скипами грузоподъемностью до 18 т и скоростью подъема 15 м/с.
В отечественной практике подъемные машины системы Блейера пока не применяются,
но следует отметить, что в Башкирском медно-серном комбинате на Сибайском карьере, с
глубиной около 350 м с начала 70-х годов до конца 90-х годов (проект немецкой фирмы «Си-
менс»), находилась в эксплуатации наклонная двухскиповая подъемная установка с обыч-
ной двухбарабанной машиной, весьма похожая на схему, изображенную на рис. 1.6. В дан-
ном случае каждый скип грузоподъемностью 40 т присоединялся к двум канатам, которые
навивались в несколько слоев на соответствующий барабан в двух секциях, разделенных про-
межуточной ребордой (как и в машинах системы Блейера). Эксплуатация такой установки
позволяла значительно сократить парк автомобильного транспорта по доставке полезного
ископаемого, что также сказалось на улучшении экологической обстановки в карьере.
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
97
Таким образом, по типу органа навивки основные виды подъемных машин бывают ба-
рабанные (с одним барабаном, с двумя барабанами, с разрезным барабаном, с бицилиндро-
коническим барабаном) и со шкивами трения (одноканатные и многоканатные).
Для барабанных машин при определении типа подъемной машины в качестве опреде-
ляющих признаков отмечаются диаметр и ширина барабана (барабанов) и разрезной части,
а для подъемных машин со шкивами трения — диаметр канатоведушего шкива и количество
канатов.
Шахтные подъемные машины подразделяются на три группы: малые барабанные подъем-
ные машины с диаметром барабана до 3,5 м включительно; крупные барабанные подъемные
машины с диаметром барабана 4 м и более; машины со шкивами трения.
Малые барабанные подъемные машины предназначены для подъема и спуска людей и
груза по вертикальным и наклонным горным выработкам и применяются для оборудования
подземных и поверхностных подъемных установок. Машины могут работать в среде, опасной
по газу или пыли, могут применяться при проходке стволов.
Крупные шахтные подъемные машины предназначены для подъема и спуска людей и
грузов в основном по вертикальным горным выработкам и применяются для оборудования
поверхностных подъемных установок глубоких шахт и рудников угольной и горнорудной
промышленности, а также для оборудования проходческих подъемных установок. Машины
предназначены для работы в среде, не опасной по газу и пыли, в закрытых помещениях с
температурой воздуха от +5 до +40°С.
В настоящее свремя в Украине подъемные машины выпускают ЗАО «Новокраматорс-
кий машиностроительный завод», г. Краматорск (далее НКМЗ) и ОАО «Донецкий завод гор-
ного машиностроения» (далее Донецкгормаш).
Техническая характеристика, описание конструкции и основные сведения о подъемных
машинах, выпускаемых этими заводами за все время их сушествования, подробно описаны в
[18, 125].
В настоящей работе приведены основные технические характеристики подъемных ма-
шин, которые выпускаются этими заводами последнее время.
3.2. Выбор типоразмера подъемной машины
Наиболее распространенный способ выбора типа машины из имеющихся типажных
конструкций заводов-изготовителей является выбор ее по расчетному диаметру барабана [см.
также формулу (15.2.5):
D6>[8]dK,MM (3.2.1)
где [<5] = 95 — для многоканатных машин, [<5] = 79 — для одноканатных машин барабанного
типа, [<5] = 60 — для подземных подъемных машин.
Принятую таким способом подъемную машину необходимо затем проверить по услови-
ям ее прочности:
(3.2.2)
где Р^ = max(P1, Р2), ЛР1Пах = тах(Р1-Р2), причем здесь Р{ и Р2 вычисляются по формулам
(2.1.6), (2.1.7), (2.1.8), (2.1.9), (2.1.12) в зависимости от типа рассчитываемой подъемной ус-
тановки; [Р] и [АР] — соответственно максимально допустимое статическое натяжение ка-
натов и максимально допустимая разность статических натяжений (эти параметры являются
одними из основных характеристик данной конкретной машины типажного ряда).
Если условия (3.2.1) и (3.2.2) выполняются, то далее необходимо барабанную машину
проверить по условию канатоемкости барабана. Так, при навивке одного каната на барабан
(для однобарабанных одноконцевых установок или для двухбарабанных двухконцевых уста-
новок) ширина барабана должна удовлетворять условию
^D6
+ Птр
+ 1 К+е),
(3.2.3)
98
ГЛАВА 3
а при навивке двух канатов на один барабан должно быть
Н + Лаг:
7tD6
+ 2«тр + л,(;, +1 (<7к+е).
(3.2.4)
В соотношениях (3.2.3) и (3.2.4) D6 измеряется в л/; здесь также обозначено: 1зап — за-
пасная длина каната (до 30 м), необходимая для его периодических повторных испытаний в
соответствии с ПБ [13], если внутри барабана не предусмотрена специальная бобина для на-
мотки такой длины каната; птр — витки трения (птр =5 и птр = 3 соответственно для бараба-
нов нефутерованных и футерованных деревом, резиной и другими материалами); пзаз >2 —
количество витков «зазора» между слоями навивающейся и свивающейся ветвями канатов
(для машин с разрезным барабаном); е — зазор между витками каната, равным 2 мм при
dK < 38 мм, а иначе — 3 мм; при D6 > 6 м — е = 3,6+0,025^, мм.
Для машин с разрезным барабаном проверку канатоемкости необходимо выполнять по
соотношению (3.2.3), в которой под символом В подразумевается ширина заклиненной (ши-
рокой) части барабана, так как навиваемый на нее канат не должен переходить через разрез
(в противном случае не представляется возможным маневрировать переставной частью ба-
рабана при крайних положениях сосудов в стволе).
Если условия (3.2.3) или (3.2.4) для принятой машины не выполняются, то необходимо
принять машину с увеличенным диаметром барабана или допустить многослойную навивку
каната на барабан. Многослойная навивка нецелесообразна для машин, расположенных на
поверхности (в вертикальных или наклонных стволах), и может быть принята в исключи-
тельных случаях, но в подземных условиях — она, как правило, является вынужденной из-за
ограниченных габаритов горных выработок.
Важным вопросом проектирования подъемных установок с машинами барабанного типа
с наземным или подземным расположением является компоновочное размещение копровых
шкивов относительно барабана.
Различаются два типа размещения шкивов: компланарное, то есть в одной плоскости (для
однобарабанных машин), и в параллельных плоскостях (как правило, для двухбарабанных
машин). В любом случае в зависимости от высоты копра и удаления от него машины вне-
шний угол девиации (максимальный угол отклонения оси струны каната от плоскости, пер-
пендикулярной оси барабана) не должен превышать 1°30' (для машин с бицилиндрокони-
ческим барабаном — до 2°).
Необходимо также рационально сочетать длину струны и угол ее наклона к горизонту,
так как при малом угле наклона и длинной струне возможны интенсивные ее раскачивания,
в особенности в переходных режимах работы машины (см. 2.1.8).
Выбранная машина должна быть настроена на такую величину тормозного усилия пре-
дохранительного торможения, чтобы при спуске груженого сосуда или противовеса при по-
рожнем сосуде (для двухскиповых установок это соответствует так называемому перегону по-
рожних сосудов) фактическое замедление превосходило минимально допустимую величину
[ос] для исключения возможности переподъема поднимающегося при этом второго сосуда
(или для обеспечения своевременной остановки машины).
Необходимые для этого расчетные значения тормозных усилий определяются при поло-
жении груженого сосуда или противовеса в крайнем нижнем положении в стволе как
Гп=тЛас] + рх-р2
Fnno = ( т1 - тгр ) laJ “ Р1 + Р2 + V
(3.2.5)
которые получаются при помощи уравнения динамики (2.1.5).
В выражениях (3.2.5) Р{ и Р2 вычисляются по формулам (2.1.6), (2.1.7), (2.1.8), (2.1.9),
(2.1.12) в зависимости от типа подъемной установки, причем в первой формуле из (3.2.5)
принимается ^ = 0 , а во второй — z = Н; допустимое замедление [oc] принимается из табл. 3.1
в зависимости от угла наклона ствола.
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
99
Таблица 3.1
Допустимые замедления и кратность тормозного усилия
Угол наклона, ° [ас], м/с2 [ап],м/с2
5...10 0,75 0,8 1,8
10...15 0,75 1,2 1,8
15...20 0,75 1,8 1,8
20...25 0,75 2,5 2
25...30 0,75 3 2,6
30...40 1,5 3,5 3
40...50 1,5 4 3
50 и более 1,5 5 3
Из двух чисел Fm, Fmo , полученных по формулам (3.2.5), находится максимальное зна-
чение, что представляет собой минимально возможную величину тормозного усилия, ис-
ключающее переподъем:
Arin = max(A».AIW)- (3-2.6)
Кроме этого, тормозное усилие предохранительного торможения должно быть таким,
чтобы при подъеме в любом месте ствола груженого сосуда или противовеса при порожнем
сосуде, что также соответствует перегону порожних сосудов для двухскипового подъема, фак-
тическое замедление не превосходило допустимую величину [а„] для исключения так назы-
ваемого набегания сосуда на канат, когда натяжение его становится равным нулю.
Это — весьма опасное явление, особенно часто наблюдаемое в наклонных стволах, не-
редко приводящее к обрыву головного каната (в вертикальном стволе набегание сосуда на
канат соответствует термину «подпрыгивание груза»). Необходимые для этого значения тор-
мозных усилий определяются посредством (2.1.5) следующим образом:
Arf="fck]-A+A
L (3.2.7)
Fh6o = ~тгр)М + А "А-тгрё]
где Р} и Р2 вычисляются по формулам (2.1.6), (2.1.7), (2.1.8), (2.1.9), (2.1.12) в зависимости
от типа подъемной установки последовательно при £=0 и z-H', допустимое замедление
\аП] принимается из табл. 3.1 в зависимости от угла наклона ствола; для вертикальных ство-
лов [дя] = 5 м/с1 (это число является округленной величиной g/2).
Из двух чисел Fh6, Fh6o при z = 0 и двух чисел F^, F'^ при z = H, вычисленных при
помощи (3.2.7), находится минимальное значение, которое является максимально возмож-
ной величиной тормозного усилия:
Anax = min(As?, FH6o, F'6, F'h6o). (3.2.8)
При правильно выбранной машине в силу выражений (2.10.26) и (2.10.28) должно вы-
полняться условие Алах > Anin, благодаря чему настройку тормоза с расчетным тормозным
усилием Fpac оказывается возможным осуществить, исходя из неравенств
Anax >Fpac > Anin- (3.2.9)
Для надежного стопорения подъемной машины в результате предохранительного тормо-
жения, даже в случае выхода из строя одного из двух приводов тормоза, ПБ регламентируются
минимально допустимые кратности тормозного усилия [^J, численные значения которых
приведены в табл. 3.1 в зависимости от угла наклона ствола (в вертикальном стволе [^1^] = 3).
Расчетная кратность тормозного усилия определяется как отношение расчетного тор-
мозного усилия в (3.2.9) к максимальной разности статических натяжений, и тогда условие
надежного стопорения выглядит так:
100
ГЛАВА 3
<3-2-10>
тах(Р1-Р2)
В ряде случаев условие (3.2.10) невозможно выполнить, и тогда при наладке машины
приходится прибегать к таким вынужденным мерам, как, например, осуществление дроссе-
лирования выпуска сжатого воздуха из тормозных цилиндров (если, разумеется, тормоз пру-
жинно-пневматический), применение специальных редукторов с маховиками и др.
В последнее время изготовители машин для подъемов в наклонных стволах (с диамет-
ром барабана до 3-х метров) освоили производство тормозных систем с так называемым из-
бирательным предохранительным торможением, при котором величина тормозного усилия
автоматически выбирается из двух постоянных, заранее рассчитанных значений в зависимо-
сти от спуска или подъема груза (см. также (2.1.5). В таких системах интервал в (3.2.9) можно
значительно увеличить, и условие (3.2.10) становится, как правило, выполнимым.
Принцип выбора типоразмера многоканатной подъемной машины по условию (3.2.1),
то есть исходя из диаметра каната, не является вполне корректным, даже при удовлетворе-
нии требований (3.2.9) и (3.2.10).
Действительно, одним из важнейших предъявляемых к такой машине требований яв-
лятся условия отсутствия скольжения канатов в различных режимах предохранительного тор-
можения, которые оказываются значительно более жесткими, чем требования к ненабега-
нию сосуда на канат для барабанной машины, рассмотренные выше.
По этой причине машины со шкивами трения, как правило, нет необходимости прове-
рять на отсутствие подпрыгивания груза, а основное внимание следует сосредоточить на обес-
печении нескольжения канатов как на главном условии обеспечения безопасной эксплуата-
ции такого типа подъемных установок.
Для этого в соответствии с (3.2.8) в рамках расчета по ^-критерию должны выполняться сле-
дующие равенства для возможных на практике основных эксплуатационных режимов движения:
спуск груза-. Д(1 + ос/g)[^.]= (1-^/§)ехр(,ио!0),
подъем груза-. Р{ (1-о„/g)exp(/ra0) = Р2 (1 + й„/g)[fccJ,
спуск противовеса: Р2 (1 + асо / g)[kCK] = (Р{ - m,pg)(1 -асо / g)ехр(/ш0),
подъем противовеса: Р2 (1-ля0 /g)exp(Jua0) = (/]-m!pg){\+an0/g)[kCK\,
где ас, ап, асо, апо — замедления машины соответственно при спуске груза, подъеме груза,
спуске противовеса, подъеме противовеса (считается, что при спуске и подъеме противове-
са — скип порожний, что для двухскипового подъема соответствует так называемому режи-
му перегона порожних сосудов); |ЛСК] — допустимый запас нескольжения канатов, принима-
емый равным 1,2; тг — масса груза в скипе; р — расчетный коэффициент трения канатов
по футеровке канатоведушего шкива, принимаемый не более 0,25; а0 — угол обхвата кана-
тами шкива трения (принимается не более 195° по требованию завода-изготовителя).
Равенства (3.2.11), таким образом, служат для определения соответствующих требуемых
замедлений, при которых гарантируется (в известном смысле) отсутствие скольжения кана-
тов по футеровке канатоведущего шкива:
спуск груза'.
подъем груза'.
спуск противовеса-
подъем противовеса'.
ас _ P2exp(pa0)-Pl[kCK]
g Р2ехр(ра0)г P,\kIK].'
ап = P^xp(paQ)- Р2[кск}
g P1exp(Jua0) + P2[/:fj’
Фо Jp~mepg)exp(paf))-Р2[кСК]
S (P]-mepg)exp(pa,l)+Р2[кск]'
апо Р2 ехр(/га0)-(Р1-mgpg)[kCK]
g P2exp(pa0) + (Pl-mPpg){kCK]’
(3.2.12)
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
101
Статические усилия и Р2 в (3.2.11) и (3.2.12) вычисляются по формулам (2.1.6) после-
довательно в двух крайних положениях сосудов стволе, то есть при ^ = 0 и z = H, и таким
образом всего оказывается восемь равенств типа (3.2.12).
Выражения (3.2.11) отличаются от (2.1.28) наличием перед Рх и Р2 множителей l±a/g,
учитывающих увеличение или уменьшение соответствующих усилий в точках набегания и
сбегания на квазидинамические приращения / g, ±аР2 / g, так как PJ g и Р2/ g фор-
мально являются массами отвесно висящих ветвей канатов с соответствующими массами кон-
цевых грузов.
В свою очередь замедления машины ас, ап, асо, апо, вычисленные с помощью (3.2.12),
обуславливают в силу (2.1.5) необходимые величины тормозных усилий:
спуск груза: Fc = mzac + Pl-P2,
подъем груза'. Fn-mLan-P1+P2,
спуск противовеса: Fco - (т^ - тгр) а^ - Рх + Р2 + mipg,
подъем противовеса: F^ - [mY - тгр ^an0+Pl-P2-mipg,
(3.2.13)
где т^ — суммарная масса установки, определяемая по формуле (2.1.4), тгр — расчетная
величина перевозимого груза.
Из четырех чисел Fc, Fn, F№, Fno при z-0 и четырех чисел F', F', F'o, Fno при z = H,
вычисленных по (3.2.13) с использованием (3.2.12), находится максимально возможное тор-
мозное усилие как
Лпах = min(Fc, Fn, Fm, Fm, F', F', F^, F^). (3.2.14)
Если машина предназначена только для подъема груза, например, в скиповых установ-
ках, то иногда она оснащается специальной блокировкой, исключающей спуск груженого скипа
или спуск противовеса при порожнем скипе (как правило, такие ситуации возможны при
случайных ошибочных действиях машиниста). В этом случае вместо (3.2.14) можно руко-
водствоваться упрощенным соотношением
гпих=тт(гл, гло, f;, f;0).
Далее, подобно (3.2.5), определяются тормозное усилие при спуске груженого скипа (при
Z = Q) и при спуске противовеса (при z = H) с нормативным замедлением [ас] = 1,5 м/с2 (см.
табл. 3.1) для предотвращения возможности переподъема'.
/ чг л (3.2.15)
Fnno = («S +Р2 +тгр£’
и находится максимальное значение из чисел (3.2.15), что представляет собой минимально
возможную величину тормозного усилия:
/т1п = шах(Глл,Глло). (3.2.16)
С помощью чисел (3.2.14) и (3.2.16) вычисляется так называемая глубина регулирования
тормозного устройства, величина которой должна быть не только положительной, но и удов-
летворять условию:
F — F
р _ 2 пых Jmin >
F +F ~
Л max Л min
где [г] = 0,1 — допустимая глубина регулирования. Это требование необходимо для гаранти-
рованной настройки тормозной системы при возможных отклонениях ее конструктивных и
физических параметров.
102
ГЛАВА 3
Если условие (3.2.17) выполняется, то в подъемной установке с выбранным типораз-
мером машины обеспечивается отсутствие скольжения канатов при любом режиме пре-
дохранительного торможения, и обеспечивается отсутствие переподъема. Иначе требуется
принять машину с увеличенным диаметром барабана или с большим количеством канатов.
Возможно, также потребуется утяжеление скипов (увеличение тс), что нередко оказыва-
ется хотя и вынужденной, но единственной мерой. Разумеется, утяжеление скипов допус-
тимо лишь в том случае, когда не нарушаются условия прочности канатов (15.2.1) или
(15.2.3).
Одним из способов обеспечения условия (3.2.17) является правильный выбор массы урав-
новешивающих канатов. Существующая рекомендация относительно величины коэффици-
ента уравновешенности к , определяемого соотношением (1.2.1), чтобы выполнялось усло-
вие <0,1, для многоканатного подъема следует понимать, как 0<ку <0,1, то есть целесо-
образно всегда иметь qy>qr.
Однако, выполнение требования (3.2.17) отнюдь не означает, что будет выполнено и
условие (3.2.10). В этом случае отдается приоритет все же условию (3.2.9), в котором уси-
лия FmSA и F^n вычисляются по формулам (3.2.14) и (3.2.16), то есть из условий несколь-
жения канатов. При этом по величине Fpac с помощью соотношений (6.1.3) вычисляется
усилие прижатия колодок тормоза к ободу, и в соответствии с кинематической схемой при-
вода тормоза производится настройка его пружинной части (первая ступень торможения)
с искусственной задержкой срабатывания грузовой части (второй ступени) до полной ос-
тановки машины (см. 6.1), а уже вторая ступень обеспечивает выполнение требования
(3.2.10).
Разумеется, расчет на нескольжение канатов для машин со шкивами трения, как и рас-
чет на ненабегание сосуда на канат для машин барабанного типа, возможен лишь при досто-
верно известной суммарной массе установки. Поэтому такого вида расчеты следует выпол-
нять после предварительного выбора типоразмера машины, редуктора и двигателя, а затем,
если параметры оборудования могут быть изменены, то снова следует уточнить расчетную
величину тормозного усилия.
Наконец, принятую машину необходимо проверить по условию допустимого давления
канатов на футеровку канатоведущего шкива:
РСР = Н/мм\ (3.2.18)
D6dA
где, например, для широко применяемой футеровки из пластиката ПП-45 допустимое дав-
ление [р] = 2Н/м^ (=2 МПа), а давление рср определяется при помощи (2.1.35) с учетом
размерностей входящих в (3.2.18) величин ( D6, dK измеряются в лш).
Итак, выбор типоразмера многоканатной машины главным образом основан на выпол-
нении условий (3.2.17) и (3.2.18), а условие (3.2.1) может служить для предварительной, ори-
ентировочной оценки типоразмера машины.
3.3. Подъемные машины ЗАО «НКМЗ»
С вводом в действие Ново-Краматорского машиностроительного завода (в настоящее
время — Закрытое акционерное общество «Ново-Краматорский машиностроительный за-
вод», далее НКМЗ), начался выпуск подъемных машин и было создано конструкторское бюро
горно-заводского оборудования, которое занималось их разработкой [86].
В 1935 г. была изготовлена первая подъемная машина для шахты имени С. Орджони-
кидзе» ПО «Макеевуголь». Машина была рассчитана на подъем 6 т груза с глубины 500 м и
создана в сотрудничестве с Харьковским электромеханическим заводом, который поставил
аппаратуру управления и асинхронный двигатель мощностью 700 кВт.
В последующем было изготовлено более 30 подъемных машин различных модификаций
для шахт Донбасса и Кузбасса.
Важным моментом и традицией производства машин на НКМЗ является постоянное
совершенствование и расширение модификаций выпускаемых машин. Так, 1946 г. — первая
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
103
подъемная машина со шкивом трения типа ШТ 7,2 для шахт глубиной 1000 м, 1948 г. — пер-
вая подъемная машина с бицилиндроконическим барабаном, 1954 г. — первая машина с ци-
линдрическим разрезным барабаном. С 1958 г. начинается выпуск наземных многоканатных
подъемных машин.
Определенным достижением можно считать производство с 1981 г. подъемных машин
серии МПБ с прогрессивными для того времени техническими решениями. Расположение
тормоза внутри барабана позволило полностью использовать наружную цилиндрическую
поверхность барабана под навивку каната, тем самым увеличить канатоемкость и умень-
шить его габариты при заданной канатоемкости. Тормоза — колодочные, самоустанавли-
вающиеся, полностью уравновешенные, нейтральные к направлению вращения барабана.
Тормозные приводы — пружинно-пневматические, безгрузовые. Для удобства монтажа и
обслуживания тормоз и тормозные приводы установлены на качающихся рамах. Навивка
каната производится на металлическую нарезную обечайку. При двухслойной навивке ба-
рабаны снабжены переходными полосами для плавного вывода каната на второй слой и
упорядочения его навивки. Машины имеют зубчатое расцепное устройство, расположен-
ное между барабанами.
Эти машины отличаются меньшими металлоемкостью и габаритами, повышенной
производительностью и надежностью, высокой степенью унификации узлов. Благодаря
оригинальному схемному решению при компоновке узлов сборки барабанов и встроен-
ных в них тормозов существенно упрощается фундамент под машины типа МПБ. После-
дние более приспособлены для установки на фундамент подъемных машин более ранних
выпусков.
В 1992 г. заводом была выпущена 2000-я шахтная подъемная машина. Это свидетель-
ствует об уникальном опыте проектирования и изготовления, монтажа, высокой эффектив-
ности, современной технологичности изготовления и эксплуатации шахтных подъемных
машин НКМЗ. Вращение барабанов подъемных машин осуществляется от быстроходных
электродвигателей (одного или двух) через механизм привода или непосредственно от при-
меняющегося редуктора ЦО-18, ЦО-22 и ЦД-20 [86].
Завод постоянно занимается и модернизацией действующих подъемных машин.
Основной путь развития производства подъемных машин на НКМЗ на ближайшее де-
сятилетие — это создание по индивидуальным заявкам заказчиков высокопроизводитель-
ных машин, позволяющих осуществлять подъем полезных ископаемых с больших глубин.
При этом решается задача подъема грузов на поверхность без установки промежуточных
подъемных машин. В этом направлении уже сделаны первые шаги. В 2001 г. спроектирова-
на и изготовлена однобарабанная подъемная машина 1—6,3x3,78 (статическое натяжение
канатов 570 кН, разность статических натяжений 320 кН, глубина подъема 1000 м). Парал-
лельно была изготовлена аналогичная машина, но с разрезным барабаном ШПМ 1—
6,3x3,78/0,63.
Трудное экономическое положение многих горных предприятий потребовало найти ре-
шения, направленные на расширение технических возможностей работающего на шахтах
оборудования и, в первую очередь, шахтных подъемных машин (увеличение грузоподъемно-
сти, канатоемкости и т. д.) при минимальных затратах заказчика. Одним из таких решений
является модернизация, направленная на переоборудование ШПМ с навиваемыми на бара-
баны канатами на многоканатные. Опыт такой модернизации уже имеется. Так, машина
ЦР-6хЗ,4/0,6 на шахте «Трудовская» ПО «Донецкуголь» переоборудована на двухканатную.
Для шахты им. А. Ф. Засядько изготавливается комплект оборудования по переоборудова-
нию однобарабанной подъемной машины 1—6x3,4 на трехканатную.
В последние годы некоторые заказчики стали проявлять интерес к шахтным подъем-
ным машинам, оснащенным дисковыми пружинно-гидравлическими тормозами. Первая
подъемная машина 2Ц-5х2,4Д-ТД с дисковыми тормозами была спроектирована и изготов-
лена НКМЗ в 2000 г. совместно с «МИДИЭЛ» (г. Донецк) для акционерной компании «Ал-
роса» (г. Мирный). Машина была укомплектована пружинно-гидравлическими тормозными
модулями и системой управления фирмы АВВ. Одновременно с модернизацией и освоени-
ем новых видов подъемных машин проводится работа по модернизации и освоению отдель-
ных элементов (составных частей) подъемных установок, а именно: копров, копровых шки-
104
ГЛАВА 3
bob, подъемных сосудов, противовесов, прицепных и подвесных устройств, загрузочных и
разгрузочных устройств, элементов армировки ствола [86].
Подъемное оборудование НКМЗ обладает патентной чистотой в России, Швеции, Гер-
мании, Чехии и многих других странах. Шахтные подъемные машины с новокраматрской
маркой называются в числе лучшин зарубежных аналогов. Их качество, надежность, высо-
кий технический уровень подтверждены длительным сроком эксплуатации. Производство
НКМЗ сертифицировано ведущей западной фирмой TUV NORD, что подтверждает внедре-
ние на предприятии современной системы качества и выполнение требований ЕНИСО 9001.
Завод выпускает крупные шахтные подъемные машины с цилиндрическим разрезным
барабаном диаметром 4; 5 и 6 м (серия ЦР); машины двухбарабанные с двумя цилиндричес-
кими барабанами диаметром 4; 5 и 6 м (серия 2Ц), и с диаметром барабанов 5 и 6,3 м (серия
МПБ); однобарабанные (серия 1), машины с бицилиндроконическим разрезным барабаном
диаметром 8 и 9 м (серия БЦК) и подъемные машины со шкивами трения — одноканатные
ШТ и многоканатные типа МК, ЦШ, МПМН (ЦШН).
Подъемные машины серии ЦР с одним цилиндрическим разрезным барабаном для од-
нослойной навивки каната применяются на двухскиповых и двухклетевых подъемах, а также
на однососудных подъемах с противовесом. Машины этой серии состоят из разрезного ци-
линдрического барабана, имеющего более широкую заклиненную и переставную части. Ба-
рабан машины по наружной поверхности имеет винтовую нарезку под канат, шаг которой
зависит от диаметра каната. Опорами главного вала служат сферические двухрядные роли-
коподшипники, установленные в разъемном корпусе. Левая опора зафиксирована от пере-
мещений, правая выполнена плавающей.
Двухбарабанные подъемные машины серии 2Ц и МПБ предназначены для оборудова-
ния двух- и однососудных с противовесом подъемных установок и обеспечивают работу
подъемной установки одновременно с нескольких горизонтов, расстояние между которыми
определяется канатоемкостью барабана. Машины этих серий имеют два цилиндрических
барабана — заклиненный и переставной.
Подъемные машины серии БЦК предназначены для оборудования вертикальных подъем-
ных установок глубоких шахт. Машины этой серии имеют один разрезной бицилиндрокони-
ческий барабан, который собран из двух цилиндров малого диаметра, двух конусов и одного
цилиндра большого диаметра.
Многоканатные подъемные машины серии ЦШ и МПМН и одноканатныве серии ШТ
выпускаются по отдельным заказам для замены действующих подъемных машин и для со-
оружанмых объектов шахтного строительства.
Ниже приведены технические характеристики и илюстрации подъемных машин НКМЗ,
выпускаемых в настоящее время. Приняты следующие условные обозначения и единицы их
измерения:
D — диаметр барабана (диаметр большого цилиндра барабана подъемных машин БЦК),
диаметр по осям каната, навитого в один слой, мм;
D, — диаметр малого цилиндра барабана подъемных машин БЦК, мм;
В — ширина барабана (ширина большого цилиндра барабана подъемных машин БЦК), мм;
В} — ширина переставной части барабана (ширина конуса барабана подъемных машин
БЦК), мм;
В2 — зазор между переставным и заклиненным барабанами (между переставной и зак-
линенной частями барабана в подъемных машинах ЦР, ширина малого цилиндра барабана
подъемных машин БЦК), мм;
В3 — ширина большого цилиндра переставной части барабана подъемных машин БЦК, мм;
п — число слоев навивки, шт.;
Рст — статическое натяжение каната, кН;
Р — разность статических натяжений канатов, кН;
V— скорость подъема, м/с;
GD1 — маховый момент вращающихся частей подъемной машины без электродвигателя
и электрооборудования, канатов и копровых шкивов, кНм1;
М — масса подъемной машины, т;
Д — подъемные машины допускают двухслойную навивку на барабан;
У — подъемные машины усиленной конструкции.
ШАХТНЫЕПОДЪЕМНЫЕ МАШИНЫ
105
3.3.1. Однобарабанные подъемные машины с цилиндрическим разрезным барабаном
(табл. 3.2, 3.3)
Таблица 3.2
Технические характеристики подъемных машин (ПМ) с одним цилиндрическим
разрезным барабаном с редукторным приводом
Тип подъемной машины Диаметр барабана (D), мм Ширина барабана, мм Число слоев навивки Нагрузка не более, кН Максимальная скорость, м/с Масса ПМ с механизмом привода, т Маховый момент вращающихся частей ПМ (GD2), кН-м2
Общая (В) В том числе переставная часть (Bj) Статическое натяжение каната Разность статических натяжений канатов
ЦР-4хЗ/0,7 4000 3000 700 1 250 160 12 108 2400
ЦР-5хЗ/0,6 5000 3000 600 1 280 210 14 161 5050
ЦР-6хЗ/0,6 6000 3000 600 1 320 240 16 177 9550
ЦР-6хЗ,4/0,6 6000 3400 600 1 320 270 16 189 11200
1-6,3x3,78/0,63 6300 37800 630 1 360 195 16 205
1-6,3x4,2/0,63 6300 4200 630 1 335 204 16 206
1-6,3x4,95/0,63 6300 4900 630 1 385 257 16 219
1-6,3x4,95/1,4 6300 4950 1400 1 360 270 16 206
Рис. 3.1. Подъемная машина с одним цилиндрическим разрезным барабаном
с редукторным приводом:
1 — барабаны в сборе; 2 — тормоз; 3 — привод тормозной; 4 — панель управления;
5 — ограничитель скорости дублирующий; 6 — ограждение; 7 — воздушно-компрессорная станция;
8 — воздухосборник; 9 — арматура и трубы пневмосистемы; 10 — комплект анкерных частей;
11 — подъемные электродвигатели; 12 — аппарат задания и контроля; 13 — механизм привода;
14 — арматура и трубы системы смазки; 15 — смазочная станция системы смазки
106
ГЛАВА 3
Таблица 3.3
Технические характеристики машин с одним цилиндрическим разрезным барабаном
с безредукторным приводом
Тип подъемной машины Диаметр барабана (D), мм Ширина барабана, мм Число слоев навивки Нагрузка не более, кН Максимальная скорость, м/с Масса подъемной машины, т Маховый момент вращающихся частей ПМ (GD2), кН-м2
Общая (В) В т(»и числе переставная часть (В j) Статическое натяжение каната Разность статических натяжений канатов
ЦР-5хЗ/0,6 5000 3000 600 1 280 210 14 102 5050
ЦР-6x3/0,6 6000 3000 600 1 320 240 16 113 9550
ЦР-6хЗ,4/0,6 6000 3400 600 1 360 270 16 125 11200
1-6x5,6/0,8 6000 5600 800 1 560 400 16 262
1-6,3x3,78/0,63 6300 3780 630 1 360 195 16 141
1-6,3x4,2/0,63 6300 4200 630 1 335 204 16 142
1-6,3x4,95/0,63 6300 4950 630 1 385 257 16 154
1-6,3x4,95/1,4 6300 4950 1400 1 360 270 16 141
1-5x4.71/0,5 5000 4710 500 1 400 300 16 210 17200
1-5x5,6/0,8 5000 5600 800 1 560 400 16 244
1-6x5,6/0,8 6000 5600 800 1 560 400 16 250
1-6,3x4,95/1,4 6000 4950 1400 1 360 270 16 155
Рис. 3.2. Подъемная машина с одним цилиндрическим разрезным
барабаном 1—6,3 х 4,2/06
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
107
Рис. 3.3. Подъемная машина с одним цилиндрическим разрезным барабаном
с безредукторным приводом:
/ — барабаны в сборе; 2 — тормоз; 3 — привод тормозной; 4 — панель управления;
5 — ограничитель скорости дублирующий; 6 — ограждение; 7 — воздушно-компрессорная станция;
8 — воздухосборник; 9 — арматура и трубы пневмосистемы; 10 — комплект анкерных частей;
И — подъемный электродвигатель; 12 — аппарат задания и контроля
Рис. 3.4. Подъемная машина с одним цилиндрическим разрезным барабаном ЦР-6хЗ/0,6
108
ГЛАВА 3
3.3.2. Двухбарабанные подъемные машины (табл. 3.4, 3.5)
Таблица 3.4
Технические характеристики двухбарабанных подъемных машин с редукторным приводом
Тип подъемной машины Диаметр барабана (D), мм Ширина барабана (В), мм Число слоев навивки Нагрузка не более, кН Максимальная скорость, м/с Масса НМ с механизмом привода, т Маховый момент вращающихся частей I IM (GD2), к! 1-м2
Статическое натяжение каната Разность статических натяжений канатов
2Ц-4х1,8 4000 1800 1 250 160 12 112 2750
2Ц-4х1,8Д 4000 1800 2 250 160 12 118 5200
2Ц-4х2,3 4000 2300 1 250 160 12 116 3700
2Ц-4х2,ЗД 4000 2300 2 250 160 12 128 7100
2Ц-5.х2,4 5000 2400 1 280 210 14 182 8350
2Ц-5х2,4Д 5000 2400 2 280 210 14 193 15000
2Ц-6.Х2,4 6000 2400 1 320 240 16 207 15400
2Ц-6.х2,4Д 6000 2400 2 320 240 16 222 2700
2Ц-6х2,8 6000 2800 1 360 270 16 216 19200
2Ц-6х2,8Д 6000 2800 2 360 270 16 221 36000
Д — подъемная машина допускает двухслойную навивку канатов на барабан
Рис. 3.5. Двухбарабанная подъемная машина с редукторным приводом:
1 — барабаны в сборе; 2 — тормоз; 3 — привод тормозной; 4 — панель управления;
5 — ограничитель скорости дублирующий; 6— ограждение; 7 — воздушно-компрессорная станция;
8 — воздухосборник; 9 — арматура и трубы пневмосистемы; 10 — комплект анкерных частей;
И — подъемные электродвигатели; 12 — аппарат задания и контроля; 13 — механизм привода;
14 — арматура и трубы системы смазки; 15 — смазочная станция системы смазки
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
109
Рис. 3.6. Двухбарабанная подъемная машина 2Ц 5x2,4
Таблица 3.5
Технические характеристики двухбарабанных подъемных машин с безредукторным приводом
Тип подъемной машины Диаметр барабана (D), мм Ширина барабана (В), мм Число слоев навивки Нагрузка не более, кН Максимальная скорость, м/с Масса подъемной машины, т Маховый момент вращающихся частей ПМ (GD2), кН*м2
Статическое натяжение каната Разность статических натяжений канатов
2Ц-5х2,4 5000 2400 1 280 210 14 118 8350
2Ц-5х2,4Д 5000 2400 2 280 210 14 130 15000
2Ц-5х2,8 5000 2800 1 560 400 14 223 16400
2Ц-6х2,4 6000 2400 1 320 240 16 144 27000
2Ц-6х2,4Д 6000 2400 2 320 240 16 158 19200
2Ц-6х2,8 6000 2800 1 360 270 16 152 36000
2Ц-6х2,8Д 6000 2800 2 360 270 16 157
2Ц-6х2,8У 6000 2800 1 560 400 16 240
2Ц-5х2,4 5000 2400 1 280 210 14 118
2Ц-5х2,4Д 5000 2400 2 280 210 14 130
110
ГЛАВА 3
Рис. 3.7. Двухбарабанная подъемная машина с безредукторным приводом:
/ — барабаны в сборе; 2 — тормоз; 3 — привод тормозной; 4 — панель управления;
5 — ограничитель скорости дублирующий; 6 — ограждение; 7 — воздушно-компрессорная станция;
8 — воздухосборник; 9 — арматура и трубы пневмосистемы; 10 — комплект анкерных частей;
И — подъемный электродвигатель; 12 — аппарат задания и контроля.
3.3.3. Однобарабанные подъемные машины (табл. 3.6, 3.7)
Таблица 3.6
Технические характеристики однобарабанных подъемных машин с редукторным приводом
Тип подъемной машины Диаметр барабана (D), мм Ширина барабана (В), мм Число слоев навивки Нагрузка не более, кН Максимальная скорость, м/с Масса 1IM с механизмом привода , г
Статическое натяжение каната Разность статических натяжений канатов
1-5x2,4 5000 2400 1 250 250 14 164
1-5х2.4Д 5000 2400 1 250 250 14 175
1-6x2,4 6000 2400 1 270 270 16 170
1-6х2,4Д 6000 2400 2 270 270 16 181
1-6x2.8 6000 2800 1 300 300 16 190
1-6х2,8Д 6000 2800 2 300 300 16 210
1-6x3,4 6000 3400 1 320 320 16 222
1-6хЗ,4Д 6000 3400 2 320 320 16 230
1-6,3x3,78 6300 3780 1 570 320 16 204,3
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
111
Рис. 3.8. Однобарабанная подъемная машина с редукторным приводом:
1 — барабаны в сборе; 2 — тормоз; 3 — привод тормозной; 4 — панель управления;
5 — ограничитель скорости дублирующий; 6 — ограждение; 7 — воздушно-компрессорная станция;
8 — воздухосборник; 9 — арматура и трубы пневмосистемы; 10 — комплект анкерных частей;
11 — подъемные электродвигатели; 12 — аппарат задания и контроля; 13 — механизм привода;
14 — арматура и трубы системы смазки; 15 — смазочная станция системы смазки
Рис. 3.9. Однобарабанная подъемная машина с редукторным приводом
112
ГЛАВА 3
Таблица 3.7
Технические характеристики однобарабанных подъемных машин с безредукторным приводом
Тип подъемной машины Диаметр барабана (D), мм Ширина барабана (В), мм Число слоев навивки Нагрузка не более, кН Максимальная скорость, м/с Масса подъемной машины, т
Статическое натяжение каната Разность статических натяжений канатов
1-5x2,4 5000 2400 1 250 250 14 100
1-5х2,4Д 5000 2400 2 250 250 14 111
1-6x2,4 6000 2400 1 270 270 16 106
1-6х2,4Д 6000 2400 2 270 270 16 117
1-6x2,8 6000 2800 1 300 300 16 126
1-6х2,8Д 6000 2800 2 300 300 16 146
1-6x3,4 6000 3400 1 320 320 16 158
1-6хЗ,4Д 6000 3400 2 320 320 16 166
1-6,3x3,78 6300 3780 1 570 320 16 135,3
Рис. 3.10. Однобарабанная подъемная машина с безредукторным приводом:
7 — барабаны в сборе; 2 — тормоз; 3 — привод тормозной; 4 — панель управления;
5 — ограничитель скорости дублирующий; 6 — ограждение; 7 — воздушно-компрессорная станция;
8 — воздухосборник; 9 — арматура и трубы пневмосистемы; 10 — комплект анкерных частей;
11 — подъемный электродвигатель; 12 — аппарат задания и контроля
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
113
3.3.4. Подъемные машины с разрезным бицилиндроконическим барабаном (табл. 3.8)
Таблица 3.8
Технические характеристики подъемных машин с разрезным бицилиндроконическим барабаном
Диаметр большого цилиндра барабана, D, мм Диаметр малого цилиндра | барабана,Dh мм Ширина большого цилинда барабана, В, мм Ширина конуса, барабана, В), мм Ширина малого цилинда барабана, В2, мм Ширина большого цилинда переставной части барабана, В3, мм Статическое натяжение каната, кН Разность статических натяжений канатов, кН Максимальная скорость, V, м/с Масса ПМ, не более, т
1 ип подъемной машины с механизмом привода без механизма привода
БЦК 8/5x2,7 8000 5000 2700 1000 870 150 630 480 16 380
БЦК-9/5х2,5 9000 5000 2500 1000 840 150 400 320 16 360 290
БЦК-8/4,5х2,25 8000 4500 2250 1000 840 150 365 285 16 345
БЦК-8/5х1,7 8000 5000 1700 1000 870 150 550 420 16 310
В
”*l 3..5
Рис. 3.11. Подъемная машина с разрезным бицилиндроконическим барабаном
с механизмом привода:
1 — барабаны в сборе; 2 — тормоз; 3 — привод тормозной; 4 — панель управления;
5— ограничитель скорости дублирующий; 6 — ограждение; 7 — воздушно-компрессорная станция;
8 — воздухосборник; 9 — арматура и трубы пневмосистемы; 10 — комплект анкерных частей;
11 — подъемные электродвигатели; 12 — аппарат задания и контроля; 13 — механизм привода;
14 — арматура и трубы системы смазки; 15 — смазочная станция системы смазки.
114
ГЛАВА 3
Рис. 3.12. Подъемная машина с разрезным бицилиндроконическим барабаном
Рис. 3.13. Подъемная машина с разрезным бицилиндроконическим барабаном
без механизма привода:
7 — барабаны в сборе; 2 — тормоз; 3 — привод тормозной; 4 — панель управления;
5 — ограничитель скорости дублирующий; 6 — ограждение; 7 — воздушно-компрессорная станция;
8 — воздухосборник; 9 — арматура и трубы пневмосистемы; 10 — комплект анкерных частей;
77 — подъемный электродвигатель; 12 -аппаратура управления.
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
115
3.3.5. Подъемные машины МПБ
В 1981 г. НКМЗ начал производство подъемных машин с пружинно-пневматическим при-
водом тормоза с внутренним расположением исполнительного органа и привода.
Опытный образец такой подъемной машины 2Ц-5х2,3 был изготовлен НКМЗ в 1981 г,
в 1982 г. смонтирован на шахте «Белицкая» ПО «Добропольеуголь» и принят приемочной
межведомственной комиссией в эксплуатацию.
В 1982 г. однобарабанная подъемная машина ШПМ 1x5x6 с внутренним расположе-
нием томозов была изготовлена и поставлена на УК «Шахта «Краснолиманская», где
смонтирована и пущена в эксплуатацию на угольном скиповом подъеме. До 1988 г.
подъемные машины с внутренним расположением тормозов имели наименование МПУ,
а с 1989 - МПБ.
Принципиальных конструктивных отличий данные машины со встроенными быстро-
действующими тормозами по сравнению с ранее выпускаемыми практически не имеют, за
исключением конструкции тормоза (см. 6.1.4).
Подъемные машины типа МПБ выпускаются с двумя цилиндрическими барабанами
одинаковой ширины под одно- и двухслойную навивку. Машины изготавливаются с редук-
торным или безредукторным приводом.
Рис. 3.14. Подъемная машина МПБ с редукторным приводом:
7 — барабаны в сборе; 2 — панель управления; 3 — ограничитель скорости дублирующий;
4 — ограждение; 5 — воздушно-компрессорная станция; 6 — воздухосборник; 7 — арматура
и трубы пневмосистемы; 8 — комплект анкерных частей; 9 — подъемные электродвигатели;
10 — аппарат задания и контроля; 11 — механизм привода; 12 — арматура и трубы системы
смазки; 13 — смазочная станция системы смазки
116
ГЛАВА 3
Таблица 3.9
Технические характеристики подъемных машин МПБ с редукторным приводом
Тип подъемной машины Диаметр барабана D, м Ширина барабана (В), м Число слоев навивки Нагрузка не более, кН Максимальная скорость, м/с Масса ПМ с механизмом привода, т Маховый момент вращающихся частей ПМ (GD2), кН-м2
Статическое натяжение каната Разность статических натяжений канатов
МПБ 5-2-2 5 2 1 320 250 14 142,1 8660
МПБ 5-2,5-2,5 5 2,5 1 320 250 14 189,7 12010
МПБ 5-3,15-3,15 5 3,15 1 320 250 14 194 13430
МПБ 6,3-2,8-2,8 6,3 2,8 1 400 320 16 207 29800
МПБ 6,3-3,15-3,15 6,3 3,15 1 400 320 16 224,6 33800
МПБ 5-2-2Д 5 2 2 320 250 14 148,4 10920
МПБ 5-2,5-2,5Д 5 2,5 2 320 250 14 189,7 14940
МПБ 5-3,15-3,15Д 5 3,15 2 320 250 14 197 16840
МПБ 6,3-2,8-2,8Д 6,3 2,8 2 400 320 16 221,8 38800
Рис. 3.15. Подъемная машина МПБ
Таблица 3.10
Технические характеристики подъемных машин МПБ с безредукторным приводом
Тип подъемной машины Диаметр барабана D, м Ширина барабана (В), м Число слоев навивки Нагрузка не более, кН Максимальная скорость, м/с Масса подъемной машины, т Маховый момент вращающихся частей НМ (GD2), кН м2
Статическое натяжение каната Разность статических натяжений канатов
МПБ 6,3-2,8-2,8 6,3 2,8 1 400 320 16 143 27000
МПБ 6,3-3,15-3,15 6,3 3,15 1 400 320 16 161 31000
МПБ 6,3-2,8-2,8Д 6,3 2,8 2 400 320 16 158 36000
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
117
Рис. 3.16. Подъемная машина МПБ с безредукторным приводом:
7 — барабаны в сборе; 2 — панель управления; 3 — ограничитель скорости дублирующий;
4 — ограждение; 5 — воздушно-компрессорная станция; 6 — воздухосборник; 7 — арматура
и трубы пневмосистемы; 8 — комплект анкерных частей; 9 — подъемный электродвигатель;
10 — аппарат задания и контроля
3.3.6. Подъемные машины со шкивами трения
С 1946 г. НКМЗ освоил выпуск одноканатных подъемных машин со шкивом трения се-
рии ШТ 7,2. Всего завод выпустил 35 таких подъемных машин, большинство из которых до
настоящего времени находится в эксплуатации.
Технические характеристики подъемной машины ШТ 7,2
Диаметр приводного шкива трения, мм 7200
Максимальный диаметр подъемного каната, мм 60
Максимальное статическое натажение каната, кН 310
Максимальная разность статических натяжений канатов, кН 72
Максимальная скорость подъема, м/с 16
Максимальная глубина подъема, м 1200
Масса машины без редуктора, т 91
С 1958 г. НКМЗ начал выпуск наземных многоканатных подъемных машин. Заводом
выпущены:
8 подъемных машин типа МК, последняя из которых МК — 3,25x4 изготовлена в 2005
году для шахты «Комсомолец Донбасса» в г. Кировское Донецкой области;
118
ГЛАВА 3
2 машины типа ЦШ, последняя из которых ЦШ-4х4Д изготовлена в 2005 году для Дон-
ского ГОКа в России.
с 1989 года ряд машин типа МПМН, а том числе:
МПМН 6,3x2 (4) для шахты «Торецкая» ПО «Дзержинскуголь»;
МПМН 6,3x4 для шахты «Комсомолец» ПО «Артемуголь»;
МПМН 6,3x4 для шахты «Северная» ПО «Дзержинскуголь»;
МПМН 6,3x2 для шахты «Комсомольская» ПО «Антрацит»;
МПМН 6,3x2 для шахты «Комсомольская» ПО «Антрацит»;
МПМН 4,2x3 для шахты им. Ленина ПО «Артемуголь»;
МПМН 5x4 для шахты им. Фрунзе ПО «Ровенькиантрацит».
Многоканатные подъемные машины выпускаются НКМЗ по отдельным заказам. Тех-
нические характеристики выпускаемых многоканатных
подъемных машин определяются
анкетой, согласованной с Заказчиком.
Рис. 3.17. Подъемная машина МПМН
3.4. Подъемные машины ОАО «Донецкгормаш»
ОАО «Донецкий машиностроительный завод», созданный в 1889 г. (завод Боссе, имени
Ленинского комсомола Украины), далее Донецкгормаш, с 1930 г. начал серийное изготовле-
ние электрических лебедок и подъемных машин, которые стали основной продукцией заво-
да. К 1940 году завод выпускал около 900 штук в год. После восстановления завода, разру-
шенного во время Великой Отечественной войны, выпуск подъемных машин постоянно уве-
личивался и к 1950 г. достиг довоенного уровня. С 1950 г. начался серийный выпуск много-
канатных подъемных машин.
Ниже приведены технические характеристики подъемных машин Донецкгормаша, вы-
пускаемых в настоящее время.
3.4.1. Барабанные подъемные машины
Барабанные подъемные машины типа Ц (однобарабанные) и 2Ц (двухбарабанные) вы-
пускаются вместо подъемных машин типа БЛ, ЛГЛ, БМ и имеют следующие преимуще-
ства:
большая надежность и долговечность работы подъемных машин — 20 лет, а подъемных
машин Ц3,5 х 2,4 и 2ЦЗ,5 х 1,8—25 лет, которую обеспечивает совершенство конструкции и
современной технологией изготовления;
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
119
наличие двух исполнительных органов тормоза колодочного типа с поступательным пе-
ремещением колодок, а не с угловым, что повышает безопасность и обеспечивает равномер-
ное распределение усилий, а, следовательно, и равномерный износ колодок;
вместо грузового или грузогидравлического привода подъемные машины с диаметром
барабана 1,2; 1,6 и 2 м имеют два пружинно-гидравлических привода с электрогидравличес-
ким регулятором давления, а подъемные машины с диаметром барабана 2,5; 3 и 3,5 м — два
пружинно-пневматических привода с электропневматическим регулятором давления, что
позволяет осуществлять дистанционное управление подъемной машиной;
управление механизмом перестановки двухбарабанных подъемных машин осуществля-
ется с пульта машиниста, что требует не более 2—3 мин. для выполнения операций по регу-
лировке длины канатов или смены горизонтов;
основные узлы (главный вал в сборе, исполнительные органы тормоза, тормозные при-
воды, станция управления тормозами) собраны на одной жесткой разъемной раме и испы-
тываются при изготовлении, а это упрощает устройство фундамента подъемной машины и
облегчает и ускоряет ее монтаж на месте установки;
возможность удобного и рационального расположения подъемных машин у ствола шах-
ты (для этих целей они могут быть изготовлены как с правым, так и с левым расположением
редуктора и электродвигателя).
Подъемные машины с диаметром барабана 1,2; 1,6; 2,0; 2,5 и 3,0 м предназначены для
подъема полезных ископаемых и породы, спуска и подъема людей, материалов и оборудо-
вания по вертикальным и наклонным (с углом наклона более 10°) горным выработкам и
применяются для оборудования поверхностных и подземных установок шахт и рудников
угольной и горнорудной промышленности. Машины могут работать в среде, опасной по
газу или пыли, и могут быть применены для оборудования проходческих подъемных уста-
новок.
Подъемные машины с диаметром барабана 3,5 м применяют для оборудования поверх-
ностных подъемных установок вертикальных и наклонных стволов шахт и рудников, а также
для проходки вертикальных стволов глубоких шахт (до 1500 м) [125].
По своему исполнению машины делятся на однобарабанные (Ц) и двухбарабанные
(2Ц). Однобарабанные машины предназначены для одно- и двухконцевых подъемов. При
одноконцевом подъеме возможно обслуживание нескольких горизонтов. При двухконце-
вом подъеме однобарабанные машины применяются для длительного обслуживания одно-
го горизонта.
Двухбарабанные подъемные машины предназначены для двухконцевых подъемов и по-
зволяют эффективно обслуживать за счет перестановки барабанов несколько горизонтов. Все
машины изготавливаются и поставляются в нормальном и взрывобезопасном исполнениях.
В комплект поставки машин входят: механическая часть со встроенным электрооборудова-
нием, аппаратура избирательного предохранительного торможения для исключения набега-
ния подъемных сосудов на канат при подъеме груза (только для машин исполнения АР),
запасные части, инструмент, невстроенное электрическое оборудование.
Механическая часть подъемных машин включает: главный вал в сборе с барабанами,
исполнительные органы тормозов, приводы тормозов, станцию управления приводом тор-
моза (для подъемных машин с диаметром барабана 1,2; 1,6; 2,0 м) или панель тормоза с ком-
прессорами и установкой воздухосборника (для подъемных машин с диаметром барабана 2,5;
3,0; 3,5 м), раму машины, приводной редуктор, приводные электродвигатели для машин с
диаметром 2,0 м и менее.
В комплект невстроенного электрооборудования входят: главные приводные электродви-
гатели — для подъемных машин с диаметром барабана более 2 м, пускорегулирующая аппара-
тура, пульт управления, аппаратура контроля хода машины, ограничитель скорости и др.
Схемно-конструктивное исполнение машин: надрамная компоновка; отъемные редук-
торы с подсоединением к коренной части и электрооборудованию через зубчатые муфты;
тормоза рычажные колодочные с пружинными или пружинно-грузовыми приводами и вер-
хним замыканием тормозного усилия опоры; коренные валы и зубчатые передачи редукто-
ров; подшипники качения; механизмы перестановки барабанов двухбарабанных машин —
зубчатые безрычажные с дистанционным управлением; несущие рамы — разъемные.
120
ГЛАВА 3
3.4.1.1. Однобарабанные подъемные машины
Таблица 3.11
Технические характеристики однобарабанных подъемных машин
Тип подъемной машины Диаметр барабана, мм Ширина барабана, мм Число слоев навивки Статическое натяжение каната, кН Разность статических натяжений канатов, кН Максимальная скорость, м/с Масса (без невстроенного электрооборудования), т
Ц-1,2х1,0АР 1200 1000 1-3 25 25 3,55 12
Ц-1,6x1,2 АР 1600 1200 1-3 40 40 4,5 14,8
Ц-2х1,5АР 2000 1500 1-3 63 63 5,6 27,5
Ц-2,5х2АР 2500 2000 1-3 90 90 7,5 43,8
Ц-Зх2,2АР 3000 2200 1-3 140 140 9,0 63
Ц-3,5х2,4 3500 2400 1-3 200 200 11,2 104,8
Таблица 3.12
Маховый момент вращающихся частей однобарабанных подъемных машин
Тип подъемной машины Редуктор Электродвигатель Маховый момент вращающихся частей ПМ (GD), КН-м2
Тип Переда- точное число Частота вращения, об/мин Мощность, кВт С электро- двигателем Передаточное число
Без махо- вика С махо- виком
Ц-1,6х1,2АР-РВ РЦД- 1150Л 30 750 160 541
30 1000 250 496
20 1000 320 712
Ц- 1,6x1,2 АР общепром 30 750 160 803
30 1000 250 759
20 1000 320 594
30 1000 320 847
Ц-2x1,5 АР- РВ Ц2Ш- 710 20 750 160 1214
20 750 250 2041
20 1000 250 1533
Ц-2х1,5АР общепром 30 750 160 2485
20 750,1 250,32 1633
30 750 160 2320
Ц-2,5х2,2АР Ц2Ш- 800П 11,5 704 919
20 867 1641
30 1249 3301
Ц-Зх2,2АР Ц2Ш- 1000 10,5 1411 2056
И,2 1433 2222
20 1622 4174
Ц2Ш- 800П И,5 1265 1466
20 1436 2152
30 2822 3868
Ц-3,5х2,4 2Ц- 1600 10 10344
И,2 11638
Ц2Ш- 1000 2472 3962
3697 4216
3944 6122
Примечание:
* — специальное исполнение (несерийная продукция)
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
121
5550
Рис. 3.18. Однобарабанная подъемная машина Ц-1,6х1,2 АР:
]__рама; 2 — главный вал в сборе с оргнаом навивки и коренными подшипниками; 3 тормоз,
4 — муфта зубчатая; 5 — редуктор; 6 — рами привода; 7 аппарат управления Мишиной,
$ — электродвигитель; 9 — муфти элистичния; 10 устиновки центробежного реле,
11 — щиток; 12 — привод тормози; 13 — стинция упривления
122
ГЛАВА 3
Рис. 3.19. Однобарабанная подъемная машина Ц-2.5х2 АР:
1 — рама; 2 — главный вал в сборе с органом навивки и коренными подшипниками;
3 — исполнительный орган тормоза; 4.— стопор; 5 — редуктор привода тахогенератора;
6 — муфта; 7 — защитный кожух; 8 — электродвигатель главного привода; 9 — аппарат задания
контроля хода; 10 — редуктор; 77 — зубчатая муфта; 12 — привод тормоза; 13 — щиток
барабана; 14 — панель управления тормозом
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
123
6885
Рис. 3.20. Однобарабанная подъемная машина Ц-Зх2,2 АР:
1 — рама; 2 — главный вал в сборе с органом навивки и коренными подшипниками;
3 — исполнительный орган тормоза; 4,— стопор; 5 — редуктор привода тахогенератора;
6 — муфта; 7 — защитный кожух; 8 — электродвигатель главного привода; 9 — привод аппарата
задания и контроля хода; 10 — редуктор; И — зубчатая муфта; 12 — привод тормоза;
13 — щиток барабана; 14 — панель управления тормозом
124
ГЛАВА 3
Рис. 3.21. Машина подъемная шахтная Ц-3,5 х 2,4 — с одноступенчатым
двухприводным редуктором:
1 — коренные подшипники; 2 — стопор; 3 — главный вал; 4 — рама; 5 — редуктор привода
тахогенератора; 6 и 8 — защитные кожухи муфт; 7 и 12 — зубчатые муфты;
9 — электродвигатели главного привода; 10 — привод аппарата задания и контроля хода;
11 — редуктор; 13 — панель управления тормозом; 14 — щиток барабана; 15 — исполнительный
орган тормоза; 16 — пружинно-пневматический грузовой привод тормоза; 17 — подвеска грузов
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
125
3.4.1.2. Двухбарабанные подъемные машины
Таблица 3.13
Технические характеристики двухбарабанных подъемных машин
Тип подъемной машины Диаметр барабанов, мм Ширина барабанов, мм Число слоев навивки Статическое натяжение каната, кН Разность статических натяжений канатов, кН Максимальная скорость, м/с Масса (без невстроенного электрооборудования), т
2Ц- 1,2x0,8 1200 800 1-3 25 25 3,55 14
2Ц- 1,6x0,8 1600 800 1-3 40 40 4,5 16,6
2Ц-2х1,1 2000 1100 1-3 63 63 5,6 32,5
2Ц-2,5х1,2 2500 1200 1-3 90 7590 7,5 55
2Ц-Зх1,5 3000 1500 1-3 140 90 9,0 78
2Ц-3,5х1,8 3500 1800 1-3 200 180 11,2 120
Таблица 3.14
Маховым момент вращающихся частей двухбарабанных подъемных машин
Тип подъемной машины Редуктор Электродвигатель Маховый момент вращающихся частей ПМ (GD2), кН*м2
Тип Переда- точное число Частота вращения, об/мин Мощ- ность, кВт с электро- двигателем без элект] эо двигателя
без ма- ховика с ма- ховиком
2Ц-1,6x0,8 РВ РЦД- 1150Л 30 750 160 566
30 1000 250 522
20 1000 320 737
2Ц-1,6x0,8 общепром 30 750 250 829
30 1000 250 785
20 1000 320 619
30 1000 320 872
2Ц-2х1,1 РВ Ц2Ш-710 30 750 160 2547
20 750 160 1274
20 750 250 2101
2Ц-2х1,1 общепром 20 1000 250 1592
30 750 160 2382
20 750,1000 250, 320 1693
2Ц-2,5Х1,2 Ц2Ш-800П 11,5 897 1096
20 1063 1837
30 1447 3496
2Ц-Зх1,5 Ц2Ш-1000 10,5 2081 2381
11,5 2099 2628
20 2352 4533
Ц2Ш- 800П’ П,5 1898
20 2452
30 4298
2Ц-3,5х1,8 2Ц-1600 (без маховика) 10 4958
11,2 5001
Ц2Ш-1000* 10,5 4822
11 5091
20 7112
Примечание:
*— специальное исполнение (несерийная продукция)
126
ГЛАВА 3
Рис. 3.22. Двухбарабанная подъемная машина 2Ц — 1,6x0,8:
7 — рама; 2 — главный вал в сборе; 3 — исполнительный орган тормоза; 4 — муфта зубчатая;
5 — редуктор; 6 — рама привода; 7 — аппарат управления машиной; 8 — электродвигатель;
9 —муфта эластичная; 10 — установка центробежного реле; 11 — щиток;
12 — пружинно-гидравлический привод тормоза; 13 — станция управления тормозом
7025
&6О
Рис. 3.23. Машины
подъемные шахтные
2Ц-2,5х1,2:
1 — рама; 2 — главный вал
с органами навивки,
с механизмом перестановки
и коренными подшипниками;
3 — исполнительный орган
тормоза; 4 — стопор;
5 — редуктор привода
тахогенератора;
6 — зубчатая муфта;
7 — защитный кожух;
8 — электродвигатель
главного привода;
9 — привод аппарата
задания и контроля хода;
10 -— редуктор;
11 — зубчатая муфта;
12 — привод тормоза;
13 — щиток барабана;
14 — панель управления
тормозами;
15 — трубопровод механизма
перестановки барабанов
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
127
1 — рама: 2 — главный вал с органами навивки, механизмом перестановки и коренными
подшипниками; 3 — исполнительный орган тормоза; 4,— стопор; 5 — редуктор привода
тахогенератора; 6 — муфта; 7 — защитный кожух; 8 — электродвигатель главного привода;
9 — аппарат задания и контроля хода; 10 — редуктор; 11 — зубчатая муфта; 12 — привод
тормоза; 13 — щиток барабана; 14 — панель управления тормозами; 15 — трубопровод механизма
перестановки барабанов
128
ГЛАВА 3
Рис. 3.25. Машина подъемная шахтная 2Ц-3,5х1,8
3.4.2. Многоканатные подъемные машины
Многоканатные подъемные машины с канатоведущими шкивами от 2,25 до 5,0 м пред-
назначены для подъема до 63 т полезных ископаемых и породы, спуска и подъема людей,
материалов и оборудования, ревизии и осмотра стволов шахт и рудников (рис. 3.26, 3.27.
3.28). Выпускаемые машины этого типа имеют два исполнения — башенное и наземное. При
башенной установке существенно уменьшается площадь необходимая для размещения над-
шахтных сооружений, и обеспечивается надежная круглогодичная эксплуатация машин.
Наземные многоканатные машины обеспечивают снижение капитальных затрат при новом
строительстве за счет применения укосных металлических копров вместо железобетонных
башенных и уменьшения величины поверхностных строительных зданий и фундаментов связи
с отказом от использования имеющих повышенные габариты и вес барабанных машин боль-
шой грузоподъемности и канатоемкости.
Применение наземных многоканатных подъемных машин во многих случаях может оказать-
ся целесообразным при реконструкции действующих подъемных установок (шахта «Торезекая» ПО
«Дзержинскуголь», шахта им. В. И. Ленина ПО «Артемуголь», шахта им. А. И. Гаевого и др.).
Многоканатные подъемные машины успешно решают проблему подъема больших гру-
зов из глубоких шахт и рудников, обеспечивают надежность и высокую безопасность рабо-
ты, имеют малые габариты и массу, экономичны.
Основой конструкции многоканатных подъемных машин является футерованный цилиндри-
ческий шкив трения, выполняющий одновременно функции несущей конструкции и привода.
Схемно-конструктивное исполнение машин: надрамная компоновка; отъемные редук-
торы (при их наличии) с подсоединением к коренной части и электродвигателям через зуб-
чатые муфты; тормоза рычажные колодочные с пружинно-грузовыми приводами и верхним
замыканием тормозного усилия; опоры коренных валов и главных функциональных узлов —
подшипники качения; отклоняющие шкивы башенных машин — барабанного типа, копро-
вые шкивы наземных машин — с раздельными независимыми шкивами.
Совершенные конструкции коренной части, тормозов и тормозных приводов обеспечи-
вают машинам минимальные габариты. На одном перекрытии копра можно размешать две
или даже три машины.
Многоканатные машины применяются для двухсосудного подъема (скипы, клети) с об-
служиванием, как правило, одного горизонта или однососудного подъема с противовесом —
для работы с нескольких горизонтов.
Машины изготавливаются в редукторном варианте с диаметрами шкивов 2,25; 3,25 и
4,0 м и безредукторном — для всех исполнений с однодвигательным и двухдвигательным при-
водом постоянного или переменного тока по системе тиристорный преобразователь посто-
янного тока — двигатель, тиристорный преобразователь частоты — асинхронный двигатель,
асинхронно-тиристорный каскад, асинхронный двигатель с фазным ротором с резисторами
в цепи ротора и контакторным управлением.
Рис. 3.26. Многоканатная подъемная машина (вид сбоку и в плане)
МПМН 5x4 МПМ 4x4 ЦШН-5х4 МК5х2 (наземная) ЦШН-4х4 МПМН 3,15-4 1 X 00 2 ЦШ-5х4 1 1 £ ЦШ-3,25х4 ЦШ-2,25х4 Тип подъемной машины ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ 129 Таблица 3.15 Технические характеристики многоканатных подъемных машин
5000 4000 5000 5000 4000 3150 5000 5000 4000 3250 2250 Диаметр канатоведущего шкива, мм
ьэ 00 Количество подъемных канатов, шт.
3000 3000 3000 3000 2000 2000 отклоняющего Диаметры шкивов, мм
5000 4000 4000 4000 3150 копрового
1250 00 о о 1250 О 00 о о U1 о о 2400 1450 оо о о 600 340 Максимальное статическое натяжение канатов, кН
300 250 О О 2? 100 200 о 630 250 200 1—- Ю Разность статических натяжений канатов, кН
00 ч© у О U1 240 04 U1 40 О Масса (без невстроенного электрооборудования), т
7665 2540 5169 0086 1881 904 ЬЭ Маховый момент главного вала в сборе без шкивов, редуктора и электродвигателя, (GD2), кН«м2
ГЛАВА 3
130
Рис. 3.28. Многоканатная подъемная машина ЦШ 3,25x4 (ЦШ4х4; ЦШ5х4)
с безредукторным приводом:
1 канатоведущий — шкив; 2 —муфта зубчатая; 3 — электродвигатель; 4 — аппарат задания
и контроля хода; 5 — установка тахогенератора; 6 — панель управления тормозом
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
131
3.5. Проходческие передвижные подъемные машины
Проходческие передвижные подъемные машины предназначены для подъема и спуска гру-
зов и людей с использованием преимущественно бадей, при проходке и углубке вертикальных и
наклонных стволов сооружаемых и действующих шахт и рудников в угольной и горнорудной
отраслях промышленности. Рассчитаны на работу в среде, не опасной по газу и пыли, на высоте
до 1000 м. Эксплуатацию машин можно осуществлять при температуре окружающей среды от —
400С до +350С. Устанавливаются на земной поверхности у ствола на фундаменте, составленном
из железобетонных блоков, на грунтах с допускаемым давлением не менее 0,1 МПа.
Машины обеспечивают:
— выполнение грузовых операций при проходке вертикальных стволов в режиме одно-
концевого бадьевого подъема;
— выполнение грузовых операций при проходке околоствольных горизонтальных выра-
боток в режиме одноконцевого клетевого подъема;
— работу вертикального и наклонного одноконцевого подъема.
Важнейшим компановочно-конструктивными особенностями машин являются:
— исполнение изделий из нескольких функциональных блоков повышенной заводской
готовности, в которых смонтировано и скоммутировано механическое и электрическое обо-
рудование, аппаратура управления, контроля и др.;
— расположение силового и вспомогательного оборудования машин на несущих жест-
ких рамах блоков в закрытых металлических и утепленных помещениях контейнерного типа
(рис. 3.29);
Рис. 3.29. Передвижная проходческая подъемная машина МПП-17,5,
размещенная в закрытых неметаллических и утепленных помещениях
— высокая степень унификации механической части машин с базовыми стационарны-
ми шахтными подъемными машинами;
— внутрирядная унификация за счет применения в машинах одинаковых блоков: уп-
равления, редукторных, компрессорного, кабины управления машиной;
— бесподвальное исполнение с монтажом блоков машин на фундаментных железобе-
тонных блоках, а на грунтах с пониженной несущей способностью с выполнением дополни-
тельной железобетонной подушки; блоки управления и компрессорный могут устанавливаться
непосредственно на утрамбованный насыпной грунт;
132
ГЛАВА 3
— выполнение блоков с размерами соответствующими нормативным требованиям под-
вижного состава для перевозки грузов по железным дорогам СНГ; блоки могут также пере-
возиться автотранспортом на трейлерах;
— соединение блоков закрытыми межблочными переходами с обеспечением удобства и
доступа к обслуживаемым узлам не менее чем с двух сторон.
Таблица 3.16
Технические характеристики проходческих передвижных подъемных машин
Тип подъемной машины Статическое натяжение каната, к! I Диаметр барабана, мм Ширина барабана, мм Диамеар каната, мм Высота подъема при навеске бадей, м Масса (без нсвстроениого электрооборудования), т
при навивке каната в один слой при навивке каната в два слоя при навивке каната в три слоя
МПП-6,3 61,8 2000 1500 22 305 690 1080 64
МПП-9 88,5 2500 1350 25 305 685 1070 109
МПП-17,5 171,5 2850 1550 33 330 745 1170 185
Система управления приводом тормоза у МПП-6,3 — гидравлическая, у МПП-9 и
МПП-17,5 — пневматическая. Сход каната с барабанов у машин снизу.
Система управления, защиты, сигнализации и блокировок обеспечивает работу машин
в режиме бадьевого и клетевого подъемов. Силовой электропривод машин — асинхронный с
фазным ротором, высоковольтный; система регулирования скорости — с помощью резисто-
ров в цепи ротора. Имеется система вентиляции приводных электродвигателей и роторных
сопротивлений. Для приема электрической энергии от внешних источников предусмотре-
ны: высоковольтный разъединитель, комплектное распределительное устройство, реверсор.
Предусмотрен режим динамического торможения при спуске груза.
Оборудование машины рассчитано на возможность многократного использования на
разных строительных площадках в течение всего срока службы. За счет повышенной заводс-
кой готовности блоков изделия имеют минимальную трудоемкость и соответственно умень-
шенные затраты на монтаж, подготовку к работе, демонтаж, подготовку к перевозке. Всем
этим в целом существенно сокращаются сроки ввода оборудования в эксплуатацию, умень-
шается цикл оснащения поверхностного комплекса строящейся шахты или рудника.
3.6. Подъемные машины индивидуального изготовления
В настоящее время в техническом развитии подъемных установок на передний план
выдвигается задача обеспечить их максимальную безопасность и эксплуатационную надеж-
ность при минимальных затратах на техническое обслуживание. Выход из строя даже одной
подъемной установки ощутимо сказывается на общем производственном процессе, как под
землей, так и на поверхности. В этой связи особое значение придается дальнейшему техни-
ческому усовершенствованию средств техники безопасности, в первую очередь, тормозных
устройств. Ниже рассмотривается опыт применения подъемных машин с многоэлементны-
ми пружинно-гидравлическими дисковыми тормозами.
Первая подъемная машина с дисковыми тормозами ЦШ 4х4Д была выпущена заводом
Донецкгормаш в ноябре 1980 г. смонтирована на породном подъеме шахты им. IX-й Пяти-
летки ПО «Советскуголь» (ныне шахта «Северная» ПО «Макеевуголь») в 1985 г. и эксплуати-
руется до настоящего времени. Кроме того, были изготовлены подъемные машины с пру-
жинно-гидравлическими дисковыми тормозами; смонтироваанные на шахте «Кировская» ПО
«Селидовуголь» и шахте «Запорожская» ПО «Красноармейскуголь», которые в настоящее
время демонтированы.
Большинство зарубежных фирм, изготавливающих шахтные подъемные машины, при-
меняют короткоходовые, безрычажные многоэлементные дисковые тормоза. Известны пру-
жинно-гидравлические дисковые тормозные устройства шахтных подъемных машин произ-
водства шведской фирмы ABB (Asea Brown Bovery), немецкой фирмы ZIEMAG Transplan
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
133
GmbH, немецкой фирмы SIEMENS и другие с рабочим давлением И..14 МПа в своей рабо-
те делает упор на использование новейших достижений в мировой практике в области шах-
тного подъема. Последнее время фирмой МИДИЭЛ поставлен целый ряд подъемных ма-
шин, механическая часть которых изготовлена заводами НКМЗ и Донецкгормаш, а диско-
вые тормоза, электропривод постоянного тока и система управления фирмой АВВ (Шве-
ция) (рис. 3.30).
Рис. 3.30. Подъемная машина ЦШ 4x4 с дисковыми тормозами фирмы АВВ
Такие подъемные машины поставлены:
— в АК «АЛРОСА» (Республика Саха, Россия);
— Рудник «Интернациональный» — подъемная машина односкипового подъема
2Ц5х2,4Д;
— Рудник «Айхал» — шахтные подъемные машины 2ЦЗ,5х1,8Д (2 шт.) и ЦЗ,5х2,4Д (2 шт.);
— Рудник «Мир» — шахтные подъемные машины ЦР5хЗ,6/0,6Д, 2Ц5х2,4Д-ТД-1,
2Ц5х2,4Д-ТД2, 2Ц5х2,4Д-ТД-3;
— ОАО «Донской ГОК» (Республика Казахстан) — подъемная машина ЦШ4х4Д.
Кроме того, специалистами фирмы МИДИЭЛ была переоборудована механическая часть
подъемных машин ЦШ 4x4 и ЦШ 2,1x4 с заменой системы радиальных тормоза на систему
дискового тормоза производства АВВ в Республике Казахстан на руднике «Жамак-Айбат»
АО «Корпорация Казахмыс».
Высокая стоимость дисковых тормозов компенсируется высоким качеством изготовления и
заводской настройки и совершенными системами управления, что обеспечивает им ведущие
позиции среди основных мировых производителей тормозных систем шахтных подъемных ма-
шин. К сожалению, в связи с высокой стоимостью дисковых тормозов и электропривода фирмы
АВВ угольная и горнорудная промышленность Украины до настоящего времени ни одной такой
подъемной машины не закупила. НПФ «МИДИЭЛ» на протяжении последних нескольких лет
ведет работы по созданию своей современной дисковой тормозной системы [138].
При этом целью разработки было решение следующих задач:
— создание существенно более дешевой, по сравнению с зарубежными аналогами, тор-
мозной системы, рассчитанной на недефицитную, общедоступную гидроаппаратуру общепро-
мышленного применения, зарекомендовавшую себя с наилучшей стороны с точки зрения на-
дежности, а также применение стандартных типоразмеров резинотехнических изделий;
— получение максимально возможного качества как предохранительного, так и рабоче-
го торможения, а, следовательно, снижение динамических нагрузок на элементы подъемной
установки и увеличения их срока службы:
— создание тормозной системы с надежностью и эксплуатационными свойствами не
уступающей, а желательно, превосходящей зарубежные аналоги.
Решение этих задач велось по нескольким направлениям.
Для начала, в отличие, например, от фирмы АВВ (признанного мирового лидера в этой
отрасли), было принято решение, что нецелесообразно комплектовать весь типоразмерный
134
ГЛАВА 3
ряд подъемных машин одинаковыми тормозными элементами. Для крупных машин количе-
ство тормозных элементов получается очень большое, что существенно усложняет их эксп-
луатацию. И, наоборот, для малых машин количество тормозных элементов получается на-
столько мало, что при этом теряется одно из главных преимуществ дисковых тормозов —
многоэлементность. Поэтому для получения оптимального количества тормозных элемен-
тов (б-5-12 пар), было определено три типоразмера тормозных элементов на усилия 3, 6,5 и
13 т. Кстати, аналогичный подход был и на заводе Донецкгормаш при разработке первых
отечественных дисковых тормозов в 80-х годах.
Первым этапом явилась разработка тормозной системы со средним типоразмером тор-
мозных элементов, предназначенной для средних барабанных и многоканатных подъемных
машин. Тормозные системы с этими элементами планируется использовать как для комп-
лектации новых машин, так и для модернизации действующих. Значительное количество
средних барабанных и средних многоканатных подъемных машин имеет асинхронный ре-
дукторный привод и поэтому тормозная система должна обеспечивать качественное рабочее
торможение, как в ручном, так и в автоматическом режиме. Для этой цели необходим был
гидравлический регулятор давления. Было принято решение использовать единственный
серийно выпускаемый гидравлический регулятор давления РДУ-1МГ. Конструкция этого
регулятора отработана за десятилетия эксплуатации, поэтому при правильном уходе и пра-
вильной настройке он обеспечивает точное и качественное управление давлением, а, следо-
вательно, и тормозным моментом.
В тормозной системе с максимальным типоразмером тормозных элементов, предназна-
ченной для крупных подъемных машин, где используется исключительно привод с тихоход-
ными электродвигателями, потребность в столь точном регуляторе давления отпадает. Там
вместо регулятора давления планируется использовать пропорциональный клапан, который
будет формировать необходимый закон замедления при торможении. В исключительных
случаях его можно использовать и для ручного управления торможением, однако, качество
торможения будет существенно ниже, чем при использовании регулятора давления.
Таким образом, в тормозной системе со средним типоразмером тормозных элементов
был принят регулятор давления РДУ-1МГ. Максимальное рабочее давление этого регулятора
составляет 1,2 МПа (12 кг/см1). Вообще существенное снижение рабочего давления тормоз-
ной системы по сравнению с тормозными системами ведущих зарубежных фирм было од-
ной из основополагающих идей при разработке тормозных систем НПФ «МИДИЭЛ». Низ-
кое давление позволяет значительно удешевить гидросистему, существенно упростить ее эк-
сплуатацию и повысить безопасность.
Главной трудностью, связанной с применением низкого давления, было создание тормоз-
ного элемента, развивающего при таком давлении требуемое тормозное усилие. До недавнего
времени это направление считалось неперспективным. Во-первых, увеличиваются размеры и
масса тормозного элемента, во-вторых, уменьшается быстродействие. Однако, в результате
работы, проводившейся в фирме МИДИЭЛ, удалось разработать компактную компоновоч-
ную схему такого тормозного элемента. Следующим шагом в решении этой задачи была раз-
работка конструкции тормозного элемента с максимальным рабочим тормозным усилием 6,5 т.
Экспериментальный образец пары тормозных элементов был изготовлен и испытан на стенде
фирмы МИДИЭЛ и показал высокие технические характеристики. После этого были изготов-
лены опытные образцы тормозных элементов, испытание которых завершено в 2006 году. На
этих образцах отрабатывалась конструкция тормозных элементов. При разработке тормозного
элемента основной задачей было получение высокого КПД, т. е. способность тормозного эле-
мента точно отрабатывать заданный тормозной момент, что весьма важно для получения каче-
ственного торможения подъемной установки. Благодаря специальной шарнирной конструк-
ции, замене традиционных направляющих скольжения на направляющие качения, реализа-
ции принципа самоустановки, как тормозной колодки, так и других узлов тормозного элемен-
та удалось получить не только очень чувствительный к управляющим командам, но и очень
простой в эксплуатации и регулировке тормозной элемент.
Другой особенностью тормозной системы является то, что она состоит из отдельных
тормозов (постаментов), каждый из которых имеет свою гидравлическую и электронную
систему управления, подчиняющихся центральному контроллеру тормозной системы. Это
позволило избежать сложной разводки трубопроводов по подъемной машине и повысить
ШАХТНЫЕ ПОДЪЕМНЫЕ МАШИНЫ
135
быстродействие тормозной системы. Кроме того, получившееся при этом дублирование всех
элементов тормозной системы позволяет избежать простоев подъемной установки при лю-
бой поломке тормозной системы.
Параллельно была разработана система управления дисковыми тормозами. При разра-
ботке тормозной системы ставилась основная задача обеспечения высокой безопасности,
надежности и достижения технического уровня, не уступающего лучшим зарубежным ана-
логам. Исходя из этого, и разрабатывалась система управления.
Стоимость разработанной тормозной системы существенно отличается от зарубежных
аналогов. Так в сравнении с тормозной системой фирмы АВВ (для одинаковых подъемных
машин с одинаковыми характеристиками) механическая часть тормозной системы НПФ
• МИДИЭЛ» дешевле в 4,6 раза, а электрической — в 2,4 раза.
3.7. Парк подъемных машин Украины
В Советском Союзе подъемные машины в разные годы выпускались машиностроительны-
ми заводами НКМЗ, СКМЗ, УЗТМ, имени ЛКУ, Александровским заводом им. Ворошилова.
Подъемные машины в Украине выпускают ЗАО «Новокраматорский машиностроитель-
ный завод», г. Краматорск (НКМЗ) и ОАО «Донецкий завод горного машиностроения», г. До-
нецк (Донецкгормаш) — старое название — Донецкий машиностроительный завод имени Ле-
нинского комсомола Украины. После окончания Великой Отечественной войны при восста-
новлении шахт Донбасса на вооружении шахтеров появились подъемные машины зарубеж-
ных фирм, полученных по «Ленд-лизу»: Норберг, Оттумва, Аллис Чальмерс, Вельман, которые
длительное время находились в эксплуатации. Так, многоканатные подъемные машины швед-
ской фирмы ASЕА длительно работали на шахте им. В. М. Бажанова ПО «Макеевуголь», а одна
из них ASEA 2x5 до настоящего времени работает на клетевом подъеме этой шахты.
В настоящее время на угольных шахтах Украины находятся в эксплуатации около 1200
подъемных машин, из них 35 % изготовлены НКМЗ и 65 % — Донецгормашем. Расчетный
срок службы шахтных подъемных машин Донецкгормаша при полной нагрузке серии БМ —
15 лет, последующих улучшенных образцов — 20 лет, машин серии Ц — 25 лет, многоканат-
ных подъемных машин серии МК — 20 лет, серии ЦШ — 25 лет; шахтных подъемных машин
НКМЗ — 25 лет, серии МПБ — 25 лет. Значительная доля шахтных подъемных машин (ШПМ)
давно выработала свой расчетный ресурс и работает с его превышением в 1,5—2 раза, а в
отдельных случаях и выше.
Если принять за верхний предел допустимого значения срока службы величину на 20—
25 % выше нормативной, то в зоне недопустимого использования находятся 14 номенклатур
барабанных машин из 28 находящихся в эксплуатации и 4 номенклатуры многоканатных
машин из 11 производства Донецкгормаш; 15 номенклатур барабанных машин из 33 исполь-
зуемых и 1 номенклатура ШПМ со шкивом трения из 3 используемых производства НКМЗ.
Таким образом, по выше названному критерию (превышение на 20—25 % расчетного
срока службы) в эксплуатации находятся 38 % барабанных ШПМ и 48 % многоканатных
машин Донецкгормаша; 50 % барабанных ШПМ и 70 % подъемных машин со шкивом тре-
ния производства НКМЗ.
Наиболее широко применяемой номенклатурой ШПМ Донецкгормаша являются: од-
нобарабанные машины с диаметром органа навивки 2,0; 2,5 и 3,0 м типа Ц2х1,5АР;
Н 2,5х2АР; Ц 3x2,2АР и их прототипы БМ 2000, БМ 2500, БМ 3000; многоканатные маши-
ны типов ЦШ (МК) 3,25x4; ЦШ (МК) 4x4, а из номенклатуры ШПМ НКМЗ — барабан-
ные подъемные машины типа 2Ц 4x1,8; 2Ц 5x2,4; 2Ц 6x2,4; ЦР 4x3/0,7; ЦР 6x3/0,6.
Глава 4
ОРГАНЫ НАВИВКИ
4.1. Принципиальные схемы органов навивки
4.2. Конструкции органов навивки барабанных подъемных
машин
4.3. Канатоведущие шкивы многоканатных подъемных
машин
4.4. Ремонт органов навивки
4.1. Принципиальные схемы органов навивки
Органы навивки (барабанные, канатоведущие), входящие в состав главного вала в сборе
шахтных подъемных машин, очень ответственные элементы, которые воспринимают высо-
кие статические и динамические нагрузки. От правильно рассчитанной и принятой конст-
рукции органа навивки и условий его эксплуатации во многом зависит ресурс механической
части подъемной машины.
Несмотря на большое многообразие конструктивных исполнений и типоразмеров
подъемных машин, их органы навивки имеют пять разновидностей: один цилиндрический
барабан неразрезной, один цилиндрический барабан разрезной, два цилиндрических бара-
бана, бицилиндроконический барабан, канатоведуший шкив трения (одноканатный или
многоканатный) (см. 3.1). Не вдаваясь в детализацию и конструктивные особенности, кото-
рые подробно описаны в [18, 125], эти пять разновидностей представим в форме следующих
Рис. 4.1. Схематическое изображение органа
навивки с одним неразрезным барабаном
Орган навивки подъемной ма-
шины с одним неразрезным бараба-
ном схематически изображен на
рис. 4.1. Здесь цифрами обозначены:
1 — обечайка, представляющая собой
цилиндрическую оболочку (трубу); 2
— реборды, приваренные к обечайке
или закрепленные к ней болтами; 3
— тормозные обода, взаимодейству-
ющие с фрикционными накладками
тормозных колодок; 4 — лобовины,
приваренные к обечайке и к ступице
и представляющие собой своего рода
«шайбу» с круглыми или овальными
отверстиями (для уменьшения метал-
лоемкости), равномерно располагае-
мыми по средней окружности «шай-
бы»; 5 — ступица барабана, свобод-
но посаженная на главный вал или
установлена на валу на подшипнике качения (плавающая опора); 6 — ступица барабана же-
стко соединенная с коренным валом (посадка с натягом или шпоночное соединение); 7 —
подшипниковые опоры, включающие в себя сферические двухрядные роликоподшипники;
8 — главный вал машины; 9 — устройство для крепления конца каната, который через от-
верстие в обечайке заводится вовнутрь барабана и присоединяется к нему при помощи двух-
плашечного жимка; 10 — хвостовик главного вала для муфты.
ОРГАНЫ НАВИВКИ
137
Подъемные машины с одним неразрезным цилиндрическим барабаном выпускаются
Донецкгормашем с диаметром барабана 1,2—3,5 м и НКМЗ с диаметром барабана 5—6 м.
Такие машины используются для спуска и подъема людей, оборудования, для выдачи полез-
ного ископаемого в наклонных и вертикальных стволах; могут устанавливаться на поверхно-
сти и в подземных горных выработках.
Тормозной обод не обязательно является частью обечайки, как изображено на рис. 4.1.
В некоторых типах машин (с диаметром барабана 2,5 м и более) тормозной обод, реборда,
лобовина и ступица представляют единое целое и присоединяются к обечайке при помощи
болтов. В таких случаях одна из двух ступиц имеет жесткое соединение с коренным валом, а
вторая может быть посажена на подшипник качения или непосредственно на вал с бронзо-
вой втулкой по скользящей посадке. Обечайка барабанов шириной более одного метра обычно
имеет с внутренней стороны кольцевые ребра жесткости различных конструктивных испол-
нений, а с внешней стороны между ребордами — спиральную нарезку ручья для укладки
каната. До 60-х годов нарезка ручья производилась по деревянным (лиственничным или ду-
бовым) тростям (шпалам), укладываемых по образующим обечайки и закрепленных к ней
болтами.
Так как периодически со стороны прицепного устройства на сосуде отрезаются отрезки
каната длиной до двух метров для повторных испытаний, то внутри барабанов может быть
установлена специальная бобина (соосная с коренным валом машины) с автономным элек-
троприводом и червячным редуктором для намотки резервной части каната длиной до 30 м.
Бобина в этом случае выполняет также роль крепления конца каната к барабану.
Подъемные машины с одним неразрезным барабаном имеют следующее стандартное
обозначение, например: Ц—\,2x1,0, в котором первое число означает диаметр барабана, как
внешний диаметр обечайки (D6 =1,2 м), а вторая — ширину барабана, как расстояние меж-
ду внутренними поверхностями реборд (5 = 1 л/). Буква //символизирует то, что в данном
случае орган навивки представляет собой один цилиндрический неразрезной барабан. Встреча-
ются также устаревшие обозначения типа БМ 2500/2030—4, где первые две цифры — диа-
метр и ширина барабана в мм, а 4 — модификация подъемной машины.
Орган навивки подъемной машины с одним разрезным барабаном схематически изоб-
ражен на рис. 4.2. Здесь цифрами обозначены: 1 — обечайка с разрезом; 2 — реборды; 3 —
тормозные обода; 4 — лобовины заклиненной части органа навивки; 5 — лобовины пере-
ставной части органа навивки; 6 — ступицы заклиненной части барабана; 7 — подшипнико-
вые узлы; 8 — вал-труба; 9 — цапфы; 10 — жимки для крепления конца каната; 11 — опора и
механизм перестановки; 12 — круговой разрез барабана; 13 — ребра жесткости; 14 — хвосто-
вик главного вала для муфты.
Подъемные машины с одним
разрезным барабаном выпускают-
ся НКМЗ с диаметром барабана
4-6 м. Такие машины использу-
ются для спуска и подъема людей,
дтя выдачи полезного ископаемо-
го, для спуска и подъема горно-
шахтного оборудования и матери-
алов в наклонных и вертикальных
стволах; предназначаются для ус-
тановки исключительно на повер-
хности шахт в специальных поме-
щениях. На поверхности обечай-
ки в пределах, ограниченных дву-
мя ребордами 2, нарезается спи-
ральный ручей, предназначенный
для упорядоченной укладки кана-
та при его навивке на барабан.
Шаг спирали определяется расче-
Рис. 4.2. Схематическое изображение органа навивки с
одним разрезным барабаном
том (см. 3.2). Одним из важных узлов органа навивки является опора и механизм перестанов-
ки, обозначенный на рис. 4.2. цифрой 11 (см. 5.2).
138
ГЛАВА 4
Подъемные машины с одним разрезным барабаном имеют следующее стандартное обо-
значение, например: ДР-4хЗ/0,7 , в котором первое число означает диаметр барабана как
внешний диаметр обечайки (D6 =4 м). вторая — ширину барабана как расстояние между
внутренними поверхностями реборд (5 = 3 м), а третья — ширину переставной части от пра-
вой реборды до разреза (5j=0,7 м ). Буквы ЦР говорят о том, что в данном случае орган
навивки представляет собой один цилиндрический разрезной барабан (см. 3.3.1).
Рис. 4.3. Схематическое изображение органа навивки с двумя барабанами
Орган навивки подъемной машины с двумя барабанами схематически изображен на рис. 4.3.
Здесь цифрами обозначены: 1 — обечайки с нарезкой, 2 — внешние реборды, 3 — внутренние
реборды, 4 — тормозные обода, 5 — внешние лобовины; 6 — внутренние лобовины; 7 — ступи-
цы заклиненного барабана, 8 — вал-труба, 9 — цапфы, 10 — узел опоры левого барабана и меха-
низма перестановки, 11 — жимки для концов канатов,12 — ребра жесткости барабанов, 13 —
подшипниковые узлы главного вала, 14 — хвостовик главного вала для муфты.
Подъемные машины с двумя барабанами выпускаются Донецкгормашем с диаметром
барабана до 3,5 м и НКМЗ с диаметром барабана 4—6 м. Такие машины используются для
спуска и подъема людей, для выдачи полезного ископаемого, для спуска и подъема горно-
шахтного оборудования и материалов в наклонных и вертикальных стволах. Машины диа-
метром 4 и более метров предназначаются для установки исключительно на поверхности шахт
в специальном помещении.
Подъемные машины с двумя цилиндрическими барабанами имеют следующее стандар-
тное обозначение, например: 2Ц-4x3, в котором первое число означает диаметр барабана
как внешний диаметр обечайки ( D6 =4 м), вторая — ширину барабана как расстояние меж-
ду внутренними поверхностями реборд (В-3 м ). Символ 2Ц говорит о том, что в данном
случае орган навивки представляет собой два цилиндрических барабана.
Рис. 4.4. Схематическое изображение органа навивки с бицилиндроконическим барабаном
ОРГАНЫ НАВИВКИ
139
Орган навивки подъемной машины с бицилиндроконическим барабаном схематически
изображен на рис. 4.4, где обозначены: 1 — обечайка большого барабана (заклиненного), 2
— обечайки малых барабанов (переставного справа), 3 — обечайки конических частей бара-
бана, 4 — конические спирали, 5 — тормозные обода, 6 — лобовины малых барабанов, 7 —
привариваемые к валу-трубе промежуточные опорные диски заклиненной части, 8 — опор-
ный диск переставной части, 9 — кольцевое ребро жесткости, 10 — опора лобовины 6 и ме-
ханизм перестановки, 11 — вал-труба, 12 — цапфы, 13 — подшипниковые узлы (подшипни-
ки скольжения), 14 — хвостовик главного вала для муфты.
Машины с бицилиндроконическим барабаном выпускаются НКМЗ с диаметром органа
навивки 8 и 9 м (диаметр малого барабана при этом — 5 м) (см. 3.3.4). Такие машины ис-
пользуются для спуска и подъема людей, для выдачи полезного ископаемого, для спуска и
подъема горношахтного оборудования и материалов только в вертикальных стволах глуби-
ной до 900 м. Уравновешивание статического крутящего момента происходит за счет того,
что при подъеме груженого сосуда его канат вначале навивается на малый барабан, а в это
время канат порожнего сосуда свивается с большого барабана. Не доходя до середины ство-
ла, канат груженого сосуда «взбирается» по конической спирали на большой барабан, а ка-
нат порожнего сосуда «сходит» на малый барабан, и этим самым происходит частичное урав-
новешивание возрастающей разности весов канатов.
Такие машины имеют следующее обозначение, например: БЦК-9/5'x'l,5, в котором
первая цифра означает диаметр большого барабана ( D6 =9 м), вторая — диаметр малого ба-
рабана ( D =5 м), третье число указывает на ширину большого барабана как расстояние меж-
ду точками схода на конические спирали (5 = 2,5 лг).
Орган навивки подъемной маши-
ны со шкивом трения схематически
изображен на рис. 4.5, где обозначены:
1 - обечайка, 2 — лобовины, 3 — тор-
мозные обода, 4 — реборды, 5 — коль-
цевые ребра жесткости, 6 — колодки
футеровки, 7 — клинья для крепления
футеровки, 8 — распорные вставки, 9
— ступицы, 10 — главный вал, 11 —
подшипниковые узлы, 12 — хвостовик
главного вала для муфты.
Каждая из двух лобовин 2 соеди-
няется с соответствующей ступицей 9
посредством болтов. Ступицы насажи-
ваются на вал по прессовой посадке. В
качестве материала для футеровки
применяется пластикат из полихлор-
винила отечественного производства
марки ПП-45.
С середины 80-х годов в СССР ос-
воен выпуск специального состава на
основе фторопласта (марки Ф-7), об-
ладающего повышенной износостой-
костью и независящим от температу-
ры нагрева коэффициентом трения.
Применяется также футеровка германской фирмы «Бекорит» (см. 4.3). Первоначальная про-
точка ручьев футеровки на глубину не менее половины диаметра каната, а также периоди-
ческие проточки с целью выравнивания усилий в канатах, производятся посредством специ-
ального суппорта с резцами соответствующего профиля.
Многоканатные подъемные машины со шкивами трения выпускаются Донецкгормашем
с диаметром канатоведущего шкива 2,25; 3,25; 4; 5 м и НКМЗ с диаметром канатоведущего
шкива 3,25; 4; 5; 6,3. Количество канатов при этом, как правило, равно четырем, но завода-
ми освоен также выпуск двухканатных, шестиканатных и восьмиканатных подъемных ма-
140
ГЛАВА 4
шин. Многоканатные подъемные машины используются для спуска и подъема людей, для
выдачи полезного ископаемого, для спуска и подъема горношахтного оборудования и мате-
риалов в вертикальных стволах глубиной свыше 700 м. Машины устанавливаются обычно в
башенных копрах, однако, в последнее время обозначилась тенденция использовать много-
канатные машины также с наземным расположением (первая в СССР такого рода установка
с двумя канатами была построена еще в 70-х годах).
Многоканатные машины имеют следующее обозначение, например: ТПП- 5х4, в кото-
ром первая цифра означает диаметр барабана ( D6= 5 л/), вторая — количество канатов
{пк = 4). Буквы ЦШявляются аббревиатурой фразы «цилиндрический шкив трения». Мно-
гоканатные подъемные машины наземного расположения выпускаются с диаметром кана-
товедушего шкива 3,15; 4; 5 и 6,3 м и имеют обозначение ЦШН, например, а (ЦШН-ЗхА),
а также МПМН (например, МПМН 6,3x4).
Одноканатные подъемные машины со шкивом трения выпускаются НКМЗ — подъем-
ные машины ШТ-1,1 (7,2 — диаметр канатоведушего шкива).
4.2. Конструкции органов навивки барабанных подъемных машин
Современные барабаны всех подъемных машин НКМЗ изготовливают сварными с ис-
пользованием листового проката и нарезкой под канат по металлической футеровке. В разрез-
ных однобарабанных и БЦК подъемных машинах для уменьшения колебаний зазора от про-
гиба вала между переставной и заклиненной частями барабана, последние крепят на специ-
альной трубе жесткости. Усовершенствование конструкции барабанов идет по пути повыше-
ния надежности сочленения трубы жесткости с валом. В первых образцах машин сварная тру-
ба жесткости прифланцовывалась болтами к посаженным на вал литым ступицам [25].
Большая кратность нагружения и наличие зазора между ступицей и фланцем трубы же-
сткости приводили к быстрому выходу из строя болтов. Для уменьшения нагрузок на болты
в дальнейших конструкциях предусматривают установку в трубе жесткости одной или двух
дополнительных опор, предварительную затяжку болтов, а также улучшение технологии сбор-
ки, обеспечивающей отсутствие зазора между ступицами и фланцем трубы жесткости.
Принятые меры оказались неэффективными, что привело к созданию конструкции трубы
жесткости, в которую вместо вала нагорячо посажены кованые цапфы. Было изготовлено
несколько машин со сварной трубой жесткости, в которой кованые втулки, посаженные на
вал, приваривали к торцу трубы жесткости. Трудности термообработки и сборки, большие
изгибающие нагрузки на сварные швы, приводившие иногда к разрыву швов, послужили
поводом для отказа от таких конструкций. В дальнейшем была создана сварно-ковано-литая
труба жесткости, в которой литые ступицы трубы приваривали электрошлаковой сваркой к
кованой средней части трубы. После сварки предусматривалась термообработка.
Подшипники сопрягаются с коренным валом по тугой посадке, а в ступицах имеют по-
садку движения. Нижняя обойма левого подшипника зафиксирована на коренном валу коль-
цами. Ступица, установленная на левом подшипнике, зафиксирована крышками, вследствие
чего она не может перемещаться вдоль вала. Ступица, установленная на правом подшипни-
ке, может перемешаться на 4 мм в одну и другую сторону, что упрощает сборку переставного
барабана на ступицах, а также позволяет компенсировать температурные изменения сопря-
гаемых деталей.
Установка ступиц переставного барабана на роликоподшипниках улучшает эксплуата-
ционные качества машины и позволяет производить перестановку барабанов на повышен-
ных скоростях.
В настоящее время литые ступицы трубы жесткости заменены коваными (машина
ЦР-5хЗ,2/0,55). Так, сварную конструкцию барабана из листового и сортового проката заме-
нили более простой безбалочной конструкцией из лобовин, колец жесткости и обечайки.
Машины с одним разрезным барабаном выполняют из двух частей: одной узкой пере-
ставной, служащей для размещения на ней витков трения и запасных витков каната, а дру-
гой — широкой неподвижно закрепленной на валу. Заклиненную часть барабана приварива-
ют к трубе жесткости, которую крепят болтами к двум ступицам, посаженным на коренной
вал. Левая ступица посажена на вал по горячей посадке. Правая заклинена на валу тангенци-
альными шпонками. Переставную часть барабана устанавливают на правой заклиненной ст\ -
ОРГАНЫ НАВИВКИ
141
иице, она может свободно перекатываться по ней при выключенном механизме перестанов-
ки благодаря вращающейся роликовой опоре.
На рис. 4.6 изображен главный вал в сборе (барабаны в сборе) двухбарабанной подъем-
ной машины НКМЗ.
Органы навивки (барабаны) осуществляют навивку и одновременную свивку канатов,
закрепленных к каждому барабану, чем обеспечивается одновременный подъем и спуск под-
Рис. 4.6. Главный вал в сборе двухбарабанной подъемной машины НКМЗ:
/ — переставной барабан; 2 — заклиненный барабан; 3 — подшипник концевой; 4 — подшипник
промежуточный; 6 — механизм перестановки (расцепное устройство); 7 — главный вал подъемной
машины; 8 — смазочная система опор переставного барабана; 9 — неподвижная ступица заклинен-
ного барабана; 10 — ступица из двух половин; 11 — ступица переставного барабана;
12 — стопорное устройство; 13 — устройство блокировочное (показано условно);
14 — венец зубчатый; 15 — шпильки; 16 — болты крепления барабабана к ступице;
17 — болты крепления постаментов подшипников к фундаменту
вешенных к канатам подъемных сосудов; остановку подъемных сосудов в требуемом поло-
жении в период их загрузки и выгрузки; перегон подъемных сосудов с одного горизонта на
другой при смене рабочих горизонтов или при регулировке длины канатов.
Переставной барабан 1 установлен на вал 7 подъемной машины посредством ступицы 11 и
венца зубчатого 14, опорами которым служат сферические роликоподшипники. Такая установка
переставного барабана позволяет ему свободно вращаться относительно вала машины.
Соединяется переставной барабан с валом 7 при помощи механизма перестановки. Зак-
линенный барабан 2 установлен на вал 7 посредством ступицы 9 и ступицы из двух половин
10, неподвижность которой достигается затяжкой двух шпилек 15 в нагретом состоянии при
монтаже машины у потребителя. Указанные шпильки имеют специально предусмотренные
сквозные отверстия по длине для равномерного их натяжения при затяжке. Оба барабана
крепятся к ступицам при помощи болтов 16.
Вал подъемной машины 7 вращается в подшипниках 3 и 4, которые устанавливаются на
фундамент посредством постаментов 5, закрепленных на фундаменте болтами 17.
Переставной барабан предназначен для размещения на его поверхности подъемного
каната длиной, обеспечивающей перемещение подъемного сосуда, закрепленного к нему, в
142
ГЛАВА 4
пределах заданных высотных отметок; размещения на его поверхности 5 витков трения
подъемного каната, необходимых для ослабления натяжения каната в месте его крепления к
переставному барабану; размещения на его поверхности резерва подъемного каната, необ-
ходимого для взятия образцов на периодические испытания; навивки и свивки подъемного
каната при вращении переставного барабана для сообщения поступательного перемещения
подъемному сосуду
Переставной барабан (рис. 4.7), состоит из следующих составных частей — цилиндричес-
кая обечайка 1, на которой выполнена винтовая канавка для упорядоченной навивки подъем-
ного каната; диски 2, в дальнейшем именуемые «лобовинами», служащие опорами обечайки.
Лобовины неподвижно соединены с обечайкой и имеют фланцы 6 с отверстиями 4 для болтов,
соединяющих их со ступицами. В лобовинах предусмотрены отверстия 5 для проведения опе-
раций обслуживания внутренней полости барабана; устройство для крепления подъемного
каната 14, состоящее из планок 7 и 8, стягивающих шпилек с гайками 9.
На обечайке неподвижно установлены реборды 10 и 11. Реборда 11 имеет по окружнос-
ти цилиндрические отверстия 12 для установки стопорного устройства. На внутренней по-
верхности обечайки установлен тормозной обод 13. Конец подъемного каната 14, проходит
через специально предусмотренное отверстие в обечайке и закрепляется к переставному ба-
рабану путем зажима между планками 7 и 8 шпильками с гайками.
Переставной барабан подъемных машин, допускающих двухслойную навивку подъемного
каната, имеет аналогичную конструкцию. Различие состоит в следующем: на обечайке 1 уста-
новлена переходная полоса 15, предназначенная для перевода подъемного каната с первого на
Рис. 4.7. Переставной барабан подъемной машины НКМЗ:
1 — цилиндрическая обечайка; 2 — диски (лобовины); 3 — устройство для крепления каната;
4 — отверстия для болтов; 5 — отверстия для проведения обслуживания; 6 —фланцы;
7,8 — планки; 9 — стягивающие шпильки с гайками, 10, 11 — реборды; 12 — отверстия
для установки стопорного устройства; 13 — тормозной обод; 14 — подъемный канат;
15 — переходная полоса
второй слой навивки, исключая трение его витков и заклинивание у реборды. Заклиненный ба-
рабан аналогичен по назначению и конструкции переставному барабану. Различие в конструк-
ции состоит в реборде 11, которая у переставного барабана имеет отверстия 12 для установки
стопорного устройства, а у заклиненного барабана указанных отверстий нет.
ОРГАНЫ НАВИВКИ
143
Орган навивки однобарабанных подъемных машин Донецкгормаша выполнен сварным.
У подъемных машин Ц-1,2x1 АР барабан имеет неразъемную конструкцию, барабаны подъем-
ных машин Ц-1,6х1,2АР и Ц-2х1,5АР имеют диаметральный разъем и съемные реборды, зак-
репленные болтами к обечайке барабана. Высота реборды допускает трехслойную навивку
каната. Канат крепится внутри барабана тремя жимками. Правая ступица посажена на глав-
ный вал по горячей посадке, левая ступица установлена на валу на подшипнике качения.
Етавный вал опирается на сферические самоустанавливающиеся подшипники качения. Тор-
цевая крышка левого подшипника имеет центральное отверстие для установки и центриро-
вания датчика направления вращения барабана.
Главный вал в сборе двухбарабанных подъемных машин Донецкгормаша (рис. 4.8) состо-
ит из вала 1, установленного на двух опорах. Опорами вала служат подшипники качения 2 и 3,
помещенные в корпуса 4 и 5. Подшипник 3 является плавающим, подшипник 2 зафиксирован
на валу втулкой 6, а в корпусе 4 торцевыми крышками 8 и 9 для удержания вала 1 от осевого
смещения. На валу 1 установлены разъемные тормозные диски 10 и 11 и разъемные средние
диски 12 и 13, состоящие из двух частей. Барабаны 14 и 15, соединены каждый с одним сред-
ним и одним тормозным дисками болтами. Барабаны для подъемных машин, предназначен-
ных для работы в подземных условиях (с индексом АР) — расположенных под землей — разъем-
ной конструкции, для машин, расположенных на поверхности — неразъемной конструкции.
Правый барабан 14 соединен неподвижно с валом 1 тангенциальными шпонками 16, а левый
барабан 15 соединен с валом специальным устройством — механизмом перестановки бараба-
нов 17 (см. главу 5). Средние диски 12 и 13, а также тормозной диск 11 левого барабана опира-
ются на вал 1 через подшипники качения 18, 19 и 20. Подшипник 20 зафиксирован на главном
валу и в диске для удержания левого барабана от осевого смешения. На конце вала 1 посажена
по горячей посадке зубчатая полумуфта 21. В крышках 8, 9 и 22 установлены резиновые уплот-
нения, препятствующие попаданию пыли и грязи в подшипниковые узлы. К тормозному дис-
ку 11 левого барабана крепится болтами зубчатая обойма 23 механизма перестановки бараба-
нов 17 (см. главу 5). Регулировка длины ветвей канатов при их вытяжке или при смене обслу-
живаемых горизонтов производится вращением правого заклиненного барабана при отсоеди-
Рис. 4.8. Главный вал в сборе двухбарабанной подъемной машины Донецкгормаша:
/ — главный вал; 2, 3 — подшипники качения; 4, 5 — корпус подшипников; 6 — втулка,
фиксирующая подшипник; 7 — шлицы вала, по которым перемещается зубчатое колесо механизма
перестановки; 8,9 — торцевые крышки; 10, 11 — тормозные диски; 12, 13 — разъемные средние
диски; 14, 15 — барабаны (органы навивки); 16 — тангенциальная шпонка; 17 — механизм
перестановки — зубчатое колесо механизма перестановки; 18, 19, 20 — подшипники качения;
21 — зубчатая полумуфта; 22 — торцевая крышка; 23 — зубчатая обойма механизма
перестановки; 24 — подача сжатого воздуха
144
ГЛАВА 4
нении от вала и заторможенном левом переставном барабане. Отсоединение левого барабана
от вала производится механизмом перестановки барабана 17.
Наиболее распространенные неисправности органов навивки [25].
{.Деформация обечайки. Причины: перегрузки или динамические усилия; значительный
износ футеровки, предназначенной помимо своего основного назначения разгружать обе-
чайку барабана. Деформированную обечайку выправляют с помощью гидродомкратов. Пос-
ле придания обечайке первоначальной формы ее усиливают установкой дополнительных
ребер жесткости.
2. Скрип барабана. Причины: ослабление заклепок, расшатывание швов, износ или ослаб-
ление крепления болтов лобовины к ступице. Обнаруженные дефектные заклепки, не имею-
щие плотного прилегания к поверхности обечайки, заменяют новыми. Ослабевшие болтовые
соединения разъемных частей барабана подтягивают, а негодные болты заменяют.
3. Трещины в обечайке. Трещины и разрывы оболочки барабана и элементов жесткости
могут происходить вследствие деформации по причинам, указанным выше.
Наименее надежными являются отдельные элементы металлоконструкции барабанов
типа БЦК ранних выпусков, у которых появлялись трещины в местах концентрации напря-
жений, перепада жесткостей и др. Например, при осмотре барабана угольного подъема шах-
ты им. К. И. Поченкова ПО «Макеевуголь» было установлено: кольцевой сварной шов левой
лобовины трубы жесткости с сопрягающейся ступицей нарушен по всему периметру; лобо-
вина имела четыре радиальные трещины, развивающиеся от ступичной части; из 16 ребер 8
имели трещины по всей длине сварного шва со ступицей.
Для устранения обнаруженных дефектов в лобовине трубы жесткости в концах трещин
рассверлили отверстия диаметром 30 мм, провели разделку и последующую сварку кольце-
вого шва левой лобовины трубы жесткости и ребер. Сваривали постоянным током, электро-
дами 3A-378/3 обратноступенчатым швом с последующей проковкой каждого валика шва.
Мелкие трещины в металлоконструкции барабанов и труб жесткости обычно не вызы-
вают внеплановой остановки машины и легко устраняются.
Как правило, небольшие трещины в обечайке разделывают У-образно, концы трещин зас-
верливают и заваривают. При трещинах длиной 100—200 мм барабан усиливают посредством
приварки накладок с внутренней стороны обечайки. Если трещины имеют длину более 200
мм, способ усиления обечайки или ремонт барабана согласовывают с заводом-изготовителем,
проектной или специализированной наладочной организацией. Трещины обечайки обычно
имеют прогрессирующий характер и значительно понижают прочность всего органа навивки.
4. Стук в барабане во время работы, повышенное осевое смещение вала. Причины: ослаб-
ление шпонок, износ вкладышей переставного барабана (на подъемных машинах старых вы-
пусков). Ослабленные шпонки плотно расклинивают и фиксируют. Деформированные или
сильно ослабленные шпонки заменяют новыми. При повышенном зазоре между валом и
вкладышами переставного барабана, подтягивают вкладыши (для машин с шаровыми вкла-
дышами), если это возможно, либо заменяют их.
Повышенный износ вкладышей переставного барабана проявляется в увеличении осе-
вого смещения вала; на ряде установок он приводил к разрушению пальцев, передающих
через коническую шестерню вращение к указателю глубины.
5. Соскальзывание каната на барабанах подъемных машин БЦК. Причина: неудовлетвори-
тельное состояние желобов. Лопнувшие сварные швы на конической части барабана завари-
вают. Желоба с трещинами, деформациями или износом более чем 20 % их первоначальной
(проектной) толщины к эксплуатации не допускают. Особое внимание обращают на состоя-
ние желобов в месте перехода каната с переставной на заклиненную часть барабана.
Для предотвращения соскальзывания каната с заклиненной на коническую часть бара-
бана копровой шкив устанавливают так, чтобы плоскость его симметрии была смещена на
100—150 мм относительно плоскости разъема барабана к центру барабана.
6. Износ незакрепленной ступицы. У большинства заклиненных барабанов только одна
лобовина жестко соединена с валом. Вторая, как правило, посажена по скользящей посадке,
снабжена смазочным устройством, а иногда втулкой скольжения. При этом крутящий мо-
мент барабана передается только через обечайку со знакопеременной нагрузкой, к тому же
изменяющейся по величине, приводит к износу незакрепленной ступицы. Износ последней
может быть существенно снижен при условии регулярной смазки сопряжения коренного вала
ОРГАНЫ НАВИВКИ
145
со ступицей. Если величина зазора между валом и ступицей в результате износа превысила
допустимые значения, ремонтируют барабан с заменой ступицы. Устанавливаемую ступицу
выполняют разъемной (по условиям монтажа). После затяжки соединительных болтов она
оказывается соединенной с валом почти по прессовой посадке. Это повышает прочность
системы вал-барабан.
4.3. Канатоведущие шкивы много канатных подъемных машин
В угольной промышленности Украины около 40 % общего числа шахт работают на глу-
бине более 600 м, около 60 шахт — от 800 до 1200 л/. Рост числа глубоких шахт потребовал
применения принципиально новых подъемных машин, обеспечивающих необходимую про-
изводительность по транспортировке грузов. Многоканатная подъемная машина представ-
ляет собой фрикцион, защищающий подъемные канаты и всю механическую часть от чрез-
мерного возрастания усилий, которые могут возникать при ударе о различного рода препят-
ствия движущегося вверх сосуда, и исключает возможность напуска и последующего обрыва
канатов в случае заклинивания опускающегося подъемного сосуда. Снижается возможность
обрыва сосудов.
Канатоведущие шкивы многоканатных подъемных машин передают движение от подъем-
ной машины и воспринимают усилия, возникающие в канатах (рис. 4.5).
Основные преимущества данной конструкции — бесшпоночное соединение шкивов с глав-
ным валом благодаря использованию горячей посадки и применению сварной конструкции
шкивов. Наиболее тяжелыми авариями на машинах со шкивами трения являются проворот ка-
натоведушего шкива на главном валу и проскальзывание канатов на канатоведушем шкиве. Про-
ворот канатоведущего шкива происходит в том случае, если сопряжение ступиц шкива с валом
выполнено на заводе-изготовителе с отступлением от чертежей. Качество бесшпоночного со-
единения ступицы и главного вала после установки проверить очень трудно. Это необходимо
выполнять перед установкой ступиц на вал специальным мерительным инструментом со всей
тщательностью. Малейшая неточность измерений сопрягаемых деталей может быть причиной
проворачивания канатоведушего шкива на валу, особенно в момент значительных динамичес-
ких нагрузок. В последнее время после выбора и обеспечения необходимых натягов в посадке
шкива на вал это бесшпоночное соединение работает достаточно надежно.
Для обеспечения необходимого сцепления подъемных канатов с канатоведушим шкивом,
увеличения срока службы канатов и выравнивания нагрузки между ними шкивы футеруют. В
процессе изготовления и эксплуатации совершенствовались материалы футеровки для канато-
ведущих и отклоняющих шкивов — от футеровки из натуральной древесины до современных
футеровочных материалов типа «Бекорит» с высокими техническими характеристиками.
Поверхность шкивов отечественных многоканатных подъемных машин футеруют брус-
ками из серийно выпускаемого пластиката ПП-45. К оболочке шкива колодки футеровки
прижимают крепежными клиньями. Сечение колодок футеровки унифицировано. Выпуска-
ют три типоразмера футеровки. Эта футеровка допускает в паре с прядевыми канатами рас-
четный коэффициент трения 0,25 и удельное давление 2 МПа. Футеровку канатоведущих
шкивов протачивают специальным приспособлением при разности диаметров желобов под
канаты, превышающей 0,5 лш. Основные неисправности канатоведущих шкивов связаны
главным образом с износом футеровки, ее креплением. Наличие большого числа отверстий
под болты для крепления футеровки ослабляет обечайку и вызывает образование трещин.
Различное натяжение канатов вызывает неравномерный износ футеровки.
Недостатком футеровки, изготовленной из полихлорвинилового пластиката ПП-45, яв-
ляется то, что она при небольшом нагревании (до 100" С) сильно размягчается, вследствие
чего уменьшается коэффициент трения. При низких температурах она теряет свои фрикци-
онные свойства.
При скольжении 20—30 м каната по футеровке верхний слой ее начинает расплавляться
(температура плавления менее 150° С). Таким образом, даже при незначительном нарушении
нормального режима происходит проскальзывание канатов по канатоведущему шкиву, что
приводит к выплавлению футеровки и тяжелым авариям.
Применение футеровки, не обеспечивающей необходимых запасов по нескольжению при
повышенных и низких температурах и необходимом давлении, в особенности на шахтах ма-
146
ГЛАВА 4
лой глубины, и отсутствие надежных устройств весового дозирования при загрузке подъем-
ных сосудов могут привести к авариям с тяжелыми последствиями (см. 24.2).
Поэтому с конца 80-х годов на многоканатных подъемных машинах начала внедрятьсяч
футеровка из материала немецкой фирмы «Бекорит», которая благодаря своим высоким тех-
ническим характеристикам по коэффициенту сцепления канатов с футеровкой, величине до-
пустимого давления, износостойкости и стабильности параметров стала находить все боль-
шее применение и в настоящее время этой футеровкой оснащены более трети многоканат-
ных подъемных установок Донбасса [42].
Футеровка фирмы «Бекорит», ранее выпускавшаяся только в Германии, в настоящее вре-
мя по лицензионному соглашению производится из материала K25SB фирмы «Бекорит» (Гер-
мания) НПО «Укрвторсырье» (г. Донецк). Продукция фирмы прошла сертификацию и раз-
решена к примению на горнодобывающих предприятиях Украины и России. Промышлен-
ное внедрение футеровки начато в 2003 году и в настоящее время установлено несколько
комплектов футеровки на многоканатных подъемных машинах Донбасса.
В 1991—1995 гг. Кемеровским научно-исследовательским институтом химической промыш-
ленности по заданию Донецкгормаша был разработан материал — прессовочная фенольная
масса Ф7-050-49Б для колодок футеровки канатоведуших и отклоняющих шкивов многока-
натных подъемных машин. Прессовочная фенольная масса представляет собой композицию
на основе новолачной феноло-формальдегидной смолы, полиакрилонитрильного каучука, орга-
нического и минерального наполнителя и специальных добавок. Разработаны две марки прес-
совочной массы для изготовления колодок футеровки, эксплуатируемых при различных удель-
ных давлениях, Ф7-050-49А на давление до 2 МПа и Ф7-050-49Б на давление до 3 МПа. Ко-
лодки из нового материала отличаются эластичностью, монолитностью, высоким коэффици-
ентом трения (сохраняется при удельном рабочем давлении до 3,0 МПа и при использовании
фрикционной канатной смазки, необходимой для зашиты канатов от коррозии).
Техническая характеристика футеровки
Ф7-050-49А Ф7-050-49 Б
Твердость по Шору 80-95 85-95
Прочность при разрыве, МПа, не менее 6,0 7,0
Относительное удлинение, % 70-200 70-200
Температура размягчения по Вика, °C, не менее 130 150
Коэффициент трения в паре со стальным канатом при наличии и (или) отсутствии в зоне контакта воды и (или) канатной смазки КФ-Ю при удельных давлениях 2,0 МПа, не менее 0,35 0,40
3,0 МПа, не менее 0,30 0,40
В настоящее время ООО «Реал-Пластик и К» (г. Кемерово, Российская Федерация) осво-
ен выпуск колодок на основе данного материала для всех типов подъемных машин. В 2003 г.
колодки прошли успешные испытания в МакНИИ. На них получен Сертификат МакНИИ и
Разрешение Госнадзорохрантруда Украины на применение термостойких колодок футеровки
из массы прессовочной фенольной марки Т-239 (Ф7-050-49Б) для шахтных многоканатных
подъемных машин. На ООО «Реал-Пластик и К» изготавливается 6 видов колодок-футеровок
для шахтных подъемных машин, которые обеспечивают высокую производительность, надеж-
ность и безопасность подъема грузов массой до 75 т на высоту до 1600 м.
ООО «Укрвторсырье» (г. Донецк) производит колодки футеровки «Бекорит» K25SB по
лицензии и из материала K25SB фирмы «Бекорит» (Германия), которые применяются для
футеровки канатоведущих шкивов шахтных подъемных машин [42, 139].
НИИГМ им. М. М. Федорова совместно с горнотехнической инспекцией региона был
собран и обобщен материал по степени износа и срокам службы футеровок канатоведуших
приводных шкивов трения на ста подъемных установках угольных шахт Донбасса.
На гистограммах рис. 4.9 представлены результаты обработки собранных данных. Наи-
более износостойкой из применяемых футеровок является «Бекорит», на втором месте Ф~
на третьем ПП45. Сроки службы футеровок имеют значительный разброс и зависят от усло-
вий эксплуатации и производительности подъемов [42]. Для высокопроизводительных подъе-
ОРГАНЫ НАВИВКИ
147
Рис. 4.9. Среднестатический годовой эксплуатационный износ футеровки
канатоведущих шкивов (мм):
а — для скиповых подъемов; б — для клетевых подъемов
нов (более 150 циклов в сутки) среднестатистический срок службы для «Бекорита» соста-
вил — 3,5 года, для Ф7 — 2,8 года, для ПП45 — 2 года. Для слабонагруженных скиповых и
тля клетевых подъемов сроки службы составили: для «Бекорита» — 6,9 года, для Ф7 — 4,8
юла, для ПП45 — 4,6 года.
Вместе с тем согласно собранным данным сроки службы футеровок в некоторых случа-
ях значительно отличаются от среднестатистических как в большую, так и в меньшую сторо-
ну при примерно одинаковых технических характеристиках подъемных установок. Это сви-
детельствует о наличии дополнительных факторов влияющих на скорость износа футеровки
142]. Рассмотрим некоторые из них.
Одним из основных факторов влияющих на износ футеровки является удельное давление
канатов на футеровку. Все подъемные многоканатные установки Украины рассчитаны на
удельное давление 2 МПа. Фактически на большинстве машин удельное давление ниже и
колеблется в пределах 1,4—1,6 МПа. На шахтах с большими высотами подъема (выше 1000 м)
среднее удельное давление на футеровку достигает 2 МПа. Срок службы футеровки на этих
шахтах не превышает 1,5 — 2 года, а в некоторых случаях при высотах подъема 1200—1300
метров, срок службы снижается до 4—6 месяцев при цикличности работы выше 200 подъе-
мов в сутки.
Вторым немаловажным фактором, влияющим на износ футеровки, является качество
применяемых канатов.
Согласно требованиям ПБ [13] на многоканатной установке должны навешиваться че-
тыре каната из одной партии изготовления, с последовательно идущими заводскими номе-
рами. Это обеспечивает одинаковый шаг свивки канатов, идентичность прочностных харак-
теристик и жесткость всех четырех канатов, что позволяет правильно регулировать распре-
деление нагрузки между канатами, сохранять одинаковые радиусы навивки ручьев канатове-
лущего шкива. Невыполнение вышеуказанных требований (например, отличие шагов свив-
ки канатов) приводит, как правило, к повышенному износу футеровки одного из ручьев. Ос-
тавшиеся неизношенные ручьи приходится протачивать под изношенный для выравнива-
ния радиусов навивки.
Процесс износа проходит интенсивно и резко снижается срок службы футеровки. К
интенсивному износу приводит наличие порывов проволоки внешних прядей каната с пос-
ледующей коррозией проволок каната. В этом случае при упругом пререползании каната по
футеровке канат работает как режущий инструмент.
Третьим фактором, влияющим на скорость, износа является качество работы обслужи-
вающего персонала по контролю радиусов навивки канатоведущих шкивов.
Допустимые отклонения в радиусах навивки, способы контроля, методология проточ-
ки регламентируются «Руководством по контролю и регулировке распределения нагрузки
между головными канатами многоканатных подъемных установок». РТМ 0701015 НИИГМ
им. М.М. Федорова. Невыполнение требований Руководства приводит к перераспределе-
нию нагрузки на один — два каната при подходе сосудов к верхней приемной площадке.
Как следствие этого происходит увеличение удельного давления каната на футеровку, а
148
ГЛАВА 4
также перегруз каната выше допустимых норм. По опыту работы в некоторых случаях пе-
регруз может достигать 100 и более процентов.
При больших отклонениях радиусов навивки нагрузка на канат возрастает и вместе с
ней начинает увеличиваться разность статических натяжений конкретно для данной канат-
ной ветви. Значение разности статических натяжений может превысить допустимое по усло-
вию нескольжения каната по шкиву. Проскальзывание этого каната по шкиву будет проис-
ходить в течение каждого цикла подъема груза, что естественно приводит к повышению ин-
тенсивности износа футеровки.
Четвертым фактором, влияющим на интенсивность износа футеровки, является кине-
матические и динамические характеристики подъемных установок. Износ футеровки прохо-
дит более интенсивно при высоких (выше 8 м/с) скоростях подъема груза, при больших ра-
бочих замедлениях и ускорениях движения подъемных сосудов.
Наличие большого числа факторов, влияющих на интенсивность износа и прямая связь
качества футеровки с безопасностью эксплуатации многоканатных подъемных установок,
требуют особо тщательного подхода при выборе типа футеровочного материала для канато-
ведущих шкивов.
Специалистами НПО «Укрвторсырье» и НИИГМ имени М. М. Федорова были прове-
дены сравнительные испытания футеровки «Бекорит К-25 SB», выпускаемой НПО «Укрв-
торсырье» и футеровки, традиционно применяемой на многоканатных подъемах отрасли
(ПП-45 и Ф7).
На испытательном стенде был промоделирован процесс скольжения канатов по шкиву
при удельном давлении каната на футеровку 20 кГ/см1 и соотношении диаметра шкива к
диаметру каната равном 80. Результаты испытаний в обобщенном виде представлены на гра-
фике рис. 4.10. Как видно из графика для образца из материала ПП45 в период испытаний
величина износа составила 8 мм, процесс нарастания износа происходил по экспоненциаль-
ному закону, при достижении значения величины износа 4 мм началось плавление образца.
Величина износа образца из Ф7 нарастала по более пологой экспоненте, потеря механичес-
ких свойств образца наступила после достижения величины износа 6 мм.
Рис. 4.10. Величина износа футеровки из разных материалов
Износ образца из материала «Бекорит К-25 SB» производства НПО «Укрвторсырье» про-
ходил практически по линейному закону и футеровка не потеряла механических свойств за
весь период испытаний, что подтверждает высокие качества этого материала.
По заказу НПО «Укрвторсырье» специалистами МакНИИ и Донбассуглеавтоматики
были проведены испытывания футеровки из материала «Бекорит К-25 SB» на действующих
нагруженных многоканатных подъемных установках шахт «Южно-Донбасская № 1» и «Крас-
ноармейская-Западная №1». Результаты испытаний показали, что футеровка из материала
«Бекорит К-25 SB» гарантировано обеспечивает требуемый коэффициент сцепления каната
с футеровкой — 0,25.
ОРГАНЫ НАВИВКИ
149
4.4. Ремонт органов навивки
Наиболее часто повторяющимися операциями по ремонту органов навивки являются:
сидение и восстановление обечаек, ремонт ступиц, ремонт механизма перестановки.
Барабан является одним из основных узлов подъемной машины, наиболее часто подвер-
: ающимся ремонту. В процессе ремонта производят, как правило, усиление барабана. Обычно
мрабаны крупных подъемных машин выполняются цельносварными с усилением по внут-
реннему диаметру специальными кольцами жесткости. Барабаны собирают на месте монтажа.
Ремонт каркаса барабана заключается в замене деформированных элементов и упроч-
нении обечайки ребрами жесткости и кольцами, а также исправлении сварных, заклепоч-
ных и болтовых соединений. Если при ремонте невозможна замена и каркас приходится пра-
вить, то он обязательно усиливается накладками.
На Горловском рудоремонтном заводе практикуется ремонт обечайки путем установки
распорных колец. На малых подъемных машинах в барабанах устанавливают несколько колец
и з листовой стали толщиной 14—20 мм и высотой до 200 мм. В барабанах, конструкцией кото-
рых предусмотрены такие кольца, необходимо только увеличить их количество, что очень удоб-
но при ремонте. На крупных подъемных машинах в цилиндрических барабанах устанавливают
новые кольцевые пояса в виде ребер или из спаренных уголков. При усилении старых колец к
ним приваривают косынки и между плоскостями спиц устанавливают новые опоры.
Наиболее эффективным способом ремонта при ослаблении обечайки и появлении трещин
я вляется усиление барабанов подъемной машины путем установки в каждом из них двух допол-
нительных колец жесткости, состоящих из отдельных сегментов с клиньями. Кольца жесткости
хстанавливают посредине между старым кольцом и лобовиной барабана [22]. При изготовлении
колец производят их контрольную сборку с подгонкой элементов и маркировкой (рис. 4.11).
л
Рис. 4.11. Контрольная сборка колец жесткости при изготовлении:
1 — номер стыка; 2 — упоры
В подготовительный период доставляют все элементы усиления барабанов подъемной
машины. Затем изготовливают и приваривают к сегментам специальные скобы для их стро-
повки. Сварка двусторонняя, производится не ближе 200 мм от края и 50 мм с каждой стороны
скобы. Заготовляют в необходимом количестве стропы, навешивают тали, закрепляют ручные
рычажные лебедки.
Установку колец жесткости осуществляют в следующем порядке. Внутрь барабана подают
первый сегмент (рис. 4.12) и устанавливают его посредине между старым кольцом жесткости и
лобовиной барабана параллельно старому кольцу жесткости. Сегмент прихватывают электро-
сваркой с двух сторон в трех точках: посредине и по концам. Длина прихватка равна 30—40 мм.
Поставить сегмент внутрь барабана следует путем затягивания за один конец с помощью руч-
ной рычажной лебедки (Q = 1,5 т), закрепленной за отверстия реборды барабана, с одновре-
менным опусканием второго конца сегмента талью (стропы универсальные, диаметр каната =
12,5 мм). Разворот сегмента внутри барабана осуществляют другими лебедками [22].
Барабан затем поворачивают на 90° и через клин также устанавливают последующие
сегменты и прихватывают к обечайке барабана. Распорные клинья устанавливают как мож-
но ближе к обечайке барабана.
150
ГЛАВА 4
Рис. 4.12. Сегмент кольца жесткости:
1 — нижняя грань; 2 —верхняя грань; 3 — боковая грань
После установки всех сегментов производят полную затяжку клиньев. Все сегменты, кроме
одного, освобождают от закрепления. Прихватка оставляется в средней части этого сегмента.
Подтяжка клиньев необходима для возможно большего прилегания колец к обечайке барабана.
Одновременно с установкой дополнительных колец необходимо заварить все обнару-
женные трещины в барабанах, предварительно разделав швы.
Затем подъемную установку эксплуатируют в течение недели. Клинья необходимо еже-
суточно осматривать и подтягивать. При этом улучшается прилегание обечайки барабана к
кольцам жесткости. Через неделю работы подъемной установки все сегменты приваривают к
обечайкам барабанов и клиньям прерывистым швом дайной 300 мм через каждые 100 мм в
шахматном порядке. Ремонт барабанов на восьми подъемных установках Карагандинского
бассейна позволил устранить потерю прочности обечаек.
В процессе длительной эксплуатации в обечайкдх барабана появляются усталостные трещины,
и прочность их значительно падает. В этих случаях с согласия завода-изготовителя производится уси-
ление барабанов подъемных машин наложением второго слоя обечайки из листовой стали.
Обечайку малых подъемных машин можно заменить. В подготовительный период заго-
тавливают обечайки барабанов, инструмент, крепежные детали, приспособления для распан-
цировки подъемного каната и его снятия, демонтажа и установки деревянных колодок футе-
ровки с нарезкой канавок под канат. Оформляется наряд-допуск на производство огневых
работ, подключаются сварочные аппараты. После остановки машины распанцировывают и
снимают подъемные канаты, демонтируют деревянные колодки футеровки; разрезают и сни-
мают полуобечайки барабанов [22].
Затем устанавливают новые полуобечайки и подгоняются отверстия крепления полу-
обечаек к отверстиям дисков (лобовин) барабана. Подгонку отверстий производят путем
прорезания новых и заварки старых. Прорезание производят, если отверстия перекрываются
или находятся близко и Т-образная головка болта попадает на старое отверстие. Болты креп-
ления обечаек затягивают от середины к краям, устанавливают и затягивают болты на стыке
полуобечаек, стыки заваривают (рис. 4.13).
Установку второй половины обечайки производят после поворота барабана на 180:
подъемным электродвигателем. Затем устанавливают новую футеровку, нарезают канавки,
навешивают подъемные канаты и запанцировывают их. Подъемную установку испытывают
и передают в эксплуатацию. В первые три дня эксплуатации подъемной машины после ре-
монта болты крепления обечаек затягивают ежесменно, в последующую неделю — ежесу-
точно, а затем — при необходимости.
Если возникает необходимость ремонта ступицы барабана, можно произвести ее заме-
ну. В качестве примера приведена технология замены ступицы барабана подъемной машины
ОРГАНЫ НАВИВКИ
151
Рис. 4.13. Крепление новой обечайки
211.-5x2,3. В подготовительный пе-
риод необходимо смотать подъем-
ный канат с барабана и снять фу-
теровку.
В основной период вырезают
часть барабана шириной 2400 мм
до лобовины. Для этого машину
отключают и вывешивают предуп-
редительные плакаты. Резку про-
изводят изнутри барабана. Выреза-
ется часть обечайки, реборды,
одно ребро жесткости и внутрен-
няя часть двух соседних ребер.
После резки снимают бензорезом
фаску 6—8 мм х45’ и зачищают
шлифовальной машинкой.
Затем навешивают ручную
таль грузоподъемностью 3 т над
осью барабана и над срезаемой ре-
бордой, поворачивают барабан
вырезанной частью вверх, выкла-
дывают шпальную клетку под ба-
рабан и закрепляют его на этой клетке в местах лобовины и колец жесткости. Отсоединяют
болты крепления ступицы и лобовины барабана и сбивают ступицу (при необходимости с
прогревом). Застропив ступицу двумя стропами через болтовые отверстия в диаметрально
противоположных точках, разрезают ее на равные части (рис. 4.14).
При этом выдают старую ступицу, опускают две половины новой ступицы, собирают ее
без затяжки стяжных болтов и заводят на место (до упора в буртик вала и лобовину барабана).
Разместив на лобовине новые отверстия (по отверстиям ступицы) убирают ступицу и прожи-
1ают бензорезом отверстия 0 20 мм. Отверстия не должны попадать на ребра и швеллеры. За-
1ем устанавливают ступицу на место и соединяют болтами с лобовиной барабана, установив
изнутри барабана шайбы толщиной 20 мм. После сборки шайбы приваривают к лобовине швом
с катетом 15 мм. Далее приваривают к барабану вырезанную часть двусторонним швом с кате-
том 12 мм, устанавливают футеровку, привод указателя глубины, убирают шпальную клетку;
навешивают подъемный канат и производят испытание подъемной машины [22].
Глава 5
МЕХАНИЗМЫ ПЕРЕСТАНОВКИ
5.1. Принцип работы механизмов перестановки
5.2. Конструктивное исполнение механизмов перестановки
5.3. Порядок проведения перестановки
5.1. Принцип работы механизмов перестановки
Принципиальная кинематическая схема механизма перестановки (расцепного устройства)
показана на рис. 5.1. Здесь условно обозначено: 1 — лобовины переставной части барабана,
2 — подшипниковые узлы опор лобовин, 3 — коренной вал машины, 4 — жестко связанный с
правой лобовиной 1 зубчатый венец с внутренними зубьями, 5 — подвижный в осевом направ-
лении венец с внешними и внутренними зубьями, 6 — жестко посаженная на вал машины
шестерня, 7 — пружина нажимного устройства, опирающаяся на правую лобовину 1, 8 — не
перемещающийся в осевом направлении относительно вала пневматический цилиндр. Уст-
ройство работает следующим образом. Перед началом производства работ по перестановке
машина должна быть заторможена предохранительным тормозом, а реборда переставной час-
ти барабана — присоединена посредством форкопфа (стопора) к фундаменту. В цилиндр 8
(рис. 5.1) подается сжатый воздух, и тогда поршни посредством своих штоков сжимают пру-
жину 7 и смещают влево подвижный зубчатый венец 5 до тех пор, пока не выйдут из зацепле-
ния его внутренние зубья с зубьями заклиненной на валу шестерни 6. При этом зацепление
внешних зубьев венца 5 с зубьями венца 4 сохраняется. Этим самым переставная часть бараба-
на оказывается кинематически несвязанной с валом машины, следовательно, и с заклиненной
частью барабана. Теперь машину можно растормозить, включить привод и начать медленное
вращение заклиненной части барабана в нужном направлении до тех пор, пока не произойдет
свивка или навивка каната на расчетную требуемую величину (например, если необходимо
обеспечить обслуживание другого горизонта или выполнить специальные работы по смене-
навеске канатов). После этого машина снова затормаживается, из цилиндров 8 выпускается
воздух, сжатая пружина 7 перемешают зубчатый венец 5 вправо до входа в зацепление с шес-
терней 6, обеспечивая кинематическую связность переставной части с валом машины. Затем
форкопф убирается, и машина готова выполнять свои обычные функции.
Рис. 5.1. Принципиальная кинематическая схема механизма перестановки
Наряду с представленной схематизацией возможны также иные схемные и компоновоч-
ные решения. Например, в серийных машинах НКМЗ количество нажимных пружин и пнев-
моцилиндров принято равным трем, располагаемых равномерно по соответствующей окруж-
ности соосной с валом.
МЕХАНИЗМЫ ПЕРЕСТАНОВКИ
153
5.2. Конструктивное исполнение механизмов перестановки
Механизм перестановки (расцепное устройство), как и орган навивки с коренными под-
шипниками, входит в состав сборки главного вала подъемной машины. Механизм перестановки
предназначен для кинематического расцепления и последующего соединения переставного ба-
рабана двухбарабанной подъемной машины (переставной части разрезного барабана подъемной
машины с разрезным барабаном) с главным валом. Механизм перестановки обеспечивает нор-
мальную работу подъемной машины — совместное вращение заклиненного и переставного ба-
рабанов (переставной части разрезного барабана) и перестановку барабанов (разрезной части) —
вращение заклиненного барабана (заклиненной части разрезного барабана) относительно затор-
моженного переставного барабана (переставной части разрезного барабана).
Необходимость такой операции возникает при регулировке длины ветвей канатов при
их вытяжке, при смене обслуживаемых горизонтов, при смене-навеске подъемных канатов.
Механизмы перестановки выпускались различных типов, которые отличались по типу
расцепного устройства — червячные, фрикционные, зубчатые рычажные, зубчатые безры-
чажные; шагу регулирования — ступенчатое и бесступенчатое; типу привода — ручной, пру-
жинно-гидравлический, пружинно-пневматический; системам и способам управления. В
процессе совершенствования конструкции прицепных устройств претерпевали большие из-
менения и их различные варианты подробно описаны в [17, 18, 25, 125].
В настоящее время подъемные машины выпускаются с зубчатыми безрычажными меха-
низмами перестановки с пружинно-пневматическим приводом, где соединение переставного
барабана (переставной части барабана) с главным валом обеспечивается усилием трех предва-
рительно сжатых пружин, а расцепление — подачей сжатого воздуха в три приводных цилинд-
ра. располагаемых равномерно по соответствующей окружности соосной с главным валом.
На рис. 5.2. приведен механизм перестановки (расцепное устройство) двухбарабанной
подъемной машины НКМЗ, который состоит из следующих составных частей: ступицы 1, не-
подвижно соединенной с валом подъемной машины; венца зубчатого 2, неподвижно соеди-
ненного (болтами) с переставным барабаном (указанный венец установлен на вал подъем-
ной машины на роликоподшипнике 9 и может свободно вращаться на валу); венца наруж-
ного 3, соединяющего своими зубьями ступицу 1 и венец 2.
Рис. 5.2. Механизм перестановки двухбарабанной подъемной машины НКМЗ:
1 — ступица; 2 — венец зубчатый; 3 — венец наружный; 4 — цилиндр пневматический;
5 — пружина; 6 — регулируемая тяга; 7 — кольцо; 8 — блокировочное устройство;
9 — роликоподшипник
154
ГЛАВА 5
На ступице 1 установлены: три цилиндра пневматических 4, предназначенные для пере-
мещения венца наружного 3 относительно ступицы 1 и венца 2; три пружины 5, которые
предназначены для удержания в соединенном состоянии венца наружного 3 со ступицей 1 и
венцом 2. Венец зубчатый 3 посредством регулируемых тяг 6 соединяется с кольцом 7, воз-
действующим на блокировочное устройство 8 в процессе перестановки барабанов. Питание
цилиндров пневматических 4 осуществляется через распределительную сеть воздуховодов.
При нормальной работе подъемной машины ступица 1 и венец зубчатый 2 соединены между
собой венцом наружным 3 под действием усилий предварительно сжатых пружин 5. При
перестановке барабанов в распределительную сеть воздухоприводов подается сжатый воз-
дух, под действием которого цилиндры 4 перемещая венец наружный 3 в осевом направле-
нии на зубьях ступицы 1, освобождают от зацепления с ним венец зубчатый 2. Вал подъем-
ной машины вместе со ступицей 1 и венцом наружным 3 получают возможность проворачи-
ваться относительно переставного барабана, соединенного болтами с венцом зубчатым 2.
Цилиндр пневматический (рис. 5.3) предназначен для перемещения венца наружного 3
механизма перестановки и состоит из следующих составных частей: поршня 1; цилиндра 2;
крышки 3 и манжеты 4.
Цилиндр пневматический устанавливается на ступице механизма перестановки и крепит-
ся к ней неподвижно болтами. При вскрытии цилиндра пневматического для периодических
осмотров последний остается соединенным с крышкой винтами 7. Уплотнение цилиндра 2 с
поршнем 1 достигается манжетой, которая крепится к поршню 1 посредством кольца и болтов
5. Уплотнение между цилиндром 2 и крышкой 3 производится прокладкой 9.
При подаче сжатого воздуха через отверстие 8 поршень 1 посредством штока 10 переме-
щает венец зубчатый 3 (рис. 5.2) для осуществления перестановки барабанов. Смазка цилин-
дра и поршня осуществляется маслом, содержащимся в сжатом воздухе.
с 'ий й
Рис. 5.3. Цилиндр пневматический механизма перестановки:
1 — поршень, 2 — цилиндр; 3 — крышка; 4 — манжета; 5 — болты крепления манжеты;
6 — болты крепления цилиндра ступицы; 7 — винты; 8 — отверстие подачи сжатого воздуха;
9 — прокладка; 10 — шток
Блокировочное устройство предназначено для предотвращения случайного растормажи-
вания предохранительного тормоза переставного барабана в период перестановки барабанов
и выдачи электрических сигналов на пульт управления подъемной машины о состоянии ме-
ханизма перестановки.
Блокировочное устройство (рис. 5.4), состоит из следующих составных частей: 1 — крон-
штейн; 2 — шток с пружиной 3, роликом 4 и рычагом 5, неподвижно закрепленным на нем;
6,7 — выключатели концевые; 8 — подшипники штока. Устройство блокировочное устанав-
ливается с зазором между роликом 4 и поверхностью механизма перестановки А. При нор-
мальной работе подъемной машины шток 2 под действием предварительно сжатой пружины
3 посредством рычага 5 воздействует на рычаг выключателя концевого 7, который выдает в
схему управления электрический сигнал готовности машины к пуску.
При перестановке барабанов кольцо 7 механизма перестановки (рис. 5.2) через ролик 4 пе-
ремещает шток 2 на величину хода наружного венца 3 механизма перестановки. Рычаг 5 осво-
бождает рычаг концевого выключателя 7, который под действием собственной пружины пере-
ключается и выдает электрический сигнал в схему управления на запрет пуска подъемной маши-
МЕХАНИЗМЫ ПЕРЕСТАНОВКИ
155
Рис. 5.4. Блокировочное устройство:
1 — кронштейн, 2 — шток; 3 — пружина;
4 — ролик; 5 — рычаг; 6,7 — выключатели
концевые; 8 — подшипник штока
А — поверхность механизма перестановки
ны. При полном выходе из зацепления с венцом 2 наружного венца 3 механизма перестановки
(рис 5.2), шток 2 рычагом 5 переключает выключатель концевой 6 и последний выдает электри-
ческий сигнал в схему управления о готовности подъемной машины к перестановке барабанов.
Одновременно концевой выключатель 6 выдает электрический сигнал в схему управления, зап-
рещающий растормаживание предохранительного тормоза переставного барабана.
Смазочная система опор переставного барабана предназначена для периодического попол-
нения подшипниковых опор переставного барабана густой смазкой при техническом обслужи-
вании подъемных машин. Смазочная система состоит из ручной станции для нагнетания густой
смазки поочередно к двум группам смазываемых точек. Выбор группы смазываемых точек про-
изводится переключателем. Для контроля давления смазки предназначен манометр.
Стопорное устройство (рис. 5.5) предназначено для удержания от вращения барабанов в
сборе при ремонте и наладке тормоза.
Рис. 5.5. Стбпорное устройство:
1 — шток; 2 — серьга; 3 — реборда переставного барабана; 4 — отверстия в реборде;
5 — регулировочная муфта; 6 — шарнир; 7 — вал стопорного устройства
На рис. 5.6 приведен механизм перестановки двухбарабанной подъемной машины Донецк-
гормаша. Механизм перестановки барабанов состоит из зубчатой обоймы 1, зубчатого коле-
са 2, трубопроводов 3, приводных цилиндров 4, поршней 5, пружин 6, диска 7, кольца 8 и
шпилек 9. Зубчатое колесо посажено на шлицы 7 главного вала 1, а зубчатая обойма непод-
вижно соединена с тормозным диском 11 левого барабана (рис. 4.8).
Пружины 6 (рис. 5.6) одним концам установлены в стаканах 10, закрепленных болтами
на колесе 2. К торцам стаканов 10 приклеены резиновые амортизаторы 11, которые опира-
ются на диск 7. Шпильки 9 ввернуты в диск и застопорены специальными шайбами. Проти-
воположные концы пружин упираются в упорные кольца 12, установленные на шпильках 9.
Вращение от главного вала 13 клевому (переставному) барабану передается через зубча-
тое колесо 2, соединенное шлицами с валом 13 и входящее в зацепление с зубчатой обоймой
1. Зубчатое колесо 2 удерживается в зацеплении с зубчатой обоймой 1 силой предварительно
сжатых пружин 6. Отсоединение переставного барабана от вала 13 производится выводом из
зацепления зубчатого колеса 2 с зубчатой обоймой 1, которое осуществляется подачей сжа-
того воздуха в приводные цилиндры 4. При этом зубчатое колесо 2 вместе с закрепленными
на нем цилиндрами 4 переместится влево по шлицам вала 13 до упора в кольцо упорное 12.
Соединение переставного барабана с валом производится вводом в зацепление зубчато-
го колеса 2 с зубчатой обоймой 1 путем выпуска сжатого воздуха из приводных цилиндров 4.
При этом зубчатое колесо под действием силы пружин 6 переместится вправо до упора амор-
тизаторов 11 в диск 7.
156
ГЛАВА 5
Сжатый воздух к вращающемуся валу подается че-
рез специальное устройство, установленное на торце
главного вала. В приводные цилиндры механизма пе-
рестановки воздух поступает из внешнего неподвиж-
ного трубопровода через полую ось, осевое и радиаль-
ное отверстия в главном вале и трубопровод механиз-
ма перестановки.
Устройство для подвода сжатого воздуха изобра-
жено на рис. 5.7. Устройство состоит из корпуса 1 с
установленной в нем на подшипниках качения 2 по-
лой осью 3 и крышки 4. Корпус 1 установлен в отвер-
стии на торце главного вала машины. Подшипнико-
вый узел уплотнен резиновыми манжетами 5, а зазор
между поверхностями корпуса 1 и главного вала уп-
лотнен резиновым кольцом 6. На конце полой оси 3
установлен угольник 7, к которому присоединяется
внешний трубопровод. Стопорная планка 8, прикреп-
ленная к торцевой крышке корпуса подшипника, удер-
живает полую ось 3 от вращения.
Для того чтобы не допустить растормаживания пе-
реставного барабана в то время, когда он отсоединен
от главного вала машины, а также для предотвраще-
ния самопроизвольного отсоединения переставного
барабана от главного вала предусмотрена блокировка
механизма перестановки.
Конструктивное исполнение блокировки приве-
дено на рис. 5.8.
В стакане 1, закрепленном в корпусе коренного
подшипника, установлен шток 2. На конце штока зак-
реплен шарикоподшипник 3. Свободный конец што-
ка воздействует на выключатели 4 и 5. Пружина 6 удер-
живает шток 2. Блокировка работает следующим об-
разом. Зубчатое колесо механизма перестановки при
выходе из зацепления перемещает шток 2, свободный
Рис. 5.6. Механизм перестановки
двухбарабанной подъемной
машины Донецкгормаша:
1 — зубчатая обойма; 2 — зубчатое
колесо; 3 — трубопроводы сжатого
воздуха; 4 — приводные цилиндры;
5 — поршни приводных цилиндров;
6 — пружины; 7 — диск; 8 —
упорное кольцо; 9 — шпилька; 10 —
стаканы; 11 — резиновые аморти-
заторы; 12 — упорные кольца;
13 — главный вал
Рис. 5.7. Устройство для подвода сжатого
конец которого последовательно
воздействует на выключатели 4 и 5. При
вводе зубчатого колеса механизма пе-
рестановки в зацепление шток и выклю-
чатели 4 и 5 возвращаются в исходное
положение под действием пружины 6.
Выключатели 4 и 5 включены в схему уп-
равления подъемной машины.
Перед перестановкой заторможен-
ный переставной барабан дополнительно
стопорится специальным тормозным
стопорным устройством (рис. 5.9). Стопо-
рение должно производиться при непод-
вижной машине.
Стопорное устройство предназначе-
но для стопорения машины при монтаже
или ремонте тормозного устройства. Сто-
воздуха:
1 — корпус; 2 — подшипник качения; 3 — полая
ось; 4 — крышка; 5 — резиновые манжеты;
6 — резиновое кольцо; 7 — угольник; 8 —
стопорная планка
порение должно производиться при не-
подвижной машине. При пользовании
стопорным устройством разность стати-
ческих натяжений канатов не должна пре-
вышать 10 кН. Устройство стопора: втул-
МЕХАНИЗМЫ ПЕРЕСТАНОВКИ
157
Рис. 5.8. Блокировка механизма перестановки:
1 — станок; 2 — шток; 3 — шарикоподшипник; 4, 5 — концевые выключатели; 6 — пружина
л 1 и 2 приварены к раме машины. Втулка 2 имеет трапецеидальную нарезку, в которую
: чинчивается палец стопора 3. Для стопорения машин палец стопора 3 гладким концом вво-
:зт специальной рукояткой или гаечным ключом между двумя специальными ребрами тор-
мозного диска. Для этого второй конец стопорного устройства имеет квадратное сечение.
Рис. 5.9. Стопорное устройство:
1 — втулка; 2 — втулка с трапецеидальной резьбой; 3 — палец стопора
5.3. Порядок проведения перестановки
Перестановку барабанов (разрезной части барабана) — далее «перестановка» осуществляют с
целью регулирования длины канатов при их вытяжке, работе подъема на два и более горизонта, а
также при навеске или замене канатов. Довольно часто переставляют барабаны на подъемных ус-
тановках с опрокидными клетями при переходе с режима подъема-спуска людей на режим подъе-
ма-спуска груза и обратно, когда указанные операции производят с разных приемных площадок.
Процесс перестановки — весьма ответственная технологическая операция, которую про-
водят не менее двух человек (машинист подъема и электрослесарь или механик подъема).
Перед перестановкой оба сосуда необходимо полностью разгрузить.
На шахте «Новодружеская» производственного объединения «Лисичанскуголь» при пере-
становке клети тормоз не обеспечил необходимого тормозного момента. В результате клеть
была упущена в ствол и разбита, выведен из строя электродвигатель. Авария произошла по
вине обслуживающего персонала, проводившего перестановку барабанов при груженой клети.
158
ГЛАВА 5
При перестановке следует придерживаться строго определенной последовательности
проведения всех операций:
— перед перестановкой шахтный персонал на нижней и нулевой площадках предупреж-
дают о предстоящей работе в стволе;
— подъемный сосуд переставного барабана устанавливают на посадочные устройства
(кулаки, посадочные брусья). Для подъемных установок БЦК. необходимо определить поло-
жение сосудов, когда перестановка будет наиболее благоприятной с точки зрения создания
необходимых запасов тормозного момента;
— переставной барабан стопорят специальным стопорным устройством;
— перед перестановкой затормаживают подъемную машину предохранительным тормо-
зом и проверяют запас хода поршней до упора в дно цилиндров предохранительного тормо-
жения. При запасе хода поршня менее допустимого производят соответствующую регули-
ровку тормоза, убеждаются в плавности хода поршней;
— при перестановке маневры возможно производить только сосудом заклиненного ба-
рабана (заклиненной части разрезного барабана), т. к. переставной барабан (переставная часть
разрезного барабана) в это время должен быть заторможен;
— поставить рукоятку управления командоаппаратом электродвигателя в нулевое поло-
жение, а рукоятку управления командоаппарата рабочего торможения в положение «Затор-
можено»;
— поставить переключатель управления механизма перестановки в положение «Вклю-
чено». При этом переставной барабан должен затормаживаться и рассоединяться с валом
подъемной машины, а на пульте управления должен включаться световой сигнал «Муфта
включена»;
— после включения механизма перестановки и подачи сжатого воздуха в приводные
цилиндры необходимо убедиться, что произошло полное расцепление зубчатого колеса с
зубчатой обоймой. В случае неполного расцепления имеющаяся в схеме блокировка меха-
низма перестановки не должна дать разрешение на пуск машины.
Если зубчатое колесо не выходит из зацепления вследствие натяга или перекоса в зубча-
том зацеплении, необходимо при плавном растормаживании машины рабочим тормозом при
нажатой кнопке блокировки включить кратковременно подъемный двигатель в сторону
подъема сосуда на заклиненном барабане. При этом разгружается зубчатое зацепление меха-
низма перестановки и облегчается выход зубчатого колеса из зацепления.
— после срабатывания механизма перестановки включают подъемный двигатель, пере-
гоняют сосуд заклиненного барабана в требуемую точку ствола и затормаживают подъемную
машину.
После окончания перестановки требуется корректировка показаний указателя глубины,
положения этажных выключателей АЗК, профилей ретардирующих дисков ограничителя
скорости и перегон подъемных сосудов на скорости менее 1 м/с на приемные площадки.
При этом следует убедиться, что показания указателя глубины, положение этажных выклю-
чателей и профилей на ретардирующих дисках соответствуют положению подъемных сосу-
дов в стволе.
Глава 6
ТОРМОЗНЫЕ УСТРОЙСТВА
ПОДЪЕМНЫХ МАШИН
6.1. Общие сведения о тормозных устройствах и основные
требования к ним
6.2. Поверочный расчет тормозных устройств
6.1. Общие сведения о тормозных устройствах и основные требования к ним
Тормозное устройство — одно из самых сложных и ответственных устройств подъемной
машины, являющееся конечным звеном в цепи защитных средств. К нему предъявляют по-
вышенные требования, так как от их совершенства зависят надежность и безопасность рабо-
ты всей подъемной установки.
Тормозные устройства обеспечивают: выполнение заданной тахограммы движения
подъемных сосудов (рабочее торможение); предохранительное торможение при срабатыва-
нии какого-либо из аппаратов защиты (возникновении неисправности); стопорение маши-
ны в фиксированном положении при ремонтах или удержание ее во время пауз с необходи-
мым запасОхМ тормозного момента; стопорение переставной части барабана при регулировке
длины канатов или смене горизонта.
Основные элементы тормозного устройства — исполнительный орган тормоза, тормоз-
ной привод, аппараты управления и системы управления тормозом.
6.1.1. Исполнительный орган тормоза
Исполнительный орган тормоза состоит из тормозных балок, тормозных колодок с фрик-
ционными накладками, тормозного обода и рычажно-шарнирного механизма.
По принципу торможения исполнительные органы тормоза подразделяются на два ос-
новных типа:
— радиального типа (рис. 6.1 а, 6.1 б), в котором две диаметрально расположенные жес-
ткие тормозные колодки 3, оснащенные фрикционными накладками 2, прижимаются с двух
сторон к цилиндрическому тормозному ободу барабана 1 с усилием F, направленным по ра-
диусу барабана;
— аксиального типа (рис. 6.1 в), в котором две тормозные колодки 3, составляющие один
так называемый тормозной модуль, прижимаются с двух сторон к соосному с барабаном 1
тормозному диску 2 (на одном диске может размещаться до восьми и более модулей) с уси-
лием/, направленным вдоль оси барабана.
Тормозные диски жестко связаны с барабаном и, чаще всего, их функции исполняют
непосредственно реборды самого барабана. Тормозные модули устанавливаются на специ-
альных суппортах («постаментах»), жестко связанных с фундаментом машины. Рабочим «те-
лом» для модулей, как правило, являются сжатый воздух или жидкость (техническое масло
под давлением).
В целях повышения безопасности и надежности эксплуатации тормозные устройства
любого типа должны располагаться по обе стороны от лобовин барабана и иметь независи-
мые приводы тормоза (в многомодульных дисковых тормозах независимыми являются каж-
дый модуль в отдельности, что является их выгодным преимуществом).
В зависимости от конструкции исполнительные органы тормоза радиального типа мо-
гут быть:
— колодочные с угловым перемещением колодок (рис. 6.2, 6.3);
160
ГЛАВА 6
Рис. 6.1. Схематические изображения исполнительного органа тормоза
радиального (а, б) и аксиального (в) типа
— колодочные с поступательным перемещением колодок, когда тормозные балки с ко-
лодками подвешены на центральных шарнирах, что обеспечивает относительно равномер-
ное распределение удельных давлений на тормозные колодки с прессмассовыми фрикцион-
ными накладками, а, следовательно, и равномерный износ (рис. 6.4—6.7);
— с внутренним расположением исполнительного органа и привода (рис. 6.1 б).
Конструкции тормозных устройств с исполнительным органом аксиального типа (дис-
ковые тормоза) смотри 6.1.5, 6.1.6.
В тормозных устройствах с исполнительным органом радиального типа, как следует из
рис. 6.1а, б прижатие колодок к ободу с усилием /"приводит к силам трения, следовательно,
к тормозному моменту М'г -p.TFDmo, где FDmo — диаметр тормозного обода, ит — коэффи-
циент трения между тормозным ободом и фрикционными накладками тормозных колодок.
А так как такой же величины момент создается и вторым тормозным устройством, то ре-
зультирующий момент будет
Мт - 2^TFDmo.
(6.1.1)
В тормозном устройстве с исполнительным органом аксиального типа при общем коли-
честве модулей на одном диске равным пт результирующий тормозной момент при двухдис-
ковой системе (при условии, что все тормозные модули имеют одинаковые технические па-
раметры) определяется выражением
Мт - 2nT[iTfDmd,
(6.1.2)
где Dmd — диаметр окружности на диске, являющейся геометрическим местом центров мо-
дулей. Из сравнения (6.1.1) и (6.1.2) следует, что при одной и той же величине тормозного
момента и примерно равных Dmo и Dmd усилие прижатия fvnT раз меньше F. Это является
еще одним достоинством дисковых тормозов.
В зарубежных странах с развитой горнодобывающей промышленностью подъемные маши-
ны с дисковыми тормозами стали применяться примерно с 70-х годов. В СССР первые такого
рода машины были разработаны и изготовлены Донецкгормашем в 1980 году (см. 6.1.5).
В расчетной практике обычно имеют дело не с величиной тормозного момента, а с при-
веденной к окружности навивки канатов на барабан расчетной величиной тормозного уси-
лия Fpac = 2МТ /D6 , где D6 — диаметр барабана, причем Fpac [см. 3.2 и соотношения (3.2.9 >
определяется совокупностью различного рода ограничений, диктуемых ПБ [13]. Тогда с ис-
пользованием формул (6.1.1) и (6.1.2) получим
F П- F D
f = f = J_Pac ,
^то 4птЦт Dmo
(6.1.3)
и при помощи этих формул рассчитываются параметры привода тормоза: давления в цилш
драх тормоза, кинематические соотношения рычажной системы и пр.
Многочисленными экспериментальными исследованиями давно установлено, что тор-
мозной момент Мт, обусловленный любым типом тормоза, следовательно, и F, /в (6.1.1)
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН 161
(6.1.2) отнюдь не является постоянной величиной, а изменяется во времени по так называе-
мому «экспоненциальному закону» [182].
^•(0=М™хр-е?ФН/7’7-)](^>0), (6.1.4)
где = FpacD6/2; Тт — постоянная времени тормоза как одна из важнейших характеристик
тормозной системы. Судя по выражению (6.1.4), с увеличением ТТ процесс торможения все
более «растягивается» во времени, а при Тт -> 0 имеет место как бы мгновенное (ступенчатое)
приложение к машине тормозного момента . Именно благодаря этому обстоятельству,
имея возможность на практике изменять величину Тт техническими средствами, удается в
ряде случаев достичь приемлемый для норм безопасности режим торможения.
Важным параметром является также время срабатывания тормоза t. Под временем сра-
батывания тормоза подразумевается время, протекающее с момента разрыва цепи зашиты до
возникновения тормозного момента, равного по величине статическому. То есть при t = t в
(6.1.4) Л/Г(гср-гхх.) = Мст, где Мст — статический момент на валу подъемной машины; —
время холостого хода. Время срабатывания тормоза для тормозной системы является показа-
телем ее быстродействия, как и постоянная времени тормоза ТТ . В силу сказанного и с помо-
щью (6.1.4) находим tcp = 7^|ln(l-Af£.m/A/max)|. Это время «сверху» ограничивается ПБ ве-
личиной |^ср] = 0,8 с независимо от привода тормоза, следовательно, и постоянная времени
тормоза оказывается ограниченной сверху, то есть должно выполняться условие
7?^Ы-[^]}/|1п(1-Л/от/Л/1гах)|- (6.1.5)
Таким образом, в тормозных системах целесообразно иметь, с одной стороны, постоян-
ную времени Тт достаточно большую для плавного торможения, а с другой стороны, Тт дол-
жно ограничиваться условием (6.1.5), что является предметом для поиска рациональных со-
четаний параметров подъемной установки в целом.
Как было сказано выше, одной из важнейших характеристик тормоза является время
холостого хода тормоза Под холостым ходом тормоза подразумевается время, протекаю-
щее с момента разрыва цепи зашиты до момента появления усилия в исполнительном орга-
не тормоза, как трактует ПБ [13], (хотя по мнению авторов следует считать «до соприкосно-
вения колодок тормоза с тормозным ободом», т. к. при неисправностях рычажно-шарнир-
ного механизма усилие в исполнительном органе может появиться раньше, чем фрикцион-
ные накладки колодок тормоза соприкоснутся с тормозным ободом, т. е. когда подъемная
машина начнет фактически затормаживаться).
Продолжительность зависит не только от величины зазора между колодками и обо-
лом, но и от люфтов в многочисленных шарнирных соединениях привода тормоза. Так как в
момент разрыва цепи ТП происходит обесточивание электродвигателя, то в интервале
движение подъемной установки в целом оказывается подчиненным только силам инерции и
гравитации. Это обстоятельство является существенным для режимов спуска грузов, так как
к началу торможения скорость машины, естественно, возрастает на величину [см.
(2.1.14)].
Продолжительность холостого хода предохранительного тормоза действующих подъем-
ных машин (4^.) в соответствии с требованиями ПБ [13] не должна превышать:
0,5 с — при грузо-пневматическом и (рис. 6.4) пружинно-пневматическом грузовом (рис.
6 4. б) приводах;
0.6 с — при грузо-гидравлическом приводе (рис. 6.3);
0.3 с — при пружинно-пневматическом и пружинно-гидравлическом приводах (рис. 6.4
и 6.11. а), а также для всех вновь создаваемых конструкций тормозных устройств.
Первые подъемные машины Донецкгормаша имели отдельно предохранительный тор-
моз с одним исполнительным органом колодочного типа с угловым перемещением колодок
и воздействием на тормозной обод барабана и рабочий (маневровый) тормоз колодочного
типа с воздействием на тормозной шкив, посаженный консольно на правом конце привод-
ного вала редуктора (ТЛ-7, ТЛ-9, БЛ1200, 2БЛ1200, БЛ1600, 2БЛ1600).
162
ГЛАВА 6
Выпуск лебедок ТЛ прекращен в 1950 г., а лебедок БЛ — в 1967 г., и хотя расчетный срок
службы этих лебедок был 10 лет, некоторые до сих пор еще находятся в эксплуатации.
Один исполнительный орган тормоза имеют также машины БМ2000-ЗА (2БМ2000-ЗА —
два исполнительных органа тормоза).
Подъемные машины БМ2500, 2БМ2500, БМ3000, 2БМ3000 имеют один сдвоенный, со-
стоящий из двух пар тормозных балок исполнительный орган тормоза с угловым перемеще-
нием тормозных колодок с одним тормозным приводом. Однобарабанные машины имеют
внешнее расположение двух пар тормозных колодок, а двухбарабанные — внутреннее. Ис-
полнительный орган этих машин оборудован пружинным звеном, предназначенным для уве-
личения упругой деформации рычажной системы тормоза для получения большей чувстви-
тельности и плавности торможения машины.
Один исполнительный орган тормоза имеют также подъемные машины со шкивом тре-
ния ШТ 7,2 завода НКМЗ.
Подъемные машины и лебедки, имеющие один исполнительный орган и один привод
тормоза, не отвечают требованиям ПБ [13] к тормозным устройствам и должны быть заме-
нены. К сожалению, до настоящего времени большое количество таких машин находится в
эксплуатации.
Все последующие подъемные машины уже имеют по два исполнительных органа тор-
моза, которые выполняют функции как предохранительного, так и рабочего торможения.
6.1.2. Тормозные приводы
Тормозные приводы подъемных машин в зависимости от источника тормозного усилия
подразделяют на грузовые, грузо-гидравлические, пружинно-гидравлические, пружинно-
пневматические (безгрузовые и грузовые), грузо-пневматические и тормозные устройства с
пружинно-гидравлическими дисковыми тормозами.
При любом типе тормозного привода тормозное усилие обеспечивается силами предва-
рительно сжатых пружин или весом тормозных грузов — это основное правило тормозных
систем: подъемная машина должна быть заторможена независящими от оператора силами.
Следует отметить, что в разных источниках название одного и того же привода тормоза
может быть разным, например, грузо-пневматический и пневмо-грузовой, грузо-гидравли-
ческий и гидро-грузовой. Более правильным следует считать название привода тормоза, в
котором на первом месте стоит источник, создающий затормаживающее усилие — груз или
пружины, т. е. грузо-пневматический, а не пневмо-грузовой или гидро-грузовой.
Грузовой привод
Первые лебедки и подъемные машины, выпускаемые Донецкгормашем, были оборудо-
ваны тормозными устройствами с грузовым приводом. Затормаживающее усилие раздельно
работающих рабочего и предохранительного тормозов создавалось тормозным грузом. Рас-
тормаживание предохранительного и ручного (маневрового) тормоза осуществлялось вруч-
ную — предохранительный тормоз растормаживался вращением маховика тормозной колонки
от руки, а рабочий — рукояткой управления. Таким приводом были оснащены лебедки ТЛ-
7, ТЛ-9, выпускавшиеся с 1938 г. по 1950 г., лебедки БЛ1200, 2БЛ1200 — с 1944 г. по 1967 г. На
модернизированных лебедках этого типа в качестве привода предохранительного тормоза
применен электрогидравлический толкатель типа ТЭГ-300, который поднимает и удержива-
ет во время работы лебедки тормозной груз. Такой привод позволял управлять предохрани-
тельным тормозом на расстоянии (рис. 6.2, в).
Управление ручным (маневровым) тормозом осуществлялось при помощи электромаг-
нита К.МТ-411 при дистанционном управлении лебедкой или рукояткой со стойки управле-
ния при ручном управлении (рис. 6.2, а, б). Таким приводом были оснащены лебедки БЛ 1200-
2М, 2БЛ1200-2М.
Бытует неправильное мнение, что величина тормозного момента, создаваемого рабо-
чим тормозом при ручном управлении такими подъемными машинами, определяется мус-
кульной силой машиниста. На самом деле эта величина определяется массой тормозного
груза ^GT (рис. 6.2 а и б), а мускульная сила машиниста используется только для отторма-
живания.
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
163
а
б
Рис. 6.2. Кинематическая схема тормоза подъемных машин и лебедок с грузовым приводом:
а, б — рабочего тормоза; в — предохранительного тормоза
Грузо-гидравлический привод
В грузо-гидравлическом приводе тормоза (рис. 6.3) затормаживающее усилие создается тор-
мозным грузом, а растормаживающее — давлением масла в тормозном цилиндре. Рабочее давле-
ние масла 6 кгс/см2 создается аккумулятором давления, который состоит из сточного бака и верти-
кального цилиндра с поршнем, находящегося под постоянным воздействием на него груза.
Грузо-гидравлическим приводом оснащены подъемные машины БМ-2000-ЗА (один тор-
мозной привод), 2БМ-2000-ЗА [(два тормозных привода, воздействующие на два исполнитель-
ных органа тормоза (рис. 6.3, а)] и подъемные машины БМ-2500, 2БМ-2500, БМ-3000, 2БМ-
3000 Донецкгормаша, а также подъемные машины НКМЗ типа ШТ 7,2 с грузо-пневматичес-
ким приводом (рис. 6.3, б), которые имеют один привод тормоза, воздействующий на сдвоен-
ный, состоящий из двух тормозных балок исполнительный орган тормоза.
а
б
Рис. 6.3. Кинематическая схема тормоза подъемных машин с грузо-гидравлическим
приводом:
а — подъемная машина БМ-2000-ЗА, 2БМ-2000-ЗА; б — остальные машины БМ, а также
подъемные машины ШТ 7,2 с грузо-пневматическим приводом
164
ГЛАВА 6
а
б
Рис. 6.4. Кинематическая схема тормоза подъемных машин:
а — с пружинно-гидравлическим или пружинно-пневматическим безгрузовым приводом;
б — с пружинно-пневматическим грузовым приводом
Пружинно-гидравлический привод
С 1977 г. Донецкгормаш освоил выпуск подъемных машин новой конструкции — одно-
барабанных и двухбарабанных с диаметром барабана 1,2, 1,6 и 2,0 м, которые в отличие от
подъемных машин БМ и 2БМ оснащены пружинно-гидравлическими безгрузовыми приво-
дами тормозов, кинематическая схема которых приведена на рис. 6.4 а, рис. 6.5.
Рис. 6.5. Принципиальная схема пружинно-гидравлического
(или пружинно-пневматического) безгрузового привода тормоза
На рис. 6.5 изображена принципиальная схема пружинно-гидравлического (или пружин-
но-пневматического) безгрузового привода тормоза, где обозначены: 1 — тормозной цилиндр,
опирающийся на фундамент машины, 2 — поршень, 3 — шток, 4 — нижний опорный диск
пружинного блока, 5 — пружины, образующие так называемый пружинный блок, 6 — стяжки
пружин, 7 — верхний опорный диск, 8 — гайки, стягивающие пружинные блоки, 9 — штан-
га, 10 — угловой рычаг, 11 — тормозная тяга, 12 — тормозные балки, 13 — тормозные колод-
ки, 14 — тормозной обод барабана, 15 — фрикционные накладки тормозных колодок, 16 —
растяжки.
Стрелками <-> условно обозначено место впуска и выпуска жидкости (масла) или сжатого
воздуха. Шток 3 поршня 2 упирается в подвижный нижний опорный диск 4, а верхний диск 7
остается неподвижным, так как стяжки 6 присоединены к крышке тормозного цилиндра 1. За-
торможенное состояние машины обеспечивается пружинным блоком 5, который предваритель-
но сжат стяжками 6. Пружинные растяжки 16, устанавливаемые между тормозными балками 12
и колодками 13, служат для выставления равномерной величины зазора между фрикционными
накладками 15 и ободом барабана 14 при расторможенной машине.
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
165
Затормаживающее усилие создается усилием первоначального сжатия посредством гаек
4 пружин пружинных блоков, растормаживание машины происходит под действием давле-
ния масла или сжатого воздуха в тормозном цилиндре, что приводит к дополнительному сжа-
тию пружин 5, штанга 9 при этом перемешается вверх, и, благодаря угловому рычагу 10 и
тормозной тяге 11, тормозные балки 12 отклоняются от вертикали, колодки 13 отходят от
обода 14, что и приводит к размыканию контакта во фрикционной паре «колодка-обод».
Рабочее торможение машины, оборудованной пружинно-гидравлическим безгрузовым
приводом тормоза, осуществляется машинистом с пульта управления машиной путем пере-
мещения рукоятки управления тормозом. При этом подача под давлением масла от масло-
^танции перекрывается обратным клапаном, и слив масла из тормозных цилиндров осуще-
ствляется через регулятор давления (см. рис. 6.10), обеспечивающий плавное уменьшение
давления, следовательно, и постепенное прижатие колодок к ободу.
При предохранительном торможении, которое инициируется машинистом или сраба-
тывает автоматически отдатчиков зашиты, слив масла из тормозных цилиндров происходит,
минуя регулятор давления, практически беспрепятственно, чем обеспечивается требуемое
быстродействие тормоза в аварийной ситуации. Максимальное тормозное усилие при рабо-
чем и предохранительном торможении в рассматриваемой системе тормоза оказывается оди-
наковым, но при рабочем торможении, благодаря регулятору давления, процесс торможе-
ния может происходить более плавно во времени, хотя, в конечном счете, это зависит также
и от квалификации машиниста.
Пружинно-пневматический привод
Подъемные машины с пружинно-пневматическими приводами тормоза выпускаются До-
нецкгормашем с 1970 г. Такими тормозами оснащены многоканатные подъемные машины, а также
одно- и двухбарабанные подъемные машины с диаметром барабана 2,5; 3,0 и 3,5 м.
Приводы выпускаются двух видов: с тормозными грузами и без грузов. Приводы с тор-
мозными грузами выпускаются для тех случаев, когда требуется двухступенчатое предохра-
нительное торможение. Это преимущесвтенно многоканатные подъемные машины и бара-
банные машины с диаметром барабана 3,5 м.
Конструктивное исполнение приводных цилиндров и пружинных блоков таких машин
приведены в [17, 125], поэтому в настоящей работе рассмотрена только конструкция пружин-
но-пневматического привода тормоза подъемных машин НКМЗ типа МПБ (см. 6.1.4, рис. 6.13).
Основные узлы таких машин (главный вал в сборе, исполнительные органы и приводы
тормоза, панель тормоза) собраны на одной жесткой разъемной раме, что упрощает устрой-
ство фундамента машины и ускоряет и облегчает ее монтаж на месте установки.
Рабочее и предохранительное торможение машин, оборудованных пружинно-пневма-
тическими безгрузовыми приводами, осуществляется аналогично машинам с пружинно-гид-
равлическими приводами. Различие состоит в том, что в этом случае рабочим «телом» явля-
ется не масло, а сжатый воздух, подаваемый от общешахтной пневмосети или от автоном-
ных компрессоров. Поэтому в настоящем разделе рассмотрен только пружинно-пневмати-
ческий грузовой привод, схематически изображенный на рис. 6.6.
12
Рис. 6.6. Принципиальная схема пружинно-пневматического грузового привода тормоза
166
ГЛАВА 6
Источником усилия рабочего торможения и первой ступени предохранительного тор-
можения является пружинный блок. Вторая ступень предохранительного торможения со-
здается тормозными грузами. На рис. 6.6 обозначены: 1 — цилиндр рабочего торможения
(ЦРТ), одновременно являющийся поршнем цилиндра предохранительного торможения
(ЦПТ); 2 — поршень ЦРТ; 3 — шток поршня ЦРТ; 4 — нижний подвижный опорный диск
пружинного блока; 5 — пружины; 6 — стяжки; 7 — верхний опорный диск; 8 — гайки, стяги-
вающие пружинный блок; 9 — ЦПТ; 10 — нижняя часть ЦРТ (условно показана как пор-
шень ЦПТ); 11 — грузовая тяга; 12 — тормозной груз; 13 — штанга; 14 — угловой рычаг; 15
— тормозная тяга; 16 — тормозные балки; 17 — тормозные колодки; 18 — тормозной обод;
19 — фрикционные накладки; 20 — регулировочные стойки. На машинах последних выпус-
ков отсутствуют регулировочные стойки 20. Вместо них установлены пружинные растяжки
аналогично схеме на рис. 6.5 (позиция 16).
Величина тормозного усилия, создаваемого пружинами 5, регулируется гайками 8 на стяж-
ках 6,которые закреплены на крышке ЦРТ. Шток 3 поршня 2 упирается в опорный диск 4.
При заторможенной рабочим и предохранительным тормозом машине давление возду-
ха в тормозных цилиндрах отсутствует, тормозные грузы опущены. При включении контак-
тора предохранителнього торможения сжатый воздух подается в ЦПТ. При этом ЦРТ подни-
мается вместе с тормозным грузом, стяжками 6 и диском 4 до упора специального диска на
тяге 11 в резиновый буфер, расположенный на нижней крышке ЦПТ (на рисунке не пока-
зан). Но машина остается заторможенной благодаря усилию пружин 5, воздействующему
через диск 4 и тягу 13 на угловой рычаг 14. Для растормаживания машины сжатый воздух
подается в ЦРТ через регулятор давления, гибкий шланг и радиальный и осевой каналы в
штоке 3. Машинист подъема, регулируя величину давления воздуха в ЦРТ, выбирает требуе-
мое усилие рабочего торможения.
Предохранительное торможение осуществляется выпуском воздуха из обоих тормозных
цилиндров. При этом выхлопные устройства должны быть отрегулированы так, чтобы воздух из
ЦРТ выходил быстрее, чем из ЦПТ. Благодаря этому осуществляется двухступенчатое предохра-
нительное торможение и закон нарастания тормозного момента приближается к экспоненци-
альному Зачастую необходимо настраивать выхлоп воздуха из ЦПТ так, чтобы опускание тор-
мозного груза происходило при остановленной машине, а торможение движущейся машины
происходило под воздействием усилия первой ступени. Эта особенность имеет большое значе-
ние для машин со шкивами трения, для которых в своем большинстве избежать опасности сколь-
жения канатов можно лишь при торможении первой ступенью, величина тормозного момента
которой может быть меньше, чем требуется при застопоренной машине.
Грузо-пневматический привод
Подъемные машины НКМЗ с разрезным барабаном и двухбарабанные с диаметром орга-
на навивки 4 м и выше оборудованы тормозами с грузо-пневматическим приводом. Тормоз
представляет собой систему шарнирного многозвенника со статически определимым рас-
пределением усилий.
Кинематические схемы тормоза подъемных машин НКМЗ с разными модификациями
исполнительного органа тормоза изображены на рис. 6.7. В отличие от предыдущих типов при-
вода тормоза грузо-пневматический привод содержит два тормозных цилиндра — цилиндр
рабочего торможения (ЦРТ) и цилиндр предохранительного торможения (ЦПТ).
Все элементы привода смонтированы на общей сварной раме, которая устанавливается
и закрепляется на фундаменте.
На рис. 6.8 приведена принципиальная схема грузо-пневматического привода тормоза.
Здесь цифрами обозначены: 1 — ЦРТ, 2 — поршень ЦРТ, 3 — шток ЦРТ, 4 — ЦПТ, 5 —
поршень ЦПТ, 6 — шток ЦПТ, 7 — тяга подвески груза, 8 — дифференциальный рычаг, 9 —
груз, 10 — штанга, 11 — угловые рычаги, 12 — тормозные колодки, 13 — тормозной обод бара-
бана, 14 — фрикционные накладки, 15 — вертикальные стойки (тормозные балки), 16 — регу-
лировочная тяга, 17 — нижняя тормозная тяга, 18 — боковая тяга, 19 — верхняя тяга.
Штоки 3 и 6 поршней цилиндров рабочего и предохранительного торможения шарнир-
но присоединены к дифференциальному рычагу 8, правый конец которого при помощи вер-
тикальной штанги 10 передает усилие привода к исполнительному органу тормоза. Благода-
ря многозвенной рычажной системе, изображенной на рис. 6.8, и наличию специальной ре-
гулировочной тяги 16, тормозные колодки перемешаются поступательно, без перекосов, что
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
\Ь1
Рис. 6.7. Кинематическая схема тормоза подъемных машин с грузо-пневматическим
приводом:
а — I и II тип исполнительного органа тормоза машин НКМЗ ранних лет выпуска;
б — III тип исполнительного органа тормоза машин НКМЗ
б
Рис. 6.8. Принципиальная схема грузо-пневматического привода тормоза
обеспечивает равномерное распределение удельных давлений и увеличивает срок службы
тормозных колодок.
В период нормальной работы машины поршень 5 цилиндра предохранительного тормо-
жения находится под давлением сжатого воздуха, чем удерживаются в верхнем положении
тормозные грузы 9. В цилиндре рабочего торможения давление отсутствует, поршень 2 нахо-
дится в крайнем нижнем положении, колодки отжаты, и машина расторможена. Рабочее
торможение осуществляется машинистом впуском сжатого воздуха в цилиндр рабочего тор-
можения через регулятор давления, который в зависимости от положения рукоятки тормоза
позволяет изменять величину давления в ЦРТ и, следовательно, величину силы прижатия
колодок к ободу. Дифференциальный рычаг 8 при этом будет поворачиваться вокруг левого
шарнира.
При включении предохранительного торможения система работает комбинировано, а
именно:
— от регулятора давления в цилиндр рабочего торможения поступает сжатый воздух с
давлением 0,2—0,25 МПа, чем создается первая ступень торможения, обеспечивающая мгно-
венное срабатывание тормоза;
— одновременно электропневматическим клапаном осуществляется выпуск воздуха из
аварийного цилиндра предохранительного торможения 2, вследствие чего опускаются тор-
168
ГЛАВА 6
мозные грузы, дифференциальный рычаг при этом поворачивается вокруг среднего шарни-
ра 5, осаживая поршень цилиндра рабочего торможения на дно. При этом осуществляется
вторая ступень торможения, обеспечивающая необходимый коэффициент статической на-
дежности тормоза.
Наличие в цилиндре рабочего торможения сжатого воздуха первой ступени создает для
поршня амортизационную подушку. Торможение в этом случае получается более мягким и
без резкого приложения тормозного усилия.
6.1.3. Аппараты управления тормозными устройствами
Аппараты управления тормозными устройствами подъемных машин служат для обеспе-
чения требуемых режимов рабочего и предохранительного торможения. К ним относятся элек-
тропневматические и электрогидравлические регуляторы давления, различного вида краны
управления, воздухораспределительные, запорно-разгрузочные, редукционные, предохрани-
тельные, обратные клапаны, клапаны замедленного торможения, электромагнитные клапаны,
регулируемые выхлопные устройства, электропневматические вентили и др.
В течение десятилетий конструкции этих аппаратов совершенствовались и модифици-
ровались вместе с техническим прогрессом, общее их количество по разновидностям и на-
значению очень велико, описание их конструкции и принципа действия подробно описаны
в [17, 25, 125] и др.
Из всего многообразия аппаратов управления тормозными устройствами приведем прин-
цип действия некоторых из них.
Трехходовой кран — это одно из простейших устройств управления машиной, выполня-
ющее важную роль в обеспечении безопасности эксплуатации и предназначенное для руч-
ного управления предохранительным тормозом. Принципиальная схема трехходового крана
изображена на рис. 6.9 (реальное конструктивное исполнение такого типа устройства, есте-
ственно, отличается от приведенной здесь схемы, например, см. гл. 7 рис. 7.22).
11 12 13 и
Рис. 6.9. Принципиальная схема трехходового крана для ручного управления
предохранительным тормозом
На рис. 6.9 цифрами обозначены: 1 — канал выпуска воздуха в атмосферу; 2 — канал вы-
пуска-впуска воздуха в цилиндр предохранительного торможения; 3 — канал впуска воздуха из
воздухосборника; 4, 5, 6 — кольцевые канавки на внутренней поверхности цилиндрического
корпуса 12 крана и на внешней поверхности цилиндрического корпуса 14 золотника 15; 7, 8, 9
— сквозные радиальные отверстия в корпусе 14; 10 — кольцевой паз на внешней цилиндри-
ческой поверхности золотника; 11 и 13 — передняя и задняя крышки корпуса крана; 16 —
шток золотника. Золотник 15 имеет сквозное осевое отверстие, что позволяет ему беспрепят-
ственно передвигаться в полости корпуса 14 под действием штока 16.
В трехходовом кране имеется три возможных состояния (откуда и происходит его на-
звание «трехходовой»),
В качестве примера рассмотрим работу трехходового крана при использовании его для уп-
равления рабочим торможением подъемных машин БМ и 2БМ с грузо-гидравлическим приво-
дом тормоза. При растормаженной машине золотник 15 находится в крайнем правом положе-
нии (это положение изображено на рис. 6.9). Масло из маслоаккумулятора поступает по кана-
лам 3—>6—>9—>10—>8—>5—>2в тормозной цилиндр, поднимая тормозной груз.
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
169
При затормаживании машины рукояткой рабочего тормоза под действием штока 16 золот-
ник 15 перемешается в левое крайнее положение, выпуская масло из тормозного цилиндра по
каналам 2-^>5-н>8—»1в сточный бак. По мере опускания тормозного груза
юлотник 15 под воздействием тормозных рычагов перемещается в нейтральное положение, при
котором канал, связанный с тормозным цилиндром, разобщен с остальными каналами, масло в
юрмозном цилиндре оказывается запертым. Для увеличения тормозного момента (дальнейшего
опускания тормозного груза) машинист перемещает рукоятку дальше в сторону положения «за-
торможено». Золотник 15 вновь перемещается в левое положение и все повторяется, как было
описано выше, но масло в тормозном цилиндре запирается при более опущенном грузе. При
полном затормаживании машины, когда дальнейшее опускание груза прекращается, канал 2 —>
5-^8 остается соединенным с каналом 7 —> 4 —> 1.
Растормаживание машины происходит в обратном порядке.
В других случаях, например, при использовании крана для предохранителнього тормо-
жения подъемных машин НКМЗ выпуска до 1963 г. с грузо-пневматическим приводом, зо-
лотник 15 может занимать только крайние (левое или правое) положения.
Регулятор давления в своей основе содержит фактически тот же трехходовой кран с конст-
руктивными модификациями, в котором перемещение золотника, играющего теперь уже роль
поршня, осуществляется не вручную, а с помощью давления сжатого воздуха, регулируемого
электромагнитной системой, в свою очередь управляемой вручную. Регулятор давления пред-
назначен для изменения давления воздуха в цилиндре рабочего тормоза с целью регулирова-
ния темпа нарастания тормозного момента при рабочем торможении подъемной машины.
Принципиальная схема конструкции регулятора изображена на рис. 6.10.
Рис. 6.10. Принципиальная
схема регулятора давления
Регулятор состоит из корпуса 1, внутри которого рас-
положен золотник 2. Корпус с золотником образуют зо-
лотниковый распределитель. Снизу корпус распределите-
ля закрыт крышкой 3, сверху на фланце корпуса 4 уста-
новлена электромагнитная головка управления, состоящая
из катушки 5, на клеммы которой подается регулируемое
напряжение U, якоря 6 и управляемого дросселя 7 типа «со-
пло-заслонка» (или шарового клапана). Камера 8, образо-
ванная верхним торцом золотника 2 и нижним торцом
электромагнитной головки управления 7, является так на-
зываемой камерой проточного регулирования (управления).
В эту камеру поступает сжатый воздух по каналу 9 через
нерегулируемый дроссель с небольшим отверстием, а ис-
текает через сопло 10, перекрываемое заслонкой 7. Золот-
ник нижней своим торцом упирается на пружину 11, слу-
жащей для уравновешивания веса золотника и для созда-
ния упреждающего давления в камере проточного регули-
рования 8.
Корпус золотникового распределителя имеет три рас-
пределительных отверстия: 12 — для впуска сжатого возду-
ха от источника давления (воздухосборника), 13 — для вы-
пуска воздуха в атмосферу, 14 — для выпуска и впуска воз-
духа в цилиндры рабочего торможения. В золотнике 2 име-
ется канал 15, связывающий проточку золотника с подзо-
лотниковой камерой.
Регулятор давления работает следующим образом. При
обтекании током катушки 5 головки управления якорь 6 с заслонкой 7 перемещаются вниз,
увеличивая сопротивление управляемого дросселя «сопло-заслонка», и при этом соответ-
ственно увеличивается в течение переходного периода времени ^давление в камере управ-
ления 8. Под действием этого давления золотник 2 перемещается вниз, сжимая пружину 11
и соединяя цилиндр рабочего торможения по каналам 12 и 14 с источником давления (с
воздухосборником). При этом давление в цилиндре рабочего торможения возрастает.
Одновременно сжатый воздух по каналу 15 в золотнике 2 поступает в подзолотниковую
камеру, возвращая золотник в нейтральное положение, изображенные на рис. 6.10, когда дав-
170
ГЛАВА 6
ление в камере 8 и подзолотниковой камере уравняется. Очень важно, чтобы давление в тор-
мозных цилиндрах и подзолотниковой камере возрастало синхронно. Иначе процесс возра-
стания давления в тормозных цилиндрах будет иметь вибрационный характер. Синхронность
достигается подбором сечения канала 15.
При уменьшении тока в катушке 5 якорь 6 и заслонка 7 поднимаются, уменьшая давление
в камере регулирования 8. Под воздействием более высокого давления в подзолотниковой ка-
мере золотник поднимается, соединяя каналы 13 и 14, давление в тормозных цилиндрах и под-
золотниковой камере снижается до тех пор, пока это давление станет ниже, чем в камере уп-
равления 8. Тогда под воздействием давления в камере 8 золотник вновь займет нейтральное
положение, запирая оставшийся воздух в тормозных цилиндрах. Для полного выпуска воздуха
из цилиндров необходимо уменьшить ток в катушке 5 до такой величины, при которой давле-
ние в камере 8 станет практически равным нулю. Тогда под воздействием пружины 11 золот-
ник установится в верхнем положении, соединив каналы 13 и 14.
Как видим из приведенного описания, каждой величине тока в катушке управления со-
ответствует пропорциональная величина давления в цилиндрах рабочего торможения.
Аналогичным образом работает регулятор давления на гидравлике с той разницей, что
воздух из сопла 10 выходит в атмосферу, а масло отводится в сточный бак.
6.1.4. Встроенные быстродействующие тормоза НКМЗ
Новокраматорский машиностроительный завод освоил производство барабанных
подъемных машин со встроенными быстродействующими тормозами с пружинно-пневма-
тическим приводом и внутренним расположением исполнительного органа и привода (см.
рис. 6.1 и 6.11).
Опытный образец подъемной машины 2Ц-5х2,3 с внутренним расположением тормо-
зов был изготовлен на заводе в 1981 г. и в 1982 г. был принят приемочной междуведомствен-
ной комиссией в эксплуатацию на шахте «Белицкая» ПО «Добропольеуголь».
В 1982 г. подъемная машина ШПМ 1x5,5x6 с внутренним расположением тормозов была
изготовлена и поставлена на Угольную компанию «Шахта «Краснолиманская», где смонти-
рована и пушена в эксплуатацию на угольном скиповом подъеме.
До 1988 г. подъемные машины с внутренним расположением тормозов имели наименова-
ние МПУ (например, МПУ-5-2,5-2,5), а с 1989 г. - МПБ (МПБ-5-2,5-2,5; МПБ-6,3-2,8-2,8).
Тормоз таких машин с пружинно-пневматическим приводом с внутренним расположе-
нием исполнительного органа и привода представляет собой систему шарнирного много-
звенника со статически определимым распределением усилий (рис. 6.11).
Рис. 6.11. Кинематическая схема тормоза подъемных машин с пружинно-пневматическим
приводом и внутренним расположением исполнительного органа и привода:
а — с угловым рычагом; б — мембранного типа (с корректором жесткости или
с ломающимися рычагами)
ТОРМОЗНЫЕ УСТРОЙСТВА подъемных машин
171
Параметры тормоза выбраны таким образом, что приложение изгибающих моментов к
главному валу при торможении практически исключено и обеспечена самоустановка тор-
мозных колодок на тормозном ободе. Технические характеристики исполнительного органа
тормоза с внутренним расположением приведены в табл. 6.1.
Таблица 6.1
Технические характеристики исполнительного органа тормоза с внутренним расположением
Основные параметры Норма для МПБ 5; МПБ 6,3
Диаметр тормозного обода, Дто, .мм 4860;6110
Общая ширина тормозных колодок на балке, мм 400; 400
Максимальный угол обхвата прессмассовыми колодками тормозного обода, градус 68; 80
Расчетный коэффициент трения прессмассовых колодок 0,3; 0,3
Масса, кг 16040; 17440
Тормоз машины (рис. 6.12) состоит из двух составных частей (половин) независимо воз-
действующих на каждый барабан машины.
Рис. 6.12. Тормоз подъемных машин типа МПБ с внутренним расположением
исполнительного органа и привода
Каждая такая часть состоит из рамы 1, которая соединена кронштейнами с проушинами
постамента с помощью шарниров 2. На раме тормоза шарнирно закреплены вертикальные
рычаги 3 и 4, на которых шарнирно установлены тормозные балки 5 и 6 с прессмассовыми
тормозными колодками (фрикционными накладками) 7 — далее «тормозными колодками».
На раме тормоза также шарнирно установлен тормозной привод 8, который шарнирно связан
с вертикальными рычагами 3 и 4 с помощью рычага 9 и тяги 10. Для установки тормоза в тре-
буемом положении по вертикали на раме тормоза установлены фиксирующие винты 11.
Для установки и регулировки зазора между тормозным ободом барабана и фрикционными
накладками 7 и правильного растормаживания, на раме тормоза 1 установлены кронштейны 12
с упорными винтами 13, для этих же целей служат и пружинные регулировочные подвески, со-
стоящие из пружин 14 и 15, тяги 16 втулок 17,18 и гаек 19. Для разгрузки кронштейна 12 и вин-
тов 13 от усилия растормаживания на тормозных приводах имеется ограничительная шпилька. В
172
ГЛАВА 6
свободном состоянии тормоз фиксируется упорными винтами 13 и гайками 19. При монтаже
или ремонте тормоза раму 1 поворачивают на шарнире 2 и фиксируют винтами 11 в положении,
при котором тормозная балка и тормозной привод наклонены, а верхняя часть тормоза выходит
из барабана. При работе шахтной подъемной машины в обычном технологическом режиме рама
тормоза закреплена от поворота фиксирующими винтами 11 в положении, при котором тормоз-
ные балки 5 и 6 занимают вертикальное положение.
Тормоз работает следующим образом. Тормозное усилие создается на штоке тормозного при-
вода 8 с помощью набора предварительно сжатых пружин. Под действием штока рычаг 9 переме-
шается вниз, передавая усилие рычагу 3, а через тягу 10 рычагу 4, раздвигая их. Тормозные балки 5
и 6 вместе с рычагами 3 и 4 перемешаются по направлению к внутренней поверхности тормозного
обода и создают тормозное усилие. При растормаживании с помощью пневмоцилиндра тормоз-
ного привода 8 сжимаются пружины, при этом шток перемещается вверх, увлекая за собой рычаг
9, рычаг 9 при помощи тяги 10 сводит рычаги 3 и 4, которые отводят балки 5 и 6 от тормозного
обода. Таким образом, тормозное усилие снимается, и барабаны могут вращаться.
Все шарниры тормоза имеют железографитовые втулки и частая смазка их при работе
не требуется.
Нормальная работа тормоза подъемной машины с точки зрения чувствительности и ми-
нимального холостого хода обеспечивается при выполнении следующих требований:
— рама тормоза должна быть установлена и зафиксирована в положении, обеспечиваю-
щем вертикальное расположение тормозных балок, при этом прессмассовые тормозные ко-
лодки не должны выходить за пределы тормозного поля;
— зазоры между тормозными колодками и тормозным полем в расторможенном поло-
жении должны быть на горизонтальном диаметре барабана не более 2 лш;
— в расторможенном положении поршень каждого тормозного привода должен быть в
крайнем верхнем положении до упора;
— конечные выключатели износа тормозных колодок на тормозном приводе должны быть
установлены таким образом, чтобы при крайнем нижнем положении поршня, обеспечивающем
тормозной момент, равный трехкратному статическому, накладывалось аварийное торможение, а
при положении поршня выше указанного на 10 мм включался предварительный сигнал о необхо-
димости регулировки тормоза в связи с износом фрикционных накладок;
— в регулирующих клапанах панели управления пружины должны быть затянуты до ве-
личины, обеспечивающей первую ступень торможения.
Регулировку тормоза необходимо производить в следующем порядке:
— установить необходимую по расчету или паспорту машины предварительную затяжку
пружин тормозных приводов, отрегулировать упоры на максимальный ход поршня;
— отвести от рычагов упорные винты 13;
— дать полное давление в цилиндры тормозных приводов, при этом поршни должны
дойти до упоров на максимальный ход;
— вращением верхней тяги 10 установить суммарный зазор между тормозными колод-
ками и тормозными ободьями 4 мм на горизонтальном диаметре барабана, при этом балки,
расположенные дальше от тормозного привода будут прилегать к тормозным полям;
— вращением упорных винтов 13 установить зазоры между колодками и тормозными
ободьями по 2 мм, после чего винты застопорить контргайками;
— обеспечить равномерный зазор между тормозными колодками и ободом гайками 19.
Регулировка тормоза при износе тормозных колодок.
По мере износа тормозных колодок зазоры между упорными винтами 13 и рычагами 3 и
4 увеличиваются. Необходимо регулировкой упорными винтами 13 в заторможенном состо-
янии обеспечить зазор не более 2 мм на сторону.
Если тормозная балка по мере износа колодок при растормаживании тормоза касается
верхней частью тормозного обода, создавая трение, необходимо гайками 19 в расторможен-
ном состоянии обеспечить равномерный зазор между ободом и балкой (по ее верхнему и
нижнему краям).
При достижении поршнем тормозного привода нижнего положения, когда конечный
выключатель на приводе подает сигнал на регулировку, необходимо произвести регулировку
зазоров при помощи тяги 10, стопорных винтов 13, гаек 19.
Для смены тормозных колодок необходимо:
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
173
— разгрузить подъемные сосуды, поставить их в стволе шахты в уравновешенном положении
। на перевесе) или поставить их на приемные площадки, а переставной барабан взять на стопор;
— рукоятку торможения поставить в положение «расторможено»;
— отвести упорный винт 13 и ввинчиванием тяги 10 в головки шарниров обеспечить
максимально возможный зазор между тормозными колодками и тормозным ободом;
— отпустить болты крепления тормозных колодок на тормозных балках и снять тормоз-
ные колодки, выдвигая их параллельно оси машины. При смене колодок, расположенных
ниже уровня пола, использовать специальные проемы (ниши) в фундаменте машины;
— установить новые тормозные колодки, перемещая их параллельно оси машины и за-
тянуть болты крепления колодок;
— произвести регулировку тормоза.
Пружинно-пневматический привод тормоза подъемных машин типа МПБ.
Принципиальная схема пружинно-пневматического привода приведена на рис. 6.5 (см.
6.1.2). Ниже приводится описание конструкции пружинно-пневматического привода тор-
моза подъемных машин типа МПБ.
В пружинно-пневматическом привода тормоза регулируемое усилие прижатия тормоз-
ных колодок к тормозному полю создается за счет энергии предварительного сжатия пру-
жин, а растормаживание — за счет подачи в тормозной цилиндр сжатого воздуха.
Пневматическая часть привода состоит из цилиндра 1 (рис. 6.13) с крышкой 2 и поршня
3. Крышка 2, установленная на раме тормоза, шпильками 4 соединена с фланцем 5. Под-
вижный фланец 6 закреплен на поршне 3.
Сверху шпильки 4 установлены гайки 12, служащие для предварительного поджатия
Рис. 6.13. Пружинно-пневматический привод
тормоза подъемных машин типа МПБ
пружин. Между фланцами 5 и 6 рас-
положен пружинный блок, состоя-
щий из 6-ти пакетов. Каждый пакет
состоит из шпильки 7, промежуточ-
ных втулок 8, концевых втулок 9,
пружин 10 и 11 (правой и левой на-
вивки). Во втулках 8 и 9, в головке
шарнира 14 и проушине крышки 2
для уменьшения сил трения уста-
новлены железографитовые втулки.
Фланец 6 соединен со штоком 13,
на верхний конец которого навинче-
на головка шарнира 14 с контргайкой.
Шток от поворота фиксируется шпон-
кой 15. Внутренняя полость цилинд-
ра 1 уплотняется воротником 16, удер-
живаемым кольцом 17.
В цилиндр 1 ввинчены диамет-
рально противоположно две шпиль-
ки 18 с гайками 19, которые ограни-
чивают ход поршня 3 вверх. На ци-
линдре 1 установлены также два ко-
нечных выключателя 20 для ограни-
чения максимального хода поршня 3
вниз при износе тормозных колодок.
Конечные выключатели 20 срабаты-
вают под действием линейки 21, ус-
тановленной на фланце 6. Один ко-
нечный выключатель дает предвари-
тельно сигнал о необходимости ре-
гулировки тормоза, после сигнала
второго конечного выключателя ма-
шина не должна растормаживаться.
Подвод воздуха в цилиндр 1 осуще-
174
ГЛАВА 6
ствляется через отверстие в крышке 2. Аналогичное отверстие служит для выпуска конденсата
при продувке цилиндра. При подаче сжатого воздуха в цилиндр 1 поршень 3 с фланцем 6 пере-
мешаются вверх, сжимая пружины 10 и 11, и через шток 13 передается усилие тормозу для
растормаживания.
При выпуске сжатого воздуха из цилиндра 1 под действием пружин 10 и 11 нижний фла-
нец 6 вместе с поршнем 3 двигаются вниз, и через шток 13 передается усилие тормозу для
затормаживания машины. Величина затяжки пружин тормозного привода регулируется гай-
ками согласно расчету для конкретных условий эксплуатации подъемных машин. При рас-
чете величины предварительной затяжки пружин величину жесткости блока принимать из
паспорта подъемной машины. Технические характеристики привода приведены в табл. 6.2.
Таблица 6.2
Технические характеристики пружинно-пневматического привода тормоза подъемных машин
НКМЗ типа МПБ
Наименование Норма для
МПБ-5 МПБ-6,3 МПБ-6,3-2,8-2,8
Диаметр цилиндра, мм 400 400 450 450
Количество пружин в пакете, шт. (в вертикальном ряду) 2 3 3 3
Количество пружин в секции, шт. (в горизонтальном ряду) 6 6 6 8
Высота пружины в свободном состоянии, мм 405 335 342 335
Жесткость блока пружин, Н/мм ( кг/мм) 158,6(16,16)* 125,6(12,79)* 163,41* 190,66*
Давление сжатого Номинальное 0...0,49(0...5) 0...0,49(0...5) 0...0,49(0...5) 0...0,49(0...5)
воздуха в цилиндре, МПа (кг/см ) Максимальное 0,589 (6) 0,589(6) 0,589(6) 0,589(6)
Масса подвижных частей привода, кг 800 880 1190 1300
Масса тормозного привода, кг 1497 1625 1745,4 1861
6.1.5. Пружинно-гидравлические дисковые тормоза Донецкгормаша
В 1980 г. Донецкгормаш разработал и изготовил подъемные машины с пружинно-гид-
равлическими дисковыми тормозами. Было выпушено три подъемных машины, две из кото-
рых были смонтированы и до настоящего времени находятся в эксплуатации (см. 3.4).
Тормозное устройство таких машин состоит из следующих узлов: две насосные станции
СНУ-6; два блока гидроаккумуляторов; две панели тормоза; 16 тормозных элементов.
Принципиальная гидравлическая схема тормозного устройства представлена на рис. 6.14.
На машине установлено 8 пар тормозных элементов БЦ1—БЦ8. Каждые четыре пары
тормозных элементов укомплектованы одинаковым комплектом гидрооборудования. Между
группами из 4-х пар тормозных элементов на напорном и сливном трубопроводах установ-
лены игольчатые запорные вентили ВНП и ВН12, что позволит при необходимости рабо-
тать всеми тормозными элементами от одного комплекта гидрооборудования.
Рабочая жидкость от насосных станций СНУ-5 А1 и А2 через обратные клапаны КО1 и
КО2 поступает в регуляторы давления А7 и блоки гидроаккумуляторов АЗ и А4. Из регуляторов
давления А7 рабочая жидкость через гидрораспределители РГ9 и РГ10 попадает в распределите-
ли РП—РГ8, установленные для каждой пары тормозных элементов; из распределителей РГ1 —
РГ8 рабочая жидкость поступает в тормозные элементы БЦ1—БЦ8. Гидрораспределители РГ9 и
РПО установлены последовательно и предназначены для отсечения регуляторов давления от слива
при предохранительном торможении. Два гидрораспределителя установлены для повышения
надежности работы тормозного устройства (один — рабочий, второй — дублер).
Растормаживание машины осуществляется одновременно включением регуляторов дав-
ления и гидрораспределителей РП—РПО, при этом рабочая жидкость поступает в тормоз-
ные элементы и, сжимая пружины, отводит фрикционные накладки от тормозного диска.
Рабочее торможение осуществляется регулятором давления, при этом распределители РП —
РПО пропускают рабочую жидкость из тормозных элементов на слив регулятора давления.
Рис. 6.14. Принципиальная гидравлическая схема:
А/, А2 — станция СНУ-6; Б1 — бак; БФ1 — фильтры; НМ/ — насос; РД1 — реле давления; РП1 — регулятор; НМ2 — насос; АК1 — аккумулятор; БМ1 —
манометры; ДР/ — дроссель; КП1 — клапан предохранительный; К/ — клапан минимального расхода; ВН9 — кран шаровой; АЗ, А4 — блок аккумуляторов;
BHIO — вентиль; А5, А6 — панель тормоза; МП/, МП2 — манометры; КР1 — клапан редукционный; Ф1 — фильтр; МН/ — манометр; А7 — регулятор
давления; РГ9, РГ/О — гидрораспределитель; РД2 — реле давления; KOI, К02 — клапан обратный; БЦ1...БЦ8 — тормозные элементы;
РП...РГ8 — гидрораспределитель; ВНI...BH8 — вентиль; ВН11...ВН/4 — вентиль; ВК — выключатель конечный
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
176
ГЛАВА 6
При предохранительном торможении распределители РГ9 и РПО отсекают регуляторы
давления от тормозных элементов, выпуск рабочей жидкости происходит через распредели-
тели РП—РГ8. Рабочее стопорное торможение осуществляется так же, только при скорости
подъема, равной скорости «дотяжки».
Комплекс аппаратуры автоматического регулируемого торможения (АРПТ) обеспечи-
вает определенную программу включения распределителей РП—РГ8. Каждая насосная стан-
ция А1 и А2 обеспечивает работу 4-х пар тормозных элементов. Напорные и сливные линии
насосных станций объединены. При открытых вентилях ВНП—ВН14 можно работать одной
насосной станцией на все 8 пар тормозных элементов. Клапаны обратные КО1 и КО2 пред-
назначены для предотвращения слива масла из блоков гидроаккумуляторов и нагнетатель-
ных линий панелей тормозов при остановке насосных станций. Перед каждой парой тор-
мозных элементов установлены вентили ВН1—ВН8, что позволяет последовательно прове-
рять каждую пару тормозных элементов или исключать ее из работы. Манометры — преоб-
разователи МП1, МП2, МН1, а также реле давления РД2 служат для контроля давления в
линиях нагнетания.
Тормоз дисковый (рис. 6.15) состоит из постамента 1,4-х тормозных элементов 2, 4-х бло-
ков выключателей 3, двух направляющих гидрораспределителей с электрическим управле-
нием 4, трубопроводов и соединительной арматуры. Постамент сварной конструкции имеет
на подошве строганые поверхности для установки на раме машины и обработанные наклад-
ки на торцовых поверхностях, на которые устанавливаются тормозные элементы. Каждая
пара тормозных элементов крепится к постаменту четырьмя шпильками 5, и, кроме того,
каждый элемент крепится к постаменту тремя болтами 6.
Рис. 6.15. Тормоз дисковый:
1 — постамент; 2 — тормозной элемент; 3 — блок выключателей; 4 — гидрораспределитель;
5 -шпилька; 6 — болт; 7 — ось; 8,9 — кронштейны; 10 — упор; И — клинья; 12 — распределитель;
13 — вентиль; 14, 15, 16, 17 — трубопроводы
Каждый тормозной элемент шарнирно закреплен осями 7 в кронштейнах 8 и 9, прива-
ренных к постаменту. Кронштейны 8 имеют отверстие для осей 7, а кронштейны 9 имеют
направляющий паз, в котором тормозной элемент может перемещаться вдоль торцовой плос-
кости постамента. Дисковый тормоз установлен на раму машины кронштейнами 9 в сторон}
канатоведушего шкива. Таким образом, тормозные элементы, расположенные со стороны
канатоведущего шкива, можно при необходимости вывести за габарит реборды; все тормоз-
ные элементы для ремонта можно повернуть вокруг осей. Положение тормозных элементов
на постаменте зафиксировано упорами 10 и клиньями 11.
Каждая пара тормозных элементов соединена трубопроводами 14 и распределителем 4
Подвод масла из панели тормоза в гидрораспределители 4 осуществляется трубопроводам г
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
177
15. Перед каждым распределителем 12 установлен запорный игольчатый вентиль 13 для воз-
можности отключения пары тормозных элементов. Слив масла осуществляется трубопрово-
дом 16, дренаж из тормозных элементов — трубопроводом 17. Винт 9 и уголок 10 удерживает
валик от проворачивания.
Технические характеристики тормозного элемента приведены в табл. 6.3.
Таблица 6.3
Технические характеристики тормозного элемента
Наименование основных размеров и параметров Нормы
Усилие затормаживания, кН 123
Усилие растормаживания при ходе 1 мм, кН 132
Зазор между диском и фрикционной накладкой в положении «расторможено», .м.м — минимальный — максимальный 1 2
Расчетный коэффициент трения фрикционной накладки по стальному диску о,з
Коэффициент полезного действия тормозного элемента 0,9
Давление на фрикционную накладку, Мпа, не более 1,0
Площадь фрикционной накладки, см' 1300
Давление масла в гидросистеме, МПа — минимальное — максимальное 7,35 10
Рабочий объем гидроцилиндра, см3 — минимальный — максимальный 20 40
Высота пакета пружин в свободном состоянии, мм 112
Рабочая площадь поршня, см" 200
Жесткость пружинного блока, кН/мм 900
Рабочая жидкость: масло «турбинное 22» по ГОСТ32-74
Панель тормоза представлена на рис. 6.16. На распределительной плите 1 смонтирована
следующая аппаратура:
— регулятор высокого давления электрогидравлический 2, предназначенный для дистанци-
онного и автоматического управления тормозными элементами при рабочем торможении;
— редукционный гидроклапан 3, предназначенный для снижения давления перед каме-
рой управления регулятора давления;
— фильтр щелевой 0,08-41-21 4 для очистки рабочей жидкости перед камерой управле-
ния регулятора давления;
— два гидрораспределителя с электрогидравлическим управлением 7 и 8 для отключе-
ния регулятора давления от тормозных элементов при предохранительном торможении;
Рис. 6.16. Панель тормоза:
1 — плита распределительная; 2 — регулятор давления; 3 — клапан редукционный; 4 — фильтр;
5 — реле давления; 6 — подставка; 7,8 — гидрораспределитель; 9, 10, 11, 12 — манометры;
13, 14, 15 — трубопроводы
178
ГЛАВА 6
— реле давления 5, предназначенное для контроля исправности пружин тормозного эле-
мента.
На трубопроводе подачи масла в тормозные элементы установлен манометр высокого
давления 10, на трубопроводе подачи масла из редукционного клапана в регулятор давления
— манометр 11 низкого давления. Распределительная плита установлена на сварной под-
ставке 6. На этой же подставке установлены электрические дистанционные манометры 9 и
12, передающие информацию о давлении в тормозных элементах и в нагнетательном трубо-
проводе на пульт управления машины.
Панель тормоза устанавливается на фундаменте. Рабочая жидкость из насосной стан-
ции высокого давления поступает в регулятор давления 2 и через редукционный клапан в
камеру управления регулятора давления. При включении регулятора давления рабочая жид-
кость подается в тормозные элементы и в реле давления 5. Слив из тормозных элементов
через регулятор давления осуществляется трубопроводом 13 из камеры управления регуля-
тора давления трубопроводом 14; слив утечек из золотника регулятора давления, гидрорасп-
ределителей, реле давления и редукционного клапана осуществляется через трубопровод 15.
Блок гидроаккумуляторов предназначен для улучшения характеристик тормозной систе-
мы при растормаживании и сглаживания резких колебаний давления в линии нагнетания.
6.1.6. Пружинно-гидравлические дисковые тормоза НПФ «МИДИЭЛ»
Большинство зарубежных фирм, изготавливающих шахтные подъемные машины, при-
меняют короткоходовые, безрычажные многоэлементные дисковые тормоза.
Высокая стоимость таких тормозов компенсируется высоким качеством изготовления и
заводской настройки и совершенными системами управления, что обеспечивает им ведущие
позиции среди основных мировых производителей тормозных систем шахтных подъемных
машин. К сожалению, в связи с высокой стоимостью дисковых тормозов угольная и горно-
рудная промышленность Украины до настоящего времени ни одной такой подъемной ма-
шины не закупила.
НПФ «МИДИЭЛ» на протяжении последних нескольких лет ведет работы по созданию
своей современной дисковой тормозной системы [138]. При этом целью разработки было
решение следующих задач:
— создание существенно более дешевой, по сравнению с зарубежными аналогами, тормоз-
ной системы, рассчитанной на недефицитную, общедоступную гидроаппаратуру общепромыш-
ленного применения, зарекомендовавшую себя с наилучшей стороны с точки зрения надежнос-
ти, а также применение стандартных типоразмеров резинотехнических изделий;
— получение максимально возможного качества как предохранительного, так и рабоче-
го торможения, а, следовательно, снижение динамических нагрузок на элементы подъемной
установки и увеличения их срока службы:
— создание тормозной системы с надежностью и эксплуатационными свойствами не
уступающей, а желательно, превосходящей зарубежные аналоги.
Решение этих задач велось по нескольким направлениям.
Для начала, в отличие, например, от фирмы АВВ (признанного мирового лидера в этой
отрасли) было принято решение, что нецелесообразно комплектовать весь типоразмерный
ряд подъемных машин одинаковыми тормозными элементами. Для крупных машин количе-
ство тормозных элементов получается очень большое, что существенно усложняет их эксп-
луатацию. И, наоборот, для малых машин количество тормозных элементов получается на-
столько мало, что при этом теряется одно из главных преимуществ дисковых тормозов —
многоэлементность. Поэтому для получения оптимального количества тормозных элемен-
тов (6 ... 12 пар), было определено три типоразмера тормозных элементов на усилия 30, 65 и
130 кН. Кстати, аналогичный подход был и на Донецкгормаше при разработке первых оте-
чественных дисковых тормозов в 80-х годах.
Первым этапом явилась разработка тормозной системы со средним типоразмером тор-
мозных элементов, предназначенной для средних барабанных и многоканатных подъемных
машин. Тормозные системы с этими элементами планируется использовать как для комп-
лектации новых машин, так и для модернизации действующих. Значительное количество
средних барабанных и средних многоканатных подъемных машин имеет асинхронный ре-
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
179
дукторный привод и поэтому тормозная система должна обеспечивать качественное рабочее
торможение, как в ручном, так и в автоматическом режиме. Для этой цели необходим был
гидравлический регулятор давления. Было принято решение использовать единственный
серийно выпускаемый гидравлический регулятор давления РДУ-1МГ. Конструкция этого
регулятора отработана за десятилетия эксплуатации, поэтому при правильном уходе и пра-
вильной настройке он обеспечивает точное и качественное управление давлением, а, следо-
вательно, и тормозным моментом.
В тормозной системе с максимальным типоразмером тормозных элементов, предназна-
ченной для крупных подъемных машин, где используется исключительно привод с тихоход-
ными электродвигателями, потребность в столь точном регуляторе давления отпадает. Там
вместо регулятора давления планируется использовать пропорциональный клапан, который
будет формировать необходимый закон замедления при торможении. В исключительных слу-
чаях его можно использовать и для ручного управления торможением, однако, качество тор-
можения будет существенно ниже, чем при использовании регулятора давления.
Таким образом, в тормозной системе со средним типоразмером тормозных элементов был
принят регулятор давления РДУ- 1МГ. Максимальное рабочее давление этого регулятора составля-
ет 1,2 МПа. Вообще существенное снижение рабочего давления тормозной системы по сравнению
с тормозными системами ведущих зарубежных фирм было одной из основополагающих идей при
разработке тормозных систем фирмы «МИДИЭЛ». Низкое давление позволяет значительно уде-
шевить гидросистему, существенно упростить ее эксплуатацию и повысить безопасность.
Главной трудностью, связанной с применением низкого давления, было создание тормоз-
ного элемента, развивающего при таком давлении требуемое тормозное усилие. До недавнего
времени это направление считалось неперспективным. Во-первых, увеличиваются размеры и
масса тормозного элемента, во-вторых, уменьшается быстродействие. Однако, в результате ра-
боты, проводившейся в фирме МИДИЭЛ, удалось разработать компактную компоновочную
схему такого тормозного элемента. Следующим шагом в решении этой задачи была разработ-
ка конструкции тормозного элемента с максимальным рабочим тормозным усилием 6,5 т. Эк-
спериментальный образец пары тормозных элементов был изготовлен и испытан на стенде
фирмы МИДИЭЛ и показал высокие технические характеристики. После этого были изготов-
лены опытные образцы тормозных элементов, испытание которых завершено в 2006 году. На
этих образцах отрабатывалась конструкция тормозных элементов. При разработке тормозного
элемента основной задачей было получение высокого КПД, т. е. способность тормозного эле-
мента точно отрабатывать заданный тормозной момент, что весьма важно для получения каче-
ственного торможения подъемной установки. Благодаря специальной шарнирной конструк-
ции, замене традиционных направляющих скольжения на направляющие качения, реализа-
ции принципа самоустановки, как тормозной колодки, так и других узлов тормозного элемен-
та удалось получить не только очень чувствительный к управляющим командам, но и очень
простой в эксплуатации и регулировке тормозной элемент.
Другой особенностью тормозной системы является то, что она состоит из отдельных
тормозов (постаментов), каждый из которых имеет свою гидравлическую и электронную
системы управления, подчиняющихся центральному контроллеру тормозной системы. Это
позволило избежать сложную разводку трубопроводов подъемной машины и повысить быс-
тродействие тормозной системы. Кроме того, получившееся при этом дублирование всех
элементов тормозной системы позволяет избежать простои подъемной установки при лю-
бой поломке тормозной системы.
Параллельно была разработана система управления дисковыми тормозами. При разра-
ботке тормозной системы ставилась основная задача обеспечения высокой безопасности,
надежности и достижения технического уровня, не уступающего лучшим зарубежным ана-
логам. Исходя из этого, и разрабатывалась система управления.
Блок-схема системы управления дисковыми тормозами представлена на рис. 6.17.
На рис. 6.17 цифрами 1—4, 26 обозначены блоки, формирующие входные сигналы о вели-
чине груза, направлении движения, положении сосуда в стволе, режиме работы подъемной
установки, скорости и действительном замедлении. Блок 5 — центральный контроллер тор-
мозной системы, 6-й — 9-й блоки — периферийные контроллеры постаментов. Далее обозна-
чены: 14—16 — тормозные блоки 1-го постамента; 17—19 — тормозные блоки 2-го постамента;
20—22 — тормозные блоки 3-го постамента; 23—25 — тормозные блоки 4-го постамента.
180
ГЛАВА 6
Рис. 6.17. Блок-схема
системы управления
дисковыми тормозами
Система управления дисковыми тормозами многофункциональна и обеспечивает вы-
полнение следующих режимов: диагностика, регулировка, работа, виды торможения (руч-
ное, автоматическое предохранительное).
Остановимся на характеристике основных режимов работы.
В режиме «диагностика» система функционирует автоматически (без участия операто-
ра). Для каждого из постаментов с 1-го по 4-й осуществляется проверка работы гидравли-
ческой и электрической частей тормозной системы, работоспособности каждого тормозного
элемента, проверка величин текущих процессов. Все данные диагностики могут быть выве-
дены на дисплей или фиксироваться в памяти устройства.
Режим «регулировка» предусматривает возможность осуществления настройки тормоз-
ной системы отдельно на каждом постаменте на рабочей машине. В случае ручного тормо-
жения обеспечивается плавное торможение рукояткой тормоза с пульта шахтного подъема.
При автоматическом торможении возможно осуществлять некоторые операции при работе
подъемной установки с помощью тормоза по определенной программе. При торможении до
остановки автоматически отрабатывается стопорение подъемной машины при реализации
диаграммы подъема электроприводом.
Автоматическое регулируемое предохранительное торможение от центрального контрол-
лера может осуществляться по одной из следующих программ:
— аналоговое предохранительное торможение по заданной программе с контролем по
действительному замедлению;
— аналоговое предохранительное торможение с обратной связью по замедлению;
— дискретное предохранительное торможение по заданной программе с контролем по
действительному замедлению.
Выбор программы осуществляется при наладке в зависимости от характеристики
подъемной установки. Предохранительное торможение по заданной программе от пери-
ферийных контроллеров постаментов предусматривает выполнение предохранительного
торможения по определенной программе отдельным постаментом при потере его связи с
центральным контроллером. Гидравлическая часть системы управления обеспечивает вы-
полнение всех перечисленных режимов торможения с высоким быстродействием и высо-
кой степенью точности.
Стоимость разработанной тормозной системы существенно отличается от зарубежных
аналогов. Так в сравнении с тормозной системой фирмы АВВ (для одинаковых подъемных
машин с одинаковыми характеристиками) механическая часть тормозной системы фирмы
«МИДИЭЛ» дешевле в 4-6 раза, а электрической — в 2-4 раза.
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
181
6.1.7. Требования к тормозным устройствам
Для обеспечения надежной и безаварийной работы подъемной установки необходимо,
чтобы тормозные устройства удовлетворяли следующим специальным требованиям.
1. Каждое тормозное устройство должно создавать рабочее и предохранительное тор-
можение подъемной машины с независимыми друг от друга способами их включения.
2. Сложение тормозных усилий, создаваемых при рабочем и предохранительном тормо-
жении, не допускается.
3. Предохранительное торможение должно включаться как автоматически при каждом
срабатывании защитных устройств или снятии напряжения, так и машинистом, причем вклю-
чение предохранительного тормоза должно сопровождаться автоматическим отключением
энергии, питающей подъемные электродвигатели.
4. Начавшееся предохранительное торможение должно продолжаться до полной оста-
новки подъемной машины и может быть прекращено только машинистом подъема после
затормаживания машины рабочим тормозом.
5. Система управления тормозным устройством должна выполняться таким образом, чтобы
при всех возможных ее повреждениях наступало надежное торможение подъемной машины.
6. Привод и система управления тормозным устройством должны иметь блокировки,
исключающие возможность растормаживания машины при нарушении нормального состо-
яния или выходе из строя любого элемента тормозной системы.
7. Продолжительность холостого хода предохранительного тормоза действующих подъем-
ных машин должна быть не более приведенных в [13] (см. 6.1.1).
8. Время срабатывания предохранительного тормоза (с учетом времени холостого хода)
не должно превышать 0,8 с [13].
9. В период предохранительного торможения вертикального подъема должно обеспечи-
ваться замедление системы не ниже 1,5 м/с2 при спуске и не более 5 м/с1 при подъеме расчет-
ного груза; кроме того, замедление, создаваемое как рабочим, так и предохранительным тор-
мозами, не должно превышать предела, обусловленного скольжением каната в системах
подъема со шкивами трения. Для наклонного подъема величины замедлений при предохра-
нительном торможении, как при подъеме, так и при спуске груза не должно выходить за
пределы, приведенные в ПБ [13]. При этом не должно быть ослабления каната и набегания
на него поднимающегося сосуда [13].
10. Коэффициент статической надежности тормоза при предохранительном торможении,
представляющий собой отношение максимального тормозного момента, развиваемого предох-
ранительным тормозом, к максимальному статическому моменту, создаваемому массой опуска-
емого расчетного груза, должен быть не менее трех для вертикального подъема и наклонного
при угле наклона выработки 30° и более. Для наклонных подъемов с углом наклона выработки
до 300 эта величина должна соответствовать требованиям, изложенным в ПБ [13].
11. Для двухбарабанных подъемных машин и машин с разрезным барабаном коэффици-
ент статической надежности предохранительного и рабочего тормозов при перестановке ба-
рабанов и обрыве одного из канатов должен быть не менее 1,2. Коэффициент статической
надежности при перестановке представляет собой отношение тормозного момента, создава-
емого на одном тормозном ободе, к максимальному статическому моменту, создаваемому
массой порожнего подъемного сосуда или противовеса и каната на одном барабане (части
барабана), а коэффициент статической надежности при обрыве каната — отношение тор-
мозного момента, создаваемого на обоих тормозных ободах, к максимальному статическому
моменту в одноконцевом режиме.
6.2, Поверочный расчет тормоза
Поверочный расчет тормоза необходимо производить:
— при сдаче в эксплуатацию вновь смонтированной подъемной установки;
— при изменении массы полезного груза, канатов или подъемных сосудов (противовеса);
— при изменении высоты или наклонной длины подъема;
— при изменении профиля наклонной выработки.
Расчет тормоза заключается в следующем:
1. Определение фактических нагрузок на подъемную машину.
182
ГЛАВА 6
2. Выбор тормозных моментов предохранительного и рабочего торможения для обеспе-
чения требований ПБ [13].
3. Расчет параметров тормозных приводов.
6.2.1. Определение фактических нагрузок на подъемную машину
Для определения фактических нагрузок на машину необходимо определить:
Тгр — максимальное статическое натяжение груженой ветви каната или канатов.
Тпор — минимальное статическое натяжение порожняковой ветви каната или канатов.
То — максимальную разность статических натяжений канатов.
Afcm — максимальный статический момент нагрузки при нормальной работе.
Т — максимальное статическое натяжение каната при перестановке для двухбарабан-
ных машин и подъемных машин с разрезным барабаном.
Т'3 — максимальное статическое натяжение каната, закрепленного на заклиненном ба-
рабане (части барабана) при перестановке, поскольку рабочий тормоз должен быть рассчи-
тан на удержание заклиненной части, в то время как переставная часть удерживается пре-
дохранительным тормозом.
— максимальный статический момент на заклиненной части.
М"ст — максимальный статический момент в случае обрыва одного из канатов для двух-
концевого подъема (в одноконцевом режиме).
Максимальное статическое натяжение Тгр, максимальная разность статических натя-
жений То, максимальный статический момент нагрузки Мст и, кроме того, для двухбара-
банных машин и подъемных машин с разрезным барабаном — максимальный статический
момент при перестановке М'ст и максимальный статический момент в случае обрыва одного
из канатов М"т определяются для следующих видов подъемных установок:
— вертикальный подъем с цилиндрическим органом навивки или шкивом трения для
систем с легкими уравновешивающими канатами (qr>qy), с тяжелыми уравновешивающи-
ми канатами (qr<qy} или без уравновешивающих для двухсосудного подъема и однососуд-
ного с противовесом; для случая равномассовых сосудов и разномассовых сосудов;
— вертикальный подъем с бицилиндроконическим барабаном (необходимые величины
определяются для критических точек);
— одноконцевой наклонный подъем с постоянным углом наклона выработки (при подъе-
ме и спуске расчетного груза);
— одноконцевой наклонный подъем с переменным углом наклона выработки (при подъе-
ме и спуске расчетного груза для нижних точек каждого участка выработки с постоянным
углом наклона);
— двухконцевой наклонный подъем с постоянным углом наклона выработки (при подъе-
ме и спуске расчетного груза и порожняка);
— двухконцевой наклонный подъем с переменным углом наклона выработки (при подъе-
ме и спуске расчетного груза и порожняка для нижних и верхних точек каждого участка вы-
работки с постоянным углом наклона).
Формулы для определения перечисленных фактических нагрузок на подъемную маши-
ну для различных видов подъемных установок приведены в [17].
Величины максимальных статических натяжений и разности статических натяжений не
должны превосходить величин, приведенных в паспорте подъемной машины.
6.2.2. Условия, которым должна удовлетворять величина тормозного момента
Для обеспечения требований ПБ к величине замедления системы в период предохрани-
тельного торможения, коэффициенту статической надежности тормоза при предохранитель-
ном торможении и коэффициенту статической надежности предохранительного и рабочего
тормозов при перестановке барабанов (требования 9, 10, 11 в 6.1.7) величина тормозного
момента должна удовлетворять следующим условиям.
1. Создание требуемого коэффициента статической надежности при спуске расчетного
груза
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
183
Мт>пМст, (6.2.1)
где Мт — тормозной момент; п — требуемый коэффициент статической надежности тормоза; Мст —
максимальный статический момент, создаваемый массой опускаемого расчетного груза, Нм.
2. Создание требуемого коэффициента статической надежности тормоза при переста-
новке барабанов (только для двухбарабанных машин и машин с разрезным барабаном) и
обрыве одного из канатов
К>1,2М;т; Мт>М"ст, (6.2.2)
где М'т — тормозной момент, создаваемый на одном тормозном ободе; М'ст — максимальный
статический момент, создаваемый массой порожнего подъемного сосуда (противовеса) и ка-
ната; М"ст — максимальный статический момент в случае обрыва одного из канатов.
3. Замедление, создаваемое предохранительным тормозом при спуске расчетного груза,
должно быть не менее величины [ас], предусмотренной ПБ [13]:
Мт - Мст + (6.2.3)
где тпр — приведенная к радиусу барабана канатоведущего шкива масса вращающихся и
поступательно перемещающихся частей установки, кг; R6 — радиус барабана (канатоведуще-
го шкива), м.
4. Замедление, создаваемое предохранительным тормозом при подъеме расчетного гру-
за, должно быть не более величины [а ], предусмотренной ПБ [13]:
Mm<[an]rnnpR6-Mcm. (6.2.4)
Приведенных четырех условий достаточно для барабанных подъемных машин. Для машин
с одно- или многоканатным шкивом трения должны быть дополнительно рассмотрены условия,
обеспечивающие отсутствие скольжения канатов по канатоведущему шкиву при предохрани-
тельном торможении в трех режимах: спуска груза, подъема груза и перегона порожних сосудов.
Подробно определение условий, обеспечивающих отсутствие скольжения канатов по
канатоведущему шкиву для подъемных машин со шкивами трения и набегания подъемных
сосудов на канат на наклонных подъемных установках рассмотрены в 3.2, а также в [231], где
приведены методические указания по расчету тормозных моментов.
В практических расчетах используют две методики определения замедлений, обеспечи-
вающие нескольжение канатов по канатоведушему шкиву во всех трех режимах предохрани-
тельного торможения. Первая методика, изложенная в [125], основана на определении для
каждого режима предохранительного торможения критического замедления а , при кото-
ром возникает скольжение канатов. При выборе тормозных моментов допустимые замедле-
ния принимают равными 0,8 а .
Вторая методика, в рамках так называемого S-критерияЗкоторую используют многие на-
ладочные организации [17, 25], основана на определении для каждого режима предохрани-
тельного торможения допустимого замедления из условия создания динамического коэффи-
циента безопасности против скольжения канатов адин >1,25. Далее приведены три условия
(соответствующие трем режимам), обеспечивающие отсутствие скольжения канатов по ка-
натоведушему шкиву, основанные на второй методике, обеспечивающей более высокую бе-
зопасность по сравнению с первой.
5. Замедление, создаваемое предохранительным тормозом при спуске расчетного груза,
должно быть не более величины ас, при которой обеспечивается коэффициент запаса про-
тив скольжения канатов &д = 1,25:
MT^Mcm^acmnpRH-
Допустимая величина замедления определяется по формуле
(6.2.5)
(6.2.6)
184
ГЛАВА 6
где /4 — коэффициент трения канатов о футеровку канатоведущего шкива; а — угол охвата
канатами канатоведущего шкива, рад; кст — коэффициент статических натяжений канатов,
т. е. отношение натяжения Р более загруженной ветви канатов, к натяжению /*, менее загру-
женной ветви канатов, в статическом режиме кст = Рх/Р2', Д — коэффициент, учитываю-
щий влияние инерционности отклоняющих или копровых шкивов и струны канатов на ве-
личины допустимых замедлений. Для многоканатного подъема при установке машины на
башенном копре это влияние невелико и может быть принято Д = 1. В случае же установки
многоканатной машины на поверхности земли, а отклоняющих шкивов на копре, а также
для подъемов типа ШТ коэффициент
п
Д = —
Р2
)0.Ш. g ( 7 Sjm )
где п — число шкивов на одной ветви канатов; (GD2) — маховой момент отклоняющих
V 'О.Ш.
шкивов (копрового шкива) одной ветви канатов, Нм1', Дб — диаметр канатоведущего шкива.
м, а — угол наклона струны канатов; L' — длина струны канатов, .и; qr — суммарная масса
1 м головных канатов, кг/м.
Для однососудного подъема с противовесом тормозной момент по пятому условию опреде-
ляют дважды: для случаев спусков расчетного груза и противовеса при порожнем подъемном
сосуде, причем для каждого случая величины Р{, Р2, кст и определяют раздельно. Учитыва-
ют меньшую величину тормозного момента, полученную из расчета для этих двух случаев.
Если при расчете окажется, что ас<1,5 м/с1, то третье и пятое условия несовместимы
друг с другом, т. е. необходимо пересмотреть параметры нагрузки подъемной установки в
сторону снижения кст.
В отдельных случаях на действующих одноканатных и многоканатных скиповых подъем-
ных установках со шкивом трения допускают ограничить нижний предел замедления при
предохранительном торможении величиной 1,2 м/с1 при условии оборудования таких уста-
новок блокировкой, исключающей возможность спуска груза со скоростью более 1 м/с. В
таких случаях должны соблюдать условия ас < 1,2 м/с1.
6. Замедление, создаваемое предохранительным тормозом при подъеме расчетного гру-
за, должно быть не более величины ап, при которой обеспечивается коэффициент запаса
против скольжения канатов ст = 1,25:
MT<anmnpRH-Mcm. (6-2-7)
Допустимая величина замедления определяется по формуле
Как и в предыдущем случае для однососудного подъема с противовесом, тормозной
момент по шестому условию определяется дважды: для случаев подъемов расчетного груза и
противовеса, при спуске порожнего сосуда. Принимается меньшая величина тормозного
момента, полученная из расчета для этих двух случаев.
Если при расчете окажется, что а >5 м/с1, то шестое условие отпадает, поскольку более
жесткое требование ставит четвертое условие.
7. Замедление, создаваемое предохранительным тормозом при перегоне порожних сосу-
дов (только для установок с равновесными подъемными сосудами), должно быть не более б?п,г.
при котором обеспечивается коэффициент запаса против скольжения канатов ст — 1,25:
МГ<<1ХЛ (6.2.9)
где т — приведенная к радиусу канатоведущего шкива масса вращающихся и поступатель-
но перемещающихся частей установки при порожних подъемных сосудах.
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
185
Допустимую величину замедления определяют по формуле
(6.2.10)
6.2.3. Выбор величины тормозного момента
Определив величины тормозного момента, создаваемого тормозным устройством для
удовлетворения условий 1, 2, 3, 4 (см. формулы 6.2.1; 6.2.2; 6.2.3; 6.2.4) и дополнительных
условий 5, 6, 7 (см. формулы 6.2.5; 6.2.7; 6.2.9) для одно- или многоканатных машин со шки-
вами трения необходимо выбрать величину тормозного момента, создаваемого тормозным
устройством для обеспечения безаварийной работы подъемной установки. При этом могут
быть следующие варианты.
1. Тормозной момент, выбранный по первым двум условиям, удовлетворяет всем осталь-
ным. Этот случай наиболее вероятен для двухконцевого подъема с барабанными машинами
при угле наклона ствола свыше 30°, а также для многоканатного однососудного подъема с
противовесом. В этом случае тормозной момент выбирают в пределах от минимальной вели-
чины, определяемой первым — третьим условиями, до максимальной, определяемой четвер-
тым — седьмым условиями. С целью улучшения динамики работы подъемных канатов при
предохранительном торможении не следует стремиться выбирать максимальный для данной
установки тормозной момент. В то же время, если четвертое — седьмое условия выполняются
с достаточным запасом, не следует стремиться выбирать минимальный тормозной момент. Это
связано с тем, что фактический тормозной момент может отличаться от расчетного в ту или
иную сторону (меньше в случаях увлажнения тормозных ободов, заедания шарниров и т. д.).
2. Тормозной момент, выбранный по первым двум условиям, удовлетворяет всем осталь-
ным, кроме третьего. Если же нижний предел тормозного момента выбрать по третьему условию
и он будет удовлетворять четвертому — седьмому, то этот случай будет сведен к предыдущему.
Такой вариант вероятен для двухконцевого подъема с барабанной машиной или для многока-
натного однососудного подъема с противовесом, когда по фактической разности статических
натяжений канатов машина недогружена по сравнению с каталожными данными.
3. Тормозной момент, выбранный по третьему условию, удовлетворяет четвертому —
седьмому условиям, но не удовлетворяет первому и второму. Если же выбрать тормозной
момент по первому и второму, то он не будет удовлетворять четвертому—седьмому услови-
ям. Этот случай распространен для многоканатных подъемных установок, подъемов типа ШТ,
вертикальных одноконцевых подъемов, наклонных одно- и двухконцевых подъемов при угле
наклона 15 — 20° и более и сравнительно небольшой разнице в углах наклона участков ство-
ла. Тормозная система должна быть настроена на двухступенчатое предохранительное тор-
можение. Величина тормозного момента первой ступени должна удовлетворять третьему —
седьмому условиям, а величина тормозного момента второй ступени — первому — второму.
Для тормозных систем, имеющих раздельные источники усилия для рабочего и предохрани-
тельного торможения, тормозной момент создаваемый рабочим тормозом, в соответствии
стребованиями ПТЭ [14] должен быть по величине не менее двухкратного максимального
статического момента. В то же время момент, создаваемый одним приводом при рабочем
торможении, должен удовлетворять второму условию по отношению к сосуду, навешенному
на заклиненный барабан (заклиненную часть барабана).
4. Тормозной момент, выбранный по третьему условию, больше момента, выбранного
по четвертому. Этот случай распространен для одноконцевых (реже двухконцевых) наклон-
ных подъемов при малых углах наклона выработки, при значительной разнице углов накло-
на участков выработки. Для таких установок невозможно выполнение третьего и четвертого
условий при одном и том же тормозном моменте ни при одноступенчатом, ни при двухсту-
пенчатом предохранительном торможении.
Наиболее опасным для таких установок при подъеме груза является превышение допустимых
замедлений при предохранительном торможении и связанное с этим ослабление каната, набегание
подъемных сосудов на канат. Растягивающее усилие в канате после выбора слабины при обратном
скатывании подъемного сосуда (партии вагонеток) может привести к обрыву каната.
186
ГЛАВА 6
Такие установки должны быть обеспечены устройствами избирательного торможения,
позволяющими получить разные законы нарастания тормозного момента в зависимости от
направления движения машины (одноконцевые подъемы) или устройствами автоматически
регулируемого предохранительного торможения (одно- и двухконцевые подъемы).
Если по каким-либо причинам (устаревшая конструкция тормозной системы, не позволяю-
шая применить АРПТ или избирательное торможение, отсутствие необходимого оборудования и
др.) не удается своевременно оборудовать подъемную установку такими устройствами, то с целью
обеспечения безаварийной эксплуатации таких подъемов для каждой конкретной установки путем
тщательного анализа должно быть применено устройство избирательного торможения (см. 7.4) и
разработаны временные или постоянные мероприятия, исключающие возможность набегания
подъемных сосудов на канат. Такими мероприятиями могут быть следующие:
— Переход в наклонных выработках с углами наклона менее 15° на другие виды транс-
порта, предусмотренные ПТЭ — конвейерный, монорельсовые и подвесные пассажирские
моноканатные дороги и т. д.
— Ограничение разброса углов наклона участков выработки при проведении наклонной
выработки, предназначенной для концевой откатки. В некоторых случаях при проектирова-
нии наклонных выработок — переход от выработок, проводимых по пласту полезного иско-
паемого, к полевым.
— Уменьшение скорости путем замены двигателя или редуктора или уменьшение кон-
цевой нагрузки для подъемов, имеющих значительный резерв производительности.
— Уменьшение скорости прохождения участков выработки с наименьшим углом накло-
на при переменном угле наклона выработки при подъеме груза. Эти участки должны быть
отмечены на указателе глубины, а машинисты подъема должны быть соответствующим об-
разом проинструктированы.
— Уменьшение тормозного момента до минимально допустимого согласно первому усло-
вию, принятие мер по задержке нарастания тормозного усилия путем дросселирования выпуска
воздуха или масла из тормозных цилиндров. При этом может оказаться невыполненным третье
условие. Здесь следует иметь в виду, для одноконцевого подъема в выработках с углом наклона
до 30’ при спуске груза ПБ [13] допускает замедления при предохранительном торможении ниже
0,75 м/с* и время срабатывания тормоза выше 0,8 с, если во всех случаях предохранительного
торможения при срабатывании концевой защиты или ограничителя скорости подъемные сосу-
ды будут остановлены на свободном для движения вниз участке выработки. Это должно быть
учтено при выборе точки начала замедления и настройке ограничителя скорости. В некоторых
случаях с целью создания резерва пути может потребоваться перенос вверх по выработке ниж-
ней приемной плошадки для посадки и высадки людей.
Лимитирующими условиями при дросселировании выпуска воздуха или масла из тор-
мозных цилиндров являются следующие: в случае предохранительного торможения при спус-
ке груза на естественной характеристике подъемного двигателя на участке выработки с наи-
большим углом наклона превышение скорости за время срабатывания тормоза должно быть
не более 25 % номинальной; диаметр отверстия в дроссельной шайбе должен быть не менее
допустимого заводом-изготовителем подъемной машины.
Нарушение изложенных требований может быть причиной серьезной аварии подъемной
установки. Наиболее частое нарушение — отклонение от расчетных параметров установки.
Нередко увеличение обслуживающим персоналом шахты состава партии вагонеток на наклон-
ном подъеме приводило к обрыву канатов или к неудержанию машины тормозом.
Большую опасность представляет превышение расчетной нагрузки на подъемных маши-
нах с одно- или многоканатным шкивом трения. На клетевых подъемах на всех приемных пло-
щадках должны быть вывешены таблички с указанием допустимой загрузки клетей, а скипо-
вые подъемы должны быть оборудованы устройствами весового дозирования груза.
6.2.4. Расчет параметров тормозных приводов
Вначале по выбранным согласно 6.2.3 тормозным моментам определяют необходимые пара-
метры настройки приводов тормоза, устанавливают фактические параметры настройки и по нио
для различных режимов определяют фактические коэффициенты статической надежности тормо-
за, необходимое давление воздуха или масла в цилиндрах предохранительного и рабочего тормо-
жения. Ниже приведен порядок расчета применительно к наиболее распространенным кинемати-
ческим схемам тормозов (см. 6.1.2). Формулы для расчета приведены в [17].
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
187
1. Для тормозов, приведенных на рис. 6.2 в, 6.3 и 6.7, определяются:
— Расчетная масса тормозного груза одного привода, необходимая для обеспечения мини-
мально допустимого коэффициента статической надежности тормоза GT — при спуске-подъеме
расчетного груза; G'T — при перестановке для подъемных машин двухбарабанных и однобара-
банных с разрезным барабаном (далее — при перестановке); G" — при обрыве каната порожне-
го сосуда или противовеса для двухконцевого подъема (далее — при обрыве каната).
— Расчетное количество тормозных грузов на один привод по максимальной величине
массы тормозного груза GTuaKC (выбранное из GT, G'T, G^). пр.
— Тормозной момент, создаваемый массой фактически навешенного тормозного груза
^тф — при спуске-подъеме расчетного груза; М'тф — при перестановке.
— Фактический коэффициент статической надежности предохранительного тормоза Кф
— при спуске-подъеме расчетного груза; К'ф — при перестановке; Кф — при обрыве каната.
2. Для тормозов, приведенных на рис. 6.7, дополнительно определяются:
Рпмин — расчетное минимальное давление в цилиндре предохранительного торможе-
ния (ЦПТ), необходимое для удержания навешенного тормозного груза (настройки реле
давления);
Ррмин — расчетное минимальное давление воздуха в цилиндре рабочего торможения
( ЦРТ), необходимое для подъема тормозных грузов при «зарядке» тормоза; Р — расчетное
давление воздуха в ЦРТ, необходимое для создания минимально допустимого коэффициен-
та статической надежности тормоза:
— при спуске-подъеме расчетного груза;
— при перестановке;
Ррф — фактическое давление воздуха в ЦРТ в положении «заторможено» при мини-
мальном давлении в воздушной сети.
3. Для тормозов, приведенных на рис. 6.4 а и 6.11, определяются:
— Расчетное усилие на угловом рычаге каждого привода тормоза, необходимое для обес-
печения минимально допустимого запаса статической надежности тормоза QT — при спус-
ке-подъеме расчетного груза; Q'r — при перестановке; Q" — при обрыве каната.
— Расчетная величина затяжки пружинного блока по максимальной величине усилия
на угловом рычаге QTMaKC (максимальное из QT, Q'r, Q"r), F .
— Фактическая величина затяжки пружинного блока, рф.
— Тормозной момент, создаваемый фактически затянутыми пружинными блоками
М/пф ~ ПРИ спуске-подъеме расчетного груза; M'nvp — при перестановке.
— Фактический коэффициент статической надежности тормоза (рабочего и предохра-
нительного) Кф — при спуске-подъеме расчетного груза; Кф — при перестановке; Кф — при
обрыве каната.
— Расчетное давление воздуха (масла) в тормозном цилиндре, необходимое для полного
оттормаживания по большей из фактических затяжек одного из пружинных блоков с учетом
большего хода поршня при срабатывании выключателя износа колодок, Рр.
— Фактическое давление воздуха (масла) в тормозном цилиндре в положении «оттор-
можено» при минимальном давлении в воздушной гидравлической сети, Рф.
4. Для тормозов, приведенных на рис. 6.4 б, определяются:
— Расчетное усилие на угловом рычаге каждого привода при торможении только грузо-
вой частью тормоза, необходимое для обеспечения минимально допустимого коэффициента
статической надежности тормоза — при спуске-подъеме расчетного груза; — при
перестановке; — при обрыве каната.
— Расчетное количество тормозных грузов на один привод по величине максимального
усилия на угловом рычаге каждого привода при торможении только грузовой частью тормо-
за, Отг (максимальное из Q^, Q^, Q^), пр.
— Расчетное усилие, создаваемое пружинным блоком на угловом рычаге каждого при-
вода тормоза Q р для обеспечения требуемого тормозного момента
— при одноступенчатом торможении равном наибольшему требуемому тормозному мо-
менту;
188
ГЛАВА 6
— при двухступенчатом торможении — тормозному моменту равному первой ступени
торможения, обеспечивающему коэффициент статической надежности рабочего тормоза для
МК не менее 2 [13].
— Расчетная величина затяжки пружинного блока Fp, определенная по Q р .
— Фактические параметры привода тормоза Пф — количество тормозных грузов, наве-
шенных на привод; Стф — масса тормозных грузов на привод; — величина затяжки пру-
жинного блока.
— Тормозной момент, создаваемый массой тормозных грузов и подвижных частей при-
вода тормоза Мт^ — при спуске-подъеме расчетного груза; М'т^ — при перестановке.
— Тормозной момент, создаваемый пружинными блоками при фактической затяжке .
М ( ч — при спуске-подъеме расчетного груза; ЛГ м — при перестановке.
— Коэффициент статической надежности тормоза, создаваемый тормозными грузами
Кг — при спуске-подъеме расчетного груза; К'г — при перестановке; К* — при обрыве каната.
— Коэффициент статической надежности тормоза, создаваемый при торможении пру-
жинными блоками К — при спуске-подъеме расчетного груза; К'п — при перестановке:
К”п — при обрыве каната.
— Расчетное давление в ЦРТ, необходимое для оттормаживания машины в ЦРТ по боль-
шей из фактических затяжек пружинного блока при наибольшем ходе поршня до сра-
батывания ВИК — Р .
— Расчетное давление в ЦПТ, необходимое для оттормаживания машины по наиболь-
шей фактической массе тормозных грузов на привод , Рп .
— Фактическое давление воздуха в ЦРТ и ЦПТ в положении «отторможено» при мини-
мальном давлении в воздушной сети — Р ф , Рпф .
6.2.5. Пример расчета параметров пружинно-пневматического привода тормоза
Ниже в качестве примера приведены формулы для расчета параметров пружинно-пнев-
матического привода тормоза с внутренним расположением исполнительного органа и при-
вода с угловым рычагом, кинематическая схема которого приведена на рис. 6.11, а.
6.2.5.1. Расчетное усилие на угловом рычаге каждого привода тормоза, необходимое для обес-
печения минимально допустимого запаса статической надежности тормоза:
— при спуске-подъеме расчетного груза:
К-МСТ
yifriRT
кН,
(6.2.11)
где К — минимально допустимый коэффициент статической надежности тормоза при спус-
ке-подъеме расчетного груза; Мст — максимальный статический момент нагрузки, к Нм: У —
количество тормозных приводов; i — передаточное число рычажного механизма
с в
2(.------------s
d а + в
i =
(6.2.12)
где/ — коэффициент трения колодок о тормозной обод; т] — коэффициент полезного дей-
ствия рычажной системы тормоза; RT — радиус тормозного обода, м.
— при перестановке:
К Мст _ \,2МСт кн
if-T]RT if^R/
(6.2.13)
где К' = 1,2 — коэффициент статической надежности тормоза при перестановке; М'сп. -
максимальный статический момент при перестановке.
— при обрыве каната:
ТОРМОЗНЫЕ УСТРОЙСТВА ПОДЪЕМНЫХ МАШИН
189
К мст _ ^Мст
y i f ri RT y i-f rj-RT’
(6.2.14)
где К" =1,2 — коэффициент статической надежности тормоза при обрыве каната; М"т — макси-
мальный статический момент в одноконцевом режиме в случае обрыва одного из канатов.
6.2.5.2. Расчетная величина затяжки пружинного блока:
r^^ QT.MaKc-^ Gn
(6.2.15)
где QT Л1акс — наибольшее из значений усилий QT, Q'T, Q?, кН; Gn — масса деталей подвиж-
ной системы одного тормозного привода, кг, Z — жесткость пружинного блока, Н/мм.
6.2.5.3. Фактические параметры затяжки пружинного блока:
F=Hce-H3am, мм, (6.2.16)
где F — фактическая величина затяжки пружинного блока; Н — высота пружинного блока в
свободном состоянии; Нзат — высота пружинного блока в затянутом состоянии при фактичес-
ком рабочем зазоре между колодками и тормозным ободом при заторможенной машине.
6.2.5.4. Тормозной момент, создаваемый фактически затянутыми пружинными блоками:
— при спуске-подъеме расчетного груза
МТ у Gn + Z(Fjj + Fn)] i-f г]Т Rr ЛОГ\ кНм (6.2.17)
— при перестановке барабанов
M'T=^\ Gn + Z FMyi f-T]T RT \Q-\ кНм (6.2.18)
где Ft и Ft, — фактическая величина затяжки пружинного блока соответственно левого и право-
го привода тормоза; FM — меньшая из фактических затяжек одного из пружинных блоков, мм.
6.2.5.5. Фактический коэффициент статической надежности тормоза (рабочего и предох-
ранительного):
— при спуске-подъеме расчетного груза
к.ЗН,
МСТ
— при перестановке
К’ = -^-.
А/
— при обрыве каната
(6.2.19)
(6.2.20)
мст'
6.2.5.6. Расчетное давление воздуха в тормозном цилиндре, необходимое
маживания машины:
(6.2.21)
для полного оттор-
р 4[9,81ОД+2(Г„ + Я)]
МПа
(6.2.22)
где Н — ход поршня при срабатывании ВИКа (больший), мм; F6 — большая из фактических
затяжек одного из пружинных блоков, мм; Т]тц — коэффициент полезного действия тормоз-
ного цилиндра (принимается по инструкции завода-изготовителя); с!ц — диаметр тормозно-
го цилиндра, м.
Глава 7
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
7.1. Испытание и комплексное обследование тормозных
устройств
7.2. Неисправности тормозных устройств
7.3. Улучшение характеристик механического торможения
7.4. Устройства избирательного предохранительного
торможения
7.5. Система автоматически регулируемого
предохранительного торможения
7.6. Резинотехнические изделия, применяемые в тормозных
устройствах
7.1. Испытание и комплексное обследование тормозных устройств
В настоящее время в эксплуатации находится большое количество подъемных машин,
срок службы которых гарантированный заводами-изготовителями давно истек. Это выдви-
гает повышенные требования к их ревизии, ремонту, наладке и испытанию. Действующие
подъемные машины оснащены в основном тормозами с исполнительным органом колодоч-
ного типа, у которых усилие от привода передается через систему рычагов на тормозные ко-
лодки, прижимаемые к тормозному ободу машины. Износ рычажно-шарнирного механизма
и различные неисправности исполнительного органа и привода тормоза, нарушения в рабо-
те схемы управления могут значительно изменить характеристики предохранительного тор-
можения и привести к аварийной ситуации.
Для повышения надежности и безопасной эксплуатации подъемных установок при еже-
годных ревизиях, наладках и испытаниях должны быть определены и оценены параметры
всех элементов тормозной системы подъемной машины и параметры предохранительного
торможения. Методика испытаний предохранительного тормоза, подробно изложенная в [17].
позволяет определить основные параметры процесса предохранительного торможения —
время срабатывания тормоза, среднее и максимальное замедления, что дает возможность
судить об их соответствии требованиям действующих Правил безопасности и Правил техни-
ческой эксплуатации [13, 14].
При отклонении каких-либо параметров от допустимых величин, а также для много ка-
натных машин (со шкивами трения) такого объема испытаний может оказаться недостаточ-
но для правильной оценки состояния и работы предохранительного тормоза. В этих случаях
рекомендуется проводить комплексное обследование функционирования тормозного устрой-
ства, контролируя большее количество параметров, характеризующих работу системы, что
позволит полнее оценить состояние и исправность всех элементов тормозного устройства и
качественно выполнить его наладку [54].
При испытании предохранительного тормоза подъемной машины целесообразно запи-
сывать (осциллографировать) и измерять следующие параметры, изменяющиеся во времени
с момента разрыва цепи защиты:
— перемещение поршней цилиндров рабочего и предохранительного торможения и дав-
ление в них;
— усилия в тормозной тяге исполнительного органа;
— момент касания колодками тормозного обода;
— скорость органа навивки и каната (для машин со шкивами трения);
— путь, проходимый органом навивки и канатом с момента разрыва цепи защиты до полной
остановки с определением величины проскальзывания каната (для машин со шкивами трения);
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
191
— ток подъемного двигателя.
Для оценки работы тормозной системы предлагается проводить статические и динами-
ческие испытания. Статические испытания выполняются на неподвижной или движущейся
с очень малой скоростью машине для каждого из тормозных приводов. Для этого подъем-
ные сосуды устанавливаются в стволе в равновесном состоянии («на перевес») и машина
растормаживается, после чего включается предохранительный тормоз и ведется запись: мо-
ментов разрыва цепи защиты и касания тормозного обода каждой стороной колодок (ближ-
ней и дальней); давления в цилиндрах рабочего и предохранительного торможения; переме-
щения их поршней; усилия в тяге исполнительного органа тормоза.
При динамических испытаниях один из сосудов загружается расчетным грузом, машина
разгоняется до требуемой скорости и в нужной для испытаний точке ствола включается пре-
юхранительный тормоз. При этом ведется запись параметров процесса торможения машины:
момента разрыва цепи защиты; скорости движения органа навивки и канатов (для машин со
щкивами трения); ток подъемного двигателя; усилия в тяге исполнительного органа тормоза.
Одновременно в ноутбуке по заданной программе происходит обработка кривой скоро-
сти машины с определением основных параметров затормаживания предохранительным тор-
мозом, которые выводятся на дисплей (экран) сразу после окончания заданного времени
,аписи процесса. Испытания выполняются как для подъема, так и для спуска груза.
Учитывая технологические особенности эксплуатации скиповых многоканатных подъем-
ных машин, динамические испытания предохранительного тормоза целесообразно выполнять:
— при подъеме груженого скипа на максимальной рабочей скорости; при спуске его на
скорости, контролируемой защитой от спуска груженого скипа на большой скорости;
— при перегоне порожних скипов с максимальной рабочей скоростью.
Для практического выполнения программы испытаний специалистами Донбассуглеав-
:оматики под руководством Корсуна В. А. и Курченко Е. М. разработан и изготовлен комп-
лект аппаратуры системы контроля исправности функционирования предохранительного
:ормоза подъемных машин СКИФ. В комплект входят датчики: скорости органа навивки
подъемной машины ДСм, скорости каната ДСк, усилия ДУ, давления ДД1, ДД2, перемеще-
ния ДП1, ДП2, а также блок согласования датчиков с компьютером БС, ноутбук, программ-
ное обеспечение для обработки результатов. Такой состав комплекта и разработанная про-
рамма обработки данных, полученных при испытаниях, позволяют комплексно обследо-
вать функционирование тормозной системы подъемной машины и выявить нарушения.
Примеры осциллограмм статического и динамического испытаний предохранительного
тормоза, снятых комплектом аппаратуры СКИФ, приведены на рис. 7.1, где ДП1 — переме-
щение поршня цилиндра рабочего торможения; ДД1 и ДД2 — давление в цилиндрах рабоче-
: о и предохранительного торможения; ДУ — усилие в тяге исполнительного органа: и И2-
<жорости каната и канатоведущего шкива; Тж — величина тока двигателя; ТП — момент раз-
рыва цепи защиты машины; КК — момент касания колодками тормозного обода.
При динамических испытаниях на экране ноутбука рядом с осциллограммами отобра-
жаются также значения параметров процесса торможения. Для данного примера это: Гп =
3.2 с — время остановки машины, т. е. прошедшее с момента разрыва цепи защиты до пол-
ной остановки машины; Г = 0,56 с — время срабатывания тормоза, т. е. с момента разрыва
цепи защиты до начала снижения скорости машины (определяется только при спуске груза);
Г. = 2,64 с — время торможения машины, т. е. с начала снижения скорости до полной оста-
новки машины; Sn = 11,3 м — путь, пройденный машиной с момента разрыва цепи защиты
до полной ее остановки; Sm = 8,25 м — путь торможения машины, т. е. пройденный от начала
снижения скорости до полной остановки; У — 5,74 м/с — начальная скорость машины, т. е.
в момент разрыва цепи защиты; V = 6,24 м/с — максимальная скорость, т. е. наибольшая
после включения записи процесса; а = 2,35 м/с1 — среднее замедление машины при предох-
ранительном торможении; Sn = 0,18 м — проскальзывание каната по канатоведущему шкиву,
т. е. разность путей, пройденных канатом и шкивом при предохранительном торможении.
Анализируя осциллограммы, полученные при испытаниях предохранительного тормо-
за, можно оценить:
— износ и состояние шарнирной системы исполнительного органа тормоза по измене-
нию давления в цилиндрах рабочего и предохранительного торможения, характеру нараста-
ния усилия и моменту касания колодками тормозного обода машины;
192
ГЛАВА 7
ft
Рис. 7.1. Осциллограммы статических (а)
и динамических (б) испытаний
предохранительного тормоза подъемной
машины
— работу каждого из приводов
по характеру изменения давления в
цилиндрах и перемещению поршней
(«зависание» поршня, характер
дросселирования и т. д.);
— время срабатывания тормоза,
среднее и максимальное замедления
машины по записи скорости органа
навивки подъемной машины;
— путь, пройденный органом
навивки (шкивом) подъемной ма-
шины с момента разрыва цепи за-
шиты до полной остановки и пра-
вильность принятой защитной та-
хограммы ограничителя скорости;
— наличие и момент появления
проскальзывания канатов по канато-
ведущему шкиву по записи скоростей
каната и шкива и величину проскаль-
зывания канатов (для машин со шки-
вами трения).
Таким образом, предлагаемая ме-
тодика позволяет получить полную
характеристику работы всех элементов
предохранительного тормоза сразу же
после окончание затормаживания ма-
шины, оценить правильность приня-
тых при наладке решений по оптими-
зации его работы и тем самым повы-
сить надежность и безопасностi
подъемной установки.
Осциллографирование процесс,:
торможения с регистрацией характе-
ристики тормозного усилия в эдеме н-
d
тах тормоза может быть выполнена также
при использовании системы оперативно-
го контроля подъемных установок, разра-
ботанной в НИИГМ им. М.М. Федорова и
предназначенной для контроля состояния
узлов и элементов подъемных установок
с использованием ПЭВМ, что позволяет
улучшить масштабные и качественные ха-
рактеристики состояния элементов при
выявлении скрытых дефектов оборудова-
ния [48].
Кроме того, кривая тормозного уси-
лия является информативным диагности-
ческим параметром при оценке парамет-
ров, определяющих техническое состоя-
ние тормозного устройства в целом. На
рис. 7.2 представлена диаграмма измене-
ния скорости и усилия в тяге тормозной
системы при предохранительном тормо-
жении подъемной машины с грузо-пнев-
матическим приводом тормоза. При ана-
лизе характеристики тормоза легко опре-
Рис. 7.2. Диаграмма изменения скорости и
усилий при предохранительном торможени.
подъемной машины с качественной
настройкой тормозной системы:
1 — скорость движения подъемных сосудов;
2 — усилие в тяге тормозной системы;
3 — напряжение в цепи ТП
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
193
они испытывают дополнительные напряжения изгиба.
Рис. 7.3. Диаграмма изменения усилий при
имеющемся износе шарнирных соединений:
1 — напряжение в цепи ТП; 2 — усилие в тягах
тормозной системы
леляется время холостого хода тормоза (Г) время задержки наложения второй ступени пре-
дохранительного торможения (Г3) Экспонентный характер нарастания тормозного усилия,
отсутствие вибраций и устойчивое значение величины первой и второй ступени торможения
указывают на качественную настройку всех элементов тормозной системы и отсутствие вред-
ных сопротивлений в элементах тормоза.
Из опыта обследования технического состояния подъемных установок установлено, что в ре-
зультате естественного изменения технического состояния элементов тормоза (износ деталей) зна-
чительно ухудшаются тормозные характеристики тормозной системы, а именно: растут время холо-
стого хода, увеличиваются динамичность работы и зона нечувствительности тормозного устройства,
уменьшается кпд устройства, снижается тормозное усилие и пр. Типичными неисправностями тор-
мозного устройства являются: заклинивание шарниров, чрезмерный износ элементов шарнирных
узлов, что приводит к перераспределению нагрузки между элементами тормозного устройства. При
этом детали начинают работать в нерасчетном режиме, т. е. кроме напряжений растяжения-сжатия
Нарушения в работе тормозной си-
стемы не всегда удается определить с
помощью механических измерительных
устройств и по величине хода поршня в
цилиндре. Использование датчиков
тормозного усилия позволяет значи-
тельно облегчить и ускорить диагности-
ку тормозной системы.
На рис. 7.3 приведен пример реги-
страции работы тормозной системы. По
характеристике нарастания усилий на-
блюдается износ шарнирных соедине-
ний тормозной системы и их недоста-
точная смазка, выражающаяся в коле-
бании тормозных усилий (преодоление
сопротивлений в шарнирах) при нало-
жении тормозного момента.
На рис. 7.4 представлена характе-
ристика тормоза, указывающая на зае-
дания (ступенчатость нарастания усилий) в тягах тормозной системы, которые практически
невозможно обнаружить визуально и с помощью измерительных устройств.
В особо неблагоприятных условиях находятся нижние шарниры тормозных балок ис-
полнительного органа тормоза, поэтому зачастую они оказываются заклиненными, и в ито-
I е балки испытывают значительные зна-
копеременные нагрузки. С помощью
датчиков усилия, установленных на
стойках тормозных балок, определяют-
ся признаки заклинивания нижних шар-
ниров, что можно наблюдать по харак-
теристикам усилий на рис. 7.5, не при-
бегая к разборке шарнирных узлов. На-
растание усилий в стойках задних тор-
мозных балок — признак заклинивания
нижних шарниров.
Применение датчиков усилия оказы-
вает также значительную помощь в кон-
троле наладки тормозной системы. На
рис. 7.6 и 7.7 приведены примеры тормоз-
ных характеристик двух подъемных ма-
шин с пружинно-гидравлическим приво-
дом тормоза. Обе машины работают в
сходных условиях, однако из характери-
Рис. 7.4. Диаграмма изменения усилий при
наличии заеданий в элементах привода тормоза:
1 — напряжение в цепи ТП; 2 — скорость движения
подъемных сосудов;
3 — усилие в тягах тормозной системы
194
ГЛАВА 7
Рис. 7.5. Диаграмма изменения усилий
на стойках тормозных балок:
1 — усилие в стоиках задних тормозных балок;
2 — усилие в стоиках передних тормозных балок
стик тормоза видны качественная настрой-
ка тормозной системы на рис. 7.6 и непра-
вильная настройка выхлопных устройств
привода тормоза на рис. 7.7, которые не
обеспечивают быстрый слив масла из тор-
мозных цилиндров при предохранительном
торможении. При отсутствии характеристи-
ки тормозного усилия затруднительно оп-
ределить причину сверхнормативного вре-
мени срабатывания тормозной системы
(tcp) (причиной может являться износ шар-
нирных соединений, заедания в тормозной
системе, чрезмерный ход поршня из-за уве-
личенных зазоров между тормозными ко-
лодками и тормозным полем и т. п.). По
характеристике усилия в тяге тормозной си-
стемы (неудовлетворительный темп нарас-
тания усилия) можно сделать вывод о том,
что однозначной причиной задержки являет-
ся отсутствие быстрого слива масла из тормоз-
ных цилиндров.
Реализация методов контроля с использо-
ванием датчиков усилий на элементах тормоз-
ной системы подъемных машин позволяет по-
высить эффективность обследования, диагно-
стики и настройки тормоза. В ряде случаев
полученная характеристика тормозного усилия
позволяет определять скрытые дефекты тор-
мозной системы, не определяемые с помощью
традиционных методов, и избежать временных
и материальных затрат на диагностирование
состояния контролируемых элементов. В соче-
тании с аналитическими, инструментальными,
измерительными методами и методами нераз-
рушающего контроля характеристика тормоз-
ного усилия дает полную картину техническо-
го состояния, обеспечения безопасной эксплу-
Рис. 7.6. Диаграмма изменения скорости
и усилий при правильной настройке
выхлопных устройств:
1 — напряжение в цепи ТП; 2 — скорость
движения подъемных сосудов;
3 — усилие в тяге тормозной системы
Рис. 7.7. Диаграмма изменения скорости и
усилий при неправильной настройке
системы предохранительного торможения:
1 — напряжение в цепи ТП; 2 — скорость
движения подъемных сосудов;
3 — усилие в тяге тормозной системы
атации, необходимости технического обслужива-
ния и ремонта элементов тормозных устройств.
Таким образом, применение регистрации ха-
рактеристик тормозных усилий рекомендуется не
только с целью определения интересующих па-
раметров процесса предохранительного торможе-
ния, но и для определения технического состоя-
ния, необходимости технического обслуживания
и настройки тормозных устройств шахтных
подъемных машин.
Кроме описанных систем контроля и диаг-
ностики СКИФ, разработанной специалистами
Донбассуглеавтоматики, и ПСОКПУ, разрабо-
танной в НИИГМ им. М. М. Федорова, извест-
ны и другие, например, аппаратура контроля
диагностики и наладки тормозной систем!
подъемной установки «Силькан». Она предна
начена для контроля, диагностики и наладки тор
ЭКСПЛУА ТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
195
мозной системы, снятия тахограммы работы, наладки и анализа состояния систем управле-
ния шахтной подъемной установки [90].
Аппаратура обеспечивает оперативное измерение, визуализацию и документирование
параметров работы тормозной системы и электропривода шахтной подъемной установки
юстоянного или переменного тока. Применение аппаратуры позволяет оперативно опреде-
лив причины отклонений в режимах работы установки, что способствует повышению эф-
фективности и безопасности ее эксплуатации.
В комплект аппаратуры «Силькан» входят:
— датчики перемещения для измерения деформации тормозных тяг — 2 шт.;
— датчик скорости (пути) — 1 шт.;
— датчик давления 0-1 МПа — 1 шт.;
— датчики тока (токовые клеши) — 2 шт.;
— блок обработки и преобразования аналоговых сигналов;
— комплект кабелей для подключения аппаратуры;
- программное обеспечение.
Аппаратура предназначена для работы с IBM, совместимым с компьютером класса
Pentium. Для удобства эксплуатации аппаратуры «Силькан» рекомендуется использовать ком-
пьютер типа ноутбук. Аппаратура предоставляет следующую информацию о работе тормоз-
ной системы и подъемной установки;
— тормозные характеристики обоих приводов и их сумму, позволяющие определить время
холостого хода и время срабатывания тормозной системы;
— графики перемещения, скорости и ускорений барабана подъемной машины;
— тормозной путь;
— графики тока и напряжения в цепи якоря подъемного двигателя (привод постоянного тока);
— графики токов в цепи статора и ротора для подъемной установки с приводом пере-
менного тока;
— графики сигналов блоков УБСР и тока возбуждения генератора.
Программное обеспечение комплекса «Силькан» предназначено для опроса датчиков,
вычисления и регистрации параметров подъемной установки при предохранительном тор-
можении, наладки тормозной системы на остановленной машине, проведения измерений и
регистрации параметров электроприводов подъемной установки в процессе ее работы. Про-
граммное обеспечение выполняет следующие функции:
— опрос датчиков, вычисление и регистрацию параметров подъемной установки при
различных режимах ее работы;
— просмотр графиков изменения параметров подъемной установки;
— расчет тормозных характеристик по деформациям тормозных тяг;
— изменение масштаба просматриваемых графиков;
— установка начального времени отсчета и расстановка временных меток;
— вывод на экран вертикальной и горизонтальной сеток;
— возможен одновременный просмотр графиков изменения контролируемых парамет-
ров для нескольких замеров;
— вывод на печать содержимого рабочего окна;
— сохранение рабочего окна в графическом формате.
7.2. Неисправности тормозных устройств
7.2.1. Неисправности исполнительного органа тормоза
Учитывая, что безопасная и безаварийная работа подъемной установки во многом обес-
печивается надежной и безотказной работой тормоза, ниже приводятся неисправности тор-
мозных устройств и методы их устранения у подъемных машин, снятых с производства, но в
большом количестве находящихся до настоящего времени в эксплуатации.
Тормозные балки
Тормозные балки — основная несущая конструкция исполнительного органа тормоза,
на которой закреплены тормозные колодки. От правильности монтажа тормозных балок во
многом зависит надежность работы всего тормозного устройства. Если тормозные балки
196
ГЛАВА 7
смонтированы неправильно, при торможении может возникать перемещение элементов ис-
полнительного органа тормоза вдоль оси органа навивки, что недопустимо.
Знакопеременные нагрузки в течение длительной интенсивной эксплуатации могут при-
вести к развитию трещин усталости в местах с наибольшими концентрациями напряжения,
вызванных резким изменением момента инерции сечения балки, фланговыми (поперечны-
ми) сварочными швами, как бы подрезающими металл поперек направления передачи мак-
симальных напряжений растяжения, и наличием окончания сварочных швов.
К появлению трещин и последующим разрушениям могут привести также скрытые де-
фекты и ошибки при изготовлении и монтаже тормозных устройств. Трещины на тормозных
балках коробчатого типа и балках двутаврового профиля с ребрами жесткости были зафик-
сированы на подъемных машинах шахт «Кузнецкая», «Комсомольская», им. Ярославского
ПО «Ленинскуголь» (г. Ленинск-Кузнецкий Кемеровской области), «Днепровская» ПО «Пав-
лоградуголь», «Суходольская Восточная» ПО «Краснодонуголь» и др.
На рис. 7.8 изображена тормозная балка коробчатого типа подъемной машины 2Ц-5х2,3, где
трещины были расположены с обеих сторон тормозной балки на всех четырех тормозных балках.
Рис. 7.8. Расположение трещин на тормозной балке коробчатого типа
Специалистами НИИГМ им. Федорова была разработана и согласована с НКМЗ техно-
логия ремонта и усиления тормозных балок коробчатого типа (рис. 7.9) и тормозных балок
двутаврового профиля с ребрами жесткости (рис. 7.10).
Рис. 7.9. Схема ремонта и усиления тормозной балки коробчатого типа
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
197
Рис. 7.10. Схема ремонта и усиления
юрмозной балки двутаврового профиля
с ребрами жесткости
Технология ремонта и усиления балок
коробчатого типа
1. Установить подъемные сосуды наперевес
(уравновесить подъем). Барабаны взять на сто-
пор (форкопф) машину растормозить.
2. Очистить поверхность металлоконструк-
ций тормозных балок от краски, смазки, ржав-
чины и грязи.
3. Засверлить окончания трещин сверлом
0 12мм. По всей длине трещин разделать их под
сварку. Разделка кромок должна образовывать V-
образный профиль под углом 6СР.
4. Заварить трещины постоянным током
электродами диаметром 3, 4 и 5 мм. Заварку
трещин производить в 4—6 проходов.
5. Изготовить из листа толщиной 20 мм
(материал Ст. 3) 2 круга диаметром 500мм для
усиления вертикальных стенок тормозной балки.
6. Наружный пояс тормозной балки разделать
под сварку, угол разделки 60'. Замерить ширину план-
ки, на которую необходимо продлить наружный пояс
в направлении шарнира и изготовить ее. По концам
ее снять фаску под углом 30> на всей ее длине.
7. Приварить планку к вертикальным стен-
кам балки (проушинам) в несколько проходов шва-
ми катетом 9—12мм. Заварить поперечный шов
многослойной сваркой, приварить планку к на-
ружному поясу.
8. Разметить место приварки кругов диа-
метров 500 мм к вертикальным боковым стен-
кам тормозных балок на их наружных раздели-
тельных поверхностях, как это показано на рис. 7.9, чтобы они закрыли места, где были тре-
щины. Выступающие участки шва трещин зачистить наждачным кругом заподлицо. Места при-
варки круга дополнительно зачистить от краски, ржавчины и масла. Круг приварить обратно-
ыпупенчатым швом в несколько проходов, окончательный катет шва 9—12 мм.
9. В месте, где заканчивается наружный пояс (коробчатое сечение), сделать электросвар-
кой плавный переход к вертикальным стенкам (проушинам) радиусом 150 мм, как это показано
на рис. 7.9.
10. Швы зачистить, поверхности балки очистить от коррозии, покрыть грунтом и окрасить.
Технология ремонта и усиления тормозных балок двутаврового профиля с ребрами жестко-
сти аналогична, только ребро усиления изготавливается в виде сегмента, как показано на
рис. 7.10.
НКМЗ освоил выпуск подъемных машин типа МПБ (МПУ) с внутренним расположе-
нием тормозов (смотри 3.3 и 6.1.4). Опыт эксплуатации подъемных машин такого типа по-
казал, что при интенсивной их работе недостаточную надежность имеют кронштейны по-
стамента тормозного устройства. Кронштейны имеют сварную конструкцию, выполненную
в нескольких вариантах. В каждом из вариантов кронштейн содержит лист металла толщи-
ной до 70 мм, усиленный ребрами или накладками для придания жесткости. Крепление крон-
штейна к фундаменту выполнено в машинах ранних годов выпуска с помощью мощных бол-
тов 6, соединяющих собственно кронштейн 3 с постаментом 4 (рис. 7.11). В машинах более
поздних годов выпуска кронштейн крепится к постаменту с помощью сварки. Второй конец
кронштейна имеет отверстие оси, являющейся элементом шарнира 2, соединяющего соб-
ственно кронштейн с тормозной балкой 1.
Все детали тормозного устройства при работе машины испытывают, кроме нормальных,
циклических нагрузок, еще и ряд перегрузок. Например, такие перегрузки возникают на дета-
198
ГЛАВА 7
г,о Д Д
Рис. 7.11. Исполнительный орган тормоза (левая половина):
1 — тормозная балка; 2 — шарнир; 3 — левый передний кронштейн с проушиной; 4 — постамент;
5 — левый задний кронштейн с проушиной; 6 — болты крепления кронштейна к постаменту
лях тормозного устройства и кронштейна при срабатывании предохранительного тормоза или
при резком приложении рабочего тормоза. Работа кронштейна под действием этих нагрузок
вызывает в его металле переменные изгибные напряжения. Изготовление кронштейнов свар-
ной конструкции требует относительно небольших затрат. Однако, опыт эксплуатации крон-
штейнов сварной конструкции, работающих в условиях интенсивной эксплуатации подъем-
ных машин и, следовательно, увеличенных динамических нагрузок, заставляет по-новому под-
ходить к методам расчета и оценке прочности кронштейнов сварной конструкции.
Результаты исследования случаев поломок деталей оборудования подъемных установок
свидетельствуют, что в большинстве случаев указанные поломки происходят из-за усталости
металла.
Известно, что сопротивление материалов действию нагрузок, меняющихся во времени по
величине или по величине и знаку, существенно отличается от сопротивления действию ста-
тической нагрузки. При этом под действием переменных нагрузок элементы конструкций раз-
рушаются при значительно меньших напряжениях, чем под действием статических нагрузок.
Практикой установлено, что если элемент конструкции многократно подвергать переменному
нагружению определенного уровня, то после некоторого числа перемен напряжений в нем
появится трещина, которая постепенно будет развиваться, ослабляя тем самым сечение дета-
ли. В конце концов, деталь разрушится, не дав при этом заметных остаточных деформаций.
Процесс усталостного разрушения металла является весьма сложным, т. к. зависит от це-
лого ряда факторов, многие из которых еше недостаточно изучены. Известно, что усталостное
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
199
разрушение характеризуется двумя стадиями, а именно, до момента появления первой макро-
скопической трещины усталости (первая стадия) и после появления усталостной трещины (вто-
рая стадия). Закономерности развития процессов усталости на каждой стадии различны, и свя-
зано это с действием специфических факторов, присущих каждой стадии. Из несомненно до-
казанных положений теории усталости, установленными исследованиями известных ученых,
следуют следующие выводы, имеющие важное значение как для формирования основ пра-
вильного конструирования деталей так и для разработки рациональных методов затем сумми-
ровать эти потери, т. е. в данном случае принцип суперпозиции неприменим.
Напряжение, резко повышенное в месте концентрации, быстро затухает по мере удале-
ния от точки максимального напряжения. Это означает, если заранее известен концентратор
напряжений (например, шпоночный паз, сварка, проточка, прессовые соединения и т. д.),
то зона поиска зарождения усталостной трещины может быть значительно сокращена. За-
рождение усталостной трещины всегда начинается в месте концентрации напряжений (под-
рез, шлаковое включение, микротрещина, переходная зона микроструктуры, граница свар-
ного шва, резкое изменение сечения детали и др.).
Развитие трещины протекает как бы с временными паузами или остановками, т. е. тре-
щина развивается постепенно отдельными импульсами. По мере ослабления сечения шаг
концентрических волн увеличивается, темп развития трещины усиливается и при опреде-
ленном остаточном сечении происходит полный долом детали. Независимо от того, что уро-
вень максимальных действующих напряжений обычно ниже предела текучести, в результате
беспрепятственного развития трещины происходит полное разрушение детали.
Из изложенного следует, что усталостную прочность детали можно значительно повы-
сить за счет улучшения проектирования конструкции и технологии ее изготовления. Необ-
ходимо в процессе проектирования выбирать такие формы детали, при которых концентра-
ция напряжений в конструкции была бы минимальной. Тщательная отработка технологии
изготовления такой конструкции и соблюдение ее в процессе производства могут обеспе-
чить необходимую усталостную прочность детали.
Имели место два случая разрушения кронштейнов постаментов тормоза подъемных ма-
шин типа МПБ (МПУ) с внутренним расположением тормоза.
Первая авария произошла на подъемной машине ШПМ 1x5,5x6,0 скипового угольного
подъема государственного предприятия «Угольная компания «Краснолиманская» 21 июля
2002 г. При выдаче горной массы произошло разрушение переднего кронштейна с проуши-
ной крепления тормозной балки к постаменту левого исполнительного органа тормоза
(рис. 7.11), что привело к остановке работы шахты и большому материальному ущербу.
При осмотре кронштейна в процессе расследования аварии установлено, что произош-
ло разрушение металла листа в виде поперечного излома по направлению предварительно
образовавшейся трещины. По характеру разрушения можно судить, что оно произошло не
мгновенно, а развивалось в течение определенного времени, о чем свидетельствует наличие
коррозии и наклепа на плоскости излома. Начало трещины происходило от сварочного шва
продольного ребра жесткости, выходящего на грань кронштейна. Данное сопряжение вы-
полнено с отступлениями от заводского чертежа. На рис. 7.12 видно, что ребра жесткости,
приваренные к листу кронштейна, выходили практически на грань кронштейна, что созда-
вало дополнительную концентрацию усилий, в то время как на чертеже завода-изготовителя
ребра жесткости расположены ближе к середине листа.
Непосредственно перед разрушением кронштейна трещина достигла половины шири-
ны листа (200 мм), что привело к дополнительному росту нагрузки на оставшееся сечение
кронштейна. Окончательное разрушение произошло мгновенно, что подтверждается харак-
терной крупнозернистой структурой излома. Характерный вид плоскости излома, наличие
на нем следов коррозии и наклепа, отсутствие механических или термических повреждений
листа кронштейна позволяет сделать вывод об усталостном виде разрушения металла.
Как установила комиссия по расследованию аварии, основными причинами аварии явились:
— отступления от чертежей завода-изготовителя при изготовлении кронштейнов тор-
мозной системы, что явилось причиной роста напряжений в наиболее нагруженном сечении
листа кронштейна, постепенному (монотонному) развитию усталостных трещин и оконча-
тельному его разрушению;
200
ГЛАВА 7
Рис. 7.12. Кронштейн с проушиной:
а — фактическое изготовление; б — изготовление по чертежу завода-изготовителя
— отсутствие необходимого доступа к отдельным силовым элементам подъемной ма-
шины, исключающее проведение достоверной проверки их состояния, как эксплуатацион-
ным персоналом, так и специалистами наладочных организаций при проведении плановых
ревизионно-наладочных работ и неразрушающего контроля деталей тормоза;
— некачественное выполнение фундамента подъемной машины;
— высокоинтенсивная эксплуатация подъемной машины ШПМ 1x5,5x6,0.
Дальнейшая модернизация конструкции кронштейна была выполнена НКМЗ и заклю-
чалась она в том, что при той же форме основного листа элементы жесткости варились к
верхней и нижней торцевым поверхностям этого листа, и в итоге конструкция кронштейна в
определенной степени напоминала по форме криволинейный двутавр. К сожалению, этот
вариант кронштейна также не лишен недостатка. Здесь появились два новых мощных кон-
центратора напряжения от перерезывающих сварных швов. Именно они явились причиной
зарождения усталостной трещины с последующим разрушением кронштейна подъемной
машины этого же типа на шахте «Степная» ПО «Павлоградуголь», повлекшим за собой дли-
тельный простой подъемного комплекса шахты.
Тормозные колодки
В качестве материала для тормозных колодок используют дерево на подъемных машинах
старых выпусков и пресс-массы. Применение крепких пород дерева, способных зашлифовать-
ся (дуб, бук, ясень и т. д.), или смолистых (сосна) для тормозных колодок не допускается. Ис-
пользуемое для тормозных колодок дерево должно быть однородным, без сучков и чрезмер-
ных трещин. Рекомендуют применять тормозные колодки из вербы, тополя, липы, ивы. При-
менение других материалов для тормозных колодок должно быть согласовано с МакНИИ.
Заменять деревянные колодки пресс-массовыми необходимо по чертежам, согласован-
ным с заводом-изготовителем подъемной машины. Новые тормозные колодки должны тща-
тельно подгонять к тормозному ободу, чтобы было обеспечено прилегание не менее 90 % рабо-
чей поверхности колодок. При значительном износе тормозных колодок крепежные детали
могут вызвать повреждение поверхности тормозного обода. Колодки заменяют, если толщина
между рабочей поверхностью колодки и наиболее выступающей металлической частью креня-
щей конструкции составляет: для деревянных колодок менее 10 мм и для пресс-массовых ме-
нее 5 мм. Каждая колодка должна быть прикреплена к балке минимум двумя болтами.
Характерная неисправность тормозных колодок, особенно деревянных, их вибрация при
затормаживании машины. Вибрация может быть вызвана неравномерным прилеганием ко-
лодок к ободу вследствие их неточной подгонки. Однако и при точной подгонке колодок
при деревянных колодках она возможна. Это объясняется тем, что при высоком коэффици-
енте трения колодок об обод и большом угле охвата тормозного обода колодками возможно
явление самозахватывания колодок тормозным ободом. Если вибрацию деревянных коло-
док не удается устранить никакими мерами, рекомендуют заменить их пресс-массовыми
имеющими несколько меньший коэффициент трения.
Тормозной обод
От технического состояния тормозного обода во многом зависит надежность работы
тормоза, долговечность тормозных колодок. Рабочая поверхность тормозного обода должна
быть чистой, гладкой. В результате эксплуатации на тормозном ободе могут появиться цара-
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
201
пины, шероховатости, трещины в местах соединения двух половин обода (табл. 7.1). При
наличии царапин и шероховатостей обод шлифуют с доведением чистоты поверхности до
Ru ~0,5. При обнаружении трещин в сварных соединениях половин тормозного обода свар-
ной шов по месту трещины удаляют и вновь заваривают.
При появлении эллипсности тормозной обод протачивают и затем шлифуют. Эллипс -
ность обода или местные выпуклости отрицательно сказываются на работе тормозной сис-
темы. При прохождении выпуклой части обода под тормозной колодкой при затормажива-
нии машины увеличивается тормозной момент, затем после выхода этой части из-под ко-
лодки тормозной момент уменьшается. Это вносит затруднения в работу машиниста. Кроме
того, эллипсность обода требует выдерживать повышенные зазоры между тормозными ко-
лодками и ободом, что увеличивает продолжительность холостого хода и время срабатыва-
ния тормоза, а также величины хода поршней тормозных цилиндров.
Биение тормозного обода измеряют индикатором. Если биение тормозного обода вновь
смонтированной машины превышает приведенные в табл. 7.1 допустимые значения, его про-
тачивают и шлифуют.
Таблица 7.1
Допустимая величина биения тормозного обода
Диаметр тормозного обода, мм 2000 - 2500 2500 - 3000 3000-4000 4000 - 5000
Допускаемая величина биения обода барабана, мм: заклиненного переставного 0,35 0,50 0,40 0,60 0,45 0,70 0,50 0,80
На машинах, находящихся в эксплуатации, допускают большие величины биения, они
могут составлять: до 1,2 мм — для барабанных машин с диаметром барабана свыше 3,5 м и
параллельным перемещением тормозных колодок, до 0,8 мм — для остальных подъемных
машин. При этом необходимо обеспечивать достаточный запас хода поршня каждого тор-
мозного цилиндра или демпфера при затормаживании, а суммарный зазор между тормоз-
ным ободом и колодками не должен превышать 4 мм. Если это условие не выполняется,
необходимо проточить и прошлифовать тормозной обод.
Величина уступов в стыках разъемных тормозных ободьев не должна превышать 0,1 мм.
При больших смещениях следует проточить выступающую кромку стыка заподлицо или скруг-
лить выступ до радиуса не менее 100 мм. При значительном износе тормозного обода после-
дний должен быть усилен специальными накладками или заменен новым. Минимально до-
пустимая толщина тормозного обода должна быть согласована с заводом-изготовителем.
Недопустимо попадание масла или воды на рабочую поверхность тормозных ободьев.
Исследованиями установлена зависимость коэффициента трения от увлажнения тормозного
поля (табл. 7.2).
Таблица 7.2
Зависимость коэффициента трения от увлажнения тормозного поля
Число грузов Коэффициент трения при торможении
предохранительном рабочем
сухие колодки увлажненный обод сухие колодки увлажненный обод
12 0,305 0,13 0,366 0,17
10 0,308 0,129 0,366 0,186
8 0,318 0,13 0,4 0,176
6 0,312 0,13 0,43 0,182
На скиповой многоканатной подъемной установке шахты им. А. М. Горького производ-
ственного объединения «Донецкуголь» произошла авария вследствие увлажнения тормоз-
ных ободьев.
202
ГЛАВА 7
После того, как скипы были остановлены в середине ствола, машинист подъема оши-
бочно включил машину на спуск груженого скипа и разогнал машину до максимальной ско-
рости. При приближении скипов к конечному положению сработал ограничитель скорости,
включилось предохранительное торможение. Путь торможения оказался чрезвычайно рас-
тянутым, вследствие чего произошел переподъем порожнего скипа около 7 м. Настройка
ограничителя скорости и тормозов позволяла предотвратить подобную аварию при сухих
тормозных ободьях. Однако при расследовании причин аварии было выявлено неудовлетво-
рительное состояние ограждающих канатоведущий шкив кожухов, вследствие чего вода,
выносимая подъемными канатами из ствола, попадала на тормозные ободья. Снижение ко-
эффициента трения вследствие увлажнения и явилось причиной аварии. Аналогичная ава-
рия с еще более тяжелыми последствиями произошла в сентябре 1993 г. в скиповом стволе
шахты имени А. Г. Стаханова ПО «Красноармейскуголь» на многоканатной машине МК4х4
(подробно описано в 24.2.2).
Не допускается чрезмерный нагрев тормозного обода. Его температура не должна превы-
шать 70° С. При чрезмерном нагреве тормозного обода и пресс-массовых колодок снижается
коэффициент трения между ними. По этой причине также возникали аварии. Так, например,
на скиповом многоканатном подъеме шахты «Центральная» производственного объединения
«Красноармейскуголь» во время работы машины произошло случайное отключение напряже-
ния цепей управления. После подачи напряжения машинист ошибочно включил машину на
спуск груза и разогнал ее до максимальной скорости. Заметив ненормальность в работе маши-
ны, машинист отключил реверсор и начал затормаживать машину рабочим тормозом. При этом
произошло интенсивное разогревание тормозных ободьев и колодок. В связи с тем, что ско-
рость машины снижалась недостаточно, сработал ограничитель скорости и включился пре-
дохранительный тормоз. Однако, вследствие разогрева тормозных ободьев и колодок умень-
шился коэффициент трения между ними, и путь предохранительного торможения оказался
больше расчетного, что привело к переподъему порожнего скипа на 6 м. После аварии на тор-
мозных ободьях были обнаружены цвета побежалости, вызванные чрезмерным нагревом. Чрез-
мерный нагрев тормозных ободьев может быть вызван плохой подгонкой тормозных колодок,
неправильной регулировкой исполнительного органа тормоза, неполным оттормаживанием
машины вследствие неправильной регулировки тормозного привода, а также выпуклостью
обода (при местном нагреве). Перечисленные дефекты должны быть устранены.
Если чрезмерный нагрев тормозных ободьев вызван интенсивным участием тормоза в
рабочих режимах, рекомендуют для снижения участия тормоза пользоваться электродина-
мическим торможением.
Рычажно-шарнирный механизм
Усилие, с которым тормозной обод вращающего органа навивки воздействует на тор-
мозные колодки, воспринимается фундаментом или рамой машины в случае установки опор
тормозных балок на раме. Фундамент или рама не должны иметь трещин или каких-либо
других дефектов, крепление опор к ним должно быть надежным. Длина фундаментных бол-
тов и способ их заделки должны соответствовать чертежам завода-изготовителя. Любые на-
рушения крепления опор тормозных балок должны немедленно устраняться.
Непараллельность осей опорного шарнира и коренного вала приводит к тому, что тор-
мозная балка заваливается в ту или иную сторону, либо поворачивается при затормаживании
машины. Чтобы избежать этого, необходимо при монтаже машины, у которой опоры тор-
мозных балок устанавливают на фундаменте, заливать опоры бетоном после проверки рабо-
ты тормоза. На машинах, у которых опоры тормозных балок установлены на раме, устранить
подобный дефект можно только правильной установкой опор тормозных балок.
В процессе эксплуатации необходимо регулярно проверять состояние шарнирных опор,
фундамента под тормозными балками, затяжку анкерных болтов и отсутствие заклинивания в
шарнирных соединениях, что приводит к повышенным изгибающим усилиям в тормозных
балках. Шарнирные соединения должны быть всегда исправными, систематически смазываться.
Заедание шарниров или чрезмерный их износ может стать причиной серьезной аварии.
Состояние шарнирного соединения зависит от следующих основных факторов: механи-
ческих свойств материала контактирующих поверхностей (твердости, прочности, вязкости и
т. д.); вида трения (жидкостное, граничное, сухое); наличия на поверхности трения абразив-
ных частиц (их числа, величины зерна и материала).
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
203
Для снижения износа шарнирных соединений исполнительного органа тормоза необходимо:
— применять износостойкие материалы для трущихся пар, не допускающие образова-
ния очагов схватывания и глубинного вырывания материалов, заедания; использовать тру-
щиеся пары с пониженными требованиями к смазке или самосмазывающиеся (железогра-
фитовые, пластмассовые, из пластмассы с антифрикционными компонентами); избегать ус-
ловий, вызывающих сухое трение, которое характеризуется наиболее интенсивным износом
трущихся поверхностей;
— не допускать попадания абразива между трущимися поверхностями. Для этого следует
защищать поверхности трения, следить за чистотой и качеством смазочных материалов, пре-
дусматривать возможность удаления продуктов износа из зоны трения, иметь одним из мате-
риалов трущейся пары материал, обладающий свойством вбирать в себя абразивные частицы.
В настоящее время применяются железографитовые втулки типа ПАЖГр-З, которые
выпускаются следующих типоразмеров (табл. 7.3):
Таблица 7.3
Типоразмер втулки Масса, кг
210x180x60 3,25
170x150x60 1,75
160x140x60 1,70
140x120x60 1,35
140x120x55 1,30
140x120x50 1,20
115x100x60 0,90
115x100x50 0,75
95x80x80 1,10
95x80x36 0,45
85x70x40 0,45
70x60x63 0,45
55x45x50 0,25
50x40x50 0,23
Опыт эксплуатации показывает, что долговечность шарнирных соединений и узлов трения
подъемных машин недостаточна. Поверхности трения плохо защищены от попадания абразив-
ных частиц, конструкция соединений не обеспечивает сохранение надежного смазочного слоя
между трущимися поверхностями, а применяемые смазки — необходимой долговечности узлов.
При зазорах между валиком и шарнирным отверстием, превышающих приведенные до-
пустимые значения (табл. 7.4), их ремонтируют силами наладочных управлений или рудоре-
монтных служб.
Таблица 7.4
Допустимые значения зазоров между валиком и шарнирным отверстием
Номинальный диаметр отверстия шарнира, мм 18-30 30-50 50-80
Зазор, jwjw: номинальный максимально допустимый 0,06-0.13 0,35 0,07-15 0,42 0,08-18 0,50
Номинальный диаметр отверстия шарнира, jwjw 80-120 120-180 180-260
Зазор, jwjw: номинальный максимально допустимый 0,09-0,21 0,58 0,1-0.24 0,66 0,12-0,128 0,75
Нередко происходит заклинивание валиков тормозной системы. Их извлечение — трудоем-
кая операция. В тех случаях, когда извлечь валик обычным путем не удается, используют при-
способление (рис. 7.13), состоящее из винта 1 с головкой, который приваривают к валику 2,
стакана 3, упорного подшипника 4 и гайки 5. При вращении гайки винт, приваренный к пальцу,
извлекает его из шарнирного соединения. Еще более эффективно извлечение заклиненных ва-
ликов с использованием горизонтальных гидравлических домкратов или гидроцилиндров.
204
ГЛАВА 7
Рис. 7.13. Приспособление
для извлечения
шарнирного валика
к аваоии с тяжелыми
Промышленность выпускает широкую номенклатуру дом-
кратов и гидроцилиндров одностороннего и двустороннего дей-
ствия. Гидроцилиндры одностороннего действия ГЦ — с пру-
жинным возвратом штока. Резьба на корпусе и в штоке позво-
ляет закрепить гидроцилиндры и использовать их как силовой
орган. Усилие от 6 до 300 тс, ход штока от 44 до 250 мм, номи-
нальное рабочее давление 630 кг/см2, масса от 1,1 до 225 кг.
Гидроцилиндры двустороннего действия с гидравличес-
ким возвратом штока ГЦЦ работают в любом пространствен-
ном положении. Усилие от 15 до 500 тс, усилие обратного
хода от 5 до 265 тс, ход штока от 180 до 400 мм, давление
630 кг/см1, масса от 7,5 до 395 кг.
Специалистами Донбассуглеавтоматики освоен ремонт
шарнирных соединений в условиях действующего подъема
с применением гидроцилиндров и переносных станков для
расточки отверстий с последующей установкой железогра-
фитовых втулок и валов соответсвующего диаметра.
Тяги тормозных систем — наиболее ответственные эле-
менты подъемной машины, так как их разрушение приводит
ствиями. Тяги в процессе эксплуатации испытывают знакопеременную нагрузку значительной
величины, что может привести к появлению усталостных трещин в местах наибольшей кон-
центрации напряжений: в резьбе, галтельных переходах от резьбы к телу тяги и с диаметра на
диаметр, в проушинах и отверстиях тяги, лысках под ключ. При наличии трещин, глубоких
вмятин или других дефектов тяг последние должны быть немедленно заменены новыми во
избежание разрушения. Для определения скрытых дефектов тяг, возникающих в процессе из-
готовления или эксплуатации, на подъемных установках используют методы неразрушающего
контроля (см. 20.2).
Кроме разрывов тормозных тяг в практике эксплуатации были случаи срыва резьбы при ма-
лой длине ввинчивания тяги в серьгу, шарнирную головку или стяжную гайку. Длина ввинчивания
тяги должна быть не менее диаметра резьбы. Тяги должны надежно фиксироваться контргайкой
при заторможенной машине (при растягивающей нагрузке на тяги), что позволит исключить зна-
копеременную нагрузку на резьбовое соединение, следовательно, снизить износ резьбы.
Заклинивание горизонтальных верхней и нижней тяг в ряде случаев вызывается ослаб-
лением затяжки контргаек, что в свою очередь приводит к повреждению резьбы в серьгах.
Необходимо систематически проводить техническое обслуживание тормозной системы с
проверкой затяжки всех контргаек исполнительного органа тормоза. Ремонтировать основ-
ные элементы тормозных устройств должны специализированные бригады, оснащенные со-
временным оборудованием, с применением прогрессивной технологии и использованием со-
ответствующих материалов.
Регулировать исполнительный орган тормоза должны в строгом соответствии с заводс-
кими инструкциями, особенно тщательно после монтажа. При этом необходимо проверить
свободу перемещения всех элементов тормоза как при нормальных, так и при увеличенных
зазорах между тормозными колодками и ободом. Нарушение инструкции по регулировке ис-
полнительного органа тормоза может привести к серьезной аварии.
Выключатели износа колодок должны срабатывать при увеличении суммарного зазора
между тормозными колодками и ободом до 4 мм, а для машин с пружинными тормозами —
при снижении тормозного момент на величину, не более 5 % расчетного. Выключатели из-
носа колодок и воздействующие на них нажимы должны быть правильно установлены. Их
положение должно быть отмечено краской. Известны аварии на подъемных установках, выз-
ванные неправильной установкой выключателей износа колодок.
7.2.2. Неисправности тормозных приводов
Грузовой привод тормоза
Подъемные машины и лебедки с грузовым приводом тормоза сняты с производства в
1971 году, но они еще сохранились в эксплуатации.
Возможные неисправности этого привода тормоза следующие:
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
205
1. Резкое торможение, ударное включение тормоза с колебаниями рычагов.
Причина: большое перепускное отверстие в обводной трубке при воздушном демпфере,
не заглушены отверстия в поршне масляного демпфера, отсутствие масла в демпфере или
недостаточность его уровня, низкая вязкость масла. Скорость падения тормозного груза ре-
гулируют так, чтобы не было заметных колебаний груза и рычагов тормоза. Грубую регули-
ровку производят изменением числа перекрываемых пробками отверстий в поршне, а плав-
ную — изменением с помощью дросселя величины отверстия.
2. Большое время холостого хода тормоза, медленное падение грузов.
Причина: высокая вязкость масла; количество масла, залитого в демпфер, больше допу-
стимого. Подбирают масло необходимой вязкости. При расторможенной машине расстоя-
ние от поршня до верхнего уровня масла должно быть 80—100 мм. Благодаря этому зазор
между колодками и ободом выбирают быстро, а затем груз плавно опускают; неправильно
выбраны отверстия для пропускания масла (п. 1).
3. Отказ тормозной системы, грузы не опускаются.
Причины: работа тормоза с неполностью поднятым грузом, отсутствует или неправиль-
но нанесена метка, против которой устанавливается палец 10 (рис. 7.14) при нормальном
верхнем положении груза; не работает блокировка от неполного подъема тормозных грузов
(ВБТГ); неправильный выбор положения кулачка сбрасывающего рычага. Регулируют изме-
Рис. 7.14. Тормозная колонка
грузового привода тормоза:
1 — корпус; 2 — крышка; 3 —
штурвал; 4 — упорный
шарикоподшипник; 5 — винт;
6 — рычаг с кулачком; 7 — рычаг;
8 — гайка; 9 — кулачки захватов;
10 — палец; 11 — захват;
12 — траверса; 13 — дно; 14 — тяга
тормозной колонки; 15 — груз;
16, 20— тяги; 17 — приводной
рычаг; 18 — кронштейн;
19 — пружина; 21 — электромагнит
нением длины тяги 20.
Неправильная установка тормозной колонки,
смещение, перекос. Устанавливают колонку с ис-
пользованием отвеса и уровня.
Ненадежное крепление демпфера на фундамен-
те, перекос демпфера. Проверяют правильность уста-
новки демпфера но вертикали и его соосность со што-
ком, а также надежность его крепления к фундаменту.
4. Самопроизвольное срабатывание тормоза.
Причина: неудовлетворительное состояние зах-
ватов 11 (рис. 7.14) и головки. При подработке зах-
ватов их следует наваривать и обрабатывать. Если
головка штока имеет скругленные края, изготавли-
вают новую головку.
На подъемных машинах БЛ-1200 и 2БЛ-1200
взамен приведенной на рис. 7.14 тормозной колон-
ки Донецкгормашем был установлен электрогидрав-
лический толкатель ТЭГ-300. На многих подъемных
машинах более ранних годов выпуска такие тормоз-
ные колонки были заменены на электрогидравличес-
кие толкатели силами шахт. Неисправностей грузо-
вого привоа тормоза с применением ТЭГ-300 зафик-
сировано не было.
Грузо-гидравлический привод тормоза
Возможные неисправности этого привода сле-
дующие.
1. При растормаживании машины наблюдают виб-
рацию поршня с грузом аккумулятора давления.
Причина: в цилиндр аккумулятора попал воз-
дух. Для выпуска воздуха необходимо опустить плун-
жер маслоаккумулятора до упора грузов в опорные
брусья. Затем отвинтить гайки на верхнем фланце ак-
кумулятора и приподнять фланец уплотнения и ман-
жету. Толчками включать маслонасос до тех пор,
пока в верхней части цилиндра аккумулятора по-
явится масло. Поставить на место манжету и фла-
нец, закрепить последний гайками и контргайками.
206
ГЛАВА 7
Рис. 7.15. Дроссельное
устройство подъемных
машин с грузо-
гидравлическим
приводом тормоза:
1 — дроссельная шайба;
2 — прокладка;
3 — расширительный
бачок
Уровень масла в сточном баке аккумулятора держать таким, чтобы маслонасос не захватывал
воздух.
2. Вибрация поршня привода тормоза, тормозных грузов и стрелки манометра.
Причина: в тормозной цилиндр попал воздух. Для выпуска воздуха необходимо пор-
шень опустить до нижней крышки цилиндра, увеличивая зазор между тормозными колодка-
ми и ободом (предварительно приняв меры, предотвращающие движение машины под воз-
действием статической нагрузки). Поршень маслоаккумулятора опустить, как в предыдущем
случае. Ослабить гайки, крепящие нижнюю крышку цилиндра. Толчками включать масло-
насос до появления масла из-под крышки, после чего крышку вновь затянуть и отрегулиро-
вать нормальный рабочий зазор между тормозными колодками и ободом. Некоторые ци-
линдры снабжены специальными устройствами для отвода воздуха. Это — либо воздухоот-
водный кран в верхней части цилиндра (машины БМ-2000-ЗА и 2БМ-2000-ЗА), либо возду-
хоотводная трубка в стакане поршня, закрываемая пробкой. Наличие этих устройств значи-
тельно упрощает удаление воздуха из тормозного цилиндра.
3. Медленное рабочее и предохранительное торможение.
Причины: большая вязкость масла в аккумуляторе давления. Для тормозной системы
должны использовать смесь минеральных масел, обладающую хорошими смазочными свой-
ствами, стойкостью к окислению, которые рекомендованы заводом-изготовителем. Исполь-
зование отработанных или загрязненных масел запрещается.
Низкая температура окружающей среды. Подъемная машина должна работать в отапли-
ваемом помещении.
Загрязнение масла в гидросистеме тормоза. Масло заменяют.
4. Резкое предохранительное торможение на наклонных подъемных установках.
Причина: большое дроссельное отверстие в дроссельной шайбе (рис. 7.15), дроссельную
шайбу заменяют, величину отверстия подбирают опытным пу-
тем по условиям работы наклонной подъемной установки.
5. Недостаточная плавность работы рабочего тормоза.
Причина: неправильно отрегулирована величина хода зо-
лотника трехходового крана. Максимальный ход золотника при
полном перемещении рукоятки управления без влияния обрат-
ной связи (легко измерить при заторможенной предохранитель-
ным тормозом машине) должен быть 30—34 мм. Регулируют из-
менением передаточного числа рычажной системы управления
тормозом методом переноса валика на то или иное отверстие
рычага, связанного с рукояткой управления тормозом.
Для машин, имеющих эластичное звено в исполнительном
органе тормоза, возможная причина — сильно затянута пру-
жина и нет необходимого зазора. Регулируют зазор между упор-
ной шайбой и дистанционной втулкой для машин 2БМ-2000-
ЗД (рис. 7.16). Машины с барабанами диаметрами 2,5 и 3 м (на-
пример, БМ-3000/2020—4) снабжают специальными пружинны-
ми звеньями, набранными из тарельчатых пружин.
Величина зазора С должна быть не менее 3,5 мм.
6. Утечки масла из тормозной системы.
Причины: нарушение уплотнений. При наличии утечек мас-
ла через сгоны и фланцы меняют прокладки во фланцах и осу-
ществляют подмотку по резьбе на сгонах.
Неисправность перепускного крана, предохранительного
клапана и кранов управления. Неисправный элемент заменя-
ют. Неисправность обратного клапана (отключенный маслона-
сос вращается в обратную сторону). Клапан притирают.
Неправильное положение золотника четырехходового кра-
на. При расторможенной машине после прекращения поднятия
тормозных грузов продолжается опускание поршня аккумулятора
давления. Масло, поступающее в тормозной цилиндр, тут же отводится через четырехходовой
кран в сточный бак. Необходимо поднять выше золотник четырехходового крана.
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
207
Рис. 7.16. Упругие звенья
исполнительного органа тормоза:
а — усиленная тяга подъемных машин
БМ-2000—ЗА:
1 — валик; 2 — тяга; 3 — дистанционная
втулка; 4 — пружина; 5 — упорная шайба;
6 — гайка; 7 — шплинт; 8 — гайка
регулировочная; 9 — контргайка;
б — устройство для увеличения упругой
деформации тормоза малых подъемных
машин с пресс-массовыми колодками:
1 — тяга; 2 — гайка; 3 — стакан;
4 — тарельчатая пружина; 5 — шайба
7. Недопустимые колебания давления масла в нагнетательном трубопроводе (более
0,05 МПа).
Причины: слишком плотная или задранная манжета, повреждение соприкасающихся
поверхностей поршня и цилиндра, перекос или отклонение от вертикали осей цилиндра и
поршня и т. п.; использование масла с неудовлетворительными смазывающими свойствами,
например, трансформаторного. Определяют и устраняют причины неисправностей.
8. Неисправности тормозного цилиндра.
Неудовлетворительное состояние поверхностей цилиндра. Корродирование поверхнос-
ти, попадание абразивных частиц при монтаже и др. Обнаруженные вмятины, задиры и сле-
ды коррозии устраняют. Проверяют отсутствие искривления штока и стакана, исправность
шарнирного соединения штока, наличие стопорных винтов в гайках, фиксирующих травер-
су на проушине штока.
9. Неудовлетворительное крепление тормозных грузов. Отсутствие необходимых запасов
расстояния до почвы (не менее 300 мм).
Причина: грузы укрепляют с отклонениями от требований завода-изготовителя. Известны
случаи падения грузов из-за ненадежного их крепления. Необходимо проверить наличие гаек, кон-
тргаек, стяжных шпилек и других крепежных устройств для фиксирования грузов на подвесках.
Не допускается работа подъемной машины при наличии в яме под тормозными грузами
посторонних предметов, воды или масла.
10. Неисправности кранов управления.
Причины: тугое перемещение золотника; искривление штока, вызывающее заедание в про-
ходной крышке крана. Обнаруживают перемещением золотника в вертикальной плоскости с
одновременным поворотом. Устраняют правкой в центрах токарного станка или заменой штока.
Повреждение, засорение и перекос направляющего отверстия в крышке. Нарушение рабочих
поверхностей золотника и втулки, тугая посадка золотника во втулке. При незначительных по-
вреждениях поверхности трения притирают пастой ГОИ. В противном случае кран ремонтируют.
Использование слишком густого масла или масла, обладающего неудовлетворительны-
ми смазочными свойствами, или загрязненного масла. Масло заменяют. Кран промывают
керосином, насухо вытирают и смазывают свежим маслом.
11. Утечки масла через кран.
Причины: износ золотника и втулки, недостаточная величина перекрытия каналов, на-
рушение уплотнений фланцев. В случае невозможности устранения обнаруженных дефектов
кран заменяют.
Грузо-пневматический привод тормоза
Грузо-пневматическим приводом тормоза оснащены подъемные машины НКМЗ. Этот
тип привода получил очень широкое распространение.
208
ГЛАВА 7
Рис. 7.17. Тормоз НКМЗ с грузо-пневматическим приводом
Возможные неисправ-
ности привода следующие.
1. Машина плохо растор-
маживается — очень распро-
страненная неисправность, в
особенности на вновь смон-
тированных подъемных ма-
шинах. Обычно она проявля-
ется в том, что не отходят от
тормозного обода верхние
колодки балок 7 (рис. 7.17),
поршень тормозного цилин-
дра 10 не доходит до дна, а
зависает в промежуточном
положении. Как правило,
кой регулировкой тяг 1 и
8 и регулирующей гайкой 5
не удается добиться желаемо-
го результата. Чтобы лучше
понять возможные причины неисправности, рассмотрим усилия, возникающие в тормозной си-
стеме при растормаживании, которое происходит под воздействием веса поршня цилиндра, ры-
чагов 9 и 12 и тяги 11. Препятствует растормаживанию вес рычагов 2 и 6 и тяги 4. Как видим,
превышение усилий, вызывающих растормаживание, над противоположными усилиями неве-
лико, поэтому достаточно даже небольшого заедания в тормозной системе, чтобы машина не
растормозилась. Нижние колодки балок отходят от тормозного обода легко, так как для этого не
требуется поднимать рычаги 2 и 6 и тягу 4. Но как только балки 7 доходят до упоров 3, расторма-
живание прекращается. В таких случаях рекомендуют утяжелить поршень тормозного цилинд-
ра, заполнив его внутреннюю полость стальными грузами. Установка дополнительных грузов
вне поршня запрещается. Она может быть допущена лишь как временная мера, но обязательно
по согласованию с заводом-изготовителем.
Причинами заеданий могут быть: небольшое остаточное давление в тормозном цилинд-
ре (не улавливаемое манометром). Для проверки этого вывинтить пробку для продувки ци-
линдра, расположенную в его днище.
Неудовлетворительное состояние шарниров, вызванное либо взаимным перекосом со-
ч членяемых деталей вследствие неудовлетворительного монтажа, либо чрезмерно тугой по-
5^ садкой шарнирных валиков, либо загрязнением шарниров (7.2.1).
Неудовлетворительное состояние тормозного цилиндра (например, слишком плотная
с^затяжка манжеты, перекос фланца, попадание грязи, абразивных частиц в тормозной ци-
Ц линдр). На шахте «Октябрьская» ПО «Макеевуголь» на подъемной машине 2Ц5х2,3 было
<£ выявлено, что поршень зависал по причине того, что он входил в тормозной цилиндр с на-
S уягом около 0,1 мм. После проточки и шлифовки поршня тормозная система стала работать
нормально. Рекомендуют тщательно обмерять цилиндр и поршень при предмонтажной ре-
визии. Суммарный зазор должен быть в пределах допусков, указанных на чертеже завода-
изготовителя (ориентировочно 0,2—0,4 мм).
2. Отказ рабочего тормоза может привести к серьезной аварии. Так, на скиповом подъе-
ме шахты им. Орджоникидзе ПО «Макеевуголь» после монтажа новой машины 2Ц5х2,3 в
процессе навески канатов и скипов возникла необходимость спуска скипа с нулевой отмет-
ки в загрузочное устройство при расцепленных барабанах. Машина не была оборудована элек-
тродинамическим торможением и спускали скип с механическим подтормаживанием. Тор-
мозные колодки еще не были притерты, что приводило к заметным вибрациям исполни-
тельного органа тормоза. Стяжная гайка на вертикальной тяге не была законтрена и вслед-
ствие вибрации она стала самопроизвольно раскручиваться, поэтому в процессе спуска ски-
па выход поршня цилиндра рабочего торможения увеличивался, пока рычаг 12 (рис. 7.17) не
уперся в балку, на которой установлен привод тормоза. При этом резко уменьшился тормоз-
ной момент, и скип упал в загрузочное устройство, произведя ряд разрушений. Выключатель
износа колодок еще не был отрегулирован, поэтому не мог своевременно включить предох-
ранительное торможение.
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
209
В другом случае на подъеме вентиляционного ствола шахты «Октябрьская» ПО «Донецк-
уголь» произошла аналогичная авария вследствие упора рычага 12 в конструкцию для ниж-
него упорного болта.
3. Неисправности тормозных цилиндров неоднократно приводили к серьезным авариям,
в особенности при расцеплении барабанов. При нормальной работе машины со сцепленны-
ми барабанами в процессе предохранительного торможения участвуют 4 тормозных цилинд-
ра: цилиндры рабочего торможения создают первую ступень торможения, а тормозные гру-
зы (при выпуске воздуха из цилиндров предохранительного торможения) — вторую ступень.
При этом неисправность одного из цилиндров может оказаться незамеченной. При расцеп-
лении же барабанов каждый привод тормоза удерживает «свой» барабан. Пневмосхема тор-
моза выполнена таким образом, что сжатый воздух из воздухосборника поступает в цилиндр
рабочего торможения переставной части через клапаны (краны) перестановки и предохра-
нительный тормоз. Если при расцепленных барабанах включится предохранительный тор-
моз, воздух из цилиндра рабочего торможения переставной части выпускается. Если при этом
соответствующий цилиндр предохранительного торможения заклинит, переставная часть ока-
жется расторможенной, что неизбежно приведет к аварии. Именно такого рода аварии нео-
днократно происходили на подъемных машинах НКМЗ, поэтому необходимо перед каждым
расцеплением барабанов убедиться в опускании тормозных грузов при предохранительном
торможении.
В практике эксплуатации подъемных машин НКМЗ (рис. 7.18) причинами заклинива-
ния поршня 3 цилиндра 5 предохранительного торможения были:
— Чрезмерная затяжка сальников (цилиндры старой конструкции с сальниковой набив-
кой). Необходимо отрегулировать затяжку сальников. Рекомендуется заменять сальники манже-
тами с соответствующей переделкой конструкции поршня. Чрезмерная затяжка сальника уплот-
нения штока, перекос фланца, утонение штока в месте соприкосновения с уплотнением. Необ-
ходимо отрегулировать затяжку сальника и положение фланца, изношенный шток заменить.
— Искривление штока 4 (рис. 7.18). Шток подвергнуть правке в центрах токарного станка
или заменить.
Рис. 7.18. Грузо-пневматический привод тормоза
— Зависание верхней серьги штока на крышке цилиндра. Крышка должна быть надеж-
но закреплена на своем месте, серьга должна свободно проходить через крышку без затира-
ния о ее края. Буферное устройство (пружина 6, тарелка 7) отрегулировать таким образом,
чтобы исключались удары поршня о верхнюю крышку при подъеме тормозных грузов.
210
ГЛАВА 7
— Наличие ржавчины, задиров, раковин на поверхности цилиндра. Разбирают привод, удаляют
ржавчину, цилиндр промывают и смазывают. При значительных дефектах цилиндр заменяют.
— Несоосность цилиндра с подвеской поршня. Устраняют правильной установкой пло-
щадки привода тормоза.
4. Поршень цилиндра рабочего торможения стучит о дно цилиндра.
Причина: неправильно отрегулирована тормозная система. При растормаживании тор-
мозные балки 7 (рис. 7.17) должны соприкоснуться со своими упорами-ограничителями 3 до
того, как поршень достигнет дна цилиндра. Дальнейшее опускание поршня приведет к зави-
санию его на системе рычагов и тяг исполнительного органа. Однако с течением времени
стук может возобновиться. Рекомендуют под угловой рычаг 12 (рис. 7.18) подставить стойку
с эластичной подкладкой (конвейерной лентой).
5. Удары при установке поршня в верхнем положении. Разрушение фундамента под тормоз-
ной площадкой.
При рабочем и предохранительном торможении площадка привода тормоза испытывает
вертикальные усилия, направленные в основном вниз и прижимающие площадку к фунда-
менту. Но при «зарядке» предохранительного тормоза возникают дополнительные усилия,
направленные вверх вследствие удара шарнирной головки 8 (рис. 7.18) о тарелку 7 при подъе-
ме тормозного груза. Это усилие передается через пружину 6 и цилиндр 5 предохранительно-
го торможения на тормозную площадку, отрывая ее от фундамента.
Так как при расчете фундамента указанную ударную нагрузку на тормозную площадку
не учитывают, происходит отрыв от общего массива части фундамента вместе с площадкой.
Во избежание разрушения фундамента необходимо «зарядку» производить аккуратно, не
допуская резкого поднятия тормозных грузов. Для смягчения ударов необходимо правильно
отрегулировать буферное устройство. Пружина 6 не должна быть сильно затянута. Сжатие
пружины должно составлять от 1/6 до 1/4 ее высоты в свободном состоянии.
Особенно сильные удары имеют место в случаях, когда число тормозных грузов 9 равно
или близко к предельному, а давления воздуха в цилиндрах рабочего торможения недостаточ-
но для поднятия тормозных грузов. Тогда грузы поднимают одновременной подачей воздуха в
цилиндры рабочего и предохранительного торможения. Удары можно предотвратить установ-
кой дроссельной шайбы диаметром 3—8 мм (подбирают опытным путем) в канале впуска воз-
духа в цилиндры предохранительного торможения (между воздухосборником и клапаном или
краном предохранительного торможения). Если по условию предохранительного торможения
требуется дросселирование и выпуска воздуха из цилиндров, может быть установлена общая
дроссельная шайба на впуск и на выпуск воздуха между клапаном (краном) и цилиндром.
6. Неисправность стопорения резьбовых соединений. Большое число деталей тормоза подъем-
ных машин НКМЗ имеет резьбовые соединения. Для надежной работы этих соединений при-
меняют стопоры в виде винтов или контргайки. В практике эксплуатации тормозов были слу-
чаи отвинчивания вилок и гайки с контргайкой. Причины: недостаточная длина стопорных
винтов и слабое зажатие гайки с контргайкой. Неисправность устраняют заменой непригод-
ных стопорных винтов. Особое внимание следует обращать на крепление тормозных грузов и
серьги к штоку. При отсутствии штифта, стопорящего серьгу на штоке, или контргаек, фикси-
рующих тормозные грузы на подвесках, последние следует немедленно установить.
В случае обрыва тяги 2 (рис. 7.18) или срыва верхней серьги со штока 4 окажется невоз-
можным затормозить машину рабочим тормозом. Более того, был зафиксирован случай раз-
рушения цилиндра 10 при такой аварии, поскольку при этом поршень 11 резко подпрыгива-
ет вверх и перекашивается в цилиндре. Для исключения подобных явлений рекомендуют на
площадке привода тормоза устанавливать П-образный ограничитель 12 излишнего подъема
рычага 1 в случаях обрыва тяги 2 или срыва серьги. Зазор между упором и рычагом не дол-
жен превышать 50 мм при заторможенной рабочим тормозом машине.
Пружинно-гидравлический привод тормоза
С пружинно-гидравлическим приводом тормоза выпускают подъемные машины Донец-
кгормаша с диаметром барабана 1,2; 1,6 и 2,0 м. Возможные неисправности пружинно-гид-
равлического привода тормоза следующие.
1. Маслонасосы не создают давление.
Причины: не отрегулирован предохранительный или редукционный клапан. Отрегули-
ровать клапаны в соответствии с заводской инструкцией или [17].
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
211
Высокая вязкость залитого в бак масла, загрязнение масла. Берут пробу масла со дна
бака и визуально определяют его чистоту. В бак должны заливать масло веретенное ЛУ или
турбинное Т22 в количестве, указанном в инструкции завода-изготовителя. Перед заливкой
масла бак должен быть промыт керосином.
Неудовлетворительное состояние насоса. Насос разбирают, осматривают и вновь собира-
ют. В случае необходимости притирают пластины к пазам ротора с использованием пасты ГОИ.
2. Маслонасосы работают с шумом, не дают максимального давления. Если при этом мас-
ляный бак заполнен пеной, стрелки манометров резко колеблются, то это говорит о засасы-
вании воздуха насосами. Необходимо проверить все уплотнения маслосистемы и валов на-
сосов. При низком уровне масла долить его в маслобак. Если дребезжит подшипник — под-
тянуть болты боковых крышек или заменить подшипники в случае их износа.
3. Проворачивание резервного насоса в обратную сторону.
Причина: неисправность обратного клапана. Клапан необходимо притереть или заменить.
4. Колебания давления в гидросистеме.
Рис. 7.19. Предохранительный клапан
с переливным золотником:
1 — пружина; 2 — опорный элемент;
3 — регулирующий винт; 4 — седло; 5 — золотник
Причины: засорение каналов пре-
дохранительного клапана (рис. 7.19)
либо седла шарикового клапана. В
первом случае разбирают клапан и
тонкой стальной проволокой прочи-
щают каналы, сначала канал «б» в зо-
лотнике. Во втором — отворачивают
регулировочный винт до отказа про-
тив часовой стрелки, смывают по-
павшую грязь потоком масла. Если
это не дает результата, снимают вер-
хнюю крышку, промывают седло,
притирают седло канала «а», если
есть задиры и царапины на фаске
седла. Клапан регулируют на требуе-
мую величину давления.
5. Чрезмерно резкое торможение
при снятии напряжения.
На подъемных машинах старых
выпусков с немодернизированной
станцией управления при предохра-
нительном торможении без снятия
напряжения масло из тормозных
цилиндров выпускают через УПТВ
и клапан замедленного торможения
(если рукоятка тормоза находится в
положении «отторможено»). Нарас-
тание тормозного момента происходит постепенно и определяется регулировкой клапана за-
медленного торможения. В случае же снятия напряжения масло выпускают через регулятор
давления. В этом случае замедление при предохранительном торможении значительно воз-
растает. Для вертикального подъема, где клапан замедленного торможения можно не исполь-
зовать, это не имеет существенного значения. Для наклонного же подъема, где, как правило,
требуется двухступенчатое предохранительное торможение, снятие напряжения во время дви-
жения машины может привести к обрыву каната вследствие набегания на него поднимаю-
щейся партии вагонеток.
С 1977 г. машины с пружинно-гидравлическим приводом тормоза выпускают с модернизиро-
ванной станцией управления, лишенной недостатка станций управления старого типа (рис. 7.20).
Модернизация заключается в том, что изменено расположение регулятора давления и У НТВ.
Со стороны напорного трубопровода первым стоит регулятор давления 19, затем устройство пре-
дохранительного торможения 18. Здесь при предохранительном торможении, как без снятия на-
пряжения, так и при снятии напряжения масло из цилиндров выпускают только через УПТВ и
далее через клапан замедленного торможения 6. Изменена конструкция УПТВ. В прежней кон-
212
ГЛАВА 7
струкции при выключении У ПТВ по мере перемещения золотника вначале перекрывался ка-
нал, соединяющий регулятор давления с напорным трубопроводом, затем полость тормозных
цилиндров соединялась со сливным трубопроводом. Такая конструкция неприемлема для мо-
дернизированных станций управления, так как при застревании золотника У ПТВ в промежу-
точном положении окажется невозможным осуществить ни предохранительное, ни рабочее тор-
можение. В новой конструкции У ПТВ за счет укорачивания золотника при опускании после-
днего вначале соединяется полость тормозных цилиндров со сточным баком, затем перекрыва-
ется канал к регулятору давления. Благодаря этому при любом положении золотника УПТВ воз-
можен слив масла из тормозных цилиндров либо через УПТВ, либо через регулятор давления.
Рис. 7.20. Схема пружинно-гидравлического привода тормоза с модернизированной
станцией управления:
1 — бак; 2, 3, 4 — насосы; 5 — воздушный фильтр; 6 — клапан замедленного торможения;
7, 8,9 — фильтры; 10 — предохранительный клапан с переливным золотником; 11 — сетчатый
фильтр; 12, 13, 14 — обратные клапаны: 15, 17, 21 — манометры; 16 — редукционный клапан;
18 — устройство предохранительного торможения (УПТВ); 19 — регулятор давления;
20, 22 — цилиндры; 23, 24 — конечные выключатели; 25 — цилиндры механизма перестановки;
26 — кран механизма перестановки; 27 — обратный клапан
Кроме того, в модернизированной станции улучшена конструкция крана замедленного
торможения. По чертежам Донецкгормаша могут быть модернизированы старые станции
управления.
6. Нерастормаживание машины с модернизированной станцией управления.
В момент растормаживания машины давление в нагнетательном трубопроводе резко
снижается вследствие впуска масла в тормозные цилиндры. Пониженное давление масла
может не удержать золотник УПТВ в верхнем положении. Последний под воздействием пру-
жины опустится и может занять новое равновесное положение, при котором все его прохо-
ды будут открыты. Тогда масло из нагнетательного трубопровода будет уходить на слив и
давление в тормозной системе не повысится. Такой случай имел место, например, при пус-
коналадочных работах на подъемной машине типа 2Ц-2х1,1 шахтоуправления им. С. М. Ки-
рова ПО «Макеевуголь». Для предотвращения таких явлений в гидросхеме предусмотрен до-
полнительный шариковый обратный клапан 27 (рис. 7.20). Шарик этого клапана должен быть
тщательно притерт к своему седлу, а давление в нагнетательном трубопроводе повышено до
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
213
верхнего предела, установленного заводской инструкцией. Полезной может также оказаться
установка дополнительной емкости объемом 1—1,5 л (гидровоздушного аккумулятора) на
участке трубопровода между обратным клапаном и УПТВ.
7. Медленное растормаживание. Этот недостаток присущ всем машинам с пружинно-гид-
равлическим приводом тормоза. Скорость растормаживания зависит от производительности
маслонасоса. Рекомендуют при растормаживании машины включать два насоса. При необ-
ходимости сделать ревизию маслостанции.
8. Узкий диапазон регулирования тормозного момент.
Изменение величины тормозного момента происходит в узком диапазоне хода управле-
ния рукоятки управления рабочим тормозом (рис. 7.25).
Для обеспечения удобства управления подъемной машиной необходимо максимально
растянуть по дуге хода рукояткизону, в которой происходит регулирование тормозного мо-
мента. Это достигается включением нелинейных элементов в схему управления рабочим тор-
можением (раздел 7.3). Рекомендуют также в случаях, когда требуемый тормозной момент
значительно меньше максимального для данного типа машины, по согласованию с заводом-
изготовителем прореживать пружины в пружинных блоках или переходить на пружины с
меньшей жесткостью.
9. Отклонения величины тормозного момента от расчетного.
Уменьшение тормозного момента может длительное время оставаться незамеченным,
но при определенных обстоятельствах приводит к тяжелой аварии. Величина тормозного
момента находится в прямой зависимости от величины затяжки пружинных блоков
F=Hce-H3am, (7.2.1)
где , Нзат — высоты пружинного блока соответственно в свободном состоянии и при
заторможенной машине, мм.
Ясно, что тормозной момент может уменьшаться вследствие уменьшения Нсв или уве-
личения Н. Первое может быть вызвано усадкой пружин, особенно в первые пять лет
эксплуатации машины, поэтому в этот период необходимо ежегодно освобождать пружин-
ный блок и измерять . В дальнейшем эту операцию проделывают один раз в пять лет.
Одновременно осматривают пружины. Пружины, имеющие трещины или давшие усадку,
резко отличающуюся от усадки остальных пружин, заменяют. Допускают применять пружи-
ны в одной секции, отличающиеся по высоте не более чем на 2 мм. По результатам измере-
ния Нсв корректируют величину затяжки пружинного блока.
Второе может быть вызвано увеличением хода поршня тормозного цилиндра вследствие
износа фрикционных накладок тормоза или по другим причинам. Выключатель, контроли-
рующий износ фрикционных накладок, и воздействующий на него рычаг регулируют из ус-
ловия уменьшения тормозного момента на 5 %. Дополнительный ход поршня тормозного
цилиндра вниз от положения, при котором регулируют затяжку пружинного блока, до поло-
жения, при котором должны разомкнуться контакты выключателя износа фрикционных на-
кладок, определяют по формуле
пвык
(7.2.2.)
где Gn — масса подвижных деталей привода тормоза, кг; Z— жесткость пружинного блока,
Н/м; F — фактическая затяжка пружинного блока, мм.
Учитывая влияние состояния пружинного блока и его затяжки на величину тормозного
момента, его следует регулярно и тщательно осматривать. При одинаковой затяжке левого и
правого пружинных блоков разница ходов поршней не должна превышать 2 мм. В против-
ном случае вновь проверяют и регулируют зазоры между колодками и ободом, после чего
повторно регулируют затяжку пружинных блоков. Фактическая величина давления масла в
тормозных цилиндрах, при которой происходит полное растормаживание машины, не дол-
жна отличаться от расчетной более чем на 10 %. Большие отклонения могут быть вызваны
следующими причинами:
214
ГЛАВА 7
— отклонением фактического хода поршня от расчетного (уточняется расчетное давле-
ние масла, необходимое для оттормаживания машины с учетом фактического хода поршня)
(см. 6.2.1);
— заеданием шарниров тормоза или неправильной регулировкой упорных болтов (про-
веряются шарнирные соединения или вворачиваются упорные болты);
— неисправностью манометра (проверяют по контрольному манометру);
— ошибкой в измерении высоты пружинного блока в свободном состоянии;
— отклонением фактической жесткости пружинного блока от расчетной (необходимо
по согласованию с заводом-изготовителем испытать пружины).
10. Отказ в работе устройства предохранительного торможения (УПТВ).
Наиболее распространенная неисправность УПТВ — повреждение пружины. В случае,
если пружина полностью разрушилась, машина не растормаживается. Кроме того, при по-
вреждении пружины золотник УПТВ при предохранительном торможении переставляется
не полностью и часть масла выходит через регулятор. Предохранительное торможение полу-
чается резким, что на наклонных подъемах приводит к набеганию подъемного сосуда на ка-
нат. Неисправность устраняют заменой пружины.
Пружинно-пневматический привод тормоза
С пружинно-пневматическим приводом тормоза Донецкгормаш выпускает многоканат-
ные подъемные машины и барабанные машины с диаметром барабана от 2,5 до 3,5 м. При-
воды выпускают двух видов: без тормозных грузов и с тормозными грузами.
Возможные неисправности пружинно-пневматического привода тормоза во многом сход-
ны с неисправностями пружинно-гидравлического привода, за исключением специфичных
для гидравлики неисправностей.
Из неисправностей, характерных для пружинно-пневматического привода, можно от-
метить следующие.
1. Большая продолжительность холостого хода тормоза. Кроме рассмотренных ранее при-
чин (заедание шарниров, слишком тугие манжеты, различные перекосы и т. д.), возможная
причина увеличенного холостого хода — избыточное давление воздуха в тормозных цилинд-
рах. Например, если для растормаживания машины достаточно давления 0,2 МПа, а факти-
чески в цилиндрах имеется давление, равное давлению в воздухосборнике (0,4—0,6 МПа), то
при предохранительном или рабочем торможении движение деталей тормоза начнется лишь
после снижения давления до 0,2 МПа. Неисправность устраняют, регулируя ток в катушке
регулятора давления.
2. Чрезмерно резкое предохранительное торможение.
Эта неисправность присуща машинам с безгрузовым пружинно-пневматическим безгрузо-
вым приводом тормоза, где пружинные блоки создают полную величину тормозного момента, а
первая ступень создается путем дросселирования выпуска воздуха из тормозных цилиндров.
Поскольку катушка регулятора давления при предохранительном торможении отклю-
чается, в ряде случаев дросселирование оказывается неэффективным. Это объясняется не-
надежной отсечкой электромагнитными клапанами тормозных цилиндров от регулятора дав-
ления, вследствие чего значительная часть воздуха из тормозных цилиндров выходит через
регулятор давления, минуя регулируемые выхлопные устройства. Для таких установок при
необходимости создания двухступенчатого предохранительного торможения рекомендуют
смонтировать схему подпитки обмотки регулятора давления. Предварительно заряженная
батарея конденсаторов емкостью 18 000—20 000 мкФ при предохранительном торможении
разряжается через обмотку регулятора давления. Благодаря этому в течение предохранитель-
ного торможения на выходе регулятора поддерживается давление воздуха, способствующее
надежному закрыванию электромагнитных клапанов.
7.2.3. Неисправности аппаратов и схем управления тормозом
Электропневматические регуляторы давления
Унифицированные регуляторы давления РДУ-1, РДУ-2 и РДВП предназначены для ус-
тановки на подъемных машинах с грузо-пневматическим и пружинно-пневматическим при-
водами тормоза. Принцип действия их одинаков, отличаются регуляторы давления конст-
руктивным исполнением, определяющим их назначение.
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
215
Рис. 7.21. Регулятор давления РДУ-1
Регулятор РДУ-1 (рис. 7.21) имеет вертикаль-
ное расположение золотника 3 и трехфланцевое
присоединение к пневмосети. Он предназначен
для установки в панели пружинно-пневматическо-
го привода тормоза и на площадке тормоза модер-
низированных подъемных машин НКМЗ с грузо-
пневматическим приводом.
Регулятор РДВП отличается от РДУ-1 взрыво-
защищенным исполнением электромагнитной го-
ловки и отсутствием электромагнита первой ступе-
ни торможения. Регулятор РДУ-2 имеет однофлан-
цевое присоединение к пневмосети и горизонталь-
ное расположение золотника. Он предназначен для
установки на немодернизированных подъемных ма-
шинах НКМЗ взамен регулятора давления ШРД-1.
Характер возможных неисправностей этих
регуляторов давления одинаков.
1. Тугой ход золотника во втулке ведет к ступен-
чатости регулирования давления, а при полном зак-
линивании золотника — к отказу тормоза.
Причины: отсутствие или загрязнение смазки,
попадание мусора, окалины в зазор между золот-
ником 3 и втулкой 2 (рис. 7.21). Регулятор разбира-
ют, промывают в керосине, протирают чистой ве-
тошью, не оставляющей ворса, смазывают чистым
маслом индустриальным И-ЗОА, затем собирают.
Золотник должен свободно перемещаться во втул-
ке при нажатии пальцем руки. Малый зазор между
золотником и втулкой. Величина зазора должна
быть в пределах 0,01—0,025 мм. При меньшей вели-
чине зазора необходима совместная притирка зо-
лотника и втулки с пастой ГОИ. Такой ремонт ре-
комендуют проводить централизованно в специа-
лизированной мастерской. Отсутствие или недоста-
точное количество смазки, применение чрезмерно
жидкого масла с плохими смазывающими свойствами. Регулируют работу маслораспылителя.
Масло должны применять марки И-ЗОА.
Низкая температура в здании подъема. Коэффициент линейного расширения латуни, из
которой изготовлена втулка, значительно выше, чем у стали, из которой изготовлен золотник,
поэтому при снижении температуры зазор между втулкой и золотником уменьшается, а при
температуре, близкой к 0°С и ниже, золотник вообще может оказаться зажатым втулкой. По-
этому в здании подъема необходимо поддерживать температуру не ниже 15° С. Если это невоз-
можно во всем здании, необходимо под регулятором давления установить нагреватель.
Деформация корпуса 1 регулятора при обтяжке болтов на соединительных фланцах. Ус-
траняют правильной установкой регулятора, выбором необходимых прокладок и точностью
монтажа, обеспечивающего к тому же вертикальное положение корпуса регулятора (РДБВ,
РДУ-1, РДВП п др.). При сборке золотник во втулке должен плавно перемещаться без заеда-
ния под действием собственного веса.
2. Не происходит полного снижения давления воздуха до нуля.
Причины: заедание золотника. Неисправность устраняют указанным ранее способом;
малый воздушный зазор между заслонкой 5 и соплом 4. Устанавливают воздушный зазор
«Ж» величиной 0,5—0,7 мм.
3. При изменении тока в обмотке управления регулятором наблюдают запаздывание изме-
нения давления или давление не достигает заданной величины.
Причины: малый зазор «Д», т. е. упор якоря 7 в магнитопровод 6 происходит раньше, чем
заслонка 5 упрется в сопло 4. Регулируют зазор «Д», который должен быть равен 1,8—2,0 мм,
216 ГЛАВА 7
поднятием якоря на плоской пружине. Одновременно необходимо поднять сопло с тем, чтобы
зазор остался равным указанной выше величине.
Засорилась система подачи сжатого воздуха в камеру проточного регулирования 8. Про-
чищают калиброванное отверстие в штуцере, фильтр освобождают от накопившихся в нем
твердых частиц, масла, влаги.
Некачественное состояние контактных поверхностей сопла и заслонки. Производят их
совместную притирку.
4. Утечки воздуха через регулятор давления могут быть выявлены следующим образом.
Рукоятку управления устанавливают в положение, соответствующее давлению в цилиндрах
рабочего торможения 0,2—0,3 МПа, и наблюдают за показаниями манометра. Неподвижность
стрелки манометра свидетельствует об отсутствии утечек. Если стрелка совершает колеба-
ния, причем быстро движется в сторону возрастания давления и медленно — в сторону сни-
жения, это свидетельствует о наличии утечек между полостями регулятора, связанными с
тормозными цилиндрами и атмосферой. Если стрелка быстро движется в сторону снижения
давления и медленно — в сторону возрастания, это свидетельствует об утечке воздуха из ка-
меры, связанной с воздухосборником, в камеру, связанную с цилиндрами тормоза.
Ориентировочными критериями для оценки величины утечек и вытекания воздуха явля-
ется период одного колебания стрелки манометра. Если период колебания более 6—8 с, утечки
считают незначительными. При оценке величины утечек воздуха описанным способом следу-
ет иметь в виду, что утечки могут быть внешними и внутренними. Внешние — это утечки через
прокладку под фланцем регулятора давления, через трубопровод к цилиндрам рабочего тор-
можения или через уплотнение цилиндров. Внутренние утечки могут происходить как через
зазор между золотником и втулкой, так и через прокладки между втулкой и корпусом. Для
правильной оценки величины внутренних утечек воздуха следует устранить внешние утечки.
Лучше всего оценить величину утечек воздуха, сравнивая работу двух регуляторов дав-
ления. В шахтных условиях можно устранить утечки между втулкой и корпусом заменой про-
кладок, однако следует помнить, что без необходимости при разборке регулятора снимать
крышку и вынимать втулку не рекомендуется, так как малейший перекос при сборке ухуд-
шит качество работы регулятора давления. Устраняют утечки между золотником и втулкой
изготовлением нового золотника и совместной его притиркой с втулкой в условиях специа-
лизированного ремонта.
5. Вибрационный характер нарастания или снижения давления возникает из-за несоответ-
ствия аэродинамических сопротивлений трубопровода между регулятором давления и тор-
мозными цилиндрами с отверстиями в золот-
нике регулятора давления. Для устранения
этого явления необходимо заглушить имею-
щиеся отверстия 9 (рис. 7.21) в золотнике и
просверлить новое отверстие диаметром 0,8—
1,2 мм. Удобно для этой цели вначале в зо-
лотнике просверлить отверстие диаметром 3—
4 мм, запрессовать в него медную заклепку, а
уже по заклепке сверлить отверстие диамет-
ром 0,8—1,2 мм.
6. Отсутствие давления первой ступени
предохранительного торможения.
Причина: заедание подвижного якоря элек-
тромагнита первой ступени. Устраняют при раз-
борке электромагнитного привода регулятора.
Трехходовой кран
Наиболее характерными неисправностя-
ми трехходового крана, которые могут при-
вести к отказу в работе предохранительного
тормоза, являются медленное предохрани-
тельное торможение; тугая посадка золотни-
ка 5; заедание или перекосы приводного ва-
лика 1 (рис. 7.22).
Затарможена
Растариажека
Рис. 7.22. Трехходовой кран подъемной
машины НКМЗ:
1 — приводной валик; 2 — вилка; 3 — рычаг;
4 — пробка; 5 — золотник; 6 — втулка;
7 — корпус
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
217
Чрезмерно тугой золотник крана подвергают притирке. Оптимальный зазор между втулкой
6 и золотником трехходового крана должен составлять 0,01 мм. Особенно опасен перекос втулки
при пережатии корпуса 7 крана. Неправильное положение золотника или малый ход его приво-
дит к перекрытию выхлопных отверстий, а следовательно, к медленному торможению.
Для нормального торможения машины золотник должен перемещаться на 32 мм, полнос-
тью открывая отверстие выпуска воздуха из цилиндра предохранительного торможения. Спосо-
бы регулирования исходного положения и хода золотника крана описаны в [17]. Неправильный
подбор прокладок между втулкой и корпусом или износ золотника и втулки приводит к утечкам
воздуха. В настоящее время трехходовые краны остались практически только на небольшом ко-
личестве подъемных установок.
Клапан управления подъемной машины Донецкгормаша
1. Повреждение диафрагмы.
Эта неисправность присуща клапанам ранних выпусков (рис. 7.23). При разрыве диаф-
рагмы 3 машина не растормаживается, и появляются значительные утечки воздуха. Диаф-
рагма имеет ограниченный срок службы ввиду недостаточной прочности, поэтому на подъем-
Рис. 7.23. Электромагнитный клапан
подъемных машин Донецкгормаша
нои установке необходимо постоянно
иметь запас диафрагм.
В клапанах более поздних выпусков
вместо диафрагмы применен поршень с
манжетой. В практике эксплуатации таких
клапанов каких-либо неисправностей,
связанных с поршнем, не наблюдалось.
Описанные далее неисправности
распространяются на пневмоусилитель 2.
2. Заедание подвижной части пнев-
моусилителя.
Причины: заедание золотника 6
пневмоусилителя во втулке 5 вследствие
искривления золотника или малого за-
зора, засорения. Вынимают золотник из
втулки, выравнивают или притирают
его, промывают.
Залипание якоря электромагнита 1
вследствие попадания масла на контакт-
ные поверхности подвижного и непод-
вижного магнитопроводов. Электромаг-
нит разбирают, масло удаляют.
3. Утечки воздуха.
Причины: износ поверхности втул-
ки и золотника. Устраняют при ремонте
клапана заменой золотника и изготов-
лением новой втулки.
Недостаточное перекрытие отвер-
стия распределения воздуха. Регулируют
установкой прокладок между корпусом
электромагнита и пневмоусилителем 2.
4. Неполная перестановка клапана.
Интенсивная утечка воздуха.
Причина: давление в воздухораспре-
делительной сети ниже 0,4 МПа. При
изношенных золотнике и втулке этой ве-
личины давления в пневмосети может
оказаться недостаточно, так как вслед-
ствие утечек воздуха в камере управления
4 (рис. 7.23) клапана не удерживается
полное давление. В этом случае клапан
218
ГЛАВА 7
может не включиться либо при включении застрять в промежуточном положении. В настоя-
щее время вместо пневмоусилителя применены электропневматические вентили ВВ-32 и ВВ-
32Ш. Практика эксплуатации не выявила каких-либо неисправностей таких клапанов, за ис-
ключением выхода из строя катушек электровентилей. В процессе эксплуатации на вентилях
ВВ-32Ш наблюдались случаи выхода из строя штепсельных разъемов.
Рекомендуют на старых выпусках подъемных машин заменять пневмоусилитель с элек-
тромагнитом электровентилем ВВ-32 с применением переходника (рис. 7.24). Такая пере-
делка позволит существенно повысить надежность используемых клапанов. Выемка на по-
верхности переходника, обращенная в сторону клапана, нужна лишь для клапанов с диаф-
рагмой. Для клапанов с поршнем эта поверхность может быть плоской.
Рис. 7.24. Переходник для установки электровентиля ВВ-32
7.3. Улучшение характеристик механического торможения
Рабочее торможение
Система рабочего торможения должна обеспечить, с одной стороны, удобство управле-
ния машиной при выполнении различных маневровых операций, с другой — невозможность
создания чрезмерных замедлений, вызывающих срабатывание парашютов, набегание под-
нимающегося сосуда на канат на наклонном подъеме или проскальзывание канатов на подъе-
ме со шкивом трения.
Существующие приводы тормоза и системы управления не полностью удовлетворяют
этим требованиям.
Для подъемных машин с пружинно-пневматическим и пружинно-гидравлическим при-
водом тормоза ход рукоятки управления из положения «расторможено» в положение «затор-
можено» можно условно разбить на шесть участков (рис. 7.25, а).
1 — давление воздуха или масла в тормозных цилиндрах равно или несколько ниже дав-
ления в воздухосборнике (маслосистеме) и не изменяется при уменьшении тока в обмотке
регулятора давления;
2 — давление воздуха (масла) снижается, но привод тормоза не приходит в движение
(снятие избыточного давления);
3 — от момента начала перемещения привода тормоза до соприкосновения тормозных
колодок с ободом (выбор зазора между колодками и ободом);
4 — от момента соприкосновения колодок с ободом (без нажатия) до создания тормозно-
го момента, равного по величине статическому моменту (участок маневрового торможения);
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ 219
5 — тормозной момент изменяется от величины, равной статическому моменту, до пол-
ной величины (участок стопорения);
6 — давление в тормозных цилиндрах равно нулю.
Участки 1, 2 и 6 бесполезны — часть хода рукоятки на них расходуется, но никаких из-
менений в тормозной системе не происходит. Участок 1 лучше исключить полностью, 2 и 6
желательно свести к минимуму. Полностью их исключить нельзя, так как в крайних положе-
ниях рукоятки управления должно быть гарантировано полное растормаживание и заторма-
живание машины с некоторым запасом на случай нестабильности работы регулятора давле-
ния. Кроме того, сведение к минимуму 2-го участка для тормоза с пружинно-пневматичес-
ким приводом целесообразно и с точки зрения быстродействия тормоза (уменьшается время
выпуска избыточного воздуха).
Максимальное удобство управления тормозом обеспечивается, если растянуть по ходу
рукоятки участок 4 за счет остальных участков. Тогда желательная зависимость тока в обмотке
регулятора и давления в тормозных цилиндрах от угла поворота рукоятки тормоза примет вид,
изображенный на рис. 7.25, а. Как видно, здесь середина характеристики более пологая, чем ее
края. Из приведенных соображений выделен оптимальный участок характеристики.
Для подъемных машин НКМЗ с грузо-пневматическим приводом тормоза могут быть
выделены пять аналогичных участков (рис. 7.25, б):
1 — увеличение тока в обмотке регулятора давления не вызывает появления давления в
тормозных цилиндрах (участок нулевого давления);
2 — от момента появления давления в тормозных цилиндрах до создания тормозного
момента, равного по величине статическому моменту (участок маневрового торможения);
3 — увеличение тормозного момента от величины, равной статическому моменту, до
величины, равной моменту, создаваемому тормозными грузами (участок стопорения);
4 — дальнейшее увеличение тормозного момента до избыточной величины;
5 — дальнейшее увеличение тока не приводит к увеличению давления воздуха в тормоз-
ных цилиндрах, которое достигло величины, равной или несколько ниже давления в возду-
Рис. 7.25. Зависимость тока / и давления Р от угла поворота рукоятки:
а — для подъемных машин с пружинно-пневматическим (гидравлическим) приводом;
б — для подъемных машин с грузо-пневматическим приводом тормоза
Ясно, что для удобства управления машиной максимально растянутым по дуге хода ру-
коятки должен быть участок 2. Участки 4 и 5 должны быть ликвидированы полностью либо
использована небольшая часть участка 4, так как избыточный тормозной момент может выз-
вать чрезмерные замедления подъемных сосудов. Участок 1 должен быть сведен к разумному
минимуму. Полностью его ликвидировать нельзя, поскольку должно быть обеспечено гаран-
тированное отгормаживание машины, не зависящее от нестабильности работы регулятора
давления.
220
ГЛАВА 7
Промышленность выпускает сельсинные командоаппараты с переменным передаточным
отношением от рукоятки к сельсину (рис. 7.26). Зависимость тока в регуляторе давления от угла
поворота рукоятки управления приблизительно похожа на такую же зависимость для подъем-
ных машин НКМЗ с грузо-пнематическим приводом тормоза. Однако здесь участок характери-
стики, близкий к положению рукоятки «расторможено», чрезмерно пологий. При повороте ру-
коятки на 10° ток практически не увеличивается. На участке от 10 до 15° увеличивается незначи-
тельно, но этим лишь выбирается запас тока на растормаживание. Участок рабочего торможе-
ния располагают примерно между 15 и 25°, что явно мало. Кроме того, полный угол поворота
сельсина слишком велик, поэтому участки избыточного давления (участки 4 и 5 на рис. 7.25, б)
занимают заметную часть хода рукоятки — примерно 15— 20°. Практика эксплуатации таких ко-
мандоаппаратов показала, что регулировкой положения статора сельсина и величины резистора
в цепи обмотки регулятора давления обычно не удается привести характеристику командоаппа-
рата к желаемой (оптимальной). Донбассуглеавтоматика широко практикует перенос сухаря 3
(рис. 7.26, б) на другое отверстие, предварительно просверленное в поводке 1 ближе к оси руко-
ятки. Этим ликвидируют чрезмерно пологий участок в начале характеристики и уменьшают пол-
ный угол поворота рычага 2 на валу сельсина, что позволяет приблизить характеристику коман-
доаппарата к оптимальной для подъемных машин НКМЗ с грузо-пневматическим приводом
тормоза. Для машин с пружинно-пневматическим и пружинно-гидравлическим приводом тор-
моза одновременно с переносом сухаря 3 рекомендуют перевернуть поводок 1, т. е. посадить его
на ось рукоятки другой стороной. Это позволит приблизить характеристику командоаппарата к
желаемой (рис. 7.25, а), но участки 5 и 6 не удается сделать крутыми.
Рис. 7.26. Кинематическая схема сельсинного командоаппарата рабочего торможения (а),
эскиз рычажной конструкции передачи (б) и зависимость тока регулятора давления
от угла поворота рукоятки командоаппарата (в)
Специалисты Донбассуглеавтоматики предложили изменить конструкцию командоап-
парата, что позволит приблизить его характеристику к линейной. Для этого необходимо из-
готовить вилку, два валика и Г-образную тягу. На рычаге вала сельсина нарезают резьбу Мб,
на которую навинчивают вилку, фиксируемую контргайкой (рис. 7.27).
Опыт эксплуатации электропневматических регуляторов давленияч показал, что высо-
кое быстродействие при отработке команд на затормаживание при рабочем торможении
может привести к аварии, в особенности на подъемных установках со шкивом трения и на-
клонных подъемных установках, ввиду возможного проскальзывания каната или набегания
подъемных сосудов на канат.
Если при быстром перемещении рукоятки рабочего тормоза в положение «Заторможе-
но» получается недопустимо резкое торможение, рекомендуют для подъемных машин НКМЗ
с грузо-пневматическим приводом установить демпфер рабочего тормоза (рис. 7.28), кото-
рый работает следующим образом.
При перемещении рукоятки рабочего тормоза в крайнее положение «Заторможено» ток
в обмотке ВР регулятора давления до определенной величины вырастает без каких-либо за-
ЭКСПЛУА ТАЛИЯ ТОРМОЗНЫХ УСТРОЙСТВ
221
Рис. 7.27. Переделка сельсинного
командоаппарата:
1 — Г-образная тяга; 2 — рычаг рукоятки
тормоза; 3 — валик; 4 — рычаг вала сельсина;
5 — вилка
держек. Затем, начиная с некоторого на-
пряжения между зажимами 1 и 2, откры-
ваются транзисторы VT2 и VT1, конден-
сатор С2 заряжается. Часть тока ответвля-
ется через транзистор VT1. По мере заря-
да конденсатора С2 потенциал базы тран-
зистора VT2 повышается и транзистор
постепенно закрывается, что приводит к
запиранию выходного транзистора VT1,
шунтирующого обмотку ВР. Ток через об-
мотку ВР постепенно увеличивается, что
вызывает постепенное нарастание тормоз-
ного момента.
Резистором R3 регулируют уставку
тока, с которой начинается замедление
нарастания тока. Диапазон регулирования
60—120 мА. Желательно уставку выбирать
такой, которая соответствует величине
давления в тормозных цилиндрах 0,1—0,15
МПа. Резистором R4 регулируют время
нарастания тока до установившегося зна-
чения при резком перемещении рукоятки
управления в крайнее положение «Затор-
можено». Пределы регулирования времени 5—15 с.
Возможны и другие варианты демп-
фирования рабочего торможения. Наибо-
лее приемлема система, которая вносила
бы ограничения на нарастание тормозно-
го момента при замедлениях, превышаю-
щих допустимые значения.
Предохранительное торможение
Предохранительное торможение
подъемных машин оценивают рядом
объективных показателей, зависящих от
конструкции тормозной системы, пра-
вильности ее настройки и эксплуатации.
Полный период торможения распре-
деляют на три основных периода: холос-
той ход, нарастание тормозного момента
или усилия и торможение с установившим-
ся тормозным моментом.
Основную часть времени холостого
Рис. 7.28. Схема демпфера рабочего тормоза
подъемных машин НКМЗ
хода составляет время от начала перемеще-
ния тормозного привода до соприкоснове-
ния колодок с тормозным ободом.
Время холостого хода тормозного ус-
тройства может быть определено по формуле
(хх ~ 1тл + *э +^л + 1л ’
(7.3.1)
где tTn и t3 — время срабатывания соответственно контактора ТП и электрических устройств
привода тормоза, с; — время срабатывания элементов управления (золотника, клапана)
до момента перемещения поршня тормозного привода, с; tn — время от начала перемеще-
ния поршня тормозного привода до соприкосновения колодок с тормозным ободом, с.
Время срабатывания тормоза включает в себя время холостого хода плюс время на-
растания tH тормозного момента до величины, равной статическому моменту:
222
ГЛАВА 7
tcp^+tu- (7.3.2)
j Безопасность при подходе подъемного сосуда к приемным площадкам определяют быс-
I тродействием тормоза, т. е. временем холостого хода и временем срабатывания, величиной
замедления, создаваемого предохранительным тормозом, скоростью подхода. Эти факторы
относят, прежде всего, к первой ступени торможения.
При скорости подхода менее 1,5 м/с вторая ступень не успевает сработать и подъемная
машина останавливается в результате действия первой ступени торможения. Таким образом,
для исключения аварии параметры, определяющие величину пути торможения, должны от-
носиться в первую очередь к первой ступени.
Рассмотрим отдельно возможности уменьшения каждой составляющей времени холосто-
го хода. Величина tTn зависит от конструкции контактора предохранительного торможения
(ТП). Не рекомендуется в качестве ТП использовать контактор постоянного тока КТП — 6023,
время срабатывания которого составляет 0,15—0,2 с. В качестве ТП необходимо использовать
контакторы с минимальным временем на отключение (0,05—0,1 с). Необходимо устранить все
заедания и затирания подвижной части контактора, задерживающие его отпадание.
Весьма ограничены возможности уменьшить t3 и Atn. Можно лишь порекомендовать
питание катушек электропневматических вентилей ВВ-32ш пониженным напряжением. Так,
вентили с катушками на напряжение 220 В вполне удовлетворительно работают при напря-
жении 150—170 Я Для подъемных машин с пружинно-пневматическим приводом тормоза
при отторможенной машине рекомендуется иметь в тормозных цилиндрах минимальное из-
быточное давление воздуха. Для подъемных машин старых конструкций с тормозными маг-
нитами КМТ необходимо максимально ускорить отпадание якоря электромагнита путем ус-
транения всех заеданий и затираний подвижной части как самого магнита, так и связанных
с ним рычагов. Может возникнуть необходимость просверлить дополнительные отверстия в
поршне демпфера электромагнита либо вообще снять поршень.
На величину tn влияют много факторов.
Наиболее значительно на величину tn влияет зазор между колодками и тормозным обо-
дом. Величина зазора должна быть минимальной, что возможно при незначительных биени-
ях тормозного обода, правильной регулировке исполнительного органа тормоза, точной под-
гонке тормозных колодок. Минимальный зазор необходимо поддерживать в течение всего
срока службы тормоза.
Факторами, влияющими на увеличение tn и tH , являются:
— заедание шарниров исполнительного органа тормоза;
— недостаточный тормозной момент первой ступени при двухступенчатом торможении;
!— засорение трубопроводов тормозной системы;
— низкая температура воздуха в здании подъемной машины, следствием чего является
; загустение масла, используемого в качестве рабочей жидкости или для смазки, а для машин
с пневматическим торможением — замерзание конденсата в трубах;
> — слишком тугая затяжка сальников или манжет тормозных цилиндров;
— малые проходные сечения в сточной линии;
— для машин с грузовым приводом тормоза — излишний уровень масла в демпфере,
малое сечение перепускного канала в демпфере либо чрезмерно густое масло в электрогид-
равлическом приводе;
— для машины с грузо-гидравлическим приводом тормоза — чрезмерно густое масло в тор-
мозной системе, неполное открытие перепускных отверстий краном предохранительного тор-
можения, малый диаметр отверстия в дроссельной шайбе, отсутствие расширительного бачка;
— для машин с пружинно-гидравлическим приводом тормоза — очень густое масло в
тормозной системе, чрезмерная затяжка пружины клапана замедленного торможения;
— для машин с пружинно-пневматическим приводом тормоза — чрезмерная затяжка
пружин регулируемых выхлопных устройств;
— для машин с грузо-пневматическим приводом — медленное нарастание давления пер-
i вой ступени вследствие неудовлетворительной работы регулятора давления.
‘ Значительное влияние на качество предохранительного торможения оказывает величи-
на тормозного момента первой ступени торможения и стабильность этой величины.
ЭКСПЛУА ТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ 223
У подъемных машин НКМЗ с грузо-пневматическим приводом тормоза первая ступень
предохранительного торможения создается регулятором давления. На величину давления воз-
духа при первой ступени торможения заметно влияет наличие или отсутствие «дежурного
тока» в обмотке рабочего торможения регулятора. На подъемной машине 2Ц-5х2,3 шахты
им. 60-летия Советской Украины ПО «Донецкуголь» имел место случай переподъема клети
при снятии напряжения. Выяснилось, что при наличии «дежурного» тока в обмотке рабоче-
го торможения величина давления воздуха первой ступени была нормальной (около 0,2 МПа),
но при снятии напряжения эта величина оказалась равной нулю. Сказанное поясняется ос-
циллограммами предохранительного торможения при наличии первой ступени торможения
и при ее отсутствии, снятыми на одной из аналогичных подъемных установок в режиме спуска
груза (рис. 7.29).
Путь предохранительного торможения при отсутствии первой ступени (рис. 7.29, б) втрое
превышает путь торможения при ее наличии (рис. 7.29, а), в рассматриваемом случае состав-
ляет 6,45 м, что значительно больше высоты свободного переподъема (2,5 м) для данной ус-
тановки.
Рис. 7.29. Осциллограммы предохранительного торможения:
а — при наличии первой ступени; б — при отсутствии первой ступени торможения;
1 — ток статора подъемного двигателя; 2 — скорость подъема
Включался предохранительный тормоз при испытаниях ограничителем скорости, на-
строенным на скорость подхода подъемного сосуда — 1,5 м/с. Полное выведение командо-
аппарата, соответствующее одному из конечных положений подъемного сосуда, имитирова-
лось с помощью универсального переключателя для проверки ограничителя скорости.
Анализ приведенных осциллограмм позволяет сделать вывод о значительном ухудшении ха-
рактеристик предохранительного торможения вследствие отсутствия первой ступени, что прояв-
ляется в увеличении времени срабатывания тормоза, значительном нарастании скорости и в итоге
в увеличении пути торможения. Отсутствие первой ступени превращает тормозной привод в чисто
грузовой со всеми присущими ему недостатками. Следовательно, надежность предохранительного
торможения таких машин полностью зависит от состояния регулятора давления.
Многие конструкции тормозов не позволяют получить стабильную величину тормозно-
го момента первой ступени. В процессе предохранительного торможения происходит непре-
рывное нарастание тормозного момента до полной величины. В число таких конструкций
входит и пружинно-пневматический (безгрузовой) привод, получивший распространение на
многоканатных машинах и на наклонном подъеме. С целью стабилизации момента первой
ступени торможения для таких машин в случае необходимости рекомендуют применять уст-
ройство, описанное в [140].
7.4. Устройства избирательного предохранительного торможения
Устройства избирательного предохранительного торможения применяют в тех случаях, ког-
да для создания требуемых ПТЭ замедлений при предохранительном торможении при подъеме
и спуске расчетного груза требуются разные законы нарастания в функции времени величины
тормозных моментов. Главным образом это относится к одноконцевым наклонным подъемным
установкам с малыми и переменными углами наклона выработки. Для таких установок разрабо-
таны и применяются различные устройства, предотвращающие набегание подъемного сосуда
(партии вагонеток) на канат в случае предохранительного торможения при подъеме груза.
224
ГЛАВА 7
В этих устройствах используют принцип избирательности действия предохранительно-
го торможения в зависимости от направления движения груза. При спуске прикладывают
полный тормозной момент, а при подъеме — первую ступень или вообще отключают тормоз
и замедление идет на свободном выбеге с наложением полного тормозного момента при ско-
рости, близкой к нулю.
Устройство, основанное на гидравлическом подпоре золотника крана
предохранительного торможения
Устройство пригодно для машин с грузо-гидравлическим приводом тормоза. Принци-
пиальная схема его приведена на рис. 7.30. Датчиком направления движения служит насос
18 типа НШ-10Е, кинематически (через центробежные реле 16 и 17) связанный с подъемной
машиной. При подъеме груза маслонасос, забирая масло из бака 22 и перекачивая его обрат-
но в бак через дроссельную шайбу 21, создаст давление в подзолотниковой полости крана
предохранительного торможения. Величину давления устанавливают подбором диаметра от-
верстия в дроссельной шайбе и измеряют электроконтактным манометром 20. При размы-
кании цепи защиты или исчезновении напряжения с подъемной установки золотник крана
24 в течение некоторого времени будет удерживаться в верхнем положении давлением масла
в подзолотниковой камере. Замедление будет происходить под действием натяжения каната
на свободном выбеге. По мере снижения скорости давление в подзолотниковой камере умень-
шается и при скорости 0,2—0,5 м/с золотник опускается, машина затормаживается.
Для предотвращения проникновения масла в надзолотниковое пространство через зазор
между золотником и штоком на золотнике устанавливают изолирующий колпачок (рис. 7.31).
При спуске груза насос перекачивает масло в противоположном направлении через об-
ратный клапан 19 типа Г-51-24 (рис. 7.30). При этом в подзолотниковой камере крана 24
создается небольшое отрицательное давление, утечки масла из крана захватываются насо-
сом, за счет чего пополняется бак 22. Излишек масла из этого бака переливается в сточный
бак 1. В случае предохранительного торможения золотник крана 24 опускается без каких-
либо задержек, и время выпуска масла из тормозного цилиндра определяется диаметром от-
верстия в дроссельной шайбе 27, подбираемом из условия плавности приложения тормозно-
го момента при спуске груза. В некоторых случаях эта шайба может отсутствовать.
Рис. 7.30. Принципиальная схема устройства избирательного торможения, основанного
на гидравлическом подпоре золотника крана предохранительного торможения:
1 — сточный бак; 2, 3, 6, 7, 11, 14 — вентили; 4, 5, 18 — насосы; 8 — фильтр; 9, 19 — обратные
клапаны; 10 — манометр; 12 — аккумулятор давления; 13 — предохранительный клапан;
15 — редуктор подъемной машины; 16, 17 — центробежные реле; 20 — электроконтактный
манометр; 21 — нерегулируемая дроссельная шайба; 22 — бак; 23 — электромагнит; 24 — кран
предохранительного торможения; 25 — кран рабочего торможения; 26 — расширительный бачок;
27 — регулируемая дроссельная шайба
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
225
Рис. 7.31. Установка изолирующего
колпачка:
1 — золотник; 2 — шток; 3 — винт;
4 — изолирующий колпачок; 5 — крышка;
6 — переходная втулка; 7 — штуцер
гибкого шланга
Устройство, основанное на задержке отключения
тормозного магнита
Устройство пригодно для всех типов подъем-
ных машин, предохранительный тормоз которых
оборудован электромагнитом типа КМТ. Им пре-
дусмотрена установка релейного шкафа, тахогене-
ратора с постоянными магнитными полюсами воз-
буждения типа ЭТ-4 (или ЭТ-5, ЭТ-6, ЭТ-7), пу-
тевого выключателя, а также кнопки экстренной
остановки и сигнальной лампы на пульте управ-
ления. Две крайние катушки тормозного электро-
магнита (удерживающие) заменяют катушками,
намотанными по следующим данным: диаметр
провода 0,33—0,35 мм, число витков 3500. Средняя
катушка (втягивающая) сохраняется.
Устройство работает следующим образом. При
«зарядке» машины напряжение кратковременно по-
дается на втягивающую катушку электромагнита и
далее электромагнит удерживается во включенном
положении за счет удерживающих катушек. В слу-
чае срабатывания ТП при движении подъемных со-
судов вверх напряжение от тахогенератора подпи-
тывает удерживающие катушки и отключение элек-
тромагнита произойдет при снижении скорости до
0,2— 1,0 м/с. При движении подъемных сосудов вниз
напряжение тахогенератора запирается выпрямите-
лем, и электромагнит отключается сразу при сра-
батывании ТП. При необходимости кнопкой экст-
ренного торможения электромагнит может быть от-
ключен в любой момент [25].
Устройство, основанное на задержке выпуска масла из тормозных цилиндров
В Донбассуглеавтоматике разработано н успешно применяется гидравлическое устройство,
исключающее набегание сосуда на канат при предохранительном и рабочем торможении
подъемных машин с пружинно-гидравлическими приводами и грузо-гидравлическнми при-
водами тормоза. В этом устройстве при подъеме груза после поступления сигнала на предохра-
нительное торможение (разрыв цепи защиты в результате срабатывания одного из ее аппара-
тов или исчезновения питающего напряжения) или при попытке резкого перемещения руко-
ятки рабочего тормоза в положение «заторможено» тормозной момент нарастает по мере сни-
жения скорости. При спуске же груза нарастание тормозного момента не ограничивают.
Рассмотрим работу устройства применительно к пружинно-гидравлическому приводу
тормоза с модернизированной маслостанцией (рис. 7.32). Эта система включает в себя уст-
ройства рабочего и предохранительного торможения, соединенные с насосами 16 и 17 и под-
поршневыми полостями тормозных цилиндров 4, шестеренчатый насос 7, кинематически
связанный с валом барабана 6 подъемной машины, камеру 10, к которой подсоединены: слив-
ные трубопроводы предохранительного и рабочего торможения и насос 7.
На участке, соединяющем насос 7 с камерой 10 и на сливе из нее, установлены дроссели
9 и 8. Слив из камеры сравнения осуществляется в промежуточную емкость, установленную
таким образом, чтобы насос был постоянно залит и работал на жидкости, сливаемой из тор-
мозных цилиндров. Необходимый уровень рабочей жидкости в промежуточной емкости 13
обеспечивается соответствующим расположением патрубка 14, через который жидкость сли-
вается из промежуточной емкости в основной маслобак 15. Патрубок слива из камеры раз-
мещен в промежуточной емкости ниже уровня рабочей жидкости в ней.
При работе подъемной машины без торможения рабочая жидкость из тормозных ци-
линдров не сливается; шестеренчатый насос, кинематически связанный с барабаном подъем-
ной машины, перекачивает рабочую жидкость по контуру, образованному промежуточной
емкостью, насосом, камерой и соединяющими их трубопроводами. При этом направление
226
ГЛАВА 7
Рис. 7.32. Схема устройства избирательного торможения, основанного на задержке
выпуска масла и тормозных цилиндров:
1 — регулятор давления; 2, 22, 23 — обратные клапаны; 3 — устройство предохранительного
торможения, УПТВ; 4 — тормозные цилиндры; 5, 14 — сливные трубопроводы; 6 — барабан
подъемной машины; 7 — насос шестеренчатый; 8, 9 — дроссели; 10 — камера сравнения;
11, 24, 26 — манометры; 12 — реле давления; 13 — емкость промежуточная; 15 — маслобак;
16, 17 — насосы ротационные; 18, 19 — фильтр пластинчатый; 20 — фильтр сетчатый;
21 — клапан предохранительный; 25 — редукционный клапан
циркуляции рабочей жидкости в указанном контуре определяется направлением вращения
барабана подъемной машины. При предохранительном торможении во время подъема груза
рабочая жидкость из подпоршневых полостей тормозных цилиндров поступает через уст-
ройство предохранительного торможения и слив 5 в камеру, туда же насосом подается рабо-
чая жидкость, засасываемая из промежуточной емкости. При этом производительность на-
соса будет пропорциональна скорости вращения барабана подъемной машины.
Так как слив из камеры задросселирован, противодавление, создаваемое в ней насосом,
препятствует сливу рабочей жидкости из подпоршневых полостей и тормозных цилиндров.
При этом максимальной скорости вращения барабана соответствует наибольшая производи-
тельность насоса и, следовательно, минимальное значение расхода рабочей жидкости, сливае-
мой из подпоршнепых полостей и тормозных цилиндров, т. е. медленное нарастание тормоз-
ного усилия. По мере снижения скорости вращения барабана (обусловленного торможением и
выбегом системы) уменьшается производительность насоса, увенчивается расход рабочей жид-
кости, сливаемой из тормозного цилиндра, т. е. будет плавное нарастание тормозного усилия.
В зависимости от угла наклона участка выработки, где в данный момент находится
подъемный сосуд, будет различным усилие на канат и, следовательно, продолжительность
периода торможения. Поскольку насос кинематически связан с валом барабана подъемной
машины, подача им рабочей жидкости в камеру осуществится в течение всего периода вра-
щения барабана подъемной машины при замедлении: такова же будет продолжительность
нарастания тормозного усилия.
Устройство двухрежимного предохранительного торможения типа СТП-1В
Устройство СТП-1В предназначено для подземных подъемных установок с пружинно-
гидравлическим приводом тормоза.
Принцип работы устройства СТП-1В заключается в том, что в режиме подъема груза при
предохранительном торможении катушки электромагнитов устройства предохраниетльного тор-
ЭКСПЛУАТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
227
можения и регулятора давления одновременно отключается от цепи питания. При этом УПТВ
отсекает тормозные цилиндры от регулятора давления и масло из тормозных цилиндров ухо-
дит на слив через регулируемое дроссельное устройство замедленного торможения, которое
настраивается для каждого конкретного случая таким образом, чтобы замедление подъемной
машины происходило плавно и исключалось набегание подьемныхсосудов на канат. По мере
истечения масла из тормозных цилиндров накладывается полный тормозной момент.
При предохранительном торможении при спуске груза происходит кратковременная за-
держка отключения УПТВ.
В результате сток масла из тормозных цилиндров происходит преимущественно через
регулятор давления, что обеспечивает интенсивное торможение подъемной установки. Че-
рез определенное время конденсаторы разряжаются, подпитка катушки электромагнита уст-
ройства предохранительного торможения прекращается, происходит его срабатывание, в
результате чего тормозные цилиндры отсекаются от регулятора давления и соединяются со
ативом через дроссельное устройство замедленного торможения (ДЗТ). В зависимости от
величины задержки срабатывания устройства предохранительного торможения можно полу-
чить различную по интенсивности нарастания тормозную характеристику.
Принцип работы тормозной системы с пружинно-пневматическим приводом тормоза в
режиме предохранительного торможения в зависимости от направления движения подъем-
ного сосуда аналогичен принципу работы тормозной системы с пружинно-гидравлическим
приводом тормоза, описанному ранее. Отличие заключается в том, что при подъеме груза в
режиме предохранительного торможения выход воздуха из тормозных цилиндров происхо-
дит через ДЗТ двух электромагнитных клапанов. Достигается нарастание тормозного момента,
а при спуске груза задерживается их срабатывание. В результате этого воздух из тормозных
цилиндров через другой электромагнитный клапан, не имеющий ДЗТ, быстро выходит в ат-
мосферу, что обеспечивает интенсивное нарастание тормозного усилия.
Подробно работа устройства двухрежимного предохранительного торможения СТП-1В
описана в [25].
Датчиком направления вращения барабана служат реле РКС-1м.
Аналогичные устройства с аппаратурой нормального общепромышленного исполнения
применяются и на поверхностных одноконцевых подъемных установках.
7.5. Система автоматически регулируемого предохранительного торможения
Описанные в 7.4 устройства избирательного предохранителнього торможения пригод-
ны для одноконцевого подъема и решают в основном проблему набегания подъемных сосу-
дов на канат на одноконцевых наклонных подъемных установках с малыми углами наклона
выработок. Радикальным решением проблемы набегания подъемных сосудов на канат на
наклонных подъемах и нескольжения канатов на подъемных установках со шкивами трения
может быть система автоматически регулируемого предохранительного торможения (АРПТ).
Для обеспечения требуемых ПБ требований по величине замедления в режиме предох-
ранителнього торможения АРПТ должна обеспечить создание тормозом необходимого тор-
мозного момента в каждый момент времени по фактическим динамическим переменным
при замедлении подъемной машины (путь, скорость, замедление).
Теоретические предпосылки принципиальной возможности реализации автоматически
регулируемого предохранительного торможения изложены в 2.1.5.
Как следует из 2.1.5, реальные возможности создания эффективных систем автомати-
чески регулируемого предохранительного торможения появляются с применением пружин-
но-гидравлических дисковых тормозов.
Тормозное устройство с пружинно-гидравлическим дисковым тормозом подъемных ма-
шин Донецкгормаша, разработанных и изготовленных в 1980 г. (6.1.5) предусматривало воз-
можность управлять приводом тормоза шахтной подъемной машины в режиме предохрани-
тельного торможения с поддержанием заданного уровня замедления независимо от величины
статической нагрузки и направления движения подъемного сосуда (спуск или подъем). Опи-
сание принципа работы такой системы приведено в [25]. К сожалению, в полном объеме такая
система на этих нескольких подъемных машинах Донецкгормаша реализована не была.
Автоматическое регулируемое предохранительное торможение обеспечивается коротко-
ходовыми безрычажными многоэлементными пружинно-гидравлическими дисковыми тор-
228
ГЛАВА 7
мозами зарубежных фирм и разработанной фирмой «МИДИЭЛ» системой управления дис-
ковыми тормозами (см. 6.1.6).
7.6. Резинотехнические изделия для тормозных устройств
Для надежной работы тормозных устройств шахтных подъемных машин большое значе-
ние имеет своевременная замена изношенных резинотехнических изделий — манжет, ворот-
ников, полиамидных прокладок, диафрагм, клапанов.
В табл. 7.5 приведены типы и заводы-изготовители основных резинотехнических изде-
лий, которые применяются в тормозных системах подъемных машин, в том числе снятых с
производства, но в большом количестве находящихся в эксплуатации.
Таблица 7.5
Резинотехнические изделия, применяемые в тормозных устройствах шахтных подъемных машин
№№ п/п Наименование изделия ГОСТы, ведомственные нормали Место установки изделия Завод-изготовитель
1 2 3 4 5
1 Воротники 400, 450, 500 ГОСТ 6678-53 (ВН 256-1-129) Цилиндры рабочего торможения подъемных машин НКМЗ ООО «Монолит», г. Днепропетровск
2 Манжеты 460x500x20 ГОСТ 6969-54 (ТУ 38-1051725-86) Цилиндры рабочего и предохранительного торможения тормозов с пружинно-пневматическим приводом многоканатных подъемных машин Донецкгормаша «
3 Клапан 45x55x15 5-34048 4-633336 Электропневматические воздухораспределительные клапаны подъемных машин выпуска после 1963 г. и дроссельные устройства подъемных машин МПУ и МПБ производства НКМЗ. «
4 Воротник 360 ГОСТ 6678-53 (ВН 256-1-129) Цилиндры рабочего торможения подъемных машин НКМЗ и Донецкгормаша ОАО «Стахановский завод РТИ», г. Стаханов
5 Манжеты 180, 200, 220, 250, 300 ГОСТ 6678-53 (ВН 256-1-128) Цилиндры рабочего торможения подъемных машин НКМЗ выпуска после 1963 г. «
6 Манжеты 150, 170, 190 ГОСТ 6678-53 (ВН 256-1-128) Цилиндры предохранительного торможения подъемных машин НКМЗ выпуска до 1963 г «
7 Манжета 280 ГОСТ 6678-53 (ВН 256-1-128) Механизм перестановки барабанов подъемных машин НКМЗ «
8 Манжеты 150x180 190x220 240x280 ГОСТ 6969-54 Штоки цилиндров предохранительного торможения тормозов с пружинно- пневматическим приводом многоканатных подъемных машин Донецкгормаша ОАО «Донецктехрезина» г. Донецк
9 Манжеты 200x240x20 400x440x20 ГОСТ 6969-54 Поршни цилиндров предохранительного торможения тормозов с пружинно-пневматическим приводом многоканатных подъемных машин Донецкгормаша «
10 Манжета 100x130 ГОСТ 6969-54 Цилиндры предохранительного торможения тормозов с пружинно- пневматическим приводом подъемных машин МК и Ц 3,5 Донецкгормаша ОАО «Донецктехрезина» г. Донецк
11 Манжета 300x340x20 ГОСТ 6969-54 Цилиндры рабочего и предохранительного торможения тормозов с пружинно-пневматическим приводом подъемных машин Донецкгормаша «
12 Манжета 85x110 ГОСТ 6969-54 Цилиндры предохранительного торможения тормозов с пружинно- пневматическим приводом подъемных машин МК 3,25x4 Донецкгормаша «
ЭКСПЛУА ТАЦИЯ ТОРМОЗНЫХ УСТРОЙСТВ
229
Продолжение таблицы 7.5
13 Манжета 70x90 ГОСТ 6969-54 Электропневматические воздухораспределительные клапаны новой конструкции и механизм перестановки подъемных машин Донецкгормаша «
14 Манжета 160x180x18 (нижняя) (верхняя) ГОСТ 14896-84 (ТП4-602) Аккумуляторы давления подъемных машин Донецкгормаша ОАО «Стахановский завод РТИ» г. Стаханов
15 Манжета 130x150x14 ТП4-603 Цилиндры рабочего торможения подъемных машин Донецкгормаша «
16 Манжета 130x160 ГОСТ 6969-54 Цилиндры рабочего торможения подъемных машин Ц 1,2x1; 2Ц 1,2x0,8 Донецкгормаша ОАО «Донецктехрезина» г. Донецк
17 Манжета 170x200 ГОСТ 6969-54 Цилиндры рабочего торможения подъемных машин Ц2х1,5; 2Ц 2x1,1 Донецкгормаша «
18 Манжета 260x300 ГОСТ 6969-54 Цилиндры рабочего торможения тормозов с пружинно-пневматическим приводом Донецкгормаша старых выпусков. «
19 Манжета 1-80-3 ГОСТ 6678-72 Дроссельное устройство воздухораспределительных клапанов подъемных машин МПБ и МПУ завода НКМЗ «
20 Манжета М65(65- ЗГ) ГОСТ 6678-72 (ВН256-1-128) Электропневматические воздухораспределительные клапаны подъемных машин НКМЗ выпуска после 1963 г. «
21 Воротник ВПУ-40 ГОСТ 6678-53 (ВН 256-1-129) Штоки поршней цилиндров предохранительного торможения подъемных машин НКМЗ «
22 Воротники ВПУ-45 В ПУ-50 ГОСТ 6678-53 (ВН256-1-129) Шток поршня цилиндра предохранительного торможения подъемных машин НКМЗ «
23 Воротник ВПУ-90 ГОСТ 6678-53 (ВН 256-1-129) Шток поршня цилиндра торможения подъемных машин ЛГЛ Донецкгормаша «
24 Диафрагма (армированная) ТПЗЛ102 2.7500.13.003 Электропневматические воздухораспределительные клапаны старой конструкции подъемных машин Донецкгормаша ОАО «Донецкгормаш», г. Донецк
25 Полиамидная прокладка 58,15x30x4 ТП4Л311 Эл ектро пневматические воздухораспределительные клапаны новой конструкции подъемных машин Донецкгормаша ОАО «Донецкгормаш», г. Донецк
26 Манжета 120x150x15 ГОСТ 6969-54 Цилиндры предохранительного торможения подъемных машин ЛГЛ, Ц1,6, 2ЦхЗ,5х1,7А ОАО «Донецктехрезина» г. Донецк
27 Манжета 40x60 ГОСТ 6969-54 Подвод воздуха и масла к цилиндрам механизма перестановки барабанов машин с пружинно-пневматическими и пружинно-гидравлическими приводами тормоза Донецкгормаша «
28 Манжета 95x125 ГОСТ 6969-54 Цилиндры механизма перестановки подъемных машин Донецкгормаша «
29 Воротник УР-600 Нестандартные изделия Цилиндры рабочего торможения крупных подъемных машин НКМЗ (БЦК, 2Ц-6) «
Глава 8
ВАЛЫ. ПОДШИПНИКИ.
СОЕДИНИТЕЛЬНЫЕ МУФТЫ
8.1. Валы
8.2. Подшипники
8.3. Соединительные муфты
8.1. Валы
8.1.1. Конструктивное исполнение валов
Срок службы подъемной машины определяется сроком эксплуатации одной или не-
скольких ее основных деталей. Базовая структурная единица механической части подъем-
ной машины — главный (коренной) вал, от прочности которого во многом зависит безава-
рийная работа всей подъемной установки. Поломка главного вала — редкое явление, но
все же имеет место и сопряжено с остановкой подъема на длительный срок. Это приводит
к нарушению ритма работы всей шахты и большому материальному ущербу. Поломки глав-
ных валов, как правило, происходят из-за усталости металла по самому слабому месту де-
тали в местах концентрации напряжений. Причины разрушений см. [22.4], а также описа-
ны в [25, 44, 60].
Анализ разрушений более 50 главных валов шахтных подъемных машин позволяет сде-
лать вывод, что основными местами разрушений (излома) являются шпоночные соедине-
ния, зона галтелей, зона сварки [44], т. е. места концентрации напряжений (см. табл. 8.1).
Таблица 8.1
Распределение мест разрушения главных валов шахтных подъемных машин
Место ] )азрушения (излома)
в шпоночных соединениях в зонах галтелей в зонах сварки
очаги очаги очаги
в шпоночных канавках в выходах шпоночных соединений под ступицами в шпоночных соединениях на галтелях малого радиуса на пересечении галтелей канавками приварки шпонок различных приварок
Число поломок
4 J 2 13 8 7 6 5
Аналогичный вывод на основании исследования в производственных условиях 76 слу-
чаев выхода из строя и поломок главных валов шахтных подъемных машин сделан в [60].
В настоящее время в угольной и горнорудной промышленности находятся в эксплуата-
ции более шестидесяти типоразмеров подъемных машин. Каждый типоразмер имеет свою
конструкцию главного вала.
В лебедках Донецкгормаша с зубчатыми передачами типа БЛ1600 и 2БЛ1600 конструк-
ция главного вала трехопорная с подшипниками скольжения с чугунными легко сменяемы-
ми вкладышами. Трехопорный главный вал является статически неопределимым, требует
сложного расчета и не гарантирует точности монтажа. Особенно тяжелые условия работы у
среднего подшипника, воспринимающего наибольшую величину опорной реакции, и того
участка вала, где установлен средний подшипник, т. к. в этом месте вал подвергается двой-
ному изгибу в противоположных направлениях при максимальной его величине. В машинах
2БЛ1600 левый барабан заклинен тангенциальными шпонками на главном валу, а правый —
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
231
насажен свободно и соединяется с валом при помощи зубчатого механизма перестановки с
ручным приводом. После 70-х годов подъемные машины с трехопорными валами не выпус-
каются. Взамен лебедок БЛ-1600 и 2БЛ-1600 Донецкгормашем освоен выпуск лебедок ЛГЛ-
1600 и 2ЛГЛ-1600, которые имели улучшенные параметры по сравнению с лебедками БЛ и
двухопорный вал на подшипниках качения. В настоящее время в эксплуатации на угольных
шахтах Украины еще находятся малые подъемные машины устаревших конструкций серии
БМ и 2БМ с диаметром барабанов 2, 2,5 и 3,0 м. Левый барабан двухбарабанных машин с
диаметром барабана 2 м заклинен тангенциальными шпонками на валу, а правый свободно
посажен на бронзовых втулках и соединен с валом посредством червячного механизма с руч-
ным приводом. С левой стороны барабана на главном валу подвешен на бронзовых втулках
цилиндрический двухступенчатый редуктор.
Особенностью подъемных машин БМ-2500, 2БМ-2500, БМ-3000 и 2БМ-3000 является
наличие отъемного редуктора. Конструкция главных валов этих машин двухопорная. В двух-
барабанных машинах левый барабан заклинен тангенциальными шпонками на валу, а пра-
вый — посажен свободно на бронзовых втулках и соединяется с валом червячным механиз-
мом с ручным приводом.
С 1974 г. Донецкгормашем освоен выпуск одно- и двухбарабанных подъемных машин
нового поколения с диаметром барабана 1,2; 1,6; 2,0; 2,5; 3 и 3,5 м. Заклиненный барабан
машин 2Ц-1,2x1 посажен на вал по горячей посадке, а переставной барабан опирается на вал
через подшипник качения. Соединение переставного барабана с главным валом произво-
дится зубчатым механизмом перестановки. Главный вал подъемных машин Ц-1,6 и 2Ц-1,6
опирается на двухрядные роликовые сферические подшипники качения. Правая лобовина
заклиненного барабана соединяется со ступицей, посаженной на главный вал по горячей
посадке, левая лобовина заклиненного барабана — со ступицей, опирающейся на вал через
подшипник качения, опорами переставного барабана на главном валу служат два подшип-
ника качения. В подъемных машинах Ц-2 и 2Ц-2 главный вал опирается на два двухрядных
роликовых сферических подшипника. Правая лобовина заклиненного барабана соединяется
пассованными болтами со ступицей, насаженной на вал по горячей посадке, левая лобовина
заклиненного барабана — со ступицей, опирающей на вал через подшипник качения. Пере-
ставной барабан опирается на главный вал через два роликовых двухрядных подшипника
качения.
Главный вал подъемных машин Ц-2,5 и 2Ц-2,5 двухопорный на роликовых двухрядных
подшипниках качения. Двухбарабанная подъемная машина имеет правый заклиненный и
левый переставной барабаны. Переставной барабан опирается на вал через подшипник ка-
чения. Соединение правых ступиц переставного и заклиненного барабанов с валом произве-
дено с помощью призматических шпонок, а левая ступица опирается на вал через ролико-
вый подшипник. Главные валы машин с диаметром барабана 3 и 3,5 м имеют аналогичную
конструкцию.
С 1953 г. заводом НКМЗ освоен выпуск подъемных машин с одним разрезным цилинд-
рическим барабаном диаметром 4,5 и 6 м. Двухопорные валы этих машин имели подшипни-
ки скольжения. Заклиненная часть барабана имела трубу жесткости, основное назначение
которой состоит в том, чтобы уменьшить прогиб вала и этим обеспечить минимальный за-
зор между обеими частями барабана. Заклиненная часть барабана крепилась к двум ступи-
цам. Левая ступица насаживалась на вал с натягом, а правая была заклинена на валу танген-
циальными шпонками. Переставная часть барабана опиралась на правую ступицу заклинен-
ной части барабана через специальные роликовые опоры.
Крупные шахтные подъемные машины завода НКМЗ с двумя цилиндрическими бара-
банами типа 2Ц-4х1,8; 2Ц-5х2,3; 2Ц-6х2,4 имеют двухопорный главный вал. Барабаны сидят
на валу ступицами. У заклиненного барабана ступица закреплена на валу тангенциальными
шпонками, т. к. левая ступица крутящего момента не передает. Обе ступицы переставного
барабана сидят на главном валу свободно на сферических втулках из антифрикционного чу-
гуна. Основной конструктивной особенностью машин типа БЦК является разрезной бици-
линдрический барабан. Заклиненная часть барабана опирается на вал через трубу жесткос-
ти, которая закреплена на главном валу двумя ступицами. Переставная часть барабана опи-
рается на трубу жесткости через специальную роликовую опору. Правая лобовина перестав-
232
ГЛАВА 8
ной части барабана прикреплена к ступице, насаженной на главный вал на втулке с баббито-
вой заливкой.
Опорами главных валов подъемных машин НКМЗ типа ЦР, 2Ц, МПБ и БЦК, которые
выпускаются в настоящее время, служат подшипники качения — сферические роликовые
радиальные двухрядные. Опорами БЦК могут по желанию заказчика быть подшипники сколь-
жения. В подъемных машинах с одноканатным шкивом трения типа ШТ ступица шкива за-
клинена на главном валу двумя тангенциальными шпонками. Опорами главного вала явля-
ются два подшипника скольжения.
Главные валы многоканатных машин Донецкгормаша серии МК изготавливаются из ко-
ваной стали марки 45 и имеют высокий класс чистоты обработки. В подъемных машинах
МК4х4 и МК 5x4 ступицы канатоведущего шкива из литой или кованой стали посажены на
вал по горячей посадке, обеспечивающей передачу крутящего момента с необходимым запа-
сом. Все коренные подшипники выполнены в виде стандартных подшипников качения сфе-
рических роликовых или двух-четырех конических. Во всех случаях установки роликовых
конических подшипников применены сферические втулки, насаженные на наружное коль-
цо подшипника. Сферические втулки позволяют исключить влияние прогиба и перекоса вала
на работоспособность коренного подшипика.
С 1975 г. Донецкгормаш выпускает многоканатные подъемные машины серии ЦШ. Схем-
ные решения и компоновка подъемных машин серии ЦШ идентичны серии машин МК.
Сборка главного вала машины ЦШ2,1х4 состоит из канатоведущего шкива, двух подшипни-
ковых опор и главного вала. Соединение ступиц канатоведущего шкива с главным валом
осуществляется по горячей посадке без шпонок. Подшипниковые опоры состоят из разъем-
ных чугунных корпусов, внутри которых расположены двухрядные сферичные роликопод-
шипники. Внутреннее кольцо сферического роликового подшипника, установленного со
стороны муфты, фиксируется торцевой шайбой, а наружное кольцо установлено с зазорами
между боковыми крышками, что позволяет компенсировать неточность монтажа и тепловые
удлинения главного вала машины.
Конструкция узла сборки главного вала машины ЦШ5х4 значительно отличается от кон-
струкции этого узла машины МК5х4. Сложные опорные узлы с четырехрядными коничес-
кими подшипниками и сферическими втулками упрощены за счет применения самоуста-
навливающихся двухрядных сферических роликоподшипников. Внутреннее кольцо подшип-
ника посажено на вал по напряженной посадке и прижато торцевой шайбой.
Следует отметить, что каждый тип машины имеет свои разновидности в части конст-
рукции главного вала, подшипников, муфт и т.д. Главные валы в сборе двухбарабанных
подъемных машин НКМЗ и Донецкгормаша изображены на рис. 4.6 и 4.8. Главный вал в
сборе подъемной машины ЦШ 5x4 (см. рис. 3.27). Габаритные чертежи главных валов подъем-
ных машин НКМЗ с разрезным барабаном ЦР-5хЗ/0,6 и двухбарабанной с двухдвигатель-
ным приводом 2Ц-5х2,4 приведены на рис. 8.1 и 8.2. Главный вал в сборе подъемной маши-
ны БЦК с опорами на подшипниках скольжения (см. рис. 8.13).
Рис. 8.1. Главный вал подъемной машины ЦР-5хЗ/0,6
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
233
Рис. 8.2. Главный вал подъемной машины 2Ц-5х2,4
Конструкции главных валов наиболее часто встречающихся типов подъемных машин с
указанием мест максимальной концентрации напряжений приведены в 22.4.
8.1.2. Восстановление шеек валов
Специалистами Донбассуглеавтоматики под руководством начальника Павлоградского
наладочного управления Хоменко А. А. освоена технология восстановления шеек валов спо-
собом низкотемпературного плазменного напыления с применением оборудования и сва-
рочных материалов фирмы «Castolin» (Швейцария). Технология, разработанная этой фир-
мой, ее оборудование и сварочные материалы позволяют выполнять ремонт посадочных мест
подшипников качения на крупногабаритных валах без демонтажа и последующей термооб-
работки [128].
При этом решаются следующие задачи:
— Черновая и чистовая проточка посадочного места под внутреннее кольцо подшипни-
ка качения с помощью специального оборудования, монтируемого непосредственно на вал.
При этом обеспечена точность обработки на диаметре 650 мм—0,04 мм по отклонению от
заданного размера, конусности и эллипсности.
— Наплавка посадочного места сварочными материалами, обеспечивающими удовлет-
ворительную структуру металла вала в зоне термического влияния при минимальном подо-
греве (250°С) без последующей термообработки.
— Поддержание необходимой температуры предварительного подогрева вала (250°С) при
минимальном расходе природного газа.
Специальные характеристики наплавленного металла исключают проворот внутренне-
го кольца подшипника относительно вала после проведения ремонта.
С применением этой технологии Павлоградским наладочным управлением Донбассуг-
леавтоматики выполнены работы по восстановлению размеров посадочных мест шеек валов
электродвигателей, вал-шестерен редукторов (диаметры восстанавливаемых посадочных мест
120—250 мм), произведен ремонт отклоняющего шкива диаметром 3000 мм многоканатной
подъемной машины ЦШ 5x4 шахты имени Героев Космоса ПО «Павлоградуголь». На откло-
няющем шкиве, кроме восстановления размеров 3-х посадочных мест шейки вала (диамет-
234
ГЛАВА 8
ром 360, 400 мм), была произведена расточка и восстановление 3-х наружных посадочных
мест под подшипники в корпусах шкива при помощи электродуговой наплавки в среде арго-
на с последующей механической обработкой по технологии компании «Meccanica» (Италия).
В зависимости от размеров восстанавливаемых валов они устанавливались на токарные станки
ДИП-300, ДИП-500. На рис. 8.3—8.5 показан порядок выполнения работ по восстановлению
размеров посадочных мест шеек вала отклоняющего шкива, на рис. 8.6—8.10 — по восста-
новлению посадочных мест под подшипники в корпусах шкива, на рис. 8.11 — посадка под-
шипника на рабочее место, на рис. 8.12 — сборка отклоняющего шкива.
Рис. 8.3. Наплавка
посадочного места
шейки вала
Рис. 8.5. Наплавленная
поверхность вала после
механической обработки
Рис. 8.4. Измерение
размеров посадочного места
шейки вала после наплавки
Рис. 8.6. Установка центрирующих устройств
Рис. 8.7. Установка привода
и рабочей штанги для
проточки посадочного
места подподшипника
Рис. 8.8. Предварительная
проточка посадочного места
под подшипник
Рис. 8.10. Инструментальный контроль после проточки
наплавленного посадочного поля под подшипник
Рис. 8.9. Наплавка посадочного поля
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
235
8.2. Подшипники
8.2.1. Подшипники шахтных подъемных машин
На шахтных подъемных машинах для опор главного вала, механизма перестановки, ре-
дукторов и электродвигателей применялись подшипники качения и подшипники скольже-
ния. В настоящее время для подъемных машин применяются в основном подшипники каче-
ния, которые выбираются расчетным путем в зависимости от нагрузочных характеристик и
скорости вращения. Могут выбираться подшипники различных заводов-изготовителей, в том
числе, кроме традиционных ГПЗ — заводов-изготовителей подшипников Российской Феде-
рации и стран СНГ, подшипники зарубежных фирм, например — SKF (Швеция), FAG (Гер-
мания), FBC (Великобритания), ВСА (США) и др. Ниже приводятся типоразмеры подшип-
ников, применяемых для опор главного вала и механизма перестановки. Опоры главного
вала подъемных машин производства НКМЗ комплектуются подшипниками качения — сфе-
рическими роликовыми радиальными двухрядными с цилиндрическим отверстием.
В основном это:
— для ШПМ диаметром барабана 4 м посадочное отверстие подшипника 460 мм (по
маркировке ГПЗ типа 3003792);
— для ШПМ диаметром барабана 5 м‘, 6 к; 6,3 м посадочное отверстие подшипника 600
мм (по маркировке ГПЗ типа 30037/600);
— для ШПМ БЦК и тяжело нагруженных диаметром 5 м; 6 м; 6,3 м посадочное отвер-
стие подшипника 850 мм (по маркировке ГПЗ типа 40031/850).
Машины типа БЦК иногда (по желанию заказчика) комплектуются подшипниками
скольжения. На рис. 8.13 изображен главный вал в сборе с органом навивки, механизмом
перестановки и коренными подшипниками скольжения подъемной машины БЦК-8х4,5х2,25.
Для опор механизма перестановки подъемных машин с разрезным барабаном типа ЦР и
для подъемных машин БЦК применяются роликоподшипники конструкции НКМЗ.
Для опор механизма перестановки двухбарабанных подъемных машин и подъемных машин
типа МПБ выбираются серийные подшипники в зависимости от диаметра посадочных отверстий:
21 (-5x2,4 0680 - 37/680 Г ГОСТ 5721-75— 1 шт.;
0750 - 40038/750 ГПЗ — 1 шт.;
2Ц-6х2,8 0680 - 37/680 ГПЗ — 1 шт.;
0750 - 40038/750 ГПЗ — I шт.;
МПБ 5-2,5-2,5 0680 - 37/680 Г ГОСТ 5721-75 — 1 шт.;
0750 - 40038/750 ГПЗ — 1 шт.;
МПБ 5-2,8-2,8 0680 - 37/680 Г ГОСТ 5721-75 — 1 шт.;
0750 - 40038/750 ГПЗ — 1 шт.;
МПБ 5-3,15-3.15 0680 - 37/680 Г ГОСТ 5721-75 — 1 шт.;
0750 - 37/680 Г ГОСТ 5721-75 — 1 шт.;
236
ГЛАВА 8
Рис. 8.13. Главный вал в сборе подъемной машины БЦК-8х4,5x2.25
Перечень подшипников, применяемых для опор главного вала и механизма перестанов-
ки, применяемых Донецкгормашем для шахтных подъемных машин приведен в табл. 8.2.
Таблица 8.2
Перечень подшипников Донецкгормаша для шахтных подъемных машин
№ п/п Подъемная машина, обозначение по ТУ Номер подшипника ГОСТ Обозначение по ISO Посадка подшипника на валу
1 Ц-1,6х1,2АР 3538 3544 1000944 5721-75 5721-75 8338-75 22238 CC/W33 22244 CC/W33 61944 МА L0/k6 L0/k6 L0/h6
2 2Ц-1,6хО,8 3538 3544 1000944 5721-75 5721-75 8338-75 22238 CC/W33 22244 CC/W33 61944 МА L0/k6 L0/k6 L0/k6
3 Ц-2х1,5АР 3544 3003752 3003752 5721-75 нестандарт нестандарт 22244 CC/W33 23152 CC/W33 23152 CC/W33 L0/k6 L0/k6 L0/h6
4 2Ц-2х1,1 3544 3003752 3003160 3003164 5721-75 нестандарт 5721-75 5721-75 22244 CC/W33 23152 CC/W33 23060 CC/W33 23064 CC/W33 L0/k6 L0/k6 L0/h6 L0/h6
5 Ц-2,5х2АР 3003752 3003164 3003164 5721-75 5721-75 5721-75 23152 CC/W33 23064 CC/W33 23064 CC/W33 L0/k6 L0/k6 L0/h6
6 2Ц-2,5х1,2 3003752 3003180 3003168 5721-75 5721-75 5721-75 23152 CC/W33 23080 CC/W33 23068 CC/W33 L0/k6 L0/k6 L0/h6
7 Ц-Зх2,2АР 3003180 5721-75 23080 CC/W33 L0/k6
8 2Ц-Зх1,5 3003180 300192 5721-75 5721-75 23080 CC/W33 23092 CC/W33 L0/k6 L0/k6
9 Ц-3,5х2,4 3680 3003296 3003192 5721-75 нестандарт 5721-75 22380 CA/W33 23296 CA/W33 23092 CC/W33 L0/k6 L0/k6 L0/k6
10 2Ц-3,5х1,8 3680 3003296 30031/530 5721-75 нестандарт 5721-75 22380 CA/W33 23296 CA/W33 230/530 CA/W33 L0/k6 L0/k6 L0/k6
11 ЦШ 2,25x4 3680 3003296 5721-75 нестандарт 22380 CA/W33 23296 CA/W33 L0/p6 L0/p6
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
237
Продолжение таблицы 8.2
12 ЦШ 3,25x4 3003296 30037/600 нестандарт нестандарт 23296 CA/W33 231/600 CA/W33 LO/рб LO/рб
13 ТПТТ 4x4 30037/600 нестандарт 231/600 CA/W33 LO/рб
14 ЦШ 5x4 30032/850 нестандарт — LO/гб
15 ЦШ 5х8М 10777/750 8419-75 — L0/m6
16 МК 5x2 30032/850 нестандарт — L0/r6
17 МПМН 3,15x4 3003296 30037/600 нестандарт нестандарт 23296 CA/W33 231/600 CA/W33 L0/p6 L0/p6
18 МПМ 4x4 30037/600 777/650 нестандарт нестандарт 231/600 CA/W33 L0/p6 L0/m6
19 МПМН 5x4 30032/850 нестандарт — L0/r6
8.2.2. Определение технического состояния подшипников качения
В работе [88] приведены методы и средства технической диагностики опорных узлов
шахтных подъемных машин. В работе [126] рассмотрены особенности определения техни-
ческого состояния подшипников качения редукторов шахтных подъемных машин. В насто-
ящее время диагностика подшипников качения подъемных машин в эксплуатационных ус-
ловиях осуществляется путем измерения уровня их вибрации, шума и температуры. Однако,
такие измерения в большинстве случаев обладают малой точностью, информативностью и
достоверностью. Это обусловлено тем, что шумы, вибрация и температура зависят не только
от состояния подшипников. Существующие методы предупреждения отказа подшипнико-
вых узлов основаны на вероятностном прогнозе и связаны с системой планово-предупреди-
тельных ремонтов, требующих разборки и сборки опор подшипников. Как правило, такой
контроль лишь констатирует факты уже значительных повреждений. Имеют место либо не-
доиспользование ресурса подшипника, либо его отказ.
Существующие методы безразборного контроля путем магнитопорошковой и ультразву-
ковой дефектоскопии в настоящее время широко используются для выявления дефектов глав-
ных валов, рычажно-шарнирного механизма тормозной системы, тормозных балок подъем-
ных машин, элементов клетей, скипов, подвесных и прицепных устройств, осей копровых
шкивов и других элементов подъемных установок. Данные методы непригодны для опреде-
ления технического состояния подшипников. В связи с этим для безразборной диагностики
подшипников качения целесообразно применение косвенных методов без непосредствен-
ного соприкосновения с элементами подшипника — с использованием в качестве источни-
ка информации вибросигнала.
Многоканатные подъемные машины в подавляющем большинстве случаев установлены
на верхних отметках башенных копров. Последние являются местом компактного размеще-
ния многочисленного оборудования, способного возбуждать колебания разного характера
(вентиляторы противометанных камер и охлаждения приводных электродвигателей, комп-
рессоры, маслонасосы, электромеханические преобразователи, скипы во время разгрузки,
приводные электродвигатели, редукторы, головные и уравновешивающие канаты, пассажир-
ские лифты при движении и др.). Возможность распространения вибрации практически по
всем конструкциям копра и возникновения резонансных явлений в них является предпо-
сылкой для появления возмущений колебательного характера от указанных источников на
обследуемой опоре вала подъемной машины. Поскольку вибропреобразователь не обладает
избирательной способностью, все поступающие в точку измерения колебания будут им вос-
приниматься, и, что вполне естественно, частоты всех этих колебаний будут в спектре виб-
росигнала. Так как частоты этих составляющих могут совпадать с информативными частота-
ми, по которым определяется техническое состояние подшипника, то их по возможности
необходимо исключить [126].
Диагноз состояния подшипника качения следует осуществлять посредством анализа и
оценки амплитудно-частотных соотношений спектров вибрации подшипниковых опор, по-
лучаемых методом стандартного спектрального анализа вибросигнала с вибропреобразова-
теля, устанавливаемого на опоры подшипников главного вала подъемной машины. Вибро-
сигнал поступает на вход виброизмерительной аппаратуры, осуществляющей предваритель-
238
ГЛАВА 8
ную его обработку и сохранение полученных результатов. Окончательная обработка выпол-
няется на компьютере [126]. Особенности определения технического состояния подшипни-
ков качения главных валов многоканатных подъемных машин приведены в [127].
8.2.3. Основные неисправности подшипников качения
Как отмечалось в 8.2.1, в настоящее время для подъемных машин применяются в ос-
новном подшипники качения. В то же время на предприятиях угольной и горнорудной про-
мышленности в эксплуатации находится большое количество подъемных машин с подшип-
никами скольжения. Неисправности подшипников скольжения, их ремонт, замена, ревизия
и наладка подробно описаны в [17, 22, 25]. Ниже рассматриваются основные неисправности
подшипников качения.
Причины преждевременного выхода из строя подшипников качения
Если подшипники выбраны правильно, подшипниковый узел спроектирован и изготов-
лен без нарушений, смазка на протяжении всей работы была надлежащего качества, то в
большинстве случаев подшипник «переживет» механизм, в котором он установлен. Однако
опыт показывает, что около 35 % отказов различных механизмов случается из-за преждевре-
менного выхода из строя подшипников. Причины их преждевременных повреждений рас-
пределяются в основной массе следующим образом [230].
Около 16 % всех преждевременных поломок подшипников вызваны неправильным мон-
тажом (обычно чрезмерным натягом) и отсутствием необходимых монтажных инструмен-
тов. В некоторых отраслях промышленности эта цифра существенно выше. Для монтажа и
демонтажа подшипников необходимы специальные механические или гидравлические ин-
струменты либо нагреватели. Около 36 % преждевременных выходов подшипников из строя
связаны с выбором неправильного смазочного материала или с неправильным его примене-
нием. Любой подшипник при отсутствии хорошего смазывания выйдет из строя намного
раньше заданного срока. Более 14 % подшипников выходят преждевременно из строя вслед-
ствие недостаточной защиты смазочного материала от загрязнений.
Когда машины работают с перегрузками, неправильно обслуживаются или не обслужи-
ваются вообще, подшипники могут преждевременно выходить из строя вследствие усталос-
ти. По этой причине выходит из строя около 34 % всех подшипников. Внезапного отказа
подшипника можно избежать, так как перегруженный или имеющий какие-либо проблемы
подшипник за долгое время до выхода из строя начинает подавать определенные «сигналы»,
которые могут обнаружить диагностические приборы.
Подготовка к монтажу
Как показывает опыт, попадание в смазку подшипника инородных частиц может при-
вести к быстрому выходу его из строя. Поэтому перед сборкой подшипникового узла все
детали, от которых в него могут попасть любые твердые или мягкие частицы, должны быть
тщательно очищены. Заусенцы должны быть удалены. Из отверстий для смазочного матери-
ала должны быть удалены остатки стружки. Протирочные материалы не должны оставлять
волокон. В частности, нельзя применять хлопчатобумажную ветошь.
Перед монтажом проверяются размеры всех посадочных мест, соответствие допусков,
посадок и внутренних зазоров технической документации. Корпусные отверстия для под-
шипников проверяются на соосность. Монтаж производят в чистых помещениях, в которых
отсутствуют металлорежущие станки и другие производящие загрязнение машины.
Подшипник следует извлекать из упаковки непосредственно перед монтажом, что по-
зволяет защитить его от загрязнений. На всех поверхностях подшипника, кроме посадоч-
ных, не следует удалять консервационное покрытие. Посадочные поверхности промываются
растворителем на основе бензина. Большие подшипники обычно покрыты толстым слоем
жирного консерванта, который необходимо удалить промыванием непосредственно перед
монтажом. Подшипники, смазываемые пластичными смазками, предназначенными для ра-
боты в условиях высоких температур, и особенно синтетическими смазками, должны быть
полностью промыты от консерванта для предотвращения его влияния на свойства смазоч-
ного материала. Используемые ранее подшипники перед монтажом должны быть тщательно
промыты. Закрытые подшипники с двусторонними контактными или бесконтактными уп-
лотнениями никогда не промывают, а только очищают их наружные поверхности.
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
239
Если имеются признаки повреждения подшипника, то его следует заменить другим.
Существует два способа очистки подшипника — холодный и горячий. При холодной
очистке подшипник промывают в растворителе на основе бензина или в другой подобной
среде. Для предварительной и окончательной промывки пользуются разными сосудами с
растворителем. Немедленно после промывки подшипник необходимо высушить, смазать
пластичной смазкой и защитить от загрязнения до момента установки. При горячей очистке
используют масло с температурой вспышки не менее 250°С. Масло нагревают до температу-
ры около 120°С. Обычно горячая очистка более эффективна. Оставшееся на подшипнике
масло, кроме того, обеспечивает хорошую защиту от коррозии [230].
Основные неисправности подшипников качения, связанные с дефектами монтажа. Темпе-
ратура нагрева исправного и правильно смонтированного подшипника с чистой смазкой не
должна превышать температуру подшипникового щита и крышки более чем на 5—10°, при
работе подшипников должен слышаться легкий равномерный шелест. Недопустимый нагрев
и повышенный шум, особенно перемежающиеся стуки, указывают на неисправность под-
шипника. При известном навыке по характеру шумов и стуков можно почти безошибочно
определить характер неисправности.
Недопустима посадка подшипника на вал с чрезмерным натягом, создающим тугое вра-
щение и недопустимый нагрев подшипника. При этом кольца подшипников деформируются,
и происходит защемление шариков или роликов. При недостаточном натяге при посадке кольцо
подшипника начинает проворачиваться относительно вала или подшипникового щита, при
этом подшипник нагревается, происходит его заедание, что изнашивает вал, увеличивает за-
зор между сопрягаемыми поверхностями и в результате подшипник быстро разрушается. Тор-
цевое крепление внутреннего кольца подшипника на изношенной шейке вала не предохраня-
ет его от проворачивания. Перекос подшипника при монтаже вызывает неравномерное рас-
пределение усилий между наружным и внутренним кольцами, вследствие чего шарики закли-
ниваются между кольцами. То же самое происходит при удлинении вала от нагрева.
В разъемных корпусах перед проверкой точности посадочных мест проверяют плотность
и равномерность прилегания их плоскостей разъема после затяжки болтов. При больших
зазорах (более 0,05 мм) необходимо плоскости разъема исправить, обязательно доведя поса-
дочное отверстие до требуемого размера. Перед этим необходимо убедиться в правильности
геометрической формы наружного диаметра кольца подшипника и использовать его как ка-
либр для шабрения по отпечаткам краски. Для предотвращения защемления подшипников
следует обязательно расшабривать (разваливать) боковые поверхности посадочных мест, при-
мыкающих к разъему, на 0,15—0,35 мм глубиной 10—30 мм. При скользящей посадке поса-
дочное место считают правильно обработанным, если равномерный контакт (по краске) его
поверхности с подшипником составляет не менее 70 %.
Важнейшее значение имеет соосность расточки посадочных мест валов редукторов (удоб-
но проверить специальными калиброванными оправками, закрепленными на концах жестко-
го стержня-фалыпвала). Соосность контролируют по расположению отпечатков краски в по-
садочных отверстиях, полученных при проворачивании в них стержня-фальшвала. В сборе
соосность расточки проверяют щупами, при этом контролируют расположение зазоров между
наружными кольцами подшипников и посадочными отверстиями, а также расположение ра-
диальных зазоров в самих подшипниках. В соосных расточках эти зазоры в ненагруженной
зоне располагают симметрично относительно вертикальной оси. Распорные втулки и дистан-
ционные кольца должны фиксировать кольца подшипников, не задевая сепаратора [230].
Правильное регулирование осевой «игры» радиально-упорных и упорных шарико- и
роликоподшипников определяет долговечность работы подшипников и других узлов. В ус-
тановленных на место подшипниках проверять осевую «игру» лучше всего с помощью инди-
катора, отжимая вал вдоль оси поочередно в обе стороны.
Грубую проверку осевой «игры» конических подшипников в разъемных корпусах можно
проводить с помощью щупа (рис. 8.14). Для этого вал 1 отжимают вдоль оси в одну сторону
и щупом 2, введенным между роликами 3 и дорожкой качения, в ненагруженной зоне заме-
ряют фактический зазор, не допуская накатывания тел качения на щуп. Замеряют два-три
раза при прокручивании вала на 120°—180°.
Допускаемый зазор D по линии давления подсчитывают, исходя из осевого зазора S, по
формуле D = 25sinj8 (8.2.1).
Ориентировочно при /3=14° зазор D = S/2.
240
ГЛАВА 8
Рис. 8.14. Способ проверки осевой «игры» в установленных подшипниках
8.3. Соединительные муфты
8.3.1. Соединительные муфты шахтных подъемных машин
На подъемных машинах для передачи вращения и крутящего момента между горизон-
тальными валами и компенсации их незначительных несоосностей применяют зубчатые,
пружинные и пальцевые соединительные муфты.
В настоящее время подъемные машины выпускаются с зубчатыми муфтами, которые
представляют собой систему зубчатых пар с внутренним зацеплением (см. рис. 8.15). Муфты
зубчатые с разъемными обоймами общемашиностроительного применения выпускаются
Донецкгормашем и другими машиностроительными заводами.
В зубчатых муфтах компенсация смещений и перекосов валов достигается относитель-
ным перекосом втулок и обойм за счет боковых зазоров между зубьями и выполнения по-
верхности выступов зубьев втулок сферической. Допустимый суммарный взаимный перекос
оси каждой втулки относительно оси обоймы до 0°30'. Муфты изготавливаются для клима-
тического исполнения У, УХЛ и О при наличии дополнительных требований — Т, для кате-
горий размещения 1—5 по ГОСТ 15150-69. Зубчатые втулки со стороны открытого торца вы-
полняются с цилиндрическими контрольными поясками по посадке h8, которые предназна-
чены для проверки соосности валов. Твердость поверхности зубьев втулок и обойм — 42—51
HRC3, при скорости зубчатого зацепления на делительном диаметре до 1 м/с — 248—302НВ.
Зубчатые обоймы муфт имеют отверстия с резьбой, закрываемые пробками, предназна-
ченные для заливки смазки в их внутреннюю полость. Технические характеристики муфт
Донецкгормаша приведены в табл. 8.3.
Umbmpo 5ез йолтоб!
«•-В-*
Рис. 8.15. Зубчатая муфта:
1 — зубчатая обойма; 2 — элемент для проверки соосности валов; 3 — зубчатая втулка
Муфты зубчатые производства Донецкгормаша
Таблица 8.3
Номер муфты Номинальный крутящий момент, кН-м Частота ьвращения, об/мин Параметры зацепления Масса, кг D,mm d, мм Ф, мм 11, мм L, мм А, мм В, мм с, мм е, мм
модуль Число зубьев
МЗ-8 23,6 1150 4 62 123-156 380 80-140 80-140 180 180 325 210 35 5,0 60
/ МЗ-9 30 1050 6 46 166-210 430 80-160 80-160 200 200 335 220 35 5,0 60
МЗ-10 50 850 6 56 243-420 490 80-180 80-180 200-300 200-300 365 245 40 5,0 60
1 МЗ-11 71 750 8 48 438-530 545 80-130 80-220 300 220-300 405 280 45 5,0 70
МЗ-12 100 670 8 54 598-773 590 100 100-240 350 280-350 485 350 50 5,0 70
1 M3-13 150 600 10 48 300-968 680 100-250 100-250 300-350 300-350 525 375 60 7,5 80
МЗ-14 200 530 10 54 830-1154 730 140-320 140-320 320 320 575 405 65 7,5 80
МЗ-15 250 500 10 58 1110-1830 780 170-360 170-360 320-450 320-450 650 480 70 7,5 80
МЗ-16 375 450 12 56 1710-2370 900 200-400 200-400 360-450 360-450 705 535 75 10,0 90
МЗ-17 560 380 12 64 2510-3130 1000 250-400 250-450 450 450-485 815 625 90 10,0 90
МЗ-18 750 340 12 72 3280-4300 1110 300-500 300-500 530-650 530-650 915 710 90 10,0 90
МЗ-19 1000 300 12 80 4700-6640 1250 300-560 300-560 485-820 485-800 975 735 100 15,0 100
МЗ-21 2000 180 14 80 7150-10640 1440 490-620 500-720 600-820 700 1320 850 100 15,0 60
M3-23 2650 120 14 98 14620-15400 1490 740-750 610 900 800-950 1725-1875 810 ПО 12,5 70
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
242
ГЛАВА 8
Заказ на зубчатую муфту должен содержать: ее типоразмер и диаметры расточек d и
каждой втулки (см. рис. 8.15). Если потребителю требуется муфта с другими видами соеди-
нений с валами, со ступенчатыми расточками, то эти требования необходимо оговаривать
дополнительно в заказе.
Для подъемных машин Донецкгормаш в основном применяет муфты МЗ-8, МЗ-17, МЗ-19,
МЗ-21. НКМЗ для своих машин применяет муфты собственного производства.
Основные технические характеристики зубчатых муфт производства НКМЗ приведены
в табл. 8.4.
Таблица 8.4
Муфты зубчатые производства НКМЗ
Наименование Норма
Тип и номер муфты МЗ-17 МЗ-19 МЗ-20 МЗ-21 МЗ-22 M3-23 МЗ-24 МЗ-25
Номинальный крутящий момент, кН-м) 560 1000 1600 2000 2800 3600 4500 7500
Маховый момент, Н«м2 1140 27000 10000 14800 24100 39600 57400 98000
Расстояние между центрами зацепления, мм 625 730 850 1000
Максимальный диаметр корпуса, мм 1000 1250 1500 1650 1840 2040 2180 2280
8.3.2. Проверка соосности валов
Несоосность валов вызывает при работе подъемной машины появление дополнитель-
ных нагрузок, генерирующих колебания машин на оборотных частотах вращения валов и их
гармониках. Дополнительные нагрузки, усиливающие вибрацию, приводят к повышенным
нагрузкам на подшипники, преждевременному износу муфт и масляных уплотнений, разру-
шению фундаментов, повышенному потреблению электроэнергии, ускоряют износ деталей
машин.
Допуски несоосности зубчатых муфт по сравнению с другими типами муфт значительно
выше, так как имеют более высокие компенсационные свойства вследствие наличия зазоров
между зубьями. Кроме того, величина допуска зависит от габаритных размеров зубчатых муфт
и передаваемых крутящих моментов. Однако, необходимо отметить, что нормы несооснос-
ти, регламентируемые ГОСТ 5006—94, значительно завышены и, несмотря на некоторые ком-
пенсационные свойства зубчатых муфт, они не способны защищать машины от динамичес-
ких нагрузок, вызываемых несоосностью валов.
По опыту Донбассуглеавтоматики их следует уменьшать в 4—8 раз, в зависимости от ско-
рости вращения вала машины [17].
8.3.2.1. Проверка и исправление соосности валов с применением механических устройств
Проверку и исправление соосности валов обязательно следует производить в следую-
щих случаях:
— при вводе подъемной машины в эксплуатацию;
— после замены редуктора, электродвигателя, вкладышей их подшипников или муфт;
— при наличии вибрации подшипников, интенсивного нагрева подшипников центри-
руемых валов, повышенным износе зубьев зубчатых муфт и других признаков неудовлетво-
рительной соосности валов;
— при видимом поддувании почвы на подземных подъемных установках или проседа-
нии фундамента.
Перед проверкой соосности валов необходимо произвести ревизию подшипников, убе-
дииться в правильности посадке полумуфт — проверить радиальное и осевое биение, прове-
рить затяжку всех анкерных болтов и болтов, крепящих подшипники этих валов к рамам или
постаментам.
Ориентировочные допустимые величины установки полумуфт, вызванные несооснос-
тью расточки их перед посадкой на вал, приведены в табл. 8.5.
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
243
Таблица 8.5
Допускаемые величины установки полумуфт
Назначение муфты Допустимый перекос оси муфты относительнооси вала, мм/м Допустимое радиальное смещение оси муфты от оси вала, мм
Муфты, соединяющиеся двигатель с редукторм 0,5 0,1
Муфты, соединяющиеся редуктор с главным валом 1,0 0,25
Как правило, при проверке соосности вала редуктора с головным валом машины за ос-
нову принимается выставка главного вала, а по нему выставляется вал редуктора, а при про-
верке соосности вала двигателя с валом редуктора за основу принимается вал редуктора. В
отдельных случаях вопрос о выборе того или иного вала в качестве основного может быть
решен наладочной бригадой на месте. В дальнейшем везде будем считать основной вал ва-
лом А, а центрируемый вал — валом Б. Сущность проверки соосности заключается в замере
радиальных смещений и осевых зазоров между торцами полумуфт.
Радиальное смещение валов замеряется в плоскости, по возможности близкой к плоско-
сти разъема муфты. Замеры производятся в четырех положениях валов при совместном их
повороте через каждые 90°. Каждый раз замеры производятся в одной и той же точке полу-
муфты, занимающей при первом замере верхнее положение в плоскости замеров.
В зависимости от местных условии выбирается один из следующих способов замеров
радиальных смещений.
I способ — замер индикатором, установленным на центровочных приспособлениях без
разборки муфты, как изображено на рис. 8.16, б. Центровочные приспособления должны
быть выверенными и достаточно жесткими. Индикатор закрепляется на валу А, а площадка,
в которую упирается штифт индикатора, — на валу Б.
Рис. 8.16. Центровочные приспособления с индикаторами для измерения:
а — угловых смещений; 6 — радиальных смещений; 1, 2 и 3 — индикаторы; 4 и 5 — угольники;
6 — кронштейн; 7 — хомут; 8 — болт; 9 и 10 — валы
II способ — замер индикатором, установленным на призме (с разборкой муфты), как
изображено на рис. 8.17. При измерении призму 1 опирают на центрирующий поясок полу-
муфты вала А, а штифт индикатора 2 — в центрирующий поясок полумуфты вала Б. При
каждом замере необходимо призму устанавливать в одно и то же место, а штифт индикатора
упирать в одну и ту же точку, для чего на полу-
муфтах делаются соответствующие отметки ме-
лом. Результаты измерения индикаторами надо
записывать в формуляр со знаком минус.
III способ — замер с помощью щупов и ско-
бы (рис. 8.18). Скоба жестко закрепляется на од-
ной из полумуфт, щупами измеряется зазор меж-
ду скобой и другой полумуфтой. Если скоба зак-
реплена на полумуфте вала Б, то данные замеров
записываются со знаком минус, а если на полу-
Рис. 8.17. Призма с индикатором
244
ГЛАВА 8
Рис. 8.18. Центровочные
скобы:
1 и 2 — скобы; 3 — хомуты;
4 и 5 — измерительные
болты; би 7 — скобы
муфте вала А — со знаком плюс. Замер щупами во всех поло-
жениях должен производиться одним и тем же лицом.
IV способ, дающий наименьшую точность, — замер с по-
мощью щупов и линейки. Применять этот способ при цент-
ровке вновь монтируемых редукторов или двигателей не ре-
комендуется. Его можно использовать только при проверке
центровки на действующих подъемных установках.
Если линейка прикладывается к валу Б, то данные заме-
ров записываются со знаком минус, а если к валу А — со зна-
ком плюс.
Данные замеров записываются по виду от вала А к валу Б
(рис. 8.19).
Величина радиального смещения вала Б относительно
вала А определяется по формулам:
в горизонтальной плоскости а, мм; (8.3.1)
в вертикальной плоскости ад =——мм; (8.3.2)
в пространстве a = yjaj + ад, мм. (8.3.3)
Осевые зазоры между полумуфтами замеряются по ним и определяется тангенс угла пе-
рекоса вала Б по отношению к валу А в двух плоскостях — горизонтальной и вертикальной.
Измерения проводят одним из следующих способов.
I способ — замер с помощью индикаторов и центровочных приспособлений (см. рис.
8.16, а). Индикаторы закрепляются на валу А. Площадки, в которые упираются штифты ин-
дикаторов, устанавливаемые на валу Б, должны быть строго перпендикулярны оси после-
днего. В формуляр (см. рис. 8.19) записываются со знаком минус показания индикаторов,
установленных первоначально по вертикали, а затем при каждом совместном повороте их на
90, 180 и 270°. Запись производится по виду от вала А к валу Б. Данные замеров обоими ин-
дикаторами в соответствующих точках суммируются;
Радиальные смещения
Рис. 8.19. Круговая диаграмма для записи результатов измерений при исправлении
соосности валов
ч
II способ — замер щупами с помощью центровочной скобы или непосредственно между
торцами полумуфт (втулок), если они не имеют забоин. Вначале замеры производятся в че-
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
245
тырех точках, расположенных на вертикальном и горизонтальном диаметрах полумуфт, за-
тем — в тех же точках при совместном повороте валов на 180°. Данные обоих замеров в со-
ответствующих точках суммируются. При замере щупами данные замеров записывать в фор-
муляр со знаком плюс. Запись производится по виду от вала А к валу Б (см. рис. 8.19).
Угловые смещения вала Апо отношению к валу А (тангенс угла перекоса) подсчитывает-
ся по формулам:
b ~Ь
в горизонтальной плоскости tgf}s =
Л .
(8.3.4)
в вертикальной плоскости tg/3e = н '> (8.3.5)
где D — диаметр, по которому производились замеры, мм;
тангенс угла перекоса валов в пространстве = у/tg2pe + tg2 ft в (8.3.6)
Абсолютные величины наибольшего радиального смещения валов и наибольшего тан-
генса угла перекоса сравниваются с допустимыми. Возможные максимальные радиальные
смещения валов атзх при отсутствии перекоса приведены в табл. 8.6.
Зубчатые муфты допускают по своим геометрическим размерам суммарный перекос оси
втулки относительно оси обоймы до 0°30'. Это означает, что при отсутствии радиального
смещения наибольший угол перекоса осей валов может быть /3^ =Г (tgfi^ = 0,0175).
Таблица 8.6
Допустимые радиальные смещения осей валов для зубчатых муфт
№ муфты 2 3 4 5 6 7 8 9 10 11 12
Радиальное смещение осей валов для зубчатых муфт, мм 1,1 1,2 1,7 2,0 2,2 2,6 3,1 3,2 3,6 3,9 4,8
№ муфты 13 14 15 16 17 18 19 20 21 22
Радиальное смещение осей валов для зубчатых муфт, мм 5,2 5,7 6,7 7,0 7,4 7,9 8,3 8,7 9,2 9,6
При наличии фактического угла перекоса Д возможное радиальное смещение валов авоз
определяют по формуле
авоз
= а
amax п
Ртах.
(8.3.7)
Однако, как показал опыт эксплуатации, при указанных выше максимальных отклоне-
ниях условия работы муфт значительно ухудшаются, вследствие чего увеличивается износ
зубьев и уплотнений, появляется вибрация подшипников и обоймы муфты. Выставка валов
с более жесткими допусками обычно не вызывает затруднений, но значительно улучшает
условия эксплуатации. Поэтому центровку валов надо производить очень тщательно.
Рекомендуется при проверке соосности тихоходных валов (главный вал) допускать сум-
марный перекос осей валов не более 2 мм/м (tgp^ =0,002), а радиальные смещения hdonB
четыре раза меньше значений, приведенных в табл. 8.6. При центровке быстроходных ва-
лов (редуктора с электродвигателем) суммарный перекос осей валов должен быть не более
1 мм/м (tgl^ =0,001), а радиальные смещения должны быть в восемь раз меньше значе-
ний, приведенных в табл. 8.6. Допускаемые смещения для пружинных муфт принимаются
такими же, как и для зубчатых муфт соответствующих размеров. Для упругих пальцевых
муфт смещения следует принимать в два раза меньше по сравнению с зубчатыми муфтами
соответствующих размеров.
Отклонения от соосности на эксплуатационных подъемных машинах могут быть значи-
тельно выше рекомендуемых. При принятии решения об улучшении соосности следует ру-
246 ГЛАВА 8
ководствоваться как отклонениями от соосности, так и внешними факторами эксплуатации.
Основными внешними показателями удовлетворительной центровки валов являются:
— отсутствие повышенного износа муфт;
— отсутствие вибраций валов, подшипников и муфт, если эти вибрации не вызываются
другими факторами (неуравновешенностью ротора, магнитной асимметрией, торцевым или
радиальным биением зубчатых колес и т. п.);
— отсутствие повышенного нагрева валов и подшипников, если нагрев не вызывается
другими факторами (плохим прилеганием вкладышей подшипников, неудовлетворительной
смазкой и т. д.).
Если внешние показатели работы удовлетворительные, то на эксплуатируемых подъем-
ных машинах допускаются смещения в три раза больше рекомендованных выше.
Улучшение соосности валов производится, если это необходимо. Улучшение соосности
достигается переносом подшипников вала Б или лап двигателя (если центрируемым валом
является вал двигателя со встроенными подшипниками).
Величины перемещений и направление определяются по формулам:
— для первого подшипника (ближайшего к муфте):
в вертикальной плоскости у{ =ag + l{tgPe, мм, (8.3.8)
в горизонтальной плоскости xj =аг + 1^[5г, мм; (8.3.9)
— для второго подшипника'.
в вертикальной плоскости у2 ~ae+^SPei (8.3.10)
в горизонтальной плоскости х2 = аг + 121§Рг, мм, (8.3.11)
где /р /2 — расстояние между плоскостью разъема муфты и плоскостями через середины пер-
вого и второго подшипникаов (или центра отверствий для крепежных болтов первой и вто-
рой лап), мм.
Положительные значения ур у2, хр х2 говорят о том, что подшипники вала Б (лапы двигателя)
необходимо перемещать вверх и вправо, отрицательные — что надо перемещать вниз и влево.
После исправления несоосности вновь производятся замеры радиального смещения и угла
перекоса валов, производится оценка качества центровки. При улучшении центровки возможно
нарушение правильности прилегания вкладышей подшипников к шейкам центрируемого вала.
Поэтому необходимо после выставки вала установить наблюдение за работой подшипников.
8.3.2.2. Высокоточное лазерное устройство для устранения несоосности ВЛУУН*
Устранение несоосности валов сопряжено с рядом технических трудностей, вызываемых
большими расстояниями между свободными участками валов, которые используются для при-
соединения измерительных средств. К тому же свободные для закрепления участки имеют ог-
раниченные размеры и обычно труднодоступны. Неблагоприятные конструктивные особен-
ности крупных стационарных машин затрудняют эффективно использовать механические ус-
тройства для измерения несоосности с консольно-расположенными опорными кронштейна-
ми, оборудованными измерительными приборами, и плоскостью измерений [233].
Исследованиями, проведенными на специальном стенде НИИГМ им. М.М. Федорова, уста-
новлено, что механические устройства с оптимальными конструктивно-компоновочными разме-
рами, позволяющими их использование на большинстве подъемных машин, обеспечивают требу-
емую точность при удалении мест закрепления измерительных средств на валах не более чем на
250 мм. Погрешности, возникающие вследствие прогиба консолей и стоек, нагруженных прибора-
ми, значительно превышают допуски соосности, что делает их непригодными для этих целей.
В качестве частичной альтернативы в [152] предлагается устройство, снабженное контр-
грузами. Диапазон линейных размеров, для которых возможно его применение, увеличива-
ется в 1,5—2 раза, однако для крупных машин этого недостаточно. Используемая технология
устранения несоосности подъемных машин, оборудованных зубчатыми муфтами, включает
разборку муфт, что существенно повышает трудоемкость работ. Измерение несоосности без
разборки зубчатых муфт усложняется из-за увеличения линейного расстояния между сво-
бодными участками валов в 2 раза и более превышающего допустимое. У машин подъемных
установок это расстояние находится в диапазоне 500—1000 мм.
* Романов В. А.
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
247
Ведущие зарубежные фирмы («Fixturlaser АВ», Швеция и «Prueftechnik AG», Германия)
для этих целей изготавливают приборы, которые оснащены лазерными источниками излу-
чения с фотоприемниками и оборудованы механизмами закрепления. Эти приборы не при-
способлены к юстировке: направления лазерного луча относительно вала и взаимное распо-
ложение источника и приемника излучения по отношению к фундаментной плите не позво-
ляют избежать погрешностей, приводящих, в конечном счете, к необходимости использова-
ния метода последовательных приближений для достижения требуемого допуска несооснос-
ти. Это влечет за собой проведение нескольких серий замеров и корректировок взаимного
позиционирования машин.
Фотоприемник содержит фотоприемную матрицу (с ее помощью оптический сигнал
преобразуется в электрический) и расчетное устройство, которое выдает корректировочные
размеры перемещения одной из машин, для получения требуемой соосности. Использова-
ние фотоприемных матриц обусловливает высокую стоимость приборов, что сдерживает их
распространение на предприятиях угольной промышленности. В [153] рекомендуется совер-
шенствовать приборы в направлении доработки механических устройств измерения, что для
шахтных подъемных установок труднодостижимо.
Специалистами НИИГМ имени М. М. Федорова разработано высокоточное лазерное ус-
тройство для устранения несоосности (ВЛУУН) — устройство нового типа, в котором ис-
пользован лазерный источник излучения и фотоэлектрический приемник, преобразующий
оптический сигнал в электрический, используемый ПЭВМ для расчетов [233].
Высокоточное лазерное устройство ВЛУУН предназначено для устранения несоосности
валов крупных стационарных машин, соединенных зубчатыми муфтами, и позволяет резко
повысить производительность и точность работ за счет исключения из состава технологии
сборочно-разборочных операций.
По сравнению с традиционными механическими устройствами использование ВЛУУН на
агрегатах, соединенных промежуточными валами, позволяет обеспечить как угловую, так и
радиальную соосность в пределах нормируемого допуска. Это достигается за счет эффектив-
ных конструктивно — компоновочных решений на уровне изобретений, включающих реали-
зацию рациональной схемы измерений, исключения погрешностей в процессе расчетов, авто-
матизацию операций измерения и расчетов с помощью ПЭВМ по специальным программам.
Технические характеристики устройства ВЛУУН
Диаметр контролируемых валов, мм 50-1000
Удаление валов, мм 50-10000
Разрешение фотоприемника, мкм 10
Точность контроля, ММ 0,05
Г абаритные размеры, мм
длина 350
ширина 280
высота 80
Масса, кг не более 4,0
Изготовитель ВЛУУН — НИИГМ имени М. М. Федорова и НПП «Компрессор».
ВЛУУН реализована высокоточная лазерная система, позволяющая устранять несоос-
ность крупных стационарных машин без разборки зубчатых муфт (рис. 8.20). Способ изме-
рения отклонения осей реализован по радиальной схеме измерений и рациональному мето-
ду расчета параметров несоосности, что позволяет автоматически избежать погрешностей,
возникающих как в процессе измерений, так и при расчетах. Система снабжена механизма-
ми быстрого закрепления, содержащими шарнирные соединения, допускающие юстировку
источника излучения и фотоприемника.
Юстировочное приспособление кроме контроля положения источника и приемника излу-
чения позволяет с достаточной точностью выполнять повороты валов на углы, кратные 90°, с
фотоприемника электрический сигнал поступает в компьютер, где с помощью специальной про-
граммы рассчитываются координаты положения центра светового пятна лазерного источника?
Поскольку юстировка — сложная операция, связанная с перестановкой юстировочного
устройства с механизма закрепления, расположенного на одном валу, на механизм закрепле-
248,ГЛАВА 8
ния другого вала (часто в труднодоступных мес-
тах), в соответствии с патентом Украины № 21169
от 15.03.2007 программа определяет две коорди-
наты центра светового пятна. Для расчета коррек-
тировочных размеров основные координаты при-
нимаются при равных дополнительных. В систе-
ме предусмотрена возможность вызова контроли-
руемого параметра в виде документа при подклю-
чении к компьютеру печатающего устройства.
Программа позволяет работать в ручном и авто-
матическом режимах. Чтобы система начала дей-
ствовать, надо выбрать способ обработки инфор-
мации (ручной или автоматический), источник
(например, фотоприемник) и уровень отсчета по
яркости. Когда система подготовлена, следует
Рис. 8.20. Общий вид лазерного
устройства ВЛУУН
нажать кнопку «Пуск». На экран монитора выводятся данные, поступающие с фотоприемни-
ка, для просмотра оперативной информации о местоположении отметки от лазерного источ-
ника сигнала.
Специальная программа определяет положение центра светового пятна при поворотах
вала в положения 90°, 180° и 270° от исходного. При этом приемник и источник последова-
тельно занимают верхнее, левое, нижнее и правое положения относительно валов машин.
На экран монитора выводятся координаты центра отметки, одновременно они заносятся под
соответствующим номером в таблицу результатов измерений р1в, р1н (верхнее и нижнее зна-
чение первого замера).
Схему замеров (рис. 8.21) составляют с указанием вида размещения машин по стрелке и
номеров ближнего и дальнего расположения источника излучения от фотоприемника. Затем
перемещают источник на расстояние Z и выполняют следующую серию замеров) р2н, р2в.
Угловое смещение осей центрируемых машин в вертикальной плоскости
tgae = Ан ~ Ag^Р2н ~Р1в\ (8.3.12)
где р1н, р1в, р2н, р2в — показания замеров, соответственно в первом положении источника из-
лучения в точках 0 и 180° (верхнем и нижнем расположении источника и фотоприемника) и
во втором положении источника вдоль оси.
В горизонтальной плоскости угловое смещение tgae находится аналогично. Измеряют
расстояния от первого положения источника излучения до центра отверстия для крепления
ближней опоры электродвигателя на фундаменте Z, и дальней опоры L2.
Определяют угловое смещение осей валов в вертикальном и горизонтальном направлениях:
b.yt=L№r, (8.3.13)
Рассчитывают радиальное смещение осей валов машин в вертикальной и горизонталь-
ной плоскостях:
д =VA; A =VJkL. (8.3.14)
ре 2 5 лг ' 7
Находят корректировочные размеры перемещения одной из машин для обеспечения
требуемой соосности. Позиционирование машины в вертикальной плоскости производится
путем изменения высоты прокладок между опорами и фундаментной плитой. Корректиро-
вочный размер прокладок находят для ближних и дальних опор:
/г1г=Аг + Д-^; к2=\в + Ц tgae. (8.3.15)
Для этих опор вычисляют корректировочный размер машины в горизонтальной плоскости:
А1г=Дг+Д tga,; Ь2г=Лг+Ь2 ^г. (8.3.16)
После корректировки положения осей вала машины определяют параметры несоосности:
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
249
tgfx^^tgal+tga]-, \р = ^\1рв + \2рг. (8.3.17)
Чтобы установить направление перемещения
машины, ось вала неподвижной машины прини-
мают за координатную и на ее полумуфте закреп-
ляют фотоприемник. Если в вертикальной плоско-
сти получены положительные величины hle и h2e,
то толщина прокладки уменьшается, а если отри-
цательные, увеличивается. В горизонтальной плос-
кости знак «плюс» указывает, что машину следует
переместить вправо, а знак «минус» — влево. Па-
раметры несоосности и вычисленные размеры кор-
ректировки положения машин заносят в таблицу.
Система дополнена усовершенствованным способом замеров, позволяющим снизить трудо-
емкость работ по устранению несоосности [154].
Устройство содержит серийно изготавливаемые комплектующие элементы, снабжено юс-
тировочным приспособлением, повышающим его точность, и имеет значительно меньшую
стоимость по сравнению с зарубежными аналогами, что способствует его широкому приме-
нению на предприятиях отрасли.
8.3.2.3. Система лазерная (АВВ — 001) производства НПП «Контест»
Система лазерная предназначена для выверки соосности осей валов механизмов; опре-
деления плоскостности поверхностей; определение состояния соосности металлообрабаты-
вающих станков.
Технические характеристики системы АВВ-1
Расстояние измерения, м, не более 2
Рабочий диапазон температур, град. С 0-50
Погрешность измерений, % 1+1 цифра
Тип лазера: видимый красный 635-670 нм, <1 мВт
Тип детекторов: фотодиоды позиционно чувствительные 10x10 мм
Разрешение, мм 0,01
Электронный инклинометр, разрешение 0,1°
Питание Аккумулятор NiMH
Масса брутто, кг 4
Установленные программы:
— центровка горизонтальных валов;
— центровка вертикальных валов;
— центровка вертикальных валов с промежуточным валом;
— центровка горизонтальных валов при развороте на малые углы
— учет тепловой расцентровки;
— подбор подкладок и расчет ожидаемой центровки;
— центровка горизонтальных валов с промежуточным валом;
— центровка механизмов с поймакуточным валом длиной более 1 м;
— определение плоскосностирНк
— определение соосности металлообрабатывающих станков.
Примечание. Установка программ определяется заказчиком. По требованию заказчика воз-
можна установка дополнительных программ.
В состав лазерной системы входят: два измерительных блока; блок дисплея; универсаль-
ное устройство для крепления эмеритальных блоков на валах механизмов; зарядное устрой-
ство; сединительные кабели; руководство по эксплуатации.
Каждый измерительный блок имеет свою маркировку — блок «S» и блок «М». Измери-
тельный блок «S» устанавливается на неподвижный механизм, а измерительный блок «М» —
на подвижный механизм. В корпуса измерительных блоков встроены лазерный излучатель и
приемник-детектор. Измерительные блоки крепятся на специальных вертикальных штан-
гах, установленных на призмах. Призмы устанавливаются на валы механизма при помощи
цепей, которые натягиваются гайкой натяжителя. Для определения плоскостности поверх-
250
ГЛАВА 8
ностей измерительные блоки установливаются специаль-
ные магниты (поставляются по требованию заказчика).
Принцип работы лазерной системы заключается в
измерении перемещений видимого лазерного луча крас-
ного цвета по окну приемника-детектора. Измеритель-
ные программы в блоке дисплея вычисляют величины,
поступающие с приемника-детектора, и рассчитывают
расцентровку и необходимые перемещения лап подвиж-
ного механизма.
Измерительные блоки могут работать в двух режи-
мах: первый блок — излучатель, второй блок — прием-
ник и наоборот; каждый из блоков является излучателем
и приемником отраженного от зеркальной поверхности
лазерного луча. Измерения выполняются по окну при-
емника-детектора в однокоординатной и двухкоординат-
ной системе. Измерительные блоки соединены с блоком
дисплея при помощи кабелей, обеспечивающих расстоя-
ние измерения до 2 м.
Перемещение лазерного луча по окну приемника-де-
тектора в цифровом виде поступает в блок дисплея, об-
рабатывается и выводится на дисплей в виде перемещений лазерного луча по каждому при-
емнику-детектору; величин смещения и излома в горизонтальной и вертикальной плоско-
стях (или в двух заданных плоскостях при центровке вертикальных валов); необходимых пе-
ремещений лап подвижного механизма для обеспечения точной центровки или величин от-
клонения от плоскостности при измерении плоскостности поверхностей.
При выполнении работ по выверке соосности валов замеры выполняются в трех поло-
жениях часовой стрелки: 0 ч, 12 ч и 3 ч. В прибор также может быть введена программа,
рассчитывающая центровку механизмов при развороте валов на малые углы (20° и более от
положения 12 ч). Точное положение определяется электронным инклинометром, встроен-
ным в измерительный блок «S». После установки лазерной системы на валы механизмов
выполняется настройка лазерного луча по центру окна приемника (в положении часовой
стрелки 12 ч). Управление прибором выполняется кнопками на лицевой панели блока дисп-
лея в соответствии с руководством по эксплуатации.
Настройка лазерного луча по центру мишени приемника-детектора выполняется при
закрытых окнах приемников мишенью с помощью двух винтов на каждом измерительном
блоке — один винт регулирует луч по вертикали, другой — по горизонтали; После ввода
размеров и настройки лазерных лучей по центрам мишеней можно приступать к выполне-
нию замеров и центровке механизма; для этого необходимо открыть приемники-детекто-
ры, развернуть валы механизмов с установленными на них измерительными блоками в по-
ложение 9 ч (при этом на дисплее угол разворота должен показывать 90°) и нажать кнопку
«СТАРТ». Далее работы выполняются в последовательности, изложенной в Руководстве
по эксплуатации.
После окончания работы с лазерной системой необходимо закрыть мишенями окна при-
емников-детекторов, отсоединить кабели, снять измерительные блоки и упаковать лазерную
систему.
При перемещении подвижного механизма в процессе выполнения центровки лазерные
лучи, перемещаясь по окнам приемников-детекторов, вводят новые данные в выбранную
программу и на дисплее прибора изменяются показания расцентровки механизмов и вели-
чины перемещений лап. Таким образом, в реальном времени отображается центровка и даль-
нейшие перемещения подвижного механизма для достижения точной центровки.
Общий вид лазерной системы с установкой на полумуфты валов показано на рис. 8.24.
При работе с лазерной системой приняты следующие обозначения:
— смещение и излом осей валов в горизонтальной и вертикальной плоскостях обозна-
чен на дисплее в виде полумуфт (рис. 8.23);
— F1 — перемещения ближних лап «подвижного» механизма;
— F2 — перемещения дальних лап «подвижного» механизма;
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
251
— М — подвижный механизм — механизм, положение которого регулируется при вы-
верке соосности валов;
— S — неподвижный механизм, положение которого не регулируется в процессе вывер-
ки соосности валов.
«Мягкая» лапа — ненагруженная лапа, то есть лапа, не притянутая крепящим болтом к
фундаменту или перетянутая лапа, создающая перекос конструкции. Наличие «мягкой» лапы
проверяется в начале центровки, как на подвижном, так и на неподвижном механизме и, в
случае необходимости, устраняется. «Холодная» центровка проводится, когда все механиз-
мы в работающем состоянии имеют температуру окружающей среды. «Тепловая» центровка
проводится в случае, когда рабочая температура механизма отличается от температуры окру-
жающей среды. В этом случае проводят центровку по «горячему» (отличному от окружаю-
щей среды сразу после остановке механизма) или по «холодному» состоянию механизма.
«Холодная» центровка проводится с учетом ввода поправок на тепловые расширения при
одинаковой температуре механизма и окружающей среды. «Холодная» центровка выполня-
ется по подпрограмме при нажатии кнопки «2» после выполнения основной центровки.
Подпрограмма «Подбор прокладок» выполняется после выполнения основной центров-
ки. Несоосность механизмов выражается в линейном и угловом смещении валов. Чаще все-
го на практике они присутствуют одновременно. Различные виды несоосности показаны на
рис. 8.23. Несоосность определяется в горизонтальной и вертикальной плоскостях.
Смешение
Смещение и излом
Рис. 8.23. Различные виды несоосности
Рис. 8.24. Определение соосности
валов с применением лазерной
системы
При работе с лазерной системой не допускает-
ся попадание лазерного луча в глаза. При выполне-
нии центровки (выверки соосности валов) механиз-
мов необходимо учитывать затяжку лап. Если лапы
механизмов затянуты, после замеров необходимо,
выполнить подбор подкладок (при необходимости)
по программе «подбор подкладок». Если лапы «под-
вижного» механизма отпущены, выполняется цент-
ровка в горизонтальной плоскости, затем лапы за-
тягиваются требуемым моментом (при этом прове-
ряется наличие «мягкой» лапы) и по программе
«подбор подкладок» определяются толщины подкла-
док под ближние и дальние лапы.
Центровка по программе «центровка горизон-
тальных валов». Устанавливают лазерную систему на
валы центруемых механизмов, (рис. 8.24). Измеряют в соответствии с рис. 8.25 при помощи
рулетки размеры L1...L4. Включают прибор кнопкой «Вкл.», из основного меню выберают
программу «Центровка горизонтальных валов» и вводят размеры L1...L4 в выбранную про-
грамму. Выполняют все действия, описанные в Руководстве. После нажатия кнопки «Ввод»
в положении 3 ч на дисплее прибора высветятся значения расцентровки механизмов в гори-
зонтальной и вертикальной плоскости, а также необходимые перемещения лап подвижного
механизма в горизонтальной и вертикальной плоскостях.
Необходимо перемещать подвижный механизм в горизонтальной и вертикальной плос-
костях в соответствии с рекомендациями прибора до тех пор, пока центровка не будет удов-
летворять требованиям, предъявляемым к данному типу механизмов. В случае, когда под-
вижный механизм в вертикальной плоскости регулируется при помощи подкладок, необхо-
димо воспользоваться программой подбора подкладок. При этом, вводя в программу прибо-
252
ГЛАВА 8
Рис. 8.25. Схема проведения проверки и исправления соосности валов
ра толщины подкладок, близкие к расчетным, определяется ожидаемая центровка в верти-
кальной плоскости.
8.3.3. Основные неисправности зубчатых муфт и их устранение
Характерные неисправности зубчатых муфт следующие.
— Износ отверстий и болтов. Наиболее слабое место зубчатых муфт — сопряжение болтов
с отверстиями обойм. В сопряжении болтов с отверстиями получаются различные по величи-
не зазоры и натяги. Болты, имеющие в сопряжении натяг, при передаче крутящего момента
будут нагружены, а имеющие зазор — нагрузку воспринимать не будут, поэтому в этом случае
болты нагружаются разными по величине силами. Совершенно очевидно, что для лучшего
распределения общей нагрузки между болтами необходимо, чтобы все болты имели в сопря-
жении одинаковый натяг. Это условие тем существеннее, чем больше величина и непостоян-
ство передаваемых муфтой крутящих моментов, что имеет место на подъемных машинах.
Установлено, что на ряде машин по указанной причине изнашиваются отверстия и бол-
ты, что приводит к увеличению зазора в сопряжении и к срезанию болтов. Отверстие прини-
мает форму эллипса. Эллипсность отверстия в отдельных случаях доходит до 4 мм. Устране-
ние такой эллипсности с помощью разверток — длительный и трудоемкий процесс. Обслу-
живающий персонал шахт обычно устранял эту неисправность, сменяя болты, но при этом
не обеспечивалось требуемое сопряжение соединения болтов с отверстием зубчатых обойм.
Зубчатая муфта является ответственным и нагруженным элементом машины. Частый выход
из строя болтов муфты усложняет техническое обслуживание подъемной установки.
В Донбассуглеавтоматике разработан способ восстановления отверстий обойм зубчатой
муфты с заменой болтов для обеспечения требуемого сопряжения болтов с отверстием без
разбора зубчатой муфты (рис. 8.26).
Рис. 8.26. Восстановление отверстий обойм зубчатых муфт
Перед устранением дефекта обследуют состояние отверстий, определяют величину их
эллипсности, изготавливают комплект болтов с превышением номинального диаметра на
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ
253
величину до 4 мм. Затем на подшипник 2 главного вала 1 устанавливают кронштейн 5 и фик-
сируют его болтами 4. К кронштейну крепят станок ГАРО 3, к шпинделю которого — оправ-
ку-резцедержатель 6. В квадратное гнездо оправки вставляют резец, который фиксируют вин-
том для предотвращения радиальных смещений. Затем из одного отверстия зубчатых обойм
7 извлекают болт, а остальные обтягивают гаечным ключом. Свободное отверстие зубчатых
обойм устанавливают в верхнее положение, после чего по резцу выставляют ось шпинделя
станка ГАРО относительно оси отверстия. Расточку отверстий ведут в определенной после-
довательности с обеспечением требуемого сопряжения с изготовленным болтом большего
диаметра. Вначале растачивают диаметрально противоположные отверстия, а затем все под-
ряд по окружности зубчатых обойм. Такой способ восстановления зубчатых обойм без раз-
борки зубчатой муфты применим независимо от величины выработки отверстия.
— Несоответствие осевых разбегов валов двигателя и редуктора может привести к пере-
даче продольных колебаний одного вала на другой.
Если муфта не компенсирует эти колебания, то галтель шейки вала двигателя периоди-
чески соприкасается с торцами вкладышей, что приводит к вибрациям подшипника. Так как
ближний к муфте подшипник имеет двустороннее ограничение хода шейки вала, то осевая
вибрация присуща ему в большей степени. Необходимо устранить несоответствие разбегов.
— Слабая посадка или шаткость втулки муфты на валу.
К наиболее распространенным дефектам соединительных муфт относятся смещение зуб-
чатой втулки на валу при бесшпоночной посадке, ослабление шпоночного соединения. В
таких случаях муфту необходимо заменить. Кернить вал или насаживать втулку с примене-
нием прокладок недопустимо. При замене муфт втулки снимают с помощью гидросъемни-
ков. Чаще для съема муфты быстро подогревают втулку, предохраняя вал от перегрева.
Если нет уверенности в том, что поверхность вала не повреждена, а муфта может быть
использована, последнюю разрезают автогеном в месте установки шпонки. Обычно при на-
личии шпоночного соединения полумуфты насаживают на вал по прессовой посадке 2-го
класса точности. Перед расточкой втулки необходимо микрометром измерить диаметр вала
в нескольких сечениях. При расточке втулки надо обеспечить требуемый натяг. Предельные
отклонения втулки от диаметра вала приведены в табл. 8.8.
Таблица 8.8
Предельные отклонения отверстия втулки от диаметра вала
Диаметр вала, мм 30-50 50-80 80-100 100-120 120-150 150-180
Предельные отклонения отверстия втулки от -52 -65 -85 -95 -110 -125
диаметра вала, мкм -36 ' -45 -60 -70 -80 -95
Диаметр вала, мм 180-220 220-260 260-310 310-360 360-440 440-500
Предельные отклонения
отверстия втулки от -145 -165 -195 -220 -260 -300
диаметра вала, мкм -115 -135 -160 -185 -220 -260
При прессовой посадке втулку насаживают с подогревом в масляной ванне до темпера-
туры 200°С, предварительно осмотрев шейку вала, зачистив ее и подогнав шпонки. На шей-
ке вала не должно быть рисок, заусенцев и других дефектов. Втулку необходимо насадить
так, чтобы торец вала был заподлицо с торцом втулки.
При бесшпоночном соединении втулок муфт с валами, втулки заменяют в заводских
условиях. Допуски на расточку втулок для обеспечения гарантированного натяга в этом слу-
чае определяют специальным расчетом.
Специалистами Павлоградского наладочного управления Донбассуглеавтоматики для
разборки и сборки зубчатых полумуфт используется устройство для индукционного нагрева
токами промышленной частоты.
Конструкция и принцип работы индукционного устройства
Нагреватель состоит из магнитопроводящей системы и индукционной катушки. Маг-
нитопроводящая система состоит из неподвижных и подвижных магнитопроводов. Непод-
вижные магнитопроводы закреплены неподвижно на раме сварной конструкции. Подвиж-
ные магнитопроводы устанавливаются на приваренные к раме штыри и могут перемещаться
254
ГЛАВА 8
в радиальном направлении в зависимости от размеров диаметров нагреваемой полумуфты.
Для удобства перемещения подвижные магнитопроводы имеют ручки. Магнитопроводы ус-
танавливаются на магнитопроводы и перемещаются по направляющим в осевом направле-
нии, что позволяет нагревать полумуфты различной длины.
Технические характеристики устройства
Тип устройства Тип нагревателя индукционное многовитковый индуктор с замыкающей магнитной цепью
Режим работы Частота питающего тока, Гц Рабочее напряжение перемнного тока, В: ручной 50
в силовой цепи в цепи управления и сигнализации Потребляемый ток (наибольший), А: 380 ± 10 220 ± 10
в сети (при установленных косинусных конденсаторах) в индукторе Максимально потребляемая мощность, кВт Ориентировочная продолжительность нагрева полумуфты № 15 до температуры 190-200° С, мин 220 330 70 6
Индукционная катушка состоит из четырех секций, соединенных последовательно. Внутрен-
ние секции имеют по 13 витков, наружные по 14. Секции опираются на четыре текстолитовые
подставки и прижимаются к ним хомутами. Для защиты катушки от повреждения и попадания на
нее масла при нагревании полумуфт внутри катушки закреплен стеклотекстолитовый экран.
, / Повышенный износ зубьев зубчатых втулок и обоймы [25].
Причины: несоответствие типа смазки или ее отсутствие. Совершенно недопустимы: за-
полнение муфты смесью солидола с опилками; значительный перекос обоймы по отноше-
нию к каждой втулке (более 0°30'; неудовлетворительная центровка; недопустимое радиаль-
ное и торцевое биение каждой полумуфты.
В результате ошибок, допущенных при расточке муфты, могут иметь место либо эксцентри-
ситет, либо торцевое биение. В первом случае полумуфты даже при правильной центровке будут
смещены относительно друг друга. При этом возникает перекос в контакте зубьев зубчатой втул-
ки и обоймы, что вызывает повышенный износ зубьев. Кроме того, появляется дополнительный
момент вращения, стремящийся изогнуть сопрягаемые валы, что вызывает вибрацию подшип-
ников. Допускается износ зубьев до 15 %. Сами зубья муфт восстановлению не подлежат.
Для оценки износа зубьев проверяют боковой зазор между зубьями, величину которого
сравнивают с величиной, определенной по формуле
/^.S-m-Sy-S^,
(8.3.18)
где т — модуль зуба; St, S2 — толщина зуба на начальной окружности соответственно втул-
ки и обоймы. Исходные данные для определения AS берут из табл. 8.9.
Таблица 8.9
Данные для определения AS
Типоразмер муфты Модуль Число зубьев Ширина зуба, мм Толщина зуба, мм Максимально допустимое смещение осей валов, мм
прямого бочкообразного
втулки и обоймы втулки обоймы
5 3 56 25 4,35 4,49 4,35 0,2
6 4 48 30 5,83 6,01 5,83 0,2
7 4 56 35 5,83 6,01 5,83 0,25
8 4 62 35 5,83 6,01 5,83 0,25
9 6 46 35 8,91 9,11 8,91 0,25
10 6 56 40 8,91 9,11 8,91 0,3
11 8 48 45 11,92 12,20 11,92 0,3
12 8 54 50 11,92 12,20 11,92 0,35
13 10 48 60 14,91 15,27 14,91 0,40
14 10 54 65 - 14,91 15,27 14,91 0,40
15 10 58 70 14,91 15,27 14,91 0,50
16 12 56 75 17,80 18,36 17,80 0,60
17 12 64 90 17,80 18,36 17,80 0,70
18 12 72 90 17,80 18,36 17,80 0,80
19 12 80 100 17,80 18,36 17,80 0,80
ВАЛЫ. ПОДШИПНИКИ. СОЕДИНИТЕЛЬНЫЕ МУФТЫ 255
В Специализированном шахтомонтажном управлении производственного объединения
«Карагандауголь» изготовлен и внедрен прибор (рис. 8.27) для определения износа зубьев с
модулем 2—20 мм. Прибор представляет собой штангенциркуль с установленной на непод-
вижной губке дистанционной планкой. Планка перемещается по пазу и фиксируется в необ-
ходимом положении прижимным винтом. Измерение производится по постоянной хорде Sx,
определяемой на расстоянии hx от головки зуба. Величины 5 и hx являются расчетными:
для прямозубых некоррегированных передач:
5= 1,387 т; h=0,7Wm, (8.3.21)
для некоррегированных косозубых передач
5 = 1,387/n ; т = т cos В ; h — 0,748/п , (8.3.22)
где тн — модуль нормальный; ms — модуль торцевой; /3 — угол наклона зубьев.
Рис. 8.27. Прибор для определения износа зубьев
Глава 9
РЕДУКТОРЫ
9.1. Анализ характера работы зубчатых передач
9.2. Расчет и выбор редуктора
9.3. Редукторы шахтных подъемных машин
9.4. Повышение надежности работы редукторов
подъемных машин, находящихся в эксплуатации
9.1. Анализ характера работы зубчатых передач
Лебедки и подъемные машины оснащаются редуктором для уменьшения частоты вра-
щения органа навивки (барабана) по сравнению с частотой вращения ротора двигателя. Наи-
более распространено применение одно- и двухступенчатых редукторов, реже — трехступен-
чатых (рис. 9.1). Выбор количества ступеней и собственно типа редуктора диктуется, прежде
всего, требуемой величиной отношения частот вращения ротора двигателя и барабана, вели-
чиной расчетного крутящего момента и другими факторами (см. 9.2).
Рис. 9.1. Принципиальные схемы редукторов подъемных машин:
а) одноступенчатый с одним двигателем; б) одноступенчатый с двумя двигателями;
в) двухступенчатый с одним двигателем; г) двухступенчатый с двумя двигателями;
1 — барабан подъемной машины; 2 — редуктор; 3 — электродвигатель
Подъемные машины с быстроходными двигателями оснащаются двухприводными или
одноприводными редукторами (по количеству двигателей). В ряде случаев на быстроходном
валу редуктора устанавливается маховик для увеличения суммарного момента инерции его
вращающихся элементов, что необходимо для удовлетворения условий предельно допусти-
мых замедлений машины в режимах предохранительного торможения (см. 3.2). Подъемные
машины с тихоходными двигателями постоянного тока — безредукторные. Известны также
(из зарубежных источников) машины со встроенным в барабан двигателем.
Колеса и шестерни редукторов — цилиндрические, как правило, с двухрядным располо-
жением, косозубые шевронного типа, с эвольвентным зацеплением или с зацеплением Нови-
кова. Для малых машин с диаметром барабана до 3-х метров (лебедок) применяются также
однорядные редукторы с прямозубым эвольвентным зацеплением. Соединения ротора двига-
теля с входным быстроходным валом редуктора и выходного тихоходного вала редуктора с
коренным валом машины осуществляются с помощью зубчатых муфт (иногда — пальцевых).
Редукторы с двумя приводами устанавливаются на специальной упругой подвеске, что
способствует демпфированию динамических нагрузок в системе. В этом случае каждый из
быстроходных валов редуктора имеет по две муфты: одну непосредственно на входе в редук-
РЕДУКТОРЫ
257
тор и вторую — в конце полого быстроходного вала. Часто эксплуатационники, ограничива-
ются, если позволяют условия, одним приводом, а второй привод используется в качестве
резервного в случае отказа одного из электродвигателей.
Анализ характера работы зубчатых передач, а также имеющийся опыт их эксплуатации
дает основание предположить, что для всего зубчатого агрегата и силовой установки в целом
одним из наиболее опасных факторов являются так называемые циклические погрешности
изготовления, то есть такие погрешности, которые систематически повторяются и проявляют
себя за каждый оборот шестерни или колеса, что приводит к нарушению контакта в зацепле-
нии вследствие накопленной циклической ошибки в шаге. В этом случае вступление в кон-
такт каждой очередной пары зубьев неизбежно сопровождается их взаимным ударом из-за раз-
личия скоростей точек контакта, следовательно, в этот момент могут возникать значительные
по величине силы взаимодействия, что приводит к ударно-колебательному состоянию систе-
мы. Этому также способствуют деформации идущих впереди упругоподатливых зубьев. Явле-
ния такого рода получили название кромочного удара [190]. Скорость кромочного удара, на-
правленная по нормали к соприкасаемым поверхностям зубьев, определяется по формуле
VK = 72(д'ш + w)(pul + pK)pK/pul, Мм/с, (9.1.1)
где сок, рад/с — угловая скорость колеса; рш,рк, мм — радиусы кривизны профилей зубьев
шестерни и колеса; Мш, мм — разность основных шагов зацепляемых зубьев; w, мм — уп-
ругая деформация ранее вступившей в контакт пары зубьев. Ударное импульсное взаимодей-
ствие повторяется с так называемой зубцовой частотой (или частотой зацеплений)
со3 =лп& / ЗО^п^ / 30, рад / с, (9.1.2)
где Пр «2 — частоты вращения шестерни и колеса, измеряемые количеством оборотов в ми-
нуту; z1; Z2 — числа их зубьев.
Для определения усилий взаимодействия при кромочном ударе, контактируемые зубья
представляются в виде консольных балок переменного сечения. При этом жесткость зубча-
той пары определяется, например, для прямозубого зацепления, по формуле
Сзл(л)=--------—---------(9.1.3)
11,2 + 7,5(5/т-1,25)2
где £’ = 2,06 105 Н/мм1 — модуль упругости стали; Ь, мм — ширина зубчатого венца;
т, мм — модуль зацепления; s, мм — координата точки контакта, отсчитываемая от осно-
вания зуба. Для нормальной высоты зуба 5min//n = 0,25 соответствует начальной точке кон-
такта, а 5шах//п = 2,25 — точке на вершине зуба. С помощью (9.1.3) определяется усреднен-
ная величина жесткости в течение времени контакта:
Ccp=0,Wl%E, Н/мм2 (9.1.4)
и тогда, зная скорость импульсного воздействия (9.1.1) и частоту импульсов (9.1.2), опреде-
ляется амплитуда силы взаимодействия при кромочном ударе по формуле
к 2sin(?rto0/to3)’
где соа=^Сср / Мзп, рад / с; Мзп — приведенная к основной окружности масса зубчатой пары
шестерни и колеса. Из формулы (9.1.5), в частности, видно, что циклически повторяющиеся
кромочные удары при <у0/а>3 = л(л = 1, 2,...) могут вызывать резонансные состояния, как на
основной частоте оз3, так и на обертонах 2а>3, За>3,...
Как следует из (9.1.3), жесткость зубчатой пары в течение времени контакта является
переменной величиной и, к тому же, периодически изменяющейся с зубцовой частотой а>3
(9.1.2), то есть Сзп (?) = Сзп (t+2n/а>3). Это обстоятельство дает основание предположить, что
258
ГЛАВА 9
в зубчатой паре возможна реализация параметрического резонанса на демулътипликационной
частоте (о3/1., что приблизительно имеет место в случае равенства
^=2^/^ (9.1.6)
и теоретически на всех частотах na.J'l, (п = 2, 3,...).
Этим самым обнаруживается еще одна немаловажная особенность взаимодействующих
зубчатых колес редуктора — возможность параметрического возбуждения колебаний.
Как видно, динамическое состояние зубчатой пары в отдельности и редуктора в целом в
режимах, так сказать, стационарного взаимодействия, определяется множеством различных
факторов конструктивного и технологического характера. Но имеется еще один фактор, фор-
мирующий динамическое состояние редуктора в неизбежных на практике так называемых
нестационарных режимах. Реальные подъемные машины, как правило, работают по схеме:
пуск — разгон до заданной скорости — движение с постоянной скоростью — замедление —
стопорение. Далее этот процесс повторяется множество раз в зависимости от технологичес-
кого назначения машины, то есть в рассматриваемой системе имеет место так называемый
повторно-кратковременный режим эксплуатации. В таком случае на передний план выдвига-
ется следующая существенная особенность зубчатых зацеплений так называемого переборно-
го редуктора, в котором не учитываются явления кромочного удара.
Для устранения возможного заклинивания зубьев при нагреве и для обеспечения усло-
вий протекания смазки необходим гарантированный боковой зазор S между профилями
зубьев сопряженных колес. Этот зазор необходим также для компенсации различного рода
погрешностей, неизбежно привносимых при изготовлении и монтаже передачи, которые,
собственно говоря, и являются упомянутыми выше причинами возбуждения периодических
колебаний зубчатых пар. Боковой зазор определяется в сечении, перпендикулярном к на-
правлению зубьев, в плоскости, перпендикулярной к осям основных цилиндров.
В настоящее время существуют узаконенные стандартом нормы для величины бокового
зазора в зубчатых передачах. Система допусков на зубчатые передачи устанавливает гаранти-
рованный боковой зазор <5^, которым является наименьший предписанный боковой зазор,
независящий от степени точности изготовления колес и передач, для чего предусмотрено
шесть видов сопряжений, определяющих различные значения <5^. На величину бокового
зазора государственным стандартом и заводскими нормалями устанавливается также восемь
видов допусков, определяемых разностью между наибольшим и наименьшим зазором [189].
По мере увеличения бокового зазора увеличивается соответственно и допуск. Разность меж-
ду наибольшим и гарантированным зазором должна быть достаточной для компенсации по-
грешностей изготовления и монтажа колес.
Наибольший боковой зазор, фактически образуемый между зубьями в передаче, не ог-
раничен стандартом. Он представляет собой замыкающее звено сборочной размерной цепи,
в которой составляющими размерами, ограниченными допусками, являются межосевое рас-
стояние, смещение исходных контуров при нарезании обоих колес и др. Более того, по мере
износа зубьев этот зазор неизбежно увеличивается, и его максимально допустимое значение
регламентируется эксплуатационными нормативами.
Непосредственные наблюдения за работой подъемных машин в периоды рабочего и
предохранительного торможения свидетельствуют о том, что редуктор нередко становится
источником своеобразных вибраций, сопровождающихся интенсивным стуком в зубчатых
зацеплениях. Судя по всему, это явление обязано своему проявлению накопленной к момен-
ту начала торможения потенциальной энергии в упругих элементах трансмиссии при отклю-
ченном электродвигателе и наличию неизбежных боковых зазоров в зацеплениях зубчатых
пар. Такого рода процессы называются перекладыванием зазора, учет которых принципиаль-
но необходим для редукторов подъемных машин, работающих в интенсивном режиме.
На рис. 9.2 схематически изображено эвольвентное прямозубое зацепление с наличием
между зубьями бокового зазора 50 (излагаемые ниже рассуждения применимы и для косозу-
бого зацепления с поправками на угол наклона зубьев). Здесь Р — полюс зацепления, PMvi
PN— линии зацепления; цифрами обозначены характерные окружности соответственно ше-
стерни и колеса: 1 и 4 — начальные, 2 и 5 — делительные, 3 и 6 — основные. В данном случае
зазор 80 образовался при вращении шестерни против хода часовой стрелки.
РЕДУКТОРЫ
259
На рис. 9.3 в этой же зубчатой паре схематически изображено образование бокового
зазора <50 при относительном вращении шестерни по ходу часовой стрелки.
Рис. 9.2. Перекладывание зазора справа от зуба шестерни при ее вращении
против хода часовой стрелки
Рис. 9.3. Перекладывание зазора слева от зуба шестерни при ее вращении
по ходу часовой стрелки
Как видно из приведенных схем зацеплений, построенных с соблюдением геометричес-
ких соотношений и пропорций, линейная величина бокового зазора <50, как минимальное
расстояние между эвольвентными профилями зубьев шестерни и колеса, отсчитывается по
линиям зацепления PN, РМ. Это утверждение, вообще говоря, очевидное, строго доказыва-
ется, пользуясь методами теории зубчатых зацеплений [186].
Действительно, связь линейного бокового зазора <50 с угловым зазором 8у , равным углу
поворота шестерни при неподвижном колесе до выбора зазора So между участками эволь-
вент В^ и В2С2 , обозначенных на рис. 9.2, определяется при помощи нетрудно вытекаю-
щего из теории эвольвентных зацеплений соотношения
5o=(^oi-^i)+(^o2-^)-, (9-1.7)
ri
где /J, г2 — соответственно радиусы начальных окружностей 1 и 4 на рис. 9.2; Ux, U2 — соот-
ветственно угловые величины дуг и ^B2 основных окружностей 3 и 6; £/01, U02 — ана-
логичные линейные величины дуг т^В, и основных окружностей 3 и 6 в случае плотно-
го зацепления (при отсутствии бокового зазора).
Каждая из величин U{, U2 и U0l, U02, независимо от наличия или отсутствия бокового
зазора, определяется по формуле
U=2(tga0-a0)+—, (9.1.8)
гэ
260
ГЛАВА 9
где а0 — профильный угол инструментальной рейки, используемой при нарезании зубьев;
гд — радиус делительной окружности (соответственно 2 и 5 для шестерни и колеса, как по-
казано на рис. 9.2); tz — толщина зуба по делительной окружности.
В свою очередь, как известно,
tz=m(n/2+?£ tga0-Q, (9.1.9)
где т — модуль зацепления; £ — коэффициент смещения инструментальной рейки при кор-
рекции профиля зуба (коэффициент коррекции); £ — коэффициент утонения зуба, равный
отношению толщин изношенного и неизношенного зубьев.
С помощью соотношений (9.1.7), (9.1.8), и (9.1.9), а также с использованием известных
формул для параметров rv г2, гЭ1, гЭ2 5 на®Дем
2
8у=-(^2)> (9.1.Ю)
Z1
где — количество зубьев шестерни; £1>2 — коэффициент утонения зуба шестерни и колеса.
Решая, далее, задачу о пересечении прямой PN с участками эвольвент Б,С] и Й2С2 (см.
рис. 9.2), устанавливаем, что
*о = Д)Л, (9.1.11)
где 7^ — радиус основной окружности 3 на рис. 9.2, а с учетом (9.1.10) —
<50+ £2)cosa0. (9.1.12)
Формула (9.1.11) устанавливает, таким образом, взаимную зависимость линейного зазора
от углового, а формулы (9.1.10) и (9.1.12) позволяют вычислять эти зазоры при известных ко-
эффициентах утонения зубьев £2. Соотношение (9.1.11) позволяет также непосредственно
вычислить угловой зазор по измеренному инструментальным способом линейному зазору.
Так как центроидами зубчатого зацепления являются начальные окружности с радиуса-
ми ц и г2 , а связь этих радиусов с радиусами и Т^2 устанавливается формулами
r1cosa = 7^ll, r2cosa=T^2,
где а — профильный угол инструментальной рейки с учетом угловых коррекций и £2 со-
ответственно для шестерни и колеса, то формулу (9.1.11) целесообразно записать также в виде
<50 =5>,r1cosa. (9.1.13)
В соотношении (9.1.13) угол а вычисляется как наименьший положительный корень
уравнения инволюты
Формула (9.1.13) устанавливает, таким образом, связь между угловым и линейным зазо-
ром с учетом геометрических параметров зацепления.
Минимальная величина линейного бокового зазора принимается при изготовлении в пре-
делах (0,01...0,03>, где т — модуль зубчатого зацепления. В процессе износа зубьев факти-
ческий зазор может в десятки раз превышать минимальное значение, и его величина легко
определяется существующими измерительными средствами при выполнении работ по реви-
зии и наладке подъемной машины.
Переходные состояния трансмиссии двухступенчатого редуктора подъемной машины
принципиально могут быть трех видов: контакт разомкнут только в тихоходной передаче,
контакт разомкнут только в быстроходной передаче, контакт разомкнут одновременно в ти-
хоходной и в быстроходной передаче. Эти состояния в каждом конкретном случае могут че-
редоваться в произвольной последовательности, чем обуславливается не столько сложность,
сколько громоздкость математического описания такого рода процессов. Моделирование
РЕДУКТОРЫ
261
переходных процессов при перекладывании зазоров с целью получения величин контактных
усилий между зубьями шестерни и колеса представляет собой самостоятельную задачу, и здесь
остановимся на приближенном, с достаточной степенью точности для инженерных целей,
способе определения этих усилий для одного частного случая.
Можно показать, что при соударении двух масс тг, , между которыми в момент уда-
ра имеется упругий элемент с коэффициентом жесткости С, движущихся в начальный мо-
мент времени (до удара) соответственно со скоростями К15 V2,> V2) > максимальное усилие
удара определяется по формуле
(9.1.14)
где С = Сзп в соответствии с формулой (9.1.3) или С = Сср в соответствии с более конкретизи-
рованной формулой (9.1.4).
В выражении (9.1.14) считается, что применительно к двухступенчатому двухрядному
редуктору тх — это приведенная к основной окружности зацепления первой ступени масса
быстроходного вала с шестернями, включая муфту и ротор двигателя; — приведенная к
такой же окружности масса промежуточного вала с колесами и шестернями (см. рис. 9.1, Ь).
В нормальных эксплуатационных состояниях, когда в течение подъема или спуска груза
электродинамический момент двигателя не меняет знак, то есть двигатель не переходит в ре-
куперативный или в генераторный режим, состояние зацепления в быстроходной передаче такое
же, предположим, как показано на рис. 9.2, и оно сохраняется неизменным от пуска до оста-
новки машины (если не учитывать, разумеется, вибрационные процессы в трансмиссии).
Однако в процессе предохранительного торможения машины при спуске груза, когда
остановка машины осуществляется механическим тормозом при отключенном двигателе,
состояние зацепления в быстроходной передаче становится таким, как показано на рис. 9.3,
так как перемещение ротора, движущегося по инерции, опережает в данном случае переме-
щение машины, движущейся с замедлением ас [вычисление этого параметра производится с
помощью формул (3.2.12) в 3.2). Таким образом, в рассматриваемом режиме происходит ти-
пичное перекладывание зазора. Величину разности скоростей зубьев шестерни и колеса V} - V2
в (9.1.14) в таком случае определим с учетом передаточного отношения редуктора как
=Kt-V2 = ipedyj200Qac8, (9.1.15)
где учтено, что замедление ас имеет размерность м/с1, а остальные параметры в (9.1.14) из-
меряются в мм и мм/с.
Следует учесть также то обстоятельство, что сила удара при перекладывании зазора за-
висит также от так называемого коэффициента перекрытия кп > 1, и тогда для двухрядных
редукторов с учетом формул (9.1.14), (9.1.15) и (9.1.4) запишем
Р =6,28^ lt>£ac8 . (9.1.16)
кп у т1 + m2
Оценки по формуле (9.1.16) показывают, что контактные усилия при перекладывании
зазора составляют величину порядка 100 кН. Такого уровня нагрузки, безусловно, являются
одной из причин иногда наблюдаемых явлений питтинга на поверхностях зубьев.
9.2. Расчет и выбор редуктора
Прежде чем производить выбор редуктора, необходимо решить вопрос о его принципи-
альной необходимости для рассчитываемой машины. Для этого целесообразно вначале вы-
числить «оценочную» мощность привода машины по формуле
N^-^P.-P^KBm,
где разность Р}- Р2 определяется с помощью выражений (2.1.6), (2.1.7), (2.1.8), (2.1.9), (2.1.12)
в зависимости от типа рассчитываемой подъемной установки как максимальная из двух зна-
262
ГЛАВА 9
чений разностей, полученных при z = 0 и z = Н\ Ио — максимальная расчетная скорость
движения сосудов [см. формулу (18.3.7)]. Если окажется, что заведомо
ЛГ0Ч <1000 кВт, (9.2.1)
то следует принять привод с одним асинхронным двигателем, оснащенный редуктором, при-
чем в этом случае передаточное отношение редуктора предпочтительно должно быть как
можно большим для машин с подземным расположением, так как габариты двигателя при
увеличении числа пар полюсов возрастают [см. в связи с этим формулу (10.1.1)].
Если оценочная мощность оказывается такой, что выполняются неравенства
1000 кВт < N0li < 2000 кВт, (9.2.2)
то в этом случае целесообразно принять привод с двумя асинхронными двигателями, также
оснащенный редуктором. Соотношения (9.2.1) и (9.2.2) обусловлены сугубо техническими
обстоятельствами, так как максимальная мощность выпускаемых в настоящее время асинх-
ронных двигателей ограничена величиной 1125 кВт. Именно по этой причине при
1У0Ц>2ШкВт (9.2.3)
требуется принимать привод с тихоходными двигателями постоянного тока без редуктора,
максимальная мощность которых в настоящее время ограничена величиной 5000 кВт (в за-
рубежной практике известны случаи применения электродвигателей мощностью до 7000 кВт).
Разумеется, неравенства (9.2.1), (9.2.2) и (9.2.3) в дальнейшем расчете могут быть скорректиро-
ваны в связи с более точным вычислением мощности и типа привода, и тогда могут быть приняты
иные, более обоснованные решения относительно необходимости оснащения машины редуктором.
Таким образом, если для конкретной рассчитываемой машины требуется редуктор, то
его типоразмер выбирается из типажного ряда заводов-изготовителей по величине допуска-
емого максимального динамического крутящего момента на тихоходном валу [Л/^], то есть
для подъема в вертикальном стволе должно выполняться условие [см. также (2.1.3) и далее]
[^п»]г[(^--Р2)+(^+^)»,/«+4(Л+ЛК/-О«]^/2> Я». (9.2.4)
где Рг и Р2 вычисляются по одной из формул (2.1.6), (2.1.7), (2.1.8), (2.1.9), (2.1.12) при z = 0
для заданного типа подъемной установки.
Для подъемов в наклонных стволах вместо (9.2.4) следует руководствоваться соотношением
[(Ипи]а[И-Д)+(М1+М2Ч+4(4+/.)вг/Д?]Д,/2, (9.2.5)
где Mv М2 — массы поднимающихся и опускающихся капетов с учетом концевых масс.
При производстве работ по смене-навеске канатов, в особенности на двухбарабанных
машинах или на машинах с разрезным барабаном, часто бывает необходимым, например,
приподнять порожний сосуд на небольшую высоту или перегнать его снизу вверх (в зависи-
мости от принятой схемы работ) при рассоединенном переставном барабане или перестав-
ной части барабана. В этом случае в (9.2.4) следует вместо Р\ подставить P^-m^g, принять
Р2 = 0 , а динамическими составляющими — пренебречь, так как рассматриваемые маневро-
вые операции выполняются на минимально возможной скорости и при пренебрежимо ма-
лом ускорении «трогания с места». Тогда, дополнительно к условию (9.2.4), должно быть
(9.2.6)
причем здесь Р} вычисляется при £ = 0. Надо заметить, что в большинстве случаев неравен-
ство (9.2.4) является более сильным, чем (9.2.5), то есть при выполнении (9.2.4) условие
(9.2.5) — заведомо обеспечивается. Однако такая проверка все же нужна.
9.3. Редукторы шахтных подъемных машин
Подъемные машины, имеющие привод от быстроходных двигателей, соединяются с ними
через зубчатые передачи. Лебедки и малые подъемные машины старых выпусков оборудованы двух-
РЕДУКТОРЫ
263
или одноступенчатыми редукторами с регулируемыми межцентровыми расстояниями, называе-
мыми иначе полуоткрытыми зубчатыми передачами. Зубчатые колеса заключены в общий корпус
сварной конструкции, который служит масляной ванной. Зубья зубчатых колес, шестерен и вал-
шестерен фрезерованы. Первая передача имеет шевронные зубья, вторая — прямые. Зубчатое ко-
лесо второй ступени устанавливается на главном валу машины. Все валы установлены на подшип-
никах скольжения, которые монтируют на специальной раме. Смазка подшипников кольцевая.
Отъемный редуктор шахтных подъемных машин представляет собой отдельный узел, со-
стоящий из одно- или двухступенчатой цилиндрической зубчатой передачи, заключенной в
корпус с жесткими межцентровыми расстояниями. Редукторы соединяются с главным валом
подъемной машины зубчатой или жесткой муфтой и с валом двигателя — зубчатой либо пру-
жинной муфтой. Одноступенчатые редукторы имеют по две вал-шестерни с зубчатыми или
пружинными муфтами для соединения с приводными двигателями. Один из двигателей может
быть рабочим, второй — резервным или при двухдвигательном приводе — оба рабочими.
Отъемные редукторы выпускались с подшипниками скольжения или качения, заключен-
ными в корпус редуктора. Смазка подшипников принудительная или разбрызгиванием. При смаз-
ке разбрызгиванием для улучшения подачи масла к подшипникам некоторые редукторы снаб-
жены скребками для съема масла с зубчатого колеса и системой желобов или только системой
желобов. Редукторы ЦД2-163 подъемных машин БМ-2000-ЗА 2БМ-2000-ЗА, а также редукторы
ЦД4-115 лебедок БЛ-1200 отличаются тем, что колесо второй передачи шевронные; у редуктора
ЦД2-163 и прямозубое у редуктора ЦД4-115 установлены на главном валу машины (лебедки).
Корпус редуктора подвешен на бронзовых втулках на валу. Передняя часть корпуса редуктора
при помощи шарнирного звена связана с рамой подъемной машины (лебедки). Вал-шестерни
этих редукторов предусматривают установку двух двигателей с левой и правой сторон редуктора,
один из которых может быть рабочим, другой — резервным, или оба рабочих.
Для многоканатных подъемных машин выпускались редукторы с подпружиненным корпу-
сом (рис. 9.5). У двухприводных редукторов внутри полых вал-шестерен быстроходных ступеней
проходят двигательные валы, посредством которых производится соединение вал-шестерен с
электродвигателями. Двигательный вал одним концом через половину зубчатой муфты, состоя-
щей из обоймы и втулки, соединяется с вал-шестерней. Другой конец двигательного вала соеди-
няется с двигателем второй половиной зубчатой муфты. Такое соединение вал-шестерен с двига-
телями позволяет редуктору поворачиваться вокруг оси выходного вала при деформации пру-
жинных опор от реактивного момента.
Редукторы ЦОН-16, ПДН-17, ЦОН-18 и 2ЦОН-22 выпускались с зацеплением Новико-
ва. Остальные редукторы выпускаются с эвольвентным зацеплением.
Технические характеристики редукторов подъемных машин старых выпусков приведе-
ны в [17, 19, 22, 125]. Ниже приведены технические характеристики редукторов подъемных
машин, выпускаемых в настоящее время.
Таблица 9.1
Технические характеристики редукторов для подъемных машин НКМЗ
Тип редуктора Передаточное отношение Допустимый крутящий момент на тихоходном валу, кН-м Масса редуктора, т Маховый момент GD2P, КН-м2
При однодвигательном приводе При двухдвигательном приводе
ЦО-18 10,5±0,21 320 640 38 910
ЦО-18 11,5+0,28 290 580 38 980
ЦО-22 10,5+0,21 570 1140 64 2500
ЦО-22 11,5+0,23 500 1000 64 2800
ЦД-20 20+0,4 380 — 28 900
НКМЗ оборудует подъемные машины в основном редукторами ЦО-18, ЦО-20, ЦО-22.
В табл. 9.1 приведены основные характеристики этих редукторов.
Донецкгормаш изготавливает широкую номенклатуру цилиндрических редукторов: двух-
ступенчатых с горизонтальной компановкой валов общего назначения и специальных (для
использования в общепромышленных приводах.
Технические характеристики редукторов подъемных машин Донецкгормаша приведены
в табл. 9.2.
264
ГЛАВА 9
Таблица 9.2
Технические характеристики редукторов подъемных машин Донецкгормаша
Обозначение редуктора Крутящий момент на тихоходном валу, кН- м Передаточные отношения, U Масса редуктора, т Варианты сборки (рис. 9.4)
Ц2Ш - 800П 170 7,1; 10; 11,2; 20; 30; 35,8 11,6 12; 21
Ц2Ш - 800У 240 7,1; 10; 11,2; 14; 28 14 12; 21; 31; 32; 33
Ц2Ш1000 320 10.17, 11.29, 19.63 21,6 12; 21
2Ц-1600 290/580; 280/560; 270/540 7.35; 10,5; 11,5 25,1 —
РЦЦ-1150Л 550/510 20; 31,5 3,2 12
Ц2Ш-710 95 20/30.5 7,8 12; 21
Редукторы рассчитаны для работы в реверсивных, непрерывных и повторно кратковре-
менных режимах. За счет использования легированных сталей и термообработки редукторы
имеют высокие нагрузочные характеристики. Смазка зубчатых передач и подшипников оку-
нанием и разбрызгиванием. Редукторы с горизронтальной компоновкой имеют несколько
вариантов сборки, которые характеризуются расположением и количеством выходных кон-
цов быстроходных валов (рис. 9.4).
Рис. 9.4. Варианты сборки редукторов
9.4. Повышение надежности работы редукторов подъемных машин,
находящихся в эксплуатации
Редукторы шахтных подъемных машин — один из наиболее надежных элементов, и, как
правило, срок их службы совпадает со сроком службы подъемной установки. Тем не менее, даже
в самых совершенных конструкциях редукторов периодически возникают те или иные неисп-
равности, обусловленные рядом причин. Ниже рассмотрены характерныенеисправности редук-
торов подъемных машин, находящихся в эксплуатации, и пути повышения их надежности.
9.4.1. Основные неисправности редукторов и способы их устранения
1. Распространенной неисправностью редукторов является расшатывание колес на валу с
ослаблением посадки ступицы. Расшатывание вызывается главным образом неправильным вы-
бором шпоночных канавок или размеров шпонок.
Для проверки шаткости зубчатых колес включают подъемный двигатель при заторможен-
ной машине в одну и другую сторону. При наличии люфта происходит заметное смещение сту-
пицы относительно вала. Шаткость устраняют подтягиванием шпонок, а в случае необходимос-
ти их заменой. После подтягивания тангенциальных шпонок устанавливают новые стопорные
устройства. При шаткости, обусловленной износом ступицы зубчатого колеса, установка допол-
нительных прокладок не допускается и в таких случаях ставят вопрос о замене колеса. В случае
скалывания стенок цементированных и закаленных шпоночных канавок на валу и втулке
последние восстанавливают нарезанием новых шпоночных канавок в диаметрально проти-
воположном месте.
2. Нарушение уплотнений в разъеме корпуса редуктора и подшипников. Вскрывают крышку
редуктора и подшипников и очищают поверхность разъема, далее ее промывают керосином
или соляровым маслом и протирают денатурированным спиртом или растворителем РПВ. На
просушенную поверхность непрерывным слоем наносят пасту «Герметик» вдоль всей поверх-
ности разъема узкой струйкой. Закрывают крышку и равномерно затягивают. Под действием
давления паста растекается по всей поверхности разъема, заполняя все неровности и пустоты.
Через 2—3 ч после герметизации редуктор может быть включен в работу. Запрещается установ-
ка уплотнительных прокладок в не предусмотренных конструкцией редуктора местах. Ослаб-
ленные болтовые соединения подтягивают.
РЕДУКТОРЫ
265
3. Трещины фундамента под редуктором, неплотное прилегание корпуса редуктора к фун-
даменту, ослабление затяжки анкерных болтов.
При появлении трещин ремонтируют и усиливают фундамент. Прилегание корпуса ре-
дуктора при монтаже улучшается выравниванием поверхности фундамента, а в процессе эк-
сплуатации — установкой регулировочных прокладок. Ослабленные анкерные болты подтя-
гивают. Пропитанные маслом участки поверхности фундамента вырубают и ремонтируют.
4. Нерациональный режим смазки. Проверяют подачу масла к смазываемым узлам, регу-
лируют аппараты сигнализации и блокировки системы смазки редуктора.
5. Трещины в корпусе редукторов. При обнаружении трещин в корпусе редуктора необхо-
димо в первую очередь установить направление и приблизительные границы трещин. Для
этого поверхность в зоне трещины очищают от масла и ржавчины стальной щеткой и смо-
ченной в керосине ветошью, после чего насухо вытирают. Оперативно границы трещины
определяют следующим образом. Место обнаруженной трещины смачивают керосином, ко-
торый через 10 мин удаляют. Затем на поверхность наносят меловую краску. После просыха-
ния краски деталь простукивают, в результате керосин проступает из трещины и образует на
поверхности, покрытой мелом, линию, соответствующую очертанию трещины.
Для определения точной границы трещины наиболее целесообразно использовать методы
ультразвуковой и магнитопорошковой дефектоскопии. Просвечивание обеспечивает высокую
надежность определения дефектов в металле. Для предотвращения дальнейшего распространения
трещины по концам ее сверлят сквозные отверстия диаметром не менее толщины стенки. При
заварке трещин в деталях с толщиной стенки 3—12 мм применяют одностороннюю разделку, а при
толщине металла свыше 12 мм — двухстороннюю. При заварке трещин в каждом отдельном слу-
чае, в зависимости от характера трещины, конфигурации и материала, сварку должны вести соот-
ветствующими электродами при определенных режимах.
9.4.2. Улучшение качества зубчатого зацепления
Возникновение неисправностей редукторов сопровождается, как правило, ухудшением
его шумовой характеристики при работе вхолостую и под нагрузкой. При нормальной рабо-
те редуктора шум должен быть ровным, умеренным, низкого тона, без стуков, перезвонов и
пульсаций. В редукторах с зацеплением Новикова может наблюдаться повышенный шум,
который ослабевает в процессе приработки редуктора.
Причины, вызывающие ненормальный шум редуктора.
Шум, напоминающий периодическое щелканье зубьев, особенно заметный со стороны ведо-
мого колеса. Причины: некачественное изготовление колеса — наличие больших отклонений
в окружном шаге.
Резкий металлический скрежет, дребезжащий звук, вызывающий вибрацию корпуса редуктора.
Причины: увеличение бокового зазора зубчатой передачи свыше нормы; недостаточный боко-
вой зазор между зубьями передачи; расцентровка колес; наличие острых кромок на головках
зубьев; наличие на рабочем профиле зубьев неравномерной выработки (хребта или канавки).
Циклический, то возникающий, то снижающийся шум, периодичность изменения звучания
которого совпадает с частотой вращения колеса. Причины: наличие эксцентриситета окруж-
ности колеса относительно оси; наличие накопленной ошибки окружного шага; поврежде-
ние зуба колеса или шестерни при монтаже, транспортировке, забоины, вызывающие изме-
нение геометрической формы зуба.
Стук в зубчатой передаче, соответствующий частоте вращения зубчатого колеса. При-
чины: разработка посадочного места одной из опор подшипников.
Износу и другим видам повреждений наиболее подвержены элементы зубчатого зацепления.
Это, прежде всего: заедание, скол торцов и вершин зубьев, поломка, отслаивание цементи-
рованного слоя, выкрашивание, осповидный питтинг, коррозия зубьев и др.
Многие разрушения зубчатых передач обусловлены нарушением правильности зацепле-
ния. В передачах со значительным перекосом зубьев существенно повышается контактное
давление, возникают ударные нагрузки, в результате чего происходит контактное разруше-
ние зубьев. Взаимный перекос зубьев значительно снижает их долговечность, износостой-
кость и противозадирную стойкость и ухудшает условия их смазки. При значительном пере-
косе имеет место прогрессирующее выкрашивание зубьев с первого же момента работы ре-
дуктора под нагрузкой.
266
ГЛАВА 9
Нарушение правильности зацепления обусловлено: несоосностью расточки корпусных де-
талей, дефектами, возникающими при термической обработке, неточностью изготовления, не-
качественной сборкой; недостаточной жесткостью опор зубчатых передач. Неправильная уста-
новка опор нарушает зацепление, уменьшает пятно контакта, ведет к увеличению контактных
напряжений на поверхности зубьев, вызывает преждевременный питтинг, торцевые сколы. По-
ломка зубьев происходит также в результате частых включений подъемных двигателей при за-
торможенной машине, особенно при загрузке подъемных сосудов на весу. При высоких динами-
ческих нагрузках зарождаются усталостные трещины, которые под воздействием циклических
нагрузок постепенно приводят к разрушению зацепления. Некачественное зацепление может
быть также следствием деформации редуктора из-за недостаточной жесткости или перетянутос-
ти его корпуса анкерными болтами, износа посадочных мест подшипников, прогиба вала.
На скиповом подъеме 2Ц-4х1,8 шахты «Благодатная» ПО «Павлоградуголь» вследствие
перетянутости корпуса редуктора зубья имели боковой контакт. При поломке одного из зу-
бьев последний вошел во впадину вал-шестерни. При входе в эту впадину других зубьев ко-
леса они были деформированы, а в бандаже возникла трещина. После слесарной обработки
деформированных зубьев редуктор был вновь пущен в работу, но в дальнейшем произошел
разрыв бандажа одного полушеврона зубчатого колеса. После замены зубчатой передачи кон-
тактные напряжения в зубьях были снижены благодаря переводу машины на двухдвигатель-
ный привод и улучшению качества зацепления.
Известны случаи неправильной сборки шевронных передач через зуб, из-за чего возника-
ет нескомпенсированное осевое усилие, а также нарушается зацепление, что приводит к по-
вышенному износу зубьев и подшипников. По указанной причине произошел разрыв бандажа
на зубчатом колесе редуктора на скиповом подъеме МК 5x4, оснащенном редуктором 2ЦД-2-
23, шахты им. А. А. Скочинского ПО «Донецкуголь».
Разрушение зубчатых передач наступает вследствие:
— осповидного износа, который возникает под воздействием высоких удельных давлений,
когда на контактирующих поверхностях появляются микропластические деформации сжатия.
На трущихся поверхностях появляются микротрещины, которые под воздействием повторно-
переменных напряжений вызывают усталостные явления. В результате на поверхности зацепле-
ния возникают одиночные и групповые осповидные впадины. При попадании жидкой смазки
на поверхность трения и относительном перемещении зубьев открытый конец трещины закры-
вается, в результате возникает высокое давление, расклинивающее трещину. На шахте «Цент-
ральная» ПО «Красноармейскуголь» (подъемная машина МК4х4) каждые 2—3 года производили
замену передач из-за повышенного износа зубьев. Разрушение зацепления проявлялось в интен-
сивном осповидном износе зубьев. Работа редуктора сопровождалась периодическими стуками
при движении в одну сторону. Как впоследствии было установлено, причиной неудовлетвори-
тельной работы редуктора был износ посадочных поверхностей корпуса редуктора.
Определение и улучшение качества зубчатого зачепления
Для определени качества зубчатого зацепления необходимо произвести внутренний ос-
мотр редуктора. При внутреннем осмотре снимаются крышки смотровых окон и проверяет-
ся состояние зубчатых зацеплений и смазки редуктора.
При осмотре зубчатых зацеплений обращается внимание на целость зубьев, износ их и состо-
яние поверхности. Величина износа зубьев по толщине не должен превышать 10%. Наличие пит-
тинга, те. выкрашивания металла на поверхности зубьев, не может служить причиной замены ко-
лес, если питтинг расположен у ножки зуба и занимает не более 20% его боковой поверхности.
Если обнаружится, что у основания одного из зубьев имеются трещины или что повреж-
денная выкрашиванием (питтингом) площадь рабочей поверхности зубьев превышает 30 %
боковой поверхности зуба, а глубина ямок выкрашивания превосходит 10 % толщины, зуб-
чатые колеса заменяют или ремонтируют в заводских условиях.
Качество зацепления проверяют по расположению и величине пятна контакта зубьев. Пят-
но контакта должно располагаться посредине рабочей поверхности зуба. Ориентировочные нормы
величины пятна контакта эвольвентного зацепления: 40—45 % высоты и 50—60 % длины зуба.
В передачах с зацеплением Новикова первоначальный контакт имеет отпечаток краски
или блеск в виде ровной сплошной линии, расположенной примерно посредине рабочих по-
верхностей зубьев, и занимает не менее 95 % по их длине. Постепенно в процессе работы ре-
дуктора под нагрузкой происходит приработка зубьев и касание (контакт) распространяется
РЕДУКТОРЫ
267
на всю их высоту. Шабровка или обработка напильником зубьев с зацеплением Новикова не
допускается. Проверяют пятно контакта по краске, нанесенной тонким слоем на боковую по-
верхность зубьев. Примеры контактов зубчатых цилиндрических колес приведены в табл. 9.3.
Таблица 9.3
Примеры контактов зубчатых цилиндрических колес
Контакт Характер шума Оценка качества зацепления
Серединный Шелест, идет легкое гудение низкого тока Хорошее
Боковой Без нагрузки шелест, под нагрузкой вой Неудовлетворительное
Две полосы Под нагрузкой вой и перемежающийся стук, без нагрузки шелест или очень маленький стук Неудовлетворительное
Составной, серединный Перемежающийся стук при холостом ходе и вой под нагрузкой Неудовлетворительное
У головки Под нагрузкой шум низкого тона Удовлетворительное
Боковой раздвоенный Легкий вой. Очень малый перемежающийся стук Неудовлетворительное
Раздвоенный, продольный Легкий вой среднего тона и легкий перемещающийся стук Неудовлетворительное
Переходный Перемежающийся стук Неудовлетворительное
В случае несоответствия величины пятна контакта зубьев и его расположения вышеука-
занным нормам прежде всего, необходимо установить характер несоответствия. Если харак-
тер несоответствия одинаков для всех зубьев колеса, то причинами его могут быть для ре-
дукторов с регулируемыми межцентровыми расстояниями — непараллельность и перекос зуб-
чатых передач, для редукторови с жесткими межцентровыми расстояними — перекос осей
передач, вызванный пережимом корпуса редуктора при монтаже или отсутствие осевого сме-
щения валов вследствие зажатия наружных обойм подшипников качения.
Боковой контакт вызывается перекосом валов. Величину перекоса определяют по на-
клону валов, измеренному с помощью валовых уровней, и определяют по формуле:
---------д-ж-10
2 2 J
(9.4.1)
где 3 — величина перекоса, мм; А, Б, В, Г — показания уровня на соответствующих шейках
вала (для устранения ошибки в формулу подставляют полусумму прямого и обратного показа-
ний уровня на каждой шейке); д — цена деления уровня, мм/м; ж — ширина полушеврона, м.
Допуск на непараллельность и перекос осей валов при нормальном модуле (от 1 до 30
мм) (см. табл. 9.4). Перекос осей валов редукторов с жесткими межцентровыми расстояния-
ми чаще всего может быть связан с пережимом корпуса редуктора при монтаже. Поочеред-
ным ослаблением болтов, крепящих редуктор к фундаменту, добиваются правильного рас-
положения пятна контакта, определяемого по краске. Пережим корпуса устраняют исправ-
лением фундамента или стальными прокладками, подкладываемыми под корпус редуктора.
После устранения пережима производят подливку фундамента.
Таблица 9.4
Допуск на непараллельность и перекос осей валов
Степень точности Допуск на непараллельность и перекос осей валов, мкм, при ширине колеса или полушеврона, мм
св. 110-160 св. 160-220 св. 220-320 св. 320-450 св. 450-630
7 21 24 28 34 40
8 26 30 36 42 50
9 34 38 45 52 60
При наличии пятна контакта у головки зуба проверяют межцентровое расстояние осей
передач с помощью штихмаса и микрометров. Измерять следует с обеих сторон колеса, по
возможности ближе к опорам вала.
268
ГЛАВА 9
Межцентровое расстояние определяют по формуле
где I — кратчайшее расстояние между валами, измеренное штихмасом, мм; DxiaD2 — диамет-
ры валов, измеренные микрометрами, мм. Предельные отклонения межцентрового расстоя-
ния АвЛ и ДнА приведены в табл. 9.5.
Зацепление контролируют также измерением бокового зазора между зубьями путем прока-
тывания свинцовой прокладки между профилями зубьев. Полные боковые зазоры на одном и на
другом торцах зуба должны быть одинаковыми и находиться в пределах, указанных в табл. 9.5.
Максимальный допустимый боковой зазор Стзх в зацеплении в результате износа опре-
деляют по формуле
С_И=0>1'У+С,«е. (’«)
где S=7tm /2 , т — нормальный модуль, мкм; С — величина максимально допустимого
а / н 2 макс
бокового зазора, мкм (табл. 9.5).
Таблица 9.5
Предельные отклонения межцентрового расстояния и величины максимально допустимого
бокового зазора
Вид сопряжений Обозначение отклонений и допусков Отклонения и допуски, мкм при межцентровом расстоянии, мм
св.320-500 св.500-800 св.800-1250 св. 1250- 2000 св.2000- 3150
Д с, 130 170 210 260 360
X С, 260 340 420 530 710
ш Сг 530 670 850 1060 1400
Д jUfaAky AgA ±100 ±100 ±120 ±150 ±180
X АвА9 AgA ±160 ±180 ±200 ±250 ±280
ш Л^А, AgA. ±250 ±280 ±320 ±400 ±450
Примечание. С — гарантированный боковой зазор, мкм; ДвА, ДНА — предельные отклоне-
ния межцентрового расстояния, мкм; Д, X, Ш — сопряжения соответственно с нормальным,
уменьшенным и увеличенным гарантированными зазорами.
Если характер несоответствия пятна контакта зубьев нормам циклически изменяется по
окружности колеса, причиной может быть биение торца обода колеса. Биение проверяют
стрелочным индикатором, устанавливаемым у торца венца зубчатого колеса. Для исключе-
ния влияния осевого разбега вала на показания индикатора у торца вала устанавливают вто-
рой индикатор. Показания индикаторов вычитают, если они расположены с одной стороны
колеса, и складывают, если они расположены с разных сторон. Биение измеряют не менее
чем в восьми точках по окружности колеса. Допустимые величины биения приведены в
табл. 9.6. Если величина биения колеса превышает допустимую, необходима замена колеса.
Таблица 9.6
Допустимые величины биения торца обода колеса
Степень точности по нормам контакта Биение, мкм, при ширине колеса или полушеврона, мм
св. 110-160 св. 160-250 св. 250-320 св. 320-450 св. 450-630
7 8 6 5 4,2 3.6
8 10 8 6 5,2 4,5
9 12 10 8 6,5 5,5
10 16 12 10 8.5 7,0
РЕДУКТОРЫ
269
9.4.3. Повышение надежности работы подпружиненных редукторов
На многоканатных подъемных машинах, находящихся в эксплуатации, применяются
подпружиненные редукторы, значительно снижающие удары, возникающие в системе при
работе асинхронного двигателя (рис. 9.5).
Рис. 9.5. Подпружиненный редуктор 2ЦД
Необходимыми условиями удовлетворительной работы подпружиненных редукторов
являются: правильность установки корпуса 1 на опорах 2; точная центровка редуктора с ка-
натоведущим шкивом и подъемными двигателями; незначительное биение корпуса в гори-
зонтальной и вертикальной плоскостях; правильная регулировка демпферов 5.
При внешнем осмотре проверяют состояние пружинных опор 2 и крепление их к фун-
даменту. Контролируют зазоры: а между втулкой 6 и крышкой 4 редуктора (обычно устанав-
ливают на заводе); в — между втулкой и корончатой гайкой 7; с — между корпусом 1 редук-
тора и опорной тумбой 2.
Отправным при монтаже служит зазор с = Е+К, где Е — среднеарифметическая величи-
на деформации пружины 3 от веса редуктора; К — постоянная, определяемая конструкцией
редуктора (приводится в инструкции завода-изготовителя). Расчетная величина с должна по
возможности совпасть с фактически измеренной. Чтобы определить зазор в между гайкой и
втулкой, используют формулу в- = с—а. Зазор в регулируют корончатой гайкой, которую сто-
порят шплинтом.
Биение корпуса редуктора в местах, наиболее удаленных от фланца главного вала, дол-
жно быть не более 1 мм в горизонтальной и вертикальной плоскостях. Биение устраняют
уточнением центровки главных валов. При максимальных колебаниях подпружиненного ре-
дуктора в условиях пиковых нагрузок (например, при разгоне электродвигателя) регулируют
демпферы. Внутренняя полость демпфера должна быть полностью заполнена маслом.
Регулировочными винтами добиваются определенной степени дросселирования отвер-
стий, перепускающих масло из одной полости демпфера в другую. В течение первых пяти
лет эксплуатации подпружиненного редуктора возможна усадка пружин 3. При обнаруже-
нии остаточной деформации устанавливают новую подкладку 8 большей толщины, компен-
сирующую величину деформации пружин.
Проанализируем аварию с подпружиненным редуктором 2ЦД-23 подъемной машины
МК5х4 шахтоуправления «Октябрьское» ПО «Донецкуголь». В период разгона обычного цик-
ла подъема груженого скипа, когда подъемные сосуды достигли скорости 8 м/с, разрушился
главный вал редуктора между соединительной муфтой и редуктором. Машинист, услышав
треск, удары, затормозил машину предохранительным тормозом. В течение последних 15
дней, предшествующих аварии, обслуживающий персонал фиксировал повышенную вибра-
цию корпуса редуктора вдоль оси главного вала с возрастающей амплитудой до 10 мм. Ава-
рийное разрушение вала редуктора произошло из-за усталостной потери прочности металла
от действия на него сложных знакопеременных силовых перегрузок кручений и изгиба. Раз-
270
ГЛАВА 9
рушение вала развивалось от его наружной поверхности в плоскости сечения концентричес-
кими зонами на глубину до 50 мм, что составило 35 % потери рабочего сечения вала. Одна из
причин аварии — несоответствие прочностных характеристик редуктора паспортным нагруз-
кам машины, проектным и фактическим эксплуатационным режимам работы подъемной
установки. Редуктор постоянно работал с перегрузкой в период разгона машины на 19 % по
максимальному расчетному моменту вращения на его главном валу. Сопутствующая причи-
на аварии — дополнительные перегрузки на изгиб главного вала редуктора из-за несоблюде-
ния нормированных зазоров.
От корпуса редуктора (от усилий, возникших на упорах верхнего ограничения хода ре-
дуктора) главному валу передавались дополнительные нагрузки изгиба, которые в шесть раз
превышали расчетную нагрузку изгиба этого вала. (Последний испытывал сложную силовую
знакопеременную перегрузку).
При устранении аварии было выполнено следующее: изготовлен новый вал; установле-
ны новые подшипники качения главного вала; для улучшения центровки и уменьшения ко-
лебаний редуктора между полумуфтами главного вала редуктора и шкивом трения установ-
лены дополнительные прокладки.
Кроме того, за период эксплуатации подъемной машины выходили из строя: зубчатое
колесо первого блока промежуточной передачи из-за поломки шевронного зуба; зубчатое
колесо второго блока промежуточной передачи из-за поломки зуба и порыва зубчатого вен-
ца. В разное время разрушались шпильки ограничения верхнего хода корпуса редуктора.
Чтобы избежать подобных аварий, следует:
— регулярно комплексно проверять правильность монтажа редуктора;
— все установленные параметры и нормированные зазоры привести в соответствие с
заводскими инструкциями по монтажу и эксплуатации подпружиненных редукторов и по-
стоянно контролировать соблюдение их в процессе эксплуатации;
— для снижения перегрузки возможна перестройка регулятора хода подъемной машины
со сниженным ускорением в период разгона или установка меньшей нормы загрузки скипа.
Для выявления, оценки и устранения нарушений центровки редукторов, установленных
на пружинных опорах, необходимо:
— подъемные сосуды установить на перевес, шкив трения зафиксировать стопором и
включить предохранительный тормоз;
— подъемные электродвигатели отключить от сети и принять меры против их включения;
— проверить количество смазки в картере редуктора и установить его согласно реко-
мендациям завода-изготовителя.
Рассоединить муфту, соединяющую шкив трения и редук-
тор (рис. 9.6), а также муфты приводных электродвигателей,
установив предварительно на двигательные валы монтажные
полукольца. Снимают гайки 1 и стяжные шпильки 3, затем
спецгидродомкратом выпрессовывают соединительные шпиль-
ки 2. Отсоединенный редуктор из-за наличия неуравновешен-
ных масс примет перекошенное положение на пружинных опо-
рах. При этом наиболее вероятным положением фланца полу-
муфты редуктора 1 относительно фланца полумуфты главного
вала 2 будет такое, как показано на рис. 9.7, а. Центровка счи-
тается удовлетворительной, если величины смещения и Д2
(мм) соответствуют приведенным в табл. 9.7.
Если редуктор занимает положение относительно главного
вала, отличное от изображенного на рис. 9.7 а, или величины Д{ и
Рис. 9.6. Муфта,
соединяющая шкив
трения и редуктор
Таблица 9.7
Допустимые величины смещения полумуфт
Тип редуктора РС-700 2ЦД-14 2ЦЦ-17 2ЦД-20 2ЦД-23
Д1 8,0 18,0 14,0 22,0 9,0
Дг 7,0 15,5 3,0 13,0 L0
РЕДУКТОРЫ
271
Д2 не соответствуют приведенным, центровку исправляют. При этом следует иметь в виду, что
количественная оценка величин А} и Aj может быть неточной вследствие возможного увеличе-
ния трения на фланцах полумуфт.
Для более полной оценки качества центровки вал редуктора приподнимают (подъем-
ным краном или домкратом соответствующей грузоподъемности) и торцы полумуфт уста-
навливают в параллельное положение (рис. 9.7, б) с точностью 0,1 мм. При этом зазор Д2
между торцами полумуфт должен быть не более 1 мм. Иная величина зазора Д2 или верти-
кальное смещение редуктора в направлении, перпендикулярном оси главного вала, свиде-
тельствует о неправильной установке пружинных опор на фундаменте. В этом положении
необходимо измерить и записать высоту каждого пружинного пакета Нгр., с точностью ±0,5 мм.
Рис. 9.7. Взаимное расположение полумуфт главного вала и подпружиненного
редуктора после:
а — рассоединения муфты; б — поднятия полумуфты редуктора показано на рис. 9.7, а.
Далее грузоподъемным устройством приподнимают весь редуктор, высвобождая пружи-
ны, измеряют высоту каждого пружинного пакета в свободном состоянии Нсв., определяют
величину сжатия каждой пружины Е= Нсв. — Нгр1, а также среднюю величину сжатия пружин
отдельно для каждой из опор по формуле:
<9-4.4)
где п — число пружинных пакетов на одной опоре.
После этого редуктор вновь опускают на пружинные опоры. У правильно смонтирован-
ного редуктора его вал должен возвышаться над главным валом на величину Д(. =0—2 мм, а
отклонение величин сжатия каждой из пружин Е. от среднего значения Е на опоре не пре-
вышать ±2,0 мм. Если хотя бы одно из этих условий не соблюдено, центровку следует счи-
тать неудовлетворительной.
Исправляют центровку редуктора изменением толщин подкладок 8 на расчетную вели-
чину (рис. 9.5) индивидуально под каждым пружинным пакетом. Величину корректировки
толщины подкладки <5( определяют по формуле
(9.4.5)
А, имеет положительное значение, если ось редуктора находится над осью главного вала;
и отрицательное, если ось главного вала находится над осью редуктора.
Положительное значение А, свидетельствует о необходимости увеличить толщину под-
кладки, отрицательное — о необходимости уменьшить ее. После корректировки толщин под-
кладок повторяют все приведенные ранее операции для контроля.
Если окажется, что максимальные зазоры в четырех диаметрально противоположных точ-
ках по наружной окружности полумуфт имеют разную величину и наибольший зазор превышает
0,1 мм, то между торцами полумуфт устанавливают прокладку из декапированной стали на вели-
чину суммарного торцевого биения полумуфты с таким расчетом, чтобы наибольший зазор не
превышал 0,1 мм. Муфты соединяют (запрессовывают соединительные втулки и затягивают гай-
ки стяжных болтов), включают подъемную машину в работу и проверяют биение корпуса редук-
тора в вертикальной и горизонтальной плоскостях, которое должно быть не более 1 мм.
Глава 10
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ
ПЕРЕМЕННОГО ТОКА
10.1. Общие сведения
10.2. Расчет и выбор электродвигателя
10.3. Расчет роторных сопротивлений
10.4. Автоматизация подъемных установок с асинхронным
двигателем с фазным ротором с металлическим
реостатом в цепи ротора
10.5. Электропривод с асинхронным двигателем
с фазным ротором с применением асинхронно-
тиристорного каскада
10.6. Частотно-регулируемый электропривод
с асинхронным двигателем
10.7. Частотно -регул ируемый электропривод
с синхронным двигателем
10.1. Общие сведения
Современный привод подъемных машин и лебедок является электрическим, хотя еще до срав-
нительно недавнего времени сохранился и привод с паровыми машинами (шахта «Министр Ахен-
бах», Германия, такая подъемная машина демонтирована в 1993 г. в связи с закрытием шахты).
Лебедки и подъемные машины оснащаются, преимущественно, асинхронными двигателя-
ми с фазным ротором. Асинхронные двигатели с фазным ротором с металлическим или жидко-
стным реостатом в цепи ротора используются в качестве электропривода более чем на 90 %
подъемных машинах, находящихся в эксплуатации в угольной и горнорудной промышленности
стран СНГ. Это объясняется преимуществами этого электропривода, а именно: малая стоимость
оборудования и строительно-монтажных работ, простота обслуживания, малые затраты времени
на восстановление при отказах, легкость резервирования, высокая эксплуатационная надежность.
На подъемных машинах с мощностью электропривода 250 кВт и менее применяются
низковольтные двигатели, а при большей мощности — высоковольтные двигатели напряже-
нием 6 кВ. Максимальная мощность асинхронного двигателя с фазным ротором 1600 кВт.
Подъемные машины могут иметь два двигателя в работе — двухдвигательный привод или
один двигатель — однодвигательный привод. Как правило, при однодвигательном приводе
имеется резервный двигатель — один двигатель в работе, другой — в резерве. В связи с тем,
что скорость асинхронных двигателей 250—1000 об/мин предусмотрено наличие редуктора.
Асинхронные двигатели с фазным ротором развивают номинальную частоту вращения
п = пн
nH = (l-sH)60f /р, об/мин, (10.1.1)
где s = sH — номинальное скольжение магнитного поля при номинальном (рабочем) крутя-
щем электродинамическом моменте МЭ = МН (номинальное скольжение, как правило, со-
ставляет для серийных электродвигателей не более 0,04); / = 50 Гц — стандартная частота
промышленного тока, р — число пар полюсов статорной обмотки.
В формуле (10.1.1) величина псин =60f /р, об/мин называется синхронной частотой вра-
щения магнитного поля, создаваемого статорными обмотками электродвигателя. В зависи-
мости от р=\, 2, 3... эта частота образует следующий дискретный ряд:
273
________________ЭЛЕКТРОПРИВОД С ДВИГА ТЕЛЯМИ ПЕРЕМЕННОГО ТОКА_
^х^ббо, 1500, 1000, 750, 600, 500, ... об/мин7"^>
В общем слмааелараЯетры п, ncu!1Ts связаны следующей зависимостью:
S = (ncuH~n)/ncuH-
(10.1.2)
Рис. 10.1. Характеристики асинхронного
двигателя с фазным ротором
При запуске двигателя и при его ос-
тановке используются специальные релей-
ные роторные станции [17, 25, 197], пред-
назначенные для ступенчатого изменения
активного сопротивления в цепи ротора,
благодаря чему обеспечивается в должной
мере плавный разгон и замедление
подъемных сосудов. На рис. 10.1 изобра-
жены типичные характеристики асинх-
ронного двигателя с фазным ротором в ко-
ординатах М-Мэ/Мкр и 1-s, которая,
судя по (10.1.1), пропорциональна часто-
те вращения ротора л; Мкр — так называ-
емый критический момент, при котором
происходит «опрокидывание двигателя».
Кривые 1—4 называются искусственными
характеристиками, а кривая 5 — есте-
ственной.
При подключении статорных обмо-
ток к питающей сети, в двигателе, с еще
неподвижным ротором, постепенно уве-
личивается крутящий момент от нуля до
тех пор, пока он не станет равным пус-
ковому моменту Мп, при котором ротор
начинает ускоренно вращаться (дуга ах1\
на искусственной характеристике 1). При этом движущий момент уменьшается до тех пор,
пока он не станет равным номинальному Мн (последнее вовсе не обязательно — вместо
Мн это может быть любое значение М', удовлетворяющее условию Мн < М' <МП). В это
время происходит отключение части резисторов в роторной цепи, что соответствует «скач-
кообразному переходу» на искусственную характеристику 2, и вращение ротора продолжа-
ет ускоряться по дуге afo. Такой процесс повторяется несколько раз, пока система не вый-
дет на естественную характеристику, достигнув по дуге номинальную частоту враще-
ния при номинальной величине скольжения (на рис. 10.1 в качестве иллюстрации изобра-
жены четыре искусственные характеристики, хотя на практике их может быть до девяти и
более; чем больше ступеней, тем плавней разгон и больше время разгона). При работе на
естественной характеристике все роторные сопротивления (резисторы) выведены, то есть
закорочены, но это не означает, что в роторной цепи вообще отсутствует какое-либо со-
противление: остаточное омическое сопротивление обусловлено сопротивлением собствен-
ных роторных обмоток. Именно из-за этого естественная характеристика имеет неболь-
шой наклон в окрестности Мн.
Расчет роторных сопротивлений (см. 10.3) основан на использовании известной клас-
сической формулы Клосса для электродинамического момента [181]:
2_+2s А+^
*
Л/ □ — ———- S^
(10.1.3)
где Uo, В — напряжение питающей сети; ]\, R2,0m — соответственно активные сопротивле-
ние цепей ротора и статора; — критическое скольжение двигателя, при котором проис-
ходит его «опрокидывание». Собственно говоря, кривые на рис. 10.1 и построены в соответ-
ствии с соотношением (10.1.3).
274
ГЛАВА 10
Формула Клосса (10.1.3) описывает стационарные квазидинамические процессы, то есть
без учета изменений во времени электромагнитных потокосцеплений статорной и ро-
торной Т2 обмоток в переходных динамических состояниях. В общем же виде электродина-
мический момент определяется выражением
(10.1.4)
в котором (осин=?л/ — синхронная циклическая частота, а потокосцепления и Ч/2 опре-
деляются как решения следующей системы обыкновенных дифференциальных уравнений
[184]:
(10.1.5)
Л2
причем здесь
с2 Юсин
(10.1.6)
dt Ln
Параметры £jk в обозначениях (10.1.6) связаны с собственными (Zj, 1^) и взаимной
(-^12) индуктивностями обмоток ротора и статора соотношениями [181]:
^2, (ю.1.7)
^2 Аг h
Выражение (10.1.4) для электродинамического момента асинхронного двигателя с фаз-
ным ротором с учетом уравнений (10.1.5) и обозначений (10.1.6), (10.1.7) можно применять
не только для исследования обычных нестационарных переходных состояний, но и в случа-
ях, когда напряжения питающей сети t70 или его циклическая частота сосин являются задан-
ными функциями времени t, например, для частотно регулируемого электропривода, что
представляет самостоятельную практическую задачу.
Необходимо отметить, что выражение (10.1.4) приводится к формуле Клосса (10.1.3),
если пренебречь в (10.1.4), (10.1.5), (10.1.6) всеми производными по времени и принять ряд
упрощений, касающихся численных сравнений электродинамических констант.
Для лебедок и машин с подземным расположением в шахтах, опасных по газу и пыли,
для целей разгона двигателя используются жидкостные реостаты [17, 25], позволяющие плавно
(без «скачков») изменять сопротивление в цепи ротора R2. В этом случае при расчетах по
формуле Клосса (10.1.3) можно считать, что 7?2=7?2(г) является «медленно» изменяющейся
функцией от времени, хотя более достоверные результаты, разумеется, получаются с приме-
нением соотношения (10.1.4).
В последнее время наметилась перспективная тенденция применения частотно регули-
руемых асинхронных двигателей и так называемых систем АВК (асинхронно вентильный кас-
кад), а также системы, частотно-регулируемого привода, которые позволяют не только осу-
ществлять плавный пуск двигателя, но и являются экономически более выгодными.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА 275
10.2. Расчет и выбор электродвигателя
Шахтные подъемные установки работают, как правило, в так называемом повторно-кратков-
ременном режиме, а это означает, что, например, в течение рабочей смены двигатель множество раз
включается и выключается. В интервалах между этими событиями двигатель выполняет рутинную
работу: разгоняет массивную машину до необходимой скорости, заставляет двигаться всю систему
с этой постоянной скоростью, затем вынуждает всю систему двигаться с замедлением до стопоре-
ния. Естественно, такой режим вызывает повышенный нагрев силовых обмоток двигателя (хотя в
нем имеется, как правило, принудительная вентиляция), следовательно, ведет к преждевременно-
му «старению» изоляции и в конечном итоге — к выходу из строя двигателя в целом.
С увеличением мощности двигателя фактор нагрева изоляции в меньшей степени ска-
зывается на ее долговечности, в связи с чем возникает идея рассчитывать мощность привода
по суммарной выделяемой теплоте. А так как последняя пропорциональна квадрату тока в
силовых обмотках или квадрату развиваемого двигателем движущего усилия F(z) [см. урав-
нение М.М. Федорова (2.1.13)], то в этом случае расчет мощности необходимо производить
по интегральному среднеквадратическому значению усилия
/Тг
рэфф=ЫР2^, (10.2.1)
V о
называемым эффективным усилием привода [здесь Т определяется в соответствии с обозна-
чениями (2.1.21)]. При этом эффективная мощность привода находится по формуле
^эфф = РэффУй, (10.2.2)
где, напомним, VQ — максимальная скорость движения подъемных сосудов. В этом состоит
суть так называемого расчета по тепловому режиму электропривода шахтных подъемных уста-
новок (такого рода расчеты, впрочем, используются и для других видов технических систем).
Расчет установочной мощности привода необходимо производить с учетом кпд ус-
тановки в целом, то есть на основании (10.2.2) должно быть = F^VQ , гДе
Луст^мехПреЯдв, (10.2.3)
причем Tjpgg и rife определяются по каталогам редукторов и электродвигателей, а при-
нимается не более 0,9, чем учитываются потери электроэнергии из-за трения в подшипни-
ковых узлах коренного вала машины и копровых шкивов, из-за трения в направляющих ус-
тройствах сосудов и др. Таким образом,
(10.2.4)
ЛмехЛредЧдв
После определения по формуле (10.2.4) установочной мощности из каталога принятого
типа электродвигателей выбирается типоразмер с ближайшей большей номинальной мощ-
ностью NH и с частотой вращения ротора не менее пн:
~^->пн, (10.2.5)
где — принимается по характеристикам принятого ранее редуктора. В связи с соотноше-
нием (10.2.5) вычисляется фактическая скорость движения сосудов
(Ю.2.6)
60/^
которая может несколько превосходить величину %. Для принятого таким способом двига-
теля необходимо вычислить коэффициент его перегрузочной способности как отношение
максимального движущего усилия к номинальному:
276
ГЛАВА 10
k^F^/Nn^k^}, (10.2.7)
где — максимальное движущее усилие в соответствии с (2.1.6); — допустимая
перегрузочная способность принятого двигателя по каталогу. Если условие (10.2.7) не вы-
полняется, то необходимо принять двигатель с большей номинальной мощностью.
Для осуществления изложенной здесь канвы расчета требуется вычислить эффективное
усилие в соответствии с (10.2.1). Входящий сюда интеграл особенно просто вычисляется для
случая идеально уравновешенного подъема, то есть при qr=qy в (2.1.6). При этом
F = m^-72+{m\-mi)S,
at
и элементарное интегрирование с использованием формул (2.1.21) приводит к выражению:
„ / , L ( тпг Y In ау+а3
F^fa-m^g 1+ ----------------------.
V -"h J ST g
В практике проектирования при заданных, не обязательно равных, величинах qr, qy,
причем возможно также, что qy = 0, обычно расчет эффективного усилия производится
следующим образом.
Вначале строится диаграмма скорости, ускорений и движущих усилий, как это, напри-
мер, изображено на рис. 2.2 для трехпериодной тахограммы.
Далее в интервалах [z0, и [t2, /3] заменяются слабо выраженные криволинейные дуги
отрезками прямых, проходящих соответственно через точки с ординатами Fn, F12 и F3l, F32,
и тогда интеграл в (10.2.8) приводится к виду
или для общего случая л-периодной тахограммы —
F^ = J^i(^l + FklFk2 + F^)(tk-tk_1). (10.2.8)
V-57 к=1
С применением вычислительных средств вместо (10.2.8) можно получить более точное
численное значение F&p.
Если торможение машины происходит при отключенном двигателе с применением ме-
ханического тормоза, то в (10.2.8) такие интервалы движения в расчет не принимаются, то
есть формально считается, что соответствующие tk -tk_^=Q при неизменной величине про-
должительности движения Т.
Элементарная работа, совершаемая подъемной машиной, определяется одним из следу-
ющих эквивалентных соотношений:
Луст ^lycm
где кпд установки Цуст вычисляется по формуле (10.2.3); а так как это в свою очередь явля-
ется элементарной величиной потребляемой электроэнергии, то суммарная ее затрата за по-
луцикл подъема запишется в виде
0 Т]уст о Wycm
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
277
Г ^2 Т
Подставив сюда (2.1.6) и замечая, например, что jz.• z.dt-— =0 , так как скорость в
О 2 о
начале и в конце движения равна нулю, получим
J^-m^gH
'dycm > (10.2.9)
Чует
откуда следует, что величина потребляемой электроэнергии не зависит ни от суммарной мас-
сивности установки, ни от разности qr-qy.
Так как в соответствии с (18.3.8) разность т1-т2 =пскту)/2, то величина потребляемой
электроэнергии за полный цикл подъема при помощи (10.2.9) запишется в виде
^зат ~ Пск^гр^^ / ^lycm >
следовательно, при прочих равных параметрах в двухскиповом подъеме (иск = 2) электро-
энергии затрачивается в два раза больше, чем в односкиповом (иск = 1), но их кпд остается
одинаковым — Т)уст, потому что и полезная работа определяется как nCKm!pgH.
10.3. Расчет роторных сопротивлений
Цель расчета состоит в определении величин роторных сопротивлений В^ для каждой
/-Й пусковой (искусственной) характеристики (см. 10.1) и моменты времени отключения ро-
торных сопротивлений для обеспечения плавного разгона машины.
Исходными данными для выполнения такого рода расчетов являются каталожные дан-
ные принятого в соответствии с 10.2 асинхронного двигателя с фазным ротором, и, прежде
всего, его номинальные параметры: мощность NH0M, число пар полюсов р, скольжение sH,
коэффициент перегрузочной способности в соответствии с определением (10.2.7).
Необходимо знать также следующие специальные параметры двигателя: активные со-
противления обмоток статора 7^ и ротора Bf0”1, реактивные сопротивления статорных и ро-
торных обмоток соответственно и Х2
Наконец, требуется на основании опыта расчетов и эксплуатации задаться величиной
пускового момента двигателя Мп, который назначается при помощи коэффициента пуско-
вого момента кп (\<кп< кпер) по отношению к номинальному моменту Мн:
1ИЯ = £Я7ИЯ, (10.3.1)
где с использованием (10.1.1) запишем Мн = 3O7Vн/{ппн^.
На рис. 10.1 переключение роторных сопротивлений происходит в своеобразном «кори-
доре», образованным двумя вертикальными «стенками» Мн и Мп. На практике нецелесо-
образно иметь коридор с неупорядоченными профилями стенок, а также равномерно сужи-
вающийся или расширяющийся к верху. Последний вариант приводит к значительным «брос-
кам» тока в роторной цепи, что вызывает повышенные динамические нагрузки в трансмис-
сии машины. Равномерно суживающийся коридор, хотя и способствует сглаживаю динами-
ческих факторов, однако приводит к неоправданному увеличению количества ступеней, сле-
довательно, к усложнению роторной станции. На основании этого в дальнейшем принята
концепция прямолинейного коридора с вертикальными стенками. Исключение может со-
ставлять переключение с последней искусственной характеристики на естественную, когда
точка ап+1 на рис. 10.1 может располагаться справа или слева от правой границы коридора.
В формуле Клосса (10.1.3) критическое скольжение магнитного поля необходимо
понимать как критическое скольжение, соответствующее z-й искусственной характеристике,
в силу чего вместо символа введем обозначение > величина которого является пере-
менной и определяется соотношениями
= Д-1/^+^+ЗГг)/^]2, (10.3.2)
278
ГЛАВА 10
причем здесь ftp — текущая величина активного сопротивления роторной цепи с учетом
внешних роторных резисторов, а сумма реактивных сопротивлений Хх+Х2 считается по-
стоянной. Тогда (10.1.3) в обозначениях (10.3.2) можно записать в следующей эквивалент-
ной форме:
(10.3.3)
При подстановке в (10.3.3) s = s<£ = pYi из (10.3.18) получим выражение для критическо-
го момента, независящего от номера искусственной характеристики:
_ ЗрЦ2 р
кр 2яА2(1+РУ
(10.3.4)
в силу чего соотношения (10.3.3) запишем в следующем безразмерном виде
М$> 2(l + p)pYiS
Мкр s2+2p2yiS + p2^
(10.3.5)
Так как по определению Мкр = [кпер\МН, то равенство (10.3.1) запишется в форме
мп/мкр -• В СИЛУ этого обстоятельства очередная фаза вращение ротора на каж-
дой из характеристик (включая первую пусковую и естественную) начинается при выполне-
нии очевидных условий
(5 - ^ 4) _ Мп _ кп ,
Мкр ^кр [^лер]
(10.3.6)
в которых соответствует скольжению на z-й характеристике в момент времени переключе-
ния сопротивлений, то есть в момент перехода i+1-ю характеристику, причем s0 =1, так как
вращение ротора начинается по первой искусственной (пусковой) характеристике, когда в
начальный момент «трогания с места» М^-Мп. Подстановка в (10.3.6) выражения (10.3.5)
с учетом принятой символики приводит к уравнению относительно у,:
kn _ 2(l + p)pSi_x7i
^лер! £1 + 2Д25,_!/,• + Р2У- ’
решение которого запишем как
Y,
s.-i
кд 1 +Д
ы 0
1
р2'
(10.3.8)
В момент времени переключения роторных сопротивлений электродинамический мо-
мент становится равным Мн, и при этом Мн/МКр=\/^кперУ Следовательно, в момент пе-
реключения роторных сопротивлений, то есть при переходе от z-й характеристики к z+7-й,
должны выполняться условия
~ ) _ Мн _ 1
МКр Мф
(10.3.9)
Подстановка в (10.3.9) выражения (10.3.5) приводит к уравнению относительно сколь-
жения s, при ранее вычисленной величине /, по формуле (10.3.8):
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
279
1 2(1 + /3)Дз,у,.
г---=.= , I / l,‘ (10.3.10)
откуда находим
( I-------------2—A
7=0 [^](1+0)-0-Ж,](1+0)-0) -1 («•”)
л V J
Предварительно введя для постоянных параметров в (10.3.8) и (10.3.11) обозначения для
краткости дальнейшего изложения:
а =
, А = аЬ,
(10.3.12)
перепишем (10.3.9) и (10.3.11) в форме у,/=а, si / yi -b. Если умножить первое из этих
равенств на второе, то получим однородное линейное уравнение в конечных разностях
Sj -Лл,-! =0, решение которого, удовлетворяющее начальному условию з0 =1, как было ого-
ворено выше, имеет следующий простой вид
siA = Л'-1, и при этом Yj=aA,'~l. (10.3.13)
Таким образом, алгоритм вычисления роторных сопротивлений сводится к последова-
тельности операций на основании формул (10.3.13):
1. Скольжение и сопротивление в роторной цепи на первой пусковой характеристике
вычисляется при i=l: s0 =1, уг = a = R^ / R}.
2. Сопротивление в роторной цепи на второй искусственной характеристике вычисля-
ется при i—2. 3j = Л, у2 = / Л •
3. Сопротивление в роторной цепи на третьей искусственной характеристике вычисля-
ется при z-3: s2 = Л2, у3 = аЛ2 = Т?23) /R\ .
Этот процесс вычислений продолжается до тех пор, пока при некотором значении i = n
не выполнится условие ^п-^°т^/R$°m <0,1, что может служить критерием для определе-
ния количества п искусственных характеристик, после чего закорачиваются все внешние со-
противления и двигатель выводится на естественную характеристику, на которой z = n+l.
Следующим этапом расчета является определение моментов времени переключения ро-
торных сопротивлений, которые являются фактически основными параметрами настройки
роторной релейной станции. Это уже — задача механики: записать и решить уравнения дви-
жения подъемной установки на каждом из этапов с постоянным роторным сопротивлением
и определить искомые промежутки времени.
В основу таких построений примем уравнение динамики М.М. Федорова (2.1.3), кото-
рое путем представлений
м^г~ (10314)
1ред а* ^ред 1ред
(здесь D6 — диаметр барабана машины) запишем в форме
(10.3.15)
где со — циклическая частота вращения ротора двигателя; — статический момент на
валу ротора от внешних нагрузок (см. также пояснения к обозначениям в начале 2.1.1).
280
ГЛАВА 10
В интервале времени между моментами переключения сопротивлений в рамках концеп-
ции «медленно» изменяющейся функции будем считать, что Мст в (10.3.15) является посто-
янной величиной, но к началу движения на последующей z+1-й искусственной характерис-
тике к Мст прибавляется вполне конкретная алгебраическая (со своим знаком) величина
, которую, основываясь на уравнении (2.1.13), в обозначениях (10.3.14), определим как
амс(;+1)=d26 ^qy~q^8 j a.dt, (ю.з. 16)
Zlped t,i
где ?,_15 tt — моменты времени разгона двигателя по z-й характеристике (считается, что при
i = 1 — = ?0 = 0), (О, — изменяемая во времени частота вращения ротора по z-й характери-
стике. Таким образом, в общем случае на каждой z-й характеристике
'С = 'С + ХДЛО (10.3.17)
11=1
причем — начальный статический момент при пуске двигателя.
С учетом представлений (10.3.17) уравнение (10.3.15) перепишем так, чтобы оно описы-
вало движение в ограниченном интервале времени [?. b ?(] между двумя последовательными
переключениями роторных сопротивлений:
«]), (10.3.18)
где электродинамический момент (?) определяется из соотношений (10.3.5), если учесть,
что в силу (10.1.2) текущее скольжение $(?) = 1-«о((?)/госин, где (осин=2л//р (см. определе-
ния в 10.1). Или более конкретно:
МО)=Мкр---------2(1 + Д)Д/,(1-^7^«)------
(1-ю, /юси„) + 2Д 2/, (1-ю, /а>син)+Д /2
При подстановке этого выражения в уравнение (10.3.18) приходим к уравнению отно-
сительно функции a>j (?):
---------------2(И-Д)^,(1-т,./^-------- (Ю.3.19)
dt (1 - /Юсин )2 + 2 Д 2у,- (1 -щ,- /ю^ )+Д 2у2
Уравнение (10.3.19) является неоднородным нелинейным уравнением, общее решение
которого из-за его структуры получить в квадратурах не представляется возможным. Однако
это уравнение можно линеаризовать, так как, судя по рис. 10.1, на участках разгона по каж-
дой z-й характеристике, включая естественную, момент двигателя практически линейно за-
висит от скольжения.
Основываясь на этом обстоятельстве, представим, что дуги на рис. 10.1 представля-
ют собой прямые отрезки линий, описываемых уравнениями
_МП-М«>
МП~МН
Подставляя сюда s(t)=1 - ю( (?)/<»син, в результате несложных выкладок получим
M<i) (?) = т1^)(Мд~мн) ! МГ?(1-^)-МЯ(1-^-1)
Юсин S|_i— Sj — Sj
Тогда уравнение (10.3.15), вместо (10.3.19), примет линеаризованную форму
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
281
= (10320)
& ^син 5/-1 si si-l si
В целях сокращения дальнейших записей целесообразно ввести обозначения:
= Мп-Мн = Л/я(1-5,.)-Л/я(1-5,1)-Л/^
^^син (5/-1 - si) ^П ~ Мн
и при этом уравнение (10.3.20) запишется как
dor
-±+pi(oi=pi(ocmpi. (10.3.22)
at
Общее решение неоднородного линейного уравнения (10.3.22) с постоянными коэффи-
циентами в интервале [r,_], г,]) имеет вид
аз-, (r)=q ехр[-д,
где С, — постоянная интегрирования, которую определим из условия, что при /=//_!, то
есть в момент начала движения по z-й характеристике, частота вращения ротора практичес-
ки равна той величине, которая предшествовала моменту переключения сопротивлений (если
пренебречь переходными процессами). Иначе говоря, должно быть to, ), что
дает возможность найти С = to, , (t, ,)-(0„шр,. И тогда
a>i (r) = -[toCUHp, -to,_i fo-Ojexpf-p, (t'^+cocuHp,. (10.3.23)
При t=tt получим ®/U)=-[®C(e/P/-®,_iU_i)]exp[-p,.(z,.-z,_1)]+toc„Hp,., откуда найдем
интервал времени разгона на z-й характеристике:
, , _ 1 1я ^cmPi ~ (^)
Ч “ 4-1 - 1П-------------т.—С •
Pi <OcuHPi-<Oi-l\ti-l)
А так как to,-^,)/®^ = 1-5,, <»/_i(^--i)/тсин = 1-^-1, т0> воспользовавшись выражениями
(10.3.13), окончательно получим
(10.3.24)
С помощью соотношений (10.3.24) на каждой ступени пуска необходимо проверить вы-
полнение неравенства
d(O:(t'} г . .-I / «;_1 \ 2а
max—= р,. [toCUHp,. - )J = p,toCKK Гр. -1+Л ) <—,
где а<1 м/ с2 — допустимое ускорение разгона в соответствии с «Общесоюзными нормами
технологического проектирования шахтных подъемных установок» [32].
Таким образом, расчет роторных сопротивлений и моментов срабатывания релейной
станции фактичеки сводится к вычислениям по простым формулам (10.3.13) и (10.3.24).
На практике с достаточной степенью точности чаще применяется упрощенная методи-
ка расчета роторных сопротивлений, где задаются число ступеней роторных сопротивлений
станции управления, а величина сопротивлений по ступеням, среднепусковой ток и относи-
тельная продолжительность работы по ступеням определяются по величинам номинального
сопротивления ротора, номинального тока ротора и относительной продолжительности ра-
боты всего сопротивления, умноженным на соответствующие, заранее рассчитанные, коэф-
фициенты для каждой ступени [17].
282
ГЛАВА 10
10.4. Автоматизация подъемных установок с асинхронным двигателем
с фазным ротором с металлическим реостатом в цепи ротора
Как отмечалось в 10.1, на подавляющем большинстве подъемных машин в качестве элект-
ропривода применяется асинхронный двигатель с фазным ротором с реостатом в цепи ротора.
К сожалению, этот привод имеет весьма существенные недостатки. Он не обладает ре-
гулировочными качествами, необходимыми для шахтных подъемных машин. Механические
характеристики асинхронного двигателя с фазным ротором с реостатом в цепи ротора явля-
ются нелинейными, исключают однозначность между положением рукоятки управления и
скоростью при различных нагрузках. Неудовлетворительная управляемость, сильная зависи-
мость пониженной скорости от изменения нагрузки неблагоприятны для выполнения рабо-
чих диаграмм шахтных подъемных установок.
Неудовлетворительным являются и тормозные характеристики асинхронного двигате-
ля, так как невозможно осуществление электрического торможения на скорости ниже синх-
ронной при нормальном включении двигателя. Для управления асинхронным двигателем
подъемной машины вынужденно используются различные характеристики при пуске, разго-
не, замедлении и при управлении на промежуточных скоростях.
Применение динамического торможения в значительной степени улучшает управление
асинхронным приводом, обеспечивает плавность изменения и приложения нагрузок на эле-
менты машины, создает возможность глубокого регулирования скорости при спуске грузов,
получения устойчивой пониженной скорости, что упрощает ручное управление приводом.
Практически все подъемные установки с асинхронным приводом с реостатом в цепи
ротора управляются машинистом подъема вручную, при этом присутствует и играет боль-
шое значение человеческий фактор, который в 90 % случаев является причиной аварий на
подъемных установках.
Энергетические показатели привода определяются высотой подъема, отношением
Vcp 1^макс > продолжительностью работы на пониженных скоростях, отношением времени вклю-
чения двигателя в цикле ко времени цикла, временем загрузки подъема в течение суток.
Применение асинхронного привода на подъемах значительной мощности при увели-
ченном времени работы на пониженых скоростях характеризуются высокими тепловыми
потерями в роторной цепи двигателя и большим расходом электроэнергии.
Асинхронный привод имеет низкий cosip, на скиповых подъемах он составляет 0,6-
0,65, на клетевых — 0,35—0,5 в зависимости от особенностей рабочих диаграмм.
Схемы управления подъемным двигателем с фазным ротором с различными варианта-
ми полуавтоматического разгона, статические преобразовательные устройства для динами-
ческого торможения, ревизия и наладка различных схем управления приведены в [17].
Низкая управляемость привода затрудняет осуществление автоматизации подъемных
установок.
Специалисты Донбассуглеавтоматики под руководством кандидата технических наук
И. Я. Гальперина разработали и организовали изготовление комплектов аппаратуры автома-
тического управления скиповыми подъемными установками с асинхронными двигателями с
фазным ротором, которые были внедрены более чем на 50 шахтах [21].
Модернизация электропривода и автоматизация шахтных подъемных установок должны
обеспечивать в своей совокупности их высокоэффективную, надежную и безаварийную ра-
боту без постоянного присутствия обслуживающего персонала. Это должно достигаться с
учетом реальных условий эксплуатации подъемной установки, которые определяются воз-
действием большого числа разнообразных факторов (техническое состояние подъемной ма-
шины, оборудования загрузочно-разгрузочных устройств и приемных площадок, ствола и
его армировки, наличие или отсутствие резерва производительности, климатические усло-
вия, соображения по обеспечению безаварийной и безопасной работы в конкретных услови-
ях, обеспеченность обслуживающим персоналом, уровень его квалификации и т. п.). Эти
факторы невозможно игнорировать и их учет существенно усложняет задачу перевода уста-
новки на автоматическую работу. Правда, многие из них могут быть устранены в процессе
реконструкции или капитального ремонта подъемной установки, которые должны предше-
ствовать ее автоматизации. Однако в условиях действующего подъема это связано зачастую с
длительными простоями оборудования, необходимостью ведения горных работ и является.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
283
следовательно, не только дорогостоящим мероприятием, но и требует тщательной организа-
ционной подготовки. В этих условиях компенсация недостатков и несовершенства основно-
го оборудования и уровня эксплуатации за счет расширения функций систем управления и
применения высоконадежной аппаратуры может оказаться для многих установок не только
экономически более целесообразной, но и единственной реально существующей возможно-
стью их перевода на автоматическую работу. Критерием, определяющим целесообразность
принятого технического решения, является его экономическая эффективность с учетом до-
стигнутого в условиях конкретной установки положительного эффекта, первоначальных и
последующих капитальных затрат, эксплуатационных издержек во всех аспектах, вероятнос-
ти вынужденного простоя и связанного с ним ущерба.
Исходя из основополагающих условий и следует формулировать требования к электро-
приводу и автоматике подъемных установок. Эти требования, имеющие рекомендательный
характер, можно разделить на три группы:
— требования к функциям систем управления и автоматизации;
— требования к аппаратуре управления, ее конструктивному исполнению и размеще-
нию в здании подъемной машины;
— требования к аппаратам и схемам защиты, блокировки и сигнализации.
Система управления и автоматизации должна удовлетворять следующим требованиям:
1. Предусматривать способы управления:
— автоматическое — цикл выполняется автоматически после получения разрешающих
сигналов от аппаратов, контролирующих процессы разгрузки и загрузки подъемных сосудов;
— дистанционное — цикл выполняется автоматически по сигналам оператора загрузоч-
ного устройства или опрокида;
— местное — цикл выполняется автоматически по команде машиниста подъемной машины;
— ручное — управление осуществляется машинистом подъемной машины.
Автоматическое управление является основным. Остальные способы управления следу-
ет рассматривать, как вынужденные, и применять их только в процессе выполнения пуско-
наладочных работ или на период времени, необходимый для устранения неполадок, препят-
ствующих автоматическому управлению.
2. Предусматривать остановку подъемных сосудов в промежуточных точках ствола (ре-
жим отбоя), если по условиям эксплуатации их нельзя останавливать в крайних положениях
на длительный промежуток времени. Рекомендуется поднимаемый сосуд останавливать на
отбой перед разгрузочными кривыми. Если в зимнее время это неприемлемо по причине
обмерзания сосуда и его содержимого, то следует дополнительно предусматривать возмож-
ность постановки подъемных сосудов на отбой в теплой части ствола.
3. При автоматическом управлении должна существовать принципиальная возможность
проходить отдельные участки ствола на пониженной скорости, если по условиям эксплуата-
ции в этом возникает необходимость.
4. Необходимо предусматривать выборку слабины каната до начала периода движения,
если загружаемый подъемный сосуд устанавливается на посадочные брусья.
5. Полностью использовать возможности электропривода подъемной машины для фор-
мирования близкой к оптимальной диаграммы скорости (т. е. обеспечивающей максималь-
ную производительность при условии непревышения допустимого уровня динамических на-
грузок в элементах подъемной установки).
6. Если подъемная установка оборудована загрузочным устройством с секторным затво-
ром, который открывается под действием веса опускающегося скипа, то в момент посадки
скипа на педаль его скорость должна составлять не более 0,5—0,6 м/с. Если скип в период
дотягивания не имеет механического контакта с загрузочным устройством, то скорость до-
тягивания в зависимости от возникающих в разгрузочных кривых динамических усилий при-
нимается в пределах 0,7—1 м/с.
7. Минимальный путь дотягивания подъемных сосудов необходимо принимать в зави-
симости от конструкции загрузочно-разгрузочных устройств и самих сосудов. В реальных
условиях всегда наблюдается разброс точки начала дотягивания, что вынуждает увеличивать
путь дотягивания сверх минимальной величины. Одной из причин разброса является по-
грешность (нестабильность) пути основного замедления подъемных сосудов, обусловленная
различной величиной статического усилия. Эта погрешность должна составлять не более 1 м.
284
ГЛАВА 10
Современные САР скорости позволяют получить и более высокую точность регулирования,
однако это не дает сколько-нибудь заметного увеличения производительности подъемной
установки, так как сохраняется разброс точки начала дотягивания, обусловленный действи-
ем прочих факторов (различная величина упругой деформации канатов, неточность сраба-
тывания этажных выключателей путевого командоаппарата и др.), устранение которых тре-
бует существенного усложнения системы автоматического управления (САУ).
8. Точность остановки подъемных сосудов в конечных положениях должна быть доста-
точной для их надежной разгрузки при полном исключении случаев срабатывания выключа-
телей переподъема. Для соблюдения установленных норм выключатели настраиваются на
срабатывание при переподъеме в 0,4—0,5 м. В этих условиях для скипов допустимое откло-
нение от нормального положения в месте разгрузки должно составлять до +300 мм с учетом
разброса точки срабатывания выключателя стопорения, пути стопорения (т. е. величины
проворота канатоведущего органа после срабатывания выключателя стопорения) и припод-
нимания скипа после разгрузки вследствие уменьшения величины упругой деформации ка-
натов. Поэтому величина пути стопорения по экспериментальным данным не должна пре-
вышать 50—100 мм. При использовании качающихся площадок отклонение подъемных сосу-
дов от нормального положения должно составлять до ±100 мм.
9. Перед стопорением снижать скорость до 0,3—0,4 м/с, т. е. вводить дополнительную (по-
садочную) ступень скорости для обеспечения требуемой точности остановки подъемных сосу-
дов в конечных положениях и снижения динамических нагрузок при посадке опускаемого со-
суда на брусья и в момент стопорения машины механическим тормозом. Переход на посадоч-
ную скорость происходит в результате срабатывания этажного выключателя путевого коман-
доаппарата, а команда на стопорение машины поступает от датчика, установленного на копре
(или в стволе). При точной настройке этажного выключателя стопорение машины механичес-
ким тормозом происходит сразу же после перехода на посадочную скорость. Однако вслед-
ствие различной величины упругой деформации канатов поднимаемого сосуда и разброса точ-
ки срабатывания этажного выключателя движение с посадочной скоростью может происхо-
дить на участке пути до 1 м. Чтобы при этом не происходило сколько-нибудь заметного увели-
чения продолжительности цикла из-за статического падения скорости, она должна поддержи-
ваться с точностью до ±0,05 м/с. На подъемных установках с асинхронным приводом при пе-
регоне порожних сосудов или значительном их недогрузе обеспечить поддержание скорости с
такой точностью затруднительно и для этого сравнительно редкого случая может быть допу-
щено увеличение скорости на 0,15 м/с. В результате путь стопорения возрастает, но это час-
тично компенсируется отсутствием явления приподнимания сосуда после разгрузки.
10. Система управления электроприводом должна допускать дозирование с приемлемой
точностью момента подъемного двигателя при заторможенной машине, т. е. момент должен
быть однозначной функцией перемещения рукоятки управления. Потребность в подобном
дозировании возникает, если необходимо переместить подъемный сосуд на небольшой учас-
ток пути (иногда в несколько сантиметров), а даже незначительный обратный ход недопус-
тим (например, при выполнении ремонтных работ в стволе с подъемного сосуда или разбу-
ривании вагонеток в клети). В этом случае машинист создаст необходимый для предотвра-
щения обратного хода двигательный момент, а затем постепенно растормаживает машину.
11. Производительность подъемной установки при автоматическом управлении должна
быть не ниже максимальной часовой производительности при ручном управлении машиной
наиболее опытным машинистом этой установки.
Аппаратура управления, ее конструктивное исполнение и размещение в здании подъемной
машины должны удовлетворять следующим требованиям:
1. Вся аппаратура управления, защиты, стволовой и технологической сигнализации, ус-
танавливаемая в здании подъемной машины, должна иметь комплектное исполнение и раз-
мещаться в блоке шкафов за исключением пульта управления, роторной станции, роторных
сопротивлений и аппаратов, кинематически связанных с подъемной машиной.
2. Релейно-контакторную аппаратуру целесообразно применять на постоянном токе, так как
по сравнению с аппаратурой на переменном токе она имеет более высокую надежность. Чтобы
свести к минимуму сбои в ее работе, величина напряжения, коммутируемого открытыми контак-
тами, должна составлять, как правило, не менее 220 В. Для коммутации слаботочных цепей реко-
мендуется применять герконовые реле, имеющие высокую надежность и небольшие габариты.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
285
Каждый из силовых регулирующих аппаратов должен содержать не более одного ком-
пактного легкозаменяемого блока управления. Электрические соединения внутри блока дол-
жны выполняться пайкой, без разъемных узлов. При этом в результате резкого сокращения
объема внешней коммутации и числа разъемных соединений существенно повышается на-
дежность аппаратуры и практически отпадает задача поиска неисправного блока, которая
1тя обслуживающего персонала невысокой квалификации представляется достаточно слож-
ной даже при наличии системы индикации неисправностей.
Это требование диктуется специфическими условиями эксплуатации шахтных стационар-
ных установок, средства и системы управления которыми в последние годы существенно ус-
ложняются и требуют квалифицированного обслуживания. Но так как многие угольные шах-
ты находятся на значительном удалении от крупных промышленных и культурных центров, то
укомплектование их электромеханических служб специалистами высокой квалификации пред-
ставляет собой трудноразрешимую задачу. Поэтому для устранения неполадок в сложных сис-
темах регулирования и управления привлекается, как правило, технический персонал специа-
лизированной наладочной организации, обслуживающей шахты в радиусе до 200 км. В резуль-
тате оперативность обслуживания оказывается невысокой. В этой ситуации укрупнение бло-
ков управления при наличии прошедших обкатку резервных блоков позволяет свести к мини-
муму число аварийных вызовов с шахт и ущерб от вынужденного простоя оборудования.
3. Иметь минимальное число регулировок, используемых для настройки аппаратуры
после монтажа на объекте. Обилие регулировок усложняет процесс настройки и увеличивает
вероятность неправильных действий со стороны обслуживающего персонала.
4. Трудовые затраты на пусковую наладку аппаратуры должны быть небольшими. В про-
тивном случае стоимость пусковой наладки оказывается чрезмерно высокой и может даже
превысить первоначальную стоимость налаживаемой аппаратуры. Как показывает опыт, при
отсутствии сдерживающих факторов продолжительность пусковой наладки аппаратуры уп-
равления и автоматизации подъемной установки составляет не более месяца.
5. Блок шкафов управления целесообразно размещать по возможности в пределах пря-
мой видимости от пульта управления. Это существенно облегчает процесс наладки и обслу-
живания электрооборудования.
Аппараты и схемы защиты, блокировки и сигнализации должны удовлетворять следующим
требованиям:
1. Электрические схемы следует строить по возможности с максимальным самоконтро-
лем, чтобы нарушения исправности отдельных элементов (потеря цепи в контактах, обрыв в
катушках реле или соединительных проводах, выход из строя резисторов, диодов и т. п.) не
приводили к возникновению аварийной ситуации.
2. Система защит и блокировок должна контролировать работу подъемной установки,
по крайней мере, с двойным перекрытием, т. е. выход из строя какого-либо защитного уст-
ройства еще не должен приводить к возможности возникновения неконтролируемого ава-
рийного режима.
3. Защитное или блокировочное устройство должно реагировать на отклонение от нор-
мального режима работы независимо друг от друга, т. е. выход из строя одного из них не
должен сказываться на работе другого. Например, магнитные выключатели стопорения и
переподъема не должны срабатывать от общего магнита, так как в случае его сбивания пада-
ющими в ствол кусками горной массы будут выведены из работы сразу оба выключателя.
4. Вероятность срабатывания защитного устройства по ложным причинам или вслед-
ствие его чрезмерной чувствительности к контролируемому параметру должна быть сведена
практически к нулю, так как подобные срабатывания побуждают обслуживающий персонал
загрубить «на глазок» или даже полностью заблокировать работу устройства.
5. Сложные защитные устройства должны иметь моноблочную конструкцию небольших
габаритов и легко заменяться резервными.
6. Для облегчения поиска сработавшего защитного устройства целесообразно применять
индикаторы срабатывания защит, по возможности электрически не связанные с цепью защиты.
В [21] изложены теоретические положения по построению системы автоматического
управления шахтной подъемной установки (САУ), описаны задающее устройство, формиру-
ющее сигнал заданной скорости с ограничением ускорения и рывка, компенсация ошибок
регулирования по управляющему воздействию, описана передаточная функция системы
286
ГЛАВА 10
подъемная машина — канат — подъемный сосуд, приведены методы построения и расчета
системы автоматического регулирования (САР) скорости, расчет САР скорости в режиме
динамического торможения, результаты ее моделирования и промышленных испытаний.
Приведены описание конструкции и принцип работы следующих оригинальных уст-
ройств, обеспечивающих работу подъемной установки в автоматическом режиме.
Узел команд и технологического контроля (УКТ) выдает команды:
— на выборку слабины каната после окончания процесса разгрузки подъемного сосуда
(если загружаемый подъемный сосуд устанавливается на посадочные брусья);
— на пуск машины после выборки слабины каната и окончания процесса загрузки
подъемного сосуда;
— на стопорение машины механическим тормозом по достижении подъемными сосуда-
ми крайних положений;
— на постановку подъемных сосудов на отбой в промежуточной точке ствола, если по
технологическим причинам цикл завершить нельзя или в работе подъемной установки воз-
никли неполадки, препятствующие дальнейшей работе, но не требующие наложения пре-
дохранительного тормоза;
— на снятие с отбоя.
Аппарат управления контакторами (АУК) реализует аналого-дискретный способ управ-
ления контакторами цепи ротора подъемного двигателя, осуществляя их включение в пери-
од вывода подъемного сосуда из разгрузочных кривых по скорости и ускорению, а в период
разгона — по ускорению с отсечкой по току, в период замедления в режиме динамического
торможения — по скорости.
Аппарат управления скоростью (АУС) формирует в функции времени сигнал заданной
скорости с ограничением ускорения и рывка, вырабатывает сигнал ошибки по скорости,
управляет регулируемым механическим тормозом, а в период основного замедления — и ста-
торными контакторами подъемного двигателя.
Тиристорный выпрямитель для динамического торможения (ТВДТ) обеспечивает регули-
рование тока динамического торможения в функции сигнала ошибки по скорости.
Тиристорный коммутатор (ТК) для бесступенчатого регулирования момента асинхрон-
ного подъемного двигателя по цепи ротора.
Удовлетворительная автоматизация периода дотягивания на подъемной установке, обору-
дованной асинхронным электродвигателем с металлическим реостатом в цепи ротора, в услови-
ях изменения статической нагрузки в значительных пределах осуществлялась обычно с помо-
щью регулируемого механического тормоза, компенсирующего избыточную часть двигательно-
го момента. Недостатками этого способа являются повышенный износ механического тормоза
и дополнительный расход электроэнергии. Кроме того, как показывает опыт наладки и эксплу-
атации, обеспечить высокое качество регулирования таким способом затруднительно. Автома-
тизация периода дотягивания может быть осуществлена и с помощью микропривода, но это тре-
бует существенного усложнения механической части подъемной машины, что нецелесообразно.
Силовая полупроводниковая техника открыла возможности решения этой задачи чисто элект-
рическими средствами. Так, хороший результат может быть достигнут применением асинх-
ронно-вентильного (асинхронно-тиристорного) каскада или преобразователя частоты, что в
настоящее время получает все большее распространение (см. 10.5 и 10.6).
На подъемных установках, оборудованных скипами с донной разгрузкой, в период до-
тягивания груженого скипа необходимо развивать значительный двигательный момент. По-
этому эффективная автоматизация периода дотягивания на этих установках может быть осу-
ществлена бесступенчатым регулированием двигательного момента в функции ошибки по
скорости. Подобное регулирование на подъемных установках с асинхронным двигателем с
фазным ротором реализуется с помощью тиристорного коммутатора (ТК), шунтирующего
часть роторных сопротивлений подъемного двигателя.
В настоящее время для подъемных машин находят применение тиристорные коммута-
торы двух типов: с широтно-импульсным управлением на стороне переменного тока и фазо-
вым управлением. Коммутаторы с широтно-импульсным управлением отличаются просто-
той схемного решения, коммутаторы с фазовым управлением обеспечивают более благопри-
ятное протекание электромагнитных процессов в двигателе и несколько лучшее качество ре-
гулирования скорости. Поэтому первые рекомендуется применять на малых подъемных ма-
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
287
шинах, оборудованных двигателями небольшой мощности, а вторые — на подъемных маши-
нах с двигателями средней и большой мощности.
Функциональная схема автоматического управления скиповым подъемом
Как отмечалось выше, асинхронный привод шахтных подъемных машин является наи-
более простым и надежным, и поэтому получил наибольшее распространение на угольных
шахтах. Однако на основе высоковольтного асинхронного двигателя с металлическим реос-
татом в цепи ротора не удается создать систему с единым силовым регулирующим устрой-
ством, позволяющим осуществлять без коммутационных переключений регулирование ско-
рости по заданной программе на протяжении всего цикла как в зоне двигательных, так и
тормозных моментов. Поэтому функциональная схема автоматического управления подъем-
ной машиной с асинхронным приводом (рис. 10.2) содержит несколько замкнутых контуров
регулирования, применяемых в разные периоды движения.
Команда на начало движения по-
ступает из узла команд и технологичес-
кого контроля УКТ, в котором анали-
зируется информация о ходе процессов
разгрузки и загрузки подъемных сосу-
дов. УКТ подключает подъемный дви-
гатель ПД контактором В или Н к пи-
тающей сети и через аппарат управле-
ния скоростью АУС подает команду на
растормаживание машины.
Выбор требуемых реостатных ха-
рактеристик ПД в процессе движения
производится с помощью аппарата уп-
равления контакторами цепи ротора
АУК, на входы которого поступают
сигналы действительной скорости иД
от тахогенератора ТГ и тока ic статора
ПД от трансформатора тока ТГ Кроме
того, в АУК поступают команды от
этажных выключателей путевого ко-
мандоаппарата ПК. АУК осуществля-
ет включение контакторов У1—У8 в пе-
риод вывода подъемного сосуда из раз-
грузочных кривых по скорости и уско-
рению, в период разгона — по ускоре-
нию с отсечкой по току, в период ос-
новного замедления в режиме динами-
ческого торможения — по скорости.
В периоды основного замедле-
ния, движения с промежуточной ско-
ростью, дотягивания и стопорения уп-
равляющие команды вырабатывает
АУС, который выполняет следующие
функция: формирует в функции вре-
мени сигнал заданной скорости с ограничением ускорения и рывка, вырабатывает сигнал
ошибки по скорости АС/, управляет регулируемым механическим тормозом через электро-
пневматический или электрогидравлический регулятор давления РД и совместно с УКТ —
статорными контакторами В, Н, ДТ подъемного двигателя. На входы АУС поступают сигна-
лы: ид, из УКТ и от этажных выключателей ПК.
Основное замедление производится в режиме динамического торможения или на сво-
бодном выбеге, если величина замедления от действия статической неуравновешенности
составляет не менее 0,6—0,7 м/с. Регулирование тока динамического торможения произво-
дится в функции сигнала АС/ тиристорным выпрямителем ТВДТ, который подключается к
статору ПД контактором ДТ.
288
ГЛАВА 10
Движение с промежуточной скоростью и дотягивание производятся в двигательном ре-
жиме путем бесступенчатого регулирования момента ПД тиристорным коммутатором ТК в
функции сигнала ALA.
Механический тормоз в периоды основного замедления, движения с промежуточной
скоростью и дотягивания работает в «дежурном» режиме, т. е. вмешивается в процесс регу-
лирования скорости только в том случае, если она по какой-либо причине начинает превы-
шать заданную величину. Подобное выделение целесообразной зоны работы регулируемого
механического тормоза облегчается тем, что в рассмотренной функциональной схеме во всех
САР скорости используется общий сигнал ошибки по скорости.
Рассмотренные в настоящей главе узлы и аппараты составляют основу комплекта аппа-
ратуры автоматического управления скиповым подъемом с асинхронным приводом. Комп-
лект (рис. 10.3) применяется для модернизации электрооборудования действующих подъем-
ных машин и состоит из следующих шкафов (перечисление производится справа налево по
виду с лицевой стороны):
— стволовой сигнализации (рабочей и резервной) и стволовых датчиков (электронные
блоки управления гамма-реле контроля разгрузки подъемных сосудов и заполнения прием-
ных бункеров, станции управления магнитных выключателей стопорения и переподъема,
флажковые датчики горной массы в течках приемных бункеров). В шкафу размещены также
звонки кодовой сигнализации, что позволяет отказаться от применения колонки стволовой
сигнализации;
Рис. 10.3. Блок шкафов комплекта аппаратуры автоматического управления
скиповым подъемом с асинхронным приводом
— ручного управления;
— автоматического управления;
— стабилизированных выпрямителей (рабочего и резервного) для питания оперативных
цепей постоянного тока;
— вспомогательных приводов;
— тиристорного выпрямителя для динамического торможения со встроенным силовым
трансформатором.
Вне блока шкафов устанавливаются высоковольтное распредустройство, высоковольт-
ный реверсор, роторная станция, тиристорный коммутатор, пульт управления и аппараты,
кинематически связанные с подъемной машиной.
Комплект может быть применен для управления подъемными машинами всех типов,
как поставляемых в настоящее время, так и поставлявшихся ранее.
10.5. Электропривод с асинхронным двигателем с фазным ротором
с применением асинхронно-тиристорного каскада
На подъемных машинах с асинхронным двигателем с фазным ротором с металлическим
реостатом в цепи ротора предпринимались попытки обеспечить высокое качество регулирова-
ния, повысить экономичность привода и обеспечить высокую динамику переходных процессов
с наименьшими затратами путем использования схемы асинхронно-вентильного каскада АВК
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
289
В 2005 г. Научно-производственная электротехническая компания АОЗТ «Элетекс» на
действующей подъемной машине 2Ц4х1,8 двухскипового угольного подъема главного ствола
шахты «Благодатная» ПО «Павлоградуголь» с участием Павлоградского наладочного управ-
ления Донбассуглеавтоматики и Углемонтажа ввела в эксплуатацию разработанный и изго-
товленный АОЗТ «Элетекс» комплекс оборудования, обеспечивающий работу одного из
подъемных электродвигателей по схеме асинхронно-тиристорного каскада (АТК).
Подъемная машина оборудована двумя электродвигателями АКН-16-51-20 напряжени-
ем 6 кВ, мощностью 800 кВт, 290 об/мин. Напряжение ротора 665 В, ток 755 А.
Один из двигателей находится в работе, другой — в резерве.
АТК — это электропривод, входящий составной частью в комплекс оборудования ШПМ-
АТК, который, получая командные и информационные сигналы от пульта шахтного подъе-
ма ПШП, механизмов подъемной машины ШПМ, загрузочно-разгрузочных устройств, вспо-
могательных механизмов, высоковольтных выключателей, обеспечивает движение подъем-
ных сосудов в соответствии с заданной диаграммой движения, защиту ШПМ в аварийных
ситуациях, защиту оборудования АТК.
Собственно оборудование АТК состоит из 2-х шкафов: шкаф силовой ШС-АТК и шкаф
управления ШУ-12. собранные в общий щит силовой ЩСП-АТК.
Для работы АТК необходимы трансформатор (ТСЗП-1000) и сглаживающие дроссели
ФРОС 500 - 4 шт.
Зажимы ротора электродвигателя, кроме того, что они подключены к роторному управ-
ляемому выпрямителю АТК и заводятся в силовой шкаф ШС-АТК, подключены также к
трем ящикам сопротивлений, расположенным в шкафу управления ШУ-12. Данные ящики
сопротивлений закорачиваются тиристорным ключом. Тиристорный ключ включается на
время включения и отключения реверсора в цепи статора двигателя. В течение переходных
процессов включения и отключения реверсора ротор двигателя замкнут на сопротивления.
Спецификой управления ШПМ шахты «Благодатная» является то, что подъемная ма-
шина должна независимо управляться двумя разными по типу приводами. При этом одни и
те же механизмы ШПМ и шахтного подъема должны обмениваться сигналами с разными
приводами. В связи с этим АТК получает ряд функциональных сигналов от специального
шкафа коммутационных согласований ШКС. Кроме того, ШУ-12 обменивается сигналами
со следующими функциональными устройствами: пульт машиниста подъемной машины
(ПШП); шкаф логометрии (ШЛ), из которого получают сигналы, связанные со стволом шах-
тного подъема; аппарат задания и контроля хода АЗК; реверсор; высоковольтное распредус-
тройство; привод тормоза; механизм перестановки.
Структура силовой части привода на базе АТК (асинхронно-тиристорного каскада) не-
сколько отличается от известной схемы АВК (асинхронно-вентильного каскада), а именно:
— подключаемый к роторным обмоткам асинхронного двигателя преобразователь вы-
полняется по схеме управляемого выпрямителя;
— роторный управляемый выпрямитель (РУВ) и сетевой управляемый выпрямитель
(СУВ) (ведомый сетью инвертор тока) выбираются по мощности на полный диапазон регу-
лирования частоты вращения двигателя.
Регулирование частоты вращения двигателя производится изменением тока Id в звене по-
стоянного тока АТК. Статическая точность поддержания частоты вращения двигателя — не
хуже 2 % (определяется характеристиками присоединенного к двигателю тахогенератора ТГ).
Изменение знака момента двигателя осуществляется переводом роторного и сетевого
управляемых выпрямителей АТК в соответствующие области работы (см. векторные диаг-
раммы токов и напряжений двигателя на рис. 10.4). При двигательном режиме асинхронно-
го двигателя роторный выпрямитель работает с углами управления, равными или близкими
к а'мин. При торможении двигателя роторный выпрямитель переводится в инверторную об-
ласть работы (угол управления а макс).
Микропроцессорная система управления (М ПСУ) на программном уровне содержит все фун-
кциональные узлы, необходимые для работы привода на базе АТК. Основными из них являются:
— регулятор скорости PC;
— узел выделения модуля выходного сигнала PC, формирующий задание по току;
— узел выделения знака выходного сигнала PC, определяющий режим работы роторно-
го управляемого выпрямителя;
290
ГЛАВА 10
— регулятор тока РТ;
— системы импульсно-фазового управления (СИФУ) роторного и сетевого управляе-
мых выпрямителей;
— местный пульт управления ПУ.
Сигнал п обратной связи по частоте вращения формируется с помощью тахогенерато-
ра ТГ. Вместо тахогенератора возможно применение цифрового (кодоимпульсного) датчика.
Структура АТК (рис. 10.4) не позволяет без дополнительных устройств изменить направ-
ление вращения ротора электродвигателя.
Рис. 10.4. Принцип функционирования привода АТК. Структура силовой схемы
и системы управления:
а — двигательный режим; б — тормозной режим
Выбор направления движения сосуда производится с помощью реверсора за счет изменения
порядка чередования фаз подводимого к статору напряжения при отсутствии вращения ротора.
МПСУ на программном уровне изменяет порядок формирования импульсов управления ротор-
ным выпрямителем в зависимости от выбранного направления вращения электродвигателя.
Преимущества электропривода АТК в сравнении с резисторно-контакторным приводом:
— высокое качество регулирования скорости — система выполняется замкнутой по ско-
рости и отрабатывает задание непрерывно без дополнительных переключений;
— высокая экономичность привода — отсутствуют потери в металлическом реостате;
— высокая динамика переходных процессов — для динамического торможения исклю-
чается источник тока;
— упрощение процесса управления подъемной машиной — машинист подъема задает
только скорость движения сосуда. Разгон, замедление, поддержание скорости на заданном
уровне выполняются автоматически.
Преимущества микропроцессорной системы управления по сравнению с аналоговыми
системами:
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
291
— повышенная надежность системы — обеспечивается за счет уменьшения объема сис-
темы, числа разъемов, монтажных соединений и применения электронных компонентов с
повышенной плотностью размещения внутренних элементов;
— повышение точности и качества регулирования;
— упрощение наладки и эксплуатации — в системе отсутствуют подстроечные потенци-
ометры, не требуется сезонная (зима-лето) подстройка параметров, т. к. необходимые кор-
ректировки являются составной частью рабочих алгоритмов;
— высокая информативность эксплуатационного персонала о режимах работы и настрой-
ках привода.
На дисплей выводится информация:
— о готовности всех составных частей оборудования к пуску;
— о настройках системы регулирования и защиты (коэффициенты, ограничения, устав-
ки срабатывания и т. д.);
— о фактических значениях контролируемых переменных (ток, напряжение, скорость и т. д.);
Возможность архивирования информации о рабочих и аварийных режимах на персо-
нальном компьютере с последующим воспроизведением данных.
Возможность управления работой привода от персонального компьютера с визуализа-
цией всех процессов от АСУ верхнего уровня.
Потребление электроэнергии при работе подъемной установки по схеме АТК в среднем
снижены на 36 % на 1 цикл по сравнению с потреблением электроэнергии по схеме с резистор-
но-контакторным управлением, что зафиксировано установленными на подъеме счетчиками.
После ввода в эксплуатацию комплекса АТК на подъемной установке один из электро-
двигателей остался работать по традиционной схеме резисторно-контакторного привода, дру-
гой — по схеме АТК.
При эксплуатации подъемной установки с применением АТК подтвердились преиму-
щества электропривода АТК по качеству регулирования, лучшей динамике, значительной
экономии электроэнергии.
Диаграмма работы АТК приведена на рис. 10.5, где V (м/с) — скорость движения сосуда,
F (кН) — усилие, I (А) — ток в цепи ротора (первая цифра в скобках) и ток в звене постоян-
ного тока преобразователя частоты (вторая цифра в скобках).
292
ГЛАВА 10
Действующий ток за время цикла равен 640/800 А. Номинальный действующий ток ро-
тора двигателя 755 А, трансформатора ТСЗПЮОО — 816 А.
Учитывая положительный опыт эксплуатации асинхронного привода по схеме АТК, ПО
«Павлоградуголь» намечает установить такой привод еще на нескольких подъемных установках.
10.6. Частотно-регулируемый электропривод с асинхронным двигателем
В последние годы во всем мире в отраслях промышленности, где применяется регули-
руемый электропривод с двигателями постоянного тока, наблюдается тенденция замены их
на двигатели переменного тока: асинхронные, синхронные и вентильные двигатели. Это
объясняется, прежде всего, трудностями эксплуатации коллекторов и дефицитом меди. Кроме
того, современные тиристорные системы регулирования скорости двигателей переменного
тока обеспечивают механические характеристики электропривода не хуже, чем в системе
тиристорный преобразователь — двигатель постоянного тока. В качестве примера рассмот-
рим систему частотно-регулируемого электропривода для шахтных подъемных установок
(ЭЧМП) с асинхронным двигателем с короткозамкнутым ротором.
В конце 80-х годов по разработкам института ВНИИВЭ (г. Донецк) Научно-производ-
ственное закрытое акционерное общество «Электромаш» (г. Тирасполь) начало выпуск частот-
но-регулируемого электропривода ЭЧМП. Были изготовлены несколько комплектов, однако,
в начале 90-х годов многие комплекты или не были смонтированы на шахтах, или не были
введены в эксплуатацию. В настоящее время такой комплект работает на шахте «Сухая Бал-
ка» ПО «Кривбассруда».
Электропривод частотно-регулируемый для подъемных машин ЭЧМП выполнен на базе
преобразователя частоты с непосредственной связью и предназначен для использования в
качестве реверсивного регулируемого привода шахтных подъемных машин, установленных
на поверхности шахт.
ЭЧМП выпускается на номинальную мощность 315; 630; 1250 кВт, частота вращения
(синхронная) 375; 500; 600; 750 об/мин., диапазон регулирования 1:100.
Электропривод обеспечивает:
— двухсторонний обмен энергией между питающей сетью и электродвигателем;
— форму напряжения, близкую к синусоидальной с малым содержанием высших гар-
моник для получения момента электродвигателя без существенных пульсаций и исключения
«шагания ротора» в зоне низких частот;
— частотное управление асинхронным электродвигателем с короткозамкнутым ротором,
как в двигательном, так и генераторном режимах, работу с автоматическим поддержанием по-
стоянства магнитного потока электродвигателя в функции тока статора и частоты тока ротора;
— частотный пуск и частотное торможение электродвигателя с рекуперацией энергии в сеть;
— бесконтактное реверсирование электродвигателя;
— работу электродвигателя на установившейся скорости в заданном диапазоне;
— разгон и торможение электродвигателя по сигналу задатчика интенсивности с огра-
ничением допустимой перегрузки по току;
— плавное нарастание момента электродвигателя при трогании для безударного выбора
люфтов и натяжения канатов шахтной подъемной машины;
— плавное и экономичное регулирование скорости подъемных сосудов в зоне низких ско-
ростей до 0,3 м/с для обеспечения режимов дотяжки, маневровых операций и ревизии канатов.
В состав электропривода входят:
— согласующий трансформатор, служащий для согласования напряжения сети 6 кВ и
напряжения питания преобразователя частоты, а также снижающий влияние преобразовате-
ля на питающую сеть;
— тиристорный преобразователь частоты с непосредственной связью с системой управ-
ления преобразователем и системой автоматического регулирования электропривода;
— асинхронный электродвигатель с короткозамкнутым ротором и с импульсным датчи-
ком скорости.
На рис. 10.6 представлена функциональная схема электропривода, где:
Т — трансформатор согласующий; ПЧНС — преобразователь частоты с непосредственной
связью; QF1...QF3 — автоматические выключатели; БР9201 — блок регулирования электропри-
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА 293
«ода; КА — командоаппарат; ФВ — фазочувствительный выпрямитель; ПФ — преобразователь
функциональный; ЗИ— задатчик интенсивности; РЧВ — регулятор частоты вращения ротора;
ПК — преобразователь координат; ПЧС — преобразователь частотного сигнала; сумма-
яюр; ВЗ — ячейка выделения знака; РТ-А, РТ-В, РТ-С — регуляторы фазных токов; СИФУ-А,
СИФУ-В, СИФУ-С — системы импульсно-фазового управления; УРУ-А, УРУ-В, УРУ-С — уст-
ройства раздельного управления тиристорными мостами; ПЧ-А, ПЧ-В, ПЧ-С — преобразова-
тели частоты трехфазно-однофазные; ТМ1, ТМ2 — тиристорные управляемые посты; ИДС —
импульсный датчик скорости; М — электродвигатель; ДТ-А, ДТ-В, ДТ-С — датчики тока.
6*6 5Ц,
Рис. 10.6. Функциональная схема электроприводов комплектных частотно-регулируемых
для шахтных подъемных машин ЭЧМП-315
Электропривод работает следующим образом. Напряжение задания скорости электро-
привода от сельсинного командоаппарата КА поступает на вход фазочувствительного вып-
рямителя ФВ, полярность и величина выходного напряжения которого определяется направ-
лением движения и величиной угла поворота рукоятки командоаппарата КА. Задатчик ин-
тенсивности ЗИ определяет темп разгона и торможения электропривода. На входе регулято-
ра частоты вращения РЧВ сигнал задания и*ю сравнивается с действительным значением
Ua поступающим с импульсного датчика скорости ИДС. Для преобразования частоты сле-
дования импульсов, снимаемых с ИДС, в напряжение постоянного тока служит преобразо-
ватель частотного сигнала ПЧС Полярность напряжения на выходе. ПЧС определяется с
помощью ячейки выделения знака ВЗ.
В электроприводе реализовано двухканальное задание тока статора электродвигателя с
косвенным поддержанием постоянства потока, что позволяет независимо управлять реак-
тивной мощностью и моментом асинхронного электродвигателя (АД), Реактивная составля-
ющая тока статора определяется уставкой i[d , а активная составляющая тока ilq , которые
поступают с выхода РЧВ.
Частота тока статора АД определяется как алгебраическая сумма частоты вращения ро-
тора и заданной частоты тока ротора АД
/1=±(/.±/2).
где /ш — частота вращения ротора; fa — частота тока ротора.
294
ГЛАВА 10
Знаки «+» или «-» перед скобками определяют направление вращения, а перед f2 — режим
работы АД: двигательный или генераторный. Суммирование частот осуществляется в сумматоре Z.
Частота тока ротора пропорциональна активной составляющей тока статора и преобразуется а им-
пульсный сигнал из выходного сигнала РЧВ посредством управляемого генератора импульсов ГИУ
В преобразователе координат ПК по сигналам i[d , i{q и fx формируется трехфазная си-
стема синусоидальных напряжений, которая является заданием на фазные токи статора АД
(i*A , i*B , ic )и поступает на входы регуляторов фазных токов РТ-А, РТ-В, РТ-С, где сравни-
вается с действительными значениями токов iA , iB , ic , поступающими с датчиков тока
ДТ-А, ДТ-В, ДТ-С. Выходные напряжения с контуров регулирования фазных токов посту-
пают в систему импульсно-фазового управления соответственно по фазам СИФУ-А, СИФУ-В,
СИФУ-С, где формируются управляющие импульсы тиристоров.
Преобразователь частоты собран по трехфазно-мостовой схеме и представляет собой три
тиристорных реверсивных выпрямителя, которые управляются по синусоидальному закону
с раздельным управлением тиристорными мостами. Каждый реверсивный выпрямитель пи-
тает обмотку статора АД. Раздельное управление тиристорными мостами осуществляется
устройствами раздельного управления УРУ-А, УРУ-В, УРУ-С.
Преобразователь частоты имеет следующие виды защит:
— от токов короткого замыкания в преобразовательном устройстве и нагрузке;
— от выхода из строя тиристоров;
— от внешних и внутренних перенапряжений на тиристорах;
— от недопустимых перегрузок по току;
— от исчезновения или недопустимого снижения напряжения в силовой питающей сети
или сети собственных нужд;
— от исчезновения потока охлаждающего воздуха;
— от работы на двух фазах приводного двигателя;
— от замыканий на землю.
В преобразователе предусмотрены следующие виды сигнализации:
— включенного и отключенного состояния автоматических выключателей на входе пре-
образователей;
— о готовности электропривода к работе;
— об аварийном отключении;
— о замыкании на землю.
Для ускорения поиска неисправностей в преобразователе предусмотрена возможность
измерения выходных сигналов ячеек системы регулирования, а также сигнализация о работе
следующих функциональных узлов:
— системы импульсно-фазового управления;
— ячеек импульсных трансформаторов;
— стабилизированных источников питания;
— схемы токовой защиты;
— о перегорании предохранителей в цепях силовых тиристоров.
Конструктивно электропривод представляет сочетание стоящих отдельно друг от друга транс-
форматора, преобразователя частоты и электродвигателя с импульсным датчиком скорости.
Преобразователь частоты с непосредственной связью состоит из четырех шкафов: шка-
фа вводных автоматов ША, двух шкафов силовых тиристоров ШТ и шкафа управления ШУ.
В шкафу автоматов ША установлены три автоматических выключателя. К выходу каждого
автоматического выключателя подключены три реактора, которые служат для развязки отдель-
ных фаз тиристорного преобразователя частоты со стороны сети. В ША также расположены за-
щита преобразователя от перенапряжений и элементы схемы автоматики электропривода.
Шкафы тиристоров ШТ собраны на силовых тиристорных блоках (по 18 блоков в каж-
дом шкафу). Охлаждение шкафов силовых тиристоров осуществляется двумя встроенными
вентиляторами.
В шкафу управления ШУ размещены блоки системы управления преобразователем и сис-
темы регулирования электроприводом, конструктивно выполненные на унифицированных эле-
ментах (блочная унифицированная конструкция БУК-б). Для удобства обслуживания и эксплу-
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
295
нации блоки с ячейками системы управления и регулирования выполнены на поворотной раме.
Преобразователь имеет блочное исполнение. Обслуживание шкафов — двухстороннее.
Элементы и узлы преобразователя конструктивно выполнены в виде выемных блоков или
съемных панелей. Двери шкафов преобразователя частоты имеют электрическую блокировку.
В шкафах предусмотрено местное освещение.
На лицевых сторонах шкафов установлены измерительные приборы и лампы сигнали-
зации, характеризующие работу электропривода. Внешние электрические выводы преобра-
зователя выполнены шинами с местами для присоединения кабеля, а электродвигатели — с
помощью коробки выводов.
Электродвигатель соединяется с редуктором шахтной подъемной машины с помощью
зубчатой или пальцевой муфты. Соединение импульсного датчика скорости с электродвига-
телем осуществляется с помощью муфты, обеспечивающей отсутствие люфта и кинемати-
ческую точность передачи.
Завод ХЭМЗ разработал и освоил выпуск электродвигателей серии АДЧ.
Трехфазные низковольтные двигатели с короткозамкнутым ротором серии АДЧ — спе-
циализированные электрические машины, предназначенные для работы совместно с час-
тотными преобразователями в приводах, требующих регулирования частоты вращения ме-
ханизма в широком диапазоне.
Серия электродвигателей АДЧ спроектирована на базе серии высоковольтных электродви-
гателей АН-4, выпускающихся ГП «ХЭМЗ» с начала 1980-х годов по настоящее время и зареко-
мендовавших себя в высшей степени надежными, экономичными и удобными в эксплуатации.
Исполнение по способу монтажа, конструкция сердечника статора, изоляция обмоток
статора, конструкция клетки и сердечника ротора двигателей АДЧ выполнены на основе
рабочей конструкторской документации на электродвигатели серии АН-4. В конструкции
двигателей АДЧ отсутствуют узлы и детали, работоспособность и надежность которых не
подтверждена многолетним опытом проектирования, изготовления и эксплуатации.
Ряд конструктивных решений двигателей АДЧ направлен на повышение монтажной
готовности и надежности.
В двигателях АДЧ (рабочее напряжение 690 В), мощность 325, 630, 1250 кВт применена
аналогично двигателям серии АН-4 (рабочее напряжение 6000 В) изоляция типа «Монолит».
Двигатели АДЧ могут быть выполнены с вентиляцией как от независимого вентилято-
ра, так и от вентилятора типа «наездник».
В двигателях серии АДЧ применены подшипники шведской фирмы SKF. При этом обес-
печена изоляция одного подшипника, что является необходимым условием при питании от
тиристорного преобразователя.
По габаритно-установочным размерам двигатели АДЧ соответствуют ранее выпускае-
мым и при модернизации ШПМ для каждого отдельного случая могут быть изготовлены с
размерами по крепежным отверстиям, соответствующими имеющемуся фундаменту, что по-
зволяет исключить его переделку.
НИИ ХЭМЗ разработал преобразователи частоты на базе инвертора тока (ПЧИТ). Преоб-
разователи частоты ПЧИТ предназначены для регулирования частоты вращения асинхрон-
ных двигателей с короткозамкнутым ротором напряжением, 6, 10 кВ мощностью от 400 кВт
до 2000 кВт и по спецзаказу на большие мощности (рис. 10.7).
Преобразователи частоты ПЧИТ обеспечивают:
— плавное регулирование частоты вращения в заданном диапазоне;
— плавный пуск и торможение двигателей с регулируемым темпом;
— ограничение тока и момента в динамических режимах работы;
— рекуперацию энергии торможения в питающую сеть.
Высокие вычислительные возможности микропроцессорной системы и оригинальные
алгоритмы управления обеспечивают электроприводам на основе ПЧИТ следующие каче-
ственные регулировочные характеристики:
— рабочий диапазон регулирования по скорости 1:20 в отсутствие специальных тахо-
метрических устройств на валу двигателя и 1:50 при наличии универсальных тахометричес-
ких устройств;
— ШИМ — управление током двигателя в области выходных частот инвертора 5 Гц и
ниже, что существенно снижает пульсации скорости двигателя в области низких частот;
— режим постоянства потока ротора двигателя (обеспечивает высокие динамические ха-
рактеристики привода);
296
ГЛАВА 10
Рис. 10.7. Щит преобразователя частоты
ПЧИТ 1000 кВт
— режим постоянства абсолютного
скольжения двигателя независимо от ве-
личины момента двигателя;
— двухзонное регулирование скорос-
ти (режимы U/f = const и U = const) с воз-
можностью увеличения частоты вращения
двигателя до значения 1,4 номинальной;
— автоматическое повторное вклю-
чение после кратковременного исчезно-
вения напряжения сети и автоматический
подхват двигателя «на лету».
Система управления ПЧИТ обеспечивает:
— автоматическую настройку пара-
метров регуляторов с учетом реальных па-
раметров двигателя и привода;
— самодиагностику системы управ-
ления;
— запоминание причин аварийного отключения и индикацию данной причины;
— хранение информации о предаварийном и поставарийном состоянии преобразовате-
ля с возможностью вывода данной информации на дисплей компьютера;
— архивирование задаваемых режимов и событий в процессе эксплуатации;
— управляющую и информационную связь с управляемыми устройствами более высо-
кого уровня по стандартному последовательному интерфейсу (RS232, RS485).
ПЧИТ имеет следующие виды защит:
— от недопустимых перегрузок по току:
— от внутренних и внешних (со стороны нагрузки) коротких замыканий;
— от перенапряжений в силовой части:
— от исчезновения или недопустимого снижения напряжения собственных нужд.
Силовая схема ПЧИТ (преобразовательная часть) выполнена с явно выраженным звеном
постоянного тока с мостовым управляемым выпрямителем на входе и автономным инверто-
ром тока на выходе. Электропривод ПЧИТ конструктивно выполнен в виде щита преобразо-
вателя частоты и отдельно стоящих силовых трансформаторов и сглаживающих реакторов.
ПЧИТ (преобразовательная часть) конструктивно выполнен в виде щита (рис. 10.7) —
сборки трех шкафов унифицированной конструкции двустороннего обслуживания.
В центральном шкафу смонтированы блоки с силовыми полупроводниковыми прибо-
рами (тиристорами и диодами), объединенными с тыльной и лицевой стороны медными
шинами в схему управляемого выпрямителя и инвертора тока. В ПЧИТ используются широ-
ко распространенные серийно выпускаемые в СНГ тиристоры и диоды. С тыльной стороны
шкафа на несущих балках смонтированы вспомогательные электрические элементы инвер-
тора — линейные и нелинейные дроссели, R-С цепи. Охлаждение силовой схемы осуществ-
ляется с помощью встроенных вентиляторов. Направление движения воздуха — снизу вверх.
Левый и центральный шкафы щита содержат силовые несущие конструкции с располо-
женными на них коммутирующими емкостями и системой подводящих кабелей.
Микропроцессорная система управления выполнена в виде печатных плат, расположен-
ных в экранированном отсеке на передней двери тиристорного шкафа.
Сглаживающие дроссели для ПЧИТ устанавливается отдельно.
Функциональная однолинейная схема электропривода на базе ПЧИТ приведена на рис. 10.8.
МВ
дс
Рис. 10.8. Функциональная однолинейная схема электропривода на базе ПЧИТ
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
297
Научно-производственная фирма МИДИЭЛ поставила в Российскую Федерацию несколь-
ко подъемных машин с системой частотно-регулируемого электропривода на базе тиристор-
ных преобразователей частоты серии ACS-800 производства фирмы АВВ (Швеция) с элект-
родвигателями АДЧ (ПЧ-АД) [138].
Комплект электрооборудования ПЧ-АД включает:
— тиристорный электропривод переменного тока на базе преобразователя частоты с мик-
ропроцессорным управлением ACS-800 производства компании АВВ, включая асинхронные
двигатели с короткозамкнутым ротором новой серии АДЧ;
— аппаратуру управления, включая микропроцессорное устройство контроля хода
подъемного сосуда — монитор подъемной установки АНМ-110 фирмы АВВ.
Система отличается плавным пуском и торможением, бесступенчатым регулированием
скорости в широком диапазоне, простой в наладке, не требует частого обслуживания.
Преобразователи модели ACS-800 сменили ACS-600, которые выпускались достаточно
лтительное время и завоевали признание во многих областях. По сравнению с предшествен-
ником, ACS-800 является более компактным, обладает большими возможностями управле-
ния и коммуникации [138 ].
Монитор подъема АНМ-110 полностью заменяет электромеханические устройства (типа
АЗК с ЭОС) и обеспечивает точный контроль над всеми жизненно важными параметрами
подъемной установки, такими, как скорость, ускорение, замедление или положение сосуда.
Устройство реализует все необходимые защиты, работает независимо от системы управле-
ния подъемом и в случае превышения скорости или избыточного перемещения выдает ко-
манду аварийной остановки.
Частотный электропривод обеспечивает значительно меньший расход электроэнергии
по сравнению с применением схемы двигатель с фазным ротором с металлическим реоста-
том в цепи ротора за счет исключения тепловых потерь в реостате.
Кроме этого, дополнительную экономию создают:
— сокращение потребления реактивной энергии при повышении коэффициента мощ-
ности практически до единицы;
— сокращение времени цикла за счет более точной отработки тахограммы и сокраще-
ния пути дотяжки;
— сокращение времени на обслуживание частотного привода по сравнению с релейно-
контакгорным, в том числе с высоковольтной коммутационной аппаратурой;
6
Рис. 10.9. Блок-схема электропривода
по системе ПЧ-АД:
Т — согласующий трансформатор
6 кВ/0,69 кВ; ПЧ — преобразователь
частоты ACS-800; АД — асинхронный
короткозамкнутый двигатель; Р —
редуктор, ПМ — подъемная машина;
ПУ — пульт управления; И — индикатор
глубины; У— указатель глубин; С —
скоростемер; КТ — командоаппарат
тормоза; КА — командоаппарат привода;
МП — монитор подъема АНМ-110; ШГП —
шкаф главного привода; ДИ — датчики
импульсов
— сокращение времени простоя ШПМ при ремонтах за счет более высокой надежности
системы частотного электропривода (по данным компании АВВ, расчетная наработка на отказ
составляет порядка 150 000 ч).
Одним из главных преимуществ приводов переменного тока АВВ является обширная
номенклатура общих технологических решений, таких, как программа запуска Start-up
Assistant, адаптивное программирование, режим прямого регулирования крутящего момента
(DTC), общие пользовательские и эксплуатационные интерфейсы, общее программное обес-
298
ГЛАВА 10
печение для инженерных расчетов, пусконаладочных работ и технического обслуживания, а
также общие запасные части.
«Изюминкой» семейства приводов переменного тока АВВ является революционный ме-
тод Прямого Управления Моментом — DTC (Direct Torque Control). Использование принципа
управления DTC позволяет добиться отличных показателей управления моментом и скорос-
тью асинхронных электродвигателей, в том числе при знакопеременных моментах нагрузки на
валу двигателя. При этом использование датчика положения вала двигателя (энкодера) явля-
ется необязательным. Если же требования к качеству регулирования настолько высоки, что
без датчика на валу двигателя не обойтись — ACS800 позволяет легко и быстро подключить
датчик и использовать метод управления DTC в системе, замкнутой по скорости двигателя.
Режим DTC в качестве основных регулируемых переменных использует магнитный поток ста-
тора и крутящий момент. С помощью быстродействующего процессора результаты вычисления со-
стояния электродвигателя обновляются 40000 раз в секунду (т. е. каждые 25 мкс) в рамках усовершен-
ствованной программной модели электродвигателя. Метод DTC обеспечивает наименьшие потери
благодаря коммутации силовых полупроводниковых приборов только когда это необходимо.
Преимущества привода с DTC:
— меньшее требуемое количество и мощность трансформаторов;
— меньше требуется силовых кабелей;
— более быстрое и точное управление;
— меньшая занимаемая площадь — ниже стоимость строительства копра и помещения ШПУ;
— низкая генерация гармоник;
— не потребляется реактивная мощность;
— меньшие падения напряжения;
— способность функционирования в более слабой сети;
— не требуются фильтры для повышения коэффициента мощности и подавления выс-
ших гармоник;
— не требуются выключатели постоянного тока;
— не требуются плавкие предохранители;
— сверхбыстрая реакция на изменения нагрузки и задания;
— отсутствие фиксированной частоты коммутации, что исключает опасность резонанса;
— коммутация силовых ключей только в случае необходимости, чтЪ означает уменьше-
ние уровня коммутационных перенапряжений;
— не требуется настройка в соответствии с индуктивностью сети;
— входной преобразователь типа «включай и работай».
Точное управление вращающим моментом, обеспеченное DTC позволяет преобразова-
телю создать максимальный начальный вращающий момент, который является управляе-
мым и плавно регулируемым.
В режиме оптимизации, поток двигателя автоматически адаптируется к нагрузке, обеспе-
чивая высокую эффективность и уменьшение шума двигателя. Благодаря оптимизации пото-
ка, полный кпд двигателя и привода обычно улучшается на 1—10 % в зависимости от нагрузки.
Из-за независимо определенного переключения, преобразователь не имеет фиксирован-
ной частоты переключений. Это устраняет резонансы, которые вызывают раздражающий
слышимый шум, связанный с приводами переменного тока с использованием стандартной
технологии широтно-импульсной модуляции.
В DTC поток статора и вращающий момент используется как первичные переменные
управления. Состояние двигателя вычисляется с модификацией 40000 раз в секунду в разви-
той программной модели двигателя высокоскоростным процессором цифрового сигнала. Из-
за непрерывного модифицирования состояния двигателя и сравнения фактических значе-
ний с опорными величинами, каждое одиночное переключение в инверторе определяется
независимо. Это значит, что привод может всегда производить оптимальную комбинацию
переключений и может немедленно реагировать на динамические изменения типа ударов
нагрузки или прерываний подачи питания. При DTC не требуется отдельный широтно-им-
пульсный модулятор, управляемый напряжением и частотой.
Измеряемые ток электродвигателя и напряжение звена постоянного тока являются ис-
ходными величинами для адаптивной модели, которая позволяет получить мгновенные зна-
чения момента и потока с быстродействием 25 мкс. Полученные величины затем сравнива-
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
299
ются (компараторами потока и момента) с величинами задания по потоку и моменту, выра-
батываемыми соответствующими блоками формирования задания. В зависимости от вели-
чин рассогласования формирователь импульсов непосредственно определяет оптимальные
значения угла управления силовыми вентилями.
10.7. Частотно-ре1улируемый электропривод с синхронным двигателем
За рубежом в последние 15—20 лет безредукгорный электропривод выполняется в ос-
новном по системе — преобразователь частоты с непосредственной связью — синхронный
двигатель (НПЧ-СД). Электроприводы поставляются ведущими зарубежными фирмами Гер-
мании (Siemens), Швеции (АВВ), Франции (Alstom), США и Канады.
Синхронный двигатель идеален для шахтного подъема: более высокая эффективность,
более высокий коэффициент мощности, больший воздушный зазор, меньшая сила магнит-
ного притяжения, меньший вес и площадь основания.
Силовая часть этой системы практически не отличается от системы непосредственный
преобразователь частоты — асинхронный двигатель. В системе управления предусмотрены
узлы регулирования магнитного потока, обеспечивающие необходимый режим тиристорно-
го возбудителя, питающего обмотку возбуждения синхронного двигателя. Преимущества ре-
гулируемых электроприводов по системе непосредственный преобразователь частоты — син-
хронный двигатель по сравнению с аналогичными по мощности по системе тиристорный
преобразователь — двигатель постоянного тока состоят в следующем:
— на изготовление синхронного двигателя требуется примерно на 20% меньше электро-
технической стали и меди, чем для двигателя постоянного тока;
— нет коллектора, более высокая надёжность, нет проблем коммутации, конструкция
прочнее, высокая надежность при меньшем объеме обслуживания;
— годовые затраты на обслуживание системы тиристорный преобразователь частоты —
синхронный двигатель, составляют 36 ч против 140 ч для привода по системе тиристорный
преобразователь — двигатель (по данным фирмы Siemens);
— повышенная перегрузочная способность, ограниченная только механической проч-
ностью (она составляет 3—4 против 2 у двигателя постоянного тока);
— обеспечивается диапазон регулирования скорости до 100:1 без пульсаций момента;
— более высокий средневзвешенный КПД (0,94 против 0,89 у двигателя постоянного тока);
— меньшая генерация токов высших гармоник в сеть;
— отсутствие обслуживаемого коллектора создает возможность разработки компактных
подъемных машин со встроенным внутрь канатоведущим шкивом с синхронным двигателем.
При регулировании скорости СД, так же, как и в АД, необходимо вместе с регулировани-
ем частоты/осуществлять регулирование напряжения U Законы изменения Uwf те же, что и
в случае применения АД, однако системы с СД получаются проще из-за отсутствия необходи-
мости стабилизации скорости при изменении нагрузки. Это позволяет использовать разомк-
нутые системы регулирования скорости с регулированием напряжения и частоты.
Эта новая технология привода теперь хорошо проверена АВВ для применения в шахт-
ном подъеме, первая установка находится в промышленной эксплуатации с июля 2001 г. К
настоящему времени фирма АВВ поставила 17 систем НПЧ-СД для приводов среднего на-
пряжения в шахтном подъеме, и еще 5 — для низкого напряжения.
В Российской Федерации первая поставка комплекта электрооборудования для безре-
дукгорного электропривода скиповой подъемной установки по системе НПЧ-СД осуществ-
лена в 2003 г. по проекту Научно-производственного центра «Электротехнические комплек-
сы» НПЦ-12 ОАО «Электропривод», г. Москва (далее ОАО «Электропривод») для ствола ВСС-
1 рудника «Скалистый» ОАО «ГМК «Норильский никель». Проект реализован с применени-
ем электрооборудования (НПЧ, синхронный двигатель) фирмы Siemens [404].
Были сделаны следующие выводы:
1. Электропривод НПЧ-СД превосходит привод Г-Д по весовым показателям, затратам
на потребляемую электроэнергию и обслуживание.
2. Электропривод НПЧ-СД по сравнению с приводом ТП-Д дороже на 2%, но, благода-
ря более высокому кпд и меньшей на 11% стоимости потребляемой электроэнергии, окупа-
ется за 1,6 года при стоимости 0,01 долл. США за 1 кВт-час или за 0.16 года при стоимости
0.1 долл. США за 1 кВт-час.
300
ГЛАВА 10
Силовая схема электропривода и алгоритм управления НПЧ определяются в основном
влиянием на питающую сеть, оптимальным использованием габаритной мощности высоко-
моментного приводного двигателя и унификацией оборудования силовой схемы.
На рис. 10.10 приведена однолинейная схема силовой цепи электропривода по системе
преобразователь частоты с непосредственной связью — синхронный двигатель, реализован-
ного ОАО «Электропривод» для шахтной подъемной машины ствола ВСС-1, который был
выполнен по эквивалентной (по отношению к питающей сети) 12-пульсной системе. При-
няты следующие обозначения: Tl, Т2 — преобразовательные трансформаторы; ТЗ — транс-
форматор возбудителя; СТ1 (НПЧ1), СТ2 (НПЧ2) — секции тиристорные; КШ — коммута-
тор шинный; ВТ — шкаф тиристорного возбудителя; СД — синхронный двигатель.
Рис. 10.10. Однолинейная схема электропривода по системе НПЧ-СД
В нормальном режиме работы с помощью шинного коммутатора каждая из статорных
обмоток синхронного двигателя подключается к отдельной тиристорной секции. В аварий-
ном режиме предусмотрено последовательное соединение обмоток и подключение их к од-
ной из тиристорных секций НПЧ, что позволяет работать с номинальной нагрузкой на ско-
рости до 50% от номинальной.
Основными элементами синтеза системы автоматического регулирования (САР) элект-
роприводов такого типа являются дифференциальные уравнения объекта регулирования и
методы преобразования этих дифференциальных уравнений при изменении систем коорди-
нат (систем отсчета), в которых формируются управляющие воздействия.
В основе методики синтеза лежит представление нестационарного многосвязного объекта
(каким являются СД) в виде некоторой совокупности стационарных подобъектов с линей-
ными звеньями в основных каналах регулирования и принципы подчиненного регулирова-
ния переменных с последовательной коррекцией параметров.
Совокупность этих принципов позволяет, с одной стороны, получать такие требуемые
показатели конкретных электроприводов, как высокая перегрузочная способность, высо-
кая степень использования габаритной мощности электрооборудования, заданный диапа-
зон регулирования скорости, а с другой стороны, унифицировать узлы схем независимо от
вида конкретной структуры регулирующей части САР. На рис. 10.11 показана функцио-
Система управления
верхнего уровня
Пульт
шахтного
подъема
[заданного
значения
скорости
Коммуникационный блок
Блок выбора режима и
задания парамметров
Задатчик тахограммы
движения (FGG)
Коэффициент
подстройки
s* - заданное значение положения
v* - заданное значение скорости
а* - заданное значение ускорения
Sact - действительное значение ускорения
Vact - действительное значение скорости
т* - задание на момент
ЧК» - заданное значение магнитного потока
ф - вычисленное значение магнитного потока
совфМ - коэффициент мощности
IsPHIl * - моментная составляющая тока статора
IsPHI2* - магнитная составляющая тока статора
фЬ-угол нагрузки
1 -уголв осях ротора
фа-угол в осях поля
iLl *, iL2*. iL3* - заданные значения фазных токов
1с* - заданное значение тока возбуждения
1е - действительное значение тока возбуждения
iLl ,iL2,iL3 - действительные значения фазных токов
ULI ,UL2,UL3 - действительные значение фазных напряжений
ia* заданное значение тока по осиа
ip* заданное значение тока по осиР
VD-векторный преобразователь
S
а'
Режим
укорочения
каната
сочфМг
m*-
ia*
VDfe
"Привязка'
к нужной
ветви
ЬРЫ2*
11ре дрегулирование
по статическому
моменту J
IMO
тульского £—
датчика
Определение
г—> действительного
положения скипа
Sact
Синхронизация при
определении
действительного
положения скипа
Определение
действительной
скорости
Модель
СДпо
току
sintbL
cosjiL
Vact
sin<j>s
СОЭфз
iL3*
Контур регулирования
фазных токов
iLl*1 . п
s
имо
iL14L2jL3
sinl
V-
VD
COS1
Модель
СД по
напряж.
UL1,UL2.UL3
Регулятор
тока возбуждения
1е*
Рис. 10.11. Функциональная схема САР
le
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
302 ГЛАВА 10
нальная схема САР. В НПЧ, выполненном по схеме на рис. 10.10, возможно уменьшение
потребления реактивной мощности при использовании алгоритмов управления, обеспе-
чивающих трапецеидальный характер гладких составляющих выходных фазных напряже-
ний. При этом энергетические показатели электропривода определяются режимами рабо-
ты отдельных преобразователей (каждый из которых образует однофазный выход НПЧ), а
режимы нагрузки — трехфазными линейными напряжениями с гладкой составляющей си-
нусоидальной формы, которые при отсутствии связи нулевых точек НПЧ и СД образуются
из трапецеидальных фазных напряжений [404]. Оптимизация параметров управляющего
напряжения заключается в минимизации процентного содержания пятой и седьмой гар-
монических составляющих при максимально возможной амплитуде первой гармоничес-
кой составляющей.
Глава 11
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ
ПОСТОЯННОГО ТОКА
11.1. Общие сведения
11.2. Электропривод постоянного тока по системе Г-Д
11.3. Электропривод постоянного тока по системе ТП-Д
11.4. Резервирование питания подъемных двигателей
постоянного тока
ПЛ. Общие сведения
При необходимой мощности привода подъема более 2000 кВт применяются двигатели
постоянного тока. Как правило, это низкооборотные двигатели (безредукгорный привод) и
только в отдельных случаях высокооборотные двигатели с редуктором, которые ставились
на первые пятиметровые многоканатные подъемные машины.
Получили широкое распространение приводы типа Г-Д (система «генератор — двига-
тель» и ТП-Д (система тиристорный преобразователь-двигатель). Такие приводы обеспечи-
вают эффективное автоматическое регулирование скорости с применением пропорциально-
интегральных регуляторов в цепях обратных связей по току в якорной цепи и скорости ма-
шины по принципу подчиненного регулирования с ограничением рывка (см. 2.1 и [193]).
В системах Г-Д для возможности изменения скорости вращения ротора двигателя его якор-
ная цепь подключается к регулируемому источнику постоянного тока. В качестве такого источ-
ника традиционно применяется электромашинный преобразователь, то есть генератор постоян-
ного тока, как правило, с приводом от синхронного двигателя, обеспечивающего практически
постоянную скорость вращения якоря генератора (СД-Г). В современных приводах Г-Д на об-
мотку возбуждения генератора подается регулируемое управляющее напряжение Uy от тирис-
торного возбудителя, изменение которого и приводит к изменению напряжения на якоре гене-
ратора и, в конечном счете, к вариации скорости вращения ротора двигателя.
На подъемных установках с двумя высокооборотными двигателями постоянного тока в
состав электромашинного преобразователя входят два генератора (Г-СД-Г), которые вклю-
чены с двумя подъемными двигателями последовательно (скиповые подъемы шахт «Октябрь-
ский рудник» и им. А.А. Скочинского ПО «Донецкуголь»).
До 1977 г. на подъемных установках большой мощности с двигателями постоянного тока
применялся электропривод по системе Г-Д с электромашинными преобразователями. Только
на шахтах угольной промышленности Украины до настоящего времени находятся в эксплуата-
ции 75 таких преобразователей (17 из них зарезервированы тиристорными преобразователями).
После 1977 г получили широкое применение тиристорные преобразователи (в системах ТП-Д),
которые обеспечивают регулируемую величину постоянного тока в якорной цепи двигателя. На
вход тиристорного преобразователя подается управляющее напряжение Uy, изменение которого
приводит к изменению напряжения на выходе тиристорного преобразователя и соответственно к
изменению скорости вращения ротора двигателя. Такие преобразователи отличаются от элекгро-
машинных повышенной экономичностью и относительной простотой управления [193].
Электродинамический момент двигателя постоянного тока Мэ, хотя и подчиненный
тем же уравнениям Кирхгофа, что и для асинхронного двигателя, описывается [181] совсем
другим по структуре дифференциальным уравнением [по сравнению с 10.1.4]:
304
ГЛАВА 11
где T=La/R„ — постоянная времени якорной цепи (для систем ТП-Д La, Rt, — соответствен-
но индуктивность и активное сопротивление якорных обмоток; для систем Г-Д Ья и Rx — об-
щие индуктивность и сопротивление якорных цепей двигателя и генератора); Тп — постоянная
времени тиристорного преобразователя, питающего обмотки якоря двигателя для систем ТП-Д,
или постоянная времени цепи возбуждения (статорных обмоток) генератора для систем Г-Д.
В уравнении (11.1.1) также обозначено: Ф — постоянный магнитный поток, создавае-
мый постоянным током возбуждения в статорных обмотках двигателя от автономного нере-
гулируемого тиристорного преобразователя (или другого типа выпрямителя переменного
тока); С — некоторая постоянная, зависящая от типа и конструкции двигателя; со — теку-
щая циклическая частота вращения якоря двигателя.
Функция f (Uy) от регулируемого напряжения Uy, подаваемого на вход тиристорных
преобразователей в цепи якоря двигателя для системы ТП-Д, или на вход тиристорных пре-
образователей в цепи статорных обмоток генератора (обмоток возбуждения), определяется
соответственно выражениями:
1
f(Uy)=kTjUy(r)exp — dr
Л •* о
(11.1.2)
о \ ' )
где кт — коэффициент усиления тиристорного преобразователя в якорной цепи двигателя
(для систем ТП-Д), или в цепи возбуждения генератора (для систем Г-Д).
Разумеется, что функциональные соотношения для электродинамических моментов дви-
гателей асинхронных (10.1.4), включая формулу Клосса (10.1.3), и постоянного тока (11.1.1)
необходимо рассматривать совместно с уравнениями механики для системы движущихся
объектов подъемной установки в формулировке Ньютона, Даламбера или Лагранжа. Час-
тично этот подход освещен в 10.3 и, конечно же, используется в общих уравнениях динами-
ки шахтного подъема, представленных в 2.2.
Как правило, электродвигатели устанавливаются на фундаменте в собственных подшип-
никах. Известны также особые конструктивные решения со встроенным в барабан подъем-
ной машины тихоходным электродвигателем постоянного тока (Германия), что значительно
уменьшает строительные габариты. Это особенно важный фактор при решении вопроса о
размещении нескольких машин на одном перекрытии в башенном копре. Имеется также
отечественный опыт создания многоканатных машин с консольной подвеской якорей двух
электродвигателей постоянного тока на главном валу подъемной машины (Донецкгормаш,
1969г). Такая конструкция позволяет повысить надежность установки за счет исключения
двух подшипниковых опор роторов каждого из двигателей, упростить систему смазки, зна-
чительно уменьшить габариты машины.
11.2. Электропривод постоянного тока по системе Г-Д
В системе Г-Д подъемный двигатель Д получает питание от генератора Г. Регулирование
скорости подъемного двигателя и изменение направления вращения производится измене-
нием величины напряжения и полярности на зажимах его якоря.
Ток обмотки возбуждения подъемного двигателя в период его работы остается неизмен-
ным и снижается примерно наполовину в период пауз.
Изменение величины напряжения и полярности на зажимах якоря двигателя достигается
изменением величины тока и направления его в обмотке возбуждения главного генератора Г.
В зависимости от источника, от которого происходит изменение величины напряжения и по-
лярности на зажимах обмотки возбуждения генератора применялись схемы с электромашин-
ными усилителями поперечного поля ЭМУ, с ЭМУ и промежуточным магнитным усилителем,
с промежуточным и силовым магнитным усилителем, которые описаны в [5, 17, 51, 101].
Схемы управления шахтных подъемных машин с приводом по системе Г-Д позволяют
обеспечить строгое выполнение заданных диаграмм скорости независимо от величины и знака
нагрузки при высокой стабильности системы и достаточном быстродействии.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА 305
Правильно налаженная система Г-Д обеспечивает автоматический разгон, движение с
максимальной скоростью и автоматическое замедление подъемной машины во время подхо-
да подъемного сосуда к приемной площадке. Функции машиниста сводятся к выбору на-
правления движения подъемной машины, троганию без рывка и обратного хода и стопоре-
нию в конце хода. Эти функции можно передать схеме управления, при этом машина будет
работать в автоматическом режиме.
Специалистами Донбассуглеавтоматики под руководством кандидата техническим наук
И. Я. Гальперина разработан и внедрен практически на всех подъемных установках Донбасса
с приводом по системе Г-Д комплект аппаратуры управления скиповым подъемом [21].
Функциональная схема разработанной системы автоматического управления с согласо-
ванием работы электропривода и механического тормоза приведена на рис. 11.1.
Рис. 11.1. Функциональная схема автоматического управления подъемной машиной
с приводом постоянного тока по системе Г-Д
Основным управляющим устройством подъемной машины с приводом по системе Г-Д
является выполненный в виде одного блока тиристорный регулятор скорости ТРС (рис. 11.1),
который содержит узел задания направления движения и уставок скорости УЗС с ограничи-
телем напряжения ОН и функциональным преобразователем ФП на выходе, задающее уст-
ройство ЗУ, суммирующий усилитель У с узлом обратных связей УОС и тиристорный возбу-
дитель генератора ТВ Г.
К выходу ТВГ подключена обмотка возбуждения ОВГ генератора Г. На вход УЗС посту-
пает первичный управляющий сигнал U к от сельсинного командоаппарата СКАР (или по-
тенциометрического регулятора напряжения). УЗС вырабатывает сигнал U^, полярность
которого определяется заданным направлением движения, а величина изменяется ступенча-
то в результате срабатывания этажных выключателей путевого командоаппарата ПК. Часть
этого сигнала (АС/^,), соответствующая скорости 0,2—0,25 м/с, проходит на вход У через ОН,
минуя ЗУ. Сигнал Ц^. поступает также на вход ФП, на выходе которого формируется сигнал
U^, поступающий на вход ЗУ. Зависимость Ubx (t/^.) формируется так, чтобы растянуть
зону малых скоростей по дуге перемещения рукоятки управления СКАР и тем самым повы-
сить плавность и точность управления машиной во время выполнения маневровых опера-
ций. ЗУ формирует изменяющийся в функции времени сигнал Uv и выполняется по схеме,
предусматривающей программирование ограничения рывка, если это необходимо, либо без
него, если в этом нет нужды. Сигналы \UV , Uv и поступающие из УОС сигналы обратных
связей суммируются усилителем У (сигнал обратной связи по скорости поступает от тахоге-
нератора ТГ или формируется в УОС тахометрическим мостом).
306
ГЛАВА 11
Команда на начало движения поступает в УЗС из схемы управления и технологического
контроля СУТ, в которой анализируется информация о ходе процессов разгрузки и загрузки
подъемных сосудов. Одновременно СУТ подаст команды: на растормаживание машины —
через регулятор давления РД и на увеличение возбуждения двигателя до номинального зна-
чения в тиристорный возбудитель двигателя ТВД, питающий обмотку возбуждения ОВД
подъемного двигателя Д.
Если загрузка подъемных сосудов производится на весу, то при определенных неисп-
равностях в системе управления растормаживание машины может произойти при отсутствии
достаточного момента на валу двигателя и под действием статического усилия произойдет
обратный ход машины. Поэтому при загрузке на весу СУТ подает команду на растормажи-
вание машины после поступления в нее информации о достаточной величине тока якоря и
тока возбуждения подъемного двигателя.
Из-за инерционности и нестабильности процесса растормаживания машины ее трогание
может сопровождаться значительным рывком. Если растормаживание производить с упреж-
дением, то в зависимости от величины и знака статического усилия возможен кратковремен-
ный обратный ход машины, что нежелательно. Чтобы исключить как чрезмерный рывок, так
и обратный ход, на период трогания машины вводятся ограничения по заданию скорости и
току якоря (принимается несколько превышающим максимальный статический ток). Осуще-
ствляется это содержащимся в ТРС герконовым реле гашения интеграторов задатчика РГИ,
при включении которого обеспечивается Uv = 0 независимо от величины сигнала Um и умень-
шается в УОС до требуемой величины уставка токовой отсечки. Снятие ограничений можно
производить по времени, давлению в цилиндрах рабочего тормоза, положению привода тор-
моза, по скорости и току якоря. Наилучшие результаты дает снятие ограничений по скорости
и по времени. Действительно, фиксирование начала движения машины является наиболее
достоверной информацией, свидетельствующей о ее готовности к дальнейшему наращиванию
скорости. Для этого используется чувствительный полупроводниковый усилитель скорости УС
с реле PC на выходе (усилитель является одним из узлов аппарата токовой защиты АТЗ подъем-
ного двигателя). Вход усилителя подключен на напряжение тахогенератора ТЕ Усилитель и
реле включаются при скорости 0,1—0,15 м/с, достижение которой обеспечивает сигнал .
Реле PC через СУТ отключает реле РГИ и ограничения снимаются.
Если производится подъем тяжелого груза, то скорость может не достичь порога сраба-
тывания усилителя УС, либо это произойдет с заметной задержкой во времени. Поэтому реле
РГИ дополнительно отключается по истечении выдержки времени, отсчет которой начина-
ется в момент подачи команды на растормаживание машины.
Если необходимо произвести остановку машины, то из СУТ подаются команды: в УЗС —
на снижение скорости до нулевого значения и в УС — на увеличение уставки отключения до
0,5—0,7 м/с. Когда скорость уменьшится до этой величины, реле PC отпадет и произведет
необходимые переключения в СУТ. В результате ТРС переводится в режим гашения тока
якоря, ток возбуждения двигателя ослабляется в несколько раз, а машина стопорится меха-
ническим тормозом.
Разработанные для реализации схемы автоматического управления узлы и устройства
(тиристорный возбудитель генератора, тиристорный возбудитель двигателя, тиристорный
регулятор скорости, схема управления и технологического контроля) составляют основу ком-
плекта аппаратуры автоматического управления скиповым подъемом с приводом Г-Д. Ком-
плект (рис. 11.2) применяется для модернизации электрооборудования действующих подъем-
ных машин и состоит из следующих шкафов (перечисление производится справа налево по
виду с лицевой стороны):
— стволовой сигнализации и стволовых датчиков;
— автоматического управления;
— ручного управления;
— тиристорного возбудителя двигателя со встроенным силовым трансформатором и ста-
билизированным выпрямителем для питания оперативных цепей постоянного тока;
— вспомогательных приводов.
Вне блока шкафов устанавливаются высоковольтное распредустройство, аппаратура уп-
равления синхронным двигателем, пульт управления и аппараты, кинематически связанные
с подъемной машиной.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
307
Рис. 11.2. Блок шкафов комплекта аппаратуры автоматического управления
скиповым подъемом с приводом Г-Д
Комплект может быть применен для управления и клетевыми подъемами. В этом случае
часть содержащейся в нем аппаратуры не используется.
11.3. Электропривод постоянного тока по системе ТП-Д
Опытные экземпляры привода по системе ТП-Д были смонтированы в 1974 г. на многока-
натных подъемных установках Никитовского ртутного комбината. На скиповом подъеме, обо-
рудованном машиной МК 2,1x4 с двигателем ПБК-180/70 мощностью 1220 кВт, был установлен
нереверсивный тиристорный преобразовательный агрегат АТ-2500/825Т, включенный на якорь
двигателя, и реверсивный тиристорный возбудитель ТВР-320-460, включенный на обмотку воз-
буждения двигателя. На клетевом подъеме, оборудованном машиной МК 2,1x4 с двигателем П-
143-4К мощностью 200 кВт, был установлен реверсивный тиристорный преобразовательный
агрегат ТПР-500-460. Тиристорные преобразователи были разработаны специалистами НИИ
ХЭМЗ и выпускались Харьковским электромеханическим заводом ХЭМЗ. До установки тирис-
торных преобразовательных агрегатов оба подъема работали с приводом по системе Г-Д, и при
монтаже преобразователей были предусмотрены стационарные переключающие устройства, обес-
печивающие быстрый переход с одной системы привода на другую. Привод ТП-Д этих устано-
вок в настоящее время продолжает эксплуатироваться в качестве основного.
С 1977 г. на подъемных установках вновь строящихся шахт начали вводиться в эксплуа-
тацию тиристорные преобразовательные агрегаты серии АТ и АТР па тиристорах Т-160 и
серии ТПЗ и ТПРЗ на тиристорах Т-320. Электромагнитные процессы силовой части тирис-
торных преобразователей, системы управления ими и конструкция тиристорных агрегатов
описаны в [167, 168, 169] и официальных изданиях [170, 171, 172].
На подъемных установках применяются тиристорные преобразователи различные по
способу организации реверса вращения двигателя — с реверсом тока в якоре двигателя и с
реверсом тока в обмотке возбуждения. На скиповых подъемах применяется реверс тока в
обмотке возбуждения, а на клетевых — реверс тока якоря.
Реверс тока в якоре обеспечивает необходимое качество управления подъемом, но требует в два
раза большее количество силовых тиристоров, две группы которых включены встречно друг другу.
Реверс тока в обмотке возбуждения требует 3—4 кратных форсировок по напряжению,
что иногда не обеспечивает необходимое качество управления двигателем.
Наибольшее распространение получили нереверсивные тиристорные преобразователи,
применяемые на грузовых подъемах в комплекте с тиристорными возбудителями ТПР9-320/
460Р для реверса поля двигателя.
В приводе по системе ТП-Д применяются подъемные двигатели серии П2 с шихтован-
ной станиной для уменьшения постоянной времени цепи возбуждения. В системах с нере-
версивными якорными преобразователями обмотки возбуждения двигателей были пересое-
308
ГЛАВА 11
динены в две параллельные цепи (т. е. на напряжение ПО В). Для этих условий и при номи-
нальном напряжении возбудителя 460 В полное время реверса возбуждения двигателей со-
ставляет около 2 с.
На всех установках с приводом по системе ТП-Д была применена двухкратно-интегри-
рующая система подчиненного регулирования, выполненная на основе унифицированной
блочной системы регуляторов (УБСР). Рекомендуемые в некоторых работах [173, 174] усо-
вершенствования структуры двухкратно-интегрирующей системы привода по системе ТП-Д
для уменьшения неблагоприятного влияния ослабления поля двигателя и зоны прерывис-
тых токов при малых статических нагрузках не применялись. Для получения обратной связи
по скорости использовались прецизионные тахогенераторы типа ПТ-42-4У (паспортные дан-
ные: мощность — 23 Впг, напряжение — 230 5; частота вращения — 100 об/мин).
Для подавления помех на выходе тахогенераторов всех установок были установлены
фильтры с постоянной времени Тф = 0,03 0,075 с. Расчет параметров регуляторов скорости
с учетом фильтра производился по методике, приведенной в [175]. Ограничение скорости
нарастания тока якоря достигалось за счет демпфирования переходных процессов в контуре
скорости. Поэтому параметры регулятора тока определялись по общепринятой методике без
наложения ограничений на скорость нарастания тока якоря. Некомпенсируемая постоянная
времени принималась равной 0,01 с.
В связи с большим дефицитом меди после появления первых тиристорых преобразова-
телей Минэлектротехпром запретил закладывать в проекты шахтных подъемных установок с
двигателями постоянного тока системы Г-Д. Эти системы было разрешено применять толь-
ко в порядке исключения на удаленных объектах при недостаточной мощности электричес-
ких сетей после представления убедительных экономических обоснований.
Если в конце 70-х—начале 80-х годов к применению тиристорных преобразователей на
шахтах относились с опаской, то уже вскоре из-за больших преимуществ система ТП-Д (зна-
чительно меньший расход электроэнергии, высокая ремонтопригодность благодаря блочно-
му исполнению) получила широкое распространение в шахтном подъеме. Тиристорные пре-
образователи постоянно совершенствовались — на смену преобразователям АТ, АТР, кото-
рых было выпущено несколько штук, пришли преобразователи ТПЗ и ТПР-3, получившие
широкое распространение. ХЭМЗ продолжал совершенствовать конструкцию преобразова-
телей, были разработаны и выпускались заводом преобразователи КТЭУ, а затем УКТЭШ.
Унифицированный комплектный тиристорный электропривод постоянного тока для шахт-
ных подъемных машин серии УКТЭШ с аналоговой системой управления предназначен для
управления электродвигателем постоянного тока шахтных подъемных машин.
Силовое напряжение переменного тока выпрямляется тиристорным преобразователем.
Величина выходного напряжения преобразователя задается системой управления в зависимо-
сти от требуемых по технологии работы ШПМ скорости вращения двигателя и его момента.
Питание обмотки возбуждения двигателя осуществляется от регулируемого тиристор-
ного выпрямителя, входящего в состав УКТЭШ. Изменение направления вращения двига-
теля производится изменением направления тока якоря или полярности напряжения обмот-
ки возбуждения двигателя.
Защита силовой цепи двигателя от недопустимой величины тока осуществляется быст-
родействующим выключателем. При стоянке двигателя и отсутствии тока разрыв силовой
цепи производится с помощью линейных контакторов.
В состав УКТЭШ входят: вентильные секции СВ; шкаф регулирования ШРУ; щит сило-
вой с защитной и коммутационной аппаратурой ЩСУ; тиристорный возбудитель двигателя;
силовой трансформатор; сглаживающие реакторы.
Конструктивно УКТЭШ компонуется из щитов и шкафов унифицированной конструкции.
Секция тиристорная СВ состоит из двух шкафов: шкафа тиристорного и шкафа управ-
ления (ввода), соединенных стыковочными узлами, а также, общими опорными и транспор-
тными элементами.
Щит силовой ЩСУ состоит из шкафа с линейными контакторами и шкафа управления
автоматическим выключателем. Оба шкафа конструктивно объединены между собой.
Шкаф тиристорного возбудителя ЭКТ и шкаф регулирования ШРУ объединены в шит
управления. Обслуживание шкафов и щитов — двухстороннее.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
309
Основные технические характеристики УКТЭШ
Напряжение питающей силовой сети, кВ 6 или 10
Номинальный выпрямленный ток силовой цепи, А 1600,2500, 3200.4000,5000,6300
Номинальное выпрямленное напряжение силовой цепи, В 440,600, 750,930
Напряжение трехфазной сети собственных нужд, В 380
Напряжение тиристорного возбудителя двигателя, В 440
Номинальный ток возбудителя, А 100,200,320,500
Точность поддержания скорости, % 1,0
Диапазон регулирования скорости электродвигателя 75:1
Вентиляция тиристорных шкафов СВ и шкафа тиристорного возбудителя — принуди-
тельная, вытяжная от встроенных в шкафы вентиляторов, направление движения воздуха
снизу вверх. Вентиляция остальных шкафов и щитов — естественная.
В течение 70-х—80-х и начале 90-х годов подъемные машины в угольной промышленно-
сти и горнодобывающей промышленности были оснащены большим количеством тиристор-
ных преобразователей всех этих типов. Только на шахтах угольной промышленности Украи-
ны в эксплуатации находятся около 70 тиристорных преобразователей производства завода
ХЭМЗ. В 1990 г. завод прекратил выпуск преобразователей и постепенно наметился значи-
тельный физический и моральный износ оборудования, связанный с отсутствием запасных
блоков и ячеек, с прекращением производства устаревших комплектующих изделий и кон-
структивов, которые сначала продолжали поставляться различными фирмами, использую-
щими старые запасы, оставшиеся на складах, и демонтированные блоки и комплектующие с
электрооборудования, ранее поставленного на шахты, но своевременно не смонтированные.
Постепенно их поставка полностью прекратилась и на шахтах оборудование поддержива-
лось в рабочем состоянии силами специалистов наладочных управлений и шахтными умель-
цами, которые ремонтировали и восстанавливали вышедшие из строя блоки.
Из НИИ ХЭМЗ и завода ХЭМЗ выделился ряд творческих коллективов, каждый из ко-
торых организовал свое частичное предприятие и считает себя преемником НИИ ХЭМЗ и
ХЭМЗ. Эти предприятия по-разному развивались, создавали собственные производствен-
ные базы, арендовали существующие и, используя интеллектуальный потенциал и научно-
производственный опыт бывших работников института и завода, стали постепенно осваи-
вать производство различных видов оборудования, которое раньше выпускалось заводом
ХЭМЗ, в том числе комплекты электропривода для шахтного подъема.
На предприятиях угольной промышленности Украины для подъемных установок с при-
водом постоянного тока стали поступать тиристорные электроприводы постоянного тока с
микропроцессорным управлением.
ГПНИИХЭМЗразработал и совместно с ЗАО «Элтехком» изготовил и поставил на шах-
ту «Щегловская Глубокая» ш/у «Донбасс» два электропривода комплектных тиристорных с
микропроцессорным управлением ЭКТ-МП-5000/750—21—150УХЛ4.
Один ЭКТ-МП, смонтированный и введенный в эксплуатацию на породном подъеме
этой шахты в 2006 г., сохраняет силовую схему привода УКТЭШ, а в качестве системы уп-
равления преобразователем применена система DCSR601.0000.001500СО производства фир-
мы АВВ (Швеция). Второй электропривод ШПР-ЭТК0, изготовленный в апреле 2005 г., смон-
тирован и введен в эксплуатацию в 2006 г. Он имеет и силовую схему, и систему управления
преобразователем DCS602—3303-71R15000CO производства фирмы АВВ (Швеция).
На шахту «Суходольская-Восточная» ПО «Краснодонуголь» в 2006 г. были поставлены,
смонтированы и пущены в эксплуатацию два комплекта регулируемого электропривода по-
стоянного тока с микропроцессорным управлением РЭП-2-Ш4к7-УХЛ4. Изготовитель — Меж-
дународный Консорциум «Энергосбережение» (г. Харьков), поставщик — ООО «Укрэлектросер-
вис» (г. Харьков).
В состав регулируемого электропривода (РЭП) входят: щит силовой, состоящий из шкафа
управления с автоматическим выключателем ШВА и шкафа управления линейными кон-
такторами ШКЛ; щит силовой, состоящий из шкафа ввода ШВ и шкафа вентильной секции
ШВС — 2 шт.; шкаф тиристорного возбудителя ШТВ; шкаф системы регулирования СРПУ,
содержащий систему автоматического регулирования скорости электропривода, систему уп-
310
ГЛАВА 11
Рис. 11.3. Функциональная схема силовой
части РЭП
равления тиристорным преобразова-
телем и возбудителем, а также цепи
защиты, диагностики, сигнализации
и индикации неисправностей.
Функциональная схема силовой
части РЭП приведена на рис. 11.3.
Нереверсивные вентильные сек-
ции СВ-1 и СВ-2 подключаются к
сети 6 кВ через два силовых транс-
форматора ТС1 и ТС2 и масляный
выключатель ВМ, установленный в
комплектном распределительном ус-
тройстве КРУ. Соединение обмоток
трансформаторов по схеме А/А
(ТС1), A/У (ТС2) формирует сдвиг
питающего напряжения секций на 30
электрических градусов, что обеспе-
чивает двенадцатипульсную схему
выпрямления. Реверсивный возбуди-
тель тиристорный подключается к
сети -380 В через встроенный токо-
ограничивающий реактор.
Последовательно с каждой вен-
тильной секцией включены сглажива-
ющие реакторы L1 и L2 для выравни-
вание токов между секциями и обеспе-
чения высокой надежности в работе,
исключая выход из строя силовых элементов (тиристоров и предохранителей силовых блоков).
Выключатель ВМ служит для защиты преобразователя от токов короткого замыкания
на стороне переменного тока. Защита силовой цепи постоянного тока от недопустимых пе-
регрузок и коротких замыканий осуществляется с помощью быстродействующего автомати-
ческого выключателя ВАТ.
Для оперативной коммутации силовой цепи на период длительной остановки электро-
привода или во время работы предохранительного торможения в главной цепи двигателя
включены контакты КМ1, КМ2 и КМЗ линейного контактора КД.
Система управления электропривода (СУЭ) установлена в шкафу регулирования СРПУ
Задающим сигналом является задание скорости w3ad . В СРПУ поступают сигналы обратной
связи wM по частоте вращения электродвигателя от датчика скорости ДС, токи каждой вен-
тильной секции и , а также ток цепи возбуждения .
Функциональная схема секции вентильной приведена на рис. 11.4.
Секция вентильная (СВ) структурно состоит из пяти выпрямительных мостов, собран-
ных по трехфазной мостовой схеме. При дальнейшем описании элементов секции вентиль-
ной символ j (j = 1..5) обозначает порядковый номер моста.
Каждый выпрямительный мост подключен к шинам питающего напряжения через раз-
делительные реакторы Ljl...Lj6. Реакторы также выполняют функцию делителей тока для
равномерного деления между мостами одной вентильной секции.
Каждый выпрямительный мост выполнен на тиристорах VSjl...VSj6 типа Т753-1000-2800.
Каждый полупроводниковый прибор защищен от токов короткого замыкания быстро-
действующим предохранителем FUjl...FUj6 типа ПП60М-39У-4391-00. Каждый предохра-
нитель имеет указатель срабатывания и блок свободного контакта. Нормально замкнутые
контакты блоков свободных контактов предохранителей соединены последовательно и вы-
ведены в шкаф регулирования. Таким образом, система управления имеет информацию о
состоянии каждого выпрямительного моста секции вентильной.
Управляющие импульсы на тиристоры секции вентильной формируются с помощью
импульсного трансформатора, входящего в блок драйвера тиристора (на схеме не показаны).
Блок драйвера тиристора (БДрТ) установлен на каждом полупроводниковом приборе.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
311
От силового трансформатора
VS0 L|1 FU,"
II III.. jlti
VSj3 L)3
- » ...pHfc/WV
VS.5 L.5
-------
1 3 5 I ___________
VS15 Li5 FUjS
VS|1 I,” FUf
VS)3 l;3 FU.3
VS0 Lf’ FU|1
VS;S
VS|3 L,3
В силовую схему подъемного электродвигателя
Рис. 11.4. Функциональная схема секции вентильной
Управляющие импульсы на блок драйвера тиристора поступают от блока усиления им-
пульсов БУИ-1, установленного в шкафу регулирования. Один БУИ подает импульсы на 6
блоков драйвера тиристора БДрТ Таким образом, для управления тиристорами пяти мостов
вентильной секции используется 5 БУИ.
При выходе из строя предохранителя или тиристора в одном выпрямительном мосту весь
мост отключается от управления путем снятия управляющих импульсов. При этом секция вен-
тильная может продолжать работу. При выходе из строя предохранителей или тиристоров в сле-
дующем выпрямительном мосту система управления останавливает весь электропривод ШПМ.
312
ГЛАВА 11
Функциональная схема системы управления электропривода с двенадцатипульсной схе-
мой выпрямления приведена на рис. 11.5.
Рис. 11.5. Функциональная схема системы управления шкафа регулирования
Указанная функциональная схема реализована в виде совокупности программных мо-
дулей для микропроцессорного контроллера.
На схеме показаны динамические характеристики отдельных узлов (реакция на скачок входно-
го сигнала), кроме безинерционных модулей «Блок выделения модуля» (БВМ) и «Блок величины
возбуждения» (БВВ), для которых показана статическая характеристика (зависимость вход-выход).
Система регулирования построена по принципу двухконтурной двухканальной системы
подчиненного регулирования (СПР) параметров.
Первый канал — канал регулирования скорости. Внутренним для него является двухка-
нальный контур регулирования тока вентильных секций, выполненный на пропорциональ-
но-интегральных регуляторах тока ПИ-РТ1 и ПИ-РТ2.
В связи с использованием нереверсивного тиристорного выпрямителя в якорной цепи
двигателя на входе регуляторов тока предусмотрен программный модуль выделения модуля
БВМ. С выхода блока БВМ однополярный сигнал задания тока /св 3 поступает на блоки
ограничения тока БОпи рт] и БОпи_ртг2 Ограниченное задание тока поступает на сумматоры
сравнения задания с сигналом обратной связи icel и соответственно, после чего сигнал
ошибки регулирования поступает на регуляторы тока. Ток каждого из мостов регулируется
своим регулятором тока (ПИ-РТ1 и ПИ-РТ2 соответственно).
Для повышения динамических характеристик регуляторы выполнены с переменными
коэффициентом усиления и постоянной интегрирования в функции величины сигнала об-
ратной связи. Таким образом, при малых значениях тока регулятор может быть более быст-
родействующим. Выходы регуляторов тока после блоков ограничения поступают на соот-
ветствующие СИФУ СВ1 и СИФУ СВ2.
Внешний регулятор контура регулирования скорости — пропорционально-интеграль-
ный регулятор ПИ-PC также выполнен с переменным коэффициентом усиления и постоян-
ной интегрирования в функции величины сигнала обратной связи. В динамических режи-
мах электропривода шахтного подъема, учитывая наличие гибких связей в механизме, долж-
ны исключаться скачки динамического момента двигателя. Для развертки сигнала задания
скорости во времени используется задатчик интенсивности ЗИ, с выхода которого задание
поступает на регулятор после сравнения с сигналом обратной связи. Этот модуль формирует
на начальном и конечном участках ускорения (торможения) параболические участки в за-
данной тахограмме, что обеспечивает нарастание и спадание динамического тока по линей-
ному закону в течение 1.5...2.5 с.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
313
Сигнал задания скорости формируется фазочувствительным выпрямителем, преобразу-
ющим угол поворота сельсинного командоаппарата в аналоговый сигнал U3ad Знак сигнала
задания скорости определяется направлением поворота рукоятки командоаппарата. Далее
сигнал задания поступает в задатчик величины скорости ЗС, в котором, в зависимости от
сигналов направления (Вперед и Назад) и величины (РПС и РМС) скорости, формируется
величина задания скорости, которая поступает на ЗИ.
Второй канал — канал регулирования потока возбуждения.
Реверс момента двигателя производится изменением направления тока возбуждения
двигателя. Знак тока возбуждения, а, следовательно, и момента двигателя определяется зна-
ком сигнала на выходе регулятора скорости PC.
Блок величины возбуждения БВВ формирует сигнал задания тока возбуждения 1те на
входе регулятора тока возбуждения ПИ-РТВ.
Если момент нагрузки больше выбранной уставки, то БВВ ограничивает задание тока воз-
буждения на вход ПИ-РТВ на уровне номинального тока. Если момент меньше выбранной
уставки, то задание тока возбуждения на вход ПИ-РТВ уменьшается и поле электродвигателя
ослабляется, что необходимо для уменьшения времени реверса момента при малых нагрузках.
В схеме может быть выполнен запрет задания тока якоря на период предохранительного
механического торможения подъемной машины обнулением сигнала 1св .
Все параметры регуляторов, в том числе ограничения, задаются в виде уставок при по-
мощи пульта управления ПУ.
Тиристорная часть электропривода представляет собой две секции вентильные СВ-1 и
СВ-2. Каждая секция состоит из пяти трехфазных мостов, включенных на параллельную ра-
боту, и размещена в отдельном шкафу ШВС.
В каждой секции реализована шестипульсная мостовая схема выпрямления. Благодаря
сдвигу на 30 электрических градусов напряжений вторичных обмоток питающих трансфор-
маторов формируется двенадцатипульсная схема выпрямления.
Каждая секция вентильная содержит 30 силовых тиристорных модулей (5 мостов, со-
единенные параллельно).
Модуль силовой тиристорный состоит из тиристора в комплекте с охладителем и быст-
родействующего предохранителя на ток 630 А. Модуль включает RC-цепи и блок драйвера
тиристора БДрТ для управления тиристором и сигнализации о состоянии, связанный с внеш-
ней схемой управления.
Выходные цепи тиристорных секций подключены к якорной обмотке двигателя.
Защита преобразователя, а также якорной обмотки двигателя осуществляется быстродейству-
ющим автоматическим выключателем ВАТ типа ВАТ-48, включенным в якорную цепь двигателя.
Разборка якорной цепи двигателя при отсутствии нагрузки и стоянке двигателя произ-
водится линейным контактором КЛ.
Защита тиристоров от перенапряжений осуществляется варисторами, установленными
в блоках БЗП шкафов ввода, а также при помощи RC-цепей. Блоки БЗП служат для защиты
тиристоров от перенапряжений, связанных с включением и отключением силовых транс-
форматоров ТС1 и ТС2. Варисторы защищены быстродействующими предохранителями.
Защитные функции и сигнализация электропривода обеспечиваются программно-ап-
паратным комплексом системы управления, состоящим из датчиков, индикаторов и управ-
ляющего контроллера с набором специализированного программного обеспечения. С учас-
тием Павлоградского наладочного управления Донбассуглеавтоматии и Углемонтажа ЭКПЦ
введен в эксплуатацию в июле 2007 года.
Научно-производственная электротехническая компания АОЗТ«Элетекс-«С» (г. Харьков) раз-
работала, изготовила и поставила в 2006 г. на шахту им. Героев Космоса ПО «Павлоградуголь»
электропривод комплектный ЭКПЦ-5000/750 (ЭКПЦ) для резервирования существующего тири-
сторного преобразователя питающего двигатель постоянного тока скипового подъема.
Электропривод комплектный постоянного тока с микропроцессорной системой управ-
ления ЭКПЦ предназначен для плавного пуска, регулирования скорости, момента и тормо-
жения механизмов с приводными двигателями постоянного тока.
Существуют исполнения ЭКПЦ по различным параметрам:
По способу выполнения вентильной части:
— с нереверсивными якорным преобразователем и реверсивным возбудителем;
314
ГЛАВА 11
— с реверсивным якорным преобразова-
телем и нереверсивным возбудителем.
По току якоря:
— по 6-пульсной мостовой схеме: 800,
1000, 1600, 2500, 3200, 4000, 5000 А;
— по 12-пульсной схеме: 3200, 4000,
5000, 6300, 8000, 10000 А.
По напряжению якоря: 440, 600, 750,
930 5.
По диапазону изменения скорости дви-
гателя — однозонное, двухзонное.
По числу электродвигателей: однодвига-
тельные, двухдвигательные.
По дополнительному составу аппарату-
ры силовой цепи: с линейным контактором
и без него, с динамическим торможением и
без него.
По способу связи с питающей сетью: с
трансформаторной связью, с реакторной связью.
По току возбуждения: 100, 200, 320, 500,
630, 800 А.
По напряжению возбуждения: 220, 440,
660 5.
В состав электропривода ЭКПЦ входит
следующее оборудование:
— Шкафы (щиты) тиристорные якорно-
го преобразователя (вентильные секции) —
обеспечивают преобразование питающего
напряжения переменного тока в напряжение
постоянного тока по схеме 6 (12)-пульсного
выпрямителя на базе тиристорных блоков. Каждый шкаф (щит) тиристорный содержит шахты
для установки тиристорных блоков. Блок представляет собой одну тиристорную ветвь, со-
стоящую из силового тиристора с охладителем, индуктивным делителем тока и быстродей-
ствующим предохранителем. Допускается другая компоновка тиристорных блоков. Шкафы
(щиты) тиристорные имеют принудительную вытяжную вентиляцию от встроенных венти-
ляторов. Направление движения воздуха — снизу вверх. Шкафы (щиты) тиристорные ЭКПЦ
выполнены с резервированием тиристорных блоков для сохранения работоспособности при
выходе из строя одного из вентилей. При выходе из строя одной параллельной ветви вен-
тильной части допускается работа: без снижения нагрузок — в течение 8 часов; при выходе
из строя 2-х параллельных ветвей — в течение 3 минут, после чего производится отключе-
ние. При исчезновении воздушного принудительного охлаждения в шкафах (щитах) тирис-
торных с полным числом работающих параллелей допускается работа при ограничении тока
нагрузки на уровне 1,2 1НОМ в течение 3 минут с последующим проведением регламентных
работ в силовой части изделия. При одновременном исчезновении принудительного охлаж-
дения и выходе из строя одной или двух параллельных ветвей в шкафу (щите) тиристорном
изделия производится аварийное отключение электропривода.
— Шкаф управления с микропроцессорной системой управления (МПСУ) и встроен-
ным возбудителем (рис. 11.6) предназначен для формирования импульсов управления тири-
сторов шкафов (щитов) тиристорных электропривода (вентильных секций), а также для уп-
равления напряжением возбуждения приводного электродвигателя. Подключение возбуди-
теля к сети трансформаторное или реакторное.
— Щиты силовые с быстродействующими выключателями ВАТ и линейными контакто-
рами (рис. 11.7) — предназначены для защиты электропривода от токов короткого замыка-
ния, перегрузки и оперативных коммутаций цепи якоря двигателя. Щиты имеют естествен-
ную воздушную вентиляцию.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
315
— Шкаф (щит) коммутационный —
предназначен для бестоковых переключений
выходов якорного преобразователя и возбу-
дителя при переводе электродвигателя на
питание от основного или дополнительно-
го электропривода (для двухдвигательного
исполнения). Шкаф (щит) коммутацион-
ный выполняется с естественным воздуш-
ным охлаждением.
— Сглаживающие дроссели.
— Силовой трансформатор для питания
вентильной части якорного преобразовате-
ля (для 12-пульсных схем выпрямления воз-
можно применение двух силовых трансфор-
маторов с разными схемами соединения об-
моток).
ЭКПЦ обеспечивает:
— регулирование скорости двигателя —
производится изменением напряжения цепи
Рис. 11.7. Щиты силовые с
быстродействующими выключателями
ВАТ и линейными контакторами
якоря двигателя от нуля до номинального значения, диапазон регулирования скорости — не
менее 1:75;
— ограничение полного тока на заданном уровне с точностью не менее 10 %;
— статическую точность поддержания скорости вращения двигателя — не хуже 1 % (оп-
ределяется характеристиками пристроенного к двигателю тахогенератора или импульсного
датчика угла поворота).
ЭКПЦ в исполнении с нереверсивными тиристорными якорными преобразователями
(по 12 — пульсной схеме) и реверсивным тиристорным возбудителем электродвигателя мо-
жет работать как в выпрямительном, так и инверторном режимах. В выпрямительном режи-
ме работы ЭКПЦ передает мощность от силового трансформатора к электродвигателю, а в
инверторном — от двигателя в питающую сеть через силовой трансформатор. Изменение
знака момента двигателя осуществляется за счет реверса тока возбуждения электродвигателя
поля путем выбора соответствующей работающей вентильной группы возбудителя. Переход
из выпрямительного в инверторный режим работы и наоборот осуществляется автоматичес-
ки под управлением встроенной системы регулирования. В ЭКПЦ обеспечивается выравни-
вание нагрузок параллельно работающих мостов 12-пульсного якорного преобразователя.
ЭКПЦ обеспечивает следующие виды защит:
— отключение приводного двигателя при любом размыкании цепи защиты или снятии
напряжения;
— от выхода из строя тиристоров при внешних и внутренних КЗ, открывания тиристора
в неработающей группе, опрокидывания инвертора;
— от перенапряжений на тиристорах;
— от аварийной перегрузки тиристоров;
— от развития аварийных процессов при исчезновении напряжения питания собствен-
ных нужд и силового напряжения;
— от недопустимой продолжительности работы при аварии системы вентиляции;
— от обрыва поля возбуждения;
— от превышения допустимого тока возбуждения;
— от перенапряжения на якоре двигателя;
— от перегрузки двигателя, превышающей заданную величину в течение заданного ин-
тервала времени;
— от включения преобразователя на вращающийся двигатель;
— от нарушения изоляции элементов силовой части;
— от сбоев микропроцессорной системы управления-преобразователем;
— запрет работы при неправильной сборке якорной цепи и цепи возбуждения двигателя
при переходе от основного к резервному электроприводу.
316
ГЛАВА 11
ОАО «Завод «Преобразователь» (г. Запорожье) имеет 40 летний опыт изготовления элек-
троприводов постоянного и переменного тока. В 1978 г. реверсивный тиристорный преобра-
зователь этого завода был установлен в качестве резервного источника постоянного тока для
питания подъемного двигателя скипового подъема шахты «Россия» ПО «Селидовуголь», ко-
торый находится в эксплуатации до настоящего времени.
В 1977 г. тиристорные преобразователи Запорожского завода «Преобразователь» были
использованы при создании передвижных установок резервного питания УРПП, а в 1983 г. —
более современных установок «Старт-83» (см. 11.4).
В перестроечный период 90-х годов завод сохранил коллектив, производственную базу и вы-
пускает широкую номенклатуру электрооборудования для различных отраслей промышленности.
В 2006 г. для скипового угольного подъема Угольной компании «Краснолиманская» ОАО
«Завод «Преобразователь» по проекту, выполненному специалистами Донбассуглеавтомати-
ки, поставил Комплектный тиристорный электропривод КТЭ6300/750-0121-00П2(КТЭ) с ре-
версом тока в якорной цепи для резервирования и замены находящихся в эксплуатации и
выработавших свой ресурс тиристорных преобразователей ТПР-3 и КТЭУ.
В состав КТЭ входят: шкафы ввода ШВ-1 и ШВ-2, шкафы силовые ШС-1 и ШС-2, шкаф
управления ШУ, шкаф переключения резерва ШПР, шкаф ШВТ с автоматическим быстро-
действующим выключателем постоянного тока ВАТ-48, реакторы сглаживающие СРОСЗ—
320М, трансформаторы силовые ТСЗП-4000/10УЗ типа RESIBLOC, возбудитель КТЭВ-200/
460—ООН—00-П211, программно-аппаратный комплекс, ЗИП.
Комплектный тиристорный электропривод обеспечивает:
— формирование диаграммы скорости разгона и замедления с ограничением ускорения
и его производной — рывка;
— отсутствие колебаний скорости подъемного двигателя на всех условиях задания и при
всех нагрузках, особенно при работе в зоне прерывистого тока;
— вычисление и запоминание статического тока при начале движения и использование
этой информации при растормаживании машины в середине ствола;
— компенсацию ЭД в САР скорости;
— точную остановку скипа в разгрузке, для чего используется информация от импульс-
ного датчика пути с дальнейшим наложением тормоза;
— диапазон регулирования выпрямленного напряжения 0+ 100 %;
— ток перегрузки 2 / в течение 15 с;
— диапазон регулирования скорости 100:1.
В 1997—2002 гг. в Научно-производственном центре «Электротехнические комплексы»
НПЦ-12 ОАО «Электропривод» под руководством Л.Х. Дацковского разработаны техничес-
кие проекты и осуществлены поставки электрооборудования с тиристорными электропри-
водами постоянного тока для трех подъемных установок ОАО «ГМК «Норильский никель».
В числе этих проектов — скиповая установка ствола ВС-9 и проходческая установка ствола
ВС-7 шахты «Скалистая»[225], которые введены в работу.
На рис. 11.8 приведена схема главного привода скиповой подъемной установки ствола
ВС-9 (в однолинейном изображении), в котором применены современные комплектные ти-
ристорные преобразователи с микропроцессорным управлением.
Характерной особенностью этих преобразователей является большой набор библиотеч-
ных программ, позволяющий проектировать практически любые требуемые структуры регу-
ляторов. Программирование связей между элементами структуры и настройка параметров
регуляторов осуществляется с помощью системы проектирования SIMOVIS.
Системное программно-аппаратное обеспечение преобразователей позволяет произво-
дить автоматическую настройку регуляторов на стандартные оптимумы с выдачей парамет-
ров реального объекта, получать осциллограммы переходных процессов в любой точке струк-
туры регулирования, а также реализовать свыше 100 защит и диагностических сообщений о
неисправностях отдельных узлов. Структура системы регулирования скорости подъемной
машины разработана в ОАО «Электропривод» с использованием имеющихся в составе пре-
образователей программных, аппаратных и сетевых средств.
На рис. 11.9 приведена схема электропривода подъемной установки с реверсивным тири-
сторным преобразователем по 12-пульсной схеме в цепи якоря (в однолинейном изображе-
нии). По такой схеме реализован электропривод скиповой подъемной установки БКПРУ-1 в
ОАО «Уралкалий».
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
317
6 кВ
Рис. 11.8. Однолинейная схема главного привода ствола ВС-9 с реверсом в цепи возбуждения:
Tl, Т2 — трансформаторы; Ml — двигатель; L1,L2 — дроссели сглаживающие; L — реакторы
анодные; ЩВМ — щит вспомогательных механизмов; ОВД — обмотка возбуждения двигателя;
Н4 — шкаф защиты от перенапряжений
Рис. 11.9. Однолинейная схема главного привода с реверсом в цепи якоря
318
ГЛАВА 11
11.4. Резервирование питания подъемных двигателей постоянного тока
На шахтах угольной промышленности Украины в настоящее время работают около 130
подъемных установок с приводом постоянного тока. Более половины из них — установлены
с приводом постоянного тока по системе Г-Д, которые были введены в эксплуатацию до
1977 г. На этих подъемах в качестве преобразователей для получения постоянного тока ис-
пользуются электромашинные преобразователи, выполненные по схеме синхронный гене-
ратор — двигатель (СД-Г).
Многолетний опыт их эксплуатации показал, что аварийные простои чаще всего вызыва-
ются неполадками электромашинного преобразовательного агрегата (синхронного двигателя и
генератора главного тока). Синхронные двигатели работают в тяжелом режиме знакоперемен-
ных нагрузок, после 20—30 лет работы у них стареет высоковольтная изоляция статора. В ней
появляются микротрещины, в которые попадает пыль и влага. Это приводит, в конце концов, к
пробою изоляции и трению частей обмотки. Были случаи, когда сгорала вся статорная обмотка.
Ремонт и замена обмотки не восстанавливает полную работоспособность машины. Горение
обмотки статора вызывает перегорание межпластинчатой бумажной изоляции магнитопровода.
Восстановить эту изоляцию в процессе ремонта не удается. В дальнейшем при эксплуатации
машины происходит местный нагрев магнитопровода, что приводит к быстрому старению изо-
ляции обмотки в этом месте. Поэтому после первого пробоя можно ожидать следующего каж-
дые 3—4 года. Такие машины требуют замены. Дальнейшая их эксплуатация невыгодна.
Ротор синхронного двигателя электрически более надежен, чем статор, так как включен
на низкое напряжение, чего нельзя сказать о его механической надежности. Вращаясь с боль-
шой скоростью (1000 об/мин), ротор испытывает большие механические нагрузки. Это при-
водит к ослаблению клиньев, удерживающих обмотку на валу, к появлению дополнительной
вибрации и в конечном итоге к аварии.
Генераторы постоянного тока — это высокооборотные машины, установленные одно-
временно с синхронными двигателями, и поэтому у них, как и у синхронных двигателей,
ресурс работы давно выработан. Если у СД это внешне незаметно, то у генераторов это вид-
но по износу коллектора и щеточного аппарата. В результате дребезг и искрение, износ ще-
ток и постоянная головная боль для ремонтной службы.
При выходе из строя крупных электрических машин их восстановление продолжается
длительное время, нередко более месяца. Чтобы это не приводило к простою шахты, приме-
няется резервирование питания подъемных двигателей.
Наиболее простой способ резервирования состоит в оснащении каждой подъемной ма-
шины с приводом постоянного тока двумя преобразовательными агрегатами — рабочим и
резервным. Такое резервирование весьма удобно для эксплуатации, но применяется редко
из-за больших капитальных затрат. Поэтому наибольшее распространение получило резер-
вирование с помощью передвижных преобразовательных агрегатов.
Первый из передвижных преобразовательных агрегатов был смонтирован на железно-
дорожной платформе и состоял из синхронного двигателя мощностью 2500 кВт, генератора
постоянного тока мощностью 2000 кВт, возбудителя синхронного двигателя, вспомогатель-
ного генератора, электромашинного усилителя, высоковольтного распределительного уст-
ройства и пускорегулирующей аппаратуры. Впоследствии были изготовлены еще несколько
агрегатов по аналогичному принципу. Более чем двадцатилетний опыт использования таких
агрегатов на шахтах Донбасса показал их высокую эффективность. Простои подъемных ус-
тановок были сведены к минимуму. Снизилась и аварийность, так как появилась возмож-
ность проведения профилактических ремонтов электрических машин.
Дальнейшее совершенствование технологии добычи угля, применение высокопроизводи-
тельной горной техники, концентрация горных работ потребовали увеличения мощности при-
вода подъемных установок до 3600—5000 кВт (шахты «Прогресс» ПО «Торезантрацит», им. Ста-
ханова ПО «Красноармейскуголь», им. А. А. Скочинского, ш/у «Октябрьский рудник» ПО «До-
нецкуголь», им. Героев Космоса ПО «Павлоградуголь», «Самсоновская Восточная» ПО «Крас-
нодонуголь»). Для резервирования таких мощных электрических машин существовавшие пере-
движные преобразовательные агрегаты были неприемлемы. Кроме того, многие вновь строящи-
еся шахты не имеют подъездных железнодорожных путей (шахта им. Героев Космоса ПО «Пав-
лоградуголь») или они находятся на значительном удалении от здания подъемной машины.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
319
В связи с этим возникла настоятельная необходимость создания мощной мобильной
передвижной установки, обеспечивающей резервирование питания приводов всех действу-
ющих и проектируемых подъемных машин. Такая передвижная установка резервного пита-
ния в 1977 г. была разработана специалистами Донбассуглеавтоматики под руководством Ко-
солапова А. Л. и изготовлена Донецким экспериментально-механическим заводом объеди-
нения «Укршахтострой».
Установка резервного питания передвижная (УРПП) состоит из двух передвижных пре-
образовательных агрегатов А и Б, каждый из которых выполнен на основе реверсивного ти-
ристорного преобразователя Запорожского завода «Преобразователь» с раздельным управ-
лением. Агрегаты могут эксплуатироваться как самостоятельно, так и включаться на совме-
стную работу параллельно или последовательно, обеспечивая резервирование питания на
подъемных машинах как с одним, так и с двумя двигателями. При параллельном включении
агрегатов номинальный ток установки 5000 А, напряжение 700 В, при последовательном или
самостоятельном включении — 2500 А, 700 В на каждый агрегат.
На рис. 11.10 изображено последовательное включение агрегатов при резервировании
питания двух двигателей, включенных по схеме «восьмерка». Параллельное включение агре-
гатов для питания одного двигателя большой мощности отличается изменением включения
только силовых выводов постоянного тока, которые соединяются параллельно.
Рис. 11.10. Упрощенная схема последовательного включения передвижных
преобразовательных агрегатов при двухдвигательном приводе подъемной машины
Первичная обмотка силового питающего трансформатора Тр агрегата А соединена в тре-
угольник, а агрегата Б — в звезду. Поэтому силовые вентильные секции агрегатов питаются
напряжениями, сдвинутыми на 30 эл. градусов, и при совместной работе агрегатов реализу-
ется двенадцатипульсная схема выпрямления, что уменьшает пульсации выпрямленного на-
пряжения и искажения, вносимые преобразователями в питающую сеть. Для уменьшения
зоны прерывистых токов и пульсаций выпрямленного тока предусмотрена установка сгла-
живающих реакторов L. Максимальная защита на стороне переменного тока осуществляет-
ся масляными выключателями ВМ, на стороне постоянного тока — выключателями В.
При совместной работе агрегатов система управления агрегата А является ведущей, а
агрегата Б — ведомой. Сигнал U& поступает из схемы управления подъемной машиной на
вход задающего устройства ЗУ. Так как привод по системе ТП-Д является быстродействую-
щим, то ЗУ вырабатывает сигналы заданных скорости, ускорения и рывка и сигнал Uy на его
320
ГЛАВА 11
выходе является их алгебраической суммой. САР скорости выполнена статической с парал-
лельной коррекцией и содержит обратные связи по напряжению и току двигателя (не пока-
заны на рисунке) и скорости. Сигнал обратной связи по скорости Ud поступает от тахогене-
ратора. При отсутствии стационарного тахогенератора с малым уровнем пульсаций выход-
ного напряжения может быть применен тахогенератор с фрикционным приводом от тормоз-
ного обода подъемной машины, либо обратная связь по скорости может быть выполнена по
схеме тахометрического моста. Суммирование задающих сигналов и сигналов обратных свя-
зей осуществляется суммирующим усилителем УС, который для получения приемлемого ка-
чества регулирования охвачен корректирующими обратными связями.
Хотя обеспечиваемое системой качество регулирования и не удовлетворяет условиям
оптимума, но она может быть введена в работу на установках с разными параметрами прак-
тически без наладки. Применение системы подчиненного регулирования, которая является
более совершенной, признано нецелесообразным для передвижной установки, поскольку для
реализации преимуществ такой системы потребовались бы значительные затраты времени
на выбор параметров регуляторов тока и скорости применительно к каждому подъему.
С выхода УС напряжение поступает в систему импульсно-фазового управления СИФУ
и преобразуется в импульсы управления, фаза которых определяется величиной и полярно-
стью выходного сигнала УС. Импульсы управления СИФУ усиливаются системой усиления
пусковых сигналов СУ ПС и подаются на тиристоры силовых вентильных секций СВ.
При совместной работе агрегатов переключатель режимов работы П в агрегате Б уста-
навливается в положение С — совместная работа. При этом ЗУ, УС и СИФУ агрегата Б вы-
водятся из работы и все управление УРПП осуществляется от агрегата А. Импульсы управ-
ления, выработанные в СИФУ-В или СИФУ-Н агрегата А, сводятся в один канал, задержи-
ваются по фазе на 30 эл. градусов в блоках задержки БЗ-В или БЗ-Н и подаются в агрегат Б,
где блоки распределения импульсов БРИ распределяют их по фазам преобразователя.
Система защиты СЗ обеспечивает защиту УРПП от токовых перегрузок. При превыше-
нии уставки по току срабатывает герконовое реле, установленное на выходных шинах вен-
тильных секции, воздействуя па СИФУ, сдвигает импульсы управления силовых тиристоров
в инверторную область и отключает выключатели В и ВМ.
При индивидуальной работе агрегата Б переключатель П устанавливается в положение
И и в работе будет находиться его собственная система управления ЗУ-УС-СИФУ-СУПС.
Конструктивно каждый агрегат выполнен в виде крытого фургона на автомобильном
двадцатитонном прицепе. Схема размещения оборудования агрегата приведена на рис. 11.11.
Суммарная масса оборудования 19500 кг. Балансирно-рессорная подвеска прицепа допуска-
ет скорость движения до 70 км/ч по дорогам с асфальтовым покрытием. Транспортирование
каждого агрегата обеспечивается автомобилем КрАЗ-258. Внешний вид установки резервно-
го питания УРПП показан на рис. 11.12.
Рис. 11.11. Размещение оборудования установки резервного питания на автомобильном
прицепе:
1 — силовой сухой трансформатор питания преобразовательных секций; 2 — ячейка
трансформатора собственных нужд; 3 — электрокалорифер; 4 — силовые вентильные секции;
5 — реактор сглаживающий; 6 — шкаф подключения контрольного кабеля и силовых кабелей
постоянного тока; 7 — ввод высокого напряжения; 8 — ячейка масляного выключателя; 9 — шкаф
управления преобразователем; 10 — шкаф системы автоматического регулирования, защиты
и совместной работы; 11 — выключатель на стороне постоянного тока.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
321
Рис. 11.12. Установка резервного питания УРПП
При возникновении аварийной
ситуации агрегаты доставлялись на
шахту и устанавливались вблизи соот-
ветствующего подъема, а после под-
ключения силовых и контрольного ка-
белей подъемная машина вводилась в
работу от установки резервного пита-
ния практически в течение несколь-
ких часов и обеспечивала устойчивую
работу подъемной установки на все
время устранения аварийной ситуации
или проведения планово-предупредительного ремонта.
Для сокращения времени подключения УРПП при проведении планово-предупредитель-
ных ремонтов или в аварийных случаях на многих шахтах были оборудованы пункты под-
ключения шкафного исполнения, куда подводились высоковольтный кабель от подстанции
или высоковольтного распредустройства подъема, силовые кабели постоянного тока от
подъемных электродвигателей и контрольный десятижильный кабель для связи со схемой
управления подъема.
Учитывая положительный опыт эксплуатации установки резервного питания передвиж-
ной УРПП, специалистами Донбассуглеавтоматики под руководством Косолапова А.Л.
были разработаны, изготовлены и внедрены две современные установки «Старг-83», где при-
менены тиристорные преобразователи Запорожского завода «Преобразователь» (рис. 11.13).
В 80-е — 90-е годы передвижные установки резервного питания успешно эксплуатиро-
вались при устранении аварий на преобразовательных агрегатах и при проведении плановых
ремонтов синхронных двигателей и генерато-
ров главного тока на многих шахтах с приво-
дом постоянного тока Донецкой, Луганской,
Днепропетровской и Ростовской областей.
Постепенно для резервирования преобра-
зовательных агрегатов на шахтах стали устанав-
ливаться стационарные резервные тиристор-
ные преобразователи и к концу 90-х годов по-
чти половина электромашинных преобразова-
телей была зарезервирована.
По мере физического и морального изно-
са тиристорные преобразователи первых поко-
лений АТ, АТР, ТПЗ и ТПР-3 стали резервиро-
ваться более современными преобразователя-
ми третьего — четвертого поколений КТЭУ и
УКТЭШ.
Рис. 11.13. Передвижные установки
резервного питания «Старт-83»
В настоящее время происходит процесс ввода в эксплуатацию тиристорных преобразо-
вателей пятого поколения с микропроцессорным управлением, выпуск которых начали ос-
ваивать ОАО «Завод «Преобразователь» г. Запорожье, Международный Консорциум «Энер-
госбережение» г. Харьков, АОЗТ «Элетекс-«С» г. Харьков, ГП НИИ ХЭМЗ совместно с ЗАО
«Элтехком» г. Харьков (см. 11.3). Фирма МИДИЭЛ поставляет привод постоянного тока с
микропроцессорным управлением производства фирмы АВВ (Швеция).
Глава 12
ЭЛЕКТРООБОРУДОВАНИЕ ШАХТНЫХ
ПОДЗЕМНЫХ ПОДЪЕМНЫХ МАШИН*
12.1. Состояние вопроса и тенденции развития
12.2. Электропривод с асинхронным двигателем с фазным
ротором на базе устройств УВП-350 и КУВВ
12.3. Двухдвигателъный электропривод с асинхронным
фазным ротором на базе устройства УВПМ-350 и
сервопривода жидкостного реостата
12.4. Электропривод по схеме асинхронного вентильного
каскада на базе устройства УВК-350
12.5. Электропривод с короткозамкнутым асинхронным
двигателем и преобразователем частоты ПЧВ-250
12.6. Программно-аппаратный комплекс КПА
12.1. Состояние вопроса и тенденции развития
Электрооборудование шахтных подземных подъемных машин (ШППМ) традиционно
подразделяется на главный электропривод, вспомогательные электроприводы и аппаратуру
дистанционного управления и защиты.
Основным видом главного электропривода ШППМ до настоящего времени остается элект-
ропривод на базе асинхронного двигателя (АД) с фазным ротором. Он обеспечивает все необходи-
мые технологические режимы, такие как подъем и спуск с пониженной и номинальной скорос-
тью, электрическое генераторное и динамическое торможение. Регулирование скорости подъем-
ного АД, как правило, осуществляется взрывобезопасным жидкостным реостатом типа ВЖР-350.
В качестве АД главного привода используются электродвигатели с фазным ротором серий
ВАОК производства ОАО «Первомайский электромеханический завод» (ПЭМЗ) (г. Первомайск)
или МА-36 производства ГП «Харьковский электромеханический завод» (ХЭМЗ) (г. Харьков).
Для управления статорной цепью АД в эксплуатации до сих пор применяется взрывобе-
зопасный комплект аппаратуры, выпускавшийся ПЭМЗ (г. Первомайск) и состоящий из че-
тырех блоков РКВ-300, КДТВ-400, БДТВ-400 и БКЗВ-400. Комплект был разработан в 60-х
годах, содержит устаревшие комплектующие и технические решения, не соответствует совре-
менным требованиям по безопасности. В настоящее время он снят с производства, и комп-
лектовать вновь вводимые подземные подъемные установки или осуществлять капитальный
ремонт действующих подъемных машин практически нечем.
Для управления вспомогательными электроприводами маслонасосов мощностью 2,2 кВт
или пневмостанции тормозной системы мощностью 11 кВт, насосом и вентилятором систе-
мы охлаждения жидкостного реостата мощностью 5,5 кВт используются серийные пускате-
ли ПВИ-63, мощность которых существенно превышает требуемую.
Аппаратура дистанционного управления и защит производится Конотопским заводом
«Красный металлист» и включает ряд отдельных блоков во взрывобезопасных оболочках с
искробезопасными цепями управления:
— пульт ППМ 1.1М;
— шкаф с приводом аппарата ШПА-3;
— блок управления регулятором БУРВ-3;
— станция тормоза предохранительного взрывобезопасная СТП-1В;
* Материалы представлены к. т. н. Дубинским А. А. (ЗАО «Донецкая инжиниринговая группа»)
ЭЛЕКТРООБОРУДОВАНИЕ ШАХТНЫХ ПОДЗЕМНЫХ ПОДЪЕМНЫХ МАШИН 323
— датчик контроля положения унифицированный ДКПУ-11 (12);
— блок сравнения и контроля ограничителя скорости БСКО-1;
— датчик путевой ДПИ-1,
Для питания искробезопасных цепей аппаратуры управления используются три источ-
ника питания БП 12-12, для соединения отдельных блоков между собой — три взрывобезо-
пасных кабельных ящика типа ЯСВ.
Для замены электрооборудования главного привода и вспомогательных приводов на вновь
вводимых в эксплуатацию и действующих ШППМ с 2001 г. Закрытым акционерным обществом
«Донецкая инжиниринговая группа» разработаны и серийно выпускаются Устройства управле-
ния взрывозашищенные для подъемных машин УВМП-350 и Комплектные устройства управле-
ния вспомогательными приводами подъемной машины взрывозащищенные КУВВ. Более 20
устройств УВМП-350 успешно эксплуатируются на шахтах Донбасса (ГП «Угольная компания
«Краснолиманская», ПО «Добропольеуголь», шахта «Суходольская-Восточная» ПО «Краснодо-
нуголь», шахта им. Чкалова ПО «Шахтерекантрацит»), Российской Федерации (КМА-Руда, г. Губ-
кин, «Кузбасспромуголь», г. Бедово) и Казахстана (Донской ГОК, г. Хромтау).
12.2. Электропривод с асинхронным двигателем с фазным ротором
на базе устройств УВПМ-350 и КУВВ
Устройство УВПМ-350 предназначено для защиты, оперативного включения (отключе-
ния), изменения направления вращения и замыкания обмоток ротора АД электропривода
подземных подъемных машин шахт, опасных по газу и пыли. Оно может эксплуатироваться
совместно с аппаратурой дистанционного управления подъемными установками типа АДУ-1
и Комплектным устройством управления вспомогательными приводами подъемной маши-
ны взрывозашищенным КУВВ.
Технические характеристики устройства УВПМ-350
Номинальное напряжение переменного тока, В 660
Частота напряжения сети, Гц 50
Номинальное напряжение постоянного тока динамического торможения, В 10, 20
Номинальная величина тока, проходящего через силовые зажимы, А 350 при ПВ = 40%
Тц = 17 мин
Максимальное значение:
— переменного тока, А 500
— постоянного тока, А 600
Габаритные размеры, мм, не более
длина 2850
ширина 906
высота 990
Масса, кг, не более 1100
Режим работы аппаратуры управления при работе АД в двигательном режиме, череду-
ющемся с режимом динамического торможения, соответствует повторно-кратковременному
с продолжительностью включения 40 % и продолжительностью цикла до 30 мин для каждого
из указанного выше режима работы в отдельности.
Силовая часть устройства включает:
— блокировочный разъединитель для подачи напряжения на устройство;
— автоматический выключатель для защиты силовых цепей;
— реверсор, обеспечивающий подачу на статор АД напряжения с различной последова-
тельностью чередования фаз;
— контактор для замыкания цепей ротора;
— контактор, обеспечивающий подключение источника динамического торможения к
двум фазам статора;
— источник регулируемого постоянного тока для динамического торможения, включа-
ющий автоматический выключатель, понижающий трансформатор и блок тиристоров.
Для обеспечения равномерной токовой нагрузки на каждую фазу контактора динамического
торможения и уменьшения среднего значения тока силовых полупроводниковых приборов исполь-
зована нулевая шестипульсная схема включения тиристоров. Для уменьшения габаритных размеров
понижающего трансформатора использовано соединение обмоток по схеме звезда-зигзаг.
324
ГЛАВА 12
Источник динамического торможения оснащен цифровым регулятором тока на микроконт-
роллере, обеспечивающим требуемые блокировки и переключение режимов при минимальном токе.
Входные управляющие сигналы подаются на устройство от пульта управления подъем-
ной машины и аппаратуры дистанционного управления по искробезопасным цепям с опт-
ронной гальванической развязкой.
Входными командами являются:
— дистанционное включение и отключение автоматического выключателя;
— включение контакторов реверсора;
— включение режима динамического торможения;
— включение короткозамыкателя.
Устройство также обеспечивает максимальную и нулевую защиты, защиту двигателя от
перегрузки, предупредительный контроль изоляции.
Общий вид устройства УВПМ-350 приведен на рис. 12.1.
На действующих подъемных установках, где продолжает эксплуатироваться комплект ап-
паратуры производства ОАО «ПЭМЗ», зачастую выходит из строя только блок динамического
торможения БДТВ-400. Его ремонт невозможен ввиду отсутствия комплектующих изделий,
давно снятых с производства (магнитный усилитель, поляризованное реле и др.). Для его за-
мены разработано Устройство динамического торможения взрывозащищенное УДТВ-500.
Устройство УДТВ-500 предназначено для обеспечения тормозных режимов асинхрон-
ных двигателей с фазным ротором подъемных машин, конвейеров и других механизмов мощ-
ностью до 250 кВт.
Технические характеристики устройства УДТВ-500
Номинальное напряжение сети, В
Частота сети, Гц
Номинальное напряжение постоянного тока динамического торможения, В
Номинальная величина постоянного тока статора, А
Номинальная величина тока ротора, А
Охлаждение
Степень защиты устройства от внешних воздействий по ГОСТ 14254
Габаритные размеры, мм
длина
ширина
высота
Масса, кг
660
50
10, 20
500
400
Воздушное естественное
IP54
1100
850
900
480
Схемотехнические решения, использованные в устройстве УДТВ-500, аналогичны при-
мененным в устройстве УВПМ-350. При этом устройство обеспечивает:
— автоматическое регулирование постоянного тока статора в зависимости от тока рото-
ра для оптимизации режима динамического торможения;
— бестоковое включение и выключение режима динамического торможения.
Устройство обеспечивает следующие защиты и блокировки:
— защиту от перегрузки по току двигателя в режиме динамического торможения;
— нулевую защиту;
— максимальную защиту понижающего трансформатора;
— защиту от перегрева двигателей;
— защиту от перегрева силовых полупроводниковых приборов;
ЭЛЕКТРООБОРУДОВАНИЕ ШАХТНЫХ ПОДЗЕМНЫХ ПОДЪЕМНЫХ МАШИН
325
— предупредительный контроль изоляции статора двигателя;
— защиту от замыканий в цепях дистанционного управления;
— электрическую блокировку, обеспечивающую невозможность отключения разъеди-
нителя под токовой нагрузкой;
— механическую блокировку, обеспечивающую невозможность доступа в отсек с ком-
Рис. 12.2. Общий вид устройства
УДТВ-500
мутационной аппаратурой при включенном
разъединителе.
Устройство обеспечивает индикацию:
— тока привода;
— наличия напряжения на устройстве;
— режима динамического торможения;
— включенного положения контактора;
— причины отказа или срабатывания за-
щит и блокировок.
Общий вид устройства УДТВ-500 приве-
ден на рис. 12.2.
Устройство КУВВ предназначено для уп-
равления вспомогательными электропривода-
ми ШППМ независимо от типа главного при-
вода, а также других стационарных шахтных
механизмов с несколькими электродвигателя-
ми и соответствующими параметрами.
Технические характеристики устройства КУВВ
Напряжение питающей сети, В 660/380
Частота питающей сети, Гц 50
Число фаз питающей сети 3
Номинальный ток ввода, А 50
Максимальное количество подключаемых токоприемников, шт. 5
Номинальный ток отходящих присоединений (фидеров), А:
три ввода 3,8-6,0
два ввода 5,5-8,0
один ввод 13,0-19,0
Предельная коммутационная способность (действующее значение), кА 6,0
Номинальная мощность подключаемых двигателей, кВт 2,2-13
Габаритные размеры корпуса, мм 850x750x650
Масса, кг, не более 200
Электрическая схема устройств обеспечи-
вает следующие виды защит, блокировок и ин-
дикации:
— максимальную токовую защиту;
— защиту от перегрузки;
— блокировку, препятствующую включе-
нию встроенных аппаратов при повреждении
или снижении изоляции отходящего присое-
динения ниже допустимого уровня;
— световую индикацию о срабатывании
максимальной защиты;
— световую индикацию о срабатывании
тепловой защиты;
— световую индикацию о срабатывании
блоков контроля сопротивления изоляции;
— проверку исправности блоков контро-
ля сопротивления изоляции.
Общий вид устройства КУВВ приведен на
рис. 12.3.
Рис. 12.3. Общий вид устройства КУВВ
326
ГЛАВА 12
12.3. Двухдвигательный электропривод с асинхронным двигателем
с фазным ротором на базе устройств УВПМ-350 и сервопривода
жидкостного реостата
В качестве главного привода ШППМ при мощности 400—500 кВт целесообразно при-
менять двухдвигательный электропривод, поскольку предельная мощность взрывозащищен-
ных двигателей при напряжении сети 660 В — 250 кВт, а применение высоковольтного (на
6 кВ) электрооборудования существенно удорожает стоимость проекта.
Поэтому для электропривода подъемной машины Ц3х2,2 АР в условиях ГП «Угольная
компания «Краснолиманская» был применен оригинальный тип двухдвигательного привода
с двумя электродвигателями с фазным ротором с жидкостными реостатами ВЖР в цепи ро-
тора, УВПМ-350 и центробежным сервоприводом жидкостного реостата с короткозамкну-
тым асинхронным двигателем.
Жидкостный реостат в цепи ротора одного двигателя управляется оператором (ведущий
ВЖР), а жидкостный реостат в цепи ротора другого двигателя (ведомый ВЖР) управляется
дистанционно с помощью центробежного сервопривода, который автоматически регулирует
нагрузку второго двигателя в функции нагрузки первого. В состав центробежного сервопри-
вода входят привод жидкостного реостата ПЖР, регулирующий положение ножей ведомого
ВЖР с помощью короткозамкнутого асинхронного двигателя и устройство взрывозащищен-
ное управления реостатом УВР-Ц.
В состав УВР-Ц входят блокировочный разъединитель для подачи напряжения на устрой-
ство, контактор, разъединительный трансформатор 660/380 В, преобразователь частоты фирмы
АВВ типа ACS 401, устройство динамического торможения, аппаратура управления и зашиты.
УВР-Ц предназначено для защиты, оперативного включения (отключения), регулирова-
ния скорости вращения и торможения асинхронного короткозамкнутого двигателя центро-
бежного сервопривода ведомого ВЖР. Устройство обеспечивает регулирование положения но-
жей ведомого жидкостного реостата второго двигателя в режиме следящего электропривода в
зависимости от тока ротора первого двигателя. Устройство также обеспечивает максимальную
и нулевую защиты, защиту двигателя от перегрузки, предупредительный контроль изоляции.
12.4. Электропривод по схеме асинхронного вентильного каскада
на базе устройства УВК-350
Для решения проблем энергосбережения, повышения надежности и управляемости на
действующих или модернизируемых ШППМ целесообразно применять систему асинхрон-
но-вентильного каскада (АВК). Она на 15—25 % позволяет сократить потребление активной
мощности за счет рекуперации энергии в питающую сеть и заменить громоздкий и трудно
управляемый жидкостный реостат на командоаппарат задания скорости подъема. Структур-
ная схема электропривода ШППМ по системе АВК приведена на рис. 12.4.
Для подключения к сети, реверсирования и подачи тока динамического торможения в
статор двигателя главного привода рекомендуется применять устройство УВПМ-350, хотя
принципиально возможно применение и аппаратуры на базе блоков РКВ-300, КДТВ-400,
БДТВ-400 и БКЗВ-400, если они уже находятся в эксплуатации на действующей ШППМ.
Электрооборудование для управления ротором двигателя размещено в устройстве УВК-350.
Технические характеристики устройства УВК-350
Номинальное напряжение сети, В 660
Частота сети, Гц 50
Номинальная нагрузка, А 400
Точность поддержания частоты вращения, % 10
Охлаждение Водяное, принудительное
Степень защиты устройства от внешних воздействий по ГОСТ 14254. IP54
Габаритные размеры, мм
длина 1100
ширина 850
высота 900
Масса, кГ 520
Рис. 12.4. Структурная схема электропривода ШППМ по системе АВК:
КА — командоаппарат; АА — аппаратура автоматизации; БПРК — блок преобразования сигналов командоаппарата; ЦУ— цепи управления; УГР —
устройство гальванической развязки входных сигналов; БЛОС — блок логической обработки сигнала; PC — регулятор скорости; РТ1, РТ2 — регулятор тока;
СИФУ — система импульсно-фазового управления; БВУ — блок входных устройств; ТИ — тиристорный инвертор; В — неуправляемый выпрямитель;
Т— трансформатор динамического торможения; ТВДТ — тиристорный выпрямитель динамического торможения; УВК — устройство включения
контакторов; УДС — устройство преобразования сигналов датчиков тока статора; УДР — устройство преобразования сигналов датчиков тока ротора;
ДЧТР — датчик частоты тока ротора; УПС ДЧТР — устройство преобразования сигналов ДЧТР; УЗ — устройство защит; БИ — блок индикации; ЦЗ —
цепь защиты, 1 — подъемный электродвигатель; 2, 3 — электродвигатель маслонасосов; 4, 5, 6 — электродвигатели компрессора, насоса системы
охлаждения, вентилятора системы охлаждения
ЭЛЕКТРООБОРУДОВАНИЕ ШАХТНЫХ ПОДЗЕМНЫХ ПОДЪЕМНЫХ МАШИН
328
ГЛАВА 12
Силовая часть устройства включает:
— блокировочный разъединитель для подачи напряжения на устройство;
— контакторы КМ;
— неуправляемый выпрямитель В;
— тиристорный управляемый инвертор ТИ;
— сглаживающий дроссель ДР, размещенный в отдельной оболочке.
Особенностью устройства УВК-350 является возможность применения двигателей се-
рии ВАОК всех типоразмеров, а двигателей серии МА36 до мощности 160 кВт включитель-
но. Это объясняется высоким (более 1000 В) напряжением ротора двигателей серии МА 36
больших мощностей и невозможностью работы инвертора при напряжении сети 660 В без
согласующего трансформатора.
Тиристорный управляемый инвертор оснащен цифровым регулятором тока и частоты
Рис. 12.5. Общий вид устройства УВК-350
вращения двигателя на микроконтролле-
ре, обеспечивающим требуемые регулиро-
вочные свойства системы.
Сигнал задания скорости подается на
устройство от командоаппарата на пульте
управления подъемной машины по искро-
безопасным цепям.
Устройство также обеспечивает авто-
матическое поддержание заданной скоро-
сти привода, максимальную и нулевую за-
щиты, защиту двигателя от перегрузки, за-
щиту от перегрева силовых полупровод-
никовых приборов, предупредительный
контроль изоляции роторных цепей дви-
гателя.
Общий вид устройства УВК-350 при-
веден на рис. 12.5.
12.5. Электропривод с короткозамкнутым асинхронным двигателем
и преобразователем частоты ПЧВ-250
Наиболее перспективным типом электропривода ШППМ в настоящее время является
привод с преобразователем частоты и асинхронным короткозамкнутым двигателем ПЧ-АД.
Продолжительное время развитие этого направления сдерживалось относительной дорого-
визной ПЧ, их сложностью, недостаточной надежностью, проблемами с охлаждением сило-
вых полупроводниковых приборов ПЧ в замкнутых объемах взрывозащищенных оболочек.
В настоящее время ведущими электротехническими компаниями, такими как АВВ,
Siemens, Schneider и др. выпускаются надежные ПЧ и их компоненты (силовые полупровод-
никовые приборы, в том числе с водяным охлаждением, силовые конденсаторы, датчики,
драйверы и микроконтроллеры систем управления). Методы управления ПЧ непрерывно
совершенствуются, а их энергетические показатели постоянно улучшаются. Это создает пред-
посылки для создания отечественных ПЧ во взрывозащищенном исполнении, в том числе и
для ШППМ. При этом возможны два направления разработок:
— использование серийных общепромышленных ПЧ методом заключения их во взры-
вонепроницаемую оболочку и оснащения необходимыми для взрывозащищенного электро-
оборудования дополнительными защитами и устройствами;
— создание оригинальных конструкций на базе силовых полупроводниковых модулей,
конденсаторов, микроконтроллеров ведущих фирм с учетом всех требований, предъявляе-
мых к электрооборудованию взрывозащищенного исполнения.
Примером реализации первого направления являются разработанные ЗАО «Донецкая
инжиниринговая группа» устройства ЭМДВ на базе ПЧ фирмы АВВ для привода монорель-
совых и напочвенных дорог.
В рамках второго направления Украинский научно-исследовательский институт взры-
возащищенного оборудования (УкрНИИВЭ) по заказу ЗАО «Горные машины» разработал
комплектный электропривод с преобразователем частоты взрывозащищенный ПЧВ-250.
ЭЛЕКТРООБОРУДОВАНИЕ ШАХТНЫХ ПОДЗЕМНЫХ ПОДЪЕМНЫХ МАШИН
329
Технические характеристики преобразователя ПЧВ-250
Номинальное напряжение сети, В 660
Частота сети, Гц 50
Номинальная нагрузка, А 315
Максимальная мощность двигателей при напряжении сети 660 В, кВт 250
Диапазон регулирования частоты, Гц 1.. .50
Точность поддержания частоты вращения, % 5
КПД, % 97
Коэффициент мощности 0,99
Степень защиты устройства от внешних воздействий по ГОСТ 14254 IP54
Габаритные размеры, мм
длина 2600
ширина 1200
высота 1550
Масса, кГ 2400
Преобразователь частоты взрывозащищенный ПЧВ-250 предназначен для управления и
защиты асинхронного короткозамкнутого двигателя подземных подъемных машин мощнос-
тью до 250 кВт. Преобразователь обеспечивает плавный запуск, регулирование и автомати-
ческое поддержание частоты вращения приводного двигателя, бесконтактное реверсирова-
ние приводного двигателя, а также электрическое торможение двигателя с рекуперацией энер-
гии в питающую сеть. В преобразователе имеются максимальная и нулевая защиты, защита
двигателя от перегрузки и перегрева, защита от перегрева силовых полупроводниковых при-
боров, предупредительный контроль изоляции двигателя.
Особое внимание следует уделить защите от утечек в сетях с полупроводниковыми при-
Рис. 12.6. Общий вид преобразователя
ПЧВ-250
борами, поскольку стандартные аппараты заши-
ты, установленные в шахтные подстанции не мо-
гут осуществить ее в полной мере. Для этой цели
необходимо применять специальный аппарат за-
щиты, устанавливаемый в подстанцию взамен се-
рийного, например устройство АЗУР4-ПП, раз-
работанный УкрНИИВЭ и прошедший испыта-
ния МакНИИ совместно с преобразователем
ПЧВ-250.
Преобразователь обеспечивает индикацию
тока привода, напряжения сети, частоты привод-
ного двигателя, причин отказа или срабатывания
защит и блокировок на пульте машиниста
ШППМ.
Общий вид преобразователя ПЧВ-250 при-
веден на рис. 12.6.
12.6. Программно-аппаратный комплекс КПА
Аппаратура дистанционного управления и защит ШППМ производства Конотопского
завода «Красный металлист», состоящая из отдельных блоков во взрывобезопасных оболоч-
ках с искробезопасными цепями управления, не отвечает современному техническому уров-
ню, устарела морально и физически.
Взамен нее УкрНИИВЭ по заказу ЗАО «Горные машины» разработал программно-аппа-
ратный комплекс КПА, представляющий единое изделие. Применение в качестве средства
управления, защиты, индикации и диагностики программно-аппаратного комплекса на базе
современных промышленных контроллеров позволяет использовать новые подходы в пост-
роении систем отображения технологической ситуации ШППМ.
Комплекс включает три подсистемы — управления главным приводом, управления рабо-
чим и аварийным тормозом, управления движением, отображение и хранение информации.
При этом основой концепцией является отображение в рабочем режиме только информа-
ции о скорости и местоположении подъемного сосуда, необходимой для оперативного уп-
330
ГЛАВА 12
равления ШППМ, а прочая информация отображается только при возникновении неисп-
равностей, аварийных ситуаций или ошибочных действиях персонала. Технические характеристики комплекса КПА Максимальная скорость подъема, м/с 5,0
Погрешность контроля скорости, м/с 0,1
Максимальная длина откатки, м 2300
Погрешность контроля положения сосуда, м 0,1
Количество горизонтов (заездов), не более 5
Количество путевых выключателей, не более 20
Собственное время срабатывания защит от переподъема и превышения скорости, с, не более 0,1
Номинальное напряжение сети, В 660
Частота, Гц 50
Степень защиты устройства от внешних воздействий по ГОСТ 14254 IP54
Габаритные размеры, мм, не более 1200x650x1100
Масса, кг, не более 400
Основным инструментом отображения в этом случае служит промышленный монитор,
а вся выводимая на экран информация подразделяется на следующие группы:
— положение в стволе и скорость подъемных сосудов;
— параметры защитной тахограммы;
— специальные технологические режимы и подготовительные операции;
— неисправности технологического комплекса;
— ошибочные действия персонала;
— сведения о причинах аварийной остановки;
— архивная и справочная информация.
Комплекс имеет следующие исполнения:
— по типу главного привода — асинхронный двигатель с фазным ротором и жидкостным
реостатом или асинхронный короткозамкнутый двигатель с преобразователем частоты;
— по типу тормозной системы — гидравлическая или пневматическая.
Комплекс выполняет следующие функции:
— управление скоростью главного привода ШППМ путем воздействия на преобразова-
тель частоты или жидкостный реостат;
— управление рабочим тормозом;
— управление предохранительным тормозом (зарядка и аварийное торможение ШППМ);
— регулируемое предохранительное торможение, исключающее набегание сосуда на канат;
— включение и выключение главного привода;
— аварийное включение электрического торможения;
— отключение главного привода и включение предохранительного тормоза при превы-
шении допустимого тока (сверхтоке), коротком замыкании, перегрузке и перегреве двигате-
ля главного привода, неисправности системы охлаждения, утечке на землю;
— защиту от исчезновения или недопустимого снижения напряжения силовых цепей и
собственных нужд (нулевая защита);
— блокировку, не допускающую снятия предохранительного тормоза и включение глав-
ного привода при неисправности аппаратуры или повреждении датчиков и цепей управления;
— блокировку, не допускающую снятия предохранительного тормоза и включение глав-
ного привода и вспомогательных приводов при снижении уровня изоляции ниже допусти-
мого предела;
— блокировку от включения главного привода при вращающемся двигателе;
— блокировку от чрезмерного износа тормозных колодок;
— защиту от провисания струны и напуска каната;
— блокировку, позволяющую включать главный привод после переподъема сосуда толь-
ко в направлении ликвидации переподъема;
— блокировку, не допускающую снятия предохранительного тормоза, если рукоятка уп-
равления рабочим тормозом не находится в положении «заторможено», а рукоятка управле-
ния скоростью главного привода — в нулевом положении;
ЭЛЕКТРООБОРУДОВАНИЕ ШАХТНЫХ ПОДЗЕМНЫХ ПОДЪЕМНЫХ МАШИН
331
— защиту от переподъема;
— защиту от превышения максималь-
ной скорости и скорости подхода к при-
емным площадкам;
— защиту от повреждения кинемати-
ческой цепи датчиков перемещения и ско-
рости.
Основные узлы и блоки комплекса вы-
полнены в виде пульта управления (рис. 12.7).
В левом отсеке расположена система
управления торможением. На его лицевой
стороне имеются приборы для индикации
давления в тормозных цилиндрах, кнопки
включения и отключения машины, пере-
ключатель перестановки барабанов и аку-
стический излучатель для подачи звуковых
сигналов. Управление рабочим тормозом
Рис. 12.7. Общий вид пульта управления осуществляется с помощью командоаппа-
рата, установленного на левой консоли.
В центральном отсеке расположены контроллер, элементы системы отображения и вво-
да-вывода. На лицевой панели установлены монитор, защищенный поликарбонатным лис-
том, стрелочный указатель скорости, ключ, кнопки программирования и световые индика-
торы стволовых команд.
В правом отсеке расположена система управления главным приводом. На лицевой па-
нели установлены стрелочные индикаторы тока нагрузки главного привода и напряжения
сети, светодиодная мнемосхема состояния всех аппаратов главного и вспомогательных при-
водов. На консоли размещены командоаппарат задания скорости, кнопки «Вперед», «На-
зад», «Стоп», задания направления движения.
Правый отсек разработан в 2-х модификациях для: подъемных машин с асинхронным
двигателем с фазным ротором с ВЖР в цепи ротора и для подъемных машин с приводом
ПЧ-АД.
Глава 13
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
13.1. Общие требования к аппаратам защиты и блокировки
13.2. Защита от переподъема
13.3. Защита от превышения скорости
13.4. Защита от провисания струны каната
13.5. Новые разработки элементов защиты на базе
микропроцессорной техники
13.1. Общие требования к аппаратам защиты и блокировки
Правильно спроектированная, смонтированная, квалифицированно налаженная и тща-
тельно обслуживаемая подъемная установка должна работать надежно и безопасно.
Для обеспечения безопасной и надежной работы подъемных установок, своевременно-
го обнаружения нарушения режимов работы и принятия необходимых мер по предупрежде-
нию аварии применяют систему защиты и блокировки, являющуюся составной частью сис-
темы управления.
Вследствие возможности выхода из строя элементов системы управления и конструк-
ции подъемной машины, наличия скрытых дефектов или воздействия случайных факторов,
которые невозможно учесть, а также из-за ошибочных действий обслуживающего персонала
вероятны опасные режимы при работе подъема. Правильное взаимодействие защит и бло-
кировок во многих случаях позволяет избежать аварии на подъемных установках.
Элементы защиты подъемных установок, как правило, реагируют на предельное откло-
нение основных параметров системы (ток, скорость, величину напуска каната, переподъем
и т. д.), действие защиты проявляется во включении предохранительного тормоза и прекра-
щении технологического процесса. В то же время защита не должна мешать нормальной
работе подъемной установки. Это обстоятельство предъявляет повышенные требования к
элементам защиты. Однако нередки случаи аварий на ряде подъемных установок из-за прин-
ципиально неверно выполненной защиты, отсутствия самоконтроля, несовершенства отдель-
ных аппаратов защиты и блокировки, и периодических проверок их элементов.
Опыт эксплуатации и наладки подъемных установок позволяет сформулировать основ-
ные требования к аппаратам защиты и блокировки, которые следует учитывать при их про-
ектировании, эксплуатации и наладке:
— высокая надежность;
— постоянная готовность к работе;
— проверка готовности аппаратов должна осуществляться как в ручном, так и в автома-
тическом режиме:
— простота настройки с обеспечением ее фиксации;
— перестройка должна осуществляться только представителями специализированных
организаций;
— отсутствие ложных срабатываний (высокая надежность отдельных элементов и аппара-
тов защиты в целом), стабильность работы; должны быть исключены срабатывания защитных
устройств вследствие их чрезмерной чувствительности к контролируемому параметру;
— охват как можно большего числа защищаемых параметров. Анализ аварий на подъем-
ных установках свидетельствует о необходимости расширить диапазон защитных функций —
аппаратура защиты должна реагировать, если не удовлетворяется хотя бы одно из требова-
ний, устанавливаемых для основных и второстепенных параметров системы;
— высокая степень самоконтроля элементов и электрических цепей;
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
333
— при проектировании аппаратов защиты должны использоваться методы, основанные
на определении реакции аппаратов зашиты на специальные контрольные и рабочие сигналы;
— резервирование аппаратов защиты, контролирующих основные параметры и содер-
жащих отдельные неконтролируемые узлы или элементы;
— автоматическая индикация срабатывания и поиск недопустимого отклонения того или
иного параметра; для обеспечения поиска срабатывания защитного устройства целесообраз-
но применять индикаторы сработавшей защиты, по возможности электрически не связан-
ные с цепью защиты; не допускается иметь общие элементы присоединения к подъемной
машине аппаратов регулирования и защиты при отсутствии дублирования;
— срабатывание аппаратов защиты и блокировки должно вызывать включение предох-
ранительного тормоза, предупредительной сигнализации или накладывать запрет на после-
дующий цикл.
Классификация системы защит и блокировок
Система защит и блокировок подъемных установок может быть разделена на следую-
щие основные группы.
1. Защиты, требующие немедленного включения предохранительного тормоза. Эти за-
щиты выполняются с высокой степенью самоконтроля и отличаются высокой надежнос-
тью. К ним относят: защиту от переподъема, превышения скорости, провисания струны и
напуска каната, проскальзывания каната или канатов (для подъемных машин с приводны-
ми шкивами трения); защиту и блокировки, контролирующие работу тормозной системы
(от чрезмерного износа тормозных колодок, понижения давления в тормозной системе,
положения рукояток рабочего и предохранительного тормозов, положения тормозного груза
машин и лебедок с грузовым приводом тормоза, положения трехходового крана машин
НКМЗ, наличия необходимого давления в цилиндрах рабочего торможения машин НКМЗ,
исправности цепи обмоток регулятора давления, положения рукоятки предохранительно-
го торможения при модернизации тормозной системы НКМЗ выпуска до 1963 г.; защиты и
блокировки механизма перестановки (смещения заклиненной части барабана относитель-
но переставной при фрикционном механизме перестановки, от случайного выхода из за-
цепления муфты механизма перестановки во время движения или стоянки машины и др.);
защита от обратного хода (несоответствия вращения барабана подъемной машины выб-
ранному направлению движения); зашита от обрыва кинематической цепи к аппарату за-
дания и контроля (АКХ, АЗК и др.); аварийная кнопка, а также возможность аварийной
остановки машины с мест разгрузки, загрузки и осмотра; защита от открытия дозатора при
движении подъемной машины; максимальная и нулевая защиты подъемных двигателей;
защита от неравномерной загрузки параллельно работающих двигателей; защита и блоки-
ровки подъемных установок, оборудованных динамическим торможением; максимальная
защита главной цепи системы Г-Д, осуществляемая воздушным автоматом; защита от по-
вышения тока главной якорной цепи системы Г-Д во время паузы; защита от исчезнове-
ния возбуждения подъемного двигателя; дополнительные защиты и блокировки на авто-
матизированных подъемных установках; защиты и блокировки, препятствующие пораже-
нию электрическим током.
2. Зашиты, позволяющие завершить цикл подъема, но запрещающие дальнейшую рабо-
ту: от перегрева подшипников (вторая ступень теплового контроля); при отключении венти-
ляторов охлаждения электрических машин системы Г-Д и ТП-Д; при отключении масло-
смазки подшипников редуктора и подъемной машины.
3. Защиты, сигнализирующие о неисправности элементов оборудования подъемной ус-
тановки, которые допускают работу подъемной установки со сниженными параметрами без
уменьшения надежности и безопасности до остановки ее на ремонт: от перегрева подшип-
ников (первая ступень теплового контроля); зашита от нарушения изоляции цепей управле-
ния и главной цепи системы Г-Д.
Кроме защит, схема управления имеет систему блокировок, препятствующих выполне-
нию какой-либо операции, влекущей за собой аварийный режим подъемной установки. Си-
стема блокировок обеспечивает строго определенную последовательность операций, произ-
водимых машинистом подъема при включении схемы управления или при восстановлении
334
ГЛАВА 13
схемы после срабатывания какой-либо из защит. Кроме перечисленных выше на подъемной
машине имеются следующие блокировки:
— между рукояткой управления и предохранительным тормозом. Нулевое положение
рукоятки командоконтроллера — необходимое условие зарядки предохранительного тормо-
за. Нулевая блокировка исключает возможность самозапуска двигателя при восстановлении
схемы после срабатывания предохранительного тормоза:
— запрещающая движение подъемной машины в сторону дальнейшего переподъема.
Блокировка осуществляется контактами обходного переключателя в цепи реверсирующих
контактов в цепи предохранительного тормоза:
— между контакторами реверсора, исключающая возможность их одновременного вклю-
чения. Блокировка осуществляется перекрестным включением размыкающих контактов кон-
такторов в цепи их катушек и механическим устройством:
— запрещающая включение двигателя при включенном предохранительном тормозе,
обеспечивается включением катушек реверсора после замыкающих контактов контактора
предохранительного тормоза (ТП);
— обеспечивающая правильное взаимодействие элементов при перестановке;
— дуговая для ограничения скорости переключения контакторов по условию дугогашения;
— привода корректора, разрешающая коррекцию только после остановки машины и при
заторможенной рукоятке рабочего тормоза;
— обеспечивающая включение вспомогательных приводов перед началом работы;
— запрещающая отправление незагруженного сосуда;
— запрещающая пуск машины при неразгруженном сосуде;
— запрещающая разгрузку сосуда при полном приемном бункере;
— предусматривающие остановку подъемного сосуда в стволе при недопустимо низком
уровне транспортируемого груза в загрузочном бункере и отсутствии груза в дозаторе;
— запрещающая включение реверсора при «запинании» (приваривании) контактора ус-
корения;
— запрещающая движение груженого скипа вниз (для многоканатных подъемных машин);
— от понижения уровня электролита жидкостного реостата;
— дверей высоковольтных реверсоров, положения бака контроллера, положения масля-
ного выключателя, крышек аппаратуры во взрывозашишенном исполнении.
Повышение надежности подъемных установок может быть достигнуто применением
наряду с совершенными схемами управления и регулирования более совершенных защит. В
то же время значительная часть необходимых защит зачастую проектами не предусматрива-
ется. Известны случаи установки на одном валу электрического ограничителя скорости и
аппаратов программирования, что недопустимо.
Не предусматривается дублирование зашит со взаимной проверкой их действия, что яв-
ляется наиболее перспективным направлением, так как полного самоконтроля при созда-
нии аппаратов защиты добиться, как правило, не удается.
Виды защит, контролирующих основные параметры подъемных установок, регламенти-
руют ПТЭ и ПБ. В то же время по мере накопления опыта эксплуатации и наладки создается
ряд дополнительных защит и блокировок, обусловленных особенностями конструкции
подъемной машины, привода, схемы управления, технологии и эксплуатации. Такие защиты
необходимо совершенствовать, унифицировать и распространять для аналогичных условий,
что позволит предотвратить ряд неполадок и аварий на подъемных установках.
Подъемная установка — сложный и ответственный энергомеханический комплекс, на-
рушение работы которого может привести к аварии с тяжелыми последствиями: травмиро-
ванию людей или длительной остановке шахты.
Поэтому, для того, чтобы этого не допустить в соответствии с требованиями ПБ [13]
подъемные установки должны быть оборудованы таким большим количеством защит и бло-
кировок, каждая из которых важна и необходима.
Но наиболее ответственными и определяющими безопасность работы подъемных уста-
новок являются защита от переподъема, защита от превышения скорости (ограничитель ско-
рости), защита от провисания струны каната (кроме подъемных машин со шкивами трения)
и защитные блокировочные устройства, обеспечивающие надежную работу тормоза.
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
335
13.2. Защита от переподъема
Для защиты от переподъема на шахтной подъемной установке в соответствии с требова-
ниями ПБ [13] каждый подъемный сосуд (противовес) должен быть снабжен концевым вык-
лючателем, установленным в выработке или на копре и предназначенным для выключения
предохранительного тормоза при подъеме сосуда на 0,5 м выше уровня верхней приемной
площадки (нормального положения при разгрузке), и дублирующим концевым выключате-
лем на указателе глубины (или в аппарате задания и контроля хода).
В наклонных выработках концевые выключатели должны устанавливаться на верхней
приемной площадке на расстоянии 0,5 м от нормального положения, обусловленного рабо-
чим процессом.
Подъемные установки с опрокидными клетями должны иметь дополнительные конце-
вые выключатели, установленные на копре на 0,5 м выше уровня площадки, предназначен-
ной для посадки людей в клеть. Работа этих концевых выключателей должна дублироваться
концевыми выключателями, установленными на указателе глубины (в аппарате задания и
контроля хода). Данное требование не распространяется на подъемные установки с самооп-
рокидывающимися бадьями при проходке вертикальных стволов.
Допускается установка дублирующих концевых выключателей на копре на одном уров-
не с основными при подключении их отдельными кабелями. Последнее требование не рас-
пространяется на бесконтактные концевые выключатели, в схеме которых предусмотрен са-
моконтроль исправности цепей.
Дополнительные концевые выключатели (основные и дублирующие) на установках с
опрокидными клетями должны включаться в цепь защиты в зависимости от заданного ре-
жима «груз» и «люди».
Для проверки исправности и правильности установки выключателей (основных и дуб-
лирующих) на пульте машиниста должны быть установлены кнопки или переключатели без
фиксации положения (для поочередного шунтирования выключателей при проверке).
Нередки аварии, вызванные переподьемом после работ по замене футеровки, канатов
подъемных машин. Так, на шахте им. 60-летия Октября на клетевом подъеме произошел пере-
подъем клети с ее разрушением. После замены подъемной машины во время установки правой
клети в верхнем положении для настройки концевых выключателей и настройки ограничителя
скорости машинист потерял ориентировку и совершил переподьем. Необходимо на подъемных
машинах после проведения ремонтных работ соблюдать особую осторожность при первоначаль-
ном пуске их в эксплуатацию. Машину должны включать в строгом соответствии с сигналами с
мест крайних положений подъемных сосудов. Схема переподъема должна иметь блокировоч-
ный обходной выключатель, предотвращающий включение подъемного двигателя в сторону даль-
нейшего переподъема. В некоторых случаях действие данной блокировки оказывается неэффек-
тивным, в особенности для подъемов с противовесом. При нахождении груженого скипа (или
противовеса) внизу и растормаживании машины без включения подъемного двигателя враще-
ние произойдет в сторону дальнейшего переподъема, так как в этом случае блокировка обход-
ным переключателем исключается из работы. По этой причине зафиксировано несколько ава-
рий на ряде шахт. Для таких случаев целесообразно иметь дополнительную блокировку, препят-
ствующую растормаживанию машины до создания необходимого двигательного момента для
удержания расчетного груза. На схеме (рис. 13.1) растормаживание машины (контакты SQ1) до-
пускается после включения подъемного двигателя в соответствующую сторону (контакты КМ1
(В) или КМ2 (Н) и КМ41), в противном случае включается предохранительный тормоз.
В качестве концевых выключателей для защиты от переподъема применяются контак-
тирующие и не контактирующие концевые выключатели.
Контактирующие концевые выключатели применяются, как правило, только в качестве
дублирующих. В качестве основных используются не контактирующие концевые выключа-
тели. Это датчики, которые определяют положение объекта без непосредственного контакта
с ним. Датчики не имеют движущихся частей, легко герметизируются и обеспечивают боль-
шую надежность при работе в стволах шахт. Эти датчики выпускались различных типов (ВБД,
ВБДШ, ВКИ-1, ВБВ-1, ВМ-62, ВМ-63, ВМ-64). В настоящее время Днепропетровским за-
водом шахтной автоматики выпускаются датчики контроля положения унифицированные
ДКПУ, но на шахтах в большом количестве еще находятся датчики ВМ-62, ВМ-63, ВМ-64,
которые выпускались Конотопским заводом «Красный металлист».
336
ГЛАВА 13
SQ3 К1 SQ5 SQ6 SQ4 К2
Рис. 13.1. Включение исполнительных контактов зашиты от переподъема в цепь зашиты:
SQ1, SQ2 — блокировочные выключатели рабочего тормоза; SQ3, SQ4, KI, К2 — концевые
включатели переподъема; SQ5 и SQ6 — выключатели износа колодок; КМ1 (В) и КМ2 (Н) —
блок-контакты реверсора; KM4I — блок-контакты первого контактора ускорения;
ЗА — переключатель обходной
13.2.1. Магнитные выключатели ВМ-62 и ВМ-63
1. В комплект магнитного выключателя ВМ-62 входят: станция управления СВМ-62,
датчик ДВМ-62 и магнит МВМ-63.
2. В комплект магнитного выключателя ВМ-63 входят: станция управления СВМ-63,
датчик ДВМ-62 и магнит МВМ-63.
3. Выключатели магнитные ВМ-62 и ВМ-63 имеют одинаковое схемное решение и от-
личаются только конструктивным выполнением корпуса станции управления.
Станция управления СВМ-62 выпускается в нормальном исполнении, а станция СВМ-
63 — в исполнении PH.
Цепи датчиков обоих выключателей искробезопасны.
4. Напряжение питания станции управления 380 В переменного тока промышленной
частоты. Допустимое отклонение напряжения +10—20 %. Потребляемая мощность 15 ВА.
5. Напряжение питания датчика 24 В переменного тока (от станции управления).
6. Источник магнитного поля — постоянный магнит.
7. Рабочий воздушный зазор между датчиком и постоянным магнитом не более 100 мм
при скорости движения магнита над датчиком не выше 8 м/с и не более 80 мм при скорости
движения магнита не выше 12 м/с (при скорости контролируемого объекта выше 12 м/с необ-
ходимо ставить два магнита МВМ-63 с промежутком между ними 150—200 мм).
8. Станции управления магнитных выключателей СВМ-62 и СВМ-63 нормально рабо-
тают при температуре окружающей среды от — 40 до +60°С.
9. Датчик ДВМ-62 и постоянный магнит МВМ-63 залиты компаундом и могут работать
в условиях высокой влажности (до 97 %) и высокой агрессивности среды при температурах
от — 50 до +90°С.
10. Длина соединительного кабеля между станцией управления и датчиком в пределах
500 м на работу выключателей не влияет.
11. Разрывная мощность контактов исполнительного реле МКУ-48 не превышает 500 ВА.
Длительно пропускаемый ток через контакты не должен превышать 5 А.
Электрическая схема и работа магнитных выключателей (ВМ)
Принцип действия магнитного выключателя основан на изменении электрических па-
раметров датчика под воздействием внешнего магнитного поля.
Электрическая схема магнитного выключателя приведена на рис. 13.2.
При подаче на схему питания (СВМ, клеммы К1 и К2) на выходных зажимах датчика
(ДВМ-62, клеммы К13 и К14) появляется выходной сигнал, который через трансформатор
ТрЗ подается на вход транзисторного усилителя. Усиленный сигнал через выпрямитель ВГ-2
поступает на обмотку промежуточного реле 1Р. Реле 1Р срабатывает и подготавливает цепь
исполнительного реле 2Р. В цепи питания реле 2Р имеется собственный замыкающий кон-
такт, параллельно которому подключены клеммы блокировочной перемычки (СВМ, клем-
мы К9 и К10).
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
337
Рис. 13.2. Принципиальная схема бесконтактного магнитного выключателя
ВМ-62 (ВМ-63)
Если в схеме предусмотрена работа в режиме путевого датчика, на клеммы К9 и К10
(СВМ) ставится перемычка, шунтирующая собственный блокировочный контакт исполни-
тельного реле 2Р (в таком виде выключатели поставляются заводом).
В этом случае после подачи питания на схему и срабатывания реле 1Р сразу же срабатывает
и реле 2Р. Для подключения выключателя к схемам на выходные клеммы КЗ—К4 и К5—Кб выве-
дены замыкающие контакты, а на К7 — К8 — размыкающий контакт исполнительного реле 2Р.
При работе схемы в режиме конечного выключателя предусмотрено два варианта воз-
можного использования ВМ-62 (ВМ-63).
1. В автоматическом режиме, т. е. при подходе подъемного сосуда к нормальному ко-
нечному положению, выключатель срабатывает и переводит схему автоматического управ-
ления в режим, когда невозможен дальнейший прямой ход подъемных сосудов, а возможен
только возвратный ход, причем после ухода подъемных сосудов из конечного положения
схема выключателя автоматически возвращается в исходное состояние [ 1Р и 2Р (см. рис. 13.2)
становятся под напряжение].
В этом случае перемычка на клеммах 9 и 10 (СВМ) сохраняется, и выключатель работа-
ет аналогично режиму путевого датчика.
В схемах автоматики подъемных установок магнитные выключатели, работающие в ка-
честве датчиков стопорения, можно сблокировать, т. е. на клеммы К9 и К10 (СВМ) первого
выключателя вместо перемычки подсоединяются размыкающие контакты реле 2Р второго
выключателя, а на клеммы К9 — К10 (СВМ) второго выключателя подсоединяются размы-
кающие контакты реле 2Р первого выключателя. При таком включении реле 2Р первого вык-
лючателя ставится под напряжение после срабатывания второго выключателя; следующий
цикл работы проходит в обратном порядке.
2. Когда магнитный выключатель используется в качестве концевого выключателя, вы-
зывающего предохранительное торможение, перемычка на клеммах К9 — К10 (СВМ) сни-
мается и вместо нее включаются контакты обходного переключателя или промежуточного
реле, специально предусмотренного для возврата схемы выключателя в исходное состояние.
Во всех режимах работы при нормальном состоянии схемы выключателя реле 1Р и 2Р
находятся под током. Это обеспечивает контроль целости всех электрических цепей выклю-
чателя, т. е. при любом повреждении электрической схемы выключателя, приводящем к вы-
ходу его из строя, исполнительное реле отпадает (выключатель срабатывает), обеспечивая
своими контактами сигнализацию о потере контроля и остановку подъемной машины.
338
ГЛАВА 13
При прохождении около датчика источника магнитного поля МВМ-63 на заданном рас-
стоянии выходной сигнал датчика ДВМ-62 уменьшается до величины, которая оказывается
ниже порога чувствительности транзисторного усилителя.
При этом ток в нагрузке усилителя (реле 1Р) падает до нуля. Реле 1Р отпадает и разры-
вает цепь катушки реле 2Р. Реле 2Р отпадает и своими контактами воздействует на схему
автоматики или вызывает срабатывание предохранительного торможения.
13.2.2. Датчики контроля положения ДКПУ
Датчики контроля положения унифицированные ДКПУ предназначены для контроля
положения шахтных подвижных объектов, в том числе концевой защиты.
Модификация датчиков и их назначение приведены в табл. 13.1.
Таблица 13.1
Модификация датчиков и их назначение
Модификация датчиков Основные части Вид воздействия Назначение
Блок исполнительный Преобразователь первичный
ДКПУ-11 БИ-1 ПП-1 Ферромагнитн ый материал Контроль положения шахтных вагонеток, скипов, клетей, ляд главных вентиляторных установок и т.п.
ДКПУ-21 БИ-2
ДКПУ-12 БИ-1 1Ш-2 с магнитом МПП (МВМ-63-1) Магнитное поле Защита подъемных установок от переподъема сосудов и т.п.
ДКПУ-22 БИ-2
Место эксплуатации датчиков указаны в табл. 13.2.
Таблица 13.2
Места установки датчиков
Модификация датчика Место эксплуатации
ДКПУ-11 В шахтах, опасных по газу или пыли
ДКПУ-21
ДКПУ-12 На поверхности или в шахтах, не опасных по газу или пыли
ДКПУ-22
Датчики ДКПУ-12 и ДКПУ-22 обеспечивают самоконтроль исправности элементов своих
электрических схем.
Таблица 13.3
Технические характеристики
Наименование величин Норма
ДКПУ-11 ДКПУ-12 ДКПУ-21 ДКПУ-22
Номинальное напряжение питания с частотой 50 Гц, В 660/380/127 380/220/127
Допустимое отклонение величины питающего напряжения, % +10,-15
Потребляемая мощность, ВА, не более 20
Время срабатывания датчика, с, не более 0,1
Время возврата в состояние готовности, с, не более 0,1
Количество контактов выходных реле 2р, 2з
Наработка на отказ, ч, не менее 6000
Срок службы, лет, не менее 6
Режим работы продолжительный
БИ-1 БИ-2 ПП-1 ПП-2
Рабочий зазор между первичным преобразователем и объектом контроля, мм, не более - - 120 160
Масса, кг 40 10 4 2
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
339
Устройство ДКПУ и его составных частей
Блок БИ-1 состоит из стального корпуса и выемной части. Корпус разделен перегород-
кой на отделение вводов и аппаратное отделение. На перегородке расположено 18 проход-
ных зажимов. Корпус имеет 5 кабельных вводов под кабель диаметром 25 мм.
Корпус снабжен блокировочным устройством, состоящим из блокировочного кольца,
расположенного на передней крышке, и блокировочного винта, фиксирующего положение
ручки выключателя. Блокировочное устройство не позволяет снять переднюю крышку, зак-
рывающую доступ к выемной части, пока выключатель включен. Включенное и отключен-
ное положения выключателя фиксируются блокировочным винтом.
Все элементы электрической схемы смонтированы на связанных между собой нижней и
верхней металлических панелях (выемная часть).
Электрическое соединение выемной части с проходными зажимами осуществляется дву-
мя проводными жгутами.
Искробезопасные цепи выполнены проводом синего или голубого цвета.
В состав блока БИ-1 (рис. 13.3) входят:
входной трансформатор Т1 для разделения цепей электронной схемы блока и искробе-
зопасных цепей управления; транзисторный усилитель переменного тока (триггер на тран-
зисторах VI, V7 и усилительные каскады на транзисторах V9, VI3) с трансформаторным вы-
ходом (трансформатор Т2); промежуточное реле К1 с элементами выпрямления (VI7) и сгла-
живания (С4) выходного сигнала усилителя переменного тока; выходные реле для коммута-
ции искробезопасных (реле К2) и искробезопасных (реле КЗ) цепей и силовой трансформа-
тор ТЗ, первичная обмотка I которого имеет отводы для подключения к питающей сети 127,
380, 660 В. Остальные обмотки трансформатора ТЗ служат для питания электрических схем
блока (И) и преобразователя (III), а также для использования в качестве источника входного
сигнала (ГУ).
искробезопаснгл
пезь
Рис. 13.3. Схема электрическая принципиальная блока БИ-1
Блок исполнительный БИ-2 представляет собой пластмассовый корпус с выемной частью,
закрепленной на пластмассовом основании, на котором имеются зажимы для внешних подсое-
динений. Выемная часть состоит из металлической панели, на которой смонтированы все узлы
электрической схемы. Электрические соединения выемной части с зажимами внешних соеди-
нений осуществляются двумя проводными жгутами. Искробезопасные цепи выполнены прово-
340
ГЛАВА 13
дом синего или голубого цвета. На верхней лицевой части корпуса расположена табличка со
структурной схемой БИ-2. Предохранители закрываются подпружиненной крышкой.
Рис. 13.4. Схема электрическая принципиальная преобразователя ПП-1
Состав блока и принципиальная электрическая схема блока БИ-2 аналогична составу и
схеме блока БИ-1.
Первичный преобразователь ПП-1 выполнен в двух конструктивно связанных корпусах
из ударопрочной и устойчивой в агрессивных средах пластмассы. В одном корпусе, крышка
которого по периметру залита компаундом, расположены две индуктивные катушки L1 и L2,
настройка которых выполнена на заводе. Во втором корпусе расположена электронная часть,
выполненная на двух печатных платах, одна из которых представляет собой блок искробезо-
пасной защиты и залита компаундом. Преобразователь имеет три зажима для подключения
к блоку БИ-1 (БИ-2) и кабельный ввод под кабель диаметром до 18 мм.
Корпус имеет четыре планки для крепления в зоне монтажа.
Первичный преобразователь ПП-2 представляет собой трансформатор с сердечником в
виде двух П-образных пластин из пермаллоя и двух катушек, помещенный в пластмассовый
корпус и чувствительный к магнитному полю. Для защиты от повреждений трансформатор
залит компаундом. Кабельный ввод ПП-2 рассчитан на 4-х жильный кабель с наружным
диаметром до 18 мм. После заделки кабеля камера вводов заливается составом, применяе-
мым для заливки кабельных муфт.
Магнит МПП (МВМ-63-1) представляет собой постоянный магнит из специального
сплава. Магнит помещен в оболочку из пластмассы и для защиты от коррозии и поврежде-
ний залит компаундом.
Принцип работы ДКПУ
Принцип действия ДКПУ-11 и ДКПУ-21 основан на изменении электрических пара-
метров преобразователя ПП-1 под действием ферромагнитной массы объекта контроля.
На рис. 13.3 и 13.4 приведены схемы электрические принципиальные соответственно
блока БИ-1 и преобразователя ПП-1.
Блоки БИ-1 (БИ-2) выполняют функции размножителя контактов реле К1 и источника
питания преобразователя ПП-1.
В исходном состоянии (при отсутствии объекта контроля в рабочей зоне преобразовате-
ля ПП-1) и при включении блока БИ-1 (БИ-2) блок и преобразователь получают питание,
генератор электрических колебаний ПП-1 вырабатывает переменное напряжение частотой
20 кГц, которое поступает на передающую катушку L1, создающую возбуждающее перемен-
ное электромагнитное поле, однако, все реле блока отключены.
Связано это с тем, что приемная катушка L2 в оптимальном положении установлена
относительно передающей L1 таким образом, что э. д. с., наводимые в ней магнитными по-
токами, создаваемыми ближней и дальней ветвями катушки L1, примерно равны. Так как
магнитные потоки катушек противофазны и взаимно компенсируются, то результирующая
э. д. с. в приемной катушке L2 в исходном состоянии схемы близка к нулю.
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
341
Таким образом, при настройке получают минимальное значение коэффициента индук-
тивной связи между L1 и L2.
Упомянутая выше э. д. с. поступает на инвертирующий вход 4 порогового устройства на
операционном усилителе D1. Так как величина этой э. д. с. при условии отсутствия контро-
лируемого объекта в зоне чувствительности первичного преобразователя является минималь-
ной (обычно 5—30 мВ), что значительно ниже порога срабатывания компаратора (160—180
мВ), то на выходе 10 операционного усилителя D1 сигнал отсутствует, транзистор V10 заперт
напряжением смешения, создаваемым цепью R14, V8, V9, реле К1 отключено, и его контакт
К 1.1 в цепи подачи сигнала от обмотки 1У силового трансформатора ТЗ на вход блока БИ-1
(БИ-2) разомкнут. Таким образом, напряжение на входной обмотке I разделительного транс-
форматора Т1 блока отсутствует.
На выходе транзисторного усилителя переменного тока блока БИ-1 (БИ-2) сигнал так-
же отсутствует, и промежуточное реле К1, а, следовательно, и выходные реле К2 и КЗ нахо-
дятся в отключенном состоянии.
При наличии объекта в зоне контроля преобразователя ПП-1 коэффициент индуктив-
ной связи между катушками L1 и L2 возрастает э. д. с., наводимая в приемном контуре L2—
С4, превышает величину порога срабатывания компаратора, синусоидальное напряжение на
инвертирующем входе компаратора преобразуется в прямоугольные импульсы на его выхо-
де, которые сглаживаются фильтром R12—С6. Получено таким образом постоянное напря-
жение открывает транзистор V10, реле К1 включается и замыкает своим контактом К1.1 цепь
подачи напряжения (~5,0 В) с обмотки 1У трансформатора ТЗ блока БИ-1 (БИ-2) на вход-
ную обмотку I разделительного трансформатора Т1 блока. Переменное напряжение часто-
той 50 Гц с выхода трансформатора Т1 (обмотка II) поступает на управляемый по двум вхо-
дам триггер на транзисторах VI, V7. Триггер формирует импульсы прямоугольной формы со
скважностью, примерно равной 2, которые затем усиливаются транзисторами V9, V13, рабо-
тающими в ключевом режиме, и поступают на первичную обмотку I трансформатора Т2.
Выходной сигнал обмотки II трансформатора Т2 выпрямляется диодным мостом V17, сгла-
живается конденсатором С4 и включает промежуточное реле К1, замыкающие контакты К 1.3
и К 1.4 которого включают выходные реле К2 и КЗ.
Контакты К1.1 и К1.2 используются для кратковременного шунтирования транзисторов
VI и V7 с целью установления транзистора VI3 в закрытое состояние при снятии входного
сигнала.
Блоки БИ-1 и БИ-2 рассчитаны для работы от входного сигнала переменного тока сину-
соидальной и импульсной формы частотой 50 Гц напряжением более 1 В при токе более 2 мА.
Принцип действия ДКПУ-12 и ДКПУ-22 основан на изменении электрических пара-
метров преобразователя ПП-2 при воздействии на него поля постоянного магнита, укреп-
ленного на подвижном объекте. При воздействии на датчик внешнего магнитного поля, со-
здаваемого магнитом, сердечник трансформатора намагничивается, и его магнитная прони-
цаемость резко уменьшается. Это приводит к исчезновению напряжения на вторичной об-
мотке трансформатора преобразователя ПП-2, а значит, и на входной обмотке I раздели-
тельного трансформатора блока БИ-1 (БИ-2).
Дальнейшая работа блока и БИ-1 (БИ-2) не отличается от описанного ранее.
Предусмотрено несколько вариантов использования датчиков всех модификаций.
1. При подходе подвижного объекта к точке контроля датчик должен сработать и выдать
сигнал в схему управления и сигнализации, а при уходе объекта сразу же вернуться в состо-
яние готовности. В этом случае на зажимы 11—12 БИ-1 (10—11 БИ-2) ставится перемычка,
шунтирующая собственный блокировочный контакт выходного реле КЗ (в таком виде дат-
чик поставляется заводом).
2. При подходе подвижного объекта к точке контроля датчик должен сработать и выдать
сигнал в схему управления и сигнализации, а возвратиться в состояние готовности только пос-
ле прихода объекта в следующую точку контроля или после автоматического переключения
схемы управления на реверсивный ход. В этом случае перемычка с зажимов 11-12 БИ-1 (10—
11 БИ-2) снимается, и они соединяются с соответствующими размыкающими контактами дру-
гого датчика (контролирующего приход объекта в следующую точку контроля) или реле схемы
управления, либо блок-контактами исполнительного механизма, возвращающими преобразо-
ватель в положение готовности только после отработки схемой нужных операций.
342
ГЛАВА 13
Такая блокировка выходных реле датчика контактами других элементов схемы или вза-
имная блокировка датчика позволяет избежать преждевременного возврата датчика в состо-
яние готовности при уходе объекта от точки контроля, если датчик воздействует на элемен-
ты схемы или исполнительные механизмы с большим временем обработки команды.
3. В схемах защиты, когда перемещение контролируемого объекта за пределы нормаль-
ного рабочего хода рассматривается как предаварийное или аварийное состояние объекта и
возвратный ход его допустим только после выяснения причин, создавших аварийную ситуа-
цию. Перемычка с зажимов 11—12 блока БИ-1 (10—11 БИ-2) снимается, и они соединяются
с замыкающими контактами кнопки или ключа на пульте оператора (диспетчера) для ручно-
го возврата датчика в состояние готовности.
Во всех нормальных режимах работы схема датчика должна постоянно находиться под
током, а в состоянии готовности под током находятся и выходные реле датчика, что обеспе-
чивает самоконтроль исправности электрической схемы.
Примечание: при необходимости блок исполнительный с четырьмя выходными преобра-
зователями может быть выполнен в виде набора одноблочных исполнительных блоков БИ-2.
13.3. Защита от превышения скорости
При эксплуатации подъемной установки могут возникнуть следующие аварийные ре-
жимы:
— аварийный переподъем сосудов в их конечных положениях;
— жесткая посадка подъемных сосудов на посадочные устройства при спуске-подъеме
людей или большие динамические нагрузки от движущихся подъемных сосудов на загрузоч-
ные и разгрузочные устройства;
— «разнос» подъемного электродвигателя от превышения максимальной скорости подъема.
Защита от опасного переподъема может быть обеспечена только в том случае, когда путь
торможения после срабатывания концевого выключателя переподъем окажется меньше воз-
можного пути свободного переподъема, минимальная величина которого определена ПТЭ
[14]. Этот путь торможения зависит от скорости подхода подъемного сосуда к концевому
выключателю переподъема.
Поэтому для защиты от переподъема в соответствии с требованиями ПБ [13] каждая
действующая подъемная установка со скоростью движения свыше 3 м/с и вновь проектиру-
емые — свыше 2 м/с должна быть оборудована ограничителем скорости, вызывающим вклю-
чение предохранительного тормоза в случае:
— превышения в период замедления скорости защитной тахограммы, величина которой
в каждой точке пути замедления определяется из условий предотвращения аварийного пере-
подъема скипов и клети (скорость более 1 м/с);
— превышение скорости равномерного хода на 15 %;
— подхода сосуда к верхней и нижней приемным площадкам, а также к жестким на-
правляющим при канатной армировке ствола со скоростью более 1 м/с при спуске-подъеме
людей и 1,5 м/с — при спуске-подъеме груза.
1 3.3.1. Ограничители скорости ХЭМЗ с командоаппаратами РОС-5914
На подъемных установках наибольшее распространение получили электромеханичес-
кие ограничители скорости ХЭМЗ с применением командоаппаратов РОС 5914. Задающее
устройство этой схемы — ретардирующий диск с профилем, приводимым во вращением от
подъемной машины и контактный реостат РОС 5914. Датчик действительной скорости —
тахогенератор ТГ.
Электромеханический ограничитель скорости ХЭМЗ с одним командоаппаратом с
контролируемым разгоном является простейшим устройством, применяемым для зашиты
шахтных подъемных установок от аварийного переподъема подъемных сосудов в конечных
их положениях из-за превышения допустимой скорости подхода и контролирующим опас-
ное превышение максимальной скорости подъема.
Работает ограничитель скорости следующим образом. Якорь тахогенератора ТГ посред-
ством редуктора или клиноременной передачи соединен с валом подъемного двигателя, по-
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
343
этому э. д. с. тахогенератора прямо пропорциональна скорости движения подъемной машины.
Рычаг с роликом командоаппарата (регулируемого сопротивления) КА перемещается профи-
лем ретардирующего диска. При движении машины с максимальной скоростью рычаг коман-
доаппарата занимает положение, при котором сопротивление последнего максимально.
Реле ограничения скорости РОС регулируется так, что его якорь втягивается при токе,
превышающем ток якоря тахогенератора при номинальной скорости на 10—15 %. Таким об-
разом, при превышении номинальной скорости на 10—15 % якорь РОС втягивается, а его
контакты разрывают цепь контактора ТП и вызывают предохранительное торможение.
При прохождении подъемными сосудами места, с которого должно начинаться замед-
ление машины, профиль ретардирующего диска начинает перемещать рычаг с роликом ко-
мандоаппарата, при этом сопротивление последнего уменьшается. Соответственно должны
уменьшаться скорость движения машины и напряжение тахогенератора. Если снижение ско-
рости отстает от уменьшения сопротивления командоаппарата, то РОС срабатывает. При
полностью закороченном регулируемом сопротивлении командоаппарата РОС должно сра-
ботать при скорости подъемной машины, равной допустимой скорости подхода.
Реле контроля цепи РКЦ служит для контроля наличия тока в цепи. Ток втягивания его
устанавливается минимально возможным. На время стоянки машины и движения ее с ма-
лой скоростью, при которой якорь РКЦ не втянут, контакты его в цепи ТП должны быть
зашунтированы размыкающими блок-контактами одного из промежуточных контакторов
ускорения (например, УЗ или У4) или реле скорости.
На машинах с приводом по системе Г-Д контакты РКЦ в цепи ТП обычно шунтируют-
ся размыкающими блок-контактами реле низкого напряжения РНН, которые втягиваются
при малом напряжении в главной якорной цепи.
Простейшая однокомандноаппаратная схема электрического ограничителя скорости,
описанная выше, при правильной ее настройке в большинстве случаев обеспечивает надеж-
ность защиты подъемной установки и не препятствует нормальному разгону машины с уско-
рением, определяемым мощностью двигателя. Если же это ускорение в отдельных случаях
окажется больше, чем расчетное замедление, контролируемое ограничителем скорости, что
может привести к срабатыванию ограничителя скорости в период разгона машины, то в та-
ких случаях применяются двухкомандноаппаратные схемы (рис. 13.5).
Рис. 13.5. Двухкомандоаппаратные схемы электрического ограничителя скорости ХЭМЗ:
а — с выпрямителями в цепях промежуточных реле; б — с выпрямителями в цепях
командоаппаратов; РОС — реле ограничения скорости; РКЦ — реле контроля цепи; КА-В
и КА-Н — командоаппараты; ТГ — тахогенератор; В1 и В2 — выпрямители; РНН и РНВ —
промежуточные реле направления вращения; РС1 — реле скорости; СД — добавочный резистор;
А — амперметр; ТВ — таховольтметр
344
ГЛАВА 13
В таких схемах для каждого направления вращения в работу включается один из коман-
доаппаратов, на который воздействует профиль только в последний период подъемного цикла.
Для двухкомандоаппаратных схем ограничителей скорости особое значение имеет соблюде-
ние одинаковой полярности напряжения тахогенератора при рабочем и резервном источни-
ках питания его обмотки возбуждения. В остальном принцип работы двухкомандоаппарат-
ных ограничителей скорости не отличается от однокомандоаппаратных.
Ограничитель скорости повышенной надежности ОСПН
Специалисты Донбассуглеавтоматики разработали электрический ограничитель скоро-
сти повышенной надежности. Необходимость в такой разработке возникла в связи с тем, что
существующие схемы электрического ограничителя скорости надежно не контролируют элек-
трическую цепь ограничителя в период замедления, а также возможные неисправности ки-
нематической цепи.
Конструктивно электрический ограничитель скорости выполнен таким образом, что
позволяет контролировать любую возможную неисправность в электрической и кинемати-
ческой цепях ограничителя скорости. Для этого ограничитель скорости выполнен в виде двух
независимых электрических ветвей, тахогенераторы которых приводятся во вращение от раз-
ных точек кинематической схемы подъемной машины: от подъемного двигателя и от при-
водного вала указателя глубины.
Рис. 13.6. Кинематическая схема ограничителя
скорости повышенной надежности
с неконтролируемым разгоном:
1 — барабан подъемной машины; 2 — редуктор подъемной
машины; 3 — подъемный двигатель; 4 — повышающий
редуктор или клиноременная передача; 5 — тахогенератор
ТП; 6 — приводной вал указателя глубины;
7 — тахогенератор ТГ2; 8 — повышающая передача;
9 — командоаппараты РОС-5914
На рис. 13.6 показано расположение дополнительного тахогенератора. На рис. 13.7 по-
казана электрическая схема ограничителя скорости повышенной надежности.
Работает ограничитель скорости аналогично описанным выше электрическим ограни-
чителям. Отличительной особенностью является контроль исправности цепи каждой элект-
рической ветви. Реле контроля исправности цепи РКЦ служит для контроля наличия тока в
цепях реле РОС1 и РОС2. Реле выполнено двухобмоточным с одинаковым числом витков в
обмотках.
Через одну обмотку реле РКЦ проходит ток тахогенератора ТП, через другую — ток
тахогенератора ТГ2. Магнитные потоки, создаваемые этими токами в магнитопроводе реле,
равны между собой и направлены навстречу друг другу. Таким образом, суммарный маг-
нитный поток в магнитопроводе реле при нормальной работе подъемной машины или при
стоянке в любом месте ствола всегда равен нулю и якорь реле РКЦ не притягивается. Реле
РКЦ настроено таким образом, что его якорь притягивается в случае неисправности в од-
ной ветви ограничителя скорости, вызванной обрывом в якорной цепи тахогенератора,
потерей возбуждения тахогенератором, остановкой тахогенератора, расцеплением указа-
теля глубины с главным валом, остановкой ретардирующего диска, смещением профиля
ретардирующего диска.
Регулируется реле ограничения скорости РОС1 и РОС2 на ток втягивания, превышаю-
щий на 10—15 % ток в цепи РОС при максимальной скорости и полной величине регулируе-
мой части сопротивления командоаппарата. Затем проверяется величина контролируемой
скорости подхода подъемных сосудов к нормальному верхнему положению.
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
345
Рис. 13.7 — Электрическая схема ограничи-
теля скорости повышенной надежности:
а — с контролируемым разгоном; б —
с неконтролируемым разгоном; в — схема
включения контактов реле в цепь зашиты;
г — схема включения реле РКВ;
РОС1, РОС2 — реле ограничения скорости;
РКЦ — реле контроля цепи; KAI, КА2, КА1-В,
КА2-В, КА1-Н, КА2-Н — командоаппараты;
ТП, ТГ2 — тахогенераторы; Д —
выпрямители; Al, А2 — амперметры; ТВ2 —
таховольтметр: УП — универсальный
переключатель с самовозвратом; ТП —
контактор предохранительного тормоза;
РКВ — реле контроля возбуждения; ТП (ов),
ТГ2 (ов) — обмотки возбуждения
тахогенераторов; СУТП, СУТГ2 — установочные
резисторы
Настройка РКЦ производится при отключенном тахогенераторе ТП и работающем та-
хогенераторе ТГ2, затем проверяется при отключенном ТГ2 и работающем ТП.
Для контроля наличия тока в обмотках возбуждения тахогенераторов ТП и ТГ2 служит
токовое реле РКВ с высоким коэффициентом возврата, замыкающий контакт которого вклю-
чается в цепь защиты подъемной установки.
По рекомендации Госгортехнадзора СССР Минуглепромом СССР были приняты сроч-
ные меры по оборудованию всех людских и грузолюдских установок на угольных и сланце-
вых шахтах ограничителями скорости повышенной надежности Донбассуглеавтоматики. По
многочисленным запросам предприятий и организаций горнодобывающих бассейнов Со-
ветского Союза Донбассуглеавтоматика разослала необходимую документацию по этой раз-
работке. Практически все действующие подъемные установки во всех отраслях горнодобы-
вающей промышленности СССР от Норильска до Казахстана и от Эстонии до Сахалина были
оборудованы этими ограничителями.
1 3.3.2. Ограничители скорости ОСЭРП
На многоканатных и барабанных подъемных установках с высотой подъема более 500 м
успешно применяют электрические ограничители скорости с поводковым редуктором
ОСЭРП, ОСЭРП-2К, ОСЭРП-Д, разработанные Н. И. Шаповаловым (Донбассуглеавтома-
тика).
Особенностью этих ограничителей являются устройство кинематической цепи аппарата
(поводковый редуктор), обеспечивающее возможность сохранения оптимального размера
профилей ретардирующего узла задания скорости на участке пути контролируемого замед-
ления. Это позволяет сохранить одинаковую чувствительность и точность функционального
контроля на подъемных установках с различной высотой подъема в диапазоне до 2000 м.
С помощью блока датчика заданной скорости БДЗС (рис. 13.8) удается получить про-
грамму заданной скорости на контролируемом пути необходимого масштаба и точности.
346
ГЛАВА 13
Рис. 13.8. Кинематическая схема блока датчика заданной скорости
ограничителя скорости ОСЭРП
В блоке БДЗС вращение от вала подъемной машины передается на входной вал трехсту-
пенчатого редуктора. От выходного вала редуктора 1 через фрикцион 2 и эластичную муфту
3 вращение получает поводковый редуктор 4, имеющий набор поводков и обеспечивающий
передаточное число I = 1—9,8. На выходе вала поводкового редуктора закреплены возврат-
ная пружина 8 и ретардирующий диск 7 с двумя профилированными сегментами 5, пооче-
редно воздействующими на рычаги соответствующих командоаппаратов 9 (датчиков задан-
ной скорости). В плоскости вертикальной оси ретардирующего диска предусмотрен упор 10,
а на самом диске — упорный штифт 6, который фиксирует конечное рабочее положение
ретардирующего диска.
При разгоне машины возвратная пружина поворачивает ретардирующий диск на поло-
вину оборота и в результате выводит задействованный профилированный сегмент из кон-
такта с рычагом командоаппарата. В этом положении ретардирующий диск остается весь
период равномерного хода машины, а рычаги обоих командоаппаратов занимают положе-
ние максимального задания. При входе подъемного сосуда на участок пути контролируемого
замедления ретардирующий диск вновь получает вращение от выходного вала поводкового
редуктора и другим своим профилированным сегментом воздействует на рычаг соответству-
ющего командоаппарата. В конце подъемного цикла этот командоаппарат оказывается в
положении минимального задания, в то время как другой командоаппарат весь период оста-
ется в положении максимального задания и готов к работе для обратного хода машины.
При очередном цикле подъема все функциональные элементы кинематики блока БДЗС
действуют в обратной последовательности. Если в процессе цикла подъема возникает рас-
согласование между фактическим положением подъемного сосуда в стволе шахты и соответ-
ствующим положением профилированного ретардирующего диска ограничителя (от вытяж-
ки или проскальзывания подъемных канатов и т. п.), то в конце текущего или следующего
цикла подъема происходит автоматическая коррекция, согласующая положение сосуда и ре-
тардирующего диска за счет проскальзывания фрикциона 2 при соприкосновении штифта 6
ретардирующего диска с упором 10 (см. рис. 13.8).
Благодаря регулируемому передаточному числу за счет изменения числа поводков их
взаимного расположения можно получить необходимую величину пути контролируемого
ограничителем скорости для каждой конкретной установки.
Электрическая схема ограничителя скорости ОСЭРП имеет небольшие отличия, свя-
занные с дополнительными мерами по увеличению уровня контролируемости цепей ограни-
чителя скорости, от схемы ХЭМЗ.
Общий недостаток ограничителей скорости — наличие в них контактных элементов. В
качестве датчика скорости подъемной машины используют тахогенераторы. Тахогенератор
постоянного тока на базе коллекторной электромашины требует постоянного профилакти-
ческого ухода за коллектором и щетками, обладает непостоянством сопротивления скользя-
щего контакта, требует стабилизации тока возбуждения, имеет пульсации напряжения. Все
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
347
это отрицательно сказывается на точности работы тахогенератора, колебания напряжения
которого при изменении температуры на 30—40°С составляют от 10 до 15 %, что совершенно
недопустимо.
Для уменьшения колебаний напряжения необходимо: питать обмотку независимого воз-
буждения от стабилизирующего устройства, включать последовательно с обмоткой возбуж-
дения тахогенератора резистор из константана или нихрома, причем отношение сопротив-
ления полюсов к добавочному сопротивлению целесообразно выбирать в пределах 1/3—1/4.
Определенного эффекта можно достичь включением параллельно обмотке возбуждения ста-
билитрона.
В результате указанных мероприятий колебание напряжения можно снизить до 3—4 %
Uhom тахогенератора.
Неблагоприятное влияние низкочастотных пульсаций напряжения, вызванных неудов-
летворительной центровкой, несимметрией магнитного поля (полюсные пульсации) и фор-
мой зубцов якоря (зубцовые пульсации), сглаживается соответствующим подбором цепочек
RC. Нередко тахогенераторы, поставленные вместе с машинами, имеют недостаточную мощ-
ность, в результате при изменении нагрузки могут возникать недопустимые колебания на-
пряжения, снижающие точность работы системы управления, защиты и контроля.
В этих случаях тахогенератор меняют на более мощный или согласовывают нагрузку
схемы с возможностью установленного тахогенератора по мощности.
Таким образом, тахогенераторы должны иметь малую зависимость напряжения от изме-
нения внешней температуры, нагрузки в их цепи, характеристики должны быть линейны, а
уровень пульсаций минимальный.
В последнее время все более широко внедряют устройства контроля с бесконтактными
тахогенераторами, обеспечивающими простоту и надежность эксплуатации. Их преимущества:
— возможность отказа от устройств стабилизации тока возбуждения (вследствие такой
зависимости выходного напряжения от колебаний величины тока возбуждения);
— возможность трансформации напряжения и создания нескольких гальванически не
связанных сигналов, пропорциональных скорости вращения;
— стабильность характеристик в процессе длительной эксплуатации; простота устрой-
ства и высокая надежность в связи с исключением вращающихся обмоток и подвижных кон-
тактов.
Для того, чтобы уйти от ненадежных контактных элементов Н. И. Шаповалов разрабо-
тал ограничитель скорости ОСЭРП-2Д, в котором в качестве датчиков заданной скорости
предусмотрены сельсинные датчики задания сигнала контролируемой скорости.
На рис. 13.9 изображена комбинированная структурная схема ограничителя скорости.
Ограничитель скорости ОСЭРП-2Д представляет собой конструкцию, состоящую из от-
дельного блока формирования сигналов скорости ВФС, содержащего в общем корпусе ки-
нематические узлы — редукторы зубчатые 1РДЗ, 2РДЗ и редуктор поводковой передачи РДП
ретардирующего устройства, сельсинные датчики задания сигнала контролируемой скорос-
ти 1ДЗС-В, 2ДЗС-В, 1ДЗС-Н, 2ДЗС-Н и один из двух тахогенераторных датчиков сигнала
действительной скорости 1 ДДС; второй, дублирующий, тахогенераторный датчик сигнала
действительной скорости 2ДДС имеет автономную кинематическую связь с приводом подъем-
ной машины. Блок релейной обработки сигналов БРОС содержит набор реле и аппаратов
для сравнения сигналов контролируемых скоростей, выдачи исполнительных команд функ-
циональным элементам в цепях защиты подъемной машины, технологических блокировкой
и индикаций режимов работы ограничителя скорости.
От вала подъемной машины вращение передается на блок ВФС, в котором посредством
ретардирующего устройства и датчиков 1ДЗС-В, 2ДЗС-В или 1ДЗС-Н, 2ДЗС-Н (в зависимо-
сти от направления движения подъемной машины) формируется задание контролируемой
скорости, а датчиками 1ДДС, 2ДДС выдается сигнал действительной скорости подъемной
машины.
Сигналы этих датчиков поступают на блок БРОС, где их величина оценивается и сопо-
ставляется с параметрами настройки исполнительных реле, которые при превышении за-
данной тахограммы движения машины срабатывают и выдают сигнал на аварийное тормо-
жение машины.
348
ГЛАВА 13
Рис. 13.9. Схема комбинированная
структурная ограничителя скорости
ОСЭП-2Д
На рис. 13.10 приведена кинематичес-
кая схема ограничителя скорости.
Отбор вращения от вала подъемной
машины в ограничителе скорости воспри-
нимается тихоходным валом редуктора
1РДЗ, сцепленного с редуктором 2РДЗ.
Через редуктор 1РДЗ и ременную переда-
чу ПРС вращение передается тахогенера-
торному датчику сигнала действительной
скорости 1ДДС.
Другой (дублирующий) тахогенера-
торный датчик сигнала 2ДДС получает
вращение от привода подъемной машины
по автономному кинематическому каналу.
От редуктора 2РДЗ через фрикционную
муфту ФМ вращения получает редуктор
поводковый РДП, который своими пара-
метрически профилированными ретарди-
рующими кулачками воздействует на по-
воротные рычаги 1PM, 2РМ сельсинных
датчиков задания сигнала контролируе-
мой скорости 1ДЗС-В, 2ДЗС-В и 1ДЗС-
Н, 2ДЗС-Н.
Электрическая схема ограничителя
скорости состоит из нескольких функци-
ональных узлов.
Параметрическая часть электричес-
кой схемы выполнена двумя симметрич-
но дублированными цепями основных функциональных аппаратов, каждая из которых со-
держит узел формирования сигнала действительной скорости, узел задания сигнала контро-
лируемой скорости по защитной тахограмме и узел сопоставительной обработки сигналов.
Узел формирования сигнала действительной скорости состоит из тахогенераторного дат-
чика постоянного тока 1ДДС (2ДДС), стабилизатора напряжения СН.
В узел задания сигнала контролируемой скорости входят сельсинные датчики 1ДЗС-В,
1ДЗС-Н (2ДЗС-В, 2ДЗС-Н) кинематически связанные через рычажные механизмы 1PM, 2РМ
с параметрически профилированными кулачками ретардирующего устройства.
В узел сопоставительной обработки сигнала входит реле 1РОС (2РОС) с катушкой, вклю-
ченной в цепь тахогенераторного датчика 1ДДС (2ДДС) и сельсинных датчиков 1ДЗС-В,
1ДЗС-Н (2ДЗС-В, 2ДЗС-Н), и реле ЗРОС (4РОС) с катушкой, включенной непосредственно
или через резистор 1R (2R) на якорный выход тахогенераторного датчика 1ДДС (2ДДС).
Другая часть электрической схемы включает в себя узлы и элементы:
— автоматического непрерывного самоконтроля исправности ограничителя скорости;
— блокировки от самовосстановления схемы аппарата после исчезновения и устра-
нения причины его срабатывания;
— световой индикации с запоминанием, сигнализирующей раздельно о срабатыва-
нии исполнительного реле контроля скорости или устройства контроля исправности;
— индикации, позволяющей на протяжении всего цикла подъема визуально контро-
лировать разность между фактической скоростью движения и скоростью, заданной по
защитной тахо грамме;
— выбора режимов работы «груз»—«люди»—«ревизия»;
— периодической (ежесменной) проверки исправности и правильности функциони-
рования аппарата в различных режимах его работы;
— другие коммутационные и защитные элементы схемы аппарата.
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
349
Рис. 13.10. Схема кинематическая
принципиальная ограничителя
скорости ОСЭРП-2Д
13.3.3. Ограничитель скорости электрический ЭОС-3
Ограничитель ЭОС-3 предназначен для защиты рудничных подъемных установок от
превышения защитных значений скорости в период разгона, равномерного хода, замедле-
ния и дотягивания.
Ограничитель скорости ЭОС-3 входит в комплект программного аппарата АЗК-1 и по-
ставляется Конотопским заводом «Красный металлист».
Технические характеристики:
Напряжение питания стабилизированное
переменного тока частотой 50 Гц, В 220 ± 5
Диапазон контролируемых скоростей, м/с 1—16
Погрешность контроля скорости, м/с при:
— минимальной скорости 1 м/с 0,1
— максимальной скорости 16 м/с 0,5
Время срабатывания, с, не более 0,1
Основная функциональная часть аппарата ЭОС-3, осуществляющая защиту от превы-
шения скорости, состоит из двух независимых (дублированных) каналов ограничения ско-
рости, выполненных в виде отдельных взаимозаменяемых блоков ограничения БО1, БО2 с
питанием от однотипных трансформаторов Т1 и Т2 (рис. 13.11).
Каждый блок ограничителя содержит:
— делитель напряжения, пропорционального фактической скорости движения подъем-
ной машины, с согласующим переменным резистором ИП1;
350
ГЛАВА 13
Рис. 13.11. Структурная схема ограничителя скорости ЭОС-3
220В cmai
В цепи защиты и
сигнализации
— узел формирования напряжения, пропорционального скорости защитной диаграммы
с подстроечным трансформатором ТЗ для задания скорости подхода к приемной площадке
Vn, диодным функциональным преобразователем ДФП и переменным резистором RP-2 для
подстройки максимальной скорости защитной диаграммы;
— нуль-орган НО для сравнения напряжений и определения момента превышения скорости;
— тиристорный усилитель У для включения реле превышения скорости РОС1, РОС2;
— элементы контроля приближения фактической скорости к защитной диаграмме (эле-
менты формирования тока в индикаторе РА) пропорционального разности напряжений на
входах нуль-органа.
Структурная схема ЭОС-3 приведена на рис. 13.11. Заданная скорость формируется ло-
гической схемой «ИЛИ», собранной на контактах этажных выключателей шкафа ШПА-1 и
реле КЗ и К4, следующим образом. На участке максимальной скорости в схему «ИЛИ» по-
ступает сигнал от трансформатора Т2, пропорциональный этой скорости, умноженной на
к=1,1—1,15 (допускаемое превышение максимальной скорости не более 15 %). В точке нача-
ла замедления этажный выключатель этот сигнал отключает, а вместо него подключает сиг-
нал от одного из сельсинов СС1 или СС2 (в зависимости от направления движения). Зубча-
тые передачи к сельсинам приняты такими, чтобы путь замедления машины соответствовал
углу поворота ротора каждого сельсина не более 70°. Зависимость напряжения на выходе
сельсина от угла поворота на этом участке практически линейна. В точке начала замедления
сигнал от сельсина должен быть равным сигналу, поступающему от трансформатора Т2. Этого
достигают соответствующей регулировкой резисторов RP3 и RP4. По мере подхода подъем-
ного сосуда к приемной площадке этот сигнал снижается до величины, пропорциональной
допустимой скорости подъезда к приемной площадке.
Если на грузо-людском подъеме скорость транспортировки людей снижена по сравне-
нию со скоростью транспортировки груза, на выходе схемы «ИЛИ» в режиме «Люди» вво-
АП ПАРА ТЫ ЗАЩИТЫ И БЛОКИРОВКИ
351
дится резистор RP5, снижающий заданную скорость до установленной величины. При реви-
зии ствола и канатов сигнал на выходе схемы «ИЛИ» отключается, и ограничитель скорости
контролирует минимальную скорость, равную допустимой скорости подъезда к приемной
площадке. Выход со схемы «ИЛИ» подается на первичную обмотку разделительного транс-
форматора ТЗ. Со вторичных обмоток этого трансформатора сигналы поступают в два иден-
тичных блока ограничения Б01 и Б02. В каждом блоке сигнал поступает на диодный функ-
циональный преобразователь ДФП, преобразующий линейную зависимость заданной ско-
рости от пути в параболическую. Сигнал с выхода ДФП поступает через резистор RP2 на
вход 1 нуль-органа НО. На этот же вход поступает сигнал от трансформатора Т с подвижным
ферритовым сердечником. Величина этого сигнала пропорциональна допустимой скорости
подъезда к приемной площадке и регулируется ввинчиванием (увеличение) или вывинчива-
нием (уменьшение) сердечника. На вход 3 нуль-органа поступает сигнал, пропорциональ-
ный действительной скорости машины, от тахогенератора G1. Возможна также работа от
двух тахогенераторов G1 и G2, каждый из которых работает на «свой» блок БО. Тогда тахоге-
нератор G1 подключается на клеммы К19 и К20, a G2 — на клеммы К21 и К22. Напряжение
тахогенератора через диоды VII и V12 и выпрямительный мост V7—V10 поступает на дели-
тель напряжения, состоящий из резисторов RP1, R11—R13. Требуемый уровень напряжения
на входе 3 нуль-органа устанавливает резистор RP1.
Нуль-орган НО представляет собой блокинг-генератор, генерирующий переменное на-
пряжение на выходе при условии, что сигнал на входе 1 выше, чем на входе 3. Выходной
сигнал с НО через усилитель У поступает на реле ограничения скорости РОС1 (РОС2). При
превышении фактической скорости над заданной сигнал на входе 3 НО становится выше
сигнала на входе 1, происходит срыв генерации, реле РОС1 (РОС2) отпадает, размыкая цепь
защиты подъемной установки.
Степень приближения фактической скорости к заданной можно наблюдать на микро-
амперметре РА, установленном на пульте машиниста.
В схеме ЭОС-3 предусмотрен ряд устройств, контролирующих исправность ее элементов.
Целостность кинематической цепи шкафа ШПА-1 контролируется тахогенераторами G3
и G4, встроенными в шкаф.
Напряжение этих тахогенераторов поступает на входы усилителей У1 блоков релейных
усилителей БРУ1 и БРУ2. На выходе этих усилителей включены реле К1 и К2. Контакты
этих реле включены в цепь узла заданной скорости на входах ДФП. В случае поломки кине-
матической цепи ШПА-1 тахогенераторы G3 и G4 не выдают напряжение, реле К1 и К2 не
притянутся и на входы 1 нуль-органов поступает лишь сигнал минимальной заданной ско-
рости, определяемой трансформатором Т
Исправность тахогенератора G1 (или G1 и G2) контролируют с помощью реле КЗ и К4,
включенных на выходы усилителей У2 блоков БРУ1 и БРУ2. На входы этих усилителей по-
ступает падение напряжения на одном из диодов VII или VI2 (в зависимости от направления
вращения подъемной машины). Для каждого направления вращения включается одно из реле
КЗ или К4. Контакты реле KI—К4 включены в цепь реле времени КТ по логической схеме
«И—ИЛИ». При исправных тахогенераторах и правильном функционировании реле KI—К4
якорь КТ притянут. При любом повреждении этих элементов КТ отключается и своими кон-
тактами размыкает цепь защиты подъемной машины.
Реле КЗ и К4 одновременно выполняют функцию реле направления вращения. Их кон-
такты включены в логическую схему «ИЛИ» узла заданной скорости таким образом, что на
участке разгона они отключают сельсин СС1 или СС2 и подключают сигнал максимальной
контролируемой скорости от трансформатора Т2. В цепь реле КТ включены также контакты
реле KV, контролирующего напряжение сельсинов, и некоторых этажных выключателей с
целью контроля правильности функционирования этих элементов.
Контакты реле KI — К4, KV включены в цепи светодиодов, а контакты реле К5, Кб и
КТ — в цепи сигнальных ламп, что позволяет визуально следить за их функционированием.
Для настройки и проверки работы ограничителя скорости предусмотрена схема имита-
ции напряжения тахогенераторов, состоящая из трансформаторов Т5 и Т4 и потенциомет-
ров RP6 и RP7.
Практика эксплуатации ограничителей скорости ЭОС-3 выявила, что их отказы чаще
всего происходят вследствие нечеткой работы этажных выключателей шкафа ШПА-1, что
352 ГЛАВА 13
является большим конструктивным недостатком ограничителя ЭОС-3 (медленное или не-
четкое переключение, недовключение, загрязнение или поломка контактов). Эти неисправ-
ности легко могут быть обнаружены и устранены на подъемной установке.
Однако эти неисправности приводят к частым ложным срабатываниям ограничителя и
при условии напряженной работы подъема эксплуатационный персонал, как правило, выво-
дит ограничитель из работы, шунтируя его контакты в цепи защиты. Так, при расследовании
аварии на скиповом многоканатном подъеме шахты «Красноармейская Западная №1», ко-
торая произошла 21.01.2001 г. было установлено, что контакты двух ограничителей скорос-
ти ЭОС-3 — основного и дублирующего в цепи защиты были зашунтированы (см. 24.2.2).
Ремонтировать блоки БО и БРУ на подъемной установке не рекомендуют. Эту работу
лучше выполнять централизованно в лабораториях специализированных наладочных или
ремонтных предприятий. Для проверки и предварительной настройки блоков в лаборатории
должен быть специальный стенд, но лучше иметь сам ограничитель скорости ЭОС-3.
Непосредственно на подъемной установке должно быть хотя бы по одному резервному
блоку БО и БРУ полностью исправному и настроенному. Для их хранения в шкафу ЭОС-3
специально предусмотрено место.
13.3.4. Ограничитель скорости ОСПМ
Ограничитель скорости шахтных подъемных машин ОСПМ, выпускаемый Конотопс-
ким заводом «Красный металлист», предназначен для защиты от аварийного переподъема
сосудов и превышения скорости подъемных машин, установленных на земной поверхности,
с высотой подъема до 2000 м.
Ограничитель ОСПМ осуществляет размыкание цепи защиты при достижении подъем-
ной машиной скорости, которая равна заданной защитной тахограммой на участках пути
разгона, равномерного хода, замедления, дотягивания и на участке высоты переподъема.
Технические характеристики
Скорость подъемных сосудов, м/с
контролируемая, в пределах 1,0 - 20,0
максимальная, в пределах 2,0 - 20,0
подхода 1,0; 1,5
Собственное время срабатывания, с, не более 0,1
Погрешность контроля скорости, м/с, при:
минимальной — 1 м/с ±0,1
максимальной — 20 м/с ± 0,67
Ограничитель скорости ОСПМ содержит два идентичных канала ограничения скорости
с взаимным контролем параллельности настройки и работы каждого из каналов.
Каждый канал представляет собой отдельный независимый ограничитель, имеющий
обособленную привязку к подъемной машине и осуществляющий следующие функции: фор-
мирование сигналов, пропорциональных скорости и пути перемещения барабана подъем-
ной машины при помощи датчика путевых импульсов (ДПИ); формирование сигналов про-
хождения подъемными сосудами контрольных точек пути при помощи магнитогерконовых
датчиков (ДПМГ), устанавливаемых непосредственно в стволе; формирование сигнала за-
щитной тахограммы; сравнение сигналов заданной и действительной скоростей; выдачу ко-
манды на предохранительное торможение при превышении действительной скоростью зна-
чения, заданного защитной тахограммой.
Каждый канал содержит специальный чувствительный узел, который при возникнове-
нии рассогласования между каналами выдает команду на запрет последующего пуска подъем-
ной машины до устранения неисправности, вызвавшей это рассогласование.
Ограничитель имеет соответствующую индикацию о срабатывании исполнительных ус-
тройств, содержит элементы, позволяющие произвести контроль правильности настройки и
нормального функционирования.
Ограничитель состоит из двух датчиков ДПИ-1 или УСПМ, четырех магнитогерконо-
вых датчиков ДПМГ и блока обработки информации БОИ-1.
Датчик ДПИ-1 устанавливается на подъемной машине и приводится во вращение (со-
ответственно при движении машины) при помощи футерованного ролика, прижимаемого к
АП ПАРА ТЫ ЗАЩИТЫ И БЛОКИРОВКИ
353
тормозному полю барабана. На оси ролика находится зубчатый диск, зубцы которого прохо-
дят сквозь паз специального устройства с установленными в нем двумя парами светофото-
диодов. При вращении диска фотодиоды V3 и V4 периодически освещаются соответствую-
щими светодиодами VI и V2. При этом изменяются входные параметры компараторов Д1 и
Д2 и на выходных клеммах датчика присутствуют две последовательности электрических
импульсов, число которых пропорционально пути, а частота — скорости движения подъем-
ной машины. Обе последовательности сдвинуты друг относительно друга на 1/4 периода и
таким образом, содержат информацию о направлении движения подъемной машины.
Схема ограничителя позволяет применять при переключении соответствующих пере-
мычек датчики УСПМ. Последние применяются в том случае, если барабан подъемной ма-
шины снабжен специальными зубьями, позволяющими снимать датчиками УСПМ путевую
информацию о скорости движения барабана и его направлении, как и датчиками ДПИ-1.
Магнитогерконовые датчики типа ДПМГ устанавливаются в шахтном стволе в расчет-
ных точках начала участков контроля замедления. При прохождении мимо датчиков подъем-
ного сосуда с укрепленным на нем магните датчик срабатывает — замыкается герметизиро-
ванный контакт (геркон).
Блок обработки информации БОИ-1 обрабатывает сигналы, поступающие от датчиков
путевых импульсов ДПИ-1 или УСПМ и датчиков положения ДПМГ, формирует сигналы
заданной и действительной скоростей подъемной машины, производит сравнение этих сиг-
налов и в случае необходимости выдачу команды на предохранительное торможение уста-
новки путем размыкания контактов исполнительных реле, осуществляет контроль идентич-
ности работы и выдачу команды на запрет последующего пуска машины путем размыкания
контактов соответствующих реле. Блок содержит также необходимые элементы настройки и
индикации.
Блок путевой информации БПИ содержит оптронные развязки, для путевых импуль-
сов, поступающих от датчиков УСПМ или от датчиков ДПИ-1. Блок содержит устройство
для определения направления движения.
Блок задания БЗ содержит 16-ти разрядный двоичный реверсивный счетчик, 10-ти вхо-
довой цифроаналоговый преобразователь, усилитель, вычитатель и функциональный преоб-
разователь, производящий операцию извлечения корня квадратного для формирования на-
пряжения на участке замедления.
При подходе подъемного сосуда к точке начала участка контроля замедления срабатывает
соответствующий датчик положения подъемных сосудов ДПМГ, установленный в стволе.
Узел формирования напряжения действительной скорости состоит из преобразователя
частоты в напряжение постоянного тока, на вход которого подаются путевые импульсы от
датчика ДПИ-1 или УСПМ. Выходное напряжение преобразователя поступает на вход филь-
тра. Коэффициент усиления преобразователя устанавливается резисторами. Напряжение на
выходе фильтра пропорционально частоте следования импульсов и соответственно, скорос-
ти движения подъемной машины.
Узел сравнения напряжений действительной и заданной скоростей представляет собой
вычитатель. Напряжение на выходе вычитателя пропорционально разности заданной и дей-
ствительной скоростей.
Напряжение разности скоростей подается на пороговое устройство. Если значение дей-
ствительной скорости меньше (по модулю) заданного на выходе порогового устройства при-
сутствует положительный потенциал, который открывает транзистор. При этом реле защиты
РЗ включено и контакты его в цепи защиты замкнуты. При превышении действительной
скоростью заданного значения на выходе порогового устройства появляется отрицательный
потенциал, который запирает транзистор. При этом реле РЗ отключается, контакты его в
цепи защиты размыкаются, и включается предохранительный тормоз.
13.3.5. Ограничитель скорости независимый ОСН
Ограничитель скорости независимый (ОСН) разработан и изготавливается Научно-произ-
водственным центром «Электротехнические комплексы» ОАО «Электропривод» г. Москва [219].
ОСН является программно-управляемым устройством, аппаратура которого представ-
ляет собой низковольтное комплектное устройство (НКУ) с электронным блоком управле-
354 ГЛАВА 13
ния на базе программируемого контроллера SIMATIC S7—300. Алгоритмы работы ОСН, ре-
ализованные программно, выполняют следующие функции:
— смена режима работы НАСТРОЙКА/РАБОТА в зависимости от положения переклю-
чателя режима работы S1;
— выдача сигналов наложения предохранительного тормоза, при фиксировании аварий-
ной ситуации;
— ввод в ОСН защитных диаграмм;
— ввод в ОСН параметров подъемной установки;
— проверка введенных данных на допустимость;
— измерение (вычисление) скорости перемещения сосуда (сосудов);
— обработка сигналов путевых датчиков синхронизации, путевых датчиков контрольной
точки;
— контроль срабатывания исполнительных реле;
— индикация на пульте оператора текущего положения скипов, направления движения
и скорости;
— контроль исправности ОСН методами самодиагностики;
— вывод аварийных сообщений на панель ОСН, которая размещается на дверце шкафа
ОСН, с последующим их квитированием;
— индикация текущего времени и даты на панель ОСН, а также ввод новых значений
времени и даты.
Ограничитель скорости независимый (ОСН) служит для защиты шахтных подъемных
установок от превышения допустимого значения скорости, заданной защитной диаграммой,
а также для защиты шахтных подъемных установок от превышения допустимого значения
так называемого обратного хода — перемещения под действием груза сосудов в направле-
нии, противоположном заданному.
ОСН предназначен для замены морально устаревших ограничителей скорости типа ЭОС.
Принцип действия ОСН по защите подъемной установки от превышения скорости осно-
ван на непрерывном сравнении в процессе спуска-подъема действительной скорости с расчет-
ным значением, которое получено на основании защитной диаграммы, хранимой в памяти
ОСН. Хранимая защитная диаграмма представляется таблично в виде кусочно-линейной за-
висимости максимально допустимой скорости сосуда как функции координаты пути.
Для измерения скорости сосудов в ОСН на валу барабана подъемной машины дополни-
тельно устанавливается импульсный датчик. Для начальной установки и контроля положе-
ния сосудов, а также для контроля начала замедления, используются магнитоэлектрические
или герконовые путевые датчики. В стволе требуется установить по два путевых датчика для
каждого сосуда.
Для повышения надежности работы ОСН предусмотрен непрерывный взаимный конт-
роль по пути и скорости между ОСН и другим устройством измерения скорости. Контроль
осуществляется путем перекрестного обмена тремя аналоговыми сигналами, представляю-
щими положение сосуда, действительную скорость и максимально-допустимую расчетную
скорость для данной точки пути, (из защитной диаграммы). При использовании на подъем-
ной установке современной микропроцессорной системы управления, имеющей встроенный
блок измерения и контроля скорости, такой взаимный контроль осуществляется между ОСН
и этим блоком.
В тех же случаях когда используется традиционная релейная схема управления, и при
этом в соответствии с требованиями ПБ необходимо иметь два независимых канала измере-
ния скорости, на подъемной установке могут использоваться два ОСН с непрерывным вза-
имным контролем.
Ввод настроечных параметров в ОСН осуществляется в специальном режиме «Настрой-
ка». Войдя в режим «Настройка» по паролю, можно ввести такие данные о подъемной маши-
не: диаметр барабана, число импульсов датчика на один оборот, диаграмму движения, величи-
ну номинального напряжения на выходе тахогенератора и др. После ввода исчерпывающего
набора параметров ОСН автоматически настраивается на работу на данном объекте.
В процессе эксплуатации на ОСН проводятся периодические регламентные проверки,
подтверждающие его защитные функции.
АП ПАРА ТЫ ЗАЩИТЫ И БЛОКИРОВКИ
355
Рис. 13.12. СУП — система управления
ШПМ:
Утек, V' тек — текущая скорость;
SmeK, S' тек — текущее положение;
Узащ, V защ — скорость по защитной
диаграмме; ИД — импульсный датчик;
ПД1... ПД4 — позиционные датчики
Рис. 13.13. Диаграмма
срабатывания ОСН
на равномерном ходу:
1 — напряжение в цепи ТП;
2 — скорость движения подъемных
сосудов; 3 — защитная диаграмма
скорости
Рис. 13.14. Диаграмма
срабатывания ОСН на участке
замедления:
1 — напряжение в цепи ТП;
2 — скорость движения подъемных
сосудов; 3 — защитная диаграмма
скорости; 4 — путь,
контролируемый ограничителем
356
ГЛАВА 13
Защитная диаграмма задает зависимость максимально допустимой скорости, как функ-
цию пути. Вычисленное согласно диаграмме значение скорости применяется для контроля
текущей скорости перемещения, измеренной в ОСН по показаниям числоимпульсного дат-
чика. В ОСН защитная диаграмма аппроксимирована кусочно-линейной функцией. Отрез-
ки ломаной, из которых состоит диаграмма, ограничены узлами, в которых определены ско-
рость движения V и соответствующее положение скипа Н. Данная защитная диаграмма срав-
нивается с защитной диаграммой сформированной в системе управления ПМ. При рассог-
ласовании защитных диаграмм ОСН разрывает цепь предохранительного тормоза.
Ввод защитных диаграмм и параметров производится предварительно, до начала эксп-
луатации ОСН в соответствии с существующими режимами работы подъемной установки и
требованиями. Ввод защитных диаграмм и параметров производится в режиме работы ОСН
«НАСТРОЙКА». Осуществлять ввод защитных диаграмм и параметров разрешается только
специально обученному персоналу.
В процессе спуска-подъема, ОСН непрерывно измеряет положение и скорость движе-
ния сосудов и сравнивает полученное значение скорости с допустимой величиной скорости
определенной по защитной диаграмме. Если измеренная скорость превысит допустимую,
ОСН разрывает цепь предохранительного тормоза.
Для определения положения сосуда в стволе используется два независимых канала. В
первом канале координата пути определяется по импульсному датчику, установленному на
валу подъемной установки и сравнивается с аналоговым сигналом второго канала, поступа-
ющего из системы управления подъемной установкой. При рассогласовании показаний пер-
вого и второго канала ОСН разрывает цепь предохранительного тормоза.
Для измерения скорости перемещения сосудов в стволе в ОСН используются два неза-
висимых канала измерения скорости. Основным каналом измерения пути и скорости явля-
ется серия импульсов, поступающая от датчика, установленного на валу барабана подъем-
ной машины. Координата пути определяется по числу поступивших с начала движения им-
пульсов. Скорость движения сосудов рассчитывается на основании частоты следования им-
пульсов.
Второй, аналоговый, канал измерения скорости, является поверочным, и служит для
контроля правильности измерения скорости по сигналам от импульсного датчика. На его
вход подается аналоговый сигнал, величина которого пропорциональна скорости вращения
барабана. В качестве аналогового сигнала может использоваться сигнал от тахогенератора,
установленного на валу барабана, либо сигнал от любого другого измерителя скорости вра-
щения барабана (например, сигнал от измерителя скорости в главном приводе, который ис-
пользуется в цепи обратной связи главного привода). Если при работе ОСН разность вели-
чин скоростей, измеренных по двум каналам, превысит определенную величину, это будет
означать неисправность одного из каналов измерения скорости, и вызовет наложение ТП по
причине неисправности оборудования.
Для синхронизации фактического положения сосуда в стволе и показаний ОСН исполь-
зуются 2 путевых датчика установленных в стволе, вблизи крайних точек движения.
Еще два путевых датчика контроля положения сосудов в стволе (Check Points), устанав-
ливаются на начальном участке замедления каждого сосуда и обеспечивают:
— дополнительную проверку измерения пути;
— контроль скорости в точке;
— контроль снижения защитной диаграммы на участке замедления.
При не соответствии хотя бы одного из параметров, ОСН разрывает цепь предохрани-
тельного тормоза.
Для работы подъемной установки в различных технологических режимах в ОСН можно
ввести несколько защитных диаграмм. Диаграммы задаются в виде кусочно-линейных зави-
симостей скорости от координаты пути. Соответствующие диаграммы должны быть введены
и в систему управления подъемной машиной.
На участке равномерного хода защитная диаграмма ОСН должна не более чем на 15 %
превышать значение скорости диаграммы движения.
На пути дотягивания и переподъема, а также на участке пути, расположенном ниже
нижней приемной площадки, скорость, заданная защитной диаграммой, не должна превы-
шать значения скорости подхода, Vn.
АП ПАРА ТЫ ЗАЩИТЫ И БЛОКИРОВКИ
357
Для режима «ревизия» защитная диаграмма должна задавать скорость Vn на всем пути
перемещения подъемного сосуда.
Ввод защитной диаграммы и других параметров ОСН осуществляется с панели, которая
размещена на дверце шкафа ОСН.
Условия эксплуатации ОСН
Температура окружающего воздуха должна изменяться в пределах от 0 до +40°С.
Воздух должен быть чистым, его относительная влажность не должна превышать 50 %
при температуре +40°С и 90 % при температуре +20°С.
Атмосферное давление 795 +1080 гПа (596 + 810 мм рт. ст.).
Степень загрязнения окружающей среды 1.
Высота над уровнем моря мест установки ОСН не должна превышать 2000 м.
Конструктивно корпус ОСН выполнен в виде ящика одностороннего обслуживания с га-
баритными размерами 600x800x250 мм со степенью защиты IP 55. Снаружи ОСН окрашен серо-
зеленой эпоксидно-полиэфирной краской RAL 7032S. Масса ОСН не более 50 кг. Конструк-
ция ОСН соответствует группе М3 по ГОСТ 17516.1-90. Охлаждение естественное, воздушное.
Питание ОСН осуществляется от сети переменного тока с напряжением 220В, 50 Гц.
Потребляемая мощность не более 200 Вт.
По результатам испытаний на ОСН были получены «Разрешение на применение № РРС-
00 17090» в Федеральной службе по экологическому, технологическому и атомному надзору
Российской Федерации и «Сертификат соответствия РОСС RU. МЕ92/В00628» в Межотрас-
левом органе сертификации «Сертиум».
В комплект поставки входит ОСН, импульсный датчик «НиЬпег» и 4 путевых датчика
«Tifenbuch».
13.3.6. Ограничитель скорости шахтных подземных подъемных машин ОСП-1
Ограничитель скорости ОСП-1 предназначен для защиты от превышения допустимых
значений скорости шахтных подземных подъемных машин.
Ограничитель разработан институтом «Автоматуглерудпром» и поставляется Конотопс-
ким электромеханическим заводом «Красный металлист» в комплекте с аппаратом управле-
ния лебедками АУЛ-1 или ШПА-3.
Технические характеристики
Напряжение питания переменного тока, В 127/380/660
Диапазон контролируемых скоростей, м/с 1—7
Погрешность контроля скоростей, м/с
(в пределах скорости 1—7 м/с) 0,1. 0,31
Время срабатывания, с, не более 0,1
Ограничитель скорости ОСП-1 (рис. 13.13) состоит из блока сравнения и контроля огра-
ничителя БСКО-1, двух датчиков путевых ДПИ-1, блока питания с искробезопасным выхо-
дом во взрывобезопасном исполнении БП-2, блока ограничителя БО и блока индикации БИ.
Датчик ДПИ-1 формирует путевые импульсы, полученные при вращении его диска от
тормозного обода. Выходные сигналы датчика — это импульсы двух последовательностей,
сдвинутые друг относительно друга на 90 электрических градусов. В зависимости от направ-
ления движения подъемной машины используют изменение направления сдвига импульсов,
а частоту этих импульсов — для измерения действительной скорости движения.
В блоке БСКО-1 вырабатывается задание защитной диаграммы скорости, определяется
направление движения, происходит сравнение действительной и заданной скоростей, выдает-
ся сигнал в цепь защиты и сигнализации при превышении допустимых значений скорости.
Принцип действия ограничителя скорости ОСП-1 основан на сравнении действитель-
ной скорости с заданной по защитной диаграмме. Это сравнивают на участках разгона и
равномерного хода в функции пути, а в период основного замедления — в функции време-
ни. Ограничитель ОСП-1 имеет два идентичных канала.
При движении подъемного сосуда «Вверх» выходные импульсы датчика ДПИ-1 посту-
пают в блок БИ, при этом срабатывает реле К5, соответствующее направлению движения
подъемного сосуда «Вперед» (канал 1).
Одновременно от датчика ДПИ-1 поступают импульсы (одной последовательности) с
частотой, пропорциональной скорости движения подъемного сосуда, в блок БО (узел дей-
358
ГЛАВА 13
ствительной скорости). Контакт К5.1 реле К5 замыкается и подключает уставку Vlmax к узлу
заданной скорости (контакт К1.1 замкнут). При достижении подъемным сосудом участка
равномерного хода этажный выключатель ЭВ-2 включает реле К2, контакт которого К2.1
подключает уставку V2max к узлу заданной скорости (контакт К1.2 замкнут).
98-1 38-2 ДП*~1(2)
Рис. 13.15. Схема электрического ограничителя скорости ОСП-1
При достижении подъемным сосудом участка замедления этажный выключатель ЭВ-1
отключает реле К.1. Контакты К1.1 и К1.2 (см. рис. 13.15) отключают уставки защиты Vlmax и
V2max от узла заданной скорости. На выходе данного узла напряжение заданной скорости
уменьшается с темпом, соответствующим замедлению защитной диаграммы до уровня кон-
тролируемой скорости похода Vl^.
Одновременно при движении подъемной машины от датчика ДПИ-1 поступают импуль-
сы с частотой, пропорциональной скорости ее движения, в узел действительной скорости,
где преобразуются в напряжение постоянного тока, которое настраивается на согласованное
с величиной, соответствующей напряжению заданной скорости. При превышении сигнала
действительной скорости над заданной защитное реле исполнительного устройства выдаст
команду на предохранительное торможение.
Величина сигнала рассогласования заданной и действительной скоростей подается на
микроамперметр для визуального контроля.
Схема ограничителя скорости предусматривает самоконтроль исправности каналов и
правильность их настройки.
Наличие напряжения источника питания контролируют с помощью двухобмоточного
реле. Предусмотрен также контроль целостности кинематической цепи аппарата ШПА-3.
При неисправности в кинематической цепи аппарата ШПА-3 реле К4 своим контактом
отключит уставку максимальной скорости и подключится уставка задания.
Схема исключает возможность ложных срабатываний ограничителя скорости на стоян-
ке машины от рассогласования состояний устройств определения направления движения в I
и II каналах.
Опыт эксплуатации ограничителя скорости ОСП-1 подтвердил его работоспособность.
В то же время имеет место низкое качество монтажа плат в части пайки и крепления круп-
АП ПАРА ТЫ ЗАЩИТЫ И БЛОКИРОВКИ
359
негабаритных элементов (реле, конденсатор СЮ и др.), в результате происходят обрывы то-
копроводящих дорожек, встречается низкое качество покрытия плат изоляционным лаком.
Регулирование величин сигналов задания (резисторы R 1—R6) подаваемых на входы мик-
росхем, возможно в пределах 0—12 В, хотя по техническим условиям на входы микросхем
допускается подавать сигнал не более 6—8 В. В результате перегрузки входов микросхем воз-
можен выход их из строя. Для предотвращения этого необходимо введение ограничивающих
резисторов, включаемых последовательно с Rl—R6.
Для обеспечения работоспособности аппарата и работы световой индикации заводом
установлены перемычки на плате блока БО (между контактами реле К2 и К4) и на разъемах
XI и ХЗ (18-20).
В результате в работе оставлена только световая индикация исправности каналов. При
удалении перемычек рассогласования между каналами возникают незатухающие колебания
в одном из каналов.
Устранение колебаний в блоке БО возможно введением элемента «ИЛИ» на входах мик-
росхемы Д8 (рис. 13.16), собранного на диодах V25—V26 разных каналов. Для выравнивания
уровней сигналов на вход «9» микросхемы Д8 сигнал подается через диоды V24.
Схема контроля в этом случае срабатывает, если уровень сигнала на входе «12» микро-
схемы Д8 превысит уровень входа «9» на 0,5 В.
В исходном состоянии при отсутствии рассогласования по каналам уровни сигналов на
входах «9» и «12» Д8 каждого канала одинаковы, реле К2 включено и контактами К2.2 под-
ключено максимальное задание.
При наличии рассогласования более 0,5 В (0,5 м/с) отрицательной полярности, из-за
уменьшения уровня действительной скорости или самопроизвольного увеличения уровня
задания в одном из каналов:
а) в исправном канале наступит ограничение скорости задания до Vmin (сигнал на входе
«12» Д8 больше, чем сигнал на входе «9»);
б) в неисправном канале (где изменилась величина сигнала сравнения на выходе «7» Д6
по сравнению с сигналом второго канала) ограничение не наступает, так как сигнал неисп-
равного канала, больший по величине, через диоды V24 и V25 поступает одновременно на
входы «9» и «12» микросхемы Д8 неисправного канала.
Рис. 13.16. Усовершенствованная схема контроля исправности каналов ограничителя
скорости ОСП-1
360
ГЛАВА 13
Необходимости ограничения сигнала в этом канале нет, так как канал неисправен.
При положительной полярности напряжения рассогласования из-за произвольного
уменьшения уровня задания или увеличения уровня действительной скорости только в од-
ном канале ограничение не наступит (диоды V24 — V26 заперты), но в этом нет необходи-
мости, так как такие изменения сигналов в любом из каналов вызовут срабатывание элемен-
тов Д7; V22 и К1, т. е. наложение предохранительного тормоза.
Особенность предлагаемой схемы контроля — наличие запоминания отказавшего кана-
ла за счет четкой фиксации уровней сигналов на входе исправного и неисправного каналов.
В связи с разделением сигналов на входах вычитателей Д8 изменилась и смысловая ин-
формация, выдаваемая светодиодами Н1:
а) при исправных каналах горят оба светодиода;
б) при наличии рассогласования в неисправном канале светодиод горит, а в исправном —
не горит.
Исходное состояние схемы восстанавливают кнопкой «Проверка задания» после устра-
нения неисправности. Рассмотренная схема позволяет осуществить автоматический конт-
роль исправности каналов и запоминания отказавшего канала.
13.3.7. Ограничитель скорости для подземных подъемных машин
с применением центробежных реле
На шахтных подземных подъемных машинах в качестве ограничителя скорости приме-
няют центробежное реле РМВ-7011, соединенное с подъемной машиной посредством муф-
ты или клиноременной передачи. При превышении номинальной скорости подъемного со-
суда на 15 % контакт центробежного реле в цепи защиты размыкается, включая предохрани-
тельный тормоз. На подъемных машинах со скоростью движения более 3 м/с для контроля
скорости подхода дополнительно устанавливают второе центробежное реле, включая его кон-
такт в цепь защиты. Параллельно контакту реле включаются контакты путевых выключате-
лей, которые размыкаются на участке контроля скорости подхода.
В процессе эксплуатации возможны следующие неисправности центробежных реле, вли-
яющие на правильность их работы: ослабление крепления грузов, отсутствие смазки под-
шипников, ослабление клиноременной передачи и посадки шкивов на валу, нечеткая работа
контактного устройства.
При неудовлетворительной работе снимают крышку реле и осматривают все детали.
Подшипники и скользящие детали смазывают, устраняя заедание муфты на валу; проверяют
фиксацию регулировочной гайки, состояние шплинтов микровыключателя; подтягивают
крепежные детали, натягивают клиновой ремень, а при необходимости заменяют.
При настройке центробежного реле используют тахометр, который измеряет частоту
вращения вала реле в момент размыкания контакта. Она должна на 10—15 % превышать но-
минальную частоту вращения машины.
При периодических проверках центробежных реле используют различные способы. Что-
бы избежать срабатывания реле при частоте вращения машины, превышающей номиналь-
ную, что приводит к нежелательным динамическим перегрузкам, стремятся проверить цен-
тробежные реле на малой скорости подъемной машины. С этой целью используют поворот-
ные площадки, позволяющие за счет изменения межцентрового расстояния и применения
шкивов разного диаметра изменять передаточное число клиноременной передачи. Однако
такой способ трудоемок и неудобен.
На шахтных подъемных машинах, оборудованных взрывобезопасной аппаратурой с ис-
кробезопасными цепями управления, выпускаемой Первомайским заводом им. К. Маркса,
можно проверять центробежное реле, не включая предохранительный тормоз. Для этого в
цепь защиты подъемной машины, состоящей из искробезопасного трансформатора Т
(рис. 13.17), реле постоянного тока К, диода V и контактов соответствующих аппаратов за-
щиты, параллельно контакту центробежного реле SR включают кнопку проверки SB и мил-
лиамперметр РА.
Проверяют следующим образом. Один из машинистов нажимает на кнопку проверки
SB, а другой разгоняет машину.
При превышении номинальной скорости контакт выключателя SR размыкается, но пре-
дохранительный тормоз не включается, так как реле К питается по обходной цепочке. Мо-
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
361
Рис. 13.17. Схема проверки центробежных
реле на шахтных подъемных установках
с искробезопасными цепями управления
мент срабатывания центробежного реле определяют по миллиамперметру, а величину пре-
вышения скорости по скоростемеру
Вместо миллиамперметра в цепь проверки можно включать светодиод с ограничиваю-
щим ток резистором. Светодиод встраивают в скоростемер. При превышении номинальной
скорости размыкается контакт реле SR и загорается светодиод. Второй вариант предпочти-
тельнее, так как не требует установки на пульте управления дополнительного прибора. Кро-
ме того, момент срабатывания реле SR и скорость, при которой срабатывание происходит,
можно наблюдать в одном месте.
Применение центробежных реле не
обеспечивало всех требований ПБ [13] к ог-
раничителям скорости для подъемных ма-
шин со скоростью движения более 3 м/с, а
ограничители скорости ОСП-1 в силу ряда
причин, в том числе и экономического ха-
рактера, не нашли широкого применения на
подземных подъемных машинах.
Поэтому специалистами Донбассугле-
автоматики под руководством Е. М. Курчен-
ко предложена схема включения центро-
бежных реле с блоком контроля и индика-
ции [112], обеспечивающая в полном объеме требования ПБ к ограничителю скорости, в
том числе в части контроля скорости подхода и в части контроля целостности передачи вра-
щения от вала подъемной машины к указателю глубины [13].
Для этого выключатели ПВЗ и ПВ4 аппарата ШПА (АУЛ) настраиваются так, чтобы
один из них срабатывал в начале участка контролируемого пути S* при подходе сосудов к
верхней приемной площадке, а другой — к нижней (рис. 13.18).
Рис. 13.18. Тахограммы цикла подъема (а) и диаграммы замыкания контактов путевых
выключателей (б): 1 и 2 — защитные и рабочие тахограммы
i контакт замкнут
□ контакт разомкнут
*— вперед
— > назад
Контролируемый путь Sk определяют из условия остановки сосудов предохранительным
тормозом в конечных точках при подходе их к началу контролируемого пути с максимально
возможной для данной машины скоростью:
(13.3.1)
362
ГЛАВА 13
где vH — номинальная скорость машины, м/с; а — среднее замедление (при расчете защит-
ной тахограммы принимается 0,5 м/с2); tc — время срабатывания предохранительного тор-
моза, с.
При наличии на установке устройства защиты от набегания подъемных сосудов на ка-
нат (избирательного предохранительного торможения) значения Sk во время подхода сосу-
дов к верхней приемной площадке должно быть не менее наибольшего пути, проходимого
при подъеме сосудов в процессе предохранительного торможения. Такая настройка путевых
выключателей позволяет контролировать скорость подхода на уровнях 1 или 1,5 м/с по все-
му участку контролируемого пути и обеспечивает условия безопасности, хотя сопряжена с
некоторым увеличением продолжительности цикла.
Для сокращения продолжительности цикла предлагаемая схема ограничителя (рис. 13.19)
предусматривает при отходе сосудов от приемных площадок возможность разгона подъем-
ной машины до скорости равномерного хода, не ожидая выхода сосудов из зоны контроли-
руемого пути подъезда (неконтролируемый отъезд). При необходимости контролировать ско-
рость отъезда на уровне 1 или 1,5 м/с из схемы исключаются контакты В, Н и ДТ. Отметим,
что вместо этих контактов для возможности неконтролируемого отъезда подъемных сосудов
от конечных положений можно применить контакты реле скорости РКС, которые необхо-
димо установить на машине. Целесообразно дополнить схему ограничителя скорости на базе
центробежных реле блоком контроля и индикации работы ограничителя БКИ.
Рис. 13.19. Схема ограничителя скорости и включение его в цепь управления
предохранительным тормозом машины
\
На рис. 13.19 приведена схема предлагаемого блока БКИ и включение его в цепи защи-
ты и управления машиной с использованием комплекта взрывобезопасной аппаратуры уп-
равления лебедками и малыми подъемными машинами [113]. На схеме сохранена заводская
маркировка и обозначение этой аппаратуры: TV2. TV3 — искробезопасные трансформато-
ры; VD12, VD14 — диоды; КЗ — реле промежуточное предохранительного тормоза; К7 —
реле промежуточное динамического торможения; УПДТ — ключ включения динамического
торможения. На схеме также указаны; РЦ1 — центробежное реле на номинальные обороты
750—1200 мин1 контролирующее превышение максимальной скорости на 15 % и реле РЦ2
на 250—375 мин1, контролирующее превышение допустимой скорости подхода сосудов к
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
363
конечному положению; ПВЗ и ПВ4 — путевые выключатели, диаграммы замыкания кото-
рых приведены на рис. 13.18.
Действует схема блока контроля и индикации работы ограничителя скорости (рассмот-
рим случай одноконцевого подъема) следующим образом (рис. 13.19). При нахождении
подъемных сосудов, например, на верхней приемной площадке контакт ПВЗ.2 замкнут и
светодиод HL2 включен, а контакт ПВ4.2 разомкнут и HL3 выключен. Светодиод HL1 вык-
лючен. После включения на спуск (вперед) машина начинает разгоняться под действием веса
сосудов. При увеличении скорости до величины, на которую настроено реле РЦ2, его кон-
такт РЦ2.1 размыкается и включается светодиод HL1. Он будет включен в течение всего пе-
риода движения машины со скоростью большей, чем контролируемая скорость подхода. В
момент прохода подъемными сосудами точки начала контроля пути приближения к верхней
приемной площадке переключится ПВЗ. Его контакт ПВ3.2 выключит светодиод HL2, что
сигнализирует о выходе сосудов из зоны контролируемого пути у верхней площадки.
При подходе подъемных сосудов к нижней приемной площадке машинист на участке
пути до точки начала контроля скорости подхода должен снизить ее до величины несколько
меньшей, чем контролируемая (учитывая гистерезис при срабатывании реле РЦ2). После
уменьшения скорости до указанной замкнется контакт реле РЦ2. Светодиод HL выключит-
ся. При проходе точки начала контролируемого пути к нижней приемной площадке пере-
ключится путевой выключатель ПВ4. Контактом ПВ4.2 включается светодиод HL3. сигна-
лизирующий о нахождении подъемных сосудов в зоне контролируемого пути. Этот светоди-
од останется включенным до выхода подъемных сосудов из зоны контролируемого пути в
следующем цикле. При движении подъемных сосудов вверх (назад) схема работает анало-
гично описанному.
Конструктивно блок контроля и индикации работы ограничителя скорости целесооб-
разно разместить в корпусе скоростемера, установленного на пульте машиниста подъема. В
этом случае машинист одновременно видит переключение светодиодов и скорость движе-
ния машины, что позволяет сразу обнаружить нарушения.
Следует отметить, что используемые на подземных подъемных машинах указатели ско-
рости на базе датчика УПДС (ДКС) и миллиамперметра [113] обладают значительной нели-
нейностью, поэтому требуют индивидуального изготовления неравномерной шкалы либо
доработки схемы скоростемера для обеспечения равномерной шкалы. Такая схема скоросте-
мера разработана специалистами Донбассуглеавтоматики.
Наличие сигнализации о срабатывании реле РЦ2 (светодиод HL) и переключении путе-
вых выключателей ПВЗ и ПВ4 (светодиоды HL2, HL3) позволяет машинисту в каждом цик-
ле подъема судить не только об исправности их работы, но и контролировать скорость сра-
батывания реле РЦ2. Например, при нарушении связи РЦ2 с машиной или его неисправно-
сти (нарушении регулировки) HL не будет включаться в течение всего цикла подъема (или
включаться при скорости, отличающейся от требуемой), а отсутствие переключения HL2 и
HL3 свидетельствует о неисправности путевых выключателей ПВЗ, ПВ4 или о нарушении
связи аппарата контроля хода (АУЛ, ШПА-3) с машиной. Поэтому при любых нарушениях
(отклонениях) эксплуатация подъемной машины до устранения неисправности должна быть
запрещена.
Таким образом, световая индикация, контролирующая работу путевых выключателей и
центробежного реле РЦ2, переключающаяся в нескольких точках пути каждого цикла подъе-
ма, позволяет судить о целостности передачи от вала подъемной машины к указателю глуби-
ны и ограничителю скорости. Поскольку в Правилах безопасности способ контроля целост-
ности передачи не оговаривается, то предлагаемое решение, являясь дискретной визуальной
формой такого контроля, может считаться обеспечивающим условия п. 4.7.4 л. ПБ [13].
Схемой ограничителя скорости предусмотрена возможность удобного и безопасного
контроля правильности срабатывания реле РЦ2 и РЦ1 без наложения предохранительного
тормоза при наладке ограничителя и в процессе эксплуатации при ежесменных проверках
подъемной установки машинистом. Для этого на шкале скоростемера, установленного на
пульте управления, при наладке должны быть нанесены четкие метки скорости подхода и
скорости, на которую настроено реле контроля РЦ1.
Проверку выполняют при спуске подъемных сосудов, для чего их устанавливают ниже
точки начала контроля подхода к верхней приемной площадке. При этом контакты ПВ3.1 и
364
ГЛАВА 13
ПВ4.1 замкнуты, а ПВ3.2 и ПВ4.2 разомкнуты и светодиоды HL2, HL3 и HL1 выключены.
Растормаживают подъемную машину и разгоняют ее под действием веса опускающихся сосу-
дов. В процессе разгона в момент включения HL1 светодиоды HL2 и HL3 выключены. Свето-
диод HL1 также выключен. Растормаживают, подъемную машину и разгоняют ее под действи-
ем веса опускающихся сосудов. В процессе разгона в момент включения светодиода HL1 фик-
сируют скорость машины. Она соответствует скорости подхода, контролируемой реле РЦ2, и
не должна превышать 1 м/с для людских и 1,5 м/с для грузовых подъемов. После включения
светодиода HL1 нажимают кнопку проверки КП1 (ее удерживают нажатой до конца провер-
ки) и продолжают плавный разгон машины. При достижении скорости большей номинальной
на величину не более 15 % (отмечена на шкале скоростемера) должен отключиться светодиод
HL1 и оптроном VI включиться динамическое торможение подъемного двигателя. В этот мо-
мент фиксируется скорость машины (соответствует настройке реле РЦ1).
Включение динамического торможения при срабатывании реле РЦ1 позволяет сразу
начать торможение подъемной машины и не допустить дальнейшего превышения скорости.
При ее снижении до значения, несколько меньшего скорости равномерного хода, включит-
ся светодиод HL1. После этого машинист отпускает кнопку проверки КП1, замедляет маши-
ну динамическим торможением, выключив УПДТ, и останавливает ее рабочим тормозом.
Предлагаемая схема ограничителя скорости позволяет осуществить защиту подъемных
установок от превышения скорости согласно действующим Правилам безопасности, удобно
и качественно проверять его работу. Применение этого ограничителя скорости не потребует
значительных затрат на приведение действующих ограничителей в соответствие с ПБ, повы-
сит надежность и безопасность эксплуатации подземных подъемных установок.
13.3.8. Методика расчета и построения тахограмм для наладки защиты
от превышения скорости
13.3.8.1. Общие положения
Надежная работа ограничителя скорости обеспечивается правильным расчетом и налад-
кой его с учетом условий эксплуатации подъемной установки. Для каждой подъемной уста-
новки рассчитываются критическая, защитная и рабочая тахограммы (диаграммы скорос-
ти), которые представляют собой зависимость допустимой скорости движения подъемной
машины от расстояния между точкой, где в данный момент находится подъемный сосуд, до
крайнего его положения.
Ограничитель скорости должен быть настроен по расчетной защитной тахограмме.
Настоящая методика разработана специалистами Донбассуглеавтоматики под руковод-
ством Е. М. Курченко, согласована с МакНИИ и рекомендована к применению при наладке
ограничителей скорости.
Методика разработана на основании многолетнего опыта наладки и эксплуатации огра-
ничителей скорости шахтных подъемных установок с учетом требований [13, 14, 17, 114].
Разработанная методика не снижает параметров безопасности эксплуатации, определяемых
в [17, 114], а в отдельных случаях и ужесточает требования, предъявляемые к защите шахт-
ных подъемных установок от превышения скорости.
По сравнению с действующими в настоящее время методиками [6, 17, 114], данная ме-
тодика имеет следующие существенные отличия.
1. Для всех технологических схем подъемных установок критическая тахограмма опре-
деляется из условия остановки подъемного сосуда при предохранительном торможении в
точке конечной рабочей остановки, т. е. Vn = 0.
2. Методика предусматривает определение допустимой скорости подхода подъемного
сосуда к концевым выключателям переподъема из условия обеспечения защиты от аварий-
ного переподъема (для случаев фактической малой высоты переподъема).
3. При расчете защитной тахограммы для всех технологических схем подъемных устано-
вок обязательно предусматривается контролируемый путь дотягивания с учетом величины
пути, не защищаемого ограничителем скорости от жесткой посадки.
При расчете тахограмм принимаются следующие условия и упрощающие допущения,
не приводящие к снижению безопасности подъемных установок.
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
365
1. Процесс предохранительного торможения рассматривается не с момента разрыва цепи
защиты, а с момента возникновения скорости, соответствующей уставке срабатывания огра-
ничителя скорости. При этом учитывается время срабатывания ограничителя скорости.
2. При расчете тахограмм принимаются не фактические величины замедлений при пре-
дохранительном торможении и времен срабатывания ограничителя и тормоза, а предельно
допустимые по нормативным документам [13, 14, 150].
Это связано с тем, что тормозной путь, проходимый подъемными сосудами в процессе
предохранительного торможения, зависит от коэффициента трения колодок, КПД тормоз-
ной системы, величины груза в подъемном сосуде и других факторов, которые могут изме-
няться в процессе эксплуатации.
3. Для определения фактических величин времени срабатывания t , приращения скоро-
сти А К за время срабатывания тормоза, ускорения свободного выбега асв и среднего замед-
ления апт при предохранительном торможении осциллографируется (для обеспечения точ-
ности определения не менее 3-х раз) процесс предохранительного торможения при спуске
номинального груза и движении подъемного сосуда в нижней части ствола с допускаемой
ПБ скоростью подхода на данной установке.
Это обусловлено тем, что при предохранительном торможении на малой скорости дви-
жения машины время нарастания тормозного усилия до максимальной величины больше,
чем время с момента включения тормоза до остановки машины. Поэтому на малых скорос-
тях среднее значение замедления получается меньше, а путь торможения больше.
В случае, если после обработки осциллограммы (п.2) величина t получается больше, а ве-
личина ат меньше допускаемых величин, то в расчетах применяются их фактические величины.
4. Для удобства обработки осциллограммы производится ее линеаризация путем прове-
дения касательных к кривым нарастания и снижения скорости (рис. 13.20). Такая линеари-
зация позволяет упростить формулы для расчета, но несколько увеличивает (примерно на
0,2—0,4 м) расчетный путь торможения.
Рис. 13.20. Обработка осциллограммы предохранительного торможения при спуске
номинального груза на контролируемой скорости подхода сосудов:
Vn — скорость машины в момент срабатывания предохранительного тормоза на скорости
подхода, контролируемой ограничителем скорости, м/с; ДИ — приращение скорости за время
срабатывания предохранительного тормоза, м/с; 1 — касательная к линии скорости при ее увели-
чении; 2 — линия средней величины замедления при торможении; 3 — касательная к линии скорос-
ти, параллельная линии 2; / — расчетное время срабатывания предохранительного тормоза
подъемной машины, с; t — время, в течение которого скорость машины увеличилась, с; t3 — время,
в течение которого скорость машины снижалась от максимального значения до нуля, с
5. В течение расчетного времени срабатывания тормоза подъемный сосуд движется с ус-
корением свободного выбега асв, определяемым для режима спуска номинального груза. По
истечении этого времени начинается торможение с замедлением предохранительного тормо-
жения апт, средняя величина которого определяется после линеаризации осциллограммы.
366
ГЛАВА 13
6. В случаях, когда необходимо получить максимально возможную производительность
подъемной установки и величина t при максимально допустимом зазоре между тормозны-
ми колодками и ободом заметно меньше допускаемой ПБ, а величина ат заметно больше
минимально допускаемой ПБ, возможно их величины принимать по результатам осциллог-
рафирования процесса предохранительного торможения при спуске номинального груза на
допустимой скорости подхода. При этом должны быть предусмотрены специальные мероп-
риятия, гарантирующие стабильность этих параметров.
При этом должны быть предусмотрены специальные мероприятия, гарантирующие ста-
бильность этих параметров.
Критерием стабильности работы тормоза и ограничителя скорости может служить по-
стоянство величины скорости, при которой срабатывает ограничитель скорости на контро-
лируемом участке пути дотягивания, и величины пути торможения машины при срабатыва-
нии предохранительного тормоза на этой скорости.
Для этого при ежесменной проверке подъемной машины в Книге осмотра подъемной
установки должны фиксироваться для каждого из подъемных сосудов скорость, при которой
срабатывает ограничитель скорости на контролируемом участке пути дотягивания и величи-
на пути предохранительного торможения, проходимого при этом подъемной машиной.
Контролировать эти параметры можно, например, с помощью индикатора работы тор-
моза [6], устанавливаемого на пульте управления подъемной машины.
13.3.8.2. Исходные данные для расчета тахограмм
Для расчета тахограмм подъемной установки необходимо получить на шахте фактичес-
кие данные о подъемной установке в соответствии с таблицей 13.4 и заосциллографировать
процесс предохранительного торможения при спуске номинального груза в нижней части
ствола на допускаемой ПБ скорости подхода не менее 3-х раз.
Подъемный сосуд загружается номинальным грузом и останавливается на расстоянии 25—
30 м от нижней приемной площадки. Ограничитель скорости переключается в режим контроля
скорости подхода, после чего подъемная машина растормаживается и под действием груза начи-
нается ее движение в сторону спуска груза. При скорости машины около 0,5—1 м/с (в зависимо-
сти от величины контролируемой скорости подхода) включается запись осциллограммы. В мо-
мент достижения машиной скорости срабатывания ограничителя при подходе подъемных сосу-
дов V', произойдет срабатывание ограничителя скорости и через время ^(см. рис. 13.20) про-
изойдет разрыв цепи защиты. Величина скорости в момент разрыва цепи защиты И должна
фиксироваться на осциллограмме, например, комплектом аппаратуры «Скиф» [54].
Для упрощения расчетов принимается, что Vn = V„ .
Для скиповых многоканатных подъемных установок, на которых имеется защита от спус-
ка груза на большой скорости, осциллограмма снимается на скорости срабатывания этой
защиты, но не более 1,5 м/с.
На осциллограммах записывается кроме скорости машины также момент разрыва цепи
защиты. Масштаб осциллограмм должен быть достаточным для их дальнейшей обработки.
Выполняется линеаризация полученных осциллограмм (рис. 13.20), по которым изме-
ряются и рассчитываются следующие параметры движения машины при предохранитель-
ном торможении с учетом масштабов осциллограммы:
Vn — скорость, при которой включился предохранительный тормоз, м/с;
ДИ — приращение скорости за время срабатывания тормоза, м/с;
ty — время, в течение которого за время срабатывания предохранительного тормоза ско-
рость увеличивается, с;
t3 — время, в течение которого в процессе предохранительного торможения скорость от
максимального значения снижается до нуля, с;
tq, — расчетное время срабатывания тормоза, с;
~ ускорение свободного выбега, .м/с2;
ДИ
а№ = (13.3.2)
1у
а'пт — средняя величина замедления при предохранительном торможении со скорости
подхода, м/с.
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
367
Таблица 13.4
№ п/п Наименование Обозначение Величина
1 Максимальная (номинальная) скорость движения под ъемных сосудов, м/с Ум
2 Фактическая высота (путь) переподъема. Для МК, ЦШ и вновь вводимых ШТ указывается высота свободного переподъема, м К
3 Величина (высота) переподъема, при которой срабатывают концевые от переподъема, м Кп
4 Длина разгрузочных кривых, м
5 Длина (высота) жестких направляющих при канатной армировке ствола, м h«H
6 Длина (высота) боковых направляющих при переходе подъемного сосуда с лобовых на боковые направляющие, м Ьбн
7 Время срабатывания концевого выкл. переподъема, с 1кп 0,1
8 Время срабатывания ограничителя скорости, с toe 0,1
9 Время срабатывания тормоза, с tcp 0,8
10 Расчетная «скорость дотягивания», м/с Va 0,5
И Допускаемая скорость подхода к приемной площадке 1,0 м/с - при спуске-подъеме людей 1,5 м/с - при спуске-подъеме груза Vn
12 Расчетная величина замедления по рабочей тахограмме 0,5 м/с2 - при углах наклона выработки до 30° 0,75 м/с2 - при углах наклона выработки свыше 30° a₽
13 Расчетная величина замедления при предохранительном торможении 0,75 м/с2 - при углах наклона выработки до 30° 1,5 м/с2 - при углах наклона выработки свыше 30° &1П
14 По осциллограмме спуска номинального груза в нижней части ствола: а^ - ускорение свободного выбега, м/с2 а'щ. - средняя величина замедления при предохранительном торможении со скорости подхода, м/с2 дУ - приращение скорости за время срабатывания тормоза, м/с Эсв
a in
дУ
15 Если осциллограмма не снималась, то расчетные величины ускорений и приращения скорости принимаются: ас, = 1,2 м/с2, дУ = 0,96 м/с - для барабанных грузовых и грузолюдских, а также одноконцевых людских подъемных установок; асв " 1,0 м/с2, дУ = 0,8 м/с - для людских подъемных установок; асв = 0,75 м/с2, дУ = 0,6 м/с - для всех подъемных установок с уравновешивающими канатами, а также для всех установок с углом наклона до 30° а'„г =1,2 м/с2 - для подъемов с углом наклона свыше 30° а'щ = 0,6 м/с2 - для подъемов с углом наклона до 30° Лев
a rrr
дУ
апт
(13.3.3)
Уп+ьу
Полученные данные записываются в таблицу 13.4 и используются в дальнейших расче-
тах. При этом, если величина а'^, рассчитанная по осциллограмме, будет меньше норма-
тивных значений, то в дальнейших расчетах принимается эта величина. В остальных случаях
апт принимается по предельно допустимым нормативным значениям.
368
ГЛАВА 13
Значение ускорения свободного выбега асв можно определять расчетным методом по
проектным данным установки как отношение максимальной разности натяжений ветвей
канатов к приведенной массе установки. После чего с учетом времени срабатывания тормо-
за определяется величина приращения скорости Д V . Величина апт принимается в этом слу-
чае, по предельнодопускаемым нормативным значениям.
В случаях, когда по каким-либо причинам осциллограмма предохранительного тормо-
жения при спуске номинального груза на скорости подхода не могут быть сняты и нет пол-
ных исходных данных для расчета ускорения свободного выбега, допускается в расчетах при-
нимать следующие величины:
= 1,25 .м/с2 — для грузовых и грузо-людских подъемных установок;
=1,0 .м/с2 — для людских подъемных установок;
= 0,75 .м/с2 — для всех подъемных установок с уравновешивающими канатами (ма-
шины МК, ШТ);
а'пт = 1,2 .м/с2 — для вертикальных и наклонных подъемов с углом наклона свыше 30°;
= 0’6 м/с2 ~ Д™ наклонных подъемов с углом наклона до 30°;
tq, = 0,8 с — время срабатывания тормоза.
Приращение скорости в таких случаях определяется по формуле:
(13.3.4)
До расчета тахограмм проверяется величина допустимой скорости подхода к конечным по-
ложениям по пути свободного переподъема и определяется минимальный путь «дотягивания».
После получения и расчета всех исходных данных (см. табл. 13.4) выполняется расчет и
Рис. 13.21. Тахограммы периода замедления:
1 — расчетная критическая; 2 — расчетная защитная; 3 — расчетная рабочая;
4 — фактическая защитная
Расчет и построение расчетных тахограмм удобнее выполнять на компьютере по про-
грамме расчета и построения тахограмм (Примеры расчета и построения тахограмм для ски-
пового подъема с канатными проводниками и клетевого подъема смотри 13.3.8.10 и 13.3.8.11).
Рассчитанные критическая, защитная и рабочая тахограмма строятся на одном рисун-
ке в одном и том же масштабе (см. рис. 13.21). Расположение защитной тахограммы по
отношению к рабочей и критической оценивается визуально, а при необходимости и рас-
четным путем, для исключения как ложных срабатываний ограничителя при возможных
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
369
отклонениях от предельной рабочей тахограммы, так и возможности неполного обеспече-
ния защитных функций вследствие приближения защитной тахограммы в отдельных точ-
ках пути к критической.
При необходимости выполняется корректировка рабочей и защитной тахограмм (на-
пример, изменением контролируемого пути дотягивания, снижением контролируемой или
рабочей скорости подхода и др.).
Необходимость такой корректировки защитной тахограммы по отношению к критичес-
кой показана на рис. 13.26 на примере клетевого подъема.
13.3.8.3. Расчет величины пути, не защищаемого ограничителем скорости
Не во всех случаях ограничитель скорости, настроенный на величину скорости подхода
допустимую ПБ, может защитить подъемную установку от аварийного переподъема или же-
сткой посадки подъемного сосуда.
Это обусловлено тем, что при спуске груза за время срабатывания предохранительного
тормоза и время торможения подъемный сосуд проходит определенный путь, который мо-
жет оказаться больше допустимого пути свободного переподъема, а скорость его в момент
подхода к точке возможной жесткой посадки может оказаться выше допустимой.
Поэтому на каждой подъемной установке должны быть определены допустимая скорость
подхода к концевому выключателю переподъема по фактической величине пути свободного
переподъема и путь, не защищаемый ограничителем скорости от жесткой посадки подъем-
ных сосудов.
Проверка и определение допустимой скорости подхода к концевым
выключателям переподъема
Концевые выключатели переподъема и ограничитель скорости могут обеспечивать за-
щиту от аварийного переподъема только в том случае, если путь при предохранительном тор-
можении окажется меньше или равным пути переподъема от места установки концевого
выключателя.
Путь торможения зависит от скорости подхода подъемного сосуда к конечному выклю-
чателю переподъема, времени его срабатывания и от настройки тормозной системы.
Поскольку к концевому выключателю переподъема сосуд может подойти со скоростью
подхода, на которую настроен ограничитель скорости, то путь торможения, проходимый
подъемным сосудом после его срабатывания, определяется формулой
ЛИ2 , (к„+дг/
2а№ 2апт
(13.3.5)
где tKn — время срабатывания концевого выключателя переподъема. В расчете принимается
^=0,1 с.
В величину пути свободного переподъема h* входит и расстояние от нормального поло-
жения подъемного сосуда при разгрузке до концевого выключателя переподъема, поэтому
минимальная величина пути свободного переподъема должна быть не менее
fyimin — + fyor (13.3.6)
Здесь — расстояние от нормального положения подъемного сосуда при разгрузке до
того из концевых выключателей переподъема (основного или дублирующего), который сра-
батывает при большей высоте переподъема, м, но не более 0,5 м.
Если величина получается больше, чем путь свободного переподъема И*, то необ-
ходимо уменьшить контролируемую ограничителем скорость подхода. В этом случае допус-
тимая скорость подхода будет равна:
К =
-\V2(
Ья.м.йлн»' ^+1
&св
@св
(13.3.7)
Полученную допустимую скорость подхода V' необходимо принять в расчетах защитной
тахограммы, а также при расчете пути, не защищаемого от жесткой посадки подъемного сосуда.
370
ГЛАВА 13
Путь, не защищаемый ограничителем скорости от жесткой посадки
В случае спуска груза и срабатывания ограничителя скорости на конечном участке пути
«дотягивания» за время срабатывания предохранительного тормоза подъемный сосуд дви-
жется с ускорением свободного выбега и к моменту подхода к конечному положению (воз-
можным точкам жесткой посадки) его скорость может быть выше допустимой.
Правила безопасности [13] допускают посадку сосуда со скоростью 1 м/с при спуске-
подъеме людей и 1,5 м/с при спуске-подъеме груза. Однако, посадка подъемного сосуда даже
с этими скоростями нежелательна. Поэтому при расчете величины пути, не защищаемого
ограничителем скорости от жесткой посадки , целесообразно считать, что сосуд к точкам
возможной жесткой посадки должен подходить с нулевой скоростью.
Путь, который пройдет подъемный сосуд в процессе предохранительного торможения
при спуске груза до полной остановки , если ограничитель сработал на скорости подхо-
да, определяется формулой:
ДИ2 | (И„+ДК)2
2а№ 2апт
(13.3.8)
где tK — время срабатывания ограничителя скорости, с.
Во всех расчетах принимается tK =0,1 с.
Рассчитанная величина пути физически означает, что при спуске груза с контроли-
руемой ограничителем скоростью подхода и срабатывании предохранительного тормоза в
точке ствола, отстоящей от возможной точки жесткой посадки на расстоянии большем или
равном , сосуд подойдет к этой точке с нулевой скоростью. Если срабатывание предох-
ранительного тормоза при той же скорости V произойдет на расстоянии менее , то со-
суд подойдет к этой точке со скоростью больше нуля, а в отдельных случаях и больше допу-
стимой скорости подхода.
13.3.8.4. Определение величины пути «дотягивания»
Опыт эксплуатации подъемных установок показывает, что при отклонениях в выполне-
нии рабочей тахограммы наиболее вероятно срабатывание ограничителя скорости в самом
начале пути контроля скорости подхода, поскольку, если подъемная машина к точке начала
контроля скорости подхода уже движется со скоростью ниже этой скорости, то вероятность
ее увеличения на оставшемся участке пути до контролируемой скорости подхода очень мала.
Поэтому введение в рабочую и защитную тахограммы пути «дотягивания», равного по вели-
чине , позволяет свести к минимуму вероятность жесткой посадки из-за наличия участка
пути, не защищаемого ограничителем скорости.
Исходя из изложенного, минимальная величина пути «дотягивания» hd должна составлять:
hd = h)Kn — для установок, на которых жесткая посадка исключается или возможна толь-
ко в точке конечной рабочей остановки (посадочные брусья, кулаки), но не менее 3 м для
клетей и не менее удвоенной длины разгрузочных кривых для скипов [32];
hd = ^жп+ ^жн — для установок с канатной армировкой ствола;
hd ~ ^жп + ^бн ~ ДЛЯ установок с переходом подъемного сосуда с лобовых направляющих
на боковые.
Здесь hM.H — длина жестких направляющих и ]цн — длина боковых направляющих, оп-
ределяется как их длина от начала (со стороны ствола) до конечного рабочего положения
подъемного сосуда. При этом, если на разных сосудах эта длина разная, следует брать боль-
шую длину.
Рассчитанная величина пути «дотягивания» учитывается как для рабочей, так и для за-
щитной тахограмм.
13.3.8.5. Критическая тахограмма
Величина скорости в момент разрыва цепи защиты, при которой в процессе предохра-
нительного торможения опускающийся сосуд с грузом остановится в нижнем конечном по-
ложении, а поднимающийся — в верхнем конечном положении, называется критической
скоростью.
Зависимость величины критической скорости от положения подъемных сосудов в ство-
ле называется критической тахограммой.
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
371
В настоящее время принято два варианта расчета критической тахограммы [17, 114]:
Вариант 1 — для условий, когда возможна жесткая посадка подъемного сосуда (имеются
посадочные брусья или кулаки, конструкция разгрузочных кривых не позволяет вход скипа
со скоростью выше предельной, имеется переход к жестким направляющим при канатной
армировке ствола или переход с лобовых направляющих на боковые и т. д.).
Вариант 2 — для условий, когда жесткая посадка исключается (клетевые подъемные ус-
тановки без кулаков или посадочных брусьев, скиповые с внешним приводом разгрузки и
загрузки скипов без посадочных брусьев), а ограничитель скорости должен только предотв-
ратить аварийный переподъем.
В первом варианте при расчете критической тахограммы процесс предохранительного
торможения должен окончиться в конечном рабочем положении подъемного сосуда.
Во втором варианте процесс предохранительного торможения должен закончиться в
конце пути свободного переподъема.
Расчет критической тахограммы по второму варианту допускает аварийную остановку
опускающегося подъемного сосуда ниже нормального рабочего положения, т. е. опускание
его в зумпф для вертикальных стволов, или в нерабочую тупиковую часть выработки для
наклонных стволов.
Учитывая периодичность чистки зумпфов, их заполнение водой, возможность попада-
ния посторонних предметов на путь в нерабочей зоне наклонных выработок целесообразно
расчет критической тахограммы для всех подъемных установок вести из условия, чтобы про-
цесс предохранительного торможения заканчивался в точке конечной рабочей остановки
(нормального положения при разгрузке), т. е. по варианту 1.
Критическая тахограмма рассчитывается в диапазоне скоростей J< = O-s-l,15J^ по фор-
муле:
_(К,+ДИ)2
ЛЙ - --------
2°пт
(13.3.9)
2
При расчете принимаются: апт = 0,75 м/с1 для наклонных подъемов с углом наклона до
30°, апт = 1,5 м/с1 для вертикальных и наклонных подъемов с углом наклона свыше 30°. Для
многоканатных подъемных установок и установок со шкивами трения, если по условию пре-
дотвращения скольжения канатов по канатоведущему шкиву величина среднего замедления
должна быть меньше 1,5 м/с, тогда величина апт = 1,2 м/с1.
13.3.8.6. Расчетная защитная тахограмма
Расчетная защитная тахограмма — это зависимость значений скорости от положения
подъемных сосудов в стволе, при достижении которых должно происходить срабатывание
ограничителя скорости. Она определяет на каком расстоянии от конечного положения и при
какой скорости должен сработать ограничитель скорости.
По этой тахограмме должен настраиваться ограничитель скорости.
Ограничитель скорости обеспечит безопасную эксплуатацию подъемной установки, если
его защитная тахограмма не будет пересекаться с критической в диапазоне скоростей
гл...1,15р;.
Расчет защитной тахограммы на участке замедления выполняется в диапазоне скорос-
тей V( =Vn ...1,15/" с учетом минимального для данной установки пути «дотягивания» [150].
И2.-И2
h3i=^—^+hd.
2.0 3
Здесь а3 — величина расчетного замедления по защитной тахограмме [6]:
1152И 2-И2
= а ---------г_п_
р
(13.3.10)
(13.3.11)
л2-И?
м г о
ар — допускаемая величина рабочего замедления [14]; ар = 0,5 м/с1— для наклонных подъем-
ных установок с углом наклона до 30°; ар = 0,75 м/с1— для вертикальных и наклонных подъем-
ных установок с углом наклона свыше 30°.
372
ГЛАВА 13
В случае пересечения защитной тахограммы с критической следует увеличить путь «до-
тягивания».
13.3.8.7. Расчетная рабочая тахограмма
Тахограмма, выполняемая во время нормальной работы подъемной установки, называ-
ется рабочей.
Нормы технологического проектирования подъемных установок предусматривают для
скиповых и клетевых подъемов семипериодные тахограммы. Величина основного ускорения и
замедления для вертикальных людских и грузовых подъемов не должна превышать 0,75 м/с2, а
для наклонных подъемов с углом наклона до 30°—0,5 м/с2. Ускорение при трогании с места и
замедление при стопорении не должно превышать 0,3 м/с2.
Семипериодная тахограмма включает следующие участки пути (периоды):
1 — Разгон до скорости 0,5 м/с
2 — Отход сосудов от конечного положения со скоростью 0,5 м/с.
Суммарный путь движения первого и второго участка тахограммы принимается не менее
1,5 м для клетей, а для скипов не менее длины разгрузочных кривых, увеличенных на 0,5 м.
3 — Разгон машины от скорости 0,5 м/с до максимальной скорости равномерного хода.
4 — Движение машины с максимальной скоростью равномерного хода.
5 — Снижение скорости с максимальной до скорости 0,5 м/с.
6 — Движение машины со скоростью 0,5 м/с («дотягивание»).
7 — Стопорение машины в конечной рабочей точке пути подъема (снижение скорости с
0,5 м/с до 0).
Суммарный путь движения на 6 и 7 участках тахограммы следует принимать не менее 3
м для клетей и не менее удвоенной длины кривых для скипов.
В период разгона для вертикальных и наклонных (более 30°) подъемных установок, пред-
назначенных для подъема и спуска людей, расчетное значение ускорения не должно превы-
шать 1 м/с2, а для наклонных установок до 30°—0,75 м/с2. Величина ускорения для грузовых
подъемных установок определяется проектом [14].
Расчетное значение замедления принимается по табл. 13.4. Допускается превышение
расчетных рабочих замедлений при условии, что среднее замедление при предохранитель-
ном торможении в режиме спуска груза будет больше расчетного рабочего замедления не
менее чем в 2 раза [14].
Рабочая тахограмма должна строиться с учетом требований [32]. При этом для автома-
тизированных подъемных установок рассчитывается полная рабочая тахограмма, по кото-
рой настраивается схема (аппарат) заданной скорости системы автоматического управления.
Период рабочей тахограммы для участка замедления рассчитывается в диапазоне скоро-
стей у.-Уд..Ум по предельно допустимым значениям скорости «дотягивания» и рабочего
замедления по формуле:
К2-И?
hpi=-4y^+hd. (13.3.12)
2аР
Здесь Vd = 0,5 м/с — предельно допустимая величина скорости «дотягивания»; ар= 0,75 м/с2 —
для вертикальных и наклонных подъемов с углом наклона более 30°; ар= 0,5 м/с2 — для на-
клонных подъемов с углом наклона до 30°.
Пересечение рабочей и защитной тахограмм не допускается.
При ручном управлении подъемной машиной определяется точка начала замедления при
подходе подъемных сосудов к конечным положениям, которая должна находиться на 1—2 м
раньше точки начала контроля снижения скорости на защитной тахограмме. В этой точке,
отмеченной на указателе глубины, должен включаться автоматический звонок, сигнализи-
рующий машинисту о начале периода замедления.
В инструкции для машиниста по управлению подъемной машиной должны быть указа-
ны величина пути, проходимого в начале цикла на скорости дотягивания, и величина пути
дотягивания. Эти величины целесообразно отметить на указателе глубины.
13.3.8.8. Проверка и построение фактической защитной тахограммы
Фактическая защитная тахограмма — это тахограмма, на которую реально настроен ог-
раничитель скорости и выражает зависимость фактической величины скорости, при кото-
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
373
рой срабатывает ограничитель скорости, от расстояния подъемного сосуда до точки конеч-
ной рабочей остановки.
Проверка фактической защитной тахограммы производится после построения узла за-
данной скорости (изготовление и установка профиля, подбор передачи к роторам сельсинов
программы заданной скорости и др.) и наладки ограничителя скорости.
Ограничитель скорости ХЭМЗ с командоаппаратами РОС5914
Если это ограничитель скорости повышенной надежности, то желательно снимать за-
щитную тахограмму для каждого контура, или на контуре наиболее «затрубленном», т. е. ко-
торый настроен либо на большую скорость подъезда или на большее превышение скорости
или на профиле, соответствующему наименьшему контролируемому пути. Приборы для из-
мерения напряжений настройки ограничителя скорости должны быть астатические или се-
рии «М» (магнитоэлектрические). Многопредельные приборы типа «Ц» будут давать разные
показания при измерении постоянного и выпрямленного токов.
Для снятия фактической защитной тахограммы необходимо собрать схему, приведен-
ную на рис. 13.22. Напряжение, подводимое от постороннего источника постоянного тока,
подается последовательно с якорем тахогенератора. В этом случае это напряжение будет равно
ЭДС тахогенератора. Как известно, э.д.с. пропорциональна числу оборотов тахогенератора.
Имеющиеся в схеме тахогенератора другие цепи, не относящиеся к ограничителю (скорос-
темер, обратные связи для ДТ и др.), отключать при снятии фактической защитной тахог-
раммы не требуется. Тахограмму необходимо снимать при подъезде подъемного сосуда к ко-
нечному положению, а не при его отъезде.
Рис. 13.22. Схема для определения параметров ограничителя скорости РОС-5914:
— сопротивление якоря тахогенератора ТГ; Кщ — переходное сопротивление щеток
тахогенератора; Rnp — сопротивление проводов схемы ограничителя; Rpac — сопротивление катушек
реле РОС; Rpicu — сопротивление катушек реле РКИ (РКЦ); RHee — невыключаемое сопротивление
командоаппарата КА; Rpei —регулируемое сопротивление командоаппарата КА
Фактическая защитная тахограмма строится на том же листе, где построены расчетные
тахограммы. Начать построение рекомендуется с нанесения линий соответствующих факти-
ческой скорости подъезда и фактического превышения максимальной скорости. Начинать
снятие фактической защитной тахограммы необходимо с установки подъемных сосудов в
такое положение, чтобы профиль был вблизи ролика командоаппарата, на котором будем
снимать фактическую защитную тахограмму. Подать напряжение на ЛАТР. Выбрать необхо-
димую полярность для командоаппарата, на котором будем снимать фактическую защитную
тахограмму, увеличить ЛАТРом напряжение до срабатывания реле РОС и определить по вольт-
374
ГЛАВА 13
метру PV величину напряжения при этом — UcpM - Подсчитать величину напряжения, соот-
ветствующие скорости 1 м/с.
(13.3.13)
Здесь: п — коэффициент, учитывающий настройку ограничителя на превышение мак-
симальной скорости (л<1,15).
Уменьшить напряжение в схеме до «О». Открыть аппарат и, медленно перемещая сосуды
«наезжать» профилем на ролик командоаппарата. Следить за положением подвижного кон-
такта командоаппарата. Как только подвижный контакт командоаппарата коснется 4-й клем-
мы командоаппарата снизу (положение I подвижного контакта на рис. 13.23), остановить
подъемную машину. Нанести метку на профиле и барабане или указателе глубины. Эта точ-
ка «а» на тахограмме характерна тем, что в этом месте ствола окончился контроль превыше-
ния максимальной скорости и начался контроль снижения скорости, а расстояние от нее до
конечного положения сосуда — это путь замедления, контролируемый ограничителем ско-
рости (см. рис. 13.21).
Затем при помощи ЛАТРа (рис. 13.22)
установить по вольтметру PV напряжение,
соответствующее максимальной скорости
подъема. Медленно перемещая сосуд в
сторону «наезда» профиля на ролик ко-
мандоаппарата доводим до срабатывания
РОС (контакт реле РКИ должен быть за-
шунтирован). Для исключения влияния
э.д.с. тахогенератора при перемещении
машины на результаты испытания в этом
случае необходимо снять ремень или от-
ключить обмотку возбуждения тахогенера-
тора. Нанести метку на барабане или ука-
зателе глубины. Это точка «в». На профи-
ле в месте его касания с роликом КА, на-
носим постоянную метку. Точка «в» тахог-
раммы характерна тем, что при испытании
ограничителя скорости методом «наезда»
на максимальной скорости в этом месте
профиля должно происходить срабатыва-
ние ограничителя скорости. Затем остав-
шуюся часть пути до конечного положе -
Рис. 13.23. Схема внутренних соединении
командоаппарата РОС-5914:
R — невыключаемое сопротивление;
R—регулируемое сопротивление
ния сосудов необходимо разбить на несколько участков. Рекомендуется 5—6 промежуточных
точек. Останавливая подъемные сосуды на границе этих участков сделать метки на барабане
или указателе глубины и при помощи ЛАТРа по вольтметру PV определить для каждой точ-
ки напряжение Ut, при котором срабатывает реле РОС. Так как в этом случае напряжение
Ц равно Э.Д.С. тахогенератора, то по нему определяем скорость, при которой происходило
срабатывание реле РОС в каждой точке.
(13.3.14)
Последнюю характерную точку фактической защитной тахограммы скорости получим следу-
ющим образом: при открытом командоаппарате РОС-5914 делаем дальнейший «наезд» профиля
на ролик командоаппарата и следим за перемещением подвижного контакта РОС-5914. ЛАТР дат-
жен быть в нулевом положении (на выходе напряжение равно «О»). Как только подвижный кон-
такт РОС-5914 коснется 3-й сверху клеммы командоаппарата (положение II подвижного контакта
на рис. 13.23), необходимо остановить машину Нанести метку на барабане. С момента замыкания
3-го сверху контакта все регулируемое сопротивление будет выведено и начнется контроль скоро-
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
375
сти подхода. После нанесения метки, медленно перемещая машину, остановить подъемные сосу-
ды в конечном положении. Измерить расстояние от конечного положения до метки, сделанной в
момент касания подвижного контакта с 3-й сверху клеммы. Полученное расстояние в масштабе
отложить на линии фактической скорости подъезда. Получим точку «с».
Расстояние от этой точки до конечного положения сосуда — это путь «дотягивания», на
котором ограничитель скорости контролирует скорость подхода.
Теперь необходимо измерить все расстояния от конечного положения до каждой точки
занести в протокол и по расстоянию и величине скорости, при которой срабатывает ограни-
читель в этой точке, построить фактическую защитную тахограмму (рис. 13.21).
а б
I
к'хема ограничителя
Рис. 13.24. Схема для определения параметров защитной тахограммы:
а — ограничители с командоаппаратами РОС 5914; б — ограничители ЭОСЗ (ЭОС 2)
При правильно построенном профиле фактическая защитная тахограмма должна быть
близка к расчетной или совпадать с ней.
Пересечение фактической защитной и расчетной критической на пути контроля сниже-
ния скорости в диапазоне скоростей недопустимо.
Ограничитель скорости ЭОС-3
Снятие фактической защитной тахограммы скорости выполняется после окончания на-
ладки ограничителя скорости при движении подъемных сосудов к конечным положениям
для каждого из каналов контроля (выключатель В6 установить в положение «Настройка») в
следующей последовательности.
Подключить контрольный вольтметр PV параллельно установленному в аппарате вольт-
метру VI или V2 (см. рис. 13.24, б). Контрольный вольтметр должен быть астатическим или
магнитоэлектрической системы класса не ниже 1,5.
При движении машины с максимальной (номинальной) скоростью VM определить ве-
личину напряжения UM тахогенератора, соответствующую этой скорости.
Выключатель В1 установить в положение 3 «Проверка». Потенциометр RP7 установить
в положение «min» (рис. 13.11).
Двигаясь с малой скоростью к приемной площадке остановить машину в момент пере-
ключения этажных выключателей ЭВ38 при движении «вперед» или ЭВ 17 при движении
«назад». Сделать метку на барабане (шкиве) машины. Эта точка «а» характерна тем, что в
ней оканчивается путь контроля величины скорости 1,15 VM и начинается контроль пути сни-
жения скорости — h3 (см. рис. 13.21).
(Здесь и далее по тексту все обозначения приведены в соответствии с заводским «Руко-
водством по эксплуатации ограничителя скорости электрического ЭОС-3»).
Повышая напряжение потенциометром RP7 по контрольному вольтметру PV определить
и записать величину напряжения UcpM , при котором срабатывает реле РОС в этой точке.
Определить фактический коэффициент п, учитывающий настройку ограничителя ско-
рости на превышение максимальной скорости.
и = (13.3.15)
376
ГЛАВА 13
Определить величину напряжения I/, соответствующую скорости 1 м/с:
и,=-^. (13.3.16)
п VM
Двигаясь далее в момент переключения дублирующих этажных выключателей ЭВ 16
(ЭВ37) остановить машину, сделать метку на барабане (шкиве) и потенциометром RII7, по-
вышая напряжение, определить и записать величину напряжения срабатывания реле РОС в
этой точке. Следует отметить, что величина пути от точки переключения ЭВ38 (ЭВ17) до
точки переключения ЭВ 16 (ЭВ37) должна быть в пределах 1—5 м.
Остановить машину еще в 3-х — 4-х точках пути замедления (например, 0,75; 0,5 и 0,25
от контролируемого пути снижения скорости — /^) с нанесением меток на барабане (шкиве)
машины и таким же способом определить и записать напряжение срабатывания реле РОС в
каждой из этих точек.
Выключатель В1 установить в положение 2 «Проверка». Резистор RP6 (рис. 13.11) дол-
жен быть установлен и зафиксирован в положении соответствующем по напряжению конт-
ролируемой скорости подхода Vn (было выполнено при наладке ограничителя). Очень мед-
ленно продолжать движение машины в сторону конечного положения подъемных сосудов
до срабатывания реле РОС (машина затормозится предохранительным тормозом). Сделать
очередную метку на барабане (шкиве) машины. Это точка «с» начала контроля ограничите-
лем скорости подхода V (см. рис. 13.21). Если для увеличения пути дотягивания в схеме
использованы этажные выключатели ЭВ 15 (ЭВ36) остановить машину в момент переключе-
ния этих выключателей и потенциометром RP6 определить напряжение срабатывания реле
РОС в этой точке.
После этого подъемные сосуды установить в крайних положениях («точная остановка»),
сделать последнюю отметку на барабане (шкиве) машин и потенциометром RH6 определить
напряжение, при котором срабатывает реле РОС в этой точке.
От этой точки (или от точки начала замедления) измеряют последовательно путь до
каждой отмеченной ранее точки.
Определяют скорость машины, при которой срабатывает реле РОС, в каждой из этих
точек:
К=-. (13.3.17)
' U,
По полученным данным заполнится протокол и строится фактическая защитная тахог-
рамма = /(Л; ) на том же листе, что и расчетные тахограммы.
Фактическая защитная тахограмма в диапазоне скоростей Vn -s-1,15 VM не должна пересе-
каться с расчетной критической тахограммой. В случае их пересечения необходимо произве-
сти корректировку настройки ограничителя (сделать более ранним включение этажных вык-
лючателей ЭВ 38 и ЭВ 17) и повторно снять фактическую защитную тахограмму.
После окончания снятия фактической защитной тахограммы потенциометры КП6 и ЯП 7
установить и зафиксировать в положениях соответствующих скорости подхода Vn и превыше-
нию максимальной скорости 1,15^. Выключатели В1 и В6 установить в положение «работа».
13.3.8.9. Проверка и построение фактической критической тахограммы
Проверка фактической критической тахограммы выполняется после окончания всех
работ по ревизии, наладке и испытанию тормозной системы подъемной машины и ограни-
чителя скорости при ежегодной ревизии и наладке подъемной установки, а также после ре-
монта и переналадки тормозной системы или ограничителя скорости.
Для построения фактической критической тахограммы необходимо провести испыта-
ния и экспериментально определить величины тормозных путей для нескольких значений
скорости, при которой происходит разрыв цепи защиты предохранительного тормоза. Реко-
мендуется испытания проводить при максимальной скорости VM; скоростях примерно рав-
ных 0,75 VM\ 0,5 VM; 0,25 VM, а также при скорости подхода Vn, контролируемой ограничите-
лем скорости, и скорости дотягивания Vd.
АП ПАРА ТЫ ЗАЩИТЫ И БЛОКИРОВКИ
377
Испытания проводятся для наиболее тяжелых режимов работы:
— спуск расчетного груза для клетевых подъемных установок;
— перегон порожних сосудов для скиповых подъемных установок;
— спуск противовеса при подъеме порожнего подъемного сосуда на подъемных уста-
новках с противовесом.
При проведении испытаний необходимо выполнять организационные и технические
мероприятия, обеспечивающие безопасное выполнение работ по испытанию ограничителя
скорости методом наезда [17].
Наиболее быстро, удобно и точно проводить указанные испытания при помощи устрой-
ства (прибора), позволяющего фиксировать и запоминать величину скорости в момент раз-
рыва цепи защиты и путь торможения, проходимый подъемным сосудом с момента разрыва
цепи защиты до полной остановки [151].
Испытания проводятся следующим образом.
При движении машины с максимальной скоростью на расстоянии от нижнего конечно-
го положения подъемного сосуда равном 1,5 величины расчетного пути, контролируемого
ограничителем скорости, включают предохранительный тормоз и фиксируют в этот момент
величину скорости и путь торможения. Также фиксируются указанные параметры и для дру-
гих скоростей движения машины. При этом на малых скоростях движения (0,251^;Vn uVd)
расстояние до нижнего конечного положения подъемного сосуда в момент включения пре-
дохранительного тормоза должно составлять около 0,5 величины пути, контролируемого ог-
раничителем скорости.
Результаты испытаний сводятся в таблицу и строится фактическая критическая тахог-
рамма на том же месте, что расчетные и фактическая защитная.
После окончания испытаний определить фактический запас по пути при предохрани-
тельном торможении с максимальной скорости движения машины VM, как разность вели-
чины пути при скорости VM по фактической защитной тахограмме и величины пути при ско-
рости VM по фактической критической тахограмме.
Величина запаса по пути торможения должна быть не менее величины:
V M — для скиповых и грузовых клетевых подъемных установок;
1,51^ — для людских и грузолюдских подъемных установок.
В случае получения фактического запаса по пути торможения меньше рекомендуемого
необходимо увеличить контролируемый ограничителем путь замедления путем увеличения
пути «дотягивания».
13.3.8.10. Пример расчета и построения тахограмм скипового подъема с канатными провод-
никами
Исходные данные
VM = 8,75 — максимальная (номинальная) скорость движения подъемных сосудов, м/с;
Д,= 12 — фактическая высота (путь) переподъема. Для МК, ЦШ и вновь вводимых ШТ
указывается высота свободного переподъема, м;
7^= 0,5 — величина (высота) переподъема, при которой срабатывают концевые от пе-
реподъема, м;
hpK = 2,2 — длина разгрузочных кривых, м;
^жн =7 — длина (высота) жестких направляющих при канатной армировке ствола, м;
tKn = 0,1 — время срабатывания концевого выкл. переподъема, с;
/^=0,1 — время срабатывания ограничителя скорости, с;
1^ = 0,8 — время срабатывания тормоза, с;
Vd= 0,5 — расчетная «скорость дотягивания», м/с,
Vn= 1,5 — допускаемая скорость подхода к приемной площадке 1,0 м/с — при спуске-
подъеме людей; 1,5 м/с — при спуске-подъеме груза;
ар = 0,75 — расчетная величина замедления по рабочей тахограмме 0,5 м/с2 — при углах
наклона выработки до 30°; 0,75 м/с2 — при углах наклона выработки свыше 30°;
апт = 1,5 — расчетная величина замедления при предохранительном торможении; 0,75 м/с2 —
при углах наклона выработки до 30°; 1,5 м/с2 — при углах наклона выработки свыше 30°;
378
ГЛАВА 13
=1,25 — ускорение свободного выбега, м/с2;
а'пт =1,2 — средняя величина замедления при предохранительном торможении со ско-
рости подхода, м/с2;
A V —1 — приращение скорости за время срабатывания тормоза, м/с.
Расчетная минимальная величина пути переподъема — 4,9 м.
Расчетная величина допустимой скорости подхода — 1,5 м/с.
Расчетная величина пути, не защищаемого ограничителем скорости от жесткой посадки — 4,4 м.
Таблица 13.5
Расчет критической, защитной и предельной рабочей тахограмм
Скорость, м/с 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5 7.0
Критическая, м 1.6 2.6 3.8 5.2 6.7 8.4 10.3 12.3 14.5 16.9 19.4 22.1 25.0 28.0
Защитная, м 0.0 0.0 11.4 12.3 13.4 14.8 16.5 18.4 13.6 23.0 25.7 28.7 31.9 35.4
Рабочая, м 11.4 11.9 12.7 13.9 15.4 17.2 19.4 21.9 24.7 27.9 31.4 35.2 39.4 43.9
Скорость, м/с 7.5 8.0 8.5 8.8 10.1
Критическая, м 31.2 34.6 38.1 40.0 50.2
Защитная, м 39.1 43.1 47.3 49.5 62.2
Рабочая, м 48.7 53.9 59.4 62.2
Общий контролируемый путь — 62,2 м.
Контролируемый путь дотягивания — 11,4 м.
Примечание: Указан контролируемый путь до точки конечной рабочей остановки.
Рис. 13.25. Тахограммы периода замедления для примера расчета тахограмм скипового
подъема с канатными проводниками:
1 — расчетная критическая; 2 — расчетная защитная; 3 — расчетная рабочая
13.3.8.11. Пример расчета и построения тахограмм клетевого подъема
Исходные данные
VM =8,75 — максимальная (номинальная) скорость движения подъемных сосудов, м/с;
/^,=12 — фактическая высота (путь) переподъема. Для МК, ЦШ и вновь вводимых ШТ
указывается высота свободного переподъема, м;
=0,5 — величина (высота) переподъема, при которой срабатывают концевые от пере-
подьема, м;
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
379
tKn =0,1 — время срабатывания концевого выкл. переподъема, с;
tx =0,1 — время срабатывания ограничителя скорости, с;
/о>=0,8 — время срабатывания тормоза, с;
Vd =0,5 — расчетная «скорость дотягивания», м/с;
Vn=1,0 — допускаемая скорость подхода к приемной площадке 1,0 м/с — при спуске-
подъеме людей; 1,5 м/с — при спуске-подъеме груза;
=0,75 — расчетная величина замедления по рабочей тахограмме 0,5 м/с/ — при углах
наклона выработки до 30°; 0,75 м/с/ — при углах наклона выработки свыше 30°;
апт=1,5 — расчетная величина замедления при предохранительном торможении 0,75 м/с/ —
при углах наклона выработки до 30°; 1,5 м/с/ — при углах наклона выработки свыше 30°;
=0,62 — ускорение свободного выбега, м/с/-,
dnm=\,2 — средняя величина замедления при предохранительном торможении со ско-
рости подхода, м/с/-,
АИ=0,5 — приращение скорости за время срабатывания тормоза, м/с;
Расчетная минимальная величина пути переподъема — 2,54 м.
Расчетная величина допустимой скорости подхода —1,0 м/с.
Расчетная величина пути, не защищаемого ограничителем скорости от жесткой посадки — 2,04 м.
Таблица 13.6
Расчет критической, защитной и предельной рабочей тахограмм
Скорость, м/с 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0 6,5 7,0
Критическая, м 1,0 1,9 2,9 4,1 5,5 7,0 8,7 10,6 12,6 14,8 17,1 19,7 22,4 25,3
Защитная, м 0,0 3,0 3,6 4,5 5,7 7,1 8,7 10,6 12,8 15,2 17,8 20,8 23,9 27,4
Рабочая, м 3,0 3,5 4,3 5,5 7,0 8,8 11,0 13,5 16,3 19,5 23,0 26,8 31,0 35,5
Скорость, м/с 7,5 8,0 8,5 8,8 10,1
Критическая, м 28,3 31,5 34,9 36,6 46,4
Защитная, м 31,0 35,0 39,2 41,3 53,9
Рабочая, м 40,3 45,5 51,0 53,9
Общий контролируемый путь — 53,88 м.
Контролируемый путь дотягивания — 3,00 м.
Примечание: Указан контролируемый путь до точки конечной рабочей остановки.
Рис. 13.26. Тахограммы периода замедления для периода расчета тахограмм клетевого подъема:
1 — расчетная критическая; 2 — расчетная защитная; 3 — расчетная рабочая
380
ГЛАВА 13
Рис. 13.27. Схема разгрузки скипов:
1 — ось проводников; 2 — кузов; 3 — затвор;
4 — лоток; 5 — приемный бункер; 6 — траектория
разгрузочного ролика затвора; 7 — траектория оси
затвора; 8 — окончание открываний затвора; 9 — начало
открываний затвора; 10 — разгрузочная кривая;
11 — ход ролика
Таблица 13.7
Длина разгрузочных кривых для скипов угольных шахт
Скипы для одноканатных Скипы для многоканатных
подъемных установок подъемных установок
Типоразмер скипа Емкость, м3 Длина кривых, м
2СН4-1 4,0 2,2
2СН5-1 5,0 2,2
1СН7-1 7,0 2,2
2СН9,5-1 9,5 2,2
1СН11-1 11,0 2,2
5СН11-1 п,о 2,2
2СН15-1 15,0 2,2
1СН20-1 20,0 2,2
СН4-170-1,8 4,0 2,5
СН5-185-1,8 5,0 2,4
СН7-185-1,8 7,0 2,4
СН9,5-185-1,8 9,5 2,4
СН9,5-185-1,1 9,5 2,4
СНП-185-1,8 11,0 2,4
СНП-185-1,1 п,о 2,4
СНП-223-1,1 п,о 2,6
СН15-223-1Д 15,0 2,6
Типоразмер скипа Емкость, м3 Длина кривых, м
2СН9,5-2 9,5 2,2
1 СНП-2 11,0 2,2
5СН11-2 11,0 2,2
2СН15-2 15,0 2,2
1СН20-2 20,0 2,2
ЗСН20-2 20,0 2,4
1СН25-2 25,0 2,4
2СН25-2 25,0 2,4
1СН35-2 35,0 2,4
2СН35-2 35,0 2,4
1СН55-2 55,0 2,6
СНМ9,5-185-1,8 9,5 2,4
СНМ9,5-185-1,1 9,5 2,4
СНМ11-185-1,8 п,о 2,4
СНМП-185-1,1 11,0 2,4
СНМ11-223-1,8 п,о 2,6
СНМП-223-1,1 11,0 2,6
СНМ15-223-1Д 15,0 2,6
СНМП20-223-1Д 20,0 2,6
СНМП20-280-1Д 20,0 3,0
СНМП25-235-1Д 25,0 2,6
СНМП25-280-1Д 25,0 3,0
СНМП35-235-1Д 35,0 2,6
СНМП35-280-1Д 35,0 3,0
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
381
13.3.9. Методика проверки ограничителей скорости
Расчет профилей и задающих устройств, а также наладка ограничителей скорости дос-
таточно полно описаны в литературе [17].
Анализ многочисленных аварий, связанных в той или иной степени с работой ограни-
чителя скорости, позволяет сделать вывод, что многие аварии произошли не только из-за
несовершенства конструкции аппаратов, но также из-за неправильных действий обслужива-
ющего персонала.
На скиповом подъеме шахты «Калиновская-Восточная» производственного объеди-
нения «Макеевуголь» обслуживающий персонал ошибочно изменил полярность тахогене-
ратора. В результате ограничитель скорости, изготовленный по схеме ХЭМЗа, не контро-
лировал скорость подхода, так как диоды в цепи соответствующих командоаппаратов ока-
зались включенными в непроводящем направлении. Это в итоге привело к аварии с пере-
подьемом сосудов.
В некоторых случаях из-за неправильной настройки или других причин обслуживаю-
щий персонал на некоторое время выводит из работы ограничитель скорости, что совер-
шенно недопустимо.
В свое время были приняты меры по фиксации задающих профилей, отметке на профи-
лях положение роликов рычагов командоаппаратов РОС5914 в конечных положениях подъем-
ных сосудов, пломбированию реле и др., что способствовало снижению числа отказов ограни-
чителей скорости. Тем не менее, на многих подъемных установках отсутствует или нарушена
фиксация профилей электрических ограничителей скорости на ретардирующих дисках. Фик-
сация профилей нередко нарушалась после замены футеровки органа навивки, подъемных
канатов или других ремонтных работах. Кроме того, на профилях отсутствуют или закрашива-
ются контрольные метки нормального их положения. В результате, в крайних положениях
подъемных сосудов сопротивления командоаппаратов электрических ограничителей скорости
выводится не полностью и в контуре ограничителя скорости остаются одна, две и более ступе-
ней сопротивлений командоаппарата, что приводит к завышению контролируемой скорости
подъезда к приемной площадке. Поскольку ограничитель скорости проверяют косвенным пу-
тем (поворотом рукоятки универсального выключателя), или нажатием рычага командоаппа-
рата до упора, ухудшение параметров настройки электрического ограничителя скорости из-за
неправильной установки профилей такой проверкой не обнаруживается. Таким образом, на-
дежность защиты от превышения скорости в немалой степени зависит от своевременной и
квалифицированной проверки ограничителей скорости обслуживающим персоналом соглас-
но требованиям ПБ, ПТЭ и регламентирующим инструкциям и методикам.
Наряду с известными способами целесообразно использовать методику проверки элект-
рического ограничителя скорости методом «наезда», разработанную Донбассуглеавтоматикой
для барабанных подъемных машин. Известные способы проверки (например, выведения про-
филя или шунтирование командоаппарата РОС-5914 и др.) весьма несовершенны, так как они
лишь имитируют превышение скорости и не дают достаточной уверенности в работе аппарата
для режима действительного превышения скорости. Это в равной степени относится и к аппа-
ратам типа ЭОС, которые проверяют на неподвижной машине. Поэтому ограничитель скоро-
сти следует проверять наездом на профиль с заведомо повышенной скоростью, с последую-
щей оценкой величины запаса пути торможения. Однако, указанный способ таит в себе опас-
ность аварийного переподъема. Ведь сама по себе проверка ограничителя скорости связана с
сомнением в его исправной работе, а если такое сомнение существует, то можем ли мы с дос-
таточной уверенностью допускать действительное преднамеренное превышение скорости в
опасной зоне основного замедления. Отсюда следует, что проверять ограничитель скорости в
условиях максимально приближенных к действительным должны на достаточно безопасном
расстоянии подъемных сосудов от крайних положений — на удалении 1,5—2,0 — кратного пути,
контролируемого ограничителем. Такую проверку называют «Метод наезда».
При расчете пути, контролируемого ограничителем скорости, и построении защитной
диаграммы расчетное замедление при предохранительном торможении принимают на 25 %
ниже действительного значения, полученного при испытаниях.
Ожидаемая максимальная величина запаса пути торможения 53 при исправно работа-
ющем предохранительном тормозе, правильной настройке ограничителя может быть опре-
делена по формуле
382
ГЛАВА 13
(l,15i>)2 (1.15ц)2 (1,15ц)2
3 2а30,75 2а3 6
(13.3.18)
где v — скорость подъема, при которой срабатывает предохранительный тормоз, м/с; а3 —
замедление при предохранительном торможении при спуске груженого сосуда, м/с2.
Если принять расчетную величину замедления на 25 % выше минимально допустимой
для вертикальных подъемов (1,5 м/с2), то минимальный запас пути торможения при различ-
ных скоростях подъема можно рассчитать по приведенной ранее формуле.
V.... 10 8 6 4 3
S3.... 8,8 5,5 3,16 1,4 0,8
Запасы пути торможения при больших действительных замедлениях в случае прочих
равных условий будут иметь соответственно большие значения. Поэтому можно было бы
приведенные запасы пути торможения считать минимально допустимыми при проверке
ограничителя скорости способом методом «наезда», так как в момент проверки тормозная
система должна быть исправна и создавать замедление не менее l,2a3min. Если при провер-
ке все же окажется, что величина запаса пути торможения меньше приведенной величи-
ны, следует проверить правильность настройки РОС (ЭОС), соответствие контролируемо-
го пути расчетному.
Проверяют работу ограничителя методом «наезда» после окончания работ по ревизии и
наладке тормозной системы и ограничителя скорости в режиме спуска расчетного груза с
соблюдением необходимых мер безопасности.
Суть проверки заключается в следующем: подъемный сосуд (противовес), при спуске
которого проверяют ограничитель скорости, устанавливают на расстоянии, вдвое превыша-
ющем расчетный путь замедления от крайнего положения; затем совмещают метки на указа-
теле глубины. При этом для машин с ограничителем скорости, изготовленным по схеме
ХЭМЗа, рассоединяют вал указателя глубины и вращением штурвала совмещают метку, обо-
значающую конечное положение профиля, с роликом соответствующего командоаппарата.
При этом стрелка указателя глубины, соответствующая сосуду, которым осуществляют на-
езд, должна занять нижнее крайнее положение.
Для машины же с ограничителем скорости ЭОС и аппаратом АЗК-1 (АКХ) корректо-
ром стрелку сельсинного указателя совмещают с меткой, соответствующей конечному по-
ложению сосуда, которым осуществляют «наезд». При этом необходимо заметить, сколько
оборотов сделал диск точного отсчета указателя глубины. На подъемных машинах типа
БЦКБ допускают производить «наезд» дополнительными профилями, полностью соответ-
ствующими рабочим, которые устанавливают на ретардирующем диске на время провер-
ки. При проверке один из членов бригады располагается у аварийной кнопки и контроли-
рует действия машиниста подъема. Чтобы разогнать машину до максимальной скорости,
перемещают подъемный сосуд в ствол на соответствующее расстояние от фиктивной точ-
ки начала замедления. Далее машинист разгоняет машину до максимальной скорости и
движется, пока профиль ретардирующего диска не начинает выводить командоаппарат.
Руководитель наладочной бригады в это время контролирует момент срабатывания огра-
ничителя скорости по метке на профиле либо на указателе глубины и в случае, если огра-
ничитель скорости не срабатывает при прохождении контрольной метки, даст указание
члену бригады о включении аварийной кнопкой предохранительного торможения. После
срабатывания ограничителя скорости и остановки машины по профилю либо по указате-
лю определяют фактический запас пути торможения, при отсутствии которого необходи-
мо увеличить контролируемый путь замедления и повторно проверить ограничитель ско-
рости методом «наезда».
После окончания проверки по сигналам стволового и рукоятчика подъемные сосуды на
малой скорости движения машины (0,3—0,5 м/с) устанавливают в крайние положения, мет-
ки на указателе глубины совмещают с положением подъемных сосудов. Проверяют защиту
от переподъема, после этого перегоняют порожние сосуды. В случае отказа ограничителя
скорости во время проверки указатель глубины и подъемные сосуды возвращают в крайние
положения, отыскивают причину отказа и повторяют проверку методом «наезда».
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
383
13.4. Защита от провисания струны каната
Каждая подъемная установка, за исключением установок со шкивами трения, а также
установок, где по технологии предусматривают ослабление каната (например, грузовые на-
клонные установки), оборудуют защиту от провисания струны и напуска каната.
Контроль ослабления каната может осуществляться следующими измерениями: прогиба
струны каната между барабаном и копровым шкивом по принципу механического воздействия
каната на определенную конструкцию или электрического кон такта между канатом и подка-
натной конструкцией, реакции опоры в подшипниках копровых шкивов с использованием
магнитоупругих датчиков; натяжения каната в точке подвески сосуда с дистанционной пере-
дачей сигнала. Самый простой и наиболее распространенный — первый способ.
Практика шахтного подъема показала, что, как правило, ослабление каната происходит
в результате застревания подъемного сосуда в разгрузочных кривых. При этом вращение
подъемной машины в сторону зависшего в кривых сосуда всегда сопровождается напуском
струны каната и, как правило, обнаруживается с помощью электромеханических устройств,
устанавливаемых в оконных проемах для выхода каната из здания подъемной машины.
Недостатком применявшихся ранее механических устройств от провисания струны была
их низкая надежность. Поломки, деформация, обмерзание отдельных элементов приводили
к отказам в работе, сопровождались авариями с обрывом подъемного каната и падением со-
суда в ствол.
Так, на скиповом подъеме шахты «Н. Карбонит» производственного объединения «Пер-
вомайскуголь» оборвался подъемный канат. После застревания правого скипа в разгрузоч-
ных кривых приемного бункера машинист, не заметив случившегося, начал выполнять оче-
редной цикл. В результате напуск каната под барабаном подъемной машины составил 300 м
каната. В этот момент застрявший скип освободился, с большой скоростью выбрал напуск
каната и оборвал его. При этом были повреждены расстрелы, разрушены посадочные балки,
деформирован улавливающий бункер.
Подобные аварии имели место на шахте «Ново-Бутовка» производственного объедине-
ния «Макеевуголь», на шахте №29 производственного объединения «Донецкуголь», на шах-
те «Селидовская» производственного объединения «Селидовуголь», ш. им. XXI Съезда КПСС
ПО «Кузбассуголь», ш. «Южная» ПО «Дзержинскуголь», ш. «Самарская» ПО «Павлограду-
голь» и др. (см. 24.1).
Причины указанных аварий: недостаточные уход и контроль состояния разгрузочного
бункера, отсутствие или низкая эффективность сигнализации, контролирующей заполнение
верхнего приемного бункера, неисправность защиты, загрубление и отсутствие контроля ее
работоспособности; конструктивное несовершенство защиты от провисания струны каната.
Некоторое время широко применяли схемы и устройства, основанные на возникнове-
нии электрического контакта между изолированным от земли проводником, установленным
в проеме здания под канатом, и канатом, связанным через подъемную машину с землей.
При появлении контакта между проводником и канатом исполнительное реле втягивалось.
Недостаток такой схемы — отсутствие самоконтроля при исчезновении напряжения пита-
ния, обрыве цепи и плохом контакте между канатом и проводником (например, при обиль-
ной смазке каната). С учетом этих недостатков усовершенствовано реле ИКС-2. В этой схе-
ме исполнительное реле постоянно обтекается током, а появление контакта между провод-
ником и канатом приводит к шунтированию катушки реле. Благодаря этому контролируют
источник питания и целостность цепи и катушки реле.
Известны и другие схемы, имеющие те же недостатки и отличающиеся разной чувстви-
тельностью.
Применяемые устройства, измеряющие прогиб стрелы каната между барабаном и коп-
ровым шкивом, можно подразделить на две группы:
— имеющие жесткий элемент, поворотную рамку, трубу, воспринимающие вес каната;
— воспринимающие вес каната гибким элементом (например, тросиком).
Наибольшее распространение получило защитное устройство, разработанное специали-
стами Донбассуглеавтоматики.
Оно представляет собой проводник, к которому постоянно прижимаются пластины, изо-
лированные от земли (рис. 13.28). Пластины включают в последовательную цепь, состоящую
384
ГЛАВА 13
Рис. 13.28. Схема защитного устройства
от провисания струны каната
из катушки электромагнитного реле времени
КТ, выпрямительного моста V и вторичной об-
мотки трансформатора Т. Принцип действия
схемы следующий. При провисании канат ло-
жится на проводник и отжимает его от пласти-
ны. В результате размыкается цепь питания реле
КТ, включается предохранительный тормоз.
Комплект защиты состоит из двух подканатных
конструкций, устанавливаемых под каждым из
подъемных канатов в проемах здания.
Подканатная конструкция представляет
собой два опорных изолятора, устанавливае-
мых возле канатного проема. На них крепят
проводник с пружинными звеньями. В каче-
стве проводника используют отрезок стальной
трубы диаметром 12—16 мм и длиной, определяемой размерами канатного проема; в каче-
стве пружинных звеньев — отрезки стального троса диаметром 16 мм и длиной 250 мм.
Пружинные звенья прижимают проводник к
фигурным пластинам, выполненным из медного
троллейного провода. На штанге-трубе 1 (рис. 13.29)
в местах электрического контакта с троллейным
проводом устанавливают медные или из оцинко-
ванного железа хомуты 2 шириной 60—80 мм. Хо-
муты изолируют от штанги специальной проклад-
кой и соединяют между собой изолированным мед-
ным проводом 3, проложенным в штанге-трубе.
При этом обеспечивается надежный контакт меж-
ду неподвижными пластинами и штангой и исклю-
чается появление напряжения на штанге. Рассто-
Рис. 13.29. Конструкция контакта
между штангой и неподвижными
пластинами
яние от подъемного каната до проводника подканатной конструкции регулируют передви-
жением опорных изоляторов по специальным вертикальным салазкам, закрепленным на стене
по обеим сторонам канатного проема. Это расстояние выбирают минимально возможным.
Реле защиты КТ (см. рис. 13.28), которых обычно два — отдельно для каждого каната, имеют
выдержку времени, которая предотвращает ложные срабатывания защиты при колебаниях
подъемного каната. Выдержка времени выбирается отдельно для каждой установки, но во
всех случаях, она не должна превышать 1 с.
Всю электрическую схему устройства собирают на панели защиты. В качестве трансфор-
матора, снижающего сетевое напряжение 380 В до безопасной величины 12 5, используют ос-
ветительный трансформатор ОСО—0,25—380/12. Выпрямительный мост собирают из кремни-
евых диодов Д-242Б. В качестве защитных реле используют электромагнитные РЭВ-811. Об-
моточные данные катушек реле: число витков 1600, провод ПЭЛ диаметром 0,6 мм.
Замыкающие контакты защитных реле включают в цепь защиты подъемной установки
так, чтобы они могли шунтироваться независимо друг от друга обходным блокировочным
переключателем. Для периодической, например, при передаче смены, проверки защиты слу-
жит тросик, прикрепляемый к проводнику подканатной конструкции.
Применение защитного устройства Донбассуглеавтоматики резко сократило число ава-
рий, связанных с зависанием сосуда в разгрузочных кривых. В то же время имеют место слу-
чаи отказа защиты по следующим причинам:
— неправильной разделки канатного проема 2 (рис. 13.30), в результате чего ослаблен-
ный канат 1 ложится на нижнюю часть проема, огибая подканатную конструкцию 3. Так, на
одной из шахт обрыв скипа произошел из-за напуска каната в результате застревания подъем-
ного сосуда в разгрузочных кривых. Защита от напуска каната не сработала ввиду того, что в
канатном проеме была установлена конвейерная лента выше нижнего уровня канатного про-
ема на 400 мм. Напуск каната составил около 20 м. В случае неправильной разделки стены
канатного проема можно исправить положение, удалив часть стены (см. рис. 13.30, пунк-
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
385
тарная линия), а также необходимо запретить установку в канатных проемах любых устройств,
мешающих работе защиты от напуска каната;
— неправильной установки подканатной конструкции, которая опущена слишком низ-
ко, в результате чего при напуске канат ложится на проем, не воздействуя на подканатную
конструкцию;
— маленькой выдержки времени и частых срабатываний защиты из-за колебаний кана-
та, приводящих к ее шунтированию;
— деформации и изгиба трубы-штанги из-за ударов каната в результате колебаний при пре-
дохранительном торможении. Последний указанный недостаток привел специалистов Донбас-
суглеавтоматики к созданию подканатной конструкции с гибким элементом (рис. 13.31) [21].
Рис. 13.30. Расположение подканатной
конструкции у проема стены
Рис. 13.31. Конструкция защиты от
провисания струны каната с гибким
элементом
Провисание струны каната 6 контролируют с помощью тросика 5 диаметром 4—6 мм. Один
конец тросика зажат болтом 2 во втулке 1, которая закреплена в уголке гайкой 4, а другой
конец зажат в грузе 17 болтиками 15 и 16. Тросик переброшен через шкив 8, закрепленный на
уголке 7, пропущен через отверстие во втулке 9, навинченном на нее упоре 11, якоре и сердеч-
нике реле 14 типа РЭВ-800, катушка которого снята. Во втулке тросик зажат болтом 10, поэто-
му втулки и упор перемещаются вверх-вниз вместе с тросиком. Реле содержит два последова-
тельно соединенных контакта с удлиненными направляющими, один из которых замыкаю-
щий, а другой — размыкающий. Контакты реле, для исключения вероятности случайного при-
косновения к ним, закрыты кожухом 13. В исходном состоянии упор устанавливается в такое
положение, чтобы якорь реле занимал промежуточное положение и оба контакта были замк-
нуты, и фиксируется контргайкой 12. Если подъемный канат ложится на тросик, то втулка
вместе с упором перемещается вверх и один из контактов реле размыкается. Если тросик об-
рывается выше втулки, то под действием груза реле довключается и размыкается другой его
контакт. При обрыве тросика ниже втулки под действием пружины реле один из его контактов
также разомкнется. В этом случае груз зависает в ловителе 18 на болтах 15 и 16.
Для удобства настройки защиты в уголках 3 и 7 предусмотрены отверстия, по которым
втулки 1 и шкив могут перемещаться вверх — вниз. Так как нормальное провисание струны
каната при верхнем и нижнем положениях подъемного сосуда различно, то при оптималь-
ной настройке защиты втулка и шкив располагаются, как правило, на разных горизонталях.
Рассматриваемое устройство не вызывает затруднений при замене каната, так как для
вывода его из работы достаточно сбросить трос со шкива, а после замены подъемного каната
снова надеть его на шкив, контакт реле на это время следует зашунтировать.
Положительными качествами рассматриваемой конструкции подканатной защиты яв-
ляются: высокая надежность (вероятность ее повреждения при сильных биениях струны ка-
386
ГЛАВА 13
ната весьма незначительная), простота настройки и обслуживания, полный самоконтроль,
высокая чувствительность (для уверенного срабатывания достаточно прогиба горизонталь-
ного участка тросика на 0,5—1,0 см), возможность включения контактов реле непосредственно
в цепь защиты или коммутирования цепей напряжением 220 В.
Известны случаи, когда при обрубке каната на испытания положение последнего витка
каната на барабане изменилось, и струна каната оказывалась вне зоны действия защиты.
Чтобы избежать отказов защиты от провисания и напуска каната, необходима ее периоди-
ческая, не реже двух раз в месяц, проверка с осуществлением естественного напуска.
Проверка защиты от провисания струны каната, выполненной на принципе измерения
прогиба струны каната между барабаном и копровым шкивом, производится вначале опро-
бованием схемы вручную, а затем естественным напуском каната при подвешенном в стволе
подъемном сосуде. При этом на каждой подъемной установке должны быть простые при-
способления, позволяющие надежно фиксировать подъемный сосуд в разгрузке, т. е. наибо-
лее вероятном месте возможного зависания или на нулевой площадке.
Величину напуска проверяют проворачиванием барабана и она не должна превышать
1,5 м. В то же время защита от провисания каната не должна срабатывать при нормальных
колебаниях струны каната (колебания струны при предохранительном торможении не при-
нимают во внимание).
Общий недостаток всех видов защит, основанных на измерении прогиба струны кана-
та, — ограниченность их действия по глубине ствола. С одной стороны, это связано с тем,
что при застревании опускающегося сосуда на определенной глубине ствола вес вертикаль-
ной части каната будет поддерживать струну каната в натянутом состоянии и ее прогиб мо-
жет оказаться недостаточным для воздействия на подканатную конструкцию. Считается, что
эти виды защиты надежно срабатывают при застревании подъемного сосуда на глубине до
300 м. С другой стороны, при застревании даже на небольшой глубине сосуда, опускающего-
ся с максимальной или близкой к ней скоростью, копровой шкив и силу своей инерции бу-
дет некоторое время поддерживать струну каната в натянутом состоянии и защита сработает
с заметным запаздыванием.
Более перспективными являются виды защит, реагирующие на ослабление каната и сра-
батывающие до образования прогиба струны каната. Созданы и изготовлены устройства с ис-
пользованием магнитоупругих датчиков, основанные на измерении реакций опор в подшип-
никах копровых шкивов. При застревании подъемного сосуда на большой глубине создавае-
мое весом каната воздействие подшипников на магнитоупругих датчики окажется соизмери-
мым с воздействием при верхнем положении незастрявшего сосуда. Это заставляет применять
корректирующие устройства, вводящие в схему аппарата поправку порога срабатывания п фун-
кции положения сосуд.) в стволе, что — принципиальный недостаток этих видов защит.
Так, для шахт глубиной более 400 м для компенсации веса каната, соизмеримого с весом
скипа, в схему добавляют компенсационное устройство. Для чего дополнительно устанавливают
сельсин, приводимый в действие ретардирующим диском. Ведутся разработки устройств, реаги-
рующих на ослабление каната непосредственно в прицепном устройстве, с передачей сигнала по
высокочастотному каналу связи. Принципиально такие устройства должны быть лишены недо-
статков описанных выше устройств, но они могут не среагировать на застревание сосуда в раз-
грузочных кривых, поскольку натяжение каната у прицепного устройства в этом случае будет
поддерживаться весом струны каната. Поэтому перспективным представляется сочетание таких
устройств с описанным ранее защитным устройством Донбассуглеавтоматики.
Следует помнить, что сколь ни совершенной была бы защита от напуска каната, она не
в состоянии предотвратить образование напуска, достаточного для обрыва каната, если со-
суд застрял при максимальной или близкой к ней скорости. Напуск каната не может был,
менее пути предохранительного торможения подъемной машины за вычетом пути торможе-
ния застрявшего сосуда.
13.5. Новые разработки элементов защиты на базе микропроцессорной техники
13.5.1. Аппарат защиты и контроля движения АЗ КД
Научно-производственная фирма «МИДИЭЛ» совместно с ЗАО «Элтехком» разработа-
ла Аппарат защиты и контроля движения шахтной подъемной установки АЗКД.
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
387
АЗКД является системой, предназначенной для обеспечения защиты и контроля рабо-
ты шахтной подъемной установки (ШПУ). АЗКД обеспечивает точный контроль над всеми
основными параметрами шахтного подъема: скоростью, ускорением и положением подъем-
ных сосудов в течение всего рабочего цикла. Устройство легко вводится в электрическую
схему находящихся в эксплуатации ШПУ и предназначено для замены электромеханичес-
ких систем типа АЗК-1 с ЭОС-3. АЗКД предназначается для применения в ШПУ, располо-
женных на поверхности, независимо от типа и исполнения подъемной машины (одно- или
двухбарабанная, со шкивом трения, проходческая, для вертикальных и наклонных стволов),
как для вновь создаваемых подъемных установок, так и для находящихся в эксплуатации.
АЗКД работает независимо от системы управления подъемом. При автоматической работе
подъемной установки АЗКД может использоваться также в качестве управляющего устрой-
ства, задающего рабочую тахограмму движения сосуда и обеспечивающего формирование и
выдачу путевых команд управления.
Технические характеристики АЗКД
Питающая сеть:
Напряжение переменное 220 В,
Частота сети 50 Гц.
Режим работы продолжительный
АЗКД рассчитан на непрерывный режим работы и устойчиво работает при отклоне-
нии напряжения питания от номинального значения от плюс 10 % до минус 15 %, при тем-
пературе окружающей среды от плюс 5 °C до плюс 40°С и относительной влажности 80 %
при 25 °C.
АЗКД обеспечивает возможность перестройки защитной тахограммы на режимы подъе-
ма «Груз», «Люди», «Ревизия» и пригоден для ШПУ, обслуживающих от одного до 16 рабо-
чих горизонтов.
В режиме «Ревизия» АЗКД обеспечивает возможность задания скорости защитной та-
хограммы, равной допускаемой ПБ скорости подхода к приемной площадке (1 м/с при подъе-
ме-спуске людей и 1,5 м/с при подъеме-спуске груза), на всем пути перемещения подъемно-
го сосуда.
Системные требования к панельному компьютеру
Процессор, не ниже Pentium 300 MHz;
Оперативная память, не менее 128 Mb;
Свободное дисковое пространство, не менее 1Gb;
Программа предназначена для функционирования под управлением операционной си-
стемы Microsoft Windows NT 4.0.
Выполняемые функции
АЗКД является локальным аппаратом в системе управления ШПУ и предназначен для
выполнения следующих функций:
— непрерывное сравнение сигналов действительной скорости со значениями, заданны-
ми защитной тахограммой скорости;
— размыкание цепи защиты при достижении подъемной машиной скорости, значение
которой равно заданному защитной тахограммой на участке пути разгона (равномерного хода,
замедления, на участке высоты переподъема), а для опускающегося сосуда на свободном для
его перемещении участке пути, расположенном ниже нижней площадки, или при потере за-
щитных функций;
— формирование защитной тахограммы скорости;
— сравнение измеренного значения положения подъемного сосуда с сигналами путевых
датчиков в контрольных точках ствола;
— формирование и выдача путевых команд управления и защиты;
— регистрация, хранение и воспроизведение информации об аварийных отключениях
АЗКД;
— архивирование всех рабочих параметров рабочего цикла подъема, с возможностью
последующего вывода на принтер;
— регистрации, хранения и воспроизведения сохраняемой информации о параметрах
безопасности, режимах работы и срабатывании защит.
388
ГЛАВА 13
АЗКД функционально разделен на две подсистемы:
— подсистема контроля движения и защиты;
— подсистема задания параметров, регистрации и визуализации информации.
Подсистема контроля движения и защиты обеспечивает выполнение следующих функций:
— размыкание цепи защиты при недопустимом отклонении от установленных значений
параметров безопасности ШПУ;
— контроль проскальзывания каната и пробуксовки канатоведущего шкива на многока-
натных ШПУ и выдачу соответствующих команд машинисту подъемной машины;
— автоматический непрерывный контроль исправности (самоконтроль) элементов, уз-
лов и блоков, выход из строя которых приводит к потере защитных функций АЗКД. Элемен-
ты, узлы и блоки, влияющие на потерю защитных функций аппарата и не охваченные авто-
матическим контролем исправности, дублируются;
— блокировку, не допускающую самовосстановление схемы (замыкание контакта ис-
полнительного устройства в цепи защиты подъемной машины) после исчезновения или уст-
ранения причины его срабатывания;
— автоматическую установку схемы в режим «Ревизия» при восстановлении ранее сня-
того напряжения питания с АЗКД;
— возможность выдачи в заданных точках пути сигналов (путевых команд), необходи-
мых для безопасного управления и защиты ШПУ;
— световую сигнализацию с запоминанием, сигнализирующую раздельно о срабатыва-
нии реле защиты или реле контроля неисправности;
— формирование сигнала рассогласования между фактической скоростью движения и
скоростью, заданной защитной тахограммой, и вывод его для визуального контроля на пульт
машиниста;
— контроль сигналов датчиков синхронизации и точек проверки.
Подсистема задания параметров, регистрации и визуализации информации обеспечивает
выполнение следующих функций:
— задание параметров движения, контроля и защит ШПУ;
— отображение состояния элементов цепи аварийного отключения;
— визуализация, регистрация и хранение параметров движения, контроля и защит ШПУ.
Конструктивное исполнение
АЗКД смонтирован в металлическом шкафу одностороннего обслуживания, который мож-
но устанавливать в помещении оператора подъемной машины. На двери шкафа находится па-
нель оператора, состоящая из жидкокристаллического (ЖК) монитора панельного компьютера
и стандартной PC-клавиатуры. Связь между панельным компьютером и главным контроллером
поддерживается с помощью последовательного интерфейса К8-232.
С помощью клавиатуры задаются все необходимые значения рабочих параметров шахт-
ного подъема; на мониторе осуществляется визуализация текущего состояния измеряемых
величин, а также содержится информация о режимах работы системы и обо всех аварийных
ситуациях.
В системе предусмотрена архивация и запись на жесткий диск панельного компьютера
всех данных, необходимых для контроля рабочего цикла подъемной установки. К выходно-
му разъему панели оператора может быть подключен стандартный принтер для распечатки
результатов архивирования.
Шкаф АЗКД в отличие от АЗК-1 не связан механически с валом барабана подъемной
машины и поэтому может быть установлен в непосредственной близости от пульта управле-
ния, что позволяет оператору использовать монитор АЗКД в качестве индикатора положе-
ния сосудов подъемника и других параметров движения.
В состав шкафа аппарата защиты и контроля движения входят:
— промышленный контроллер ADAM 5511;
— панельный компьютер РРС-105;
— измеритель скорости;
— блок питания;
— источник бесперебойного питания;
— модуль входных оптронов;
— плата выходных реле.
АП ПАРА ТЫ ЗАЩИТЫ И БЛОКИРОВКИ
389
Структурная схема АЗКД приведена на рис. 13.32, показатели функционального назна-
чения приведены в табл. 13.7.
Таблица 13.7
Показатели функционального назначения
Глубина подъема, м до 1800
Диапазон контролируемых скоростей, м/с, от 0,3 до 20
Диапазон контролируемых ускорений, м/с2 от Одо 5
Максимальное количество формируемых путевых команд, шт. 64
Погрешность контроля скорости, %, не более: при скорости 0,3 м/с при скорости 20 м/с ±5 ±2,5
Погрешность формирования путевых команд, м не более 0,01
Количество точек отбора информации о положении сосуда в стволе, шт., на один горизонт 4
Время реакции системы на превышение заданной скорости движения, с не более 0,1
Значение контролируемой пробуксовки шкива, м не более 2
Периодичность контроля идентичности функционирования каналов скорости, с не более 0,05
Дискретность индикации цифрового указателя глубины, м 0,01
Импульонй
Г ШКАФ АЗКД
И_
ИБП
Плата ги-сдхы- репе
Рис. 13.32. Структурная схема АЗКД:
1 — промышленный контроллер ADAM-5511; 2 — модуль входных оптронов; 3 — измеритель
скорости; 4 — плата выходных реле; 5 — импульсный датчик; 6 — источник бесперебойного
питания; 7 — панельный компьютер; 8 — переключатель «РАБОТА/ПАРАМЕТРЫ»; 9 — кнопка
«Сброс Аварий»; 10 — блок питания
13.5.2. Автоматизированная система управления и комплексной защиты шахтной
подъемной установки, регистрации и визуализации режимов ее работы ЗДКР
Сотрудниками ООО НТФ «Автоматуглерудпром» и ОАО «Гипроруда» разработана авто-
матизированная система управления и комплексной защиты шахтной подъемной установ-
390
ГЛАВА 13
ки, регистрации и визуализации режимов ее работы, сокращенно система ЗКДР (защиты,
контроля движения и регистрации) [148].
Система предназначена для решения на современном уровне задач повышения эффек-
тивности и безопасности работы ШПУ, расположенных на поверхности. Решение этих задач
распадается на следующие составляющие:
— непрерывный контроль всех параметров безопасности ШПУ;
— повышение качества контроля параметров и оперативности срабатывания защит от
недопустимых режимов работы;
— повышение надежности работы ШПУ;
— постоянный мониторинг ситуации и обеспечение условий для своевременного при-
нятия предупредительных и защитных мер по обеспечению безопасной работы ШПУ;
— регистрация, хранение и автоматизированное воспроизведение исторической инфор-
мации о работе установки за требуемый интервал времени, разработка и реализация рацио-
нальных управленческих решений по результатам ее анализа.
В соответствии с этим главными функциями системы управления и комплексной защи-
ты ШПУ являются контроль движения, защита от недопустимых режимов работы, выдача
путевых команд, регистрация текущих данных, визуализация текущей и накопленной ин-
формации о режимах работы и параметрах ШПУ.
Требования, определяющие технические решения: универсальность системы, дублиро-
вание технических средств отбора и обработки информации о параметрах безопасности, а
также взаимный контроль правильности функционирования этих средств.
Дублирование технических средств обработки информации выполнено в виде двухка-
нального аппарата контроля хода и защиты АКХЗ.
Для полного дублирования функций защиты к каждому из двух резервированных одно-
временно работающих каналов, образованных контроллерами с соответствующим набором
модулей ввода-вывода, подключены дублированные средства отбора информации о пара-
метрах безопасности ШПУ, а дублированные каналы запитаны от отдельных источников
бесперебойного питания.
Развитые коммуникационные и функциональные возможности, высокий уровень точ-
ности и надежности работы предопределили целесообразность применения поворотных
шифраторов приращений в качестве датчиков скорости движения подъемного сосуда ШПУ.
Выбор конкретного типа поворотного шифратора приращений обуславливался возможнос-
тью реализации требований к системе по точности и быстродействию, представленных в
табл. 1. Для выполнения этих требований поворотный шифратор приращений должен ха-
рактеризоваться определенным путевым квантом Д/г, равным отрезку пройденного пути меж-
ду двумя выдаваемыми импульсами. По опыту разработки и эксплуатации шахтных ограни-
чителей скорости для надежного обеспечения упомянутых требований к системе применяе-
мый в ней датчик скорости должен иметь путевой квант ДЛ<10лгм, а с учетом обеспечения
запаса по точности и быстродействию — Д/г < 5лш. Поворотные шифраторы приращений
наряду с другими параметрами характеризуются количеством импульсов за один оборот вала.
Для выполнения требований к величине путевого кванта и условий обеспечения универсаль-
ности системы по отношению к ряду ШПУ с диаметрами барабана или шкива трения до 5 м
в ней должны применяться поворотные шифраторы приращений, имеющие не менее 3500—
4000 импульсов на один оборот вала.
Всем перечисленным требованиям в полной мере отвечают поворотные шифраторы ряда
серий фирмы Pepperl+Fuchs. Учитывая также высокую надежность продукции данной фир-
мы, в системе были применены поворотные шифраторы приращений именно ее производ-
ства: Series 10-11631-F-5000 и RHI58N-0AK1R61N-5000.
Таблица 13.8
Требования к системе, определяющие выбор поворотного шифратора приращений
Параметр Значение
Относительная погрешность контроля скорости движения Не более 5%
Время реакции системы на превышение заданной скорости Не более 0,1 с
Относительная погрешность контроля превышения заданной скорости Не более 10%
Абсолютная погрешность формирования путевых команд Не более 0,1 м
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
391
В системе задействованы датчики следующих типов:
— датчики давления Sitrans Р серии MS фирмы Siemens;
— преобразователи измерительные напряжения постоянного тока Е 857 ЭС;
— датчики положения ДКПУ-22.
В качестве датчиков тока используются стандартные шунты, которые входят в состав
системы управления электроприводом шахтной подъемной машины.
Алгоритм работы подсистемы контроля хода и защиты реализуется на уровне контрол-
леров АКХЗ двумя программами: «Ввод данных» и «Управление».
Программа «Ввод данных» написана на языке С и по предъявлению пароля в диалого-
вом режиме предоставляет возможность ввода, редактирования и записи в память контрол-
леров постоянных данных и уставок срабатывания защит, а также вызова и просмотра запи-
санных данных. При выборе любой из позиций меню на экран выводятся формы для запол-
нения соответствующими данными.
Программа «Управление» разработана с использованием инструментальной системы
программирования Ultra Logik. В нее включены две внешние процедуры, написанные на язы-
ке С и свернутые в функциональные блоки системы.
Программа подсистемы регистрации и визуализации режимов работы (данная подсис-
тема состоит из сети АРМ машиниста и АРМ механика ШПУ) создана с использованием
Scada-системы Genesis532 (фирма Iconics) версии 7.0.
Обмен информацией между двумя подсистемами производится по сети Ethernet с про-
токолом IPX.
Функции и возможности системы
Разработанная система выполняет следующие основные функции:
— защита ШПУ при выходе значений параметров безопасности за допустимые пределы,
заданные в виде уставок срабатывания;
— контроль исправности элементов, узлов и блоков, выход из строя которых приводит
к потере защитных функций системы;
— выдача сообщений машинисту о проскальзывании каната по результатам ведения со-
ответствующего контроля;
— блокировка, не допускающая самовосстановления системы после исчезновения или
устранения причины срабатывания защит;
— автоматическая установка в режим «Ревизия» при восстановлении ранее снятого на-
пряжения питания;
— выдача в заданных точках пути путевых команд, необходимых для безопасного управ-
ления и защиты ШПУ;
— контроль цепи тормоза предохранительного (ТП) и определение причин его срабаты-
вания:
— формирование сигнала рассогласования фактической и заданной скоростей движе-
ния и вывод его для визуального контроля на соответствующий прибор, представленный на
АРМ машиниста;
— контроль состояния и положения оборудования ШПУ по сигналам соответствующих
датчиков и выдача сообщений;
— контроль идентичности работы резервированных каналов АКХЗ и выдача сигнала
запрета пуска очередного цикла подъема;
— визуализация заданных режимов работы, местоположения подъемных сосудов в стволе,
скорости движения подъемных сосудов (тахограмм), а также значений заданной и фактиче-
ской скоростей движения, пройденного пути, токов якоря и возбуждения электродвигателя,
давления в системах ТП и ТР (тормоза предохранительного и рабочего);
— регистрация, хранение, архивирование и документирование информации о состоя-
нии и режимах работы ШПУ;
— воспроизведение исторической информации за указанный период времени.
Возможности системы характеризуются показателями, представленными в табл. 13.9.
Опыт внедрения и эксплуатации
Для решения задач комплексной защиты, регистрации и визуализации режимов работы
ШПУ опытный образец системы ЗКДР был установлен на Центральном руднике ОАО «Апа-
тит» (Мурманская область), налажен и поставлен комиссией на приемочные испытания.
392
ГЛАВА 13
После успешного завершения приемочных испытаний и доводки по замечаниям и предло-
жениям приемочной комиссии система ЗКДР была сертифицирована (сертификат соответ-
ствия № РОСС RU. МЕ92. ВООЗ 16), получила разрешение Федерального горного и промыш-
ленного надзора России № РРС 04-11720 на право применения на ШПУ и введена в эксплу-
атацию [148].
Таблица 13.9
Показатели, характеризующие возможности системы
Показатель Значение
Глубина подъема, м До 1500
Максимальная скорость движения сосуда, м/с До 20
Диапазон значений контролируемых ускорений, м/с2 0..5
Количество формируемых путевых команд, шт. 40
Погрешность контроля превышения заданной скорости, % Не более ± 10
Погрешность формирования путевых команд, м Не более ± 0,1
Количество точек отбора информации о положении сосуда в стволе, шт. 4 (на один горизонт)
Время реакции системы на превышение заданной скорости движения, с Не более 0,1
Минимальное значение контролируемой скорости пробуксовки шкива и проскальзывания каната, м/с 0,2
Периодичность контроля идентичности каналов, с До 5
После года эксплуатации системы специалистами рудника была высказана идея ее раз-
вития, то есть создания на базе системы ЗКДР модифицированного варианта ЗКДР М, ко-
торый бы отличался от прототипа наличием подсистемы управления.
Разработанная система ЗКДР. М по принципу построения также представляет собой
многоуровневую распределенную сетевую структуру и функционально состоит из следую-
щих подсистем:
— контроля движения и защиты;
— регистрации и визуализации информации;
— автоматизированного управления.
Система ЗКДР имеет три модификации ЗКДР.1, ЗКДР.2 и ЗКДР. 3.
Модификация системы ЗКДР. 1 содержит в своем составе двухканальный аппарат АКХЗ,
средства отбора информации и функционально состоит из двух подсистем:
— контроля движения и защиты;
— регистрации и визуализации информации.
Модификация системы ЗКДР.2 содержит в своем составе пульт управления шахтной
подъемной машиной ПУШПМ, двухканальный аппарат АКХЗ, контроллер управления
КУПМ, средства отбора информации и функционально состоит из следующих подсистем:
— контроля движения и защиты;
— регистрации и визуализации информации;
— автоматизированного управления.
Модификация системы ЗКДР. 3 содержит в своем составе аппарат регистрации АР и
средства отбора информации о значениях регистрируемых параметров ШПУ, состоянии и
режимах работы оборудования, а также специальное прикладное обеспечение (ПО) для стан-
дартной ПЭВМ, периодически или постоянно подключаемой к аппарату регистрации. Функ-
ционально ЗКДР. 3 состоит из следующих подсистем:
— регистрации информации;
— формирования базы данных и визуализации информации. Модификация системы
ЗКДР. 3 фактически представляет собой регистратор параметров и режимов работы ШПУ, (в
дальнейшем по тексту регистратор РПР), применение которого предусматривается требова-
ниями ПБ [13].
Модификации ЗКДР.1 и ЗКДР.2 системы ЗКДР предназначены для автоматизированно-
го управления шахтными подъемными установками ШПУ и выполнения комплекса мер по
обеспечению необходимого уровня их производственной безопасности за счет непрерывно-
го выполнения следующих операций в ходе цикла подъема:
— непрерывное управление электроприводом подъемной машины и дискретное управ-
ление оборудованием ШПУ;
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
393
— отбор, ввод, обработка и представление информации о параметрах и режимах рабо-
ты, выявление и индикация недопустимых отклонений от установленных значений основ-
ных параметров безопасности, обеспечение оперативной защиты ШПУ от превышения ско-
рости, переподъема, пробуксовки шкива, выхода за допустимые пределы давления в системе
предохранительного тормоза и недопустимых режимов силовых цепей электропривода и це-
пей управления;
— ввод от соответствующих датчиков, обработка и представление информации о других
параметрах ШПУ, выявление и индикация недопустимых или опасных отклонений от уста-
новленных значений параметров и обеспечение либо оперативной зашиты ШПУ, либо
блокировки очередного цикла подъема до устранения выявленных отклонений;
— регистрация, архивирование, хранение и воспроизведение исторической производ-
ственной информации о работе ШПУ;
— выдача путевых команд управления и защиты.
Регистратор РПР предназначен для непрерывной регистрации значений параметров и
режимов работы ШПУ, накопления и хранения информации и обеспечения возможности
считывания как текущей, так и исторической информации для дальнейшего анализа и при-
нятия обоснованных и эффективных управленческих решений, касающихся как штатных,
так и, главным образом, нештатных ситуаций, возникающих при работе ШПУ
Система ЗКДР предназначена для применения на ШПУ, расположенных на поверхнос-
ти шахт, работающих в регионах с умеренным и холодным климатом, и пригодна для ис-
пользования на ШПУ с барабанными и многоканатными подъемными машинами со всеми
системами электропривода.
Состав и массогабаритные параметры
Техническое обеспечение модификации системы ЗКДР. 1 представляет собой следующий
набор технических средств:
— средства отбора информации подсистемы контроля движения и защиты (датчики пе-
ремещения барабана или канатоведущего и отклоняющего шкивов подъемной машины (эн-
кодеры), датчики давления рабочей среды в системах предохранительного и рабочего тормо-
зов, датчики тока в главной цепи и в обмотках возбуждения электродвигателей);
— аппарат контроля хода и защиты АКХЗ, представляющий собой два контроллерных
канала контроля хода и защиты со взаимным контролем идентичности их работы;
— АРМ машиниста подъема на базе ПЭВМ, конфигурация которой включает систем-
ный блок, клавиатуру, монитор, сетевая карта, устройство записи на компакт диски (CD-
ROM), источник бесперебойного питания;
— АРМ механика подъема на базе ПЭВМ, конфигурация которой включает системный
блок, клавиатуру, монитор, сетевую карту, источник бесперебойного питания, принтер, уст-
ройство записи на компакт диски (CD-ROM).
Техническое обеспечение модификации системы ЗКДР.2 представляет собой следующий
набор технических средств:
— средства отбора информации подсистемы контроля движения и защиты (датчики пе-
ремещения барабана или канатоведущего и отклоняющего шкивов, подъемной машины (эн-
кодеры), датчики давления рабочей среды в системах предохранительного и рабочего тормо-
зов и датчики тока в главной цепи и в обмотках возбуждения электродвигателей);
— средства отбора информации подсистемы управления (датчики напряжения и тока в
главных цепях и цепях управления, датчики давления и температуры);
— аппарат контроля хода и защиты АКХЗ;
— пульт управления шахтной подъемной машиной ПУШПМ;
— контроллер управления КУПМ;
— АРМ механика подъема на базе ПЭВМ, конфигурация которой включает системный
блок, клавиатуру, монитор, сетевые модули, источник бесперебойного питания, принтер,
устройство записи на компакт диски (CD-ROM).
Техническое обеспечение модификации системы ЗКДР. 3, то есть регистратора РПР,
представляет собой следующий набор технических средств:
— аппарат регистрации АР;
— средства отбора информации.
Основные массогабаритные параметры технических средств системы ЗКДР соответству-
ют нормам, указанным в табл. 13.10.
394
ГЛАВА 13
Таблица 13.10
Массогабаритные параметры технических средств системы ЗДКР
Наименование параметров Норма
Габаритные размеры, мм, не более — аппарат контроля хода и защиты АКХЗ — контроллер управления КУПМ — аппарат регистрации АР — датчики — пульт ПУШПМ высота ширина глубина Масса, кг, не более — аппарат контроля хода и защиты АКХЗ — контроллер управления КУПМ — аппарат регистрации АР — датчики — пульт ПУШПМ 1800x1200x500 1800x600x500 1300x600x320 145x216x175 1500 2200 1200 75 50 50 10 100
Показатели функционального назначения
Система ЗКДР имеет двухуровневую структуру. Первый уровень систем ЗКДР. 1 и ЗКДР.2
представлен подсистемами управления и контроля движения и защиты, второй — подсисте-
мой регистрации и визуализации информации.
Первый уровень системы ЗКДР. 3 представлен подсистемой регистрации информации,
второй — подсистемой формирования базы данных и визуализации информации.
Функционирование подсистемы контроля движения и защиты обеспечивается аппара-
том контроля хода и защиты АКХЗ и датчиками, входящими, как в состав системы, так и в
состав оборудования ШПУ.
Функционирование подсистемы управления обеспечивается пультом управления
ПУШПМ, контроллером управления КУПМ и средствами отбора информации о парамет-
рах и состоянии оборудования ШПУ, контролируемых подсистемой.
Функционирование подсистемы регистрации и визуализации информации обеспечива-
ется АРМ машиниста и АРМ механика подъема или пультом управления ПУШПМ и АРМ
механика подъема.
Функционирование подсистемы регистрации информации модификации ЗКДР. 3 обес-
печивается аппаратом регистрации АР и средствами отбора информации о параметрах и со-
стоянии оборудования ШПУ, контролируемых подсистемой.
Функционирование подсистемы формирования базы данных и визуализации информа-
ции модификации ЗКДР. 3 обеспечивается специальной прикладной программой для стан-
дартной ПЭВМ, периодически или постоянно подключаемой к аппарату регистрации АР.
Пульт управления ПУШПМ выполнен на основе промышленной мебели, состоящей из
двухтумбового стола с двумя монтажными секциями и регулируемого поворотного кресла.
На столешнице стола установлены два манипулятора (джойстика), ряд кнопок управления
оборудованием и переключателей цепей управления оборудованием, в тумбах стола — два
персональных компьютера с источниками бесперебойного питания и клавиатурой, а в мон-
тажных секциях — два монитора, клеммники.
Система ЗКДР может иметь модификацию, предусматривающую применение выделен-
ного сервера, поставляемую по специальным заказам.
В процессе работы модификации ЗКДР.1 и ЗКДР.2 системы выполняют набор функций,
состоящий из функций, которые должна выполнять каждая из их подсистем.
Подсистема контроля движения и защиты выполняет следующие функции:
— размыкание цепи защиты при недопустимом отклонении от установленных значений
параметров безопасности ШПУ;
— контроль пробуксовки канатоведущего шкива и проскальзывания канатов по канато-
ведущему шкиву на многоканатных ШПУ и выдачу соответствующих команд машинисту
подъемной машины или на срабатывание защиты;
АППАРАТЫ ЗАЩИТЫ И БЛОКИРОВКИ
395
— автоматический непрерывный контроль исправности (самоконтроль) элементов, уз-
лов и блоков, выход из строя которых приводит к потере защитных функций системы;
— блокировку, не допускающую самовосстановление схемы (замыкание контакта ис-
полнительного устройства в цепи защиты подъемной машины) после исчезновения или уст-
ранения причины его срабатывания;
— выдачу в заданных точках пути сигналов (путевых команд), необходимых для управ-
ления и защиты ШПУ;
— контроль сигналов устройств и событий, вызывающих срабатывание предохранитель-
ного тормоза ШПУ;
— световую индикацию с запоминанием, сигнализирующую раздельно о срабатывании
реле защиты или реле контроля исправности;
— формирование сигнала рассогласования между фактической скоростью движения и
скоростью, заданной защитной тахограммой, и вывод его для визуального контроля на соот-
ветствующий прибор (отклономер), представленный на мониторе АРМ машиниста;
— контроль сигналов датчиков стопорения, точной остановки сосуда, стволовых дверей
и других технологических устройств.
Подсистема управления обеспечивает:
— задание режима работы на предстоящий цикл подъема;
— дискретное управление (запуск в работу и останов) оборудования ШПУ;
— непрерывное управление электроприводом шахтной подъемной машины;
— управление рабочим тормозом;
— наложение и снятие предохранительного тормоза;
— предупредительную сигнализацию при выходе значений технологических параметров
из номинального диапазона;
— ввод и запись в память контроллера значений уставок срабатывания предупредитель-
ной сигнализации.
Подсистема регистрации и визуализации информации производит обработку и отображе-
ние на мониторах значений и сообщений о:
— заданном режиме работы и сигналах стволовой сигнализации;
— состоянии элементов цепи предохранительного тормоза;
— положении стволовых дверей, посадочных и других технологических устройств;
— местоположении подъемных сосудов ШПУ в стволе шахты;
— скорости движения подъемных сосудов (тахограмма движения);
— токе подъемного двигателя;
— токе возбуждения двигателей (для электропривода постоянного тока);
— снижении сопротивления изоляции;
— напряжении сети;
— напряжении внешних цепей управления ВЦУ;
— давлении маслостанции;
— давлении в цилиндре предохранительного тормоза;
— давлении в цилиндре рабочего тормоза;
— давлении в тормозной системе;
— температуре деталей оборудования, а также регистрацию, хранение и архивирование
информации о состоянии и работе оборудования ШПУ
М одификации системы ЗКДР. 1 и ЗКДР.2 характеризуются показателями назначения и
соответствуют нормам, приведенным в табл. 13.11.
Таблица 13.11
Показатели назначения системы ЗДКР
Наименование показателя Значение, норма
Напряжение питания, номинальное, В 220 переменного тока(50±1)Гц
Потребляемая мощность, ВА, не более 1000
Количество каналов ввода сигналов, шт., не менее:
ЗКДР.1
аналоговых 8
дискретных 80
ЗКДР.2
аналоговых 27
дискретных 92
396
ГЛАВА 13
Продолжение таблицы 13.11
Количество каналов вывода управляющих сигналов, шт., не менее: ЗКДР.1 аналоговых дискретных ЗКДР.2 аналоговых дискретных 48 2 52
Высота отображаемых цифр и знаков на дисплеях, мм, не менее 9
Наличие гальванической развязки в каналах ввода-вывода Обязательно
Прочность изоляции гальванической развязки, В, не менее 500
Характер выходных сигналов управления Релейные, типа «сухой контакт»
Коммутационная способность выходных реле: напряжение переменного тока, В, не менее ток, А, не менее напряжение постоянного тока, В, не менее ток, А, не менее 220 1 30 5
Диапазон изменения выходного сигнала непрерывного управления электроприводом, В от-10 до+10
Диапазон изменения выходного сигнала непрерывного управления регулятором давления рабочего тормоза, мА от 0 до 200
Гтп/биня попъемя м. пл 3000
Максимальная скорость движения сосуда, м/с, до 20
Диапазон значений контролируемых ускорений, м/с от 0 до 5
Количество формируемых путевых команд, шт. 40
Погрешность контроля превышения заданной скорости, %, не более ±10
Погрешность формирования путевых команд, м, не более ±0,1
Количество точек отбора информации о положении сосуда в стволе, шт., на один горизонт 4
Быстродействие защиты по превышению скорости и переподъему, с, 0,1
Минимальное значение контролируемой скорости пробуксовки шкива и проскальзывания каната, м/с 0,2
Периодичность контроля идентичности каналов, с, до 1,0
Дички путной
ММйШМШШ
Датчик путной Аппарат контрол* кода и защиты
информации модифицированный (АКХЗ Mi
Датами авеееми*
Датчики положении
Рис. 13.33. Структурная схема комплекса технических средств системы ЗКДР-2
АРМмаханика
Пулы управлении
ШПМ(ПУШПМ)
В систвму управлении
электроприводом шахтной
подьймой машины (ШПМ)
Глава 14
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
14.1. История развития стволовой сигнализации и связи
14.2. Нормативные требования к системам стволовой
сигнализации и связи на шахтном подъеме
14.3. Аппаратура шахтной стволовой сигнализации
и связи вертикальных подъемных установок (ОАО
«Красный металлист»)
14.4. Аппаратура сигнализации и радиосвязи «Весна-СРС»
14.5. Система телезащиты и телесигнализации «Радуга-2»
14.6. Комплексы аппаратуры «СИГНАЛ»
14.7. Оценка эффективности устройств шахтной
стволовой сигнализации и связи
14.8. Применение современных микропроцессорных систем
в стволовой сигнализации с использованием
оборудования зарубежных фирм
14.1. История развития стволовой сигнализации и связи
Еще 100 лет назад стволовая сигнализация осуществлялась с помощью звукового сигна-
ла от удара по металлическому листу молотком, закрепленном на конце сигнального троса,
перекинутого через блоки от шахтного ствола в здание подъемной машины. С увеличением
и изменением глубины шахтного ствола для компенсации большой длины троса применя-
лись противовесы и пружины. Уже в 1913 г. в Европе на шахтах и рудниках начали внедрять
электрическую сигнализацию — визуальную индикацию («Спуск», «Стоп», «Подъем»,
«Люди»). Нашли долговременное применение циферблатная, семафорная, простая звуковая
и световая сигнализации.
С развитием техники усложнялись требования к качеству сигнализации. В конце 30-х годов
прошлого века внедрялись релейные системы, позволившие существенно увеличить количество
световых индикаций. Спустя примерно 20 лет было предложено техническое решение по сохране-
нию на определенное время визуальной индикации всех обязательных сигналов. Эго время соот-
ветствовало подъему или опусканию подъемного сосуда. Сигналы передавались с горизонтов элек-
тромеханическим ключом. Но даже при наличии этих усовершенствованных систем стволовой
сигнализации не были полностью устранены аварии и отказы в работе шахтного подъема. Имели
место ложные (т.е. их не давали ни рукоятчик, ни стволовой) и неполные сигналы (неясно — кто
отправил сигнал первым — рукоятчик или стволовой).
Для устранения ряда недостатков в практику ввели формирование четких сигналов с
помощью многокнопочных сигнальных панелей. Сигналы, полученные в машинном зале,
имели постоянные временные соотношения между отправлением и паузой, постоянную дли-
тельность импульса сигнала. Но полной уверенности эксплуатационного персонала в иден-
тичности отправленных и полученных сигналов не было. Опасения вызывали малочувстви-
тельность электромеханических устройств. Кроме того, были проблемы прямой сигнализа-
ции из движущегося подъемного сосуда в машинный зал, так как проводная связь по много-
жильному кабелю эффективна только до определенной глубины. Кабель, размещаемый под
подъемным сосудом, было трудно обслуживать. Шли поиски повышения надежности и бе-
зопасности стволовой сигнализации и связи. Это достигалось за счет обеспечения систем
сигнализации устройствами самообнаружения повреждений, обеспечения искробезопаснос-
ти аппаратуры в вентиляционных стволах с исходящей струей, контроля замыкания на зем-
398
ГЛАВА 14
лю, сохранение работоспособности сигнализации при отсутствии электропитания. Большое
значение имеют средства координации системы стволовой сигнализации с другими защит-
ными устройствами — введение блокировки тормоза подъемной машины при сигналах ава-
рийной остановки, блокировки оборудования приемных площадок и др.
14.2. Нормативные требования к системам стволовой сигнализации и связи
на шахтном подъеме
Система стволовой сигнализации, связи и управления — это комплекс аппаратов, орга-
нов управления, защит стволового оборудования, предназначенный для передачи речевых
сигналов, тональной сигнализации, передачи данных между стволом шахты и помещением
управления подъемом [224]. В зависимости от типа, количества, фактора безопасности кон-
тролируемых объектов в стволе, система стволовой сигнализации в той или иной степени
формирует технологический процесс работы шахтной подъемной установки и околостволь-
ного оборудования. Поэтому безотказная и эффективная работа системы стволовой сигна-
лизации и связи является одним из самых важных условий безопасной эксплуатации шахт-
ного подъема. Учитывая это, к системе стволовой сигнализации и связи предусмотрен ряд
функциональных требований, которые содержатся в различных нормативно-технических
документах — «Правилах безопасности в угольных шахтах» (Украина) [13], «Единых прави-
лах безопасности при разработке рудных, нерудных и рассыпных месторождений полезных
ископаемых подземным способом» (Российская Федерация, ПБ-03-553-03) [223], «Правилах
безопасности в угольных шахтах» (Российская Федерация, ПБ 05-618-03) [47], «Правилах
технической эксплуатации угольных и сланцевых шахт» [14], «Общесоюзных нормах техно-
логического проектирования шахтных подъемных установок» [32] и др.
В связи с тем, что эти требования приводятся в разобщенном виде, а в отдельных случа-
ях неоднозначно изложены, ниже сформулированы в концентрированном виде функцио-
нальные требования, которым должна отвечать рабочая (резервная) и ремонтная стволовая
сигнализация и связь, изложенные в [41, 224].
Требования к системам стволовой сигнализации на шахтном подъеме
Для обеспечения условий безопасной и безаварийной работы шахтных подъемных уста-
новок предусмотрен ряд требований к стволовой сигнализации и связи. Каждая подъемная
установка должна быть оборудована следующими видами сигнализации и связи:
— рабочей, предназначенной для обеспечения выполнения технологических операций
по подъему-спуску людей и грузов;
— резервной, используемой в случае выхода из строя рабочей сигнализации и связи;
— ремонтной, применяемой при осмотре и ремонте крепи и армировки ствола, элемен-
тов копрового станка, подъемных сосудов.
Стволовая сигнализация и связь независимо от конструктивного исполнения должны
обеспечивать надежное выполнение ряда функций, количество которых зависит от типа
подъемных установок — клетевая или скиповая, грузолюдская (людская) или грузовая, при-
нятой технологической схемы, числа обслуживаемых горизонтов и т.д. Ниже приведены функ-
циональные требования, которым должны удовлетворять системы рабочей сигнализации и
связи применительно к клетевым грузолюдским и скиповым подъемным установкам.
На грузолюдских подъемных установках рабочая (резервная) стволовая сигнализация долж-
на обеспечивать:
Передачу сигналов:
1. В здание подъемной машины машинисту (оператору) подъема:
— от рукоятчика приемной площадки: режимы работы («Люди», «Груз», «Негабарит» и т.п.);
— от рукоятчика: адреса движения клети: «1-й горизонт» — «n-й горизонт», «Приемная
площадка 1», «Приемная площадка 2»;
— от рукоятчика: рабочие сигналы: «Стоп», «Вверх», «Вниз», «Тихо вверх», «Тихо вниз»;
— от рукоятчика: сигнал «Пуск». Этот сигнал подается рукоятчиком рабочим сигналом
и служит машинисту основанием для отправки клети;
— с горизонтов и приемных площадок: сигнал «Авария». Сброс звукового сигнала про-
изводится машинистом (оператором) подъема и светового — на месте подачи сигнала «Ава-
рия». По сигналу «Авария» подъем производит аварийный останов;
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
399
— с горизонтов и приемных площадок сигналы об открытом положении предохрани-
тельных дверей, опущенном положении качающихся площадок, о выдвинутом положении
кулаков и др. («Двери», «Качающиеся площадки», «Кулаки» и др.). При возникновении сиг-
нала об открытом положении предохранительных дверей, подъем блокируется.
2. На горизонты стволовым:
— от рукоятчика приемной площадки: режимы работы: «Люди», «Груз», «Негабарит».
Эти сигналы воспроизводятся на шкафах приемной площадки и горизонтов;
— от рукоятчика: адреса движения клети: «1-й горизонт» — «n-й горизонт», «Приемная
площадка 1», «Приемная площадка 2»;
— сигналы об открытом положении предохранительных дверей, опущенном положении
качающихся площадок и о выдвинутом положении кулаков и др. («Двери», «Качающиеся
площадки», «Кулаки» и др.). Эти сигналы воспроизводятся на световом табло собственных
рабочих мест;
— из машинного отделения: сигнал «Ревизия».
3. На приемную площадку рукоятчику:
— с горизонтов от стволового (с индикацией горизонта, на котором находится клеть)
тоновых рабочих сигналов «Стоп», «Вверх», «Вниз», «Тихо вверх», «Тихо вниз» после прибы-
тия клети на данный горизонт и получения сигнала «Готов» от помощника стволового;
— сигналы об открытом положении предохранительных дверей, опущенном положении
качающихся площадок и о выдвинутом положении кулаков и др. («Двери», «Качающиеся
площадки», «Кулаки» и др.). Эти сигналы воспроизводятся на световом табло собственных
рабочих мест;
— из машинного отделения: сигнал «Ревизия».
4. От помощника стволового — стволовому или помощникарукоятчика — рукоятчику сиг-
налов «Авария» и «Стоп».
Блокировки, исключающие возможность:
— включения комплекса обмена вагонеток в режиме «Люди», «Негабарит», «Ревизия»;
— выдвижения посадочных устройств на неработающих горизонтах, а на работающем
горизонте — при скорости подъемного сосуда более 1 м/с в режиме «Груз»;
— выдвижения посадочных устройств на горизонтах в режиме «Люди» и «Ревизия»;
— захода опрокидной клети в разгрузочные кривые в режиме «Люди»;
— одновременной подачи сигналов (за исключением сигнала блокировки подъема и
«Авария») с двух и более рабочих мест (приемные площадки и горизонты);
— подачи с горизонта сигналов «Вверх», «Вниз», «Тихо вверх», «Тихо вниз» до подачи сигна-
лов от помощника стволового «Готов» и до прибытия клети на горизонт, откуда подается сигнал;
— подачи рабочих сигналов после подачи сигнала «Авария»;
— подачи любых сигналов после сигнала «Ревизия» (за исключением сигнала «Авария»
и сигналов от датчиков);
— подачи сигналов «Вверх», «Вниз», «Тихо вверх», «Тихо вниз» при наличии сигналов
«Двери», «Качающиеся площадки» и других сигналов, запрещающих движение ПУ (во всех
режимах, кроме режима «Негабарит»);
— одновременную работу совмещенных в одном стволе грузолюдских подъемных уста-
новок в различных режимах;
— подачи рабочих сигналов при открытых стопорах в клети в режиме «Груз»;
— одновременную подачу сигналов из клети и от рукоятчика приемной площадки;
— запрет передачи сигналов от стволовых непосредственно машинисту, минуя рукоятчика;
Рабочая сигнализация и связь должны также обеспечивать:
— непрерывный контроль исправности линии подачи сигнала;
— контроль напряжения питания;
— задержку подачи звуковых сигналов: «Авария» — не более 0,1 с; «Стоп» — не более
0,25 с;
— симплексную двустороннюю громкоговорящую связь с управлением от рукоятчика
приемной площадки со следующими абонентами; машинистом подъемной машины; ство-
ловыми горизонтов; рукоятчиком второй приемной площадки в режиме горизонта;
— вызов: машиниста подъемной машины — только голосом; стволовых — тональным
сигналом; рукоятчика — тональным и световым сигналами;
400
ГЛАВА 14
— телефонную связь: — между машинистом подъема и рукоятчиком;
— между рукоятчиком и стволовым.
На скиповых подъемных установках стволовая рабочая (резервная) сигнализация и связь
должны обеспечивать:
Передачу сигналов:
1. В здание подъемной машины машинисту (оператору) подъема:
— сигнала об окончании загрузки скипа на горизонте, разгрузки его на разгрузочной
площадке; о верхнем уровне материала в бункере. Этот сигнал используется для управления
ПУ в соответствии с заданным алгоритмом и воспроизводится на мнемосхеме дисплея для
получения информации о состоянии этих механизмов;
— предупредительного сигнала перед пуском подъемной машины, работающей в режиме
автоматического управления. Этот сигнал подается также в камеру загрузочного устройства;
— со всех рабочих мест, сигнала «Авария» в систему управления подъемом. По сигналу
«Авария» подъем производит аварийный останов.
2. От машиниста подъема на горизонты и разгрузочную площадку сигналов режимов:
«Груз», «Ревизия», «Люди». Эти сигналы воспроизводятся на шкафах разгрузочной площадки и
горизонтов.
3. На горизонты, разгрузочную и нулевую площадки сигналов о месте нахождения скипа.
Блокировки, исключающие возможность:
— подачи рабочих сигналов с горизонтов, на которых отсутствует скип;
— одновременной подачи рабочих сигналов с нескольких рабочих мест;
— всех сигналов (кроме сигнала «Авария») в режиме «Ревизия»;
— подачи рабочих сигналов после подачи сигнала «Авария».
Рабочая сигнализация и связь должны также обеспечивать:
— звуковое сопровождение каждого изменения светового сигнала;
— сброс сигнала «Авария»: звукового — машинистом подъема; светового — только с
места подачи;
— задержку подачи звуковых сигналов: «Авария» — не более 0,1 с; «Стоп» — не более 0,25 с;
— непрерывный контроль исправности линии подачи кодового сигнала «Стоп» и сигна-
ла «Авария»;
— двустороннюю громкоговорящую связь между машинистом подъема и операторами
загрузки, операторами нулевой и разгрузочных площадок;
— вызов: машиниста подъема — голосом и световым сигналом; стволовых горизонтов и
операторов нулевой и разгрузочных площадок — тональным сигналом и голосом;
— кодовую сигнализацию для передачи рабочих сигналов между операторами загрузки/
разгрузки и машинистом (оператором) подъема;
— телефонную связь между машинистом и операторами загрузки/разгрузки;
— сигнализацию о вывозе людей при помощи скипов [224].
Ремонтная сигнализация (в отличие от рабочей) должна исключать возможность трав-
мирования людей при осмотре и ремонте ствола, подъемных сосудов, армировки, элементов
копра, отвечать ряду специфических требований и обеспечивать:
— подачу трех рабочих команд «Вверх», «Вниз», «Стоп» из подъемного сосуда;
— воспроизведение рабочих команд в машинном отделении на пульте с их фиксацией и
в месте подачи механическим указателем;
— кратковременное (1—2 с) акустическое подтверждение принимаемых рабочих команд;
— сброс зафиксированных рабочих команд при подаче команды «Стоп»;
— контроль исправности канала передачи команды «Стоп» и автоматическую подачу
команды «Стоп» при неисправности этого канала;
— симплексную двустороннюю громкоговорящую связь машиниста подъема с персона-
лом, находящимся в (на) подъемном сосуде (при остановленном подъемном сосуде), при
этом в обоих пунктах связи должен быть дежурный прием;
— передачу речевой информации в машинное отделение с движущегося подъемного сосуда
и передачу речевой информации машинистом подъемной машины только после ее остановки;
— передачу рабочих команд и речевой информации в каждый из двух дополнительных
пунктов как с движущегося, так и с остановленного сосуда (например, машинисту лебедки
при работах по замене проводников или расстрелов армировки ствола и др.);
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
401
— двустороннюю громкоговорящую связь и подачу рабочих команд между отметкой, на
которой имеется свободный доступ к подъемным канатам (на башенных копрах многока-
натных установок), и отметкой, где размещен пульт управления подъемной машины;
— автоматический переход устройств машинного отделения на автономное питание, обес-
печивающее работу в режиме связи не менее 3 ч при отключении сетевого напряжения;
— индикацию разряда автономного источника питания в устройстве подъемного сосуда.
Независимо от технического решения, реализованного в аппаратуре по каналу связи,
ремонтная сигнализация и связь должны содержать два основных устройства:
— на подъемном сосуде для формирования и передачи рабочих команд «Вверх», «Вниз»,
«Стоп», а также для симплексной громкоговорящей связи с машинистом подъема. Это уст-
ройство (или отдельные его части, например, радиостанция) должны быть мобильными и
содержать автономный источник питания, приемник-передатчик;
— в машинном отделении для приема рабочих сигналов, контроля исправности канала
передачи сигнала «Стоп» и речевой информации из подъемного сосуда, а также передачи
речевой информации из машинного отделения в подъемный сосуд [224].
В соответствии с требованиями ПБ в стволах глубиной более 500 м для ремонтной сигнали-
зации должны применяться средства беспроводной связи. В частности, в качестве линии связи
могут быть использованы канаты: тяговые, парашютные, направляющие. Другой вариант воз-
можен при организации высокочастотного канала связи с помощью кабеля, проложенного для
этой цели. Независимо от технического решения, реализованного в аппаратуре по каналу связи,
ремонтная сигнализация и связь должны содержать два основных устройства:
— на подъемном сосуде для формирования и передачи рабочих команд «Вверх», «Вниз»,
«Стоп», а также для симплексной громкоговорящей связи с машинистом подъема. Это уст-
ройство (или отдельные его части, например, радиостанция) должны быть мобильными и
содержать автономный источник питания, приемник-передатчик;
— в машинном отделении для приема рабочих сигналов, контроля исправности канала
передачи сигнала «Стоп» и речевой информации из подъемного сосуда, а также передачи
речевой информации из машинного отделения в подъемный сосуд.
Составные части как рабочей, так и ремонтной сигнализации и связи, устанавливаемые
в машинном отделении поверхностных подъемных установок, могут иметь общепромыш-
ленное исполнение. Все остальные компоненты сигнализации и связи, монтируемые на при-
емных площадках и в стволе шахт, опасных по газу и пыли, должны быть во взрывозащи-
щенном исполнении [41].
Таким образом, вышеизложенные требования и нормативно-технические документы
определяют то минимальное количество функций системы стволовой сигнализации, кото-
рыми должна обладать любая подъемная установка, независимо от конструктивного испол-
нения самой системы. Необходимо добавить, что требования, содержащиеся в нормативно-
технических документах, перечисленных выше, составлены в большей степени для подъем-
ных установок с невысоким уровнем автоматизации, где работа подъема предусматривается
в ручном режиме управления. Поэтому при проектировании подъемных установок на базе
современного микропроцессорного оборудования с высоким уровнем автоматизации вызы-
вает трудности создание алгоритма (порядка) работы стволовой сигнализации, который бы
полностью соответствовал технологическому процессу работы шахтного подъема и одновре-
менно отвечал бы всем требованиям правил безопасности.
14.3. Аппаратура шахтной стволовой сигнализации и связи
(ОАО «Красный металлист», Конотоп)
Конотопский электромеханический завод ОАО «Красный металлист» выпускает аппарату-
ру шахтной стволовой сигнализации ШСС-1 и систему шахтной стволовой сигнализации и свя-
зи СШСС.1 [80]. Аппаратура ШСС-1 предназначена для координации действий персонала, об-
служивающего подъемную установку при выполнении операций по: спуску-подъему людей, груза,
оборудования. Аппаратура используется для работы в районах с умеренным и холодным клима-
том на вертикальных подъемных установках всех типов и назначений с высотой подъема до 2000 м
в шахтах, опасных по газу и пыли, а также по внезапным выбросам угля, породы и газа.
В зависимости от вида шахтных подъемных установок аппаратура ШСС-1 имеет две
модификации:
402
ГЛАВА 14
— ШСС-1К — для клетевого подъема с числом горизонтов до семи при двух приемных
площадках и машинном отделении — 28 вариантов исполнения.
— ШСС-1С — для скипового подъема с числом горизонтов до трех, с двумя площадка-
ми и машинным отделением — 3 варианта исполнения.
Технические характеристики
Напряжение питания, В 380
Потребляема мощность, ВА, не более 880
Дальность восприятия световых сигналов, м, не менее 3
Уровень звукового давления, дБ, не менее 90
Рис. 14.1. Аппаратура СШСС.1
Система ШСС-1К имеет ряд серьезных недостатков (низкая надежность всей системы и
внутренних блоков, морально устаревшая элементная база и конструкция, большие эксплу-
атационные затраты и т. Д.) и поэтому в последнее время часто возникает вопрос о замене
данной системы стволовой сигнализации на современные микропроцессорные системы.
Система шахтной стволовой сигнализации и связи СШСС.1 (рис. 14.1).
Предназначена для оперативной сигнали-
зации и связи между машинистом шахтного
подъема и персоналом на подъемном сосуде
при ведении осмотровых и ремонтных работ в
вертикальных шахтных стволах, а на клетевых
подъемных установках — и для постоянно дей-
ствующей связи между машинистом подъема
и пассажирами в клети в случае экстремаль-
ных ситуаций. Система СШСС.1 рассчитана
для работы в шахтах, в том числе опасных по
газу и пыли в соответствии с требованиями ПБ.
Система работает на несущих радиочас-
тотах 130 или 160 кГц с амплитудной моду-
ляцией, обеспечивает двухстороннюю симп-
лексную громкоговорящую связь, а также передачу и прием с фиксацией на световом табло
сигналов рабочих команд «Вверх», «Вниз», «Стоп». В качестве линии связи используется
подъемный или парашютный канат подъемной установки.
Система имеет две модификации СШСС.1.1 и СШСС.1.2, работающих на несущих час-
тотах 130 и 160 кГц. Составными частями являются:
— Устройство приемо-передающее УПП-1 и УПП-2.
— Устройство машинного отделения УМО.1 (УМО.2).
— Пульт машиниста ПМ1.
— Устройство постоянно действующей связи УПДС.1(УПДС.2).
— Источник питания мощный аккумуляторный ИПМ.2.
— Устройство зарядноеУЗА.1.
— Устройство питания машинного отделения ИП4.
— Устройство антенное УПКС.
Технические характеристики СШСС.1
Выполняемые функции, ед. не менее 22
Дальность передачи информации, м, не менее 2500
Длительность непрерывной работы приемо-передающих устройств подъемного сосуда от 6
автономного источника питания, ч не менее
Потребляемая мощность, Вт, не более 150
Несущие частоты, кГц: СШСС. 1.1 130
СШСС. 1.2 160
Номинальная выходная мощность усилителя низкой частоты приемников на нагрузке
8 Ом±5% Вт, не менее:
для устройств машинного отделения 0,9
для приемо-передатчика подъемного сосуда 0,4
Номинальное напряжение питания изделия от сети переменного тока частоты (50± 1) Гц, В 127 или 220
К недостаткам аппаратуры СШСС.1 следует отнести: большой вес устройства приемо-
передающего УПП1; большой вес блока питания аккумуляторного; двухгнездовые разъемы
на блоках УПП1 и УА быстро выходят из строя; при работе двух подъемных сосудов в одном
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
403
стволе и работе на них СШСС.1 происходит накладка работы с одного УПП1 на другой;
аппаратура СШСС.1, изготовленная на устаревшей элементной базе, — громоздкая, имеет
большие габариты, вес и невысокое качество работы.
14.4. Аппаратура сигнализации и радиосвязи «Весна-СРС»
В последние годы получили распространение системы контактной связи и сигнализации,
радиосвязи и радиотелеуправления, бесконтактной индуктивной связи по тяговым и несущим
канатам шахтной подъемной установки, например, аппаратура стволовой радиосвязи для верти-
кальных подъемных установок «Весна-СРС». Аппаратура сигнализации и радиосвязи разработа-
на специалистами МакНИИ и выпускается ЗАО «Весна-Контакт», г. Днепропетровск) [73, 75].
Аппаратура предназначена для осуществления ремонтной сигнализации и двусторон-
ней связи ремонтного персонала (рис. 14.2). Применяется в шахтах всех категорий, включая
шахты, опасные по газу и пыли, а также для связи пассажиров клети с машинистом подъема,
при осмотрах, ремонтах ствола и в экстремальных ситуациях.
Рис. 14.2. Аппаратура сигнализации «Весна-СРС»
Аппаратура радиосвязи в шахтном стволе «Весна-СРС» работает в диапазоне 0,1—30,0 МГц
и состоит из станции машиниста подъема «Весна-СШ», мобильной радиостанции «Весна
НШ2м» (размер 180x165x65 мм), клетевой радиостанции «Весна НШ2м», с выносными пуль-
тами для установки в клети, копровой и клетевой антенны, зарядного устройства. Аппарату-
ра обеспечивает связь при перемещении подъемных сосудов по всему шахтному стволу. При
этом можно вести связь с машинистом подъема с копра, со ствола и т.п.
Технические характеристики «Весна-СРС» [73]
Рабочая частота 200, 225, 250, 275, 300 кГц
Класс разборчивости речи по ГОСТ 16 600 Ш
Вид модуляции Мощность передатчика, Вт: частотная
станции машиниста подъема 3
носимой станции 2
клетевой станции 2
Мощность приемника, Вт:
станции машиниста подъема 2
носимой станции 0,5
клетевой станций 0,5
Чувствительность приемника, мкВ:
станции машиниста подъема 4
носимой станции 4
клетевой станции 4
Напряжение питания, В:
станции машиниста подъема -220,-12
носимой станции -8,4
клетевой станции -8,4
Продолжительность работы от аккумуляторного блока питания, ч
станции машиниста подъема 3
носимой станции 8
Масса (кг) и габариты (мм):
станции машиниста подъема 1,5-200x160x150
носимой станции 1,2-180x156x65
клетевой станции 4,0-325x295x125
404
ГЛАВА 14
14.5. Система телезащиты и телесигнализации «Радуга-2» [79]
Система телезащиты и телесигнализации
(г. Харьков) и предназначена для:
Рис. 14.3. Аппаратура «Радуга»
Радуга-2» (рис. 14.3) выпускает Укрспецсвязь,
— обеспечения симплексной связи
между клетью и машинным залом с пре-
имущественной связью из клети;
— подачи команд «Код», «Исполне-
ние», «Стоп», «Решетки открыть», «Аварий-
ный стоп» из клети в машинный зал
подъемной установки;
— защиты от напуска каната на клеть
и противовес с включением предохрани-
тельного тормоза, если напуск произошел;
— контроля положения внутриклетевых
стопоров и блокировки выключения подъем-
ной установки при открытых стопорах или же
включением предохранительного тормоза, если
стопоры открылись во время движения клети;
Технические характеристики «Радуга-2»
Максимальная дальность связи — 1300 м
Допуск работы двух комплектов в одном шахтном стволе;
Работа каналов телесигнализации и речи в диапазоне от 2 до 3 МГц
Передача команд телеуправления, телесигнализации и телезащиты — 12 шт.
Исполнение — РН2
Выходная мощность каждого передатчика на нагрузке 75 Ом, мВт — 300±50
Потребляемый ток:
— в режиме ТС, мА не более 260
— в режиме ТЗ, мА не более 180
Изготавливается система в четырех исполнениях, которые отличаются составом, часто-
тами передатчиков и приемников, что позволяет оснащать ею подъемные установки «клеть -
клеть», «клеть — противовес» и устанавливать в одном стволе два комплекта «Радуга-2». Со-
став системы: станции клетевая и машиниста, блок индикации, пульт переносной, блок ак-
кумуляторов и согласующие устройства.
14.6. Комплексы аппаратуры «СИГНАЛ» [78]
Комплексы аппаратуры «СИГНАЛ-17», «СИГНАЛ-18», «СИГНАЛ-19», «СИГНАЛ-20» для
шахтных подъемных установок выпускает Союзцветавтоматика (Российской Федерация) [78].
Аппаратура предназначена (рис. 14.4) для связи и сигнализации между подъемными со-
Рис. 14.4. Общий вид аппаратуры
судами, машинным залом и посадочными площад-
ками, а также для экстренной остановки подъемной
машины при возникновении в шахтном стволе ава-
рийных режимов, в том числе от напуска каната.
Аппаратура применяется в вертикальных шах-
тных стволах, оборудованных подъемными установ-
ками с различными типами подъемных сосудов и
направляющих, с одним или несколькими подъем-
ными канатами. Принцип действия основан на при-
еме-передаче сигналов по беспроводной связи. Раз-
говорная связь, технологическая сигнализация и уп-
равление осуществляются по индуктивным дуплек-
сным каналам связи.
Достоинством аппаратуры являются: высок»
надежность, многофункциональность, экологичес-
кая чистота, простота эксплуатации, хорошая зашм-
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
405
Технические характеристики аппаратуры «Сигнал»
Диапазон несущих частот, кГц 1980-2620
Максимальная глубина шахтного ствола, м 2000
Максимальный диаметр подъемного каната, мм 65
Время подачи сигнала экстренной остановки подъемной машины не более, с 0,2
Напряжение питания, В:
постоянного тока 3,75
переменного тока частотой 50 Гц 127
Потребляемая мощность, Вт:
постоянного/переменного тока 50/500
та от влияния шахтной среды, умеренная цена. Выполнена в рудничном нормальном испол-
нении.
Аппаратура состоит из приемопередатчиков, пультов и устройств управления, датчиков,
трансформаторов и согласующих устройств. Электрическое соединение элементов комплек-
са между собой производится кабелями, входящими в комплект поставки. Аппаратура уста-
навливается в здании подъема, на руддворе и шахтном стволе (рис. 14.5).
Рис. 14.5. Схема размещения аппаратуры «Сигнал»
в здании подъема и шахтном стволе:
1 — приемопередатчик; 2 — микрофон; 3 — пульт
управления; 4 — трансформатор для связи
с канатом; 5 — датчик натяжения каната;
6 — датчик положения сосуда; 7 — постоянный магнит;
8 — блок управления [78]
Особенности применения аппаратуры «СИГНАЛ»
Тип комплекса Схема подвески подъемных сосудов Элемент конструкции, служащий линией связи
«СИГНАЛ-17» Клеть с противовесом, клеть без противовеса, многоэтажная клеть Подъемный канат
«СИГНАЛ-18» Две клети Подъемный канат
«СИГНАЛ-19» Проходческая бадья Направляющий канат
«СИГНАЛ-19» и «СИГНАЛ-19-1» Две проходческие бадьи в одном шахтном стволе Направляющий канат
«СИГНАЛ-20» Скип с противовесом, скип без противовеса, два скипа Подъемный канат
14.7. Оценка эффективности устройств шахтной стволовой
сигнализации и связи [74]
Применение современных средств связи в шахте повышает безопасность труда, способству-
ет оптимизации рабочего процесса, позволяет оперативно получать информацию о ходе выпол-
няемых работ, значительно снижает вероятность возможных производственных ошибок и нару-
шений технологии. Одним из важнейших условий обеспечения высокопроизводительной рабо-
ты подъемных установок является наличие средств сигнализации и связи между машинистом
шахтного подъема и персоналом, находящимся в подъемном сосуде. Поэтому актуальным явля-
ется создание эффективных средств связи с высоким уровнем надежности во взрывобезопасном
исполнении всех устройств, находящихся в шахтных условиях.
Техника радиосвязи на поверхности Земли в настоящее время значительно усовершен-
ствовалась. Попытки перенести эту технику в условия шахты всегда оказывались дорогосто-
406
ГЛАВА 14
ящими и во многих случаях являлись сложной технической задачей. В отличие от работы на
поверхности Земли распространение электромагнитных волн в стволе невозможно без при-
нятия специальных мер. Окна д ля определенных предпочтительных диапазонов частот, обес-
печивающие распространение сигнала без значительного затухания, отсутствуют. Чтобы обес-
печить необходимую дальность, можно воспользоваться проводником, по которому распро-
страняются радиоволны, или разместить через определенные расстояния регенераторы, ко-
торые принимают сигналы и передают их снова. Исследования показали, что надежную ра-
диосвязь в стволе обеспечивают системы, построенные по принципу индуктивной связи с
использованием металлических проводников [74].
На угольных предприятиях Украины применяется аппаратура ШВС-ЗА (изготовитель —
Сумской завод электронных микроскопов), АСМК-1, ШСС-1 (изготовитель — ОАО «Крас-
ный металлист», г. Конотоп), ВЧСН-2 (разработчик — институт «Автоматгормаш», г. Донецк),
с помощью которой координируются действия обслуживающего персонала при спуске и
подъеме людей и оборудования. Опыт использования показал, что количество и номенкла-
тура передаваемых сигналов не удовлетворяют требованиям безопасной и безаварийной ра-
боты шахтной подъемной установки.
Созданы и внедрены в производство новые системы контактной связи и сигнализации, ра-
диосвязи и радиотелеуправления, бесконтактной индуктивной связи по тяговым и несущим ка-
натам подъемной установки. В табл. 14.1 приведены основные технические характеристики
новой аппаратуры сигнализации и связи, созданной в последнее время.
Установлено, что эффективность стволовой связи и ее надежность определяются не толь-
ко величиной затухания в тракте передачи информации, но и качеством изготовления самой
аппаратуры, при помощи которой осуществляется связь. Более того, предельно допустимое
значение затухания в канале в определенной степени зависит от самой аппаратуры. Анализ
табл. 14.1 показывает, что рабочие частоты и способ модуляции, применяемые в аппаратуре
стволовой сигнализации и связи, различны. Это свидетельствует о недостаточности научных
данных для обоснования оптимальных решений по выбору канала передачи информации.
Системам присущи некоторые особенности, связанные с непостоянством электрических па-
раметров линии связи и элементов бесконтактного индуктивного присоединения. Поэтому
для выбора области устойчивой работы систем необходимо производить анализ изменения и
расчет тракта передачи информации для каждой шахты.
Исследование вопросов, связанных с повышением эффективности передачи информа-
ции, основано на том, что в качестве критериев для оценки эффективности системы переда-
чи приняты: надежность, помехоустойчивость, степень использования пропускной способ-
| ности канала связи, коэффициент технического использования, дальность действия систе-
[ мы, эксплуатационные расходы и стоимость изготовления.
При построении систем стволовой радиосвязи (СРС) возникает ряд задач, вызванных слож-
ностью функционирования таких систем в шахтном стволе. Необходимо знать зоны связи,
информационные характеристики абонентов, характеристики электромагнитной обстановки
и распространения радиосигналов в стволе, в том числе в аварийных ситуациях.
С учетом сказанного обобщенная модель канала передачи информации СРС может быть
записана в виде
^{e»}=<2l <14.7.1)
где 5 , 5 — соответственно выходная и входная информация СРС; В — информационная
характеристика абонента; (Un,F,L) — параметр электромагнитной обстановки (текущее
значение уровня помехи Un, зависящей от частоты / и дальности связи Z); QL — оператор
преобразования информации.
В общем случае синтез оптимального оператора QL, обеспечивающего заданное качество СРС
?i при определенных ограничениях, и является задачей синтеза оптимального радиоканала СРС
[| Характеристики оператора QL в большей степени зависят от свойств трассы распространения ра-
lj диоволн в стволе. Чтобы достичь нечувствительности к электромагнитным помехам, частотная
полоса системы стволовой связи должна лежать в оптимальной зоне каната в плане его продоль-
I ного и поперечного затухания и передаточных характеристик. Продольное затухание, т.е. ослабле-
ние сигнала с увеличением длины, растет с частотой по закону степенной функции [215].
Технические характеристики
Таблица 14.1
Параметры «СШСС.1» ОАО «Красный металлист», г. Конотоп «Весна СРС» ЗАО «Весна- комплект», г. Днепропетровск «РАДУГА-2» | «ВЕРТИКАЛЬ» Укрспецсвязь, г.Харьков «FLEXCOM» MRS Канада «MR90» FHF Германия «СИГНАЛ-18» СоюзЦМА Россия
Станция клетевая Передаваемая дискретная информация, шт Речеваяя связь Аккумуляторы, В Исполнение, степень защиты Габаритные размеры, мм, не более Масса, кг, не более 12 1 12 РОИаДР54 290x160x140 6,5 1 1 8.4 РОИа,1Р54 325x295x125 4,0 12 1 7,5 РН2 358x242x112 8 11 1 7,5 РН2 358x242x112 8 32 1 12 нет данных нет д анных нет данных 20 1 12 Ех1а1Р54 390x247x12 3 7,7 1 3,75 РОИа,1Р54 нет данных нет данных
Станция машиниста Принимаемая дискретная информация, шт Речеваяя связь Напряжение питания, В Габаритные размеры, мм, не более Масса, кг, не более 12 1 220(127) 400x230x120 4,5 1 1 220 200x160x150 1,5 12 1 220 482x474x198 24 11 1 220 482x474x198 24 32 1 110/230 нет данных нет данных 20 1 5 10x247x123 9,8 1 127 нет данных нет данных
Рабочая частот, мГц 0,13; 0,16 0,2; 0,225; 0,25; 0,275; 0,3 2-3 2,1-3,783 1900 27-35 1,98-2,620
Вид модуляции Амплитудная Частотная Амплитудная Амплитудная ИКМ Частотная Частотная
Дальность, км 2,5 1,5 1,3 1,3 0,7-100 1,5-10 2,0
Время подачи сигнала экстренной остановки подъемной машины не более, с 0,25 0,2 0,2
Скорость передачи информации, Кбод/с 1,2/19,2 2,4/19,2
Продолжительность работы от аккумуляторного источника питания, час 24 24 24 24 нет д анных нет данных нет данных
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
408
ГЛАВА 14
aL=KFNL, (14.7.2)
где К — константа с соответствующей размерностью для «однородной» горной выработки
(изменяется в пределах 8<Л'<22), а «неоднородной» (лава, штрек) 22<Л'<24; N— показатель,
зависящий от вида крепи (изменяется от 0,5 до 1,5).
Поперечное затухание (затухание связи между антенной станции и излучающим кабе-
лем) уменьшается с увеличением частоты и определяется из формулы
(14.7.3)
Л)
где d — расстояние между антенной и волноводом, см; Fo — несущая частота, Гц; к — постоян-
ная, определяемая размером и материалом антенны [216]; АС — ширина полосы частот, Гц.
При наложении и суммировании этих затуханий с учетом проводимости горных пород
и расстояния между приемной и передающей антеннами определяют оптимальную частоту
F для передачи на заданное расстояние максимальной мощности полезного сигнала. При
движении клети непрерывно меняются проводимость горных пород, расстояние между або-
нентами и характеристики проводящих направляющих, что приводит к изменениям величи-
ны F . Тогда для поддержания заданного качества радиоканала СРС необходимо адаптив-
ное изменение его параметров в соответствии с возникающими условиями распространения
радиосигналов. Это требование можно интерпретировать как требование синтеза адаптив-
ного оператора Q , стабилизирующего качество передачи информации СРС на определен-
ном уровне.
Существует ряд способов синтеза такого оператора путем изменения частоты Fonm, спо-
соба модуляции, мощности сигнала и т.д. При известном среднем расстоянии, усредненных
характеристиках трасс распространения радиосигналов для СРС определяется диапазон из-
менения частоты, мощности излучения АР и способ модуляции. В [217] получены выраже-
ния для выигрыша gAM и обобщенного выигрыша g^iW оптимального приема при амплитуд-
ной модуляции (AM)
2
„ _ Рвых _ ^тАМ . „1 _ Sam
Sam т n-2 ’ Sam ~
P ex т^м + П1 a
(14.7.4)
где mAM — индекс амплитудной модуляции; П— пик-фактор сообщения; а ----------отноше-
Fc
ние полосы пропускания канала к максимальной частоте сигнала; р^рдых — отношение
сигнал/помеха на входе и выходе приемника.
Предельное значение выигрыша при AM равно 1. Оно достигается тогда, когда т = 1 и
/7=1. При передаче речи /7 = 3 и тогда при т = O^g^ = 0,165 и g^iW = 0,083.
Выигрыш при фазовой модуляции (ФМ) определяется выражением
1 ZY^ 1 ZY^
1 ОС 1 1 ОС / л л *7 с\
(14.7.5)
v 4 И1 4 П2
а при частотной модуляции (ЧМ)
3 а3 1 3 а2 /1Л-7 4Ч
8чм~4~Л1’ 8чм~41^' 14’7’6
Из формул (14.7.5) и (14.7.6) видно, что при ЧМ, как и при ФМ, выигрыш может быть
значительно больше единицы и достигается как за счет увеличения мощности сигнала, так
за счет расширения полосы частот, занимаемой сигналом. Высокую помехоустойчивость обес-
печивает система с фазоимпульсной модуляцией (ФИМ). Обобщенный выигрыш в системе
определяется из формулы.
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
409
1 fA?'
я2*Цт0 ,
&ФИМ~
(14.7.7)
где Кф — коэффициент, зависящий от формы импульса; Ат — максимальная девиация поло-
жения импульса [217].
При оптимальном выборе параметров системы ФИМ: /т0 = 1, F=2Fc, Ат 1/2/
s1 = 0,2
г'"” шГк*
(14.7.8)
о 1 jOL
При Ki =1/12, что соответствует треугольной форме импульса, gonm =-=.
v 4IIZ
Это совпадает с (14.7.5) для систем с частотной модуляцией. Следовательно, потенци-
альная помехоустойчивость системы ФИМ при оптимальном выборе параметров и системы
ЧМ при том же значении а одинакова.
Так как ЧМ проще ФИМ, то для передачи сигналов по каналам связи целесообразно
использовать частотную модуляцию. Работа радиоканала с ЧМ осуществляется на некото-
рой частоте F. внутри полосы А/ В этом случае могут использоваться методы с автовыбором
рабочих частот. Применяются три варианта построения адаптивных радиоканалов с автовы-
бором. В первом варианте для связи используют частоты / с заданным превышением уров-
ня полезного сигнала над уровнем помехи, во втором — выбирают Ft с максимальным пре-
вышением уровней сигнал/помеха, в третьем — выбор F. осуществляют так же, как и во вто-
ром, но прием информации на выбранной F ведется до уменьшения отношения сигнал/по-
меха ниже заданного. В каждом из этих вариантов необходима текущая автоматическая оценка
качества каналов на группе частот. В адаптивных радиоканалах с зондированием перспек-
тивно использование методов приема непрерывных сигналов с синхронно-фазовым детек-
тированием, повышающим помехоустойчивость приема и обеспечивающим работу радиока-
нала СРС в условиях адаптации по частоте. Однако при изменении частоты динамический
диапазон синхронного приемника будет уже недостаточен, что приведет к срыву приема ЧМ
колебания. Для устранения этого явления необходимо введение в приемник узлов первона-
чальной грубой настройки частотномодулируемого генератора на принимаемую несущую
частоту. Тогда при переходе на другую частоту будет происходить автоматическое изменение
параметров частотномодулируемого генератора; фазовый детектор должен рассчитываться
на достаточно широкую полосу частот, определяемую максимально и минимально возмож-
ными значениями частоты.
Для оценки эффективности систем связи в [217] применяется коэффициент использо-
вания канала по мощности Д (энергетическая эффективность) и коэффициент использова-
ния канала по полосе частот / (частотная эффективность):
P = R/pQ , (14.7.9)
где R — скорость передачи информации; р0 — отношение мощности сигнала Р к спект-
ральной плотности No мощности шума.
После того, как выбрана система по показателям Ди/, можно вычислить обобщен-
ный показатель технического эффекта г/ — информационную эффективность.
77 = 7?/Aflog(p + l), (14.7.10)
где р = Рс/ Рш — отношение мощности сигнала и шума в полосе A f
Проведенный анализ показывает, что высокая помехоустойчивость обеспечивается при
условии, что отношение сигнала к помехе на входе приемника больше предельного (порого-
вого) значения. Порог помехоустойчивости амплитудной модуляцией (система СШСС.1) вы-
ражается слабо. Системы с частотной и фазоимпульсной модуляцией (аппаратура «Весна-
СРС», «Сигнал-18») примерно равноценны. В этих системах, а также в цифровых системах с
импульсно-кодовой модуляцией (ИКМ) высокая помехоустойчивость может быть достигну-
410 ГЛАВА 14
та увеличением ширины спектра сигнала. В реальных условиях эффективность систем суще-
ственно снижается из-за потерь в канале. Основными причинами этих потерь являются по-
мехи, неточности формирования и синхронизации сигналов, нестабильность частоты и т.п.
Поэтому оптимизация параметров выбранного варианта системы должна производиться с
учетом этих факторов.
Важным критерием выбора F является уровень помех или напряженность поля помех.
Для обеспечения радиосвязи в стволе с учетом благоприятных значений продольного зату-
хания можно использовать длинноволновой диапазон (100—500 кГц), а средневолновой диа-
пазон (около 2 МГц) позволяет получить отношение сигнал/помеха приблизительно на 20 дБ
лучше. Влияние электромагнитной обстановки на качество передачи информации СРС оп-
ределяется параметром . Анализ помех вида речевого шума [218] показывает, что
амплитуда импульсной помехи изменяется в пределах динамического диапазона полезного
сигнала по нормальному закону. Длительность импульса помехи меньше, чем период следо-
вания полезного сигнала с максимальной частотой Fc основного тракта. При оценке каче-
ства тракта целесообразно использовать коэффициент разборчивости W. В практике при
расчете коэффициента разборчивости речи при действии импульсной помехи с большой
скважностью могут встретиться три случая.
1. Пики помехи и сигнала совпадают по амплитуде, но длительность импульса может
быть меньше длительности сигнала. При этом может наступить ограничение импульсной
помехи вследствие ограниченности динамического диапазона, а разборчивость речи будет
определяться характером амплитудного ограничения. Так, в [218] приводится расчет коэф-
фициента разборчивости для импульсов с большой скважностью
(Nr А
-уЧ (14.7.11)
где W — коэффициент разборчивости сигнала при ограничении; Wg — коэффициент раз-
борчивости при отсутствии помех; А — число импульсов за период наблюдения Г, ти — дли-
тельность импульсных помех.
2. Помеха действует на участках, где уровень сигнала мал или равен нулю. В этом случае
разборчивость определяется по формуле
] m 1 л
(14.7.12)
2 U„tNT 2 U^T
где сг„=———- — дисперсия помехи; = с с — дисперсия сигнала; тэ — параметры
Т
органа слуха; Ти — длительность промежутка между импульсами помехи; ти — длительность
превышения уровня помехи над уровнем сигнала; Un — максимальное значение помехи; п —
уровни сигнала; m — число полосок (для речевых сигналов выбирается 20).
3. Помеха частично маскирует сигнал, т.е. часть пиковых уровней сигнала совпадает с
пиками уровней помех. Коэффициент разборчивости при действии импульсных помех оп-
ределяется для каждой полоски равной разборчивости.
(14.7.13)
Из выражений (14.7.11), (14.7.12), (14.7.13) видно, что коэффициент разборчивости ре-
чевого сигнала при действии импульсных помех зависит от соотношения помеха/сигнал, дли-
тельности импульсной помехи, а также от постоянной времени слуха, которая изменяется в
пределах 50—200 мс.
Проведенный анализ существующих средств шахтной стволовой сигнализации и свя-
зи показал, что разработанная аппаратура (табл. 14.1) не имеет канала передачи измери-
тельной информации, а передача дискретной информации осуществляется с низким быст-
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
411
Рис. 14.6. Структурная схема
комплекса технических средств,
разрабатываемого НИИГМ
им. Федорова
родействием. Указанные недостатки снижают эффективность применения аппаратуры, а
при движении сосуда в стволе со скоростью более 4 м/с возможна потеря информации о
натяжении каната, текущем положении сосуда, контроле состояния и срабатывания пара-
шютов.
Для решения задач контроля провисания струны и натяжения каната, контроля состоя-
ния и срабатывания парашютов, защиты подъемной установки от жесткой посадки клети в
НИИГМ им. М.М. Федорова ведутся работы по созданию комплекса технических средств,
обеспечивающих безопасную эксплуатацию шахтных подъемных установок.
На рис. 14.6 приведена структурная схема разрабатываемого комплекса. В состав комп-
лекса входит: устройство отображения информации — УОИ, приема информации — УПИ,
сбора и передачи информации — УСПИ; датчики на-
тяжения каната — ДН, срабатывания парашюта — ДП,
наличия клети — ДК, провисания струны — ДС; источ-
ник питания — ИП; передатчик ПРД и приемник ПРМ
радиосигналов.
Комплекс снабжен средствами передачи инфор-
мации по проводным линиям связи и средствами ра-
диосвязи. При передаче информации о срабатывании
парашюта, натяжении или провисании каната исполь-
зуется принцип индуктивной радиосвязи по направ-
ляющим. Передатчик ПРД снабжен устройством ко-
дирования информации, которая поступает через при-
емник ПРМ, где она декодируется в УОИ. Информа-
ция о наличии клети на горизонте поступает с датчи-
ков ДК на устройство сбора и передачи информации,
с выхода которого через проводную линию связи и ус-
тройство приема информации поступает на УОИ. Уст-
ройство обрабатывает информацию, осуществляет ар-
хивацию данных, сигнализирует о срабатывании защит
и формирует команды управления подъемной установ-
кой ПУ.
Комплекс выполняет следующие функции:
— контроль провисания струны и натяжения каната;
— защиту подъемной установки от напуска каната;
— контроль состояния и срабатывания парашютов;
— передачу сигналов о срабатывании защиты от
напуска каната и о срабатывании парашютов;
— контроль режима замедления и защиту подъемной установки от жесткой посадки клети;
— диагностику технического состояния комплекса технических средств;
— формирование информации машинисту подъема информации о режиме движения
клети людского и грузолюдского подъема, срабатывание аварийных датчиков.
Внедрение разработанного комплекса на шахтах позволит повысить достоверность кон-
троля натяжения каната и не допустить их перегрузки, предотвратить аварии и обеспечить
защиту ПУ от жесткой посадки клети.
14.8. Применение современных микропроцессорных систем
в стволовой сигнализации с использованием оборудования зарубежных фирм*
НПФ «МИДИЭЛ» в своих разработках подъемных машин использует современную про-
дукцию ведущих производителей шахтного оборудования — фирм «АВВ» (Швеция) и
«FHF» (Германия). Более высокий технический уровень применяемого оборудования по-
зволяет помимо выполнения всех требований ПБ обеспечить более безопасную, более ин-
формативную, более удобную, с точки зрения конечного пользователя, работу шахтного
подъема.
* Вакуленко А. В., Василенцев В.А. (НПФ «МИДИЭЛ»)
412
ГЛАВА 14
Алгоритмы работы систем стволовой сигнализации и связи подъемных установок со стан-
дартным набором стволового оборудования и при различных режимах управления, реализу-
ющие требования к системам стволовой сигнализации и связи, приведены в [224].
Алгоритмы позволяют организовать необходимый рабочий цикл в требуемом режиме
работы подъемной установки. Особенностью этих алгоритмов является то, что основным ре-
жимом работы подъемной установки является автоматический для скиповых подъемов и по-
луавтоматический для клетевых подъемов, т.е. большинство функций по управлению подъе-
мом возлагается на систему автоматического регулирования, а человеком выполняются опе-
рации по изменению технологического процесса (режим работы, адрес движения и т.д.) и
обеспечению безопасности подъема (команда на пуск, блокировки и т.д.).
Применив данные алгоритмы работы стволовой сигнализации в своих технических про-
ектах на подъемных машинах, уже поставленных заказчику (четыре барабанных подъемных
машины для рудника «Мир» АК «АЛРОСА», многоканатная машина ЦШ4х4Д для ОАО «Дон-
ской ГОК») фирме «МИДИЭЛ» удалось обеспечить соответствие современной микропро-
цессорной системы управления предъявляемым в ПБ функциональным требованиям.
В проектах электрической части шахтных подъемных машин, выполненных фирмами
АВВ и НПФ «МИДИЭЛ», заложены технические решения, увязывающие системы управле-
ния подъемными машинами с системами стволовой сигнализации в единый комплекс авто-
матизированного управления подъемно-транспортной системой.
Система управления и автоматизации АВВ построена на основе микропроцессорных
программируемых контроллеров. Весь алгоритм управления подъемной машиной по сигна-
лам из ствола, а также механизмами, установленными в стволе, реализуется главным кон-
троллером подъемной установки. Система стволовой сигнализации, включающая централь-
ный шкаф в помещении оператора, периферийные устройства, датчики на горизонтах во 1
взрывоопасной зоне, соединяется с системой управления подъемом посредством модемной |
связи. Для цепей сигналов защиты из ствола (аварийный останов, блокировка подъема и I
т.д.) и цепей связи с датчиками положения сосудов в стволе предусмотрена аппаратная связь. 1
Наглядная визуальная информация о состоянии механизмов в стволе представляется на ви-
довом экране компьютера оператора подъемной машины (рис. 14.7).
Структурная схема системы стволовой сигнализации с использованием оборудования
FHF, которая была применена на клетевом подъеме рудника «Мир» показана на рис. 14.8.
В классическом варианте все оборудование FHF, располагаемое в стволе, выполняется во ;
взрывобезопасном исполнении. На шахтах не опасных по газу и пыли, где не требуется приме-
нение взрывобезопасной аппаратуры, НПФ «МИДИЭЛ» предлагает систему стволовой сигна-
лизации с использованием невзрывобезопасных аппаратов ввода-вывода фирмы АВВ для сбо-
ра данных оборудования в стволе. В этом случае для организации телефонной и громкогово-
рящей связи, а также для радиосвязи с подъемным сосудом используется стандартное обору-
дование FHF, а для передачи данных из ствола в систему управления подъемом и обратно при-
меняются модули удаленного ввода-вывода S800, которые принимают сигналы непосредственно
на горизонтах и передают в центральный контроллер по шине связи.
Как указывалось ранее, для осуществления связи с подъемным сосудом и реализация
некоторых функций (контроль натяжения каната, контроль стопоров вагонетки, управление
подъемом из клети, голосовые функции и т.д.), указанных в разработанных алгоритмах ра- !
боты стволовой сигнализации, необходимо использование мобильных радиосистем. НПФ
«Мидиэл» в своих проектах использует стволовую радиостанцию фирмы FHF типа MR90.
Система мобильной радиосвязи MR90 является многоканальной системой радиопере- !
дачи речи и данных для применения в подземных выработках. Система радиосвязи служит
для обмена технологическими данными между оборудованием в клети и системой управле-
ния подъемной машины. Голосовая связь из клети или с противовеса с помощью перенос-
ной радиостанции используется при техническом обслуживании ствола и контроле каната.
Максимальный радиус действия радиосвязи составляет 2,5 км.
Фирма «Мидиэл» разработала локальную систему стволовой сигнализации, которая по-
зволяет заменить устаревшие системы стволовой сигнализации с минимальными измененм-
ями в схеме подъемной установки. Эта система представляет собой отдельный шкаф связи с
программируемым контроллером АС800М фирмы АВВ, набор аппаратов сигнализации и свя-
зи в стволе и персональный компьютер. В контроллере загружена программа обработки сиг-
DUNbOK Operator Workplace
yu ij J
О П ервый aep. сигнал
-Itflxf
J, |<, ‘dreii ~|
£_____as?-I >- «»» _ ц> - ;,ип
Люди
...*л_.<\т.....Т...’...Й ’ ЕЕ -
Аварийный стор
[ Предупреждение
PBES Синхронизация
Двери уровней
DQNGQK
Положение
Скорость
Давление
ЩИ Блокировка
1 Ручной режим тормоза
Рожим тоста
ЦЕ Автомат
шл РуЧ1 юй
Резерв
Ревизия
i Ногабарит
Спуск груза
И Груз
mi люди
к Обход
Рй Клеть на ур. 1
М БЛОК.
I Авария
I Клеть на ур. 2
Блок.
Авария
ИКлотьна ур. 3
Блок.
Авария
I Клеть на ур. 4
Блок.
Авария
ЦКлеть на ур. 5
Блок.
Авария
Клеть на ур. б
Ц Блок.
Авария
ЦКлоть на ур. 7
.Блок.
Авария
ИКлеть на ур. 8
ш Блок.
Авария
ИКлеть на ур. 9
Щ Блок.
Авария
ЦП 1 еГ 1°1 1 1 1 1 — От
1 -6.4m 1 1
-I1?!?— । -260,0т I I 250т
-лгдоп^ I -680,От I I — -500т
-740,От_ 1 -ЭООДт 1 1 1 750т
-000, От i 1 1 1 — -980т
Радио MR90
Работа
Замена батареи
Запрос режима
Ревизия
Негабарит
И Спуск груза
И Груз
mi люди
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
Рис. 14.7. Пример экрана компьютера оператора подъемной машины с визуальной информацией о состоянии механизмов в стволе
414
ГЛАВА 14
Помещение подъема
Рис. 14.8. Структурная схема системы стволовой сигнализации с спользованием
аппаратуры FHF (фрагмент)
налов из ствола и требуемый алгоритм работы стволовой сигнализации. К контроллеру
АС800М подключены блоки дискретного ввода/вывода, с помощью которых осуществляет-
ся передача сигналов в систему управления подъемом и обратно. С центральной станцией
системы стволовой сигнализации FHF контроллер АС800М соединен через специальную
шину связи. Также к контроллеру через шину связи TCP/IP подключается персональный
компьютер с установленной системой SCADA, с помощью которой осуществляется в виж
экранов визуализация информации о состоянии механизмов в стволе, состоянии системы
управления стволовой сигнализации и т.д. Также на персональном компьютере реализуется
регистратор параметров, осуществляющий регистрацию событий, аварийных ситуаций, не-
исправностей, наиболее важных параметров и т.д. с требуемой глубиной архива. Структур-
ная схема такой системы показана на рис. 14.9.
На объектах, где предъявляются требования к резервированию системы стволовой сиг-
нализации (резервная сигнализация), фирма «МИДИЭЛ» предлагает комплекс стволовой
сигнализации с гибкой системой резервирования на базе контроллеров серии АС800. В за-
висимости от требуемой степени дублирования возможны варианты как частичного, так
полного резервирования структурных элементов системы. Для повышения надежности рв-
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
415
Помещение подьема 1 (имена управления
I пооьегюн
Рис. 14.9. Структурная схема локальной стволовой сигнализации
боты подъемной установки и избежания простоя подъема производится в различной комби-
нации дублирование стволового магистрального кабеля, источников питания, шины связи,
модулей ввода/вывода, контроллеров АС800, программного обеспечения и т.д. На рис. 14.10
показан пример полного резервирования аппаратов и коммуникаций оборудования АВВ.
Для скиповых подъемов НПФ «Мидиэл» предлагает в составе основной системы управ-
ления скиповой подъемной установкой подсистему контроля и управления механизмами
416
ГЛАВА 14
Рис. 14.10. Пример полного резервирования контроллеров АС800М
Рис. 14.11. Примерный внешний
вид ящика управления системой
загрузки в стволе
загрузки/разгрузки скипов. Эта подсистема служит для сбора информации о состоянии ме-
ханизмов, передачи соответствующих сигналов, выдачи команд управления механизмами.
Основными механизмами оборудования комплекса загрузки являются следующие уст-
ройства:
— дозатор;
— распределительная воронка;
— конвейер;
— питатель;
— приемный бункер комплекса загрузки.
Весь алгоритм работы комплекса загрузки закладывается в программе, находящейся в
главном контроллере подъема. Управляющая программа также обеспечивает необходимые
технологические блокировки и защиты (контроль последовательности запуска механизмов,
состояния датчиков, уровня руды в бункерах), индика-
цию весовой загрузки на приборе местного ящика уп-
равления и на дисплее диспетчера и др.
На горизонте загрузки установлены шкафы управ-
ления, содержащие устройства, обеспечивающие ввод/
вывод сигналов от оборудования горизонта, а на пере-
дней панели — органы управления и элементы инди-
кации (рис. 14.11).
Предлагается несколько вариантов реализации уп-
равления комплексом загрузки:
1. Система загрузки скипов с использованием
объемных дозаторов (рис. 14.12).
2. Система загрузки скипов с использованием взве-
шивания в дозаторах (рис. 14.13).
3. Система с весовым конвейером (рис. 14.14).
На рис. 14.7 показано изображение экрана состо-
яния оборудования стволовой сигнализации.
В заключение необходимо сказать, что, используя
продукцию лучших производителей шахтного оборудования фирм АВВ и FHF, НПФ «МИ-
ДИЭЛ» удалость обеспечить высокий уровень автоматизации шахтного подъема и всех тех-
нических устройств, связанных с функционированием шахтной подъемной установки, и при
этом выполнить технические требования к стволовой сигнализации ПБ стран СНГ. Благода-
ря применению микропроцессорных систем стволовой сигнализации, связи и управления,
включая радиосвязь с подъемным сосудом, стала возможной реализация автоматического
режима управления подъемной установкой, т.е. функционирование шахтного подъема про-
изводится с минимальным участием человека, что, безусловно, ведет к увеличению произво-
дительности и повышению эффективности работы всего подземного комплекса.
Рис. 14.12. Система загрузки скипов с использованием объемного дозатора
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
Рис. 14.13. Система загрузки скипов с использованием взвешивания в дозаторе
ГЛАВА 14
Рис. 14.14. Бездозаторная схема загрузки скипа с весовым конвейером
СТВОЛОВАЯ СИГНАЛИЗАЦИЯ И СВЯЗЬ
Глава 15
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
75.1. Конструктивные особенности и классификация
канатов
15.2. Расчет и обоснование выбора канатов
15.3. Основные требования и рекомендации по выбору
канатов
15.4. Контроль состояния шахтных канатов
15.1. Конструктивные особенности и классификация канатов
Стальные канаты впервые были применены в 1834 г. на одном из рудников в Германии.
В настоящее время имеется большое разнообразие конструкций канатов, но по принципу
построения они сводятся к нескольким основным конструктивным формам.
Канаты различаются, прежде всего, порядком их свивки. Так, проволоки могут быть сви-
ты между собой один раз, что приводит к образованию так называемого спирального каната
или каната одинарной свивки, возможные поперечные сечения которого показаны на рис. 15.1.
Затем такие спиральные канаты (называемые теперь прядями) могут быть свиты снова в канат,
в результате чего получается канат двойной свивки. Продолжая этот процесс дальше, можно
получить канат тройной (кабельтовой) свивки и т.д. В транспортных системах шахт и рудников
с канатной тягой преимущественно используются канаты двойной свивки.
Рис. 15.1. Спиральные канаты (пряди)
Спиральные канаты могут также быть специальной, так называемой закрытой конст-
рукции, изображенной на рис. 15.2.
Рис. 15.2. Канат закрытой конструкции:
7 — центральная проволока, 2 — проволоки первого слоя, 3 — круглые проволоки второго слоя,
4 — х-образные проволоки второго слоя, 5 — z-образные проволоки третьего слоя
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
421
Центральная часть каната может состоять из нескольких слоев проволок. Слоев круг-
лых и х-образных проволок также может быть несколько. Внешний слой г-образных прово-
лок хорошо защищает внутренние проволоки от влаги и абразивных частиц, способствует
длительному сохранению канатной смазки, а также эффективно противостоит истиранию.
Канаты закрытой конструкции применяются в качестве проводниковых канатов в вер-
тикальных шахтных стволах, в качестве грузонесущих канатов подвесных дорог и др. Каждая
прядь каната двойной свивки состоит из центральной проволоки и нескольких слоев свитых
проволок. Если шаг свивки («период» спирали) смежных слоев одинаков, то межслойный
контакт проволок оказывается линейным (ЛК). В противном случае взаимное соприкоснове-
ние слоев проволок получается точечным (ТК). При этом контактные напряжения в точках
соприкосновения проволок при прочих одинаковых условиях значительно превосходят на-
пряжения, которые возникают при линейном касании. По этой причине канаты типа ТК
уступают в долговечности канатам типа ЛК. В многослойной пряди возможна также комби-
нация обоих вариантов свивки, и тогда имеет место точечно-линейный контакт (ТЛК) между
проволоками смежных слоев.
В последнее время получили распространение канаты с так называемым полосовым кон-
тактом проволок (ПК), что достигается предварительным пластическим обжатием прядей
типа ЛК путем ее силового волочения через фильеру, благодаря чему проволоки всех слоев
приобретают многогранный взаимообусловленный профиль. Такого типа канаты в меньшей
степени подвержены механическому износу, и при этом контактные давления между прово-
локами распределяются не по линии, а по полосе, что способствует увеличению усталостной
долговечности. В отечественной практике канаты из пластически обжатых прядей впервые
были испытаны на ряде шахт с наклонными стволами в 1974—1976 гг.
Пряди (спиральные канаты или канаты одинарной свивки) с линейным касанием про-
волок (ЛК) принципиально могут быть трех следующих различных видов.
1. Прядь типа сил, в которой диаметры проволок в каждом слое одинаковы, как это изоб-
ражено на рис. 15.1, а. Эти пряди характерны увеличенным диаметром внешних проволок, и
поэтому являются более стойкими против истирания. Из такого рода прядей изготавливают-
ся, например, канаты двойной свивки конструкции ГОСТ 3077—80, широко используемые
на подъемных установках в шахтных наклонных стволах и выработках, где из-за неизбежно-
го контакта каната с почвой происходит интенсивный износ наружных проволок.
2. Прядь типа варрингтон, содержащая слои проволок одинакового и различного диа-
метра (рис. 15.1, б). Из таких прядей изготавливаются, например, канаты двойной свивки
конструкции ГОСТ 2688—80.
3. Прядь типа филлер, содержащая межслойные проволоки заполнения (рис. 15.1, в). Из
такого рода прядей изготавливаются, например, канаты конструкции ГОСТ 7665—80. Кана-
ты с проволоками заполнения отличаются повышенной степенью заполнения металлом по-
перечного сечения пряди. Их рекомендуется применять, например, в качестве тормозных
канатов клетевых одноканатных подъемных установок, оборудованных парашютными уст-
ройствами. Примером пряди с точечно-линейным контактом проволок может быть прядь
типа варрингтон (рис. 15.1, б), повитая сверху с точечным касанием проволоками одинако-
вого диаметра (так называемый закрытый варрингтон). Считается, что наличие точечных кон-
тактов внешнего слоя проволок способствуют их усталостному разрушению в первую оче-
редь, что является своеобразным индикатором для своевременной отбраковки каната, пре-
дотвращающей аварию (впервые такого типа канаты были применены на шахтах и рудниках
Германии в 1939 году накануне второй мировой войны).
Если прядь в канате двойной свивки имеет практически круглое поперечное сечение
(см. рис. 15.1), то такой канат называется круглопрядным. Канаты могут быть также трехгран-
нопрядными, овалънопрядными и плоскопрядными, в которых поперечные сечения прядей по
форме напоминают соответственно треугольник, овал и прямоугольник. Возможны также
иные геометрические конфигурации. Из фасоннопрядных канатов отечественной промыш-
ленностью освоено производство трехграннопрядных канатов в соответствии с ГОСТ 3085—
80. В свое время (до 70-х годов) трехграннопрядные канаты рекомендовались для примене-
ния в качестве головных на многоканатных подъемных установках, исходя из соображений
улучшения контактного взаимодействия каната с футеровкой канатоведущего шкива. Опыт
эксплуатации показал, однако, что срок службы футеровки практически остается таким же,
422
ГЛАВА 15
как и при круглопрядных канатах'при незначительном отличии долговечности канатов, но
при производстве работ по смене-навеске трехграннопрядных канатов, обладающих повы-
шенной кругимостью (см. ниже), не исключен травматизм рабочего персонала.
В центральной части каната двойной свивки располагается сердечник, который может
быть металлическим (выполненным в виде спирального каната или каната двойной свив-
ки), либо органическим (изготовленным из пеньки, сизали, искусственных полимерных во-
локон). Сердечник каната является естественной опорой для внешних прядей, а органи-
ческий сердечник, кроме того, исполняет роль своего рода «аккумулятора» смазки для про-
волок. Диаметр сердечника принимается таким, чтобы между прядями был гарантирован-
ный, так называемый тангенциальный зазор, необходимый для надежной опоры прядей на
сердечник. В противном случае канат после обтяжки нередко приобретает форму, весьма
напоминающую штопор (в особенности это характерно для канатов с металлическим сер-
дечником).
Примером каната с металлическим сердечником является канат двойной свивки конст-
рукции ГОСТ 7669—80, в котором сердечник представляет собой также канат двойной свив-
ки из прядей типа «сил». Если, глядя сбоку на канат или на отдельную прядь, видно, что
пряди в канате или проволоки в пряди свиваются слева вверх направо, то такая свивка счи-
тается правой (специального обозначения не имеет). В случае свивки справа вверх налево —
свивка является левой (Л). Если проволоки в пряди и сами пряди в канате двойной свивки
имеют одинаковое направление свивки, например, правое, то такой канат называется кана-
том односторонней (О) или алъбертовой свивки (устаревший термин по имени немецкого изоб-
ретателя Альберта). В противном случае канат называется крестовой свивки (специального
обозначения не имеет).
В канатах крестовой свивки внешние проволоки прядей на поверхности каната почти
параллельны оси каната, а при односторонней — они почти перпендикулярны. Это обстоя-
тельство послужило в свое время основанием рекомендации применения канатов односто-
ронней свивки для систем подъема со шкивами трения, что якобы способствует увеличению
сил сцепления каната с футеровкой шкива. Однако канаты односторонней свивки обладают
значительно большей неуравновешенностью крутящих моментов, то есть большой крутимо-
стъю при действии растягивающей нагрузки, и по этой причине они, как и трехграннопряд-
ные канаты, в шахтном подъеме не нашли применения. Можно изготовить канат также ком-
бинированной свивки (К) с чередующимися прядями односторонней и крестовой свивок. На
шахтах такие канаты не применяются.
В канатах одной конструкции правой и левой свивки крутящие моменты, вызванные
продольной нагрузкой, направлены в противоположные стороны. Величину крутящего мо-
мента в канате можно рассчитать по формуле
(15.1.1)
где dK — диаметр каната; Р, Н— концевая нагрузка, приходящаяся на один канат; Р Н— вес
отвеса каната; а и с — безразмерные коэффициенты жесткости, зависящие только от кон-
струкции каната, значения которых для наиболее распространенных типов стандартных ка-
натов приведены в табл. 15.1 [183].
Таблица 15.1
Основные жесткостные параметры канатов
Конструкция каната, ГОСТ Канаты не обтянутые Канаты обтянутые
Односторонние Крестовые Односторонние Крестовые
а с а с а с а с
7668-80 0,233 0,0327 0,227 -0,0221 0,303 0,0426 0,300 -0,0291
7669-80 0,332 0,0411 0,329 -0,0286 0,331 0,0423 0,328 -0,0294
7665-80 0,171 0,0234 0,167 -0,0166 0,222 0,0304 0,220 -0,0219
3077-80 0,236 0,0329 0,230 -0,0225 0,311 0,0433 0,307 -0,0301
2688-80 0,228 0,0318 0,222 -0,0212 0,296 0,0412 0,293 -0,0279
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
423
По формуле (15.1.1) с использованием данных табл. 15.1 нетрудно определить нормаль-
ную боковую нагрузку на проводник от направляющих устройств сосуда, следовательно,
можно оценить возникающие при этом силы трения и ожидаемые величины истирания (из-
носа) трущихся пар. В одноканатных системах подъема с фактором истирания проводников
и направляющих устройств приходится мириться, но в многоканатных системах подъема с
четным количеством канатов, благодаря использованию равного числа канатов правой и ле-
вой свивки, можно добиться практически полного уравновешивания горизонтальных нагру-
зок на проводники (их последовательность в присоединении к скипу или клети не имеет
значения), компенсируя этим самым крутящие моменты канатов.
Для уменьшения величины крутимости каната его изготавливают, например, двухслой-
ным, то есть состоящим из двух слоев прядей с противоположными направлениями свивки.
Теоретически может существовать абсолютно некрутящийся канат, однако на практике это
недостижимо (или, по крайней мере, трудно осуществимо), и поэтому канаты такого рода на-
зываются малокрутящимися (МК). Для малокрутящихся канатов параметр с оказывается бо-
лее чем в 10 раз меньшим, чем для однослойных канатов [см. формулу (15.1.1)]. Примером
может быть канат ГОСТ 3088—80, пряди которого относятся к типу варринггон (см. рис. 15.1, б).
Такие канаты используются в качестве уравновешивающих органов на шахтном подъеме.
На практике нередко возникает необходимость определения удлинения вертикально
висящего каната длиной L, растянутого внизу усилием Р. Для этого следует руководствовать-
ся следующей формулой [см. также (15.1.1)]:
&L = (P+PJ2)L/A, (15.1.2)
где А — агрегатная продольная жесткость каната, определяемая выражением
A=aEd2K, (15.1.3)
причем здесь а — безразмерный конструктивный параметр, принимаемый из табл. 15.1, а
Е = 2,06-105 Н/ лш2 — модуль упругости стали, если диаметр каната d* измерять в мм.
Канат называется нераскручивающимся (Н) [178], если при его свивке в результате спе-
циальной силовой пластической обработки в трехроликововых устройствах, так называемых
преформаторах, прядям заранее придается спиральная форма, какую они имеют в готовом
канате. В противном случае канат оказывается раскручивающимся (Р). На ответственных
подъемах предпочтительно применять хотя и несколько более дорогие, но нераскручиваю-
щиеся канаты. Улучшение качества каната также достигается применением при изготовле-
нии так называемой рихтовки, осуществляемой протяжкой готового каната через трехроли-
ковое устройство, что приводит к частичной «разгрузки» каната от внутренних напряжений
и придает ему прямолинейную форму в свободном состоянии.
Для защиты проволок каната от коррозии применяются специальные канатные смазки,
для которых характерна повышенная «липучесть» к металлу (адгезия) и повышенная темпе-
ратура плавления (каплепадения). Для подъемных машин со шкивами трения применяются
особые фрикционные смазки, которые не только предохраняют канат от коррозии, но и прак-
тически не снижают коэффициент трения во фрикционной паре «канат-футеровка» по срав-
нению с вариантом применения «сухих» (не смазанных) канатов. Большинство канатных
смазок поставляется в двух исполнениях: для применения при изготовлении канатов и для
применения в производственных условиях. В последнем варианте поставка иногда осуще-
ствляется в специальной аэрозольной упаковке.
Долговременной сохранности проволок способствует также их гальваническое (элект-
ролитическое) или горячее оцинкование (окунание проволоки в расплав цинка), чему в на-
стоящее время уделяется повышенное внимание. В последнее время в зарубежной практике
практически повсеместно отказались от гальванического метода оцинкования по экологи-
ческим соображениям, хотя этот способ экономически целесообразен. Цинковое покрытие
может иметь различную толщину в зависимости от коррозионной активности среды: для особо
жестких (ОЖ), жестких (Ж) и средних (С) агрессивных условий работы.
По назначению канаты изготавливаются как грузовые (Г) и грузолюдские (ГЛ). После-
дние отличаются от грузовых более жесткими требованиями к разбегу временных сопро-
тивлений разрушению проволок, повышенными требованиями при испытаниях к количе-
424
ГЛАВА 15
ству перегибов проволок до их разрушения, повышенным требованиям к разбегу диамет-
ров проволок и др. Некоторые конструкции канатов изготавливаются исключительно как
грузовые.
Отличительным признаком канатов является также механические свойства металла про-
волок: высшей марки (В) и первой марки (1). Такие канаты отличаются между собой по тре-
бованиям, предъявляемым к прокатной катанке, являющейся исходной «заготовкой» для
волочильных агрегатов. Одним из важнейших отличительных признаком канатов является
его маркировочная группа прочности, представляющая собой среднюю величину разрывного
напряжения всех проволок, выраженное в Н/мм2или в МПа (см. об этом в 18.3.2).
Наконец, канаты подразделяются на нормальные (специального обозначения не имеет),
которые и применяются на шахтах, и повышенной точности изготовления (Т), отличающие-
ся между собой различными требованиями к допускам на отклонения диаметров проволок и
к диаметру каната в целом. Все изготавливаемые канаты имеют специальную маркировку
(условное обозначение). Например, канат диаметром 46,5 мм, грузового назначения (Г), марки
В, оцинкованный по группе С, левой (Л) односторонней (О) свивки, нераскручивающийся
(Н), повышенной точности (Т), маркировочной группы прочности 1570 Н/мм2, ГОСТ 7668—
80, имеет обозначение
Канат 46,5-Г-В-С-Л-Н-Т-1570 ГОСТ7668-80.
Конструктивные признаки каната по назначению, типу, направлению и способу свив-
ки, типу сердечника, точности изготовления, степени крутимости и форме поперечного се-
чения каната', типу свивки, форме поперечного сечения и виду прядей, типу контакта, меха-
ническим свойствам, виду покрытия проволок схематично изображены на рис. 15.3.
15.2. Расчет и обоснование выбора канатов
В современной расчетной практике диаметр головного (подъемного) каната dK рассчи-
тывается, исходя из его статического нагружения максимальным растягивающим усилием.
При этом условие прочности каната записывается в форме
(15.2.1)
где пк — количество головных канатов, на которых подвешен подъемный сосуд (в многока-
натных системах подъема — до 10-ти); [ли] — допустимый (нормативный) запас прочности
головных канатов, определяемый в соответствии с требованиями «Правил безопасности в
угольных шахтах»; QyM — суммарное разрывное усилие всех проволок одного каната в соот-
ветствии со стандартом его конкретной конструкции; — максимальная растягивающая
нагрузка в одном канате или суммарная для всех головных канатов, то есть непосредственно
возле копрового или канатоведущего шкива.
Численные значения допустимых запасов прочности принимаются в зависимости от
назначения подъемной установки и от количества головных канатов из табл. 15.2.
Таблица 15.2
Допустимые запасы прочности подъемных канатов
Назначение Подъема Запасы постоянные [тП ] Запасы «условные» [ту ]
Одноканатные Многоканатные Одноканатные Многоканатные
Грузовой 6,5 7,0 8,5 9,5
Грузолюдской 7,5 8,0 10,0 11,5
Людской 9,0 8,0 13,5 11,5
В соответствии с «Правилами безопасности в угольных шахтах» величину допустимого
запаса прочности можно принимать независимо от максимальной длины отвеса каната L, и
в этом случае в (15.2.1)
[т]=[тд]
(15.2.2)
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
425
Рис. 15.3. Конструктивные признаки канатов, применяемых в угольной и горнорудной
промышленности
426
ГЛАВА 15
(см. табл. 15.2). Однако при £>600 м (в принятых на рис. 2.1 обозначениях L=H+hr)
допускается вместо условия прочности (15.2.1) пользоваться также более простым, так назы-
ваемым условным соотношением прочности (условной прочностью):
(15.2.3)
[ТИу]
где [?Иу] — «условный» запас прочности (см. табл. 15.2) по отношению к концевой нагрузке
m}g [здесь масса определяется по первой из формул (18.3.8)]. Формально, как следует из
(15.2.1), расчетный допустимый запас прочности оказывается зависящим от длины отвеса £:
г , бООрП/тК/Иу]
[т 1=------п 1 frJL ^Jr--к, (15.2.4)
J 600[?ия]+£([?Иу]-[?ия])
и вычисленный таким способом допустимый запас [т] можно подставлять в условие проч-
ности (15.2.1). Таким образом, допустимый запас прочности канатов уменьшается при уве-
личении £, но он не должен быть меньшим 4,5 для грузового подъема и 5 — для грузолюдс-
кого и людского.
Формулы, подобные (15.2.4) или несколько измененные, используются во многих стра-
нах с развитой горнодобывающей промышленностью (США, Англия, Германия, Польша,
Чехия, ЮАР, Австралия и др.). В британских нормах, кроме того, допустимые запасы зави-
сят также от отношения диаметра барабана машины De, мм, к диаметру каната d, мм:
8=WWD/dK. (15.2.5)
В СССР впервые концепцию зависимости допустимого запаса прочности от длины от-
веса каната предложил и теоретически обосновал акад. Г. Н. Савин в 1947 г. В 50-х годах эта
концепция была узаконена в «Правилах безопасности ...» в форме принципа расчета по фор-
муле (15.2.13), благодаря трудам проф. В. Д. Белого.
Суммарное разрывное усилие канатов QcyM различных конструкций в стандартном сор-
таментном ряде указывается для так называемых маркировочных групп прочности
айр=1370,1470, 1570, 1670, 1700, 1860, ... Н/мм1 {МПа).
Расчетами установлено, что с достаточно приемлемой точностью для инженерных це-
лей практически для всех канатов двойной свивки с линейным касанием проволок
Осу^&пА (15.2.6)
где d* — диаметр каната, мм\ Q — безразмерный параметр, зависящий только от конструк-
ции каната, численные значения которого для наиболее распространенных конструкций стан-
дартных канатов приведены в табл. 15.3.
Таблица 15.3
Основные конструктивные параметры канатов
ГОСТ Q q
7668-80 0,389 0,493
7669-80 0,470 0,556
7665-80 0,281 0,468
3077-80 0,369 0,472
2688-80 0,381 0,475
Усилие в (15.2.1) определяется как P\{z) при z=0, если qy<qr, или при Z=H,
если Qy>Qr, для каждого конкретного варианта рассчитываемой подъемной установки из
соотношений (2.1.6), (2.1.7), (2.1.8), (2.1.9), (15.2.4).
Так, для уравновешенного подъема при qy~qr с помощью (2.1.6) находим
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
427
-^гпах = [>Ц+^(Я+Йг+Йу)]£.
(15.2.7)
Подобно (15.2.6) можно также записать, что
QT
(15.2.8)
где 7800 кг / м3 — объемная масса стали; q — безразмерный параметр, зависящий толь-
ко от конструкции каната, численные значения которого для наиболее распространенных
конструкций приведены в табл. 15.3. Подстановка (15.2.6) и (15.2.7) с учетом (15.2.8) в урав-
нение прочности (15.2.1) позволяет найти
dK> L-----—-----5^---------------• (15.2.9)
V Qa«p / И -10 QYcmg(H+hr+hy)
При отсутствии уравновешивающего каната в формуле (15.2.9) необходимо просто при-
нять hy = 0. Для каната в наклонном стволе, руководствуясь первым из соотношений (2.1.9)
и с учетом обозначений (15.2.2), по аналогии получим
dK> |_ г п ~ (15.2.10)
V^p/W-lO +М*12
В выражениях (15.2.9) и (15.2.10) величина [ти] принимается либо в соответствии с (15.2.2),
либо при £>600 м вычисляется по формуле (15.2.4). Если же при £>600 м непосредствен-
но воспользоваться условием прочности (15.2.3), то вместо (15.2.9) и (15.2.10) соответствен-
но для подъема в вертикальном и наклонном стволе нетрудно получить:
ъ l^gkulmy]
------’ “к - ---=------
Q^npnK \
(15.2.11)
Далее из сортамента стандартных канатов принятой конструкции принимается диаметр
каната, ближайший больший к вычисленному значению по формулам (15.2.9), (15.2.10) или
(15.2.11). После выбора типоразмера головного каната становятся известными по сортамен-
тному ряду его основные параметры qr и QyM. Затем для уравновешенного подъема следует
подобрать подходящий типоразмер уравновешивающего каната, чтобы qy как можно менее
отличалось от qr (для многоканатного подъема целесообразно иметь qy>qr), уточнить зна-
чение 7^ и сделать окончательный проверочный расчет по одной из формул (15.2.1) или
по формуле (15.2.3), если £>600 м и принята концепция переменных запасов прочности.
Это необходимо для того, чтобы убедиться в выполнении нормативных требований «Правил
безопасности ...».
В настоящее время для подъемов в вертикальных стволах диаметр d рекомендуется при-
нимать из так называемого унифицированного ряда, представляющего собой следующую по-
следовательность диаметров канатов конструкции ГОСТ 7668—80, оцинкованных, с марки-
ровочной группой прочности 1570 МПа\
27; 33; 36,5; 42; 46,5; 50,5; 56 мм.
Унифицированный ряд типоразмеров канатов был научно обоснован и предложен для
повсеместного внедрения НИИГМ им. М. М. Федорова в 1976 г. в связи с необходимостью
скорейшего оснащения угольных шахт СССР оцинкованными канатами для радикального
продления их сроков службы. В первую очередь это относилось к множеству в тот период
вновь вводимых в эксплуатацию крупнейших в стране и в Европе подъемных комплексов с
многоканатными машинами шахт-новостроек.
До этого времени единственным средством защиты канатов от коррозии была канатная
смазка, да и та на машинах со шкивами трения перед навеской практически полностью уда-
лялась специальной обработкой перегретым паром для, скажем так, «профилактики» одного
из опаснейших явлений на шахтном подъеме — скольжения канатов. Поэтому не удивитель-
428
ГЛАВА 15
но, что на многих подъемах срок службы канатов составлял считанные месяцы. Но, тем не
менее, несмотря на столь неблагоприятные обстоятельства, применение оцинкованных ка-
натов на угольных шахтах долгое время оставалось практически неразрешимой проблемой.
И вызвана она была следующими причинами.
Во-первых, из-за сложившейся в практике проектирования тенденции «экономии ме-
талла», коснувшейся и канатов, что вынуждало принимать неоправданно завышенные зна-
чения маркировочной группы прочности, и это приводило в соответствии, например, с
(15.2.8), естественно, к пониженному диаметру заказываемого каната (экономия металла хоть
и мизерная, но главным являлся довлеющий в то время принцип).
Во-вторых, из-за узаконенного требования, чтобы на угольных шахтах оцинкованные
канаты применялись как изготовленные для особо жестких агрессивных условий работы, то
есть с максимальной группой цинкового покрытия (порочная концепция: канаты, так ска-
зать, можно вообще не защищать, но уж если защищать, то по максимуму). Но в то время ни
на однрм отечественном канатном заводе технологически невозможно было совместить по-
вышенную маркировочную группу прочности с максимальной маркой цинкового покрытия,
и поэтому канаты для угольной промышленности в течение многих лет поставлялись нео-
цинкованными. Надо заметить, что и сейчас проблема оцинкования канатной проволоки по-
вышенной группы прочности остается открытой, в том числе и в зарубежных странах, что
связано, в известной мере, с запретом электролитического способа оцинкования как эколо-
гически вредного, о чем говорилось в 15.1.
Немалую отрицательную роль в этом сыграло также весьма жесткое требование к мини-
мально допустимому отношению диаметра канатоведущего шкива к диаметру каната — [5] = 100
[см. определение (15.2.5)], что приводило для конкретно принятой машины к необходимос-
ти использования канатов уменьшенного диаметра, а это в свою очередь еще тем более зас-
тавляло проектировщиков увеличивать маркировочную группу прочности проволок.
Разрешить сложившуюся проблему удалось путем следующих организационных и тех-
нических мероприятий:
а) ограничением маркировочной группы прочности канатов числом 1570 МПа, наибо-
лее подходящим для горячего оцинкования проволок с последующем волочением;
б) принятием допустимого отношения диаметра канатоведущего шкива к диаметру ка-
ната равным [5] - 95 вместо [5] = 100, так как изменение величин этих отношений в столь
небольшой окрестности практически не сказывается на долговечности каната;
в) разрешением использовать на угольных шахтах оцинкованные канаты как предназ-
наченные для средних агрессивных условий работы.
В результате этого, а также на основании соответствующих расчетов, и оказалось воз-
можным получить унифицированный ряд, что не только обеспечило шахтные подъемы вполне
качественными оцинкованными канатами со сроком службы более 2-х лет (на уровне миро-
вой практики), но и значительно сократило номенклатурный перечень заказываемых и по-
требляемых канатов — семь типоразмеров одной конструкции вместо семидесяти более чем
пяти различных конструкций. В связи с принятием унифицированного ряда также значи-
тельно сократилось количество применяемых типоразмеров уравновешивающих канатов,
типоразмеров подвесных и прицепных устройств для головных и уравновешивающих кана-
тов и т. д. Кроме того, производство в большом объеме оцинкованных канатов послужило
для специалистов-канатчиков полезным практическим опытом и явилось, в известном смыс-
ле, действенным стимулом к непрерывному совершенствованию технологии и к улучшению
качества оцинкования проволок.
15.3. Основные требования и рекомендации по выбору канатов
Выбор канатов для подъемных установок должен производиться с учетом конкретных
условий их работы. Головные канаты людских и грузолюдских подъемных установок должны
быть грузолюдскими (ГЛ) марки ВК или В. Канаты головные для перевозки груза, уравнове-
шивающие, проводниковые, отбойные, тормозные, амортизационные, включающего устрой-
ства парашютов со шкивом трения должны быть не ниже марки В (требование введено с
01.01.05). Все канаты в шахтных стволах рекомендуется применять из оцинкованной прово-
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
429
локи. Группа оцинкования устанавливается по согласованию с заводами — изготовителями
канатов. В отдельных случаях допускается навеска канатов без покрытия.
Рекомендуется применять подъемные канаты с маркировочной группой по временному
сопротивлению разрыву 1570—1670—1770 МПа', при этом не следует без необходимости ис-
пользовать канаты с повышенными значениями ав. Уравновешивающие канаты должны
иметь маркировочную группу прочности 1370—1570 МПа. Проводниковые и отбойные кана-
ты закрытой и полузакрытой конструкций должны иметь маркировочную группу прочности
1080—1370 МПа, пряденой конструкции — 1370—1570 МПа. Тормозные канаты в парашютах
ПТКА, ПТКПА, ПТКША, П KJIA и канаты включающих устройств в парашютах со шкивом
трения должны иметь маркировочную группу прочности не ниже 1570 МПа. Амортизацион-
ные канаты для парашютов и для канатно-винтовых амортизаторов устройств от переподъе-
мд должны иметь маркировочную группу прочности 1370—1570 МПа.
Рекомендуется применять канаты правой свивки, за исключением многоканатного подъе-
ма, где подъемные канаты должны быть попарно правой и Левой свивок. К навеске на мно-
гоканатной подъемной установке допускаются канаты однрго и того же типа, диаметра и
конструкции, изготовленные на одном и том же заводе, с одинаковой маркой проволок по
прочности. Разница значений разрывных усилий отдельных канатов не должна превышать
5 % по отношению к наибольшему разрывному усилию.
При проектировании подъемных установок выбор канатов для конкретных условий сле-
дует производить с учетом восприимчивости канатов к коррозионному воздействию внеш-
ней среды. Минимально допустимые диаметры канатов для наклонных подъемных устано-
вок из условий коррозионной устойчивости (17,5—29,0), мм, в зависимости от ГОСТ или ТУ
на канаты [49]. На одноканатных подъемных установках с канатными проводниками для обо-
их подъемных сосудов должны навешиваться головные канаты одинакового диаметра, кон-
струкции и направления свивки. На многоканатных подъемных установках должно быть на-
вешено не менее двух уравновешивающих канатов предпочтительно одной конструкции и
одинакового типоразмера. При этом для одной установки канаты должны иметь одинаковое
направление свивок. Применение круглых однослойных канатов не допускается. При ис-
пользовании круглых прядевых канатов в качестве уравновешивающих их крепление к
подъемным сосудам должно осуществляться с помощью вертлюжных прицепных устройств.
В качестве тормозных и амортизационных канатов парашютов применяют нераскручиваю-
щиеся круглопрядные канаты крестовой свивки с органическим сердечником. Диаметр на-
ружных проволок тормозных канатов должен быть не менее 2 мм.
В качестве канатных проводников и отбойных канатов эксплуатационных шахт должны
применяться канаты, имеющие в наружном слое проволоки фасонного профиля высотой не
менее 5 мм. Допускается применение круглопрядных нераскручивающихся однослойных
канатов крестовой свивки с металлическим и органическим сердечником и диаметром на-
ружных проволок не менее 2 мм. В случае применения канатов с органическим сердечником
необходимо в процессе эксплуатации следить, чтобы натяжной груз за счет вытяжки каната
не опускался на почву зумпфа. В качестве канатных проводников проходческих подъемов
должны применяться такие же однослойные круглопрядные канаты, как с металлическим,
так и с органическим сердечником, а также многопрядные канаты, имеющие наружные про-
волоки диаметром не менее 1,5 мм. Для навески проходческого оборудования следует при-
менять многопрядные малокрутящиеся канаты, закрытые подъемные канаты и однослой-
ные круглопрядные канаты крестовой свивки. Для навески спасательных лестниц и кабелей
должны применяться многопрядные малокрутящиеся или закрытые подъемные канаты.
Для навески опалубки и щитов-оболочек рекомендуется применять закрытые подъем-
ные канаты (если они не являются направляющими), а для навески насосов — многопряд-
ные малокрутящиеся канаты. При навеске оборудования на нескольких канатах (полки, ста-
вы труб и др.) рекомендуется применять канаты различного направления свивки (левой и
правой).
Независимо от назначения рекомендуется применять нераскручивающиеся канаты. Про-
верка нераскручиваемости каната должна осуществляться удалением перевязок и мест за-
варки. При этом в нераскручивающихся канатах пряди в канатах двойной свивки, наружные
пряди в многопрядных канатах, проволоки в канатах одинарной свивки могут раскручивать-
ся на расстоянии не более одного шага свивки от конца каната или могут раскручиваться на
430
ГЛАВА 15
расстоянии не более пяти шагов свивки таким образом, чтобы их можно было легко возвра-
тить в прежнее положение. Закрытый подъемный и спиральный несущий канаты являются
нераскручивающимися, если при освобождении конца каната от зажимов и сварки фасон-
ные проволоки не выходят из замка. Определение нераскручиваемости указанного слоя про-
волок производят на расстоянии не менее половины шага свивки от места отрезки.
Для проверки степени уравновешенности канатов, изготовленных по ГОСТ 3241—91,
канат длиной, равной 50 его диаметров, свободно располагают на горизонтальной поверхно-
сти и измеряют максимальное отклонение оси каната от прямой, проведенной между его
концами. Отклонение должно быть не более:
10 диаметров — для канатов с органическим сердечником;
15 диаметров — для канатов с металлическим сердечником и канатов одинарной свивки.
В вертикальных стволах с машинами барабанного типа в качестве головных рекоменду-
ется применять оцинкованные канаты по ТУ 14—4—1444—87—Б унифицированных типораз-
меров: 25,5; 27,0; 33,0; 36,5; 42,0; 46,5; 50,5; 53,5; 58,5 мм.
На подъемах с канатными проводниками допускаются к применению малокрутящиеся
канаты (ГОСТ 16828—81). Канаты с металлическим сердечником по ГОСТ 7669—80 и закры-
тые подъемные по ГОСТ 10506—76 допускаются к применению при реконструкции подъем-
ных установок и углубке стволов при недостаточной канатоемкости барабанов имеющихся
подъемных машин. На наклонных грузовых подъемах следует применять подъемные канаты
из пластически обжатых прядей по ТУ 14—4—874—78, ТУ 14—4—875—78, а также канаты мар-
ки «Дайформ».
При проходке вертикальных стволов рекомендуется применять:
в качестве головных для подъемных сосудов — канаты по ГОСТ 10506—76 или малокру-
тящиеся по ГОСТ 16828—81;
для подвески полков — малокрутящиеся канаты по ГОСТ 16827—81 или канаты по ГОСТ
7668-80;
для подвески спасательных лестниц, кабелей, насосов, трубопроводов — канаты по ГОСТ
10506—76 или малокрутящиеся по ГОСТ 16827—81, ГОСТ 16828—81;
для подвески металлической опалубки — канаты по ГОСТ 10506—76.
В качестве сигнальных тросов на грузолюдских и людских подъемных установках реко-
мендуется применять оцинкованные или покрытые искусственными материалами канаты
крестовой свивки с органическим сердечником диаметром 5—10 мм. В качестве уравновеши-
вающих следует применять, как правило, оцинкованные малокрутящиеся или некрутящиеся
многопрядные канаты. На подъемных установках барабанного типа и отдельных установках
со шкивами трения могут применяться плоские канаты.
Пример подбора головных и уравновешивающих канатов для многоканатных машин
приведен в [49].
15.4. Контроль состояния шахтных канатов
Канаты шахтных подъемных установок подлежат осмотру специально выделенными
лицами, назначенными приказом руководителя предприятия. При осмотрах канатов опре-
деляется число оборванных проволок на шаге свивки и измеряют утонение канатов. Все
подъемные канаты вертикальных и наклонных подъемов, за исключением канатов на грузо-
вых и наклонных шахтных подъемах с углом наклона менее ЗОщ канаты для подвески пол-
ков, спасательных лестниц и проходческих люлек должны быть испытаны перед навеской.
Резинотросовые уравновешивающие канаты испытываются в соответствии с Инструкцией
по эксплуатации резинотросовых уравновешивающих канатов. Канаты подъемных устано-
вок и проходческие, испытанные перед навеской, за исключением подъемных шестипряд-
ных канатов с органическим сердечником в вертикальных стволах и на людских и грузолюд-
ских клетевых подъемах в наклонных выработках с углом наклона более 600, проверяемых
дефектоскопом, канатов в установках с одноканатными и многоканатными шкивами тре-
ния, канатов для подвески полков, должны повторно испытываться.
Порядок и сроки осмотра канатов различного назначения и конструкции, нормы бра-
ковки, сроки повторного испытания канатов и предельный срок их службы установленные в
зависимости от их назначения, а также порядок и условия продления срока службы канатов
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
431
подробно описаны в [13, 19, 28, 33, 47, 49]. Прочность каната в основном обусловливается
площадью сечения стали в его поперечном сечении и временным сопротивлением разрыву
проволок. В процессе эксплуатации площадь поперечного сечения стали проволок умень-
шается вследствие механического износа и коррозии, появляются обрывы проволок. Осо-
бую опасность представляет коррозия внутренних проволок, не поддающаяся контролю вне-
шним осмотром. Нередко коррозией поражаются соприкосновения проволок смежных пря-
дей и места контакта проволок с сердечником. Быстрее корродируют канаты, проволоки
которых не имеют защитного покрытия, при несвоевременном нанесении смазки на канаты
в процессе их эксплуатации, нанесении на канаты вместо специальной канатной смазки
смазок другого назначения, иногда в смеси с отработанными маслами. Проволоки оцинко-
ванных канатов корродируют после разрушения цинкового покрытия, то есть через значи-
тельно больший срок, чем проволоки неоцинкованных канатов. При шелушении цинкового
покрытия, наблюдаемого в начальный период эксплуатации в случае некачественного по-
крытия проволок, коррозия стали может происходить в те же сроки, что и для неоцинкован-
ных канатов. - -
Опыт эксплуатации канатов, подверженных коррозии, показывает, что при удовлетвори-
тельном наружном состоянии каната (число видимых обрывов наружных проволок на длине
шага свивки и утонение находятся в допустимых пределах) из-за коррозии прочность каната
может уменьшиться настолько, что обрыв каната может произойти при нормальных эксплуа-
тационных режимах. Для обеспечения безопасности работы подъемной установки должна кон-
тролироваться с помощью специального прибора потеря площади сечения стали от коррозии
и механического износа круглых подъемных канатов с органическим и металлическим сердеч-
никами, изготовленными как из проволоки без покрытия, так и из оцинкованной проволоки.
Подъемные прядевые канаты, эксплуатирующиеся в вертикальных стволах и на людс-
ких и грузолюдских подъемах, в наклонных выработках, а также канаты для подвески пол-
ков при проходке стволов глубиной более 600 м и для подвески стволопроходческих комбай-
нов, навешиваемых с запасом прочности менее 6-кратного, должны подвергаться инстру-
ментальному контролю. При навеске канатов, которые должны подвергаться инструменталь-
ному контролю, в том числе и при продлении срока службы в порядке и по условиям, приве-
денным в [13, 49], от них должны отрезаться и храниться в здании подъема в течение всего
срока службы контрольные отрезки.
Инструментальная проверка всех перечисленных выше канатов может начинаться ра-
нее и производиться чаще, чем указано в [13, 49], если при визуальных осмотрах будет обна-
ружен ускоренный износ наружных проволок от коррозии и истирания. Потерю площади
сечения подъемного каната по всей длине от коррозии и механического износа допускается
контролировать с помощью измерителей износа стальных канатов ИИСК-5. Контроль нео-
цинкованных канатов может производиться измерителем ИИСК-4. Измерители ИИСК-5 и
ИИ СК-4 предназначены для работы в стволах, подземных выработках и околоствольных
помещениях шахт и рудников, опасных по газу и пыли, при температуре от — 10 до + 40° С и
относительной влажности 100 %.
Приборы обеспечивают измерение относительной потери площади сечения стали в пре-
делах от 5 до 30 % с абсолютной погрешностью не более +3 % канатов диаметром, лш:
от 15 до 65 - ИИСК-5;
от 18 до 65 — ИИСК-4.
В приборах реализуется способ, основанный на измерении относительного уменьшения
переменного магнитного потока индуктивным измерительным преобразователем, у которо-
го составной частью магнитопровода является отрезок контролируемого каната. При этом
шкала стрелочного показывающего прибора проградуирована в процентах относительной
потери площади сечения стали проволок. Особенность контроля оцинкованных канатов со-
стоит в том, что при зондировании их переменным магнитным полем слой цинка на прово-
локах создает противопоток, влияющей на показания прибора. При использовании прибора
ИИСК-4 выделить связанное с этим изменение магнитного потока нельзя, в связи с чем они
непригодны для контроля оцинкованных канатов. Измерители износа стальных канатов
ИИСК-5 и ИИСК-4 включают две составные части:
прибор измерительный типа ПРИ. 3 в ИИСК-5 и ПРИ.2 в ИИСК-4;
измерительный преобразователь ИПР.2 в ИИСК-5 и ИПР1 в ИИСК-4.
432
ГЛАВА 15
В зависимости от диаметра контролируемых канатов должны применяться типоразме-
ры ИИСК-5 и ИИСК-4, приведенные в табл. 15.4.
Таблица 15.4
Диаметры канатов, мм, в зависимости от типа прибора
Прибор Маркировка типоразмеров измерителя
А Б В Г Д
ИИСК-5 15-25 25-42 42-65 — —
ИИСК-4 18-25 25-35 35-45 45-55 55-65
Соответственно измерители маркируются и должны заказываться с учетом конкретного
типоразмера: ИИСК-5А, ИИСК-4Г и т. д. Измерительные преобразователи маркируются
аналогично (ИПР.2А, ИПР.4Г), а прибор измерительный каждой модели измерителя выпус-
кается одной модификации для всех типоразмеров, но проходит индивидуальную заводскую
настройку в составе конкретного типоразмера. Принцип действия ИИСК-5 и ИИСК-4 ос-
нован на определении разности параметров преобразователя, установленного на контрольном
отрезке каната и затем на контролируемом канате. Поэтому контроль канатов может произ-
водиться измерителями только при наличии контрольных отрезков подлежащих проверке
канатов, которые должны использоваться для настройки измерителей перед выполнением
измерений. Контрольным может считаться отрезок подлежащего проверке каната, оставлен-
ный при навеске последнего на подъемной установке не подвергавшийся воздействию раз-
рушающих факторов (сечение металла этого отрезка каната может быть принято за 100 %).
Контрольный отрезок должен иметь длину не менее 5,5 м, концы его надежно обвязаны мяг-
кой проволокой или зажаты жимком, а торцы заварены. Не допускается использовать в ка-
честве контрольного отрезок каната с нарушенной структурой (при наличии «жучков», за-
павших или выпученных прядей, ослабленных проволок в прядях и др.).
В средней части контрольный отрезок должен иметь участок длиной (1,0 ± 0,1) м, на
котором путем равномерного удаления (одинакового количества) проволок наружного слоя
от каждой пряди имитирована относительная потеря площади сечения стали в пределе 10—
15 %. Диаметры проволок каната берутся из свидетельства об испытаниях в канатно-испы-
тательной станции или из соответствующего стандарта (если канат перед навеской не испы-
тывается). Площадь сечения всех проволок каната берется из стандарта, но корректируется,
если по результатам испытаний в канатно-испытательной станции установлено, что завод-
изготовитель изменил диаметры проволок. Например, на подъемной установке навешен ка-
нат диаметром 39,5 мм (ГОСТ 7668—80). Расчетная площадь сечения всех проволок каната
согласно сортаменту — 615,25 мм1, диаметр наружных проволок — 2,2 мм. Канатно-испыта-
тельная станция установила, что канат изготовлен заводом с наружной проволокой диамет-
ром 2,1 мм. Площадь сечения всех проволок каната с учетом указанной корректировки со-
ставляет 587,58 мм1. Для получения участка, имитирующего потерю площади сечения метал-
ла, в каждой пряди удалено по 4 проволоки, всего в 6 прядях удалено 24 проволоки. Относи-
тельная потеря площади сечения стали (%) при этом составит
24л- 2 I2
g = ’ -100%=14,1. (15.4.1)
587,58-4
К каждому контрольному отрезку каната должна быть прикреплена бирка с указанием
заводского номера, ГОСТ, диаметра и значения относительной потери площади сечения ста-
ли на участке с искусственным дефектом. Контрольный отрезок должен быть натянут с тем
же усилием, что и подлежащий проверке канат. Допускается использование для настройки
измерителя контрольного отрезка, натянутого с меньшим усилием, но не менее 5 кН. В пос-
леднем случае в показания измерителя при его настройке каждый раз перед выполнением
измерений должна вводиться поправка, обусловленная разностью натяжений проверяемого
каната и его контрольного отрезка.
Если контролируется канат, у которого имеется заведомо неизношенный участок (учас-
ток подъемного каната вблизи точки схода с подъемной машины барабанного типа при по-
ложении подъемного сосуда на нижней приемной площадке, участок каната для подвески
полков и проходческого оборудования вблизи точки схода с лебедки), то поправка вводится
за счет настройки (регулировки баланса моста) прибора измерительного и вывода на нуль
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
433
стрелки показывающего прибора, которая сместилась с нуля после перестановки измери-
тельного преобразователя прокалиброванного прибора с контрольного отрезка на проверяе-
мый канат. При этом принимается, что площадь сечения всех проволок на указанном выше
участке каната подъемной установки с машиной барабанного типа не уменьшается за время
эксплуатации каната, то есть сохраняется постоянной от измерения к измерению.
Если контролируется канат, у которого нет неизношенного участка (головные канаты
подъемных установок с одноканатными и многоканатными шкивами трения, подъемные
канаты установок с многослойной навивкой, где обводнению и коррозии подвергаются и
витки трения, и запасные витки, расположенные на барабане за счет выноса воды канатом,
расположенным в верхних слоях, и др.), то поправка должна определяться не позднее чем
через месяц со дня навески каната на подъемную установку, но после окончания его конст-
руктивной вытяжки. Поправка определяется так же, как и на подъемной установке с маши-
ной барабанного типа по разбалансу настроенного и прокалиброванного на контрольном
отрезке прибора после его перестановки на находящийся в навеске канат. Установленное
для каждого каната значение поправки должно быть записано в Книгу осмотра канатов и
при выполнении в дальнейшем контроля относительной потери площади сечения металла
должно вводиться в прибор после его калибровки на контрольном отрезке. При эксплуата-
ции оцинкованных канатов механический износ проволок начинается с разрушения цинко-
вого покрытия. Гальванические процессы, происходящие при контакте проволоки с шахт-
ной водой, содержащей соли, кислоты или щелочи, также сначала разрушают более актив-
ный цинк, препятствуя разрушению стали проволок.
Уменьшение массы цинкового покрытия приводит к отклонению указателя показываю-
щего прибора, причем это отклонение возрастает по мере износа цинка, что не свидетель-
ствует об уменьшении площади сечения стали проволок. Поэтому эти показатели должны
быть разграничены с показаниями, характеризующими потерю площади сечения стали про-
волок. Внесение соответствующей поправки в показания измерителя ИИСК-5 основывает-
ся на следующем:
а) показывающий прибор ИИСК-5 имеет дополнительную нижнюю шкалу с нулем по-
средине, относительно которого указатель перемещается в разные стороны в зависимости от
того, что служит причиной разбаланса измерительного моста: разрушение цинка или разру-
шение стали;
б) разрушение цинкового покрытия начинается раньше разрушения стали проволок, а
после его завершения в той мере, в какой оно влияет на показание измерителя, проходит
еще длительный период, соответствующий времени работы в данных условиях неоцинко-
ванного каната до начала коррозии и механического износа стали, то есть появления потери
площади сечения стали проволок, чему отвечает отклонение указателя показывающего при-
бора в сторону, противоположную той, куда стрелка отклоняется по мере износа цинка.
Максимальное по значению отклонение указателя показывающего прибора от нуля ниж-
ней шкалы влево является поправкой, которую нужно суммировать с показаниями прибора
при отклонениях указателя от нуля вправо, вызываемых уменьшением площади сечения стали
проволок и фиксируемых при выполнении текущего осмотра. Значение поправки, как пока-
зывает накопленный опыт, колеблется в широких пределах — от 1—2 до 4—5 % и для отдель-
ных канатов может превышать 5 % относительной потери площади сечения стали проволок,
в связи с чем неправильное определение ее (при пропуске момента максимального левого
отклонения указателя измерительного прибора) приведет к эксплуатации каната, имеющего
опасный износ, который значительно превышает допустимый.
Во избежание этого, во-первых, следует проводить первую инструментальную проверку
оцинкованных канатов раньше, чем указано в [49], если при визуальном осмотре будет об-
наружен заметный износ цинкового покрытия. В случае шелушения цинка в начальный пе-
риод эксплуатации каната периодичность проведения его инструментального контроля дол-
жна быть такой, как для неоцинкованных канатов. Во-вторых, инструментальный контроль
оцинкованных подъемных канатов следует проводить, как правило, с подключением само-
пишущего прибора, если это не противоречат условиям безопасного применения измерите-
ля в опасных по газу и пыли выработках шахт, так как уровень его взрывозащиты РП с ис-
кробезопасными электрическими цепями, а самописец общепромышленного исполнения.
В качестве самописца можно использовать любой самопишущий миллиамперметр с током
434
ГЛАВА 15
полного отклонения 5 мА и выходным сопротивлением от 300 до 1200 Ом. Накопление кана-
тограмм позволяет при их сопоставлении зафиксировать момент окончания разрушения цин-
кового покрытия и значение поправки, которая должна в последующем учитываться при
измерениях относительной потери площади сечения стали проволок. Кроме того, наличие
канатограмм позволяет наглядно видеть распределение потери площади сечения по длине
каната, а также ее изменение во времени. Канатограмма является документом о состоянии
каната на день проверки.
Перед проверкой каната прибором типа ИИСК рекомендуется удалить все выступаю-
щие концы оборванных проволок, очистить поверхность каната от местных скоплений зат-
вердевшей смазки, грязи, льда и других инородных покрытий. При резких возрастаниях зна-
чений измеряемой величины на коротких по длине участках каната следует убедиться в пра-
вильности выполнения контроля в соответствии с требованиями Руководства по эксплуата-
ции измерителя износа стальных канатов, а в месте наибольших показаний измерение долж-
но быть проведено при неподвижном состоянии преобразователя и каната.
Следует иметь в виду, что находящиеся на расстоянии менее 0,5 м от каната большие
ферромагнитные массы, как, например, металлические балки, влияют на показания прибо-
ра. Если невозможно удалить их от каната (например, близко к расстрелам располагаются
обычно тормозные канаты парашютов клетей, близко друг к другу располагаются головные
канаты многоканатных подъемных установок), то соответствующую погрешность измере-
ний следует исключить за счет соответствующей установки контрольных образцов канатов
при настройке и калибровке измерителя. При контроле потери площади сечения стали зап-
рещается результаты измерений на одном участке каната экстраполировать на другие участ-
ки. Каждый канат должен проверяться по всей длине. Как правило, это не удается сделать с
одной установки измерительного преобразователя. Поэтому на канате перед перестановкой
преобразователя должна ставиться метка, необходимая для исключения возможности про-
пуска участка каната.
Нормы браковки, когда канаты должны быть сняты и заменены новыми, приведены в
[13, 49]. Контроль потери площади сечения стали подъемных канатов осуществляется про-
тяжкой каната через измерительный преобразователь. Контроль неподвижных канатов (про-
водниковых, полковых, тормозных и др.) выполняется перемещением измерительного пре-
образователя по контролируемому канату. Для этого преобразователь крепится вспомогатель-
ным тросиком к подъемному сосуду, который во время проверки должен двигаться вверх по
стволу. Во избежание появления дополнительной погрешности в процессе измерений ось
тросика (стропа), которым крепится измерительный преобразователь не должна отклонять-
ся от оси проверяемого каната более чем на 150, так как в противном случае может произой-
ти расстыковка половин преобразователя, и появится дополнительный магнитный зазор,
искажающий результаты измерений.
Проверка отвеса подъемного каната и его струны производится на нулевой отметке ство-
ла. Ствол должен иметь прочное перекрытие. В процессе проверки указанных участков
подъемный сосуд должен двигаться вниз. Оператор (наладчик) с измерительным прибором,
производящий проверку, должен при этом находиться вне перекрытия. Аналогично при ус-
тановке измерительного преобразователя на уравновешивающий канат на отметке руд двора
оператор с измерительным прибором должен находиться вне сечения ствола. Скорость от-
носительного движения контролируемого каната и измерительного преобразователя должна
быть не более 0,5 м/с. Систематические проверки шахтных канатов приборами рекомендует-
ся производить специальными бригадами операторов (наладчиков) в количестве 2—3 чел.
В распоряжении таких групп должен быть набор комплектов измерителей для всех диа-
метров прядевых канатов, использующихся на подъемах предприятия и подлежащих конт-
ролю указанными приборами. Проверка канатов должна производиться согласно графику.
На многоканатных подъемных установках должен еженедельно осуществляться контроль
распределения нагрузки между головными канатами при нижнем положении подъемного
сосуда. Контроль распределения нагрузки при верхнем положении подъемного сосуда дол-
жен осуществляться при каждом измерении потери сечения каната, а также в тех случаях,
когда возникнет сомнение в равномерности натяжения всех канатов.
Необходимость такого контроля вызвана тем, что на многоканатных подъемных уста-
новках может иметь место значительная неравномерность распределения нагрузки между
СТАЛЬНЫЕ КАНАТЫ ДЛЯ ШАХТНОГО ПОДЪЕМА
435
канатами, при которой перегрузки канатов в 1,5 раза превышают номинальные. Неравно-
мерность распределения нагрузки между канатами приводит к ускоренному износу футеров-
ки и к ускоренному разрушению перегруженного каната. Когда степень износа подъемных
канатов приближается к предельно допустимой, перегрузки отдельных канатов могут приве-
сти к их обрыву. При нижнем положении подъемного сосуда распределение нагрузки между
канатами с достаточной точностью может быть определено волновым методом [49].
В последние годы для инструментального контроля канатов получили распространение
двухфункциональные приборы (например, «Интрос»), применяющиеся для определения
потери сечения и обнаружения локальных дефектов. В отличие от приборов типа ИИСК
указанные приборы фиксируют результаты измерений в памяти, обеспечивая количествен-
ный и качественный анализ результатов измерений. При использовании таких приборов сле-
дует руководствоваться соответствующими нормативными, методическими документами и
инструкциями изготовителей.
МакНИИ разработан измеритель износа стальных канатов ИИСК-7. Прибор предназ-
начен для проведения инструментального неразрушающего контроль шахтных подъемных
канатов с целью определения по всей их длине потери сечения стали проволок [13]. Измери-
тель состоит из микропроцессорного электронного блока, двух измерительных преобразова-
телей — соответственно для канатов диаметрами от 12 до 30 мм и от 25 до 65 мм, датчика
линейной координаты, устанавливаемого на преобразователь для определения расположе-
ния дефектов по длине каната, и зарядно-питающего устройства для подзарядки автономно-
го источника.
Рис. 15.4. Измеритель ИИСК-7
Измеритель ИИСК-7 имеет цифровую индикацию результатов измерений потери сече-
ния с указанием координаты преобразователя на канате, их запоминание с последующей
передачей на ПК для архивирования и распечатки.
Таблица 15.5
Основные технические характеристики ИИСК-7
Диапазон диаметров контролируемых канатов, мм 12-65
Скорость контроля, м/с 0-3
Диапазон измерения потери сечения, % 0-30 %
Основная абсолютная погрешность измерения потери, % сечения ±2%
Время непрерывной работы от аккумуляторного источника питания, не менее, ч 8
Масса измерительного преобразователя, устанавливаемого на канат, кг 4,5; 7,5
Исполнение РО Иа 1Р 54
Особо взрывозащищенное исполнение прибора с искробезопасными электрическими
цепями позволяет применять его для контроля канатов в условиях шахтных стволов и под-
земных горных выработок шахт, опасных по газу или пыли.
Глава 16
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА
ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ
16.1. Общие положения
16.2. Прицепные устройства
16.3. Подвесные устройства для сосудов одноканатного
подъема
16.4. Головные подвесные устройства сосудов
многоканатного подъема
16.5. Подвесные устройства для круглых уравновешивающих
канатов
16.6. Подвесные устройства для бадей проходческих
подъемных установок
16.7. Переоборудование клетей под подвесные устройства
УП вместо ПУМ
16.8. Основные направления повышения надежности
и безопасности эксплуатации подвесных устройств
16.1. Общие положения
Подвесным устройством называется сменное устройство, предназначенное для присое-
динения канатов к шахтным подъемным сосудам (скипам, клетям, бадьям, противовесам), и
которое может от них отсоединяться. Подвесное устройство состоит из прицепного устрой-
ства (коуша) и элементов конструкции подвески. Прицепное устройство (коуш) служит для
соединения подъемного каната с подвеской. Подвеской является соединительные звенья под-
весного устройства, с помощью которого последнее сцепляется с подъемным сосудом.
Подвески различают одинарные, двойные и полифилярные. Двойной называют такую
подвеску, у которой имеются две независимые ветви прикрепления прицепного устройства к
подъемному сосуду, а полифилярной — несколько (более двух) независимых ветвей. В свою
очередь двойная и полифилярная подвески могут выполняться таким образом, что в нор-
мальном рабочем состоянии нагрузка от сосуда может передаваться канату: только через одну
подвеску; через часть подвесок; через все подвески. В первом случае подвески, несущие ра-
бочую нагрузку, являются рабочими, а освобожденные от рабочей нагрузки — предохрани-
тельными. Во втором случае все подвески являются рабочими.
Эти положения явились основой для разработки требований Правил безопасности отно-
сительно необходимости иметь для клетей людских и грузолюдских подъемов двойную неза-
висимую подвеску — рабочую и предохранительную. Отсутствие предохранительной подвески
разрешается для противовесов одноканатных подъемов, а также на многоканатных подъемах
при условии крепления сосудов и противовесов к канатам не менее чем в двух точках.
На одноканатных подъемных установках различают подвесные устройства для грузовых
сосудов (скипы, грузовые клети, противовесы) и для грузолюдских клетей, т. к. требования
Правил безопасности (обязательность установки парашютных устройств при перевозке лю-
дей) обусловливают различие их конструктивных решений. Грузолюдские и людские клети
имеют более сложную конструкцию подвески в связи с необходимостью размещения допол-
нительных элементов предохранительной подвески и ловителя парашюта. На сосудах мно-
гоканатных подъемных установок принципиальные различия в конструкции подвесных уст-
ройств скипов и клетей отсутствуют в связи с тем, что Правилами безопасности применение
парашютов для сосудов многоканатного подъема не предусмотрено.
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ
437
Правила безопасности предъявляют высокие требования к надежности подвесных уст-
ройств, в частности, запас прочности подвесных и прицепных устройств должен быть три-
надцатикратным (с учетом макисмального количества людей) для грузолюдских и людских
подъемов и десятикратным для грузовых подъемов. Кроме того, каждый тип прицепного ус-
тройства должен обеспечить прочность закрепленного в нем каната не менее 85 % агрегат-
ной прочности нового каната.
Правилами безопасности регламентирован также срок службы подвесных и прицепных ус-
тройств, который при эксплуатации подъемных установок должен быть не более 5-ти лет. И лишь
с 1986 г. в Правилах безопасности появилось указание о возможности продления срока службы
подвесных устройств на 2 года, сверх нормативных 5-ти лет. В последней редакции Правил безо-
пасности предоставлено право на продление срока службы на 3 года свыше 7-ми лет общего
срока эксплуатации на основании экспертизы организаций, имеющих разрешение Госпромгор-
надзора Украины на проведение экспертного обследования [13]. Таким образом, срок службы
подвесных и прицепных устройств может быть доведен до 10-ти лет вместо первоначальных 5-
ти. Более того, соответствующими письмами Госпромгорнадзором в исключительных случаях
допускается начальникам горных округов рассматривать возможность продолжения срока эксп-
луатации подвесных и прицепных устройств свыше 10-ти лет при условии наличия положитель-
ного заключения НИИГМ им. М. М. Федорова, МакНИИ или Экспертно-технического центра
Госпромгорнадзора Украины по результатам проведенных испытаний.
16.2. Прицепные устройства
Применяемые прицепные устройства по способу соединений каната с подвеской сосуда
можно разделить на два вида коуша: грушевидные и клиновые.
Грушевидные коуши подразделяют на симметричные и эксцентричные. Свободный ко-
нец, огибая коуш, крепится шестью стальными зажимами к грузовой ветви каната, из кото-
рых пять являются рабочими, а шестой — контрольным. При использовании таких коушей
наиболее интенсивному износу подвергается канат под нижним жимком у вершины коуша
из-за больших напряжений в проволоках, вызванных изгибом каната.
Дружковским машиностроительным заводом разработан стандарт предприятия СТП
44.01-75 на коуши литые для круглых канатов четырех типов. Грушевидные коуши типа I
имеют симметричную конструкцию (рис. 16.1, а), а типа II — эксцентричную конструкцию
(рис. 16.1, б.) и предназначены они для клетей с парашютами типа ПКН. Диапазон диамет-
ров канатов от 20 до 65 мм. Грушевидные коуши типа III (рис. 16.1, в.) и типа IV (рис. 16.1, г)
являются эксцентричными, предназначены для скипов с диаметром подъемных канатов от
21 до 65 мм и различаются они размером Н.
Зажимы для круглых канатов диаметром от 21 до 65 мм к этим коушам выпускаются 9
типоразмеров (рис. 16.2). Кроме Дружковского машиностроительного завода выпуск груше-
видных коушей освоен также другими заводами горного машиностроения.
Рис. 16.1, а, б:
а — коуш типа I симметричный; б — коуш типа II эксцентричный
438
ГЛАВА 16
Рис. 16.1, в, г. Грушевидный коуш
Основным недостатком грушевидных коушей являются значительная высота подвески,
большая длина каната в запанцировке, трудоемкость операции по перепанцировке подъем-
ного каната.
Клиновые безжимковые коуши имеют три конструктив-
ных исполнения: рычажно-клиновый регулируемый коуш
типа КРГ, безжимковый клиновый коуш с односторонним
зажатием каната типа ККБ, безжимковый клиновой коуш
типа КД двустороннего зажатия каната. Коуши типа КРГ
(рис. 16.3) разработаны Донгипроуглемашем для канатов
прядевых конструкций диаметром от 17 до 60,5 мм и рас-
считаны на статические нагрузки для клетей до 300 кН и
скипов до 390 кН. Коуши имеют шесть типоразмеров.
Опыт эксплуатации прицепных устройств с коушами
КРГ показал, что при их применении происходит быстрое
усталостное разрушение прядей канатов в месте входа в жесткие клинья. Наибольшие разру-
шения каната наблюдаются на расстоянии 50—80 мм от входа рабочей ветви в запанцировку.
Быстрое развитие усталостных повреждений проволок в этом случае обусловлено возникнове-
нием у входа в коуш высоких контактных и изгибных на-
пряжений, а также фактором концентрации напряжения
из-за резкого изменения напряженно-деформированно-
го состояния каната, сочленяемого с жесткой массой. На-
дежность закрепления каната в этих случаях в значитель-
ной степени зависит от тщательности изготовления и точ-
ности подгонки деталей заклинивающего механизма.
Кроме того, эти коуши требуют для каждого диамет-
ра каната всякий раз применять клинья со строго опреде-
ленными размерами канавок. Запанцировку канатов зак-
рытой конструкции коуш КРГ не обеспечивает вообще.
Коуши КРГ в настоящее время сняты с серийного произ-
водства и изготавливаются по индивидуальным заказам
шахт Ясногорским машиностроительным заводом (Туль-
ская область, Российская Федерация) для закрепления на
Рис. 16.3. Коуш типа КРГ:
копре и в зумпфе проводниковых и отбойных прядевых канатов. На базе конструкции коуша
КРГ Донгипроуглемашем для запанцировки канатов закрытой конструкции был разработан
эксцентриковый коуш КРЗ, а Ясногорским машиностроительным заводом в настоящее время
освоен выпуск клиновых коушей ККП по ТУ 2408.10153-92, предназначенных для крепления
проводниковых и отбойных канатов закрытой конструкции.
Основные параметры коушей ККП и КРГ, выпускаемых в настоящее время Ясногорс-
ким машиностроительным заводом, представлены в табл. 16.1.
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ
439
Таблица 16.1
Технические характеристики коушей ККП и КРГ
Обозначение Статическая нагрузка кН, не более Канат Масса, кг
ГОСТ Диаметр, мм Тип
ККП-1.000 210 3090 - 73 32,0-35,5 Закрытый 124
ККП-2.000 320 7675 - 73 38,5 Закрытый 204
10506-76 40,0
7675 - 73 40,5
ККП-3000 430 7675 - 73 45,0 Закрытый 239
КРГ - 1А.000 108 17,0-30,5 Прядевый 65
КРГ-2А.000 150 23,5-36,0 Прядевый 90
КРГ - 3A.000 210 28,0-45,0 Прядевый 128
КРГ-4А.000 320 32,0-56,5 Прядевый 197
КРГ - 5А.000 430 38,5-64,0 Прядевый 232
КРГ - 6А.000 650 42,5 - 64.0 Прядевый 310
Многих из недостатков рычажно-клиновых коушей КРГ лишены клиновые коуши с од-
носторонним зажатием каната типа ККБ конструкции ВНИПИрудмаш (г. Кривой Рог). Было
разработано шесть типоразмеров этих коушей для канатов прядевой конструкции диамет-
ром от 19 до 65 мм. Коуши применялись на всех одноканатных грузовых и на всех многока-
натных подъемных установках. Опыт эксплуатации этих коушей показал, что их конструк-
ция также не обеспечивает устранения усталостных повреждений проволок каната в месте
набегания его на клин вследствие высоких контактных напряжений, упругого проскальзы-
вания каната и поперечных колебаний. В частности, для применения на шахтах угольной
промышленности был создан специальный ряд коушей ККБ восьми типоразмеров, которые
должны обеспечивать запанцировку канатов как прядевой, так и закрытой конструкции ди-
аметром от 19,5 до 71 мм. Основные параметры коушей ККБ для шахт угольной промыш-
ленности приведены в табл. 16.2.
Таблица 16.2
Технические характеристики коушей ККБ
Типоразмер коуша Статическая нагрузка, кН Диаметр каната, мм Масса, кг
Грузо-людской подъем грузовой подъем прядевого закрытого
ККБ 4 40 52 19,5-23,0 20 54
ККБ 6,3 63 82 22,0-28,0 22;25 75
ККБ 10 100 130 26,5-35,5 27;30;33 156
ККБ 16 160 208 33,0-48,0 33;36;38 290
ККБ 20 200 260 38,0-49,0 38;40;43 335
ККБ 25 250 325 46,0-54,0 46;50 440
ККБ 31.5 315 410 49,0-60,0 52;55 578
ККБ 35,5 355 462 55,0-71,0 60 725
На рис. 16.4, а представлена конструкция коуша ККБ, снабженного демпфером — огра-
ничителем и клином со вставкой увеличенного радиуса. Коуш состоит из корпуса 1, в кото-
рый входит подвижный клин 2. С целью снижения напряжений в канате от поперечных ко-
лебаний на участке набегания его на клин в верхней части корпуса коуша установлен гаси-
тель 3 с размещенными в нем резиновыми втулками. Фиксация клина в корпусе после за-
щемления каната осуществляется натяжным устройством 4. Свободный конец закрепляется
в специальном крестообразном зажиме 5, являющимся одновременно контрольным и пре-
дохранительным. Присоединение коуша к деталям подвески осуществляется валиком 6.
Коуш новой конструкции со съемной вставкой (рис. 16.4, б) состоит из корпуса 1, съем-
ной вставки 2 и прокладок 3. Корпус клина по наклонной и круговой части имеет канавку
под канат и опорную поверхность, контактирующую с вертикальным вкладышем корпуса
440
ГЛАВА 16
Рис. 16.4 а. Коуш типа ККБ (г. Кривой Рог)
Рис. 16.4, б. Подвижной клин коуша
со съемной вставкой
коуша. Съемная вставка, выполненная с большим радиусом, чем круговая часть корпуса кли-
на, обеспечивает плавный вход каната на клин. Прокладки 3 путем подбора их количества
для соответствующего типа каната обеспечивают совпадение оси каната с вертикальной осью
коуша, проходящей через центр подвесок. Этим исключается изгиб каната на выходе его из
гасителя колебаний.
Клиновый коуш КД двухстороннего зажатия (рис. 16.5) состоит из листов, соединенных
между собой вкладышами с помощью прогонных болтов, собственно коуша, зажима, амор-
тизатора и горизонтального клина. Канат в коуше удерживается за счет двустороннего зажа-
тия его между клином и вкладышами. Горизонтальный клин фиксирует положение клина и
предотвращает его перемещение вниз при
напуске каната.
В дальнейшем конструкция коуша по
инициативе Ясногорского машинострои-
тельного завода и по согласованию с Дон-
гипроуглемашем, НИИГМ им. М. М. Федо-
рова и МакНИИ была модернизирована.
Суть модернизации состояла в замене бол-
тового соединения листов 4 с вкладышем
(рис. 16.5) сварным соединением. Это по-
зволило значительно упростить изготовле-
ние и сборку коуша. Конструкция такого
коуша представлена на рис. 16.6.
Коуш КД обладает рядом преимуществ
по сравнению с коушами КРГ и ККБ:
— повышена надежность удержания
каната за счет двухстороннего его зажатия;
— улучшены условия эксплуатации при
перепанцировке каната в коуше;
— повышена ремонтопригодность за
счет применения сменных втулок в шар-
нирах;
— уменьшены габариты и масса
вследствие применения низколегирован-
ных сталей;
— увеличен срок службы.
Альтернативы данному коушу пока нет.
Вид А
Рис 16.5. Клиновый коуш КД двустороннего
зажатия
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ
441
Рис. 16.6. Коуш КД сварной конструкции:
1 — лист коуша; 2 — валик; 3 — зажим; 4 — амортизатор; 5 — клин;
6 — горизонтальный клин
16.3. Подвесные устройства для сосудов одноканатного подъема
В настоящее время для присоединения головных канатов к шахтным скипам вертикаль-
ного одноканатного подъема применяются подвесные устройства типа УПС с клиновыми
коушами двухстороннего зажатия каната (рис. 16.7). Технические характеристики подвесных
устройств типа УПС представлена ниже в табл. 16.3.
Таблица 16.3
Технические характеристики коушей УПС
Обозначение Статическая нагрузка, кН Диаметр каната, мм Масса, кг
Рис. 16.7, а Рис. 16.7, б
УПС 6.3.000 63 20,0-36,5 75 67
УПС 12.5.000 125 27,0-46,5 165 154
УПС 20.000 200 33,0-58,5 305 302
УПС 30.000 300 42,0-65,0 475 470
УПС 46.000 460 44,0-65,0 684 689
На базе коушей ККБ выпускались подвесные устройства типа ПУС скипов вертикаль-
ного одноканатного подъема. В настоящее время эти подвесные устройства остались на не-
многих шахтах.
Для клетей одноканатного подъема серийно изготавливаются Донецкгормашем (Украина)
и Ясногорским машиностроительным заводом (Российская Федерация, Тульская обл.) — под-
весные устройства типа УП с коушами КД. Технические характеристики приведены в табл. 16.4.
Подвесные устройства УП в
зависимости от величины стати-
ческой нагрузки разрабатываются
пяти типоразмеров. Устройства со-
стоят из сварного клинового коу-
ша 1, балки 2, серег 3, тяги 4,
кронштейнов 5, стоек 6, зажима 7,
втулки 8 (рис. 16.8). Во всех шар-
нирных соединениях подвесного
устройства для увеличения срока
службы и обеспечения ремонтоп-
ригодности имеются сменные
втулки.
При эксплуатации коуш КД,
в котором закреплен головной
канат, через накладки опускается
в балку, соединенную со стойка-
ми и проушинами клети. При на-
пуске головного каната или его
Рис. 16.7. Подвесное устройство с коушем КД
442
ГЛАВА 16
Таблица 16.4
Технические характеристики подвесных устройств
Условные обозначения исполнений Наименование основных параметров и размеров
Статическая нагрузка, кН Диаметр головного каната для коуша, мм Габаритные размеры, мм Масса, кг, не более
Высота, А Ширина, В
УП 6,3 000 УП-01 УП-02 УП-03 63 20-24 24-28 28-33 33-6,5 1700 550 200
УП 12,5 000 УП-01 УП-02 УП-03 125 27-32 32-37 37-42 42-6,5 1900 700 400
УП 20 000 УП-01 УП-02 УР-03 УП-04 200 33-37 37-41 41-46 46-52 52-58 2150 850 700
УП 25.000 УП-01 УП-02 УП-03 УП-94 250 36,5-41 41-44,5 44,5-48,5 48,5-53,5 53,5-58,5 2250 900 900
УП 30.00 УП-01 УП-02 УП-03 УП-03 300 42-46 46-50 50-55 55-60,5 60,5-65 2300 1000 1100
обрыве коуш перемещается между листами балки и направляющими, обеспечивая при этом
свободное разжатие пружины парашюта и его включение. В случае разрушения деталей
рабочей подвески — балки, стоек, серег, валиков — клеть будет удерживаться на запасной
подвеске — коуш, тяга, траверса 3 ловителя парашюта. Направляющие на балке обеспечи-
вают направленное движение коуша при напуске головного каната.
На малых клетях некоторых подъемов еще эксплуатируются подвесные устройства ПКН
с предохранительными цепями и нерегулируемой рабочей подвеской.
Рабочая ветвь такого подвесного устройства состоит из грушевидного коуша, жимков,
тяги и соединительных звеньев. Параллельно рабочей подвеске имеется ветвь предохрани-
тельной подвески. К грушевидному коушу посредством верхней оси треугольных баланси-
ров присоединены две траверсы, к которым крепятся четыре якорные цепи, связанные с про-
ушинами верхнего пояса клети.
Подвесные устройства ПКН изготавливаются по индивидуальному заказу Дружковским
машиностроительным заводом. Разработаны эти подвесные устройства для деревянных про-
водников применительно к парашютам резания типа ПДП.
Основными недостатками подвесных устройств этого типа являются: значительная длина
подвесного устройства, обусловленная запанцировкой каната большим количеством жимков;
интенсивный износ проволок каната под первым жимком; значительные затраты времени на
перепанцировку каната.
16.4. Головные подвесные устройства сосудов многоканатного подъема
Отличительная особенность подвесных устройств сосудов для многоканатного подъема
состоит в необходимости присоединения к нему нескольких подъемных канатов (от двух до
восьми). Подвеска сосуда может осуществляться прямым присоединением каждого каната
или посредством специальных уравнительных устройств, предназначенных для равномерно-
го распределения концевой нагрузки между канатами.
Равномерное распределение концевой нагрузки между канатами является одним из ос-
новных условий обеспечения безопасной эксплуатации многоканатных подъемных машин.
Причины неравномерного распределения нагрузок между канатами обусловлены различием
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ
443
Рис. 16.8. Подвесное устройство
типа УП-12,5:
1 — лист коуша; 2, 3, 6, 8 — валик;
4 — тяга; 5 — сттойка; 7 — серьга;
9 — балка
длин окружностей ручьев канатоведущего шкива,
длин подъемных канатов, диаметров, жесткостей и
модулей упругости подъемных канатов между со-
бой, а также непостоянством этих параметров по
длине каждого из канатов. Проблема выравнивания
натяжений канатов в определенной мере решается
конструкцией подвесных устройств, которые могут
быть разделены на две группы: безуравнительные и
уравнительные.
Донгипроуглемашем и НИИГМ им. М.М. Фе-
дорова согласно ТУ 12.44.1124-85 разработаны три
типоразмера безуравнительных подвесных уст-
ройств УПБ, выпуск которых освоил Дружковский
машиностроительный завод (рис. 16.8 и 16.9). Ти-
поразмеры изготавливаемых подвесных устройств:
УПБ-500, УПБ-800 и УПБ-1200.
Технические характеристики подвесных уст-
ройств типа УПБ приведены в табл. 16.5.
В деталях шарнирных соединений подвесных
устройств установлены сменные втулки и предус-
мотрены места для смазки. Валики, тяги, втулки,
траверсы и удлинители подвесных устройств изго-
тавливаются из стали 40ХН с твердостью
НВ241...285 для деталей толщиной до 100 мм и НВ
197...241 для деталей толщиной свыше 100 мм,
клин — из стального литья марки 35Л, вкладыши —
из стали 35, листы коуша — из стали 10ХСНД или
15ХСНД. Допускается изготавливать детали подвес-
ных устройств из сталей других марок с аналогич-
ными физико-механическими свойствами, не ухудшающими качество подвесных устройств.
Таблица 16.5
Технические характеристики подвесных устройств типа УПБ
Обозначение исполнений Статическая нагрузка, КН, не более Диаметр головного каната для коуша КД, мм Количество точек соединения подвесного устройства с сосудом, шт. Масса, кг Тип коуша
УПБ-500 500 27...42 4 635 кд 12,5
УПБ-500-01 500 27...42 2 910 КД 12,5
УПБ-500-02 500 27...42 4 635 КД 12,5
УПБ-500-03 500 27...42 2 910 КД 12,5
УПБ-800 800 33...46,5 4 ИЗО КД 20
УПБ-800-01 800 33...46,5 2 1580 КД 20
УПБ-800-02 800 33...46,5 4 ИЗО КД 20
УПБ-800-03 800 33...46,5 2 1580 КД 20
УПБ-1200 1200 42... 50,5 4 1785 КД 30
УПБ-1200-01 1200 42... 50,5 2 2520 КД 30
УПБ-1200-02 1200 42...50,5 4 1785 КД 30
УПБ-1200-03 1200 42... 50,5 2 2520 КД 30
Конструкция подвесных устройств УПБ с коушем КД для клетей и скипов представлена
соответственно на рис. 16.9 и 16.10.
На шахтах угольной промышленности Украины преимущественное распространение по-
лучило жесткое крепление всех головных канатов на одном сосуде (противовесе) и балан-
сирное с двухточечным креплением к сосуду и парным выравниванием натяжений канатов —
на другом. В этом случае схема подвески сосудов является фактически безуравнительной,
поэтому актуальное значение приобретает систематический контроль натяжения канатов,
своевременное регулирование их длин, проточка желобков, состояние футеровки шкива и
444
ГЛАВА 16
Рис. 16.9. Подвесное устройство типа
УПБ с коушем КД (для клетей):
1 — лист коуша; 2, 4 — валик; 3 — тяга
Рис. 16.10. Подвесное устройство типа УПБ
с коушем КД (для скипов):
1 — лист (щека коуша); 2, 4, 1,9 — валик;
3, 8 — тяга; 5 — траверса; 6 — планка
др. Основным недостатком балансирных подвесных устройств является то, что эффективное
выравнивание натяжения канатов создается лишь на ограниченном участке движения сосу-
дов вследствие недостаточности хода балансиров.
Равномерность распределения нагрузки между канатами чаще всего контролируется вол-
новым методом, основанным на однозначной связи между скоростью распространения по
канату волн упругих поперечных колебаний и концевой нагрузкой. Размер, на который сле-
дует укоротить наименее нагруженный канат или уменьшить длину желобка канатоведущего
шкива, определяют согласно «Руководству по контролю и регулировке распределения на-
грузки между головными канатами многоканатных подъемных установок». Укорочение ка-
натов сводится к перепанцировке их в коушах, а уменьшение длины желобка — к уменьше-
нию диаметра навивочной поверхности проточкой футеровки специальным устройством.
16.5. Подвесные устройства для круглых уравновешивающих канатов
В качестве подвесных устройств для круглых уравновешивающих канатов применяются
вертлюжные устройства типа УП-М конструкции НИИГМ им. М.М. Федорова
(см. рис. 16.11). Эти устройства изготавливаются Дружковским машиностроительным заво-
дом в комплекте с подъемными сосудами, а также по отдельным заказам Донецкгормашем в
комплекте со скипами.
Подвесное устройство УП-М (рис. 16.11) имеет два типоразмера: УП-2М под статичес-
кую нагрузку 150 кЯи УП-ЗМ под статическую нагрузку 200 кН. Кроме того, в зависимости
от конструкции привязки устройств к сосудам (серийного и индивидуального изготовления)
каждый из этих типоразмеров имеет целый ряд исполнений.
16.6. Подвесные устройства для бадей проходческих подъемных установок
Крепление проходческих бадей к подъемному канату осуществляется при помощи при-
цепных устройств типов УПП и УПЗ, разработанных институтом ЦНИИподземмаш (г. Мос-
ква) и изготавливаемых Горловским машиностроительным заводом им. С. М. Кирова.
Устройство УПП предназначено для закрепления конца подъемного каната прядевой
конструкции, а УПЗ — для закрепления каната закрытой конструкции.
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ 445
Рис. 16.11. Подвесное
устройство типа УП-М:
1 — коуш; 2 — вертлюг; 3, 5 —
траверсы; 4 — звенья
Устройство УПП (рис. 16.12) состоит из крюка 1, защел-
ки 2, траверсы 3, подшипника 4, щек 5, гайки 6, клиновой
муфты 7, клина 8, контрольных зажимов 9, специального за-
жима 10 и шайбы амортизатора 11.
При креплении в коуше канат огибается вокруг клина
и вставляется в муфту, при этом длина свободного конца
каната для установки контрольных зажимов должна состав-
лять примерно 500 мм. Затем к клиновой муфте присоеди-
няются щеки и крюк, после чего производится обтяжка
каната при нагрузке, равной грузоподъемности прицепно-
го устройства, и устанавливаются контрольные зажимы та-
ким образом, чтобы на свободном конце каната образова-
лась контрольная пет-
ля. технические харак-
теристики устройств
типа УПП представле-
ны в табл.16.6.
Устройство УПЗ
(рис. 16.13) состоит из
крюка 1, защелки 2,
нижней 3 и верхней 9 траверс, упорного подшипника 4,
щек 5, гайки 6, концевой страхующей муфты 7, втулки
клиновой 8, амортизатора 10.
В прицепном устройстве
осуществляется двойная за-
делка подъемного каната —
основная и страхующая, при
этом каждая рассчитана на
восприятие полной нагрузки
на устройство. Основная за-
делка состоит из клиновой
втулки, в которую входят три
клина, ниже основной задел-
ки расположена страхующая
заделка, в которой распу-
щенный конец каната рас-
членен с помощью сектор-
ных и угловых клиньев. Та-
кая двойная заделка каната
полностью исключает возможность его выдергивания из прицеп-
ного устройства.
Закрепление закрытого подъемного каната в прицепном ус-
тройстве типа УПЗ исключает возможность осмотра каната в за-
Й
%
Рис. 16.12. Устройство УПП
Рис. 16.13. Устройство
УПЗ
Таблица 16.6
Технические характеристики устройств типа УПП
Типоразмер Статическая нагрузка, кН Диаметр каната прядевой конструкции, мм. Масса, кг.
У ПП-2,8 28 18-20 85
УПП-01 28 20-23 84
УПП-02 28 23-26 92
УПП-5,0 50 20-23 112
УПП-0,1 50 23-26 113
УПП-0,2 50 26-30 114
УПП-0,3 50 30-35 118
УПП-8,0 80 34-36 165
УПП-0,1 80 36-38 165
446
ГЛАВА 16
пинцировке с целью оценки его состояния. Поэтому необходимо строго соблюдать требова-
ния периодичности перепанцировки прицепных устройств.
Параметры устройств типа УПЗ представлены в табл. 16.7.
Таблица 16.7
Технические характеристики устройств типа УПЗ
Типоразмер Статическая нагрузка, кН Диаметр каната прядевой конструкции, мм Масса, кг
УПЗ-4-20 40 20,0 97
УПЗ-5-22 50 22,0 131
УПЗ-5-25 50 25,0 133
УПЗ-8-25 80 25,0 148
УПЗ-8-27 80 27,0 148
УПЗ-8-ЗО 80 30,0 163
УПЗ-11-33 ПО 33,0 185
УПЗ-11-36 ПО 36,0 204
УПЗ-15-36 150 36,0 225
УПЗ-15-38 150 38,0 225
t Л
16.7. Переоборудование клетей одноканатного подъема
для подвесных устройств типа УП вместо ПУМ
В 80-е годы прошлого века самым распространенным типом подвески подвесных устройств
для клетей одноканатного подъема были подвесные устройства типа ПУМ с коушем КРГ В на-
стоящее время серийный выпуск их Ясногорским заводом и Донецкгормашем прекращен, вза-
мен освоено производство подвесных устройств УП с коушем КД. Тем не менее, имеется целый
ряд шахт, на которых эксплуатация подвесных устройств ПУМ еще продолжается. Подвесные
устройства УП обладают рядом преимуществ по сравнению с устройствами ПУМ, в частности:
— повышена надежность удержания каната в коуше двухстороннего зажатая;
— улучшены условия эксплуатации в части перепанцировки каната в коуше и смазки
шарнирных соединений;
— повышена ремонтопригодность за счет применения сменных втулок в шарнирных
соединениях;
— уменьшены габариты, масса (до 50 %) за счет при-
менения низколегированных сталей;
— увеличен срок службы.
Однако, с уменьшением габаритов подвесных уст-
ройств УП изменены привязочные размеры к проушинам
клетей, вследствие чего требуется соответствующее изме-
нение узла присоединения подвесных устройств на клетях.
Конструкторская документация на переоборудование
шахтных клетей для установки на них подвесных устройств
УП может выполняться энергомеханической и техноло-
гической службами шахты. После выполнения работ по
переоборудованию клетей исполнителем вносится соот-
ветствующая запись в паспорт подъемного сосуда.
При разработке конструкторской документации на пе-
реоборудование клетей для подвесных устройств УП, дол-
жен быть выполнен расчет узлов крепления, а также про-
верка расчетом элементов клети, к которым они крепятся.
Переоборудование клетей, изготовление и монтаж
узлов крепления проушин для подвесных устройств УП
должны выполняться ремонтными предприятиями отрас-
ли. Сварку должен производить сварщик, выдержавший
испытания согласно действующим в отрасли правилам.
Разработано несколько вариантов крепления про-
ушин на существующих клетях для подвесных устройств
типа УП, из которых выбирается оптимальный вариант
для конкретной клети. Первый вариант (рис. 16.14) пре-
Рис. 16.14. Крепление новых
проушин к поясу клети при
замене подвесного устройства:
1 — проушины; 2 — верхний пояс
клети; 3 — швелеры; 4 — заклепки;
5 — болты
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ
447
дусматривает крепление новых проушин следующим образом. Под верхний пояс клети заводит-
ся рама, сваренная из швеллеров. Поперечные стороны состоят из двойных швеллеров, к кото-
рым заклепками крепятся проушины. Рама крепится к верхнему поясу посредством болтов.
Подвесные устройства УП для клетей одноканатных грузолюдских подъемов рассчитыва-
ются с 10-кратным запасом прочности по отношению к максимальной статической нагрузке.
Элементы крепления проушин для подвесного устройства УП-20 также рассчитывают-
ся, исходя из этих условий.
16.8. Основные направления повышения надежности и безопасности
эксплуатации подвесных устройств
Требования, обеспечивающие надежность, безопасность и удобства эксплуатации под-
весных устройств, сформулированы многолетним опытом применения на угольных шахтах
различных конструкциях подвесных устройств. Требования в части надежности и удобства
эксплуатации этих устройств можно свести к двум положениям:
— подвесное устройство должно быть конструктивно простым, не требующим от обслу-
живающего персонала особых, высококвалифицированных знаний и навыков;
— конструкция подвесного устройства должна обеспечивать свободный доступ для ос-
мотра и проверки состояния всех его несущих элементов и каната на участке запанцировки,
надежное закрепление обильно смазанного каната, а также удобства и минимальные затра-
ты времени для его перепанцировки.
Требования относительно надежности и безопасности эксплуатации подвесных устройств
регламентированы Правилами безопасности, Правилами технической эксплуатации, нормами
и рекомендациями МакНИИ на проектирование подвесных устройств для вертикальных
подъемных установок, методикой МакНИИ лабораторных и заводских испытаний подвес-
ных устройств, нормативно-методическими документами НИИГМ им. М. М. Федорова по
техническому обслуживанию, неразрушающему контролю и экспертно-техническому обсле-
дованию подвесных устройств при их эксплуатации.
Безаварийность работы шахтного подъема всегда достигалась высокой надежностью и
прочностью подвесных устройств подъемных сосудов, для обеспечения которых необходимо
знать причины, влияющие на преждевременное разрушение элементов подвесных устройств.
При требуемых ПБ запасах статической прочности подвесных устройств случаев разру-
шения их в пределах первоначально установленного ПБ нормативного срока службы, со-
ставляющего 5 лет, не наблюдалось. Именно это обстоятельство послужило основанием для
постановки вопроса о возможности увеличения нормативного срока службы подвесных уст-
ройств свыше 5-ти лет. После соответствующих исследований специалистами НИИГМ им.
М. М. Федорова и МакНИИ такая задача была решена, что позволило удвоить срок службы
подвесных устройств за счет внедрения мероприятий, связанных с проведением неразруша-
ющего контроля этих устройств по специальным методикам.
Однако, к концу прошлого и началу нынешнего столетия на шахтах угольной промыш-
ленности Украины и России произошел ряд аварий, связанных с разрушением деталей под-
весных устройств, срок службы которых еще не достиг даже нормативного, равного 5-ти го-
дам. В частности, такие аварии произошли на шахте «Капитальная» (ПО «Интауголь» (РФ),
Угольной компании «Краснолиманская»), шахте им. М. И. Калинина ПО «Донецкуголь»,
шахте «Добропольская» ПО «Добропольеуголь», шахте «Комсомолец Донбасса». Объясне-
ний этому явлению сначала не было, но результаты анализа поломок деталей подвесных ус-
тройств свидетельствовали о том, что произошли они из-за усталости металла.
Почему же именно в этот период времени проявились процессы усталостного разруше-
ния деталей подвесных устройств, срок эксплуатации которых оказался существенно ниже
нормативного?
Для ответа на этот вопрос рассмотрим механизм процесса усталостного разрушения, в
основу которого, согласно исследованиям многих ученых, положены дислокационные пред-
ставления о строении металлов. Усталостное разрушение характеризуется тремя стадиями:
первая стадия — до момента появления первой макроскопической трещины, т. е. это период
зарождения трещины, вторая стадия — после появления усталостной трещины, третья ста-
дия — хрупкое разрушение.
448
ГЛАВА 16
Специалисты в области усталости металла превалирующее значение в зарождении тре-
щин усталости отдают дислокациям, являющимися проявлением поликристаллической струк-
туры и неоднородности материала. Под действием соответствующих нагрузок вследствие
неоднородности материала в отдельных кристаллических зернах возникают перенапряже-
ния, при этом способности зерен решетки сопротивляться сдвигу исчерпываются, и в итоге
это место может явиться очагом зарождения мельчайших микротрещин. Период от начала
эксплуатации детали до появления зародыша микротрещины принято называть инкубацион-
ным периодом усталости.
Зарождение трещины на стадии инкубационного периода еще не определяет разруше-
ния детали в целом. Если перенапряжения в зернах кристаллической решетки вызваны при-
ложением к детали разовой статической нагрузки, то дальнейшего развития трещина может
не получить. Обязательным условием развития трещины является наличие переменных во
времени напряжений определенной величины. И если трещина появилась, то рано или по-
здно деталь обязательно разрушится под воздействием знакопеременных нагрузок, скорость
развития трещины зависит не только от характера внешних силовых факторов, но и от вели-
чины и характера действительных напряжений детали.
Усталостное разрушение металла начинается, как правило, с поверхностных слоев детали,
поэтому исходное состояние поверхности оказывает большое влияние на циклическую проч-
ность и соответственно на скорость разрастания трещины. Известно также, что чем выше пре-
дел прочности стали, тем в большей мере снижается циклическая прочность ее при ухудшении
качества поверхности. Неровности на поверхности детали, вызванные коррозией, а также риски,
оставленные резцом при механической обработке детали, являются эффективными концент-
раторами напряжений, и являются одной из причин снижения циклической прочности.
Вторая стадия усталостного разрушения детали связана с разрастанием трещины до тех
пор, пока сопротивление оставшейся части сечения детали ослабится настолько, что запас
прочности ее относительно максимальной статической нагрузки окажется полностью исчер-
панным, и при малейшем внешнем возмущении происходит хрупкое разрушение конструк-
ции. Максимальное напряжение, при котором материал способен сопротивляться, не разру-
шаясь, при любом произвольно большом числе повторений переменных напряжений назы-
вается пределом выносливости ав.
В настоящее время разработаны критерии усталостной прочности материалов и несущей
способности элементов конструкций, с учетом характера цикла напряжений, вида напряжен-
ного состояния и конструктивно-технологических факторов. В частности, из несомненно до-
казанных положений теории усталости следует, что процесс, проходящий при повторно-пере-
менных нагрузках в металлах, носят резко выраженный местный характер, а образование тре-
щин происходит, как правило, в поверхностных слоях детали в местах максимальной концен-
трации напряжений. Исходя из этих положений и анализа случаев разрушения подвесных ус-
тройств при эксплуатации, можно сформулировать основные принципы построения алгорит-
ма обследования подвесных устройств с целью выявления зон наиболее вероятного возникно-
вения усталостных трещин при минимальных затратах времени и средств. Прежде всего, сле-
дует иметь в виду, что для изготовления деталей подвесных устройств применяют хромонике-
левые стали с высоким пределом прочности за счет специальной термической обработки.
Как известно, чем выше прочность стали, тем выше ее чувствительность к концентра-
ции напряжений и к растягивающим напряжениям. Коэффициенты чувствительности к кон-
центрации напряжений зависят не только от механических свойств стали, но и от конструк-
тивной формы детали, от среды, в которой она работает, от состояния поверхностных слоев
детали, а также от распределения в ней напряжений и предварительной внутренней напря-
женности материала.
Далее на примере тяги подвесного устройства УПБ многоканатного подъема рассмот-
рим механизм возможного перераспределения концентрации напряжений в ней в процессе
эксплуатации подъемной установки с учетом указанных выше факторов.
Расчетная схема тяги представлена на рис 16.15, служит она для соединения прицеп-
ного устройства (коуш КД) с верхним поясом подъемного сосуда. Рассчитана тяга на макси-
мальную статическую нагрузку из условия 10-кратного запаса прочности по отношению к
временному сопротивлению принятых материалов. Сразу же следует отметить, что в комп-
лект подвесного устройства УПБ входят 4 тяги, и в расчете принимается равномерное
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ
449
Рис. 16.15. Расчетная схема тяги
подвесного устройства УПБ-500
распределение нагрузки между ними. Но, как было
выше отмечено, в процессе эксплуатации многока-
натных подъемных установок имеет место неравно-
мерное распределение общей концевой нагрузки меж-
ду головными канатами. Вследствие этого не исклю-
чена перегрузка отдельных канатов вплоть до воспри-
ятия всей нагрузки одним из них. Соответственно и
подвесное устройство этого каната тоже окажется пе-
регруженным, при проверке же прочности элементов
подвесного устройства на максимальную статическую
нагрузку этот факт не учитывается.
При расчете тяги определяется напряжения рас-
тяжения в сечениях А-А, Б-Б и В-В (рис. 16.15). Ста-
тическое напряжение растяжения
в сечении А-А
<=------А-----> (16.7.1)
р (B-d)t K
в сечении Б-Б
(16.7.2)
в сечении В-В
р
А
4
(16.7.3)
где Р-— максимальная статическая нагрузка на тягу; В, d, t — размеры проушины;
4
К — опытный поправочный коэффициент, который равен:
для сечения А-А
К, =0.56+0.46—-0.14, (16.7.4)
х а
для сечения Б-Б
К, = 0.56+0.46—-0.1—. (16.7.5)
xi
Запас прочности п в каждом сечении определяется как
„ = ^<10. (16.7.6)
°р
Ниже в табл. 16.8 представлены расчетные значения запасов прочности тяг подвесных
устройств УПБ трех типоразмеров в сечениях А-А, Б-Б, В-В. Материал тяг — сталь 40хН,
предел прочности материала <Уе = 850 МПа, термообработка — улучшение НВ 241...285.
Обращает на себя внимание разница в запасах прочности участков тяги между сечения-
ми, которая наиболее существенная между сечениями Б-Б и В-В. Резкое изменение момента
инерции сопрягаемых сечений является своего рода концентратором напряжений, способству-
ющим возникновению усталостной трещины. Для уменьшения величины напряжений в зоне
сопряжения сечений А-А, В-В и Б-Б предусмотрены переходы в виде галтели. Тем не менее,
галтельный переход является потенциальным очагом зарождения усталостной трещины.
450
ГЛАВА 16
Таблица 16.8
Расчетные значения запасов прочности тяг подвесных устройств УПБ трех типоразмеров
Тип подвесного устройства УПБ-500 УПБ-800 УПБ-1200
Концевая нагрузка Qmax, кН 500 800 1200
Отношение: Запас прочности, п Напряжение Ор, МПа Сечение А-А 27,2/31,2 21,7/39,2 18,8/45,1
Сечение Б-Б 36,6/23,2 24,8/34,2 16,6/51,3
Сечение В-В 13,3/63,7 12,0/70,8 14,2/59,7
Вероятность того, что это может произойти, возрастает также вследствие наличия на по-
верхности галтели явно выраженных дефектов в виде следов резца при механической обработ-
ке детали, которые также являются концентраторами напряжений. Кроме того, подвесные ус-
тройства эксплуатируются в условиях воздействия на них агрессивной среды шахтного ствола,
выражающегося в интенсивно коррозионном повреждении поверхности тяги в целом и гал-
тельных переходов в частности. Однозначно доказано, что коррозия вызывает резкое сниже-
ние пределов выносливости (до 70—80 %). При этом снижение пределов выносливости при
наличии коррозии тем более сильно выражено, чем выше предел прочности металла и чем
больше последний склонен к коррозии. Именно по этой причине для изготовления подвесных
устройств отдают предпочтение применению коррозионностойких сталей.
Однако, с конца 90-х годов прошлого столетия, когда в стране сложилось тяжелое эконо-
мическое положение, в отдельных случаях имели место нарушения этих правил по причине
отсутствия необходимой марки стали. Так, например, для изготовления тяг подвесных устройств
типа УПБ проектом предусмотрено применение стали 40ХН. Но были отдельные случаи, ког-
да по указанным выше причинам завод-изготовитель использовал для изготовления тяг сталь
40Х, которая имеет более низкие противокоррозионные свойства по сравнению со сталью 40ХН.
Следовательно, необоснованная замена металла может явиться причиной резкого снижения
выносливости детали вследствие коррозионного повреждения ее поверхности, вызывающего
значительную концентрацию напряжений, а также ослабление сопротивления образованию
усталостных трещин. Именно это и имело место на ряде упомянутых выше шахт при эксплу-
атации подвесных устройств, срок службы которых еще далеко не достиг нормативного.
Разработанная еще в 1967 г. МакНИИ «Методика испытаний подвесных устройств сосудов
для подъемных установок вертикальных шахт» допускает возможность замены металла при ус-
ловии проведения соответствующих лабораторных испытаний, объем и вид которых определяет
проектная организация, внесшая изменения совместно с организацией, создавшей подвесное
устройство. Испытания проводит организация, внесшая изменения, и завод-изготовитель.
Снижение предела выносливости подвесных устройств в процессе их эксплуатации мо-
жет произойти вследствие недостаточного уровня технического обслуживания его. Согласно
рекомендациям на проектирование подвесных устройств они должны быть доступны для
осмотра и представлять собой эластичную конструкцию, позволяющую отклонения прицеп-
ного устройства от вертикальной оси при передвижении подъемного сосуда по стволу. Воз-
можность отклонения элементов относительно друг друга обеспечивается за счет шарнирно-
го соединения их между собой. С этой целью в подвесных устройствах УП и УПБ всех типо-
размеров предусмотрены устройства для смазки шарнирных узлов.
Как показал опыт эксплуатации подвесных устройств, эффективность работы устройств
для смазки шарниров весьма низкая. И объясняется это не с отсутствием желания у рабочего
персонала производить своевременную смазку шарниров, а в основном с недостатками кон-
струкции, как шарнирных узлов подвесного устройства, так и несущих элементов (балок)
подъемных сосудов, к которым эти шарниры крепятся.
В существующих конструкциях подъемных сосудов многоканатного подъема шарнирные
узлы присоединения подвесного устройства к несущим балкам подъемного сосуда находятся в
пространстве между балками. Это пространство, как правило, заполнено увлажненным уголь-
но-породным штыбом, извлечь который достаточно сложно. Под влиянием этого штыба про-
исходит интенсивное корродирование элементов шарнирного узла, что ведет к его заклинива-
нию, т. е. шарнир теряет функцию элемента, призванного обеспечить подвижность деталей
подвесного устройства относительно подъемного сосуда. В такой ситуации принятая расчет-
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ
451
ная схема для проверки запасов прочности деталей подвесных устройств не отвечает реально-
сти. Чувствительность металла к поверхностным концентраторам напряжений у разных ме-
таллов различная и зависит от условий нагружения детали. В условиях растяжения и изгиба
чувствительность к поверхностным концентраторам увеличивается по сравнению с условиями
однородного распределения напряжения по сечению детали (растяжение — сжатие), и предел
выносливости металла тяг подвесных устройств в этом случае заметно снижается.
Обобщая изложенное, можно констатировать, что в тягах подвесных устройств типа УПБ
наиболее вероятным очагом зарождения усталостной трещины и интенсивного ее развития
являются зоны С и Д галтельного перехода (рис. 16.12). Основными причинами зарождения
и развития трещин в этих местах являются:
— наличие концентратора напряжений вследствие резкого изменения момента инерции
сечения сопрягаемых сечений;
— наличие концентраторов напряжений, связанных с качеством механической обработки тяги;
— наличие концентраторов напряжений, связанных с коррозией деталей вследствие воз-
действия агрессивной среды шахтного ствола;
— перераспределение фактических напряжений в тяге в сторону их увеличения из-за
заклинивания шарнирных узлов подвесных устройств и неравномерного распределения уси-
лий в головных канатах;
— замена стали 40ХН на сталь 40Х, имеющую более низкий предел выносливости.
Совместное сочетание этих факторов, несомненно, ведет к ускорению развития появив-
шейся усталостной трещины, что является объяснением разрушения деталей подвесных уст-
ройств, срок службы которых не достиг нормативного.
Одним из примеров, подтверждающим факт усталостного разрушения тяги подвесного
устройства УПБ-800 в зоне галтельного перехода, является фото, представленное на рис. 16.16.
Срок эксплуатации этого устройства составил всего лишь 3,5 года.
Рис. 16.16. Трещина в подвесном устройстве
В целом же критериями браковки подвесных устройств являются:
— снижение запаса прочности деталей относительно нормативного (вследствие корро-
зионного и механического износа) при максимальной статической нагрузке;
— превышение суммарного износа элементов шарнирных соединений относительно нор-
мативного;
— наличие внутренних и наружных дефектов (типа трещин), остаточных деформаций;
— снижение защемляющей способности прицепного устройства.
Перечень работ по обследованию технического состояния подвесных устройств: анализ
технической документации, визуальный осмотр, инструментальный контроль, расчет оста-
точной долговечности, составление заключения о состоянии устройства. Дефектоскопия де-
талей подвесных устройств проводится в целях выявления усталостных трещин в наиболее
напряженных сечениях, при этом используются методы и средства магнитопорошковой и
ультразвуковой дефектоскопии.
Требования к порядку подготовки и проведения дефектоскопии подвесных устройств
определены СОУЮ. 1.00174094.006.2005 «Шахтные подвесные устройства и парашюты. Тре-
452
ГЛАВА 16
бования к контролю». Данным документом предусмотрен демонтаж подвесных устройств,
их разборка, чистка и последующий контроль. Следует отметить, что демонтаж и разборка
подвесных устройств (особенно многоканатного подъема) является трудоемкой операцией и
требует значительных затрат времени и вывода подъемной установки из эксплуатации на
период выполнения этих работ.
Имея четкую картину о местонахождении участков зон максимальной концентрации
напряжений в каждой из деталей, представляется возможным осуществить достоверный уль-
тразвуковой контроль этих участков без демонтажа и разборки устройства, т. е. при мини-
мальных затратах времени и средств.
Еще одним показательным примером вредного проявления усталости металла на проч-
ность подвесных устройств является случай разрушения трех клиновых коушей двухсторон-
него зажатия каната КД на скиповых подъемах шахты «Добропольская» ПО «Доброполье-
уголь»и «Угольная компания «Краснолиманская». Это те случаи, когда известная поговорка
«Где тонко — там и рвется» не оправдала себя.
В первоначальном варианте коуш КД (рис. 16.5) состоял из листов 4, соединенных меж-
ду собой вкладышами 6 и 3 с помощью болтов 8. В дальнейшем по инициативе Ясногорско-
го машиностроительного завода, который являлся единственным изготовителем этого изде-
лия, с целью снижения трудоемкости изготовления было предложено заменить болтовое со-
единение сварным (рис. 16.6).
Коуш сварной конструкции был всесторонне испытан в МакНИИ согласно «Методике
испытаний подвесных устройств сосудов для подъемных установок вертикальных шахт». Ре-
зультаты испытаний оказались положительными и эта конструкция была принята к серий-
ному производству. Согласно расчету запасы прочности относительно максимальной стати-
ческой нагрузки в сечениях, указанных на рис. 16.6, составили (рис. 16.16):
Сечение Запас прочности
А-А 10,4
Б-Б 19,6
В-В 33,0
Г-Г 50
Казалось бы, что при действии растягивающих нагрузок коуш должен разрушиться по
сечению А-А, что и подтверждается натурными испытаниями, проведенными на разрывной
машине в МакНИИ. Однако, в действительности это оказалось не так.
На скиповом одноканатном подъеме ствола № 1 шахты «Добропольская» ПО «Добро-
польеуголь» в мае 2002 г. было выполнено плановое обследование подвесного устройства УПС
20 с коушем КД 20, которое было изготовлено Дружковским машиностроительным заводом
31.01.97 г. и введено в эксплуатацию 25.06.1999 г., т. е. на момент обследования срок службы
подвесного устройства составил не более 3-х лет. При осмотре коуша на листах визуально
была обнаружена сквозная трещина длинной 91,5 мм в районе окончания сварного шва, со-
единяющего листы с вкладышем. Лишь благодаря своевременному выявлению трещины была
предотвращена серьезная авария.
Аналогичная картина имела место на УК «Краснолиманская», где на двух коушах
КД-30 подвесного устройства УПС-30 с интервалом в одну неделю были выявлены такие
же трещины в том же сечении. При этом срок службы подвесных устройств не превысил
2-х лет.
Возникает вопрос, почему именно в сечении В-В, где запас прочности листов коуша
относительно максимально статической нагрузки составил 91,5, возникла и развилась до
91,5 мм усталостная трещина, а в сечении А-А, где запас прочности составил 10.4, не обнару-
жено даже признаков ее зарождения.
Анализируя конструкцию коуша КД с болтовым креплением листов, обнаружилось, что
в сечении В-В имеется концентратор напряжений вследствие резкого изменения момента
инерции сечения, т. е. сечение, представленное двумя листами и вкладышем, резко перехо-
дит в сечение 2-х листов. В коуше сварной конструкции в этом же сечении находится еще
один концентратор напряжений в виде окончания сварного шва, соединяющего листы коу-
ша с вкладышем. Таким образом, сварной коуш находится в более сложном напряженном
ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА ВЕРТИКАЛЬНЫХ ПОДЪЕМНЫХ СОСУДОВ 453
состоянии, чем коуш, в котором листы с вкладышем соединены с помощью болтов. Поскольку
усталостные трещины появились в коушах только сварной конструкции, то это явилось тре-
вожным сигналом о наложении запрета на эксплуатацию коушей сварной конструкции.
Более детальный анализ конструкции сварных коушей и технологии их изготовления
позволили объяснить причину появления и ускоренного развития усталостных трещин в ко-
ушах именно сварной конструкции. Как оказалось, связанно это с заменой марки стали при
изготовлении листов коуша.
Согласно заводскому формуляру листы коуша УП 20 шахты «Добропольская» изго-
товлены из стали 10 М2Б вместо стали 10ХСНД, предусмотренной проектом, а листы коу-
шей КД 30 ГП «Угольная компания «Краснолиманская» изготовлены из стали 14 М2 вме-
сто стали 15ХСНД. Стали 10М2Б и 14 М2 имеют худшую свариваемость по сравнению со
сталями типа ХСНД, а свариваться они должны с вкладышем, выполненным из стали 30.
Сварка таких сталей требует специальной технологической подготовки, связанной с пред-
варительным подогревом металла. Если этого не сделать, то в зоне окончания шва привар-
ки листов к вкладышу происходит резкое снижение усталостной прочности металла в лис-
тах коуша. Здесь наглядно проявилось свойство аддитивности концентрации напряжений,
когда действие концентрации напряжений от резкого изменения момента инерции сече-
ния в сочетании с концентратором от окончания сварочного шва дополнительно усили-
лось нарушением технологии сварки, что привело к зарождению усталостной трещины и
стремительному развитию ее до значительных размеров под воздействием переменных на-
пряжений. Именно благодаря большому запасу прочности коуша в этом сечении трещина
разрасталась до размера 91,5 мм, была выявлена визуально, но при этом сопротивление
оставшейся части сечения еще не было исчерпано полностью, поэтому разрушения коуша
не произошло.
Следует так же отметить, что интенсивность эксплуатации скипов с аварийными коу-
шами была весьма высокой в сочетании с предельно допустимой для данного типа коуша
концевой нагрузкой. При этом загрузка скипов осуществлялась на весу, что создавало до-
полнительные динамические нагрузки на прицепное устройство.
Таким образом, основными причинами возникновения усталостных трещин в коушах
сварной конструкции являются:
— замена при изготовлении коуша листов стали легкосвариваемой на сталь трудносва-
риваемую;
— неудачное конструктивное исполнение коуша, приведшее к появлению в одном сече-
нии двух концентраторов напряжений вместо одного;
— нарушение технологии сварки листов коуша с вкладышем;
— загрузка скипов на весу и эксплуатация скипов при их максимальной допустимой
нагрузке и высокой интенсивности.
Одной из обязательных работ по обследованию технологического состояния подвесных
устройств является расчет остаточной долговечности. В основу этого расчета положены ре-
зультаты длительных усталостных испытаний отдельных деталей подвесных устройств, про-
веденных МакНИИ и НИИГМ им. М. М. Федорова.
Испытания проводились на специальных испытательных машинах, создающих пульси-
рующую нагрузку с несимметричным циклом. Количество циклов нагружения было приня-
то равным 20 106. Испытывались детали подвесных устройств, которые отработали на реаль-
ных подъемных установках в течение 7 лет.
В этом случае остаточную, ограниченную 20 106 циклами нагружений долговечность Т
подвесных устройств после 7 лет эксплуатации, можно определить по формуле:
20 106
«r«2«3«4’
(16.7.6)
где п{ — количество циклов подъемов в сутки; п2 — количество циклов нагружений за каж-
дый цикл подъема (выбирается из табл. 16.9, представленной ниже в зависимости от глуби-
ны ствола Ни числа циклов подъема в сутки); л3 — количество дней работы подъемной уста-
новки в году, п3 = 360; п4 — запас циклической долговечности, п4 = 1,5 — для грузовых подъе-
мов; п4 = 2,5 — для людских и грузолюдских подъемов.
454
ГЛАВА 16
Таблица 16.9
Количество циклов нагружений за каждый цикл подъема
Н (метров) Циклов в сутки До 100 100-300 300-500 500-1000 Свыше 1000
до 100 10,0 13,0 15,0 17,0 20,0
до 200 13,0 15,0 17,0 20,0 23,0
до 300 15,0 17,0 20,0 23,0 25,0
до 600 17,0 20,0 23,0 25,0 28,0
свыше 600 20,0 23,0 25,0 28,0 30,0
Результаты таблицы получены на основании расшифровки осциллограмм усилий, вос-
принимаемых подвесными устройствами в условиях вертикальных стволов ряда шахт Дон-
басса и рудников Кривбасса.
Величина искривления профиля проводников в данных стволах не превышала значе-
ний, регламентированных «Инструкцией по производству маркшейдерских работ». В ство-
лах, в которых искривления проводников выходят за нормативные пределы, значения коэф-
фициента п2 должны быть увеличены в 2—3 раза по сравнению с табличными или же требу-
ется выполнить работы по приведению профиля проводников в норму.
Следует также отметить, что в коушах КД во время проверки надежности запанцировки
каната нагрузкой, равной массе скипа с грузом, предусмотренной «Руководством по эксплуа-
тации подвесного устройства УПС», при загрузке скипа углем имел место случай выдергива-
ния каната из коуша КД и падения скипа в зумпф, Причиной выдергивания каната явилось
наличие в корпусе коуша штыба, что не позволило клину коуша переместиться под нагрузкой
от каната и обеспечить надежное защемление каната между клином и вкладышами корпуса. С
целью повышения уровня безопасной эксплуатации подвесных устройств УП и УПС Донгипро-
углемашем предложено данные подвесные устройства эксплуатировать с обязательной уста-
новкой на холостой ветви каната дополнительного зажима крестового типа (рис. 16.5).
Анализ опыта эксплуатации подвесных устройств типа УПБ и УП за период с 1991 г. по
настоящее время позволяет сформулировать основные предложения по повышению надеж-
ности и безопасности их эксплуатации:
— лицам технического надзора, отвечающим за эксплуатацию подъемных установок, про-
анализировать техническую документацию (формуляр) заводов-изготовителей на предмет
установления факта наличия или отсутствия замены марки стали при изготовлении подвес-
ных устройств и дополнительно проинструктировать обслуживающий персонал о повыше-
нии качества проведения технического обслуживания подвесных устройств, обратив особое
их внимание на осмотр мест наиболее вероятного зарождения усталостных трещин, прове-
дения очистки шарнирных узлов от штыба;
— своевременно осуществлять контроль равномерности распределения нагрузок между
головными канатами подъемной машины и при необходимости производить регулирование
нагрузок между канатами путем проточки футеровки канатоведущего шкива или перепан-
цировки каната в коушах;
— исключить практику замены марки стали деталей подвесных устройств заводами-изго-
товителями без согласования с Донгипроуглемашем, НИИГМ им. М.М. Федорова и МакНИИ;
— произвести корректировку чертежей балок крепления тяг подвесных устройств подъем-
ных сосудов с целью повышения дефектоскопической технологичности их и обеспечения
доступа для осмотра состояния шарнирных узлов и проведения их смазки;
— исследовать напряженное состояние деталей подвесных устройств при нарушении ра-
ботоспособности шарниров, уточнить расчетную схему для этих условий и определить запа-
сы прочности;
— рассмотреть целесообразность увеличения гарантированного зазора до 1,0 мм в шар-
нирах при изготовлении деталей подвесных устройств с целью обеспечения подвижности шар-
нирных соединений и облегчения демонтажа деталей для проведения неразрушающего кон-
троля зон, потенциально опасных с точки зрения зарождения усталостных трещин.
Глава 17
ПАРАШЮТЫ ШАХТНЫЕ ДЛЯ КЛЕТЕЙ
И ПРОТИВОВЕСОВ
17.1. Основные положения
17.2. Типы парашютов и принцип их работы
17.3. Устройство и работа парашюта и его
составных частей
17.4. Настройка амортизаторов
17.5. Проверка действия ловителя при напуске каната
17.6. Регламент технического обслуживания парашютов
17.7. Неисправности парашютов
17.1. Основные положения
Согласно требованиям ПБ [13] клети для спуска и подъема людей и противовесы людских
и грузо-людских подъемных установок должны быть оборудованы парашютами, предназна-
ченными для плавного торможения и остановок в случае обрыва головного каната.
Допускается отсутствие парашютов на:
— клетях и противовесах аварийно-ремонтных подъемных установок;
— клетях и противовесах подъемных установок вспомогательных стволов, не предназ-
наченных для постоянного спуска и подъема людей;
— противовесах действующих подъемных установок вертикальных стволов, на которых
невозможно расположить площадку длиной 1,5 м и шириной 0,4 м, и если отделения клети и
противовеса отделены друг от друга перегородкой из реек или канатами. Разрешается отсут-
ствие перегородки, если высота рамы противовеса превышает два шага армировки при двух-
стороннем и шаг армировки при одностороннем расположении проводников. Противовес в
этом случае должен также быть оборудован предохранительными башмаками длиной не ме-
нее 400 мм с увеличенными зазорами.
Замедление при торможении порожних клетей парашюта не должно превышать 50 м/с2,
а при торможении клетей с максимальным числом людей должно быть не менее 6 м/с2. Ис-
пытание парашютов должно производиться не реже одного раза в 6 месяцев в соответствии с
«Руководством по эксплуатации ПТКА6,3.000 РЭ».
Согласно ГОСТ 15850-84 назначенный срок службы парашютов должен быть 7 лет при
условии, что после 5 лет эксплуатации срок службы продлен на 2 года комиссией, возглавля-
емой главным механиком шахты. Комиссия принимает решение о продлении срока службы
на основании: положительных результатов дефектоскопии и дефектации, выполненной спе-
циализированной организацией согласно СОУ 10.1.00174094.006:205 «Шахтные подвесные
устройства и парашюты. Требования к контролю» и удовлетворительных результатов испы-
тания парашюта согласно «Руководству по эксплуатации парашютов».
Этой же комиссией срок службы парашютов и клетей может быть продлен в целом не более
чем на 5 лет сверх срока их службы по экспертным выводам организаций, имеющих Разрешение
Госпромгорнадзора Украины на проведение экспертного обследования (технического диагнос-
тирования). В последние годы, учитывая значительное количество (более 70 %) стационарного
оборудования, в том числе и парашютов, которое эксплуатируется со сверхнормативными сро-
ками, Госпромгорнадзор Украины счел возможным поручить своим территориальным управле-
ниям рассматривать, в порядке исключения, возможность продления сроков эксплуатации ста-
ционарного оборудования и парашютов при условии наличия положительного заключения
НИИГМ им. М.М. Федорова, МакНИИ или ЭТЦ по результатам проведенных испытаний.
456
ГЛАВА 17
17.2. Тйпы парашютов и принцип их работы
В настоящее время на шахтах применяются в основном парашюты с захватом за тор-
мозные канаты. Серийно выпускаются в настоящее время следующие типы парашютов с зах-
ватом за тормозные канаты: ПТКА; ПТКПА; ПТКША; ПКЛА и ПКЛША.
Парашюты типа ПТКА и ПТКТТТА могут эксплуатироваться с клетями массой до 30 т, а
типа ПТКПА — с противовесами массой до 16 т на одноканатных подъемах вертикальных
стволов глубиной до 900 м при скорости движения подъемного сосуда до 12 м/с независимо
от типа и расположения проводников. Парашюты ПКЛА (и их модификации ПКЛША при-
менительно к подъемам со шкивами трения) имеют эксцентриково-клиновой ловитель, осу-
ществляющий мгновенный захват за один тормозной канат. Применяются они на однока-
натных подъемах вертикальных и наклонных стволов с рельсовыми односторонними про-
водниками при недостаточных зазорах между клетями.
Возможность эксплуатации парашютов с глубиной ствола свыше 900 м должна быть со-
гласована с Донгипроуглемашем или НИИГМ им. М.М. Федорова при соответствующем
обосновании.
Технические характеристики шахтных парашютов вышеуказанных типов приведены в'
табл. 17.1—17.6. В таблицах масса парашюта, установленном на подъемном сосуде, приведе-
на без учета тормозных канатов и балок для крепления.
Парашюты ПТКА серийно изготавливаются Донецкгормашем и Ясногорским машза-
водом (Российская Федерация), а парашюты ПТКПА, ПТКША, ПКЛА и ПКЛША — только
Ясногорским машзаводом.
Таблица 17.1
Технические характеристики парашюта ПТКА (ГОСТ 15850-84)
№ Наименования основных параметров и размеров Типоразмеры
ПТКА6,3-01 ПТКА12,5-01 ПТКА20-01 ПТКА25-01 ПТКА30-01
1 Статическая нагрузка, кН 63 125 200 250 300
2 Диаметр тормозного каната, мм 25,5 30,5 35,0 40,0 45,0
3 Расстояние между осями клиновых зажимов тормозных канатов, мм 1150 1200 1480 1015 1150 1200 1350 1480 1540 1630 1730 980 1150 1200 1350 1540 1630 1680 1730 1870 1540 1630 1680 1780 1870 1040 1080 1150 1500 1630 1780 1870
4 Масса парашюта, установленного на клети, кг, не более 1300 1580 2710 2845 3050
Таблица 17.2
Технические характеристики парашюта ПТКПА (ТУ 24.08.1347-84)
№ Наименования основных параметров и размеров Типоразмеры
ПТКПА-01 ПТКПА-02 ПТКПА-03
1 Статическая нагрузка, кН 63 125 160
2 Диаметр тормозного каната, мм 30,5 30,5 30,0
3 Расстояние между осями клиновых зажимов тормозных канатов, мм 800; 900; 1015; 1150; 1200; 1350; 1480; 1540; 1630; 1730
4 Масса парашюта, установленного на противовесе, кг, не более 1613 1682 1812
5 Диаметр головного каната, мм 20-36,5 27-46,5 33-58,5
Таблица 17.3
Технические характеристики парашюта ПТКША20 (ТУ 24.08.1347-84)
№ Наименования основных параметров и размеров Типоразмеры
ПТКША20-01 ПТКША20-02 ПТКША20-03 ПТКША20-04
1 Статическая нагрузка, кН 200 200 200 200
2 Диаметр тормозного каната, мм 35 35 35 35
3 Расстояние между осями клиновых зажимов тормозных канатов, мм 950; 1540
4 Масса парашюта, установленного на клети, кг, не более 2903 3499 6904 7523
ПАРАШЮТЫ ШАХТНЫЕ ДЛЯ КЛЕТЕЙ И ПРОТИВОВЕСОВ
457
Таблица 17.4
Технические характеристики парашюта ПКЛША (ТУ 24.08.1347-84)
№ Наименования основных параметров и размеров Типоразмеры
ПТКША25-01 ПТКША25-02 ПТКША25-03 ПТКША25-04
1 Статическая нагрузка, кН 250 250 250 250
2 Диаметр тормозного каната, мм 40 40 40 40
3 Расстояние между осями клиновых зажимов тормозных канатов, мм 1540; 1630; 1870
4 Масса парашюта, установленного на клети, кг, не более 3150 3746 7150 7746
Таблица 17.5
Технические характеристики парашюта ПТКШАЗО (ТУ 24.08.1347-84)
№ Наименования основных параметров и размеров Типоразмеры
ПТКША30-01 ПТКША30-02 ПТКША 30-03 ПТКША 30-04
1 Статическая нагрузка, кН 300 300 300 300
2 Диаметр тормозного каната, мм 45 45 45 45
3 Расстояние между осями клиновых зажимов тормозных канатов, мм 1040; 1080; 1150; 1630; 1870
4 Масса парашюта, установленного на клети, кг, не более 3381 3975 7381 7975
Таблица 17.6
Технические характеристики парашютов ПКЛА и ПКЛША (ТУ 12.0174069.057-84)
№ Наименования основных параметров и размеров Типоразмеры
ПКЛА 6,3-01 ПКЛА 6,3-02 ПКЛА 12,5-01 ПКЛА 12,5-02 ПКЛА 20-01 ПКЛА 20-02
1 Статическая нагрузка, кН 63 125 200
2 Номинальный диаметр тормозного каната, для клинового зажима, мм 35,0 40,0 50,5
3 Расстояние между осями клиновых зажимов тормозных канатов и тяги ловителя, мм 495; 555; 735 500; 555; 735; 780 500; 555; 735; 780
4 Масса парашюта, установленного на клети, кг, не более 800 1140 1240 1840 1620 2220
В состав парашюта ПТКА и ПТКПА входят следующие сборочные единицы: ловитель,
амортизатор, муфты соединительные и направляющая (рис. 17.1). Кроме перечисленных сбо-
рочных единиц, в состав парашютной установки входят также тормозные канаты. Ловитель
парашюта ПТКА и ПТКПА устанавливается на клети (противовесе) на опорах. В состав ло-
вителя входят детали, указанные на рис. 17.1.
С целью повышения надежности работы и ремонтопригодности парашюта в шарнир-
ных узлах ловителя устанавливаются сменные металлические втулки и предусмотрены места
для смазки.
Парашют типа ПКЛА
Отличительной особенностью данной конструкции является наличие лишь одного тор-
мозного каната, обусловленное односторонним расположением рельсовых проводников.
Устройство включает в себя стационарные канатно-винтовые амортизаторы, эксцентри-
ко-клиновой ловитель, направляющие муфты, один тормозной канат, соединительные муфты,
458
ГЛАВА 17
Рис. 17.1. Парашют ПТКА:
1 — шток; 2 — тяга; 3 — траверса;
4 — рычаг; 5 — лист; 6 — серьга;
7 — ось; 8 — валик; 9 — валик;
10 — клин; 11 — спинка
которые по конструкции такие же, как и для пара-
шютов типа ПТКА. Общий вид ловителя парашю-
та ПКЛА представлен на рис. 17.2.
Включение ловителя осуществляется через ры-
чаг 2 пружинным приводом от штока 4 парашюта.
Принцип действия ловителя парашютного устрой-
ства типа ПКЛА заключается в следующем. При
обрыве головного каната или подвесного устрой-
ства пружина привода разжимается, толкает шток
4 вниз и поворачивает рычаг 2 ловителя. При этом
клин 6 перемещается вверх и зажимает тормозной
канат. Происходит предварительное включение ло-
вителя. С этого момента начинается рабочее сра-
батывание ловителя, так как клеть, перемещаясь
вниз, зависает через серьги 11 на эксцентриковом
рычаге. Рычаг, поворачиваясь за счет эксцентриси-
тета под действием веса клети, еще больше зажи-
мает тормозной канат между спинкой и клином.
Ввиду того, что тормозной канат закреплен в амор-
тизаторе, происходит плавная остановка клети.
Парашютное устройство ПКЛША для клетей
вертикального подъема со шкивом трения отлича-
ется от парашюта ПКЛА лишь наличием включа-
ющего устройства специальной конструкции, ко-
торое обусловлено схемой одноканатной двухконцевой подъемной установки со шкивом тре-
ния. Особенность подъема с машиной типа ШТ состоит в том, что при обрыве каната или
разрушении подвесного устройства у одного из подъемных сосудов длинный конец отвеса ка-
ната, увлекаемый вторым сосудом при его падении, может оставаться под натяжением, пре-
пятствующим разжатию приводной пружины парашюта. В связи с этим рассматриваемая сис-
тема должна иметь специальное устройство принудительного включения парашютов обеих кле-
тей, работающее независимо от факторов, обусловли-
вающих возможное натяжение каната у второй клети
в аварийной ситуации.
В парашютах типа ПКЛША эта задача решена
при помощи включающего каната (рис. 17.3). Имеет-
ся включающее устройство 4 со срезными шпилька-
ми, включающий канат 2 и контргруз 8 для натяже-
ния включающего каната. Включающее устройство
ловителя имеет хомут, один конец которого с помо-
щью срезного валика крепится к включающему ка-
нату, а другой — через срезные шпильки крепится к
кронштейну клети.
Парашют типа ПТКША
Парашютные устройства типа ПТКША, приме-
няемые на клетях подъемных установок со шкивами
трения при двустороннем расположении проводников
в стволе, оборудованы ловителями типа ПТКА и
включающим устройством, аналогичным конструк-
ции, используемой в парашютах ПКЛША.
Парашюты с ловителями ПТКА и ПКЛА безот-
казны в отношении захвата за тормозные канаты. Од-
нако, их модификации ПТКША и ПКЛША для
подъемов со шкивами трения нормально работают
лишь при сравнительно малых скоростях движения.
При скоростях свыше 6 м/с искривления проводни-
ков обусловливают сильные поперечные колебания
Рис. 17.2. Общий вид ловителя
парашюта ПКЛА:
1 — тяга; 2 — рычаг; 3,1 — валик;
4 — шток; 5, 10 — ось; 6 — клин;
8 — спинка; 9 — щека; 11 — серьга
ПАРАШЮТЫ ШАХТНЫЕ ДЛЯ КЛЕТЕЙ И ПРОТИВОВЕСОВ
459
головного и включающего канатов, приводящие к взаим-
ному их захлестыванию и ложному срабатыванию пара-
шютов. Кроме того, ложные срабатывания всех модифи-
каций парашютов с клиновыми ловителями наблюдают-
ся также и при порывах и вспучиваниях проволок наруж-
ного слоя тормозного каната, при его обледенении и на-
личии на нем вязкой смазки.
Несмотря на вышеотмеченные недостатки, при тща-
тельном эксплуатационном уходе и надзоре описанные
парашютные устройства обеспечивают полную безопас-
ность доставки людей по вертикальным стволам шахт.
Парашют типа ПДП
Парашютные устройства типа ПДП (рис. 17.4) раз-
решены к промышленному применению на клетевых
подъемах при деревянных проводниках двухстороннего
расположения.
Парашют осуществляет улавливание (торможение и
удержание) клети за деревянные проводники жесткой ар-
мировки ствола.
Конструкция парашюта включает пружинный при-
водной механизм, рычажный передаточный механизм и
захваты. Приводной механизм в принципе не отличает-
ся от подобного устройства, используемого в парашю-
тах с клиновыми ловителями. Передаточный механизм
состоит из двух двуплечих рычагов. Одним концом ры-
чаги шарнирно соединены с серьгами, связанными со
штоком приводного механизма при помощи оси. Дру-
гим концом рычаги поджаты снизу к упорным прили-
вам захватов. Парашют имеет четыре захвата — по два
на каждый проводник, установленные относительно
него с двух боковых сторон.
В транспортном положении захваты, установленные
на поворотных осях опор, оттягиваются от проводников
цилиндрическими пружинами. Рабочие поверхности зах-
ватов конструкции МакНИИ снабжены двумя профиль-
ными гребнями и ограничительной щекой, которые при
вдавливании в проводник обеспечивают протяжку дре-
весины с обжатием волокон в сужающихся каналах, со-
здавая заданное постоянное сопротивление.
В аварийной ситуации пружина привода, разжимаясь,
опускает шток парашюта вниз. При этом через серьги осу-
ществляются поворот двуплечих рычагов и одновременный
подвод захватов к поверхностям проводников с первона-
чальным внедрением гребней в древесину. Дальнейшее вне-
дрение захватов в проводники обеспечивается за счет веса
падающей клети. В процессе взаимодействия захватов с про-
водниками происходят торможение и остановка клети.
Парашюты ПДП с захватом конструкции МакНИИ
в настоящее время являются наиболее совершенной кон-
струкцией парашютов для деревянных проводников.
Рис. 17.3. Схема парашютного
устройства ПКЛША для
подъемов со шкивами трения
и односторонними
рельсовыми проводниками:
1 — дополнительный шкив;
2 — включающий канат;
3 — тормозные канаты;
4 — включающее устройство
ловителя; 5 — хвостовой канат;
6 — натяжное устройство
тормозных канатов; 7 —
ловитель; 8 — контргруз;
9 — амортизатор;
10 — ферма дополнительного
шкива
17.3. Устройство и работа парашюта и его составных частей
На шахтах угольной промышленности Украины самым распространенными являются
парашюты типа ПТКА (см. рис. 17.1). В транспортном положении ловителя должны быть
обеспечены зазоры между диском стакана и опорной плитой пружины в пределах 10 мм, а
460
ГЛАВА 17
Рис. 17.4. Парашют ПДП:
Общий вид парашюта ПДП для деревянных
проводников с захватом конструкции МакНИИ:
1 — канат с коушем; 2 — рабочая подвеска
с центральным штоком парашюта;
3 — предохранительная подвеска; 4 — проводник;
5 — двуплечие рычаги; 6 — захваты
между витками пружины 3—4 мм. При этом в подвесном устройстве опоры (накладки) коуша
должны плотно прилегать (без зазоров) к балке и через стойки воспринимать всю нагрузку
клети, а тяга, траверса, шток, стакан, гайка и валики ловителя — только усилие приводной
пружины. В ловителе парашюта ПТКПА между плитой и стаканом пружины зазора не дол-
жно быть, а межу витками — 3—4 мм.
Для предохранения спинок и клиньев от трения о тормозные канаты на ловителе уста-
навливаются кронштейны с вкладышами. На клети (противовесе) также должны устанавли-
ваться направляюще муфты с вкладышами.
Опоры, на которые устанавливается ловитель, служат для фиксирования ловителя на
клети (противовесе) и предотвращения его от продольно-поперечных смещений, которые
могут вызвать повышенный износ вкладышей, клиньев и спинок, а также соприкосновение
ловителя с расстрелами армировки ствола. В опорах ловителя устанавливаются срезные
шпильки из медного прутка по ГОСТ 1535-910 5 мм для парашюта ПТКА 6,3 и0 6 мм — для
остальных типоразмеров парашютов.
Указанные шпильки исключают возможность срабатывания ловителя от незначительных на-
грузок, воздействующих на него со стороны тормозных канатов или армировки ствола. При сраба-
тывании ловителя эти шпильки срезаются, и ловитель отделяется от опор. При осмотре парашют-
ной установки проверяется состояние шпилек, которые при необходимости заменяются.
17.3.1. Амортизаторы парашюта
Амортизаторы (рис. 17.5) устанавливаются на подшкивных или специальных площад-
ках копра и служат для погашения кинетической энергии улавливаемой клети (противовеса)
и обеспечения плавного торможения их с заданным замедлением.
Состоят амортизаторы из двух листов 1, сухарей 2, винтов 3, гаек 4, валков 5, шпилек 6
и кожуха 7.
Перемещением сухарей относительно валков осуществляется перегиб амортизационных
канатов, что создает необходимую величину тормозного усилия.
Технические характеристики амортизаторов приведены в табл. 17.7.
Таблица 17.7
Технические характеристики амортизаторов
Наименование показателей Тип амортизатора
ТА-1М.000 ТА-ЭМ.000
Количество канавок, шт. 1 3
Диаметр амортизационного каната, мм 45,0 45,0
Максимальное усилие, кН 150 450
Габаритные размеры, мм 575x250x860 575x350x860
Масса, кг 130 170
ПАРАШЮТЫ ШАХТНЫЕ ДЛЯ КЛЕТЕЙ И ПРОТИВОВЕСОВ
461
17.3.2. Соединительные и направляющие муфты
Соединительные муфты служат для соединения тормозных канатов с амортизационны-
ми. В зависимости от типоразмера амортизаторов и их расположения на копре соединитель-
ные муфты изготавливаются одноручьевыми, трехручьевыми и блочными.
Одноручьевые соединительные муфты (рис. 17.6) состоят из двух конусообразных полумуфт
2 и 6, обоймы 4, трех шпилек — центральной 5 диаметром 20 мм и боковых 3 диаметром
8 мм. В каждой полумуфте имеется по одному комплекту губок 1 и 7, которые служат для
дополнительного зажатия канатов в полумуфтах.
Трехручьевые соединительные муфты (рис. 17.7) служат для соединения тормозного ка-
ната с тремя амортизаторами и состоят из конусообразной полумуфты 1 для крепления од-
ного амортизационного каната и крестообразной полумуфты 3 для креплениядвух амортиза-
ционных канатов и одного тормозного. Замок муфты 3 предназначен для удержания стака-
нов амортизационных канатов в гнездах полумуфты.
Блочные соединительные муфты (рис. 17.8) применяются в тех случаях, когда амортиза-
торы устанавливаются на подшкивных площадках в одной плоскости со шкивами. В этом
случае возникает необходимость установки на один тормозной канат двух амортизаторов для
обхода нижнего шкива. Конструкция муфты предусматривает возможность соединения од-
ного тормозного каната с одним или тремя амортизационными канатами.
Муфта состоит из колодки 1, соединенной щеками 2 со стаканом 3, в котором удержи-
вается тормозной канат 4. Амортизационные канаты огибают колодки, и концы их пропус-
каются через два амортизатора.
Технические характеристики соединительных муфт приведены в табл. 17.8.
Таблица 17.8
Технические характеристики соединительных муфт
Наименование показателей Тип соединительной муфты
ТАСМ-1А.000 TACM-3A.000 ТАСМ1-3
Статическая нагрузка, кН, не более 150 450 450
Диаметр амортизационного каната, мм 45,0 45,0 45,0
Диаметр тормозного каната, мм 25,5; 30,5 35; 40; 45 45,0
Габаритные размеры, мм 156x960 170x340x835 610x900
Масса муфты без канатов, кг 45 67 90
Кронштейны и муфты направляющие, устанавливаемые на ловителе, на верхнем и ниж-
нем поясах клети (противовесе) предназначены для направления тормозного каната при дви-
жении и предохранения от износа рабочих поверхностей клиньев и спинок ловителя.
462
ГЛАВА 17
Рис. 17.6.
Рис. 17.7.
Рис. 17.6 — 17.8. Соединительные муфты:
рис. 17.6— одноручьевые; рис. 17.7 — трехручьевые; рис. 17.8 — блочные
Муфты направляющие устанавливаются строго по оси тормозного каната. Износ смен-
ных вкладышей направлявших муфт допускается в пределах 3 мм на сторону, исключающий
возможность соприкосновения каната со спинкой и клином.
17.3.3. Крепление тормозных канатов в зумпфе
Крепление тормозных канатов в зумпфе (рис. 17.9) состоит из балки 1, зажима 2, огра-
ничителя натяжения 3. Тормозные канаты в нижней части ствола должны быть натянуты
усилием примерно 10 кНи закреплены таким образом, чтобы при возникновении в них боль-
ших усилий концы их освободились от крепления. Усилие 10 кН можно достигнуть с помо-
щью гаечного ключа с рукояткой длиной 250...350 мм и приложением усилия 100—150 Н. Для
натяжения каната служит натяжная скоба. После натяжения канатов устанавливаются огра-
ничители натяжения, а натяжная скоба снимается.
Рис. 17.9. Крепление тормозных канатов в зумпфе
Ограничитель натяжения (рис. 17.10) состоит из угольников 1, между которыми с по-
мощью болтов 2 зажимается канат. Угольники крепятся к балке разрывными болтами 3
диаметром 10 мм. В процессе работы парашюта после улавливания и остановки клети уп-
ругие силы вытянувшегося каната подбросят ее вверх. Если в этот момент нижние концы
канатов будут закреплены жестко, то после выбирания слабины находящихся под клетью
концов тормозных канатов, может произойти расклинивание с его последующим вторич-
ным захватом. Ограничитель натяжения позволяет избежать этих нежелательных явлений.
При возникновении натяжения (направленного вверх) тормозных канатов более 10 кН бол-
ПАРАШЮТЫ ШАХТНЫЕ ДЛЯ КЛЕТЕЙ И ПРОТИВОВЕСОВ
463
ты, крепящие угольники ограничителя натяжения
в балке разрушаются, и концы канатов будут сво-
бодными.
17.3.4. Работа парашюта ПТКА
При обрыве головного каната или подвесного
устройства приводная пружина разжимается и через
шток, связанный с рычагами, перемещает клинья и
тем самым зажимает тормозные канаты. Период от
момента обрыва подъемного каната до момента со-
прикосновения клина с тормозным канатом (под
действием силы пружины) являются периодом холо-
стого хода механизма ловителя.
Ловитель находится на опорах до того момента,
пока силы взаимодействия (трения) между клиновым
Рис. 17.10. Ограничитель натяже-
ния тормозного каната:
1 — угольник; 2 — болт; 3 —
разрывной болт
зажимом (клин и спинка) и тормозным канатом не станут больше веса ловителя и после-
дний остановится. С этого момента ловитель как бы соединяется с тормозными канатами,
клеть (противовес), перемещаясь вниз, через шток, серьги и рычаги еще больше зажимает
канаты клиньями. Плавное торможение клети (противовеса) осуществляется за счет про-
тяжки амортизационных канатов в амортизаторах, установленных на копре.
В транспортном положении при подъеме — спуске клети (противовеса) приводная пру-
жина сжата натяжением подъемного каната, ловитель установлен на опорах и клинья не со-
прикасаются с тормозными канатами, при этом между канатом и клином, канатом и спин-
кой должны быть обеспечены зазоры с учетом предельно допустимых износов клина, спин-
ки и листа при номинальных диаметрах тормозных канатов для парашютов: ПТКА6,3—5..7
мм. ПТКА12.5; ПТКА2О; ПТКП; ПТКША20-7..10 мм. ПТКА25; ПТКА30; ПТКША25;
ПЖША30-8...12 мм. При этом в подвесном устройстве опоры или планки коуша, должны
плотно (без зазоров) прилегать к балке и через стойки воспринимать всю нагрузку клети.
Зазор между стаканом и плитой определяется путем установки между ними свинцовой про-
кладки толщиной 15—20 мм при разжатой пружине, а затем, сжимая ее массой клети по тол-
щине, определяют величину зазора.
При эксплуатации необходимо контролировать указанные размеры при ежемесячных
технических осмотрах парашюта, а плотное прилегание опор или планок коуша к балке под-
весного устройства — при ежесменных осмотрах. Пружина должна быть установлена только
с номером, который указан в паспорте смонтированного парашюта. При регулировке необ-
ходимо добиться, чтобы при подъеме клети ловитель не поднимался с опор. Выход клиньев
из клиновых зажимов при включении ловителя с посадкой клети на кулаки или перекрытие
ствола и напуском головного каната должен быть не менее для парашютов: ПТКА6,3—85 мм\
ПТКА12,5; ПТКПА - 100 мм, ПТКА20; ПТКША20-105 мм, ПТКА25; ПТКША25-95 мм,
ПТКА30; ПТКША30—110 мм.
При выходе клиньев менее величин, указанных выше, необходимо проверить предель-
ные величины износов клина, спинки, листов, тормозных канатов и при необходимости за-
менить новыми и провести повторные испытания. Величину зазора в клиновом зажиме за-
меряют с помощью клинового шаблона следующим образом: сначала замеряется величина
зазора между тормозным канатом и спинкой ловителя, а затем, отклонив тормозной канат в
сторону до его соприкосновения с клином, замеряется суммарный зазор. Для определения
зазора между канатом и клином необходимо из суммарного зазора вычесть зазор между ка-
натом и спинкой. Данные замеры зазоров выполняются при монтаже и эксплуатации пара-
шюта, а также при определении величины износа клина, спинки и вкладышей. Предельный
износ вкладышей должен быть не более 3 мм на сторону.
Рекомендуется шахтам заказывать тормозные канаты с несмазанной наружной поверх-
ностью согласно ГОСТ 3241-91 «Канаты стальные. Технические условия». Тормозные кана-
ты, покрытые на заводе-изготовителе канатными смазками, перед навеской на шахте долж-
ны быть очищены от наружной смазки тепловым или механическим способом. В процессе
эксплуатации тормозные канаты следует смазывать, тонким слоем эксплуатационной канат-
ной смазкой Торсиол-35Э (ТУ 38 УССР 201214-80 Торсиол-35 Э).
464
ГЛАВА 17
Ниже балок натяжного устройства в зумпфе необходимо оставить запас каната длиною
2...3 м. Конец каната следует обрезать и сплавить электросваркой, предварительно наложив
проволочный бандаж на расстояние 40...50 мм от линии среза.
17.4. Настройка амортизаторов
Под настройкой амортизаторов понимается установка сухарей при помощи винтов в
положение, соответствующее установленной проектной величине статического сопротивле-
ния амортизатора протяжке каната.
Положение сухаря «X» и соответствующая этому величина статического сопротивления
амортизатора указываются на заводской табличке амортизатора и в формуляре парашюта.
Амортизаторы должны настраиваться на замедление 6 .м/с2 при максимальном грузе. При
улавливании порожней клети амортизатор, настроенный на 6 м/с2 при максимальном грузе,
создает большее замедление, но оно не выйдет за пределы допустимого 50 м/с2. Замедление
клети с максимальным количеством людей будет больше 6 м/с2. Максимальным грузом сле-
дует считать постоянно транспортируемый данным подъемом груз, который не должен пре-
вышать грузоподъемность клети и ее массу.
Величина статического сопротивления одного амортизатора определяется по формуле:
Ro=^l+Pk.Hj (174Л)
1.Г.-ТП
где Fmopj) — величина тормозящей силы, Н. Это значение определяется:
— для груженой клети без уравновешивающего каната, Н, по формуле:
40Рл<=0(«+1); (17.4.2)
— для груженой клети с уравновешивающим канатом, Я; по формуле
^=((2+^)(л + 1), (17.4.3)
где п = — — отношение принятого замедления клети j к ускорению свободного падения; Q —
S
масса клети с максимальным грузом, кг; Q — масса уравновешивающего каната, кг; Н— вы-
сота подъема, м (высота подъема плюс высота копра до соединительной муфты и длина каната
в зумпфе до натяжного устройства); т — количество амортизаторов; Рк — масса 1 п.м тормоз-
ного каната, кг; 1,2 — коэффициент; j — принятое замедление клети, м/с2; g — 9,81 м/с2.
При блочной соединительной муфте с двумя амортизаторами статическое сопротивле-
ние амортизатора необходимо разделить пополам и на эту величину производить настройку
этих двух амортизаторов. При настройке амортизаторов оба сухаря амортизатора необходи-
мо поставить в одинаковое положение «X». Установка сухарей амортизатора в положение
«X» производится от торца сухаря до стенки амортизатора.
17.5. Проверка действия ловителя при напуске каната
При проведении полугодовых испытаний парашютов и при их замене назначается ко-
миссия в составе главного инженера и главного механика шахты. Испытания парашютов
проводятся в следующем объеме:
— испытывается подвесное устройство согласно «Руководству по эксплуатации УП6,
3.000 РЭ» [146];
— проверяется действие ловителя при напуске подъемного каната;
— проверяется ловитель на защемляющую способность при статическом действии при-
водной пружины;
— проверяется действие ловителя при отсоединении клети от подъемного каната с на-
чальной скоростью, равной нулю.
Перед испытаниями парашютов на верхней приемной площадке или нулевой отметке, или
в руддворе необходимо установить перекрытие ствола из двутавровых балок и деревянных бру-
ПАРАШЮТЫ ШАХТНЫЕ ДЛЯ КЛЕТЕЙ И ПРОТИВОВЕСОВ
465
сьев, которое должно обеспечить удержание клети (противовеса) с грузом, равным максималь-
ному количеству людей, падающей с высоты 0,75 м. Все указания и распоряжения в процессе
подготовки и проведения испытаний должен давать главный механик шахты или его помощник.
Клеть (противовес) установить на перекрытие ствола и дать напуск подъемного каната.
При этом ловитель должен сработать — зажать клиньями тормозные канаты. После чего сле-
дует замерить ход штока (траверсы), который не должен превышать ход, указанный в табл. 8
«Руководства по эксплуатации УП 6,3.000 РЭ» для конкретного типоразмера парашюта. Меж-
ду клиньями, спинками и тормозными канатами не должно быть зазора.
Проверка ловителя на защемляющую способность при статическом действии приводной
пружины. Для этого необходимо клеть поставить на перекрытие ствола и напустить подъем-
ный канат. Отсоединить тягу парашюта от подвесного устройства. При этом пружина долж-
на быть разжата. С помощью подъемного каната клеть поднять над перекрытием ствола на
высоту 0,5...0,7 м, затем медленно опустить. При этом клеть должна удерживаться ловителем
на тормозных канатах.
Проверка действия ловителя при отсоединении клети (противовеса) от подъемного каната с
начальной скоростью равной нулю. Предлагается два варианта проведения данных испытаний:
— с отсоединением клети (противовеса) от подъемного каната;
— с напуском подъемного каната и отсоединением клети (противовеса) от вспомога-
тельного каната.
Указанные испытания проводятся с помощью разъединительного крюка. Технология ис-
пытаний детально изложена в «Руководстве по эксплуатации ПТКА 6,3.000». Испытания
проводятся два раза: одно — с порожней клетью, второе — с клетью, загруженной грузом,
соответствующим весу максимального количества людей. Инвентарные балки и канат долж-
ны иметь 3-х кратный запас прочности по отношению к массе клети с расчетным грузом.
Результаты испытаний следует считать удовлетворительными, если ловитель опустился
по тормозным канатам не более 300 м, без учета величины протяжки канатов в амортизато-
рах и отсутствия поломки деформацией в деталях парашюта. При этом величина протяжки
амортизационных канатов не регламентируется.
Не допускается повторное использование амортизационных канатов после протяжки их
в амортизаторах, т. е. протянутый участок амортизационного каната в амортизатор не заво-
дится и остается ниже амортизатора. Допускается проведение испытаний парашютов на од-
ном и том же участке тормозных канатов при условии отсутствия деформации каната. После
срабатывания ловителя все замеры по испытаниям, а также демонтаж разъединительного
крюка и восстановление ловителя в рабочее положение необходимо производить, убедив-
шись в надежности удержания клети (противовеса) на тормозных канатах.
17.6. Регламент технического обслуживания парашютов
Организация технического обслуживания, планового текущего ремонта и устранения
возможных неисправностей и отказов парашюта осуществляется в соответствии с «Руковод-
ством по эксплуатации ПТКА 6,3.000» (далее Руководство).
В комплект парашюта должны входить: запасные части: клин, спинка, пружины, вкла-
дыши направляющих муфт, муфта соединительная, втулки, валики; формуляр, руководство
по эксплуатации, общий вид ловителя. Кроме того, у главного механика шахты должны быть
следующие документы: монтажные чертежи парашюта для данного подъема; графики ос-
мотра и ремонта парашюта.
В процессе эксплуатации парашют подвергается следующим видам технического обслу-
живания и ремонта в объеме, указанном в Руководстве:
— ежесменному (ТО-1) и ежесуточному (ТО-2) техническому обслуживанию;
— ежемесячному (РО-1) ремонтному обслуживанию;
— полугодовому текущему ремонту (Т2).
Кроме предусмотренных плановых работ по техническому обслуживанию парашютов,
они должны подвергаться дополнительным осмотрам и ревизиям в аварийных случаях; при
срабатывании парашюта, в том числе ложном, экстренном торможении подъемной маши-
ны, зависании подъемного сосуда в стволе, при случайном падении в ствол посторонних
предметов и других нарушений нормальной работы подъемной установки, которые могут
вызвать повреждения ловителя.
466 ГЛАВА 17
17.7. Неисправности парашютов
Вероятные причины отказа парашютной установки [25].
1. Увеличенный зазор между тормозным канатом и зажимающим органом ловителя, выз-
ванный повышенным износом трущихся деталей (муфты, клиньев, спинок).
Износ рабочих поверхностей клина и спинки ловителя происходит из-за трения о канат
при несвоевременной замене чугунных вкладышей направляющих муфт, установленных на
ловителе и клети. Благодаря меньшему исходному зазору (2 мм вместо 5 мм), между клинья-
ми и спинками ловителя в транспортном положении вначале должны истираться вкладыши
направляющих муфт, а затем уже рабочие поверхности клина и спинки.
Для контроля точности установки направляющих муфт имеются специальные стержни.
По пропущенным через ловитель контрольным стержням выставляют и закрепляют на кле-
ти верхние направляющие муфты. Нижние направляющие муфты выставляют по отвесу после
установки верхних муфт. Причиной повышенного износа деталей парашютов может быть
неправильное положение тормозных канатов относительно подъемных. Те и другие канаты
должны находиться в одной плоскости и совпадать с осью проводников. Для этого, пользу-
ясь шаблоном, перемещают амортизаторы или опоры и выставляют тормозные канаты.
2. Неправильная сборка ловителя, задевание за соседние детали, перекосы деталей, повы-
шенное трение, приводящее к нарушению зажима канатов приводной пружиной.
Зазор между максимально выступающей точкой ловителя и расстрелом должен быть не
менее указанного в ПБ. Зазоры проверяют, укладывая на крышу клети шаблон длиной, рав-
ной габаритам ловителей. При наличии искривления расстрелов их необходимо заменить
новыми.
3. Попадание посторонних предметов между движущимися деталями ловителя.
4. Недостаточная прочность деталей установки.
Износ деталей парашюта, снижающий прочность последних более чем на 20 %, недопу-
стим. Детали с таким износом необходимо заменить.
5. При нормальной работе подъема конструкция парашютной установки исключает воз-
можность ложного срабатывания ловителя за счет предохранительных срезных шпилек в опо-
рах ловителя и крестовой траверсы.
Ложные срабатывания парашютов могут происходить в случае:
— снижения скорости движущейся вниз клети из-за неудовлетворительного состояния
направляющих лап и проводников;
— сближения проводников, нарушения их параллельности, отсутствия плавных перехо-
дов на стыках, образования на проводниках льда;
— большого искривления ствола и проводников, отклоняющихся от вертикали, хотя и
сохраняющих параллельность между собой; большого ускорения при движении клети вниз,
приводящего к ослаблению натяжения подъемного каната;
— неравномерного (толчками) сматывания и наматывания каната из-за плохо прото-
ченной футеровки барабана или обода направляющего шкива, приводящего к колебаниям
клети подъемном канате;
— аварийного торможения подъемной машины, когда подъемный канат клети, движу-
щейся вниз, испытывает дополнительное натяжение от сил инерции опускающейся клети.
Натяжение каната поднимающейся ветви при аварийном торможении уменьшается из-за
разности замедлений клети и органа навивки подъемной машины, а также внутренних сил
упругости самого подъемного каната и инерции клети. Таким образом, при резком торможе-
нии подъема возможны случаи зависания обеих клетей на парашютах, поэтому при проведе-
нии ежегодной ревизии, наладки и испытания подъемной установки необходимо обеспечи-
вать величину замедления при предохранительном торможении в строгом соответствии с тре-
бованиями ПБ.
6. Длительность перерывов в работе подъема в период морозов.
Для предотвращения аварии при длительных перерывах в работе верхнюю клеть следует
опускать в устье шахтного ствола под теплый поток воздуха.
Во всех случаях захвата ловителем тормозного каната необходимо выяснить причину
этого явления, осмотрев место и характер захвата, и после этого приступить к работе. При
захвате ловителя без обрыва головного каната, чтобы ввести подъемную установку в эксплу-
ПАРАШЮТЫ ШАХТНЫЕ ДЛЯ КЛЕТЕЙ И ПРОТИВОВЕСОВ
467
атацию, необходимо осмотреть место захвата, для этого слесари подъема (не менее двух че-
ловек) должны опуститься к месту включения ловителя, имея при себе необходимый инст-
румент (ключи, кувалду, ломик и др.). В соответствии с характером захвата и состоянием
подъемного каната принимают меры к выдаче людей на поверхность. Усилием подъемного
каната, не превышающим максимальную концевую нагрузку, ловитель расклинивается и ус-
танавливается на опорах. Тщательно осматривают парашют по программе месячного осмот-
ра, осматривают канат на участке захвата, устраняют причины, вызывающие срабатывание
ловителя, а также осматривают ствол для проверки наличия других причин, которые могут
помешать нормальной работе подъема, и подъемный канат.
Комиссия в составе главного инженера, главного механика и механика подъема состав-
ляет акт, в котором отмечает причину срабатывания ловителя, результаты осмотра ловите-
лей и всей парашютной установки в целом, и дает разрешение на эксплуатацию подъема.
7. Отсутствие резервных пружин. •
В комплекте поставки парашюта содержится семь приводных пружин, периодичность
замены которых равна одному году, а срок службы паращютов с соответствующими продле-
ниями может достигать 10 лет. Таким образом, имеется противоречие между количеством
поставленных заводом пружин и допустимым сроком их службы. Разрешить это противоре-
чие можно лишь за счет обоснованного увеличения срока службы пружины путем сравнения
расчетного числа циклов нагружения пружины с фактическим числом циклов нагружения
для данного подъема. Срок службы пружины — 1 год — установлен Донгипроуглемашем из
условия нагружения пружины парашюта весом клети с интенсивностью 300 циклов в сутки.
При расчете пружин на усталость принимается базовое число циклов 100 000, что ориенти-
ровочно соответствует 1 году эксплуатации пружины. Фактически же многие подъемы эксп-
луатируются с интенсивностью менее 300 циклов в сутки. Отношение проектного числа цик-
лов к фактическому позволяет выявить резерв пружины по фактору усталостной прочности.
Глава 18
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ
И НАКЛОННЫХ СТВОЛОВ
18.1. Общие сведения о подъемных сосудах
(транспортных средствах)
18.2. Скипы в вертикальных стволах
18.3. Расчет грузоподъемности и скорости скипов
18.4. Клети в вертикальных стволах
18.5. Противовесы
18.6. Подъемные сосуды в наклонных стволах
18.7. Неисправности скипов, клетей и противовесов
18.1. Общие сведения о подъемных сосудах (транспортных средствах)
К подъемным сосудам (транспортным средствам) относятся скипы, клети, скипо-кле-
ти, противовесы, бадьи, вагонетки и их составы.
Основными подъемными сосудами эксплуатационной шахты для выдачи горной массы
на поверхность являются скипы. Для спуска и подъема людей, угля, породы, различных ма-
териалов и горного оборудования, а также на инспекторских и аварийно-ремонтных подъем-
ных установках применяются клети. В практике имеет место также применение комбиниро-
ванных конструкций — сочетание скипа с клетью — скипо-клети (используются редко и не
являются перспективными). При проходке шахтного ствола применяются бадьи, служащие
для выдачи породы, спуска материалов, транспортировки людей и др. В наклонных стволах
для выдачи горной массы и породы используются скипы, специальные клети для вагонеток,
шахтные вагонетки и их составы. Транспорт людей по наклонным выработкам осуществля-
ется в специальных людских вагонетках (каретах), а также в клетях.
В стволах с канатными проводниками в сочетании с многоканатными подъемными ма-
шинами, а также с одноканатными подъемными машинами со шкивом трения применяют,
как правило, скипы с неподвижным кузовом и неопрокидные клети. В обоих случаях подъем-
ные сосуды по общей компоновке и исполнению конструкции идентичны с подъемными
сосудами стволов с жесткими армировками. Отличие заключается лишь в конструкциях на-
правляющих (для жестких или канатных проводников) устройств. Следует отметить, что к
подъемным сосудам для канатных проводников нет необходимости предъявлять требования
повышенной прочности и конструктивной жесткости, особенно изгибной, как это требуется
в случае жестких армировок с постоянным шагом. Эти подъемные сосуды могут быть значи-
тельно облегчены при соблюдении требований типажа и унификации [18].
Большую роль при выборе типа подъемных сосудов играет отношение мертвого веса
сосуда к полезному, поднимаемому за один раз грузу, которое оказывает прямое влияние на
мощность электропривода установки, расход электроэнергии, размеры и стоимость механи-
ческой части подъемной машины. Минимальное указанное отношение при скипах состав-
ляет 0,7 +1,2; менее выгодно оно при неопрокидных клетях (1,6 + 2,5) и самое невыгодное
при опрокидных клетях (3,0+ 3,4).
Согласно «Общесоюзным нормам технологического проектирования шахтных подъемных
установок (ОНТП 5-86)» [32] для выдачи полезного ископаемого в зависимости от требуемой
производительности в одном стволе должны приниматься следующие виды подъемов:
— как правило, двухскиповой;
— двухскиповой и односкиповой с противовесом;
— два двухскиповых.
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
469
Применение двух односкиповых подъемов вместо одного двухскипового допускается при
многогоризонтной работе или при многоканатном подъеме, если двухскиповой подъем не
обеспечивает нескольжение канатов. Для выполнения вспомогательных грузовых операций
и спуска-подъема людей в зависимости от требуемой производительности принимаются сле-
дующие виды подъемов:
— два одноклетевых с противовесом;
— двухклетевой и одноклетевой с противовесом.
Фланговые вентиляционные и воздухоподающие стволы, используемые в качестве за-
пасных выходов, оборудуются, как правило, одно или двухклетевым аварийно-ремонтным
подъемом. Подъемные сосуды для вертикальных подъемов следует применять из числа пре-
дусмотренных ГОСТ и унифицированных (параметрическими, типажными) рядами. Допус-
кается вводить дополнительные элементы в конструкцию этих сосудов применительно к
прогрессивным армировкам стволов, а также для других целей, по чертежам проектной орга-
низации, согласованным с институтом — разработчиком сосудов.
В проектах реконструкции, технического перевооружения шахт и подготовки новых го-
ризонтов, действующих и сохраняемых стволов, армировка или другие элементы подъемно-
го комплекса, которых не позволяют применять стандартные подъемные сосуды, допускает-
ся использование индивидуальных скипов и клетей. Конструктивные решения и размеры
этих сосудов должны быть максимально приближены к предусмотренным ГОСТ, ТУ или
унифицированным (параметрическими, типажными) рядам. Для одноканатных подъемов
предпочтительным является применение облегченных сосудов из высококачественных ста-
лей с антикоррозийным покрытием. Применение облегченных сосудов для многоканатных
подъемов ограничивается условиями нескольжения канатов. Клети и противовесы, обору-
дованные парашютами по ГОСТ 15850-84, следует применять, как правило, при высоте подъе-
ма до 900 м. Возможность использования этих парашютов при большей высоте подъема дол-
жна быть согласована с разработчиком парашюта.
18.2. Скипы в вертикальных стволах
По назначению скипы подразделяются на угольные, рудные и породные, которые кон-
структивно идентичны, но отличаются между собой габаритами [18]. Способ разгрузки ски-
па определяет разделение скипов на три группы: скипы с неподвижным кузовом, с отклоня-
ющимся кузовом и опрокидные. Две последние группы в настоящее время практически не
применяются и здесь не рассматриваются.
Разгрузка скипов с неподвижным кузовом осуществляется посредством специальных
затворов — секторных, клапанных, шиберных. Механизм затвора, независимо от его типа,
приводится в действие от специальных стационарно установленных в копре ствола разгру-
зочных профилированных кривых, с которыми взаимодействуют разгрузочные ролики на
секторном затворе 5 (рис. 18.1), в результате чего при движении скипа вверх затвор открыва-
ется, и груз по наклонному днищу кузова высыпается в приемный бункер. При обратном
движении скипа (вниз) затвор аналогичным образом закрывается. Имеются способы откры-
вания затвора от внешних электрических, пневматических и гидравлических приводов, а так-
же от автономных приводов, устанавливаемых на самом скипе. Ось поворота секторного зат-
вора 5 устанавливается на зауженной части кузова (сектор при открывании затвора повора-
чивается вокруг оси по часовой стрелке).
В месте расположения секторного затвора боковые стенки кузова имеют небольшой скос,
т. е. изогнуты таким образом, что между ними и рамой имеется зазор. В этом зазоре разме-
щаются боковые стенки секторного затвора. Ось вращения последнего укреплена на наклон-
ном днище кузова [18].
Первоначально скипы с секторным затвором изготавливались с так называемым выд-
вижным лотком (рештаком), который при открывании затвора автоматически выдвигался,
образуя как бы продолжение наклонного днища. Этим самым перекрывался естественный и
неизбежный зазор между скипом и кромкой приемного бункера с целью уменьшения про-
сыпания груза. Однако на.практике выдвижной лоток нередко становился причиной зависа-
ния скипа при его обратном ходе из-за неизбежно возможных неполадок в механизме затво-
ра, что приводило, естественно, к авариям. Для устранения этого недостатка скипы с сере-
470
ГЛАВА 18
дины 80-х годов начали .изготавливаться без выд-
вижного лотка (разработка Донгипроуглемаша и
НИИГМ им. М. М. Федорова), что не только уп-
ростило конструкцию затвора, но и увеличило его
надежность. Существенным при этом оказалось
то, что просыпание груза, о чем свидетельствуют
наблюдения, практически не увеличилось.
Скип оборудуется также верхней смотровой
площадкой с ограждением и зонтом 1 (см. рис. 18.1),
используемой при ежесуточном осмотре крепи
ствола, армировки, состояния прицепных и под-
весных устройств. Предусматривается также ниж-
няя смотровая площадка, которая хотя и не регу-
лярно используется, но необходима в специальных
случаях, например, для визуального контроля со-
стояния вертлюжных устройств уравновешиваю-
щих канатов. Емкость скипов одноканатного
подъема составляет 7+15 к3 и многоканатного —
10 - 35 м\
На рис. 18.1 схематически изображен скип
конструкции института Сибгипрошахт, основны-
ми элементами которого являются кузов 3 и
рама 4. Кузов, усиленный ребрами жесткости,
представляет собой призматическую емкость с заг-
рузочным порталом вверху и разгрузочным уст-
ройством внизу (в данном случае — это сектор-
ный затвор 5). Кузов жестко присоединен к раме,
содержащей поперечную балку, к которой крепят-
ся прицепные устройства головных канатов (для
уравновешивающих канатов, при их наличии, ана-
логичная балка располагается внизу, она здесь не
изображена). На раме располагаются также трех-
роликовые блоки рабочих направляющих уст-
ройств 8 — вверху и внизу, и предохранительные
башмаки 7 (верхние не показаны). Загрузка скипа
производится из бункера, оборудованного загру-
зочным устройством с объемным или весовым до-
затором (последний — для подъемных установках с машинами со шкивами трения). На бо-
ковых стенках секторного затвора установлены на осях разгрузочные ролики. При входе ро-
ликов в разгрузочные кривые происходит открывание затвора. После разгрузки скип опус-
кается и затвор принудительно возвращается в исходное положение.
С целью увеличения жесткости скипов с неподвижным кузовом НИИГМ им. М.М. Фе-
дорова и Донгипроуглемашем была проведена модернизация этих скипов. Кузов модерни-
зированного скипа выполнен без сужения в районе затвора, что позволило резко снизить
величину коэффициента концентрации напряжений в раме скипа и тем самым повысить
надежность его эксплуатации (рис. 18.2).
Скипы, движущиеся в проводниках коробчатого профиля, оснащены направляющими
устройствами качения типа НКП, разработаннми НИИГМ им. М.М. Федорова. Устройства
НКП представляют собой трехроликовую опору, смонтированную на общей раме. Каждая
роликоопора выполнена в виде массивного цельнорезинового колеса, насаженного на кон-
сольный вал. В 1992 г. был разработан, изготовлен и испытан головной образец скипа такой
конструкции, а в 1995 г. на базе этих испытаний были разработаны и утверждены Техничес-
кие условия Украины ТУУ 12.00174065.101-95 на ряд большегрузных скипов шахтных с не-
подвижным кузовом вместимостью 20-5-35 к3 — СНМП, предназначенных для транспорти-
рования угля по вертикальным стволам шахт угольной промышленности, оборудованным
многоканатными подъемными установками, при проводниках прямоугольного сечения и ско-
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
471
Рис. 18.2. Модернизированный скип
СНМП (без сужения):
1 — каркас; 2 — верхняя балка каркаса;
3 — нижняя балка каркаса; 4 — кузов; 5 — затвор;
6 — лоток; 7 — ограждение верхней смотровой
площадки; 8 — ограждение нижней смотровой
площадки; 9 — зонт; 10 — кожух; 11 — направляю-
щее устройство НКП; 12 — направляющее
устройство УНС; 13 — подвесное устройство
для головных канатов; 14 — подвесное устройство
для уравновешивающих канатов; 15 — балка
для крепления головных канатов; 16 — опора;
17 — балка для крепления головных канатов;
18 — разгрузочные ролики затвора
рости движения до 16 м/с. Скипы вместимостью 25 и 35 м3 должны эксплуатироваться при
высоте подъема до 1700 м, скипы вместимостью 20 м3 — при высоте подъема до 1300 м.
Скипы изготавливаются следующих типоразмеров: СНМП20-223-1,1; СНМП20-280-
1,1; СНМП25-235-1Д; СНМП25-280-1Д; СНМП35-235-1Д; СНМП35-280-1Д. Структура
условного обозначения скипов (на примере скипа СНМП20-223-1Д): «С» — скип; «Н» —
неподвижный кузов; «М» — многоканатный подъем; «П» — проводники прямоугольного
сечения; «20» — номинальная вместимость кузова, м3; «223» — длина кузова в плане, см;
«1,1» — насыпная масса угля. Кроме того, все скипы этих типоразмеров имеют по несколько
исполнений в зависимости от количества уравновешивающих канатов, типа подвесного
устройства, расположения головных канатов относительно плоскости проводников и плос-
кости симметрии скипа, высоты скипа и др. В частности скипы типоразмера СНМП20-223
имеют 6 исполнений; типоразмера СНМП20-280-12 исполнений; типоразмера СНМП25-
235-12 исполнений; СНМП25-280-11 исполнений; СНМП35-235-39 исполнений; СНМП35-
280-21 исполнений.
Данные по скипам СНМП, касающиеся наибольшей высоты подъема, при которой скип
того или иного исполнения может применяться, определены исходя из условия, что грузо-
подъемность скипа реализуется полностью. При этом головные каната по ГОСТ 3088-80 мар-
кировочной группы 160 кгс/мм2 обеспечивают требуемый запас прочности, установленный
ПБ[13].
Факторами, ограничивающими наибольшую высоту подъема, являются: наибольшая допус-
каемая суммарная статическая нагрузка на головные канаты коушей; наибольшая допускаемая
нагрузка на подвесное устройство для уравновешивающего каната; высота загрузочного окна
скипа; удельное давление канатов на футеровку шкива подъемной машины. В случае примене-
ния скипа в других условиях, например, при малых высотах подъема, когда возникает проблема
предупреждения проскальзывания головных канатов по шкиву подъемной машины и возникает
необходимость искусственного утяжеления скипов или снижения массы транспортируемого груза,
могут применяться канаты другого типа. Может возникать необходимость снижения подъемной
472
ГЛАВА 18
массы груза при больших высотах подъема из-за достижения удельных давлений канатов на фу-
теровку шкива подъемной машины, превышающих допустимые значения.
Таким образом, при выборе того или иного исполнения скипа должен быть проведен
тщательный анализ технических возможностей подъемной установки с учетом изложенных
выше факторов. Скипы исполнений от СНМП35-235-1.1 до СНМП35-235-1.1-0.7 включи-
тельно имеют каркас высотой 14950 мм и сравнительно малую высоту загрузочного окна, что
не позволяет применять такие скипы при высотах подъема свыше 1300 м. При уравновеши-
вающих канатах по ГОСТ 3088-80 диаметром 54,5 мм максимальная допустимая нагрузка на
подвесное устройство УП-2М-22 достигается при высоте подъема примерно 1100 м. Для ис-
полнений СНМП35-235-1.1-01; 03; 0,5 и 0,7 нагрузки на подвесные устройства для головных
и уравновешивающих канатов (УП-ЗМ-05) при высоте подъема 1300 м не достигают допус-
тимых величин. Однако, применять эти скипы при больших высотах подъема не рекоменду-
ется из-за малой высоты загрузочного окна.
Для исполнений от СНМП35-235-1.1-08 до — 19 предусматривается высота каркаса 15900
мм с загрузочным окном, позволяющим применять скипы при высотах подъема до 1700 м.
Но исполнения, содержащие УП-2М-22, не могут быть рекомендованы для высот подъема
более 1100 м. Эти исполнения предусмотрены для шахт, рассчитанных на перспективу углуб-
ки стволов при переходе на более глубокие горизонты добычи. Скипы исполнений, содер-
жащих подвесные устройства УП-ЗМ-05, по условию нагружения каната диаметром 54,5 мм
могут применяться при высотах подъема до 1550 м с подвесным устройством для 4-х голов-
ных канатов, рассчитанным на 1400 кН. Это исполнения СНМП35-235-1Д-10; -13; -16; -19.
Скипы исполнений с УП-ЗМ-05, но оборудованные подвесным устройством для 4-х голов-
ных канатов, рассчитанным на 1200 кН могут применяться при высотах подъема до 1450 м.
Это исполнения СНМП35-235-1Д-09; -12; -15; -18.
Скипы исполнений от СНМП35-235-1Д-20 до — 27 оборудованы подвесным устрой-
ством для 6-ти головных канатов, рассчитанным на 1400 кН, и тремя подвесными устрой-
ствами для уравновешивающих канатов. Область применения этих скипов аналогична обла-
сти применения скипов, рассматриваемых выше. Однако 6-канатные скипы перед 4-канат-
ными имеют то преимущество, что при работе на установках с большей высотой подъема и,
в особенности в системе «скип — противовес» позволяют снять ограничения высоты подъе-
ма по условию удельного давления канатов на футеровку шкива машины без снижения мас-
сы груза, а также иметь большую долговечность футеровки шкива. Скипы исполнений от
СНМП35-235-1Д-28 до — 35 для 6-канатного подъема с 4-мя уравновешивающими каната-
ми диаметром 49,5 мм позволяют расши-
рить область их применения с УП-2М-22
до 1400 м, а с УП-ЗМ-05 до 1700 м. Скипы
исполнений СНМП-235-1,1-32 и — 33, а
также от СНМП-235-1,1-36 до — 39 с 4-мя
подвесными устройствами для уравнове-
шивающих канатов УП-ЗМ-08 и УП-ЗМ-
09 при малых высотах подъема позволяют
путем варьирования диаметрами головных
и уравновешивающих канатов при неболь-
шом утяжелении скипов устранить опас-
ность проскальзывания канатов по шкиву
подъемной машины без снижения массы
груза даже в системе «скип — скип».
Скип серии СНМП (рис. 18.2) состо-
ит из каркаса 1, верхней балки 2 с опорой
16, нижней балки 3, подвесного устройства
13 для головных канатов, подвесных уст-
ройств 14 для уравновешивающих канатов,
затвора 5, лотка 6, направляющих уст-
ройств качения типа НКП 11, башмаков
предохранительных 12, кожуха 10, ограж-
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
473
дения 7 с зонтом 9, ограждения нижней площадки 8, тяг, предназначенных для подъема ски-
па с целью ослабления натяжения головных канатов при перепанцировке их в коушах.
Каркас 1 представляет собой металлоконструкцию, состоящую из верхней и нижней
балок, соединенных между собой вертикальными стойками, выполненными из уголков, и
приваренного к ним кузова. Верхняя балка 2 выполнена из листовой стали. На верхнем лис-
те балки предусмотрены отверстия для крепления ограждения с зонтом. На нижнем листе
предусмотрены отверстия для крепления опоры 16 четырьмя болтами. Здесь же предусмот-
рены четыре отверстия для установки тяг подвесного устройства головных канатов.
Конструкция опоры представлена на рис. 18.3. На листе 1 имеются пазы «Б», позволяю-
щие перемещать опору относительно верхней балки скипа на ± 50 мм для совмещения оси
подвески с центром масс скипа. В отверстие «Г» при сборке скипа устанавливается валик,
вокруг которого поворачивается балка 2 (рис. 18.4). Опора (рис. 18.3) предназначена для на-
грузки на подвесное устройство до 1200 кН и расположения канатов в плоскости проводни-
ков. При расположении канатов в плоскости симметрии скипа и для нагрузок на подвесное
устройство до 1400 кН, а также при подвесных устройствах для 6-ти головных канатов конст-
рукции опор несколько иные. Ограничение поворота балки 2 (рис. 18.5) при установке ее в
опоре осуществляется специальными упорами 12 (рис. 18.5).
Новое решение конструкции скипа с неподвижным кузовом и секторным затвором было
найдено Донгипрошахтом совместно с НИИГМ им. М. М. Федорова и МакНИИ. Основной
отличительной особенностью этого скипа явилось отсутствие сужения кузова, что позволило
резко снизить величину коэффициента концентрации напряжения в раме скипа и тем самым
повысить надежность его эксплуатации. На верхней балке предусмотрены также четыре отвер-
стия для установки тяг подвесного устройства головных канатов. Чертеж балки приведен на
рис. 18.4. Она представляет собой двуплечее коромысло 8 (рис. 18.5), сваренное из листов.
7УП-|- Ц5Г
32ГПИ
Рис. 18.4. Балка опоры СМУ 35.00.020
Среднее отверстие служит для соединения с центральной опорой 11 (рис. 18.5), осталь-
ные — для соединения с тягами подвесного устройства. Количество этих отверстий определя-
ется числом головных канатов. Все отверстия имеют сменные втулки. Нижняя балка 3 (рис. 18.2)
каркаса скипа выполнена из листовой стали. Ее нижний лист является одновременно полом
нижней смотровой площадки. Для предотвращения скопления штыба на площадке в этом ли-
сте предусмотрены сквозные отверстия. Нижняя смотровая площадка предназначена для обес-
печения возможности осмотра ствола в его нижней части, выполнения ремонтных работ в ство-
ле, осмотра и обслуживания механизмов секторного затвора скипа, контроля работы вертлю-
гов подвесных устройств для уравновешивающих канатов при движении скипа по стволу.
Кузов скипа представляет собой сварной короб, в нижней части которого расположено
разгрузочное окно. Снаружи кузов усилен горизонтальными поясами, внутренние поверх-
474
ГЛАВА 18
Рис. 18.5. Крепление подвесного устройства к балке опоры. Устройство подвесное
СМУ УП35.00.110
ности кузова футерованы сменными листами. С целью снижения нагрузок на затвор и пре-
дохранения задней стенки кузова от износа при загрузке углем в верхней части установлен
отбойник, выполненный в виде сварной плиты. Для присоединения подвесных устройств
уравновешивающих канатов на скипах предусмотрена нижняя прицепная балка 17 (рис. 18.2)
с тремя или четырьмя присоединительными отверстиями, выполненная из листовой стали.
Затвор скипа состоит из двух боковин и усиленного швеллерами и снабженного футеро-
вочными листами днища-сектора, закрывающего разгрузочное окно кузова. В нижней пра-
вой части затвора установлена ось с разгрузочными роликами, которая опирается на прива-
ренные к боковинам вкладыши. Затвор соединяется с кузовом скипа с помощью втулок и
вала, опирающегося на подшипники. На концах оси установлены два разгрузочных ролика.
Лоток скипа (рис. 18.6) состоит из футерованной сменными листами направляющей 1 и
двух изогнутых листов 2, сужающих поток транспортируемого материала и препятствующих
его рассеиванию в стороны. Направляющая и изогнутые листы крепятся к боковинам ниж-
ней балки скипа с помощью болтовых соединений.
С целью уменьшения зазора между направляющей и при-
емным бункером на ее нижнем конце установлена транспор-
терная лента 3. Зазор между лентой и бункером составляет при-
мерно 50 мм.
В качестве рабочих направляющих опор скипа применяют-
ся направляющие качения типа НКП-320. В качестве предохра-
нительных башмаков на скипе применяются направляющие ус-
тройства скольжения типа УНС, состоящие из корпуса, двух
сменных вкладышей боковых и одного лобового вкладыша.
Для ограничения россыпи транспортируемой массы при
загрузке скипа имеется кожух 10 (рис. 18.2). Он выполнен из
четырех боковых щитов и заднего щита. Щиты соединяются
между собой и каркасом с помощью болтовых соединений. В
нижней части кожуха размещены два швеллера для установки
съемного полка, предназначенного для вывоза людей скипом в
аварийных случаях. На верхней балке скипа болтами закрепля-
ется ограждение с зонтом. Каркас скипа, затвор и балки для
присоединения подвесных устройств изготавливаются из низ-
колегированных сталей по ГОСТ 19281 с классом прочности не
Рис. 18.6. Лоток скипа
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
475
ниже 352. Допускается изготовление стоек каркаса из стали Ст. Зпс5-св по ГОСТ 380, изго-
тавливаться стойки должны из цельных заготовок. Допускается изготовление стойки из двух
частей со сваркой их встык.
В 2005 г. в Донгипроуглемаше разработаны Технические условия ТУУ29.5-00174065-177:
2005 «Скипы шахтные СН и СНМ с неподвижным кузовом вместимостью 4—15 .и3», срок
введения в действие ТУУ с 2005.07.01, срок действия до 2010.07.01. Настоящие технические
условия распространяются на скипы одноканатного подъема вместимостью от 3 м3 до 15 м3 и
на скипы многоканатного подъема вместимостью от 7 м3 до 15 .и3.
Типоразмеры скипов одноканатного подъема: СН4-170-1,8; СН5-185-1,8 двух исполне-
ний; СН7-185-1,8 двух исполнений; СН9,5-185-1,1 двух исполнений; СН11-185-1,8 двух ис-
полнений; СН11-185-1,1 двух исполнений; СНП-223-1,1 двух исполнений; СН15-223-1,1 двух
исполнений. Структура условного обозначения скипов серии СНхх-ххх-хх-хх: «С» — скип;
«Н» — неподвижный кузов; «хх» — вместимость кузова, м3; «ххх» — ширина кузова в плане в
см; «хх» — насыпная масса груза; «хх» — исполнение скипа. Скипы многоканатного подъема
серии СНМ имеют 7 типоразмеров; СНМ9,5-185-1,8 — 29 исполнений; СНМ9,5-185-1,1 —
12исполнений; СНМ11-185-1,8 — 30исполнений; СНМ11-185-1,1 — 12исполнений; СНМ11-
223-1,8 — 20 исполнений; СНМ11-223-1,1 — 8 исполнений; СНМ15-223-1,1 — 16 исполне-
ний.
Структура условного обозначения скипов этой серии в отличие от скипов серии СН со-
держит букву «М», что означает принадлежность его к многоканатному подъему. Конструк-
тивно эти скипы выполнены аналогично большегрузным скипам СНМП. Отличием являет-
ся лишь несколько иное исполнение в скипах серии СН узла соединения подвесных уст-
ройств с рамой скипа. В скипах одноканатного подъема для присоединения головного кана-
та используются подвесные устройства УИС 12,5, и УИС-20 или УИС-30 в зависимости от
грузоподъемности скипа. При соблюдении условий эксплуатации, регламента технических
обслуживаний и ремонтов, предусмотренных «Руководством по эксплуатации», полный срок
службы скипов этой серии составляет 12 лет. Предельным состоянием скипа считается появ-
ление трещин в стойках каркаса после нормативного срока службы или повышения напря-
жений в несущих элементах каркаса скипа выше допустимых значений.
Дальнейшее совершенствование скипов с неподвижным кузовом в части повышения
жесткости последнего выполнено институтами Южгипрошахт и Гипрошахт путем создания
клапанного затвора вместо секторного. Управляется механизм клапанного затвора как и сек-
торный, от разгрузочных кривых, расположенных на копре. Продолжаются работы по со-
зданию еще более совершенного затвора — шиберного с автономным приводом, опыт при-
менения которого накоплен на рудниках ПО «Кривбассруда».
Скипы с неподвижным кузовом емкостью 20 м3, 25 jw3, 30 jw3 и 35 jw3 серийно изготавливают-
ся Дружковским машиностроительным заводом и Донецкгормашем по ТУУ 12.00174065.101-95.
особенностью данных скипов является отсутствие сужения кузова и большое выходное отвер-
стие, они более технологичны в изготовлении, в меньшей степени происходит налипание транс-
портируемого материала на внутренних стенках кузова скипа.
В [18] приведены основные параметры скипов типажного ряда, применяемых на новых,
реконструируемых и действующих шахтах угольной промышленности. Для шифровки моде-
лей скипов приняты следующие условия обозначения: буквенный индекс «СН» — скип с
неподвижным кузовом, буквенный индекс «СО» — скип с опрокидным кузовом.
Опыт эксплуатации скипов серии «СО» показал существенные недостатки конструкции.
Это, прежде всего, недостаточная конструктивная жесткость металлоконструкции; большие
динамические нагрузки, возникающие при входе скипа в разгрузочные кривые; большой
собственный вес самого скипа; мощные разгрузочные кривые; большой период дотяжки скипа
при входе в кривые на малой скорости; большой дополнительный объем надшахтного со-
оружения и копра и т. д. Поэтому на строящихся и реконструируемых шахтах скипы с откло-
няющимся и опрокидным кузовом, как правило, не применяются.
Наилучшими эксплуатационными показателями обладают скипы с неподвижным кузо-
вом. Преимущества этого типа скипов предопределили повышенный интерес и внимание
проектных организаций горнодобывающих отраслей промышленности к разработке конст-
рукций скипов с неподвижным кузовом и различными видами затворов — секторным, кла-
панным, шиберным. В частности, в разработке параметрического ряда базовых моделей ски-
476
ГЛАВА 18
пов с неподвижным кузовом принимали уча-
стие институты Сибгипрошахт, Южгипро-
шахт, Гипрошахт.
Подвесное устройство, представленное
на рис. 18.5, состоит из коушей 1 типа КД,
тяг, валиков 3 и 4, удерживаемых от выпаде-
ния чеками 5 и шайбами. Контроль отсут-
ствия проскальзывания каната производится
по величине зазора между хомутами 13 в
плоскости зажима коуша. Балка 8 при работе
скипа может совершать колебании вокруг ва-
лика 10, установленного в опоре 11. Колеба-
ния балки ограничиваются упорами 12.
На рис. 18.7 представлена конструкция
секторного затвора института Сибгипрошахт.
Рис. 18.7. Секторный затвор скипа
конструкции института Сибгипрошахт
18.3. Расчет грузоподъемности и скорости скипов
Как правило, изначальным параметром для расчета грузоподъемности скипов является
годовая производительность подъемной установки Агод, т/год, или суточная производитель-
ность А^, т/сут, связанные между собой соотношением
Асут = Агод/300, т/сут, (18.3.1)
где число 300 означает нормативное количество рабочих дней в году. Часовая производитель-
ность Ачас, т/час, определяется по формуле (18.3.1) как
Ачас=^!!!'ки’ т/час, (18.3.2)
*сут
где Т^— 18ч — нормативная продолжительность работы установки в течение суток при трех-
сменном режиме, кн — коэффициент неравномерности поступления транспортируемого гру-
за в загрузочный бункер (обычно принимается равным не менее 1,5).
Если под термином продолжительностью цикла подъема Тццк подразумевать время, прой-
денное с момента начала двух последовательных операций подъема какого-либо конкретно-
го скипа по символической схеме «подъем—разгрузка—спуск—загрузка», то
Тцик=2(Т+{п), (18.3.3)
где Т, с — продолжительность движения скипа в стволе, определяемая четвертой из фор-
мул (2.1.21); tn> с — продолжительность паузы на загрузочно-разгрузочные операции. Тогда
в зависимости от количества скипов пск в данной установке (пс=2 и пс=1 в случае двухски-
пового подъема и при односкиповом подъеме с противовесом) должно выполняться ра-
венство
3,6 тцик
(18.3.4)
где m^, кг — масса полезного груза в скипе, то есть его необходимая грузоподъемность; чис-
ло «3,6» служит для перевода размерности m/ч часовой производительности в размерность
кг/с. Подстановка (18.3.2) и (18.3.3) в соотношение (18.3.4) позволяет определить
Я Т+tn к
!Р~ 1,8 П(Х
(18.3.5)
Если в формулу (18.3.5) подставить Т = V0 /(2апр)+Н/Vo из (2.1.21) и учесть, что, про-
должительность паузы на загрузочно-разгрузочные операции пропорциональна грузоподъ-
емности скипа, о чем свидетельствует опыт эксплуатации и многочисленные хронометраж-
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
477
ные измерения, то с приемлемой точностью можно считать, что tn = 0тгр, причем Д ~ 10 3 с/кг,
то в результате получим
*о "2^4,^ +2Я^, =0. (18.3.6)
Это соотношение можно рассматривать как уравнение относительно максимальной ско-
рости движения подъемных сосудов Уо. В (18.3.6) обозначено:
£ =--------------р, с кг,
(18.3.7)
а параметр апр определяется из (2.1.22) при заданных ау, а3 <1, м/с2. Из (18.3.6) находим
^0 ЕМгр^пр
1- 1- 2Н 2
\ ^тгр)
(18.3.8)
Прежде чем приступить к завершающей фазе расчета скорости и грузоподъемности, сле-
дует проверить выполнение условия Vo < Vnped, где Vnpei — предельно допустимая скорость,
при которой трапециевидная тахограмма становится треугольной, так как при Ко > Vnped скип
просто не успевает снизить скорость до нуля при подходе к месту разгрузки. Скорость V
определяется с помощью выражения Т = К0/(2алр) + Я/К0 из (2.1.21), если минимизировать
время движения Т по скорости Ио, и тогда получим Vnped = ^2апрН . Заметим, что подобное
соотношение долгое время (до середины 70-х годов) содержалось в ПБ в качестве норматива.
Формула (18.3.7) свидетельствует о том, что при увеличении тгр максимальная скорость
Vo монотонно убывает. Так как типажный ряд современных скипов содержит дискретный и
не очень многочисленный набор возрастающих по величине значений тгр, то расчет сводит-
ся к вычислению дискретной убывающей последовательности Ро всего лишь для нескольких
типоразмеров скипов. Далее проектировщик должен принять решение о рациональном соче-
тании полученных пар чисел тгр и Vo, основываясь на опыте эксплуатации, экономических
оценках, инженерной интуиции и здравом смысле (разумеется, при этом также следует при-
нимать во внимание требования заказчика).
В расчетной практике давно сложились две, можно сказать, «противоборствующие» кон-
цепции: «малый груз — большая скорость» и «большой груз — малая скорость». Сторонники каж-
дой из этих точек зрения по-своему правы, однако опыт все же свидетельствует о том, что
гораздо выгоднее эксплуатировать скип большой грузоподъемности при сравнительно неболь-
шой скорости, чем наоборот. Действительно, при больших скоростях движения неизбежно
уменьшается долговечность проводников, направляющих устройств на сосудах (в особенности
роликовых), подшипниковых узлов подъемной машины, редукторных пар и, кроме того, уве-
личивается расход электроэнергии из-за преодоления сосудами повышенного сопротивления
воздушной среды, которое пропорционально квадрату скорости относительного движения.
В результате принятого выбора, основанной на любой из упомянутых концепций, ста-
новится известной также масса порожнего сосуда (скипа или клети) тс, содержащаяся в ти-
пажном ряде подъемных сосудов, и тогда для формул (2.1.6), (2.1.7), (2.1.8), (2.1.9), (2.1.12)
можно вычислить входящие туда параметры (массы концевых грузов)
т1-тс + тгр, т2=тс +
2 гр
(18.3.9)
необходимые для дальнейшего расчета [заметим, что т2 при пск= 1 — это масса противовеса,
равная, как следует из (18.3.9), тс+тгр/2}.
18.4. Клети в вертикальных стволах
По конструктивному исполнению клети различаются на неопрокидные и опрокидные,
а по технологии изготовления — на клепаные и сварные. По транспортному назначению
478
ГЛАВА 18
клети могут быть грузолюдские и людские. Неопрокидные клети бывают одно- и много-
этажные. В угольной промышленности преимущественно используются клети не более чем
с двумя этажами (трехэтажные клети иногда применяются в шахтном строительстве). Оп-
рокидных клетей в настоящее время на шахтах практически нет. На каждом этаже клети
имеются рельсовая колея для размещения вагонетки и устройство для ее фиксации. По-
садка клети на приемных площадках осуществляется на качающиеся площадки (в систе-
мах подъема со шкивами трения), кулаки и брусья, служащие для состыковки рельсовой
колеи (магистральной и клетевой). В отечественной практике клети одноканатных подъе-
мов в обязательном порядке оснащаются парашютными устройствами, срабатывающими
при обрыве головного каната. В этом экстремальном случае происходит захват специаль-
ных ловителей за тормозные канаты, на которых и зависает клеть. В зарубежной практике
подобные устройства не применяются.
На рис. 18.8 схематически изображена конструкция неопрокидной двухэтажной клети с
двусторонним расположением проводников. Здесь цифрами обозначено: 1 — головной ка-
нат, 2 — несущая балка подвески клети, 3 — прицеп-
ное устройство, 4 — тяга подвесного устройства, 5 —
траверса, 6 — шток ловителя, 7 — ловитель, 8 — ог-
раждения смотровой площадки, 9 — крыша клети, 10
— муфта скольжения тормозного каната, 11 — направ-
ляющий башмак, 12 — обвязочный пояс, 13 — двери,
14 — этажные перекрытия, 15 — элементы каркаса
клети, 16 — тормозной канат.
Срабатывание ловителя 7 происходит, как было
сказано выше, при обрыве головного каната 1 или при
его напуске при застревании опускающейся клети. При
этом клеть зависает на двух тормозных канатах 16. На-
правляющие устройства 11 размещаются на верхнем и
нижнем обвязочных поясах 12.
Эти клети различаются числом этажей, размера-
ми в плане и по высоте, типом и расположением про-
водников и направляющих устройств, парашютных и
подвесных устройств, типом и размерами транспорти-
руемых в них вагонеток, стопорами, конструктивным
исполнением несущего каркаса.
В табл. 18.1 помещены технические характерис-
тики унифицированных неопрокидных клетей одно-
канатного подъема (в соответствии с типажом), из-
готавливаемых в настоящее время для действующих
и реконструируемых шахт. Шифр, принятый типажом
для унифицированных клетей, обозначает: буквен-
ный индекс «УКН» — унифицированную клеть нео-
прокидную; буквенный индекс «УКО» — унифици-
рованную клеть опрокидную; цифра слева от буквен-
ного индекса — этажность клети (кроме клети
Рис. 18.8. Схема двухэтажной
клети
ЗУКН4.5-3); цифра справа от буквенного индекса — длину клети, к; цифра справа через
дефис — тип и расположение проводников.
В табл. 18.2 приведены технические характеристики неопрокидных клетей параметри-
ческого ряда при одноканатном подъеме, в таблице 18.3 — при многоканатном подъеме, а в
табл. 18.4 — опрокидные клети.
Шифр клетей параметрического ряда: буквенный индекс «КН» — клеть неопрокидная,
цифра слева от буквенного индекса — этажность, цифра справа от буквенного обозначе-
ния — длина клети, м, цифра справа через дефис — тип подъема (1 — одноканатный, 2 —
многоканатный).
Все рассмотренные выше клети по технологии изготовления являются клепанными.
Клепаный каркас неопрокидной клети состоит из нескольких горизонтальных поясов
(двух для одноэтажных и трех для двухэтажных), соединенных между собой вертикальными
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
479
Таблица 18.1
Технические характеристики унифицированных неопрокидных клетей
Типоразмер клети Длина, мм Ширина в свету, мм Грузо- подъемность, т Тип проводников и их расположение Размер транспортируемых вагонеток Коэффи- циент тары
1 УКН 1,2-1 1200 830 1,5 Деревянные, двусторонние ВОК-35* 0,59
1 УКН 1,4-1 1400 970 2,3 Тоже ВГ-0,7; УВОД,5 0,48
1 УКН 1,55-1 1550 960 2,1 Тоже УВГ-0,8 УВГ-1,0 0,73
2 УКН 1,55-1 1550 960 4,2 Тоже УВГ-1,0 0,59
1 УКН 1,9-1 1900 960 2,5 Тоже УВГ-1,2 0,71
2 УКН 1,9-1 1900 960 5,0 Тоже УВГ-1,2 0,54
1 УКН 1,9-2 1900 960 2,5 Рельсовые, двусторонние УВГ-1,2 0,88
2 УКН 1,9-2 1900 960 5,0 Тоже УВГ-1,2 0,67
1 УКН 2-1 2000 1320 4,0 Деревянные, двусторонние ВГ-1,2 УВОД,8 0,47
1 УКН 2-2 2000 1320 4,0 Рельсовые, двусторонние УВОД,8 0,50
1 УКН 2,5-1 2500 1320 4,0 Деревянные, двусторонние ВГ-1,2 УВО-1,0 0,51
1 УКН 2,5-2 2500 1320 4,0 Рельсовые, двусторонние УВО-1,0 0,55
1 УКН 2,55-1 2550 1020 3,0 Деревянные, двусторонние УВГ-1,3 0,89
2 УКН 2,55-1 2550 1020 6,0 Деревянные, двусторонние УВГ-1,4 0,68
1 УКН 2,55-2 2550 1020 3,0 Рельсовые, двусторонние УВГ-1,4 0,92
2 УКН 2,55-2 2550 1020 6,0 Тоже УВГ-1,4 0,69
1 УКН 2,55-3 2550 1020 3,0 Рельсовые, односторонние УВГ-1,4 0,94
2 УКН 2,55-3 2550 1020 6,0 Тоже УВГ-1,3 УВГ-1,4 0,67
1 УКН 2,8-1 2800 1336 4,0 Деревянные, двусторонние ВГ-1,2; УВО-1,0 0,97
1 УКН 3-1 3000 1336 4,0 Тоже УВО-1,0 1,01
1 УКН 3,1-1 3100 1370 7,0 Тоже ВГ-1,2; ВГ-2,2 0,54
1 УКН 3,1-2 3100 1370 7,0 Рельсовые, двусторонние ВГ-1,2; ВГ-2,2 0,54
1 УКН 3,2-1 3200 1456 9,9 Деревянные, двусторонние ВГ-2,2; УВГ-1,6 0,52
2 УКН 3,2-1 3200 1456 7,8 Тоже УВГ-1,6; ВГ-2,2 0,91
1 УКН 3,3-2 3300 1000 3,6 Рельсовые, двусторонние УГВ-1,6 0,83
2 УКН 3,3-2 3300 1000 7,2 Тоже УГВ-1,6 0,73
1 УКН 3,3-3 3300 1000 3,6 Рельсовые, односторонние УГВ-1,6 0,81
2 УКН 3,3-3 3300 1000 7,2 Тоже УГВ-1,6 0,71
1 УКН 3,5-1 3500 1675 9,0 Деревянные, двусторонние УВБ-2,5 0,67
1 УКН 3,5-1 3500 1340 7,0 Тоже ВГ-2,2 0,72
2 УКН 3,5-1 3500 1340 14,0 Деревянные, двусторонние ВГ-2,2 0,61
1 УКН 3,6-1 3600 1400 5,2 Тоже УВГ-2,5 0,74
2 УКН 3,6-1 3600 1400 10,4 « УВД-2,5 0,64
1 УКН 3,6-2 3600 1400 5,2 Рельсовые, двусторонние УВД-2,5 0,74
2 УКН 3,6-2 3600 1400 10,4 Тоже УВД-2,5 0,63
1 УКН 3,6-3 3600 1400 5,2 Рельсовые, односторонние УВД-2,5 0,74
2 УКН 3,6-3 3600 1400 10,4 Тоже УВД-2,5 0,68
1 УКН 3,7-3 3700 1456 7,5 « ВГ-2,5 0,90
2 УКН 3,7-3 3700 1456 7,5 Рельсовые, односторонние УВБ-1,6 1,15
1 УКН 4-1 4000 1476 6,6 Деревянные, двусторонние ВГ-2,5 0,71
2 УКН 4-1 4000 1476 13,2 Тоже УВБ-1,6 0,66
1 УКН 4-1 4000 1476 6,6 Рельсовые, двусторонние УВГ-3,3 0,71
2 УКН 4-2 4000 1476 13,2 Тоже УВГ-3,3 0,66
1 УКН 4-3 4000 1476 6,6 Рельсовые, односторонние УВГ-3,3 0,76
2 УКН 4-3 4000 1476 13,2 Тоже УВГ-3,3 0,65
1 УКН 4,5-3 4500 1550 13,0 « ВГ-4,0у; ВГ-3,3 0,65
2 УКН 4,5-3 4500 1550 13,2 « ВГ-3,3 0,9
3 УКН 4,5-3 4500 1500 10,0 Рельсовые, односторонние ВГ-4,0у; ВГ-2,2 и две ВГ-1,2 0,54
’Существующая вагонетка, не предусмотренная типажом вагонеток
480
ГЛАВА 18
Таблица 18.2
Технические характеристики неопрокидных клетей при одноканатном подъеме
Типоразмер клети Длина, мм Ширина в свету, мм Грузо- подъемность, т Тип проводников Размер транспортируемых вагонеток
2 КН 3,1-1 3100 1370 8,0 Металличес- кие, жесткие и деревянные ВГ-1,2
1 КН 3,6-1 3600 1400 5,5 Металличес- кие, жесткие и канатные УВГ-2,5 УВД-2,5
2 КН 3,6-1 3600 1400 11,5 То же УВД-2,5
1 КН 3,6-3 3600 1400 7,0 То же ВГ-2,2
2 КН 3,6-3 3600 1400 14,0 1КН5,2-1 5200 1650 13,0 То же ВД-5,6, ВГ-4,0, УВГ-3,3, УВГ-2,5, ВГ-4,0у
1 КН 4-1 4000 1500 9,0 2КН5.2-1 5200 1650 13,0 То же ВГ-4,0у
2 КН 4-1 4000 1500 11,0 То же УВГ-3,3, вгчо, УВД-3,3, ВД-4,0
1 КН 4,5-1 4500 1500 13,0 Металличес- кие, жесткие и канатные ВГ-4,0у, ВГ-2,2 и две ВГ-1,2
2 КН 4,5-1 4500 1500 14,0 То же ВГ-2,2 и две ВГ-1,2
Таблица 18.3
Технические характеристики неопрокидных клетей при многоканатном подъеме
Типоразмер клети Размер в плане, мм Этажность Типоразмер транспортируемых вагонеток
длина ширина
2 КН 3,6-2 3600 1400 2 УВГ-2,5
1 КН 4-2 4000 1500 1 ВГ-2,2
2 КН 4-2 4000 1500 2 ВД-40,0
1 КН 4,5-2 4500 1500 1 ВД-40,0
2 КН 4,5-2 4500 1500 2 ВД-40,0
1 КН 5,2-2 5200 1650 1 ВД-40,0
2 КН 5,2-2 5200 1650 2 ВД-40,0
Таблица 18.4
Технические характеристики опрокидных клетей
Параметры Типоразмер клети
УКО 2,55-1 УКО 2,55-2 УКО 3,6-1 УКО 3,6-2 УКО 4-1 УКО 4-2
Гру зоподьемность, т, не более 2,9 2,9 5,2 5,2 6,5 6,5
Тип проводника Деревянный Метали- ческий Деревян- ный Метали- ческий Дере- вянный Метали- ческий
Основные размеры, мм Длина 2550 2550 3600 3600 4000 4000
Ширина 1004 1004 1384 1384 1468 1468
Высота 6260 6260 7130 7130 7760 7760
Масса, т, не более 4,5 4,5 6,5 6,5 8,0 8,0
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
481
стойками и раскосками. Средний и нижний пояса представляют собой плоскую замкнутую
раму, выполненную из гнутого швеллера и усиленную полосами и косынками в местах изги-
бов по углам. Стойки выполнены из уголков и швеллеров и располагаются по четыре с каж-
дой боковой стороны клети. Угловые стойки приклепываются к косынкам рам, а средние —
в местах, соответствующих расположению колес вагонеток. Боковые стороны клетей обши-
ваются перфорированной листовой сталью, а торцовые стороны оборудуются съемными две-
рями. Рамы горизонтальных поясов, за исключением верхней, покрываются листовой ста-
лью и служат полом для каждого этажа клети. На полу закреплены рельсы и стопоры. Рама
верхнего пояса покрыта крышей и снабжена несущими поперечными балками, к которым
присоединены подвесное и парашютное устройства. Направляющие устройства размещают
на обвязочных поясах согласно расположению проводников.
Крыша клети состоит из трех частей, каждая из которых в случае необходимости легко снимает-
ся. Загнутые к низу края крыши исключают возможность попадания воды в клеть. Средняя часть
крыши снимается, когда требуется произвести замену пружины парашюта. Крайние части крыши
снимаются при спуске длинномерных материалов. Предусмотренный горизонтальный полок на край-
них частях крыши создает удобство обслуживания и осмотра парашюта, подвесного устройства и
армировки ствола. Части крыши удерживаются на клети с помощью специально предусмотренных
угольников, которые при движении клети по стволу не позволяют им смещаться в сторону.
В унифицированных клетях в качестве материала для крыши и дверей рекомендовалось
применение дюралюминия, позволяющий уменьшить массу клети вдвое в сравнении со сталью.
На крыше клети установлено ограждение, предохраняющее людей, находящихся там при осмот-
ре подвесного устройства и армировки ствола. К поперечным балкам нижнего обвязочного по-
яса присоединено подвесное устройство уравновешивающих канатов. Неопрокидным клетям при-
сущи следующие недостатки. Имеет место ограниченная возможность увеличения полезной на-
грузки, так как это определяется типоразмером вагонетки. Увеличение же числа вагонеток, раз-
мещаемых в клети, приводит к увеличению сечения ствола или числа этажей клети. Последнее
приводит к сложным маневрам подъемной установкой в периоды погрузочно-разгрузочных опе-
раций, а, следовательно, к неоправданным непроизводительным затратам времени. Кроме того,
по сравнению со скиповым подъемом, требуется оборудовать приемные площадки сложной си-
стемой откатки и специальным оборудованием обмена вагонеток.
С введением в действие унифицированных клетей (согласно типажу) отпадает существо-
вавший традиционный недостаток неопрокидных клетей по сравнению со скипами — более
Рис. 18.9. Общий вид опрокидной
клети для рельсовых проводников
двустороннего расположения
с парашютом ТК (а) и схема
разгрузки в кривых копра (б)
высокий коэффициент тары. Прежде он составлял для
клетей 1,6—2,5 и для скипов 0,7—1,2. В настоящее вре-
мя расхождение в коэффициенте тары сглажено, и он
составляет для унифицированных клетей 0,85—1,3, а
для типажных скипов 0,65—1,2.
Опрокидные клети. Металлоконструкция опрокид-
ной клети (рис. 18.9) состоит из двух частей: вертикаль-
ной рамы с нижним несущим поясом и опрокидываю-
щейся платформы, на которой размещается вагонетка.
Опрокидывающаяся платформа соединена с рамой
при помощи горизонтальной оси, смещенной по отно-
шению к раме. Рама клети состоит из двух вертикаль-
ных профильных стоек. В них по обеим сторонам поме-
щены направляющие устройства (башмаки). Вертикаль-
ные стойки рамы в нижней и верхней частях соединены
поперечными балками из швеллеров, образующих жест-
кую конструкцию. К верхней поперечной балке рамы
прикреплены элементы крыши, подвесное и парашют-
ное устройства. Опрокидывающаяся платформа пред-
ставляет собой каркас, состоящий из горизонтальной
рамы и боковых стенок, склепанных из швеллеров и
уголков, обшитых перфорированной листовой сталью.
В верхней части по обеим сторонам боковых стенок рас-
положены разгрузочные ролики. Горизонтальная рама
482
ГЛАВА 18
Рис. 18.10. Общий вид неопрокидной
двухэтажной клети для рельсовых
проводников двустороннего расположения
с парашютом ПТКА:
1 — подвесное устройство с коушем типа КРГ;
2 — ловитель парашюта; 3 — тормозной канат;
4 — несущий каркас; 5 — направляющий башмак
платформы перекрыта металлическим лис-
том, образующим пол, на котором установ-
лены рельсы для вагонетки и стопоры. На
торцовые стороны опрокидывающейся плат-
формы навешены съемные двери. Опрокид-
ная клеть в околоствольном дворе загружа-
ется вагонеткой так же, как и неопрокидная,
а разгружается на поверхности автоматичес-
ки при помощи разгрузочных кривых, уста-
новленных на копре.
Разгрузочные ролики клети входят в раз-
грузочные кривые, и при этом опрокидыва-
ющаяся платформа с находящейся на ней ва-
гонеткой поворачивается вокруг оси. До тех
пор, пока центр тяжести опрокидной плат-
формы вместе с груженой вагонеткой не пе-
реместится за вертикальную плоскость, про-
ходящую через ось вращения, разгрузочный
ролик клети будет перекатываться по кривой.
При переходе центра тяжести через указанную
плоскость разгрузочный ролик клети выходит
из кривой, и опрокидывающаяся платформа
опускается на опорные ролики копра. При
дальнейшем подъеме рамы опрокидывающа-
яся платформа, обкатывая опорные ролики,
наклоняется на угол 135°, соответствующий
полной разгрузке вагонетки.
В случае переподъема разгрузочные
ролики переходят на дополнительные кри-
вые. Опрокидным клетям свойственны все
недостатки опрокидных скипов, усугублен-
ные более неблагоприятным соотношени-
ем полезного и собственного весов. Слож-
ность
эксплуатации и отмеченные выше
несовершенства опрокидных клетей обусловливают
необходимость отказа от применения их на подъем-
ных установках новых и реконструируемых шахт.
Являясь универсальным типом подъемного сосу-
да, скипо-клети выполняют все функции шахтного
подъема без усложнения оборудования приемных пло-
щадок, которое неизбежно в случае применения кле-
тей. Конструкция скипо-клети Донгипроуглемаша по-
казана на рис. 18.11. Клетевая и скиповая части ски-
по-клети связаны общей несущей рамой. К раме при-
соединены подвесное и парашютное устройства. Клеть
предназначена как для спуска-подъема людей, так и
вагонеток с грузом, для чего снабжена рельсами и сто-
порами. Скип с донной разгрузкой и отклоняющим-
ся кузовом служит для подъема породы.
Применение скипо-клетей является, как прави-
ло, вынужденной мерой по повышению эффектив-
ности подъемной установки в сложившихся услови-
ях действующих шахт. Поэтому они не могут быть
перспективным типом подъемного сосуда для новых
высокопроизводительных шахт. Пути совершенство-
вания отечественных конструкций шахтных клетей
Рис. 18.11. Общий вид скипо-клети
конструкции Донгипроуглемаша
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
483
в ближайшие годы заключаются в полном отказе от применения опрокидных клетей вообще
и в переходе на неопрокидные клети, а также в их совершенствовании за счет перехода на
цельносварные конструкции облегченного типа с применением легких материалов и высо-
копрочных сталей с высокой абразивно-коррозионной стойкостью.
Процесс перехода от клетей клепаной конструкции к сварной происходил поэтапно по
мере изучения и обобщения Донгипроуглемашем опыта применения электросварки при из-
готовлении различных ответственных металлоконструкций. На первом этапе разрабатывал-
ся вариант сварно-клепаной конструкции клетей, т. е. пояса изготавливались клепаными, а
их соединения со стойками выполнялось с помощью электросварки, и наоборот — пояса
сварные, а их соединения с вертикальными стойками — клепаное.
В итоге Донгипроуглемашем для спуска-подъема людей, транспортирования шахтных ваго-
неток, а также оборудования и вспомогательных материалов по вертикальным стволам шахт уголь-
ной промышленности глубиной до 1600 м со скоростью движения клети до 12 м/с были разрабо-
таны и утверждены Технические условия ТУ12.0174069-017-87 «Клети шахтные вертикальные
сварные многоканатного подъема КНМ». Клети КНМ изготавливаются одно- или двухэтажные
в 15 исполнениях для нагрузок от 500 кН до 720 кН. Снабжены они подвесными устройствами
для головных канатов типа УПБ, а для уравновешивающих канатов — УП-М. По индивидуаль-
ным заказам возможно изготовление нестандартных клетей этажностью от 1 до 3 этажей.
Технические характеристики этих клетей приведены в табл. 18.5. Серийное производ-
ство клетей начато с 1986 г. Дружковским машиностроительным заводом.
Для вертикальных одноканатных подъемов Донгипроуглемаш разработаны сварные одно-
и двухэтажные клети типа НОВ по техническим условиям ТУУ12.00174065.123-97. Клети из-
Таблица 18.5
Технические характеристики сварных клетей для многоканатного подъема
Исполнение клети Число этажей [ Ширина каркаса, мм Длина каркаса, мм Высота каркаса, мм Подвесное устройство для головных канатов Типоразмер вагонетки Масса комплекта, клети, кг Расположение проводников
тип диаметр каната
2КНМЗ,6-150 2 1400 3600 5645 ВГ-2,5 ВДК-2,5 8400 Одностороннее, рельс Р50, Р43
1КНМ4,0-90 1 3369 УПБ-500 27-42 7000 Р50, Р43
1КНМ4,0-90-01 1 7900 Лобовые коробчатые, 160x160 мм
2КНМ4,0-150 2 8700 Одностороннее, рельс Р50, Р43
2КНМ4,0-150-01 2 1500 4000 УПБ-800 33-46,5 9200 !!
2КНМ4,0-150-02 2 5645 УПБ-500 27-42 9600 Лобовые коробчатые, 160x160 мм
2КНМ4,0-150-03 УПБ-800 33-46,5 ВГ-2,5 10100 It
2КНМ4,0-150-04 2 УПБ-500 27-42 ВГ-3,3 9450 Двусторонние, коробчатые, 160x160 мм
2КНМ4,0-150-05 2 УПБ-800 33-46,5 ВД-3,3 9940 !!
1КНМ5,2-140 1 1650 3425 УПБ-500 27-42 ВДК-2,5 8100 Двусторонние Р50, Р43
2КНМ5,2-150 2 1500 12300 Лобовые коробчатые, 160x160 мм
2КНМ5,2-150-01 2 5200 12650 w
2КНМ5,2-150-02 2 1650 5780 УПБ-800 33-46,5 13100 Двустороннее, сдвоенное, коробчатое, 160x160 мм
2КНМ5,2-150-03 12250 Двустороннее, сдвоенное, канатные Ф38,5; 40,5; 45 мм
2КНМ5,2-150-04 2 1500 11900
484
ГЛАВА 18
готавливаются следующих типоразмеров: 1НОВ255-3,2; 1НОВЗЗО-З,6; 1НОВ360-6,0;
1НОВ400-6,6; 1НОВ400-9,0; 2НОВ330-7,3; 2НОВ360-11,5; 2НОВ400-13,2; 2НОВ400-15,0 и
имеют исполнения, определяемые типом и расположением направляющих. Пример услов-
ного обозначения при заказе клети одноэтажной с длиной пояса 3600 мм (360 см), грузо-
подъемностью 60 кН (6,0 т) с направляющими скольжения для рельсовых односторонних
проводников: «Клеть 1НОВ360-6,0-01 ТУУ12.00174065.123-97».
Технические характеристики сварных клетей НОВ приведены в табл. 18.6.
Таблица 18.6
Технические характеристики сварных клетей для одноканатного подъема
Обозначение клета Габаритные размеры, мм Грузоподъемность, кН, не более Количество этажей 'Гипоразмер подвесного устройства Типоразмер парашюта Масса (без парашюта и подвесного устройства), кг, не более Масса комплекта, кг не более Удельная масса, кг/ги. год. не более Тип направляющих
Типоразмер Исполнение 1 Ширина Высота Скольжения УНС Качения НКП и скольжения УНС
Для проводников
Одноэтажные клета
1НОВ255-3.2 1НОВ255-ЗД 1НОВ255-3.2-01 1НОВ255-ЗД-02 2550 1010 3045 32 1 УП6,3 ПТКА6.3 2135 4100 6,9 + —
1НОВ330-3.6 1НОВ330-3.6 1НОВЗЗО-З,6-01 3300 990 3065 36 УП12.5 ПТКА12Л 2370 5000 «3
1НОВ360-6.0 11108360-6,0 1НОВ360-6,0-01 1НОВ36ОД0-02 3600 1400 3190 60 3350 6000 5,7 + + —
1НОВ400-6.6 1НОВ400-6,6 1НОВ400-6,6-01 1НОВ400-6,6-02 4000 1460 3230 65 3600 6350 5,7 +1 + + 111 + —
1НОВ400-6,6-03 3280 УП20 ПТКА20 4200 8300 6,6
1НОВ400-9.0 1НОВ400-9.0 1НОВ400-9.0-01 1НОВ400-9.0-02 4000 1500 3240 90 3600 8050 4,2 + + +1 1 •
1НОВ400-9.0-03 4290 8950 5,0
Двухэтажные клета
2НОВ255-6.5 2НОВ255-6,5 2НОВ255-6.5-01 2НОВ255-6.5-02 2550 1010 5355 65 2 УП12,5 ПТКА12Л 3290 5950 53 + + —
2НОВЗЗО-7Д 2НОВЗЗО-7Д 2НОВЗЗО-7.2-01 3300 990 5450 72 3730 6400 5,4 + +
2НОВ360-ПЗ 2НОВ360-11,5 2HOB360-I1,5-01 2НОВ360-11,5-02 3600 1400 5520 115 УП20 ПТКА20 5620 9600 5,0 + + —
2НОВ400-13^ 2НОВ400-13.2 2НОВ400-13.2-01 2НОВ400-13,2-02 4000 1460 5710 132 УП25 ПТКА25 6060 10900 4,7 +1 + + +
2НОВ400-13^-03 5850 УПЗО ПТКА30 7160 12250 5,6
2НОВ400-15,0 2HOB400-I5.0 2НОВ400-15.0-01 2НОВ400-15,0-02 4000 1500 5710 150 УП25 ПТКА25 6280 11100 43 + 111 + 1 +1 •
2HOB4QO-15,0-03 6890 12100 4,8
Клети снабжены подвесными устройствами типа УП и парашютами ПТКА.
Полный срок службы клетей НОВ, составляет не менее 10 лет при соблюдении условий
эксплуатации, регламента технических обслуживаний и ремонтов, предусмотренных «Руко-
водством по эксплуатации». Предельным состоянием клети считается:
— потеря сечения стоек металлоконструкции по толщине полок более чем на 2,5 мм
вследствие коррозии;
— появление усталостных трещин длиной свыше 15 мм в силовых элементах металло-
конструкции (стойках, поясах) или сварных швах соединений стоек с поясами и балкой пос-
ле нормативного срока службы клети.
Клети могут комплектоваться направляющими устройствами качения НКП-260 или на-
правляющими устройствами скольжения УНС. Металлоконструкция клетей для работы с
уравновешивающими канатами и имеет нижнюю балку для установки подвесного устрой-
ства УП-М. Подвесное устройство для уравновешивающего каната должно обеспечивать
присоединение плоского уравновешивающего каната. В крыше клетей и в междуэтажном
перекрытии двухэтажных клетей предусмотрены лазы для возможности выхода людей из
нижнего этажа клети в верхний и далее на крышу в аварийных случаях. В клети предусмот-
рены скобы для возможности перемещения людей на крышу клети, а на клети ограждения и
зонты для защиты людей от воды и мелких падающих предметов.
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
485
Стыковые сварные швы при изготовлении клетей контролируются методами ультразву-
ковой дефектоскопии в соответствие с «Временной инструкцией по ультразвуковому конт-
ролю сварных соединений металлоконструкций шахтных клетей».
Таблица 18.7
Типоразмеры транспортируемых вагонеток в клетях НОВ
Типоразмер клетей Типоразмеры вагонеток Возможное сочетание
1НОВ255-3,22 НОВ255-6,5 ВГ1,3-600; ВГ1,4-600
1НОВ330-3.6 2НОВЗЗО-7.2 ВТ 1,6-600
1НОВ360-6,0 2НОВ360-11,5
1НОВ400-6,6 1НОВ400-9,0 2НОВ400-13.2 2НОВ400-15,0 ВГ2,5-900; ВГЗ,3-900 ВДЗ,3-900; ВДК2,5-900 1) ВГ2,5-900 ВДЗ,3-900 2) ВГЗ,3-900 ВДЗ,3-900 3) ВГ2,5-900 ВДЗ,3-900 ВДК2,5-900 4) ВГЗ,3-900 ВДЗ,3-900 ВДК2,5-900
В целях снижения действующих напряжений в металлоконструкциях сварной клети выби-
рают такие соединения ее элементов, которые обеспечивают невысокие коэффициенты кон-
центрации напряжений. Основные элементы поясов и поперечные балки сваривают встык. Край-
ние стойки клети в местах соединения с поясами усиливают косынками, привариваемыми встык
и вместе со стойками, ввариваемыми в пояс. Средние стойки клети вваривают в специально
выполненные пазы пояса и при необходимости усиливают привариваемыми встык косынками.
Стойки клети изготовляют из неравнобоких угольников, так как толщина их полок больше тол-
щины полок швеллеров, что позволяет выполнять швы больших размеров. Растяжки металло-
конструкций клети приваривают к косынкам и стойкам встык. Полосы растяжек соединяют
между собой планками, свариваемыми продольными швами. Поперечные швы на стойках и ра-
стяжках не допускают. Пояса клети изготавливают из гнутого листового профиля.
Для посадки клетей применяют посадочные кулаки или качающиеся площадки. На про-
межуточных горизонтах должны применяться только качающиеся площадки. Применение
на промежуточных горизонтах кулаков допускается при наличии сигнализации и блокирую-
щих устройств, связывающих работу подъемной установки с положением кулаков. При подъе-
ме и спуске людей посадочные кулаки на нижнем околоствольном дворе должны быть убра-
ны, если нет ограничителя скорости, автоматически ограничивающего скорость (не более
1,0 м/с) подхода клети к конечному положению.
Загрузку вагонеток в клеть следует производить толкателями самокатного уклона перед
клетью. Стопоры, толкатели, путевые тормоза и предохранительные решетки должны быть
сблокированы с клетью таким образом, чтобы их можно было включать только после уста-
новки клети на посадочные устройства.
Для ослабления удара при посадке клети применяют резиновые амортизаторы. После-
дние устанавливают в нижнем поясе клети в местах ее контакта с посадочными устройствами,
что смягчает удары и снижает усилия в конструкции клети при посадочных операциях. Амор-
тизаторы, деформируясь по высоте, поглощают кинетическую энергию, запасенную клетью.
Далее были также разработаны и спроектированы неопрокидные клети параметричес-
кого ряда для одноканатного подъема, предназначенные для новых и реконструируемых шахт
[18], технические характеристики которых приведены в табл. 18.8.
18.5. Противовесы
Противовесы предназначены для уравновешивания клети (скипа) в шахтном стволе. Он
обеспечивает плавность хода клети или скипа, повышает технико-экономические показате-
ли и эффективность действующих систем шахтного подъема.
486
ГЛАВА 18
Таблица 18.8
Технические характеристики неопрокидных клетей для одноканатного подъема
Типоразмер клети Длина, мм Ширина в свету, мм Грузоподъемность, т Тип проводников Тип транспортируемых вагонеток
1КН1,4-1 1400 970 2,3 Деревянные ВГ-0,7 УВО-0,5
1КН2-1 2000 1320 4,0 Деревянные и металлические ВГ-1,2 УВО-0,8
1КН2,55-1 2550 1020 3,2 Металлические, жесткие и канатные УВГ-1,3 УВГ-1,4
2КН2,5-1 2550 1020 6,5 То же ВГ-2,2
1КН3.1-1 3100 1370 7,0 Металлические, жесткие и деревянные ВГ-1,2
Противовес для одноклетьевых и односкиповых одноканатных и многоканатных подъем-
ных установок выполняется в виде металлической рамы, заполненной чугунными грузами.
При помощи подвесного устройства противовес подвешивается к одной ветви (ветвям)
подъемного каната (канатов), а к другой ветви подвешивается подъемный сосуд. Габариты в
плане противовесов должны приниматься из расчета установки на них смотровых площа-
док, имеющих площадь не менее 0,6 jw2 один из линейных размеров должен быть не менее
0,4 м и ограждение высотой не менее 1,2 м.
Кроме подвесных устройств, противовесы одноканатного подъема оснащаются парашю-
тами типа ПТКПА. Допускается эксплуатация противовесов без парашютов при условиях,
оговоренных в п. 4.1.30 ПБ [13}.
Направленное движение противовесов по стволу осуществляется по деревянным, рель-
совым или коробчатым проводникам жесткой армировки или по канатным проводникам
гибкой армировки.
18.6. Подъемные сосуды в наклонных стволах
18.6.1. Скипы в наклонных стволах
Все стволы с наклоном к горизонту в пределах 3...85° считаются наклонными. Подъем-
ные сосуды в наклонных стволах перемещаются на колесах по колее рельсового пути, уло-
женного на почве наклонной выработки. По способу разгрузки скипы подразделяются на
опрокидные и с разгрузкой через заднюю стенку кузова. По конструктивному исполнению
скип представляет собой вагонетку, установленную на колесно-рельсовой ходовой части,
включающей две колесные пары — переднюю и заднюю.
Опрокидной скип, схематически изображенный на рис. 18.12, где он для удобства пока-
зан в горизонтальном положении, состоит из кузова 1 с передними 6 и задними 8 колесными
парами 6, катящимися по рельсовому пути 5, тяги подвесного устройства 2, прицепного уст-
ройства 3, к которому присоединен канат 4. Тяга подвесного устройства соединена с задней
стенкой кузова шарнирно. Задние колеса 6, кроме ходового обода, снабжены дополнитель-
ными соосными катками 7. Кузов скипа представляет собой короб с проемом 9 в передней
стенке, через который осуществляется загрузка и выгрузка горной массы. В месте разгрузки,
кроме основного пути, имеется уширенная поднимающаяся колея разгрузочного пути (на
рисунке условно изображена кривой 10). На этом участке катки 7 задней оси, двигаясь по
дополнительным разгрузочным кривым 10, приподнимают заднюю часть кузова, а при этом
передние колеса 8 продолжают катиться по основным рельсам 5. Этим самым происходит
разгрузка скипа. В зависимости от параметров I и h разгрузочной кривой скип поворачива-
ется на заданный угол по часовой стрелке, но при этом высота h не должна превышать базу
скипа Ь, иначе произойдет отрыв передних колес от рельсов (на рис. 18.2 изображенная раз-
грузочная кривая соответствует повороту скипа на 90°).
Скип с разгрузкой через заднюю стенку кузова, схематически показанный на рис. 18.13,
состоит из кузова 1, установленного на раме 2, снабжен секторным затвором 3 с узлами по-
ворота 5 и разгрузочными роликами 4. Открывание затвора (по часовой стрелке) происходит
при наезде роликов 4 на профилированную разгрузочную кривую 14.
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
487
Рис. 18.12. Схема конструкции опрокидного скипа для наклонных стволов и выработок
Рис. 18.13. Схема конструкции скипа с секторным затвором для наклонных
стволов и выработок
К раме крепятся оси передних 11 и задних 10 колесных пар, катящихся по рельсовому
пути 13. Непосредственно к кузову с двух сторон в узлах 6 шарнирно прикреплены тяги под-
весного устройства 7, к которым шарнир-
но подсоединено прицепное устройство 8
с головным канатом 9. В таких скипах, в
отличие от опрокидных, на участке разгруз-
ки катки 12 передней оси, двигаясь по до-
полнительным разгрузочным рельсам 15,
приподнимают переднюю часть кузова, что
при открытом затворе «помогает» высыпа-
нию груза. Если угол наклона ствола пре-
вышает угол естественного откоса транс-
портируемого груза, то в установке разгру-
зочных рельсов 15 нет необходимости.
18.6.2. Клети в наклонных стволах
Такие клети, как правило, применяют-
ся для выполнения вспомогательных опера-
ций, обеспечивающих доставку людей и ва-
гонеток с материалами и оборудованием, а
также для транспортировки вагонеток с уг-
лем и породой, преимущественно в стволах
с углом наклона свыше 30°.
По конструктивному исполнению кле-
ти различаются по типу парашюта: с захва-
том за рельсы основной колеи и с захватом
Рис. 18.14. Схематическое изображение
грузолюдской клети для наклонных
стволов
488
ГЛАВА 18
за тормозной канат. По количеству этажей клети изготавливаются одно-, двух- и трехэтаж-
ными. С целью возможности размещения вагонеток в клети, сиденья для людей выполняют-
ся откидными. Пол каждого этажа выполняется горизонтальным, сообразуясь с принятым
заранее углом наклона ствола. На рис. 18.14 схематически изображена типичная конструк-
ция двухэтажной грузолюдской клети, где обозначено: 1 — кузов клети, 2 — рама, 3 — этаж-
ные перекрытия, 4 — рельсы для шахтных вагонеток, 5 — колесные пары, 6 — рельсовый
путь, 7 — прицепное устройство, 8 — головной канат.
18.6.3. Вагонетки для перевозки людей
Такие вагонетки могут использоваться как одиночные, так и в составах из головной и
нескольких прицепных [194]. Головная вагонетка имеет прицепные устройства для соедине-
ния с головным (тяговым) канатом и с прицепными вагонетками. Вагонетка состоит из ку-
зова с сиденьями для людей, ходовой части, прицепного и парашютного устройства. Сраба-
тывание парашютного устройства происходит автоматически при обрыве головного каната,
но парашют может иметь и ручной привод, приводимый в действие кондуктором.
18.6.4. Грузовые шахтные вагонетки
По конструкции и способу разгрузки вагонетки могут быть: с глухим, жестко закреп-
ленным на раме кузовом, разгружающиеся опрокидыванием; с шарнирно закрепленным на
раме кузовом и поднимающимся бортом, разгружающиеся наклоном кузова; с кузовом, име-
ющим откидные днища для разгрузки; с кузовом, имеющим откидные стенки и наклонное
днище, разгружающиеся при открывании стенок; с глухим опрокидным кузовом, разгружа-
ющиеся опрокидыванием кузова.
По емкости кузова различаются вагонетки малой (до 1,25 jw3), средней (от 1,25 jw3 до
2,8 jw3) и большой емкости (свыше 2,8 jw3). Основными элементами грузовой опрокидной ва-
гонетки, схематически изображенной на рис. 18.15, являются: рама 1, кузов 2, колесные пары
3, подвагонный упор 4, буфер 5, сцепки 6.
Рис. 18.15. Схематическое изображение шахтной вагонетки
Рама 2 представляет собой несущую часть вагонетки, на которой крепятся полускаты 3,
кузов 1, буфера 5 и сцепные устройства 6. Изготавливается из двух продольных швеллеров,
соединенных по концам буферами. Снизу к швеллерам крепятся кронштейны для осей по-
лускатов и подвагонный упор 4, взаимодействующий с кулаками толкателя.
Кузов вагонетки 1 изготавливается из стальных листов толщиной 5...6 мм при помощи
электросварки. Форма кузова выполняется такой, чтобы наиболее полно использовать габа-
риты вагонетки и обеспечить отсутствие налипания сыпучего груза. Кронштейны для осей
полускатов соединяются с рамой жестко или посредством резиновых и пружинных аморти-
заторов. Рессорная подвеска обеспечивает плавность движения вагонетки и равномерное рас-
пределение нагрузки от колес на рельсы. Обод колеса вагонетки имеет коническую форму,
что способствует самоцентрированию вагонетки в рельсовой колее при неизбежных откло-
нений ширины колеи от номинальной величины.
Буфера 5 необходимы для амортизации ударов вагонеток друг с другом и для удобства
сцепки и расцепки вагонеток. По конструкции буфера бывают жесткими и упругими за счет
установки пружин или резиновых прокладок.
Сцепные устройства 6 (сцепки) служат для соединения вагонеток в состав и передачи
тягового усилия. По способу действия сцепки делятся на простые и автоматические, а по
конструкции — на невращающиеся и вращающиеся. Автоматические сцепки, служащие од-
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
489
повременно и буферами, обеспечивают сцепление вагонеток при их столкновении, и при
этом расцепка производится вручную. Вращающиеся сцепки допускают разгрузку вагонеток
в круговых опрокидывателях без расцепки состава.
18.7. Неисправности скипов, клетей, противовесов
Техническое состояние металлоконструкций подъемных сосудов оценивается как:
— удовлетворительное, когда она отвечает фактическим нагрузкам и условиям эксплуа-
тации без проведения дополнительных работ;
— требующее восстановление эксплуатационных свойств путем устранения выявленных
недопустимых отклонений от нормы, проведения соответствующего ремонта или снижения
нагрузок и интенсивности эксплуатации;
— неудовлетворительное, когда восстановление эксплуатационных свойств невозмож-
но или экономически нецелесообразно.
Несущие металлоконструкции скипов, клетей и противовесов эксплуатируются в спе-
цифических условиях атмосферы шахтного ствола, подвергаются они также значительным
динамическим нагрузкам различного характера и в результате длительной интенсивной ра-
боты запас их статистической и усталостной прочности монотонно снижается, что может
явиться причиной усталостного разрушения металлоконструкции.
В скипах с неподвижным кузовом и секторным затвором конструкции института Сибгип-
рошахт характерной неисправностью является появление усталостных трещин в вертикальных
стойках каркаса в месте сужения нижней части кузова и примыкания сварочного соединения
стойки каркаса к нижним обвязочным поясом кузова. Это место является наибольшим концен-
тратором напряжений в металлоконструкции каркаса, и именно оно является очагом зарожде-
ния усталостной трещины под воздействием значительных динамических нагрузок при движе-
нии скипа по проводникам с пере-
менной жесткостью и нарушенной
прямолинейностью и, особенно
при взаимодействии секторного
затвора с разгрузочными кривыми.
Неисправности такого характе-
ра, приведшие к аварии или дли-
тельному перерыву в работе под ъем-
ной установки, имели место на шах-
те «Центральная» ПО «Красноар-
мейскуголь», шахтах «Южнодонбас-
ская № 1», «Южнодонбасская № 3»
и им. Е. Т. Абакумова ПО «Донецк-
уголь», шахте «Шахтерская-Глубо-
кая» ПО «Шахтерскантрацит» (Ук-
раина), шахте «Обуховская» ПО «Гу-
ковуголь» (Российская Федерация)
и др. Устранение подобных аварий
производилось путем замены скипа
на новый или же ремонта и усиле-
ния его рамы и кузова непосред-
ственно в шахтных условиях. Суть
такого ремонта заключается в увели-
чении жесткости нижней части ски-
па путем приварки дополнительных
уголков к существующим уголкам
стоек рамы и приварки к нижней
части кузова. Один из вариантов та-
кого ремонта представлен на рис.
18.16 применительно к угольному
неопрокидному скипу.
А — А
Рис. 18.16. Усиление скипа при ремонте
490
ГЛАВА 18
Второй довольно часто встречающейся неисправностью скипа является выпучивание
оболочки кузова вследствие потери сечения листов металла из-за коррозионного и абразив-
ного износа. Такие явления имели место на угольных скипах шахты «Новодонецкая» ПО
«Добропольеуголь», шахты им. М.И. Калинина ПО «Артемуголь» и др. При возникновении
таких неисправностей производится замена скипа на новый. В случае отсутствия нового скипа
на шахте временно, до приобретения нового, производят ремонт существующего скипа пу-
тем вырезания деформированных листов кузова и наварки новых листов.
Характерной неисправностью большегрузных скипов многоканатного подъема является
также отказ в работе роликовых направляющих устройств типа НКП вследствие заклинивания
подшипников рабочих колес. При заклинивании подшипника происходит интенсивный одно-
сторонний износ резинового бандажа роликоопоры и в итоге она превращается в своего рода
лыжу. При этом уменьшаются кинематические зазоры между контактными поверхностями ко-
робчатого проводника армировки и рабочими поверхностями предохранительного башмака
скольжения скипа. В результате происходит интенсивный износ коробчатого проводника и, ко-
торые согласно ПБ подлежат замене при износе на одну сторону свыше половины толщины его
стенки, толщина которой в зависимости от типоразмера проводника составляет всего лишь от
10 мм до 16 мм. Таким образом, при износе стенки проводника на 5—8 мм последний подлежит
замене, что связано со значительными материальными затратами и вывода на некоторое время
подъема из эксплуатации. Более того, сверхнормативный износ коробчатого проводника может
привести к его раскрытию и разрушению, если износу подвергается сварной шов. Следователь-
но, в целях предотвращения этого требуется проводить своевременное и квалифицированное
техническое обслуживание скипов и их направляющих устройств качения.
Одной из наиболее опасных аварий при работе подъемной установки — заклинивание
скипа в разгрузочных кривых. Чаще всего это происходит вследствие попадания в скип по-
сторонних негабаритных предметов, способных помешать закрытию затвора при выходе скипа
из кривых. Известны случаи, когда по этой причине происходил обрыв кривой и падение ее
в ствол. Последствия такой аварии связаны со значительными экономическими потерями.
Выход скипа из кривых может произойти также вследствие заклинивания направляющих
роликов, больших износов подшипников и оси вращения, износа проводников сверх нормы в
зоне разгрузочных кривых. Для предупреждения аварий подобного рода необходимо: ежесу-
точно проверять работу затвора скипа; состояние разгрузочных кривых; разработать меропри-
ятия по предупреждению попадания негабаритных предметов в кузов скипа; в зимнее время
систематически очищать ото льда разгрузочные кривые и проводники; регулярно очищать и
менять полосы разгрузочных кривых (отклонение уровня их установки не должно превышать
10 мм); после замены проводников, направляющих опор и роликов, а также замены кривых
проверять движение скипа в разгрузочных кривых; при замене кривых проверять их выставку
с привлечением маркшейдерской службы шахты. Необходимо также предусматривать отбой-
ные элементы, воспринимающие первый удар потока загружаемой горной массы.
В практике эксплуатации клетей имели место случаи усталостного разрушения проушин
верхней балки для присоединения подвесных устройств.
Долговечность подъемных сосудов зависит от целого ряда факторов конструктивного,
технологического и эксплуатационного характера. К эксплуатационным факторам относят-
ся: обводненность шахтного ствола, интенсивность работы подъема, тип посадочных уст-
ройств приемных площадок, динамичность процессов нагружения сосуда.
Клети, скипы и противовесы угольных шахт эксплуатируются в вертикальных стволах с
высокой обводненностью. Основным поставщиком шахтных вод в ствол являются водонос-
ные горизонты, содержащие межпластовые воды. Вследствие содержания серной и соляной
кислот, сульфатов железа и аммония шахтная вода является сильным электролитом, в кото-
ром коррозионные процессы идут активно и носят явно выраженный электролитический
характер. Под влиянием шахтных вод и атмосферы шахтного ствола металлоконструкция
шахтного сосуда подвергается интенсивной коррозии, что приводит к потере сечения несу-
щих элементов. Особенно агрессивной является шахтная вода с кислой средой (PH <7).
Считается, что при потере сечения несущих элементов металлоконструкции подъемных
сосудов свыше 20 % требуется выполнить проверочный расчет сосуда на прочность [163].
При нормальных условиях эксплуатации подъемного сосуда из всех процессов его нагруже-
ния, таких как разгон и торможение в нормальном режиме работы, экстренное торможение,
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
491
колебание сосуда на упругом канате при движении по стволу, улавливание клети парашютом
в случае обрыва головного каната наиболее опасным является посадка на кулаки. В резуль-
тате изменения в момент посадки на кулаки величины и направления усилий, действующих
на раму клети при движении по стволу, напряжения в несущих элементах изменяются не
только в значительных пределах по величине, но и по знаку. Процесс посадки клети на кула-
ки характеризуется возникновением нагрузок в ее несущих элементах. Величина динамичес-
ких нагрузок зависит от скорости движения клети в момент посадки, от амортизационных
свойств посадочных устройств, от поддерживающего влияния головного каната.
Коррозионная среда, которой является шахтная вода и общая атмосфера шахтного ство-
ла, при одновременном воздействии с циклическими нагрузками не только уменьшает сече-
ния несущих элементов сосуда за счет статической коррозии, но и снижает их пределы вы-
носливости. Наличие всех перечисленных факторов определяет коррозионно-усталостную
долговечность несущих элементов рамы сосуда, а также их сварных и клепаных соединений.
Несущая рама подъемного сосуда, в частности клети, представляет собой сложную ста-
тически неопределимую конструкцию с высокой степенью неопределимости. В стержневых
статически неопределимых конструкциях исключение из работы вследствие разрушения од-
ного или нескольких несущих элементов не приводит к потере несущей способности систе-
мы в целом. Происходит обязательное перераспределение нагрузки между недеформирован-
ными элементами. Нагрузка в них несколько увеличивается, однако работоспособность не
теряется. Для стержневой системы опасным будет такое состояние, при котором вследствие
текучести в одном или ряде сечений появляются пластические шарниры, конструкция теря-
ет несущую способность и превращается в отдельный механизм.
Учитывая вышеизложенное, можно утверждать, что появление трещин в одном из свар-
ных или клепаных соединений и даже полное разрушение сварного шва или заклепки не при-
водит к потере несущей способности рамы клети. Выполненный Донгипроуглемашем расчет
несущей способности клети показал, что даже при исключении из работы наиболее нагружен-
ного и ответственного узла (соединение боковой стойки с нижним поясом), клеть может рабо-
тать еще продолжительное время. Напряжения в наиболее нагруженном сечении нижнего по-
яса значительно возрастают, но они не превышают предела текучести материала. При таких
значениях напряжений клеть сможет работать еще несколько тысяч циклов, пока накопление
усталостных повреждений не приведет к разрушению несущих элементов.
Расчет клети на коррозионно-усталостную долговечность может быть выполнен по ме-
тодике Донгипроуглемаша [162]. В этой методике рассмотрен вероятностный аспект расчета
долговечности клети, что позволяет оценивать долговечность, как существующих клетей, так
и клетей на стадии их создания. Для установления долговечности клети с вероятностной
оценкой необходимо знать вероятностные оценки исходных данных, определяющих эксплу-
атационные факторы, прочность и нагруженность ее несущих элементов. Уровень вероятно-
сти при определении ограниченной долговечности клети принят 0,95. Все факторы, опреде-
ляющие ограниченную долговечность клети, должны соответствовать этому же уровню.
Для установления вероятностных оценок факторов, определяющих долговечность кле-
ти, должны рассматриваться статистические данные клетей аналогичного типа, собранные
по многим шахтам, а также данные, полученные при проведении теоретических и экспери-
ментальных исследований. Методика вероятностной оценки долговечности клетей позволя-
ет, исходя из нагруженности клети, по значениям максимальных расчетных напряжений оп-
ределить с требуемой вероятностью ее срок службы.
Применение данного метода расчета во многих случаях не представляется возможным в
связи с отсутствием необходимых статистических данных. Тем не менее, на основании уже
выполненных расчетов клетей типа 1НОК, 1НОВ, КНМ и других следует вывод, что наибо-
лее нагруженными стержнями несущей рамы являются средние поперечные балки нижнего
пояса клети. Нагруженность остальных несущих стержней рамы клети (стойки, растяжки,
верхний пояс) значительно ниже по сравнению с участками нижнего пояса.
В случае необходимости оперативной оценки технического состояния подъемного со-
суда, коррозионный износ несущих элементов рамы которого достиг предельного значения
(20 %), оценка возможности дальнейшей эксплуатации его может быть выполнена согласно
рекомендациям [164], которыми руководствовались проектные организации при расчете ски-
пов и противовесов до выхода «Методики вероятностной оценки...» [162]. При этом задачей
492
ГЛАВА IS
расчета является проверка прочности на максимальную нагрузку элементов рамы скипа,
противовеса и сварных соединений в соответствии с условием их нагружения и принятым
материалом, а также проверка стоек рамы на выносливость.
Условиями расчета являются:
— материал рамы сосуда или противовеса с механическими свойствами по пределу те-
кучести а и пределу прочности сгв;
— расчет верхней балки сосуда производится на максимальную статическую нагрузку из
условия десятикратного запаса прочности по отношению к временному сопротивлению ма-
териала для противовесов и клетей грузового подъема и тринадцатикратного запаса прочно-
сти по отношению к массе максимального количества спускаемых людей;
— расчет нижней балки сосуда, к которой крепятся подвесные устройства для уравнове-
шивающих канатов, производится на максимальную статическую нагрузку головных канатов
с шестикратным запасом прочности по отношению к временному сопротивлению материала;
— расчет стоек сосуда на выносливость производится с запасом прочности равным 1,5;
— все остальные элементы сосуда проверяются на максимально возможные нагрузки, кото-
рые могут в них возникнуть по пределу текучести материала с запасом прочности равным 1,5.
Исходными данными для расчета являются: чертеж подъемного сосуда (противовеса); чер-
тежи схемы подъема; чертеж сечения ствола; масса сосуда (противовеса); масса уравновешиваю-
щих канатов; концевая нагрузка на головные канаты сосуда (противовеса); масса подвесного
устройства уравновешивающих канатов. При расчете верхней балки сварной конструкции по
известной концевой нагрузке, составляется расчетная схема, строится эпюра изгибающих мо-
ментов, определяются максимальные напряжения изгиба и определяется запас прочности
°в
п —
&изг.
(18.7.1)
где ов — предел прочности стали. Как правило, для типовых клетей сварной конструкции
запас прочности балки существенно превышает нормативный запас.
Производится также проверка сварных швов, соединяющих элементы балки и ультра-
звуковой контроль сварных швов (рис. 18.17).
Напряжение в сварном шве определяется по формуле
(18.7.2)
Рис. 18.17. Способы
прозвучивания сварных
соединений:
а — прямым лучом;
б — однократно отраженным
лучом; в — способ прозвучива-
ния разнотолщинных сварных
соединений
где N — усилие в точке присоединения каната; Ли — толщи-
на таврового шва; /} = 0,7 — коэффициент, характеризую-
щий условия сварки; 1ш — длина шва.
Далее расчет производится по обычной схеме, т. е. оп-
ределяется максимальный изгибающий момент напряжения
изгиба и запас прочности сварного шва, значение которого
для реальных типовых конструкций клетей составляет, как
правило, не менее 14.
Расчет нижней балки ведется аналогично.
Расчет вертикальных стоек рамы производится в следу-
ющей последовательности:
1. Определяется расчетная нагрузка Qt:
Ql = (G» +Qy_K-Q„,jKd, (18.7.3)
где Qc — масса сосуда; Q — масса уравновешивающих кана-
тов; Q„y — масса подвесного устройства головных канатов; Кд —
коэффициент динамичности, учитывающий динамические на-
грузки, возникающие при предохранительном торможении
Кд=--2+\, (18.7.4)
g
ПОДЪЕМНЫЕ СОСУДЫ ВЕРТИКАЛЬНЫХ И НАКЛОННЫХ СТВОЛОВ
493
где g — ускорение свободного падения; q — реальное замедление подъемной машины при
предохранительном торможении (берется из отчета по ревизии и наладке подъемной уста-
новки);
2. Определяется нагрузка на одну стойку:
(18.7.5)
п
где п — количество стоек рамы сосуда.
3. Определяется напряжение разрыва в стойке:
(18.7.6)
"ст
где F — сечение стойки.
4. Запас прочности стойки на разрыв:
« = ^->1,5, (18.7.7)
°р
где ит — предел текучести материала стойки. Для Ст. 3 ат = 240 Н/мм2, для стали 09Г2С
ат = 310 Н/мм2.
5. Производится расчет стоек на выносливость по нагрузкам, соответствующим нагруз-
кам Q2 и Q3 из условия, что
<7ip<[ct2J, (18.7.8)
где сг1р — напряжение в стойке с учетом коэффициента динамичности;
ст1, = -=-> (18.7.9)
п*ст
Нагрузка Q2 определяется из выражения
Q2={Qc-Qy.^Kd, (18.7.10)
где Кд — коэффициент динамичности при работе сосуда (противовеса); ^=1,2; Qc — масса
сосуда; Qny — масса подвесного устройства головных канатов;
Нагрузка Q3 определяется из выражения
Qi=(Qc+Qy.K-Qn.y.)Kd, (18.7.11)
где Qny — масса подвесного устройства уравновешивающих канатов.
Допускаемое напряжение для асимметричного цикла нагружения:
г_ i________'Р__________
2к1 [(1-г)£ + (1 + г)п]и’
где ff-j =0,36 Д = 0,8 — коэффициент снижения предела выносливости за счет коррозии;
к — коэффициент концентрации напряжений.
(18.7.12)
У продольного (флангового) шва в месте перехода основного металла к сварному шву
коэффициент концентрации напряжений составляет к = 4 [166]; И — коэффициент чувстви-
тельности металла асимметрии цикла нагружения; г] = 0,2 [166]; л= 1,5 — принятый запас
прочности на выносливость.
494
ГЛАВА IS
6. Проводится проверка на срез сварных швов приварки стойки к балке верхнего пояса рамы.
Для этого составляется схема крепления стойки с указанием размеров швов узла приварки.
Напряжение в сварных швах узла определяют по формуле:
(18.7.13)
(hlll+h2l2+h3l3+...+hflln)P
где Р — усилие на одну стойку; А. — высота /-го шва; I. — длина /-го шва; Д =0,7 — коэффи-
циент, принимаемый в зависимости от условий сварки.
Запас прочности
ст. 0,6
л = —--------
(18.7.14)
где <ув — предел текучести материала.
Как показали результаты расчета сварных клетей, запас прочности этих швов достаточ-
но велик и достигает 18 и более.
Глава 19
ПУТИ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ
ЭКСПЛУАТАЦИИ РЕЛЬСОВЫХ ПРОВОДНИКОВ
ЖЕСТКОЙ АРМИРОВКИ
19.1. Основные положения
19.2. Мероприятия по снижению коэффициента трения
в кинематической паре «направляющее устройство
скольжения подъемного сосуда — рельсовый проводник»
19.3. Технические решения по уменьшению давления
подъемного сосуда на проводники
19.1. Основные положения
В настоящее время на шахтах и рудниках самым распространенным видом армировки верти-
кальных стволов является жесткая, основными конструктивными элементами которой являются
проводники (рельсовые, коробчатые металлические, деревянные) и расстрелы. Для обеспечения
направленного движения подъемных сосудов и противовесов в проводниках жесткой армировки
служат направляющие устройства, которые монтируются на сосудах. По принципу взаимодей-
ствия контактных поверхностей проводников и направляющих устройств последние делятся на
направляющие устройства скольжения и направляющие устройства качения. Наиболее распрост-
раненным видом направляющих устройств для рельсовых проводников являются направляющие
устройства скольжения (башмаки), которые своими рабочими поверхностями примыкают к рель-
совому проводнику, образуя кинематическую силовую пару трения с продольной подвижностью.
Трение скольжения вызывает большие энергетические потери и значительный износ ра-
бочих поверхностей, как направляющих башмаков скольжения, так и рельсовых проводни-
ков. Известно, что величина сопротивления от трения направляющих устройств скольжения
сосуда о проводник армировки составляет около 6 % всех других сил, обуславливающих на-
тяжение каната (вес груза, вес сосуда, вес каната) [212]. Поскольку замена изношенных на-
правляющих устройств и проводников требует значительных трудовых и материальных зат-
рат, то вопрос повышения долговечности пары трения «направляющее устройство скольже-
ния — рельсовый проводник» является весьма актуальным.
Величина силы трения в каждой паре «направляющее устройство скольжения — рельсо-
вый проводник» определяется по формуле:
FK=№K, (19.1.1)
где F — сила трения; Ц — коэффициент трения скольжения; NK — усредненное по длине
вкладыша нормальное давление, действующее на направляющее устройство; к — номер на-
правляющего устройства на подъемном сосуде.
Из анализа данного выражения следует очевидный вывод, что износостойкость пары
трения может быть повышена путем уменьшения коэффициента трения д , силы NK или же
этих двух параметров одновременно. Ниже рассмотрены пути достижения поставленной цели.
19.2. Мероприятия по снижению коэффициента трения в кинематической
паре «направляющее устройство скольжения подъемного сосуда —
рельсовый проводник»
Износ рабочих поверхностей направляющих башмаков скольжения и рельсовых провод-
ников обусловлен работой сил трения скольжения, возникающих в силовой паре «направляю-
496
ГЛАВА 19
щее устройство скольжения — рельсовый проводник». Основные факторы, влияющие на тре-
ние и износ данной пары, можно условно разделить на следующие три группы: технологичес-
кие (структура, химические, физические и механические свойства материала пар трения), кон-
структивные (схема контакта, макро- и микрогеометрия поверхностей трения, геометричес-
кий фактор, конфигурация поверхностей, наличие смазки и способ ее подвода), эксплуатаци-
онные (удельная работа трения, относительная скорость скольжения, удельная нагрузка, тем-
пературный режим, смазка и ее свойства). Поэтому подход к решению задачи повышения сро-
ка службы направляющих устройств скольжения и рельсовых проводников должен быть ком-
плексным с учетом анализа всех факторов, влияющих на работу сил трения.
Известно, что трение между контактными поверхностями направляющих устройств сколь-
жения и проводников обусловлено сопротивлением движению одного тела по другому, кото-
рое объясняется следующими двумя основными причинами. Первая причина — это кинети-
ческое трение из-за наличия выступов — неровностей на поверхностях контактирующих тел и
наличия твердых частиц породы и угля в атмосфере шахтного ствола. Выступы (неровности на
поверхности тел), цепляясь друг за друга при движении сосуда по стволу, подвергаются упру-
гим или пластическим деформациям, что требует приложения соответствующих усилий. Ана-
логичным образом абразивные частицы, попадающие из атмосферы шахтного ствола в зону
трения между рабочими поверхностями натравляющего устройства и рельсового проводника,
действуют как мгновенно закрепленные тела по отношению к одной из двух поверхностей
трения, вызывая резание или царапание другой поверхности. В основе второй причины со-
противления движению одного тела по другому (даже с идеально гладкими поверхностностя-
ми) лежит микросхватывание металлов, т. е. явление местного соединения двух твердых тел,
происходящее в твердом состоянии при трении вследствие действия молекулярных сил. Для
разъединения сцепленных подобным образом поверхностей необходимо приложить значитель-
ную силу. Данный вид трения еще называют адгезионным, и он имеет место в режимах с высо-
кими скоростями скольжения или большими давлениями, в материалах низкой и средней твер-
дости, в местах местных отклонений от правильной геометрической формы.
Процесс трения направляющего устройства скольжения по рельсовому проводнику
представляет собой сложную совокупность механических, физических и физико-механи-
ческих явлений. В процессе трения под влиянием многочисленных факторов происходит
формирование поверхностных слоев контактирующих тел, т. е. именно поверхностные слои,
отличаясь специфическим структурным состоянием, обуславливают механизм трения. Сле-
довательно, для обеспечения благоприятного (с точки зрения износа) механизма трения
требуется в первую очередь обосновать и правильно решить вопрос подбора материала кон-
тактирующих тел, т. е. материал контактирующих тел должен быть таковым, чтобы в про-
цессе трения была обеспечена структура их поверхностных слоев, исключающая возник-
новение режима адгезионного трения, и до минимума снижался коэффициент трения.
Традиционный подход к выбору материала для направляющих башмаков скольжения
состоит в том, чтобы его твердость была ниже твердости рельсового проводника. Считает-
ся, что при таком подходе обеспечивается менее интенсивное изнашивание рельсового про-
водника. Поэтому башмаки скольжения или их сменные вкладыши изготавливаются из
стали низкой твердости (по сравнению с твердостью рельсового проводника). При внима-
тельном инструментальном рассмотрении изношенных поверхностей стальных вкладышей
направляющих башмаков, наряду с признаками обычного абразивного и усталостного из-
нашивания (следы резания, царапины, усталостные трещины), видны явные признаки мо-
лекулярно-механического изнашивания (следы схватывания и вырыва металла). Естествен-
но, что присутствие явления микросхватывания металлов в процессе взаимодействия на-
правляющего башмака с проводником ведет к росту силы трения и, как следствие, — до-
полнительному износу рабочих поверхностей башмака и проводника.
Вместе с тем общеизвестным является факт, что коэффициент трения (а, следователь-
но, и сила трения) уменьшается с увеличением твердости трущихся деталей. Об этом, в час-
тности, свидетельствуют данные табл. 19.1.
Исхода из изложенного выше, представляется возможным уменьшить коэффициент тре-
ния за счет существенного увеличения твердости рабочих поверхностей направляющего баш-
мака скольжения. В связи с этим возникает вопрос подбора соответствующего материала
для башмака или его сменных вкладышей.
ПУТИ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ЭКСПЛУАТАЦИИ РЕЛЬСОВЫХ ПРОВОДНИКОВ ...
497
Таблица 19.1
Значения коэффициента трения
Твердая сталь Мягкая сталь Латунь Медь Алюминий Олово Свинец
Коэффициент трения по твердой стали 0,393 0,410 0,535 0,548 0,649 0,786 1,955
Коэффициент трения металла по металлу 0,393 0,410 0,634 0,600 0,937 1,110 3,310
Твердость металла по шкале твердости НВ 5-8,5 4,5 3-4 2,5-3 2 1,8 1,5
При подборе материала для данных целей необходимо считаться с тем обстоятельством,
что поверхностный слой направляющего башмака, находящегося постоянно в контакте с
проводником и имеющего малые размеры по
сравнению с последним, может подвергаться
нагреву в отдельных локальных участках. Это
предположение подтверждается соответствую-
щими натурными экспериментами, когда пос-
ле постановки новых сменных вкладышей на
башмаки и выполнения нескольких циклов
спуска-подъема на поверхности вкладышей от-
четливо были видны локальные участки с при-
жогами металла. Как известно [213], темпера-
тура трущихся поверхностей оказывает замет-
ное влияние на коэффициент трения, а имен-
но; с ростом температуры растет и коэффици-
ент трения, причем для более мягких сталей
этот рост более значителен (рис. 19.1).
Рис. 19.1. Влияние температуры
на коэффициент трения
На рис. 19.2 представлены графики, характеризующие зависимость твердости некоторых
металлов от температуры поверхностного слоя. Из графиков следует, что твердость даже инст-
рументальных сталей резко падает с ростом температуры, а (в соответствии с выводами
табл. 19.1) это ведет к росту коэффициента трения в кинематической паре. Вместе с тем в ре-
альном диапазоне изменения температур практически остается постоянной твердость литых
твердых сплавов, а также металлокерамических сплавов. Таким образом, в качестве материала
рабочих поверхностей башмаков скольжения целесообразно применять высокотвердый сплав.
Рис. 19.2. Изменение твердости инструментальных
материалов при нагреве:
1 — твердые металлокерамические сплавы; 2 — литые
твердые сплавы; 3 — углеродистая инструментальная
сталь; 4 — быстрорежущая сталь
Среди известных высокотвердых сплавов поставленным требованиям наиболее полно от-
вечают износостойкие хромистые чугуны. Их производство освоено рядом ремонтно-механи-
ческих заводов угольной и других отраслей промышленности. Применяются они для изготов-
ления деталей, работающих в условиях интенсивного абразивного и абразивно-коррозионно-
го износа. Существенным недостатком данного материала является его хрупкость и, следова-
тельно, высокая чувствительность к нагрузкам ударно-динамического характера, Поскольку
498
ГЛАВА 19
Рис. 19.3. Направляющее устройство
скольжения:
1 — накладка правая; 2 — корпус;
3 — накладка левая; 4 — вкладыш лобовой;
5 — вкладыш боковой; 6 — гайка;
7 — шайба; 8 — болт; 9 — планка
такой вид нагрузок является типичным для
подъемных сосудов, то для предотвращения ава-
рии в случае внезапного разрушения вкладыша
при движении подъемного сосуда по стволу кон-
струкция направляющего башмака должна обес-
печивать жесткое зажатие вкладышей, исключа-
ющих их самовыпадение при разрушении.
Конструкция одного из первых вариантов
башмака скольжения, отвечающая данным тре-
бованиям, представлена на рис. 19.3. Башмак
содержит цельнолитой стальной корпус 2, ло-
бовый 4 и два боковых вкладыша 5, две наклад-
ки правые 1, две накладки левые 3 и крепеж-
ные элементы 6,7 и 8, 3 — толщина бокового
вкладыша, с — ширина головки рельса, мм.
Боковой вкладыш 5 имеет прямоугольную
форму, аналогичную форме лобового вкладыша.
Крепится он к корпусу с помощью двух прижим-
ных накладок 1 и 3, имеющих отверстие под болт.
Выступы на накладках в форме зуба, прилегая к
кромке бокового вкладыша, служат для его удер-
жания и зажатия с двух сторон. К накладкам при-
варены планки 9 для фиксации положения пос-
ледних и предотвращения перемещения боковых
вкладышей в боковом направлении. Для удержа-
ния лобового вкладыша от продольного переме-
щения боковые вкладыши имеют выступы, ко-
торые входят в пазы лобового.
Для замены вкладышей в результате их из-
носа в процессе эксплуатации необходимо осла-
бить два болта на одном торце направляющего устройства, снять боковые, а затем лобовой вкла-
дыши, поставить в обратном порядке новые и затянуть болты. Испытания данной конструкции
направляющего башмака производились на шахте им. Артема ПО «Дзержинскуголь» и на шахте
им. Костенко ПО «Карагандауголь» В результате испытаний установлено, что применение смен-
ных вкладышей из износостойкого чугуна обеспечивает существенное (в 10—20 раз) увеличение
срока их службы. Одновременно износ рельсовых проводников уменьшается примерно в 2 раза.
Кроме того, благодаря высокой твердости вкладышей происходит постепенное сглаживание ус-
тупов на стыках проводников.
В процессе эксплуатации направляющих башмаков в их конструкции был выявлен ряд не-
достатков, в частности, имели место случаи локального выкрашивания металла боковых вкла-
дышей в зоне контакта их с прижимными накладками вследствие высоких удельных давлений,
значительного объема работ по мехобработке корпуса, отсутствие возможности регулировки за-
зора между контактными поверхностями вкладышей и рельсового проводника. Данные недо-
статки были учтены при разработке последующих вариантов конструкций направляющих баш-
маков скольжения с вкладышами из износостойкого чугуна. Ниже описаны две усовершенство-
ванные конструкции направляющих башмаков скольжения открытого и полузакрытого типов.
На рис. 19.4, а изображено направляющее устройство скольжения открытого типа (вид
сбоку); на рис. 19.4, б — то же (вид сверху); на рис. 19.4, в — разрез А-А [214]. Направляю-
щий башмак шахтного подъемного сосуда содержит П-образный литой корпус 1, лобовой 2
и боковые 3 сменные вкладыши, прижимные накладки 4 и 5 соответственно для лобового и
боковых вкладышей, болты 6 и 7 для крепления указанных накладок, а также компенсирую-
щие прокладки 8, расположенные между основаниями вкладышей и корпусом.
Вкладыши 2 и 3 выполнены в виде сплошных прямолинейных брусьев, что позволяет изготав-
ливать их методом литья или порошковой металлургии из известных материалов, обладающих из-
носостойкими и антифрикционными свойствами. Вкладыш 2, расположенный на основании кор-
пуса, закрепляется с помощью болтов 6 фигурной прижимной накладкой 4, охватывающий вкла-
ПУТИ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ЭКСПЛУАТАЦИИ РЕЛЬСОВЫХ ПРОВОДНИКОВ ...499
Рис. 19.4. Направляющее
устройство скольжения
открытого типа
дыш с трех сторон. Для разгрузки болтов 6 от ударных нагрузок
при «наезде» вкладыша на уступ стыка проводника на корпусе
башмака имеются выступы 9, ограничивающие перемещение на-
кладок к вкладышам вдоль башмака. Боковые вкладыши 3 рас-
положены в гнездах корпуса и прижимаются сверху накладками
5 с помощью болтов 7. Для обеспечения надежного закрепления
вкладышей и предотвращения их самопроизвольного перемеще-
ния в направлении проводника в результате вибрации при ослаб-
лении болтов, неточного изготовления и т. п. одна из боковых гра-
ней каждого вкладыша и сопрягаемая с ней поверхность корпуса,
или прижимной накладки выполнена с наклоном так, что тол-
щина вкладыша увеличивается к его основанию. При сборке баш-
мака лобовой вкладыш 2 вместе с накладкой 4 устанавливают на
основание корпуса 1 между выступами 9 и закрепляют болтами 6.
Боковые вкладыши 3 укладывают в гнезде корпуса и зажимают
накладками 5 с помощью болтов 7.
Направляющий башмак работает следующим образом. В про-
цессе взаимодействия направляющего башмака движущегося
подъемного сосуда с проводниками происходит механический из-
нос вкладышей, в результате чего зазоры между рабочими повер-
хностями вкладышей и проводника увеличиваются. При дости-
жении максимально допустимых значений зазоры уменьшают до
первоначальных путем перемещения вкладыша в направлении
проводника на величину износа. Для перемещения бокового вкла-
дыша 3 отсоединяют болты 7, снимают прижимную накладку 5,
подвигают вкладыш и в образовавшийся зазор между его основа-
нием и корпусом устанавливают прокладку 8 (см. рис. 19.4) соот-
ветствующей толщины, устанавливают накладку на место и кре-
пят болтами. Для восстановления первоначального зазора между
лобовыми вкладышем и проводником, отсоединяют болты 6, сни-
мают накладку 4 вместе с вкладышем, устанавливают прокладку
8, ставят вкладыш вместе с накладкой на место и крепят их болтами. При максимально допусти-
мом износе вкладышей, определяемом надежностью крепления, их заменяют новыми в порядке,
описанным выше, и с удалением всех компенсирующих прокладок.
Конструкция направляющего устройства скольжения полузакрытого типа представлена
на рис. 19.5.
Направляющий башмак шахтного подъемного сосуда состоит из корпуса, выполненного из
двух секций 1, основания 2, лобового 3 и боковых 4 сменных вкладышей, упругих прокладок 5,
торцовых накладок 6 и 7 (устройства продольной фиксации вкладышей) и болтов 8, соединяю-
щих торцовые накладки с секциями корпуса. Вкладыши 3 и 4 расположены на опорах 9 в осно-
вании 2 и имеют скошенные грани для их фиксации в башмаке. Со стороны накладки 7 нахо-
дится устройство для продольной фиксации лобового вкладыша, которое выполнено в виде клина
10, упоров 11 и болта 12, удерживающего клин. Другим концом лобовой вкладыш контактирует
с прикрепленным к основанию упором 13. Одной боковой гранью он сопрягается с опорой 9
основания 2, другой — с фиксирующей пластиной 14, расположенной между вкладышем и вто-
рой опорой 9. Опора 9 и пластина 14 удерживают вкладыши от перемещения в направлении
проводника 15. Лобовой вкладыш может занимать различное положение относительно направ-
ляющей и удерживается в корпусе с помощью прокладок 16 и 17 различной толщины. Фикса-
цию лобового вкладыша в нужном положении относительно проводника осуществляют с помо-
щью нажимного винта 18. При этом нажимной винт 18 воздействует на пластину 14, а прокладка
17 отсутствует. При износе боковых вкладышей 4 между ними и секциями 1 корпуса устанавли-
вают прокладки 19, компенсирующие износ вкладышей 4.
При износе лобового вкладыша 3 и необходимости его перемещения в сторону провод-
ника откручивают болт 12, выбивают клин 10, вынимают вкладыш 3 с пластиной 14 и про-
кладкой 17. Устанавливают прокладку 16, компенсирующую износ вкладыша, вкладыш с
пластиной 14 и более тонкой прокладкой 17. При износе бокового вкладыша и необходимо-
500
ГЛАВА 19
а — общий вид; б — тот же вид сверху; в — разрез А-А; г — вариант с нажимным винтом
сти его замены или перемещения в направлении проводника откручивают болты 8, снимают
торцовую накладку 6, ослабляют болты, крепящие башмак к сосуду, и извлекают вкладыш 4
и устанавливают либо новый вкладыш, либо старый вкладыш с прокладкой 19, компенсиру-
ющий износ вкладыша. Закрепление вкладыша производят в обратном порядке.
19.3. Технические решения по уменьшению давлений подъемного сосуда
на проводники
При движении подъемного сосуда в стволе по проводникам жесткой армировки на него
воздействуют различные усилия, вызывающие линейный и угловые перемещения сосуда. Ве-
личина этих смещений зависит от соотношения усилий и их направления. Реакция проводни-
ков на смещение сосуда проявляется в виде нормальной силы, определяющей уровень работы
сил трения скольжения между направляющими башмаками и проводниками и соответственно
износ их рабочих поверхностей. Ниже рассмотрены технические решения, направленные на
уменьшение величины нормального давления подъемного сосуда на проводники.
К внешним силам, действующим на подъемный сосуд при движении его по стволу, от-
носятся: Рр обусловленная расцентровкой подъемного сосуда из-за несовпадения точки под-
вески головного каната с вертикальной осью, проходящей через центр масс сосуда; Р2 от
момента, возникающего в канате под действием растягивающей нагрузки; Р3, обусловленная
колебаниями подъемного сосуда вследствие периодического изменения жесткости армиров-
ки; Р4, обусловленная нарушением прямолинейности профиля проводников; аэродинами-
ческая сила Р5, обусловленная неравномерностью распределения скорости воздушного по-
тока по боковым сторонам подъемного сосуда; импульсная аэродинамическая сила Р6, воз-
никающая при встрече подъемных сосудов и при прохождении ими вентиляционных про-
межуточных горизонтов; сила Кориолиса Р7.
ПУТИ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ЭКСПЛУАТАЦИИ РЕЛЬСОВЫХ ПРОВОДНИКОВ ...
501
19.3.1. Центровка скипов
Рассмотрим детальнее характер проявления данных сил и технические решения по сниже-
нию их величины. В существующих конструкциях подъемных сосудов вследствие погрешностей
их проектирования и изготовления, а также несимметричности расположения груза в них, как
правило, имеет место несовпадение точки подвески головного каната с вертикальной осью, про-
ходящей через центр масс сосуда. По этой причине происходит перекос подъемного сосуда, ко-
торый компенсируется опорными реакциями проводников и направляющих устройств, что при-
водит к интенсивному механическому износу их рабочих поверхностей. Это особенно характер-
но для скипов, движущихся по проводникам одностороннего расположения.
Устранение или, по крайней мере, существенное уменьшение силы Pt может быть осу-
ществлено проведением центровки скипа, которая в условиях эксплуатационного ствола
может быть выполнена следующими способами:
— переносом точки подвески головного каната по отношению к центру масс скипа;
— изменением положения центра масс скипа по отношению к точке подвески головно-
го каната путем крепления к нему уравновешивающих грузов;
— сочетанием вышеуказанных способов.
Выбор способа центровки скипа определяется конкретными условиями, однако при этом
следует иметь в виду, что центр тяжести груженого скипа не совпадает с центром тяжести
порожнего. Оптимальным же вариантом центровки скипа является вариант, когда вызван-
ные расцентровкой опорные реакции груженого и порожнего скипа равны по величине и
противоположны по направлению (т. е. при его подъеме и спуске).
Определение величины эксцентриситета центра масс скипа по отношению к точке под-
вески головного каната производится расчетно-экспериментальным методом. Для уяснения
сути метода рассмотрим расчетные схемы отцентрированного (рис. 19.6, а) и неотцентриро-
ванного (рис. 19.6, б) скипа. Ось головного каната неотцентрированного скипа не проходит
через центр масс скипа, т. е. центр масс скипа расположен по отношению к головному кана-
ту эксцентрично с эксцентриситетом е. В результате появляется момент силы Q (Q — вес
порожнего или груженого скипа), под действием которого скип перекашивается до упора
своими направляющими устройствами в рельсовые проводники, со стороны которых на со-
суд действуют опорные реакции R, которые считаются одинаковыми по модулю, если угол
(р (рис. 19.6, б) достаточно мал. Как правило, верхние направляющие устройства упираются
в рельсовые проводники своими лобовыми поверхностями, а нижние — губками.
Рис. 19.6, а. Схема подвески отцентрированного скипа:
а — отцентрированного; б — неотцентрированного
502
ГЛАВА 19
Скип находится в равновесии под действием двух моментов — момента внешних сил и
момента сил реакции. Момент от внешних сил — это момент от эксцентрично приложенной
силы веса скипа, т. е.
Рис. 19.7. Схема измерения
опорных реакций скипа:
1 — скип; 2 — нижние
направляющие устройства;
3 — динамометр; 4 — ручная
лебедка; 5 — индикатор часового
типа; 6 — верхние направляющие
устройства; 7 — рельсовый
проводник
MQ=Q(e-8)cos<p, (19.3.2)
момент от сил реакции
MR-RHcos(p. (19.3.3)
Из условия равновесия MQ = MR имеем
Q(e-8) = RH. (19.3.4)
В данном уравнении неизвестными являются е и R,
т. е. для определения эксцентриситета скипа е необходи-
мо знать опорную реакцию R Опорная реакция R явля-
ется силой, которую необходимо приложить к скипу, что-
бы направляющие устройства потеряли контакт с провод-
никами. Данная сила определяется экспериментальным
путем для каждого конкретного случая по схеме, представ-
ленной на рис. 19.7.
Для проведения измерений нижняя рама скипа 1 с
помощью каната соединяется через динамометр 3 с руч-
ной лебедкой 4. Точка крепления каната к раме должна
располагаться посередине скипа между нижними направ-
ляющими башмаками 2. К проводникам 7 крепится рей-
ка, на которой устанавливается индикатор часового типа
5 таким образом, чтобы его наконечник упирался с уси-
лием в нижнюю раму скипа в средней ее части. Вращени-
ем рукоятки лебедки 4 к скипу плавно прикладывается
усилие до тех пор, пока не произойдет отрыв губок ниж-
них башмаков скипа от соответствующих рабочих повер-
хностей рельсовых проводников. Момент отрыва устанав-
ливается по началу движения стрелки индикатора часо-
вого типа 5. Одновременно регистрируется величина уси-
лия по шкале динамометра 3. Во избежание случайных
ошибок аналогичные измерения проводят 3—5 раз и бе-
рут среднее значение. Полученная величина усилия является искомой опорной реакций R
(она же сила Р() на нижние направляющие устройства со стороны рельсовых проводников.
Аналогично выполняются измерения для определения влияния пробного груза на вели-
чину реакций скипа. Для этого скип возвращается в исходное положение и на его нижней
раме эксцентрично относительно отвеса головного каната размещается пробный груз, масса
которого известна. Затем с помощью лебедки; динамометра и индикатора часового типа из-
меряют величину усилия отрыва губок нижних направляющих устройств от проводников.
Разность измеренных усилий характеризует влияние пробного груза на величину опорных
реакций скипа.
Величина эксцентриситета приложения нагрузки (веса порожнего или груженого ски-
па) по отношению к оси головного каната определяется из выражения (19.3.5):
+ (19.3.5)
^гр(л)
где Rip(n) — опорная реакция груженого (порожнего) скипа, определенная эксперименталь-
ным путем, Я; Н— расстояние между направляющими устройствами по вертикали, мм; Qep(n) —
груженого (порожнего) скипа, Н; 8 — зазор между рабочими поверхностями направляюще-
го устройства и рельсового проводника, мм.
ПУТИ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ЭКСПЛУАТАЦИИ РЕЛЬСОВЫХ ПРОВОДНИКОВ ...503
Экспериментальными исследованиями установлено, что в существующих конструкциях
скипов величина эксцентриситета груженого скипа меньше порожнего. Поэтому оптималь-
ные условия износа рабочих поверхностей направляющих башмаков и рельсовых проводни-
ков могут быть достигнуты при переносе подвески скипа в точку, где обеспечивается равен-
ство работы сил трения груженого и порожнего скипа, т.е. должно быть соблюдено условие
= Rn. Следовательно, ось головного канала после центровки должна проходить через точ-
ку «е», расположенную между и еп (рис. 19.8). В этом случае эксцентриситет груженого
скипа будет равен е'гр =е-егр, а порожнего — еп =еп -е •
Из формулы (19.3.4) находим
(19.3.6)
Qn(en~e~g)
(19.3.7)
Приравнивая опорные реакции груженого и порожнего скипа, с помощью (19.3.6) и
(19.3.7) с использованием (19.3.5) после несложных преобразований находим, что
Q!p(e.,p+8} + Qn(en-8} (R^rJH+IQ^S
Qzp+Qn QzP+Qn
Таким образом, при смещении точки подвески головного каната к скипу на величину е от его
прежнего положения скип будет перекашиваться при спуске и подъеме в разные стороны. При
спуске порожний скип будет контактировать с рельсовыми про-
водниками лобовыми поверхностями верхних и губками нижних
направляющих башмаков, а при подъеме груженогоскипа — на-
оборот. Тем самым будет достигаться равномерный износ всех ра-
бочих поверхностей направляющих башмаков скипа, в результа-
те чего их срок службы существенно увеличится.
Ниже в качестве примера показаны варианты техничес-
ких решений по переносу точки подвески головного каната.
На рис. 19.9 представлены традиционные схемы подвески ски-
па с коушем ККБ КД, грушевидным без переходных звеньев
и с переходными звеньями. На рис. 19.10 представлены воз-
можные варианты подвесок скипа с перекосом, точки присо-
единения головного каната на различные величины. На при-
веденных схемах величины переноса оси подвески головного
каната обозначены буквой «а» с соответствующим индексом.
Детали измененной подвески скипа должны быть рассчи-
таны на прочность в соответствии с требованием ПБ, изго-
товлены в соответствии с требованиями завода-изготовителя
подвесных устройств и проверены ультразвуковым и магни-
скипа
топорошковым методами неразрушающего контроля.
Рис. 19.9. Схемы подвески скипа:
а — без перехода звеньев, б — с переходом звеньев,
1 — щека коуша; 2 — переходное звено; 3 — валик
коуша; 4 — распорные втулки; 5 — валик скипа
504
ГЛАВА 19
а
Рис. 19.10. Варианты подвесок скипа с переносом точки присоединения головного каната
на различные величины
Далее рассмотрим способ центровки скипа изменением положения его центра масс пу-
тем закрепления на конструкции скипа уравновешивающего груза. В данном способе воз-
можны два варианта определения величины уравновешивающего груза q:
— измерение опорных реакций скипа без установки пробного груза;
— измерение опорных реакций с установкой пробного груза.
В обоих вариантах величина уравновешивающего груза определяется из условия, что он
должен оказывать такое же действие на скип, как перенос оси головного каната на величину
«е» (рис. 19.8).
Расчетные схемы для определения величины уравновешивающего груза по первому ва-
рианту представлены на рис. 19.11.
Составим уравнение моментов сил, действующих на порожний (рис. 19.11, а) и груже-
ный (рис. 19.11, б) скип:
Mn=-qa+Qnen+Qn(e-8)-, (19.3.9)
Mip=qa+Qipe,p-Qzp (е + 5).
(19.3.10)
Моменты должны быть равны по величине и противоположны по направлению, т. е.
М = Мп. После несложных преобразований с учетом выражения (19.3.5) получим вес урав-
новешивающего груза, Н, выраженную через измеренные экспериментальным путем опор-
ные реакции скипа:
Рис. 19.11. Скип, отцентрированный
дополнительным грузом:
а — порожний скип; б — груженый скип
(r^+rAh+iq-s
q=\-2_Al-------(19.3.11)
2а
Не вдаваясь в подробности преоб-
разований, приведем окончательное
выражение для определения веса урав-
новешивающего груза по второму ва-
рианту (т. е. с использованием проб-
ного груза):
(19.3.12)
2\R гр
где qnp — масса пробного груза, кг',
гДе Кр(п) - экспе-
риментально измеренные опорные ре-
акции груженого (порожнего) скипа с
пробным грузом.
Таким образом, найденная по
формулам (19.3.11) и (19.3.12) масса
ПУТИ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ЭКСПЛУАТАЦИИ РЕЛЬСОВЫХ ПРОВОДНИКОВ ...
505
уравновешивающего груза, размещенного в соответствующем месте металлоконструкции
скипа, окажет на скип действие, аналогичное смещению оси головного каната на величину
«е», т. е. скип будет перекашиваться при спуске и подъеме в разные стороны, обеспечивая
равенство опорных реакций на его направляющие устройства со стороны рельсовых провод-
ников.
Иногда по ряду технических причин не представляется возможным достичь оптимальной
центровки скипа одним из двух выше названных способов. В этом случае возможен вариант
сочетания двух способов, т. е. частичный перенос точки подвески головного каната и закрепле-
ние на конструкции скипа уравновешивающего груза соответствующей массы.
19.3.2. Действие крутящего момента каната
Рассмотрим действие на подъемный сосуд крутящего момента головного каната. Крутя-
щий момент, передаваемый на сосуд, обусловлен конструкцией каната и упругонапряжен-
ным состоянием, возникающим в канате при его изготовлении в процессе свивки проволок
и прядей. По всей глубине ствола крутящий момент, приложенный к сосуду, действует в по-
стоянном направлении и изменяется вдоль оси ствола по линейной зависимости:
M = kd\Qn+Qip^
(19.3.13)
где d — диаметр головного каната; Qn — масса сосуда; Qip — масса груза в сосуде; qr — масса
1 погонного метра головного каната; z — длина свисающего каната; к — коэффициент упру-
гой связи (к = 0,1).
Под действием крутящего момента М сосуд прижимается направляющими башмаками
к проводникам с усилием Р2, что ведет к механическому износу как башмаков, так и про-
водников. Уменьшить величину усилия Р2 можно путем обеспечения раскрутки головного
каната соответствующей растягивающей нагрузкой. Для пояснения данного положения пред-
ставим формулу (19.3.13) в виде суммы трех слагаемых:
М = М3 + М2+М3,
(19.3.14)
где Mx=kdQn — крутящий момент, обусловленный массой порожнего подъемного сосуда;
М2 =kdQ!p — крутящий момент, обусловленный массой груза в сосуде; М3 = Q,5kdqxz — кру-
тящий момент, обусловленный массой головного каната.
В общем случае эпюры изменения крутящего момента каната по глубине ствола при спус-
ке порожнего и подъеме груженого скипа соответственно представлена на рис. 19.12, а, б.
Если между головным канатом и подъемным сосудом установить вертлюжное устрой-
ство, то оно обеспечит раскрутку каната под действием растягивающей нагрузки, и момент
М в любой точке ствола будет равен нулю. Однако в настоящее время на шахтах для посто-
янной эксплуатации не применяются подвесные устройства с вертлюгами для головных ка-
натов. Поэтому в этих условиях речь может идти лишь о разовом использовании вертлюга
для осуществления частичной раскрутки каната под действием растягивающей нагрузки от
массы сосуда или груза в нем.
Практическая реализация данного технического предложения применительно к скипо-
вому подъему может быть выполнена следующим образом. На нулевой отметке ствола меж-
ду головным канатом и скипом монтируется вертлюжное устройство, производится спуск
порожнего скипа до нижней приемной площадки. При этом крутящий момент по всей глу-
бине ствола будет равен нулю. Затем на нижней приемной площадке ограничивают возмож-
ность вращения каната с помощью специальных зажимов и направляющей рамки. Теперь
при подъеме порожнего скипа вверх вследствие уменьшения растягивающей нагрузки от
массы головного каната будет наблюдаться рост крутящего момента по линейному закону,
но с обратным знаком. Эпюра изменения крутящего момента для данного случая представ-
лена на рис. 19.12, в.
На нулевой отметке ствола производится, демонтаж вертлюга при зафиксированном
канате, подвесное устройство монтируется к скипу, и лишь затем канат освобождается от
зажимов и направляющей рамки. При сравнении эпюр на рис. 19.12, а, б видно, что во
506
ГЛАВА 19
Рис. 19.12. Эпюры изменения крутящего момента каната по глубине ствола:
а — спуск порожнего скипа; б — подъем груженого скипа: в — спуск и подъем груженого скипа
с вертлюгом; г — подъем груженого скипа с вертлюгом
втором случае работа сил трения по глубине ствола будет значительно меньше. Однако
при этом крутящий момент от каната по-прежнему действует в постоянном направлении,
что будет вести к одностороннему износу направляющих башмаков и проводников. Эпюра
изменения крутящего момента каната при подъеме груженого скипа представлена на рис.
19.12, г (для случая, когда М2> М3).
Сравнивая эпюры рис. 19.12, б, г можно сделать вывод о том, что при подъеме гружено-
го скипа также достигается положительный эффект от предварительной раскрутки каната.
Таким образом, внедрение данного технического решения обеспечивает более благоприят-
ные условия работы кинематической пары трения «направляющий башмак скольжения —
рельсовый проводник», так как помимо снижения величины усилия от закрутки каната име-
ет место чередование контакта рабочих поверхностей башмака и проводника соответствен-
но при спуске порожнего и подъеме груженого скипа. В принципе же, варьируя величину
растягивающей нагрузки в зависимости от массы груза в скипе, можно достичь оптимально-
го с точки зрения работы сил трения варианта раскрутки каната.
19.3.3. Влияние параметрических колебаний
Заметную роль в формировании работы сил трения кинематической пары «башмак —
проводник» играет сила Р3, обусловленная колебаниями подъемного сосуда вследствие пе-
риодического изменения жесткости армировки. Природа возникновения данных сил состо-
ит в следующем. Движущийся подъемный сосуд вызывает упругие деформации проводни-
ков. Проводники, в свою очередь, вследствие упругости оказывают влияние на характер ко-
лебаний сосуда. Особую роль в этом играет периодическое изменение жесткости армировки,
влияние которой формально можно рассматривать как действие некоторой «возмущающей»
внешней силы F с периодом Т = 2h/V, где h — шаг армировки, а V — скорость движения
подъемного сосуда. Следовательно, наличие таких колебаний сосуда является свойством си-
стемы «сосуд-армировка», а сами колебания не являются вредными с точки зрения допол-
нительного возрастания силы трения скольжения.
Если же частота «возмущений» сил F окажется равной (или близкой) частоте собствен-
ных колебаний системы «сосуд-армировка», то в данной системе возникнут резонансные
колебания с возможностью неограниченного возрастания динамических нагрузок на арми-
ровку и силы трения в паре «башмак — проводник». Поскольку наличие таких колебаний
является нежелательным и даже опасным явлением, то требуется обеспечить работу системы
«сосуд-армировка» в заведомо дорезонансном режиме с достаточным запасом устойчивости.
Данная задача решается на стадии проектирования армировки конкретного подъема или же
в процессе эксплуатации на основании выполнения соответствующих расчетов с учетом ре-
ПУТИ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ЭКСПЛУАТАЦИИ РЕЛЬСОВЫХ ПРОВОДНИКОВ...
507
зультатов инструментального контроля фактической поте-
ри сечения металла расстрелов и проводников (см. 2.3).
19.3.4. Влияние искривления проводников
Важным фактором, влияющим на работу сил трения,
является горизонтальная сила Р4, обусловленная нарушени-
ем прямолинейности профиля проводников вследствие воз-
действия горного давления на крепь ствола, технологичес-
ких погрешностей, допущенных при монтаже армировки,
механического и коррозионного изнашивания элементов ар-
мировки, ненадежности стыковых соединений, узлов креп-
ления проводников и заделки расстрелов в крепь ствола и
ряда других причин. В частности, резкие искривления про-
водников и уступы на их стыках непосредственно возбужда-
ют и поддерживают интенсивные колебания подъемного со-
суда, создающие горизонтальные ударно-динамические на-
грузки на проводники. Плавное искривление проводников
на протяженном участке ствола приводит к возникновению
горизонтальной силы Р4, приближенно равной (рис. 19.13):
P4=|sina~|^, (19.3.15)
Рис. 19.13. Статическая
горизонтальная сила,
обусловленная нарушением
прямолинейности профиля
проводников
где Q — концевая нагрузка; а — угол.отклонения проводников от вертикали; I — длина уча-
стка ствола, на котором имеет место отклонение проводников от вертикали; Д — макси-
мальная величина отклонения проводников от вертикали.
В соответствии с «Временными указаниями по проектированию, строительству и эксп-
луатации крепи и армировки вертикальных стволов угольных шахт в условиях влияния очи-
стных работ» (1972 г.) норматив допустимого искривления в стволах, подверженных влия-
нию очистных работ, составляет у <0,005. Тогда, приняв, например, концевую нагрузку
Q = 300 кН, величина нормальной силы, действующей на проводник, составит Р4 = 750 Н.
Следовательно, сила трения будет равна
/у =ц-Р4 =0,14-750 = 105 Я, (19.3.16)
где ц = 0,14 — коэффициент трения для мокрых рельсовых проводников.
Таким образом, для уменьшения работы сил трения, обусловленных нарушением пря-
молинейности профиля проводников, необходимо в процессе эксплуатации обеспечить ин-
струментальный контроль геометрических параметров армировки и соблюдение их норма-
тивных значений.
19.3.5. Влияние аэродинамических сил
Аэродинамическая сила Р? обусловленная неравномерностью распределения скорости
воздушного потока по боковым сторонам сосуда в стволе, равна
Р5=0,5р(к12-К22)-5, (19.3.17)
где р — плотность воздуха при нормальных условиях (р = 1,2 кг/м3); Vv V2 — скорость пото-
ка воздуха между боковыми стенками сосуда и шахтного ствола; S — площадь боковой стен-
ки подъемного сосуда, м2.
Импульсная аэродинамическая сила, возникающая при встрече подъемных сосудов,
определяется по формуле:
rt=0,06sp,(v,-v,)2.
(19.3.18)
508
ГЛАВА 19
где 5 — площадь поверхности стороны подъемного сосуда, обращенной в сторону к движу-
щемуся навстречу сосуду, л/2; И — скорость подъемного сосуда; И — скорость воздушного
потока в шахтном стволе; 0т — средний коэффициент давления в зоне встречи.
Импульсная аэродинамическая сила давления воздушного потока на сосуд в зоне вен-
тиляционного канала равна:
%=0,5CpVe2S6smy, (19.3.19)
где С — коэффициент формы; S6 — площадь боковой стенки сосуда, м; у/ — угол атаки, град.
Следует отметить, что силы Р^Р^Р^ незначительные и не могут оказать существенного
влияния на износ кинематической пары «направляющий башмак — проводник».
19.3.6. Влияние кориолисового усилия
Кариолисово усилие Р7 является результатом сложного движения подъемного сосуда по
стволу. Оно состоит из движения относительно собственно ствола со скоростью Ии движения,
возникающего вследствие суточного вращения Земли с угловой скоростью ю = 2тг/24-60-60.
Кариолисово усилие направлено по касательной к параллели на восток. Величина этого уси-
лия равна:
P7=2Q(oVcos(p/g = KKQV, (19.3.20)
где со — угловая скорость; <р — географическая широта места расположения шахты; Кк = 1-105
(для широты Донбасса).
Данное усилие по величине также невелико и не играет существенной роли в формиро-
вании уровня работы сил трения.
Следует отметить, что срок службы кинематической пары трения «направляющий баш-
мак скольжения — рельсовый проводник» может быть существенно повышен за счет вне-
дрения комплекса технических решений, связанных с уменьшением коэффициента трения
между контактирующими поверхностями, а также ограничения по величине и рационально-
го распределения внешних сил, действующих со стороны подъемного сосуда на направляю-
щие проводники.
Глава 20
ОБЩИЕ ВОПРОСЫ НЕРАЗРУШАЮЩЕГО
КОНТРОЛЯ И ТЕХНИЧЕСКОЙ
ДИАГНОСТИКИ ОБОРУДОВАНИЯ
20.1. Общие понятия о механических системах,
видах нагрузок, причинах отказов и повреждений
20.2. Система неразрушающего контроля оборудования
подъемных установок
20.3. Физические основы и принципы ультразвуковой
дефектоскопии
20.4. Магнитная дефектоскопия
20.5. Капиллярная дефектоскопия
20.6. Ультразвуковая толщинометрия
20.7. Акустико-эмиссионный метод контроля
20.8. Контроль физико-механических свойств металлов
(испытание на твердость)
20.9. Контроль состояния железобетонных копров,
зданий, фундаментов
20.1. Общие понятия о механических системах, видах нагрузок,
причинах отказов и повреждений
Работоспособность шахтной подъемной установки определяется соподчиненностью всех
ее элементов, представленной в виде конструктивно-структурной системы из восьми уров-
ней сложности, приведенной в табл. 20.1.
Таблица 20.1
Структурная система шахтного подъемного комплекса
Уровень сложности структурной группы Структурная группа Элементы, составляющие структурные группы
I Подъемный комплекс ствола Полный комплект оборудования конкретного ствола (копры, подъемные машины, подъемные сосуды, подвесные устройства, парашюты и канаты, загрузка, разгрузка и приёмно-отправительные площадки, армировка ствола и т.д.)
II Целевой комплекс Подъемная установка ствола (клетевая, скиповая, аварийно-ремонтная)
III Главный агрегат Подъемная машина, армировка, копёр
IV Комплексное техническое средство Система целевого комплекса (механическое оборудование подъемной машины, электрическое оборудование подъемной машины, проводники армировки и т.д.)
V Совокупное техническое средство Орган навивки подъемной машины, тормозная система, редуктор, электродвигатель
VI Простое техническое средство Механизм перестановки, маслосистема, тормозная система
VII Узел Сборный элемент, состоящий из сопряженных деталей (шарнирный узел тормозной системы, главный вал машины и ступица барабана, подшипниковый узел)
VIII Деталь Неразборной элемент (главный вал, тормозная тяга, колодка, вал-шестерня)
510
ГЛАВА 20
В процессе эксплуатации детали и элементы оборудования подъемных установок под-
вергаются действию постоянных и переменных нагрузок. Переменные нагрузки, в свою оче-
редь, подразделяются на детерминированные и случайные. К детерминированным относят-
ся нагрузки, основные характеристики которых изменяются по известной функциональной
зависимости. Все недетерминированные виды нагрузок относятся к категории случайных и
описываются случайными функциями. Определенное сочетание прочностных свойств мате-
риалов и нагрузок может привести к появлению отказов.
Вследствие воздействия нагрузок подъемная установка и все ее элементы подвержены
физическому (материальному) изнашиванию под воздействием трения, нагрузок, среды, вре-
мени и других факторов. Физическое изнашивание обусловлено тремя категориями воздей-
ствия на детали и узлы элементов: механическим воздействием, усталостным воздействием
и воздействием в виде напряжений. Изнашивание элементов оборудования подъемной уста-
новки в пределах технических норм, не ведущее к потере ею надежности при нормальном
обслуживании в процессе безаварийности технического использования, считается естествен-
ным. Изнашивание в результате нарушения правил технического использования оборудова-
ния, в аварийных ситуациях, при наличии конструктивных и технологических дефектов,
допущенных во время проектирования, изготовления или предшествующих ремонтных ра-
бот, называется ускоренным. Оно может привести к значительным деформациям, поврежде-
ниям и разрушениям деталей, сопряженных узлов и более сложных структурных элементов
оборудования подъемных установок. Таким образом, причинами отказов оборудования
подъемных установок являются ошибки проектирования, ошибки изготовления, ошибки
эксплуатации. Типичными дефектами конструирования являются: наличие концентраторов
напряжений, ошибки в учете распределения напряжений, неправильный расчет несущей
способности, ошибки в учете эксплуатационных напряжений, неправильный выбор матери-
алов, недостаточная защищенность узлов трения и др.
К наиболее типичным дефектам технологии изготовления можно отнести: дефекты из-
за неправильного состава материала, дефекты при выплавке и изготовлении заготовок, ошиб-
ки при механической обработке (задиры, заковы, подрезы, трещины и др.), дефекты сварки,
дефекты при обработке поверхностей детали, дефекты сборки.
Основными эксплуатационными причинами отказов и повреждений являются: наруше-
ние условий применения, неправильное техническое обслуживание, наличие перегрузок и не-
предвиденных нагрузок, обусловленных нарушениями: сужение колеи проводников жесткой
армировки, влияние связанных отказов (вторичные повреждения), попадание в механизм по-
сторонних предметов (например, засоренность абразивом подшипника), влияние внешней
атмосферы и пр. Наиболее опасными являются отказы, связанные с изломом детали. Обычно
различают изломы динамические, усталостные, вызванные превышением предела прочности.
К динамическим относятся изломы, происходящие внезапно под действием перегрузок или
удара. Среди динамических изломов следует различать хрупкие изломы с крупнозернистой
поверхностью у практически недеформируемых материалов и гладкие изломы, связанные со
значительной пластической деформацией материала.
К усталостным изломам относятся изломы под действием переменных нагрузок, когда
разрушение наступает после приложения большого числа циклов нагружений. Этот вид разру-
шения является наиболее характерным для оборудования подъемных установок и наиболее
широко распространенным. Тем не менее, он еще недостаточно изучен. Неоспоримо доказан-
ным является факт, что усталостная трещина в элементах подъемных установок всегда возни-
кает в той точке металла, где отношение местного напряжения к пределу выносливости метал-
ла самое низкое. Обычно эти точки находятся на поверхности детали. Объясняется это тем,
что прочность металла по его поперечному сечению сравнительно одинакова, а максимальное
напряжение при кручении или изгибе находится в крайних волокнах.
И, наконец, изломы, вызванные превышением предела прочности, занимают среднее
положение между динамическими и усталостными. Они характеризуются большой поверх-
ностью окончательного излома, а также наличием на поверхности излома отдельных, прохо-
дящих на больших расстояниях линий разгрузки или уступов.
Анализ случаев разрушения деталей оборудования подъемных установок из-за усталос-
ти металла свидетельствует, что усталостные трещины появляются без заметной пластичес-
кой деформации. Профиль излома состоит из двух отчетливых областей: одна — гладкая и
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 511
бархатистая является усталостной зоной, вторая — грубошероховатая и кристаллическая —
зоной мгновенного разрушения. Первая область образуется в течение многих циклов. В ре-
зультате воздействия переменных нагрузок поверхности усталостной трещины сглаживают-
ся из-за трения между двумя поверхностями трещины. Та часть материала, которая разруша-
ется мгновенно, имеет грубую зернистую поверхность, так как износ между поверхностями
трещины в данном случае отсутствует.
Таким образом, одним из основных показателей работоспособности детали является
отсутствие усталостной трещины в металле детали, поэтому задача своевременного ее выяв-
ления является актуальной. Контроль несплошности металла осуществляется соответствую-
щими методами и средствами дефектоскопии.
20.2. Система неразрушающего контроля оборудования подъемных установок
20.2.1. Понятие о методе и системе контроля
Метод контроля определяет, какое физическое явление используется для контроля. Каж-
дый метод контроля одной и той же детали может быть реализован в нескольких вариантах,
например, в зависимости от частоты, чувствительности, расположения датчиков, регистрируе-
мого параметра и т.д. Объект контроля может быть проверен различными методами неразруша-
ющего контроля. Таким образом, метод контроля — это определенные принципы и средства
контроля, применяемые по определенным правилам. Применительно к оборудованию подъем-
ных установок выбор методов неразрушающего контроля диктуется ограниченностью доступа к
местам, подлежащим контролю, возможностью лишь частичной разборки изделия или его уз-
лов, крайне сжатые сроки проведения контроля и другие специфические условия.
Система контроля — это комплексная проверка объекта контроля одним методом с
разными параметрами или разными методами, т.е. система контроля — это совокупность
вариантов одного или различных методов неразрушающего контроля, используемых по оп-
ределенной программе для оценки качества конкретных объектов. При организации сис-
темы неразрушающего контроля необходимо принимать во внимание, что применение нео-
боснованно большого числа методов контроля, а также необоснованное завышение объе-
мов контроля (число деталей, подлежащих контролю, опасных сечений на них, отсутствие
критериев опасности того или иного дефекта) наносит экономический ущерб в связи с
большой потерей рабочего времени. Поэтому при одинаковой чувствительности предпоч-
тение следует отдавать методу, который проще и доступнее, требует минимальных затрат
времени на подготовку к контролю и собственно контроль, имеет более высокую досто-
верность, т.е. оптимальная система контроля должна обеспечивать максимальную техни-
ческую эффективность контроля при минимальных затратах. В такой постановке техни-
ческая эффективность оценивается через надежность контроля, т.е. вероятность непропус-
ка дефектов системой контроля.
20.2.2. Дефекты, их типы и виды
Под дефектом понимается несплошность материала. Дефекты-несплошности различа-
ют по типу и виду. Под типом понимают природу дефекта, его происхождение (поры, шла-
ковые включения, расслоение, трещина, непровар сварочного шва). Вид дефекта характери-
зует степень его опасности для изделия. Дефекты в изделии могут появиться как на стадии
изготовления детали, так и на стадии ее эксплуатации.
В процессе изготовления металлическая деталь проходит технологический цикл, вклю-
чающий целый ряд технологических операций: плавка, литье, обработка давлением, терми-
ческая и механическая обработки, соединение с другими деталями (сварка, заклепки, раз-
личные виды посадок). Возникновение дефекта возможно на всех этапах технологических
операций изготовления детали и называются они технологическими дефектами. К их числу
относятся: усадочные раковины, газовые раковины, расслоения металла, ковочные трещи-
ны, закаты, флокены и др.
Дефекты, появившиеся в процессе эксплуатации изделия, называются эксплуатацион-
ными. Возникают они под воздействием внешних нагрузок - статических, ударных, динами-
ческих. Особенно сильное воздействие на прочность детали оказывают переменные дина-
512_________________________ ГЛАВА 20____________________________________
мические нагрузки, приводящие к развитию усталостных трещин, интенсивность роста ко-
торых зависит также от влияния коррозионной среды. Наиболее опасными являются плос-
кие поверхностные дефекты в виде заковов и закатов, которые с течением времени, как пра-
вило, склонны к развитию усталостных трещин под воздействием переменных нагрузок.
Объемные дефекты округлой формы, расположенные внутри сечения детали, менее склон-
ны к развитию усталостных трещин и оказывают меньшее влияние на прочность детали. Для
разъяснения причин развития дефектов в зависимости от его формы под действием много-
кратных нагрузок, рассмотрим простейшие схемы распределения напряжений по сечению
детали, представленные на рис. 20.1 [220].
Под действием растягивающей многократной нагрузки в изделии создаются растяги-
вающие напряжения, являющиеся постоянными по сечению детали, не имеющей дефекта
(рис. 20.1а), плавно возвышающиеся у границ округлого дефекта (рис. 20.1, б) и резко по-
вышающиеся у границ дефекта с острыми краями (рис. 20.1, в). Из рассмотрения этих ри-
сунков следует вывод о том, что наибольшие напряжения возникают у границ дефекта.
Отношение максимального напряжения к его среднему значению, соответствующему не-
дефектому образцу (рис. 20.1, а), называют коэффициентом концентрации. Для дефектов
округлой формы (рис. 20.1, б) он равен 2—5, а для дефектов с острыми краями (рис. 20.1, в)
он достигает от 10 до 100.
Рис. 20.1. Распределение напряжений по сечению образца
20.2.3. Классификация методов неразрушающего контроля
Согласно принятой классификации все методы неразрушающего контроля разделяют
на девять групп или видов: акустический, магнитный, вихретоковый, электрический, радио-
волновой, тепловой, оптический, радиационный, с проникающими веществами (капилляр-
ный). Внутри каждого вида неразрушающего контроля методы классифицируют по целому
ряду дополнительных признаков.
Традиционно сложилось, что неразрушающий контроль оборудования шахтных подъем-
ных установок осуществляется в основном с использованием методов акустической и маг-
нитной групп, реже — капиллярные. Методы акустического контроля делят на две большие
группы: активные, в которых акустические колебания и волны возбуждаются и принимают-
ся, и пассивные, использующие только прием колебаний и волн. Второй метод может при-
меняться для выявления трещин на участках, не имеющих непосредственный доступ. В свою
очередь активные акустические методы делят на две подгруппы: в одной применяются бегу-
щие волны (т.е. распространяющиеся в объекте контроля), а в другой — колебания собствен-
но объекта контроля. Акустические методы позволяют выявлять как поверхностные, так и
внутренние дефекты.
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 513
Из магнитных методов неразрушающего контроля наибольшее применение нашел маг-
нитопорошковый метод, который может применяться только для контроля участков, имею-
щих непосредственный доступ. Для контроля капиллярным методом используются специ-
альные проникающие жидкости. Эти методы позволяют выявить только поверхностные де-
фекты, расположенные на глубине не более 0,01 мм.
20.3. Физические основы и принципы ультразвуковой дефектоскопии
20.3.1. Ультразвуковые колебания
Методы ультразвукового контроля основаны на исследовании процесса распространения
упругих колебаний с частотой 0,5-10 МГц в контролируемых изделиях и предназначены для
обнаружения поверхностных и внутренних дефектов типа несплошностей материала.
Ультразвуковые волны (УЗВ) могут распространяться в любой материальной среде: газо-
образной, жидкой и твердой. В зависимости от характера волнового движения в упругой среде
ультразвуковые волны разделяются на продольные, поперечные и поверхностные. Тип волны
определяет характер движения частиц упругой среды, в которой распространяется волна. Вол-
ны называются продольными, если колебания частиц среды происходят вдоль направления рас-
пространения волны. Если же колебания частиц среды происходят по траекториям, представ-
ляющим собой отрезки прямых, перпендикулярных направлению движения волны, то такие
волны называются поперечными (сдвиговыми). Поверхностные волны (волны Релея) распрост-
раняются на поверхности тела, подобно волнам на поверхности воды. Траектории движения
частиц среды при распространении поверхностных волн имеют вид эллипсов, плоскости ко-
торых перпендикулярны поверхности и совпадают с направлением распространения волны.
Тип акустической волны в той или иной упругой среде зависит от упругих свойств сре-
ды. В твердых телах могут распространяться волны всех типов, так как твердое тело обладает
упругостью объема и формы. В газообразной среде распространяются только продольные
волны, а в жидкой среде, кроме того, и поверхностные. Любая среда, в которую введены
ультразвуковые колебания, обладает определенными акустическими характеристиками, ос-
новными из которых являются: скорость распространения ультразвуковых колебаний, их
затухание и акустическое сопротивление.
20.3.2. Отражение и преломление акустических волн [144]*
При нормальном падении на границу двух полубезграничных сред акустическая волна
частично проходит через границу, а частично отражается от нее. При наклонном падении
дополнительно происходит трансформация волн. В наиболее общем случае на границе двух
твердых сред (рис. 20.2) возникают две (продольная и поперечная) отраженные и две пре-
ломленные волны Направления отраженных и прошедших волн определяются из закона си-
нусов (закон Снеллиуса):
sin/3 _ since, _ since, _ since, _ since,'
~~q~ ~~q~
(20.3.1)
где С — скорость падающей (продольной или поперечной) волны; С, и С( — скорости про-
дольных и поперечных волн, для нижней среды они помечены индексом «штрих».
Рис. 20.2. Отражение и преломление волн на границе двух твердых сред
* Ушаков В.М.
514
ГЛАВА 20
Этот закон следует из равенства фазовых скоростей вдоль границы для всех волн. Амп-
литуда прошедшей и отраженной Аотр волн характеризуются соответствующими коэффи-
циентами прозрачности D = Апр/А0 и отражения R = Аотр /Аа для каждого типа возникающих
волн (L4o — амплитуда колебательной скорости падающей волны).
Рассмотрим случай, когда продольные волны наклонно падают из одной твердой среды
на границу с другой твердой средой, например, из призмы наклонного преобразователя на
границу «оргстекло — сталь». В первой среде распространяется отраженная продольная и
трансформированная поперечная волны, во второй среде (сталь) — прошедшие продольные
и трансформированные поперечные волны. Именно эти волны представляют интерес для
практики контроля. Скорости прошедших волн больше скорости падающей продольной вол-
ны в первой среде. Будем увеличивать угол падения. Тогда при некотором значении угла
падения продольной волны на границе раздела угол преломления для продольной волны будет
равным 90°. Такую преломленную продольную волну, распространяющуюся вблизи границы
раздела, называют подповерхностной продольной (или головной) волной, а угол падения падаю-
щей продольной волны на границу сред — первым критическим углом. Он находится из соот-
ношения
sMKpi=77, 8шДир2=^-. (20.3.2)
Ч с,
Первый критический угол системы «оргстекло — сталь» равен 27,5° [144].
При дальнейшем увеличении угла падения продольных волнна границу «оргстекло —
сталь», при некотором значении угла падения продольных волн, угол преломления попе-
речных волн будет равен 90°. Поперечная волна, распространяясь вдоль границы раздела
сред (как правило, вдоль свободной границы стали вне призмы преобразователя), стано-
вится поверхностной волной. Вторым критическим углом называют угол падения продоль-
ных волн на границу раздела сред, при котором преломленные поперечные волны распро-
страняются вдоль границы, трансформируясь в поверхностные волны. Наиболее эффек-
тивно поверхностные волны возбуждаются при угле, несколько большем второго крити-
ческого угла. Еще раз подчеркнем, что для существования первого и второго критических
углов скорость падающих продольных волн в первой среде должна быть меньше скорости
преломленных продольных и поперечных волн во второй среде. Для системы «оргстекло-
сталь» это условие соблюдается. Второй критический угол для этой системы равен при-
мерно 59°. Следует отметить, что закон Снеллиуса используется для расчета углов прелом-
ления, далеких от первого и второго критических углов. В практике УЗК вместо угла пре-
ломления используют угол ввода, который связан с углом падения (или углом призмы пре-
образователя) для системы «оргстекло—сталь» следующим образом (выделены значения
углов призмы и углов ввода, которые наиболее часто используются при неразрушающем
ультразвуковом контроле):
Угол падения р (угол призмы, градусы) 30 32 37,5 40 47 50 53 55 30 32 37,5 40
Угол ввода fa градусы) 37 40 45 50 60 65 70 73 37 40 45 30
Значения углов призмы 30—55° наклонных преобразователей выбран между первым и
вторым критическими углами. В этом случае в стали существуют только поперечные пре-
ломленные волны. Для возбуждения в стали поверхностных волн используют наклонные
преобразователи с углом призмы, равным 62°, при этом угле призмы энергия возбуждаемых
поверхностных волн максимальна.
Остановимся на свойствах поверхностных волн. Эти волны имеют низкое значение
коэффициента затухания, поэтому способны распространяться на большие расстояния
вдоль поверхности твердого тела. Энергия поверхностных волн локализована на глуби-
не, примерно равной длине волны. При распространении поверхностных волн частицы
среды движутся, вращаясь по эллипсам с большей осью, перпендикулярной границе.
Волны распространяются не только вдоль плоской, но и вдоль искривленной поверхно-
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 515
сти. На вогнутых участках поверхности они трансформируются в объемные волны и тем
больше, чем значительнее радиус кривизны. Трансформированные объемные волны рас-
пространяются в глубь изделия. На этих же участках поверхностные волны отражаются
(в том числе и в сторону излучающего преобразователя), отражение также происходит и
от несплошностей, например, трещин, выходящих на поверхность твердого тела. Дефек-
ты, расположенные на глубине больше длины поверхностных волн, практически не вы-
являются. На вогнутых участках твердого тела скорость поверхностных волн уменьшает-
ся, а на выпуклых — увеличивается. Скорость поверхностных волн составляет 0,93 ско-
рости поперечных волн [144].
Рассмотрим наклонное падение поперечной волны в стали на границу раздела «сталь —
воздух». Этот случай важен для контроля поперечными волнами сварных соединений одно-
кратно отраженным лучом, когда поперечные волны отражаются от донной поверхности из-
делия. Согласно закону Снеллиуса, в общем случае при отражении возникает трансформиро-
ванная волна на границе раздела, распространяющаяся под углом, большим, чем отраженная
поперечная волна, так как скорость продольных волн больше, чем поперечных. Следователь-
но, при определенном угле падения поперечной волны трансформированная продольная вол-
на будет скользить вдоль границы раздела «сталь — воздух», которая становится неоднородной
и быстро затухает за счет переизлучения в сталь в виде боковой поперечной волны.
Угол падения поперечной волны на границу раздела, при котором трансформированная
продольная волна скользит вдоль границы раздела, называют третьим критическим углом.
Из закона Сибелиуса следует, что синус третьего критического угла равен отношению
скорости поперечной к продольной волне в твердом теле.
Распространение ультразвуковых волн в твердых телах подчиняется следующим общим
закономерностям: угол отражения продольной волны а, всегда равен углу падения Д ; угол
отражения поперечной волны at всегда меньше угла падения продольной волны Д .
Скорость распространения ультразвуковых колебаний связана с длиной волны и часто-
той колебаний следующей зависимостью
С = /А, (20.3.3)
где С — скорость ультразвука, м/с; f— частота колебаний, Гц; Л — длина волны, м.
Длиной волны называют расстояние между двумя ближайшими частицами, находящи-
мися одновременно в одинаковом положении относительно состояния равновесия. Число
максимальных отклонений частицы среды от положения равновесия в течение одной секун-
ды называют частотой колебаний ультразвука. Скорость распространения упругих волн раз-
личных видов в некоторых материалах представлена в табл. 20.2. Затухание ультразвуковых
колебаний проявляется в виде постепенного ослабления их амплитуды А и интенсивности J.
Это ослабление происходит по закону
Ax = Aoe~Sx, (20.3.4)
г -28х
ос
(20.3.5)
где Ахи Jx — соответственно амплитуда и интенсивность ультразвуковой волны на расстоянии
х от точки с амплитудой Ад интенсивностью Jg; 8 — коэффициент затухания ультразвука.
Если известны значения интенсивностей в двух точках и х2, то коэффициент затуха-
ния может быть найден по формуле
2(x2-*i) |^2>
(20.3.6)
Распределение энергии между отраженной и преломленной волной при переходе из од-
ной среды в другую определяется акустическим сопротивлением этих сред. Удельное акусти-
ческое сопротивление среды Z равно произведению плотности среды р на скорость волны
С в ней
Z = pC.
(20.3.7)
516
ГЛАВА 20
Таблица 20.2
Распространение ультразвуковых волн в твердых телах
Материал Плотность, г/см3 Продольные волны Поперечные волны Поверхностные волны
Скорость ультразвука, м/с Длина волны при частоте 2,5 МГц, мм Скорость ультра-звука, м/с Длина волны при частоте 2,5 МГц, мм Скорость ультразвука, м /с Длина волны при частоте 2,5 МГц, мм
Сталь 3 7,80 5930 2,37 3270 1,31 3000 1,20
Чугун 7,60 5300 2,12 3000 1,20 2800 1,12
Оргстекло 1,18 2670 1.07 1120 0,44 1050 0,42
Латунь Л-68 8,44 4440 1,77 2125 0,85 1950 0,78
Медь (красная) 8,90 4700 1,88 2260 0,94 1930 0,77
Алюминий 2,70 6260 2,50 3080 1,23 2800 1,12
Дюралюминий 2,78 6250-6350 2,52 3100 1,24 2900 0,77
Никель 8,80 4700 1,88 2260 0,94 1930 1,16
Свинец П,4 2160 0,86 700 0,28 630 0,25
Олово 7,30 3320 1,33 1670 0,66 1560 0,62
Стекло 2,60 5900 2,36 3400 1,36 3100 1,24
Резина сырая 1,3-2,1 1480 0,59 — — — —
Эпоксидная смола ЭД-5 — 2580 1,03 — — — —
Вода 0,997 1497 0,6 — — — —
Глицерин 1,26 1923 0,77 — — — —
Компрессорное масло КС-19 0,91 1503 0,6 — — — —
Трансформаторное масло 0,92 1390 0,55 — — — —
Полистирол 1,06 2350 1120 — —
Различные типы волн в одной и той же среде имеют различное удельное сопротивление.
В табл. 20.3 приведены значения Zwra некоторых сред и материалов [144].
Таблица 20.3
Значения 7для некоторых сред и материалов
Среда Удельное акустическое сопротивление Z, 106 кг/м2,с
продольные волны поперечные волны
Дюралюминий 16,9 8,3
Сталь 45,6 25,2
Медь 41,8 20,5
Органическое стекло 3,14 1,32
Полистирол 2,49 1,19
Резина 1,40 -
Трансформаторное масло 1,28 —
Вода 1,49 -
Воздух 4,340"* -
20.3.3. Пьезоэлектрические преобразователи
Излучение и прием ультразвуковых колебаний осуществляется в основном с помощью
пьезоэлектрических преобразователей. Пьезопреобразователи представляют собой пласти-
ны, изготовленные из монокристаллических (кварц, сегнетовая соль и др.) или поликрис-
таллических керамических материалов (титанат бария, цирконат-титанат свинца и т.п.).
В основе работы пьезопреобразователей лежит пьезоэлектрический эффект, обладаю-
щий свойством обратимости. Прямой пьезоэлектрический эффект заключается в том, что
при воздействии на пьезопластину переменного усилия на ней возникает переменное элект-
рическое напряжение, меняющееся по такому же закону, как и усилие. Прямой пьезоэффект
используется при регистрации ультразвуковых колебаний. Обратный пьезоэффект заключа-
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 517
ется в изменении размеров пьезопластины под действием электрического поля, и он исполь-
зуется для излучения ультразвука в окружающую среду.
В ультразвуковой дефектоскопии для излучения и приема колебаний применяются пье-
зоэлементы в виде дисков или квадратных пластин, испытывающие деформации растяже-
ния и сжатия по толщине. Изменение толщины пьезопластины М пропорционально при-
ложенному напряжению U:
м = (20.3.8)
где Е — модуль Юнга; е — пьезоэлектрическая константа материала пьезопластины.
Для получения максимальной амплитуды переменного напряжения или амплитуды ко-
лебаний пьезопластины, т.е. для более эффективного преобразования пластина должна ра-
ботать в резонансном режиме, следовательно, ее толщина d должна быть кратна длине полу-
волны колебаний
d=nk/2^nCtilf0, (20.3.9)
где п — целое число; fo — собственная частота колебаний пластины.
Если диаметр плоской пьезокерамической пластины превосходит длину волны, то ульт-
развуковые колебания в этом случае распространяются в виде направленного пучка. Причем
вблизи пластины ультразвуковой пучок не расходится. Протяженность данного участка Za,
называемого ближней зоной или зоной Френеля, определяется выражением
Zfl=a2A, (20.3.10)
где а — радиус пластины.
На расстоянии Za от пластины начинается расхождение лучей ультразвукового пучка.
Эта зона называется дальней или зоной Фраунгофера и пучок здесь приобретает форму усе-
ченного конуса, половину угла расхождения которого можно вычислить по формуле
sin<p = 0,6A/a. (20.3.11)
При проведении дефектоскопии весьма важно как можно более точно установить мес-
тонахождения дефекта. Эта задача будет решена тем точнее, чем меньше угол раствора пучка
и больше направленность ультразвуковых волн. С увеличением частоты колебаний угол ра-
створа пучка уменьшается. Следовательно, для точного нахождения координат дефекта сле-
дует применять пьезопластины больших размеров и высокие частоты ультразвука.
Интенсивность ультразвуковых колебаний в дальней зоне меняется вдоль оси пучка, а
именно: с удалением от пластины интенсивность снижается обратно пропорционально квад-
рату расстояния до пластины. Кроме того, с удалением от оси ультразвукового пучка интен-
сивность также уменьшается. В ближней зоне интенсивность ультразвуковых колебаний рас-
пределена неравномерно и изменяется по сложному закону как вдоль оси пучка, так и по его
сечению. Ввод ультразвуковых колебаний в контролируемую деталь осуществляется с помо-
щью специальных искателей, которые различаются по типу вырабатываемых волн, их часто-
те и величине угла падения, по способу ввода волн и т.д. Так как целью любого искателя
является формирование ультразвуковых колебаний и ввод их в контролируемую деталь, то
все они имеют ряд общих элементов. К числу этих элементов относятся: пьезопластина, дем-
пфер, протектор. Пьезопластина, как правило, располагается между демпфером и протекто-
ром. Ультразвуковые колебания, вырабатываемые пьезопластиной под воздействием напря-
жения, проходят с одной стороны к демпферу, а с другой — через протектор в контролируе-
мую деталь. Чтобы колебания, отраженные от демпфера, не возвращались на пьезопластину
и не вызывали помех, демпфер изготовляется из материала с большим затуханием ультразву-
ка. Наиболее распространенным материалом для изготовления демпфера является тексто-
лит, обеспечивающий эффективное гашение колебаний в диапазоне частот от 0,7 МГц и выше.
Кроме того, демпфер служит также для уменьшения продолжительности ультразвуковых
импульсов, вырабатываемых искателем. Уменьшение длительности собственных колебаний
пьезопластины достигается увеличением удельного акустического сопротивления демпфера
за счет применения в качестве демпфирующей массы эпоксидной смолы с наполнителем
(сажа, молотая резина, свинцовый сурик, вольфрамовый порошок и т.п.).
518
ГЛАВА 20
Протектор искателя предназначен в основном для защиты пьезопластины от истира-
ния. Так как протектор приводит к уменьшению ультразвуковой энергии, попадающей в кон-
тролируемую деталь, то его обычно изготовляют небольшой толщины (0,1—1,5 мм) из сталь-
ной фольги, металлокерамики или оргстекла. Вместо жестких протекторов иногда применя-
ют эластичные пленки. Пространство между пьезопластиной и пленкой заполняют мине-
ральным маслом.
Акустическая связь искателей с контролируемыми изделиями осуществляется контак-
тным, иммерсионным или щелевым способами. При контактном способе контроля иска-
тель прижимается к контролируемому изделию через слой жидкости, толщина которой А
выбирается из условия Д<0,5Ст (где т — длительность импульса; С — скорость ультразву-
ка). Причем искатель, как правило, перемещается вручную. При иммерсионном способе
контролируемая деталь и искатель помещаются в ванну, заполненную жидкостью (водой,
дизельным топливом, минеральным маслом). Расстояние А между искателем и деталью вы-
бирается из условия А>0,5Ст . Щелевой способ контактирования предусматривает подачу
контактной жидкости в щель между искателем и контролируемой деталью. Искатель в этом
случае, как правило, снабжается устройством, поддерживающим постоянное расстояние
между пьезоэлементом и поверхностью контролируемой детали. Данное расстояние обыч-
но принимается в пределах длины волны ультразвука. Основное распространение иммер-
сионный и щелевой способы получили при автоматической дефектоскопии изделий, а также
для контроля изделий с грубой поверхностью.
Наиболее распространенными типами искателей являются прямые (нормальные), на-
клонные (призматические) и раздельно-совмещенные. Прямые искатели излучают в конт-
ролируемое изделие продольные волны. При контроле с помощью данных искателей воз-
можны все способы ввода ультразвука в изделие, т.е. контактный, иммерсионный и щеле-
вой. Прямые искатели позволяют достаточно хорошо обнаруживать дефекты, расположен-
ные параллельно поверхности ввода ультразвука. Дефекты, расположенные перпендикуляр-
но поверхности ввода ультразвука или наклонно, прямыми искателями не выявляются. Пря-
мыми искателями нельзя также проконтролировать тонкостенные изделия. В подобных слу-
чаях применяют наклонные искатели.
Основной деталью наклонного искателя является призма, которая предназначена для
преломления ультразвуковых волн, излучаемых пьезопластиной. Обычно призма изготавли-
вается из органического стекла. Пьезопластина излучает в призму продольные волны, кото-
рые на границе раздела призмы и изделия трансформируются в поперечные. Угол падения
ультразвука выбирают в пределах между первым и вторым критическими углами с тем, что-
бы в контролируемом изделии распространялась только поперечная волна. Поскольку для
пары «органическое стекло-сталь» /?кр1 =28°-29° и Дкр2 =55°-57°, то обычно применяют ис-
катели с углами падения ультразвука (углами призмы) от 30° до 52°.
Ультразвуковые волны при падении на контактирующую поверхность частично отража-
ются от нее и распространяются в призме искателя. Отражаясь от стенок призмы, ультразву-
ковые волны могут попасть на пьезопластину, что создает на экране дефектоскопа различ-
ные помехи. Для уменьшения помех размеры и форма призмы выбираются такими, чтобы
отраженный от границы раздела между призмой и изделием ультразвук не попал на пьезоп-
ластину. Кроме того, для улучшения затухания отраженного ультразвука передние грани при-
змы делают ребристыми, удлиненной формы, с загнутой передней частью (ловушками) и т.д.
Если угол призмы искателя равен второму критическому углу падения, то в изделие будут
введены поверхностные волны. Поскольку при той же частоте колебаний длина этих волн
меньше по сравнению с продольными и поперечными, то чувствительность контроля при
этом возрастает, что позволяет выявить более мелкие дефекты. Наклонные искатели могут
быть использованы как при контактном, так и при щелевом способах ввода ультразвука в
контролируемое изделие. С их помощью выявляются дефекты в деталях сложной формы.
Раздельно-совмещенный искатель содержит пьезопластины, включенные по раздельной
схеме, но заключенные в одном корпусе и разделенные акустическим экраном. Одна из пье-
зопластин является излучающей, а вторая — приемной. Назначение акустического экрана —
исключить возможность прямой передачи акустических сигналов от излучающей пластины
к приемной.
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 519
20.3.4. Методы ультразвуковой дефектоскопии
Ультразвуковая дефектоскопия деталей шахтных подъемных установок может быть осу-
ществлена различными методами, которые отличаются друг от друга по принципу действия,
устройству аппаратуры, характеру измеряемых величин, способу размещения искателей. В
зависимости от этих признаков можно выделить следующие основные методы ультразвуко-
вой дефектоскопии: теневой, эхо-импульсный, резонансный, импедансный и свободных ко-
лебаний. Для дефектоскопии оборудования подъемных установок применяют в основном
первые два метода.
Теневой метод (рис. 20.3, а) заключается в том, что с одной стороны контролируемого
объекта при помощи излучателя вводят ультразвуковые колебания, а с другой — при помо-
щи приемника регистрируют интенсивность этих колебаний. По уменьшению сигнала на
приемнике судят о наличии дефекта. Для применения теневого метода необходим двусто-
ронний доступ к контролируемому объекту, что является существенным недостатком для его
широкого практического использования. Разновидностью теневого способа является зеркаль-
но-теневой, при котором излучатель и приемник размещены с одной стороны контролируе-
мого объекта. В этом случае появление дефекта фиксируется в соответствии с исчезновени-
ем или уменьшением донного сигнала. Данный метод применяется чаще всего для контроля
проката малой и средней толщины, имеющего ровную донную поверхность.
Эхо-импульсный метод (рис. 20.3, б) получил наиболее широкое применение. Он осно-
ван на введении в контролируемый объект с помощью излучателя коротких импульсов упру-
гих колебаний и регистрации интенсивности и времени прихода эхо-сигналов, отраженных
от дефектов.
Рис. 20.3. Принципильная схема ультразвуковой дефектоскопии
520
ГЛАВА 20
Упругие волны, встречая на своем пути дефекты, частично отражаются и в виде эха по-
падают обратно на головку излучателя. Остальная часть колебаний достигает противополож-
ной стороны контролируемого объекта, отражается от раздела объект-воздух или другая сре-
да и тоже, как эхо, попадает на головку излучателя. При этом отраженные от дефекта коле-
бания возвращаются раньше, чем от противоположной стороны объекта, поэтому сначала
на экране дефектоскопа появляется импульс от дефекта, а затем от противоположной сторо-
ны объекта (донный сигнал). На экране они располагаются один за другим на расстоянии,
соответствующем времени их возвращения. Расстояние до дефекта определяется как разность
времени между моментом посылки импульса и моментом приема эхо-сигнала. Размер де-
фекта оценивается величиной амплитуды эхо-сигнала. Данный метод является довольно чув-
ствительным, поскольку эхо-сигналы даже незначительной амплитуды могут быть приняты
чувствительным приемником при отсутствии помех от генератора.
Однако, если расстояние до отражающей поверхности невелико и эхо-сигнал приходит
до окончания посылки сигнала, то на фоне значительно более мощного зондирующего им-
пульса он не воспринимается и, следовательно, дефект не обнаруживается. Таким образом,
обнаружение дефекта возможно лишь на расстояниях, превышающих «мертвую зону», когда
эхо-сигнал приходит после окончания зондирующего (посылаемого) импульса. Протяжен-
ность мертвой зоны определяется из выражения
£^=0,5(77. (20.3.12)
Эхо-импульсный метод применяется для выявления внутренних, поверхностных и под-
поверхностных дефектов в деталях, изготовленных из магнитных и немагнитных материалов.
Резонансный метод (рис. 20.3, в) основан на возникновении в контролируемом изделии
стоячих волн. При совпадении частоты упругих волн, возбуждаемых в изделии, с собствен-
ной частотой колебаний изделия возникает резонанс. При этом уменьшается акустическое
сопротивление контролируемой детали и соответственно уменьшается отбор мощности от
источника ультразвука (генератора). Уменьшение отбираемой мощности регистрируется ин-
дикатором. При наличии в детали дефекта ее частота свободных колебаний изменяется, сле-
довательно, резонанс исчезает, что регистрируется индикатором. Резонансный метод чаще
всего применяется для контроля изделий сравнительно небольшой толщины из металлов,
фарфора, стекла, керамики при доступе с одной стороны.
Импедансный метод контроля (рис. 20.3, г) основан на изменении силы реакции, оказы-
ваемой на датчик контролируемым изделием, при наличии в нем дефекта. Данный метод
целесообразно применять для контроля качества покрытия рабочих поверхностей деталей
или слоистых изделий. Для этого к контролируемой детали прижимают стержень с двумя
пьезоэлементами, один из которых является источником непрерывных упругих колебаний,
другой динамометром, измеряющим силу реакции изделия на стержень. Если дефект в дета-
ли отсутствует, то сила реакции детали на стержень будет большой. При наличии дефекта,
например, отслоение гальванического покрытия, данный участок колеблется независимо от
всей детали, и сила реакции при этом резко уменьшается.
Метод свободных колебаний (рис. 20.3, д) основан на изменении частоты свободных колеба-
ний контролируемой детали. Если на контролируемую деталь воздействовать резким ударом из-
вне, то в ней возникают свободные колебания. Частота этих колебаний определяется инерцион-
но-упругими параметрами детали, которые в свою очередь зависят от физической однородности
материала детали. Наличие неоднородности в детали в первую очередь приводит к изменению
ее упругих характеристик, что соответственно изменяет частоту свободных колебаний.
20.3.5. Аппаратура для ультразвуковой дефектоскопии
Приборы ультразвуковой дефектоскопии, как и приборы других методов дефектоскопии,
совершенствуются постоянно по мере достигнутого уровня развития науки и технологии при-
боростроения и освоения новых физических принципов контроля. Первыми промышленны-
ми образцами дефектоскопов, начиная с 60-х годов прошлого века, были УДМ-1М, УДМ-3,
ДУК-1 ЗИМ, ДУК-66, ДУК-66П. Затем появилось поколение более совершенных переносных
приборов серии УД: УД-10УА, УД-2-11, УД2-12, которые работают на частотах 1,25; 1,8; 2,5;
5,0 и 10,0 МГц в диапазоне толщин контролируемого материала от 1 до 5000 мм.
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 521
Примерно с 2000 г. отечественный промышленностью освоен выпуск более совершен-
ного прибора — УД2-70. Прибор работает на этих же частотах, но дополнительно имеет бо-
лее широкие сервисные возможности; память программ настройки, память измеренных тол-
щин контролируемых изделий, два независимых строба автоматической сигнализации де-
фекта, временная регулировка чувствительности, режим увеличения экрана, электронная
«лупа», режим «заморозки» изображения экрана, функция «замок», режим связи с персо-
нальным компьютером для ввода в него информации из памяти дефектоскопа и возможно-
сти распечатки этой информации на принтере; а режим ввода программ настроек из компь-
ютера в память прибора. Как и остальные дефектоскопы, прибор УД-2-70 реализует эхо-
импульсный, теневой и зеркально-теневой методы акустического контроля. Масса данного
прибора почти в три раза меньше массы остальных.
Общая комплектация построения аппаратуры для ультразвукового контроля: электрон-
ный блок (собственно дефектоскоп); преобразователи, служащие для излучения и приема
УЗ колебаний; различные вспомогательные устройства. Дефектоскоп предназначен для ге-
нерирования зондирующих импульсов высокочастотного напряжения, усиления, регистра-
ции эхо-импульсов от дефектов и определения координат. Амплитудно-временная характе-
ристика отраженных сигналов отображается на экране дефектоскопа, на котором в опреде-
ленном масштабе воспроизводится ход УЗ луча в контролируемом объекте.
От синхронизатора тактовые импульсы поступают на генератор зондирующих импуль-
сов и запускают его. Зондирующие импульсы возбуждают в пьезопластине УЗ колебания,
через контактную среду, поступающие в контролируемое изделие. Одновременно тактовые
импульсы от синхронизатора подаются на генератор развертки, скорость которой может ме-
няться. Отраженные от дефекта упругие импульсы преобразуются приемной пьезопласти-
ной в электрические сигналы, которые усиливаясь, подаются на вертикальные пластины элек-
тронно-лучевой трубки (ЭЛТ). Горизонтальная развертка ЭЛТ — временная, расстояние по
ней от зондирующего импульса до принятого сигнала пропорционально времени прохожде-
ния импульса от пьезопластины до дефекта и обратно. Для измерения координат в дефек-
тоскопах предусмотрены специальные устройства — глубиномеры.
Отклонение луча на ЭЛТ в вертикальном направлении (высота импульсов) характери-
зует амплитуду принятого сигнала, пропорциональную отражающей площади дефекта и из-
меряемую с помощью аттенюатора. В дефектоскопах также имеются вспомогательные уст-
ройства: глубиномер, автоматический сигнализатор дефектов, блоки временной регулиров-
ки чувствительности и др., упрощающие труд оператора и расширяющие возможности ульт-
развукового контроля, его производительность и надежность.
20.3.6. Акустический контакт и способы оценки его качества
Ультразвуковые волны отражаются от тончайших воздушных зазоров, поэтому, чтобы вве-
сти УЗВ в объект контроля, между ним и преобразователем вводят жидкие контактные среды.
Чем более шероховатая поверхность изделия, тем требуется толще слой контактной жидкости.
Особенно плохое качество поверхности имеют детали подвесных устройств и парашютов,
т.к. они работают в условиях агрессивной атмосферы шахтного ствола и поверхность этих де-
талей подвергается интенсивному неравномерному коррозионному изнашиванию. Перед про-
ведением ультразвукового контроля детали подвергаются механической очистке от продуктов
коррозии с помощью металлических щеток, шаберов, напильников и лишь затем на их повер-
хность наносят контактную жидкость, толщина слоя которой зависит от величины неровнос-
тей. На плохо смазанном участке поверхности детали слой контактной жидкости между пре-
образователем и изделием может отсутствовать или не полностью заполнять зазор. Изменение
толщины слоя контактной жидкости вызовет изменение коэффициента прозрачности грани-
цы преобразователя с контролируемым объектом. В этом случае возможно возникновение кли-
новидного слоя, что повлечет изменение направления излучения преобразователя.
При контроле детали прямым преобразователем с использованием прибора УД2-12 или
УД2-70, имеющих два автоматических сигнализатора дефектов с раздельной регулировкой
интервала времени и порога срабатывания, настроив один сигнализатор на слежение за по-
явлением эхо-сигналов от дефектов, а второй — на слежение за качеством акустического кон-
такта по амплитуде донного сигнала, можно заметить изменение донного сигнала на несколь-
522
ГЛАВА 20
ко децибел. При контроле наклонным преобразователем надежных способов слежения за
стабильностью акустического контакта не разработано, дефектоскопов с автоматическим
наблюдением за качеством акустического контакта не выпускается. Поэтому при контроле
наклонным искателем принято периодически получать на экране дефектоскопа эхо-сигнал
от какого-либо естественного отражателя, например, от двугранного угла детали.
Наглядным примером влияния качества поверхности контролируемой детали на ослаб-
ление донного сигнала являются результаты эксперимента по изменению величины донного
импульса в зависимости от шероховатости поверхности специально изготовленных сталь-
ных образцов прямоугольной формы при контактном способе ультразвукового контроля для
диапазона частот 1,25; 2,5 и 5,0 МГц. Различная шероховатость поверхности достигалась за
счет соответствующей механической обработки детали — токарной обработки, фрезерова-
ние, шлифование ее поверхности. Использовались также аналогичные образцы такой же
толщины, изготовленные из деталей подвесных устройств, эксплуатируемых в течение 5 лет
в условиях атмосферы шахтного ствола.
Оценка качества поверхности производилась путем сравнения амплитуды донного эхо-
сигнала, наблюдаемого на экране дефектоскопа. Полученное значение амплитуды эхо-сиг-
нала нормировалось относительно опорного сигнала амплитудой 30 мм. Каждое измерение
производилось не менее чем на 4-х участках соответствующего образца и повторялось 3 раза.
Во всех опытах толщина образцов, чувствительность дефектоскопа, тип контактной смазки
и степень прижатия искателя к образцу были неизменными.
Результаты сравнительной оценки влияния шероховатости поверхности на чувствитель-
ность контроля показывают, что при прочих равных условиях уровень донного сигнала об-
ратно пропорционален величине шероховатости поверхности контролируемой детали.
20.3.7. Технология контроля
Ультразвуковая дефектоскопия элементов шахтных подъемных установок проводится по
специальной технологии, излагаемой в соответствующих методиках. В этих методиках изла-
гаются следующие вопросы: периодичность проведения контроля; номенклатура деталей,
подвергаемых контролю; цель контроля; зоны и чувствительность контроля; тип используе-
мого дефектоскопа; места ввода ультразвуковых колебаний в деталь; тип и частота ультра-
звуковых колебаний, оптимальный угол ввода их в деталь; тип искательной головки; конт-
рольный образец (эталон); подготовка детали к контролю; способы обеспечения акустичес-
кого контакта; жидкость для обеспечения акустического контакта; настройка дефектоскопа
перед контролем; технология проведения контроля конкретной детали или ее участка (зоны);
способ расшифровки результатов контроля и определение размеров дефекта; нормы на бра-
ковку деталей; меры безопасности при проведении контроля.
Надежность выявления дефектов зависит от правильного выбора и тщательной отра-
ботки методики контроля. Целью ультразвукового контроля ответственных элементов шахт-
ных подъемных установок, проводимого в шахтных условиях, является выявление в первую
очередь эксплуатационных дефектов, т.е. усталостных трещин, появляющихся, как правило,
в местах наибольшего концентратора напряжений и развивающихся обычно от поверхности
детали внутрь ее. Поэтому зоны контроля устанавливают на основании использования ре-
зультатов прочностных расчетов, а также анализа статических данных о местах распростра-
нения дефектов в контролируемых деталях, характера этих дефектов и их ориентации.
Важным этапом в процессе выявления дефектов является правильный выбор чувстви-
тельности дефектоскопа, т.к. при заниженной чувствительности возможен пропуск дефек-
тов, а завышение чувствительности приводит к выявлению структурных неоднородностей
металла или же мелких, не опасных для прочности детали дефектов. Чувствительность опре-
деляется принятым значением браковочного критерия. С ужесточением этого критерия чув-
ствительность повышается, однако возрастает влияние маскирующих факторов, что в итоге
снижает достоверность контроля. Ввод ультразвуковых колебаний в деталь осуществляется с
доступных поверхностей так, чтобы обеспечивались наиболее благоприятные условия выяв-
ляемое™ дефектов в местах их наиболее вероятного возникновения. При этом необходимо
принимать во внимание наличие на детали конструктивных неровностей (галтелей, высту-
пов, проточек), которые являются естественными отражателями для ультразвука, что соот-
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 523
ветственно можно использовать в процессе контроля для проверки исправности дефектос-
копа и надежности акустического контакта между искателем и поверхностью детали.
При выборе дефектоскопа руководствуются его основными характеристиками:
— глубиной проникновения ультразвуковых колебаний, при которой на экране дефек-
тоскопа можно наблюдать стабильный импульс;
— разрешающей способностью, определяющей возможность различать на экране дефек-
тоскопа импульсы от близко лежащих дефектов;
— чувствительностью, определяемой при оптимальных условиях контроля на эталонах
при выявлении наименьшего дефекта;
— размером «мертвой» зоны;
— удобством работы, что особенно важно при проведении дефектоскопии в условиях
шахты.
Угол ввода и тип ультразвуковых колебаний рассчитывают и уточняют эксперименталь-
но из условия обеспечения высокой эффективности выявления наиболее вероятных дефек-
тов. Рабочая частота ультразвука выбирается в зависимости от толщины контролируемой
детали, коэффициента затухания ультразвука в данном материале, чистоты обработки по-
верхности ввода ультразвука. Рабочая частота ультразвука понижается с увеличением тол-
щины детали и коэффициента затухания ультразвука. Следует также иметь в виду, что с уве-
личением частоты уменьшается мертвая зона и возрастает разрешающая способность. Для
контроля крупнозернистых материалов с высоким уровнем структурной реверберации сле-
дует применять более низкие частоты ультразвука.
Как уже отмечалось выше, чистота обработки поверхности ввода ультразвука оказывает
большое влияние на качество акустического контакта при контактном способе ввода ультра-
звука. С целью обеспечения надежного акустического контакта на поверхность контролируе-
мой детали наносится тонкий слой контактной жидкости. Выбор ее определяется чистотой
обработки, формой и ориентацией поверхности ввода. В качестве контактной жидкости при-
меняют различные минеральные масла, солидол, глицерин, воду. Для смазки гладких поверх-
ностей используют менее вязкие жидкости, для грубых — более вязкие. При контроле верти-
кальных поверхностей применяют густые смазки, пасты. Если контроль ведется наклонными
искателями, то контактная поверхность призмы искателя должна быть точно подогнана к по-
верхности детали. Выбор типа искательной головки производится из условия обеспечения ввода
ультразвуковых колебаний из выбранных на поверхности детали мест с необходимыми углом
и частотой, высокой стабильности акустического контакта и удобства в работе.
Важным этапом в процессе выявления дефектов является настройка чувствительности
дефектоскопа. Один из наиболее широко распространенных способов настройки чувстви-
тельности — применение контрольных образцов (эталонов). Для каждого типа деталей обычно
изготовляется отдельный контрольный образец. Он, как правило, представляет собой конт-
ролируемую деталь (или ее часть) с искусственно нанесенным контрольным отражателем в
месте наиболее вероятного распространения дефектов. В случае невозможности использо-
вания для этой цели детали (например, из-за больших габаритов) контрольный образец мо-
жет быть изготовлен из одинакового с деталью материала. В качестве контрольных образцов
широко используется также выпускаемые серийно эталоны.
Расшифрование результатов контроля включает основные способы распознавания воз-
никающих сигналов на индикаторе дефектоскопа от дефектов и их отличия от сигналов-
помех, а также способы определения месторасположения и размеров дефектов. Координаты
дефектов в детали определяют по местоположению искателя на ее поверхности в момент
получения максимального сигнала от дефекта и времени пробега от дефекта ультразвуковой
волны. Размеры дефекта могут быть оценены путем измерения максимальной амплитуды
сигнала от дефекта или же путем определения положений крайних точек дефекта. Более слож-
ной является задача определения формы дефекта. Форма дефекта может быть определена по
косвенным признакам. Например, округлые дефекты дают интенсивное отражение при раз-
личных направлениях прозвучивания; при наличии трещины интенсивное отражение наблю-
дается только в одном направлении; при наличии шлаковых включений можно наблюдать
донный сигнал.
Отбраковка деталей по выявленным дефектам производится в соответствии с действую-
щими техническими условиями или техническими требованиями на контролируемую деталь.
524
ГЛАВА 20
20.4. Магнитная дефектоскопия
20.4.1. Сущность метода
Сущность магнитной дефектоскопии состоит в том, что по контролируемой детали, по-
мещенной в магнитное поле, протекает магнитный поток. Встретив на своем пути препят-
ствие в виде дефекта (трещины, расслоения, волосовины, флокены) с меньшей магнитной
проницаемостью, часть магнитных силовых линий выходит на поверхность детали, образуя
вокруг дефекта поле рассеяния (рис. 20.4).
Рис. 20.4. Поле рассеяние вокруг дефекта детали
Для регистрации полей рассеяния над дефектами применяют различные методы, среди
которых наиболее широкое применение нашел магнитопорошковый метод.
В магнитном поле каждая частица ферромагнитного порошка становится диполем с четко
выраженными разноименными полюсами по своим концам. В однородном магнитном поле
на разноименные полюсы ферромагнитной частицы действуют одинаковые по величине, но
обратные по направлению силы. Под действием этих сил ферромагнитная частица устанав-
ливает свою ось по направлению сил магнитного поля. В неоднородном поле напряжен-
ность поля у одного из полюсов частицы больше, чем у другого, поэтому на частицу допол-
нительно действует сила, перемещающая данную частицу в область с более высокими значе-
ниями напряженности магнитного поля.
Под действием поля ферромагнитные частицы поворачиваются вдоль потока магнит-
ной индукции и концентрируются на тех участках, где интенсивность магнитных силовых
линий вблизи поверхности изделия максимальна. На движение частиц в магнитном поле
оказывают влияние также силы трения, определяемые вязкостью жидкой среды.
20.4.2. Способы намагничивания деталей
При магнитопорошковом методе контроля могут быть применены следующие виды на-
магничивания: полюсный, циркулярный и комбинированный (табл. 20.4).
Полюсное намагничивание применяют для обнаружения усталостных трещин и других
дефектов, расположенных поперек или под углом к продольной оси детали. Замкнутые ли-
нии магнитного поля пересекают поверхность проверяемой детали в двух местах: там, где
они входят в деталь, и там, где из нее выходят. В этих местах образуются магнитные полюсы:
северный и южный. Этим обусловлено и название способа намагничивания — полюсное.
Полюсное намагничивание проводят в катушке (соленоиде) или с применением гибко-
го токопроводящего кабеля, который наматывают на деталь. Если деталь имеет большую
длину, то контроль проводят по участкам, охваченным витками кабеля или катушки.
Циркулярное намагничивание применяют для выявления продольных и радиальных дефек-
тов. При таком намагничивании магнитные силовые линии имеют вид замкнутых контуров, рас-
положенных в плоскости, перпендикулярной направлению тока. Особенностью данного спосо-
ба намагничивания является то, что замкнутые линии магнитного поля не имеют пересечений с
поверхностью детали и по этой причине не образуют на ней магнитных полюсов. Поскольку для
контролируемой детали циркулярное магнитное поле является поперечным, поэтому в нем силь-
нее всего поляризуются стенки продольных трещин. Для циркулярного намагничивания ток
пропускают через деталь или массивный стержень, на который надевается полая деталь, или по
тороидальной обмотке, намотанной на деталь (тороидальное намагничивание).
Комбинированное намагничивание позволяет выявлять как продольные, так и поперечные
дефекты за один прием контроля. Деталь при этом одновременно намагничивается двумя
магнитными полями: полюсным и циркулярным. В этом случае возникает результирующее
поле, силовые линии которого направлены по винтовой линии.
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 525
Виды, способы и методы намагничивания
Таблица 20.4
Вид намагничивания (по форме магнитного потока) Способ намагничивания Схемг намагничивания
Продольное (полюсное) Постоянный магнит |ф Г
Электромагнит
1 ф
Намагничивающий соленоид
Г A
Пропускание тока по всему изделию Ф
Г ♦р о C' "I
1
Пропускание тока по контролируемой части изделия о
"'-И
Циркулярное / С помощью провода с током, помещаемого в отверстие изделия j -o
1 t
^2
< •
Путем индуцирования тока в изделии 4, <Рг И
pff
/
Пропускание через изделие электрического тока и магнитного потока от электромагнита Л V
Пропускание по изделию двух (или более) независимых токов во взаимно перпендикулярных направлениях T * П
I "
Комбинированное Путем индуцирования тока в изделии и током, проходящим по проводнику, помещенному в отверстие изделия
.UM I
Г J-*
Пропускание тока по изделию и при помощи соленоида d
VP//A7//,\
1 4-
H 1 T <1
Условные обозначения: И — изделие; Ф — магнитный поток; I — намагничивающий поток
526
ГЛАВА 20
20.4.3. Способы, дефектоскопирования деталей
Различают два способа контроля намагниченных деталей методом магнитного порош-
ка — контроль на остаточной намагниченности и контроль в приложенном магнитном поле.
Первый способ намагниченности заключается в намагничивании детали, включении
намагничивающего поля и последующего нанесения на ее поверхность магнитной суспен-
зии. Способ применяется для проверки деталей из магнитно-твердых материалов, в частно-
сти, конструкционных и инструментальных сталей после их термической обработки.
Контроль в приложенном магнитном поле заключается в намагничивании детали и од-
новременно с этим нанесении на ее поверхность магнитной суспензии. Этим способом про-
веряют детали, выполненные из магнитно-мягкой стали, например, из сталей марок Ст. 3,
Ст. 10, Ст. 20 и др.
Магнитное поле может быть как постоянным, так и переменным. Все зависит от того, ка-
кой ток (постоянный или переменный) проходит по обмотке намагничивающего устройства.
Постоянный ток создает магнитное поле, глубоко проникающее в металл, поэтому его целесо-
образно применять для выявления не только поверхностных, но и подповерхностных дефектов.
При контроле деталей в переменном поле сказывается поверхностный эффект (вытес-
нение тока к поверхности). При этом происходит намагничивание линий наружных слоев,
обеспечивающее выявление поверхностных дефектов.
20.4.4. Магнитные порошки и суспензии
Надежность выявления мельчайших поверхностных трещин магнитным методов в зна-
чительной мере зависит от свойств магнитного порошка.
Магнитные порошки представляют собой магнитные материалы с соответствующей фор-
мой, размерами, магнитной проницаемостью и способностью сохранения остаточной магнит-
ной индукции. Цвет этих материалов может быть черным, серым и красным. Получают их путем
механического измельчения до пылевидного состояния закись-окиси железа или химическим
путем из водного раствора сернокислого железа и азотнокислого аммония с последующим про-
каливанием магнетика до превращения его в буровато-красную гамма-окись железа. Черный
магнитный порошок применяется для дефектоскопии деталей со светлой поверхностью, крас-
ный и серый порошки — для контроля деталей с темной поверхностью. Добавка в порошки лю-
минофоров придает им люминесцентные качества. В ультрафиолетовых лучах этот порошок имеет
желто-зеленое свечение. Магнитные порошки используются для приготовления жидких магнит-
ных суспензий, которые делятся на водные, масляные и керосино-масляные. В качестве жидкой
среды для водной магнитной суспензии применяется вода с добавками (калиевый хромпик, каль-
цинированная сода, эмульгатор). Поскольку водные суспензии предназначены для контроля де-
талей с обезжиренной поверхностью, то данный вид суспензии в дефектоскопии оборудования
шахтных стационарных установок не нашел достаточного применения. В качестве жидкой сре-
ды для масляной и керосино-масляной суспензии применяются жидкие минеральные масла
(трансформаторное, МК-8, веретенное) и керосин. Концентрация магнитного порошка в сус-
пензии может меняться в зависимости от объекта контроля.
Качество магнитной суспензии контролируют по выявлению дефектов на эталонных
деталях, по концентрации магнитного порошка в суспензии и вязкости ее жидкой основы.
20.4.5. Основные технологические операции
Соблюдение технологии — одно из основных условий надежности контроля. Малейшее
отклонение от технологии может привести к не выявлению дефектов, поэтому нельзя гово-
рить о важных и неважных моментах в технологии контроля. Магнитопорошковый метод
контроля состоит из следующих основных операций: подготовка поверхности детали к кон-
тролю; намагничивание детали, нанесение магнитной суспензии; осмотр поверхности дета-
ли и оценка годности контролируемой детали, размагничивание детали. Наивысшая чувстви-
тельность контроля магнитопорошковым методом может быть получена на деталях, имею-
щих высокий класс чистоты поверхности. Увеличение шероховатости поверхности ведет к
снижению чувствительности контроля из-за появления фона из магнитного порошка. Это
ведет к необходимости уменьшения напряженности намагничивающего поля и соответствен-
но к снижению чувствительности контроля.
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 527
Контролируемые детали должны быть очищены от грязи, смазки, отслаивающейся ржавчи-
ны, окалины. Детали с темной поверхностью рекомендуется предварительно покрывать тонким
слоем (не более 15 мкм) светлой краски, например, нитроэмалью НЦ-25; нанесение краски це-
лесообразней производить аэрозольным способом. Чувствительность контроля должна быть до-
статочной для надежного выявления эксплуатационных дефектов. Такие понятия, как тонкие и
грубые дефекты весьма расплывчаты и не дают конкретного представления о размерах дефектов.
Для того чтобы внести большую определенность в этот вопрос, в методике дефектоскопии, дей-
ствующей в отрасли, на основании экспериментальных исследований принята чувствительность
контроля, обеспечивающая выявление искусственного дефекта размером 6x0,5 мм.
Чувствительность контроля проверяют с помощью контрольных образцов. В качестве
образцов могут быть использованы отрезки деталей, имеющие естественные дефекты соот-
ветствующих размеров или же контрольные образцы, входящие в комплект дефектоскопа.
Контрольный образец может быть также изготовлен из отрезка детали, в которой фрезой
выполняют паз, в него запрессовывают медную пластину и тщательно развальцовывают ме-
ста стыка этих металлов. В качестве контрольного образца иногда применяют также детали,
на которых трещины получают особо резкой закалкой.
Оптимальный режим намагничивания и чувствительность контроля определяют по оседа-
нию магнитного порошка над дефектом. Начало обработки детали суспензией должно совпа-
дать с началом намагничивания. После обильного и равномерного смачивания детали струей
суспензии со слабым напором обработка суспензией прекращается. Намагничивающий ток вык-
лючается после полного стекания суспензии с детали. В случае осаждения порошка на гребнях
резьбы полив суспензией рекомендуется осуществлять после включения электромагнита или
соленоида. Наиболее удобный способ нанесения суспензии — полив ее из бачка или резиновой
груши. Перед употреблением суспензию необходимо каждый раз взбалтывать. Струю следует
направлять на деталь таким образом, чтобы суспензия медленно стекала по местам наиболее
вероятного расположения дефекта. При этом необходимо следить, чтобы струя не смывала час-
тиц порошка, осевших на дефектных местах. Отработанную суспензию собирают в специальные
ванночки, устанавливаемые под деталью. Поскольку суспензия в процессе работы неизбежно
обедняется магнитным порошком, его необходимо периодически взбалтывать.
При проведении контроля применяют продольное намагничивание электромагнитом или
постоянным магнитом, соленоидом или гибким кабелем таким образом, чтобы направление
магнитного поля было перпендикулярно к вероятной ориентации дефекта. Напряженность
намагничивающего поля устанавливают в соответствии с требованиями к размерам недопу-
стимых дефектов и магнитными характеристиками материала детали. Осмотр деталей про-
водят через 1-2 минуты после прекращения воздействия суспензии при освещенности 3000-
4000 люкс. Для тщательного осмотра применяют лупы 2-, 4-, 7- и 10- кратного увеличения и
другие оптические приборы. Детали, подвергнутые магнитному контролю, подлежат размаг-
ничиванию, так как из-за остаточной намагниченности в процессе эксплуатации детали к ее
поверхности будут притягиваться ферромагнитные продукты износа, что оказывает влияние
на работоспособность элементов шарнирных соединений, подшипников и т.д. Размагничи-
вание осуществляют путем циклического перемагничивания детали уменьшающимся по ам-
плитуде и изменяющимся по направлению магнитным полем.
Признаком наличия дефекта при магнитном контроле является наличие плотного вали-
ка магнитного порошка на поверхности детали. При этом осаждение магнитного порошка
по целому ряду причин может служить причиной появления мнимых дефектов. Одной из
таких причин является магнитная неоднородность, возникающая в местах резкого уменьше-
ния сечения намагниченного изделия, в местах местного поверхностного наклепа металла и
забоин, в местах рисок, в местах раздела двух структур материала в детали и т.д.
20.4.6. Магнитные дефектоскопы
Для обнаружения поверхностных и подповерхностных дефектов в ответственных эле-
ментах шахтных стационарных установок в условиях эксплуатации применяются в основ-
ном переносные дефектоскопы ПМД-70, МАГЭКС-3.
Дефектоскоп ПМД-70 позволяет намагничивать и размагничивать детали с помощью
кабеля, электрокарандашей, соленоида или электромагнита и проводить контроль деталей,
как в приложенном магнитном поле, так и на остаточной намагниченности.
528
ГЛАВА 20
Размагничивание деталей с помощью кабеля и электрокарандашей выполняется автома-
тически, а с помощью электромагнита — путем снижения тока до нуля (вручную) при автома-
тической его коммутации. Дефектоскоп размещен в двух чемоданах: в чемодане № 1 размеще-
ны блок питания, импульсный блок и блок управления в чемодане № 2 — намагничивающие
устройства, соленоид, гибкий намагничивающий кабель, длиной 4 м сечением 4 мм1 и 10 мм1,
электроконтакты, электромагнит с универсальными полюсными наконечниками и др.
В комплекте дефектоскопа имеются также универсальные приспособления для нанесе-
ния на детали магнитной суспензии: ванночки, пипетки, поворотное зеркало, телескопичес-
кая лупа ЛПШ-474 и переносная лампа ПЛ-36, которые обеспечивают удобства при выпол-
нении работ по контролю деталей. Питается прибор от сети переменного тока напряжением
220 В или сети источника постоянного тока напряжением 24 Д; масса чемодана № 1 равна
41 кг, а чемодана №2—18 кг.
Дефектоскоп позволяет контролировать различные по форме детали, сварные швы, внут-
ренние поверхности отверстий путем намагничивания отдельных контролируемых участков
или детали в целом циркулярным или продольным полем, создаваемым с помощью набора
намагничивающих устройств, питаемых импульсами тока, электроконтакты, гибкий кабель,
а также постоянным током электромагнитом, соленоидом. Дефектоскоп питается от сети
постоянного тока напряжением 24 В или от сети переменного тока 50 Гц напряжением 220 В
при этом максимальная потребляемая мощность не превышает 200 Вт. Необходимость иметь
внешнее питание создает определенные проблемы использования прибора в шахтных усло-
виях. Кроме того, значительная масса его также является ограничивающим фактором ис-
пользования прибора в шахтных условиях.
Указанных недостатков лишен дефектоскопический комплект «МАГЭКС-3» с намагни-
чивающим устройством МЭ-3. Комплект позволяет производить неразрушающий контроль
магнитопорошковым методом ферромагнитных изделий при намагничивании их продольным
магнитным полем магнита МЭ-3, который обеспечивает плавную регулировку напряженнос-
ти магнитного поля и межполюсного расстояния. Комплект может эксплуатироваться в цехо-
вых, лабораторных, полевых условиях, на высотных объектах и в условиях, где энергоснабже-
ние затруднено или недопустимо по правилам техники безопасности, при температуре окру-
жающей среды от — 30 до + 50° С и относительной влажности до 95% при температуре 35° С.
20.5. Капиллярная дефектоскопия
20.5.1. Сущность метода
Поверхностные дефекты представляют собой капиллярные сосуды, обладающие спо-
собностью «всасывать» смачивающие их специальные цвето-контрастные жидкости под воз-
действием капиллярных сил. Именно на использовании капиллярных свойств жидкостей и
основан метод капиллярной или цветной дефектоскопии [221].
а б в
1 2 1
Рис. 20.5. Схема контроля деталей капиллярным методом с применением проявителя:
а — полость трещины заполнена проникающей жидкостью ; б — жидкость удалена
с поверхности детали; в — нанесен проявитель, трещина выявлена; 1 — деталь, 2 — полость
трещины; 3 — проникающая жидкость
При контроле на деталь наносят специальную смачивающую (индикаторную) жидкость,
обладающую высокими окрашивающими качествами и высокой капиллярной активностью.
Данная жидкость под действием капиллярных сил заполняет полости поверхностных дефек-
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 529
тов. Затем индикаторную жидкость удаляют с поверхности детали. Для этой цели применя-
ют специальные очищающие составы. Оставшуюся в полостях дефектов часть индикатор-
ной жидкости обнаруживают путем нанесения проявителя, который абсорбирует жидкость,
образуя индикаторный рисунок, а также создает фон, улучшающий видимость рисунка.
20.5.2. Основные технологические операции
При контроле деталей методом цветной дефектоскопии выполняют следующие техно-
логические операции: подготовка деталей, нанесение индикаторной жидкости, удаление
индикаторной жидкости с поверхности деталей, нанесение проявителя, осмотр деталей, уда-
ление проявителя с годных деталей. Подготовка деталей к контролю оказывает большое вли-
яние на его результаты, поэтому перед нанесением индикаторной жидкости необходимо тща-
тельно удалить с поверхности детали следы масла, смазки, грязи, продукты коррозии и т.п.
Удаление масел и смазок осуществляют путем «мягкого» полива бензином из специального
полиэтиленового баллончика и протиркой контролируемого места мягкой кистью или чис-
той ветошью. После обезжиривания контролируемую деталь рекомендуется продуть сухим
сжатым воздухом в течение 1—2 минут. Коррозию с деталей рекомендуется удалять химичес-
ким, электрохимическим или анодно-ультразвуковым способом. После очистки деталей с
применением кислот последние нейтрализуют слабыми щелочными растворами, промыва-
ют чистой водой и сушат. Любые виды загрязнений не рекомендуется удалять механически-
ми способами (зачисткой шлифовальными шкурками, металлическими щетками, абразив-
ными кругами, пескоструйной обработкой и др.), т.к. в этом случае полости дефектов заг-
рязняются продуктами очистки, уменьшается ширина раскрытия полостей и в результате
вероятность обнаружения дефектов резко снижается.
Нанесение индикаторной жидкости осуществляют чаще всего либо погружением деталей
в ванну с жидкостью, либо «мягким» поливом из полиэтиленового баллончика. При этом
поверхность контролируемой детали должна все время оставаться смоченной жидкостью, для
чего кистью и обливанием жидкость наносят многократно, в несколько слоев. Продолжи-
тельность заполнения полостей дефектов зависит главным образом от вязкости жидкости,
ее смачивающей способности, а также от размеров полости дефекта. При использовании
красной проникающей жидкости, приготовленной на основе спирта, время пропитки долж-
но составлять не более 2-х минут.
Удаление избытка индикаторной жидкости с контролируемой поверхности должно про-
изводиться тщательно, т.к. от этого зависит чувствительность метода. При этом необходимо
предотвратить появление окрашенного фена на бездефектной поверхности контролируемой
детали и вместе с тем обеспечить сохранение проникающей жидкости в полостях поверхно-
стных дефектов. Очистка осуществляется в несколько этапов. Вначале производят грубую
очистку с помощью чистой ветоши, обильно смоченной водой. При этом смывание должно
производиться таким образом, чтобы за одно движение смывалась вся контролируемая по-
верхность. Затем поверхность детали смачивают с помощью кисти или простым поливани-
ем. После водной промывки деталь сушится в потоке чистого подогретого воздуха (с ис-
пользованием тепловентилятора, фона или источника сжатого воздуха). Струя воздуха дол-
жна направляться по касательной к поверхности, чтобы легко сдувались капли воды. Допус-
кается удаление следов влаги чистыми марлевыми салфетками.
Сразу же после удаления индикаторной жидкости и сушки детали производят нанесение
проявляющей жидкости. Нанесение проявителя осуществляют с помощью аэрозольного бал-
лона, пульверизатора или мягкой волосяной кистью. При нанесении проявителя необходи-
мо стремиться, чтобы его слой был по возможности равномерным; рядом лежащие слои не
должны перекрывать друг друга больше чем на 1—2 мм. Оптимальное расстояние между рас-
пылителем и контролируемой поверхностью составляет 300—350 мм.
Для обнаружения дефектов деталь осматривают не ранее чем через 10 минут после окончания
нанесения проявителя. Осмотр проводят при повышенной локализации освещенности не менее
2000 люкс с использованием софитов местного освещения, исключающих попадание прямого света
в глаза наблюдателя. Для опознания отдельных мелких дефектов рекомендуется применять лупу.
При распознании поверхностных дефектов обращают внимание на следующие их ос-
новные признаки:
530
ГЛАВА 20
— трещины (шлифовочные, усталостные, термические) — выявляются в виде резких крас-
ных линий на белом или светло-розовом фоне;
— поры — в виде отдельных красных точек или пятен (глубокие поры имеют более яр-
кий цвет, чем мелкие).
Наряду с рисунками от действительных дефектов могут быть обнаружены индикатор-
ные рисунки ложных дефектов, к которым относятся резкие изменения геометрии детали,
незначительные повреждения и загрязнения поверхности. За ложные трещины могут быть
приняты царапины и риски, галтели малого радиуса, уступы, сколы окисной пленки, следы
лакокрасочных покрытий, окрашенные волокна ветоши и др. Проявитель с поверхности кон-
тролируемой детали может быть удален протиркой ветошью или жесткой кистью, смочен-
ным растворителем.
Капиллярные методы дефектоскопии применяются для обнаружения только поверхно-
стных дефектов, представляющих собой нарушения сплошности материала. Контролю эти-
ми методами подвергают детали различной конфигурации, изготовленные из черных и цвет-
ных металлов, пластмасс и других материалов. Месторасположение дефекта и его истинная
конфигурация на поверхности детали определяется без ошибок и большого труда. По на-
глядности методы цветной дефектоскопии не уступают магнитопорошковым методам конт-
роля. К их недостаткам можно отнести необходимость предварительной и притом очень
тщательной подготовки деталей, качество которой не контролируется.
20.6. Ультразвуковая толщинометрия
20.6.1. Общие сведения
Ультразвуковые толщиномеры предназначены для измерения толщины изделий, доступ
к которым имеется только с одной стороны. В шахтном подъеме такими изделиями являют-
ся технологические трубопроводы различного назначения (маслосистема, сжатый воздух, ме-
таноотсос), воздухосборники сжатого воздуха, металлоконструкции металлических копров,
ободья копровых шкивов, коробчатые проводники и расстрельные балки жесткой армиров-
ки, элементы металлоконструкций клетей, скипов, противовесов и проходческих бадей, ме-
таллические обечайки органов навивки барабанных подъемных машин, обечаек канатоведу-
щих шкивов трения многоканатных подъемных машин и др.
20.6.2. Сущность метода
Принцип работы приборов ультразвуковой толщинометрии аналогичен принципу ра-
боты импульсных ультразвуковых дефектоскопов, реализующих эхо-метод [222]. Специфи-
ка толщиномера по сравнению с дефектоскопом состоит в том, что он должен обеспечить по
возможности, более точное измерение времени прихода донного сигнала t, вычесть из него
время, соответствующее пробегу ультразвукового импульса в призмах или протекторе пре-
образователя, а также в слое контактной жидкости t\ и преобразовывать его в толщину из-
меряемого изделия Н
H=C(t-ty2. (20.6.1)
Настройка толщиномера состоит в установлении скорости звука С в материале изделия
по образцу или по участку изделия, толщина которого известна. Кроме того, прибор требует
настройки начала отсчета, чтобы исключить время tl. Дальнейшее измерение состоит в при-
жатии преобразователя к точкам поверхности изделия, где нужно выполнить контроль, счи-
тывании и записи показаний толщиномера.
20.6.3. Приборы ультразвуковой толщинометрии
Различают три вида задач при измерении толщины, которым соответствуют три группы
приборов:
1. Автоматический контроль изделий в потоке (обычно труб).
2. Ручной контроль изделий с гладкими параллельными поверхностями, например, из-
делий после их изготовления.
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 531
3. Ручной контроль изделий с грубыми непараллельными поверхностями, например,
изделий, внутренняя поверхность которых поражена коррозией или же на ней имеются раз-
личного рода отложения.
Именно последняя группа приборов наиболее подходит для толщинометрии деталей
оборудования подъемных установок. Более того, многие детали и изделия имеют не одну, а
обе поверхности с коррозионными повреждениями.
Требованиям контроля изделий с корродированными поверхностями наиболее полно
отвечают на сегодняшний день ультразвуковые толщиномеры «Булат 1S». В приборе исполь-
зуется контактный способ обеспечения акустического контакта прижимом контактной по-
верхности преобразователя к поверхности контролируемого объекта. Диапазон измеряемых
толщин по стали в зависимости от типа преобразователя от 0,8 мм до 200 мм.
20.7. Акустико-эмиссионный метод контроля
Этот метод неразрушающего контроля пока не нашел широкого распространения на
практике, но перспективы его применения весьма высоки. Метод акустической эмиссии (АЭ)
основан на том эффекте, что растущая трещина или возникновение дополнительных напря-
жений внутри изделия, например, вследствие деформации, высвобождает энергию, которая
излучается также в форме звуковых волн [222]. Диапазон частот этих импульсов или дуга
импульсов распространяется на все частоты слышимого звука вплоть до наивысших частот.
Однако по практическим причинам ограничиваются диапазоном ультразвука около 1 МГц,
так как при более низких частотах измерение нарушается из-за слишком большого числа
помех окружающей среды, а при более высоких частотах сильно ограничивается дальностью
распространения из-за поглощения звука в материале. По аналогии с методами сейсмологии
звуковые импульсы регистрируются пьезопреобразователями, прикрепленными к детали, и
подвергаются дальнейшей обработке.
Следует еще раз подчеркнуть, что метод АЭ дефектоскопии обеспечивает обнаружение
и регистрацию только развивающихся (действительно опасных) дефектов [144]. Классифи-
цируют их не по размерам, а по опасности. Это означает, в частности, что отдельные дефек-
ты, размер которых превышает браковочный уровень традиционных методов неразрушаю-
щего контроля, при использовании АЭ дефектоскопии могут не проявиться, поскольку су-
ществуют, не развиваясь при рабочих нагрузках.
Итак, акустическая эмиссия, или эмиссия волн напряжений — это явление, заключаю-
щееся в генерации упругих волн в твердых телах при их деформации. Главными источника-
ми акустической эмиссии считают процессы скольжения и разрушения в кристаллах (и их
скоплениях), трения поверхностей разрыва друг о друга, движения дислокаций и изломов,
релаксации упругой матрицы при движении дислокаций. Моменты излучения волн эмиссии
распределены статически во времени; возникающие при этом дискретные импульсы — вспыш-
ки имеют широкий частотный диапазон (от десятков килогерц до сотен мегагерц) в зависи-
мости от материала.
Основные показатели, характеризующие акустическую эмиссию согласно ГОСТ 27655-
88: число импульсов — число зарегистрированных импульсов дискретной АЭ за интер-
вал времени наблюдения; суммарный счет N — число зарегистрированных превышений им-
пульсами АЭ установленного уровня дискрименации за интервал времени наблюдения; ак-
тивность — число зарегистрированных импульсов АЭ за единицу времени; скорость счета
N— отношение суммарного счета АЭ к интервалу времени наблюдения Еэ — энергия, выде-
ляемая источником АЭ и переносимая волнами, возникающими в интервале; энергия ис-
точника Ес — энергия АЭ механических колебаний, выделяемая в месте локальной пере-
стройки структуры.
Кроме того, в научно-технической литературе АЭ широко применяются понятия: амп-
литуда сигнала — максимальное значение огибающей принятого сигнала; пиковая амплиту-
да — максимальное значение амплитуды за определенный интервал времени.
В материалах с хорошо выраженной площадкой текучести на диаграмме «напряжение —
деформация» кривая зависимости активности АЭ () от напряжения имеет один максимум,
соответствующий пределу текучести материала. Установлено также, что начальная амплитуда
сигналов зависит, в частности, от уровня остаточных напряжений в материале.
532
ГЛАВА 20
Рис. 20.6. Изменения числа импульсов АЭ N
и раскрытия трещины 8 при малоцикловых
усталостных испытаниях (п — число циклов)
Характерной особенностью АЭ
при циклическом нагружении являет-
ся быстрое уменьшение числа импуль-
сов АЭ и их амплитуд при повторных
нагружениях. Этот эффект носит на-
звание эффекта Кайзера — первого
исследователя эффекта. В настоящее
время он формулируется как явление
невоспроизводимости АЭ при повтор-
ном нагружении вплоть до максималь-
ной нагрузки предшествующего нагру-
жения. Абсолютное исчезновение АЭ
при повторном нагружении должно
говорить, что материал не поврежда-
ется и, следовательно, усталостного
разрушения не будет наблюдаться при
любом числе циклов нагружения. Вме-
сте с тем, если при повторных нагру-
жениях амплитуда и число импульсов
АЭ уменьшаются незначительно, то имеет место быстрое накоплении повреждений и соот-
ветственно быстрое усталостное разрушение объекта.
Типичная кривая числа импульсов АЭ при малоцикловой усталости приведена на
рис. 20.6. Эта кривая получена при испытании на изгиб образцов конструкционной стали с
надрезом [144]. Сечение образца 20x40 мм, длина 300 мм. Глубина надреза 5 мм. Максималь-
ная нагрузка в цикле 4,9-104 Н.
В первом цикле нагружения происходит интенсивное пластическое деформирование
материала в вершине надреза и соответственно излучается большое число импульсов АЭ с
достаточной для регистрации амплитудой. В каждом последующем нагружении число им-
пульсов снижается на порядок (участок АВ кривой). Далее происходит медленное накопле-
ние повреждений (участок ВС). Энергия сигналов АЭ настолько мала, что они не регистри-
руются аппаратурой. Однако на определенных этапах роста усталостной трещины в объекте
происходят перераспределение напряжений и ускоренный рост от трещины (участок CD). В
описываемом образце ускоренный рост трещины произошел в районе 180 — 220 циклов. Этот
период можно связать с переходом микроскопической трещины в макроскопическую. Визу-
ально микроскопическая трещина была обнаружена только через несколько десятков цик-
лов после того, как она была зарегистрирована прибором АЭ.
Вслед за образованием макроскопической трещины началось ее медленное развитие (уча-
стие DE). Этому периоду соответствуют малые по амплитуде импульсы АЭ, не регистрируе-
мые аппаратурой. После увеличения усталостной трещины до определенного размера про-
исходит интенсивное пластическое разрушение. Оно сопровождается активным излучением
упругих волн. Этому участку роста трещины соответствует участок EFm кривой АЭ. Данная
стадия роста трещины заканчивается либо увеличением трещины на всю толщину объекта,
либо хрупким разрушением после достижения трещиной критического размера. В любом
случае отмеченный участок EF на кривой АЭ сигнализирует о приближающемся катастро-
фическом разрушении или об отказе в работе объекта.
Таким образом, при промежуточном значении нагрузки в цикле происходит подраста-
ние трещины; дальнейшее увеличение нагрузки (вплоть до максимума) в цикле приводит к
пластическому деформированию небольшого объема в вершине трещины. Естественно, что
при последующем нагружении с превышением максимального значения в цикле произойдет
значительная пластическая деформация, и разрушение объекта будет протекать, как и при
статическом нагружении.
Чувствительность метода АЭ к росту усталостной трещины весьма высока и может дости-
гать долей микрометра на цикл. Чувствительность определяется путем деления длины пути, прой-
денного усталостной трещиной, на общее число сигналов АЭ, зарегистрированное аппаратурой.
Важнейшая проблема АЭ-дефектоскопии — выделение АЭ-сигналов на фоне помех. Сле-
дует помнить, что согласно эффекту Кайзера АЭ-сигналы возникают только при приложении
ОБЩИЕ ВОПРОСЫ НЕРАЗРУЩАЮЩЕГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ОБОРУДОВАНИЯ 533
к объекту контроля определенной нагрузки, в ненагруженном же состоянии они отсутствуют
(объект «не звучит»). Другой важный показатель принадлежности зафиксированного сигнала
к АЭ — его локальный характер, т.е. привязка к определенной зоне, координатам объекта. Ло-
кальный характер АЭ-сигналов — один из основных признаков наличия дефекта. АЭ-источ-
ники, координаты которых случайным образом распределены по объекту, либо не являются
результатом развития трещины, либо этот разброс вызван настройкой аппаратуры.
Изучение сигналов АЭ дает ценную информацию о развитии усталостных трещин. Сте-
пень опасности, обусловленная наличием трещины в детали, находится в прямой зависимо-
сти от длины трещины и скорости ее роста. Скорость роста трещины (отношение прира-
щения длины за цикл нагружения =(№]di) определяет амплитуду акустических импуль-
сов, зависит она от коэффициента концентрации напряжения Кв вершине трещины и опре-
деляется соотношением = СК9, где С и q — константы материала.
Методы АЭ применяют для контроля состояния крупных емкостей, находящихся под дав-
лением, атомных реакторов, различных металлоконструкций. Известны исследования АЭ на
стальных образцах, разрушаемых при многократных циклических нагружениях. В этом случае
было обнаружено повышение активности АЭ задолго до образования видимой трещины. Пред-
варительно нагруженный образец циклично нагружали до разрыва с частотой 1800 цикл/мин.
Практически до 6000 циклов АЭ не наблюдалась, затем она стала нарастать. Когда число цик-
лов достигло 22000, скорость счета резко возросла. Видимая поверхностная трещина была об-
наружена по достижении 34000 циклов, а к 55000 циклов ее длина достигла 3 мм.
Известен также опыт контроля технического состояния металлических опор контактной
сети методами АЭ. Исходя из конструктивных особенностей, характера нагрузки и условий экс-
плуатации объекта, рекомендовано при АЭ-дефектоскопии опор использовать способ зонного
контроля в 2-канальном варианте, располагая датчики-преобразователи акустической эмиссии
в непосредственной близости от опасной зоны (на высоте, примерно, 0,25 м от грунта).
АЭ применяют при контроле процессов сварки и сварных швов. Напряжения, возникаю-
щие при проведении сварки, могут достигать значительной величины и вызывать пластичес-
кую деформацию материала шва и околошовной зоны с появлением трещин, являющихся
мощным источником АЭ. Но обнаружение трещин затруднено из-за шумности сварочных про-
цессов: горение дуги, плавление металла, затвердевание и растрескивание флюса, образование
капель металла в сварочной ванне и др. Для устранения указанных шумов (помех) необходимо
записывать уровень АЭ при различных шумовых факторах. Образование трещин характеризу-
ют мощные импульсы с амплитудой на 15—20 дБ, превышающей средний уровень шумов.
Применительно к оборудованию шахтных подъемных установок этот метод может ока-
заться единственно возможным для объективного контроля состояния коренного вала
подъемной машины, подвесных устройств, копровых шкивов, канатов и других ответствен-
ных изделий.
20.8. Контроль физико-механических свойств металлов
(испытание на твердость) [222]
Показатели твердости рассчитываются по формуле
1 = К\-1 (20.8.1)
I А Г
где Р — нагрузка; А — площадь отпечатка; К — численный коэффициент.
При различных методах испытания на твердость (по Бринеллю, по Роквеллу, по Вик-
карсу, по Шору, по Временному сопротивлению ) определение площади А не одинаково,
однако в любом случае измеряется только плоская площадь, т.е. та, которая видна под изме-
рительным микроскопом.
Ультразвуковая техника измерения отпечатков при испытаниях на твердость основыва-
ется на одном из положений теории упругости, согласно которому элемент поверхности с
площадью А перемещается перпендикулярно к поверхности тела на величину 8 , если на
него действует давление р, т.е. нагрузка Р = р-А. Формула имеет вид:
534
ГЛАВА 20
8
д
(20.8.2)
где / — численный коэффициент, зависящий от геометрической формы нагруженной зоны
(круглая или квадратная форма отпечатка); д — коэффициент Пуассона у изотропных ма-
Е , „
териалов Д =—-1; Е — модуль упругости на растяжение; G — модуль сдвига.
2G
Частное — представляет собой упругую податливость (с) нагруженной зоны поверхнос-
Р
ти, которая ведет себя как линейная пружина (если площадь А постоянна). На этом прин-
ципе был разработан динамический метод измерения твердости, который был внедрен в прак-
тику под названием ультразвуковой контактный импеданс.
Принцип измерения твердости заключается в следующем. Алмазная пирамидка зак-
реплена на конце металлического стержня, который колеблется под действием пьезопласти-
ны на резонансной частоте. При калиброванной нагрузке алмазная пирамидка внедряется в
материал и изменяет резонансную частоту стержня. Так как глубина внедрения алмазной
пирамидки в материал является показателем прочности, то существует зависимость между
изменением частоты резонанса стержня и твердостью материала:
I = f(F), (20.8.3)
где I— твердость материала; F— резонансная частота стержня.
В настоящее время освоен серийный выпуск твердомеров различных модификаций, сре-
ди которых наиболее распространенными являются универсальный твердомер 54-459М и
«Константа» К5Д». Эти приборы и предназначены для измерения твердости (по Бринеллю,
Роквеллу, Виккерсу, Шору) и механической прочности о^(по ГОСТ 22761-77) конструкци-
онных и углеродистых сталей в производственных условиях. Допускается применение твер-
домеров для измерения твердости чугуна, нержавеющих сталей и сплавов из цветных метал-
лов в режиме измерения с коррекцией по образцам, изготовленным из испытуемого матери-
ала предприятием-изготовителем. Штатным режимом работы приборов является режим ра-
боты по пяти отпечаткам с автоматическим усреднением результатов измерений.
Применение динамических твердомеров ограничивается следующими факторами:
1. Испытуемые детали не должны быть ни слишком легкими, ни слишком тонкими. В
частности, минимальная масса контролируемого изделия для твердомера 54-459М должна
быть не менее 1 кг, а твердомера «Константа» К5Д» — не менее 3 кг.
2. Метод измерений в случае пористых или неоднородных материалов (типа отливок,
изделий порошковой металлургии, чугуна с включениями графита и т.д.) в общем случае
непригоден ввиду неопределенности и изменчивости упругих частот.
3. Составные материалы типа биметаллов, металлов с покрытиями, металлов с оксидной
пленкой и т.д. обычно непригодны ддя испытаний на твердость динамическим способом.
4. Крупнозернистые металлы в общем случае не могут быть проконтролированы ввиду
большого рассеяния.
Применительно к оборудованию подъемных установок операция по измерению твердо-
сти определена нормативными документами по диагностированию воздухосборников тормоз-
ных систем подъемных машин. Кроме того, зачастую такая необходимость возникает для уточ-
нения марки стали, из которой изготовлена деталь, в частности, тяги подвесных устройств,
трубы главного водоотлива, вертикальные стойки клетей, скипов, противовесов и др.
Глава 21
ВИБРОАКУСТИЧЕСКАЯ ДИАГНОСТИКА,
ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА
21.1. Виброакустическая диагностика
21.2. Диагностика и устранение динамической
неуравновешенности роторов шахтных
стационарных машин
21.3. Особенности вибродиагностики многоканатных
подъемных установок
21.1. Виброакустическая диагностика
21.1.1. Актуальность вибродиагностики шахтных стационарных установок
Вибрации элементов шахтных подъемных машин выше допустимых норм приводят к
ускоренному износу и поломке отдельных деталей и узлов, расшатыванию и разрушению
фундаментов, нарушению функционирования или выводу из строя машины в целом. Кроме
того, вибрации нарушают нормальную работу приборов и аппаратуры контроля и управле-
ния, отрицательно влияют на организм обслуживающего персонала. Известно много случа-
ев, когда из-за вибраций выходили из строя многоканатные подъемные установки зачастую
с остановкой работы шахты на длительное время.
Причины вибраций: механический дисбаланс; неправильная центровка валов, наруше-
ние центровки под действием динамических сил при работе; дефекты соединительных муфт;
перекос подшипников по отношению к оси вала; погнутость, несимметричная жесткость вала;
дефекты зубчатой передачи, подшипников качения или скольжения; задевание ротором не-
подвижных частей; трение подвижных частей о неподвижные; заклинивание при перекосах
в подвижно-сопряженных парах; ослабление крепления опор к раме и др.
Своевременное обнаружение превышающих норму вибраций, диагностирование и уст-
ранение причин, их вызывающих, снижает простои машин, увеличивает межремонтные сро-
ки, сокращает расход запасных частей, обеспечивает безаварийную работу, повышает общую
надежность и долговечность машин, снижает расход электроэнергии, создает условия для
перехода от планово-предупредительного ремонта к более экономичному ремонту по состо-
янию машины. Современная виброизмерительная техника и технология вибродиагностиро-
вания — это оперативное и высокоэффективное средство безразборного обнаружения неис-
правностей машин, устраняющих необоснованные разборки машин, сопровождаемые нару-
шением условий приработки узлов и деталей.
Применение сравнительно сложных и дорогих вибродиагностических приборов и систем
экономически целесообразно из-за высокой стоимости шахтных стационарных установок, боль-
шой мощности их приводов и высоких требований к надежности и безаварийности.
Частота вращения шкивов и барабанов подъемной машины не превышает 80 об/мин, а
частота вращения роторов двигателей — 75 об/мин.
Возможность выполнять вибродиагностику шахтных стационарных установок в рабо-
чем режиме позволяет расширить функции приборов и применять их не только для перио-
дической диагностики, но и ддя непрерывного автоматического контроля.
21.1.2. Параметры и обобщенные характеристики вибраций
Вибрации возникают при воздействии периодически изменяющихся сил на обладаю-
щие упругостью детали, звенья, узлы машины. Вибрации возбуждаются также ударами. Удар —
536
ГЛАВА 21
это механический импульс, относительно короткий во времени по сравнению с периодом
вызываемого им колебания.
Вибрации относятся к области механических колебаний, но общепринятого определения,
выделяющего вибрацию среди механических колебаний, не существует. Очень часто термины
вибрация и механические колебания — синонимы. Большей частью термин вибрация упот-
ребляется в случаях, когда исследуемая система состоит из массивных элементов, между кото-
рыми имеются упругие связи. Именно такими системами являются подъемные машины.
Математическое описание вибраций элементов машин весьма сложно, а поэтому при
изучении явлений вибраций процесс схематизируется, то есть учитываются наиболее суще-
ственные стороны изучаемых явлений и отбрасываются второстепенные.
Периодическая сила, вызывающая вибрацию, определяется величиной, направлением и час-
тотой. Соответственно этому вибрация также характеризуется тремя показателями: амплитудой,
фазой и периодом колебания. Амплитуда виброперемещения — это максимальное значение откло-
нения рассматриваемой точки деформируемой системы от положения равновесия при воздействии
на систему периодической силы. Фаза определяет угол отклонения направления вектора вибрации
от отмеченного на валу машины радиуса начального отсчета, направление которого выбирают про-
извольно, но в дальнейшем не изменяют, так же как и выбранное направление отсчета. Период —
это отрезок времени Т, за который необходимая точка системы совершит полное колебание. Виб-
рацию удобнее характеризовать частотой/= Т1 (Гц) — величиной, обратной периоду.
Частота вращения вала машины, с-1 ,f = л/60, где п — частота вращения машины, об/
мин. Имеется также понятие циклической частоты гармонических вибраций со (рад/с), опре-
деляющей угловую скорость вектора вибрации to = 2я/. Вращаясь с этой угловой скорос-
тью, вектор вибрации через t секунд повернется на угол cot по отношению к горизонтальной
оси, с направлением которой он совпадал в начальный момент времени.
Проекция вектора вибрации на горизонтальное направление ОХ
S-Sacoscot, (21.1.1)
где S — виброперемещение рассматриваемой точки машины в направлении горизонтальной
оси; 5 — амплитуда виброперемещения. Это уравнение гармонического колебания.
Важные параметры гармонического колебания — также скорость v и ускорение а:
v = 5atocos(to/+^/2) = vacos(to/+^/2), (21.1.2)
a = Saco2 cos (cot+ir) = aacos(cot+я), (21.1.3)
где va=5ato — амплитуда виброскорости; аа = Saco2 — амплитуда виброускорения.
Из формул (21.1.1—21.1.3) следует, что форма и период колебательного движения одина-
ковы ддя всех трех параметров вибрации. Поэтому аналогично вектору вибрации, имеюще-
му модуль Sa, можно представить модель вектора виброскорости: va = Saco и модель вектора
виброускорения: аа = Saco2. При этом следует учитывать, что векторы виброскорости и виб-
роускорения соответственно опережают векторы виброперемещения и виброскорости на фа-
зовый угол я/2 . Удобно виброперемещения измерять в микронах (мкм), виброскорость — в
мм/с, а виброускорение — в м/с1.
Вибрации машин часто имеют характер более сложный, чем гармонический. В этих слу-
чаях пользуются обобщенными характеристиками параметров вибрации: пиковым и средним
квадратическим значениями, которые отсчитываются непосредственно по шкалам индикато-
ра виброметра. Пиковое значение вибрации определяется как наибольшее отклонение колеба-
тельной величины в ту или другую сторону от нулевого уровня: хр =|Атах| Пиковые вибра-
ции являются часто случайными величинами. Поэтому пиковое значение смещений 5 ха-
рактеризует максимальное отклонение колеблющегося тела, что важно, например, при вы-
боре зазоров между колеблющимися телами. Пиковое значение ускорений а р используют
ддя оценки наибольших инерционных сил. Пиковое значение виброскорости особого прак-
тического значения не имеет, однако среднее квадратическое ее может быть использовано
для оценки энергии колебаний.
ВИБРОАКУСТИЧЕСКАЯДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА 537
Известно, что сигнал, имеющий периодический характер, можно представить в виде ряда
Фурье:
x = a0+a1sin(fi)/+a1)+a2sin(2fi)/+a2)+"+a„sin(zKO/+an)+... (21.1.4)
Амплитуды гармоник ап можно определять путем анализа амплитудно-временных ха-
рактеристик сигнала способом быстрого преобразования Фурье с помощью различных ана-
лизаторов спектра. Многие взаимодействия деталей носят импульсный характер. Это соуда-
рение деталей, вызванное зазорами в сочленениях, нарушением формы деталей и местными
деталями. Импульсный процесс соударений в машине обычно имеет периодический харак-
тер. Выполнив узкополосный спектральный анализ, можно получить амплитудно-частотную
характеристику импульсных сигналов.
Примеры такой характеристики представлены на рис. 21.1.
Рис. 21.1. Спектр колебаний подшипника главного вала подъемной машины ШПМ 1x5x6,3
Поэтому его легко выделить с помощью фильтра из общего сигнала вибраций, а затем,
пропустив через детектор, получить огибающую сигнала, несущую информацию об импуль-
сах, вызванных дефектами. Совместный анализ спектра сложного колебания и спектра им-
пульсных сигналов облегчает разделение причин дефектов при вибродиагностике.
21.1.3. Нормирование вибраций
Цель существующих способов и средств борьбы с вибрацией заключается в снижении
вибраций до нормы, обеспечивающей безопасные условия труда обслуживающего персона-
ла, надежную и длительную работу машин и сооружений.
Вибрационные параметры связаны между собой соотношениями:
S.=2,5Vfajf-, (21.1.5)
где Sa и а — амплитуда соответственно виброперемещения (мкм) и виброускорения (м/с1)-,
va — амплитуда виброскорости, мм/с',/— частота вибрации, Гц.
Рекомендуется для низкооборотных машин с частотой вращения п -10 -» 1500 об/мин нор-
мировать виброперемещение S, для машин, имеющих среднюю частоту вращения п =
п = 1500-е-6000 об/мин, — виброскорость v и для высокооборотных машин с частотой враще-
ния « = 6000-1-2000 об/мин — виброускорение а.
В случае сложного сигнала для оценки вибрации используют формулу суммирования
вредности вибрации:
Х4/4- <1, (21.1.6)
где Л — амплитуда измеряемого параметра (S, v или а) i-й гармонической составляющей
оцениваемого сигнала вибрации; Д' — нормативная амплитуда измеряемого параметра виб-
рации для частоты z-й гармонической составляющей. Соотношение (2.1.6) означает, что по
538
ГЛАВА 21
вредности сложная вибрация достигает границу зоны тогда, когда сумма всех удельных вред-
ностей вибрации равна единице. Например, верхнее значение с оценкой удовлетворительно
(рис. 21.2) для п = 1000 об/мин соответствует амплитуде виброперемещений 47 мкм. Допус-
тим, что измеренная вибрация на опоре машины, ротор которой вращается с такой частотой
вращения, имеет сложную форму и состоит из двух составляющих: с частотой 16,6 Гц и амп-
литудой 30 мкм и частотой 200 Гц и амплитудой 5 мкм (норма 6 мкм). Каждая из этих состав-
ляющих в отдельности находится в норме, однако, при расчете по формуле 30/47+5/6=1,47>1.
Рис. 21.2. Нормы вибрации шахтного оборудования
Следовательно, вибрация превышает верхнюю границу зоны «Удовлетворительно» и на-
ходится в зоне «Требует исправления». На рис. 21.3 приведены значения верхних зон норма-
тивных значений амплитуд измеряемых параметров вибраций (S, v или а): «Отлично», «Хо-
рошо», «Удовлетворительно», «Требует исправления» [231].
Выше значений зоны «Требует исправления» начинается зона «Опасно». Штрихпунк-
тирной линией нанесена кривая, соответствующая временным санитарным нормам по огра-
ничению вибраций рабочего места, исходя из физического воздействия вибраций на людей.
В случае установки машины на перекрытиях башенных копров нормы вибраций следует
уменьшать в 2 раза, за исключением норм на колебание всего башенного копра, вызванное
неуравновешенностью канатоведущего шкива подъемной машины.
Зональное представление норм удобно для прогнозирования состояния машины и при
проведении ремонтов по техническому состоянию. При переходе параметров вибрации в зону
ВИБРОАКУСТИЧЕСКАЯДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА
539
«Опасно» машина должна быть остановлена немедленно. Зона «Требует исправления» пре-
дусматривает время на подготовительные операции по устранению причин без остановки
машины. Зона «Удовлетворительно» позволяет работать машине до следующего планово-
предупредительного ремонта. Зона «Хорошо» сокращает перечень работ при планово-пре-
дупредительном ремонте. Зона «Отлично» свидетельствует о том, что планово-предупреди-
тельный ремонт можно не производить.
Уровень отдельных гармонических составляющих вибрационного сигнала определяют с
помощью измерений с плавно перестраиваемым узкополосным фильтром. Значения амплиту-
ды гармоники и ее частоты отсчитывают в положении максимальных показаний указанных
индикаторов. Для измеряемых параметров должны быть представлены амплитудные значения.
Для контроля вибраций выбирают места, где энергия колебаний передается на опорные
основания или на другие детали. На шахтных подъемных установках основной источник энер-
гии колебаний — вращающиеся массы, поэтому такими местами, в первую очередь, являют-
ся подшипниковые опоры.
При оценке вибраций электродвигателя машины, входящей в состав шахтной подъем-
ной установки, вибродатчики располагают на опорах подшипников. Допускают размещение
датчиков в удобных местах вблизи указанных точек, а также на лапах и фланцах машин.
Рекомендуется дополнительно измерять вибрации в других точках, где наиболее отчетливо
проявляются составляющие вибрации, характеризующие работу основных узлов машины, а
также в точках, находящихся вне машины в случаях проявления резонанса. В каждой конт-
ролируемой точке необходимо размещать датчики для измерения в трех направлениях (вер-
тикальное, горизонтальное и осевое), желательно на одном кронштейне. Места установки
датчиков должны быть точно нанесены на схему в протоколе измерения вибрационных па-
раметров для сравнения измерений, проводимых в различное время, повторения неудавшихся
по каким-либо причинам измерений или сравнения с объектами аналогичного назначения.
В протоколе должны быть указаны место и дата испытаний по проверке норм вибра-
ций, организация, предприятие, где производилось испытание, сведения об испытываемой
машине, характеристика средств измерения, условия испытаний, схема расположения виб-
роизмерительных датчиков и способы их соединений. Должна быть приведена таблица с ре-
зультатами определения зон оценок нормирования вибраций, заключение по результатам ис-
пытаний, подписи исполнителей испытания и представителей предприятия, ответственных
за работу испытываемого оборудования.
Для непрерывного виброконтроля машин шахтных стационарных установок использу-
ют контрольно-сигнальную аппаратуру. Одной из разновидностей ее является Унифициро-
ванная телекоммуникационная система диспетчерского контроля и автоматического управ-
ления горными машинами (УТАС). Разработана и изготавливается ГП «Петровский завод
угольного машиностроения», согласована с МакНИИ, Госпромнадзором Украины и внедре-
на на 14 шахтах. Вибрации для условий непрерывного контроля нормируются автоматичес-
ким сравнением вибрационного уровня с эксплуатационной нормой вибрации. Под эксплу-
атационными нормами допускаемой вибрации понимают технически обоснованные и эко-
номически целесообразные оптимальные уровни вибрации. Нормирование вибраций при не-
прерывном контроле ведут по двум уровням: предупредительному, соответствующему ниж-
ней границе эксплуатационной нормы «Требует исправления», и аварийному, соответствую-
щему нижней границе эксплуатационной нормы «Опасно».
При превышении вибрации контролируемой установки предупредительного уровня сра-
батывает сигнализация контрольно-сигнальной аппаратуры, при превышении аварийного
уровня контрольно-сигнальная аппаратура автоматически отключает установку. Предупре-
дительный и аварийный уровни контролируемой вибрации задаются в контрольно-сигналь-
ной аппаратуре соответствующими устройствами управления.
21.1.4. Диагностирование машин по виброакустическим признакам
Дефекты проектирования, изготовления и приобретенные в результате износа, наибо-
лее отчетливо проявляются только в процессе взаимодействия деталей при работе машин.
Нарушения в структуре работающей машины нельзя увидеть, но почти всегда можно изме-
рить вызванные ими шум и вибрацию. Шум и вибрации машин по количеству содержащей
540
ГЛАВА 21
информации имеют преимущество перед инертными сигналами, такими, как температура
масла, содержание в нем частиц износа, развиваемая машиной мощность, хотя эти парамет-
ры также зависят от состояния работающей машины. Недостаток вибродиагностики заклю-
чается в том, что упругие колебания распространяются практически от всех элементов рабо-
тающей машины, и в точке установки вибродатчика на него действует их суммарный сигнал.
Качественно и особенно количественно разделить его и расшифровать не просто.
Виброакустические сигналы, приходящие в точку измерения от каждой кинематичес-
кой пары, отличаются временем прихода, амплитудой и спектральным составом. Для выде-
ления этих сигналов из фона общих помех создают специальные методики и измерительные
системы. К выбору методов и приборов, которые требуются для наблюдения и сбора диагно-
стической информации для конкретной машины, необходимо подходить оптимально. Ис-
пользование неоправданно сложного диагностического оборудования может серьезно поме-
шать прогрессу вибрационной диагностики неисправности машины из-за чрезмерных мате-
риальных затрат и необходимости использовать квалифицированных специалистов. С дру-
гой стороны, недостаточные данные могут привести к ошибочным выводам. Поэтому все
факторы должны тщательно оцениваться перед выбором методов и приборов для виброак-
кустического диагностирования.
При виброакустическом диагностировании может быть использована следующая инфор-
мация: амплитуды средних квадратических и пиковых значений виброперемещения, виб-
роскорости и виброускорения; частотные спектры вибраций и импульсных сигналов; сдвиг
фаз между сигналами вибраций одинаковой частоты; резонансные и критические частоты;
коэффициент внутреннего затухания колебаний системы; силы и моменты сопротивления
движению; инерционные характеристики машины; статическая и динамическая жесткость
опорных узлов и валов и проявление ее нелинейности; нагрузочные характеристики и по-
требляемая мощность; характер распространения и распределения вибраций в машине и со-
оружениях; оценочные коэффициенты балансируемости и др.; результаты анализа случай-
ных стационарных и нестационарных вибраций и измерения шумовых характеристик; дан-
ные измерений перемещений в статике; контроль допусков на нарушения зазоров, геомет-
рии деталей, правильности работы кинематических пар там, где это можно сделать без раз-
борки машины.
Результаты измерений сравнивают с ранее полученными. Необходимые для диагности-
ки изменения параметров машин вносят в процессе диагностирования. Используют также
воспринимаемые оператором сенсорные ощущения. Необходимо использовать приборы для
получения ткого рода информации, позволяющие выделять оттенки, которые свойственны
именно исследуемой машины. А для этого нужно знать, чем отличаются виброакустические
сигналы, порождаемые различными кинематическими парами и силовыми воздействиями
при возникновении дефектов и нарушений в работе машин.
Несмотря на многообразие типов, шахтные подъемные машины имеют много анало-
гичных с вибрационной точки зрения элементов — вал (ротор) машины и двигателя, непод-
вижные части, внутри которых они размещены, опорные и упорные подшипники качения
или скольжения, опоры, раму, редуктор, соединительные муфты, фундамент. Ротор или вал —
основной и наиболее важный источник вибраций машины. Кроме основной вибрации с ча-
стотой вращения об/с, ротором могут возбуждаться высшие гармоники ifg, где i —
целые положительные числа. Интенсивность высших гармоник быстро убывает с увеличе-
нием i. При нелинейности характеристик системы ротор—корпус возможны субгармоничес-
кие колебания с частотами, в целое число раз меньшими частоты вращения. Если машина
соединена с двигателем через редуктор, то рассматриваются две частоты вращения: — дви-
гателя «2, — машины. Соответственно может быть две группы гармоник и субгармоник.
Главная причина роторной вибрации — его неуравновешенность. Вибрация с частотой
вращения ротора и весь комплекс ее гармоник могут вызываться и другими причинами, на-
пример расцентровкой, разностенностью внутренних колец подшипников качения, проги-
бом вала, влиянием другой машины, имеющей одинаковую частоту вращения, и т. д. В таких
случаях для анализа причин вибраций необходимо при исследовании вводить дополнитель-
но данные, исходя из природы явлений. Если какая либо из гармоник i = z по интенсивнос-
ти выделяется из убывающего ряда, то причиной может быть местный резонанс детали, на
ВИБРОАКУСТИЧЕСКАЯ ДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА 541
которой установлен вибродатчик, или наличие в машине детали с z-элементами, которые
возбуждают вибрацию с частотой f = гл/60 . Необходимо проанализировать, является ли при-
чиной интенсивности вибрации на этой частоте местный резонанс или вибрации вызывают-
ся деталью, имеющей z-элементов. Такими элементами, возбуждающими вибрацию, могут
быть зубцы ротора двигателя, зубья шестерен редуктора, насаженных на вал. Овальность внут-
реннего кольца подшипника качения или овальность шейки вала подшипника скольжения
является источником вибраций с z — 2. Частота f = 2и/60 наблюдается также при сочетании
неправильного центрирования или излома линии валов двигателя и машины с перекосом
подшипников. Частоты возмущающих сил при неисправности некоторых деталей, таких как
подшипники качения, зубчатые колеса и другие, можно подсчитать.
Передаточное отношение, определяющее угловую скорость сепаратора подшипника ка-
чения определяется формулой
z^l-zt/2, (21.1.7)
где к = d/Dcos a; d — диаметр тела качения; D — диаметр окружности, по которой располо-
жены центры тел качения; d — угол между двумя телами качения. Исходя из примерного
геометрического подобия подшипников, ц = 0,4 .
Частота вращения сепаратора относительно неподвижного кольца
fl =4/о«О,4/о, (21.1.8)
при которой происходят неполадки сепаратора.
Если в неподвижном кольце будет дефект, и через него будет перекатываться каждое
тело качения, то частота перекатывания тел качения по наружной обойме определится как
/2=/1Z«O,4/oz = i2/o, (21-1.9)
где z — число тел качения в подшипнике; i2 = 0,4z — число, определяющее кратность часто-
ты действия возмущающей силы от перекатывания тел качения по дефекту в наружной обойме
по отношению к частоте вращения вала.
Частота вращения сепаратора относительно подвижного внутреннего кольца с учетом
(21.1.7) и (21.1.8) определится как
/з-/о-/1=(1+*/2)/о='з/о- (21.1.10)
Исходя из примерного геометрического подобия подшипников, /Л3 = 0,58.
Частота перекатывания тел качения по дефекту внутреннего кольца:
/4 =/3Z = O,58/oz = z4/o, (21.1.11)
где z4 ~ 0,58z — число, определяющее кратность частоты действия возмущающей силы от
перекатывания тел качения по дефекту в подвижной внутренней обойме по отношению к
частоте вращения вала. Частота, вызываемая перекатыванием дефекта тела по наружному
кольцу,
/5=/oD/(2J)(1-^). (21.1.12)
В пределах практической точности величиной (1 — к2) можно пренебречь и определить:
/5=/0Z)/(2J) = z5/0. (21.1.13)
Так как дефект тела качения периодически контактирует с каждым из колец подшипни-
ка, то частота перекатывания
f6=fQD/d = i6f0, (21.1.14)
где z5 и i6 — соответствующие кратности действия возмущающей силы от дефекта тела качения.
Локальные дефекты подшипников качения (сколы, пятна коррозии, вмятины) выявля-
ются четко на спектре импульсных сигналов, распределенные дефекты (некруглость колец,
перекос посадочных мест, разноразмерность шариков и др.) — на обычном спектре. Диапазон
542
ГЛАВА 21
частот вибраций, возбуждаемых подшипниками качения, довольно широк. Кроме указанных
причин на вибрации могут влиять различные другие нарушения в самом подшипнике, допу-
щенные заводом-изготовителем; неправильная смазка или наличие в ней включений, повы-
шенные радиальные зазоры и зазоры в сепараторах, неправильно выбранный (слабый) под-
шипник, нарушение геометрической формы подшипника за счет перетяжек при монтаже.
Вибрация импульсного характера возникает в момент проворота внутреннего кольца
подшипника на валу. Причиной проворота может быть неправильно выбранная или выпол-
ненная посадка, эллипсность шейки вала, недостаточная чистота поверхности и перерожде-
ние структуры металла шейки вала за счет усталостных явлений. Нагрев и воздействие цент-
робежных сил могут дополнительно ослаблять посадку. Внутреннее кольцо подшипника в
начальной стадии проворачивается при резком изменении нагрузки и частоты вращения, а
также при пусках и остановок машины. После таких проворотов в сигналах виброперемеще-
ния наблюдаются изменения амплитуд и фаз. Следует отметить, что даже идеально изготов-
ленный подшипник качения — источник виброперемещения и шума из-за упругих дефор-
маций деталей и неизбежного проскальзывания тел качения в местах контакта с кольцами.
Подшипники скольжения в вибрационном отношении имеют преимущества благодаря
их бесшумной и устойчивой работе при повышенных виброперемещениях. Вибрации в под-
шипниках скольжения возникают при потере устойчивости движения ротора, самовозбуж-
дении колебаний с частотой, меньшей половины частоты (30—40 %) собственных колебаний
ротора, либо с собственной частотой ротора. Причиной вибрации от потери устойчивости
движения ротора могут быть: уменьшение нагрузки на одну из цапф трехопорного агрегата в
результате расцентровки валов; неправильная подгонка баббитовой заливки вкладыша к цап-
фе по длине или по окружности; увеличение зазоров в подшипнике; чрезмерная вязкость
масла. В последнем случае рекомендуется увеличить температуру масла.
Самовозбуждающие колебания на основной собственной частоте ротора могут возник-
нуть при частоте вращения, в 2 раза превышающей эту частоту. Интенсивность таких коле-
баний нарастает с ростом частоты. Вибрация, возбуждаемая редуктором, имеет плотный дис-
кретный спектр с относительно большой интенсивностью некоторых составляющих. В спек-
тре вибраций определяющими наиболее часто являются зубцовые частоты и их гармоники:
/з=/о^ (21.1.15)
где z — число зубьев колеса (шестерни); i — номер гармоники колебаний. Зубцовые вибра-
ции вызываются ошибками в основном шаге и другими дефектами, приводящими к непра-
вильному распределению нагрузки вдоль зуба. В редукторах с косозубыми и шевронными
передачами зубцовая частота вызывается неравномерностью нагрузок, определяемой тем, что
деформация входящего в зацепление зуба больше, чем деформация выходящего.
Следующие по значимости — вибрации редукторов с частотой вращения входного и
выходного валов и гармоники этих вибраций. Они вызываются накоплением погрешностей
окружного шага на колесе и шестерне, неуравновешенностью их, перекосом осей и переда-
чей вибраций на редуктор от электродвигателя и машины через муфты и основание. В спек-
тре вибраций редукторов могут также проявляться частоты, обусловленные циклическими
погрешностями зубофрезерования шестерни и колеса. Частота колебаний этого вида зави-
сит от — число зубьев делительного колеса зуборезного станка:
fa=f0Zffi. (21.1.16)
Наличие в редукторе значительного числа возмущающих сил ударного характера обус-
ловливает интенсивные резонансные колебания его деталей (крутильные, поперечные и осе-
вые колебания колес и шестерен, изгибные колебания деталей картера). Поэтому спектр
вибраций редукторов занимает полосу от десятка герц до нескольких килогерц. Вибрации
могут быть вызваны также электромагнитами силами вследствие виткового замыкания в ро-
торе синхронного электродвигателя, короткого замыкания в фазном роторе асинхронного
двигателя, обрыва стержня ротора короткозамкнутого двигателя. По внешним проявлениям
эти вибрации сходны с неуравновешенностью.
Неконцентричность расположения активной части ротора в расточке статора приводит
к возникновению вибрации с частотой 100 Гц (двойная частота сети) независимо от частоты
ВИБРОАКУСТИЧЕСКАЯ ДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА
543
вращения и числа полюсов машины. Чтобы установить, вызвана ли вибрация электродвига-
теля неуравновешенностью, механическими причинами или электромагнитными явления-
ми, необходимо отключить двигатель от сети и исследовать вибрации в момент, когда часто-
та вращения его еще не успела снизиться. Если при этом вибрация не исчезнет, то причиной
ее возбуждения являются механические повреждения.
При вибродиагностике машины в первую очередь следует обращать внимание на коле-
бания резонансного характера. Тело, выведенное из равновесия кратковременно приложен-
ной возмущающей силой, благодаря внутренним силам упругости, приходит в колебатель-
ное движение с определенной частотой, называемой собственной частотой колебания тела.
Если на тело, находящееся в свободном колебательном движении, периодически действует
возмущающая сила с частотой, равной частоте собственных колебаний данного тела, то раз-
мах колебаний резко увеличивается. Это явление называется резонансом.
Машине, находящейся в состоянии резонанса, необходима частая балансировка, так как
накапливающаяся в процессе эксплуатации незначительная неуравновешенность ротора
вызывает недопустимые вибрации. При вращении неуравновешенного ротора центробеж-
ная сила, вызванная его дисбалансом, является возмущающей силой. При этом частота вы-
нужденных колебаний равняется частоте вращения ротора. При совпадении частоты соб-
ственных колебаний вала с частотой вращения ротора наступает явление резонанса. Ампли-
туда колебаний вала и вибрация подшипников резко возрастают. Частота вращения ротора,
равная частоте собственных колебаний вала, называется критической.
Под действием центробежных сил неуравновешенных масс вал вращающегося ротора
получает упругий динамический прогиб, величина и форма которого определяются значе-
нием и расположением масс по длине ротора, а также частотой вращения и жесткостью опор.
Различают первую, вторую, третью и т. д. формы динамических прогибов ротора. Наиболее
опасна первая форма динамического прогиба ротора. Каждой форме динамических проги-
бов ротора соответствует своя критическая частота вращения. Например, валы шахтных тур-
бокомпрессоров имеют рабочую частоту вращения выше критической. Если вал работает при
частоте вращения выше критической, то его называют гибким, если же ниже критической,
то жестким. Считают, что для условий безопасности работы должно существовать соотноше-
ние
1,4*1<и< 0,7^, (21.1.17)
где п — рабочая частота вращения, об/мин; к{ — первая критическая частота вращения, об/мин;
кг — вторая критическая частота вращения, об/мин.
Уменьшение жесткости опор приводит к снижению собственной частоты системы. Если
она при этом будет приближаться к рабочей частоте вращения, то может возникнуть резо-
нанс. При подходе к резонансу появляются вибрации типа биений, возникающие в резуль-
тате суммирования вынужденных и свободных колебаний. К критической частоте вращения
может приблизиться валопровод трехопорного агрегата из-за неправильной центровки и из-
менения в связи с этим условий опирания вала. Резонанс может вызвать рядом расположен-
ная машина или вспомогательное оборудование, если частоты вращения их роторов совпа-
дают с резонансной частотой рассматриваемой системы ротор — опоры.
21.1.5. Приборы вибрационной диагностики
Процесс измерения параметров вибраций, необходимых для вибродиагностики, предус-
матривает три основные стадии. Вначале вибрация преобразовывается в электрический сиг-
нал. Электрические методы виброизмерений наиболее удобны. Они позволяют измерять
вибрации во многих точках, использовать электрические приборы для анализа колебатель-
ных процессов, автоматизировать измерения, организовывать предупредительную аварий-
ную сигнализацию. Один из способов преобразования вибраций в электрический сигнал
основан на использовании пьезоэффекта — свойства ряда веществ электрически поляризо-
ваться под действием механической силы.
В виброизмерительных приборах применяют вещества с сильно выраженным пьезоэф-
фектом и высоким удельным электрическим сопротивлением, сохраняющим эти свойства в
широком интервале температур, такие как кварц, керамика из титанита бария и цирконата
544
ГЛАВА 21
титанита свинца с различными присадками (пьезокерамика ЦТС). Пьезоэлектрические эле-
менты получили наибольшее распространение в вибропреобразователях ускорения, которые
в этом случае называют пьезоакселерометрами.
Широкое применение получили также вибродатчики, использующие для преобразования
индукционный элемент, который содержит постоянный магнит и электрическую катушку, кон-
структивно соединенные так, чтобы вибрация вызывала их относительное перемещение. Выра-
батываемая при этом э. д. с. пропорциональна скорости изменения магнитного потока, и элект-
рический сигнал на выходе вибропреобразователя будет пропорционален скорости вибрации.
Следующая стадия заключается в том, что электрический сигнал от первичного вибропреобра-
зователя поступает в приборы, которые преобразуют его так, чтобы он мог характеризовать пи-
ковые или средние квадратические значения виброперемещения, виброскорости, виброускоре-
ния, интенсивность вибрации, частотный спектр вибрации, ударные импульсы, параметры слу-
чайных вибрационных процессов или другие параметры, вводимые для улучшения процесса виб-
родиагностирования машин. На этой стадии многие преобразования могут выполняться ЭВМ.
Последняя стадия — регистрация результатов измерений. Регистрация может осуществ-
ляться путем отсчета оператором показаний стрелочного прибора с последующей регистра-
цией этого показания в журнале, автоматическим записывающим прибором, передачей ин-
формации в ЭВМ. Разработка приборов для вибродиагностики основана на принципах Го-
сударственной системы промышленных приборов и средств автоматизации (ГСП). Состав-
ная часть ее — агрегатный комплекс средств измерения вибраций АСИВ.
Вибродиагностика шахтных стационарных машин базируется на приборах виброизме-
рительной системы «Спектр-АСИВ», предназначенной для последовательного измерения в
12 точках на стационарных машинах средних квадратических значений виброускорения, виб-
роскорости, виброперемещения, размаха виброперемещения, сдвига фаз синхронных гар-
монических колебаний, выполнения спектрального анализа вибрации, визуального наблю-
дения ее формы, измерения частоты вибрации.
Агрегатный принцип построения аппаратуры «Спектр-АСИВ» допускает независимое
использование приборов и блоков этой аппаратуры. Так, например, виброметр ВВМ-001
может использоваться для контроля норм вибрации машин и агрегатов. Совместно с блоком
фильтров ВФШ-001 виброметр позволяет анализировать частотный состав вибраций и по
частотному спектру определять источники и причины вибраций, контролировать правиль-
ность наладки машины и ее качество, выделять основную частоту, вызванную небалансом
машины, и, таким образом, подготовливать сигнал для использования его при динамичес-
кой балансировке. Прибор ВБВ-001 обеспечивает наблюдение формы вибросигнала, по ко-
торой можно судить о неисправности, а также измерение фазы небаланса, которую необхо-
димо знать для определения места установки уравновешивающего груза при балансировке.
Фаза измеряется двумя способами: стробоскопическим (с помощью строболампы), который
нагляден и удобен в работе; дистанционным (с помощью выносного датчика), который при-
меняется в тех случаях, когда труден или опасен доступ к концу вала.
При исследовании вибраций с частотой ниже 2 Гц, например при исследовании колеба-
ний многоканатных подъемных машин вместе с башенным копром, в качестве первичных
вибропреобразователей применяют магнитоэлектрические сейсмоприемники. Из серийно
выпускаемых сейсмоприемников для этой цели наиболее подходит маятниковый сейсмоп-
риемник С5С, который в комплекте с регистрирующими устройствами позволяет записы-
вать вертикальные или горизонтальные перемещения сооружений в диапазоне от 0,1 до 15 мм
с частотой до 0,2 Гц (собственная частота маятника).
Низкая частота собственных колебаний обеспечивается большой приведенной длиной
маятника (0,42 м), достигнутой в сравнительно малых габаритах прибора за счет асиммет-
ричного расположения двух примерно одинаковых масс с двух сторон от оси вращения ма-
ятника. Принцип действия сейсмоприемника следующий: корпус сейсмоприемника, связан-
ный с исследуемым объектом, следует за его движением. Маятник прибора стремится вслед-
ствие инерции остаться в покое. Движение индукционной катушки, закрепленной на осно-
вании корпуса сейсмоприемника, относительно магнита, закрепленного на маятнике, со-
здает на выходе прибора эдс., которая пропорциональна скорости этого движения.
Обработка осциллограмм колебаний обычно начинается с определения масштабов записи:
горизонтального (масштаба времени) и вертикального. Временной масштаб определяют по мет-
ВИБРОАКУСТИЧЕСКАЯ ДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА
545
кам времени, отмечаемым по осциллограмме. Вертикальный масштаб записи вибраций вычис-
ляют по рабочему участку амплитудно-частотной характеристики данного вибрографа и коэф-
фициенту ослабления (заглубления), который был использован при получении данной записи.
Амплитуда перемещения (скорости, ускорения) при частоте колебаний f:
А = Д(24сд)/24, (21.1.18)
где р — коэффициент загрубления; 2Адсц — двойная амплитуда (размах) осциллографичес-
кой кривой; Af — значение амплитудно-частотной характеристики прибора на частоте f
Для повышения точности определения частоты по временным меткам рекомендуется
брать для обработки участок осциллограмм, соответствующий нескольким периодам коле-
баний. Фазовый сдвиг (градус) относительно другого гармонического колебания такой же
частоты определяется как
2 = 3607’//, (21.1.19)
где Т — длина периода одного колебания на осциллограмме; t — длина сдвига между двумя
синусоидами, изображающими колебания.
Описанная выше обработка осциллограмм относится к гармоническим или близким к
ним по форме колебаниям. В других случаях исследуемое колебание, представленное реаль-
ной осциллографической кривой, должно быть отнесено к той или иной теоретической мо-
дели: биению, полигармоническим или затухающим колебаниям, стационарному или неста-
ционарному случайному процессу и т. д. Чувствительность вибрографов с сейсмоприемни-
ками регулируют специальными шунтовыми устройствами.
Экспериментальное определение чувствительности и амплитудно-частотной характери-
стики виброизмерительного прибора выполняют на градуированном вибростенде. Работа на
нем заключается в ступенчатом изменении частоты колебаний рабочего стола с закреплен-
ным на нем сейсмоприемником, измерении его амплитуды перемещения (скорости, ускоре-
ния) и осциллографирования показаний градуируемого вибрографа. Значение частот реко-
мендуется выбирать из следующего ряда: 0,2; 0,25; 0,31; 0,4; 0,5; 0,63; 0,8; 1,0; 1,25; 1,6; 2,0;
2,5; 3,1; 4,0; 5,0; 6,3; ... Гц.
Для измерения амплитуды перемещения рабочего стола в качестве измерительного ин-
струмента используют микроскоп в комплекте со специальным окулярным микрометром,
предназначенным для линейных измерений объектов. Микроскоп наводят на подсвеченную
сбоку зачищенную торцевую поверхность рабочего стола вибростенда и измеряют длину раз-
мытого изображения светящейся точки в поле зрения микроскопа.
Измерив частоту и амплитуду колебаний рабочего стола, нетрудно определить амплиту-
ды скорости и ускорения по формулам гармонических колебаний. Однако, такой расчетный
переход справедлив лишь в том случае, если колебания вибростенда мало отличаются от гар-
монических, что можно проверить по осциллографической записи.
На основании обработки полученных осциллограмм строится амплитудно-частотная
характеристика. По оси абсцисс откладывают частоту вынужденных колебаний, по оси ор-
динат — величину Af, характеризующую чувствительность прибора
4=24сц/(24л), (21.1.20)
где 2Досд — размах гармонических колебаний, измеренный по осциллограмме или по экрану
осциллографа; 2Ам — размах колебаний платформы вибростенда.
21.2. Диагностика и устранение динамической неуравновешенности
роторов шахтных стационарных машин
21.2.1. Принципы и понятия
Примерно в 50 % случаев вибрации связаны с неуравновешенностью роторов машин.
Неуравновешенность не только сама по себе оказывает вредное воздействие, но и вскрывает
другие источники вибраций, находящиеся в скрытом пассивном состоянии. Возникает не-
уравновешенность из-за несимметричного расположения массы ротора по отношению к оси
546
ГЛАВА 21
вращения. При вращении с угловой скоростью со неуравновешенной массы М, жестко свя-
занной с ротором и имеющей эксцентриситет г, возникает центробежная сила F= Mr а2. Эта
сила передается на опоры ротора, вызывая вибрации машин и сооружений.
Векторная величина, равная произведению неуравновешенной массы на ее эксцентри-
ситет, называется дисбалансом. Вектор дисбаланса перпендикулярен к оси ротора, проходит
через центр неуравновешенной массы и вращается с ротором. Направление вектора дисба-
ланса совпадает с направлением эксцентриситета неуравновешенной массы. Угол, опреде-
ляющий положение вектора дисбаланса в системе координат, связанный с осью ротора, на-
зывается углом дисбаланса.
Процесс определения значений и положения уравновешивающих дисбаланс масс и их
установка на ротор в виде уравновешивающих грузов называется балансировкой ротора. Ра-
диальные плоскости ротора, на которых устанавливают уравновешивающие грузы, называ-
ются балансировочными плоскостями. Балансировка роторов может производиться на спе-
циальных устройствах, станках и стендах или в собственных подшипниках на месте установ-
ки машины. Одним из видов несимметричного расположения масс в неуравновешенном
роторе может быть смещение центра тяжести ротора по отношению к оси вращения. Если
ротор, обладающий такой неуравновешенностью, установить на горизонтальные параллель-
ные призмы, то он повернется и займет положение, при котором центр тяжести будет нахо-
диться внизу. Таким образом, эта неуравновешенность может быть выявлена статической
проверкой, и поэтому она называется статической.
При статической неуравновешенности можно считать, что на вращающийся ротор дей-
ствует одна неуравновешенная центробежная сила, которая проходит через центр тяжести пер-
пендикулярно к оси вращения. Если балансировочная плоскость проходит через центр тяжес-
ти ротора, то эта сила уравновешивается прикреплением одного груза, центробежная сила от
которого равна уравновешенной центробежной силе и направлена в противоположную ей сто-
рону. Балансировка в собственных подшипниках вращающегося ротора, имеющего статичес-
кую неуравновешенность, называется статической балансировкой в динамическом режиме.
Другой вид несимметричного расположения системы масс ротора можно привести к двум
неуравновешенным массам; расположенным в радиальных плоскостях и размещенным так,
что при вращении ротора возникает пара равных и противоположно направленных центро-
бежных сил. Центр тяжести такой системы находится на оси вращения, и поэтому неуравно-
вешенность не может выявиться статически, без вращения ротора. Такую неуравновешен-
ность называют моментной, а процесс ее устранения моментной балансировкой. При момент-
ной балансировке уравновешивающие массы рассчитывают так, чтобы установка их в двух
балансировочных плоскостях создавала уравновешивающую пару центробежных сил.
Наиболее часто встречается совместно статическая и моментная неуравновешенность. Та-
кая неуравновешенность называется динамической. По своему воздействию на ротор она может
быть заменена эквивалентными силой и парой сил или двумя центробежными силами, располо-
женными в двух балансировочных плоскостях. Неуравновешенность, обнаруженную после мон-
тажа машины или во время ее эксплуатации, во многих случаях можно устранять на месте уста-
новки машины. Непосредственно измерить неуравновешенность массы и вызываемые ею цент-
робежные силы невозможно. Поэтому величины и местонахождение эквивалентных неуравно-
вешенных масс определяют косвенно сравнением вызываемых ими вибраций с вибрациями,
создаваемыми центробежными силами от специально прикрепляемых пробных масс.
В большинстве случаев точных вибрационных характеристик машин не имеется. По-
этому в основу балансировки в собственных подшипниках положено допущение о том, что
векторы вибраций и векторы вызывающих их сил при постоянной частоте вращения про-
порциональны друг другу и взаимно сдвинуты на постоянный угол. Отношение силы не-
уравновешенной центробежной силы к амплитуде вызванной ею вибрации называют коэф-
фициентом влияния.
Процесс балансировки роторов по коэффициентам влияния наиболее прост в реализа-
ции, так как исключает необходимость определения динамических характеристик системы.
Однако значение динамических характеристик системы облегчает выбор плоскости балан-
сировки, места измерений, пробных грузов и порядок пусков машины с пробными грузами.
Поэтому процесс балансировки желательно строить так, чтобы наиболее быстро раскрыва-
лись необходимые динамические характеристики системы.
ВИБРОАКУСТИЧЕСКАЯДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА
547
21.2.2. Статическая балансировка в динамическом режиме
Статическую балансировку в динамическом режиме применяют в случае, когда началь-
ная неуравновешенная масса, пробный и уравновешивающий грузы размещают в одной плос-
кости или в близлежащих плоскостях (рис. 21.3).
На рис. 21.3 изображены: Fg — начальная неуравновешенная центробежная сила, выз-
ванная наличием неуравновешенной массы Ро, величина и положение которой неизвестны;
F' — центробежная сила, вызванная прикреплением специального пробного груза Р’, мес-
то прикрепления и масса которого известны; F^ — геометрическая сумма векторов Fa и F',
4;, А', 4) — векторы вибраций, вызываемых соответствующими силами Fo, F', F$ . В силу
принятых допущений параллелограммы сил векторов вибраций подобны.
Рис. 21.3. Схема статической балансировки
в динамическом режиме:
1 — балансируемое колесо; 2 — подшипник;
3 — торец вала с нанесенной на нем радиальной
меткой; 4 — неподвижно прикрепленный к подшипнику
диск с делениями через 5°, нанесенными против часовой
стрелки; 5 — датчик; 6 — виброметр; 7 — стробоскоп
Порядок проведения балансировки следующий.
Подготовка к балансировке (установка датчиков, прибора и приспособлений для измере-
ния фазы).
Первый пуск машины’, на ротор действует начальная неуравновешенность Ро, измеряют
размах вибрации опоры Ао и отмечают положение метки Мо, наблюдаемой в свете лампы
стробоскопа, управляемого усиленным, отфильтрованным и преобразованным в импульсы
сигналом от вибродатчика.
Второй пуск машины с пробным грузом Р', установленным в балансировочной плоско-
сти ротора. Измеряют размах вибрации опоры А^ и отмечают положение метки М'{}, наблю-
даемой в свете строболампы. Определяют сдвиг фазы а -вектора А^ по отношению к векто-
ру Ао, равный углу сдвига между метками Мо и M’Q (при стробоскопическом измерении угол
измеряется в обратном направлении от метки М'ок метке Ма).
Построение треугольника векторов вибраций. Выбирают масштаб изображения векторов
вибраций. В масштабе изображают вектор Ад — из начала Ао под углом а проводят в масшта-
бе вектор А^. Соединив концы векторов Ад и А^, получим вектор А', в соответствующем
масштабе изображающий вектор вибрации от влияния пробного груза. Из примера построе-
ния треугольника вектора вибраций (см. рис. 21.3) видно, что вибрация опоры после при-
крепления пробного груза значительно возросла. Такое прикрепление пробного груза нельзя
считать удачным. Пробный груз при динамической балансировке необходимо прикреплять
так, чтобы вибрация опор при пуске ее с этим грузом существенно снижалась. Достигается
это предварительным определением направления действия неуравновешенной центробеж-
ной силы и прикрепления пробного груза в противоположном направлении. При этом зна-
чительно сокращается затрачиваемое на балансировку время и улучшается ее качество.
Расчет уравновешивающего груза. Для уравновешивания колеса необходимо, чтобы вектор
вибрации, вызываемой первоначальной неуравновешенностью, и вектор вибрации от допол-
нительно прикрепленного груза были равны по значению и направлены в противоположные
548
ГЛАВА 21
стороны. Для этого вектор Л'необходимо увеличить в Л()/Л'раз и повернуть на угол Д так,
чтобы он был направлен в сторону, обратную вектору Д,. Это достигается увеличением проб-
ного груза Р' в AJ Л'раз и поворотом его по окружности с тем же радиусом на угол Д .
Таким образом, масса уравновешивающего груза
(7=^4) (21.2.1)
Л
где к — коэффициент влияния.
Установка уравновешивающего груза и пуск с уравновешивающим грузом для проверки точ-
ности балансировки.
Прикрепление к колесу рассчитанного уравновешивающего груза обычно не приводит
к полному уничтожению вибраций из-за отклонения свойств реальных систем от принятых
допущений. Остается вибрация, представляемая некоторым вектором А2. Если вибрация сни-
жается до нормы, то процесс балансирования считается законченным. Уравновешивающий
груз следует откорректировать, если в результате первого цикла балансировки вибрации сни-
зились, но не достигли нормы. Вектор остаточной вибрации А2 принимается как вектор пер-
воначальной неуравновешенности. Чтобы не делать пуска с пробным грузом, используются
данные первоначального пробного груза и его вектора вибрации А'. Для корректировки не-
обходимо, чтобы вектор вибрации, вызываемый остаточной неуравновешенностью, и век-
тор вибрации от пробного груза были равны по величине и обратны по направлению. Для
этого вектор А' необходимо изменить в А1 / А' раз и повернуть так, чтобы он был направлен
в сторону, обратную вектору. А2 Это достигается прикреплением, помимо груза Gy, дополни-
тельного корректировочного груза
(21.2.2)
Процесс балансировки повторяют до тех пор, пока вибрации не достигнут нормы.
21.2.3. Требования к точности операций уравновешивания роторов
Косвенный путь определения неуравновешенных масс — причина появления многих
погрешностей, влияющих на результат балансировки. Если эти погрешности не учитывать,
не пытаться их избежать или уменьшить, если не вести уравновешивание по пути, обеспечи-
вающему наименьшие погрешности, то процесс балансировки может потерять всякий смысл.
Рассмотрим факторы, влияющие на точность определения уравновешивающих грузов.
Вектор А' (см. рис. 21.3) влияния пробного груза Р' на вибрацию опоры определяют гео-
метрическим вычитанием вектора вибраций Ад от влияния первоначальной неуравновешен-
ности из вектора вибрации А^, возникающей при прикреплении к неуравновешен ному ро-
тору дополнительного пробного груза.
На рис. 21.4 изображен случай, когда вектор вибраций А' от влияния пробного груза в 3
раза меньше вектора вибраций Ао от первоначальной неуравновешенности, а вектор А^ бли-
зок по значению и направлению к вектору Ао. Прямоугольниками очерчены зоны, в которых
за счет погрешностей примерно ±10 % по амплитуде и ±5° по углу могут оказаться начала
векторов Ао и А^ при неизменном положении их концов. Многоугольником очерчена зона
погрешностей вектора А'. На рисунке видно, что вектор А' целиком расположился в зоне
погрешности.
Так как погрешности в определении значения и по-
ложения уравновешивающего груза пропорциональны
погрешностям в определении значения и направления
вектора А', то при расчете уравновешивающего груза в
приведенном случае погрешность может оказаться на-
столько большой, что вместо уменьшения произойдет
увеличение вибраций. Поэтому для уменьшения относи-
тельной погрешности при определении вектора А', не-
обходимо, чтобы он был близок по значению к вектору
Ад. Чтобы обеспечить качественную балансировку, необ-
ходимо соблюдать следующие условия:
Рис. 21.4. Схема к определению
погрешностей
уравновешивания роторов
ВИБРОАКУСТИЧЕСКАЯДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА 549
1. Пробный груз должен по возможности выбираться равным массе ожидаемой перво-
начальной неуравновешенности и прикрепляться диаметрально противоположно.
2. Проведение балансировки в собственных подшипниках допускается после устране-
ния всех возможных (кроме неуравновешенности ротора) причин вибраций.
3. В процессе балансировки частота вращения ротора должна поддерживаться постоян-
ной, допускается отклонение не более ± 2 %, поэтому машина не должна нести нагрузки
(балансировка под нагрузкой рекомендуется только в случае, когда предварительно точно
установлено, что нарушение уравновешенности связано с наличием нагрузки).
4. Должна быть применена аппаратура, обеспечивающая измерение размаха и сдвига
фаз вибрации. Рабочий диапазон аппаратуры по частоте должен перекрывать частоту враще-
ния балансируемого ротора. Для выделения оборотной составляющей вибраций должны быть
предусмотрены узкополосные фильтры. В 5 %-ном частотном диапазоне измеряемой вибра-
ции приведенная погрешность измерения амплитуды вибросмещений не должна превышать
± 5 %. Погрешность измерений фазы вибраций должна быть не более ± 2°. Дополнительные
погрешности измерения размаха вибросмещения от изменения напряжения питания на
± 10 % не должна превышать ± 1 %. Может быть применена и любая аппаратура, позволяю-
щая измерять амплитуду и фазу вибраций с заданной точностью и частотой, соответствую-
щей частоте вращения ротора.
5. Погрешность изготовления рассчитанных пробных грузов по массе не должна превы-
шать ± 1 %.
6. Погрешность установки пробных и уравновешивающих грузов не должна превышать
1 % по радиусу и 2° по углу установки.
7. Расчеты должны выполняться с точностью до трех значащих цифр.
8. Процесс балансировки должен выполняться по методике, обеспечивающей минималь-
ную чувствительность к погрешностям и отклонениям от принятых допущений линейной
зависимости между центробежными силами и вызываемыми ими вибрациями.
21.2.4. Подготовка к балансировке в двух балансировочных плоскостях
Началу балансировки должно предшествовать получение следующей информации: такие
характеристики машины, как частота вращения, общие габариты (расстояние между подшип-
никами, балансировочными плоскостями и от подшипников к торцам валопровода); возмож-
ность использования стробоэффекта на торцах валопровода; расстояние от машины до рабо-
чего места машиниста; масса ротора; диаметр окружности размещения грузов на балансиро-
вочных плоскостях; возможность изготовления балансировочных приспособлений и пробных
грузов; условия подключения приборов к электрической сети; данные об имеющихся дефек-
тах машины, проявившихся на стадиях проектирования, изготовления, транспортирования,
монтажа, наладки, эксплуатации; качество центровки; внешня вибрационная обстановка; на-
личие рядом машин, возбуждающих вибрации, возможность их остановки в моменты измере-
ния вибраций балансируемой машины; ограничения на пуск балансируемой машины.
Проводят также визуальную оценку вибрационного состояния машины до ее остановки
для балансировочных работ. На этом предшествующем этапе должно быть принято решение
о выборе аппаратуры и месте ее установки, о местах крепления датчиков и направлениях
измерения вибраций. Должны быть заказаны кронштейны для крепления датчиков, шкала
стробофазометра и заготовки пробных грузов.
При динамической балансировке в двух плоскостях параметры вибраций измеряют пре-
имущественно в двух точках. Эти точки могут быть выбраны как на опорах, так и на фунда-
менте или перекрытиях. Расстояние между точками установки датчиков не должно быть мень-
ше расстояния между опорами. Точки выбирают в местах с большой вибрацией, но не пре-
вышающей пределы измерений датчиков. Чаще датчики размещают на опорах. В сложных
случаях балансировки на каждой опоре устанавливают по три датчика. Размещение датчи-
ков на кронштейнах обоих опор должно быть идентично. При одинаковой чувствительности
датчиков это позволяет получать дополнительную информацию о соотношении амплитуд и
фаз вибраций на обеих опорах.
Балансировку можно выполнять, имея два и даже один датчик. Направление измерений
в этом случае предварительно выбирают по визуальному наблюдению вибраций, исходя из
550
ГЛАВА 21
соответствия частоты вибраций вращению, устойчивости вибраций по частоте и амплитуде
и достаточности уровня их для измерений и расчетов в процессе балансировки. Возмож-
ность такой визуальной оценки вырабатывается по мере накопления опыта балансировки.
При балансировке с использованием одного датчика измерения на опорах выполняют по
очереди, при этом надо строго следить за идентичностью установки датчика.
При балансировке канатоведущих и отклоняющих шкивов многоканатных подъемных
машин сейсмоприемники можно устанавливать на фундамент машины или на пол перекры-
тия без крепления. Массы пробных и уравновешивающих грузов, используемых при балан-
сировке шкивов многоканатного подъема — 5—30 кг.
Уточняют значение первого пробного груза по результатам наблюдения за разгоном машины
при первом пуске и измерении вибраций опор. При временном креплении пробных грузов в ба-
лансировочных плоскостях необходимо помнить, что возникающие при вращении центробежные
силы в сотни и тысячи раз превышают массу груза. Крепление пробных грузов должно надежно
выдерживать эти нагрузки. Против вращающихся частей с грузами не должны находиться люди.
Вокруг торца валопровода размещают кольцо с делениями через 5°, отсчитываемыми
против часовой стрелки. Нулевую метку направляют горизонтально вправо. На торец нано-
сят радиальную метку так, чтобы ее направление совпадало с радиальным направлением ло-
патки или одного из болтов, равномерно расположенных по окружности ротора. Эту лопат-
ку или болт обозначают цифрой 1. Остальные нумеруют по направлению против часовой
стрелки, если смотреть с наблюдаемого торца. Исходя из числа болтов или лопаток, опреде-
ляют угол между соседними отметками, что необходимо для ориентировки при установке
пробных и уравновешивающих грузов. Непосредственно перед началом балансировки раз-
мечают схему балансируемой машины, разворачивают аппаратуру и средства балансировки,
ведут подготовку к проведению первого эксперимента с пуском машины без пробного груза.
Рекомендуемый порядок обозначений на схеме балансируемой машины следующий: торец
валопровода, выбранный для установки устройств измерения фазы вибрации, располагают справа,
затем слева направо обозначают опоры буквами А и В, а балансировочные плоскости — буквами
С и D. Графическую часть расчетов уравновешивающих грузов — производят на диаграммах.
Они изображают относительные направления векторов вибраций и размещение пробных и урав-
новешивающих грузов, если смотреть со стороны выбранного для наблюдения торца.
На левой диаграмме (см. рис. 21.5, а и б) изображены векторы вибраций точки, обозна-
ченной буквой А, размещение грузов в балансировочной плоскости С; на правой диаграм-
ме — векторы вибраций опоры, обозначенные буквой В, и размещение грузов в плоскости
Д. Все углы, отсчитываемые против часовой стрелки, принимают положительными, по ча-
совой стрелке — отрицательными.
Рис. 21.5. Векторы вибрации при динамической балансировке в двух плоскостях:
а — опора А, балансировочная плоскость С; б — опора В, балансировочная плоскость Д
ВИБРОАКУСТИЧЕСКАЯ ДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА
551
Чтобы не усложнять описание, условно считают, что все пробные и уравновешивающие
грузы закреплены на балансировочных окружностях с одинаковыми радиусами. В этом слу-
чае вместо центробежных сил в расчеты можно подставлять пропорциональные им веса гру-
зов. Если при выполнении балансировки уравновешивающий груз необходимо будет пере-
нести ближе или дальше от оси вращения, то необходимо ввести поправку, учитывающую
пропорциональное возрастание значения центробежной силы при увеличении расстояния
от оси вращения до места прикрепления груза.
Так как принятые обозначения мест установки датчиков, балансировочных плоскостей и по-
рядок отсчета углов сдвига фаз и углов постановки пробных и уравновешивающих грузов являют-
ся общими для рассматриваемых далее способов балансировки, то в дальнейшем описание этих
обозначений и порядка отсчета опускается или производится в сокращенном виде. При стробос-
копическом измерении фаз вибраций изображение метки смещается на угол, равный углу сдвига
фаз вибраций, но в обратном направлении. Чтобы скомпенсировать это явление, диаграммы век-
торов вибраций и диаграммы размещения грузов делают раздельно. Получив стробоскопические
отсчеты фаз по кольцу у торца вала, измеряют соответствующие амплитуды вибраций. После это-
го выполняют все необходимые расчеты на диаграмме вибраций. Затем результаты определения
углов расположения и значений грузов переносят на диаграмму с отсчетом углов против часовой
стрелки, как на кольце у торца вала. Ориентируясь в направлении этого торца, устанавливают на
роторе корректировочные грузы соответственно их изображению на диаграмме.
21.2.5. Выбор значения и места прикрепления пробного груза
В целях ускорения балансировки и повышения ее качества необходимо стремиться к
тому, чтобы пробный груз был по возможности близким по значению и месту прикрепления
к уравновешивающему грузу.
Для определения значения и положения пробного груза при статической балансировке
в динамическом режиме можно с достаточной точностью воспользоваться известными из
теории колебаний соотношениями. Согласно этим соотношениям уравнение перемещения
точек опоры при вибрациях, вызванных неуравновешенностью, в общем случае имеет вид:
x = ?lcos(fi#-p), (21.2.3)
где ait — угол поворота неуравновешенной центробежной силы; <р — угол, на который век-
тор центробежной силы опережает вектор вибраций. Значения вектора (амплитуда) вибра-
ции А = XPr/G, т. е. оно прямо пропорциональна дисбалансу Рг и обратно пропорциональна
массе колеса G. Коэффициент Л, называемый коэффициентом динамичности, характеризу-
ет изменение вектора вибрации в зависимости от отношения п/п0, т. е. отношения рабочей
частоты вращения колеса к резонансной частоте вращения и от величины е = Е /п$, где Е —
коэффициент затухания е. Коэффициент динамичности:
Я- г (21.2.4)
1г т2
1-(«/^))2 +4(п/"о)2е2
Чем ближе рабочая частота вращения к резонансной, тем выше коэффициент Л. Изме-
нение угла у сдвига фаз между центробежной силой и вектором вибрации в зависимости от
отношения п/п0 и коэффициента затухания е выражается формулой
(21.2.5)
1-(л/^))
Пробный груз и первоначальная неуравновешенная масса должны быть по возможности
равны по весу. Исходя из этих соображений, пробный груз Р = AG/(Лг), где А — амплитуда
вибрации, мкм\ G — масса колеса с валом, т,г — радиус крепления пробного груза, мм. Вели-
чины Л и Ф могут быть приближенно определены при наблюдении характера изменения виб-
рации подшипников в период пуска. Возможны три случая.
552
ГЛАВА 21
1. Амплитуда вибрации по мере разворота машины нарастает плавно. Это указывает на
работу машины в дорезонансной зоне. Коэффициент Л для этого случая следует брать в пре-
делах 0,6— 1, <р = 30° + 60°.
2. Амплитуда вибрации резко возрастает при подходе к рабочей частоте вращения. Это
свидетельствует о работе машины в резонансной зоне. Коэффициент следует принимать в
пределах 1—2, ф=60°+120°.
3. В период пуска амплитуда вибрации проходит максимум, а при подходе к рабочей час-
тоте вращения она падает. Машина работает в зарезонансной зоне: А —1,5—t =2; ф=120°-270°.
Пробный груз должен быть прикреплен в направлении, противоположном направле-
нию действия неуравновешенной центробежной силы. Особенно важно предварительное
определение неуравновешенной центробежной силы в тех случаях, когда уровень вибрации
машины высок и случайное прикрепление пробного груза в направлении действия центро-
бежной силы может привести к аварии.
При динамической балансировке, чтобы облегчить анализ явлений, происходящих при
уравновешивании, рекомендуется пробные грузы в обеих балансировочных плоскостях при
первых пробных пусках брать равными и располагать их в одной аксиальной плоскости. Осо-
бенно удобно закрепление пары грузов одновременно в двух плоскостях, а затем поочеред-
ное оставление каждого из грузов, входящих в пару, на своем месте.
21.2.6. Динамическая балансировка в двух плоскостях
Динамическая балансировка последовательным уравновешиванием сил в двух балансиро-
вочных плоскостях применяется в случае, когда начальные неуравновешенные массы не могут
быть приведены к одной балансировочной плоскости. Метод последовательного уравновешива-
ния по сравнению с другими методами имеет наименьшую чувствительность к погрешностям.
Суть последовательного уравновешивания заключается в определении уравновешиваю-
щего груза, закрепление которого на одной из балансировочных плоскостей, например, плос-
кости С (см. рис. 21.5, а), обращает в нуль силу, действующую на одну из опор. Этим устра-
няется вибрация опоры. После этого прикреплением груза в плоскости D (см. рис. 21.5, б)
уравновешивается другая опора. Так как первая опора начнет при этом опять вибрировать,
то снова приступают к ее уравновешиванию прикреплением груза в плоскости С и т. д. В
определенных условиях для устранения вибраций опор при последовательном уравновеши-
вании целесообразно применять также грузы, вызывающие пару центробежных сил.
На примере балансировки рассмотрим порядок последовательного уравновешивания
ротора. Графическая часть примера приведена на диаграмме (см. рис. 21.5). На диаграмме
(см. рис. 21.5, а) изображены векторы вибраций опоры А и размещение грузов в плоскости
С; на диаграмме (см. рис. 21.5,6) — векторы вибраций опоры В и размещение грузов в плос-
кости D. Вначале производят четыре пробных пуска, результаты которых приведены в
табл. 21.2 и на рис. 21.5. Изображены: Ао и Во — векторы вибраций при пуске машины с су-
ществующим небалансом; А^ и Bq — векторы вибраций при пуске машины с массой проб-
ного груза Р' = 2000г в плоскости С; А£ и — векторы вибраций при пуске машины с
пробными грузами в плоскости С и D; А£ и В" — векторы вибраций при пуске машины с
массой пробного груза Р{= 2000 г в плоскости D; А' и S', А*и В", А" и В” — векторы влия-
ния соответственно от пробного груза в плоскости С, от пары пробных грузов (в плоскостях
С и D), от пробного груза в плоскости D.
Анализируя результаты пробных пусков, видим, что балансировку целесообразно начинать
с уменьшения вибрации на опоре А размещением уравновешивающего груза массой = 2100 г
в плоскости С под углом 45° относительно первоначального положения пробного груза Р'. При
этом на опоре В увеличения вибрации не ожидается. Результаты пятого пуска это подтвердили.
Затем для уменьшения вибрации на опоре В размещают в плоскости D уравновешивающий груз
массой Р2=2200 г. В результате (шестой пуск) амплитуда вибрации на опоре В уменьшилась в 2
раза, но существенно увеличилась на опоре А (79 мкм). Для ее снижения произведен седьмой
пуск машины с грузом массой Р3 = 2400 г в плоскости С. Поскольку при этом вибрация на опоре
В изменилась незначительно, было принято решение уменьшить ее постановкой груза массой
Р4=1140 г в плоскости D. В этом случае на опоре А ожидается незначительное увеличение вибра-
ции. Результаты последнего пуска подтвердили правильность данного решения.
ВИБРОАКУСТИЧЕСКАЯ ДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА
553
Таблица 21.2
Амплитуда и сдвиги фаз вибрации
Пуск машины Груз Амплитуды и сдвиги фаз вибраций
Плоскость прикрепления Угол, градусов Масса, г Опора А Опора В
Амплитуда, мкм Сдвиг фаз, градусов Амплитуда, мкм Сдвиг фаз, градусов
1. Без пробных грузов Л=78 а0 =207° 4=88 Ро=135°
2. С 90 2000 4=57 а; =143° 4=84 Pi = 103”
3. С D 90 270 2000 2000 4=60 а;=172” 4=ioo Ро'=145°
4. D 270 2000 4=105 ао=217” 4=93 Ро=18О"
5. С 46 2100 4=13 «! =293“ Д=75 ₽1=99°
6. С D 46 303 2100 2200 4=89 а2 = 275” 4=38 Р2=235°
7. С D С 46 303 115 2100 2200 2400 4=0 — 4=41 Рз = 12Г
8. С D С D 46 303 115 325 2100 2200 2400 1140 4=16 а4=235” 4=15 ₽4=211“
В результате за восемь пусков вибрации на опоре А были снижены в 4,9 (с 78 мкм до
16 мкм) раза, а на опоре В — в 5,9 раза (с 88 мкм до 15 мкм).
21.2.7. Выбор рационального пути проведения балансировки
Приведенные способы определения уравновешивающих грузов не могут исчерпать все
многообразие случаев, с которыми приходится встречаться в практике балансировки. По-
этому, чтобы рационально вести процесс уравновешивания с учетом конкретных условий в
каждом отдельном случае, необходимо владеть методикой анализа процесса балансировки.
В связи с этим приводятся некоторые элементы анализа этого процесса.
Характер векторных треугольников вибраций непосредственно изучается после каждо-
го пуска машины с дополнительным прикреплением груза. После пуска машины с одним
пробным грузом, с парой пробных грузов или с произвольной системой грузов может ока-
заться, что построенные векторные треугольники вибраций примерно подобны для обеих
опор и для всех направлений измерений вибраций (или, по крайней мере, для направлений
с наибольшими вибрациями). В таких случаях можно непосредственно из векторных треу-
гольников определить, как изменить данный груз, пару грузов или систему грузов и на какой
угол повернуть грузы, чтобы резко снизить вибрации на обеих опорах. После этого дальней-
шее снижение вибраций целесообразно производить методом последовательного уравнове-
шивания сил.
Если векторные треугольники вибраций одной опоры не подобны аналогичным треу-
гольникам вибрации другой опоры, то необходимо применить метод одновременного урав-
новешивания сил, предварительно оценив влияние погрешностей на результаты расчета.
Принятый способ крепления пары пробных грузов и одного из этих грузов позволяет там,
где необходимо, проверить точность сделанных измерений вибраций и правильность приня-
тых в основе балансировки допущений. Для этого делается дополнительный пуск машины с
другим грузом, входившим в пару пробных грузов.
Распределение влияния неуравновешенных центробежных сил, приложенных в двух
балансировочных плоскостях, между обеими опорами вращающегося в собственных подшип-
никах ротора, отличается от распределения сил, приложенных статически к телу, покояще-
муся на двух опорах. Нетрудно установить, что если бы распределение сил соответствовало
законам статики, то между вибрациями от влияния пробного груза и пары пробных грузов и
расстояниями между опорами и балансировочными плоскостями существовала бы следую-
щая зависимость: А'/А*-СВ/CD и В'/ B’=CA/CD.
554
ГЛАВА 21
В практике эти равенства не соблюдаются. Поэтому, пользуясь приведенными форму-
лами, по отношениям амплитуд вибраций определяют размеры некоторой условной маши-
ны, в которой силы, действующие в балансировочных плоскостях и на опоры, такие же, как
и в реальной машине, но размеры условной машины таковы, что распределение сил подчи-
няется законам статики. Это позволяет сложную динамическую задачу уравновешивания
ротора в собственных подшипниках заменить элементарной задачей статики, придав всем
операциям простой физический смысл.
Чтобы избежать расходимости процесса уменьшения вибраций, каждая из опор должна урав-
новешиваться в балансировочной плоскости, которая находится ближе к ней на схеме условной
машины, несмотря даже на то, что в реальной схеме эта плоскость может оказаться наиболее
удаленной от опоры. Первый уравновешивающий груз необходимо устанавливать в такой плос-
кости, чтобы устранение вибрации на одной опоре приводило к снижению их на другой. Способ
одновременного уравновешивания сил в двух плоскостях целесообразно применять в случаях,
когда он имеет малую чувствительность к погрешностям.
Для оценки ожидаемых погрешностей надо мысленно совместить вектор вибрации А’ и
Б* на векторных треугольниках вибраций опор А и В. Если при этом вектор А' направлен в
сторону, обратную вектору Б', а вектор Л() — в сторону, обратную Бо, то чувствительность к
погрешностям будем минимальной. При совпадении направлений указанных векторов чув-
ствительность к погрешностям будет максимальной и в случае, когда величина А '/А* будет
близка по значению к величине В'/ В’, а величина А^/А’ — к величине В{}/В’, расчет урав-
новешивающих грузов из-за больших погрешностей потеряет всякий смысл. Остальные воз-
можные сочетания занимают промежуточные положения между указанными случаями ми-
нимальной и максимальной чувствительности к погрешностям.
Можно применить и другой способ оценки погрешностей. Минимальная чувствительность
к погрешностям будет и в случае расположения опор на схеме условной машины вне баланси-
ровочных плоскостей по обе стороны и максимальная чувствительность — при расположении
опор между балансировочными плоскостями. Если на схеме условной машины опоры находятся
между балансировочными плоскостями на очень малом расстоянии друг от друга (А{ВХ < 0,5), то
расчет уравновешивающих грузов теряет смысл из-за больших погрешностей.
21.3. Особенности вибродиагностики многоканатных подъемных установок
Оборудование многоканатных подъемных установок совместно с башенными копрами,
на которых оно установлено, представляет собой единую систему. От надежности работы этой
системы в значительной мере зависит бесперебойная работа шахты в целом. Многолетняя
практика эксплуатации показала, что один из основных эксплуатационных факторов — фак-
тор надежности — снижается при наличии в системе повышенных вибраций. Опасные коле-
бания копра, перекрытий, деталей и узлов машин, вызванные разными причинами, наблю-
дались на многих шахтах.
Опасными колебаниями следует считать вынужденные колебания копра, машин, пере-
крытий, ответственных узлов машин и конструкций, амплитуды которых превышают допус-
тимые нормативные значения на технологическое оборудование, а для рабочих мест — са-
нитарные нормы. Колебания от воздействия ветра носят случайный характер и влияние его
на конструкцию учитывают при проектировании копра. Однако порывы ветра могут вызвать
колебания копра с собственной частотой. Колебания могут превысить нормативные сани-
тарные нормы. Такие колебания относятся к числу опасных. Практика эксплуатации башен-
ных копров показала, что частота собственных колебаний копров с круглым сечением со-
ставляет до 1,5 Гц, с квадратным сечением — до 5 Гц.
Ветровые колебания копра измеряют при неработающих машинах и механизмах. Виброп-
реобразователи устанавливают на отметке машинного зала в двух точках перекрытия. Точки
выбирают на максимальном удалении от центра копра на оси, перпендикулярной к направле-
нию ветра. При этом измеряют горизонтальные колебания в направлении действия ветра.
Способность конструкций копра воспринимать механические колебания на расстоянии
может быть причиной появления опасных колебаний перекрытий, конструкций, деталей и
узлов машин, возбуждаемых работающими машинами и механизмами, установленными в
примыкающих к копру сооружениях. Такие колебания возможны при совпадении частоты
возмущающих колебаний с собственной частотой колебаний всей башни или ее перекры-
ВИБРОАКУСТИЧЕСКАЯДИАГНОСТИКА, ВИБРОКОНТРОЛЬ, БАЛАНСИРОВКА 555
тий, конструкций, деталей и узлов машин и механизмов, установленных на копре и изме-
рять их следует при неработающих машинах и механизмах. При измерении колебаний пере-
крытий вибропреобразователи устанавливают в точках перекрытий, где наблюдаются мак-
симальные колебания.
Наиболее часто опасные колебания копра, перекрытий, конструкций, деталей и узлов
машин и механизмов возбуждаются работающими машинами и механизмами, установлен-
ными на перекрытиях копра. Возбудителями опасных колебаний могут быть: ведущие и от-
клоняющие шкивы, приводные электродвигатели, редукторы подъемных машин; электро-
двигатели и генераторы системы Г-Д; вентиляторы противометанных камер; компрессор-
ные установки тормозных устройств подъемных машин; подъемно-транспортное оборудова-
ние и др. Основная причина появления опасных колебаний — динамические нагрузки, воз-
никающие при вращении роторов машин, имеющих остаточный дисбаланс, значение кото-
рого превышает допустимое для данного ротора. Опасные колебания возможны и в случае,
когда остаточный дисбаланс имеет номинальное значение, но при этом в какой-то системе
наблюдается явление резонанса.
Динамические нагрузки от ведущих и отклоняющих шкивов оказывают главным образом
воздействие на колебания копра. Частота вращения шкивов близка к собственной частоте ко-
лебаний башенного копра, а нередко и совпадает с ней. В последнем случае амплитуда колеба-
ний копра за время рабочего цикла может достигать опасного значения. Значительные враща-
ющиеся массы приводных электродвигателей подъемных машин часто являются причиной
опасных колебаний. При наличии дисбаланса возникают колебания самих машин и их узлов,
а при резонансе — и перекрытий, элементов машин, конструкций, удаленных от возбудителей
колебаний на значительные расстояния. Неточности монтажа, удары на зубьях зубчатой пере-
дачи, взаимные перекосы отдельных элементов машины и редуктора могут стать причинами
возникновения опасных колебаний, как самого редуктора, так и других деталей и узлов.
Значительные вращающиеся массы имеют электродвигатели и генераторы преобразовате-
лей. При балансировке их роторов заводы-изготовители руководствуются существующими нор-
мами допустимых дисбалансов, которые не учитывают особенности места установки машин на
башенных копрах. Поскольку машины установлены на перекрытии, то даже при допустимом
заводском значении дисбаланса возможны опасные колебания перекрытия, если его собствен-
ная частота колебаний равна или близка частоте вращения ротора машины. В случае, если оста-
точный дисбаланс превышает допустимые значения специальных норм для оборудования мно-
гоканатного подъема, то вероятность возникновения опасных колебаний резко возрастает.
Источником опасных колебаний могут быть и вентиляторы противометанных камер. При
установке вентилятора на перекрытии с применением виброизоляции наблюдаются опас-
ные колебания самого вентилятора, а при установке без виброизоляции возможны опасные
колебания перекрытий и конструкций копра деталей и узлов других машин. Компрессорные
установки тормозных устройств подъемных машин, электродвигатели и насосы системы мас-
лосмазки, установки двигатель — генератор для питания цепей управления магнитной стан-
ции постоянным током имеют относительно небольшие вращающиеся массы. Однако, вви-
ду того, что они расположены вблизи оборудования с устройствами КИП и автоматики, выз-
ванные ими колебания могут быть опасными для этих устройств, особенно при резонансе.
Опасные колебания могут возбуждаться установленным на копре подъемно-транспортным
оборудованием при производстве монтажных и демонтажных работ. Работа данного обору-
дования сопровождается толчками, могущими вызвать свободные колебания копра, значе-
ние которых может превышать нормативные.
При диагностике в процессе работы подъема в рабочем состоянии одновременно нахо-
дится большинство машин и механизмов, поэтому опасные колебания в этом случае могут
возбуждаться одновременно несколькими источниками. Колебания перекрытий, конструкций,
деталей и узлов машин при резонансных явления носят практически синусоидальный харак-
тер; колебания систем, где отсутствуют резонансные явления имеют сложный характер. По-
этому для определения источников этих колебаний применяют спектральный анализ электри-
ческого сигнала, поступающего от вибропреобразователя, где наблюдаются механические ко-
лебания. Ниже приводится технология определения источников опасных колебаний.
Колебания башенного копра в целом, а также конструкций, деталей и узлов машин и
перекрытий измеряют и сравнивают с нормами вибраций оборудования и санитарными нор-
556
ГЛАВА 21
мами. Колебания измеряют там, где они влияют на нормальную работу оборудования или
обслуживающего персонала. Измерения проводят только предварительно протарированным
комплектом виброизмерительной аппаратуры. Подсоединение вибропреобразователей к виб-
роизмерительной аппаратуре и соединение блоков между собой выполняют так же, как они
соединялись при тарировке. Вибропреобразователи к объектам измерения крепятся в соот-
ветствии с инструкциями применяемых вибропреобразователей. В качестве вспомогатель-
ных устройств допускается использование кронштейнов, струбцин и др. После выполнения
подготовительных работ применяемую виброизмерительную аппаратуру включают в сеть
согласно имеющимся к ней инструкциям.
При работающих установках один из вибропреобразователей подключается на вход ап-
паратуры, и с помощью электрического фильтра в диапазоне частот 0,5—100 Гц производят
гармонический анализ поступающего от вибропреобразователя электрического сигнала. При
этом по показаниям виброметра определяют амплитуду, а по частотомеру — частоту гармо-
нических составляющих сигнала. Эту же операцию можно выполнить с помощью анализа-
тора спектра и регистрирующего прибора. При необходимости операции спектрального ана-
лиза повторяют для каждого установленного вибропреобразователя. Для точек измерения с
опасными колебаниями методом исключения или с помощью стробоскопического освети-
теля определяют источники их возбуждения.
Метод исключения заключается в том, что установка, частота вращения которой совпада-
ет с частотой опасных колебаний в данной точке, выключается (если это не нарушает техноло-
гический процесс производства). При этом по виброметру следят за изменением амплитуды
опасных колебаний. Прекращение колебаний данной частоты или изменение значения после
отключения установки свидетельствует, что последняя — источник опасных колебаний.
Если опасные колебания одной и той же частоты наблюдаются в нескольких точках из-
мерения, то отключение установки при условии, что она служит источником колебаний,
приведет к прекращению колебаний этой частоты во всех точках измерения. В противном
случае источником колебаний является другая установка. В случае, если возбудителями ко-
лебаний являются несколько установок, частоты вращения которых одинаковы или близки,
для определения источников колебаний отключают все установки (если это не нарушает тех-
нологического процесса) и поочередным включением определяют ту, работа которой воз-
буждает колебания перекрытия копра.
После определения источников опасных колебаний следует принять меры по устране-
нию причин, вызывающих появление таких колебаний.
Глава 22
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ
ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК
МЕТОДАМИ НЕРАЗРУШАЮЩЕГО
КОНТРОЛЯ
22.1. Неразрушающий контроль тормозных систем
шахтных подъемных машин
22.2. Неразрушающий контроль подвесных
и парашютных устройств
22.3. Неразрушающий контроль осей копровых шкивов
22.4. Дефектоскопия главных валов подъемных машин
22.1. Неразрушающий контроль деталей тормозных устройств
шахтных подъемных машин
22.1.1. Общие сведения
При проектировании подъемной машины элементы тормозной системы рассчитывают
из условия обеспечения 5-кратного запаса прочности относительно предела текучести мате-
риала. При этом расчетной схемой предполагается, что под действием внешних сил тормоз-
ного привода при заторможенной машине тормозные тяги испытывают растяжение, а под
действием сил тяжести подвижных элементов тормозного устройства при расторможенной
машине тяги испытывают сжатие. Именно влияние действия только этих сил и учитывается
традиционной расчетной схемой.
Однако, в процессе эксплуатации тормозные тяги дополнительно могут нагружаться из-
гибающимися моментами. Причем изгибающий момент в плоскости исполнительного органа
тормоза возникает вследствие действия сил трения в кинематических парах, а изгибающий
момент в перпендикулярной плоскости — вследствие неточностей изготовления и монтажа
тормозных балок, кинематических пар и несимметричного расположения упоров. Следова-
тельно, тяги тормозных устройств в подъемных машинах в процессе эксплуатации могут под-
вергаться сложным деформациям (растяжение с изгибом). С точки зрения прочности наибо-
лее неблагоприятен случай, когда силы трения в шарнирном соединении максимальны или,
более того, шарнир вообще не выполняет своего функционального назначения, т. е. не обес-
печивает возможность относительного углового перемещения сопрягаемых деталей тормоза.
В этих условиях наличие в детали концентратора напряжения (например, заков, закат, ра-
ковина, резкий переход от большего диаметра к меньшему и т. д.) вызывает появление усталост-
ной трещины, которая со временем развивается до значения, при котором статическая проч-
ность остаточного сечения детали оказывается исчерпанной и при очередном срабатывании тор-
моза деталь внезапно разрушается. С целью своевременного предотвращения таких случаев про-
изводят неразрушающий контроль элементов тормозной системы подъемных машин.
Анализ результатов дефектоскопии тормозных систем подъемных машин в различных
бассейнах отрасли показывает, что дефекты встречаются в основном в различного рода тягах
(горизонтальные, вертикальные, грузовые), а в таких деталях, как тормозные стойки, диф-
ференциальные рычаги, траверсы и валики шарнирных соединений, зафиксированы еди-
ничные случаи обнаружения дефектов. Причем, как правило, это были дефекты металлурги-
ческого или технологического характера, а не эксплуатационного. Поскольку все звенья ки-
нематической цепи исполнительного органа тормозной системы подъемной машины рас-
считывают на статическую прочность по тормозному моменту, равному утроенному стати-
558
ГЛАВА 22
ческому моменту на барабане подъемной машины с обеспечением 5-кратного запаса проч-
ности по пределу текучести, то из этих позиций и сопоставляют нагруженность и соответ-
ственно прочность деталей тормозного устройства. Размеры некоторых из них выбраны из
конструктивных соображений и значительно превышают те, которые необходимы для обес-
печения их требуемого запаса прочности. Такими деталями являются балки и стойки, угло-
вые и дифференциальные рычаги. Так, например, сечение тормозной балки выбрано из со-
ображений необходимости размещения на ней тормозных колодок.
Тяги и шпильки тормозных грузов постоянно воспринимают статическую нагрузку —
вес грузов, а в момент срабатывания тормоза добавляется значительная динамическая со-
ставляющая — сила инерции движущихся грузов. При таком режиме работы в указанных
деталях возможно зарождение усталостных трещин. В аналогичном режиме работают также
штанги и штоки цилиндров.
Вертикальные и горизонтальные тяги — наиболее нагруженные по сравнению с другими
деталями тормозного устройства, так как сечение их выбирают близким к расчетному, а в зави-
симости от состояния шарнирных узлов им приходится работать в условиях сложных деформа-
ций, т. е. в режиме, отличном от расчетного. Причем напряжения от действия переменных во
времени растягивающих, сжимающих и изгибающих усилий перераспределяются с учетом кон-
центраторов напряжений (галтельные переходы, проточки, лыски под ключ, резьбы и т. д.). Та-
ким образом, проанализировав соответствие фактической нагруженности деталей расчетной, а
также состояние вопроса в части их прочности, можно сделать вывод о том, что детали тормоз-
ного устройства, несмотря на единые требования к их конструкционной прочности, в действи-
тельности неравнопрочны. Несомненно, что в этих условиях усталостные дефекты могут появить-
ся в первую очередь в деталях, имеющих наименьший запас усталостной прочности.
В кинематической цепи исполнительного органа и привода тормоза к таким деталям
относятся горизонтальные и вертикальные тяги исполнительного органа тормоза, тяги и
шпильки тормозных грузов, штанги и штоки цилиндров. Данная номенклатура деталей пол-
ностью согласуется с результатами анализа случаев разрушения деталей тормозных устройств
подъемных машин на предприятиях угольной и горнорудной промышленности. На первом
этапе внедрения технологии неразрушающего контроля была принята следующая периодич-
ность дефектоскопии элементов тормозных устройств: всех вновь устанавливаемых подъем-
ных машин перед вводом в эксплуатацию (кроме тех, элементы которых подвергались де-
фектоскопии на заводе-изготовителе с соответствующей записью в паспорте машины);
подъемных машин людских и грузолюдских подъемных установок — через каждые 3 года;
подъемных машин грузовых подъемных установок — через каждые 5 лет.
Такой регламент контроля принят в основном на основании зарубежного опыта, согласно
которому интервалы времени между очередными проверками элементов тормозной системы
устанавливают в зависимости от числа циклов работы подъемной установки за год. Кроме
того, периодичность контроля ставится в зависимость от важности элементов и тяжести по-
следствий в случае их разрушения (табл. 22.1).
Таблица 22.1
Периодичность проверки элементов тормоза
Условия нагружения (число циклов в год) Интервалы времени между последующими проверками, лет
Наиболее ответственные детали Остальные детали
Группа А Группа В
Тяжелые (более 200000) 1-3 4—6
Средние (10000-200000) 2-5 6-10
Легкие (менее 10000) 3-10 10
К группе А относятся детали, разрушение которых приводит к потере тормозного усилия
более чем на 50 %. К ним относятся детали тормозных систем с одним тормозным приводом. К
группе В относятся детали, разрушение которых приводит к потере тормозного усилия менее
чем на 50 %. К ней можно отнести детали тормозной системы с двумя тормозными приводами.
На заводах-изготовителях подъемных машин в 90-е годы прошлого века налажен нераз-
рушающий контроль деталей тормозных устройств, повышены требования к качеству их изго-
товления, внесены конструктивные изменения в детали с целью уменьшения концентраторов
напряжений. По мнению специалистов этих заводов, в настоящее время нет необходимости в
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
559
проверке элементов тормозных систем в течение нормативного срока службы подъемных ма-
шин, который составляет примерно 14 лет для малых барабанных машин и 20—25 лет для круп-
ных барабанных и многоканатных подъемных машин.
В связи с этим регламент дефектоскопии деталей тормозных устройств в 1987 г. был пе-
ресмотрен в части срока проведения первого контроля. Более целесообразной была призна-
на следующая периодичность дефектоскопии: перед вводом в эксплуатацию вновь устанав-
ливаемых подъемных машин и после истечения установленного заводом-изготовителем по-
ловинного срока службы механической части машины; по истечении срока службы механи-
ческой части, а затем через каждый год подъемных машин людских и грузолюдских подъе-
мов в случае необходимости их дальнейшей эксплуатации и через каждые 2 года машин гру-
зовых подъемов и всех подъемов вспомогательных (фланговых) стволов.
Проведению дефектоскопии предшествуют подготовительные работы, а именно: раз-
борка тормозного устройства, подготовка поверхности деталей к контролю и наружный ос-
мотр деталей. Задача подготовительных работ — обеспечение необходимого доступа к дета-
лям для их контроля соответствующим методом.
Подготовленные к дефектоскопии детали тормозной системы укладывают на опоры в го-
ризонтальное положение таким образом, чтобы резьбовые и переходные сечения находились с
наружной стороны опор. Тяжеловесные детали допускается контролировать без снятия их с
машин. В частности, контроль горизонтальных тяг крупных подъемных машин допускается
проводить без их демонтажа, но при этом следует обязательно тяги вывинтить таким образом,
чтобы в серьгах осталось несколько витков резьбового участка тяги. Контроль в этом случае
проводят со специальных площадок, а операторы страхуются монтажными поясами.
Перед проведением дефектоскопии оператором проводится тщательный визуальный
осмотр деталей, подготовленных к контролю. Все обнаруженные при этом поверхностные
изъяны (риски, забоины и др.) отмечают для удобства контроля. В последние годы благода-
ря успехам в области физики и радиоэлектроники в арсенале дефектоскопистов появилось
достаточно большое разнообразие методов неразрушающего контроля. Однако, каждый из
этих методов имеет свою оптимальную область применения в зависимости от вида выявляе-
мых дефектов, размеров и геометрических форм контролируемых деталей, качества их по-
верхности, условий контроля и многих других факторов. Так как на сегодняшний день ос-
новная задача проведения неразрушающего контроля тормозных устройств подъемных ма-
шин — выявление поверхностных и внутренних дефектов эксплуатационного, технологи-
ческого и металлургического характера в деталях различных геометрических форм с гладки-
ми и резьбовыми участками, проточками, галтельными переходами, лысками под ключ и
т. д., то для получения объективной картины состояния детали рациональнее использование
двух методов неразрушающего контроля — ультразвукового и магнитопорошкового.
Ультразвуковой контроль проходят в первую очередь те детали (или их участки) силовой
части привода и исполнительного органа тормоза, которые обладают достаточной дефектос-
копической технологичностью для реализации данного метода контроля. Так, например, в тор-
мозных тягах не представляется возможным с достаточной степенью достоверности проконт-
ролировать ультразвуковым методом резьбовые участки тяги, места переходов с большего ди-
аметра на меньший. К числу таких же деталей относят валики, имеющие осевые и радиальные
канавки для подачи смазки в шарнирное соединение. Неудовлетворительной дефектоскопи-
ческой технологичностью обладают литые и сварные угловые и дифференциальные рычаги.
22.1.2. Ультразвуковой контроль
Ультразвуковой контроль элементов тормозных систем осуществляют дефектоскопами
УД2-12, УД2-70 и др. Контроль производят стандартными наклонными искательными го-
ловками с углом ввода ультразвукового луча в металл 40’ (угол призмы 30°), а также нор-
мальными искателями на частоте 2,5 МГц. Для контроля деталей цилиндрической формы
(особенно малого диаметра) рекомендуется использовать сменные насадки, радиус кривиз-
ны рабочей поверхности которых равен радиусу контролируемой детали. Применение таких
насадок позволяет обеспечить более стабильный контакт искателя с поверхностью детали.
Детали тормозных устройств контролируют вручную, т. е. оператор перемещает искатель по
поверхности детали и одновременно следит за экраном дефектоскопа.
Для обеспечения акустического контакта между искателем и деталью на подготовлен-
ную поверхность перед контролем наносят слой контактной смазки. На деталях с малыми
560
ГЛАВА 22
диаметрами, а также при повышенной температуре рекомендуется использовать смазку бо-
лее густой консистенции (вазелин, солидол). Однако необходимо учитывать, что с увеличе-
нием вязкости контактной жидкости снижается чувствительность к выявлению дефектов.
Проверка работоспособности дефектоскопа с искателем проводится в начале работы и зак-
лючается в проверке чувствительности дефектоскопа с искателем, правильности работы глуби-
номера и угла ввода. Чувствительность дефектоскопа с искателем считают удовлетворительной,
если всеми его индикаторами обеспечивается соответствующая поисковая чувствительность,
которая превышает условную или предельную на 1-3 дБ. Правильность работы глубиномера про-
веряют на стандартном образце № 1 (или № 2) прямым искателем, измеряя временный интер-
вал до пропила (или дна). Угол ввода искателя проверяют по стандартному образцу № 2.
Настройка дефектос-
копа на контроль конкрет-
ной детали выполняется
непосредственно на рабо-
чем месте и заключается в
настройке глубиномера,
временной селекции и чув-
ствительности контроля.
Настройку глубиномера
проводят для определения
расположения дефектов в
деталях и осуществляют по
испытательному образцу
или образцу из оргстекла
(рис. 22.1) с учетом попра-
вок на материал (й — глу-
бина залегания отверстия в
образце из оргстекла, Н —
то же, для стального образ-
ца) (табл. 22.2).
Таблица 22.2
Значения глубины залегания отверстия в образцах
h, мм 4,5 9,2 18,5 37 55 74 92 111
Н, мм 5 10 20 40 60 80 100 120-
Скорость развертки дефектоскопа настраивается непосредственно на контролируемой де-
тали с тем, чтобы сигналы, полученные от конца прозвучиваемой зоны, находились в пределах
экрана дефектоскопа и располагались в определенных местах на линии развертки. Скорость раз-
вертки для наклонных искательных головок настраивают по углам, образованным пересечением
поверхности детали, одна из которых противоположна поверхности ввода УЗК, другая перпен-
дикулярна к ней, а также по различным поверхностям, перпендикулярным к линии распростра-
нения ультразвуковых лучей. Примеры углового отражателя — любой двухгранный угол детали,
место перехода гладкой цилиндрической поверхности детали в резьбовую часть, поверхности
закругления деталей при нормальном падении на них ультразвуковых лучей и т. п.
Скорость развертки для нормальных (прямых) искательных головок настраивают по
донному импульсу. Скорость развертки настраивают по прямому лучу (первое отражение).
Ориентировочное расположение дефекта определяют по положению искателя на детали и
максимума сигнала от дефекта на развертке. После настройки скорости развертки проводят
настройку чувствительности дефектоскопа по отражению от искусственных дефектов в эта-
лонных образцах. В качестве эталонных образцов могут быть использованы стандартные
образцы или же специальные испытательные. Стандартные образцы входят в комплект об-
разцов и вспомогательных устройств КОУ. При отсутствии комплекта КОУ стандартные об-
разцы изготавливают в соответствии с ГОСТ 14782—76.
Специальные испытательные образцы (рис. 22.2) изготавливают из металла по акусти-
ческим свойствам соответствующего контролируемому. Высота А образца должна соответ-
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
561
Рис. 22.2. Испытательный образец из металла:
А — размер, соответствующий толщине (диаметру) контролируемой детали
ствовать толщине (диаметру) контролируемой детали, а длина составлять не менее
1,5.4/1/cosa. Рабочая (контактная) поверхность образца может быть плоской или цилинд-
рической, с радиусом, равным радиусу детали. Искусственные дефекты (угловые отражате-
ли) изготавливают с помощью устройства для нанесения эталонных дефектов УНЭД-Ц2, вхо-
дящего в комплект образцов и вспомогательных устройств КОУ. Угловые отражатели могут
быть изготовлены также с помощью специального бойка, рубящий конец которого должен
быть заточен таким образом, чтобы передняя грань углубления была перпендикулярна к по-
верхности образца. Эта грань — отражающая. Боек изготавливают из стали марки 60СГ или
РУ, подвергнутой термообработке. При вырубке боек устанавливают так, чтобы рубящая грань
была перпендикулярна к поверхности, после этого по валику наносят несколько ударов мо-
лотком. Образовавшийся после вырубки валик вытесненного металла удаляют напильником.
Глубину искусственного дефекта можно измерить штангенциркулем с глубиномером.
Предельную чувствительность при контроле детали определенной толщины (диаметра)
устанавливают по зарубке соответствующего испытательного образца, а условную чувстви-
тельность, соответствующую предельной, — по отверстиям стандартного образца № 1.
Ниже представлены значения чувствительности для деталей различной толщины и диа-
метра.
Таблица 22.3
Значения чувствительности для деталей различной толщины н диаметра
Условная чувствительность по образцу №1, мм 20 30 55 40 60
Толщина детали, мм 10-30 30-50 50-80 80-100 свыше 100
Амплитуда сигнала, отраженного от зарубки и отверстия, на экране дефектоскопа дол-
жна быть 20 мм, а искатель должен находиться в положении, при котором эхо-сигнал дости-
гает максимального значения. С учетом возможного уменьшения чувствительности дефек-
тоскопа при контроле деталей по сравнению с настройкой по эталонному образцу из-за раз-
ности в шероховатости поверхности и в толщине смазки поиск дефектов должен проводить-
ся при повышенной чувствительности, которая превышает условную или предельную на 1—
3 дБ. Детали прозвучивают прямым пучком челночным зигзагообразным перемещением ис-
кателя по поверхности детали. Поперечное перемещение искателя должно быть более 1/2
его ширины, продольного перемещения 30—80 мм, при этом он поворачивается на 5—15°.
При контроле плоских деталей прямоугольного сечения (рис. 22.3) ввод ультразвуковых
колебаний осуществляют с поверхности, имеющей большую площадь. Поскольку дефект, в
частности усталостная трещина, может начать развиваться с любой поверхности, то требует-
ся ввести УЗК и с поверхности, противоположной первой. Дефект типа трещины зачастую
развивается не перпендикулярно к поверхности ввода УЗК, а под некоторым углом.
В этом случае искатель, находящийся в положении 3, выявляет данный дефект, но этот
же искатель, находящийся в положении 2, этого уже не обеспечивает. Поэтому с целью уве-
личения вероятности выявления наклонных трещин каждая деталь должна прозвучиваться в
двух взаимно противоположных направлениях последовательно с каждой поверхности, име-
ющей большое сечение. При этом одновременно с повышением достоверности контроля
достигается также полное прозвучивание всего объема детали. Действительно, если прозву-
562
ГЛАВА 22
чивать деталь только в одном направлении (искатель в положении 1), то заштрихованная
зона на рис 22.3 окажется непроконтролированной.
Рис. 22.3. Схема контроля плоской детали
При отсутствии дефектов на экране дефектоскопа наблюдается только начальный импульс.
При наличии дефектов на экране возникают дополнительные импульсы. Исправность прибора
и надежность акустического контакта в процессе контроля периодически проверяется по углам,
образованным пересечением поверхностей детали (положение искателя 4 на рис. 22.3). Зона кон-
троля деталей цилиндрической формы (тяги — см. рис. 22.4, а; штоки — см. рис. 22.4, б) — вся
поверхность детали за исключением резьбовых участков. При этом ввод в металл детали ультра-
звуковых колебаний от искателя производят вдоль образующей цилиндрической поверхности в
двух взаимно противоположных направлениях. При отсутствии дефектов основного материала в
контролируемой зоне на экране дефектоскопа наблюдается только начальный (зондирующий)
импульс. При наличии дефектов на экране возникают дополнительные импульсы.
Рис. 22.4. Схема контроля деталей цилиндрической
формы тяги и штока:
а — тяги; б — штока; в — начальный (зондирующий импульс;
г — дополнительные импульсы от дефектов; 1 — искатель;
2 — деталь (тяга, шток)
Результаты теоретических исследований напряженного состояния тормозных тяг, анализ
результатов испытаний их на статическую прочность, а также анализ случаев разрушения тяг в
процессе эксплуатации показывают, что даже при работе этих деталей в расчетном режиме
(т. е. растяжение-сжатие) наибольшая вероятность возникновения усталостных трещин суще-
ствует на участке кольцевой проточки для выхода резца при нарезке резьбы, т. е. на участке
перехода гладкой цилиндрической части тяги в резьбовую, а точнее — в галтели на границе
кольцевой проточки с гладкой цилиндрической частью тяги (рис. 22.5). Следовательно, про-
верка указанного участка тяги должна быть произведена наиболее тщательно. Действующая в
отрасли методика дефектоскопии предусматривает для этого участка только магнитопорошко-
вый метод контроля, который отличается высокой чувствительностью. Из-за высокой чувстви-
тельности метода характер отложения металлического порошка в магнитном поле над устало-
стной трещиной и над различными рисками на поверхности проточки идентичен, поэтому
трудно дать правильную оценку картины осажденного порошка. Оператор во время контроля
может допустить ошибку — забраковать тягу, приняв риски на ее поверхности за усталостные
трещины и, наоборот, пропустить тягу с усталостной трещиной. Такие случаи имели место на
практике и наиболее характерны для подъемных машин устаревших конструкций.
С целью повышения надежности контроля слабого сечения тормозной тяги исследова-
лась возможность применения ультразвукового метода. В основу метода взят тот факт, что
при наличии в кольцевой проточке тяги усталостной трещины и вводе ультразвуковых коле-
баний наклонным искателем с гладкого участка тяги в сторону резьбового участка часть ни-
ток резьбы оказывается в геометрической тени и индикатором прибора не фиксируется.
Сущность метода состоит в следующем. При нахождении призматического искателя с уг-
лом призмы 40° на гладком участке тормозной тяги в положении I (рис. 22.5, а) ультразвуко-
вой луч, если в кольцевой проточке тяги отсутствует дефект, многократно отражаясь от повер-
хности тяги, затухает и к искателю не возвращается. В итоге на экране дефектоскопа наблюда-
ется осциллограмма, состоящая только из начального (зондирующего) импульса 1 (рис. 22.5, б).
При нахождении искателя в положении II ультразвуковой луч отразится от ребер прямого двух-
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
563
гранного угла, и в результате на экране кроме начального импульса 1 появится донный им-
пульс 2 (рис. 22.5, в). Это положение искателя — первая граница зоны сканирования и может
использоваться для периодической проверки настройки скорости развертки прибора. Кроме
того, наличие донного импульса 2 может служить критерием надежности акустического кон-
такта искателя и детали, а также исправности акустического тракта прибора.
При перемещении искателя из положения II в направлении к положению III луч отра-
жается от вертикальной плоскости АВ, и в зависимости от глубины проточки донный им-
пульс 2 будет смещаться влево вдоль линии развертки на небольшое расстояние.
При положении искателя на участке III— IV ультразвуковые колебания отражаются от
боковых граней резьбы, и на экране прибора наблюдается частокол импульсов (рис. 22.5, г).
Положение искателя IV— вторая граница зоны его сканирования. Наличие трещины в коль-
цевой проточке препятствует прохождению ультразвуковых колебаний к резьбе, что ведет к
резкому уменьшению амплитуды отраженных сигналов или к их исчезновению. Минималь-
но фиксируемый размер трещины зависит от глубины и ширины кольцевой проточки. Чем
ближе трещина расположена к галтели (т. е. наиболее опасному сечению тяги), тем более
мелкой она может быть, чтобы служить экраном для ультразвуковых лучей. Это наглядно
следует из сравнения трещин глубиной Л1 и Л2 (см. рис. 22.5, а).
Рис. 22.5. Схема контроля кольцевой проточки
и резьбы тормозной тяги:
а — элемент тормозной тяги; б, в, г — осцилограммы
импульсов на экране прибора;
I, II, III, IV, V— призматическиеие искатели
ультразвуковых колебаний; hf h2 — трещины разной глубины
С точки зрения возможности возникновения усталостных трещин опасны также участки
деталей в зоне отверстия под валик. К таким деталям относятся головки и вилки шарниров,
некоторые виды тяг, рычагов. При выборе схемы перемещения искателя на поверхности данно-
го участка детали следует принимать такую схему, которая дает совмещение проекции акусти-
ческой оси на поверхность ввода ультразвуковых колебаний с направлением действия наиболее
опасных напряжений в детали, возникающих при ее работе. Выбор именно такого направления
перемещения искателя делает наиболее вероятным нахождение эксплуатационных дефектов, так
как плоскость их преимущественного распространения, как правило, перпендикулярна к на-
правлению действия опасных напряжений. В связи с этим при контроле детали в районе отвер-
стия акустическую ось искателя направляют по касательной к образующей поверхности детали.
Технология контроля плоских траверс (если качество поверхности позволяет осуществить
контроль) ничем не отличается от технологии контроля плоских тяг. Тормозные стойки и
балки контролируют без их снятия с подъемной машины, при этом прозвучивают только
кольцевые участки в зоне отверстий шарнирных соединений. Искатель перемещают вокруг
отверстия. Направление прозвучивания совпадает с ходом движения искателя. Контроль
проводят при прямом и обратном ходах искателя. Скорость развертки настраивают по углу,
образованному пересечением цилиндрической поверхности отверстия с плоской поверхнос-
тью щеки детали, противоположной плоскости ввода ультразвука. Особенность контроля —
ввод колебаний осуществляют только с одной поверхности, так как ввести колебания с про-
тивоположной поверхности не представляется возможным.
Валики контролируют с торца и с цилиндрической поверхности. Контроль с торца про-
водят нормальным искателем на частоте 2,5 МГц. Искатель перемещают по торцу валика по
замкнутому кругу. После двойного контроля по кругу искатель смещают по радиусу к центру
и операцию повторяют. Аналогичным образом проводят контроль с противоположного тор-
564
ГЛАВА 22
ца. В зависимости от расположения искателя при прозвучивании валика можно получить
ряд характерных осциллограмм, эхо-сигналы на которых соответствуют отражению ультра-
звуковой энергии от противоположного торца и резьбы на переднем его конце.
Валик может быть также проконтролирован и наклонным искателем с углом призмы
40°, расположенным на его цилиндрической части. При контроле искатель зигзагообразно
перемещают по цилиндрической поверхности детали. Прозвучивание ведут в направлении
одного торца валика, затем в направлении другого. Скорость развертки настраивают по углу,
образованному цилиндрической поверхностью валика и торцом. Глубину прозвучивания
принимают равной диаметру валика. При контроле деталей тормозной системы на экране
дефектоскопа возможно появление ложных импульсов от неровностей на поверхности, про-
тивоположной поверхности ввода ультразвуковых колебаний. Данные неровности — резуль-
таты небрежного обращения с деталью — удары молотком, следы зубила, вмятины от прово-
лочек каната (при монтаже детали) и т. д. В этом случае следует дополнительно зачистить
неровности и повторным контролем убедиться в отсутствии трещины.
Конечная цель ультразвукового контроля — идентификация дефектов по классам с уче-
том их потенциальной опасности. Поэтому при проведении дефектоскопии необходимо как
можно более полно выявить количественные и качественные характеристики дефектов. Ос-
новные измеряемые характеристики выявленного дефекта при контроле изделия наклонным
искателем следующие: эквивалентная площадь дефекта, координаты дефекта в сечении де-
тали, условные размеры дефекта, угол индикации дефекта.
Эквивалентную площадь дефекта определяют непосредственно по испытательным об-
разцам с искусственными отражателями. Координаты дефекта определяют в соответствии с
инструкцией по эксплуатации дефектоскопа. Условные размеры дефекта определяют интер-
валом перемещения искателя между некоторыми крайними положениями, в пределах кото-
рого воспринимается эхо-сигнал от дефекта. Крайними положениями искателя считают те,
при которых амплитуда сигнала от дефекта уменьшается до уровня 20 мм.
Угол индикации дефекта измеряют углом поворота искателя в одну сторону от положения,
соответствующего максимальной амплитуде эхо-сигнала от дефекта в данном сечении, до поло-
жения, при котором амплитуда эхо-сигнала уменьшается до некоторого заданного значения.
22.1.3. Магнитопорошковый контроль
Магнитопорошковый метод неразрушающего контроля применяют для выявления по-
верхностных (подповерхностных) дефектов (трещины, заковы, надрывы, включения) на де-
талях, которые полностью или частично не представляется возможным проконтролировать
ультразвуковым методом из-за их неудовлетворительной дефектоскопической технологич-
ности, а именно: на резьбовых участках, проточках и на выходе резьбы вертикальных и го-
ризонтальных тяг, тяг тормозных грузов, штанг и штоков поршней, шпилек тормозных гру-
зов; участках тяг с лысками под ключ, а также участках деталей, в которых были обнаружены
поверхностные дефекты ультразвуковым методом. Контроль осуществляют с применением
серийных магнитных дефектоскопов ПМД-70, 77 ПМД-ЗМ или МАГЭКС-3.
В качестве индикаторов дефектов используют магнитные порошки (например, магнит-
ный черный порошок ТУ 6-14-1009-74) в виде суспензии на жидкой основе. В качестве жид-
кой основы применяют минеральное масло (например, трансформаторное или РМ) и керо-
син. Масляную магнитную суспензию готовят из масла и магнитного порошка с концентра-
цией 2О±5 г порошка на 1 л масла, керосино-масляную магнитную суспензию — из смеси
трансформаторного масла с керосином (50/50 %) и магнитного порошка (20±5 г/л). При кон-
троле резьбовых участков допускается снижение концентрации порошка до 5 г/л. Это спо-
собствует уменьшению оседания порошка в основании канавок резьбы (особенно при конт-
роле деталей диаметром около 25 мм и шагом резьбы 1,5—2 см). С этой же целью в суспензию
с пониженной концентрацией порошка рекомендуется добавлять антикоагулянт, например,
нитрованное масло в количестве 0,5—1,0 г на 1 л суспензии.
При приготовлении суспензии магнитный порошок тщательно растирают в небольшом
количестве основы суспензии до получения однородного состава с консистенцией сметаны,
а затем полученный состав размешивают во всем объеме жидкой основы суспензии.
Необходимо следить, чтобы магнитная суспензия не загрязнялась пылью, песком, крас-
кой, продуктами коррозии и волокнами обтирочных материалов.
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
565
Контроль магнитопорошковым методом состоит из стандартных операций: подготовки
детали к контролю; проверки чувствительности контроля; намагничивания детали; обработ-
ки детали суспензией; осмотра и разбраковки.
Соблюдение технологии — одно из основных условий надежности контроля. Малейшее от-
клонение от технологии может привести к невыявлению дефектов, поэтому нельзя говорить о важ-
ных и неважных моментах в технологии контроля. Наивысшая чувствительность контроля магни-
топорошкового метода может быть получена на деталях, имеющих высокий класс чистоты повер-
хности. Увеличение шероховатости поверхности ведет к снижению чувствительности контроля из-
за появления фона из магнитного порошка. Это ведет к необходимости уменьшения напряженно-
сти намагничивающего поля и соответственно к снижению чувствительности контроля.
Контролируемые детали должны быть очищены от грязи, смазки, отслаивающейся ржавчи-
ны, окалины. Детали с темной поверхностью рекомендуется предварительно покрывать тонким
слоем (не более 15 мкм) краски, например, нитроэмалью НЦ-25; нанесение краски целесообраз-
ней производить аэрозольным способом. Чувствительность контроля должна быть достаточной
для надежного выявления эксплуатационных дефектов. Такие понятия, как тонкие и грубые де-
фекты весьма расплывчаты и не дают контрастного представления о размерах дефектов. Для
того чтобы внести большую определенность в этот вопрос, в методике дефектоскопии, действу-
ющей в отрасли, на основании экспериментальных исследований принята чувствительность кон-
троля, обеспечивающая выявление искусственного дефекта размером 6x0,5 мм.
При проведении контроля применяют продольное намагничивание постоянным маг-
нитом, электромагнитом, соленоидом или гибким кабелем таким образом, чтобы направле-
ние магнитного поля было перпендикулярно к вероятной ориентации дефекта. Напряжен-
ность намагничивающего поля устанавливают в соответствии с требованиями к размерам
недопустимых дефектов и магнитными характеристиками материала детали.
Зная магнитные характеристики контролируемой марки стали (в частности, коэрцитивную
силу Я) и требуемую чувствительность контроля, можно по специальной методике определить
напряженность приложенного магнитного поля, которую необходимо получить на поверхности
контролируемой детали. Однако этот метод довольно сложен и трудоемок, поэтому примени-
тельно к деталям тормозного устройства на основании экспериментальных исследований пред-
ложены оптимальная напряженность и режим намагничивания, представленные в табл. 22.4.
Представленные в табл. 22.4 режимы контроля при необходимости могут уточняться
экспериментально.
Таблица 22.4
Режимы контроля тормозных тяг
Параметры Машины НКМЗ Машины Донецкгормаша Машины Донецкгормаша
Марка стали детали Ст. 20 (Ст. 3) Ст. 45 Ст. 40Х
Напряженность приложенного поля, А/м 1100 2400 3200
Ток соленоида электромагнита, А 0,7 1,5 2,0
Ток при намагничивании гибким кабелем, А '2’2-Jll + D2 W 48>/Z2+D2 W 64л/£2+Л2 W
Примечание: L — длина намотки кабеля, см; D — диаметр витка кабеля, см; W— число витков
Контроль тормозных тяг рекомендуется проводить за четыре поворота через 90°. Если
участок резьбы превышает 130—150 мм, то его контролируют в несколько приемов.
При контроле соленоидом и гибким кабелем магнитную суспензию наносят на расстоя-
нии не более 250 мм от соленоида, при контроле электромагнитом — между его полюсами.
Расстояние между полюсными наконечниками электромагнита на теле цилиндрической тяги
принимают равным 40—50 мм, а на теле плоской тяги — 130—150 мм.
Следует подчеркнуть важность тщательности контроля и осмотра наиболее напряженных
витков резьбы тормозных тяг. Выполненные во НИИГМ им. М. М. Федорова теоретические и
экспериментальные исследования напряженного состояния резьбовой части тормозных тяг, по-
казали, что в том месте тяги, где нет сопряжения гайки с тягой, распределение напряжений по
виткам одинаково и максимальные напряжения находятся во впадине резьбы. Далее в глубь тела
резьбовой части напряжения сглаживаются и становятся равными напряжениям от простого
566
ГЛАВА 22
растяжения (номинальные напряжения). В месте сопряжения винт — гайка картина распределе-
ния напряжений значительно отличается от указанной выше. Здесь наиболее нагружен первый
виток резьбового соединения. Далее напряжения убывают и уже на пятом витке они практичес-
ки равны номинальным. Были определены коэффициенты концентрации напряжений в витках
резьбы, которые соответственно составили: в витке 1—5,5; в витке 2—4,7; в витке 3—3,1; в витке
4—1,57. Таким образом, витки резьбы, находящиеся в соединении с гайкой, должны контроли-
роваться наиболее тщательно. Признак наличия дефекта — появление над ним валика порошка.
По оседанию порошка определяют местоположение, конфигурацию дефекта, а в ряде случаев и
его характер. Детали тормозных систем, в которых обнаружены дефекты любым из рассмотрен-
ных выше способов, к дальнейшей эксплуатации непригодны, если дефекты не удается устра-
нить без снижения регламентированного запаса прочности. Поскольку безопасность эксплуата-
ции подъемных установок в значительной мере зависит от целостности любого элемента тор-
мозной системы, то требования к прочности этих элементов довольно жесткие.
В настоящее время известны эффективные методы расчета на прочность элементов кон-
струкций без начальных повреждений (например, трещин). Между тем для практических пред-
ложений становится актуальной проблема живучести первоначально сплошных тел, имеющих
надежный запас прочности в расчетных условиях эксплуатации, но претерпевающих частич-
ное разрушение в условиях нагружения, не предусмотренных в расчете. Для практики важно
знать, будут ли образующиеся в первоначально сплошном теле трещины равновесными (име-
ющие постоянные размеры при фиксированном значении внешней нагрузки) или неравно-
весными (динамические, неуправляемо увеличивающиеся размеры на все сечение тела).
Степень опасности дефекта существенным образом зависит от того, в каком месте дета-
ли он расположен, как он ориентирован в поле напряженного состояния детали, какова его
форма. Вместе с тем известно, что материал в процессе его работы разрушается не мгновен-
но. Многочисленными исследованиями установлено, что образцы, подверженные цикличес-
ким нагрузкам, 90—97 % времени своего срока службы работают при наличии и развитии
дефектов. Даже хрупкое разрушение не происходит мгновенно, а занимает определенный
промежуток времени с момента зарождения дефекта.
Поэтому, с учетом значительного запаса прочности деталей тормозных систем подъем-
ных машин, представляется возможным сложную задачу оценки опасности выявленного де-
фекта заменить более простой задачей оценки прочности детали с ослабленным сечением
из-за выборки металла на глубину залегания дефекта. Такая задача легко решается с помо-
щью обычных методов сопротивления материалов из условия обеспечения регламентиро-
ванного нормативно-технической документацией запаса прочности данной детали.
Подобная практика удаления дефектов довольно широко применяется в различных от-
раслях промышленности. При этом дефект удаляют съемом металла напильниками, шлифо-
вальной машиной или воздушно-дуговым методом с обеспечением плавных переходов к не-
поврежденной поверхности детали. Анализ статистических данных результатов дефектоско-
пии тормозных систем подъемных машин показал, что практически в половине из тяг де-
фекты поверхностные и располагаются в гладкой части (теле) тяги. Глубина обнаружения
дефектов не превышает 1—5 мм.
22.2. Неразрушающий контроль подвесных и парашютных устройств
Для подвесных и парашютных устройств, как и любых других изделий машинострое-
ния, в процессе эксплуатации характерно прогрессивное ухудшение рабочих характеристик
из-за воздействия необратимых процессов, среди которых основные: усталостное старение,
износ, различные виды коррозионного старения.
При спускоподьемных операциях на детали подвесных устройств действуют цикличес-
кие нагрузки, которые зависят от интенсивности подъема (частота изменения знака нагруз-
ки и пауз между ускорениями) и состояния проводников.
Проектирование и расчет подвесных устройств и парашютов проводят из условия обеспече-
ния статической прочности при действии максимальных нагрузок. Так, детали подвесного уст-
ройства для людских и грузо-людских подъемов рассчитывают на концевую нагрузку с 13-крат-
ным запасом прочности, детали парашюта — на тормозное усилие, создаваемое амортизатором
при улавливании клети в случае обрыва головного каната. Номинальные же нагрузки, которые
испытывают подвесные и парашютные устройства в процессе эксплуатации и которые обуслав-
ливают их прочность, меньше максимальных, на которые они рассчитаны, в 10—15 раз. Поэтому
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
567
вероятность возникновения усталостных повреждений в металле деталей этих устройств за рас-
четный срок службы весьма мала. В данном случае предельным состоянием металла будут не
усталостные разрушения, а пластические деформации и механический и коррозионный износ.
Однако, учитывая чрезвычайную ответственность парашютных и подвесных устройств, факт
отсутствия усталостных повреждений в металле их деталей следует проверить одним из методов
неразрушающего контроля. Особенно такой контроль необходим в местах концентрации напря-
жений, где наиболее вероятно возникновение поверхностных усталостных трещин.
В методике дефектоскопии, действующей в угольной промышленности, представлена
номенклатура подвергаемых дефектоскопии деталей подвесных устройств и парашютов, из-
ложены вопросы подготовки их к контролю, технологии дефектоскопии, даны приспособ-
ления и образцы, повышающие достоверность и производительность контроля, освещены
вопросы техники безопасности при выполнении дефектоскопии, а также оценки и оформ-
ления результатов дефектоскопии.
Поскольку номенклатура деталей, подлежащих контролю, весьма обширна, предложено
разделить их в зависимости от геометрической формы на четыре группы: I — детали цилинд-
рической формы (валики и оси); II — детали плоской формы (тяги, траверсы, рычаги коушей
и ловителей парашютов, корпуса коушей, спинки парашютов); III — детали комбинирован-
ной формы, т. е. детали, имеющие цилиндрические и плоские участки (штоки и тяги ловите-
лей парашютов); IV — детали сложной формы (серьги, вилки, эксцентриковые рычаги).
Шероховатая поверхность деталей и экономическая нецелесообразность их дополнитель-
ной шлифовки создают неблагоприятные условия для передачи ультразвуковых колебаний и
вызывают необходимость проведения дефектоскопии при низкой стабильности акустического
контакта между искателем и деталью. Магнитопорошковому контролю подвергают поверхно-
сти деталей в зонах контроля, т. е. в наиболее слабых сечениях. В частности, в деталях группы
I такими зонами является практически вся поверхность валиков (кроме резьбы) и осей. В де-
талях групп II, III и IV эти зоны расположены в основном вокруг отверстий, в мес.
Контроль осуществляется с применением серийно выпускаемого магнитного дефектос-
копа МАГЭКС — ПМД-70 и магнитного порошка в виде суспензии на жидкой основе. При-
готовление суспензии, определение концентрации порошка в ней, проверка чувствительно-
сти контроля осуществляются, как и при контроле деталей тормозной системы. Детали из
сталей марок 45 и 40Х могут контролироваться как способом приложенного магнитного поля,
так и способом остаточной намагниченности. Детали из сталей марок 35, Ст. 5 и Ст. 3 кон-
тролируют только способом приложенного поля.
В табл. 22.5 на рис. 22.6 представлены основные схемы и режимы намагничивания.
Схему намагничивания и режим контроля выбирают в зависимости от марки стали и
формы детали. При прочих равных условиях предпочтение следует отдавать способу оста-
точной намагниченности, как более рациональному.
Электромагнит или постоянный магнит необходимо располагать таким образом, чтобы
направление поля было перпендикулярно к направлению возможных трещин. Контроль мест
изменения сечения, пазов, вкладышей целесообразно проводить также на остаточной на-
магниченности, осуществляя намагничивание импульсным током с помощью гибкого кабе-
ля (схема 2) или пропусканием тока (постоянного или импульсного) вдоль перехода (паза) с
помощью электроконтактов. Подобные зоны на деталях из магнитомягких сталей контроли-
руют способом приложенного поля с помощью электромагнита.
Способ контроля валиков и осей выбирают в зависимости от марки стали детали и прово-
дят по схемам 4 или 5. При контроле по схеме 5 контролируемую деталь приставляют к одному
из полюсов электромагнита через специальный сердечник, вставленный в соленоид.
Ультразвуковая дефектоскопия подвесных устройств осуществляется применением де-
фектоскопов УД2-12 или УД2-70 или любого другого, позволяющего соблюдать основные
параметры контроля. Контроль проводят нормальным и наклонным преобразователями (угол
призмы 30 и 40°) на частоте 2,5 МГц. Участки детали, на которых из-за их малых размеров не
представляется возможным разместить наклонный искатель на 2,5 МГц, рекомендуется кон-
тролировать искателем на 5 МГц. Предельная чувствительность контроля должна обеспечи-
вать обнаружение искусственного дефекта типа зарубки размером 2x1,5 мм.
Подготовку к контролю проводят в полной аналогии с методикой контроля деталей тор-
мозной системы. Детали плоской формы (группа I) рекомендуется контролировать наклон-
Таблица 22.5
Режимы намагничивания
Схемы намагничивания (рис. 22.6) Способ контроля поля
Способ приложенного поля Постоянный ток Импульсный ток (гибкий кабель 20 мм3)
Марка стали
Ст.З Ст. 5, Ст. 35 Ст. 45 Ст. 40х Ст. 45 Ст.40х Ст. 45 Ст. 40х
Оптимальная напряженность, А/м
1120 1300 2400 3200 8000 11200 8000 11200
, 3,5г/ / = СО ;_4г/ со , 7,5г/ / = (О , 9,5г/ / = со , 25г/ со , 35г/ У _ (0 го > 0,025с/ го > 0,035г/
к. / «г к / = 7,5г/ l=4d / = 7,5г/ / = 9,5г/ l = 25d l = 35d Кабель укладывается в местах переходов (пазов), контролируемый участок накрывается пластиной
1 = 0,7 А 1 = 0,8 А 1 = 1,5/1 / = 2,0Л 1 >2,5А 1>3,7А — —
f" — н (0 t-U^- (!) /=4,7^ 0) . Jl2+D2 со Jl2+d2 / =0 со f ^l2+d2 Ct) <y = 0,008x/l2 + Z)2 r^O^llx/^ + D2
•Л»
1=0,7 А 1 = 0,и 1 = 1,5/1 /=2,0А 1>2,5А I >3,7 A — —
I — ток, А; со — число витков; d — диаметр контролируемой зоны, мм; L — длина намотки соленоида, мм; D — диаметр намотки соленоида, мм.
ГЛАВА 22
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
569
ними преобразователями с углом призмы 30°. Прозвучивание производят прямым пучком
путем продольно-поперечного перемещения искателя по поверхности детали. Преобразова-
тель перемещается в прямом и обратном направлениях с двух противоположных поверхнос-
тей детали. Наличие дефекта устанавливают по появлению импульса, расположенного в конце
настроенной развертки. Валики и оси (детали группы II) контролируют нормальным иска-
телем поочередно с обоих торцов детали. Искатель перемещают по торцу детали по замкну-
тому кругу. Признак надежности акустического контакта — наличие на экране дефектоскопа
эхо-сигнала отражения ультразвуковой энергии от противоположного торца.
Валики и оси крупных типоразмеров рекомендуется контролировать также наклонным
искателем (угол призмы 40°), располагая его на цилиндрической поверхности детали. Про-
звучивание ведут сначала в направлении одного торца детали, затем в направлении другого
торца зигзагообразным перемещением искателя по цилиндрической поверхности детали.
Комбинированные детали (группа II) состоят из участков плоской и цилиндрической форм.
Плоские участки контролируют в соответствии с методикой прозвучивания деталей группы I.
Цилиндрические участки контролируют в соответствии с методикой контроля цилиндричес-
ких тяг тормозных систем подъемных машин, т. е. ввод в металл ультразвуковых колебаний
проводят вдоль образующей цилиндрической поверхности в двух взаимно противоположных
направлениях. При отсутствии дефектов на экране прибора наблюдается только начальный
(зондирующий) импульс. Контроль осуществляют наклонным искателем с углом призмы 30°
на частоте 2,5 МГц, контроль деталей сложной формы (группа IV) — искателями с углами при-
змы 30 и 40°. Угол призмы выбирают в зависимости от конфигурации детали с учетом обеспе-
чения наиболее полного прозвучивания тела контролируемого участка детали.
Работоспособность искателя и прибора, наличие акустического контакта и чувствитель-
ность контроля должны в процессе работы время от времени проверяться по углам, высту-
пам контролируемых деталей, стандартным и испытательным образцам. Признак наличия
дефектов, подлежащих регистрации, — срабатывание дополнительных индикаторов, а также
появление и перемещение на экране сигнала, максимум которого располагается в рабочей
зоне и имеет амплитуду 20 мм и более при чувствительности, соответствующей предельной.
При обнаружении в детали одиночного дефекта типа трещины глубиной не более 4 мм допус-
кается удалять ее съемом части металла с обеспечением плавных переходов радиусом не более 10 мм.
При этом металл должен сниматься на 0,5 мм больше, чем глубина трещины. Данный участок
детали после удаления трещины необходимо дополнительно проверить магнитопорошковым или
ультразвуковым методом. Результаты дефектоскопии деталей подвесных устройств и парашютов
оформляют протоколом, аналогичным протоколу результатов дефектоскопии тормозных систем.
В отдельных случаях допускается ультразвуковой контроль деталей подвесных устройств
многоканатного подъема без разборки подвесного устройства на отдельные детали.
22.3. Неразрушающий контроль осей копровых шкивов
Основных геометрические параметры осей копровых шкивов диаметром от 3 до 6 м пред-
ставлены в табл. 22.6.
Эскизы осей копровых шкивов цилиндроконической и цилиндрической форм с под-
шипниками качения представлены соответственно на рис. 22.7, а и б.
Рис. 22.7. Эскизы осей копровых шкивов с подшипниками качения:
а — цилиндроконической формы; б — цилиндрической формы
570
ГЛАВА 22
Таблица 22.6
Основные геометрические параметры осей копровых шкивов
№№ пп Тип шкивз L, мм Lb ММ мм U мм L<, мм Ф мм Ь, мм преобр. 13° преобр. 10°
аь мм мм аь мм а2, мм
1 шккз 1034 83 158 315 300 120 23 — — 30 33
2 ШККЗА 1050 99 174 323 308 140 27 — — 19 25
3 ШКК4А 1159 111 186 348 344 160 30 68 — 18
4 ШКК4Б 1148 117 195 351 328 170 32 60 68 — —
5 Ш5А 1140 115 210 324 316 170 31 30 26 — —
6 Ш6 1290 134 225 345 315 200 35 33 23 — —
7 Шб',0101 1320 160 252 360 330 260 43 — 30 33
8 Н336 1675 305 447 537 537 260 78 105 105 — —
9 ШКФЗБ 1068 117 220 335 336 170 32 65 65 —
10 Ш4А 1148 117 220 349 349 170 32 75 75 — —
11 П1КФ4А 1159 133 225 356 356 200 35 64 64 — —
12 И15 1163 133 225 336 336 200 35 48 48 — —
13 Н336Д 1345 170 — 425 425 280 44 69 69 — —
14 Ш6‘,0101Н 1320 160 252 364 364 260 43 53 53 — —
15 Н336.2 1465 170 342 335 435 280 44 64 64 — —
16 ШКЗ 1190 232 — 395 398 160 — — — — —
17 ШК4Б 1415 370 — 477 480 240 — — — — —
18 М8012 1330 300 415 415 200 — — — —
19 Г8017 1335 300 — 417 387 200 — — — —
20 Г8015 1405 370 — 477 417 240 — — — — —
21 Г8013 1530 370 — 465 465 240 — — — — —
22 Г8020 1535 370 — 467 467 260 - - — - —
Дефектоскопия осей копровых шкивов проводится с целью выявления в них усталост-
ных трещин, которые могут возникать в галтелях и крайних участках подступичной части.
Дефектоскопия производится УЗ-методом с помощью дефектоскопов УД2-12; УД2-70
следующими преобразователями:
— типовыми прямыми на частоту 2,5 МГц или 1,25 МГц для контроля галтелей I и II;
— специальными наклонными с углом призмы 10°, 13° на частоту 2,5 МГц для контроля
подступичной части осей;
— типовыми наклонными с углом призмы 30° (40°, 50°) на частоту 2,5 МГц для контроля
подступичной части цилиндроконических осей;
— типовыми раздельно-совмещенными малогабаритными на частоту 5 МГц для контро-
ля подступичной части цилиндрических осей с подшипниками качения.
Схемы контроля осей в сечениях I, II и крайних участков подступичной зоны представ-
лены на рис. 22.8 (а, б, в, г).
Рис. 22.8. Контроль галтелей осей:
а — схема прозвучивания цилиндроконической оси; б — картина на экране дефектоскопа; в —
схема прозвучивания цилиндрической оси; г — картина на экране дефектоскопа.
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
571
Ультразвуковой контроль необходимо проводить на поисковой чувствительности, устано-
вив искатель на торце оси. При контроле галтели 1 в случае появления сигналов необходимо
произвести прозвучивание, отступая от края окружности торца оси на расстояние «в» (см.
рис. 22.9). Отсутствие сигналов при этом показывает, что отражение УЗ-луча было от угла внут-
ренней обоймы подшипника; наличие же сигнала является признаком наличия дефекта.
Рис. 22.9. Контроль крайних участков
подступичной части цилиндрической оси:
а — схема прозвучивания; б — картина на
экране дефектоскопа; в — картина на экране
дефектоскопа при включенной задержке
При контроле крайних участков подступичной части в некоторых случаях могут возникнуть
сигналы от буртика или проточки. Для более точной расшифровки сигнала необходимо увеличить
разрешающую способность дефектоскопа. При перемещении преобразователя, по окружности этот
сигнал почти не изменяется по амплитуде и остается на том же расстоянии (в том же положении
на экране дефектоскопа). Сигнал же от дефекта будет изменяться от максимальной амплитуды до
нуля при перемещении преобразователя по окружности и при смещении к центру торца оси.
Крайние участки подступичной части цилиндроконических осей могут быть проконтроли-
рованы наклонным преобразователем с конической поверхности. Такой контроль рекомендует-
ся применять в качестве дополнительного при обнаружении дефекта в подступичной части оси,
а также в том случае, если размеры контролируемой оси не совпадают с размерами, указанными
в таблице для данного типа оси. Оптимальный угол, призмы преобразователя — 50°.
Поиск дефектов осуществляется перемещением преобразователя вниз по образующей
конической части оси до исчезновения сигнала от бурта или проточки, а затем при дальней-
шем перемещении преобразователя в зоне до 10 м ведется поиск дефектов. В поперечном
направлении преобразователь перемещается с шагом 5—10 мм.
При контроле крайних участков подступичной части настройка скорости развертки про-
изводится следующим образом. Получив сигнал от бурта (проточки), преобразователь пере-
мещают вниз по конусной части оси до исчезновения сигнала. Передний фронт строб-им-
пульса глубиномера устанавливают в точке, где сигнал от бурта (проточки) исчезает, а зад-
ний фронт строб-импульса отодвигают на 20 мм по развертке.
Настройка чувствительности производится в следующем порядке:
— получить максимальный, сигнал от бурта (проточки) и уменьшить амплитуду сигнала
до отсчетного уровня;
— предельную чувствительность устанавливают, повышая чувствительность на 12 дБ с
помощью аттенюатора прибора;
— контроль производится на поисковой чувствительности.
Контроль подступичной части цилиндрических осей возможен раздельно-совмещенным
малогабаритным преобразователем на частоту 5 МГц, если крепление ступицы шкива к оси
выполнено с помощью съемных сегментов. При этом преобразователь устанавливается на
торец оси у ступицы (рис. 22.9) контроль подступичной части производится перемещением
преобразователя по плоскости под ступичной части оси.
22.4. Дефектоскопия главных валов
22.4.1. Ультразвуковая дефектоскопия
Дефектоскопия главных валов подъемных машин производится с целью выявления ус-
талостных поверхностных трещин. Дефектоскопия валов должна производиться первый раз
перед вводом подъемной машины в эксплуатацию (если дефектоскопия не производится на
заводе-изготовителе с соответствующей отметкой в паспорте машины), а затем после исте-
чения нормативного срока службы машины, указанного в нормативно-технической доку-
ментации на машину. Согласно техническим условиям на подъемные машины НКМЗ и До-
нецкгормаша срок службы машины до списания механической части составляет:
572
ГЛАВА 22
Все типы подъемных машин НКМЗ 25 лет
Подъемные машины Донецкгормаша:
БЛи2БЛ 10 лет
ЛГЛ 15 лет
БМ-2000,2БМ-2000, БМ-2500,2БМ-2500, БМ-3000,2БМ-3000, БМ-45, БМ-46 15 лет
Подъемные машины с пружинно-пневматическими приводами тормозов 20 лет
Новые подъемные машины с пружинно-гидравлическими приводами тормоза 20 лет
Все многоканатные машины серии МК 20 лет
Машины Ц-3,5х2А и 2Ц-3,5х1,7А с пружинно-грузовым пневмоприводом 25 лет
Все многоканатные машины серии ЦШ 25 лет
Зарождение усталостных трещин происходит, как правило, в наиболее опасных сечениях
вала. Это, во-первых, сечения, в которых действуют наибольшие изгибающие и крутящие мо-
менты и, во-вторых, сечения, в которых имеются концентраторы напряжений в виде галтелей,
шпоночных пазов, посадочных соединений и т. п. Сочетание этих факторов в одном сечении
является наиболее неблагоприятным с точки зрения усталостной прочности вала. Таким обра-
зом, поскольку критерием предельного состояния вала является усталостная трещина, то зада-
ча установления предельного состояния сводится к выявлению потенциально опасных зон,
установлению факта изменения геометрических параметров и свойств материала в этих зонах.
Нарушение геометрических параметров главного вала может проявляться также в виде до-
полнительных зазоров в местах сопряжения вала и ступиц барабана или ступиц механизма пере-
становки вследствие износа посадочных поверхностей сопрягаемых деталей. При увеличении
зазора между ступицей и валом снижается прочность напряженного соединения вследствие умень-
шения площади поверхности контакта, роста удельного давления и соответственно увеличения
коэффициента концентрации напряжений. Этот концентратор является более существенным,
чем концентратор напряжений зоны галтели, пересеченной шпоночными канавками. Этот кон-
центратор не учитывался при расчете на усталостную прочность на стадии проектирования вала
и, следовательно, запас прочности в данной зоне относительно предела усталости, оказывается
ниже нормативного, что не может не сказаться на остаточном ресурсе вала.
Сечения вала, имеющие наименьшие запасы прочности, следует рассматривать как по-
тенциально опасные зоны, и они должны быть проверены средствами и методами неразру-
шающего контроля в соответствии с действующими нормативно-техническими документа-
ми. Такими документами для угольных шахт Украины являются ГОСТ 24507-80. «Контроль
неразрушающий. Поковки из черных и цветных металлов. Методы ультразвуковой дефек-
тоскопии» и КД12.03 «Подъемные машины. Дефектоскопия главных валов. Методика», раз-
работанным НИИГМ им. М.М. Федорова и Укруглеизотоп и утвержденным Энергомехани-
ческим управлением Минтопэнерго Украины в 1996 г.
НИИГМ им. М.М. Федорова были проанализированы порядка 60 конструкций главных
валов практически всех типоразмеров и модификаций подъемных машин отечественного и
зарубежного производства, находящихся в эксплуатации на угольных шахтах Украины. На
базе этого анализа были разработаны формуляры контроля каждого из типов валов. В конце
этого подраздела на рис. 22.15 приведены формуляры контроля главных валов подъемных
машин. На формулярах кружками обозначены зоны наиболее вероятного зарождения уста-
лостных трещин. Здесь же приведены основные размеры, как всего вала, так и сечений по-
тенциально опасных зон, представлена схема нагружения вала и относительные эпюры из-
гибающего и крутящего моментов, зоны и характеристики посадочных соединений «ступи-
ца барабана — главный вал», нанесены контуры сопрягаемых с валом узлов и деталей (под-
шипник, ступицы барабанов и механизма перестановки, соединительные муфты).
Основным методом неразрушающего контроля корпусных деталей является ультразву-
ковой, в отдельных случаях применяется магнитопорошковый метод. Предварительный кон-
троль состояния вала осуществляется визуально-оптическим методом с целью оценки каче-
ства поверхности вала в потенциально опасных зонах, выявления признаков нарушения плот-
ности посадочных соединений, следов ведения сварочных работ на поверхности вала и дру-
гих явно видимых дефектов. Результаты визуально-оптического контроля регистрируются в
протоколе контроля в виде рисунков с указанием места расположения дефекта, его направ-
ления и формы.
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
573
Ультразвуковая дефектоскопия главных валов должна производиться контактным эхо-
импульсным методом по ГОСТ 20415. В состав аппаратуры контроля должны входить:
— ультразвуковой дефектоскоп УЗД второй группы по ГОСТ 23049;
— ультразвуковые пьезопреобразователи (ПЭП) по ГОСТ 26266, работающие в комп-
лекте с дефектоскопом;
— стандартные (СО) и контрольные (КОВ) образцы для настройки и контроля УДЗ и
пьезоэлектротехнических преобразователей.
Основными параметрами эхо-метода при контроле вала являются: рабочая частота УЗК;
угол ввода УЗК в тело вала; чувствительность УЗД; диапазон измеряемых глубин дефектов и
погрешность; тип используемого ПЭП; шероховатость поверхности вала в зоне контроля,
которая должна быть не более Rz 40.
Ультразвуковой дефектоскоп при контроле вала поверхностных подъемных машин дол-
жен удовлетворять следующим требованиям:
Область применения Общего назначения
группа УЗД вторая с глубиной контроля до (1000=Ы5) мм
конструктивное исполнение переносной или портативный; виброустойчивый
климатическое исполнение не хуже УХЛ 4.2 (ГОСТ 15150)
управление с ручным управлением или автоматизированным с выходом на компьютер
При контроле вала в подземных условиях УЗД должен быть взрывобезопасного испол-
нения по ГОСТ 23049. В случае применения УЗД общепромышленного исполнения, конт-
роль вала должен проводиться в соответствии с требованиями ПБ [13].
Пьезоэлектрические преобразователи (ПЭП) должны удовлетворять следующим требо-
ваниям: по конструктивному исполнению — контактные, совмещенные, с плоской рабочей
поверхностью; по направлению ввода УЗК в тело вала — прямые (создающие продольные
УЗК); наклонные с углом ввода УЗК в металл 40°, 50°, 65°, 70° (создающие сдвиговые УЗК);
наклонные с углом ввода УЗК в металл 90° (создающие поверхностные волны).
В качестве акустической контактной среды используются смазочные материалы, конси-
стенция которых исключает самопроизвольное стекание смазки с поверхности вала. Реко-
мендуемые типы стандартных смазок: автомобильная марки ЦИАТИМ, солидол жировой и
другие смазки аналогичного вида. При выборе типа смазки необходимо учитывать темпера-
туру окружающей среды.
Проведению дефектоскопии вала должен предшествовать анализ конструкции вала, ко-
торый целесообразно проводить в лабораторных условиях с целью выбора из имеющейся
номенклатуры ПЭП тех из них, которые обеспечивают требуемую достоверность контроля
при минимальных затратах времени и средств на подготовку поверхности вала к контролю.
При прочих равных условиях из всей номенклатуры ПЭП предпочтение следует отда-
вать тому, длина луча УЗК которого при установке его в соответствующей точке вала являет-
ся наименьшей и обеспечивается возможность выявления дефектов минимального размера.
Место установки наклонных ПЭП на валу должно выбираться из условия, чтобы обеспечи-
валась возможность возвратно-поступательного перемещения его в осевом направлении не
менее чем на 15—20 мм, что является достаточным для прозвучивания зон намина подсту-
пичных участков вала (рис. 22.12, а).
В реальных условиях эксплуатации для исключения непредвиденных ситуаций, связан-
ных с размещением ПЭП на поверхности вала, рекомендуется прорабатывать одновременно
несколько вариантов схем контроля конкретного сечения вала с использованием ПЭП раз-
личного типа (рис. 2.12).
Еще раз следует напомнить, что проведению ультразвуковой дефектоскопии подступич-
ных участков главного вала должна предшествовать тщательная проверка состояния каче-
ства посадки ступиц барабана на валу. Наиболее оперативно эту проверку можно выполнить
измерением величины зазора между поверхностью вала и ступицей барабана с помощью ин-
дикатора часового типа. Нарушение плотности посадки свидетельствует о развитии коэф-
фициента концентрации в зоне намина вала, это является сигналом о возникновении усло-
вий начала развития процесса усталостного разрушения вала.
Контролю участков вала с использованием наклонных ПЭП с углом ввода УЗК в металл
40°, 50°, 65° или 70° должна предшествовать операция проверки прозвучиваемости металла
574
ГЛАВА 22
вала. Применение данного типа ПЭП связано, как правило, с прозвучиванием всего попе-
речного сечения вала и длина ультразвукового луча при контроле крупных подъемных ма-
шин типа БЦК, 2Ц-5 может достигать до 1,5 м. С увеличением диаметра вала обычно возра-
стают загрязненность внутренней структуры его металла различными включениями, мелки-
ми раковинами и т. п., что значительно увеличивает затухание УЗК в металле и как след-
ствие ведет к невозможности осуществления контроля по принятой схеме.
Операция проверки прозвучиваемости обычно выполняются на этапе настройки вре-
менной селекции контроля. Проверку следует начинать с ПЭП на 2,5 МГц. При отсутствии
прозвучиваемости на данной частоте следует использовать ПЭП с более низкой частотой.
Признаком плохой прозвучиваемости металла является наличие на экране дефектоско-
па частокола неустойчивых случайных импульсов в пределах рабочей зоны контроля, огра-
ниченной начальным и конечным строб-импульсами.
Основные положения настройки прибора и технологии контроля изложены в соответ-
ствующем Руководстве по эксплуатации дефектоскопа.
Рис. 22.10. Зоны контроля главного вала шахтной подъемной машины
(на примере вала машины типа 2Ц 6x2,4):
1 — галтель и край посаженной ступицы заклиненного барабана; 2 — край по посадке с натягом
ступицы заклиненного барабана; 3 — галтель; 4 — шпоночный паз под шестерней привода
механизма указателя глубины; 5 — подшипник качения; 6 — ступица механизма перестановки;
7 — ступица переставного барабана; 8 — ступица заклиненного барабана; 9 — зубчатая муфта
Рис. 22.11. Зоны контроля главного вала шахтной подъемной машины
(на примере вала машины типа ЦР 6x3,2/05):
1 — галтель и край посаженной по прессовой посадке полой трубы на левую цапфу; 2 — галтель
и край посаженной по прессовой посадке полой трубы на правую цапфу; 3 — галтель
подшипниковая; 4 — подшипник качения; 5 — ступица барабана
На рис. 22.12 показаны типовые схемы ультразвукового контроля характерных участков
валов.
Рис. 22.12, а. Варианты схем контроля вала
различными наклонными ПЭП
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
575
Рис. 22.12, б. Схема контроля в зоне
напряженного шпоночного соединения
под ступицей (барабана или механизма
перестановки) и галтелей:
Зоны контроля: I — галтель и край
посаженной на вал ступицы заклиненного
барабана; 2 — подступичная зона вала;
III — наклонный преобразователь (Р ~ 4(1)
при I варианте контроля; П2 — наклонный
преобразователь (Р = 5(1) при II варианте
контроля; I — расстояние для установки
преобразователя в начальную точку
сканирования
Рис. 22.12, в. Схема контроля главного
вала в зоне края посаженной ступицы
барабана (механизма перестановки)
и галтелей:
Зоны контроля: I — галтель; 2, 3 — края
ступицы барабана; III — наклонный
преобразователь (Р — 4(1) при I варианте
контроля; П2 — наклонный преобразователь
(Р = 65°)при IIварианте контроля; I,, 12-
расстояние для установки преобразователей
в начальную точку сканирования; 13, 14 —
расстояние для установки преобразователей
в конечную точку сканирования (не менее
мерной зоны преобразователя)
Рис. 22.12, г. Схема контроля в зоне
главного вала края посаженного
по напряженной посадке подшипника
качения переставного барабана
и галтелей:
Зоны контроля: I — галтель; 2, 3 — края
подшипника качения; II — наклонный
преобразователь (р = 4(1); I — расстояние
для установки преобразователя в начальную
точку сканирования
22.4.2. Магнитопорошковая дефектоскопия главных валов
Магнитопорошковую (МП) дефектоскопию рекомендуется применять для контроля по-
верхностных участков вала с явно выраженными концентрациями напряжений, в частности:
— выходы шпоночных пазов и канавок;
— отверстия, в том числе резьбовые, расположенные на цилиндрической поверхности
вала (например, для крепления планок, фиксирующих шпонки от осевого сдвига; фиксации
хомутов);
— галтельные переходы, если не представляется возможным проконтролировать их уль-
тразвуковым методом;
576
ГЛАВА 22
— поверхности, на которых обнаружены дефекты при визуально-оптическом осмотре с
целью уточнения их характера;
— посадочные места при капитальном ремонте коренной части подъемной машины (за-
мена ступиц барабана, коренных подшипников, соединительных муфт и др.);
— в трехопорных валах — галтели шейки среднего подшипника.
Основными параметрами магнитопорошковой дефектоскопии главного вала в соответ-
ствии с ГОСТ 21105 являются:
— условный уровень чувствительности — класс В;
— способ контроля — способ приложенного магнитного поля (СПП);
— вид намагничивания — продольное (полюсное);
— способ намагничивания — при помощи ручного электромагнита с подвижными полюсами;
— напряженность магнитного поля (для стали Ст. 45) — не менее 25 А/см.
Наиболее полно требованиям безопасности при контроле валов поверхностных и подзем-
ных подъемных машин отвечает серийно выпускаемый дефектоскопический комплект «МА-
ГЭК.С-3» с намагничивающим устройством МЭ-3, выполненным на основе постоянных маг-
нитов, обладающих большой магнитной энергией. В качестве дефектоскопических материа-
лов используется керосиновая суспензия на основе магнитных или железных порошков с
концентрацией (25±5) г/л. Нанесение магнитной суспензии на контролируемый участок вала
производится путем полива слабой струей между полюсами магнита. Участки вала, подлежа-
щие МП-дефектоскопии, должны быть вручную очищены от загрязнений и смазки с помо-
щью деревянных или пластмассовых скребков и обезжиривающих растворов.
Для исследования контролируемого поперечного сечения вала на предмет отсутствия в
нем усталостных трещин необходимо расположить магниты устройства МЭ-3 на поверхности
вала в осевом направлении так, чтобы исследуемое поперечное сечение располагалось между
магнитами. Затем включить магниты и нанести магнитную суспензию на поверхность вала
между магнитами. Не отключая магниты, осмотреть поверхность контролируемого участка вала
и только затем отключить магниты. При обнаружении признаков усталостного дефекта занес-
ти в протокол его контуры и повторить контроль до получения аналогичного рисунка.
Следует еще раз отметить, что для повышения достоверности контроля намагничивание
участка вала в районе концентратора напряжений должно производиться таким образом,
чтобы направление намагничивающего поля магнита было параллельным оси вала.
Типовые схемы намагничивания участков вала в местах концентраторов напряжений
представлены на рис. 22.13; 22.14.
Рис. 22.13. Участок вала с закрепленной
конической шестерней привода
указателя глубины:
1 — тяга привода указателя глубины;
2 — шпонка для крепления на валу коничес-
кой шестерни; 3 — коническая шестерня
(состоит из двух частей)
Рис. 22.14. Привод указателя глубины
расположенный между заклиненным
барабаном и подшипником:
1 — шпоночный паз (зоны контроля)
Ниже на рис. 22.15 приведены зоны контроля главных валов подъемных машин различного типа.
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
577
Pi Pz Р\ Pi- усилия. передадаемые на бал ступицами ЯараЗанаб от десобых нагрузок и усилий б канатах,
Рзх окружное усилие на зудчотом колесе, Рз Рз Рз- опорные реакции 6 коренных подшипниках бала
1,2- жители и края лисахтных /тупиц заклиненного барадпна.
J.C галтели и края посаженных ступиц перестойного дарадана,
S- галтель под средним подшипником скольжения
Главный вал подъемной машины фирмы Вельман (США)
Pi Ре Pi Pi- усилия, передаваемые ни бал ступицами бароданоб от бесобых нагрузок и усилии б канатах,
Рзж- окружное усилие на зубчатом колесе, Р РзРз- опорные реакции б коренных подшипниках бала
1 - шпоночная конабка
2 3,4- края посаже^жых на бал ступиц заклеенного дфо&на,
5~ житель под среАяж> подшипником скольжения
Главный вал подъемной машины 2x3x1,6 фирмы ОТТУМВА (США)
Л Pz Pi Pi- ycuzw nepeSoOaeesie m йал cmymuom ScpaSoHoB от Весобыг нагруоок и уситш В конатои.
Рзк- окрухше усияие мо зубчатое колосе, fh Rz Рз- опорные реакции В ксреннык гюЛйипникох Вола
I £ 3 Z 6- края посохенных на Вал ступиц перестаВного и заклиненного ВораВоноб;
t- шпонанные канаВки под ступицами жжлиненного дородна:
7- галтели и участок Вала под средним подшипником скпльхения.
Главный вал подъемной машины 2x3,6x1,8 фирмы Аллис Чальмерс
578
ГЛАВА 22
Эпюра изгибающих моментов
Эпюра крутящих нпнентоб
Pi Рг- усилия передаваемые на бил с/пипииими барабана ат бесовых нагрузок и усилий б кипите.
Ран- неуравновешенное усилие на зубчатой муфте. Pt Рг- опорные реалист 6 коренных подшипниках бала
12. 6-галтели: t- шпоночные кснобки 3, 5- галтель и крой посаженной ступииы барабана,
7- шпоночная канадка под конической шестерней привода механизма указателя глубины и
галтели б проточке бала
Главный вал подъемной машины СКМЗ 1x6x3
Р^Р^РхPi-усилия. передо&эеные на бая ступицони закяиыенно&з и перестабнзго Заро&зноЗ Рэя-окружрюе усилья? на луЗчапак
«W ЩЬ-стрные реакцш 3
123. &. tZ-xpa? посаженных на Зал ступи
Ц Н-гаяглели и хрия гхкажеюых на бал ступиц.
54 7,8-гытели.
4..? 17-резьЗобые аяЗерсятя штем-ых эо^азб.
К. £ ^-шпоночные хансЗха
Главный вал подъемной машины 2БМ-2000
Рзм
Эвра крутящих моментов
РЛГзЯчрюмередсбаеые « бал cmpaiov зааинетгга и переагюбюге брядзеб т усилю б катах.
Рзн-неурабюбеленке доле на зубчат нурае, ffi/b-агрные реакции б юреных ябсхписах Ват
li-галтель и край посаженной ступииы заклиненного барабана S ИО-шпоночные конабки
235-резьбобые отберется шпоночных замков. 6-галтель и край посаженной ступицы
механизма перестановки, 7- край посаженной ступииы переставного барабана.
8-шпсночноя канавка под зубчатым колесом прибода механизма усазотеля глубины
Главный вал подъемной машины 2БМ-3000
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
579
Эпюра изгибающих моментов -----“—;-----
Эпюра крутящих моментов г L; j;; s s. 11J,
PlP:- усилия, прхМаеные на бал слупицти барабана an бесовых нагрузок 6 канате.
Рж-уиме на зубчатом колесе редуктора
Pi /&аирные реакции б коренных подшипниках бола
>-галтель и край посаженного подшипника качения,
Э.З-галтель и края посаженной по горячей посадке заклиненной ступицы барабана
Главный вал подъемной машины Ц-1,2x1
ляям/
ЪРз-иси&Я леве&баемые на &зя сяхриц-эми &?хдана усилие
но зубчатой куфте ресжцоц б псдштнцках бала
Кгалтель и край посаженной сбободной ступицы барабана.
2-галтель.
3-галтель и край посаженной по горячей посадке заклинен-
ной ступицы ^хзбак!
Главный вал подъемной машины Ц-1,6x1,2
Эпира иэгибмщих нонентоб _
11 Н И 11 i I й । i j j!
Эпюра крупкщих моментов » Н и Ш.к! HI
РгРг-усилия. передаваемые на Вал ступорами барабаю от бесовых нагрузок и усилий
в сенате, Рзм-неуравнобешенное усилие на зубчатой муфте;
R {Рс-опорные реакции В коренных подшипниках вала
Главный вал подъемной машины Ц-2х1,5
580
ГЛАВА 22
Pl Pi- усилия передаваемые на Вал ступицами барабана аа йесабых нагрузок и усилии б кгшпе,
Рзм~ неурРбнобеатае усилие на зубчзтай муфте.
R- R:- тарные реакции б коренных поОиипниках бала
1.4- галтели,
2- шпоночные к скобки.
3-резь6а6ые отверстия, предназначенные для крепления шпанок,
5- галтель и край посаженной на Вал заклиненной ступицы барабана
Главный вал подъемной машины Ц-2,5х2
Сби&гдная апипици биродани Заклиненная ступица барабана
Зжрл крутящих моментов
Pt Рг~ усилия. передаваемые на бол ступицами барабана ат бесовых нагрузок и усилий б кан&пе,
Рзм- неуравновешенное усилие на зубчатой муфте,
„ Rt Рг-апарные реакции б коренных лодй&пчикйх бала
1-галтелы и крои посаженной ступицы ос^аоана.
2- шпоночная канадка
3— резедовые отверстия для крепления планок, фиксирующих шпонки.
4~ галтели и крои пасоженнои заклиненной ступицы дарадана
Главный вал подъемной машины 1хЗх2У
Эпсра крутящих
мсменлюб
Pi Pz Pi Р^~ усилия передаваема на бал ступите бародаюб ат бесовых нагрухн и усилий б кснаг^х.
Pxt- пхружбюе (б^ювнпбеигрннае/ усилие на зубчатой муфте.
Pt Rz - агарные реакции б кронных подшипниках бала
f- галтели б Нюточке бала,
2~ крюй посаженной бек^зённей ступицы дорадо^з
3- икк»кзчные канабки.
4- резь^збые отдерстия крепления пламж фиксации шпонок,
S- галтеле край посаженной бн&лней ступицы зок/юн&^иго барабана зона под ступицей
Главный вал подъемной машины 2x3x1,5
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
581
Эпюра изгидсюиих нонентоб
Эпюра крутящих \ I N I I | I i i I i I j M I | I I j I I I [ | | H | | I
нонЬтб II I H I I I H I I I I I H I . M I I I } I | I H | M I I I I
Pi. Рг- усилиялередабаеные на han ступицам барабана am бесовых нагрузок и усший б канате.
Рзн- неуравновешенное усилие на хДчатаи нуфте.
PtPr- опорные рескции а коренных падшзпнитх ват
1- галтель и край посаженной на бал левой ступицы барабана.
2 резьбовые отверстия шпоночных заикав.
3- шпоночные канавки,
4-крой посаженной на дал правой ступицы барабана.
Главный вал подъемной машины Ц-3,5х2
Л Ргнрмзя, лередабагные на ваз сашзаани бфабаа от бесовых нагрузок и усыпи в кате.
Я; Рхпрые реакции в коренных птшпнжох вала
Рзн- шухзбнобеьеннае усилие на зубатой лолунуфте
i Z 5- гатели и края обеих агупщ боробина
3 6- запели.
4-шптачвя канавка
Главный вал подъемной машины Ц-3,5х2,4
ШЛ/Гр
Pl Рз Pi Л- усилия, передабаеные на бол ступицами барабанов от бесовых нагрузок и усилий б катах.
Рзн- неуробнобешенкзе усилие на зубчапой нуфяе.
Р-Р;-спорые реоазии б коренных подшипниках бот
1- галтели и край посаженной по напряженной посадке втулки.
2- галтель и край посаженного на вал внутреннего кольца подшипника.
3— галтель и край аосаженнагона бал внутреннего кольца подшипника,
4- шпоночные канавки,
5- резьбовые отверстия крепления планок для фиксации шпонок.
6- галтель и край ступицы заклиненного барабана
Главный вал подъемной машины 2Ц-3,5х1,7А
582
ГЛАВА 22
Злою крутяши нонетов
1-саагя, а угйжюечоа « чзеятш mike тишеeta 2-уа «згежгг ю юуиганй locate xims rawt
.tas/s^Msj8»t«ee®4?ife? 4-*ита»
Z-awMo^i^W-ioowewcesinxbe влвдшмкФт mmn
Главный вал подъемной машины 2Ц-3,5х1,7
1 Ri Гр?
Л_____1
г₽2 * Рзм
Схема нагружения боли
Pi Pz усилия. передабаемые мобил ступицами барабана от бесобых нагрузок и усилий б канате,
Рзм- неурабнобешенное усилие на зубчатой муфте.
Pt Pz-опорные реакции б коренных подшипниках бала
1Ц- галтели и края посаженных на бал ступиц барабана.
2~ шпоночные канадки.
S-галтели б проточке бала,
6- шпоночная канадка под коническим зубчатым колесом прибодз
механизма указателя глубины
Главный вал подъемной машины ЦР-4хЗ,2/0,6
/Нал спиши зоююненной Пхвая аарицр заминай Раазвйя омва перюяйш плимк
РсРгРз- усилия передаваемые на Вал ступицами ворована от весовых нагрузок и усилий S каютах.
Рзм- неуравновешенное усилие на зувчотой муфте.
Rt Rc- опорные реакции В коренных подшипниках Вола
16- галтель и крой трубы, В котаруо запрессована цапфа. 7.8- голте/ш.
2- край посаженной по плотной посадке левой ступицы заклиненной части ворована
3, 4- галтель и край пасахенной по прессовой сюсодйе правой ступииы заклиненной части ворована.
5- галтел и край посаженного по плотной посадке правого венца роликовой опоры переставной части ворована
Главный вал подъемной машины ЦР-1x4x3,4/06
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
583
t- галтель,
2- галтел и крой посаженной трубы на цапфу.
3- галтель подшипниковая
Главный вал подъемной машины ЦР-5хЗ,2/0,55
j 1 i j 1 [ Ii 11111 И ; M 1 H H 1 1 I i H i l 1 ; t : : I i • \ 1 ’ : 1
А усилие передЬваеное на бал ступицей ворована ат Весовых нагрузок и усилий В канате.
Ран- неуювнабешенное усилие на зубчатой нуфте.
Pt Р.~- опорные реакции В коренных подшипниках Вала.
7- галтель и край посаженной по прессовой посадке полой трубы на певуч цапфу. 3- галтель подшипниковая,
2- галтель и край посаженной по прессовой посадке полой трубы на пробую цапфу
Главный вал для подъемной машины ЦР-6хЗ,2/0,5
Pi Рг- усилия пфедоваеные на Вал ступицами барабана от весовых нагрузок и усилий в канате.
Рзн- неуравновешенное усилие на зубатой нуфте. Ri Рг- опорные реакции В коренных подшипниках вала
I & 7-галтели, j $- галтель и край посаженной ступицы бородою.
4- шпоночная кснавка. 9- подшипниковые галтели.
8- шпоночная канавка под конической шестерней привода нехонизно указателя глубины
Главный вал подъемной машины НКМЗ 1x6x3
584
ГЛАВА 22
Pi P;Pi Pi-усилия передабоекые по бал ступицами заклиненного и переставного барабанов ап усилии б канатах.
Рзн- неуравновешенное усилие на зубчатой муфте, Ri Яг- опорные реакции б коренник подшипниках бала
А шпоночная кснобко под коничеким колесом привода механизма указателя глубины
2- край посаженной на бал внутренней ступицы заклиненного барабана.
3- шпоночная канавка под внешней ступицей заклиненного барабана.
I- галтель и край посаженной по плотной посадке ступицы заклиненного барабана.
5- галтели б проточке бала
Главный вал подъемной машины 2x4x1,8
Рз Рг Pj Я-исцшя гхуждабормые аи Ат/7 ступицами прррстабного и заклиненного бараданоб упяй S юмоше,
Рзм- неура&язбешенноеусилие на зубчатой муфте.
Pt Яг-спорные реакции о коренных подшипниках бала
I 3, 8-галтели. S-шпонвчные конабки,
2-голтель и край посаженного по напряженной посадке лодшиг^цка качения,
4- шпоночной камабха под шестерней грибодо мехдчизно указателя глубины,
6- галтель и край посаженной по плотной пос&Эке ступицы жжлиненного барабана.
7-край посаженной по плотной лососке ступицы заклиненного дорабана
Главный вал подъемной машины 2Ц-4х1,8
Pi Рг Рз, Pi-усилия передобаегле но бал ступицами переставного и заклиненного бсрабаноб от
усилий б канатах. Рзм- неуравновешенное усилие на зудчапой муфте
Pi Рг- опорные реакции в коренных подшипниках дала
Т-галтель и тзай посаженной с налтгом ступииы механизма перестанови.
22- галтели и край посаженного по тугой посадке внутреннего кольца подшипника
4.S- галтель и край посаженной по напряженной посадке внулренней ступицы заклиненного барабана.
6 7- гатпель и край посаженной с натягом внешней ступииы заглиненного барабана
в- подшипниковая галтель
Главный вал подъемной машины 2Ц-4х2,3
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
585
^идра крутящих мон&кшзб
PtPsPxPt -усилия ЛЕр&За&емье на бая ступицами заклиненного и перестабнвги баря&ноб ап усилии б канатах.
Рзм-меурабнобешенмое усилие на зу&члюй муфте. fftft-orxp&e рвашии б xopewx подшипниках била
123~гопп»пи и фая гюсаженных ю гшгюи гюсодке подия/пн^зФб коченцсг. 4 -жители конической
шестерю прибода ^л*н/лн? указателя глубины &-шпоючные канадки, 7-галтель и фю посаженной по ллапяой посаде внешней
ступицы заслоненного 8-кра) посаженной по плотню пасодсе бнеи/неи ступицы заклиненного дфодона
Главный вал подъемной машины 2Ц-4х2,3
Pt Рг Рз Р.-усилия, персдайаепые на Сол ступицами переставного и заклиненного барабанов от усилий б катах.
Рзн-юурабновешенное усилие на рубчатой муфте.
Rt Re-торные реакции б коренных подшипниках Вала
I 3-галтели 2 6.9- галтель и край посаженного подшипника
/. -шпоночная канавка под шестерней привода механизма указателя глубины.
5- шпоначноя канавка, 7-галтели б протечке бала.
6- галтель и крой посаженной по плотной посадке ступицы заклиненного барабана
Главный вал подъемной машины 2Ц-5х2,4
ррп.р, усилия, передаваемые на бал ступицами даоаданов ап весовых нагрузок и усилий В канатах.
Рзм- неуравновешенное усилие на зубчатой муфте. Ri Рг- опарные реакции В коренных подшипниках бала
f- край посаженной по прессовой посадке ступицы механизма перестаюбки барабана.
2- галтель и края посаженных по посадке с натягам ступииы механизма перестановки и внутреннего кольцо
подшипника. 6- край посаженного па тугой посадке внутреннего кольцо подшипника качения.
3— галтели и край посаженного по тугой посадке внутреннего кольца подшипника качения. 7- галтель и крой
посаженного по тугой посадке внутреннего кольца подшипника качения. (.589IZ в 16- галтель.
V. п- крой посаженной по напряженки посадке ступицы заклиинноге барадана .
я- галтель и крои посаженной по прессовой посадке ступицы заклиненного оарабона.
15- крой посаженной по прессовой посадке ступииы закошенного баройона
Главный вал подъемной машины 2Ц-6х2,4
586
ГЛАВА 22
|P2 |P3______________________|Pl !R2
: _______ Схегю нагружения Вам -ы-л-3-r
|P3M*Rl jPl
111 л -------1—
Зпра крутящих нонентоВ
PiPzPsPi-оаящ переЫаеные на Вон апрчиани ВсраВаноВ от Весовых нагрузок и усилий в койотах,
Рзн- неуравновешенное усилие на зубчами нуфте.
Pt Рг- опарные реакции о коренных подшипниках Вала
12-галтель и край посаженной по прессовой посадке Внеитей ступицы заклиненного ВараВано.
34- галтель и край посаженной Внутренней ступицы заклиненного дарована
56- галтель
Главный вал подъемной машины 2Ц-6х2,4
А галтель и край посаженной ступицы заклиненного ворована
2- край по посадке с натягон стцшцы заклиненного Варавою.
3- галтели В проточке Вала.
4- шпоночная канавка под шестерней привода нехонизно указателя глувиш
Главный вал подъемной машины 2Ц-6х2,4
Р: Pz Pj- усилия передобоемые на бал ступицами барабана от бесовых нагрузок и усил/й б канате.
Рзн- неуравновешенное усилие но зубчатой муфте.
Р> Pz- опарные реакции б коренных подшипниках вала
1 2 4 - край посаженной с нотягон ступииы барабана.
3- шпоночные ханабки.
б- шпоночная канадка под зубчатым колесом прибода механизма укзотеяя глубины,
7- подшипникобые галтели,
б- галтель и крой посаженной ступив псмучуфты
Главный вал подъемной машины БЦК-8/4,5х2
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
587
Pi Рг Pt Pt Л fib- усилии передаваемые на бал ап весовых нагрузок и усилии 6 канате.
Рзм-неуравновешенное усилие на зубчатой муфте.
Pi Рг- опарные реакции В коренных подшипниках вала
t 2- края посаженной по прессовой посадке трубы соответственно на левую и правую цапфы.
1 4- шпоночные канавки
Главный вал подъемной машины БЦК-8/5х2,7
I Ri t^2 f^3 t^4 i *Р2*Рзм
> ыпрпгурина Anon_________ . - ______ .
gWWi/X j । j ; | = H H ! j j j | | i | i i | --I--;..?
Рг Рг Pi P< Ps Аь Рг- усилии передаваемые на вал от весовых нагрузок и усилий 6 канате.
Рзм- неуравновешенное усилие на зубчатой муфте.
Pt Рг- опорные реакции о коренных подиипниках Вала
I 2- галтели и края посаженной по прессовой посадке трубы соответственно на левую и правую цапфы
Главный вал подъемной машины БЦК-9/5х2
I Ri t^2 i^3 i^4 _________t ^7 * R2 * Рзм
Рзн- неуравновешенное усилие на зубчатой муфте.
Р> Рг- опарные реагции о коренных подшипниках вала
I 2- галтели и края посаженной па прессовой посадке труды соответственно на левую и правую цапфы
Главный вал подъемной машины БЦК-9/5х2
588
ГЛАВА 22
Pt Рг Pi Л ft Я ft- усилия передаваемые на вал от бесовых нагрузок и усилий 6 коте.
Рзн-неураЛобешенное усилие на зубчатой нуфте.
Rt Re- опарные реакции В коренных подшипниках Вала
I 2- галтели и края посаженной по прессовой посадке трубы соответственно на левую и пробую цапфы
Главный вал подъемной машины БЦК-9/5х2
Pt Pz Pi Л. Pi Рь- усилия передаваемые на Вал от бесовых нагрузок и усилий 6 канате.
Рзн- неуравновешенное усилие на зубчатой нуфте. Rt Рз- опорные реакции В коренных подшипниках Вала
I 2- края посазсенной па прессовой осадке пруды соответственно на левую и правую цапфы,
i <•- шпоночные канавки
Главный вал подъемной машины БЦК-9/5х2,25
Pt Р; - усилия передаваеные на вал от весовых нагрузок и усилий в канате.
Рзн- неуравновешенное усилие на зубчатой нуфте.
Rt Rz- опорные реаеции Окоренных подшипниках вала
12 -края посаженма по прессовой посадке ступиц соответствето на левую и правую цапфы.
3- итоночная канавка
Главный вал подъемной машины БЦК-9/5х2,5
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
589
Pt Рз- усилия, передаваемые на Вал ступицами шкива Pt Рг- реакции в подшипниках Вала
f- тхзи посаженной с натягом ступицы канптоВедущего шкива.
2. 3. 4- галтель и края посаженных с натягом cmtptuu канотоведущега шкива
5- галтель
Главный вал подъемной машины МК 3,25x4
Pt Рг. усилия передаваемые на бал ступицами шкиба. Рзм- меурабнобешенное усилие на зубчатой муфте
Р Rj-реакции 6 подшипниках бала.
f- краг посаженной с натягом ступицы канапобедушега шкиба.
2 Л 4- галтель и края посаженных с натягом ступиц канотобедушего шкиба
Главный вал подъемной машины МК 4x4
Pt Рг- усилия передаваемые на Вал ступшот шкива; Рзм- усилие на полумуфте. Pt Р:> реакции 6 подшипниках
14- край посаженной по прессовой посадке левой и правой ступиц шкива
Z 3- галтели и кроя посаженных по прессовой посадке левой и пробой ступиц шкива
5- галтель
Главный вал подъемной машины МК 5x2
Глава 23
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ
ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК,
ОТРАБОТАВШЕГО УСТАНОВЛЕННЫЙ СРОК
ЭКСПЛУАТАЦИИ
23.1. Общие вопросы эксплуатации оборудования подъемных
установок
23.2. Особенности эксплуатации оборудования подъемных
установок с истекшим сроком службы
23.3. Принципы установления критериев предельного
состояния подъемных машин с истекшим сроком
службы
23.1. Общие вопросы эксплуатации оборудования подъемных установок
Термин «эксплуатация оборудования подъемной установки» подразумевает совокупность
трех составляющих этого процесса: использование оборудования по назначению; техничес-
кий надзор и обеспечение безопасной работы; организация и планирование технического
обслуживания и ремонта оборудования.
Задача обеспечения безопасной эксплуатации подъемных машин и парашютных устройств,
клетей, скипов, противовесов, копровых шкивов, проводников жесткой армировки и канатов
в пределах сроков, оговоренных заводами-изготовителями или Правилами безопасности в
угольной промышленности, традиционно решалась путем проведения комплекса организаци-
онно-технических мероприятий. Мероприятия регламентированы требованиями Положения
о планово-предупредительной системе технического обслуживания и ремонта оборудования,
Правил безопасности в угольных шахтах, Правил технической эксплуатации угольных и слан-
цевых шахт и целого ряда других отраслевых нормативно-технических документов, утверж-
денных бывшими Министерствами угольной промышленности СССР и Украины.
После распада СССР на шахтах угольной промышленностиУкраины сложилась неуте-
шительная картина с поддержанием безопасности при эксплуатации оборудования подъем-
ных установок на должном уровне, и с каждым годом эта ситуация все более усугубляется в
худшую сторону. Объясняется это физическим износом оборудования, находящегося в дли-
тельной эксплуатации. Процесс обновления этого оборудования вследствие сложной эконо-
мической ситуации, сложившейся в стране, фактически был остановлен.
Минуглепром Украины и Госпромгорнадзор Украины еще в 1995 г. были вынуждены об-
ратить самое серьезное внимание на решение актуальной и наболевшей проблемы обеспече-
ния надлежащего уровня безопасности эксплуатации оборудования подъемных установок фак-
тически отработавшего срок эксплуатации, установленный заводами-изготовителями и нор-
мативными документами. Результатом этого явилось принятие новой концепции установле-
ния срока безопасной эксплуатации оборудования подъемных установок, нормативный срок
которого считался исчерпанным. Основные положения этой концепции нашли отражение в
соответствующих разделах Правил безопасности в угольных шахтах последних редакций.
Следовательно, эксплуатация оборудования подъемных установок, считавшаяся до не-
давнего времени областью чистой практики, приобрела новое качество, что потребовало раз-
работки соответствующей теоретической и научной базы. В ее становлении и развитии веду-
щая роль принадлежит головному институту отрасли — НИИГМ имени М.М. Федорова.
Значительный вклад внесли также Донбассуглеавтоматика, институты МакНИИ, Донгип-
роуглемаш, Донецкий и Луганский ЭТЦ.
___________ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...___591
23.2. Особенности эксплуатации оборудования подъемных установок
с истекшим сроком службы
Существующие подходы к оценке безопасности оборудования основаны на понятии
ресурса — суммарной наработке изделия от начала его эксплуатации или ее возобновлении
после ремонта до перехода в предельное состояние (ГОСТ 27.002-89).
Ресурс оборудования подъемных установок обычно устанавливается заводом-изготовите-
лем и традиционно считается как нормативный срок эксплуатации, который в действительнос-
ти носит в большей степени экономический, нежели технический характер. Неоспоримым яв-
ляется факт, что по мере эксплуатации оборудования его техническое состояние монотонно из-
меняется в худшую сторону. Соответственно уменьшается и остаточный ресурс изделия. Для обес-
печения необходимого уровня безопасности должна выдерживаться необходимая вероятность
того, что остаточный ресурс будет выше заданного требуемого уровня.
Безопасность эксплуатации оборудования подъемных установок с истекшим норматив-
ным сроком службы должна достигаться не только соблюдением традиционного комплекса
норм и правил эксплуатации, регламентированных требованиями нормативно-технической
документации (ГОСТы, ОСТы, ТУ и РД Госпромгорнадзора Украины) и эксплуатационно-
технической документацией (паспорт или формуляр на оборудование, инструкция по эксп-
луатации, сведения о заменах, заключения и результаты предыдущих обследований). Дости-
гается это также проведением качественно нового вида работ — экспертизы промышленной
безопасности и технического диагностирования, которые позволят определить реальное со-
стояние оборудования в текущий момент и спрогнозировать его на ближайшее будущее.
В данной области знаний накоплен обширный материал по применяемым конструкци-
онным материалам, процессам, в них протекающим, закономерностям изменения свойств
металлов при длительной службе оборудования, по типам эксплуатационных разрушений и их
причинам, видам и методам неразрушающего контроля, выявляемым дефектам и т. п. Тем не
менее, достоверность и качество получаемых результатов в значительной мере зависят также
от опыта и квалификации лиц, выполняющих экспертизу промышленной безопасности, так
как проблема оценки повреждаемости механических изделий подъемных установок является в
общем случае трудоемкой задачей. Она изучена не настолько глубоко, чтобы рядовой эксперт,
руководствуясь лишь результатами контроля, смог бы выполнить расчет остаточного ресурса
конкретной конструкции. В наибольшей мере на сегодняшний день решение этой проблемы
может быть достигнуто на основании исследования модели с использованием совокупности
методов контроля, правил и процедур обследования, опыта и интуиции эксперта.
Для своевременного обнаружения повреждений технологического оборудования и кон-
троля их дальнейшего поведения необходимо полнее использовать возможности методов
неразрушающего контроля (НК), вибродиагностики и расчетно-аналитических методов.
На сегодняшний день благодаря разработкам НИИГМ имени М. М. Федорова, МакНИИ,
Донбассуглеавтоматики и других организаций отрасль располагает необходимой норматив-
но-методической базой для ведения работ по оценке остаточного ресурса оборудования ста-
ционарных установок, в частности подъемных, находящихся в длительной эксплуатации.
Основным из этих документов являются Технологическая инструкция по дефектоскопии
деталей тормозных устройств подъемных машин, подвесных и парашютных устройств подъем-
ных сосудов, осей копровых шкивов, а также Руководящий технический материал по техно-
логии обследования и оценке технического состояния оборудования подъемных установок.
Эти документы разрабатывались еще в конце 80-х — начале 90-х годов прошлого столе-
тия и к настоящему времени уже устарели. Накопленный опыт обследования оборудования
подъемных установок и оснащение рынка диагностической аппаратурой, более совершен-
ными средствами неразрушающего контроля позволили НИИГМ имени М.М. Федорова
приступить к пересмотру и корректировке указанных документов.
23.3. Принципы установления критериев предельного состояния
подъемных установок с истекшим сроком службы
Чувствительность деталей к дефектам — степень снижения механических характерис-
тик металла детали в зоне дефекта по сравнению с бездефектным участком — зависит от
многих факторов, а именно: особенностей конструкции, типа, расположения и размера де-
592
ГЛАВА 23
фекта; ориентировки его в поле напряженного состояния; особенностей напряженного со-
стояния детали; свойств металла; режима, степени и длительности нагружения; влияния сре-
ды, условий эксплуатации и т. д.
В настоящее время получены определенные результаты в области исследования механи-
ческих закономерностей деформирования и разрушения как научной основы по нормирова-
нию расчетов на прочность и определению остаточного ресурса. В этом случае характерис-
тики стандартных механических свойств (типа пределов текучести, прочности, выносливос-
ти, длительной прочности, ударной вязкости и т. д.) используются для обоснования выбора
материалов и расчетного определения основных размеров элементов конструкций с введе-
нием соответствующих запасов прочности по номинальным напряжениям.
Однако, расчеты на прочность по номинальным напряжениям с использованием пере-
численных характеристик не отражают роли таких важных факторов, как местная механи-
ческая напряженность, длительность, повторяемость и нестационарность эксплутационных
режимов, исходная и развивающаяся дефектность, действие рабочих сред, изменение струк-
туры и свойств материалов и т. д.
В последнее десятилетие прошлого века и в начале этого, развитию методов расчета
прочности конструкций с учетом указанных выше факторов было посвящено значительное
число отечественных и зарубежных публикаций. Однако, достижения науки и практики в
области обеспечения прочности изделий машиностроения еще не стали достоянием всех
отраслей промышленности [204, 207, 209].
Это связано, прежде всего, с рядом организационных проблем: отсутствие обобщения
научных достижений и передового опыта, недостаточная разработка на их основе межотрас-
левых руководящих и нормативных документов в области расчетов и испытаний на проч-
ность (рекомендаций, методических указаний, стандартов), отсутствие необходимого коли-
чества и требуемого качества оборудования (испытательных машин, стендов) и средств ре-
гистрации, измерения и обработки информации. В 80-х годах прошлого века в системе Гос-
стандарта СССР разрабатывалась комплексная программа создания системы межотраслевых
нормативно-технических документов на методы расчетов и испытаний на прочность в ма-
шиностроении. При разработке данной программы принимался во внимание тот факт, что
современные машины и оборудование работают в условиях интенсивно развивающейся мно-
гоцикловой и малоцикловой усталости металла, воздействия агрессивной среды, а также в
условиях, способствующих хрупкому разрушению (в частности, наличие дефектов — исход-
ных трещин, расслоений, включений, динамических воздействий и т. д.).
Поэтому в программе особое внимание было уделено необходимости разработки мето-
дов определения долговечности с учетом нестационарности процессов нагружения, уровня
температур, наличия среды, присутствия дефектов и т. д. Комплексность программы должна
быть достигнута путем стандартизации методов расчетов, механических испытаний, норми-
рования метрологических характеристик и параметров испытательных машин. Основные
этапы разработки программы: составление методических рекомендаций по способам расче-
тов и испытаний, разработка проектов новых ГОСТов; усовершенствование существующих
ГОСТов на методы расчетов и механических испытаний.
Программой планировался также выпуск в виде методических указаний и рекомендаций
документов, устанавливающих расчетно-экспериментальные методы определения эксплутаци-
онной нагруженности, напряженно-деформированного состояния, исследования колебаний и
устойчивости элементов конструкций, несущей способности и долговечности, а также физи-
ческих характеристик, отражающих процессы деформирования и разрушения. На основе раз-
рабатываемой в соответствии с комплексной программой системы межотраслевых норматив-
ных материалов по расчетам и испытаниям на прочность должны быть усовершенствованы
отраслевые стандарты, учитывающие специфику сложившихся в отраслях подходов к расче-
там и испытаниям на прочность, а также уровня назначаемых запасов прочности.
Разработка программы рассчитана на много лет, и ее осуществление позволило бы пе-
рейти к установлению научно-обоснованных критериев браковки различных элементов шах-
тных подъемных установок на базе расчетно-экспериментальных методов. Однако, с распа-
дом СССР программа не была завершена.
Определенные успехи в установлении критериев браковки получены в сварочном про-
изводстве. Здесь накоплен экспериментальный материал по влиянию глубины непровара на
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
593
величину предела прочности при статических испытаниях, предела выносливости при пере-
менных нагрузках, при повторных статических нагрузках, влияние глубины непровара на
сопротивление сварных соединений удару и на изменение пластических свойств.
Нормативы, регламентирующие допуски на величину и тип дефектов в швах сварных
соединений, имеются в различных отраслях промышленности. Однако, эти допуски в зна-
чительной мере установлены исходя из технологических возможностей предприятий, и не
имеют количественного обоснования с позиций несущей способности, прочности и плас-
тичности сварного соединения.
Нормы допустимых дефектов для одних и тех же видов изделий в разных отраслях промыш-
ленности отличаются иногда в несколько раз; причем многие нормы на малозначительные де-
фекты являются излишне жесткими. Это объясняется не только ростом требований к качеству,
но также и тем, что с развитием и совершенствованием методов неразрушающего контроля, уве-
личением чувствительности аппаратуры, вероятность выявления дефектов повышается. Таким
образом, установление норм на допустимость дефектов в деталях в значительной степени явля-
ется волевым. В то же время от принятых норм зависит, с одной стороны, несущая способность
конструкций, а с другой — доля брака на производстве. Поэтому в ряде стран, в частности, для
сварных соединений, разрабатывают многозвенную систему оценки дефектов по ступеням (бал-
лам) дефектности. При этом качество в каждом виде дефектов оценивают по нескольким ступе-
ням размеров и нескольким ступеням частоты или длины дефекта.
В нефтяной и газовой промышленности существуют отраслевые технические условия и
нормали на допустимые и недопустимые дефекты в деталях бурового оборудования и инст-
румента. Общим для этих ТУ и нормалей является то, что на поверхности всех деталей не
допускаются плены, раковины, заковы, расслоения, трещины, шлаковые включения, воло-
совины. В то же время целый ряд дефектов является допустимым. Например, при изготовле-
нии бурового крюка из стали 30 5Л-Ш по нормам завода «Баррикада» в готовой детали на
необработанных поверхностях отливок возможны без исправления литейные дефекты диа-
метром до 5 мм, глубиной до 5 мм в площади поражения, не превышающей 10 % площади
отливки при негрупповом расположении. Без исправления допускаются литейные дефекты,
вскрытые при механической обработке, если они не больше 3 мм в площади поражения, не
превышающей 10 % площади обрабатываемой поверхности при негрупповом расположении.
Такие же дефекты считаются допустимыми для щек талевого блока.
Весьма жесткие требования предъявляются к дефектам осей колесных пар подвижного
состава. На заводах-изготовителях, чтобы не допустить выпуск осей с внутренними дефекта-
ми и осей с крупнозернистой структурой металла, понижающей его прочность, ось или заго-
товку проверяют ультразвуковым методом при продольном прозвучивании на частоте
2—2,5 МГц. Подлежат браковке следующие оси (поковки):
— если при продольном прозвучивании на частоте 2,5 МГц обнаружено затухание, пре-
вышающие 46 дБ;
— сигнал донного отражения у оси окажется ниже сигнала отражения в эталонном бруске
при неизменном положении регуляторов;
— при дефектоскопировании оси в любой части линии развертки экрана дефектоскопа
будет обнаружен сигнал, который не может быть вызван формой оси и превышающий уро-
вень помех более, чем в три раза.
Институтом ЦНИИТМаш для Минтяжэнерго разработаны отраслевые технические ус-
ловия ОТУ 24-10-004-68 на ультразвуковой контроль заготовок валов и роторов паровых тур-
бин. В металле заготовок не допускаются дефекты типа трещин, флокенов, усадочных рых-
лот и прочих грубых дефектов. Допускаются отдельные дефекты, которые по совокупности
всех технологических признаков и результатов контроля могут быть классифицированы как
дефекты типа неметаллических включений или сегрегатов, если их условные размеры по со-
поставлению с эталонами (плоскими отражателями), а также их количество находятся в пре-
делах следующих норм:
— общее количество дефектов с размерами от 2 до 4 мм включительно в заготовке не
должно превышать 30 шт., в том числе на бочке не более 10 шт., причем, отдельные дефекты
должны находиться на расстоянии не менее 50 мм друг от друга;
— отдельные дефекты от 2 до 4 мм включительно в обоих концах заготовки должны
находиться друг от друга на расстоянии 50 мм, если они расположены в одном радиальном
594
ГЛАВА 23
направлении. В случае беспорядочного расположения дефектов расстояние между ними счи-
тается допустимым, если оно удовлетворяет хотя бы одному из указанных выше критериев;
— отдельные разрозненные дефекты размерами менее 2 мм не учитываются. В случае
обнаружения значительных скоплений указанных дефектов вопрос о годности заготовки со-
гласовывается с заказчиком;
— дефекты размерами более 4 мм, но до 6 мм включительно, допускаются в количестве
10 штук в местах, предусмотренных чертежом, согласованным между поставщиком и заказ-
чиком.
На Ясиноватском машиностроительном заводе производился ультразвуковой контроль
осей копровых шкивов. В процессе эксплуатации оси работают на изгиб; изготавливаются
они из стали 45 диаметром 100—400 мм и длиной 1000—1300 мм. Поковки для осей поставлял
НКМЗ. При проведении УЗ-контроля во многих осях обнаруживаются дефекты. Заводом в
волевом порядке приняты следующие браковочные нормы: допускаются дефекты в виде мел-
ких неметаллических включений, флокенов и раковин, расположенные на глубине более 1/4
диаметра оси. Недопустимыми дефектами являются трещины.
Наиболее правильным, по нашему мнению, является подход к установлению допустимых
дефектов предприятий Министерства авиационной промышленности. Их основные принци-
пиальные положения к вопросу разработки критериев браковки состоят в следующем:
— классификация деталей по конструктивной форме с учетом влияния концентраторов
напряжений;
— оценка характера и опасности дефекта;
— ориентировка дефекта;
— чувствительность материала детали к дефекту;
— характер нагружения.
Для деталей без значительной концентрации напряжений степень опасности дефектов
будет определяться в основном их характером, ориентировкой в поле напряженного состоя-
ния, чувствительностью металла к дефекту и режимом напряженного состояния. Более су-
щественными для прочности являются дефекты на более напряженных поверхностях. Для
деталей с существенной концентрацией напряжений (в связи с конструктивной формой) сте-
пень опасности дефекта будет определяться, прежде всего, тем, находятся ли они в зоне мак-
симальной напряженности или вне ее.
К более опасным по форме дефектам следует отнести сильно вытянутые и острые по
очертаниям нарушения сплошности; к менее опасном — дефекты округлой формы. С увели-
чением размеров дефекта опасность его возрастает.
Высокая чувствительность современных приборов неразрушающего контроля позволя-
ет выявлять множество несущественных для работы детали дефектов. Поэтому на предприя-
тиях авиационной промышленности существуют инструкции, предусматривающие ограни-
чение чувствительности приборов, установленное на основании длительного опыта эксплу-
атации ответственных деталей самолета, работающих на усталость.
Наиболее опасной ориентировкой дефекта является такая, при которой наибольшее ра-
стягивающее напряжение действует перпендикулярно или под углом, близким к 90°, к на-
правлению вытянутого дефекта (т. е. дефект раскрывается). В этом случае влияние дефектов
на прочность существенно возрастает, особенно если дефект находится в месте концентра-
ции напряжений. Наименее опасной ориентировкой дефекта является такая, при которой
растягивающие напряжения отсутствуют или действуют параллельно или под очень малым
углом к направлению вытянутого дефекта (т. е. дефект закрывается или не раскрывается).
Металлические материалы имеют различную чувствительность к дефектам. Эта чувстви-
тельность может быть оценена в первом приближении характеристиками чувствительности
материала к концентрации напряжений при соответствующих напряженных состояниях и
характере нагружения.
Мало чувствительными к дефектам являются стали с высокой пластичностью (т. е. мяг-
кие стали, например. Ст. 3, Ст. 5 и т. д.) или материалы со значительной внутренней неодно-
родностью (например, чугун). Повышенной чувствительностью обладают сплавы с ограни-
ченной пластичностью (стали повышенной прочности) или с остаточной внутренней пере-
напряженностью (низкоотпущенные стали). Так, например, для стали 40ХНМА с термичес-
кой обработкой (закалка 850° в масле, отпуск при 200°) щелевой подрез приводит к сниже-
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
595
нию прочности (касательных напряжений) до 78,5 % и особенно существенно он влияет на
пластичность — при неблагоприятной ориентировке дефекта пластичность падает более чем
в шесть раз.
Степень опасности дефектов определяет также режим напряженного состояния, т. е.
характер нагружения. Влияние дефектов будет наименьшим при статическом нагружении
детали. При повторном нагружении с ограниченным числом циклов влияние дефектов бо-
лее опасно. Наиболее опасно влияние дефектов при длительных повторных нагружениях.
Опасность дефекта обычно является наибольшей при симметричных циклах [205].
Анализируя изложенный материал, можно сделать вывод, что нормы допустимых дефек-
тов в ответственных деталях различных отраслей промышленности касаются в основном ста-
дии изготовления изделия, а не его эксплуатации. В связи с этим они отражают степень совер-
шенства технологии изготовления заготовки детали. Аналогичная ситуация сложилась и с под-
ходом к оценке опасности дефектов в деталях шахтных подъемных установок, в частности,
подъемных машин, предназначенных на длительный срок эксплуатации [60].
Базовой структурной единицей подъемной машины является главный вал, и его разру-
шение означает замену всей машины, т. е. по сути дела состояние вала определяет техничес-
кий ресурс подъемной машины. Главные валы крупных подъемных машин изготавливаются
из стальных поковок, которые в силу технологических особенностей металлургического про-
изводства еще на стадии их изготовления приобретают дефекты в виде неметаллических вклю-
чений, раковин, закатов, усадочных трещин, флокенов, расслоений и т. д. Естественно, что
изготовленный из такой поковки вал после окончательной обработки сохранит все внутрен-
ние дефекты данной поковки. Любой из этих дефектов, по своей сути, является концентра-
тором напряжения и в результате длительной эксплуатации подъемной машины он является
потенциальным источником зарождения усталостной трещины, которая при определенном
сочетании и характере внешних нагрузок получит дальнейшее развитие, что, в конце кон-
цов, приведет к разрушению вала.
Чтобы этого не произошло, поковки еще до изготовления вала подвергаются на заводе
ультразвуковому контролю сплошности металла согласно ГОСТ 24507-80 «Контроль нераз-
рушающий. Поковки из черных и цветных металлов. Методы ультразвуковой дефектоско-
пии». Этим стандартом определено, что схема прозвучивания поковок в полном объеме ус-
танавливается таким образом, чтобы каждый элементарный объем металла был прозвучен в
трех взаимно перпендикулярных плоскостях. Этим документом также определено, что уро-
вень фиксации дефекта и браковочный уровень должны соответствовать уровням, установ-
ленным технической документацией на поковки. На основании сопоставления результатов
контроля и требований нормативно-технической документации завода-изготовителя подъем-
ной машины делают заключение о годности или браковке поковки для соответствующего
изделия (в данном случае главного вала подъемной машины).
В нормативно-технической документации на поковки, подлежащие ультразвуковому
контролю, должны быть указаны уровень фиксации, недопустимый уровень ослабления дон-
ного сигнала, параметры недопустимых дефектов. Для краткой формулировки нормативных
требований к качеству поковки рекомендуется указывать группу качества поковок в соответ-
ствии с таблицей, приведенной в ГОСТ 24507-80. эта таблица содержит 8 групп качества
поковок, для каждой из которых приведены значения п0 — минимального недопустимого
количества не протяженных дефектов размером 100 мм.
Нормативно-техническим документом, определяющим требования к качеству поковок
для валов подъемных машин, является разработанные НКМЗ технические условия ТТУ
05763599 «Машины подъемные шахтные барабанные», в которых в разделе «Показатели на-
дежности» указано, что в главных валах, изготавливаемых из поковок, допускаются дефекты
в соответствии с ГОСТ 24507-80, группа качества 4л. Для поковок этой группы качества НКМЗ
в свое время были разработаны временные нормы допустимых дефектов в зависимости от
толщины детали, подвергаемой ультразвуковому контролю.
Согласно этим нормам в деталях толщиной до 100 мм включительно допускаются:
— отдельные дефекты эквивалентным диаметром до 2 мм включительно, если они не
представляют непрерывной цепи;
— одиночные дефекты эквивалентным диаметром до 3 мм включительно, если расстоя-
ние между ними не менее 50 мм;
596
ГЛАВА 23
— скопление дефектов эквивалентным диаметром до 2 мм включительно на площади
2 см2, если расстояние между указанными скоплениями не менее 50 мм;
— глубина залегания дефектов, указанных выше, должна быть не менее 100 мм от по-
верхности готовой детали.
В деталях толщиной от 100 до 400 мм включительно допускаются:
— отдельные дефекты эквивалентным диаметром до 3 мм для поковок, 5 мм для отливок
включительно, если они не представляют непрерывной цепи;
— одиночные дефекты эквивалентным диаметром до 5 мм для поковок, 7 мм для отли-
вок включительно, если расстояние между ними не менее 50 мм;
— скопление дефектов эквивалентным диаметром до 3 мм для поковок, 5 мм для отли-
вок включительно на площади 4 см2,если расстояние между скоплениями не менее 200 мм;
— отдельные дефекты эквивалентным диаметром до 6—8 мм для поковок, 7—10 мм для
отливок, если расстояние между ними не менее 300 мм;
— глубина залегания дефектов, указанных выше, должна быть не менее 50 мм от повер-
хности готовой детали.
В деталях толщиной от 400 до 1000 мм включительно допускаются:
— отдельные дефекты эквивалентным диаметром до 4 мм включительно, если они не
представляют непрерывной цепи;
— одиночные дефекты эквивалентным диаметром до 6 мм включительно, если расстоя-
ние между ними не менее 80 мм;
— скопление дефектов эквивалентным диаметром до 4 мм включительно на площади
10 см2, если расстояние между указанными скоплениями не менее 300 мм;
— одиночные дефекты эквивалентным диаметром до 7—10 мм, если расстояние между
ними не менее 400 мм;
— глубина залегания дефектов — не менее 80 мм от поверхности готовой детали;
— в осевой зоне площадью, равной площади круга диаметром 200 мм, кроме дефектов,
указанных в первых двух пунктах допускаются также скопления дефектов эквивалентным
диаметром до 4 мм включительно на площади 10 см2, если расстояние между указанными скоп-
лениями не менее 200 мм, а также одиночные дефекты эквивалентным диаметром до 7—15 мм
включительно, если расстояние между ними не менее 250 мм.
Указанные выше дефекты в металле деталей допустимы, если по совокупности всех тех-
нологических процессов и результатов контроля они могут быть классифицированы как де-
фекты типа неметаллических включений. Представленные нормы являются временными и
подлежат уточнению по мере накопления данных.
Таким образом, является объективной реальностью факт, что главный вал подъемной ма-
шины на любом этапе ее эксплуатации, может иметь внутренние дефекты, приобретенные еще
на стадии изготовления поковок, которые согласно ГОСТ 24507-80 являются допустимыми.
Выполняя в плановом порядке дефектоскопию главного вала, оператор может выявить внут-
ренний дефект, а технический эксперт в силу неправильного понимания природы происхожде-
ния такого дефекта и степени влияния его на усталостную долговечность вала, может классифи-
цировать этот дефект как брак, что явится основанием для принятия им ошибочного решения о
необходимости замены машины со всеми вытекающими из этого решения последствиями эко-
номического и технического характера.
Вал подъемной машины при работе находится в сложном напря-
женном состоянии. В частности, при спуске электродвигателя величина
крутящего момента на главном валу в несколько раз превышает номи-
нальные напряжения, Дале в моменты включения ступеней пускового
сопротивления на подъемных машинах с асинхронным приводом име-
ют место значительные скачки напряжений кручения. При торможении
машины характер колебаний крутящего момента аналогичен. Кроме
того, в подъемных машинах происходит изменение знака крутящего
момента при изменении направления вращения органа навивки.
Изгиб главного вала осуществляется тремя составляющими
(рис. 23.1): массой всех вращающихся деталей на валу и составляющи-
ми вертикальной 5,e=5,sinj8 и горизонтальной Sz = Sco&P натяжений
канатов 5, причем Se уменьшает изгибающий момент.
Рис. 23.1. Схема
нагрузок
главного вала
6
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...597
Изгибающий момент от G для каждого сечения вала практически постоянный, а напря-
жения изгиба изменяются по симметричному циклу как для вращающихся деталей. Состав-
ляющие 5 и 8г, создают переменную величину изгибающего момента за период подъема гру-
за в зависимости от положения канатов на органе навивки, колебаний их натяжения от сил
инерции поднимаемого груза и изменений величины крутящего момента на валу.
Следовательно, характер изменения напряжений изгиба вала за полный цикл работы
машины соответствует напряжениям от веса вала с наложением на них напряжений от на-
тяжений канатов.
Итак, за каждый цикл спуска-подъема главный вал подъемной машины испытывает до-
статочно сложный блок напряжений кручения и изгиба. Кроме того, в процессе эксплуата-
ции он испытывает также ряд перегрузок, возникающих при срабатывании предохранитель-
ного тормоза, во время загрузки подъемных сосудов на весу, при резком снятии провисшим
канатом подъемных сосудов с твердого основания (с кулаков, посадочных брусьев), при зас-
тревании подъемного сосуда в проводниках жесткой армировки и в ряде других случаев.
На определенной стадии действия циклических нагрузок в сочетании с перегрузками в
валах подъемных машин в местах, где циклические напряжения достигают больших значе-
ний (галтели, надрезы, участки шероховатости, места структурных дефектов металла и т. п.),
могут возникать и прогрессивно развиваться трещины усталости, которые постепенно при-
водят к усталостному разрушению вала.
Анализ всех случаев разрушения главных валов (а их зафиксировано порядка 80) [60]
свидетельствует, что все они произошли по причине усталости металла вала. На основании
доказанных положений теории усталости можно сформулировать типовую схему процесса
усталостного разрушения главного вала подъемной машины:
— очаг усталостной трещины находится, как правило, на поверхности вала;
— конструкция главного вала является ступенчатой, имеет многочисленные галтельные
переходы различного радиуса, шпоночные пазы, радиальные отверстия с резьбой для креп-
ления стопорных планок, посадочные места под ступицы органов навивки, наличие следов
резца на поверхности вала в результате механической обработки его, внутренняя структура
вала засорена дефектами металлургического характера и т. д.;
— все перечисленные особенности конструкции главного вала представляют собой кон-
центраторы напряжения, которые в процессе эксплуатации могут наслаиваться друг на дру-
га и значительно усиливаться, например, вследствие увеличения зазора между валом и сту-
пицей барабана и т. д.
— усталостная трещина может возникнуть в любых сечениях главного вала, в которых
действуют наибольшие моменты и где имеется концентратор напряжений, при этом запас
статической прочности в данном сечении не играет роли;
— чем выше запас статической прочности в соответствующем сечении вала, тем больше
площадь сечения трещины в этом сечении и соответственно повышается вероятность выяв-
ления трещины существующими техническими средствами.
При обследовании главного вала подъемной машины в условиях эксплуатации не всегда
представляется возможным достаточно точно установить факт появления нового концентра-
тора напряжений, который может спровоцировать зарождение трещины усталости. Более того,
достигнутый уровень знаний также пока не позволяет определить скорость развития трещи-
ны, а, следовательно, спрогнозировать время эксплуатации вала до его разрушения.
В частности, если общий запас прочности трехопорного вала при его соосности равен 3,7,
то в случае понижения средней опоры на 3 мм общий запас прочности снижается до 0,97 [60].
В трехопорных валах наиболее слабым местом является кольцевая проточка на валу возле
средней опоры. Кольцевая проточка служит для размещения в ней разъемного зубчатого
колеса механического указателя глубины. В свою очередь зубчатое колесо в этой проточке
фиксируется призматической шпонкой, для размещения которой в проточке выполнен при-
зматический паз. Таким образом, в этом сечении вала имеет место наслоение нескольких
концентраторов напряжений (две галтели кольцевой проточки и шпоночный паз), что весь-
ма опасно и недопустимо, так как происходит своего рода суммирование и усиление кон-
центрации напряжений. Кроме того, рядом с кольцевой проточкой расположена опора сред-
него подшипника, и в случае ее понижения запас прочности этих сопрягаемых сечений еще
более резко снижается, что неоднократно приводило к разрушению вала.
598
ГЛАВА 23
Таким образом, при обследовании подъемных машин с трехопорным главным валом в
обязательном порядке должно быть демонтировано разъемное зубчатое колесо механизма ука-
зателя глубины и верхняя крышка корпуса среднего подшипника и выполнена дефектоскопия
поверхности кольцевой проточки в районе призматического шпоночного паза, а также шейки
подшипника скольжения. Метод контроля шейки — капиллярный или УЗК, а проточки —
магнитопорошковый или УЗК. При обнаружении усталостной трещины в зависимости от ее
размера требуется замена вала или же при отсутствии резервного вала требуется до его замены
разработать мероприятия по эксплуатации подъемной машины с дефектным валом, в частно-
сти, ужесточить регламент контроля дефектного участка вала, снизить концевую нагрузку и
скорость подъема, перевести установку в грузовой или аварийно-ремонтный режим и т. д.
Большое влияние на усталостную прочность главного вала подъемной машины оказы-
вает состояние посадочных соединений ступиц органов навивки с валом. Наиболее распро-
страненные виды посадок ступиц органов навивки на главный вал представлены в табл. 23.1.
Таблица 23.1
Таблица посадок ступиц органов навивки на главный вал
Однобарабанные машины
Свободная ступица Заклиненная ступица
А/С; А3/С*; А/С3; А3/С3 W ♦ ♦ ♦ А3/ГР ; A/Гр; А/С3; А3/Пл - в шпоночном соединении
Двухбарабанные машины
Переставной барабан Заклиненный барабан
Ступицы Свободная ступица Заклиненная ступица
А3/С3; А3/Х3"" Нп, Тп - в посадке внутреннего кольца подшипника качения А/С; Аз/С3; А/Н; А/Пл А3/С3; А3/Пл - в шпоночном соединении; А3/Гр; А3/Пр ; А3/Пр23
Машины БЦК с разрезным барабаном
Соединение цапфы с полым валом - трубой: А3/ Пв13; А3/ Пр23; А3/ nD22a
Многоканатные машины
Соединение ступицы с главным валом: A/Гр; Аз/Пр23
* — скользящая посадка; ** — горячая посадка; *** — плотная посадка; **** — ходовая посадка;
***** _ Прессовая посадка.
Обозначения посадок приняты по системе, действовавшей на период создания конст-
рукторской документации на подъемные машины в XX веке.
Указанные соединения нагружены значительными крутящими моментами и являются
ответственными, так как от их надежности зависит работоспособность машины. Размеры
контактной площади ступицы барабана и вала, а также распределение напряжений зависят
от величины посадочного зазора, материалов ступицы и вала, усилий предварительной за-
тяжки шпонок, характера нагрузки и передаваемого крутящего момента, макро- и микроге-
ометрии поверхностей.
При расчете такого соединения предполагается, что сопряжение главного вала и ступи-
цы органа навивки происходит без зазора с контактом по дуге, равной 180°. В процессе экс-
плуатации в сопряжении вала и ступицы может возникнуть дополнительный зазор, вызван-
ный износом посадочных поверхностей сопряженных деталей и релаксацией контактных на-
пряжений вследствие перехода части упругой деформации в остаточную. Ослабление соеди-
нений дополнительно происходит также вследствие контактной коррозии.
С увеличением зазора между валом и ступицей происходит перераспределение напря-
жений, т. к. уменьшается поверхность контакта, соответственно возрастает удельная нагруз-
ка и усиливается концентрация напряжений. По этой причине снижаются запасы прочнос-
ти главных валов подъемных машин и осей копровых шкивов. С течением времени, по мере
зарождения и развития усталостных трещин, концентрация напряжений еще более возрас-
тает, а трещина начинает быстро развиваться от поверхности вала к центру, все сильнее ос-
лабляя поперечное сечение, вплоть до разрушения вала.
Анализ поломок валов свидетельствует также, что слабым местом главного вала является
зона галтели, выполненная малым радиусом и пересеченная выходами шпоночных канавок. В
данном случае разрушение вала является следствием одновременного действия нескольких кон-
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
599
центраторов напряжений; галтели малого радиуса, пересечения галтелей шпоночными канавка-
ми, контактного давления на вал. Кроме того, причинами усиления концентрации напряжений
является также низкое качество изготовления валов, в частности, наличие задиров и грубых ри-
сок на поверхности галтелей, низкое качество технологической обработки поверхности вала,
наличие коррозионных язв на поверхности галтелей, ведение ремонтных работ на валу с приме-
нением электросварки без строгого соблюдения технологических режимов сварки.
Кроме разрушения главных валов подъемных машин имели место случаи разрушения
осей копровых шкивов. Анализ причин поломок осей копровых шкивов и характер их раз-
рушения показывают, что их усталостные трещины возникают, как правило, на расстоянии
5—10 мм от края ступицы шкива и развиваются перпендикулярно продольной оси шкива.
Возможную причину появления этих трещин можно объяснить следующим образом.
В процессе эксплуатации ось копрового шкива воспринимает нагрузку от веса подъем-
ных сосудов и канатов, вызывающую знакопеременный изгиб оси шкива. Кроме того, вслед-
ствие неравномерности движения сосудов и нарушения прямолинейности проводников ар-
мировки (местные искривления, наличие уступов на стыках проводников, заужения колеи и
т. д.) на ось копрового шкива, как и на главный вал подъемной машины, передается динами-
ческий удар. В этих условиях наличие даже небольшого поверхностного дефекта может ока-
заться причиной развития усталостной трещины.
Элементарный расчет показывает, что момент инерции сечения ступицы копрового
шкива в среднем в 10—15 раз превышает момент инерции сечения оси, т. е. ступицу шкива
по отношению к оси можно рассматривать как абсолютно жесткое тело. Приняв идеализи-
рованную расчетную схему оси копрового шкива в виде двухопорной балки с сосредоточен-
ной силой Р, приложенной в среднем сечении оси, из известного дифференциального урав-
нения изогнутой оси (EJy” = Мх) можно определить величину прогиба У в любом сечении X
оси. Выполнив подобный расчет применительно к шкиву Ш6 при силе Р = 246 т, равной
суммарному разрывному усилию каната при коэффициенте динамичности К= 1,25, получе-
на величина упругого прогиба оси h — 372 мкм. Эта величина прогиба оси соизмерима с
полем допусков для валов, выполненных по посадкам, обеспечивающим натяг +400 мкм.
При такой ситуации полного нарушения посадочного соединения «ступица-ось» может не
произойти, но образование зоны намина шириной до 10 мм на стыке поверхности упругого
вала с жесткой ступицей шкива не исключено. Вследствие этого посадочное соединение оси
со ступицей в пределах ширины зоны намина ослабляется, со временем в эту зону проника-
ет влага, происходит интенсивная коррозия металла оси в пределах зоны намина, которая,
являясь концентратором напряжений, в конце концов, приводит к зарождению усталостной
трещины с последующим ее развитием до критической величины.
Таким образом, наиболее вероятным местом появления эксплуатационных дефектов типа
усталостных трещин в осях копровых шкивов является подступичная зона оси шириной до
10 мм от края ступицы. Выявляются также трещины довольно просто ультразвуковым мето-
дом согласно РТМ 07.01.021-87 «Технологическая инструкция по дефектоскопии деталей
тормозных устройств подъемных машин, подвесных и парашютных устройств подъемных
машин, подвесных и парашютных устройств подъемных сосудов, осей копровых шкивов».
Одновременно с контролем подступичной зоны шкива производится ультразвуковой конт-
роль подшипниковых и промежуточных галтелей оси, которые также являются концентра-
торами напряжений и местами зарождения усталостных трещин. Обнаружение усталостной
трещины в указанных сечениях является основанием для браковки копрового шкива.
Оси копровых шкивов изготавливаются из стальных поковок и им характерны все осо-
бенности, присущие поковкам для валов подъемных машин, т. е. наличие внутренних де-
фектов, обусловленных спецификой технологического производства поковок. Доказанным
является факт, что внутренние дефекты существенно менее опасны, чем дефекты поверхно-
стные усталостного происхождения.
При ультразвуковом прозвучивании сечения вала (оси) прямым лучом внутренние де-
фекты неизбежно являются помехой на пути следования луча, и скрывают при этом дей-
ствительно опасный усталостный поверхностный дефект. Поэтому из всего многообразия
схем прозвучивания вала (оси) предпочтение следует отдавать тем схемам, которые обеспе-
чивают выявление непосредственно поверхностных дефектов, расположенных в наиболее
напряженных сечениях вала (оси).
600
ГЛАВА 23
Итак, критериями браковки высоконагруженных главных валов подъемных машин и осей
копровых шкивов следует считать появление поверхностных усталостных трещин любого раз-
мера, расположенных в зоне максимальных концентраторов напряжений, обусловленных
проявлением конструктивных недостатков (галтели малого радиуса, пересечение галтелей
шпоночными канавками, наличие поперечных резьбовых отверстий и т. д.), а также причи-
нами эксплуатационного характера (нарушение посадочных соединений «вал-ступица», кор-
розия в галтелях, ведение сварочных работ на валу и т. д.) [209].
Второй структурной единицей, техническое состояние которой в значительной степени
определяет предельное состояние подъемной машины, являются органы навивки, т. е. бара-
баны. Металлоемкая конструкция барабана в большинстве случаев (особенно это касается
барабанов подъемных машин НКМЗ) усилена различными кольцами жесткости, подкосами
и косынками, соединенными с обечайкой с помощью сварных швов. Сварные швы, как пра-
вило, не отличаются высоким уровнем изготовления, поэтому на ранней стадии эксплуата-
ции машины проявляются внешние признаки деградации металла в виде трещин в сварных
швах. Однако появление таких трещин обычно не характеризует общую деградацию метал-
локонструкции барабана, а только дает информацию о некоторых аномальных локальных
дефектах, не связанных с усталостью. Во многих случаях дальнейшее развитие таких трещин
прекращается. Появившиеся в процессе длительной эксплуатации машины трещины в теле
обечайки или лобовин могут быть идентифицированы как усталостные. Именно эти трещи-
ны представляют наибольшую опасность, и их появление свидетельствует о переходе метал-
локонструкции барабана в предельное состояние. Однако, это не означает, что машина под-
лежит замене. Конструкция барабанов является ремонтопригодной и уже накоплен боль-
шой опыт ремонта барабанов путем как локализации трещины засверловкой ее вершины,
разделкой и заваркой, так и усилением обечайки постановкой поверх существующей новой.
Кроме трещин переход барабана в предельное состояние может быть обусловлен умень-
шением толщины металла обечайки вследствие ее механического износа. Это может приве-
сти к снижению прочности и потере устойчивости барабана. Величина уменьшения толщи-
ны обечайки нормативно-техническими документами не регламентирована, но она может
быть установлена расчетным методом на основании исследований [210], доведенных до ин-
женерной методики [211].
Толщина обечайки барабана из условия ее прочности
с 7’-О,5£к£_1/1.[0’сж.]1О_6
8 =---------------------- (23.3.1)
где 3 — толщина обечайки барабана, мм; Т — фактическое максимальное статическое натя-
жение каната, П; FK — площадь каната, мм2; £ — модуль упругости каната, Па; Е — модуль
упругости материала обечайки, Па; t — шаг навивки каната на барабан, мм; [ст^] — допуска-
емое напряжение сжатия для материала обечайки, Па.
В свою очередь
t=dk+e, (23.3.2)
где dk — диаметр каната, мм; е — расстояние между витками каната на барабане, мм, а
Fk=Q,25andk, (23.3.3)
где а — коэффициент заполнения.
Если толщина обечайки окажется недостаточной для обеспечения ее прочности при дан-
ной статической нагрузке, то, воспользуясь приведенной выше формулой, можно опреде-
лить допустимую концевую нагрузку при существующей толщине обечайки.
Следующей структурной единицей подъемной машины является тормозное устройство,
основными элементами которого являются исполнительный орган и тормозной привод. Тор-
мозное устройство является ответственейшей частью подъемной машины, поэтому Правила
безопасности предъявляют особые требования к их работоспособности, в частности, к быс-
тродействию параметров предохранительного тормоза.
ОЦЕНКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБОРУДОВАНИЯ ПОДЪЕМНЫХ УСТАНОВОК...
601
Что касается механической части тормоза, то согласно статистике наиболее частым раз-
рушениям подвергаются горизонтальные и вертикальные кованые или точеные тяги. Харак-
тер разрушения — усталостный. Потенциально опасные зоны — галтельные переходы ци-
линдрической части тяги в плоскую, а также место сбега резьбы и первые 3—5 витков резьбы
под гайкой. Визуально эти дефекты выявить сложно, поэтому в этих условиях единственно
возможным является применение методов дефектоскопии.
Конфигурация исполнительного органа тормоза определена не только размерами тор-
мозных тяг, но и размерами вертикальных стоек и балок, для которых основную роль играют
не столько напряжения, сколько конструктивные соображения, в частности, необходимость
размещения и закрепления тормозных колодок. Металлоконструкция тормозных стоек и
балок выполнена сварной. Потенциально опасными зонами этих конструкций являются ме-
ста перехода закрытого коробчатого сечения балки в открытое в виде двух вертикальных стоек.
Особенностью развития усталостных трещин в потенциально опасных зонах этих конструк-
ций является то, что усталостная трещина имеет достаточно большую длину и легко выявля-
ется визуально. Если появление первых признаков зарождения и развития усталостных тре-
щин в потенциально опасных зонах вертикальных и горизонтальных тяг требует замены этих
элементов, то при появлении усталостных трещин в тормозных балках и стойках возможен
их ремонт (см. 7.2.1).
Критериями предельного состояния элементов тормозных устройств, кроме усталост-
ных трещин, являются также параметры быстродействия предохранительного тормоза и за-
зоры в элементах шарнирных узлов механизма тормоза. Эти параметры между собой в опре-
деленной степени связаны и, зная любой из них, можно дать предварительную оценку пре-
дельного состояния тормоза.
Большинство подъемных машин имеет редукторный привод.
На основании анализа технической литературы и опыта эксплуатации подъемных ма-
шин критерием предельного состояния редуктора принято считать:
— деформация фундамента редуктора, приводящая к расцентровке соединительных муфт,
и трещины в фундаменте имеют прогрессивное развитие;
— нарушение целостности корпуса редуктора и условий его смазки;
— наличие более двух разрушенных зубьев, расположенных рядом;
— наличие более 10 % зубьев со сколами кромок;
— появление усталостных трещин у ножек зубьев;
— наличие трещин в спицах зубчатых колес;
— шаткость зубчатых колес на валах;
— снижение запаса прочности зубьев на изгиб ниже нормативного.
Критерием предельного состояния зубьев по изгибной прочности принято считать из-
нос зуба по толщине более 10 %. Более обоснованно этот критерий может быть установлен
на основании расчета прочности зубьев на изгиб с учетом фактических нагрузок на редуктор
с обеспечением запаса прочности не менее 1,5.
Принимая во внимание особенность и глубину вопроса обоснования критериев предель-
ного состояния подъемных машин с истекшим сроком службы, представляется целесооб-
разным дискуссия и обмен мнениями и опытом по используемым принципам, подходам,
методам и оценкам указанной проблемы.
Глава 24
ХАРАКТЕРНЫЕ АВАРИИ
НА ПОДЪЕМНЫХ УСТАНОВКАХ
24.1. Аварии, связанные с обрывом канатов
24.2. Аварии на подъемных установках со шкивами трения
24.3. Жесткая посадка клети на кулаки или посадочные
брусья
24.1. Аварии, связанные с обрывом канатов
Несмотря на значительные достижения в области совершенствования качества изготов-
ления канатов и методов периодического контроля, аварии, связанные с обрывом канатов,
происходят достаточно часто.
В [44] подробно проанализированы случаи обрывов стальных и резинотросовых урав-
новешивающих канатов, описаны обстоятельства и причины аварий, связанных с обрывом
канатов, в том числе с групповыми несчастными случаями, предложены мероприятия по
предупреждению подобных аварий.
Как показывает анализ произошедших аварий, основными причинами обрывов канатов
являются потеря прочности канатов из-за повышенного износа и перегрузки, которые в нор-
мальных режимах эксплуатации не должны иметь место (рис. 24.1) [44].
Обрывы канатов из-за снижения их прочности ниже допустимого уровня, отвечающего
износу до норм браковки по требованиям ПБ [13], происходят из-за грубого нарушения ре-
жима осмотра и контроля канатов.
К числу повторявшихся в разных регионах аварий на вертикальных шахтных подъем-
ных установках с машинами барабанного типа относятся обрывы канатов, которые контро-
лировались прибором ИИСК, но при установке датчика на канат только в здании подъем-
ной машины. При этом остается непроверенным участок каната от прицепного устройства
до барабана подъемной машины (струна и стрела каната). Проверить этот участок можно,
установив датчик на канат на нулевой отметке ствола. На ряде шахт, когда этого не делали,
произошли аварии из-за неудовлетворительного состояния непроверенного участка каната
(шахта № 7 «Великомостовская» ПО «Укрзападуголь», угольный подъем; шахта «Благодат-
ная» ПО «Павлоградуголь», скиповый подъем; шахта «Центральная» ПО «Красноармейску-
голь», скиповый подъем).
При расследовании аварий, связанных с обрывами канатов, во многих случаях устанав-
ливается, что число обрывов проволок на длине одного шага свивки и потеря сечения стали
проволок каната превышают допустимые по требованиям ПБ, канат имеет коррозийный
износ и утонение диаметра выше допустимого (табл. 24.1).
Часто не выполняется требование ПБ о ежесуточных и ежемесячных осмотрах, а при
проведении последних канат не очищается от затвердевшей смазки, не выполняется требо-
вание ПБ о регулярной (через каждые 2 месяца) передвижке каната на четверть длины витка
i каната на барабан, чтобы переместить так называемый «критический участок» перехода ка-
ната с одного слоя на другой, который подвергается усиленному износу (ш. им. А.М. Горько-
го ПО «Донецкуголь», вспомогательный клетевой подъем).
’ Обрывы каната на людских наклонных подъемах не должны приводить к свободному
скатыванию состава вагонеток, так как парашютные устройства людских вагонеток имеют 3
независимых привода: от пружины на каждой вагонетке, от ограничителя скорости, уста-
навливаемого на головной вагонетке, и от рукоятки ручного привода.
ХАРАКТЕРНЫЕ АВАРИИ НА ПОДЪЕМНЫХ УСТАНОВКАХ
603
Рис. 24.1. Классификация причин обрывов канатов
К сожалению, очень часто из-за несвоевременного и низкого уровня проведения осмот-
ров и испытаний оборудования подъемных установок, грубого нарушения требований Пра-
вил безопасности в неудовлетворительном состоянии находятся не только подъемные кана-
ты, но и людские вагонетки, и их парашютные устройства. Это приводит не только к авари-
ям, а и к групповым несчастным случаям (шахта им. А. А. Скочинского, шахта «Петровская»
ПО «Донецкуголь»; шахта 1-3 «Новогродовская» ПО «Селидовуголь»; шахта «Краснодарская-
Южная» ГП «Луганскуглестройреструктуризация»).
Характерная авария и связанный с ней групповой несчастный случай произошла
25.08.2005 г. на людской подземной наклонной подъемной установке бремсберга пласта
шахты имени Артема Луганской области.
Машинист подъема без присутствия второго машиниста и без пробного проезда по вы-
работке перед подъемом-спуском людей по сигналу кондуктора людской вагонетки в режи-
Аварии, связанные с обрывом канатов
Таблица 24.1
№№ пЛг Дата аварии Объединение, шахта Состояние каната на момент авария Результат акярнк
1 04.11.72 г. ПО «Укрзапацуголь» ш. №7 «Великомостовская» скиповой подъем Потеря сечения стали проволок каната на участке от Гфицепиого устройства до барабанной подъемной машины — 20% Обрыв каната, падение груженого скипа в ствол
2 29.11.72 г. ПО «Павлоградуголь» ш. «Благодатная» скиповый подъем Потеря сечения стали проволок каната на участке от прицепного устройства до барабанной подъемной машины >25% Обрыв каната, падение груженого скипа в ствол
3 25.11.75 г. Рудник «Каула-Котсельваара» г. Заполярный Мурманская область Набегание вагонеток на канат при подъеме груза при резкой остановке подъемной машины и ударное приложение нагрузки к канату при свободном скатывании вагонеток вниз Обрыв каната
4 22.11.77 г. ПО «Допецкуголь» ш. им. ААСкочинского людской наклонный подъем Потеря сечения стали проволок каната по обе стороны от места обрыве 25%, обрывы наружных проволок, количество которых на длине, равной шагу свивки, равнялось 7 при допустимом 5. Утонение каната в не нагруженном состоянии 12,5% при допустимом 10% в нагруженном остоянии Обрыв каната, групповой несчастный случай
5 17.04.78 г. ПО «Артемуголь» ш. им. Артема скиповой угольный подъем Ударное приложение растягивающей нагрузки к канату при переподьеме правого скипа и ударе о расстрелы копра со скоростью более 3 м/с Обрыв каната правого скипа, напуск левого каната, петля которого попала в раздел правого скипа и при его падении была перебита
6 16.12.83 г. ПО «Кузбассуголь» ш. hm.XXVI Съезда КПСС скиповый подъем Зависание скипа в разгрузочных кривых, напуск каната и при последующем падении скипа ударное приложение растягивающей нагрузки к канату Обрыв каната, падение скипа в зумпф, групповой несчастный случай с рабочими - выполнявшими работу по очистке зумпфа
7 20.05.84 г. ПО «Дзержинскуголь» ш. «Южная» Зависание скипа в разгрузочных кривых, напуск каната и при последующем падении скипа ударное приложение растягивающей нагрузки к канату Конец каната был выдернут из зажимав крепления к грушевидному коушу
8 02.08.85 г. ПО «Допецкуголь» ш. им. АМ.Горького вспомогательный клетевой подъем Многочисленные обрывы проволок на шаге свивки, потеря сечения места обрыва 15% (в месте перехода со второго слоя на третий) Обрыв каната, клеть с двумя работниками зависла на тормозных канатах парашютной установки
9 28.01.87г. ш. «Первомайская» Луганской области наклонный людской подъем Многочисленные обрывы проволок на шаге свивки Обрыв каната
10 11.11.87г. ПО «Грузуголь» ш. «Восточная» угольный скиповый подъем 17 обрывов проволок на шаге свивки (при допустимом 11), потеря сечения стали проволок каната >40% Обрыв каната
11 06.09.92г. ПО «Красноармейскуголь» ш. «Центральная» скиповый подъем Потеря сечения стали проволок каната на участке от прицепного устройства до барабана подъемной машины (струна каната) — 28% Обрыв каната
12 07.05.94г. ПО «Макеевуголь» ш. «Калиновсхая- Восточпая» наклонный грузолюдской подъем Потеря сечения стали проволок каната у места обрыва — 50% Обрыв каната
13 17.10.97г. ПО «Донепкуголь» ш. «Петровская» наклонный людской подъем У места обрыва потеря сечения стали проволок каната 26% фактический диаметр каната—23,3 вместо 25,5 Обрыв каната, несрабатывание парашютов, групповой несчастный случай
14 28.01.98г. ПО «Селидрвуголь» ш. 1-3 «Новогродовская» наклонный людской подъем Потеря сечения стали проволок каната выше места обрыва— 60%, ниже обрыва— 53% Обрыв каната, несрабатывание парашютов, групповой несчастный случай
15 20.04.00г. ГП «Луганскуглестрой- реструкгуризацня» ш. «Краснодарская-Южная» наклонный людской подъем Отсутствовал сертификат на оборвавшийся канат, свидетельство о первичном испытании каната перед навеской и повторных в процессе эксплуатации на каиатно-испытателыюй станции. Потеря сечения стали проволок каната в месте обрыва—49,5% Обрыв каната, несрабатывание парашютов, групповой несчастный случай
16 26.03.01г. ПО «Допецкуголь» ш. им.бО-легия Советской Украины наклонный грузовой подъем Потеря сечения стали проволок каната у места обрыва — 54%. Число обрывов проволок на длине одного свивки — 72 (при допустимом 11). Обрыв каната
17 19.05.01г. ООО фирма «Карбон» шахта №20 наклонный скиповый подъем Перегруз каната при подходе скипов к противопожарной перемычке вследствие расклинивания скипа одной из старых шпал, находящихся на хранении в пространстве между скипом и стенкой выработки Обрыв каната, групповой несчастный случай из-за езды людей ня составе, не предназначенном для этих целей
18 31.08.02 Шахта им, АТ.Стаханова ПО «Красноармейскуголь» наклонный грузовой подъем Потеря сечения стали проволок каната у места обрыва—23% Обрыв каната
19 25.08.05г. Шахта им. Артема Луганской области наклонный людской польем Потеря сечения стали проволок каната на верхнем отрезке оборванного конца каната - от 10% до 19%, на нижнем — от 19 до 50%. Обрыв каната, несрабатывание парашютов, (рупповой несчастный случай
20 04.02.06г. ПО «Павлоградуголь» ш. «Самарская» породный подъем Зависание скипа в разгрузочных кривых, напуск каната и при последующем падении скипа ударное приложение растягивающей нагрузки к канату Обрыв каната. Падение скипа в ствол
ГЛАВА 24
ХАРАКТЕРНЫЕ АВАРИИ НА ПОДЪЕМНЫХ УСТАНОВКАХ
605
ме динамического торможения начал опускать пассажирские вагонетки В ПЛ, в которых на-
ходились 15 человек. При приближении вагонеток к приемной площадке промежуточного
горизонта машинист начал снижать скорость подъемной машины и в это время поступил
звуковой и световой сигнал «Стоп» от кондуктора. Машинист, увидев, что пассажирские ва-
гонетки опускаются ниже обычного места остановки приблизительно на 8 м, резко затормо-
зил подъемную машину рабочим тормозом. В результате резкого торможения из-за динами-
ческих усилий подъемный канат, который был в неудовлетворительном состоянии, оборвал-
ся, вагонетки начали скатываться вниз, набирая скорость, и из них начали выскакивать люди,
пока вагонетки, сойдя с колеи, не остановились, пройдя около 100 м.
При проведении спасательных работ было установлено, что в результате аварии было
травмировано 15 человек, в том числе 1 — со смертельным исходом, 6 — в тяжелом состоя-
нии, 3 — с травмами средней тяжести, 5 — с легкими травмами.
При расследовании аварии установлено следующее.
Головной канат людских вагонеток был испытан канатно-испытательной станцией
04.06.05 г. впервые после навески каната в декабре 2004 года и был признан непригодным к
эксплуатации по следующим причинам:
— 33,49 % суммарного поперечного сечения стали проволок каната не выдержали ис-
пытания на разрыв и перегиб (допустимое по ПБ — наиболее 25 %);
— проволоки всех диаметров имели коррозию; у
— проволоки диаметром 2,0 мм имели утонение.
Несмотря на повторные испытания 12.07.05 г. представленного шахтой другого куска
этого же каната, признанного годным к эксплуатации, есть основание предполагать, что
фактически эксплуатировался непригодный канат.
Первый инструментальный контроль каната был выполнен 18.06.05 г. прибором ИИСК,
результаты которого свидетельствуют, что потеря сечения стали проволок каната составила
7 % при допуске 18 %; экспертной комиссии был представлен также протокол об инструмен-
тальной проверке 22.07.05 г., в соответствии с которым потеря сечения составила 9 %, одна-
ко при расследовании аварии было установлено, что фактически эта проверка не произво-
дилась.
При визуальном осмотре каната после аварии в месте порыва установлено, что прово-
локи прокорродированы и скручиваются при их деформации, пеньковый сердечник сухой,
следы смазки отсутствуют. Результаты осмотра концов оборванных проволок показали на-
личие «шеек», характерных для разрушения проволок растягивающей нагрузкой (31,3 % пло-
щади сечения всех проволок), изломы от изгибов выявлены на проволоках, составляющих
25,1 % сечения всех проволок.
Результаты измерения потери сечения стали проволок каната в месте обрыва прибором
ИИСК-5 показали:
— потеря сечения на верхнем отрезке составила: 19 % вблизи от места обрыва, 17 % — в
средней части, 10 % на удаленном от места обрыва конце;
— потеря сечения на нижнем отрезке составила: 25 % вблизи от места обрыва, 50 % — в
средней части, 19 % — на удаленном от места обрыва конце (при допустимом 18 %).
Результаты разрушающих испытаний проволок каната у места обрыва показали, что сум-
марное разрывное усилие всех проволок составило 44 % от первоначального.
Людские вагонетки изготовлены в декабре 1998 г., навешены на людской подъемной ус-
тановке бремсберга пласта К, в марте 1999 г. Срок службы людских вагонеток в соответствии
с требованиями ПБ (5 лет) истек, но продление срока службы произведено не было.
Паспорт представлен только на одну прицепную вагонетку ВЛН1-10П, паспорта на го-
ловную и вторую прицепную вагонетки отсутствовали.
В соответствии с представленным на рассмотрение экспертной комиссии актом от
17.06.05 г. последнее испытание парашютов вагонеток проводилось в июне 2005 г. Согласно
акту парашюты выдержали испытание, однако как показал осмотр вагонеток экспертами
после аварии, акт испытаний парашютов был составлен формально без их испытания.
При осмотре людских вагонеток после аварии установлено, что включение парашютов
после обрыва каната не произошло ни от одного из трех независимых приводов и упоры
остались в транспортном положении, т. к. парашютная система находилась в неудовлетво-
рительном состоянии.
606
ГЛАВА 24
Кулаки приводов парашютов находились на расстоянии от включающих вилок, не обес-
печивающих включение парашютов при срабатывании приводных пружин.
На головной вагонетке отсутствовала задняя ходовая тележка со специальным скатом,
на котором размещается приводная звездочка ограничителя скорости. Вместо нее установ-
лена обычная ходовая тележка от прицепной вагонетки. Отсутствовали стойки на задней
ходовой тележке, необходимые для размещения ограничителя скорости. Ограничитель ско-
рости обнаружен в камере подъемной установки.
Рукоятка ручного привода тормозной системы парашюта не имела жесткой связи с при-
водным валом, а свободно проворачивалась на нем. Шарнирное звено привода тормозной
системы находилось в замкнутом состоянии, и было покрыто слоем коррозии и грязи. От-
сутствовал трос, который должен обеспечивать связь между рукояткой ручного привода тор-
мозной системы первой (прицепной) вагонетки и шарнирным звеном головной вагонетки.
Таким образом, непосредственными причинами аварии и группового несчастного слу-
чая явились:
1. Неудовлетворительное состояние подъемного каната.
2. Эксплуатация людских вагонеток, выработавших установленный срок, с неисправ-
ными тормозными (парашютными) устройствами.
3. Ошибочные действия машиниста подъема.
Причинами, обусловившими возникновение аварии и группового несчастного случая,
явились:
Неудовлетворительное состояние путевого хозяйства бремсберга и отсутствие необхо-
димого количества межпутевых роликов, что приводило к бурению вагонеток, повышен-
ному износу подъемного каната и возникновению в нем значительных динамических на-
грузок.
Неудовлетворительное ведение ответственными лицами шахты требуемой ПБ техничес-
кой документации, формальное отражение результатов проверок, осмотров и испытаний
оборудования в книгах, предусмотренных ПБ.
Низкий уровень обслуживания подъемной установки, грубое нарушение порядка про-
ведения осмотров, проверок и испытания оборудования. Если бы были выполнены самые
элементарные требования ПБ о ежесменном перед началом перевозки людей осмотре ваго-
неток и парашютных устройств дежурным электрослесарем и кондуктором и ежесуточном
осмотре указанного оборудования и проверке парашютных устройств включением ручного
привода механиком подъема, эта и другие подобные аварии с групповым несчастным случа-
ем не произошли.
Отсутствие при спуске-подъеме смены второго машиниста.
Возникновение перегрузки каната, которая при нормальном режиме эксплуатации не
должна иметь место и может привести к его обрыву, даже если канат находится в удовлетво-
рительном состоянии, может возникнуть по разным причинам (рис. 24.1).
Одна из самых распространенных причин перегрузок подъемных канатов на подъемных
установках наклонных выработок при подъеме груза — набегание вагонеток на канат, когда
величина замедления подъемной машины при торможении выше, чем замедление вагонеток
движущихся вверх. При этом происходит напуск каната и при свободном скатывании ваго-
неток вниз после остановки — ударное приложение нагрузки к канату (рудник «Каула-Кот-
сельвааре» в г. Заполярный Мурманской области).
На скиповых подъемных установках, как правило, ослабление каната происходит в ре-
зультате застревания подъемного сосуда в разгрузочных кривых. При этом вращение подъем-
ной машины в сторону зависшего в кривых сосуда всегда сопровождается напуском струны
каната и при последующем освобождении скипа — ударное приложение растягивающей на-
грузки к канату, обрыв скипа и падение его в ствол.
Так, па скиповом подъеме шахты «Н. Карбонит» производственного объединения «Пер-
вомайскуголь» оборвался подъемный канат. После застревания правого скипа в разгрузоч-
ных кривых приемного бункера машинист, не заметив случившегося, начал выполнять оче-
редной цикл. В результате напуск каната под барабаном подъемной машины составил 300 м
каната. В этот момент застрявший скип освободился, с большой скоростью выбрал напуск
каната и оборвал его. При этом были повреждены расстрелы, разрушены посадочные балки,
деформирован улавливающий бункер [25].
ХАРАКТЕРНЫЕ АВАРИИ НА ПОДЪЕМНЫХ УСТАНОВКАХ
607
Подобные аварии имели место на шахте «Ново-Бутовка» ПО «Макеевуголь», на шахте
№29 ПО «Донецкуголь», на шахте «Селидовская» ПО «Селидовуголь», на шахте имени XXI
Съезда КПСС ПО «Кузбассуголь».
Причины указанных аварий: недостаточные уход и контроль состояния разгрузочного бун-
кера, отсутствие или низкая эффективность сигнализации, контролирующей заполнение вер-
хнего приемного бункера, неисправность защиты от провисания струны и напуска каната.
Особо следует сказать о подобной аварии, которая произошла на скиповом породном
подъеме шахты «Самарская» ПО «Павлоградуголь» 4 февраля 2006 года. Из-за сильных хо-
лодов было произведено утепление канатного проема с помощью специальной конструкции
на крыше здания подъемной машины. После окончания работ не была проверена защита от
провисания струны каната естественным напуском. Скип застрял в разгрузочных кривых и
при выполнении следующего цикла струна каната начала провисать, что должно было при-
вести к срабатыванию защиты от провисания струны каната. Однако канат лег не на трубу
конструкции защиты от напуска, а на элемент конструкции для утепления канатного проема
в результате защита от провисания струны каната была выведена из работы.
Напуск каната был обнаружен только тогда, когда скип не прошел нулевую площадку. В
результате после освобождения скипа из-за ударного приложения нагрузки канат оборвался,
и скип упал в ствол.
Причиной перегрузки канатов может быть столкновение подъемного сосуда с препят-
ствием. Примером таких аварий могут быть авария на скиповом угольном подъеме шахты
имени Артема ПО «Артемуголь», на наклонном скиповом подъеме шахты №20 000 фирмы
«Карбон» (табл. 24.1).
С целью предотвращения аварий, связанных с обрывом канатов необходимо: запрещать
эксплуатацию канатов, прочность которых оказалась ниже допустимого уровня, отвечающе-
го нормам браковки по ПБ, и не допускать перегрузку канатов сверх уровня, отвечающего
нормальному режиму работы подъемной установки.
24.2. Аварии на подъемных установках со шкивами трения
24.2.1. Аварии, связанные со скольжением канатов
Особенностью подъемных установок со шкивами трения является отсутствие жесткой
связи каната с органом навивки. При нарушении фрикционной связи канатов с футеровкой
канатоведущего шкива возникает аварийная ситуация.
Возможны два варианта — когда линейная скорость органа навивки больше скорости
канатов (пробуксовка) и когда скорость канатов превышает линейную скорость органа на-
вивки (скольжение канатов по канатоведущему шкиву).
Первый вариант возникает более редко, когда при неправильно выполненных органи-
зационных и технических мероприятиях оба подъемных сосуда или канаты оказываются за-
фиксированными в неподвижном положении, а канатоведущий шкив приводится во враще-
ние. Это возможно при пуске машины в эксплуатацию или значительном перегрузе подъем-
ного сосуда, превышающем расчетную тяговую способность подъемной машины. Такой ре-
жим может быть предотвращен защитой от пробуксовки канатов, когда при превышении
линейной скорости органа навивки по отношению к скорости канатов защита от пробуксов-
ки воздействует на отключение электропривода и включает предохранительный тормоз.
Второй вариант происходит достаточно часто и, как правило, приводит к авариям с тя-
желыми последствиями.
Известно много случаев скольжения канатов на подъемных установках, которые приве-
ли к тяжелым авариям с большими материальными потерями (табл. 24.2).
На шахте имени IX Пятилетки (ныне шахта «Северная») производственного объедине-
ния «Макеевуголь» в марте 1975 г. на скиповом угольном подъеме при дотягивании перегру-
женного скипа произошло проскальзывание головных канатов на канатоведущем шкиве
многоканатной подъемной машины МК4Х4. В результате груженый скип упал в ствол, обо-
рвался проводниковой канат, повредились дегазационный и воздушный ставы, армировка
ствола, оборвались четыре головных каната, произошло разрушение амортизационных уст-
ройств и т. д. Порожний скип разрушил амортизационную раму и перекрытие отметки 57 м
608
ГЛАВА 24
Таблица 24.2
Аварии на подъемных установка со шкивами трения, вызванные скольжением канатов
№№ п/п Дата аварии Объединение, шахта Примечание (тип футеровки, температура в машзале)
1 03.1975 ПО «Макеевуголь», ш. им. IX Пятилетки ПП-45,-10°С
2 01.1977 ПО «Артемуголь» ш. «Комсомолец» 1111-45, перегруз скипа
3 09.1980 ПО «Донецкуголь» ш. им. А.М.Горького ПП-45
4 12.1981 ПО «Антрацит» ш. «Комсомольская» ПП-45, - 20°С
5 04.1983 ПО «Антрацит» ш. «Комсомольская» 1111-45, перегруз скипа
6 05.1984 ПО «Ростовуголь» ш. «Глубокая» Бекорит
7 01.1986 ПО «Шахтерскантрацит» ш. «Комсомолец Донбасса» Спуск противовеса, -20°С
8 01.1988 ПО «Интауголь» ш. «Капитальная» Снижение величины замедления, — 40°С
9 05.1988 ПО «Торезантрацит» ш. «Прогресс» Бекорит
10 07.1988 ПО «Павлоградуголь» ш. им. Героев Космоса Бекорит
11 08.1988 ПО «Макеевуголь» ш. им. IX Пятилетки Неисправность АРПТ
12 09.1988 ПО «Гуковуголь» ш. им. 50-летия ЛК Бекорит
13 01.1989 ПО «Кривбассруда» ш. им. газеты «Правда» ПП-45,-10°С
14 01.1990 ПО «Шахтерскантрацит» ш. «Комсомолец Донбасса» ПП-45,-10°С
15 02.1990 ПО «Донецкуголь» ш. «Октябрьский рудник» Аварийное торможение груженого скипа. Проскальзывание — 130 м
16 03.1991 ПО «Кривбассруда» ш. «Первомайская» ПП-45
копра. В результате аварии была выведена из строя футеровка канатоведущего шкива и де-
формированы оба скипа. Непосредственными причинами аварии явились перегруз подни-
маемого скипа горной массой 27,7 т вместо 21 т по проекту, минимальный резерв тяговой
способности подъемной машины, обусловленный установкой новой футеровки на шкиве
трения и ее неправильной проточкой, а также ошибочные действия машиниста подъемной
установки, который после остановки перегруженного скипа включил подъемную машину на
спуск груженого скипа вместо его подъема.
Авария с тяжелыми последствиями произошла в январе 1977 г. на угольной скиповой
многоканатной подъемной установке ствола № 4 шахты «Комсомолец» производственного
объединения «Артемуголь». При подъеме вверх левого груженого скипа цикл подъема про-
ходил на пониженной скорости из-за большой перегрузки скипа (19 т вместо проектных
12m). Перегрузка скипа была столь велика, что подъемный двигатель не мог создать доста-
точного крутящего момента, чтобы скип был разгружен. После остановки левого перегру-
женного скипа перед разгрузочными кривыми были выполнены маневры для разгрузки ски-
па. При очередной попытке затянуть перегруженный скип в кривые произошла пробуксовка
канатоведущего шкива относительно канатов, нагрев футеровки, изготовленной из полихлор-
винилового пластиката ПП-45, уменьшился коэффициент сцепления канатов с футеровкой
и левый груженый скип упал в зумпф. Правый порожний скип ударился о балки подшкив-
ной площадки копра, произошло разрушение рамы скипа в месте присоединения прицеп-
ного устройства и правый порожний скип вместе с уравновешивающими канатами также
упал в зумпф. Конец правого головного каната и прицепное устройство перелетели через
копровой шкив и обрушили фермы крыши здания подъемной машины.
Аналогичная авария произошла на подъемной установке шахть/'&лсомольская» в г. Ант-
раците Луганской области. При загрузке скипов, имеющих емкость 25 л?, использовалась объем-
ная дозировка, настроенная на емкость 19 м3. В аварийном цикле скип был загружен такой
массой угля, которая в нем с верхом поместилась, что было установлено при осмотре скипа
после аварии, когда он находился в зумпфе ствола на разрушенном от удара откосном полке.
ХАРАКТЕРНЫЕ АВАРИИ НА ПОДЪЕМНЫХ УСТАНОВКАХ
609
Из-за перегрузки скипа разгон подъемной машины ненормально затянулся, машинист
остановил подъемную машину и доложил об этом по телефону энергетику шахты. Однако
энергетик вместо срочного прибытия на подъемную установку появился более чем через 1
час. В течение этого времени скип, находившийся в нижней части ствола, заполнился попа-
давшей в него водой в связи с обильным притоком воды в стволе. Вследствие дополнитель-
ной загрузки скипа подъемная машина уже не в состоянии была сдвинуть его вверх.
Было принято ошибочное решение не разгружать скип в том положении, которое он
занимал в стволе, а медленно опускать его вниз. При трогании перегруженного скипа вниз
из-за большой разницы статических натяжений в набегающих и сбегающих ветвях головных
канатов началось их скольжение относительно полихлорвиниловой футеровки канатоведу-
щего шкива. Из-за нагрева футеровка начала плавиться, превращаясь в пену. Коэффициент
сцепления между канатами и футеровкой канатоведущего шкива стал уменьшаться, а ско-
рость падающего вниз перегруженного и поднимающегося вверх порожнего скипов возрас-
тать. Амортизирующие устройства не смогли остановить скипы. Кинетическая энергия дви-
жущейся системы была столь велика, что канаты защитных устройств после протяжки через
канатно-винтовые амортизаторы были выдернуты из них. При осмотре канатно-винтовых
амортизаторов, из которых выдернулись канаты, были обнаружены цвета побежалости на
поверхностях скольжения сухарей. Нижний скип упал на откосной полок, разбив его, а вер-
хний порожний пробил бетонное перекрытие башенного копра и уперся в следующее пере-
крытие, на котором находились отклоняющие шкивы.
На скиповом угольном подъеме шахты «Комсомолец Донбасса» ПО «Шахтерскантра-
цит» в январе 1990 г. из-за отрицательной температуры в машинном зале произошло обледе-
нение канатов на участке от нулевой площадки до канатоведущего шкива, что привело к
проскальзыванию канатов, деформации подъемного сосуда и повреждению амортизаторов.
Основные причины аварий на подъемных установках со шкивами трения, связанные со
скольжением канатов:
— перегруз подъемных сосудов, превышающий расчетную тяговую способность подъем-
ной машины;
— неправильная настройка предохранительного тормоза, не обеспечивающая условие
скольжения канатов по канатоведущему шкиву;
— неудовлетворительная техническая эксплуатация подъемной установки (несвоевре-
менная регулировка натяжения подъемных канатов, несвоевременная или некачественная
проточка футеровки и т. п.);
— неправильное применение смазки канатов;
— ухудшение фрикционных свойств футеровки с течением времени или под воздействием
температурного фактора;
— применение несертифицированной футеровки, приобретенной у коммерческих струк-
тур с коэффициентом сцепления между канатом и футеровкой ниже допустимого.
24.2.2. Аварии при спуске груженого скипа
Спуск груженого скипа не предусмотрен проектным технологическим режимом работы
подъемной установки. При торможении груженого скипа, движущегося вниз на большой
скорости, тормоз испытывает огромные динамические нагрузки, поэтому для скиповых
подъемов с многоканатными машинами завод-изготовитель рекомендует при проведении
наладочных работ испытывать предохранительное торможение при спуске груза на скорости
не более половины максимальной.
Режим спуска груза на скиповых подъемных установках может возникнуть при ошибоч-
ных действиях машиниста подъема или неисправности схемы управления и защитно-блоки-
ровочных устройств. При этом очень часто происходят аварии с тяжелыми последствиями
даже при нормально загруженных подъемных сосудах и отсутствии скольжения (табл. 24.3).
На скиповой многоканатной подъемной установке шахты им. А. М. Горького производ-
ственного объединения «Донецкуголь» в апреле 1971 г. произошла авария вследствие увлажне-
ния тормозных ободьев. После того как скипы были остановлены в середине ствола, маши-
нист подъема ошибочно включил машину на спуск груженого скипа и разогнал машину до
максимальной скорости. При приближении скипов к конечному положению сработал огра-
610
ГЛАВА 24
Таблица 24.3
Аварии на подъемных установках при спуске груженого скипа
№№ п/п Дата аварии Объединение, шахта
1 04.1971 ПО «Донецкуголь» ш. им. А.М.Горького
2 09.1973 ПО «Красноармейскуголь» шахта «Центральная»
3 05.1979 ПО «Стахановуголь» ш. им. ХХП Партсъезда КПСС
4 04.1988 ПО «Интауголь» шахта «Капитальная»
5 05.1988 ПО «Интауголь» шахта «Капитальная»
6 08.1988 ПО «Луганскуголь» ш/у «Луганское»
7 09.1989 ПО «Макеевуголь» шахта «Ясиновская-Глубокая»
8 02.1990 ПО «Донецкуголь» ш/у «Октябрьское»
9 09.1993 ПО «Красноармейскуголь» ш. им. А.Г.Стаханова
10 09.1993 ПО «Кривбассруда» шахта «Первомайская»
11 01.2001 шахта «Красноармейская-Западная №1»
ничитель скорости, и включилось предохранительное торможение. Путь торможения оказал-
ся чрезвычайно растянутым, вследствие чего произошел переподъем порожнего скипа около
7 м. Настройка ограничителя скорости и тормозов позволяла предотвратить подобную аварию
при сухих тормозных ободьях. Однако при расследовании причин аварии было выявлено не-
удовлетворительное состояние ограждающих канатоведущий шкив кожухов, вследствие чего
вода, выносимая подъемными канатами из ствола, попадала на тормозные ободья. Снижение
коэффициента трения вследствие увлажнения и явилось причиной аварии.
Аналогичная авария с еще более тяжелыми последствиями произошла в сентябре 1993 г. в
скиповом стволе шахты имени А. Г Стаханова ПО «Красноармейскуголь» на многоканатной ма-
шине МК4х4, когда вследствие снижения коэффициента трения при значительной обводнении
тормозных ободьев перегруженный скип и оборвавшиеся 4 головных и 2 уравновешивающих ка-
ната упали в зумпф, а порожний скип, разбив строительные конструкции противометанной каме-
ры, амортизационные и разгрузочные устройства, завис в стенке копра выше точки разгрузки.
Не допускается чрезмерный нагрев тормозного обода. Его температура не должна превы-
шать 70°С. При чрезмерном нагреве тормозного обода и пресс-массовых колодок снижается ко-
эффициент трения между ними. По этой причине также возникали аварии. Так, например, на
скиповом многоканатном подъеме шахты «Центральная» производственного объединения «Крас-
ноармейскуголь» в сентябре 1973 г. во время работы машины произошло случайное отключение
напряжения цепей управления. После подачи напряжения машинист ошибочно включил ма-
шину на спуск груза и разогнал ее до максимальной скорости. Заметив ненормальность в работе
машины, машинист отключил реверсор и начал затормаживать машину рабочим тормозом. При
этом произошло интенсивное разогревание тормозных ободьев и колодок. В связи с тем, что
скорость машины снижалась недостаточно, сработал ограничитель скорости и включился пре-
дохранительный тормоз. Однако вследствие разогрева тормозных ободьев и колодок уменьшил-
ся коэффициент трения между ними и путь предохранительного торможения оказался больше
расчетного, что привело к переподьему порожнего скипа на 6 м. После аварии на тормозных
ободьях были обнаружены цвета побежалости, вызванные чрезмерным нагревом.
Крупная авария со значительными материальными потерями произошла в январе 2001
года на многоканатной подъемной установке скипового ствола шахты «Красноармейская-
Западная № 1».
Авария произошла при следующих обстоятельствах. После загрузки горной массой пра-
вый скип двухскипового угольного подъема был отправлен в автоматическом режиме. Скип
был перегружен, так как весовая дозировка не работала. В процессе движения скипа про-
изошло аварийное отключение подъемной машины одной из защит. После кратковремен-
ной стоянки подъемная машина была включена машинистом подъема в ручном режиме
ошибочно в сторону спуска правого груженого скипа без включения автомата главного тока,
т. е. двигатель в процессе торможения при спуске груженого скипа не участвовал. При рас-
следовании аварии было установлено, что часть цепей аппаратов защиты была исключена из
работы методом шунтирования (ограничители скорости ЭОС-3 основной и дублирующий,
блокировка растормаживания машины при отсутствии тока в якорной цепи двигателя).
ХАРАКТЕРНЫЕ АВАРИИ НА ПОДЪЕМНЫХ УСТАНОВКАХ
611
При увеличении скорости выше номинальной машинист подъема приняла меры по за-
тормаживанию машины. Несмотря на производимые машинистом подъема действия, ско-
рость движения скипа достигла 18 м/с (по тахограмме самопишущего скоростемера), поэто-
му оставшегося участка пути в пределах пути свободного переподъема было недостаточно
для остановки скипа. В результате левый (порожний) скип после прохождения свободной
высоты переподъема вошел в зону действия амортизационного устройства, канаты которого
протянулись на полную длину, и пробил перекрытие противометанной камеры.
Опустившимся на повышенной скорости правым груженым скипом после протяжки амор-
тизационных канатов были разрушены рамы амортизаторов разделительные колодцы уравно-
вешивающих канатов в зумпфовой части ствола. Скип вышел из направляющих проводников.
Вследствие нагрева при торможении груженого скипа, двигавшегося вниз с большой
скоростью, рабочие поверхности полей тормозных ободьев имели цвета побежалости и были
покрыты тонким слоем расплава тормозных колодок.
Чтобы предотвратить возникновение подобных аварий, необходимо:
1. Обеспечить загрузочное устройство весовой дозировкой, произвести корректировку объемной
дозировки бункера-дозатора с учетом фактического объемного веса транспортируемой горной массы.
Фактическую максимальную массу груза в скипе Q& можно рассчитать по формуле
(24.2.»
где Q — максимально возможный объем горной массы с учетом угла естественного отко-
са, л«3; Ууг,У„ — насыпная плотность соответственно угля и породы, тп/и3; z— зольность гор-
ной массы; уг м — насыпная плотность горной массы, /и/м3;
2. Рассчитать тяговую способность подъемной машины с учетом максимальной факти-
ческой зольности выдаваемой горной массы и обеспечить работу многоканатных подъемных
установок в строгом соответствии с проектными режимами и нагрузками.
3. Рассчитать и наладить тормозную систему таким образом, чтобы в любых режимах обес-
печивались минимально допустимые замедления, не вызывающие проскальзывания канатов.
4. Выполнять при установке новой футеровки на канатоведущем шкиве проточку жело-
бов под канаты на глубину не менее половины диаметра каната.
5. Смазывать подъемные канаты, поставляемые заводами-изготовителями для навески
на шкивы трения, только фрикционной смазкой.
6. Установить блокировку, исключающую спуск груженого скипа.
7. Исключить возможность попадания на тормозные колодки масла и влаги.
8. Применять новые футеровочные материалы канатоведущих шкивов многоканатных
подъемных установок со стабильно высоким коэффициентом трения, не изменяющимся при
нагреве вследствие проскальзывания канатов.
При выполнении этих требований и правильном техническом обслуживании будет обес-
печена безопасная эксплуатация подъемных машин со шкивами трения, что подтверждается
отсутствием подобных аварий в последнее время.
24.3. Жесткая посадка клети на кулаки или посадочные брусья
5 мая 1983 года на клетевой подъемной установке ствола №8 шахты «Луганская» ПО
«Стахановуголь» в результате жесткой посадки клети на посадочные брусья произошла ава-
рия с групповым несчастным случаем.
Машинист при подходе клети с людьми к нижней приемной площадке несвоевременно
включил динамическое торможение, и клеть подошла к конечному положению со скорос-
тью около 3 м/с и в момент удара о посадочные брусья были травмированы люди, находящи-
еся в клети.
При расследовании аварии установлено, что проектом были предусмотрены два ограни-
чителя скорости — ЭОС-2 и РОС 5914.
На момент аварии ограничитель ЭОС-2 был разукомплектован и не введен в работу.
Ограничитель скорости РОС-5914 был в неисправном состоянии, так как в командоап-
парате РОС-5914 выпал подвижный подпружиненный контакт, а проектная схема самокон-
612
ГЛАВА 24
троля неисправности цепей ограничителя скорости была неэффективна (контакт РКЦ в цепи
защиты был блокирован размыкающимися блок-контактом последнего контактора ускоре-
ния роторной цепи, а подъемная машина работала с отклонением от проектного режима по
максимальной скорости — на искусственных характеристиках двигателя).
Авария с групповым несчастным случаем из-за жесткой посадки клети произошла 18
декабря 1989 года на клетевом подъеме ШТ 7,2 вентиляционного ствола шахтоучастка «Ка-
питальная» шахты «Советская» ПО «Макеевуголь».
Машинист подъемной установки, приняв смену, начал спуск людей в шахту в присутствии
машиниста, сдавшего смену. Осуществляя очередной спуск восточной клети, в которой нахо-
дился 21 человек, в то время как западная клеть была порожняя, машинист при подходе вос-
точной клети к горизонту № 8, на котором должны были выходить люди, не начал своевре-
менно уменьшать скорость подъемной машины. В результате клеть, двигаясь с установившей-
ся скоростью, вошла в участок пути, контролируемый ограничителем скорости. Ограничитель
скорости в связи с превышением скорости сверх допустимой включил предохранительный тор-
моз. Однако из-за заклинивания поршня в цилиндре предохранительного тормоза сработала
только первая ступень тормоза. Развиваемый ею тормозной момент машину не останавливал.
Видя, что шкив трения продолжает вращаться, контрольный машинист отключил высо-
ковольтный масляный выключатель. Однако опускающаяся клеть успела осуществить жест-
кую посадку на разделительные деревянные брусья, установленные в зумпфовой части ство-
ла для уравновешивающих канатов. В результате 10 человек в клети получили тяжелые трав-
мы, 6 — легкие, 5 человек травм не получили. Разрушение брусьев в данном случае сыграло
роль амортизатора, смягчившего удар. Уже после этого порожняя клеть ударилась о балки
подшкивной площадки копра.
Причиной аварии явились ошибочные действия машиниста подъемной установки, вы-
разившиеся в запоздалом начале торможения подъемной машины и неисправность тормоз-
ной системы.
Из-за длительной эксплуатации тормозной цилиндр предохранительного тормоза приоб-
рел конусность, а на поверхности скольжения появились продольные борозды. В неработоспо-
собном состоянии оказалась часть шарнирных соединений тормоза. Но этим причинам при ава-
рийном торможении поршень завис в верхней части цилиндра предохранительного тормоза.
Авария с групповым несчастным случаем из-за жесткой посадки клети на кулаки про-
изошла 05.10.1999 г. в клетевом стволе № 2 шахты «Новопавловская» в г. Красный Луч Лу-
ганской области.
По стволу производится спуск-подъем людей, оборудования, материалов и выдача по-
роды. При выдаче породы опрокидывание вагонеток производится в разгрузочных кривых,
установленных на копре. На нулевой отметке и горизонте 5 (отметка «—845 м») установлены
кулаки, а на горизонте 4 (отметка «—690 jw») — качающиеся площадки.
В мае 1986 г. на подъемной установке ствола была смонтирована новая машина 2Ц-6х2,8,
обеспечивающая скорость движения опрокидных клетей 8,7 м/с. Каждая клеть позволяет
перевозить 20 человек или вагонетку УВГ-2,5. Перевозка людей осуществляется только ле-
вой клетью. Правая клеть при этом служит противовесом. В качестве ограничителя скорости
используется электрический ограничитель скорости ЭОС-3, а в качестве дублирующего —
электрический ограничитель скорости на базе РОС-5914.
При спуске смены после посадки на горизонте 4 (отметка «—690 jw») трех человек в ле-
вую клеть, где уже находилось 8 человек, машинист подъема получила сигнал на спуск клети
на 5-ый конечный горизонт (отметка «—845 jw»). После растормаживания подъемной маши-
ны машинистом была включена сначала первая, а затем вторая ступень динамического тор-
можения. Скорость движения клетей достигла 4 м/с. Рядом со сменным машинистом нахо-
дился контрольный машинист. В это время в здание подъемной машины зашел механик
подъема, который заговорил с машинистами на отвлеченную тему. В ответ сменный маши-
нист пожаловалась на невозможность работать из-за того, что в глаза светит солнце.
Сразу же после этого из-за возрастания скорости машинист подъема попыталась вклю-
чить сначала третью, а затем четвертую ступень динамического торможения и начать тормо-
жение рабочим тормозом. Однако уже сработал предохранительный тормоз.
Как показали механик по стационарному оборудованию и слесарь мехцеха, которые
находились на приемной площадке 5-го горизонта, они отчетливо слышали, как была снята
ХАРАКТЕРНЫЕ АВАРИИ НА ПОДЪЕМНЫХ УСТАНОВКАХ
613
качающаяся площадка на 4-ом горизонте и начала опускаться клеть. Через некоторое время
ими был услышан нарастающий шум в стволе, и они поняли, что клеть приближается к го-
ризонту с повышенной скоростью. Без предварительного замедления клеть с ударом стала
на кулаки. В момент удара из нее раздались стоны.
После аварии было установлено, что срок очередной ревизии и наладки подъемной ма-
шины истек почти за 3 месяца до аварии, а технический осмотр и испытание ее через полго-
да после предыдущей ревизии и наладки комиссией под руководством главного механика
шахты не проводились. Основной ограничитель скорости ЭОС-3 оказался неработоспособ-
ным (вышло из строя два блока БРУ), а в дублирующем реостатном ограничителе скорости
РОС-5914 согнут нажимной рычаг командоаппарата, в результате чего при наезде профиля
сопротивление командоаппарата выводилось не полностью и контролировалась повышен-
ная скорость подъезда. Этим и объясняется жесткая посадка клети на кулаки в ситуации,
когда машинист подъема не начала вовремя тормозить машину.
Кроме того, оказались неисправными датчик ДВМ-6 переподъема левой клети в режи-
ме «люди», самопишущий скоростемер, реле контроля напряжения РКН, манометр контро-
ля давления сжатого воздуха. К моменту аварии на 4 с лишним месяца была просрочена ин-
струментальная проверка подъемных канатов на потерю сечения.
Машинистка подъема, допустившая аварию, самостоятельно работала на данной грузо-
людской подъемной установке после выхода из отпуска и перевода с грузового подъема без
необходимой стажировки и проверки ее профессиональных качеств.
13 сентября 2005 года на северном воздухоподающем стволе ГП «Угольная компания
«Краснолиманская» при спуске смены произошла посадка клети с пассажирами на посадоч-
ные балки со скоростью более 1 м/с (жесткая посадка). В результате было травмировано 9 из
22 работников, находящихся в клети.
Авария с групповым несчастным случаем произошла по следующим причинам:
1. Неправильные действия машиниста подъема, которая производила замедление подъем-
ной машины в режиме динамического торможения без подтормаживания рабочим тормозом
и снижения скорости подъемной машины при подходе к посадочной площадке нижнего го-
ризонта до скорости дотягивания менее 0,5 м/с.
Второй машинист, в обязанности которого входило наблюдение за процессом движения
клети, не отреагировала на то, что при подъезде к посадочной площадке не была своевре-
менно снижена скорость до скорости дотягивания. Кроме того, после того, как стало извес-
тно о травмировании работников, находящихся в клети, при ее жесткой посадке, не остано-
вила подъемную машину до выяснения причин аварии, а продолжала спуск смены.
2. При проведении наладочных работ силами ООО «Донбассремонтналадкасервис» спе-
циализированная наладочная бригада выполнила наладку ограничителя скорости повышен-
ной надежности РОС-5914 с нарушениями требований «Руководства по ревизии, наладке и
испытанию шахтных подъемных установок», а именно:
— не было произведено построение расчетной рабочей, защитной и критической тахог-
рамм ограничителя скорости;
— профили заданной контролируемой ограничителем скорости были установлены таким
образом, что контроль скорости подъезда начинался практически непосредственно в самом конце
цикла подъема, не предусматривалось снижение скорости до скорости подъезда 1 м/с к точке
перехода от канатных проводников к жестким направляющим и не предусматривался контроль
участка пути дотягивания; профили не были зафиксированы и не были нанесены четкие метки
положения роликов командоаппаратов заданной скорости в конечных точках пути.
Таким образом, все аварии, связанные с жесткой посадкой клети на кулаки или поса-
дочные брусья были из-за неправильных действий машинистов подъема. Но все эти аварии
не должны были произойти, если бы при этом тормозная система и ограничитель скорости
работали исправно.
СПИСОК ЛИТЕРАТУРЫ
1. Давыдов Б.Л. Неполадки шахтных подъемных установок, их предупреждение и устра-
нение.— М.: Углетехиздат, 1948.— 184 с.
2. Монтаж, эксплуатация и наладка подъемных установок / Калиш С.И., Найденко И.С.,
Чебаненко К.И. и др.— М.: Недра, 1964.— 447 с.
3. Калиш С.И., Чебаненко К.И. Справочник машиниста шахтной подъемной машины.—
М.: Государственное научно-техническое издательство литературы по горному делу, 1962.—
207 с.
4. Найденко И.С., Белый В.Д. Шахтные многоканатные подъемные установки. Изд. 2-е,
переработанное и дополненное,— М.: Недра, 1979.— 391 с.
5. Киричок Ю.Г., Чермалых В.М. Привод шахтных подъемных установок большой мощ-
ности.— М.: Недра, 1972.— 336 с.
6. Мурзин В.А., Решетников В.И., Шатило А.Н. Защита рудничных подъемных устано-
вок от превышения скорости,— М.: Недра, 1974.— 176 с.
7. Федоров М.М. Шахтные подъемные установки,— М.: Недра, 1979.— 309 с.
8. Завозин Л.Ф. Шахтные подъемные установки. Изд. 2-е, переработанное и дополнен-
ное,— М.: Недра, 1975.— 368 с.
9. Правицкий Н.К. Рудничные подъемные установки,— М.: Госгортехиздат, 1963.— 416 с.
10. Песвианидзе А.В. Расчет шахтных подъемных установок,— М.: Недра, 1992.
11. Степанов А.Г. Динамика шахтных подъемных установок,— Пермь: Рос АН, Уральс-
кое отд. Горного института, 1994.— 203 с.
12. Дворников В.И., Къерцелин РЕ. Теоретические основы динамики шахтного подъем-
ного комплекса.— София, МОНТ, 1992.— 363 с.
13. НПАОП 10.0—1.01—05. Правила безопасности в угольных шахтах,— К.: Вщлуння,
2005,- 398 с.
14. Правила техшчно! експлуатацп вупльних шахт.— М.: Недра, 2006.— 353 с.
15. Правила безопасной эксплуатации электроустановок потребителей. ДНАОП 0.00-1.21-
98.— К.: Основа, 1988.— 380 с.
16. Правила техшчно! експлуатацп електроустановок споживач!в. Затверджено наказом
Мппстерства палива та енергетики 25.07.06 № 258. Зареестровано Мшюстом Украши 25.10.06
№ 1143/13017.- К.: «НТУКЦ» АЕЕ, 2006.
17. Руководство по ревизии, наладке и испытанию шахтных подъемных установок. Изд.
2-е, переработанное и дополненное / Бежок В.Р., Чайка Б.Н., Кузьменко Н.Ф. и др.— М.:
Недра, 1982.- 391 с.
18. Стационарные установки шахт / Под ред. Братченко Б.Ф.— М.: Недра, 1977.— 440 с.
19. Руководство по техническому обслуживанию и ремонту шахтных подъемных устано-
вок/ Пристром В.А., Манец И.Г. и др.— М.: Недра, 1983.— 231 с.
20. Техническое обслуживание и ремонт стационарного оборудования / Бирюков В.М.,
Пристром В.А., Матвеев В.И. и др.— М.: Недра, 1988,— 318 с.
21. Гальперин И.Я., Бежок В.Р Модернизация электропривода и автоматизация шахт-
ных подъемных установок.— М.: Недра, 1984.— 220 с.
22. Манец И.Г, Грузутин Р.Я., Негруцкий Б.Ф. Ремонт шахтных подъемных машин.—
М.: Недра, 1979.— 253 с.
23. Манец И.Г, Снегирев Ю.Д., Паршинцев В.П. Техническое обслуживание и ремонт
шахтных стволов. 2-е изд. перераб. и дополненное.— М.: Недра, 1987.— 324 с.
24. Справочник по эксплуатации шахтных стационарных установок / Махиня В.В., Ма-
нец И.Г, Паршинцев В.П. и др.— К.: Техника, 1989.— 207 с.
25. Неисправности шахтных подъемных установок. Изд. 2-е переработанное и допол-
ненное / Бежок В.Р, Грузутин Р.Я., Калинин В.Г. и др.— М.: Недра, 1991.— 368 с.
СПИСОК ЛИТЕРАТУРЫ
615
26. Бежок В.Р., Калинин В.Г., Чайка Б.Н. Аппараты защиты и блокировки шахтных
подъемных установок.— М.: Недра, 1974.— 88 с.
27. Гончаров И.Б., Матангин К.М. Дефектоскопия оборудования в угольной промыш-
ленности.— М.: Недра, 1990.— 150 с.
28. РД 03-422-01 «Методические указания по проведению экспертных обследований
шахтных подъемных установок» Утверждено Постановлением Госгортехнадзора России от
26.01. №23. Дата введения в действие с 01.01.2002. Опубликовано: официальное издание.—
М.: ГУП «НТЦ «Промышленная безопасность», 2001.— 16 с.
29. Малеев В.Б., Малашкина В.А. Ремонт и эксплуатация стационарного оборудования
шахт.— М.: Недра, 1980.— 330 с.
30. Пристром В.А. Техническое обслуживание и ремонт шахтных подъемных установок //
Уголь,- 1984.- № 10.- С. 37-38.
31. Методика расчета жестких армировок вертикальных стволов шахт,— Донецк: ВНИИГМ
им. М.М.Федорова, 1985.— 170 с.
32. Общесоюзные нормы технологического проектирования шахтных подъемных уста-
новок,— М.: Минуглепром СССР, 1986,— 27 с.
33. Положение о планово-предупредительной системе технического обслуживания и
ремонта оборудования угольных и сланцевых шахт Министерства угольной промышленнос-
ти СССР— М.: ИГД им. А.А. Скочинского, 1981,— 31 с.
34. Завгородний В.И., Беляк В.Л. Повышение безопасности эксплуатации шахтных
подъемных установок при многослойной навивке каната на барабан подъемной машины//
Безопасность труда в промышленности,— 2004.— № 6.— С. 41—44.
35. Наумов С. С. Разработка схем и устройств для расширения области применения мно-
гоканатного шахтного подъема. Автореферат дис... на соискание ученой степени канд. техн,
наук: 05.05.06. — Ленинград, Горный институт, 1987. -22 с.
36. Прокопьев Н.Д. Модернизация действующих подъемных установок. — В кн.: Маши-
ностроение и техносфера XXI века // Сборник трудов международной научно-технической
конференции в г. Севастополь 12—17 сентября 2005 г,— Донецк: ДонНТУ, 2005.— 281 с. (часть
III, раздел 23).- С. 184-194.
37. Грядущий Б.А., Пристром В.А., Трибухин В.А. Обеспечение безопасной эксплуата-
ции высокопроизводительных подъемных комплексов на примере шахты «Красноармейс-
кая-Западная № 1». В кн.: Тезисы докладов конференции «Пути повышения безопасности
горных работ в угольной отрасли»,— Макеевка: МакНИИ, 2004,— С. 421—424.
38. Белозерский А.А. Состояние промышленной безопасности при эксплуатации, об-
служивании и ремонте шахтных подъемных комплексов и главных вентиляторных устано-
вок // Безопасность труда в промышленности,— 2003,— № 7,— С. 22.
39. Обеспечение безопасной эксплуатации оборудования шахтных стационарных уста-
новок с использованием средств и методов виброметрии // Пристром В.А., Рубан В.Ф., Три-
бухин В.А. и др. В кн.: Тезисы докладов конференции «Пути повышения безопасности гор-
ных работ в угольной отрасли».— Макеевка: МакНИИ, 2004,— С. 450—452.
40. Дылдин Г.П. Монтаж и эксплуатация шахтных подъемных установок: Учебное посо-
бие / Уральский государственный горный университет,— Екатеринбург: УГГУ, 2005,— 80 с.
41. Субботин А.И., Беляк Л.А., Шатало А.Н. Сигнализация и связь на шахтном подъеме //
Безопасность труда в промышленности,— 2001.— № 8.— С. 49—51.
42. Грядущий Б.А., Евсюков С.А. Опыт эксплуатации футеровок канатоведущих шкивов
подъемных установок со шкивами трения // Глюкауф. На русском языке,— 2004.— № 1(2).—
С. 72-73.
43. Хюзер Р. Повышение производительности установки главного подъема путем увели-
чения полезной нагрузки восточного скипового отделения // Глюкауф. На русском языке,—
2004,- № 2(3).- С. 24-29.
44. Расследование и предотвращение аварий на угольных шахтах / Под общ. ред. Брюха-
нова А.М. Авторы Брюханов А.М., Бережинский В.И., Бусыгин К.К. и др.— В 2-х частях.
Часть 1; Часть 2 — 635 с.— Донецк: Норд Пресс, 2004.
45. Новая специализированная портативная микропроцессорная аппаратура инструмен-
тального экспресс-контроля и диагностики состояния оборудования шахтных подъемных ус-
тановок для служб контроля, ремонта и наладки (ОРИОН-1М) / ИТГМ им. Н.С. Полякова.
616
СПИСОК ЛИТЕРАТУРЫ
46. Самородов А.И. Повышение надежности подъемных установок, находящихся в дли-
тельной эксплуатации // Уголь Украины.— 1997.— № 11.— С. 10—12.
47. ПБ 05-618-03. Правила безопасности в угольных шахтах (утв. Постановлением Гос-
гортехнадзора РФ от 5 июня 2003 г. № 50).
48. Толошный С.И. Диагностирование технического состояния элементов тормозных
устройств шахтных подъемных машин / В сб. научных трудов «Проблеми експлуатацп об-
ладнання шахтних стацюнарних установок» № 94. — Донецк: НИИГМ имени М.М.Федоро-
ва, 2001.- С. 162-169.
49. РД 03-439-02.Инструкция по эксплуатации стальных канатов в шахтных стволах (Се-
рия 03. Выпуск 13. / Кол. авт.— М.: Государственное унитарное предприятие «НТЦ по безо-
пасности в промышленности Госгортехнадзора России», 2002,— 216 с.
50. Подвесные устройства шахтных подъемных сосудов / Гаркуша Н.Г, Колосов Л.В.,
Обухов А.Н. и др.— М.: Недра, 1980.— 105 с.
51. Электрооборудование шахтных подъемных машин / Калашников Ю.Т, Католиков В.Е.,
Шпильберг ГИ. и др.— М.: Недра, 1986.— 285 с.
52. Машиностроение и техносфера XXI века // Сборник трудов международной научно-тех-
нической конференции в г Севастополе 8—14 сентября 2003 г,— Донецк: ДонНТУ, 2004.— 157 с.
53. Дебелый В.Л., Лебедев В.П., Кирбаба Е.А. Замена подъемных машин МК 5x4 в ба-
шенном копре скипового ствола шахты «Комсомолец Донбасса» // Уголь Украины.— 2005.—
№ 3,- С. 30-31.
54. Корсун В.А., Курченко Е.М. Методика комплексного обследования функциониро-
вания тормозных систем подъемных машин // Уголь Украины.— 2005.— № 3.— С. 17—19.
55. Гришко А. П. Стационарные машины. 4.1. Рудничные подъемные установки: Учеб-
ник.— М.: Издательство МГГУ, 2005.— 473 с.
56. Совершенствование средств контроля за состоянием элементов шахтных подъемных
установок / Бевз Е.Е., Беликов В.Г, Бережинский В.И. и др.— М.: ЦНИЭИуголь, 1978.
57. Васильев Б.В., Баженов А.П. Управление режимами работы шахтных подъемных
машин.— Пермь: Перм. гос. техн, ун-т, АОЗТ «НИПО».— 162 с.
58. Шамсутдинов М.М. Шахтные подъемные установки (безопасность эксплуатации):
Монография.— Бишкек: КРСУ, 2000.— 102 с.
59. Пахомов П.И., Фролов А.В. Методы и технические средства повышения безопасно-
сти эксплуатации рудничных подъемов: Монография,— Бишкек: КРСУ, 2000.— 172 с.
60. Котляревский Г.П. Повышение надежности и долговечности горношахтного обору-
дования,— М.: Недра, 1971,— 200 с.
61. Левкин Н.Б. Предотвращение аварий и травматизма в угольных шахтах Украины.—
Донецк: Донбасс, 2002,— 392 с.
62. Антипенко Г.А., Гаврюк Г.Ф., Назаренко В.А Маркшейдерские работы при строитель-
стве шахт и подземных сооружений: Учеб, пособие / ГА. Антипенко, Г.Ф. Гаврюк, В.А. Наза-
ренко.—Днепропетровск: НГА Украины, 1999.— 150 с.
63. Бондаренко В.И., Пристром В.А, Трибухин В.А. Анализ причин разрушения подвес-
ных устройств подъемных сосудов вертикальных подъемных установок и пути повышения на-
дежности их работы // Проблеми експлуатацп обладнання шахтних стацюнарних установок:
Зб1рник наукових праць,— Донецьк: ВАТ «НД1ГМ 1м. М.М.Федорова», 2005.— С. 52—61.
64. Гришко А.П., Шелоганов В.И. Стационарные машины и установки: Учеб, пособие.—
М.: Изд-во Моск, горного ун-та, 2004.— 325 с.
65. Корняков М.В. Способы и устройства защиты шахтных подъемных установок от
провисания струны и напуска каната.— Иркутск: Изд-во ИрГТУ, 2002,— 57 с.
66. Трибухин В.А. Вопросы управления многомодульным дисковым тормозом / В кн.:
Машиностроение и техносфера XXI века // Сборник трудов международной научно-техни-
ческой конференции в г. Севастополь 12—17 сентября 2005 г,— Донецк: ДонНТУ, 2005.— 281 с.
(часть III, раздел 24).— С. 195—202.
67. Должиков П.Н. Ресурсосберегающий способ укрепления оснований шахтных стаци-
онарных установок // Прнича електромеханпса та автоматика: Науково-техшчн. зб.— Дншро-
петровськ: НГАУкраши, 1999.— № 2(61).— С. 276—278.
68. Вопросы безопасной эксплуатации шахтных подъемных установок / Трифанов М.Г,
Князев А.А, Трифанов ГД. и др. Интернет-источник: priroda.pemi.ru/files/1110805171
СПИСОК ЛИТЕРАТУРЫ
617
69. Бережинский В.И., Кудрявцев Е.М., Железняк О.С., Семеняк А.Ю. Измеритель из-
носа стальных канатов ИИСК-7 / Матер1али М1жнародно! конференцп «Форум прниюв-
2005».— Т.1.— Дншропетровськ: НГУ, 2005.— С. 85—91.
70. Единые правила безопасности при разработке рудных, нерудных и россыпных мес-
торождений полезных ископаемых подземным способом (ПБ 03-553-03). Серия 03. Вып. 33 /
Колл, авт.— М.: ГУП «НТЦ «Промышленная безопасность», 2003.— 200 с.
71. Негруцкий Б.Ф. Интенсификация монтажа оборудования угольных шахт.— М.: Не-
дра, 1983.— 231 с.
72. Стороженко А. М., Кирей А. Ф., Маслий А. К. Аппаратура контроля сигнализации и
связи для рудничных подъемных установок,— М.: Недра, 1975.
73. Аппаратура стволовой радиосвязи «Весна-СРС» / С.В. Бабков, В.А. Казаков,
В.П. Коптиков и др.— В кн.: «Матер1али м1жнародно!’ конференцп' «Форум прник!в-2005»,
том 1.— Дншропетровськ: НГУ, 2005.— С. 48—53.
74. Дворников В.И., Чехлатый А.Н. Оценка эффективности устройств шахтной стволо-
вой сигнализации и связи // Проблеми експлуатацп обладнання шахтних стацюнарних уста-
новок: 36. наук, праць.— Донецьк: ВАТ «НД1ГМ 1м. М.М. Федорова», 2003.— Вип. 99.
75. Бабков С.В., Казаков В.А. Исследование и разработка аппаратуры стволовой радио-
связи / В кн.: Тезисы докладов конференции «Пути повышения безопасности горных работ
в угольной отрасли»,— Макеевка, МакНИИ, 2004,— С. 227—229.
76. Лангнер В. Радиотелефонная связь на подземных работах // Глюкауф,— 1973.— № 16,—
С. 37-43.
77. Попов А.И., Шишкин П.А., Юрченко В.Н. Шахтная связь за рубежом,— М.: ЦНИЭИу-
голь, 1971.
78. Союзцветметавтоматика. Комплексы аппаратуры для шахтных подъемных устано-
вок «СИГНАЛ-17», «СИГНАЛ-18», «СИГНАЛ-19», «СИГНАЛ-20». Проспект.
79. Система телесигнализации и телезащиты «Радуга» / ОАО «Рудоавтоматика».
80. Аппаратура шахтной стволовой сигнализации и связи вертикальных подъемных ус-
тановок ШСС-1 (завода «Красный металлист», г. Конотоп). Проспект.
81. Аппаратура универсальная сигнализации и связи (УАСС.З).
82. Кокин А.Ю. / ОКВУЗ Институт предпринимательства «Стратегия», г. Желтые Воды/
Совершенствование аппаратуры шахтной стволовой сигнализации.
83. Инбис. Работы по сигнализации и связи.
84. Стаховиц В., Миклер Р, Кабцински В.Современные системы сигнализации и авто-
матизации для шахтного подъема // Глюкауф.— 1994.— № 5—6.— С. 51—55.
85. Кубарев А.И. Надежность в машиностроении,— М.: Издательство в машинострое-
нии, 1977.— 264 с.
86. Опыт создания шахтных подъемных машин в АО «НКМЗ» / Граматный В.М., Попов Г.И.,
Кулик О.Е., Баранов Н.Я. // Горные машины и автоматика,— 2003.— № 8.
87. Савенко Е.С. «Обгрунтування силових параметр!в трансмкп в нестащонарних режи-
мах роботи шахтних щцйомних машин» (05.05.06 — прнич! машини). Спецрада Д 11.052.05 у
Донецькому нацюнальному техн, ун-т! МОН Украши.
88. Петренко В.В. Разработка метода и средств технической диагностики опорных узлов
шахтных подъемных машин: Дис. ... канд. техн, наук: 05.05.06 Новочеркасск, 2002.
89. Лебедев С. В. Повышение эффективности работы тормозных систем шахтных подъем-
ных установок с асинхронным приводом: Дис. ... канд. техн, наук: 05.05.06, 05.09.03,— М.,
2003.
90. Аппаратура контроля, диагностики и наладки тормозной системы подъемной уста-
новки «СИЛЬКАН». Информация предприятия «Региональный канатный центр».
91. Беленцов В.Н. Исследование деформаций основания передвижных проходческих подъем-
ных машин на работоспособность зубчатых передач редуктора. Автореф. дис..., 1992,— 22 с.
92. Старовойтов Ю.В. Технология обследования и метод расчета износа зубьев редукто-
ра подъемных машин // Горная механика,— 2000.— № 1—2.
93. Бровко Д.В. Обгрунтування конструкгивних параметр!в фундаментних плит башто-
вих копр1в рудних шахт Кривбасу: Автореф. дис... канд. техн, наук: 05.15.04 / Нац. прн. акад.
Украши.— Д., 2001,— 16 с.— укр.
618
СПИСОК ЛИТЕРАТУРЫ
94. Самойленко А.А. Управления электроприводом шахтной подъемной установки с уче-
том распределенных параметров электромеханической системы: дис... канд. техн, наук:
05.09.03 / Национальный горный ун-т.— Д., 2004.
95. Универсальный дефектоскоп канатов. Информация предприятия «Тритон-Электро-
никс С».
96. Белобров В.И., Абрамовский В.Ф., Самуся В.И. Тормозные системы шахтных подъем-
ных машин / АН УССР, Ин-т геотехн. механики.— Киев: Наук, думка, 1990.— 173 с.
97. Справочник технолога-машиностроителя. Том 1 / Под редакцией Косиловой А.Г.,
Мещерякова Р.К.— Изд. 3-е перераб.— М.: Машиностроение, 1973.
98. Браславский В.М. Технология обкатки крупных деталей роликами,— М.: Машино-
строение, 1966.
99. Школьник Л.М., Шахов В.И. Технология и приспособления для упрочнения и от-
делка деталей накатыванеием.— М.: Машиностроение, 1961.
100. Руководство по определению износа и ремонту тормозных устройств действующих
шахтных подъемных машин,— Донецк: ИГМиТК им. М.М. Федорова, 1972.
101. Супрунов В.Ф. Привод постоянного тока шахтных подъемных машин.— М.: Недра,
1978.- 213 с.
102. Белоцерковский В.А.Обоснование и разработка перенастраиваемой защиты шахт-
ных подъемных установок от превышения скорости. Автореферат диссертации на соискание
ученой степени канд. техн, наук.— Донецк, 1993.— 16 с.
103. Дворников В.И., Чехлатый А.Н. Пути повышения эффективности аппаратуры уп-
равления ШПУ / Сб. трудов НИИГМ им. М.М. Федорова, 2005.— 316 с.
104. Серезентинов Г.В., Варников С.А. Анализ надежности шахтных подъемных устано-
вок / Матер1али науково-практично! конференцп «Донбас-2020: Наука i техшка — вироб-
ництву» (05—06 с!чня 2002 р.).— Донецьк: ДонНТУ, 2002.
105. Шмэлинг В., Крист Б. Перебазирование современной шахтной подъемной установки //
Глюкауф.— 2001.— № 2.
106. Замена шахтных подъемных машин методом надвижки / Б.Негруцкий Б.Ф., Шуль-
ман К.И., Баров В.А. и др. // Шахтное строительство.— 1971.— № 6.— С. 22—23.
107. Новохатько И.Т. Замена подъемных машин способом «накатки»// Шахтное строи-
тельство.— 1967.— № 5.— С. 28—29.
108. ТМ. Сагдиев, М.С. Мукашев, О.И. Самотоева. Модернизация шахтных подъемных
установок на Донском ГОКе: проблемы и перспективы // Горный журнал Казахстана,—
2004,- №4.
109. Белый В. Д., Лысак Г. Д., Петраков А. И. Шахтные парашюты,— М., 1960.
ПО. ГОСТ 15850-84. Парашюты шахтные для клетей.
111. СОУ 10.1.00174094.007:2005. Правила оцшки техшчного стану металевих шахтних
копр1в. Видання офщшне. Стандарт Мппстерства вупльно! промисловосп Украши.
112. Корсун В.А., Курченко Е.М. Ограничитель скорости для подземных подъемных
машин // Уголь Украины.— 2005.— № 3.— С. 15—17.
113. Бацылев П.П., К.Г.Вейсберг, М.М.Герасименко. Взрывобезопасная аппаратура уп-
равления шахтными подъемными машинами и лебедками.— М.: Недра, 1971.
114. Методика расчета критических защитной и рабочих тахограмм. МУП СССР. НИ-
ИГМ 1984.
115. СОУ 10.1.00174094.002:2005 «Оцшювання техшчного стану та визначення термшу
безпечно! експлуатацп устаткування шахтних щдшмальних установок». Видання офщшне.
Стандарт Мппстерства вупльно!’ промисловосп Украши.
116. СОУ 10.1.00174094.006:2005 «Шахтш щцвгсш пристро! та парашути. Вимоги до кон-
тролю». Видання офщшне. Стандарт Мппстерства вугыьно! промисловосп Украши.
117. Верзилов М.А. Рудничные подъемные установки: Учебное пособие.— Якутск: Изд-
во ЯГУ, 2005.- 130 с.
118. Кабанов В.А. Расчет и конструирование шахтных подъемных машин,— Л.: Изд. ЛГИ,
1979.
119. Классен В.В., Кабанов В.А., Смородин А.С. и др. Шахтные подъемные установки
(методические указания по курсовому проектированию).— Л.: Изд-во ЛГИ, 1988.
СПИСОК ЛИТЕРАТУРЫ
619
120. Проспекты фирмы «INCO engineering, s.r.o.» (Чехия), 2006.
121. Яшаров А.М., Калюжный А.С. Оборудование шахтного подъема // Уголь Украи-
ны,— 2003.— № 9.
122. СОУ 10.1.00174094.005:2005 «Устаткування вертикальних ствол!в шахт. Вимоги до
техшчного обслуговування i ремонту». Видання офщшне. Стандарт Мгшстерства вупльно!
промисловосп Украши.
123. РТМ 07.01.009-78 «Временная метод ика проведения дефектоскопии подвесных устройств
при эксплуатации и капитальном ремонте».— Донецк: НИИГМ им. М.М. Федорова, 1978.
124. РД-15-05-2006 Методические указания по проведению экспертизы промышленной
безопасности подъемных сосудов шахтных подъемных установок (утв. приказом Федераль-
ной службы по экологическому, технологическому и атомному надзору России от 26 февра-
ля 2006 г. № 126).
125. Димашко А.Д., Гершиков И.Я., Кревневич А.А. Шахтные электрические лебедки и
подъемные машины: Справочник,— М.: Недра, 1974.— 363 с.
126. Яценко В.А., Пристром В.А., Трибухин В.А., Рубан В.Ф. Особенности определения
технического состояния подшипников качения редукторов шахтных подъемных машин //
Проблеми експлуатацп обладнання шахтних стацюнарних установок: Зб1рник наукових
праць.— Донецьк: ВАТ «НД1ГМ iM. М.М. Федорова», 2005,— Вип. 99.— С. 98—108.
127. Пристром В.А., Трибухин В.А., Рубан В.Ф., Яценко В.А. Особенности определения
технического состояния подшипников качения коренных валов многоканатных подъемных
машин // Проблеми експлуатацп обладнання шахтних стацюнарних установок: Зб1рник на-
укових праць.— Донецьк: ВАТ «НД1ГМ 1м. М.М. Федорова», 2005.
128. Проспекты фирмы КАСТОЛИН ЮТЕКТИК ИНТЕРНЕШНЛ С.А
129. Лазерное устройство для устранения несоосности ВЛУУН. Проспект НИИГМ име-
ни М.М. Федорова. 2006.
130. Заболотный К.С. Научное обоснование технических решений по повышению кана-
тоемкости и уменьшению габаритов шахтных подъемных машин с цилиндрическими бара-
банами: Дис... д-ра техн, наук: 05.15.16 / Государственная горная академия Украины.— Д.,
1997.- 325 с,- Б1блюгр.: С. 314-325.
131. Энергосбережение на угольных предприятиях/ Коллектив авторов// Под ред. Б.А.1ря-
дущего.— Донецк, 2006.— 384 с.
132. СОУ 10.1.00174094.001-2004. Енергобаланс вупльних пщприемств. Аудит енергос-
поживання. 1нструкщя. Мшпаливенерго Украши. 2004.— 44 с.
133. Система подъема — сверхмощная многоканатная ШПУ на золотом руднике Ньюк-
рест Телфер, Австралия. Доклад Граге (фирма ABB Automation Technologies АВ, Швеция) на
конференции в г. Севастополе. 2006.
134. Модернизация скипового подъемного комплекса. Информация шахты «Красноар-
мейская-Западная № 1».
135. Корзун А.В., Байсаров Л.В., Янко С.В., Солдатов В.И. Опыт модернизации скипо-
вого подъема шахты // Уголь Украины,— 2002,— № 12.
136. Проспект Фирмы Mine Eguipment Services Inc.
137. Футеровка шахтных подъемных машин ООО «Реал-пластик» (г. Кемерово). Проспект.
138. Машиностроение и техносфера XXI века // Сборник трудов международной науч-
но-технической конференции в г. Севастополь 12—17 сентября 2005 г. Севастополе,— До-
нецк: ДонНТУ, 2005.— 281 с.
139. Евсюков С.А. Футеровка канатоведущих шкивов многоканатных подъемных машин
Донецкого угольного бассейна / Глюкауф. На русском языке,— 2003.— № 3.
140. Шаповалов Н.И. Повысить безопасность эксплуатации многоканатных подъемных
установок // Безопасность труда в промышленности,— 1987.— № 2,— С. 42—44.
141. Чернов М.А., Яковлев С.В., Ковалева Н.И., Беляк В.Л. Разработка технологии по-
лучения колодок футеровок для шкивов шахтных многоканатных подъемных машин // Бе-
зопасность труда в промышленности.— 2004,— № 3.— С. 34.
142. Руководство по замене подъемных сосудов,— Донецк НИИГМ им. М.М. Федорова, 1978.
143. Хаджиков PH. Горная механика. Том 2. Шахтные подъемные установки,— М.: Уг-
летехиздат, 1958.— 302 с.
620
СПИСОК ЛИТЕРАТУРЫ
144. Ушаков В.М. Неразрушающий контроль и диагностика горно-шахтного и нефтега-
зового оборудования,— М.: Горная книга, 2006.— 317 с.
145. Соломенцев А.И., Мавроди П.И., Соломенцев К.А. Реконструкция подъемной ма-
шины ЦР-5хЗ,2/0,55 Абаканского рудника НПО «Сибруда»,— В сб. научных трудов «Горная
механика», выпуск 2.— Донецк: НИИГМ имени М.М. Федорова, 1992.— С. 144—152.
146. Руководство по эксплуатации УП6,3.000 РЭ.
147. Парашют шахтный для клетей ПТКА Руководство по эксплуатации ПТКА 6,3.000 РЭ.
Ясногорский машзавод. 1985.
148. Система управления и комплексной защиты шахтной подъемной установки. Ка-
шич А., Марищенко А., Божок Н. и др. // Современные технологии автоматизации.— 2005.—
№ 2,— С. 26-34
149. Бежок В.Р, Калинин В.Г, Манец И.Г. Донбассуглеавтоматика. История становле-
ния и развития 1955—2005 / Под ред. В.А. Корсуна,— Донецк: ООО «Юго-Восток, Лтд»,
2005.- 434 с.
150. КД12.01.11.003-99 Руководящий нормативный документ Минуглепрома Украины.
Изделия шахтной автоматики. Ограничители скорости шахтных подъемных установок. Об-
щие технические требования. Методы испытаний. Минуглепрома Украины, 1999.— 21 с.
151. Сидоренко В.А, Курченко Е.М. Контроль исправности предохранительного тор-
моза подъемной машины // Уголь Украины.— 1994.— № 6.
152. Декларащйний патент № 60854 А. Украша, G01 В 5/25. Пристрш для вим!ру не-
сп1вв1сност1 вал!в машин / В.О. Романов, В.Й. Мялковський, Г.1. Манець // Промислова
власшсть,— 2003.— № 10.
153. Лихачев С.В., Мартыновский В.А. Центровка оборудования — проблемы и перс-
пективы // Современные методы неразрушающего контроля и технической диагностики:
Материалы 11-й Международной конф,— Ялта, 2003.
154. Решение Государственного департамента интелектуальной собственности о выдаче
декларационного патента по заявке Романова В.А. Способ контроля несоосности валов, А
№ 200606607 от 13 06 2006, принятое 15.12.2006.
155. Тимошенко С.П., Войновский-Кригер С. Пластинки и оболочки.— Физматгиз.—
М., 1966.- 636 с.
156. Власов В.В., Леонтьев Н.Н. Балки, плиты и оболочки на упругом основании.— М.:
Физматгиз, I960.— 492 с.
157. Горбунов-Посадов М.И., Малинова ТА. Расчет конструкции на упругом основа-
нии.— М.: Стройиздат, 1973.— 628 с.
158. Седов Л.И. Методы подобия и размерности в механике.— М.: ГИТТЛ, 1957.— 376 с.
159. Ковальский Б.С. О расчете правого барабана при многослойной навивке каната.
Подъемно-транспортное оборудование / Республиканский межведомственный научно-тех-
нический сборник). Выпуск 19.— К.: Техника, 1988.— С. 3—6.
160. Ковалев Ю.Г, Сизоненко А.В. Контроль состояния канатов на подъемных установ-
ках шахт // Уголь Украины.— 2006.— № 12.— С. 27—30.
161. Расчет несущей способности неопрокидной клети при разрушении некоторых ее
элементов. А/4811-10. Донгипроуглемаш, 1977.
162. Методика вероятностной оценки долговечности клетей шахтных неопрокидных для
вертикального подъема. Донгипроуглемаш, 1994.
163. РТМ по технологии обследования и оценке технического состояния оборудования
подъемных установок. РТМ 07.01.027-93. НИИГМ им. М.М.Федорова, Донецк, 1999.
164. Рекомендации по расчету клетей с неподвижным кузовом. Донгипроуглемаш, А 2773
165. Николаев ГА. Расчет сварных соединений и прочность сварных конструкций.— М.:
Высшая школа, 1965.
166. Справочник по кранам. Изд. 2-е перераб. / Под редакцией Дукельского, 1971.
167. Шипило В.П.Автоматизированный вентильный электропривод.— М.: Энергия, 1969.
168. Барский В.А. Раздельное управление реверсивными тиристорными электроприво-
дами,— М.: Энергия, 1973.
169. Мощные управляемые выпрямители для электроприводов постоянного тока / Э.М. Ап-
текер, Г.Г. Жемеров, И.И. Левитан, А.Г. Элькан.— М.: Энергия, 1975.
СПИСОК ЛИТЕРАТУРЫ
621
170. Серия тиристорных преобразовательных агрегатов АТ и АТР мощностью до 5000
кВт для автоматизированных электроприводов постоянного тока. Отраслевой каталог
05.03.29.— 74.— М.5 Информэлектро, 1974.
171. Серия тиристорных преобразовательных агрегатов ТПЗ и ТПРЗ мощностью 1000—
12000 кВт на тиристорах Т-320. Отраслевой каталог 05.03.14229-74.— М.5 Информэлектро.
172. Электроприводы комплектные тиристорные постоянного тока мощностью 530—
2000 кВт для шахтных подъемных машин. Отраслевой каталог 08.50.02-76.— М.: Информ-
электро, 1976.
173. Динкель А.Д., Католиков В.Е., Седунин AM. Синтез САУ тиристорным приводом
рудничного подъема с учетом зоны прерывистых токов // Электротехническая промышлен-
ность. Электропривод.— 1980.— № 7(87).— С. 7—10.
174. Динкель А.Д., Католиков В.Е., Седунин А.М. Синтез САУ тиристорным приводом
руднсичного подъема с учетом зоны прерывистых токов // Электротехническая промыш-
ленность. Электропривод.— 1981.— № 2(91).— С. 20—23.
175. Решмин Б.И., Ямпольский Д.С. Проектирование и наладка систем подчиненного
регулирования электроприводов.— М.: Энергия, 1975.— 184 с.
176. Баклашов И.В. Расчет, конструирование и монтаж армировки стволов шахт,— М.:
Недра, 1973.— 248 с.
177. Глушко М.Ф. Стальные подъемные канаты,— Киев: Техника, 1965,— 327 с.
178. Государственные стандарты Союза ССР. Канаты стальные. Сортамент.— М.: Госком
СССР по стандартам, 1987,— 176 с.
179. Дворников В.И. О параметрических резонансах при движении подъемного сосуда в
проводниках армировки ствола. Дис... канд. техн, наук.— Донецк, 1966.— 152 с.
180. Дворников В.И. О методике расчета и рациональных параметрах шахтных подъем-
ных установок // Уголь Украины,— 1983,— № 9.— С. 33—35.
181. Дворников В.И. Теория и моделирование динамического состояния шахтного
подъемного комплекса. Дис... докт. техн, наук.— Донецк, 1989.— 385 с.
182. Дворников В.И. Ильин В.А. Тормозные характеристики малых подъемных машин с
пружинным гидравлическим приводом тормоза // Уголь Украины,— 1982,— № 8,— С. 27—28.
183. Дворников В.И., Шайхет Л.Е. Механические характеристики шахтных подъемных
канатов,— В сб. «Шахтный подъем», № 42,— Донецк, 1976.— С. 19—26.
184. Ключев В.И. Теория электропривода.— М.: Энергоатомиздат, 1985,— 560 с.
185. Ландау Л.Д., Лифшиц Е.М. Механика.— М: Наука, 1973.— 208 с.
186. Литвин Ф.Л. Теория зубчатых зацеплений.— М.: Наука, 1968,— 584 с.
187. Мартыненко В.С. Операционное исчисление,— Киев: Изд. КГУ, 1965,— 188 с.
188. Нестеров П.П., Шабанов-Кушнаренко Ю.П., Гончаренко Н.К. Безуравнительный
многоканатный подъем,— Киев: ГИТЛ УССР, 1963,— 475 с.
189. Основные нормы взаимозаменяемости. ГОСТ 1643-81. Зубчатые передачи цилинд-
рические. Допуски,— М.: 1984,— 96 с.
190. Петрусевич А.И. Динамические нагрузки на зубьях прямозубых колес. Вопросы рас-
чета и конструирования деталей машин.— М.: Изд-во АН СССР, 1942,— 311 с.
191. Проектирование и конструирование транспортных машин и комплексов / Под ред.
И.Г Штокмана.— М.: Недра, 1986.— 302 с.
192. Савин Г.Н., Горошко О.А. Динамика нити переменной длины,— Киев: Изд. АН
УССР, 1962,- 332 с.
193. Тиристорный электропривод рудничных подъемов / А.Д. Динкель, В.Е. Католиков,
В.И. Петренко, Л.М. Коваль.— М.: Недра, 1977,— 312 с.
194. Транспорт на горных предприятиях / Б.А. Кузнецов, А.А. Ренгевич и др.— М.: Не-
дра, 1969.— 656 с.
195. Федоров М.М. Теор1я и расчеть гармоническаго рудничнаго подъема,— Екатери-
нославъ: Типо-Цинкограф1я, 1914,— 178 с.
196. Федоров М.М. Избранные труды,— Киев: Изд. АН УССР, I960.— Т. 2.— 463 с.
197. Федорова З.М., Хаджиков Р.Н., Качеровский В,— М.: Рудничные подъемные уста-
новки,— М.: Недра, 1966.— 308 с.
198. Шкляренко О.М. Вопросы технической реализации современных систем электро-
приводов переменного тока шахтных подъемных машин и вентиляторов главного проветри-
622
СПИСОК ЛИТЕРАТУРЫ
вания.— В кн.: Машиностроение и техносфера XXI века // Сб. трудов международной науч-
но-технической конференции в г. Севастополь 12—17 сентября 2005 г,— Донецк: ДонНТУ,
2005.- 281 с. (часть III, раздел 12-21).- С. 118-171.
199. Сергиенко С.Н. Новые технические разработки НПФ «МИДИЭЛ» в области шахт-
ного подъема и вентиляторов главного проветривания,— В кн.: Машиностроение и техносфе-
ра XXI века // Сб. трудов международной научно-технической конференции в г. Севастополь
12—17 сентября 2005 г,— Донецк: ДонНТУ, 2005,— 281 с. (часть III, раздел 22).— С. 172—183.
200. Дубинский А.А., Кац А.Б., Рутберг Л.Н. Взрывозащищенное устройство для управ-
ления электроприводом подземных подъемных машин // Взрывозащищенное электрообо-
рудование: Сб. науч. тр. УкрНИИВЭ,— Донецк, 2001.— С. 122—126.
201. Дубинский А.А., Кац А.Б., Рутберг Л.Н., Власов В.Д. Пути совершенствования взры-
возащищенной аппаратуры управления электроприводом // Взрывозащищенное электрообо-
рудование: Сб. науч. тр. УкрНИИВЭ.— Донецк: Юго-Восток, 2002,— С. 134—138.
202. Дубинский А.А., Кац А.Б., Рутберг Л.Н., Марейченко И.В. Интерактивная система
отображения информации о состоянии подземных подъемных машин / Взрывозащищенное
электрооборудование: Сб. науч, трудов УкрНИИВЭ,— Донецк, 2006,— С. 330—335.
203. Машины подъемные шахтные барабанные. Мппини пщйомш шахтш барабаннъ Тех-
нические условия ТУУ 29.2-05763599-033-2001 (Взамен ТУ24.00.5203-83)
204. Сервисен С.В., Когаев В.П., Козлов Л.А., Шнейдерович Р.М. Несущая способность
и расчеты деталей машин,— М.: Машгиз, 1963,— 451 с.
205. Беляев Н.М. Сопротивление материалов,— М.: Наука, 1965. — 856 с.
206. Фесик СП. Справочник по сопротивлению материалов.— Киев: «Бущвельник», 1970.
207. Беренов Д.И. Расчеты деталей на прочность.— Москва-Свердловск: Машгиз, 1969.—
216 с.
208. Ковалевская В.И., Бабак Г.А, Пак В.В. Шахтные центробежные вентиляторы,—
М.: Недра, 1976,— 320 с.
209. Серенсен СВ., Шнейдерович Р.М., Громан М.В. Валы и оси.— М.: Машинострое-
ние, 1970,— 320 с.
210. Давыдов Б.Л. Расчет и конструирование шахтных подъемных машин.— М.: Углетех-
издат, 1949.
211. Федорова З.М. Рудничные подъемные машины,— М.: Углетехиздат, 1958.
212. БровманЯ.В. Надшахтные копры,— М.: Недра, 1961.
213. Шафранов Н.К Технология армирования вертикальных стволов,— М.: Недра, 1984.— 240 с.
214. Патент Украины № 75018.
215. Олаф И., Ройтерс X. Распространение электромагнитных волн под землей // Глю-
кауф.— 1984,- № 23,- С. 15-22.
216. Лангнер В. Радиотелефонная связь на подземных работах // Глюкауф,— 1973.—
№ 16,- С. 37-43.
217. Зюко А.Г. и др. Теория передачи сигналов,— М.: Радио и связь, 1986,— 304 с.
218. Канаев Р.Г. Влияние импульсных помех на разборчивость речи / Сб. трудов: Теория
передачи информации по каналам связи.— Л.: Изд-во ЛЭИС, 1982,— С. 56—62.
219. Ограничитель скорости независимый. НПЦ «Электротехнические комплексы»
НПЦ-12 ОАО «Электропривод».— Москва. Проспект
220. Ермолов И.Н., Ермолов М.И. Ультразвуковой контроль,— М.:НПО ЦНИИТМАШ,
1993,- 199 с.
221. Неразрушающий контроль металлов и изделий. Справочник под редакцией ЕС. Са-
мойловича,— М.: Машиностроение, 1976.— 456 с.
222. Крауткремер Й., Крауткремер Г. Ультразвуковой контроль материалов,— М.: Ма-
шиностроение, 1991.— 752 с.
223. Единые правила безопасности при разработке рудных, нерудных и россыпных мес-
торождений полезных ископаемых подземным способом (ПБ 03-553-03). Серия 03. Вып. 33 /
Колл, авт.— М.: ГУП «НТЦ «Промышленная безопасность», 2003,— 200 с.
224 Вакуленко А.В., Василенцев В.А. (НПФ «МИДИЭЛ»). Доклад «Стволовая сигнали-
зация и связь на шахтном подъеме. Технические требования и алгоритмы реализации. Меж-
дународная научно-технической конференции в г. Севастополь 12—17 сентября 2005 г.— До-
нецк: ДонНТУ, 2005,— 281 с.
СПИСОК ЛИТЕРАТУРЫ
623
225. Дацковский Л.Х.,Роговой В.И. Электропривод шахтных стационарных устано-
вок. Современное состояние и перспективы.— В кн.: «МЬквщомчий науково-техшчний
зб!рник». Випуск 66. «Електромашинобудування та електрообладнання».— Кшв: Техшка,
2006. - С. 94-102.
226. Бирюков А.В., Шухер В.И., Католиков В.Е. и др. Автоматизированный тиристор-
ный электропривод постоянного тока для шахтных подъемных машин // Автоматизирован-
ный электропривод. Сборник научных трудов,— Москва, 2002,— С. 71—89.
227. Дацковский Л.Х., Бирюков А.В., Кузнецов И.С. и др. Безредукторный частотноре-
гулируемый синхронный электропривод производственных механизмов // Автоматизирован-
ный электропривод: Сборник научных трудов.— Москва, 2002,— С. 43—70.
228. Дацковский Л.Х., Бирюков А.В. и др. Частотнорегулируемый синхронный электро-
привод мощностью 5000 кВт вентиляторной установки // Проблемы автоматизированного
электропривода. Теория и практика,— Харьков: Основа, 1997.— С. 190, 191.
229. Кочетков В.Д., Дацковский Л.Х., Бирюков А.В. и др. Системы регулирования элек-
троприводов переменного тока с микропроцессорным управлением // Электротехническая
промышленность. Сер. 08. Электропривод: Обзор, информ,— 1989.— Вып. 26,— С. 1—80.
230. Черменский О.Н., Федотов Н.Н. Подшипники качения: Справочник-каталог.— М.:
Машиностроение, 2003,— 576 с.
231. Методические указания к расчету тормозного момента и проверочному расчету на
нескольжение канатов в режимах предохранительного торможения подъемных машин со
шкивами трения,— Донецк: НИИГМ имени М.М. Федорова, 1989.— 154 с.
232. Временная инструкция по применению средств и методов снижения уровня вибра-
ции стационарных машин шахт и обогатительных фабрик,— Донецк: Институт горной меха-
ники и технической кибернетики им. М.М. Федорова, 1968,— 85 с.
233. Романов В.А. Лазерная система // Уголь Украины.— 2004,— № 5.
Науково-виробниче видання
Бежок Впсгор Романович
Дворшков Володимир 1ванович
Манець 1ван Григорович
Пристром Володимир Адольфович
ШАХТНИЙ шдйом
За загальною редакщею Б.А. Грядущего та В.А. Корсуна
Росшською мовою
Науков! редакторы Р.Д. Расклна, С.В. Лаппо
Компьютерный Ha6ip Н.В. Калййна
Дизайнер Д. О. Мульченко
Техшчний редактор А.К. Миронова
Пщписано до друку 25.08.2007 р.
Формат 60x84/8. Патр офсетний.
Гарштура «Newton». Друк лазерний.
Ум. друк. арк. 72,54. Обл.-вид. арк. 71,33.
Наклад 200 прим. Зам. № 097.
Видавництво та друк ТОВ «Юго-Восток, Лтд».
83055, Донецьк, вул. Щорса, 17.
Тел./факс: (062) 305-50-13; e-mail: vostok@skif.net, vostokl@dc.dn.ua
Свщоцтво про держреестращю:
серы ДК №1224 вщ 10.02.2003 р.
ИНФОРМАЦИЯ ОБ АВТОРАХ И РЕДАКТОРАХ
БЕЖОК Виктор Романович
горный инженер-электромеханик, радиоинженер, технический директор
Гйсударстненккж акционерной компании «Донбассуглеавтоматнка», специалист
в области проектирования, монтажа. наладки и эксплуатации шахтных подъел «их
установок, автор 5 научно-производственных изданий, отраслевой нормативно-
технической документации по проведению наладочных и ремонтных работ
стационарного оборудования и 17 изобретений.
ДВОРНИКОВ Владимир Иванович
горный инженер-механик, специалист в области динамики механических
систем, профессор Донецкого национального технического университета,
доктор технических наук, руководитель научной школы в области шахтного
подъема, автор 250 научно-технических изданий и 70 изобретений.
МАНЕЦ Иван Григорьевич
горный инженер-электромеханик, заведующий отделом интеллектуальной
собственности Научно-исследовательского института горной механики имени
М.М. Федорова, кандидат техни- еских наук, специалист в области технического
обслуживания и ремонта оборудования шахтного подъема, автор 160 научно-
технических изданий и 65 изобретений.
ПРИСТРОМ Владимир Адольфович
горный (шжснер, заведующий отделом шахтного подъема Научно-исследовательс-
кого института горной механики имени М.М. Федорова, кандидат технических
влук, специалист в области технической диагностики и эксплуатации оборудования
подъемных установок, автор 170 научно-технических изданий, отраслевых
нормативных документов и 50 изобретений.
ГРЯДУЩИЙ Борис Абрамович
горный инженер-электромсхпинк. директор Научно-исследовательского института
горной механики имени М.М. Федорова, доктор технических наук, профессор,
научный । \ ( . водитель работ по технологии и безопасности горного производства,
автор 210 научно-технических изданий и 50 изобретений.
КОРСУН Владимир Андреевич
горный инженер-электромеханик, генеральный директор Государственной
акционерной ком сан ни «Донбассутлеавто латикз», специалист в области проекти-
рования, монтажа, наладки и эксплуатации шахтных стационарных установок,
автор книг, отраслевой нормативно-технической документации и изобретений.