


























































































































































































































Автор: Ельцин С.Н. Жуков А.П. Кашин В.М. Рютин В.Б.
Теги: оружие вооружение артиллерийско-техническое имущество бронированные машины и специальные средства транспорта стрелковое оружие личное оружие боеприпасы и боевые отравляющие вещества управляемые и неуправляемые ракеты и реактивные снаряды ракетная техника
ISBN: 978-5-85546-299-9
Год: 2007



Министерство образования и науки Российской Федерации
Балтийский государственный технический университет «Военмех»
Кафедра ракетостроения
С. Н. ЕЛЬЦИН, А.П. ЖУКОВ, В.М. КАШИН,
В. Б. РЮТИН
ОЦЕНКА ЭФФЕКТИВНОСТИ
ПЕРЕНОСНЫХ ЗЕНИТНЫХ
РАКЕТНЫХ КОМПЛЕКСОВ
Под редакцией В.М. Кашина
Санкт Петербург
2007
УДК 623.462.22(011)
093 Г
I' '
i _
Оценка эффективности переносных зенитных
093 ракетных комплексов / С.Н. Ельцин, [и др.]; Под
ред. В.М. Кашина; Балт. гос. техн. ун-т. - СПб.,
2007. - 236 с.+ 3 вкл.
ISBN 978-5-85546-299-9
Излагается разработанный в КБМ (г. Коломна)
подход к оценке эффективности переносного зенитного
ракетного комплекса (ПЗРК) с учетом всех этапов его
боевого функционирования. Подход основан на ис-
пользовании метода статистических испытаний (метода
Монте-Карло).
Для инженерно-технических работников, специа-
лизирующихся в области ракетостроения. Может ис-
пользоваться в учебном процессе при изучении дисци-
плин специальностей «Ракетостроение», «Модерниза-
ция и исследование операций в ОТС».
УДО 623.462.22(011)
Рецензенты: проф. каф. «Системы ракетных и артиллерий-
ских комплексов ВМФ» ВМА им. Н.И. Кузнецова, д-р техн, наук,
проф. Б.И. Марченко^ проф. каф. «Процессы управления» БГТУ,
д-р техн, наук, проф. В.А. Бородавкин
ИИ
006242567
Утверждено
редакционно-издательским
советом университета
ISBN 978-5-85546-299-9
© БГТУ, 2007
© Авторы,2007
ВВЕДЕНИЕ
В предлагаемой монографии представлен подход к составле-
нию математической модели оценки эффективности использова-
ния ПЗРК и построению алгоритма ее реализации при составлении
соответствующего программного продукта для практического ис-
пользования. Математическая модель отражает динамику работы
ПЗРК в пространстве как на отдельных этапах, так и в целом. Па-
раметры, характеризующие выполнение отдельных этапов, в том
числе и тех, на которых ПЗРК испытывает влияние разнообразных
помех, маневр цели и т.п., определяются в текущие моменты вре-
мени состоянием системы «боец - ПЗРК - цель».
В книге рассматриваются два подхода к оценке эффективно-
сти ПЗРК. При первом подробно описываются этапы боевой рабо-
ты комплекса до момента встречи ракеты с целью в условиях по-
меховой обстановки, получение законов распределения координат
точки встречи «ракета-цель» и оценка эффективности работы
комплекса при заданных вероятностях поражения цели при выходе
ракеты в эту точку. При втором подходе рассматриваются все мо-
менты, связанные с взаимодействием ракеты и ее боевого оснаще-
ния с целью, с учетом полученных на первом этапе законов рас-
пределения координат точки встречи.
Представленные математические модели оценки боевой эф-
фективности ПЗРК могут быть использованы для определения ве-
роятности поражения одной ЗУР неманеврирующей цели и цели,
совершающей маневр при стрельбе, как в беспомеховой обстанов-
ке, так и в условиях искусственных и естественных помех с учетом
надежности комплекса и процесса боевой работы на встречных и
догонных курсах.
Модели позволяют оценить вероятность поражения цели за
пролет зоны поражения и до заданного рубежа как без учета, так и
с учетом вероятности обнаружения цели, при наличии в составе
комплекса средств целеуказания и обнаружения и без них.
Книга состоит из четырех разделов и приложения.
3
В первом разделе проводится сравнительный анализ создан-
ных в России ПЗРК и подробно описываются устройство и функ-
ционирование комплекса «Игла-С», данные по типовым целям и
кривые, характеризующие зоны пуска ракеты и поражения целей
при различных условиях стрельбы.
Во втором разделе излагается подход к составлению математи-
ческой модели описания различных целей, (самолета, вертолета,
крылатой ракеты), рассмазриваются факторы, приводящие к пора-
жению цели, и критерии, по которым производится оценка пора-
жаемое™. Вводятся понятия зонных характеристак и зон достовер-
ного поражения цели. Приводятся примеры построения зонных ха-
рактеристик вышеперечисленных целей для различных видов взаи-
модействия ракеты и цели: при прямом попадании в цель, при по-
верхностном взаимодействии, при дистанционном подрыве боевой
часта; рассматриваются все возможные состояния цели после взаи-
модействия. Для оценки уязвимости отсеков цели, поражаемых
пробивным действием осколков, предлагается использовать такие
понятия как уязвимая площадь грани, толщина разнесенных пре-
град, обобщенная характеристика разнесенности и вносимая оско-
лочным полем энергия, необходимая для поражения отсека.
В третьем разделе представлена обобщенная математическая
модель процесса боевого функционирования ПЗРК. Формализо-
ванная схема стрельбы включает содержательное описание воз-
душной цели (ВЦ) как объекта поражения ЗУР, включая парамет-
ры полета цели (высота, курсовой параметр, скорость, тип манев-
ра), возможные способы защиты от огня зенитных средств (типы
применяемых помех, тактика их применения и т.д.), а также мо-
дель характеристак внешних условий (рельеф местности, метеоро-
логические и фоновые условия). Раздел посвящен реализации пер-
вого подхода к оценке боевой эффективности ПЗРК. Дается общее
выражение для определения критерия оценки боевой эффективно-
сти ПЗРК в условиях помех с учетом надежности комплекса и по-
ведения цели.
В четвертом разделе рассматриваются математические моде-
ли, описывающие положение ракеты относительно цели в точке
встречи, позволяющие далее рассчитывать действие поражающих
цель факторов самой ЗУР и ее боевым снаряжением при различ-
ных условиях встречи. Поскольку изложенная модель может быть
применена и к боевому снаряжению ракет ПВО с более мощными
4
боевыми частями, чем применяемая в ракете ПЗРК, то, несмотря
на вывод, сделанный в разд. 2, рассматривается не только механи-
ческое воздействие, но и аэро- и гидроудары, инициирующее воз-
действие и другие явления.
Математические модели, реализованные в соответствующем
программном обеспечении, требуют значительного объема исход-
ной информации, которая получена в результате многочисленных
испытаний. В основу монографии положены результаты много-
летней работы С.И. Петухова, | А.И. Степанова!, Г.Л. Мордачева ,
(3 ЦНИИ МО РФ),_______Н.С.Матюхова и___________И.Л.Косарева
(в/ч 33157), | А.П. ГуцевичаП (ЦНИИХМ), | Е.П. Желязкова |,
Н.Ю. Комракова, Л.В. Тузикова, Ю.А. Федосова, В.Н. Чуваева
(2 ЦНИИ МО РФ), обобщенные в трудах КБМ (г. Коломна). Дер-
жателем программного обеспечения является КБМ.
Апробация моделей в учебном процессе проведена в БГТУ
«Военмех» силами студентов кафедры «Ракетостроение». В каче-
стве примера в Приложении приведен интерфейс программы рас-
чета механического действия осколков, разработанного студентом
Ю. Тарасовым.
Принятые обозначения
АР - авиационная ракета;
БЗ - боевой заряд;
БС - боевое снаряжение ;
БСК - боевые средства комплекса;
БЧ - боевая часть;
БЭД - быстродействующий электродетонатор;
ВВ - взрывчатое вещество;
ВУ - взрывательное устройство;
ВУВ - воздушная ударная волна;
ВЦ - воздушная цель;
ГТД - газотурбинный двигатель;
ДПЛА - дистанционно-пилотируемый летательный аппарат;
ДРЛО - дальнее радиолокационное обнаружение;
ДУ - двигательная установка;
ЖВА - жизненно важный агрегат;
ЗУР - зенитная управляемая ракета;
ИК - инфракрасный;
КБ - крыльевой блок;
5
КВУ - контактное взрывательное устройство;
ККПА - комплект контрольно-проверочной аппаратуры;
КМ - композиционный материал;
КНВ - контактно-неконтактный взрыватель;
КНВУ - контактно-неконтактное взрывательное устройство
КР - крылатая ракета;
ЛА - летательный аппарат;
ЛТЦ - ложная тепловая цель;
МД - маршевый двигатель;
МДВ - метеорологическая дальность видимости;
МО - математическое ожидание;
МУ - магистрали управления;
НВУ - неконтактное взрывательное устройство;
НИП - наземный источник питания;
ОБ - оптический блок;
ОГС - оптическая головка самонаведения;
ОФБЧ - осколочно-фугасная боевая часть;
ПВО - противовоздушная оборона;
ПЗРК - переносной зенитный ракетный комплекс;
ПИМ - предохранительно-исполнительный механизм;
ПКП - подвижный контрольный пункт;
ПКР - противокорабельная ракета;
ПМ - пусковой механизм;
ПО - приборный отсек;
ПРР - противорадиолокационная ракета;
ПУ - предусилитель;
ПЭ - поражающий элемент;
РДТТ - ракетный двигатель на твердом топливе;
СВН - средства воздушного нападения;
СК - следящий координатор;
СКО - среднее квадратическое отклонение;
ССО - система стабилизации оборотов;
СТ - стартовый двигатель;
ТА - тактическая авиация;
ТВД - токовихревой датчик;
ТВД - турбовинтовой двигатель;
ТМС - топливные и масляные системы;
ТРД - турбореактивный двигатель;
ТРДД - турбореактивный двухконтурный двигатель;
6
ТРДДФ - форсажный турбореактивный двухконгурный дви-
гатель;
ТРТ - твердое ракетное топливо;
УАБ - управляемая авиационная бомба;
УД - ударный датчик;
УР СД - управляемая ракета средней дальности;
ФК - форсажная камера;
ФП - фотоприемник;
ЭМ - электрическая машинка.
Основные индексы
- номер агрегата;
i - номер реализации, преграды и т.п.;
j - номер отсека;
г - расстояние;
х,у^~ координаты;
азп - автомат захвата (задержка) и пуска;
ау - аэроудар;
в - встреча, выполнение;
вид - видимость;
вр - врезание;
гп - готовность к пуску;
гу - гидроудар;
дп - дистанционный подрыв;
др - дробление;
з, (зах) - захват, запаздывание;
зад - заданный;
зп - задержка пуска, захват ЛТЦ;
зф - захват фонов;
им - импульс;
кву - контактное взрывательное устройство;
КП (кп, пк) - контактный подрыв;
лг - линия горизонта;
м - метеорологическая дальность;
мд - механическое действие;
н - надежность, навстречу;
7
н-в - навстречу-вдогон;
нв - несущий винт;
нву - неконтактное взрывательное устройство;
нм - начало маневра;
нп - начало постановки помех;
НП (нп, пн) - неконтактный подрыв;
нф - стрельба навстречу при наличии фонов;
об (общ) - обшивка;
обл - облачность;
обн - обнаружение
оп - опознавание;
отн - относительный;
отр - отраженный;
п - положение, поверхность, подрыв, предпусковой этап, пуск;
пб - ближняя граница пуска;
пд - дальняя граница пуска, подрыв дистанционный;
пз - захват в полете, перезахват;
пол - полет;
порб - поражение в ближней зоне;
порд - поражение в дальней зоне;
пп - подрыв поверхностный;
пр - пропуск, пересечение;
р - ракета, рубеж;
с - сопровождение;
са - автосопровождение;
сн - срыв наведения;
т (трт) - топливо;
тв, (в) - стрельба вдогон;
тн, (н) - стрельба навстречу;
тн-в, (н-в) - стрельба навстречу - вдогон;
ф - функционирование, фон;
фд - фугасное действие;
хв - хвостовой винт;
ц - цель;
э (экр) - экран.
8
1. ПЕРЕНОСНОЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС.
УСТРОЙСТВО И ФУНКЦИОНИРОВАНИЕ
1.1. Российские ПЗРК. Общие сведения
ПЗРК предназначен для поражения реактивных, турбовинто-
вых и винтовых самолетов, вертолетов, а также малоразмерных
целей типа беспилотных летательных аппаратов и крылатых ракет
на встречных и догонных курсах в условиях естественных (фоно-
вых) и искусственных помех при визуальной видимости цели.
Основные принципы, определяющие облик комплекса:
• визуальное обнаружение цели;
• применение оптической (тепловой) головки самонаведения
(ОГС);
• реализация принципа “выстрелил - забыл”;
• обеспечение стрельбы с плеча одним стрелком-зенитчиком;
• высокая точность стрельбы;
• обеспечение высокой вероятности поражения широкого
класса целей;
• простота и надежность эксплуатации.
Классическими представителями ПЗРК являются российские
комплексы типа “Стрела-2” и “Игла”. В табл. 1.1 приведены ос-
новные ТТХ российских ПЗРК.
Таблица 1.1
Тактико-технические характеристики российских ПЗРК
Характерис- тики “Стрела-2” (“Стрела-2М”) “Стрела-3” “Игла-1” “Игла” “Игла-С”
1 2 3 4 5 6
Типы пора- жаемых целей Самолеты ТА, вертолеты Самолеты ТА верто- леты Самолеты ТА верто- леты, КР, ДГИ1А Самолеты ТА верто- леты, КР, ДИЛА Самолеты ТА верто- леты, КР, ДПЛА
Высота полета поражаемых целей, м 50-1500 (50-2300) 30-3000 10-3500 10-3500 10-3500
Параметр по- ражаемых целей, м 0-2000 0-3000 0-3000 0-3000 0-3000
9
Окончание табл. 1.1
1 2 3 4 5 6
Наклонная дальность пора- жения цели, м 800-3600 (800-4200) 500-4500 500- 5000 500- 5200 500- 6000
Скорость пора- жаемых целей, м/с: на встречных курсах на догонных курсах До 150 До 220 (260) До 310 До 260 360 До 320 До 400 До 320 До 400 До 320
Масса БСК: в боевом по- ложении, кг в поход ном положении, кг 14.50(15.00) 15.80(16.50) 16.00 18.30 17.95 20.00 18.00 20.15 18.25 (не более 21.0 сПНВ) 20.10
Время перевода БСК из поход- ного в боевое, с Не более 13 Не более 13 Не бо- лее 13 Не бо- лее 13 Не бо- лее 12
Диапазон рабо- чих температур, °C От -38 до +50 От -38 до +50 От -40 до+50 От -44 до +50 От -44 до +50
Калибр ракеты, мм 72.00 72.00 72.10 72.20 72.20
Длина ракеты, мм 1440(1430) 1470 1630 1635 1635
Масса ракеты, кг 9.20 (9.80) 10.30 10.80 10.60 11.70
Тип головки самонаведения Тепловая, следящая, пассивная
Тип боевой части Осколочно-фугасная
Помехозащи- щенность Высокая от фоновых помех Высокая
Тип взрывате- ля Контактный Контактный, за- глубленного дей- ствия Некон- тактно- контакт- ный, заглуб- ленного действия
Масса БЧ, кг 1.18 | | 1.18 1.25 | 1.25 2.50
Время само- ликвидации, с 14.0-17.0 13.0-14.3
Подрыв остат- ков топлива ДУ Нет Предусмотрен
10
Основные особенности российских ПЗРК различных поко-
лений.
Комплексы первого поколения “Стрела-2”, “Стрела-2М”:
• поражение самолетов на догонных курсах на дальностях
3,5-4,2 км и высотах от 0,05 до 2,3 км;
• реализован принцип “выстрелил - забыл”;
• высокая оперативность боевого применения;
• минимальный вес.
Комплексы второго поколения.
“Стрела-3”:
• применено охлаждение фотоприемника в головке самона-
ведения;
• применена защищенность от фоновых помех;
• применен автономный запросчик “свой - чужой”;
• использован автомат оценки достаточности теплового из-
лучения цели;
• повышена эффективность за счет смещения центра груп-
пирования попаданий ракеты в наиболее уязвимые части цели;
• решена задача поражения воздушных целей на встречных
курсах;
• расширена зона поражения до 4,5 км.
“Игла-1”:
• цели - новые самолеты и вертолеты, КР и ДПЛА;
• сведены к минимуму требования к стрелку при пуске раке-
ты за счет применения автомата захвата и пуска, автоматического
введения требуемых углов возвышения и упреждения;
• повышена эффективность за счет смещения точек попада-
ния ракеты в корпус цели;
• осуществляется подрыв остатков топлива маршевого дви-
гателя одновременно с боевой частью;
• повышена работоспособность комплекса после случайных
падений на твердый грунт или пребывания под водой и в любых
климатических условиях.
“Игла”:
• реализована возможность залпового пуска ракет с исполь-
зованием опорно-пусковой установки “Джигит”;
• применена двухспектральная ИК головка самонаведения;
II
• реализовано автоматическое введение углов упреждения и
возвышения при пуске;
• осуществляется селекция цели в условиях постановки ею
тепловых помех;
• реализовано программное обеспечение попадания ракеты в
корпус цели;
• осуществляется блокировка пуска ракеты по «своим це-
лям».
Комплекс третьего поколения “Игла-С”: - достигнуто уве-
личение эффективности поражения воздушных целей и поражаю-
щего действия БЧ за счет:
—увеличения веса БЧ по сравнению с БЧ ЗУР ПЗРК “Игла”;
— заглубленного контактного подрыва боевого снаряжения с
адаптацией уровня заглубления к скорости встречи с целью;
— неконтактного подрыва боевого снаряжения (в случае про-
маха) с оптимизацией выбора момента подрыва;
— детонации остатков топлива ДУ;
- повышения точностных характеристик ракеты;
— увеличения дальности поражаемых целей до 6,0 км за счет
улучшения аэродинамических характеристик ракеты;
— обеспечения стрельбы ночью за счет применения прицела
ночного видения;
— обеспечения поражения воздушных целей, применяющих
одиночные или групповые тепловые помехи;
—возможности поражения малоразмерных целей.
Технические решения, упрощающие порядок боевой рабо-
ты и увеличивающие боевую эффективность комплекса:
• внедрение неконтактного подрыва БЧ, что позволило зна-
чительно увеличить эффективность при стрельбе по малоразмер-
ным целям;
• смещение ракеты при подлете к цели от источника тепло-
вого излучения (двигателя) к центру цели в наиболее уязвимую ее
часть (внедрено, начиная со “Стрелы-3”);
• разворот ракеты в упрежденную точку на начальном уча-
стке полета под действием порохового управляющего двигателя,
что обеспечило автоматическое введение углов упреждения и воз-
вышения (внедрено, начиная с “Иглы-Г’);
12
• подрыв БЧ после заглубления в тело цели, что приводит к
увеличению ущерба от ее подрыва (внедрено, начиная с “Иглы-Г’);
• подрыв остатков твердого ракетного топлива маршевого
двигателя, значительно увеличивающий фугасное действие
(“Игла-Г’);
• оснащение боевых средств ПЗРК запросчиками “свой -
чужой”, что обеспечило блокировку пуска ракеты по своим само-
летам в том случае, если стрелок-зенитчик произвел ошибочное
прицеливание;
• применение прицела ночного видения, позволяющего при
минимальной освещенности обнаруживать и обстреливать воз-
душные цели.
Высокие эксплуатационные качества и безопасность.
Боевые средства комплекса (ракета в пусковой трубе и много-
разовый пусковой механизм) сохраняют свои характеристики и
могут быть использованы:
• после погружения в воду на глубину до 1 м на время до
30 минут;
• после падения с 1 м на грунт или с 2 м на бетон в уку-
порке;
• после воздействия пыли, дождя и других климатических
факторов.
Они безопасны при ударах после падения с 5 м на бетон, в ус-
ловиях электромагнитных полей, после прострела пулями и оскол-
ками, способны выдерживать длительное транспортирование, в
том числе на колесных и гусеничных машинах, десантирование в
парашютных мешках и на парашютных платформах. Комплексы
хорошо зарекомендовали себя при эксплуатации и хранении в раз-
личных климатических зонах земного шара.
Специфические особенности малогабаритных ЗУР ПЗРК типа
“Игла-С”:
• сравнительно малая мощность БЧ, масса которой не пре-
вышает 2-3 кг;
• высокая точность наведения ракеты на цель, когда величи-
на максимального промаха значительно меньше линейных разме-
ров цели;
• высокий удельный вес случаев прямого попадания в круп-
норазмерную цель, при которых не всегда достигается ее пораже-
ние;
13
Рис. 1.1. Боевые средства комплекса «Игла-С»: 1 - ракета; 2 - труба; 3 - пусковой механизм;
4 - наземный источник питания
• обеспечение одновременно с подрывом БЧ подрыва остат-
ков невыгоревшего топлива маршевого заряда ДУ ракеты
(по энергетическим характеристикам эти взрывы соизмеримы);
• отсутствие полной информации об условиях встречи ЗУР
с целью, необходимой для оптимального подрыва БЧ по сигналу
сКНВУ;
• реализация заглубленного или поверхностного подрыва БЧ
в зависимости от условий встречи ЗУР с целью;
• сравнительно небольшое количество ПЭ, обусловленное
ограничением по массе ЗУР и БЧ, и малый вес ПЭ.
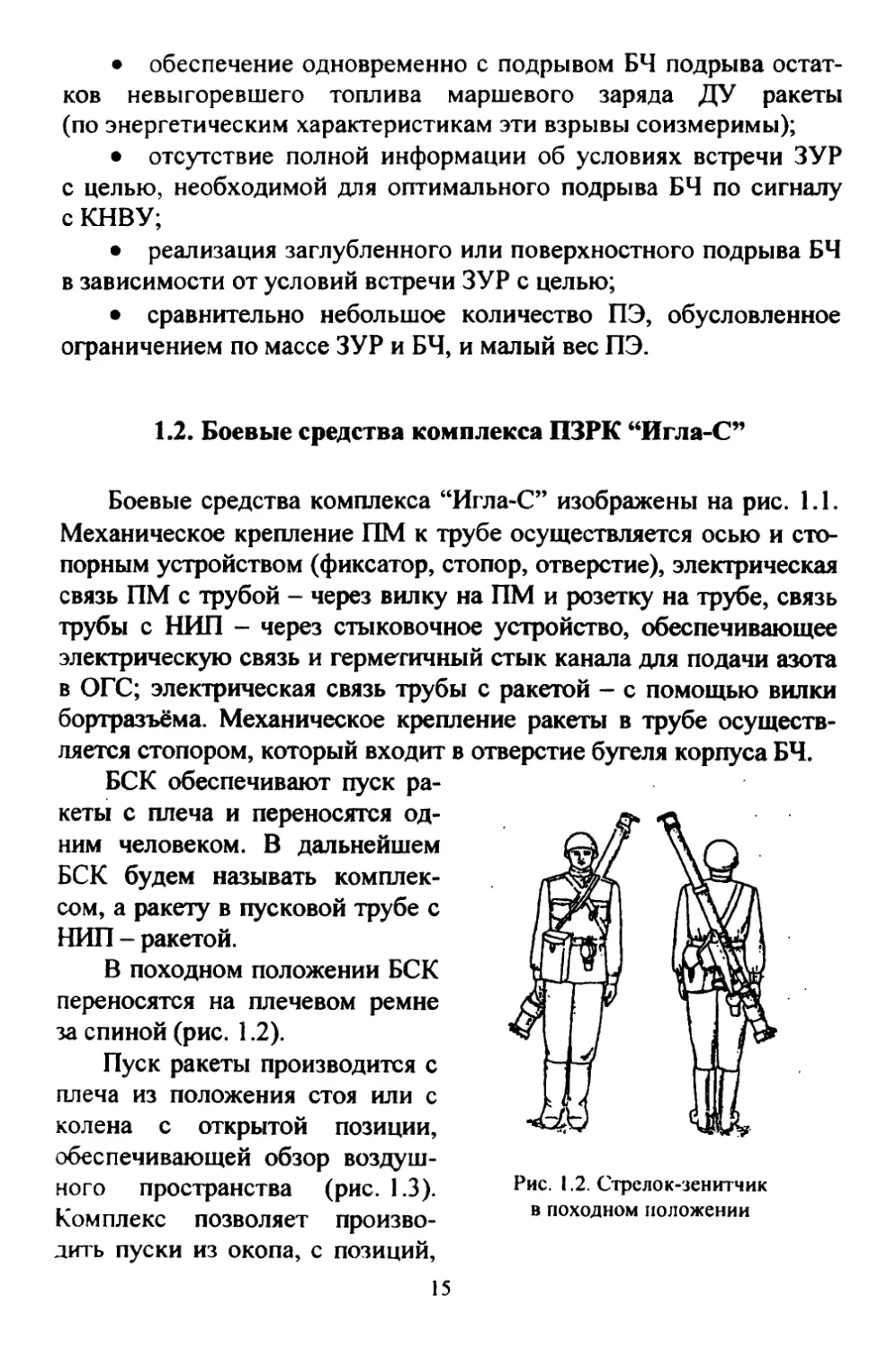
1.2. Боевые средства комплекса ПЗРК “Игла-С”
Рис. 1.2. Стрелок-зенитчик
в походном положении
Боевые средства комплекса “Игла-С” изображены на рис. 1.1.
Механическое крепление ПМ к трубе осуществляется осью и сто-
порным устройством (фиксатор, стопор, отверстие), электрическая
связь ПМ с трубой - через вилку на ПМ и розетку на трубе, связь
трубы с НИП - через стыковочное устройство, обеспечивающее
электрическую связь и герметичный стык канала для подачи азота
в ОГС; электрическая связь трубы с ракетой - с помощью вилки
бортразъёма. Механическое крепление ракеты в трубе осуществ-
ляется стопором, который входит в отверстие бугеля корпуса БЧ.
БСК обеспечивают пуск ра-
кеты с плеча и переносятся од-
ним человеком. В дальнейшем
БСК будем называть комплек-
сом, а ракету в пусковой трубе с
НИП - ракетой.
В походном положении БСК
переносятся на плечевом ремне
за спиной (рис. 1.2).
Пуск ракеты производится с
плеча из положения стоя или с
колена с открытой позиции,
обеспечивающей обзор воздуш-
ного пространства (рис. 1.3).
Комплекс позволяет произво-
дить пуски из окопа, с позиций,
15
занимаемых на воде и болотистой местности, с подвижных объек-
тов, стоящих или движущихся по ровной местности со скоростью
не более 20 км/ч.
Рис. 1.3. Стрелок-зенитчик в боевом положении
Особенности устройства ракеты.
В ракете (рис. 1.4) используется одноканальная система управ-
ления, сущность которой заключается в том, что ракете для созда-
ния управляющей силы в любом направлении пространства с по-
мощью одной пары рулей задаётся принудительное вращение с
частотой (15±5) Гц относительно продольной оси.
Рис. 1.4. Ракета: 1 - оптическая головка; 2 - приборный отсек; 3 - боевая
часть; 4 - маршевый двигатель; 5 - стартовый двиютель; 6 - крыльевой блок;
А - аэродинамический насадок
16
Управление осуществляется так, чтобы за каждый оборот ра-
кеты равнодействующая управляющей силы была направлена в
требуемом направлении. Сигналы управления с ОГС на частоте
вращения ракеты вокруг её продольной оси поступают по одному
информационному каналу на электрическую машинку (ЭМ), обес-
печивая управление ракетой в двух взаимноперпендикулярных
плоскостях, чем реализуется выбранный метод наведения - про-
порциональное сближение (рис. 1.5). При этом методе управляю-
щий сигнал независимо от вида стрельбы (навстречу, вдогон) про-
порционален абсолютной угловой скорости вращения линии визи-
рования «ракета-цель».
Рис. 1.5. Траектории движения ракеты на цель по методу про-
порционального сближения: а - стрельба вдогон, б - стрельба
навстречу; 1 - линия визирования «ракета-цель» в момент
пуска ракеты, 2 - участок полета в упрежденную точку,
3 - участок вывода в упрежденную точку, 4 - траектория
цели, 5 - точка встречи
17
Сущность метода заключается в сведении к нулю угловой
скорости линии визирования, что обеспечивает встречу ракеты
с целью в упреждённой точке. Фаза и амплитуда сигнала, пос-
тупающие на пропорциональный рулевой привод, определя-
ют изменение направления и интенсивность разворота ракеты
в полёте.
Длительность сигнала с выхода ФП-1 зависит от углового рас-
согласования между осью гироскопа и направлением на цель, а
частота следования импульсов сигнала определяется частотой
вращения ротора гироскопа. Вырабатываемый в электронном бло-
ке сигнал ошибки (сигнал коррекции) определяется угловым рас-
согласованием между осью гироскопа и направлением на цель,
обеспечивая тем самым режим автоматического слежения за це-
лью.
Сигнал коррекции, пропорциональный угловой скорости ли-
нии визирования «ракета-цель», поступает в автопилот, где после
дополнительной фильтрации перемножается с сигналом с опорно-
го датчика положения на суммарной частоте вращения ротора ги-
роскопа и ракеты.
После фильтрации сигнала с фазового детектора сигнал на
частоте вращения ракеты, пропорциональный угловой скорости
линии визирования, поступает на ЭМ, которая обеспечивает
управление ракетой.
Сигнал управления, поступающий с ОГС на ЭМ, содержит
сигнал управления по пеленгу на начальном участке полёта, сиг-
нал слежения в ближней зоне и смещения, сигнал с датчика угло-
вой скорости ракеты.
Оптическая головка самонаведения предназначена для за-
хвата и автоматического сопровождения цели по ее тепловому из-
лучению, для измерения угловой скорости линии визирования ра-
кета-цель и формирования управляющего сигнала.
Основные технические характеристики ОГС: поле зре-
ния 1°; максимальный угол пеленга ±40°; максимальная угловая
скорость слежения 12%.
ОГС представляет собой гироскопическое устройство, кото-
рое непрерывно совмещает оптическую ось объектива координа-
тора, воспринимающего ИК-излучение от цели, с направлением на
эту цель. Элементы ОГС размешаются в корпусе, имеющем об-
текатель, выполненный из оптической керамики.
18
Функционально ОГС состоит из следящего координатора
(СК) и электронного блока. Следящий координатор (рис. 1.6)
предназначен для непрерывного автоматического слежения за це-
лью, формирования сигнала коррекции для совмещения оптиче-
ской оси координатора с линией визирования «ракета-цель» и
выдачи управляющего сигнала, пропорционального угловой ско-
Рис. 1.6. Структурная схема следящего координатора
СК состоит из гироскопа, координатора, элементы которого
(объектив, приемники основного ФП1 и вспомогательного ФП2
каналов ИК-диапазонов излучения и два предусилителя) установ-
лены на роторе гироскопа и вращаются с частотой его вращения,
селектора, электронного блока, системы коррекции гироскопа и
ССО. Оптическая ось объектива совпадает с осью собственного
вращения ротора гироскопа. Гироскоп может отклоняться от
продольной оси ОГС на угол пеленга (угол между осью гироско-
па и продольной осью ракеты).
Оптическая схема координатора (рис. 1.7) состоит из обтека-
теля 7, главного зеркала 7, линзы 5, контрзеркала 2, спектродели-
тельного фильтра 4. Тепловые излучения ИК-диапазонов от цели и
помехи, пройдя через обтекатель, отразившись от главного зерка-
ла. проходят через линзу и, отразившись от контрзеркала, попада-
ют на спектроделительный фильтр, который пропускает излучение
в спектральной области основного канала и отражает в спектраль-
19
ной области вспомогательного. В фокусах оптической системы
обоих каналов радиально относительно оптической оси располо-
жены фотоприёмники основного 6 и вспомогательного 3 каналов,
на которые поступают сигналы от цели и помехи соответственно.
Рис. 1.7. Оптическая схема координатора: 1 - обтекатель, 2 - контрзеркало,
3 - ФП2, 4 ~ спектроделительный фильтр, 5 - линза, 6 - ФП1, 7 - главное
зеркало
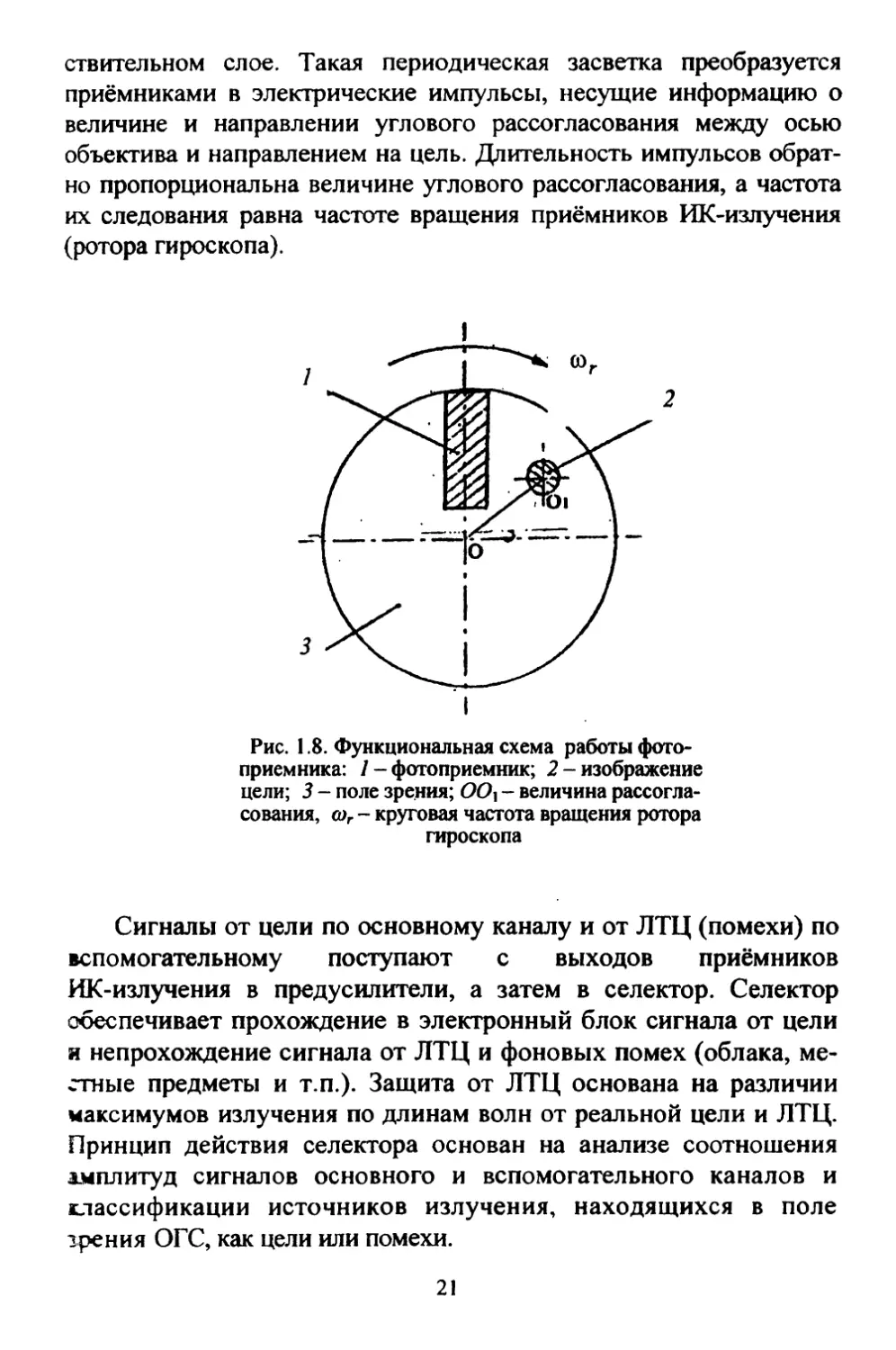
На рис. 1.8 изображены фотоприёмник, размещённый на оси
гироскопа, имеющий прямоугольную форму и вращающийся с час-
тотой (Ог, а также цель и поле зрения. При вращении ротора гиро-
скопа происходит обзор пространства в пределах поля зрения объ-
ектива с помощью приёмников ИК-диапазонов излучения. Изобра-
жение цели расположено в фокусе оптической системы. Если на-
правление на цель совпадает с оптической осью объектива, изобра-
жение фокусируется в центре поля зрения. При появлении углового
рассогласования ОО\ между осью объектива и направлением на
цель изображение цели смещается относительно центра поля зре-
ния. При вращении ротора гироскопа приёмники ИК-излучения за-
свечиваются на время прохождения изображения цели на фоточув-
20
ствительном слое. Такая периодическая засветка преобразуется
приёмниками в электрические импульсы, несущие информацию о
величине и направлении углового рассогласования между осью
объектива и направлением на цель. Длительность импульсов обрат-
но пропорциональна величине углового рассогласования, а частота
их следования равна частоте вращения приёмников ИК-излучения
(ротора гироскопа).
Рис. 1.8. Функциональная схема работы фото-
приемника: 7 - фотоприемник; 2 - изображение
цели; 3 - поле зрения; ОО} - величина рассогла-
сования, а)г - круговая частота вращения ротора
гироскопа
Сигналы от цели по основному каналу и от ЛТЦ (помехи) по
вспомогательному поступают с выходов приёмников
ИК-излучения в предусилители, а затем в селектор. Селектор
обеспечивает прохождение в электронный блок сигнала от цели
и непрохождение сигнала от ЛТЦ и фоновых помех (облака, ме-
стные предметы и т.п.). Защита от ЛТЦ основана на различии
максимумов излучения по длинам волн от реальной цели и ЛТЦ.
Принцип действия селектора основан на анализе соотношения
амплитуд сигналов основного и вспомогательного каналов и
классификации источников излучения, находящихся в поле
зрения ОГС, как цели или помехи.
21
Сигнал от цели с селектора поступает в электронный блок.
Управляющий сигнал с электронного блока поступает в обмотки
системы коррекции гироскопа, в автопилот и далее, после преоб-
разования, используется на частоте вращения ракеты для управле-
ния рулями.
Электромагнитное поле катушек коррекции, взаимодействуя с
полем магнита ротора гироскопа, вынуждает перемещаться его ось
в сторону уменьшения рассогласования между оптической осью
объектива и направлением на цель. Таким образом осуществляется
слежение ОГС за целью.
Для совмещения оптической оси объектива координатора с
визирной осью прицельного устройства предусмотрена система
арретирования гироскопа. В этом случае при наличии цели в поле
зрения прицельного устройства цель будет находиться в поле зре-
ния ОГС. Для поддержания скорости вращения ротора гироскопа
служит система стабилизации оборотов. Она построена по прин-
ципу следящей системы и обеспечивает стабильность скорости
вращения ротора в пространстве. Для обеспечения необходимой
чувствительности приёмника основного канала ИК-диапазона из-
лучения в ОГС установлена система охлаждения, использующая в
качестве хладагента азот, находящийся под давлением в баллоне
НИЛ.
При захвате цели ОГС формирует сигнал, который преобразу-
ется в ПМ в звуковой (телефон на ПМ) и световой (лампа на тру-
бе) сигналы для стрелка-зенитчика.
Автопилот формирует управляющий сигнал на разворот раке-
ты на начальном участке траектории для автоматического обеспе-
чения необходимых углов возвышения и упреждения1; преобразу-
ет сигнал коррекции с СК в сигнал управления на частоте враще-
ния ракеты.
Исполнительным элементом следящего координатора цели
является трёхстепеный гироскоп в карданном подвесе, позволяю-
щем ему отклоняться на ±40°.
Приборный отсек с установленными в нем элементами изо-
бражен на рис. 1.9. Электрическая машина создает управляющие
1 Угол возвышения - угол между горизонтом и продольной осью ракеты в
вертикальной плоскости; Угол упреждения - угол между вектором скорости ра-
кеты и линией визирования ракета-цель.
22
усилия на аэродинамических рулях. Электропитание ЭМ осущест
вляется от одной из двух бортовых батарей.
Рис. 1.9. Приборный сисек.: 7 - электрическая машина;
2 - управляющий двигатель; 3 - бортовая батарея;
4 - замыкатель; 5 - усилитель привода; 6 - блок пластин;
7 - розетка бортового разъема; 8 - блок розеток; 9 - датчик
угловых скоростей; 10 - контрольный разъем; А- аэродинами-
ческий руль; Б - дестабилизатор
Управляющий двигатель 2 обеспечивает разворот ракеты на
начальном участке траектории полета, когда аэродинамические
рули ввиду малой скорости ракеты малоэффективны, с помощью
двух газовых каналов в ПО.
Бортовые батареи 3 в количестве двух штук предназначены
для питания бортовой аппаратуры постоянным электрическим то-
ком. Одна батарея обеспечивает электропитанием ОГС и взрыва-
тель БЧ, другая - ЭМ.
Замыкатель 4 - одна из ступеней предохранения ракеты. При
нахождении ракеты в трубе, когда сложены аэродинамические ру-
ли А. цепь питания КНВ разорвана. При вылете ракеты из трубы и
раскрытии рулей замыкатель замыкает цепь питания КНВ.
23
Блок розеток 8 служит для электрического соединения ракеты
с трубой (при помощи розетки бортового разъёма 7), элементов
приборного отсека, ОГС с приборным отсеком, БЧ с приборным
отсеком.
Контрольный разъём 10 служит для контроля функционирова-
ния ракеты с использованием ПКП (ККПА). Блок пластин 6 обес-
печивает раскрытие и стопорение двух рулей А и двух дестабили-
заторов Б, Датчик угловых скоростей 9 предназначен для форми-
рования электрического сигнала, пропорционального угловой ско-
рости колебаний ракеты относительно её поперечных осей, и ис-
пользуется для демпфирования угловых колебаний ракеты в полё-
те. При размещении ракеты в трубе рули А и дестабилизаторы Б
сложены, раскрытие их осуществляется при выходе ракеты из
трубы.
Дестабилизаторы, установленные под углом к продольной оси
ракеты, обеспечивают требуемую устойчивость ракеты и создают
дополнительный крутящий момент на её вращение.
Боевая часть. БЧ (рис. 1.10) предназначена для нанесения
воздушной цели повреждений, приводящих к её уничтожению или
невозможности выполнения ею боевой задачи. В зависимости от
условий встречи ракеты с целью реализуется неконтактный или
контактный режим подрыва.
БЧ совместно с детонационноспособным топливом маршевого
двигателя, оставшимся к моменту встречи ракеты с целью, состав-
ляют боевое снаряжение ракеты.
Поражающими факторами боевого снаряжения являются фу-
гасное действие продуктов взрыва БЧ и остатков топлива МД, а
также осколочное действие элементов, образующихся при дробле-
нии корпусов БЧ и МД.
БЧ состоит из контактно-неконтактного взрывателя 2, боевого
заряда 3, быстродействующего электродетонатора 4 и выполнена в
виде отдельного несущего отсека ракеты. Для стопорения ракеты в
трубе служит бугель А.
КНВ предназначен для выдачи исполнительной коман-
ды на подрыв БЭД при встрече ракеты с целью, по истече-
нии заданного времени самоликвидации, при пролёте ракеты
мимо цели на расстоянии до 1,2 м (гарантированное срабатыва-
ние).
24
Рис. 1.10. Боевая часть: 1 - оптический блок, 2 - неконтактно-
контактный взрыватель, 3 - боевой заряд, 4 - быстродействую-
щий электродетонатор, 5 - ударный датчик, 6 - токовихревой
датчик, 7 - электронный блок, 8 - окно передающего устройст-
ва, 9 - окно приемного устройства, А - бугель
КНВ не срабатывает от подстилающей поверхности (земля,
вода, кустарник и т.п.) при пролете над ней на расстоянии 4,5 м
fгарантированное несрабатывание) и выше.
КНВ имеет две ступени предохранения, обеспечивающих
безопасность эксплуатации комплекса при техническом обслужи-
вании, транспортировании, хранении и пуске ракеты. Первая сту-
пень снимается от электрического сигнала при выходе ракеты из
пусковой трубы в момент раскрытия рулей, вторая - на траектории
полёта под действием продольных и угловых ускорений.
КНВ состоит из оптического блока 7, ударного датчика 5, дат-
чика токовихревого 6 и электронного блока 7 (см. рис. 1.10). ОБ
предназначен для формирования сигнала фиксации цели в пределах
заданной величины промаха и выдачи управляющего сигнала на
электронный блок КНВ. Электронный блок КНВ по сигналу ОБ
обеспечивает выдачу исполнительной команды на БЭД.
ОБ является приемо-передающим устройством, формирую-
щим двенадцатилучевую диаграмму чувствительности, располо-
женную по окружности в экваториальной плоскости и направлен-
ию под углом 80° к продольной оси ракеты по направлению ее
движения. Такое количество лучей обеспечивает срабатывание
25
КНВ с заданной вероятностью при встрече ракеты с малоразмер-
ной целью с промахами не более заданного.
Приемо-передающее устройство состоит из шести приемо-
передающих каналов, каждый из которых создает по две диаграммы
направленности. При этом приемные и передающие каналы ОБ
ориентированы в пространстве таким образом, что каждой зонди-
рующей диаграмме соответствует своя приемная диаграмма.
БЗ предназначен для создания заданного поля поражения, воз-
действующего на цель после получения от БЭД инициирующего
импульса, а также подрыва несгоревшей части заряда двигатель-
ной установки.
После старта ракеты, при ее удалении на расстояние от 100 до
400 м от среза пусковой трубы, срабатывает электронный ключ и
электрическое питание подается на всю схему КНВ. КНВ взводит-
ся и готов к действию.
ОБ начинает зондировать пространство импульсным излуче-
нием. При поступлении на вход фотоприёмников отраженных от
цели оптических сигналов, совпадающих по времени и длительно-
сти с соответствующими излучаемыми лазерными импульсами,
цель считается захваченной и по истечении времени задержки
КНВ выдает команду на подрыв БЭД, если до этого не происходит
контакт ракеты с целью.
Для согласования области срабатывания КНВ с полем пора-
жения БЧ в КНВ имеется набор временных задержек, отсчитывае-
мых от первого отраженного от цели оптического сигнала. Вели-
чина временной задержки определяется полетным заданием, вво-
димым оператором перед пуском ракеты, и зависит от вида
стрельбы (навстречу или вдогон), размера цели (крупная или мел-
кая), а также сигналом с оптической головки самонаведения, про-
порциональным углу пеленга и поступающим в КНВ в процессе
полета ракеты. Если до истечения времени задержки поступает
сигнал с ТВД при отсутствии сигнала с ударного датчика, проис-
ходит немедленное срабатывание БЧ (режим рикошета).
При попадании ракеты в цель по сочетанию сигналов от УД и
ТВД КНВ формирует адаптируемую к скорости проникания в цель
временную задержку на подрыв БЭД обеспечивая заглубленный
подрыв БЧ. В случае промаха ракеты по цели, превышающего ра-
диус чувствительности ОБ, через время от 13 до 14,3 с с момента
старта ракеты по команде КНВ происходит самоликвидация БЧ.
26
Боевая часть ракеты ПЗРК относится к классу боеприпасов с
произвольным дроблением корпуса. В корпусе находится пример-
но 1,5 кг ВВ в тротиловом эквиваленте, обеспечивающего разлет
примерно 500 полуприготовленных осколков со скоростью около
2000 м/с.
Маршевый двигатель (рис. 1.11) предназначен для разгона
ракеты до заданной скорости при работе на первом режиме и под-
держания её на маршевом режиме полёта.
Двигатель двухрежимный, твердотопливный, однокамерный.
Заряд 5 вкладной, выполнен из детонационноспособного топлива.
Внутреннее теплозащитное покрытие скреплено с камерой 3 двига-
теля. В сопловом блоке 8 маршевого двигателя установлен лучевой
воспламенитель 9 замедленного действия, обеспечивающий сраба-
тывание воспламенителя б маршевого двигателя на безопасном для
стрелка-зенитчика расстоянии - не менее 5,5 м. Лучевой воспламе-
нитель задействуется газами стартового двигателя, проходящими по
газоходной трубке. Необходимое время задержки включения вос-
пламенителя маршевого двигателя осуществляется за счёт времени
сгорания пиротехнического замедлителя, входящего в состав луче-
вого воспламенителя.
Стартовый двигатель (рис. 1.12) предназначен для обеспе-
чения старта ракеты из трубы и придания ей на начальном участке
траектории необходимых осевой и угловой скоростей.
Двигатель твердотопливный, заряд 3 вкладной. Сопловой блок
5 имеет пять сопел, обеспечивающих вращение ракеты при старте.
Электровоспламенитель 4, от которого срабатывает воспламени-
тель 2 двигателя, соединен с пусковой трубой контактной связью
6. Стартовый двигатель стыкуется с сопловым блоком маршевого
двигателя, при этом газоходная трубка 1 надевается на корпус лу-
чевого воспламенителя замедленного действия. По окончании ра-
боты стартового двигателя его корпус улавливается в трубе и ра-
кета вылетает из трубы без него.
Крыльевой блок (рис. 1.13) предназначен для аэродинами-
ческой стабилизации ракеты в полёте, создания подъёмной
силы и поддержания требуемой скорости вращения ракеты на
траектории.
Крыльевой блок крепится на сопловом блоке маршевого дви-
гателя. Раскрытие крыльев происходит после вылета вращающей-
ся ракеты из трубы под действием центробежных сил.
27
Рис. 1.11. Маршевый двигатель: 1 - дно; 2 - уплотнительные кольца; 3 - камера; 4 - теплопроводящий
элемент; 5 - маршевый заряд; 6 - воспламенитель; 7 - заглушка; 8 - сопловой блок; 9 - лучевой воспламенитель;
А - резьбовое отверстие
Рис. 1.12. Стартовый двигатель: 1 - газоход:
ная труба; 2 - воспламенитель; 3 - заряд;
4 - электровоспламенитель; 5 - сопловой
блок; 6 - контактная связь
Рис. 1.13. Крыльевой блок:/ - пластина;
2 - вкладыш; 3 - корпус; 4 - ось; 5 - пружина;
6 - стопор; 7 - винт; 8 - вкладыш
29
Для поддержания требуемой скорости вращения ракеты в
полете крылья развернуты относительно её продольной оси на
определенный угол.
Труба предназначена для обеспечения прицельного и
безопасного пуска ракеты, а также для улавливания старто-
вого двигателя. Она является направляющим устройством
при пуске и одновременно служит контейнером при эксплуа-тации
ракеты.
Основные технические характеристики трубы: максимальное
количество пусков из одной трубы 5, длина трубы
1713 мм.
Наземный источник питания одноразового действия
(рис. 1.14) предназначен для снабжения хладагентом системы
охлаждения ОГС и обеспечения электроэнергией БСК в период
подготовки ракеты к пуску.
Наземный источник питания состоит из баллона 2, напол-
ненного сжатым азотом, и батареи 1 с твердым электролитом.
Баллон предназначен для длительного хранения сжатого азота под
давлением и представляет собой металлическую шаровую
ёмкость. НИП приводится в действие путём прокола мембраны 7
бойком 9 при его перемещении.
Время приведения батареи в рабочее состояние при
подключённой нагрузке составляет: 1 с - при температуре
окружающей среды от -20 до 50°С, 1,3 с - при темпе-
ратуре окружающей среды от -20 до -44°С. Масса
НИП 1...1,2 кг.
1.3. Пусковой механизм
Пусковой механизм (рис. 1.15) предназначен для подготовки к
пуску и пуска ракеты.
Основные технические характеристики ПМ: число пус-
ков одним ПМ не менее 750; вес 1,9 кг; габариты
368x81x184 мм.
Телефон 8 предназначен для подачи звуковой информации о
захвате цели ОГС, пусковой крючок 2 - для замыкания электри-
ческих цепей контактной группы 1.
30
ОТКР
- после использования
Рис. 1.14. Наземный источник питания: 1 - батарея; 2 - баллон; 3 - стержень; 4 - разъем; 5 - контакты;
6 - мембранный узел; 7 - мембрана; 8 - штуцер; 9 - боек; 10 - колпак; 11 - колпачок; В - канал
Рис. 1.15. Пусковой механизм: 1 - контактная группа; 2 - пусковой крючок; 3,11- ось; 4 - корпус; 5 - электронный блок;
6 -вилка; 7- крышка; 8 -телефон; 9 - рычаг сброса; 10,12,14 - пружина; 13 -фиксатор; 15 - стопор; 16- кнопка СЕ-
ЛЕКТОР; Г - место пломбирования; Д - индекс изделия; Е - заводской номер изделия; Ж - прорезь; И - отверстие; К - зуб
Электронный блок 5 ПМ обеспечивает:
• разгон ротора гироскопа ОГС;
• автоматическое арретирование и разарретирование гиро-
скопа;
• обработке и оценку сигналов информации, поступающих с
ОГС;
• формирование сигналов звуковой и световой информации
при наличии цели в поле зрения ОГС;
• подачу напряжения на стопор и бортовые батареи.
ПМ может работать как в автоматическом, так и в ручном
режимах, переключение которых осуществляется пусковым
крючком. Для работы ПМ в режиме “Автомат” необходимо за
время менее 0,6 с перевести пусковой крючок из исходного
положения до упора. При наличии цели в поле зрения ОГС
появляются сигналы звуковой и световой информации. В течение
0,8 с после разарретирования ротора гироскопа ОГС осущест-
вляет поэтапный анализ сигнала от цели. При положительных
результатах анализа напряжение с платы мощного интерфейса
подаётся на бортовые батареи и стопор трубы, после его сраба-
тывания - на стартовый и управляющий двигатели.
Если величина излучения от цели недостаточна для слежения
ОГС, то ротор гироскопа периодически арретируется, лампа
световой информации на трубе мигает, а телефон ПМ издаёт
прерывистые звуковые сигналы.
Если угловая скорость линии визирования «ракета-цель»
больше 12 %, ПМ задерживает пуск ракеты до тех пор, пока
скорость не уменьшится до 12 %.
Для обеспечения работы ПМ в режиме “Ручной” необходимо
перевести пусковой крючок из исходного положения в среднее,
задержать его в этом положении не менее 0,6 с, а затем перевести
в положение до упора.
1.4. Взаимодействие БСК при пуске и частей ракеты в полёте
После обнаружения цели и принятия решения на её обстрел
стрелок-зенитчик приводит в действие НИП.
Нахождение цели в зоне пуска определяется по её располо-
жению в мушке прицела, а окончательно - по наличию устой-
33
чивых сигналов информации (звукового и светового) после
перевода пускового крючка до упора или в среднее положение.
После приведения в действие НИП сжатый газ поступает в
систему охлаждения ОГС и в канал накола батареи НИП. Батарея
НИП срабатывает, и напряжение с неё поступает в блок датчиков
трубы, электронный блок ПМ и ОГС. Ротор гироскопа разго-
няется и арретируется, при этом происходит согласование опти-
ческой оси координатора ОГС с визирной осью прицела пусковой
трубы, что обеспечивает нахождение цели в поле зрения ОГС при
прицеливании. При прицеливании с ОГС на ПМ поступают
сигналы от цели (при наличии её в поле зрения ОГС) и от фона.
При входе цели в зону пуска пуск ракеты по цели возможен в
автоматическом (“Автомат”) или ручном (“Ручной”) режимах.
В режиме “Автомат” стрелок-зенитчик за время не более 0,6 с
переводит пусковой крючок из исходного положения в положение
до упора. При этом ротор гироскопа ОГС разарретируется,
появляются сигналы звуковой и (или) световой информации.
Пуск в режиме “Автомат” возможен, если в течение 0,8 с
после нажатия на пусковой крючок до упора будут выполняться
следующие условия:
• сигнал от цели должен быть достаточен для слежения ОГС
за целью;
• угловая скорость линии визирования «ракета-цель» не
более 12 %;
• угол между оптической осью объектива координатора и
прицела трубы меньше 2°.
При выполнении всех перечисленных условий, о чём свиде-
тельствует наличие устойчивых сигналов звуковой и световой
информации, напряжение с платы мощного интерфейса поступает
на воспламенитель бортовых батарей и через 0,66 с - на
электровоспламенители стопора ракеты. При срабатывании
воспламенителя бортовых батарей последние задействуются и
выдают электропитание на элементы ракеты, а при срабатывании
электровоспламенителя стопора трубы осуществляется механи-
ческое расстопорение ракеты в трубе и замыкание запальных
цепей управляющего и стартового двигателей. Стартовый дви-
гатель при срабатывании сообщает ракете необходимую скорость
вылета из трубы, вращение относительно продольной оси и
воспламеняет лучевой воспламенитель замедленного действия.
34
Стартовый двигатель заканчивает свою работу в трубе и
задерживается в ней с помощью улавливающего устройства.
Ракета вылетает из трубы, при этом раскрываются рули,
дестабилизаторы, крылья.
После срабатывания стартового двигателя, вылета ракеты из
трубы и удаления её на безопасное для стрелка-зенитчика
расстояние (не менее 5,5 м) от лучевого воспламенителя замед-
ленного действия загорается воспламенитель и заряд маршевого
двигателя. Маршевый двигатель разгоняет ракету до маршевой
скорости и поддерживает её в полёте, при этом вращение ракеты
на траектории обеспечивается за счёт наклона дестабилизаторов и
крыльев.
После вылета ракеты из трубы управляющий двигатель
осуществляет разворот ракеты на начальном участке траектории
по командам ОГС, что создает необходимые углы упреждения и
возвышения.
В процессе слежения ракеты за целью в полёте ОГС формирует
командный сигнал, который поступает на ЭМ, для управления
ракетой.
Метод наведения обеспечивает попадание ракеты в зону
наиболее тепло-контрастных элементов конструкции цели. Для
повышения эффективности поражения при пусках по реактивным
самолётам в системе управления ракеты предусмотрена схема
смещения центра группирования попаданий в направлении полёта
самолёта, т.е. в его фюзеляж.
При попадании ракеты в цель или в случае промаха не более
1,2 м по команде КНВ срабатывает БЧ. При пролёте ракеты на
расстоянии более 1,2 м от цели через время от 13 до 14,3с
происходит самоликвидация ракеты по команде КНВ.
1.5. Цели ПЗРК и их характеристики
Как указывалось ранее, ПЗРК предназначен для поражения ре-
активных, турбовинтовых и винтовых самолетов, вертолетов, а
также малоразмерных целей типа беспилотных летательных аппа-
ратов и крылатых ракет. В табл. 1.2-1.4 приведены основные ха-
рактеристики известных представителей перечисленных целей, по
которым может работать ПЗРК.
35
Характеристики самолетов ТА
Таблица 1.2
Характеристики Марки
F-15E “Игл” F-I6A “Файтинг Фолкон” F/A-18A/C “Хорнет” F/A-22A “Рэптор” А-10А “Танддэ- бО1ГГ F-117A “Найггхоук” “Рафаль” “Си Харриер”
Страна- разработчик США США США США США США Франция Велико- британия
Тип Ударный истребитель для завоева- ния превос- ходства в воздухе Многоце- левой истреби- тель Тактический истребитель- бомбардиров- щик палубного и сухопутного базирования Много- функцио- нальный истребитель Штурмовик и передовой воздушный пост наведе- ния Малозамет- ный ударный самолет Многоцеле- вой истреби- тель Палубный истребитель- разведчик КВВП
Экипаж 2 1 1 1 1 1 1 I
Двигатели, тяга, кгс ТРДЦФ 2x13210 ТРДЦФ 1x12100 ТРДЦФ 2x8035 ТРДЦФ 2x15890 ТРДД 2x4115 ТРДД 2x4900 ТРДЦФ 2x7445 ТРДД 1x9770
Максимальная скорость, км/ч: на высоте у земли 2655 1480 2125 1300 1915 1350 2500 720 620 1040 1910 1390 1190 1150
Практический потолок, м 18300 15240 15240 18000- 20000 13500 11765 15250 15300
Размеры, м: длина высота размах крыла плошадь крыла, м2 19.43 5 63 13.05 56.48 14.52 5.01 10.01 28.87 17.07 4.66 11.43 37.16 18.92 5.00 13.56 78.00 16.26 4.47 17.53 47.01 20.08 3.78 13.20 105.90 15.27 5.34 10.80 45.70 14.20 3.70 7.70 18 60
Материалы конструкции, %: А1 сплавы Ti сплавы Fe (сталь) Композиционные материалы (КМ)* 37.3 26.6 5.5 2.2 78.3 4.2 3.7 4.2 49.6 12.9 16.7 9.9 33.0 24.0 5.0 35.0 1309 кг Броня КМ
♦ Нетрадиционные материалы - 50%, в т.н. 25% - углепластик
Таблица IJ
Характеристики вертолетов
Характеристики Марки
А. 129 “Мангу- ста” AH-1G “Хью Кобра” AH-1W “Супер Кобра” АН-64А “Апач” Ан.Мк.7 “Линкс” UH-60L “Блэк Хоук” RAH- 66А “Команч” SA.342M “Газель” OH-58D “Кайова”
Страна- разработчик Италия США США США Велико- британия, Франция США США Франция, Велико- британия США
Тип Легкий противо- танковый или разве- дыватель- ный Огневой поддерж- ки и борь- бы с тан- ками Непосред- ственной огневой поддерж- ки и борь- бы с тан- ками Боевой противо- танковый Транс- портный и противо- танковый Много- целевой Разведы- вательно- ударный с возмож- ностью ведения воздуш- ного боя Легкий многоце- левой Легкий разведы- вательно- ударный
Экипаж 2 2 2 2 2 2-3 2 2 2
Двигатели: мощность, л.с. гтд 2x880 гтд 1x1400 гтд 2x1625 гтд 2x1800 гтд 2x1135 гтд 2x1800 гтд 2x1430 гтд 1x858 гтд 1x650
Скорость, км/ч: максимальная крейсерская 295 250 270 227 282 (352) 278 (365) 296 310 255 295 237 328 (352) 302 280 260 250 222
Потолок, м: динамический статический 6500 3140 3480 4270 915 6400 3505 5000 3230 5835 3170 - 4300 3040 5400 3050
Характеристики
А. 129 “Мангу- ста” AH-1G “Хью Кобра” AH-1W “Супер Кобра” . АН-64А “Апач”
Размеры, м: диаметр несу- щего винта 11.90 13.41 14.63 14.63
длина с вра- щающимися винтами 14.29 16.11 17.68 17.60
) длина фюзеля- 3 жа 12.27 13.59 13.87 14.97
высота с вра- щающимися винтами 4.77 4.09 4.32 4.66
ширина фюзе- ляжа 1.25 0.99 -1.50 2.80
ометаемая не- сущим винтом площадям2 111.22 141.26 168.11 168.11
Окончание табл. 1.3
Марки
Ан.Мк.7 “Линкс” UH-60L “Блэк Хоук” RAH- 66А “Команч” SA.342M “Газель” OH-58D “Кайова”
12.80 16.36 11.90 10.50 10.67
15.16 19.76 14.28 11.97 12.58
1
13.17 15.26 13.22 9.53 0.44
3.54 5.13 3.37 3.19 3.93
2.94 2.20 2.15 2.04 1.97
128.71 210.15 111.22 86.59 89.38
Характеристики беспилотных ЛА
Г а б л и ц а 1.4
Характеристи- ки Марки
“Мейверик” AGM-65 АДОЖН “Харм” AGM- 88А “Тэсит Рейн- боу” AGM-136\ “Гар- пун” AGM- 84А “Экзо- сет” АМ.39 “Уол- лай” ALCM AGM- 86С Тома- хок BGM- 109С BGM- 34С ‘ Акил а”
Страна- разработчик США США США США Франция США США США США США
Тип УР сд ПРР ПРР ПКР ПКР УАБ КР КР ДПЛА ДПЛА
Максимальная скорость, км/ч 780-2160 900- 2250 Дозвук. 1000- 1100 1080 700-900 900 До 950 900 180
Максимальная даль- ность стрельбы, км 8-25 25 600 110-130 50-70 40-50 500 - - -
Размеры, м: длина з диаметр 5 размах крыла 2.500 0.300 0.700 3.960 0.254 1.130 2.540 0.600 3.850 0.340 0.900 5.600 0.350 1.080 3.900 0.460 1.500 6.350 0.580 3.700 5.560 0.517 2.630 8.500 0.74x1.1 4.200 1.800 0.320 3.700
Масса ракеты, кг 210-307 361 500-575 530 670 1100 1360 1225
Система наве- дения Телевизи- онная, тепловизи- онная, полуактив- ная лазер- ная Пас. р/л Инерц.-ь +пас. р/л Инерц.+ актив- ная РЛГСН Инерц.+ актив- ная РЛГСН ТВ Инерц.+ 4-система коррек- ции тра- ектории по конкр. рельефу места. Инерц.4- 4- кор- рекция по циф- ровой карге местно- сти - -
Боевая часть Масса, кг ОФБЧ, кумулят. БЧ 57-136 ОФБЧ 66 ОФБЧ 45 Фугасно- проник. 220 Проник. 165 Фугасн. 907 Фугасн., проник., кассета. 450 Монобл., (кассета.) 454 (1.5x168) - -
Масса ВВ, кг — 25-36 — 95 70 450 — — - —
Рис. 1.16. Пространствен-
ное представление зоны
пуска ракеты
1.6. Зоны пуска и поражения
Зона пуска представляет собой часть пространства, при нахож-
дении цели в котором должен произ-
водиться пуск ракеты (рис. 1.16). Зоной
поражения называется часть простран-
ства, в пределах которой возможна
встреча ракеты с целью, если пуск раке-
ты осуществлён в зоне пуска.
Плоскостные зоны пуска при пусках
ракет по различным типам целей при
температуре 15 °C изображены на
рис. 1.17-1.20.
Пространственные зоны пуска и
поражения при стрельбе на встречных
курсах представляются горизонталь-
ными плоскостями для нескольких высот.
На рисунках для упрощения изображены зоны пуска ракеты и
поражения цели только для “положительного” параметра Р. Для
“отрицательного” они располагаются симметрично оси ОХ.
Зоны строятся в системе координат с началом в точке старта
ракеты. Ближняя граница зоны пуска и поражения в основном
ограничивается на встречном курсе поперечной перегрузкой ракеты,
на догонном курсе - максимальной угловой скоростью слежения, при
которой ПМ разрешает пуск, и поперечной перегрузкой ракеты.
Дальняя граница зоны пуска и поражения в основном
ограничивается:
• на встречном курсе - мощностью излучения цели, при кото-
рой ОГС надёжно функционирует в момент старта ракеты. Величи-
на этого ограничения зависит от типа, параметров движения цели и
чувствительности ОГС;
• на догонном курсе - дальностью управляемого полёта раке-
ты, ограниченной ресурсом работы двигательной установки, а также
минимально допустимой скоростью встречи ракеты с целью, обес-
печивающей необходимую перегрузку для срабатывания
взрывателя.
Кроме того, на границы зон пуска влияют максимально допус-
тимый угол пеленга ОГС и максимально допустимый угол пуска.
Максимальный угол пуска ракеты в вертикальной шюскости принят
равным 70° исходя из физиологических возможностей стрелка-
зенитчика.
40
Рис. 1.17. Типовые зоны пуска ракеты и зоны поражения
целей, летящих со скоростью 100 м/с в вертикальной плос-
кости при параметре Р=0
4000 3000 2000 1000 0 1000 3000 3000 4000 5000 X М
б
Рис. 1.18. Типовые зоны пуска ракеты и зоны поражения
целей, летящих в горизонтальной плоскости со скоро-
стью 100 м/с, а - на высоте - 10 м; б- 2000 м:
--------- - зоны пуска,.... - зоны поражения
41
Рис. 1.19. Типовые зоны пуска ракеты и зоны поражения целей, летящих
со скоростью Уц=310 м/с, в вертикальной плоскости при параметре Р=0
Рис. 1.20. Типовые зоны пуска ракеты и зоны поражения целей,
летящих в горизонтальной плоскости со скоростьюЗОО м/с,
а - на высоте - 10 м; б~2000 м:
---- - зоны пуска,.... - зоны поражения
42
2. ОБОБЩЕННАЯ МОДЕЛЬ ОЦЕНКИ ЭФФЕКТИВНОСТИ
ПЗРК
2.1. Математическое представление цели
Любая воздушная цель (ВЦ) может быть представлена как со-
вокупность отсеков (агрегатов), при воздействии ракеты по кото-
рым она может быть поражена. Внешние обводы и геометрические
размеры ВЦ (рис. 2.1, 2.2) - одни из основных факторов, опреде-
ляющих эффективность воздействия ракеты по ВЦ.
Анализ конструктивных особенностей типовых целей показы-
вает, что поверхности их отдельных элементов могут быть с дос-
таточной для практики точностью описаны уравнениями цен-
тральных поверхностей второго порядка (эллипсоид, эллиптиче-
ский конус - рис. 2.3) с наложенными на них ограничениями в ви-
де плоскостей, перпендикулярных их главным осям.
Рис. 2.2. Функциональные элементы цели: / - фюзеляж; 2,3 - консоли
(корневые части крыльев); 4,5 - консоли стабилизаторов; 7,8- двигатели;
6,9 - киль; 10,11 - диффузоры; 12J3 - концевые части крыльев; 14 - кабина
43
Рис. 2.2. Боевое вооружение цели
b
Рис. 2.3. Характерные размеры эллипсоида и конуса
44
В канонической системе координат уравнение эллипсоида
имеет вид
х2 у2 Z2
"Т + 7Т + ~2
а Ь с
уравнение эллиптического конуса -
2 2 2
X у Z
—т* + —v + —т
2 » 2 2
а Ь с
(2.1)
(2.2)
где а,Ь,с- полуоси эллипсоида и конуса (для конуса а - расстоя-
ние от вершины, на котором замеряются величины b и с).
Каноническая СК 0XYZ имеет начало в геометрическом цен-
тре эллипсоида или в вершине конуса. Оси образуют правую трой-
ку векторов и совпадают с главными направлениями поверхности
(рис. 2.4).
Рис. 2.4. Взаимное положение целевой и канонической
систем координат
45
Поскольку оси канонической СК могут быть ориенти-
рованы произвольно относительно СК, связанной с целью
(начало координат произвольное, ось Хи параллельна оси
цели, ось Yu перпендикулярна плоскости крыльев самолета
или несущего винта вертолета, ось Zu составляет с осями Хи, Yu
правую или левую тройку векторов), то для приведения
уравнений (2.1) и (2.2) к целевой системе координат необхо-
димо:
• повернуть систему OXYZ на некоторые углы а,Р,у, опре-
деляющие взаимную ориентацию целевой и канонической систем
координат;
• перенести начало СК OXYZ в начало системы ОХа Уц Z„ на
величины t,m,n (см. рис. 2.4).
Угол а - угол между осью и проекцией оси Ха на плоскость
XaOZa; положительное направление угла - от оси Хц против часо-
вой стрелки, если смотреть с конца оси Уц; р - угол между плос-
костью XuOZa и осью X; положительное направление - от плоско-
сти XuOZu против часовой стрелки, если смотреть с конца оси Z„;
у - угол между плоскостью YOX канонической СК и вертикальной
плоскостью, проходящей через ось ОХ, положительное
направление - против часовой стрелки, если смотреть с конца
оси Хи. £,т,п — проекции радиуса-вектора р, проходящего
из начала целевой СК в точку начала канонической СК, на оси
Уц, Z„.
При этом осуществляется переход к общему виду уравнения
2-го порядка в целевой системе координат:
«1 jx2 + а22у2 + Дзз?2 + 2п12ху + 2al3xz + 2a2iyz +
+ 2ai4x + 2а24у + 2a34z + а44 = О,
где ац,а22’—’а44 _ коэффициенты аппроксимируемых поверхно-
стей:
=(}-2е)Ь2с2£2 + а2с2£2у +а2с2£2;
2а}2 -2^\-2z)b2c2f. хтх +a2c2tymy + a2b2£zmz] ;
46
«14 = -2 [(1 - 2e)/>2c2 W2 + т£хтх + ntxnx + a2c2W2 +
+ m(m +nt nv + a2b2t£2z +mtzm, +nt,n7 1 ;
<з44 = -2[(1 - 2e)62c2 (t2£2 + m2m2 + w2w2 + 2£m£xmx + 2£n£xnx +
+ 2mnmxnx) + a2c2[t2t2y +m2m2 +n2n2 + 2£m£ ym + 2Myny +
•2mnm n )+a2b2(£2£2 +m2m2 +n2n2 +2£mtzm, +2Mznz +
+ 2mnmznz)+(e-l)a2b2c2 J,
где tx,£y,£z,mx,my,mz,nx,ny,nz - направляющие косинусы
между осями целевой и канонической систем координат;
е - признак аппроксимирующей поверхности: в = 0 - для эллип-
соида, е = 1 - для эллиптического конуса.
Найденную аппроксимирующую поверхность необходимо
сравнить с реальной и оценить точность их совпадения. Для
этого используется метод контрольных сечений. Аппрокси-
мирующую поверхность (эллипсоид или конус) рассекают рядом
плоскостей. Контуры сечений сравнивают с реальными изображе-
ниями отсеков (их проекциями на координатные плоскости целе-
вой системы) и вносят корректуру до получения требуемой точно-
сти.
Агрегаты цели аппроксимируются параллелепипедами с за-
данными координатами центров и размерами граней. Некоторые
агрегаты, например боевые части, могут описываться поверхно-
стями 2-го порядка.
В качестве примера в табл. 2.1-2.9 приведены значения коэф-
фициентов аппроксимирующих поверхности для таких целей, как
самолет, вертолет, крылатая ракета. Каждому функциональному
отсеку самолета, вертолета и других целей присваивается свой ин-
декс:
j = 1 - фюзеляж;
j = 2 - правая консоль крыла (корневая часть);
47
j = 3 - левая консоль крыла (корневая часть);
7 = 4 - правая консоль стабилизатора;
7 = 5 - левая консоль стабилизатора;
7=6 - правый киль;
7 = 7 - правый двигатель;
7=8 - левый двигатель;
7=9- левый киль;
7 = 10 - хвостовая балка вертолета;
7 = 11 - килевая балка вертолета;
7 = 12 - концевая часть правого крыла;
7’ = 13 - концевая часть левого крыла;
7 = 14 - кабина;
7=15 - свободный номер;
7 = 16 - несущий винт вертолета;
7 = 17 - хвостовой винт вертолета;
7 = 181
j = 19 - свободные номера.
7 = 20]
При этом несущий и хвостовой винты вертолета аппрок-
симируются эллипсоидами, включающими в себя любое
положение лопастей (центр эллипсоида совпадает с цент-
ром вращения, а две его полуоси равны длине лопас-
тей). Свободные номера предусмотрены для отсеков, для
аппроксимации которых требуется несколько поверхностей
(например, фюзеляж).
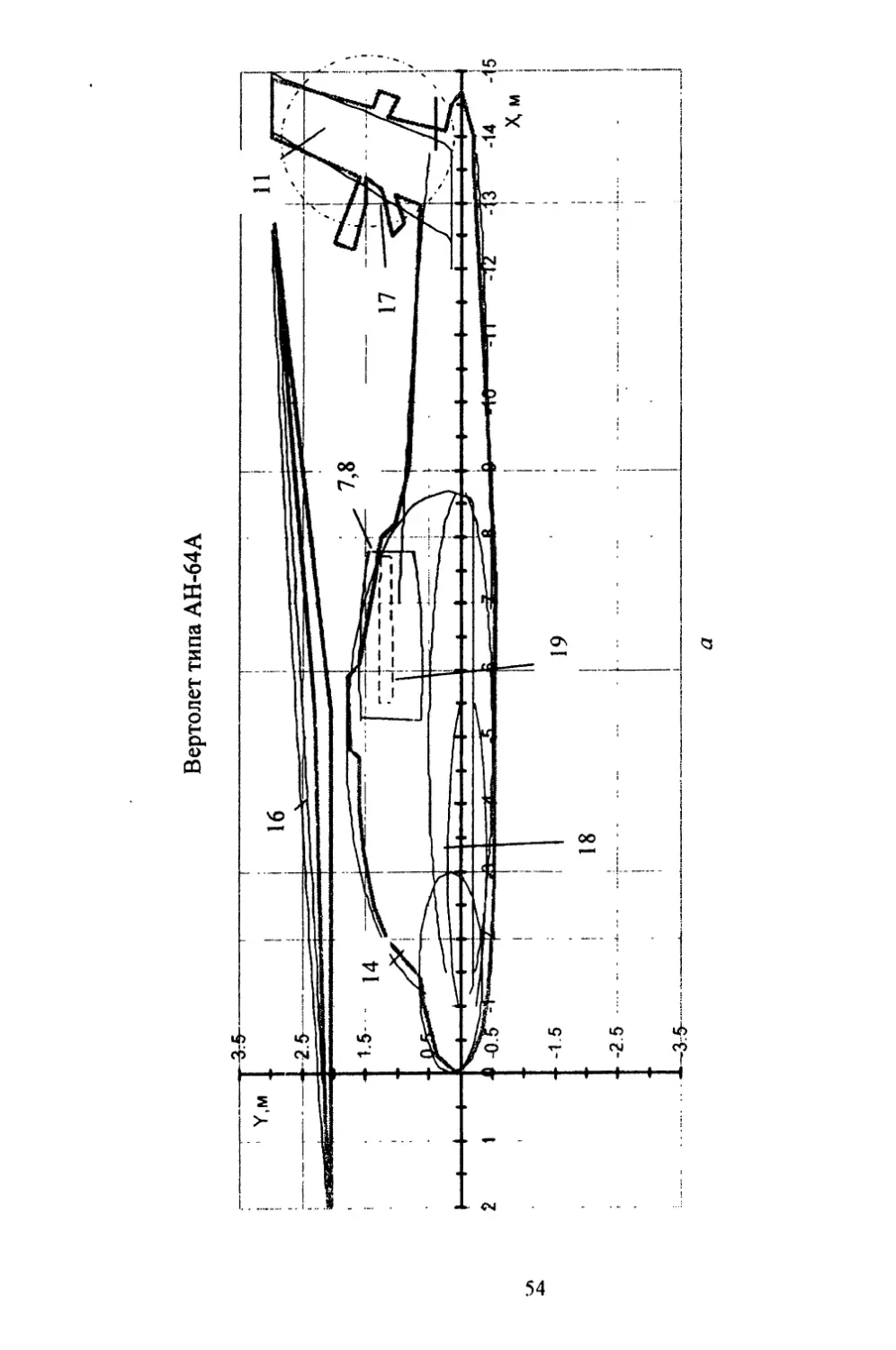
Примеры описания контуров самолета типа F-16, верто-
лета типа АН-64А; крылатой ракеты типа AGM-86C ALCM
представлены соответственно на рис. 2.5-2.7 и в табл. 2.1-2.9.
На рисунках размытыми линиями представлены исходные
контуры, сплошными - контуры аппроксимирующих поверхно-
стей.
48
Y. м
гЧ—
Самолет типа "F-161
а
Рис. 2.5. Сравнение исходной поверхности контура самолета и аппроксимирующей: а - вид сбоку; б - вид в плане
Таблица 2.1
Отсеки самолета типа F-16, аппроксимированные поверхностями второго порядка
Номер отсека j Отсек Ограничения, наложенные на аппроксимирующие поверхности
хн, м лк, м Ун,М Ук, м zH, м ZK, м
1 Носовая часть фюзеляжа -6.0 100 -100 100 -100 100
2 Крыло правое -100 100 -100 100 0.9 4.65
3 Крыло левое -100 100 -100 100 -4.65 -0.9
4 Стабилизатор правый -100 100 -100 100 0.65 2.7
5 Стабилизатор левый -100 100 -100 100 -2.7 -0.65
6 Киль -100 100 0.3 3.25 -100 100
15 Кабина -100 100 0 100 -100 100
7 Двигатель -14.5 -4.85 -100 100 -100 100
9 Основание киля -100 100 0.5 1.0 -100 100
18 Наплыв хвостовой части фюзеляжа -13.5 -10.2 -100 100 -100 100
19 Носовой отсек-«игла» -1.0 100 -100 100 -100 100
12 Фальшкиль правый -100 100 -100 -0.75 -100 100
13 Фальшкиль левый -100 100 -100 -0.75 -100 100
14 Наплыв центральной части фюзеляжа -10.2 100 -100 100 -100 100
Таблица 2.2
Исходные данные для определения коэффициентов аппроксимации
Номер отсека j а, м Ь, м с, м /, м т, м п, м а, град р, град у, град 8
1 4.25 0.45 0.75 -5.2 0.4 0 0 -6 0 0
2 5.0 0.15 1.9 -10.7 0 5.6 69 0 0 1
3 5.0 0.15 1.9 -10.7 0 -5.6 -69 0 0 1
4 2.1 0.05 0.75 -14.3 0 3.9 71 0 0 1
5 2.1 0.05 0.75 -14.3 0 -3.9 -71 0 0 1
6 5.45 1.1 0.1 -15.6 5.2 0 0 -57 0 1
15 2.0 0.7 0.5 -5.2 0.35 0 0 6 0 0
7 9.5 0.8 0.8 -6.0 -0.1 0 0 0 0 0
9 2.5 1.25 0.1 -14.4 1.75 0 0 -40 0 1
18 10.0 0.2 1.0 -11.5 0 0 0 0 0 0
19 1.0 0.05 0.05 -1.0 -0.05 0 0 0 0 0
12 0.7 0.4 0.05 -11.55 -0.75 0.5 0 0 0 0
13 0.7 0.4 0.05 -11.55 -0.75 -0.5 0 0 0 0
14 4.0 0.2 1.6 -9.0 0 0 0 0 0 0
Г а б л и ц a 2.3
Коэффициенты поверхностей второго порядка,
аппроксимирующих отсеки цели
Номер отсека ./ all all аЗЗ 2^12 2а13 2д23 2л14 2л24 2д34 д44
1 0.223673 10.05039 3.657656 2.088731 0 0 1.490711 2.82109 0 1.254199
2 0.479828 90.25 0.001447 0 0.430737 0 7.856183 0 4.592676 29.17179
3 0.479828 90.25 0.001447 0 -0.43074 0 7.856183 0 -4.59268 29.17109
4 0.009707 2.480625 -8.9Е-05 0 0.007653 0 0.247782 0 0.110136 1.556874
5 0.009707 2.480625 -8.9Е-05 0 -0.00765 0 0.247782 0 -0.11014 1.556874
6 0.205328 0.079597 35.94003 0.2824 0 0 4.937768 3.577636 0 29.21274
15 0.132088 0.990412 1.96 -0.18244 0 0 1.437567 -1.64199 0 3.535022
7 0.4096 57.76 57.76 0 0 0 4.9152 11.552 0 -21.6432
9 0.016654 0.030221 9.765625 0.076938 0 0 0.345003 1.002136 0 1.607151
18 0.04 100 4 0 0 0 0.92 0 0 1.29
19 0.000006 0.0025 0.0025 0 0 0 0.000013 0.00025 0 0.000006
12 0.0004 0.001225 0.0784 0 0 0 0.00924 0.001838 -0.0784 0.073454
13 0.0004 0.001225 0.0784 0 0 0 0.00924 0.001838 0.0784 0.073454
14 0.1024 40.96 0.64 0 0 0 1.8432 0 0 6.656
Вертолет типа АН-64А
а
б
Рис. 2.6. Сравнение исходной поверхности контура вертолета
и аппроксимирующей: а - вид сбоку; б - вид в плане
Таблица 2.4
Отсеки вертолета типа АН-64А, аппроксимированные
кривыми второго порядка
Номер отсека, 7 Отсек Ограничения, наложенные на аппроксимирующие поверхности
-*н.м *к,м Ун.м Хк.м ^н.м ZK.M
1 Фюзеляж -8.75 -1.50 -100.00 100.00 -100.00 100.00
2 Крыло правое -100.00 100.00 -100.00 100.00 0.20 2.75
3 Крыло левое -100.00 100.00 -100.00 100.00 -2.75 -0.20
4 Стабилизатор правый -100.00 100.00 -100.00 100.00 0.00 1.75
5 Стабилизатор левый -100.00 100.00 -100.00 100.00 -1.75 0.00
7 Двигатель правый -7.80 -5.25 -100.00 100.00 -100.00 100.00
8 Двигатель левый -7.80 -5.25 -100.00 100.00 -100.00 100.00
10 Хвостовая балка -13.74 -7.00 -100.00 100.00 -100.00 100.00
11 Килевая балка -100.00 100.00 0.15 3.00 -100.00 100.00
14 Кабина -100.00 100.00 -0.20 100.00 -100.00 100.00
15 Носовой отсек -100.00 100.00 -100.00 100.00 -100.00 100.00
18 Радионавигационный
отсек -100.00 -1.00 -100.00 100.00 -100.00 100.00
16 Несущий винт -100.00 100.00 -100.00 100.00 -100.00 100.00
17 Рулевой винт -100.00 100.00 -100.00 100.00 -100.00 100.00
19 Кессоны крепления дви- гателей -7.70 -5.50 -100.00 100.00 -100.00 100.00
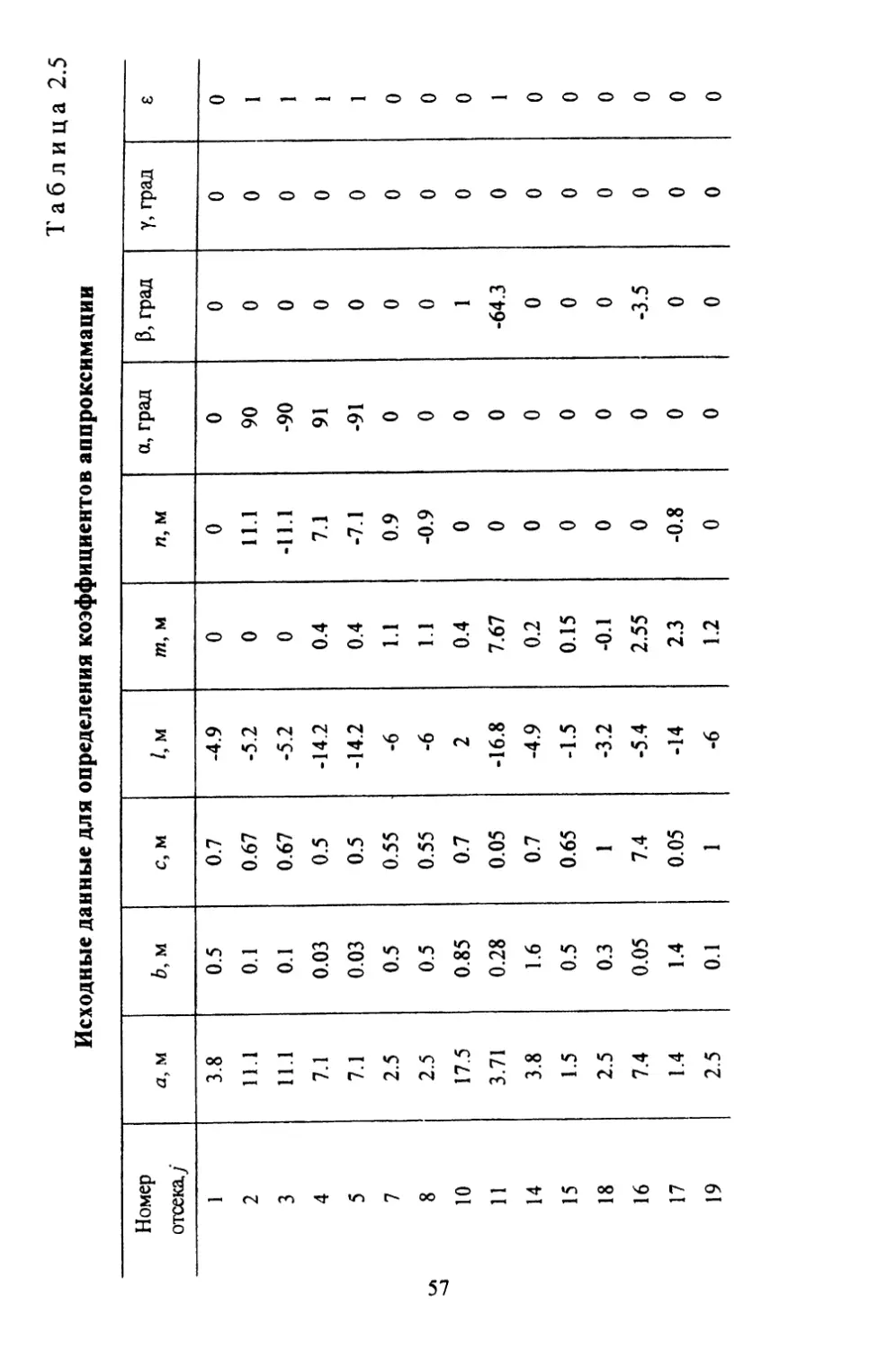
Таблица 2.5
Исходные данные для определения коэффициентов аппроксимации
Номер отсека, j а, м Ь, м с, м Z, м т, м п, м а, град ₽, град Y, град 8
1 3.8 0.5 0.7 -4.9 0 0 0 0 0 0
2 11.1 0.1 0.67 -5.2 0 11.1 90 0 0 1
3 11.1 0.1 0.67 -5.2 0 -11.1 -90 0 0 1
4 7.1 0.03 0.5 -14.2 0.4 7.1 91 0 0 1
5 7.1 0.03 0.5 -14.2 0.4 -7.1 -91 0 0 1
7 2.5 0.5 0.55 -6 1.1 0.9 0 0 0 0
8 2.5 0.5 0.55 -6 1.1 -0.9 0 0 0 0
10 17.5 0.85 0.7 2 0.4 0 0 1 0 0
11 3.71 0.28 0.05 -16.8 7.67 0 0 -64.3 0 1
14 3.8 1.6 0.7 -4.9 0.2 0 0 0 0 0
15 1.5 0.5 0.65 -1.5 0.15 0 0 0 0 0
18 2.5 0.3 1 -3.2 -0.1 0 0 0 0 0
16 7.4 0.05 7.4 -5.4 2.55 0 0 -3.5 0 0
17 1.4 1.4 0.05 -14 2.3 -0.8 0 0 0 0
19 2.5 0.1 1 -6 1.2 0 0 0 0 0
Таблица 2.6
Коэффициенты поверхностей второго порядка, аппроксимирующих отсеки цели
Номер отсека, у ап а22 а33 2^12 2ап 2а23 2aM 2^24 2а34 а44
1 0.1225 7.0756 3.61 0 0 0 1.2005 0 0 1.172325
2 1.2321 55.30898 -0.00449 0 0.000003 0 12.8138 0 0.099674 32.7627
3 1.2321 55.30898 -0.00449 0 -ЗЕ-06 0 12.8138 0 -0.09967 32.7627
4 0.045355 12.6025 -0.00021 0 -0.00159 0 1.299382 -10.082 -0.0196 11.31157
5 0.045355 12.6025 -0.00021 0 0.001591 0 1.299382 -10.082 0.019596 11.31157
7 0.075625 1.890625 1.5625 0 0 0 0.9075 -4.15938 -2.8125 5.803125
8 0.075625 1.890625 1.5625 0 0 0 0.9075 -4.15938 2.8125 5.803125
10 0.399624 150.0169 221.2656 -5.22475 0 0 0.491402 -109.564 0 -86.9988
11 0.027902 0.006312 1.079105 0.027046 0 0 0.730074 0.357538 0 4.761461
14 1.2544 7.0756 36.9664 0 0 0 12.29312 -2.83024 0 12.28763
15 0.105625 0.950625 0.5625 0 0 0 0.316875 -0.28519 0 0.021389
18 0.09 6.25 0.5625 0 0 0 0.576 1.25 0 0.4216
16 11.31214 2987.482 0.1369 365.4275 0 0 -809.669 -13262.9 0 14716.53
17 0.0049 0.0049 3.8416 0 0 0 0.1372 -0.02254 6.14656 3.435341
19 0.01 6.25 0.0625 0 0 0 0.12 -15 0 9.297501
LA
\D
KP AGM-86C ALCM
a
б
Рис. 2.7. Сравнение исходной поверхности контура КР и аппроксимирующей: а - вид сбоку; б - вид в плане
Г а б л и ц а 2.7
Отсеки крылатой ракеты типа AGM-86C ALCM,
аппроксимированные кривыми второго порядка
Номер отсека, J Отсек Ограничения, наложенные на аппроксимирующие поверхности
ХН,М *к,м >н,м •Ук,м ZH,M ^к,м
1 Фюзеляж -5.80 -1.00 -100.00 100.00 -100.00 100.00
2 Крыло правое -100.00 100.00 -100.00 100.00 0.12 1.80
3 Крыло левое -100.00 100.00 -100.00 100.00 -1.80 -0.12
4 Стабилизатор правый -100.00 100.00 -100.00 100.00 0.12 0.72
5 Стабилизатор левый -100.00 100.00 -100.00 100.00 -0.72 -0.12
6 Киль -100.00 100.00 0.30 0.90 -100.00 100.00
7 Сопловой отсек -6.30 -5.70 -100.00 100.00 -100.00 100.00
15 Носовой отсек -1.50 100.00 -100.00 100.00 -100.00 100.00
18 Воздухозаборник -6.30 -4.60 -100.00 100.00 -100.00 100.00
19 Хвостовой отсек -6.30 -5.00 -100.00 100.00 -100.00 100.00
Таблица 2.8
Исходные данные для определения коэффициентов аппроксимации
Номер отсека, j а, м 6, м с, м /, м ти, м Л, м а, град р, град у, град е
1 5.00 0.30 0.30 -3.00 0.00 0.00 0.00 0.00 0.00 0
2 4.00 0.05 0.20 -4.85 -0.25 3.85 65.00 0.00 0.00 1
3 4.00 0.05 0.20 -4.85 -0.25 -3.85 -65.00 0.00 0.00 1
4 1.30 0.05 0.20 -6.00 -0.25 1.30 78.00 0.00 0.00 1
' 5 1.30 0.05 0.20 -6.00 -0.25 -1.30 -78.00 0.00 0.00 1
6 0.80 0.20 0.20 -6.00 1.25 0.00 0.00 -75.00 0.00 1
7 1.00 0.28 0.28 -5.50 0.00 0.00 0.00 0.00 0.00 0
15 1.20 0.28 0.29 -1.20 0.00 0.00 0.00 0.00 0.00 0
18 0.80 0.28 0.25 -5.20 0.15 0.00 0.00 15.00 0.00 0
19 1.20 0.25 0.25 -5.20 0.15 0.00 0.00 0.00 0.00 0
Т а б л и ц a 2.9
Коэффициенты поверхностей второго порядка, аппроксимирующих
отсеки цели
Номер отсека, j *11 а22 °33 2<jI2 2а13 2й23 20)4 2*24 2а34 *44
1 0.008100 2.250000 2.250000 0.000000 0.000000 0.000000 0.048600 0.000000 0.000000 -0.129600
2 0.032838 0.640000 0.007062 0.000000 0.030718 0.000000 0.200261 0.320000 0.094606 0.343517
3 0.032838 0.640000 0.007062 0.000000 -0.030718 0.000000 0.200261 0.320000 -0.094606 0.343517
4 0.004038 0.067600 0.000087 0.000000 0.001759 0.000000 0.046170 0.033800 0.010329 0.136020
: 5 0.004038 0.067600 0.000087 0.000000 -0.001759 0.000000 0.046170 0.033800 -0.010329 0.136020
6 0.001486 0.000014 0.025600 0.000850 0.000000 0.000000 0.016771 0.005065 0.000000 0.047147
7 0.006147 0.078400 0.078400 0.000000 0.000000 0.000000 0.067612 0.000000 0.000000 0.179787
15 0.006593 0.121104 0.112896 0.000000 0.000000 0.000000 0.015824 0.000000 0.000000 0.000000
18 0.007251 0.037649 0.050176 -0.017550 0.000000 0.000000 0.078046 -0.102555 0.000000 0.207474
19 0.003906 0.090000 0.090000 0.000000 0.000000 0.000000 0.040625 -0.027000 0.000000 0.102025
2.2. Понятие поражения цели
Понятие «поражение ВЦ» является ключевым при оценке
эффективности стрельбы. Во-первых, оно определяет требования к
изменениям свойств цели (боевых и летно-технических) в резуль-
тате ее обстрела и нанесения повреждений. Во-вторых, в зависи-
мости от сформулированных требований к изменению состояния
цели после обстрела определяется совокупность ее жизненно
важных агрегатов (ЖВА), их поражаемых комбинаций и потреб-
ные уровни повреждений, при которых произойдет поражение
цели.
При обосновании понятий поражения ВЦ учитываются:
• результат воздействия средств ПВО с позиций предотвра-
щенного ущерба обороняющейся стороне, который противник мог
бы нанести в результате огневого воздействия;
• возможность контроля результата воздействия, чтобы в
дальнейшем принимать целесообразные решения на последующие
воздействия по уже обстрелянной цели;
• временной фактор, так как процессы, происходящие в по-
врежденных ЖВА цели и проявляющиеся вне их, развиваются во
времени.
На практике для оценок эффективности обычно используют
базовые понятия «поражение ВЦ» применительно к определенно-
му классу ВЦ. Существует следующая система понятий пораже-
ния:
• поражение по типу "А" - нанесение цели повреждений, ко-
торые приводят к невозможности продолжать полет и, как следст-
вие, к беспорядочному падению практически сразу после действия
поражающих факторов боеприпаса (время идентификации факта
поражения не превышает 20-30 с);
• поражение по типу "В” - нанесение цели повреждений, ко-
торые приводят к невозможности продолжать полет практически
сразу после воздействия БЧ или спустя некоторое время, ограни-
ченное максимальной дальностью планирования (для вертолетов -
временем полета в режиме авторотации);
• поражение по типу ”С” - не имеющее единой формулиров-
ки для различных классов целей и связанное с невозможностью
выполнения ими боевой задачи.
64
Так, для ударных самолетов формулировка типа «С» может
звучать следующим образом: нанесение цели повреждений, при
которых невозможно штатно применить управляемое оружие
класса «воздух-земля», для самолетов ДР ДО - нанесение цели по-
вреждений, которые приводят к немедленному прекращению из-
лучения основной РЛС. Для беспилотных ударных ЛА: тип «С» -
нанесение цели повреждений, при которых она не способна пора-
зить атакуемый объект.
При последней формулировке желательно конкретизировать
геометрические и стойкостные свойства атакуемого объекта. При
этом совокупность ЖВА, при выводе из строя которых достигает-
ся задача стрельбы, будет изменяться в зависимости от рубежа пе-
рехвата - расстояния от цели до атакуемого объекта в момент ее
обстрела. Так, для беспилотных ударных ЛА типа ПКР поражение
по типу "С” - это нанесение ПКР повреждений, при которых прак-
тически исключается возможность поражения ею атакуемого объ-
екта (корабля).
При рубеже перехвата ПКР в несколько сот метров в число
уязвимых может быть включено только боевое снаряжение ПКР,
которое необходимо сынициировать.
Соотношения между типами поражения в общем случае может
быть проиллюстрировано диаграммой (рис. 2.8), из которой видно,
что событие С включает событие А. Во многих случаях целесооб-
разно использовать пересечение событий В и С.
Рис. 2.8. Соотношения между типами поражения Л, В, С
65
Иногда применяются и другие понятия поражения: нанесение
цели повреждений, которые приводят к срыву выполнения боевой
задачи, но при этом ЛА возвращается на базу с задержкой после-
дующего вылета, или нанесение цели повреждений, позволяющих
выполнить боевую задачу, но приводящих к безвозвратной потере
ЛА, и т.д.
Многообразие формулировок типов поражения не означает,
что все они должны использоваться при разработке характеристик
уязвимости для проведения оценок эффективности стрельбы. Для
оценок, например, математического ожидания числа сбитых целей
при сравнительной оценке различных вариантов боевого оснаще-
ния ЗУР целесообразно использовать понятия поражения, опреде-
ляющие безвозвратные потери. При оценке эффективности эшело-
нированной обороны от СВН целесообразно учитывать временной
фактор.
23. Поражающее действие и критерии поражения
Поражающее действие ОФБЧ малогабаритной ЗУР по ВЦ
обусловлено:
• при контактном подрыве - совместным разрушающим дей-
ствием продуктов детонации и осколков;
• при дистанционном подрыве - действием двух поражаю-
щих факторов (ВУВ и осколков) по конструкции планера и ЖВА
ВЦ.
При высокоскоростном взаимодействии поражающих факто-
ров с конструкцией планера и ЖВА, имеющими различное физи-
ческое содержание (боевая нагрузка - заряды ВВ и ТРТ, топлив-
ные баки - углеводородное топливо, система управления - блоки
радиоэлектронной аппаратуры и т.д.), могут возникать различные
физические процессы, развитие которых приведет к поражению
ВЦ. Действие ВУВ и осколков по ВЦ способно реализовать раз-
личные типы поражающего воздействия, структура которых при-
ведена в табл. 2.10.
66
Таблица 2.10
Поражающие факторы и последствия их воздействия
Поражаю- щие факторы Тип поражающего воздействия Поражаемый отсек Последствия
ВУВ Фугасное действие Конструкция планера Разрушение конст- рукции
Осколочно- фугасное действие То же То же
Осколки
Аэроудар » »
Гидроудар Топливные баки Разрушение конст- рукции, потеря топ- лива
Инициирующее действие Боевая нагрузка Взрыв боевой на- грузки
Зажигательное дей- ствие Топливная система (топливные баки) Взрыв паров топли- ва, пожар
Механическое (пробивное) дейст- вие Силовая установка, экипаж, система управления и т.д. Остановка двигате- лей, потеря управ- ления и т.д.
Поражающее действие ОФБЧ описывается комплексной мо-
делью, которая представляет собой совокупность алгоритмов, раз-
работанных на основе анализа закономерностей, характеризующих
поражающее действие данного типа БЧ по ВЦ.
Расчетные алгоритмы позволяют оценивать вероятность по-
ражения уязвимого отсека (отсеков) ВЦ при действии поражаю-
щих факторов ОФБЧ для конкретного типа поражающего воздей-
ствия. При этом поражающие факторы рассматриваются либо как
независимые (например, действие осколочных полей (аэроудар) и
действие ВУВ по конструкции планера), либо как совместные (на-
пример, совместное осколочно-фугасное действие по конструкции
планера).
На рис. 2.9 приведена структура комплексной модели оценки
поражающего действия ОФБЧ.
67
Комплексная модель оценки поражающего действия ОФБЧ
Модель оценки меха-
нического (пробивного)
действия
Модель
оценки
аэроудара
Модель оценки
фугасного действия
Модель оценки
инициирующего
действия
Модель оценки
зажигательного
действия
Модель
оценки
гидроудара
Модель оценки совместного осколочно-фугасного
действия
Рис. 2.9.Структура комплексной модели оценки поражающего
действия ОФБЧ
Входящие в ее состав частные модели постоянно дополняются
и совершенствуются как для повышения степени их адекватности,
так и для достижения полноты комплексной модели. При этом
необходимо отметить, что эта полнота (достаточность) определя-
ется не только составом поражающих факторов, но и особенно-
стями типовых ВЦ, составом и физическим содержанием их
жизненно важных компонентов. Иначе говоря, внедрение новых
технологий и технических решений предопределяет необходи-
мость анализа особенностей поражающего действия ОФБЧ по
отсекам и конструкций ВЦ. Например, широкое распространение
ТРТ поставило вопрос о разработке модели оценки инициирую-
щего действия осколков по РДТТ, находящихся в составе управ-
ляемых и неуправляемых ракет на борту самолета-носителя
(см. рис. 2.2).
Критерии поражения и критериальные параметры уязви-
мости. Критерии поражения ВЦ определяют тот минимальный
уровень повреждений, по достижении которого она переходит в
состояние, соответствующее признакам принятых понятий пора-
жения. Различают критерии поражения собственно ВЦ и критерии
поражения ее ЖВА.
68
Критерии поражения собственно ВЦ характеризуются сово-
купностью ЖВА, формализуемой логической схемой уязвимости,
а также их качественным состоянием, при достижении которого
для требуемой комбинации агрегатов происходит поражение ВЦ.
Критерии поражения ЖВА связаны с уровнем воздействия по-
ражающих факторов, при достижении которого с заданной веро-
ятностью осуществляется переход в новое качественное состояние
(разрушение, взрыв, воспламенение, вывод из строя и т.п.). В ис-
ходных данных критерии поражения ЖВА задаются, как правило,
через критериальные параметры уязвимости, которые являются
количественной мерой стойкости (уязвимости) данного ЖВА при
воздействии конкретного поражающего фактора и реализации
конкретного типа поражающего воздействия. Значения крите-
риальных параметров приводятся в таблицах уязвимости каждой
типовой ВЦ. Используя значения критериальных параметров уяз-
вимости, непосредственно или косвенно (в зависимости от алго-
ритмов частных моделей оценки для различных типов поражаю-
щих воздействий) производится сравнительная оценка реализо-
ванного при взрыве ОФБЧ и требуемого для поражения ЖВА
уровня поражающего фактора.
Например, существуют различные подходы к оценке эффек-
тивности поражающего действия осколков. Использование соот-
ношений теории пластичности в предположении, что отношение
энергии деформации преграды к ее объему постоянно, приводит к
параметру, характеризующему пробивную способность осколка, в
виде отношения кинетической энергии осколка U = 1/2 qv^ к объ-
ему вытесненного из пробоины материала:
3,=t//(6S)=|pV2|,
Z о
где q и р - масса и плотность осколка соответственно; V* - ско-
рость встречи осколка с преградой; 5 - толщина пробиваемой
преграды; 5 и h - приведенные к цилиндру размеры осколка (ми-
делево сечение S' = лг2 и длина, г - радиус цилиндра).
Другие варианты представления:
• удельная энергия осколка Э2 = - <l/2)Pvlh '>
• полная кинетическая энергия Э3 = U = (1/2)рУ2лг2Л;
• удельный импульс Э4 = qv/S = pvBh .
69
Параметр Э| используется при оценке вероятности пробития
металлической преграды, Э3 - поражения живой силы, Э4 - зажи-
гательного действия жидких топлив.
Критическое значение Э так называемого «убойного оскол-
ка» для живой силы равно: Э* = 100 Дж, Э4 =900 Дж - при вероят-
ности зажигания, равной 0,5; безопасное значение Э4=160 Дж -
при вероятности зажигания, равной единице.
Критическое давление и длительность удельного импульса,
инициирующие детонацию ВВ при ударном действии осколка,
оцениваются энергией Э5~15О МВт с вероятностью 0,5 (в зависи-
мости от типа ВВ Э5 может принимать значения в диапазоне
50-300 МВт).
Цель может быть поражена при непосредственном контакте ее
с ракетой (поверхностный или заглубленный подрыв) и при под-
рыве БЧ на некотором расстоянии от нее.
2.4. Структура и состав исходных данных по уязвимости ВЦ
при прямом попадании малогабаритных ЗУР
Вероятность поражения ВЦ при прямом попадании малогаба-
ритной ЗУР определяется как вероятность осуществления совме-
стных событий:
• попадания ЗУР в исходные отсеки ВЦ, т.е. отсеки, вывод
которых из строя приводит к поражению ВЦ по одному из приня-
тых понятий поражения;
• поверхностного или заглубленного подрыва.
В случае прямого попадания в качестве основной характери-
стики уязвимости ВЦ принимаются зонные характеристики, пред-
ставляющие собой совокупность уязвимых отсеков ВЦ, при попа-
дании ЗУР в поверхность которых и штатном срабатывании боево-
го снаряжения ЗУР цель считается пораженной по одному из при-
нятых типов поражения. В исходных данных по уязвимости ВЦ
зонные характеристики определяются как проекции поверхности
уязвимых отсеков на плоскости с основных направлений (сверху,
снизу, справа, слева) для поверхностного и заглубленного подрыва
БЧ ЗУР с учетом вклада в поражающее действие остатков невыра-
ботанного топлива РДТТ ЗУР для одного и более значений его
массы. На рис. 2.10-2.14 рассматриваются следующие варианты
70
Рис. 2.10. Зонные характеристики уязвимости вертолета типа «Апач» (по-
ражение по типу Л): / - несущий винт; 2 - рулевой винт; 3 - килевая бал-
ка, хвостовая балка, стабилизатор; 4 - кабина; 5 - закабинный отсек
Л В87,ТЙГ“
Н Варианты подрыва
II, III. IV
Варианты подрыва
III, IV
fj Вариант подрыва
Рис. 2.11. Зонные характеристики уязвимости вертолета типа «Апач»
(поражение по типу В): 1 - несущий винт; 2 - рулевой винт; 3 - килевая
балка, хвостовая балка, стабилизатор; 4- кабина; 5 - закабинный отсек;
7 - носовой отсек
1
Варианты подрьва
Ч. II. III. IV
Варианты подрыва
II. III. IV
Варианты подрыва
III, IV
Рис. 2.12. Зонные характеристики уязвимости СКр (поражение по типу С):
1 - планер; 2 - хвостовой обтекатель
Рис. 2.13. Зонные характеристики самолета F-16 (поражение по типу Л):
2 - кабина; 6 - киль; 9 - закабинный отсек
6
Рис. 2.14. Зонные характеристики самолета F-16 (поражение по типу В):
1 - носовой отсек; 2 - кабина; 4 -5 -6 - киль; 8-9 - закабинный отсек
подрыва: I - поверхностный подрыв ОФБЧ; II - поверхностный
подрыв ОФБЧ + 0,6 кг (заглубленный ОФБЧ); III - поверхност-
ный подрыв ОФБЧ + 1,3 кг (заглубленный ОФБЧ + 0,6 ОФБЧ);
IV -заглубленный ОФБЧ + 1,3 кг.
Для определения типа подрыва (поверхностный или заглублен-
ный) для каждого уязвимого отсека конструкции планера ВЦ задает-
ся толщина обшивки, приведенная к дюралевому эквиваленпу.
Таким образом, исходные данные по уязвимости типовой ВЦ
при прямом попадании ЗУР включают в себя четыре проекции ВЦ
(сверху, снизу, справа, слева), исходные данные по вероятностно-
му распределению толщин обшивок в конструкции планера ВЦ в
дюралевом эквиваленте (табл. 2.11):
Таблица 2.11
Корневая часть консоли крыла
Ръ 0 0,87 0,96 1,0
Зпр, мм 4 10 20 25
- вероятность того, что толщина обшивки уязвимого отсека не более 6пр.
Из рис. 2.10-2.14 видно, что, например, самолет будет поражен
по типу А при любом виде подрыва, если ракета попадет в кабину
пилота, и только при заглубленном подрыве ОФБЧ и остатков то-
плива (1,3 кг), если попадет в диффузор.
На состав исходных данных по уязвимости ВЦ при прямом
попадании малогабаритной ЗУР влияют следующие факторы:
• принятая система понятий поражения (для каждого кон-
кретного понятия поражения определяются свои зонные характе-
ристики ВЦ);
• тип подрыва (поверхностный или заглубленный), который
определяется по специальной расчетной методике на основе ис-
ходных данных по вероятностному распределению толщин обши-
вок в конструкции планера ВЦ в дюралевом эквиваленте (для слу-
чаев поверхностного и заглубленного подрыва определяются свои
зонные характеристики);
• наличие остатков невыработанного топлива в РДТТ ЗУР
(для каждого нормированного остатка топлива определяются свои
зонные характеристики ВЦ).
71
2.5. Структура и состав исходных данных по уязвимости ВЦ
при дистанционном подрыве БЧ малогабаритных ЗУР
Подрыв БЧ в зоне достоверного поражения. Структура и со-
став исходных данных по уязвимости ВЦ при дистанционном под-
рыве БЧ малогабаритных ЗУР в зонах достоверного и вероятного
поражения существенно различаются (рис. 2.15). Эти различия оп-
ределяются существом исходных данных, необходимых для оце-
нок эффективности стрельбы при подрыве БЧ в соответствующих
зонах поражения.
В зоне достоверного поражения вывод ЖВА из строя достига-
ется обычно за счет совместного осколочно-фугасного действия
взрыва БЧ малогабаритной ЗУР. Из-за сложности происходящих
при этом физических процессов практически не удается рассчи-
тать вероятность вывода из строя тех или иных ЖВА и закон по-
ражения имеет ступенчатый вид.
Для малогабаритных ЗУР целесообразно связать зону досто-
верного поражения с зонными характеристиками при контактном
подрыве БЧ. В этом случае размеры этой зоны () определяют-
ся для всех уязвимых отсеков ВЦ, заданных зонными характери-
стиками, как минимальное расстояние от точки подрыва БЧ до по-
верхности уязвимого отсека. Таким образом, зона достоверного
поражения представляет собой область пространства, ограничен-
ного в общем случае криволинейными поверхностями уязвимого
отсека и равноудаленными от них на расстояние поверхно-
стями (см. рис. 2.15).
Не каждый уязвимый отсек может иметь зону достоверного
поражения. Имеющие ее отсеки считаются нерезервированными.
Поэтому предполагается, что подрыв БЧ в зоне достоверного
поражения любого из них приводит к поражению цели. Значение
/?дп для одного и того же уязвимого отсека может изменяться
в зависимости от того, применительно к какому типу пораже-
ния разработаны характеристики уязвимости и с каким остат-
ком ТРТ подрываются ЗУР. Зоны достоверного поражения
задаются посредством таблиц, фрагмент которых приведен
в виде табл. 2.12.
72
Зоны достоверного
поражения
ооооооосооооо
(Т) - сбоку
(Т) - сверху
Рис. 2.15. Проекции зонных характеристик и зоны достоверного поражения
Таблица 2.12
Номер и наименова- ние уязвимого отсе- ка Уязвимое на- правление Яяп, м
Тип "А" Тип "В"
БЧ БЧ+ 1'PTj БЧ+ ТРТ2 БЧ БЧ+ ТРТ! БЧ+ ТРТ2
1 - носовой отсек конструкции планера Справа, слева, сверху, снизу - - - 0,6. 0,8 1,0
2 - кабина экипажа Справа, слева сверху 0,5 0,8 0,7 1,0 0,9 1,2 0,5 0,8 0,7 1,0 0,9 1,2
3 - центральная часть фюзеляжа Справа, слева, сверху снизу 0,2 0,4 0,3 0,6 0,5 0,4 0,6 0,4 0,8 0,6
Уязвимые направления приводятся в привязке к продольной
оси ЛА по полету. Тогда в сечении, перпендикулярном ей, зона
достоверного поражения, например для отсека ”2 - кабина экипа-
жа", будет иметь вид, приведенный на рис. 2.16.
Слева
Справа
- жизненно
важный агрегат
- уязвимый отсек
- зона
достоверного пора-
жения
Рис. 2.16. Зона достоверного поражения отсека «кабина экипажа»
в проекции на плоскость, перпендикулярную продольной оси самолета
Подрыв БЧ в зоне вероятного поражения. В зоне вероятного
поражения основным поражающим фактором БЧ малогабаритных
ЗУР является осколочное поле.
74
Состав исходных данных по уязвимости, используемых
для оценок эффективности стрельбы малогабаритными ЗУР при
дистанционном подрыве БЧ вне зоны достоверного поражения
(в зоне вероятного поражения):
• перечень типов поражения и их формулировки, примени-
тельно к которым разработаны характеристики уязвимости;
• перечень и описание событий, при совершении которых
достигается поражение цели по заданному типу;
• схемы уязвимости, представляющие собой логические вы-
ражения, связывающие элементарные события поражения уязви-
мых отсеков с событием поражения цели по заданному типу;
• перечень уязвимых отсеков, их условные обозначения,
геометрические характеристики, координаты в связанной с ЛА
системе, критериальные параметры поражения;
• алгоритмы расчета вероятности поражения уязвимых отсе-
ков при известных параметрах воздействия на них поражающих
факторов.
События, при свершении которых достигается поражение ВЦ,
по своей сути являются сложными и могут быть описаны, напри-
мер, в виде табл. 2.13.
Таб л и ца2.13
Условное обозначение Описание события
А| (В,) Повреждение конструкции планера цели, приводящее к полной потере прочности, несущих свойств и управляемости
а2 Инициирование заряда химического ВВ боевой нагрузки и твердого топлива РДТТ, приводящее к событию Ai
Аз Взрыв паров топлива, приводящий к событию Ai
АДВ4) Практически мгновенный вывод из строя членов экипажа, пилотирующих цель
в7 (С7) Полный вывод из строя силовой установки
Следствием событий Ai Л2, ... будет поражение цели по типу Л,
следствием событий В4, By,... - поражение цели по типу В, и т.д.
В перечень событий включаются только те, которые могут
произойти при действии поражающих факторов БЧ ЗУР, эффек-
тивность которой оценивается. Так, например, если при дистанци-
онном подрыве БЧ малогабаритной ЗУР вне зоны достоверного
75
поражения осколки при любых условиях соударения не могут
сынициировать ВВ боевой нагрузки и ТРТ, то событие А2 в пере-
чень не включается.
События А\, Л2, В7 и другие будут иметь место, если произош-
ли элементарные события, состоящие в разрушении, выводе из
строя, повреждении уязвимых отсеков, имеющих определенную
геометрическую форму, размеры, компоновку на ЛА, критериаль-
ные параметры поражения. Тогда, например, для самолета с двумя
летчиками сложное событие Л4 можно представить следующей
логической схемой: Л4 = оЛ я42 + я43, где сц, а? - события, со-
стоящие в практически мгновенном выводе из строя первого и
второго летчика соответственно при действии осколочного поля;
а43 - событие, состоящее в практически мгновенном выводе из
строя одновременно двух летчиков избыточным давлением при
аэроударе или фугасном действии.
Для двухдвигательного самолета сложное событие В7 может
представляться следующей логической схемой: Б7 = (bj+ b* +
+Z>73) • (bi4+ b/ + Z>76), где Ъ/ - события, состоящие в пораже-
нии компрессора; Z>72, Z>75 - события, состоящие в поражении ТМС;
Z>73, b/ - события, состоящие в поражении камеры сгорания и тур-
бины правого и левого двигателя соответственно.
В целом схема уязвимости применительно к типу поражения А
может иметь следующий вид:
А = Aj+ А2+ А4А5+ At+Ag;
9
Ах - Ха1 ’ А2 = а2+а2+а2; А4 = а4'- а42 + а43;
У=1
А$ = 4/5'+ а2 + а$3 а*; А(, = а$ + а$ ; Ag = ag1 .
Учитывая соотношения между событиями А и В, схема уязви-
мости применительно к поражению цели по типу В может быть
представлена, например, следующим образом:
В — А + В\ + Bf, + В2; J = Л|+
B^bi'bf + b?- B6 = b6'-b62 + b63-,
B7 = (b7l + b72 + b73) (b7* + b75 + b76).
Каждому из aJr, Ь/. элементарных событий соответствуют
уязвимые отсеки (агрегаты), имеющие такое же условное обозна-
чение. Геометрически уязвимые отсеки (агрегаты) чаще всего
76
представляются как прямые параллелепипеды, имеющие линейные
размеры lx*ly* L по осям целевой связанной СК и координаты
центра отсека х, у, z.
Если форма отсека отличается от параллелепипеда, то указы-
ваются ее вид и характерные размеры.
Геометрические характеристики уязвимых отсеков (агрегатов)
позволяют оценить условия и параметры их накрытия осколочным
полем или другими поражающими факторами. Для ответа на
вопрос, будут ли они при этом поражены, служат критериальные
параметры уязвимости. Для уязвимых отсеков (агрегатов), пора-
жаемых пробивным действием осколков, к таким параметрам
относятся:
Sr, м2 - уязвимая площадь грани или максимальная уязвимая
площадь грани уязвимого отсека;
^injn^ Лтах, ММ - наименьшее и наибольшее значения толщины
разнесенных преград в дюралевом эквиваленте, соответствующие
необходимому и достаточному условиям поражения уязвимого
отсека осколком за счет пробивного действия;
Igo* - обобщенная характеристика разнесенности преград, эк-
ранирующих жизненно важные элементы уязвимого отсека (агре-
гата) с заданного направления;
k. mi Ml J
где n - количество преград; Л, - толщина z-й преграды; Lj - рас-
стояние между первой и z-й преградами.
Применительно к уязвимым отсекам, в которых в качестве
критериальных используются перечисленные параметры, сужде-
ние о степени его поражения делается на основе сравнения про-
бивной способности осколка со значениями Amin, Лтах , с учетом
параметра разнесенности Igo . Значение Sr служит для оценок
числа попавших в уязвимый отсек "убойных" осколков.
Если в качестве критерия поражения используется сравнение
внесенной осколочным полем и потребной для поражения уязви-
77
мого отсека энергии Е, то вместо T/min, , Igo используются
критериальные параметры Emin> Emax- В целом фрагмент характери-
стик уязвимости отсеков, поражаемых механическим действием и
задаваемых таблично, может иметь вид табл. 2.14.
Таблица 2.14
Усл. обозн. Уязви- мый отсек Напра- вление 5г. м2 ^min, ММ ^тах> ММ lgc‘ х, м у, м Z, м 4. м /у, м 1г, М
а? (Ь?) Летчик Справа, слева, сверху, снизу, впереди 0,4 0,4 0,18 0,18 0,2 7 7 5 12 6 18 18 8 35 22 2,8 2,8 2,0 3,2 3,5 3,8 0;2 0 0,4 1,0 0,45
ь7‘ Компрес- сор дви- гателя Справа слева снизу 0,18 0,14 0,12 Emjn=l2-103 Дж Егаах=38 103 Дж 10,2 -0,1 0 0,4 Цилиндр г=0,24
ь72 Гопливо- иасляная система хвигателя Справа, слева, снизу 0,15 0,20 0,25 10 10 8 18 18 22 2,8 2,8 3,0 10,8 -0,2 0 0,8 0,6 0.6
Консоль крыла
Для отсеков, поражаемых инициирующим действием оскол-
ков, таблица характеристик уязвимости соответствующих отсеков
может иметь вид табл. 2.15.
Таблица 2.15
Усл. обозн. /язвимый отсек (тип ВВ) Чапра- зление 5г,м2 ^об, ММ Аэ, мм ^кр X, М У, м Z, М /х, м /у, м 4. м
а2‘ БЧУР "Сай- двиндер" ia крылье- вой под- веске (ТГ-40) Справа снизу 0,03 0,03 И 11 0 0 1,1 1,1 0,8 0,8 8,8 -0,2 3,2 0,35 Цилиндр г=0,24
а22 Бомба Мк-82 на подфюзе- ляжной подвеске (тротил) Снизу Снизу 0,19 6 0 1.0 0,6 9,4 -0,6 0 0,9 0,3
78
Параметры h3 характеризуют защищенность заряда ВВ бое-
припаса оболочкой и экраном в стальном эквиваленте, коэффициен-
ты к0, Лкр - структуру оболочки заряда и достаточный уровень
взрывчатых преобразований ВВ, при котором цель поражается.
Близкую по сути структуру имеют таблицы характеристик
уязвимости отсеков, поражаемых за счет других факторов зажига-
тельного действия, аэроудара, гидроудара, фугасного действия
(см. разд. 4).
Данные табл. 2.15 служат входной информацией в математиче-
ские модели оценки законов поражения ВЦ. Так, параметры х, у, z,
4, 1У, 12 используют для оценки характеристик воздействия пора-
жающих факторов взрыва БЧ по уязвимым отсекам, критериальные
параметры - в алгоритмах расчета вероятности поражения уязви-
мых отсеков при известных характеристиках воздействия по ним
поражающих факторов. С использованием этих вероятностей и схем
уязвимости рассчитываются законы поражения ВЦ.
Как следует из изложенного, составная часть исходных дан-
ных по уязвимости ВЦ, а именно алгоритмы расчета вероятности
поражения, являются одновременно и составной частью матема-
тической модели оценки эффективности. Структура алгоритма
для каждого типа поражающего воздействия достаточно проста
(рис. 2.17).
Характеристики поражаю-
щих факторов, воздейст-
вующих на уязвимый отсек
Критериальные пара-
метры уязвимого отсека
I________
Алгоритмы расче-
та вероятности
поражения
Вероятность пораже-
ния уязвимого отсека
Рис. 2.17
Обобщая сказанное, можно констатировать, что поражение
ВЦ при воздействии по ней осколочного поля возможно за счет:
• механического действия осколков по ЖВА;
• инициирующего действия осколков по зарядам ВВ и ТРТ
боевой нагрузки;
• зажигательного действия осколков по жидкой или паро-
воздушной фазам топливных баков;
79
• аэро-, гидроудара при действии плотного осколочного поля
по отсекам конструкции планера.
Экспериментально показано, что осколки ОФБЧ малогабарит-
ных ЗУР ПЗРК даже в наиболее благоприятных условиях не спо-
собны возбудить детонацию ВВ боевой нагрузки самолетов и вер-
толетов, в результате чего смогло бы произойти их поражение, или
вызвать взрывчатые превращения в боевой нагрузке КР, достаточ-
ные для разрушения ее конструкции в полете. Кроме того, уста-
новлено, что даже при групповом действии осколков данной
ОФБЧ по паровоздушной фазе топливного бака не происходит
инициирование взрыва паров топлива.
Условия разрушения отсеков конструкции планера типовых
целей за счет совместного осколочно-фугасного действия взрыва
БЧ определены размером зон достоверного поражения. За преде-
лами этой зоны, как показывают результаты экспериментально-
теоретических исследований, разрушение отсеков конструкции
типовых целей за счет аэро-, гидроудара при действии только ос-
колочного поля с параметрами (масса, материал, форма, скорость
и углы соударения осколков, ширина поля), характерными для
ОФБЧ ЗУР ПЗРК, возможно при величине удельной энергии (Эуд)
осколочного поля на отсеке: для самолета-истребителя и вертолета
Эуд > 2,8 МДж/м2; для крылатой ракеты Эуд > 1,8 МДж/м2. В то же
время реализуемые при взрыве ОФБЧ ЗУР ПЗРК вне зоны досто-
верного поражения значения удельной энергии осколочного поля
не превышают 1,5... 2,0 МДж/м2 для самолетов и вертолетов и
0,6...0,8 МДж/м2 для крылатой ракеты.
Из вышеизложенного следует, что характеристики осколочно-
го поля малогабаритной ОФБЧ ЗУР ПЗРК при подрыве в зоне
вероятного поражения таковы, что практически невозможно
разрушить конструкцию планера, топливный бак, вывести из
строя двигатель при воздействии по его компрессору, сыницииро-
вать боевую нагрузку. Поэтому в качестве основных объектов
поражения на ВЦ осколочным полем ОФБЧ ЗУР ПЗРК могут
рассматриваться экипажи, бортовые системы, топливомасляная
система двигателей применительно к механическому (пробивно-
му) действию осколков. К наиболее тяжелым последствиям для
ВЦ может привести выход из строя бортовой системы управления
полетом.
80
3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОЦЕНКИ
БОЕВОЙ ЭФФЕКТИВНОСТИ ПЗРК
3.1. Этапы работы ПЗРК
Применительно к боевой работе ПЗРК с точки зрения ее веро-
ятностной оценки весь процесс стрельбы делится на три этапа
(рис. 3.1): предпусковой, этап наведения и этап поражения цели.
Рис. 3.1. Этапы работы ПЗРК
Предпусковой этап начинается с момента обнаружения цели и
заканчивается пуском ЗУР.
Анализ процесса боевой работы ПЗРК на предпусковом этапе
позволяет выделить следующие фазы, осуществляющиеся с помо-
щью оптических и оптико-электронных устройств комплекса, а
также при участии стрелка-зенитчика: фазу обнаружения, фазу
прицеливания и сопровождения цели стрелком-зенитчиком, фазу
захвата и автосопровождения цели ОГС до старта ЗУР.
Фаза обнаружения начинается с момента получения целеука-
зания либо с начала самостоятельного поиска цели в заданном сек-
торе наблюдения.
В связи с тем, что процесс обнаружения цели зависит от мно-
гих факторов: условий наблюдения и психофизиологического со-
стояния наблюдателя, точности целеуказания, скорости, размера и
ракурса цели и др., можно считать обнаружение воздушной цели
81
на фиксированной дальности случайным событием. Поэтому
выполнение этой фазы можно характеризовать законом распреде-
ления вероятности обнаружения цели по дальности до цели
Фобн(Добн) •
Фаза прицеливания и сопровождения цели стрелком-зенит-
чиком начинается с момента обнаружения цели и заканчивается
моментом пуска ЗУР. На выполнение данной фазы могут влиять
следующие факторы, имеющие случайный характер: индивиду-
альные особенности стрелка-зенитчика, разброс параметров дви-
жения цели, состояние атмосферы и фоновых условий.
Успешное выполнение фазы сопровождения характеризуется
вероятностью сопровождения цели в интервале дальностей от мо-
мента обнаружения цели до момента пуска ЗУР.
Фаза захвата начинается с момента выхода ОГС на режим ра-
боты и заканчивается в момент пуска ЗУР. На фазу захвата дейст-
вуют такие случайные факторы, как интенсивность теплового из-
лучения цели, направление полета цели, разброс технических ха-
рактеристик элементов ОГС, состояние атмосферы и др. В связи с
этим дальность захвата цели является случайной величиной, а вы-
полнение фазы захвата и сопровождения цели можно характеризо-
вать законом распределения вероятности захвата цели по дально-
сти ДО ЦеЛИ фзСДз/Добн).
Описание предпускового этапа работы ПЗРК дополняется
временными характеристиками, существенно влияющими на его
успешное выполнение. К ним относятся:
• время обнаружения цели;
• время на опознавание и принятие решения на обстрел
цели;
• время приведения комплекса в положение боевой готовно-
сти;
• время выхода аппаратуры комплекса на режим работы;
• время на прицеливание и сопровождение цели;
• время анализа захвата цели АЗП.
В общем случае временные характеристики ПЗРК имеют слу-
чайный разброс величин, который обусловлен степенью обучен-
ности стрелков-зенитчиков с их индивидуальными особенностями,
разбросом временных параметров работы элементов комплекса за
счет неточности изготовления и настройки аппаратуры.
82
В целом предпусковой этап можно охарактеризовать законом
распределения дальностей пуска ЗУР, а успешное выполнение
этапа оценивается вероятностью своевременного пуска ЗУР (пуска
в зоне пуска) <рп(Дп/Д3).
Этап наведения начинается с момента пуска ЗУР и заканчива-
ется в момент ее встречи с целью. Задачей его является обеспече-
ние этой встречи в пределах допустимых промахов.
Случайный характер этапа наведения обусловлен влиянием
таких факторов, как разброс начальных условий пуска ЗУР, раз-
брос полетного времени ЗУР при стрельбе в данную точку встре-
чи, разброс ошибок наведения ЗУР и т.д.
Этап наведения характеризуется законом распределения даль-
ностей встречи ЗУР с целью, а успешное выполнение этого этапа
оценивается условной вероятностью этой встречи в пределах до-
пустимых промахов в зоне поражения срв(Дв/Дп).
Этап поражения цели оценивается условной вероятностью по-
ражения боевым снаряжением ЗУР, нормально выведенной в рай-
он встречи с целью ЛБС (Д в ).
Условная вероятность поражения боевым снаряжением в ос-
новном зависит от типа цели, ее уязвимости, параметров полета, от
ошибок наведения и условий встречи ЗУР с целью, от типа и мощ-
ности БЧ, типа ВУ и надежности его срабатывания у цели. Услов-
ная вероятность поражения цели боевым снаряжением ЗУР - одна
из основных составляющих эффективности ПЗРК.
Наряду с описанием процесса боевого функционирования
ПЗРК формализованная схема стрельбы включает содержательное
описание воздушной цели (ВЦ) как объекта поражения ЗУР,
включая параметры полета цели (высота, курсовой параметр, ско-
рость, тип маневра), возможные способы защиты от огня зенитных
средств (типы применяемых помех, тактика их применения и т.д.),
а также модель характеристик внешних условий (рельеф местно-
сти, метеорологические и фоновые условия).
В условиях помех (естественных и искусственных) процесс
стрельбы ПЗРК представляется в виде этапов (фаз) боевой работы
комплекса, чувствительных к воздействию помех. На каждом из
этапов (предпусковом, наведения ЗУР и поражения цели) влияние
помех оценивается (характеризуется) следующими законами рас-
пределения:
83
- на предпусковом этапе:
• законом распределения вероятности захвата цели ОГС по
дальности в условиях помех;
• законом распределения вероятности срыва автосопро-
вождения цели ОГС до старта ЗУР из-за влияния помех;
• законом распределения дальностей пуска ЗУР в условиях
помех;
- на этапе наведения:
• законом распределения вероятности срыва наведения ЗУР
в условиях помех;
• законом распределения дальностей встречи ЗУР с целью в
условиях помех;
- на этапе поражения цели:
• законом распределения промахов при воздействии помех;
• условной вероятностью поражения цели боевым снаряже-
нием ЗУР в условиях помех.
3.2. Выбор и обоснование критерия оценки боевой
эффективности
На выбор критерия оценки боевой эффективности ПЗРК
большое влияние оказывают особенности, присущие комплексам
такого класса:
• визуальный способ обнаружения ВЦ;
• непосредственное участие человека в выполнении опера-
ций подготовки и пуска ЗУР;
• зависимость характеристик ПЗРК от метеорологических и
фоновых условий;
• зависимость дальностей захвата цели ОГС от характери-
стик цели (интенсивности теплового излучения, направления и
скорости полета), разброса технических характеристик ОГС и др.
В связи с этим дальность пуска носит случайный характер и не
может быть задана заранее. Поэтому критерий оценки боевой эф-
фективности должен задаваться с учетом перечисленных особен-
ностей. Кроме того он должен учитывать случайные факторы, обу-
словленные процессом боевой работы комплекса и влияющие на
положение точки встречи ЗУР с целью относительно местополо-
жения ПЗРК.
84
Такой принцип расчета эффективности ПЗРК предусматривает
не только определение эффективности собственно ЗУР, но и веро-
ятностный учет всех предшествующих пуску ЗУР фаз боевой ра-
боты ПЗРК. Протекающие внутри каждой фазы процессы являют-
ся случайными. Вероятность успешного выполнения каждой фазы
- частный показатель эффективности одного или нескольких эле-
ментов ПЗРК, функционирующих на данной фазе, и, кроме того,
он зависит от надежности элементов ПЗРК, участвующих в боевой
работе на данной фазе.
Таким образом, эффективность стрельбы ПЗРК с учетом всех
фаз боевой работы можно представить как произведение вероят-
ности безотказной работы элементов ПЗРК во всех фазах боевой
работы на вероятность выполнения всех последовательных фаз,
включая фазу поражения цели в точке встречи.
Изложенный подход к оценке процесса боевой работы ПЗРК
позволяет получить общее выражение для определения боевой
эффективности его стрельбы:
(At Л2 А3) = Рн • Рп ( А{) • Рв (А2 !А{) ЛБС (А3 / Л, А2 ),
где Wt (Л] А2 А3) - вероятность поражения цели при стрельбе од-
ной ЗУР с учетом всех этапов боевой работы ПЗРК; Рн - надеж-
ность функционирования всех элементов ПЗРК в процессе боевой
работы; Рп (Л[) - вероятность успешного выполнения предпуско-
вого этапа (событие At); Рв (а2 / Ах ) - условная вероятность ус-
пешного выполнения этапа наведения (событие
условная вероятность поражения цели бое-
вым снаряжением (БС) ЗУР (событие А3).
Более конкретная вероятность поражения одиночной цели од-
ной ЗУР с учетом всего процесса боевой работы определяется по
формуле
ВДр)^н(1-Рпр)-Р0П’Рс-(1-РвР)х
Мр
X f
f И J Фобн( Добн)' Фз (Дз / Добн )' Фп (Дп / Дз ) Фв (Дв / Дп ) ’
х^Бс(Дв^в
85
где И7! (др) - вероятность поражения одиночной цели одной ЗУР
до заданного рубежа; Др - заданный рубеж поражения цели; Рн -
надежность функционирования средств комплекса; Рпр - вероят-
ность пропуска цели; Роп - вероятность опознавания цели; Рс -
вероятность сопровождения цели; Рвр - вероятность врезания ЗУР
в землю; Ф0бн(Добн) ~ плотность распределения дальностей обна-
ружения цели; ф3(Д3/Добн) _ условная плотность распределения
дальностей захвата цели ОГС ЗУР; <рп(Дп/Д3) - условная плот-
ность распределения дальностей пуска ЗУР; фв(Дв/Дп) - услов-
ная плотность распределения дальностей встречи ЗУР с целью;
^бс(Дв) ~ условная вероятность поражения цели боевым снаря-
жением ЗУР.
Наличие в реальной боевой обстановке естественных и искус-
ственных помех не меняет основную задачу ПЗРК - поражение
ВЦ, и поэтому указанный критерий определяется как в беспомехо-
вой обстановке, так и в условиях помех.
Общее выражение для определения критерия оценки боевой
эффективности в условиях помех ИД (Др) будет иметь вид
Wi (Др) = Рн • (1 - Рпр) • Роп • Рс (1 - Рвр) • (1 - Рлг) • (1 - Рас) • (1 - Рен) х
Др -«>
х I 11йобн(Добн)-Фп(Дэ/Добн)-Фп(Д„/Дз)У(Дв/Дп)-^Ж4Дп
оо 00 3 П В
хя" (ДВ)4ДВ ,
ьс
где ФзП(Дз/Добн), Фп(Дп/Дз)> Фв(Дв/Дп) - плотность распреде-
ления соответственно дальностей захвата цели ОГС, пуска ЗУР и
встречи ЗУР с целью в условиях помех; Рлг - вероятность переза-
хвата ОГС линии горизонта; РАС - вероятность срыва автосопро-
вождения ОГС цели до старта ЗУР в условиях помех; Рсн - веро-
ятность срыва наведения ЗУР в условиях помех; (Дв) - услов-
ная вероятность поражения цели боевым снаряжением ЗУР в усло-
виях помех.
86
Выбранный критерий боевой эффективности стрельбы ПЗРК
(И7!) критичен к изменению условий стрельбы, параметров полета
цели, средств и способов противодействия воздушного противника.
33. Метод оценки боевой эффективности ПЗРК
Поскольку боевая работа ПЗРК при стрельбе представляет со-
бой процесс, характеризуемый действием множества случайных
факторов, то для оценки результатов функционирования ПЗРК на
каждом этапе целесообразно использовать метод статистических
испытаний (метод Монте-Карло).
Сущность метода состоит в следующем: требуется найти зна-
чение некоторой изучаемой величины х. Для этого выбирают та-
кую случайную величину X, математическое ожидание которой
равно М(Х)=х. Чтобы определить М(Х), проводится п испытаний,
в результате которых будет получено п значений величины х,. То-
п
гда среднее значение х = —— принимается в качестве оценки ис-
п
комого значения: х^х-х.
Поскольку метод Монте-Карло требует большого числа испы-
таний, то необходимо определиться с числом испытаний (реализа-
ций), которые нужно провести, чтобы получить удовлетворяющий
испытателя результат.
Соотношение частоты и вероятности. Если в результате
заданного числа реализаций получена частость события А (на-
пример, fFi, R^q , 7?бс, Льс > ^бс>), равная Р, то истинное значение
вероятности события А будет лежать в пределах
Пример. В результате 500 реализаций (73ад=500) получена
частота события А, равная Р = 0,6. С какой ошибкой определяется
вероятность события А?
87
Максимальная ошибка Е- Л 1-Р =,——— =0,022=2,2%.
I, J/ зад V 500
Следовательно, истинное значение вероятности Р = Р± Е =
= 0,60 ± 0,02 = 0,58-0,62.
Число реализаций и максимальная ошибка. Чтобы обеспе-
чить максимальную практически возможную ошибку в определе-
нии вероятности события А, не превосходящую значения А, необ-
ходимо осуществить число реализаций не менее, чем
_4Р(1-Р)
2зад ^2 ’
где Р - искомая вероятность события А, которую можно взять ори-
ентировочным значением по частоте события в первой серии реа-
лизаций.
Пример. Сколько нужно сделать реализаций, чтобы ошиб-
ка в определении вероятности Р = 0,6 была не более
А = 0,05?
„ г 4Р(1-Р) 40,6-0,4 „ОЛ
Получим = —Ц:—.— = 384.
А2 0,052
3.4. Алгоритм определения закона распределения координат
точки встречи ракеты с целью
Сущность метода статистических испытаний состоит в созда-
нии специального алгоритма, математически воспроизводящего
боевой процесс. Моделирующий алгоритм позволяет получать
информацию о состоянии процесса работы ПЗРК на отдельных
этапах, начиная с момента обнаружения ВЦ и заканчивая момен-
том поражения ее боевым снаряжением ЗУР. Вычислительный
процесс в этом случае строится по единому алгоритму, представ-
ленному на рис. 3.2 и отражающему весь цикл функционирования
ПЗРК включая этап поражение цели.
Суть вычислительного процесса состоит в построении
законов распределения показателей эффективности работы ПЗРК
на каждом ее этапе при известных законах распределения входных
88
Рис. 3.2. Укрупненный алгоритм расчета вероятности поражения цели
89
характеристик двух основных объектов (цели и ПЗРК) в неопреде-
ленных условиях внешней среды, воздействие которой также яв-
ляется неопределенным. По результатам моделирования каждого
этапа вычисляется оценка показателя эффективности использова-
ния ПЗРК при работе по конкретной цели.
Для построения закона распределения оценки показателя
эффективности и определения его характеристик необходимо
провести определенное количество опытов, сделать выборку
репрезентативной и получить состоятельную оценку показа-
теля.
Способ задания законов распределения входных характери-
стик и параметров внешней среды может быть как аналитическим,
так и наиболее простым - табличным. Таблицы составляются для
конкретного типа цели, фиксированных параметра и высоты ее
полета, конкретного типа помехи и способа ее применения, кон-
кретных заданных внешних условий. Здесь и в дальнейшем опре-
деляется случайное число (а или какое либо другое), равномерно
распределенное в интервале [0;1].
Вычислительный процесс организуется следующим образом:
• выбирается вариант функционирования ПЗРК либо на эта-
пах, предшествующих действию ракеты или ее боевой части по
цели, либо в период воздействия;
• для каждого рассматриваемого этапа выбирается реализа-
ция случайных чисел, равномерно распределенных на отрезке
[0,1], с помощью специальной программы «датчика случайных
чисел»;
• с помощью этих чисел описываются случайные процессы,
отражающие существо рассматриваемого этапа, и рассчитываются
значения характеризующих его величин. Рассматриваемое число
реализаций задается на основе накопленного опыта.
В соответствии со схемой, приведенной на рис. 3.2, сначала
моделируются процессы функционирования ПЗРК на предпуско-
вом этапе и этапе наведения, предшествующих непосредственно-
му взаимодействию ракеты с целью. Результатом моделирования в
этом случае будет закон распределения горизонтальных дально-
стей встречи ракеты с целью - условная вероятность выхода раке-
ты в точку встречи с целью в функции горизонтальной дальности
полета ЗУР. Второй этап - моделирование воздействия ракеты или
ее боевой части по цели (рис. 3.3). Результатом моделирования
90
Рис. 3.3. Укрупненный алгоритм моделирования воздействия ракеты по цели
будет закон распределения вероятности поражения цели - услов-
ная вероятность поражения также в функции горизонтальной
дальности.
Результатом моделирования в целом будет закон распределе-
ния вероятности поражения цели в функции горизонтальной даль-
ности.
Представленный на рис. 3.3 алгоритм включает в себя
18 блоков. Каждый блок описывает конкретный этап работы
ПЗРК.
1 - блок исходных данных;
2 - блок анализа надежности;
3 - блок выбора варианта расчета;
4 - блок определения параметров траектории цели;
5 - блок определения дальности и времени обнаружения
цели;
6 - блок вычисления I работного времени и момента готовно-
сти к захвату цели ОГС;
7 - блок определения дальности и времени захвата цели
ОГС;
8 - блок вычисления II работного времени и момента готовно-
сти к пуску ЗУР;
9 - блок определения дальности и времени пуска ЗУР;
10 - блок воздействия линии горизонта;
11 - блок определения фоновых условий;
12 - блок воздействия фонов на предпусковом этапе;
13 - блок определения условий применения ЛТЦ;
14 - блок воздействия ЛТЦ на предпусковом этапе;
15 - блок определения дальности и времени встречи ЗУР с це-
лью;
16 - блок воздействия фонов на этапе наведения;
17 - блок воздействия ЛТЦ на этапе наведения;
18 - блок анализа эффективности действия боевого снаряже-
ния ЗУР;
19 - блок определения закона распределения вероятности по-
ражения цели ЗУР.
Рассмотрим содержание каждого блока.
92
3.5. Исходные данные (блок 1)
В блоке 1 определяются основные характеристики цели и
ПЗРК, а также другие исходные данные, необходимые для расчета
боевой эффективности ПЗРК (тип помехи и способ ее применения,
конкретные заданные внешние условия).
В исходных данных должны быть указаны:
• закон распределения дальностей обнаружения цели;
• закон распределения дальностей захвата цели ОГС;
• закон распределения дальностей пуска ЗУР;
• закон распределения дальностей встречи ЗУР с целью, если
законы известны;
• признак режима стрельбы: навстречу, навстречу - вдогон
(т.е. за пролет всей зоны поражения), вдогон;
• признак выполнения целью маневра (есть, нет);
• признак наличия фонов (есть, нет);
• признак наличия ложных тепловых целей (ЛТЦ) (есть,
нет);
• признак варианта построения помех (три варианта);
• количество реализаций;
• количество интервалов, необходимое для построения зако-
нов распределения;
• координаты цели в функции времени в стартовой системе
координат - в виде табл. 3.1, в которой координаты цели задаются
по убыванию и могут принимать как положительные, так и отри-
цательные значения.
Таблица 3.1
Задание координат цели
Время полета цели г, с ‘о ‘1 *2
хц(4 м *ц0 •*ц! хц2 хил
лХО»м •УцО Уи2 Уил
Z (/) м ц ' 7 ^цО %и2 £ц0
93
• момент времени начала маневра цели;
• интегральное распределение метеорологической дальности
видимости;
• интегральное распределение дальности прямой видимос-
ти;
• надежность комплекса в процессе боевой работы;
• распределение вероятности пропуска цели стрелком-
зенитчиком в зависимости от метеорологической дальности види-
мости;
• интегральное распределение дальностей обнаружения
цели без учета влияния рельефа местности для определенных зна-
чений;
• максимальное и минимальное значения времени запазды-
вания обнаружения внезапно появившейся цели стрелком-
зенитчиком;
• вероятность правильного опознавания цели;
• математическое ожидание (МО) и среднее квадратическое
отклонение (CKO) I работного времени, включающего в себя вре-
мя, затрачиваемое на включение источника питания, опознавание
цели, поимку цели в прицельное устройство и сопровождение
цели;
• дальность до дальней (ближней) границы зоны пуска при
стрельбе навстречу (вдогон);
• интегральное распределение дальностей до ближней гра-
ницы зоны пуска ЗУР при стрельбе навстречу;
• дальность до ближней (дальней) границы зоны поражения
при стрельбе навстречу в случае маневра цели;
• вариант задания законов распределения захвата цели ОГС
- интегральное распределение дальности захвата цели ОГС или
интегральное распределение горизонтальных дальностей захвата
цели ОГС (навстречу - вдогон, в беспомеховой обстановке, в ус-
ловиях фонов, в условиях постановки ЛТЦ и др.);
• время функционирования источника питания ком-
плекса;
• задержка включения источника питания после обнаруже-
ния цели;
• максимальная допустимая угловая скорость линии визиро-
вания "ракета - цель";
94
• МО и CKO II работного времени, включающего в себя
время, затрачиваемое на проверку качества захвата цели ОГС, вве-
дение углов упреждения (при необходимости), прохождение ко-
манды ’’пуск” и сход ЗУР;
• предельная высота полета цели, при которой возможен пе-
резахват ОГС линии горизонта;
• МО и СКО времени анализа автомата захвата и пуска
(АЗП);
• варианты задания законов распределения пуска ЗУР: инте-
гральное распределение дальностей пуска ЗУР; интегральное рас-
пределение горизонтальных дальностей пуска ЗУР (при стрельбе
навстречу, вдогон, в беспомеховой обстановке, в условиях фонов,
в условиях постановки ЛТЦ и др.)
• МО и СКО упреждения по углу места и азимуту в зависи-
мости от дальности пуска (Дп) - в виде табл. 3.2:
Таблица 3.2
Задание МО и СКО упреждения по углу места и азимуту %
Дп -м Дш -м Дп2 > м Дпл »м
^01 ^02 <;0„
Оо> град °01 ° 02 °0я
£о >град ^02
0^, град °£2
• распределение вероятности перезахвата ОГС линии гори-
зонта в зависимости от дальности до цели;
• интегральное распределение вероятности врезания
ЗУР в землю в зависимости от дальности до цели в момент пуска
ЗУР;
• вероятность сопровождения цели стрелком-зенитчиком;
• варианты задания законов распределения встречи ЗУР с
целью: интегральное распределение дальностей встречи ЗУР с це-
лью или интегральное распределение горизонтальных дальностей
встречи ЗУР с целью (при стрельбе навстречу, вдогон, в беспоме-
ховой обстановке, в условиях фонов, в условиях постановки ЛТЦ
и др.) - в виде табл. 3.3:
95
Таблица 3.3
F(p) ЛЙ) Мл) ММ л (л)
Д(х),м Д1(*|) Д,(х.) Ди(*п)
i = 1,2,.. .,я - число табличных значений Ft или .
• скорость ЗУР (ур) в зависимости от полетного времени (/р)
- в виде табл. 3.4:
Таблица 3.4
Полетное вре- мя ЗУР /р,с zpl Zp2 ^р/л
Скорость ЗУР Ур,м/с VP1 Vp2 У р/л
• МО и СКО времени окончания стартового участка полета
ЗУР;
• шаг изменения текущего времени;
• коэффициент навигации;
• максимальная располагаемая нормальная перегрузка ЗУР;
• флюктуационная нормальная перегрузка ЗУР;
• расстояние между целью и ЗУР, при котором считается,
что встреча произошла;
• варианты задания условной вероятности поражения цели
боевым снаряжением ЗУР (ЛБС) в зависимости от дальности
встречи ЗУР с целью /?бс(Дв) или от горизонтальной дальности
/?бс(хв) ПРИ различных условиях стрельбы (при стрельбе навстре-
чу, вдогон, в беспомеховой обстановке, в условиях фонов, в усло-
виях постановки ЛТЦ и др.) - в виде табл. 3.5 (при отсутствии об-
ращения к модели, описанной в разд. 2):
Таблица 3.5
Распределение вероятностей поражения целей боевым
снаряжением ЗУР
^БС ЛБС1 (/?EC|>/?BCi) ЛБС2 (^БС2’^БС2) ^БСт (^БСт’^БСт)
д(х.),м Д1(х»1) Д2(хв2) Дв/п С*в/п ) )
96
• вероятности захвата ОГС фонов (таблично, числом);
• вероятность захвата ОГС фонов на временном интервале
Л| (от момента готовности к захвату цели ОГС до момента ее за-
хвата);
• вероятность срыва автосопровождения из-за влияния фо-
нов РЭф2 на временном интервале Д2 (от момента захвата цели
ОГС до момента выдачи разрешения на пуск ЗУР);
• вероятность срыва наведения ЗУР в условиях фонов Рэф3
на временном интервале Д3 (от момента выдачи разрешения на
пуск ЗУР до момента встречи ЗУР с целью);
• интегральное распределение наличия облачности по высо-
там7?обл(Аобл) - в виде табл- 36:
Таблица 3.6
Л)бл -Гобл 1 Гобл 2 л обл/и
Йо6л’М ^обл! ^обл2 "облт
• частость различных типов облачности (Р) в зависимости
от высоты йобЛ - в виде табл. 3.7 и аналогичных ей для трех типов
облачности и трех ярусов I, II и III:
Таблица 3.7
Пример задания облачности I типа I яруса
₽ ₽2
Лобл’м ^обл! Гобл2 ^облт
• интегральное распределение вероятности перезахвата ОГС
фоновых неравномерностей (Рпз) в зависимости от пути (s), про-
ходимого линией визирования "ЗУР - цель" по поверхности обла-
ков - в виде табл. 3.8 и аналогичных ей для трех типов облачности
и трех ярусов :
Таблица 3.8
Пример задания вероятности перезахвата ОГС фоновых
неравномерностей для облачности I типа I яруса
рт Л131 Г\1з2 Лв/л
S ,м 5, 52
97
• общее количество ЛТЦ;
• МО и СКО дальности начала постановки ЛТЦ (для I вари-
анта расчета - см. подразд 3.7);
• СКО определения наклонной дальности ракеты (Дт);
• темп сброса ЛТЦ до пуска ЗУР;
• МО и СКО времени начала постановки ЛТЦ (для III вари-
анта расчета);
• темп сброса ЛТЦ после пуска ЗУР;
• признак захвата ЛТЦ (0 или 1);
• вероятность захвата ЛТЦ Рпз (срыва автосопровождения
Рса или срыва наведения Рсн) на трех временных интервалах
(таблично или числом).
Распределения вероятностей Р1П(ДЦ), Рса(Дц), Дсн(Дц) в за-
висимости от дальности до цели на соответствующем временном
интервале задаются в виде таблиц, аналогичных табл. 3.9:
Таблица 3.9
р Ри2 Лхп
Дц.М Дц1 JXu2 Дцп
3.6. Анализ надежности функционирования ПЗРК в процессе
боевой работы (блок 2)
При определении надежности ракетных систем большое зна-
чение имеет оценка величины вероятности Ри по данному числу т
появления события А в п независимых испытаниях. Вероятность
Р„ является параметром, входящим в распределение случайной
величины X, принимающей только значения 1 и 0, в зависимости
от того, появляется ли событие А в рассматриваемой реализации
или нет. Несмещенной состоятельной и эффективной оценкой па-
раметра Ри является частость появления события А в п опытах:
Рк=т!п.
Разыгрывая в соответствующей реализации случайное число
а, равномерно распределенное в интервале [0; 1 ], и сравнивая с по-
лученным а параметр Рн, можно сделать следующие выводы:
98
1)если произошел отказ по надежности функционирования
ПЗРК (ос,] > Рн), то расчет в данной реализации прекращается и
осуществляется переход к следующей реализации;
2) если отказа нет (а] < Рн),расчет продолжается далее по
приведенному алгоритму.
3.7. Выбор варианта расчета (блок 3)
Возможный вариант расчета боевой эффективности выбирает-
ся в зависимости от того, какой момент времени принимается за
начало отсчета и как будет протекать дальнейшее управление вы-
числительным процессом в соответствующей реализации, т.е.
будут ли рассчитываться дальность и время обнаружения цели
(блок 5), захвата цели ОГС (блок 7), пуска ЗУР (блок 9), встречи
ЗУР с целью (блок 15).
Рассмотрим следующие четыре варианта расчета:
• I - при известном законе распределения дальностей обна-
ружения цели Д^ за начало отсчета принимается момент време-
ни, соответствующий дальности до цели = Дц(/), расчет на-
чинается с блока 5.
• П - при известном законе распределения дальностей
захвата цели ОГС Д^, после учета влияния надежности за
начало отсчета принимается момент времени, соответствую-
щий Дздх = Дц(0, далее расчет проводится, начиная с бло-
ка?.
• III - при известном законе распределения дальностей пус-
ка ЗУР Дп после учета влияния надежности расчет проводится с
момента времени, соответствующего Дп = Дц(/), далее - начиная
с блока 9.
• IV - при известном законе распределения дальностей
встречи ЗУР с целью Дв после учета влияния надежности расчет
проводится с момента времени, соответствующего ДВ=ДЦО)’
начиная с блока 15.
99
3.8. Определение параметров траектории цели (блок 4)
В этом блоке в соответствии с заданным законом движения
цели формируется траектория ее полета.
Из табл. 3.1 по начальному значению времени tQ путем ли-
нейной интерполяции находятся текущие координаты цели в сис-
теме координат, связанной с точкой старта ЗУР, - уц0 и гц0.
Затем определяются высота Ни и параметр Рц начальной точки
траектории полета цели:
Нц .Уцо(0’ ~ ^цоО) •
AZ
Текущие значения проекций вектора скорости цели на коор-
динатные оси стартовой системы координат находятся из соотно-
шений
ltX Az ’
/Л
ДГ
где хц0, Уц0, zu(/) - текущие координаты цели в стартовой СК;
Д/ - шаг изменения текущего времени.
Текущее расстояние до цели Дц0, Угол места ец0 и угол
азимута <рц0 в сферической СК, связанной с точкой старта ЗУР,
определятся из соотношений
Дц0=7^0^10^10; ец0=arctg-r===;
<p(0=arctg^^ .
ХцУ/
В зависимости от направления стрельбы угол <pu(z) может
принимать следующие значения:
если хц0>О и гц0>О, то <рц0 = |(рц0 ;
если хц0>О и zn0< 0, то (рц0= 2л-|фц0 ;
если хц0<О и гц0>О, то <рц0= л-|<рц0;
100
если хц(/)<0 И 2ц(/)<0, то Фц(/) = л + |фц(/)|;
если хц(/) = 0 и zu(z)>0, то Фц(/) = л/2 ;
если хц(/) = 0 и 2ц(г)<0, то <Рц(') = -*/2;
если хц(/)>0 и гц(0=°, то фц(')=°;
если хц(/)<0 и гц(') = 0> то фц(/)= л .
Информация данного блока используется на всех этапах моде-
лирования.
3.9. Определение дальности и времени обнаружения цели
(блок 5)
В блоке 5 на основании заданных законов распределения оп-
ределяются:
• метеорологические дальности видимости (МДВ);
• вероятность пропуска цели стрелком-зенитчиком;
• вероятность опознавания цели;
• дальность и время обнаружения цели.
Каждый из перечисленных параметров определяется по схо-
жему алгоритму. На основе заданного интегрального распределе-
ния параметра, задаваемого таблично (аналогично табл. 3.3), по
случайному числу а путем линейной интерполяции выбирается
значение искомого параметра.
Метеорологическая дальность видимости Дм определяется на
основе интегрального распределения МДВ ^М(ДМ) по случайному
числу а2, с которым сопоставляется величина вероятности про-
пуска цели стрелком-зенитчиком ^(Дм), назначаемой сравне-
нием со случайным числом а3. Если случайное число
а3 > (1 - Рпр), то фиксируется пропуск цели, расчет в данной реа-
лизации прекращается и осуществляется переход к следующей
реализации. В противном случае расчет продолжается далее по
представленному на рис. 3.3 алгоритму.
Из нескольких таблиц интегрального распределения дально-
стей обнаружения цели без учета влияния рельефа местности
по значению Дм выбирается конкретная таблица зако-
на Ылтб)}- По случайному числу а4 из таблицы
101
путем линейной интерполяции выбирается значение Д*б при ну-
левых >глах укрытия
Дальность обнаружения цели определяется на основе таблицы
шпттр1льж>тт}' распределения дальностей прямой видимости Двид-
^вяд(Двнд) по случайному числу а5 путем линейной интерполя-
ции значений Двид.
Анализ выборок Д^, Двид позволяет определить дальность
обнаружения цели из условия Доб = пнп(Доб,Двид).
По дальности обнаружения цели определяется горизонтальная
составляющая дальности цели :
*обн — уДоб Zn *
и по ней из таблицы, аналогичной табл. 3.1, путем линейной ин-
терполяции - время обнаружения цели /обн .
Если в дальности обнаружения не учитывается рельеф мест-
ности = Добто за время обнаружения цели принимается
G ~^обн’
Если дальность обнаружения равна дальности видимости
(Доб=Двид)> то за время обнаружения цели принимается время
/1 =^обн + где *з ~ случайная величина времени запаздывания
обнаружения внезапно появившейся цели стрелком-зенитчиком:
>,= аЛ”» + 0-<*6
Здесь ~ задаваемые максимальное и минимальное
значения времени запаздывания обнаружения внезапно появив-
шейся цели стрелком-зенитчиком. В этом случае дальность обна-
ружения цели определяется как
Доб = Дц('1 ) •
Для удобства при проведении расчетов время обнаружения
цели можно считать равным нулю. Тогда в табл. 3.1 значения
необходимо переопределить с учетом времени обнаружения цели:
С = G “ *1 и за время обнаружения цели принимается = 0,
а за дальность обнаружения цели = Дц(/|) .
102
Ошибка в опознавании цели определяется сравнением случай-
ного числа а7 с вероятностью опознавания Роп. Если
а7 > Л>п» имеет место неправильное опознавание цели, расчет в
данной реализации прекращается и осуществляется переход к сле-
дующей. В противном случае расчет продолжается далее по алго-
ритму рис. 3.3.
3.10. Вычисление I работного времени и момента
готовности к захвату цели ОГС (блок 6)
Первое работное время ПЗРК Tj включает в себя время,
затрачиваемое на включение источника питания, опознавание
цели, поимку цели в прицельное устройство и сопровождение
цели.
Случайное значения I работного времени определяется как
Т] — т j + cj j,
где Tj, Gj - математическое ожидание (МО) и среднее квадрати-
ческое отклонение (CKO) I работного времени; - здесь и при
дальнейшем изложении случайная величина, распределенная по
стандартному нормальному закону (МО равно нулю, СКО равно
единице).
Момент готовности ПЗРК к захвату цели /2 = + Ti •
По t2 из табл. 3.1 линейной интерполяцией определяется ко-
ордината цели в момент t2 -xn(t2), затем вычисляется расстояние
до цели - Дц(г2).
Начиная с момента готовности к захвату цели ОГС, проводит-
ся анализ влияния искусственных ложных тепловых целей (ЛТЦ) и
естественных (фонов, линии горизонта) помех на процесс функ-
ционирования ПЗРК.
В зависимости от того, присутствуют или нет какие-либо по-
мехи и по какому варианту они строятся, реализуется тот или иной
вариант расчета (помехи или игнорируются или учитываются в
соответствующих блоках и реализациях).
103
3.11. Определение дальности и времени захвата цели ОГС
(блок 7)
В блоке 7 определяются дальности до ближней границы зоны
пуска при стрельбе навстречу и вдогон, находится минимальное
значение из времени функционирования источника питания и вре-
мени достижения целью дальней границы пуска при стрельбе вдо-
гон и ближней границы пуска при стрельбе навстречу, рассчиты-
вается значение угловой скорости линии визирования ’’ракета-
цель”, определяются дальность и время захвата цели ОГС. Опре-
деление зоны пуска и характерные примеры зон были приведены
в разд. 2.
Если предусмотрен учет влияния помех, то для проверки воз-
можности перезахвата ОГС естественных и искусственных помех
происходит обращение данного блока к блокам 12 и 14.
Дальность до ближней границы зоны пуска при стрельбе на-
встречу Д ”б определяется с использованием таблицы £пб (д “б )
интегрального распределения дальностей до ближней границы зо-
ны пуска ЗУР по случайному числу а8 путем линейной интерпо-
ляции.
Аналогично из таблицы Fn6 (д ®б ) интегрального распределе-
ния дальностей до ближней границы зоны пуска ЗУР при стрельбе
вдогон по случайному числу а 8 линейной интерполяцией выби-
рается значение Д®б .
Если ограничения по ближней границе зоны пуска отсут-
ствуют, то дальность до ближней границы при стрельбе навстре-
чу и вдогон принимается равной дальности до цели на пара-
метре:
Дпб = Дпб = УцО + 2ц0 ’
Минимальное случайное значение времени достижения целью
той или иной границы зоны поражения гк в интервале между вре-
менем функционирования источника питания /ф (за начало отсче-
та /ф принимается момент ) и временем г“д достижения
целью дальности Д при стрельбе навстречу' или временем t®6
104
достижения целью Д ®б при стрельбе вдогон определяется сле-
дующим образом:
• рассчитываются координаты горизонтальных дальностей
ближней и дальней границ зоны поражения:
н — /| Пв 2 2 । в _ ттв 2 2^
. *лб “ 1/1 Д Г16 ~.Уц “ I’ ХПЛ ~ 1/1 Дпд t ~ .Уд, ~ I’
• из табл. 3.1 линейной интерполяцией по х”б опреде-
ляется /пнб (г’б);
• если /ф > , то tK = , в противном случае tK = /ф;
• если /ф > , то tK = г®д, в противном случае tK = .
Случайное значение времени захвата цели ОГС (t3) определя-
ется в зависимости от того, что задано: интегральное распределе-
ние дальности или горизонтальных дальностей захвата цели ОГС.
В первом случае с помощью случайного числа а9 из таблиц
интегрального распределения дальностей захвата цели ОГС
^х(д-*), /Цд™*),
^зах (дх) в зависимости от того, ведется стрельба навстречу или
навстречу-вдогон (т.е. за пролет всей зоны поражения), при нали-
чии или отсутствии фонов и ЛТЦ путем линейной интерполяции
определяются:
Д™ (Хзах) ~ дальность (или горизонтальная дальность) за-
хвата цели ОГС при стрельбе навстречу (навстречу-вдогон) в бес-
помеховой обстановке;
Дзах (Хзах) ” дальность (или горизонтальная дальность) за-
хвата цели ОГС при стрельбе вдогон в беспомеховой обстановке;
ДзахВ (лзахВ) “ дальность (или горизонтальная дальность) за-
хвата цели ОГС при стрельбе навстречу-вдогон в беспомеховой
обстановке и соответствующие им горизонтальные дальности за-
хвата цели ОГС:
TH _ (и™2 _ _ 2 тн-в _ ГТгн-в2 2 2 тв Гггтв2_ 2 _ 2
^зах "у Дзах -'цО уДзах -'цО ’ -*зах уДзах УцО ^иО *
105
Аналогичная процедура осуществляется при задании инте-
грального распределения горизонтальных дальностей захвата цели
ОГС.
Горизонтальная дальность захвата цели ОГС без учета влия-
ния угловой скорости линии визирования “ЗУР-цель” при извест-
ном законе распределения дальностей обнаружения цели опреде-
ляется так:
Хзах1 = т*п(хзах>хц0)) ПРИ ММ-О при стрельбе навстречу
(при хц(/2)< 0 расчет в данной реализации прекращается);
Хзах1 = m*n(xwt ’ хц(^2 )) ПРИ стрельбе вдогон;
хз^с1 = min(x3™B > хц )) навстречу-вдогон (т.е. за пролет всей
зоны поражения).
Горизонтальная дальность захвата цели ОГС без учета влия-
ния угловой скорости линии визирования “ЗУР-цель” при извест-
ном законе распределения дальностей захвата цели ОГС:
Хзах1 = Хмх “ ПРИ стрельбе навстречу;
Хзах1 ~ Хмх “ ПРИ стрельбе вдогон;
Хзах1 = хзахВ ~ ПРИ стрельбе навстречу-вдогон.
Так как при известном законе распределения дальностей за-
хвата цели ОГС за начало отсчета принимается момент времени
захвата, то из табл. 3.1 линейной интерполяцией определяется /3^х1
(или или Z^]), соответствующее хзах1 (или х^], или х31х1),
затем переопределяются значения tt в табл. 3.1:
tt =ti -zmx1 “ ПРИ стрельбе навстречу;
= tt - (£х® - при стрельбе вдогон;
zi =ti “'Ll “ ПРИ стрельбе навстречу-вдогон.
Начиная с момента достижения целью горизонтальной даль-
ности х“ах1 или х‘ах1, или х®ах1, рассчитываются значения угло-
вой скорости линии визирования "ЗУР-цель":
•ко=7мо+М')^2 мо •
106
Если <7(0 < <jmax , то:
Хзах ~ Х™х “ ПРИ стрельбе навстречу;
Хзах = Хзах ~ ПРИ стрельбе вдогон;
Хзах = х™хВ “ ПРИ стрельбе навстречу-вдогон.
R противном случае при стрельбе навстречу расчет в данной
реализации прекращается и осуществляется переход к следующей
реализации. При стрельбе вдогон принимается - хзах = хц(г), при
стрельбе навстречу-вдогон - хза^ = хц(/), где хц(/) - горизонталь-
ная дальность, начиная с которой выполняется условие
?(0 — <7max
Дальность захвата цели ОГС в рассмотренных условиях:
Дмх = +ylo + z2^ - при стрельбе навстречу;
Дих = /rlax+^Jo+2uO - ПРИ стрельбе вдогон;
Д£х = “ ПРИ стрельбе навстречу-вдогон.
По (х£®,Х*ах) из табл- 3.1 путем линейной интерполя-
ции определяется время захвата цели ОГС и принимается за /3.
При известном законе распределения дальностей обнаружения
цели, если t3 < tk, то расчет продолжается далее по алгоритму
рис. 3.2; иначе расчет прекращается и осуществляется переход к
следующей реализации.
3.12. Вычисление II работного времени и момента готовности
к пуску (блок 8)
Второе (II) работное время т2 включает в себя время, затра-
чиваемое на проверку качества захвата цели ОГС, введение углов
упреждения (при необходимости), прохождение команды ’’пуск” и
сход ЗУР.
Случайное значения II работного времени т2 представляется
как
т2 = т2 +*2О2,
107
где - МО и CKO II работного времени; к2 - случайная ве-
личина, распределенная по стандартному нормальному закону.
Тогда момент готовности ПЗРК к пуску ЗУР можно предста-
вить как сумму случайного времени захвата цели /3 и т2:
Г4 = t3 4- Т2 •
По t4 из табл. 3.1 линейной интерполяцией определяется го-
ризонтальная координата цели хц(г4) и вычисляется дальность до
нее Дц(/4).
3.13. Определение дальности и времени пуска ЗУР (блок 9)
В блоке 9 определяются дальность и время пуска ЗУР, рас-
сматривается специфика расчета в случае выполнения целью ма-
невра, проверяется принадлежность точки пуска ЗУР зоне пуска,
проводится проверка на выполнение условия по угловой скорости,
определяется вероятность врезания ЗУР в землю.
В случае учета естественных и искусственных помех происхо-
дит обращение данного блока к блокам 12 и 14, с помощью кото-
рых определяется результат воздействия естественных (фонов) и
искусственных (ЛТЦ) помех на предпусковом этапе.
Порядок определения дальности и времени пуска ЗУР. Слу-
чайные значения дальности и времени пуска ЗУР (/4) определяют-
ся, так же как и ранее, в зависимости от того, что задано: инте-
гральное распределение дальностей или горизонтальных дально-
стей пуска.
В первом случае с помощью случайного числа а10 из таблиц
интегрального распределения дальностей захвата цели
огсгп(цвп), ^п(цпн), гп(дпн*), (гп(цпв*), Кп(ц""), Гп(цпвп) в
зависимости от того, ведется стрельба навстречу или навстречу-
вдогон (т.е. за пролет всей зоны поражения), при наличии или от-
сутствии фонов и ЛТЦ путем линейной интерполяции определя-
ются дальности пуска:
Д“ - при стрельбе навстречу;
Д"’в - при стрельбе навстречу-вдогон;
Дп - при стрельбе вдогон.
108
Во втором случае при тех же условиях функционирования ис-
пользуются таблицы (^п(д"ф),
^(Дп")» ^п(ДпВП) и на их основе путем линейной интерполяции
определяются х”, или х“’в, или хв и затем вычисляются дально-
сти пуска Д”, или Д"’в, или Дв в соответствующих условиях
стрельбы.
Далее определяются дальности до ближних границ зон пуска
при стрельбе навстречу и вдогон по алгоритму, изложенному в
блоке 7.
Если известны закон распределения дальностей обнаружения
цели или закон распределения дальностей захвата цели ОГС, рас-
чет продолжается далее по алгоритму, изложенному в блоке 7.
При стрельбе вдогон дальность пуска ЗУР, горизонтальная
дальность пуска ЗУР, время пуска ЗУР определяются как
Дп =ДцО4)’ *п =*ц(^4)> ^5 ~ ^4 •
Условия определения дальности пуска ЗУР в зоне пуска.
Дальность пуска ЗУР в зоне пуска определяется при выполнении
следующих условий:
• если Двб < Дв < Двд - расчет продолжается далее по алго-
ритму, иначе - расчет прекращается, осуществляется переход к
следующей реализации;
• при стрельбе навстречу или навстречу-вдогон дальность
пуска ЗУР, горизонтальная дальность пуска ЗУР, время пуска ЗУР
определяются как
Дп =Дц('4); ХП =хц(^); [5 - При стрельбе навстречу;
Дп'В =Дц(^); хп‘в {5 =/4 - при стрельбе навстречу-
вдогон;
• при стрельбе навстречу и навстречу-вдогон в момент
времени t5 осуществляется проверка на выполнение условия
по угловой скорости линии визирования. Если условие
<?('5) < <j(')max выполняется, то расчет продолжается далее по ал-
горитму, иначе - расчет прекращается, переходят к следующей
реализации.
109
Далее осуществляется проверка пуска ЗУР в зоне пуска:
• при стрельбе навстречу, если Д"б < Д” < Д^, расчет
продолжается далее по алгоритму, иначе - расчет прекращается,
переход к следующей реализации;
• при стрельбе навстречу-вдогон (т.е. за пролет всей
зоны поражения), если Д”б < Д” < Д“д (при в - °) или
Дпб - Дп В - Дпд (ПРИ хп В < °)’ расчет продолжается далее по
алгоритму, иначе - расчет прекращается, переходят к следующей
реализации.
При известном законе распределения дальностей обнаружения
цели проверяется условие, если t5 <rk, то значения *п(хп~В>хп)’
Дп(Дп~В’Дп)> *5 запоминаются, расчет продолжается далее по
алгоритму, иначе - расчет прекращается, переходят к следующей
реализации.
Возможность срыва сопровождения цели стрелком-
зенитчиком. Возможность срыва сопровождения цели стрелком-
зенитчиком проверяется путем сравнения заданной вероятности
сопровождения цели Рс со случайным числом аи.
Если ан > Рс, считается, что произошел срыв сопровожде-
ния цели стрелком-зенитчиком, расчет прекращается и осуществ-
ляется переход к следующей реализации. Если аи < Рс, расчет
продолжается далее по алгоритму.
Возможность врезания ЗУР в землю проверяется анало-
гично. По текущему значению дальности до цели из таблицы
Рвр(Дц) определяется вероятность врезания ЗУР в землю Рвр.
Полученная вероятность Рвр сравнивается со случайным чис-
лом а12 .
Если а12 < Рвр , то произошло врезание ЗУР в землю, расчет
прекращается и осуществляется переход к следующей реализации.
В противном случае расчет продолжается далее по алгоритму.
Особенности расчета в случае совершения целью маневра.
При расчете показателя боевой эффективности по маневрирующей
цели принимается, что цель начинает маневрировать в момент
пуска ЗУР (до этого момента она летит горизонтально).
ПО
Из этого следует, что для учета маневра необходимо осущест-
вить сдвиг элементов таблицы, определяющих траекторию цели,
таким образом, чтобы участок маневра цели начинался с момента
пуска ЗУР.
Реализуется это следующим образом.
После определения координат и времени пуска ЗУР находят:
• разность между временем начала маневра гнм и временем
пуска ЗУР гп :
дг=/нм -Л;
• разности между координатами начала маневра
(*нм>.Унм>2нм) и координатами цели в момент пуска
ЗУР(хп,уп,гп):
^ = *нм-*п, Ьу = _УНМ - Уп > A2 = Z..M-Zn-
Затем элементы табл. 3.1 сдвигаются на полученные разности
и переопределяются:
Zj — Zj - Д/, Хц] — Хц, — Дх, — Уц| ~ Ду, ~ — Д^ .
В остальном расчет при совершении целью маневра не отли-
чается от расчета без маневра (за исключением дополнительной
проверки, осуществляемой в блоке 15).
Алгоритм данной модели позволяет проводить расчет для це-
ли, начинающей маневрировать в любой момент времени, при на-
личии необходимых исходных данных.
Учет влияния помех. Если предусмотрен учет влияния по-
мех, то для проверки возможности перезахвата ОГС естественных
и искусственных помех после успешного завершения работы дан-
ного блока происходит передача управления процессом последо-
вательно в блоки 10, 12, 14.
Так, для проверки перезахвата ОГС линии горизонта происхо-
дит обращение к блоку 10, в котором реализуется эта проверка:
• если фоны присутствуют, то осуществляется переход в
блок 12;
• если фоны отсутствуют, расчет продолжается далее по ал-
горитму;
• если ЛТЦ присутствуют, осуществляется переход в блок 14;
• если ЛТЦ отсутствуют, расчет продолжается далее по ал-
горитму.
111
3.14. Воздействие линии горизонта (блок 10)
В данном блоке проверяется возможность перезахвата ОГС
линии горизонта.
Если высота цели меньше или равна высоте линии горизонта
(уц(/5)< Я”г), то по текущему значению дальности до цели из
таблицы РЛГ(ДЦ) определяется вероятность перезахвата ОГС ли-
нии горизонта (Рлг).
Полученная вероятность Рлг сравнивается со случайным чис-
лом ав.
Если а 13 < Рлг, то произошел перезахват линии горизонта,
расчет прекращается и переходят к следующей реализации. В про-
тивном случае осуществляется выход из этого блока и возврат в
блок 9.
3.15. Определение фоновых условий (блок 11)
В этом блоке определяются высота расположения облаков,
тип и ярус облака.
Если вероятность захвата ОГС фонов задается числом, то
осуществляется выход из данного блока и возврат в блок вызова -
блок 6.
Если вероятности захвата ОГС фонов задаются таблично, то
определяется высота расположения облаков. По случайному числу
а14 из табл. 3.6 интегрального распределения наличия облачности
по высотам Л,бл(Лобл) выбирается высота расположения облаков
^обл •
В зависимости от полученного значения высоты расположе-
ния облаков определяется номер яруса облаков: I ярус, если
Лобл < 2000 м; II, если < 4000 м; III, если <10000 м.
Тип облачности (Т) определяется по выбранному значению вы-
соты облаков Аобл с помощью табл. 3.7 Рт(^лт) (Л-номер яру-
са, Т - номер типа облачности). Для полученного яруса облаков вы-
бираются частости типов Р(, Р2 > ₽з > которые предварительно нор-
мируются и затем сравниваются со случайной величиной а15.
112
т =
Аналогичные таблицы используются для 2-го и 3-го типов об-
лачности I яруса, для трех типов облачности И и III ярусов:
1 - если 0 < а15 - Pi ’
< 2-если р* <а15 <Р] + 02,
3-если p;+p;<ai5 <_l ,...........
где Р], р2 , ₽з ~ нормированные значения величин р,, р2, р3, оп-
ределяемые как
₽, =----------- (/=1,2,3).
Р1+₽2+₽3
После завершения работы данного блока осуществляется пе-
реход в блок, откуда был осуществлен его вызов (блок 6).
3.16. Воздействие фонов на предпусковом этапе (блок 12)
В блоке 12 определяется воздействие фонов на предпусковой
этап работы ПЗРК. В данном блоке рассчитывается путь, прохо-
димый линией визирования "ракета-цель" по поверхности облаков
с момента готовности к захвату цели ОГС до момента пуска раке-
ты и осуществляется проверка захвата ОГС фоновых неравномер-
ностей.
Процесс работы ПЗРК, представленный на рис. 3.4, можно
разбить на следующие временные интервалы: Aj - от момента го-
товности к захвату цели ОГС до момента ее захвата; Д2 - от мо-
мента захвата цели ОГС до момента выдачи разрешения на пуск
ЗУР; А3 - от момента выдачи разрешения на пуск ЗУР до момен-
та встречи ЗУР с целью. При этом учитываются и оцениваются
воздействия помех.
На рис. 3.4 /обн - время обнаружения цели; tn - момент го-
товности к захвату цели ОГС; Т| - I работное время, включающее
в себя время, затрачиваемое на включение источника питания,
опознавание цели, поимку цели в прицельное устройство и сопро-
вождение цели; t3 - момент захвата цели ОГС; /гп - момент
готовности к пуску; т2 - II работное время, включающее в себя
113
время, затрачиваемое на проверку качества захвата цели ОГС, вве-
дение углов упреждения (при необходимости), прохождение ко-
манды "пуск" и сход ЗУР; Гв - время встречи ЗУР с целью; тпол -
полетное время ракеты; тазп = тазп + к6 -оазп - время анализа ав-
томата захвата и пуска (АЗП), где тазп>°азп ~ МО и СКО времени
анализа автомата захвата и пуска (АЗП).
Рис. 3.4. Временные интервалы работы ПЗРК
Вероятность захвата ОГС фонов может быть задана числом
или таблицей.
Если вероятность захвата ОГС фонов задается числом, то оп-
ределяется временной интервал, на котором осуществляется влия-
ние фонов:
• если t < t2, влияние фонов игнорируются, осуществляется
выход из данного блока и возврат в блок вызова (блок 7, блок 9);
• если t2 , то случайное число а15 сравнивается с ве-
роятностью захвата ОГС фонов на временном интервале
Д1 ~ Лф1 ’
• если а15 , то считаем, что произошел перезахват ОГС
фонов, тогда осуществляется переход к следующей реализации;
• если а15 > Рзф1, осуществляется выход из данного блока и
возврат в блок вызова (блок 7);
114
• если условие t2 < t < t3 не выполняется, проверяется воз-
действие фонов на следующем временном интервале.
Для этого учитывается время, затрачиваемое на работу авто-
мата захвата и пуска: /азп = t3 + тазп и, если t3 <t </азп , то случай-
ное число а16 сравнивается с вероятностью срыва автосопровож-
дения из-за влияния фонов на временном интервале.
А2 ~Лф2 ТогДа:
• если а16 < Р3ф2, считается, что произошел срыв автосо-
провождения цели ОГС из-за фонов и осуществляется переход к
следующей реализации;
• если а16 > Р3ф2 , осуществляется выход из данного блока и
возврат в блок вызова (блок 7);
• если условие < t < /азп не выполняется, то осуществляет-
ся выход из данного блока и возврат в блок вызова (блок 7).
Если вероятность захвата ОГС фонов задается таблицей,
то определяется путь, проходимый линией визирования
"ЗУР-цель" по поверхности облаков с момента готовности захвата
цели ОГС до момента пуска ЗУР.
Координаты точек пересечения (*пр,ГПр>гпр) линии визиро-
вания с нижней поверхностью облаков находятся путем совмест-
ного решения двух уравнений: уравнения линии визирования
х~*р _ У~Ур z-zp
*ц — Гц ~ Гр ~Zp
и уравнения плоскости (параллельной плоскости XOZ) у = ,
где хр, ур, zp - координаты ЗУР в стартовой системе координат.
Так как на временных интервалах Aj и Д2 хр = 0, то коорди-
наты пересечения определяются следующим образом:
Х„ z„
Y — Ц А V — h 7 — ц А
лпр побл ’ ^пр ™обл ’ ^пр л*обл •
-Уц Уц
Путь, проходимый линией визирования за время ДГ, равен:
&S(t) = ^[xnpG-^-^pW]2 +[упр(/~Д/) - У пр + [znpO znpO)f •
115
Суммарный путь, проходимый линией визирования на вре-
Z ч 5
менном интервале Aj, равен: S{t) = £ AS(/).
'2
Суммарный путь, проходимый линией визирования на вре-
t
менном интервале А2, равен: S[t)= X Д£(У)
5
Вероятность захвата ОГС фоновых неравномерностей опреде-
ляется для конкретного типа и яруса облаков с использованием
таблиц Рпз (S') - интегрального распределения вероятности пере-
захвата ОГС фоновых неравномерностей.
Затем, если t3 < t < , то по значению суммарного пути,
проходимого линией визирования "ЗУР-цель" на данном времен-
ном интервале, из выбранной таблицы определяется вероятность
захвата ОГС фонов - Рпз.
Полученная вероятность Рпз сравнивается со случайным чис-
лом а17:
• при а17 < Рпз считается, что произошел перезахват
фоновых неравномерностей на временном интервале Ан рас-
чет прекращается и осуществляется переход к следующей реали-
зации;
• если а17 > Рпз, осуществляется выход из данного блока и
возврат в блок вызова (блок 7);
• когда условие t2 < t < t3 не выполняется, проверяется воз-
действие фонов на следующем временном интервале.
Если t3<t <7азп, то по значению суммарного пути, проходи-
мого линией визирования "ЗУР-цель" на временных интервалах
Aj и Д2, из уже выбранной таблицы определяется новое значение
р
1 ПЗ •
Полученная вероятность Рпз сравнивается со случайным чис-
лом а18:
• если а18<Ргп, то произошел срыв автосопровождения
цели ОГС из-за фонов, расчет прекращается и осуществляется пе-
реход к следующей реализации;
116
• если а18 > Рпз, осуществляется выход из данного блока и
возврат в блок вызова (блок 7);
• если условие t3 <t </азп не выполняется, осуществляется
выход из данного блока и возврат в блок вызова (блок 7).
3.17. Определение условий применения ложных тепловых
целей (ЛТЦ) (блок 13)
В блоке 13 моделируются условия, при которых использова-
ние ПЗРК осуществляется с учетом влияния искусственных по-
мех, применяемых целью. Для этого определяются способ поста-
новки ЛТЦ и, в соответствии с ним, время и дальность начала по-
становки помех.
Рассматриваются три варианта постановки ЛТЦ:
• со случайной дальности до ПЗРК, определяемой средства-
ми воздушного нападения;
• со случайного момента времени после захвата цели ГСН;
• со случайного момента времени после обнаружения пуска
ЗУР.
В первом случае при появлении ЛТЦ на дальности большей,
чем возможная дальность обнаружения цели, они игнорируются, а
учет влияния ЛТЦ начинается с момента времени готовности к
захвату цели ОГС.
Во втором случае ЛТЦ начинают сбрасываться на участке Д2 •
При попадании ЛТЦ на временные интервалы Aj, Д2 возможен
их захват ОГС. В этом случае расчет прекращается и осуществля-
ется переход к следующей реализации.
В третьем случае ЛТЦ, сбрасываемые на временном интервале
Д3, могут привести к срыву наведения ЗУР на цель, при этом рас-
чет также прекращается и осуществляется переход к следующей
реализации.
Постановка ЛТЦ производится в моменты времени, кратные
темпам сброса ЛТЦ до пуска ЗУР () и после (Д(72 ).
Дальность и время начала постановки первой ЛТЦ определя-
ются для I варианта постановки ЛТЦ в случае стрельбы вдогон в
следующем порядке:
117
• определяется наклонная дальность на параметре
Др “ У ЦО + Z ЦО >
• находится дальность начала постановки ЛТЦ
Д£т =Др + ^7аДр ’
• по дальности Д„п определяется - время начала поста-
новки ЛТЦ.
В случае стрельбы навстречу находится случайная дальность
начала постановки ЛТЦ:
Днп=Днп+*8%1 ’
^нп
где Днп^л1 ’ ~ МО и СКО дальности начала постановки ЛТЦ
(I вариант);
По дальности Д„п определяется Г *п. Если Д„п > Д^, то
принимается Д„п = Доб и t'm = tx.
Для II варианта постановки ЛТЦ Г„п =Г3 + а19Д(7]И по време-
ни находится дальность начала постановки ЛТЦ. Для III варианта
постановки ЛТЦ -T™ = Тнп , 'нп ='з + тазп + тнп>
где Тип, oJJn - МО и СКО времени начала постановки ЛТЦ
(III вариант).
3.18. Воздействие ЛТЦ на предпусковом этапе (блок 14)
В блоке 14 определяются моменты времени и соответствую-
щие им дальности появления очередных ЛТЦ, временные интер-
валы попадания помех, проверяется захват ОГС помехи, определя-
ется воздействие искусственных помех на предпусковом этапе ра-
боты ПЗРК.
Момент времени появления очередных ЛТЦ с учетом темпа
сброса ЛТЦ:
— 'нп + Д^А • (/ — 1),
118
где i - номер очередной ЛТЦ; гнп - момент времени начала по-
становки ЛТЦ.
Если текущее время появления очередных ЛТЦ меньше
времени готовности к захвату цели ОГС t2 (4 \ то ЛТЦ игно-
рируются, осуществляется выход из данного блока и возврат в
блок вызова (блок 7, блок 9). Если /2 - Ч < , то анализируется
вариант задания вероятности срыва на интервале Aj.
В случае если вероятность захвата ЛТЦ (срыва автосопровож-
дения или срыва наведения) на временных интервалах
(где / = 1,2,3) задана таблично, то по дальности до цели в момент
появления ЛТЦ (Дц(/,)) из таблицы вероятности захвата ЛТЦ Рзп
определяется вероятность захвата ЛТЦ на участке
“ Лп(Дц)> и если случайное число а20 не больше вероятности
захвата - то считается, что произошел перезахват
ЛТЦ на временном интервале Д,, расчет прекращается и осущест-
вляется переход к следующей реализации.
Если а20 > P3nj (Дщ), то определяется время сброса следую-
щей ЛТЦ и анализ повторяется до тех пор, пока не проверятся на
перезахват все ЛТЦ, сбрасываемые на участке Др т.е. пока
t2 <tj <t3 и общее количество ЛТЦ не окажется больше заданного.
Если вероятность захвата ЛТЦ на участке А( задана числом,
то случайное число а20 сравнивается с Рзп и далее анализ прово-
дится точно по вышеизложенному алгоритму.
Если общее количество ЛТЦ больше заданного, расчет пре-
кращается, происходит выход из данного блока и возврат в блок
вызова (в блок 9).
Если то проверяется попадание ЛТЦ на временной ин-
тервал Д2.
Если /, < /азгр то определяется тип задания вероятности срыва
автосопровождения цели ОГС.
Аналогично определяется вероятность срыва автосопровож-
дения ОГС на участке Д2 и если а21 <Рсз(Дщ), то расчет
прекращается и осуществляется переход к следующей реализации.
119
Если a2i >Рса(Цц/), то срыва автосопровождения ОГС из-за
данной ЛТЦ не произошло, и если общее количество ЛТЦ мень-
ше или равно заданному, то расчет повторяется для очередного
сброса ЛТЦ до тех пор, пока время, потребное автомату захвата и
пуска для анализа ситуации, не станет больше случайно выбранно-
го (/j- ).
Если последнее условие не выполняется или количество ЛТЦ
оказалось больше заданного, происходит выход из данного блока и
возвращение в блок вызова (блок 9).
В случае если вероятность срыва автосопровождения ОГС
на участке Д2 задается числом, проверка на возможность срыва
автосопровождения ОГС проводится по вышеизложенному
алгоритму.
3.19. Определение дальности и времени встречи ЗУР с целью
(блок 15)
В блоке 15 путем численного интегрирования уравнения дви-
жения ракеты и цели определяются время и дальность встречи ЗУР
с целью. В ходе решения задачи определяются:
• начало управляемого полета;
• текущие координаты цели в ракетной системе координат;
• текущие сферические координаты цели в ракетной системе
координат, приращение углов поворота вектора скорости ЗУР;
• составляющие проекций вектора скорости на координат-
ные оси ракетной системы координат;
• текущие координаты ракеты в стартовой системе коорди-
нат;
• проверяются на выполнение условия по угловой скорости
и по нормальной перегрузке;
• момент встречи ЗУР с целью и дальность до цели в момент
встречи.
Дальности при различных видах стрельбы Д“ , Д“"в, Дв (на-
встречу, навстречу-вдогон, вдогон) и известном законе распреде-
ления дальностей встречи ЗУР с целью выбираются по случайно-
го
му числу а2з, с помощью следующих таблиц интегрального рас-
пределения дальностей:
FB(#B ) при стрельбе навстречу, навстречу-вдогон и
при стрельбе вдогон в беспомеховой обстановке и отсутствии фо-
нов;
Гв(^вФ) ПРИ стрельбе навстречу, навстречугвдогон - и
£в(дВф) пРи стрельбе вдогон при наличии фонов;
FB при стрельбе навстречу, навстречу-вдогон и FB
при стрельбе вдогон при наличии ЛТЦ.
Горизонтальная дальность встречи ЗУР с целью рассчитывает-
ся в зависимости от вида траектории:
хв = “Тцо “гцо ПРИ стрельбе навстречу;
хв = “7Дв2 “Хю ~ гц0 пРи стрельбе вдогон;
= ^Д“2 -уц0 -z20 при стрельбе навстречу-вдогон
(т.е. за пролет всей зоны поражения).
Если задается интегральное распределение горизонтальных
дальностей пуска ЗУР, то выбор горизонтальных дальностей хв,
хв’в, хв производится из таблиц:
FB(xBH) при стрельбе навстречу, навстречу-вдогон и FB(xB)
при стрельбе вдогон в беспомеховой обстановке и отсутствии фо-
нов;
FB(xB*) при стрельбе навстречу, навстречу-вдогон и FB(x**)
при стрельбе вдогон при наличии фонов;
FB(x«n) при стрельбе навстречу, навстречу-вдогон и FB(xBn)
при наличии ЛТЦ.
Далее определяется дальность встречи ЗУР с целью:
Дв = Ан2 - Ао - 2ц0 - при стрельбе навстречу;
Дв = К - Ао - 2но " при стрельбе вдогон;
ДГ = ^uo“zuo ” ПРИ стРельбе навстречу-вдогон.
121
За момент встречи ЗУР с целью принимается время гв, соот-
ветствующее Xg (Xg"B,xf ), определяемое из табл. 3.1.
При выполнении условий принадлежности дальностей Д“,
Д“‘в, Дв зоне поражения: Д”орб<Д«<Д"орд - при стрельбе
навстречу, Дворб < Дв < ДпОрд - при стрельбе вдогон,
Дпорб^Дв‘В^Дпорд (при х»~В>0) - при стрельбе навстречу-
вдогон, Дворб*Д"'в^Дворд (при хвн-в <0) - осуществляется расчет
с учетом наличия фона и помех, в противном случае расчет в дан-
ной реализации прекращается и осуществляется переход к сле-
дующей реализации.
Скорость ЗУР vp в функции полетного времени /р - vp(zp)
рассчитывается либо при известных законах распределения дально-
стей обнаружения цели, либо захвата цели ОГС, либо пуска ЗУР.
Скорость ЗУР в соответствующие моменты времени опреде-
ляется по зависимости vp(zp) (табл. 3.4). Входом в таблицу явля-
ется значение полетного времени ЗУР, определяемое по формуле
tp = t -15, где t5 - время пуска.
В момент времени t5 рассчитываются случайные значения уг-
лов пуска:
9рв((5) = ец(15)+^10а<;+^0 ’ 9рг(/5) = <Рц(/5)+^Н°4 +^0 ’
где £10, к{! - случайные величины, определяемые по стандарт-
ному нормальному закону; £0, , £0, <j^ - МО и СКО упреждения
по углу места и азимуту, выбранные из табл. 3.2 по Дц(/5) путем
линейной интерполяции.
С момента времени Z5 + AZ последовательно определяются:
• составляющие вектора скорости ЗУР в ракетной системе
координат (см. разд. 4) без учета его доворота за время Az, кото-
рые требуются по методу наведения:
%xi (0 = UP (')cos еРв (' - Az)cos 6рг (z - Az),
»'pJ-i(O=''pO)sin0pB(r - А/),
122
v Pzi (')=vP (OcosepB 0 - A')sin ePr 0 - A/);
• проекции вектора относительной скорости на оси ракетной
системы координат:
Уцх] 0” Уцх (0“ Урх! (0 ?
'(')-Уру1(')>
^UZl (0 ~ ^UZ W Vpzi (0 ’
• текущие координаты цели без учета доворота вектора ско-
рости ЗУР за время Дг в ракетной системе координат:
*цх1 (О-^цх! — Уцх1 (0‘>
•Уцу! Уцу10 ~ А0"*'Уцу1 (О’>
Zuzl (0 — ^uzl ~ + Уuzl (0 ’ ’
где координаты цели в момент времени пуска ЗУР в момент t5
равны: 41 (/5) = хц (/5), yuy (t5) = уц (/5 ), 2цг (/5) = zu(t5 );
• текущие сферические координаты цели в ракетной системе
координат:
Дцх1 (0= ^Хцх1 0Х.Уцх1 0^*" zuzl (0 >
Е"'(')=агс'87ттАг
V -^цх! V/ + ^uzl
’ (Л 4. ^uzl(0
9ui(z) = arctg—;
*цх1 V/
• угол срц1 (г), анализ которого приведен в блоке 4;
• момент начала управляемого полета ЗУР:
гн =/5 +/с +£12пс,
где tc , ос - МО и СКО времени окончания стартового участка по-
лета ЗУР; ^12 - случайная величина, определяемая по стандартно-
му нормальному закону;
• приращения углов поворота вектора скорости ЗУР:
дерв (0 = кр [еЦ10 - М- e’ul (0]°О >
123
ерв0=0Рв('-А')-Д0рв(');
Д0Рг (') = *Р [<Рщ (' - Д') - 4>ц1 (')к cos ец1 /cos ерв (г),
0рг(О=еРгО-дО-Д0ргО).
где aQ = 0, если t < t„ и а0 -1, если t > tH;
• составляющие проекций вектора скорости ЗУР на коорди-
натные оси ракетной системы координат с учетом его доворота за
время А/:
Урх! (r) = vp(OcosOpe(f)cosepc0 ,
Vpyl(')=Vp(')SinM')>
%г1(О=М')СО50рв('>'пМ') ’
• текущие координаты цели в ракетной системе координат
при t > tH :
*4X1 (0 = ХЦХ1 - Д') - kpxl (0 - VUX (')]• Д' >
хцу1 (') = *цу 1 (' - Д')- кру 1 (')- % (')]• Д' ’
*Uzl (') = Xuzl (' - Д') - kpzl (') - Vuz (')]• Д' >
• текущие сферические координаты цели в ракетной системе
координат t > :
Д ц 1 (0 - (f)+.Vuyl ^цг1 (0 ’
eul(0=arctg-=^d2= ,
М0+4Л')
ср1д1 (r)= arctg-- ;
Лцх1 V/
• проводится анализ угла срц1 (г), приведенный в блоке 4;
• текущие координаты ЗУР в стартовой системе координат:
*р(')= J%(Ocos0pB(r>os0pr(^r,
Z5
124
«г(0 =
^P0 = fvp(r)sin0pB(/)7r,
'5
zP(t)= J vp(OcosepB(r>inOpr (t)dt-
'5
• угловая скорость линии визирования:
$0= 0 + Фц10 cos2 ёц10 •
Если q(t) > , то расчет прекращается и осуществляется
переход к следующей реализации, иначе - расчет продолжается по
алгоритму.
Далее определяются:
• текущие вертикальная nB(t) и горизонтальная nr(t) со-
ставляющие нормальной перегрузки ЗУР:
Н>0Аер»0
gAr
ypO)aepr0cos9pB(z)
gAZ
где g - ускорение силы тяжести;
• текущая нормальная перегрузка ЗУР n(t) - 7wb (0+"г (О!
• нормальная перегрузка ЗУР и(г) сравнивается с макси-
мальной располагаемой нормальной перегрузкой ЗУР итах .
Если и(0+Ифл > итах> происходит срыв наведения ЗУР, расчет
прекращается и осуществляется переход к следующей реализации,
иначе расчет продолжается далее по алгоритму.
Далее определяются время и дальность встречи ЗУР с целью.
Встреча ЗУР с целью считается произошедшей, если Дц1(/)< АД.
За момент вс гречи ЗУР с целью принимается время tB = t, оп-
ределяемое из табл. 3.1. За координаты точки встречи принимают-
ся координаты цели в момент встречи: *в=*ц0)> ^в=^ц(0’
~ 2ц. (О ’
125
Дальность до цели в момент встречи ЗУР с целью
Дн - + ?в •
При выполнении условий принадлежности дальности Дв зоне
поражения: Д"орб Дв < Д„орд - при стрельбе навстречу,
Дпорб Дв S Дпорд - при стрельбе вдогон, Д”орб < Дв < Д"орд (при
хв >0) - при стрельбе навстречу-вдогон, Д*орб <ДВ <Ддорл (при
хв < 0 ) осуществляется расчет с учетом наличия фона и помех, в
противном случае расчет в данной реализации прекращается и
осуществляется переход к следующей реализации.
В случае выполнения расчета по маневрирующей цели прове-
ряется принадлежность Дв зоне поражения.
При выполнении условий Д„“рб < Дв < Д™рд - при стрельбе
навстречу, Д„“рб < Дв < Д®„рд - при стрельбе вдогон,
Дпорб Дв Дпорд (ПРИ хв > 0 ) - при стрельбе навстречу-вдогон,
Дпорб ^Дв Дпорд (при хв<0) - производится учет влияния
помех, если это предусмотрено, иначе расчет в данной реализа-
ции прекращается и осуществляется переход к следующей реали-
зации.
3.20. Воздействие фонов на этапе наведения (блок 16)
Для учета влияния фонов на этапе наведения рассчитывается
путь, проходимый линией визирования "ракета-цель” по поверх-
ности облаков с момента схода ракеты до момента встречи ее с
целью, затем проверяется срыв процесса наведения из-за захвата
ОГС фонов. Так же как и ранее, вероятность захвата ОГС фонов
может задаваться или таблицей, или числом.
Если вероятность захвата ОГС фонов Р3ф3 задается числом,
то влияние фонов на временном интервале Д3 определяется срав-
нением случайного числа а22 с Р3ф3. Если а22 < Р3ф3, то счита-
126
ется, что произошел срыв наведения ЗУР на цель из-за фонов,
расчет в данном блоке прекращается и осуществляется переход к
следующей реализации. Если а22 > Лфз > т0 осуществляется выход
из данного блока и возврат в блок вызова (блок 15).
Если вероятность захвата ОГС фонов задается таблицей,
то для определения пути, проходимого линией визирования "ЗУР-
цель” по поверхности облаков во время полета ЗУР, необходимо
найти координаты точек пересечения (xnp,ynp,znp) линии визи-
рования с поверхностью облаков. Координаты определяются пу-
тем совместного решения двух уравнений: уравнения линии визи-
х-х у-у Z-Z
рования ----— =-------=------- и уравнения плоскости (па-
*ц - *р -Уц " Ур ZU - zp
раллельной плоскости XOZ) у = /?обл .
Результаты решения (координаты точек пересечения):
•^пр “ хр “* ~ (^обл ” .Ур)’ -Упр “ ^Обл ’ ^пр ” zp (^обл ~.Ур)‘
•Уц“>Р Уц~Ур
Путь, проходимый линией визирования за время Д/, опреде-
ляется по формуле
И)=VkpC'-AO-JnpWf+крО-И-лР(ОР+knp(z“M~M0f»
пока выполняется условие ta3n<t<te. При / >/в определяется
суммарный путь, проходимый линией визирования на временном
интервале Д3:
50= £а5(')-
^азп
Вероятность захвата ОГС фоновых неравномерностей опреде-
ляется для временного интервала za3ll < / < tB. В этом случае по
значению суммарного пути, проходимого линией визирования
"ЗУР-цель" на временных интервалах Д1,Д2,Д3, из выбранной
таблицы интегрального распределения вероятности пере-
захвата ОГС фонов РпзС?) определяется вероятность захвата ОГС
фонов.
127
Полученная вероятность Рпз сравнивается со случайным чис-
лом а23. Если а23 Рпз, то произошел срыв наведения
ЗУР на цель из-за фонов, расчет прекращается и осуществля-
ется переход к следующей реализации. Если а23>Рпз, то осу-
ществляется выход из данного блока и возврат в блок вызова
(в блок 15).
3.21. Воздействие ЛТЦ на этапе наведения (блок 17)
В этом блоке определяется воздействие ЛТЦ на этапе наведе-
ния, проверяется срыв наведения ЗУР на цель.
Сначала рассчитывается время сброса очередной ЛТЦ:
tt=tmi^Ur (i -1). При t, < tB и при табличном задании вероят-
ности захвата ЛТЦ (срыва автосопровождения или срыва наведе-
ния Рсн) на временных интервалах по дальности между ЗУР и
целью в момент Г, из таблицы /^(Дц) определяется вероятность
срыва наведения ЗУР на цель.
Сравнивая случайное число а24 с Рсн/, можно сделать
вывод:
• если а24<Рсн/, то произошел срыв наведения ЗУР на
цель из-за ЛТЦ. В этом случае расчет прекращается и осуществля-
ется переход к следующей реализации;
• если а24>Рсн/, то расчет повторяется, т.е. осуществляется
проверка для очередного сброса ЛТЦ до тех пор, пока количество
ЛТЦ не станет больше заданного и tt < Гв .
Когда > гв или количество ЛТЦ больше заданного,
расчет прекращается, осуществляется возврат в блок вызова
(блок 15).
В случае если вероятность срыва наведения задается числом,
анализ воздействия ЛТЦ на этапе наведения проводится аналогич-
но изложенному выше алгоритму.
128
3.22. Анализ эффективности действия боевого снаряжения ЗУР
(блок 18)
Закон распределения горизонтальных дальностей встречи.
Эффективность действия боевого снаряжения ЗУР можно оценить
двумя способами: смоделировать действие боевого снаряжения, не
рассматривая подробно сам процесс действия, или получить закон
распределения вероятностей поражения цели, подробно анализи-
руя поведение ракеты вблизи цели с учетом ее ориентации относи-
тельно цели и функционирования непосредственно боевого сна-
ряжения (БЧ и ракеты).
В первом случае определяется факт поражения цели в данной
точке встречи ЗУР с целью.
Пусть ЛБС(Дв)(/?БС(хв)) - условная вероятность поражения
цели боевым снаряжением ЗУР (Т?БС) в зависимости от дальности
(горизонтальной дальности) встречи (хв) в беспомеховой обста-
новке; А^(Дв)(/?БС(хв)) - условная вероятность поражения цели
боевым снаряжением ЗУР в зависимости от дальности (горизон-
тальной дальности) встречи в условиях фонов; ЯБС(ДВ)|/?БС(хв))
- условная вероятность поражения цели боевым снаряжением ЗУР
в зависимости от дальности (горизонтальной дальности) встречи в
условиях постановки ЛТЦ.
Тогда если задается условная вероятность поражения цели
боевым снаряжением ЗУР (ЯБС) в зависимости от дальности
встречи ЗУР с целью (Дв), то при отсутствии фоновых помех и
ЛТЦ или при наличии только первых или только вторых, по Дв
из табл. 3.10 путем линейной интерполяции определяется соответ-
ствующее данной точке встречи ЗУР с целью значение Т?БС.
Таблица 3.10
^БС (ЛБС ’ ЛБС ) ДбС1 (ЛБС1’ЛБС1) ^БС2 (^БС2 ’ ^бс2 )
Дв(*в) Д в I (*в1 ) Дв2 (*в2 ) Д вт )
Аналогичный подход используется, если задается услов-
ная вероятность поражения цели боевым снаряжением ЗУР (ЯБС)
129
i . здажимости от горизонтальной дальности встречи ЗУР
с целые ( хв ).
Полученная вероятность Т?БС сравнивается со случайным
числом а25. Если а25 < /?Бс ( *в>.Ув>7в)> то в Данной точке встре-
чи ЗУР поразила цель - условная вероятность поражения цели
принимается равной единице (W{ = 1). Если «25 ^бс (xb>.Vb>zb)>
то условная вероятность поражения цели принимается равной ну-
лю (Wx = 0).
Значения Wx в каждой реализации запоминаются для даль-
нейшего использования в блоке определения закона распределе-
ния вероятности поражения цели.
Расчет по представленному алгоритму (т.е. начиная с блока 2
и заканчивая блоком 18) проводится заданное число раз (NR), т.е.
пока j < NR, где j - число реализаций.
Законы распределения горизонтальных дальностей пуска и
встречи, а также вероятности поражения цели строятся на базе на-
бранной статистики.
Из всех горизонтальных дальностей пуска, полученных в ре-
зультате решения заданного количества реализаций, выбираются
их минимальное (xnmin) и максимальное (хптах) значения.
Затем для определения закона распределения горизонтальных
дальностей пуска отрезок [^nmin;xnmax] разбивается на заданное
число интервалов точками хш , где i - номер интервала.
Далее суммируется число горизонтальных дальностей пуска,
попавших в каждый интервал, и определяется частость попадания:
fni гл ) — ^п/1NP ,
где nni - число горизонтальных дальностей пуска, попавших
в Z-й интервал; NP - количество всех горизонтальных дальностей
пуска, полученных в результате решения заданного числа реализа-
ций.
Закон распределения горизонтальных дальностей пуска опре-
деляется как
^п(хп) =
/=1
130
где KI - число интервалов, необходимое для построения законов
распределения.
Аналогично определяется закон распределения горизонталь-
ных дальностей встречи ЗУР с целью путем разбиения
отрезка [xBmin ’Хптах1 на заданное количество интервалов точками
, где i - номер интервала. , ’ ,,
Суммируя число горизонтальных дальностей встречи,
попавших в каждый интервал, определяется частость попада-
ния:
где пВ1 - число горизонтальных дальностей встречи, попавших
в i -й интервал; NV - число всех горизонтальных дальностей
встречи, полученных в результате решения заданного число реали-
заций.
По частости попаданий определяется закон распределения го-
ризонтальных дальностей встречи:
^в(*в) = S/bzG^b/)-
i=i
Закон распределения вероятности поражения цели ЗУР.
Аналогично алгоритму, приведенному для горизонтальных даль-
ностей пуска и встречи, определяется частость поражения цели в
каждом интервале:
где - количество фактов поражения в z-м интервале; NR -
заданное количество реализаций.
Тогда закон распределения вероятности поражения цели од-
ной ЗУР с учетом всего процесса боевой работы комплекса запи-
шется как
, х К1 / ч
/=1
131
4. ОПРЕДЕЛЕНИЕ УСЛОВНОЙ ВЕРОЯТНОСТИ
ПОРАЖЕНИЯ ЦЕЛИ БОЕВЫМ СНАРЯЖЕНИЕМ ЗУР
Оценка эффективности действия боевого снаряжения ЗУР
позволяет получить закон распределения вероятностей пораже-
ния цели в результате подробного анализа поведения ракеты
вблизи цели с учетом ее ориентации относительно цели и
функционирования непосредственно боевого снаряжения (БЧ и
ракеты).
Для этого необходимо:
• определить положение ракеты относительно цели в точке
встречи;
• учесть рассеивание координат точек срабатывания ВУ;
• описать внешний облик цели;
• описать внутреннее устройство цели;
• определить момент срабатывания ВУ;
• оценить последствия непосредственного взаимодействия
ракеты с целью;
• оценить последствия действия поражающих факторов при
подрыве БЧ и топливных остатков ДУ ракеты.
Организация вычислительного процесса в этом случае пред-
ставлена на рис. 4.1.
4.1. Модель ориентации ЗУР относительно цели
При определении взаимного положения ЗУР и цели использу-
ются следующие системы координат (все они правые).
X3Y3Z3 - земная СК (начало совпадает с точкой старта ЗУР,
ось Х3 произвольно ориентирована в горизонтальной плоскости,
ось Y3 направлена вертикально вверх);
Xv Yv Zv - ракетная скоростная СК (начало в центре масс
ЗУР, ось XVp параллельна вектору скорости ракеты, ось Yv - в
вертикальной плоскости).
132
Рис. 4.1 Схема оценки поражающего действия ЗУР
На рис. 4.2 0р - угол между вектором скорости ракеты и
плоскостью X3OZ3\ сОр — угол между проекцией вектора скорости
ракеты на плоскость X30Z3 й осью Х3.
Рис. 4.2. Ракетная скоростная и земная системы координат
Проведя ряд последовательных взаимных поворотов осей ско-
ростной СК относительно осей земной, получим таблицу косину-
сов углов, устанавливающих связь между осями скоростной и зем-
ной СК и определяющих положение вектора скорости ЗУР в зем-
ной системе координат (табл. 4.1- 4.5):
Таблица 4.1
Косинусы углов между ракетной скоростной
и земной системами координат
Оси OXV vp OYV vp OZV p
ОХ3 cosGp coscop - sin Op coscop sin (Dp
OY3 sin (op sin Op cosOp 0
OZ3 - cosOp sin (Op sin 0p sin (Op COS CD p
A^pKpZp - ракетная связанная система координат (начало в
центре масс ЗУР, ось Хр параллельна продольной оси ЗУР, ось Ур
- в вертикальной плоскости);
134
На рис. 4.3 Ор - центр масс ракеты; ар - угол атаки, угол ме-
жду проекцией вектора скорости на плоскость симметрии ракеты
(XpOYp) и осью ОХР; Рр - угол скольжения, угол между вектором
скорости ракеты vp и плоскостью симметрии XpOYp и осью 0Хр.
Рис. 4.3. Взаимное расположение ракетной связанной
и ракетной скоростной систем координат
Таблица 4.2
Косинусы углов между ракетной связанной и ракетной скоростной
системами координат
Оси oxv p OYV vp ozv vp
oxv *р COS dp COSpp - sinap cosPp sinPp
OYV vp sinap cos ap 0
ozv vp - cosapsinPp sin dp sinPp cosPp
Xv^YViiZVii - целевая скоростная система координат (начало
в произвольной точке цели, ось параллельна вектору скоро-
сти цели, ось - в вертикальной плоскости);
135
На рис. 4.4 0Ц - угол между вектором скорости цели и плос-
костью X^OZ3\ соц - угол между проекцией вектора скорости цели
на плоскость X3OZ3 и осью Х3.
Рис. 4.4. Целевая скоростная и земная системы координат
Таблица 4.3
Косинусы углов между целевой скоростной
и земной системами координат
Оси oxv vu OYV *u ozv vu
ОХ3 COS 0ц COS(DU -sin0u cosCOu sin CO ц
OY, sin6u COS©U 0
OZ, - cos0usin(Oy sin0u sin CO ц cos CO у
АГЦУЦ2Ц - целевая связанная система координат (начало сов-
падает с началом Уу ось Хц параллельна строительной
оси цели, ось Уц перпендикулярна плоскости крыльев (несущего
винта вертолета).
136
На рис. 4.5 ац - угол атаки, угол между проекцией вектора
скорости на плоскость симметрии цели (ЛцОцУц) и осью ОХ^
₽ц ~ Угол скольжения, угол между вектором скорости ракеты и
плоскостью симметрии АцОцУц и осью ОХп ; уц - угол крена.
Рис. 4.5. Взаимное расположение целевой связанной
и целевой скоростной систем координат
Таблица 4.4
Косинусы углов между целевой связанной целевой
и скоростной системами координат
Оси охи OYa oza
QXV 'ц cosau cosPu sinpusinyu- -sinau cosPucosyu sinpucosyu+ +cospusinausinyu
OYV *ц sinau cosau cosyu -cosau sinyu
OZV - cosau sinPu COS0U sin Yu + +sinpu sinaucosyu cospi(cosYu- -sin pySin a ц sinyu
XYZ - относительная система координат (начало совпадает с
началом > ось % параллельна вектору относительной
скорости, ось Y - в вертикальной плоскости).
137
На рис. 4.6 а - угол между проекцией вектора относительной
скорости на плоскость X3OZ3 и осью Х3, р - угол между вектором
относительной скорости и плоскостью X3OZ3.
Рис. 4.6. Взаимное расположение относительной и земной систем координат
Таблица 4.5
Косинусы углов между относительной
и земной системами координат
Оси ox OY OZ
ОХ3 cos 01 cosP -sin Op cos a sin a
OY3 sinp cosP 0
oz3 - cos P sin a sinP sin a cos a
Для формирования условий встречи ракеты с целью восполь-
зуемся матричной схемой представления систем координат. На-
пример, матрица направляющих косинусов для скоростной и зем-
ной СК
138
e
S
e
Zvp
"4
"4
<P
<p
3
W-
2Vp
где
(3. XVP = cos9p coscop, = sin0p, <p = -sin<opcos0p,
Г.. >Vp = -sin9pcoscOp, ml yvp = cos0p, = sinOpSinajp,
% =sin®p, = 0, «2Vp = C0S“p •
Здесь и далее индекс справа внизу означает рассматриваемую
ось; индекс справа вверху означает, по отношению к какой систе-
ме координат определяются направляющие косинусы, буква £ при
этом соответствует оси X, m-Y, и -Z,
Аналогично формируются:
• матрица направляющих косинусов вектора скорости цели в
земной СК
II e3 my^u ПуУц
3 3
4 %
• матрица направляющих косинусов взаимосвязи связанной
и скоростной СК цели:
tjcvu V V n^u
II =f cn V Пууа 9
Zv V V
где = Gosa.. cosB.., тп? =sinau, = — sinP„ cosau ,
Хц ц *-*• Лц Лц м
= sinрцsinyu-cospy sinaucosru, =cosaucosyu ,
=cosPusinyu +sinPu sina(1 cosyu,
V у
£ u =sinpucosyu + cospusinausinyu, mzu = -cosausinyu,
u ц
139
= cosPu cosyu-sinPu sinau sinyu ;
• матрица взаимосвязи ракетной связанной и ракетной скоро-
стной СК в предположении об отсутствии у ракеты крена (ур =0)
<₽ =
ХР
£VP
*Ур
(vp
%
хр
"ftp
хр
пР
Ур
п.Р
"Р
4.2. Условия встречи ракеты с целью (блок 2)
Одной из величин, определяющих условия встречи ракеты с
целью, является относительная скорость, которая может быть оп-
ределена через проекции ее вектора на оси земной СК (рис. 4.7)
v = v £3 — v£3
уотн^з vP€*vp % ’
3 3
иотнуз = VpmxVp ~ V4mxvu '
Тогда относительная скорость = ЖУ™* )2 +(v'OTHy )2 +(^OThz ?
Рис. 4.7. Определение проекций вектора относительной скорости на оси
земной системы координат
140
Направляющие косинусы осей X, Y и Z в земной СК также
представим через проекции ее вектора относительной скорости:
V V V
ОТН *ОТНу 0ТН7
е3=-----т3 =----------3-, п3 =-----3~,
^отн ^отн ^отн
Су =-cosasin0, m^=cosp, п3 = sin a sin р,
t3z =sina, m3z=0, n’=cosa,
где P = arcsin(zn’) - угол наклона вектора относительной скорости
к плоскости X3OZ3; a - угол между осью Х3 и проекцией век-
тора относительной скорости на плоскость X3OZ3:
_____
Г~2 2
V 4- V
^* VOTH^3 УОТН£з
VOTHX
iS—?======
/ 2 2
У отнх3 ^rOTHZ3
при von,Z3 *0,
при УОТН7з >0-
Тогда матрица направляющих косинусов осей Y и Z в земной
СК будет иметь вид
М3
лЗ 3 3
tx rnx пх
£3у m3y п3у ,
лЗ 3 3
mz nz
где £3у =-cos a sin р,
m’=cosp, n’=sinasinp, Z’=sina,
m3 = 0, n3z =cosa.
Матрицы взаимосвязи ,Л/рц,Мц,Мр,М? СК
будут иметь вид
V __ V V V V --V
MVU=M3V м3 , Мр" =мр? Mvu, Л/рц = Л/рц Л/цц,
vp Р U и к р и
Mv =М3 -М3, Мц=МцЦ-Mv ,Мр=М^ Ми М^М^-Мр11,
ц ц ц и к
где М - транспонированная матрица.
141
Угол встречи х - угол между вектором скорости ракеты и об-
ратным направлением вектора скорости цели - равен:
X = arccos ~^у fx
xv xv
к Р И
-ml т3
v V
Р и
V
р
ч
угол между векторами относительной скорости и скорости ЗУР
р = arccos £3xfд. + т3т3 + п3хпх
< vp vp VP >
угол между векторами относительной скорости и скорости цели
8 = %-Р,
XrYrZr - система координат, связанная с траекторией поражаю-
щего элемента (рис. 4.8). Начало системы - в центре боевой части,
ось Хг параллельна направлению полета ПЭ, ось Yr - в верти-
кальной плоскости.
Рис. 4.8. Определение положения поражающего элемента
Распределение случайных значений параметров, характери-
зующих положение ракеты и цели в рассмотренных СК, определя-
ется следующими соотношениями:
142
Vr> = mv + G cv - для скорости ЗУР;
p p
0p = /n„ + G°e - для угла между плоскостью X.OZ^ и век-
9 Р
торм скорости ракеты;
<Ор = ^<ор + ^зс«р - Для Угла между осью Х3 и проекцией
векторов скорости ЗУР
ар = Wap + ^4Оар - для угла атаки ЗУР;
Рр = т + - для угла скольжения
ЗУР;
Гр =т, +^oYp - Для угла крена ЗУР;
Vu = Wv +^7°v
u u
- для скорости цели;
0ц = дае +ц8о0 - для угла между плоскостью X3OZ3 и век-
торм скорости цели;
соц = т<1>ц + - для угла между осью Х3 и проекцией век-
тора скорости цели;
ац = /Лац + ^10Оац - для угла атаки цели;
р=«в +GiOn - для угла скольжения цели;
И Рц 11 ”ц
Уц = 7Луц + £120уц - для угла крена цели
где т - математическое ожидание и а- среднеквадратиче-
ское отклонение:
mv ,oVp - скорости ЗУР;
mv >av„ - скорости цели;
ц ц
^0р,о0р,^ц,0ец—угла между плоскостью X3OZ3 и векто-
рами скорости ЗУР и цели соответственно;
^Шр,са)р,/л(Лц,оШц - Угла между осью Х3 и проекцией
векторов скорости ЗУР и цели на плоскость X3OZ3 соответст-
венно;
wap’aap ’ w0p’a0p “ углов атаки и скольжения ЗУР соответ-
ственно;
143
та >°а ’ ’ав " Углов атаки и скольжения цели соответст-
, ГПа ,Оп
ац’ ан ’ рц’ рц
венно;
ту , сY - угла крена ЗУР;
гр гр
ту , oY - угла крена цели;
гц гц
wipan “Угла пеленга.
Здесь и при дальнейшем изложении - случайное число,
распределенное по нормальному закону с т = 0, о= 1 (индекс
i присваивается соответствующей реализации).
4.3. Определение координаты траектории ЗУР в картинной
плоскости (блок 3)
Введем понятия плоскости встречи и картинной плоскости.
Плоскость встречи - плоскость, проходящая через начало системы
^цГУц7Уц и параллельная векторам скорости ЗУР и цели
(рис. 4.9). Картинная плоскость - плоскость, перпендикулярная
линии визирования цели и проходящая через начало системы
(рис. 4.10).
Рис. 4.9. Плоскость встречи ракеты с целью
144
Координаты точек наведения могут определяться в процессе
решения или задаваться произвольно. Причем могут находиться
или задаваться одна или две точки (по количеству двигателей у
цели).
Если задана одна точка наведения, то вероятность наведения
принимается равной: Рп = Рг = 1 (при п = 1).
Если координаты точек наведения определяются в процессе
решения, то точка наведения выбирается на кромке сопла двига-
теля цели (ближнего двигателя при наличии у цели двух двигате-
лей). Для этого при заданных начальных координатах x„,y„,z„
формируется матрица направляющих косинусов вектора относи-
тельной скорости ракеты относительно цели:
V ___V
М* =Муи-Ми".
р р
Координата траектории ЗУР в картинной плоскости находит-
ся из совместного решения уравнения плоскости встречи, прохо-
дящей через центр сопла:
У~УПп
fu та пи =0,
VP Р Р
*ц Уц 2Ц
145
и уравнения окружности среза сопла радиусом гс:
(у-УиЛ +(z~^nY = ^-
Результатом этого решения являются коэффициенты а, Ь, с
квадратного уравнения
цу2 + by 4- С = 0 ,
где а = В2 + D2, Ь = 2АВхЦп - 2В2уЦп - 2D2yUn,
с = А2х2 -2АВха уи +В2у2 -D2r2+D2y2 ,А = ти t''u-(Vunu
Ц/1 Z Чл Z Цл С Z Ни ’ Хур 2ц >>ц Хур
5 = <цлц fV2u,O = C .
ХЦ XVp *Vp 2Ц XVp ХЦ хУр
Обозначив b = —, с = — , имеем два решения этого уравне-
2а а
ния:
Ju,! = -b -y/b2-c, yUn2 = -b + у1ь2 -с .
Тогда если b2 - с к 0, то из двух решений выбирается первое
значение координаты yUn, если ЗУР подходит к цели снизу,
и второе - если сверху:
4„
-^л!
/ч»2
при €,ц>0 и УЦл1<Уц,2,
при ^ц<0 и Уиг11<Уаг12,
где £уц ^0 - условие подхода ЗУР к цели снизу, (уа < 0 - сверху.
Аналогично определяется координата zUn :
_ zu„-^c-^Un-yuJ при £Zu£0,
Z“” I 2 ( ‘ V
Zu„+^C -{yUn-yuJ при ^ц<0.
где £Zu > 0 - условие подхода ЗУР к цели слева, £гц < 0 - справа.
При наличии рассеивания координаты хЦп,уЦп,гип прини-
маются за координаты центра группирования точек наведения в
ск хцгцги.
146
Если ,у задаются произвольно, то пересчет коор-
динат точек наведения (их математического ожидания)
Лцл ,уЦл ,гПп и их разбросов оХц ,оу^ ,огц в относительную
СК XYZ производится по следующим соотношениям:
Уцл (.Уцл ) •>
чЛил)
Под |А/Ц| понимается транспонированная матрица А/ц с эле-
ментами, взятыми по абсолютной величине.
Координаты случайной точки наведения в картинной плоско-
сти СК XYZ определяются как
Уп = Уп + £13° - zn=zn +^14% ,
где - случайное число, распределенное по нормальному закону
с т = 0, о = 1.
Координаты случайной (z-й) траектории центра масс ЗУР в
картинной плоскости определяются с учетом угла наклона глав-
ных осей эллипса рассеивания а (при задании закона распределе-
ния промахов):
п с ♦ ^ay°zPyz
0’5arCtg V
Oz G у
При > О И Gy=Gz,
При Р>т<0 И Gy=Gz,
При Gy Ф Gz ,
где р - коэффициент корреляции (0,1- 0,3), Gy » gz ® 0,2 - 0,6.
Главные средние квадратические отклонения координат точек
наведения:
/22 • 2*2
o^=Joz cos a + ovozpyzsin2a + oysin a,
/2 2 2 • 2
on=Jaj,cos a-GyGzpyz sin2a + oz sm a.
147
и координаты траектории центра масс ЗУР в картинной плоскости
системы XYZ\
у\=ту+ sina + ^16ол cosa,
zt =mz +^15a^ cosa-^16on sina.
Если распределение промахов задано совокупностью траекто-
рий y-,z-,(xnp =2^ то производится выборка очередной пары зна-
чений.
Определяются координаты случайной (/-й) траектории центра
масс ЗУР в картинной плоскости СК XYZ относительно случайной
точки наведения:
У,>=Уп + Уь zt ~zn +z'i
Представим ЗУР в виде отрезка прямой, разделенного на к
частей (рис. 4.11), Л=0... Лтах . Поскольку решается задача пораже-
ния ЗУР цели как объемного объекта, то необходимо определить
координаты траектории А-й точки ЗУР в системе ATZ:
xft=-100 + (Z-*A£>Xp,
У ik = У1+^-кМ)тХр,
ztk =zi +(L-kAL)nXp,
2L
где , L - полудлина ЗУР; 100 в м - ‘исходная точка’,
^тах
отстоящая на 100 м от плоскости YOZ (к=0 - носик ЗУР).
Рис. 4.11. Определение координат попаданий ЗУР в цель
148
Координаты траектории ЗУР в системе ХиУц7п определяют-
ся из соотношений
4.4. Определение координат попаданий ЗУР в цель (блок 4)
Координаты ’’потенциального” попадания ЗУР в цель необхо-
димы либо для определения точки подрыва БЧ для ЗУР с КВУ,
либо для ЗУР с НВУ, не сработавшим до прямого попадания в
цель (отсек, агрегат).
При контактном подрыве БЧ ЗУР возможны попадание ракеты
в форсажную камеру двигателя цели, прямой контакт ракеты с це-
лью носиком, соударение корпуса ракеты с целью, соударение ра-
кеты с лопастями несущего или хвостового винтов вертолета.
Во всех случаях ЗУР представляется в виде набора равноот-
стоящих по продольной оси ракеты X? точек с координатами
х1Г, ,уи ,,2и(см. рис. 4.11).
Ну к* у Пук ’ Пук v г 7
Подлет ракеты к цели возможен с любого направления при
стрельбе навстречу или вдогон (сверху, снизу, слева, справа).
Определение координат попадания ЗУР в контур j -го отсека
цели основано на поиске ближней точки пересечения прямой, ори-
ентированной по вектору относительной скорости, и поверхности
2-го порядка, аппроксимирующей отсек.
При наличии ограничений, наложенных на поверхности отсе-
ков, возможно попадание ЗУР в ограничительную плоскость, пер-
пендикулярную одной из осей. В этом случае выбор из нескольких
(до четырех) точек пересечения траектории ЗУР с отсеком истин-
ной точки соударения неоднозначен и требует дополнительного
анализа.
В случае попадания определяются углы между нормалью к
поверхности цели в точке соударения и вектором относительной
скорости (продольной осью ЗУР).
Координата х точки пересечения к-н точки /-й траектории ЗУР
с поверхностью у-го отсека цели находится на основании совмест-
149
ного решения уравнения поверхности, описывающего у-й отсек
цели:
ану*2 +а227/ + 2al2jxy + 2al3jxz + 2a23jyz +
+ 2<714. x + 2a24, у + 2a34y z + a44. = 0 ,
и уравнения траектории к-н точки ЗУР в системе XUYUZU :
Х-Хцр _ г-^ир
t t £
*ц Уц zu
В результате решения определяются коэффициенты B2,Bx,Bq
квадратного уравнения вида
В2хг + Вхх + Bq = 0;
^2 ~allj +a22j^l +a33j^2 +^al2j^l +^al3j^2 +^a23j^l^2’
B} = ~2а22^ххц0 + 2a22^tyuf) -2а33^£2хц0 +2a33j.£2zuO -
~^al2j^lxu0 +^a13jzuO + ^а12уУиО ~^a13j^2xu0 ~
~^a23j^l^2xu0 + ^а23у^2УиО + ^a23j^lzu{) + ^a14j + ^a24j^l +^a34^2^
fy) = a22jrfxu0 +а22уУиО ~^а22^1хи0Уи0 +a33j^2xu0 +
+ a33jzuO ~^a33j^2xuOzuO + ^a23j^l^2xu0 ~^a23^2хцОУцО ~
~2a23j^lxu0zu.O +^а23)Уи02и0 ~^a24j^lxuO + ^a24уУцО ~
~^a34^2xu0 + 2Яз4у2цО +a44p
r„P f - Уц f - u
где f 1 " ’ ^2 ” £ •
*ц *ц
______________ __ в
Обозначим Bi = ; Bo = . Решения квадратного урав-
нения представим в виде
*ц/?Л1 = “51 ~ “ 5о ’ хц^2 = ~В\ + 75!2 “ 5о •
Тогда если - Во > 0, то из двух решений, определяющих ко-
ординату х (Xuijk} и точки пеРесечения ^"й точки z-й траек-
150
тории ЗУР с поверхностью у-го отсека цели, выбирается первое
(вход) точек пересечения или второе (выход) на основании сле-
дующего анализа:
ХМ1 ^ijk^
ХцУк2 ~ ХцУк2 ,
> 0 (стрельба вдогон),
Хц//*2
Х^Ук2 *М1
< 0 (стрельба навстречу).
Далее определяются координат у и z пересечения Л-й точки
/-й траектории ЗУР с поверхностьюу-го отсека цели:
•^Mi = 1 “ ЛИ0 Л ’ Уцук2 = 1 ~ Хц0 ^**0 ’
Z^ijk\ =^2(хц^1 “Лцо)+2цо> “XU(J+ZU0-
При отсутствии пересечения /-й траектории с у-м отсеком
(б2 - Bq < о) определяются координаты точек попадания к-х точек
ЗУР во все другие отсеки цели.
Если пересечение имело место, то последовательно проверя-
ются на принадлежность у-му отсеку координаты первой
(^и и ,Уп l. ь. ) и второй(хп., )точек:
v z ц{/£] ’ п//£] 7 г \ л Цук2 цук2 7
Хп < Х„ < Х„ , у.. <У„ <у.. , Z.. <ZU.., <ZU ,
цну Ml цку V цук{ *j И/ КУ
гдехцНу ^uHy’zuHy ’ xuKy ^цку’2цКу - координаты ограничений
(начала и конца), наложенные на поверхности, аппроксимирую-
щие отсеки цели.
Причем если выполняется последнее условие
7Цн < 7Ц^ < 7Цк , то за координаты точки пересечения прини-
маются координаты первой точки:
Хцук ХЦук\ ’ Уцук Уцу'к! ’ Zu>yk 2цук\
Аналогично проверяется принадлежность координат второй
точки с координатами хЦ;#2 ,7Ц/. у-му отсеку:
X.. < х„ , < х„ , у.. < у.. . < у,. , Zu ^zu.., < zu
Ину цУк2 цк j 7 цну 7 иУк2 7 Цку Цну Ц(/^2 Цк j
151
Соответственно каждому условию последовательно опреде-
ляются координаты точки попадания:
• в ограничительную плоскость, перпендикулярную оси
X„,(V=1),
Ух1ук ” |у Ц|<7 при 1 Хц > 0 - стрельба вдогон , при t Хц < 0 - стрельба навстречу ,
у„... = Лии /.
л Uyk 1 \ Uyk
2 Чук = ^АХЧук
XutJ+ -УU0 ’
~ ^цо)+ 2ц0;
• в ограничительную плоскость, перпендикулярную оси Кц,
(V = 2),
рУци При ^уц > 0, (подход снизу),
Уиук при /уц <0,(подход сверху),
Хчук ~ р УЧ;* ^uo/+xuo ’
7ц
_ ^ц ( _ )
Z4yk ~ р учук ^uo/+zuo ’
7ц
• в ограничительную плоскость, перпендикулярную оси
ZU,(V = 3),
{z„ при £. > 0,(подход слева),
zUk при <0,(подход справа),
1Х ( \
_ Лц ( I
X4ijk ~ ~р Учук ~ zuo Г Хио
zu
У^ук о V^ijk ZU0 /+ -^0 ’
где V = 1,2,3 - признаки ограничительных плоскостей отсеков,
перпендикулярных соответствующим осям цели.
152
Проверка принадлежности точки попадания поверхности у-го
отсека производится следующим образом.
Обозначим левую часть уравнения поверхности у-го отсека
через F:
F = l +^33,zn +2а12 у...., +
itj Пук j j Пук j Пук ЦукуЦук
+ '2'al3jxUijkZUijk +'2,a^jy4ijkZ4ijk +2О14УХЦ(/* +
+ 2а247Уц^ +2a34^.zu^ + <2447-
Если F <0 и х„ < хи., < хи , у.. < у,.... < у,, ,
цну цук ^Kj ’ z цну л Чук у цк j ’
7 < z„ , < z„ , то считается, что имеет место не менее одного
Чну Цук ЦКу ’ ~
попадания.
Далее определяется расстояние от точки на траектории ЗУР с
координатами ,7^ до точки попадания ву-й отсек:
d‘Jk fauj/k Хц0^ +(y*ijk •Уир 2цо)
и формируется массив величин ’
для первой реализации. Если попадания нет, то осуществляется
переход к следующей реализации.
Процедура определения принадлежности координат точек по-
падания ЗУР всем отсекам, описанная выше, должна быть прове-
дена для всех просматриваемых траекторий ракеты для всех
< &тах ) иу( J Утах )•
После перебора возможных точек пересечения к-х точек раке-
ты со всеми у'-ми отсеками из массива координат этих точек выби-
рается точка, находящаяся на минимальном расстоянии от цели:
dyk = min min Цд J-
J к
Угол между вектором относительной скорости и нормалью к
поверхности цели в точке соударения
а0 =arccos|^0|,
где
153
2(31 Ij xuljk + ^ПуУцук + 2<3137 ZUyk + 2<314 J >
^2 =^а22уУи0к +2’a12jxUyk +2a23jZUyk + 2a24j
Fy=2a33jZ}l..k +2а\з^ук +2а23}У^ук + 2a34j.
При попадании ЗУР в ограничительные плоскости, перпенди-
кулярные соответствующим осям ракеты А"Ц,КЦ,/Ц, принимается
/0 ~ # хц > ’ ^o=^zu- При пересечении траекторией ЗУР
поверхности цели угол между продольной осью ЗУР и нормалью
к поверхности цели в точке соударения определится из соотноше-
ния
£ах F{+mx F2 + n“ F3
a_ = arccosи , где К =------=====------------.
p 1 P| P / r-2 r-2 r?2
yj + F2 + F2
При попадании ЗУР в одну из ограничительных плоскостей
значению присваивается модуль косинуса угла:
=
Хр
Хр
хр
-
Влет ЗУР в форсажную камеру двигателя. При попадании в
плоскость среза сопла двигателя определяется факт влета ЗУР в
форсажную камеру. Определяющими это условиями являются пе-
ресечение ограничительной плоскости перпендикулярной оси Ха ,
стрельба вдогон и хц„Л = хц. В этом случае за координаты точ-
ки влета принимаются х„ = х„... , у,,. - у,,.., , z... = z,.... и далее
рассчитываются параметры взаимодействия ЗУР с элементами
форсажной камеры.
Попадание ЗУР в лопасти винтов вертолета. При попада-
нии в поверхность, аппроксимирующую любое положение лопа-
стей несущего или хвостового винтов вертолета, определяется
факт попадания ЗУР в лопасть. При этом несущий и хвостовой
винты аппроксимируются эллипсоидами, моделирующими любое
положение лопастей. Центр эллипсоида совпадает с центром вра-
щения, а две его полуоси равны длине лопастей.
154
Если имеет место попадание в несущий или хвостовой винты,
то за координаты точки пересечения принимаются те же коорди-
наты
X.. ~ 1 Уи = У L1 ) Zu- = /
ц/ 11 у к ’ 7 Щук 7 Ц/ Чук
и разыгрывается определение факта попадания в лопасть одного
из них.
Таким образом координаты попаданий ЗУР в цель опреде-
ляются для случаев:
• пересечения траектории ЗУР с целью (в том числе если
есть КНВУ, но характеристики его неизвестны, и если есть КВУ, а
КНВУ отключено);
• индикации цели лучом НВУ;
• пересечения траектории ПЭ с целью.
В двух последних случаях необходимо определить расстояние
от точки на траектории ЗУР с координатами х^, y^z^ до точки
попадания в/-й отсек:
dm = (хп , +(Уи , “)2 + (zn , .
Ук уv Чук ЦО' Ц/уЛ z *4) 7 v ЦуЛ ц07
Для этого при просмотре всех реализаций i Jзад формиру-
ется массив величин p\S,j, из которого
выбирается точка, находящаяся на минимальном расстоянии от
цели:
dyk = min min
J
4.5. Определение факта влета ЗУР в форсажную камеру
двигателя цели (блок 5)
На основании информации о наличии пересечения траектории
ЗУР с плоскостью среза сопла двигателя устанавливается факт
влета ЗУР в форсажную камеру (ФК) двигателя цели. В этом слу-
чае необходимо определить координаты попадания ЗУР либо во
внутреннюю стенку ФК, либо в турбину.
Цель может иметь по крайней мере два двигателя. Тогда вста-
ет вопрос, в какой из них попадет ракета.
155
Проверка наличия у цели одного или двух двигателей прово-
дится на основании анализа: |zCJ | + |zC21 > 0, при выполнении этого
условия - два двигателя, иначе - один, где zc и zC2 - координаты
центров сопел двигателей.
За координаты центра сопла, в плоскость среза которого про-
изошло попадание носика ЗУР, принимаются удовлетворяющие
одному из условий (при наличии двух двигателей): если
(уС1 - Ущ + (zci - zu, Г < ГС > т0 принимается ус = _уС] , zz = zCJ;
если (уС2-j/ц.)2+(zC2-Иц.)2 <гс2, то принимается ус = jC2 ,
zc ~ zc2 ПРИ наличии одного двигателя, если
Gel - Ущ Г + (*C1 - J2 < ГС >то принимается ус = уС{, zz = zC} .
Тогда координаты попадания в срез сопла назначаются как
Хц< S=zv
Координаты хвоста ЗУР при прохождении носиком ракеты
плоскости среза сопла двигателя цели:
ХЦ| = хц/ - ’ Ущ = Уи.1 ~ ^тхр ’ = zUi ~ ^пхр •
Координаты хвоста ракеты при его совмещении с плоскостью
среза сопла двигателя цели в направлении вектора относительной
скорости:
£v 7, \ Z- 7 , X
—х — "U I- Vх I, ,,Л „ -х _ гЦ I- ^.х I, .х
Уц. V^II* ^1!' /4” Ум' 211- — Ц . /4” Z... .
Ц/ £ \ Ц/ Ц/ / * Н/ Ц/ g \ Ц/ Ц/ / Ц/
хц *ц
Координата точки удара носика ЗУР о внутреннюю стенку
форсажной камеры или в турбину определяется из уравнения вида
Л2у2 + Аху + Aq = 0 ,
полученного при совместном решении уравнения цилиндрической
поверхности (внутренняя стенка форсажной камеры) радиуса гс и
уравнения траектории носика ЗУР, проходящей через точку с ко-
ординатами хц,,уц,,7Ц. в направлении вектора относительной
скорости:
156
Ц/
^xu
ПЛ —гц
Обозначим т? =—— ,
£
Уц
£у
/ц 2ц
— 1 + TZ?2 5
4 = 2(-т2уи. +m2zUi -ус -m2zc),
Л =т2У'и/ ~2т2Ущ2'щ + 2т22СУщ +Ус + zc -2zczm + гц, ~гс
А
2А2 ’
А)
А'
Если A2 -Aq > 0, то из двух решений
х„. =—— у„. -у' + х' и уи. =-At±JA?-Ao
ЦП 2 / I ЦП 2 Ц1 J Ц1 Ц/1 2 1 v 1
Уц 4 7
координаты хц. и ju выбираются на основании следующего ана-
лиза:
ХЦ/ XU,j
у* =3ч/
во всех случаях
при
X < X
Ц/1 ~ Ц/2
при
_ хч хщ2
Хц'1 Хц'2 ’ Ущ =а,2
Возможность попасть в турбину определяется условием
Ой-У$ +(< ~z$ <гс
Тогда если А2 -А0<0, то хц. = хц. + Дхт;
Тц, = ^Ц, ;гц/ =гц/; если Л]2-Л0>0 и хц. > хц. + Дхт, то
хц. =х^. +Дхт, уц. -хЦ;)+Л,,.> zUi =7Х(\ -Ч-)+Ч' ;
* *Ц *ц
если (у*. - усУ + (z* -z^f >г2, то имеет место удар корпусом
157
ЗУР по цели, признак уязвимости принимается равным нулю
(%, = 0) и осуществляется переход к следующей реализации. Если
- Ах >0 и х < хц. + ZkxT , то за координаты попадания при
ударе о внутреннюю стенку форсажной камеры принимаются
= ХЦ/ ’ А, = 5^ ZU/ = ’
Углы а0 и ар , определяющие направление оси ЗУР при уда-
ре о стенку форсажной камеры, находятся по соотношениям
а0 =arccos|^0| и ар = arccos|fp|,
Расстояния от точки на траектории ЗУР с координатами
хпл >Уцл > Д° точки попадания в отсек (/=1) определятся из
уравнения
Приведенные соотношения используются для определения
факта индикации цели лучом НВУ и координат попадания ПЭ.
4.6. Определение факта попадания в лопасть несущего
или хвостового винтов вертолета (блок 6)
Определим случайное положение первой лопасти несущего
(ано) и хвостового (ахо) винтов в момент пролета ЗУР картин-
ной плоскости:
®hq — ®hs=i ~ Яз ’ > ахо — ®,xg=i — ^4 ’ 2л .
где Лз» Яд _ случайные числа; S - номер лопасти винта
(5Н =1...УН,5Х = 1...УХ).
Время полета ЗУР от картинной плоскости до момента пере-
сечения траектории ЗУР с поверхностью, аппроксимирующей
всю совокупность положения лопастей несущего (хвостового)
винтов (координаты точки пересечения хЦ/, уц., ), равно:
158
х,..£х + y„.€v +zh
. _ U| *ц s и./ Уц U, гц
^*пол —
V отн
Положения лопастей несущего (aHS) и хвостового (axs )
винтов в момент пересечения траектории ЗУР с аппроксимирую-
щей поверхностью определяются из выражений
a н$ — a HQ + Н ’ А^ПОЛ + д г (^Н “О’
axg “ axo + 03х ‘ А^пол + дг & “ 0 •
Приведенные координаты пересечения Ks (И- ось, перпенди-
кулярная оси лопасти и лежащая в плоскости вращения, начало
оси на оси лопасти) определяются:
для несущего винта
Ks =хи sinaH +£..,005(1.. -xHAsinaH -zHAcosaH ,
£>Н U/ Hs Ц/ Hs HQ Hs HQ HS ’
ДЛЯ ХВОСТОВОГО
Кс =х. sinar +у.. cosaj. -хх sinar -yr cosa_ .
\ ц/ xs uz xs х0 xs *0 xs
Условие пересечения траектории ЗУР с лопастью несущего вин-
та |Кун | < где Ьн - ширина лопасти несущего винта. Тогда коор-
динаты точки пересечения траектории ЗУР с лопастью будут равны:
Хц, = ХЧук ’ y4j = У' ZUj = Z^ijk •
Возможность удара вращающейся лопастью несущего (хво-
стового) винта по корпусу ЗУР определяется угловым положением
точки пересечения траектории ЗУР с плоскостью вращения несу-
щего (хвостового) винта:
XUj ~ XHQ
aTH = arccos—г- -----------------
-^н0Т +(ч -^но)2
ХЦ/ “Ххо
и - arccos , • -- -- - -...........
-^хо)2 +(уц/ -Ло)2
159
Угол поворота лопасти несущего (хвостового) винта за время
пролета ЗУР через плоскость вращения винта
2£fpv 2LP
а Л'ц а 2ц
Аа =---------—сон и Аах =------------сох ,
v £ v £
V ОТН € V ОТН 2Ц
где сон и сох - угловые скорости вращения несущего и хвостового
винтов соответственно.
Если угол положения точки пересечения траектории ЗУР с
плоскостью вращения несущего винта меньше угла положения ло-
пасти винтов в момент пересечения с поверхностью (атн < aHS ), то
необходимо проверить все последующие лопасти (5Н = SH +1), и
если атн < ан^ + Дан, то за координаты точки пересечения прини-
маем хц. = Хц., уц. = j/ц., £ц. = 2Гц.. Такая оценка производится
просмотром последовательности числа лопастей в пределах огово-
ренного 5Н < NH.
Условия пересечения траектории ЗУР с лопастью хвостового
винта и возможности удара вращающейся лопастью хвостового
винта по корпусу ЗУР определяются аналогично.
Если не зафиксировано попаданий в лопасти ни несущего, ни
хвостового винтов, то осуществляется переход к следующей реа-
лизации (/=/+1).
Расстояние от точки на траектории ЗУР с координатами
хцо ’-Уно ’ zuo до точки попадания в лопасть несущего или хвосто-
вого винтов определяется выражением
= ^(ХЦ/ ““хцдУ “УцфУ + (ZU/ “^uo)2 ’
4.7. Определение координат точек подрыва БЧ по сигналу
с КВУ и вида подрыва БЧ (блок 7)
При известных координатах точки попадания, относительной
скорости и углах соударения необходимо определить координаты
точки подрыва БЧ и его вид (заглубленный или поверхностный).
Возможны следующие положения точки подрыва БЧ по сиг-
налу с* КВУ относительно цели и внутри нее (см. рис. 4.11):
160
• при соударении ЗУР носиком с корпусом цели;
• при соударении ЗУР носиком с корпусом цели и после-
дующем проникании за обшивку отсека;
• при касательном соударении корпуса ЗУР с целью;
• при влете ЗУР в форсажную камеру двигателя;
• при соударении ЗУР с лопастями винтов вертолета.
В случае соударения корпуса ЗУР с целью необходимо опре-
делить факт срабатывания БЧ для рассматриваемых типов ВУ.
Команда на подрыв БЧ формируется контактными (КВУ) или не-
контактными (НВУ) взрывательными устройствами.
КВУ могут быть следующих типов:
• на наведенных токах, в котором исполнительный сигнал на
подрыв БЧ вырабатывается при проникании центра БЧ за метал-
лическую преграду (I тип);
• магнитно-электрического типа, в котором сигнал на под-
рыв БЧ поступает с некоторой задержкой (II тип);
• комбинированного типа (КВУ на наведенных токах
плюс КВУ магнитно-электрического типа), в котором КВУ
П типа выступает в качестве дублирующего, если не сработал пер-
вый (Ш тип).
НВУ могут быть радиолокационными, лазерными, оптическими.
Область срабатывания НВУ формируется лучами ограничен-
ной длины, равной дальности срабатывания НВУ, расположенных
под некоторым заданным углом наклона к оси ЗУР. Она может
представлять собой конус или систему лучей, с описанными выше
параметрами.
В простейшем случае срабатывание НВУ происходит, если
хотя бы один из его лучей пересечется с поверхностью цели и ве-
личина отраженного сигнала будет достаточна для срабатывания
исполнительной схемы. С целью повышения помехозащищенно-
сти подрыв БЧ может осуществляться только после накопления
определенного числа отраженных импульсов, что реализуется вве-
дением так называемой конструктивной задержки, величина кото-
рой зависит от способа обработки и анализа сигналов и инерцион-
ности радиоэлементов.
Для повышения эффективности НВУ может быть предусмот-
рена также функциональная задержка выдачи команды на подрыв
БЧ, которая задается искусственно и зависит от степени учета типа
161
цели и условий ее полета, а также от условий встречи ракеты с це-
лью. Эта задержка может определяться на борту ЗУР или на земле
и затем передаваться на борт, либо устанавливаться на земле до
старта ЗУР и не изменяться в полете.
При промахе ЗУР окончание процесса функционирования
НВУ определяется максимальной дальностью, ограничивающей
область срабатывания НВУ.
Поскольку в точке попадания толщина обшивки неизвестна,
то при оценке вида подрыва необходимо предусмотреть определе-
ние случайного значения приведенной к дюралю толщины обшив-
ки планера. Ее можно задать в исходных данных в зависимости от
наличия толщины для различных участков отсеков цели.
Рассмотрим последовательно все возможные случаи подрыва.
Соударение ЗУР носиком с корпусом цели. Если в этом слу-
чае срабатывает КВУ магнитно-электрического типа (КВУ II), то
координаты точки подрыва БЧ определяются следующим образом.
Задаваясь случайными значениями вероятности ^сркву и вре-
мени срабатывания КВУ, определим расстояние г, пройденное
ЗУР от момента соударения с целью до момента подрыва БЧ:
Tkrv“Wt +^17ат ,
КВУ ткву 17 ткву ’
где £17 - случайное число; тх и от - математическое ожи-
кву кву
дание и среднеквадратическое отклонение закона срабатывания
КВУ II типа соответственно,
ТП- = /(^отн.^О.^п); °Т = /(v'oTH.^O^n )>
т^кву J \ vim ’ v ’ р / ’ ^кву J ' итн ’ и? р / ’
7* = V Т
' v отн4 кву •
Тогда координаты точки подрыва БЧ определятся из соотношений
*111 = хц, + г^Хц - ^БЧ^Нц ’
yUi =>Ui + г7уц -^БЧ^уц>
z"k =z„. +г€, -W1! >
Ц| U1 2ц ЬЧ гц ’
где £бч - расстояние от носика ЗУР до центра БЧ; г ~
направляющие косинусы соответствующих осей цели.
162
Условие пересечения поверхности j-го отсека цели и сферы
радиусом г описывается уравнением
У + ^,У^< +
+ ^a14jXUj +2^24у^Ц; +2<2з4^2ц. + 4/44^.
Тогда подрыв будет заглубленным, если F < 0, и поверхностным,
если F > 0.
Аналогичным образом определяются координаты точки под-
рыва БЧ, если срабатывает КВУ комбинированного типа (I + II).
При этом в зависимости от значения случайного числа т]5 вероят-
ность срабатывания КВУ принимается как
ml. = 1, если т|5 < тL. , или р’ = 0, если п5 > т\п
сРкву ’ ° сРкву ’ сРкву ’ ° сРкву
При срабатывании КВУ I и III типов координаты точек под-
рыва БЧ и вид подрыва определяются сравнением координат точ-
ки попадания ЗУР (£=0) в j-й отсек (хц.,уц.,гц.) с задаваемыми
границами разбиения отсеков (хн,х12,---,*21) и соответствующи-
ми им вероятностями наличия толщины обшивки для каждого ус-
ловного участка разбиения отсеков (5пр = /(/§) на основании сле-
дующего анализа.
Отсеки разбиваются на группы по соответствующим осям цели.
Группа отсеков по оси Хц:
• те, для описания которых требуются аппроксимации не-
скольких поверхностей (фюзеляж, кабина и т.п.);
• правый, левый двигатели;
• хвостовая балка вертолета.
Группа отсеков по оси по оси Уц:
• правый киль, левый киль;
• килевая балка вертолета.
Группа отсеков по оси по оси Zu:
• левая и правая консоли крыльев ;
• концевые части крыльев.
163
Фиксируются граничные координаты разбиения цели на отсе-
ки: ПО ОСИ Ха - Хц , *12 , Х13, Х21 > *31 ’ по Оси ~ -Hl ^21 > П0
оси Zu - 2ц, z2|. При этом в каждом случае проверяются условия
принадлежности отсеков соответствующим группам разбиения:
*ц. <Хц,
*ц. <х12, хц. <х13,
*ц. <*21’ *ц. <*31>
Уп. <У11,
Уп. <Z>1,
8пР=Ж>Для
с последующим назначением толщины обшивки
каждого условного участка разбиения отсеков, где Р§- вероят-
ность наличия толщины обшивки (не более предельной).
Соударение ЗУР носиком с корпусом цели и последующее
проникание за обшивку отсека. Это случай с неясными исходами
пробития преграды или его отсут-
ствия и, как следствие, нахожде-
ния места подрыва БЧ.
Будем считать закон распре-
деления вероятности пробития
преграды (рис .4.12) корпусом
ЗУР при попадании в цель (Л=0)
линейным в функции рассчиты-
ваемого параметра А, значение
которого вычисляется в соответ-
ствующей реализации при опре-
делении пробиваемой толщины с соответствующей вероятностью
5np=W:
Рис. 4.12. Закон распределения
вероятности пробития
А = -7------VT-2-
где у - плотность материала обшивки планера цели; ЛЬЛ2 - ко-
эффициенты, получаемые опытным путем; приближенно можно
считать Л| = 1,5, Л2 = 1,33 .
По значению А определяется вероятность пробития преграды
корпусом ЗУР при попадании в цель (£=0):
164
1
А-Ах
А2 - Ах
О
при А > А-, ,
при < А < А2,
при А < Ах,
где А] и А2 также получаются из опыта; приближенно можно счи-
тать A i=12, А 2=0,28.
При попадании ракеты в цель возможен рикошет. Критиче-
ский угол рикошетирования определяется зависимостью
акр=Л3-е Л45пр, рад, где коэффициенты Л3,Л4 определяются
опытным путем. Приближенно можно считать Л3=1,57,
Л4 = 0,03.
При встрече ракеты с целью возможен поверхностный и за-
глубленный подрыв БЧ, что определяется особенностями работы
КВУ и отсутствием или наличием рикошета. Вероятность заглуб-
ления БЧ при условии пробития преграды:
1
о
А
при ар <. акр ,
при ар > акр .
Тогда вероятность заглубленного подрыва БЧ
Р = Р Р
1 зп 1 пр^ 3 •
Если однозначно определено, что имеет место заглубленный
подрыв БЧ (Рзп =1), то координаты положения КВУ в момент по-
падания носика ЗУР в цель определятся из соотношений
7кву _Т nV VKB* - V -I z™y=z -L
Хц/ Хн/ Чву^хц’^ц/ У nt Ькву^?ц» 2ц/ ьквуЧц>
где £кву - расстояние от носика ЗУР до центра КВУ.
Если вероятность заглубления БЧ в цель Рзп < 1, то ее зна-
чение разыгрывается и в зависимости от результата принима-
ется решение либо о заглубленном, либо о поверхностном
подрыве БЧ.
Координаты точки подрыва БЧ при заглубленном подрыве
определяются следующим образом: сначала определяются коор-
165
динаты точки пересечения траектории центра КВУ с поверхно-
стью цели хкву, yKBy,zKBy, аналогично порядку и соотношениям,
Ц/ Ilf Uf
приведенным при определении координат попаданий ЗУР в цель,
с подстановкой вместо координат хЦ0,^Ц0,гЦ() соответственно
—кву —кву —кву ппинимЯя гкву - х vKBy = V 7кву = Z
ХЦ, 'Ущ ,zm ' принимая хц. хп..к, уц. уп..к, z^.
Тогда координаты точки подрыва БЧ будут равны:
<=С+(iK.y - zE4 , у j=. +- ЛЕЧ ,
где £бч - расстояние от носика ЗУР до центра БЧ.
При поверхностном подрыве БЧ Рзп=0 координаты точки под-
рыва БЧ определяются в зависимости от типа срабатываемого
КВУ. Если сработало КВУ на наведенных токах или если КВУ
комбинированного типа и ар > акр, то за координаты принимают-
ся х"к = х„ , у”к = уп., z^ = zu..
Соударение корпуса ЗУР с целью по касательной. При каса-
тельном соударении Л-й (Л>0) частью корпуса ЗУР с целью сраба-
тывает КВУ на наведенных токах ( I тип). Тогда, задавшись зако-
ном распределения вероятности срабатывания КВУ, в зависимости
от того, какой частью корпуса ЗУР произошло соударение с целью
( Рк в функции А£ для соответствующего расстояния от носика
ср
ракеты k-AL), определим координаты x^,y^,z^для поверхно-
стного подрыва:
+ (*^ - £вч )^р . < = У„, + - £вч )«“Ур ,
<k=z„,+(M-IE4)<p.
Влет ЗУР в форсажную камеру двигателя. Условием прони-
кания ЗУР в форсажную камеру является пересечение ЗУР по-
верхностью, перпендикулярной оси I
>0,хи.
Ц/ \
166
При попадании ракеты в срез сопла (хЦ/ = хц.если исполь-
зуется КВУ I типа, то считаем, что подрыва БЧ не происходит, и
рассматриваем новую реализацию.
Подрыв БЧ произойдет при попадании ракеты либо в турбину
двигателя, либо в стенку форсажной камеры. В первом случае за
координаты точки подрыва БЧ принимаются координаты точки
пересечения траектории ракеты плоскости турбины:
хпк~х -L № v^-v -L ft znk-z -I fV
ЬБЧ%’ БЧ \ ЬБЧ%’
где (хц, = хц. 4- Дхт), и подрыв БЧ считается заглубленным. При
соударении ЗУР с внутренней стенкой форсажной камеры
(хц. = хц.) за координаты точки подрыва принимаются xJJ* = хц.,
yj* = уЦ/, 2Гц* = и подрыв БЧ также считается заглубленным.
Соударение ЗУР с лопастями винтов вертолета. В случае
попадания в лопасть несущего или хвостового винтов вертолета
координаты точки подрыва БЧ определяются аналогично:
хч = - ^БЧ€ХЦ ’ = ут -^БЧ^ц’ =z«i-£БЧ^ц и
подрыв БЧ считается поверхностным. В случае удара лопасти вра-
щающегося винта по корпусу ЗУР разыгрывается вероятность сра-
батывания ВУ при ударе лопасти винта по корпусу ЗУР -РСр. За-
давшись случайным числом т|18 > при выполнении условия
П18 Лр принимаем х J = хи., = уи., z* = гц. и подрыв БЧ
также считается поверхностным.
4.8. Определение принадлежности точек подрыва БЧ различ-
ным поражаемым зонам цели при контактном подрыве (блок 8)
Для решения этой задачи вся поверхность цели (или отсека)
разбивается на зоны, внутри которых подрыв БС приводит к повре-
ждениям цели, соответствующим определенному типу поражения.
Координаты границ поражаемых зон по осям %u,yu,Zu
котангенс угла наклона линии границ зон к оси
Ац(^), индекс, присваиваемый поражаемым зонам
167
задаются для каждого сочетания отсека (/), вида подрыва (поверх-
ностный или заглубленный) и остатка топлива ДУ ЗУР в
виде табл. 4.6 (всего таблиц такого вида для каждого отсека
(у) - шесть).
Таблица 4.6
X b У Z ©
*1 *1 у' "J '©;
уГ 'г" л т Z1 ’©^
хе bt У'е 'z'< '©^
уТ 1 т zf пт zl '©7
Признак поражения п&™ ставится в соответствие каждому
участку поражаемой зоны в направлении осей ХЦ,КЦ,7Ц, которым
присваиваются индексы 1, т и п, причем возрастание I, т,п со-
ответствует увеличению координат хц,уц,7ц соответственно:
п @71 = 0 - не поражаемая зона ни по какому типу, л ©7 =1 - зо-
на, поражаемая по типу ‘С’, л©7 = 2 - зона, поражаемая по типу
‘В’, л©7 = 3 - зона, поражаемая по типу ‘А’. Последнее значение
границы для каждого отсека задается заведомо
большим, например - 100м.
Максимальное число границ зон разбиения для каждого у-го
отсека цели в направлении оси ^u^max),Xu(wmax).2u(nmax), а
также признак задания первой секущей плоскости (х1сп) задают-
ся в виде табл. 4.7.
168
Таблица 4.7
7 = 1 7=2 J J max
maxj £ c max] I max 2 ^max/max
^maxj ^max] wmax2 Wmax7max
^maxj ^maxf ^max2 "maxJmax
^Icnj ^•lcn| ^lcr>2 k,cn7max
Если сечение задается на вертикальной проекции цели, то
X. = 1, если на горизонтальной, то X. = 2.
’сп ’ г ’ ‘сп
При определении вероятности поражения цели необходимо
учитывать не только вид подрыва БЧ, но и подрыв остатков топ-
лива двигателя ЗУР. Предусмотрено задание зон для трех значений
остатков топлива ДУ: нулевого и двух нормирован-
ных (<вт =0,сот =(от1,о)т =<вТ2). Остатки топлива ДУ задаются
в виде функции полетного времени ЗУР до точки встречи с
целью о)т = /0ПОЛ) и выбираются по его значению Гпол:
tnn„=m. + С90, , где т. ,с. - математическое ожидание
и среднеквадратическое отклонение полетного времени ЗУР до
точки встречи ЗУР с целью; £19 - случайное число.
В случае если остаток топлива ДУ не соответствует заданно-
му, определяется принадлежность точки подрыва БЧ зонам пора-
жения цели для соседних остатков. Примеры построения зон по-
ражения самолета, вертолета и КР рассмотрены в разд. 2.
Первое сечение образуется плоскостями вида х = хе + ЬеУц.
или х = хе + , где хе - координата точки пересечения плоско-
сти с осью Хц; Ь( - котангенс угла между плоскостью и осью
Хи; - координаты точки подрыва БЧ; I = 1,2,...<?тах - но-
мера секущей плоскости. Последнее значение границы для каждого
отсека узадается заведомо большим, например-100м.
Удовлетворение неравенства xt +bey^(z"4)<х" <хм
означает, что точка с координатами xJJ. ,у£ ,z^. (точка подрыва БЧ)
находится между соседними I -й и 1-й плоскостями.
169
Если участок между плоскостями I и I +1 необходимо раз-
бить по оси Уц, используется семейство плоскостей, перпендику-
лярных оси Уц: у - у™ , где т = l,2,...mmax .
Удовлетворение неравенства у™ < у". < у™+х означает,
что точка подрыва БЧ находится между плоскостями €, £+1 и
W, т+1.
Если необходимо, осуществляется третье разбиение плоско-
стями, перпендикулярными оси Zu: z-nzf, где п = 1,2,...ятах.
Условием, что точка подрыва находится между п и и+1 плос-
костями, является выполнение неравенства z™ < z^. < z™+1 .
Оценка принадлежности точки подрыва БЧ той или иной зо-
не уязвимости проводится в соответствии со схемой, представлен-
ной на рис. 4.13, на основании следующего анализа.
Последовательно, начиная с первого отсека, рассматрива-
ются участки (также начиная с первого) по оси X с установле-
нием поверхности, на которой задается сечение: если
x”K <х^ +^УцК , то сечение задается на вертикальной поверхно-
сти, если х™ <х£ - на горизонтальной. Аналогично зада-
ются участки по осям У и Z при выполнении условий у™ < у™,
кпк| s' -tn
Принадлежность точки подрыва БЧ той или иной зоне уяз-
вимости оценивается для всех п < итя„., т < оття„. и t < I тяу.. По
IIlaAj ' HlaAj IlldXJ
достижении лтах^, /лтах. или ^тах^ признаку уязвимости %, при-
сваивается значение = 6 и осуществляется переход к следую-
щей реализации и так по всем отсекам.
Значение выбирается из таблиц, аналогичных табл. 4.6.
Если имеет место заглубленный подрыв БЧ или п®™>2.
то значению Xi присваивается соответствующий признак пора-
жения (Х]“л®7) и рассчитывается вероятность поражения
цели.
170
х"( < х, + y^b, — у^ < у
I (zu, ) |нет
|нет I
Ф нет
2^<2z!_a^ 201
Ф нет
ЦИКЛ ПО п 7. J -— -> П 0 ]
|нет Ф нет
Ф нет
цикл по п z |2 —— -> п 0 2
цикл по у {” —— z J < 1 z [” —— -> 1 0 ["
Ф нет
„п ~т да v 2 zx т
zu. < z2---------►
Ф нет
цикл по —— -> л 0 ["
цикл по х t + у 2(bz ——у < у‘< ——z"t <lz\ — -S—> 1 0 <
(z ц , ) 1 нет
У!!. < У?-^-> z”.<'z2(-^l®2(
4
ЦИКЛ по у 7 ----—Z ц < 1 Z ( ——1 0 7
Ф нет
20;
Ф нет
ЦИКЛ по
т ,, п ____________да л Q m
Рис. 4.13. Схема определения принадлежности точки подрыва БЧ зоне
уязвимости п (для j отсеков): п - номер пуска, т - номер взлета,
£ - направление воздействия
171
Для оценки воздействия поражающих факторов БЧ на другие
отсеки цели, по отношению к которым поверхностный подрыв БЧ
на у-м отсеке можно рассматривать как неконтактный, необходи-
мо определить принадлежность точек подрыва БЧ зоне досто-
верного поражения цели. При этом принимается х™ = х™,
= ПК ПН ПК
У Hi У uj ’ 2щ 2 и/ •
В случае непоражения цели ни по какому типу, кроме "А", при
поверхностном подрыве БЧ полученная информация используется
при расчете поражения цели при неконтактном подрыве для опре-
деления возможности поражения соседних отсеков за счет оско-
лочно-фугасного действия.
4.9. Определение координат точки подрыва БЧ по сигналу
с НВУ (блок 9)
Рассматривается модель работы НВУ, позволяющая достаточ-
но точно аппроксимировать работу таких типов взрывателей, как
радиолокационный, лазерный, оптический, с геометрически про-
стой областью срабатывания (конус, система лучей).
Начиная с заведомо дальней точки, с определенным шагом
вдоль относительной траектории ЗУР происходит формирование
области срабатывания лучей.
Так же как и ранее, необходимо знать координаты ’’потенци-
ального” попадания ЗУР в цель, которые определят точки подрыва
БЧ ЗУР с НВУ, не сработавшим до прямого попадания в цель. *
Так же как и ранее, поверхности отдельных элементов цели
описываются уравнениями центральных поверхностей второго
порядка (эллипсоид, эллиптический конус) с наложенными на них
ограничениями в виде плоскостей, перпендикулярных их главным
осям (см. разд. 2).
Так же как и ранее, определение координат попадания ЗУР
в контур у-го отсека цели основано на поиске ближней точки
пересечения прямой, ориентированной по вектору относительной
скорости.
В случае попадания определяются углы между нормалью к
поверхности цели в точке соударения и вектором относительной
скорости (продольной осью ЗУР).
172
При промахе ЗУР окончание процесса моделирования работы
НВУ определяется максимальной дальностью, ограничивающей
область срабатывания НВУ.
В случае если характеристики НВУ не известны, возможно
непосредственное задание координат точек подрыва БЧ с некото-
рым шагом вдоль траектории ракеты для определения координат-
ного закона поражения.
Вероятность безотказной работы НВУ принимается равной:
^вбр если случайное число т|, < , в противном случае
осуществляется переход к новой реализации, считая, что в составе
ЗУР имеется только контактное взрывательное устройство или что
неконтактное отключено.
Область срабатывания лучей НВУ вдоль относительной траек-
тории ЗУР может быть сформирована с постоянным шагом Дхотн
или шаг смещения координаты вдоль оси X системы XYZ может
рассчитываться как Аготн = v0TH • ти, где ти - длительность им-
пульса НВУ.
Случайное значение минимального расстояния, ограничи-
вающего область срабатывания НВУ вдоль оси X, определится из
соотношения *min = xmin + П, • Д*отн > где 0 < < 1; xmin, xmax -
минимальное и максимальное значения дальностей вдоль оси X,
ограничивающих область срабатывания НВУ; Дхотн - шаг смеще-
ния координаты вдоль оси X системы XYZ.
Тогда координаты /-й траектории центра НВУ:
• в системе координат XYZ х"ву = xmin + (z-ZHBy)£Xp >
У = У/+ “ ^нву ’ zi ~ zi + ” ^нву)^Хр ’ Деву > м ““
расстояние от носика ЗУР до центра КВУ;
• в системе координат ХцУц7и, связанной с целью,
Унву
и/
нвУ
нву
нву
X У,нву
нву
173
Если в составе ЗУР имеется КНВУ, характеристики которого
известны, то формирование области срабатывания НВУ произво-
дится следующим образом.
Для луча с номером £л =1 и последующих номеров опреде-
ляются:
• экваториальный угол £я -го луча НВУ
л
где =2л-а>-ти, со - угловая скорость вращения ЗУР, Nn -
число лучей НВУ;
• положение (направляющих косинусов) ^л-го луча в систе-
ме координат A'pKpZp, связанной с ракетой,
Мрл =
£Л
*р
£л
Ър
/л
*р
= cosQn ,
= cos-^n sinQn ,
= sinQnsiny£ji ,
где Пл - угол между продольной осью ЗУР (Хр ) и лучом НВУ;
• положение ^л-го луча в системе координат XIlY{[Zu
£л
хц
£я
Уч
£л
zu
Мл
= А/РхМрл.
Для определения точки индикации поверхности цели лучом
НВУ используется алгоритм, изложенный в блоке 4, с той лишь
разницей, что луч НВУ формализуется уравнением прямой:
*-<ву _г~Су
лЛ лЛ лЛ
Расстояние от точки на траектории ЗУР с координатами цен-
тра НВУ , у“ву, z™y до поверхности цели
d... = /ёх -хнву? + (v - vHBy? + (z -zHBy)2
ayk \ > +[-z4ijk u, >
174
Параметры dj —diji(,xil — х^^Уи ~Уцу/1>гц — zUy^’^o ~^о
используются для определения номера отсека, с поверхностью ко-
торого произошло пересечение луча.
Могут быть заданы дальности срабатывания НВУ, а может за-
кон срабатывания НВУ по дальности. Если задаются дальности
срабатывания НВУ, то с ними сопоставляются соответствующие
вероятности срабатывания НВУ РСрВу (табл. 4.8).
Таблица 4.8
рНву 1 ср 1 0
Dcp, м 0 Bep max
Если задается закон срабатывания НВУ по дальности, то рас-
чет РСрВу ведется с учетом полученной дальности.
Обозначим Dcpl дальность срабатывания НВУ, менее кото-
рой происходит срабатывание НВУ с вероятностью, равной еди-
нице; Dcp2 - дальность срабатывания НВУ, более которой вероят-
ность срабатывания равна нулю.
Дальность срабатывания НВУ изменяется в зависимости от уг-
ла между лучом НВУ и нормалью к поверхности цели а0,
а0 = arccosj^o’11, причем 0 < а0 < 90° .С увеличением угла а0 даль-
ность уменьшается, что учитывается коэффициентом ку (табл. 4.9):
Depl “ Dcpl > Dq>2 — DCp2 к у
Таблица 4.9
1 0
а0, град а01=0° «0/ =90°
Если истинная координата дальности срабатывания НВУ
лежит в пределах между Dcpl <<^л <Dcp2, то вероятность сраба-
тывания НВУ можно определить как
Dcd2 -d?
рнвУ __ СР2 J
ср ~ D - D
^ср2 ^ср!
175
В других случаях необходимо задаться зависимостью
Л:рВУ==Л^)л ) и приступить к новой реализации числа отраженных
импульсов:
N =N +1 N = V +1
где Уотрим - число отраженных от цели импульсов, начальное
значение им = 0; NUM - число всех импульсов, начиная с пер-
вого отраженного, начальное значение Уим = 0.
Учет накопления определенного числа отраженных импуль-
сов, испускаемых одним лучом (в пределах четырех, но не меньше
двух), производится при любой z-й реализации, если случайная
вероятность РСрВу > т|,. Если число испускаемых одни лучом им-
пульсов меньше двух, то принимается Уотр им = 0 и Л'им = 0.
В зависимости от типа цели (крупноразмерная или малораз-
мерная) и типа стрельбы (навстречу или вдогон) необходимо на-
значить или рассчитать время функциональной задержки выдачи
команды на подрыв БЧ - Тзф.
Расчеты проводятся для двух значений угла пеленга цели я
(малого т]м и большого т|б), которые назначаются для соответст-
вующего типа цели (табл. 4.10).
Таблица 4.10
Тип цели Режим стрельбы Пеленг, град %ф,с
Крупноразмерная Навстречу Пб
Пм
Вдогон Пб
Им
Координаты точки подрыва БЧ по сигналу с НВУ определятся
из соотношений
хц,- ~ ХЦ;У + (^нву ~^Бч)^хц +'|<отн(’сзк + Хзф)^хц’
Тц, = Рц,У +(^нву-^Бч)^хц +voth(X3k +тзф)^уц’
2ц" = 2щУ + (^нву “ ^БЧ кХц + VOTH(тзк + тзфУ 2ц >
где тзк - конструктивная задержка выдачи команды на подрыв БЧ.
176
Если в соответствующей реализации т| > т]Б, то принимается
г| = г|Б , иначе т| = г|м. В случае, если х™ < хц, при £Хц > 0 или
Хц” > хЦ/ при <0, то координаты «потенциального» попада-
ния ЗУР в цель определяются, как и ранее, путем решения задачи
пересечения траектории ЗУР с целью. При этом за координаты
принимаются координаты, получаемые при условии,
что в составе ЗУР имеется контактно-неконтактное взрывательное
устройство (КИВУ), характеристики которого известны. В этом
случае рассчитывается координатный закон распределения коор-
динат. xmjn — xmjn + Ахотн .
Реализации повторяются при выполнении условий
X • при £г >0 или xmin >xmax при £х <0, в том
числе для разных типов ВУ и всех £ л < Ул.
4.10. Определение принадлежности точек подрыва БЧ зоне
достоверного поражения при неконтактном подрыве (блок 10)
Напомним, что под зоной достоверного поражения понимает-
ся некоторая пространственная область, внутри которой при под-
рыве БЧ с учетом подрыва остатков топлива ДУ, событие, заклю-
чающееся в поражении цели за счет совместного осколочно-
фугасного действия, является достоверным.
Геометрически зона достоверного поражения представляет
собой пространственную область, ограниченную поверхностью
исходного отсека, поверхностью, эквидистантной поверхности
исходного отсека и отстоящей от нее на некотором расстоянии, и
поверхностями, проходящими по границам исходного отсека пер-
пендикулярно его поверхности.
Методический подход к аналитическому представлению зон-
ных характеристик уязвимости цели в зоне достоверного пораже-
ния аналогичен приведенному при определении принадлежности
точек подрыва БЧ различным поражаемым зонам цели при кон-
тактном подрыве.
Координаты границ зон достоверного поражения по осям
ХЦ,ГЦ,7Ц ((хе)дп,(у”)дп,(п^)дп), котангенсы углов наклона
177
линий границ зон к оси ^ц((^)дп), расстояния от точки подрыва
БЧ до поверхности отсеков цели (ЛДП|, ЛДП2, /?дпз) и соответст-
вующие им значения ©7 )дп задаются для каждого отсека (/') це-
ли для трех остатков топлива ДУ (сот = 0,сот = <оТ1 ,сот = соТ2 )
Грани объемов образуются плоскостями, пересекающими ось
Ха, вида х - х( + Ьеу™ или х = х( +bez™, где хе - координата
точки пересечения плоскости с осью Хи; Ье - котангенс угла ме-
жду плоскостью и осью Хц; у™, z'™ - координаты точки подры-
ва БЧ при использовании неконтактного подрыва.
Пусть € , т, п - индексы, присваиваемые участку поражаемой
зоны в направлении осей XU,YU,ZU, € = l,2,...Zmax,
т = l,2,.../nmax, п = l,2,...nmax. Если участки между плоскостями (.
и £+1, т и /п+1, п и п+1 необходимо разбить, то используется
семейство плоскостей, перпендикулярных осям Хи, Уц и Zu соот-
ветственно.
Так же как и ранее, каждому участку с индексами I, т,п ста-
вится в соответствие признак поражения " . Последнее зна-
чение границы для каждого отсека (x(,y™,nz™) задается заведомо
большим, например - 100 м;
Максимальное число границ зон разбиения для каждого у-го
отсека цели в направлении осей -ru(^maJ^(mmax)>Zu(«max). а
также признак задания первой секущей плоскости (х1сп) должны
быть заданы.
Величина остатка топлива ДУ сот = /(/пол) определяется по
значению /пол (табл. 4.11).
Таблица 4.11
^ПОЛ’ с ^поло ^ПОЛп
сот,кг юто (Н - 0 тп
Если о>т - 0, то выбор характеристик поражаемых зон произ-
водится из соответствующих таблиц для значений <вт = 0 , а также
178
для сот = 0 и сот - coTJ , если сот < coTJ ; сот = coTJ и сот = соТ2 , ес-
ли сот < соТ2 ; сот = соТ2, если сот > соТ2 .для всех j = l,...,Jmax*
Принадлежность точки неконтактного подрыва БЧ зонам досто-
верного поражения проводится на основании следующего анализа.
Задаются значения (( тах )дп ,(wmax )дп ,(«тах )Дп А1 )дп •
СП
ПН 7 пн
Удовлетворение неравенств: хц. <Х£+Ь?уц. - сечение за-
дается на вертикальной проекции цели или х™ < хе + bez™ - се-
чение задается на горизонтальной проекции цели, у™ < у™,
z™ <z™ при просмотре всех п < итах, т < wmax и I < ^тах, озна-
чает, что точка неконтактного подрыва БЧ принадлежит зоне дос-
товерного пораженияу-го отсека цели.
Если в число отсеков входит несущий или хвостовой винт
вертолета, то необходимо определить расстояние от точки подры-
ва БЧ до оси вращения несущего ( /?нв) и хвостового (/?хв) винтов
соответственно:
Лив = = ^н-хно)2+(у™-Уно)2
и сопоставить с ними соответствующие значения вероятности на-
личия лопасти несущего Рнв = Л^нв) или хвостового /’хв=Л^хв)
винтов напротив точки подрыва БЧ. Принимается Рнв =1 и Рхв=1,
если в реализации т] < Рнв и т| < Рхв. В ином случае ущерба верто-
лету, связанному с попаданием в винты, нет, Рнв =0 и
("®”)7=16=О>Лв=Ои("07)7=17=°-
Определение принадлежности точки подрыва БЧ поверхности,
эквидистантной поверхности у'-го отсека и отстоящей от нее на
расстояние Лдп от точки подрыва БЧ, проводится путем проверки
наличия пересечения сферы радиуса Рдп с поверхностью цели.
Для первого остатка топлива принимается расстоя-
ние РдП = (ЛдП ] )^ • Для случайных реализаций f (f - номер
реализации) и заданного числа точек разбиения отрезка
Рдп - if (if = 0 ,1,2.. ,z/max) для определения пересечения поверхно-
179
сти у'-го отсека цели и сферы радиусом 7?дп ^/?ДП| ,Лдп2,7?дп3) опре-
деляются:
• случайные значения углов а у =т]ц-2л и
Р/ = (Л12 -0,5>, где Т)11Л112 _ случайные числа, равномерно рас-
пределенные в интервале [0; 1 ];
• случайные значения координат Xj,yj,zj на сфере при за-
данном максимальном количестве точек разбиения z/max:
1
„ _ гпн + ^дп •'/•Лдп . cosa у cosP f
Xf ~ XUj ifmax
у/ = У™ + ^ДП I ^ДП sin Py,
tfmax
zf = z™ ^дп к 1 Vmax if -^дп sinaу cosPy;
• соответствующие им поверхности Aj :
Af + а22уУ/ +a33jzf +^a\2jxfyf +^-a\3jXfzf +
+ 2^23jyfzf+^aHjXf+ ^a24j У f + 2яз4у 2 f + O44y
Количество реализаций F для определения пересечения по-
верхности у'-го отсека цели и сферы радиусом 7?ДП(ЛДП| ,/?ДП2 ,ЛДПЗ)
задается.
При наличии пересечения (Лу <0) соответствующему
ЛДп(ЯдП1,/?дп2^дпз) присваивается индекс поражаемой зоны
("©7 )j у-го отсека.
Из всех значений выбирается максимальное:
” ©7 = тах(" ©7 )у • Это значение сравнивается с максимальным,
полученным при определении принадлежности точек подрыва БЧ
различным поражаемым зонам цели при контактном подрыве, и из
двух выбирается максимальное значение ” ©7 >
180
4.11. Определение начальных параметров поражающего
элемента БЧ (блок 11)
В случае непоражения цели при прямом попадании ЗУР в цель
и при подрыве БЧ в зоне достоверного поражения координаты точ-
ки подрыва БЧ используются для оценки поражения цели ПЭ БЧ.
Начальные параметры поражающего элемента определяются
исходя из его распределения и начальных скоростей в угле разле-
та, полученных в статике.
Начальная скорость ПЭ в угле разлета может быть оценена по
известной зависимости
,ст = 0,5П
г у2 + 4а/<р
где D - скорость детонации взрывчатого вещества; твв - масса
взрывчатого вещества БЧ; тм - масса металла корпуса БЧ;
а = гавв/шм; ф - коэффициент, учитывающий форму БЧ;
Ф=3,33,4и6 соответственно для сферической, цилиндрической и
плоской формы; ф] =0,8...0,9 - коэффициент, учитывающий поте-
ри энергии, идущей на разрушение оболочки или на прорыв про-
дуктов детонации в зазоры готовых фрагментов и передаваемый
осколками воздуху в момент разлета.
Поражающие элементы, образуемые при разрушении корпуса,
могут иметь произвольную форму (разные миделево сечение,
суммарную площадь поверхности), разные массу, начальные ско-
рости и углы разлета, скорости и углы подхода к цели в момент
контакта с целью.
Количество осколков массой 1 г и более N> I можно опреде-
лить по формуле
7^1 =
rcp В
где р = 0,45...0,65 - опытный коэффициент, зависящий от свойств
взрывчатого вещества; В = 0,3...0,4 - коэффициент, зависящий
от конструкции БЧ; гср - средний радиус камеры корпуса
боевой части; ов- предел прочности материала корпуса БЧ на
разрыв.
181
Структура осколочного потока БЧ характеризуется распреде-
лением поражающих элементов по углу разлета ^Vn3(VrCT об-
щим количеством ПЭ Упэ и распределением ПЭ по весовым груп-
пам Nn3(qr) -табл. 4.12, 4.13.
Для каждого ПЭ выбираются случайный угол вылета, случай-
ная начальная скорость и случайный вес, определяются направ-
ляющие косинусы траектории в различных системах координат,
скорость в динамике (с учетом скорости ЗУР), относительная ско-
рость.
Таблица 4.12
Распределение ПЭ и начальных скоростей ПЭ (vCTr)
в угле разлета в меридиональной плоскости (Т Гст )
0 1
Фгсг,град Ч* '"min гст max
Усп’м/С
Миделево сечение ПЭ может быть задано значениями
или таблично ( S? втабл.4.13).
m ’ mmax ’ mmin v м 7
Применительно к БЧ ЗУР ПЗРК распределение ПЭ по весовым
группам может быть организовано в диапазоне 0,2 < qrmin < 0,5;
0,6 < qrmax < 5 и задано либо таблично, либо законом.
Таблица 4.13
Распределение ПЭ по весовым группам
) 0 1
Яг ’г 4г min 47 max
» см2 °М min QT OM max
Для заданной весовой группы ПЭ по случайному числу т|13 ,
равномерно распределенному в интервале [0;1], по данным распре-
делений ^э(Жгст) = Жз) и Усто =/(П1з) и ЖэЖ) = Жз)
определяются случайные значения угла \|/г в меридиональной
182
плоскости, начальной скорости в статике vci> , веса qr и площадь
миделева сечения .
По случайному числу т}|4 определяются:
• экваториальный угол у г - 2лт|]4 ;
• направляющие косинусы траектории r-го ПЭ в системе
XpYpZp:
=cosvr, тр = sincosyл, пр = sin\pr sinyr;
• направляющие косинусы траектории r-го ПЭ в системе
*VpYVpZVp
tVp т*р =|^р тр «р|хЛ/рР;
• начальная скорость ПЭ в динамике (с учетом скорости
ЗУР): _______________________________________
// yZ / у \2 / у \2
Уп = »/ УСт + УП + Уст тг + Уст ”гР ;
Д^> 1/1 VI р г pi I г / I viy Г I 7
• направляющие косинусы траектории r-го ПЭ в системе
XVpYVpZVp в динамике:
~у Уст/гР+Ур ~у У СТХР ~*р '/стг«гР
, т/ =— ------, пгр =—-----;
V V v
*ДГ УДГ Дг
• направляющие косинусы траектории r-го ПЭ в системе
У Y 7 •
tvru mvru
Тр тр п^М^-,
р
• относительная скорость ПЭ
у = ч Iv (Vli — v< Г + (у п/ц I + (V п^ц Г
Г \\Дг г Ц/ \ Дг г / \ Дг г / ’
• направляющие косинусы траектории r-го ПЭ в системе
XVl{YViiZVii с учетом скорости цели:
Ул £4- V,. v v
г =д^х------ц, уц = УдЛ^, УЦ =ЧЛ.
Уг Уг Уг
183
• направляющие косинусы траектории r-го ПЭ в системе
= т"и п/ц|хЛУци.
4.12 Определение условий встречи ПЭ с агрегатом цели
и предельной толщины пробития монолитной дюралевой
преграды ПЭ (блок 12)
Возможность и координаты попадания в цель (отсек) каждого
ПЭ определяются по алгоритму, аналогичному изложенному в
блоках 4, 5, 6. При этом за начальные значения координат цели
(отсека) принимаются координаты цели (отсека), полученные при
неконтактном подрыве БЧ: j’ = 1, xUQ = х™ , у^ = у™, z^ = z™,
-I'l, tv = m,, I. = n^.
Далее определяются скорость соударения ПЭ с первой прегра-
дой, коэффициент формы ПЭ, возможность и координаты попада-
ния ПЭ в уязвимый агрегат, предельная толщина монолитной дю-
ралевой преграды, которую пробивает ПЭ при нормальном соуда-
рении, моделируются воздействия всех ПЭ и определяются веро-
ятности поражения агрегатов цели за счет действия различных по-
ражающих факторов БЧ.
Как указывалось ранее, воздушная цель, исходя из принятых
понятий поражения, аппроксимируется системой параллелепипе-
дов с заданными координатами центров и размерами граней, каж-
дый из которых является моделью агрегата (ЖВА), принадлежа-
щего тому или иному отсеку цели.
Поверхности некоторых агрегатов, например боевых частей,
задаются поверхностями второго порядка. В этом случае задача
встречи ПЭ с поверхностью агрегата решается аналогично задаче
встречи ракеты с целью.
Поражение ВЦ за счет механического действия ПЭ по ее
ЖВА происходит при пробитии экранирующих, как правило раз-
несенных, преград и нанесении повреждений ЖВА, приводящих к
выводу их из строя.
Способность ПЭ пробить преграду оценивается сопоставле-
нием его удельной кинетической энергии (энергии, отнесенной к
184
средней площади поперечного сечения осколка) и энергии, тре-
буемой для пробития преграды заданных толщины и материала.
Удельная кинетическая энергия ПЭ на разных расстояниях от
точки подрыва БЧ различна:
Е =^L
УД 25ср '
Масса ПЭ и его средняя площадь миделева сечения связаны
соотношением 5ср = кфд^\ где кф - коэффициент формы ПЭ.
Для компактных ПЭ
*Фпип ~^t>max = *Ф = (^п/4)(Ро/?г) ’
где р0, г/см3 - плотность материала ПЭ; 5П - площадь полной по-
верхности ПЭ. Для некомпактных ПЭ при известной их ориента-
ции в момент соударения с первой преградой
*Фт1п = *Фтах “ *Ф = ^м(ро/?г) •
Для некомпактных ПЭ при неизвестной (случайной) их ориен-
тации в момент соударения с первой преградой
^Фтах(т1п) ^Mmax(min) (ро/^г) >
где 5М и 5М - соответственно наибольшее и наименьшее
Mmax Mmin
из всевозможных значений площади миделя ПЭ - SL.
После определения возможности и координат попадания в
цель (отсек) каждого ПЭ определяются:
• скорость соударения ПЭ с первой преградой;
• коэффициент формы ПЭ;
• возможность и координаты попадания ПЭ в уязвимый аг-
регат;
• предельная толщина монолитной дюралевой преграды, ко-
торую пробивает ПЭ при нормальном соударении.
Рассмотрим пример попадания ПЭ в фюзеляж.
Координатам точки на траектории ПЭ присваиваются коор-
динаты точки подрыва БЧ при неконтактном подрыве и соответст-
вующие направления осей цели:
У = 1,*ц п=<н,Уцп =y™,znn = = nf.
J ’ UQ Ц/ ’ ' HQ Ц, > UQ Ц/ Ju r r zu r
185
. Расстояние от точки подрыва БЧ до соответствующей поверх-
ности параллелепипеда, моделирующего фюзеляж, и координаты
точки пересечения траектории ПЭ определяется присвоением:
^Гу ~ d ijk > xry ~xijk’> У Гу ~ У ijk > zry ~гук^ Гу ~^0'
Начальная скорость осколков рассматривается как абсолют-
ная, полученная в результате сложения векторов скоростей оскол-
ка и ракеты:
И) =7*7 + Vp+2VrVpCOS(p.
Относительную скорость встречи vB ПЭ с целью на расстоянии
dr.j определим с учетом потери скорости осколком при его дви-
жении в атмосфере. Уравнение движения ПЭ:
a^L = -C &-S
4 dt x 2 cp’
где q - масса осколка; vr - скорость осколка; p - плотность атмо-
сферы; сх - коэффициент лобового сопротивления осколка
(Сх«1,24).
Решая уравнение движения относительно v = vx при х = dr
получим выражение для скорости ПЭ:
у_ = v,exp -с
В»* F Г
Р^ср^гу
2ЧГ
Тогда скорость встречи ПЭ с учетом скорости цели
vB = + vlr + 2VuVB^COS(p ,
где уц - скорость цели в момент встречи; <р - угол между вектора-
ми скорости цели и скорости ПЭ.
Выбираем qr > 4г и определяем скорость соударения ПЭ с
фюзеляжем:
Ч =vrexp(-^.a),
где а = (cxpBScp)/29r - баллистический коэффициент, 1/м2.
Если в фюзеляже или в другом отсеке находится какой либо
агрегат (признак принадлежности т-го агрегата фюзеляжу - Е\),
186
то необходимо учитывать, с какого направления рассматривается
уязвимая грань агрегата: сзади (ц = 1), спереди (ц = 2), снизу
(ц = 3 ), сверху (р = 4), слева ( ц = 5 ), справа (ц = 6).
Поскольку агрегат моделируется параллелепипедом, то по со-
ответствующему алгоритму последовательно просматриваются все
координаты пересечения траектории ПЭ с гранями параллелепи-
педа.
Например, пусть воздействие ПЭ по агрегату происходит сза-
ди и количество разбиений в агрегате >0. Тогда рассматрива-
ются грани параллелепипеда, перпендикулярные оси Х9 и опреде-
ляются координаты попадания ПЭ в переднюю или заднюю грань
этого агрегата:
=< =^(«; -<н)+к", 4 -<")+<"
t r £ г
с последующей проверкой ограничений по осям уц и zu:
аУ < ,.Т < т аУ т аг < т < т az
Уи ~~^-У» +у’ ^2u+ — •
Если эти ограничения выполняются, то определяется расстояние
от точки подрыва БЧ до точки попадания ПЭ в грань рассматри-
ваемого агрегата:
пнг ,( т ..""ГхМ „пнР
“г V'H Хц1 / +VH Ущ / +гц ZU, / •
Значение dx запоминается, и просматриваются остальные агрега-
ты, находящиеся в фюзеляже (/'=!),- т = т +1.
Подобным образом проверяются остальные возможные воз-
действия ПЭ по всем агрегатам цели.
После определения расстояний до всех агрегатов выбирается
тот агрегат, с которым произошло первое пересечение траектории
ПЭ из условия dx = min|y* |, определяются грань, с которой пе-
ресеклась траектория ПЭ, и угол подхода ПЭ к этой (ц -й) грани
выбранного (т -го) агрегата а = arcsinp0|.
Расстояние до агрегата, его индекс, направление подхода ПЭ,
признак грани, с которой пересеклась его траектория, угол подхода
используются далее для определения последствий взаимодействия.
187
Предельная толщина пробития монолитной дюралевой пре-
грады конечной толщины при нормальном (а =90°) соударении
ПЭ с преградой Лпр (AnPmin >^пртах ) опРеДеляется из соотноше-
ний
Лпп . , =---------------------— при v > 800 м/с,
»Pn,,n(m.x) I + 1.55.10-1(v 800)«Z3 К ‘г
,y2 P»-v.2 -io-2 .
где ‘*»«=|-21+^.«<™>ч-2|>80^ •
Фтах(пнп) д
Лпп I \ - А ПРИ 800 м/с.
пРтт(тах) г вг
Значение коэффициента, учитывающего материал преграды,
Еа, берется из табл. 4.14 (£д = f (Х^ш)).
Таблица 4.14
Коэффициенты Е„ учитывающие материал преграды
т ^Об1Ц Е 3 'см
1 2 мд мах]
В таблице - последний номер из агрегатов, поражаемых
за счет пробивного действия ПЭ (механическое действие);
Ej -EXj- признак принадлежности т -го агрегата j-му отсеку;
- признак материала обшивки:
Х^,ц=1 - для углепластиков (КМ) и оргстекла;
^общ _ 2 _ ддЯ обшивок из алюминиевых сплавов,
£д=1180 Дж/см3;
= 3 - для обшивок из титановых сплавов, £д=1770 Дж/см3;
= 4 - для стальных обшивок; £д = 2360 Дж/см3.
Для компактных ПЭ и некомпактных при известной их ориен-
тации в момент соударения с первой преградой можно принять
188
к. = к. = к., к*. . = кл. -кл,, hnn . = hnn =hm.
Фтш Фтах Ф Фтт Фтах Ф’ пРтт пРтах ПР
Для некомпактных ПЭ при неизвестной (случайной) их ориента-
ции в момент соударения с первой преградой к$ = ^mjn + ^фтах •
Подобная процедура осуществляется для всех г <Nm.
4.13. Модели оценки эффективности механического действия
ПЭ (блок 13)
Обозначим через ^мах’^мах’^мах’^мах’^м^х’^мах’^мах макси-
мальное число агрегатов цели, поражаемых за счет механического,
инициирующего, зажигательного, по зарядам РДТТ АР, аэро-
гидроударного и фугасного действий ПЭ соответственно.
тмах| ” последний номер из агрегатов, поражаемых за счет
пробивного действия ПЭ (механическое действие);
тмах2 ~ последний номер из агрегатов, поражаемых за счет
впрыска топлива в воздушные каналы ГТД при действии ПЭ (ме-
ханическое действие);
тмахз ~ последний номер из агрегатов, поражаемых за счет
внесенной в них ПЭ кинетической энергии (механическое дейст-
вие);
тмах " последний номер из агрегатов, поражаемых за счет
инициирующего действия ПЭ по зарядам ВВ;
Tkmx] " последний номер из агрегатов, поражаемых за счет
действия ПЭ по зарядам РДТТ АР;
- последний номер из агрегатов, поражаемых за счет
разрыва корпуса работающего РДТТ при действии ПЭ;
тмгахз “ последний номер из агрегатов, поражаемых за счет
взрывного горения ТРТ при воздействии потока ПЭ;
тм1х “ последний номер из агрегатов, поражаемых за счет
воспламенения топлива и взрыва его паров при действии ПЭ;
тмах _ последний номер из агрегатов, поражаемых за счет
аэроудара при действии потока ПЭ по конструкции планера;
189
. тмах “ последний номер из агрегатов, поражаемых за счет
гидроудара при действии потока ПЭ;
тмах - последний номер из агрегатов, поражаемых за счет фу-
гасного действия взрыва ОФБЧ по конструкции планера.
Определение вероятности поражения агрегатов цели, по-
ражаемых за счет пробивного действия ПЭ. Для последнего из
агрегатов, поражаемых за счет пробивного действия ПЭ (механи-
ческое действие т < )> скорости соударения ПЭ с преградой
Av(Avmin,Avmax) определяются с учетом скорости дробления Удр
материалов ПЭ (см. табл. 4.14). Так, для материалов ПЭ типа алю-
миниево-магниевых, титановых сплавов, циркония и стали
Av(Avmin,AvmaY) = -vnn(vnn . vnn ),адля материалов ти-
паВНЖ-90 Av(Avmin,Avmax) = v. sin1/,3a-u_n(vnn . ynn ).
\ min’ max/ вг др\ ДРтт» дРтах 7
Представление о величине скоростей дробления ПЭ для неко-
торых материалов дает табл. 4.15.
Таблица 4.15
Среднее(у ), минимальное (у ) и максимальное (v)
"^min дРтах
значения скорости дробления ПЭ
Материал ПЭ Ро. г/см3 Скорости дробления ПЭ, м/с
V ДРщ1П Удр УдРтах
Алюминиевый сплав 2,7 1900
Цирконий (ЦАМ) 6,4 1500 1850 2200
Сталь 7,8 - - -
Медь 8,9 - 1850 -
ВНЖ-90 16,8-17,2 900 1300 1700
Для определения вероятности пробития удобно пользоваться
дюралевыми преградами. В случае других материалов необходимо
заменить рассматриваемую преграду эквивалентной ей с точки
зрения вероятности пробития дюралевой преградой.
Суммарные наименьшая и наибольшая толщины разнесенных
преград в дюралевом эквиваленте (AImjn(max), Amin, Amax), соответ-
ствующие необходимому и достаточному условию поражения
190
т-го агрегата за счет пробивного действия, определяются соотно-
шениями
Лу . , ч = hnn . . • (1 - kv . . . • Igo ),
z'min(max) nPnun(max) v vrnax(mm) ° '
где kv (^min>^vmax) “ коэффициент, учитывающий влияние
скорости соударения (Av) на пробивную способность при
действии по разнесенным преградам (табл. 4.16)
k(^min^vmax) = /(Av'(Avmin,Avmax))J; Igo* - обобщенная ха-
рактеристика разнесенности преград, экранирующих уязвимый
агрегат с заданного направления (табл, 4.17).
Таблица 4.16
^min>*vmax) к^>п
МД%.пЛУтах), м/с -2000 4000
Таблица 4.17
т ^тмс,му общ 0Т Ц S* ,м2 5г,м2 ^min ’ ММ ^тпах ’ ММ Igo*
1 2 тмд maxi
В таблице >му - признак топливных и масляных систем в
РД (ТМС) и магистралей управления (Хтмсму=1 - агрегат отно-
сится к ТМС и МУ; Хтмс>му = 0 - не относится); 1 °бш - признак
материала обшивки; ц - признак направления, с которого рас-
сматривается уязвимая грань агрегата; S'*, м2- наибольшая
уязвимая площадь грани т-го агрегата с ц-го направления; 5Г,
2
м - площадь грани с ц -го направления.
Суммарные наименьшая и наибольшая толщины разнесенных
преград в дюралевом эквиваленте (/zmjn, Лтах ) с учетом углов под-
хода ПЭ
191
min . > ‘max
ka
^max
ka
, л , a-a. _ . .
где Zl=Q если a < сц , ka =----—, если a<a2, ka = 1, если
a2 -aj
a>a3, a1?a2,a3 - углы для определения коэффициента, учиты-
вающего влияние угла подхода ПЭ на его пробивную способ-
ность. Полученные экспериментальные значения аьа2,а3 равны
9°, 35° и 90° соответственно.
Условная вероятность поражения агрегатов цели принимается
равной:
= °> (Л* )Г* = 0 если кч = °’ Н™ А1тах - Ат>п ’
Рптр^ = 1, если й£тах > й^.
>т ___________^тах ^min___________
Пр»*- у у у ♦ у ♦
' Йу - Йу . + Йтах - Йт;п
^тах Lmm тах тт
если йу < й‘ .
^-тах тах
Вероятность поражения агрегата при условии накрытия его
соответствующей площади
СУ
/ рТ\МД _ рт ° г
)| Гпрг. ' s у
где 5,, - площадь грани с ji-го направления; 5ry = Sy ; Sy - наи-
большая уязвимая площадь грани т-го агрегата с ц-го направления.
Если агрегатами являются топливные и масляные системы в РД и
магистрали управления, то 5/ = 5Г • (1 + 0,25 • S^2). Значения
Sy, Sr задаются табл. 4.17.
Если в текущей реализации т] < (Pj )“л, то вероятность пора-
жения агрегатов цели, поражаемых за счет пробивного действия
ПЭ, принимается равной единице (Рг’ )“д = 1, соответственно
X, =®х и (Р/)“» =1, иначе ((Р^Г =о).
Примечание. Поражение агрегата, находящегося за преградой, может
быть также оценено по величине остаточной скорости, которую сохранит ПЭ
после пробития преград без учета эффекта дробления ПЭ.
192
Толщина металлической преграды h , пробиваемой осколком с вероятно-
стью 0,5, может быть оценена по формуле
h" = 0,138tZ]P| -У±=. (л* < 1,ц),
V°2P2
где dx - приведенный диаметр осколка; Р] - плотность материала осколка;
р2 - плотность материала преграды; о2 “ динамический предел текучести мате-
риала преграды.
Порядок остаточной скорости после пробития преграды, в предположении
линейной аппроксимации скорости в преграде толщиной h можно оценить по
формуле
7,258 I---
^ост=^в----T-Va2p2 •
Pldl
В литературе приводятся полуэмпирические формулы для потерянной ско-
рости Ур = Ув - у^ типа movl = Кпр</]8„р, т.е. для остаточной скорости
У ост = VB~^Knp(dl/q).
Полагая, что эта формула работает и при критической скорости, т.е. скоро-
сти, при которой преграда толщиной h* пробивается с полной потерей кинети-
ческой энергии, приравнивая значения 8= Л* и принимая У ост =0, получим
оценку :
K^=52,5o2p2-^.
«1Р1
Определение вероятности поражения агрегатов цели, по-
ражаемых за счет впрыска топлива в воздушные каналы ГТД,
при действии ПЭ. Для агрегатов, поражаемых за счет впрыска
топлива в воздушные каналы ГТД при действии ПЭ (второй вид
механического действия т < т“^Х2 ), определяется критическое
значение скорости vKp, при которой разрушается стенка топлив-
ного бака агрегата:
( h У/2
Ук=1430 *а- Н- ’
Кр U I ’
\^м /
где - толщина стенки топливного бака агрегата в дюралевом эк-
виваленте; ка - коэффициент, учитывающий влияние угла а на ин-
тенсивность впрыска топлива в канал воздухозаборника (табл. 4.18).
193
Та б л и ц a 4.18
*а 1,07 1,07 1,03 0,78 0,71 0,73 0,78 0,82 0,88 0,94 1,00
а, град 0 9 10 20 30 40 50 60 70 80 90
Значение условной вероятности поражения агрегатов цели,
поражаемых за счет впрыска топлива в воздушные каналы ГТД
при действии ПЭ, принимается равной: Р = 0, (Pj )^д = 0, если
v_ <ук_ или V. >ул_, и Рг =1,если vB <v_D.
Вероятность поражения ТМС агрегатов при условии накрытия
их соответствующей площади
су
/ рТ\мд _ р °г
( г')2 _
Если в текущей реализации т| < то вероятность пора-
жения агрегатов цели, поражаемых за счет впрыска топлива в воз-
душные каналы ГТД принимается равной единице: (Р*)“д = 1,
соответственно (Р/)мд = 1, иначе (Р* )“д = 0.
Значения S^,Sr, задаются табл. 4.19.
Таблица 4.19
Определение вероятности поражения агрегатов цели, по-
ражаемых за счет внесенной в них ПЭ кинетической энергии.
Для агрегатов, поражаемых за счет внесенной в них ПЭ кинетиче-
ской энергии (механическое действие т < т*дхз), рассчитывается
количество ПЭ, попавших в т-й агрегат. Для этого задаются коли-
чество ПЭ, достаточное для поражения исходного агрегата при
попадании в его уязвимую площадь, - N*-, наименьшее и наиболь-
194
шее значение параметра, характеризующего уязвимость отсека,
поражаемого за счет внесенной в него кинетической энергии ос-
колков: Emin, Emax.
Характеристики уязвимости агрегатов, поражаемых за
счет внесенной в них осколками кинетической энергии
I ц, 0Т, 5Г, 5ГУ, Emin, £ma„, N* ), задаются в виде табл. 4.20
Таблица 4.20
т ®т 5г,м2 5/,м2 Е Дж X ШТ
т“Л +1 max 2
•
тмд тахз
Вносимая У осколками кинетическая энергия осколков EN
рассчитывается при условии N < N , начиная с начального значе-
ния N=\t
N
Еы ~ Y,ENr ,
Nr=\
qr-vl i
где ЕХг=*!-2*.1О-3.
Условная вероятность поражения агрегатов цели, поражаемых
за счет внесенной в них ПЭ кинетической энергии, определяется с
учетом минимальной кинетической энергии, требуемой для пора-
жения агрегата £min:
р _ Eft ~ ^rnin
* Д7 >
F — F .
^тах ^тт
причем PN = 0, если EN < Emin , и PN = 1, если EN > Етах . С уче-
том относительной поражаемой площади искомая вероятность
су
Юзмд=Лгу--
Если в текущей реализации т| < (Р* , то вероятность поражения
агрегатов цели, поражаемых за счет внесенной в них ПЭ кинети-
195
ческой энергии, принимается равной единице: (Р^)^ = 1, и соот-
ветственно (Р/)мд = 1, иначе = 0.
4.14. Модель оценки эффективности инициирующего действия
ПЭ (блок 14)
Для агрегатов, поражаемых инициирующим действием ПЭ,
для расчета вероятности поражения используются такие характе-
ристики уязвимости, как толщина преграды, экранирующей бое-
вую нагрузку, и толщина оболочки заряда ВВ, которые характери-
зуют защищенность заряда ВВ оболочкой и экраном в стальном
эквиваленте, а также коэффициенты, характеризующие структуру
оболочки заряда и достаточный уровень взрывчатых преобразова-
ний ВВ, при котором поражается цель.
Примечание. Прямая надежная передача детонации от активного заря-
да через воздух к пассивному заряду бризантного ВВ возможна при давлениях не
менее сотен МПа и происходит на очень малых дистанциях порядка 30-40 см, при
контакте зарядов или при действии продуктов взрыва активного ВВ.
Критерием возможности детонации является критическое давление чувст-
вительности конденсированных ВВ к детонации (табл. 4.21 и 4.22).
Таблица 4.21
Взрывчатое вещество р, г/см3 Рч» ГПа
Тротил 1,6 1,96
Тротил 1.34 0,77
Гексоген 1,74 1,78
Тетрил 1,7 2,55
ТГ 50/50 1,7 2,94
Аммонит IDKB-20 1,34 0,70
Победит ВП-3 1,34 0,56
Таблица 4.22
ВВ Состо- яние ВВ р, г/см3 V„,M/C Vc, м/с vB, м/с
Тротил л 1,61 900/1150 900/1150 1500/1720
Тротил пр 1,5 530/545 490/510 640/650
20ТНТ/80 АС пор 1,03 — — 1080/1400
Гексоген пр 1,65 360/400 - 460/520
Гексоген+5% парафина пр 1,59 430/470 410/430 520/560
Аммонит 2 пор 0,90 - - 1120/1300
196
Окончание табл. 4.22
Тетрил пр 1,65 400/420 - 480/510
ТЭН+10% па- рафина пр 1,53 - - -
35%-й динамит пл 1,45 250/280 290/340
ТГ 45/40 + 15А1+ 3% воска л 1,75 770/1050 85/90 85/90
Пентолит пор 1,13 320/350 - -
л - литое, пр - прессованное, пор - порошковидное, пл - пластичное
В табл. 4.22 приведены экспериментальные данные по ини-
циированию ВВ ударом осколками длиной и диаметром 15 мм.
Косая черта разделяет верхний и нижний пределы критической
скорости, возрастающей с углом встречи. Так, при инициирова-
нии прессованного тротила скорость заметно возрастает при от-
клонении от нормали угла встречи всего на 5-6°. При отклонении
на угол более 10 вероятность детонации стремится к нулю.
Такие цели, как самолеты-носители, могут иметь на борту
авиационное вооружение (бомбы, ракеты), снабженное двигателя-
ми ТТ. В этом случае возможно поражение агрегатов цели за счет
инициирующего действия ПЭ по зарядам ТРТ РДТТ, находящихся
в составе управляемых и неуправляемых ракет на борту самолета-
носителя, а также за счет разрыва корпуса работающего РДТГ ра-
кеты и взрывного горения ТРТ при воздействии потока ПЭ. В ка-
честве характеристик уязвимости в этом случае дополнительно
используются величина свободного объема камеры сгорания
РДТТ, а также наименьшее и наибольшее критические значения
удельной энергии ПЭ, при которых разрушается агрегат конструк-
ции планера цели.
В процессе решения определяется скорость соударения ПЭ,
соответствующая вероятности инициирования, равной 0,5. Для
агрегатов, поражаемых за счет инициирующего действия ПЭ по за-
рядам ВВ (т <т™х )> определяется скорость соударения для за-
данных типа ВВ и материала ПЭ:
v0>5=F Ар Vr-(1 +Л-Х3/2),
•к 77
В . (^экр + ^об ) ’ »о л л
где vr = Пм—775----Г" ; 1 =----V3----’ k " коэффициент,
Лф/3 ^2/9’Sin4a sin "a
определяющий изменение инициирующей способности осколка в
197
зависимости от структуры оболочки заряда БП; к*? - коэффициент,
учитывающий степень взрывчатого превращения ВВ боевой на-
грузки, достаточного для поражения цели (табл. 4.23); к$ - коэф-
фициент формы ПЭ; йоб - толщина оболочки заряда ВВ, приведен-
ная к стали; йЭ1ф - толщина преграды, экранирующей боевую на-
грузку или боевое снаряжение, приведенная к стали; А, В, К, п -
коэффициенты для определения вероятности инициирования заря-
да ВВ одиночным осколком (табл. 4.23).
Таблица 4.23
Тип ВВ Материал ПЭ А В К п
ТГ-40 ВНЖ-90 0,012 2700 0,47 0,24
ТГ-40 Сталь 0,012 2550 0,39 1,33
ТГ-40 Цирконий 0,036 2550 0,58 0,48
ТГ-40 Ал. сплав 0,060 2500 0,63 0,02
Тротил ВНЖ-90 0,0075 4680 0,11 1,00
Тротил Сталь 0,020 4540 0,13 0,57
Окфол ВНЖ-90 0,036 2270 0,52 0
Окфол Сталь 0,030 1900 0,57 0,30
Характеристики уязвимости агрегатов, поражаемых за
счет инициирующего действия ПЭ по зарядам ВВ
,ц, S],Sr, Л^, АЭКр, , Лкр), задаются в виде табл. 4.24.
Таблица 4.24
Т 0t $гу,м2 Sr,M2 Лоб, мм Лэч>,мм Л° knb Кр
+1 тахз ^ин max
Условная вероятность инициирования ВВ цели
р _/вг-0>9 и0|5
Г' 0,2 ^0>5 ’
причем Рг. = 0, (Р?. )ин - 0, если vir < 0.9 • v0 5, и Pr. = 1, если
Вероятность поражения агрегата при условии накрытия его
соответствующей площади
198
<?у
(Рт)ин =
' ' 5,.
£У
Если в данной реализации т| < Рг •—то вероятность пора-
жения агрегата за счет инициирующего действия ПЭ принимается
равной единице: (Pj)MH=l, соответственно (Р/)ин = 1, иначе
(л;г=о-
4.15. Модель оценки эффективности поражающего действия ПЭ
по зарядам ТРТ РДТТ АР (блок 15)
Находящиеся на борту самолета-носителя авиационные раке-
ты (управляемые и неуправляемые) могут быть объектами воздей-
ствия ЗУР. Поражение агрегатов самолета в этом случае может
произойти за счет инициирующего действия ПЭ по зарядам БЧ
или ТРТ РДТТ АР. Подход к оценке поражающего действия ЗУР
по зарядам БЧ описан в подразд. 4. 14. Поражение агрегатов само-
лета при попадании ЗУР в РДТТ АР будет иметь место, если про-
изойдет разрыв корпуса работающего РДТТ или возникнет эффект
взрывного горения ТРТ.
В качестве характеристик уязвимости в этом случае дополни-
тельно используются величина свободного объема камеры сгора-
ния РДТГ, а также наименьшее и наибольшее критические значе-
ния удельной энергии ПЭ, при которых разрушается агрегат кон-
струкции планера цели.
Вероятность поражения агрегатов цели, поражаемых за
счет разрыва корпуса работающего РДТТ. Условная вероятность
поражения агрегатов цели, поражаемых за счет разрыва корпуса
работающего РДТТ Р при действии ПЭ (т < ), определяется
ri мах/
скоростью vp, необходимой для разрушения корпуса РДТТ цели с
заданной величиной свободного объема камеры сгорания - W:
Ур = 7500-IF0,17
199
Условная вероятность принимается равной: Р = 0,
(Лу )?Т = 0 > если увг < VP > и Лу = 1 > если v*r > vp • Тогда вероят-
ность поражения агрегатов цели, поражаемых за счет разрыва кор-
пуса работающего РДТТ при действии ПЭ, при условии накрытия
корпуса заданным потоком ПЭ равна:
сУ
(Р^)^ ~ 1> (•^,|Т)ТрТ = 1 > если в текущей реализации т) < (Р^)^ >
иначе (Р* )У>Т = 0 .
Характеристики уязвимости агрегатов, поражаемых за счет
разрыва корпуса работающего РДТТ, (®т ,ц, S*,Sr, h^, Лэкр.И’
задаются в виде табл. 4.25.
Таблица 4.25
т $у,м2 5г,м2 Лоб, ММ Аэкр.мм и;м3
г4" +1 maxi max 2
Вероятность поражения агрегатов цели, поражаемых за
счет взрывного горения ТРТ при действии ПЭ. При известных
предельной толщине пробития оболочки и экрана и выполнении
условия
, . ^об ^экр
^пр^-.- Р>
*а
где ка - коэффициент, учитывающий угол подхода ПЭ к оболоч-
ке, для всех ПЭ, обладающих соответствующей энергетикой и по-
павших в исходный агрегат, рассчитывается энергия осколков
данной весовой группы £л,, :
qr • vl ,
Е„ = ——^Ю“3
2
200
Для того чтобы рассчитать энергетический поток ПЭ, необхо-
димо определить суммарную площадь поверхности агрегата, на-
крываемого этим потоком ПЭ.
Пусть N\ - число осколков, попавших в заднюю или перед-
нюю грани агрегата; N2 - число осколков, попавших в верхнюю
или нижнюю грани агрегата; 7V3 - число осколков, попавших в ле-
вую или правую грани агрегата; Мт,п, Mmin , Mmm - минимальное
количество ПЭ, попавших в соответствующие грани с заданных
направлений. Для всех случаев запоминаются координаты попада-
ния ПЭ в соответствующие грани: xj, yj, zj .
Далее проводится расчет 5HJ, SH2 > по следующему
алгоритму.
Если число осколков, попавших в заднюю или переднюю грани
агрегата, > то принимается SH1 = 0, в противном случае
определяются координаты попадания ПЭ в грань, находящуюся на
минимальном расстоянии от точки разрыва с координатами
(У* )min = min {уД }, (zj )min = min (z* },
(Л’м )max = max {y*}, (z* )max = max {г* },
соответствующими размерами = (у^)твх ~(y^)min,
Ч, =(^)max -(^)min и ПЛОЩадЫО SH, = LHyj .
Аналогично рассчитываются площадь верхней или нижней
поверхности агрегата, накрываемого потоком ПЭ в верхнюю или
нижнюю грани агрегата: 5НЗ = • LH^ 9 где
= )max “(*ц)miiv = (-Уц)тпах “Galinin» = |
(*ц)тах ““ Hiaxjxp | (^ц)щт ~ }(^g)max — }
= 0 при А/? < ^2 ’
н2 г z zmm ’
площадь поверхности левой или правой грани агрегата, в которую
могут попасть ПЭ: 5НЗ = где LH^ = (xpmax -(x^)min,
£н^3 =^H^max (*p)min “ ПНп|хц j, (Xg )max
(^g)min ~ min|yg }(Уц)тах ~ rnax|y^ |
201
S = 0 при N3 <N3 . .
H3 r J Jmin
Суммарная площадь поверхности агрегата, накрываемого по-
током ПЭ:
н н] «2 hj
Удельная энергия потока осколков, накрывающих агрегат:
1 N
ЭУД= — • £^г(при SH = О Эуд=0).
Лн JVr=l
Обозначим ЭуД1П, 3^“ - наименьшее и наибольшее критиче-
ские значения удельной энергии осколков, при которых разруша-
ется агрегат конструкции планера без учета действующих на него
в полете нагрузок. Тогда вероятность поражения агрегатов цели,
поражаемых за счет взрывного горения ТРТ при действии ПЭ,
равна:
гч _ гаПНП
хрТчТРТ _ /д УД
' * r^max _ rjmin ’
^уд ^уд
(Р/)7г=0,если Эуд<;Э™п,
= 1, (^)1рт = 1,если Эуд>Э™.
Если п^(^т)Г, то пРинять (Р*)зрт =1,(Р<т)трт = 1, иначе
Й)Г =о)«
Характеристики уязвимости агрегатов, поражаемых за счет
взрывного горения ТРТ при воздействии потока осколков
(®т ’И, Эуд ,Эуд , ho6, ЛЭКр, Ni min, N2 minmin)’ задаются в ви-
де табл. 4.26.
Таблица 4.26
т 0Т r^min ^уд ’ Дж/м2 г>тах ч7уд , Дж/м2 ММ ^экр? ММ TV, • 7V Imin ^2min ^3min
хтрт +1 тах2 тТрт тахз
202
4.16. Модель оценки эффективности зажигательного действия
ПЭ (блок 16)
Вероятность поражения агрегатов цели за счет воспламенения
топлива или взрыва его паров при попадании ПЭ либо в жидкую,
либо в паровоздушную фазы топливного агрегата (бака) (т т^х ),
соответственно определяется их уязвимостью.
В качестве параметра уязвимости топливных агрегатов (баков)
принят экспериментально определяемый параметр К. Для различ-
ных фаз топлива и различных топливных баков (агрегатов) зада-
ются граничные значения параметра К (Kmjn, Ктах), характери-
зующего уязвимость топливных баков за счет зажигательного дей-
ствия ПЭ.
Толщина обшивки агрегата задается в дюралевом эквиваленте.
Вероятности поражения топливных агрегатов определяются с
учетом вероятностей воспламенения топлива/^ , развития пожара
Рп и эффективности системы пожаротушения £сп:
Воспламенение жидкой или паровоздушной фаз возможно
только при условии, что поток осколков обладает соответствую-
щей удельной энергией.
Характеристикой, используемый для расчета критических
значений удельной энергии потока осколков, вызывающей вос-
пламенение, является коэффициент к(Н) = j(H). При расчетах
к(Н) можно воспользоваться его значениями, приведенными
21 — 7/
в табл. 4.27, или принять ЦЯ) = —-—.
Таблица 4.27
Я, км 0-10 16 20 25 30
Л(Я) 0,80 0,67 0,35 -0,12 -0,60
Во всех случаях, если направление, с которого рассматривает-
ся уязвимая грань агрегата, - сверху (ц = 4), к(Н) = 1, в других
случаях к(Н) - 1, если Н< 17, и Л(Я) = 0, если //>21.
При условии, что поток осколков обладает соответствующей
удельной энергией, вероятность воспламенения топлива
203
р = K-^min
В° «max-«т.п '
Текущее значение К = S^2 • vB .
Условные вероятности воспламенения топлива и соответст-
венно вероятность поражения агрегата в z-й реализации принима-
ются равными нулю (PgQ =0, Рв =0, (7^т)зд =0), если
К < Nmin , и единице (Р^ = 1), если К > Ктах .
Приведенный подход необходимо применить для всех
N ^тах- Если в текущей реализации т| < Рво, то PBQ = 1, иначе
р =о, Р = 0, (Рт)зд=0.
При условии, что поток осколков обладает соответствующей
удельной энергией, вероятность поражения цели за счет зажига-
тельного действия с учетом накрываемой потоком осколков пло-
щади и высоты подрыва БЧ равна:
сУ
р =рвп—
вг в0
причем Рв =0, (Р/)зд = 0, если hx/ka >h^. Если в текущей
реализации г] < Рв?, то Рв =1, иначе Рв =0, (Р(т)зд=0.
Во всех случаях, если направление, с которого рассматривает-
ся уязвимая грань агрегата, - сверху (ц = 4), вероятность возник-
новения пожара и вероятность срабатывания системы пожароту-
шения принимаются равными: Pn = 1, кса = 1. В других случаях
вероятность возникновения пожара рассчитывается с учетом веро-
ятности взрыва паровоздушной смеси при расходе поступающего
1-Р^
воздуха GB : Рп = Р^ + 5,6 • GB, если GB < $ , или Pn = 1, если
’-%
GB > —— , где РП() - вероятность возникновения пожара при
отсутствии поступления воздуха; GB = 5,31О-5 -v^2 -е"0,11577,
если определено, что взрыв может произойти в агрегатах, принад-
204
лежащих фюзеляжу, крылу, центроплану, хвостовому оперению;
С?в = 3,43-10"6 • N’Sj • У^2 • е-0,115Я, если с каждым агрегатом, рас-
положенным в отсеках, сопоставлена вероятность Рпо , например
в виде табл. 4.28.
Значение вероятности Р задается в зависимости от принад-
лежности исходного агрегата фюзеляжу (ХфюгЧ) или крылу, цен-
троплану, хвостовому оперению (Хфкх= 2).
Таблица 4.28
т Ej \жх ^"0 т
1 1 0,46 11 1 0,46
2 2 0,07 12 2 0,07
3 2 0,07 13 2 0,07
4 2 0,07 14 1 0,46
5 2 0,07 15
6 2 0,07 16
7 17
8 18
9 2 0,07 19
10 1 0,46 20
Значение в табл. 4.28 задается в диапазоне т = + 1 , .
тахз ’ 7 шал
Примечание. Пример параметров взрыва топливовоздушных смесей
(ТВС) по результатам эксперимента приведен в нижеследующей таблице:
ТВС Ар, атм Г,°К Е, кал/кг 103р, г/см3 D, м/с V, м/с q, %ГК в смеси
Керосин 19,05 2822 637 2,312 1789 800,9 6,43
Бензин 19,05 2854 637 2,266 1807 809,4 6,33
Др - избыточное давление, Т - температура, Е - энергия взрыва, р - плот-
ность газа, D - скорость детонации, V - массовая скорость, q - содержание топли-
ва по весу, ГК - горючий компонент.
Площадь пробоины в обшивке от одиночного осколка (S|, см2)
определяется соотношением
=5М ,если <800 м/с,
1 М 7 в у ! '
Г -12
h
SX=SM - l+3,3610-3 (vBr-800>-J-
Лпр
если
_А_
^пр ’
205
=SM [1 + 0,676 10’4%,-800) J2, если —~—^0,2 ,
"np ' *a
Ai - толщина первой преграды (обшивки исходного агрегата) в
дюралевом эквиваленте. Если в текущей реализации г| < Рп , то
принимается Рп = 1, иначе Рп = 0, (7^т)зд = 0 .
Если в беспилотном или пилотируемом ЛА предусмотрена
система пожаротушения, то вероятность ее срабатывания рассчи-
тывается по соотношению
_N-S}-3
СП 12 >
причем если TV S) <3см2, то принимается ксп =0 и (/),т)м = 0,
а если 7V-S, > 15см2, то ксп = 1. Если п<кс„, то к... = 1, иначе
1 z Vll 1 VII у Vli х
4=о и (Р5)зд=о.
Вероятность поражения цели за счет воспламенения топлива и
взрыва его паров при действии ПЭ в итоге определится как
(^)ад=4-Л,-4=1-
Характеристики уязвимости агрегатов, поражаемых за
4.17. Модель оценки эффективности аэроудара при действии
плотного потока ПЭ (блок 17)
При действии плотного потока ПЭ поражение агрегатов (отсе-
ков) конструкции цели может возникнуть за счет аэроудара. Эф-
фект аэроудара определяется конструктивными параметрами по-
206
ражаемого агрегата (отсека) планера цели и, в частности, его гео-
метрическими размерами, материалом и толщиной обшивки пла-
нера и параметрами потока ПЭ.
В качестве энергетической характеристики воздействия ис-
пользуется средняя удельная энергия поля ПЭ, полностью или
частично накрывающего уязвимый отсек, приходящаяся на едини-
цу площади грани уязвимого отсека.
В качестве энергетического критерия разрушения уязвимого
отсека принимается удельная (критическая) энергия поля ПЭ, оп-
ределяемая максимальным и минимальным значениями критиче-
ского параметра уязвимости Со, характеризующего прочностные
свойства отсека.
Эффект аэроудара определяется сравнением требуемых и рас-
полагаемых энергетических характеристик поля ПЭ.
Тогда выражение для расчета вероятности поражения исход-
ного отсека за счет аэроудара при действии потока осколков в об-
щем случае с трех уязвимых направлений (р* будет иметь вид
О приЭуд^ ^Эуд(иэ)т^,
-'Э (и )min
Уд2 уд^ 3-'min э / )т‘п<э <Э (п )min
Г»/ |а / \rnin гч ( \rnin ПРИ ^УД\”э/тт < Ад? < АдРМтах’
ЭУд(Иэ)тах-ЭудЮтш S
1 приЭуд^ >Эуд(лэ)тах,
где Эуд(мэ)"^ =т1п{ЭуД(лэ)т|п}71 Дж/м2 - наименьшее критиче-
ское значение удельной энергии потока осколков, при которых
разрушается отсек конструкции планера, с учетом минимальных
действующих на него в полете нагрузок {эуд(нэ)т1п^ Дж/м2;
Эуд("эС = ™п{эуд(иэ)тах}7/Дж/м2 - наибольшее критическое
значение удельной энергии потока осколков, при которых разру-
шается отсек конструкции планера, с учетом максимальных дейст-
вующих на него в полете нагрузок (эуд(пэ)тах}7 Дж/м2;
207
3
Эуд~ = E*vj ’^уд7 ~ суммарная энергия потока осколков, при-
Vj=l 1
холящаяся на агрегат со всех возможных направлений.
Величина удельной энергии, вносимой потоком осколков в от-
сек конструкции планера (в общем случае неравнопрочного с раз-
личных уязвимых направлений) с Vrro уязвимого направления,
зависит от площади отсека , приведенной к VrMy уязвимому
направлению, числа осколков и количества кинетической
энергии г-го осколка , попавшего в площадь 5^ :
1 у1
ЭУДУ1 •
«V] ^=1
Значение весового коэффициента , характеризующего
относительную стойкость исходного отсека к воздействию
потока осколков с Vi-ro уязвимого направления, определяется
как
_ ЭуД(иэ)тт
где Эуд(мэ)т|П 1Шп(ЭуД(лэ))^ ,
/— \ (рудСЛэХтп/у. + \^уд(Лэ)тах/у.
(Эуд(лэ))71 =-------------------------------L - среднее значе-
ние удельной энергии потока осколков, попавших в площадь
-для отсеков фюзеляжа
-для отсеков крыла н
хвостового оперения,
208
где
) ЮР/ту^ср
Omin(max)/V » CL- vVi ’
1 'wVj °m ’^aiuvj
Эуд(0)т,п, Эуд(0)тах - наименьшее и наибольшее критические
значения удельной энергии потока осколков, при которых разру-
шается отсек конструкции планера, без учета действующих на не-
го в полете нагрузок; пэ - эксплуатационная перегрузка цели в мо-
мент воздействия по ней поражающих факторов взрыва ОФБЧ;
Лц - разрушающая перегрузка; COinjnV], COmaxV], Дж/кг - наи-
меньшее и наибольшее значения параметра, характеризующего
прочностные свойства отсека, поражаемого за счет аэроудара,
приведены в таблицах характеристик уязвимости. Параметр Со
характеризует прочностные свойства отсека - так называе-
мый ЭКР (энергетический критерий разрушения), который
пропорционален величине критического удельного импульса и
при параметрах осколков, вызывающих аэроудар, в основном
определяет значение удельной критической энергии потока оскол-
ков. Параметр определяется по результатам экспериментальных
исследований.
(^TVj )ср ~ средняя масса осколка, попавшего в агрегат с V,
уязвимого направления:
при < 800,
при 800 <vw <УДР - коэффициент,
при V*. >идр,
учитывающий влияние ударной вязкости материала осколка на
интенсивность аэроудара;
к =
Лдр
1 - для осколков из стали, ВНЖ;
2,8 - для осколков из дюраля;
2,4 - для осколков из циркония;
SM, см1 2 - площадь миделя осколка.
209
к =<
1 при Лэш <С,
С - коэффициент, учитывающий
-— при Лэш > С,
. эш
влияние эшелонирования осколков в потоке на интенсивность аэ-
роудара; £эш, м - глубина (в потоке) поля осколков, накрывающего
исходный отсек; C~LX или Ly или Lz, м - глубина отсека с рассмат-
риваемого уязвимого направления.
Величина в выражении расчета энергии осколков учиты-
вает влияние основных параметров осколочного потока:
Уц г-» * кпх_.
Л
(^avj )ср )cp>^Jv
1
где =-----------о з---------коэффициент, учитывающий влия-
ет (^BrVi )ср
ние массы и скорости осколка;
NV1
S *aV1
„ ч rVi=l ,,
(ла )cd = —--------- “ среднее значение коэффициента,
Vi NVx
учитывающего влияние угла подхода осколка к грани агрегата с V!
уязвимого направления на его пробивную способность;
/^(yBrVi )cp,#J - коэффициент, учитывающий влияние
высоты и скорости встречи ПЭ с целью;
* 04- )срЛ| =1,если (%г Лр<идр,
к V1 ) Vi V1
^1 (*ВГ )ср’^
\ V1 .
(V )2
1 Brv. 'СР 1
2 *
^ДР
.если (vBr^ )ср>Удр,
210
к (Увг„ Vя =0,2, если к (V )ср,Я <0,2,
к V1 Л, < V1 >Vj
vH характеризует степень накрытия отсека осколочным
полем.
-ПРИЦну] = ,’°’
- при LH > 1 м; pHVj < 10, но перекрыт
хотя бы один из параметров грани отсека;
- при LH < 1 м; < 1,0, но перекрыт
хотя бы один из параметров грани отсека;
- при совместном выполнении условий
1,0 > Рну| > 0,2; 1,0 > Lx,y,z > 0,5.
Здесь Zx,y,z - степень перекрытия (наибольшая) одного из харак-
терных размеров отсека Zx, Ly, Lz осколочным полем; цн = ^н/^г ~
степень накрытия поверхности исходного отсека осколочным
полем; 5Н, м2 - площадь части поверхности исходного отсека,
накрытая осколочным полем; 5Г, м2 - наибольшее значение
проекции уязвимой площади исходного отсека на плоскость,
перпендикулярную вектору скорости уъ потока осколков;
ZH =SH/Z, или Ly или Zz, м - один из линейных разме-
ров грани отсека, полностью перекрываемого осколочным по-
лем.
Явление аэроудара имеет смысл учитывать, если предель-
ная толщина пробиваемой осколками обшивки будет больше
или равна толщине обшивки с учетом свойств ее материала и угла
подхода ПЭ:
211
Ij > * дрбщ
ПР “ k
где кл - коэффициент дюралевого эквивалента, характеризующий
материал обшивки по вероятности;
0,4 - для углепластиков (КМ), оргстекла;
1,0 - для обшивок из алюминиевых сплавов;
1,5- для обшивок из титановых сплавов;
2,0 - для стальных обшивок.
Поэтому при определении величины Эуд71 учитываются
только те осколки, для которых это условие выполняется.
Рассмотрим последовательность расчета вероятности пораже-
ния отсека при действии аэроудара в отдельной реализации.
Для того чтобы рассчитать энергетический поток ПЭ, необхо-
димо определить суммарную площадь поверхности агрегата, на-
крываемого потоком ПЭ.
Пусть Ni - число осколков, попавших в заднюю или перед-
нюю грани агрегата (при условии, что грани перпендикулярны оси
Х9 Vj = 1); N2~ число осколков, попавших в верхнюю или нижнюю
грани агрегата (при условии, что грани перпендикулярны оси
Y, Vj =2); N3 - число осколков, попавших в левую или правую
грани агрегата (при условии, что грани перпендикулярны оси
Z, =3); AGmin, Minin» Mmin “ минимальное число ПЭ, попавших в
соответствующие грани с заданных направлений.
По алгоритму, изложенному в подразд. 4.15, определяются:
• размеры и площади соответствующих граней
> 'к 11 5 -^ц > 5 5 5 *511^ , S«• 5н «
НУ1 “х2 Hz2 лЗ Н1 н2 н3 н
В дальнейшем в качестве примера будем рассматривать толь-
ко Vre уязвимое направление;
• число осколков, попавших в площадь 5^ - , где
- площадь 5Н, приведенная к Угму уязвимому направлению;
• средняя масса осколка, попавшего в агрегат с V уязвимого
направления -(^ )ср;
212
• средняя скорость осколка, попавшего в агрегат с V, уязви-
мого направления - (vBrVj )ср ;
• количество кинетической энергии r-го осколка, попавшего
в площадь 5HV1 , - , Дж;
• коэффициент дюралевого эквивалента, характеризующий
материал обшивки (Лд);
• предельная толщина обшивки, пробиваемой осколком йпр;
• Удр “ скорость, при которой осколок дробится;
• коэффициент, учитывающий влияние скорости осколков и
высоты полета цели, к((у^ )ср,Я);
• среднее значение коэффициента, учитывающего влияние
угла подхода осколка к грани агрегата с V] уязвимого направления
на его пробивную способность, (ка )сп;
• коэффициент, учитывающий влияние массы и скорости ос-
колка, к„„ ;
• степень перекрытия (наибольшая) одного из характерных
размеров отсека Lx, Ly, Lz осколочным полем, Ъх<у<г;
• площадь части поверхности исходного отсека, накрытая
осколочным полем, 5В, м2;
• наибольшее значение проекции уязвимой площади исход-
ного отсека на плоскость, перпендикулярную вектору скорости vg
потока осколков, Sr, м2;
• степень накрытия поверхности исходного отсека осколоч-
с
ным полем, ц = ——;
н 5Г
• один из линейных размеров грани отсека, полностью пере-
крываемого осколочным полем, L=LX или Ъу или Ъг, м ;
• степень накрытия грани исходного отсека осколочным по-
лем, Lн = —;
н L
• характеристика степени накрытия отсека осколочным по-
лем, vH_ :
н V]
213
1
1
-при pHV) =1,0;
- при LH > 1 м; pHV) < 1,0, но перекрыт
хотя бы один из параметров грани отсека;
1
4
VHV]
- при LH < 1 м; pHV] < 1,0, но перекрыт
хотя бы один из параметров грани отсека;
М
-при совместном выполнении условий
Hhvj "yLx-y'2
1,0>Мну >0,2; l,0>Lx,y,z >0,5.
Примечание. Оценка перекрытия хотя бы одного из параметров грани
отсека производится на основании следующего анализа: относительный размер
vH1 накрываемой осколочным полем грани соответствующего направления будет
равен: = 1, если ;> 1, в остальных случаях при < 1 .
• = ——, если £Н1 <1м и
Н1 т "1
ЬН1
VH1 = 1, если £ > 1 м и £
Н1 Н1 НУ1
£н^ >aj, (напомним, что ax,ay,az
правления),
- размеры граней соответствующего на-
Н] 1’
если £
"я
^а2> vH, = —, если £
z Н1 г ни
ЬН1
£н
Hq z
VH) =0
отношениям
, если цН1 < 0,2 . Если > 0,2, то VHJ рассчитывается по со-
1,1
Н1
Нн|
.если £н^ >0,5aJ, vH) =----
Нн]
, если
и
L„ >0,5a’, и £ <0,5a’v.
нл у нл у
Аналогично поступаем c vH2 - vH2 = 1, если р.н^ > 1. В остальных случа-
ях при цН2 < 1:
vH2 = 1 . если L„2
,н > ах или £
Н-Ч х ИХ2
'hZ2
214
= -—, если Lн <1м и Ln >а}ш1„ >axz и L„ <агх,
2 £н2 2 *2 Z2
V = о, если И <0,2 и £ < al или £ <0,5 -al-
~ 2, п *2 - п "2 **
В остальных случаях при цН2 > 0,2 :
v =---------Ц. ------ если Г >Ъ$-а1 или £ <0,5-а* и
vh2 Г 7— н*2 х н*2 х
^н2 ’ ^нх2 /х
Lh.2 >0,5-aJ,
vH3 =0,если Инз <0,2 или £н^ <0,5-а*,
vH0 = 1, если £ > 1 м , и £ > а!,
нз нз н*з х
V =_1_.если £„ < 1 м и £ >а1 или £ и £ <а’.
нз г «3 нхз 1 у hXj х
^нз
• глубина (в потоке) поля осколков, накрывающего исход-
ный отсек, £эш, м;
• глубина отсека с рассматриваемого уязвимого направления
C=LX или Ly или Lz, м;
• коэффициент, учитывающий влияние эшелонирования ос-
колков в потоке на интенсивность аэроудара,
к
эш71
• коэффициент, учитывающий влияние ударной вязкости ма-
териала осколка на интенсивность аэроудара,
к
• наименьшее и наибольшее значения параметра Со, Дж/кг
(^Ominvp ^OmaxV]хаРактеРизУюи<его прочностные свойства
отсека, поражаемого за счет аэроудара (приводятся в таблицах
характеристик уязвимости);
• наименьшее и наибольшее критические значения удельной
энергии потока осколков, при которых разрушается отсек конст-
рукции планера, без учета действующих на него в полете нагрузок
Эуд(0)тт’Эуд(0)тах; наименьшее и наибольшее критические зна-
чения удельной энергии потока осколков, при которых разрушает-
ся отсек конструкции планера, с учетом действующих на него в
полете нагрузок - Эуд(пэ)т1п,Эуд(«э)тах,Дж/кг, (эуд(иэ)т|п(тах))71 ;
215
• среднее критическое значение удельной энергии (э^д(лэ)) ;
• значение весового коэффициента, характеризующего отно-
сительную стойкость исходного отсека к воздействию потока ос-
колков с Vi-ro уязвимого направления, ;
• величина удельной энергии, вносимой потоком осколков в
отсек конструкции планера (в общем случае неравнопрочный с
различных уязвимых направлений) с Vrro уязвимого направления,
Эуд71 ’ ’
• суммарная энергия потока осколков, приходящаяся на аг-
регат со всех возможных направлений,
Зуд£ ’
• наименьшее из наименьших и наибольшее из наибольших
критических значений удельной энергии потока осколков, при ко-
торых разрушается отсек конструкции планера, с учетом дейст-
вующих на него в полете нагрузок, Эуд(иэ)™“, Эуд(лэ)™“;
• вероятность поражения отсека за счет аэроудара - (р/ .
Характеристики уязвимости агрегатов, поражаемых за счет
аэроудара при действии потока осколков по конструкции планера
(w,COmin -Ю-4,^ ,50бщДфкхД^щ), задаются в ви-
де табл. 4.30.
Таблица 4.30
domin’ Ю 9
Con^lO-4,
Дж/кг
Нс/м2
$общ
мм
X °бщ
гзд +1
max
тау
шах
§общ 9 мм - толщина обшивки отсека конструкции планера.
4.18. Модель оценки эффективности гидроудара при действии
плотного потока ПЭ (блок 18)
При действии плотного потока ПЭ возможно поражение агре-
гатов (отсеков) конструкции ЛА за счет гидроудара, возникающе-
го в отсеках ЛА, заполненных жидкостью.
216
Эффект гидроудара рассчитывается с использованием тех же
критериальных параметров уязвимости конкретного отсека, что и
при оценке эффективности аэроудара, и, в основном, того же алго-
ритма.
Так же как и ранее, явление гидроудара имеет смысл учи-
тывать, если предельная толщина пробиваемой осколками
обшивки
й > д°бщ
пр - k
Так же как и ранее, вероятность разрушения агрегата вследст-
вие гидроудара рассчитывается по аналогичным зависимостям.
Так, для V! = 1
(рД, -°,если ЭУД71 *°’
Xi =0>если Эуд^ >0 и Эуд^ -(^уд(иэ)тш)у1 ’
)vi =Г если ^УД71 (^уд(иэ)тах)у, ’
Если , то принимается =1, иначе = 0.
Аналогичные расчеты проводятся для других граней:
V! = 2 , V ( = 3 . Тогда вероятность разрушения агрегата вследст-
вие гидроудара
Характеристики уязвимости агрегатов, поражаемых за
счет гидроудара при действии потока осколков
(0Г > И» Comin • 10-4, COmax • 10-4, /0,8общДфкх, задаются в виде
табл. 4.31.
217
Таблица 4.31
т
С 10’4
^omin 1 v >
Дж/кг
тзд +1
шах
гау
шах
£эш, м - глубина (в потоке) поля осколков, накрывающих исходный агрегат.
4.19. Модель оценки эффективности фугасного действия ВУВ,
образуемой при взрыве заряда ВВ (блок 19)
Основным поражающим фактором при фугасном действии БЧ
ЗУР по цели будет воздушная ударная волна (ВУВ). Эффектив-
ность ее действия характеризуется избыточным давлением во
фронте Па) и полным удельным импульсом (Z, Па с) фазы
сжатия (импульсом, воспринимаемым поверхностью исходного
отсека конструкции планера в процессе нагружения ВУВ).
Избыточное давление фронта ВУВ, действующее на конст-
рукцию, зависит от кривизны фронта волны и высоты, на которой
срабатывает БЧ:
^ = 0,15-^ + 0,21-£2 + 0,23-£ при 0,1^-^^Ю;
Рн Рн
-^ = 0,232-^+5,673-^-12,882 при 10<-^-<100,
. Рн Рн
1
1 Га?/3
где ри, Па - атмосферное давление на высоте Н; £ =-— -
приведенная кривизна фронта; Rj, м - радиус ВУВ в зоне контакта с
гранью исходного отсека; Q, =6ЬчПбч^ ^ЛПбчО-Пбч)4-—
[Дж]
2?
- часть энергии взрыва ОФБЧ, обеспечивающая его фугасное дейст-
вие; q = ~ удельная теплота взрыва заряда ОФБЧ
ВВ тнт
218
[Дж/кг]; £>бч - масса ОФБЧ, кг; цБЧ - коэффициент наполнения
ОФБЧ; \|/вв- удельный тротиловый эквивалент ВВ ОФБЧ;
=4,2 10^ - удельная теплота взрыва [Дж/кг];
тнт
I = k\ Ix-sm(kQ-af) + k2 • I2-cos2(k0-af),
— = 0,053 -§-0,001 -§2-0,001 -§3 при 0,1 <-^<10;
4 Рн
<
— = (0,048- 4-0,422/ +0,1467 при 10 <—^<100;
ч 4 Рн
— = 0,105-§ + 0,024-§2 при 0,1 <-^<100.
Л) Рн
Здесь /|- составляющие импульса избыточного давления в фазе
сжатия ВУВ с учетом кривизны фронта, Па-с; 12 - импульс избы-
точного давления на преграде при нормальном отражении от пре-
/ \1/3
грады, Па-с; /„ = — • —
С’н V Рн )
- импульс избыточного давления в
фазе сжатия ВУВ на высоте Н; к0 = 1 - 0,73 • simp • cos®;
к\ =11 --^--cosq)
; Df =СН • 11 + 0,8—— - скорость фронта
V Рн
( &Pf
ВУВ; к2 = 1 - 0,67 • М coscp • ехх - 0,09—— ; ф, град - угол между
I Рн )
векторами D/ и уц в зоне контакта поверхности отсека цели с
ВУВ (при лобовом соударении ф=180°); cty, град - угол между
вектором Dy и нормалью к поверхности исходного отсека в зоне
контакта с фронтом ВУВ; ф, град - острый угол между вектором
vu и плоскостью грани исходного отсека; ®, град - острый угол
между внешней нормалью к грани исходного отсека в зоне контак-
та с ВУВ и плоскостью, в которой лежат векторы Df и уц; М -
число маха полета цели.
219
Время прихода ВУВ взрыва ОФБЧ (/, с) и кривизна фронта £
связаны соотношением
с _ Ги + 0,1 • Т„
S t t + 0,12-T„’
у/3
, £,(о) - в момент подрыва БЧ; t,(z) - в мо-
т 1 I Q*
гдеТн= —• —
'•'н \Рн 7
мент прихода фронта ВУВ к грани цели; Сн - атмосферная ско-
рость звука на высоте Н, м/с.
Исходный отсек конструкции планера считается пораженным,
если хотя бы на одной из его граней в результате фугасного воз-
действия выполняется условие Z>Z0 на площади не менее 50% от
площади грани или не менее 1 м2. Zo - минимальный полный
удельный импульс, разрушающий исходный отсек конструкции
планера при действии воздушной ударной волны (ВУВ), Па с.
При выполнении этих условий вероятность поражения исход-
ного отсека определяется по формуле
ПРИ 7</0 г ^0,25
V/ ) — ] , > где Л) — 0,316- /0 ’6бч •
[1 при I > Iq
4.20. Определение уловной вероятности поражения цели боевым
снаряжением ЗУР (блок 20)
По информации, полученной из блоков 8,10,12-19, в каждой
реализации определяется условная вероятность поражения цели
ЛБС. по каждому типу поражения (А, В или С):
=i-[.-(«, гс,н>-к гс,]{1 -teга
где (/?бс . f В’С> характеризуют степень
поражения цели (%,) соответственно при контактном подрыве БЧ,
при подрыве БЧ в зоне достоверного поражения и за счет действия
различных поражающих факторов БЧ при неконтактном подрыве
вне зоны достоверного поражения. При этом (х,)=1 соответствует
поражению по типу С, (х, )=2 - по типу 5, (х, )=3 - по типу А.
220
Поскольку тип поражения А включает в себя поражение по
типам В и С, то при (хЭ^З принимается также (%J=2 и (%,)=!, а
тип поражения В включает в себя С, поэтому при (х,)=2 принима-
ется также (х/) = 1.
В свою очередь (/?бс, > определяется как
>нп Ж)
БС/ /
т=тк
= 1- п
.-кН
ттах
х П
*=^+1 -
/ \А(В,С)
где J характеризует степень поражения т-х агрегатов
(т=1,...тЛ), входящих в последовательную схему, т.е. поражение
любого из агрегатов приводит к безусловному поражению цели;
характеризуют степень поражения агрегатов
(т = т*+1...т Д входящих в параллельную схему, составляющую
поражаемую комбинацию из двух агрегатов;
характеризуют степень поражения агрегатов (т = т€+1...ттах), вхо-
дящих в параллельную схему, составляющую поражаемую комби-
нацию из трех агрегатов.
По аналогичной формуле в каждой реализации определяется
вероятность поражения цели при действии каждого из поражаю-
щих факторов:
/ Г>мд1 пмд2 пмдЗ пин ртрт1 птрт2 птртЗ пзд nay niy пфд \А(В£)
(КБСг > ^БС, > ^БС/ > > ^БС/ ’ ’ ^БС/ ’ ^БС, ’ ^БС, ’ ^БС, > ^БС, )
Для каждого рассматриваемого типа поражения каждому агре-
гату (т) в исходных данных (табл. 4.17, 4.19 - 4.24, 4.28 - 4.31)
ставится в соответствие признак 0Т, несущий следующую ин-
формацию в виде шестизначного числа: первая цифра означает
тип поражения (1,2 или 3), вторая - схему поражения (1 ~ после-
довательная схема, 2 - параллельная схема из двух агрегатов, 3 -
параллельная схема из трех агрегатов), третья, четвертая, пятая,
шестая цифры означают, с какими агрегатами исходный агрегат
составляет поражаемую комбинацию.
221
Поскольку тип поражения цели определяется построением
схемы уязвимости, то возможно формирование любых произволь-
ных типов поражения исходя из требуемых гипотез. Методически
это будет зависеть от подбора и связи между отдельными пора-
жаемыми агрегатами.
В случае построения координатного закона поражения расчет
проводится вдоль относительной траектории ЗУР с заданным ша-
гом. Кроме того, в каждой реализации фиксируется попадание ЗУР
в цель и соударение корпусом, если оно имеется.
Результаты расчета запоминаются, осуществляется переход к
следующей реализации.
После набора статистики определяется условная вероятность
поражения по типам А, В или С как
Лад
Z *£В>С)
а-г БС.
ОА(В,С) _
БС ~ J -J ’
а зад и нес
где JHec - количество неучитываемых реализаций, полученных,
например, из-за неправильно заданных исходных данных.
При этом если величина остатка топлива ДУ (сот ) находится в
интервале заданных значений, то проводится двукратный счет для
этих значений (в случае контактного подрыва БЧ и подрыва в зоне
достоверного поражения), затем определяется истинное значение
показателя эффективности методом линейной интерполяции.
Кроме того, определяются составляющие эффективности
( ^бс ):
• в случае контактного подрыва
Лад
= -и—-—,
‘'зад ‘'нес
• в случае дистанционного подрыва
Лад
К^)А(В’С)
(^^(В.С) = Ы--------------,
J зад J нес
• в случае неконтактного поверхностного подрыва
222
£« )А(В’С)
(Я™ )А(В>С) = -----'-----,
*Аад — *Лзес
а также такие показатели, как
•Лад
zL^nn,
• вероятность прямого попадания в цель Лпп = —,
•Лид — "Лзес
где Япп. определяется по признаку Xq =h
• вероятность заглубленного подрыва БЧ
Лад
/при v=0
Язп =——------------,
(•Лад ~ •Лес )Лзп
• вероятности поражения агрегатов цели за счет действия
различных поражающих факторов БЧ (Л^1, Я^с2, ,
Лин птрт! Г>трт2 г>тртЗ г>зд г>ау г>гу рфдчА(В,С)
БС’ЛБС ’ЛБС ’ЛБС ’КБО ЛБС’КБС’КБС/
Ляп
f («,)*“>
‘'зад ‘'нес
где индекс «хх» соответствует одному из поражающих факторов БЧ.
ЗАКЛЮЧЕНИЕ
Разработанный подход к составлению математических моде-
лей позволяет оценить условную вероятность поражения воздуш-
ной цели по любому заданному типу поражения (А, В и С) в лю-
бых условиях использования ПЗРК и встречи ЗУР с целью при на-
личии в составе боевого снаряжения ЗУР как контактного, так и
неконтактного взрывательного устройства с учетом возможного
подрыва одновременно с БЧ остатков топлива двигательной уста-
новки.
223
Представленный подход и модели могут быть использованы
при оценке эффективности ЗУР других классов, поскольку вклю-
чают различные типы поражающего воздействия ОФБЧ:
• механическое действие ПЭ (пробивное действие, пора-
жающее за счет впрыска топлива в воздушные каналы ГТД и вне-
сения в агрегаты цели кинетической энергии);
• инициирующее действие ПЭ по зарядам ВВ и РДТТ цели
или боевой нагрузки;
• зажигательное действие ПЭ по топливным агрегатам цели;
• аэроудар и гидроудар при действии плотного потока ПЭ по
конструкции планера цели;
• фугасное действие ВУВ, образуемой при взрыве заряда ВВ
ЗУР.
На базе представленных моделей разработано программ-
мное обеспечение и организован цикл лабораторных работ
по дисциплинам специальностей «Ракетостроение» и «Моделиро-
вание и исследование операций в организационно-технических
системах».
Библиографический список
1. Абезгауз Г.Г. и др. Справочник по вероятностным расчетам. М.: Воениз-
дат, 1970.
2. Базазянц С. И. и др. Боевая живучесть летательных аппаратов (по мате-
риалам зарубежной печати). М.: Воениздат, 1983.
3. Белов А.Г, и др. Методы оценки эффективности действия боеприпасов
на стадии проектирования. СПб.: БГТУ, 1996.
4. Вентцель Е.С. Введение в исследование операций. М.: Сов. радио, 1964.
5. Вентцель Е.С, Теория вероятностей. М.: Наука, 1969.
6. Взрывные явления. Оценка и последствия. Кн.2. / Под ред.
Я.Б.Зельдовича, Б.Е Гельфанда. М.: Мир, 1986.
7. Горбунов В.А. Эффективность обнаружения целей. М.: Воениздат ,1980.
8. Гришин П.А. Живучесть, уязвимость и надежность военной техники:
учеб, пособие. М.: МАИ, 1979 .
9. Гусейнов А.Б. Эффективность комплексов ЛА. М.: 1985.
10. Дональд Д. Современная военная авиация и ВВС стран мира: Справоч-
ное издание. М.: Омега, 2003.
11. Желязков Е.П. и др. Методические основы определения исходных дан-
ных по уязвимости воздушных целей для оценок эффективности стрельбы по ним
малогабаритных ЗУР. Тверь, 2002.
12. Желязков Е.П. Методы разработки и обоснования характеристик уязви-
мости воздушных целей при действии по ним обычных боеприпасов: учеб, посо-
бие. ЦНИИ МО РФ, 2006.
224
13. Зимин Г.В. и др. Справочник офицера противовоздушной обороны. М.:
Воениздат, 1987.
14. Котляревский В.А и др. Аварии и катастрофы. Предупреждение и лик-
видация последствий. В 5 книгах. М.: Изд-во ассоциаций строительных вузов,
1995.
15. Метод статистических испытаний (метод Монте-Карло) / Под ред.
Ю.А. Шрейдера. М.: Физматгиз, 1962.
16. Миропольский Ф.П. и др. Авиационные боеприпасы и их исследование.
М.: ВВИА им. Н.Е. Жуковского, 1996.
17. Джонсон Н. и др. Статистика и планирование в технике и науке. Мето-
ды обработки данных: Пер. с англ, под ред. Э.К. Лецкого. М.: Мир, 1980.
18. Неупокоев Ф.К. Стрельба зенитными ракетами. М.: Воениздат, 1980.
19. Орленко Л.П. Физика взрыва и удара. М.: Физматгиз, 2002.
20. Пересада С.А. Зенитные ракетные комплексы. М.: Воениздат, 1973.
21. Петухов С. И. и др. Эффективность ракетных средств ПВО. М.: Воениз-
дат, 1976.
22. Покровский Г. И. Взрыв. М.: Недра, 1980.
23. Хорн Р. и др. Матричный анализ: пер. с англ, под ред. Х.Д. Икрамова.
М.: Мир, 1986.
24. Сигорский В.П. Математический аппарат инженера. Киев: Техшка, 1975.
25. Суриков Б.Т. Ракетные средства борьбы с низколетящими целями. М.:
Воениздат, 1973.
26. Фендриков ИМ. и др. Методы расчетов боевой эффективности воору-
жения. М.: Недра, 1980.
27. Физика взрыва / Под ред. Л.П. Орленко. М.: Физматгиз, 2002.
28. Чуев Ю.В. Исследование операций в военном деле. М.: Воениздат, 1979.
29. Шагов Ю.В. Взрывчатые вещества и пороха. М.: Воениздат, 1976.
30. Эффективность ракетных систем: метод, указания к лабораторным ра-
ботам / Сост. С.Н. Ельцин; Балт. гос. техн. ун-т. СПб., 2006.
225
ПРИЛОЖЕНИЕ
ПРИМЕР РЕАЛИЗАЦИИ СТАТИСТИЧЕСКОГО
МОДЕЛИРОВАНИЯ МЕХАНИЧЕСКОГО ДЕЙСТВИЯ ПЭ
ПО КРЫЛАТОЙ РАКЕТЕ
1. Общие сведения о программе
Программа PZRK реализована с помощью пакета программирования Borland
Delphi 6.0 и написана под Windows. Этот фрагмент требует 130МЪ оперативной
памяти и установления программы Microsoft Excel. Для работы программы необ-
ходимо в её каталог поместить связанный с ней файл «KP.xls», в котором содер-
жатся данные о целях и о том, куда записываются сохранённые данные.
Работа с программой осуществляется путём взаимодействия с активными
элементами интерфейса. Пользователь должен последовательно ввести исходные
данные либо открыть из файла сохранённые ранее.
Программа предусматривает три вида расчёта:
1) единичный расчёт по случайным данным;
2) расчёт по N реализациям для получения оценок вероятностей поражения
агрегатов цели;
3) расчёт с выводом графических зависимостей оценки вероятности пораже-
ния заданного агрегата от факторов.
Данные расчёты производятся в любом порядке и по желанию пользователя.
Имеется также возможность сохранять исходные данные в файл с последующим
их выводом.
В программе предусмотрено меню, с помощью которого можно открыть
файл данных, обратиться к справке.
2. Ввод исходных данных
После запуска программы на экране появляется главное окно, на котором
находятся кнопки управления. «ВВОД ПАРАМЕТРОВ» и «ОТКРЫТЬ ИЗ ФАЙ-
ЛА» (рис. П.1).
Нажатие на кнопку «ОТКРЫТЬ ИЗ ФАЙЛА» приведёт к вводу исходных
данных, содержащихся в файле «KP.xls», после чего можно осуществлять расчё-
ты - кнопки станут активными.
Нажатие кнопки «ВВЕСТИ ПАРАМЕТРЫ» приведёт к появлению окна
«ДАННЫЕ О БЧ» (рис. П.2).
226
Рис. П.1
мюд
обч
Lil J
Ммфр«кгм 72—л
ДлшБЧЙсм
Рис. П.2
227
В этом окне можно варьировать характеристики БЧ:
• изменяя положение полос прокрутки, установить калибр и длину БЧ,
толщину оболочки БЧ;
• выбирая из предложенного списка, установить тип ВВ и материал обо-
лочки БЧ.
Если предложенных вариантов недостаточно, то предусмотрена возмож-
ность задать другие материалы и типы ВВ. Эта возможность реализуется при
нажатии на кнопку «ДРУГАЯ БЧ».
После её нажатия перед Вами откроется диалоговое окно (рис. П.З), не за-
крыв которое, Вы не сможете работать с основной программой. По умолчанию
здесь заполнены данные для стальной БЧ с тротиловым наполнением.
Для ввода дополнительного материала нужно заполнить поля: «плотность
материала» и «предел прочности на разрыв». Для добавления другого ВВ необхо-
димо знать его плотность, скорость детонации и коэффициент «бета» (0,4 - 0,7),
который входит в расчёт оценочного числа осколков соответствующей весовой
группы.
ни
лкое по массе и углу
DK
Znwc—
В мойте в соответствующие поля информацио
Рис. П.З
После ввода данных о БЧ определяется распределение осколков по весовым
группам. Для этого последовательно нажимаются кнопки «РАСПРЕДЕЛЕНИЕ
ПО МАССЕ», «РАСПРЕДЕЛЕНИЕ ПО УГЛУ». После этого в памяти будут соз-
даны таблицы распределений. Просмотреть их, а также характеристики БЧ мож-
но, нажав на кнопку «ПАРАМЕТРЫ БЧ» (рис. П.4).
Здесь выводятся также параметры БЧ, которые были вычислены по задан-
ным данным: оценка общего числа осколков, масса оболочки БЧ, масса ВВ.
После определения распределения осколков по весовым группам и нажатия
кнопки «ДАЛЕЕ» появляется окно «ДАННЫЕ О ЦЕЛИ» (рис. П.5).
228
Рис. П.4
Рис. П.5
229
В этом окне вводятся данные о цели. Пользователю предлагаются две стан-
дартные цели: крылатая ракета класса «воздух - земля» AGM-88C ALCM и ис-
требитель F-16. По умолчанию данные по этим целям уже набраны. Их можно
выбрать, включив напротив интересующей цели переключатель. Данные по этим
целям находятся также в файле «KP.xls». Однако можно задать другую цель: при
нажатии на кнопку «ВВЕСТИ ДАННЫЕ» откроется файл, в который вводятся
такие данные, как координаты агрегатов, поражаемых за счёт механического дей-
ствия осколков, толщины оболочек, характеристики материалов и т.п. Также в
случае задания другой цели нужно передвинуть полосу прокрутки на положение,
соответствующее числу введённых агрегатов.
Аналогично параметрам БЧ параметры цели можно просмотреть, нажав на
кнопку «ПАРАМЕТРЫ ЦЕЛИ» (рис. П.6). Откроется форма с таблицей парамет-
ров цели.
Рис. П.6
После ввода данных о цели, при нажатии на кнопку «ДАЛЕЕ» откроется ок-
но «ДАННЫЕ О РАКЕТЕ И ЦЕЛИ» (рис. П.7). Здесь вводятся углы, координаты
цели и ракеты в момент подрыва БЧ, угол подлёта. Эти данные вводятся как ма-
тематическое ожидание величины и её дисперсия. Углы вводятся в градусах, ко-
ординаты - в метрах.
Задаваемые координаты ракеты являются координатами центра масс БЧ, а
цели, в зависимости от её типа, могут задаваться от носка.
Следующим окном является окно «МД ОСКОЛКОВ» (рис. П.8).
230
Рис. П.7
Рис. П.8
Здесь с помощью полосы прокрутки вводятся число реализаций, которое бу-
дет использовано при расчёте оценки вероятности поражения агрегатов, а также
данные по графикам. Предлагается четыре варианта графических зависимостей
оценки вероятности поражения:
231
• от угла подлёта ракеты к цели;
* от скорости цели;
• от скорости ракеты;
• от величины промаха (расстояния срабатывания НВУ).
Можно задать диапазоны изменения факторов и номер агрегата, для которо-
го будут построены графические зависимости.
С нажатием на кнопку «ДАЛЕЕ» ввод исходных данных завершается.
Введённые данные можно сохранить в файле, нажав на кнопку «СОХРА-
НИТЬ В ФАЙЛ».
3. Единичный расчет, расчет по N реализациям, вывод графиков
После ввода исходных данных кнопки «ЕДИНИЧНЫЙ РАСЧЁТ», «РАСЧЁТ
ПО N РЕАЛИЗАЦИЯМ», «ВЫВОД ГРАФИКОВ», «ДАННЫЕ О БЧ», «ДАННЫЕ
О ЦЕЛИ» становятся активными (см. рис. П.1).
В случае единичного расчёта осуществляется одна реализация действия ос-
колков по заданной цели (один расчет вероятности поражения цели за счет МД).
Данные о цели и ракете выбираются случайным образом из заданного диапазона.
После нажатия на соответствующую кнопку появится окно (рис. П.9), в котором
будет находиться таблица с вероятностями механического действия осколков по
агрегатам цели. Ячейки будут содержать только 0 или 1. В этом же окне отража-
ются случайные данные, при которых был осуществлён расчёт.
Рис. П.9
В случае расчёта по N реализациям появляется окно (рис. П. 10) с таблицей, в
ячейках которой находятся оценки вероятности поражения агрегатов при задан-
ных исходных данных.
232
Пример графического преставления результатов расчетов приведен на рис.
П.П, где отражены зависимости оценок вероятностей поражения для заданного
агрегата цели по 100 реализациям в 10 точках. Зависимости выводятся на экран в
виде окна после нажатия кнопки «ВЫВОД ГРАФИКОВ».
При анализе результатов расчетов необходимо иметь в виду, что представ-
ляемые оценки получены на ограниченной выборке.
Рис. П.П
233
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ......................................................3
1. ПЕРЕНОСНОЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС.
УСТРОЙСТВО И ФУНКЦИОНИРОВАНИЕ.............................9
1.1. Российские ПЗРК. Общие сведения........................9
1.2. Боевые средства комплекса ПЗРК “Игла-С”...............15
1.3. Пусковой механизм.....................................30
1.4. Взаимодействие БСК при пуске и частей ракеты в полёте.33
1.5. Цели ПЗРК и их характеристики.........................35
1.6. Зоны пуска и поражения................................40
2. ОБОБЩЕННАЯ МОДЕЛЬ ОЦЕНКИ ЭФФЕКТИВНОСТИ ПЗРК...............43
2.1. Математическое представление цели....................43
2.2. Понятие поражения цели...............................64
2.3. Поражающее действие и критерии поражения.............66
2.4. Структура и состав исходных данных по уязвимости ВЦ при
прямом попадании малогабаритных ЗУР...................70
2.5. Структура и состав исходных данных по уязвимости ВЦ при
дистанционном подрыве БЧ малогабаритных ЗУР...........72
3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОЦЕНКИ БОЕВОЙ
ЭФФЕКТИВНОСТИ ПЗРК.......................................81
3.1. Этапы работы ПЗРК.....................................81
3.2. Выбор и обоснование критерия оценки боевой эффективности..84
3.3. Метод оценки боевой эффективности ПЗРК................87
3.4. Алгоритм определения закона распределения координат точки
встречи ракеты с целью................................88
3.5. Исходные данные (блок 1)..............................93
3.6. Анализ надежности функционирования ПЗРК в процессе боевой
работы (блок 2).......................................98
3.7. Выбор варианта расчета (блок 3).......................99
3.8. Определение параметров траектории цели (блок 4)......100
3.9. Определение дальности и времени обнаружения цели (блок 5) 101
3.10. Вычисление I работного времени и момента готовности к
захвату цели ОГС (блок 6)............................103
3.11. Определение дальности и времени захвата цели ОГС (блок 7) 104
3.12. Вычисление II работного времени и момента готовности к
пуску (блок 8).......................................107
3.13. Определение дальности и времени пуска ЗУР (блок 9).108
3.14. Воздействие линии горизонта (блок 10)................112
3.15. Определение фоновых условий (блок 11)...............112
3.16. Воздействие фонов на предпусковом этапе (блок 12)....113
3.17. Определение условий применения ложных тепловых целей
(ЛТЦ) (блок 13)......................................117
3.18. Воздействие ЛТЦ на предпусковом этапе (блок 14).....118
3.19. Определение дальности и времени встречи ЗУР с целью
(блок 15)............................................. 120
3.20. Воздействие фонов на этапе наведения (блок 16)......126
3.21. Воздействие ЛТЦ на этапе наведения (блок 17)........128
3.22. Анализ эффективности действия боевого снаряжения ЗУР
(блок 18)..............................................129
4. ОПРЕДЕЛЕНИЕ УСЛОВНОЙ ВЕРОЯТНОСТИ ПОРАЖЕНИЯ
ЦЕЛИ БОЕВЫМ СНАРЯЖЕНИЕМ ЗУР.................................132
4.1. Модель ориентации ЗУР относительно цели..............132
4.2. Условия встречи ракеты с целью (блок 2)..............140
4.3. Определение координаты траектории ЗУР в картинной
плоскости (блок 3).......................................144
4.4. Определение координат попаданий ЗУР в цель (блок 4).149
4.5. Определение факта влета ЗУР в форсажную камеру двига-
теля цели (блок 5)........................................155
4.6. Определение факта попадания в лопасть несущего или
хвостового винтов вертолета (блок 6).....................158
4.7. Определение координат точек подрыва БЧ по сигналу
с КВУ и вида подрыва БЧ(блок7)...........................160
4.8. Определение принадлежности точек подрыва БЧ различным
поражаемым зонам цели при контактном подрыве (блок 8)....167
4.9. Определение координат точки подрыва БЧ по сигналу
с НВУ (блок 9)...........................................172
4.10. Определение принадлежности точек подрыва БЧ зоне
достоверного поражения при неконтактном подрыве (блок 10).177
4.11. Определение начальных параметров поражающего элемента
БЧ (блок 11).............................................181
4.12 Определение условий встречи ПЭ с агрегатом цели и предельной
толщины пробития монолитной дюралевой преграды ПЭ
(блок 12)................................................184
4.13. Модели оценки эффективности механического действия ПЭ
(блок 13)................................................189
4.14. Модель оценки эффективности инициирующего действия ПЭ
(блок 14).................................................196
4.15. Модель оценки эффективности поражающего действия ПЭ по
зарядам ТРТ РДТТ АР (блок 15).............................199
4.16. Модель оценки эффективности зажигательного действия ПЭ
(блок 16)................................................203
4.17. Модель оценки эффективности аэроудара при действии плот-
ного потока ПЭ (блок 17).................................206
4.18. Модель оценки эффективности гидроудара при действии плот-
ного потока ПЭ (блок 18).................................216
4.19. Модель оценки эффективности фугасного действия ВУВ,
образуемой при взрыве заряда ВВ (блок 19)..............218
4.20. Определение уловной вероятности поражения цели боевым
снаряжением ЗУР (блок 20)..............................220
ЗАКЛЮЧЕНИЕ................................................223
Библиографический список................................224
Приложение. Пример реализации статистического моделирова-
ния механического действия ПЭ по крылатой ракете........226
Ельцин Станислав Николаевич, Жуков Александр Павлович,
Кашин Валерий Михайлович, Рютин Валерий Борисович
Оценка эффективности переносных зенитных
ракетных комплексов
Редактор Г. М. Звягина
Корректор Л. А. Петрова
Подписано в печать 02.10.2007. Формат бумаги 60x84/16. Бумага документная.
Печать трафаретная. Усл. печ. л. 14,25. Тираж 100 экз. Заказ № 213
Балтийский государственный технический университет
Типография БГТУ
190005, С.-Петербург, 1-я Красноармейская ул., д.1