/








































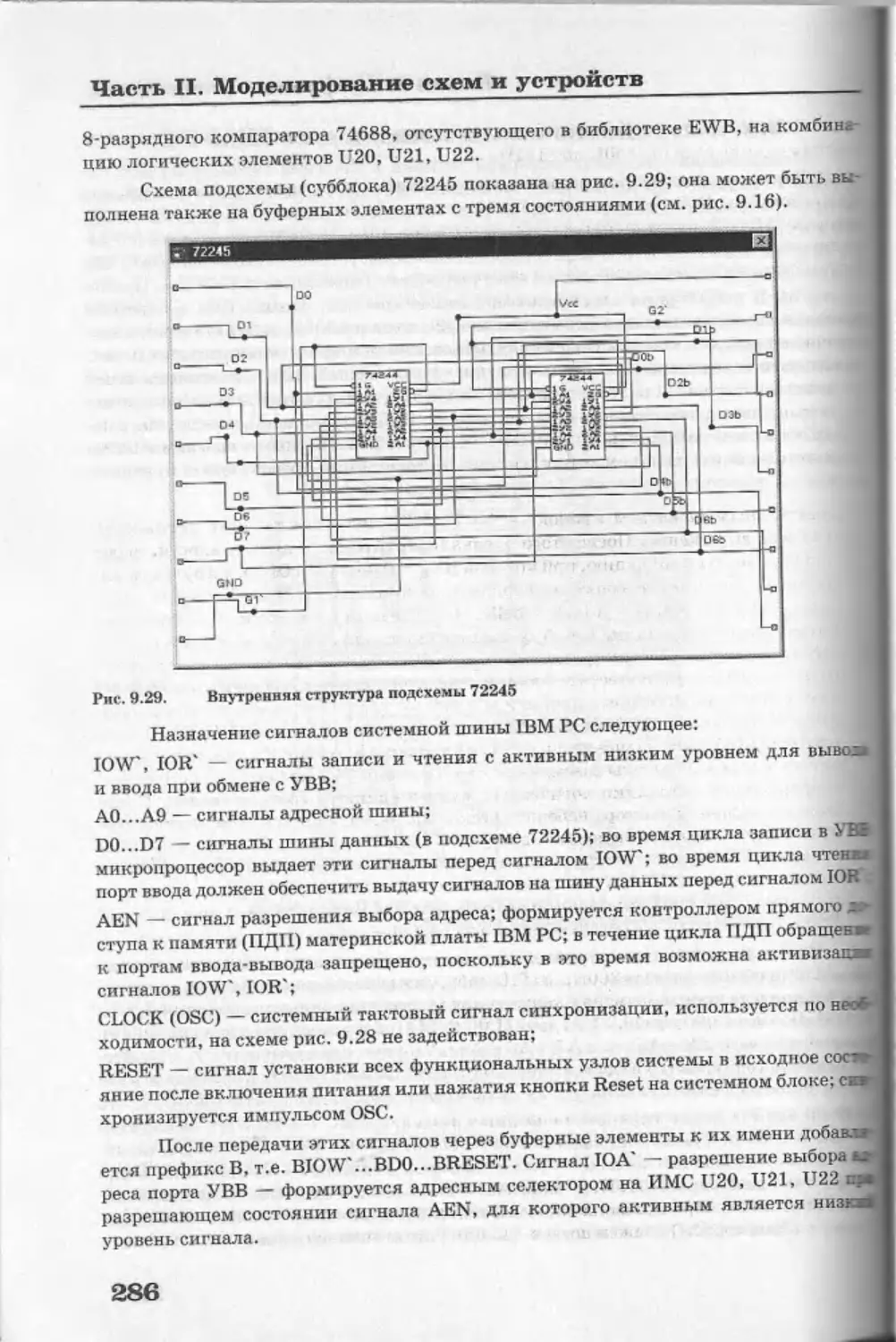

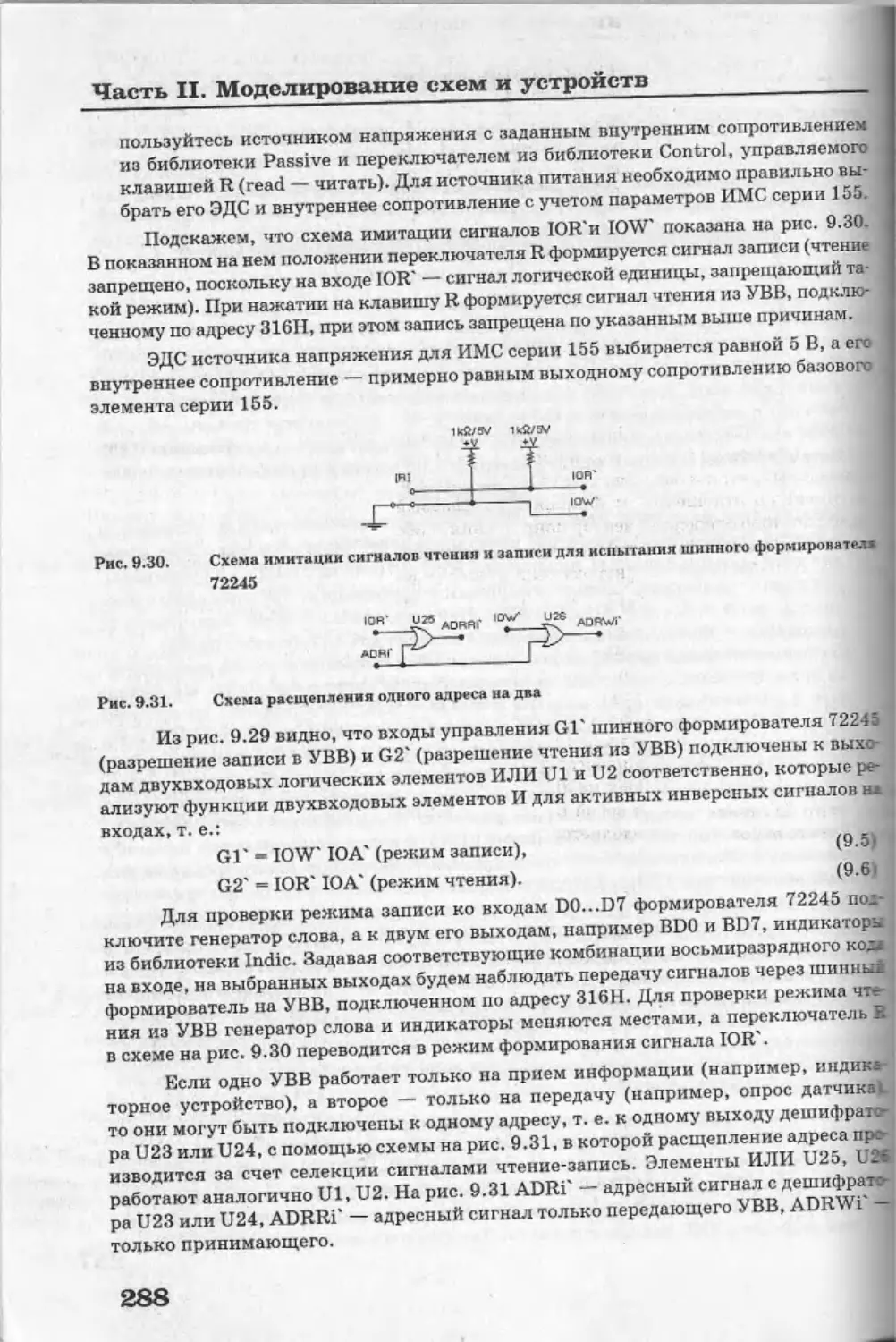














































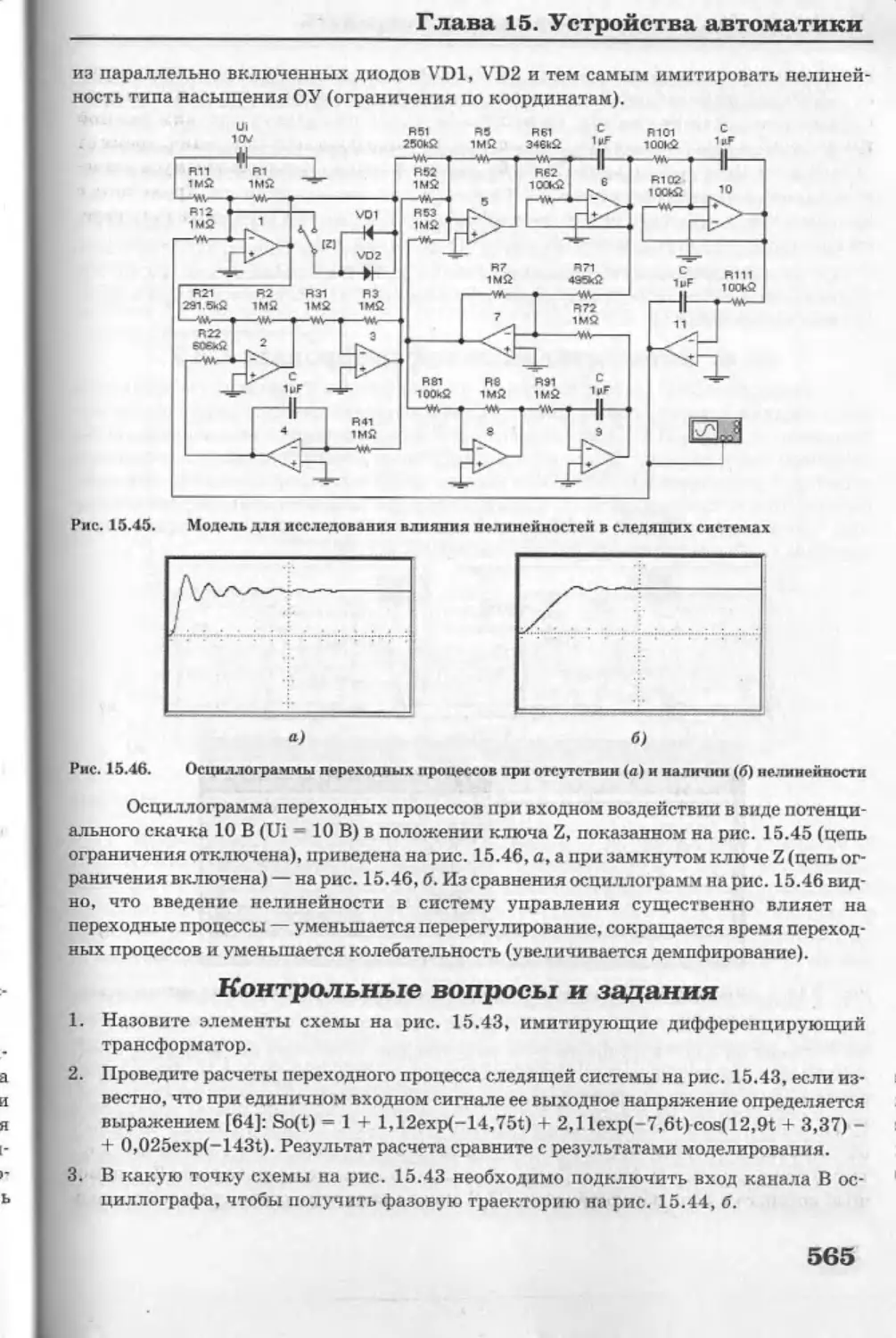










Автор: Карлащук В.И.
Теги: электроника радиотехника программное обеспечение радиоэлектроника
ISBN: 5-93455-083-7
Год: 2001




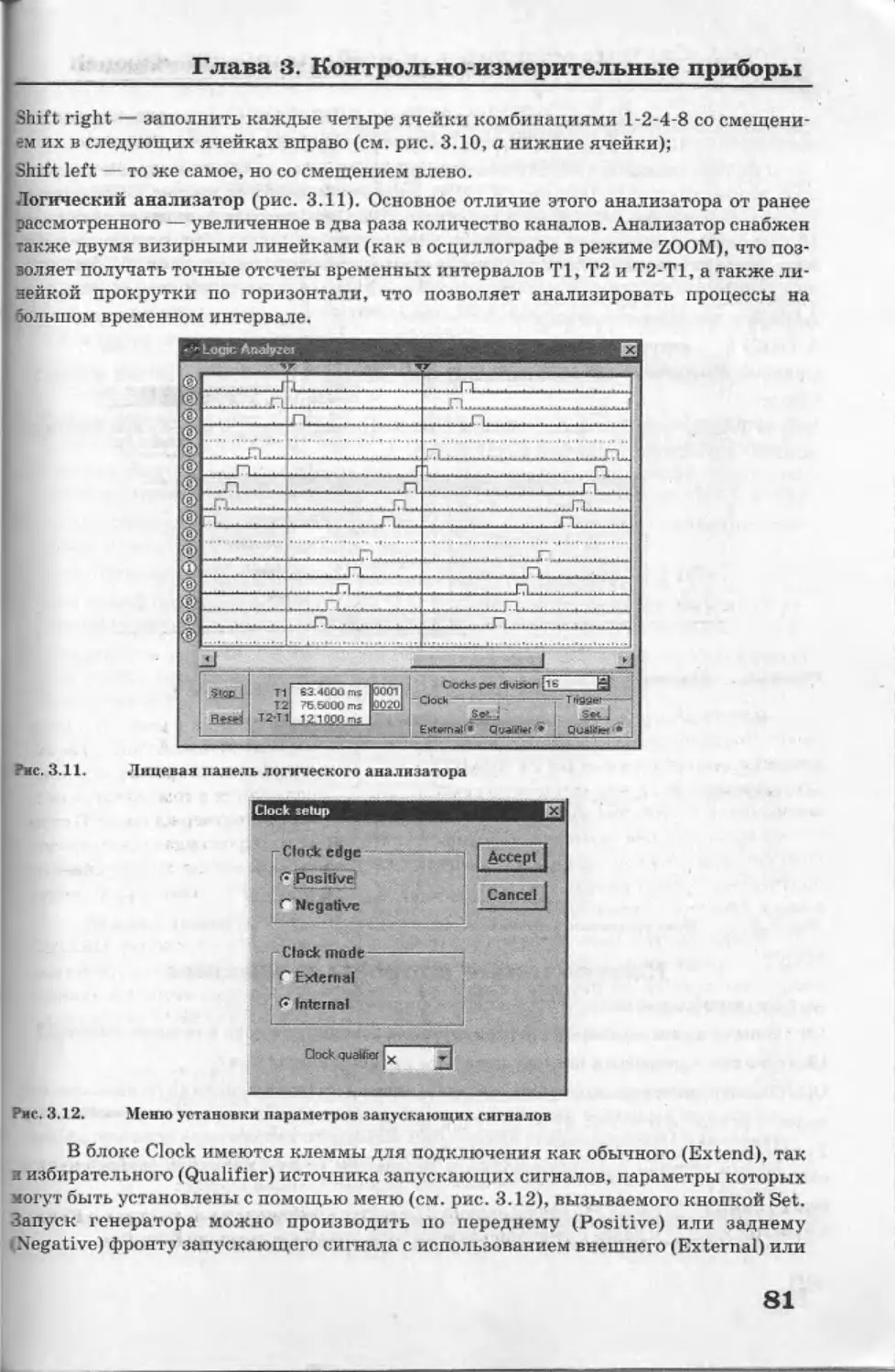
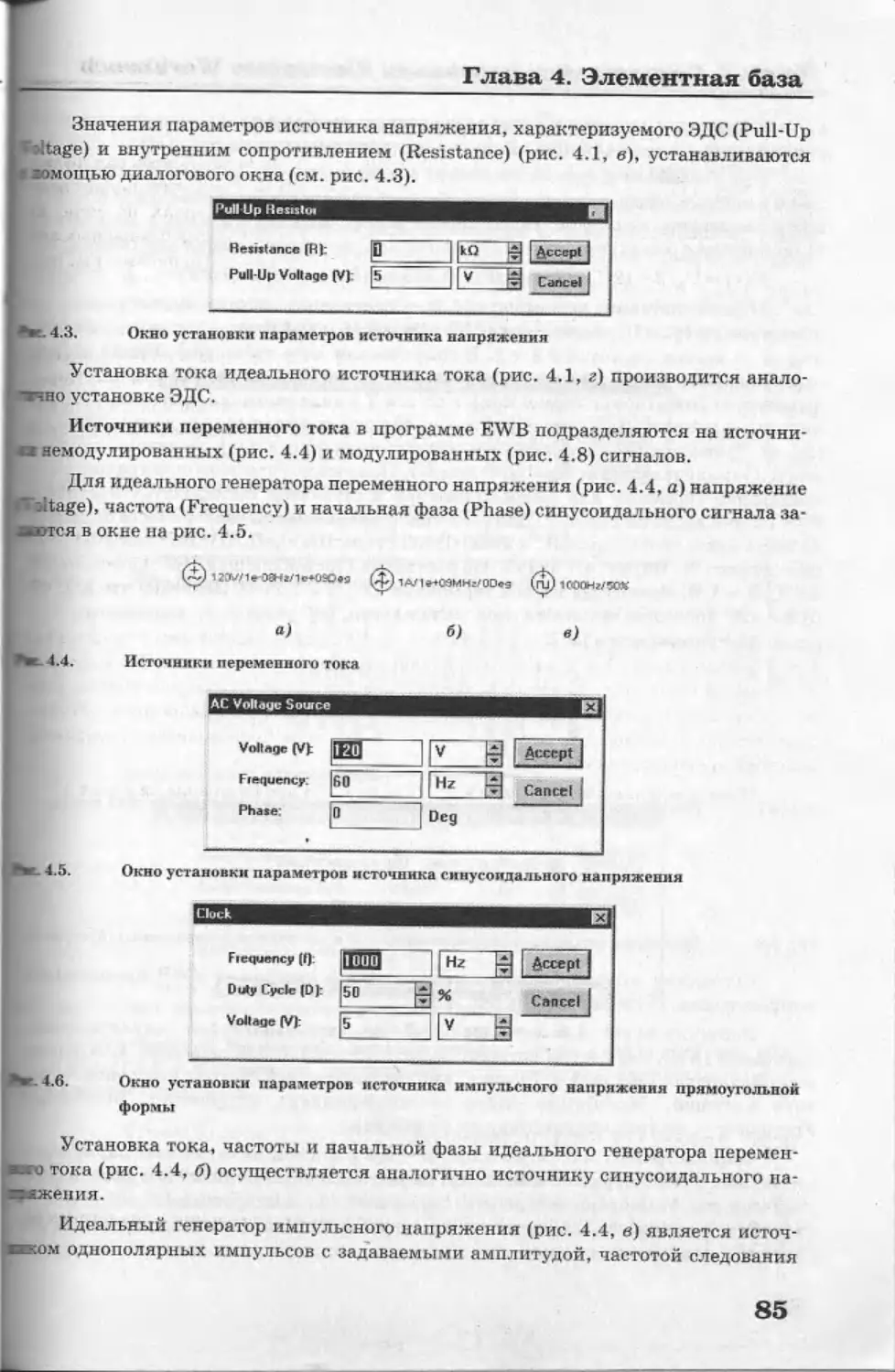
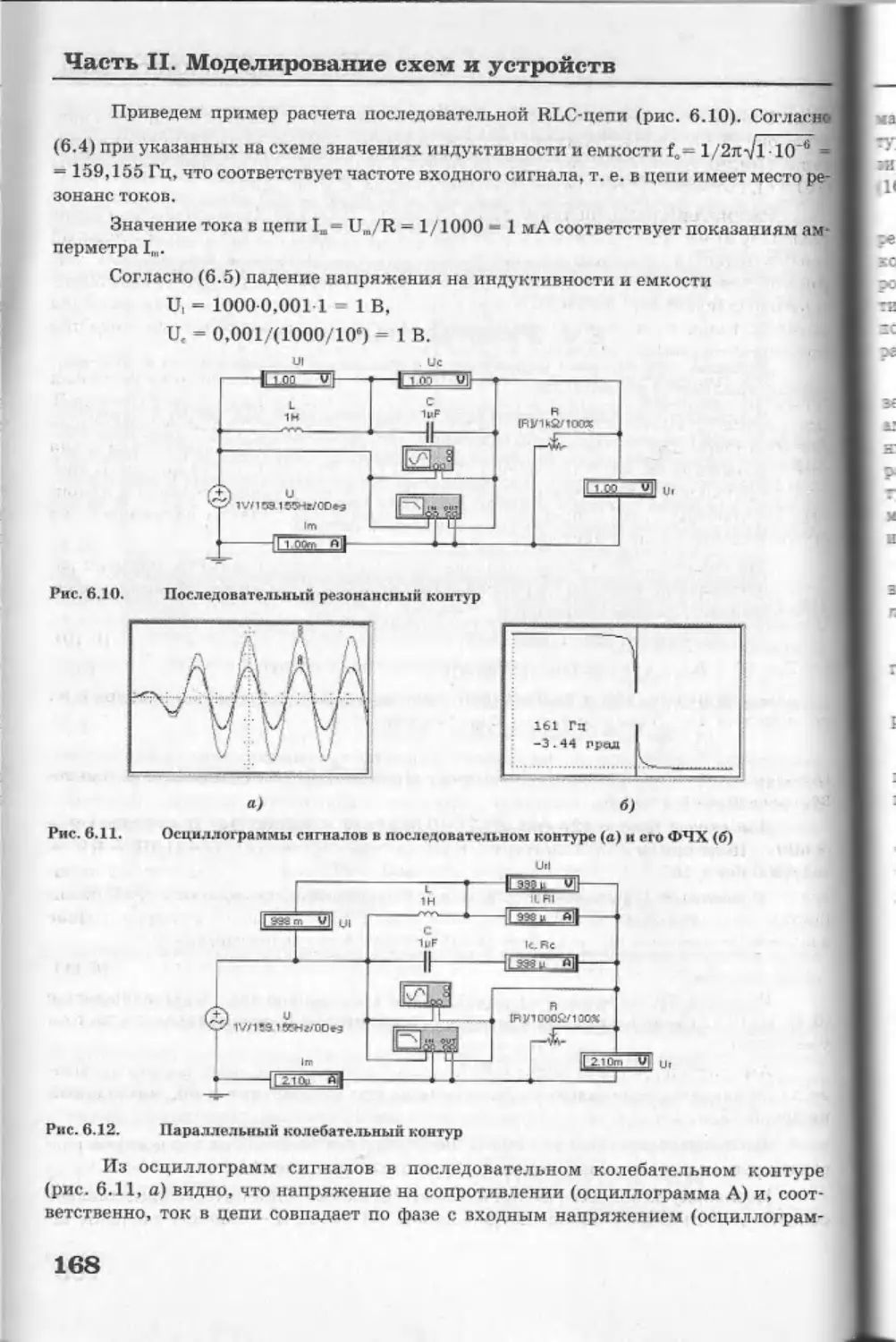
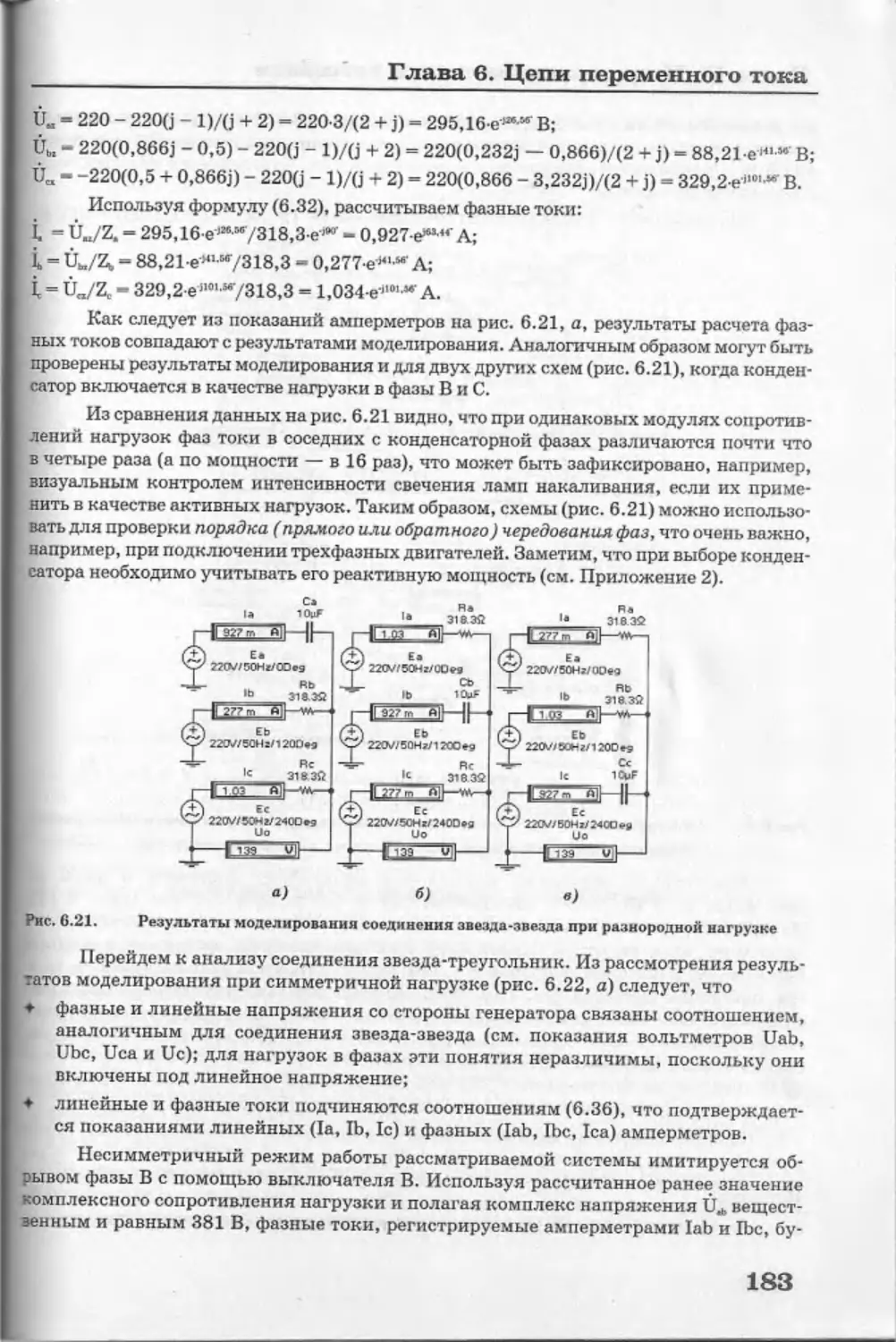
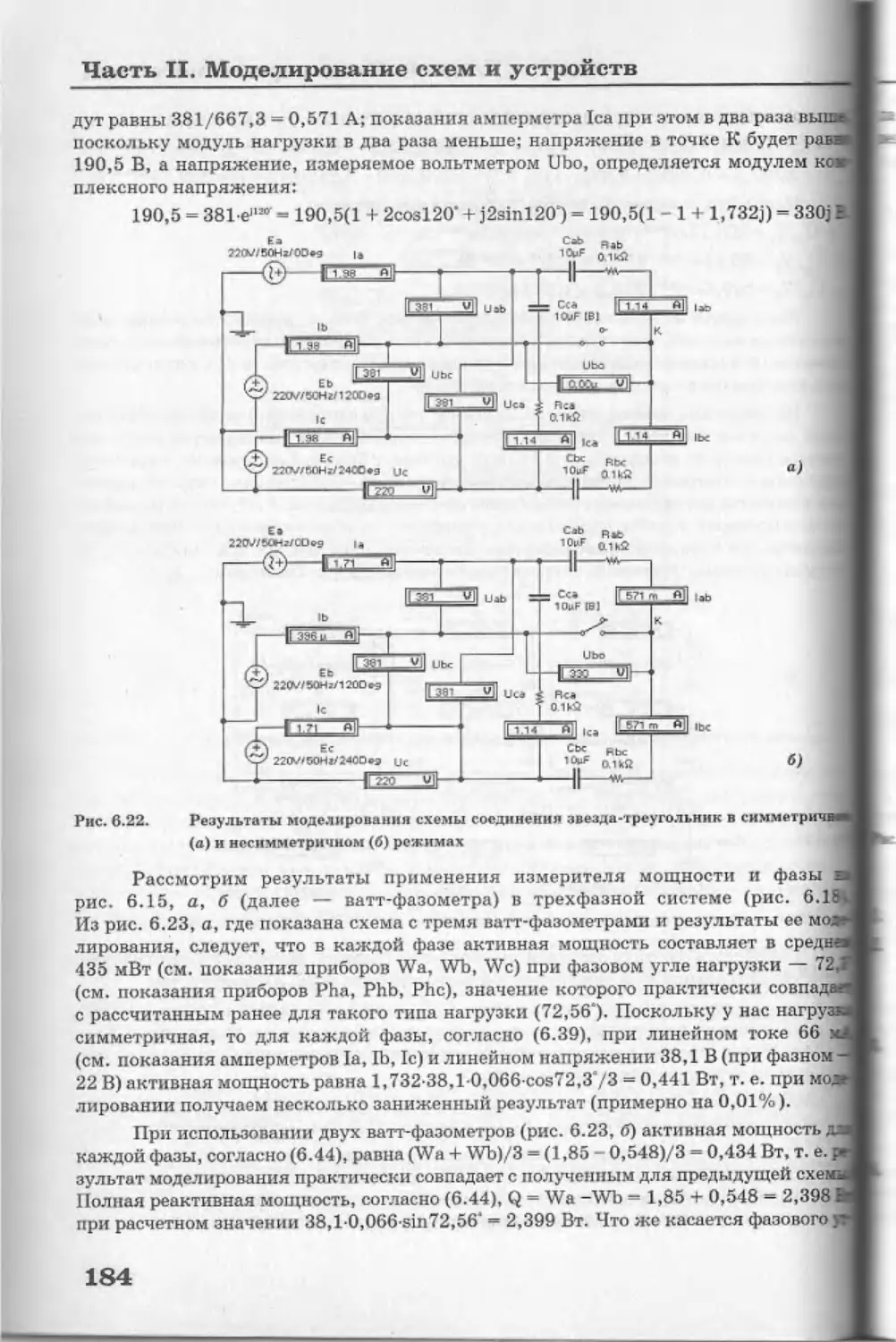
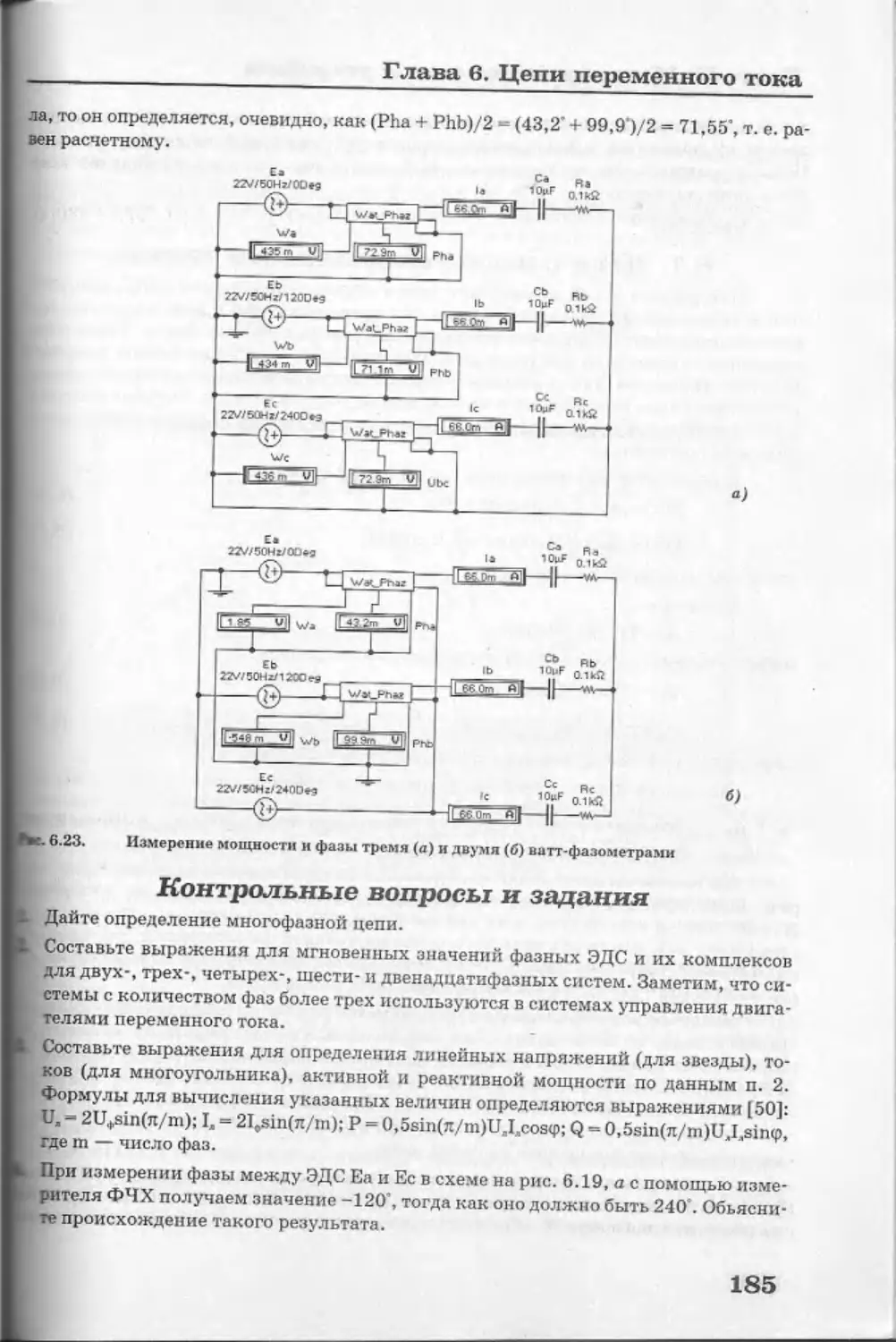
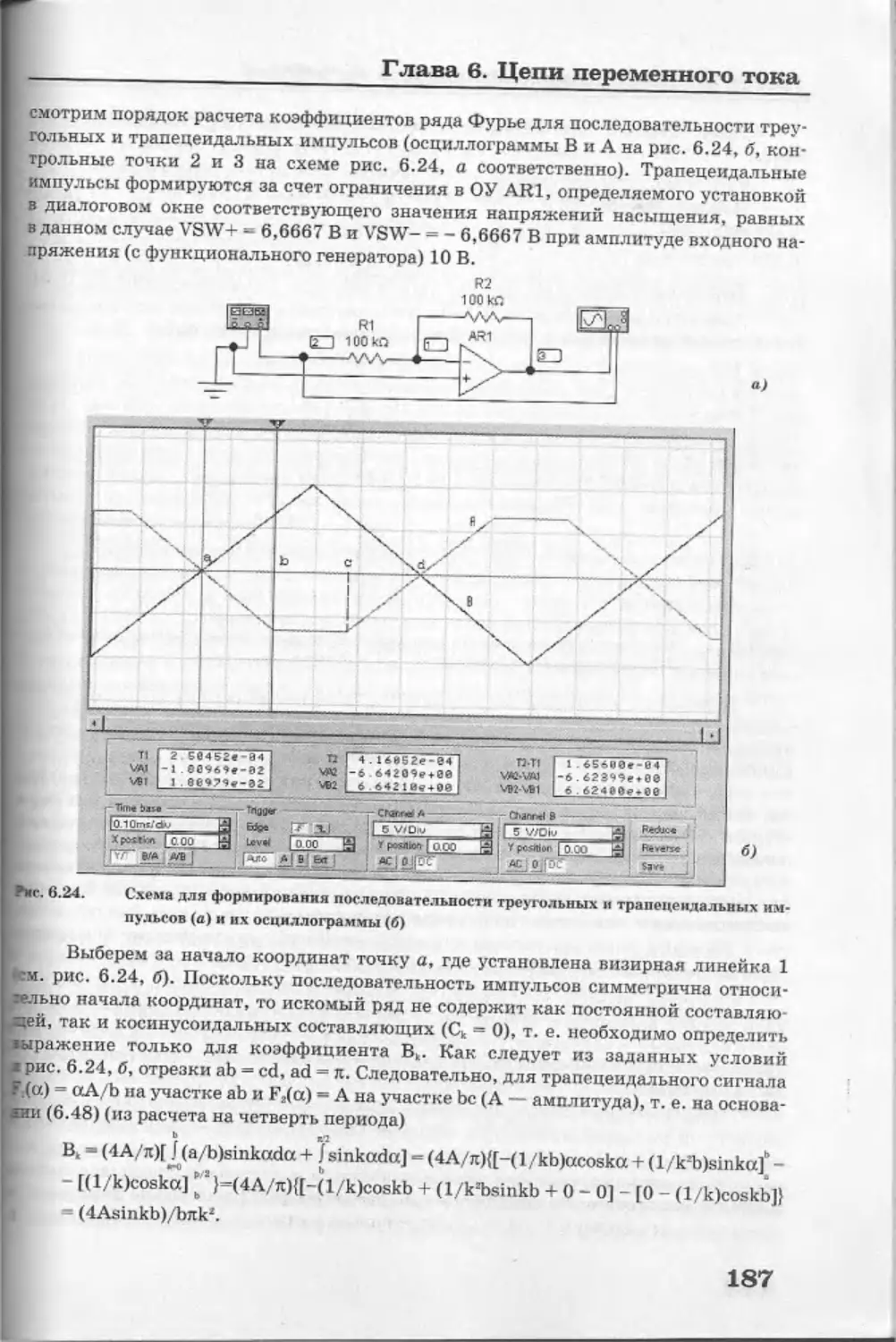
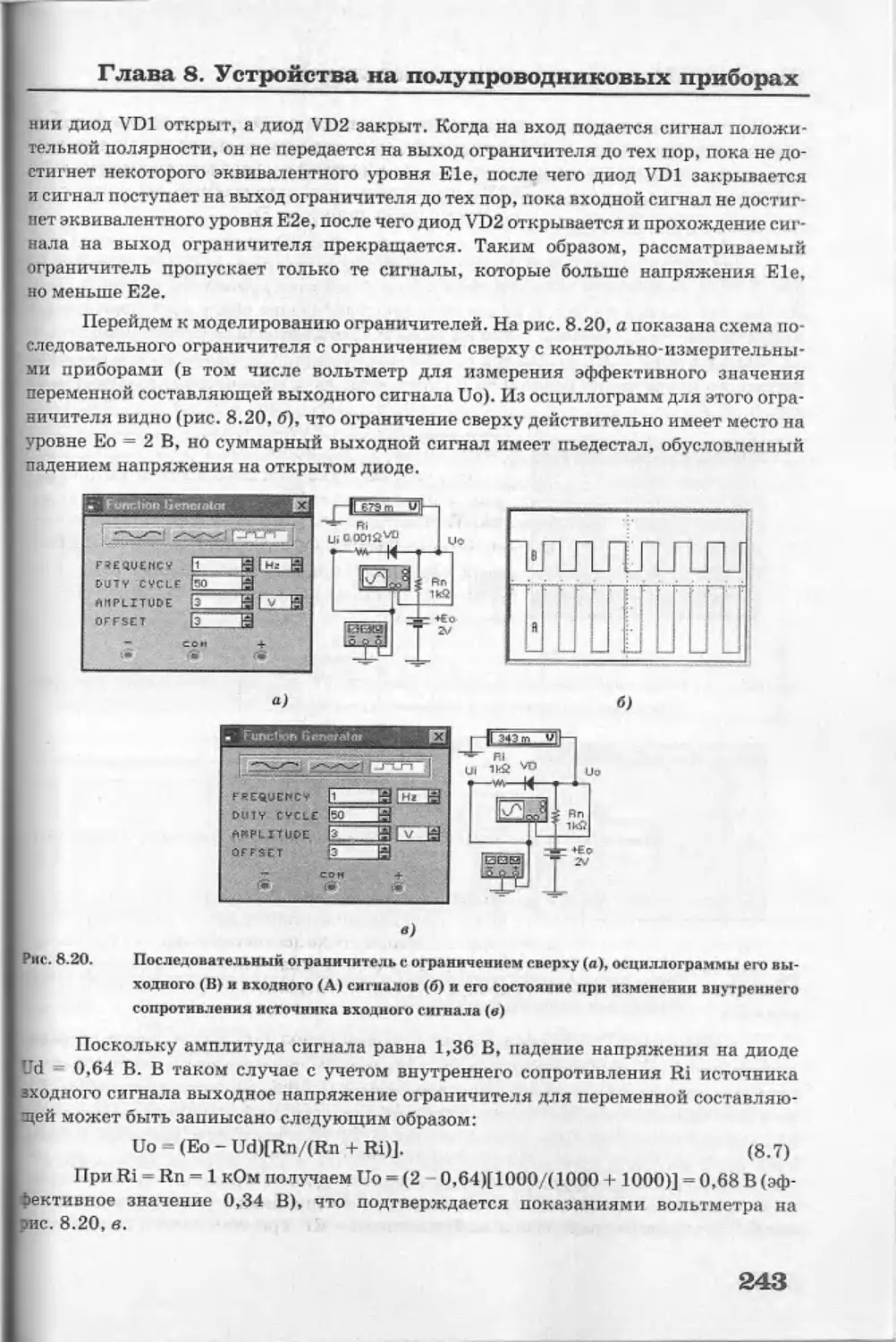
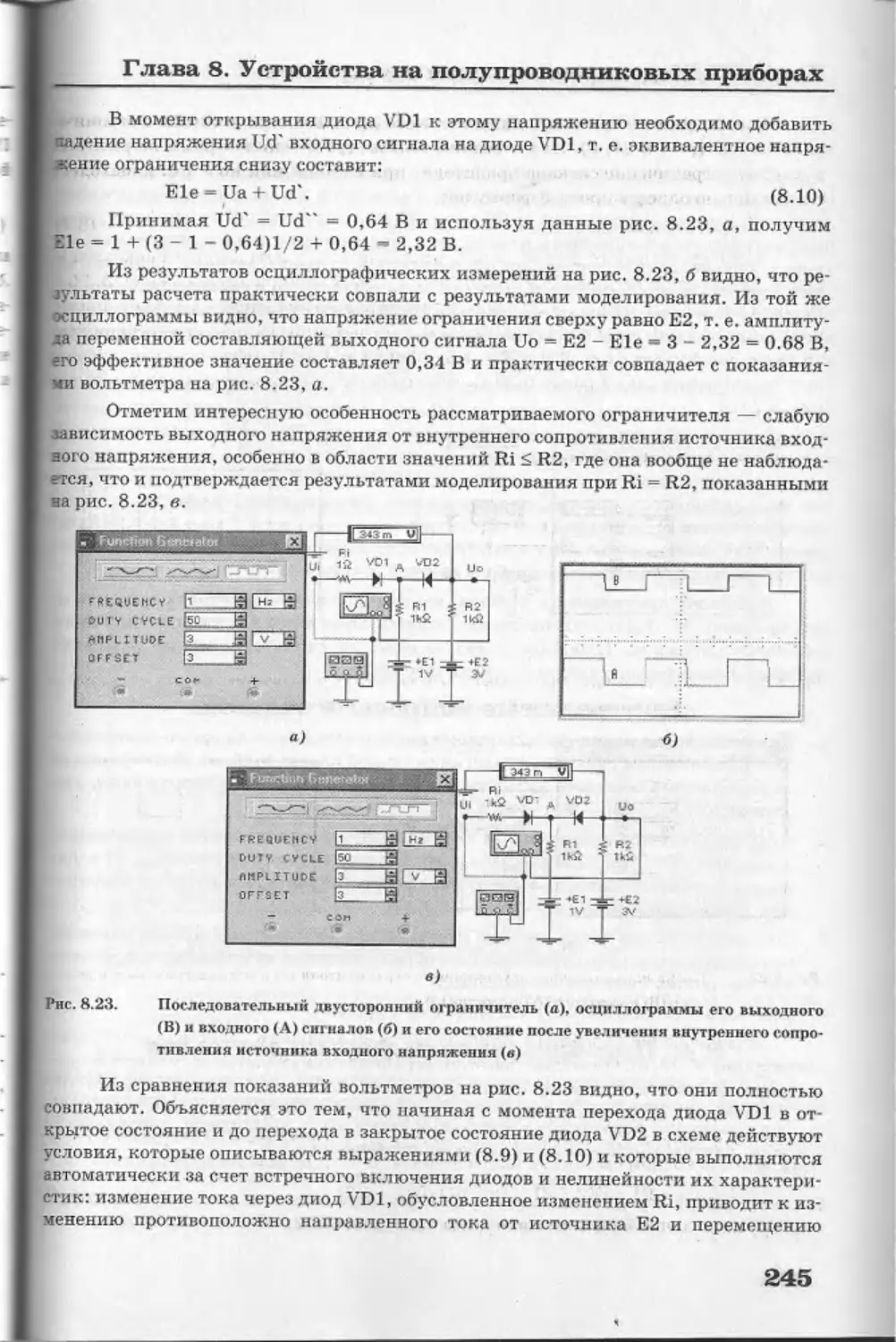
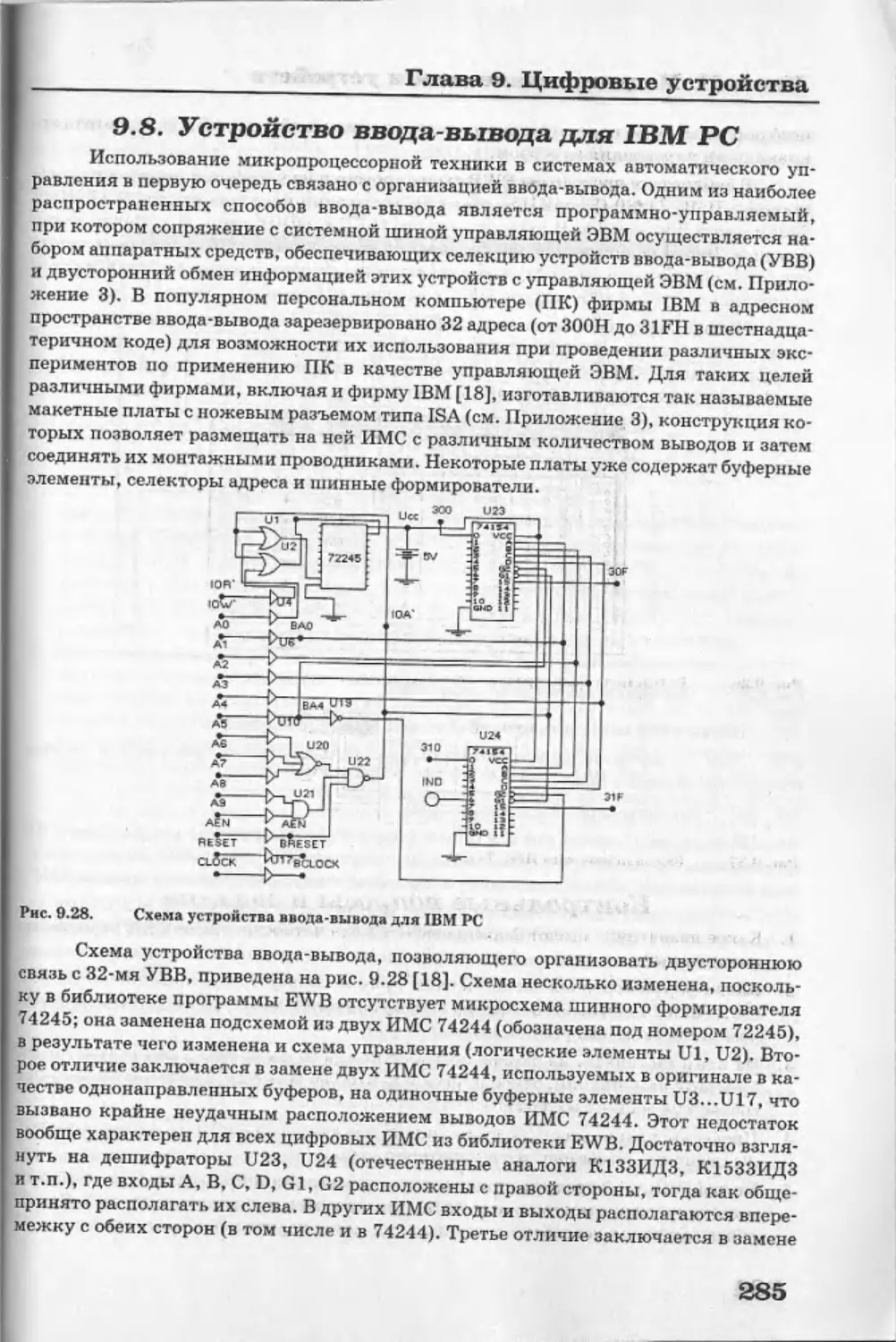
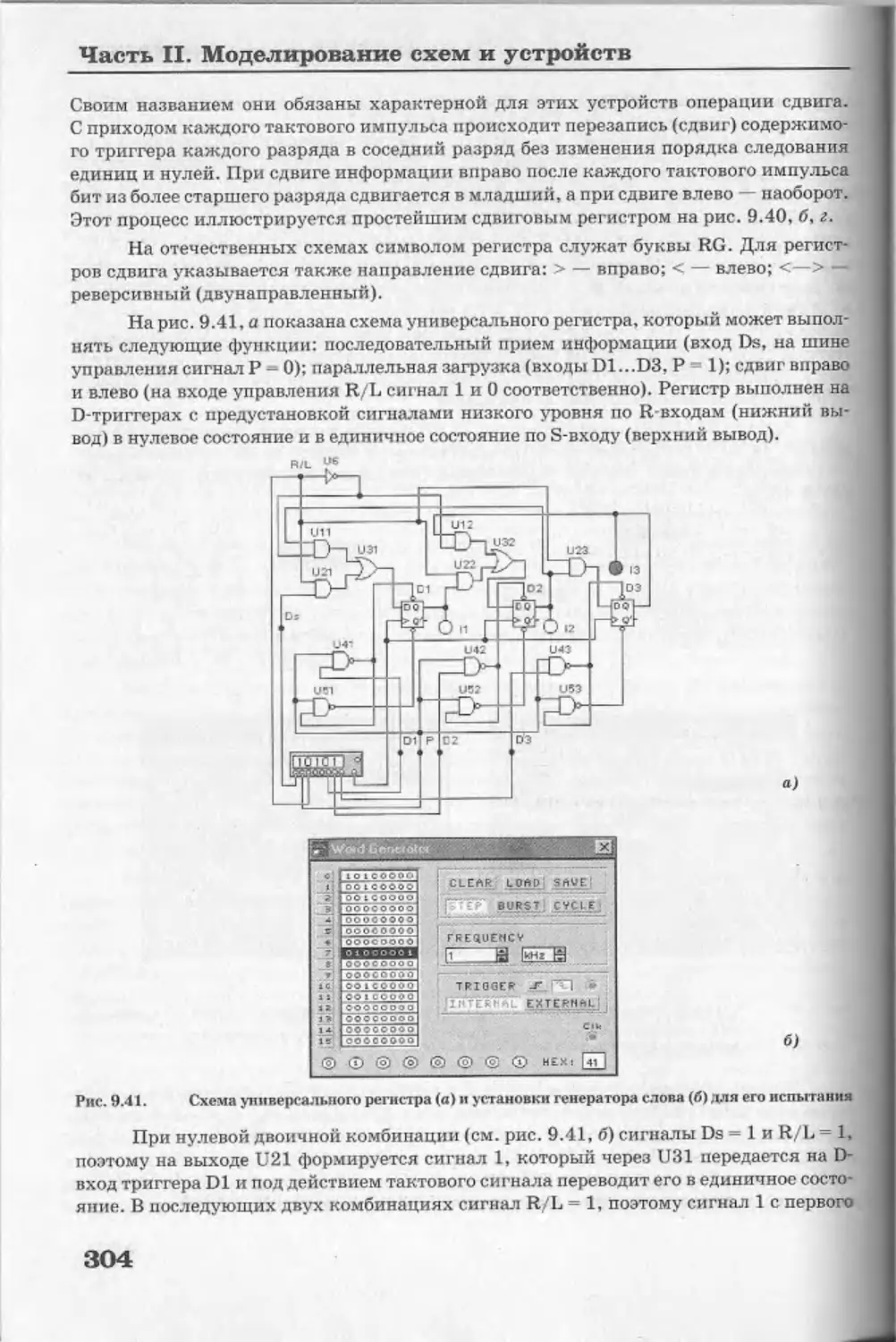
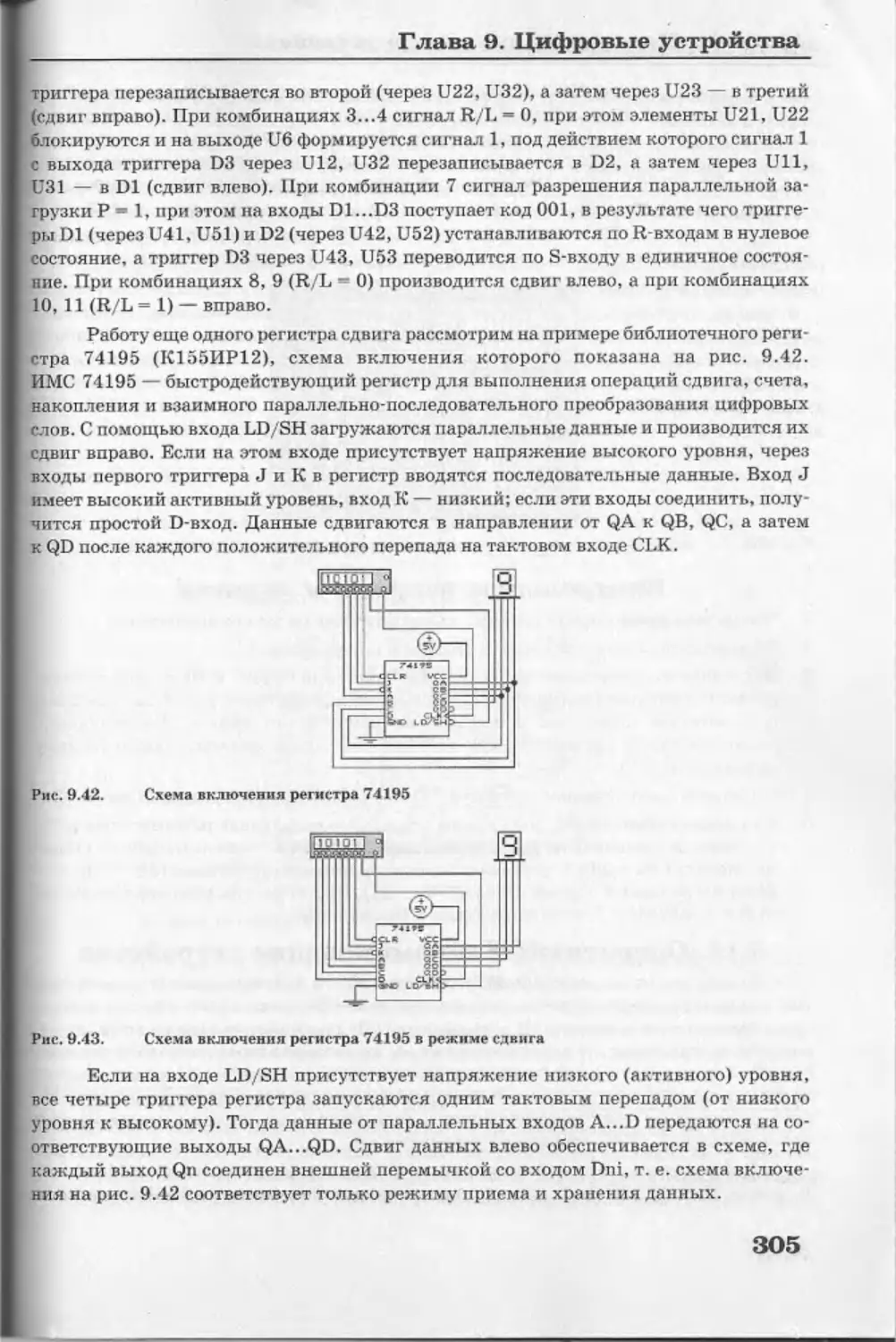
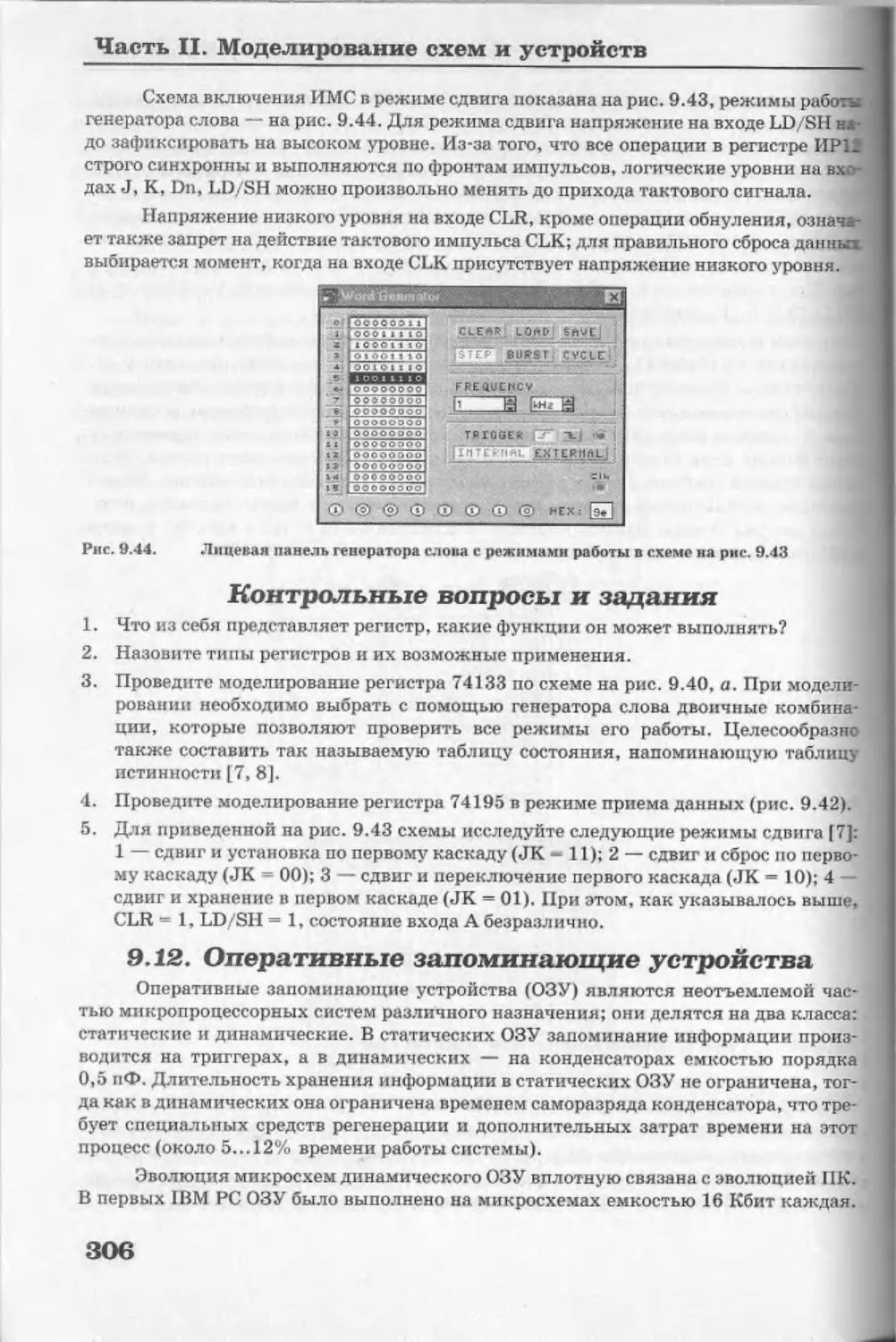
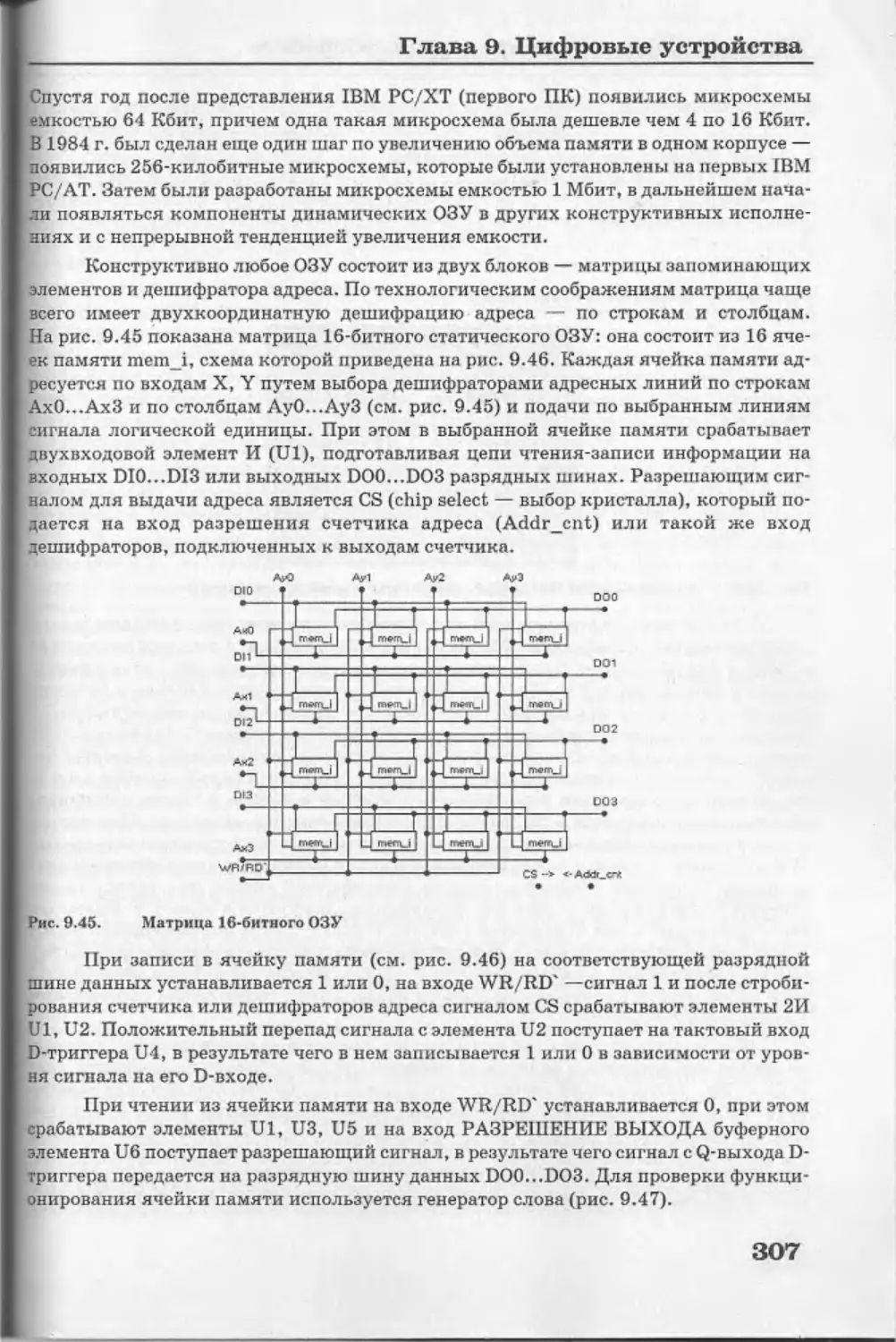
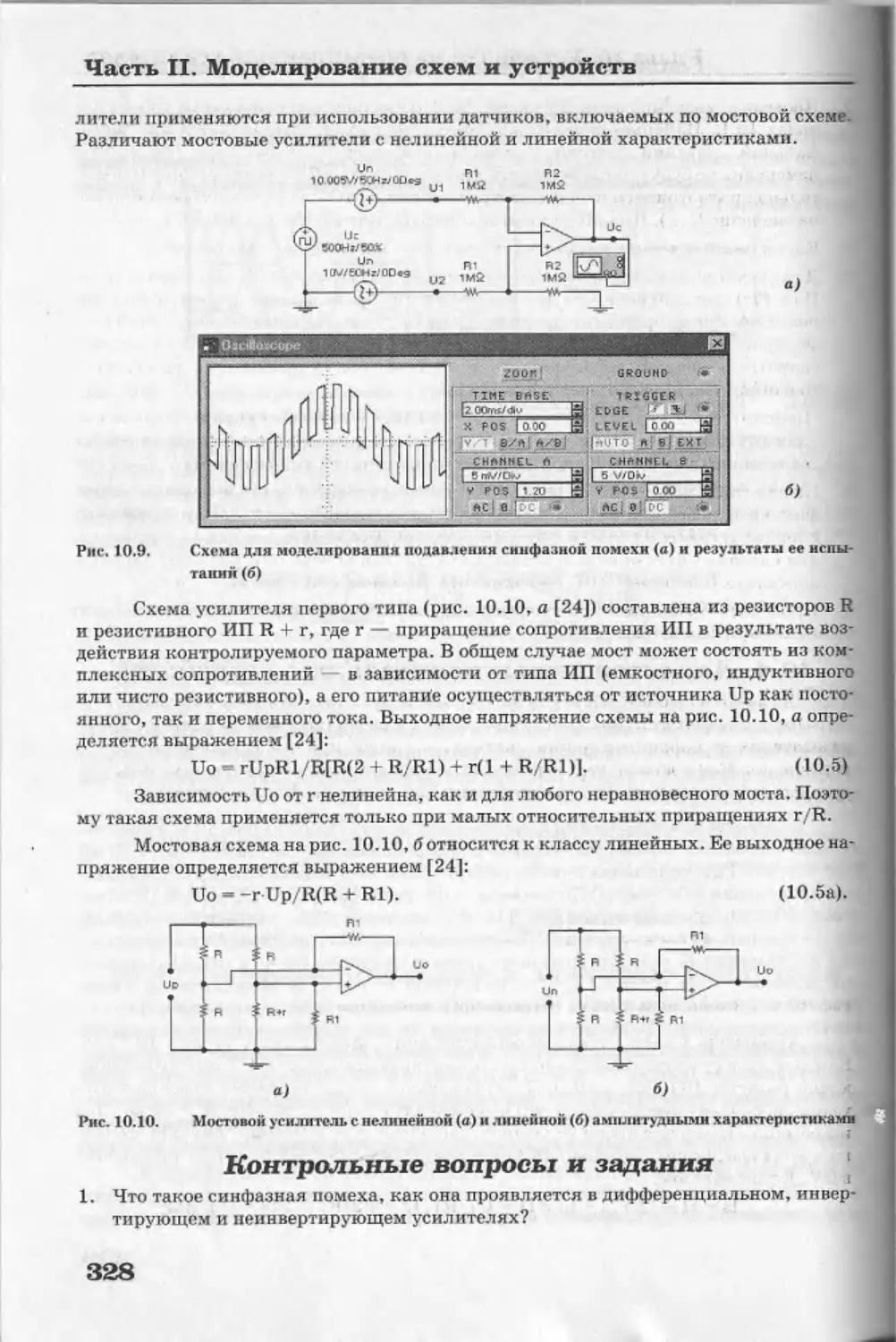
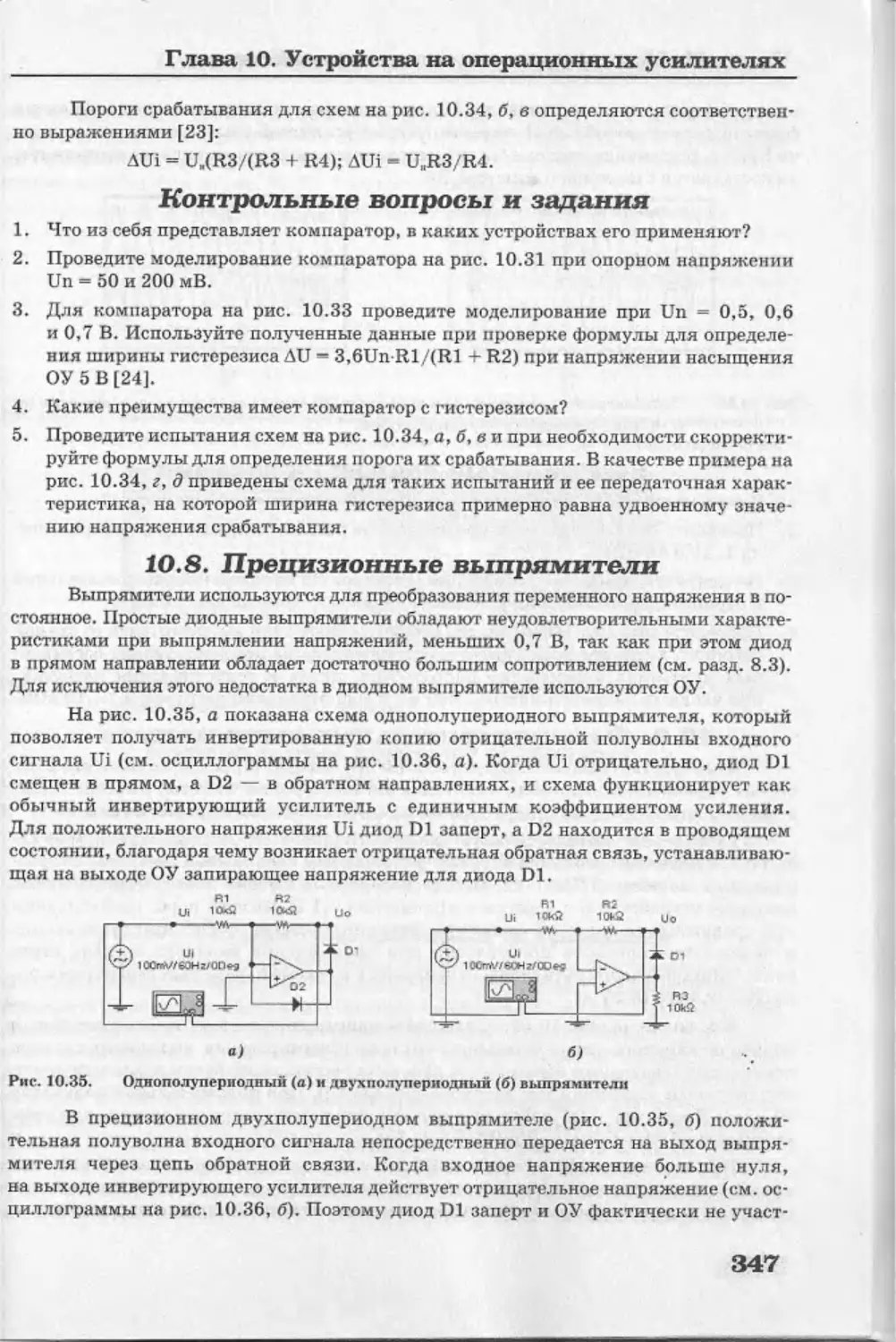
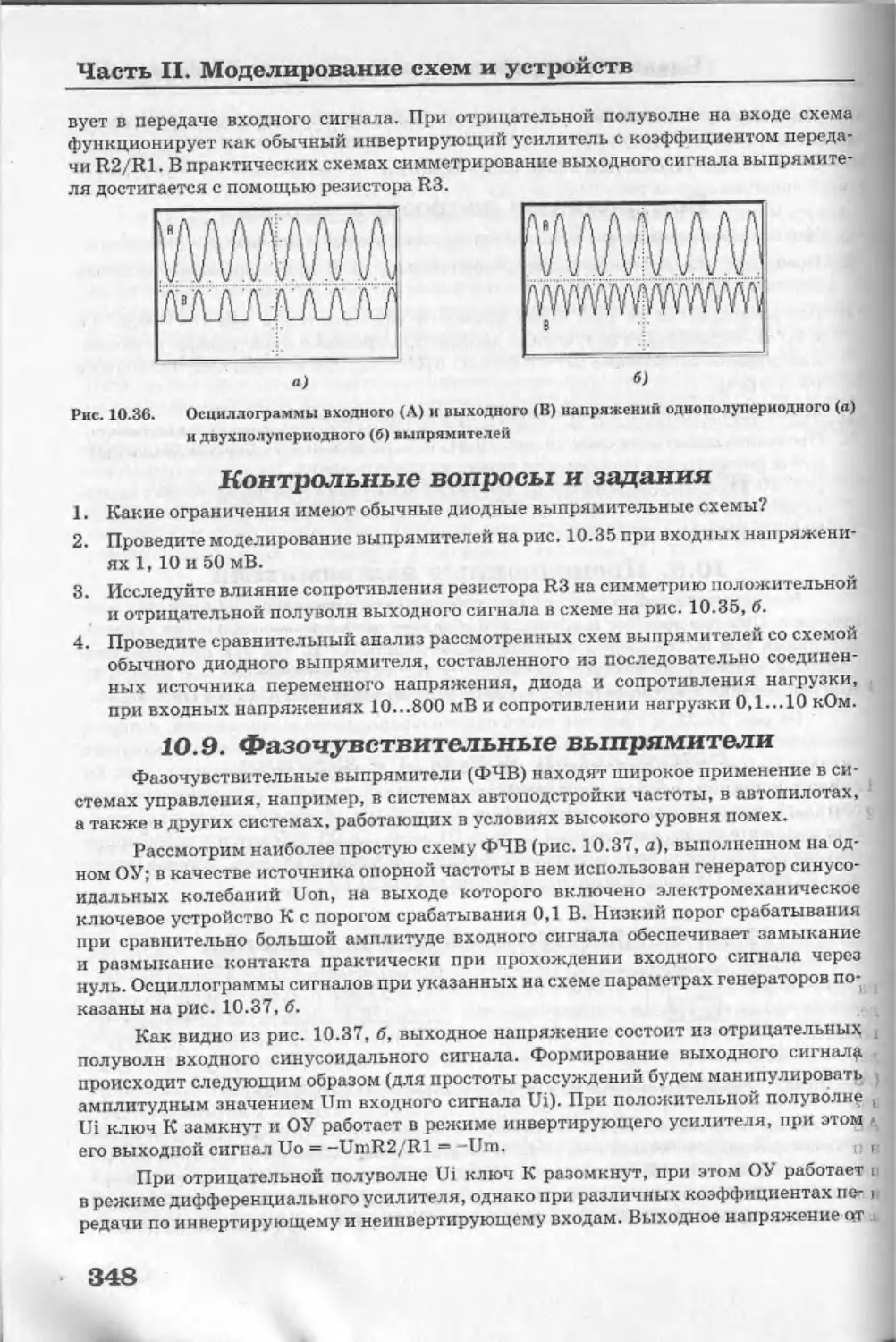
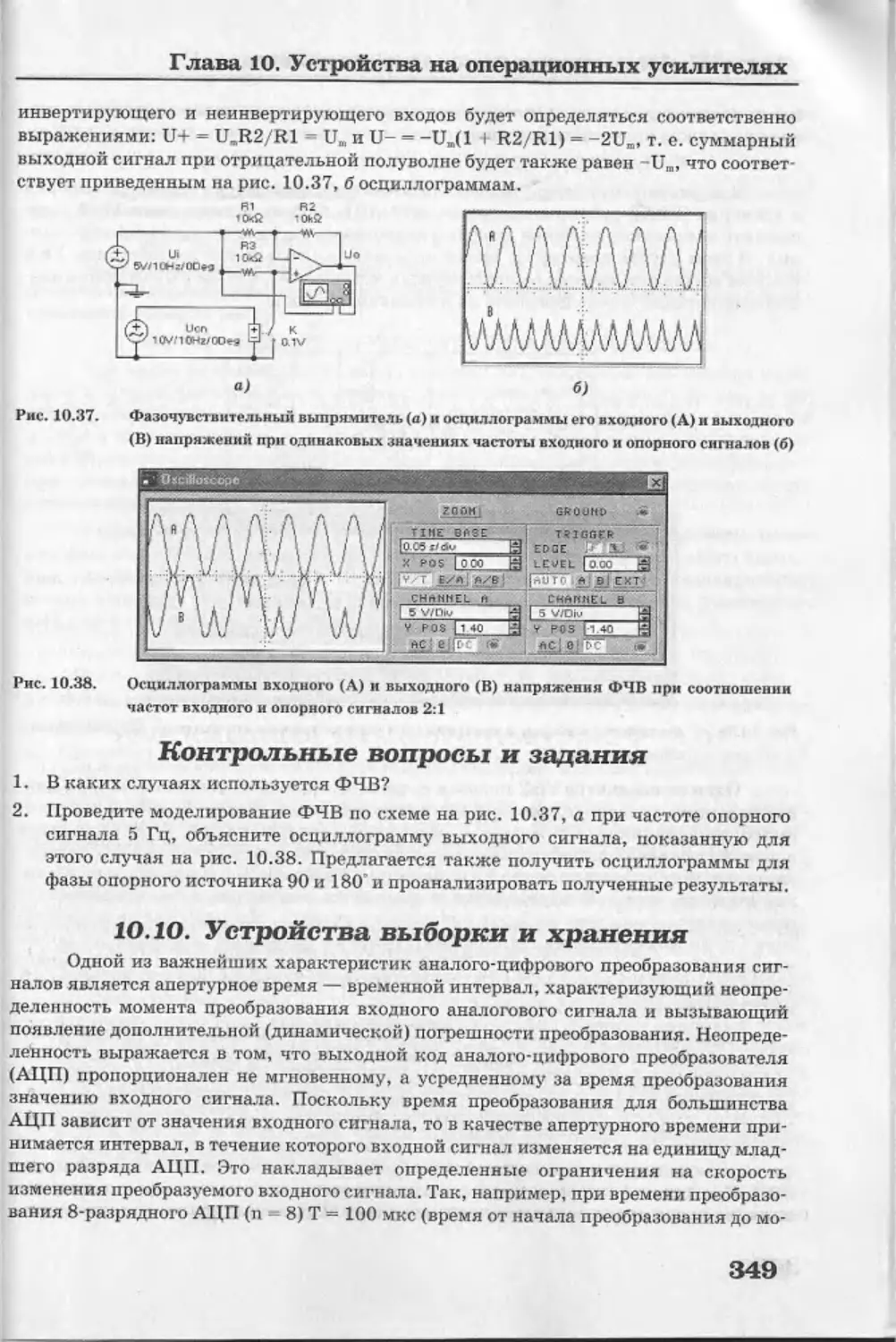
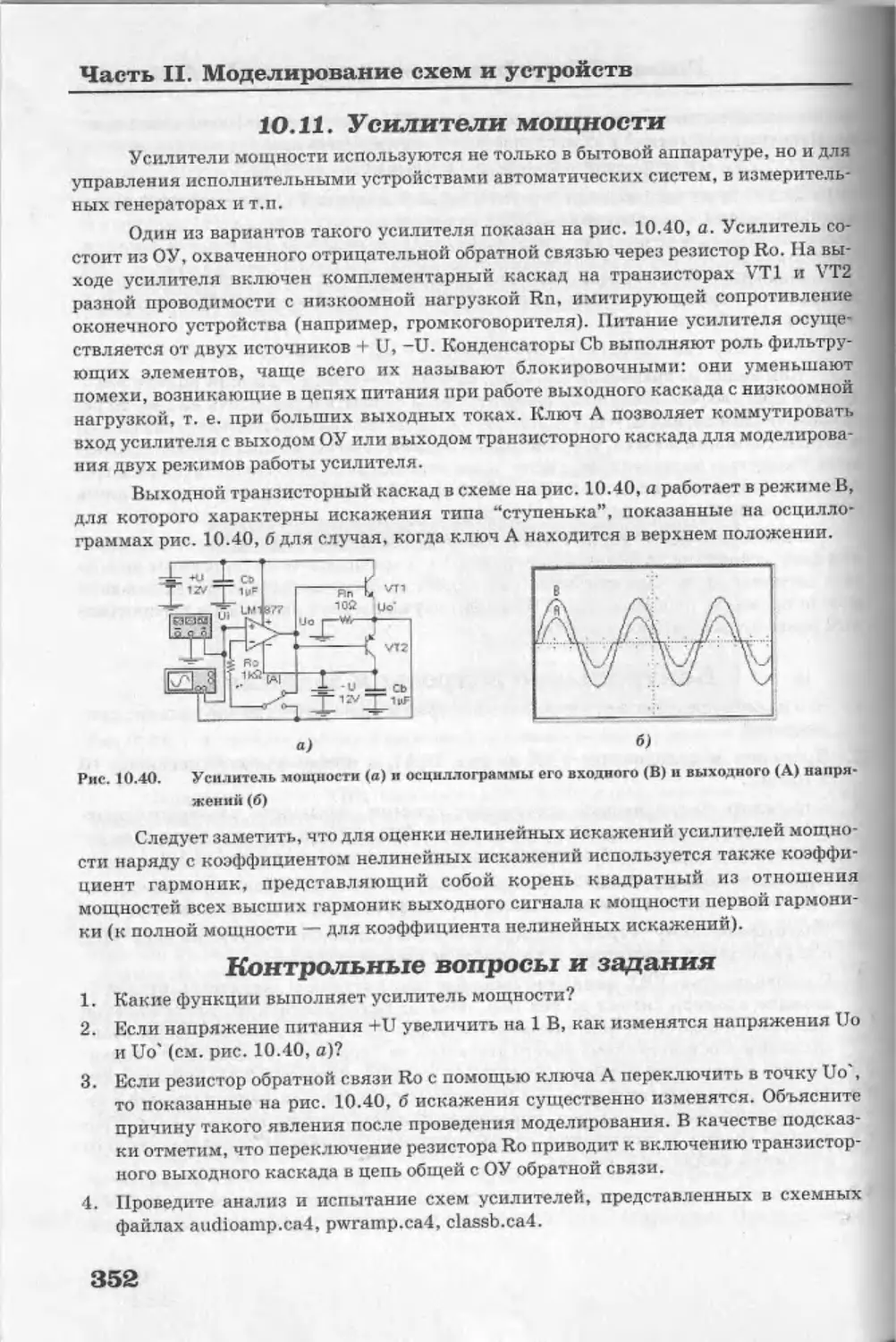
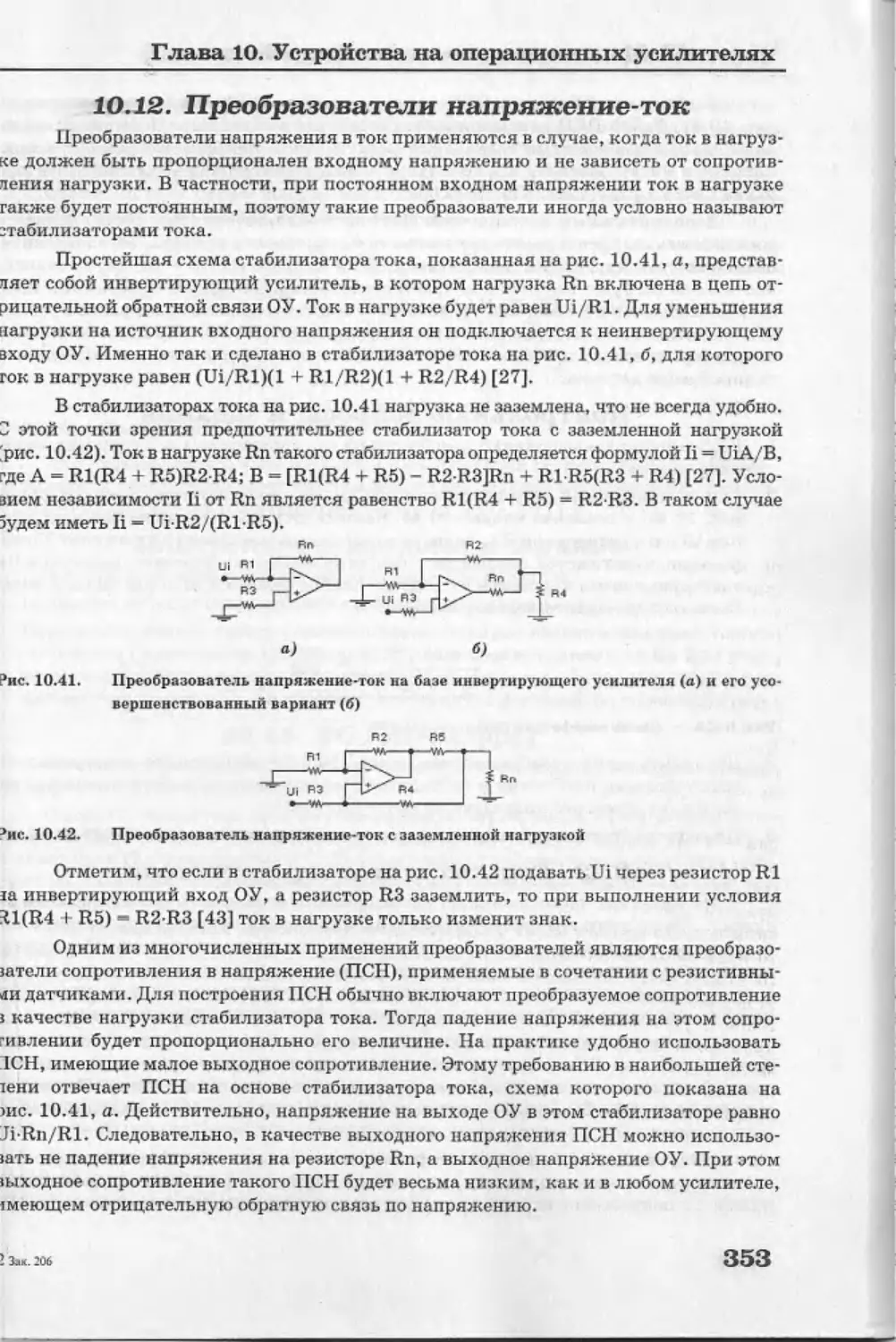
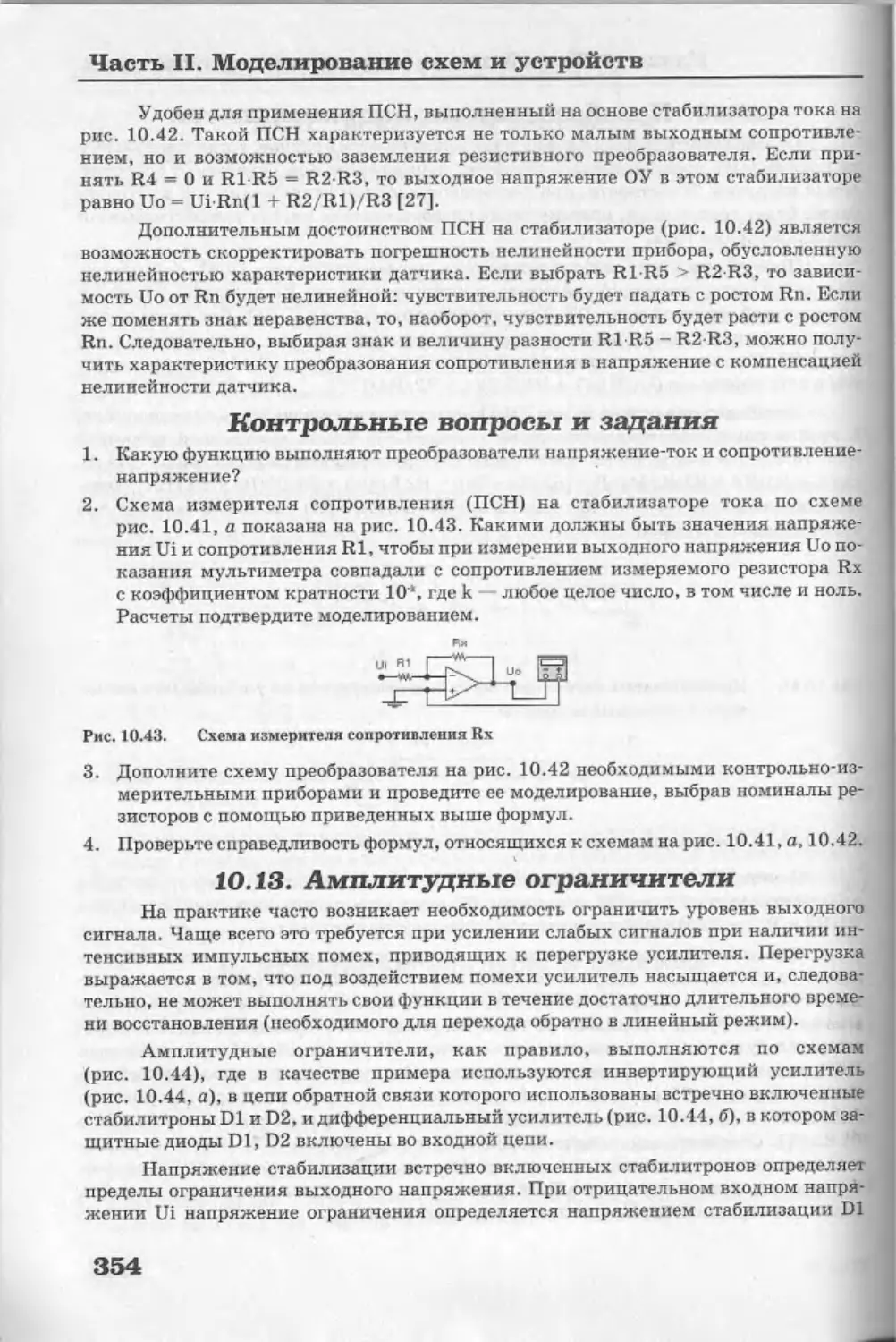
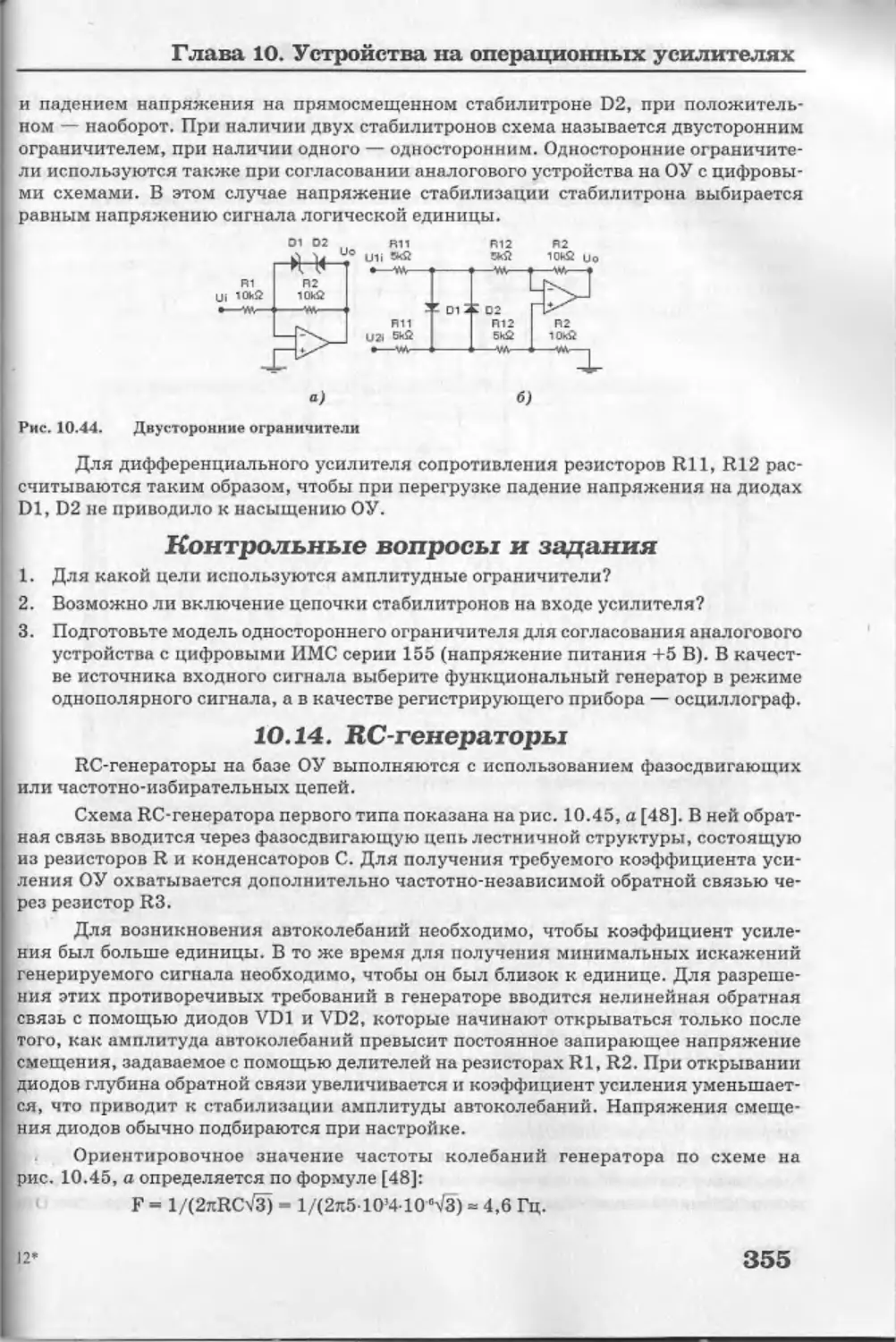
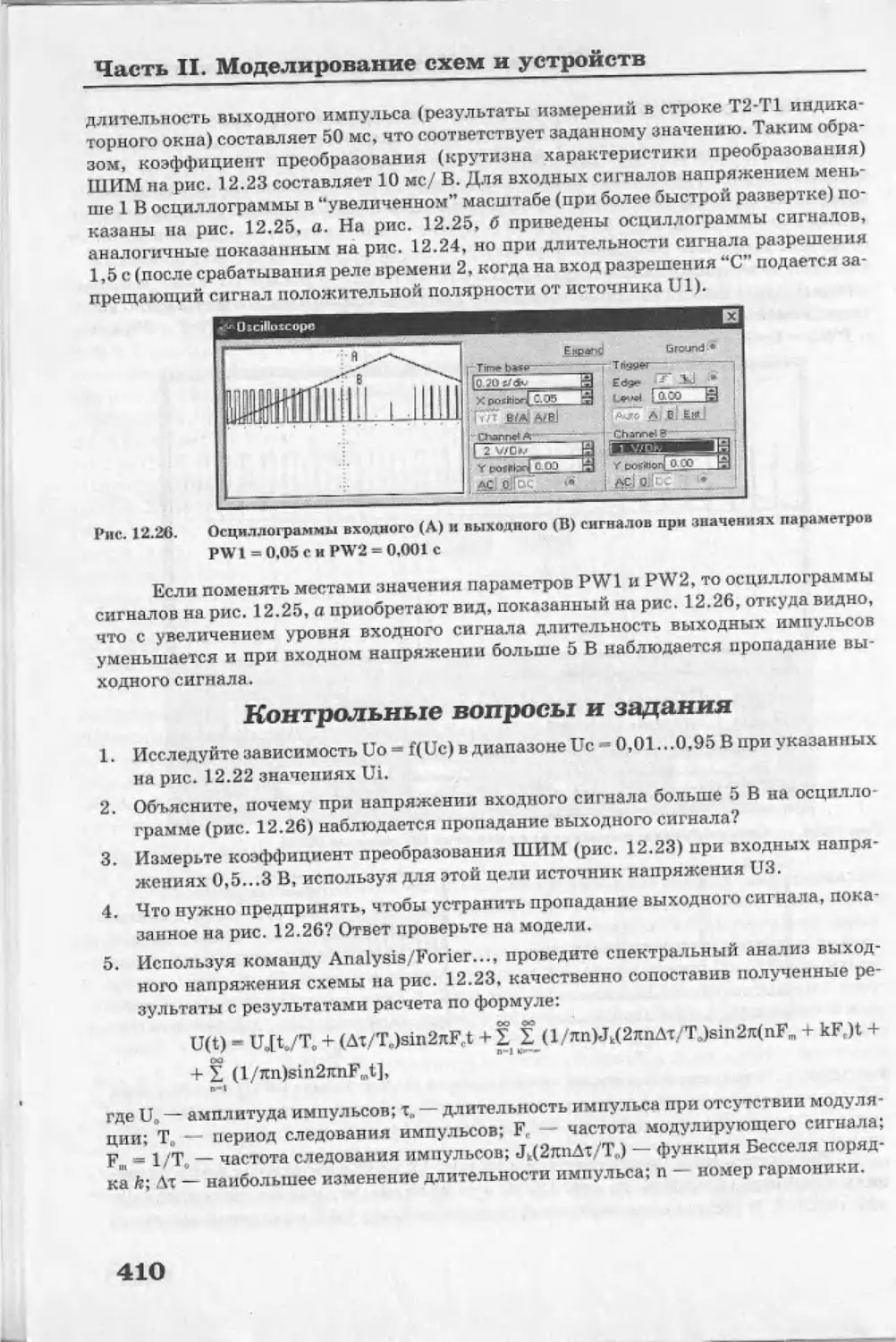
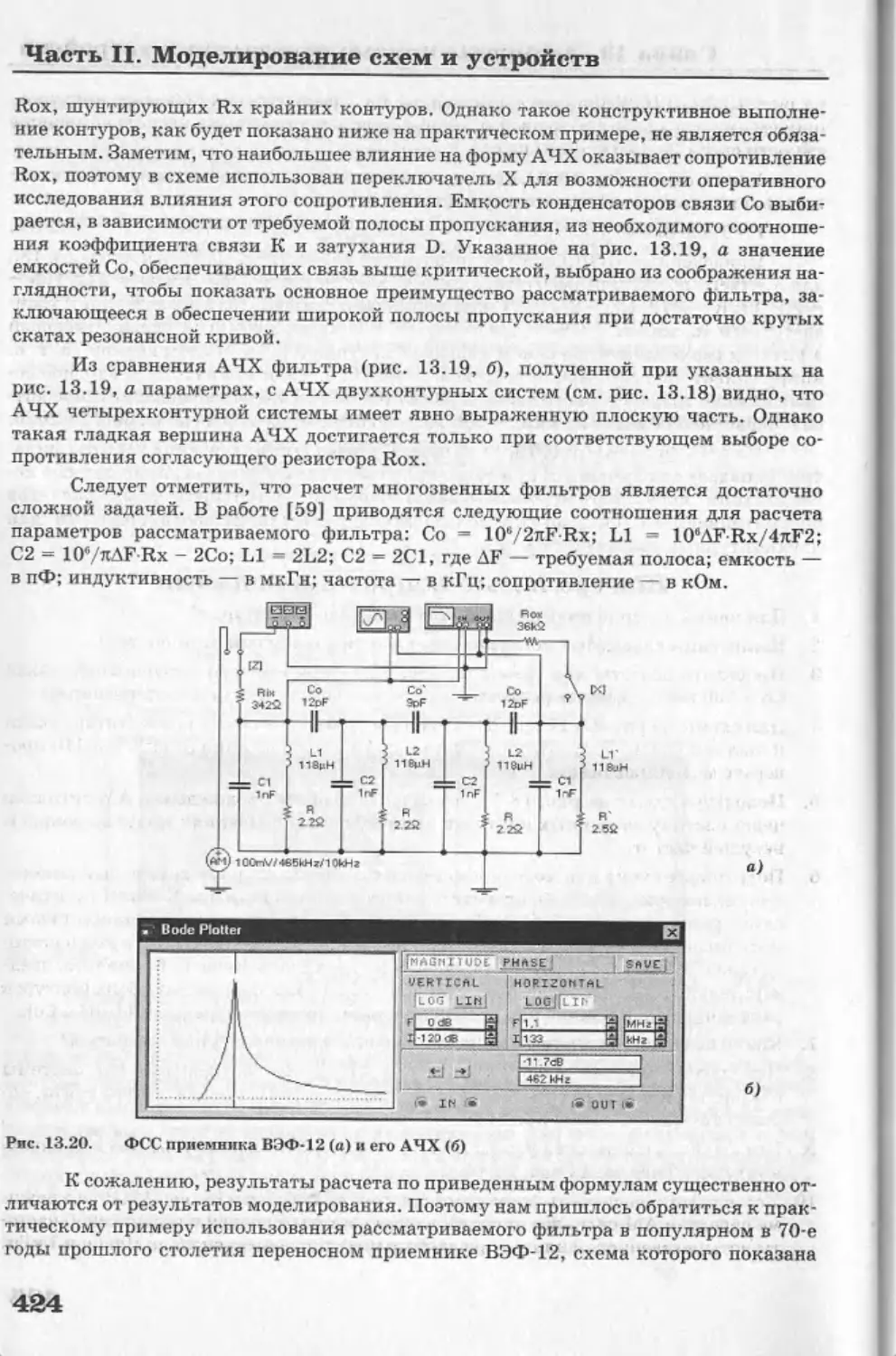
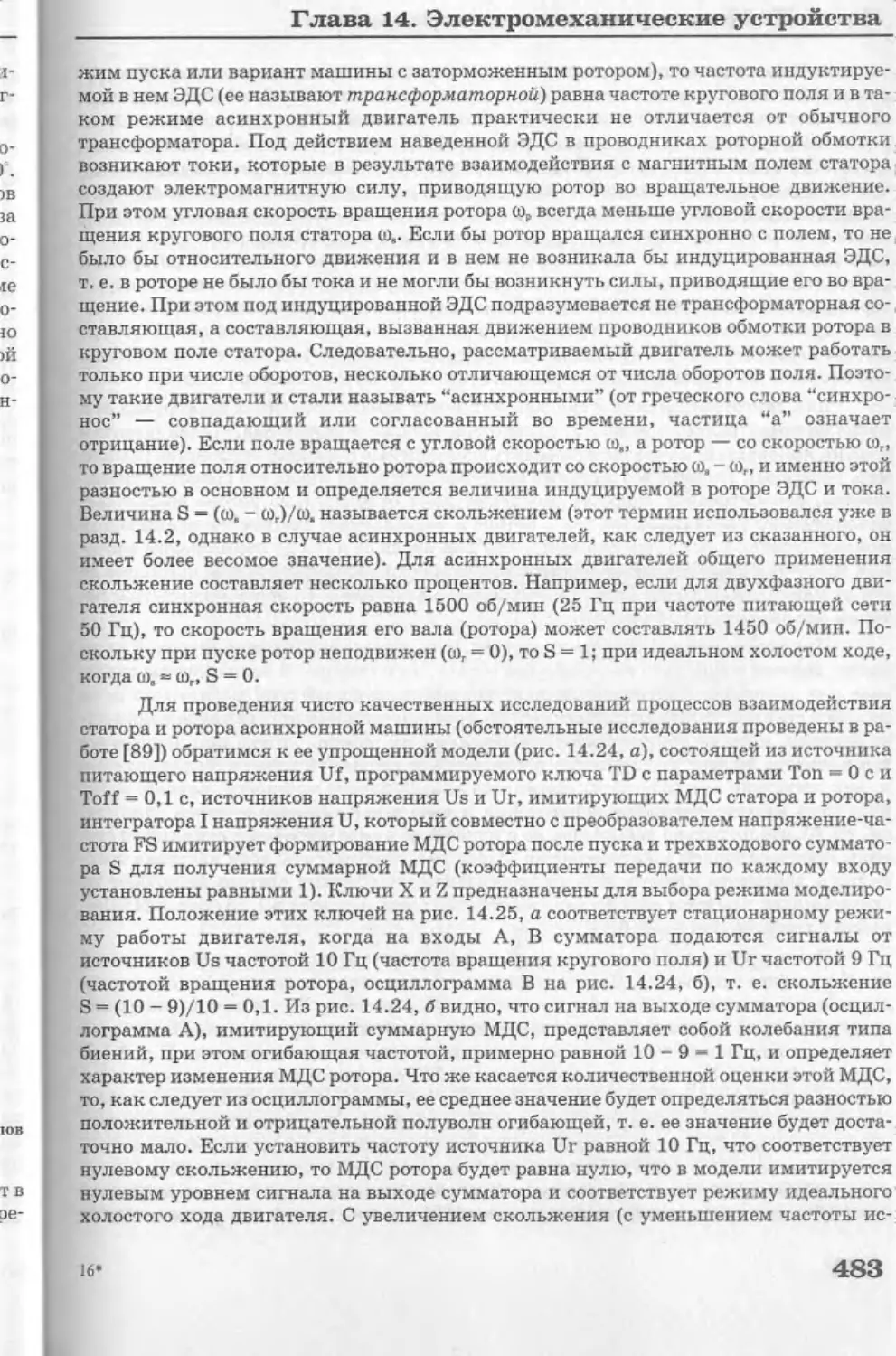
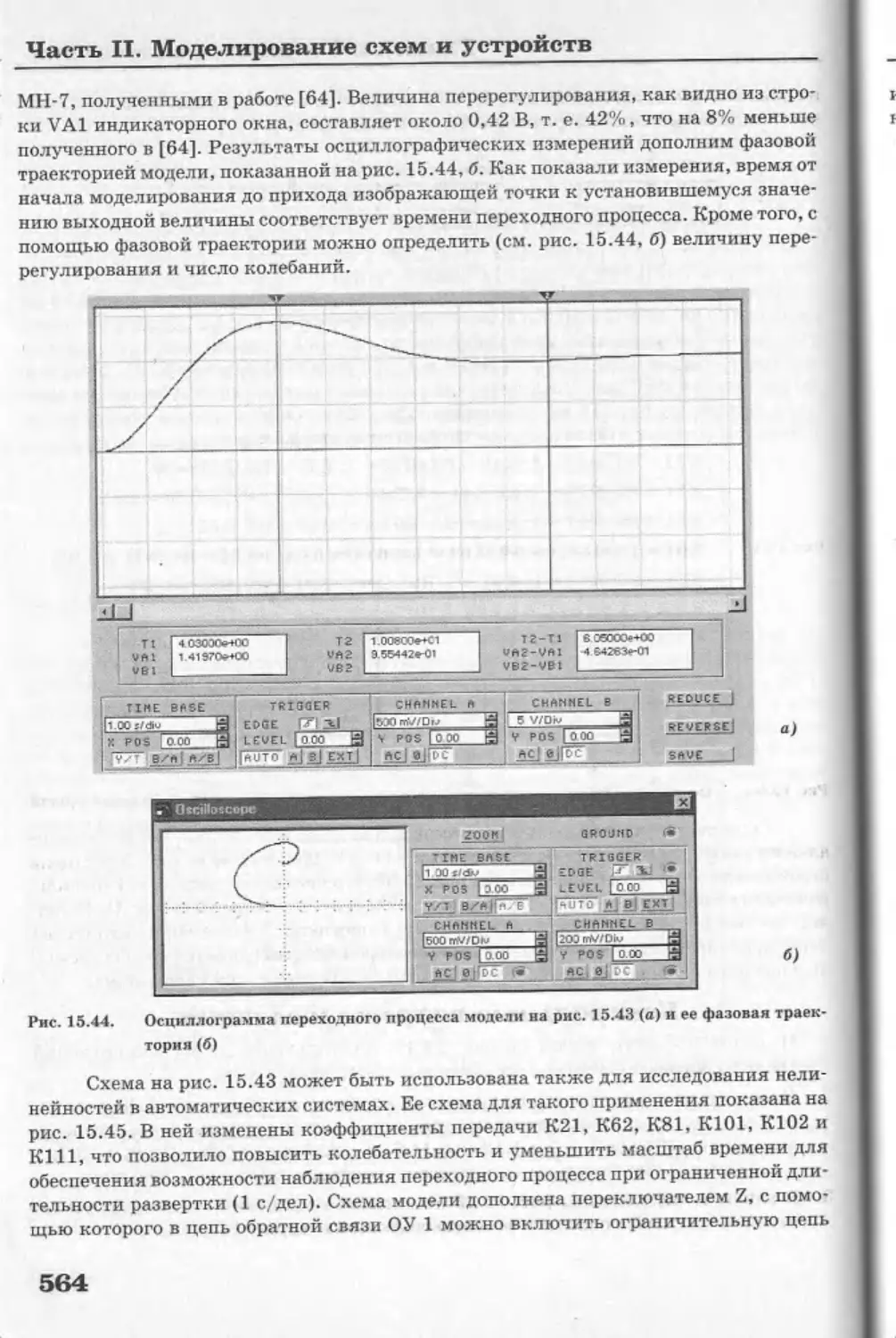
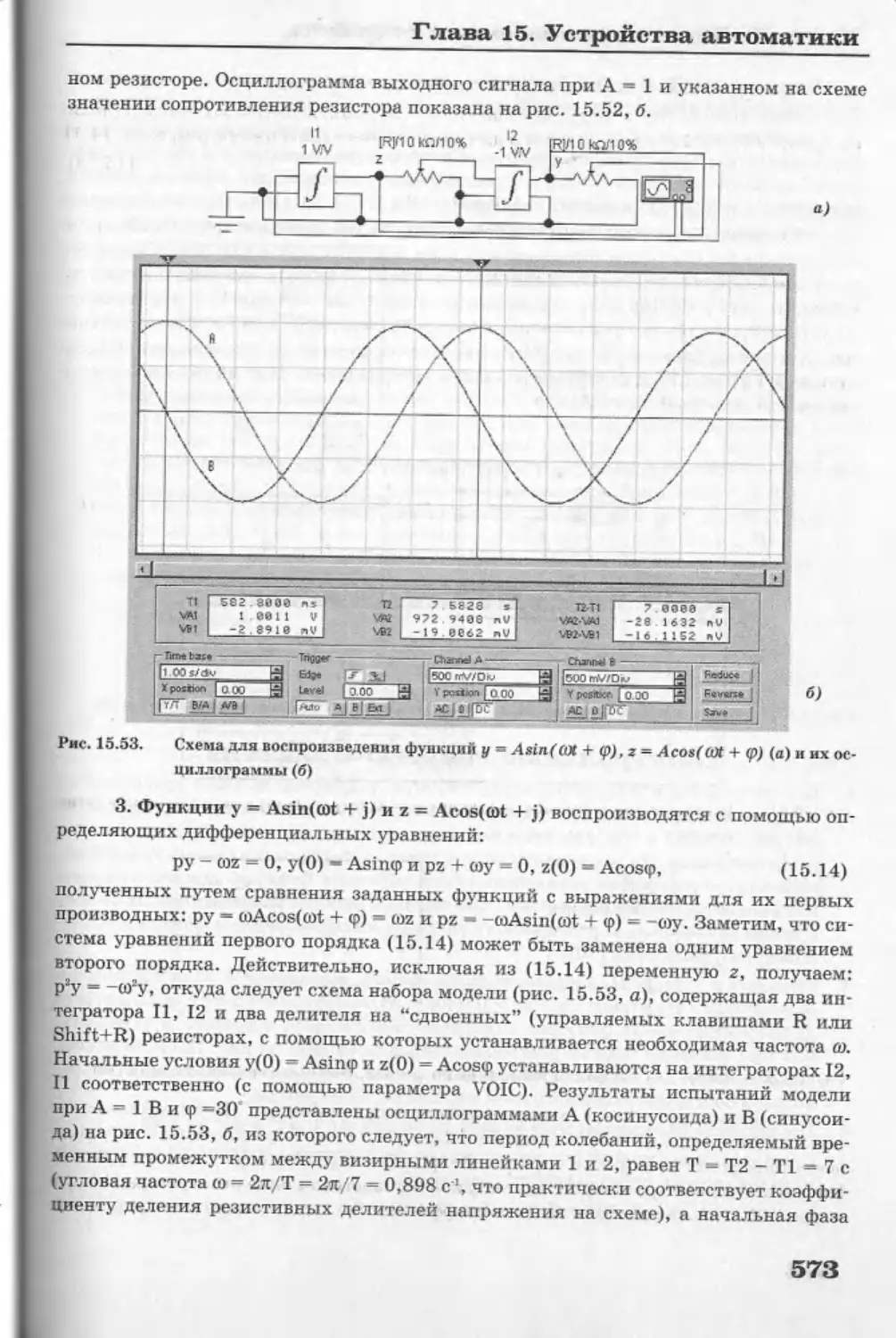
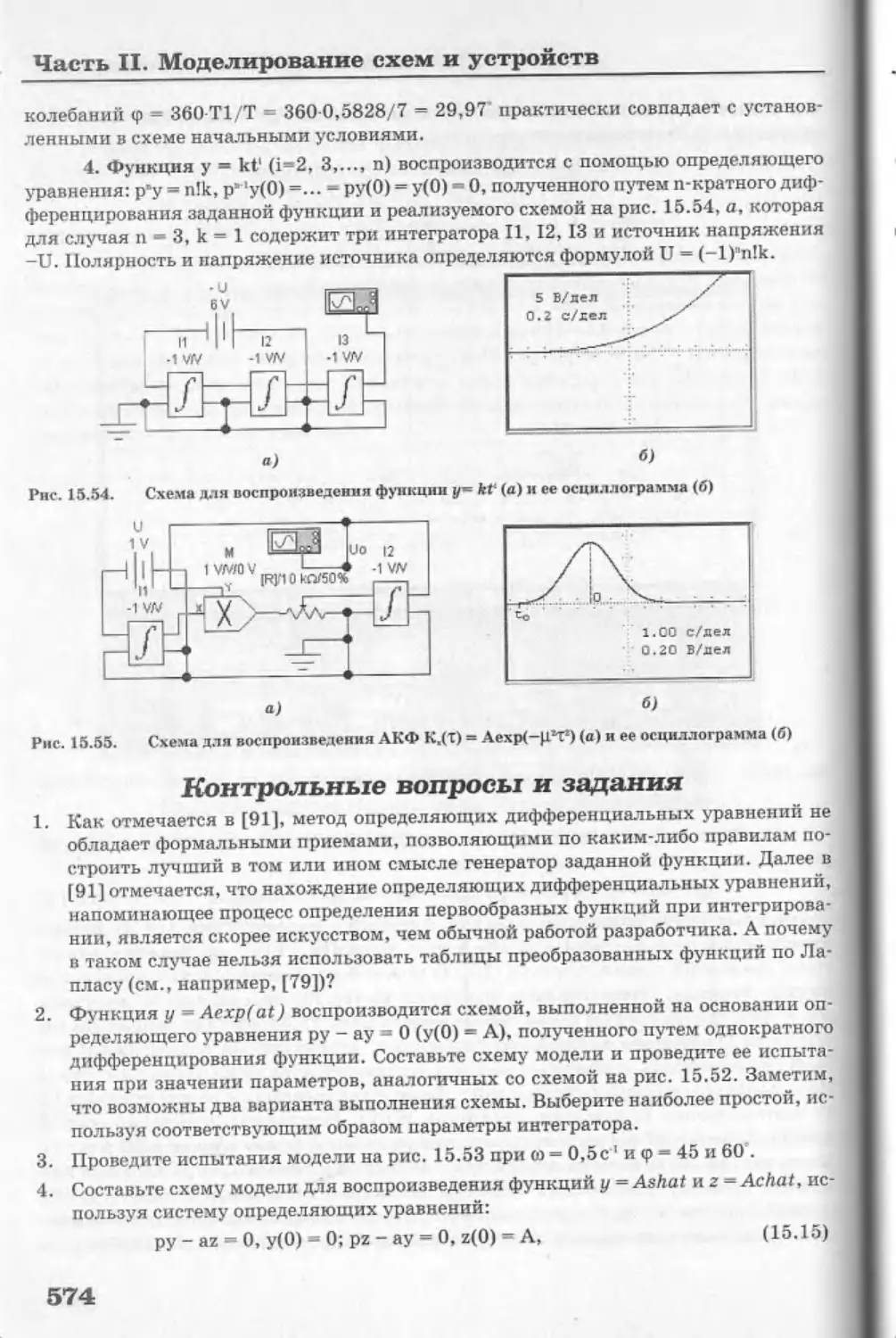
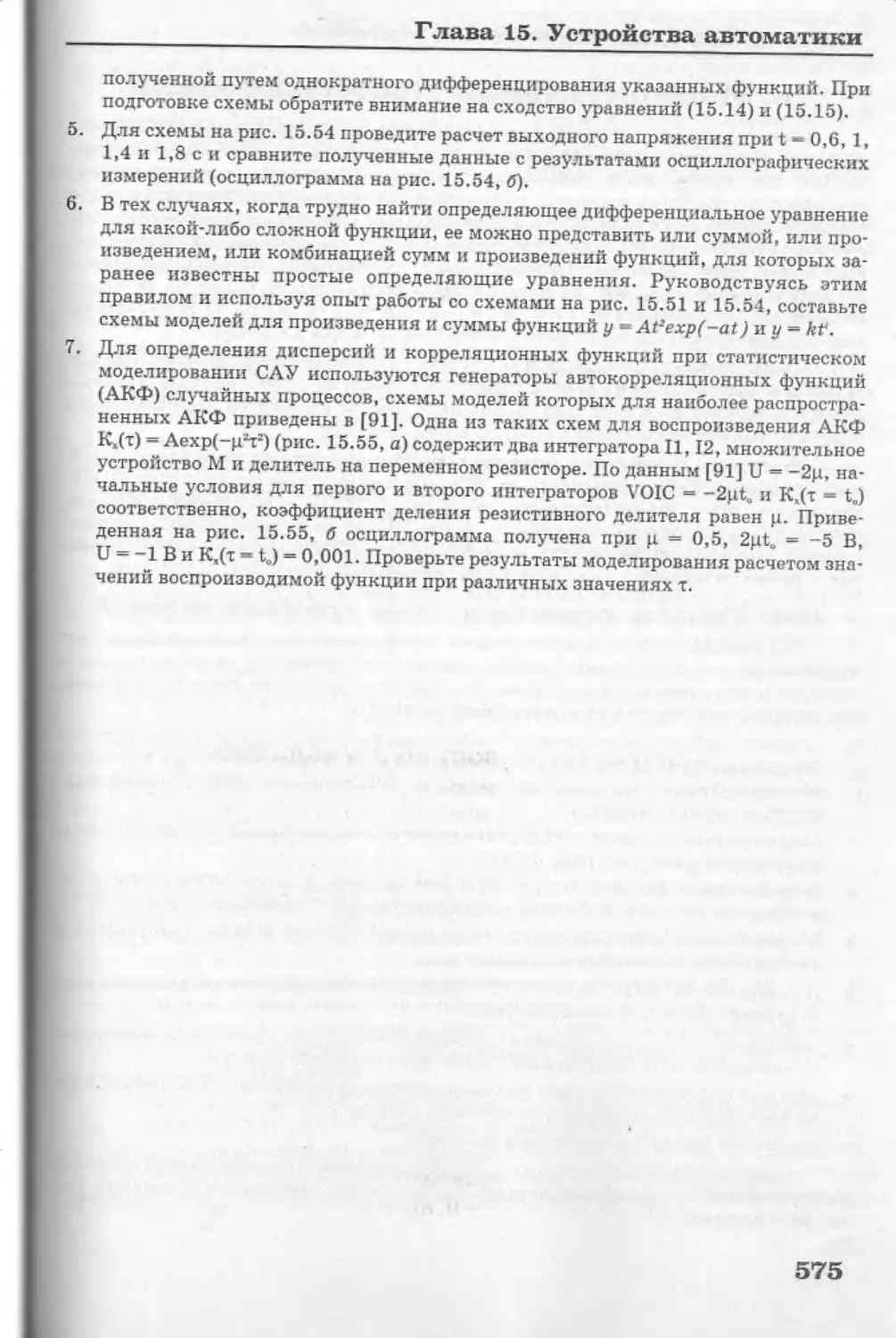
Текст
Василий Иванович Карлащук
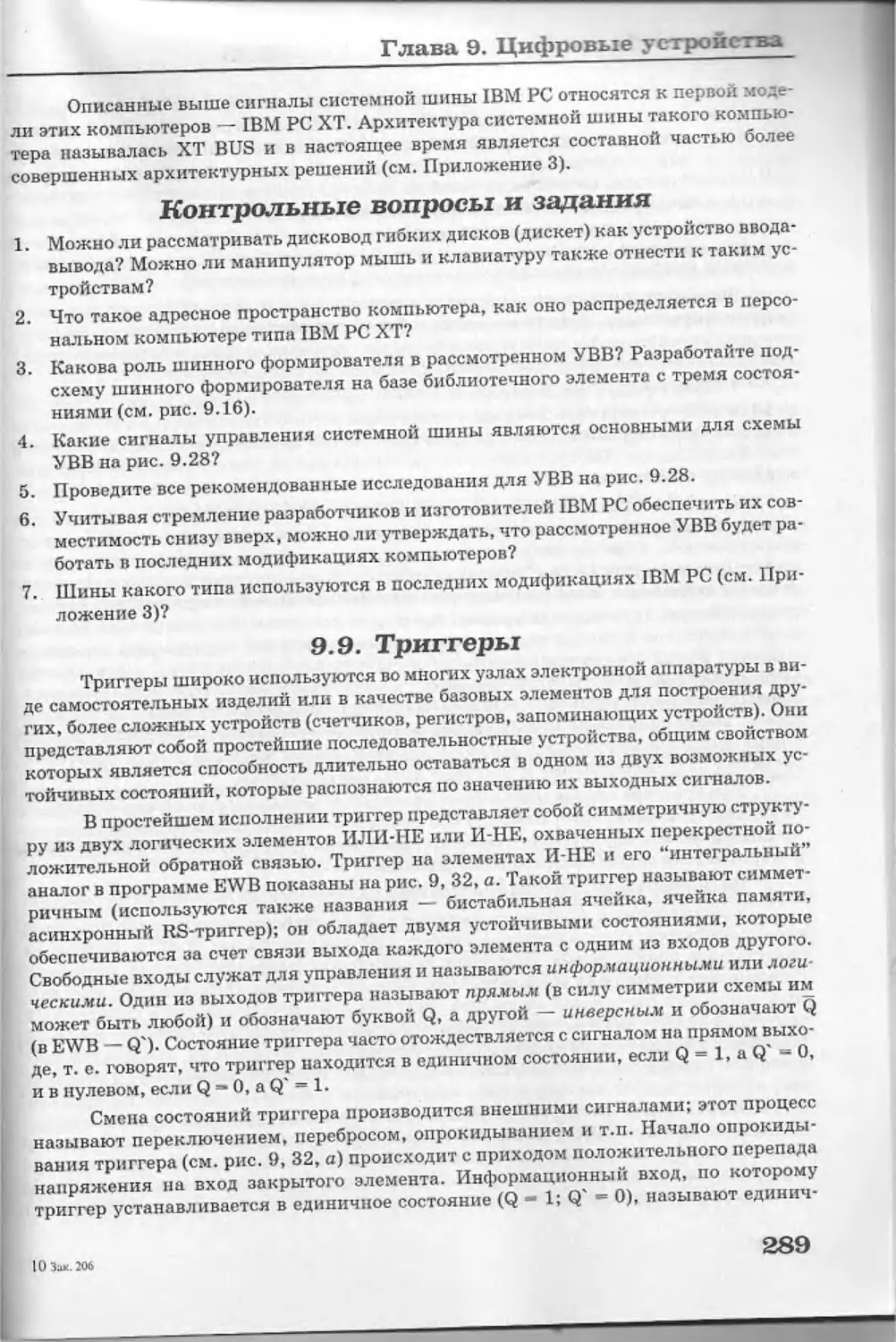
Электронная лаборатория
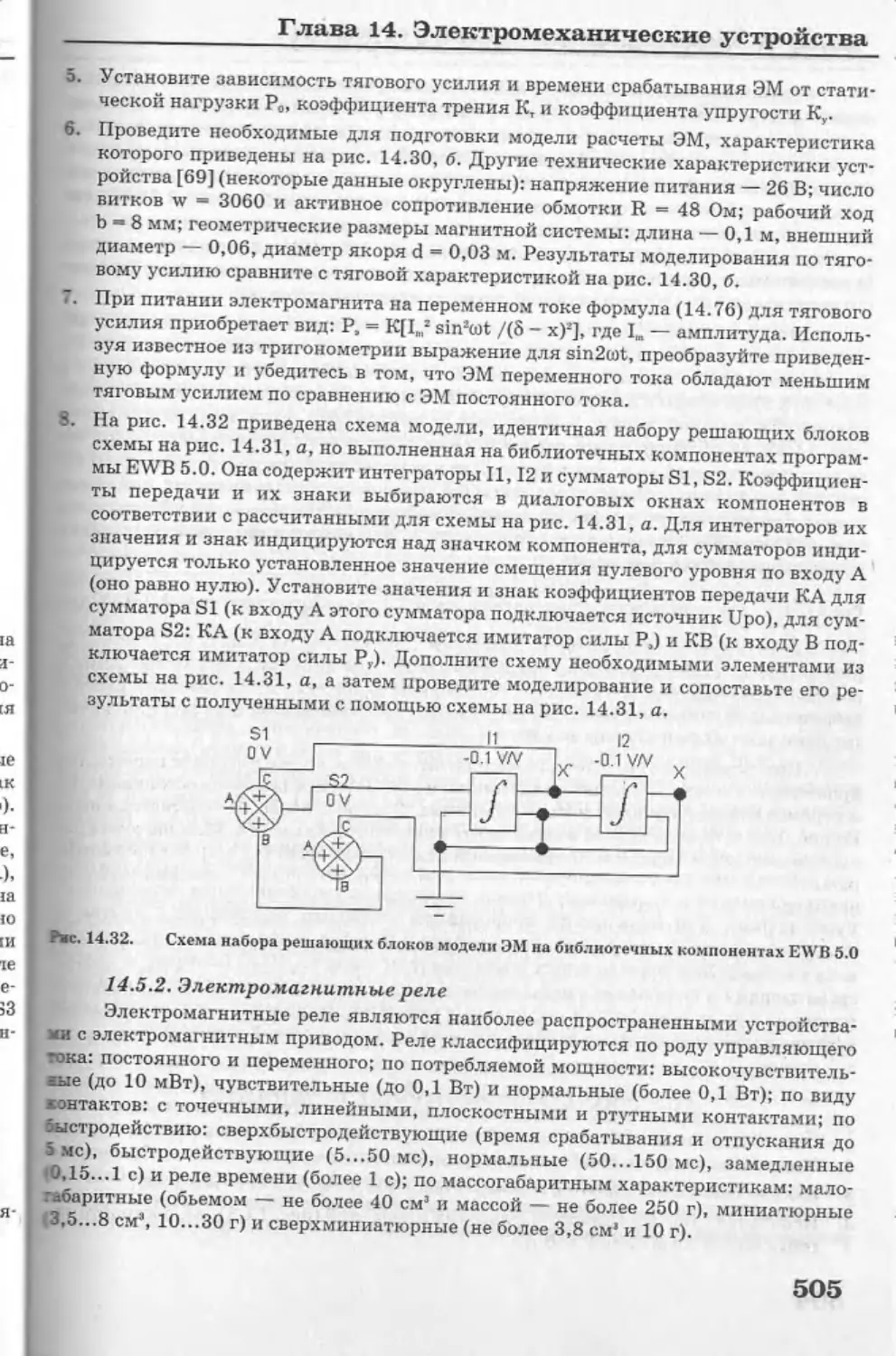
на IBM PC
Программа Electronics Workbench и
ее применение
издание 2-е,
дополненное и переработанное
“СОЛОН-Р”
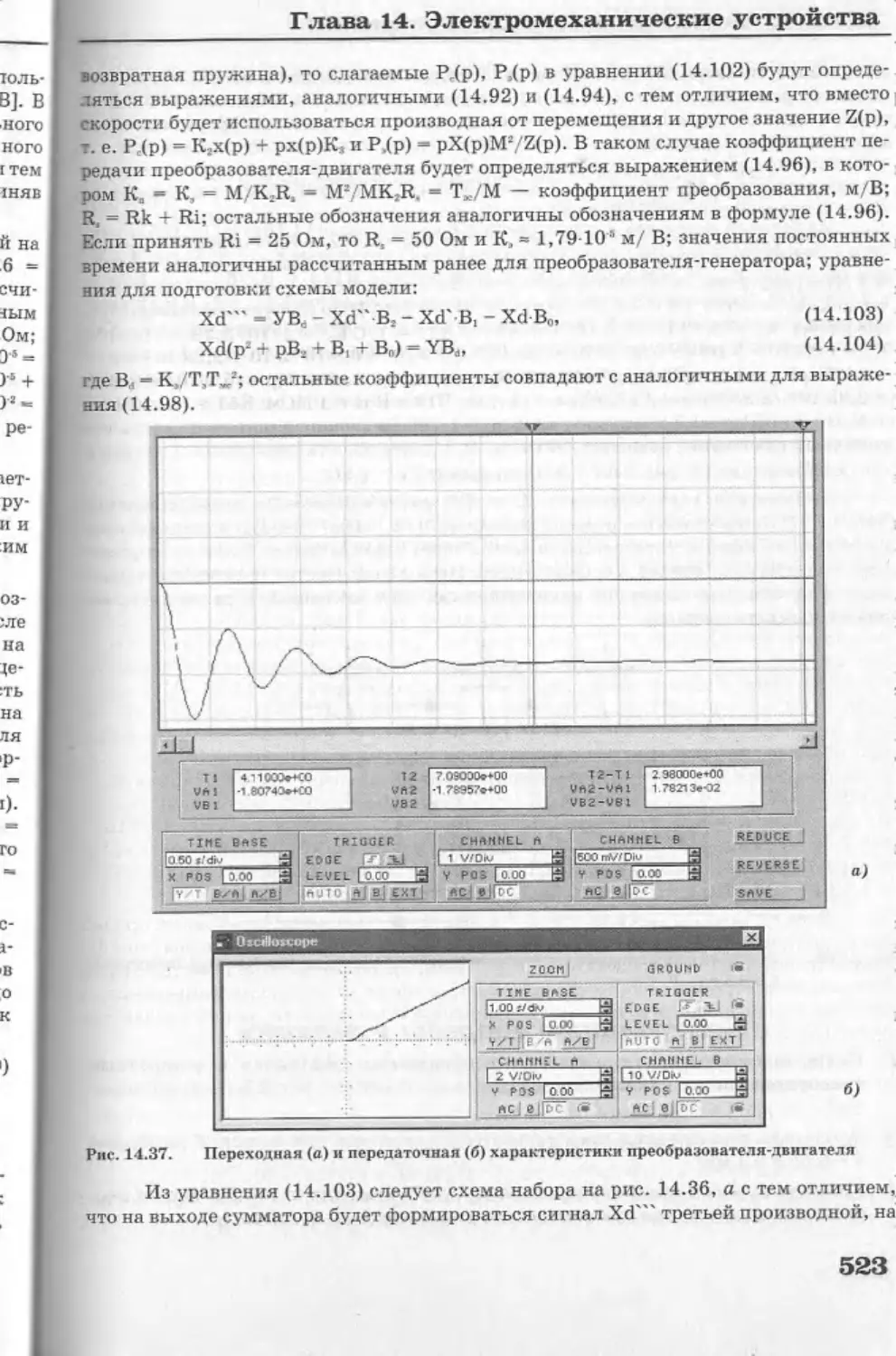
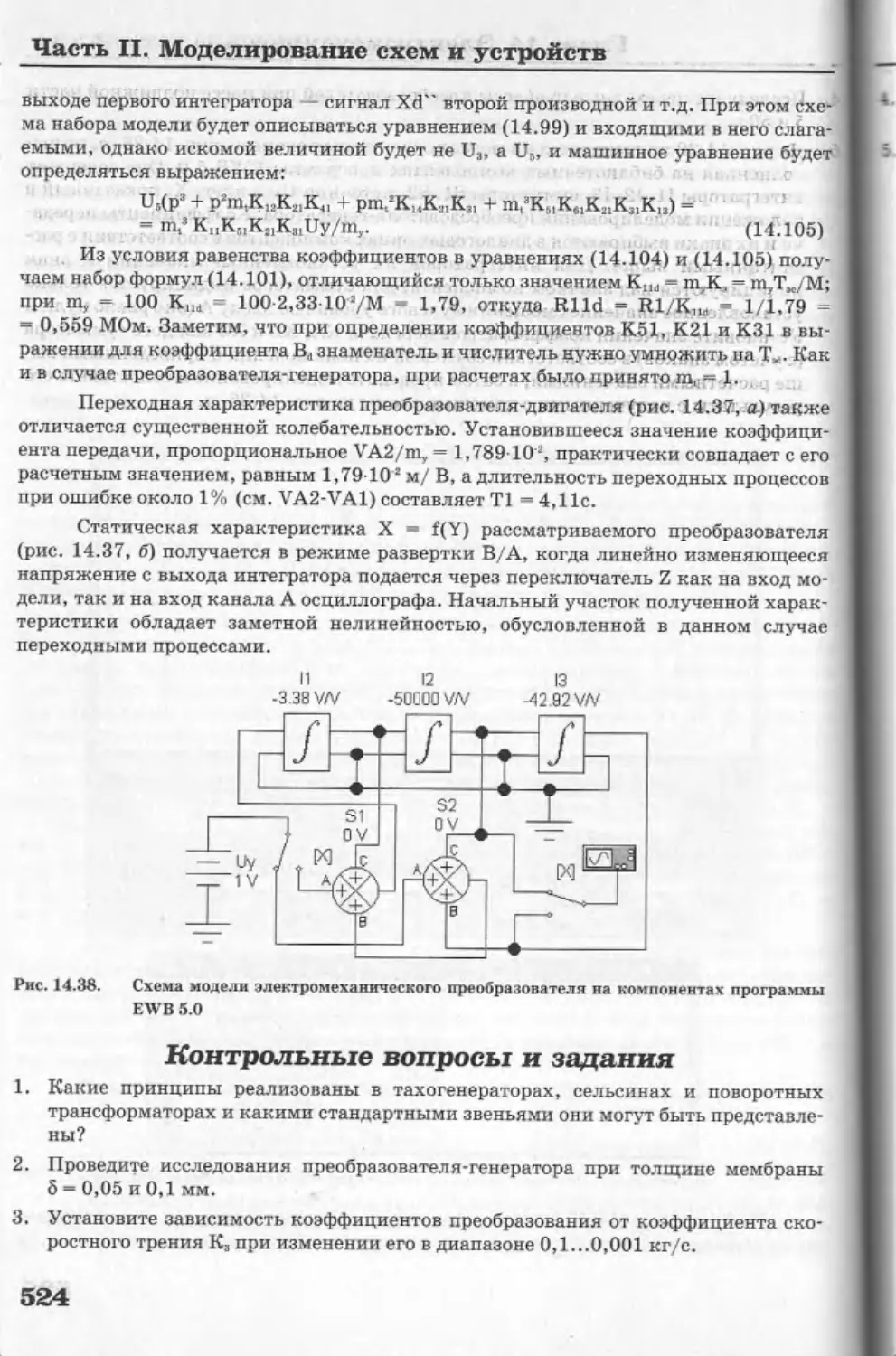
Москва 2001
Василий Иванович Карлащук
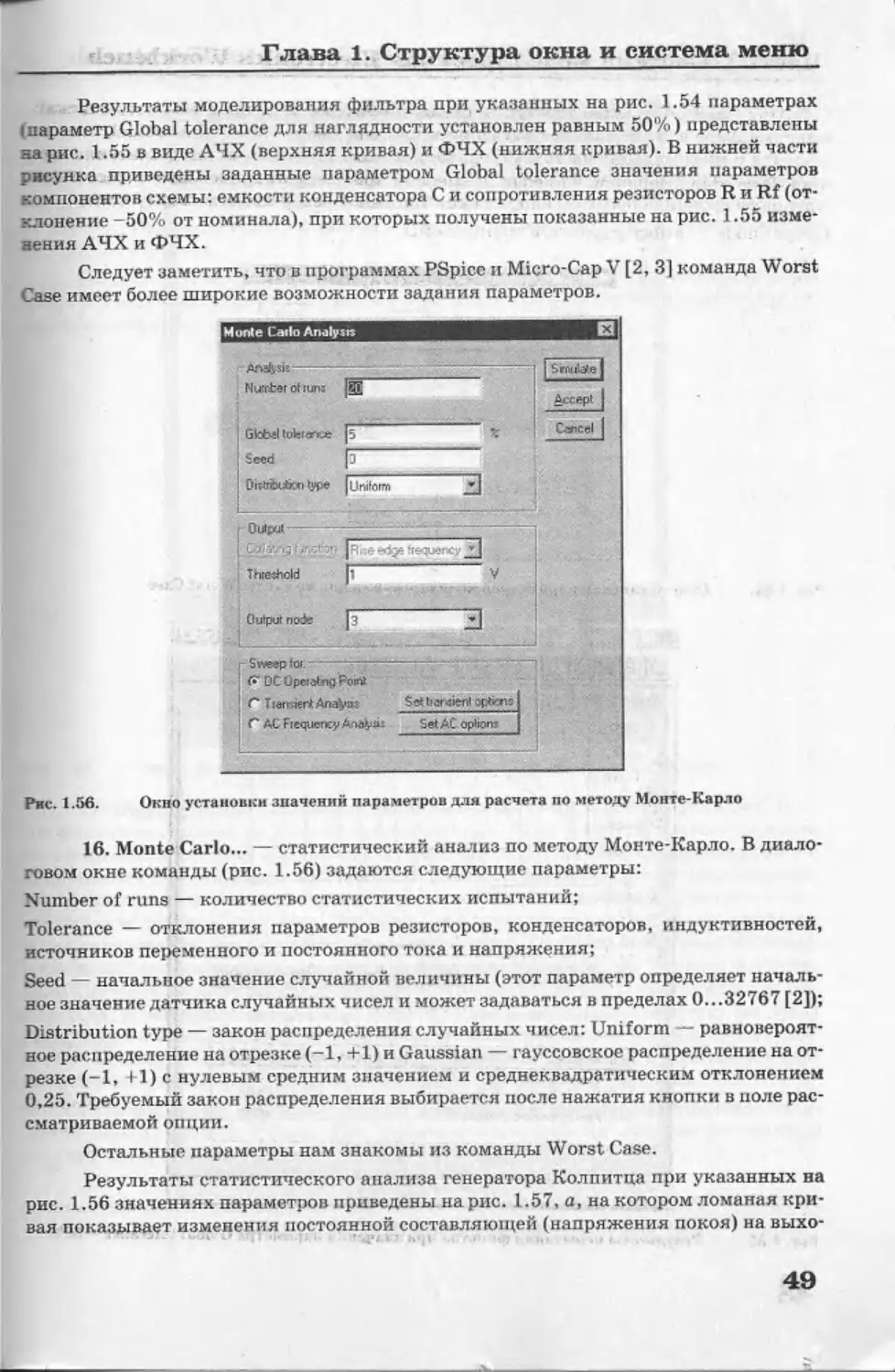
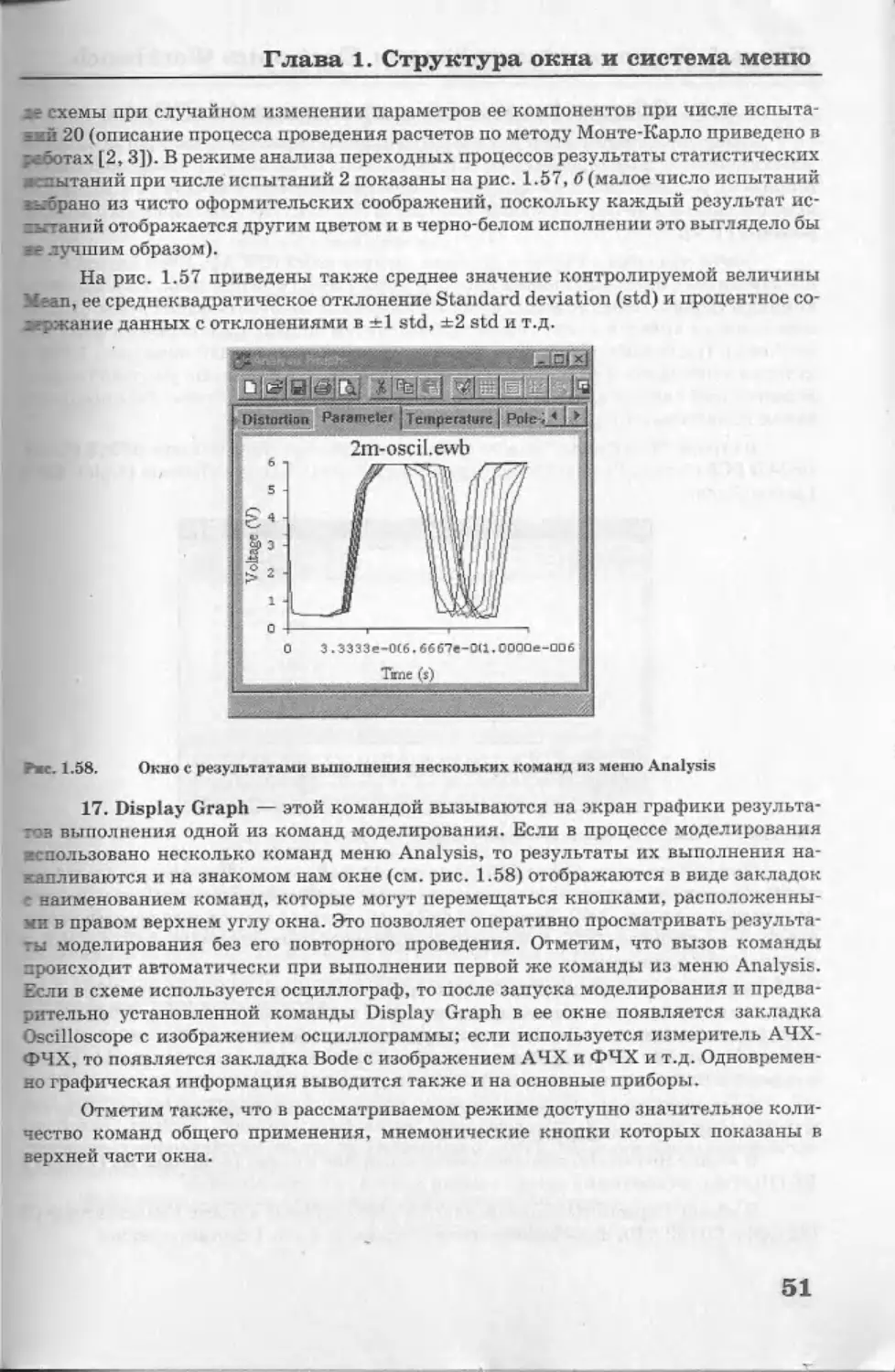
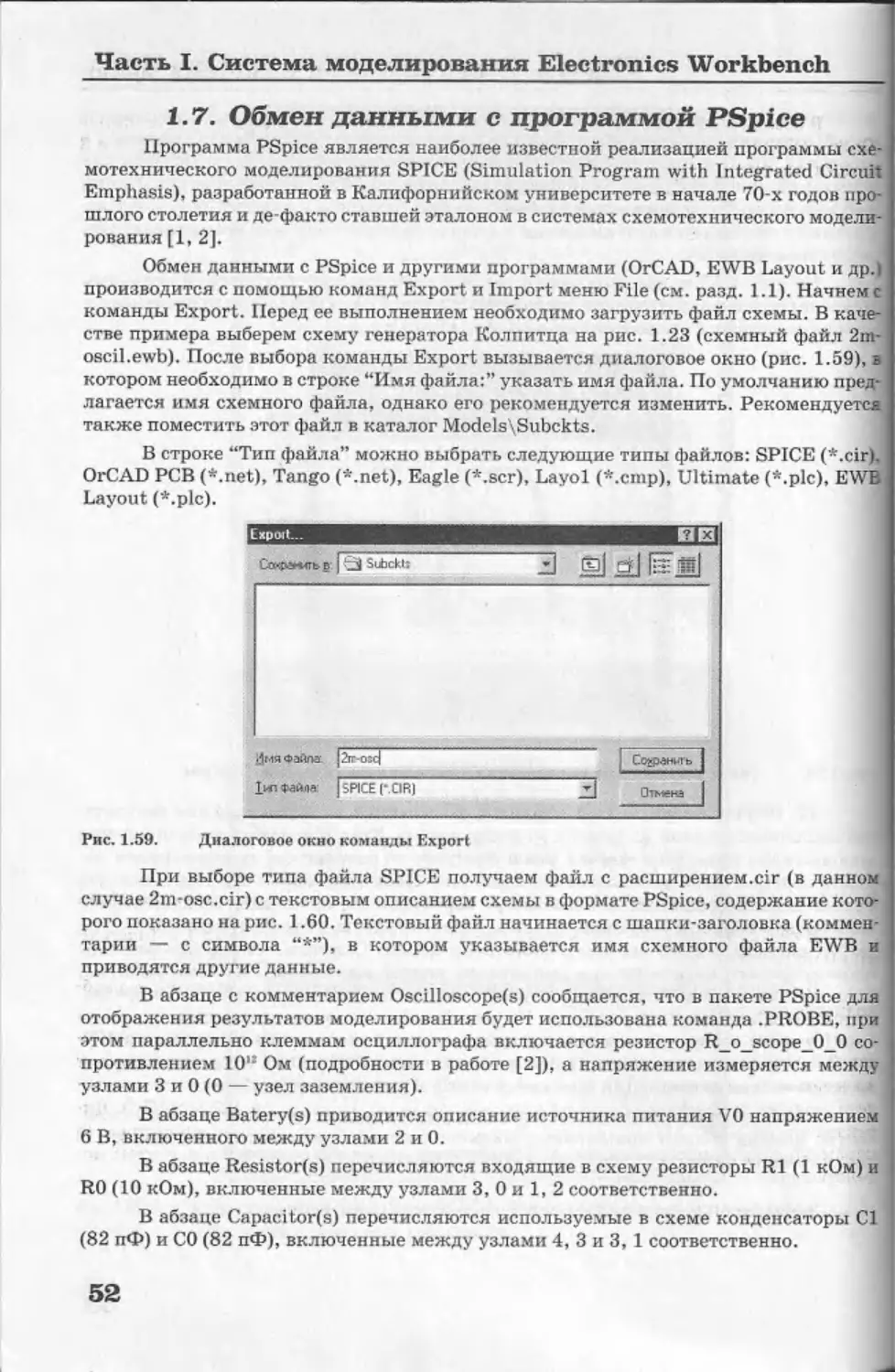
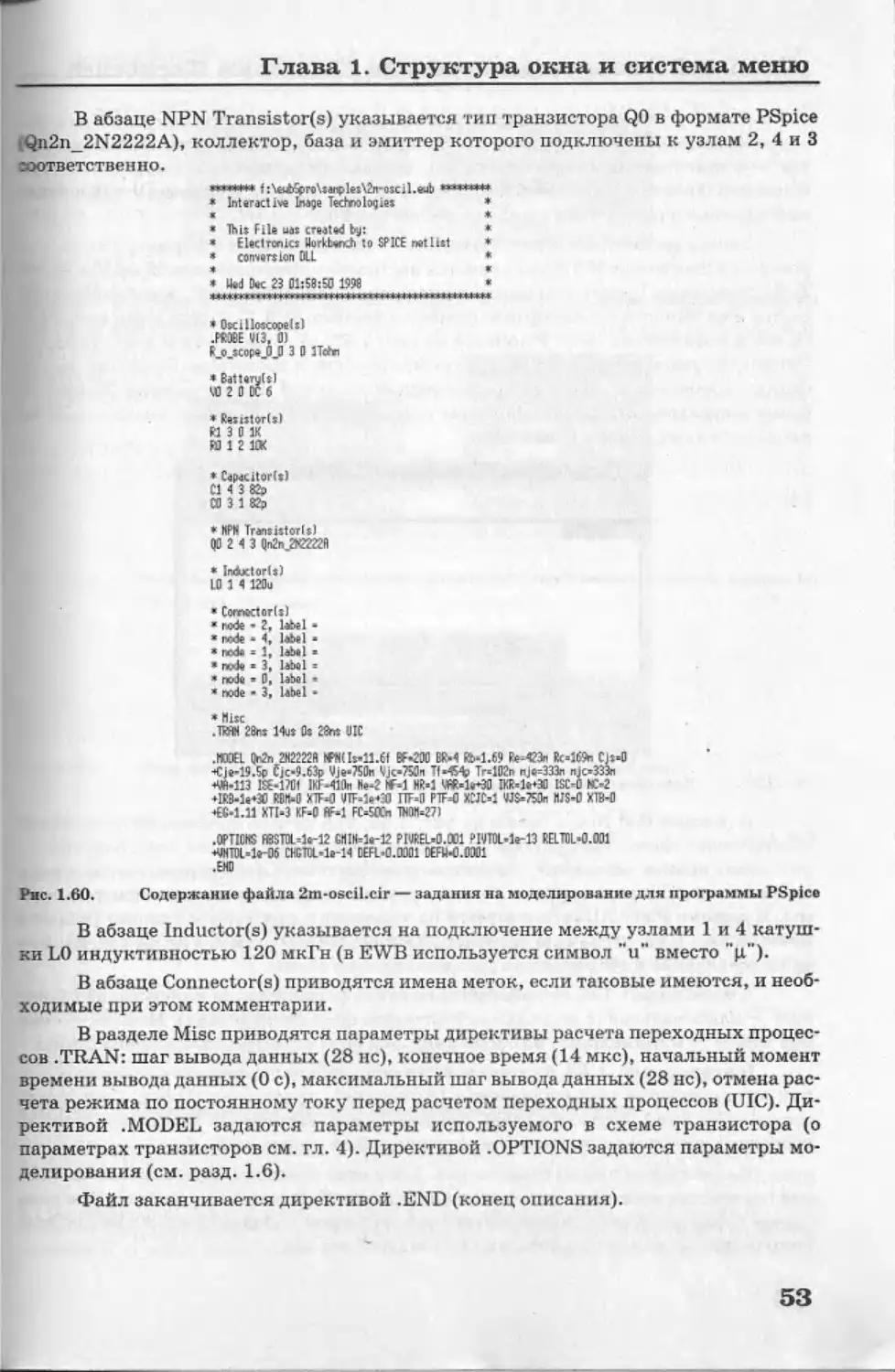
Электронная лаборатория на IBM PC
Программа Electronics Workbench и ее применение
издание 2-е, дополненное и переработанное
Книга посвящена применению программы Electronics Workbench фирмы
Interactive Image Technologies (Канада) для схемотехнического моделирования
аналоговых и цифровых радиоэлектронных устройств различного назначения,
представленных большим количеством практических схем, что делает книгу
своеобразным справочным пособием. Она может быть использована в техни-
ческих учебных заведениях при проведении лабораторных работ по основам
электротехники, электроники, вычислительной техники и автоматики. Книга
может быть также полезной для радиолюбителей, инженеров-разработчиков и
студентов вузов.
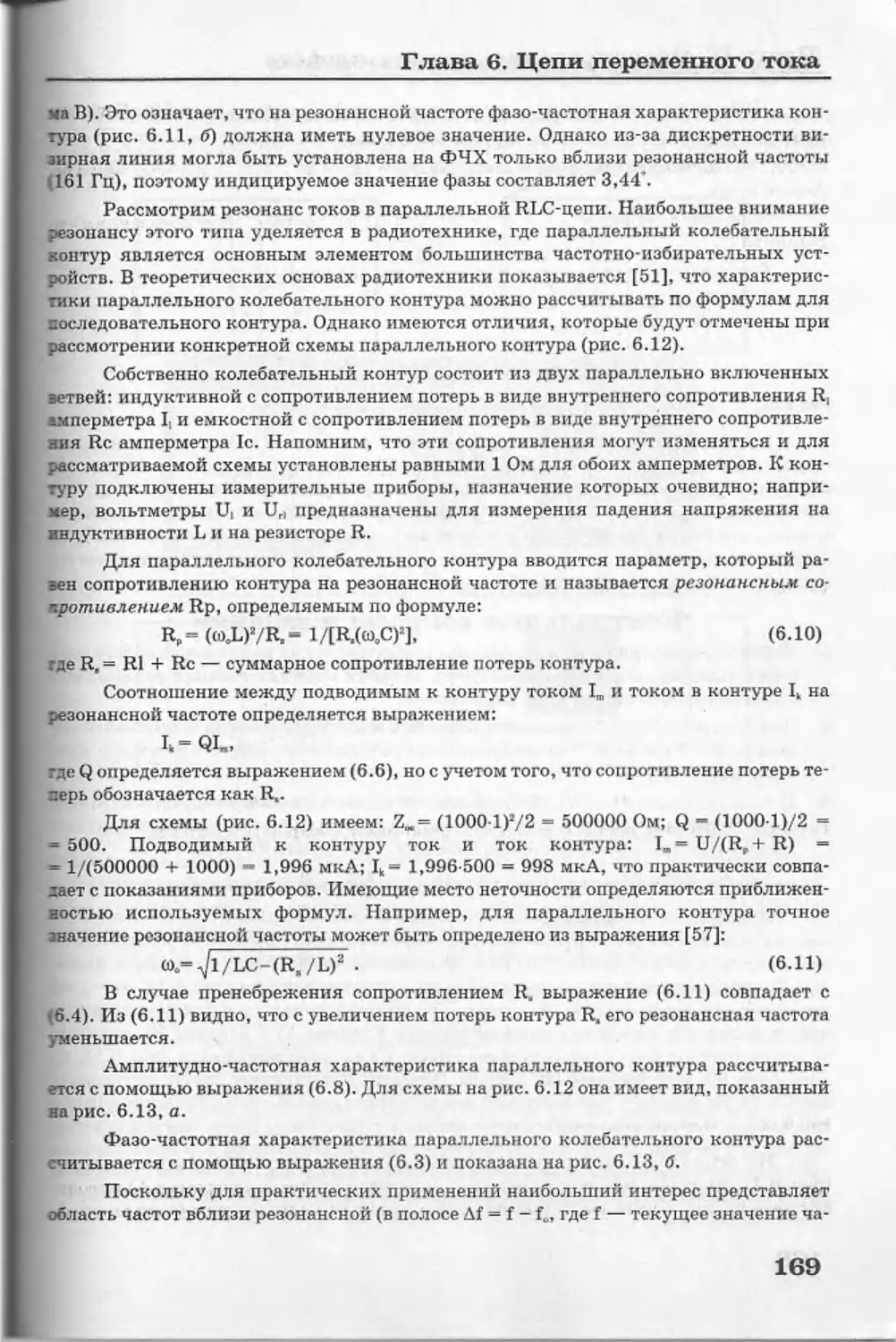
Во втором издании книги упорядочен иллюстративный материал с одно-
временным сокращением его малоинформативпой части. Вместе с тем для рас-
ширения возможностей книги как справочного руководства и лабораторного
практикума по различным направлениям радиоэлектроники и автоматики в нее
включены: дополнительные сведения по настройке программы в разичных ре-
жимах ее работы (гл. 1) и подготовке схем (гл. 2); краткие сведения по EWB вер-
сии 6.02 (Приложение 7); материалы по моделированию механических сил и
моментов (разд. 5.6), магнитных цепей (разд. 5.7), методов измерения частоты,
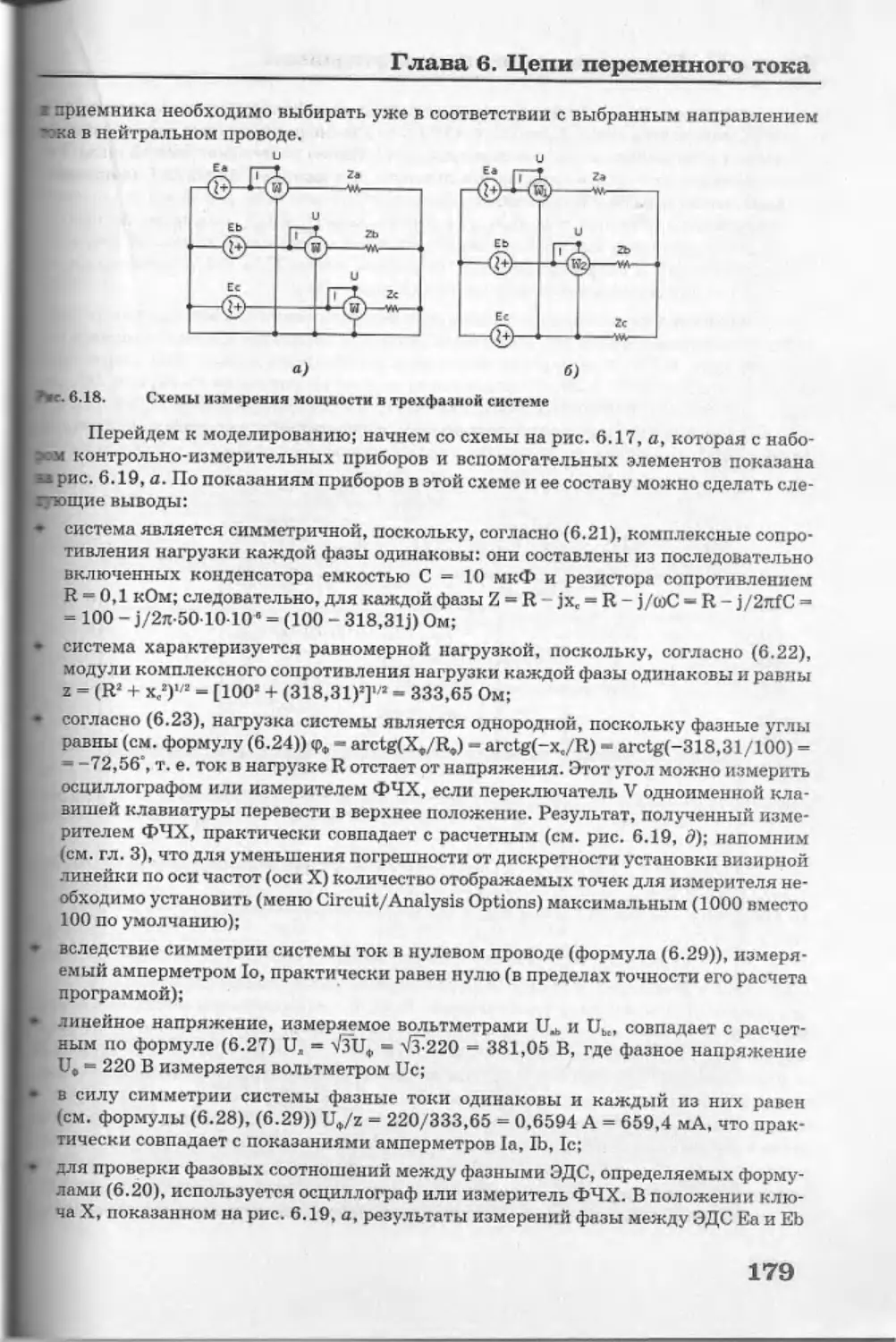
фазы и мощности переменного тока (разд. 6.5), многофазных цепей (разд. 6.6),
цепей с косинусоидальными токами (разд. 6.7) и распределенными параметрами
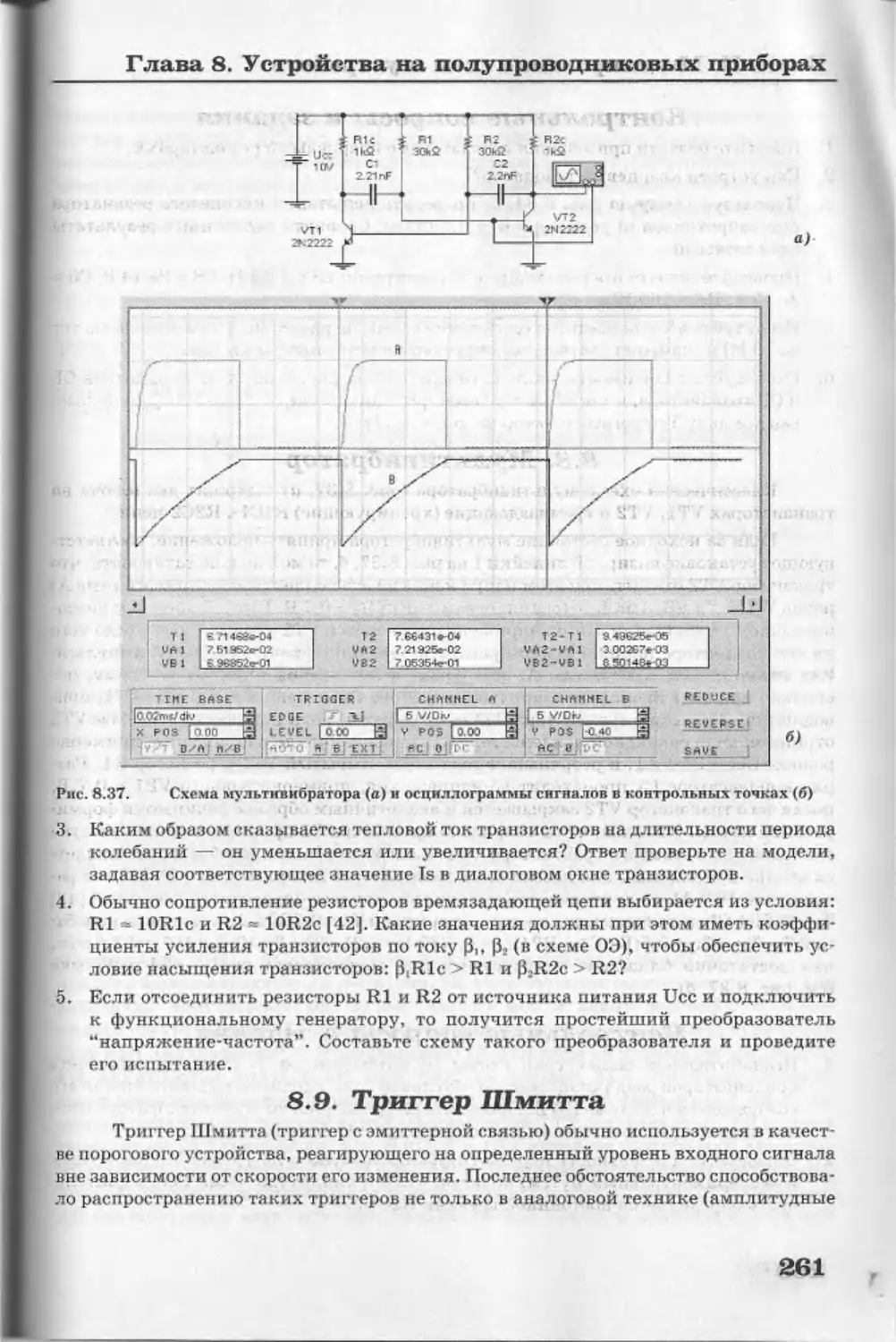
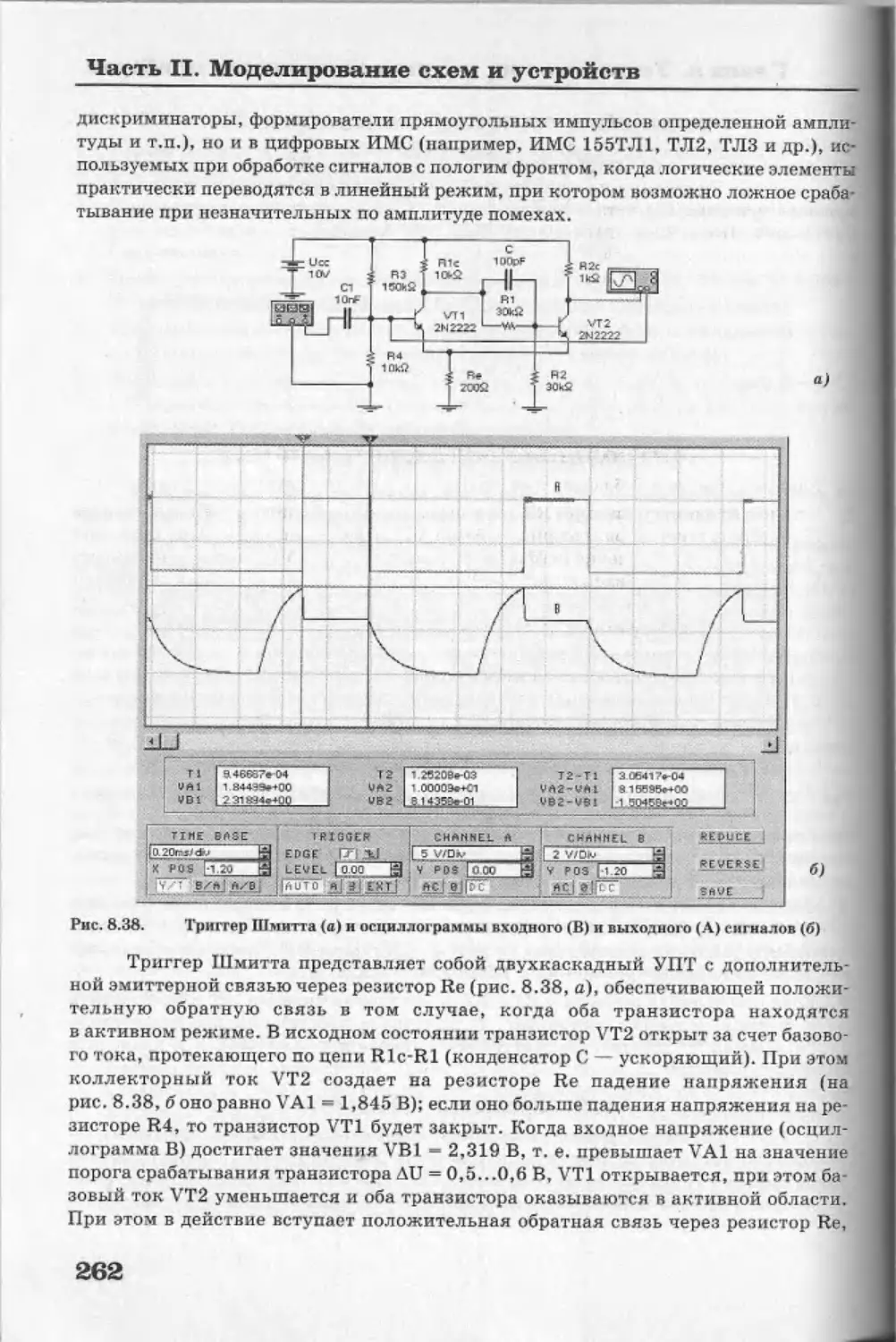
(разд. 6.8), переходных процессов (разд. 6.9), импульсных устройств на транзис-
торах (разд. 8.8 и 8.9), усилителей типа МДМ (разд. 10.16), аналоговых ключей
на ОУ (разд. 10.17), импульсных устройств на ОУ (разд. 10.18, 10Д9, 10.20),
АЦП уравновешивающего типа (разд. 11.7), тиристорных источников с фазо-
вым управлением (разд. 12.7), цифровых систем управления (разд. 15.6), фор-
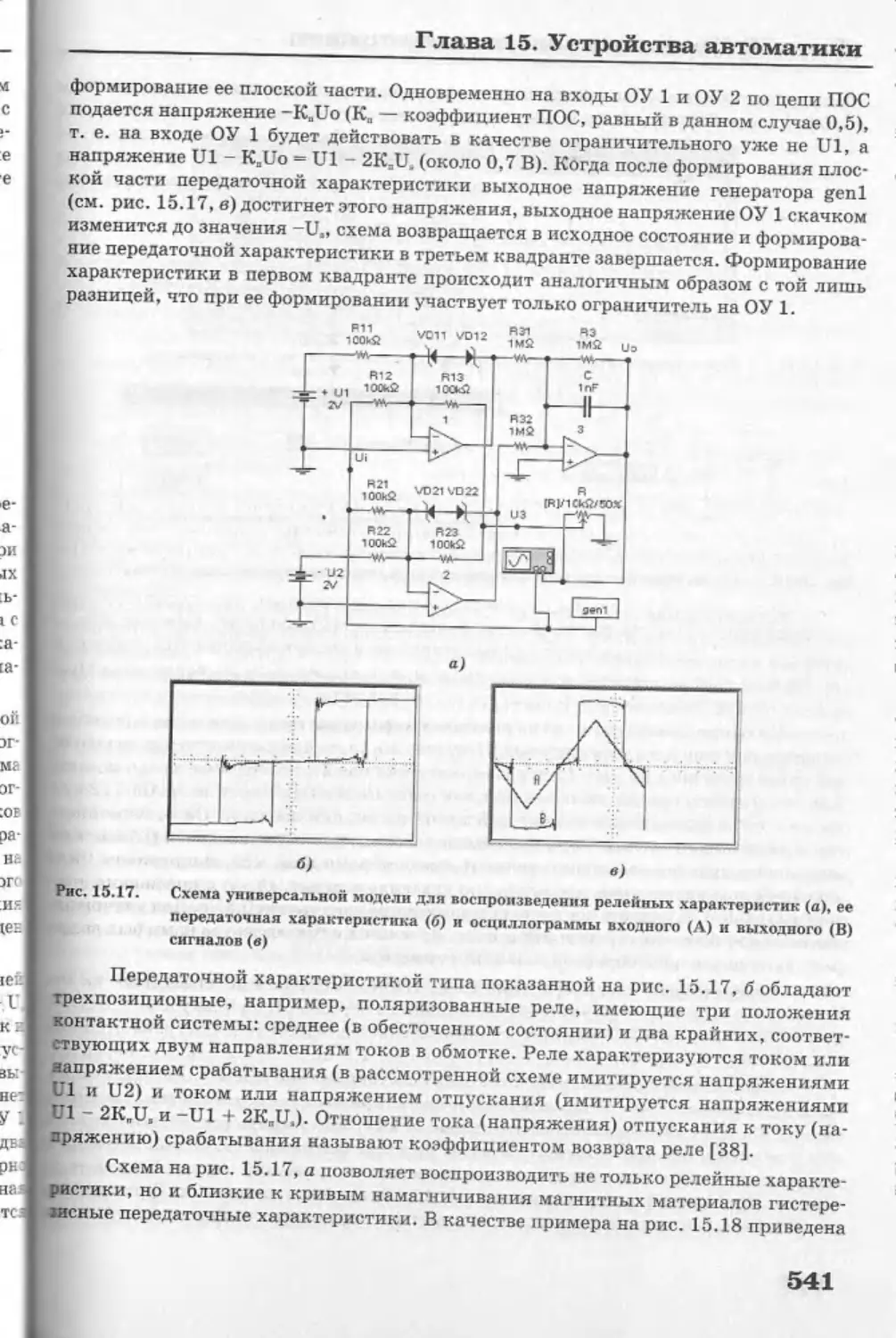
мирователей управляющих и возмущающих воздействий (разд. 15.7),
элементов и устройств автоматизированного электропривода (гл. 14), измери-
тельных преобразователей для информационно-измерительных и автоматизи-
рованных систем управления (гл. 14, 16), дополнительных схем по триггерам,
счетчикам (разд. 9.9 и 9.10), активным фильтрам (разд. 10.5), модуляторам и
детекторам (разд. 13.5, 13.6).
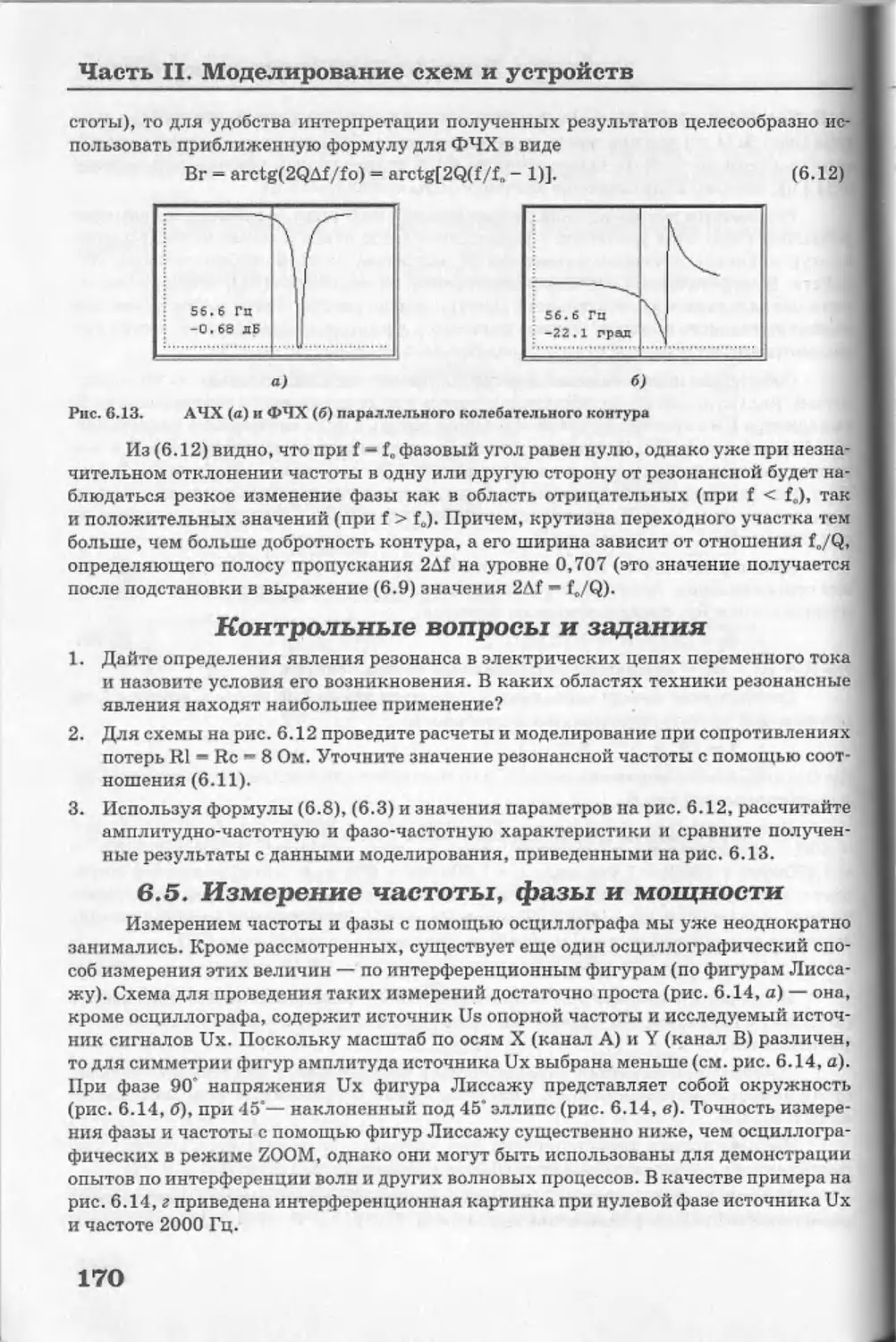
Ответственный за выпуск С. Иванов .
Редактор В. Разсвиг
Верстка Н. Бармина
Обложка Е. Жбанов
ISBN 5-93455-083-7
© “СОЛОН-Р” 2001
© Карлащук В. И.
Введение
Посвящается внуку Владиславу
Введение
Разработка любого радиоэлектронного устройства сопровождается физичес-
ким или математическим моделированием. Физическое моделирование связано с
большими материальными затратами, поскольку требуется изготовление макетов и
их трудоемкое исследование. Часто физическое моделирование просто невозможно
из-за чрезвычайной сложности устройства, например, при разработке больших и
сверхбольших интегральных микросхем. В этом случае прибегают к математическо-
му моделированию с использованием средств и методов вычислительной техники.
Например, известный макет Р-CAD [1] содержит блок логического моделирования
цифровых устройств, однако для начинающих, в том числе и для студентов, он пред-
ставляет значительные трудности в освоении. Не меньшие трудности встречаются и
при использовании системы DesignLab [1, 2]. Как показал анализ состояния про-
граммного обеспечения по схемотехническому моделированию, на этапе начального
освоения методов автоматизированного проектирования и на этапах проведения
поисково-исследовательских работ целесообразно рассмотреть возможность исполь-
зования следующих программ [3]:
Micro-Cap V — разработка фирмы Spectrum Software (www.spectrum-
soft.com), выпускается для платформ IBM, NEC и Macintosh. В версиях для IBM и
NEC PC требуется процессор не ниже 80386 с сопроцессором, 15 Мбайт свободного
пространства на жестком диске, Windows З.хх или выше. Имеется библиотека моде-
лей 10 тыс. электрорадиоэлементов ведущих фирм Японии, Европы и США. Про-
грамма позволяет:
4- создать принципиальную электрическую схему устройства и отредактировать ее;
♦ провести расчет статического режима по постоянному току;
♦ рассчитать частотные характеристики и переходшые процессы;
♦ провести оценку уровня внутреннего шума и предельной чувствительности;
♦ провести многовариантный анализ, включая статистический анализ по методу
Монте-Карло;
♦ наращивать библиотеку компонентов;
♦ представлять данные в форме, удобной для интерпретации и дальнейшего анализа;
♦ реализовать другие сервисные функции, типичные для такого класса программ.
Недавно вышедшая версия 6.0 программы обладает еще более широкими воз-
можностями по синтезу аналоговых схем, по составу библиотечных компонентов, по
быстродействию, точности и др. [68].
DesignLab 8.0 — интегрированный пакет корпорации MicroSim
(www.orcad.com), в состав которого входит известная программа моделирования
PSpice. Этот пакет позволяет проводить сквозное проектирование радиоэлектронных
устройств: от ввода принципиальной схемы, ее моделирования до создания управля-
ющих файлов для программаторов, разработки печатных плат и управляющих про-
грамм для сверлильных станков и вывода данных на графопостроитель.
Aplac 7.0 — пакет с типичным набором возможностей, перечисленных выше
(www.aplac.hut.fi/aplac). Программа позволяет также моделировать устройства
СВЧ-диапазона, в частности, она содержит подпрограмму расчета трехмерных элек-
3
Введение
, тромагнитных полей микроподосковых конструкций и других устройств СВЧ-уех-
никш Программа позволяет вводить и выводить данные с.помощью интерфейсных
плат стандарта IEEE-488.
• ’ System View 1.9 — программа фирмы Elanix (www.elanix.com), содержит ти-
пичный набор функций для схемотехнического моделирования, а также богатый.ма-
тематичес^цй. аппарат для обработки полученных результатов. Программа
позволяет моделировать устройства на уровне функциональных устройств.
Electronics Workbench (EWE) — разработка фирмы Interactive Image
Technologies (www.interactiv.com). Особенностью программы EWB является нали-
чие контрольно-измерительных приборов, по внешнему виду, органам управления и
.характеристикам максимально приближенных к их промышленным аналогам, что
способствует приобретению практических навыков работы с наиболее распростра-
ненными приборами: мультиметром, осциллографом, измерительным генератором
и др. Программа легко осваивается и достаточно удобна в работе. После составления
схемы и ее упрощения путем оформления подсхем моделирование начинается щелч-
ком обычного выключателя.
К перечисленным программам следует добавить также -программу
CfrcuitMakcr 6.0 фирмы MicroCode Engineering (www.microcode.com); содержащую
обширную библиотеку моделей промышленных изделий электронных компонентов с
возможностью оперативного просмотра их основных характеристик (Например, для
транвиСтора — это тип корпуса, максимальное напряжение, ток, частота, фйрма-из-
готовйтель и др.). Программа позволяет достаточно оперативно подготавливать элек-
трические схемы аналоговых, цифровых или смешанных аналого-цифровых
устройств и проводить их моделирование с получением результатов в виде осцилло-
грамм сигналов и графиков частотных характеристик; возможно получение точных
отсчетов с помощью вертикальных и горизонтальных визирных линий; позволяет
, контролировать режим по постоянному току в выбранных точках схемы. Отличи-
, тельной особенностью программы является наличие анимационных компонентов (за-
пуск ракеты, старт автомобилей), призванных имитировать конечный результат
работы схемы, а также наличие учебного пособия в демонстрационном режиме. Она
интегрируется с программой разработки печатных пла^ TraxMaker. Имеются ком-
мерческие и студенческие версии.
Поскольку книга имеет учебный характер, в качестве основного инструмента-
рия автором выбрана программа Electronics Workbench (EWB) как отличающаяся
самым простым и легко осваиваемым пользовательским интерфейсом. Опыт исполь-
зования глав 9,10, 11,14, 15, 16 и некоторых разделов из других глав книги в каче-
стве лабораторного практикума по курсам “Технические средства систем
‘ управления” и “Электромеханические системы”, читаемым автором в Российском
университете дружбы народов (РУДН), подтвердил правильность такого выбора.
'Кроме того, в Канаде и США издано более десятка учебных ггособийна базе этой про-
‘ граммы.’ Необходимо также отметить-, что как учебная программа EWB обладает
! Весьма важным достоинством (по сравнению с обучающими программами с жестким
алгоритмом), которое заключается в развитии творческого начала учащегося: он мо-
•• жет не только выполнять задания преподавателя, но и имеет возможность предло-
жить и апробировать свои технические решения, а это уже творчество, которое
превращает учебный процесс в увлекательное занятие. Отметим также, что с наряду
. , с высоким обучающим эффектом применение моделирующих программ позволяет
} решить одновременно и такие проблемы как экономия материальных и.финансовых
..-„средств, затрачиваемых да лабораторное оборудование и его обслуживание; значи-
4
Введение
тельное сокращение времени на подготовку и проведение лабораторных работ; про-
ведение экспериментов, недоступных на обычном лабораторном оборудовании; при-
обретение навыков и приемов автоматизированного проектирования; возможность
включения отдельных фрагментов лабораторного практикума в перечень домашних
• заданий (с учетом возрастающей с каждым днем доступности ПК) и т.п.
Учитывая легкость освоения программы, следует отметить, что она и, соответ-
ственно, книга по ее применению будут полезны не только студентам и учащимся,
но и разработчикам разнообразной аппаратуры — специалистам по схемотехнике,
не имеющим специальной подготовки по автоматизированным системам проектиро-
вания. Кроме того, книга может быть использована в качестве “живого” справочни-
ка по разнообразным радиоэлектронным схемам (естественно, при наличии
компьютера и самой программы).
Книга состоит из трех частей.
Первая часть посвящена описанию программы EWB версии 4.1, наиболее попу-
лярной и доступной, и последней версии 5.0. Первая часть содержит четыре главы.
Глава 1 дает представление о меню, выполненном в стандартной для Windows
манере. В главе описаны команды по подготовке схем, их конвертированию в другие
системы моделирования и созданию макросов (в других программах для этого требу-
ется знание специального языка), команды, задающие режим моделирования, копи-
рования элементов схем, команды экрана, а также, начиная с версии 5.0, —
команды по проведению многовариантного анализа, статистического анализа, Фу-
рье-анализа и др. Изложение иллюстрируется примерами использования команд.
В главе 2 приводится описание технологии подготовки схем и краткое описа-
ние состава библиотечных компонентов (более подробное описание дается в других
главах по мере использования отдельных компонентов в конкретных схемах).
В главе 3 приводится подробное описание семи контрольно-измерительных
приборов. Особенностью этого набора являются сходство по внешнему виду и харак-
теристикам с промышленными аналогами и простота применения, что создает ил-
люзию реальности и порождает чувства, характерные для радиолюбительского
творчества.
В главе 4 приведены сведения по элементной базе, используемой в радиоэлек-
тронной аппаратуре, а также результаты измерения характеристик моделей библио-
течных компонентов и их сопоставление с характеристиками реальных компонентов.
Вторая часть книги посвящена расчету и моделированию типовых электрон-
ных схем и электромеханических устройств. Ее материалы могут быть использова-
ны при проведении лабораторных работ по электротехнике, радиотехнике,
вычислительной технике, автоматике и другим предметам радиотехнического про-
филя. При подготовке к лабораторным работам, а также для закрепления материа-
ла могут быть использованы контрольные вопросы и задания в конце каждого
раздела. По сравнению с традиционными методами проведения лабораторных работ
использование EWB позволяет (повторяясь из-за злободневности темы) значительно
сократить время на подготовку и проведение таких работ при существенной эконо-
мии средств за счет многопрофильного использования ПК вместо дорогостоящего
лабораторного оборудования.
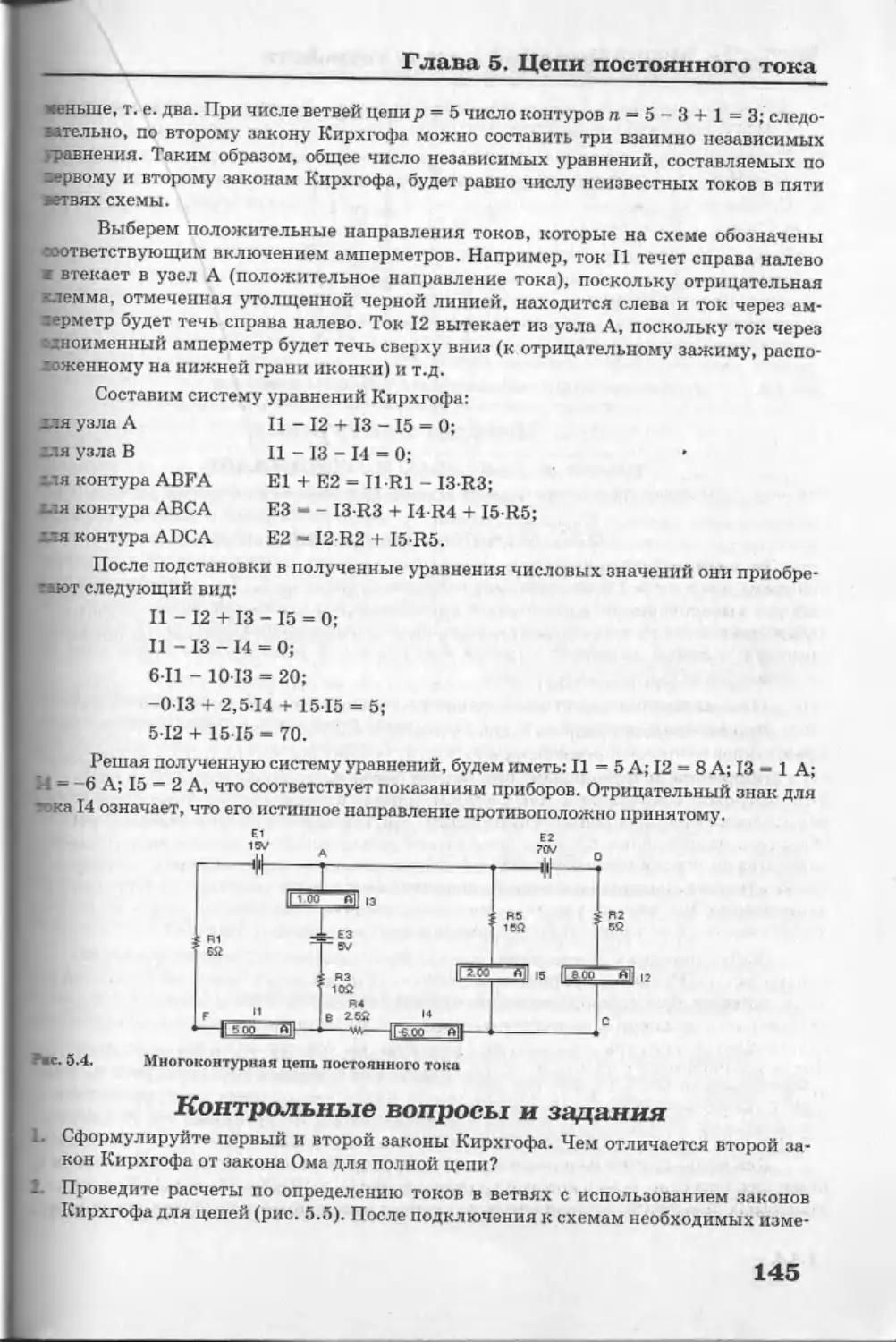
Главы 5 и б предназначены в основном для изучающих теоретические основы
электротехники. За основу приняты упражнения и задачи из различных сборников (в
основном из сборника М. Р. Шебеса [35]), которые иллюстрируются результатами мо-
5
Введение
дслирования. Процесс моделирования облегчается за счет возможности использова-
ния, кроме основных приборов, в неограниченном количестве амперметров и вольтме-
тров с цифровым отсчетом и разнообразных моделей источников тока и напряжения.
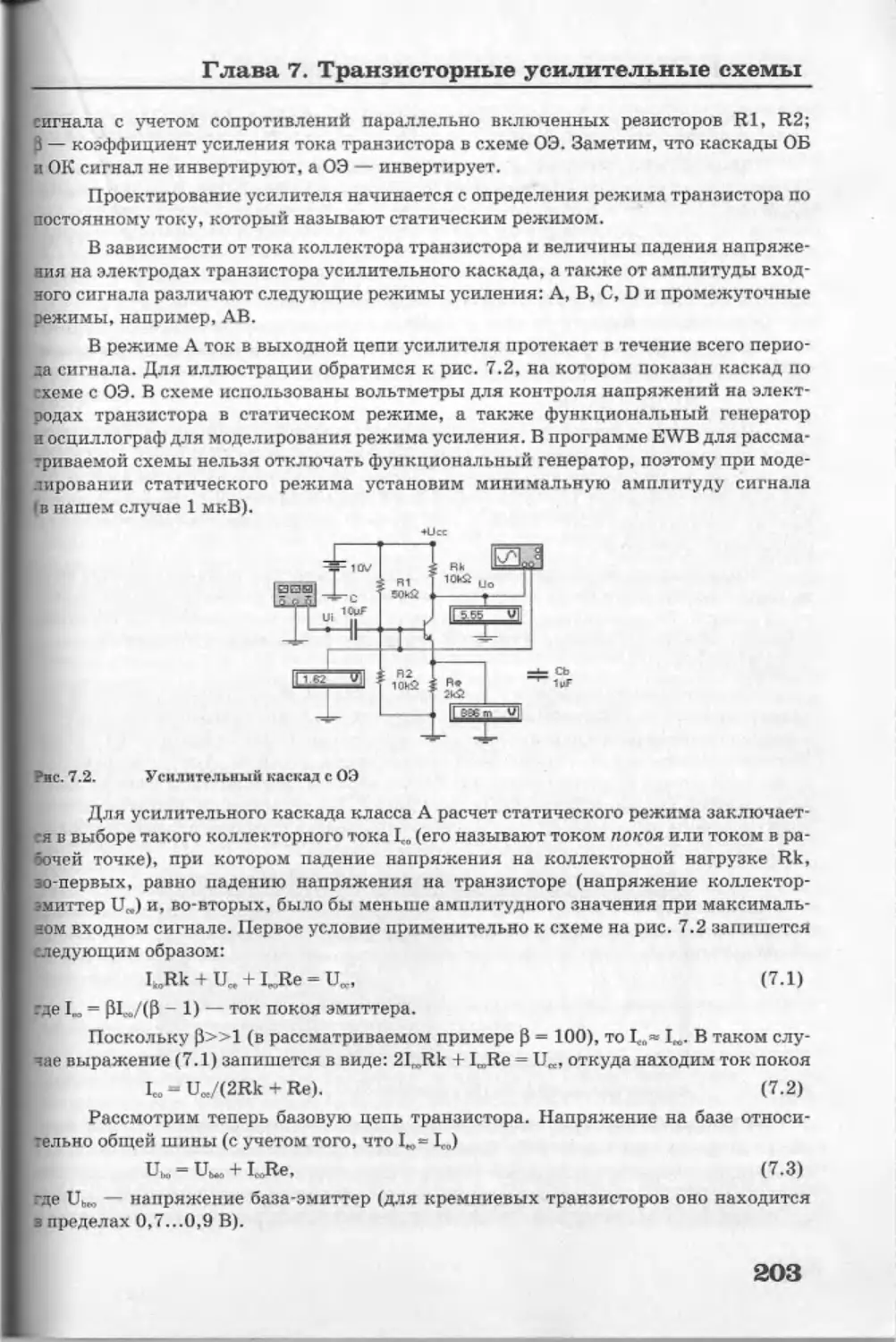
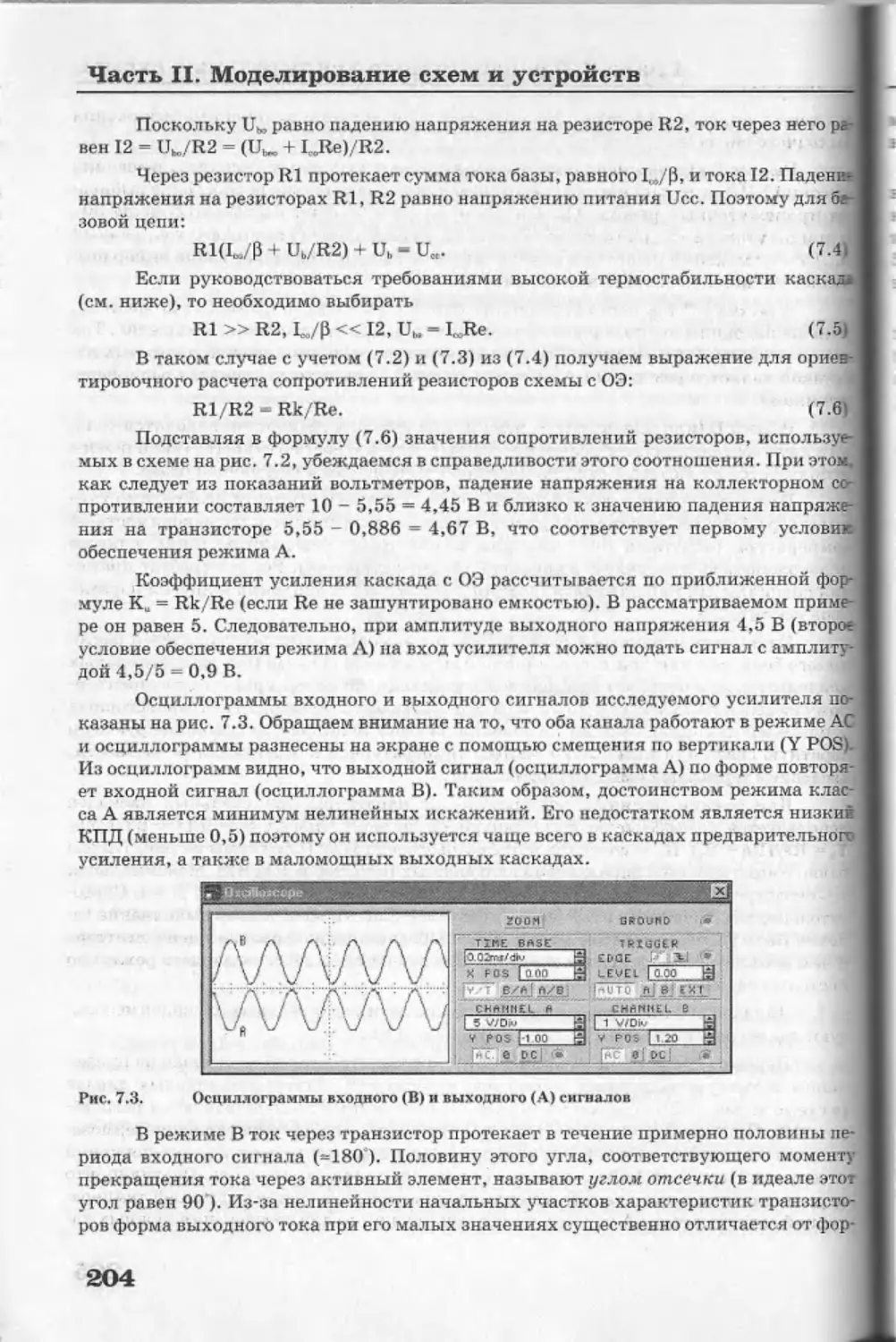
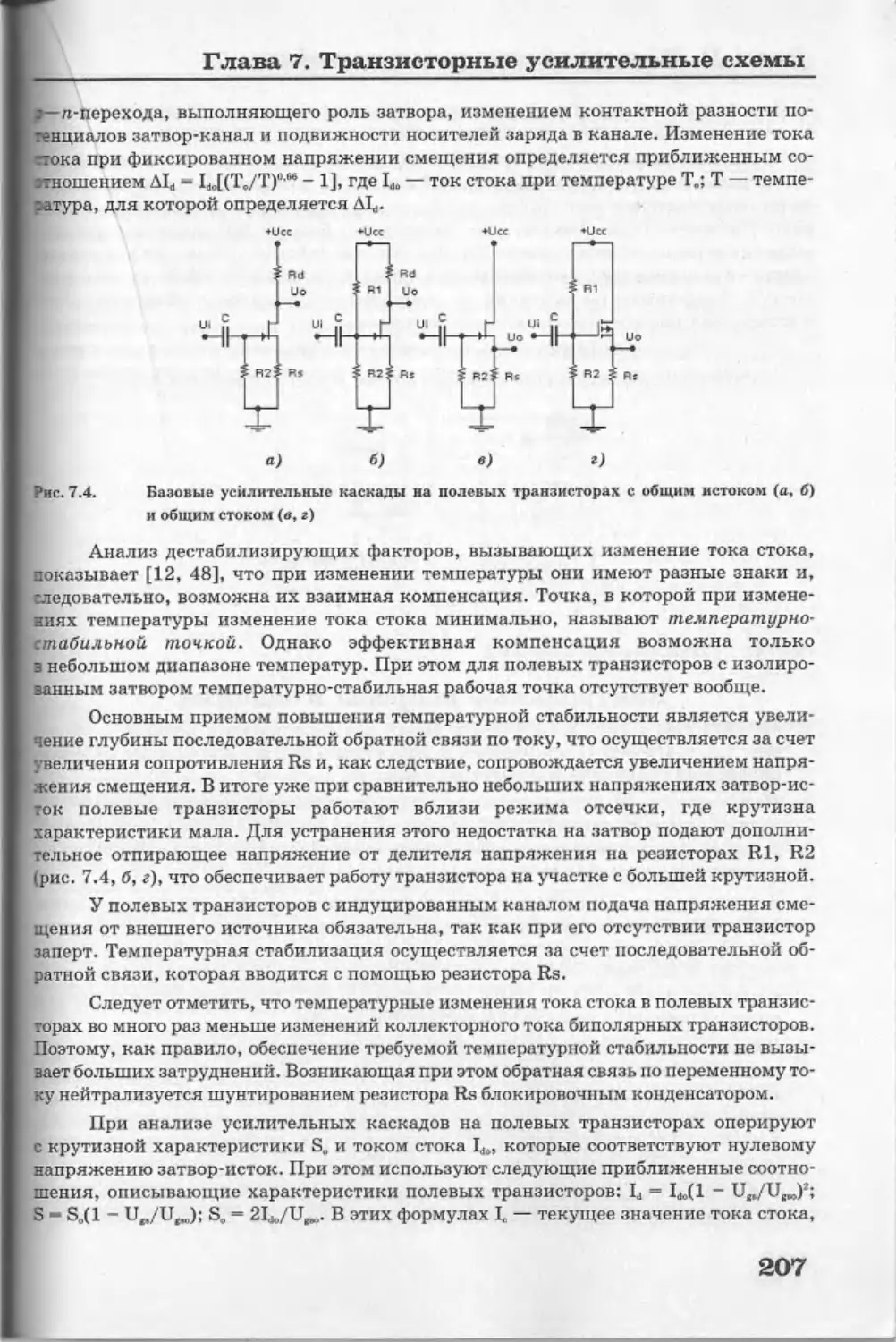
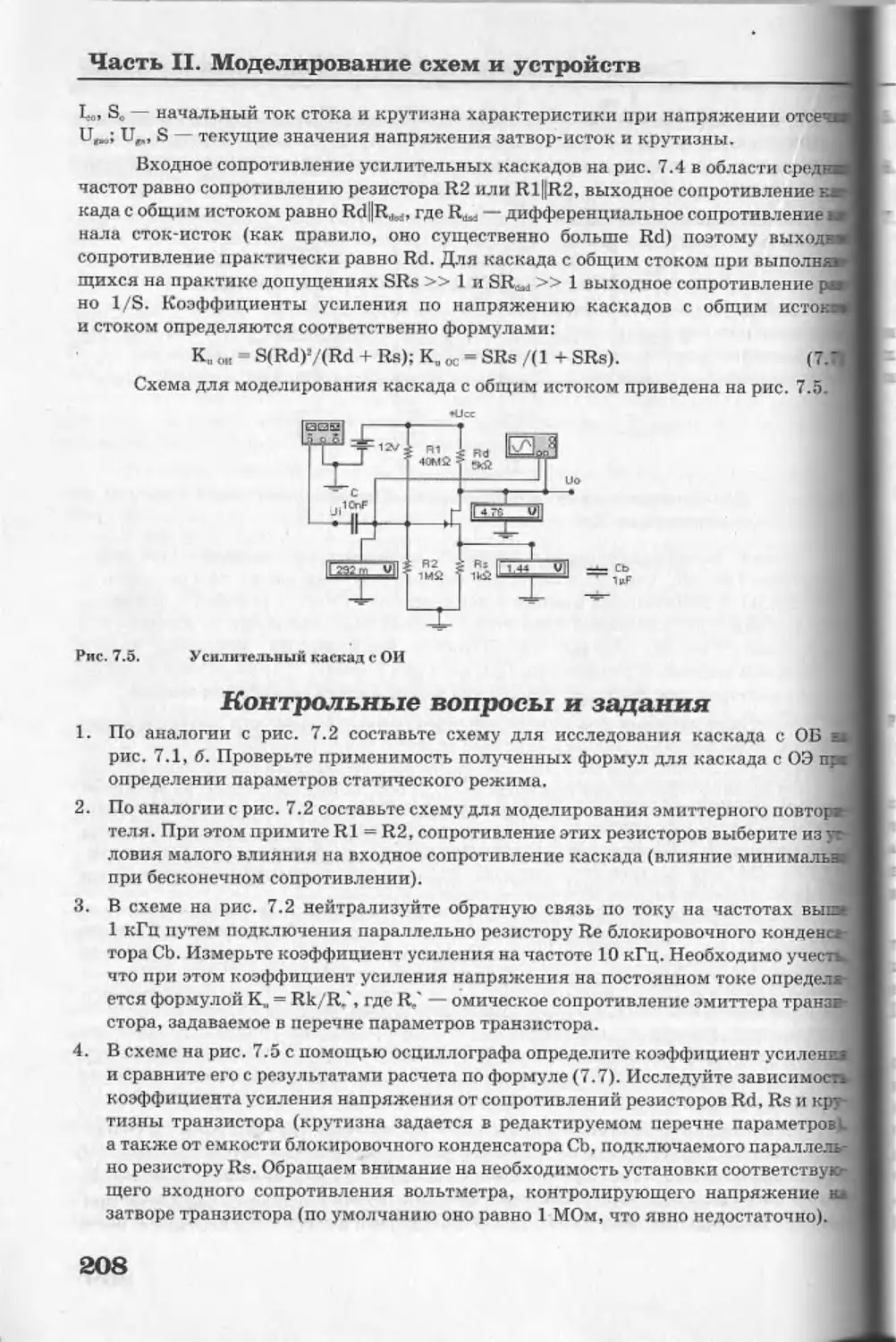
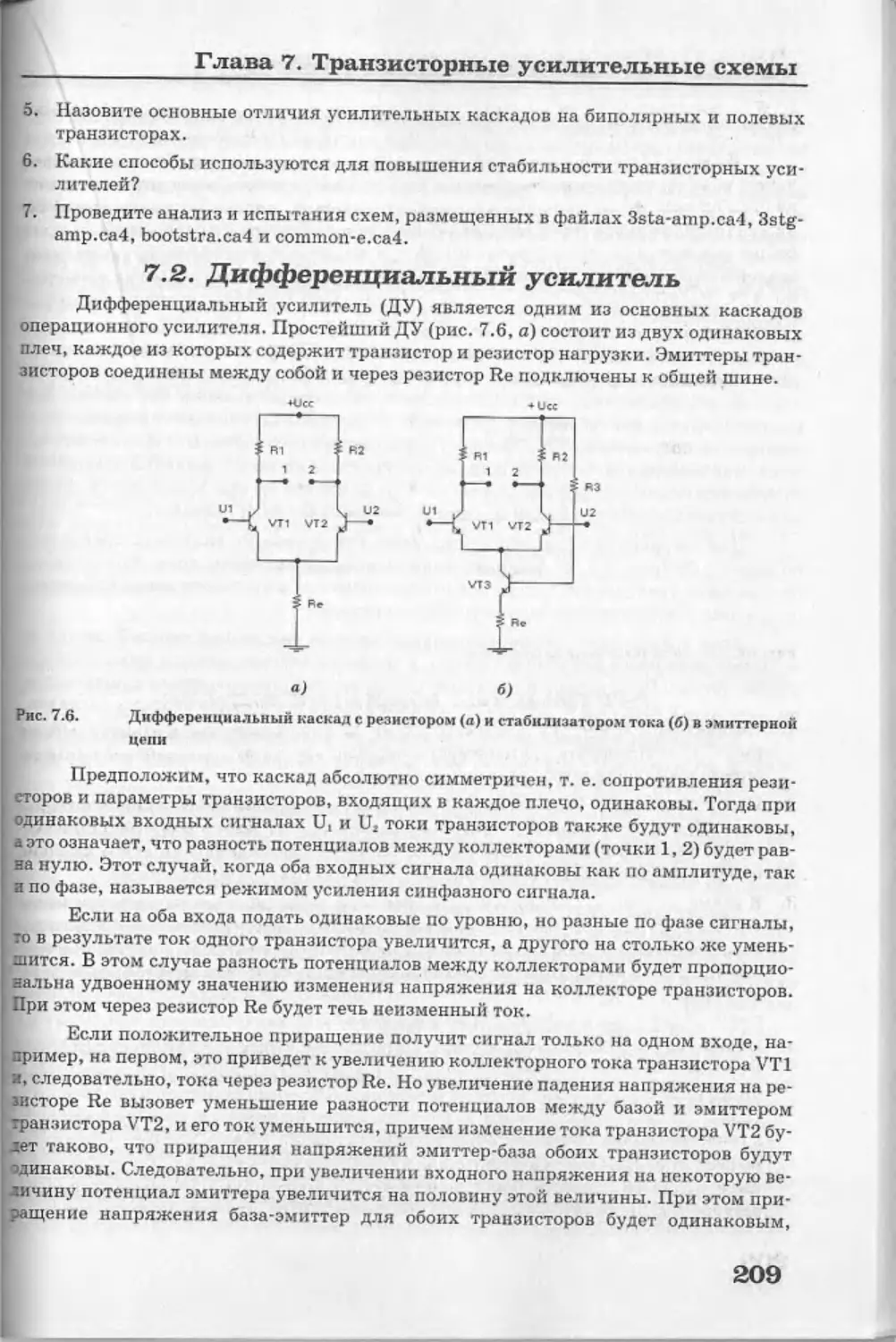
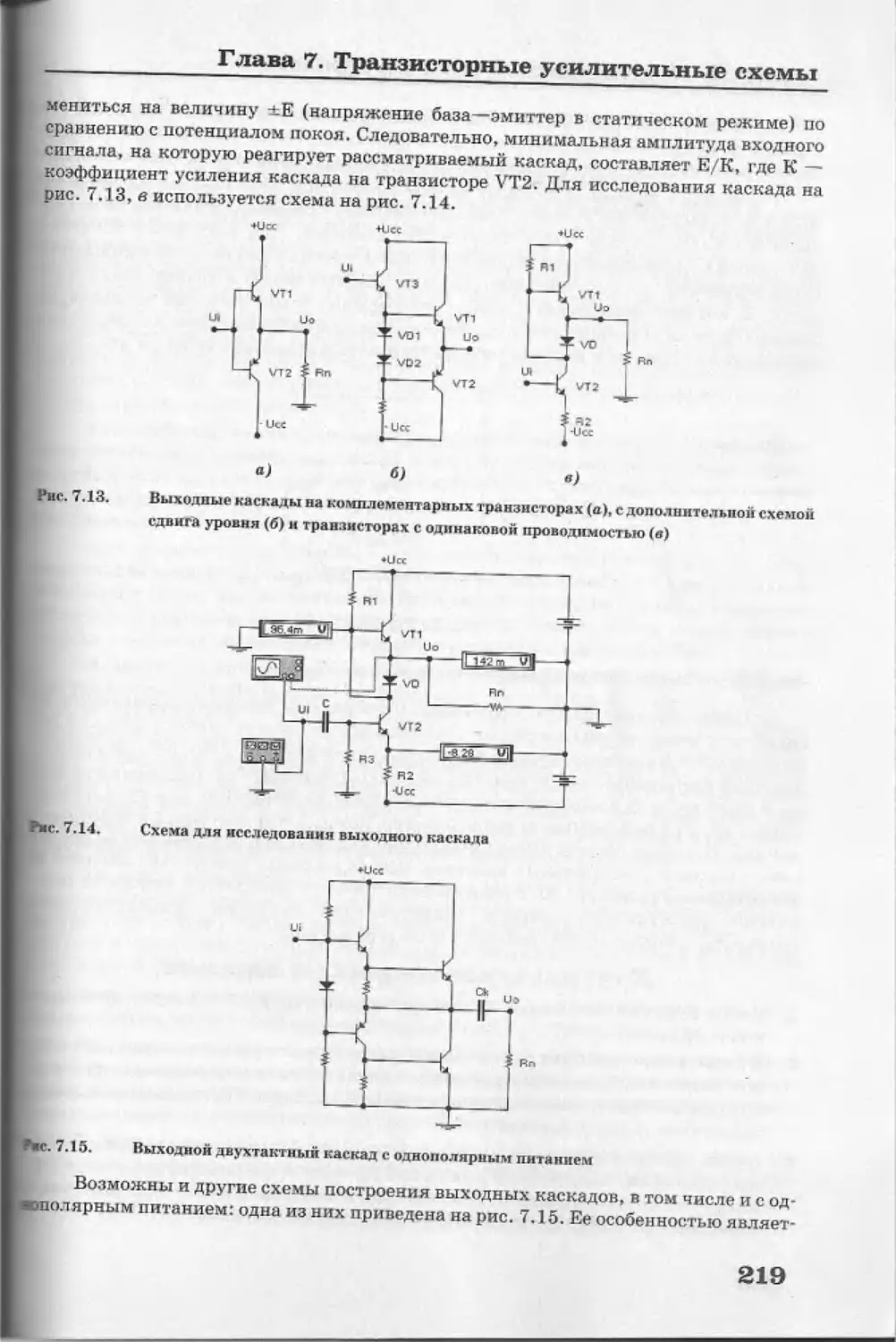
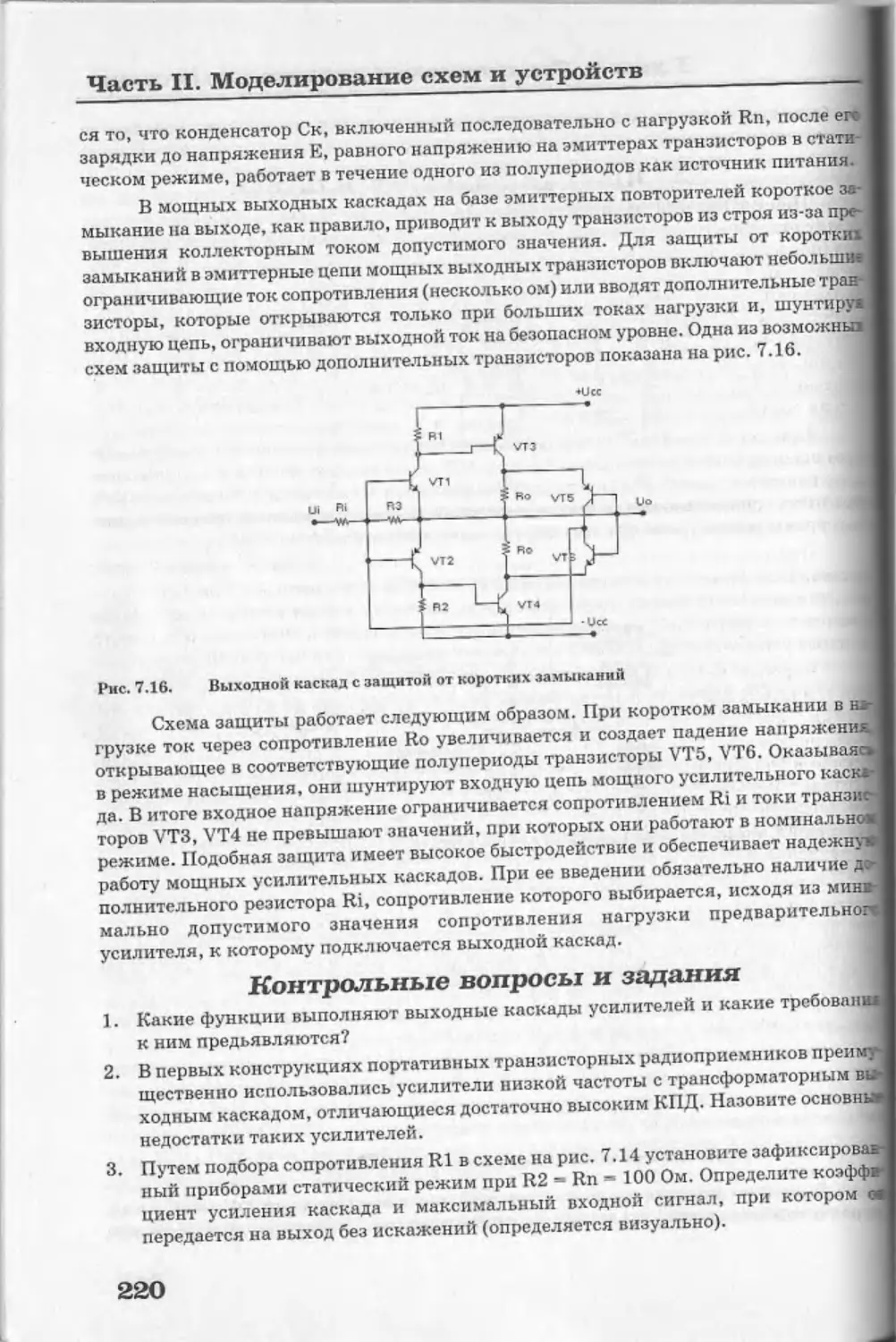
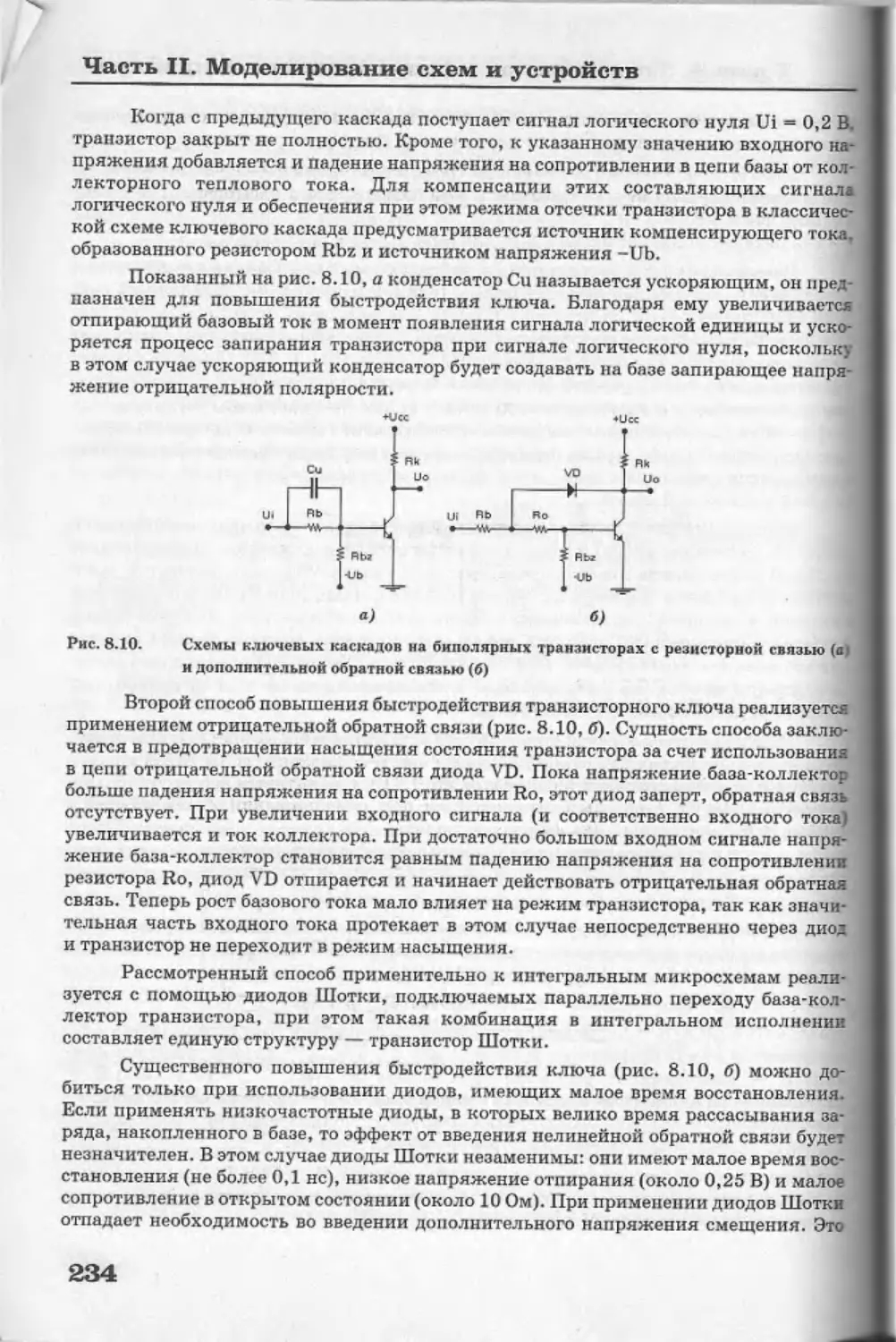
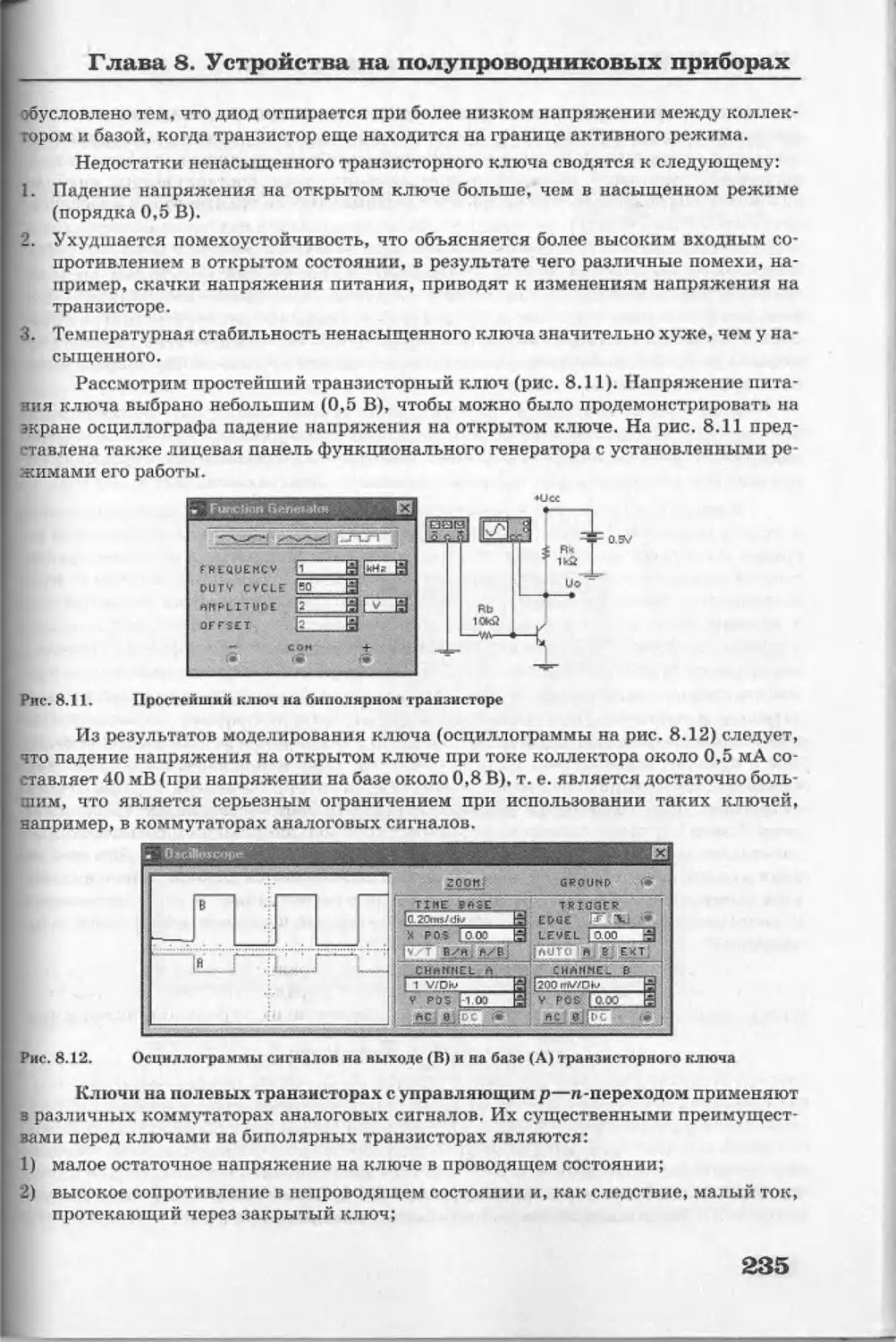
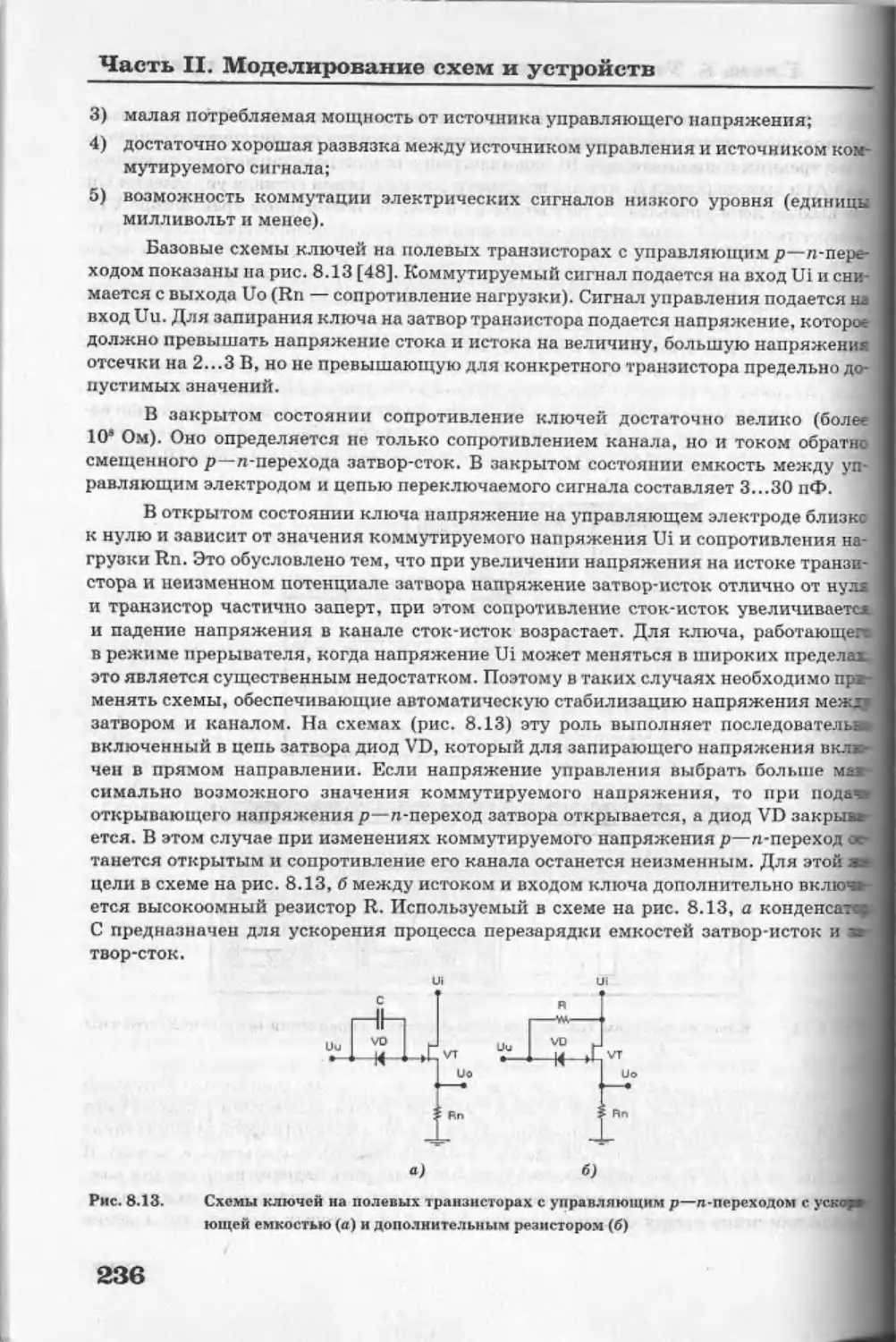
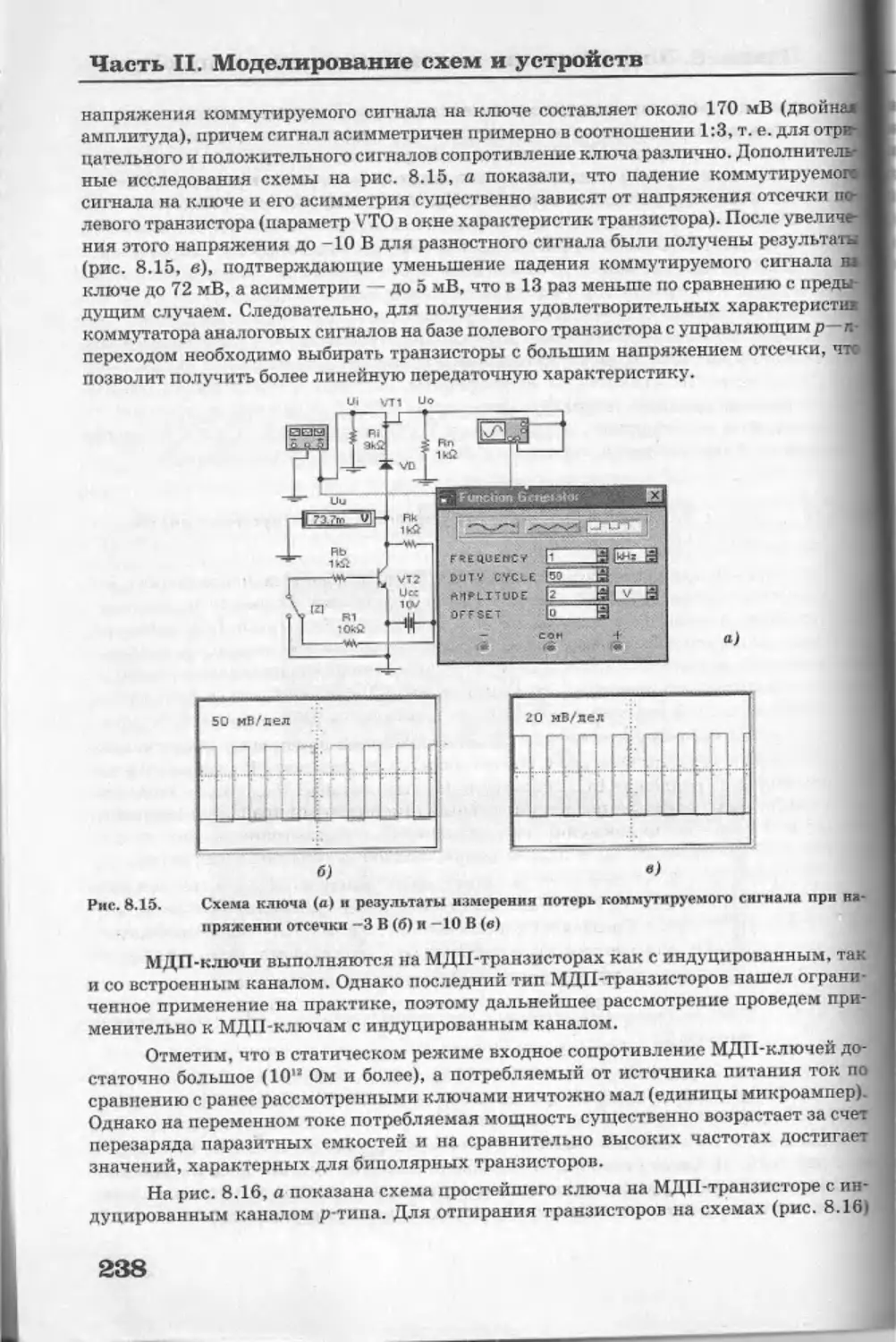
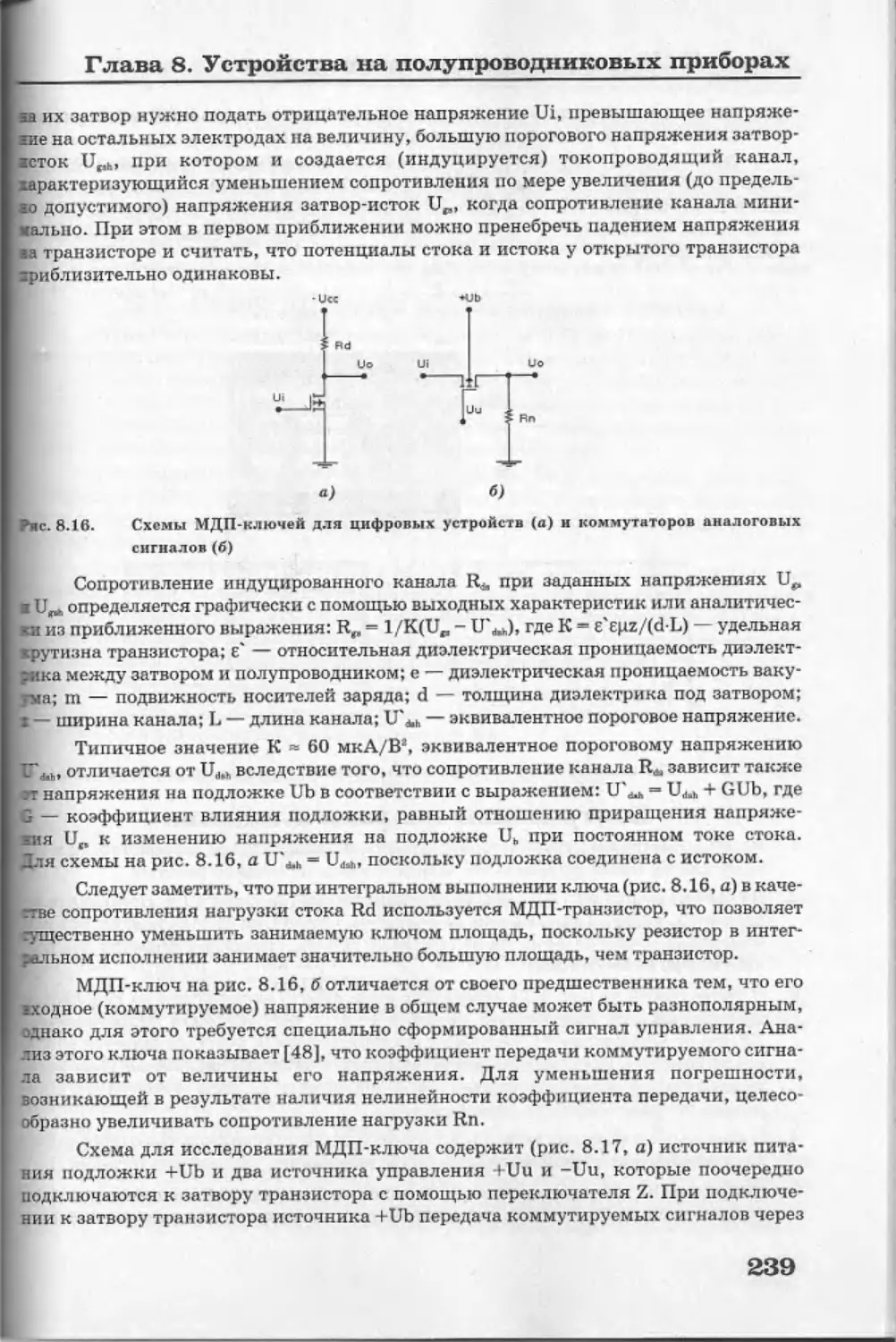
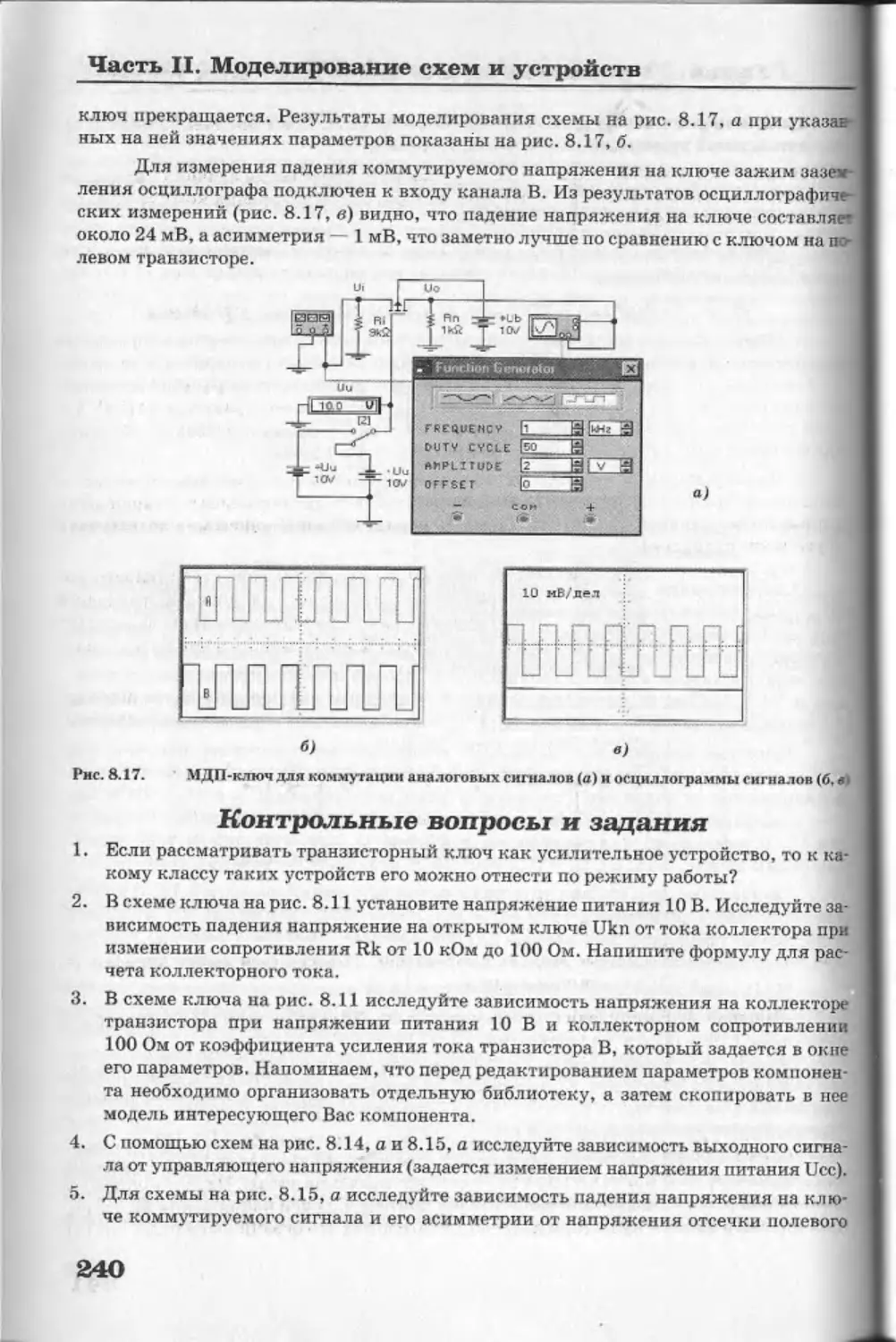
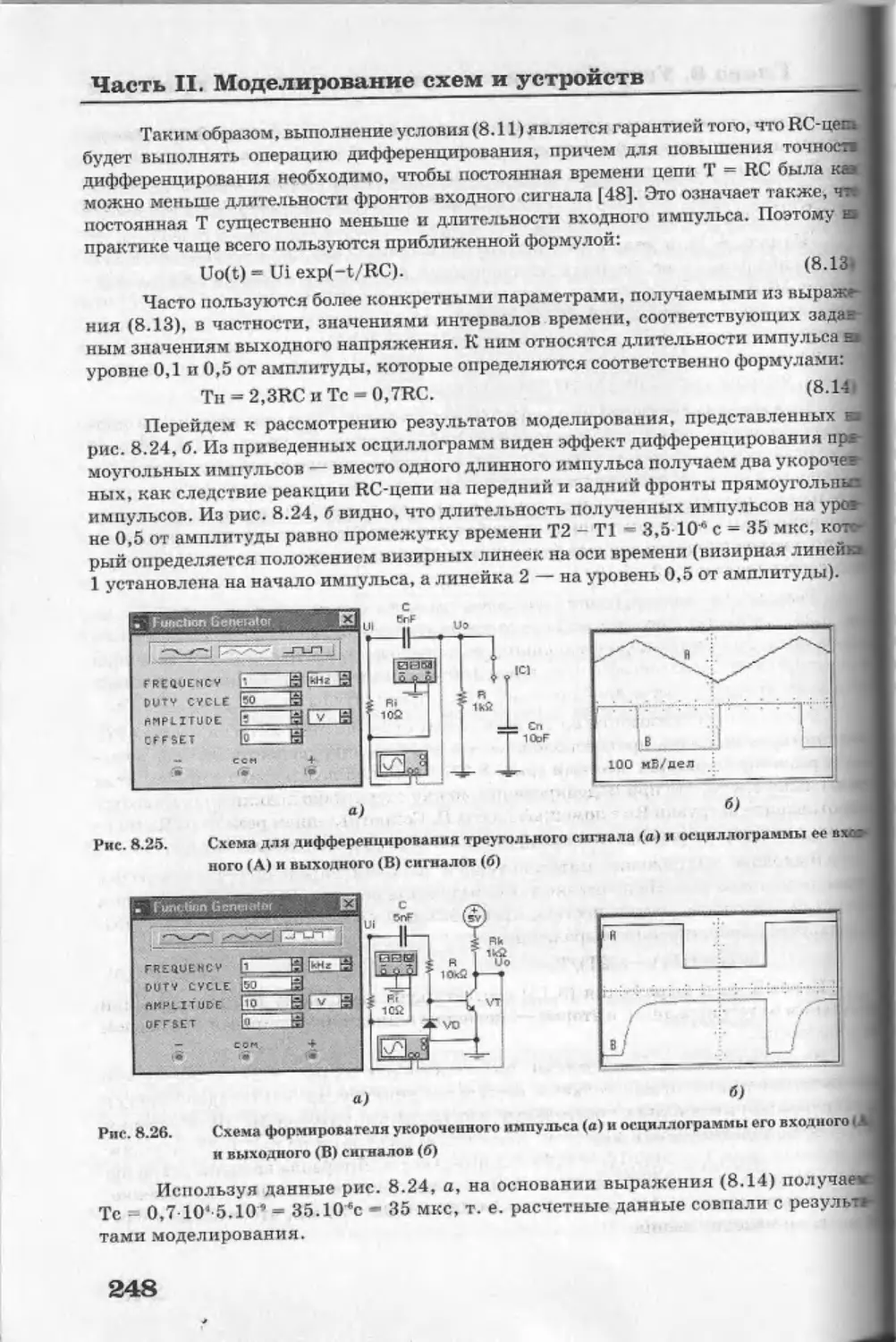
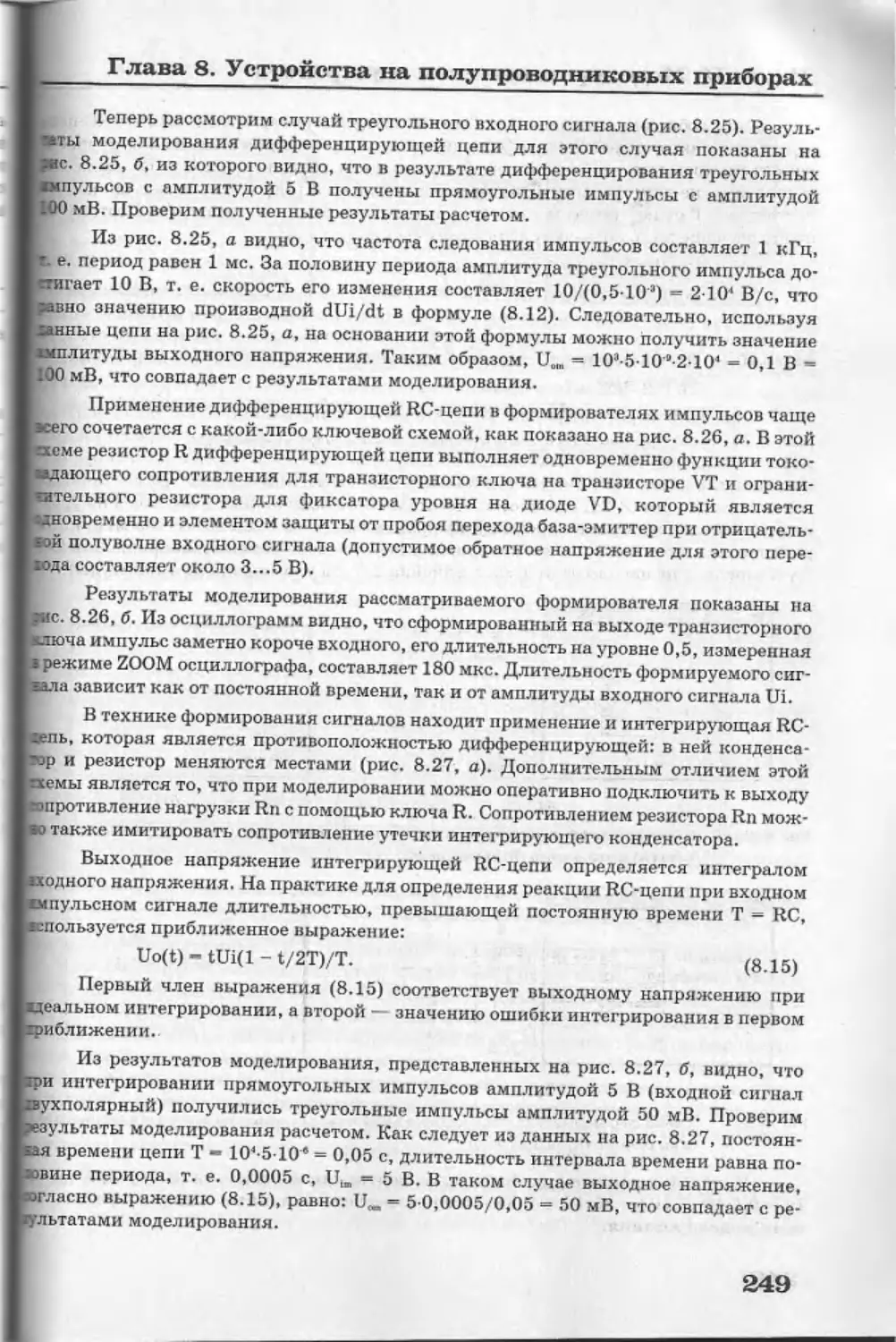
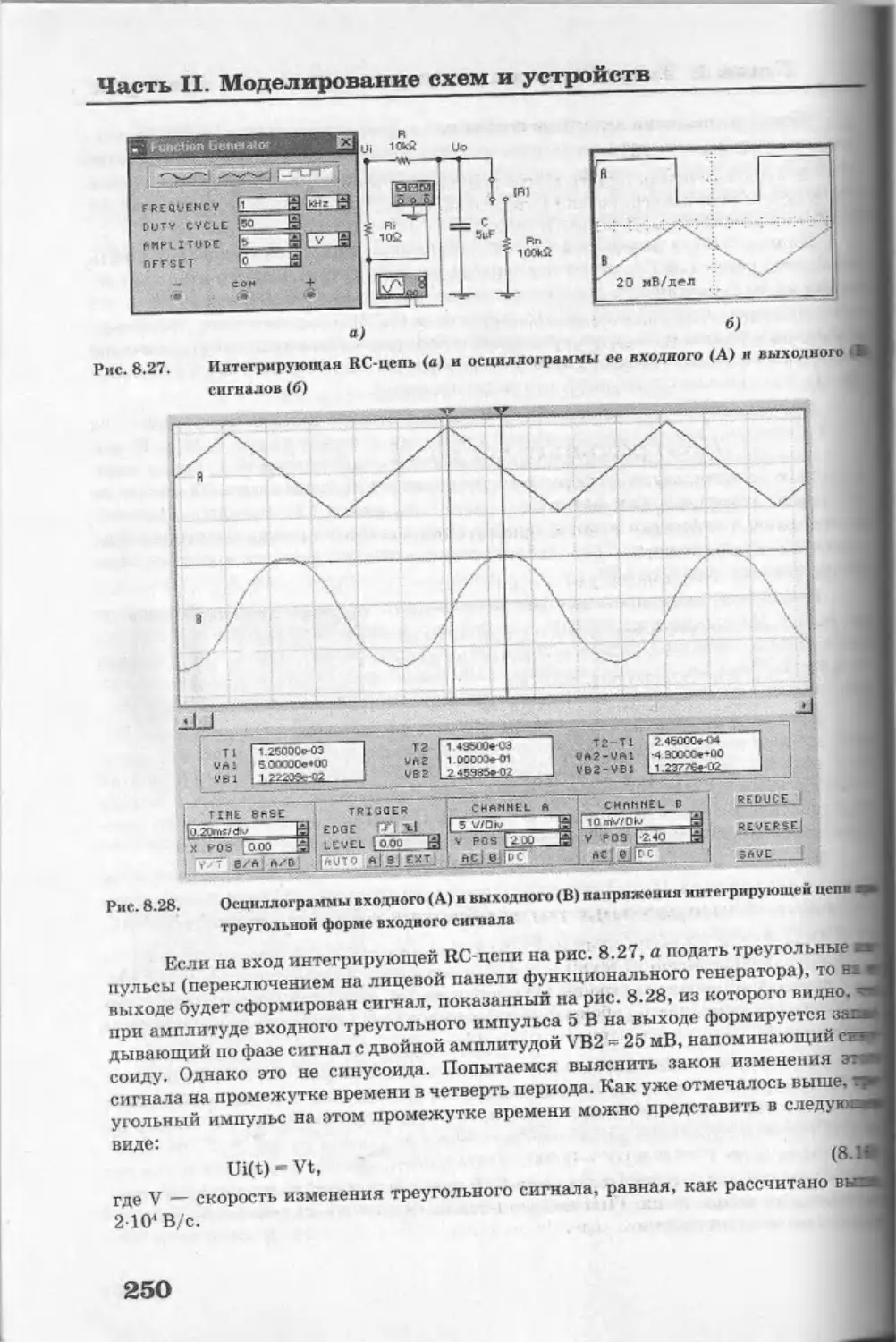
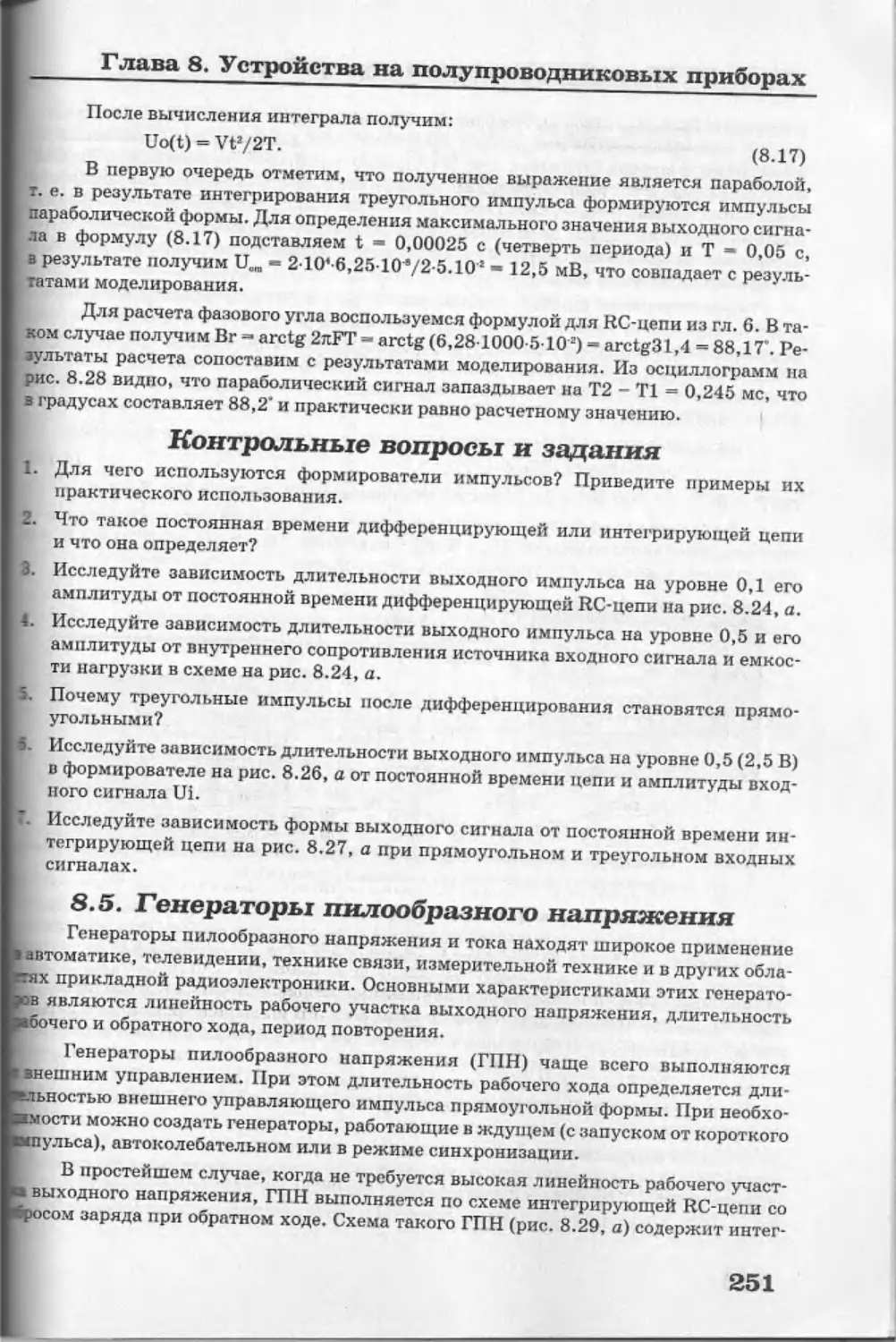
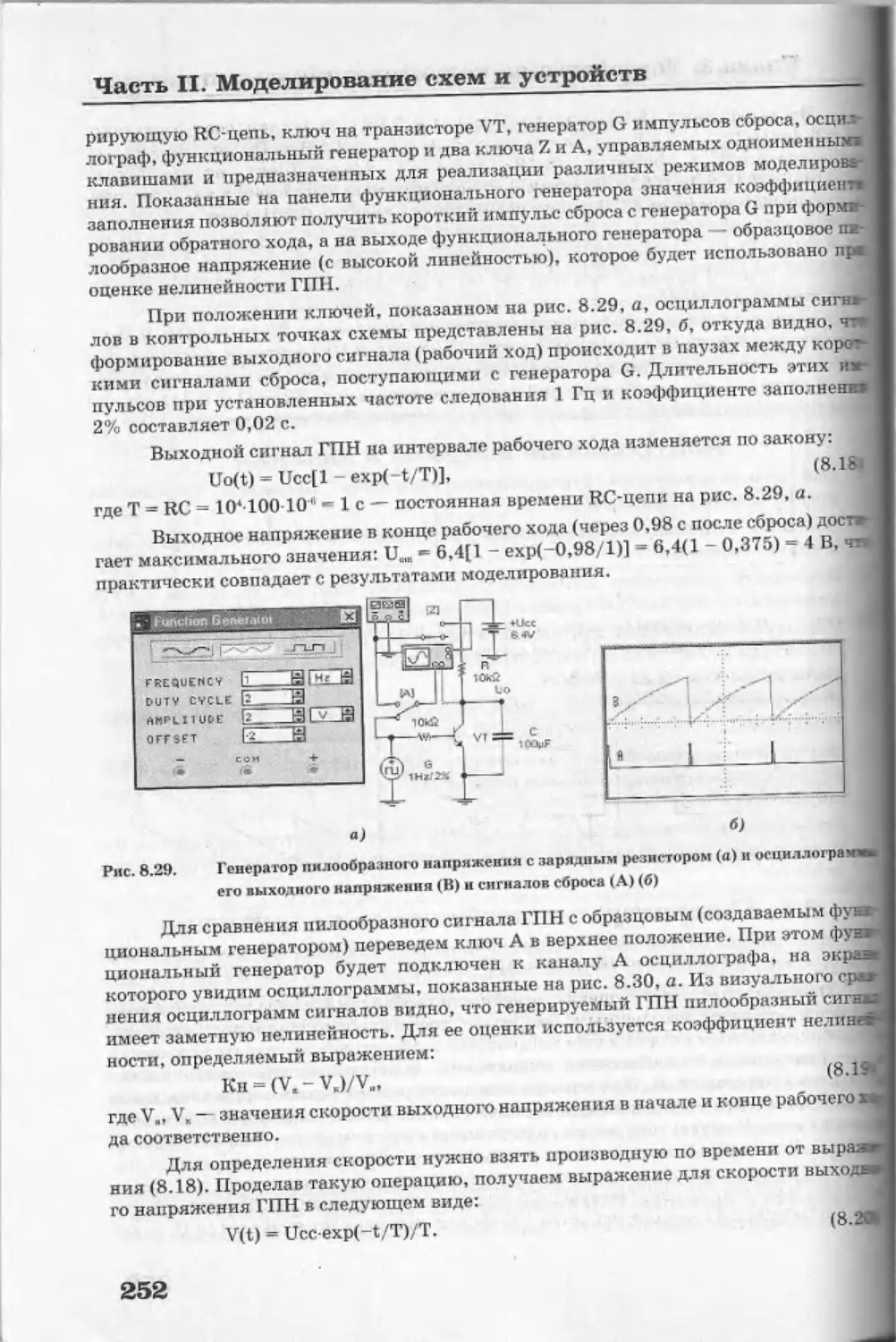
В главах 7 и 8 рассматриваются практические схемы транзисторных радио-
электронных устройств, заимствованные из различных популярных изданий. Заяв-
ленные характеристики устройств сопоставляются с результатами моделирования.
В главах 9 и 10 рассмотрены устройства на цифровых и аналоговых микросхе-
мах, сопоставляются результаты их расчета и моделирования. Большинство уст-
ройств рассматриваются в порядке возрастающей сложности. Например,
последовательно рассматриваются полусумматор, полный сумматор, выясняется их
внутренняя структура на уровне простейших, ранее изученных логических элемен-
тов, а затем на их базе строится модель многоразрядного сумматора, работа которо-
го проверяется с помощью генератора слов (кодового генератора) и
алфавитно-цифровых индикаторов.
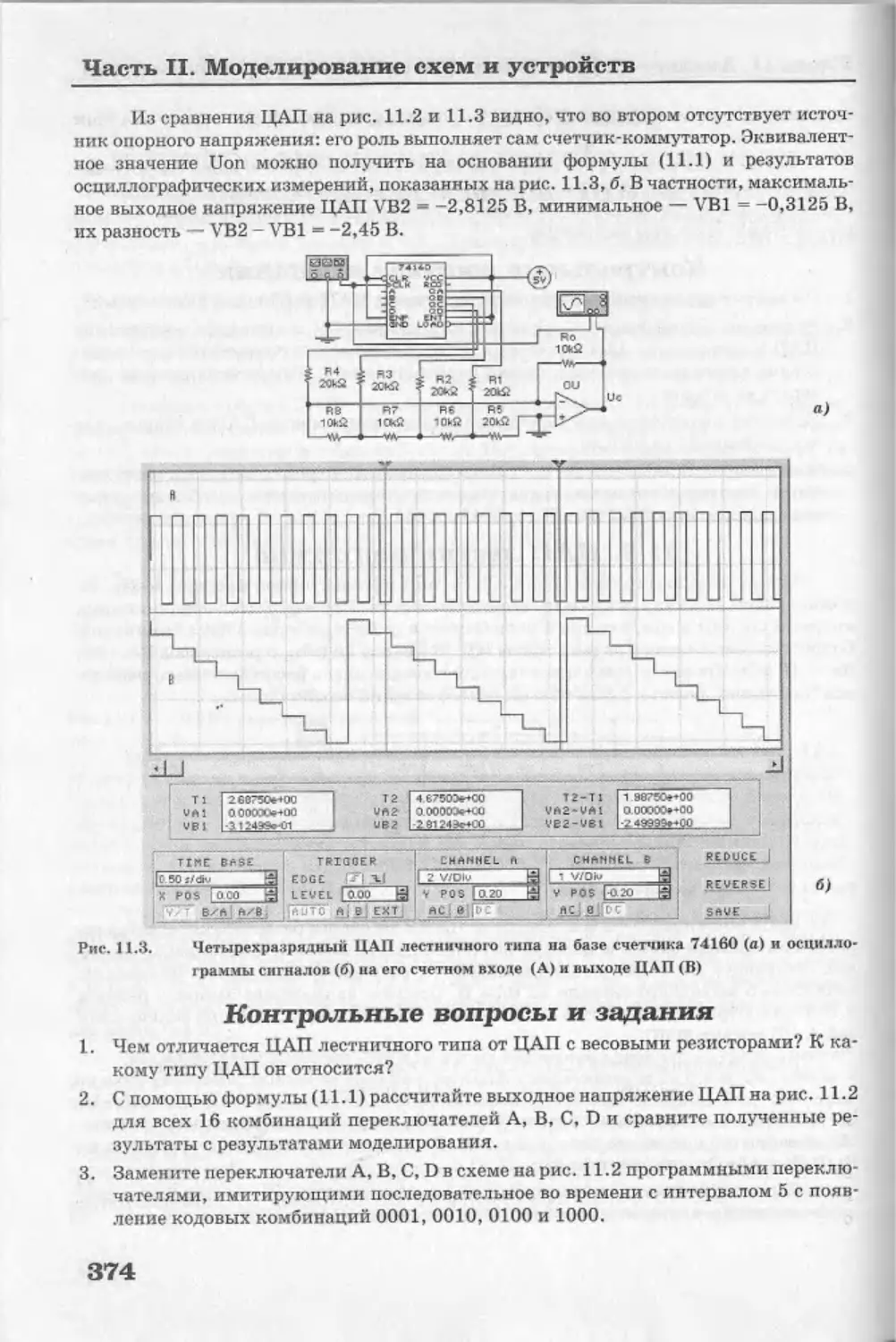
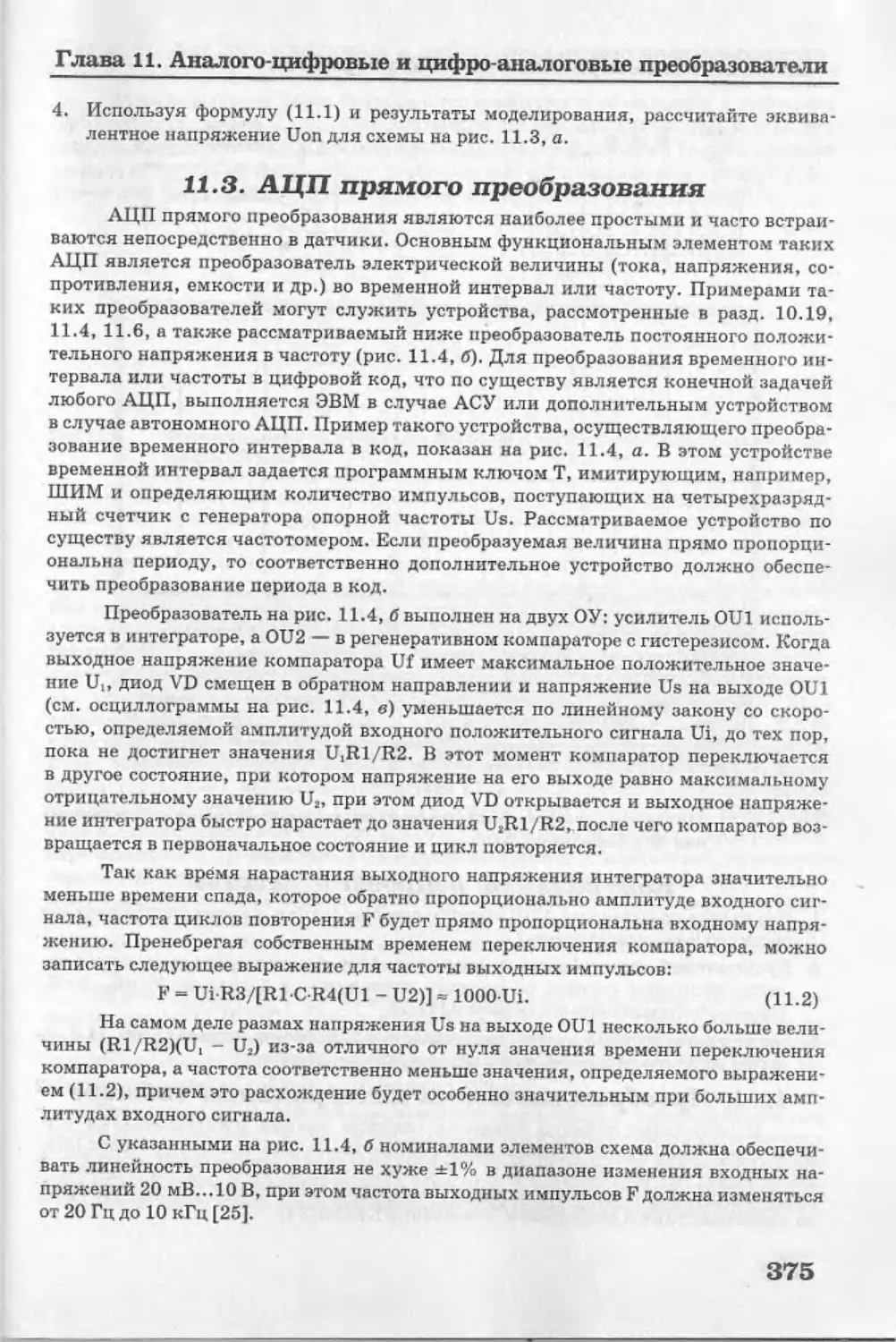
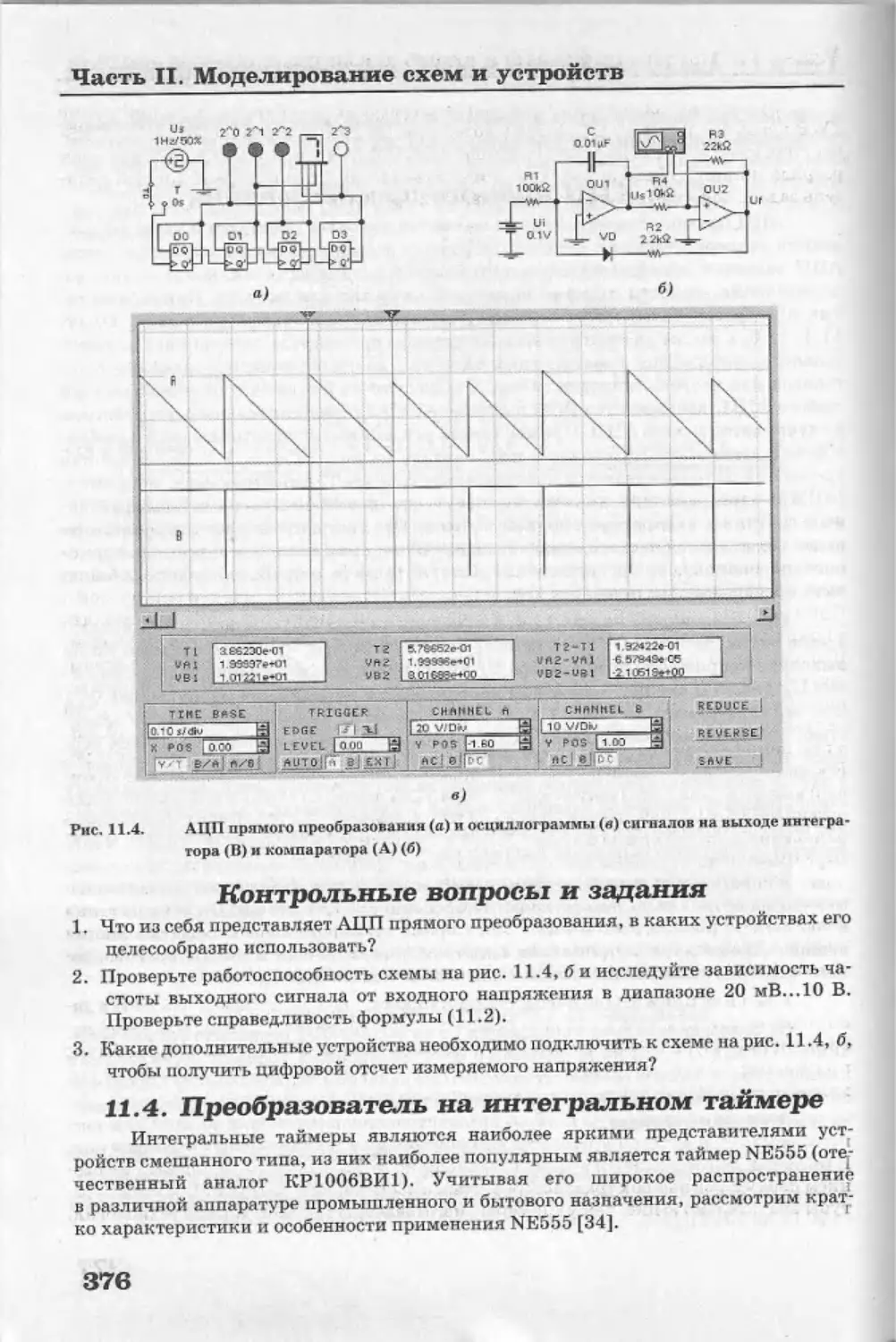
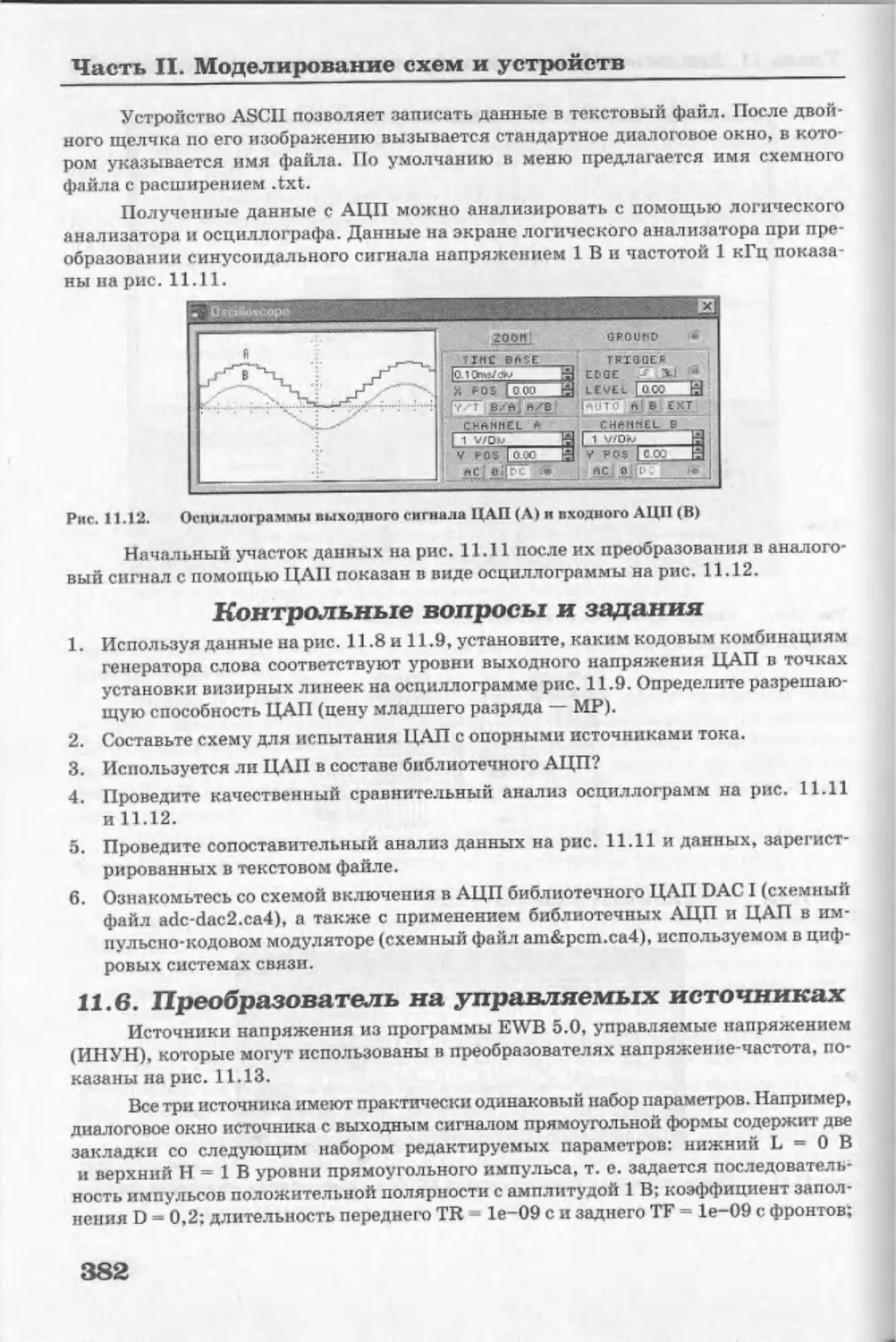
В главе 11 рассмотрены характеристики и способы построения цифро-анало-
говых и аналого-цифровых преобразователей (ЦАП и АЦП), приводятся различные
схемные варианты и результаты моделирования. Выявлены внутренняя структура и
возможности библиотечных ЦАП и АЦП.
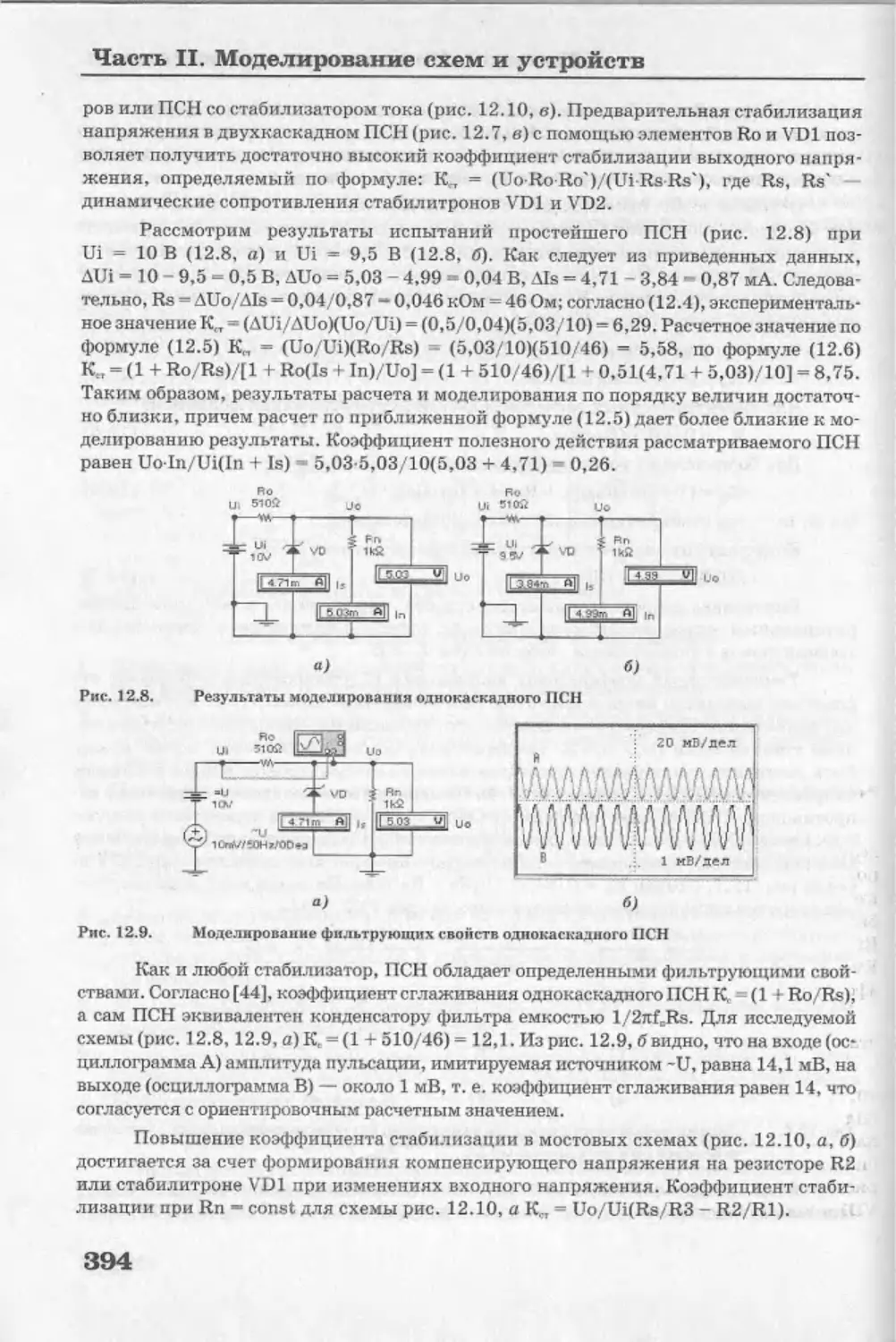
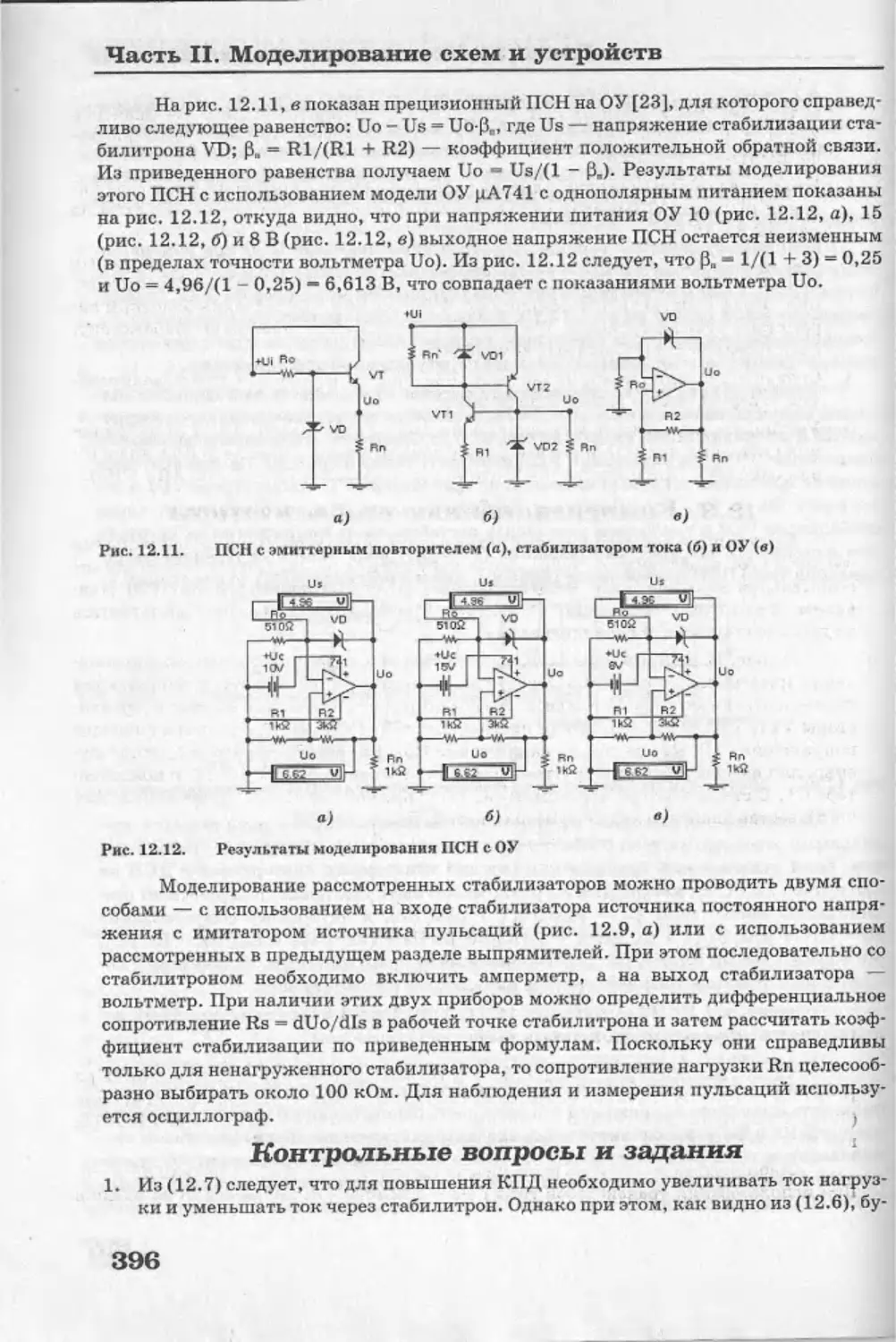
В главе 12 рассмотрены способы построения вторичных источников электро-
питания: от выпрямителей, умножителей и простейших параметрических стабили-
заторов до импульсных стабилизаторов. Выявлены ограничения программы по
возможностям моделирования транзисторных преобразователей, являющихся ос-
новными компонентами бестрансформаторных источников питания.
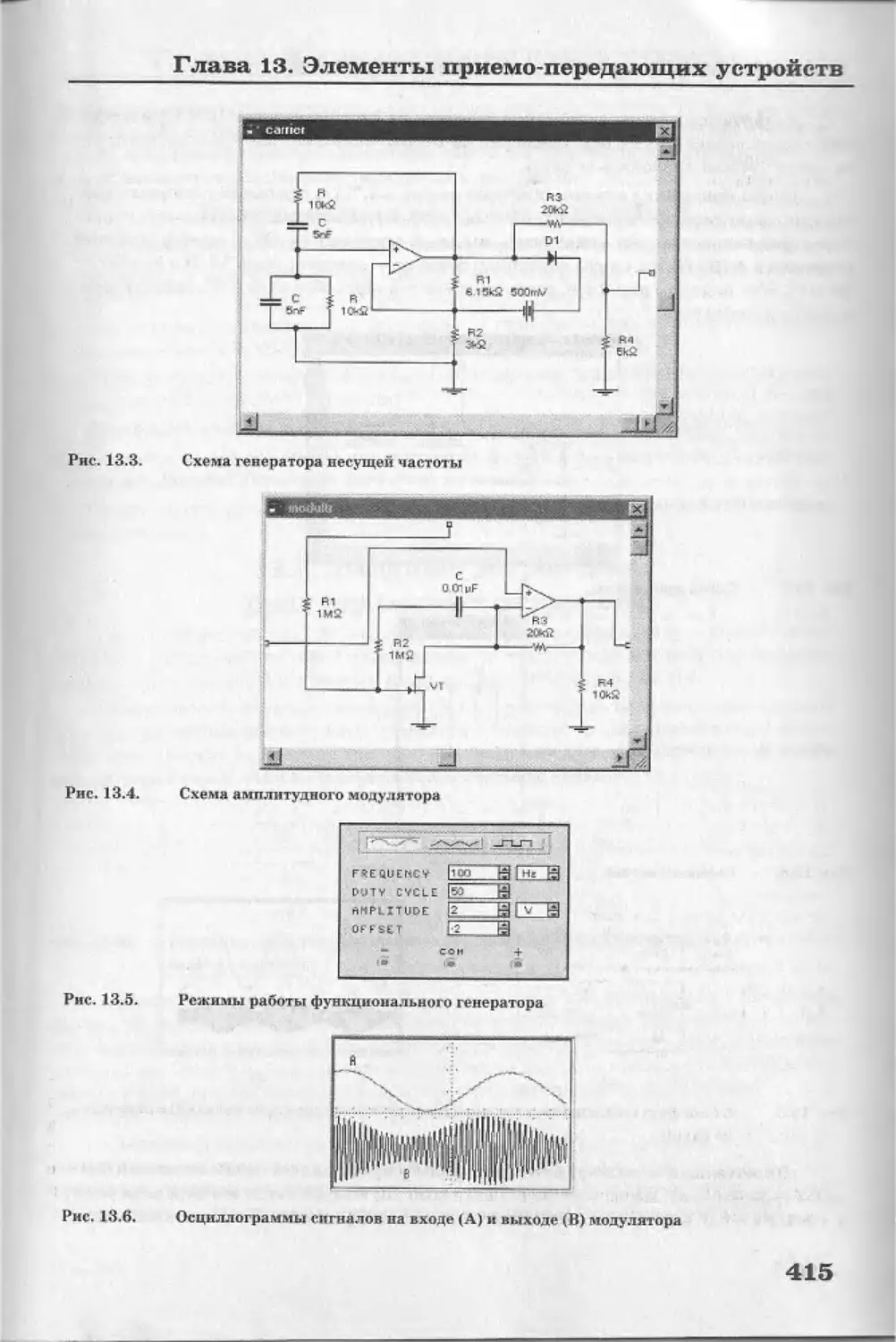
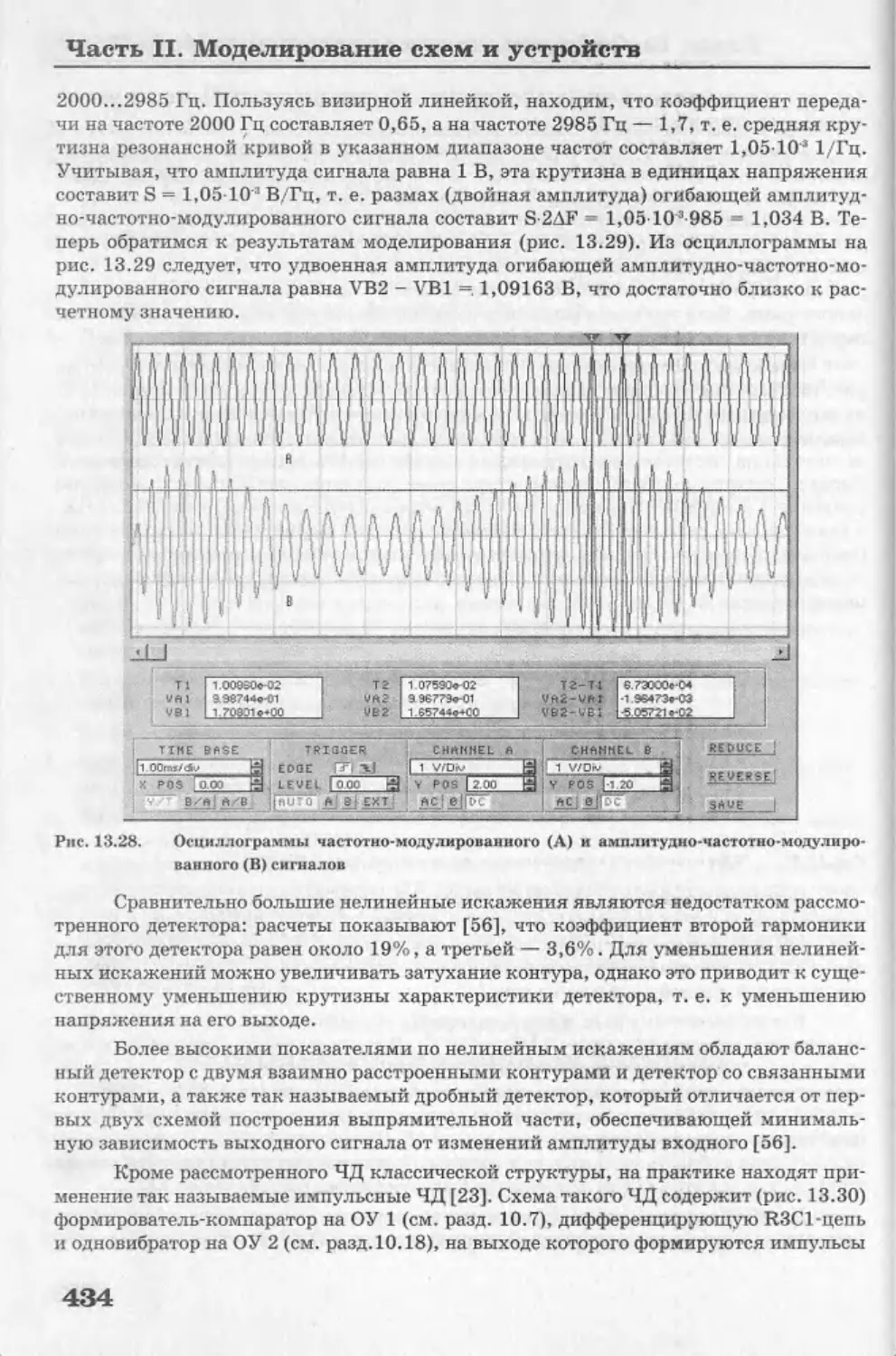
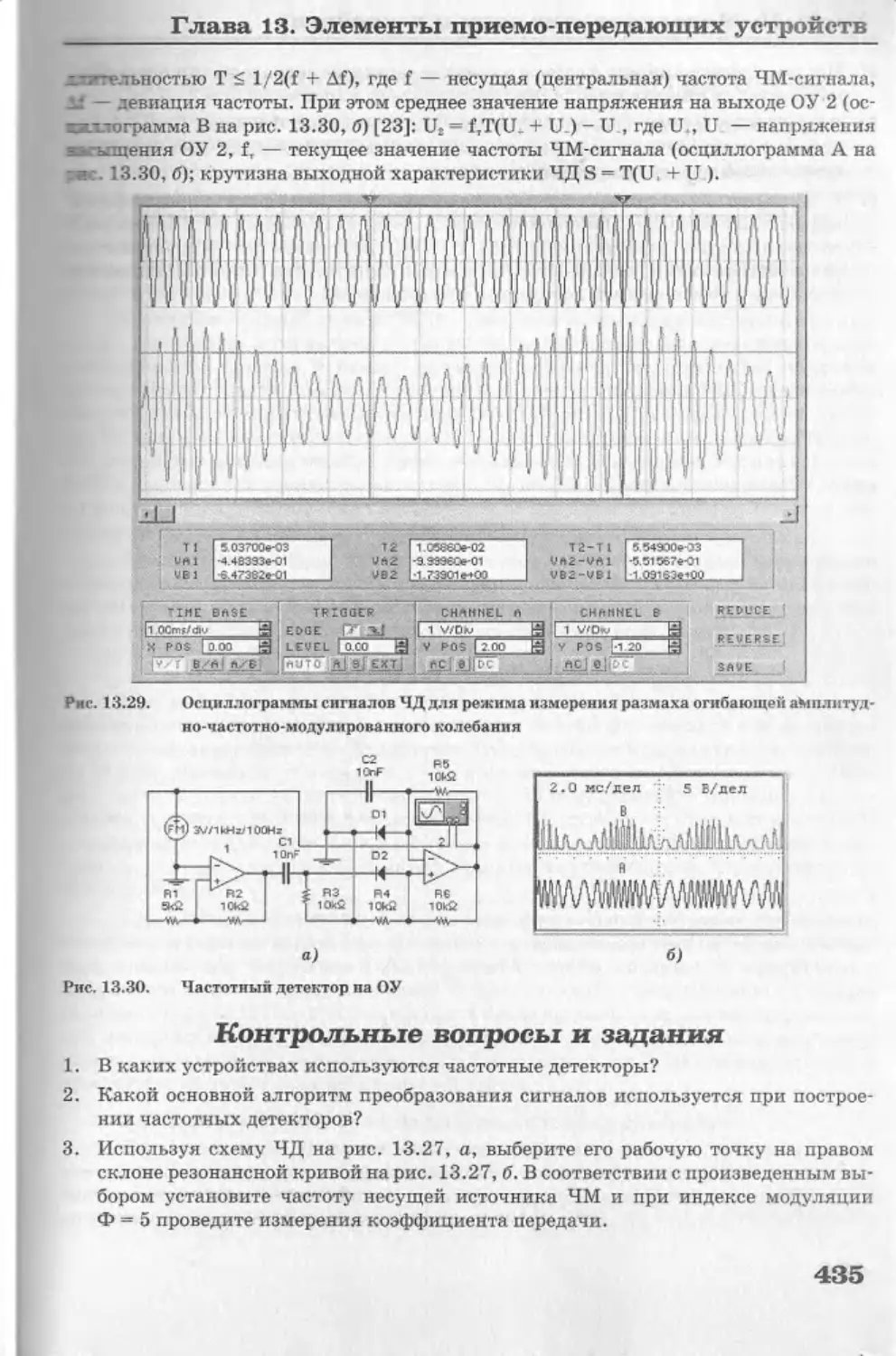
В главе 13 приведены результаты моделирования отдельных функциональ-
ных узлов приемо-передающих устройств: модуляторов, преобразователей частоты,
колебательных контуров, детекторов и др.
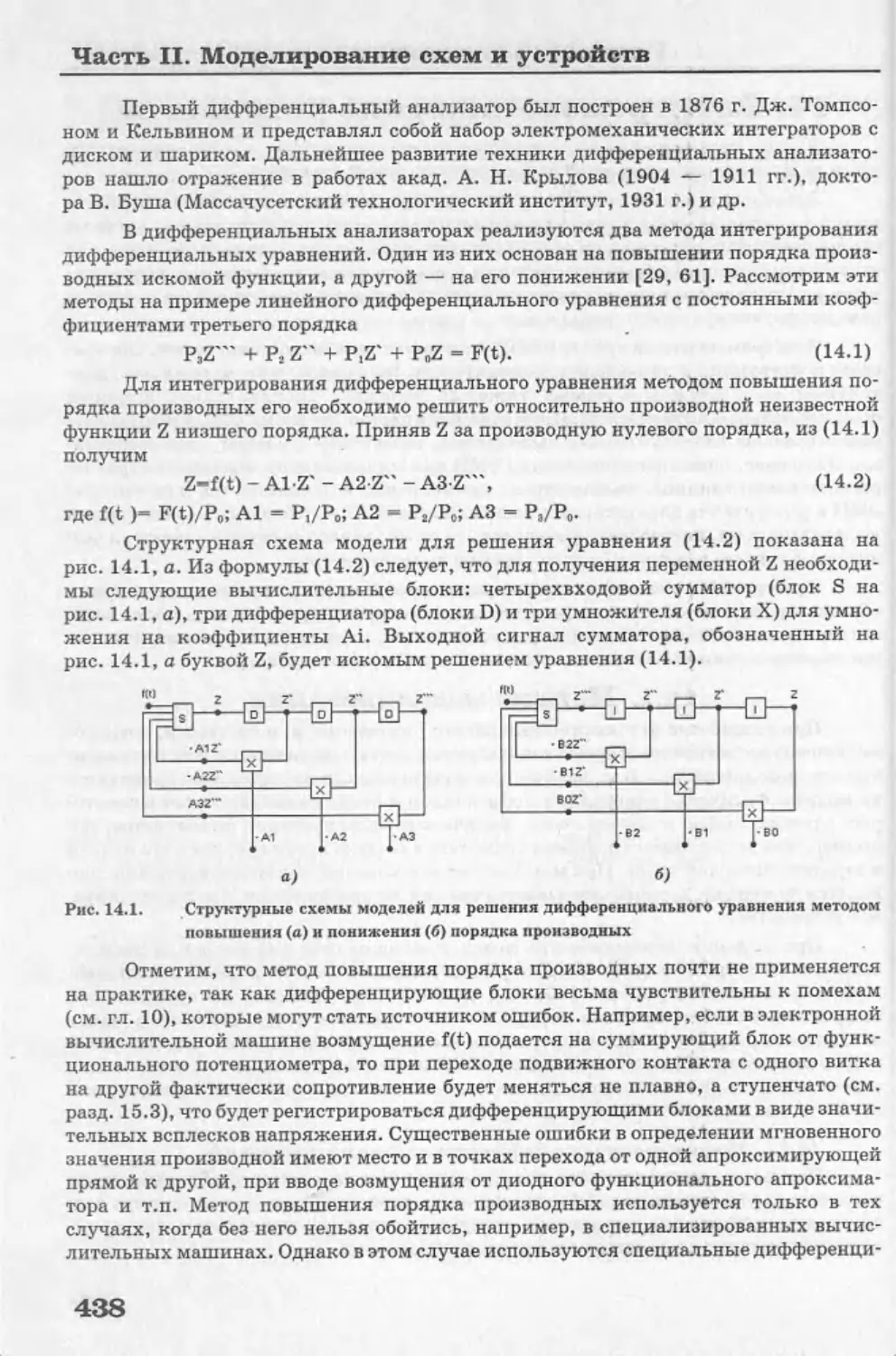
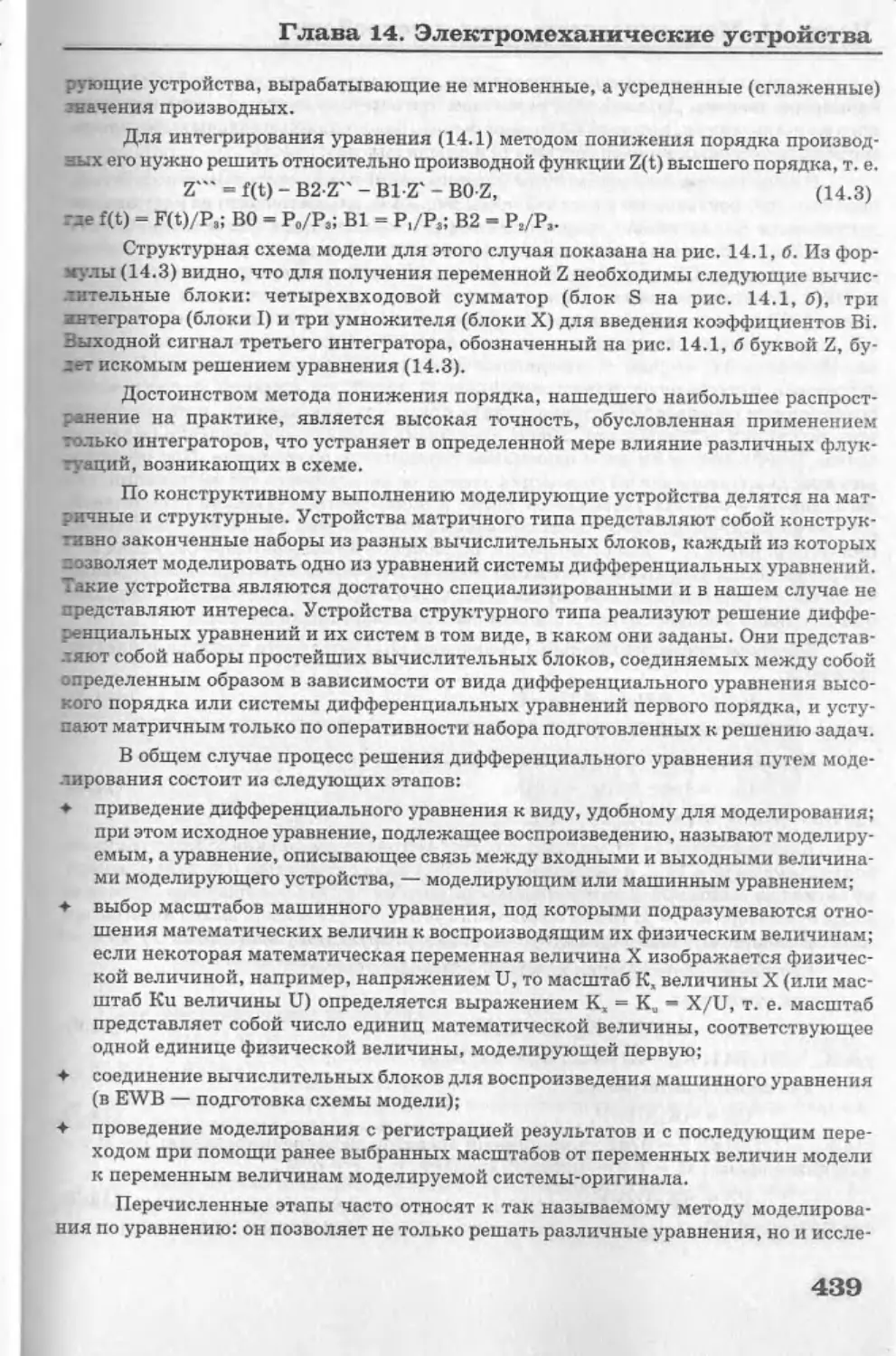
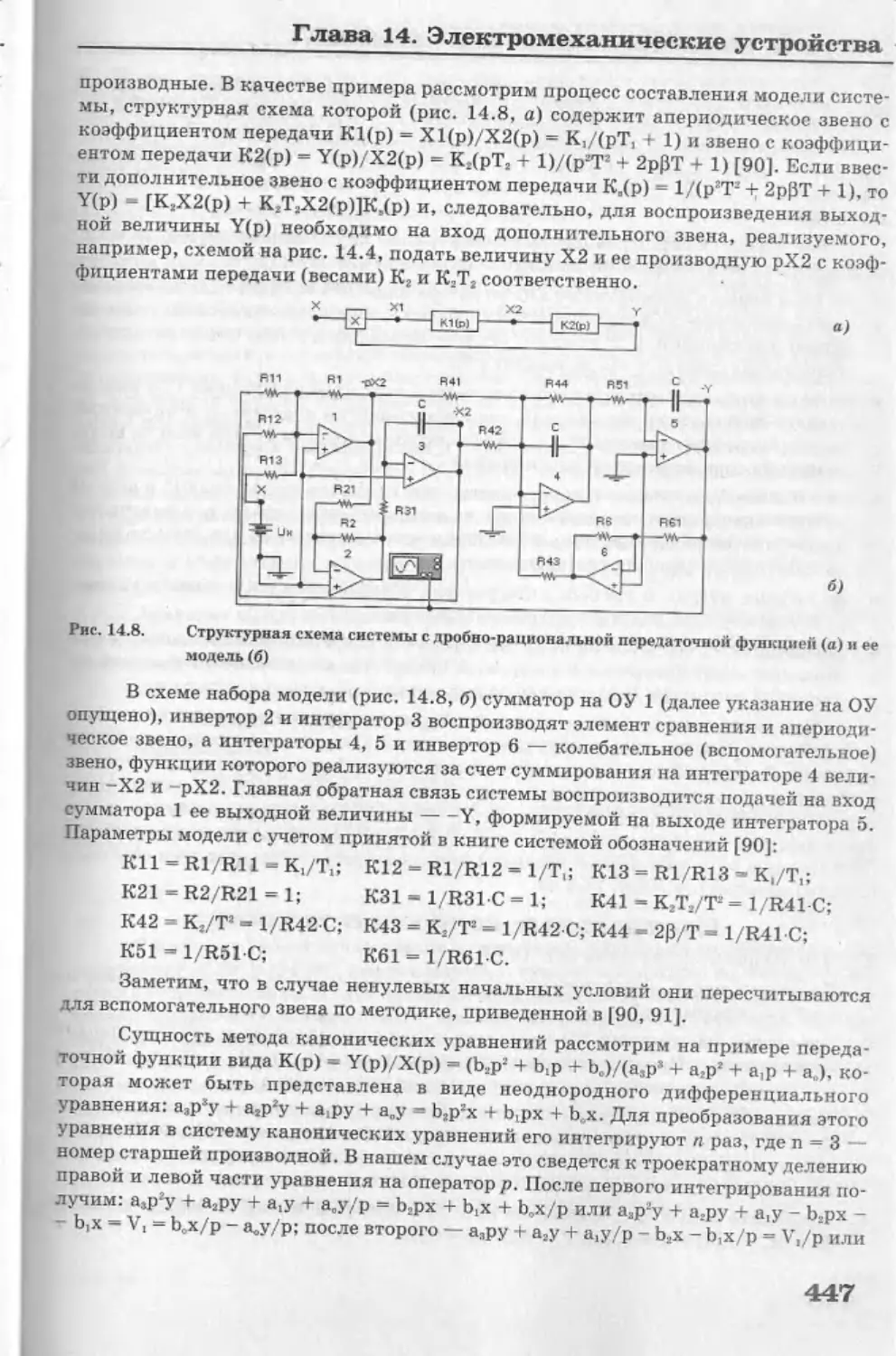
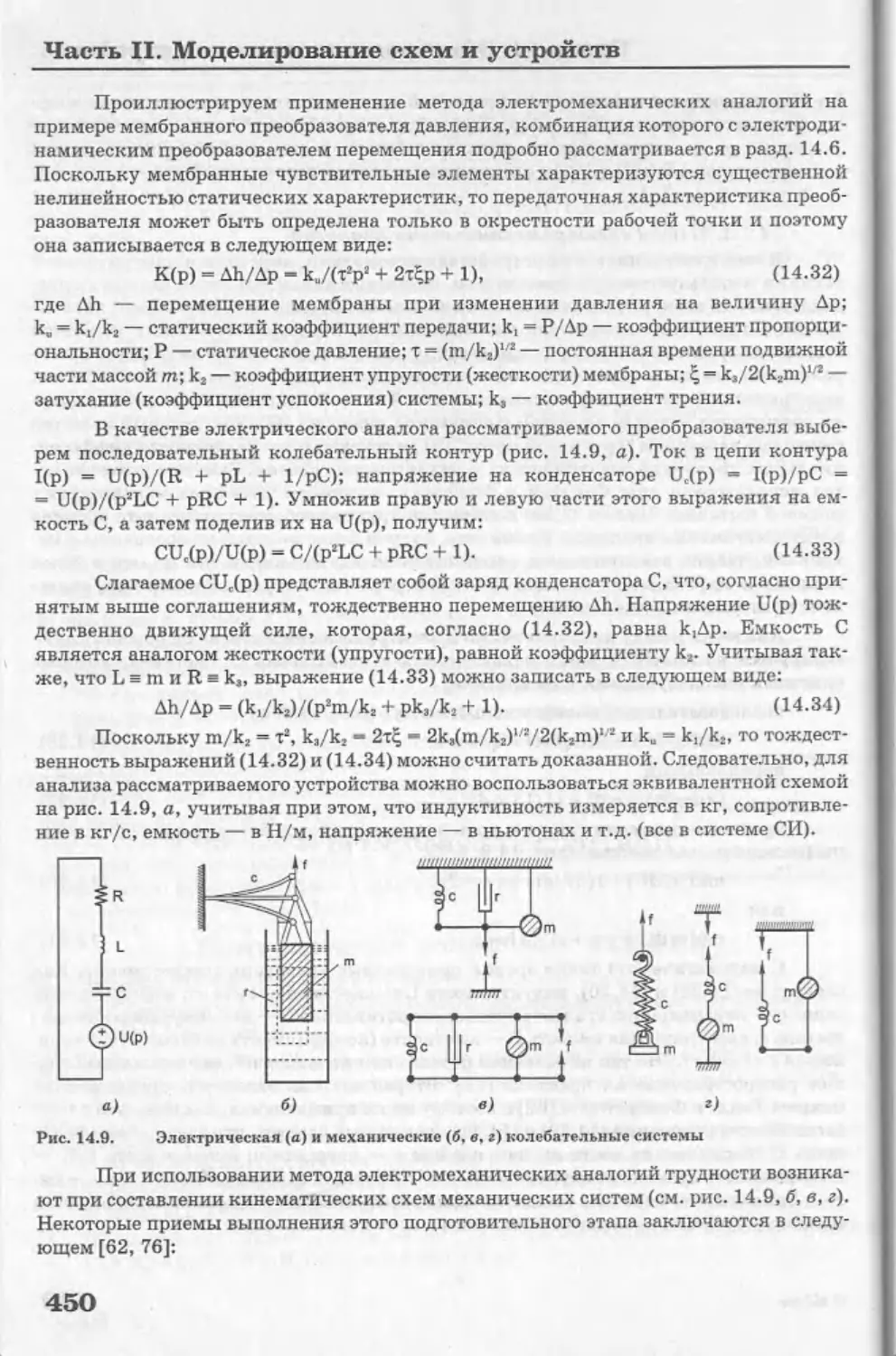
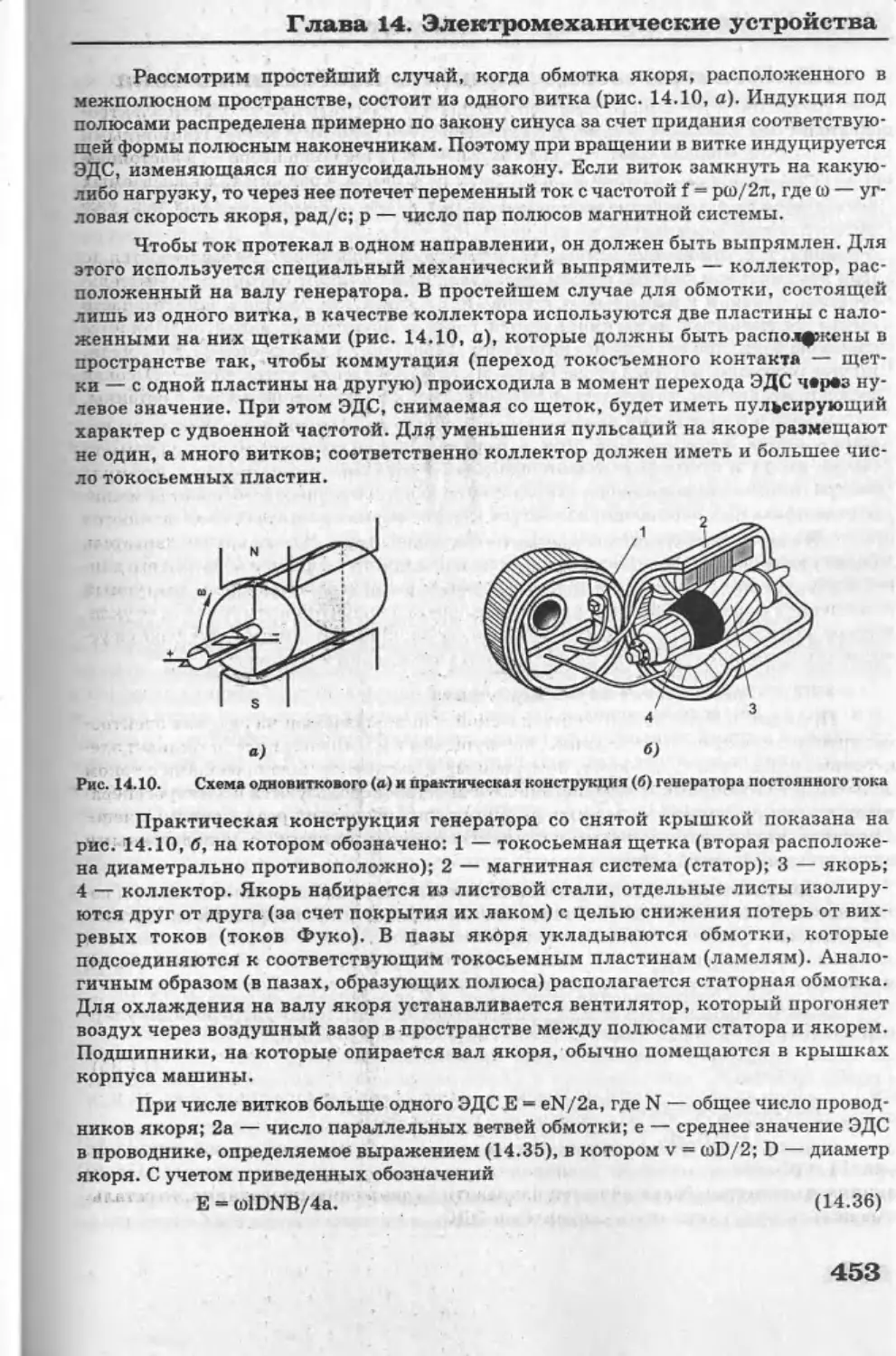
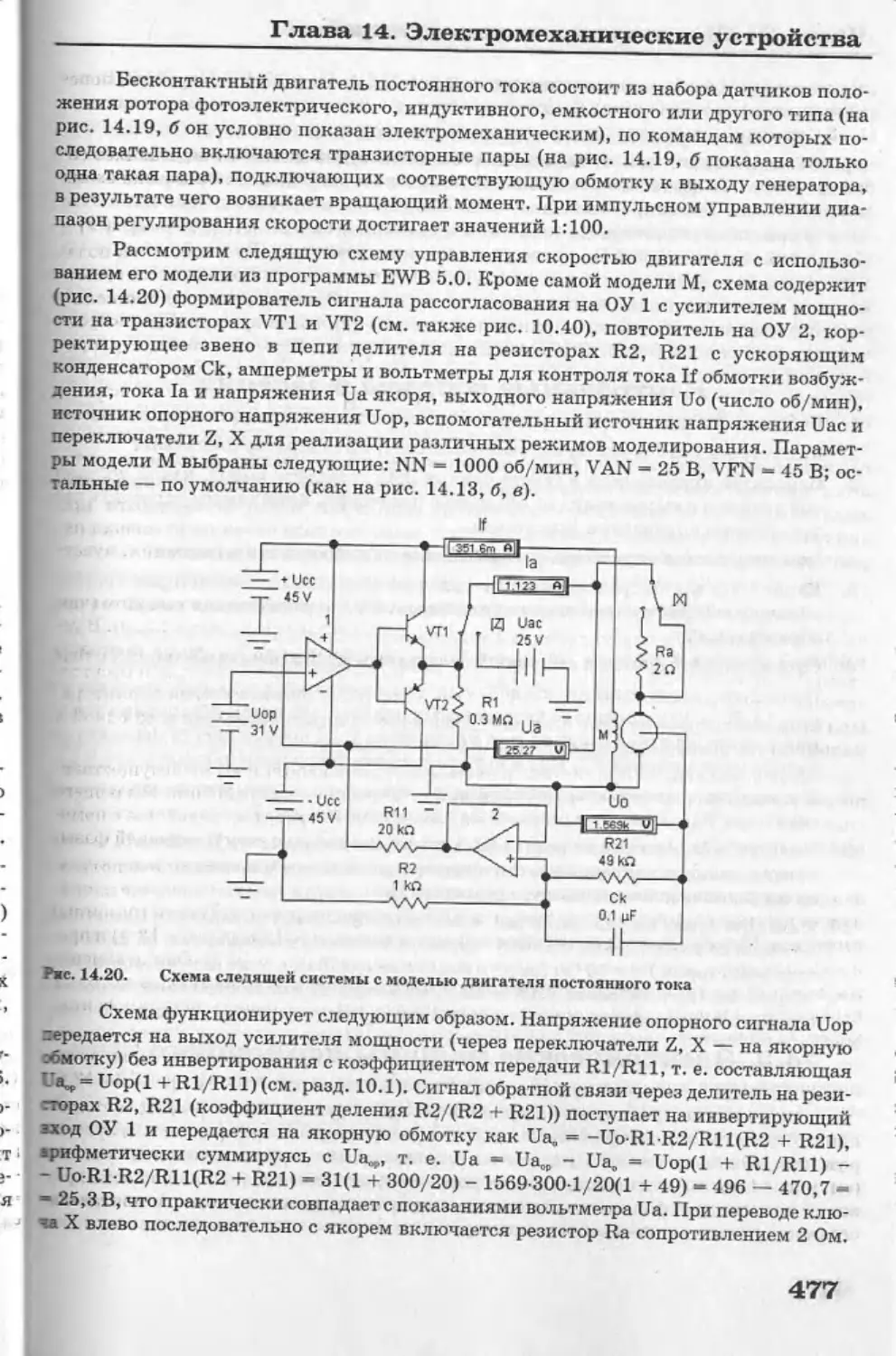
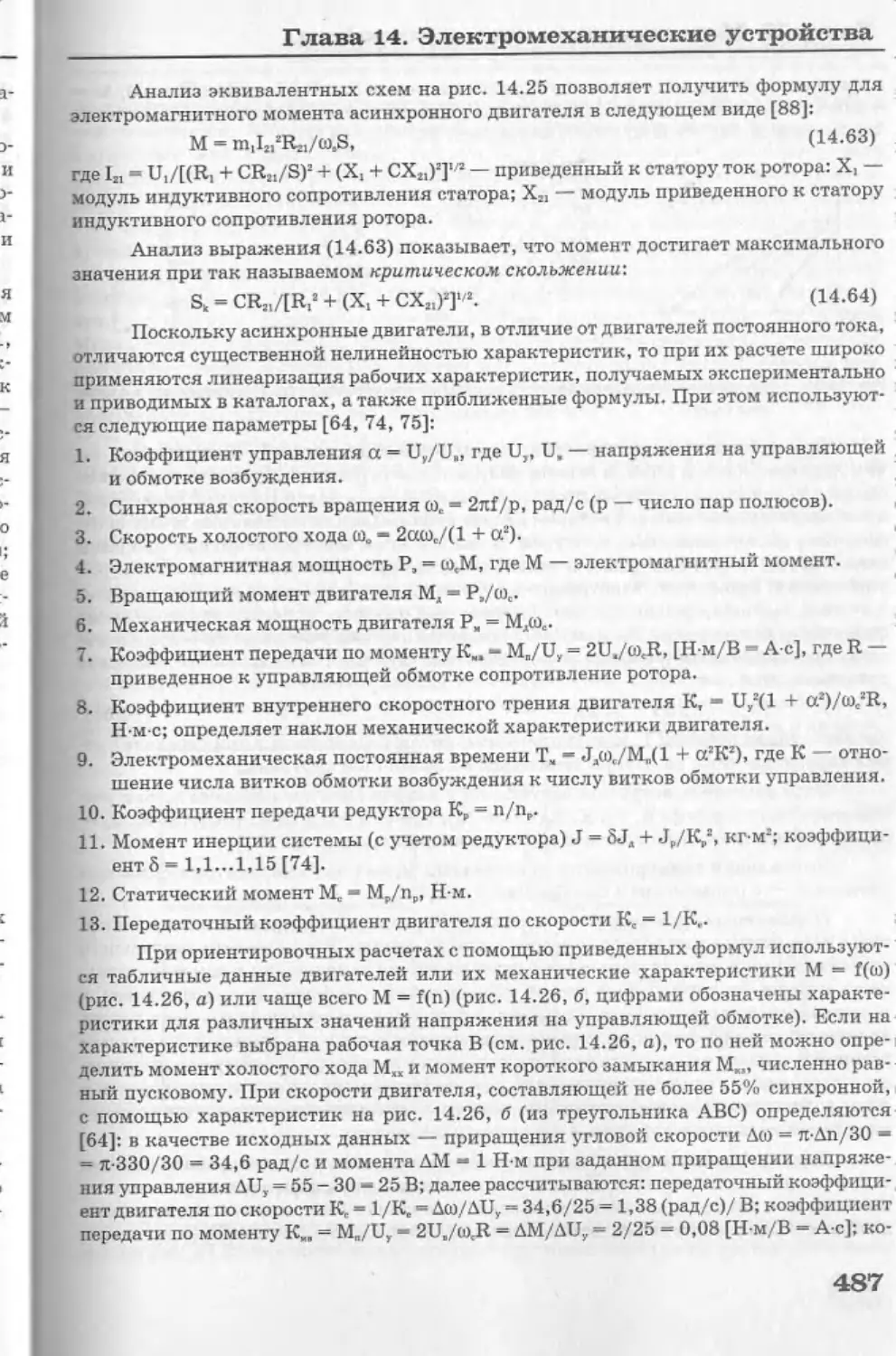
Глава 14 посвящена вопросам моделирования устройств электромашинного и
электромагнитного привода, а также электромеханических измерительных преоб-
разователей.
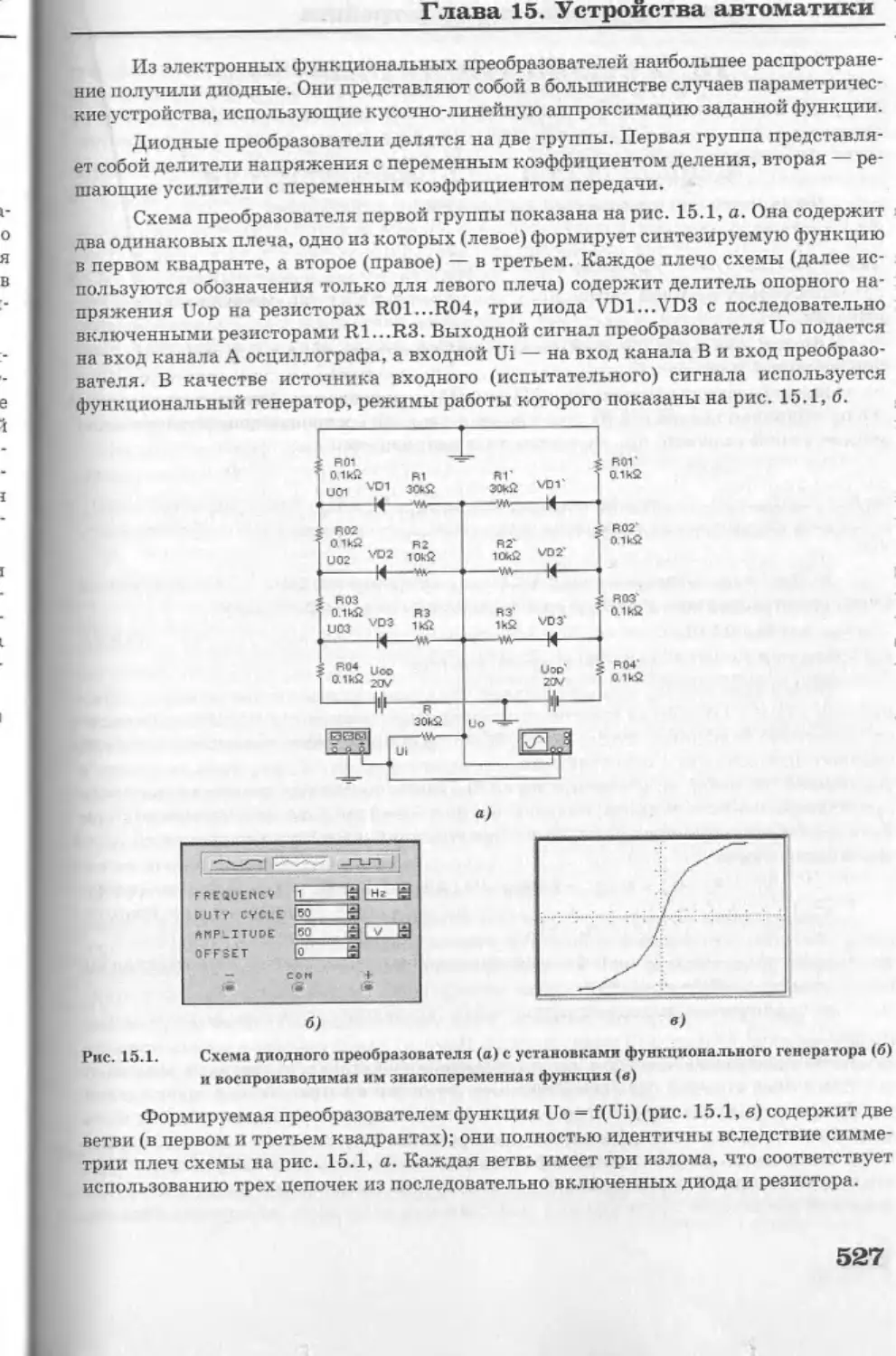
В главе 15 рассмотрены аналоговые вычислительные устройства и разнообраз-
ные функциональные преобразователи, используемые при моделировании и разра-
ботке систем автоматического управления.
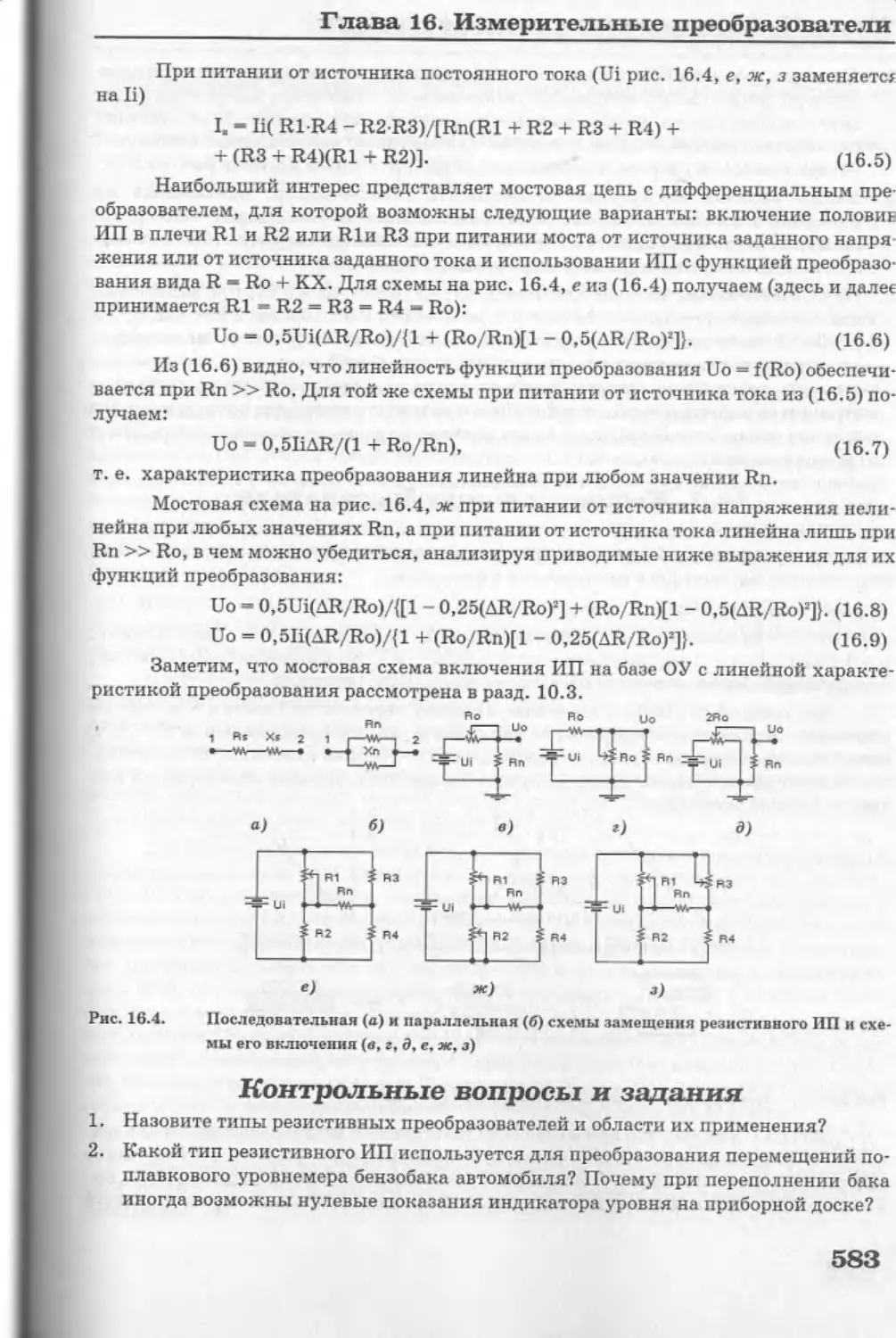
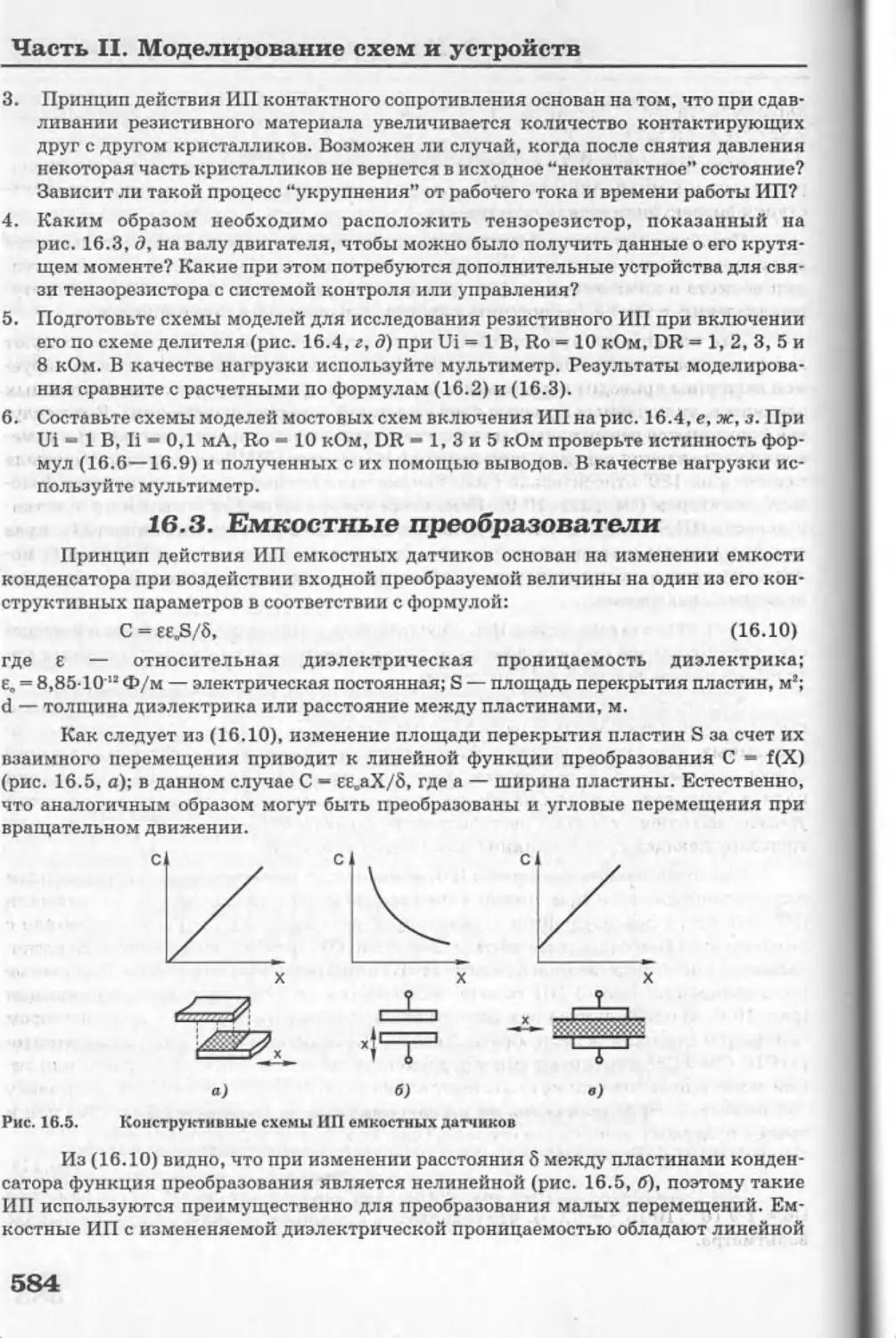
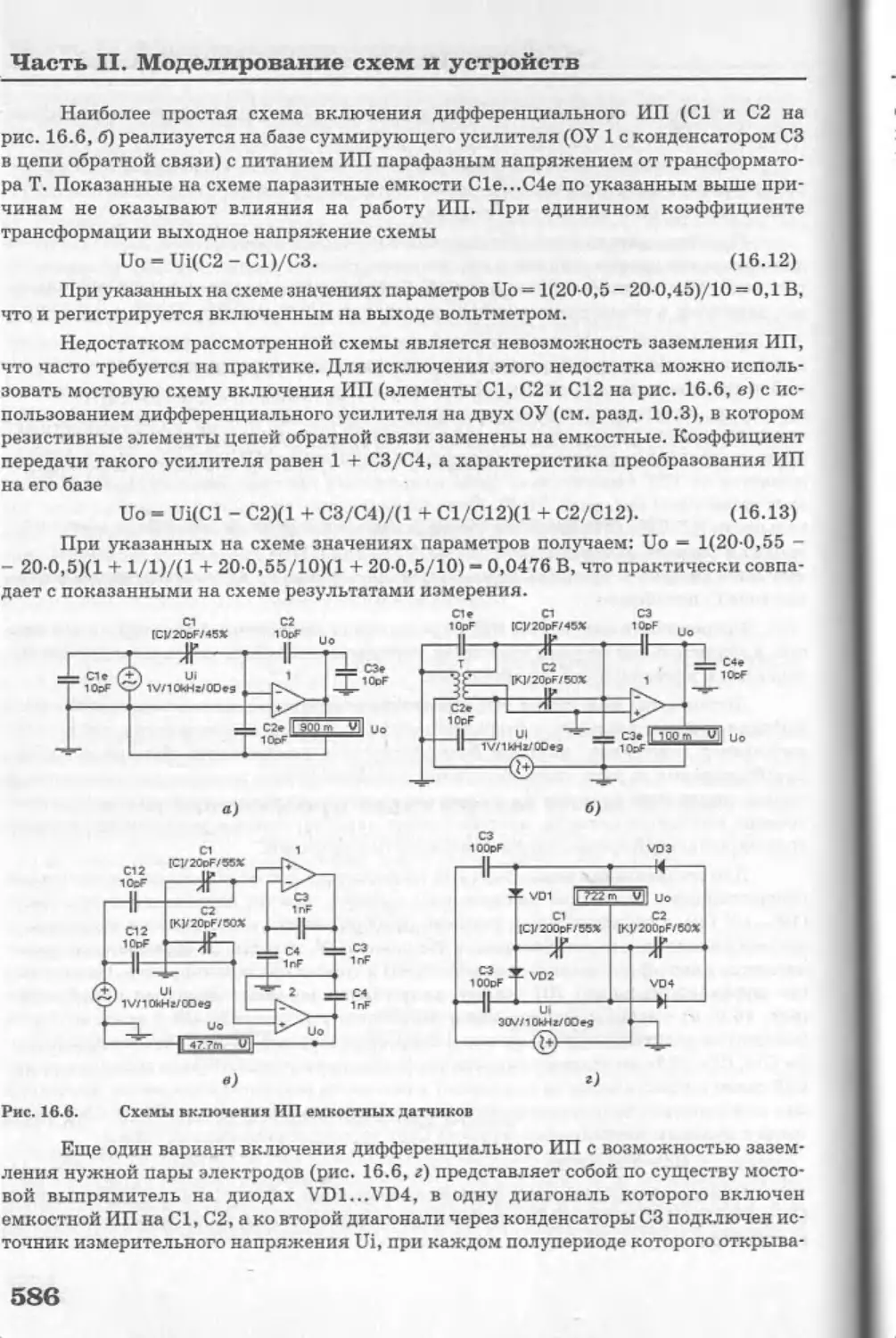
В главе 16 приведены схемы и результаты моделирования измерительных
преобразователей, используемых в датчиках информационно-измерительных и сис-
тем управления.
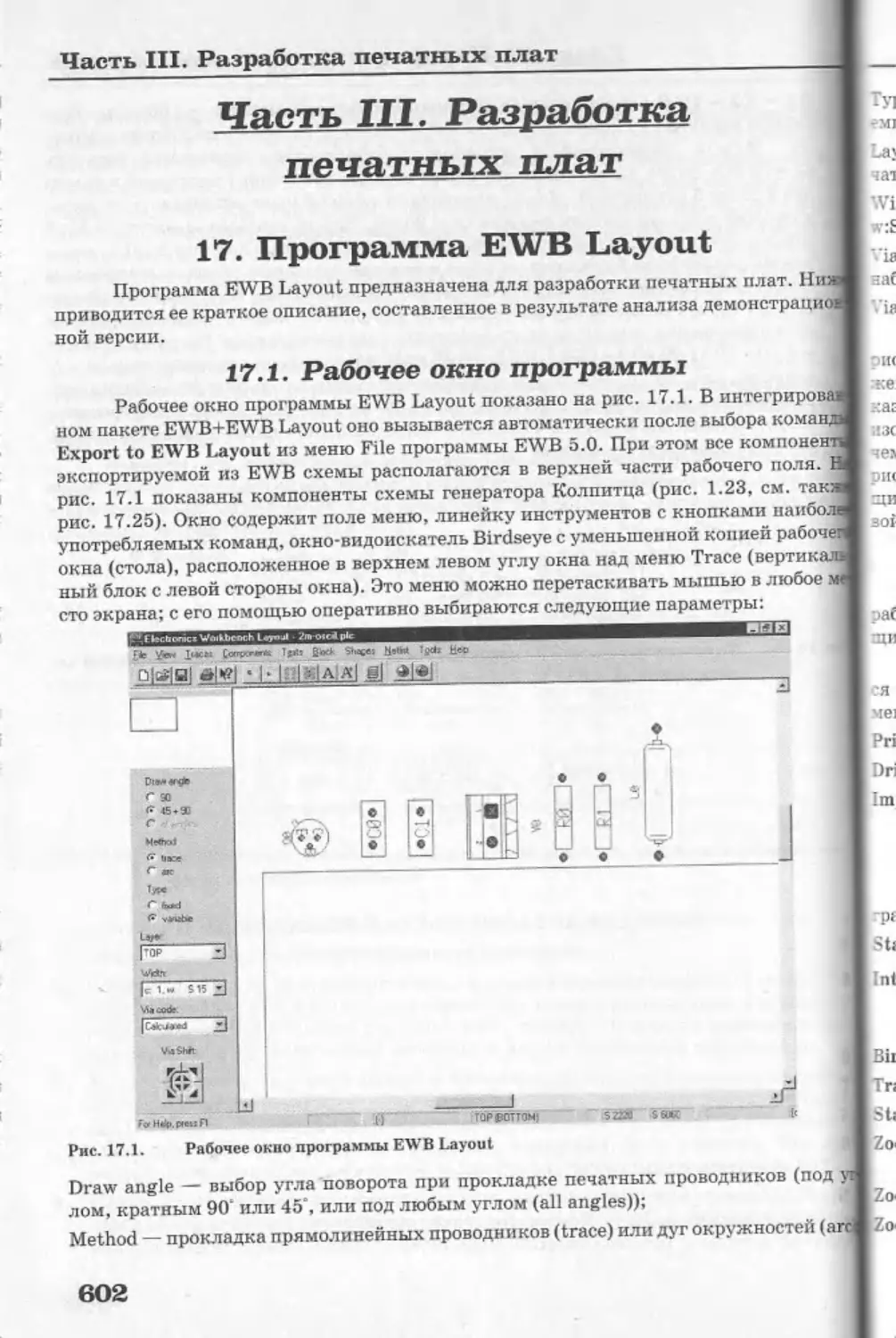
Третья часть книги посвящена конструированию печатных плат. Она состоит
из главы 17 и содержит краткое описание программы EWB Layout, составленное по
результатам анализа ее демонстрационной версии.
Автор выражает глубокую благодарность В. Д. Разевигу, замечания которого
способствовали существенному улучшению книги, и компании “Софт Лайн”
(http://www.softline.ru; info@softline.ru) — дистрибьютору Electronics Workbench
в СНГ — за предоставленную рабочую версию программы. Автор благодарит также
читателей, приславших свои замечания, которые учтены в настоящем издании.
Демонстрационную версию программы Electronics Workbench можно получить
по Internet, обратившись на Web-страницу: http://www.interactiv.com. С фирмой-
разработчиком можно связаться по электронной почте: support@interactiv.com, BBS:
8-416-977-3540, факсу: 8-416-977-1815, телефону: 8-416-977-5550.
6
Введение
Книга автор с благодарностью примет все замечания, пожелания и предло-
жения, которые следует направлять по адресу: 129337, Москва, а/я 5, изд-во “Со-
лон-Р”; электронная почта: Solon.Pub@relcom.ru; факс: (095) 252-7203; телефон:
(095) 252-3696.
7
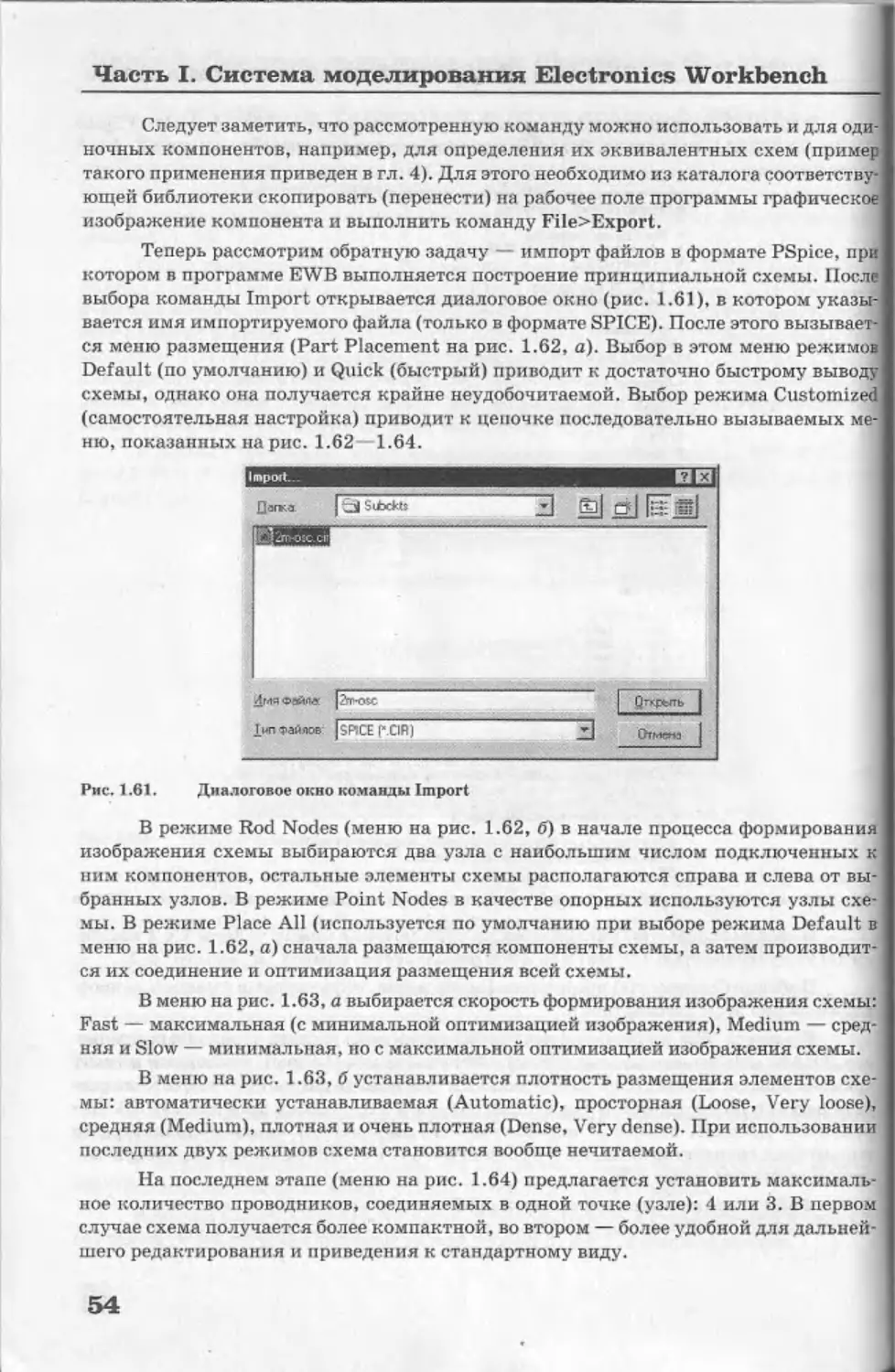
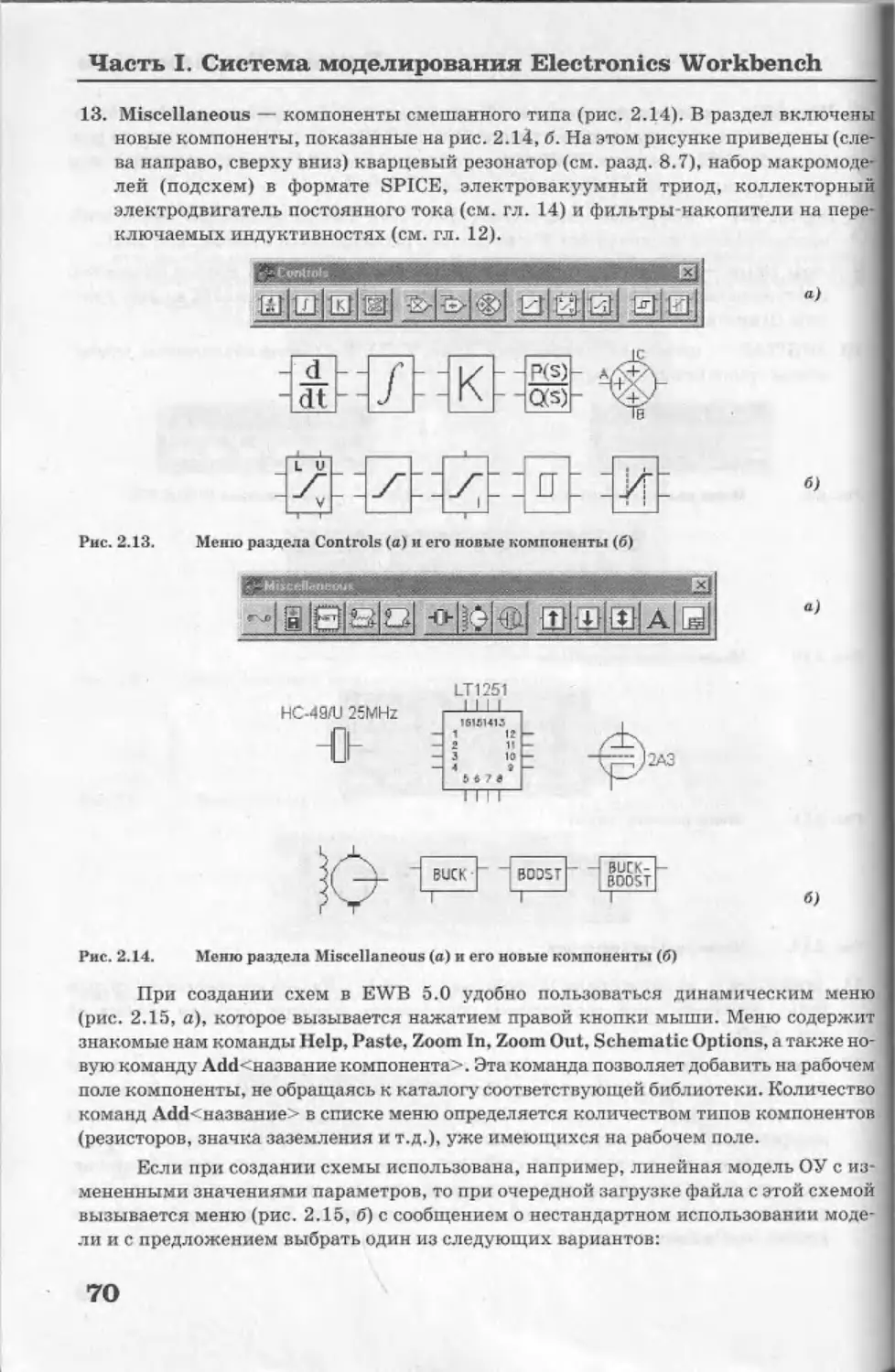
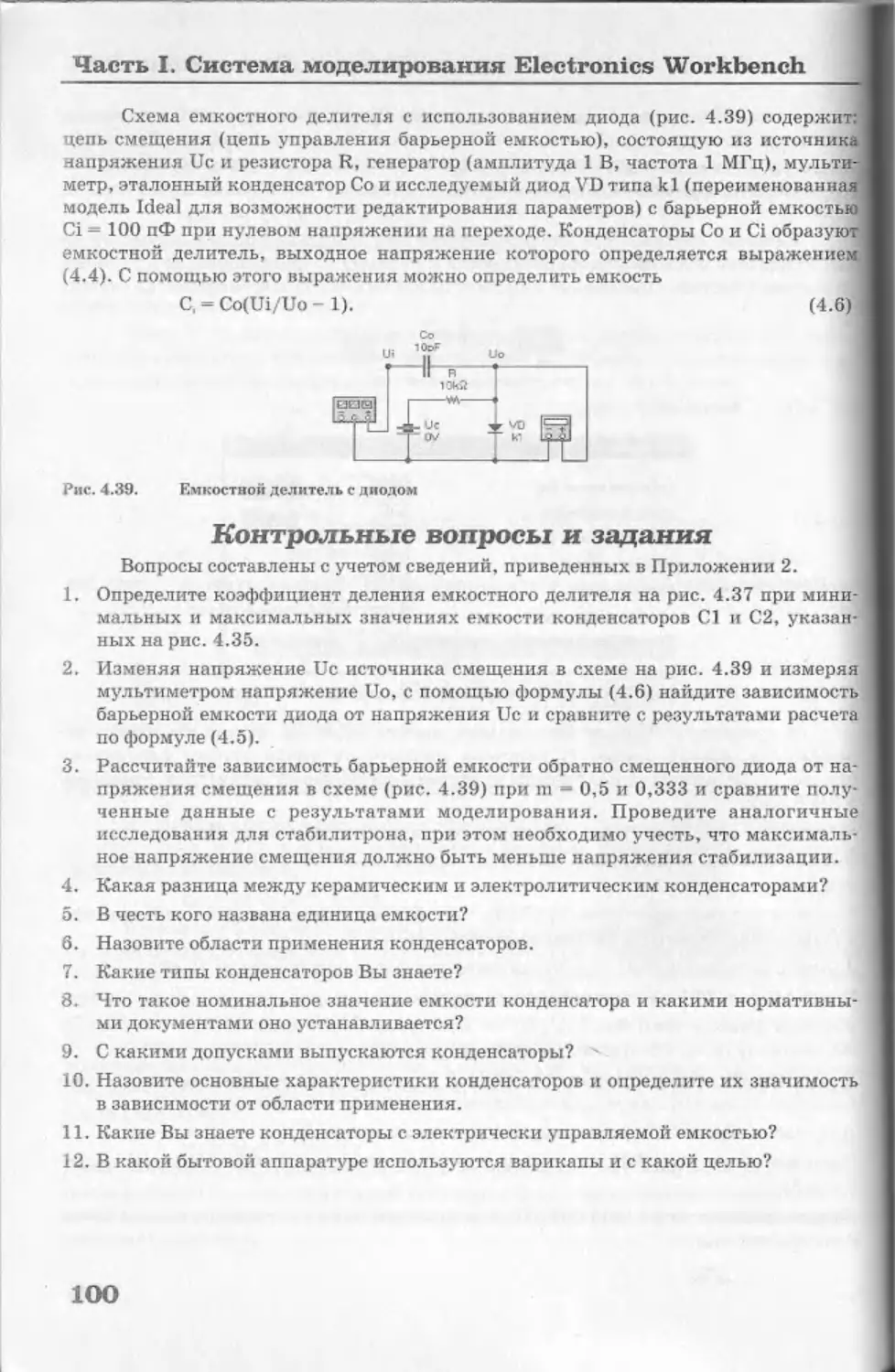
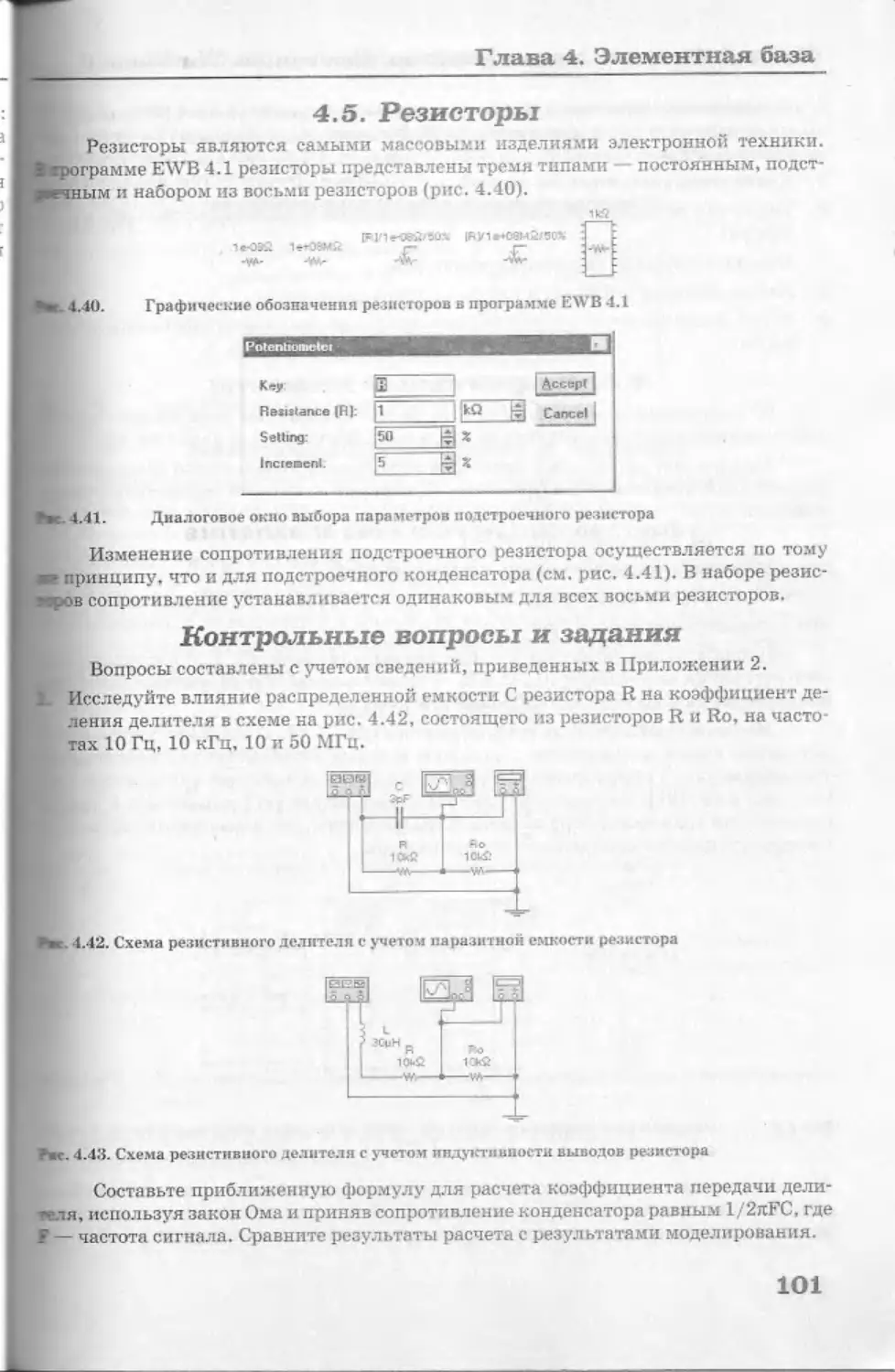
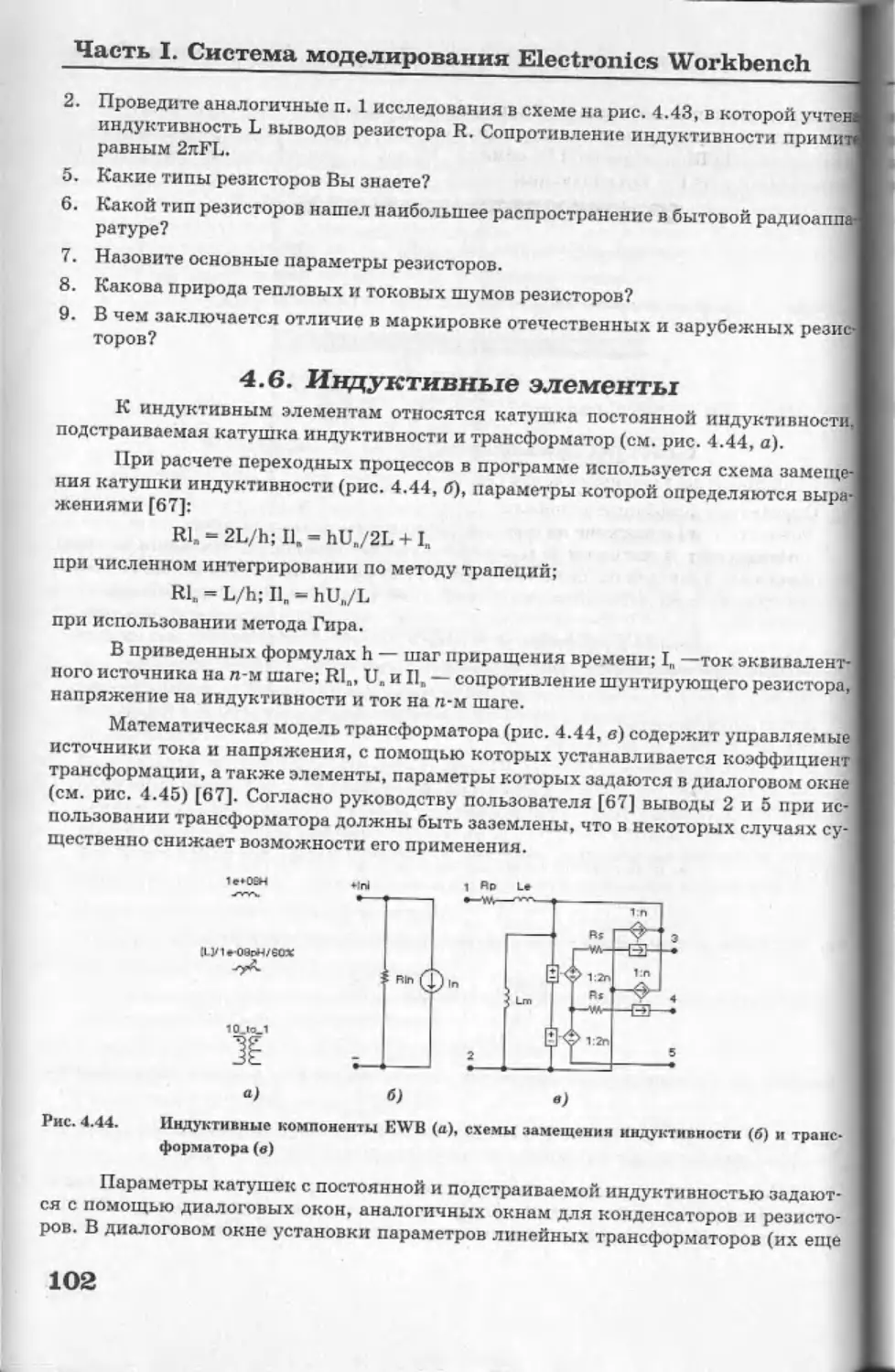
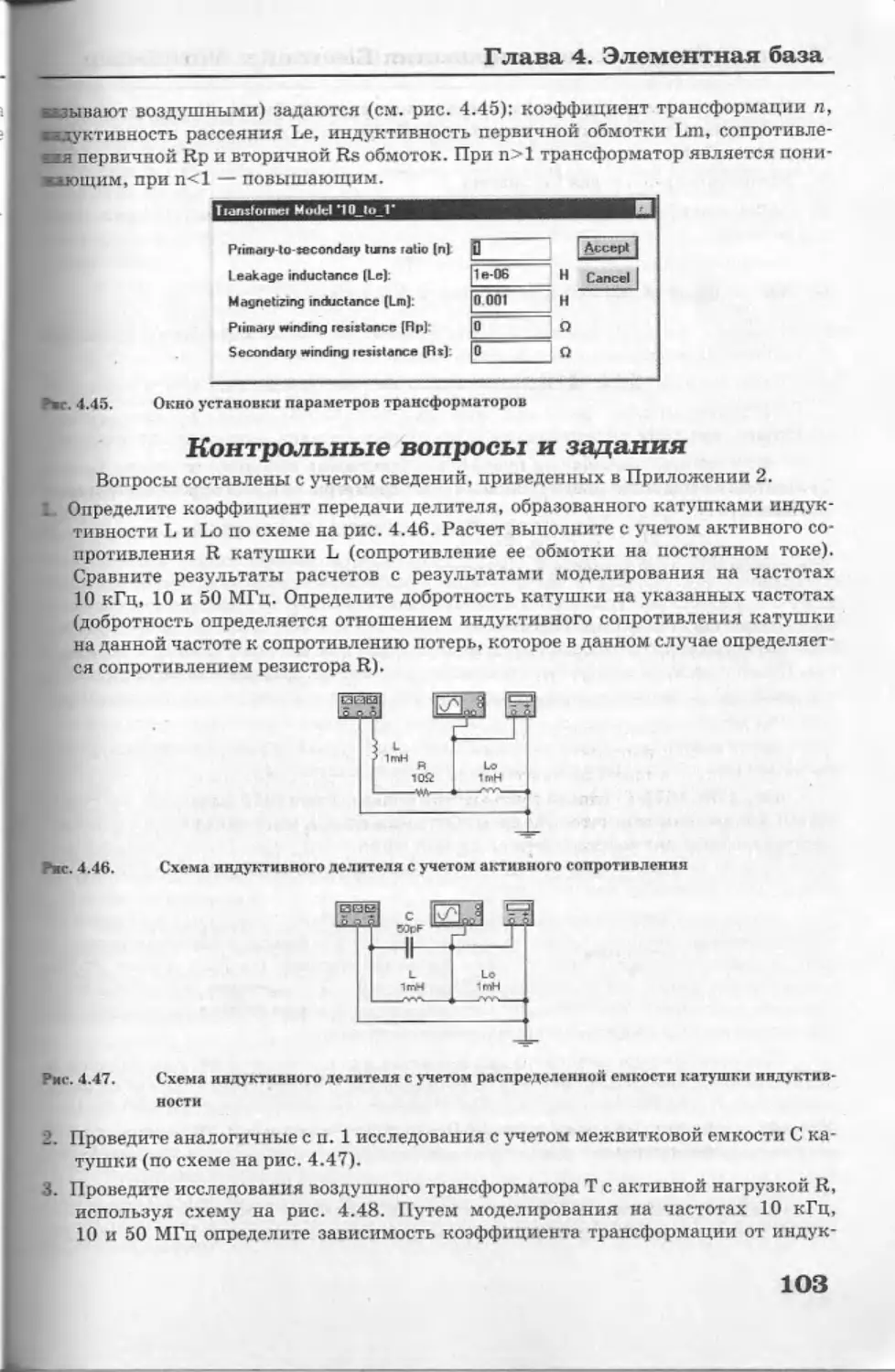
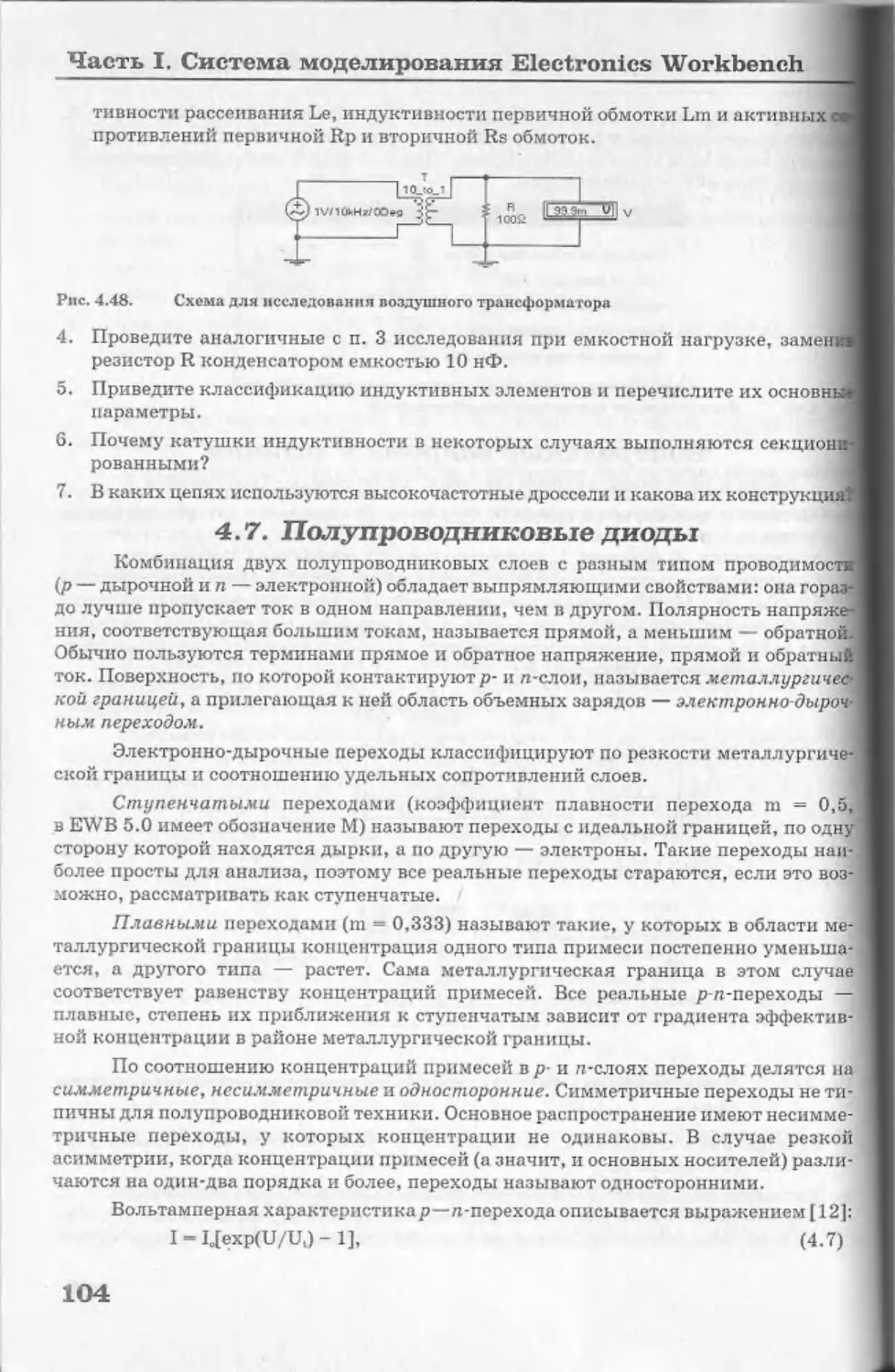
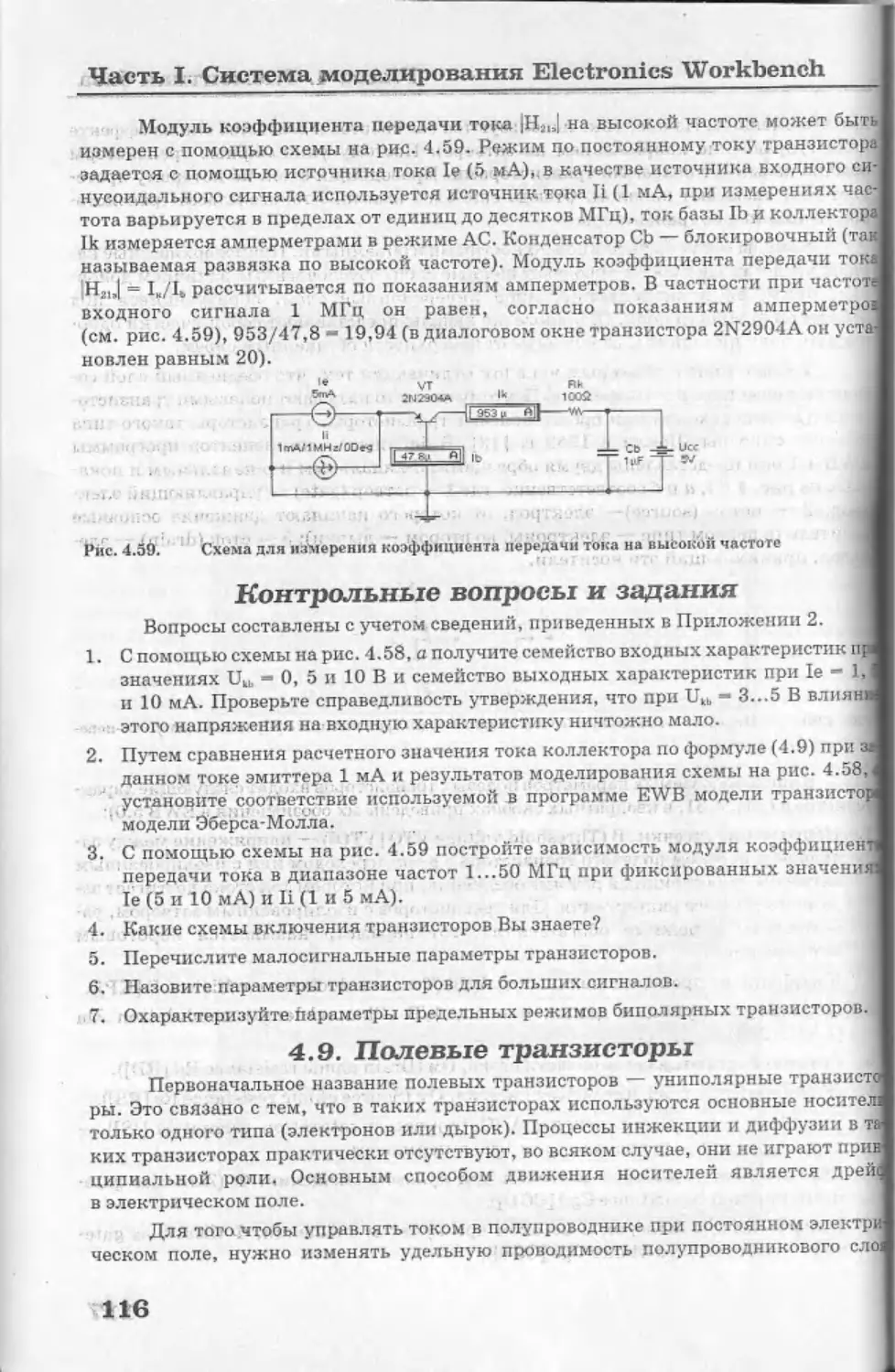
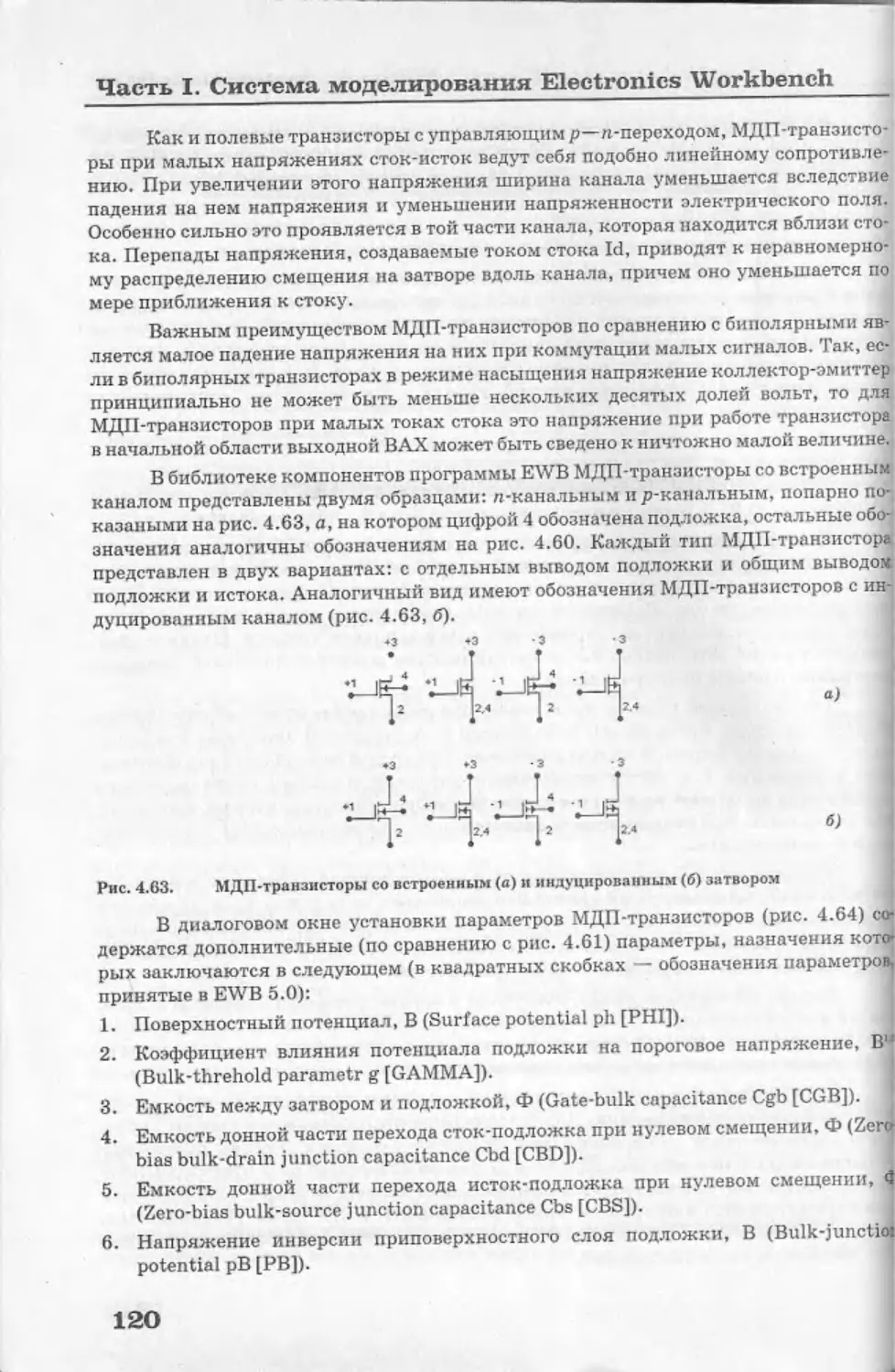
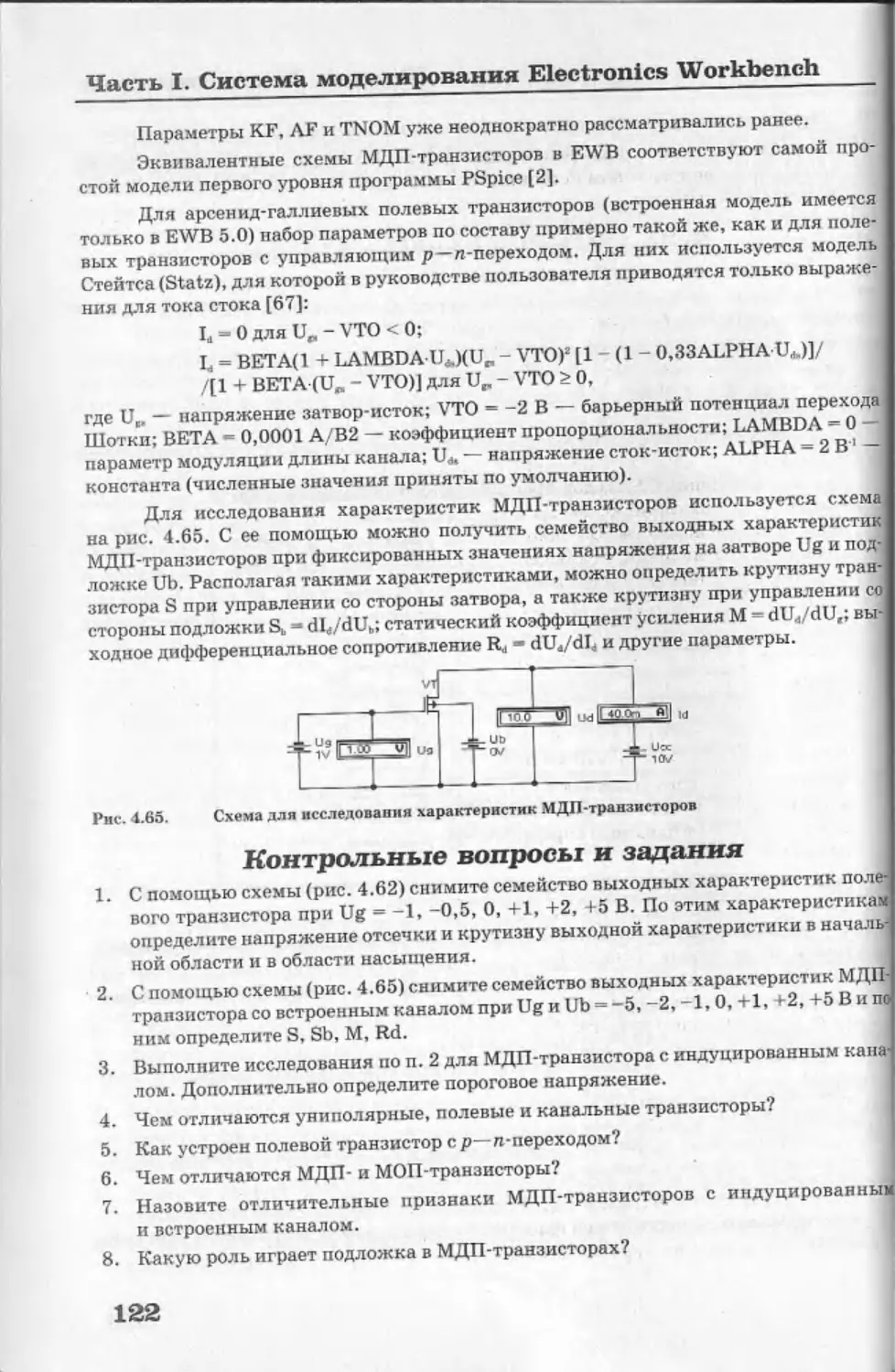
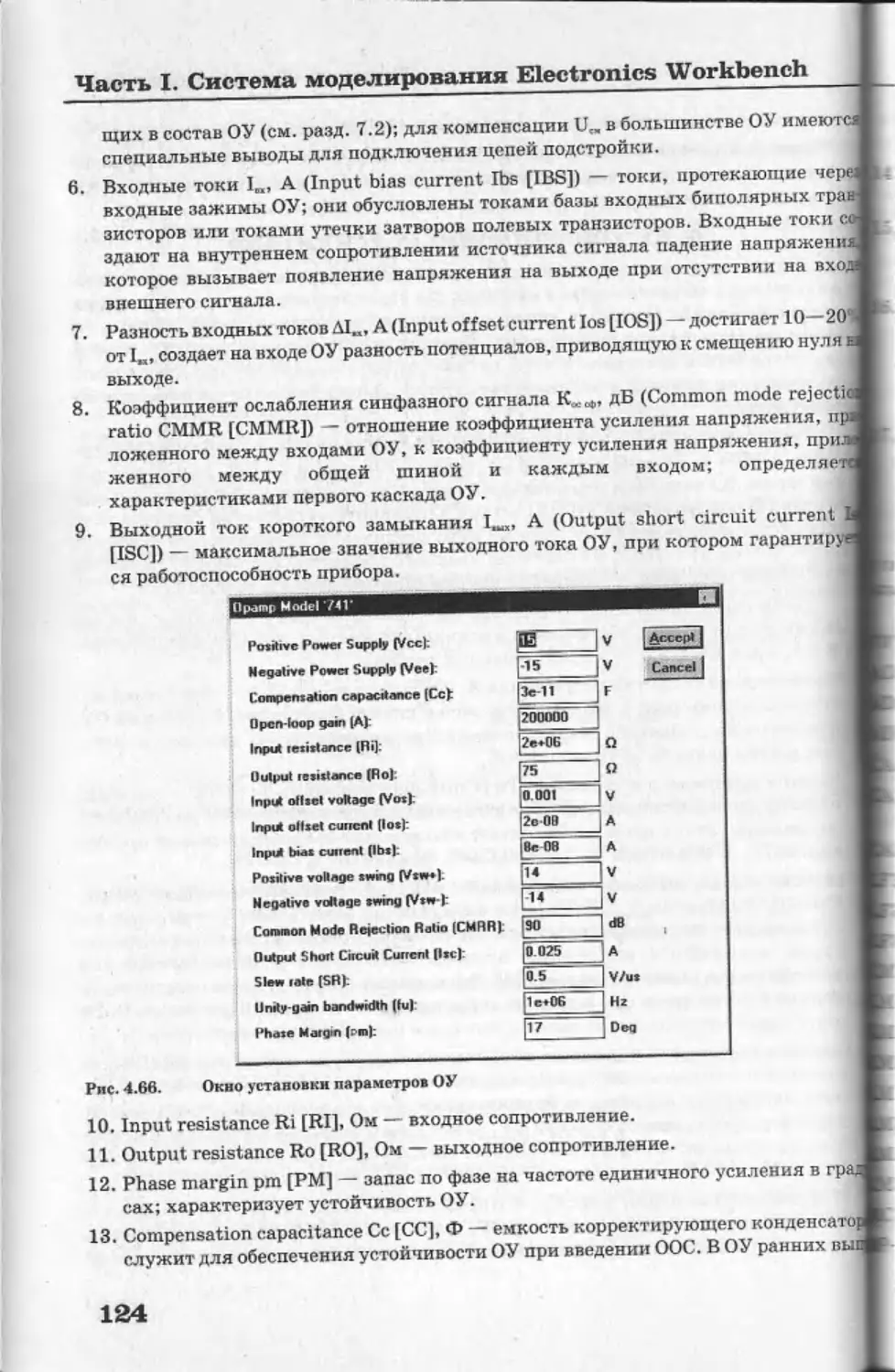
Часть I. Система моделирования Electronics Workbench
Часть I. Система моделирования
Electronics Workbench
История создания программы Electronics Workbench (EWB) начинается
с 1989 г. Ранние версии программы состояли из двух независимых частей. С помо-
щью одной половины программы можно было моделировать аналоговые устройства,
с помощью другой — цифровые. Такое “раздвоенное” состояние создавало опреде-
ленные неудобства, особенно при моделировании смешанных аналого-цифровых ус-
тройств. В 1996 г. в версии 4.1 эти части были объединены, а спустя полгода была
выпущена пятая версия программы с расширенными возможностями анализа при-
мерно в объеме программы Micro-Cap V [3] и переработанной библиотекой компонен-
тов. Дополнительные средства анализа цепей в EWB 5.0 выполнены в типичном для
всей программы ключе — минимум усилий со стороны пользователя. Дальнейшим
развитием EWB является программа EWB Layout, предназначенная для разработки
печатных плат [66] (гл. 17), а также EWB версии 6.02 (Приложение 7).
Программа EWB обладает преемственностью снизу вверх, т. е. все схемы, со-
зданные в версиях 3.0 и 4.1, могут быть промоделированы в версии 5.0. Кроме того,
EWB позволяет также моделировать устройства, для которых задание на моделиро-
вание подготовлено в текстовом формате SPICE, чем обеспечивается совместимость
с программами Micro-Cap и PSpice [2, 3].
Программа EWB 4.1 рассчитана для работы в среде Windows З.хх или 95/98
и занимает около 5 Мбайт дисковой памяти, EWB 5.0 — в среде Windows 95/98
и NT 3.51, требуемый объем дисковой памяти — около 16 Мбайт. Для размещения
временных файлов требуется дополнительно 10...20 Мбайт свободного пространства.
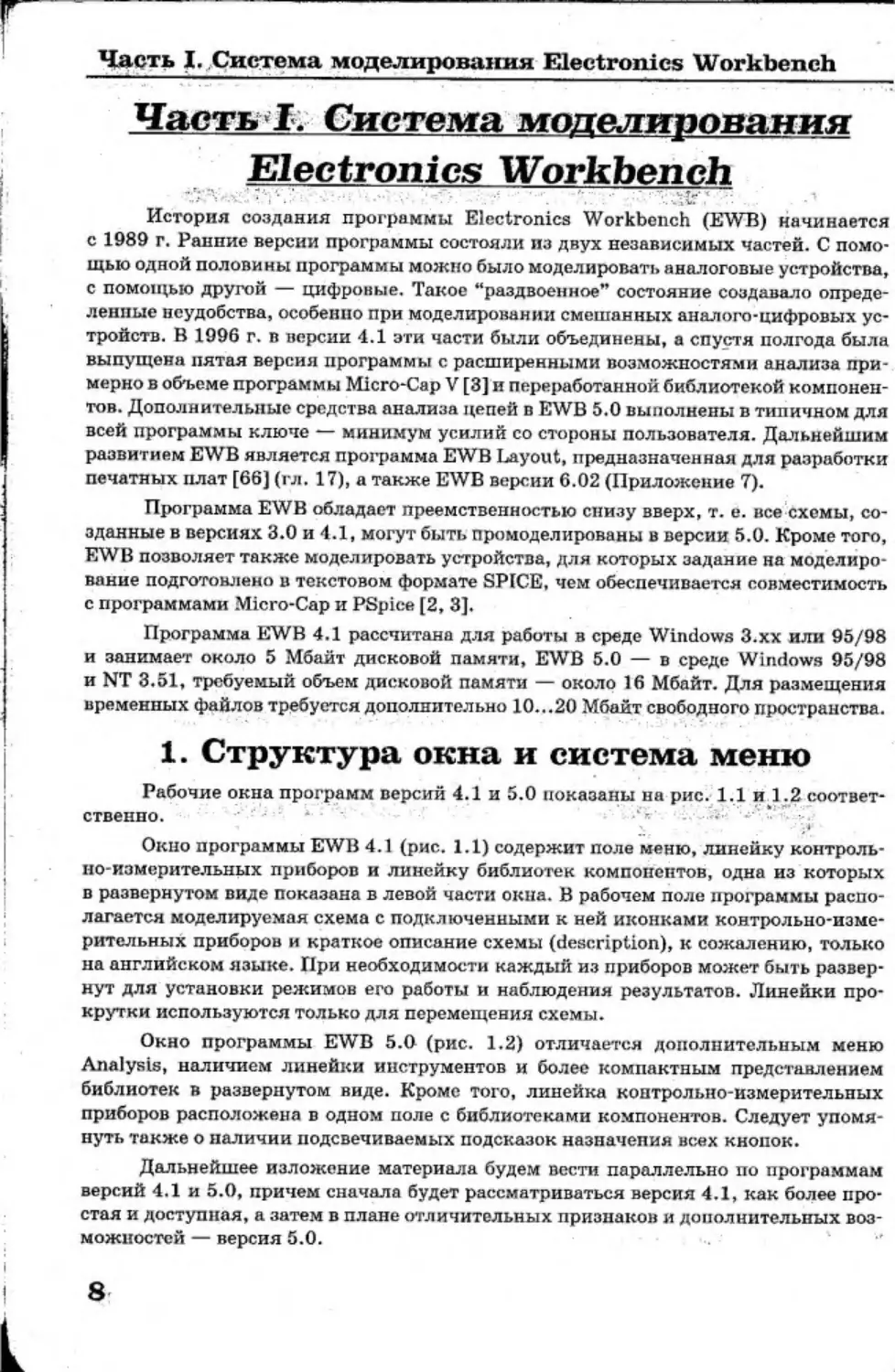
1. Структура окна и система меню
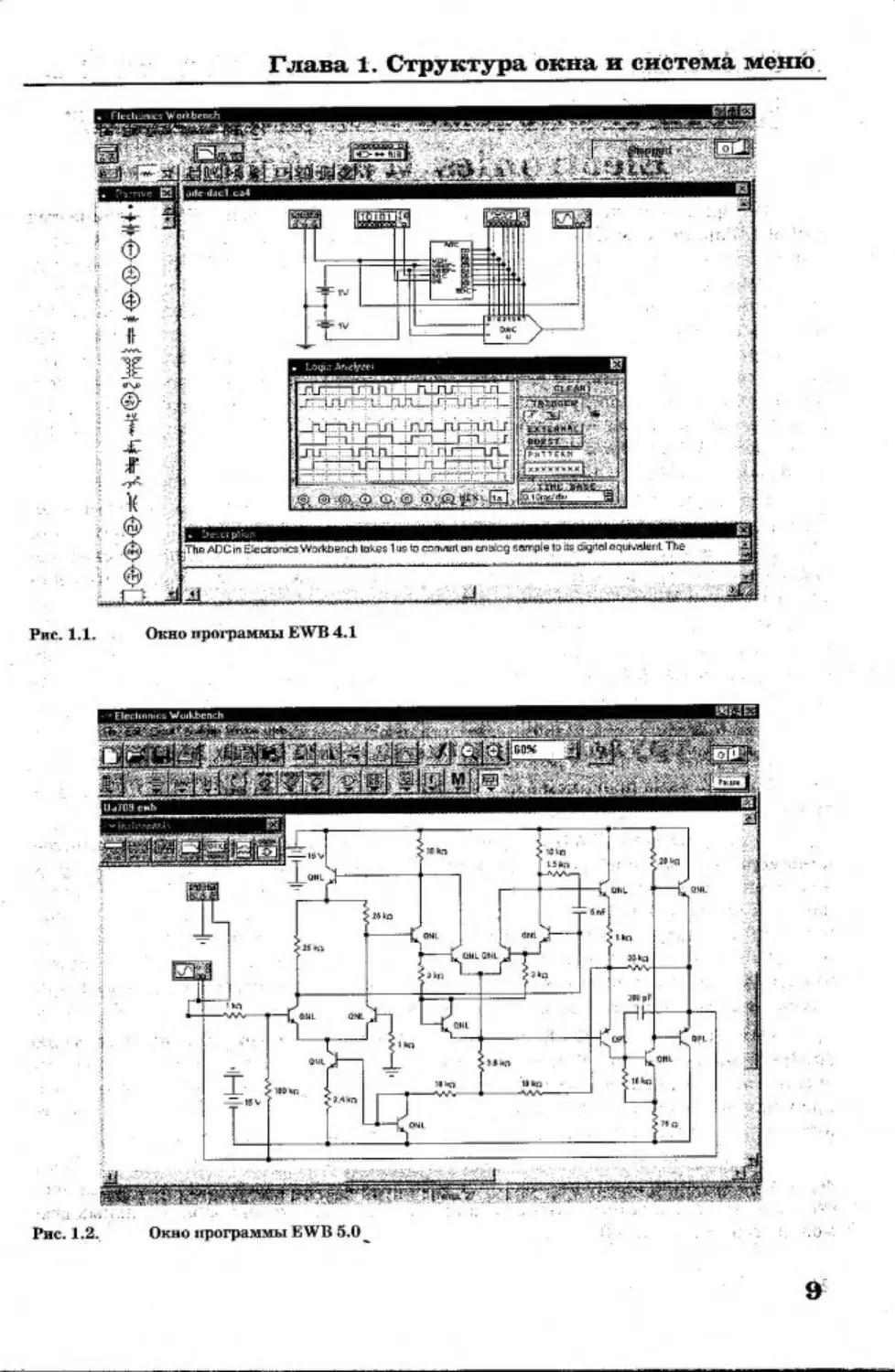
Рабочие окна программ версий 4.1 и 5.0 показаны на рис. 1.1 и 1.2 соответ-
ственно.
Окно программы EWB 4.1 (рис. 1.1) содержит поле меню, линейку контроль-
но-измерительных приборов и линейку библиотек компонентов, одна из которых
в развернутом виде показана в левой части окна. В рабочем поле программы распо-
лагается моделируемая схема с подключенными к ней иконками контрольно-изме-
рительных приборов и краткое описание схемы (description), к сожалению, только
на английском языке. При необходимости каждый из приборов может быть развер-
нут для установки режимов его работы и наблюдения результатов. Линейки про-
крутки используются только для перемещения схемы.
Окно программы EWB 5.0 (рис. 1.2) отличается дополнительным меню
Analysis, наличием линейки инструментов и более компактным представлением
библиотек в развернутом виде. Кроме того, линейка контрольно-измерительных
приборов расположена в одном поле с библиотеками компонентов. Следует упомя-
нуть также о наличии подсвечиваемых подсказок назначения всех кнопок.
Дальнейшее изложение материала будем вести параллельно по программам
версий 4.1 и 5.0, причем сначала будет рассматриваться версия 4.1, как более про-
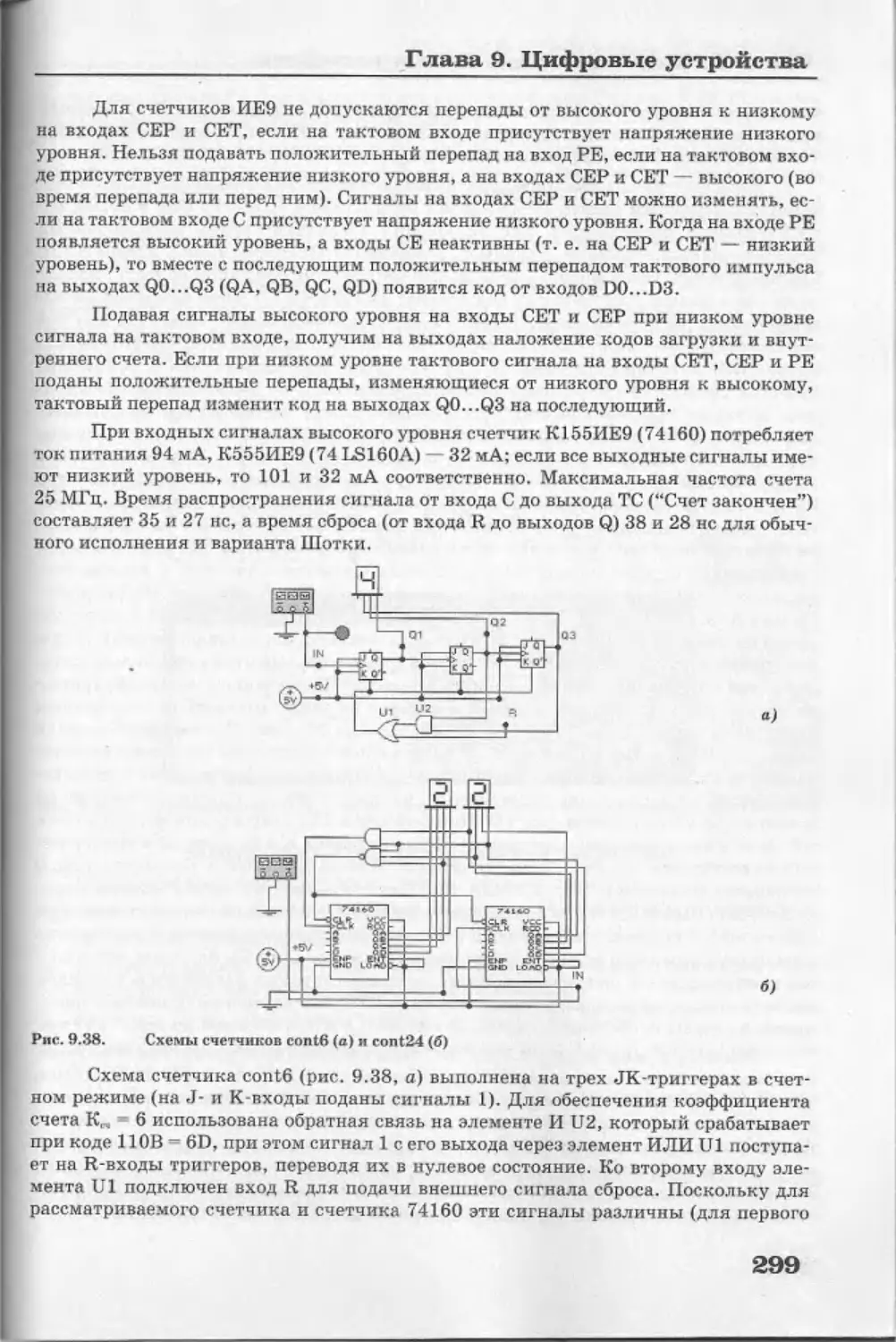
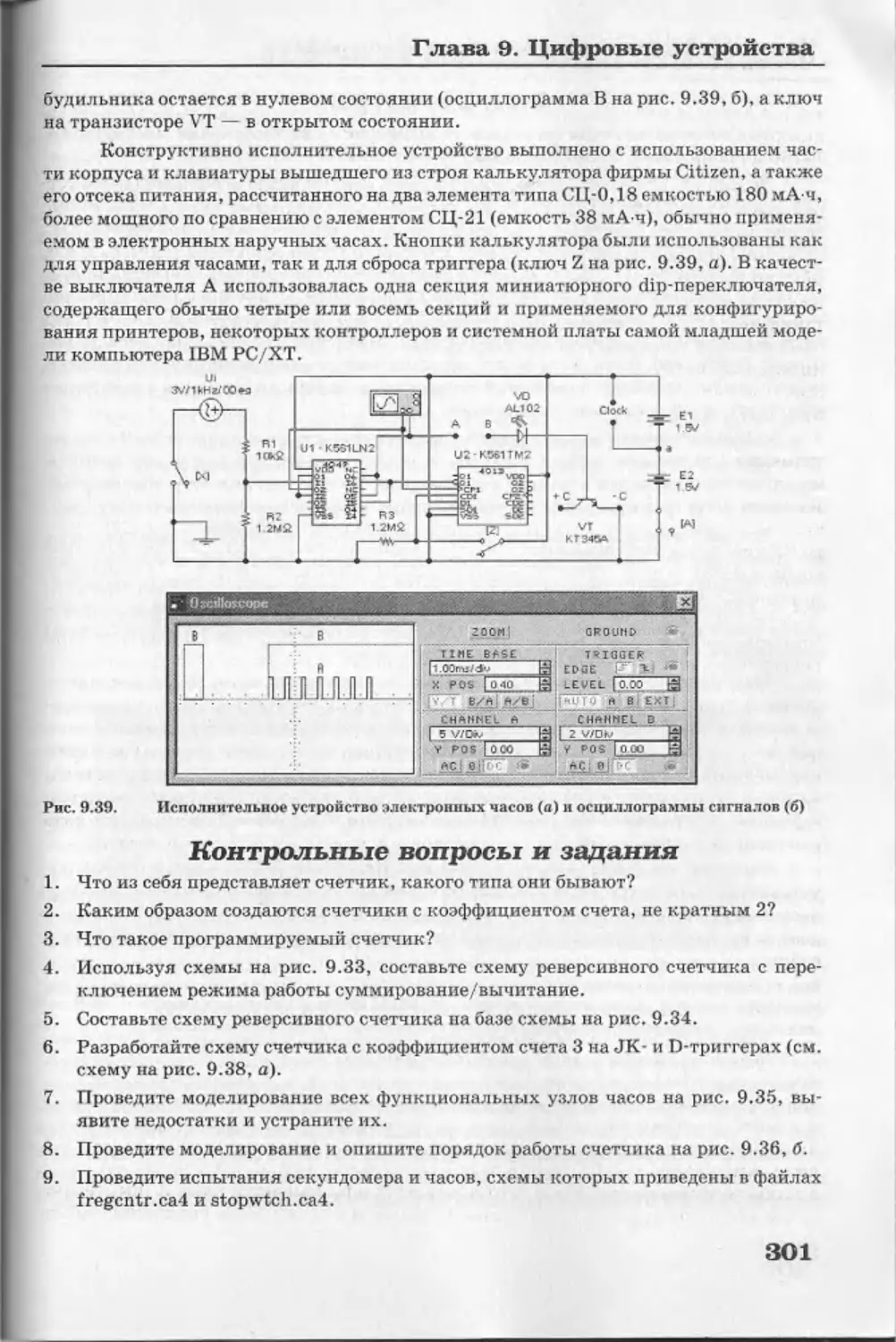
стая и доступная, а затем в плане отличительных признаков и дополнительных воз-
можностей — версия 5.0.
8
Глава 1. Структура окна и система меню
Окно программы EVVB 4.1
Рис. 1.1
Рис. 1.:
9
Часть I. Система моделирования Electronics Workbench
Рассмотрим команды меню программы EWB 4.1 в порядке их следования на
рис. 1.1. . t .
1.1. Меню File
Меню File предназначено для загрузки и записи файлов, получения твердой
копии выбранных для печати составных частей схемы, а также для имиорта/экспор-
та файлов в форматах других систем моделирования и программ разработки печат-
ных плат.
1. Первые четыре команды этого меню: New (Ctrl+N), Open... (Ctrl+O), Save
(Ctrl+S), Save As... •— типичные для Windows команды работы с файлами и по-
этому пояснений не требуют. Для этих команд в пятой версии имеются кнопки
(иконки) со стандартным изображением. Схемные файлы программы EWB име-
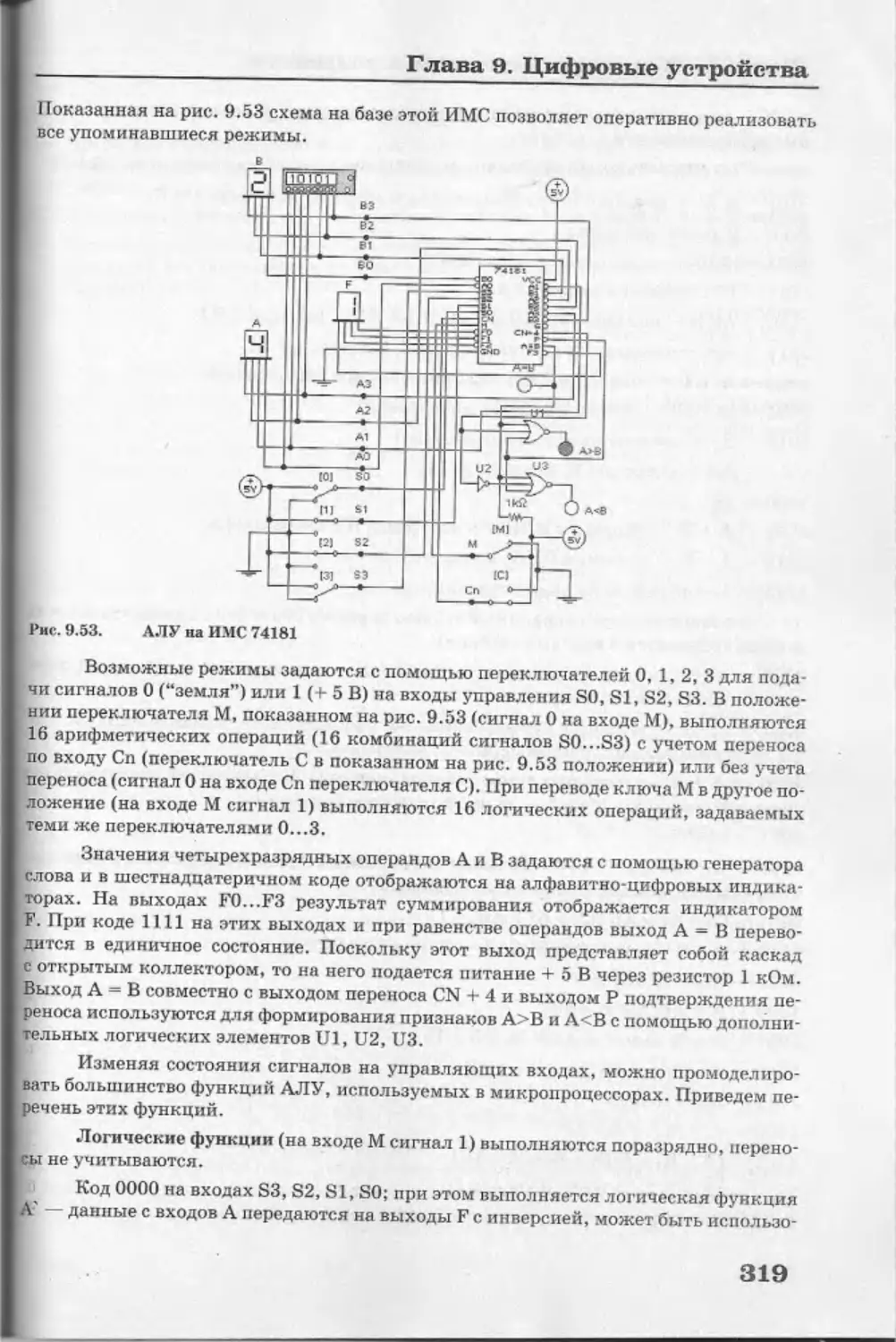
ют следующие расширения :.саЗ и.сИЗ — аналоговые и цифровые схемы для
EWB 3.0,.са4 — аналого-цифровые схемы для EWB 4.1 H.ewb — аналого-цифро-
вые схемы для EWB 5.0.
2. Revent to Saved... — стирание всех изменений, внесенных в текущем сеансе ре-
дактирования, и восстановление схемы в первоначальном виде.
3. Print... (CTRL+P) — выбор данных для вывода на принтер:
Schematic — схемы (опция включена по умолчанию);
Description — описания к схеме;
Part list — перечня выводимых на принтер документов;
Label list — списка обозначений элеглентов схемы;
Model list — списка имеющихся в схеме компонентов;
Subcircuits — подсхем (частей схемы, являющихся законченными функциональны-
ми узлами и обозначаемых прямоугольниками с названием внутри);
Analysis options — перечня режимов моделирования;
Instruments — списка приборов (см. гл. 3).
В этом же подменю можно выбрать опции печати (кнопка Setup) и отправить
материал на принтер (кнопка Print). В программе EWB 5.0 предусмотрена также
возможность изменения масштаба выводимых на принтер данных в пределах от
20 до 500%.
4. Print Setup... — настройка принтера.
5. Exit (ALT + F4) — выход из программы.
6. Install... — установка дополнительных программ с гибких дисков.
7. Import from SPICE — импорт текстовых файлов описания схемы и задания на
моделирование в формате SPICE (с расширением.cir) и автоматическое построе-
ние схемы но ее текстовому описанию.
8. Export to SPICE — составление текстового описания схемы и задания на модели-
рование в формате SP1CE.
9. Export to РСВ — составление списков соединений схемы в формате OrCAD и дру-
гих программ разработки печатных плат.
Одноименное меню программы EWB пятой версии отличается от рассмотрен-
ного тем, что в подменю Import/Export предусмотрены возможности обмена данны-
ми с программой разработки печатных плат EWB Layout (см. гл. 17).
10
Глава 1. Структура окна и система меню
1.2. Меню Edit
Меню Edit позволяет выполнять команды редактирования схем и копирова-
ния экрана.
1. Cut (CTRL4-X) — стирание (вырезание) выделенной части схемы с сохранением ее
в буфере обмена (Clipboard). Выделение одного компонента производится щелч-
ком мыши на изображении (значке) компонента. Для выделения части схемы или
нескольких компонентов необходимо поставить курсор мыши в левый угол вооб-
ражаемого прямоугольника, охватывающего выделяемую часть, нажать левую
кнопку мыши и, не отпуская се, протянуть курсор по диагонали этого прямо-
угольника, контуры которого появляются уже в начале движения мыши, и затем
отпустить кнопку. Выделенные компоненты окрашиваются в красный цвет.
2. Copy (CTRL+C) — копирование выделенной части схемы в буфер обмена.
3. Paste (CTRL+V) — вставка содержимого буфера обмена на рабочее поле програм-
мы. Поскольку в EWB нет возможности помещать импортируемое изображение
схемы или ее фрагмента в точно указанное место, то непосредственно после
вставки, когда изображение еще является отмеченным (выделено красным)
и может оказаться наложенным на создаваемую схему, его можно переместить
в нужное место клавишами курсора или ухватившись мышью за один из отме-
ченных компонентов. Таким же образом перемещаются и предварительно выде-
ленные фрагменты уже имеющейся на рабочем поле схемы.
4. Delete (Del) — стирание выделенной части схемы.
5. Select All (CTRL+A) — выделение всей схемы.
6. Copybits (CTRL+I) — команда превращает курсор мыши в крестик, которым по
правилу прямоугольника можно выделить нужную часть экрана, после отпуска-
ния левой кнопки мыши выделенная часть копируется в буфер обмена, после чего
его содержимое может быть импортировано в любое приложение Windows. Копи-
рование всего экрана производится нажатием клавиши Print Screen; копирование
активной в данный момент части экрана, например, диалогового окна — комбина-
цией Alt 1 Print Screen. Перечисленные команды очень удобны при подготовке от-
четов по моделированию, например, при оформлении лабораторных работ.
7. Show Clipboard — показать содержимое буфера обмена.
Одноименное меню EWB 5.0 аналогично рассмотренному, за исключением на-
звания команды копирования экрана в п. 6. Она называется Copy as Bitmap и, к сожа-
лению, не имеет клавиатурного дублирования (комбинации CTRL+I для EWB 4.1), что
в некоторых случаях затрудняет возможность копирования элементов схемы.
1.3. Меню Circuit
Меню Circuit используется при подготовке схем, а также для задания параме-
тров моделирования.
1. Activate (CTRL+G) — запуск моделирования.
2. Stop (CTRL+T) — остановка моделирования. Эта и предыдущая команды могут
быть выполнены также нажатием кнопки IC°U1, расположенной в правом верх-
нем углу экрана.
3. Pause (F9) — прерывание моделирования.
4. Label... (CTRL+L) — ввод позиционного обозначения выделенного компонента
(например, R1 — для резистора, С5 — для конденсатора и т.д.) с помощью диа-
11
Часть I. Система моделирования Electronics Workbench
лотового окна (см. рис. 1.3). При необходимости сдвига обозначения вправо мож-
но слева ввести необходимое число пробелов|не более 14 символов в строке).
5. Value... (CTRL+ U) — • изменение номинального значения параметра компонента
с помощью диалогового окна (см. рис. 1.4); команда выполняется также двой-
ным щелчком по компоненту. Номинальное значение параметра вводится с кла-
виатуры, после чего нажатием курсором мыши на кнопки вверх-вниз
выбирается множитель, кратный 1000. Например, для конденсатора задается
его емкость в пикофарадах (пФ), нанофарадах (нФ), микрофарадах (мкФ) или
миллифарадах (мФ). i
Рис. 1.3.
Окно ввода позиционного обозначения резистора
Окно ввода номинального значения параметра компонента
Рис. 1.4.
Рис. 1.5.
Меню выбора модели операционного усилителя с возможностью редактирования ее
параметров
6. Model... (CTRL+M) выбор модели компонента (полупроводникового прибора,
операционного усилителя, трансформатора и др.); команда выполняется также
двойным щелчком по компоненту. В меню команды (рис. 1.5) выбираются:
Library — перечень библиотек, в которых находятся компоненты выбранного типа;
12
Глава 1. Структура окна и система меню
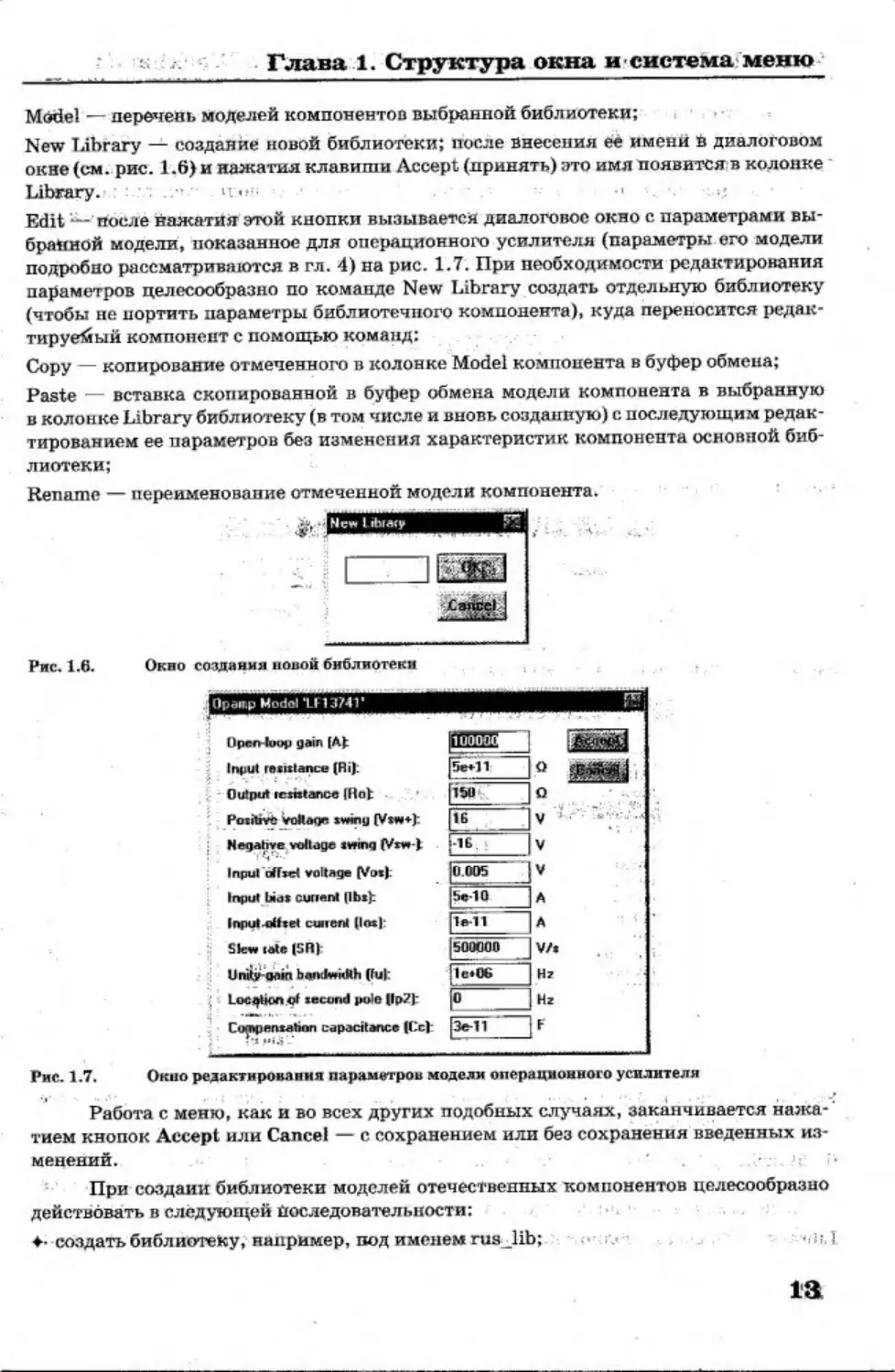
Model — перечень моделей компонентов выбранной библиотеки;
New Library — создание новой библиотеки; после внесения ее имени В диалоговом
окне (см. рис. 1.6) и нажатия клавиши Accept (принять) это имя появится в колонке
Library. :: ; цг«; •• . ..»
Edit **- после нажатия этой кнопки вызывается диалоговое окно с параметрами вы-
бранной модели, показанное для операционного усилителя (параметры его модели
подробно рассматриваются в гл. 4) на рис. 1.7. При необходимости редактирования
параметров целесообразно по команде New Library создать отдельную библиотеку
(чтобы не портить параметры библиотечного компонента), куда переносится редак-
тируемый компонент с помощью команд:
Сору — копирование отмеченного в колонке Model компонента в буфер обмена;
Paste — вставка скопированной в буфер обмена модели компонента в выбранную
в колонке Library библиотеку (в том числе и вновь созданную) с последующим редак-
тированием ее параметров без изменения характеристик компонента основной биб-
лиотеки;
Rename — переименование отмеченной модели компонента.
Рис. 1.6. Окно создания новой библиотеки
lOpair-p Modol TF13741'
Open-hop gain (At
Input resistance (Ri): 5e«-ll °
Output resistance (Rot IbO ° ,
Positive Voltage swing (Vsw*): 16 V ‘ \
Negative voltage swing (Vxw-). 16. V
Input offset voltage (Vos): fl 005 V
Input bias current (Ibst 5e10 A
Input-offset current (lost le-11 ~ A
Slew tale (SR) 500000 V/s
UnAjroain bandwidth (fu|: le.Ob Hz
Location of second pule (Ip2)' 0 Hz
Compensation capacitance (Cc): .•J M«3 .. 3e-11 f
Рис. 1.7. Окно редактирования параметров модели операционного усилителя
Работа с меню, как и во всех других подобных случаях, заканчивается нажа-'
тием кнопок Accept или Cancel — с сохранением или без сохранения введенных из-
менений. '
При создали библиотеки моделей отечественных компонентов целесообразно
действовать в следующей Последовательности:
создать библиотеку, например, вод именем rus_lib; , *н;, I
13
Часть I. Система моделирования Electronics Workbench
♦ скопировать в эту библиотеку модель компонента, наиболее близкого по параме-
трам к отечественному компоненту;
♦ переименовать скопированную модель, присвоив ей, например, имя K140UD5
(латинская транскрипция К140УД5);
♦ при необходимости отредактировать значения параметров переименованной мо-
дели, используя данные каталогов отечественных микросхем или литературных
источников [4 — 11].
7. Zoom (CTRL+Z) — раскрытие (развертывание) выделенной подсхемы или кон-
трольно-измерительного прибора, команда выполняется также двойным щелч-
ком мыши по иконке компонента или прибора.
8. Rotate (CTRL+R) — вращение выделенного компонента; большинство компо-
нентов поворачиваются по часовой стрелке (в EWB 5.0 — против) на 90’ при каж-
дом выполнении команды, для измерительных приборов (амперметр, вольтметр
и др.) меняются местами клеммы подключения; команда используется при под-
готовке схем. В готовой схеме пользоваться командой нецелесообразно, посколь-
ку это чаще всего приводит к путанице, — в таких случаях компонент нужно
сначала отключить, а затем вращать.
9. Fault (CTRL+F) — имитация неисправности выделенного компонента путем вве-
дения:
Leakage — сопротивления утечки;
Short — короткого замыкания;
Open — обрыва;
None — неисправность отсутствует (включено по умолчанию).
10. Subcircuit... (CTRL4-B) — преобразование предварительно выделенной части
схемы в подсхему. Выделяемая часть схемы должна быть расположена таким об-
разом, чтобы в выделенную область не попали не относящиеся к ней проводники
и компоненты. В результате выполнения команды вызывается диалоговое окно
(рис. 1.8), в строке Name которого вводится имя подсхемы, после чего возможны
следующие варианты:
Copy from Circuit — подсхема копируется с указанным названием в библиотеку
Custom без внесения изменений в исходную схему;
Move from Circuit — выделенная часть вырезается из общей схемы и в виде подсхе-
мы с присвоенным ей именем копируется в библиотеку Custom;
Replace in Circuit — выделенная часть заменяется в исходной схеме подсхемой
с присвоенным ей именем с одновременным копированием в библиотеку Custom.
Для просмотра или редактирования подсхемы нужно дважды щелкнуть мы-
шью ио ее значку. Редактирование подсхемы производится по общим правилам ре-
дактирования схем. При создании дополнительного вывода необходимо из
соответствующей точки подсхемы курсором мыши протянуть проводник к краю ее
окна до появления незакрашенной прямоугольной контактной площадки, после че-
го отпустить левую кнопку мыши. Для удаления вывода необходимо курсором мы-
ши ухватиться за его прямоугольную площадку у края окна подсхемы и вынести ее
за пределы окна.
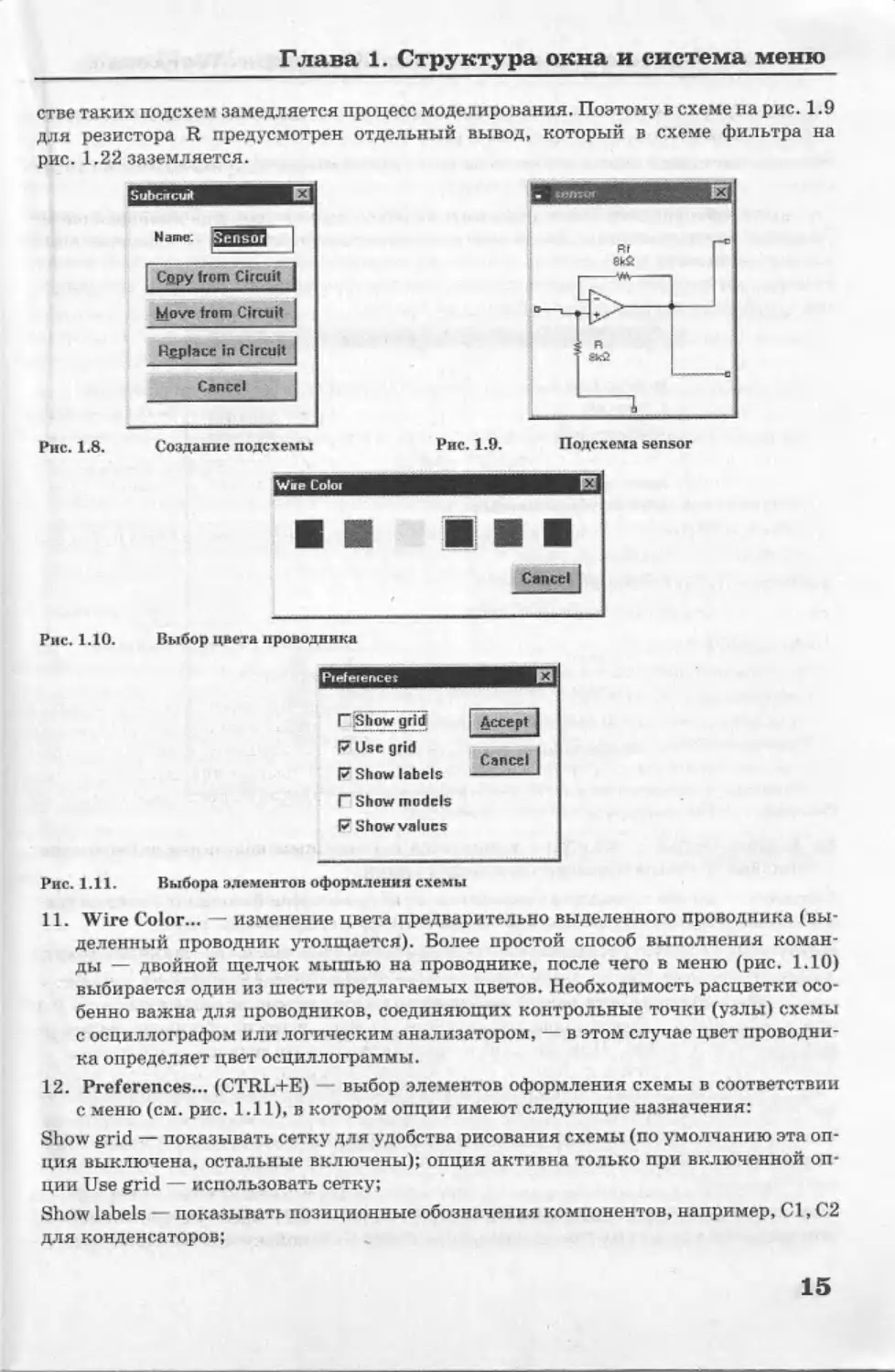
В качестве примера на рис. 1.9 приведена подсхема sensor неинвертирующего
усилителя на ОУ, используемого в фильтре (см. рис. 1.22). Здесь уместно отметить,
что введение в подсхему “земли” нецелесообразно, поскольку при большом количе-
14
Глава 1. Структура окна и система меню
стве таких подсхем замедляется процесс моделирования. Поэтому в схеме на рис. 1.9
для резистора R предусмотрен отдельный вывод, который в схеме фильтра на
рис. 1.22 заземляется.
Рис. 1.8. Создание подсхемы Рис. 1.9. Подсхема sensor
Рис. 1.10. Выбор цвета проводника
Рис. 1.11. Выбора элементов оформления схемы
11. Wire Color... — изменение цвета предварительно выделенного проводника (вы-
деленный проводник утолщается). Более простой способ выполнения коман-
ды — двойной щелчок мышью на проводнике, после чего в меню (рис. 1.10)
выбирается один из шести предлагаемых цветов. Необходимость расцветки осо-
бенно важна для проводников, соединяющих контрольные точки (узлы) схемы
с осциллографом или логическим анализатором, — в этом случае цвет проводни-
ка определяет цвет осциллограммы.
12. Preferences... (CTRL+E) выбор элементов оформления схемы в соответствии
с меню (см. рис. 1.11), в котором опции имеют следующие назначения:
Show grid — показывать сетку для удобства рисования схемы (по умолчанию эта оп-
ция выключена, остальные включены); опция активна только при включенной оп-
ции Use grid — использовать сетку;
Show labels — показывать позиционные обозначения компонентов, например, Cl, С2
для конденсаторов;
15
Часть I. Система моделирования Electronics Workbench
Show models — показывать наименование моделей компонентов, например, типов
транзисторов;
Show values — показывать номиналы компонентов, например, сопротивления рези-
сторов.
Следует отметить, что в программе EWB 3.0 в рассмотренной команде можно
было использовать пароль. Например, вывод на экран номинальных значений ком-
понентов или их типов возможен только при знании пароля. А это позволяло, в свою
очередь, преднамеренно вводить скрытые таким образом неисправности компонен-
тов и отрабатывать учащимися навыки их поиска.
Analysis Options
Analysis Type
Г Transient
<• Steady-state;
Active Component Simulation
P" Assume linear operation
Oscilloscope Display
Г Pause alter each screen
Г Store results for all nodes
Toleiance:
T ime domain points pel eye
Bode Analysis points pe« cj
T empoiaiy file size foi simu
Accept |
Cancel
(MbJ:
Рис. 1.12. Окно выбора режимов моделирования
13. Analysis Options... (RL+Y) — выбор режимов моделирования в диалоговом окне
(см. рис. 1.12) с установкой следующих опций:
Transient расчет переходных процессов после включения источника питания (ре-
зультаты представляются на экране осциллографа в графическом виде);
Steady-state — расчет стационарного режима схемы (режима по постоянному току);
Assume linear operation — при расчете принять линеаризованную модель активных
компонентов (Active Component Simulation);
Pause after each screen — пауза после заполнения экрана осциллографа (Oscilloscope
Display);
Store results for all nodes — сохранение (запоминание) результатов моделирования
для всех контрольных точек (узлов) схемы;
Tolerance — задание допустимой погрешности моделирования (по умолчанию 1%);
чем меньше погрешность моделирования, тем больше затраты времени на
моделирование;
Time domain points per cycle — выбор количества отсчетов отображаемого на экране
осциллографа сигнала (по умолчанию 100 точек на период, может быть увеличено
16
Глава 1. Структура окна и система меню
в 100 раз). С увеличением количества отсчетов форма сигнала рассчитывается более
точно при одновременном замедлении процесса моделирования; в некоторых
случаях заниженное (установленное по умолчанию) значение параметра может
привести к существенным искажениям результатов моделирования;
Bode Analysis points per cycle — выбор количества расчетных точек для отображения
результатов моделирования на экране измерителя амплитудно-частотных и фазо-
частотных характеристик; увеличение количества точек позволяет уменьшить
погрешность от дискретности установки визирной линейки по оси X (оси частот).
Temporary file size for simulation [Mb] размер временного файла для хранения
результатов моделирования (по умолчанию 10 Мбайт), при необходимости может
быть изменен.
Меню Circuit в пятой версии EWB заметно отличается от рассмотренного. От-
личия заключаются в следующем:
1. Исключены команды по пп. 1, 2 и <3, они перенесены в меню Analysis и могут вы-
полняться также нажатием кнопок IIQ 1«И|, . .11.
2. Введены дополнительные команды управления расположением графического
изображения компонентов: Flip Horizontal — зеркальное отображение компо-
нента по горизонтали и Flip Vertical — то же, но по вертикали. Команды
Rotate, Flip Horizontal и Flip Vertical могут быть выполнены также нажатием
кнопок Jk| ^ |.
Введенные дополнения очень полезны, поскольку существенно расширяют
возможности оформления схем. Например, в версиях 3.0 и 4.1 не удавалось соответ-
ствующим образом расположить на схеме транзисторы, конденсаторы переменной
емкости и другие компоненты в соответствии со стандартами. В качестве примера на
рис. 1.13 приведены результаты применения указанных команд для преобразования
графического изображения конденсатора переменной емкости: на рис. 1.13, а —
изображение конденсатора в исходном состоянии, на рис. 1.13, б — после примене-
ния команды Rotate (поворот на 90 против часовой стрелки), на рис. 1.13, в — после
применения команды Flip Horizontal (зеркальное отображение по горизонтали) и на
рис. 1.13, г после применения команды Flip Vertical (зеркальное отображение по
вертикали).
а) б) в) г)
Рис. 1.13. Результаты применения команд Rotate и Flip
3. Команды по пп. 4, 5 и 6 объединены в команду Component Properties (свойства
компонента). Команда выполняется также после двойного щелчка по компонен-
ту или нажатия кнопки . При выполнении команды открывается диалоговое
окно (рис. 1.14) из нескольких закладок. Содержание закладки Label соответст-
вует команде по п. 4 за исключением строки Reference ID: в ней указывается по-
зиционное обозначение компонента, используемое в дальнейшем при
выполнении команд меню Analysis. При выборе закладки Value задаются номи-
нальное сопротивление компонента (резистора), значения линейного (ТС1) и
квадратичного (ТС2) температурных коэффициентов сопротивления. С учетом
17
Часть I. Система моделирования Electronics Workbench
этих параметров действительное сопротивление резистора Яд определяется вы-
ражением [2]:
R„= R[1 + ТСЦТ - Тп) + ТС2(Т - Тп)2],
где R — номинальное сопротивление резистора; Тп - 27’С поминальная температу-
ра; Т — текущее значение температуры резистора.
3 Terminal Орвтр Properties
И13
babel Models |FaUt | Display)
lixary
but_b(wn
corrtinea
el«Vec
hatris
lhax
Ihwcxx
I rear
Irnl xx
I m2 xx
Im3xx
lrr£xx
Im7xx
Irrcxwa
Medel
зс
ad cp 37
ad389
ad507
ad5O9
ad515
ad517
ad542
ad544
ad545a
ad54S
ad547
ad548
ad549
0< Отмзна
6)
Рис. 1.14. Диалоговое окно команды Component Properties, закладки Fault (а) и Models (6)
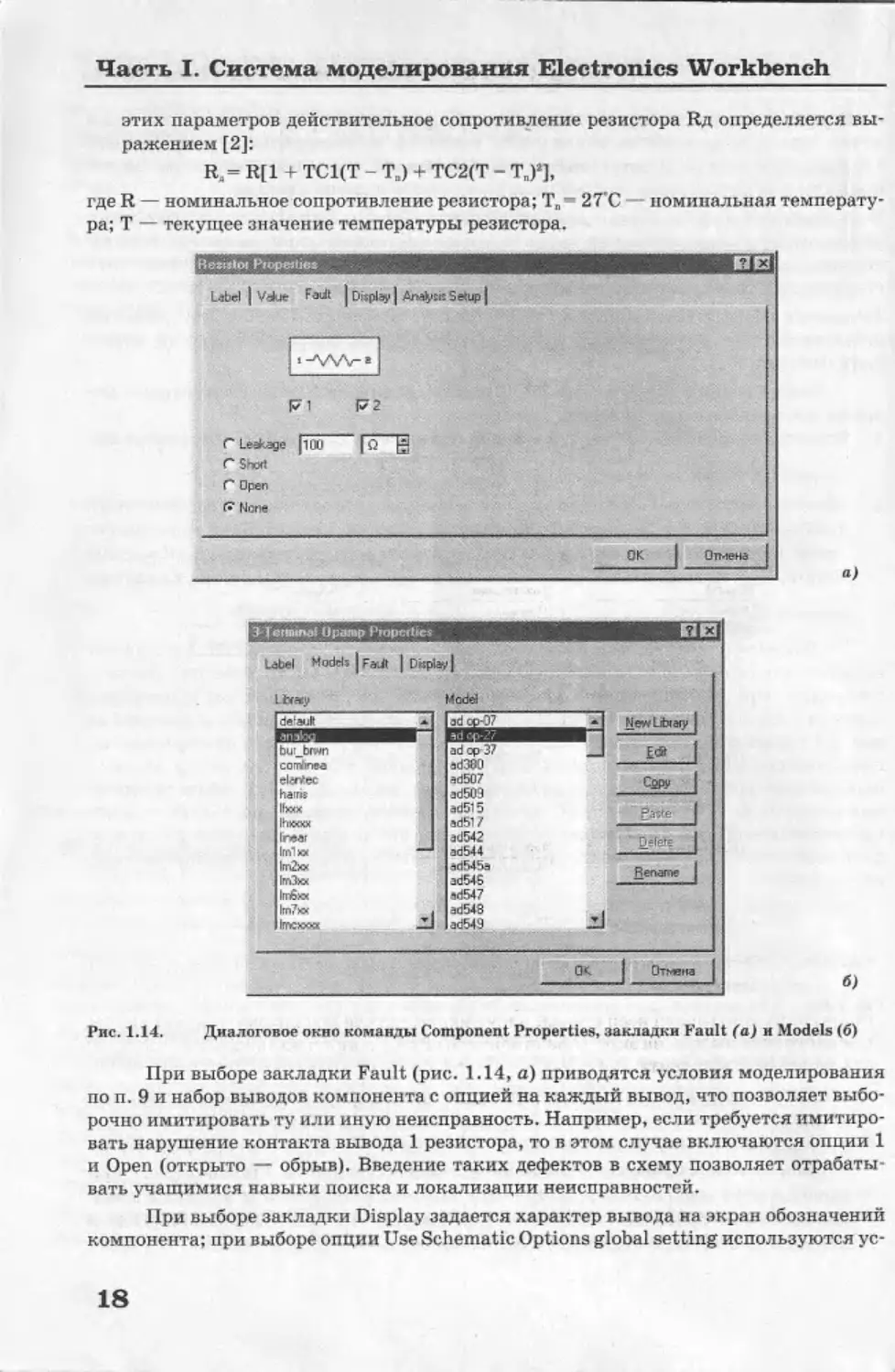
При выборе закладки Fault (рис. 1.14, а) приводятся условия моделирования
по п. 9 и набор выводов компонента с опцией на каждый вывод, что позволяет выбо-
рочно имитировать ту или иную неисправность. Например, если требуется имитиро-
вать нарушение контакта вывода 1 резистора, то в этом случае включаются опции 1
и Open (открыто — обрыв). Введение таких дефектов в схему позволяет отрабаты-
вать учащимися навыки поиска и локализации неисправностей.
При выборе закладки Display задается характер вывода на экран обозначений
компонента; при выборе опции Use Schematic Options global setting используются ус-
18
Глава 1. Структура окна и система меню
а)
б)
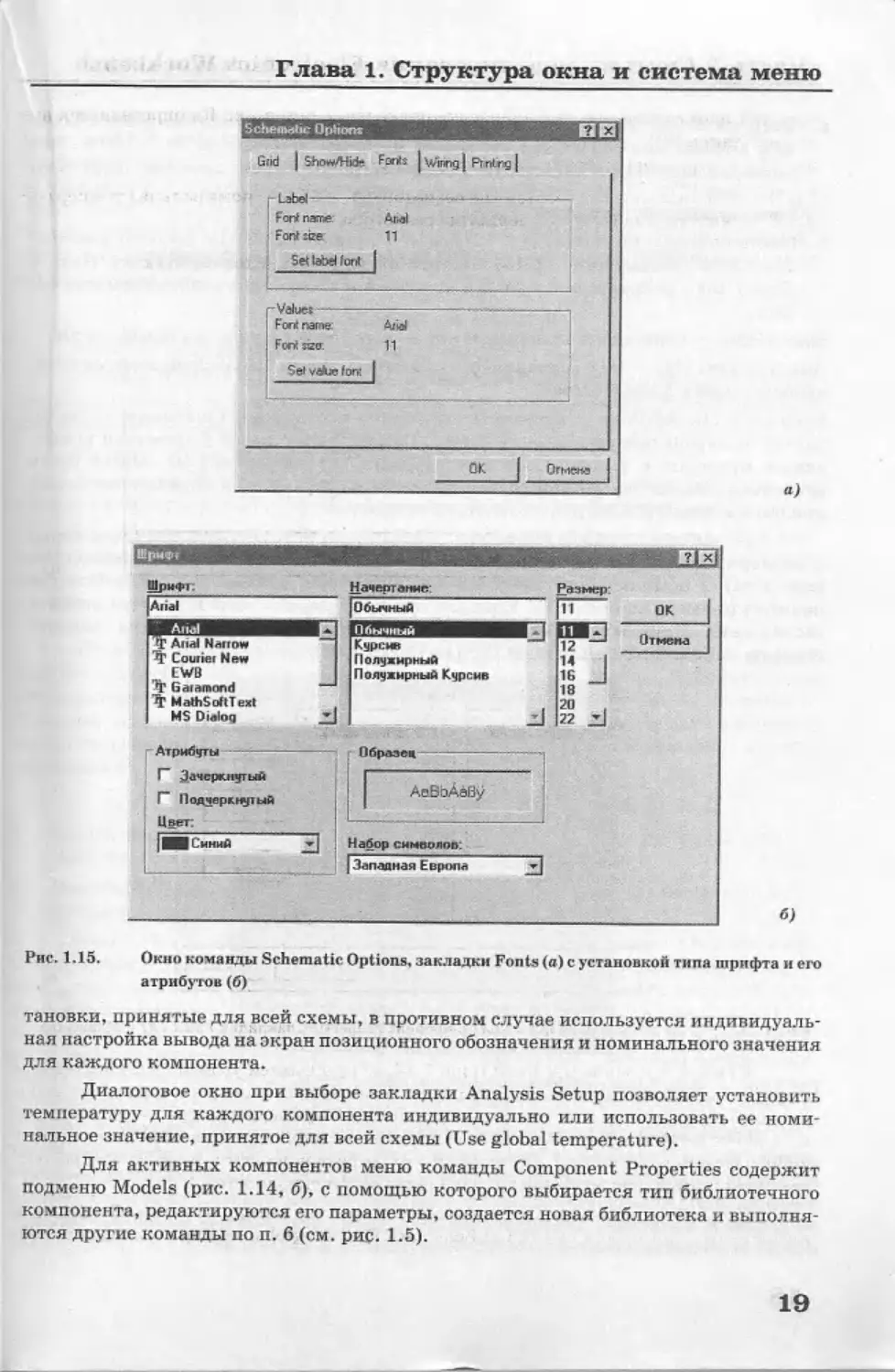
Рис. 1.15. Окно команды Schematic Options, закладки Fonts (а) с установкой типа шрифта и его
атрибутов(б)
тановки, принятые для всей схемы, в противном случае используется индивидуаль-
ная настройка вывода на экран позиционного обозначения и номинального значения
для каждого компонента.
Диалоговое окно при выборе закладки Analysis Setup позволяет установить
температуру для каждого компонента индивидуально или использовать ее номи-
нальное значение, принятое для всей схемы (Use global temperature).
Для активных компонентов меню команды Component Properties содержит
подменю Models (рис. 1.14, б), с помощью которого выбирается тип библиотечного
компонента, редактируются его параметры, создается новая библиотека и выполня-
ются другие команды по п. 6 (см. рис. 1.5).
19
Часть I. Система моделирования Electronics Workbench
<^|<Д||80Х J
4. Введены дополнительные команды масштабирования схемы: увеличения Zoom
In и уменьшения Zoom Out с указанием масштаба в диапазоне 50 — 200%. Эти
команды могут быть выполнены также с помощью мнемонических средств со
стандартным обозначением
5. Вместо команды Preferences (п. 12) введена команда Schematic Options, диалого-
вое окно которой (рис. 1.15) состоит из ряда закладок. Закладки Grid и
Show/Hide, по сравнению с EWB 4.1, содержат следующие дополнительные оп-
ции:
Show Nodes — показывать нумерацию нод всех точек соединения компонентов;
Autohide part bins — по умолчанию не показывать состав библиотеки компонентов,
используемой в данной схеме;
Keep parts bin positions — сохранять положение используемой библиотеки компо-
нентов на экране при оформлении схемы. Обычно выбор новой библиотеки компо-
нентов приводит к выключению предыдущей. Для сохранения на экране сразу
нескольких библиотек их необходимо разнести но экрану, при этом их положение
при выборе новой библиотеки останется неизменным.
При выборе закладки Fonts (рис. 1.15, а) можно установить тип (Font name)
и размер (Font size) шрифта раздельно для обозначения компонента (кнопка Set
label font) и номинального значения его параметра (кнопка Set value font). В
качестве примера на рис. 1.15, б показано окно установки типа и размера шрифта
обозначения компонента. Заметим, что для меток (и только) можно выбрать
шрифты кириллицы Ма Суг и Mt Суг (для EWB 5.0с).
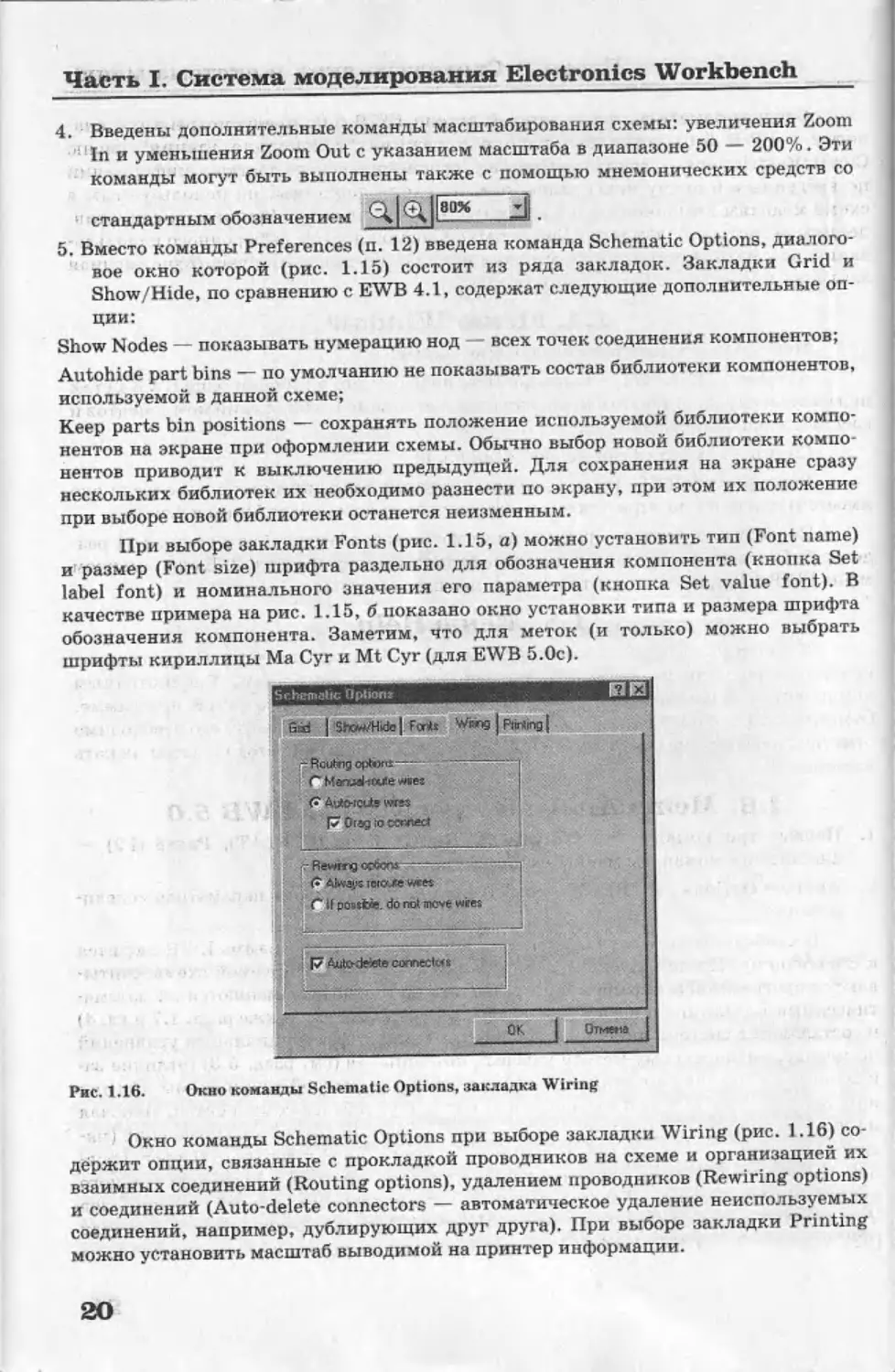
Рис. 1.16. Окно команды Schematic Options, закладка Wiring
Окно команды Schematic Options при выборе закладки Wiring (рис. 1.16) со-
держит опции, связанные с прокладкой проводников на схеме и организацией их
взаимных соединений (Routing options), удалением проводников (Rewiring options)
и соединений (Auto-delete connectors — автоматическое удаление неиспользуемых
соединений, например, дублирующих друг друга). При выборе закладки Printing
можно установить масштаб выводимой на принтер информации.
20
Глава 1. Структура окна и система меню
Следует заметить, что в сетевой версии EWB 5.0с предусмотрена (по ана-
логии с EWB 3.0) установка пароля и режима “только для чтения” (меню
Cicuit/Restrictions..., закладка General), ограничивающего доступ к информации
по введенным в схему неисправностям, по схеме подсхемы, по используемым в
схеме моделям компонентов и их номинальным значениям (например, сопротив-
лениям резисторов) (закладка Componets) и возможностям выборочного использо-
вания рассматриваемых ниже методов анализа из меню Analysis (одноименная
закладка в окне меню Cicuit/Restrictions...).
1.4. Меню Window
Меню Window содержит следующие команды:
Arrange (CTRL+W) — упорядочение информации в рабочем окне EWB путем
перезаписи экрана, при этом исправляются искажения изображений компонентов и
соединительных проводников;
Circuit — вывод схемы на передний план;
Description (CTRL+D) — вывод на передний план описания схемы (если оно
имеется) или окна-ярлыка для его подготовки (только на английском языке).
Последующие пункты рассматриваемого меню активизируют один из 11 раз-
делов библиотеки компонентов, которые будут рассмотрены в гл. 2. В одноименном
меню EWB 5.0 присутствуют только три первые команды.
1.5. Меню Help
Меню Help построено стандартным для Windows способом. Оно содержит
краткие сведения по всем рассмотренным выше командам, библиотечным
компонентам и измерительным приборам, а также сведения о самой программе.
Отметим, что для получения справки по библиотечному компоненту его необходимо
отметить на схеме щелчком мыши (он высветится красным цветом) и затем нажать
клавишу F1.
1.6. Меню Analysis программы EWB 5.0
1. Первые три команды — Activate (CTRL+G), Stop (CTRL+T), Pause (F9) —
аналогичны командам меню Circuit программы EWB 4.1.
2. Analysis Options... (CTRL+Y) — набор команд для установки параметров модели-
рования.
В наиболее общем случае процесс моделирования в программе EWB сводится
к следующему. После запуска моделирования данные моделируемой схемы считы-
ваются программой (с экрана монитора), затем компоненты заменяются их матема-
тическими моделями (чаще всего моделями PSpice [1] — см. также разд. 1.7 и гл. 4)
и составляется система линейных, нелинейных или дифференциальных уравнений
по методу, аналогичному методу узловых потенциалов (см. разд. 5.3) (отличие за-
ключается в том, что потенциал рассчитывается для каждой точки схемы или так
называемой ноды точки соединения выводов двух и более компонентов, включая
и узел — точку соединения трех и более компонентов). Далее система уравнений (ма-
трица) преобразуется в две треугольные - нижнего (Low) и верхнего (Upper) уров-
ней (LU-факторизация, напоминающая двухходовой метод последовательного
исключения переменных Гаусса), после чего для нахождения корней (потенциалов
V, в каждой поде) применяется метод Ныотона-Рафсона, реализующий формулу
[92]: VI1H=V„ - F(Vn)/F'(V.), где Vu1l, V,- — значения потенциала в i-ой точке схемы на
21
Часть I. Система моделирования Electronics Workbench
текущем и предыдущем шаге итерации; F(VJ, F'(Vn) — соответствующая функция
от V,, и ее производная.
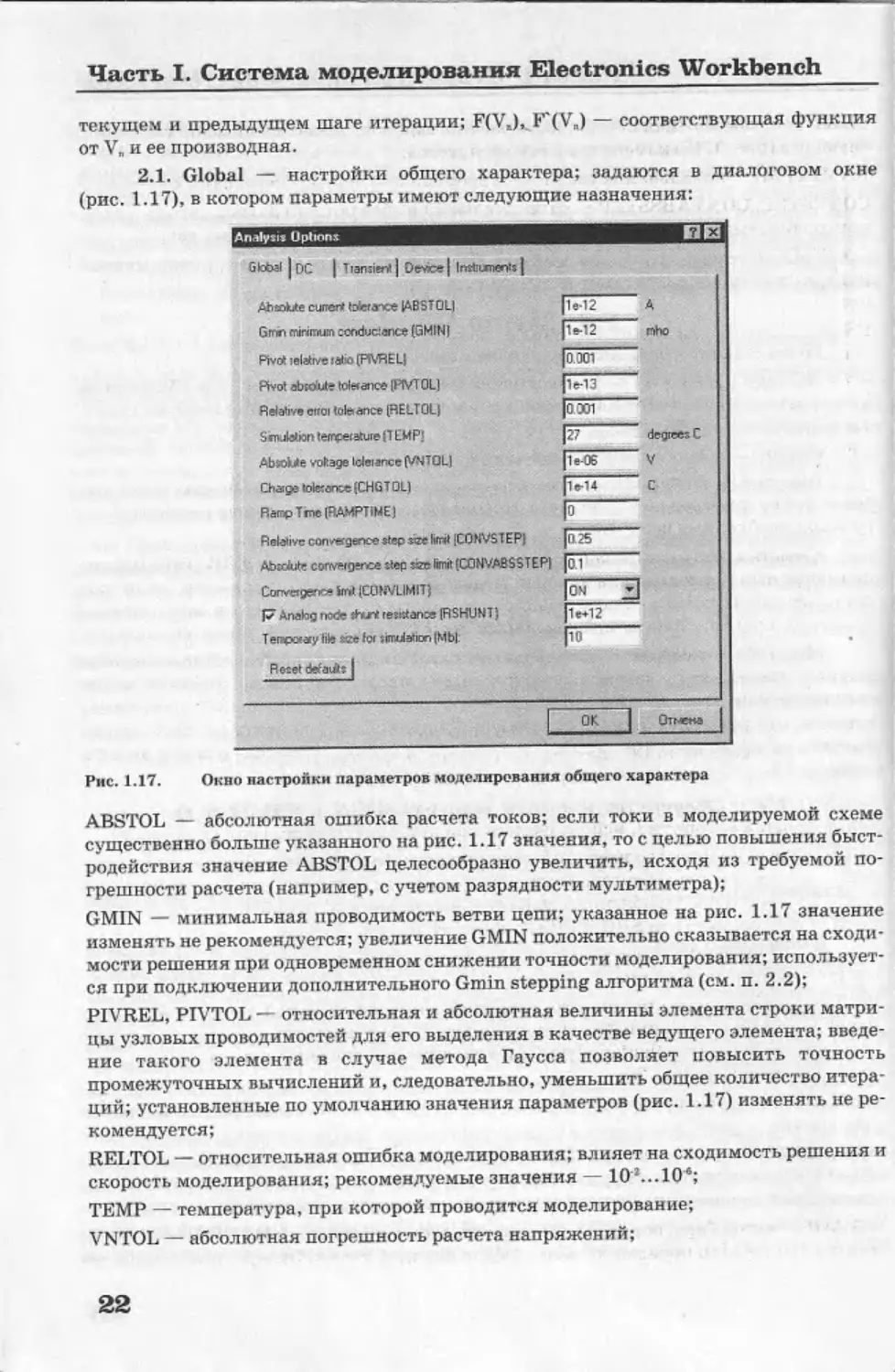
2.1. Global — настройки общего характера; задаются в диалоговом окне
(рис. 1.17), в котором параметры имеют следующие назначения:
Рис. 1.17. Окно настройки параметров моделирования общего характера
ABSTOL — абсолютная ошибка расчета токов; если токи в моделируемой схеме
существенно больше указанного на рис. 1.17 значения, то с целью повышения быст-
родействия значение ABSTOL целесообразно увеличить, исходя из требуемой по-
грешности расчета (например, с учетом разрядности мультиметра);
GMIN — минимальная проводимость ветви цепи; указанное на рис. 1.17 значение
изменять не рекомендуется; увеличение GMIN положительно сказывается на сходи-
мости решения при одновременном снижении точности моделирования; использует-
ся при подключении дополнительного Gmin stepping алгоритма (см. п. 2.2);
PIVREL, PIVTOL — относительная и абсолютная величины элемента строки матри-
цы узловых проводимостей для его выделения в качестве ведущего элемента; введе-
ние такого элемента в случае метода Гаусса позволяет повысить точность
промежуточных вычислений и, следовательно, уменьшить общее количество итера-
ций; установленные по умолчанию значения параметров (рис. 1.17) изменять не ре-
комендуется;
RELTOL — относительная ошибка моделирования; влияет на сходимость решения и
скорость моделирования; рекомендуемые значения — 102...10б;
TEMP — температура, при которой проводится моделирование;
VNTOL — абсолютная погрешность расчета напряжений;
22
Глава 1. Структура окна и система меню
CHGTOL — абсолютная погрешность расчета зарядов; установленные по умолчанию
значения (рис. 1.17) изменять не рекомендуется;
RAMPTIME — начальная точка отсчета времени при анализе переходных процессов;
CONVSTEP, CONVABSSTEP — относительный и абсолютный размер автоматически
контролируемого шага итерации при расчете режима по постоянному току;
CONVLIMIT — включение или выключение дополнительных средств, встроенных в
модели некоторых компонентов, для обеспечения сходимости итерационного про-
цесса;
RSHUNT —сопротивление утечки для всех нод относительно общей шины (зазем-
ления); при сообщениях об ошибках “No DC path to ground” (плохое заземление
цепи) и “Matrix is nearly singular” (матрицы очень близки — речь идет о матрицах
L- и U-уровнсй) значение параметра варьируются в пределах 10е... 109 Ом;
Temporary... — объем дисковой памяти для хранения временных файлов (Мбайт) в
случае сложных цепей значение параметра увеличивается.
Кнопка Reset defaults во всех диалоговых окнах предназначена для установки
значений параметров по умолчанию. Используется в том случае, если после редакти-
рования необходимо вернуться к исходным данным.
Заметим, что варьирование параметров ABSTOL, RELTOL, VNTOL, CHGTOL, на-
пример, с целью уменьшения времени моделирования может ограничиваться неудов-
летворительной сходимостью итерационного процесса при наличии в моделируемой
схеме нод и ветвей с близкими значениями искомых напряжений, токов или зарядов.
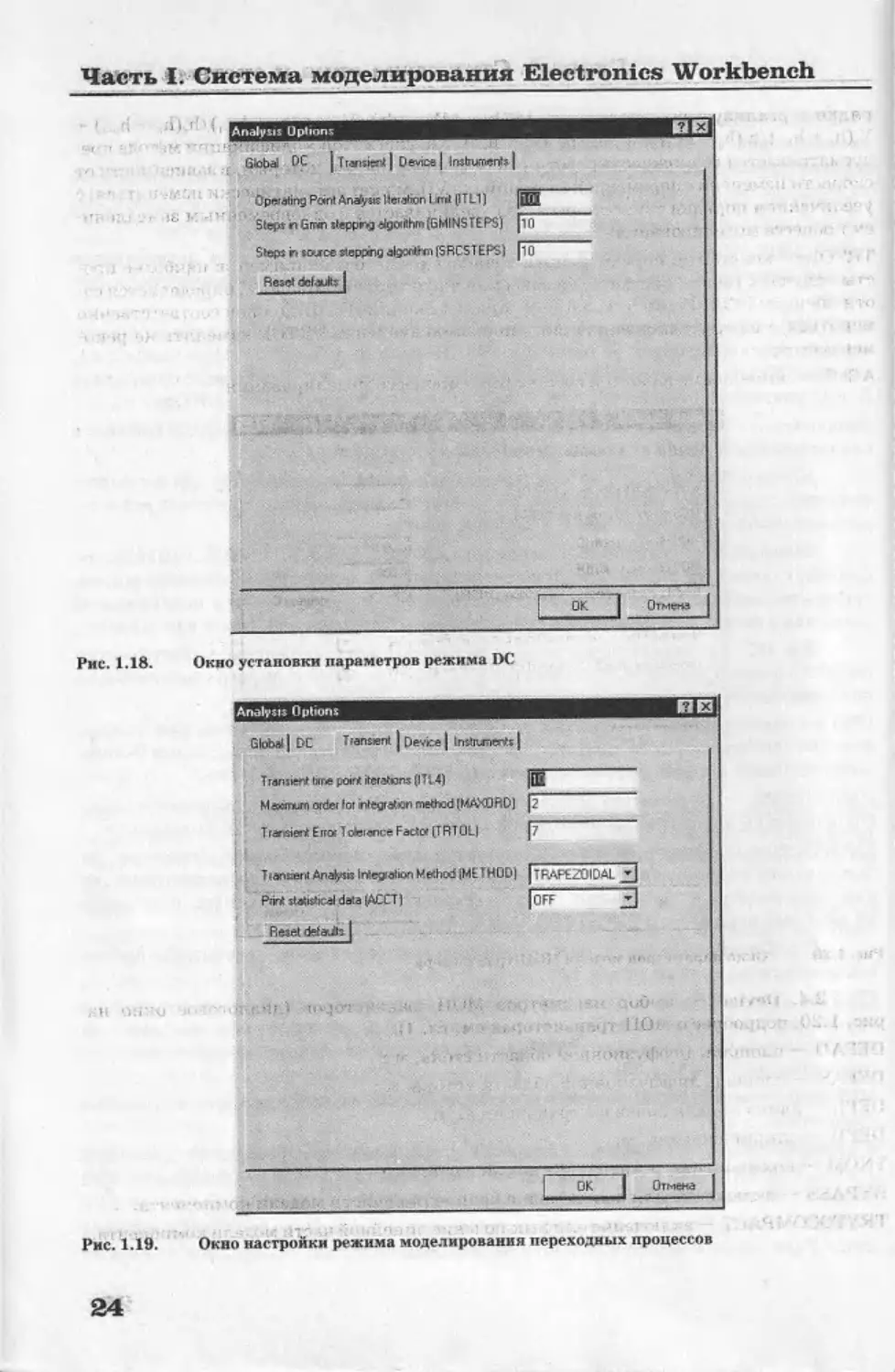
2.2. DC — настройки для расчета режима по постоянному току (статический
режим) с помощью диалогового окна (рис. 1.18), параметры которого имеют следую-
щее назначение:
ITL1 — максимальное количество итераций приближенных расчетов; при сообще-
нии “No convergence in DC analysis” (неудовлетворительная сходимость при DC-ана-
лизе) значение параметра увеличивается до 500... 1000;
GMINSTEPS — количество итераций размером GMIN каждая дополнительного
Gmin stepping алгоритма, используемого при неудовлетворительной сходимости;
SRCSTEPS — количество итераций дополнительного Source stepping алгоритма, ис-
пользуемого при неудовлетворительной сходимости решения для нелинейных це-
пей; заключается в “дроблении” участка характеристики нелинейного компонента
на заданное параметром SRCSTEPS количество шагов.
2.3. Transient — настройка параметров режима анализа переходных процес-
сов (диалоговое окно на рис. 1.19):
ITL4 — максимальное количество итераций для расчета одной точки переходных
процессов; при сообщении “Time step too small” (шаг времени очень мал) или “No
convergence in the transient analysis” (нет сходимости) значение параметра целесооб-
разно увеличить до 15...20;
METHOD — метод приближенного интегрирования системы дифференциальных
уравнений:
4- TRAPEZOIDAL — метод Эйлера с уравниванием, реализует формулу:
Vn+i=V„ + (h/2)(dV„/dt + dVn^j/dt), где h — шаг итерации, Va.u V,, — значения потен-
циала в i-ой точке схемы на текущем и предыдущем шаге итерации;
4 GEAR — метод Гира; порядок метода определяется параметром MAXORD (от 2 до 6);
метод Гира первого порядка является модификацией метода Эйлера, при втором по-
23
Часть I. Система моделирования Electronics Workbench
Рис. 1.18.
Окно установки параметров режима DC
Рис. 1.19.
Окно настройки режима моделирования переходных процессов
24
Глава 1. Структура окна и система меню
рядке реализуется формула [67]: (dVa.I/dt)=VoH (2h„ + h^O/Mh,, Ь hn_j) +
VB(h„ + h„.j)/hn(hs - ho4) + Vn lha/hn-i(bn -I ha4), т.ё. уже в этой модификации метода пре-
дусматривается возможность работы с переменным шагом, который, в зависимости от
скорости изменения переменной (потенциала Vi), может автоматически изменяться; с
увеличением порядка точность расчетов увеличивается с одновременным замедлени-
ем процесса моделирования;
TRTOL — константа, определяющая точность расчетов; например, в наиболее про-
стых случаях такая константа, называемая характеристикой шага, определяется со-
отношением [93]: |dV/dt| h=const, т. е. при изменении |dV/dt| должен соответственно
меняться и шаг; установленное по умолчанию значение TRTOL изменять не реко-
мендуется;
АССТ — разрешение на вывод сообщений о процессе моделирования.
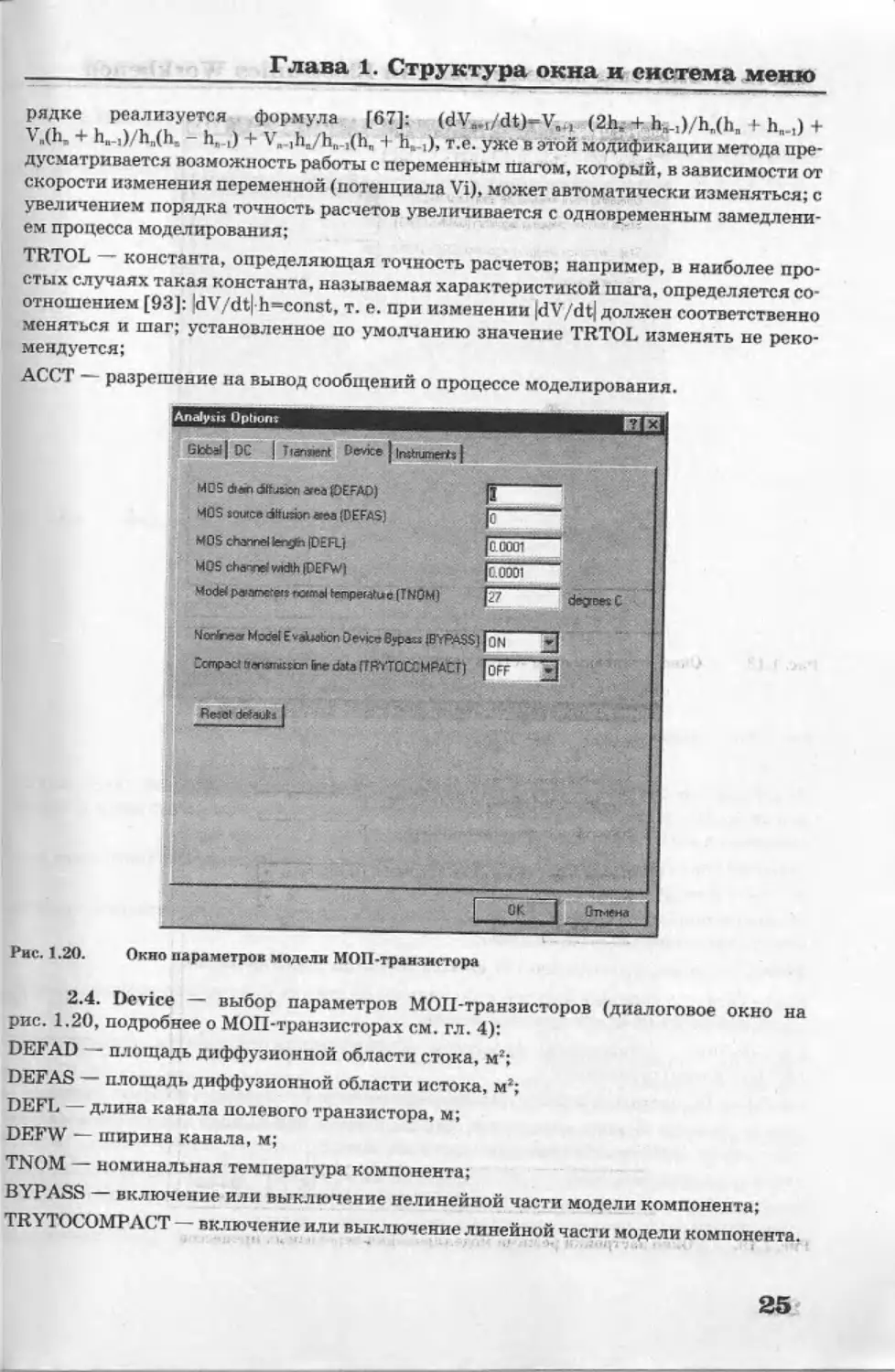
Рис. 1.20. Окно параметрон модели МОП-транзистора
2.4. Device — выбор параметров МОП-транзисторов (диалоговое окно на
рис. 1.20, подробнее о МОП-транзисторах см. гл. 4):
DEFAD - площадь диффузионной области стока, м2;
DEFAS — площадь диффузионной области истока, м2;
DEFL — длина канала полевого транзистора, м;
DEFW — ширина канала, м;
TNOM — номинальная температура компонента;
BYPASS — включение или выключение нелинейной части модели компонента;
TRYTOCOMPACT — включение или выключение линейной части модели компонента.
25
Часть I. Система моделирования Electronics Workbench
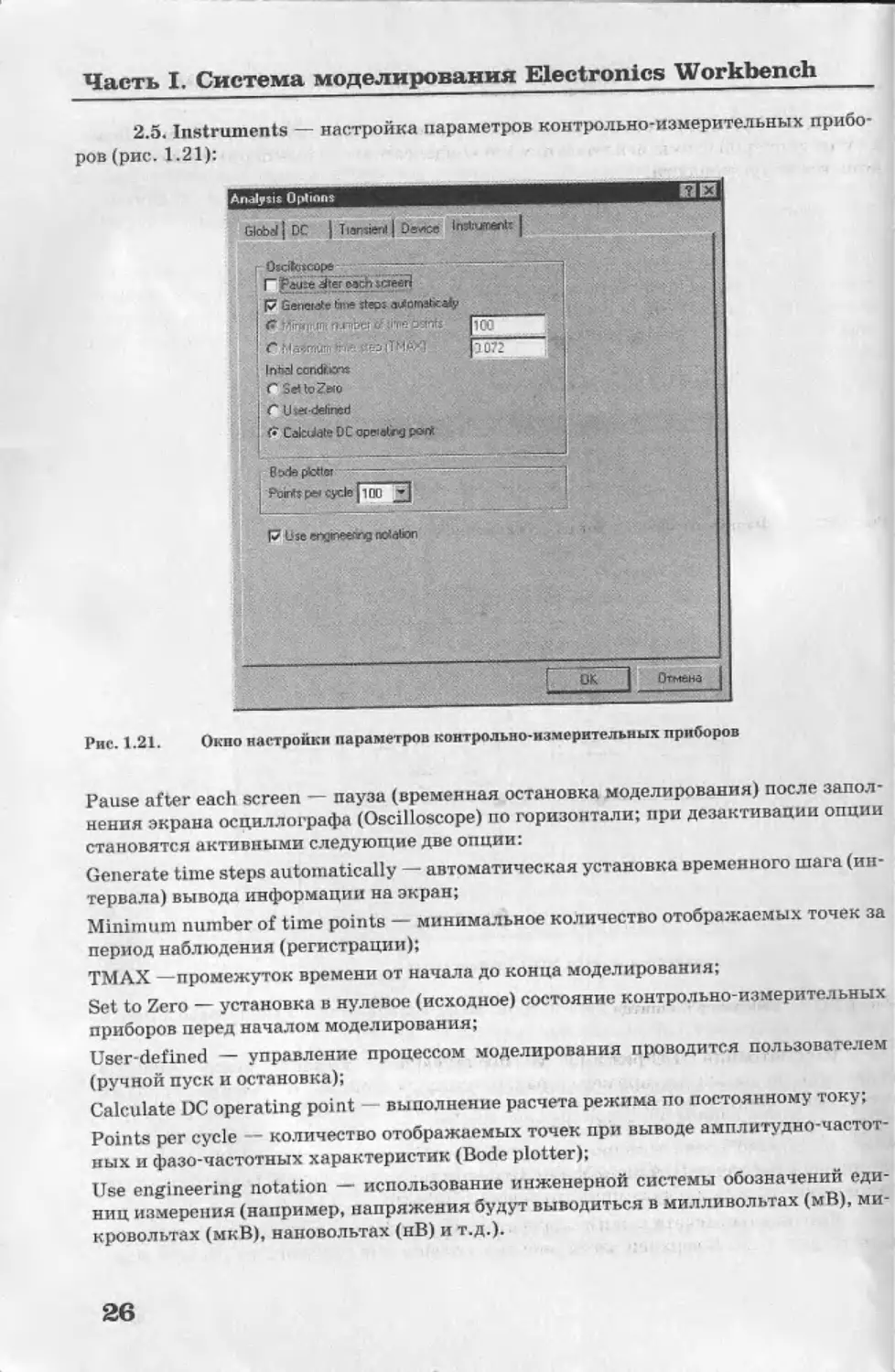
2.5. Instruments — настройка параметров контрольно-измерительных прибо-
ров (рис. 1.21):
Рис. 1.21. Окно настройки параметров контрольно-измерительных приборов
Pause after each screen — пауза (временная остановка моделирования) после запол-
нения экрана осциллографа (Oscilloscope) по горизонтали; при дезактивации опции
становятся активными следующие две опции:
Generate time steps automatically — автоматическая установка временного шага (ин-
тервала) вывода информации на экран;
Minimum number of time points — минимальное количество отображаемых точек за
период наблюдения (регистрации);
ТМАХ —промежуток времени от начала до конца моделирования;
Set to Zero — установка в нулевое (исходное) состояние контрольно-измерительных
приборов перед началом моделирования;
User-defined — управление процессом моделирования проводится пользователем
(ручной пуск и остановка);
Calculate DC operating point выполнение расчета режима по постоянному току;
Points per cycle - количество отображаемых точек при выводе амплитудно-частот-
ных и фазо-частотных характеристик (Bode plotter);
Use engineering notation — использование инженерной системы обозначений еди-
ниц измерения (например, напряжения будут выводиться в милливольтах (мВ), ми-
кровольтах (мкВ), нановольтах (нВ) и т.д.).
26
Глава 1. Структура окна и система меню
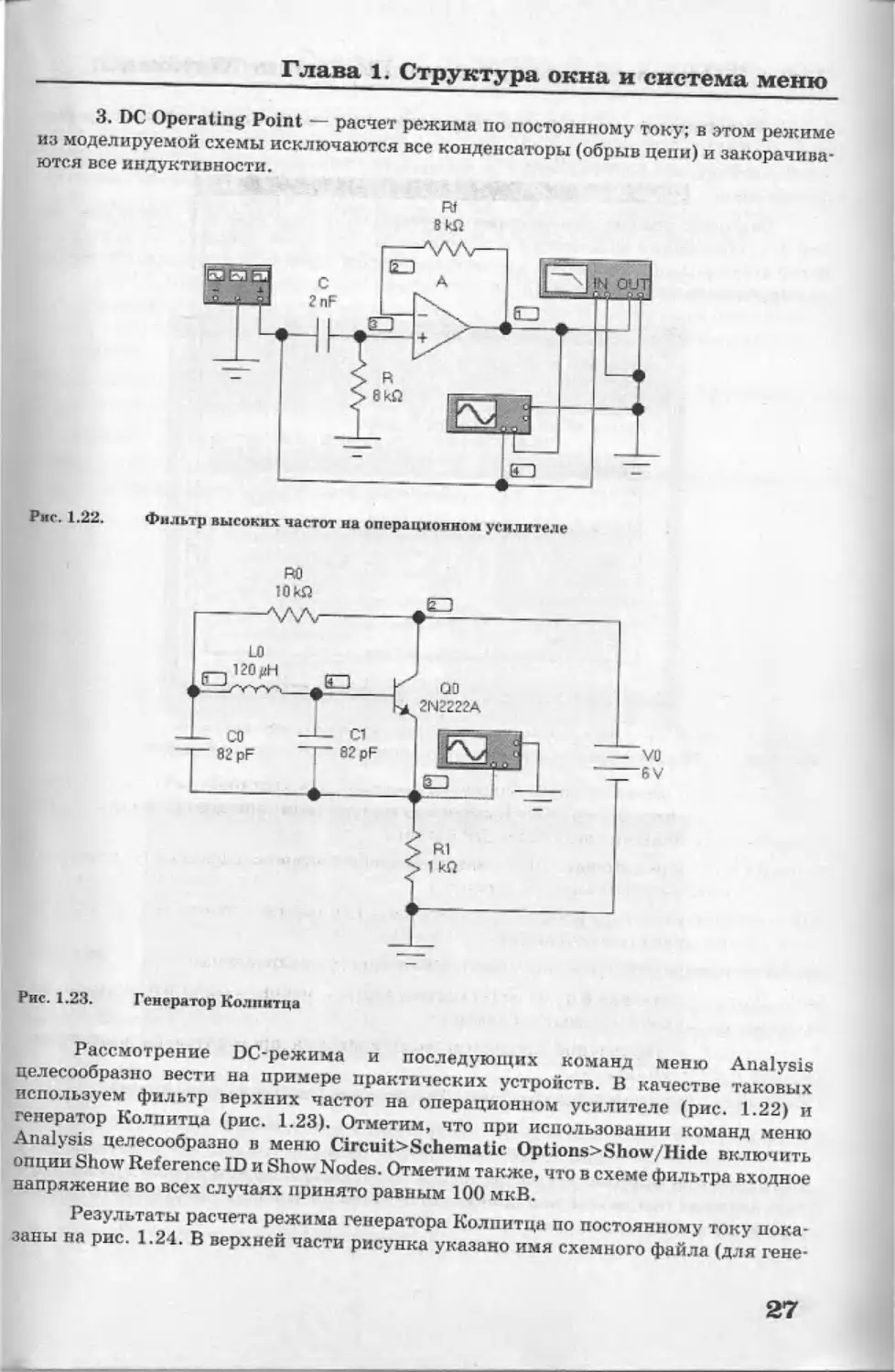
3. DC Operating Point — расчет режима по постоянному току; в этом режиме
из моделируемой схемы исключаются все конденсаторы (обрыв цени) и закорачива-
ются все индуктивности.
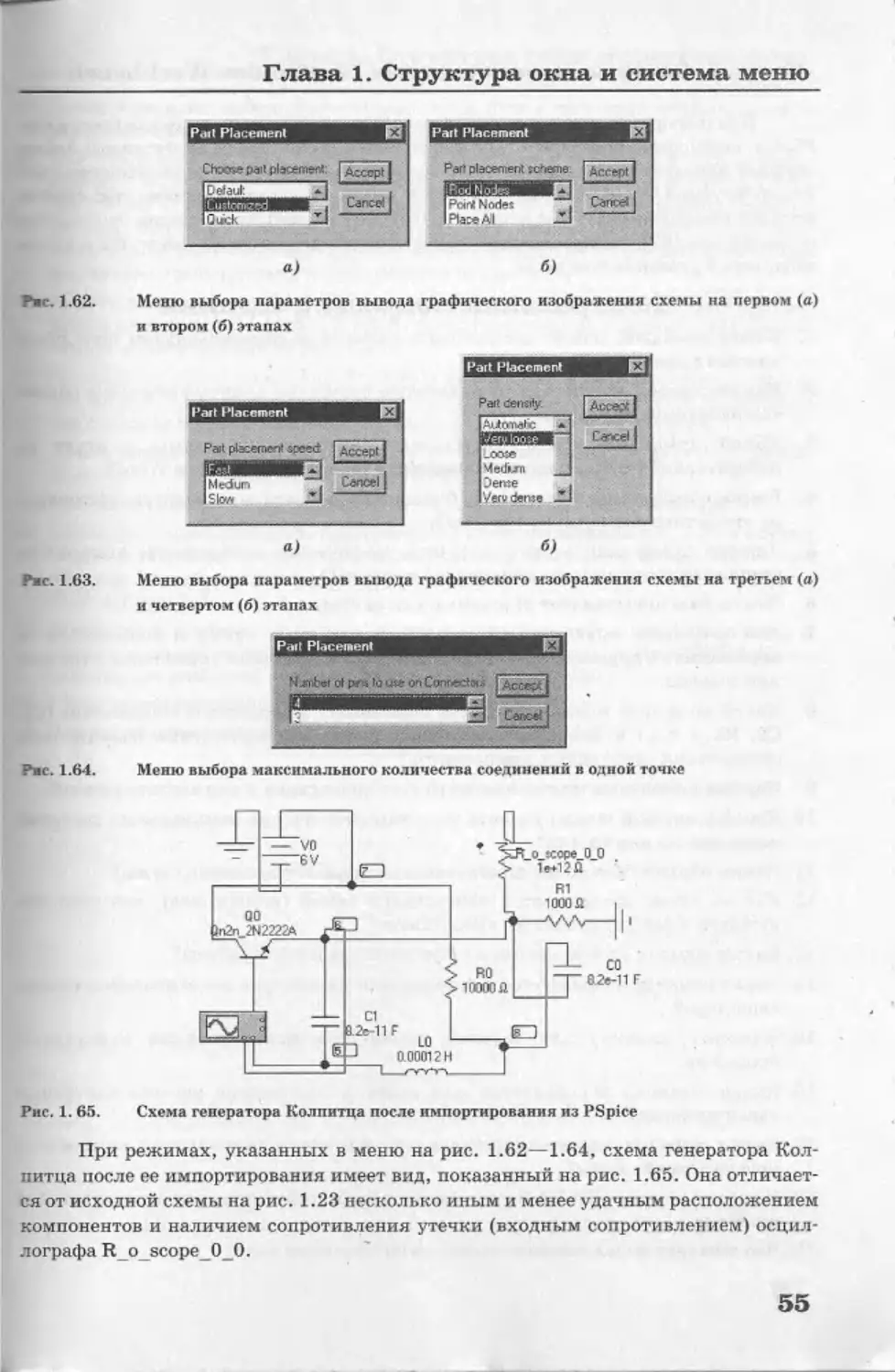
Рис. 1.23.
Rf
ВкЯ
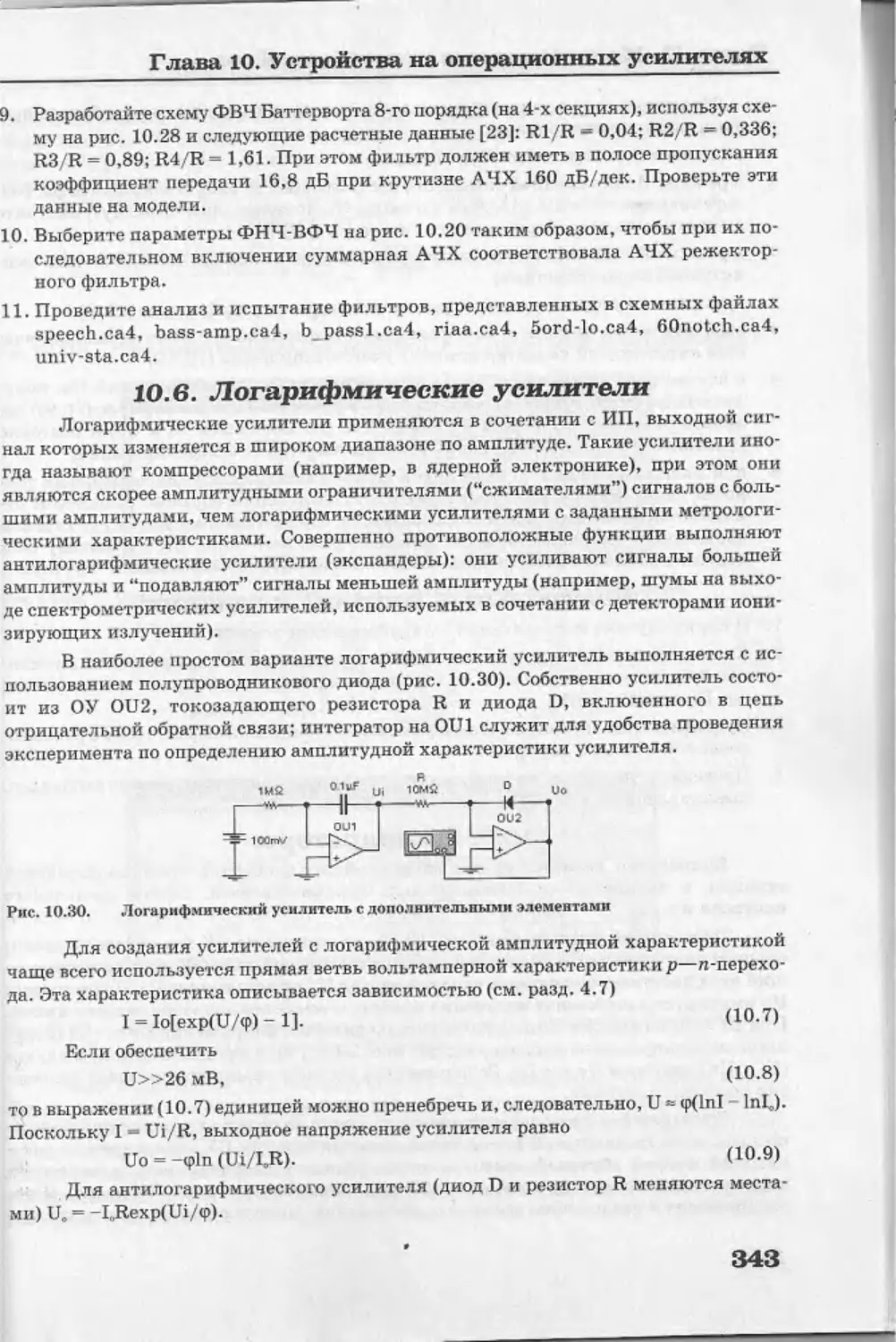
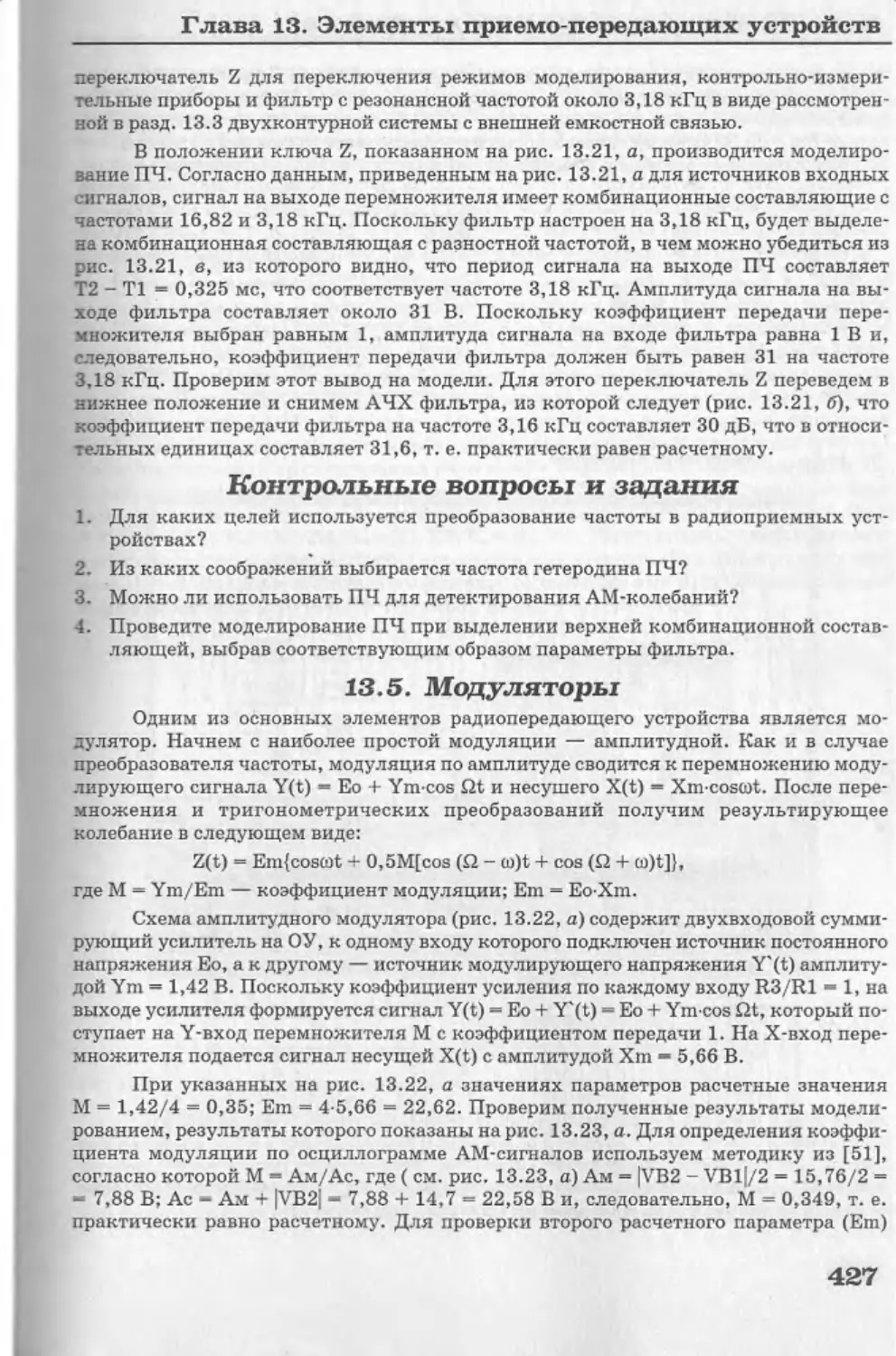
Рис. 1.22. Фильтр высоких частот на операционном усилителе
Генератор Колпитца
Рассмотрение DC-режима и последующих команд меню Analysis
целесообразно вести на примере практических устройств. В качестве таковых
используем фильтр верхних частот на операционном усилителе (рис. 1.22) и
генератор Колпитца (рис. 1.23). Отметим, что при использовании команд меню
Analysis целесообразно в меню Circuit>Schematic Options>Show/Hide включить
опции Show Reference ID и Show Nodes. Отметим также, что в схеме фильтра входное
напряжение во всех случаях принято равным 100 мкВ.
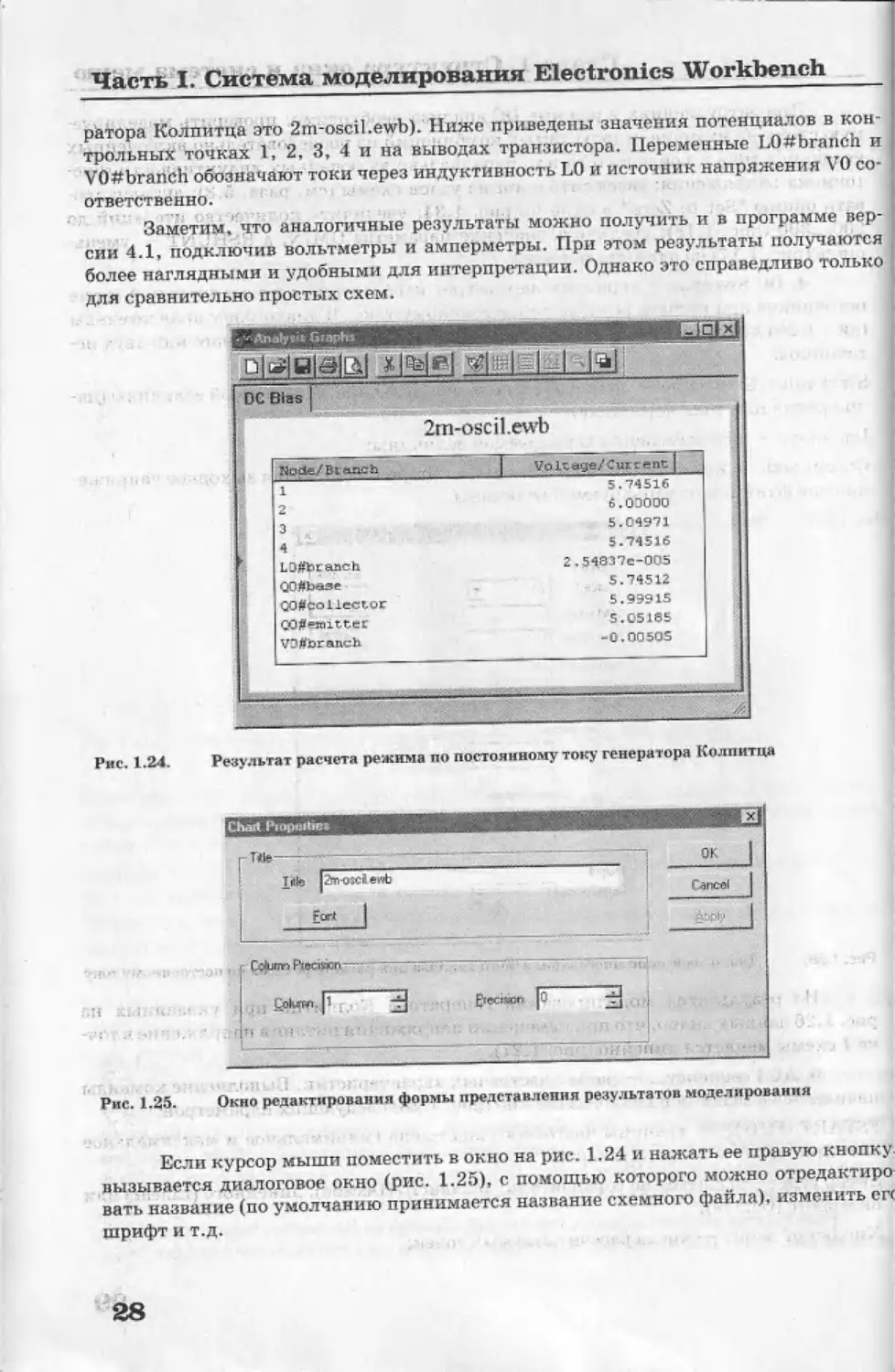
Результаты расчета режима генератора Колпитца по постоянному току пока-
заны на рис. 1.24. В верхней части рисунка указано имя схемного файла (для гене-
Часть I. Система моделирования Electronics Workbench
ратора Колпитца это 2m-oscil.ewb). Ниже приведены значения потенциалов в кон-
трольных точках 1, 2, 3, 4 и на выводах транзистора. Переменные L0#branch и
V0#branch обозначают токи через индуктивность L0 и источник напряжения V0 со-
ответственно.
Заметим» что аналогичные результаты можно получить и в программе вер-
сии 4.1, подключив вольтметры и амперметры. При этом результаты получаются
более наглядными и удобными для интерпретации. Однако это справедливо только
для сравнительно простых схем.
Рис. 1.24. Результат расчета режима по постоянному току генератора Колпитца
Рис. 1.25. Окно редактирования формы представления результатов моделирования
Если курсор мыши поместить в окно на рис. 1.24 и нажать ее правую кнопку,
вызывается диалоговое окно (рис. 1.25), с помощью которого можно отредактиро
вать название (по умолчанию принимается название схемного файла), изменить ег(
шрифт и т.д.
28
Глава 1. Структура окна и система меню
При затруднениях в режиме DC-анализа необходимо: проверить моделируе-
мую схему на наличие недопустимых комбинаций из последовательно включенных
источника тока и конденсатора или параллельно включенных индуктивности и ис-
точника напряжения; заземлить один из узлов схемы (см. разд. 5.3); активизиро-
вать опцию “Set to Zero” в окне на рис. 1.34; увеличить количество итераций до
200...300 (рис. 1.18); увеличить значение параметра GMIN, a RSHUNT — умень-
шить (рис. 1.17) на один-два порядка.
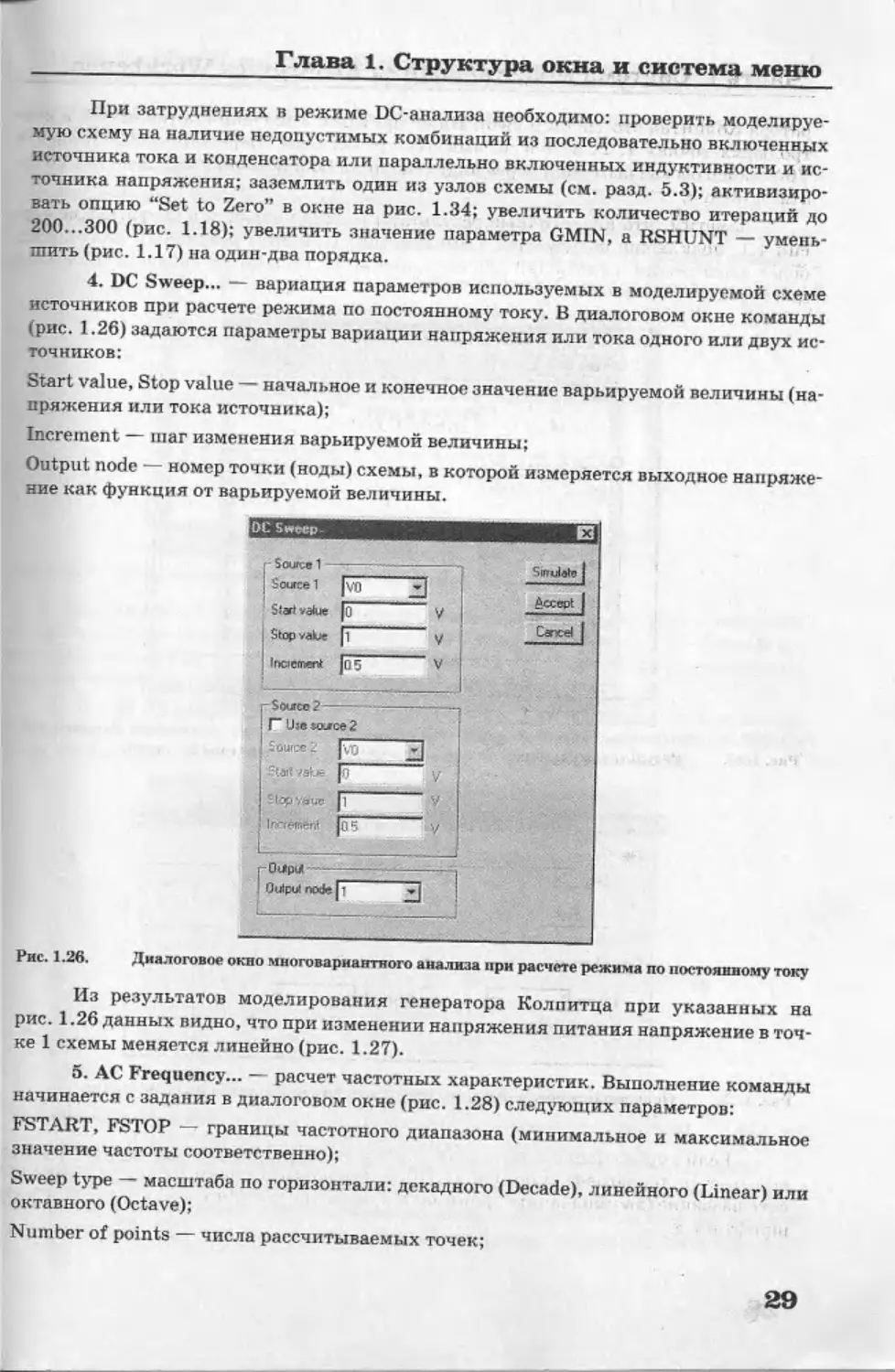
4. DC Sweep... — вариация параметров используемых в моделируемой схеме
источников при расчете режима по постоянному току. В диалоговом окне команды
(рис. 1.26) задаются параметры вариации напряжения или тока одного или двух ис-
точников:
Start value, Stop value — начальное и конечное значение варьируемой величины (на-
пряжения или тока источника);
Increment — шаг изменения варьируемой величины;
Output node — номер точки (коды) схемы, в которой измеряется выходное напряже-
ние как функция от варьируемой величины.
Рис. 1.26. Диалоговое окно многовариантного анализа при расчете режима по постоянному току
Из результатов моделирования генератора Колпитца при указанных на
рис. 1.26 данных видно, что при изменении напряжения питания напряжение в точ-
ке 1 схемы меняется линейно (рис. 1.27).
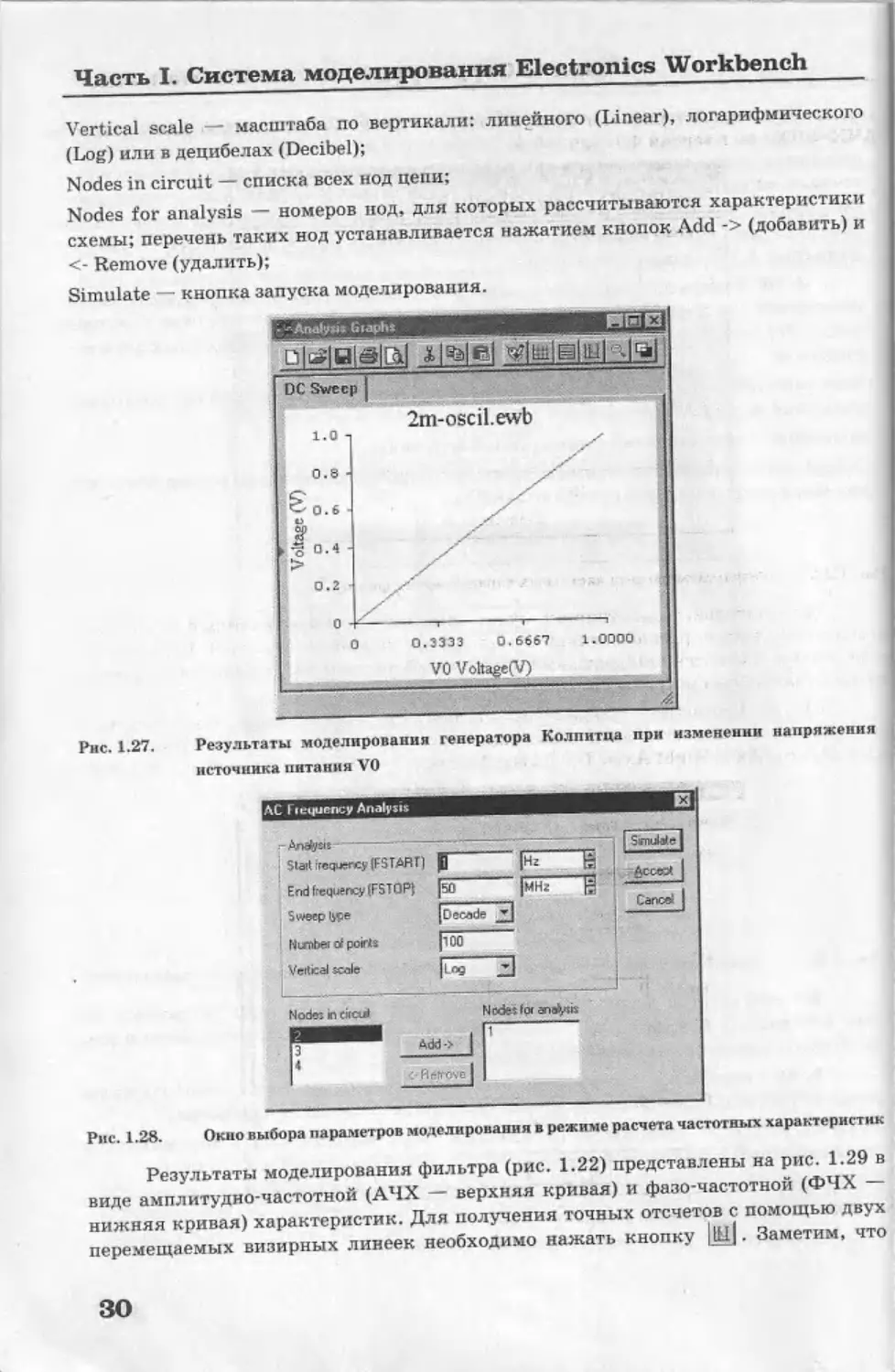
5. AC Frequency... — расчет частотных характеристик. Выполнение команды
начинается с задания в диалоговом окне (рис. 1.28) следующих параметров:
FSTART, FSTOP — границы частотного диапазона (минимальное и максимальное
значение частоты соответственно);
Sweep type — масштаба по горизонтали: декадного (Decade), линейного (Linear) или
октавного (Octave);
Number of points — числа рассчитываемых точек;
29
Часть I. Система моделирования Electronics Workbench
Vertical scale — масштаба по вертикали: линейного (Linear), логарифмического
(Log) или в децибелах (Decibel);
Nodes in circuit — списка всех нод цепи;
Nodes for analysis — номеров нод, для которых рассчитываются характеристики
схемы; перечень таких нод устанавливается нажатием кнопок Add -> (добавить) и
<- Remove (удалить);
Simulate — кнопка запуска моделирования.
Рис. 1.27.
Результаты моделирования генератора Колпитца при изменении напряжения
источника питания V0
AC l iequency Analysis
XJ
Anetysts -------- —
Start irequsney IFSTABT)
End frequency (FSTOPJ
Sweep type
I--------F~
[50 |mHz
^Decade
[ioo
F3 3
| Simulate |
-'Accept I
Caned I
Node: in circut.
Numbet oi poirts
Vertical «de
Add •> |
: Flffwe |
Nodes lot ana^sis
Рис. 1.28. Окно выбора параметров моделирования в режиме расчета частотных характеристик
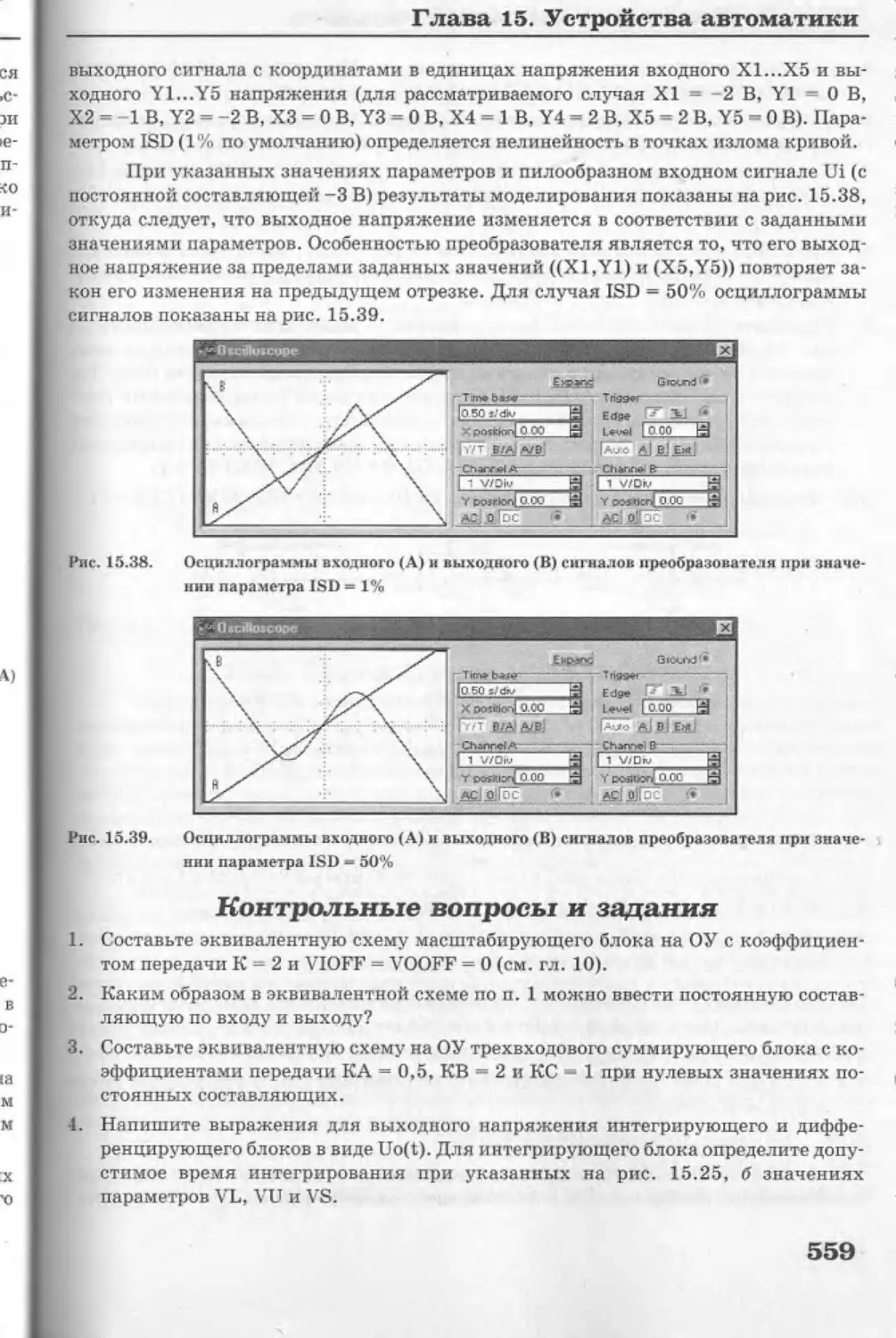
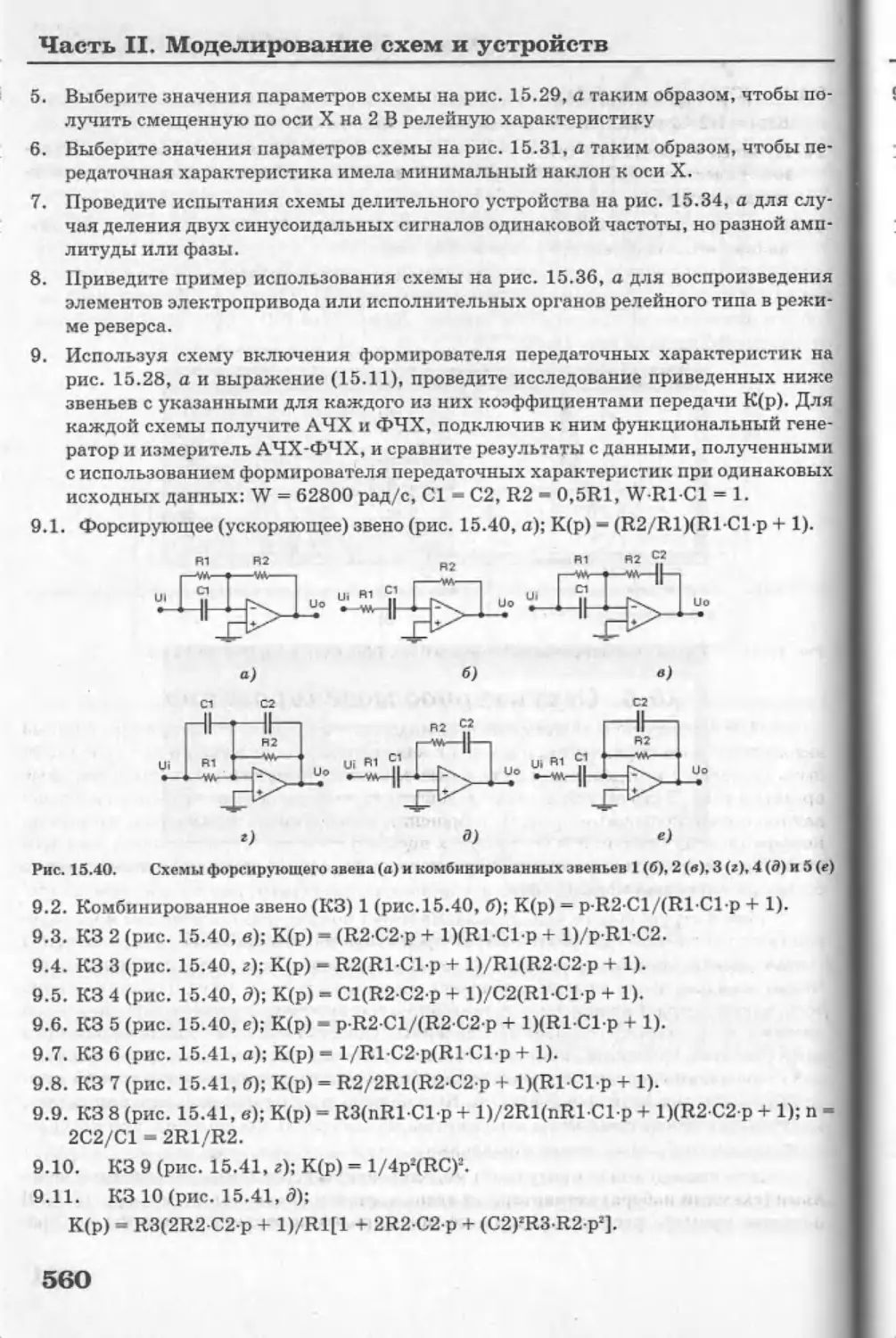
Результаты моделирования фильтра (рис. 1.22) представлены на рис. 1.29 в
виде амплитудно-частотной (АЧХ — верхняя кривая) и фазо-частотной (ФЧХ —
нижняя кривая) характеристик. Для получения точных отсчетов с помощью двух
перемещаемых визирных линеек необходимо нажать кнопку |ltl|. Заметим, что
30
Глава 1. Структура окна и система меню
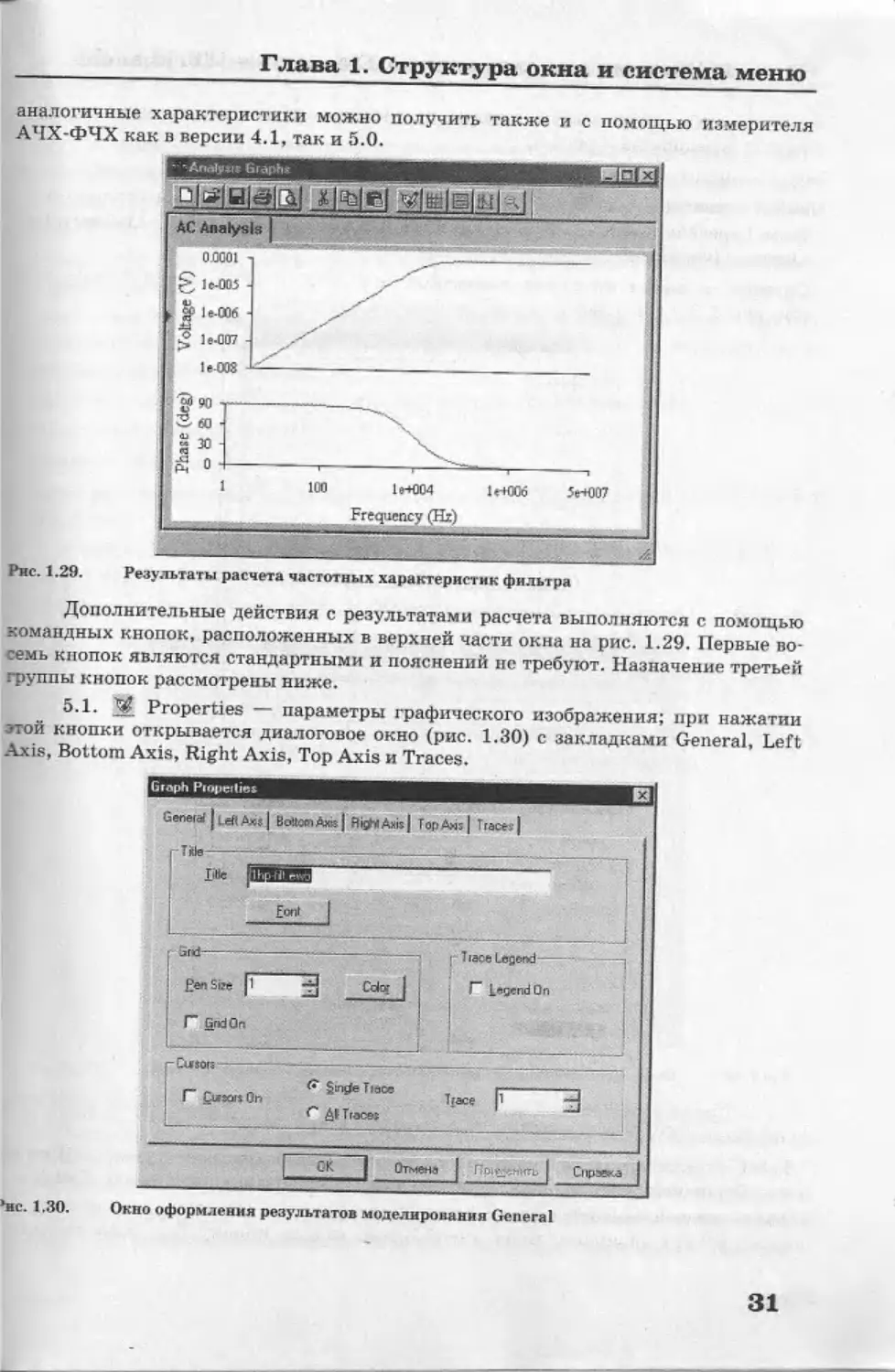
аналогичные характеристики можно получить также и с помощью измерителя
АЧХ-ФЧХ как в версии 4.1, так и 5.0.
Рис. 1.29. Результаты расчета частотных характеристик фильтра
Дополнительные действия с результатами расчета выполняются с помощью
командных кнопок, расположенных в верхней части окна на рис. 1.29. Первые во-
семь кнопок являются стандартными и пояснений нс требуют. Назначение третьей
группы кнопок рассмотрены ниже.
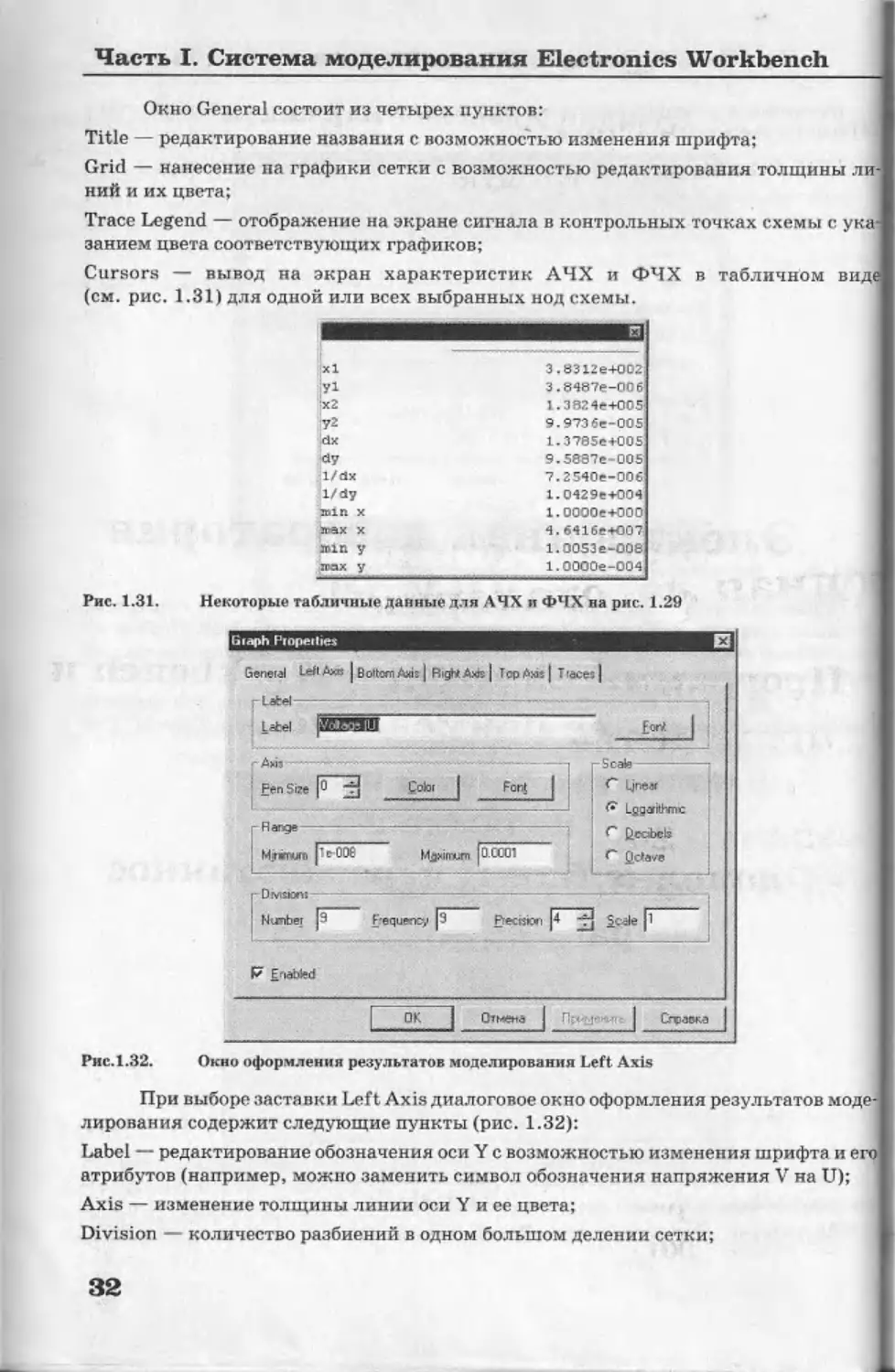
5.1. Properties — параметры графического изображения; при нажатии
этой кнопки открывается диалоговое окно (рис. 1.30) с закладками General, Left
Axis, Bottom Axis, Right Axis, Top Axis и Traces.
*ис. 1.30. Окно оформления результатов моделирования General
31
Часть I. Система моделирования Electronics Workbench
Окно General состоит из четырех пунктов:
Title — редактирование названия с возможностью изменения шрифта;
Grid — нанесение на графики сетки с возможностью редактирования толщины ли-
ний и их цвета;
Trace Legend — отображение на экране сигнала в контрольных точках схемы с ука-
занием цвета соответствующих графиков;
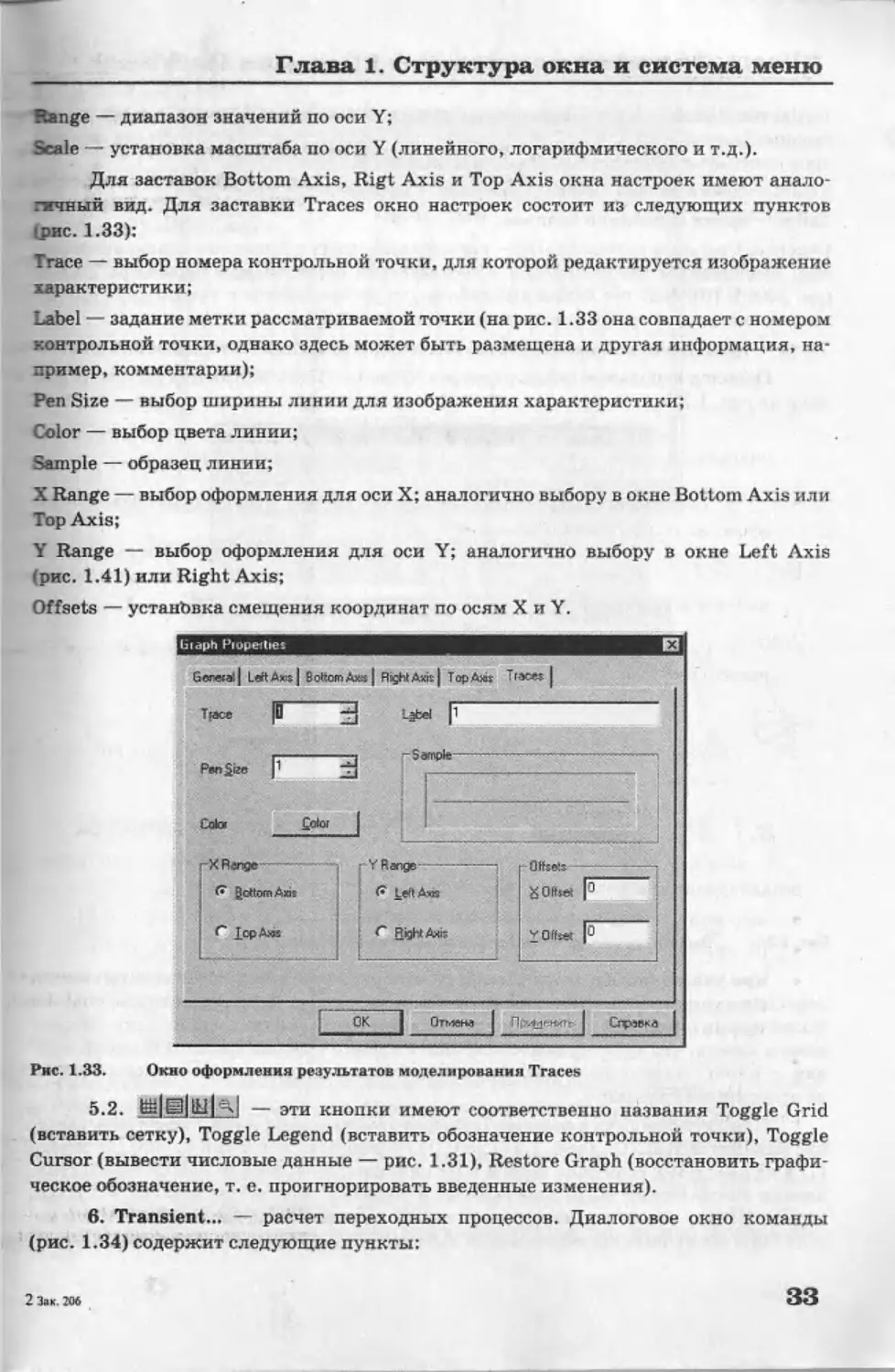
Cursors — вывод на экран характеристик АЧХ и ФЧХ в табличном виде
(см. рис. 1.31) для одной или всех выбранных нод схемы.
а
Х1 3.8312e+OO2
71 3.8487e-006
:х2 1.3824C+005
72 9.9736e-005
dx 1.3785e+00S
dy 9.5887c-005
1/dx 7.2540e-006
1/dy 1.0429e+004
»1П X 1.0000e+000
inax x 4.6416e+O07
»in у 1.00S3e-008
wax у 1.0000e-004
Рис. 1.32.
Рис. 1.31. Некоторые табличные данные для АЧХ и ФЧХ на рис. 1.29
Окно оформления результатов моделирования Left Axis
При выборе заставки Left Axis диалоговое окно оформления результатов моде-
лирования содержит следующие пункты (рис. 1.32):
Label — редактирование обозначения оси Y с возможностью изменения шрифта и его
атрибутов (например, можно заменить символ обозначения напряжения V на U);
Axis — изменение толщины линии оси Y и се цвета;
Division — количество разбиений в одном большом делении сетки;
32
Глава 1. Структура окна и система меню
Range — диапазон значений по оси Y;
Scale — установка масштаба по оси У (линейного, логарифмического и т.д.).
Для заставок Bottom Axis, Rigt Axis и Top Axis окна настроек имеют анало-
гичный вид. Для заставки Traces окно настроек состоит из следующих пунктов
(рис. 1.33):
Trace — выбор номера контрольной точки, для которой редактируется изображение
характеристики;
Label — задание метки рассматриваемой точки (на рис. 1.33 она совпадает с номером
контрольной точки, однако здесь может быть размещена и другая информация, на-
пример, комментарии);
Pen Size — выбор ширины линии для изображения характеристики;
Color — выбор цвета линии;
Sample — образец линии;
X Range — выбор оформления для оси X; аналогично выбору в окне Bottom Axis или
Top Axis;
Y Range — выбор оформления для оси Y; аналогично выбору в окне Left Axis
(рис. 1.41) или Right Axis;
Offsets — устанЪвка смещения координат по осям X и Y.
Рис. 1.33. Окно оформления результатов моделирования Traces
5.2. ЙЯ|М^1 — эти кнопки имеют соответственно названия Toggle Grid
(вставить сетку), Toggle Legend (вставить обозначение контрольной точки), Toggle
Cursor (вывести числовые данные — рис. 1.31), Restore Graph (восстановить графи-
ческое обозначение, т. е. проигнорировать введенные изменения).
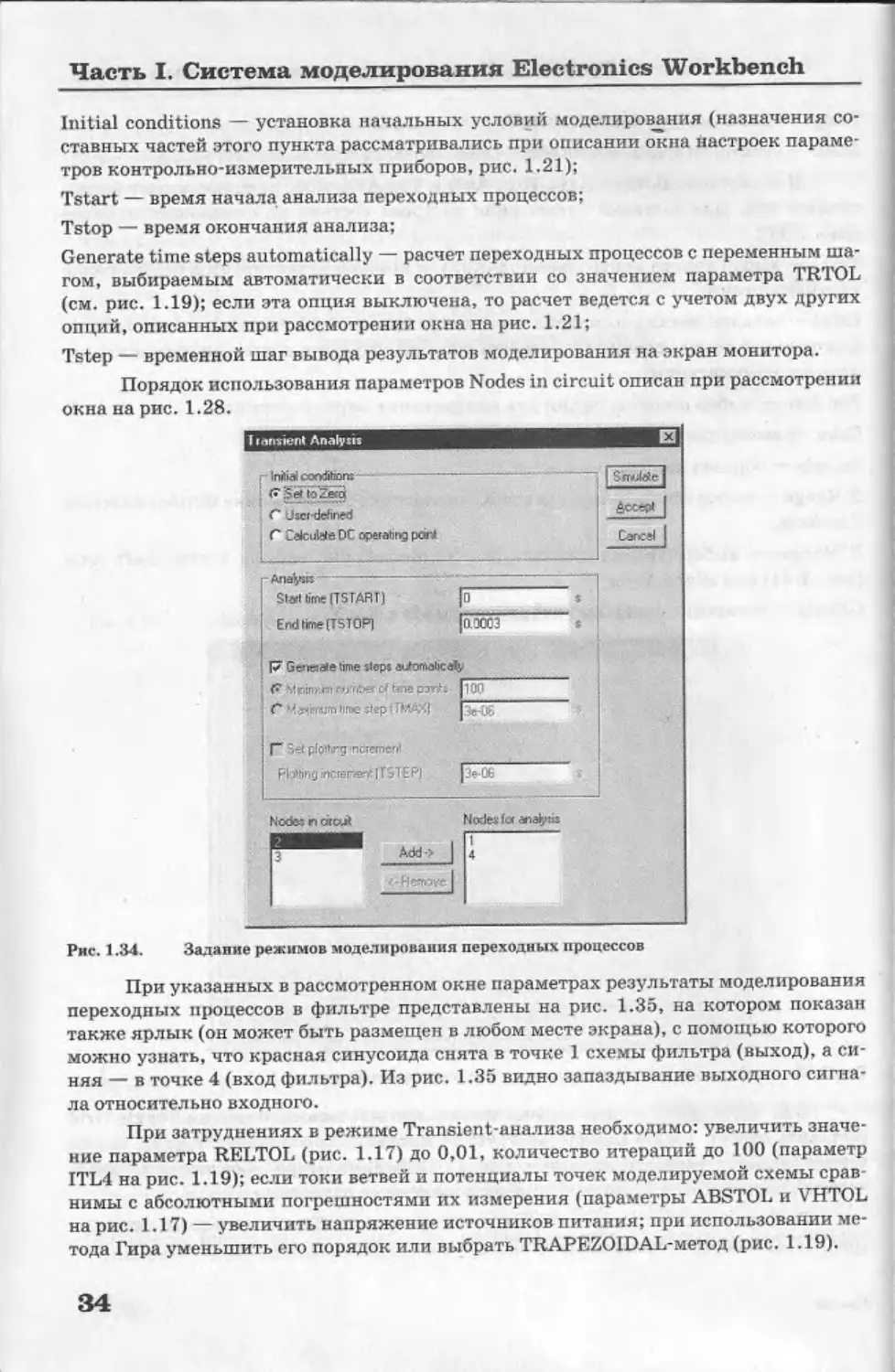
6. Transient... — расчет переходных процессов. Диалоговое окно команды
(рис. 1.34) содержит следующие пункты:
2 Зак. 206
33
Часть I. Система моделирования Electronics Workbench
Initial conditions — установка начальных условий моделирования (назначения со-
ставных частей этого пункта рассматривались при описании окна настроек параме-
тров контрольно-измерительных приборов, рис. 1.21);
Tstart — время начала анализа переходных процессов;
Tstop — время окончания анализа;
Generate time steps automatically — расчет переходных процессов с переменным ша-
гом, выбираемым автоматически в соответствии со значением параметра TRTOL
(см. рис. 1.19); если эта опция выключена, то расчет ведется с учетом двух других
опций, описанных при рассмотрении окна на рис. 1.21;
Tstep — временной шаг вывода результатов моделирования на экран монитора.
Порядок использования параметров Nodes in circuit описан при рассмотрении
окна на рис. 1.28.
Рис. 1.84. Задание режимов моделирования переходных процессов
При указанных в рассмотренном окне параметрах результаты моделирования
переходных процессов в фильтре представлены на рис. 1.35, на котором показан
также ярлык (он может быть размещен в любом месте экрана), с помощью которого
можно узнать, что красная синусоида снята в точке 1 схемы фильтра (выход), а си-
няя — в точке 4 (вход фильтра). Из рис. 1.35 видно запаздывание выходного сигна-
ла относительно входного.
При затруднениях в режиме Transient-анализа необходимо: увеличить значе-
ние параметра RELTOL (рис. 1.17) до 0,01, количество итераций до 100 (параметр
ITL4 на рис. 1.19); если токи ветвей и потенциалы точек моделируемой схемы срав
нимы с абсолютными погрешностями их измерения (параметры ABSTOL и VHTOL
на рис. 1.17) — увеличить напряжение источников питания; при использовании ме-
тода Гира уменьшить его порядок или выбрать TRAPEZOIDAL-метод (рис. 1.19).
34
Глава 1. Структура окна и система меню
Рис. 1.35. Результаты расчета переходных процессов в фильтре
Рмс. 1.36. Окно установки режима Фурье-анализа
7. Fourier... — проведение Фурье-анализа (спектрального анализа). При выбо-
ре этой команды параметры моделирования задаются с помогцыо диалогового окна
(рис. 1.36), в котором опции имеют следующие назначения:
Output node — помер контрольной точки (ноды), в которой анализируется спектр
сигнала (для выбора на схеме такой точки необходимо включить опцию Show nodes
в меню Circuit/Schematic Options...);
Fundamental frequency — основная частота колебания (частота первой гармоники);
2*
35
Часть I. Система моделирования Electronics Workbench
Number harmonic число анализируемых гармоник;
Vertical scale — масштаб по оси Y (линейный, логарифмический, в децибелах);
Advanced - набор опций этого блока предназначен для определения более топкой
структуры анализируемого сигнала путем введения дополнительных выборок (по
умолчанию выключены);
Number of points per harmonic — количество отсчетов (выборок) на одну гармонику;
Sampling frequency — частота следования выборок;
Display phase вывод на экран распределения фаз всех гармонических составляю-
щих в виде непрерывной функции (по умолчанию выводится график только ампли-
туд гармоник);
Output as line graph - вывод на экран распределения амплитуд всех гармонических
составляющих в виде непрерывной функции (по умолчанию — в виде линейчатого
спектра).
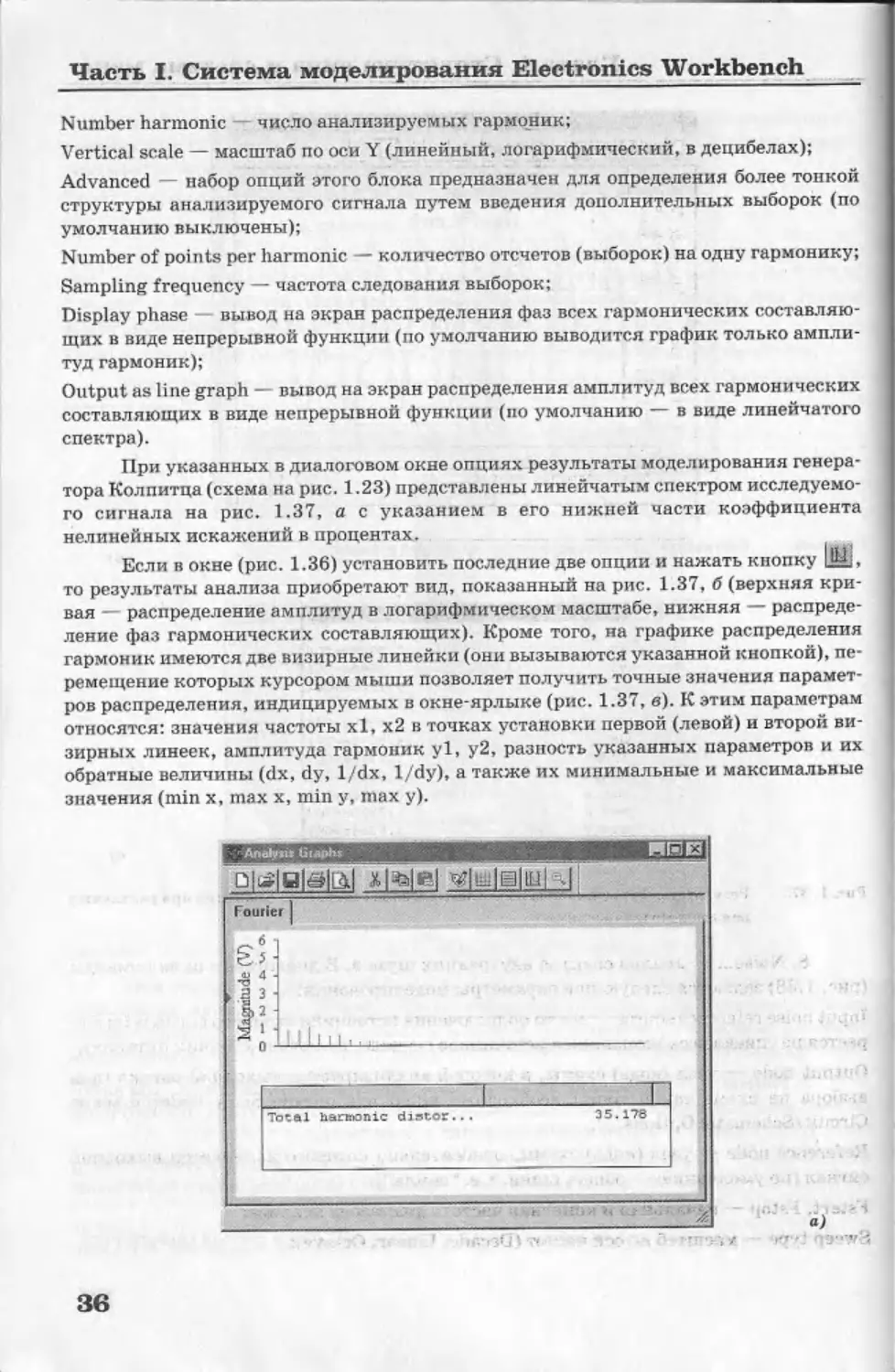
При указанных в диалоговом окне опциях результаты моделирования генера-
тора Колпитца (схема на рис. 1.23) представлены линейчатым спектром исследуемо-
го сигнала на рис. 1.37, а с указанием в его нижней части коэффициента
нелинейных искажений в процентах.
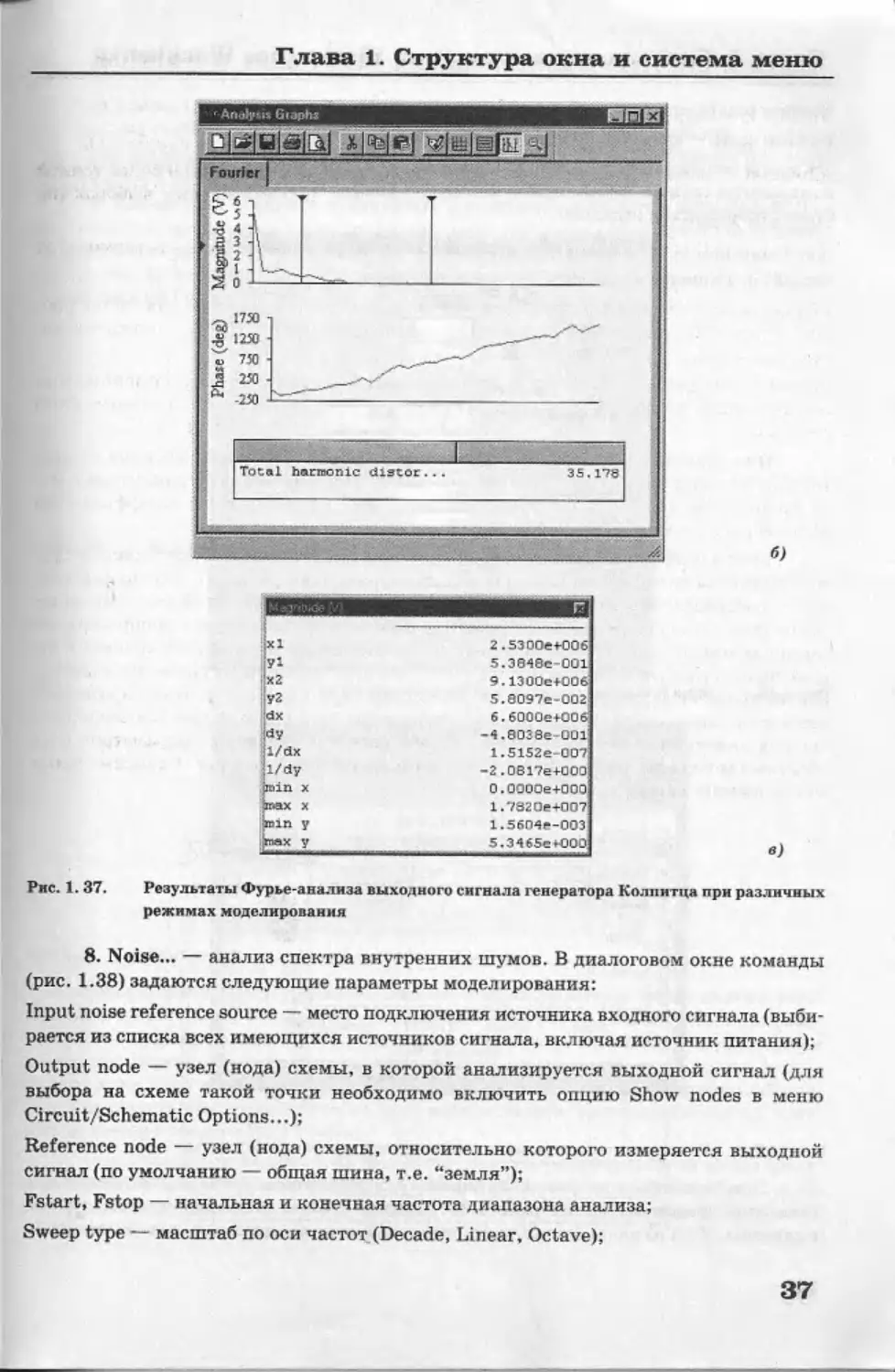
Если в окне (рис. 1.36) установить последние две опции и нажать кнопку ,
то результаты анализа приобретают вид, показанный на рис. 1.37, б (верхняя кри-
вая - распределение амплитуд в логарифмическом масштабе, нижняя — распреде-
ление фаз гармонических составляющих). Кроме того, на графике распределения
гармоник имеются две визирные линейки (они вызываются указанной кнопкой), пе-
ремещение которых курсором мыши позволяет получить точные значения парамет-
ров распределения, индицируемых в окне-ярлыке (рис. 1.37, в). Катим параметрам
относятся: значения частоты xl, х2 в точках установки первой (левой) и второй ви-
зирных линеек, амплитуда гармоник yl, у2, разность указанных параметров и их
обратные величины (dx, dy, 1/dx, 1/dy), а также их минимальные и максимальные
значения (min х, max х, min у, шах у).
36
Глава 1. Структура окна и система меню
б)
Xl Z.5300e<-006
yi 5.3848c-001
|Х2 9.1300C+006
у2 5.8097e-002
dx 6.6000e+006
dy -4.8038e-001:
: 1/dx 1.51S2e-007
1/dy -2.0817e+000
min x 0.0000e+000
max x 1.7820e+007
min у 1.5бП41»-003
'max у 5.3465с»000
в)
Рис. 1. 37. Результаты Фурье-анализа выходного сигнала генератора Колпитца при различных
режимах моделирования
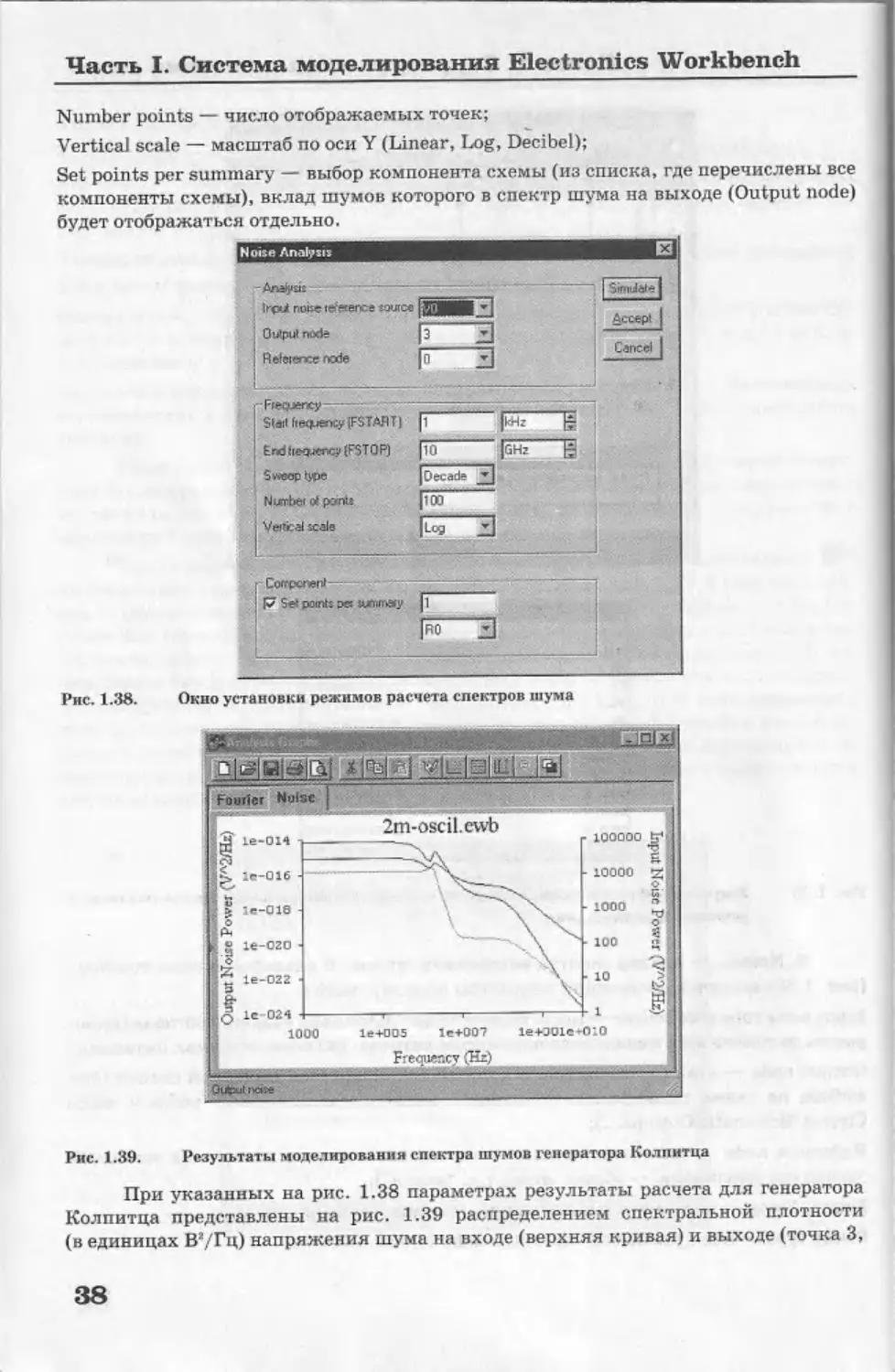
8. Noise... — анализ спектра внутренних шумов. В диалоговом окне команды
(рис. 1.38) задаются следующие параметры моделирования:
Input noise reference source — место подключения источника входного сигнала (выби-
рается из списка всех имеющихся источников сигнала, включая источник питания);
Output node — узел (нода) схемы, в которой анализируется выходной сигнал (для
выбора на схеме такой точки необходимо включить опцию Show nodes в меню
Circuit/Schematic Options...);
Reference node — узел (нода) схемы, относительно которого измеряется выходной
сигнал (по умолчанию — общая шина, т.е. “земля”);
Fstart, Fstop — начальная и конечная частота диапазона анализа;
Sweep type — масштаб по оси частот (Decade, Linear, Octave);
37
Часть I. Система моделирования Electronics Workbench
Number points — число отображаемых точек;
Vertical scale — масштаб по оси Y (Linear, Log, Decibel);
Set points per summary — выбор компонента схемы (из списка, где перечислены все
компоненты схемы), вклад шумов которого в спектр шума на выходе (Output node)
будет отображаться отдельно.
Рис. 1.38. Окно установки режимов расчета спектров шума
Рис. 1.39. Результаты моделирования спектра шумов генератора Колпитца
При указанных на рис. 1.38 параметрах результаты расчета для генератора
Колпитца представлены на рис. 1.39 распределением спектральной плотности
(в единицах В*/Гц) напряжения шума па входе (верхняя кривая) и выходе (точка 3,
38
Глава 1. Структура окна и система меню
средняя кривая), а также составляющая, обусловленная резистором R0. Наименова-
ние каждой составляющей индицируется в левом нижнем углу окна при указании
курсором мыши на соответствующую кривую (на рис. 1.39 индицируется наимено-
вание средней кривой — Output noise).
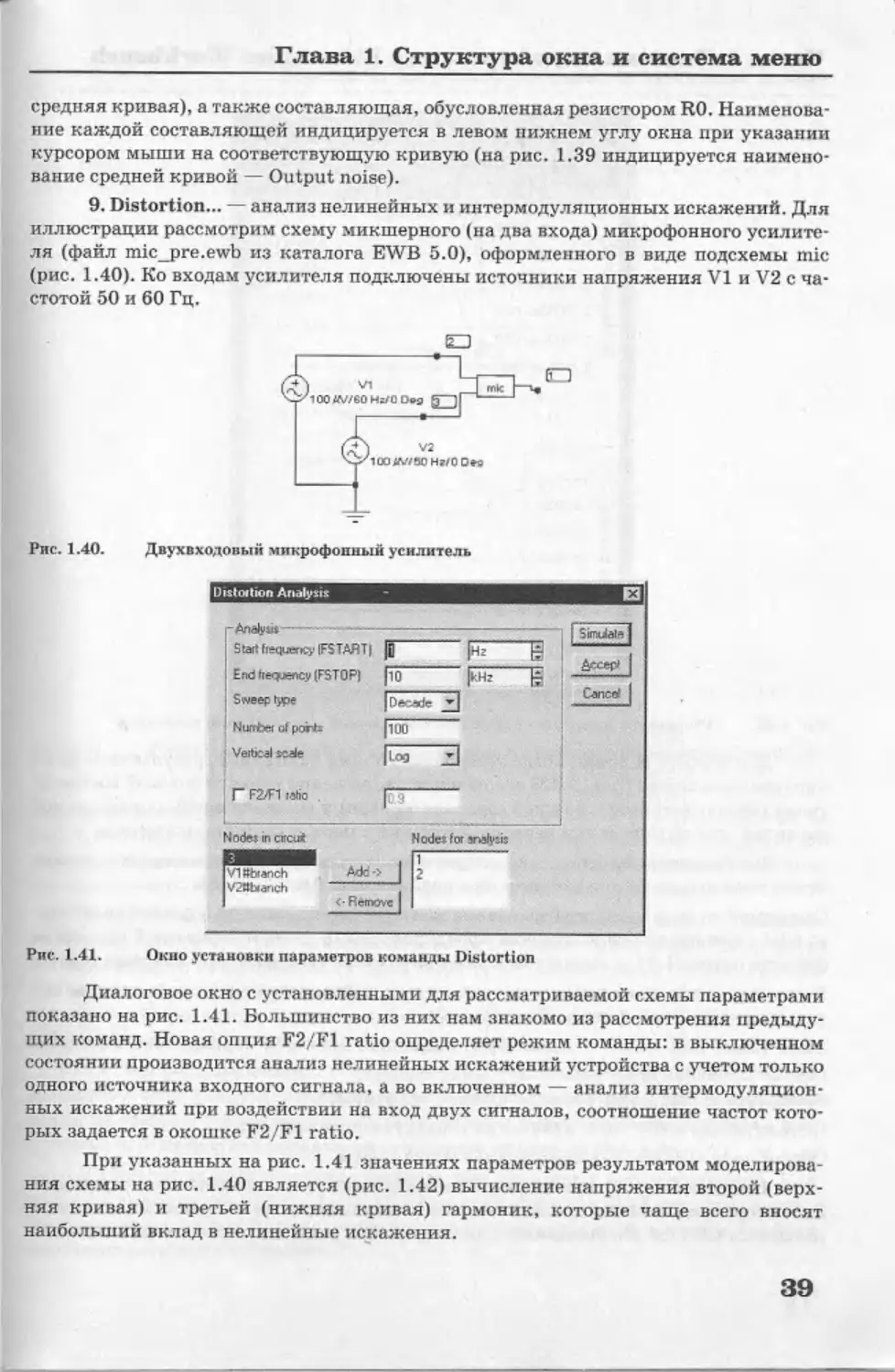
9. Distortion... — анализ нелинейных и интермодуляционных искажений. Для
иллюстрации рассмотрим схему микшерного (на два входа) микрофонного усилите-
ля (файл mic_pre.ewb из каталога EWB 5.0), оформленного в виде подсхемы mic
(рис. 1.40). Ко входам усилителя подключены источники напряжения VI и V2 с ча-
стотой 50 и 60 Гц.
Рис. 1.40. Двухвходовый микрофонный усилитель
Distottion Analysis
Р Simulate
Сансе?
Node? for analysis
Adc-> | 2
< Remove I
Nodes in circuit
Рис. 1.41. Окно установки параметров команды Distortion
Диалоговое окно с установленными для рассматриваемой схемы параметрами
показано на рис. 1.41. Большинство из них нам знакомо из рассмотрения предыду-
щих команд. Новая опция F2/F1 ratio определяет режим команды: в выключенном
состоянии производится анализ нелинейных искажений устройства с учетом только
одного источника входного сигнала, а во включенном — анализ интермодуляцион-
ных искажений при воздействии на вход двух сигналов, соотношение частот кото-
рых задается в окошке F2/F1 ratio.
При указанных на рис. 1.41 значениях параметров результатом моделирова-
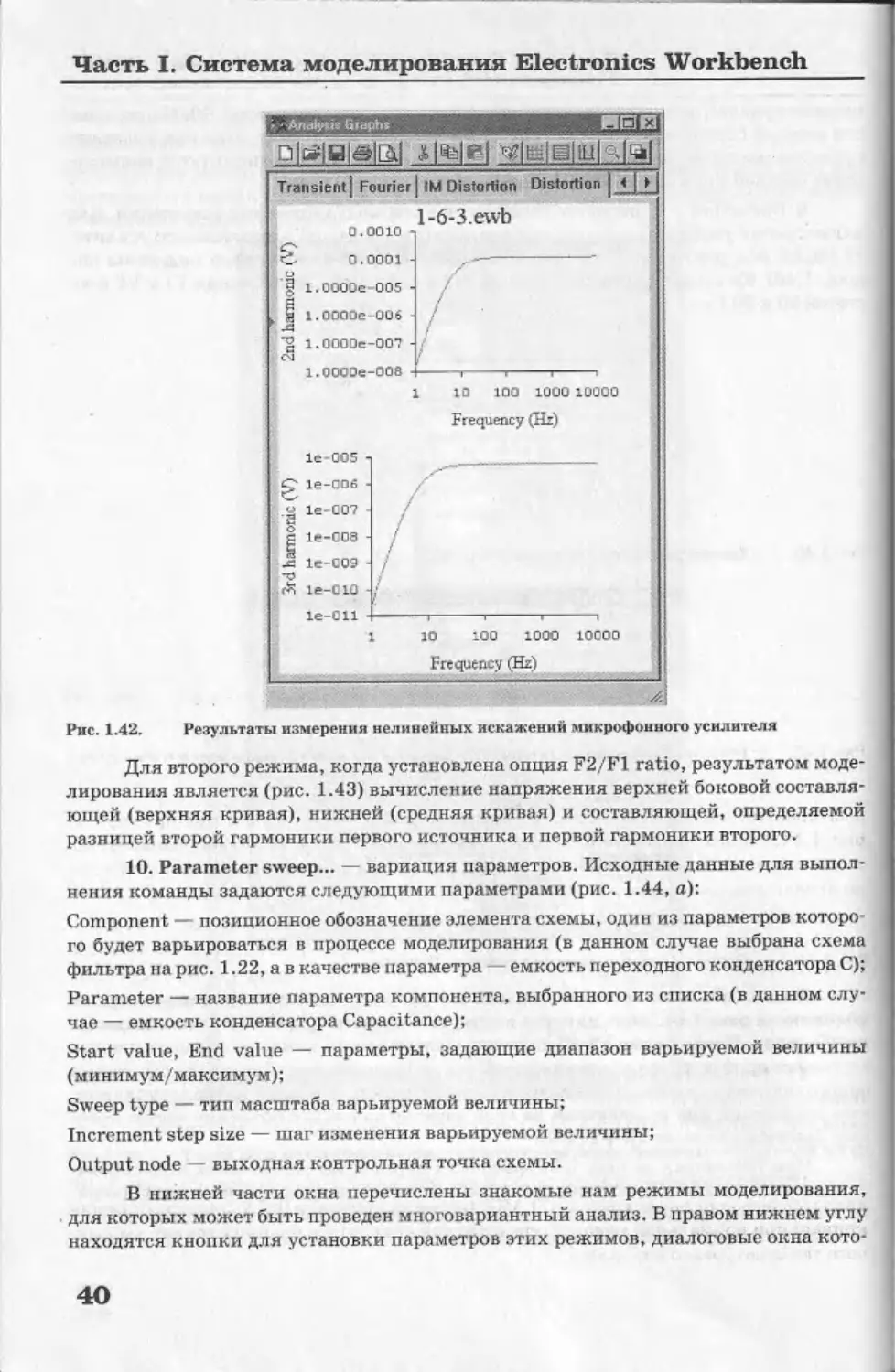
ния схемы на рис. 1.40 является (рис. 1.42) вычисление напряжения второй (верх-
няя кривая) и третьей (нижняя кривая) гармоник, которые чаще всего вносят
наибольший вклад в нелинейные искажения.
39
Часть I. Система моделирования Electronics Workbench
Рис. 1.42.
• Graph» HSE3
Результаты измерения нелинейных искажений микрофонного усилителя
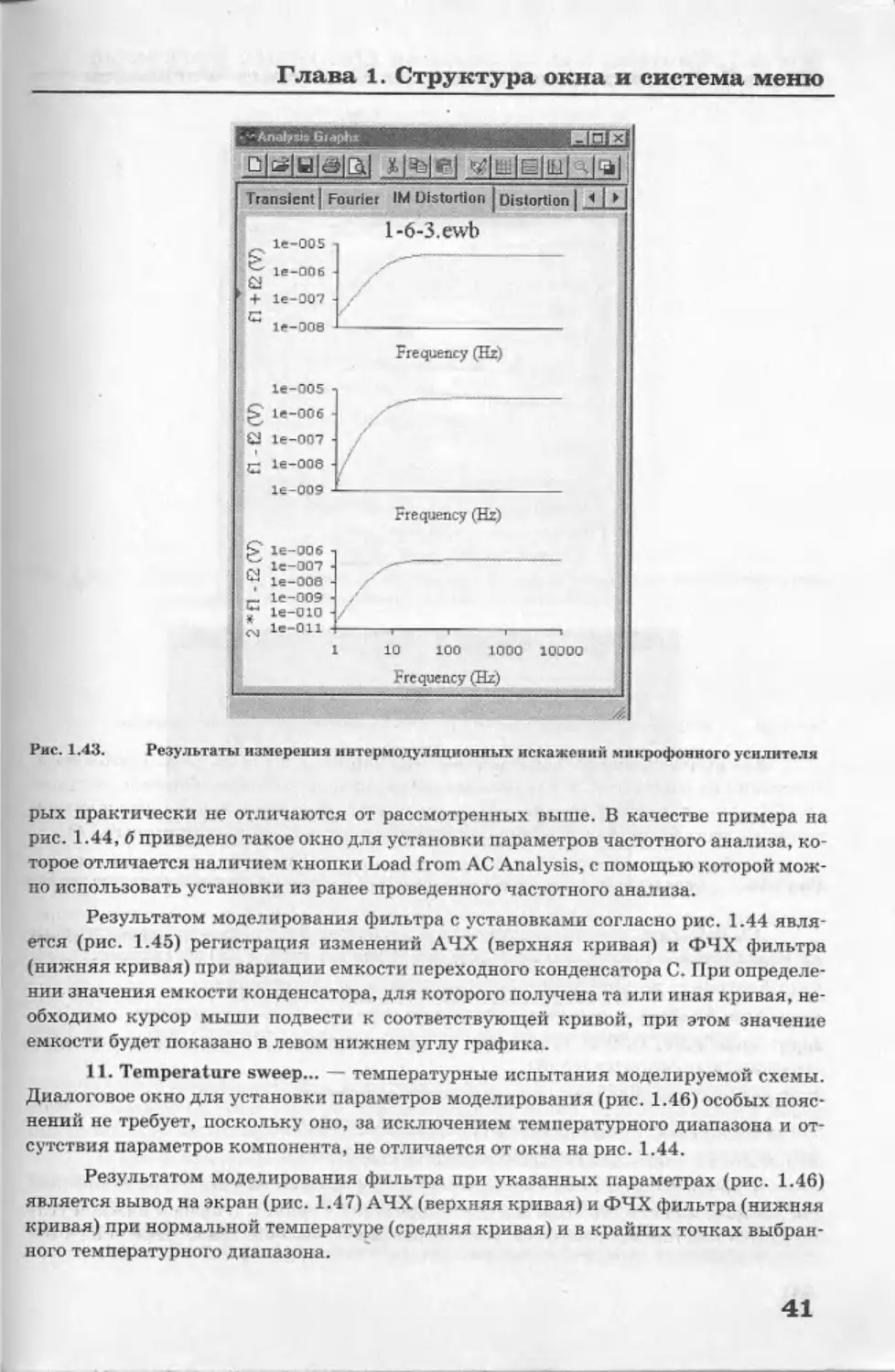
Для второго режима, когда установлена опция F2/F1 ratio, результатом моде-
лирования является (рис. 1.43) вычисление напряжения верхней боковой составля-
ющей (верхняя кривая), нижней (средняя кривая) и составляющей, определяемой
разницей второй гармоники первого источника и первой гармоники второго.
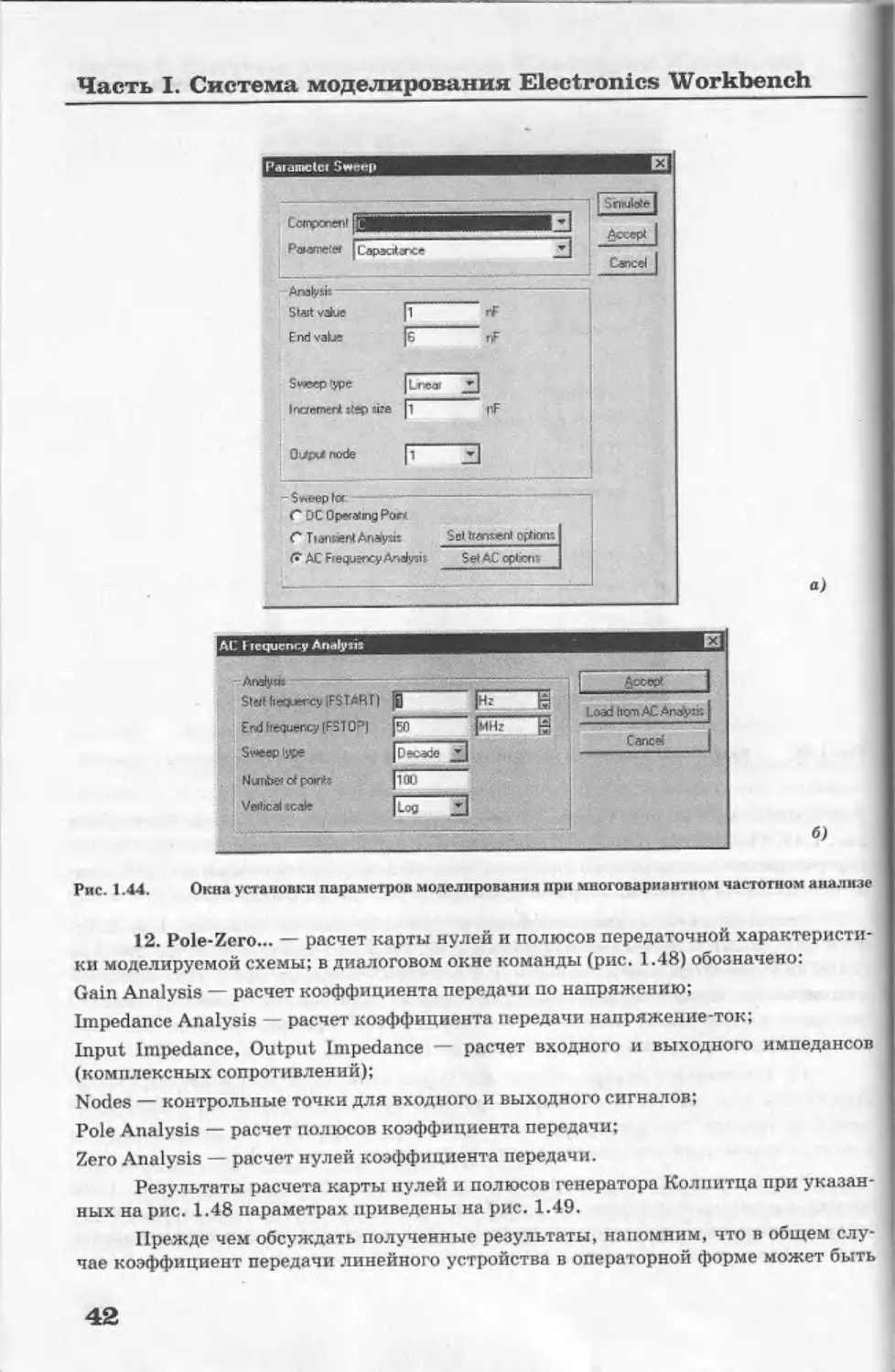
10. Parameter sweep... — вариация параметров. Исходные данные для выпол-
нения команды задаются следующими параметрами (рис. 1.44, а):
Component — позиционное обозначение элемента схемы, один из параметров которо-
го будет варьироваться в процессе моделирования (в данном случае выбрана схема
фильтра на рис. 1.22, а в качестве параметра емкость переходного конденсатора С);
Parameter — название параметра компонента, выбранного из списка (в данном слу-
чае — емкость конденсатора Capacitance);
Start value, End value — параметры, задающие диапазон варьируемой величины
(м и нимум/максимум);
Sweep type — тип масштаба варьируемой величины;
Increment step size — шаг изменения варьируемой величины;
Output node выходная контрольная точка схемы.
В нижней части окна перечислены знакомые нам режимы моделирования,
для которых может быть проведен многовариантный анализ. В правом нижнем углу
находятся кнопки для установки параметров этих режимов, диалоговые окна кото-
40
Глава 1. Структура окна и система меню
Рис. 1.43. Результаты измерения интермодуляционных искажений микрофонного усилителя
рых практически не отличаются от рассмотренных выше. В качестве примера на
рис. 1.44, б приведено такое окно для установки параметров частотного анализа, ко-
торое отличается наличием кнопки Load from AC Analysis, с помощью которой мож-
но использовать установки из ранее проведенного частотного анализа.
Результатом моделирования фильтра с установками согласно рис. 1.44 явля-
ется (рис. 1.45) регистрация изменений АНХ (верхняя кривая) и ФЧХ фильтра
(нижняя кривая) при вариации емкости переходного конденсатора С. При определе-
нии значения емкости конденсатора, для которого получена та или иная кривая, не-
обходимо курсор мыши подвести к соответствующей кривой, при этом значение
емкости будет показано в левом нижнем углу графика.
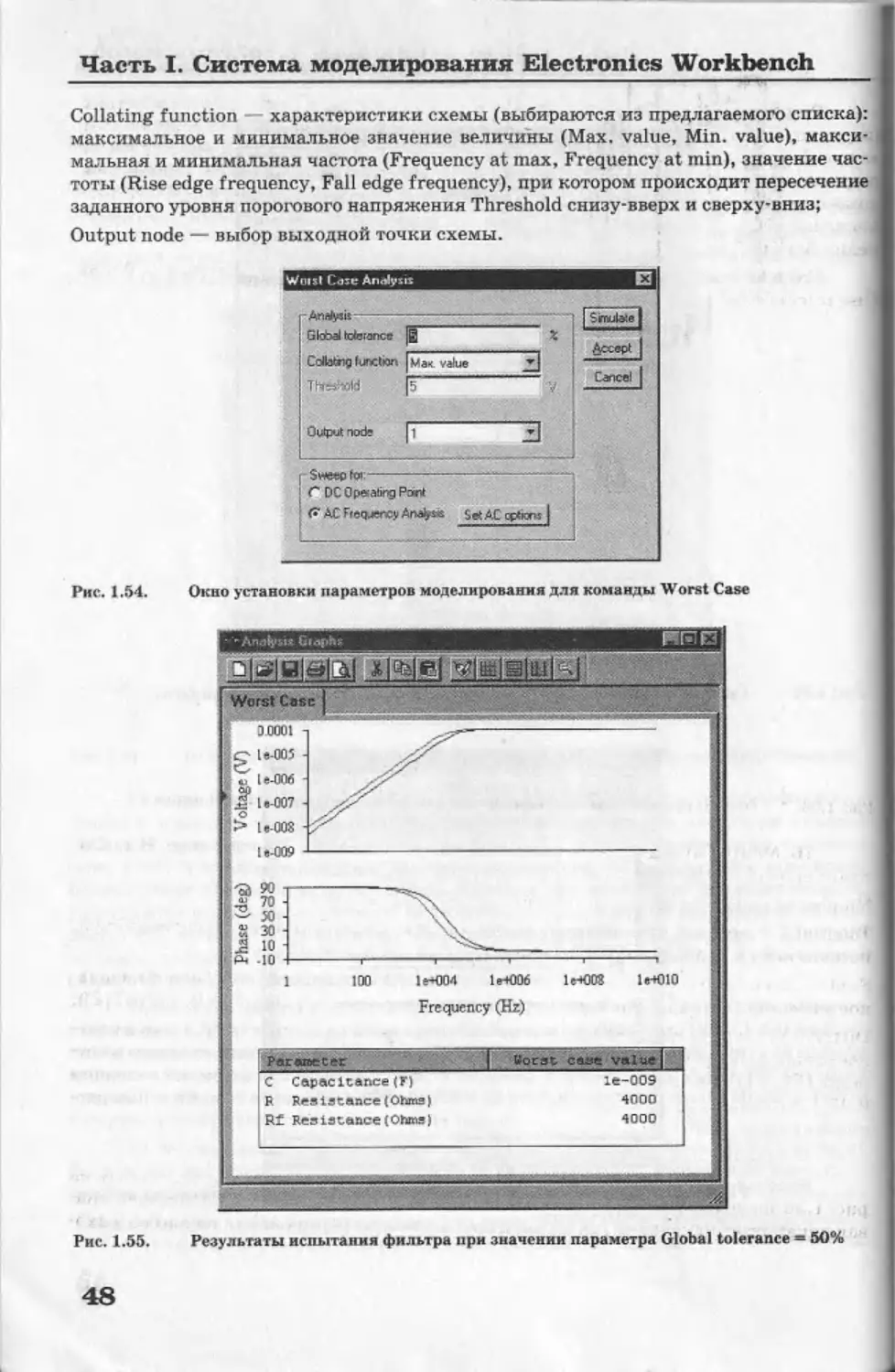
11. Temperature sweep... — температурные испытания моделируемой схемы.
Диалоговое окно для установки параметров моделирования (рис. 1.46) особых пояс-
нений не требует, поскольку оно, за исключением температурного диапазона и от-
сутствия параметров компонента, не отличается от окна на рис. 1.44.
Результатом моделирования фильтра при указанных параметрах (рис. 1.46)
является вывод на экран (рис. 1.47) АЧХ (верхняя кривая) и ФЧХ фильтра (нижняя
кривая) при нормальной температуре (средняя кривая) и в крайних точках выбран-
ного температурного диапазона.
41
Часть I. Система моделирования Electronics Workbench
а)
Рис. 1.44. Окна установки параметров моделирования при многовариантном частотном анализе
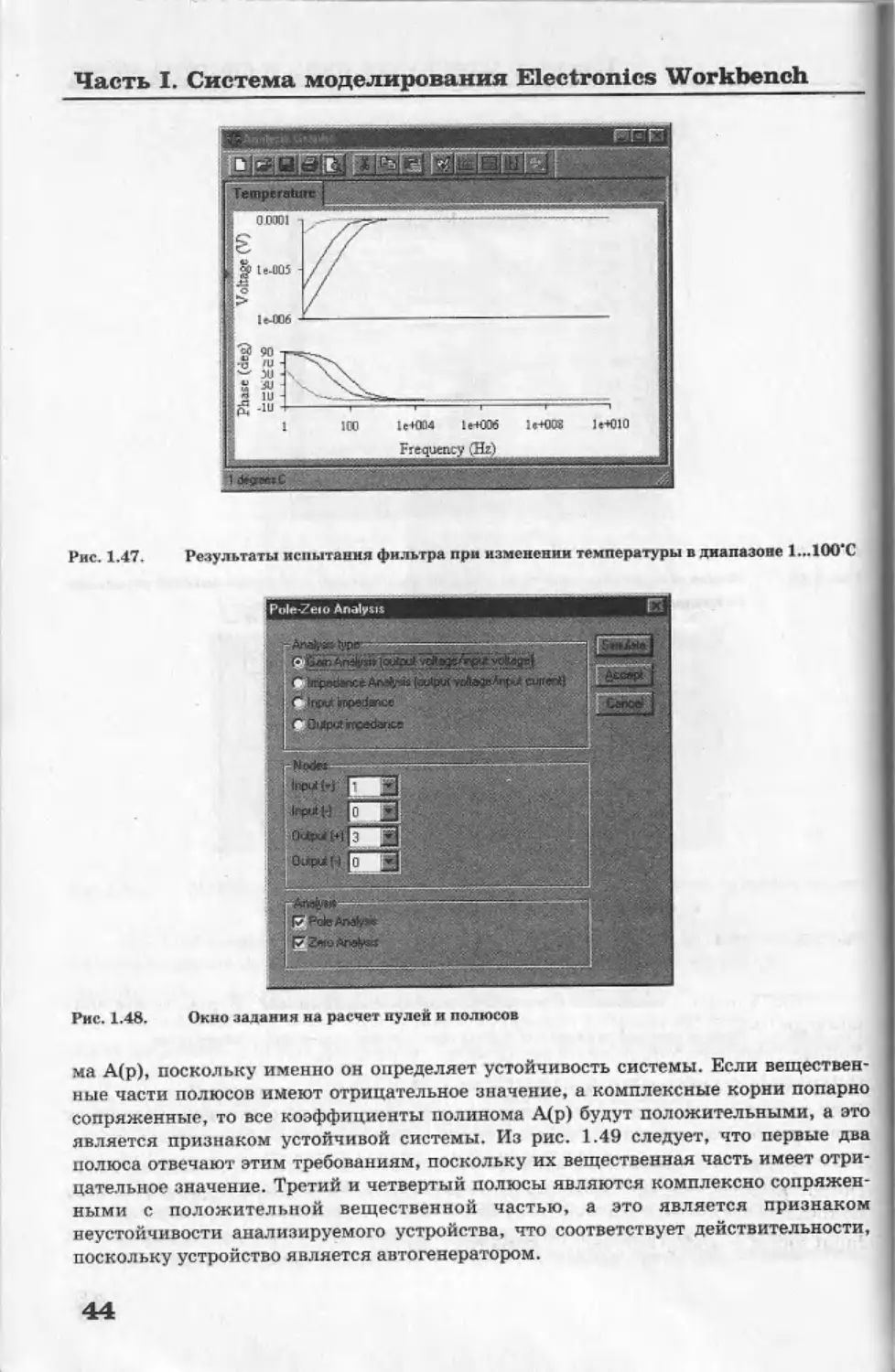
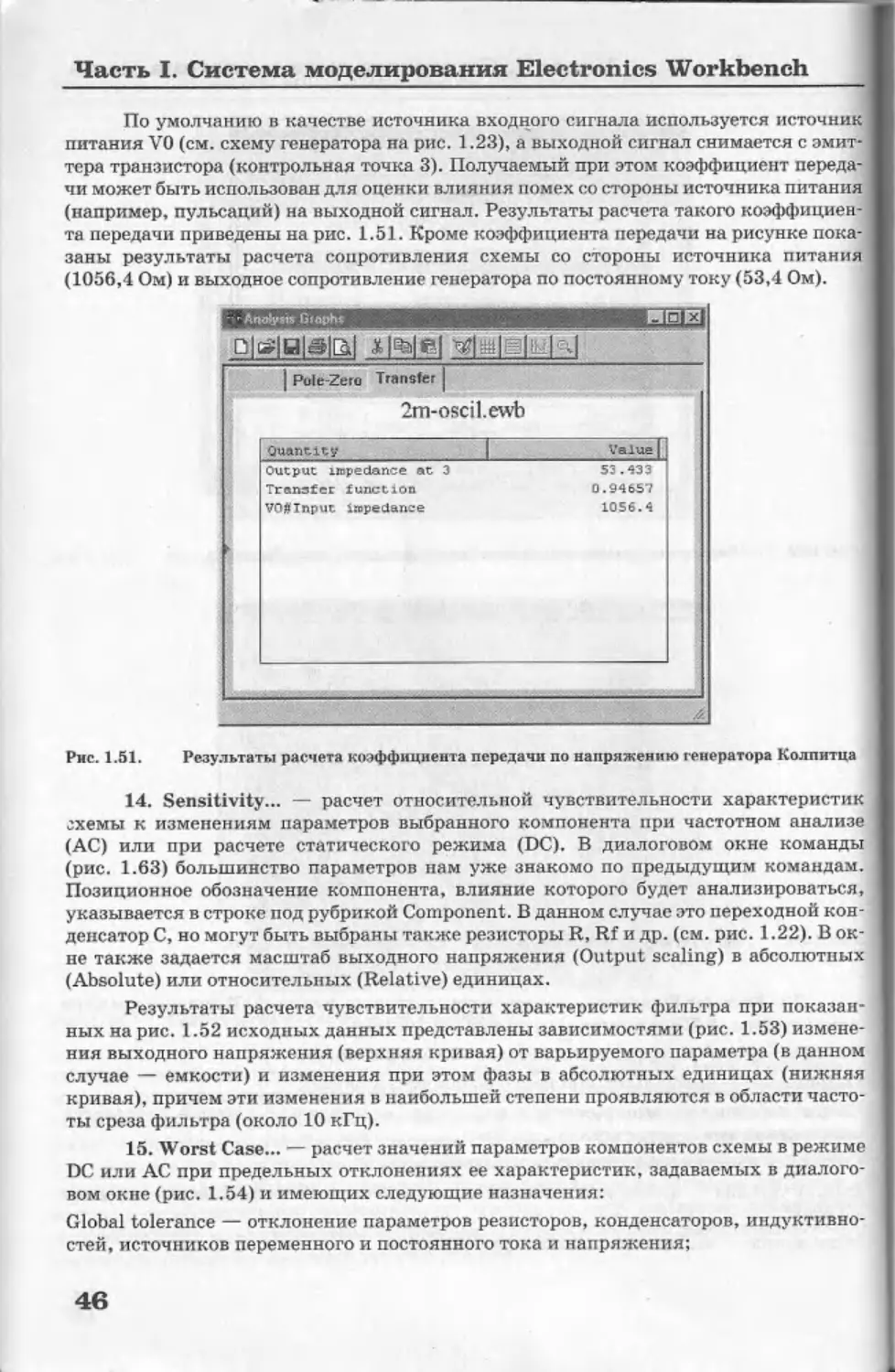
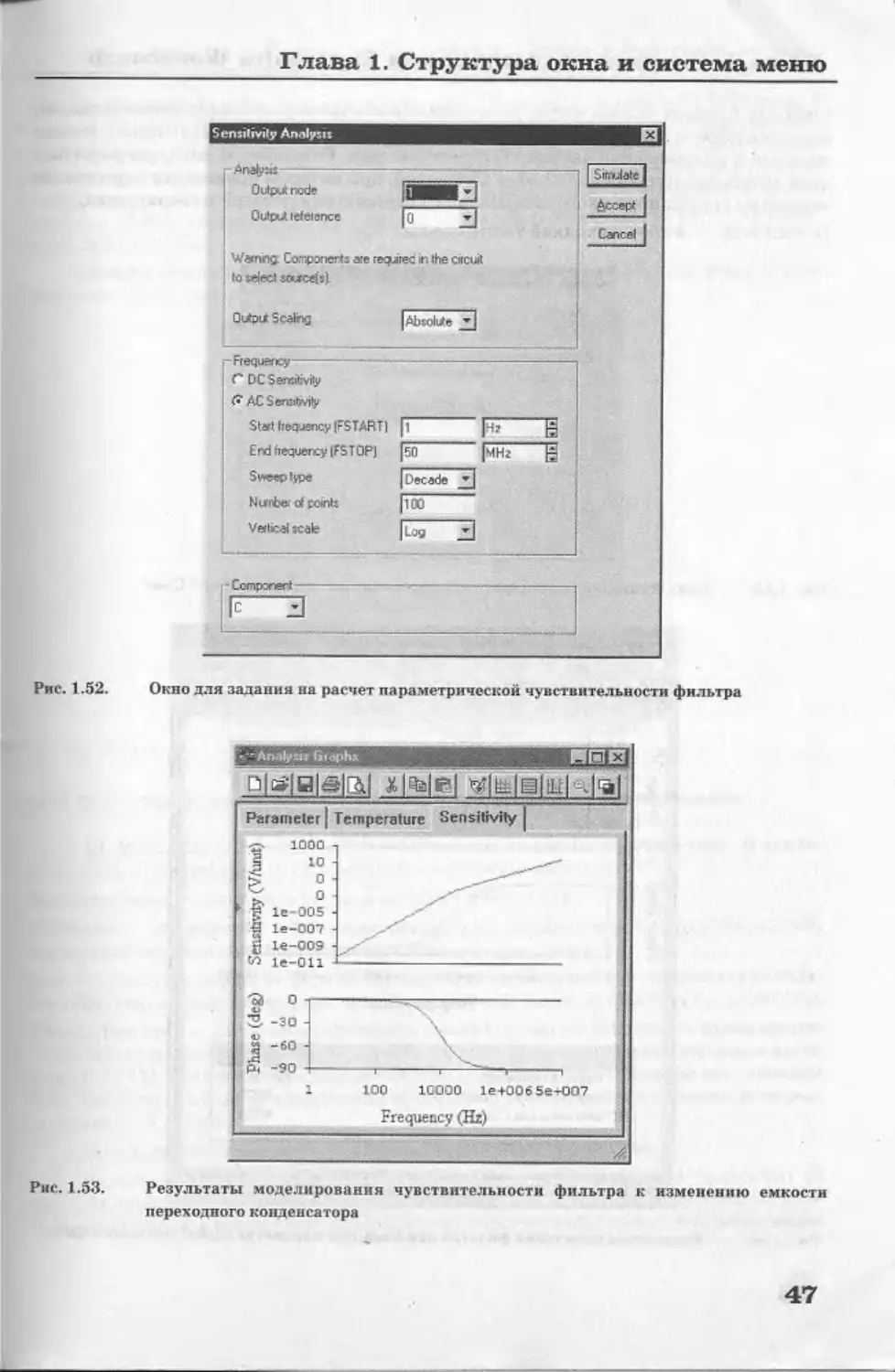
12. Pole-Zero... — расчет карты нулей и полюсов передаточной характеристи-
ки моделируемой схемы; в диалоговом окне команды (рис. 1.48) обозначено:
Gain Analysis — расчет коэффициента передачи по напряжению;
Impedance Analysis — расчет коэффициента передачи напряжение-ток;
Input Impedance, Output Impedance — расчет входного и выходного импедансов
(комплексных сопротивлений);
Nodes — контрольные точки для входного и выходного сигналов;
Pole Analysis — расчет полюсов коэффициента передачи;
Zero Analysis — расчет нулей коэффициента передачи.
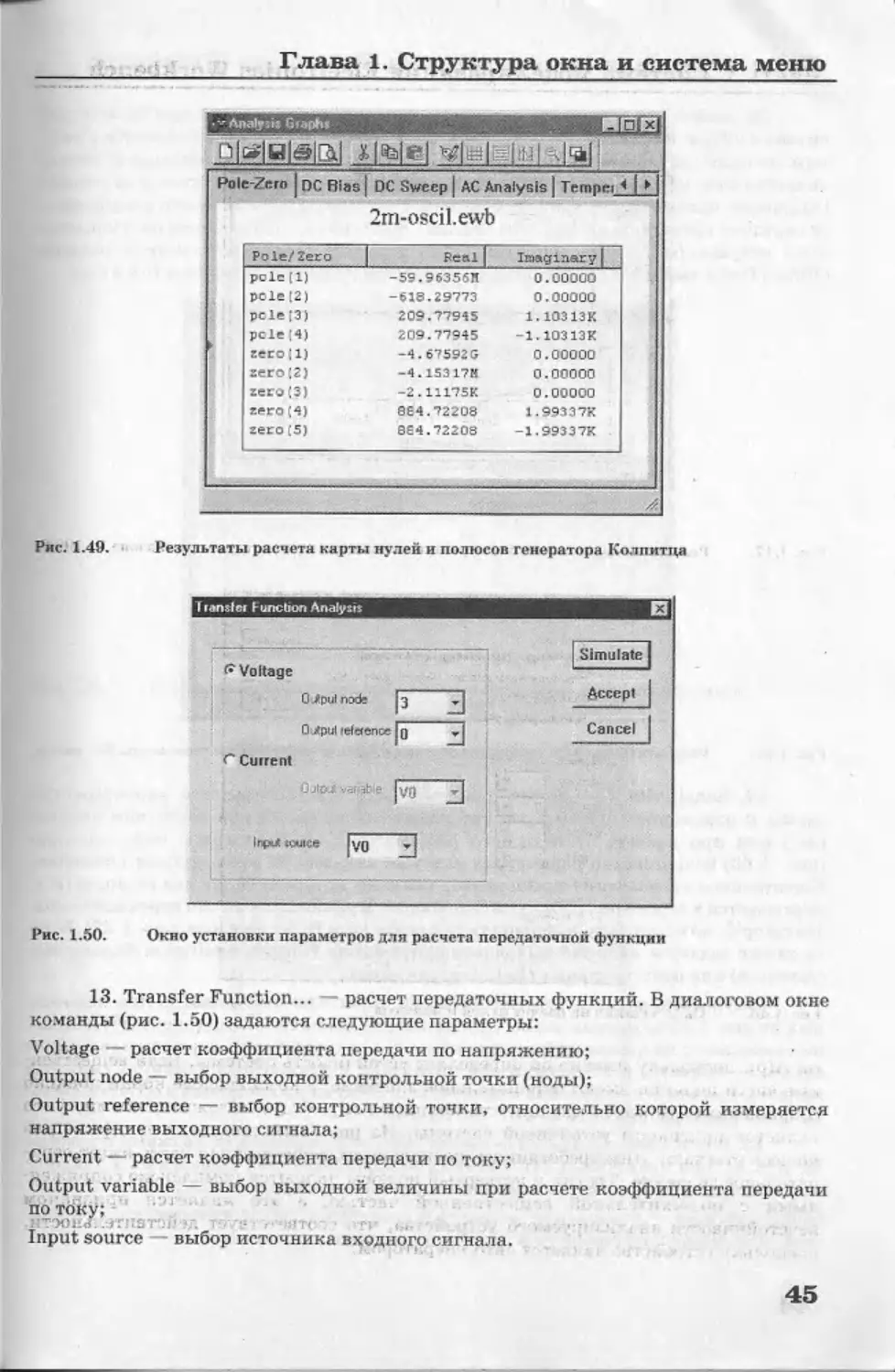
Результаты расчета карты нулей и полюсов генератора Колпитца при указан-
ных на рис. 1.48 параметрах приведены на рис. 1.49.
Прежде чем обсуждать полученные результаты, напомним, что в общем слу-
чае коэффициент передачи линейного устройства в операторной форме может быть
42
Глава 1. Структура окна и система меню
Рис. 1.45.
Результаты многовариантного анализа фильтра при изменении емкости переходно-
го конденсатора в диапазоне от 1 до 6 нФ
Рис. 1.46. Окно установки параметров моделирования при изменении температуры
представлен в следующем виде: К(р) = В(р)/А(р), где р — оператор Лапласа; В(р),
А(р) — полиномы. Под нулями передаточной функции К(р) понимаются корни
полинома В(р) числителя, а под полюсами — корни полинома А(р) знаменателя.
На рис. 1.49 в графе Real приведена действительная (вещественная) часть кор-
ней полиномов, а в графе Imaginary — мнимая часть. Располагая такими данными,
можно сделать вывод о порядке дифференциального уравнения моделируемой схе-
мы и составить выражение для коэффициента передачи, а также сделать выводы о ее
устойчивости. Для этого достаточно провести анализ полюсов, т. е. корней полино-
43
Часть I. Система моделирования Electronics Workbench
Рис. 1.48.
Рис. 1.47. Результаты испытания фильтра при изменении температуры в диапазоне 1...100‘С
Окно задания на расчет пулей и полюсов
ма А(р), поскольку именно он определяет устойчивость системы. Если веществен-
ные части полюсов имеют отрицательное значение, а комплексные корни попарно
сопряженные, то все коэффициенты полинома А(р) будут положительными, а это
является признаком устойчивой системы. Из рис. 1.49 следует, что первые два
полюса отвечают этим требованиям, поскольку их вещественная часть имеет отри-
цательное значение. Третий и четвертый полюсы являются комплексно сопряжен-
ными с положительной вещественной частью, а это является признаком
неустойчивости анализируемого устройства, что соответствует действительности,
поскольку устройство является автогенератором.
44
Глава 1. Структура окна и система меню
Pole-Zero | DC Bias | DC Sweep | AC Analysis ] Tempei < I ►
2m-oscil.ewb
Pole/Zero I Beal | Imaginary|
pole(1) -59.96356И 0.00000
pole[2) -618.29773 0.00000
pole |3) 209.77945 1.1O313K
pcle[4) 209.77945 -1.1O313K
zero: 1) -4.675920 0.00000
zero(2) -4.1S317M 0.00000
zero(3) -2.11175K 0.00000
zero (4) 884.72208 1.99337K
zero (5) 884.72208 -1.99337K
Рис. 1.49. Результаты расчета карты нулей и полюсов генератора Колпитца
Рис. 1.50. Окно установки параметров для расчета передаточной функции
13. Transfer Function... расчет передаточных функций. В диалоговом окне
команды (рис. 1.50) задаются следующие параметры:
Voltage расчет коэффициента передачи по напряжению;
Output node - выбор выходной контрольной точки (ноды);
Output reference — выбор контрольной точки, относительно которой измеряется
напряжение выходного сигнала;
Current — расчет коэффициента передачи по току;
Output variable — выбор выходной величины при расчете коэффициента передачи
по току;
. •• - • •г< т>- • . . • •• •
Input source выбор источника входного сигнала.
45
Часть I. Система моделирования Electronics Workbench
По умолчанию в качестве источника входного сигнала используется источник
питания V0 (см. схему генератора на рис. 1.23), а выходной сигнал снимается с эмит-
тера транзистора (контрольная точка 3). Получаемый при этом коэффициент переда-
чи может быть использован для оценки влияния помех со стороны источника питания
(например, пульсаций) на выходной сигнал. Результаты расчета такого коэффициен-
та передачи приведены на рис. 1.51. Кроме коэффициента передачи на рисунке пока-
заны результаты расчета сопротивления схемы со стороны источника питания
(1056,4 Ом) и выходное сопротивление генератора по постоянному току (53,4 Ом).
Рис. 1.51. Результаты расчета коэффициента передачи по напряжению генератора Колпитца
14. Sensitivity... — расчет относительной чувствительности характеристик
схемы к изменениям параметров выбранного компонента при частотном анализе
(АС) или при расчете статического режима (DC). В диалоговом окне команды
(рис. 1.63) большинство параметров нам уже знакомо по предыдущим командам.
Позиционное обозначение компонента, влияние которого будет анализироваться,
указывается в строке под рубрикой Component. В данном случае это переходной кон-
денсатор С, но могут быть выбраны также резисторы R, Rf и др. (см. рис. 1.22). В ок-
не также задается масштаб выходного напряжения (Output scaling) в абсолютных
(Absolute) или относительных (Relative) единицах.
Результаты расчета чувствительности характеристик фильтра при показан-
ных на рис. 1.52 исходных данных представлены зависимостями (рис. 1.53) измене-
ния выходного напряжения (верхняя кривая) от варьируемого параметра (в данном
случае — емкости) и изменения при этом фазы в абсолютных единицах (нижняя
кривая), причем эти изменения в наибольшей степени проявляются в области часто-
ты среза фильтра (около 10 кГц).
15. Worst Case... — расчет значений параметров компонентов схемы в режиме
DC или АС при предельных отклонениях ее характеристик, задаваемых в диалого-
вом окне (рис. 1.54) и имеющих следующие назначения:
Global tolerance — отклонение параметров резисторов, конденсаторов, индуктивно-
стей, источников переменного и постоянного тока и напряжения;
46
Глава 1. Структура окна и система меню
Рис. 1.52. Окно для задания на расчет параметрической чувствительности фильтра
Рис. 1.53. Результаты моделирования чувствительности фильтра к изменению емкости
переходного конденсатора
47
Часть I. Система моделирования Electronics Workbench
Collating function характеристики схемы (выбираются из предлагаемого списка):
максимальное и минимальное значение величины (Max. value, Min. value), макси-
мальная и минимальная частота (Frequency at max, Frequency at min), значение час-
тоты (Rise edge frequency, Fall edge frequency), при котором происходит пересечение
заданного уровня порогового напряжения Threshold снизу-вверх и сверху-вниз;
Output node — выбор выходной точки схемы.
Рис. 1.55.
Рис. 1.54. Окно установки параметров моделирования для команды Worst Case
Результаты испытания фильтра при значении параметра Global tolerance = 50%
48
Глава 1. Структура окна и система меню
Результаты моделирования фильтра при указанных на рис. 1.54 параметрах
I параметр Global tolerance для наглядности установлен равным 50%) представлены
на рис. 1.55 в виде АЧХ (верхняя кривая) и ФЧХ (нижняя кривая). В нижней части
рисунка приведены заданные параметром Global tolerance значения параметров
.компонентов схемы: емкости конденсатора С и сопротивления резисторов R и Rf (от-
клонение -50% от номинала), при которых получены показанные на рис. 1.55 изме-
нения АЧХ и ФЧХ.
Следует заметить, что в программах PSpi.ce и Micro-Cap V [2, 3 ] команда Worst
Case имеет более широкие возможности задания параметров.
Рис. 1.56. Окно установки значений параметров для расчета по методу Монте-Карло
16. Monte Carlo... — статистический анализ по методу Монте-Карло. В диало-
говом окне команды (рис. 1.56) задаются следующие параметры:
Number of runs — количество статистических испытаний;
Tolerance — отклонения параметров резисторов, конденсаторов, индуктивностей,
источников переменного и постоянного тока и напряжения;
Seed — начальное значение случайной величины (этот параметр определяет началь-
ное значение датчика случайных чисел и может задаваться в пределах 0...32767 [2]);
Distribution type — закон распределения случайных чисел: Uniform — равновероят-
ное распределение на отрезке (-1, +1) и Gaussian — гауссовское распределение на от-
резке (-1, 11) с нулевым средним значением и среднеквадратическим отклонением
0,25. Требуемый закон распределения выбирается после нажатия кнопки в поле рас-
сматриваемой опции.
Остальные параметры нам знакомы из команды Worst Case.
Результаты статистического анализа генератора Колпитца при указанных на
рис. 1.56 значениях параметров приведены на рис. 1.57, а, на котором ломаная кри-
вая показывает изменения постоянной составляющей (напряжения покоя) на выхо-
49
Часть I. Система моделирования Electronics Workbench
Рис. 1.57.
а)
б)
Результаты статистических испытаний генератора Колпитца в статическом режиме (а)
и при анализе переходных процессов (б)
50
Глава 1. Структура окна и система меню
де схемы при случайном изменении параметров ее компонентов при числе испыта-
ли 20 (описание процесса проведения расчетов по методу Монте-Карло приведено в
реботах [2,3]). В режиме анализа переходных процессов результаты статистических
испытаний при числе испытаний 2 показаны на рис. 1.57, б (малое число испытаний
дыбрано из чисто оформительских соображений, поскольку каждый результат ис-
пытаний отображается другим цветом и в черно-белом исполнении это выглядело бы
к лучшим образом).
На рис. 1.57 приведены также среднее значение контролируемой величины
Mean, ее среднеквадратическое отклонение Standard deviation (std) и процентное со-
держание данных с отклонениями в ±1 std, ±2 std и т.д.
Ряс. 1.58. Окно с результатами выполнения нескольких команд из меню Analysis
17. Display Graph — этой командой вызываются на экран графики результа-
те в выполнения одной из команд моделирования. Если в процессе моделирования
z пользовано несколько команд меню Analysis, то результаты их выполнения на-
капливаются и на знакомом нам окне (см. рис. 1.58) отображаются в виде закладок
е наименованием команд, которые могут перемещаться кнопками, расположенны-
ми в правом верхнем углу окна. Это позволяет оперативно просматривать результа-
ты моделирования без его повторного проведения. Отметим, что вызов команды
происходит автоматически при выполнении первой же команды из меню Analysis.
Если в схеме используется осциллограф, то после запуска моделирования и предва-
рительно установленной команды Display Graph в ее окне появляется закладка
Oscilloscope с изображением осциллограммы; если используется измеритель АЧХ-
ФЧХ, то появляется закладка Bode с изображением АЧХ и ФЧХ и т.д. Одновремен-
но графическая информация выводится также и на основные приборы.
Отметим также, что в рассматриваемом режиме доступно значительное коли-
чество команд общего применения, мнемонические кнопки которых показаны в
верхней части окна.
51
Часть I. Система моделирования Electronics Workbench
1,7. Обмен данными с программой PSpice
Программа PSpice является наиболее известной реализацией программы схе-
мотехнического моделирования SPICE (Simulation Program with Integrated Circuit
Emphasis), разработанной в Калифорнийском университете в начале 70-х годов про-
шлого столетия и де-факто ставшей эталоном в системах схемотехнического модели-
рования [1,2].
Обмен данными с PSpice и другими программами (OrCAD, EWB Layout и др.|
производится с помощью команд Export и Import меню File (см. разд. 1.1). Начнем с
команды Export. Перед ее выполнением необходимо загрузить файл схемы. В каче-
стве примера выберем схему генератора Колпитца на рис. 1.23 (схемный файл 2m-
oscil.ewb). После выбора команды Export вызывается диалоговое окно (рис. 1.59), в
котором необходимо в строке “Имя файла:” указать имя файла. По умолчанию пред-
лагается имя схемного файла, однако его рекомендуется изменить. Рекомендуется
также поместить этот файл в каталог Models\Subckts.
В строке “Тип файла” можно выбрать следующие типы файлов: SPICE (*.cir).
OrCAD РСВ (*.net), Tango (*.net), Eagle (*.scr), Layol (*.cmp), Ultimate (*.plc), EWB
Layout (*.plc).
Рис. 1.59. Диалоговое окно команды Export
При выборе типа файла SPICE получаем файл с расширением.cir (в данном
случае 2m-osc.cir) с текстовым описанием схемы в формате PSpice, содержание кото-
рого показано на рис. 1.60. Текстовый файл начинается с шапки-заголовка (коммен-
тарии — с символа “*”), в котором указывается имя схемного файла EWB и
приводятся другие данные.
В абзаце с комментарием Oscilloscope(s) сообщается, что в пакете PSpice для
отображения результатов моделирования будет использована команда .PROBE, при
этом параллельно клеммам осциллографа включается резистор R_o_scope_0_0 со-
противлением 10,: Ом (подробности в работе [2]), а напряжение измеряется между
узлами 3 и 0 (0 — узел заземления).
В абзаце Batery(s) приводится описание источника питания V0 напряжением
6 В, включенного между узлами 2 и 0.
В абзаце Resistor(s) перечисляются входящие в схему резисторы Rl (1 кОм) и
R0 (10 кОм), включенные между узлами 3, 0 и 1, 2 соответственно.
В абзаце Capacitor(s) перечисляются используемые в схеме конденсаторы С1
(82 пФ) и СО (82 пФ), включенные между узлами 4, 3 и 3, 1 соответственно.
52
Глава 1. Структура окна и система меню
В абзаце NPN Transistor(s) указывается тип транзистора Q0 в формате PSpice
• Qn2n_2N2222A), коллектор, база и эмиттер которого подключены к узлам 2, 4 и 3
соответственно. f :\ei>Spro\sahples\2n-oscil.eub «=«***♦* « Interactive Inage Tecfwlogies * s ♦ • This File uas created by: * » Electronics Uorkberdi to SPICE net list ♦ « conversion DLL * * * LxS-SLit-h58:i H 1 ш 1 1 1 . 11 111 - J1 I 11 1 M * Oscilloscope!?) .HiJBE 9(3, 01 R_o.scope.0_0 3 0 ITtfn » Batterulsl 40 2 0 DC 6 * Reststor(s) И 3 0 IK Ю 1 2 10K
♦ Capac itor(s)
Cl 4 3 82р
СО 31 82?
* КРК Transistor!*)
Q0 2 4 3 Qn2n.2N22228
« Inductor!*)
LO 1 4 120u
« Comector(s)
« «de - 2, label -
* node « 4, label
• «4# « 1, label «
« гхЖ « 3, label =
» node » 0, label *
* node - 3, label •
» Wise
.1WW 28ns 14us Оз 28ns UIC
.MXEL Qn2n 2К2222Й hFN( Is-21.6f BF-200 BR«4 Rb-1.69 Re«4?3n Rc-16* Cjs«D
4je-19.5p Cjc-9.63p Mje-PSOn Vjc«750n Tl«454? Tr=102n nje=333n njc«333n
AW-ИЗ ISE-1701 IKMlOn He-2 lf«l HR«1 tfR«le*30 IKR«le»30 ISC-0 H>2
+IR8-le*3O RBH«O XTF«O UTF«le*3O IM PTF4 XCJC-1 9J$=751i MJS-0 X18-0
4C-1.11 XTI-3 KF»O fiF«l FC«5CGi TN3H=27)
.OPTICKS FeST0l=lo-12 CIIIH=1»-12 PIURELMJ.OOl PIVTOL-le-13 RELTOL-0.031
«ЧНБЫНИ CHET0L-le-14 DEFbO.OMl DEFU4J.0301
.EHD
Рис. 1.60. Содержание файла 2m-oscil.cir — задания на моделирование для программы PSpice
В абзаце Inductor(s) указывается на подключение между узлами 1 и 4 катуш-
ки L0 индуктивностью 120 мкГн (в EWB используется символ ’’и" вместо ”ц”).
В абзаце Connector(s) приводятся имена меток, если таковые имеются, и необ-
ходимые при этом комментарии.
В разделе Misc приводятся параметры директивы расчета переходных процес-
сов .TRAN: шаг вывода данных (28 нс), конечное время (14 мкс), начальный момент
времени вывода данных (0 с), максимальный шаг вывода данных (28 нс), отмена рас-
чета режима по постоянному току перед расчетом переходных процессов (UIC). Ди-
рективой .MODEL задаются параметры используемого в схеме транзистора (о
параметрах транзисторов см. гл. 4). Директивой .OPTIONS задаются параметры мо-
делирования (см. разд. 1.6).
Файл заканчивается директивой .END (конец описания).
53
Часть I. Система моделирования Electronics Workbench
Следует заметить, что рассмотренную команду можно использовать и для оди
ночных компонентов, например, для определения их эквивалентных схем (пример
такого применения приведен в гл. 4). Для этого необходимо из каталога соответству
ющей библиотеки скопировать (перенести) на рабочее поле программы графическое
изображение компонента и выполнить команду File>Export.
Теперь рассмотрим обратную задачу — импорт файлов в формате PSpice, при
котором в программе EWB выполняется построение принципиальной схемы. 11осл<
выбора команды Import открывается диалоговое окно (рис. 1.61), в котором указы
вается имя импортируемого файла (только в формате SPICE). После этого вызывает
ся меню размещения (Part Placement на рис. 1.62, а). Выбор в этом меню режима]
Default (по умолчанию) и Quick (быстрый) приводит к достаточно быстрому вывода
схемы, однако она получается крайне неудобочитаемой. Выбор режима Customized
(самостоятельная настройка) приводит к цепочке последовательно вызываемых ме
ню, показанных на рис. 1.62 1.64.
Рис. 1.61. Диалоговое окно команды Import
В режиме Rod Nodes (меню на рис. 1.62, d) в начале процесса формирования
изображения схемы выбираются два узла с наибольшим числом подключенных к
ним компонентов, остальные элементы схемы располагаются справа и слева от вы-
бранных узлов. В режиме Point Nodes в качестве опорных используются узлы схе-
мы. В режиме Place АП (используется по умолчанию при выборе режима Default в
меню на рис. 1.62, а) сначала размещаются компоненты схемы, а затем производит-
ся их соединение и оптимизация размещения всей схемы.
В меню на рис. 1.63, а выбирается скорость формирования изображения схемы:
Fast — максимальная (с минимальной оптимизацией изображения), Medium — сред-
няя и Slow — минимальная, но с максимальной оптимизацией изображения схемы.
В меню на рис. 1.63, б устанавливается плотность размещения элементов схе-
мы: автоматически устанавливаемая (Automatic), просторная (Loose, Very loose),
средняя (Medium), плотная и очень плотная (Dense, Very dense). При использовании
последних двух режимов схема становится вообще нечитаемой.
На последнем этапе (меню на рис. 1.64) предлагается установить максималь-
ное количество проводников, соединяемых в одной точке (узле): 4 или 3. В первом
случае схема получается более компактной, во втором — более удобной для дальней-
шего редактирования и приведения к стандартному виду.
Глава 1. Структура окна и система меню
Ржг. 1.62.
Меню выбора параметров вывода графического изображения схемы на первом (а)
и втором (б) этапах
а)
б)
Рис. 1.63. Меню выбора параметров вывода графического изображения схемы на третьем (я)
и четвертом (б) этапах
Рис. 1.64. Меню выбора максимального количества соединений в одной точке
Рис. 1. 65. Схема генератора Колпитца после импортирования из PSpice
При режимах, указанных в меню на рис. 1.62—1.64, схема генератора Кол-
питца после ее импортирования имеет вид, показанный на рис. 1.65. Она отличает-
ся от исходной схемы на рис. 1.23 несколько иным и менее удачным расположением
компонентов и наличием сопротивления утечки (входным сопротивлением) осцил-
лографа R o scope О 0.
55
Часть I. Система моделирования Electronics Workbench
При импортировании схем, подготовленных в текстовом виде для программ
PSpice, необходимо предварительно загрузить в каталог Models необходимые библ:
отечные файлы (с расширением .lib) и перезагрузить EWB. Если необходимые до
импортируемой схемы данные находятся в файлах с расширением .mod (файл
моделей компонентов) и .net (список соединений схемы), то, согласно руководст!
пользователя [67], их необходимо соответственно изменить на .lib и .cir и такя
загрузить в указанный каталог.
Контрольные вопросы и задания
1. Какой командой можно восстановить схему в ее первоначальном виде носи
внесения изменений?
2. Каким образом можно получить твердую копию (на принтере) схемы и списо
составляющих ее компонентов?
3. Какой командой можно скопировать изображение схемы в отчет п
лабораторной работе, подготавливаемый в текстовом редакторе Word?
4. Каким образом можно составить библиотеку моделей компонентов, состоящу!
из отечественных комплектующих?
5. Какими командами можно изменить графическое изображение компонент
(например, конденсатора переменной емкости)?
6. Что из себя представляет подсхема и как ее создать?
7. Что обозначает выделение объекта? Выделите часть схемы и попытайтесь е
переместить в другое место экрана, пользуясь клавишами управления курсоро]
или мышью.
8. Какой командой можно присвоить компоненту позиционное обозначение (С1
С2, R1 и т.д.) и какое правило используется при присвоении позиционные
обозначений однотипных компонентов?
9. Какими командами можно изменить цвет проводника и для чего это нужно?
10. Какой командой можно удалить из схемы обозначения номинальных значени]
компонентов или их тип?
11. Каким образом можно масштабировать размеры изображения схемы?
12. Как на схеме обозначаются контрольные точки (номера нод), для чего они
нужны и в каких случаях их нужно знать?
13. Каким образом можно менять шрифт символов и его атрибуты?
14. Какая команда используется для установки параметров моделирования общего
характера?
15. Назовите команду для задания параметров моделирования переходных
процессов.
16. Какая команда используется для задания параметров расчета частотных
характеристик?
17. Каким образом можно индивидуально изменить температуру компонента
моделируемой схемы?
18. Назовите команду EWB 5.0 для задания параметров контрольно-измерительных
приборов.
19. Что означает моделирование схемы по постоянному току?
56
Глава 1. Структура окна и система меню
Ж Елкой командой можно провести анализ модели в частотной области и какие
характеристики при этом можно получить?
- 2ля усилителя на рис. 1.22 модуль коэффициента передачи и его аргумент
|фезовый угол) определяются формулами: [K(w)[ = wT / ч'(соТ)2 + 1; <р = arctg(l/wT),
Бе Т = RC — постоянная времени входной цепи; w = 2nF; F — частота входного
«гнала. Используя приведенные формулы, рассчитайте и постройте амплитудно-
ктотную и фазо-частотную характеристики усилителя и сравните полученные
результаты с результатами моделирования на рис. 1.29.
_ И . пользуя формулу из п. 21, рассчитайте и постройте амплитудно-частотную ха-
рактеристику для С - 1 нФ и 6 нФ и сравните полученные результаты с резуль-
татами моделирования на рис. 1.45.
Ж Анализируя схему генератора Колпитца на рис. 1.23 и результаты моделирова-
кя на рис. 1.51, установите, какими компонентами определяется сопротивле-
ве схемы со стороны зажимов для подключения источника питания.
М Каким образом можно получить краткие сведения о модели конкретного компо-
нента?
S Что такое спектральный анализ и какой командой его можно выполнить?
Ж Кгпользуя команду Export, конвертируйте схему фильтра на рис. 1.22 в формат
PSpice и составьте комментарий к полученному текстовому файлу. Используя
вс-манду Import, конвертируйте полученный файл из формата PSpice в формат
KWB4.1 или 5.0.
1" Ьз^явите внутреннюю структуру (состав математической модели) ОУ с тремя и
=£тъю выводами из библиотеки Analog ICs (EWB 5.0) или Active (EWB 4.1), ис-
альзуя для этой цели команды Export и Import меню File.
. • Какие математические методы используются в EWB?
Ж Чем отличается иода схемы от ее узла (см. разд. 5.3)?
57
Часть I. Система моделирования Electronics Workbench
2. Создание схем
В данной главе рассматривается процесс подготовки схем, состав библиотек
компонентов EWB 4.1 и 5.0 и их краткие характеристики.
2.1. Технология подготовки схем
Прежде чем создавать чертеж принципиальной схемы средствами программы
EWB, необходимо на листе бумаги подготовить ее эскиз с примерным расположени-
ем компонентов и с учетом возможности оформления отдельных фрагментов в виде
подсхем. Целесообразно также ознакомиться с библиотекой готовых схем програм-
мы (см. Приложение 1) для выбора аналога (прототипа) или использования имею-
щихся решений в качестве подсхем.
В общем случае процесс создания схемы начинается с размещения на рабочем
поле EWB компонентов из библиотек программы в соответствии с подготовленным
эскизом. Одиннадцать разделов библиотеки программы EBW 4.1 поочередно могут
быть вызваны с помощью меню Window или с помощью иконок, расположенных под
линейкой контрольно-измерительных приборов (см. рис. 1.1). Каталог выбранной
библиотеки располагается в вертикальном окне справа или слева от рабочего поля
(устанавливается в любое место перетаскиванием стандартным способом — за шапку
заголовка). Для открытия каталога нужной библиотеки необходимо подвести курсор
мыши к соответствующей иконке и нажать один раз ее левую кнопку, после чего се-
рый фон иконки меняется на желтый. Необходимый для создания схемы значок
(символ) компонента переносится из каталога на рабочее поле программы движением
мыши при нажатой левой кнопке, после чего кнопка отпускается (для фиксирования
символа) и производится двойной щелчок но значку компонента. В раскрывающемся
диалоговом окне устанавливаются требуемые параметры (сопротивление резистора,
тип транзистора и т.д.) и выбор подтверждается нажатием кнопки Accept или клави-
ши Enter. Па этом этапе необходимо предусмотреть место для размещения контроль-
ных точек и иконок контрольно-измерительных приборов.
Если в схеме используются компоненты одинакового номинала (например, ре-
зисторы с одинаковым сопротивлением), то номинал такого компонента рекоменду-
ется задать непосредственно в каталоге библиотеки и затем переносить компоненты
в нужном количестве на рабочее поле. Для изменения номинала компонента необхо-
димо два раза щелкнуть мышью по символу его графического изображения и в рас-
крывающемся после этого окне внести изменения.
При размещении компонентов схемы на рабочем поле программы EWB 5.0
можно воспользоваться динамическим меню, описанным в конце главы.
После размещения компонентов производится соединение их выводов провод-
никами. При этом необходимо учитывать, что к выводу компонента можно подклю-
чить только один проводник. Для выполнения подключения курсор мыши
подводится к выводу компонента и после появлении прямоугольной площадки сине-
го цвета нажимается левая кнопка и появляющийся при этом проводник протягива-
ется к выводу другого компонента до появления на нем такой же прямоугольной
площадки, после чего кнопка мыши отпускается, и соединение готово. При необхо-
димости подключения к этим выводам других проводников в библиотеке Passive вы-
бирается точка (символ соединения) и переносится на ранее установленный
проводник. Чтобы точка почернела (первоначально она имеет красный цвет), необ-
ходимо щелкнуть мышью по свободному месту рабочего поля. Если эта точка дейст-
вительно имеет электрическое соединение с проводником, то она полностью
окрашивается черным цветом. Если на ней виден след от пересекающего проводии-
58
Глава 2. Создание схем
------—----------------------------------------------------------------
«л. то электрического соединения нет и точку необходимо установить заново. После
тзвчной установки к точке соединения можно подключить еще два проводника. Ес-
хж соединение нужно разорвать, курсор подводится к одному из выводов компонен-
тов или точке соединения и при появлении площадки нажимается левая кнопка,
хэоводник отводится на свободное место рабочего поля, после чего кнопка отпуска-
ется. Если необходимо подключить вывод к имеющемуся на схеме проводнику,
w проводник от вывода компонента курсором подводится к указанному проводнику
ж после появления точки соединения кнопка мыши отпускается. Следует отметить,
прокладка соединительных проводников производится автоматически, причем
Г7«епятствия — компоненты и другие проводники — огибаются по ортогональным
«правлениям (по горизонтали или вертикали).
Точка соединения может быть использована не только для подключения про-
водников, но и для введения надписей (например, указания величины тока в провод-
ке, его функционального назначения и т.п.). Для этого необходимо дважды
эедкнуть по точке и в раскрывшемся окне ввести необходимую запись (не более 14
гхмволов), причем запись можно смещать вправо путем введения слева нужного ко-
зчества пробелов. Это свойство может быть использовано и в том случае, когда по-
жпионное обозначение компонента (например Cl, R10) накладывается на рядом
^сходящий проводник или другие элементы схемы.
Если необходимо переместить отдельный сегмент проводника, к нему подво-
хжтея курсор, нажимается левая кнопка и после появления в вертикальной или го-
ризонтальной плоскости двойного курсора производятся нужные перемещения.
Подключение к схеме контрольно-измерительных приборов производится
ж^ллогично. Причем для таких приборов, как осциллограф или логический анализа-
тор. соединения целесообразно проводить цветными проводниками, поскольку их
~~=~ определяет цвет соответствующей осциллограммы. Цветные проводники целе-
оосюразны не только для обозначения проводников одинакового функционального
г-значения, но и для проводников, находящихся в разных частях схемы (например,
проводники шины данных до и после буферного элемента). Примеры такого оформ-
ления можно найти в каталогах готовых схем (см. файл adc-dacl.ca4).
При обозначении компонентов необходимо придерживаться рекомендаций
з правил, предусмотренных ЕСКД (единой системой конструкторской документа-
ми). Что касается пассивных компонентов, то при выборе их обозначений особых
трудностей не возникает. Трудности возникают при выборе активных элементов —
микросхем, транзисторов и т.п., особенно при необходимости использования ком-
понентов отечественного производства, когда требуется установить точное соот-
ветствие функциональных обозначений выводов и параметров зарубежных
ж отечественных компонентов. Для облегчения этой задачи можно воспользовать-
ся таблицами соответствия зарубежных и отечественных компонентов (см. гл. 4).
При импортировании в создаваемую схему другой схемы или ее фрагментов
целесообразно действовать в следующей последовательности:
♦ командой File>Save As записать в файл создаваемую схему, указав его имя в ди-
алоговом окне (расширение имени файла указывать не обязательно, программа
сделает это автоматически);
♦ командой File>Open загрузить на рабочее поле импортируемую схему стандарт-
ным для Windows образом (некоторые особенности описаны в конце главы);
♦ командой Edit>SeIect All выделить схему, если импортируется вся схема,
или выделить ее нужную часть (см. разд. 1.2);
59
Часть I. Система моделирования Electronics Workbench
♦ командой Edit>Copy скопировать выделенную схему в буфер обмена;
♦ командой File>Open загрузить создаваемую схему;
♦ командой Edit>Paste вставить содержимое буфера обмена на рабочее поле; после
вставки импортируемая схема будет выделена (и отмечена красным цветом)
и может оказаться наложенной на создаваемую схему;
♦ клавишами управления курсором (или ухватившись мышью за один из компо-
нентов) отбуксируйте импортированную часть в нужное место, после чего можно
отменить выделение;
♦ после подключения импортированной схемы необходимо щелчками мыши прой-
тись но всем ее компонентам, чтобы исключить их смещения, возникающие при
буксировке и приводящие к ступенчатым искажениям проводников.
Перемещения отдельных фрагментов схемы при ее компоновке выполняются
вышеописанным образом после выделения фрагмента. Если схема состоит из одно-
типных блоков, то целесообразно скомпоновать один такой блок, а затем путем ко-
пирования и вставки размножить его до нужного количества и выполнить
необходимые соединения.
После подготовки схемы рекомендуется составить ее описание (окно-ярлык
вызывается из меню Window>Description), в котором указывается ее назначение;
после проведения ^моделирования указываются его результаты. К сожалению, про-
грамма EWB позволяет вводить описание только на английском языке. Кроме того,
в EWB не предусмотрены средства для редактирования графических изображений
компонентов, а также введения новых шрифтов (в EWB 4.1).
Перейдем теперь к краткому обзору библиотечных компонентов программы
EWB. Более подробные сведения будут приведены в гл. 4 и в других главах по мере
их применения. При описании библиотек после названия компонента в скобках ука-
зываются назначаемые пользователем параметры. Например, для конденсатора это
емкость, значение которой может быть установлено с помощью диалогового окна на
рис. 1.4, а также температурные коэффициенты и разбросы (для EWB 5.0), для опе-
рационного усилителя — тип, который может быть выбран с помощью меню на
рис. 1.5, и т.д.
2.2. Группа Custom —
вспомогательные компоненты ®з|
В разделе Custom программы EWB 4.1 размещаются подсхемы, если они име-
ются в данной схеме (в исходном состоянии раздел пуст), а также все библиотечные
компоненты предыдущей версии EWB 3.0 в случае импорта из этой версии схемных
файлов. В EWB 5.0 этот раздел называется Favorites. Заполнение раздела моделями
компонентов или подсхем осуществляется программой автоматически одновремен-
но с загрузкой схемного файла и очищается после окончания работы с ним.
2.3. Группа Passive — пассивные компоненты id
Раздел Passive содержит следующие пассивные компоненты:
• Точка соединения проводников, используемая также для введения на схе-
му надписей длиной пе более 14 символов (других способов введения текста в EWB
не существует). Например, если на схеме требуется указать значение тока в какой-
либо ветви, то на проводнике этой ветви ставится точка, затем двойным щелчком по
60
Глава 2. Создание схем
точке вызывается диалоговое окно (рис. 1.3), в котором и выполняется соответству-
ющая надпись.
Заземление (метка).
Батарея (напряжение).
Источник постоянного тока (ток).
SjlZOV/KHs/ODeg ,
Источник переменного синусоидального напряжения (эффективное
значение напряжения, частота, фаза).
jjCT04HIIK переменного синусоидального тока (эффективное значение
тока, частота, фаза).
’КЙ
-Av- Резистор (сопротивление).
1uF
Конденсатор (емкость).
----- Катушка (индуктивность).
Трансформатор с возможностью редактирования:
♦ коэффициента трансформации (Primary-to-secondary turns ratio n);
♦ индуктивности рассеяния (Leakage inductance Le, Гн);
♦ индуктивности первичной обмотки (Magnetizing inductance Lm, Гн);
♦ сопротивления первичной обмотки (Primary winding resistance Rp, Ом);
♦ сопротивления вторичной обмотки (Secondary winding resistance Rs, Ом).
Предохранитель (ток срабатывания).
Источник фиксированного напряжения - 5В.
Источник произвольного постоянного напряжения и последовательно вклю-
ченный резистор (напряжение, сопротивление).
Potentiometer
Key:
Resistance (R).
Setting:
Increment:
1’ Iю tel
I50 в
I5 tel 1?
[Accept |
Рис. 2.1. Диалоговое окно задания параметров потенциометра
[R!/!kf?/5OX
Потенциометр, параметры задаются с помощью диалогового окна
(см. рис. 2.1), в котором параметр Key определяет символ клавиши клавиатуры
(по умолчанию R), нажатием которой сопротивление уменьшатся на заданную
величину в % (параметр Increment, подвижный контакт двигается влево) или
61
Часть I. Система моделирования Electronics Workbench
увеличивается на такую же величину нажатием комбинации клавиш Shift R
(подвижный контакт двигается вправо); второй параметр номинальное значе-
ние сопротивления, третий — начальная установка сопротивления в % (по умол-
чанию — 50%).
ICVIOuf/SOK
Конденсатор переменной емкости (аналогично потенциометру).
[LJ/10rr>H/50«
Катушка переменной индуктивности (аналогично потенциометру).
1uF
К Электролитический конденсатор (емкость).
nj. .иознг/50% реыератОр однополярных прямоугольных импульсов (амплитуда, часто
та, коэффициент заполнения).
...j > инн. ренератОр амплитудно-модулированных колебаний (напряжение и
частота несущей, коэффициент и частота модуляции; на значке графического
изображения компонента коэффициент модуляции не указан).
(₽м)„..-1скюйгл оонг ренератОр частотно-модулированных колебаний (напряжение и час-
тота несущей, индекс и частота модуляции; на значке компонента индекс моду-
ляции не указан).
Сборка из восьми независимых резисторов одинакового номинала (сопро-
тивление).
2.4. Группа Active — активные компоненты tfj
Раздел Active содержит полупроводниковые диоды, биполярные транзисто-
ры, операционные усилители, аналоговые делительное и множительное устройства,
а также линии связи.
Полупроводниковый диод (тип).
Х' Стабилитрон (тип).
Светодиод (тип).
У
' ’ Биполярные п— р—п- и р—п~р-транзисторы соответственно (тип).
Линейная модель операционного усилителя (тип).
741
Нелинейная модель операционного усилителя (тип).
Тиристор или динистор (тип).
* + Диод Шокли (тип).
62
Глава 2. Создание схем
И Симметричный динистор или диак (тип).
Симметричный тринистор или триак (тип).
У*
Выпрямительный мост (тип),
ил
Аналоговый умножитель (коэффициент передачи).
1
Аналоговое устройство деления (коэффициент передачи).
Xlnel
Ь- Линия передачи с потерями, характеризуемая параметрами (подробности в
разд. 6.7):
♦ длина линии (Length of the Transmission Line Lon, m);
♦ сопротивление на единицу длины (Resistance per unit length Rt, Om/m);
♦ индуктивность на единицу длины (Inductance per unit length Lt, Гн/м);
♦ емкость на единицу длины (Capacitance per unit length Ct, Ф/м);
♦ проводимость на единицу длины (Conductance per unit length Gt, См/м);
♦ количество последовательно включенных элементарных сегментов (Number of
Lumps n).
<tn«l
Линия передачи без потерь с возможностью редактирования:
♦ волнового сопротивления (Nominal Impedance Zo, Ом);
♦ времени задержки распространения сигнала в линии (Propogation Time Delay Td, с);
+ количества последовательно включенных элементарных сегментов (Number of
Lumps n).
2.5. Группа, FET — полевые транзисторы
Раздел FET содержит полевые транзисторы в следующем составе.
Г1 ±
+~ Полевые транзисторы с управляющим р—« переходом (тип).
Ji+JEJEjjEi Полевые МОП-транзисторы со встроенным каналом (Depletion
MOSFETs), n-канальные и р-канальные, с раздельными или соединенными вы-
водами подложки и истока (тип).
Полевые МОП-транзисторы с индуцированным каналом (Enhancement
MOSFETs), n-канальные и р-канальные, с раздельными или соединенными вы-
водами подложки и истока (тип).
63
Часть I. Система моделирования Electronics Workbench
2.6. Группа, Control — коммутационные
устройства и управляемые источники Н
Раздел Control содержит коммутационные устройства и управляемые источ-
ники в следующем составе.
Коде)
Переключатель, управляемый нажатием задаваемой клавиши клавиатуры (по
умолчанию — клавиша пробела).
0.5f
«-
°™* Переключатель, автоматически срабатывающий через заданное время на
включение и выключение (время включения и выключения, с).
Ш -/ -IV ЦК 1А
* 1 v 1 Выключатель, срабатывающий в заданном диапазоне входных напря-
жений или токов (напряжение или ток включения и выключения).
12 [? V iv/v Источники напряжения, управляемые током или напряжением (ко-
эффициент передачи).
Йф 1А/А^]ф ir«ho Источники тока, управляемые током или напряжением (коэффи-
циент передачи).
реле с перекидным контактом (ток срабатывания и отпускания, индуктив-
ность обмотки).
Полиномиальный источник питания (коэффициенты полинома,
в гл. 4 и 14).
2.7. Группа Hybrid — гибридные компоненты Hi
Для компонентов библиотеки Hybrid, за исключением таймера, допускается
редактирование в диалоговом окне следующих параметров:
♦ верхний уровень входного напряжения (High-Level Input Voltage Vih, В);
♦ нижний уровень входного напряжения (Low-Level Input Voltage Vil, В);
♦ время установления при переходе от нижнего уровня к верхнему и наоборо!
(Propagation Delay Time, Low-to-High Level Output Tplh; Propagation Delay Time,
High-to-Low Level Output Tphl, c);
♦ пороговое напряжение (Threshold Voltage Vth, B).
Например, для АЦН (ADC) первые два параметра обозначают диапазон преоб-
разуемых напряжений, третий — время преобразования, четвертый — цена млад-
шего разряда.
—Я5=—
8-разрядный АЦП.
64
Глава 2. Создание схем
8-разрядный ЦАП с внешними опорными источниками тока и парафаз
ным выходом.
8-разрядиый ЦАП с внешними опорными источниками напряжения.
Я5ЯгЯГП5Г
Моностабил ьный мультивибратор.
Популярная микросхема многофункционального таймера 555, отечествен-
ный аналог — КР1006ВИ1.
2.8. Группа, Indic — индикаторные приборы
Раздел Indic содержит амперметр и вольтметр с цифровым отсчетом, одиноч-
ные и многосегментные светоиндикаторы, 8-разрядное устройство записи данных и
звуковой сигнализатор (зуммер).
" ' Вольтметр (внутреннее сопротивление, режим измерения постоянного или
переменного тока).
Амперметр (внутреннее сопротивление, режим измерения постоянного
или переменного тока).
10W12V
-®- Лампа накаливания (напряжение, мощность).
О- Светоиндикатор (цвет свечения).
rd’ Семисегментный индикатор (тип).
Семисегментный индикатор с дешифратором (тип). У семисегментных индика-
торов редактируемые параметры такие же, как и в группе Hybrid.
Гй>|
8-разрядное устройство записи данных в текстовом режиме.
Звуковой индикатор (зуммер) (частота звукового сигнала, напряжение и ток
срабатывания).
Линейка из десяти независимых светодиодов (напряжение, номинальный и
минимальный ток).
3 Зак. 206
65
Часть I. Система моделирования Electronics Workbench
IV
3- Линейка из десяти светодиодов со встроенным АЦП (минимальное и макс:
мальное напряжение).
2.9. Группа Gates — логические элементы £>
Группа Gates состоит из моделей базовых логических элементов и моделей ш
фровых ИМС ТТЛ- и КМОП-серий.
С> £> Логические элементы И, И-НЕ (количество входов).
Логические элементы ИЛИ, ИЛИ-HE (количество входов).
>2> Логические элементы ИСКЛЮЧАЮЩЕЕ ИЛИ и ИСКЛЮЧАЮЩЕЕ ИЛИ
НЕ (количество входов).
‘Ь* Логические элементы НЕ, буфер и тристабильный буфер элемент с тр<
мя состояниями.
}: AND J MRND ? OR }> NOR
I1 ,ют 1 Г XOR > XNOR BUFFERS
росхемы).
Цифровые ИМС ТТЛ-
и КМОП-серий (тип
мик
2.10. Группа Comb’I —
комбинированные цифровые компоненты
53 Полусумматор (тип).
0 Полный сумматор (тип).
них 1 ^DEC/DEHUx] ENCODERS*] j>REITHHETlc|
Серийные микросхемы
мультиплексоров.
де
кодеров/демультиплексоров,
ройств (тип микросхемы).
кодеров,
элементов
арифметико-логических
уст
2.11. Группа Seg’’I — триггеры
S RS-триггер (тип).
JK-триггеры с прямым или инверсным тактовым входом и входами
преду
становки (тип).
D-триггеры без предустановки и со входами предустановки (тип).
66
Глава 2. Создание схем
t-FLOPS >COUNTERS PSHIFTREOS
----1 с----i l----1 Серийные микросхемы триггеров, счетчиков и регист-
ров (тип микросхемы).
2,12. Группа, IC — цифровые микросхемы
в группе 1С собраны МОдели цифровых ИМС серий
FSN74 и CD4000 (отечественные ИМС серий 155 и 176 соответственно). Для кон-
кретных ИМС вместо символов хх ставятся соответствующие номера, например,
SN7407 — 6 буферных элементов с открытым коллектором, CD1081 — 4 элемен-
та 2И и т.д.
2.13. Библиотека компонентов EWB 5.0
Библиотека компонентов программы EWB 5.0 несколько расширена и сущест-
венно переработана за счет перегруппировки компонентов, хотя многие компонен-
ты. как и в EWB 4.1, не вполне соответствуют той группе, к которой они отнесены.
Эта библиотека содержит следующие разделы.
1 Favorites раздел, аналогичный группе Custom в EWB 4.1.
_ Sources — источники сигналов (меню для выбора компонентов показано на
рис. 2.2). Раздел дополнен несколькими управляемыми источниками. Заметим,
что под источниками сигналов подразумеваются не только источники питания,
но и управляемые источники.
X Basic — раздел, в котором собраны все пассивные компоненты, а также коммута-
ционные устройства (рис. 2.3).
Рис. 2.2. Меню раздела Sources
Рис. 2.3. Меню раздела Basic
Важным дополнением являются модели с нелинейной индуктивностью, в том
числе трансформаторы с сердечником. Интересной особенностью наделена в этом
разделе точка соединения, параметры которой можно задавать с помощью диалого-
вого окна на рис. 2.4. Она может быть наделена такими свойствами, как отсутствие
(Open) соединения между проводниками, подключенными к ней с соответствующей
стороны (цифры 1, 2, 3 и 4 на рис. 2.4 определяют количество и направление соеди-
няемых проводников). Например, при включенных опциях 1, 3 и Open между про-
водниками, подключенными со сторон 1 и 3, не будет электрического соединения.
4. Diodes — диоды (рис. 2.5). Ничего нового в семейство диодов не добавлено.
67
Часть I. Система моделирования Electronics Workbench
5. Transistors — транзисторы (рис. 2.6). К семейству транзисторов добавлены (по
сравнению с EWB 4.1) р-канальный и п-канальный арсенид-таллиевые полевые
транзисторы (рис. 2.6, б). В качестве их математических моделей используются
модель Куртиса, модель Рэйтеона и TriQuint модель [2, 3].
6. Analog ICs аналоговые микросхемы (рис. 2.7, а). К семейству аналоговых ми-
кросхем добавлены две разновидности операционных усилителей (рис. 2.7, б, в),
компаратор напряжения (рис. 2.7, г) и микросхема для систем фазовой автопод-
стройки частоты (рис. 2.7, д'), состоящая из фазового детектора, фильтра ниж-
них частот и управляемого напряжением генератора.
Рис. 2.4. Окно установки параметров точки соединения
Рис. 2.5. Меню раздела Diodes
а) б)
Рис. 2.6. Memo раздела Transistors (а) и графическое изображение арсенид-таллиевых поле-
вых транзисторов(б)
а) б) в) г) д)
Рис. 2.7. Меню раздела Analog ICs (а) и графические обозначения операционных усилителей
с семью (б) и девятью выводами (в), компаратора (г) и микросхемы для систем авто-
подстройки частоты (д)
68
Глава 2. Создание схем
7. Mixed ICs — микросхемы смешанного типа (рис. 2.8). Содержание раздела полно-
стью идентично содержанию группы Hybrid EWB 4.1, т. е. в него входят 8-раз-
рядпый АЦ11, два типа ЦАП (с внешними опорными источниками тока или
напряжения), мультивибратор и интегральный таймер.
8. Digital ICs — цифровые микросхемы (рис. 2.9). Раздел полностью аналогичен
рассмотренной выше группе IC с несколько расширенным количеством ИМС.
9. Logic Gates — логические цифровые микросхемы (рис. 2.10). Раздел полностью
идентичен рассмотренной выше группе Gates; добавлен элемент НЕ на базе триг-
гера Шмитта.
10. DIGITAL — цифровые микросхемы (рис. 2.11). В разделе объединены компо-
ненты групп Comb'I и Seg'l.
Рис. 2.8. Меню раздела Mixed ICs
Меню раздела Digital ICs
Рис. 2.9.
Рис. 2.10. Меню раздела Logic Gates
Рис. 2.11. Меню раздела Digital
Рис. 2.12. Меню раздела Indicators
И. Indicators — индикаторные устройства (рис. 2.12). Раздел соответствует группе
Indic, изменено лишь графическое обозначение зуммера (седьмая иконка на
рис. 2.12).
12. Controls — аналоговые вычислительные устройства (рис. 2.13). Этот раздел наи-
более насыщен новыми моделями. Кроме аналоговых делительных и множитель-
ных устройств, ранее входивших в группу Active, сюда включены (рис. 2.13, б)
дифференциатор, интегратор, масштабирующее звено, формирователь переда-
точных функций, трехвходовой сумматор, управляемый ограничитель напряже-
ния, неуправляемый ограничитель напряжения, ограничитель тока, блок
с гистерезисной характеристикой и селектор сигналов. Все эти компоненты по-
дробно рассмотрены в гл. 15.
69
Часть I. Система моделирования Electronics Workbench
13. Miscellaneous — компоненты смешанного типа (рис. 2.14). В раздел включен!
новые компоненты, показанные на рис. 2.14, б. На этом рисунке приведены (сл<
ва направо, сверху вниз) кварцевый резонатор (см. разд. 8.7), набор макрокоде
лей (подсхем) в формате SPICE, электровакуумный триод, коллекторны
электродвигатель постоянного тока (см. гл. 14) и фильтры-накопители на пере
ключаемых индуктивностях (см. гл. 12).
а)
Рис. 2.13. Меню раздела Controls (а) и его новые компоненты (б)
Рис. 2.14. Меню раздела Miscellaneous (а) и его новые компоненты (б)
При создании схем в EWB 5.0 удобно пользоваться динамическим меню
(рис. 2.15, а), которое вызывается нажатием правой кнопки мыши. Меню содержит
знакомые нам команды Help, Paste, Zoom In, Zoom Out, Schematic Options, а также но-
вую команду АсШсназвание компонентах Эта команда позволяет добавить на рабочем
поле компоненты, не обращаясь к каталогу соответствующей библиотеки. Количество
команд А(1(1<название> в списке меню определяется количеством типов компонентов
(резисторов, значка заземления и т.д.), уже имеющихся на рабочем поле.
Если при создании схемы использована, например, линейная модель ОУ с из-
мененными значениями параметров, то при очередной загрузке файла с этой схемой
вызывается меню (рис. 2.15, б) с сообщением о нестандартном использовании моде-
ли и с предложением выбрать один из следующих вариантов:
70
Глава 2. Создание схем
Use library model — использовать стандартную модель с параметрами по умолчанию;
Use circuit model — использовать модель с измененными значениями параметров;
Put model into... — вставить модель в каталог однотипных моделей (открывается ме-
ню соответствующего каталога);
Rename model... — переименовать модель;
Cancel — отказаться от загрузки.
Аналогичное меню имеется и в EWB 4.1.
Help
Paste
Zoomln
Zoom Out
Schematic Options..
Addlnducloi
AddOpeciot
Add Resistor
Add Ccmector
a)
Рис. 2.15. Динамическое меню (a) и меню выбора вариантов загрузки схемы с библиотечным
компонентом с нестандартным набором параметров (б)
Контрольные вопросы и задания
1. Каким образом можно подключить вывод компонента к проводнику?
2. Какие компоненты располагаются в каталогах библиотек Custom и Favorites?
3. Назовите элемент для образования в схеме узла соединений? Какие дополни-
тельные функции может он выполнять?
4. Составьте схему цепи, состоящей из последовательно включенных батареи на-
пряжением 5 В и переменного резистора сопротивлением 10 кОм, включенного
потенциометром. Между подвижным контактом потенциометра и одним из за-
жимов батареи включите вольтметр. Изменяя положение подвижного контакта
нажатием назначенной Вами клавишей клавиатуры, по показаниям вольтметра
определите направление его перемещения.
5. Подготовьте схему цепи, состоящей из источника переменного синусоидального
напряжения и вольтметра. Установите напряжение источника 10 В. Полагая,
что вольтметр измеряет эффективное значение напряжения, выясните, какому
значению соответствует установленное напряжение источника — эффективному
или амплитудному.
б. Почему в опыте по п. 4 вольтметр имеет нулевые показания в режиме измерения
постоянного тока?
7. Составьте схему цепи, состоящей из последовательно включенных источника по-
стоянного тока, амперметра и потенциометра 10 кОм, включенного в режиме пе-
ременного сопротивления (к схеме подключается вывод подвижного контакта
и одного из неподвижных). Изменяя сопротивление резистора назначенной кла-
вишей, убедитесь, что ток в цепи не меняется. Объясните — почему?
71
Часть I. Система моделирования Electronics Workbench
8. Соберите цепь, состоящую из источника постоянного тока и предохранителя, ус
тановив ток срабатывания 10 мА. Изменяя ток источника, установите факт сра
батывания предохранителя при указанном значении тока.
9. Подключите вольтметр к генератору прямоугольных импульсов, установив амп-
литуду выходного сигнала 10 В. Почему измеряемое вольтметром напряжение
равно половине установленного как в режиме измерения постоянного, так и пе-
ременного тока? Сделайте вывод о форме выходного сигнала генератора.
10. Подготовьте схему цепи, состоящей из последовательно включенных источник)
постоянного напряжения, резистора 1 кОм и стабилитрона. Параллельно стаби
литрону подключите вольтметр. Установите зависимость напряжения на стаби
литроне от напряжения источника. Полученное напряжение стабилизацш
сравните со значениями параметров модели стабилитрона.
11. Составьте схему цепи, состоящей из двух батарей напряжением 2 и 12 В, анало
гового умножителя и вольтметра. Одну батарею подключите ко входу X, вто
рую — ко входу Y умножителя, а к его выходу — вольтметр. Убедитес!
в правильности функционирования умножителя.
12. При подготовке схемы иногда возникает необходимость перемещения ее отдель
ных фрагментов. Каким образом это можно сделать? В качестве тренировки пе
реместите собранную в п. 10 схему в левый верхний угол экрана, не используд
линейку прокрутки или перетаскивание отдельных символов компонентов кур
сором.
13. Соберите схему, состоящую из последовательно включенных источника пост©
янного тока и реле. Изменяя ток источника, убедитесь в правильности функци
онирования реле.
14. Соберите схему, состоящую из батареи и лампы накаливания. Определите на
пряжения, при которых лампа зажигается и перегорает.
15. Определите напряжение срабатывания светоиндикатора.
16. Назовите основные отличия библиотек компонентов EWB 4.1 и 5.0.
72
Глава 3. Контрольно-измерительные приборы
3. Контрольно-измерительные приборы
Панель контрольно-измерительных приборов находится под полем меню рабо-
чего окна программы EWB (рис. 1.1) и содержит цифровой мультиметр, функциональ-
ный генератор, двухканальный осциллограф, измеритель амплитудно-частотных
и фазо-частотных характеристик, генератор слов (кодовый генератор), 8-канальный
логический анализатор и логический преобразователь (рис. 3.1). Общий порядок рабо-
ты с приборами такой: иконка прибора курсором переносится на рабочее поле и под-
ключается проводниками к исследуемой схеме. Для приведения прибора в рабочее
। развернутое) состояние необходимо дважды щелкнуть курсором по его иконке. Рас-
смотрим каждый прибор подробно.
Рис. 3.1. Панель контрольно-измерительных приборов
3.1. Мультиметр (Multimeter) 21
На лицевой панели мультиметра (рис. 3.2, а) расположен дисплей для отобра-
жения результатов измерения, клеммы для подключения к схеме и кнопки управле-
ния:
jajp — выбор режима измерения тока, напряжения, сопротивления и ослабле-
ния (затухания);
= — выбор режима измерения переменного или постоянного тока;
— режим установки параметров мультиметра. После нажатия на эту кноп-
ку открывается диалоговое окно (рис. 3.2, б), на котором обозначены:
Multimeter
Ammeter resistance (R):
Voltmeter resistance (R):
Ohmmeter current (I J:
Decibel standard (V):
I1 ;1"° fej Accept I
I1 bl Cancel 1
|0.Ш 1 _ .И
I1 V 3
а) б)
Рис. 3.2. Лицевая панель мультиметра (а) и окно установки его режимов (б)
Ammeter resistance — внутреннее сопротивление амперметра;
Voltmeter resistance — входное сопротивление вольтметра;
Ohmmeter current — ток через контролируемый объект;
Decibel standard — установка эталонного напряжения VI при измерении ослабления
или усиления в децибелах (по умолчанию VI = 1 В). При этом для коэффициен-
та передачи используется формула: К[дБ] = 201og(V2/Vl), где V2 — напряжение
в контролируемой точке.
Приведем пример использования мультиметра в режиме dB. Предположим,
что необходимо измерить коэффициент передачи аудиоусилителя па частоте
20 кГц. Для этого к его входу подключим источник переменного синусоидального
напряжения частотой 20 кГц и напряжением VI 1 В, а к выходу — мультиметр.
73
Часть I. Система моделирования Electronics Workbench
Предположим далее, что в режиме измерения напряжения получена величина вы-
ходного напряжения V2 100 В. Следовательно, коэффициент передачи усилителя
К = V2/V1 = 100. Переведем мультиметр в режим с!В, тогда получим значение ко-
эффициента усиления в децибелах К[дБ] = 201ogl00 = 40 дБ. Предположим далее,
что частота входного сигнала увеличена до 100 кГц и получено напряжение на вы-
ходе усилителя V2 -0,1В, т. е. коэффициент передачи в данном случае составляет
К “ 0,1/1 = 0,1. В режиме dB мультиметр измерит К[дб] = 201og 0,1 = —20 дБ.
Отметим, что мультиметр измеряет эффективное (действующее) значение пе-
ременного тока.
3.2. Функциональный генератор
(Function Generator) !ES
Лицевая панель генератора показана на рис. 3.3. Управление генератором осу-
ществляется следующими органами управления:
Рис. 3.3. Лицевая панель функционального генератора
z -х -rvt— выбор формы выходного сигнала: синусоидальной (выбрана
по умолчанию), треугольной и прямоугольной;
frequency h — установка частоты выходного сигнала;
Du-v cycle (so-& — установка коэффициента заполнения в%: для импульсных
сигналов это отношение длительности импульса к периоду повторения — вели-
чина, обратная скважности, для треугольных сигналов — соотношение между
длительностями переднего и заднего фронтов;
amplitude л о — установка амплитуды выходного сигнала;
OFFSET
— установка смещения (постоянной составляющей) выходного
сигнала;
9 Т t
— выходные зажимы; при заземлении клеммы СОМ (общий) на
клеммах “—” и получаем парафазный сигнал.
3.3. Осциллограф (Oscilloscope) ЕМ
Лицевая панель осциллографа показана на рис. 3.4. Осциллограф имеет два
канала (CHANNEL) А и В с раздельной регулировкой чувствительности в диапазоне
от 10 мкВ/дел (mV/Div) до 5 кВ/дел (kV/Div) и регулировкой смещения по вертика-
ли (Y POS). Выбор режима по входу осуществляется нажатием кнопок де . Ре-
жим АС предназначен для наблюдения только сигналов переменного тока (его еще
74
Глава 3. Контрольно-измерительные приборы
называют режимом “закрытого входа”, поскольку в этом режиме на входе усилите-
ля включается разделительный конденсатор, не пропускающий постоянную состав-
ляющую). В режиме 0 входной зажим замыкается на землю. В режиме DC (включен
-о умолчанию) можно проводить осциллографические измерения как постоянного,
так и переменного тока. Этот режим еще называют режимом “открытого входа”, по-
скольку входной сигнал поступает на вход вертикального усилителя непосредствен-
но. С правой стороны от кнопки DC расположен входной зажим.
Рис. 3.4. Лицевая панель осциллографа
Рис. 3.5. Лицевая панель осциллографа в режиме ZOOM
Режим развертки выбирается кнопками .в/а; а/в: . В режиме Y/Т (обыч-
ный режим, включен по умолчанию) реализуются следующие режимы развертки:
по вертикали — напряжение сигнала, по горизонтали время; в режиме В/ А:
по вертикали — сигнал канала В, по горизонтали сигнал канала А; в режиме А/ В:
по вертикали — сигнал канала А, по горизонтали — сигнал канала В.
В режиме Y/Т длительность развертки (TIME BASE) может быть задана в диа-
пазоне от 0,1 нс/дел (ns/div) до 1 с/дел (s/div) с возможностью установки смещения
в тех же единицах по горизонтали, т. е. по оси X (X POS).
75
Часть I. Система моделирования Electronics Workbench
В режиме Y/Т предусмотрен также ждущий режим (TRIGGER) с запуском
развертки (EDGE) по переднему или заднему фронту запускающего сигнала (выби-
рается нажатием кнопок s-*) при регулируемом уровне (LEVEL) запуска, а также
в режиме AUTO (от канала А или В), от канала А, от канала В или от внешнего ис-
точника (EXT), подключаемого к зажиму в блоке управления TRIGGER. Названные
режимы запуска развертки выбираются кнопками '• AJI21L1
Заземление осциллографа осуществляется с помощью клеммы GROUND
в правом верхнем углу прибора.
При нажатии на кнопку ZOOM лицевая панель осциллографа существенно ме-
няется (см. рис. 3.5) — увеличивается размер экрана, появляется возможность про-
крутки изображения по горизонтали и его сканирования с помощью вертикальных
визирных линий (синего и красного цвета), которые за треугольные ушки (они обо-
значены цифрами 1 и 2) могут быть курсором установлены в любое место экрана.
При этом в индикаторных окошках под экраном приводятся результаты измерения
напряжения, временных интервалов и их приращений (между визирными линиями).
Изображение можно инвертировать нажатием кнопки REVERSE и записать
данные в файл нажатием кнопки SAVE. Возврат к исходному состоянию осцилло-
графа производится нажатием кнопки REDUCE.
3.4. Измеритель АЧХ и ФЧХ
(Bode Plotter) Вазд
Лицевая панель измерителя АЧХ-ФЧХ показана на рис. 3.6. Измеритель
предназначен для анализа амплитудно-частотных (при нажатой кнопке MAGNI-
TUDE, включена по умолчанию) и фазо-частотных (при нажатой кнопке PHASE) ха-
рактеристик при логарифмической (кнопка LOG, включена по умолчанию) или
линейной (кнопка LIN) шкале по осям Y (VERTICAL) и X (HORIZONTAL). Настрой-
ка измерителя заключается в выборе пределов измерения коэффициента передачи
и вариации частоты с помощью кнопок в окошках F — максимальное и I — мини-
мальное значение. Значение частоты и соответствующее ей значение коэффициента
передачи или фазы индицируются в окошках в правом нижнем углу измерителя.
Значения указанных величин в отдельных точках АЧХ или ФЧХ можно получить
с помощью вертикальной визирной линейки, находящейся в исходном состоянии
в начале координат и перемещаемой по графику мышью или кнопками <— и Ре-
зультаты измерения можно записать также в текстовый файл. Для этого необходи-
мо нажать кнопку SAVE и в диалоговом окне указать имя файла (по умолчанию
предлагается имя схемного файла). В полученном таким образом текстовом файле
с расширением .bod АЧХ и ФЧХ представляются в табличном виде.
Лицевая панель измерителя АЧХ и ФЧХ
Рис. 3.6.
76
Глава 3. Контрольно-измерительные приборы
Подключение прибора к исследуемой схеме осуществляется с помощью за-
жимов 1N (вход) и OUT (выход). Левые клеммы зажимов подключаются соответст-
венно ко входу и выходу исследуемого устройства, а правые — к общей шине.
Ко входу устройства необходимо подключить функциональный генератор или дру-
гой источник переменного напряжения, при этом каких-либо настроек в этих уст-
ройствах не требуется.
3.5. Генератор слова
(Word Generator)
Внешний вид генератора слова в развернутом виде показан па рис. 3.7. Гене-
ратор (его называют еще кодовым генератором) предназначен для генерации 16-ти
’-разрядных двоичных слов, которые набираются пользователем на экране, распо-
ложенном в левой части лицевой панели. Для набора двоичных комбинаций необ-
ходимо щелкнуть мышью на соответствующем разряде и затем ввести с клавиатуры
j или 1. Дальнейшие перемещения по полю экрана удобнее проводить не с помо-
—ью мыши, а клавишами управления курсором. Содержимое экрана можно сте-
реть, загрузить новое значение или записать в файл соответственно кнопками
коло, srveJ . При записи необходимо нажать кнопку SAVE и в диалоговом ок-
не указать имя файла (по умолчанию предлагается имя схемного файла). В полу-
денном таким образом текстовом файле с расширением .dp будет записано в виде
таблицы содержимое экрана с указанием номеров строк (слов). При необходимости
его можно отредактировать и загрузить снова нажатием кнопки LOAD.
Рис. 3.7. Лицевая панель генератора слова
Сформированные слова выдаются на восемь расположенных в нижней части
прибора выходных клемм-индикаторов:
♦ с индикацией выходного сигнала в двоичном коде на клеммах-индикаторах
и в шестнадцатеричном коде в окне HEX;
♦ в пошаговом (при нажатии кнопки STEP), циклическом (при нажатии кнопки
CYCLE) или с выбранного слова до конца (при нажатии клавиши BURST) при за-
данной частоте посылок (установка нажатиями кнопок в окнах FREQUENCY);
♦ при внутреннем (при нажатии кнопки INTERNAL) или внешнем запуске (при
нажатии кнопки EXTERNAL, рядом расположена клемма для подключения сиг-
нала синхронизации);
♦ при запуске по переднему или заднему фронту, используя кнопки ,
На клемму Clk выдается выходной синхронизирующий импульс.
Часть I. Система моделирования Electronics Workbench
3.6. Логический анализатор
(Logic Analyzer) fe&tel
Внешний вид логического анализатора показан на рис. 3.8. Анализатор пред-
назначен для отображения на экране монитора 8-разрядных кодовых последова-
тельностей одновременно в восьми точках схемы, а также в виде двоичных чисел на
входных клеммах-индикаторах и в виде шестнадцатеричных чисел в окне HEX.
Длительность развертки задается в окне TIME BASE, при нажатии кнопки CLFAR
информация на экране стирается.
Рис. 3.8. Лицевая панель логического анализатора
В блоке TRIGGER расположены кнопки запуска по положительному (включе-
на по умолчанию) или отрицательному спаду сигнала и клемма для подключения
внешнего источника синхронизации, например, генератора слова (подключается по-
сле нажатия кнопки EXTERNAL). Кроме того, предусмотрен автозапуск (после на-
жатия кнопки BURST) и запуск по заданной двоичной комбинации (после нажатия
кнопки PATTERN), устанавливаемой пользователем в окошке под кнопкой путем
введения туда с клавиатуры 1,0 или X (неопределенное состояние), предварительно
щелкнув мышью на нужном разряде.
3.7. Логический преобразователь
(Logic Converter) iS’S’Sfll
Внешний вид логического преобразователя показан на рис. 3.9. На лицевой
панели преобразователя показаны клеммы-индикаторы входов А, В,..., Ни одного
выхода OUT, экран для отображения таблицы истинности исследуемой схемы, эк-
ран-строка для отображения ее булева выражения (в нижней части). В правой час-
ти панели расположены кнопки управления процессом преобразования
(CONVERSIONS). Возможные варианты использования преобразователя (см. также
примеры в гл. 9):
1. Логический анализ п-входового устройства с одним выходом (входы исследуемо-
го устройства подключаются к клеммам А... И, а выход — к клемме OUT). В этом
случае, используя кнопки управления, получим:
1.1. I — таблицу истинности исследуемого устройства;
1.2. ToF - «д?.. —булево выражение, реализуемое устройством;
1.3. 1О!* " . —минимизированное булево выражение;
78
Глава 3. Контрольно-измерительные приборы
1.4. "* —схему устройства на логических элементах без ограничения
их типа;
1.5. .?!?_-* НЛ'!2. — схему устройства только на логических элементах И-НЕ.
2. Синтез логического устройства по таблице истинности.
2.1. Щелчком мыши по входным клеммам А, В,..., Н, начиная с клеммы А, активи-
зируем мышыо требуемое число входов анализатора (на рис. 3.10 показаны ак-
тивными входы А, В, С и D), в результате чего на экране анализатора получим
начальную таблицу истинности, в которой будут представлены все возможные
комбинации входных сигналов и соответствующие им значения логических сиг-
налов (0 или 1) в столбце OUT.
2.2. Отредактируем полученную таблицу в соответствии с заданием путем записи
1, 0 или X в столбце OUT в строках, которые по комбинациям входных сигналов
соответствуют заданным. Пусть, например, в первой строке при комбинации
входных сигналов 0000 (см. рис. 3.10) нужно на выходе получить не 0, а 1.
Для этого ставим курсор мыши на первую строку в столбце OUT, производим щел-
чок и на клавиатуре вводим 1. Дальнейшие перемещения с целью редактирова-
ния остальных строк столбца OUT удобнее производить с помощью клавиш
управления курсором. При этом данные в столбцах Л, В, С и D редактирования не
требуют, поскольку в этих столбцах уже имеются все возможные комбинации.
Далее выполняем команды из п. 1, начиная с пп. 1.2.
Рис. 3.9. Лицевая панель логического преобразователя
3. Синтез логического устройства по булеву выражению.
3.1. Булево выражение заносится в экран-строку, предварительно активизируя там
мышью курсор. Используются символы А...Н, при инверсии — А'...Н'.
3.2. Нажимая кнопку Я!В "* 1°11 , получаем таблицу истинности.
Далее выполняем команды п. 1, начиная с пп. 1.3.
3.8. Приборы программы EWB 5.0
Большая часть приборов программы пятой версии не отличается от рассмот-
ренных выше. Наибольшим изменениям подверглись генератор слова и логический
анализатор.
Генератор слова. Его внешний вид показан на рис. 3.10, а. Основное отличие
генератора от рассмотренного ранее, состоит в том, что он является 16-разрядным.
79
Часть I. Система моделирования Electronics Workbench
Кодовые комбинации необходимо задавать в шестнадцатеричном коде, что для на-
чинающих пользователей менее удобно и не так наглядно, как в 8-разрядном.
Каждая кодовая комбинация заносится с помощью клавиатуры, номер редак-
тируемой ячейки фиксируется в окошке EDIT блока ADRESS (на рис. 3.10, а поме-
щена цифра 0003, поскольку курсор находится в третьей ячейке, верхняя ячейка —
нулевая). Всего таких ячеек и, следовательно, комбинаций — 2048. В процессе рабо-
ты генератора в отсеке ADRESS индицируется номер текущей ячейки (CURRENT),
ячейки инициализации или начала работы (INITIAL) и конечной ячейки (FINAL).
Выдаваемые на 16 выходов (в нижней части генератора) кодовые комбинации инди-
цируются в текстовом (ASCII) и двоичном коде (BINARY).
а) 6)
Рис. 3.10. Лицевая панель генератора слова (и) и окно его предустановок (б)
Запуск генератора осуществляется таким же образом, как и в рассмотренном
выше. Дополнением здесь является внешний запуск (нажата кнопка External) по го-
товности данных (клемма DATA READY). Сигнал с этого выхода сопровождает каж-
дую выдаваемую на выход кодовую комбинацию и используется в том случае, когда
исследуемое устройство обладает свойством квитирования (подтверждения). В этом
случае после получения очередной кодовой комбинации и сопровождающего его сиг-
нала DATA READY исследуемое устройство должно выдать сигнал подтверждения
получения данных, который подается на вход синхронизации генератора (клемма
в блоке Trigger) и производит очередной запуск генератора.
К дополнительным органам управления относится также кнопка BREAK-
POINT — прерывание работы генератора в указанной ячейке. При этом требуемая
ячейка выбирается па дисплее генератора курсором, а затем нажимается кнопка
BREAKPOINT. Существенно расширены функции кнопки PATTERN, после ее на-
жатия вызывается меню (рис. 3.10, б), в котором обозначено:
Clear buffer — стереть содержимое всех ячеек (содержимое буфера экрана);
Open загрузить кодовые комбинации (из файла с расширением .dp);
Save — записать все набранные па экране комбинации в файл;
Up counter заполнить буфер экрана кодовыми комбинациями, начиная с 0 в нуле-
вой ячейке и далее с прибавлением 1 в каждой последующей ячейке;
Down counter — заполнить буфер экрана кодовыми комбинациями, начиная с FFFF
в нулевой ячейке и далее с уменьшением на 1 в каждой последующей ячейке;
80
Глава 3. Контрольно-измерительные приборы
Shift right — заполнить каждые четыре ячейки комбинациями 1-2-4-8 со смещени-
ем их в следующих ячейках вправо (см. рис. 3.10, а нижние ячейки);
Shift left то же самое, но со смещением влево.
Логический анализатор (рис. 3.11). Основное отличие этого анализатора от ранее
рассмотренного — увеличенное в два раза количество каналов. Анализатор снабжен
также двумя визирными линейками (как в осциллографе в режиме ZOOM), что поз-
воляет получать точные отсчеты временных интервалов Tl, Т2 и Т2-Т1, а также ли-
нейкой прокрутки по горизонтали, что позволяет анализировать процессы на
большом временном интервале.
Рис. 3.11. Лицевая панель логического анализатора
Рис. 3.12. Меню установки параметров запускающих сигналов
В блоке Clock имеются клеммы для подключения как обычного (Extend), так
и избирательного (Qualifier) источника запускающих сигналов, параметры которых
могут быть установлены с помощью меню (см. рис. 3.12), вызываемого кнопкой Set.
Запуск генератора можно производить по переднему (Positive) или заднему
Negative) фронту запускающего сигнала с использованием внешнего (External) или
81
Часть I. Система моделирования Electronics Workbench
внутреннего (Internal) источника. В окне Clock qualifier можно установить значение
логического сигнала (0, 1 или X), при котором производится запуск анализатора.
Дополнительные условия запуска анализатора могут быть выбраны с помо-
щью диалогового окна (см. рис. 3.13, а), которое вызывается кнопкой Set в блоке
Trigger. С помощью этого окна в каналах А, В и С можно задать нужные двоичные
16-разрядные комбинации сигналов и затем в строке Trigger combinations устано-
вить дополнительные условия отбора, которые показаны на рис. 3.13, б. Перечис-
лим некоторые из них:
A OR В — запуск анализатора от канала А или В;
A THEN В — запуск анализатора от канала А, если сигнал в канале В равен 1;
(A OR В) THEN С - запуск анализатора от канала А или В, если сигнал в канале
С равен 1.
В окне Trigger qualifier можно задать логические сигналы 1, 0 или X, при наличии
которых производится запуск анализатора.
(rigger pattern?
а)
п
A {юсхю'.ххххиож-и
В |ххххххххх»«»:>сх
С [хххжхэоооосхюсхх
Т г jrjgei ca-nbrtat cm [д
Tracer quafihei A ORB
AORBORC
_______________________A THEN В
6)
Рис. 3.13.
Окно установки дополнительных параметров запуска (а) условий отбора (б)
Контрольные вопросы и задания
1. Каким образом включаются в цепь амперметр и вольтметр?
2. Почему для мультиметра регламентируется величина тока в режиме омметра?
3. Что такое децибел и чье имя носит эта единица измерения?
4. Какому значению соответствует задаваемое на лицевой панели функционального
генератора выходное напряжение — амплитуде сигнала или его эффективному
значению? Ответ проверьте измерением выходного напряжения осциллографом.
5. Каким образом в функциональном генераторе можно получить однополярный
сигнал?
6. Чему будет равно напряжение между клеммами и ” функционального ге-
нератора при установке на его лицевой панели напряжения 10 В?
82
Глава 3. Контрольно-измерительные приборы
Обычно вольтметры измеряют эффективное значение напряжения (другие слу-
чаи оговариваются особо). Измерьте выходное напряжение функционального ге-
нератора с помощью мультиметра и сравните полученные результаты
с осциллографическими измерениями.
9. Из сравнения результатов измерения эффективного значения и амплитуды на-
пряжения на выходе функционального генератора установите соотношения
между этими величинами для синусоидального, треугольного и прямоугольного
сигналов (коэффициент заполнения выберите равным 50%).
Установите пределы регулировки чувствительности осциллографа по вертика-
ли, а также диапазон разверток.
Н Каким образом с помощью осциллографа можно получить значения амплитуды
сигнала и его частоты?
11 Каким образом можно получить разноцветные осциллограммы сигналов на эк-
ране осциллографа и как их разнести по вертикали для удобства наблюдения?
12 Какими двумя способами можно получить точные значения коэффициента уси-
ления и фазового сдвига на данной частоте с помощью измерителя АЧХ и ФЧХ?
В, Каким образом в генераторе слов на рис. 3.7 задаются двоичные комбинации сиг-
валов и где находятся младший и старший разряды?
К Чем отличается генератор слов на рис. 3.7 от генератора на рис. 3.10?
М. Для каких целей в логическом анализаторе используется режим запуска по за-
данной двоичной комбинации контролируемых с его помощью сигналов?
» Придумайте пример использования генератора слов и логического анализатора
длй поиска неисправностей в цифровой системе, например, в системе управле-
ния елочной гирляндой на базе персонального компьютера.
83
Часть I. Система моделирования Electronics Workbench
4. Элементная база
В этой главе приводятся краткие сведения о моделях компонентов радиоэлек-
тронной аппаратуры (РЭА), имеющихся в программе EWB. Дополнительные сведе-
ния по таким компонентам будут приводиться в других главах по мере их
использования в конкретных схемах. Дополнительная информация о реальных эле-
ментах РОА (условия и области применения, классификационные параметры, кон-
структивные особенности и др.) помещены в Приложении 2.
4.1. Источники тока
В общем случае источники тока могут быть представлены в виде генератора
напряжения или генератора тока (см. разд. 5.1). Источники тока делятся на источ-
ники постоянного тока, переменного тока и управляемые (функциональные) источ-
ники. Кроме того, они подразделяются на измерительные источники и источники
для электропитания.
Примером измерительного источника является рассмотренный в гл. 3 функ-
циональный генератор. Из источников постоянного тока в качестве измерительной
широко используется так называемый нормальный элемент (электрохимический
источник), обладающий высокой стабильностью выходного напряжения и использу
емый в высокоточных образцовых установках для поверки вольтметров, ампермет-
ров и других измерительных приборов (см. разд. 16.6).
Источники для электропитания являются самыми массовыми устройствами
(см. Приложение 6). Их принято делить на первичные и вторичные. К первичным
источникам относятся: электрогенераторы, преобразующие механическую энергию
в электрическую, термоэлектрогенераторы, солнечные и атомные батареи, электро-
химические источники. Во вторичных источниках тока производится преобразова-
ние тока первичного источника (см. гл. 12).
Источники постоянного тока в программе EWB представлены на рис. 4.1.
~ >1e-O^V 08271V фкмицд
. Т 7
а) б) в) г)
Рис. 4.1. Источники постоянного тока
Рис. 4.2. Окно задания ЭДС источника напряжения
Идеальный (с внутренним сопротивление Ki = 0) источник постоянного напря-1
жения 4 5 В (рис. 4.1, а) предназначен, в основном, для логических схем. На рис. 4.1, б'
показан идеальный источник постоянного напряжения с задаваемой в диалоговом ок-
не на рис. 4.2 ЭДС.
84
Глава 4. Элементная база
Значения параметров источника напряжения, характеризуемого ЭДС (Pull-Up
tage) и внутренним сопротивлением (Resistance) (рис. 4.1, в), устанавливаются
•мощью диалогового окна (см. рис. 4.3).
Pull Up Besistoi
Resistance (R): |fl ~ | |kQ | Accept |
Pull-Up Vollaqe (V) |5 | [v g Cancel |
4.3. Окно установки параметров источника напряжения
Установка тока идеального источника тока (рис. 4.1, г) производится анало-
5но установке ЭДС.
Источники переменного тока в программе EWB подразделяются на источни-
яемодулированных (рис. 4.4) и модулированных (рис. 4.8) сигналов.
Для идеального генератора переменного напряжения (рис. 4.4, а) напряжение
iltage), частота (Frequency) и начальная фаза (Phase) синусоидального сигнала за-
стоя в окне на рис. 4.5.
(~) 120V/1* ЗаЧг/1с*0«Овз lA/fe+WMHs/ODes (гц) 1СО0Нг/50К
а) б) в)
4.4. Источники переменного тока
Окно установки параметров источника синусоидального напряжения
4.5.
Fiequency (I):
Duty Cycle (D):
Volleoc (V):
4.6. Окно установки параметров источника импульсного напряжения прямоугольной
формы
Установка тока, частоты и начальной фазы идеального генератора перемсп-
j тока (рис. 4.4, б) осуществляется аналогично источнику синусоидального па-
жепия.
Идеальный генератор импульсного напряжения (рис. 4.4, в) является источ-
•м однополярных импульсов с задаваемыми амплитудой, частотой следования
85
Часть I. Система моделирования Electronics Workbench
и коэффициентом заполнения (Duty Cycle, отношение длительности импульса к пе
риоду следования — величина, обратная скважности) (окно на рис. 4.6).
При указанном на рис. 4.6 значении коэффициента заполнения 50% (длител
ность импульса равна половине периода) периодическая импульсная последовател
ность называется меандром. Такой сигнал может быть представлен в виде сумы
гармонических составляющих (простых синусоид) путем разложения в ряд Фурье [35
U(x) = Um/2 + (2Um/n)[cos(2nF) - 0,333 cos(6nF) + 0,2cos(10kF) - ...]. (4.1)
Первое слагаемое выражения (4.1) — постоянная составляющая, равная пс
ловине амплитуды Um, первое слагаемое в квадратных скобках — первая гармонику
второе — третья гармоника и т.д. В графическом виде такое разложение обычн
представляется в виде так называемого линейчатого спектра, когда по оси X отк.’п
дывается частота (номер гармоники), а по оси Y в виде вертикальной линии — амг
литуда гармоники. Для получения такого спектра средствами программы EWB 5.
(см. гл. 1) необходимо составить цепь из источника (рис. 4.4, в), резистора, заземли
ния и применить команду Analysis>Fourier. Полученное при этом спектральное ра<
пределение гармоник для рассматриваемой импульсной последовательности пр
Um= 2 В показано на рис. 4.7. Для того чтобы в черно-белом изображении была ви/
на постоянная составляющая, в меню Graph Properties>Left Axis был выбран белы
цвет для оси X. Из рис. 4.7 видно, что постоянная составляющая действительно pai
на U„,/2 - 1 В, амплитуда первой гармоники 2Um/n = 1,27 В. Заметим, что для ии
пульсной последовательности при скважности, не равной 2, выражение (4.1
несколько усложняется [51].
Рис. 4.7. Линейчатый спектр последовательности прямоугольных импульсов типа меандр
(йи) 1V/1000H2/100HZ (m) 57/1ОСОН1/1OCWZ
а) б)
Рис. 4.8. Источники амплитудно-модулированных (а) и частотно-модулированных (б) сигнал!
Источники модулированного напряжения в программе EWB представлен
компонентами, показанными на рис. 4.8.
Источник на рис. 4.8, а — идеальный генератор амплитудно-модулированны
колебаний (AM), параметры которого задаются в диалоговом окне (рис. 4.9), в кот
ром обозначено: Carrier Amplitude — амплитуда несущей, Carrier Frequency — ча
тота несущей, Modulation Index — коэффициент модуляции, Modulatic
Frequency — частота модулирующего колебания.
Осциллограмма AM-сигнала при М = 0,5 и значениях остальных параметро
указанных в окне на рис. 4.9, показана на рис. 4.10. Коэффициент модуляции опр
деляется как отношение амплитуды огибающей (на осциллограмме — 0,5 В) к
среднему значению, т. е. к амплитуде несущей (1 В). Коэффициент модуляции в<
гда меньше или равен единице.
86
Глава 4. Элементная база
Аналитическое выражение для AM-сигнала записывается в следующем виде
|: U(t) = Ur[l + Msin(2n:F,„)t]sin(27i:Fct). Это выражение после тригонометрических
образований может быть представлено в более наглядном виде [51J:
U(t) - U.[cos(2nFc)t + 0,5Mcos2n(Fc + Fm)t + 0,5Mcos2n(Fr - Fm)t]. (4.2)
Первое слагаемое выражения (4.2) называется несущим колебанием, второе
гаемое — колебанием с верхней боковой, третье — колебанием с нижней боковой
готой.
Параметры источника частотно-модулированных колебаний (ЧМ) на
. 4.8, б задаются в диалоговом окне (рис. 4.11), аналогичном по набору парамет-
окну на рис. 4.9.
Singln-Fiequency Amplitude Modulation Source
AccepT]
’w 4.9. Окно установки параметров источника AM-колебаний
4.10.
Осциллограмма АМ-колебаннй
Окно установки параметров источника ЧМ-колсбаний
Аналитическое выражение для ЧМ-сигнала имеет следующий вид [51]:
- = Ucsin[2ntFr + М sin(2jtFm)t]. Это выражение для удобства интерпретации преоб-
жзсвывается к виду [51]:
U(t)=UcJ0(z)cos(27tFc)t + Ue£jB(z) cos2n(Fc+ nFJt + Ut£cos2it(Fe- Fm)t,
n=l H-l
--- J (z), Jn(z) — функции Бесселя нулевого и n-го порядка от аргумента z = М.
В приведенном выражении, как и в случае AM-сигнала, первое слагаемое на-
акзается несущим колебанием, второе слагаемое — гармоническими составляющей-
ся верхней боковой полосы частот, третье — составляющими нижней боковой
87
Часть I. Система моделирования Electronics Workbench
полосы частот. Количество верхних и нижних боковых частот теоретически беско
нечно. Практически же при больших значениях М составляющие, начиная прибли-
зительно cn = M+ 1, можно не учитывать.
Осциллограмма ЧМ-колебания, полученная при индексе модуляции М а 5,
приведена на рис. 4.12.
Рис. 4.12. Осциллограмма ЧМ-колебания
Управляемые источники программы EWB показаны на рис. 4.13. Источник
на рис. 4.13, а представляет собой источник напряжения, управляемый током
(ИПУТ). В диалоговом окне этого источника задается единственный параметр —
коэффициент передачи, равный отношению выходного напряжения к току управ-
ления; параметр имеет размерность сопротивления. Для источника тока, управля-
емого напряжением (ИТУН, рис. 4.13, б), этот параметр имеет размерность
проводимости, поскольку коэффициент передачи равен отношению выходного тока
к напряжению управления.
Источники на рис. 4.13, в, г представляют собой источники напряжения и то-
ка, управляемые соответственно напряжением и током (ИНУН и ИТУТ). Коэффици-
ент передачи этих устройств — величина безразмерная.
Imho IV/V фф 1А/А
а) 6) в) г) д)
Рис. 4.13. Управляемые источники напряжения и тока
v>vi
viva
----------- V1V2
VI *2 Ч=г---
Рис. 4.14. Схемы включения полиномиального источника
Выходной сигнал управляемого источника на рис. 4.13, д определяется поли-
номиальной функцией. Для более детального знакомства с таким источником рас-
88
Глава 4. Элементная база
гжэтрим некоторые схемы их включения (рис. 4.14). Первая (верхняя) схема выпол-
мет суммирование напряжений VI и V3, средняя схема — умножение одпоимен-
еых напряжений, а нижняя возводит в кубическую степень напряжение VI.
Выходное напряжение рассматриваемого источника описывается полиномом
педующего вида:
Y - А + В VI + C V2+ DV3 + E(V1)2 + FV1-V2 + G VI V3 4- H(V2)a +
+ IV2 V3 + J(V3)2 + KV1V2V3 (4.3)
Коэффициенты полинома задаются с помощью окна (рис. 4.15).
ЕЗ
I‘oly f Ю<П1<11 Source
Conutrtnt (А):
Coefficient of VI (B|
Coefficient of V2 (C):
Coefficient of V3 (D):
Coefficient of VI* (EJ.
Coefficient of V1 *V2 (FJ:
Coefficient of VI *V3 (GJ:
Coefficient of V2l (HJ:
Coefficient of V2*V3 (I J:
Coefficient of V3 1 (J):
Coefficient ofVfV2*V3 (KJ:
0
0
Г
0
0
0
0
o'
o’
•жх 4.15. Значение параметрон полиномиального источника напряжения для возведения VI
во вторую степень
Контрольные вопросы и задания
| Имеется источник напряжения 10 В с внутренним сопротивлением 10 МОм и на-
грузкой, изменяющейся в пределах от 10 до 100 Ом. Можно ли такой источник
назвать генератором тока?
— Проведите расчет слагаемый выражения (4.1) при Um = 2 В и сравните получен-
ные результаты с данными рис. 4.7.
I Формула (4.3) получена путем сопоставления данных на рис. 4.14 и значений ко-
эффициентов полинома в диалоговом окне источника для каждой схемы. Прове-
дите такой сопоставительный анализ самостоятельно. Каким другим, более
простым способом можно получить формулу (4.3)?
4. Руководствуясь формулой (4.3), исследуйте возможные варианты возведения
постоянного напряжения 3 В в кубическую степень, в четвертую и пятую степень
на базе одного полиномиального источника. Составьте схемы устройств и про-
верьте их работоспособность.
> Составьте схему для исследования спектрального состава AM- и ЧМ-сигналов.
Результаты моделирования сопоставьте с расчетными по формулам (4.2) и (4.2а).
89
Часть I. Система моделирования Electronics Workbench
6. Как известно, мощность в цепи постоянного тока определяется формула
W V I = V7K. Для создания модели простейшего ваттметра, реализующую эа
формулу, используйте полиномиальный источник, а в качестве показывающе!
прибора — амперметр W, включенный последовательно с нагрузкой R = 100 (Ъ
7. Ознакомьтесь с формирователями математических функций с использование
управляемых источников (схемный файл math.ca4).
4.2. Индикаторные приборы
Индикаторные приборы программы EWB 4.1 показаны на рис. 4.16.
Вольтметры и амперметры обеспечивают отсчет измеряемой величины с то’
ностью до третьего знака (в EWB 5.0 — до четвертого). Параметры приборов задаю'
ся в диалоговом окне (для вольтметра — на рис. 4.17). В поле первого парамета
задается входное сопротивление вольтметра, в поле второго — режим измерения in
стоянного (DC) или переменного (АС) тока. Диалоговое окно для амперметра — ан;
логичное рассмотренному с той лишь разницей, что первый параметр — эч
внутреннее сопротивление амперметра, которое значительно меньше входного о
противления вольтметра.
Отрицательная клемма для подключения этих приборов обозначена широко
черной полосой и может быть размещена на любой грани иконки при вращении изобр<
жения компонента (вращение выполняется нажатием комбинации клавиш Ctrl + R).
Рис. 4.16.
Индикаторные приборы
Voltmeter
Resistance (Н): |Д ! ‘MQ [ АссерГ]
Mode: [DC Jtj Cancel |
Рис. 4.17. Окно установки параметров вольтметра
7-сегментпый цифровой индикатор — модель широко используемых в цифра
вой технике алфавитно-цифровых индикаторов. Параметры индикатора задаются
в диалоговом окне (рис. 4.18), в котором первый параметр — максимальное значение
входного напряжения, второй — его минимальное значение, третий и четвертый пара-
метры — время задержки переключения при переходе от низкого (минимального
уровня входного напряжения к верхнему (максимальному) и наоборот, пятый пара-
метр — пороговое входное напряжение, при котором начинается свечение. Отечест
венными аналогами таких приборов являются индикаторы типа АЛС, ЗЛС и др. [36].
Четырехвходовой индикатор отличается от рассмотренного наличием встро-
енного дешифратора, что позволяет подключать его непосредственно к выходам дво-
ично-десятичных счетчиков с кодом 8-4-2-1. Правый вывод такого индикатора 1
младший или нулевой разряд, при его активизации на индикаторе высвечивается 1.
Левый вывод индикатора — старший или третий разряд, при его активизации отоб-
ражается цифра 8. Если сигнал логической единицы подать на все входы индикато-
90
Глава 4. Элементная база
. то будет отображаться буква F, обозначающая в шестнадцатеричной системе
нсления десятичное число 15 (сумма чисел 8, 4, 2 и 1). При всех возможных ком-
нациях входных сигналов на индикаторе можно отображать числа 0...9 и буквы
В, С, D, Е и F. Отечественными аналогами таких приборов являются индикаторы
па 490ИП1, 490ИП2 с тем отличием, что они могут отображать только цифры [36].
Светодиод — параметры этого индикатора будут описаны при рассмотрении
.тупроводниковых диодов.
3
High-Level Input Voltage (Vih); 33 V Accept
Low-Level Input Voltage (Vil): 2.5 V Cancel
Propagation Delay Time. Low-to-High Level Output (Tplh): le-08 s
Propagation Delay Time. Highto-Lnw Level Output (Tphl): le-08 s
Threshold Voltage (Vth). 2.5 V
Окно установки параметров 7-сегментпого индикатора
4.18.
Окно установки параметров звуковой сигнализации
4.19.
4.20. Окно установки параметров лампы накаливания
Предохранитель модель плавкого предохранителя, срабатывание которого
— и заданном токе сопровождается пропаданием на его значке зигзагообразной пе-
эехычки между выходными зажимами.
Логический пробник — характеризуется напряжением срабатывания 2,4 В,
соответствует минимальному значению сигнала логической единицы цифровых
ЖМС ТТЛ-серии (с питанием +5 В). Срабатывание сопровождается красным или си-
жм свечением.
Звуковая сигнализация (зуммер) — параметры задаются в диалоговом окне
Сяс. 4.19), котором первый параметр — частота сигнала, подаваемого на громко-
говоритель компьютера, два других — напряжение и ток срабатывания.
Лампа накаливания характеризуется мощностью и номинальным напряже-
тем (рис. 4.20). Напряжение, при котором лампочка зажигается, примерно равно
91
Часть I. Система моделирования Electronics Workbench
половине номинального. При напряжении, превышающем номинальное на небол
шую величину, лампочка перегорает и цепь обрывается, т. е. этот компонент мож<
быть использован также в качестве предохранителя, срабатывающего при заданнь
значениях напряжения и тока, равного отношению мощности к напряжению.
Десятисегментный индикатор содержит линейку из десяти независимых и:
дикаторов, параметры которых устанавливаются в диалоговом окне (рис. 4.21), г;
первый параметр — напряжение срабатывания, второй и третий — номинальны
и минимальный ток. Отечественными аналогами этого индикатора являются так н
зываемые шкальные индикаторы типа ЗЛС317, 3JIC343A, ЗЛС362 и др. (36].
Bargraph Display
Forward Voltage Drop (VI) "
Current at which VI is measured (II): 0.03
Turn on Current (Ion): 0.01
L И Accept 1
А £1 Cancel
А jl
Рис. 4.21. Окно установки параметров 10-ссгментного индикатора
Рис. 4.22. Схема включения десятисегментного индикатора
Примериспользования 10-сегментного индикатора приведен на рис. 4.22. Эт
схема в несколько измененном виде заимствована из каталога готовых схем про
граммы EWB. Она содержит 10 компараторов напряжения на ОУ (см. раздел 10.7]
На один вход каждого ОУ подается опорное напряжение, формируемое источнике
напряжения Uo и делителем на резисторах R1 ...Rl 1. Вторые входы всех ОУ объеду
йены и подключены к выходу функционального генератора, используемого в режи^
ме синусоидальных или треугольных колебаний с постоянной составляющей
Амплитуда выходного сигнала выбирается равной Uo/2, частота — около 1 Гц. Вьи|
ходы ОУ подключены к сегментам индикатора, дополнительные резистора
R12...R21 служат для установки тока через каждый сегмент.
92
Глава 4. Элементная база
После включения источника питания (начало моделирования) выходное на-
ж^яжение функционального генератора сравнивается с опорным. Это приводит к по-
везовательному срабатыванию компараторов, что фиксируется индикатором
ж вгзуально воспринимается таким же образом, как и индикация уровня в аудиоси-
стемах (непрерывно и синхронно с уровнем громкости перемещающееся по длине
Ехлякатора свечение).
Принцип работы рассмотренной схемы использован в другом десятисегмент-
ях индикаторе (рис. 4.16), у которого всего два вывода. Параметры индикатора за-
Яжжутся в диалоговом окне (рис. 4.23), в котором первый параметр определяет
исряжение срабатывания первого (нижнего) сегмента, второй — напряжение сра-
йгтъевания верхнего (десятого) сегмента. Для определения напряжения срабатыва-
ех= остальных сегментов можно воспользоваться простой схемой, состоящей из
□□следовательно включенных индикатора и источника постоянного напряжения.
Жженяя напряжение источника, нетрудно определить напряжение срабатывания
ажкдого сегмента визуальным контролем за его свечением.
**• 4.23. Установка параметров 10-сегмептного индикатора со встроенным АЦП
Контрольные вопросы и задания
1 Определите напряжения срабатывания каждого сегмента 10-сегментного инди-
катора при исходных данных, указанных на рис. 4.23. Установите характер за-
висимости напряжения срабатывания от номера сегмента.
2. Используя схему на рис. 4.24, определите ток I, при котором лампочка L перего-
рает при различных значениях допустимой мощности.
4.24. Применение лампы накаливания в качестве предохранителя
: Составьте схему из источника постоянного напряжения и логического пробника.
Изменяя напряжение источника, установите напряжение срабатывания пробни-
ка с точностью до десятых долей вольта.
4- Составьте схему, состоящую из звукового сигнализатора (зуммера), источника
постоянного напряжения, резистора, амперметра и вольтметра. Убедитесь в пра-
вильности срабатывания звуковой сигнализации при установленных в диалого-
вом окне значениях тока и напряжения срабатывания.
а- Какое количество амперметров и вольтметров можно использовать в моделируе-
мой схеме?
4. Проведите испытания семисегментного индикатора (схемный файл
7segdemo.ca4).
93
Часть I. Система моделирования Electronics Workbench
7. Практическая конструкция предохранителей представляет собой чаще всего
трубчатый стеклянный или керамический корпус с металлическими колпач-
ками-клеммами на торцах, к которым припаивается протянутая в полости кор-
пуса тонкая проволока, материал и диаметр которой определяет ток
плавления. При диаметре d = 0,02...0,2 мм ток плавления определяется фор-
мулой I = (d - 0,005)/k, [А], в которой коэффициент к = 0,034 — для меди;
0,05 — для латуни; 0,07 — для константана; 0,127 — для железа [45]. Для более
толстых проводников ток плавления Т = m(d3)IZ2, [А], где ш 80 — для меди;
24,6 — для железа; 12,8 — для олова. Поскольку расплавление сопровождается
своеобразным взрывом и разбрызгиванием расплавленного металла, то с увели-
чением тока и соответственно диаметра провода диаметр защитного трубчатого
корпуса увеличивается для предотвращения его разрушения. Рассчитайте ток
плавления медных проволок диаметрами 1,3; 2,2; 3; 4,5; 7 и 10 мм.
4.3. Коммутационные устройства
Под коммутационными устройствами (КУ) понимаются устройства, скачкооб-
разно изменяющие значения своих параметров при определенном (пороговом) значе-
нии управляющего сигнала. В устройствах, предназначенных для коммутации
электрических цепей, это реализуется практически мгновенным изменением электри-
ческого сопротивления или проводимости их исполнительных систем (непосредствен-
но коммутирующих элементов). Коммутационные устройства программы EWB 4.1
представлены на рис. 4.25 (сведения по реальным устройствам — в разд. 14.5).
Устройство на рис. 4.25, a — переключатель типа однополюсного тумблера,
управляемого нажатием назначенной клавиши клавиатуры (по умолчанию клави-|
ши Space — пробел). Имя клавиши устанавливается в диалоговом окне (рис. 4.26).
Рис. 4.25.
Рис. 4.26.
0 05А
[Space]
a) б) в) г) д)
Коммутационные устройства
Switch
XJ
Accept |
Cancel I
Окно установки клавиши управления ключом
КУ на рис. 4.25, б — реле времени (переключатель с программируемым врем<
нем переключения). Его параметры задаются в диалоговом окне (рис. 4.27), где пар!
метр Топ — время включения разомкнутого в исходном состоянии контакта поел
начала моделирования; параметр Toff — время выключения (перевод контактов в и<
ходное состояние), это время также отсчитывается от момента начала моделирование
В качестве примера использования программируемого КУ рассмотрим схем
на рис. 4.28. Она содержит источник питания U = 5 В, два переключателя SI, S2 и aj
фавитно-цифровой индикатор. Параметры переключателей выбраны следующим сИ
разом: для первого Топ = 3 с, Toff = 10 с; для второго Топ = 6 с, Toff -15 с. Поел
94
Глава 4. Элементная база
включения питания (начало моделирования) сигнал логической единицы (-5 R) бу-
лет подан на выводы 0 и 2 индикатора. Поскольку индикатор работает в коде 8-4 -2-1,
то при этом высвечивается цифра 5 (сумма чисел 4 и 1). Через 3 с ключ S1 переводит-
ея в верхнее положение и сигнал +5 В подается на вход 3 — загорится цифра 9 (сумма
чисел 8 и 1). Поскольку начало отсчета для всех промежутков времени одинаково,
I w через 3 с сработает переключатель S2, в результате чего сигнал +5 В будет подан на
вход 1 — загорится буква А (шестнадцатеричный эквивалент десятичной цифры
10 =8 + 2). Затем через 4 с сработает переключатель S1, в результате чего напряже-
те +5 В будет подано на вход 2 и загорится цифра 6 (сумма 4 + 2). И наконец через
5 с сработает переключатель S2, и схема вернется в исходное состояние.
КУ па рис. 4.25, в, г — однополюсные выключатели, управляемые напряже-
нием или током. Параметры цепи управления задаются в диалоговом окне на
рее. 4.29 (для компонента на рис. 4.25, в), где первый параметр — напряжение
включения, второй — напряжение выключения (для компонента на рис. 4.25, г —
-хк включения и выключения соответственно).
4.27. Окно установки параметров реле времени
F»c. 4.28. Схема с программируемым КУ
tac. 4.29. Окно установки параметров КУ, управляемого напряжением
В качестве примера рассмотрим схему на рис. 4.30. В ней имеются два управ-
емых напряжением ключа SI, S2. Управление ключами осуществляется от фупк-
:онального генератора, выходное напряжение которого контролируется
циллографом. В силовой части схемы использованы источник напряжения U, ло-
ческий пробник Р и лампочка L. Параметры цепи управления ключей выбраны
“дующим образом: для первого ключа Uon = 1 В, Uoff = 2 В; для второго ключа
= 5 В, Uoff = 7 В. Режим работы функционального генератора показан на
с. 4.31, а, осциллограмма его выходного напряжения на рис. 4.31, б. Как вид-
из осциллограммы, генератор позволяет получить пилообразные однополярные
пульсы. Из рис. 4.31 видно, что скорость нарастания пилообразного напряжения
ггавляет 10 В/с. Если рассмотреть работу схемы за один период, то включение ло-
ческого пробника произойдет через 0,1 с после начала формирования пилообраз-
95
Часть I. Система моделирования Electronics Workbench
ного импульса, поскольку для ключа S1 напряжение срабатывания выбрано равпь
1 В (“пройденный путь” в 1 В нужно разделить на скорость 10 В/с). Затем при напр
жении 2 В, т. е. через 0,1 с, ключ S1 размыкается и логический пробник выключав
ся. Когда пилообразное напряжение достигает 5 В (0,5 с после начала формирован»
импульса), срабатывает ключ S1, зажигается лампочка и остается в таком состоят
0,2 с, пока пилообразный импульс не достигнет значения 7 В, при котором ключ {
размыкается. Через 0,3 с процесс повторяется, поскольку пилообразный импул
достигает своего максимального значения 10 В.
Рис. 4.31.
Рис. 4.32.
Рис. 4.30. Схема включения КУ, управляемого напряжением
I----- J
FREQUCHCM ЕВ
DUTY CYCLE 139 ____
AHFI.T’UDE |5 & I V fel
OFFSET |S &
a)
б)
Режимы работы функционального генератора (а) и осциллограмма его выходи»
напряжения (б)
Reidy
E3
Coil inductance (Lc) тутти H Accept |
Turn-on current (Ion): 0.05 A zl Cancel
Holding current (Ihd): 0.025 A il
Окно установки параметров электромагнитною реле
Рис. 4.33. Схема включения электромагнитного реле
Устройство на рис. 4.25, д — электромагнитное реле с перекидными контак'
ми. Параметры его управляющей цепи задаются в диалоговом окне на рис. 4.32, i
первый параметр — индуктивность катушки реле, второй и третий — ток срабат
вания и удержания.
96
Глава 4. Элементная база
В качестве примера на рис. 4.33 приведена схема включения реле с управлени-
КУ (напряжение включения 1 В, выключения 8 В). Для индикации состояния
,ктов реле используется логический пробник Р. Второй канал осциллографа
гючен в цепь питания обмотки после токозадающего резистора Rd. Осцилло-
!ы сигналов (второй канал смещен вниз) показаны па рис. 4.34 при индуктивно-
обмотки 0,001 и 0,1 Гн. Из сравнения осциллограмм видно, что при большой
уктивности в цепи управления наблюдаются затухающие колебания.
а) . б)
4.34. Осциллограммы напряжения на обмотке электромагнитного реле при индуктивнос-
ти обмотки 0,001 Гн (а) и 0.1 Гн (б)
Контрольные вопросы и задания
Какие КУ Вы знаете и где они применяются?
Назовите основные характеристики КУ.
Составьте схему из четырех программируемых переключателей (реле времени)
и четырех зуммеров. Подберите параметры этих компонентов таким образом,
чтобы проигрывался фрагмент позывных радиостанции “Маяк”.
Используя принципы построения схемы на рис. 4.28, составьте схему, которая
бы обеспечивала последовательный во времени (например, через 5 с) вывод на
индикатор символов 0...9, A...F. Подскажем, что для этого придется добавить
еще два ключа. ч л
Используя принципы построения схемы на рис. 4.30, замените в схеме на
рис. 4.22 компараторы напряжения на КУ с бкнбм срабатыва'ния 0,5 В (разность
между напряжением включения и выключения) и непрерывным слежением (на-
пряжение включения очередного КУ должно равняться напряжению выключе-
ния предыдущего КУ). Выберите форму и амплитуду сигнала управления.
Объясните явление возникновения колебаний в схеме на рис. 4.33 при- увеличе-
нии индуктивности катушки реле.
Ознакомьтесь со схемами включения светодиода, релей зуммера (схемный файл
dig-ana. са4).
4.4. Конденсаторы
Конденсаторы относятся к одному из наиболее распространенных компопен
тов РЭА. В программе EWB 4.1 конденсаторы представлены тремя типами
1лс. 4.35, а).
Первый тип охватывает практически все конденсаторы, второй электроли-
сческие, третий — подстроечные: значение емкости каждого конденсатора может
ять установлено в пределах от 103 пФ до 10" Ф. Емкость подстроечного кондепсато-
1 может изменяться нажатием назначенной пользователем клавиши клавиатуры
кх. 20о
97
Часть I. Система моделирования Electronics Workbench
(по умолчанию — клавиши С), начиная от максимального значения до минимально
го с заданным шагом (от 1 до 100%) (рис. 4.36).
При расчете переходных процессов в программе используется схема замещенг
конденсатора (рис. 4.35, б), параметры которой определяются выражениями [67]:
Rcn - h/2C; Ic0 " 2CUc/h + Ic
при численном интегрировании по методу трапеций;
Rcn = h/C; Icn = C Un/h
при использовании метода Гира.
Здесь h — приращение времени на каждом шаге интегрирования; 1П — знач
ние тока эквивалентного источника на л-м шаге; Rcn, Un и 1са — сопротивление inyi
тирующего резистора, напряжение на конденсаторе и ток на n-м шаге.
4
le-ОЗоТ
[C|M0uF/5O%
Я
а) б)
Рис. 4.35. Графические обозначения конденсаторов (а) и схема их замещения в режиме расче-
та переходных процессов (б)
1 ime Delay Switch
Time on (Ton):
lino off (Toff): [o
@ Cancel |
Рис. 4.36. Окно установки параметров подстроечного конденсатора
В качестве примера рассмотрим используемую на практике схему емкостного
делителя (рис. 4.37), выходное напряжение которого, измеряемое мультиметром,
определяется формулой:
Uo-Ui-Cl/(C1 +С2). (4.4)
Поскольку измерения можно проводить при различной форме напряжения
функционального генератора, то при сопоставлении результатов расчета по формуле
(4.4) и результатов моделирования необходимо учитывать, что мультиметр измеряет
эффективное значение напряжения, которое для синусоидального сигнала составля-
ет 0,707 от амплитудного, 0,578 — для треугольного и 1 — для меандра (прямоуголь-
ный сигнал со скважностью 2). Рассмотрим возможность использования в качестве
подстроечного конденсатора варикапа — специально сконструированного диода, ба-
рьерная емкость р—«-перехода которого зависит от обратного напряжения в соответ-
ствии с формулой:
С„ = Q/(l + Ut/Uc)m, (4.5)
где С„ — емкость перехода при обратном напряжении Uc, С, — емкость при нулевом
напряжении, Ut — температурный потенциал (при комнатной температуре он со-
ставляет 26 мВ), m = 0,5 — для резких (сплавных) и 0,333 для плавных (диффу-
зионных) переходов.
98
Глава 4. Элементная база
Основной параметр варикапа — емкость Ся при номинальном напряжении
звещения. Кроме того, указываются максимальная Сч.,к,. и минимальная Счяи емкос-
Ш при минимальном и максимальном напряжениях смещения соответственно. Ино-
кха в числе характеристик варикапа приводится коэффициент перекрытия
_вс:ости — отношение максимальной емкости к минимальной.
Качество конденсатора характеризуется добротностью, которая определяется
отношение реактивного сопротивления к полному сопротивлению потерь диода
анной частоте. Повышение добротности достигается путем уменьшения утечек.
Емкостной делитель
Diode Model VI
Диалоговое окно установки параметров диодов
4.38.
В программе EWB нет специальной модели варикапа, вместо нее можно ис-
Есльзовать модель диода. В перечень параметров диода входят следующие
рис. 4.38, в квадратных скобках приведены обозначения параметров, принятые
1EWB5.0):
Saturation current Is [IS], A — обратный ток диода (по умолчанию 10 u Л);
Ohmic resistance rs [RS], Ом — объемное сопротивление (от десятков до десятых до-
гей Ом);
Zero-bias junction capacitance Cj [CJO], Ф — барьерная емкость p—n-перехода при
,кулевом напряжении (от единиц до десятков пФ);
Junction potential vj [VJ], В - контактная разность потенциалов (0,75 В);
jTranzit time т [ТТ], с — время переноса заряда;
ction grading coefficient m [M| конструктивный параметр р—ц-перехода:
формулу (4.5), в большинстве случаев in - 0,333;
Revers Bias Breakdown Voltage Vbr [BV], В — максимальное обратное напряжение
«задается со знаком минус, для стабилитронов параметр не нормируется).
Для стабилитронов в перечень параметров включаются:
Zener test current Izt [IZT], A — номинальный ток стабилизации (от единиц до десят-
ков мА);
Zener test voltage at Izt Uzt | VZT], В напряжение стабилизации при номинальном
г оке стабилизации.
99
Часть I. Система моделирования Electronics Workbench
Схема емкостного делителя с использованием диода (рис. 4.39) содержи
цепь смещения (цепь управления барьерной емкостью), состоящую из источник
напряжения Uc и резистора R, генератор (амплитуда 1 В, частота 1 МГц), мульти
метр, эталонный конденсатор Со и исследуемый диод VD типа kl (переименованная
модель Ideal для возможности редактирования параметров) с барьерной емкосты
Ci = 100 пФ при нулевом напряжении на переходе. Конденсаторы Со и Ci образую
емкостной делитель, выходное напряжение которого определяется выражение:
(4.4). С помощью этого выражения можно определить емкость
С, = Co(Ui/Uo - 1). (4.6)
Со
Рис. 4.39. Емкостной делитель с диодом
Контрольные вопросы и задания
Вопросы составлены с учетом сведений, приведенных в Приложении 2.
1. Определите коэффициент деления емкостного делителя на рис. 4.37 при мини
мальных и максимальных значениях емкости конденсаторов С1 и С2, указан
ных на рис. 4.35.
2. Изменяя напряжение Uc источника смещения в схеме на рис. 4.39 и измеряя
мультиметром напряжение Uo, с помощью формулы (4.6) найдите зависимость
барьерной емкости диода от напряжения Uc и сравните с результатами расчета
по формуле (4.5).
3. Рассчитайте зависимость барьерной емкости обратно смещенного диода от на-
пряжения смещения в схеме (рис. 4.39) при ш = 0,5 и 0,333 и сравните полу-
ченные данные с результатами моделирования. Проведите аналогичные
исследования для стабилитрона, при этом необходимо учесть, что максималь-
ное напряжение смещения должно быть меньше напряжения стабилизации.
4. Какая разница между керамическим и электролитическим конденсаторами?
5. В честь кого названа единица емкости?
6. Назовите области применения конденсаторов.
7. Какие типы конденсаторов Вы знаете?
8. Что такое номинальное значение емкости конденсатора и какими нормативны-
ми документами оно устанавливается?
9. С какими допусками выпускаются конденсаторы? '
10. Назовите основные характеристики конденсаторов и определите их значимость
в зависимости от области применения.
11. Какие Вы знаете конденсаторы с электрически управляемой емкостью?
12. В какой бытовой аппаратуре используются варикапы и с какой целью?
1ОО
Глава 4. Элементная база
4.5. Резисторы
Резисторы являются самыми массовыми изделиями электронной техники,
трамме EWB 4.1 резисторы представлены тремя типами постоянным, подст-
1ым и набором из восьми резисторов (рис. 4.40).
11Л
1с-ЭЭЙ 1ё»О8МЙ
-W- -Wr
|₽У1е-ЛЙ/в0% 1ЛУ1с»08М2/50Х
4.40. Графические обозначения резисторов в программе EWB 4.1
PotentK>mclci
Key: £3 | Accept|
Resistance (Rj: [1 £9 3 Cancel |
Setting: j50 *
Incretacnl: [5 *
4.41. Диалоговое окно выбора параметров подстроечного резистора
Изменение сопротивления подстроечного резистора осуществляется по тому
'ринципу. что и для подстроечного конденсатора (см. рис. 4.41). В наборе резис-
>в сопротивление устанавливается одинаковым для всех восьми резисторов.
Контрольные вопросы и задания
Вопросы составлены с учетом сведений, приведенных в Приложении 2.
Исследуйте влияние распределенной емкости С резистора R на коэффициент де-
ления делителя в схеме на рис. 4.42, состоящего из резисторов R и Ro, на часто-
тах 10 Гц, 10 кГц, 10 и 50 МГц.
4.42. Схема резистивного делителя с учетом паразитной емкости резистора
?ис. 4.43. Схема резистивного делителя с учетом индуктивности выводов резистора
Составьте приближенную формулу для расчета коэффициента передачи дели-
теля, используя закон Ома и приняв сопротивление конденсатора равным l/2rcFC, где
F — частота сигнала. Сравните результаты расчета с результатами моделирования.
101
Часть I. Система моделирования Electronics Workbench
2. Проведите аналогичные п. 1 исследования в схеме на рис. 4.43, в которой учте!
индуктивность L выводов резистора R. Сопротивление индуктивности прими-
равным 2tiFL.
5. Какие типы резисторов Вы знаете?
6. Какой тип резисторов нашел наибольшее распространение в бытовой радиоапп.
ратуре?
7. Назовите основные параметры резисторов.
8. Какова природа тепловых и токовых шумов резисторов?
9. В чем заключается отличие в маркировке отечественных и зарубежных рези
торов?
4.6. Индуктивные элементы
К индуктивным элементам относятся катушка постоянной индуктивност!
подстраиваемая катушка индуктивности и трансформатор (см. рис. 4.44, а).
При расчете переходных процессов в программе используется схема замену
ния катушки индуктивности (рис. 4.44, б), параметры которой определяются выра
жениями [67]:
Rln = 2L/h; II. = hUn/2L + In
при численном интегрировании по методу трапеций;
Rl„ = L/h; Iln-hUn/L
при использовании метода Гира.
В приведенных формулах h — шаг приращения времени; 1„ —ток эквивалент
кого источника па n-м шаге; RIn, Un и Iln — сопротивление шунтирующего резистора
напряжение на индуктивности и ток на n-м шаге.
Математическая модель трансформатора (рис. 4.44, в) содержит управляемы!
источники тока и напряжения, с помощью которых устанавливается коэффициент
трансформации, а также элементы, параметры которых задаются в диалоговом окн<
(см. рис. 4.45) [67]. Согласно руководству пользователя [67] выводы 2 и 5 при ис-
пользовании трансформатора должны быть заземлены, что в некоторых случаях су-
щественно снижает возможности его применения.
Рис. 4.44. Индуктивные компоненты EWB (а), схемы замещения индуктивности (б) и транс-
форматора (в)
Параметры катушек с постоянной и подстраиваемой индуктивностью задают-
ся с помощью диалоговых окон, аналогичных окнам для конденсаторов и резисто-
ров. В диалоговом окне установки параметров линейных трансформаторов (их еще
102
Глава 4. Элементная база
лвают воздушными) задаются (см. рис. 4.45): коэффициент трансформации п,
активность рассеяния Le, индуктивность первичной обмотки Lm, сопротивле-
первичпой Rp и вторичной Rs обмоток. При п>1 трансформатор является пони-
дцим, при п<1 — повышающим.
11 lonstoimei Model ’10_to_1*
Primary to-secondary tuns ratio (nJ fl Accept |
leakage inductance (Lc): 1e-06 H Cancel |
Magnetizing inductance (Lm): 0 001 H
Primary winding resistance (Rp): 0 Q
Secondary winding resistance (Rs): 0 Q
Рве. 4.45. Окно установки параметров трансформаторов
Контрольные вопросы и задания
Вопросы составлены с учетом сведений, приведенных в Приложении 2.
1- Определите коэффициент передачи делителя, образованного катушками индук-
тивности L и Lo по схеме на рис. 4.46. Расчет выполните с учетом активного со-
противления R катушки L (сопротивление ее обмотки на постоянном токе).
Сравните результаты расчетов с результатами моделирования на частотах
10 кГц, 10 и 50 МГц. Определите добротность катушки на указанных частотах
(добротность определяется отношением индуктивного сопротивления катушки
на данной частоте к сопротивлению потерь, которое в данном случае определяет-
ся сопротивлением резистора R).
Рис. 4.46. Схема индуктивного делителя с учетом активного сопротивления
Рис. 4.47. Схема индуктивного делителя с учетом распределенной емкости катушки индуктив-
ности
2. Проведите аналогичные с п. 1 исследования с учетом межвитковой емкости С ка-
тушки (по схеме на рис. 4.47).
1. Проведите исследования воздушного трансформатора Т с активной нагрузкой R,
используя схему на рис. 4.48. Путем моделирования на частотах 10 кГц,
10 и 50 МГц определите зависимость коэффициента трансформации от индук-
103
Часть I. Система моделирования Electronics Workbench
тивности рассеивания Le, индуктивности первичной обмотки Lm и активных
противлений первичной Rp и вторичной Rs обмоток.
V
Рис. 4.48. Схема для исследования воздушного трансформатора
4. Проведите аналогичные с п. 3 исследования при емкостной нагрузке, замен»
резистор R конденсатором емкостью 10 нФ.
5. Приведите классификацию индуктивных элементов и перечислите их основные]
параметры.
6. Почему катушки индуктивности в некоторых случаях выполняются секционв-1
рованными?
7. В каких цепях используются высокочастотные дроссели и какова их конструкция?!
4.7. Полупроводниковые диоды
Комбинация двух полупроводниковых слоев с разным типом проводимости!
(р — дырочной и п — электронной) обладает выпрямляющими свойствами: она гораз-1
до лучше пропускает ток в одном направлении, чем в другом. Полярность напряже-1
ния, соответствующая большим токам, называется прямой, а меньшим — обратной-1
Обычно пользуются терминами прямое и обратное напряжение, прямой и обратный!
ток. Поверхность, по которой контактируют/?- и n-слои, называется метал лургичес- '
кой. границей, а прилегающая к ней область объемных зарядов — электронно-дыроч-
ным переходом.
Электронно-дырочные переходы классифицируют по резкости металлургиче-
ской границы и соотношению удельных сопротивлений слоев.
Ступенчатыми переходами (коэффициент плавности перехода m = 0,5,
в EWB 5.0 имеет обозначение М) называют переходы с идеальной границей, по одну
сторону которой находятся дырки, а по другую — электроны. Такие переходы наи-
более просты для анализа, поэтому все реальные переходы стараются, если это воз-
можно, рассматривать как ступенчатые.
Плавными переходами (ш = 0.333) называют такие, у которых в области ме-
таллургической границы концентрация одного типа примеси постепенно уменьша-
ется, а другого типа — растет. Сама металлургическая граница в этом случае
соответствует равенству концентраций примесей. Все реальные /?-л-переходы —
плавные, степень их приближения к ступенчатым зависит от градиента эффектив-
ной концентрации в районе металлургической границы.
По соотношению концентраций примесей в р- и n-слоях переходы делятся на
симметричные, несимметричные и односторонние. Симметричные переходы не ти-
пичны для полупроводниковой техники. Основное распространение имеют несимме-
тричные переходы, у которых концентрации не одинаковы. В случае резкой
асимметрии, когда концентрации примесей (а значит, и основных носителей) разли-
чаются на один-два порядка и более, переходы называют односторонними.
Вольтамперная характеристика^—«-перехода описывается выражением 112]:
I-Uexp(U/U3-l], (4.7)
104
Глава 4. Элементная база
где I — ток через переход при напряжении U, I. — обратный ток, U. — температур-
ный потенциал, равный при комнатной температуре 26 мВ.
Если к переходу подключить обратное напряжение, то при определенном его
значении переход пробивается. Различают три вида пробоя: туннельный, лавинный
и тепловой. Первые два связаны с увеличением напряженности электрического по-
ля в переходе, а третий — с увеличением рассеиваемой мощности и, соответственно,
температуры.
В основе туннельного пробоя лежит туннельный эффект, т. е. “просачивание”
электронов сквозь тонкий потенциальный барьер перехода. В основе лавинного про-
боя лежит “размножение” носителей в сильном электрическом поле, действующем
в области перехода. Электрон и дырка, ускоренные полем па длине свободного про-
бега, могут разорвать одну из ковалентных связей полупроводника. В результате
рождается новая пара электрон-дырка и процесс повторяется уже с участием новых
носителей. При достаточно большой напряженности поля, когда исходная пара но-
сителей в среднем порождает более одной новой пары, ионизация приобретает ла-
винный характер, подобно самостоятельному разряду в газе. При этом ток будет
ограничиваться только внешним сопротивлением. Явление пробоя находит практи-
ческое применение в стабилитронах — приборах, предназначенных для стабилиза-
ции напряжения.
В основе теплового пробоя лежит саморазогрев перехода при протекании обрат-
ного тока. С ростом температуры обратные токи резко возрастают, соответственно
увеличивается мощность, рассеиваемая в переходе; это вызывает дополнительный
рост температуры и т.д. Как правило, тепловой пробой не имеет самостоятельного
значения: он может начаться лишь тогда, когда обратный ток уже приобрел достаточ-
но большую величину в результате лавинного или туннельного пробоя.
Ранее (в разд. 4.4) мы уже говорили о барьерной емкости. Ее принято разде-
лять на две составляющие: барьерную емкость, отражающую перераспределение за-
рядов в переходе, и диффузионную емкость, отражающую перераспределение
носителей в базе. Такое разделение в общем условно, но оно удобно на практике, по-
скольку соотношение обеих емкостей различно при изменении полярности прило-
женного напряжения. При прямом напряжении главную роль играют избыточные
заряды в базе и, соответственно, диффузионная емкость. При обратном напряжении
избыточные заряды в базе малы и главную роль играет барьерная емкость. Обе емко-
сти нелинейны: диффузионная емкость зависит от прямого тока, а барьерная — от
обратного напряжения.
Набор задаваемых параметров для диодов в EWB 5.0 заметно больше по срав-
нению с EWB 4.1. Диалоговое окно для задания параметров диодов в EWB 5.0 состо-
ит из двух одинаковых по внешнему виду закладок (первая из них показана на
рис. 4.49), с помощью которых можно дополнительно (по сравнению с окном на
рис. 4.38) задать следующие параметры:
N — коэффициент инжекции;
EG — ширина запрещенной зоны, эВ; (для германия — 0,72 эв, для кремния — 1,1 эв);
FC — коэффициент нелинейности барьерной емкости прямо смещенного перехода;
BV — напряжение пробоя (положительная величина, в EWB 4.1 она принята отри-
цательной), В; для стабилитронов вместо этого параметра используется параметр
VZT — напряжение стабилизации;
IBV — начальный ток пробоя при напряжении BV (положительная величина), А;
для стабилитронов вместо этого параметра используется параметр IZT — начальный
ток стабилизации;
105
Часть I. Система моделирования Electronics Workbench
XTI — температурный коэффициент тока насыщения;
KF — коэффициент фликкер-шума;
AF — показатель степени в формуле для фликкер-шума;
TNOM — температура диода, ’С.
Рис. 4.49. Диалоговое окно установки параметров диодов в EWB 5.0, закладка 1
а) б) в) г)
Рис. 4.50. Эквивалентные схемы диода при расчете на постоянном токе (а), в диапазоне част<
(б, в) и схема для исследования прямой ветви ВАХ (г)
Эквивалентные схемы диода показаны на рис. 4.50, а, б, на которых обозначе-
но: А — анод, К — катод, I — источник тока, Rs — объемное сопротивление, С — ем-
кость перехода, Gmin — проводимость, обусловленная утечками (в EWB 5.0
задается в диалоговом окне, см. рис. 1.17). Вольтамперная характеристика (ВАХ)
диода определяется следующими выражениями [67]:
для прямой ветви
I = Io[exp(U/(N Ut)) - 1] + U-Gmia для U > -5N Ut;
для обратной ветви
I - I0[exp(U/(N U,)) - 1] + U-G,nis для 0 > U > -5N Ut;
I = -I. + ичОии для -BV < U < -5NU,;
I - -TBV для U - -BV;
I = 1„{ехр[ -(U + BV)/(N U,))] - 1 + BV/UJ для U < -BV.
106
Глава 4. Элементная база
Здесь Io = I — обратный ток диода при температуре TNOM; N — коэффициент
ЕЕекции; BV, IBV — напряжение и ток пробоя; U, — температурный потенциал пе-
рехода; U — напряжение на диоде.
При расчете переходных процессов используется эквивалентная схема диода
с* рис. 4.50, б), для которой емкость перехода определяется с помощью выраже-
«±[67]:
С = T(dI/dU) + CJO(1 - U/UJ m для U < FCVJ;
C = x(dI/dU) + CJ0(F3 - mU/Ut)/F2 для U > FCVJ,
-z- r 2 = (1 - FC)1*"; F3 = 1 - FC(1 - m).
В приведенных формулах т - время переноса заряда; CJO — барьерная ем-
при нулевом смещении на переходе; VJ — контактная разность потенциалов;
в= 0.33...0,5 — параметр перехода.
При малых уровнях сигналов используется линеаризованная эквивалентная
оаа (рис. 4.50, в), на которой проводимость G = dl/dU = LexpCU/fN UJVfN U,).
Zea этом емкость перехода определяется формулами [67]:
С = tG + CJO(1 - U/UJ m для U < FC VJ;
С tG + CJO(F3 - mU/U,)/F2 для U 2* FC VJ.
Исследование прямой ветви BAX диодов может быть проведено с помощью
яезсы на рис. 4.50, г. Она состоит из источника тока I, амперметра А (можно обой-
щсь и без него, поскольку регистрируемый ток точно равен задаваемому), исследуе-
мгс диода VD и вольтметра V для измерения напряжения на диоде.
Лк. 4.51. Схема характериографа (а), полученная на нем ВАХ диода (в) и схема для исследо-
вания ее обратной ветви (б)
Процесс исследования ВАХ может быть автоматизирован с помощью характе-
риографа (рис. 4.51, а, в), в котором формирование изображения ВАХ осуществля-
ют
Часть I. Система моделирования Electronics Workbench
ется в режиме развертки В/А осциллографа, при этом используются сигнал
с функционального генератора и с нагрузки диода.
Для исследования обратной ветви ВАХ диода используется схем;
см. рис. 4.51, б. В ней вместо источника тока используется источник напряжения
с защитным резистором Rz для ограничения тока через диод в случае его пробоя.
Кроме одиночных диодов, в библиотеке EWB имеется также диодный мости
для которого можно дополнительно задать коэффициент эмиссии N (Emissii
Coefficient).
Светодиод — специально сконструированный диод, в котором предусмотри
возможность вывода светового излучения из области перехода сквозь прозрачное о
но в корпусе.
При прохождении через диод тока в прилегающих к переходу областях пои
проводника происходит интенсивная рекомбинация носителей зарядов — элект]
нов и дырок. Часть освобождающейся энергии выделяется в виде квантов све'
В зависимости от ширины запрещенной зоны полупроводника излучение моя
иметь длину волны либо в области видимого света, либо невидимого инфракрасно:
излучения. Излучение переходов на основе арсенида галлия имеет длину волны ок
ло 0,8 мкм. Переходы из карбида кремния или фосфида галлия излучают видимь
свет в диапазоне от красного до голубого цвета. Важнейшими параметрами светод
ода являются яркость, измеряемая в нитах при определенном значении прямого т
ка, и цвет свечения (или спектральный состав излучения).
Для светодиода дополнительно указывается минимальный ток в прямом н
правлении Turn-on current (Ion), при превышении которого светодиод зажигаете
Для измерения ВАХ светодиодов можно использовать приведенные выше схемы.
Переключающие диоды ср-п—р—п- или п— р—п— р-структурами — это т
ристоры [86]. Тиристоры, имеющие выводы от крайних электродов, называют дин
сторами, а приборы с третьим выводом (от одного из средних электродов)
тринисторами. Кроме того, к классу тиристоров относятся симисторы — симметри
ные динисторы (диаки), симметричные тринисторы (триаки) и достаточно редк!
тип динистора — диод Шокли, в котором структурар—п—р—п организована за сч
наличия в р—n-переходе ловушек, формируемых путем легирования. На рис. 4..'
приведены обозначения переключающих диодов, модели которых имеются в пр
грамме EWB 4.1: (слева направо) диод Шокли, симметричный динистор (диак, дв
направленный динистор), тринпстор (триодный тиристор) и симметричнь
тринистор (триак, симмистор).
•И- # &
Рис. 4.52. Переключающие диоды
Для переключательных диодов задаются значения следующих параметр
(для EWB 5.0 их обозначения указываются в квадратных скобках):
Saturation current Is [IS], A — обратный ток динистора;
Peak Off-state Current Idrm [IDRM], A — то же, но для тринистора;
Switching voltage Vs [VS], В — напряжение, при котором динистор переключает'
в открытое состояние;
Forward Breakover voltage Vdrm [VDRM], В — то же, но для тринистора при нулев<
напряжении на управляющем электроде;
108
Глава 4. Элементная база
к On-State Voltage Vtm [VTM], В — падение напряжения в открытом состоянии;
ward Current at wich Vtm is measured Itm [ITM], А ток в открытом состоянии;
п-off time Tg [TG], с — время переключения в закрытое состояние;
ding current Ih [IH], A — минимальный ток в открытом состоянии (если он мень-
установленного, то прибор переходит в закрытое состояние);
lical rate of off-state voltage rise dv/dt [DV/DT], В/мкс — допустимая скорость из-
•ения напряжения на аноде тринистора, при котором он продолжает оставаться
.крытом состоянии (при большей скорости тринистор открывается);
о-bias junction capacitance Cj [CJO], Ф — барьерная емкость динистора при нуле-
! напряжении на переходе;
teTrigger voltage Vgt [VGT], В напряжение на управляющем электроде откры
отринистора;
:е Trigger current Igt [IGT], A —гок управляющего электрода;
rage at which Igt is measured Vd [VD], В — отпирающее напряжение на управля-
ем электроде.
Silicon-Controlled Rectifier Model 'ideal*
Peak Off State Current (Idem): EHI0 A Accept |
Forward Breakover voltage (Vdrm): 200 V Cancel |
Peak On-Slate Voltage (Vtm). 1.5 V
Forward Current at which Vtm u measured (Itm): 1 A
Turn-off time 11<11: 1.5e-05 s
Critical rate of off state voltage rise (dv/dt) 50 V/us
Holding current (Ih): 0.02 A
Gate 1 rtggcr voltage (Vgt) 1 V
Gate Trigger current (Igt); 0.001 A
Voltage al which Igt is measured (Vd): 10 V
4.53. Диалоговое окно установки параметров тринистора
Схема для исследования тиристоров
Fmc. 4.54.
Перечисленные параметры можно задать с помощью диалоговых окон, анало-
гичных приведенному на рис. 4.53 для тринистора.
Исследование прямой ветви ВАХ тринистора можно проводить с использова-
—тем схемы (рис. 4.54), на которой показаны источники входного напряжения Ui
109
Часть I. Система моделирования Electronics Workbench
и напряжения управления Uy с защитными резисторами Rzt, Rzy. Измерение ВАХ
проводится при изменении Ui от нуля до Udrm + 50 В при фиксированном значении
Uy, например, в трех точках 0,5Vd, Vd и l,5Vd. При исследовании обратной ветви
ВАХ меняется только полярность Ui.
Следует отмстить, что снятие ВАХ переключательных диодов может быть осу-
ществлено также и в режиме заданных токов в силовой и управляющей цепи, т.е.
с помощью схем, аналогичных приведенным на рис. 4.50 и 4.51.
Контрольные вопросы и задания
Вопросы составлены с учетом сведений, приведенных в Приложении 2.
1. Используя схему на рис. 4.50, исследуйте прямую ветвь ВАХ диода и стабили-
трона и сравните эти данные с результатами расчетов по формуле (4.7).
2. Используя схему на рис. 4.51, исследуйте обратную ветвь ВАХ приборов из п. 1
и сравните полученные результаты с результатами расчетов по формуле (4.7).
3. Используя схемы на рис. 4.50 и 4.51, исследуйте ВАХ диода Шокли и симмет-
ричного динистора (диака).
4. Исследуйте ВАХ тринистора с использованием схемы на рис. 4.54. Составьте
схему для исследования обратной ветви ВАХ.
5. Составьте схему для исследования ВАХ тринистора с использованием источни-
ков тока и сравните полученные результаты с результатами по п. 4.
6. Как устроен полупроводниковый диод?
7. Какие типы р—n-переходов Вы знаете?
8. Какой формулой описывается вольтамперная характеристика р—п-перехода?
9. Назовите типы пробоев р—zi-перехода и дайте их краткую характеристику.
10. Перечислите составляющие емкости р-д-перехода.
11. Назовите и кратко охарактеризуйте типы полупроводниковых диодов.
12. Назовите типы и особенности переключательных диодов.
13. Разработайте схемы моделей характериографов для исследования ВАХ тиристо-
ров.
14. Ознакомьтесь со схемой включения симмисторов (схемный файл dimmer.са4).
4,8, Биполярные транзисторы
Различают три схемы включения биполярных транзисторов (рис. 4.55): с об-
щей базой (ОБ), с общим эмиттером (ОЭ) и с общим коллектором (ОК).
In Out Out Out
ОБ ОЭ OK
Рис. 4.55. Основные схемы включения транзисторов
На практике чаще всего используются два семейства ВАХ транзисторов —
входные и выходные. Входные характеристики определяют зависимость входного
тока (базы или эмиттера в зависимости от способа включения транзистора) от напря-
жения между базой и эмиттером при фиксированных значениях напряжения на
коллекторе. Выходные характеристики определяют зависимость тока коллектора от
110
Глава 4. Элементная база
напряжения коллектор-эмиттер при фиксированных значениях тока базы или эмит-
тера (в зависимости от способа включения транзистора).
Входные характеристики имеют вид, аналогичный характеристикам диодов:
т'-к экспоненциально возрастает с увеличением напряжения база-эмиттер. При по-
вышении и понижении температуры входные характеристики смещаются в сторону
меньших и больших входных напряжений соответственно. Напряжение между ба-
эои и эмиттером для кремниевых транзисторов уменьшается примерно на 2 мВ при
увеличении температуры на каждый градус Цельсия.
Особенностью выходных характеристик транзистора, включенного по схеме
: ОБ, является слабая зависимость тока коллектора от напряжения коллектор-база
При больших напряжениях Uh6 происходит пробой коллекторного перехода.
При увеличении температуры выходные характеристики смещаются в сторону боль-
-их токов из-за увеличения обратного тока 1ко.
У транзистора, включенного по схеме с ОЭ, ток коллектора более сильно зави-
глт от напряжения коллектор-эмиттер. Резкое возрастание тока коллектора начина-
ет: я при меньшем коллекторном напряжении, чем для включения транзистора по
гхеме с ОБ. При повышении температуры выходные характеристики значительно
вмещаются в сторону больших токов, их наклон сильно увеличивается.
ВАХ транзисторов и диодов снимаются на постоянном токе (по точкам) или
е помощью специальных приборов — характериографов, позволяющих избежать
перегрева приборов.
Входные и выходные характеристики транзисторов используются для расчета
хепей смещения и стабилизации режима, расчета конечных состояний ключевых
схем (режимов отсечки и насыщения).
В библиотеку EWB включено достаточно большое количество импортных би-
полярных транзисторов, отечественные аналоги которых можно найти в [11, 15].
В некоторых случаях может оказаться более удобным самостоятельно создать от-
ельную библиотеку отечественных транзисторов, используя команду Model из ме-
зо Circuit.
В состав параметров транзисторов включены следующие (см. рис. 4.56, в ква-
дратных скобках приведены обозначения параметров, принятые в EWB 5.0):
1. Обратный ток коллекторного перехода, A (Saturation current Is [IS]);
2. Коэффициент усиления тока в схеме с ОЭ Н21» (Forward current gain coefficient BF
[BF]);
3. Коэффициент усиления тока в схеме с ОЭ при инверсном включении транзисто-
ра (эмиттер и коллектор меняются местами) (Reverse current gain coefficient BR
[BR]);
4. Объемное сопротивление базы, Ом (Base ohmic resistance rb [RB]);
5. Объемное сопротивление коллектора, Ом (Collector ohmic resistance rc [RC]);
5. Объемное сопротивление эмиттера, Ом (Emitter ohmic resistance re [RE]);
". Емкость эмиттерного перехода при нулевом напряжении, Ф (Zero-bias В-Е junc-
tion capacitance Се [CJE]);
В. Емкость коллекторного перехода при нулевом напряжении, Ф (Zero-bias С-Е
junction capacitance Сс [CJC]);
9. Емкость коллектор-подложка, Ф (Substrate capacitance Cs [CJS]);
10. Время переноса заряда через базу, с (Forward transit time tF [TF]);
111
Часту 1> Система моделирования Electronics Workbench
11. Время переноса заряда через,базу в инверсно^ включении, с (Revers transit LR
[TR]);
12. Коэффициент плавности эмиттерного перехода (В-Е junction grading coefficient
me [ME]):
13. Коэффициент плавности коллекторного перехода (В-С junction grading coeffi
cient me [MCJ); ' ' ' '
14. Напряжение Эрли, близкое к параметру U... В (Early voltage VA [VA]);
15. Обратный ток эмиттерного перехода. A (Base-Emitter Leakage Saturation Current
Ise I ISE]);
16. Ток начала спада усиления по току, близкое к параметру A (Forward Beta
High-Current Knee-Point Ikf [IKE]);
17. Коэффициент неидеальности эмиттерного перехода (Base-Emitter
Emission Coefficient Ne [NE]).
18. Контактная разность' потенциалов перехода база-коллектор, В (В-С
Leakage
junction
potential pc [VJC]).
.! ->7 . ‘4. -<. i-•»
19. Контактная разность потенциалов перехода база-эмиттер, В (В-Е junction poten-
tial ре [VJE]). ‘
ШОГг г.'/Л с.Ы. ! .1 • i ' КЦ "!иИ
NPN Transistor Model 2N22??
И
Saturation current (is):
fVfHntd current gain coefficient (BE t
Reverse current gain coefficient (BR):
Base ohmic resistance (rb):
emitter ohmic resistance (re):
Collector ohmic resistance (re):
Substrate capacitance (C?):
Zero-bias B-E junction capacitance (Ce):
Zero-bios B-C junction capacitance (Ge):
B E junction potential (pc):
B C junction potential (pc):
Forward transit time (tF):
Reverse transit time (-rRJ-
B-E junction grading coefficient (me):
B-C junction grading coefficient (me).
Early voltage (VAI
Base Emitter Leakage Saturation Cunent-(lse).
Forward Bota High-Current Knee Point (Ikf):
Base-Emitter Leakage Emission Coefficient (Ne):
Д | Accept j
200 Cancel 1
4
1 БЗ °
1Ь.423 Я
0.169 Q
0 F
1.95е 11 F
9.63е-12 F и -
0.75 V
0.75 V
4.54е-10 s ’
|1 02е07 S
|о.зэз
[о 333
|38 .5 V
10.41 А
|2
Рис. 4.56. Окно установки параметров биполярных транзисторов
Набор задаваемых параметров для биполярны?; транзисторов в EWB 5.0 за-
метно больше, чем в EVVB 4.1, они собраны в пяти окнах-закладках. Дополни-
тельные параметры находятся в последних трех закладках, одна из которых
показана на рис. 4.57. Эти параметры имеют следующие назначения:
112
Глава 4. Элементная база
XF - коэффициент неидеальности в нормальном режиме;
NR — коэффициент неидеальности в инверсном режиме;
IKR — ток начала спада коэффициента усиления тока в инверсном режиме, А;
КС — коэффициент неидеальности коллекторного перехода;
RBM — минимальное сопротивление базы при больших токах, Ом;
IRB ток базы, при котором сопротивление базы уменьшается на 50% от разницы
RB-RBM, А;
XTF — коэффициент, определяющий зависимость времени TF переноса зарядов че-
рез базу от напряжения коллектор-база;
VTF — напряжение коллектор-база, при котором начинает сказываться его влияние
saTF, В;
• ITF — ток коллектора, при котором начинается сказываться его влияние на TF, А;
?TF — дополнительный фазовый сдвиг на граничной частоте транзистора
I ? - = 1/(2ttTF), град.;
VJS — контактная разность потенциалов перехода коллектор-подложка, В;
MJS — коэффициент плавности перехода коллектор-подложка;
XCJC — коэффициент расщепления емкости база-коллектор;
” — коэффициент нелинейности барьерной емкости прямо смещенных переходов;
BG — ширина запрещенной зоны, эВ;
Р®с. 4.57. Окно установки значений дополнительных параметров биполярных транзисторов,
закладка 3
ХТВ — температурный коэффициент усиления тока в нормальном и инверсном ре-
жимах;
XTI — температурный коэффициент тока насыщения;
KF - коэффициент фликкер-шума;
AF — показатель степени в формуле для фликкер-шума;
TNOM — температура транзистора.
113
Часть I. Система моделирования Electronics Workbench
В программе EWB используется модель биполярного транзистора Гуммеля-
Пуна, подробно проанализированная в [2].
Рассмотрим способы измерения основных характеристик биполярных транзи-
сторов.
Вольтамперные характеристики. Наиболее распространенной и более простой
моделью (по сравнению с моделью Гуммеля-Пуна) биполярного транзистора являет-
ся модель Эберса-Молла [12]. Согласно этой модели статические входные и выход-
ные ВАХ транзистора в схеме с ОБ описываются следующими выражениями:
I.»AI\-aCIto; (4.8)
Ik-AaTw-Crta, (4.9)
где А » exp(Utb/U.) - 1; С - exp (Ukb/U,) -1; Гте = D ITO; Гк. = Dlk0; D = 1 - aa ; U 1~ -
тепловые токи коллекторного и эмиттерного переходов; а, а'— коэффициенты пере-
дачи тока в схеме с ОБ для прямого и инверсного включения транзистора; UJt>, U,b —
напряжения на коллекторе и эмиттере относительно базы.
Схема для исследования ВАХ транзистора показана на рис. 4.58, а. Семейство
входных ВАХ I. f (Ueb) снимается при фиксированных значениях Ukb путем измене-
ния тока I. и измерения Семейство выходных ВАХ Ik •= f(Ukb) снимается при фик-
сированных значениях 1с путем изменения напряжения Ukb и измерения Ik.
Характериограф для исследования выходных ВАХ транзисторов в схеме ОЭ
выполнен в двух вариантах: с ручным заданием тока базы (рис. 4.58, б) и автомати-
ческим (рис. 4.58, г). В обеих моделях ток базы задается источниками постоянного
тока II...15, подключаемых к базе исследуемого транзистора (в данном случае
2N2369A) с помощью переключателей 11]...[4], управляемых одноименными клави-
шами (рис. 4.58, б»), или программно управляемых 1...4 (рис. 4.58, г), для которых
время включения выбрано одинаковым и равным нулю (Топ = 0), а время выключе-
ния Toff = 1, 3, 4 и 5 с соответственно. В первом случае базовый ток равен сумме то-
ков источников, выбранных переключателями в любой комбинации, во втором —
строго через 1с в следующей последовательности: II (в момент t = 0 — начало моде-
лирования все переключатели переводятся в положение, противоположное пока-
занному на рис. 4.58, г), 12, 12 + 13, 12 + 13 + 14, 12 4- 13 + 14 + 15. Указанный
временной интервал выбран из условия синхронизации момента подключения оче-|
родного источника тока к базе транзистора с началом максимально возможного пе-
риода 1 с (частота 1 Гц) следования треугольных импульсов с функционального
генератора, используемого в качестве источника испытательного напряжения (ре-,
жимы работы генератора показаны на рис. 4.58, б, г). При этом амплитуда импульса
выбирается из условия, при котором ее двойное значение было бы больше падения
напряжения В16и,кг Rk, где В — коэффициент усиления тока в схеме ОЭ (в диалоговом!
окне исследуемого транзистора параметр BF = 136), 1б|И1? - 500 мкА — максималь-
ный ток базы. Следовательно, для схемы на рис. 14.58, г амплитуда сигнала должна!
быть выбрана более 3,4 В (выбрано 4 В).
Формирование ВАХ осуществляется в режиме развертки A/В, т. е. сигнал в ка-
нале А (падение напряжения на резисторе Rk) разворачивается по оси X сигналом, по-
ступающим с коллектора транзистора. Из показанного на рис. 4.58, в начальном
участка ВАХ при 16 = 100 мкА следует, что на ее линейном участке при напряжении на
коллекторе 250 мВ (ось X, канал В) падение напряжения на сопротивлении нагрузки!
(ось Y, канал А) составляет около 1,23 В, что соответствует коллекторному току 12,3 мА
и, следовательно, коэффициент усиления тока составляет 123, что достаточно близко!
к “паспортному” значению 136. Аналогично рассмотренному происходит формирова-
ние семейства ВАХ на рис. 4.58, д, полученного с помощью модели на рис. 4.58, г.
114
Глава 4. Элементная база
Uk
5V
«)
4
г)
О)
4.58. Схемы для исследования ВАХ биполярного транзистора
115
Часть I. Система моделирования Electronics Workbench
Модуль коэффициента передачи тока |Н21Э] на высокой частоте может бьп
измерен с помощью схемы на рис. 4.59. Режим по постоянному току транзистор
задается с помощью источника тока 1е (5 мА), в качестве источника входного ci
нусридального сигнала используется источник тока Ji (1 мА, при измерениях ча<
тота варьируется в пределах от единиц до десятков МГц), ток базы 1b и коллектор
1k измеряется амперметрами в режиме АС. Конденсатор СЬ — блокировочный (та
называемая развязка по высокой частоте). Модуль коэффициента передачи тон
HJ = рассчитывается по показаниям амперметров. В частности при часто-1
входного сигнала 1 МГц он равен, согласно показаниям амперметре
(см. рис. 4.59), 953/47,8- 19,94 (в диалоговом окне транзистора 2N2904A он уст!
новлен равным 20).
Рис. 4.59. Схема для измерения коэффициента передачи Тойа на высокой частоте
Контрольные вопросы и задания
Вопросы составлены с учетом сведений, приведенных в Приложении 2.
1. С помощью схемы на рис. 4.58, а получите семейство входных характеристик пр
значениях Ukb — 0, 5 и 10 В и семейство выходных характеристик при le — 1,
и 10 мА. Проверьте справедливость утверждения, что при Ukb - 3...5 В влияни
этого напряжения на входную характеристику ничтожно мало.
2. Путем сравнения расчетного значения тока коллектора по формуле (4.9) при 31
данном токе эмиттера 1 мА и результатов моделирования схемы на рис. 4.58.
установите соответствие используемой в программе EWB модели транзистор
модели Эберса-Мол ла.
3. С помощью схемы на рис. 4.59 постройте зависимость модуля коэффициент
передачи тока в диапазоне частот 1...50 МГц при фиксированных значения
Те (5 и 10 мА) и И (1 и 5 мА).
4. Какие схемы включения транзисторов Вы знаете?
5. Перечислите малосигнальные параметры транзисторов.
6. Назовите параметры транзисторов для больших сигналов.
7. Охарактеризуйте параметры предельных режимов биполярных транзисторов.
4.9. Полевые транзисторы
Первоначальное название полевых транзисторов — униполярные транзист<
ры. Это связано с тем, что в таких транзисторах используются основные носител
только одного типа (электронов или дырок). Процессы инжекции и диффузии в т
ких транзисторах практически отсутствуют, во всяком случае, они не играют прш
ципиальной роли. Основным способом движения носителей является дрей
в электрическом поле.
Для того чтобы управлять током в полупроводнике при постоянном электр!
ческом поле, нужно изменять удельную проводимость полупроводникового ело
116
Глава 4. Элементная база
его площадь. На практике используются оба способа и основаны они на эффекте
(управление напряжением на затворе). Поэтому униполярные транзисторы
во называют полевыми транзисторами. Проводящий слой, по которому проте-
ток, называют каналом. Отсюда еще одно название такого класса транзисто-
- канальные транзисторы.
Каналы могут быть приповерхностными и объемными. Приповерхностные ка-
представляют собой либо обогащенные слои, обусловленные наличием донор-
примесей в диэлектрике, либо инверсионные слои, образующиеся под
шем внешнего поля. Объемные же каналы представляют собой участки одно-
го полупроводника, отделенные от поверхности обедненным слоем.
Транзисторы с объемным каналом отличаются тем, что обедненный слой co-
in с помощью р - «-перехода. Поэтому их часто называют полевыми транзисто-
t р~«-переходом или просто полевые транзисторы. Транзисторы такого типа
we описаны Шокли в 1952 г. [12]. В библиотеке компонентов программы
4.1 они представлены двумя образцами: «-канальным и р-канальным и пока-
за рис. 4.60, а и б соответственно, где 1 — затвор (gate) — управляющий элек-
2 — исток (source)— электрод, от которого начинают движение основные
вли (в первом типе — электроны, во втором — дырки); 3 — сток (drain) — эле-
, принимающий эти носители.
а) б)
Полевые n-канальные (а) и р-канальные (б) транзисторы с управляющим р—п-пере-
ходом
В число задаваемых параметров полевых транзисторов входят следующие харак-
:и (рис. 4.G1, в квадратных скобках приведены их обозначения в EWB 5.0):
>яжение отсечки, В (Threshold voltage VTO [VTOJ) — напряжение между за-
>.м и истоком полевого транзистора с р—«-переходом или с изолированным
>ром, работающих в режиме обеднения, при котором ток стока достигает за-
ого низкого напряжения. Для транзисторов с изолированным затвором, ра-
ющих в режиме обогащения, этот параметр называется пороговым
яжением.
фйциент пропорциональности, A/В2 (Transconductance coefficient В [КР]).
1метр модуляции длины канала, 1/В (Channel-length modulation Xm
IBDA]).
мное сопротивление области стока, Ом (Drain ohmic resistance Rd [RD]),
мное сопротивление области истока, Ом (Source ohmic resistance Rs [RS]),
насыщения p~«-перехода, A (Gate-junction saturation current Is [IS]) —
о для полевых транзисторов с р—-«-переходом.
•ть между затвором и стоком при нулевом смещении, Ф (Zero-bias gate-
junction capacitance Cgd [CGD]).
:ть между затвором и истоком при нулевом смещении, Ф (Zero-bias gate-
? junction capacitance Cgs [CGS]).
117
Часть I. Система моделирования Electronics Workbench
9. Контактная разность потенциалов р—«-перехода, В (Gate-junction potential pb
[PB]) - только для полевых транзисторов ср—«-переходом.
|N Channel JFET Model 7N5457- КЗ
Threshold voltage (VT 0): EE V 'Accept |
Transconductance coefficient (BJ: 0.000284 Cancel |
Channel-length modulalion (XmJ: 0 0124 1/V
Drain ohmic resistance (rd): 9 03 Q
Source ohmic resistance (rtj: 8 13 Q
Gale-junction saturation current (Is): 1.89e-15 A
Zero-bias gate-drain junction capacitance (Cgd): 5.4c-12 F
Zero-bias gate-source junction capacitance (Cgs): 225e-12 F
Gate-junction potential (pB): V
Рис. 4.61. Окно установки параметров полевых транзисторов с управляющим р—п-перехо;
В программе EWB 5.0 количество параметров для полевых транзисторов у
личено. Их назначение такое же, как и для рассмотренных выше биполярных тр
зисторов. Отметим, что в EWB для полевых транзисторов используются мод»
PSpice [2].
По аналогии с биполярными транзисторами различают три схемы включен
полевых транзисторов: с общим затвором (03), с общим истоком (ОИ) и с общим <
ком (ОС).
Для исследования семейства выходных ВАХ полевого транзистора в сх<
с ОИ может быть использована схема на рис. 4.62. Она содержит источник напря;
ния затвор-исток Ug, исследуемый транзистор VT, источник питания Ucc, во;
метр Ud для контроля напряжения сток-исток и амперметр Id для измерения т
стока. Выходная ВАХ снимается при фиксированных значениях Ug путем измс
ния напряжения Ud и измерения тока стока Id. Напряжение Ug, при котором ток
имеет близкое к нулю значение, называется напряжением отсечки.
Располагая характеристиками Id = f(Ud), можно определить крути;
S = dld/dUg, являющейся одной из важнейших характеристик полевого транзис
ра как усилительного прибора.
Ua
IV
VT
2N3967
Id
Ucc
1CW
Рис. 4.62. Схема для исследования ВАХ полевого транзистора с управляющим р—п-перехо;
Другой тип полевых транзисторов — транзисторы с приповерхностным ка;
лом и структурой металл-диэлсктрик-полупроводник (МДП-транзисторы). В ча
ном случае, если диэлектриком является окисел (двуокись кремния), используе*
название МОП-транзисторы.
МДП-транзисторы бывают двух типов: транзисторы со встроенным и с ин,
цированным каналами (в последнем случае канал наводится под действием пап
жения, приложенного к управляющим электродам).
118
Глава 4. Элементная база
Транзисторы первого типа могут работать как в режиме обеднения канала но-
сителями заряда, так и в режиме обогащения. Второй тип МДП-транзисторов мож-
но использовать только в режиме обогащения. В отличие от транзисторов
с управляющим р—«-переходом металлический затвор МДП-транзисторов изоли-
рован от полупроводника слоем диэлектрика и имеется дополнительный вывод от
кристалла, называемый подложкой, на которой выполнен прибор.
Управляющее напряжение подается между затвором и подложкой. Под влия-
нием образующегося электрического поля у поверхности полупроводника создастся
r-канал за счет отталкивания электронов от поверхности вглубь полупроводника
= транзисторе с индуцированным каналом. В транзисторе со встроенным каналом
яроисходит расширение или сужение имеющегося канала. Под действием управля-
ющего напряжения изменяется ширина канала и, соответственно, сопротивление
z ток транзистора.
Напряжение на затворе, при котором индуцируется канал, называется порого-
i -..ч напряжением. При практическом определении этого напряжения обычно зада-
ется определенный ток стока, при котором потенциал затвора достигает порогового
напряжения (0,2... 1 В для транзисторов с «-каналом и 2...4 В с р-каналом).
По мере удаления от поверхности полупроводника концентрация индуциро-
ванных дырок уменьшается. На расстоянии, приблизительно равном половине тол-
аны канала, электропроводность становится собственной (беспримесной). Далее
полагается участок, обедненный основными носителями заряда, в котором суще-
ствует область положительно заряженных ионов донорной примеси. Наличие обед-
ненного участка обусловлено также отталкиванием основных носителей заряда от
эоверхности вглубь полупроводника.
Таким образом, сток, исток и канал, представляющие собой рабочие области
zin-транзистора, изолированы от подложки р—«-переходом. Очевидно, что шири-
на □-«-перехода и ширина канала изменяется при подаче на подложку дополнитель-
асго напряжения, т. е. током истока можно управлять не только путем изменения
(шряжения на затворе, но и за счет изменения напряжения на подложке. В этом слу-
управление МДП-транзистором аналогично полевому транзистору с управляю-
щем р -«-переходом.
Толщина инверсного слоя значительно меньше толщины обедненного слоя. Ес-
|'ж последний составляет сотни или тысячи нанометров, то толщина индуцированного
вала составляет всего 1...5 нм. Другими словами, дырки индуцированного канала
Прижаты” к поверхности полупроводника, поэтому структура и свойства границы по-
хупр°водник-диэлектрик играют в МДП-транзисторах очень важную роль.
L Дырки, образующие канал, поступают в него не только из подложки «-типа,
их мало и генерируются они сравнительно медленно, но также из слоев р-типа
ктока и стока, где их концентрация практически не ограничена, а напряженность
ж~я вблизи этих электродов достаточно велика.
I
В транзисторах со встроенным каналом ток в цепи стока будет протекать и при
ревом напряжении на затворе. Для его прекращения необходимо к затвору прило-
хггь положительное напряжение (при структуре с каналом p-типа), равное или
Йсльщее напряжения отсечки. При этом дырки из инверсного слоя будут практиче-
ixz полностью вытеснены вглубь полупроводника и канал исчезнет. При приложе-
но! отрицательного напряжения канал расширяется и ток снова увеличивается.
Еааим образом, МДП-транзисторы со встроенными каналами работают в режимах
ао: обеднения, так и обогащения.
119
Часть I. Система моделирования Electronics Workbench
Как и полевые транзисторы с управляющим р—/^-переходом, МДП-транзисто-
ры при малых напряжениях сток-исток ведут себя подобно линейному сопротивле-
нию. При увеличении этого напряжения ширина канала уменьшается вследствие
падения на нем напряжения и уменьшении напряженности электрического поля.
Особенно сильно это проявляется в той части канала, которая находится вблизи сто-
ка. Перепады напряжения, создаваемые током стока Id, приводят к неравномерно-
му распределению смещения на затворе вдоль канала, причем оно уменьшается по
мере приближения к стоку.
Важным преимуществом МДП-транзисторов по сравнению с биполярными яв-
ляется малое падение напряжения на них при коммутации малых сигналов. Так, ес-
ли в биполярных транзисторах в режиме насыщения напряжение коллектор-эмиттер
принципиально не может быть меньше нескольких десятых долей вольт, то для
МДП-транзисторов при малых токах стока это напряжение ври работе транзистора
в начальной области выходной ВАХ может быть сведено к ничтожно малой величине.
В библиотеке компонентов программы EWB МДП-транзисторы со встроенным
каналом представлены двумя образцами: n-канальным и р-капальным, попарно по-
казаными на рис. 4.63, а, на котором цифрой 4 обозначена подложка, остальные обо-
значения аналогичны обозначениям на рис. 4.60. Каждый тип МДП-транзистора
представлен в двух вариантах: с отдельным выводом подложки и общим выводом
подложки и истока. Аналогичный вид имеют обозначения МДП-транзисторов с ин-
дуцированным каналом (рис. 4.63, б).
а)
б)
Рис. 4.63. МДП-трапзисторы со встроенным (а) и индуцированным (б) затвором
В диалоговом окне установки параметров МДП-транзисторов (рис. 4.64) со
держатся дополнительные (по сравнению с рис. 4.61) параметры, назначения коте
рых заключаются в следующем (в квадратных скобках — обозначения параметров
принятые в EWB 5.0):
1. Поверхностный потенциал, В (Surface potential ph [PHI]).
2. Коэффициент влияния потенциала подложки на пороговое напряжение, В1
(Bulk-threhold parametr g [GAMMA]).
3. Емкость между затвором и подложкой, Ф (Gate-bulk capacitance Cgb [CGB]).
4. Емкость донной части перехода сток-подложка при нулевом смещении, Ф (Zerc
bias bulk-drain junction capacitance Cbd [CBD]).
5. Емкость донной части перехода исток-подложка при нулевом смещении, <
(Zero-bias bulk-source junction capacitance Cbs [CBS]).
6. Напряжение инверсии приповерхностного слоя подложки, В (Bulk-junctio
potential рВ [РВ]).
120
Глава 4. Элементная база
В программе EWB 5.0 количество параметров моделей МДП-транзисторов уве-
личено. Они размещаются в трех диалоговых окнах-закладках, аналогичных по
внешнему виду показанному на рис. 4.57. К дополнительно введенным относятся
следующие параметры:
LD - длина области боковой диффузии, м;
RSH удельное сопротивление диффузионных областей истока и стока, Ом;
JS — плотность тока насыщения перехода сток (исток)-подложка, А/м2;
CJ — удельная емкость донной части р—n-перехода сток (исток )-подложка при ну-
левом смещении, Ф/м2;
CJSW — удельная емкость боковой поверхности перехода сток (исток)-подлож-
ка, Ф/м;
MJ — коэффициент плавности перехода подложка-сток (исток);
CGSO удельная емкость перекрытия затвор-исток (за счет боковой диффу-
зии), Ф/м;
3 Ieimm.il Enharx:emcnt N MOSTL 1 Model 'ideal' 1
Threshold voltage (VTOJ: a v
Transconductance coefficient (B): on. Л/V1 Cancel |
Channel length modulation (Xm): » 1/V
Surface potential (p): 06 V
Bulk-threshold parameter (9): 0 V0.5
Drain ohmic resistance (rd): ° °
Source ohmic resistance (ts): 0 0
Bulk-junction saturation current (Is): 1e-14 A
Gale-bulk capacitance (CgbJ- ° F
Zero-bias gate-drain junction capacitance (Cgd): » F
Zero bias gate-source junction capacitance (Cgs) ».. F
Zero-bias bulk-drain junction capacitance (Cbd): F
Zero-bias bulk-source junction capacitance (Chs); ° . F
Bulk-junction potential (p3). 0.8 V
г.4.64. Окно установки параметров МДП-транзисторов
7GDO — удельная емкость перекрытия затвор-сток на длину канала (за счет боковой
хгффузии), Ф/м;
OGBO — удельная емкость перекрытия затвор-подложка (вследствие выхода облас-
ти затвора за пределы канала), Ф/м;
KUB — уровень легирования подложки, 1/см3;
KSS — плотность медленных поверхностных состояний на границе кремний — под-
верный оксид, 1/см2;
ТОХ — толщина оксида, м;
TPG — легирование затвора: +1 — примесью того же типа, как и для подложки,
-I — примесью противоположного типа, 0 — металлом;
ГО — подвижность носителей тока в инверсном слое канала, См2/ В/с;
ЗС — коэффициент нелинейности барьерной емкости прямо смещенного перехода
всаложки.
121
Часть I. Система моделирования Electronics Workbench
Параметры KF, AF и TNOM уже неоднократно рассматривались ранее.
Эквивалентные схемы МДП-транзисторов в EWB соответствуют самой про-
стой модели первого уровня программы PSpice [2].
Для арсенид-галлиевых полевых транзисторов (встроенная модель имеется
только в EWB 5.0) набор параметров по составу примерно такой же, как и для поле-
вых транзисторов с управляющим р — /г-псреходом. Для них используется модель
Стейтса (Statz), для которой в руководстве пользователя приводятся только выраже-
ния для тока стока [67]:
L-Одля U^-VTOcO;
Id = ВЕТА(1 + LAMBDA-U*XUr - VTO)2 [1 (1 - 0,33ALPHA UJ]/
/[1 + BETA (U^ - VTO)] для - VTO > 0,
где UK. — напряжение затвор-исток; VTO = -2 В — барьерный потенциал перехода
Шотки; ВЕТА = 0,0001 А/В2 — коэффициент пропорциональности; LAMBDA = 0 —
параметр модуляции длины канала; Ud, — напряжение сток-исток; ALPHA = 2 В1 —
константа (численные значения приняты по умолчанию).
Для исследования характеристик МДП-транзисторов используется схема
на рис. 4.65. С ее помощью можно получить семейство выходных характеристик
МДП-транзисторов при фиксированных значениях напряжения на затворе Ug и под-
ложке Ub. Располагая такими характеристиками, можно определить крутизну тран-
зистора S при управлении со стороны затвора, а также крутизну при управлении со
стороны подложки Sb =» dI4/dUb; статический коэффициент усиления М = dU4/dUc; вы-
ходное дифференциальное сопротивление Rtl - dUd/dL и другие параметры.
Рис. 4.65. Схема для исследования характеристик МДП-транзисторов
Контрольные вопросы и задания
1. С помощью схемы (рис. 4.62) снимите семейство выходных характеристик поле-1
вого транзистора при Ug = -1, -0,5, 0, 4-1, 4-2, 4-5 В. По этим характеристикам!
определите напряжение отсечки и крутизну выходной характеристики в началь-|
ной области и в области насыщения.
2. С помощью схемы (рис. 4.65) снимите семейство выходных характеристик МДП-
трапзистора со встроенным каналом при Ug и Ub = -5, -2, -1, 0, 4-1, 4-2, 4-5 В и не
ним определите S, Sb, М, Rd.
3. Выполните исследования по п. 2 для МДП-транзистора с индуцированным кана-
лом. Дополнительно определите пороговое напряжение.
4. Чем отличаются униполярные, полевые и канальные транзисторы?
5. Как устроен полевой транзистор с р—п-переходом?
6. Чем отличаются МДП- и МОП-транзисторы?
7. Назовите отличительные признаки МДП-транзисторов с индуцированный
и встроенным каналом.
8. Какую роль играет подложка в МДП-транзисторах?
122
Глава 4. Элементная база
» Что такое пороговое напряжение и напряжение отсечки?
13- Разработайте схемы характериографов для полевых транзисторов с использова-
нием управляемого током источника напряжения (см. файл fet_curv.ca4) и про-
ведите их испытания.
4.10. Операционные усилители
Первоначально операционные усилители (ОУ) применялись преимуществен-
в: в аналоговых вычислительных машинах для вычисления разнообразных матема-
тических функций. Однако в связи с возросшей доступностью ОУ область их
Кшенения существенно расширилась. Поэтому под ОУ принято понимать микро-
аему — усилитель постоянного тока, на базе которого создаются узлы аппаратуры,
жж^актеристики которых в большинстве случаев зависят только от свойств цепи об-
рвтной связи.
Распространение ОУ в интегральном исполнении началось с крупносерийного
Ьшуска в 1964 г. фирмой Fairchild ОУ типа цА702, затем цА709, разработанных
►. Видларом. В конце 60-х годов прошлого столетия появились отечественные ана-
ЖГЕ этих ОУ под названием 140УД1 и 140УД2. Дальнейшее развитие схемотехники
: технологии производства ОУ шло но пути увеличения коэффициента усиления
а входного сопротивления, исключения внешних элементов коррекции, снижения
ягтребляемой мощности, уменьшения напряжения смещения и дрейфа нуля.
Рассмотрим параметры отечественных и импортных ОУ. В круглых скобках
^сводятся их названия, обозначения и единицы измерения, принятые в программе
1"* о 4.1, а для EWB 5.0 — в прямоугольных скобках.
Коэффициент усиления напряжения Ku (Open-loop gain Л [А]) — отношение вы-
ходного напряжения к входному. В общем случае коэффициент усиления ОУ,
неохваченного обратной связью, может достигать нескольких миллионов, одна-
ко с ростом частоты он уменьшается.
2 Частота единичного усиления f„ Гц (Unity-gain bandwidth fu [FU]) — значение
частоты входного сигнала, при котором коэффициент усиления ОУ уменьшается
до единицы. Этот параметр определяет максимально возможную полосу пропус-
кания ОУ.
1 Максимальное выходное напряжение +UBUX В (Positive voltage swing,
Vsw+ [VSW+]) и -UiUXMW,, В (Negative voltage swing, Vsw- [VSW- ]) — максималь-
ное выходное напряжение положительной и отрицательной полярности, при ко-
тором нелинейные искажения пренебрежимо малы при рекомендуемой
нзготовителем схеме включения ОУ. Это напряжение измеряется относительно
гулевого потенциала при заданном сопротивлении нагрузки. При уменьшении
этого сопротивления максимальное выходное напряжение уменьшается.
. Скорость нарастания выходного напряжения Vu>ux, В/мкс (Slew rate SR [SR]) —
отношение изменения выходного напряжения от 10 до 90% от своего номиналь-
ного значения ко времени, за которое произошло это изменение. Этот параметр
характеризует скорость отклика ОУ, охваченного отрицательной обратной свя-
зью, на ступенчатое изменение входного сигнала при усилении 1 или 10. ОУ при
V>eer -« 15...150 В/мкс относятся к классу быстродействующих [4].
Напряжение смещения нуля UCM, В (Input offset voltage Vos [VOS]) — напряже-
ние, которое нужно подать на вход ОУ, чтобы выходное напряжение равнялось
нулю. Эта величина определяется разбросом параметров компонентов, входя-
123
Часть I. Система моделирования Electronics Workbench
6.
7.
8.
9.
щих в состав ОУ (см. разд. 7.2); для компенсации U„ в большинстве ОУ имеют*
специальные выводы для подключения цепей подстройки.
Входные токи I„, A (Input bias current lbs [IBS]) — токи, протекающие чср
входные зажимы ОУ; они обусловлены токами базы входных биполярных тра
зисторов или токами утечки затворов полевых транзисторов. Входные токи с
здают на внутреннем сопротивлении источника сигнала падение напряжени
которое вызывает появление напряжения на выходе при отсутствии на вхо,
внешнего сигнала.
Разность входных токов AI„, A (Input offset current los [IOS]) — достигает 10—20
от 1>х, создает на входе ОУ разность потенциалов, приводящую к смещению нуля:
выходе.
Коэффициент ослабления синфазного сигнала К<й£ф, дБ (Common mode rejectii
ratio CMMR [CMMR]) — отношение коэффициента усиления напряжения, п]
ложенного между входами ОУ, к коэффициенту усиления напряжения, при
женного между общей шиной и каждым входом; определяе
характеристиками первого каскада ОУ.
Выходной ток короткого замыкания Iwx, A (Output short circuit current
[ISC]) — максимальное значение выходного тока ОУ, при котором гарантир:
ся работоспособность прибора.
Iflpamp Model ’74Г
Positive Power Supply (Vcc): pg _ V 1 Accept |
Negative Power Supply (Vee): F« V Cancel |
Compensation capacitance (Ccfc Open-loop gain (A): 1*^’ [200000
Input resistance (Ri): |2e*06 Q
Output resistance (Ro): 1” °
Input offset voltage (Vos): [boot V
Input offset current (los): |2oO0 A
Inpul bias current (lbs): A
Positive voltage swing (Vsw«J: V
Negative voltage swing (Vsw-): r? V
Common Mode Rejection Ratio (CMRR) |30 dB .
Output Short Circuit Current (Isc): [0.025 A
Slew rote (SR): |0.S V/us
Unity-gain bandwidth (fu): Ic.OS Hz
Phase Margin (t>m): HZ Dcq
Рис. 4.66. Окно установки параметров ОУ
10. Input resistance Ri [RI], Ом - входное сопротивление.
11. Output resistance Ro [RO], Ом — выходное сопротивление.
12. Phase margin pm [PM] — запас по фазе на частоте единичного усиления в гр;
сах; характеризует устойчивость ОУ.
13. Compensation capacitance Сс [СС], Ф — емкость корректирующего конденсат
служит для обеспечения устойчивости ОУ при введении ООО. В ОУ ранних в:
124
Глава 4. Элементная база
сков предусматривались специальные выводы для подключения такого конден-
сатора, сейчас он в большинстве случаев реализуется на кристалле ОУ.
14. Location of second pole fp2 [FPS], ГЦ — частота второго полюса передаточной ха-
рактеристики (только для линейной модели ОУ на рис. 4.67, а).
15. Максимальное входное напряжение U:i, В (в списке параметров ОУ в программе
EWB отсутствует) — напряжение между входными клеммами ОУ, превышение
которого приводит к выходу прибора из строя.
16. Максимальное синфазное входное напряжение иих<ф, В (в EWB отсутствует) —
наибольшее значение напряжения, прикладываемого одновременно к обеим
входным клеммам ОУ относительно нулевого потенциала (земли), превышение
которого нарушает работоспособность прибора (увеличиваются входные токи
и смещение нуля, существенное уменьшается коэффициент усиления).
17. Коэффициент влияния источников напряжения питания Кмип, мкВ/B (в EWB от-
сутствует) — характеризует изменение выходного напряжения прецизионных
ОУ при изменении напряжения источников питания (нормируется на уровне
1... 10 мкВ/В [4]).
Значения параметров ОУ в программе EWB 4.1 могут быть отредактированы
: помощью диалогового окна на рис. 4.70 (в EWB 5.0 аналогичное окно имеет две за-
гладки).
В приводимом ниже списке ОУ данные приводятся в следующем порядке: тип
ОУ, фирма-разработчик, отечественный аналог и его краткая характеристика.
AD507
AD509
AD513
СА3140
СА3130
СА3030
LP157
F355
F356
М107
М108
301
308
143
358
211
392
1456
•07
AD 154УД2 быстродействующий ОУ;
AD 154УДЗ быстродействующий ОУ;
AD КР574УД1 быстродействующий ОУ; .
RCA К1409УД1 ОУ с полевыми транзисторами на входе;
RCA КР544УД2 широкополосный ОУ с полёёыми транзисторами на входе; ’•' ‘'
RCA КР140УД5 быстродействующий ОУ;
NS К140УД23 быстродействующий ОУ с малыми входными токами;
NS КР140УД18 широкополосный ОУ;
NS К140УД22 широкополосный ОУ;
NS К153УД6 ОУ с частотной коррекцией; f-~-
NCS К140УД14 прецизионный ОУ; "
NCS К553УД2 быстродействующий ОУ;
NCS КР140УД1408 прецизионный ОУ;
NCS К1408УД1 высоковольтный ОУ;
NCS К1401УД5 быстродействующий ОУ;
NCS К554САЗ ОУ для компараторов;
NCS К1423УДЗ быстродействующий ОУ;
МОТА КР140УД6 К140УД17 ОУ со встроенной коррекцией; прецизионный ОУ.
125
Часть I. Система моделирования Electronics Workbench
Расшифровка аббревиатур фирм-изготовителей: AD — Analog Devices, NS —
National Semiconductors, MOTA — Motorola Semiconductor Products. При необходи-
мости можно составить в EWB отдельную библиотеку из отечественных ОУ [4].
Как отмечалось ранее, характеристики устройств на ОУ во многом определя-
ются видом используемой обратной связи. В общем случае обратной связью в элек-
тронных усилителях называют связь, которая обеспечивает передачу сигналов из
выходных цепей усилителя во входные. Выходной сигнал усилителя в виде напря-
жения или тока через цепь обратной связи частично или полностью поступает на
вход, где происходит вычитание (или сложение) входного сигнала и-сигнала обрат-
ной связи. Таким образом, на вход усилителя будет поступать сигнал, равный разно-
сти или сумме входного сигнала и сигнала обратной связи. В качестве цепей
обратной связи обычно используют пассивные цепи, частотные характеристики ко-
торых существенно влияют на свойства усилительного устройства в целом.
Приведем определения некоторых наиболее распространенных терминов, ис-
пользуемых в теории усилителей с обратной связью. Петлей обратной связи назы-
вают замкнутый контур, включающий в себя цепь обратной связи и часть усилителя
между точками подключения обратной связи. Местной обратной связью (местной
петлей обратной связи) принято называть обратную связь, охватывающую отдель-
ные каскады или части усилителя. Общей обратной связью называют такую обрат-
ную связь, которая охватывает весь усилитель. Обратную связь называют
отрицательной, если она уменьшает коэффициент усиления, и положительной, ес-
ли увеличивает.
Элементы обратной связи всегда существуют в любых усилителях, даже если
их не создают искусственным путем. Они обусловлены наличием емкостных, индук-
тивных и гальванических связей и называются паразитными. Такие обратные свя-
зи трудно поддаются расчету и при неправильном проектировании и монтаже
усилителя могут привести к его самовозбуждению.
В схемной реализации усилителя и цепи обратной связи возможны варианты,
когда обратная связь существует либо только для медленно изменяющейся состав-
ляющей выходного сигнала, либо только для переменной составляющей, либо для
произвольных значений. В этих случаях говорят, что обратная связь осуществляет-
ся по постоянному току, по переменному току, как по постоянному, так и по пере-
менному току. В схеме на рис. 10.48 (см. разд. 10.15) используется обратная связь
как по постоянному, так и по переменному току.
В зависимости от способа формирования сигнала обратной связи различают:
обратную связь по напряжению, когда сигнал обратной связи пропорционален вы-
ходному напряжению; обратную связь по току, когда сигнал обратной связи про
порционален выходному току; комбинированную обратную связь, когда сигнад
обратной связи пропорционален как напряжению, так и току выходной цепи.
По способу введения во входную цепь сигнала ОС различают: последователь
ную (напряжение сигнала ОС суммируется с входным напряжением), параллельную
(ток цепи ОС суммируется с током входного сигнала) и смешанную (с входным сиг
налом суммируются ток и напряжение цепи ОС).
Рассмотрим наиболее распространенную схему усилителя с параллельной ос
ратной связью на рис. 4.67, а, на котором обозначено: К(р) — коэффициент усилены,
усилителя (в частности, ОУ); Zl(p), Z2(p) — сопротивления обратной связи (активные
индуктивные, емкостные или их сочетания); Ui, Uo — входное и выходное на пряже
ние; Ua = Uo/K(p) — напряжение на входных зажимах усилителя (оператор р для пре
стоты опущен). Применяя к цепи (рис. 4.67, а) метод наложения (см. разд. 5.4
126
Глава 4. Элементная база
получим: пренебрегая выходным сопротивлением усилителя, находим напряжение на
его входных зажимах от действия Ui - Uai = UiZ2(p)/(Zl(p) - Z2(p)); полагая входное
сопротивление усилителя достаточно большим, чтобы его влиянием можно было пре-
небречь, и учитывая инвертирующие свойства усилителя, находим слагаемое от дей-
ствия Uo - Uao = -UoZl(p)/(Zl(p) + Z2(p)). Следовательно, напряжение на входных
сжимах усилителя Ua - Uai + Uao = (Ui Z2(p) - UoZl(p))/(Zl(p) + Z2(p)). С другой сто-
тоны, Ua = Uo/K(p), т.е. Uo/K(p) = (Ui-Z2(p) -UoZl(p))/(Zl(p) + Z2(p)), откуда получа-
ем коэффициент передачи усилителя с параллельной отрицательной обратной (ОС)
Ki(p) » Uo/Ui - К(р)/(1 + (З(р)К(р)), (4.10)
где р(р) = Zl(p)/Z2(p) — коэффициент обратной связи, дающий количественную
сценку степени влияния цепи ОС. Он показывает, какая часть выходного сигнала
поступает на вход усилителя в качестве сигнала ОС.
Например, в простейшем случае инвертирующего усилителя (см. разд. 10.1)
П(р) = Rl, Z2(p) = R3, тогда при К(р) = Л (так обозначается в диалоговом окне ОУ
его коэффициент усиления без ОС) 0 - R1/R3 и Ki = А/( 1 + (ЗА). Если (ЗА»1, что ча-
не всего бывает, то Ki = 1/(3 = R3/R1. Заметим, что в более общем случае коэффици-
ент усиления ОУ без ОС К(р) может быть представлен в виде одного или двух
апериодических звеньев. В этом случае говорят об одном или двух полюсах ОУ, оп-
ределяемых соответствующими постоянными времени звеньев. Чаще всего ОУ пред-
ставляется одним апериодическим звеном с постоянной времени, определяемой
Шстотой единичного усиления.
Рассмотрим, как изменяются основные параметры усилителя при введении ОС.
Коэффициент усиления. При положительной обратной связи входной сигнал
И сигнал ОС суммируются и коэффициент усиления усилителя, как следует из вы-
яеизложенного, определяется выражением: К = Ко/( 1 - рК0), где Ко — коэффициент
каления усилителя без обратной связи (параметр А в диалоговом окне ОУ), произ-
ведение 0Ко называют петлевым усилением, а (1 - рК„) — глубиной обратной связи.
Значение петлевого усиления при положительной обратной связи ограничено
I условием рКо < 1. При РК0 > 1 усилитель становится автогенератором и не может
усматриваться как усилитель, так как выходной сигнал перестает быть однознач-
о зависимым от входного. Если РКЦ > 1, то любой входной сигнал, вызванный на-
| Видками или колебаниями параметров активных элементов, усилится и вернется на
•ход усилителя равным или больше входного. Суммируясь с ним, он вызывает по-
|жзление большего выходного сигнала, который в свою очередь суммируется с вход-
ам и вызывает дальнейшее увеличение выходного сигнала. В итоге любой сигнал,
юнйкший в линейной усилительной цепи, охваченной положительной ОС, вызо-
появление выходного сигнала, значение которого нарастает и стремится к бес-
Ьвечности. В реальном усилителе такое усиление невозможно из-за ограничений
«входного сигнала. В результате будет не “бесконечно” большое усиление, а воз-
•гкновение незатухающих колебаний. Форма колебаний зависит от параметров це-
ха обратной связи и коэффициента усиления усилителя.
Так как сигнал положительной ОС суммируется с входным сигналом, то до-
□ -лнительным условием возникновения автоколебаний является нулевой сдвиг фа-
ян между этими сигналами. Таким образом, если на какой-то частоте выполняются
условия PKU > 1 и фаза <р ” О1, то усилитель самовозбуждается, причем, если эти ус-
Ьюия выполняются только на одной частоте, то сигнал автоколебаний будет иметь
«аусоидальную форму. Если условия самовозбуждения выполняются в полосе час-
•5Т. выходной сигнал будет иметь несинусоидальную форму.
127
Часть I. Система моделирования Electronics Workbench
Если усилитель или цепь ОС вносит фазовый сдвиг, равный 180’, то входной сиг- I
нал и сигнал обратной связи вычитаются друг из друга и ОС становится отрицательной. I
Коэффициент усиления усилителя с обратной связью в этом случае К = Ко/(1 4- рКо). I
Поскольку для инвертирующего усилителя (рис. 10.1, а) (3 = R1/R3, то формула! и
К = R3/R1 для расчета усиления на постоянном токе справедлива только при PKn»l. I
Это условие является необходимым и для соотношений, использованных нами при ана-1
лизе сумматоров, интеграторов и других рассматриваемых ниже устройств.
Расчеты показывают [48], что относительное изменение коэффициента усиле-1
ния усилителя, охваченного отрицательной ОС, вызванное относительным измене-1
нием коэффициента усиления самого усилителя, уменьшается в (1 + РКО) раз.!
Изменения параметров цепи обратной связи существенно влияют на коэффициент |
усиления усилителя, поэтому к их стабильности предъявляют повышенные трсбова-1
ния. Например, усилитель имеет параметры: К* = 10\ р = 0,1; К *= 9,990. В результа-И 1
те старения элементов и изменения напряжения питания коэффициент усиления!
усилителя уменьшился в два раза и стал равным К « 5.103. Тогда относительное из-1
менение коэффициента усиления усилителя составит всего 0,2%. Изменение же!
в два раза коэффициента обратной связи (р = 0,05) приведет к изменению коэффици-1
ента усиления на 50%.
Таким образом, если выполняется условие рК0»1, то можно считать, что К не!
будет зависеть от параметров усилителя и будет примерно равен 1/Р- Если цепь от-|
рицательной обратной связи вносит небольшие фазовые сдвиги, то при РКО»1 фазо-|
вый сдвиг усилителя существенно уменьшается и определяется в основном фазовых!
сдвигом цепи обратной связи.
Выходное сопротивление усилителя зависит от того, каким образом вводится!
ОС. Если отрицательная ОС вводится по напряжению, то выходное сопротивление!
уменьшается, если по току — увеличивается.
Введение ОС широко используется для целенаправленного изменения выход!
кого сопротивления и позволяет реализовать усилители с очень малыми (сотые дол аI
ома) и очень большими (сотни — тысячи мегом) выходными сопротивлениями!
При введении ОС по напряжению усилитель приближается к идеальному источник!
напряжения, выходной сигнал которого мало меняется при различных сопротивле!
ниях нагрузки. ОС по току стабилизирует ток нагрузки, приближая усилители
к идеальному источнику тока.
Входное сопротивление также зависит от способа введения во входную цепи
сигнала ОС. При ее отсутствии входное сопротивление определяется входными на-
пряжением и током усилителя. При последовательной схеме введения ОС входное
сопротивление увеличивается в (1 + рК0) раз при отрицательной обратной связи
и уменьшается в (1 - РКО) раз при положительной.
Введение параллельной ОС эквивалентно включению параллельно входном!
сопротивлению усилителя дополнительного сопротивления, в результате чего вхо!
ное сопротивление уменьшается как при отрицательной, так и при положительно!
ОС. При больших Ко и малом сопротивлении в цепи обратной связи входное сопрс
тивление может составить десятые и тысячные доли ом.
Таким образом, применение ОС позволяет управлять значением входного и
противления и обеспечивать как достаточно высокие (десятки — тысячи мегом), та
и очень малые (десятые — тысячные доли ом) его значения.
Теперь перейдем к исследованию моделей ОУ: в программе EWB 4.1 их дш
Модель ОУ на рис. 4.67, б не имеет выводов для подключения источников питан®
128
Глава 4. Элементная база
однако их напряжение можно задать косвенно через значения максимального вы-
ходного напряжения Vsw- и Vsw+. ОУ на рис 4.67, в имеет выводы питания (пара-
метры Positive Power Supply и Negative Power Supply на рис. 4.66), что позволяет
использовать его в устройствах с одним источником питания или двумя разными ис-
точниками (например, +5 В и -15 В). Другие, более существенные различия этих мо-
делей заключаются в различии возможностей моделирования тех или иных
особенностей реальных ОУ.
Zito) Ua Z2to)
а) б) в)
Рис. 4.67. Схема включения ОУ (а) и его линейная (б) и нелинейная (в) модели
Рис. 4.68. Эквивалентная схема линейной модели ОУ
Для определения характеристик линейной модели (рис. 4.67, 6} обратимся
к ее эквивалентной схеме (рис. 4.68), составленной на основании ее текстового опи-
сания, полученного в результате применения команды Export to SPICE из меню
File. Она состоит из четырех каскадов. К зажимам 1, 2 первого (пассивного) каска-
да подключается источник входного напряжения. В первом каскаде учитывается
входное сопротивление Ri, напряжение смещения нуля имитируется источником
Uos, входные токи — источниками тока lb 1 и 1Ь2, определяемых через задаваемые
в окне (см. рис. 4.66) входные токи в соответствии с формулами:
1Ъ1 = IBS + IOS/2; Ib2 - IBS - IOS/2.
Последующие три каскада являются активными. Они выполнены на управля-
емых напряжением источниках тока Gl, G2, G3.
Исследование поведения модели при задании различных значений параметров
в диалоговом окне ОУ позволило получить следующие результаты: сопротивления ре-
зисторов R2 и R3 равны выходному сопротивлению ОУ, емкость Сс — емкости кор-
ректирующего конденсатора (см. рис. 4.66). Сопротивления резисторов R1 “ 1 кОм
(для всех линейных моделей ОУ), R2 = R3 • 1 Ом (для ОУ типа Ideal, для других ти-
пов определяются значением выходного сопротивления Ro). Коэффициенты переда-
чи управляемых источников оставались неизменными во всех режимах испытания
модели ОУ. Емкости конденсаторов С1 и С2 определяются значениями параметров
FU и FP2 соответственно. При нулевых значениях этих параметров С1 - 1,6 1030 Ф,
С2 - 1,6-Ю’33 Ф. При частоте единичного усиления FU = 1 МГц значение емкости С2
не меняется, а емкость С1 - 160 мкФ; если дополнительно установить частоту второ-
го полюса FP2 = 1 МГц, то С1 - 160 мкФ, С2 = 0,16 мкФ (такое же значение С2 сохра-
няется и при FU - 0). Проверим полученные результаты расчетом и заодно выясним
5 Зак. 206
129
Часть I. Система моделирования Electronics Workbench
физическую сущность полюсов. Частота первого полюса определяется, с одной сторо-
ны, как FP1 * FU/Л “ 10е/10е - 1 Гц, где А = 10в — коэффициент усиления ОУ на по-
стоянном токе. С другой стороны, из схемы (рис. 4.68) следует, что FP1 = 1/(2лИ1С1) =
= 1/(2я10а16010б) - 1 Гц. Таким образом, результаты совпали. Частота второго полю-
са определяется как (см. рис. 4.68) FP2 = 1 /(2ttR2C2) 1/2л1-0,16-109 = 1 МГц, что сов-
падает с заданным значением в диалоговом окне.
Перейдем теперь к рассмотрению эквивалентной схемы нелинейной модели
ОУ (рис. 4.69). В руководстве [67] она называется моделью Бойля-Кона-Педсрсона
(Boyle-Cohn-Pederson) и практически не отличается от рассмотренной в работе [2].
Модель состоит из дифференциального каскада на транзисторах QI, Q2, четырех уп-
равляемых напряжением источников тока и нелинейных элементов на диодах
D1...D4, имитирующих нелинейность выходного каскада ОУ. Цепочка из диодов
DI, D2 и резистора R01 ограничивает выходной ток ОУ, а диоды D3, D4 и источники
смещающего напряжения Uc, Ue образуют двусторонний ограничитель выходного
напряжения. Сопротивление каждого из резисторов R01 и R02 равно половине вы-
ходного сопротивления ОУ, задаваемого в окне (см. рис. 4.66). Значения напряже-
ния смещения VOS и входных токов IOS и IBS передаются в схему модели путем
изменения тока насыщения IS и коэффициента усиления тока BS для каждого тран-
зистора дифференциального каскада. Конденсатор С1 позволяет воспроизводить
двухполюсный характер частотной характеристики ОУ. Емкость этого конденсатора
задается косвенно через параметры Сс (емкость корректирующего конденсатора)
и частоту единичного усиления FU. Емкость конденсатора Се, которая обратно про-
порциональна задаваемой в диалоговом окне скорости нарастания выходного напря-
жения, позволяет имитировать несимметричность выходного импульса ОУ
в неинвертирующем включении [2].
Таким образом, основным отличием модели ОУ на рис. 4.67, в от модели на
рис. 4.67, б является возможность имитации нелинейности выходного каскада ОУ.
Рис. 4.69. Эквивалентная схема нелинейной модели ОУ
Контрольные вопросы и задания
1. Можно ли на одном ОУ выполнить линейный усилитель (например, низкой час-
тоты) с коэффициентом усиления Кц = А (см. рис. 4.66)?
2. Какое значение имеет напряжение на входе ОУ при максимальном выходном на-
пряжении -14 В (параметр Vsw на рис. 4.66)?
3. Какой параметр определяет коэффициент подавления синфазной составляющей
в ОУ? Какие значения имеет этот коэффициент в реальных ОУ?
130
Глава 4. Элементная база
4. Ознакомьтесь со схемами ОУ, представленных в файлах UA709.ca4, UA723.ca4,
UA727.ca4, UA741.ca4.
4.11. Цифровые микросхемы
Полупроводниковая электроника берет свое начало в 1948 г., когда группой
разработчиков фирмы Bell был создан первый транзистор. Спустя 11 лет инженера-
ми фирмы Texas Instruments была разработана первая микросхема, состоявшая все-
го из шести транзисторов, а в 1971 г. ныне всемирно известная фирма Intel
разработала первый 4-разрядный микропроцессор 4004, содержавший более 2000
транзисторов. В дальнейшем микроминиатюризация электронных компонентов до-
стигла таких темпов, что это послужило поводом для весьма образного сравнения
в журнале Sientific American (1982 г.): “Если бы авиапромышленность в последние
25 лет развивалась столь же стремительно, как и промышленность средств вычисли-
тельной техники, то сейчас самолет “Боинг-767” стоил бы 500 долларов и совершал
облет земного шара за 20 минут, затрачивая при этом 5 галлонов топлива”. Порази-
тельные результаты, достигнутые в микроэлектронике, стали возможны благодаря
не только новейшим полупроводниковым технологиям, но и огромному багажу схе-
мотехнических решений, накопленному в течение десятилетий многомиллионной
армией разработчиков. Несмотря на поражающие воображение количества транзис-
торов, собранных на крошечных полупроводниковых кристаллах, следует все-таки
помнить, что они представляют собой наборы из простейших элементов, к рассмот-
рению которых мы и перейдем.
В зависимости от технологии изготовления интегральные микросхемы (ИМС)
подразделяются на серии (семейства), различающиеся физическими параметрами
базовых элементов и их функциональным назначением. Наибольшее распростране-
ние получили ИМС, изготовляемые по ТТЛ- и КМОП-технологиям. (ТТЛ — транзи-
сторно-транзисторная логика с использованием биполярных транзисторов,
КМОП — с использованием комплементарных МОП-транзисторов).
Первой была выпущена ТТЛ-серия SN74/SN54 (74 — коммерческая, 54 — для
военных применений). Отечественным аналогом серии SN74 стала популярная
в свое время серия 155. В 1967 г. дополнительно разработаны семейства SN74H/54II
(High speed — быстродействующая, отечественные аналоги — серии 131 и 130)
и SN74L/54L (Low power — маломощная, аналоги — серии 158 и 136).
В 1969 г. разработана серия SN74S/54S (серии 531 и 530), в 1971 г. — серия
SN74LS/54LS (серии 555 и 533), в 1979 г. — серия SN74F/54F фирмы Fairchild
(FAST — Fairchild's Advanced Schottky TTL, серия 1531), в 1980 г. — серия
SN74ALS/54ALS (серия 1533), в 1982 г. — серия SN74AS/54AS (в обозначениях се-
рий S — Schottky, LS — Low power Schottky, ALS — Advanced Low power Schottky,
AS — Advanced Schottky, Advanced — усовершенствованная). Использование дио-
дов с барьером Шотки позволило значительно повысить быстродействие ИМС за счет
предотвращения глубокого насыщения транзисторов в ключевом режиме. Приятной
для разработчика особенностью всех перечисленных серий является полное совпаде-
ние номеров выводов и обозначения типа для ИМС одинакового функционального
назначения. Например, если SN7472 JK-триггер, то обозначение 72 будет сопут-
ствовать ему во всех сериях. Этот же принцип используется и в отечественных ИМС,
хотя тип здесь обозначается буквами. Заметим, что в EWB 5.0 для всех цифровых
ИМС введена нумерация выводов, что существенно облегчает задачу определения их
функционального назначения при сопоставлении с отечественными аналогами.
5*
131
Часть I. Система моделирования Electronics Workbench
В библиотеке программы EWB используется только серия SN74. В число ре-
дактируемых параметров цифровых ИМС входят следующие (в скобках приводятся
обозначения для EWB 4.1):
VOH, VOL — верхний и нижний уровни выходного сигнала (напряжение логической
единицы и логического нуля); в EWB 4.1 эти параметры отсутствуют;
VIH (Vih), VIL (Vil) — верхний и нижний уровни входного сигнала;
TPLH (Tplh) — задержка распространения сигнала при включении (обычно дается
на уровне 1,0);
TPIIL (Tphl) — задержка при выключении (на уровне 0,1);
VTG (Vth) — среднее напряжение срабатывания.
Для облегчения работы с библиотекой ниже приводится список отечественных
аналогов серии SN74 (для краткости некоторые повторяющиеся символы опущены).
7400 155ЛАЗ 4 элемента 2И-НЕ (цифра 2 означает двухвходовой);
7402 155ЛЕ1 4 элемента 2ИЛИ-НЕ;
740.3 155ЛА9 4 элемента 2И-НЕ с открытым коллектором (позволяют подклю- чать нагрузку с питанием от более высоковольтного источника питания);
7404 155ЛН1 6 элементов НЕ;
7405 555ЛН2 6 элементов НЕ с открытым коллектором;
7406 155ЛНЗ 6 элементов НЕ с открытым коллектором;
7407 155ЛП9 6 буферных элементов с открытым коллектором;
7408 155ЛИ1 4 элемента 2И;
7409 155ЛИ2 4 элемента 2И с открытым коллектором;
7410 155ЛА4 3 элемента ЗИ-НЕ;
7411 555ЛИЗ 3 элемента ЗИ;
7412 155ЛА10 3 элемента ЗИ-НЕ с открытым коллектором;
7414 155ТЛ2 6 триггеров Шмитта с инверсией (обладают повышенной по- мехозащищенностью);
7416 155ЛН5 6 буферных элементов НЕ;
7417 155ЛП4 6 буферных элементов с открытым коллектором;
7420 155ЛА1 2 элемента 4И-НЕ;
7421 155ЛИ6 2 элемента 4И;
7422 155ЛА7 2 элемента 4И-НЕ с открытым коллектором;
7425 155ЛЕЗ 2 элемента 4И-НЕ с входом стробирования;
7426 155ЛА11 4 элемента 2И-НЕ с открытым коллектором;
7428 155ЛЕ5 4 элемента 2ИЛИ-НЕ;
7430 155ЛА2 элемент 8И-НЕ;
7432 155ЛЛ1 4 элемента 2ИЛИ;
7437 155ЛА12 4 элемента 2И-НЕ с открытым коллектором;
7438 155ЛА13 4 элемента 2И-НЕ с открытым коллектором;
7440 155ЛЛ6 2 элемента 4И-НЕ с повышенной нагрузочной способностью;
132
Глава 4. Элементная база
7442 555ИД6 дешифратор 4x10 (декодирование 4-разрядного двоичного числа в десятичное);
7451 155ЛР11 элементы 2-2И-2ИЛИ-НЕ (2 элемента 2И, выходы которых под- ключены на кристалле ИМС к элементу 2ИЛИ-НЕ) и 2-ЗИ- 2ИЛИ-НЕ (аналогично для 2-ЗИ);
7454 155ЛР13 элемент 2-3-3-2И-4ИЛИ-ПЕ (2 элемента 2И и 2 элемента ЗИ объ- единены через 4ИЛИ-НЕ);
7455 155ЛР4 Элемент 4-4И-2ИЛИ-НЕ (2 элемента 4И объединены через 2ИЛИ-НЕ) с возможностью объединения по ИЛИ (выходной ка- скад элемента 2ИЛИ-НЕ имеет дополнительные входы транзис- тора С — Collector и Е — Emitter, что и позволяет осуществить объединение по ИЛИ);
7472 155ТВ1 JK-триггер с элементом ЗИ на входах;
7474 155ТМ2 2 D-триггера;
7475 155ТМ7 4 D-триггера с прямыми и инверсными выходами;
7476 155ТВ7 2 ЛСттриггера;
7477 155ТМ5 4 D-триггера с прямыми выходами;
7478 134ТВ14 два JK-триггера;
7486 155ЛП5 4 элемента Исключающее ИЛИ;
7490 155ИЕ2 4-разрядный асинхронный двоично-десятичный счетчик;
7491 134ИР2 8-разрядный сдвиговый регистр;
7492 155ИЕ4 4-разрядный асинхронный счетчик-делитель на 12;
7493 155ИЕ5 4-разрядный асинхронный двоичный счетчик;
74107 155ТВ6 2 JK-триггера с раздельной установкой нуля;
74109 155ТВ15 2 JK-триггера;
74112 155ТВ9 2 JK-триггера;
74113 155ТВ10 2 JK- триггера с предустановкой нуля или единицы;
74114 155ТВ11 2 JK-триггера с предустановкой нуля или единицы и общим об- нулением;
74125 155ЛП8 4 буфера с тремя состояниями;
74126 155ЛП14 4 формирователя с тремя состояниями;
74132 155ТЛЗ 4 триггера Шмитта;
74134 155ЛА19 элемент 12И-НЕ с тремя состояниями;
74138 155ИД7 дешифратор-демультиплексор 3x8;
74139 155ИД14 2 дешифратора-демультиплексора 2x4;
74145 155ИД10 двоично-десятичный дешифратор с открытым коллектором;
71147 555ИВЗ приоритетный шифратор 10-4;
71148 155ИВ1 шифратор приоритетов 8x3;
74150 155КП1 селектор-мультиплексор 16x1;
‘4151 155КП7 селектор-мультиплексор 8x1;
'4152 155КП5 селектор-мультиплексор 8x1;
74153 155КП2 2 селектора-мультиплексора 4x2;
133
Часть I. Система моделирования Electronics Workbench
74154 155ИДЗ дешифратор-демул ьтиплексор 4x16;
74155 155ИД4 2 дешифратора-мультиплексора 2x4;
74156 555ИД5 2 дешифратора-демультиплексора 2x4 с открытым коллектором;
74157 533КП16 4-разрядный селектор-мультиплексор 2x1;
74158 1533КП18 4-разрядный селектор-мультиплексор 2x1 с инверсией;
74160 155ИЕ9 4-разрядный синхронный двоичио-десятичный счетчик;
74162 1533ИЕ11 4-разрядный синхронный десятичный счетчик;
74163 155ИЕ18 4-разрядный синхронный реверсивный двоично-десятичный счетчик;
74164 155ИР8 8-разрядный регистр сдвига с параллельными выходами;
74165 555ИР9 8-разрядный регистр сдвига с параллельным вводом информации;
74166 555ИР10 8-разрядный регистр сдвига с синхронным параллельным вводом;
74169 155ИЕ17 4-разрядный двоичный синхронный реверсивный счетчик;
74173 155ИР15 4-разрядный регистр с тремя состояниями;
74174 155ТМ9 6 D-триггеров;
74175 155ТМ8 4 D-триггера;
74181 155ИПЗ 4-разрядное АЛУ;
74191 155ИЕ13 синхронный реверсивный двоичный счетчик;
74192 155ИЕ6 двоично-десятичный реверсивный счетчик;
74194 155ИР11 4-разрядный универсальный регистр сдвига;
74195 155ИР12 4-разрядный регистр сдвига с параллельным вводом;
74198 155ИР13 8-разрядный универсальный регистр сдвига;
74240 155АПЗ 8 буферов с инверсией и тремя состояниями;
74241 155ЛП4 8 буферов с тремя состояниями;
74244 155АП5 2x4 буферов с тремя состояниями;
74251 155КП15 селектор-мультиплексор 8x1 с тремя состояниями;
74253 155КП12 2 селектора-мультиплексора 4x1 с тремя состояниями;
74257 155КП11 4 селектора-мультиплексора 2x1 с тремя состояниями;
74258 155КП14 4 селектора-мультиплексора 2x1 с тремя состояниями и инвер- сией;
74273 155ИР35 8-разрядный регистр с установкой нуля;
74279 555ТР2 4 RS-триггера-защелки;
74280 1533ИП5 9-разрядная схема контроля четности;
74283 155ИМ6 4-разрядный полный сумматор с ускоренным переносом;
74298 155КП13 4 2-входовых мультиплексора с запоминанием;
74353 555КП17 сдвоенный мультиплексор 4x1 с инверсией и тремя состояниями выхода;
74365 155ЛП10 6 повторителей с управлением по входам и тремя состояниями;
74367 155ЛП11 6 повторителей с раздельным управлением по входам и тремя со- стояниями;
134
Глава 4. Элементная база
74373 155ИР22 8-разрядный буферный регистр с тремя состояниями и потенци- альным управлением;
74374 155ИР23 8-разрядный буферный регистр с тремя состояниями и импульс- ным управлением;
74377 155ИР27 8-разрядный регистр с разрешением записи;
74395 533ИР25 4-разрядный параллельный регистр сдвига.
Ссылки в этом перечне на ИМС других серий вызвано их отсутствием в серии
155, однако здесь это не имеет существенного значения, поскольку речь идет только
о выяснении функционального назначения выводов.
Цифровые ИМС КМОП-серии получили название от своего базового элемента,
в котором используется так называемая комплементарная пара из двух МОП-тран-
зисторов различной проводимости. Такие ИМС характеризуются малым потребле-
нием мощности в статическом режиме (0,02...1 мкВт на вентиль), большим
диапазоном питающих напряжений (3...18 В), высоким входным сопротивлением
(до десятков ТОм), большой нагрузочной способностью, незначительной зависимос-
тью характеристик от температуры, малыми размерами транзисторов в интеграль-
ном исполнении и, как следствие, более высокой степенью интеграции по сравнению
с ТТЛ-микросхемами.
Первые ИМС по КМОП-технологии разработаны фирмой RCA в 1968 г. Эта се-
рия имела название CD4000 (отечественные аналоги — серии 164 и 176), затем по-
следовали серии CD4000A, CD4000B (отечественные аналоги — 564, 561 и 1561),
а также МС14000А и МС14000В фирмы Motorola и 54НС фирмы National
Semiconductor в 1981 г. (отечественный аналог — серия 1564). В программе EWB
в качестве библиотечных используюся ИМС фирмы RCA, большинство которых
приведено в следующем перечне:
4000 176ЛП4 2 элемента ЗИЛИ-НЕ и 1 НЕ;
4001 561ЛЕ5 4 элемента 2ИЛИ-НЕ;
4002 561ЛЕ6 2 элемента 4ИЛИ-НЕ;
4008 561ИМ1 4-разрядный полный сумматор;
4009 176ПУ2 6 преобразователей уровня с инверсией;
4010 176ПУЗ 6 преобразователей уровня без инверсии;
4011 561ЛА7 4 элемента 2И-НЕ;
4012 561ЛА8 2 элемента 4И-НЕ;
4013 561ТМ2 2 D-триггера;
4015 561ИР2 2 4-разрядных сдвиговых регистра;
4017 561ИЕ8 десятичный счетчик с дешифратором;
4019 561ЛС2 4 элемента И-ИЛИ;
4023 561 ЛАЭ 3 элемента ЗИ-НЕ;
4024 176ИЕ1 6-разрядный двоичный счетчик;
4025 1561ЛЕ10 3 элемента ЗИЛИ-НЕ;
4027 561 ТВ1 два JK-тригтера;
4028 561ИД1 двоично-десятичный дешифратор;
4030 561ЛП2 4 элемента ИСКЛЮЧАЮЩЕЕ ИЛИ;
135
Часть I. Система моделирования Electronics Workbench
4040 1561ИЕ20 12-разрядный двоичный счетчик;
4042 561ТМЗ четыре D-триггера;
4043 561ТР2 четыре RS-триггера;
4049 561ЛН2 6 элементов НЕ;
4050 561ПУ4 6 преобразователей уровня;
4066 561КТЗ 4 переключателя (цифрового или аналогового сигнала);
4070 1561ЛП14 4 элемента ИСКЛЮЧАЮЩЕЕ ИЛИ;
4081 1561ЛИ2 4 элемента 2И;
4502 561ЛН1 6 стробируемых инверторов;
4516 561ИЕ11 4-разрядный реверсивный счетчик;
4520 561ИЕ10 2 4-разрядных счетчика;
4556 1561ИД7 двоичный декодер-демультиплексор.
I
Приведем систему обозначений входов и выходов простейших логических эле
ментов, используемых в программе EWB. Обозначения для ТТЛ-серии приводятся
в первых круглых скобках, для КМОП — во вторых, при одинаковых обозначены
ях — без скобок:
Вывод для питания — (Ucc), (Udd);
Общий вывод — (GND), (Uss);
Вывод не подключен — NC;
Входы — (А, В, С...), (I);
Выходы — (Y), (О);
Вход стробирования — G.
Приведем пример обозначения последовательности выводов для 2-входовых
логических элементов:
(1А IB 1Y, 2А 2В 2Y, ЗА ЗВ 3Y, 4А 4В 4Y), (И 12 01,13 14 02,15 16 03,17 18 04).
Для более сложных ИМС определение функционального назначения их выво
дов целесообразно проводить путем сопоставления с отечественными аналогами
[4—10]. Для более оперативной ориентации при работе с цифровыми ИМС приве
дем перечень наиболее распространенных мнемонических обозначений на их функ
циональных схемах и в таблицах состояний [5, 7].
А - В (Parity) — выход равенства операндов А и В.
A/S (Asynchro/Synchro) — вход асинхронного и синхронного режимов.
B/D (Binary/Decimal) — вход переключения счета с двоичного на десятичный.
С (Clock input) — вход тактовых импульсов.
CD (Count down) — вход тактовых импульсов на уменьшение счета (в реверсивных
счетчиках).
Си (Count up) — вход тактовых импульсов на увеличение счета.
СЕ (Clock enable) — вход разрешения для тактовых импульсов.
СЕР (Count enable parallel) — вход параллельного наращивания разрядов счетчика.
СЕТ (Count enable trickle) — вход разрешения счета при наращивании разрядов счет
чика.
CLR (Clear) — вход сброса.
136
Глава 4. Элементная база
С1П, Cn (Carry in) — вход для разряда переноса.
CS (Chip select) — выбор кристалла; определяет доступ к одной из ИМС устройства.
D (Data input) — вход данных триггера, счетчика, регистра.
DSI (Data serial input) — вход последовательных данных.
DS (Data select) — вход выбора данных.
DL, DR (Data left, Data right) — входы для последовательной загрузки (регистра)
слева, справа.
DSL, DSR (Data shift left, Data shift right) — входы для сдвига данных влево, вправо.
Е (Enable) — вход сигнала разрешения.
ЕС (Enable count) — вход сигнала разрешения счета.
ЕЕ (Enable even) — вход сигнала разрешения, счетный.
El (Enable input) — вывод ИМС, по которому дается разрешение на прием данных.
ЕЮ (Enable input/output) — вывод для одновременного разрешения по входу и выходу.
ЕО (Enable output) — вывод для разрешения по выходу.
LSB (Least significant bit) — младший значащий разряд (МЗР).
М (Mode control) — выбор режима “Арифметика-логика” в АЛУ.
РЕ (Parallel enable load) — вход разрешения параллельной загрузки.
P/S (Parallel/serial) — вход переключения режимов параллельной или последова-
тельной загрузки.
R (Reset) — асинхронный сброс данных.
RE (Read enable) — вход разрешения чтения.
S (Set) — установка триггера, счетчика, регистра.
S (Set enable) — разрешение предварительной параллельной записи.
SI (Serial input) — вход последовательный.
SIR, SIL (Serial input right, SI left) — вход последовательный справа, слева.
SR (Synchro reset) — вход сброса синхронно с тактовым импульсом.
ТС (Terminal count) — выход окончания счета.
TCD (Terminal count down) — то же, на уменьшение счета.
TCU (Terminal count up) — то же, на увеличение счета.
Рассмотрим так называемые базовые элементы, из которых набираются са-
мые сложные цифровые ИМС.
Схема базового элемента (вентиля) ТТЛ-серии показана на рис. 4.70, а. Она со-
держит три основных каскада: входной на транзисторе VT1, фазорасщепительный
на транзисторе VT2 с возможностью реализации на нем функции ИЛИ и выходной
усилитель на транзисторах VT3 и VT4 [49].
В качестве транзистора VT1 используется многоэмиттерный транзистор, от-
сутствующий в библиотеке EWB. Принцип действия входного каскада легко понять,
если переходы база-эмиттеры представить в виде диодов, как показано на
рис. 4.70, б. Тогда очевидно, что если входные диоды (входы А, В) подключены
к шипе с высоким напряжением (4...5 В), то ток резистора R1 потечет через коллек-
торный диод в базу транзистора VT2. Если же хотя бы один из входных диодов под-
ключен к земляной шине или к шине с низким напряжением, то таким же образом
137
Часть I. Система моделирования Electronics Workbench
окажется подключенным и резистор R1. На базе транзистора VT1 при этом буде-»'-?:лк
низкое напряжение (превышающее входное на величину напряжения база-эмиттер)^» .-мщ
и базовый ток транзистора VT2 станет равным нулю.
Таким образом, при высоких напряжениях на обоих входах на коллекторе тран-1
зистора VT1 также будет высокое напряжение; если же хотя бы на один из входов пода-1
но близкое к нулю напряжение, то на коллекторе VT1 установится низкое напряжение, I
а это означает, что входной транзистор выполняет логическую функцию И.
Фазорасщепляющий каскад выполнен на транзисторе VT2 и резисторах R2. I
R3 примерно равного сопротивления (около 0,25...0,33 от R1). При этом насыщение
транзистора VT2 достигается уже при достаточно малом коэффициенте усиления то-1
ка. Когда на все логические входы схемы подано высокое напряжение, через пере-1
ход база-коллектора транзистора VT1 в базу VT2 подается управляющий ток. I
в результате чего VT2 открывается. При этом напряжение в точке Е может возрасти I
только до напряжения база-эмиттер транзистора VT4, а напряжение в точке С (на I
коллекторе VT2) снизится до значения, равного сумме напряжений открытых диода - 4/1
VD и транзистора VT3. Если хотя бы на один из логических входов подается низкое
напряжение (сигнал логического нуля), то транзистор VT1 открывается, отключая I
управляющий базовый ток транзистора VT2, в результате чего VT2 закрывается I
и через резисторы R2, R3 протекает только ток утечки, поэтому напряжения в точ- I
ках Е и С близки к нулю и Ucc соответственно. Логическая функция ИЛИ может I
быть реализована при параллельном соединении двух или более подобных фазорас-1
щепительных каскадов (в точках С и Е).
Основным транзистором выходного каскада является транзистор VT4. Когда I
на входы А, В (рис. 4.70, б) подано высокое напряжение, транзисторы VT2 и VT3 от- I
крыты. В этом случае напряжение в точке С будет равно, как указано выше, напря-Я
жению двух открытых р—«-переходов. Если временно исключить из рассмотрения
транзистор VT4 и рассматривать только цепь, содержащую диод VD и транзистор I
VT3, то напряжение в точке S будет ниже напряжения в точке С на величину, рав-
ную напряжению на двух р—«-переходах. При этом напряжение на базе транзисто-I
pa VT4 будет достаточным (именно за счет диода VD) для поддержания егоI
в открытом состоянии, т. е. на выходе S будет действовать напряжение, равное на-
пряжению насыщения транзистора VT4 (сигнал логического нуля).
Если хотя бы на один из входов вентиля А или В подано низкое напряжение, I
то транзисторы VT2 и VT4 закрыты. Через резистор R2 течет только ток утечки 1
транзистора VT2, поэтому напряжение в точке С близко к напряжению питания Vcc. I
а потенциал в точке S ниже потенциала С на величину падения напряжения на двух I
открытых переходах. Падением напряжения на резисторе R2 от базового тока тран- I
зистора VT4 можно пренебречь. Таким образом, при наличии хотя бы на одном из I
входов вентиля низкого напряжения выходное напряжение вентиля ниже напряже- I
ния питания на падение напряжения на двух р—«-переходах. В различных сериях I
ТТЛ используются разные схемы выходных каскадов, однако всегда между шиной I
Ucc и выходом S имеются два последовательно включенныхр — «-перехода. Резистор I
R4 служит для защиты транзистора VT3 при закорачивании выхода S на “землю”. |
Базовый элемент серии 54/74 (155) (рис. 4.71) немного отличается от рассмоЛ
тренного (рис. 4.70), Основное отличие заключается в том, что диод VD включав
в эмиттерную, а не в базовую цепь транзистора. На рис. 4.71 показан также пом
ключенный к выходу мультиметр и имитатор входного сигнала, выполненный sJ
ключе Z. В положении ключа, показанном на рисунке, на входе формируется сиге
нал логической единицы. При переводе ключа в другое положение вход вентилв
138
Глава 4. Элементная база
заключается через резистор Ri к общей шине,
формируется сигнал логического нуля.
результате чего на входе вентиля
в
R1
'/Т1
б)
?ис. 4.70.
Базовая схема элемента ТТЛ-серии (а) и эквивалентная схема многоэмитгерного
транзистора (б)
Рис. 4.71.
Схема базового элемента серии 54/74
•Ucc
Рис. 4.72.
Базовая схема инвертора (а) и элемента ИЛИ-HE (б) КМОП-серни
Рассмотрим теперь базовые элементы ИМС КМОП-серии. Простейшим эле-
ментом этой серии является КМОП-инвертор, схема которого показана на
рис. 4.72, а. Она составлена из КМОП-транзисторов разного типа проводимости.
Транзистор n-типа подключен истоком к нулевому потенциалу, транзистор р-ти-
па — к положительной шине источника питания. Схема реализует логическую опе-
рацию НЕ и обеспечивает работу в режиме положительной логики. В таком режиме
работают большинство ИМС КМОП-серий.
139
Часть I. Система моделирования Electronics Workbench
Для реализации функции ИЛИ-HE (рис. 4.72, 6) используется параллельное I
включение МОП-транзисторов n-типа и последовательное (ярусное) включение I
транзисторов р-тина. Кроме того, каждый из входных транзисторов n-типа связан по I
затвору с транзистором p-типа. Для реализации функции И-НЕ (рис. 4.73) парал- I
лельно включаются транзисторы p-типа и последовательно — транзисторы л-типа. 3.
При подаче на вход схемы ИЛИ-HE сигнала XI высокого уровня откроется транзис- [.
тор VT1 и закроется VT4. В результате на выходе схемы формируется низкий уро- I
вень напряжения. При подаче на оба входа (XI и Х2) сигналов низкого уровня I
транзисторы VT1 и VT2 закрываются, но открываются транзисторы VT3 и VT4, в ре- I
зультате чего на выходе схемы напряжение будет близко к напряжению питания I
Ucc. Таким образом, перезаряд емкости нагрузки, подключаемой между выходным I
зажимом Y и общей шиной, всегда осуществляется через открытый транзистор р- I
или n-типа, что повышает быстродействие схемы.
Мощность, потребляемая схемой на КМОП-транзисторах, расходуется в основ- I
ном во время переходного процесса на заряд выходных паразитных емкостей схемы I
и собственных емкостей транзистора. Поэтому с увеличением частоты переключе- 1
ния, а также при увеличении выходной эквивалентной емкости потребляемая мощ- I
ность возрастает в соответствии с выражением РД1Ш - 2C-F-UJ,, где С — эквивалентная I
емкость нагрузки; F — рабочая частота; Ure — напряжение источника питания.
В статическом режиме потребляемая мощность определяется напряжением I
питания и токами утечки закрытого МОП-транзистора. Для уменьшения мощности, I
потребляемой в динамическом режиме, необходимо в первую очередь снижать ем- I
кость нагрузки.
Минимальное напряжение питания схемы на КМОП-транзисторах определя- I
ется напряжением отпирания р-канального транзистора, так как оно больше, чем I
напряжение отпирания л-канального транзистора. Естественно, что напряжение I
питания выбирается больше напряжения отпирания. Это обеспечивает схеме па I
КМОП-транзисторах высокую помехоустойчивость и быстродействие.
Рис. 4.73. Схема базового элемента И-НЕ КМОП-серии
Схема И-НЕ на рис. 4.73 содержит имитатор входного сигнала на клю-
чах А, В и мультиметр для проверки правильности функционирования схемы. В по-
ложении переключателей, показанных на схеме, на входы А, В подаются сигналы
логической единицы. При этом транзисторы VT1, VT2 будут закрыты, а транзисто-
ры VT3, VT4 — открыты и на выходе Y мультиметром будет фиксироваться низкий
уровень сигнала логического нуля. Достаточно один из выключателей перевести
в другое положение и один из двух нижних транзисторов закроется, при этом на вы-
ходе Y будет фиксироваться высокий уровень сигнала логической единицы, что и со-
ответствует логике работы элемента И-НЕ.
140
Глава 4. Элементная база
Контрольные вопросы и задания
1, Когда и где были созданы первая микросхема и первый микропроцессор?
2. Что из себя представляют ТТЛ- и КМОП-серии цифровых ИМС?
3. Что позволило радикально повысить быстродействие ТТЛ-серии?
4. В чем заключается различие в обозначениях цифровых ИМС зарубежного и оте-
чественного производства?
5. Какое основное преимущество имеют цифровые КМОП-микросхемы по сравне-
нию с ТТЛ и на каких частотах оно проявляется?
6. Какие функции выполняет многоэмиттерный транзистор в ИМС ТТЛ-серии?
7. Из описания процесса формирования на выходе S сигнала логического нуля
в схеме вентиля на рис. 4.70, а не совсем ясно, в каком состоянии при этом нахо-
дится транзистор VT3 — в открытом или закрытом. Для проверки необходимо
при логической единице на входах А, В измерить с помощью мультиметра на-
пряжение на коллекторе VT3, предварительно убедившись, что на выходе S сиг-
нал логического нуля. Если это напряжение равно Ucc = +5 В, то это означает,
что через резистор R4 ток не течет и, следовательно, транзистор VT3 закрыт. Ес-
ли это так, попытайтесь объяснить, почему?
8. Проверьте правильность функционирования схемы на рис. 4.73.
141
Часть II. Моделирование схем и устройств
Часть II. Моделирование
схем и устройств
5. Цепи постоянного тока
Реальные источники электрической энергии можно представить:
1) в виде генератора напряжения, который характеризуется ЭДС Е, численно;
ной напряжению холостого хода и включенной последовательно с внутрен
сопротивлением Ri;
2) в виде генератора тока, который характеризуется током I, численно равным
ку короткого замыкания реального источника, и параллельно подключен
проводимостью Gi.
Переход от генератора напряжения к эквивалентному генератору тока ос^
ствляется по формулам:
I = E/Ri>Gl- 1/R„ (5
а обратный переход от генератора тока к эквивалентному генератору напряжение
по формулам:
Е - I/G„ R, - 1/G,. (5.
У идеального генератора напряжения внутреннее сопротивление Ri равно :
лю, а у идеального генератора тока равна нулю внутренняя проводимость Gi.
Рассматриваемые в этом разделе методы расчета цепей постоянного тока 1
люстрируются примерами, большая часть которых взята из учебного пособия [35].
5.1. Закон Ома
Закон Ома для участка цепи: ток в проводнике I равен отношению падения н;
пряжения U на участке цепи к ее электрическому сопротивлению R:
I - U/R. (5.3)
Закон иллюстрируется схемой на рис. 5.1, из которой видно, что на участь
цепи с сопротивлением R - 100 Ом создается падение напряжения U - 9,09 В, изм
ряемое вольтметром. Согласно (5.3) ток в цепи I = 9,09/100 = 90,9 мА, что и измер:
ет последовательно включенный в цепь амперметр. Отметим, что в рассматриваема
схеме внутреннее сопротивление амперметра выбрано равным 10 12 Ом, т. е. очег
малым, а входное сопротивление вольтметра — 10’2 Ом, т. е. очень большим, чтоб
подключение измерительных приборов к цепи не оказывало сколько-нибудь заме*
ного влияния на результаты измерений.
Отметим назначение ключей К и X на рис. 5.1, управляемых нажатием одн<
именных клавиш клавиатуры.
При
размыкании ключа X в схеме
реализуется
ре-
жим холостого хода, при этом вольтметр U измеряет ЭДС источника Е = 10 В,
а вольтметр Ui имеет нулевые показания. При замыкании ключа К в схеме реализу-
ется режим короткого замыкания и, согласно (5.1), ток короткого замыкания
Io = E/Ri = 10/10 = 1 А. При этом вольтметр Ui измеряет падение напряжения
Ui = lo-Ri = 10 В.
Закон Ома для полной цепи: ток в замкнутой электрической цепи равен ЭДС
источника Е, деленной на сопротивление всей цепи. Применительно к цепи на
142
Глава 5. Цепи постоянного тока
рис. 5.1 ее полное сопротвление равно Ri + R, и на основании закона Ома получаем
I = E/(Ri + R) - 90,9 мА, что и измеряет амперметр.
Отметим, что на дисплее амперметра отображаются только три старшие раз-
ряда измеряемой величины, поэтому результат измерения округляется.
Ri м
Рис. 5.1. Простейшая цепь постоянного тока
Обобщенный закон Ома [35]: ток в замкнутой одноконтурной цепи равен отно-
шению алгебраической суммы всех ЭДС к арифметической сумме всех сопротивле-
ний. Перед расчетом выбирают направление обхода контура и считают это
направление за положительное направление тока. При определении алгебраической
суммы ЭДС со знаком плюс берут те ЭДС, направления которых совпадают с выбран-
ным положительным направлением тока, и со знаком минус — ЭДС с противополож-
ными направлениями.
В качестве примера рассмотрим изображенную на рис. 5.2 одноконтурную цепь,
состоящую из источников напряжения Е1 “ 120 В, Е2 = 40 В и резисторов с сопротив-
лениями R1 « 12 Ом и R2 = 8 Ом. Определим напряжение между точками А и В.
Выберем направление обхода контура по часовой стрелке. В таком случае ЭДС
Е1 войдет со знаком “+”, поскольку ток от Е1 совпадает с направлением обхода (поло-
жительным направлением тока во внешней цепи считается направление от положи-
тельного к отрицательному зажиму источника). При обходе же ветви с источником
Е2 направление обхода не совпадает с направлением тока, который создается этим ис-
точником. Поэтому для схемы на рис. 5.2 ток в цепи I — (El - E2)/(R1 + R2) -
= 80/20 = 4 А. Так как величина тока получилась положительной, то, следователь-
но, направление тока совпадает с выбранным. Если бы результат получился отрица-
тельным, то это означает, что действительное направление тока в цепи
противоположно выбранному.
Напряжение U,b между точками А и В определяется с помощью закона Ома
для участка цепи. Выберем участок А-Е2-В. Для этого участка закон Ома запишется
в следующем виде:
I - (U* - E2)/R2, откуда Ueb = Е2 + I R2 - 40 I- 4-8 = 72 В.
Рис. 5.2. Одноконтурная цепь с двумя источниками напряжения
Контрольные вопросы и задания
1. Сформулируйте закон Ома для участка цепи. Чем он отличается от закона Ома
для полной цепи?
2. Что представляет собой режим холостого хода и режим короткого замыкания?
143
Часть II. Моделирование схем и устройств
3. Для схемы на рис. 5.1 проведите моделирование режимов холостого хода и ко-
роткого замыкания и сравните полученные результаты с расчетными.
4. Рассчитайте напряжение между точками А и В в схеме на рис. 5.2, используя
ветвь В-Е1-А. Обратите внимание на порядок обхода участка цепи.
5. Проведите моделирование схемы на рис. 5.2, уменьшив ЭДС источников Е1 и Е2
в 4 раза.
6. Дополните цепь на рис. 5.3 необходимыми для моделирования измерительными
приборами. Рассчитайте ток в цепи и падение напряжения на участке A-В. Срав-
ните полученные результаты с результатами моделирования. Напомним, что на
графическом обозначении батареи положительный зажим источника напряже-
ния более широкий, чем отрицательный.
£1 R. £2 £3
1*' A 10ft ™ 20ft в Т
—-------.—«-------«-------------—1,|!—
Рис. 5.3. Одноконтурная цепь стремя идеальными источниками напряжения
5.2. Законы Кирхгофа
Первый закон Кирхгофа: алгебраическая сумма всех токов, втекающих в лю-
бой узел, равна нулю. Токи, втекающие в узел, условно принимаются положитель-
ными, а вытекающие из него — отрицательными (или наоборот). Если, например,
в узел втекает ток И, а вытекают токи 12 и 13, то первый закон Кирхгофа может быть
записан в виде выражения: II - 12 - 13 - 0.
Второй закон Кирхгофа: алгебраическая сумма ЭДС любого замкнутого кон-
тура равна алгебраической сумме падений напряжений на всех участках контура.
При применении второго закона Кирхгофа необходимо учитывать знаки ЭДС
и выбранное направление токов на всех участках контура. Направление обхода кон-
тура выбирается произвольным; при записи левой части равенства ЭДС, направле-
ния которых совпадают с выбранным направлением обхода независимо от
направления протекающего через них тока, принимаются положительными, а ЭДС
обратного направления принимаются отрицательными. При записи правой части
равенства со знаком плюс берутся падения напряжения на тех участках, в которых
положительное направление тока совпадает с направлением обхода независимо от
направления ЭДС на этих участках, и со знаком минус — на участках, в которых по-
ложительное направление тока противоположно направлению обхода.
Общая методика применения законов Кирхгофа для расчета сложных много-
контурных цепей такова. Устанавливается число неизвестных токов, которое равно
числу ветвей р. Для каждой ветви задается положительное направление тока. Число
независимых уравнений, составляемых по первому закону Кирхгофа, равно числу уз-
лов q (точек соединения не менее чем трех проводников) минус единица, т. е. q - 1.
Число независимых уравнений, составляемых по второму закону Кирхгофа, равно
числу контуров п = р - q + 1. Общее число уравнений, составляемых по первому
и второму законам Кирхгофа, равно числу неизвестных токов р. Решение этой систе-
мы уравнений и дает значения искомых токов.
Для иллюстрации изложенной методики рассмотрим многоконтурную цепь по-
стоянного тока (рис. 5.4), в которой три узла: А, В и С (q = 3); следовательно, число не-
зависимых уравнений, составляемых по первому закону Кирхгофа, будет на единицу
144
Глава 5. Цепи постоянного тока
меньше, т. е. два. При числе ветвей цепи р = 5 число контуров п = 5 - 3 + 1 = 3; следо-
вательно, по второму закону Кирхгофа можно составить три взаимно независимых
уравнения. Таким образом, общее число независимых уравнений, составляемых по
первому и второму законам Кирхгофа, будет равно числу неизвестных токов в пяти
ветвях схемы.
Выберем положительные направления токов, которые на схеме обозначены
соответствующим включением амперметров. Например, ток II течет справа налево
z втекает в узел А (положительное направление тока), поскольку отрицательная
клемма, отмеченная утолщенной черной линией, находится слева и ток через ам-
перметр будет течь справа налево. Ток 12 вытекает из узла А, поскольку ток через
одноименный амперметр будет течь сверху вниз (к отрицательному зажиму, распо-
ложенному на нижней грани иконки) и т.д.
Составим систему уравнений Кирхгофа:
:.~я узла Л
И - 12 + 13 - 15 = 0;
для узла В И - 13 - 14 = 0;
Я-тя контура ABFA El + Е2 = Il RI - I3R3;
для контура АВСА ЕЗ - - I3-R3 + I4R4 + I5R5;
"я контура ADCA Е2 - 12 R2 + I5R5.
После подстановки в полученные уравнения числовых значений они приобре-
тают следующий вид:
II - 12 + 13 - 15 = 0;
II - 13 - 14 = 0;
611 - 1013 = 20;
-013 + 2,514 + 1515 = 5;
512 + 1515 = 70.
Решая полученную систему уравнений, будем иметь: 11 = 5 А; 12 = 8 А; 13 - 1 А;
Z. = -6 А; 15 = 2 А, что соответствует показаниям приборов. Отрицательный знак для
жжа 14 означает, что его истинное направление противоположно принятому.
Рве. 5.4. Многоконтурная цепь постоянного тока
Контрольные вопросы и задания
1. Сформулируйте первый и второй законы Кирхгофа. Чем отличается второй за-
кон Кирхгофа от закона Ома для полной цепи?
Проведите расчеты по определению токов в ветвях с использованием законов
Кирхгофа для цепей (рис. 5.5). После подключения к схемам необходимых изме-
145
Часть II. Моделирование схем и устройств
рительных приборов проведите их моделирование. Сравните полученные данны
с результатами расчетов.
а) б)
Рис. 5.5. Двухконтурная (а) и трехконтурная (б) цепи постоянного тока
5.3. Методы контурных
токов и узловых потенциалов
Метод контурных токов (метод Максвелла) напоминает метод расчета с и(
пользованием законов Кирхгофа, однако он несколько проще и поэтому получи
большее распространение на практике при расчетах многоконтурных цепей, состою
щих из п независимых контуров. Определение токов в ветвях сводится к решени!
системы п - р - q + 1 уравнений для контурных токов In, I2k, I»...; действительны
же ток в каждой ветви находится как алгебраическая сумма контурных токов, пре
текающих через соответствующую ветвь. Выбор направлений контурных токов пр<
изволен. Каждая из ветвей сложной электрической цепи должна войти хотя б:
в один из анализируемых контуров.
Для иллюстрации метода обратимся к схеме на рис. 5.6, а, на которой выбран
ныс направления контурных токов обозначены стрелками, а токи в ветвях конту
ров — расположением входных зажимов амперметров.
Составим систему уравнений для контуров:
El - Е2 - ЕЗ = IIk(Rl + R2) - I2kR2;
Е2 - Е4 - I*(R2 4- R5 + R4) - InR4 - IlkR2;
-3 - E4 = I3k(R6 + R4) + I*R4.
После подстановки числовых значений получим:
60 = 20Ilk - 101*;
24 - - 10IIk 4- 221* + 7I3k;
-6 - 71* + 221*.
Решив эту систему уравнений, найдем контурные токи:
Ilk - 5 А, I* = 4 А, 13к - -2 А.
Теперь найдем истинные токи во всех ветвях. В ветви, где действует ЭДС Е1, ис
тинный ток II имеет направление контурного тока Ilk и равен ему: И Itk = 5 А. В вет
ви с сопротивлением R5 истинный ток 15 имеет направление контурного тока 12
и равен ему: 15 = 1а = 4 А. В ветви с сопротивлением R6 истинный ток 16 имеет на
правление, противоположное контурному току I3k, и равен 16 = -I3k = 2 А. В ветв:
с сопротивлением R2 истинный ток 12 получится наложением контурных токов 1
и I* и будет иметь направление большего из них, т. е. 12 - Ilk - I* - 1 А. В ветви с сс
противлением R4 истинный ток 14 получится наложением контурных токов I* и I
146
Глава 5. Цепи постоянного тока
будет иметь направление большего из них, т. е. 14 - + I3k - 4 + ( -2) = 2 А. В вет-
ж.. где действует ЭДС ЕЗ, истинный ток 13 получится наложением контурных токов
\ и I3k и будет иметь направление тока Ilk, т. е. 13 = Ilk + I8k — 5 + ( 2) = 3 А. Из срав-
Еения полученных расчетных данных с показаниями приборов на рис. 5.6, а видно,
«то они полностью совпадают.
Заметим, что схемы на рис. 5.6 выполнены в среде EWB 5.0 и в этом случае
з отличие от EWB 4.1) во избежание ошибок при моделировании один из ее узлов не-
людимо заземлить, поскольку в EWB расчет ведется с использованием метода узло-
• потенциалов, в котором один из узлов принимается за опорный и относительно
«его составляется п = q - 1 уравнений. Заметим также, что метод контурных токов
«метод узловых потенциалов в какой-то степени дополняют друг друга. Целесообраз-
всть использования одного или другого метода зависит от конфигурации схемы,
| именно от того, что является меньшим — число независимых контуров п " р- q + 1
Z-~i число независимых узлов п = q - 1. В первом случае целесообразно использовать
ктод контурных токов, во втором — метод узловых потенциалов. Из схемы на
>-• 5.6, б видно, что при использовании метода контурных токов нам пришлось бы
:<тавить четыре уравнения, тогда как при использовании метода узловых потенци-
ал эв их всего два (в качестве опорного узла используется узел 3 — он заземлен, т. е.
потенциал равен нулю) [35]:
V»G„ - V,G12 = El-G, + Е4 G4.
-V,GZ1 + V2G22 - -E1G, + E2G2 -I- E3 G„
L* G„ = 1/(R1 + R7) + 1/R5 + 1/R4 + 1/R6 - 1/30 + 1/15 + 1/8 + 1/40 = 0,25 1/Ом,
’ _ = 1/(R1 + R7) + 1/R5 t- 1/R2 + 1/R3 = 1/30 + 1/15 + 1/30 + 1/6 = 0,3 1/Ом — сум-
ма проводимостей, подключенных к узлам 1 и 2 соответственно; G12 - G21 = 1/(R1 + 7)
- 1 R5 - 1/30 + 1/15 = 0,1 1/Ом — сумма проводимостей, соединяющих узлы 1 и 2;
= 1/(R1 + R7) = 1/30 1/Ом, G2=l/R2 = l/30 Ом, G, - 1/R3 - 1/6 1/Ом,
= 1/R4 = 1/8 1/Ом — проводимость ветвей с ЭДС El, Е2, ЕЗ и Е4 соответственно;
зрэизведепия E.G, берутся со знаком плюс, если ЭДС в ветвях действуют в направле-
Е2 опорного узла, и со знаком минус — в противном случае.
При подготовке схемы на рис. 5.6, б были включены опции Show reference ID
ж Show nodes меню Circuit/Schematic Options...; при этом обозначения компонентов
ручаются двойными (через черту “/”): в “числителе” — назначенные составителем
Гхемы, в “знаменателе” — присвоенные программой; цифры в округленных прямо-
угольниках — номера точек (нод) соединения компонентов, в которых программой
жределяются потенциалы относительно опорного (заземленного) узла 3 и затем вы-
роятся на экран по команде Analysis/DC operating Point (рис. 5.6, в); параметры
branch...V4#branch определяют токи в ветвях с ЭДС Е1...Е4.
Вернемся однако к расчетам. После постановки числовых значений в уравне-
ея найдем потенциалы узлов 1 и 2: V, = -80 B,V2 « -140 В, что совпадает с показа-
£2_?ми вольтметров Ши U2, подключенных к указанным узлам. Токи в ветвях,
икределяемые с помощью закона Ома:
II = (V, - V2 - E1)/R1 = (-80 + 140 - 30)/30 = 1 А;
12 = (V3 - V2 + E2)/R2 - (0 + 140 + 10)/30 = 5 А;
13 - (V2 - V3 - E3)/R3 = (0 - 140 + 200)/6 - 10 А;
14 = (V3 - V, - E4)/R4 - (0 + 80 - 56)/8 = 3 А;
15 - (V1 - V2)/R5 = (-80 + 140)/15 - 4 А;
16 = (V3 - V,)/R6 = (0 + 80)/40 - 2 А,
- эпадают с показаниями соответствующих амперметров.
147
Часть II. Моделирование схем и устройств
а)
R7/R1
Е1М
30 V
R1/R2
R5JR3
15Q
^—>200
U2/M2Z'A"~I 2
1 I) У|[—«
0^15ч-12)/М7
Node/Branch VoItage/Current|
1 -80
2 -90
3 -120
б 10
7 -200
8 -56
9 -80
10 -140
11 -140
12 -80
1-1 -140
15 -140
16 -80
Vl#brunch 3
V2#branch -5
V3#branch -10
Vd^branch 1
в)
Рис. 5.6. Трех- (я) и четырехконтурная (б) цепи и результаты расчета последней (в)
I
Е
I
I
3
Е
Е
ч
-:ес]
зла:
lbh:
:раг
:за.
aci
- Г
3
н«
TI
3;
Р<
П]
сс
В
П
гд
148
Глава 5. Цепи постоянного тока
Контрольные вопросы и задания
1. В чем заключается отличие метода контурных токов от метода расчета с исполь-
зованием законов Кирхгофа для аналогичных целей?
2. Выполните расчет токов в ветвях схемы на рис. 5.6 методом контурных токов
при Е1 = 50 В, Е2 = 15 В, ЕЗ “ 5 В и Е4 = 3 В. Сравните полученные данные с ре-
зультатами моделирования.
3. Выполните расчет токов в ветвях схем на рис. 5.5 методом контурных токов.
4. Выполните расчет и моделирование схемы на рис. 5.6, б при выборе узла 1 в ка-
честве опорного.
5.4. Метод наложения
При методе наложения ток в любой ветви схемы рассчитывается как алгебра-
ическая сумма токов, вызываемых в ней каждой ЭДС в отдельности. При этом пред-
лагается', что при анализе воздействия одной ЭДС остальные ЭДС принимаются
вными нулю и при расчетах учитываются только их внутренние сопротивления.
При использовании метода наложения потребуются некоторые навыки в пре-
разовании электрических цепей. Во всех случаях замена одних схем другими, эк-
пвалентными им, не должна приводить к изменению токов и напряжений на
астках цепи, не подвергшихся преобразованию. Наиболее распространенные и ча-
о употребляемые преобразования цепей сводятся к следующим:
1. Замена последовательных сопротивлений одним эквивалентным. Эквивалент-
ное сопротивление R цепи, состоящей из последовательно соединенных сопро-
тивлений R„ Rj...Rn, равно сумме этих сопротивлений:
R = R, + R2 + ... + Rn. (5.4)
2. Замена параллельных сопротивлений одним эквивалентным. Сопротивления па-
раллельны, если все они присоединены к одной паре узлов. Эквивалентное со-
противление R цепи, состоящей из ряда параллельно соединенных
сопротивлений, определяется из формулы суммирования проводимостей:
1/R = 1/R, + 1/R, + ... + 1/Rn. (5.5)
В случае двух параллельно соединенных сопротивлений R = R1R2/(R1 + R2).
Преобразование треугольника сопротивлений (рис. 5.7, а) в эквивалентную звез-
ду сопротивлений (рис. 5.7, б) и наоборот. Формулы преобразований имеют сле-
дующий вид:
Ri = R12 R31/A; R2 - R23-R12/A; R3 = R31R23/A;
R12 = RI + R2 + R1R2/R3; R23 - R2 4- R3 + R2 R3/R1;
R31 - R3 + R1 + R3 R1/R2,
где А - R12 + R23 4- R13.
а) б)
:. 5.7. Включение сопротивлений треугольником (а) и звездой (б)
149
Часть II. Моделирование схем и устройств
Вернемся к методу наложения и рассмотрим его применение для схемы на
рис. 5.8. В этой схеме все источники напряжения идеальны, поэтому их внутренние
сопротивления равны нулю. Предположим, что действует только ЭДС Е1, а вместо Е2
будет просто проводник (короткое замыкание). В этом случае ЭДС Е1 нагружена на
эквивалентное сопротивление R1>x> = R2-R6/(R3 + R6) + R4-R5/(R4 + R5) =» 8 Ом.|
При этом токи в ветвях составят:
1Г - El/R,^ - 96/8 = 12 А;
13' = I1'R6/(R3 + R6) = 12-6/9 = 8 А;
14' - I1'R5/(R4 + R5) - 12-10/25 = 4,8 А;
12' - 13' - 14' = 8 - 4,8 = 3,2 А;
16'=11'-13'= 12-8 = 4 А;
15' = И' - 14' - 12 - 4.8 = 7,2 А.
R5
102
Рис. 5.8. Схема многоконтурной цепи
Перейдем ко второму этапу, когда активной является ЭДС Е2, а Е1 — закор<
чена. В этом случае ЭДС Е2 нагружена на эквивалентное сопротивлени
R2,.B - R3-R4/(R3 + R4) + R5-R6/(R5 + R6) - 6,25 Ом. При этом токи в ветвях им<
ют следующие значения:
12" - E2/R2W, = 75/2,5 = 12 А;
13" = I2"R4/(R3 + R4) - 12-15/18 = 10 А;
16" = I2"R5/(R5 + R6) = 12-10/16 - 7,5 А;
И" = 13" - 16" = 10 - 7,5 = 2,5 А;
14" = 12" - 13" = 12 - 10 => 2 А;
15" = 12" - 16" - 12 - 7,5 = 4,5 А.
Складывая алгебраически токи, полученные от действия каждой ЭДС в о’
дельности, найдем истинные токи в каждой ветви:
И - II' + И" = 12 + 2,5 - 14,5 А;
12 = 12' + 12" - 3,2 + 12 = 15,2 А;
13 = 13' + 13" = 8 + 10 = 18 А;
14 = 14' - 14" = 4,8 - 2 - 2,8 А;
15 = 15' + 15" = 7,2 + 4,5 = 11,7 А;
16 = 16" - 16' - 7,5 - 4 = 2,5 А,
что совпадает с результатами моделирования.
150
Глава 5. Цепи постоянного тока
Контрольные вопросы и задания
Какие законы используются при расчете токов ветвей методом наложения?
Выполните расчет токов в ветвях схемы на рис. 5.8 методом наложения при
Е1 = 48 В и Е2 = 45 В. Сравните полученные данные с результатами моделиро-
вания.
Выполните расчет токов в ветвях схем на рис. 5.5 методом наложения и проверь-
те результаты расчета путем моделирования.
Задавшись определенными значениями сопротивлений резисторов и используя
мультиметр в режиме омметра, проверьте истинность формул (5.4), (5.5) и фор-
мул, относящихся к схемам преобразования на рис. 5.7.
5.5. Метод эквивалентного генератора
Метод эквивалентного генератора напряжения называют иногда методом ко-
:ого замыкания и холостого хода или методом активного двухполюсника. С его
ющыо определяется ток в определенной ветви схемы. Назовем ее АВ и предполо-
что она содержит одно сопротивление R. Для нахождения тока в этой ветви
[ыкают ветвь и любым из рассмотренных выше методов определяют разность по-
,налов Uvx на зажимах А, В разомкнутой ветви (режим холостого хода). Затем
исляется сопротивление короткого замыкания R^, равное эквивалентному со-
тивлению остальной цепи. При этом имеющиеся в схеме источники должны
м
ь выключены и заменены их внутренними сопротивлениями, а питание схемы
цествляется от постороннего источника, подключенного к зажимам А, В иссле-
мой ветви. Следующим этапом является режим короткого замыкания, при кото-
определяется ток IKJ в ветви АВ при закороченных зажимах А, В. Заметим, что
этап не обязателен, если сопротивление Rk3 удалось определить другим, более
:им способом. Если же режим короткого замыкания все-таки пришлось приме-
3, то в этом случае
R« - U„/I« (5.6)
комый ток в ветви определяется из выражения:
l = u„/(R + RM). (5.7)
Перейдем к конкретному примеру. Для этого воспользуемся схемой на
5.9, которая представляет собой мостовую схему из двух плеч, образованных ре-
горами RI, R2, R3, R4. В одну диагональ моста включен идеальный источник на-
жения Е и переключатель, управляемый клавишей Е клавиатуры. В другую
гональ моста включен резистор R5 с ключом X, который управляется одноимен -
клавишей. Нашей задачей является определение тока через резистор R5 в рабо-
состоянии, когда ключ X замкнут. В положении ключа X, показанном на схеме
оч разомкнут), реализуется первый этап моделирования — режим холостого хо-
ветви CD. В этом режиме через сопротивления RI, R2 протекает ток Г, а через со-
:тивления R3, R4 — ток I", которые равны соответственно
Г - E/(R1 + R2) - 120/75 = 1,6 А;
Г' = E/(R3 + R4) = 120/150 - 0,8 А.
При этом потенциалы в точках С и D определяются падениями напряжений на
шеторах R1 и R3:
U„ - I'Rl =- 1,6-60 = 96 В;
= T R3 = 0,8-90 = 72 В.
151
Часть II. Моделирование схем и устройств
Располагая значением потенциалов в точках С и D, нетрудно найти и напря
жение между ними, которое равно напряжению холостого хода:
Utd = U„ - U„ - = 96 - 72 - 24 В,
что соответствует показаниям мультиметра на рис. 5.9.
Рис. 5.9. Мостовая схема в режиме холостого хода
Рис. 5.10. Мостовая схема в режиме определения сопротивления короткого замыкания
Теперь найдем сопротивление короткого замыкания. Как отмечалось выпи
сделать это можно двумя способами.
1. Путем непосредственного расчета с использованием данных схемы. В этом сл
чае источник Е нужно выключить, оставив его внутреннее сопротивление, ра
ное в данном случае пулю. Сопротивление короткого замыкания будет рав)
сопротивлению цепи между точками С и D:
Ro = R1R2/(R1 + R2) + R3 R4/(R3 + R4).
При моделировании на схеме рис. 5.9 ключ Е необходимо перевести в друг
положение, а мультиметр — в режим омметра. Результаты таких действий показ
ны на рис. 5.10, откуда видно, что расчетные данные полностью подтверждают
при моделировании.
152
Глава 5. Цепи постоянного тока
2. Искомое сопротивление можно найти и другим путем. Для этого нужно замк-
нуть точки С и D накоротко, вычислить ток I, „ протекающий через короткозамк-
нутый участок, и сопротивление короткого замыкания определить по формуле
(5.6). Для моделирования такого режима необходимо ключ Е вернуть в исходное
состояние, а мультиметр перевести в режим амперметра. В результате моделиро-
вания (рис. 5.11) получаем: ток короткого замыкания равен 0,5 А. Тогда на осно-
вании формулы (5.6) R,., *= 24/0,5 = 48 Ом.
R1
602
R2
152
F3
902
Рве. 5.11. Мостовая схема в режиме короткого замыкания исследуемой ветви
Мостовая схема в рабочем состоянии
Рже. 5.12.
Теперь можно определить и искомый ток, используя формулу (5.7):
15 - U„/(R5 Ч- Rk) 24/(12 + 48) - 0,4 А.
Для моделирования в таком режиме ключ X необходимо замкнуть, а мульти-
етр перевести в режим вольтметра. В результате моделирования получаем
ис. 5.12): падение напряжения на резисторе R5 равно 4,8 В, т. е. ток в цепи равен
,8/12 = 0,4 А, что совпадает с расчетным значением.
Кроме метода эквивалентного генератора напряжения, существует также
метод эквивалентного генератора тока. Его применение основано на взаимных
153
Часть II. Моделирование схем и устройств
преобразованиях источника тока и источника напряжения с использованием фор-
мул (5.1) и (5.2). Поскольку этот метод на практике не нашел широкого распростра
нения, то его рассматривать не будем.
Контрольные вопросы и задания
1. Какие законы теории цепей используются в методе эквивалентного генератора?
2. Проведите расчеты и моделирование рассмотренной мостовой схемы во всех ре-
жимах при сопротивлении резистора R5 = 6 Ом.
3. Рассчитайте ток через сопротивление R2 схемы на рис. 5.5, б методом экви
лентного генератора напряжения, сопровождая расчет моделированием.
5.6. Моделирование
механических сил и моментов
Схемы для воспроизведения механических сил и моментов с использование
цепей постоянного тока показаны на рис. 5.13, на котором силы имитируются напр?
жением 4-U1 (положительное направление) и -U2 (противоположное направление
а плечи сил — сопротивлениями резисторов RI, R2. Если силу измерять в ныот
нах (Н), а длину плеча в метрах, то масштабами модели будут Кг = П/B и Ки = м/С1
где См — сименс, единица проводимости, обратно пропорциональная ому, т. е. 1 ме'
длины эквивалентен 1/10° = 105 См. Для схемы на рис. 5.13, а результирующая chj
Fp = Fl - F2 = 5- 2 = 3 Н, что соответствует показаниям вольтметра, измеряющее
выходное напряжение суммирующего усилителя Uo ~ Ul Ro/Rl - U2-Ro/R2
Ш - U2 = 3 В. Значение Uo определяется с точностью, определяемой внутренним к
эффициентом усиления операционного усилителя OU (параметр А в диалоговом oki
параметров ОУ). В данном случае А - 10е и, следовательно, при Uo = 3 па входе (в то
ке А) будет действовать напряжение Ua = 3 мкВ, что и будет абсолютной ошибкой в о:
ределении суммируемых токов в точке А. Например, для источника U1 она будет рав1
3.10V5 = 6.10т«-610*%. Заметим, что каждый из источников может отключат)
с помощью переключателей 1 и 2, управляемых клавишами 1 и 2 клавиатуры.
б)
Рис. 5.13. Схемы для моделирования сил и моментов
Изменение сопротивления R2 (увеличение плеча силы F2) из условия U1/R1
U2/R2 приводит к тому, что Fp « 0 (см. рис. 5.13, б).
Схемы на рис. 5.13 позволяют моделировать сложение или вычитание с:
находящихся на одной линии. Для моделирования сил, действующих под разны
углами, могут быть использованы схемы для суммирования и вычитания синус
дальных колебаний (см. разд. 6.1).
154
Глава 5. Цепи постоянного тока
5.7. Законы Ома
и Кирхгофа для магнитных цепей
При расчетах магнитных цепей используются законы, которые совпадают по
форме с основными законами электрических цепей [83]. При этом используются сле-
дующие аналогии магнитных и электрических величин: магнитный поток Ф — элек-
трический ток I; намагничивающая (магнитодвижущая) сила F — электрическая
ЭДС; магнитное сопротивление R4 — электрическое сопротивление R. Для иллюстра-
। ции методов расчета магнитных цепей воспользуемся схемой дифференциального
| индуктивного преобразователя (рис. 14, а), состоящего из двух П-образных магнито-
| проводов 1,2 с размещенными на них катушками с числом витков w> и w2 и подвиж-
ного (среднего) магнитопровода 3, перемещающегося в горизонтальном направлении
। з воздушном зазоре между основными хмагнитопроводами 1, 2 в соответствии с изме-
j нением контролируемой величины (давления, ускорения и т.п., см. гл. 16); при ее ну-
левом значении (в исходном состоянии) воздушные зазоры 5, = 62. Параметры
эквивалентной электрической схемы преобразователя (рис. 5.14, б) определяются
следующими соотношениями (потоками рассеяния пренебрегаем): ЭДС — El = F, =
= Il-Wij Е2 = F2 = I2-w2; сопротивления резисторов — RI = R41 = h/ц,,S,; R2 = Rm2 =
.УцЛ; R3 R^ - 1,/цД; R4 = 2Rd, = 25,/щЗ,; R5 - 2R41 = 2S2/Mt,S2, где Rul, RM1, Rm3 -
магнитные сопротивления левого, правого и среднего магнитопроводов; RM, RM, —
।магнитные сопротивления воздушных зазоров (цифра 2 соответствует последова-
|тельно включенным двум зазорам — вверху и внизу); 1П 1г, 13 — средняя длина маг-
нитного пути в соответствующем магнитопроводе; ц, = ццл — магнитная
проницаемость ферроглагнитного материала; ц — относительная магнитная прони-
цаемость материала (для сталей ц = 200...5000); щ « 1,257-10^ В-с/А-м — магнитная
постоянная (магнитная проницаемость воздушных зазоров); SI, S2, S3, — сечения
/агнитопроводов и воздушных зазоров (в данном случае SI = S2 - S3 = S).
Для практического примера примем: И = 12 -= 102 A; w, = w2 = 1000 витков;
1 = 12 = 0,08 м; 13 « 0,03 м; S = 310.4 м2; 5; = 0,6-103 м; бг - 103 м; ц = 3000. Рассчиты-
ваем: Е1 =Е2 = 102-1000 = 10 A; RI - R2 в 0,08/3000-1,257-10°-3 10 * = 7,07 104 А/В-с;
R3 = 0,03/3000 1,257-10е-3-10' = 2.65104 A/В с; R4 = 2 0,0006/1,257-1 (Р-3-104 -
« 3,18210е А/В-с; R5 « 2-0,001/1,257-1 О^-З-Ю4 - 37,510е А/Вс.
Закон Ома для магнитной цепи: общий поток замкнутой магнитной цепи Ф
I прямо пропорционален намагничивающей силе F и обратно пропорционален магнит-
зому сопротивлению RM, всей цепи, т. е. Ф = F/R„. При “отключенном” правом маг-
нитопроводе (переключателем Z на рис. 5.14, б) R4<= RI + R3 -I- R4 = 3279,2-10’ А/В-с
Ф = 10/3279,2 10я = 3,05-106 В с = 3,0510 й Вб, где Вб — вебер, единица магнитного
истока (ранее использовался Мкс (максвелл) = 10s Вб).
Закон Ома для участка цепи: магнитный поток в магпитопроводе Ф равен от-
±ошению падения магнитного потенциала П-1 - F, или Н-5 = F. на ферромагнитном
--и воздушном участке цепи к ее магнитному сопротивлению R( или Rs. Из этого за-
кона следует, что напряженность магнитного поля на данном участке, в частности,
• среднем магнитопроводе Н3 = Ф3 Ри3/13 = 3,05-10е-26,5-10’/0,03 - 2,694 А/м, а паде-
йе магнитного потенциала Н3-13 = 2,694 0,03 = 80,8 мА.
Для характеристики магнитного поля используется еще одна часто использу-
«ая величина — индукция В, связанная с напряженностью соотношением В = ц0Н
измеряемая в теслах (Тл « В-с/м2); ранее использовался гаусс (Гс = 104 Тл).
Первый закон Кирхгофа для магнитной цепи формулируется так же, как
для электрической: сумма магнитных потоков, сходящихся в каком-либо узле,
155
Часть II. Моделирование схем и устройств
равна нулю. Как следует из рис. 5.14, в, сумма токов в узле АН - 12 - 13 = 0; направ-
ление токов определяется, как и ранее, соответствующим включением амперметров.
Что же касается выбора направления магнитных потоков, то они определяются по
правилу буравчика [72]: если буравчик ввертывается по направлению тока, то на-
правление его вращения определяет направление магнитных силовых линий, что
и соответствует показанному на рис. 5.14, а направлению потоков Ф, и Ф2.
а)
о- TO.Tkfi
Рис. 5.14. Магнитная цепь (а) и схемы се замещения (б, в, г)
Второй закон Кирхгофа: сумма падений магнитных потенциалов для замкнутой
магнитной цепи равна алгебраической сумме намагничивающих сил (см. рис. 5.14, г).
Таким образом, используя эквивалентную схему магнитной цепи и закон
Ома и Кирхгофа, можно составить ряд уравнений, из которых определяются знач
ния потоков в разных частях магнитной системы при заданной намагничивают*
силе (НС) катушки. Аналогично решается и обратная задача: определение требу
мой НС катушки при заданных значениях рабочих потоков.
Основные трудности при расчете магнитных цепей возникают при опреде;
нии магнитного сопротивления, которое зависит не только от величины НС (в сос
ветствии с кривой намагничивания материала), но и от формы магнитопроводс
При этом наибольшие трудности возникают при расчете магнитного сопротивлен)
воздушных зазоров, что приводит к необходимости использования приближена!
методов анализа [82].
Контрольные вопросы и задания
1. Назовите величины, используемые при расчете магнитных цепей. Почему их к
личество больше по сравнению с электрическими цепями?
2. Какой конструкции магнитной системы соответствует схема на рис. 5.14, г?
3. Составьте уравнение цепи на рис. 5.14, г, используя второй закон Кирхгос
и проверьте расчетным путем показанные на нем результаты моделирования.
4. Проведите расчет цепи на рис. 5.14, в, используя метод наложения.
5. Разработайте конструкцию магнитной цепи, соответствующую схеме замен
ния на рис. 5.6.
156
Глава 6. Цепи переменного тока
6. Цепи переменного тока
В этой главе рассмотрим простейшие цепи переменного тока, иллюстрируя их
примерами, частично заимствованными из учебного пособия [35J.
Приведем перечень основных параметров переменного тока:
1. Мгновенное значение синусоидального сигнала:
A(t) « Am sin (wt + <p),
где t — текущее время; AR — амплитуда; ф — начальная фаза; со — угловая частота.
Период Т, угловая частота со и циклическая частота F связаны соотношениями:
У - 1/Т; со = 2rcF = 2я/Т.
2. Действующие (эффективное) значения синусоидального тока и напряжения:
!»=!./72 =0,7071,.;
Ua=Um/T2 - 0.707U,.,
где Im, U„, — амплитуды тока и напряжения.
3. Средние значения синусоидального тока и напряжения за положительную по-
луволну:
Icp- 2Im/n- 0,637Im;
Ucp=2Um/n= 0,637Um.
Среднее значение синусоидально изменяющейся величины на целом периоде
то нулю.
6.1. Операции с гармоническими колебаниями
Сложение и вычитание синусоидальных токов и напряжений
Как известно из тригонометрии, при сложении двух колебаний синусоидаль-
i формы
А, - Almsin(wt + В() и А2- A2msin(wt + В2)
азуется синусоидальный сигнал той же частоты
А = Awsin(cot + В),
А„= <^А1т + А2т + 2А1л,А2и1 cos(Bj- В2);
tgB - (AImsinBl + A2asinB2)/(AlJScosB1 + AtecosB2).
Следует заметить, что формула для Амсправедлива как для амплитудного, так
эффективного значения тока и напряжения, в чем нетрудно убедиться, подставив
-эту формулу эффективные значения А1П1и А2т. Это замечание связано с тем, что да-
ее мы будем пользоваться именно эффективными значениями токов, взятыми в
whom случае из схемы на рис. 6.1.
Определим в качестве примера сумму и разность двух синусоидальных токов
1 = 1 OO*sin(d)t + 30°) мА, I2“ 12O-sin(cot - 45") мА. Используя приведенные выше фор-
мулы, для суммы токов получим:
Am = 71OO2 +1202 +2-100 120 cos75° = 175 мА;
tgB - [100sin30’ + 120sin(-45‘)]/[100cos30" + 120cos(-45‘)] - -0,1793,
ткуда фаза В = -10 10'.
157
Часть II. Моделирование схем и устройств
Для вычисления разности токов воспользуемся соотношением: -since = sm(a + 1J
В этом случае вычитаемый ток -I2lll = 120sin(a)t — 135’). Таким образом, задача выч1
ния второго тока из первого сводится к суммированию с учетом проделанных преобр!
ваний. Для разности токов в таком случае получим:
1И* V1002 + 1202 + 2100120cos(-105’) =135 мА;
tgB = (100sin30* + 120sinl35‘)/(100cos30’ + 120cosl35’) - 76,6; В = 89,2
В схемах для моделирования суммирования и вычитания синусоидальных
ков (рис. 6.1, а, б) использованы источники переменного тока, в диалоговом окне
торых можно задать частоту, ток и фазу в градусах (см. разд. 4.1). Однако задав
отрицательные значения фазы в программе не допускается. Поэтому для тока 12 в с:
ме суммирования задана начальная фаза 315", поскольку sin(~45°) = sin(360“-45
Для измерения токов в каждую ветвь включены амперметры в режиме измерения
ременного тока (АС). Как видно из показаний амперметра, измеряющего ток Is,
зультаты суммирования токов совпадают с результатами расчетов.
Для измерения фазы используем осциллограф, в канале А которого регист
руется сигнал от источника И, создающий на резисторе R1 падение напряже!
I1R1 = 0,1 1 000 = 100 В. Канал В осциллографа с помощью ключа X может подк,
чаться к резисторам R2, R3, сопротивления которых рассчитаны таким образ
чтобы токи II, Is создавали на них падения напряжения тоже 100 В (для удобс
проведения осциллографических измерений). Пользуясь переключателем X, моэ
контролировать фазовые соотношения между токами II, 12, Is. В положении п<
ключателя, показанном на рис. 6.1, такие соотношения можно регистрировать м
ду токами II и Is.
Результаты осциллографических измерений, полученные при моделирова!
процесса суммирования двух синусоидальных токов, показаны на рис. 6.1, в (для
вышения точности отсчета осциллограф включен в режиме ZOOM). Визирные лш
ки поставлены в точки пересечения синусоидами оси времени (визирная линейка 1
для тока И, 2 — для тока Is). Из правого цифрового табло видно, что временной про:
жуток между визирными линейками составляет Т2 - Т1 = 0,1125 с. Поскольку пе
од колебаний исследуемых сигналов Т = 1 с (частота 1 Гц), то измеренный промежу
времени, пропорциональный разности начальных фаз токов II, Is, в градусах мо:
быть определен из очевидного соотношения: В1 - В 36О’(Т2 - Т1)/Т = 360(0,1125)
= 40,5’ 40’30', откуда фаза суммарного тока В = -10’30', что отличается от расчет
го на 19'. Эта разница (около 3%) объясняется погрешностью отсчета временного 1
тервала при установке визирных линий (так называемая погрешность параллакса).
Из схемы на рис. 6.1, б видно, что результаты моделирования вычитания
ков полностью совпадают с данными расчета. Обратите внимание: в этой схеме
противление резистора R3 изменено для удобства проведения осциллографичесн
измерений. Что же касается фазы, то она измеряется, как и в случае суммировав
токов, в режиме ZOOM осциллографа.
Рассмотрим теперь процесс сложения напряжений U1 - 100sin(157t + 30:):
и U2 = 12Osin((ot — 45’) мВ. Схема измерений для этого случая (рис. 6.2) выполш
в виде суммирующего устройства на операционном усилителе OU. Коэффициент i
редачи для каждого источника напряжения равен R/R1 = R/R2 = 1 (см. гл. 1
По существу с помощью суммирующего усилителя процесс сложения напряже!
сведен к процессу суммирования токов II = U1/R1 и 12 = U2/R2 па резисторе R. I
этом справедливость приведенных формул обеспечивается тем, что потенциал i
ки А за счет большого коэффициента усиления ОУ практически равен нулю.
158
Глава 6. Цепи переменного тока
в)
6.1. Схемы суммирования (а) и вычитания (б) двух синусоидальных токов и осцилло-
граммы токов II (A), Is (В) при суммировании (в)
6.2. Схема сложения двух синусоидальных напряжений
Тригонометрические функции
sin2a + со$га = 1; схема для моделирования этой зависимости с использованием
полиномиального источника (коэффициенты полинома Е = Н = 1) показана на
рис. 6.3, а; первое слагаемое моделируемого соотношения имитируется источни-
159
Часть II. Моделирование схем и устройств
ком переменного синусоидального напряжения VI = Isintot, второе слагаемое
источником V2 = lsin(cot + 90) = lcoscot (осциллограммы на рис. 6.3, б); резуль*
индицируется вольтметром Uo, этот же результат можно получить па экране
циллографа, переключив его В-вход на выход полиномиального источника с :
мощью переключателя А, управляемого одноименной клавишей клавиатуры.
а) б)
Рис. 6.3. Схема для моделирования функции silt'd + С08г(Х — 1 (а) и осциллограммы входа
сигналов (б)
2. tga = sina/cosa; схема для моделирования этой зависимости с использован!
библиотечного устройства деления показана на рис. 6.4, а; числитель модели
емого соотношения имитируется источником переменного синусоидального
пряжения Vy = Isincot, знаменатель — источником Vx = lsin(cot + 90е) = 1 cos
результаты моделирования представлены в виде осциллограммы выходного с
нала Uo (рис. 6.4, в), которая является графиком функции tga, в чем можно у
диться из следующего расчета: временной промежуток между визирны
линейками Т2 - Т1 * 0,01 с при частоте сигнала 10 Гц (период 0,1 с) соответст
ет углу 36’, тангенс этого угла равен 0,72654, что совпадает с результатом мо
лирования, отображаемым в окне VB2 на рис. 6.4, в. Фазовый сдвиг мел
напряжениями Ux и Uo на рис. 6.4, в объясняется несовершенством испольг
мых в схеме моделей.
3. 2sinacosa = stn2ce, схема для моделирования этой зависимости с использова
ем библиотечного устройства умножения показана на рис. 6.4, б; один сомно:
тель имитируется источником переменного синусоидального напряжет
Vy = 0,707sincot, второй — источником Vx = 0,707sin(cot 4- 90) = 0,707cos<ot;
зультаты моделирования представлены осциллограммами выходного Uo и вх
ного Ux напряжений (рис. 6.4, г), из сравнения которых видно, что част
выходного сигнала в два раза больше при единичной амплитуде, что и соответ
вует моделируемой зависимости.
Интегрирование функций осуществляется с помощью интегрирующих уси.
телей (см. разд. 10.4). Рассмотрим их применение для интегрирования тригоном
рических функций, в частности, для вычисления интеграла вида
ipisincotdt = ^(costot - 1)
Проверим это выражение с помощью схемы на рис. 6.5, а, для которой г
Т = RC = 1 с, 0) = 2nf = 2л рад/с и единичной амплитуде расчет д:
Uo = 0,15915(cos(dt - 1). Из осциллограммы для Uo на рис. 6.5, в видно, что ।
амплитуда и постоянная составляющая практически совпадают с расчетным зна1
нием (двойная амплитуда VB1 = -0,3892 В), а фазовый сдвиг равен Т2 - Т1 = 0,25
что соответствует 90 . Если установить Ui = lsin(cot + 90е) = lcoswt, то постоянн
составляющая будет отсутствовать, что соответствует теоретическим расчетам.
160
Глава 6. Цепи переменного тока
Рис. 6.4.
Ly
O.7G7V/-iOH2/0Ges
Uftl
VB1
2.oioo:<-oi
9.9787Se-01
i.WLSfcg;
TIME ВЯЗЕ
10.01
х ро$ low
X ROS
TRIGGER
EDGE FT' 3d
LEVEL Грcn '
: ext
Us
1VHOHj/SOO«4>
2Л1000&-01
7.70397e-0l
T2
UA2
VB2 LZ2651fcflL.
tz-tj
vaz-vfti
VS2-VB1
1 OCMXCkrO?
•2.27479rO1
CHANNEL ft
IsOOmV/Div
v pos Го
CHANNEL В
reduce J
1'6.00
REVERSE
AC 0
SAVE
2)
Схемы для моделирования функций tga = sina/cos(X (а) и 2sinCt-cosCt = sin2a (б) и ос-
циллограммы сигналов (в, г)
Дифференцирование функций осуществляется с помощью дифференцирую-
щего усилителя (рис. 6.5, б), выходное напряжение которого Uo = RC(dUi/dt);
в рассматриваемом случае Uo = coRCcoscot 6,283coscot, что практически совпадает
с результатами моделирования (значение VB1 на рис. 6.5, г). Резистор Rk предназ-
начен для повышения устойчивости дифференциатора и на точность дифференциро-
вания практически не влияет (см. разд. 10.4).
6 Зак. 206
161
Часть II. Моделирование схем и устройств
Контрольные вопросы и задания
1.
2.
3.
4.
Почему методы расчета цепей постоянного тока нельзя использовать для
та цепей переменного тока? В каких случаях это можно делать?
расче-
Проведите расчеты и моделирование сложения двух синусоидальных токов при
разности фаз токов 60'.
Проведите анализ фазовых соотношений в схеме на рис. 6.1, в по результата?!
моделирования.
С помощью осциллографа измерьте фазу суммарного напряжения в схеме на
рис. 6.2.
5. Исследуйте зависимость выходного напряжения схемы па рис. 6.3, а от фазы на-
пряжения источника VI.
6. Отключение или подключение нагрузки к сети целесообразно производить в мо-
мент нулевого значения питающего напряжения. Можно ли для этой цели ис-
пользовать схему на рис. 6.4, а? Какое дополнительное устройство при это!
потребуется?
7. В каких устройствах может быть использована схема на рис. 6.4, <5?
8. Составьте схемы устройств на рис. 6.4, а, б с использованием вместо источник
Ux интегратора или дифференциатора и проведите их испытание.
в)
162
Глава 6. Цепи переменного тока
Рис. 6.5. Схемы интегратора (а) и дифференциатора (б) и осциллограммы входного и выход-
ного сигналов (в, г)
6.2. Законы Ома и Кирхгофа
Второй закон Кирхгофа для мгновенных значений напряжений и тока в одно-
контурной цепи (см. рис. 6.6), состоящей из последовательно соединенных активно-
го сопротивления R, индуктивности L и емкости С, описывается выражением:
U = IR + U, + Uf. (6.1)
Из показаний приборов на рис. 6.6 видно, что в отличие от одноконтурной це-
пи постоянного тока, при арифметическом суммировании слагаемых правая и левая
часть формулы (6.1) существенно отличаются друг от друга, т. е. U * Ur + U, + Ur.
Объясняется это, как было показано в предыдущем разделе, наличием разности фаз
суммируемых сигналов. Для полной переносимости методов расчета цепей постоян-
ного тока на цепи переменного тока Штейнмецом был предложен символический
метод [50], заключающийся в замене синусоидальных ЭДС, токов и напряжений их
изображениями с использованием экспоненциальных функций комплексной пере-
менной в соответствии с формулами:
е - EMsin(cot + Be) = Ене,<и<'м - EMeJB,e’‘* - Ёме”н;
i = IMsin(d)t + Bi) = 1ие"ы ’ - IMejBlej”' =
u - UMsin(cot + Bu) = U„eK** * *kl> и UMe,ttoel<0* - U„e’"‘,
где e, i, u — мгновенные значения ЭДС, тока и напряжения; Ем, 1ч, U„ — их амплитуд-
ные значения; Be, Bi, Bu — их начальные фазовые углы; Ем, IM,UM — комплексные амп-
литуды ЭДС, тока и напряжения; j V 1 мнимая единица; = — знак соответствия.
Комплексные числа, введенные в математику в 18 веке в связи с открытием ре-
шения кубического уравнения, для действительных (вещественных) чисел, которыми
мы оперируем при разнообразных расчетах, сколь-нибудь существенного значения са-
6*
163
Часть II. Моделирование схем и устройств
ми по себе нс имеют, однако они позволили решить ряд важных задач математики, фи-1
зики и электротехники, относящихся к функциям действительной переменной. Про-1
демонстрируем преимущества использования символического метода на примере!
цепи на рис. 6.6. Для определения мгновенных значений токов и напряжений в этой!
цепи необходимо найти частное решение интегро-дифференциального уравнения I -•
iR 4- L(di/dt) 4- (1/C) Jidt = U„sin((ot + Bu). I
Так как правая часть этого уравнения является синусоидальной функцией, I
то его частное решение (для установившегося режима) будет также синусоидальной I
функцией той частоты, т. е. ток в цепи i = IMsin(cot 4- Bi) - 1„еЯш1*В1) = 1мс’шс,,л = iMe**. По- I
скольку, как следует из теории комплексных чисел, слагаемые (di/dt) и Jidt могут I
быть заменены их изображениями jo)IMe>at и 1мем/)со соответственно, то интегро-диф- I
ференциальное уравнение приводится к виду: Н де<
RIMeM 4- jcolXe** + i-eJ"t/jo)C = UMeM.
После сокращения на ejwt получаем: сл<
t(R 4- jwL 4- 1/jwC) U„, (6.1a) I
т. e. изображение синусоидальных функций комплексными числами позволило све- I
сти интегро-дифференциальное уравнение к линейному алгебраическому, определи- I тр
ющему в достаточно простом виде (как для постоянного тока) связь между I
параметрами цепи и комплексными значениями токов и напряжений.
Из (6.1а) следует, что закон Ома в символической (комплексной) форме может I
быть записан в следующем виде: IM - UM/Z, где для рассматриваемой цепи I
Z = R 4- j(oL 4- 1/jwC — комплексное сопротивление, которое чаще всего представля- I
ется в виде суммы активного R и реактивного X сопротивлений, т. е. Z = R « jX; I
X = (oL - 1 /о)С (появление минуса следует из определения j2 = 1). Аналогичным об- 1 tj
разом, т. е. с использованием комплексных ЭДС, токов и напряжений могут быть за- I
писаны в комплексной форме и законы Кирхгофа.
Рис. 6.6. Последовательная RLC-цепь
Слагаемые реактивного сопротивления и полное сопротивление с учетом пра-
вил действия с комплексными величинами могут быть представлены в следующих
формах:
для комплексного емкостного сопротивления Хс = -jxc - х^е'*®*; хс = 1/соС — его модуль;
для комплексного индуктивного сопротивления XL = j xL — xt/e,eo’; xL = <oL — его модуль;
для полного сопротивления Z - R 4- j(xc 4- xj = R 4- jX - z-e’Br; z = |Z| = ^R24-(wL-1/(dC)2 —
его модуль.
Полагая, что в схеме на рис. 6.6 U = UMsin((Bt 4- В) и, следовательно, Ц = UMejB,
на основании (6.1а) получим: I = U/Z = UKeiB/z-c,Br - (UH/z)e*B'Br) = I„ei<B’Br), что соответ-
ствует току в цепи Т « IMsin(cot 4- В - Вт),
где 1м - Um/ ^R2+(wL-l/wC)2, (6.2)
tgBr - [wL - l/(wC)]/R, -90° J Br J 90’. (6.3)
164
Глава 6. Цепи переменного тока
Контрольные вопросы и задания
1. Почему в схеме на рис. 6.6 выбрано такое странное значение частоты —
159,155 Гц?
2. Какой этап был пропущен при выводе формулы I = I„sin(<ot + В - В()?
3. С помощью формулы (6.2) рассчитайте значение амплитуды тока в цепи на
рис. 6.6 и сравните полученные результаты с показаниями амперметра.
6.3. Индуктивность и емкость
в цепи переменного тока
Для понимания процессов, происходящих в последовательной RLC-цепи, це-
лесообразно отдельно рассмотреть последовательные RL- и RC-цепи.
Для последовательной RL-цепи (рис. 6.7, а) выражения (6.2) и (6.3) примут
следующий вид: ___
L-Um/|Z|=Um/\'R- + (coL)’; tgB=coL/R, В<90’.
Модуль полного сопротивления RL-цепи при указанных на рис. 6.7, а параме-
трах компонентов на частоте со =• 2xF = 2л-159,155 ~ 1000 рад/с равен
IZH'10002 + (1000 1)2=1414 Ом.
Амплитуда и фаза тока:
Im-Um/|Z|=10/1414—7,07 мА; tgBr-(1000-l)/1000-l, Br=45“.
Падения напряжения на сопротивлении и индуктивности
Ur=IluR-0,007071000 7,07 В; U^LX.-0,0070 1000-7,07 В,
что совпадает с показаниями приборов на рис. 6.7, а.
Рис. 6.7. Схема последовательной RL-цепи (а) и ее ФЧХ (б)
Для определения фазовых соотношений обратимся к осциллограммам на
рис. 6.8, откуда следует, что напряжение на входе RL-цепи (осциллограмма А, ви-
зирная линия 1) опережает напряжение на сопротивлении R (осциллограмма В, ви-
зирная линия 2) и, соответственно, ток в цепи на время Т2 - Т1 « 0,000785 с.
165
Часть II. Моделирование схем и устройств
Поскольку период колебаний в данном случае равен 1 /159,155 0,0063 с, то в гра-
дусах этот временной промежуток составит (360' 0,000785)/0,0063 = 44,98 , т. е. по-
грешность моделирования менее 0,05%. Заметим, что с повышением частоты этот
угол стремится к 90", что удобно наблюдать с помощью измерителя АЧХ-ФЧХ в ре-
жиме PHASE (режим ФЧХ). Из ФЧХ на рис. 6.7, б видно, что уже на частоте 12 кГп
з этой точке установлена визирная линейка) ток в RL-цепи запаздывает относитель-
2.
3
4
I
1
Для последовательной RC-цепи (рис. 6.9) из выражений (6.2) и (6.3) получаем:
!„= Uro/|Z| = U^/V^ + H/wC)2; tgBr - -1/coRC, Br > -90'.
Контрольные вопросы и задания
Проведите расчет модуля и фазы тока в RC-цепи на рис. 6.9 и сравните получен-
ные данные с приведенными на схеме результатами моделирования. Обратите
внимание па то, что в последовательной RC-цепи ток опережает входное напря-
жение в предельном случае на 90". Следовательно, напряжения на емкости и ин-
дуктивности в RLC-цепи на рис. 6.6 могут быть сдвинуты по фазе на 180 , чем
;г объясняется тот факт, что индуктивное и емкостное сопротивления входят
з формулу (6.2) с разными знаками.
166
Глава 6. Цепи переменного тока
Н 2. Почему при расчетах фазовый угол Вг имеет положительное значение для ин-
И дуктивности и отрицательное для емкости, в то время как при моделировании
г Н результаты получаются противоположными? При поиске ответа рекомендуем
- обратить внимание на общее выражение для формул (6.2) и (6.3).
I 3. Проведите расчеты модуля и фазы тока в схемах на рис. 6.7 и 6.9 при частоте
входного сигнала 1591,55 Гц. Результаты расчета сравните с результатами моде-
лирования.
4. Составьте уточненные формулы для расчета коэффициента передачи делителей
на рис. 4.46 и 4.47 (разд. 4.6).
6.4. Резонансные цепи
Явление, при котором индуктивное и емкостное сопротивления в RLC-цепи
равны, называется резонансом.
Различают последовательный (для последовательной RLC-цепи) и параллель-
ный (для параллельной RLC-цепи) резонансы. Последовательную RLC-цепь чаще всего
называют последовательным колебательным контуром, а параллельную — параллель-
ным колебательным контуром. В случае малых потерь (сопротивление R пренебрежи-
мо мало) для обоих контуров резонанс наступает при условии (oL - 1/соС = 0, откуда
получается известно^выражение для резонансной частоты:
0)о= l/^LC или Fu= l/2m/LC. (6.4).
При последовательном резонансе (для последовательного контура) ток в цепи
(см. рис. 6.10) определяется только сопротивлением R и совпадает по фазе с напря-
жением входного сигнала. При этом ток в цепи равен Ini“Um/R и напряжения на ин-
дуктивности U) и конденсаторе Uc
U,= co0LU„,/R; Ue= Ura/(RwaC) (6.5)
могут превышать напряжение входного сигнала в Q раз. Безразмерная величина
Q = U./U,,,» Ue/U.= co0L/R = l/(w0RC), (6.6)
называемая добротностью, показывает, во сколько раз напряжение на индуктивно-
сти или емкости при резонансе превышает входное напряжение контура (на практи-
ке используется также величина, обратная добротности, которая называется
коэффициентом затухания d=l/Q). Из (6.6) видно, что добротность контура возра-
стает с увеличением индуктивности L и уменьшением сопротивления потерь R и ем-
кости С контура.
С учетом (6.^выражение (6.6) может быть записано также в виде Q=W/R, где
W = \L/C. (6.7)
имеет размерность сопротивления и называется характеристическим сопротивле-
нием контура.
Амплитудно-частотная характеристика резонансной цепи определяется как
отношен ие тока, определяемого выражением (6.2), к току при резонансе, т. е.
К(<о) = R/ ^R2 + (coL - 1/<оС)г. (6.8)
В радиотехнике зависимость, описываемую выражением (6.8), обычно назы-
вают резонансной кривой и для малых отклонений частоты относительно резонанс-
ной частоты используют для нее приближенное выражение:
I K(f) = 1/-Jl + (2Q-Af/f0)2, (6.9)
где &f=f - fо— расстройка ио частоте.
167
Часть II. Моделирование схем и устройств
Приведем пример расчета последовательной RLC-цепи (рис. 6.10). Согласие
(6.4) при указанных на схеме значениях индуктивности и емкости 1/2лл/1-10’6 =
= 159,155 Гц, что соответствует частоте входного сигнала, т. е. в цени имеет место ре
зонанс токов.
Значение тока в цепи Im= U,„/R = 1/1000 - 1 мА соответствует показаниям ам
перметра 1,„.
Согласно (6.5) падение напряжения на индуктивности и емкости
U, = 1000 0,001 1 = 1 В,
U. = 0,001/(1000/10б) = 1 В.
Рис. 6.10. Последовательный резонансный контур
а)
Рис. 6.11. Осциллограммы сигналов в последовательном контуре (а) и его ФЧХ (б)
Рис. 6.12. Параллельный колебательный контур
Из осциллограмм сигналов в последовательном колебательном контуре
(рис. 6.11, а) видно, что напряжение на сопротивлении (осциллограмма Л) и, соот-
ветственно, ток в цепи совпадает по фазе с входным напряжением (осциллограм-
168
Глава 6. Цепи переменного тока
ха В). Это означает, что на резонансной частоте фазо-частотная характеристика кон-
тура (рис. 6.11, б) должна иметь нулевое значение. Однако из-за дискретности ви-
зирная линия могла быть установлена на ФЧХ только вблизи резонансной частоты
(161 Гц), поэтому индицируемое значение фазы составляет 3,44”.
Рассмотрим резонанс токов в параллельной RLC-цепи. Наибольшее внимание
резонансу этого типа уделяется в радиотехнике, где параллельный колебательный
контур является основным элементом большинства частотно-избирательных уст-
ройств. В теоретических основах радиотехники показывается [51], что характерис-
тики параллельного колебательного контура можно рассчитывать по формулам для
последовательного контура. Однако имеются отличия, которые будут отмечены при
рассмотрении конкретной схемы параллельного контура (рис. 6.12).
Собственно колебательный контур состоит из двух параллельно включенных
ветвей: индуктивной с сопротивлением потерь в виде внутреннего сопротивления Rj
амперметра L и емкостной с сопротивлением потерь в виде внутреннего сопротивле-
ния Rc амперметра 1с. Напомним, что эти сопротивления могут изменяться и для
рассматриваемой схемы установлены равными 1 Ом для обоих амперметров. К кон-
туру подключены измерительные приборы, назначение которых очевидно; напри-
мер, вольтметры U, и Url предназначены для измерения падения напряжения на
индуктивности L и на резисторе R.
Для параллельного колебательного контура вводится параметр, который ра-
вен сопротивлению контура на резонансной частоте и называется резонансным со-
противлением Rp, определяемым по формуле:
Rp = (co.L)7R, = 1 /[R.(W,C)2], (6.10)
где Re= RI + Rc — суммарное сопротивление потерь контура.
Соотношение между подводимым к контуру током Im и током в контуре Ik на
резонансной частоте определяется выражением:
1Ь= QL,
где Q определяется выражением (6.6), но с учетом того, что сопротивление потерь те-
перь обозначается как RB.
Для схемы (рис. 6.12) имеем: ZM= (1000 1)2/2 = 500000 Ом; Q - (1000-1 )/2 =
= 500. Подводимый к контуру ток и ток контура: !„ = U/(RP+ R) =
= 1/(500000 + 1000) — 1,996 мкА; Ik= 1,996-500 = 998 мкА, что практически совпа-
дает с показаниями приборов. Имеющие место неточности определяются приближен-
ностью используемых формул. Например, для параллельного контура точное
значение резонансной частоты может быть определено из выражения [57]:
Wo=71/LC-(R,/L)2 . (6.11)
В случае пренебрежения сопротивлением Re выражение (6.11) совпадает с
(6.4). Из (6.11) видно, что с увеличением потерь контура R. его резонансная частота
уменьшается.
Амплитудно-частотная характеристика параллельного контура рассчитыва-
ется с помощью выражения (6.8). Для схемы на рис. 6.12 она имеет вид, показанный
на рис. 6.13, а.
Фазо-частотная характеристика параллельного колебательного контура рас-
считывается с помощью выражения (6.3) и показана на рис. 6.13, б.
Поскольку для практических применений наибольший интерес представляет
область частот вблизи резонансной (в полосе Af = f - f„, где f — текущее значение ча-
169
Часть II. Моделирование схем и устройств
стоты), то для удобства интерпретации полученных результатов целесообразно ис-
пользовать приближенную формулу для ФЧХ в виде
Вт = arctg(2QAf/fo) = arctg[2Q(f/f„ - 1)]. (6.12)
Рис. 6.13. АЧХ (а) и ФЧХ (б) параллельного колебательного контура
б)
Из (6.12) видно, что при f - f„ фазовый угол равен нулю, однако уже при незна-
чительном отклонении частоты в одну или другую сторону от резонансной будет на-
блюдаться резкое изменение фазы как в область отрицательных (при f < fo), так
и положительных значений (при f > fu). Причем, крутизна переходного участка тем
больше, чем больше добротность контура, а его ширина зависит от отношения f0/Q,
определяющего полосу пропускания 2&f на уровне 0,707 (это значение получается
после подстановки в выражение (6.9) значения 2Af — fo/Q).
Контрольные вопросы и задания
1. Дайте определения явления резонанса в электрических цепях переменного тока
и назовите условия его возникновения. В каких областях техники резонансные
явления находят наибольшее применение?
2. Для схемы на рис. 6.12 проведите расчеты и моделирование при сопротивлениях
потерь R1 - Rc - 8 Ом. Уточните значение резонансной частоты с помощью соот-
ношения (6.11).
3. Используя формулы (6.8), (6.3) и значения параметров на рис. 6.12, рассчитайте
амплитудно-частотную и фазо-частотную характеристики и сравните получен-
ные результаты с данными моделирования, приведенными на рис. 6.13.
6.5. Измерение частоты, фазы и мощности
Измерением частоты и фазы с помощью осциллографа мы уже неоднократно
занимались. Кроме рассмотренных, существует еще один осциллографический спо-
соб измерения этих величин — по интерференционным фигурам (по фигурам Лисса-
жу). Схема для проведения таких измерений достаточно проста (рис. 6.14, а) — она,
кроме осциллографа, содержит источник Us опорной частоты и исследуемый источ-
ник сигналов Ux. Поскольку масштаб по осям X (канал А) и Y (канал В) различен,
то для симметрии фигур амплитуда источника Ux выбрана меньше (см. рис. 6.14, а).
При фазе 90" напряжения Ux фигура Лиссажу представляет собой окружность
(рис. 6.14, б), при 45*— наклоненный под 45” эллипс (рис. 6.14, в). Точность измере-
ния фазы и частоты с помощью фигур Лиссажу существенно ниже, чем осциллогра-
фических в режиме ZOOM, однако они могут быть использованы для демонстрации
опытов по интерференции воли и других волновых процессов. В качестве примера на
рис. 6.14, г приведена интерференционная картинка при нулевой фазе источника Ux
и частоте 2000 Гц.
170
Глава 6. Цепи переменного тока
Перейдем к вопросу измерения мощности и фазы в цепи переменного тока. Ес-
ли на участке цепи (двухполюснике) протекает ток i = I„sin(cot + ф) = 1ме*(ш ” и созда-
ет на нем падение напряжения u _ UMsincot s UKe:’*, то на этом участке выделяется
мощность
р = (IMUM/2)sincotsin(o)t + ф) = (1чим/2)е’,ш •> = (IMU4/2)ei’e2jwl.
(6.13)
и»
1OV/5OHs/0Deg
Ux
7.07V/50He'9DDeg
Рис. 6.14. Измерение фазы и частоты по фигурам Лиссажу
Двойка в знаменателе появилась в связи с тем, что при вычислении мощности
используются действующие значения тока и напряжения, которые в \2 раз меньше
амплитудных. Учитывая общепринятые обозначения для действующих значений
токов и напряжений (см. начало этой главы), после преобразования произведения
синусов для действительной части выражения (6.13) получаем:
р = Ш[совф - cos(2cot + ф)] = S-созф - S cos(2cot ф) = Р S cos(2cot + ф), (6.14)
где S = ГО — полная мощность; Р - Б-совф — постоянная или активная составляю-
щая мощности.
Что же касается второй составляющей выражения (6.14), то здесь уместно
упомянуть о понятии комплексной мощности [50], выражение для которой получа-
ется при замене комплекса напряжения и„е*“* на ее сопряженную величину Uueil“.
При такой искусственной замене получаем (с учетом правил действий с комплекс-
ными числами):
Р= имем1мем°*‘” = Ше* = Ul-cosq) + jUI-sincp. (6.15)
Поскольку сов2ф + sin-ф = 1, то модуль комплексной мощности равен полной
мощности S = Ш. Первое слагаемое выражения (6.15)
171
Часть II. Моделирование схем и устройств
P = UIcos(p (6.16)
совпадает с первым слагаемым выражения (6.14) и также называется активной
мощностью. Коэффициент при втором слагаемом выражения (6.15) называется ре-
активной мощностью
Q = UIsm<p (6.17)
и в таком виде используется при ее расчетах.
При этом величины Р, Q и S образуют так называемый треугольник мощности
и связаны между собой соотношением [50]:
S = (Р2 + Q2)1'2. (6.18)
Если действовать естественным путем (без использования сопряженного ком-
плекса напряжения), то комплексная часть выражения (6.13) может быть представ-
лена как IUej’e2i“4 s UI[cos(2(ot + ф) = jsin(2o)t + ср)] и по правилам обратного
преобразования, принятым в символическом методе [50], мгновенное значение мощ-
ности (определяется коэффициентом при мнимой единице)
р = UI sin(2o)t + ср) = UI cos(2(0t 4- ф + 90°) = -UI-sin(2cot 4- ф 4- 180") =
= UIcos(2wt + ф + 270’), (6.19)
как и в формуле (6.14), пульсирует с удвоенной частотой.
Для измерения мощности и ее составляющих используем модель ваттметра,
разработанную авторами работы [85]. Модифицированная схема этой модели содер-
жит (см. принципиальную и функциональную схемы на рис. 6.15, а, б) управляе-
мый током источник 1с, имитирующий токовую обмотку ваттметра (вход I);
управляемый напряжением источник Uci, имитирующий обмотку напряжения
(вход U); перемножитель М, имитирующий взаимодействие токовой и обмотки на-
пряжения ваттметра (выход W — для измерения активной мощности вольтметром
W постоянного тока).
Активное сопротивление “токовой обмотки”, включаемой последовательно
с нагрузкой (зажим L LOAD), составленной в данном случае из последовательно
включенных конденсатора Сп и активного сопротивления Rn, определяется выбран-
ным (в диалоговом окне) значением коэффициента передачи источника 1с и в данном
случае равен 0,001 Ом. В то же время для реализации алгоритма ваттметра на базе
перемножителя необходимо обеспечить масштаб 1 А = 1 В и соответственно эквива-
лентное сопротивление “токовой обмотки” 1 Ом, что в работе [85] достигается уста-
новкой коэффициента передачи перемножителя равным обратной величине
коэффициента передачи источника 1с (в данном случае — 1000). Эту функцию в рас-
сматриваемом приборе выполняет дополнительный управляемый источник LTc2
с коэффициентом передачи 1000, что позволяет повысить уровень сигнала на входе
фазометра, который в указанной работе отсутствует. Однако прежде закончим
с ваттметром, правильность функционирования которого можно проверить по пока-
заниям амперметра In и вольтметра W, “проградуированного” в единицах активной
мощности, т. е. в Вт, мВт и т.д. Поскольку амперметр In измеряет действующее (эф-
фективное) значение тока, то активная мощность может быть определена как
Р - (In)2Rn = (0,155)2 10 = 0,024025-10 = 0,24025 Вт = 240 мВт, что практически сов-
падает с показаниями вольтметра W.
Фазометр состоит из двух компараторов на ОУ 1, на входы которых поступают
сигналы с токовой и обмотки напряжения ваттметра. Выбранный режим работы ОУ 1
по выходному напряжению Vsw+ = 3,6 В, Vsw- = 0 позволяет сформировать на их вы-
ходах однополярные импульсы фиксированной амплитуды 3,6 В и смещенных отно-
сительно друг друга на временной промежуток Т2 — Т1 - 4,5 мс (см. рис. 6.15, в), что
172
Глава 6. Цепи переменного тока
при значении периода Т = 20 мс соответствует фазовому углу между напряжением
и током в исследуемой цепи 9 « 360(Т2 - Т1)/Т = 360 4,5/20 = 81. Сигналы с компара-
торов поступают на входы дифференциального усилителя на ОУ 2 с коэффициентом
передачи R3/R2 = 0,1, на выходе Ph (PHASE) которого формируются сигналы ампли-
тудой 3,6-0,1 = 360 мВ, длительностью Т2 - Т1 и периодом следования Т. Постоянная
составляющая такой последовательности, измеряемая вольтметром DEG/mV, состав-
ляет, согласно [51 ], 360(Т2 - Т1)/Т мВ, т. е. показания указанного вольтметра соответ-
ствуют значению угла <р в градусах, что и подтверждается результатами
моделирования на рис. 6.15, а.
в)
Измеритель мощности и фазы (а, б) и осциллограммы сигналов в канале фазометра (в)
Рис. 6.15.
Рассмотренные составляющие мощности переменного тока могут быть опреде-
лены также по ее максимальному и минимальному значениям в результате осцилло-
графических измерений выходного сигнала ваттметра. Активная мощность при этом
определяется (см. рис. 6.16, а) как Р = (VA2 + VAl)/2 = (1,79174 1,31014)/2 =
0,2408 Вт = 240,8 мВт; полная мощность S = (|VA2| + |VAl|)/2 - (1,79174 +
173
Часть II. Моделирование схем и устройств
+1,31014)/2 1,55094 Вт (расчётное значениеЗ = LT-In 10 0,155 = 1,55 Вт). Фазовый
угол определяется по временному промежутку Т2 - Т1 (см. рис. 6.16, а) между двумя
ближайшими друг от друга точками пересечения оси X с осциллограммой, т. е.
(р = 360(Т2 - Т1)/Т = 360-4,5/20 = 81. После этого можно определить реактивную
и перепроверить активную мощность с помощью формул (6.16) — (6.18).
а)
б)
Рис. 6.16. Осциллограммы сигналов мгновенной мощности на выходе ваттметра
174
Глава 6. Цепи переменного тока
Контрольные вопросы и задания
1. Проведите исследование интерференционных фигур при частоте источника Ux
(рис. 6.14, а) 100, 125, 200, 300 и 350 Гц. Попытайтесь установить зависимость
соотношения частот источников Us и Ux от количества точек пересечений фигур
с осью X.
2. Каким образом можно истолковать физический смысл формул (6.14) и (6.19)?
Нет ли здесь места мистическому предположению, что переменный ток “знает”,
что в одну четверть периода ему нужно зарядить конденсатор или индуктив-
ность, а в следующую четверть ему нужно принять затраченную энергию обрат-
но, поэтому он “старается” это сделать поскорее — с удвоенной частотой?
3. Входящий в формулу (6.16) множитель costp называют коэффициентом мощнос-
ти. Когда цепь переменного тока состоит только из одних активных сопротивле-
ний, напряжение и ток совпадают по фазе, т. е. <р = 0, коэффициент мощности
максимален (равен единице) и соответственно отдаваемая в нагрузку мощность
(преобразуемая, например, в интенсивность света ламп накаливания) также
имеет максимальное значение. При наличии в цепи нагрузки реактивного эле-
мента (чаще всего это индуктивность проводов, спиралей нагревательных прибо-
ров, обмоток двигателей и т.п.) costp уменьшается и соответственно уменьшается
отдаваемая в нагрузку мощность при сохранении общей потребляемой мощнос-
ти, определяемой формулой (6.16) и регистрируемой электросчетчиком,
на прежнем уровне, т. е. коэффициент полезного действия нагрузки падает за
счет бесполезной перезарядки паразитной в данном случае индуктивности. Что
можно предпринять для повышения costp в данном случае?
4. Проведите измерение параметров мгновенной мощности на нагрузке в схеме
рис. 6.15, а при Rn = 1, 100, 300 и 900 Ом. Показания ваттметра и фазометра про-
верьте осциллографическими измерениями.
6.6. Многофазные цепи
Многофазная цепь — это совокупность нескольких электрических цепей,
з которых действуют синусоидальные ЭДС одной и той же частоты, отличающиеся
друг от друга по фазе и создаваемые общим источником электрической энергии [35.
50, 85]. Отдельные электрические цепи, образующие многофазную систему, называ-
ют фазами; число цепей, входящих в систему, называют числом фаз.
Совокупность ЭДС, действующих в многофазной системе, называют многофаз-
ной системой ЭДС, а совокупность токов, протекающих в этих цепях — многофаз-
ной системой токов.
Элементарный многофазный генератор состоит из т обмоток, сдвинутых друг
относительно друга на некоторые углы. Вращая их с постоянной угловой скоростью
в однородном магнитном поле, получим m-фазный генератор синусоидальных ЭДС,
сдвинутых по фазе на углы, равные углам между обмотками (см. гл. 14).
Многофазная система называется несвязанной, если ее составляющие электри-
чески не соединены между собою, в противном случае система считается связанной.
Большинство используемых на практике многофазных систем являются связанны-
ми; из них наибольшее распространение получила трехфазная система, предложен-
ная М. О. Доливо-Добровольским, который разработал все элементы этой системы,
включая трехфазные генераторы, трансформаторы и асинхронные двигатели.
Существуют два основных способа связывания многофазных систем: соедине-
ние звездой и соединение многоугольником (треугольником — для трехфазных),
175
Часть II. Моделирование схем и устройств
причем способ связывания обмоток генератора или трансформатора не определи*
способ связывания их нагрузок, т. е. они могут быть различными. Примеры соед|
нения генераторов и их нагрузок в трехфазной системе показаны на рис. 6.17.
Соединение обмоток генератора или трансформатора звездой выполняют, об1
единяя начала всех его обмоток в одну общую точку, называемую нейтральной точ
кой (точка Ое на рис. 6.17, а). Связь между генератором и нагрузкой (приемником
в этом случае осуществляется при помощи проводов А, В, С, идущих от концов всех
обмоток, а иногда и от нейтральной точки генератора (как на 6.17, а, где Oz — общая
точка (нейтраль) нагрузки). При этом провода, идущие от обмоток, называют линек'
ними, а провод, идущий от нейтральной точки,— нейтральным (нулевым).
Соединение обмоток генератора или трансформатора многоугольником вы-
полняют, соединяя начало обмотки каждой фазы с концом обмотки следующей фа-
зы (см. рис. 6.17). Связь между генератором и нагрузкой в этом случае
осуществляют при помощи проводов Л, В, С, идущих от общих точек обмоток сосед-
них фаз и называемых линейными проводами.
Соединение приемников звездой или многоугольником выполняют таким же
образом, причем определение фазных и линейных напряжений и токов для прием-
ников остаются теми же, что и для генераторов и трансформаторов.
Тип соединения генератора с нагрузкой принято обозначать следующим обра-
зом; Y/Yo — соединение звезда-звезда с нулевым проводом (рис. 6.17, a); Y/Y — звез-
да-звезда (после размыкания ключа на рис. 6.17, а); Y/Д — звезда-треугольник
(рис. 6.17, б); A/Y — треугольник-звезда (рис. 6.17, в); &/& — треугольник-треуголь-
ник (рис. 6.17, г).
Рис. 6.17. Схемы соединений в трехфазной системе
г)
ЭДС, индуктируемые в обмотках генератора или трансформатора, напряже-
ния на зажимах этих обмоток и токи в них называют фазными ЭДС, напряжениями
и токами, а напряжения между соседними линейными проводами и токи в них назы-
вают линейными напряжениями и токами. Для трехфазных систем (рис. 6.17) фаз-
ные ЭДС определяются следующими выражениями:
еА = E^sinwt — ЁАе^; ЁА = Е„; Е„ = ЕЬч = Е^; (6.20а)
ев = EbMsin(wt + 120°) я Ёве!“*; Ёв = Ebliei,2° - Е^е j2‘0'; (6.206)
ес - ECMsin(O)t + 240’) - Ёсе*‘; Ёс - Е^е'™’ - EtMeJIW’. (6.20в)
176
Глава 6. Цепи переменного тока
Соотношения между фазными и линейными токами и напряжениями опреде-
ляются типом соединения и типом нагрузки — симметричной или несимметричной
(однородной или неоднородной, равномерной или неравномерной).
При симметричной нагрузке комплексные сопротивления
Za-Zb»Ze;Zu>-Zl<-Ze.; (6.21)
при равномерной нагрузке модули сопротивлений
z. = zb = ze; z* - = zlu; (6.22)
при однородной нагрузке фазные углы
Ф. “ Фь = Ф#; Ф.ь = Фи “ Фс- (6.23)
Фазный угол каждой фазы
Фф = arctg(X^/R1|1), (6.24)
где Хф, Ro — реактивная и активная составляющие комплексного сопротивления на-
грузки соответствующей фазы.
Для соединения звезда-звезда с нулевым проводом при любой нагрузке
• рис. 6.17, а) фазные токи:
i. - U./Za; ib = Ub/Zb; L - U./Zc; (6.25)
ток в нейтральном проводе
io-t + t + ie; (6.26)
линейное напряжение
Ц, = <3U,. (6.27)
Для соединения звезда-звезда при симметричной нагрузке фазные токи
1. = 1ь = 1е = 1ф-иф/гф, (6.28)
где иф, гф — фазное напряжение и модуль сопротивления нагрузки фазы;
ток в нулевом проводе
to = 0. (6.29)
Для соединения звезда-звезда без нулевого провода при любой нагрузке
ключ на рис. 6.17, а разомкнут) напряжение смещения нейтрали (между точками
Ое и Oz):
Uo = (U.Y. + UbYb + UeYJ/(Y. + Yb + Ye), (6.30)
। где Y.,Yh,Yf — комплексные проводимости нагрузок (величины, обратно пропорцио-
нальные комплексным сопротивлениям);
напряжения на нагрузках фаз
й« - ив- Uo; Uu “ йь" йо; ич = ие- и0; (6.31)
разные токи
I. = U„/Z.; ib = Uba/Zb; t- U„/Zc; (6.32)
линейные токи равны фазным; фазный угол каждой фазы определяется соотноше-
нием реактивного и активного сопротивлений нагрузки каждой фазы.
Заметим, что, несмотря на заметное удорожание линии электропередачи при
использовании нейтрального (нулевого) провода, его тем не менее в потребительской
тети применяют вследствие возможной несимметрии системы. При этом сечение ну-
левого провода берут или равным сечению линейного провода, или даже меньшим,
причем и в этих случаях получается значительная экономия. Кроме того, при четы-
сехпроводной линии приемники можно включать как между линейными проводами
177
Часть II. Моделирование схем и устройств
под линейное напряжение, так и между одним из линейных проводов и нейтрал]
ным проводом под фазное напряжение, что существенно расширяет возможности и
пользования разнообразных электроприборов. Наибольшее распространение н
практике получили четырехпроводные линии с напряжением 380/220 В (ранее и<
пользовалась и система 220/127 В).
Для соединения звезда-треугольник при любой нагрузке (рис. 6.17, б)
фазные напряжения
и» = и.. - Uu = и«; (б.зз>
линейные напряжения
йл = йф; (6.34)
линейные токи
i. = L- L; L = L - L; t = L- L (6.35,
Для соединения звезда-треугольник при симметричной нагрузке (рис. 6.17, f
линейные токи
I. - ’fii.; t = i. -t - i.; < б.зв>
фазные токи
t=L-L-L=u0/z. (6.37)
Мощность в трехфазной системе:
активная Р = Р. + Рь 4- Рс; (6.38)
в том числе для каждой фазы Рф - иф1фсозф =(>/3/3)иДлсо8ф; (6.39)
реактивная Q = Q, + Qb + Qc; (6.40)
в том числе для каждой фазы Q,, = U4,I^sin<p =(V373)U,I,sin(p; (6.41)
полная S = (Р2 + Q2)V2. (6.42)
Измерение мощности в трехфазной системе можно проводить тремя
(рис. 6.18, а) и двумя (рис. 6.18, б) ваттметрами. Схема с тремя ваттметрами предпо-1
лагает наличие нулевого провода, схема с двумя ваттметрами (в работе [85] она на-
зывается схемой Лрона) более универсальна: показания ваттметров в этой схеме
определяются формулами [85]:
?! = ил1лсоз(ф - 30’); Р2 = ил1лсо8(ф„ + 30’); Ф “ arctg[(p!- Р2)/(Р, + Р2)]; (6.43)
при симметричной нагрузке
Pt + Ра - ил1ясозф; Р, - Р2 = ил1л81пф. (6.44)
Заметим, что токовые и обмотки напряжения ваттметров, обычно отмечаемые
звездочками (*), на рис. 6.18 обозначены в соответствии с рис. 6.15, а, б.
При анализе и расчете многофазных цепей положительные направления всех,
токов выбираются единообразно, например, так, чтобы все линейные токи был?
направлены к приемнику или от него, а положительные фазные токи в сторонах
многоугольника — но часовой стрелке или против; для соединения звездой положи-
тельные фазные токи в ее лучах должны сходиться в нейтральной точке или расхо-
диться из нее. Положительные направления всех ЭДС и напряжений выбираются
также единообразно; при соединении звездой все положительные линейные напря-
жения направляются от предыдущей фазы к последующей или наоборот. Положи-
тельное направление тока в нейтральном проводе выбираются произвольно,
при этом положительное напряжение между нейтральными точками генератора
178
Глава 6. Цепи переменного тока
риемника необходимо выбирать уже в соответствии с выбранным направлением
:а в нейтральном проводе.
6.18. Схемы измерения мощности в трехфазнон системе
Перейдем к моделированию; начнем со схемы на рис. 6.17, а, которая с набо-
и контрольно-измерительных приборов и вспомогательных элементов показана
рис. 6.19, а. По показаниям приборов в этой схеме и ее составу можно сделать сле-
ощие выводы:
система является симметричной, поскольку, согласно (6.21), комплексные сопро-
тивления нагрузки каждой фазы одинаковы: они составлены из последовательно
включенных конденсатора емкостью С = 10 мкФ и резистора сопротивлением
R -= 0,1 кОм; следовательно, для каждой фазы Z = R - jxc = R - j/o)C “ R - j/2nfC =
= 100 - j/2n-501010e = (100 - 318,31 j) Ом;
система характеризуется равномерной нагрузкой, поскольку, согласно (6.22),
модули комплексного сопротивления нагрузки каждой фазы одинаковы и равны
z = (R2 + х?),/г = [1008 + (318,3I)2]’* - 333,65 Ом;
согласно (6.23), нагрузка системы является однородной, поскольку фазные углы
равны (см. формулу (6.24)) <рф - arctg(X*/RJ - arctg(-xe/R) - arctg(-318,31/100) =
= -72,56°, т. е. ток в нагрузке R отстает от напряжения. Этот угол можно измерить
осциллографом или измерителем ФЧХ, если переключатель V одноименной кла-
вишей клавиатуры перевести в верхнее положение. Результат, полученный изме-
рителем ФЧХ, практически совпадает с расчетным (см. рис. 6.19, <)); напомним
(см. гл. 3), что для уменьшения погрешности от дискретности установки визирной
линейки по оси частот (оси X) количество отображаемых точек для измерителя не-
обходимо установить (меню Circuit/Analysis Options) максимальным (1000 вместо
100 по умолчанию);
вследствие симметрии системы ток в нулевом проводе (формула (6.29)), измеря-
емый амперметром 1о, практически равен нулю (в пределах точности его расчета
программой);
линейное напряжение, измеряемое вольтметрами U.h и Ubt, совпадает с расчет-
ным по формуле (6.27) Ux = ^ЗИФ — \>220 = 381,05 В, где фазное напряжение
Ue = 220 В измеряется вольтметром Uc;
в силу симметрии системы фазные токи одинаковы и каждый из них равен
(см. формулы (6.28), (6.29)) U*/z = 220/333,65 = 0,6594 А = 659,4 мА, что прак-
тически совпадает с показаниями амперметров la, 1b, 1с;
для проверки фазовых соотношений между фазными ЭДС, определяемых форму-
лами (6.20), используется осциллограф или измеритель ФЧХ. В положении клю-
ча X, показанном на рис. 6.19, а, результаты измерений фазы между ЭДС Еа и ЕЬ
179
Часть II. Моделирование схем и устройств
(осциллограммы А и В) показаны на рис. 6.19, б, г. Если с помощью измерителе
ФЧХ получается прямой результат (120), то при более наглядных осциллографи-
ческих измерениях он рассчитывается, как и ранее, по формуле 360(Т2 - Т1)/Т =
= 360-6,65/20 = 119, Г; при переводе ключа X в нижнее положение измеряете*
фаза между ЭДС Еа и Ес (осциллограммы А и С на рис. 6.19, г) и затем ее значение
вычисляется обычным способом, т. е. 360-13,35/20 = 240,3:. Заметим, что при ом
циллографических измерениях первой отмечается визирной линейкой точка пен
ресечения оси X опережающей ЭДС (в данном случае ЕЬ и Ес), а затем такая же
точка — для запаздывающей (в данном случае — Еа).
Перейдем к рассмотрению результатов моделирования соединения звезда-звез-
да в несимметричном режиме, который реализуется переводом ключа С в верхнее но-;
ложение (рис. 6.20), в результате чего в фазе С образуется обрыв. При сохранение
нулевого провода (рис. 6.20, а) расчет токов ведется по формулам (6.25) и (6.26), ко-
торые для рассматриваемого случая применяются в следующем наборе: I* = U,/Z„; Ib *
= Ub/Zb; i0= t + I,. Поскольку комплексные сопротивления нагрузок и амплитуда]
фазных ЭДС одинаковы, то, вводя для упрощения записей замену Z4 = Zb = Z z-ei7£*
а)
б)
180
Глава 6. Цепи переменного тока
1 мГц
:Z0 град
.6.19. Схема соединения звезда-звезда и результаты ее моделирования в симметричном
режиме
:. ранее проведенные расчеты фазового угла), Е11И = Ehv = Ей U, = Е, Utl = Е-е”20, по-
гаем L = Е(1 + ei20)/Z ~ Е(1 + cosl20 + jsinl20)/Z = E[l- 0,5 + 0,5j(3)’ 2]/Z =
0,5Е[1 + j(3)! *]/Z. После вычисления модуля и аргумента выражения в квадратных
обках i0 = E-e*°/z-e= 220-е”32-“/ 333,65 = 0,6594eil:i2-5" А, т. е. модуль тока в ней-
альном проводе практически совпадает с показаниями амперметра Г’.
В режиме отсутствии нейтрального провода, который реализуется переводом
юча Z в нижнее положение (рис. 6.20, б), и при нулевой комплексной проводимости
13Ы С (ключ С остается разомкнутым) напряжение смещения нейтрали, согласно
30), Uo = (U,Y0 + UbYb)/(Y, + Yh). Поскольку Y. = Y., то с учетом принятых в преды-
щем опыте упрощений и полученных результатов Uo Е(1 + е',2<')/2 = 0,25Е[1 +
j(3)‘ П = 0,5Е-е,|М> = 110 eirt" В, т. е. модуль напряжения смещения нейтрали совпадает
показаниями вольтметра Uo. Продолжая исследование, с помощью (6.31) и предыду-
1их результатов вычисляем напряжения на нагрузках фаз А и В: U„ = Е(1 - 0,бе*00) =
0,5Е(2 - cos60 - jsin60) = 0,5Е[2 0,5 - 0,5j(3)'2] = 0,25(12)’ 2Е е -,13° В; Ul>t = Е(е”20-
0,5е,во) = 0,25(12)’ 2E e”w В. Поскольку напряжения на нагрузках фаз А и В одииа-
свы, то при одинаковых нагрузках фазные токи в соответствии с (6.32) i, = tb =
181
Часть II. Моделирование схем и устройств
= 0,25(12)' гЕ е',,зо7 z eiT2“ - 0,25(12)* 2220 е'™7333,65 - 0,571 eiT7“ А, т. е. расчет
значения модулей фазных токов совпадают с показаниями амперметров Та и 1b
рис. 6.20, б.
а)
Рис. 6.20. Результаты моделирования соединения звезда-звезда в несимметричном режиме
б)
Рассмотрим случай неоднородной нагрузки, имеющий практическое значёт
при определении порядка чередования фаз (рис. 6.21). В качестве нагрузки в от
случае целесообразно использовать в одной фазе конденсатор известной емкое
а в двух других фазах резисторы сопротивлением, равным модулю емкостного
противления. Можно использовать и катушку индуктивности, однако при этом
практике возникают трудности с определением ее индуктивности, в то время и
конденсаторы имеют маркированное значение емкости.
Для схемы на рис. 6.21, а комплексные проводимости нагрузок Ya = 1/Х^
l/z.e180 27t f-Ca e190 = 2л 50 10 10ъ е‘®° = 3,14-Ю3 е*®° См (См — сименс — единица in
водимости); Yb = Y.. = 1/318,3 - 3,14-10’’См. Учитывая равенство модулей проводим
стей и то, что комплексы фазных напряжений равны комплексам фазных ЭД
с одинаковой амплитудой 220 В (см. формулы (6.20)), на основании (6.30) вычисляв
напряжение смещения нейтрали:
Uo 220(е^ + е‘*м + е,г,0)/(е*° + 2) - 220(cos90’ + jsinOO + cos 120’ + jsin 120
cos240 + jsin240 )/(cos90 + jsin90’ + 2) = 220(0 + j - 0,5 + 0,866j - 0,5 0,866j)/(j +
= 220(j - l)/(j + 2) = 220(2/5)l/2eJ7l Mi = 139,14 eJT,M B,
т. e. модуль напряжения практически равен измеряемому вольтметром Uo при мод
лировании.
Далее на основании (6.31) рассчитываем напряжения на нагрузках фаз:
182
Глава 6. Цепи переменного тока
Щ = 220 - 220(j - l)/(j + 2) = 220-3/(2 + j) = 295,16-е’звЬ6' В;
Ub, - 220(0,866j - 0,5) - 220(j - l)/(j + 2) = 220(0,232j — 0,866)/(2 + j) = 88,21-e*’-*' B;
Ue - -220(0,5 + 0,866j) - 220(j - l)/(j + 2) = 220(0,866 - 3,232j)/(2 + j) = 329,2ei101-^ B.
Используя формулу (6.32), рассчитываем фазные токи:
t = U^Z. = 295,16 е^/318,3-е - 0,927^’ Л;
t = Uta/Z„ = 88,21-e*’«7318,3 - 0,277-ei4,“’ A;
t = U„/Zc - 329,2-e5IO,se’/318,3 = l,034-e',01“ A.
Как следует из показаний амперметров на рис. 6.21, а, результаты расчета фаз-
ных токов совпадают с результатами моделирования. Аналогичным образом могут быть
проверены результаты моделирования и для двух других схем (рис. 6.21), когда конден-
сатор включается в качестве нагрузки в фазы В и С.
Из сравнения данных на рис. 6.21 видно, что при одинаковых модулях сопротив-
лений нагрузок фаз токи в соседних с конденсаторной фазах различаются почти что
в четыре раза (а по мощности — в 16 раз), что может быть зафиксировано, например,
визуальным контролем интенсивности свечения ламп накаливания, если их приме-
нить в качестве активных нагрузок. Таким образом, схемы (рис. 6.21) можно использо-
вать для проверки порядка (прямого или обратного) чередования фаз, что очень важно,
например, при подключении трехфазных двигателей. Заметим, что при выборе конден-
сатора необходимо учитывать его реактивную мощность (см. Приложение 2).
Перейдем к анализу соединения звезда-треугольник. Из рассмотрения резуль-
татов моделирования при симметричной нагрузке (рис. 6.22, а) следует, что
♦ фазные и линейные напряжения со стороны генератора связаны соотношением,
аналогичным для соединения звезда-звезда (см. показания вольтметров Uab,
Ubc, Uca и Uc); для нагрузок в фазах эти понятия неразличимы, поскольку они
включены под линейное напряжение;
♦ линейные и фазные токи подчиняются соотношениям (6.36), что подтверждает-
ся показаниями линейных (la, Ib, 1с) и фазных (lab, Ibc, lea) амперметров.
Несимметричный режим работы рассматриваемой системы имитируется об-
рывом фазы В с помощью выключателя В. Используя рассчитанное ранее значение
комплексного сопротивления нагрузки и полагая комплекс напряжения U,b вещест-
венным и равным «381 В, фазные токи, регистрируемые амперметрами lab и Ibc, бу-
183
Часть II. Моделирование схем и устройств
дут равны 381/667,3 = 0,571 А; показания амперметра 1са при этом в два раза вьп
поскольку модуль нагрузки в два раза меньше; напряжение в точке К будет pai
190,5 В, а напряжение, измеряемое вольтметром Ubo, определяется модулем к
плексного напряжения:
190,5 = ЗвЬе”20 = 190,5(1 + 2COS120* + j2sinl20°) = 190,5(1 - 1 + l,732j) = 330j
Еа Cab a,h
MO/ZBOHs/ODoa |а 10uF 0
----®— ffi-gg -qJl-----------T——II——I
R>b
анЛ
22СА//50Нг/СОо3 U
6)
Рис. 6.22. Результаты моделирования схемы соединения звезда-треугольник в симметрия!
(а) и несимметричном (б) режимах
Рассмотрим результаты применения измерителя мощности и фазы
рис. 6.15, а, б (далее — ватт-фазометра) в трехфазной системе (рис. 6.1:
Из рис. 6.23, а, где показана схема с тремя ватт-фазометрами и результаты ее мо;
лирования, следует, что в каждой фазе активная мощность составляет в средн
435 мВт (см. показания приборов Wa, Wb, Wc) при фазовом угле нагрузки — 72
(см. показания приборов Pha, Phb, Phc), значение которого практически совпад«
с рассчитанным ранее для такого типа нагрузки (72,56"). Поскольку у нас нагруз
симметричная, то для каждой фазы, согласно (6.39), при линейном токе 66 1
(см. показания амперметров la, 1b, 1с) и линейном напряжении 38,1 В (при фазном
22 В) активная мощность равна 1,732-38,1-0,066 cos72,3"/3 = 0,441 Вт, т. е. при мо,
лировании получаем несколько заниженный результат (примерно на 0,01%).
При использовании двух ватт-фазометров (рис. 6.23, б) активная мощность;
каждой фазы, согласно (6.44), равна (Wa + Wb)/3 = (1,85 0,548)/3 = 0,434 Вт, т. е.
зультат моделирования практически совпадает с полученным для предыдущей схеь
Полная реактивная мощность, согласно (6.44), Q = Wa -Wb = 1,85 + 0,548 = 2,398
при расчетном значении 38,l-0,066-sin72,56‘ = 2,399 Вт. Что же касается фазового
184
Глава 6. Цепи переменного тока
ла, то он определяется, очевидно, как (Pha + Phb)/2 = (43,2‘ + 99,9)/2 = 71,55’, т. е. ра-
вен расчетному.
о)
6.23. Измерение мощности и фазы тремя (а) и двумя (б) ватт-фазометрами
Контрольные вопросы и задания
Дайте определение многофазной цепи.
Составьте выражения для мгновенных значений фазных ЭДС и их комплексов
для двух-, трех-, четырех-, шести- и двенадцатифазных систем. Заметим, что си-
стемы с количеством фаз более трех используются в системах управления двига-
телями переменного тока.
Составьте выражения для определения линейных напряжений (для звезды), то-
ков (для многоугольника), активной и реактивной мощности по данным п. 2.
Формулы для вычисления указанных величин определяются выражениями [50]:
U. - 2U,(,sin(n/ni); 1л = 2I0sin(n/m); Р = 0,5sin(n/m)UXcos<p; Q = 0,5sin(n/m)U4I,sin(p,
где m — число фаз.
При измерении фазы между ЭДС Еа и Ес в схеме на рис. 6.19, а с помощью изме-
рителя ФЧХ получаем значение -120’, тогда как оно должно быть 240 . Объясни-
те происхождение такого результата.
185
Часть II. Моделирование схем и устройств
5. Проверьте расчетным путем результаты моделирования на рис. 6.21, б, в.
6. Проведите исследование моделей на рис. 6.21 после замены конденсатора на ка-
тушку индуктивности с аналогичным значением модуля сопротивления.
7. Проведите испытания моделей на рис. 6.23 при разнородной нагрузке (даннь
на рис. 6.21).
6.7. Цепи с несинусоидальными токами
При расчете цепей переменного тока в случае периодических ЭДС, напряж
ний и токов несинусоидальной формы они представляются в виде конечных ил
бесконечных тригонометрических рядов, называемых рядами Фурье. Такое пре,
ставление справедливо для периодических функций, удовлетворяющих условия
Дирихле (конечное число разрывов первого рода (типа потенциального скачк
и конечное число максимумов и минимумов за полный период), которые выполн:
ются практически для всех периодических функций, встречающихся в электроте;
нике и радиотехнике.
При расчетах ряд Фурье используют в двух формах:
F(a) - Ал X Aksin(kat + pk), (6.4^
F(a) - А„ + ^BkSinkat + £ (\coskat; (6.4'
к-1 к*I
где a = cot; со — угловая частота, с’1;
Слагаемое
А, - (1/2я) I F(a)da (6.4
о
носит название постоянной составляющей, а коэффициенты
Bk в (1/я) jF(a)sinkada; (6.41
О
Ск - (1/тс) JF(a)coskada (6.49
О
определяют амплитуду первой и последующих k гармоник.
Поскольку формула (6.46) получена из (6.45) разложением синуса суммы дв;
углов, то между их коэффициентами имеют место следующие соотношени
Ak = (Bk + Ck)V2; tg[3k = Ck/B„; Bk = Aksinpk; Ck = А*соврк. Так как коэффициенты Bk и
зависят от начальной фазы Рк, то они изменяются при изменении начала отсчета в
мени (начала координат). Кроме того, если несинусоидальная периодическая к]
вая симметрична относительно оси абсцисс (F(a) «= -F(a + тс)), то постоянг
составляющая отсутствует; если кривая симметрична относительно начала коор.
нат (F(a) = -F(-a)), то ряд не содержит как постоянной составляющей, так и коси:
соидальных составляющих (Ск = 0); если кривая симметрична относительно <
ординат (F(a) - F(-a)), то все коэффициенты Вк равны нулю.
В случае, если подлежащая разложению в ряд Фурье периодическая функи
(кривая) задается не аналитическим выражением, а в виде графика, то в этом слу'
прибегают к приближенным методам вычисления коэффициентов ряда заменой I
тегралов соответствующими суммами путем разбиения периода заданной кривой
р равных частей. При этом за значения Ск и Вк принимают удвоенные средние api
метические значения произведений ординат вр последовательных точках разбив!
на соответствующие значения sinka и coska.
В тех случаях, когда периодическая кривая в пределах периода описывав
разными аналитическими выражениями, расчет коэффициентов ряда производи
с применением формул (6.48), (6.49) для каждого участка. В качестве примера {
186
Глава 6. Цепи переменного тока
AR1
R1
О ЮО ко
б)
смотрим порядок расчета коэффициентов ряда Фурье для последовательности треу-
гольных и трапецеидальных импульсов (осциллограммы В и А на рис. 6.24, б, кон-
трольные точки 2 и 3 на схеме рис. 6.24, а соответственно). Трапецеидальные
импульсы формируются за счет ограничения в ОУ AR1, определяемого установкой
в диалоговом окне соответствующего значения напряжений насыщения, равных
в данном случае VSW+ = 6,6667 В и VSW- = - 6,6667 В при амплитуде входного на-
пряжения (с функционального генератора) 10 В.
R2
100 ко
С. 6.24. Схема для формирования последовательности треугольных и трапецеидальных им-
пульсов (а) и их осциллограммы (б)
Выберем за начало координат точку а, где установлена визирная линейка 1
м. рис. 6.24, б). Поскольку последовательность импульсов симметрична относи-
ьно начала координат, то искомый ряд не содержит как постоянной составляю
ей, так и косинусоидальных составляющих (Ск = 0), т. е. необходимо определить
ражение только для коэффициента Вк. Как следует из заданных условий
рис. 6.24, б, отрезки ab = cd, ad = я. Следовательно, для трапецеидального сигнала
Xa) = aA/b на участке ab и F2(a) = А на участке Ьс (А — амплитуда), т. е. на основа-
нии (6.48) (из расчета на четверть периода)
В, - (4А/л)[ ha/b)sink(xda + j sinkada] = (4A/x){[-(l/kb)acoska + (l/k’b)sinka]b -
- [(l/k)coska] । "}=(4A/Tc){[-(l/k)coskb + (l/k’bsinkb + 0 - 0] - [0 - (l/k)coskb]}
(4Asinkb)/bnk2.
187
Часть II. Моделирование схем и устройств
Таким образом, для последовательности трапецеидальных импульсов будем
иметь:
Fi(ct) = (4A/bn)[(sinb)(sina) + (l/9)(sin3b)(sin3a) 4- (l/25)(sin5b)(sin5a) +... 4*
(l/k2)(sinkb)(sinka)]. (6.50)
Для последовательности треугольных импульсов ряд Фурье получается из
(6.50) при b = л/2:
F2(a) = (8A/n2)[sina + (l/9)sin3a + (l/25)(sin5a) +... + (l/k2)(sinkb)(sinka)]. (6.51)
Аналогичным образом из (6.50) можно получить ряд Фурье для последова-
тельности прямоугольных импульсов типа меандр, положив b = 0.
Н UI
а) б)
xl i.0000e+003 х1 1.0000е+003
у1 7.0201е+000 у1 8.1610е+С00
х2 5.0000е+003 х2 5.0000е+003
у2 2.9204е-001 yz 3.8543е-001
в) г)
Рис. 6.25. Линейчатый спектр и амплитуды первой и пятой гармоник трапецеидального (а,
и треугольного (б. г) колебаний
I s
I -
I —
I ’•
Г
Перейдем к рассмотрению результатов моделирования (рис. 6.25) с использоч
ванием команды Analysis/Fourier... для анализа схемы на рис. 6.24, а. В этой схем
напряжение ограничения ОУ выбрано так, чтобы для трапецеидального импульсь
выполнялось условие b л/3. При этом ряд (6.50) для первых двух гармоник (с уче-
том того, что sin3b - 0) приобретает вид: F,(a) = (6-3* :A/rc2)[sina + (l/25)sin5a], т. е
амплитуда первой гармоники (xl = 1 кГц на рис. 6.25, а,в) у1 = 6-3‘'2-6,6667/л2 =
= 7,01977 В, пятой (х2 = 5 кГц) -у2 - 7,01977/25 = 0,2808 В, что достаточно близко |
к результатам моделирования. Для треугольных импульсов F,(a) - (80/n2)[sina
- (J/9)sin3a + (l/25)(sin5cc)], т. е. амплитуда первой гармоники (xl «= 1 кГц не|
рис. 6.25, б, г) у1 = 8,1056 В, пятой (х2 = 5 кГц) — у2 = 8,1056/25 = 0,324 В, что не!
сколько меньше, чем получено при моделировании.
Напомним, что для получения данных, приведенных на рис. 6.25, в, г, необхо
димо воспользоваться визирными линейками (см. разд. 1.6).
Заметим, что при увеличении количества анализируемых гармоник (паре-
метр Number harmonics в окне на рис. 1.36) результаты моделирования становятся
более близкими к расчетным (приведенные данные получены при количестве анг
лизируемых гармоник одиннадцать для треугольных и девять — для трапецеидаль-
ных импульсов).
Если источник несинусоидального напряжения подключен к любой разветв-
ленной или неразветвленной цепи, то расчет токов производится для каждой гармя
ники в отдельности рассмотренными в предыдущих разделах методами, после чеги
рассчитываются действующие значения токов, проходящих в отдельных ветвях.!
и действующие значения напряжения на отдельных участках цепи по формулам:
U - (Uo2 4- U,2 + U22 +... 4- ипг),/г; I - (I? 4- V + У + 1п2),/2.
188
Глава 6. Цепи переменного тока
Активная Р, реактивная Q и полная S мощности вычисляются по формулам:
Р -1 UkIkcospk; Q 4 Uk-Ik-sin&; S = (Р2 + Q2),/2.
к-0 к-0
Контрольные вопросы и задания
1. Имеет ли место зависимость коэффициентов Bk, Ск от начала отсчета при пред-
ставлении ряда Фурье формулой (6.45)?
2. Используя схему на рис. 6.24, а, проведите расчет и моделирование гармонических
составляющих последовательности трапецеидальных импульсов при b =• я/6 и л/4.
6.8. Цепи с распределенными параметрами
Цепи с распределенными параметрами отличаются от рассмотренных в пре-
дыдущих разделах цепей с сосредоточенными параметрами тем, что в них индуктив-
ность, емкость, сопротивление и проводимость распределены в пространстве — чаще
здоль двух проводников, образующих линию связи для обмена информацией между
различными объектами. Если названные параметры распределены вдоль линии (на
единицу длины) равномерно (например, для двухпроводной линии в виде парал-
лельных проводников), то такая линия называется однородной, в противном случае
диния является неоднородной.
Примером проводных линий связи могут служить известные всем телефонные
(и телеграфные) линии связи, с которых и началась собственно их история. Значи-
тельным событием в этой истории была прокладка первого трансатлантического
хабеля в 1858 г. Поздравительная телеграмма по случаю завершения столь гранди-
озного и дорогостоящего проекта королевы Виктории президенту Соединенных
[Штатов длиной в 100 слов потребовала около 16 часов для передачи — не очень впе-
|чатляющая скорость передачи данных даже по тем временам, когда 25 слов в мину-
су считалось нормальным для наземной связи (при сравнительно коротких линиях
|езязи). Тогдашние связисты обнаружили, что когда напряжение прикладывалось
(«одному концу такого длинного кабеля, оно не появлялось немедленно на другом
Ьонце и вместо скачкообразного нарастания достигало установившегося значения
грез определенный промежуток времени. Когда напряжение на входе кабеля от-
ключали, напряжение на приемном конце не падало резко, а медленно снижалось,
[бель вел себя как губка. В попытке обойти “медлительность” кабеля (с целью по-
[шения скорости передачи данных) на передающей стороне начали повышать уро-
нь сигнала, пока в конечном счете, спустя 11 недель после прокладки, не пробили
|«золяцию кабеля и он стал бесполезным. Прошло еще 8 лет, когда через Атлантику
©дожили другой кабель. Достаточно большой интервал, однако в течение этого
смени удалось разобраться в происшедшем и решить многие задачи теории пере-
чи данных с использованием проводных линий связи. Одним из ученых, прини-
кших активное участие в решении этих задач, был Вильям Томсон, позже
[учивший титул лорда Кельвина.
Линии связи (ЛС) в EWB представлены двумя моделями: идеальной двухпро-
[ной ЛС без потерь (рис. 6.26, а) и с потерями (рис. 6.26, б). Математическая мо-
ль ЛС с потерями состоит из набора одинаковых звеньев (сегментов), схема
орого (рис. 6.26, в) содержит (в обозначениях EWB 5.0):
активное (омическое) сопротивление проводников ЛС, отнесенное к единице дли-
ны (погонное сопротивление), Ом/м; для реальных ЛС в зависимости от ее конст-
рукции к этому сопротивлению добавляются активные сопротивления потерь,
вызванные поверхностным эффектом (плотность тока у поверхности проводника
189
Часть II. Моделирование схем и устройств
больше, чем в центре), эффектом близости (эффект взаимодействия вихревых
ков проводников ЛС, возникающих под действием магнитного поля проводни
из-за протекающих по ним токов) и вихревыми токами, наводимыми в окруж
щих ЛС проводящих поверхностях (например, в металлическом экране);
L погонная индуктивность проводников ЛС, Гн/м;
G погонная проводимость между проводниками ЛС, См/ым; для реальных
к этой проводимости добавляются проводимости, вызванные диэлектрически
потерями изоляционных материалов;
С погонная емкость между проводниками, Ф/м.
а) б)
Рис. 6.26.
Графические обозначения ЛС без потерь (а), с потерями (б) и звено математичек
модели ЛС с потерями (в)
I Lusty transmission Line Model Ttlinel* mo
Length ol the Transmission Line (Len): I (Accept |
Number of Lumps (n): 1 Cancel j
Resistance per unit length (Rt) 0.1
Inductance per unit length (Lt)' 2 54c (15 н
Capacitance per unit length (Ct): епг F
Conductance per unit length (Gt); le-12 mho
Рис. 6.27. Диалоговое окно установки параметров ЛС с потерями
Lossless Transmission Line Model 'llnel*
Nominal Impedance (Zo): [ilfifr. Q | £.ccept~|
Piupogation Time Delay (Td); |le-09 | s Cancel j
Number of Lumps (n): '32
Рис. 6.28. Диалоговое окно установки параметров ЛС без потерь
Значения параметров ЛС в EWB 4.1 задаются с помощью диалоговых oi
(см. рис. 6.27 и 6.28). В окне на рис. 6.27 задаются значения параметров эквивалез
ной схемы на рис. 6.26, в (с индексом “t” для EWB 4.1), где, кроме перечислени
выше, указаны длина ЛС Len, м (LEN в EWB 5.0) и параметр п, определяющий 1
личество элементарных секций (рис. 6.26, в) в ЛС выбранной длины LEN (в EWB J
этот параметр отсутствует). Параметр п может быть выбран в пределах от 1 до 1
в одном компоненте на рис. 6.26, б', если этого недостаточно, то последователь
включаются несколько таких компонентов.
В диалоговом окне для идеальной (R = О, G = 0) ЛС (рис. 6.28) обозначено: Zo
волновое сопротивление, Ом; Td - время задержки распространения сигнала, с (:
раметры ZO и TD в EWB 5.0). Параметр п имеет аналогичное с рис. 6.27 назначен
190
Глава 6. Цепи переменного тока
Процессы, происходящие в ЛС, описываются так называемыми телеграфны-
ми уравнениями [51]:
Эи/Эх + L(di/3t) 4- Ri = 0; di/Эх + C(du/dt) + Gu - 0 (6.52)
где du/dx, di/dx, du/3t, di/dt — частные производные от напряжения и тока i но рас-
стоянию х и времени t.
Решение уравнений (6.52) дает следующий набор характеристик (вторичных
параметров) однородной ЛС [35, 51]:
1. Волновое (характеристическое) сопротивление
ZO = [(R + jcoL)/(G + j(oC)P. (6.53)
2. Коэффициент распространения
Y = [(R + jcoL)(G + j(oC)]B/* = р + jot. (6.54)
После возведения обеих частей выражения (6.54) в квадрат, приравнивания
мнимых и действительных частей и последующего преобразования получаем:
3. Коэффициент затухания
Р-[О,5(А + В)]‘Л (6.55)
где А = [(R2 + co2L2XG2 + io’C2)]1'1; В - (RG - ш2ЬС).
4. Коэффициент фазы
а = [0,5(А-В)]1/2. (6.56)
5. Если выполнить условие
R/L = G/C, (6.57)
называемое условием неискажающей ЛС, то из (6.53) получим
ZO = (L/C),/a, (6.58)
I т. е. волновое сопротивление, как и в случае идеальной ЛС, нс будет зависеть от час-
। тоты. Заметим, что аналогичная формула получается из условия равенства энергии
лектрического поля конденсатора и магнитного поля индуктивности для идеаль-
|&>й ЛС: Iln2L/2 = Um2C/2, откуда ZO = Ue/I, -»(L/C)1/2. Аналогичная формула получа-
ется и в случае высоких частот, когда выполняются условия: R«coL и G«wC.
ри выполнении этих условий, а также (6.58) из (6.55) и (6.56) получаем
3 - (RG),/a; а = (o(LC)‘/2. (6.59)
При тех же условиях скорость распространения электромагнитного поля
Вдоль Л С
V = со/а = 1/(LC)‘'«, (6.60)
время задержки сигнала при прохождении ЛС длиной I
TD-1/v. (6.61)
Для воздушных ЛС скорость распространения принимается равной скорости
Ьзета с = 3-10® м/с; при наличии диэлектрика скорость распространения может
меньшиться на 10...15% и более (определяется коэффициентом укорочения волны,
приблизительно равном корню квадратному из диэлектрической проницаемости ди-
зектрика). Если принять, что длина ЛС LEN измеряется в метрах и скорость рас-
Ьрюстранения равна 3-10я м/с, то на основании (6.61):
LC = 1/са = 11,1110” (6.62)
Заметим, что только ври соблюдении условия (6.62) будет однозначная связь
ежду длиной линии в метрах, погонной емкостью в Ф/м, погонной индуктивнос-
191
Часть II. Моделирование схем и устройств
тыо в Гн/м и как следствие — возможность сопоставления результатов моделиро
ния с результатами расчетов.
Рассмотрим некоторые режимы работы ЛС.
Режим бегущей волны характерен для ЛС, на выходе которой включено
тивное сопротивление, равное волновому сопротивлению Z0. Для такого режв
мгновенное значение напряжения в любой точке ЛС описывается выражением [5
U = Ui exp(~pi)cos((Dt - cxl), (6.6
где 1 — расстояние от начала ЛС до точки, в которой определяется значение нащ
женил; со — частота входного сигнала Ui.
Из формулы (6.63) видно, что амплитуда бегущей волны напряжения убыв
вдоль линии по экспоненциальному закону.
Для моделирования ЛС в режиме бегущей волны используем схему
рис. 6.29. Значения параметров ЛС LT1: LEN = 100 м, R 1 Ом/м, п 100. Зада:
ся значением L = 11,11 мкГн/м, после чего с помощью формул (6.58), (6.62) и ус
вия (6.57) находим: С1 пФ/м, Z0 = 3333 Ом, G - 10 ; См/м.
Из осциллограмм на рис. 6.30, полученных в результате моделирован:
видно, что выходное напряжение опаздывает (см. правое индикаторное окно)
Т2 - Т1 = 0,33 мкс, что при частоте входного сигнала 500 кГц (период 2 мкс) с<
ветствует а = 1,0362 рад на 100 м. По формулам (6.59) получаем и. «= 0,1046 ра
192
Глава 6. Цепи переменного тока
и р = 0,00015 + 0,00017 - 0,00032 неп/м (непер — единица затухания, применяемая
чаще всего в проводной связи и равная 8,68 дБ), т. е. расчетное значение фазовой по-
стоянной на 100 м составляет 1,046 рад, что близко к полученному при моделирова-
нии. Из индикаторных окон на рис. 6.30 видно, что амплитуда входного напряжения
UTrr = VA1 = 4,243 В, а выходного Uom = VB2 = 4,14 В. По формуле (6.63) получаем
Ucm = Ulmexp(-pi) = 4,11 В, что тоже близко к полученному при моделировании.
Режим несогласованной линии характеризуется тем, что на ее выходе вклю-
чено сопротивление Z, не равное волновому сопротивлению Z0. Наиболее ярко этот
режим проявляется при разомкнутой (Z = «) или замкнутой (Z = 0) линии. При ра-
зомкнутой линии бегущая волна тока достигает конца линии и заряды дальше дви-
гаться не могут: ток должен прекратиться. Но убывание тока создает по правилу
Ленца ЭДС самоиндукции, направленную попутно с убывающим током. Появление
же этой ЭДС приводит к повышению напряжения на конце линии, что в свою оче-
редь вызывает движение зарядов в обратном направлении.
Следовательно, дойдя до разомкнутого конца линии, волны вынуждены дви-
гаться в обратном направлении. Это явление называется отражением волны от кон-
ца линии. Энергия отраженных волн возвращается к началу линии. Электрические
заряды прямой и обратной волн у конца провода складываются, в результате чего
в этом месте в каждый момент времени получается удвоенное напряжение.
Для характеристики линии в рассматриваемом режиме используется коэффи-
циент отражения [58]:
р = (Z - ZO)/(Z + Z0). (6.64)
При Z = Z0 коэффициент р = 0 и в линии наступает режим бегущей волны.
При разомкнутой линии 2-~ир = 1. При этом в конце линии амплитуды напряже-
ния и тока определяются выражениями:
Um = U.(l + р) - 2Un; 1т -1.(1 - р) = 0.
Следовательно, при разомкнутой линии ток в ее конце равен нулю, а ампли-
туда напряжения равна двойной амплитуде падающей волны U„. При этом падаю-
щие и отраженные волны напряжения имеют одинаковую фазу, а волны тока —
противоположную.
При замкнутой линии Z - 0 и, как следует из (6.64), р = -1. При этом в конце
линии амплитуды напряжения и тока определяются выражениями:
Uni = Un(l + р) - 0; Im = 1,(1 - р) = 210.
Следовательно, при замкнутой линии напряжение на ее конце равно нулю,
а амплитуда тока равна двойной амплитуде падающей волны 1п. При этом падающие
и отраженные волны тока имеют одинаковую фазу, а волны напряжения — противо-
положную.
Наиболее просто моделируется режим разомкнутой линии. Для этого достаточно
удалить сопротивление Z0 в схеме на рис. 6.29, уменьшить до минимума потери (уста-
новлено R = 0,001 Ом/ м, G -10” См/м) и изменить частоту входного сигнала таким об-
разом, чтобы на длине линии LEN укладывалось целое число длин волн. Выберем
длину волны 50 м, что соответствует частоте входного сигнала 3.10*750 « 6 МГц. Из ос-
циллограмм на рис. 6.31, полученных в результате моделирования разомкнутой ЛС,
видно, что при входном напряжении Ui - U„ = VAI =4,24 В напряжение в конце линии
U = VB2 - 8,44 В, что близко к ожидаемому. Из рис. 6.31 видно также, что отраженная
волна опаздывает от падающей на Т2 - Т1 = 1,8 нс, что составляет около 0,067 рад
(3,84‘) и объясняется несовершенством модели и погрешностью моделирования.
7 Зик. 206
193
Часть II. Моделирование схем и устройств
Phc. 6.31.
5 4208 Зо-О 7
4 240б5с«С>0
я 428i??e*00
Г2
VA2
V82
5.43ВВ9«07 Т2-Т1
4.22594^00 VA2-VA1
8 44137^00 V В 2 • V В1
1 зояже-оз
•1 4БЗЗЗ$02
1.33470о-02
TI*1£ BASE
X POS loop E
JV r" В/A A ZB,
TRIGGER CHANNEL А
Е С* G Е ГГ| Vl ; I 2 V/Div
LEVEL | 0.00 }${ I Y POS | o.00
auto ' nj ej extJ | ас; a 3T
CHAHNEL Б
[ 5 У/Р.м
Y POS [О 03__
RSOUCE |
B.e^rse]
SAVE \
Осциллограммы сигналов на входе (А) и выходе (В) ЛС в режиме холостого хода
Рис. 6.32. Схема для исследования короткозамкнутой ЛС (а) и осциллограммы сигналов (б)
194
Глава 6. Цепи переменного тока
Схема для исследования короткозамкнутой ЛС содержит (рис. 6. 32, а) источ-
ник входного напряжения Ui частотой 6 МГц (длина волны 50 м, в ЛС длиной 100 м
укладывается две волны), амперметры А1, А2 для измерения тока на входе и выхо-
де ЛС и ЛС, по параметрам аналогичную на рис. 6.29 для разомкнутой ЛС, но состав-
ленную из трех компонентов: LI (LEN = 50 м, п = 50), L2 и L3 (LEN - 25 м, п = 25).
Заметим, что для этих компонентов нужно создать отдельную библиотеку
(см. разд. 1.3), а для амперметра А2 установить минимальное внутреннее сопротив-
ление для имитации короткого замыкания выхода ЛС.
Из показаний амперметров на рис. 6.32, а видно, что выходной ток в два раза
больше входного, равного Ui/ZO = 1/3333 = 300 мкА (действующее значение). В про-
цессе моделирования можно наблюдать, что после его запуска входной ток постепен-
но (по синусоиде и в зависимости от быстродействия ПК) возрастает, в то время как
выходной ток остается нулевым до тех пор, пока волна (осциллограмма А на
рис. 6.32, б) не достигнет конца линии. Этот момент отмечен визирной линейкой 1
(интервал Т1 = 0,292 мкс приблизительно равен 1,75 периодов входного сигнала).
Выходной ток достигает удвоенного значения в момент Т2 = 0,51 мкс (примерно три
периода входного сигнала), когда падающая волна отражается от закороченного
конца ЛС. Из рис. 6.32, б видно, что падающая волна появляется в середине ЛС (точ-
ка 1, осциллограмма В на рис. 6.32) через период входного сигнала (как и должно
быть), а на расстоянии 75 м от начала (точка 2) — через 1,5 периода. Если выбрать
внутреннее сопротивление амперметра А1 минимальным, то в ЛС будет наблюдать-
ся многократное отражение сигналов как от ее конца, так и от начала.
Контрольные вопросы и задания
1. Для каких целей используются линии связи?
2. Какими эквивалентными параметрами характеризуются линии связи?
3. Проведите расчеты постоянной затухания и фазы по формулам (6.55), (6.56)
и сравните результаты с полученными по приближенным формулам (6.59) при
указанных в тексте значениях параметров линии.
4. Рассчитайте время задержки по формуле (6.61) и сравните полученный резуль-
тат с результатами моделирования схемы на рис. 6.29 по условиям п. 3.
5. Проведите моделирование схемы на рис. 6.29 при R = 10 Ом/м и при выполне-
нии условия неискажающей линии. Результаты моделирования сравните с рас-
четными.
6. Проведите исследование схемы на рис. 6.29 в режиме холостого хода (при разо-
мкнутой ЛС) при частоте входного сигнала 3 МГц. Сколько волн укладывается
в этом случае на всей длине линии? \
7. Проведите исследование схемы на рис. 6.29 в режиме холостого хода при часто-
те входного сигнала 2 МГц. Объясните, почему отраженные волны имеют форму,
напоминающую амплитудно-модулированные колебания?
8. Проведите исследование схемы на рис. 6.32, а при частоте входного сигнала
3 МГц. Объясните изменения в осциллограмме А. Имейте в виду, что при этом
компонент L3 представляет собой короткозамкнутый четвертьволновый отрезок
ЛС, обладающий особыми свойствами — его входное сопротивление на данной
частоте (3 МГц) равно бесконечности.
9. Проведите исследование схемы на рис. 6.32, а при частоте входного сигнала
3 МГц и внутреннем сопротивлении амперметра А1, равном волновому сопротив-
7
195
Часть II. Моделирование схем и устройств
лению ЛС (3.333 Ом). Заметим, что в этом случае отраженная от конца ЛС вол:
будет поглощаться на ее входе.
6.9. Переходные процессы
До сих пор мы рассматривали процессы в электрических цепях при устано-
вившихся режимах их работы. Не менее важное значение имеет изучение процессов.
возникающих в цепях при переходе их от одного установившегося режима к дру>
му и называемых поэтому переходными процессами. Такие процессы возника!
в цепях при их включении и отключении, а также при всяком изменении парамет-
ров цепи. Несмотря на кратковременность переходных процессов, возникающие при
этом токи и напряжения могут во много раз превосходить их значения при нормаль-
ных установившихся режимах, что может привести к повреждению или даже разр;
шению отдельных элементов цепи.
г)
Рис. 6.33. KL-цепь (а) и осциллограмма ее переходных процессов (б)
Классический метод анализа переходных процессов заключается в составле-
нии дифференциального уравнения цепи, решение которого представляет собой сум-
му двух величин: 1) частного решения, выражающего установившийся режим, и
2) общего интеграла дифференциального уравнения с нулевой правой частью, выра-
196
Глава 6. Цепи переменного тока
жающего свободный режим. В качестве примера рассмотрим RL-цепь (рис. 6.33, а),
которая характеризуется двумя режимами работы.
В первом режиме (рис. 6.33, б) источник постоянного напряжения U про-
граммным ключом S (Топ = 0,05 с, Toff = 20 с) подключается на время 0,05 с к RL-
депи, причем в силу свойств EWB при t < 0 U = 0, а при t = 0 (момент включения
моделирования) U скачком изменяется до 150 В, т. е. факт запуска моделирования
равносилен подключению к RL-цепи в момент t = 0 источника U = 150 В. Для этого
случая дифференциальное уравнение цепи имеет вид: L(di/dt) + iR = U, решением
которого является выражение:
la - (U/R){1 - exp[-t(R/L)]}, (6.65)
где L/R 125-10 3/50 = 25 10 * с — постоянная времени цепи; в случае RC-цепи этот
параметр равен произведению R-C.
Процесс формирования напряжения Uo •= i.,R = U{1- exp[-t(R/L)] отображает-
ся участком А осциллограммы на рис. 6.33, г, простирающимся от t = 0 (первое уста-
новившееся значение Uo = 0) до t = Т1 = 0,05 с — второе установившееся значение
Uo “ 150[1 - ехр(-0,05/25-104)] - 150 В, что совпадает с полученным при моделирова-
нии значением VB1. Установившееся при этом значение тока Uo/R = 150/50 = 3 А оп-
ределяет начальные условия для схемы на рис. 6.33, в (второй режим), переходные
процессы в которой описываются дифференциальным уравнением: L(di/dt) + i(R +
- RI) = 0 с решением: ib = C-exp{-t[(R + Rl)/L]}, где постоянная интегрирования
С = Uo/R -ЗА.
Процесс формирования напряжения Uo = ibR = RC-exp{-t[(R + Rl)/L]} отобра-
жается участком В осциллограммы на рис. 6.33, г; при t = Т2 - Т1 = 5,144-103 с (точка
Т1 принимается за условный нуль) Uo = 50-3-ехр{-5,144-10 3[(50 + 12,5)/125-103]} =
= 11,457 В, что, с учетом погрешности установки визирных линеек, приблизительно
совпадает с полученным при моделировании значением VB2.
Операторный метод расчета переходных процессов заключается в замене
функции времени f(t), называемой в данном случае оригиналом, ее изображением,
определяемом с помощью формулы прямого преобразования Лапласа: F(p) = if(t)el>s,
в котором комплексная переменная р называется оператором Лапласа. Например,
изображением производной от f(t) будет pF(p), определенного интеграла — F(p)/p,
а закон Ома в операторной форме для последовательной RLC-цепи имеет вид:
1(р) “ {[Е(р) + Li(0) - ur(0)/p]/Z(p)}, где Е(р) — изображение ЭДС; i(0), щ(0) — значе-
ния тока и напряжения при t < 0 (перед коммутацией или началом моделирования
в среде EWB); Z(p) = R + pL + 1/рС — операторное сопротивление цепи; законы
Кирхгофа:
£ Ik(p) = 0; 1 [Ek(p) + Lk-Ik(O) - Uk(O)/p] = £ Ik(p)-Zk(p),
к» 1 I к = I
где Ik(0), Uk(0) — начальные значения тока через катушку индуктивности и напря-
жения на конденсаторе в k-ой ветви; Zk(p) = Rk + pLk + 1/рСк — операторное сопро-
тивление к-ой ветви.
Следует заметить, что наряду с преобразованием Лапласа на практике исполь-
зуется и преобразование Лапласа-Карсона F(p) •- р Jf(t)ep:, т. с. отличающееся мно-
жителем р; во многих случаях таблицы изображений и оригиналов функций
составлены именно для такого преобразования (см., например, [79]).
Для иллюстрации метода рассмотрим простейший пример включения RL-
цепи (рис. 6.34, а) под синусоидальное напряжение u = UMsin(d)t + <р). В этом слу-
197
Часть II. Моделирование схем и устройств
чае дифференциальное уравнение L(di/dt) + iR = U преобразуется в операторное:
Lpl(p) + RI(p) = U(p), откуда
I(P) = U(p)/(pL+R) = U(p)/Z(p). (6.66)
По таблицам находим изображение синусоидальной функции [79J:
U(p) = иДрюсозф + p2sin(p)/(p: + со2) (используется преобразование Лапласа-Карсона г.
после подстановки преобразуем (6.66) к виду, удобному для поиска оригинала:
I(p) = Um(ocostp p/L(p + а)(р2 + о)2) + Umsincp-p8/L(p + а)(рг + со2),
где а -= R/L. Определяя с помощью таблиц [79] оригиналы для каждого слагаемого,
получим:
i(t) = Umcos(p [е“ since + sin(cot - a)]/L(a2 + co2)*2 + Umsin<p[-ae’7(a8 + co1) -
+ sin(cot + P)/(a2 + co2)* 2]/L,
где a = arcsin[co/(a2 4- co2)*2] = arctg(co/a); p = л/2 - arctg(co/a). После дополнительных
преобразований будем иметь:
i(t) = Ume“[(coLcostp - Rsincp)/(R2 - co2L2)] + [Umsin(cot + <p - a)]/(R2 +
d-co8!?)*'2. (6.67)
Моделирование проведем в среде EWB 5.0 при Ur = 212,13 В (в диалоговом ок-
не источника задается действующее значение 150 В), со ~ 1000 с* (частота.
159,155 Гц, период Т = 6,28 мс), (р = 0. Результаты моделирования представлены на
рис. 6.35 в виде осциллограмм входного (А) и выходного (В) напряжений. Рассчиты-
ваем и сравниваем с результатами моделирования: а = arctg(coL/R) = arctg(125/50i
= 68,2’ = 1,19 рад,что практически совпадает с результатом моделирования
аи — 360(Т2 - Т1)/Т = 360-1,2024-10 3/6,28 10э=68,93е; при установке визирной ли-
нейки 1 в точку t = Т1 2,64 103 с, соответствующую амплитуде первой полуволны
выходного напряжения, Uo(t) - Ri(t) =50 212,13с ‘OO OW2M[1000 0,125 1/(2500 + 15625)1
+ [50-212,13 sin(2,64 - 1,19)]/(2500 + 15625)*1 - 25,44 + 78,78 = 104,22 В, что близко
к полученному при моделировании — 103,6532 В.
а) б)
Рис. 6.34. Последовательная RL-цепь с синусоидальной ЭДС (а) и разветвленная RLC-цепь (б)
Наибольшие трудности при использовании операторного метода возникают
при определении оригинала, особенно при анализе сложных цепей, когда изображе-
ния токов и напряжений имеют вид рациональной дроби типа
Fi(p)/F2(p) = (a„pm + аф" +... + am)/(bppn + b,pn +... + bn). (6.68)
Если m<n и корни p„ p2... p„ многочлена F2(p) различны и не равны, то ориги-
нал находится по формуле (теорема разложения):
F,(t)/F2(t)-i [F.toXexpfp^tM/pMF^). (6.69)
К» I
Если знаменатель выражения (6.68) имеет один равный нулю корень (речь идет
о корнях уравнения F2(p) = 0), т. е. F2(p) = pF3(p)), то оригинал находится по формуле:
F,(t)/FXt)=F1(O)/F,(O)+£ [F1(pl)exp(pkt)]/p2FJ(pl) (6.70)
К- I
198
Глава 6. Цепи переменного тока
-В качестве примера рассмотрим порядок расчета переходных процессов
в RLC-цепи (рис. 13.34, б), происходящих в результате замыкания резистора R
с помощью программного ключа S через 0,01 с после включения источника U (на-
чала моделирования) [35]. К этому моменту (на осциллограмме переходного про-
цесса на рис. 6.36 отмечен визирной линейкой 1) через индуктивность протекает
ток iL(0) = U/(R1 4- R 4- R2) = 125/500 = 0,25 А, а конденсатор С заряжен до напря-
жения uc(0) = R2iL(0) = 200 0,25 = 50 В.
Для схемы, образующейся после коммутации, уравнения Кирхгофа имеют вид:
(RI 4- pL)I.(p) 4- Ij(p)/pC = U(p) + LiL(0) - ut(0)/p;
(RI 4- pL)I.(p) + I2(p)R2 = U(p) + Lit(0);
1|(р)-1Лр) + 1з(р),
где U(p) = U/p (используется преобразование Лапласа, для преобразования Лапласа-
Карсона U(p) - U); 1|(р), 12(р), 1»(р) — токи через резисторы RI, R2 и конденсатор С со-
ответственно. Из этих уравнений определяем [35]
It(p) = {LCR2 iL(0)p2 + [UCR2 + LiL(0) - uc(0)CR2] 4- U}/p[LCR2 p2 +
4- (CR2-R1 4- L)p 4- RI 4- R2] - F1(p)/pF3(p),
т. e. для определения оригинала будем пользоваться формулой (6.70). После
подстановки числовых значений F:(p) = 2,5-10вр2 4- 0,0775р + 125;
F3(p) = 10 &р2 4- 0,06р 4- 250. Для нулевого корня Fj(O) = 125; F3(p) = 250.
Два других корня находятся из уравнения F3(p) = 105р2 4- 0,06р 4- 250 = 0:
pi = -3000 4- jdOOO; р2 = -3000 - j4000. Далее вычисляется производная
F3'(p) = 210вр + 0,06 и ее значения при р = р, и р = р2: F3'(p,) j0,08
F3'(p2) = ~j0,08, а также Р>(р.) = -125 + j250 и F,(p2) - -125 - j250. После подстановки
полученных значений в (6.70) и преобразований получаем: i,(t) « 0,5 + (l,375sin4000t -
- 0,25cos4000t)exp(-4000t). Поскольку в моделируемой схеме контролируется падение
напряжение на резисторе R1, то при t — Т2 - Т1 = 2,224-10* с (см. рис. 6.36)
uK1(t) = Rl-i’(t) - 50[0,5 4- (l,375sin0,8896 - 0,25cos0,8896)exp(-0,8896)] -
= 50[0,5 4- (1,375-0,777 - 0,25 0,63) 0,4108] = 43,71 В, что близко к полученному
при моделированию значению VA2 = 43,4658 В.
Интеграл Дюамеля используется для анализа переходных процессов при под-
ключении пассивного двухполюсника к источнику непрерывно изменяющегося на-
пряжения произвольной формы, описываемого различными аналитическими
выражениями на каждом участке. Интеграл имеет следующий вид [35, 79]:
i(t) = u(O)g(t) 4- xJog(t -x)u'(x)dx (6.71)
где u(0) — напряжение в начальный момент времени, для первого участка определяет-
ся в момент t = 0, для второго — в момент окончания первого и т.д.; и'(х) — значение
производной от функции и(х) в рассматриваемом интервале времени; g(t), g(t - х) —
переходная проводимость цени для общего случая и для интервала (t - х), т. е. в по-
следнем случае вместо t подставляется t-x.
Для цепи на рис. 5.33, а, находящейся по существу под воздействием прямо-
угольного импульса, переходная проводимость, как следует из (6.65), g(t) = {1 -
exp[-t(R/L)]}/R; на первом участке (L - Т1 > t > 0 на рис. 5.33, г) u,(0) = U, и/(х) = 0,
g(t - х) == {1 - exp[-(t - x)(R/L)]}/R; и, следовательно, для первого участка с помощью
(6.71) получаем: i,(t) = U{1 - exp[-t(R/L)]}/R. На втором участке (о® > t £ t, = Т1 на
рис. 5.33, г) u,(0) - u2(t») - u2(tt) = 0 - U= -U, g(t) = g(t - t>) = {1 - exp[-(t -
tl)(R/L)]}/R, u2'(x) = 0 и, следовательно, для второго участка аналогичным образом
получаем i2(t) = -U{1 - exp[-(t - t,)(R/L)]}/R. Ток в цепи определяется как
i(t) = ij(t) 4- i2(t) = U{1 - exp[t|(R/L)]}exp[-t(R/L)]/R. (6.72)
199
Часть II. Моделирование схем и устройств
Рис. 6.35. Результаты моделирования последовательной RL-цепи при подключении синусо!
дальней ЭДС
Результаты моделирования разветвленной RLC-цепи
Рис. 6.36.
Контрольные вопросы и задания
1. Дайте определение переходного процесса. Чем отличаются переходные процессы
при включении лампы накаливания и электрокофемолки?
200
Глава 6. Цепи переменного тока
2. Используя формулу (6.67), проведите расчет переходных процессов для последо-
вательной RL-цепи при ф = 30 и 90* и остальных данных, приведенных в тексте.
Результаты расчета проверьте моделированием в среде EWB 5.0.
3. Перечислите методы анализа переходных процессов и дайте их краткую харак-
теристику.
4. В схеме на рис. 6.34 рассчитайте токи i2(t) и i3(t). Для упрощения расчетов снача-
ла определите падение напряжения на параллельной ветви R2-C по формуле:
UnXt) = = U - i,(t)R2 - I/dij/dt), а затем токи по формулам: i2(t) - urc(t)/R2 и i3(t) =
= C[urc(t)/dt]. Результаты расчета u,c(t) при указанном на рис. 6.36 значении
Т2 - Т1 проверьте моделированием (не забудьте перенести заземление схемы
в соответствующее место).
5. Используя формулу (6.72), рассчитайте значения токов при t = 5, 10 и 55 мс; по-
лученные результаты проверьте моделированием.
201
Часть II. Моделирование схем и устройств
7. Транзисторные усилительные схемы
В данной главе рассматриваются базовые схемы усилителей на биполярных
и полевых транзисторах, согласующие устройства многокаскадных усилителей
а также их выходные каскады. В конце главы в качестве примера использования
рассмотренных элементов приведена схема одного из первых операционных усили
телей в интегральном исполнении.
7.1. Базовые усилительные каскады
Основные схемы построения усилителей на биполярных транзисторах опреде
ляются возможными способами их включения — ОБ, ОЭ и ОК, кратко рассмотрен
ными в гл. 4. Базовые схемы усилителей с вспомогательными элементами показан!
на рис. 7.1, где обозначено: Ucc — напряжение питания, Ui — входное напряжение
Uo — выходное напряжение, Rk — сопротивление коллекторной нагрузки, С — раз
делительный конденсатор, Re — эмиттерное сопротивление, RI, R2 — резисторы де
лителя, задающего режим каскада по постоянному току.
Особенностью классической схемы каскада с ОБ (рис. 7.1, а) является наличие
отдельного источника смещения Us, с помощью которого задается режим транзисто
ра по постоянному току, что достаточно неудобно. Поэтому на практике использует
ся каскад ОБ (рис. 7.1, б), в котором режим по постоянному току задается делителем
на резисторах RI, R2, а по переменному току база соединена с “землей” через блоки
ровочный конденсатор СЬ.
♦и«
♦Ucc
Rk R1
: : Rk
R. —j— Cb
R«-r-Cb
a)
6)
Ro
•US
в)
Рис. 7.1. Базовые усилительные каскады с ОБ (а, б), ОЭ (в) и ОК (г)
Базовые каскады характеризуются входным R„ и выходным RBfcfX сопротивле
нием, коэффициентом усиления тока К, и напряжения Ки. Ниже в качестве справоч
пой информации приводятся приближенные выражения для этих характеристик:
Для каскада с ОБ:
R„ = Re||Rr*; - Rk; К, = a; K„ = a.Rk/(Re + R.').
Для каскада с ОЭ:
R.x - P(Re + Rc'); R.ux = Rk/[p + (Re + R/)(Rk + R.)/(Re + Re' + R,)];
Kj = ₽; Ku = -Rk/(Re + R/).
Для каскада с OK:
Rux = p(Re + R.'); R.M, = Re + R,'; K, - 0; Ku - 1.
В приведенных формулах Rf' — обьемное сопротивление эмиттерного псрехо
да; a — коэффициент усиления тока транзистора в схеме с ОБ; || — значок параллель
ного соединения резисторов; R, — внутреннее сопротивление источника входного
202
Глава 7. Транзисторные усилительные схемы
сигнала с учетом сопротивлений параллельно включенных резисторов RI, R2;
3 — коэффициент усиления тока транзистора в схеме ОЭ. Заметим, что каскады ОБ
в ОК сигнал не инвертируют, а ОЭ — инвертирует.
Проектирование усилителя начинается с определения режима транзистора по
постоянному току, который называют статическим режимом.
В зависимости от тока коллектора транзистора и величины падения напряже-
ния на электродах транзистора усилительного каскада, а также от амплитуды вход-
ного сигнала различают следующие режимы усиления: А, В, С, D и промежуточные
режимы, например, АВ.
В режиме А ток в выходной цепи усилителя протекает в течение всего перио-
да сигнала. Для иллюстрации обратимся к рис. 7.2, на котором показан каскад но
схеме с ОЭ. В схеме использованы вольтметры для контроля напряжений на элект-
родах транзистора в статическом режиме, а также функциональный генератор
л осциллограф для моделирования режима усиления. В программе EWB для рассма-
триваемой схемы нельзя отключать функциональный генератор, поэтому при моде-
лировании статического режима установим минимальную амплитуду сигнала
1в нашем случае 1 мкВ).
•»Ucc
Рис. 7.2. Усилительный каскад с ОЭ
Для усилительного каскада класса А расчет статического режима заключает-
ся в выборе такого коллекторного тока 1сп (его называют током покоя или током в ра-
мой точке), при котором падение напряжения на коллекторной нагрузке Rk,
(-первых, равно падению напряжения на транзисторе (напряжение коллектор-
шттер U„) и, во-вторых, было бы меньше амплитудного значения при максималь-
ном входном сигнале. Первое условие применительно к схеме на рис. 7.2 запишется
следующим образом:
kRk + Uw + kRe = U„, (7.1)
где 1ТО = Plc/O - 1) — ток покоя эмиттера.
Поскольку р»1 (в рассматриваемом примере р = 100), то 1<лВ таком слу-
чае выражение (7.1) запишется в виде: 2IraRk + I,„Re = U«, откуда находим ток покоя
Ieo = U«/(2Rk + Re). (7.2)
Рассмотрим теперь базовую цепь транзистора. Напряжение на базе относи-
тельно общей шины (с учетом того, что 1^)
Ull0 = + IJRe, (7.3)
где UbM — напряжение база-эмиттер (для кремниевых транзисторов оно находится
в пределах 0,7...0,9 В).
203
Часть II. Моделирование схем и устройств
Поскольку равно падению напряжения на резисторе R2, ток через него р;
вен 12 = Ub/R2 = (U*. + IcoRe)/R2.
Через резистор R1 протекает сумма тока базы, равного Iw/p, и тока 12. Падещ
напряжения на резисторах RI, R2 равно напряжению питания Ucc. Поэтому для б:
зовой цепи:
R1(UP + Ub/R2) + Ub - Uce. (7.4
Если руководствоваться требованиями высокой термостабильности каска;
(см. ниже), то необходимо выбирать
RI » R2, U/P «12, Uu = I„Re. (7.5
В таком случае с учетом (7.2) и (7.3) из (7.4) получаем выражение для ориен-
тировочного расчета сопротивлений резисторов схемы с ОЭ:
R1/R2 - Rk/Re.
Подставляя в формулу (7.6) значения сопротивлений резисторов,
(7.6
используем
мых в схеме на рис. 7.2, убеждаемся в справедливости этого соотношения. При это:
как следует из показаний вольтметров, падение напряжения на коллекторном с
противлении составляет 10 - 5,55 = 4,45 В и близко к значению падения напряж
ния на транзисторе 5,55 - 0,886 = 4,67 В, что соответствует первому услови
обеспечения режима А.
Коэффициент усиления каскада с ОЭ рассчитывается по приближенной фо]
муле Ku = Rk/Re (если Re не зашунтировано емкостью). В рассматриваемом прим
ре он равен 5. Следовательно, при амплитуде выходного напряжения 4,5 В (вторе
условие обеспечения режима А) па вход усилителя можно подать сигнал с амплиг
дой 4,5/5 = 0,9 В.
Осциллограммы входного и выходного сигналов исследуемого усилителя m
казаны на рис. 7.3. Обращаем внимание на то, что оба канала работают в режиме А
и осциллограммы разнесены на экране с помощью смещения по вертикали (Y POS
Из осциллограмм видно, что выходной сигнал (осциллограмма А) по форме повтор?
ет входной сигнал (осциллограмма В). Таким образом, достоинством режима клас-
са А является минимум нелинейных искажений. Его недостатком является низкий
КПД (меньше 0,5) поэтому он используется чаще всего в каскадах предварительной
усиления, а также в маломощных выходных каскадах.
Рис. 7.3. Осциллограммы входного (В) и выходного (А) сигналов
В режиме В ток через транзистор протекает в течение примерно половины пе-
риода входного сигнала («180). Половину этого угла, соответствующего моменту
прекращения тока через активный элемент, называют углом отсечки (в идеале этот
угол равен 90 ). Из-за нелинейности начальных участков характеристик транзисто-
ров форма выходного тока при его малых значениях существенно отличается от фор-
204
Глава 7. Транзисторные усилительные схемы
мы тока в линейном режиме. Это вызывает значительные нелинейные искажения
выходного сигнала.
Режим В обычно используют в двухтактных выходных каскадах, имеющих
высокий КПД, в других каскадах его применяют сравнительно редко. Чаще выбира-
ют промежуточный режим АВ, при котором угол отсечки несколько больше 90°,
при отсутствии входного сигнала через активный элемент протекает ток, равный
5... 15% от максимального при заданном уровне входного сигнала. Такой выбор поз-
воляет уменьшить нелинейные искажения.
В режиме С ток через транзистор протекает в течение промежутка времени,
.меньше половины периода входного сигнала, т. е. при угле отсечки меньше 90*. Ток
покоя в режиме С равен нулю. Его используют в мощных усилителях, в которых на-
грузкой является резонансный контур (например, в выходных каскадах радиопере-
датчиков).
Режим D (или ключевой) — режим, при котором транзистор находится толь-
ко в двух состояниях: или полностью закрыт, или полностью открыт. Такой режим
используется в ключевых схемах, о которых речь пойдет в следующей главе.
При выборе параметров рабочей точки активного элемента необходимо учи-
тывать разброс его параметров от экземпляра к экземпляру и их зависимость от
температуры (обратный ток переходов, коэффициент передачи по току), а также
подверженность изменению во времени (за счет старения). Все это требует приня-
тия специальных мер для стабилизации коэффициента усиления и других параме-
тров усилителей.
Изменения параметров особенно опасны в первых каскадах усилителей посто-
янного тока, так как при гальванической межкаскадной связи (без разделительных
конденсаторов) и большом коэффициенте усиления это может привести к существен-
ному изменению нулевого уровня на выходе. Поэтому в большинстве транзисторных
усилителей для стабилизации положения рабочей точки вводят стабилизирующую
обратную связь или используют методы температурной компенсации (в частности,
введением термозависимых сопротивлений).
Для оценки влияния температуры на параметры усилительных каскадов
используется коэффициент температурной нестабильности St = 0/[1 + 0Yb], где
Yb = Re/(Re + Rb), Rb — сопротивление базового делителя (для схемы па рис. 7.2 оно
равно сопротивлению параллельно включенных резисторов RJ, R2). Максимальная
температурная стабильность статического режима обеспечивается при Yb - 1. Следо-
вательно, для повышения температурной стабильности желательно выполнение ус-
ловия Re»Rb, т. е. она будет тем лучше, чем больше сопротивление в цепи эмиттера
и чем меньше эквивалентное сопротивление делителя RI, R2, задающего режим по
постоянному току.
Для повышения температурной стабильности усилительных каскадов исполь-
зуют также различные способы термостабилизации.
Первый способ термостабилизации — параметрический — основан на приме-
нении термочувствительных элементов, в частности, полупроводниковых диодов
(в схеме на рис. 7.2 это может быть диод, подключенный последовательно с резисто-
ром R2). При изменении температуры окружающей среды сопротивление термоза-
висимого элемента изменяется так, что изменение тока базы или напряжения
между эмиттером и базой компенсирует изменение тока коллектора. Очевидно, что
характеристика такого термоэлемента должна обладать соответствующей темпера-
турной зависимостью. А так как это сделать трудно, то для обеспечения нужных ха-
205
Часть II. Моделирование схем и устройств
рактеристик в ряде случаев параллельно термоэлементу и последовательно с hi
включают специальным образом подобранные активные сопротивления. Это уело:
няет схему, и, кроме того, с течением времени такая компенсация нарушается.
Второй способ термостабилизации — применение отрицательной обрати
связи по постоянному току, причем используют как местную, так и общую обрати]
связи. При местной обратной связи чаще всего применяют обратную связь по toi
и несколько реже — обратную связь по напряжению. В схеме на рис. 7.2 примени
обратная связь по току, сущность которой заключается в том, что делитель на рез
сторах RI, R2 задает потенциал базы и тем самым жестко фиксирует нотенцш
эмиттера. Так как этот потенциал обусловлен падением напряжения на резисто
Re, то тем самым задается ток эмиттера. Чем меньше эквивалентное сопротивлен
базового делителя, тем в меныпей степени потенциал базы зависит от изменений б
зового тока и тем лучше стабилизация. Однако при малых сопротивлениях резист
ров RI, R2 резко возрастает мощность, потребляемая от источника питания,
и уменьшается входное сопротивление каскада.
Если необходимо иметь стабильный режим по постоянному току и максималь
ное усиление по переменному току, вводят достаточно глубокую обратную связь за!
счет увеличения сопротивления резистора Re, параллельно которому включается
конденсатор большой емкости (конденсатор СЬ на рис. 7.2), которая определяется из
условия: 2nFm,nCbRe » 1, где Fmin — минимальная частота сигнала.
В многокаскадных усилителях для стабилизации статического режима пред-i
почтение отдается общей отрицательной обратной связи по постоянному току, охва-
тывающей целиком весь усилитель. При этом местные обратные связи применять
нецелесообразно, так как они всегда уменьшают коэффициенты усиления отдель-
ных каскадов и снижают эффективность общей обратной связи.
Усилительные каскады на полевых транзисторах, в отличие от биполярных,
управляются напряжением, приложенным или к запертому р—n-переходу (в тран-
зисторах с управляющим р—n-переходом) или между электрически изолированным
затвором и подложкой, которая часто соединяется с одним из электродов транзисто-
ра (в МДП-транзисторах). Ток затвора в усилительных каскадах на полевых транзи-
сторах достаточно мал и для кремниевых структур с управляющим р—п-переходох
не превышает 10 нА. Для МДП-транзисторов этот ток на несколько порядков мень-
ше. Для транзисторов с р- п-переходом входное сопротивление на низких частотах
составляет десятки мегом, а для МДП-транзисторов достигает десятков и сотен тера-
ом. С повышением частоты входное сопротивление транзисторов существенно
уменьшается из-за наличия емкостей затвор-исток и затвор-сток.
Среди базовых каскадов на полевых транзисторах на практике наибольшее
распространение получили каскады с общим истоком (аналог ОЭ) и истоковые повто-
рители (аналог ОК), показанные в двух модификациях на рис. 7.4 и отличающиеся
способом реализации статического режима: смещение обеспечивается или за счет па-
дения напряжения на резисторе, включенном в цепь истока (рис. 7.4, а, в), или за
счет подачи на затвор дополнительного напряжения (рис. 7.4, б, г). Так как ток затво-
ра полевых транзисторов весьма мал, можно считать, что в первом случае напряже-
ние затвор-исток практически равно падению напряжения на сопротивлении Rs.
Для полевого транзистора с управляющим р—n-переходом, работающего
в широком диапазоне температур, положение рабочей точки может изменяться из-
за дополнительного падения напряжения на резисторе R2, сопротивление которого
обычно выбирается достаточно большим. Это связано с изменением обратного тока
206
Глава 7. Транзисторные усилительные схемы
-н-перехода, выполняющего роль затвора, изменением контактной разности по-
нциалов затвор-канал и подвижности носителей заряда в канале. Изменение тока
ока при фиксированном напряжении смещения определяется приближенным со-
ношением Ald - Ido[(Tc/T)06e -1], где Id0 — ток стока при температуре Т„; Т — темпе-
тура, для которой определяется AId.
а) 6) в) г)
Рис. 7.4. Базовые усилительные каскады на полевых транзисторах с общим истоком (а, б)
и общим стоком (в, г)
Анализ дестабилизирующих факторов, вызывающих изменение тока стока,
показывает [12, 48], что при изменении температуры они имеют разные знаки и,
следовательно, возможна их взаимная компенсация. Точка, в которой при измене-
ниях температуры изменение тока стока минимально, называют температурно-
стабильной. точкой. Однако эффективная компенсация возможна только
з небольшом диапазоне температур. При этом для полевых транзисторов с изолиро-
ванным затвором температурно-стабильная рабочая точка отсутствует вообще.
Основным приемом повышения температурной стабильности является увели-
чение глубины последовательной обратной связи по току, что осуществляется за счет
увеличения сопротивления Rs и, как следствие, сопровождается увеличением напря-
жения смещения. В итоге уже при сравнительно небольших напряжениях затвор-ис-
ток полевые транзисторы работают вблизи режима отсечки, где крутизна
характеристики мала. Для устранения этого недостатка на затвор подают дополни-
тельное отпирающее напряжение от делителя напряжения на резисторах RI, R2
(рис. 7.4, б, г), что обеспечивает работу транзистора на участке с большей крутизной.
У полевых транзисторов с индуцированным каналом подача напряжения сме-
щения от внешнего источника обязательна, так как при его отсутствии транзистор
заперт. Температурная стабилизация осуществляется за счет последовательной об-
ратной связи, которая вводится с помощью резистора Rs.
Следует отметить, что температурные изменения тока стока в полевых транзис-
торах во много раз меньше изменений коллекторного тока биполярных транзисторов.
Поэтому, как правило, обеспечение требуемой температурной стабильности не вызы-
вает больших затруднений. Возникающая при этом обратная связь по переменному то-
ку нейтрализуется шунтированием резистора Rs блокировочным конденсатором.
При анализе усилительных каскадов на полевых транзисторах оперируют
с крутизной характеристики S„ и током стока Id0, которые соответствуют нулевому
напряжению затвор-исток. При этом используют следующие приближенные соотно-
шения, описывающие характеристики полевых транзисторов: Id = Id0(l - Ug,/UB„)2;
S - S0(l - Un/Ur„); So = 2I*,/Uro. В этих формулах Ic — текущее значение тока стока.
207
Часть II. Моделирование схем и устройств
Lo, So — начальный ток стока и крутизна характеристики при напряжении отсе1
UK>J; Up, S — текущие значения напряжения затвор-исток и крутизны.
Входное сопротивление усилительных каскадов на рис. 7.4 в области сред,
частот равно сопротивлению резистора R2 или R 1||R2, выходное сопротивление i
када с общим истоком равно Rd||RlPzl, где R..^ — дифференциальное сопротивление
нала сток-исток (как правило, оно существенно больше Rd) поэтому выход
сопротивление практически равно Rd. Для каскада с общим стоком при выполн
щихся на практике допущениях SRs » 1 и SR^ » 1 выходное сопротивление ।
но 1/S. Коэффициенты усиления по напряжению каскадов с общим исто!
и стоком определяются соответственно формулами:
К„ он * S(Rd)2/(Rd + Rs); Ku ж = SRs /(1 + SRs). (7.
Схема для моделирования каскада с общим истоком приведена на рис. 7.5.
Рис. 7.5. Усилительный каскад с ОИ
Контрольные вопросы и задания
1. По аналогии с рис. 7.2 составьте схему для исследования каскада с ОБ
рис. 7.1, б. Проверьте применимость полученных формул для каскада с ОЭ е
определении параметров статического режима.
2. По аналогии с рис. 7.2 составьте схему для моделирования эмиттерного повто]
теля. При этом примите RI = R2, сопротивление этих резисторов выберите из
ловия малого влияния на входное сопротивление каскада (влияние минимал!
при бесконечном сопротивлении).
3. В схеме на рис. 7.2 нейтрализуйте обратную связь по току па частотах вы
1 кГц путем подключения параллельно резистору Re блокировочного конден
тора СЬ. Измерьте коэффициент усиления на частоте 10 кГц. Необходимо учес
что при этом коэффициент усиления напряжения на постоянном токе опреде.
ется формулой К„ = Rk/R.\ где R/ — омическое сопротивление эмиттера тран
стора, задаваемое в перечне параметров транзистора.
4.
В схеме на рис. 7.5 с помощью осциллографа определите коэффициент усиле:
и сравните его с результатами расчета по формуле (7.7). Исследуйте зависимо
коэффициента усиления напряжения от сопротивлений резисторов Rd, Rs и к;
тизны транзистора
(крутизна
задается в редактируемом перечне параметров
а также от емкости блокировочного конденсатора СЬ, подключаемого параллел
но резистору Rs. Обращаем внимание на необходимость установки соответству:
щего входного сопротивления вольтметра, контролирующего напряжение
затворе транзистора (по умолчанию оно равно 1 МОм, что явно недостаточно).
208
Глава 7. Транзисторные усилительные схемы
5. Назовите основные отличия усилительных каскадов на биполярных и полевых
транзисторах.
6. Какие способы используются для повышения стабильности транзисторных уси-
лителей?
7. Проведите анализ и испытания схем, размещенных в файлах 3sta-amp.ca4, 3stg-
amp.ca4, bootstra.ca4 и common-e.ca4.
7.2. Дифференциальный усилитель
Дифференциальный усилитель (ДУ) является одним из основных каскадов
операционного усилителя. Простейший ДУ (рис. 7.6, а) состоит из двух одинаковых
плеч, каждое из которых содержит транзистор и резистор нагрузки. Эмиттеры тран-
зисторов соединены между собой и через резистор Re подключены к общей шине.
Рис. 7.6.
Дифференциальный каскад с резистором (а) и стабилизатором тока (б) в эмиттерной
цепи
Предположим, что каскад абсолютно симметричен, т. е. сопротивления рези-
сторов и параметры транзисторов, входящих в каждое плечо, одинаковы. Тогда при
одинаковых входных сигналах Ut и U2 токи транзисторов также будут одинаковы,
а это означает, что разность потенциалов между коллекторами (точки 1, 2) будет рав-
на нулю. Этот случай, когда оба входных сигнала одинаковы как но амплитуде, так
а по фазе, называется режимом усиления синфазного сигнала.
Если на оба входа подать одинаковые по уровню, но разные по фазе сигналы,
то в результате ток одного транзистора увеличится, а другого на столько же умень-
шится. В этом случае разность потенциалов между коллекторами будет пропорцио-
нальна удвоенному значению изменения напряжения на коллекторе транзисторов.
При этом через резистор Re будет течь неизменный ток.
Если положительное приращение получит сигнал только на одном входе, на-
пример, на первом, это приведет к увеличению коллекторного тока транзистора VT1
и, следовательно, тока через резистор Re. Но увеличение падения напряжения на ре-
зисторе Re вызовет уменьшение разности потенциалов между базой и эмиттером
транзистора VT2, и его ток уменьшится, причем изменение тока транзистора VT2 бу-
дет таково, что приращения напряжений эмиттер-база обоих транзисторов будут
одинаковы. Следовательно, при увеличении входного напряжения на некоторую ве-
’.ичину потенциал эмиттера увеличится на половину этой величины. При этом при-
ращение напряжения база-эмиттер для обоих транзисторов будет одинаковым,
209
Часть II. Моделирование схем и устройств
но разного знака. Очевидно, что независимо от того, на какой вход каскада подают-
ся напряжения, токи транзисторов меняются одинаково и приращения их вызваны
половинной разностью напряжений, приложенных между входами. Это дает основа-
ние при анализе дифференциального каскада рассматривать только одну его полови-
ну, считая, что к его входу приложено напряжение, равное половине разностг
напряжений на входах ДУ, а сопротивление в цепи эмиттера Re равно пулю.
Важной характеристикой ДУ является коэффициент подавления синфазной:
сигнала, который показывает, во сколько раз коэффициент усиления дифференци-
ального входного сигнала, приложенного между входами каскада, больше коэффи-
циента усиления синфазных сигналов, действующих между каждым входом
и общей шиной (землей). Анализ показывает [12, 28, 48], что максимальное значе-
ние коэффициента подавления в первом приближении определяется как IJRe/ф,.
т. е. для его увеличения необходимо увеличивать сопротивление Re. Однако прв
этом приходится сталкиваться с проблемой обеспечения необходимого режима тран-
зисторов по постоянному току, которая выражается в необходимости увеличения на-
пряжение питания до такой величины, что реализация такого решения становится
технически нецелесообразной. Кроме того, на резисторе Re при этом будет бесполез-
но рассеиваться электрическая мощность, что снижает КПД каскада.
Для устранения этого недостатка вместо резистора Re включают транзистор
по схеме с ОЭ (рис. 7.1, б), который выполняет роль источника тока. Выходное со-
противление транзистора VT3 не равно бесконечности и примерно равно дифферен-
циальному сопротивлению коллекторного перехода.
Хотя в идеальном дифференциальном каскаде синфазный входной сигнал не
вызывает появления выходного сигнала, в реальном каскаде имеется небольшой вы-
ходной сигнал. Он обусловлен неполной идентичностью характеристик транзисторов,
коллекторных нагрузок и внутренних сопротивлений источников входных сигналов.,
В диапазоне высоких частот существенную роль в разбалансе каскада играют
емкости коллекторных переходов. Они являются основной причиной роста усиле-
ния синфазного сигнала в диапазоне высоких частот.
Тот факт, что работа ДУ основывается на идентичности его плеч, объясняет
популярность этих усилителей в микроэлектронике. Только в интегральных схе-
мах, где элементы расположены друг от друга на расстояниях десятков микрон
можно обеспечить максимальную идентичность параметров транзисторов.
Рассмотрим важнейший параметр ДУ — коэффициент усиления дифференци
альной. составляющей сигнала К, который часто называют просто коэффициентом
усиления. Как отмечалось выше, при анализе ДУ может рассматриваться как кас-
кад с ОЭ при Re = 0. Следовательно, его коэффициент усиления может быть опреде-
лен как [12]
К - -aR./[Re' + (1 - a)(R, + Rb')], (7.8)
где Rk = RI - R2; Rc', Rb' — объемные сопротивления эмиттера и базы соответствен-
но; R. — внутреннее сопротивление источников входного сигнала; a — коэффициен-
усиления тока в схеме с ОБ.
Очевидно, что коэффициент усиления ДУ значительно больше, чем у каскад*
с ОЭ, поскольку Re = 0 (для каскада с ОЭ коэффициент усиления обратно иропорци-i
онален Rr' + Re). Следовательно, при гораздо меньшей нестабильности статического;
режима ДУ имеет гораздо больший коэффициент усиления, что является его вторых
важным преимуществом.
210
Глава 7. Транзисторные усилительные схемы
В случае источников сигнала с малым внутренним сопротивлением (Rj менее
1 кОм) и небольших рабочих токах (менее 1 мА) вторым слагаемым в знаменателе
выражения (7.8) можно пренебречь; тогда
К = a(Rk/Rc'). (7.9)
При a = 0,9, Rk = 4 кОм и R,' = 10 Ом из (7.9) получаем К = 360.
При определении коэффициента усиления синфазной составляющей на оба
входа ДУ подается входной сигнал от одного источника. При таком условии коэффи-
циент усиления определяется как [12]
К4 - aRk/2R,. (7.10)
Следующий параметр ДУ — коэффициент подавления синфазной состав-
ляющей Кдс — характеризует влияние синфазной составляющей входного сигнала
=а дифференциальную составляющую выходного сигнала. Поскольку на практи-
ке синфазная составляющая входного сигнала может в тысячи раз превышать
дифференциальную составляющую, то значение КА< должно быть меньше К на не-
жолько порядков. Соотношение модулей этих двух величин принято характери-
зовать коэффициентом подавления синфазной составляющей, выраженным
з децибелах: Кп - 201g|K/Kj. Распространенным типом синфазного сигнала явля-
ются различные помехи (внутренние и внешние) и наводки, действующие од-
новременно на оба входа. Поэтому увеличение коэффициента Кп — один из
основных путей повышения помехоустойчивости ДУ. Для оценки Ко использует-
ся выражение [12]:
K„-Rt/R..8, (7.11)
foe б = Да/ct 4- ARk/Rk — коэффициент асимметрии ДУ, т. е. сумма относительных
разбросов параметров его плеч; при необходимости эту сумму можно дополнить раз-
fpocoM других параметров транзисторов.
Из выражения (7.11) следует важный вывод: коэффициент подавления син-
фазной составляющей находится в прямой зависимости от сопротивления источни-
а сигнала R;. Следовательно, это сопротивление должно быть как можно больше.
Различают входные сопротивления ДУ для дифференциальной и синфазной
«оставляющих сигнала, которые существенно различаются.
Входное сопротивление для дифференциальной составляющей равно удвоенно-
му входному сопротивлению каждой половины ДУ и определяется выражением: R. =
(3 + 1)R«'+ Rb']. Например, при 0 « 100, Re' = 25 Ом и Rb' = 150 Ом Ид - 5,35 кОм.
оскольку сопротивление R.' обратно пропорционально току покоя Iw, то для увеличе-
ея входного сопротивления целесообразно использовать ДУ в режиме малых токов —
1 микрорежиме. Кроме того, целесообразно использовать транзисторы с высокими
речениями р, например, каскад Дарлингтона (см. ниже). Так, если Ц = 50 мкА и
= 2000, то Re' = 0,5 кОм и R„ = 2 МОм.
Входное сопротивление для синфазной составляющей определяется сопро-
йвлением источника тока R, в соответствии с выражением Rc = ((3 + 1)R;. Посколь-
ку Ri » Rc', то Rc намного превышает R..
Еще один параметр ДУ — динамический диапазон — характеризует отноше-
le максимального и минимального напряжения входных сигналов, выраженное
В децибелах. Минимальный сигнал ограничивается уровнем собственных шумов,
максимальный — нелинейными искажениями. Оценить максимально допустимый
hr-нал можно, например, следующим образом. Пусть в режиме покоя Uto 0,5Ucc.
положительной полярности входного сигнала потенциал Ut уменьшается
Ьлоть до нуля (после чего наступает насыщение транзистора), а при отрицательной
211
Часть II. Моделирование схем и устройств
полярности увеличивается вплоть до Ucc (после чего транзистор закрывается). Та-
ким образом, в обоих случаях максимальное приращение напряжение на коллекто-
ре составляет 0,5Ucc. Деля эту величину на коэффициент усиления, получаем
максимально допустимый входной сигнал.
Синфазные сигналы могут иметь гораздо большие амплитуды, чем дифферен-
циальные, поскольку коэффициент Кс значительно меньше К,. Обычно К. < 1, поэто-
му синфазные входные сигналы могут составлять несколько вольт, вплоть дс
напряжений, близких к Ucc.
Неизбежная асимметрия плеч реальных ДУ является причиной того, что в ре-
жиме покоя имеется разность потенциалов между точками 1, 2, которой соответст-
вует па входе дифференциальный сигнал, называемый напряжением смещения
нуля иеи. Чтобы устранить разбаланс выходных потенциалов, нужно подать на вхот
дифференциальный сигнал, равный Ucm и имеющий противоположный знак. На-
пряжение смещения нуля состоит из нескольких слагаемых, каждое из которых за-
висит от разброса токов эмиттеров, коллекторных сопротивлений и др.
Разброс токов эмиттеров (при одинаковых напряжениях U,.) обусловлен раз-
бросом тепловых токов эмиттерных переходов: в транзисторе с меньшим током бу-
дет меньше и ток I,. Для того чтобы выровнять токи эмиттеров, на вход ДУ подается
“выравнивающий” дифференциальный сигнал.
UCM = <pln(L/L'). (7Л2)
Например, если тепловые токи различаются на 20%, то U<N = 5 мВ.
Вторая по важности составляющая напряжения смещения обусловлена раз-
бросом коллекторных сопротивлений. Пусть токи в плечах одинаковы, тогда раз-,
ность коллекторных потенциалов в режиме покоя составит:
U^ = 2(p(AR./Rk). . (7.13)
Например, при разбросе коллекторных сопротивлений 2% получаем UCM = 1 мЕ
Другие составляющие, связанные с разбросом коэффициента а, сопротивления R,
и др., менее существенны.
Следует заметить, что напряжение смещения пуля зависит от температуры.
Эта зависимость характеризуется температурной чувствительностью, измеряемо»
в мкВ/С. Отметим, что температурная чувствительность уменьшается вместе
с уменьшением напряжения смещения [12].
Кроме начального разбаланса коллекторных потенциалов, имеет место так-|
же начальный разбаланс входных токов 1вх. Этот параметр называют током смеще-
ния или просто разностью входных токов. Влияние разности входных tokosI
проявляется в том, что ток смещения, протекая через внутреннее сопротивление!
источника входного сигнала, создает на нем падение напряжения, которое равно-
сильно появлению напряжения смещения. Например, если разность входных токоз|
20 нА и R, = 100 кОм, то UCM 2 мВ.
Схема для исследования ДУ (рис. 7.7) по сравнению с рис. 7.1, б дополнитель-
но содержит элементы задания статического режима (резисторы Rls, R2s), блокиро-
вочный конденсатор СЬ в цепи питания, источники входного сигнала, внутренние
сопротивления которых имитируются резисторами Ri, Ri', а также контрольно-из-
мерительные приборы. С помощью вольтметров, подключенных к коллекторах
транзисторов ДУ, можно измерять напряжения смещения при изменении сопротив-
лений резисторов RI, R2, Ri, Ri' и параметров транзисторов в статическом режиме
и сравнивать полученные результаты с данными расчетов по формулам (7.12
и (7.13), а с помощью вольтметра в эмиттерной цепи транзистора VT3 — контроли-
212
Глава 7. Транзисторные усилительные схемы
ровать ток покоя по падению напряжения на резисторе Re. Изменяя фазу источни-
ков входных сигналов, можно имитировать чисто синфазные входные сигналы (фа-
за обоих источников выбирается одинаковой, амплитуда не более напряжения
питания Ucc), дифференциальные сигналы (параметры источников показаны на
рис. 7.7), смешанный режим (фазы отличаются на несколько градусов, амплитуда —
несколько меньше Ucc).
Рис. 7.7. Схема для испытаний ДУ
Рис. 7.8. Осциллограммы выходных сигналов в режиме дифференциального сигнала
Из осциллограмм выходных сигналов (рис. 7.8) ДУ на рис. 7.7 видно, что амп-
литуда выходного напряжения составляет около 75 мВ (напомним, что точное значе-
ние можно получить в режиме ZOOM), что соответствует эффективному значению
53 мВ. Поскольку эффективное значение входного сигнала равно 1 мВ, коэффициент
усиления равен 53. Расчет по формуле (7.8) при выбранных параметрах транзисто-
ров (R/ *= 5 Ом, R/ - 10 Ом, а = 0,99) дает значение около 65, т. е. получается не-
олько завышенный результат, что объясняется неидеальностью источника тока
транзисторе VT3.
Для улучшения характеристик транзисторных ДУ используется ряд схемо-
Ёнических решений, в частности, широкое применение нашел каскад Дарлингто-
и более качественный стабилизатор тока (рис. 7.9).
Каскад Дарлингтона (рис. 7.9, а) относится к классу так называемых состав-
[х транзисторов, обладающих такими свойствами, которые трудно или невозмож-
получить в транзисторах с обычной структурой. Особенностью такого каскада
ляется исключительно большой коэффициент усиления тока базы, равный
’]: ВаВ,тВ, + BiB2, где В,, В, — коэффициенты усиления тока транзисторов VT1
УТ2. Во всех практических случаях первые два члена в правой части приведенно-
213
Часть II. Моделирование схем и устройств
го выражения не существенны и эквивалентный коэффициент усиления можно за-
писать в виде В = В,Вг.
Если составляющие Bj и В2 равны 100...200, то коэффициент усиления то-
ка В составит (1...4)10\ В практических схемах В1 может быть существенно меньше
В2. Поэтому реальные значения коэффициента В составляют несколько тысяч, как
и у транзисторов с сверхтонкой базой. Этот недостаток каскада Дарлингтона объясня-
ется разницей эмиттерных токов транзисторов. Для их выравнивания параллельно
эмиттерному переходу транзистора VT2 включают резистор R (рис. 7.9, б), что позво-
ляет достичь коэффициента усиления порядка 1000...5000.
Идея стабилизатора тока на рис. 7.9, в заключается в стабилизации напряже-
ния базы транзистора с помощью параметрического стабилизатора, состоящего и:
стабилитрона VD и последовательно включенного с ним балластного резистора Нс
(см. разд. 12.2). Постоянство напряжения на базе обеспечивает постоянство напря-
жения на резисторе Re и однозначно связанный с коллекторным током ток эмитте-
ра, протекающий через нагрузку Rn.
Рис. 7.9. Схемы каскада Дарлингтона (а), составного транзистора с выравнивающим сопро-
тивлением (б), стабилизатора (о) и отражателя тока (г)
В аналоговых интегральных схемах широкое распространение получил стаби-
лизатор тока под названием “токовое зеркало” или отражатель тока (рис. 7.9, я).
Из сравнения схем на рис. 7.9, в, г нетрудно установить сходство между отражателе
тока и простейшим стабилизатором. Отличие заключается в том, что в отражате;
вместо стабилитрона используются резистор R1 и прямо смещенный р—n-nepexoj
роль которого играет транзистор VT1, включенный по схеме диода.
Если сопротивления R1 и R2 сделать неодинаковыми, то неодинаковыми б;
дут и токи эмиттеров. При этом ток в нагрузке равен:
In = I.CR1/R2), (7.14)
где 1„ — ток через резистор R1.
Как видно из выражения (7.14), ток 1„ может быть больше или меньше тока 1
в зависимости от отношения R1/R2: обычно оно не превышает нескольких единиз
из-за ограничений по площади, занимаемой на кристалле резисторами с большие
сопротивлением.
Из (7.14) следует, что выходным током 1а можно управлять, меняя тем иле;
иным способом входной ток I., в чем и проявляется достоинство отражателя тока |
Кроме того, в выражение (7.14) не входят ни напряжение на стабилитроне, ни ко:
фициент усиления тока. Это значит, что работа отражателя тока в первом приблиэ
нии не зависит от изменения этих параметров и, прежде всего, от температуры.
214
Глава 7. Транзисторные усилительные схемы
Чтобы обеспечить особо малые выходные токи (например, при работе ДУ в микро-
режиме), сопротивление R1 делают равным нулю. Для такого варианта In = ((p/R2)ln(VU
и зависимость тока нагрузки 1„ от тока управления X, значительно слабее, а управление
выходным током менее эффективно.
Контрольные вопросы и задания
1. Используя схему ДУ на рис. 7.7, исследуйте зависимость коэффициента усиле-
ния от параметров транзисторов VT1, VT2 (R/, Rb', а) и степени неиндентичнос-
ти внутренних сопротивлений источников входных сигналов. Результаты
моделирования сравните с данными расчетов.
2. Выполните исследования по п. 1 для режима синфазного входного сигнала при
двух значениях амплитуды входных сигналов: 0,1 Ucc и 0,9Ucc.
3. Для ДУ на рис. 7.7 исследуйте зависимость напряжения смещения от неидентич-
ности коллекторных нагрузок (RI, R2) и цепей смещения (Rls, R2s), а также па-
раметров транзисторов VT1 и VT2 (тепловой ток коллектора, коэффициент
усиления по току и др.). При изменении параметров транзисторов необходимо
в библиотеке компонентов сделать копию для одного из транзисторов ДУ с изме-
нением названия, например, одному присвоить имя 1, а другому — 2.
4. В схеме ДУ на рис. 7.7 замените стабилизатор тока па транзисторе VT3 на отража-
тель тока (рис. 7.9, в), используя в качестве резистора Rv резистор R3 ДУ. При этом
коллектор транзистора VT2 отражателя соедините с эмиттерами транзисторов ДУ.
Подберите сопротивления эмиттерных резисторов отражателя таким образом, что-
бы сохранился первоначальный статический режим. После таких изменений из-
мерьте коэффициенты усиления для дифференциального и синфазного сигнала
и полученные данные сравните с предыдущими результатами.
5. Какими параметрами ДУ определяется коэффициент подавления синфазной со-
ставляющей?
5. Проведите испытания усилителя по схеме, приведенной в файле diffpair.ca4.
7.3. Каскодная схема
Под каскодной схемой (или просто каскодом) понимается схема, в которой два
шзистора соединены последовательно, так что через них в статическом режиме
утекает один и тот же ток (рис. 7.10) (на практике находят применение и другие
жодные схемы, в частности, с параллельным питанием и последовательным со-
шением по переменному току, а также рассматриваемые ниже гибридные каскод-
е схемы). Транзистор VT1 включен по схеме с ОЭ, a VT2 — по схеме с ОБ. Режим
постоянному току задается с помощью резисторов RI, R2, R3. Режим ОБ транзи-
ра VT2 по переменной составляющей обеспечивается блокировочным конденса-
эм СЪ, подключенным к его базе. На рис. 7.10 показаны также необходимые для
ледования контрольно-измерительные приборы.
Каскодная схема имеет коэффициент усиления тока а = а'а", где а', а" — ко-
ициенты усиления тока первого и второго транзисторов. Коэффициент усиления
эяжения каскода определяется приближенной формулой
К. = aRk/Re. (7.15)
Как следует из (7.15), коэффициент усиления каскода по напряжению такой
как и в простейшем каскаде ОЭ (это вытекает из того, что первый транзистор
гг Ku = 1). В данном случае он равен 5, что подтверждается и результатами ос-
иографических измерений, приведенных на рис. 7.11.
215
Часть II. Моделирование схем и устройств
Не давая выигрыша ио коэффициенту усиления напряжения и тока (а также
по входному и выходному сопротивлениям), каскодная схема имеет важное преиму
щество, которое заключается в уменьшении паразитной связи между выходом Ui
и входом Ui. В простом каскаде по схеме с ОЭ выход и вход связаны через емкосп
коллекторного перехода, что в ряде случаев осложняет работу усилителей. В частно-
сти, опа приводит к увеличению входной емкости каскада, превращая каскад 03
в своеобразный интегрирующий усилитель (в усилительной технике это называется
эффектом Миллера), когда с ростом коэффициента усиления растет и входная ем-
кость. При наличии индуктивной составляющей сопротивления нагрузки и при о
ределенной реактивности выходного сопротивления предыдущего каскада таю
связь часто приводит к самовозбуждению усилителя.
Рис. 7.10.
Каскодная схема
Рис. 7.11. Осциллограммы входного (А) и выходного (В) сигналов
Причина, по которой выход и вход в каскоде связаны в меньшей степени,
ключается в том, что база VT2 находится под неизменным напряжением и его ве:
чину можно считать как бы напряжением питания для транзистора VT1, а <
нагрузкой — весьма малое сопротивление эмиттерного перехода VT2 [12]. Это озна
ет, что транзистор VT1 работает практически в режиме короткого замыкания колл!
торной цепи. Соответственно его коэффициент усиления близок к единице, эфе]
Миллера отсутствует, и входная емкость равна емкости коллекторного перех
Благодаря такой особенности каскод находит широкое применение в резонанс
усилителях, в частности, в высокочастотных каскадах радиоприемных устройст]
Контрольные вопросы и задания
1. Какими достоинствами обладает каскодная схема?
2. В схеме рис. 7.10 при Rk • 7,5 кОм установите статический режим в соотве
вии с показаниями приборов на рис. 7.10. В процессе моделирования изме]
216
Глава 7. Транзисторные усилительные схемы
коэффициент усиления напряжения и сравните полученные данные с результа-
тами расчетов по формуле (7.15). Определите максимальный входной сигнал,
при котором он передается на выход каскада без искажений. Изменяя парамет-
ры одного из транзисторов, исследуйте влияние асимметрии транзисторов по а,
Re', Rb' на статический режим и коэффициент усиления напряжения.
3. Подготовьте схемы для моделирования гибридных каскодных схем на полевых
и биполярных транзисторах [52] (рис. 7.12), подключив к ним источник питания,
недостающие компоненты (см. рис. 7.4, 7.10) и необходимые контрольно-измери-
тельные приборы. В процессе моделирования установите необходимый статичес-
кий режим (из условия неискаженной передачи сигнала), определите
коэффициент усиления напряжения и сравните его с данными расчетов но форму-
лам: для каскодной схемы ОИ -ОЭ Ku = 0SRk; для ОС—OK Ku = [3SR,/(1 + 0SRJ;
для ОС—ОЭ Ku = pSRk(l + SR.).
а) б) в)
?ис. 7.12. Гибридные каскодные схемы: общий исток—общий эмиттер (ОИ—ОЭ) (а), общий
сток—общий коллектор (ОС—ОК) (б), общий сток—общий эмиттер (ОС—ОЭ) (в)
I. Проведите испытания каскодного усилителя по схеме, приведенной в файле
video.ca4.
7.4. Выходные каскады
Задачей выходных каскадов является обеспечение заданной мощности в на-
узке. Коэффициент усиления напряжения является для выходных каскадов вто-
степенным параметром; для них наиболее важными являются коэффициент
лезного действия и коэффициент нелинейных искажений при обеспечении задан-
й мощности.
Выходные каскады обычно потребляют основную часть мощности усилителя,
тому высокий КПД имеет существенное значение. Это особенно важно для инте-
иьных схем, в которых мощность, рассеиваемая кристаллом, ограничена. Что
ается коэффициента нелинейных искажений, то для выходных каскадов он
ет немаловажное значение, поскольку в таких каскадах усиливаемые сигналы
:симальны.
Коэффициент полезного действия определяется как отношение выходной
:ости каскада к мощности, отбираемой от источника питания Ucc: КПД =
иа,1я/2и.Л₽,
где Uro, 1п, — амплитуды выходного тока и напряжения; 1ср — среднее
[ение потребляемого каскадом тока.
Коэффициент нелинейных искажений характеризует отличие формы выходно-
п'нала от формы входного, что обусловлено нелинейностью амплитудной характе-
•ики каскада. Нелинейные искажения проявляются в возникновении в выходном
®ле новых гармоник, отсутствующих во входном. Характеристикой нелинейных
217
Часть II. Моделирование схем и устройств
искажений является отношение суммарной мощности высших гармоник, начиная с?
второй, к мощности первой гармоники (на частоте входного сигнала).
Допустимое значение коэффициента нелинейных искажений определяется кон-
кретными требованиями к той или иной аппаратуре. Например, при воспроизведений
звука в аппаратуре среднего качества допускаются искажения 2...3%, в измеритель-
ных устройствах и усилителях высокого класса его значения существенно меньше.
Как отмечалось выше, существуют несколько типов режимов работы выход-
ных каскадов.
Класс А характеризуется минимальными нелинейными искажениями и ма-
лым КПД. Класс В характеризуется тем, что рабочая точка в режиме покоя располс-1
жена на границе квазилинейного участка, которая соответствует запертому
состоянию транзистора. Очевидно, что в этом случае усиливаются только положи-1
тельные полуволны входного сигнала. Поэтому выходное напряжение оказывается!
существенно несинусоидальным, т. е. содержит большое число гармоник. Анализ
показывает, что коэффициент нелинейных искажений в классе В независимо отI
амплитуды сигнала составляет около 70%, что в большинстве случаев неприемлемо |
Режим класса В реализуется в так называемой двухтактной схеме, состоящей по су-
ществу из двух усилителей, один из которых усиливает положительную полуволнуI
сигнала, а другой — отрицательную. В нагрузке эти полуволны складываются и о:
разуют полную синусоиду.
На рис. 7.13, а показана наиболее простая двухтактная схема класса В, выпел-1
ненная на коплементарных транзисторах (транзисторах разной проводимости). На-
грузка Rn включена в эмиттерную цепь транзисторов, работающих в режи.ч-
повторителей напряжения. В режиме покоя оба транзистора заперты, поскольку ед- I
пряжения на эмиттерных переходах равны нулю. Во время положительной полуволя
ны входного сигнала Ui открывается транзистор VT1, а во время отрицательно!
полуволны — транзистор VT2. Коэффициент усиления мощности близок к отношен
нию эмиттерного и базового токов, т. е. равен В + 1.
При очевидной простоте схемы па рис. 7.13, а ей свойственны сравнителыЯ
большие нелинейные искажения, что связано с наличием так называемой “пятке'
на входной ВАХ биполярных транзисторов. Очевидно, что такие искажения будуи
особенно существенны при малых входных сигналах с амплитудой, сравнимой с нэ-1
пряжением база—эмиттер в рабочей точке. Для устранения этого недостатка I
пользуют раздельные схемы подачи смещения на базы транзисторов (рис. 7.13, Ч. I
что обеспечивает режим класса АВ.
При выполнении выходного каскада на однотипных транзисторах используя
ется схема на рис. 7.13, в. В ней транзистор VT2 открыт в течение обоих полупер»-!
одов. В режиме покоя ток транзистора выбирается так, чтобы потенциале
коллектора VT2 был равен нулю. При этом диод VD и транзистор VT1 заперты; т-мЯ
в нагрузке отсутствует. Во время положительной полуволны входного сигнала
тенциал коллектора VT2 уменьшается, при этом открывается диод VD и через е:-1
грузку начинает протекать ток. Транзистор VT1 остается закрытым, так
прямое напряжение Е на диоде создает на эмиттерном переходе обратное смещен;» Я
Во время отрицательной полуволны потенциал коллектора VT2 повышается, отпЛ
рается транзистор VT1 и через нагрузку протекает ток, обусловленный транзист Л
ром VT1. При этом диод заперт, так как прямое напряжение Е на эмиттерноЛ
переходе создает на диоде обратное смещение.
Для того чтобы открылся диод VD (при положительной полуволне) или траЛ
зистор VT1 (при отрицательной полуволне), потенциал коллектора VT2 должен 2эI
218
Глава 7. Транзисторные усилительные схемы
{меняться на величину ±Е (напряжение база—эмиттер в статическом режиме) по
сравнению с потенциалом покоя. Следовательно, минимальная амплитуда входного
сигнала, на которую реагирует рассматриваемый каскад, составляет Е/К, где К —
коэффициент усиления каскада па транзисторе VT2. Для исследования каскада на
рис. 7.13, в используется схема на рис. 7.14.
♦Ucc +U« ♦Ucc
а) б)
Рис. 7.13. Выходные каскады на комплементарных транзисторах (н), с дополнительно!! схемой
сдвига уровня (б) и транзисторах с одинаковой проводимостью (в)
♦Ucc
R1
Рмс. 7.14. Схема для исследования выходного каскада
. 7.15. Выходной двухтактный каскад с однополярным питанием
Возможны и другие схемы построения выходных каскадов, в том числе и с од-
юлярным питанием: одна из них приведена на рис. 7.15. Ее особенностью являет-
219
Часть II. Моделирование схем и устройств
ся то, что конденсатор Ск, включенный последовательно с нагрузкой Rn, после еп
зарядки до напряжения Е, равного напряжению на эмиттерах транзисторов в стати
ческом режиме, работает в течение одного из полупериодов как источник питания.
В мощных выходных каскадах на базе эмиттерных повторителей короткое за-
мыкание на выходе, как правило, приводит к выходу транзисторов из строя из-за пре-
вышения коллекторным током допустимого значения. Для защиты от коротк:
замыканий в эмиттерные цепи мощных выходных транзисторов включают небольш
ограничивающие ток сопротивления (несколько ом) или вводят дополнительные трг
зисторы, которые открываются только при больших токах нагрузки и, шунтир
входную цепь, ограничивают выходной ток на безопасном уровне. Одна из возможн!
схем защиты с помощью дополнительных транзисторов показана на рис. 7.16.
Рис. 7.16. Выходной каскад с защитой от коротких замыканий
Схема защиты работает следующим образом. При коротком замыкании в i
грузке ток через сопротивление Ro увеличивается и создает падение напряжен]
открывающее в соответствующие полупериоды транзисторы VT5, VT6. Оказывав
в режиме насыщения, они шунтируют входную цепь мощного усилительного кас]
да. В итоге входное напряжение ограничивается сопротивлением Ri и токи транз!
торов VT3, VT4 не превышают значений, при которых они работают в номинальн
режиме. Подобная защита имеет высокое быстродействие и обеспечивает надежн;
работу мощных усилительных каскадов. При ее введении обязательно наличие д
полнительного резистора Ri, сопротивление которого выбирается, исходя из ми]
мально допустимого значения сопротивления нагрузки предварительна
усилителя, к которому подключается выходной каскад.
Контрольные вопросы и задания
1. Какие функции выполняют выходные каскады усилителей и какие требовал
к ним предьявляются?
2. В первых конструкциях портативных транзисторных радиоприемников преш
щественно использовались усилители низкой частоты с трансформаторным в
ходным каскадом, отличающиеся достаточно высоким КПД. Назовите основе
недостатки таких усилителей.
3. Путем подбора сопротивления R1 в схеме на рис. 7.14 установите зафиксиров
ный приборами статический режим при R2 - Rn - 100 Ом. Определите коэфе
циент усиления каскада и максимальный входной сигнал, при котором
передается на выход без искажений (определяется визуально).
220
Глава 7. Транзисторные усилительные схемы
4. Составьте схему для исследования выходного каскада на рис. 7.15 и проведите ее
моделирование.
7.5. Многокаскадные усилители
При построении многокаскадных усилителей очень важен выбор типа связи
между отдельными усилительными каскадами. Обычно используются гальваничес-
кая (непосредственная), емкостная, трансформаторная и оптронная связи. Для низ-
кочастотных усилителей чаще всего используют два первых типа связи. Третий тип
применяют значительно реже из-за больших габаритов трансформаторов и их высо-
кой стоимости (трансформаторная связь может быть успешно использована для по-
лучения максимального усиления мощности при достаточно высоком КПД).
Оптронная связь между каскадами применяется сравнительно редко, только в спе-
циальных случаях, когда при низкой рабочей частоте требуется хорошая гальвани-
ческая развязка между каскадами.
При проектировании, многокаскадных усилителей, к которым не предъявля-
ются специальные требования, обычно задают выходную мощность и напряжение,
сопротивление нагрузки, допустимый коэффициент гармоник, рабочий диапазон
частот, входное напряжение, внутреннее сопротивление источника питания и дру-
гие параметры.
При разработке усилительных устройств предусматриваются средства, обес-
I печивающие защиту его входных цепей от возможных перегрузок при случайном
воздействии помех большого уровня, приводящих в лучшем случае к перегрузке
I усилителя и кратковременной потере его работоспособности. Чаще всего для этого
I за входе усилителя используется диодный ограничитель (см. гл. 8 и 10).
Наиболее ярким примером многокаскадных усилителей являются операцион-
I sue усилители (ОУ). Их отличие от усилителей, выполненных на дискретных эле-
I ментах, заключается в основном только в методах изготовления отдельных
I компонентов схем и технологии изготовления законченных функциональных узлов.
I Однако в большинстве случаев принципиальные схемы интегральных усилителей
зыглядят значительно сложнее своих дискретных аналогов. Это объясняется тем,
I что введение нескольких транзисторов в схему усилителя для незначительного
I улучшения каких-либо его параметров при интегральной технологии не вызывает
I затруднений и не оказывает существенного влияния на его стоимость.
Благодаря использованию двухполярного питания ОУ обладает замечатель-
I вой особенностью, которая позволяет получить близкое к нулю выходное напряже-
I ше при отсутствии входного сигнала. Это свойство позволяет подключать к ОУ
I загрузку и источники входных напряжений, не заботясь о разделении переменной
I а постоянной составляющей сигнала.
В составе ОУ как многокаскадного усилителя условно можно выделить вход-
I =ую, выходную части и каскады связи между ними.
Входная часть ОУ содержит дифференциальные усилители. Выходная часть
[включает каскады усиления мощности и обеспечивает работу ОУ на заданную на-
Iгрузку. Каскады связи служат для усиления по напряжению и позволяют осущест-
I гать согласование уровней сигнала на постоянном токе.
В зависимости от количества каскадов, вносящих основной вклад в получение
[требуемого коэффициента усиления напряжения, ОУ условно делят на двух- и трех-
[•аскадные. Как правило, предпочтение отдается двухкаскадным ОУ: они имеют
учшую стабильность параметров, могут работать при значительных изменениях
221
Часть II. Моделирование схем и устройств
напряжения питания, более экономичны. Для коррекции частотной характеристи-
ки в двухкаскадных ОУ используется минимальное количество внешних элементоа
(необходим лишь один конденсатор малой емкости). Кроме того, в них легко осуще-
ствляется регулировка уровня выходного напряжения (установка нуля) с помощь:-:
одного потенциометра балансировки.
В многокаскадных усилителях на базу каждого следующего каскада поступа-
ет не только полезный сигнал, но и постоянная составляющая напряжения с коллек-
тора предыдущего каскада. Для согласования по постоянной составляющей на входаI
каждого каскада используются так называемые схемы сдвига уровня.
Простейшей схемой сдвига уровня является эмиттерный повторитель, у кот:-1
рого уровень выходного потенциала (потенциала эмиттера) ниже уровня потенциали
базы на величину Е (напряжение эмиттер—база в статическом режиме), а сигнал пе-
редается с коэффициентом передачи К«1.
Одна из возможных схем, иллюстрирующая принцип сдвига уровня с исподь-]
зованием эмиттерного повторителя, показана на рис. 7.17, а. Транзистор VT1, на ба-J
зу которого подается входной сигнал Ui, выполняет роль эмиттерного повторите/: •
Транзистор VT2 включен генератором тока, на его базу подается напряжение Us оа
специальной цепи смещения. Уровень выходного напряжения определяется напря-
жением Е и падением напряжения на резисторе R1:
Uo = Ui - 2Е - I.R2, (7.16i I
где ток I, — ток, задаваемый стабилизатором на транзисторе VT2; умножение Е на 11
связано с тем, что в процессе формирования уровня сдвига участвуют двар—п- пере-1
хода — транзисторов VT1 и VT3.
Коэффициент передачи по переменной составляющей определяется внутрея|
ним сопротивлением стабилизатора тока, которое значительно больше сопротивлЯ
ния резистора R2.
На рис. 7.17, б показана еще одна схема сдвига уровня, которая отличается 1
личием дополнительного диода VD, обеспечивающего дополнительный сдвиг пап; г
жения на величину Е. Резистор R1 служит для точной подгонки необходимого уроне
сдвига. Достоинством этой схемы является возможность получения любого уровни
сдвига за счет использования N включенных последовательно диодов, при этом вы.- I
жение (7.16) может быть записано в следующем виде: Uo = Ui - (N + 2)Е - 1,R1.
В качестве примера применения рассмотренных в этой главе отдельных элемез!
тов на рис. 7.18 показана схема одного из первых отечественных ОУ серии 140УД1. 1
Первый каскад этого ОУ состоит из ДУ на транзисторах VT1, VT2 с генератэ!
ром тока в цепи эмиттера на транзисторе VT3. Температурная стабилизация тооЛ
осуществляется транзистором VT4. Второй каскад на транзисторах VT5 и VT6 газа
ванически связан с выходами первого. На выходе усилителя включены два эмжЛ
терных повторителя на транзисторах VT7 и VT9. Каскад на транзисторе Ve
осуществляет сдвиг уровня постоянного напряжения.
Операционные усилители этой серии выпускаются двух типов, рассчитанных яЛ
различные питающие напряжения: К140УД1А — на 6,3 В (РП1П = 45 мВт) и К140УД1Б -1
на 12,6 В (Р^,- 170 мВт).
Подключение корректирующих элементов осуществляется между контактов
1 и 12 или 9 и 12 в зависимости от условий применения. Выбор емкости коррективе
ющей емкости зависит от реализуемого усиления, при этом ОУ обладает различав
полосой пропускания. Минимальное сопротивление нагрузки усилителя Rn = 5 кСв
222
Глава 7. Транзисторные усилительные схемы
Рис. 7.17. Схемы сдвига уровня на эмиттерном повторителе (а) и с дополнительным диодом (б)
R3
[С. 7.18. Схема операционного усилителя 140УД1
Осциллограммы входного (А) и выходного (В) сигналов ОУ
. 7.19.
223
Часть II. Моделирование схем и устройств
На схеме рис. 7.18 ОУ включен по схеме инвертирующего усилителя без как
либо элементов коррекции (в данном случае использованы транзисторы типа Ide
Коэффициент усиления напряжения равен Ku = Ros/Ri = 5, что подтверждается
циллографическими измерениями на рис. 7.19.
Контрольные вопросы и задания
1. Что представляет из себя схема сдвига уровня, в усилителях какого типа она
пользуется?
2. По какой схеме выполнен выходной каскад ОУ па рис. 7.18?
3. Рассчитайте коэффициент усиления схемы на рис. 7.18 при Ros - 1 и 10 кОм.
зультаты расчета проверьте моделированием.
4. При моделировании схемы на рис. 7.18 поменяйте по очереди все транзисто]
начиная с выходного каскада, на транзисторы типа 2N222 из библиотеки
проверяя после каждой замены работоспособность схемы. Напомним, что от
па введенных изменений производится командой Revent to Saved из меню Fi
5. Проведите анализ и испытание схем ОУ, содержащихся в файлах иа709.
ua723.ca4, ua727.ca4 и ua741.ca4.
224
Глава 8. Устройства на полупроводниковых приборах
8. Устройства на
полупроводниковых приборах
В данной главе рассмотрены устройства для генерации, формирования, селек-
ции и ограничения сигналов, а также транзисторные ключи для цифровых и анало-
говых сигналов.
8.1. Генераторы гармонических колебаний
Генераторы гармонических колебаний представляют собой устройства из час-
тотно-избирательной цепи и активного элемента. По типу частотно-избирательной
цепи они делятся на LC- и RC-генераторы.
Генераторы LC-типа имеют сравнительно высокую стабильность частоты ко-
лебаний, устойчиво работают при значительных изменениях параметров транзисто-
ров, обеспечивают получение колебаний, имеющих малый коэффициент гармоник.
В генераторах LC-типа форма выходного напряжения весьма близка к гармоничес-
кой. Это обусловлено достаточно хорошими фильтрующими свойствами колебатель-
ного LC-контура. К недостаткам LC-генераторов относятся трудности изготовления
высокостабильных температурно-независимых катушек индуктивности, а также
высокая стоимость и громоздкость последних. Это особенно проявляется при созда-
нии низкочастотных автогенераторов, в которых даже при применении ферромаг-
нитных сердечников габаритные размеры, масса и стоимость получаются
значительными.
Рис. 8.1. LC-генераторы с индуктивной (а) и емкостной (б) обратной связью
Базовые схемы LC-генераторов показаны на рис. 8.1 [53J. Схему на рис. 8.1, а на-
зывают индуктивной трехточкой или схемой Хартлея, на рис. 8.1,6 — емкостной трех-
точкой или схемой Колпитца. Для обеих схем с помощью резисторов RI, R2 и Re
устанавливается необходимый режим по постоянному току. Конденсаторы СЬ и Се
блокировочные, конденсатор С называют конденсатором связи. Частота автоколеба-
ний для обеих схем в первом приближении определяется известной формулой
f0-l/(2n^LkCk). (8.1)
Для схемы Колпитца:
Ck = С1С2/(С1 + С2). (8.2)
8 Зак. 206
225
Часть II. Моделирование схем и устройств
Рис. 8.2. Генератор Колпитца
Рис. 8.3. Осциллограммы сигналов на базе (А) и эмиттере (В) транзистора в генера*
Колпитца
Для всех автогенераторов условием возникновения автоколебаний явлж
наличие положительной обратной связи при коэффициенте усиления равном и.1
большим 1. Для схемы Хартлея эти условия обеспечиваются за счет транзисторно
каскада, выбора коэффициента трансформации и соответствующего включения о
мотки связи. Положительная обратная связь в генераторе Колпитца обеспечивает)
за счет того, что сигнал обратной связи поступает с такого зажима колебательно:
контура, при котором сигнал обратной связи на базе транзистора совпадает по фазе
с переменным сигналом на коллекторе. Коэффициент передачи цепи обратной связи
при этом определяется коэффициентом передачи емкостного делителя, образованно-
го конденсаторами С1 и С2. При выполнении указанных условий устройство само-
возбуждается. Процесс самовозбуждения происходит следующим образом.
При включении источника питания конденсатор колебательного контура, включен-
ного в коллекторную цепь, заряжается. В контуре возникают затухающие колеба-
ния, которые одновременно передаются на управляющие электроды транзистора по
цепи положительной обратной связи: это приводит к пополнению энергией LC-кон-
тура, и колебания превращаются в незатухающие.
226
Глава 8. Устройства на полупроводниковых приборах
Рис. 8.4. Генератор Колпитца с конденсатором связи
Рис. 8.5. Осциллограмма выходного сигнала генератора Колпитца после введения конденса-
тора связи
Выполним моделирование автогенератора Колпитца (рис. 8.2), схема которо-
го заимствована из каталога программы EWB 4.1 (схемный файл 2m-oscil.ca4). В от-
личие от базовой схемы (рис. 8.1, б) она выполнена на эмиттерном повторителе.
Расчеты по формулам (8.1) и (8.2) для схемы на рис. 8.2 дают: Ск=1мкФ;
fo=l/2p\l 10 г,=159,15 Гц.
Из осциллограмм на рис. 8.3 видно, что результаты моделирования крайне не-
утешительны. Во-первых, период колебаний, отсчитываемый с помощью визирных
линеек и равный Т2 - Т1 = 6,72 мс, несколько больше расчетного — 6,28 мс. Во-вто-
рых, форма колебаний далеко не синусоидальная. Такие результаты можно объяс-
нить слишком сильной связью колебательного контура с усилительным каскадом.
В пользу этого утверждения свидетельствует и тот факт, что двойная амплитуда вы-
ходного сигнала практически равна напряжению источника питания — около 6 В.
Для возможности управления взаимодействием колебательного контура с транзис-
торным каскадом введем конденсатор связи С (рис. 8.4).
Из осциллограмм на рис. 8.5 видно, что после введения в генератор Колпитца
конденсатора связи форма колебаний существенно улучшилась и действительно ста-
8*
227
Часть II. Моделирование схем и устройств
ла синусоидальной. При этом период колебаний Т2 - Т1 = 6,156 мс практически ра-
вен расчетному значению.
Из проведенных экспериментов видно, насколько велика роль правильного
выбора взаимодействия колебательного контура со снабжающим его энергией уси-
лительно-согласующим устройством. В технической литературе для этого введен
термин “коэффициент регенерации”. Этот безразмерный коэффициент показывает,
во сколько раз может быть уменьшена добротность колебательной системы по срав-
нению с ее исходным значением (за счет вносимых по цепи обратной связи потерь),
чтобы автогенератор оказался на границе срыва колебаний. Для низкочастотных ге-
нераторов этот коэффициент выбирают равным 1,5...3.
Особо следует сказать о блокировочных конденсаторах СЬ и Се в базовой
и эмиттерной цепях. При достаточно глубокой обратной связи и неправильно подоб-
ранных емкостях этих конденсаторов может возникать прерывистая генерация или
автомодуляция. В этом случае амплитуда колебаний будет иметь переменное значе-
ние или уменьшаться до нуля. Прерывистая генерация обусловлена тем, что при
определенных условиях напряжение автоматического смещения вследствие заряда
конденсаторов СЬ и Се может приблизиться к амплитуде напряжения обратной свя-
зи, за счет чего транзистор запирается и колебательный контур не пополняется энер-
гией. В итоге автоколебания быстро затухают и возобновляются только после
разряда этих конденсаторов. Затем процесс нарастания амплитуды, заряда конден-
саторов и срыва автоколебаний повторяется. Поэтому цепи, обеспечивающие авто-
матическое смещение, приходится, как правило, подбирать при настройке,
предварительно выбрав ее параметры из условия ReCe « тр или l/wpCe > ReQ,
где тр = 2Q/iop — постоянная времени колебательного контура; Q, (0р — его доброт-
ность и резонансная частота.
Перестройку частоты LC-генераторов обычно осуществляют изменением ем-
кости конденсатора колебательного контура. При этом изменяется и добротность
контура из-за изменения соотношения L/C, что может вызвать изменение режима
работы автогенератора. Изменение емкости обычно производят механическим пу-
тем или с помощью варикапа, изменяя напряжение смещения.
На практике находят применение также LC-генераторы с использованием эле-
ментов с отрицательным сопротивлением. В качестве примера рассмотрим схему та-
кого генератора, показанную на рис. 8.6 [30]. Он содержит эмиттерный повторитель
на транзисторе VT1, который предназначен для регулировки выходного напряже-
ния генератора путем изменения напряжения на его базе с помощью резисторов R1
и R2. Собственно генератор состоит из колебательного контура Lk, Ск и двух поле-
вых транзисторов VT2 и VT3 с каналами разной проводимости, которые обладают
участком с отрицательным дифференциальным сопротивлением. Приведенная
в [30] вольтамперная характеристика такого гибрида на отечественных полевых
транзисторах КПЗОЗ и КП103 имеет форму несимметричного колоколообразного
импульса с вершиной при напряжении 3 В (ток 2 мА) и практически нулевым током
при напряжении 8 В. Следовательно, после включения питания, когда напряжение
на конденсаторе Ск достигает 3 В, начинается резкое увеличение шунтирующего
этот конденсатор сопротивления, в результате чего увеличивается скорость заряда
конденсатора. Во второй фазе, когда при разряде конденсатора напряжение на нем
достигает 8 В, скорость его разряда увеличивается и после достижения значения
3 В начинается форсированный разряд. Таким образом, колебательный контур в ре-
зультате получает как бы два толчка в течение каждого периода колебаний, что при-
водит в конечном итоге к возникновению незатухающих колебаний.
228
Глава 8. Устройства на полупроводниковых приборах
Частота колебаний генератора па рис. 8.6 в первом приближении определяется
выражением (8.1) и составляет f„ = 1/(2тс\'1-4.106) = 79,62 Гц. Посмотрим, насколько
это соответствует результатам моделирования, представленным на рис. 8.7. Из осцил-
лограммы видно, что период колебаний составляет Т2 - Т1 = 12,24 мс, что соответст-
вует частоте колебаний 81,7 Гц, практически совпадающей с расчетным значением.
Перейдем к рассмотрению RC-генераторов. Генераторы такого типа достаточно
просты в реализации, дешевы, имеют малые габариты и массу. Однако стабильность
частоты колебаний в них значительно ниже, чем в LC-гсператорах. Форма колебаний
несколько отличается от синусоидальной и существенно изменяется в зависимости от
значений параметров активного элемента и цепи обратной связи. Эти недостатки не
позволяют применять их в схемах, где необходимо получать высокую точность и ста-
бильность частоты колебаний, а также удовлетворительную форму выходного напря-
жения. В устройствах, где к этим параметрам не предъявляются жесткие
требования, низкочастотные RC-генераторы используются достаточно широко.
В RC-генераторах обратная связь осуществляется за счет RC-цепей, обладаю-
щих избирательными свойствами и обеспечивающих на одной определенной частоте
выполнение условий возбуждения колебаний. В этих генераторах выходное напря-
жение практически повторяет форму коллекторного тока транзистора. Поэтому они
не могут работать с отсечкой тока и имеют сравнительно низкий КПД.
229
Часть II. Моделирование схем и устройств
Избирательным RC-цепям присуща невысокая добротность. Поэтому для
лучения синусоидальных колебаний с малым уровнем гармоник приходится s
дить неглубокую обратную связь. При этом активный элемент должен им
небольшую нелинейность, чтобы в момент возникновения автоколебаний коэф<
циент усиления оставался больше единицы и тем самым при любых изменениях
раметров схемы обеспечивались условия самовозбуждения.
RC-автогеператоры выполняют па основе однокаскадных и многокаскадв
усилителей. В однокаскадных автогенераторах выход усилителя соединяется со в
дом через RC-цепи, обеспечивающие фазовый сдвиг 180’ на рабочей частоте. Tai
генераторы обычно выполняют на фиксированную частоту, их иногда называют
почечными RC-генераторами.
В автогенераторах, выполненных на основе многокаскадных усилителей,
меняют как усилители переменного тока,
так и усилители
постоянного тока на
ОУ
При использовании усилителей переменного тока число каскадов выби;
четным (обычно используют двухкаскадные усилители). Такой усилитель вносжт
близкий к нулю фазовый сдвиг между входным и выходным сигналами, поэтому
цепь обратной связи, соединяющая выход со входом, должна обеспечивать на часта
те автоколебаний нулевой фазовый сдвиг. Обычно в таких генераторах в качестве
цепей обратной связи используют частото-избирательные мостовые схемы, допуска
ющие перестройку частоты в достаточно широких пределах.
Цепочечные автогенераторы должны иметь цепь обратной связи, обеспечиваю-
щую фазовый сдвиг 180’ на частоте автоколебаний. Для получения такого сдвига тре-
буется не менее трех RC-цепей. Действительно, каждое RC-звено в самых идеальные
условиях обеспечивает фазовый сдвиг на угол, меньший 90°; следовательно, два зве-
на дают фазовый сдвиг, меньший 180°. На рис. 8.8, а приведена схема цепочечного ге-
нератора, выполненного на четырехзвенной RC-цепи и транзисторном каскаде ОЭ.
Согласно [30] частота колебаний генератора на рис. 8.8, а определяется по формуле:
fo = 1/(4,9nRC) - 2,167 Гц. (8.3)
Обратимся теперь к результатам моделирования — осциллограмме на
рис. 8.8, б, откуда видно, что период колебаний выходного сигнала составляет 31а
мс, что существенно отличается от расчетного значения (Т = l/fo = 461,5 мс). В свя-
зи с этим уместно заметить, что аналитические выражения для частоты колебания
RC-генсраторов имеют весьма ориентировочный характер. Приведем два примера
Для расчета частоты колебаний используем две разные формулы для ИС-генераторз
с трехзвенной фазосдвигающей цепью из работ [48, 53], с помощью которых для схе-
мы на рис. 8.8, а получим:
fo- 1/(2RC^3) = 3,064 Гц; (8.4)
f0 - 1/(2RCV3) = 1,678 Гц. (8.5)
Из приведенных результатов видно, что для рассматриваемой схемы более
подходит результат, полученный с помощью формулы (8.4) из работы [48]. Прове-
дем дополнительные испытания модели с трехзвенной цепочкой на рис. 8.9, а.
Из приведенных на рис. 8.9, б результатов испытаний видно, что период колебаний
RC-генератора с трехзвенной цепочкой (515 мс) является чуть ли не средним ариф-
метическим между результатами, полученными по формулам (8.3) и (8.5). Таким
образом, и в этом случае имеются существенные расхождения результатов модели-
рования и расчета, причем более существенными являются расхождения между
расчетными значениями с использованием различных расчетных соотношений для
230
Глава 8. Устройства на полупроводниковых приборах
одной и той же схемы. «Это позволяет сделать вывод, что аналитические выражения
для RC-генераторов имеют очень приближенный (действительно, ориентировоч-
ный) характер.
б)
Рис. 8.8. Схема цепочечного RC-генератора (а) и осциллограмма его выходного сигнала (б)
Рис. 8.9. RC-генератор с трехзвенном фазосдвигающей цепочкой (а) и осциллограмма его вы-
ходного сигнала (б)
231
Часть II. Моделирование схем и устройств
Контрольные вопросы и задания
1. При каких условиях усилительное устройство, охваченное обратной связью, ме-
леет превратиться в автогенератор?
2. Для схемы генератора на рис. 8.2 установите путем моделирования зависимость
формы генерируемого сигнала от соотношения емкости конденсаторов С1 и С2
При варьировании емкостей этих конденсаторов обеспечьте постоянство частоты
колебаний, т. е. эквивалентной емкости контура Ск.
3. В схеме генератора на рис. 8.4 путем изменения емкости конденсатора связе
С установите граничные условия надежного самовозбуждения генератора без
ухудшения формы генерируемых сигналов (определяется визуально).
4. Исследуйте в генераторе на рис. 8.6 влияние на форму сигнала, его амплитуду
и частоту напряжения на базе транзистора (устанавливается изменением сопро-
тивления резисторов RI, R2) и емкости блокировочного конденсатора Се.
5. Используя материалы гл. 4, получите вольтамперную характеристику применя-
емого в схеме на рис. 8.6 гибридного компонента на моделях полевых транзисто-
ров типа Ideal.
6. Исследуйте зависимость формы сигнала, частоты колебаний и надежности запу-
ска RC-генератора на рис. 8.8 и 8.9 от напряжения питания Ucc.
7. Проведите испытания автогенератора, представленного в схемном файле
xtalosc.ca4.
8.2. Транзисторные ключи
Транзисторные ключи выполняются на биполярных или полевых транзисто-
рах. В свою очередь ключи па полевых транзисторах делятся на МДП-ключи и клю-
чи на полевых транзисторах с управляющим р—п-переходом.
Ключи на биполярных транзисторах делятся на насыщенные и ненасыщен-
ные. При анализе транзисторных ключей рассматривают два режима — статичес-
кий и динамический.
В статическом режиме анализируется закрытое и открытое состояние ключа.
В закрытом состоянии ключа на его входе низкий уровень напряжения (сигнал ло-
гического нуля), при котором оба перехода смещены в обратном направлении (ре-
жим отсечки). При этом коллекторный ток определяется только тепловым током.
При использовании ключа в логических интегральных схемах, в которых
обычно применяются транзисторы типа п—р- п, запирающее напряжение положи-
тельно и в этом случае имеет место только “условное” запирание транзистора, когда
его эмиттерный переход смещен в прямом направлении; однако уровень действую-
щего на его входе напряжения меньше порогового уровня, равного около 0,6 В.
и коллекторный ток транзистора относительно мал, г. е. составляет лишь единицы
процентов от тока открытого транзистора.
В открытом состоянии ключа на его входе высокий уровень напряжения (сиг-
нал логической единицы). При этом возможны два режима работы открытого тран-
зистора: работа в линейной области выходной характеристики или в области
насыщения.
В активной области эмиттерный переход смещен в прямом направлении,
а коллекторный — в обратном, при этом для кремниевых транзисторов напряжение
232
Глава 8. Устройства на полупроводниковых приборах
на эмиттерном переходе составляет около 0,7 В и коллекторный ток практически
линейно зависит от тока базы.
В области насыщения оба перехода транзистора смещены в прямом направле-
нии и изменение тока базы не приводит к изменению коллекторного тока. Для крем-
ниевых транзисторов ИС напряжение на смещенном в прямом направлении
р—n-переходе составляет около 0,8 В, для германиевых оно равно 0,2...0,4 В.
Насыщение ключа достигается увеличением тока базы. Однако при некотором
его значении, которое называется базовым током насыщения 1бн, дальнейший рост
тока базы практически не приводит к росту коллекторного тока насыщения 1кн,
при этом напряжение на коллекторе (с учетом коллекторной нагрузки) составляет
несколько десятков или сотен милливольт (в ИС около 0,1...0,2 В). Одной из важных
характеристик ключа в режиме насыщения является параметр S = 1НЖ/Тв« — коэффи-
циент насыщения; на границе насыщения S “ 1; при его увеличении увеличивается
нагрузочная способность ключа, уменьшается влияние различных дестабилизирую-
щих факторов на его выходные параметры, но ухудшается быстродействие. Поэтому
коэффициент насыщения выбирается из компромиссных соображений, исходя из
условий конкретной задачи.
Быстродействие ключевого элемента определяется максимально допустимой
частотой следования входных переключающих сигналов. Очевидно, что оно зависит
от общей длительности переходного процесса, определяемой инерционностью тран-
зистора и влиянием паразитных параметров (например, перезарядом паразитных
емкостей в процессе переключения). Часто для характеристики быстродействия
ключевого (логического) элемента используется среднее время задержки сигнала
при его передаче через элемент. При конечной длительности фронта входного сигна-
ла задержки включения и выключения отсчитываются на 10- или 50-процентных
уровнях входного и выходного сигналов.
Взаимодействие ключей друг с другом осуществляется через элементы связи.
Если уровень напряжения на выходе первого ключа высокий, то на входе другого
ключа должен быть уровень, при котором второй ключ открывается и работает в за-
данном режиме, и, наоборот, если первый ключ открыт, то на входе второго ключа
должен быть достаточно низкий уровень, при котором второй ключ закрыт. Цепь
связи оказывает существенное влияние на переходные процессы, возникающие при
переключении, и, следовательно, на быстродействие ключей. Используемые в клю-
чевых устройствах элементы связи показаны на рис. 8.10.
Ключевой каскад на рис. 8.10, а представляет собой каскад по схеме с ОЭ,
на входе которого включен резистор Rb, обеспечивающий при заданном входном на-
пряжении Ui требуемый ток насыщения базы:
U = (Ui - UJ/Rb - SI„/B - S(Ucc - UKH)/(BRk), (8.6)
где Utc - (0,7. ..0,8) В — напряжение база-эмиттер открытого транзистора (здесь и да-
лее имеются в виду кремниевые транзисторы); S - 1,5...2 — коэффициент насыще-
ния; В — коэффициент усиления транзистора по току; UHH = (0,1...0,2) В —
напряжение на коллекторе открытого транзистора; Ucc — напряжение питания.
Выберем в качестве примера ключевой каскад, используемый в микросхемах
транзисторно-транзисторной логики (ТТЛ). Для них Ucc = 5 В, нормируемое мини-
мальное входное напряжение логической единицы Ui = 2,4 В. Следовательно,
при наихудшем сочетании параметров из (8.6) получаем требуемое сопротивление
резистора: Rb = B Rk(Ui - ULe)/S(Ucc - UWK) - 0,17BRk.
233
Часть II. Моделирование схем и устройств
Когда с предыдущего каскада поступает сигнал логического нуля Ui = 0,2 В.
транзистор закрыт не полностью. Кроме того, к указанному значению входного на-
пряжения добавляется и падение напряжения на сопротивлении в цепи базы от кол-
лекторного теплового тока. Для компенсации этих составляющих сигнала
логического нуля и обеспечения при этом режима отсечки транзистора в классичес-
кой схеме ключевого каскада предусматривается источник компенсирующего тока,
образованного резистором Rbz и источником напряжения -Ub.
Показанный на рис. 8.10, а конденсатор Си называется ускоряющим, он пред-
назначен для повышения быстродействия ключа. Благодаря ему увеличивается
отпирающий базовый ток в момент появления сигнала логической единицы и уско-
ряется процесс запирания транзистора при сигнале логического нуля, поскольку
в этом случае ускоряющий конденсатор будет создавать на базе запирающее напря-
жение отрицательной полярности.
Рис. 8.10. Схемы ключевых каскадов на биполярных транзисторах с резисторной связью (а>
и дополнительной обратной связью (б)
Второй способ повышения быстродействия транзисторного ключа реализуется
применением отрицательной обратной связи (рис. 8.10, б). Сущность способа заклю-
чается в предотвращении насыщения состояния транзистора за счет использования
в цепи отрицательной обратной связи диода VD. Пока напряжение база-коллектор
больше падения напряжения на сопротивлении Ro, этот диод заперт, обратная связь
отсутствует. При увеличении входного сигнала (и соответственно входного тока)
увеличивается и ток коллектора. При достаточно большом входном сигнале напря-
жение база-коллектор становится равным падению напряжения на сопротивлении
резистора Ro, диод VD отпирается и начинает действовать отрицательная обратная
связь. Теперь рост базового тока мало влияет на режим транзистора, так как значи-
тельная часть входного тока протекает в этом случае непосредственно через диод
и транзистор не переходит в режим насыщения.
Рассмотренный способ применительно к интегральным микросхемам реали-
зуется с помощью диодов Шотки, подключаемых параллельно переходу база-кол-
лектор транзистора, при этом такая комбинация в интегральном исполнении
составляет единую структуру — транзистор Шотки.
Существенного повышения быстродействия ключа (рис. 8.10, б) можно до-
биться только при использовании диодов, имеющих малое время восстановления.
Если применять низкочастотные диоды, в которых велико время рассасывания за-
ряда, накопленного в базе, то эффект от введения нелинейной обратной связи будет
незначителен. В этом случае диоды Шотки незаменимы: они имеют малое время вос-
становления (не более 0,1 нс), низкое напряжение отпирания (около 0,25 В) и малое
сопротивление в открытом состоянии (около 10 Ом). При применении диодов Шотки
отпадает необходимость во введении дополнительного напряжения смещения. Это
234
Глава 8. Устройства на полупроводниковых приборах
обусловлено тем, что диод отпирается при более низком напряжении между коллек-
тором и базой, когда транзистор еще находится на границе активного режима.
Недостатки ненасыщенного транзисторного ключа сводятся к следующему:
1. Падение напряжения на открытом ключе больше, чем в насыщенном режиме
(порядка 0,5 В).
2. Ухудшается помехоустойчивость, что объясняется более высоким входным со-
противлением в открытом состоянии, в результате чего различные помехи, на-
пример, скачки напряжения питания, приводят к изменениям напряжения на
транзисторе.
3. Температурная стабильность ненасыщенного ключа значительно хуже, чем у на-
сыщенного.
Рассмотрим простейший транзисторный ключ (рис. 8.11). Напряжение пита-
ния ключа выбрано небольшим (0,5 В), чтобы можно было продемонстрировать на
экране осциллографа падение напряжения на открытом ключе. На рис. 8.11 пред-
ставлена также лицевая панель функционального генератора с установленными ре-
жимами его работы.
Рис. 8.11. Простейший ключ на биполярном транзисторе
♦Ucc
ио
«—•
Из результатов моделирования ключа (осциллограммы на рис. 8.12) следует,
что падение напряжения на открытом ключе при токе коллектора около 0,5 мА со-
ставляет 40 мВ (при напряжении на базе около 0,8 В), т. е. является достаточно боль-
шим, что является серьезным ограничением при использовании таких ключей,
в коммутаторах аналоговых сигналов.
Рис. 8.12. Осциллограммы сигналов на выходе (В) и на базе (А) транзисторного ключа
Ключи на полевых транзисторах с управляющим р—n-переходом применяют
s различных коммутаторах аналоговых сигналов. Их существенными преимущест-
вами перед ключами на биполярных транзисторах являются:
1) малое остаточное напряжение на ключе в проводящем состоянии;
2) высокое сопротивление в непроводящем состоянии и, как следствие, малый ток,
протекающий через закрытый ключ;
235
Часть II. Моделирование схем и устройств
3) малая потребляемая мощность от источника управляющего напряжения;
4) достаточно хорошая развязка между источником управления и источником ком-
мутируемого сигнала;
5) возможность коммутации электрических сигналов низкого уровня (единицы
милливольт и менее).
Базовые схемы ключей на нолевых транзисторах с управляющим р—/г-пере-
ходом показаны на рис. 8.13 [48]. Коммутируемый сигнал подается на вход Ui и сни-
мается с выхода Uo (Rn — сопротивление нагрузки). Сигнал управления подается на
вход Uu. Для запирания ключа на затвор транзистора подается напряжение, которое
должно превышать напряжение стока и истока на величину, большую напряжение
отсечки на 2...3 В, но не превышающую для конкретного транзистора предельно до-
пустимых значений.
В закрытом состоянии сопротивление ключей достаточно велико (более
10* Ом). Оно определяется нс только сопротивлением канала, но и током обратно
смещенного р—«-перехода затвор-сток. В закрытом состоянии емкость между уп-
равляющим электродом и цепью переключаемого сигнала составляет 3...30 пФ.
В открытом состоянии ключа напряжение на управляющем электроде близко
к нулю и зависит от значения коммутируемого напряжения Ui и сопротивления на-
грузки Rn. Это обусловлено тем, что при увеличении напряжения на истоке транзи-
стора и неизменном потенциале затвора напряжение затвор-исток отлично от нул
и транзистор частично заперт, при этом сопротивление сток-исток увеличивает*
и падение напряжения в канале сток-исток возрастает. Для ключа, работающе
в режиме прерывателя, когда напряжение Ui может меняться в широких предел!
это является существенным недостатком. Поэтому в таких случаях необходимо п]
менять схемы, обеспечивающие автоматическую стабилизацию напряжения мея
затвором и каналом. На схемах (рис. 8.13) эту роль выполняет последовател!
включенный в цепь затвора диод VD, который для запирающего напряжения вк.-
чен в прямом направлении. Если напряжение управления выбрать больше mi
симально возможного значения коммутируемого напряжения, то при пода
открывающего напряжения р—«-переход затвора открывается, а диод VD закры
ется. В этом случае при изменениях коммутируемого напряжения р—«-переход
тянется открытым и сопротивление его канала останется неизменным. Для этой
цели в схеме на рис. 8.13, <5 между истоком и входом ключа дополнительно вклк
ется высокоомный резистор R. Используемый в схеме на рис. 8.13, а конденса
С предназначен для ускорения процесса перезарядки емкостей затвор-исток и
твор-сток.
Схемы ключей па полевых транзисторах с управляющим р—п-переходом с уск
ющей емкостью (а) и дополнительным резистором (б)
Рис. 8.13.
236
Глава 8. Устройства на полупроводниковых приборах
В схеме для исследования ключа на полевом транзисторе (рис. 8.14, а) исполь-
зуются: функциональный генератор в качестве источника коммутируемого сигнала
с внутренним сопротивлением Ri, осциллограф для контроля сигнала на входе (ка-
нал А) и выходе (канал В) ключа, вольтметр для измерения сигнала управления Uu
на выходе цени управления, состоящей из ключа на биполярном транзисторе VT2
и переключателя Z, управляемого одноименной клавишей клавиатуры. В положении
переключателя, показанном на рис. 8.14, а, на базу транзистора VT2 подается через
резистор R1 сигнал условной логической единицы от источника коллекторного пита-
ния Ucc. При этом транзистор VT2 открыт и на его выходе формируется низкий по-
тенциал (73,7 мВ) сигнала управления, при котором основной ключ на транзисторе
VT1 должен быть открыт, что и подтверждается результатами осциллографических
измерений на рис. 8.14, О', на котором показаны двухполярные входной (А) и выход-
ной (В) сигналы. То, что сигналы двухполярные, подтверждается выбором режима
работы функционального генератора (установка OFFSET — наличие постоянной со-
ставляющей) и осциллографа, где установки Y POS показывают, что осевые линии
смещены на 2 деления вверх для канала Л и на 2 деления вниз для канала В.
Ui \/Т1 UO
Function 6сп<яз1о(
FREQUFHCY
DUTY CYCLE 150 tel
rtnPLlTUDE |2 tel I V &
OFFSET |0
Рис. 8.14. Ключ на полевом транзисторе с элементами управления (а) и осциллограммы
сигналов (б)
6)
Из осциллограмм на рис. 8.14, б видно также, что выходной сигнал несколько
меньше входного. Для измерения этой разницы зажим заземления осциллографа
GROUND, который по умолчанию подключается к общей шине (по этой причине такое
подключение в большинстве случаев и не показывается), подключим к каналу В
(см. рис. 8.15, а). Такое подключение позволяет измерить падение напряжения ком-
мутируемого сигнала на исследуемом ключе. Результаты осциллографических изме-
рений для этого случая показаны на рис. 8.15, б, из которых следует, что падение
237
Часть II. Моделирование схем и устройств
напряжения коммутируемого сигнала на ключе составляет около 170 мВ (двойная
амплитуда), причем сигнал асимметричен примерно в соотношении 1:3, т. е. для отри-
цательного и положительного сигналов сопротивление ключа различно. Дополнитель-
ные исследования схемы на рис. 8.15, а показали, что падение коммутируемого
сигнала на ключе и его асимметрия существенно зависят от напряжения отсечки по-
левого транзистора (параметр VTO в окне характеристик транзистора). После увеличен
ния этого напряжения до -10 В для разностного сигнала были получены результаты
(рис. 8.15, в), подтверждающие уменьшение падения коммутируемого сигнала на
ключе до 72 мВ, а асимметрии — до 5 мВ, что в 13 раз меньше по сравнению с преды-
дущим случаем. Следовательно, для получения удовлетворительных характеристик
коммутатора аналоговых сигналов на базе полевого транзистора с управляющимр —г.-
переходом необходимо выбирать транзисторы с большим напряжением отсечки, что
позволит получить более линейную передаточную характеристику.
Rk
1к2
9X2
• 1: vo
Rb
1КЙ
R1
Rn
1*2
J-2
Ucc
П»/
+-
а)
Рис. 8.15. Схема ключа (а) и результаты измерения потерь коммутируемого сигнала при на-
пряжении отсечки -3 В (б) и -10 В (<?)
МДП-ключи выполняются на МДП-транзисторах как с индуцированным, так
и со встроенным каналом. Однако последний тип МДП-транзисторов нашел ограни-
ченное применение на практике, поэтому дальнейшее рассмотрение проведем при-
менительно к МДП-ключам с индуцированным каналом.
Отметим, что в статическом режиме входное сопротивление МДП-ключей до-
статочно большое (10’2 Ом и более), а потребляемый от источника питания ток по
сравнению с ранее рассмотренными ключами ничтожно мал (единицы микроампер).
Однако на переменном токе потребляемая мощность существенно возрастает за счет
перезаряда паразитных емкостей и на сравнительно высоких частотах достигает
значений, характерных для биполярных транзисторов.
На рис. 8.16, а показана схема простейшего ключа на МДП-транзисторе с ин-
дуцированным каналом p-типа. Для отпирания транзисторов на схемах (рис. 8.16)
238
Глава 8. Устройства на полупроводниковых приборах
на их затвор нужно подать отрицательное напряжение Ui, превышающее напряже-
ние на остальных электродах на величину, большую порогового напряжения затвор-
zctok U<lh, при котором и создается (индуцируется) токопроводящий канал,
характеризующийся уменьшением сопротивления по мере увеличения (до предель-
но допустимого) напряжения затвор-исток U^, когда сопротивление канала мини-
мально. При этом в первом приближении можно пренебречь падением напряжения
=а транзисторе и считать, что потенциалы стока и истока у открытого транзистора
приблизительно одинаковы.
I Ряс. 8.16. Схемы МДП-ключей для цифровых устройств (д) и коммутаторов аналоговых
сигналов (б)
Сопротивление индуцированного канала Rli3 при заданных напряжениях
I з определяется графически с помощью выходных характеристик или аналитичес-
I ки из приближенного выражения: К<м = 1/К(ида - U'^), где К = e'epz/(d-L) — удельная
I крутизна транзистора; е' — относительная диэлектрическая проницаемость диэлект-
I гика между затвором и полупроводником; е — диэлектрическая проницаемость ваку-
I $ма; ш — подвижность носителей заряда; d — толщина диэлектрика под затвором;
I i — ширина канала; L — длина канала; U\h — эквивалентное пороговое напряжение.
Типичное значение К * 60 мкА/B2, эквивалентное пороговому напряжению
I U\h, отличается от Udbh вследствие того, что сопротивление канала зависит также
I от напряжения на подложке Ub в соответствии с выражением: U\,h = Urfah + GUb, где
I G — коэффициент влияния подложки, равный отношению приращения напряже-
I ния UB, к изменению напряжения на подложке Ub при постоянном токе стока.
Для схемы на рис. 8.16, a U\h = Udab, поскольку подложка соединена с истоком.
Следует заметить, что при интегральном выполнении ключа (рис. 8.16, а) в каче-
I ггве сопротивления нагрузки стока Rd используется МДП-транзистор, что позволяет
существенно уменьшить занимаемую ключом площадь, поскольку резистор в интег-
I райьном исполнении занимает значительно большую площадь, чем транзистор.
МДП-ключ на рис. 8.16, б отличается от своего предшественника тем, что его
входное (коммутируемое) напряжение в общем случае может быть разнополярным,
I однако для этого требуется специально сформированный сигнал управления. Ана-
лиз этого ключа показывает [48j, что коэффициент передачи коммутируемого сигна-
ла зависит от величины его напряжения. Для уменьшения погрешности,
возникающей в результате наличия нелинейности коэффициента передачи, целесо-
образно увеличивать сопротивление нагрузки Rn.
Схема для исследования МДП-ключа содержит (рис. 8.17, а) источник пита-
ния подложки +Ub и два источника управления -I Uu и -Uu, которые поочередно
подключаются к затвору транзистора с помощью переключателя Z. При подключе-
нии к затвору транзистора источника +Ub передача коммутируемых сигналов через
239
Часть II. Моделирование схем и устройств
ключ прекращается. Результаты моделирования схемы на рис. 8.17, а при ука:
ных на ней значениях параметров показаны на рис. 8.17, б.
Для измерения падения коммутируемого напряжения на ключе зажим заз<
ления осциллографа подключен к входу канала В. Из результатов осциллографиче-
ских измерений (рис. 8.17, в) видно, что падение напряжения на ключе составляет
около 24 мВ, а асимметрия — 1 мВ, что заметно лучше по сравнению с ключом на по|
левом транзисторе.
10 мВ/лел
а)
б) в)
Рис. 8.17. МДП-клточ для коммутации аналоговых сигналов (а) и осциллограммы сигналов (б, в i
Контрольные вопросы и задания
1. Если рассматривать транзисторный ключ как усилительное устройство, то к ка-
кому классу таких устройств его можно отнести по режиму работы?
2. В схеме ключа на рис. 8.11 установите напряжение питания 10 В. Исследуйте за-
висимость падения напряжение на открытом ключе Ukn от тока коллектора при
изменении сопротивления Rk от 10 кОм до 100 Ом. Напишите формулу для рас-
чета коллекторного тока.
3. В схеме ключа на рис. 8.11 исследуйте зависимость напряжения на коллекторе
транзистора при напряжении питания 10 В и коллекторном сопротивлении
100 Ом от коэффициента усиления тока транзистора В, который задается в окне
его параметров. Напоминаем, что перед редактированием параметров компонен-
та необходимо организовать отдельную библиотеку, а затем скопировать в нее
модель интересующего Вас компонента.
4. С помощью схем на рис. 8.14, а и 8.15, а исследуйте зависимость выходного сигна-
ла от управляющего напряжения (задается изменением напряжения питания Ucc).
5. Для схемы на рис. 8.15, а исследуйте зависимость падения напряжения на клю-
че коммутируемого сигнала и его асимметрии от напряжения отсечки полевого
240
Глава 8. Устройства на полупроводниковых приборах
транзистора и амплитуды коммутируемого сигнала. При выполнении первой ча-
сти задания придерживайтесь рекомендаций п. 3.
6. В схеме МДП-ключа на рис. 8.17, а установите предельные значения напряже-
ний на подложке и затворе МДП-транзистора, обеспечивающих коммутацию од-
нополярных и двухполярных сигналов.
7. С помощью схемы на рис. 8.17, а исследуйте зависимость падения напряжения на
МДП-транзисторе коммутируемого сигнала от напряжения на подложке и затворе.
8.3. Ограничители и фиксаторы уровня
Ограничителем называют четырехполюсник, на выходе которого напряжение
не изменяется, когда входное напряжение превышает некоторое пороговое значение
(ограничение сверху), принимает значение ниже порогового (ограничение снизу)
или превосходит пределы пороговых уровней (двухстороннее ограничение) [54]. Та-
ким образом, ограничитель является нелинейным четырехполюсником, обладаю-
щим в идеальном случае линейно-ломаной характеристикой.
Для ограничения сигналов по амплитуде применяются ключевые элементы —
диодные и транзисторные ключи на дискретных или интегральных компонентах
(при использовании транзисторных ключей наряду с ограничением можно получить
и усиление сигналов).
Основными характеристиками ограничителей являются: стабильность по-
ложения точек излома их характеристик, постоянство выходного напряжения
в области ограничения, линейность схемы в области пропускания (вне области ог-
раничения), коэффициент передачи (отношение приращений выходного и входно-
го напряжений) в области ограничения и в области пропускания.
При ограничении импульсов возможно растягивание фронтов из-за переход-
ных процессов в ограничителе, связанных с перезарядом паразитных емкостей,
а также с инерционностью электронных приборов.
«) 6) в)
Рас. 8.18. Последовательные диодные ограничители с ограничением сверху (а), снизу (б)
и с двухсторонним ограничением (о)
Диодные ограничители в зависимости от способа включения диода могут быть
последовательными и параллельными.
Схемы последовательных диодных ограничителей показаны на рис. 8.18,
на котором обозначено: Ui напряжение источника входного сигнала с внутренним
сопротивлением Ri; Uo — выходное напряжение ограничителя; Rn — сопротивле-
ние нагрузки; Ео - напряжение источника опорного напряжения; RI, R2, El, Е2 —
сопротивления нагрузок и источников опорного напряжения двустороннего ограни-
чителя соответственно; VD, VD1, VD2 — ограничивающие диоды. На этапе описания
принципов работы диодных ограничителей примем падение напряжения на откры-
тых диодах равными нулю (при дальнейших расчетах это ограничение будет снято).
241
Часть II. Моделирование схем и устройств
В схеме на рис. 8.18, а в исходном состоянии диод VD открыт. Когда на вход
подается сигнал положительной полярности, он передается на выход до тех пор, по-
ка не достигнет значения Ео, после чего диод закрывается и передача сигнала на вы-
ход ограничителя прекращается. Таким образом, рассматриваемый ограничитель
пропускает только сигналы, которые меньше напряжения Ео.
В схеме на рис. 8.18, б в исходном состоянии диод VD закрыт. Когда на вход по-
дается сигнал положительной полярности, он не передается на выход ограничителя до
тех пор, пока не достигнет значения Ео, после чего диод открывается и верхняя часть
входного сигнала поступает на выход ограничителя. Таким образом, рассматривае-
мый ограничитель пропускает только те сигналы, которые больше напряжения Ео.
Из рис. 8.18, в нетрудно видеть, что двухсторонний ограничитель является
комбинацией ограничителей сверху и снизу. Для этого ограничителя выбирается
Е2 > Е1, т. е. в исходном состоянии диод VD2 открыт, а диод VD1 закрыт. Когда на
вход подается сигнал положительной полярности, он не передается на выход огра-
ничителя до тех пор, пока не достигнет значения Е1, после чего диод VD1 открыва-
ется и сигнал поступает на выход ограничителя до тех пор, пока входной сигнал не
достигнет уровня Е2, после чего диод VD2 закрывается и прохождение сигнала на
выход ограничителя прекращается. Таким образом, рассматриваемый ограничи-
тель пропускает только те сигналы, которые больше напряжения Е1, но меньше Е2.
Схемы параллельных диодных ограничителей показаны на рис. 8.19, где
Ro — сопротивление ограничительного (балластного) резистора, остальные обозна-
чения совпадают с обозначениями на рис. 8.18.
Рис. 8.19. Параллельные диодные ограничители с ограничением снизу (а), сверху (б) и с дву-
сторонним ограничением (в)
В схеме на рис. 8.19, а в исходном состоянии диод VD открыт. Когда на вход
подается сигнал положительной полярности, он вследствие падения напряжения на
резисторе Ro не поступает на выход до тех пор, пока не достигнет значения Ео, после
чего диод закрывается и сигнал поступает на выход ограничителя. Таким образом,
рассматриваемый ограничитель пропускает только сигналы, которые больше напря-
жения Ео.
В схеме на рис. 8.19, б в исходном состоянии диод VD закрыт. Когда на вход
подается сигнал положительной полярности, он передается на выход ограничителя
до тех пор, пока не достигнет значения Ео, после чего диод открывается и пропуска-
ние сигнала на выход ограничителя прекращается вследствие шунтирующего дейст-
вия открытого диода. Таким образом, рассматриваемый ограничитель пропускает
только те сигналы, которые меньше напряжения Ео.
Из рис. 8.19, в нетрудно заметить, что двусторонний ограничитель, как и слу-
чае последовательных ограничителей, является комбинацией ограничителей сверху
и снизу. Для такого ограничителя выбирается Е2 > Е1, при этом в исходном состоя-
242
Глава 8. Устройства на полупроводниковых приборах
нии диод VD1 открыт, а диод VD2 закрыт. Когда на вход подается сигнал положи-
тельной полярности, он не передается на выход ограничителя до тех пор, пока не до-
стигнет некоторого эквивалентного уровня Е1е, после чего диод VD1 закрывается
и сигнал поступает на выход ограничителя до тех пор, пока входной сигнал не достиг-
нет эквивалентного уровня Е2е, после чего диод VD2 открывается и прохождение сиг-
нала на выход ограничителя прекращается. Таким образом, рассматриваемый
ограничитель пропускает только те сигналы, которые больше напряжения Е1е,
но меньше Е2е.
Перейдем к моделированию ограничителей. На рис. 8.20, а показана схема по-
следовательного ограничителя с ограничением сверху с контрольно-измерительны-
ми приборами (в том числе вольтметр для измерения эффективного значения
переменной составляющей выходного сигнала Uo). Из осциллограмм для этого огра-
ничителя видно (рис. 8.20, б), что ограничение сверху действительно имеет место на
уровне Ео = 2 В, но суммарный выходной сигнал имеет пьедестал, обусловленный
падением напряжения на открытом диоде.
Ui С 0012VO
Rn
IkQ
UO
6)
«)
Рис. 8.20. Последовательным ограничитель с ограничением сверху (а), осциллограммы его вы-
ходного (В) и входного (А) сигналов (б) и его состояние при изменении внутреннего
сопротивления источника входного сигнала (о)
Поскольку амплитуда сигнала равна 1,36 В, падение напряжения на диоде
(1 0,64 В. В таком случае с учетом внутреннего сопротивления Ri источника
годного сигнала выходное напряжение ограничителя для переменной составляю-
ей может быть запиысано следующим образом:
Uo = (Ео - Ud)[Rn/(Rn + Ri)]. (8.7)
При Ri = Rn = 1 кОм получаем Uo = (2 0,64)[1000/(1000 + 1000)] = 0,68 В (эф-
жтивное значение 0,34 В), что подтверждается показаниями вольтметра на
ic. 8.20, в.
243
Часть II. Моделирование схем и устройств
Рассмотрим теперь схему параллельного диодного ограничителя с ограниче-
нием сверху (рис. 8.21, а). Из показаний вольтметра и осциллограмм на рис. 8.21
видно, что ограничение сигнала происходит при напряжении Ео — Ud, и выходной
сигнал можно описать простой формулой:
Uo = Ео + Ud. (8.8)
Для параллельного двустороннего ограничителя, схема которого показана не
рис. 8.22, а, результаты осциллографических измерений приведены на рис. 8.22, б.
Из анализа данных на рис. 8.22 следует, что ограничение снизу наступает при на-
пряжении El - Ud, а сверху — при Е2 + Ud, т. е. выходное напряжение ограничите-
ля равно Uo Е2 - El + 2Ud = 2 - 1,5 + 2-0,64 = 1,78 В. Эффективное значение
выходного напряжения равно 0,89 В, что совпадает с показаниями вольтметра н<
рис. 8.22, б.
а)
Рис. 8.21. Схема параллельного диодного ограничителя с ограничением сверху (а) и осцилло-
граммы его выходного (В) и входного (А) сигналов (б)
а)
===- йо
и, -. afi
VD2
-»Е2
г/
ио
Рис. 8.22. Схема параллельного двустороннего ограничителя (а) и осциллограммы его выход-
ного (В) и входного (Л) сигналов (б)
В заключение перейдем к анализу последовательного двустороннего ограни-
чителя (рис. 8.23, а). Особенностью этого ограничителя является то, что при форми-
ровании напряжения ограничения принимает участие не только источник Е1.
но и источник Е2, поскольку диод VD2 открыт вплоть до достижения входным на-
пряжением уровня Е2. Рассматривая контур E1-R1-VD2-R2-E2, нетрудно подсчи-
тать, что в исходном состоянии напряжение в точке А определяется выражением:
Ua - El + (Е2 - El - Ud")Rl/(Rl + R2), (8.9»
где Ud" — падение напряжения на открытом диоде VD2.
244
Глава 8. Устройства на полупроводниковых приборах
В момент открывания диода VD1 к этому напряжению необходимо добавить
дение напряжения Ud' входного сигнала на диоде VD1, т. е. эквивалентное напря-
эние ограничения снизу составит:
Ele = Ua + Ud'. (8.10)
Принимая Ud' = Ud" = 0,64 В и используя данные рис. 8.23, а, получим
Ele = 1 + (3 - 1 - 0,64)1/2 + 0,64 - 2,32 В.
Из результатов осциллографических измерений на рис. 8.23, б видно, что ре-
гльтаты расчета практически совпали с результатами моделирования. Из той же
дйллограммы видно, что напряжение ограничения сверху равно Е2, т. е. амплиту-
1 переменной составляющей выходного сигнала Uo = Е2 - Ele = 3 - 2,32 = 0.68 В,
о эффективное значение составляет 0,34 В и практически совпадает с показания-
и вольтметра на рис. 8.23, а.
Отметим интересную особенность рассматриваемого ограничителя — слабую
зависимость выходного напряжения от внутреннего сопротивления источника вход-
ного напряжения, особенно в области значений Ri < R2, где она вообще не наблюда-
ется, что и подтверждается результатами моделирования при Ri = R2, показанными
на рис. 8.23, в.
« Fuocfiw Gttntfdlo* ЕЗ
еR£QUEНСv |i., tei | н.- &
OUTV CVCLE i5C_.__.iil _____
в И Р L 1 Т UO Е (з lei I V #
OFFSET |3 g)
в)
Рис. 8.23. Последовательный двусторонний ограничитель (а), осциллограммы его выходного
(В) и входного (A) chi налов (б) и его состояние после увеличения внутреннего сопро-
тивления источника входного напряжения (в)
Из сравнения показаний вольтметров на рис. 8.23 видно, что они полностью
•впадают. Объясняется это тем, что начиная с момента перехода диода VD1 в от-
бытое состояние и до перехода в закрытое состояние диода VD2 в схеме действуют
словия, которые описываются выражениями (8.9) и (8.10) и которые выполняются
автоматически за счет встречного включения диодов и нелинейности их характери-
стик: изменение тока через диод VD1, обусловленное изменением Ri, приводит к из-
менению противоположно направленного тока от источника Е2 и перемещению
245
Часть II. Моделирование схем и устройств
рабочей точки диода VD2 таким образом, чтобы потенциал точки А оставался неиз- з;
менным в процессе формирования плоской части вершины выходного импульса.
Фиксаторы уровня являются одним из применений диодных ограничителей. I
Во многих радиоэлектронных устройствах, в частности, в многокаскадных усилите- I
лях используются межкаскадные RC-цепи. При входном периодическом напряже- 3J
нии разделительный конденсатор такой цепи заряжается в стационарном режиме до I
уровня, определяемого постоянной составляющей входного сигнала. Если сигнал _
симметричен, то его постоянная составляющая равна нулю и среднее значение на- I
пряжения на конденсаторе также равно нулю. Это имеет место только при условии, I
когда заряд конденсатора в течение одной части периода и его разряд в течение дру- I
гой части происходят с одной и той же постоянной времени.
Если сигнал передается через разделительный конденсатор на нелинейное ус- I
тройство, в частности, на рассмотренный выше ограничитель, то сопротивления це- I
пей заряда и разряда оказываются неодинаковыми. При этом разделительный I
конденсатор зарядится в установившемся режиме до некоторого постоянного папря- 1
жения даже при отсутствии постоянной составляющей входного сигнала и напряже- I
ние на конденсаторе явится дополнительным напряжением смещения, которое I
изменит уровень ограничения или режим по постоянному току. Такое явление назы- I
вается динамическим смещением в отличие от статического смещения, задаваемого I
соответствующими элементами выбора рабочей точки.
Во многих практических случаях, например, в видеоусилителях телевизион- I
ных приемников приходится принимать специальные меры для уменьшения дина- I
мического смещения. При этом наиболее простым схемотехническим решением I
является использование диодных ограничителей.
Контрольные вопросы и задания
1. Подготовьте для моделирования схему последовательного диодного ограничите- I
ля с ограничением снизу (по аналогии со схемой на рис. 8.20, а). По результатам I
моделирования составьте выражение для расчета выходного напряжения, ана- I
логичное (8.7).
2. Подготовьте для моделирования схему параллельного диодного ограничителя I
с ограничением снизу (в качестве аналога возьмите схему на рис. 8.21, а) и про- I
ведите ее исследование. Составьте выражение для расчета выходного напряже- I
ния, аналогичное (8.8).
3. С помощью схемы на рис. 8.23, а исследуйте зависимость выходного напряже- I
ния последовательного двустороннего ограничителя от внутреннего сопротивле- I
ния источника входного напряжения.
-зс
4. Для каких целей используются фиксаторы уровня?
8.4. Преобразователи формы сигналов
Преобразователи формы сигналов (в импульсной технике, где они находят I
наибольшее применение, их называют формирователями импульсов) предназначь- I
ны для изменения параметров импульсных сигналов — амплитуды, длительности I
фронтов, длительности импульса, периода повторения и т.п.
Для изменения временных параметров импульсов чаще всего применяются I
RC-цепи. Например, для уменьшения длительности импульса используется дифф?- I
ренцирующая цепь. При этом амплитуда и длительность укороченного импульса за- I
246
Глава 8. Устройства на полупроводниковых приборах
сят не только от параметров дифференцирующей цепи, но и от параметров самого
шульса — его амплитуды и крутизны фронтов.
Схема для исследования дифференцирующей RC-цепи (рис. 8.24, а) содержит
:твенно RC-цепь, резистор Ri для имитации внутреннего сопротивления источника
:одного сигнала, в качестве которого используется функциональный генератор, ос-
гллограф, конденсатор Си для имитации емкости нагрузки, подключаемый к выхо-
' с помощью ключа С, управляемого нажатием одноименной клавиши клавиатуры.
а)
б)
С. 8.24. Дифференцирующая RC-цепь (а) и осциллограммы входного (А) и выходного (В)
сигналов (б)
Выходной сигнал Uo, формируемый на резисторе R, равен произведению со-
отивления на ток в цепи, который в данном случае равен I(t) = C(dUc/dt). Посколь-
Uc Ui - Uo, то выходное напряжение Uo(t) = RI(t) = RC[(dUi/dt) - (dL’o/dt)].
Если выполнить условие
dUo/dt« dUi/dt, (8.11)
Uo(t) = RC(dUi/dt).
(8.12)
247
Часть II. Моделирование схем и устройств
Таким образом, выполнение условия (8.11) является гарантией того, что RC-цеп
будет выполнять операцию дифференцирования, причем для повышения точност
дифференцирования необходимо, чтобы постоянная времени цепи Т = RC была ка
можно меньше длительности фронтов входного сигнала [48]. Это означает также, чт
постоянная Т существенно меньше и длительности входного импульса. Поэтому н
практике чаще всего пользуются приближенной формулой:
Uo(t) = Ui exp(-t/RC). (8.13!
Часто пользуются более конкретными параметрами, получаемыми из выраж«
ния (8.13), в частности, значениями интервалов времени, соответствующих зада®
ным значениям выходного напряжения. К ним относятся длительности импульса е
уровне 0,1 и 0,5 от амплитуды, которые определяются соответственно формулами:
Тн = 2,3RC и Тс - 0.7RC. (8.14
Перейдем к рассмотрению результатов моделирования, представленных в
рис. 8.24, б. Из приведенных осциллограмм виден эффект дифференцирования пр=
моугольных импульсов — вместо одного длинного импульса получаем два укорочен
ных, как следствие реакции RC-цепи на передний и задний фронты прямоугольны
импульсов. Из рис. 8.24, б видно, что длительность полученных импульсов на уроа
не 0,5 от амплитуды равно промежутку времени Т2 - Т1 3,5 106 с = 35 мкс, коте
рый определяется положением визирных линеек на оси времени (визирная линейк
1 установлена на начало импульса, а линейка 2 — на уровень 0,5 от амплитуды).
Рис. 8.25. Схема для дифференцирования треугольного сигнала (а) и осциллограммы ее в:
ного (А) и выходного (В) сигналов (б)
Ui
Ri
а)
с
Рис. 8.26.
R
j Z \/О
Rk
Схема формирователя укороченного импульса (а) и осциллограммы его входного
и выходного (В) сигналов (б)
Используя данные рис. 8.24, а, на основании выражения (8.14) получаем
Тс = 0,7104 5.10’ = 35.106с * 35 мкс, т. е. расчетные данные совпали с резулы!
тами моделирования.
248
Глава 8. Устройства на полупроводниковых приборах
Теперь рассмотрим случай треугольного входного сигнала (рис. 8.25). Резуль-
ты моделирования дифференцирующей цепи для этого случая показаны на
:с. 8.25, б, из которого видно, что в результате дифференцирования треугольных
[пульсов с амплитудой 5 В получены прямоугольные импульсы с амплитудой
О мВ. Проверим полученные результаты расчетом.
Из рис. 8.25, а видно, что частота следования импульсов составляет 1 кГц,
е. период равен 1 мс. За половину периода амплитуда треугольного импульса до-
игает 10 В, т. е. скорость его изменения составляет 10/(0,510’3) = 210* В/с, что
вно значению производной dUi/dt в формуле (8.12). Следовательно, используя
иные цепи на рис. 8.25, а, на основании этой формулы можно получить значение
плитуды выходного напряжения. Таким образом, Uoln = 103-5 109-2 104 = 0,1 В -
00 мВ, что совпадает с результатами моделирования.
Применение дифференцирующей RC-цепи в формирователях импульсов чаще
его сочетается с какой-либо ключевой схемой, как показано на рис. 8.26, а. В этой
еме резистор R дифференцирующей цепи выполняет одновременно функции токо-
дающего сопротивления для транзисторного ключа на транзисторе VT и ограни-
гтельного резистора для фиксатора уровня на диоде VD, который является
повременно и элементом защиты от пробоя перехода база-эмиттер при отрицатель-
•й полуволне входного сигнала (допустимое обратное напряжение для этого пере-
да составляет около 3...5 В).
Результаты моделирования рассматриваемого формирователя показаны па
[с. 8.26, б. Из осциллограмм видно, что сформированный на выходе транзисторного
>ча импульс заметно короче входного, его длительность на уровне 0,5, измеренная
режиме ZOOM осциллографа,
составляет 180 мкс. Длительность формируемого сиг-
ла зависит как от постоянной времени, так и от амплитуды входного сигнала Ui.
В технике формирования сигналов находит применение и интегрирующая RC-
;пь, которая является противоположностью дифференцирующей: в ней конденса-
р и резистор меняются местами (рис. 8.27, а). Дополнительным отличием этой
емы является то, что при моделировании можно оперативно подключить к выходу
противление нагрузки Rn с помощью ключа R. Сопротивлением резистора Rn мож-
। также имитировать сопротивление утечки интегрирующего конденсатора.
Выходное напряжение интегрирующей RC-цепи определяется интегралом
одного напряжения. На практике для определения реакции RC-цепи при входном
шульсном сигнале длительностью, превышающей постоянную времени Т = RC,
пользуется приближенное выражение:
Uo(t) - tUi(l - t/2T)/T. (8.15)
Первый член выражения (8.15) соответствует выходному напряжению при
;еальном интегрировании, а второй — значению ошибки интегрирования в первом
сближении..
Из результатов моделирования, представленных на рис. 8.27, б, видно, что
и интегрировании прямоугольных импульсов амплитудой 5 В (входной сигнал
ухполярный) получились треугольные импульсы амплитудой 50 мВ. Проверим
зультаты моделирования расчетом. Как следует из данных па рис. 8.27, постоян-
1Я времени цепи Т - 104-510б = 0,05 с, длительность интервала времени равна по-
•вине периода, т. е. 0,0005 с, Uln) = 5 В. В таком случае выходное напряжение,
гласно выражению (8.15), равно: U«. = 5 0,0005/0,05 = 50 мВ, что совпадает с ре-
льтатами моделирования.
249
Часть II. Моделирование схем и устройств
Рис. 8.27. Интегрирующая RC-цепь (а) и осциллограммы ее входного (А) и выходного
сигналов (б)
Осциллограммы входного (А) и выходного (В) напряжения интегрирующей цепи
треугольной форме входного сигнала
Рис. 8.28.
Если на вход интегрирующей RC-цени на рис. 8.27, а подать треугольные
пульсы (переключением на лицевой панели функционального генератора), то нз
выходе будет сформирован сигнал, показанный на рис. 8.28, из которого видно, ч
при амплитуде входного треугольного импульса 5 В на выходе формируется зал
дывающий по фазе сигнал с двойной амплитудой VB2 ~ 25 мВ, напоминающий сзз
сойду. Однако это не синусоида. Попытаемся выяснить закон изменения эта
сигнала на промежутке времени в четверть периода. Как уже отмечалось выше, г:
угольный импульс на этом промежутке времени можно представить в следуюгл
виде:
Ui(t) - Vt, (8.И
где V — скорость изменения треугольного сигнала, равная, как рассчитано выл
2-10’ В/с.
250
Глава 8. Устройства на полупроводниковых приборах
После вычисления интеграла получим:
Uo(t) = Vt2/2T. (8.17)
В первую очередь отметим, что полученное выражение является параболой,
т. е. в результате интегрирования треугольного импульса формируются импульсы
параболической формы. Для определения максимального значения выходного сигна-
ла в формулу (8.17) подставляем t " 0,00025 с (четверть периода) и Т = 0,05 с,
в результате получим Uora - 210‘-6,251072-5.102 - 12,5 мВ, что совпадает с резуль-
татами моделирования.
Для расчета фазового угла воспользуемся формулой для RC-цепи из гл. 6. В та-
ком случае получим Вг = arctg 2?tFT - arctg (6,281000-5102) - arctg31,4 = 88,17’. Ре-
зультаты расчета сопоставим с результатами моделирования. Из осциллограмм па
рис. 8.28 видно, что параболический сигнал запаздывает па Т2 - Т1 = 0,245 мс, что
з градусах составляет 88,2' и практически равно расчетному значению.
Контрольные вопросы и задания
1. Для чего используются формирователи импульсов? Приведите примеры их
практического использования.
2. Что такое постоянная времени дифференцирующей или интегрирующей цепи
и что она определяет?
3. Исследуйте зависимость длительности выходного импульса на уровне 0,1 его
амплитуды от постоянной времени дифференцирующей RC-цепи на рис. 8.24, а.
4. Исследуйте зависимость длительности выходного импульса на уровне 0,5 и его
амплитуды от внутреннего сопротивления источника входного сигнала и емкос-
ти нагрузки в схеме на рис. 8.24, а.
5. Почему треугольные импульсы после дифференцирования становятся прямо-
угольными?
5. Исследуйте зависимость длительности выходного импульса на уровне 0,5 (2,5 В)
в формирователе на рис. 8.26, а от постоянной времени цепи и амплитуды вход-
ного сигнала Ui.
'. Исследуйте зависимость формы выходного сигнала от постоянной времени ин-
тегрирующей цепи на рис. 8.27, а при прямоугольном и треугольном входных
сигналах.
8.5. Генераторы пилообразного напряжения
Генераторы пилообразного напряжения и тока находят широкое применение
итгоматике, телевидении, технике связи, измерительной технике и в других обла-
ях прикладной радиоэлектроники. Основными характеристиками этих генерато-
в являются линейность рабочего участка выходного напряжения, длительность
эчего и обратного хода, период повторения.
Генераторы пилообразного напряжения (ГПН) чаще всего выполняются
юшним управлением. При этом длительность рабочего хода определяется дли-
вностью внешнего управляющего импульса прямоугольной формы. При необхо-
©сти можно создать генераторы, работающие в ждущем (с запуском от короткого
|ульса), автоколебательном или в режиме синхронизации.
В простейшем случае, когда не требуется высокая линейность рабочего участ-
выходного напряжения, ГПН выполняется по схеме интегрирующей RC-цепи со
юсом заряда при обратном ходе. Схема такого ГПН (рис. 8.29, а) содержит интег-
251
Часть II. Моделирование схем и устройств
рирующую RC-цепь, ключ на транзисторе VT, генератор G импульсов сброса, осци.~
лограф, функциональный генератор и два ключа Z и А, управляемых одноименным;
клавишами и предназначенных для реализации различных режимов моделирова
ния. Показанные на панели функционального генератора значения коэффициент;
заполнения позволяют получить короткий импульс сброса с генератора G при форме
ровании обратного хода, а на выходе функционального генератора образцовое пг
лообразное напряжение (с высокой линейностью), которое будет использовано щ
оценке нелинейности ГПН.
При положении ключей, показанном на рис. 8.29, а, осциллограммы сигна
лов в контрольных точках схемы представлены на рис. 8.29, б, откуда видно, чт’
формирование выходного сигнала (рабочий ход) происходит в паузах между корот
кими сигналами сброса, поступающими с генератора G. Длительность этих и»
пульсов при установленных частоте следования 1 Гц и коэффициенте заполнена
2% составляет 0,02 с.
Выходной сигнал ГПН на интервале рабочего хода изменяется по закону:
Uo(t) = Ucc[l - exp(-t/T)], (8.181
где Т = RC = 10ч10010" •= 1 с — постоянная времени RC-цепи на рис. 8.29, а.
Выходное напряжение в конце рабочего хода (через 0,98 с после сброса) дост»
гает максимального значения: Uulll = 6,4[ 1 - ехр(-0,98/1)1 = 6,4(1 - 0,375) = 4 В, чп
практически совпадает с результатами моделирования.
a) 6j
Рис. 8.29. Генератор пилообразного напряжения с зарядным резистором (а) и осциллогра
его выходного напряжения (В) и сигналов сброса (А) (б)
Для сравнения пилообразного сигнала ГПН с образцовым (создаваемым фуи
циональным генератором) переведем ключ А в верхнее положение. При этом фуи
циональный генератор будет подключен к каналу А осциллографа, на экра-
которого увидим осциллограммы, показанные на рис. 8.30, а. Из визуального сра
нения осциллограмм сигналов видно, что генерируемый ГПН пилообразный сигш
имеет заметную нелинейность. Для ее оценки используется коэффициент нелине?
ности, определяемый выражением:
Кн = (V. - VJ/V., (8.19
где V,„ VK — значения скорости выходного напряжения в начале и конце рабочего в
да соответственно.
Для определения скорости нужно взять производную по времени от выра;5а
ния (8.18). Проделав такую операцию, получаем выражение для скорости выхода
го напряжения ГПН в следующем виде:
V(t) = Uccexp(-t/T)/T.
(8.
252
Глава 8. Устройства на полупроводниковых приборах
Из выражения (8.20) при t = 0 с и t = 0,98 с получаем соответственно
гн = 6,4ехр( 0)/1 «= 6,4 R/с и Vk = 6,4ехр( 0,98/1)/! = 2,4 В/с. После подстановки
тих значений в формулу (8.19) получаем коэффициент нелинейности
ш = (6,4 - 2,4)/6,4- 0,625. Заметим, что используемые, например, в аналого-циф-
овых преобразователях ГПН имеют нелинейность порядка 0,001 и менее.
Оценим нелинейность выходного напряжения ГПН, сравнивая его с образцо-
ым напряжением, источником которого является функциональный генератор,
(ля этого переключатели А и Z (см. рис. 8.29, а) переведем в верхнее положение.
1з полученных при этом результатов измерений (рис. 8.30, б) видно, что максималь-
ое отклонение (осциллограмма В) от линейности имеет место при выходном напря-
жении около 2 В. Если до этого момента, а это около 0,5 с, напряжение нарастало
большей скоростью но сравнению с образцовым, то затем скорость начинает падать.
Объясняется это тем, что по мере заряда конденсатора зарядный ток уменьшается.
б)
Осциллограммы выходного напряжения ГПН (В) и эталонного (А) с функционально-
го генератора (а) и разностного сигнала (б)
. 8.30.
8.31. ГПН со стабилизатором тока (а) и осциллограммы его выходного напряжения (В)
и функционального генератора (Л) (б)
Очевидно, что для улучшения линейности необходимо, чтобы ток заряда кон-
ясатора оставался неизменным. Это может достигаться различными методами,
наиболее простым является параметрический, при котором ток заряда поддержи-
ется неизменным (с определенной точностью) с помощью стабилизатора тока. Схе-
такого ГПН (рис. 8.31, а) отличается от ранее рассмотренного наличием всего
□ого компонента — полевого транзистора VT1, который и выполняет роль стаби-
затора тока. Полевой транзистор поддерживает постоянным ток в зарядном рези-
эре R. Если этот ток начинает уменьшаться, то уменьшается и падение
□ряжения на резисторе, а это вызывает компенсирующее увеличение тока через
девой транзистор за счет уменьшения сопротивления его канала. Поскольку при
эм напряжение на затворе меняется в широких пределах (от нулевого до UW.J, не-
253
Часть II. Моделирование схем и устройств
обходимо выбирать полевой транзистор с максимально возможным напряжением
отсечки (не менее Un,„).
Из осциллограмм на рис. 8.31, б видно, что ГПН со стабилизатором тока от-
личается от ГПН с зарядным резистором более высокой линейностью выходного
напряжения.
Контрольные вопросы н задания
1. Назовите основные характеристики генераторов пилообразного тока и напряже-
ния. В каких устройствах они применяются?
2. Исследуйте зависимость амплитуды и линейности выходного напряжения ГПЕ
на рис. 8.29, а от напряжения питания Ucc.
3. Установите зависимость амплитуды выходного сигнала ГПН на рис. 8.29, а сс
напряжения питания Ucc и напряжения отсечки полевого транзистора. При мо-
делировании используйте собственную библиотеку полевых транзисторов.
4. Проведите измерение разностного сигнала в ГПН на рис. 8.29, а.
8.6. Селекторы импульсов
Во многих устройствах прикладной электроники возникают задачи селекции
(выделения) из последовательности импульсов лишь тех из них, которые обладают 1
определенным признаком или совокупностью признаков (параметров). Устройства
выполняющие такие функции, называются селекторами. На выходе селектора сиге*- I
лы должны иметь ту же форму, что и на входе. Однако во многих случаях необходг-1
мо лишь регистрировать появление сигналов с определенными признаками (т. е-1
с определенными значениями параметров, по которым выполняется селекция^
а форма выходного импульса роли не играет. Применяемые в этих случаях устройст-
ва являются в сущности квазиселекторами, в них появление импульса с определен-
ным признаком на входе фиксируется появлением скачка напряжения на выходе ita
короткого импульса. Основными параметрами, по которым осуществляется селеа-1
ция, являются амплитуда, длительность или временное положение импульсов.
При амплитудной селекции (отбор импульсов, амплитуды которых находят:*
в заданном диапазоне) используются чаще всего рассмотренные выше диодные огре-1
ничители. Амплитудные селекторы, оснащенные средствами обработки информл-1
ции и известные под названием “амплитудные анализаторы”, находят широкаи!
применение при спектрометрическом анализе радиоизотопов (результатом аиалз»!
является количественное определение содержания того или иного изотопа по колм
честву импульсов заданной амплитуды, пропорциональной энергии его распада).
При временной селекции (отбор импульсов по длительности, частоте следоэг]
ния или времени их появления относительно стартового импульса) используюяЯ
различные комбинации аналоговых и цифровых устройств с достаточно сложныж]
алгоритмами обработки сигналов, если они имеют случайный характер распредел₽’|
ния по амплитуде и во времени (например, в ядерной электронике).
Наиболее простыми из временных селекторов являются селекторы по длиI
тельности. Эти селекторы используются для выделения из входной последовав ezx I
ности лишь тех импульсов, длительность которых находится в определенней
пределах, причем обычно требуется лишь регистрация наличия во входной последи
вательности импульсов с заданными параметрами.
Среди селекторов по длительности различают селекторы импульсов мак^Я
мяльной длительности, минимальной или заданной длительности [54]. Как пргяЛ
254
Глава 8. Устройства на полупроводниковых приборах
ло, во временных селекторах используется некое стартовое устройство, которое за-
дает начало отсчета времени и затем фиксирует конец регистрируемого события. Та-
ким образом, например, определяют энергию нейтронов по времени пролета
определенного расстояния, скорость снарядов и т.д. Подобный принцип использует-
ся и в схеме на рис. 8.32.
Рис. 8.32.
Схема временного селектора
Рис. 8.33. Осциллограммы сигналов на выходе ГПН (на базе транзистора VT2) (А) и на выходе
ключа на транзисторе VT3 (В)
Схема временного селектора содержит знакомый нам из предыдущего раздела
генератор пилообразного напряжения со стабилизатором тока на полевом транзисто-
ре. К схеме ГПН добавлены эмиттерный повторитель па транзисторе VT2, пороговое
устройство на транзисторе VT3 и ключ на транзисторе VT4. Простейшее пороговое
стройство на транзисторе VT3 срабатывает, когда напряжение на базе транзистора
Т2 примерно равно сумме напряжений база-эмиттер Ube двух транзисторов VT2
VT3 и напряжения Ub = UccRl/(Rl + R2) = 1 В. Полагая, что для открытых тран-
аисторов Ube = 0,65 В, получаем суммарное напряжение, примерно равное 2,3 В.
255
Часть II. Моделирование схем и устройств
Теперь обратимся к результатам моделирования, представленным на
рис. 8.33. Из осциллограмм и индикаторных окон видно, что при выходном напря-
жении ГПП около 2,37 В (точное значение см. в строке VA1 левого индикаторного
табло), что соответствует по времени 0,58 с после начала запуска ГПН (см. строку Т1
в том же табло), срабатывает пороговое устройство на транзисторе VT3 и открывает-
ся ключ на транзисторе VT1, что зафиксировано на нижней осциллограмме. Заме-
тим, что ориентировочное значение порога срабатывания практически совпало
с результатом моделирования.
Установив факт работоспособности временного селектора, мысленно отключим
генератор G и вместо него подключим источник исследуемого сигнала с амплитудой
10 В и длительностью 0,2 с. Кроме того, подключим этот источник и к двухвходовой
схеме совпадения (логический элемент И), к второму входу этой схемы через инвер-
тор подключим выход ключа на транзисторе VT4. Теперь поставим задачу: отвечает
ли исследуемый сигнал условиям отбора (селекции) по длительности, которая долж-
на находиться в пределах от 0,6 до 0,98 с. Если длительность исследуемого сигнала
находится в указанных пределах, то на выходе схемы совпадения регистрируется
сигнал совпадения. При длительности же 0,2 с этого не произойдет.
Рассмотренный пример использования устройства на рис. 8.32 является, есте-
ственно, не единственным.
Контрольные вопросы и задания
1. Какие задачи можно решать с помощью селекторов импульсов? Какие типы се-
лекторов Вам известны?
2. С помощью схемы на рис. 8.32 установите зависимость времени срабатывания по-
рогового устройства от напряжения, задаваемого делителем на резисторах R1 и R2
3. Составьте аналитическое выражение, устанавливающее зависимость временя
срабатывания порогового устройства от порогового напряжения, равного
2Ube + UccRl/(Rl + R2).
8.7. Генератор с кварцевым резонатором
Генераторы с кварцевым резонатором используются в разнообразных устройст-
вах, начиная от радиопередатчиков (одно из самых первых применений) и кончая на-
ручными часами. Для изготовления кварцевых резонаторов используется кварц —
минерал естественного происхождения. Химически это двуокись кремния, а по струк-
туре — кристалл. В природе кварц очень распространен, но полноценные кристаллы
пригодные для применения в качестве резонаторов, встречаются сравнительно редко
Для изготовления резонатора из кварцевого кристалла вырезается пластин*.
Простейший способ ее вырезания — так называемый срез Кюри, при котором боль-
шие стороны пластины параллельны оси симметрии кристалла и перпендикулярны
двум его граням (см. разд. 16.5). Исследования показали, что температурная ст:
бильность кварца получается более высокой при косых срезах — например, под уг-1
лами 35 или 49‘ к оси симметрии кристалла (срезы АТ и ВТ).
Если пластину кварца положить между двумя металлическими обкладкам! j
и сжать, то на обкладках появятся электрические заряды противоположных знаков.
Это явление, называемое прямым пьезоэлектрическим эффектом, присуще так.-ь»
турмалину, сегнетовой соли, некоторым видам синтетических кристаллов и керам»-1
ки. При переходе от сжатия пластины к ее растяжению электрические заряды ос-1
кладок изменяют знаки. Пьезоэлектрический эффект обратим: если пластин>1
256
Глава 8. Устройства на полупроводниковых приборах
кварца поместить в электрическое поле, то в кварце возникает упругая деформа-
ция — сжатие или расширение в соответствии с направлением электрического поля.
Это явление названо обратным пьезоэлекрическим эффектом.
Пластина кварца способна к собственным механическим колебаниям, при кото-
рых как по толщине, так и по длине распространяются упругие возмущения. Частота
упругих колебаний зависит от размеров пластины. Так, поперечные колебания при
толщине пластины b (в мм) при срезе Кюри имеют собственную частоту примерно
2,84/Ь (в МГц), а продольные колебания при длине пластины L (в мм) — 2,7/L МГц.
Чтобы поддерживать собственные колебания пластины незатухающими, ее
включают в схему автогенератора с помощью металлических обкладок и кварцедер-
жателя. Наиболее распространенный способ наложения обкладок — нанесение сло-
ев серебра на поверхность кварца. Кварцедержатель служит для контакта внешних
проводов с обкладками. Конструкцию из кварцевой пластины и кварцедержателя
называют кварцевым резонатором.
Если на пластину действует переменное напряжение, то она испытывает меха-
нические колебания. Следовательно, в цепи, содержащей кварц, протекает перемен-
ный ток, который состоит из двух слагаемых: тока емкостного характера,
определяемого емкостью между обкладками, и тока зарядов, создаваемых пьезоэф-
фектом. Эта последняя слагаемая имеет по отношению к напряжению фазовый
сдвиг, отличный от 90’, и ее вектор может либо опережать вектор напряжения, либо
отставать от него. Когда частота внешнего напряжения близка к частоте собствен-
ных механических колебаний кварца, то наблюдается электромеханический резо-
нанс: амплитуда тока и амплитуда собственных механических колебаний при этом
становятся максимальными. Если при данном напряжении измерять ток в цепи
вблизи резонансной частоты и определять фазовый сдвиг тока по отношению к на-
пряжению, то можно подобрать электрическую схему, эквивалентную кварцевому
резонатору и представленную на рис. 8.34, а. (обозначения на рис. 8.34, а соответст-
вуют обозначениям, принятым в EWB 5.0). В этой схеме конденсатор СО отображает
емкость между обкладками кварца. Вторая ветвь, состоящая из индуктивности LS,
емкости CS и активного сопротивления RS, представляет собой последовательный
колебательный контур, собственная частота которого определяется формулой:
Fo = 1/(2jp/LS-C), (8.21)
где С = (CS C0)/(CS + СО) - эквивалентная емкость контура с учетом емкости квар-
цедержателя.
Параметры кварца существенно отличаются от параметров обычных колеба-
тельных контуров. Так, для кварцевого резонатора на 3 МГц емкость CS исчисляет-
ся десятыми и сотыми долями пикофарады, индуктивность LS — тысячами
и десятками тысяч микрогенри (может быть и генри), сопротивление RS — единица-
ми, десятками или, при неудачной конструкции, сотнями ом. Емкость СО между об-
кладками составляет единицы или десятки пикофарад. Добротность кварцевого
резонатора достигает десятков тысяч, а в резонаторах сверхвысокой добротности —
несколько миллионов.
Схема для испытания кварцевого резонатора из программы EWB 5.0 показана
на рис. 8.34, б. Она содержит резонатор Q, резистор R сопротивлением 0,01 Ом, функ-
циональный генератор и измеритель АЧХ и ФЧХ. Параметры исследуемого резона-
тора в диалоговом окне имеют следующие значения: LS = 1,25 Н, CS — 2е-14 =
= 210 й F, СО = 2е-13 = 21013 F, RS = 10 W.
9 Зак. 206
257
Часть II. Моделирование схем и устройств
Результаты испытания резонатора показаны на рис. 8.35. Из АЧХ (рис. 8.35, a i
видно, что, кроме резонанса токов (частота Fo), в кварцевом резонаторе имеет место
также и резонанс напряжения (частота Fv). Частота резонанса по напряжению опреде-
ляется цепочкой LS-RS-CS и равна:
Fv = 1/(2jt/L&CS).
(8.22)
Рис. 8.34. Эквивалентная схема кварцевого резонатора (а) и схема для его испытания (б)
Рис. 8.35. Амплитудно-частотная (а) и фазо-частотная (б) характеристики кварцевого резонатора
Частота Fv очень близка к частоте параллельного резонанса Fo, так как CS>C0.
Как видно из ФЧХ на рис. 8.35, б, в промежутке между этими частотами реактивное
сопротивление кварца имеет индуктивный характер (ток через резистор R, с которо-
го снимается выходной сигнал напряжения на измеритель АЧХ-ФЧХ, запаздывает
почти на 90°). Расчетные значения Fo и Fv, полученные по формулам (8.21), (8.22),
практически совпадают с результатами моделирования. Из рис. 8.35, а добротность
определить по АЧХ достаточно сложно. Мы использовали следующую (очень прибли-
женную) методику: суммировались значения коэффициентов передачи на частотах
Fo (-102 дБ) и Fv (-198 дБ), из этой суммы вычиталось значение коэффициента пере-
дачи на частоте 990 кГц (-145 дБ, начало АЧХ), в результате чего получалась “высо-
та” двух резонансных пиков в “чистом виде” (без пьедестала, равного коэффициенту
передачи на частоте 990 кГц). Затем полученный остаток (155 дБ), равный сумме
двух резонансных пиков, делился на два, в результате чего получаем приближенное
эквивалентное значение добротности Qe = 77,5 дБ = 7500. Расчетное значение доброт-
ности можно получить по формуле, отличающейся от формулы для обычного колеба-
тельного контура наличием множителя, который называется коэффициентом
включения и для схемы па рис. 8.35, а определяется выражением: р CS/C0 = 0,096.
В таком случае расчетное значение добротности Qe = p2Q = рг/(2лС RS Fo) = 8050, что
несколько превышает полученное по АЧХ значение, что объясняется неточностью
изложенной выше методики.
Схема автогенератора с кварцевым резонатором на двухкаскадном усилителе
показана на рис. 8.36, а. Первый каскад выполнен на транзисторе VT1, включенном
по схеме с ОБ. Режим по постоянному току задается делителем на резисторах RI, R2
258
Глава 8. Устройства на полупроводниковых приборах
а)
б)
Схема генератора с кварцевым резонатором (а) и осциллограмма его выходного
сигнала (б)
Рис. 8.36.
и сопротивлением R4 в цепи эмиттера, конденсатор СЬ блокировочный. На выхо-
де первого каскада включен эмиттерный повторитель на транзисторе VT2. Кварце-
вый резонатор Q включен в цепь положительной обратной связи, значения его
параметров: LS = 1,25 Н, CS - 2е-14 = 2 1014 F, СО = 2е-13 = 2 10 u F, RS = 10 W.
Из осциллограммы выходного сигнала генератора (рис. 8.36, б) видно, что часто-
та колебаний Fo = 1/(Т2 - Т1) = 951 кГц почти на 5% меньше резонансной частоты квар-
ца, что объясняется влиянием емкостей база-эмиттер и база-коллектор транзисторов.
9*
259
Часть II. Моделирование схем и устройств
Контрольные вопросы и задания
1. Назовите области применения генераторов с кварцевыми резонаторами.
2. Как устроен кварцевый резонатор?
3. Используя схему на рис. 8.34, б, проведите испытания кварцевого резонатора
при сопротивлении резистора R •» 0,005 Ом. Сравните полученные результаты
с расчетными.
4. Проведите испытания резонатора с параметрами: LS - 1,25 Н, CS = 2е-14 F, СО =
2е-13 F, RS- 100 W.
5. Исследуйте возможность использования схемы на рис. 8.36, а в диапазоне частот
до 10 МГц, изменяя соответствующим образом параметры кварца.
6. Исследуйте зависимость частоты генератора на рис. 8.36, а от параметров СЕ
и СС транзистора, а также от температуры в диапазоне от 27 до 100°С, использо-
вав команду Temperature Sweep из меню Analysis.
8.8. Мультивибратор
Классическая схема мультивибратора (рис. 8.37, а) содержит два ключа на
транзисторах VT1, VT2 и времязадающие (хронирующие) R1C1-, В2С2-цепи.
Если за исходное состояние мультивибратора принять положение, соответст-
вующее установке визирной линейки 1 на рис. 8.37, б, то можно констатировать, что
транзистор VT2 открыт, при этом напряжение на его коллекторе (осциллограмма А)
равно VA1 = 75 мВ, а на базе (осциллограмма В) VB1 « 0,7 В. При дальнейшем незна-
чительном уменьшении этого напряжения транзистор VT2 закрывается, после чего
на его коллекторе начинает формироваться передний фронт выходного импульса.
Как видно из осциллограммы А, этот фронт имеет экспоненциальную форму, по-
скольку при этом происходит заряд конденсатора С2 по цепи И2с-С2-база VT1, при-
водящий к открытию транзистора VT1 и, следовательно, к подключению к базе VT2
отрицательной обкладкой конденсатора С1, заряженного до напряжения, примерно
равном Ucc-VBl-VAl, и разряжающегося через открытый VT1 и резистор R1. Раз-
ряд конденсатора С1 происходит до напряжения, примерно равного VB1 * 0,7 В,
после чего транзистор VT2 закрывается и аналогичным образом начинается форми-
рование паузы. Заметим, что в разряде конденсатора С1 принимает также участие
тепловой ток закрытого транзистора VT2. Если этим током пренебречь, что являет-
ся вполне приемлемым для кремниевых транзисторов (например, для 2N2222 он ра-
вен около 1010 А), то длительность выходного импульса определится формулой [42]
Ти = 0.7R1C1, а длительность паузы — формулой Тп =« 0.7R2 C2, т.с. период колеба-
ний Т = Ти + Тп = O,7(R1C1 + R2 C2) = 0,7(3010<2,2110’ + 30- ПГ-2,210°) = 92,6 мкс,
что достаточно близко к полученному при моделировании Т2 - Т1 - 95 мкс
(см. рис. 8.37, б).
Контрольные вопросы и задания
1. Незначительная асимметрия схемы мультивибратора за счет использования
конденсаторов различной емкости обусловлена необходимостью обеспечения его
возбуждения в системе EWB. Проведите расчет элементов мультивибратора и его
испытание при соотношении длительности импульса и паузы 1:2.
2. Определите длительность переднего фронта импульса на уровне 0,9 расчетным
и экспериментальным путем, полагая, что его амплитуда равна Ucc, а длитель-
ность определяется постоянной времени R2c C2.
260
Глава 8. Устройства на полупроводниковых приборах
R1c
ткй
R2c
-k2
2.21 nF
R2
30k2
C2
2.2nF
a)
\Л2
2N2222
T2
VA2
V82
7 66431*04
7.21925c-02
7 05354* 01
9 49625e-35
3.00267*03
елаи&Ез.
S .-1 46ЙС-04
7 51952o-02
6 96952c-01
T1
VAI
VB 1
T2-T1
VA2-VA1
VB2-UB1
TIKE BASE TRIGGER
j|002mt/dlv £| EDGE -r ~г-
X POS IO on : LEVEL I 0 CO
। b/a; a/b о 'a.- ?j EXTL
CHANNEL A
| 5 V/0K>
V POS [o.QQ
AC Oji'lT
CHANNEL В
; 5 V/Ob
V POS j-0.40
AC в '
REDUCE
REVERSE1
SAVE j
6)
Рис. 8.37. Схема мультивибратора (а) и осциллограммы сигналов в контрольных точках (б)
•3. Каким образом сказывается тепловой ток транзисторов на длительности периода
колебаний — он уменьшается или увеличивается? Ответ проверьте на модели,
задавая соответствующее значение Is в диалоговом окне транзисторов.
4. Обычно сопротивление резисторов времязадающей цепи выбирается из условия:
RI ~ lORlc и R2 « 10R2c [42]. Какие значения должны при этом иметь коэффи-
циенты усиления транзисторов по току 0,, 02 (в схеме О«Э), чтобы обеспечить ус-
ловие насыщения транзисторов: p,Rlc > R1 и p2R2c > R2?
5. Если отсоединить резисторы R1 и R2 от источника питания Ucc и подключить
к функциональному генератору, то получится простейший преобразователь
“напряжение-частота”. Составьте схему такого преобразователя и проведите
его испытание.
8.9. Триггер Шмитта
Триггер Шмитта (триггер с эмиттерной связью) обычно используется в качест-
ве порогового устройства, реагирующего на определенный уровень входного сигнала
вне зависимости от скорости его изменения. Последнее обстоятельство способствова-
ло распространению таких триггеров не только в аналоговой технике (амплитудные
261
Часть II. Моделирование схем и устройств
дискриминаторы, формирователи прямоугольных импульсов определенной ампли-
туды и т.п.), но и в цифровых ИМС (например, ИМС 155ТЛ1, ТЛ2, ТЛЗ и др.), ис-
пользуемых при обработке сигналов с пологим фронтом, когда логические элементы
практически переводятся в линейный режим, при котором возможно ложное сраба-
тывание при незначительных по амплитуде помехах.
а)
б)
Рис. 8.38. Триггер Шмитта (а) и осциллограммы входного (В) и выходного (А) сигналов (б)
Триггер Шмитта представляет собой двухкаскадный УПТ с дополнитель-
ной эмиттерной связью через резистор Re (рис. 8.38, а), обеспечивающей положи-
тельную обратную связь в том случае, когда оба транзистора находятся
в активном режиме. В исходном состоянии транзистор VT2 открыт за счет базово-
го тока, протекающего по цепи Rlc-Rl (конденсатор С — ускоряющий). При этом
коллекторный ток VT2 создает на резисторе Re падение напряжения (на
рис. 8.38, б оно равно VA1 = 1,845 В); если оно болыпе падения напряжения на ре-
зисторе R4, то транзистор VT1 будет закрыт. Когда входное напряжение (осцил-
лограмма В) достигает значения VB1, - 2,319 В, т. е. превышает VA1 на значение
порога срабатывания транзистора AU = 0,5...0,6 В, VT1 открывается, при этом ба-
зовый ток VT2 уменьшается и оба транзистора оказываются в активной области.
При этом в действие вступает положительная обратная связь через резистор Re,
262
Глава 8. Устройства на полупроводниковых приборах
что способствует лавинообразному процессу переключения транзистора VT1 в от-
крытое состояние, a VT2 — в закрытое, которое в дальнейшем поддерживается за
счет соединения его базы с общей шиной через резистор R2. Если предположить,
что падение напряжения на открытом VT2 близко к нулю, то напряжение сраба-
тывания триггера Шмитта в первом приближении может быть определено как
Ucp - Ucc Re/(Re + R2c) + AU = 10 0,2/(0,2 + 1) + 0,6 = 2,27 В, что достаточно близ-
ко к полученному при моделировании VB1 = 2,319 В. Заметим, что учет в приве-
денной формуле слагаемого -Ucc-R4/(R3 + R4) = -10 10/(10 + 150) = -0,625 В,
снижающего порог срабатывания, при моделировании не подтверждается.
Второе срабатывание триггера, при котором он возвращается в исходное состо-
яние, происходит при напряжении отпускания UOTn «= Ucc-Re/(Re + Rcl) + AU =
10 0,2/(0,2 + 10) + 0,6 = 0,8 В, которое примерно равно полученному при моделиро-
вании VB2 = 0,814 В. Таким образом, напряжение гистерезиса триггера
Ur - U<p - U_ = 2,27 - 0,8 = 1,47 В.
Контрольные вопросы и задания
1. Какими свойствами обладает триггер Шмитта и в каких случаях он применяется?
2. Удалите из схемы резисторы R3, R4 и переходной (разделительный) конденсатор
С1, а выход генератора соедините с базой VT1 через резистор Ri, имитирующий
внутреннее сопротивление источника входного сигнала. Установите зависимость
напряжения срабатывания и отпускания триггера от Ri, задаваясь его значением
10, 100, 500 Ом, 1, 5 и 10 кОм. Обратите внимание на возможность перехода триг-
гера в режим регенеративного усилителя при определенных значениях Ri.
3. Выберите параметры триггера (по схеме п. 2) таким образом, чтобы обеспечива-
лась его устойчивая работа при минимальном напряжении гистерезиса. Как сле-
дует из проведенного анализа, уменьшение напряжения гистерезиса достигается
путем уменьшения сопротивления резистора Rlc.
263
Часть II. Моделирование схем и устройств
9. Цифровые устройства
В главе рассмотрены вопросы моделирования цифровых устройств, начин;
от простейших логических элементов до сложных многофукциональных узлов, пр:
меняемых в той или иной комбинации в вычислительной технике, автоматик
информационно-измерительной технике и в других областях прикладной радиоэ.
ктроники. Дополнительные сведения приведены в Приложении 3.
ей,
В общем случае устройства, оперирующие с двоичной (дискретной) информа:
и од раздел яются
на два больших класса:
комбинационные схемы
— дискретные ав-
томаты без памяти и последовательностные — дискретные автоматы с памятью.
Под памятью подразумевается свойство системы сохранять в течение треб;
мого времени значения сигналов, характеризующих внутреннее состояние цифра
го устройства.
Сигналы на выходах комбинационного устройства в любой момент време]
однозначно определяются сочетанием сигналов на входах и не зависят от его пред!
дущих состояний. Схемным признаком таких устройств является отсутствие эле-
ментов обратной связи, обеспечивающих прохождение сигналов с выходов на входы.
К комбинационным устройствам относятся логические элементы, электронные
ключи, шифраторы, дешифраторы, мультиплексоры, демультиплексоры, большин-
ство арифметических устройств и др.
Последовательностные устройства обладают памятью, поэтому при смене ин-
формации на входах для предсказания сигналов на выходах необходимо знать их
предыдущее состояние. Показателем принадлежности схемы к последовательност-
ному типу служит наличие в пей обратных связей. Простейшими представителями
таких устройств являются триггеры. К этому же классу относятся счетчики, регис-
тры, запоминающие устройства.
Работу схем, реализующих переключательные функции, принято рассматри-
вать в безразмерном дискретном времени, для чего реальное время разбивается на
интервалы, которые нумеруются, начиная с какого-то момента. Каждый такой про-
межуток времени называют тактовым интервалом или просто тактом.
Дискретное время складывается из отдельных тактов, длительность которых
для характеристики работы устройства не имеет значения. Продолжительность от-
дельных тактов может быть различной, на работе устройства это не сказывается.
Обновление информации на выходах происходит в момент начала нового так-
та. Временные задержки, обусловленные переходными процессами, обычно не учи-
тываются, и только в тех случаях, когда частота смены тактов велика и соизмерима
с предельным быстродействием устройства, с ними приходится считаться.
9.1. Логические элементы
Известно, что математической основой цифровых вычислительных устройств
является двоичная арифметика, в которой используются всего два числа — 0 и 1.
Выбор двоичной системы счисления диктовался требованиями простоты техничес-
кой реализации самых сложных задач с использованием всего одного базового эле-
мента — ключа, который имеет два состояния: включен (замкнут) или выключен
(разомкнут). Если первое состояние ключа принять за условную (логическую) еди-
ницу, то второе будет отражать условный (логический) ноль или наоборот. Возмож-
ные комбинации приведены на рис. 9.1 — 9.3.
264
Глава 9. Цифровые устройства
На рис. 9.1 показаны ключи 1 и 0, управляемые клавишами 1 и 0 соответст-
венно, и вспомогательные устройства: батарея 5 В с внутренним сопротивлением
100 Ом и лампа накаливания на 6 В мощностью 30 мВт, которые позволяют судить
о состоянии ключа — если он находится в положении 1, лампа горит (рис. 9.1, а),
или не горит, если он находится в положении 0 (рис. 9.1, б).
Возможно другое расположение ключей по отношению к вспомогательным уст-
ройствам (рис. 9.2), при котором состояние индикаторов нуля или единицы противо-
положно показанному на рис. 9.1. При нажатии на клавишу 1 индикатор фиксирует
состояние 0 (рис. 9.2, а) и наоборот (рис. 9.2, б). Следовательно, схемы на рис. 9.2 по
выходному сигналу (состоянию индикаторных лампочек) обратны (инверсны) по отно-
шению к схемам на рис. 9.1. Поэтому такие ключи называют инверторами.
ID I0J
Рис. 9.1.
Схемы электромеханических имитаторов логической единицы (а) и нуля (б)
юоя
1002
[1| I D 30mW/6V -j н 6V
[01 ® 30mW/6V
Рис. 9.2.
Электромеханические имитаторы логической единицы (а) и пуля (б) в инверсном
режиме
4902
102
►402
П)
4902
102
10)
б)
,кежйЩ|
Рис. 9.3. Электромеханические имитаторы логической 1 (а) и 0 (б) в инверсном режиме с ин-
дикаторами выходного напряжения
Поскольку в цифровых системах содержится огромное количество ключей
(только в одном микропроцессоре их несколько миллионов) и они не могут сообщать
друг другу о своем состоянии миганием лампочек, то для взаимного обмена инфор-
мацией используются электрические сигналы напряжения. При этом ключи, как
правило, применяются в инверсном режиме с использованием схем на рис. 9.3.
На рис. 9.3 сопротивление 490 Ом имитирует внутреннее сопротивление на-
грузки ключа (аналог коллекторного сопротивления в транзисторном ключе), со-
265
Часть II. Моделирование схем и устройств
противление 10 Ом — сопротивление замкнутого электронного ключа, сопротивле-
ние 500 Ом — сопротивление разомкнутого ключа с учетом внешней нагрузки. Как
видно из рис. 9.3, наличие на выходе логического нуля (инверсия 1) индицируется
напряжением 100 мВ (в практических конструкциях может быть и больше), а нали-
чие логической единицы — напряжением 2,55 В (для ИМС составляет около 2,4 В).
Электронные ключи проектируются таким образом, чтобы при наихудших сочета-
ниях входных и выходных параметров ключи могли различать сигналы логической
единицы и нуля.
Теоретической основой применения логических элементов при создании
разнообразных цифровых устройств комбинационного типа (сумматоры, мульти-
плексоры и демультиплексоры, шифраторы и дешифраторы, цифровые компара-
торы и др.) является булева алгебра, которая оперирует двоичными переменными,
действия над которыми производятся по правилам логических операций. Про-
стейших логических операций три: отрицание (инверсия, операция НЕ), логичес-
кое умножение (конъюнкция, операция И) и логическое сложение (дизъюнкция,
операция ИЛИ). Более сложные логические преобразования можно свести к ука-
занным операциям [5, 8].
Операция отрицания выполняется над одной переменной и характеризуется
следующими свойствами: функция Y = 1 при аргументе X - 0 и Y = 0, если X = 1.
Обозначается отрицание чертой над переменной, с которой производится операция:
Y = х (игрек равен не икс); в EWB обозначается как Y X' (далее инверсия будет
обозначаться именно таким образом). Соответственно операция логического умно-
жения (конъюнкция) Y = XtX2 для двух переменных выражается следующим обра-
зом: 0 0 = 0; 01 0; 10 - 0; 11 - 1, т. е. нулевое значение хотя бы одного из
аргументов обеспечивает нулевой результат операции. Операция может быть рас-
пространена и на большее число переменных.
Операция логического сложения (дизъюнкции) Y = XtVX2 или Y = Xt + Х2 двух
переменных характеризуется следующими свойствами: 0 + 0 = 0; 0+1 = 1; 1+0 = 1:
1 + 1 = 1, т. е. единичное значение хотя бы одного из аргументов обеспечивает единич-
ный результат операции. Дизъюнкция, как и конъюнкция, может осуществляться со
многими переменными.
Совокупность различных значений переменных называют набором. Булева
функция п аргументов может иметь до N = 2° наборов. Поскольку функция прини-
мает только два значения, общее число булевых функций п аргументов равно 2N = 2\
где к = 2". Таким образом, функция одного аргумента может иметь четыре значения:
Y - X; Y = X'; Y = 1 (константа 1); Y = 0 (константа 0). Два аргумента дают уже 16
значений функции, из которых, кроме названных выше трех, на практике исполь-
зуются еще пять: ИСКЛЮЧАЮЩЕЕ ИЛИ Y = Х,ФХ2 (0 + 0 = 0;0 + 1-1;1 + 0-1;
1 + 1=0); ИЛИ-HE Y - (X, + Х2)' (стрелка Пирса, 0 + 0 - 1; 0 + 1 - 0; 1 + 0-0; 1 + 1=0);
И-НЕ Y ” (Х)Х2)' (штрих Шеффера, 00 = 1; 01 = 1; 10 = 1; 11 = 0); запретноX2Y °= XiX2'
(0-0 - 0; 01 - 0; 10 = 1; 11 = 0) или по XtY = Х,'Х2 (0 0 = 0; 0 1 - 1; 1-0 - 0; 11 = 0).
Булева алгебра базируется на нескольких аксиомах, из которых выводят
основные законы для преобразований с двоичными переменными. Обоснован-
ность выбора этих аксиом подтверждается таблицами истинности для рассмот-
ренных операций. Каждая аксиома представлена в двух видах, что вытекает из
принципа дуальности (двойственности) логических операций, согласно которому
операции конъюнкции и дизъюнкции допускают взаимную замену, если одновре-
менно поменять логическую 1 на логический 0, а 0 на 1, знак “V” (или “ + “) на
а на “V”.
266
Глава 9. Цифровые устройства
Аксиомы операции отрицания: 0 = 1; 1 = 0. Аксиомы операций конъюнкции
и дизъюнкции:
1. 0 1 = 1; (а) 1 + 1 = 1; (б)
2. 10 -0-1 = 0; (а) 0 + 1 = 1 + 0-1; (б)
3. 11 = 1; (а) 0 + 0 -0. (б)
Аксиома 16 не имеет аналога в двоичной арифметике, в которой 1 + 1 = 10
(здесь цифры и знаки имеют обычный арифметический смысл).
Законы булевой алгебры вытекают из аксиом и также имеют две формы выра-
жения: для конъюнкции и дизъюнкции. Здесь они приводятся без доказательств.
Их правильность легко проверить по таблицам истинности либо путем подстановки
0 и 1 вместо соответствующих значений переменных.
1. Переместительный закон: х> + х2 = х2 + ХР (б)
Х|Х2 = Х2Х,; (а)
2. Сочетательный закон: Х,(Х,Х,) = (Х,Х2)Х3 = Х,Х2Х3; (а)
Х, + (Х2 + Х,) = (Х1 + Хг) + Хз = Х> + X, + х3. (б)
3. Закон повторения (тавтологии): X X - X; (а) х + х = х. (б)
4. Закон обращения: если X! = Х2, то X/ = Хг'. 5. Закон двойной инверсии: (Х')' = Х. 6. Закон нулевого множества: Х0 = 0; (а) х + о = х. (б)
7. Закон универсального множества: XI = X; (а) Х + 1-1. (б)
8. Закон дополнительности: XX' - 0; (а) X + X' = 1. (б)
9. Распределительный закон: Xj(X2 + Х>) - XtX2 + Х,ХВ; (а) X, + Х2Х3 = (X, + Х2) (X, + Х3). (б)
10. Закон поглощения: Х. + Х^-Х,; (а) Х1Х2 + Х1Х2' = Х1. (б)
11. Закон склеивания: (Xx + X.MX. + X/J-Xl; (а) Х.Хз + Х.ХГ-Х,. (б)
12. Закон инверсии (закон Де Моргана): (Х:Х2)' - X,' + Х2'; (а) (X, + х2)' = х;х2'. (б)
В цифровой технике практические аналоги рассмотренных схем принято назы-
вать логическими элементами. Они различаются характером реализуемых функций,
числом входов (по числу одновременно действующих переменных), числом выходов
и другими признаками. Работа их оценивается только с точки зрения логики, без уче-
та практического воплощения (технической базы, способа питания и т.п.).
267
Часть II. Моделирование схем и устройств
Входы и выходы логических элементов в зависимости от уровня сигнала,
при котором воспринимается или вырабатывается определенное значение двоичной
переменной, подразделяются на прямые и инверсные. На прямом входе (выходе) дво-
ичная переменная имеет значение логической 1, когда сигнал на этом входе (выхо-
де) имеет значение, принятое за 1. На инверсном входе (выходе) двоичная
переменная имеет значение 1, когда уровень сигнала на этом входе (выходе) соответ-
ствует состоянию, принятому за 0.
На логические входы можно подавать постоянные логические уровни 1 и 0
(константа 1 и константа 0) согласно законам универсального и нулевого множества.
Входы, равноценные в логическом отношении (которые можно менять местами без
ущерба для выполняемой функции), допускают объединение по закону повторения:
при этом они действуют как один вход.
В отечественной литературе и документации логические элементы согласно
ГОСТ 2.743—82 “Обозначения условные графические в схемах. Элементы цифровой
техники” изображают прямоугольником (так называемое основное поле), в верхней ча-
сти которого указывают символ функции: & для И, 1 для ИЛИ. Входы показывают с ле-
вой стороны прямоугольника, выходы — с правой. Допускается другая ориентация
прямоугольника, при которой входы располагают сверху, а выходы снизу. Инверсные
входы и выходы выделяются индикатором логического отношения небольшим
кружком у вывода. Выводы питания и общий обычно не показываются. В случае необ-
ходимости шины, не несущие логической информации (в том числе питания и общие),
подводят к левой или правой стороне прямоугольника и помечают звездочкой.
Различные логические элементы выпускаются промышленностью в виде са-
мостоятельных изделий, а также как составная часть более сложных устройств
(см. разд. 4.11).
В цифровых устройствах логические состояния представляются двумя уров-
нями напряжения (потенциалов): высоким, близким к напряжению источника пи-
тания, и низким, близким к нулю. Это так называемая потенциальная система
представления информации, для которой характерны непосредственная связь меж-
ду отдельными элементами схемы. Длительность потенциальных сигналов опреде-
ляется частотой смены информации, а переключающими импульсами служат
перепады напряжения от одного уровня к другому.
Два уровня напряжения, характеризующие логические состояния, определя-
ются просто как более высокий Н (High — высокий) и низкий L (Low — низкий). Эти
два значения называют логическими уровнями. Существуют два рода так называе-
мых логических соглашений в зависимости от того, каким уровнем напряжения
кодировать логическую 1 (и соответственно логический 0). В соглашении положи
тельной логики более высокий уровень напряжения (Н) соответствует логической 1,
а низкий—логическому 0. В соглашении отрицательной логики — наоборот.
Элемент, выполняющий логические функции, можно оценивать с позиций
как положительной, так и отрицательной логики. Его функциональная роль в обоих
случаях будет различной. Это важное положение, которым часто пользуются на
практике, вытекает из законов Де Моргана. Например, по правилам положительной
логики (Н -“ 1) элемент выполняет операцию И, а в отрицательной логике (Н - 0) он
действует как элемент ИЛИ, что и следует из законов Де Моргана.
С учетом сказанного элементы, выполняющие логические операции, допуска*
ется изображать на схемах в двух логически эквивалентных формах. Имея изобра-
268
Глава 9. Цифровые устройства
i
)
жение логического элемента, его эквивалентную форму можно получить, проделав
следующие преобразования:
а) в основном поле изображения элемента символ операции & заменить на символ 1
либо наоборот;
б) все прямые входы заменить инверсными, а инверсные прямыми;
в) все прямые выходы заменить инверсными, а инверсные —прямыми.
На рис. 9.4 показаны обозначения базовых логических элементов, принятые
в программе EWB.
а) б) в) г) д)
Рис. 9.4. Графические обозначения буферного логического элемента (а), элементов И (AND) (б).
ИЛИ (OR) (в), ИСКЛЮЧАЮЩЕЕ ИЛИ (XOR) (г), их инверсные варианты во втором
ряду (NOT, NAND, NOR, XNOR соответственно) и триггер Шмитта (д)
1А1 (В)
а) б)
Рис. 9.5. Электромеханические имитаторы двухвходовых элементов
Электромеханическим аналогом буферного элемента являются имитаторы на
рис. 9.3, логического элемента НЕ (NOT) — на рис. 9.2 и 9.3, а двухвходовых элемен-
тов И, И-НЕ — на рис. 9.5.
Моделирование логических схем в программе EWB целесообразно проводить
с помощью логического преобразователя. В качестве примера на рис. 9.6, а приведе-
на схема для исследования элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. Порядок подключе-
ния исследуемого элемента к логическому преобразователю очевиден из рис. 9.6, а.
Очевидно также и то, что при наличии двух входов возможны только четыре комби-
нации входных сигналов, что отображается на экране преобразователя в виде табли-
цы истинности, которая генерируется после нажатия кнопки ..»?!*. .
Для получения булева выражения исследуемого элемента необходимо нажать
кнопку T3F -♦Aj е . Это выражение приводится на дополнительном дисплее, рас-
положенном в нижней части лицевой панели, в виде двух слагаемых, соответствую-
щих выходному сигналу ИСТИНА (сигнал логической единицы на выходе ОПТ).
Сопоставление полученного выражения с таблицей истинности убеждает нас в том.
что таких комбинаций действительно две, если учесть, что в полученном выражении
приняты следующие обозначения: А' = 0 — инверсия А 1, В' = 0 - инверсия В = 1,
знак + соответствует логической операции ИЛИ.
В качестве примера использования генератора слова для исследования логи-
ческих элементов на рис. 9.6, б приведена схема, в которой на входы элементов
269
Часть II. Моделирование схем и устройств
AND, NAND, OR, NOR подается соответствующая двоичная комбинация, а реакция
элементов индицируется включенными на их выходах логическими пробниками.
а)
б)
Рис. 9.6.
Исследование логических элементов с помощью логического преобразователя (а)
и генератора слова (б)
Рис. 9.7. Результат синтеза логического устройства по заданной таблице истинности
С помощью логического преобразователя можно проводить не только анализ
логических устройств, но и их синтез. Допустим, что нам требуется составить схему
и булево выражение для логического элемента, у которого выходная комбинация
в таблице истинности не 0110, как на рис. 9.6, а, а 1101. Для внесения необходимых
изменений отмечаем курсором в столбце OUT подлежащий изменению символ, из-
меняем его с помощью клавиатуры и затем, перемещаясь по столбцу клавишами уп-
равления курсором, изменяем по необходимости символы в других строках. После
ToJT -» а.; в
Гор- AJIBJ
внесения всех изменений последовательно нажимаем на кнопки -Л!в “* ‘-1
и получаем результат, представленный на рис. 9.7. Синтезированное логическое ус-
270
Глава 9. Цифровые устройства
з,с тройство показано в верхнем левом углу рис. 9.7, а его булево выражение — на до-
полнительном дисплее.
В более общем случае для выполнения синтеза целесообразно действовать сле-
дующим образом. Щелчком курсора по иконке логического преобразователя непо-
средственно на линейке приборов раскрываем его лицевую панель. Активизируем
курсором клеммы-кнопки А, В...Н (начиная с А), количество которых равно количе-
ству входов синтезируемого устройства. Вносим необходимые изменения в столбец
OUT и после нажатия на панели преобразователя указанных выше кнопок управле-
ния получаем результат в виде схемы на рабочем поле программы и булево выраже-
ние в дополнительном дисплее.
Humber of input*
2 gj OK
Cancel
И Рис. 9.8. Окно установки количества входов логического элемента
В заключение заметим, что для двухвходовых элементов (см. рис. 9.4) можно
увеличить количество входов до восьми, открывая двойным щелчком по значку
компонента диалоговое окно (рис. 9.8). По умолчанию в этом окне указано мини-
мально возможное число входов, равное двум. Заметим также, что при оптимиза-
ции логических устройств с целью получения наиболее простой схемы
используются различные методы минимизации булевых выражений (карты Карно,
диаграммы Вейча и др. [8, 85]), однако при числе входов более пяти этот процесс
становится крайне трудоемким.
Контрольные вопросы и задания
1. Известно, что единицей измерения информации является бит. Какие значения
может принимать эта единица?
2. Что является математической основой применения логических элементов?
3. Какое общее название имеют устройства на базе логических элементов?
4. Какие логические элементы принято считать основными и какими булевыми
выражениями они описываются?
5. Перечислите основные законы булевой алгебры.
6. Что такое положительная и отрицательная логика и на каком законе при этом
основывается взаимное преобразование логических элементов?
7. Проведите моделирование оставшихся без рассмотрения двухвходовых логичес-
ких элементов на рис. 9.4 с использованием логического преобразователя и уста-
новите для каждого из них соответствие таблицы истинности и булева выражения.
8. Разработайте схемы электромеханических имитаторов двухвходовых логичес-
ких элементов на рис. 9.4 (за исключением элемента И).
9. Проведите синтез трехвходового логического устройства с выходной комбинаци-
ей 1001Ш0в таблице истинности.
10. Проведите проверку основных аксиом и законов булевой алгебры.
271
Часть II. Моделирование схем и устройств
11. Установите различия в булевых выражениях и графических обозначениях логи-
ческих элементов программы EWB от принятых в отечественной научно-техни-
ческой литературе [8, 20, 21].
12. Проведите испытания ИМС 7400 (155ЛАЗ, 4 элемента 2И-НЕ), 7432 (155ЛЛ1, 4
элемента 2ИЛИ) и 7486 (155ЛП5, 4 элемента ИСКЛЮЧАЮЩЕЕ ИЛИ). Входы
в этих ИМС обозначаются буквами А, В; выход — Y.
13. Проведите испытания логического элемента НЕ на базе триггера Шмитта
(рис. 9.4, д’, имеется только в EWB 5.0). Сравните полученные данные по напря-
жению срабатывания и отпускания с данными, полученными в разд. 8.9.
9.2. Арифметические сумматоры
Арифметические сумматоры являются составной частью так называемых
арифметико-логических устройств (АЛУ) микропроцессоров (МП). Они используют-
ся также для формирования физического адреса ячеек памяти в МП с сегментной ор-
ганизацией памяти. В программе EWB арифметические сумматоры представлены
в библиотеке Comb'I двумя базовыми устройствами, показанными на рис. 9.9: полу-
сумматором и полным сумматором. Они имеют следующие назначения выво-
дов: А, В входы суммируемых операндов, S — результат суммирования, Со —
выход переноса, Ci — вход переноса. Многоразрядный сумматор создается на базе
одного полусумматора и п полных сумматоров. В качестве примера на рис. 9.10 при-
ведена структура трехразрядного сумматора [20]. На входы Al, А2, АЗ и Bl, В2, ВЗ
подаются первое и второе слагаемые соответственно, а с выходов SI, S2, S3 снимает-
ся результат суммирования.
8 Ш I
а) б)
Рис. 9.9. Схемы полусумматора (а) и полного сумматора (б)
Рис. 9.10. Трехразрядный сумматор
Для исследования внутренней структуры и логики функционирования сумма-
торов используем логический преобразователь. После подключения к нему полусум-
О “*
ТоГГ -♦ 11।: в
матора согласно рис. 9.11, а последовательно нажимаем кнопки А?в—
и в результате получаем таблицу истинности и булево выражение. Сравнивая полу-
ченные данные с результатами исследования базовых логических элементов в пре-
дыдущем разделе, приходим к выводу, что при подключении выводя S
полусумматора к зажиму ОПТ преобразователя (как показано на рис. 9.11, а) он вы-
полняет функции элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. Подключив клемму OUT пре-
образователя к выходу Со полусумматора (с помощью переключателя Z) и проделав
аналогичные действия, приходим к выводу, что в таком включении полусумматор
272
Глава 9. Цифровые устройства
выполняет функции элемента И. Следовательно, эквивалентная схема полусумма-
тора имеет вид, показанный на рис. 9.12, а. Эквивалентная схема полного суммато-
ра по выходу переноса показана на рис. 9.12, б.
Рис. 9.11.
Схемы подключения полусумматора (а) и полного сумматора (6) к логическому пре-
образователю
Структура библиотечного полусумматора (а) и полного сумматора по выходу пе-
реноса (б)
Рис. 9.12.
ic. 9.13. Схема включения ИМС 74181 в режиме сумматора без переноса
В каталоге программы EWB 4.1 имеется схема включения четырехразрядного
У (файл alul81.ca4) на базе серийной микросхемы 74181 (отечественный аналог
К155ИПЗ
[5,
7]). В несколько переработанном виде она показана на рис. 9.13. ИМС
’4181 обеспечивает 32 режима работы АЛУ в зависимости от состояния управляю-
щих сигналов на входах М, SO...S3, а также допускает наращивание разрядности
1ход CN и выход CN < 4 для переносов). Показанная на рис. 9.13 схема включения
МС соответствует режиму сумматора без переноса. Значения чстырехразрядных
иерандов А и В на входе задаются с помощью генератора слова и в шестнадцатерич-
ом коде отображаются одноименными алфавитно-цифровыми индикаторами.
273
Часть II. Моделирование схем и устройств
На выходах F0...F3 результат суммирования отображается индикатором F. Измеч
состояния сигналов на управляющих входах, можно промоделировать болыпинс
функций АЛУ, используемых в микропроцессорах (см. разд. 5.14). Режимы раб<
генератора слова в схеме на рис. 9.13 и его кодовый набор показаны на рис. 9.14.
Рис. 9.14. Настройка генератора слова для ИМС АЛУ
Контрольные вопросы и задания
1. Чем отличается полусумматор от полного сумматора?
2. Выясните внутреннюю структуру полного сумматора по выходу S, пользу!
схемой его подключения к логическому преобразователю на рис. 9.11, б и ирш
мая во внимание методику решения аналогичной задачи для полусумматора.
3. Используя опыт работы со схемой на рис. 9.13, подключите ко входам трехразр:
ного сумматора на рис. 9.10 генератор слова, а к выходам — алфавитно-цифро;
индикатор с дешифратором и проверьте правильность его функционирования.
4. Проверьте работу ИМС 74181 в режиме сумматора с переносом (на вход Cn i
дайте сигнал логического нуля).
9.3. Логический элемент с тремя состояниями
За основу рассматриваемого логического элемента с тремя состояниями к
базовый элемент ИМС серии 134 [8] и к нему добавлен элемент, обеспечивают
возможность реализации режима третьего состояния или так называемого 7
стояния. Следует отметить, что рассматриваемый элемент является важным ком:
центом многих цифровых ИМС, начиная от простейших логических элемен!
(например, К155ЛА9) и кончая сложными регистрами и шинными формировать
ми, обеспечивающими возможность реализации наиболее распространенных арз
текгур ЭВМ и микропроцессорных систем управления (см. Приложение 3).
Логический элемент с тремя состояниями (схема на рис. 9.15) содержит ба
вый логический элемент серии 134 на транзисторах VT1...VT4, резисторах R1...
и диоде VD2. В базовом элементе в качестве VT1 используется так называемый м-
гоэмиттерный транзистор (его диодный эквивалент рассмотрен в разд. 4.11), одн*
ввиду отсутствия такового в библиотеке EWB он представлен обычным транзие
ром. К входу In логического элемента подключен имитатор входного сигнала
переключателе D, управляемый с клавиатуры клавишей D, резистора Rd. имити:
ющего выходное сопротивление источника логического нуля, и источника напря:-
ния V 4-5 В с внутренним сопротивлением 1 кОм, имитирующего источи
входного сигнала в режиме формирования логической единицы. К точке A cxei
подключены диод VD1 и имитатор источника управления состоянием выхода ло:
274
Глава 9. Цифровые устройства
«кого элемента на переключателе Е, управляемого одноименной клавишей. Все
Элементы дополнительной схемы — компоненты из библиотек Passive и Control.
В исходном состоянии диод VD1 закрыт напряжением положительной полярности
на его катоде, и он не оказывает влияния на работу схемы. К эмиттеру транзистора
”Г1 подключен резистор Rd, на котором создастся падение напряжения:
Uin - Rd(Ucc ~ Ube)/(R1 + Rd), (9.1)
где Ucc = 5 В - напряжение питания; Ube = 0,7 В — напряжение база-эмиттер от-
крытого транзистора.
При
Uin <0,4 В (9.2)
логический элемент воспринимает входной сигнал как сигнал логического нуля.
При этом напряжение на коллекторе транзистора VT1 и базе VT2 недостаточно для
ткрывания последнего. В результате падение напряжения на резисторе R3 близко
к нулю и транзистор VT4 будет закрыт, а база транзистора VT3 соединена с источни-
ком питания Ucc через резистор R2 и VT3 будет открыт. При этом выходное напря-
жение Uy, измеряемое мультиметром, примерно равно:
Uy = (Ucc - UKfrBBt - Uup)Ry/(Ry + R4), (9.3)
ie UK,110t < 1 В — напряжение насыщения транзистора VT4; Uop < 1 В падение на-
ряжения на диоде VD2; Ry — сопротивление нагрузки, равное в данном случае
Годному сопротивлению мультиметра.
?мс. 9.15. Логический элемент с тремя состояниями
Если выбрать Ry » R4, то Uy > 3 В, т. е. при подаче на вход сигнала логичес-
Вго нуля на выходе получим сигнал логической единицы. Таким образом, схема
рис. 9.15 является логическим элементом НЕ (инвертором).
При переводе клавишей D одноименного переключателя в другое положение
эмиттер транзистора VT1 подается сигнал логической единицы, при этом эмит-
рный переход закрывается и транзистор VT1 переводится в инверсный режим (ис-
ход коллектор-база работает как обычный диод). В этом случае под действием
ка, протекающего по цепи база-коллектор VT1, транзистор VT2 открывается и за
ет падения напряжения на резисторах R2, R3 транзистор VT3 закроется, a VT4 —
роется, и на выходе У установится сигнал логического нуля.
При переводе клавишей Е одноименного переключателя во второе положение
[ряжение коллектора транзистора VT2 (точка А) будет равно
U. = Unp + (Ucc - U3p)Rd /(Rd + R2). (9.4)
275
Часть II. Моделирование схем и устройств
При выполнении неравенства R2 » Rd напряжение Uop < 1 В, что недостаточ-
но для открытия двух переходов (эмиттерного и диодного), и транзистор VT3 будет
закрыт вне зависимости от состояния транзистора VT2. Если этот транзистор открыт
(наихудший случай), то с учетом его напряжения насыщения, сравнимого с Uap, па-
дение напряжения на резисторе R3 будет ничтожно малым; следовательно, транзис-
тор VT4 будет закрыт. Таким образом, выход схемы полностью отключается от
нагрузки, что может быть зафиксировано мультиметром в режиме омметра: он будет
измерять очень большое сопротивление.
Кроме демонстрации рассмотренных режимов схемы, она может быть исполь-
зована также для исследования:
♦ помехоустойчивости по основному входу и входу разрешения третьего состояния
путем варьирования сопротивления Rd с учетом выражений (9.1), (9.2) и (9.4);
+ влияния сопротивления нагрузки на амплитуду выходного напряжения вентиля
при формировании сигнала логической единицы путем изменения входного со-
противления мультиметра с учетом выражения (9.3);
♦ влияния сопротивления нагрузки, подключенной между выходом и шиной пи-
тания Ucc, на выходное напряжение вентиля при формировании сигнала логиче-
ского нуля;
♦ влияния емкостной нагрузки на форму и амплитуду выходного сигнала вентиля:
в этом случае к выходу необходимо подключить конденсатор переменной емкос-
ти и осциллограф, а для генерации прямоугольных сигналов необходимо удер-
живать клавишу D, при этом частота следования импульсов будет равна частоте
повторения символов для данной клавиатуры;
♦ аналогичного элемента с тремя состояниями в более быстродействующей сериг
155, для чего сопротивления всех резисторов необходимо уменьшить в 10 раз.
Заметим, что в составе библиотеки компонентов имеется неинвертирующий
буферный элемент с тремя состояниями. Пример его использования в двунаправлен
ном шинном формирователе показан на рис. 9.16, где обозначено: UI, U2 — буфер-
ные элементы с тремя состояниями; U3 — элемент НЕ; I/O, О/I шины вход/выхс!
и выход/вход формирователя; Ei/Eo — сигнала разрешения входа/выходз.
При Ei/Eo = 1 (в правом положении ключа Z) U1 открыт (его выходное сопротивле-
ние индицируется на дисплее мультиметра справа), a U2 закрыт и находится в тре-
тьем состоянии (его выходное сопротивление — на дисплее мультиметра слек-
в нижнем положении ключа X), при этом сигнал с шины I/O передается на шину О I:
при Ei/Eo = 0 (в левом положении ключа Z) U1 и U2 меняются ролями и сигнал мо-
жет передаваться в обратном направлении.
Рис. 9.16. Одноразрядный шинный формирователь
В заключение упомянем о логических элементах с частично или полност
изолированным (открытым) выходным транзистором. В схемах с открытым колл.
276
Глава 9. Цифровые устройства
тором коллектор такого транзистора подключен к одному из внешних выводов ИМС,
на который через резистор нагрузки подается напряжение питания, которое может
значительно превосходить напряжение питания всей ИМС (ИМС типа 7406
(155ЛНЗ), 7422 (155ЛАЗ) и др.). В схемах с открытым эмиттером (ИМС 559ИП4,
1102АП2 и др.) “изолирован” и выведен эмиттер, что повышает нагрузочную способ-
ность ИМС по току, например, при работе на линию связи. Схемы с полностью изо-
лированным транзистором используются в интерфейсных ИМС 155ЛП7, 1102АП5,
1102АП10 для расширения возможностей их применения.
Контрольные вопросы и задания
1. Какими замечательными свойствами обладает логический элемент с тремя со-
стояниями, какие задачи цифровой техники он позволил решить?
2. Проведите исследования логического элемента на рис. 9.15 в соответствии с при-
веденными в конце раздела рекомендациями.
3. Проведите испытания шинного формирователя на рис. 9.16, используя логические
пробники в качестве индикаторов и генератор однополярных импульсов с синхрон-
ным переключением его выхода и сигнала разрешения входа/выхода с помощью
сдвоенного (управляемого одной клавишей) библиотечного переключателя.
4. Проведите испытания ИМС 74125 (155ЛП8, 4 буферных элемента с тремя состоя-
ниями) с обозначением выводов: А — вход, Y — выход, G — управление третьим
состоянием.
5. Проведите испытания элемента НЕ на рис. 9.4, а и проведите сопоставительный
анализ его параметров VOH, VOL, VIH (Vih), V1L (Vil), TPLH (Tplh), HL (Tphl),
VTG (Vth) (см. разд. 4.11) с параметрами инвертора на рис. 9.15.
9.4. Мультиплексоры и демультиплексоры
Мультиплексоры (от английского multiplex — многократный) используются
для коммутации в заданном порядке сигналов, поступающих с нескольких входных
дши на одну выходную. У мультиплексора может быть, например, 16 входов и 1 вы-
ход. Это означает, что если к этим входам присоединены 16 источников цифровых
сигналов — генераторов последовательных цифровых слов, то байты от любого из ге-
нераторов можно передавать на единственный выход. Для выбора любого из 16 ка-
налов необходимо иметь 4 входа селекции (24 = 16), на которые подается двоичный
дрес капала. Так, для передачи данных от канала номер 9 на входах селекции необ-
:одимо установить код 1001. В силу этого мультиплексоры часто называют селекто-
рами или селекторами-мультиплексорами.
Мультиплексоры применяются, например, в МП 18088 для выдачи на одни
те же выводы МП адреса и данных, что позволяет существенно сократить общее ко-
[чество выводов микросхемы; в микропроцессорных системах управления мульти-
,ексоры устанавливают на удаленных объектах для возможности передачи
[формации по одной линии связи от нескольких установленных на них датчиков.
Па рис. 9.17, а приведена схема двухканального мультиплексора, состоящего
элементов ИЛИ, НЕ и двух элементов И, а на рис. 9.17, б — функциональная схе-
ИМС 74151 (К155КП7) восьмиканального селектора-мультиплексора, выводы
орого имеют следующее назначение: D0...D7 — входы; GND — общий; VCC — на-
яжение питания 4-5 В; G'— вход разрешения (активный уровень — низкий);
W — прямой и инверсный выходы; А, В, С — адресные входы 2°, 21 и 22.
Из результатов моделирования двухканального мультиплексора с помощью
•гического преобразователя (рис. 9.18) видно, что его выходной сигнал описывает-
277
Часть II. Моделирование схем и устройств
ся булевым выражением OUT = ВС' + АС, т. е. сигнал из канала А проходит на вы-
ход при адресном входе С = 0, а из канала В — при С = 1, что и соответствует логике
работы мультиплексора.
Демультиплексоры в функциональном отношении противоположны мульти-
плексорам. С их помощью сигналы с одного информационного входа распределяют-
ся в требуемой последовательности по нескольким выходам. Выбор нужно!
выходной шины, как и в мультиплексоре, обеспечивается установкой соответствую-
щего кода на адресных входах. При т адресных входах демультиплексор мо:
иметь до 2т выходов.
Рис. 9.17. Схемы двухканального (а) и ИМС 74151 восьмиканального (5) мультиплексоров
Рис. 9.18. Результаты моделирования двухканального мультиплексора
Рис. 9.19. Схема демультиплексора
9.1
Принцип работы демультиплексора поясним с помощью схемы на рис.
на котором обозначено: X — информационный вход, А — вход адреса, YO, Y1 i
ходы. Схема содержит два элемента И и один элемент НЕ. Из рис. 9.19 нетрудно
метить, что при А = 0 сигнал с информационного входа передается на выход 1
а при А = 1 - на выход Y1. Следует отметить, что промышленностью демультинл<
соры как таковые не выпускаются, поскольку режим демультиплексора может бь
реализован как частный случай в других устройствах — дешифраторах, о кото]
речь пойдет в следующем разделе.
Контрольные вопросы и задания
1. Что из себя представляет мультиплексор, каково его назначение?
2. Подготовьте схему и проведите испытания ИМС 74151, для чего на входы 1 и
3 и 4 подайте постоянные уровни сигналов логического нуля и единицы соо-
278
I
Глава 9. Цифровые устройства
ственно, а на остальные информационные, адресные и вход управления — сигна-
лы с генератора слова в такой комбинации, чтобы при каждом шаге информация
передавалась последовательно через шаг с первого ио восьмой каналы; для инди-
кации состояния выходов используйте логический анализатор.
3. Используя методику анализа двухканального мультиплексора, с помощью ло-
гического преобразователя исследуйте внутреннюю структуру ИМС сдвоенного
четырехканального мультиплексора 74153 (К155КП2) с обозначениями выво-
дов: Л, В — адресные входы, 1G, 2G — инверсные входы разрешения первого
и второго мультиплексоров, 1СО...1СЗ и 2С0...2СЗ, 1Y и 2Y — входы и выходы
первого и второго мультиплексоров соответственно.
4. Что такое демультиплексор, для решения каких задач его можно применить?
5. Используя логический преобразователь, проведите исследования демультиплек-
сора на рис. 9.19.
6. На объекте управления, связанном с удаленной управляющей ЭВМ двухпровод-
ной линией связи, расположены 8 датчиков и такое же количество исполнитель-
ных устройств (электродвигателей, электромагнитов и т.п.). Где в такой системе
управления необходимо поставить мультиплексор и демультиплексор? Каковы
требования к форме сигналов датчиков и исполнительных устройств?
9.5. Шифраторы и дешифраторы
Шифраторы (кодеры) используются чаще всего для преобразования десятичных
чисел в двоичный или двоично-десятичный код, например, в микрокалькуляторах,
в которых нажатие десятичной клавиши соответствует генерации соответствующего
двоичного кода.
Электромеханический аналог шифратора для кодирования десятичных чисел
1...7 в двоичный код (рис. 9.20) содержит “кнопки” указанных цифр в виде одинар-
ных, сдвоенных или строенных переключателей, управляемых цифровыми клави-
шами клавиатуры. Состояние “кнопок” — включена/выключена — устанавливается
тактовыми импульсами опроса от источника однополярных импульсов Ut и на выхо-
де шифратора индицируется логическими пробниками для двоичного кода и алфа-
витно-цифровым индикатором для десятичного.
Рис. 9.20. Схема электромеханического шифратора
Поскольку в реальных клавиатурах возможно нажатие сразу нескольких кла-
виш, в шифраторах используется принцип приоритета старшего разряда, т. е.
при нажатии, например, клавиш 9, 5 и 2 на выходе шифратора будет генерировать-
ся код 1001, соответствующий цифре 9. Следует отметить, что шифраторы как от-
дельный класс функциональных устройств представлены в наиболее богатой
ТТЛ-серии всего двумя ИМС — 74147 и 74148, причем последняя ИМС имеется
279
Часть II. Моделирование схем и устройств
и в библиотеке программы EWB, Схема ее включения показана на рис. 9.21, а, а ре-
жимы работы используемого генератора слова — на рис. 9.21, б.
Назначение выводов ИМС 74148: 0...7 — входы; АО, Al, А2 — выходы; Е1 —
вход разрешения; ЕО, GS — выходы для каскадирования шифраторов. При модели-
ровании необходимо обратить внимание на реализацию принципа приоритета,
при этом следует учесть, что все входы и выходы — инверсные (на функциональной
схеме ИМС в программе EWB они показаны прямыми).
а)
Рис. 9.21. Схема включения ИМС 74148 (а) и панель генератора слова с установками для
испытания (б)
б)
Дешифратор (декодер) — устройство с несколькими входами и выходами
у которого определенным комбинациям входных сигналов соответствует активнее *
состояние одного из выходов, т. е. дешифратор является обращенным по входам
мультиплексором, у которого адресные входы стали информационными, а бывши» ,
информационный вход стал входом разрешения. Поэтому часто дешифраторы назы-
вают дешифраторами-демультиплексорами и наоборот.
Дешифраторы и демультиплексоры в виде серийных ИМС средней степсе ,
интеграции широко используются в информационно-измерительной техниг*
и микропроцессорных системах управления, в частности, в качестве коммутато-
ров-распределителей информационных сигналов и синхроимпульсов, для дему.ть-
типлексирования данных и адресной логики в запоминающих устройствах
а также для преобразования двоично-десятичного кода в десятичный с целью ут I
равнения индикаторными и печатающими устройствами.
Дешифраторы, как самостоятельные изделия электронной техники имеют 4, I
8 или 16 выходов. Если требуется большее число выходов, дешифраторы наращив»? I
ются в систему [8|.
Схема дешифратора 2x4 (рис. 9.22, а) содержит три инвертора U1...U2 и четы- I
ре элемента ЗИ-НЕ U4...U7; входы 2'0, 2'1 — адресные, G' — вход разрешения (аж- |
тивный уровень — сигнал логического нуля); выходы 0...3 — инверсные.
Заметим, что в серийных ИМС дешифраторов универсального типа выходаг
всегда инверсные, т. е. в исходном состоянии на его выходах сигнал логической едг
ницы. Это вызвано тем, что они чаще всего используются в адресных селекторах да
выбора того или иного устройства (например, микросхемы ОЗУ), в которых сигами
выбора, как правило, должен иметь низкий уровень. В качестве приме;*
на рис. 9.22, б приведена схема включения дешифратора 74154 (отечественный адг I
лог К155ИДЗ). Эта ИМС имеет четыре адресных входа А, В, С, D, два входа раз;
280
Глава 9. Цифровые устройства
ния Gl, G2 и шестнадцать выходов 0...15 (выходы не прямые, как обозначено
в EWB, а инверсные). В режиме дешифратора с генератора слова на входы Gl, G2 по-
дается 0, а на адресные входы — код в диапазоне 0000...1111. В режиме демультип-
лексора один из разрешающих входов, например G1, используется в качестве
информационного. Информационный сигнал в виде логического 0 с этого выхода
распределяется по выходам 0...15 в соответствии с состоянием адресных входов, т. е.
режимы дешифратора и демультиплексора трудно различимы.
Рнс. 9.22. Дешифратор 2X4 (а) и схема включения ИМС 74154 (б)
Контрольные вопросы и задания
1. Что из себя представляет шифратор, при решении каких задач он используется?
2. Дополните схему шифратора на рис. 9.20 элементами, обеспечивающими допол-
нительно кодирование чисел 8, 9 и 10.
3. Модернизируйте схему шифратора на рис. 9.20, заменив сдвоенные и строенные
переключатели одинарными для каждой кодируемой цифры и логическими эле-
ментами.
4. Меняя кодовые комбинации в генераторе слова на рис. 9.21, покажите, в чем за-
ключается смысл слова “приоритетный” в названии шифратора типа 74148.
5. При решении каких задач цифровой техники используются дешифраторы?
6. Проведите испытания дешифратора 2x4 (рис. 9.22, а) с использованием логичес-
кого преобразователя и генератора слова.
7. Модернизируйте схему дешифратора 2x4 на рис. 9.22, а, дополнив ее еще одним
входом разрешения с активным высоким уровнем, и проведите его испытание.
5. Подготовьте выходные кодовые комбинации генератора слова в схеме на
рис. 9.22, б, обеспечивающие поочередное включение светоиндикаторов на вы-
ходе дешифратора, начиная с выхода 0.
). Переведите дешифратор в схеме на рис. 9.22 в режим демультиплексора и вы-
полните задание в обьеме п. 8.
10. В каком состоянии будут выходные индикаторы в схеме на рис. 9.22, б при
Gl = G2- 1.
9.6. Цифровые компараторы
Цифровые компараторы (от английского compare — сравнивать) выполняют
равнение двух чисел А, В одинаковой разрядности, заданных в двоичном или дво-
[чно-десятичном коде. В зависимости от схемного исполнения компараторы могут
281
Часть II. Моделирование схем и устройств
определять равенство А -= В или неравенства А<В, А>В. Результат сравнения отоб-
ражается в виде логического сигнала на одноименных выходах.
Цифровые компараторы применяются для выявления нужного числа (слова)
в цифровых последовательностях, для отметки времени в часовых приборах, для вы-
полнения условных переходов в вычислительных устройствах, а также в адресных
селекторах [18].
Схема одноразрядного компаратора (рис. 9.23) состоит из двух элементов НЕ,
четырех элементов И и одного элемента ИЛИ-НЕ.
Рис. 9.23. Схема одноразрядного цифрового компаратора
Результаты моделирования цифрового компаратора
Рис. 9.24.
Для исследования компаратора к нему подключен логический преобразо!
тель. Подсоединяя его клемму ОПТ к каждому выходу компаратора, можно под
чить таблицу истинности и булево выражение для каждого режима рабо
компаратора. Для случая А = В результаты моделирования представлены
рис. 9.24, откуда следует, что этому условию соответствуют две комбинации сип
лов на входе: А В = 1 или А = В = 0. Этому условию соответствует и булево bbij
жение на дополнительном дисплее.
Контрольные вопросы и задания
1. Какие функции выполняет цифровой компаратор, в каких устройствах он мо/г
быть использован?
2. Используя схему на рис. 9.23, проведите ее исследование в режимах А>В, А
и проанализируйте полученные результаты.
3. Составьте схему трехразрядного компаратора и проведите его испытан:
Для формирования признаков А>В,А<ВиА = В необходимо использовать:
полнительно три трехвходовых логических элемента (подсказка).
282
Глава 9. Цифровые устройства
9.7. Устройство контроля четности
Операция контроля четности двоичных чисел позволяет повысить надежность
передачи и обработки информации. Ее сущность заключается в суммировании по
модулю 2 всех разрядов с целью выяснения четности числа, что позволяет выявить
наиболее вероятную ошибку в одном из разрядов двоичной последовательности. На-
пример, если при передаче кода 1001 произойдет сбой во втором разряде, то на при-
емном пункте получим код 1101, — такую ошибку определить в общем случае
достаточно трудно. Если же код относится к двоично-десятичному (8-4-2-1),
то ошибку легко обнаружить, поскольку полученный код (десятичный эквива-
лент — число 13) не может в принципе принадлежать к двоично-десятичному.
Обнаружение ошибок путем введения дополнительного бита четности проис-
ходит следующим образом. На передающей стороне передаваемый код анализирует-
ся и дополняется контрольным битом до четного или нечетного числа единиц
в суммарном коде. Соответственно суммарный код называется четным или нечет-
ным. В случае нечетного кода дополнительный бит формируется таким образом, что-
бы сумма всех единиц в передаваемом коде, включая контрольный бит, была
нечетной. При контроле четности все, естественно, наоборот. Например, в числе
0111 число единиц нечетно. Поэтому при контроле нечетности дополнительный бит
должен быть нулем, а при контроле четности — единицей. На практике чаще всего
используется контроль нечетности, поскольку он позволяет фиксировать полное
пропадание информации (случай нулевого кода во всех информационных разрядах).
На приемной стороне производится проверка кода четности. Если он правильный,
то прием разрешается, в противном случае включается сигнализация ошибки или
посылается передатчику запрос на повторную передачу.
Рис. 9.25. Схема формирователя бита четности четырехразрядного кода
Схема формирования бита четности [8] для четырехразрядного кода
<рис. 9.25) содержит четыре элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выполняющих опе-
рации суммирования по модулю 2 (без переноса) и состоит из трех ступеней. На пер-
зой ступени попарно суммируются все биты исходного кода на входах А, В, С, D. На
зторой ступени анализируются сигналы первой ступени и устанавливается четность
или нечетность суммы входного кода. На третьей ступени полученный результат
сравнивается с контрольным сигналом на входе Е, задающим вид используемого
контроля, в результате чего на выходе F формируется пятый дополнительный бит
четности, сопровождающий информационный сигнал в канале передачи.
Результаты моделирования формирователя показаны на рис. 9.26 в виде таб-
лицы истинности из 32 возможных двоичных комбинаций и булева выражения (из
32 комбинаций на рис. 9.26 видны только первые 16, остальные просматриваются
с помощью линейки прокрутки). Для просмотра составляющих булева выражения
283
Часть II. Моделирование схем и устройств
необходимо мышью поместить курсор в дополнительный дисплей и передвигать его
клавишами управления курсором.
В библиотеке программы EWB схема проверки на четность и нечетность пред-
ставлена ИМС 74280 (К555ИП5), схема се включения показана на рис. 9.27. ИМС
74280 имеет 9 входов (A, B...I) и два выхода (EVEN, ODD), один из которых — ин-
версный. Вход I используется для управления видом контроля (0 — контроль четно-
сти, 1 - контроль нечетности) и управляется переключателем Z. Вывод NC — по:
connection — пустой, т. е. внутри ИМС к нему ничего не подключено.
Правильность функционирования схемы проверяется с помощью генератора
слова, при этом тип контроля (четности или нечетности) выбирается переключате-
лем Z; состояние выходов ИМС контролируется подключенными к их выходам све-
тоиндикаторами (логическими пробниками).
Результаты моделирования формирователя бита четности
Рис. 9.26.
Рис. 9.27.
1.
2.
Схема включения ИМС 74280
3.
4.
Контрольные вопросы и задания
Какое назначение имеют формирователи кода четности, где они могут быть
пользованы?
Какая форма контроля четности чаще всего используется на практике, в ча
сти, в Вашем компьютере, если в нем установлены модули ОЗУ с нечетным чгг-
лом микросхем (см. разд. 9.12)?
Из представленных на экране логического преобразователя данных (рис. 9.2Я
выберите комбинации, относящиеся к контролю четности и нечетности, а такжЗ
соответствующие им слагаемые булева выражения.
Проверьте правильность функционирования схемы на рис. 9.27, подавая па Bxd
ды двоичные комбинации с генератора слова.
5. Устройства для передачи, приема и преобразования информации - восьмибя
ные (например, в модемах, в станках с программным управлением и др.). Кака
образом в таких устройствах реализуется метод паритетного контроля?
284
Глава 9. Цифровые устройства
9.8. Устройство ввода-вывода для IBM PC
Использование микропроцессорной техники в системах автоматического уп-
равления в первую очередь связано с организацией ввода-вывода. Одним из наиболее
распространенных способов ввода-вывода является программно-управляемый,
при котором сопряжение с системной шиной управляющей ЭВМ осуществляется на-
бором аппаратных средств, обеспечивающих селекцию устройств ввода-вывода (УВВ)
и двусторонний обмен информацией этих устройств с управляющей ЭВМ (см. Прило-
жение 3). В популярном персональном компьютере (ПК) фирмы IBM в адресном
пространстве ввода-вывода зарезервировано 32 адреса (от 300Н до 31FH в шестнадца-
теричном коде) для возможности их использования при проведении различных экс-
периментов по применению ПК в качестве управляющей ЭВМ. Для таких целей
различными фирмами, включая и фирму IBM [18], изготавливаются так называемые
макетные платы с ножевым разъемом типа ISA (см. Приложение 3), конструкция ко-
торых позволяет размещать на ней ИМС с различным количеством выводов и затем
соединять их монтажными проводниками. Некоторые платы уже содержат буферные
элементы, селекторы адреса и шинные формирователи.
RESET £ BRESEt'
ClSck p-HZBCLOCK
•------D-----
30F
31F
Рис. 9.28. Схема устройства ввода-вывода для IBM PC
Схема устройства ввода-вывода, позволяющего организовать двустороннюю
связь с 32-мя УВВ, приведена на рис. 9.28 [18]. Схема несколько изменена, посколь-
ку в библиотеке программы EWB отсутствует микросхема шинного формирователя
74245; она заменена подсхемой из двух ИМС 74244 (обозначена под номером 72245),
в результате чего изменена и схема управления (логические элементы UI, U2). Вто-
рое отличие заключается в замене двух ИМС 74244, используемых в оригинале в ка-
честве однонаправленных буферов, на одиночные буферные элементы U3...U17, что
вызвано крайне неудачным расположением выводов ИМС 74244. Этот недостаток
вообще характерен для всех цифровых ИМС из библиотеки EWB. Достаточно взгля-
нуть на дешифраторы U23, U24 (отечественные аналоги К133ИДЗ, К1533ИДЗ
и т.п.), где входы А, В, С, D, GI, G2 расположены с правой стороны, тогда как обще-
принято располагать их слева. В других ИМС входы и выходы располагаются впере-
межку с обеих сторон (в том числе и в 74244). Третье отличие заключается в замене
285
Часть II. Моделирование схем и устройств
8-разрядного компаратора 74688, отсутствующего в библиотеке EWB, на комбина-
цию логических элементов U20, U21, U22.
Схема подсхемы (субблока) 72245 показана на рис. 9.29; она может быть вы-
полнена также на буферных элементах с тремя состояниями (см. рис. 9.16).
Рис. 9.29. Внутренняя структура подсхемы 72245
Назначение сигналов системной шины IBM PC следующее:
IO W', IOR' — сигналы записи и чтения с активным низким уровнем для вывод!
и ввода при обмене с УВВ;
А0...Л9 — сигналы адресной шины;
D0...D7 — сигналы шины данных (в подсхеме 72245); во время цикла записи в УВЭ
микропроцессор выдает эти сигналы перед сигналом I0W'; во время цикла чтенаи
порт ввода должен обеспечить выдачу сигналов на шину данных перед сигналом ЮР.
AEN — сигнал разрешения выбора адреса; формируется контроллером прямого до-
ступа к памяти (ПДП) материнской платы IBM PC; в течение цикла ПДП обращена?
к портам ввода-вывода запрещено, поскольку в это время возможна активизацгж,
сигналов IOW‘, IOR';
CLOCK (OSC) — системный тактовый сигнал синхронизации, используется по нс
ходимости, на схеме рис. 9.28 не задействован;
RESET — сигнал установки всех функциональных узлов системы в исходное сос
яние после включения питания или нажатия кнопки Reset на системном блоке; с
хронизируется импульсом OSC.
После передачи этих сигналов через буферные элементы к их имени добав
ется префикс В, т.е. BIOW'...BDO...BRESET. Сигнал ЮА' — разрешение выбора
реса порта УВВ — формируется адресным селектором на ИМС U20, U21, U22
разрешающем состоянии сигнала AEN, для которого активным является ниа
уровень сигнала.
286
Глава 9. Цифровые устройства
На выходах 0... 15 дешифраторов U23, U24 формируются адресные сигналы 32
портов ввода-вывода (от 300II до 31FH) с активным низким уровнем.
Для индикации состояния выходов в простейшем случае может быть исполь-
зован светодиод IND (на схеме подключен только к одному выходу). Входы дешиф-
раторов Gl, G2 разрешающие, при подаче на них сигналов низкого уровня
«логического нуля) разрешается формирование сигнала на выходе дешифратора, оп-
ределяемого двоичным кодом на адресных входах А, В, С, D.
Работа с УВВ на рис. 9.28 позволяет ознакомиться с аппаратными средствами
программного ввода-вывода и отработать навыки по диагностике и локализации неис-
правностей цифровых систем управления. Приведем примерный перечень таких работ:
1. Исследование цепи формирования сигнала ЮА' и выявление (локализация) име-
ющихся ошибок. Для этого на рабочее поле программы поместите иконку логи-
ческого преобразователя и к его входам А, В... подключите сигналы А5...А9,
AEN соответственно, а к выходу OUT — сигнал ЮА' (выход микросхемы U22).
Затем двойным щелчком мыши разверните логический преобразователь, после-
RIE
довательным нажатием кнопок "*• - получите таблицу истинности
и булево выражение. После этого проанализируйте таблицу истинности, выде-
лив двоичную комбинацию, при которой ЮА' 0 (колонка OUT), а в булевом вы-
ражении — слагаемое, соответствующее этой комбинации. При этом необходимо
учесть, что А = А5, В = A6...F AEN. Найдите ошибку в схеме и исправьте ее
(подсказка — нужно заменить буферный элемент для одного из сигналов).
I 2. Исследование цепей формирования адресов УВВ. В правый верхний угол рабоче-
го ноля программы поместите иконку генератора слова и соедините его выход-
ные клеммы-индикаторы, начиная с правого младшего разряда, со входами
А0...А7. Проанализируйте адресное пространство в диапазоне 300H...31FH и ус-
тановите требуемое значение сигналов на входах А8, А9 и AEN, после чего под-
ключите к ним элементы заземления или источник + 5V из библиотеки Passive,
имитирующие источники логического нуля и единицы соответственно. После
этого на экране генератора наберите несколько чередующихся комбинаций дво-
ичных кодов, соответствующих адресу 316Н, и в пошаговом режиме, нажимая
клавишу STEP, проверьте факт формирования низкого активного уровня на вы-
ходе дешифратора U24, к которому подключен индикатор IND; при правильно
выбранной двоичной комбинации его свечение прекращается. Аналогичным об-
разом проверяются все остальные выходы дешифраторов.
Подскажем, что для определения состояния сигналов на адресных входах
А5...А9 в диапазоне адресов 300H...31FH необходимо преобразовать их шестнадцате-
ричный код в двоичный, заменяя каждую цифру тетрадой с весом разрядов 8-4-2-1,
I е. 300II ООП 0000 0000, 31FH = ООП 0001 1111, откуда видно, что в указанном
диапазоне адресов А9 = А8 = 1 и А7 = А6 = А5 = 0 (отсчет адресов начинается с млад-
Iщего, нулевого разряда). Следовательно, ко входам А8, А9 нужно подключить источ-
ник сигнала логической единицы (+5V), а ко входам А5, Аб, А7 — заземление.
3. Исследование цепей управления шинным формирователем 72245. Для проверки
правильности функционирования этого узла ко входам А0...А9 подключите ис-
точники сигналов логического нуля и логической единицы в комбинации, соот-
ветствующей адресу 316Н, а вход AEN заземлите, если не была исправлена
ошибка в п. 1. При правильной коммутации после включения источника пита-
ния индикатор IND должен погаснуть. Для управления входами IOR', 1OW' вос-
287
Часть II. Моделирование схем и устройств
пользуйтесь источником напряжения с заданным внутренним сопротивлением
из библиотеки Passive и переключателем из библиотеки Control, управляемого
клавишей R (read — читать). Для источника питания необходимо правильно вы-
брать его ЭДС и внутреннее сопротивление с учетом параметров ИМС серии 155.
Подскажем, что схема имитации сигналов IOR'ii IOW' показана на рис. 9.30.
В показанном на нем положении переключателя R формируется сигнал записи (чтение
запрещено, поскольку на входе IOR' — сигнал логической единицы, запрещающий та-
кой режим). При нажатии на клавишу R формируется сигнал чтения из УВВ, подклю-
ченному по адресу 316Н, при этом запись запрещена по указанным выше причинам.
ЭДС источника напряжения для ИМС серии 155 выбирается равной 5 В, а его
внутреннее сопротивление — примерно равным выходному сопротивлению базового
элемента серии 155.
1kft/6V 1x2/57
f т
IRJ I IOR'
I—o—o------------1 IOW
Рис. 9.30. Схема имитации сигналов чтения и записи для испытания шинного формирователе
72245
Рис. 9.31. Схема расщепления одного адреса на два
Из рис. 9.29 видно, что входы управления G1' шинного формирователя 72245
(разрешение записи в УВВ) и G2' (разрешение чтения из УВВ) подключены к выхо-
дам двухвходовых логических элементов ИЛИ U1 и U2 соответственно, которые ре-
ализуют функции двухвходовых элементов И для активных инверсных сигналов на
входах, т. е.:
GI' - IOW' IOA' (режим записи), (9.5)
G2' = IOR' IOA' (режим чтения). (9.6 •
Для проверки режима записи ко входам D0...D7 формирователя 72245 под-
ключите генератор слова, а к двум его выходам, например BD0 и BD7, индикаторы
из библиотеки Indic. Задавая соответствующие комбинации восьмиразрядного кодг
на входе, на выбранных выходах будем наблюдать передачу сигналов через шинные
формирователь на УВВ, подключенном по адресу 316Н. Для проверки режима чте-
ния из УВВ генератор слова и индикаторы меняются местами, а переключатель F.
в схеме на рис. 9.30 переводится в режим формирования сигнала IOR'.
Если одно УВВ работает только на прием информации (например, индика-
торное устройство), а второе — только на передачу (например, опрос датчикаI.
то они могут быть подключены к одному адресу, т. е. к одному выходу дешифрато-
ра U23 или U24, с помощью схемы на рис. 9.31, в которой расщепление адреса про
изводится за счет селекции сигналами чтение-запись. Элементы ИЛИ U25, U2®
работают аналогично UI, U2. На рис. 9.31 ADRi' — адресный сигнал с дешифрато-
ра U23 или U24, ADRRP — адресный сигнал только передающего УВВ, ADRWi' —
только принимающего.
288
Глава 9. Цифровые устройства
Описанные выше сигналы системной шины IBM PC относятся к первой моде-
ли этих компьютеров — IBM PC XT. Архитектура системной шины такого компью-
тера называлась XT BUS и в настоящее время является составной частью более
совершенных архитектурных решений (см. Приложение 3).
Контрольные вопросы и задания
1. Можно ли рассматривать дисковод гибких дисков (дискет) как устройство ввода-
вывода? Можно ли манипулятор мышь и клавиатуру также отнести к таким ус-
тройствам?
2. Что такое адресное пространство компьютера, как оно распределяется в персо-
нальном компьютере типа IBM PC XT?
3. Какова роль шинного формирователя в рассмотренном УВВ? Разработайте под-
схему шинного формирователя на базе библиотечного элемента с тремя состоя-
ниями (см. рис. 9.16).
4. Какие сигналы управления системной шины являются основными для схемы
УВВ на рис. 9.28?
5. Проведите все рекомендованные исследования для УВВ на рис. 9.28.
6. Учитывая стремление разработчиков и изготовителей IBM PC обеспечить их сов-
местимость снизу вверх, можно ли утверждать, что рассмотренное УВВ будет ра-
ботать в последних модификациях компьютеров?
7. Шины какого типа используются в последних модификациях IBM PC (см. При-
ложение 3)?
9.9. Триггеры
Триггеры широко используются во многих узлах электронной аппаратуры в ви-
де самостоятельных изделий или в качестве базовых элементов для построения дру-
гих, более сложных устройств (счетчиков, регистров, запоминающих устройств). Они
представляют собой простейшие последовательностные устройства, общим свойством
которых является способность длительно оставаться в одном из двух возможных ус-
тойчивых состояний, которые распознаются по значению их выходных сигналов.
В простейшем исполнении триггер представляет собой симметричную структу-
ру из двух логических элементов ИЛИ-ПЕ или И-НЕ, охваченных перекрестной по-
ложительной обратной связью. Триггер на элементах И-НЕ и его “интегральный”
аналог в программе EWB показаны на рис. 9, 32, а. Такой триггер называют симмет-
ричным (используются также названия — бистабильная ячейка, ячейка памяти,
асинхронный RS-триггер); он обладает двумя устойчивыми состояниями, которые
обеспечиваются за счет связи выхода каждого элемента с одним из входов другого.
Свободные входы служат для управления и называются информационными или логи-
ческими. Один из выходов триггера называют прямым (в силу симметрии схемы им
может быть любой) и обозначают буквой Q, а другой — инверсным и обозначают Q
(в EWB — Q'). Состояние триггера часто отождествляется с сигналом на прямом выхо-
де, т. е. говорят, что триггер находится в единичном состоянии, если Q = 1, a Q' = О,
и в нулевом, если Q»O,aQ* = 1.
Смена состояний триггера производится внешними сигналами; этот процесс
называют переключением, перебросом, опрокидыванием и т.п. Начало опрокиды-
вания триггера (см. рис. 9, 32, а) происходит с приходом положительного перепада
напряжения на вход закрытого элемента. Информационный вход, по которому
триггер устанавливается в единичное состояние (Q 1; Q' = 0), называют единич-
10 Зак. 206
289
Часть II. Моделирование схем и устройств
ным или S-входом (от англ, set — установка), а в нулевое (Q' О, Q = 1) — нулевым
или R-входом (reset — возврат). Комбинацию входных сигналов S = R = 0 называ-
ют нейтральной или режимом хранения — при ней триггер хранит состояние, в ко-
торое он был приведен в предыдущем такте. Если на один из входов подать
единичный сигнал, сохраняя нулевой на другом, триггер примет состояние, кото-
рое однозначно определяется комбинацией входных сигналов. Если переключаю-
щие сигналы одновременно подать на оба входа (комбинация S = R - 1), на обоих
выходах появятся логические нули и устройство утратит свойства триггера; поэто-
му такую комбинацию называют запрещенной (неопределенной).
Более сложные схемы триггеров содержат рассмотренный RS-триггер и уст-
ройства управления, представляющие собой комбинационные устройства, преобра-
зующие входную информацию в комбинацию сигналов, под воздействием которых
собственно триггер принимает одно из двух устойчивых состояний.
Главная роль в формировании свойств триггерной системы принадлежит уп-
равляющему устройству. В схемном отношении устройства управления отличаются
большим разнообразием. Изменяя схему устройства управления и способы ее связей
с ячейкой памяти (RS-триггером), можно получить триггеры с разными функцио-
нальными свойствами.
Входные сигналы в зависимости от выполняемой роли подразделяются на три
категории: информационные (логические), подготовительные (разрешающие) и ис-
полнительные (командные). Сигналы на информационных входах определяют
информацию, которая будет записана в триггер. Роль подготовительных и исполни-
тельных сигналов — вспомогательная: с их помощью можно в нужный момент пре-
рвать действие триггера или группы триггеров, сохранив информацию на выходе.
Исполнительные сигналы задают момент приема входной информации триггером
и служат для синхронизации работы ряда устройств, образующих функциональный
узел. Эти сигналы часто так и называют — синхронизирующими или тактовыми.
Входы триггера по характеру входных сигналов подразделяются также на три кате-
гории: информационные (логические), предустановки (подготовительные) и так-
товые (синхронизирующие). Информационные входы имеются у всех триггеров,
тогда как подготовительные и тактовые могут отсутствовать.
Тип триггера определяется функциональной зависимостью между сигналами
на входах и выходах, которая может быть выражена разными способами: временны-
ми диаграммами, характеристическими уравнениями, таблицами внешних перехо-
дов (таблицами состояний), графами переходов [5, 85].
По способу ввода информации триггеры делятся на асинхронные и синхронные.
У асинхронных триггеров имеются только информационные (логические)
входы; примером такого триггера является RS-триггер на рис. 9.32, а. Основным
недостатком асинхронных триггеров является неудовлетворительная помехоза-
щищенность в условиях возможных временных задержек сигналов (так называе-
мых гонок или состязаний сигналов). Этот недостаток устраняется в синхронных
триггерах за счет использования дополнительного командного сигнала, который
подается на синхронизирующий (тактирующий) вход С (рис. 9.32, б). Синхронизи-
рующие сигналы вырабатываются специальным генератором тактовых импуль-
сов, которые задают частоту смены информации в дискретные моменты времени
и тем самым общий ритм работы большинства узлов аппаратуры. При этом опро-
кидывание (срабатывание) синхронных триггеров происходит только при участии
тактовых импульсов, длительность которых гораздо меньше их периода. В осталь-
ное время на входные сигналы, равно как и помехи различного происхождения,
триггер не реагирует.
290
Глава 9. Цифровые устройства
В зависимости от того, какой параметр входных сигналов используют для за-
писи информации, триггеры подразделяются на три категории: со статическим уп-
равлением записью (управляемые по уровню входного сигнала), с динамическим
управлением (управляемые по фронту или срезу) и двухступенчатые. Для асин-
хронных триггеров в качестве управляющих служат сигналы на информационных
входах, для синхронных — тактовый импульс. Триггер со статическим управлени-
ем срабатывает в момент, когда входной сигнал достигает порогового уровня;
для синхронных триггеров это означает, что за время действия тактового импульса
смена сигналов на информационных входах вызывает новые срабатывания, т. е.
синхронные триггеры со статическим управлением при активном состоянии такто-
вого входа ведут себя подобно асинхронным. Устранение этого недостатка достигает-
ся в триггерах с динамическим и двухступенчатым управлением. Триггеры
с динамическим управлением реагируют на перепад напряжения от нуля к единице
(активный фронт) либо от единицы к нулю (активный срез управляющего импуль-
са). Триггеры с управлением по срезу входного сигнала (триггеры с внутренней за-
держкой) широко применяются на практике. Возможность задержки момента
опрокидывания триггера на время, равное длительности тактового импульса, эф-
фективно используется при обработке информации, позволяя производить по фрон-
ту тактовых импульсов считывание информации, а но срезу — запись.
Двухступенчатые триггеры содержат две ячейки памяти, запись информации
в которые происходит последовательно в разные моменты времени. Такую структу-
ру триггеров называют системой “ведущий-ведомый” или MS-структурой (от англ,
master-slave — хозяин-невольник). Первая ступень (ведущий) служит для промежу-
точной записи входной информации, а вторая (ведомый) — для последующего запо-
минания и хранения. Поскольку этот процесс происходит за два такта, то такие
триггеры называют также двухтактными. Управление двухступенчатым триггером
возможно не только двумя, но и одним тактовым импульсом: запись информации
в ведущую ступень происходит с приходом тактового импульса по фронту, а переза-
пись в ведомую — в момент его окончания (по спаду).
Заметим, что триггеры с динамическим и двухступенчатым управлением час-
то называют flip-flop (щелчок-хлопок), а со статическим — latch (защелка). Симво-
лом триггера на схемах служит буква Т, а двухступенчатого — ТТ, что отражает его
внутреннее устройство.
Рассмотрим наиболее распространенные типы триггеров.
JK-триггер относится к универсальным устройствам; их универсальность за-
ключается в том, что они, во-первых, могут быть использованы в регистрах, счетчи-
ках, делителях частоты и других узлах, и, во-вторых, путем определенного
соединения выводов они легко обращаются в триггеры других типов. Это позволяет
промышленности сократить номенклатуру триггеров, не ограничивая в то же время
разработчиков аппаратуры.
Схема простейшего JK-триггера показана на рис. 9.32, в, а его аналогов в про-
грамме EWB — на рис. 9.32, г, где обозначено: J, К — информационные входы; > —
тактовый вход; вывод сверху — асинхронная предустановка триггера в единичное со-
стояние (Q » 1) вне зависимости от состояния сигналов на входах (функционально ана-
логичен входу S RS-триггера); вывод внизу — асинхронная предустановка в нулевое
состояние (так называемая очистка триггера, после которой Q' = 1); наличие кружоч-
ков на изображениях выводов обозначает, что активными являются сигналы низкого
уровня, а для тактового входа — что переключение триггера производится не по перед-
нему фронту тактового импульса, а по его срезу (по заднему фронту импульса).
10*
291
Часть II. Моделирование схем и устройств
Из схемы JK-триггера на рис. 9.32, в следует, что его состояние зависит не
только от сигналов на входах J и К, но и от логически связанных с ними выходных
сигналов, что позволяет исключить запрещенные состояния. Функциональной осо-
бенностью этих триггеров является то, что при всех комбинациях входных сигна-
лов, кроме К = J = 1, они действуют подобно RS-триггеру, причем вход Y играет роль
S-входа, а К — роль R-входа; при К = J " 1 в каждом такте происходит опрокидыва-
ние триггера и выходные сигналы меняют свое значение.
Рис. 9.32. Схемы триггеров
D-триггеры в отличие от рассмотренных имеют для установки в состояния
1 и 0 один информационный D-вход (D — от англ, delay — затяжка, задержка).
Функциональная особенность триггеров этого типа состоит в том, что сигнал па
выходе Q в такте п + 1 повторяет входной сигнал Dn в предыдущем такте п и со-
храняет (запоминает) это состояние до следующего тактового импульса. Другими
словами, D-триггер задерживает на один такт информацию, существовавшую на
D-входе, т. е. закон функционирования D-триггера очень прост: Q"’1 = D". Хране-
ние информации D-тригтерами обеспечивается за счет цепей синхронизации, по-
этому все реальные D-триггеры — тактируемые. Управление по тактовому входу
может быть статическим, динамическим или двухступенчатым.
D-триггер можно образовать из любого синхронного RS- или JK-триггера, ес-
ли на их информационные входы одновременно подавать взаимно инверсные сигна-
лы D и D (рис. 9.32, е, д). Функциональные схемы D-триггеров с предустановкой
и без нее показаны на рис. 9.32, ж.
DV-триггеры представляют собой модификацию D-триггеров. Их логичес-
кие функции определяются наличием дополнительного входа V, играющего роль
разрешающего по отношению ко входу D (рис. 9.32, з). Когда V = 1, триггер функ-
ционирует как D-триггер, при V = 0 он переходит в режим храпения информации
независимо от смены сигналов на входе D. Записанная в обычный D-триггер ин-
формация не может храниться более одного такта: с каждым тактовым импульсом
состояние триггера обновляется. Наличие же V-входа расширяет функциональные
возможности D-триггера, позволяя в нужные моменты времени сохранять инфор-
мацию на выходах в течение требуемого числа тактов.
Т и TV-триггеры (счетные триггеры) имеют один информационный Т-вход (от
англ, toggle — чека, коленчатый рычаг) и отличаются простотой действия. Смена со-
стояний здесь происходит всякий раз, когда входной сигнал меняет свое значение
в определенном направлении — от нуля к единице или от единицы к нулю; это един-
ственный вид триггера, текущее состояние которого определяется не информацией
на входах, а состоянием его в предыдущем такте. По способу ввода входной инфор-
мации Т-триггеры могут быть асинхронными и синхронными. Способы образования
Т-триггеров на базе JK- и D-триггера показаны на рис. 9.32, и.
Для исследования триггерных схем целесообразно использовать генератор
слова и светодиодные индикаторы на выходах, при этом для тактирования тригге-
292
Глава 9. Цифровые устройства
ров необходимо использовать выход синхронизации генератора. Конечной задачей
исследования является получение таблицы истинности, являющейся одной из ос-
новных характеристик триггера. Получение ее целесообразно проводить в следую-
щем порядке:
♦ последовательно подать на входы предустановки триггера соответствующие ак-
тивные сигналы (0 или 1) и зафиксировать состояние выхода триггеров для это-
го случая; для проверки асинхронности этих входов указанные операции
повторить при различных состояниях сигналов на тактовом и информационных
входах;
+ подать на информационные входы сигналы 0 и 1 в различных комбинациях (на
входах асинхронной предустановки при этом должны быть соответствующие не-
активные сигналы — 0 для инверсных и 1 для прямых) и зафиксировать для
каждой комбинации состояние выходов триггера;
♦ на основании полученных результатов составить таблицу истинности.
Контрольные вопросы и задания
1. Какие типы триггеров Вы знаете, чем обусловлено их многообразие?
2. Проведите исследования триггеров на рис. 9.32; для библиотечных триггеров по-
лученную таблицу истинности сравните с таблицей истинности, вызываемой на-
жатием клавиши помощи F1 после выделения на схеме триггера.
3. По приведенному выше описанию алгоритма функционирования двухступечато-
го триггера составьте его схему на двух RS-триггерах с записью информации за
два и один такт.
4. Проведите испытания ИМС D-триггера 7474 (155ТМ2), выводы которой имеют
следующие назначения (для необозначенных в тексте раздела): CLR', PRE' —
R- и S-входы (инверсные); CLK — тактовый вход.
5. Проведите испытания ИМС JK-триггера 7472 (155ТВ1) с трехвходовыми элемен-
тами на J- и К-входах, обозначенных соответственно JI, J2, J3 и KI, К2, КЗ.
9.10. Счетчики
Счетчиком называют устройство, сигналы на выходе которого отображают
число импульсов, поступивших на счетный вход. Триггеры на рис. 9.32, и могут слу-
жить примером простейшего счетчика: такой счетчик считает до двух. Счетчик, об-
разованный цепочкой из m триггеров, может подсчитать в двоичном коде 2т
импульсов. Каждый из триггеров такой цепочки называют разрядом счетчика. Чис-
ло т определяет количество разрядов двоичного числа, которое может быть записа-
но в счетчик. Число К„ = 2" называют коэффициентом (модулем) счета.
Информация снимается с прямых и (или) инверсных выходов всех триггеров.
В паузах между входными импульсами триггеры сохраняют свои состояния, т. е.
счетчик запоминает число входных импульсов.
Нулевое состояние всех триггеров принимается за нулевое состояние счетчика
в целом. Остальные состояния нумеруются по числу поступивших входных импуль-
сов. Когда число входных импульсов N„ > Ксч, происходит переполнение, после чего
счетчик возвращается в нулевое состояние и цикл повторяется. Коэффициент счета,
таким образом, характеризует число входных импульсов, необходимое для выпол-
нения одного цикла и возвращения в исходное состояние. Число входных импульсов
и состояние счетчика взаимно определены только для первого цикла.
293
Часть II. Моделирование схем и устройств
После завершения каждого цикла на выходах последнего триггера возникают
перепады напряжения. Это определяет второе назначение счетчиков: деление числа
входных импульсов. Если входные сигналы периодичны и следуют с частотой
то частота выходных сигналов равна F.ul = F„/Kc<. В этом случае коэффициент счета
называется коэффициентом деления и обозначается как Кзд.
У счетчика в режиме деления используется выходной сигнал только последнего
триггера, промежуточные состояния остальных триггеров во внимание не принимают-
ся. Всякий счетчик может быть использован как делитель частоты. Поэтому подобное
устройство часто называют счетчиком-делителем. Такие делители имеют целочислен-
ный коэффициент деления. Однако элементная база современной микроэлектроники
позволяет создавать делители и с дробными коэффициентами деления [5, 8].
Символом счетчиков на схемах служат буквы СТ (от англ, counter — счет-
чик), после символа проставляют число, характеризующее модуль счета (напри-
мер, 2 или 10 — СТ2, СТЮ).
Основными эксплуатационными показателями счетчика являются емкость
и быстродействие. Емкость счетчика, численно равная коэффициенту счета, равна
числу импульсов за один цикл. Быстродействие счетчика определяется двумя пара-
метрами: разрешающей способностью Трм.<м и временем установки кода счетчика
Т^,. Под разрешающей способностью подразумевают минимальное время между дву-
мя входными сигналами, в течение которого не возникают сбои в работе. Обратная
величина FMaKC = 1/Тр„.„ называется максимальной, частотой счета. Время установ-
ки кода Тхст равно времени между моментом поступления входного сигнала и перехо-
дом счетчика в новое устойчивое состояние. Эти параметры зависят от
быстродействия триггеров и способа их соединения между собой.
Счетчики различаются числом и типами триггеров, способами связей между
ними, кодом, организацией счета и другими показателями. Цифровые счетчики
классифицируются по следующим параметрам [7, 8]:
♦ коэффициент счета: двоичные (бинарные); двоично-десятичные (декадные) или
с другим основанием счета; с произвольным постоянным и переменным (про-
граммируемым) коэффициентом счета;
+ направление счета: суммирующие, вычитающие и реверсивные;
4- способ организации внутренних связей: с последовательным, параллельным или
с комбинированным переносом, кольцевые.
Классификационные признаки независимы и могут встречаться в разных со-
четаниях: например, суммирующие счетчики бывают как с последовательным, так
и с параллельным переносом, они могут иметь двоичный, десятичный и иной коэф-
фициенты счета.
Введением дополнительных логических связей — обратных и прямых — дво-
ичные счетчики преобразуются в недвоичные. Наибольшее распространение полу-
чили десятичные (декадные) счетчики, работающие с Ксч = 10 в двоично-десятичном
коде (двоичный — по коду счета, десятичный — по числу состояний).
Десятичные счетчики организуются из четырехразрядных двоичных счет-
чиков. Избыточные шесть состояний исключаются введением дополнительных
связей. Возможны два варианта построения схем: счет циклически идет от 0000 до
1001 и исходным состоянием служит 0110В - 6D; счет происходит до 111 IB = 15D
(В, D — обозначения двоичного и десятичного чисел). Первый вариант на практи-
ке применяется чаще.
294
Глава 9. Цифровые устройства
В суммирующем счетчике каждый входной импульс увеличивает на единицу
число, записанное в счетчик, при этом перенос информации из одного разряда в дру-
гой, более старший, имеет место, когда происходит смена состояния 1 на 0.
Вычитающий счетчик действует обратным образом: двоичное число, храня-
щееся в счетчике, с каждым поступающим импульсом уменьшается на единицу. Пе-
реполнение вычитающего счетчика происходит после достижения им нулевого
состояния. Перенос из младшего разряда в старший здесь имеет место при смене со-
стояния младшего разряда с 0 на 1.
Реверсивный счетчик может работать в качестве суммирующего и вычитаю-
щего. Эти счетчики имеют дополнительные входы для задания направления счета.
Режим работы определяется управляющими сигналами на этих входах. В програм-
ме EWB такие счетчики представлены ИМС 74163 и 74169 (К155ИЕ18, ИЕ17).
Счетчики с последовательным переносом представляют собой цепочку тригге-
ров, в которой импульсы, подлежащие счету, поступают на вход первого триггера,
а сигнал переноса передается последовательно от одного разряда к другому.
Главное достоинство счетчиков с последовательным переносом — простота
схемы. Увеличение разрядности осуществляется подключением дополнительных
триггеров к выходу последнего триггера. Основной недостаток счетчиков с последо-
вательным переносом — сравнительно низкое быстродействие, поскольку триггеры
срабатывают последовательно, один за другим. Счетчики этого класса в библиотеке
EWB 5.0 представлены 6-разрядпым двоичным счетчиком 4024 (176ИЕ1).
Максимальная частота счета определяется режимом работы. Если считывание
состояния счетчика должно происходить после каждого входного импульса, как это
имеет место, например, при счете до заданного числа, то максимальная частота равна
Fmx = l/[(m - lyT^ + TJ, где ш число разрядов; TJ4„ задержка переключения одно-
го триггера; Тср время срабатывания внешнего элемента или считывающей схемы.
Рис. 9.33. Счетчики последовательного типа
Схемы четырехразрядных двоичных счетчиков последовательного типа на
библиотечных D-триггерах показаны на рис. 9.33. На входы счетчиков подаются им-
пульсы с выхода синхросигналов генератора слова, которые генерируются при оче-
редном нажатии клавиши STEP. Каждый триггер счетчиков осуществляет деление
на 2, сигнал переноса передается последовательно от одного разряда к другому:
для суммирующего (рис. 9.33, а) — с прямых выходов, для вычитающего
(рис. 9.33, б) — с инверсных. Состояния разрядов счетчика в двоичном коде индици-
руются логическими пробниками, а в десятичном — семисегментным индикатором.
Как видно из рис. 9.33, число зарегистрированных суммирующим счетчиком им-
пульсов равно 5 = 2° + 22, а для вычитающего — количество подлежащих к вычита-
нию импульсов 6 = 21 + 22.
Счетчики с параллельным переносом состоят из синхронных триггеров. Счет-
ные импульсы подаются одновременно на все тактовые входы, а каждый из тригге-
295
Часть II. Моделирование схем и устройств
ров цепочки служит по отношению к последующим только источником информаци-
онных сигналов. Срабатывание триггеров параллельного счетчика происходит син-
хронно, и задержка переключения всего счетчика равна задержке одного триггера.
В таких счетчиках используются JK- и D-триггеры. В схемном отношении они слож-
нее счетчиков с последовательным переносом. Число разрядов у этих счетчиков
обычно невелико (4...6), поскольку с повышением числа разрядов число внутренних
логических связей быстро растет.
Счетчики с параллельным переносом применяются в быстродействующих ус-
тройствах. Они обладают более высокой помехоустойчивостью, так как в паузах
между импульсами триггеры счетчика блокированы. К их недостаткам следует от-
нести меньшую нагрузочную способность отдельных разрядов из-за дополнительной
нагрузки внутренними связями. Каскад, предшествующий счетчику, должен иметь
достаточную мощность, чтобы управлять входами нескольких триггеров.
Счетчики с параллельным переносом (их чаще называют синхронными) в биб-
лиотеке EWB представлены счетчиками 74160, 74162, 74163 и 74169 (аналоги —
К155ИЕ9, ИЕ11, ИЕ18, ИЕ17 соответственно).
Схема четырехразрядного счетчика с параллельным переносом на библиотечных
JK-триггерах (рис. 9.34) содержит дополнительные логические элементы для формиро-
вания сигналов переноса: U1 при коде ООН, U2 — при 0111, U3 при 1111.
Рис. 9.34. Счетчик с параллельным переносом
В счетчике с параллельно-последовательным переносом триггеры объединены
в группы так, что отдельные группы образуют счетчики с параллельным переносом,
а группы соединяются последовательно. В роли групп могут быть и готовые счетчи-
ки. Счетчики этого типа, как правило, многоразрядные. Общий коэффициент счета
равен произведению коэффициентов счета всех групп. По быстродействию они зани-
мают промежуточное положение.
Счетчики-делители, оформленные как самостоятельные изделия, имеются
в составе многих серий микросхем. Номенклатуру счетчиков отличает большое раз-
нообразие. Многие из них обладают универсальными свойствами и позволяют уп-
равлять коэффициентом и направлением счета, вводить до начала цикла исходное
число, прекращать счет по команде, наращивать число разрядов и т.п. С помощью
готовых счетчиков можно решить большинство практических задач, возникающих
перед разработчиками аппаратуры. Если возникает потребность в счетчиках с нети-
повыми характеристиками, то в этом случае они создаются из отдельных триггеров
и логических элементов.
Проектирование счетчика сводится к определению числа триггеров и органи-
зации связей между ними и логическими элементами, а также вычислению разре-
шающей способности счетчика (максимальной частоты счета).
296
Глава 9. Цифровые устройства
На первом шаге проектирования заданный коэффициент счета (деления) пре-
образуется в двоичный код. Число разрядов двоичного числа показывает, сколько
триггеров должен иметь счетчик, а число единиц определяет число входов логичес-
кого элемента. Входы элемента подключаются к прямым выходам Q тех триггеров,
которые соответствуют единицам двоичного числа. Следует только учитывать, что
первый, входной триггер отображает младший разряд числа. Выход логического
элемента соединяется с входами установки пуля (входы R) всех триггеров, от кото-
рых сделаны отводы, а также тех, которые непосредственно за ними следуют.
Результаты проектирования применимы к триггерам разных видов логики, од-
нако реальные схемы при этом могут различаться в деталях. Поскольку принуди-
тельная установка в нуль по R-входу у некоторых типов триггеров осуществляется
сигналами логического нуля (ТТЛ, ДТЛ), у других — сигналами логической едини-
цы (КМОП), в первом случае должен быть применен логический элемент И-НЕ,
во втором И. Кроме того, в суммирующем счетчике опрокидывание каждого после-
дующего триггера должно происходить тогда, когда сигнал на выходе предыдущего
триггера изменяется от 1 к 0, поэтому важен порядок соединения триггеров между со-
бой. Если в счетчике применяются триггеры с прямым управлением (по фронту 0->1),
их входы присоединяются к инверсным выходам предыдущих. В случае триггеров
с инверсным управлением входы подключают к прямым выходам. Добавив к исход-
ной схеме несколько дополнительных элементов, можно расширить ее возможнос-
ти — сделать счетчик с самоостановом (одноразового действия) или обеспечить
в режиме деления кратковременный импульс на выходе последнего триггера.
Рис. 9.35. Функциональная схема часов
Рис. 9.36. Панель функционального генератора в схеме часов
Порядок разработки устройств на базе счетчиков рассмотрим на примере циф-
ровых часов, функциональная схема которых приведена на рис. 9.35. Часы содер-
жат три пары индикаторов для отображения часов, минут, секунд и два одиночных
индикатора-разделителя. Индикаторы управляются от подсхем cont24 и cont60
с питанием от источника +5V. В качестве задающего генератора используется функ-
циональный генератор, режим работы которого показан на рис. 9.36.
Отметим, что представленная на рис. 9.35 схема обладает крайне низким быс-
тродействием, поэтому реализовать режим секундомера путем повышения частоты
297
Часть II. Моделирование схем и устройств
задающего генератора нс удалось. Блок cont60 представляет собой счетчик с коэф-
фициентом счета = 60, его функциональная схема (рис. 9.37) содержит подсхему-
счетчик cont6 (К„ = 6) и двоично-десятичный счетчик 74160 (К155ИЕ9).
Микросхема К155ИЕ9 (74160) — декадный двоично-десятичный счетчик [7]. Он за-
пускается положительным перепадом тактового импульса и имеет синхронную за-
грузку (предварительную установку каждого триггера по входам А, В, С, D).
Несколько счетчиков ИЕ9 образуют синхронный многодекадный счетчик. Сброс
всех триггеров — асинхронный по общему входу сброса R (CLR').
Рис. 9.37. Функциональная схема счетчика cont60
Счетчик 74160 содержит внутреннюю логику ускоренного переноса, и все
триггеры получают перепад тактового импульса одновременно. Изменения выход-
ных состояний триггеров совпадают по времени, поэтому в выходных импульсных
последовательностях нет пиковых помех. Запускающий тактовый фронт импуль-
са — положительный, причем для варианта этой микросхемы с переходами Шотки
буферный элемент тактового входа имеет порог с гистерезисом 400 мВ, что уменьша-
ет чувствительность к импульсным помехам, а также обеспечивает устойчивое пере-
ключение триггеров при медленно нарастающем перепаде тактового импульса.
Счетчик ИЕ9 полностью программируемый, поскольку на каждом из его вы-
ходов можно установить требуемый логический уровень. Такая предварительная ус-
тановка происходит синхронно с перепадом тактового импульса и не зависит от того,
какой уровень присутствует на входах разрешения счета СЕР (ENP) и СЕТ (ENT). На-
пряжение низкого уровня, поступившее на вход параллельной загрузки РЕ (LOAD'),
останавливает счет и разрешает подготовленным на входах D0...D3 (А, В, С, D) дан-
ным загрузиться в счетчик в момент прихода следующего положительного перепада
тактового импульса (от низкого к высокому уровню или при переходе от 0 к 1).
Сброс счетчика ИЕ9 — асинхронный. Если на общий вход сброса R поступает
напряжение низкого уровня, на выходах всех четырех триггеров устанавливаются
низкие уровни независимо от сигналов на входах С (CLK), РЕ, СЕТ и СЕР. Внутрен-
няя схема ускоренного переноса необходима для синхронизации многодекадной це-
пи счетчиков ИЕ9. Специально для синхронного каскадирования микросхема имеет
два входа разрешения: СЕР (параллельный) и СЕТ (вспомогательный, с условным
названием “трюковый”), а также выход ТС (RCD — окончание счета).
Счетчик считает тактовые импульсы, если на обоих его входах СЕР и СЕТ на-
пряжение высокого уровня. Вход СЕТ последующего счетчика получает разрешение
счета в виде напряжения высокого уровня от выхода ТС предыдущего счетчика.
Длительность высоких уровней (сигнала логической 1) на выходе ТС примерно соот-
ветствует длительности высокого уровня на выходе Q0 предыдущего счетчика.
298
Глава 9. Цифровые устройства
Для счетчиков ИЕ9 не допускаются перепады от высокого уровня к низкому
на входах СЕР и СЕТ, если на тактовом входе присутствует напряжение низкого
уровня. Нельзя подавать положительный перепад па вход РЕ, если на тактовом вхо-
де присутствует напряжение низкого уровня, а на входах СЕР и СЕТ — высокого (во
время перепада или перед ним). Сигналы на входах СЕР и СЕТ можно изменять, ес-
ли на тактовом входе С присутствует напряжение низкого уровня. Когда на входе РЕ
появляется высокий уровень, а входы СЕ неактивны (т. е. на СЕР и СЕТ - низкий
уровень), то вместе с последующим положительным перепадом тактового импульса
на выходах Q0...Q3 (QA, QB, QC, QD) появится код от входов D0...D3.
Подавая сигналы высокого уровня на входы СЕТ и СЕР при низком уровне
сигнала на тактовом входе, получим на выходах наложение кодов загрузки и внут-
реннего счета. Если при низком уровне тактового сигнала на входы СЕТ, СЕР и РЕ
поданы положительные перепады, изменяющиеся от низкого уровня к высокому,
тактовый перепад изменит код на выходах Q0...Q3 на последующий.
При входных сигналах высокого уровня счетчик К155ИЕ9 (74160) потребляет
ток питания 94 мА, К555ИЕ9 (74 LS160A) 32 мА; если все выходные сигналы име-
ют низкий уровень, то 101 и 32 мА соответственно. Максимальная частота счета
25 МГц. Время распространения сигнала от входа С до выхода ТС (“Счет закончен”)
составляет 35 и 27 нс, а время сброса (от входа R до выходов Q) 38 и 28 нс для обыч-
ного исполнения и варианта Шотки.
а)
Рис. 9.38. Схемы счетчиков cont6 (а) и cont24 (б)
б)
Схема счетчика cont6 (рис. 9.38, а) выполнена на трех JK-триггерах в счет-
ном режиме (на J- и К-входы поданы сигналы 1). Для обеспечения коэффициента
счета 6 использована обратная связь на элементе И U2, который срабатывает
при коде 110В 6D, при этом сигнал 1 с его выхода через элемент ИЛИ U1 поступа-
ет на R-входы триггеров, переводя их в нулевое состояние. Ко второму входу эле-
мента U1 подключен вход R для подачи внешнего сигнала сброса. Поскольку для
рассматриваемого счетчика и счетчика 74160 эти сигналы различны (для первого
299
Часть II. Моделирование схем и устройств
это 1, а для второго - 0), то на входе R счетчика cont6 в схеме на рис. 9.37 включен
инвертор. Счетчик часовых интервалов cont24 (рис. 9.38, б) выполнен на двух ИМС
74160 и обеспечивает коэффициент Ксч = 24.
В заключение рассмотрим практическую конструкцию исполнительного уст-
ройства к наручным электронным часам с будильником (схема на рис. 9.39, а), ко-
торую можно использовать для включения в заданное время разнообразных
исполнительных устройств, например, карманного радиоприемника, плеера и т.п.
Обычно в таких часах используется пьезоэлетрический громкоговоритель, напря-
жение на котором, как показали испытания, достигает 3...5 В при напряжении пи-
тания часов 1,5 В (батарея Е1 на рис. 9.39, а, зажимы Clock). Заметим, что для
обеспечения функционирования устройства сопряжения в нем используется допол-
нительный источник питания Е2, включаемый последовательно с основным,
при этом суммарное напряжение питания составляет 3 В. Дополнительный источ-
ник питания в практической конструкции может отключаться выключате-
лем А. Для имитации выходного сигнала будильника в схеме модели используется
источник синусоидального сигнала Ui, подключаемый к входу II формирователя
на двух инверторах микросхемы U1 через ограничительный (защитный) резистор
R1 переключателем X, управляемым одноименной клавишей клавиатуры. Заме-
тим, что для повышения чувствительности формирователя нижний вывод резисто-
ра R2 можно подключить к точке “а” соединения источников El, Е2; при этом порог
срабатывания первого инвертора будет снижен примерно в два раза. С выхода фор-
мирователя Q2 сигнал поступает на тактовый вход СР1 D-триггера U2 (осцилло-
грамма А на рис. 9.39, б). Поскольку на D-вход триггера подан сигнал логической
единицы (вход D1 соединен с положительным зажимом источника питания), то при
поступлении на вход СР1 первого импульса триггер переводится в единичное состо-
яние, при этом сигнал логического нуля с выхода Q1 (со значком инверсии) тригге-
ра поступает на вход предусилителя мощности на двух параллельно включенных
инверторах микросхемы U1 (входы 15 и 16, выходы Q5 и Q6). К сожалению, модели
цифровых ИМС в программе EWB по нагрузочной способности существенно отли-
чаются от их промышленных аналогов и не рассчитаны на подключение к их выхо-
дам таких нагрузок, как показанный на рис. 9.39, а ключевой каскад на
транзисторе VT со светодиодом VD в базовой цепи. Поэтому в схеме модели в базо-
вой цепи ключа предусмотрен разрыв цепи — клеммы А и В, которые в практичес-
кой конструкции должны быть соединены. Использованный в рассматриваемом
устройстве транзистор типа КТ645А обладает сравнительно малым напряжением
насыщения (менее 0,5 В при токе коллектора до 150 мА) и позволяет включать в за-
данное время приемник или плеер с 3-вольтовым питанием; при этом необходимо
соблюдать указанную на схеме полярность (клеммы +С и -С). Заметим, что в слу-
чае критичности по напряжению питания коммутируемых устройств в ключевом
каскаде можно использовать транзистор типа КТ630, у которого напряжение насы-
щения в открытом состоянии составляет менее 0,3 В при токе коллектора >150 мА.
Осциллограммы на рис. 9.39, б получены следующим образом. После включе-
ния моделирования в положении переключателей X и Z, показанных на схеме,
триггер оказывается в нулевом состоянии (аналогичное явление имеет место
и в практической конструкции после включения питания переключателем А, что
индицируется светодиодом VD). Для перевода триггера в исходное единичное состо-
яние замыкается ключ Z и на S-вход CD1 подается сигнал логической единицы,
а затем он размыкается, после чего замыкается и размыкается ключ X (имитирует-
ся начало и конец работы будильника), при этом триггер после окончания работы
300
Глава 9. Цифровые устройства
будильника остается в нулевом состоянии (осциллограмма В на рис. 9.39, б), а ключ
на транзисторе VT — в открытом состоянии.
Конструктивно исполнительное устройство выполнено с использованием час-
ти корпуса и клавиатуры вышедшего из строя калькулятора фирмы Citizen, а также
его отсека питания, рассчитанного на два элемента типа СЦ-0,18 емкостью 180 мА ч,
более мощного по сравнению с элементом СЦ-21 (емкость 38 мА ч), обычно применя-
емом в электронных наручных часах. Кнопки калькулятора были использованы как
для управления часами, так и для сброса триггера (ключ Z па рис. 9.39, а). В качест-
ве выключателя А использовалась одна секция миниатюрного dip-переключателя,
содержащего обычно четыре или восемь секций и применяемого для конфигуриро-
вания принтеров, некоторых контроллеров и системной платы самой младшей моде-
ли компьютера IBM PC/XT.
Рис. 9.39. Исполнительное устройство электронных часов (а) и осциллограммы сигналов (б)
Контрольные вопросы и задания
1. Что из себя представляет счетчик, какого типа они бывают?
2. Каким образом создаются счетчики с коэффициентом счета, не кратным 2?
3. Что такое программируемый счетчик?
4. Используя схемы на рис. 9.33, составьте схему реверсивного счетчика с пере-
ключением режима работы суммирование/вычитание.
5. Составьте схему реверсивного счетчика на базе схемы на рис. 9.34.
6. Разработайте схему счетчика с коэффициентом счета 3 на JK- и D-триггерах (см.
схему на рис. 9.38, а).
7. Проведите моделирование всех функциональных узлов часов на рис. 9.35, вы-
явите недостатки и устраните их.
8. Проведите моделирование и опишите порядок работы счетчика на рис. 9.36, б.
9. Проведите испытания секундомера и часов, схемы которых приведены в файлах
fregcntr.ca4 и stopwtch.ca4.
301
Часть II. Моделирование схем и устройств
9.11. Регистры
Основное назначение регистров — хранение и преобразование многоразряд-
ных двоичных чисел. Регистры наряду со счетчиками и запоминающими устройст-
вами являются наиболее распространенными устройствами цифровой техники.
При сравнительной простоте регистры обладают большими функциональными воз-
можностями. Они используются в качестве управляющих и запоминающих уст-
ройств, генераторов и преобразователей кодов, счетчиков, делителей частоты, узлов
временной задержки [7, 8]. Регистры выполняются на синхронных триггерах D- или
JK-типа с динамическим или статическим управлением. Одиночный триггер может
запоминать (регистрировать) один разряд (бит) двоичной информации. Такой триг-
гер можно считать одноразрядным регистром. Занесение информации в регистр на-
зывают операцией ввода или записи. Выдача информации внешним устройствам
характеризует операцию вывода или считывания. Запись информации в регистр не
требует его предварительного обнуления.
Понятие “весовой коэффициент” к разрядам регистра в отличие от счетчика не-
применимо, поскольку весовая зависимость между отдельными разрядами целиком
определяется записанной в регистр информацией. По этой причине на условных изоб-
ражениях регистров нумерация информационных входов и выходов наносится подряд.
Все регистры в зависимости от функциональных свойств подразделяются на
две категории — накопительные (регистры памяти, хранения) и сдвигающие.
В свою очередь сдвигающие регистры делятся по способу ввода и вывода информа-
ции на параллельные, последовательные и комбинированные (параллельно-после-
довательные и последовательно-параллельные), по направлению передачи (сдвига)
информации — на однонаправленные и реверсивные.
Наиболее простыми регистрами являются регистры памяти. Их назначение —
хранение двоичной информации небольшого объема в течение короткого промежут-
ка времени. Эти регистры представляют собой набор синхронных триггеров, каж-
дый из которых хранит один разряд двоичного числа. Ввод (запись) и вывод
(считывание) информации производится параллельным кодом. Ввод обеспечивается
тактовым импульсом, с приходом очередного тактового импульса записанная ин-
формация обновляется. Считывание производится в прямом или в обратном коде
(в последнем случае — с инверсных выходов).
Регистры хранения представляют собой наборы триггеров с независимыми ин-
формационными входами и обычно общим тактовым входом. В таком качестве исполь-
зуются синхронные триггеры, составленные из микросхем, содержащих в одном
корпусе несколько самостоятельных триггеров, например KI 55ТМ8 (74175), KI 55ТМ9
(74179) и другие, которые можно рассматривать как 4...6-разрядные регистры памяти.
Наращивание разрядности регистров памяти достигается добавлением нужного числа
триггеров, тактовые входы которых подсоединяют к шине синхронизации.
Регистр К155ИР15 (74173) является библиотечным компонентом EWB и мо-
жет служить примером устройства хранения с тремя выходными состояниями (схе-
ма включения — на рис. 9.40, а). Отметим опять крайне неудачное расположение
выводов регистра 74173 и их несоответствие оригиналу [7, 8]. Как видно из
рис. 9.40, а, К155ИР15 — четырехразрядный регистр. Он имеет выходы 1Q...4Q
с третьим Z-состоянием (при сигнале 1 на выводах G2, G1), а его входы 1D...4D снаб-
жены логическими элементами разрешения записи путем подачи логического 0 на
входы М, N (в EWB ошибочно показаны прямыми). Используется регистр как четы-
302
Глава 9. Цифровые устройства
рехразрядный источник кода, способный обслуживать непосредственно шину дан-
ных цифровой системы.
Загрузка информации в регистр производится синхронно с положительным
перепадом тактового импульса, если на входах М, N присутствуют напряжения низ-
кого уровня. Если на одном из этих входов напряжение высокого уровня, после при-
хода положительного тактового перепада в регистре должны остаться прежние
данные. Вход сброса CLR имеет высокий активный уровень. Если на входы G2, G1
подано напряжение активного низкого уровня, данные, содержащиеся в регистре,
отображаются на выходах 1Q...4Q, присутствие хотя бы одного напряжения высоко-
го уровня на входах разрешения G2 и G1 вызывает Z-состояние (размыкание) для
выходных линий. При этом данные из регистра в шину данных систем не проходят,
выходы регистра не влияют на работу других аналогичных выходов, присоединен-
ных к проводникам шины. На работу входов сброса CLR и тактового С смена уровней
на входах разрешения влияния не оказывает.
Регистр К155ИР15 потребляет ток 72 мА и имеет тактовую частоту до 25 МГц;
вариант 74LS173 потребляет ток 30 мА при тактовой частоте 30 МГц. Режимы рабо-
ты генератора в схеме регистра и некоторые его кодовые комбинации показаны на
рис. 9.40, в.
Рис. 9.40. Схема включения регистра 74173 (а) с установками генератора слова (в) и простей-
шая схема регистра сдвига на D-триггерах (б) с установками генератора слона (г) для
его испытания.
б)
Вторым распространенным классом регистров являются регистры сдвига, ко-
торые отличаются большим разнообразием как в функциональном отношении, так
и в отношении схемных решений и характеристик. Регистры сдвига, кроме опера-
ции хранения, осуществляют преобразование последовательного двоичного кода
в параллельный, а параллельного в последовательный; они выполняют арифмети-
ческие и логические операции, служат в качестве элементов временной задержки.
303
Часть II. Моделирование схем и устройств
Своим названием они обязаны характерной для этих устройств операции сдвига.
С приходом каждого тактового импульса происходит перезапись (сдвиг) содержимо-
го триггера каждого разряда в соседний разряд без изменения порядка следования
единиц и нулей. При сдвиге информации вправо после каждого тактового импульса
бит из более старшего разряда сдвигается в младший, а при сдвиге влево — наоборот.
Этот процесс иллюстрируется простейшим сдвиговым регистром на рис. 9.40, б, г.
На отечественных схемах символом регистра служат буквы RG. Для регист-
ров сдвига указывается также направление сдвига: > — вправо; < — влево; <—> —
реверсивный (двунаправленный).
На рис. 9.41, а показана схема универсального регистра, который может выпол-
нять следующие функции: последовательный прием информации (вход Ds, на шине
управления сигнал Р = 0); параллельная загрузка (входы D1...D3, Р 1); сдвиг вправо
и влево (на входе управления R/L сигнал 1 и 0 соответственно). Регистр выполнен на
D-триггерах с предустановкой сигналами низкого уровня по R-входам (нижний вы-
вод) в нулевое состояние и в единичное состояние по S-входу (верхний вывод).
Рис. 9.41. Схема универсального регистра (а) и установки генератора слова (б) для его испытания
При нулевой двоичной комбинации (см. рис. 9.41, б) сигналы Ds = 1 и R/L = 1.
поэтому на выходе U21 формируется сигнал 1, который через U31 передается на D-
вход триггера D1 и под действием тактового сигнала переводит его в единичное состо-
яние. В последующих двух комбинациях сигнал R/L = 1, поэтому сигнал 1 с первого
304
Глава 9. Цифровые устройства
триггера перезаписывается во второй (через U22, U32), а затем через U23 — в третий
(сдвиг вправо). При комбинациях 3...4 сигнал R/L = 0, при этом элементы U21, U22
блокируются и на выходе U6 формируется сигнал 1, под действием которого сигнал 1
с выхода триггера D3 через U12, U32 перезаписывается в 02, а затем через U11,
U31 — в D1 (сдвиг влево). При комбинации 7 сигнал разрешения параллельной за-
грузки Р = 1, при этом на входы D1...D3 поступает код 001, в результате чего тригге-
ры D1 (через U41, U51) и D2 (через U42, U52) устанавливаются по R-входам в нулевое
состояние, а триггер D3 через U43, U53 переводится по S-входу в единичное состоя-
ние. При комбинациях 8, 9 (R/L = 0) производится сдвиг влево, а при комбинациях
10, 11 (R/L =1) — вправо.
Работу еще одного регистра сдвига рассмотрим на примере библиотечного реги-
стра 74195 (К155ИР12), схема включения которого показана на рис. 9.42.
ИМС 74195 — быстродействующий регистр для выполнения операций сдвига, счета,
накопления и взаимного параллельно-последовательного преобразования цифровых
слов. С помощью входа LD/SH загружаются параллельные данные и производится их
сдвиг вправо. Если на этом входе присутствует напряжение высокого уровня, через
входы первого триггера J и К в регистр вводятся последовательные данные. Вход J
имеет высокий активный уровень, вход К — низкий; если эти входы соединить, полу-
чится простой D-вход. Данные сдвигаются в направлении от QA к QB, QC, а затем
к QD после каждого положительного перепада на тактовом входе CLK.
Рис. 9.12. Схема включения регистра 74195
Рис. 9.43. Схема включения регистра 74195 в режиме сдвига
Если на входе LD/SH присутствует напряжение низкого (активного) уровня,
все четыре триггера регистра запускаются одним тактовым перепадом (от низкого
уровня к высокому). Тогда данные от параллельных входов A...D передаются на со-
ответствующие выходы QA...QD. Сдвиг данных влево обеспечивается в схеме, где
каждый выход Qn соединен внешней перемычкой со входом Dni, т. е. схема включе-
ния на рис. 9.42 соответствует только режиму приема и хранения данных.
30.5
Часть II. Моделирование схем и устройств
Схема включения ИМС в режиме сдвига показана на рис. 9.43, режимы работ
генератора слова — на рис. 9.44. Для режима сдвига напряжение на входе LD/SH в
до зафиксировать на высоком уровне. Из-за того, что все операции в регистре ИР
строго синхронны и выполняются по фронтам импульсов, логические уровни на вх
дах J, К, Dn, LD/SH можно произвольно менять до прихода тактового сигнала.
Напряжение низкого уровня на входе CLR, кроме операции обнуления, означ
ет также запрет на действие тактового импульса CLK; для правильного сброса даннь
выбирается момент, когда на входе CLK присутствует напряжение низкого уровня.
Рис. 9.44. Лицевая панель генератора слона с режимами работы в схеме на рис. 9.43
Контрольные вопросы и задания
1. Что из себя представляет регистр, какие функции он может выполнять?
2. Назовите типы регистров и их возможные применения.
3. Проведите моделирование регистра 74133 по схеме на рис. 9.40, а. При модели-
ровании необходимо выбрать с помощью генератора слова двоичные комбина-
ции, которые позволяют проверить все режимы его работы. Целесообразно
также составить так называемую таблицу состояния, напоминающую таблицу
истинности [7, 8].
4. Проведите моделирование регистра 74195 в режиме приема данных (рис. 9.42).
5. Для приведенной на рис. 9.43 схемы исследуйте следующие режимы сдвига [7]:
1 — сдвиг и установка по первому каскаду (JK * 11); 2 — сдвиг и сброс по перво-
му каскаду (JK = 00); 3 - сдвиг и переключение первого каскада (JK = 10); 4 —
сдвиг и хранение в первом каскаде (JK = 01). При этом, как указывалось выше,
CLR = 1, LD/SII = 1, состояние входа А безразлично.
9.12. Оперативные запоминающие устройства
Оперативные запоминающие устройства (ОЗУ) являются неотъемлемой час-
тью микропроцессорных систем различного назначения; они делятся на два класса:
статические и динамические. В статических ОЗУ запоминание информации произ-
водится на триггерах, а в динамических — на конденсаторах емкостью порядка
0,5 пФ. Длительность хранения информации в статических ОЗУ не ограничена, тог-
да как в динамических она ограничена временем саморазряда конденсатора, что тре-
бует специальных средств регенерации и дополнительных затрат времени на этот
процесс (около 5... 12% времени работы системы).
Эволюция микросхем динамического ОЗУ вплотную связана с эволюцией ПК.
В первых IBM PC ОЗУ было выполнено на микросхемах емкостью 16 Кбит каждая.
306
Глава 9. Цифровые устройства
Спустя год после представления IBM PC/XT (первого ПК) появились микросхемы
емкостью 64 Кбит, причем одна такая микросхема была дешевле чем 4 по 16 Кбит.
В 1984 г. был сделан еще один шаг по увеличению объема памяти в одном корпусе —
появились 256-килобитные микросхемы, которые были установлены на первых IBM
PC/AT. Затем были разработаны микросхемы емкостью 1 Мбит, в дальнейшем нача-
ли появляться компоненты динамических ОЗУ в других конструктивных исполне-
ниях и с непрерывной тенденцией увеличения емкости.
Конструктивно любое ОЗУ состоит из двух блоков — матрицы запоминающих
элементов и дешифратора адреса. По технологическим соображениям матрица чаще
всего имеет двухкоординатную дешифрацию адреса — по строкам и столбцам.
На рис. 9.45 показана матрица 16-битного статического ОЗУ: она состоит из 16 яче-
ек памяти memi, схема которой приведена на рис. 9.46. Каждая ячейка памяти ад-
ресуется по входам X, Y путем выбора дешифраторами адресных линий по строкам
АхО...АхЗ и по столбцам АуО...АуЗ (см. рис. 9.45) и подачи по выбранным линиям
сигнала логической единицы. При этом в выбранной ячейке памяти срабатывает
двухвходовой элемент И (U1), подготавливая цепи чтения-записи информации на
входных DI0...DI3 или выходных DO0...DO3 разрядных шинах. Разрешающим сиг-
налом для выдачи адреса является CS (chip select — выбор кристалла), который по-
дается на вход разрешения счетчика адреса (Addr_cnt) или такой же вход
дешифраторов, подключенных к выходам счетчика.
Рис. 9.45. Матрица 16-битного ОЗУ
При записи в ячейку памяти (см. рис. 9.46) на соответствующей разрядной
шине данных устанавливается 1 или 0, на входе WR/RD' —сигнал 1 и после строби-
рования счетчика или дешифраторов адреса сигналом CS срабатывают элементы 2И
UI, U2. Положительный перепад сигнала с элемента U2 поступает на тактовый вход
D-триггера U4, в результате чего в нем записывается 1 или 0 в зависимости от уров-
ня сигнала па его D-входе.
При чтении из ячейки памяти на входе WR/RD' устанавливается 0, при этом
срабатывают элементы UI, U3, U5 и на вход РАЗРЕШЕНИЕ ВЫХОДА буферного
элемента U6 поступает разрешающий сигнал, в результате чего сигнал с Q-вы хода D-
триггера передается на разрядную шину данных DO0...DO3. Для проверки функци-
онирования ячейки памяти используется генератор слова (рис. 9.47).
307
Часть II. Моделирование схем и устройств
Р»гс. 9.46. Схема ячейки памяти mem_i
Рис. 9.47. Лицевая панель генератора слова с установками для ячейки памяти
Современные запоминающие устройства статического типа с произвольны
доступом (Static Random Access Memory — SRAM) отличаются высоким быстроде]
ствисм и в микропроцессорных системах используются ограниченно из-за сравщ
тельно высокой стоимости. В таких системах они используются только в качест!
так называемой кэш-памяти [22]. Cache (запас) обозначает быстродействующую б;
ферную память между процессором и основной памятью, служащую для частичной
компенсации разницы в скорости процессора и основной памяти: в нее заносятся на-
иболее часто используемые данные. Когда процессор первый раз обращается к ячей-
ке памяти, ее содержимое параллельно копируется в кэш, и в случае повторного
обращения может быть с гораздо большей скоростью из нее извлечено. При записи
в память информация попадает в кэш и одновременно копируется в память (схема
Write Through — прямая или сквозная запись) или копируется через некоторое вре-
мя (схема Write Back — обратная запись). При обратной записи, называемой также
буферизованной сквозной записью, информация копируется в память в первом же
свободном такте, а при отложенной (Delayed Write) - когда для помещения в кэш
нового значения не оказывается свободной области; при этом в основное ОЗУ вытес-
няются сравнительно редко используемые данные. Вторая схема более эффективна,
но и более сложна за счет необходимости поддержания соответствия содержимо!
кэша и основной памяти.
Кэш-память состоит из области данных, разбитой на блоки (строки), которые
являются элементарными единицами информации при работе кэша, и области при-
знаков (tag), описывающей состояние строк (свободна, занята, помечена для дозапи-
си и т.п.). В основном используются две схемы организации кэша: с прямых
отображением (direct mapped),, когда каждый адрес памяти может кэшироваться
только одной строкой (в этом случае номер строки определяется младшими разряда-
ми адреса), и n-связный ассоциативных! (n-way associative), когда каждый адрес мо-
жет кэшироваться несколькими строками. Ассоциативный кэш более сложен.
308
Глава 9. Цифровые устройства
однако позволяет более гибко кэшировать данные; наиболее распространены четы-
рехсвязные системы кэширования.
Микропроцессоры 486 и выше имеют также внутренний (Internal) кэш объе-
мом 8... 16 Кбайт. Он также обозначается как Primary (первичный) или LI (Level 1 —
первый уровень) в отличие от внешнего (External), расположенного на плате и обо-
значаемого Secondary (вторичный) или L2. В большинстве процессоров внутренний
кэш работает по схеме с прямой записью, а в 486 (процессор Intel P24D и последние
DX4-100, AMD DX4-120, 5x86) и Pentium он может работать и с отложенной запи-
сью. Последнее требует специальной поддержки со стороны системной платы, чтобы
при обмене по DMA (прямое обращение к памяти устройств ввода-вывода) можно бы-
ло поддерживать согласованность данных в памяти и внутреннем кэше. Процессоры
Pentium Pro имеют также встроенный кэш второго уровня объемом 256, 512 или
1024 Кбайт с собственным контроллером и локальной 64-разрядной шиной данных,
работающей на внутренней частоте МП; использована дополнительная внутренняя
оптимизация, ускорена работа конвейера и степень параллелизма, улучшена систе-
ма предсказания переходов (Dynamic & Speculative Execution).
В микропроцессорных системах в качестве ОЗУ чаще всего используются дина-
мические ОЗУ с запоминающим конденсатором, которые отличаются большим мно-
гообразием. Приведем данные по наиболее распространенным типам таких ОЗУ [22].
В динамической памяти (Dynamic Random Access Memory — DRAM) ячейки
выполнены на основе областей с накоплением зарядов, занимающих гораздо мень-
шую площадь, нежели триггеры, и практически не потребляющих энергии при хра-
нении информации. При записи бита в такую ячейку в ней формируется
электрический заряд, который сохраняется в течение нескольких миллисекунд;
для постоянного сохранения заряда ячейки необходимо регенерировать (перезапи-
сывать) ее содержимое. Ячейки микросхем динамической памяти также организо-
ваны в виде прямоугольной матрицы: при обращении к микросхеме на ее входы
вначале подается адрес строки матрицы, сопровождаемый сигналом RAS (Row
Address Strobe — строб адреса строки), затем, через некоторое время — адрес столб-
ца, сопровождаемый сигналом CAS (Column Address Strobe — строб адреса столбца).
При каждом обращении к отдельной ячейке регенерируются все ячейки выбранной
строки, поэтому для полной регенерации матрицы достаточно перебрать адреса
строк. Ячейки динамической памяти имеют сравнительно малое быстродействие
(десятки — сотни наносекунд), но большую удельную плотность (порядка несколь-
ких мегабайт на корпус) и меньшее энергопотребление.
Обычные ОЗУ называют часто асинхронными, так как установка адреса и по-
дача управляющих сигналов могут выполняться в произвольные моменты времени,
необходимо только соблюдение временных соотношений между этими сигналами.
В них включены так называемые охранные интервалы, необходимые для установле-
ния сигналов. Существуют также синхронные виды памяти, получающие внешний
синхросигнал, к импульсам которого жестко привязаны моменты подачи адресов
и обмена данными: они позволяют более полно использовать внутреннюю конвейе-
ризацию и блочный доступ.
FPM DRAM (Fast Page Mode DRAM — динамическая память с быстрым страничным
доступом) отличается от обычной динамической памяти тем, что после выбора стро-
ки матрицы и удержания сигнала RAS допускает многократную установку адреса
столбца, стробируемого сигналом CAS, а также быструю регенерацию по схеме “CAS
прежде RAS”. Первое позволяет ускорить блочные передачи, когда весь блок дан-
ных или его часть находятся внутри одной строки матрицы, называемой в этой сис-
теме страницей, а второе — снизить затраты времени на регенерацию памяти.
309
Часть II. Моделирование схем и устройств
EDO (Extended Data Out — расширенное время удержания данных на выходе) фак-
тически представляют собой обычные микросхемы FPM, на выходе которых уста-
новлены регистры-защелки данных. При страничном обмене такие микросхема:
работают в режиме простого конвейера: удерживают на выходах данных содержи-
мое последней выбранной ячейки, в то время как на их входы уже подается адрес
следующей выбираемой ячейки. Это позволяет примерно на 15% по сравнению
с FPM ускорить процесс считывания последовательных массивов данных. При слу-
чайной адресации такая память ничем не отличается от обычной.
BEDO (Burst EDO — EDO с блочным доступом) — память на основе EDO, работающая
не одиночными, а пакетными циклами чтения/записи. Современные процессоры
благодаря внутреннему и внешнему кэшированию команд и данных обмениваются
с основной памятью преимущественно блоками слов максимальной ширины.
При наличии памяти BEDO отпадает необходимость постоянной подачи последова-
тельных адресов на входы микросхем с соблюдением необходимых временных за-
держек, достаточно стробировать переход к очередному слову отдельным сигналом.
SDRAM (Synchronous DRAM — синхронная динамическая память) — память с син-
хронным доступом, работающая быстрее обычной асинхронной (FPM/EDO/BEDO).
Кроме синхронного доступа, SDRAM использует внутреннее разделение массива па-
мяти на два независимых банка, что позволяет совмещать выборку из одного банка
с установкой адреса в другом. SDRAM также поддерживает блочный обмен. Основное
преимущество SDRAM состоит в поддержке последовательного доступа в синхронном
режиме, где не требуется дополнительных тактов ожидания. При случайном доступе
SDRAM работает практически с той же скоростью, что и FPM/EDO.
PB SRAM (Pipelined Burst SRAM — статическая память с блочным конвейерным до-
ступом) — разновидность синхронных SRAM с внутренней конвейеризацией, за счет
которой примерно вдвое повышается скорость обмена блоками данных.
DR DRAM (Direct Rambus DRAM) — разновидность синхронной памяти; снабжена
специальным интерфейсом фирмы Rambus [84]; для связи с контроллером памяти
используется специальная быстродействующая шина Rambus Channel, допускаю-
щая использование тактовой частоты 400 МГц и обмен по обоим фронтам импульсов,
т. е. обмен с частотой 800 МГц, что соответствует пропускной способности 1,6
Гбит/с; при максимально возможном количестве каналов 4 пропускная способность
возрастает до 6,4 Гбит/с.
Кроме основного ОЗУ, устройством памяти снабжается и устройство отобра-
жения информации — видеодисплейная система. Такая память называется видеопа-
мятью и располагается на плате видеоадаптера.
Видеопамять служит для хранения изображения. От ее объема зависит макси-
мально возможное разрешение видеокарты — АхВхС, где А — количество точек пс
горизонтали, В — по вертикали, С — количество возможных цветов каждой точки.
Например, для разрешения 640x480x16 достаточно иметь видеопамять 256 Кбайт,
для 800x600x256 — 512 КБ, для 1024x768x65536 (другое обозначение —
1024x768x64k) — 2 Мбайт и т.д. Поскольку для хранения цветов отводится целое
число разрядов, количество цветов всегда является целой степенью 2 (16 цветов —
4 разряда, 256 — 8 разрядов, 64k — 16 и т.д.).
В видеоадаптерах используются следующие типы видеопамяти [22]:
FPM DRAM (Fast Page Mode Dynamic RAM — динамическое ОЗУ с быстрым странич-
ным доступом) — основной тин видеопамяти, идентичный используемой в систем-
ных платах. Активно применялась до 1996 г. Наиболее распространенные
310
Глава 9. Цифровые устройства
микросхемы FPM DRAM — четырехразрядные DIP и SOJ, а также шестнадцатираз-
рядные SOJ.
VRAM (Video RAM — видео-ОЗУ) — так называемая двухпортовая DRAM с поддерж-
кой одновременного доступа со стороны видеопроцессора и центрального процессора
компьютера. Позволяет совмещать во времени вывод изображения на экран и его об-
работку в видеопамяти, что сокращает задержки и увеличивает скорость работы.
EDO DRAM (Extended Data Out DRAM — динамическое ОЗУ с расширенным време-
нем удержания данных на выходе) — память с элементами конвейеризации, позво-
ляющей несколько ускорить обмен блоками данных с видеопамятью.
SGRAM (Synchronous Graphics RAM — синхронное графическое ОЗУ) — вариант
DRAM с синхронным доступом, когда все управляющие сигналы изменяются одно-
временно с системным тактовым синхросигналом, что позволяет уменьшить времен-
ные задержки.
WRAM (Window RAM — оконное ОЗУ) — EDO VRAM, в котором окно, через кото-
рый обращается видеоконтроллер, сделано меньшим, чем окно для центрального
MDRAM (Multibank DRAM — многобанковое ОЗУ) — вариант DRAM, организован-
ный в виде множества независимых банков объемом по 32 Кбайт каждый, работаю-
щих в конвейерном режиме.
Увеличение скорости обращения видеопроцессора к видеопамяти, кроме по-
вышения пропускной способности адаптера, позволяет повысить максимальную ча-
стоту регенерации изображения, что снижает утомляемость глаз оператора.
Микросхемы памяти имеют четыре основные характеристики — тип, объем,
структуру и время доступа. Тип обозначает статическую или динамическую па-
мять, объем показывает общую емкость памяти, а структура - количество ячеек
памяти и разрядность каждой ячейки. Например, 28/32-выводные DIP-микросхе-
мы SRAM имеют 8-разрядную структуру (8кх8, 16кх8, 32кх8, 64кх8, 128кх8), кэш
объемом 256 Кбайт состоит из восьми микросхем 32кх8 или четырех микросхем
64кх8 (речь идет об области данных, дополнительные микросхемы для хранения
признаков могут иметь другую структуру). Две микросхемы по 128кх8 поставить
уже нельзя, так как нужна 32-разрядная шина данных, что могут обеспечить толь-
ко четыре микросхемы. Распространенные РВ SRAM в 100-выводных корпусах
PQFP имеют 32-разрядную структуру 32кх32 или 64кх32 и используются по две
или но четыре в платах для Pentium.
30-контактные SIMM имеют 8-разрядную структуру и используются с процес-
сорами 286, 386SX и 486SLC по две, а с 386DX, 486DLC и обычными 486DX — по че-
тыре. 72-контактные SIMM имеют 32-разрядную структуру и могут использоваться
с 486DX по одной, а с Pentium и Pentium Pro — по две. 168-контактные DIMM име-
ют 64-разрядную структуры и используются в Pentium и Pentium Pro по одной. Ус-
тановка модулей памяти или микросхем кэша в количестве больше минимального
для данной системной (материнской) платы позволяет ускорить работу с ними, ис-
пользуя принцип чередования (Interleave).
Время доступа характеризует скорость работы микросхемы и обычно указыва-
ется в наносекундах после тире в конце наименования. На более медленных микросхе-
мах могут указываться только первые цифры (-7 вместо -70, -15 вместо -150),
на более быстрых статических “-15” или “-20” обозначает реальное время доступа
к ячейке. Часто на микросхемах указывается минимальное из всех возможных времен
311
Часть II. Моделирование схем и устройств
доступа, например, распространена маркировка 50 EDO DRAM вместо 70, или 45
вместо 60, хотя такой цикл достижим только в блочном режиме, а в одиночном рея
ме микросхема по-прежнему имеет время доступа 70 или 60 нс. Аналогичная сит
ция имеет место и в маркировке РВ SRAM: 6 вместо 12 и 7 вместо 15. Микросхо
SDRAM обычно маркируются временем доступа в блочном режиме (10 или 12 нс).
ИМС памяти реализуются в корпусах следующих типов:
DIP (Dual In line Package — корпус с двумя рядами выводов) — классические мик;
схемы, применявшиеся в блоках основной памяти IBM PC/XT и ранних PC/AT, ci
час применяются в блоках кэш-памяти.
SIP (Single In line Package — корпус с одним рядом выводов) — микросхема с одн
рядом выводов, устанавливаемая вертикально.
SIPP (Single In line Pinned Package — модуль с одним рядом игольчатых выводов)
модуль памяти, вставляемый в панель наподобие микросхем DIP/SIP; применял
в ранних IBM PC/AT.
SIMM (Single In line Memory Module — модуль памяти с одним рядом контактов) —
модуль памяти, вставляемый в зажимный разъем; применяется во всех современ-
ных платах, а также во многих адаптерах, принтерах и прочих устройствах. SIMM
имеет контакты с двух сторон модуля, но все они соединены между собой, образу*
как бы один ряд контактов. На SIMM в настоящее время устанавливаются преиму-
щественно микросхемы FPM/EDO/BEDO.
DIMM (Dual In line Memory Module — модуль памяти с двумя рядами контактов) —
модуль памяти, похожий на SIMM, но с раздельными контактами (обычно 2x84 k
за счет чего увеличивается разрядность или число банков памяти в модуле. Приме-
няется в основном в компьютерах Apple и новых платах Р5 и Р6. На DIMM устанав-
ливаются микросхемы EDO/BEDO/SDRAM.
CELP (Card Egde Low Profile — невысокая карта с ножевым разъемом на краю) —
модуль внешней кэш-памяти, собранный на микросхемах SRAM (асинхронный) или
РВ SRAM (синхронный). По внешнему виду похож на 72-контактный SIMM, имеет
емкость 256 или 512 Кбайт. Другое название — COAST (Cache On ASTick — букваль-
но “кэш на Палочке”).
Модули динамической памяти кроме основных ячеек памяти, могут иметь до-
полнительные ячейки для хранения битов четности (Parity) для байтов данных; та-
кие SIMM иногда называют 9- и 36-разрядными модулями (по одному биту четности
на байт данных). Биты четности служат для контроля правильности считывания дан-
ных из модуля, позволяя обнаружить часть ошибок (см. разд. 9.7). Модули с битами
четности имеет смысл применять лишь там, где требуется повышенная надежность.
Для обычных применений подходят и тщательно проверенные модули без битов чет-
ности, однако при условии, что системная плата поддерживает такие типы модулей.
Проще всего определить тип модуля по маркировке и количеству микросхем
памяти на нем: например, если на 30-контактном SIMM две микросхемы одного ти-
па и еще одна другого, то две первых являются основными (каждая — по четыре
разряда), а третья предназначена для хранения битов четности (она одноразрядная).
В 72-контактном SIMM с двенадцатью микросхемами восемь из них хранят данные,
а четыре — биты четности. Модули с количеством микросхем 2, 4 или 8 не имеют па-
мяти для хранения битов четности.
312
Глава 9. Цифровые устройства
Иногда на модули ставится так называемый имитатор четности — микросхе-
ма-сумматор, выдающая при считывании ячейки всегда правильный бит четности;
предназначена для установки в платы, где проверка четности не отключается.
72-контактные SIMM имеют четыре специальные линии PD (Presence
Detect — обнаружение наличия), на которых при помощи перемычек может быть ус-
тановлено до 16 комбинаций сигналов. Линии PD используются в некоторых мате-
ринских платах для определения наличия модулей памяти в разъемах и их
параметров (объема и быстродействия). В большинстве универсальных плат произ-
водства “третьих фирм”, как и выпускаемые ими SIMM, линии PD не используются.
В модулях DIMM в соответствии со спецификацией JEDEC технология PD ре-
ализуется при помощи перезаписываемого ПЗУ с последовательным доступом
(Serial EEPROM) и носит название Serial Presence Detect (SPD). ПЗУ представляет
собой 8-выводную микросхему, размещенную в углу платы DIMM, а его содержимое
описывает конфигурацию и параметры модуля. Системные платы с набором микро-
схем (чипсетами) 440LX/BX могут использовать SPD для настройки системы управ-
ления памятью. Некоторые системные платы могут обходиться без SPD, определяя
конфигурацию модулей обычным путем.
Контрольные вопросы и задания
1. Какие существуют типы памяти?
2. Проведите моделирование ячейки статической памяти на рис. 9.46. Задачей мо-
делирования является выбор двоичных комбинаций для сигналов па входе ячей-
ки и регистрация результата на выходе ячейки с помощью индикатора IND.
3. На базе схемы на рис. 9.45 разработайте схему четырехразрядного ОЗУ с приме-
нением генератора слова. При этом в схеме на рис. 9.45 используйте только 4
младших адреса (два ио строкам и два по столбцам) и соответственно двухразряд-
ную шину данных (две входные и две выходные). К выходным шипам подключи-
те индикаторы.
4. Где в современных компьютерах используется память статического типа?
5. Чем отличается динамическая память от статической?
6. Какие типы динамической памяти используются в современных компьютерах?
". Что такое видеопамять и как она связана с характеристиками отображаемой на
дисплее информации?
8. Какие типы памяти используются в качестве видеопамяти?
9. Какое конструктивное оформление имеют микросхемы памяти?
10. Проведите испытания ОЗУ, схема которого приведена в файле ram.ca4.
9.13. Постоянные запоминающие устройства
Постоянные запоминающие устройства (ПЗУ) делятся на четыре типа [4, 5]:
♦ масочные, программируемые на заводе-изготовителе с применением специаль-
ных масок;
♦ однократно программируемые потребителем путем пережигания нихромовых
или поликремневых перемычек;
♦ многократно программируемые потребителем со стиранием записанной инфор-
мации ультрафиолетовым излучением;
♦ многократно программируемые потребителем с электрическим стиранием ин-
формации.
313
Часть II. Моделирование схем и устройств
Рассмотрим ПЗУ второго типа, которое состоит из дешифратора пх2° и под-
ключенных к его выходам схем ИЛИ с плавкими перемычками (рис. 9.48). ПЗУ со-
держит дешифратор 2x4 в виде подсхемы pzu_dcd (А, В - кодовые входы, Е — вход
разрешения, активный сигнал высокого уровня), к выходам которых можно под-
ключить четыре элемента 4ИЛИ с дополнительными устройствами. На рис. 9.48 пог
казаны два таких элемента, выполненных в виде отдельных подсхем pzu_nr.l
и pzu_un2. Хотя эти элементы одинаковы, наращивание их на схеме путем копир:
вания исключено из-за наличия пережигаемых перемычек: при наличии одноимен
ных подсхем пережигание перемычки в одной подсхеме автоматически приведет
к пережиганию такой же перемычки в другой. Поскольку программа не позволяет
копировать подсхемы с их переименованием, все их приходится выполнять отдель-
но. На схеме DO, D1 выходы младшего и первого разрядов.
Рис. 9.48. Схема двухразрядного ПЗУ
Рис. 9.49. Внутренняя структура подсхемы дешифратора
Дешифратор pzu ded (рис. 9.49) выполнен на трех элементах НЕ и четыр
элементах ЗИЛИ-НЕ на транзисторах (рис. 9.50).
Необходимость выполнения элементов дешифратора на транзисторах обы
пяется тем, что используемые в программе EWB модели цифровых ИМС не все;
позволяют подключать к ним обычные транзисторные схемы и, в частности, приз
няемые в рассматриваемом ПЗУ ячейки памяти в виде подсхемы pzu uni. Ее вн
ренняя структура аналогична структуре ячейки памяти, используемой в II
К155РЕЗ (рис. 9.51) [5]. В отличие от ИМС К155РЕЗ, в которой в качестве элемен
ИЛИ применяется многоэмиттерный транзистор, на рис. 9.51 используются отде.
314
Глава 9. Цифровые устройства
ные транзисторы Т1...Т4, эмиттеры которых через пережигаемые перемычки
S1...S4 (имитируются предохранителями на 10 мА) соединены с формирователем на
транзисторах Тб, Тб и стабилитроне D. Транзистор Тб и стабилитрон D используют-
ся только в режиме программирования и в рабочем режиме не оказывают влияния
на работу выходного каскада на транзисторе Тб (каскад с открытым коллектором),
поскольку транзистор Тб закрыт низким потенциалом на его базе (напряжение про-
боя стабилитрона D выбирается несколько больше напряжения питания транзисто-
ра Тб, подаваемого во второй подсхеме в точку D0 или D1 через резистор нагрузки).
а) б)
Рис. 9.50. Схемы элементов НЕ (а) и ИЛИ-ПЕ (б)
Рис. 9.51. Внутренняя структура ячейки памяти двухра.зрядногоо ПЗУ
Ячейка ПЗУ работает следующим образом. В исходном состоянии транзисто-
ры Т1...Т4 и Тб закрыты, и при подключенной к Тб нагрузке на его выходе D0
формируется сигнал логической единицы (около 4- 5 В). При подаче на вхо-
ды А, В дешифратора заданной кодовой комбинации, а на вход разрешения Е — сиг-
нала логической единицы, один из транзисторов Т1...Т4 откроется и на выходе D0
юрмируется сигнал логического нуля. Так, например, при А - В = 1 откроется
>анзистор Т4 и сигнал логической единицы с его эмиттера через перемычку S4 по-
•упит на делитель на резисторах R2, R3, транзистор Тб откроется, и на его выходе
315
Часть II. Моделирование схем и устройств
сформируется сигнал логического нуля. Очевидно, что и при любой другой двоичнст
комбинации будет происходить то же самое до тех пор, пока не будет разрушена со-
ответствующая перемычка.
Пережигание перемычек составляет суть программирования и осуществляет-
ся отдельно для каждого разряда (каждой ячейки) следующим образом:
♦ на входы Л, В (см. рис. 9.48) подается двоичная комбинация, соответствующая
адресу пережигаемой перемычки в программируемом разряде (в ячейке
pzu_unx, где х — номер ячейки);
4 к выходу ячейки Dx через резистор нагрузки (его сопротивление для конкрет-
ных ИМС указывается в документации, для К155РЕЗ составляет около 300 Ом
подключается источник напряжения 12,5 В, в результате чего стабилитрон D
пробивается и транзистор Т5 открывается;
4 на вход разрешения Е на короткое время подается сигнал логической единицы
при этом через один из открытых транзисторов Т1...Т2 и Т5 протекает ток, доста-
точный для пережигания соответствующей перемычки (длительность разрешаю^
щего сигнала на входе Е в промышленных программаторах может автоматическв
увеличиваться после нескольких неудачных попыток программирования однсг
и той же ячейки);
4- источник 12,5 В отключается; после раскрытия соответствующей подсхемы
можно убедиться, что перемычка действительно разрушена (в промышленных
программаторах этот процесс сводится к проверке записи программируем’
ячейки и при отрицательном результате производится повторное программиро-
вание при большей длительности разрешающего сигнала).
Заключительным этапом программирования серийных микросхем ПЗУ в про-
мышленных условиях является электротермотренировка, которая проводится чащ*
всего в течение 168 часов при повышенной температуре, после чего производится до-
полнительный контроль записанной информации. Если при этом обнаруживаете*
ошибка, допускается повторное программирование. Если ошибка снова повторяет-
ся, микросхема бракуется.
Для моделирования процесса программирования к программируемой схеме
необходимо подключить дополнительные элементы. Моделирование целесообразна
начинать с одноразрядного ПЗУ (рис. 9.52).
Следует отметить, что рассматриваемая модель ПЗУ (как на рис. 9.48, так и н»
рис. 9.52) достаточно капризна и при некоторых комбинациях входных сигнале»
моделирование не выполняется. Признаком невозможности моделирования являет-
ся отсутствие слева от включателя питания (в верхнем правом углу экрана) табл;
с индикацией временных интервалов отсчета. По истечении некоторого времени хо-
жет быть выдана рекомендация изменить установку погрешности моделирование
(по умолчанию она равна 1%). Целесообразно установить ее максимально возмож-
ной (10%) в меню Circuit (команда Analysis Options, параметр Tolerance). Целесооб-
разно также поварьировать сопротивлениями входных резисторов и резистор:®
нагрузки элементов НЕ и ИЛИ-HE (рис. 9.50), а также попробовать изменить пара-
метры транзисторов. В крайнем случае можно ограничиться простейшим случаем —
обойтись без дешифратора и использовать только одну ячейку памяти (см
рис. 9.51), подключив к выходу и к одному из ее входов дополнительные элементы,
как показано на рис. 9.52.
316
Глава 9. Цифровые устройства
ПЗУ с пережигаемыми перемычками используются чаще всего в качестве спе-
циализированных дешифраторов, например, для селекции УВВ.
ПЗУ с ультрафиолетовым стиранием используются в микропроцессорных си-
! стемах для хранения управляющих программ, в частности, для размещения BIOS
(Basic Input/Output System — основной системы ввода/вывода, записанной в ПЗУ,
отсюда ее полное название ROM BIOS) [22]. BIOS представляет собой набор про-
грамм проверки и обслуживания аппаратуры компьютера и выполняет роль посред-
ника между операционной системой (ОС) и аппаратной частью ПК. BIOS получает
управление при включении системной платы, тестирует саму плату и основные бло-
ки компьютера — видеоадаптер, клавиатуру, контроллеры дисков и портов вво-
да/вывода, настраивает чипсет платы и загружает внешнюю ОС. При работе под
I управлением DOS/Windows З.х/95/98 BIOS управляет основными устройствами,
при работе под OS/2, Unix, Windows NT BIOS практически не используется, выпол-
няя лишь начальную проверку и настройку.
О.ЗК2
Н Рис. 9.52. Модель ПЗУ с дополнительными элементами
Обычно на системной плате установлено только ПЗУ с системным (Main
I System) BIOS, отвечающим за саму плату и контроллеры FDD (флоппи-дисков), HDD
I (жестких дисков), портов и клавиатуры; в системный BIOS практически всегда вхо-
I дит System Setup — программа настройки системы. Видеоадаптеры и контроллеры
I HDD с интерфейсом ST-506 (MFM) и SCSI имеют собственные BIOS в отдельных ПЗУ;
I их также могут иметь и другие платы — интеллектуальные контроллеры дисков
и портов, сетевые карты и т.п.
Обычно BIOS для современных системных плат разрабатывается одной из спе-
I диализированных фирм: Award Software, American Megatrends (AMI), реже:
Phoenix Technology, Microid Research; в данное время наиболее популярны BIOS
фирмы Award. Некоторые производители плат (например, IBM, Intel и Acer) сами
разрабатывают BIOS для них. Иногда для одной и той же платы имеются версии
BIOS разных производителей, в этом случае допускается копировать прошивки или
I заменять микросхемы ПЗУ; в общем же случае каждая версия BIOS привязана
к конкретной модели платы.
Раньше BIOS помещался в однократно программируемые ПЗУ либо ПЗУ
с ультрафиолетовым стиранием; сейчас в основном выпускаются платы с электриче-
ски перепрограммируемыми ПЗУ (Flash ROM), которые допускают перепрограмми-
рование BIOS средствами самой платы. Это позволяет исправлять заводские ошибки
317
Часть II. Моделирование схем и устройств
в BIOS, изменять заводские установки по умолчанию, программировать собствен-
ные экранные заставки и т.п.
Тип микросхемы ПЗУ обычно можно определить по маркировке: 27хххх —
обычное ПЗУ, 28хххх или 29хххх — перепрограммируемые. Если на корпусе мик-
росхемы 27хххх есть прозрачное окно — это ПЗУ с ультрафиолетовым стираниеэс
если его нет — это однократно программируемое ПЗУ, которое можно лишь заме-
нить на другое.
Видео-ПЗУ (Video ROM) — постоянное запоминающее устройство, в которое
записаны видео-BIOS, экранные шрифты, служебные таблицы и т.п. ПЗУ не исполь-
зуется видеоконтроллером напрямую, к нему обращается только центральный про-
цессор в результате выполнения программ, записанных в том же ПЗУ. На многий
современных видеокартах устанавливаются электрически перепрограммируем
ПЗУ (EEPROM, Flash ROM), допускающие перезапись пользователем под управле-
нием специальной программы из комплекта карты.
ПЗУ необходимо только для первоначального запуска видеоадаптера и работы
в режиме DOS, Novell Netware и других ОС, функционирующих преимуществен»
в текстовом режиме; ОС Windows, OS/2 и им подобные, работающие через собствен-
ные видеодрайверы, не используют ПЗУ для управления адаптером либо использ
ют его только при выполнении программ для DOS.
При создании видео-BIOS все разработчики придерживаются рекомендаций
VESA и VBE. VESA (Video Electronics Standards Association — ассоциация стандар-
тизации видеоэлектроники) — организация, выпускающая различные стандарт-
в области электронных видеосистем и их программного обеспечения. VBE (VESA.
BIOS Extension — расширение BIOS в стандарте VESA) — дополнительные фу?-
ции видео-BIOS по отношению к стандартному видео-BIOS для VGA, позволяющие
запрашивать у адаптера список поддерживаемых видеорежимов и их параметров
(разрешение, цветность, способы адресации, развертка и т.п.) и изменять эти пара-
метры для согласования адаптера с конкретным монитором. По сути, VBE являет
ся унифицированным стандартом программного интерфейса с УЕЗА-совместимымя
картами: при работе через видео-BIOS он позволяет обойтись без специализирован-
ного драйвера видеокарты.
Контрольные вопросы и задания
1. Какие существуют типы ПЗУ и где они используются?
2. Что такое BIOS для компьютера, видеоконтроллера, накопителя на жестком маг-
нитном диске (винчестера) и других периферийных устройств?
3. Какие типы ПЗУ используются для хранения программ BIOS?
4. Используя схему на рис. 9.52, проведите моделирование процесса программиро-
вания ПЗУ с пережигаемыми перемычками.
5. Составьте схему ПЗУ на базе двухразрядного ПЗУ на рис. 9.48 и проведите мсз₽-
лирование процесса программирования одной из его ячеек памяти.
9.14. Арифметико-логическое устройство
В разд. 9.2 уже упоминалась ИМС арифметико-логического устройства (АЛТI
74181 (К155ИПЗ) в связи с возможностью использования ее в качестве четырехрвИ
рядного сумматора. Там же указывалось, что эта ИМС обеспечивает 32 режима ра't-
ты АЛУ в зависимости от состояния управляющих сигналов на входах М, SO...S3
318
Глава 9. Цифровые устройства
Показанная на рис. 9.53 схема на базе этой ИМС позволяет оперативно реализовать
все упоминавшиеся режимы.
Рис. 9.53. АЛУ на ИМС 74181
Возможные режимы задаются с помощью переключателей 0, 1, 2, 3 для пода
чи сигналов 0 (“земля”) или 1 (4- 5 В) на входы управления SO, SI, S2, S3. В положе-
нии переключателя М, показанном на рис. 9.53 (сигнал 0 на входе М), выполняются
16 арифметических операций (16 комбинаций сигналов SO...S3) с учетом переноса
по входу Сп (переключатель С в показанном на рис. 9.53 положении) или без учета
переноса (сигнал 0 на входе Сп переключателя С). При переводе ключа М в другое по-
ложение (на входе М сигнал 1) выполняются 16 логических операций, задаваемых
теми же переключателями 0...3.
Значения четырехразрядных операндов А и В задаются с помощью генератора
слова и в шестнадцатеричном коде отображаются на алфавитно-цифровых индика-
торах. На выходах F0...F3 результат суммирования отображается индикатором
F. При коде 1111 на этих выходах и при равенстве операндов выход А = В перево-
дится в единичное состояние. Поскольку этот выход представляет собой каскад
с открытым
коллектором,
то на него подается питание 4- 5 В через резистор 1 кОм.
•ыход А = В совместно с выходом переноса CN 4- 4 и выходом Р подтверждения пе-
еноса используются для формирования признаков А>В и А<В с помощью дополни-
!льных логических элементов UI, U2, U3.
Изменяя состояния сигналов на управляющих входах, можно промоделиро-
вать большинство функций АЛУ, используемых в микропроцессорах. Приведем пе-
чень этих функций.
Логические функции (на входе М сигнал 1) выполняются поразрядно, перено-
сы не учитываются.
Код 0000 на входах S3, S2, SI, S0; при этом выполняется логическая функция
V — данные с входов А передаются на выходы F с инверсией, может быть использо-
319
Часть II. Моделирование схем и устройств
вана в команде СМ А (здесь и далее используется мнемоника команд микропроцессо-
ров семейства 80хх фирмы Intel);
0001 — (А + В)'— поразрядная операция ИЛИ с инверсией над операндами А и В;
0010 — А'В — операция И инвертированного операнда А и операнда В;
ООН — 0 — нет операции;
0100 — (АВ)' — операция И с инверсией;
0101 — В'— инверсия операнда В;
0110 — АЕ В — операция ИСКЛЮЧАЮЩЕЕ ИЛИ, команда XRA;
0111 — АВ'— операция И над операндами А и инверсией В;
1000 — А' + В — операция ИЛИ над инверсией А и операндом В;
1001 — (А + В)' — операция ИЛИ с инверсией;
1010 — В — передача на выход операнда В;
1011 — АВ — операция И, команда ANA;
1100— 1;
1101—А+В' — операция ИЛИ над инверсией В и операндом А;
1110 — А + В — операция ИЛИ, команда ORA;
1111 — А — передача на выход операнда А.
Арифметические операции (М = 0) без переноса (Cn “ 1) и с переносом (Сп - 0.
данные приводятся в круглых скобках):
0000 — А — передача на выход операнда (А + 1 — суммирование операнда с 1 пере-
носа, команда инкремента);
0001 — А + В — операция суммирования без учета переноса, команда ADD ((А + В»
+ 1 — суммирование с учетом переноса, команда ADC);
0010 — А + В' — операция суммирования операнда А с инверсией операнда В бег-
учета переноса ((А + В') + 1 — то же, но с учетом переноса);
ООН-----1(0);
0100 — А + АВ' (А + (АВ)' + 1). Далее мы от комментариев воздержимся в надежде
что из вышеизложенного все и так очевидно;
0101 — (А + В) + АВ'((А + В) + АВ' + 1);
ОНО — А - В - 1, команда SBB (А — В, команда SUB);
0111 - АВ'- 1((АВ)');
1000 — А + АВ(А + В + 1);
1001 — А + В, команда ADD (А + В + 1);
1010 — (А + В') + АВ ((А + В') + АВ + 1);
1011 — АВ-1(АВ);
1100 —A + A(A +А+ 1);
1101 — (А + В) + А((А + В) + А + 1);
1110 — (А + В') + А ((А + В') + А + 1);
1111 —A-1(A).
320
Глава 9. Цифровые устройства
Контрольные задания
1. Проведите моделирование всех перечисленных выше режимов АЛУ (рис. 9.53),
предварительно составив неповторяющиеся комбинации на выходе генератора
слова.
2. Дополните операции без комментариев описанием выполняемых ими функций.
3. Проанализируйте систему команд микропроцессора 18080 (КР580ИК80) и воз-
можность использования в них логических функций и арифметических опера-
ций ИМС 74181.
11 Зак. 206
321
Часть II. Моделирование схем и устройств
10. Устройства на
операционных усилителях
Значительное число аналоговых схем прикладной радиоэлектроники в на-
стоящее время во многих случаях выполняется на операционных усилителях (ОУ*
[19, 23—28]. Это стало возможным не только в связи с возросшей доступность»
ОУ, но и благодаря ряду их достоинств (универсальность, существенное упроще-
ние межкаскадных и межблочных связей, повышение возможностей микромини-
атюризации аппаратуры и др.), способствующих ускорению и повышению
качества разработки РЭА различного назначения.
10.1. Масштабирующие преобразователи
Масштабирующие преобразователи применяются, в частности, для унифика-
ции выходного сигнала первичного измерительного преобразователя (ИП) к стан-
дартному уровню для дальнейшего преобразования в цифровую форму и обработка
в микропроцессорных системах управления или измерения. Такие преобразователе
по существу являются усилителями, которые преимущественно выполняются на ОУ
в интегральном исполнении, при этом чаще всего используются три схемы включе-
ния ОУ (рис. 10.1).
Усилитель на рис. 10.1, а называется инвертирующим по той причине, что его
выходной сигнал находится в противофазе с входным. Его коэффициент усиления
по постоянному току в первом приближении (см. разд. 4.10) определяется формулой
К„„ = R3/R1, а в диапазоне частот:
K(jw)-K./(l+j(0M»h (10.li
где К„— усиление на постоянном токе; 0),р — граничная частота ОУ по уровню О,7О7Ке.
Коэффициент усиления по постоянному току неинвертирующего усилителя
(рис. 10.1, б) в первом приближении равен Ко11 ~ 1 + R3/R1, а в диапазоне частот опре-
деляется выражением (10.1). Частным случаем неинвертирующего усилителя являет-
ся повторитель напряжения (рис. 10.1, в) с единичным коэффициентом передачи; о=
обладает весьма высоким входным сопротивлением и используется для согласования
высокоомных ИП с последующими вторичными ИП с низкоомным входом.
а) б) в)
Рис. 10.1. Инвертирующий (а), неинвертирующий (б) усилитель и повторитель напряжения (в
на ОУ
Одной из важных характеристик усилителей являются их частотные характе-
ристики. Для сравнительного анализа различных усилителей на ОУ по этому пара-
метру воспользуемся схемой на рис. 10.2, а, которая содержит ОУ МС1456.
функциональный генератор и измеритель амплитудно-частотных и фазо-частотных
характеристик (АЧХ-ФЧХ). Для оценки рабочего диапазона частот усилителя изме-
ряют его АЧХ и определяют верхнюю граничную частоту по уровню 0,707, что соот-
322
Глава 10. Устройства на операционных усилителях
ветствует спаду усиления на -3 дБ. Из АЧХ усилителя на ОУ МС1456 (рис. 10.2, б)
видно, что диапазон частот по уровню -3 дБ составляет 0...376 кГц.
а)
Рис. 10.2. Усилитель на ОУ MCI456 (а) и его АЧХ (б)
б)
Весьма важными характеристиками ОУ являются смещение нуля и паразит-
ные входные токи. Эти параметры определяют точностные характеристики таких
устройств, как аналоговые вычислительные машины, разнообразная измеритель-
ная техника и т.п.
Согласно [23] для инвертирующего усилителя выходное напряжение, вызван-
ное напряжением смещения нуля определяется выражением:
= VJ1 + R3/R1), (10.2)
а вызванное входными токами Iu и их разностью I„ff — соответственно выражениями:
U* = UR2 - Rl||R3||Ri), (10.3)
U«b = Ipf,R3, (10.4)
где значок |j означает параллельное включение сопротивлений, Ri — входное сопро-
тивление ОУ.
Для моделирования влияния дестабилизирующих факторов на выходное на-
пряжение ОУ используется схема на рис. 10.3. Поскольку в процессе эксперимента
придется варьировать параметры ОУ, для предотвращения порчи библиотечного
компонента целесообразно организовать новую библиотеку, скопировав в нее вы-
бранный компонент, например, ОУ МС1456. Кроме того, необходимо учитывать, что
для используемой модели ОУ (см. разд. 4.10) входные токи по каждому входу опре-
деляется как 1Ы1 = lbs + Ios/2 и = lbs - Ios/2.
Моделирование целесообразно проводить в следующем порядке:
♦ в режиме редактирования характеристик ОУ установите значения lbs = los - 0,
а для = Vos выберите значения 1, 3, 5, 10 мВ и с помощью мультиметра из-
мерьте соответствующие им выходные напряжения U„m; полученные данные
сравните с результатами расчетов по формуле (10.2);
♦ установите Vm = Vos = 0, los 0, а для lbs выберите 1е-10, Зе-10, 5е-10,1е-9 А и для
этих значений измерьте и сравните с данными расчетов по формуле (10.3);
в случае их расхождений попытайтесь объяснить причину, используя эквивалент-
ную схему на рис. 4.68 (заметим, что формула (10.3) получена в предположении,
что входные токи имеют одинаковое направление — или втекающие или выте-
кающие из входных зажимов ОУ в зависимости от типа используемых во входных
каскадах транзисторов);
♦ установите V<* = Vos = 0, lbs = 0 и для los выберите 1е-10, Зе-10, 5е-10 А; для каж-
, дого значения los измерьте Гw; и сравните с данными расчетов по формуле (10.4);
1*
323
Часть II. Моделирование схем и устройств
повторите опыт при lbs = 1е-9 А, после чего сделайте вывод о взаимном влиянии
los и lbs.
R3
IMft
Рис. 10.3. Схема для исследования влияния напряжения смещения и паразитных входных токов
Заметим, что при использовании ОУ в разнообразных ИН размерность и обозна-
чения коэффициента передачи зависят от значений и величин входного и выходного
сигналов, например, S = — носит название коэффициента преобразования на-
пряжения в ток; W = Р1И./11Х — коэффициент преобразования тока в мощность. В част-
ном случае, когда входное и выходное значения сигналов являются однородными,
коэффициент передачи называют коэффициентом усиления, при этом различают: ко-
эффициент усиления по напряжению К, — U^/U^, коэффициент усиления по дюку
К, * Твмж/1„, коэффициент усиления по мощности Кр = Р^/Р^ и соответственно в лога-
рифмических единицах Кц = 201g(Ueux/U„), К, = 201g(I11MX/IIol), Кр = 101g(PFUX/P„).
Контрольные вопросы и задания
1. Что такое масштабирующий преобразователь, какие схемы используются для
его реализации?
2. Используя описанную выше методику определения рабочего диапазона частот
ОУ, проведите с помощью схемы на рис. 10.2 сравнительный анализ ОУ следую-
щих типов: LF157 (К140УД23), LM108 (К140УД14), LM358 (К140УД5)
и МС1456 (К140УД6). Выберите ОУ с максимальной граничной частотой.
3. Проведите моделирование влияния напряжения смещения пуля и паразитных
входных токов ОУ на его выходное напряжение, используя схему на рис. 10.3.
Напомним, что входные токи модели ОУ по каждому входу различны и опреде-
ляются формулами Ibcl = lbs + Ios/2; Ibc2 = lbs - Ios/2 (см. разд. 4.10). Для из-
мерения входных токов используйте микроамперметры.
4. Назовите тип ОС, используемой в инвертирующем усилителе на ОУ и эмиттер-
ном повторителе (параллельная, последовательная, по току, по напряжению).
5. Какое влияние оказывает нестабильность сопротивления резисторов RI, R3 на
стабильность коэффициента усиления?
6. Используя уточненную формулу Кои = Ко/[1 + Ko(Rl/R3)] (см. разд. 4.10),
для схемы на рис. 10.3 рассчитайте изменение коэффициента передачи при ис-
пользовании перечисленных в п. 2 ОУ при изменении сопротивления резистора
R1 на ±10% и при изменении Ко = А (см. диалоговое окно ОУ) на ±30%. Резуль-
таты расчета сравните с результатами моделирования.
7. Проведите анализ и моделирование усилителей, представленных в схемных фай-
лах audiodsn.са4 и riaa.ca4.
8. Для усилителя на рис. 10.4 коэффициент усиления К = Uo/Ui = R2/R1 “ 1000. Сле-
довательно, при входном напряжении 1 мВ выходное напряжение должно быть
равно 1 В, а вольтметр показывает 500 мВ. Объясните причину такого явления. * -
324
Глава 10. Устройства на операционных усилителях
Рис. 10.4. Инвертирующий усилитель
10.2. Корректор нелинейности датчика.
В автоматических системах управления и измерительной технике исполь-
зуются корректирующие звенья различного назначения, в частности, нелинейные
(см. гл. 15) для корректировки характеристики ИП датчиков. В качестве примера
рассмотрим устройство линеаризации характеристики датчика, используемого для
измерения влажности зерна и реализующего наиболее надежный и простой способ
измерения сопротивления на постоянном токе. Нелинейность такого датчика прояв-
ляется в области малых значений влажности, где зависимость сопротивления от со-
держания влаги носит логарифмический характер [19]. Это позволяет представить
эквивалентную схему датчика в виде последовательно включенных резистора Rd
и диода Dd (рис. 10.5, а). Корректирующее звено выполнено на операционном уси-
лителе OU, в цепь отрицательной обратной связи которого включен резистор Rk по-
следовательно с диодом Dk. Для наблюдения эффекта линеаризации введен
переключатель Л, который нажатием клавиши Л клавиатуры замыкает диод Dk.
Рис. 10.5. Эквивалентная схема корректора нелинейности датчика и его характеристики
Для получения передаточной характеристики рассматриваемого устройства
используются функциональный генератор в режиме пилообразного сигнала и осцил-
лограф в режиме развертки В/A, при котором выходной сигнал Uo, поступающий на
вход канала В, разворачивается сигналом с функционального генератора, поступаю-
щим на вход канала А.
Результаты моделирования при выключенном корректирующем диоде (в по-
ложении переключателя А, показанном на рис. 10.5, а) приведены на рис. 10.5, б, в,
из которого видны искажения выходного сигнала (рис. 10.5, б) и передаточной ха-
рактеристики (рис. 10.5, в), вызванные нелинейностью датчика в области неболь-
325
Часть II. Моделирование схем и устройств
шой влажности, т. е. при низких уровнях сигнала на выходе датчика (при анализе
осциллограмм и коэффициента передачи не забывайте, что используется инвертиру-
ющий усилитель).
а)
Рис. 10.6.
Осциллограмма выходного напряжения (а) и передаточная характеристика (б) дат-
чика при включенной коррекции
При переводе выключателя А в нижнее положение (коррекция включена) ис-
кажения выходного сигнала устраняются, а передаточная характеристика не имеет
характерного излома, вызванного нелинейностью датчика (см. рис. 10.6, а, б).
Для более сложной коррекции могут быть использованы универсальные функцио-
нальные преобразователи, рассмотренные в гл. 15.
Контрольные вопросы и задания
1. С какой целью осуществляется линеаризация характеристик датчиков?
2. Путем анализа данных на рис. 10.5, б, в определите, при каких параметрах вы-
ходного сигнала генератора получены эти данные, если учесть, что нелинейность
датчика проявляется в наибольшей степени при низких уровнях сигнала.
3. Проведите моделирование схемы на рис. 10.5, а при различных типах диодов Dd
и Dk. При моделировании необходимо учесть, что диоды работают в прямо сме-
щенном режиме и их вольтамперная характеристика в таком включении описыва-
ется выражением: I - Io[exp(U/(p) - 1] или U = 1п(1Д + 1), где 1„ — обратный
(тепловой) ток; (р — температурный потенциал р—«-перехода, при температуре
20‘С он равен 26 мВ. Каким параметром диода в приведенной формуле необходимс
варьировать, чтобы при моделировании добиться положительных результатов?
4. Проведите моделирование схемы на рис. 10.5, а при сопротивлении датчика
100 Ом (учтите рекомендации п. 3).
5. Почему передаточные характеристики датчика изображены на экране осцилло-
графа не в первом, а в четвертом квадранте?
1О.З. Дифференциальные и мостовые усилители
Дифференциальные усилители (ДУ) находят применение в качестве масшта-
бирующих преобразователей для датчиков с малым выходным сигналом в условиях
сильных промышленных помех, например, термопар, тензометров сопротивлений,
емкостных датчиков, датчиков биотоков и т.п.
Простейшая схема ДУ изображена на рис. 10.7, а. Делитель напряжения на
входе используется для выравнивания коэффициентов усиления сигналов U1 и U2.
при этом выходное напряжение определяется выражением: Uo -• (U2 - U1)R2/R1.
Схема па рис. 10.7, а находит достаточно широкое применение, хотя и облада-
ет одним недостатком, заключающемся в сравнительно низком входном сопротивле-
нии. Если этот недостаток имеет существенное значение, то применяют схему на
326
Глава 10. Устройства на операционных усилителях
рис. 10.7, б, в которой он устранен за счет использования двух ОУ [27]. В этой схеме
входное сопротивление ДУ равно входному сопротивлению ОУ; при RI = R2 - R вы-
ходное напряжение усилителя Uo = 2(U2 - U1). Сопротивление R3 выбирается из ус-
ловия минимизации влияния паразитных входных токов усилителей; в первом
приближении R3 = R1||R2.
Рис. 10.7. Схема ДУ на одном (а) и двух (б) ОУ
Недостатком ДУ на рис. 10.7, б является ограниченный коэффициент усиле-
ния, налагаемый условием RI = R2 = R. Этого недостатка лишена схема с тремя ОУ
(рис. 10.8), называемая часто инструментальным усилителем; его выходное напря-
жение определяется очевидным выражением: Uo = -(U2 - U1)R2/R1, справедли-
вость которого подтверждается результатами моделирования.
Рис. 10.8. Схема инструментального ДУ
Обычные схемы инвертирующего и неинвертирующего ДУ одинаково усили-
вают полезный сигнал и наведенные помехи, при этом ДУ значительно ослабляет
синфазные помехи. Степень ослабления синфазных напряжений определяется ко-
эффициентохМ ОУ.
В качестве примера оценим помехозащищенность схемы на рис. 10.9, а при сле-
дующих значениях параметров: входной дифференциальный сигнал U2 - U1 = 10 мВ
(частота 500 Гц); синфазная помеха (ее причиной может послужить так называе-
мая продольная или помеха общего вида — см. разд. 16.7) Un = U2 — U1 - 10 В (ча-
стота 50 Гц); примем типичное для ОУ значение = 80 дБ = 10 000;
при указанных на схеме значениях сопротивления резисторов коэффициент усиле-
ния напряжения К_ = 1. Для полезного сигнала получаем Uo - 10 мВ, для синфаз-
ной помехи — Uo = UnK„/Kw <ф “ 10-1/10000 = 1 мВ. В моделируемой схеме
(рис. 10.9, а) полезный сигнал Uc формируется импульсным генератором (скваж-
ность сигнала равна 2, амплитуда импульса 10 мВ, подключение источника Uc
к дифференциальным зажимам UI, U2 в программе EWB не допускается). Параме-
тры напряжения помехи Un можно варьировать в широких пределах, в том числе
менять и фазу, что часто встречается на практике, когда не удается полностью сим-
метрировать токопроводящие провода. В предположении, что такая асимметрия
имеет место, для ее имитации в верхнем источнике напряжение помехи увеличено
на 5 мВ. Полученные при этом результаты испытаний показаны на рис. 10.9, б.
Дифференциальные усилители, включенные в мостовую схему и преобразую-
щие приращение сопротивления в напряжение, называются мостовыми. Такие уси-
327
Часть II. Моделирование схем и устройств
лители применяются при использовании датчиков, включаемых по мостовой схеме.
Различают мостовые усилители с нелинейной и линейной характеристиками.
Рис. 10.9.
Схема для моделирования подавления синфазной помехи (а) и результаты ее испы-
таний (б)
а)
б)
Схема усилителя первого типа (рис. 10.10, а [24]) составлена из резисторов R
и резистивного ИП R 4- г, где г — приращение сопротивления ИП в результате воз-
действия контролируемого параметра. В общем случае мост может состоять из ком-
плексных сопротивлений в зависимости от типа ИП (емкостного, индуктивного
или чисто резистивного), а его питание осуществляться от источника Up как посто-
янного, так и переменного тока. Выходное напряжение схемы на рис. 10.10, а опре-
деляется выражением [24]:
Uo = rUpRl/R[R(2 + R/Rl) + r(l + R/Rl)]. (10.5)
Зависимость Uo от г нелинейна, как и для любого неравновесного моста. Поэто-
му такая схема применяется только при малых относительных приращениях r/R.
Мостовая схема на рис. 10.10, б относится к классу линейных. Ес выходное на-
пряжение определяется выражением [24]:
Uo = -г Up/R(R + RI). (10.5а).
Рис. 10.10. Мостовой усилитель с нелинейной (а) и линейной (б) амплитудными характеристиками
Контрольные вопросы и задания
1. Что такое синфазная помеха, как она проявляется в дифференциальном, инвер-
тирующем и неинвертирующем усилителях?
328
Глава 10. Устройства на операционных усилителях
2. Проведите моделирование ДУ на рис. 10.9, а при напряжении помехи в обоих ка-
налах 10 В. Измерьте напряжение помехи на выходе (выполняется при мини-
мальном значении полезного сигнала, наприхмер, 1 мкВ). Если результаты
измерения не будут соответствовать данным расчета, объясните причину (внима-
тельно просмотрите список параметров выбранного ОУ, обратив особое внимание
на значение К<.^). При отсутствии такого параметра выберите другой тип ОУ.
3. Какая разница между дифференциальными и мостовыми усилителями?
4. Для схемы на рис. 10.10, а с помощью формулы (10.5) рассчитайте зависимость
Uo = F(r) при изменении г в диапазоне 0,01...0,5 кОм и затем проверьте модели-
рованием при напряжении питания моста Up 1 В. Найдите ошибку в этой схе-
ме, сравнив ее со схемой на рис. 10.9, а. После определения ошибки выберите
сопротивления резисторов моста такими, чтобы они не оказывали существенно-
го влияния на коэффициент передачи ДУ.
5. Проведите моделирование схемы на рис. 10.10, б и проверьте справедливость вы-
ражения (10.5а). Объясните, за счет чего в этой схеме обеспечивается линейная
зависимость выходного напряжения от приращения сопротивления г.
6. Недостатком усилителя на рис. 10.8, б является фиксированное значение коэф-
фициента передачи. Попытайтесь усовершенствовать схему этого усилителя
с целью устранения отмеченного недостатка. Для этого необходимо обеспечить
для сигнала Uoi единичный коэффициент передачи через ОУ 2 при одинаковых
значениях (например, 10) коэффициента передачи для сигналов U2 и U1.
7. Проведите моделирование дифференциального усилителя, представленного
в схемном файле instru.ca4.
10.4. Аналоговые вычислительные устройства
К базовым аналоговым вычислительным устройствам относятся сумматор, ин-
тегратор и дифференциатор. Они используются в различных измерительных преоб-
разователях и корректирующих звеньях, а также при моделировании систем
управления. Как правило, эти устройства выполняются на базе ОУ по схеме инверти-
рующего усилителя (рис. 10.1, а), обеспечивающего максимальную точность.
R1 R< С
а) б)
Рис. 10.11. Схемы двухвходового сумматора (а) и интегратора (б)
Сумматор. Схема двухвходового сумматора представлена на рис. 10.11, а.
Каждый вход сумматора соединяется с инвертирующим входом ОУ через взвешива-
ющий резистор (RI, R2,..., Rn). Инвертирующий вход называется суммирующим
узлом, поскольку здесь суммируются все входные токи и ток обратной связи. Как
и в обычном инвертирующем усилителе, напряжение на инвертирующем входе рав-
но нулю (вследствие действия ООС), следовательно, равен нулю и ток, втекающий
в ОУ. Таким образом,
Is = II + 12 +... + In и II = U1/R1,12 = U2/R2,..., In = Un/Rn.
329
Часть II. Моделирование схем и устройств
Так как напряжение на инвертирующем входе примерно равно нулю, то
Uo Is Rs. В таком случае пос-ле преобразований получаем выражение для выходно-
го напряжения сумматора в следующем виде:
Uo = -Rs(Ul/Rl + U2/R2 +... + Up/Rn).
Интегратор — это электронная схема, выходной сигнал которой пропорцио-
нален интегралу от входного. Принципиальная схема простого аналогового интегра-
тора показана па рис. 10.11, б. На этой схеме конденсатор в цепи обратной связи ОУ
подсоединен между суммирующим входом и выходом интегратора. Для определе-
ния выходного напряжения интегратора при постоянном напряжении Ui на его вхо-
де воспользуемся формулой (4.10) из разд. 4.10, в которой К(р) = А (коэффициент
усиления ОУ без ОС), Zl(p) = R, Z2(p) = 1/рС, р — оператор Лапласа. В таком случае
получаем Uo(p) = A-B Ui/(p + В), где В = A R C. Оригиналом полученного выражения
является формула Uo(t) = A Ui[l - exp(-t-B)]. Разлагая экспоненциальный член
в ряд и ограничившись первыми тремя членами разложения (из-за ничтожно малых
значений остальных), получим Uo(t) = (Ui t/RC)( 1 - t/2A R C). Нетрудно убедиться,
что при достаточно большом значении А и реальных значениях времени интегриро-
вания (t « 2A-R-C) вторым слагаемым можно пренебречь. В таком случае выходное
напряжение интегратора Uo(t) = Uit/RC. Заметим, что если принятое допущение по
каким-либо причинам не выполняется, то слагаемое t/2ARC используется для
оценки точности интегрирования.
Таким образом, при воздействии постоянного входного напряжения Ui напря-
жение на выходе интегратора является линейной функцией времени. Если напряже-
ние Ui действует неопределенно долгое время, выходное напряжение Uo будет
изменяться до тех пор, пока не достигнет величины напряжения насыщения ОУ
(в этом можно убедиться после включения схемы). Это происходит потому, что по
постоянному току интегратор является усилителем с разомкнутой петлей ОС. Заме-
тим, что в интеграторах с большими постоянными времени RC должны использо-
ваться ОУ с малыми входными токами и конденсаторы с малыми токами утечки.
Рис. 10.12. Схема интегратора с имитацией режимов ввода начальных условий, интегрирова-
ния и хранения (а) и результаты его испытаний (б)
На практике работа интегратора обычно состоит из трех этапов: ввод началь-
ных условий, интегрирование и хранение результата интегрирования. Схема интег-
ратора с имитацией этих режимов приведена на рис. 10.12, а. Для ввода начальных
условий (заряд интегрирующего конденсатора С до напряжения Uio « Uy R2/Rl) ис-
пользуется ключ-таймер К1, который срабатывает через 1 с после включения схемы
и удерживается в замкнутом состоянии 1 с. Через 2 с после включения срабатывает
ключ К2 и начинается процесс интегрирования, который длится 3 с, после чего ин-
тегратор переводится в режим хранения (см. рис. 10.12, б).
330
Глава 10. Устройства на операционных усилителях
Дифференциатор — антипод интегратора по функциональному назначению;
его выходной сигнал пропорционален скорости изменения во времени входного сиг-
нала Ui, т. е. Uo = -RC(dUi/dt). При практической реализации дифференциатора
(см. рис. 10.13, а) возникают проблемы с обеспечением его устойчивости, поскольку
такое устройство является системой второго порядка и в нем возможны возникнове-
ния затухающих колебаний на определенных (обычно высоких) частотах, что под-
тверждается наличием резонансного “всплеска” на его АЧХ (рис. 10.13, б).
В модифицированной схеме дифференциатора (рис. 10.14, а) дополнительно
введен резистор Ri, который сглаживает АЧХ дифференциатора и тем самым пре-
дотвращает возникновение паразитных колебаний. Сопротивление резистора Ri оп-
ределяется из выражения [18]: Ri = VR/2tcFoKo, где 2 nF.,К,. — произведение
коэффициента усиления на ширину полосы пропускания ОУ (этот параметр часто
называют добротностью ОУ). При указанном на рис. 10.14, а значении Ri АЧХ диф-
ференциатора приобретает вид, показанный на рис. 10.14, б, откуда видно, что уси-
ление на частоте 39 кГц уменьшилось почти на 30 дБ (см. рис. 10.13, б), а это
означает, что на этой частоте паразитные колебания будут уменьшены на 30 дБ.
а)
Рис. 10.13. Схема идеального дифференциатора (а) и его АЧХ (б)
Рис. 10.14. Практическая схема дифференциатора (а) и его ЛЧХ (б)
Основным критерием при выборе ОУ для дифференциаторов является его бы-
стродействие: нужно выбирать ОУ с высокой максимальной скоростью нарастания
выходного напряжения и высоким значением произведения коэффициента усиле-
ния на верхнюю граничную частоту (т. е. большой площадью усиления). Однако это
не исключает необходимости использования дополнительного резистора Ri.
При проектировании интеграторов и дифференциаторов существенное значе-
ние имеет также и выбор типа конденсатора. Поскольку выбор чаще всего ограничи-
вается конденсаторами с диэлектриком, то в таком случае необходимо иметь в виду,
что они обладают свойством неконтролируемого накопления зарядов. Это явление
называется абсорбцией, сущность которого заключается в следующем.
331
Часть II. Моделирование схем и устройств
При кратковременном замыкании полностью заряженного конденсатора “на-
коротко”, точнее, на малое сопротивление, емкость С (основная часть емкости, обус-
ловленная быстрой поляризацией) разрядится. В то же время емкость Са (часть
емкости, обусловленная медленной поляризацией, т. е. абсорбцией заряда) не успе-
ет разрядиться, так как скорость ее разряда будет определяться большой постоянной
времени Ca(Ra + Ry), где Ry — сопротивление утечки. После размыкания обкладок
конденсатора остаточный заряд емкости Са медленно перераспределяется между ем-
костями Са и С и создаст некоторое напряжение на обкладках конденсатора. Это ос-
таточное напряжение составит лишь некоторую часть начального напряжения
и после достижения максимального значения будет постепенно спадать со временем
за счет саморазряда конденсатора.
Отношение остаточного напряжения к зарядному напряжению, выражен-
ное в процентах, называется коэффициентом абсорбции Ка. Величина Ка зависит
от условий испытания и прежде всего от времени заряда Т1, времени закорачива-
ния Т2 и времени ТЗ установления остаточного напряжения U«T. Обычно выбира-
ют Т2 = 2... 5 с; при дальнейшем его увеличении величина Ка заметно снижается;
увеличение TI и Т2 приводит к возрастанию Ка. Обычно указывают значения Ка
при Т1 = ТЗ = 5...15 мин. Для многих типов конденсаторов эти значения не дают
правильного представления о максимально возможном значении коэффициента
абсорбции, которое может быть получено при длительной зарядке, порядка де-
сятков часов, и таком времени ТЗ, которое соответствует максимальному UO<T.
С увеличением емкости конденсатора скорость нарастания напряжения UICT
уменьшается, а потому при небольших значениях времени ТЗ величина Ка снижает-
ся. При достаточно больших значениях ТЗ величина Ка от емкости не зависит.
Величина коэффициента абсорбции представляет интерес не только при про-
ектировании устройств автоматики и измерительной техники, в которых остаточ-
ный заряд на конденсаторах может существенно искажать результаты измерений,
но и техники безопасности при обслуживании установок с применением высоко-
вольтных конденсаторов. Поэтому такие установки обычно снабжаются специаль-
ными разрядными сопротивлениями или другими разрядными устройствами,
обеспечивающими нужную степень безопасности. В некоторых случаях разрядные
сопротивления встраиваются непосредственно в конденсатор. При выборе разряд-
ных сопротивлений обычно исходят из требования, чтобы за время не более 30 с
с момента отключения конденсатора напряжение на его выводах упало до безопас-
ного значения.
Для серийно выпускаемых конденсаторов Ка при Т1 = 15 мин и ТЗ = 3 мин на-
ходится в пределах от 0,01% для фторопластовых до 15% для керамических, а при
Т1 = 25 ч и ТЗ = 5...10 ч соответственно 0,05 и 47% [40].
Схема для исследования абсорбционных процессов (рис. 10.15, а) содержит
источник Ui испытательного постоянного напряжения, зарядный R1 и разрядный
R2 резисторы и программно-управляемые переключатели SI, S2, предназначенные
для задания необходимых временных интервалов Т1 и Т2. Напомним, что для этих
переключателей задаются (относительно момента начала запуска моделирования,
т. е. после включения выключателя в верхнем правом углу) следующие временные ин-
тервалы: Time on (Ton) — время включения и Time off (Toff) — время выключения,
т. е. время включенного состояния ключа равно Toff - Топ. Для рассматриваемой схе-
мы эти параметры имеют следующие значения: время включения — 0,1 (5,1) с,
время выключения 5 (6,1) с (в скобках указаны значения параметров для ключа
S2), т. е. Т1 = 5 с, Т2 = 1 с.
332
Глава 10. Устройства на операционных усилителях
Из результатов моделирования на рис. 10.15, б видно: если время ТЗ выбрать
из условия ТЗ - Т2 = 1 с, то остаточное напряжение составит около 3 В, т. е. ко-
эффициент абсорбции в данном случае равен Ка = 100Uc<T/Ui = 100-3/10 = 30%.
S1
01s Uo
а)
Рис. 10.15. Схема для моделирования абсорбционных процессов в конденсаторах (а) и результа-
ты осциллографических измерений (б)
Схема для воспроизведения поступательного движения
Рис. 10.16.
Рассмотрим несколько примеров применения аналоговых вычислительных
устройств для моделирования некоторых задач элементарной физики.
Поступательное движение описывается выражением: S S„ + Vot + at2/2, где
So — путь, пройденный к моменту t = 0; Ve -• начальная скорость; а — ускорение;
t — текущее время. В схеме для моделирования (рис. 10.16) первое слагаемое при-
веденной формулы имитируется источником постоянного напряжения Us; если
пройденный путь измерять в метрах, то, следовательно, масштаб модели по этому
параметру К, = м/В. Второе слагаемое характеризует равномерное поступательное
движение и имитируется источником Uv и интегратором на элементах R, С, OU1,
выходное напряжение которого определяется выражением: Uov = (Uv/RC)t, где
RC — постоянная времени, с (в данном случае RC = 10й-10й - 1 с). Третье слагаемое
характеризует равноускоренное поступательное движение и имитируется источни-
ком Ua и двумя интеграторами на 0U2 и OU3. Напряжение на выходе первого инте-
гратора UI = (Ua/RC)t. Поскольку второй интегратор выполняет операцию типа
333
Часть II. Моделирование схем и устройств
Jt-dt = t2/2, то Uoa = (Ua/2R2C*)t2. Все три слагаемые подаются на входы суммируг
щего усилителя на OU4, выходное напряжение которого Uo = K„Us + Kv(Uv/RC)t
K,(Ua/2R2C2)t2.
Переключатели S, V, А, управляемые одноименными клавишами клавиа1
ры, позволяют проводить моделирование различных видов поступательного
движе-
ния в той или иной комбинации; в частности, в положении переключателей,
показанном на рис. 10.16, имитируется равноускоренное движение, траектория ко-
торого показана на рис. 10.17, откуда видно, что при So = -10 м (отрицательное зна-
чение выбрано для более удобного размещения траектории на экране осциллографа),
при t = 6 и 9 с пройденный путь составляет 1,075 и 10,138 м соответственно, что
совпадает с расчетным значением.
Рис. 10.17. График пути для раиноускоренного движения
Схема на рис. 10.16 может быть использована также для моделирования дви-
жения тела с учетом его массы. Однако при этом целесообразно рассмотреть другую
схему, одновременно продемонстрировав возможность упрощения схемы на
рис. 10.16. Такая схема показана на рис. 10.18, а: ее упрощение заключается в ис-
пользовании двухвходового интегрирующего усилителя на OU2, что позволяет ис-
ключить один интегратор и сумматор. Однако при этом исключается и возможность
одновременного наблюдения на осциллографе траекторий от двух слагаемых выра-
жения для пройденного пути, которое в рассматриваемом случае имеет вид:
S •= Vot gt2/2, где g 9,81 м/с2 — ускорение свободного падения. “Машинным” эк-
вивалентом этого уравнения является выражение Uo = (Uv/RC)t - (Ua/2R2C2)t2. Ре-
зультаты моделирования показаны на рис. 10.18, б, откуда видно, что полное время
в пути составляет Т2 = 2,855 с, максимальная высота “траектории” VB1 = 9,983 м,
а время, при котором она достигается, равно Т2 - Т1 = Т2/2 = 1,43 с. Проверим ре-
зультаты моделирования. Полетное время определяется из равенства V..t = gt2/2,
откуда t = 2V0/g = 28/9,81 = 2,854 с; при максимальной высоте скорость равна ну-
334
Глава 10. Устройства на операционных усилителях
лю, поэтому Vo = gt, откуда tm = Vo/g = 14/9,81 = 1,427 с; максимальная высота тра-
ектории получается при t e tr„ и, как нетрудно подсчитать, равна 9,9 м. Таким об-
разом, имеет место практически полное совпадение результатов моделирования
и расчета. Причем, рассмотренные параметры траектории являются характерными
для движения тела, брошенного под углом к горизонту. Единственное, что не уда-
ется смоделировать, так это угол бросания: он автоматически определяется слагае-
мым Uv/RC - V„.
а)
Рис. 10.18. Схема модели (а) и траектория (б) движения тела, брошенного иод углом к горизонту
Неравномерное поступательное движение может быть промоделировано с помо-
щью рассмотренных выше схем, однако вместо источников постоянного напряжения
необходимо использовать источники с соответствующим законом изменения их на-
пряжения во времени. В качестве примера на рис. 10.19, а приведена схема источни-
ка со ступенчатым изменением выходного напряжения (осциллограмма на
рис. 10.19, б). Высота каждой ступеньки задается источниками U1...U4, а их пере-
ключение осуществляется программируемыми переключателями 1...4, время вклю-
чения которых Топ выбрано одинаковым для всех переключателей и равным 0 с,
а время выключения Toff = 2, 4, 8, 14 с для переключателей 1, 2, 3, 4 соответственно
(указанные параметры задаются в диалоговом окне для таких переключателей). После
включения моделирования все переключатели переводятся в положение, противопо-
335
Часть II. Моделирование схем и устройств
ложное показанному на рис. 10.19, а, затем они последовательно, начиная с первого,
переводятся через заданное время в исходное состояние. Обращаем внимание на то.
что полярность источника U3 противоположна полярности остальных источников.
Рис. 10.19. Схема формирователя ступенчатого напряжения (а) и осциллограмма его выходно-
го напряжения (б)
Контрольные вопросы и задания
1. Какие функции может выполнять интегратор, кроме основного назначения?
2. Проведите расчет выходного напряжения двухвходового сумматора на
рис. 10.11, а при указанных на схеме параметрах и сравните полученные данные
с результатами моделирования.
3. Проведите моделирование интегратора по схеме на рис. 10.12, а при С = 2 нФ,
Uy = 2 В, Ui = 200 мВ. Результаты моделирования интегратора сравните с ре-
зультатом расчета по формуле: Uo(t) = Uit/RC - UyR2/Rl.
4. Проведите моделирование дифференциаторов на рис. 10.13 и 10.14; исследуйте
влияние на его АЧХ коэффициента усиления ОУ при разомкнутой отрицатель-
ной обратной связи и частоты единичного усиления (параметры А и Fu в окне ус-
тановки параметров ОУ).
5. Исследуйте зависимость коэффициента абсорбции Ка от промежутков времени
Т1 и Т2 для схемы на рис. 10.15, а; в качестве остаточного напряжения исполь-
зуйте его значение в момент Т2 + 1 с.
10.5. Активные фильтры
Фильтрующие элементы используются в блоках питания для фильтрации сиг-
налов, в качестве корректирующих звеньев в системах управления и т.п. Фильтры
делятся на два класса — пассивные и активные, причем основным отличием активно-
го фильтра является наличие усилительного элемента — обычно это ОУ. Если в филь-
тре содержится один реактивный элемент (емкость или индуктивность), то такой
фильтр называется фильтром первого порядка, если два — то второго порядка, и т.д.
Наиболее распространенным пассивным фильтром первого порядка является
интегрирующая RC-цепь (см. гл. 6), входящая в состав рассмотренного выше интег-
ратора, который может рассматриваться как активный низкочастотный фильтр пер-
вого порядка. Этот же фильтр в технике электропитания называется Г-образным,
в аудиотехнике — фильтром нижних частот (ФНЧ), а в технике управления — кор-
ректирующим или интегрирующим звеном [29]. Следует отметить, что фильтры на
базе RC-цепей обладают своеобразной дуальностью. Если в RC-фильтре поменять ме-
стами элементы R и С, то получим фильтр верхних частот (ФВЧ); примером такого
преобразования может служить рассмотренный в разд. 10.4 дифференциатор.
336
Глава 10. Устройства на операционных усилителях
Классической схемой пассивного фильтра второго порядка является последо-
вательная RLC-цепь (см. гл. 6). Если в такой цепи выходной сигнал снимать с кон-
денсатора, то получим ФНЧ второго порядка, а если с индуктивности, — то ФВЧ.
При практической реализации RLC-фильтров (особенно низкочастотных) наиболь-
шие трудности возникают с изготовлением катушек индуктивности, их экранирова-
нием, а при больших значениях индуктивности с проблемой массы
и геометрических размеров. С появлением ОУ эти проблемы были решены с исполь-
зованием активных RC-фильтров. Появились так называемые безындуктивные час-
тотные фильтры.
Поскольку с активными фильтрами первого порядка мы уже познакомились
в предыдущем разделе на примере интегратора и дифференциатора, то далее основ-
ное внимание будет уделено активным фильтрам второго порядка, многообразие
схемных реализаций которых следует из их обобщенного коэффициента передачи,
который в операторной форме имеет вид [23]:
К(р) = (Ьо 4- Ъ.р + Ьгр2)/(а0 + а,р + а2р2).
Из этого выражения получаем формулы для коэффициента передачи ФНЧ
при Ь, = Ь2 — О, ФВЧ — при b0 “ bj = 0, полосового фильтра (ПФ) — при Ьо = Ь2 = 0, ре-
жекторного фильтра (РФ) — при bt - 0. При практической реализации таких филь-
тре наибольшее распространение получили схемы с симметричным Т-образным
мостом и многоконтурной обратной связью [23]. Для таких фильтров модуль и аргу-
мент коэффициента передачи
|К(jco)| = А/[(04 + co2co02(d2 - 2) + Ио4]1'2;
(р = В = -arctg{[2 - «/(до + (4 - d2)I/2]/d} - arctg{[2 - co/w° - (4 - d2),/2]/d}, (10.6)
где (0 текущее значение частоты; w0 — частота среза; d - Дсо/О)0 — коэффициент за-
тухания; Дсо — полоса пропускания по уровню 0,707 (-3 дБ).
Коэффициент А в формуле (10.6) определяется типом фильтра: для ФНЧ
А = Коюо2, для ФВЧ А = Косо2, где Ко = 1 — коэффициент передачи при со =- 0 (для ФНЧ)
и 0) » со0 (для ФВЧ); фазовые углы ср = В (для ФНЧ) и ф = я + В (для ФВЧ).
Пример реализации активных фильтров на базе симметричных Т-мостов по-
казан на рис. 10.20, а, где на ОУ 1 выполнен ФНЧ, а на ОУ 2 — ФВЧ. Параметры
ФНЧ определяются по формулам [23]: со0 - 1/R2(C1C2)V2 = 1/106(10’-510 l0)l/2 =
= 1414,2 с1 = 225,2 Гц; d = (0.R2 C1 = 2co0R2 C2 = 1414,21040° - 1,414, т. е. коэф-
фициент передачи на частоте О)о будет равен 1/d - 0,707 - -3 дБ, что согласуется с ре-
зультатами моделирования (см. АЧХ на рис. 10.20, б).
Параметры ФВЧ при Cl = С2 = С определяются по формулам [23]: со0 =
1/C(R1R2)1/2 - 1/10*(Ж2-10Т = 707 с1 - 112,6 Гц; d = 2(R1/R2)‘'2 = 2(10’/210*)’'а =
= 1,414, т. е. коэффициент передачи на частоте со(1 будет равен 1/d = 0,707 = -3 дБ.
Для получения АЧХ ФВЧ (рис. 10.21, а) ключ Z на рис. 10.20, а переводится в нижнее
положение; к сожалению, из-за дискретности установки визирной линейки оказалось
невозможным установить ее на расчетное значение частоты соо. Если при этом ключ X
перевести в правое положение, то получим суммарную АЧХ последовательно вклю-
ченных ФНЧ-ФВЧ (рис. 10.21, б). Поскольку коэффициенты передачи фильтров при
’этом перемножаются, а их логарифмы складываются, то указанный на рис. 10.21, б
коэффициент передачи -1,95 дБ можно получить суммированием коэффициентов пе-
редачи, получаемых по АЧХ на рис. 10.20, б и 10.21, а на частоте 154 Гц.
Пример реализации активных фильтров на основе многоконтурной обратной
связи показан на рис. 10.22, а, где на ОУ 1 выполнен ФНЧ, а на ОУ 2 — ФВЧ. При
RI = R2 = R3 = R параметры ФНЧ в этом случае определяются по формулам [23]:
337
Часть II. Моделирование схем и устройств
Wo = 1/R(C1 С2)12 = 1/104109 5 10 “Г 2 = 4472,1 с * = 712,1 Гц; d = 3(С2/С1)12 =
= 3(5-10п/10*)‘2 = 0,671, т. е. коэффициент передачи на частоте w^ будет равен
1/d = 1,5 = 3,47 дБ, что согласуется с результатами моделирования (см. ЛЧХ на
рис. 10.22, б). Параметры ФВЧ при Cl = С2 = С определяются по формулам [23]:
Ко = С1/С2 = 1075-10’° = 2; Wo 1/(R1 R2C2C3)12 = 1/(10’-20 10°-5 10’МО °)‘2 =
= 316,2 с ’ = 50,35 Гц; d = (R1/R2)12[(С1/С2)1'2 + (СЗ/С2)1'2 + (С2/СЗ)1’2] =
- (10720 106)12[(10-*/5 Ю ’°)’ 2 + (1075 10 ’°)’2 + (510 ,0/10’)’2] - 0,79, т. е. коэффи-
циент передачи па частоте w0 будет равен Ko/d = 2,532 = 8,07 дБ. Для получения
АЧХ ФВЧ (рис. 10.22, в) ключ Z на рис. 10.22, а переводится в нижнее положение;
как и в первом случае, из-за дискретности установки визирной линейки оказалось
невозможным установить ее на расчетное значение частоты соо.
Рис. 10.20. Схемы ФНЧ и ФВЧ с Т-мостОм (а) и АЧХ ФНЧ (б)
б)
Рис. 10.21. ЛЧХ ФНЧ (а) и суммарная АЧХ ФВЧ-ФНЧ (б)
Из сравнения схем на рис. 10.20 и 10.22 видно, что фильтры с многоконтурной
обратной связью по числу элементов являются более простыми. Дополнительное уп-
рощение схемы достигается в фильтрах с повторителем напряжения на ОУ
(рис. 10.23). Для расчета параметров такого фильтра используются следующие фор-
мулы (для ФНЧ и ФВЧ): w0 - 1/(R1 R2 C2 СЗ)’2; d = (R2 C2/R1C1)’2 +
(R1C2/R2C1)12 + (R1C1/R2C2)12 - KO(R1C1/R2 C2)’2.
338
Глава 10. Устройства на операционных усилителях
Для полосовых фильтров коэффициент А = ci K-.ox^, а фазовый угол (р = л + В
(см. формулу (10.6)). Для их схемной реализации используются такие же КС-цепи,
как и в рассмотренных ФНЧ и ФВЧ.
Рис. 10.22. Схемы фильтров ФНЧ и ФВЧ на основе многоконтурной обратной связи (а) и их
АЧХ (б, в)
Рис. 10.23. Схемы фильтров ФНЧ и ФВЧ иа базе повторителя напряжения
Рис. 10.24.
Полосовой фильтр на базе Т-моста (а) и его АЧХ (б)
Полосовой фильтр па базе двойного Т-моста (рис. 10.24, а) обеспечивает высокую
добротность, однако при этом требуется поддерживать условие его баланса (Cl = 2С2;
R3 = R2/2), что может быть обеспечено только при использовании прецизионных рези-
сторов и конденсаторов. При условии выполнения баланса параметры фильтра рассчи-
339
Часть II. Моделирование схем и устройств
тываются по формулам [23]: Ко -- 2R4R2/R1(R4 + 2R2) = 2-10Ч072-10‘(10* 4- 2-10* • =
= 0,98; = (1 + 2R2/R4)5 2/R2 С2 = (1 + 2 10710е)’ 710410* = 101 с1 = 16,08 Пс
d = 2R2/R4(1 I 2R2/R4)12 = 2• 10‘/10e( 1 + 210710е)*2 = 0,0198; коэффициент передав
па частоте <д> равен K0/d = 49,5 = 33,9 дБ, т. е. расчетные данные достаточно хороню со-
гласуются с результатами моделирования (см. АЧХ на рис. 10.24, б). Заметим, что а ре-
зультате сопоставления результатов расчета и моделирования формула для К» был!
скорректирована (аналогичная формула в [23] справедлива только для 2R2 » R4).
Параметры ПФ с многопетлевой обратной связью (рис. 10.25) выбирают: •
с помощью формул [23]: Ко = R3/R1(1 4- С2/С1); ох, = [(1/R1 + 1/R2)/R3 Cl С2]
d = [1/(1/R1 4- 1/R2)-R3]* -[(С1/С2)12 4- (С2/С1)12].
R1
--VA-
Рис. 10.25. Полосовой фильтр с многопетлевой обратной связью (а) и его АЧХ (б)
Рис. 10.26. Полосовой фильтр с многопетлевой обратной связью и регулируемым затуханием -
и его АЧХ (б)
В ПФ на рис. 10.26 реализована возможность регулирования затухания и, сле-
довательно, полосы пропускания при неизменной резонансной частоте (в данном
случае — 22,8 Гц). Это достигается изменением коэффициента усиления К = R5/R4.
Параметры фильтра определяются формулами [23]:
К, = К[1 4 R1/R3 + (С2/С1)(1 4- R1/R2) 4- (1 - K)(R 1/R2)];
соо = [(1/R1 4- 1/R2)/R3C1 С2]12;
d-[R3/(l/Rl4- 1/R2)H[1/R14- 1,/R34-(1 -K)/R3XC1/C2)‘2 + (l/Rl 4- 1/R2XC2/C1) :
При использовании в ПФ положительной обратной связи удается реализо-
вать избирательное устройство с достаточно высокой добротностью. Схема такого
ПФ с использованием Т-моста показана на рис. 10.27, а. Резонансная частота ПС
= 1/R-C = 1/10410 я = 10000 с’1 - 1,58 кГц; Ко = 1 4- R2/R1 = 14- 2 10710,1 1 О’ =
= 2,961; d = (3 - Ко)/2 = 0,0]95; коэффициент передачи на резонансной частоте
K0/d = 151,85 = 43,6 дБ, т. е. расчетные данные согласуются с результатами моде
лирования на рис. 10.27, б.
Широкополосные полосовые фильтры можно реализовать путем последова-
тельного включения рассмотренных ФВЧ, ФНЧ или НФ. Если к АЧХ таких фильт-
340
Глава 10. Устройства на операционных усилителях
ров предъявляются специальные требования по неравномерности коэффициента пе-
редачи в полосе пропускания и крутизне, то в таком случае используются фильтры,
АЧХ которых описывается полиномами Баттерворта, Чебышева и Бесселя; для рас-
чета таких фильтров применяются специальные таблицы [23, 31].
R R
Рис. 10.27. ПФ с высокой добротностью
б)
Рис. 10.28. ФВЧ Баттерворта 6-го порядка (а) и его ЛЧХ (6)
Фильтры Баттерворта характеризуются максимально плоской АЧХ в полосе
пропускания. Управление величиной выходного напряжения и перестройка по часто-
те в широком диапазоне осуществляются в этих фильтрах проще, чем в других, по-
скольку при каскадном соединении все секции настраиваются на одну и ту же частоту.
Фильтры Чебышева обеспечивают наивысшую крутизну АЧХ в переходной
полосе частот. Однако при этом АЧХ в полосе пропускания приобретает колебатель-
ный характер. Чем больше неравномерность в полосе пропускания, тем выше кру-
тизна затухания в переходной полосе частот.
Фильтры Бесселя обладают максимально плоской характеристикой группо-
вого времени запаздывания (производная от ФЧХ по частоте) и линейностью ФЧХ
в полосе пропускания. Однако крутизна затухания фильтра невелика.
В качестве примера рассмотрим ВЧ-фильтр Баттерворта (рис. 10.28), построен-
ный на трех последовательно включенных ФВЧ по схеме (рис. 10.23) с тем отличием,
Что в усилителе каждой секции ФВЧ предусмотрена возможность установки коэффи-
341
Часть II. Моделирование схем и устройств
циента усиления за счет изменения сопротивления резисторов RI, R2, R3, что позво-
ляет изменять затухание каждой секции в соответствии с расчетным значением, при-
веденным в [23]. Частота среза каждой секции ФВЧ одинакова и равна 1/RC =
= 1/10* 10е = 100 с1 *= 15,92 Гц; согласно расчетным данным [23], в полосе пропуска-
ния фильтр имеет коэффициент передачи 12,4 дБ при крутизне АЧХ 120 дБ/дек.
Из АЧХ рассматриваемого фильтра (рис. 10.28, 5) видно, что частота среза (по
уровню 12,4 - 3 ~ 9,4 дБ) практически равна расчетной. Крутизна АЧХ, полученная
путем измерения коэффициента передачи на частотах 1 и 10 Гц, также соответству-
ет расчетному значению 120 дБ/дек.
Рис. 10.29. Режекторный фильтр (а) и его АЧХ (б)
В заключение рассмотрим режекторный фильтр (рис. 10.29, а) [23]. Он отно-
сится к фильтрам третьего порядка. Сопротивление резистора R1 выбирается из ус-
ловия RI = R/12; частота режекции со,, = 1/R C = 1/12-10‘- 10 я = 1443,4 с1 — 229,8 Гц
практически совпадает с полученным при моделировании (см. рис. 10.29, б); анали-
тическое выражение для затухания в работе [23] отсутствует; с уменьшением коэф-
фициента деления делителя (па выходе ОУ) затухание уменьшается.
Контрольные вопросы и задания
1. Какими недостатками обладают пассивные фильтры?
2. Просуммировав значения коэффициентов передач (в дБ) фильтров на рис. 10.22
на частотах 10... 1000 Гц, постройте суммарную АЧХ и проверьте результаты
проделанной работы па модели (ключи Z и X переводятся в положение, противо-
положное показанному на рис. 10.22, а).
3. Проведите расчет параметров фильтров на рис. 10.23 и проверьте их моделирова-
нием.
4. Проведите сравнительный анализ по крутизне АЧХ фильтров на рис. 10.20 10.23
при затухании d = 1,414.
5. Достоинством фильтров на рис. 10.23 является возможность введения элемен-
тов, обеспечивающих регулировку затухания при неизменной частоте среза.
Введите в схему такие элементы и проведите ее испытания.
6. Проведите расчет параметров фильтров на рис. 10.25 и 10.26 и сравните по-
лученные данные с результатами моделирования, представленными на этих
рисунках.
7. Для фильтров на рис. ] 0.20—10.26 проведите расчет ФЧХ (см. формулу (10.6))
и полученные данные сравните с результатами моделирования.
8. Используя свойство дуальности, преобразуйте схему фильтра на рис. 10.28
в ФНЧ Баттерворта 6-го порядка (сопротивления резисторов R1...R3 остаются
без изменений).
342
Глава 10. Устройства на операционных усилителях
9. Разработайте схему ФВЧ Баттерворта 8-го порядка (на 4-х секциях), используя схе-
му на рис. 10.28 и следующие расчетные данные [23]: R1/R = 0,04; R2/R = 0,336;
R3/R = 0.89; R4/R =1,61. При этом фильтр должен иметь в полосе пропускания
коэффициент передачи 16,8 дБ при крутизне ЛЧХ 160 дБ/дек. Проверьте эти
данные на модели.
10. Выберите параметры ФНЧ-ВФЧ на рис. 10.20 таким образом, чтобы при их по-
следовательном включении суммарная АЧХ соответствовала АЧХ режектор-
ного фильтра.
11. Проведите анализ и испытание фильтров, представленных в схемных файлах
speech.са4, bass-amp.са4, b passl.ca4, riaa.ca4, 5ord-lo.ca4, 60notch.ca4,
univ-sta.ca4.
10.6. Логарифмические усилители
Логарифмические усилители применяются в сочетании с ИП, выходной сиг-
нал которых изменяется в широком диапазоне по амплитуде. Такие усилители ино-
гда называют компрессорами (например, в ядерной электронике), при этом они
являются скорее амплитудными ограничителями (“сжимателями”) сигналов с боль-
шими амплитудами, чем логарифмическими усилителями с заданными метрологи-
ческими характеристиками. Совершенно противоположные функции выполняют
антилогарифмические усилители (экспандеры): они усиливают сигналы большей
амплитуды и “подавляют” сигналы меньшей амплитуды (например, шумы на выхо-
де спектрометрических усилителей, используемых в сочетании с детекторами иони-
зирующих излучений).
В наиболее простом варианте логарифмический усилитель выполняется с ис-
пользованием полупроводникового диода (рис. 10.30). Собственно усилитель состо-
ит из ОУ OU2, токозадающего резистора R и диода D, включенного в цепь
отрицательной обратной связи; интегратор на OU1 служит для удобства проведения
эксперимента по определению амплитудной характеристики усилителя.
Рис. 10.30. Логарифмический усилитель с дополнительными элементами
Для создания усилителей с логарифмической амплитудной характеристикой
чаще всего используется прямая ветвь вольтамперной характеристики р—zz-nepexo-
да. Эта характеристика описывается зависимостью (см. разд. 4.7)
I = Io[exp(U/<p) - 1]. (10.7)
Если обеспечить
U»26 мВ, (10.8)
то в выражении (10.7) единицей можно пренебречь и, следовательно, U <p(lnl InIJ.
Поскольку I = Ui/R, выходное напряжение усилителя равно
Uo =-<pln (Ui/IOR). (10.9)
Для антилогарифмического усилителя (диод D и резистор R меняются места-
ми) Uo = -I„Rexp(Ui/<p).
343
Часть II. Моделирование схем и устройств
Моделирование логарифмического усилителя (рис. 10.30) целесообразно про-
водить в следующем порядке:
для диода D выберите Io = Is " 10 а А;
♦ в режиме В/А (выходной сигнал Uo, поступающий на вход В осциллографа, раз-
ворачивается по оси X входным сигналом Ui, поступающим на вход А) получите
амплитудную характеристику усилителя Uo f(Ui);
♦ в режиме ZOOM осциллографа измерьте выходное напряжение в 10 точках амп-
литудной характеристики;
4- сравните полученные данные с результатами расчета по формуле (10.9);
4- обратите особое внимание на справедливость формулы (10.9) на начальном уча-
стке амплитудной характеристики (с учетом допущения (10.8));
4- в случае неудовлетворительных результатов (расхождение значений Uo, полу-
ченных по амплитудной характеристике и рассчитанных по формуле (10.9)) по-
лучите отсчеты в 10 точках в режиме Y/Т (по значениям Ui и Uo) и повторно
проведите сравнительную оценку результатов расчета и моделирования;
4- при малых значениях Ui (единицы и десятки милливольт) для повышения точ-
ности измерений целесообразно поступить следующим образом: резистор R от-
ключается от интегратора и подключается к отрицательному зажиму источника
постоянного напряжения, выполняющего роль источника Ui, а к выходу OU2
подключается вольтметр, и амплитудная характеристика снимается “вручную”.
Контрольные вопросы и задания
1. В каких случаях используются логарифмические усилители?
2. Какие типы диодов наилучшим образом подходят для логарифмических усили-
телей (в качестве подсказки — эти диоды известны под именем их создателя,
см. Приложение 2)?
3. Проведите моделирование логарифмического усилителя на рис. 10.30 в рекомен-
дованном объеме и порядке.
4. Проведите анализ и моделирование усилителя типа компрессор/экспандер,
представленного в схемном файле сотехр.са4.
10.7. Компараторы
Компаратор является одним из важнейших элементов преобразовательной
техники, в частности, аналого-цифровых преобразователей, систем предельного
контроля и т.п.
Простейший компаратор (рис. 10.31, а) состоит из ОУ без обратной связи;
опорное напряжение Un подается на неинвертирующий вход ОУ, а на инвертирую-
щий вход поступает суммарный входной сигнал Ui' от источников Ui, Up (источник
Up имитирует напряжение источника помехи, о чем более подробно сказано ниже).
При Ui'>Un на выходе компаратора устанавливается напряжение Uo = -Us (отри-
цательное напряжение насыщения, см. рис. 10.31, б); в противоположном случае
(Ui'< Un) получаем Uo = 4- Us. Если поменять местами входы, это приведет к инвер-
сии выходного сигнала.
Компаратор должен переключаться из одного состояния в другое с максималь-
но возможной скоростью. В рассматриваемом компараторе ОУ используется с разо-
мкнутой петлей обратной связи, поэтому отпадает необходимость в частотнрй
коррекции (используется в реальных ОУ для обеспечения его устойчивости), кото-
рая приводит к увеличению времени срабатывания. Время срабатывания — это вре-
344
Глава 10. Устройства на операционных усилителях
мя, необходимое для переключения компаратора из одного состояния в другое (из
точки А в точку В передаточной характеристики на рис. 10.31, б). Максимальная
скорость нарастания выходного напряжения показывает, насколько быстро изменя-
ется выходной сигнал в процессе переключения.
Рис. 10.32.
б)
Рис. 10.31. Простейший компаратор напряжения (а) и его передаточная характеристика (б)
Осциллограммы входного (Л) и выходного (В) напряжений компаратора
в)
Компаратор с гистерезисом (о), его передаточная характеристика (б) и осциллограм-
мы входного (А) и выходного (В) сигналов
Рис. 10.33.
Б
Если напряжение Ui', поступающее на вход компаратора, содержит помеху
Up, то, как видно из осциллограмм на рис. 10.32, это приводит к ложным срабаты-
ваниям. Для их предотвращения применяют цепь положительной обратной связи,
за счет которой часть выходного напряжения подается на неинвертирующий вход.
Такой компаратор называется компаратором с гистерезисом, его принципиальная
Схема показана на рис. 10.33, а, а передаточная характеристика и осциллограммы
сигналов — на рис. 10.33, б, в.
345
Часть II. Моделирование схем и устройств
При введении в схему элементов положительной обратной связи (дел
тель на резисторах RI, R2) изменяется опорное напряжение. При высоком урс
не выходного напряжения +Us опорное напряжение Un возрастает на величи:
AU, = (Us - Un)Rl/(Rl + R2).
В результате компаратор будет переключаться из состояния с высоким уровне'
выходного напряжения при новом значении Un' = Un -I- AUt. Как только входное на-
пряжение Ui превысит опорное напряжение Un' (точка В на рис. 10.33, б), выход;
напряжение компаратора начнет уменьшаться и через резистор R2 передаваться
неинвертирующий вход, стимулируя дальнейшее падение выходного напряже:
За счет положительной обратной связи этот процесс происходит лавинообразно,
и кох-
паратор быстро переключается в противоположное состояние (точка С на рис. 10.33, 6Х
Поскольку на выходе компаратора действует теперь напряжение Uo - -Us, на его вхс -
по цепи обратной связи передается напряжение AU2 = -(Us + Un)Rl/(Rl + R2). В э:
случае устанавливается новое опорное напряжение для состояния с низким выходи;
уровнем (точка D на рис. 10.33, с?): Un' = Un + AU2.
Как видно из осциллограммы на рис. 10.33, в, после введения положительна
обратной связи составляющие помех во входном напряжении уже не вызывают ло:
ных срабатываний компаратора. Ширина петли гистерезиса 2AU изменяется варъ
рованием коэффициента передачи делителя па резисторах RI, R2.
Рис. 10.34. Схемы бистабильных элементов и гистерезисная передаточная характеристика
Компаратор с гистерезисом относится к классу бистабильных пороговых ус
ройств (триггеров Шмитта), которые в обобщенном виде могут быть представлет
в виде трех схем: с двумя (рис. 10.34, а) и одним (рис. 10.34, б, в) входами. Поро
срабатывания для схемы на рис. 10.34, а определяются выражениями [23]:
AUli = иифп + ро)/(1 - р0) + U2i(l - pu)/(l - PJ;
AU2i = -U„(p. 4 PJ/( 1 - p„) + Uli(l - po)/(l - P„),
где p.? = R1/(R1 г R2), p„ = R3/(R3 + R4) — коэффициенты отрицательной и полол
тельной обратной связи соответственно (рв > |30); U. — напряжение насыщения
(если они различны для положительной и отрицательной полуволны входного
пряжения, то это должно быть учтено при использовании приведенных формул).
346
Глава 10. Устройства на операционных усилителях
Пороги срабатывания для схем на рис. 10.34, б, в определяются соответствен-
но выражениями [23]:
AUi =' U,(R3/(R3 + R4); AUi - U„R3/R4.
Контрольные вопросы и задания
1. Что из себя представляет компаратор, в каких устройствах его применяют?
2. Проведите моделирование компаратора на рис. 10.31 при опорном напряжении
Un = 50 и 200 мВ.
3. Для компаратора на рис. 10.33 проведите моделирование при Un = 0,5, 0,6
и 0,7 В. Используйте полученные данные при проверке формулы для определе-
ния ширины гистерезиса AU “ 3,6Un-Rl/(Rl + R2) при напряжении насыщения
ОУ 5 В [24].
4. Какие преимущества имеет компаратор с гистерезисом?
5. Проведите испытания схем на рис. 10.34, а, б, в и при необходимости скорректи-
руйте формулы для определения порога их срабатывания. В качестве примера на
рис. 10.34, г, д приведены схема для таких испытаний и ее передаточная харак-
теристика, на которой ширина гистерезиса примерно равна удвоенному значе-
нию напряжения срабатывания.
10.8. Прецизионные выпрямители
Выпрямители используются для преобразования переменного напряжения в по-
стоянное. Простые диодные выпрямители обладают неудовлетворительными характе-
ристиками при выпрямлении напряжений, меньших 0,7 В, так как при этом диод
в прямом направлении обладает достаточно большим сопротивлением (см. разд. 8.3).
Для исключения этого недостатка в диодном выпрямителе используются ОУ.
На рис. 10.35, а показана схема однополупериодного выпрямителя, который
позволяет получать инвертированную копию отрицательной полуволны входного
сигнала Ui (см. осциллограммы на рис. 10.36, а). Когда Ui отрицательно, диод D1
смещен в прямом, a D2 — в обратном направлениях, и схема функционирует как
обычный инвертирующий усилитель с единичным коэффициентом усиления.
Для положительного напряжения Ui диод D1 заперт, a D2 находится в проводящем
состоянии, благодаря чему возникает отрицательная обратная связь, устанавливаю-
щая на выходе ОУ запирающее напряжение для диода D1.
Рис. 10.35. Одяополупериоднын (а) и двух полупер иодный (б) выпрямители
В прецизионном двухполупериодном выпрямителе (рис. 10.35, tf) положи-
тельная полуволна входного сигнала непосредственно передается на выход выпря-
мителя через цепь обратной связи. Когда входное напряжение больше нуля,
на выходе инвертирующего усилителя действует отрицательное напряжение (см. ос-
циллограммы на рис. 10.36, б). Поэтому диод D1 заперт и ОУ фактически не участ-
347
Часть II. Моделирование схем и устройств
вует в передаче входного сигнала. При отрицательной полуволне на входе схема
функционирует как обычный инвертирующий усилитель с коэффициентом переда-
чи R2/R1. В практических схемах симметрирование выходного сигнала выпрямите-
ля достигается с помощью резистора R3.
а) б)
Рис. 10.36. Осциллограммы входного (А) и выходного (В) напряжений однополупериодного (а)
и двухполупериодного (б) выпрямителей
Контрольные вопросы и задания
1. Какие ограничения имеют обычные диодные выпрямительные схемы?
2. Проведите моделирование выпрямителей на рис. 10.«35 при входных напряжени-
ях 1, 10 и 50 мВ.
3. Исследуйте влияние сопротивления резистора R<3 на симметрию положительной
и отрицательной полуволн выходного сигнала в схеме на рис. 10.35, б.
4. Проведите сравнительный анализ рассмотренных схем выпрямителей со схемой
обычного диодного выпрямителя, составленного из последовательно соединен-
ных источника переменного напряжения, диода и сопротивления нагрузки,
при входных напряжениях 10...800 мВ и сопротивлении нагрузки 0,1...10 кОм.
10.9. Фазочувствительные выпрямители
Фазочувствительные выпрямители (ФЧВ) находят широкое применение в си-
стемах управления, например, в системах автоподстройки частоты, в автопилотах,
а также в других системах, работающих в условиях высокого уровня помех.
Рассмотрим наиболее простую схему ФЧВ (рис. 10.37, а), выполненном на од-
ном ОУ; в качестве источника опорной частоты в нем использован генератор синусо-
идальных колебаний Uon, на выходе которого включено электромеханическое
ключевое устройство К с порогом срабатывания 0,1 В. Низкий порог срабатывания
при сравнительно большой амплитуде входного сигнала обеспечивает замыкание
и размыкание контакта практически при прохождении входного сигнала через
нуль. Осциллограммы сигналов при указанных на схеме параметрах генераторов по-
казаны на рис. 10.37, б.
Как видно из рис. 10.37, б, выходное напряжение состоит из отрицательных
полуволн входного синусоидального сигнала. Формирование выходного сигналу
происходит следующим образом (для простоты рассуждений будем манипулировать
амплитудным значением Um входного сигнала Ui). При положительной полуволне .
Ui ключ К замкнут и ОУ работает в режиме инвертирующего усилителя, при этом
его выходной сигнал Uo = -UmR2/Rl = -Um.
При отрицательной полуволне Ui ключ К разомкнут, при этом ОУ работает г
в режиме дифференциального усилителя, однако при различных коэффициентах пе- ।
редачи по инвертирующему и неинвертирующему входам. Выходное напряжение от
348
Глава 10. Устройства на операционных усилителях
инвертирующего и неинвертирующего входов будет определяться соответственно
выражениями: U+ = UeR2/Rl = Um и U- = -Um(l I R2/R1) = -2Ura, т. e. суммарный
выходной сигнал при отрицательной полуволне будет также равен Um, что соответ-
ствует приведенным на рис. 10.37, б осциллограммам.
б)
Рис. 10.37. Фазочувствительный выпрямитель (а) и осциллограммы его входного (А) и выходного
(В) напряжений при одинаковых значениях частоты входного и опорного сигналов (б)
Рис. 10.38. Осциллограммы входного (А) и выходного (В) напряжения ФЧВ при соотношении
частот входного и опорного сигналов 2:1
Контрольные вопросы и задания
1. В каких случаях используется ФЧВ?
2. Проведите моделирование ФЧВ по схеме на рис. 10.37, а при частоте опорного
сигнала 5 Гц, объясните осциллограмму выходного сигнала, показанную для
этого случая на рис. 10.38. Предлагается также получить осциллограммы для
фазы опорного источника 90 и 180 и проанализировать полученные результаты.
1O.1O. Устройства выборки и хранения
Одной из важнейших характеристик аналого-цифрового преобразования сиг-
налов является апертурное время — временной интервал, характеризующий неопре-
деленность момента преобразования входного аналогового сигнала и вызывающий
появление дополнительной (динамической) погрешности преобразования. Неопреде-
ленность выражается в том, что выходной код аналого-цифрового преобразователя
(АЦП) пропорционален не мгновенному, а усредненному за время преобразования
значению входного сигнала. Поскольку время преобразования для большинства
АЦП зависит от значения входного сигнала, то в качестве апертурного времени при-
нимается интервал, в течение которого входной сигнал изменяется на единицу млад-
шего разряда АЦП. Это накладывает определенные ограничения на скорость
изменения преобразуемого входного сигнала. Так, например, при времени преобразо-
вания 8-разрядного АЦП (п = 8) Т = 100 мкс (время от начала преобразования до мо-
349
Часть II. Моделирование схем и устройств
мента получения выходного кода) максимальная частота входного аналогового сиг-
нала не должна превышать значения
F = 1/(2тсТ 2П) = 6,2 Гц. (10.10)
Для уменьшения апертурной погрешности используются устройства выборки
и хранения (УВХ), работающие синхронно с АЦП. Основное назначение УВХ — за-
помнить мгновенное значение входного аналогового сигнала на время преобразова-
ния. В этом случае апертурное время определяется только быстродействием УВХ
и может составлять несколько наносекунд, а это означает, что частоту входного ана-
логового сигнала можно повысить на несколько порядков.
а)
Рис. 10.39. Устройство выборки и хранения (а) и осциллограммы его входного (А) и выходного
(В) напряжений (б)
Один из вариантов УВХ показан на рис. 10.39, а: оно состоит из ОУ OU1 с за-
поминающим конденсатором Ст в цепи отрицательной обратной связи и управля-
емого от источника Uy ключа К. При разомкнутом ключе УВХ находится
в режиме хранения выборки аналогового сигнала, подаваемой на вход АЦП (гори-
зонтальные площадки на осциллограммах рис. 10.39, б). Когда преобразование за-
канчивается, ключ К переводится в замкнутое состояние и на конденсаторе
запоминается очередная выборка аналогового сигнала. Напряжение на конденса-
торе Ст до момента перехода в режим хранения полностью повторяет по форме
входное напряжение, поскольку OU1 функционирует в режиме инвертирующего
усилителя с коэффициентом передачи К = R2/R1 - 1. Инвертирующий усилитель
на OU2 выполняет роль буферного.
Недостатком схемы на рис. 10.39, а является увеличение апертурного време-
ни из-за конечного времени заряда конденсатора Ст через резистор R1 (для серий-
ной ИС УВХ типа К1100СК2 это время составляет 100 нс). Однако этот недостаток
имеет и положительные свойства. Достоинством этой схемы является возможность
повышения помехозащищенности АЦП, если соответствующим образом выбрать ча-
стоту квантования (частоту источника Uy) и использовать алгоритмы цифровой
фильтрации сигналов при дальнейшей обработке выборок в управляющей микро-
ЭВМ. Простейший алгоритм такой фильтрации рассмотрим на примере уменьшения
влияния напряжения помехи сетевой частоты (50 Гц) и ее гармоник. Предположим,
350
Глава 10. Устройства на операционных усилителях
что полезный сигнал — постоянное напряжение Е„ на которое наложена такая поме-
ха. Непрерывный сигнал в этом случае можно представить как
Ео = Е, + EjSincoT + Ej8in2(oT + Е3 sin(3wT) +....
Если отсчет напряжения берется в момент времени Т1, то мгновенное значе-
ние напряжения, воспринимаемое ЭВМ, будет равно
Ео, - Е. + E,sina)T, + E2sin2(oT, + Ея sin3coT, +....
Если второй отсчет берется в момент времени Т2 - Т, + n/(i) (слагаемое л/со рав-
но половине периода сетевой помехи и является известной величиной), то напряже-
ние второй выборки равно
Ео2 = Е, + EiSin((oTj + л) + E2sin(wT, + 2л) + E3sin(wT1 + Зл) +...
Как видно из сравнения Ео, и Ео2, выборки нечетных гармоник помехи нахо-
дятся в противофазе. Если полученные отсчеты сложить и разделить на два, то ре-
зультирующий сигнал £₽ = £„ + E2sin2(j)T, +... будет состоять из полезного сигнала Es
и четных гармоник помехи, т. е. основная и все нечетные гармоники помехи оказыва-
ются полностью подавленными. Если далее использовать дополнительную фильтра-
цию полезного сигнала, то в этом случае необходимо отфильтровывать лишь
составляющие помехи с частотами 2(0 и выше.
Рассмотренный алгоритм подавления помех можно промоделировать, изме-
няя фазу источника опорного напряжения Uy и сравнивая осциллограммы выход-
ных сигналов на выходе схемы на рис. 10.39, а. Более детальное моделирование
можно провести, используя два УВХ (для получения двух выборок) и рассмотрен-
ный ранее суммирующий усилитель.
Контрольные вопросы и задания
1. Что из себя представляет устройство выборки и хранения и где оно находит при-
менение?
2. Проведите моделирование УВХ на рис. 10.37, а при входном напряжении 10
и 100 мВ.
3. Определите составляющую апертурного времени, вызванную конечным време-
нем заряда конденсатора Ст через резистор R1, и определите в связи с этим ог-
раничения на частотный диапазон входного сигнала по формуле (10.10).
4. Проведите моделирование УВХ па рис. 10.37, а в режиме подавления помех в со-
ответствии с вышеизложенной методикой цифровой фильтрации сигналов.
5. Подготовьте схему устройства цифровой фильтрации, состоящего из двух УВХ
и двухвходового сумматора, и проверьте ее работоспособность.
6. Разновидностью УВХ являются пиковые (амплитудные) детекторы, отслежи-
вающие входной сигнал до тех пор, пока не будет достигнуто максимальное
значение, после чего они автоматически переходят в режим хранения этого
значения. Составьте схему такого детектора на диоде и запоминающем конден-
саторе; в качестве источника входного сигнала частотой 2 Гц используйте
функциональный генератор, а в качестве устройства для периодической раз-
рядки конденсатора — ключ, управляемый напряжением частотой 1 Гц. Про-
ведите анализ и испытания схемы пикового детектора, представленного
в схемном файле peak_det.ca4.
351
Часть II. Моделирование схем и устройств
10.11. Усилители мощности
Усилители мощности используются не только в бытовой аппаратуре, но и для
управления исполнительными устройствами автоматических систем, в измеритель-
ных генераторах и т.п.
Один из вариантов такого усилителя показан на рис. 10.40, а. Усилитель со-
стоит из ОУ, охваченного отрицательной обратной связью через резистор Ro. На вы-
ходе усилителя включен комплементарный каскад на транзисторах VT1 и VT2
разной проводимости с низкоомной нагрузкой Rn, имитирующей сопротивление
оконечного устройства (например, громкоговорителя). Питание усилителя осуще-
ствляется от двух источников 1- U, -U. Конденсаторы СЬ выполняют роль фильтру-
ющих элементов, чаще всего их называют блокировочными: они уменьшают
помехи, возникающие в цепях питания при работе выходного каскада с низкоомной
нагрузкой, т. е. при больших выходных токах. Ключ А позволяет коммутировать
вход усилителя с выходом ОУ или выходом транзисторного каскада для моделирова-
ния двух режимов работы усилителя.
Выходной транзисторный каскад в схеме на рис. 10.40, а работает в режиме В,
для которого характерны искажения типа “ступенька”, показанные на осцилло-
граммах рис. 10.40, б для случая, когда ключ А находится в верхнем положении.
Рис. 10.40. Усилитель мощности (а) и осциллограммы его входного (В) и выходного (А) напря-
жений (б)
Следует заметить, что для оценки нелинейных искажений усилителей мощно-
сти наряду с коэффициентом нелинейных искажений используется также коэффи-
циент гармоник, представляющий собой корень квадратный из отношения
мощностей всех высших гармоник выходного сигнала к мощности первой гармони-
ки (к полной мощности — для коэффициента нелинейных искажений).
Контрольные вопросы и задания
1. Какие функции выполняет усилитель мощности?
2. Если напряжение питания +U увеличить на 1 В, как изменятся напряжения Uo
и Uo' (см. рис. 10.40, а)?
3. Если резистор обратной связи Ro с помощью ключа А переключить в точку Uo',
то показанные на рис. 10.40, б искажения существенно изменятся. Объясните
причину такого явления после проведения моделирования. В качестве подсказ-
ки отмстим, что переключение резистора Ro приводит к включению транзистор-
ного выходного каскада в цепь общей с ОУ обратной связи.
4. Проведите анализ и испытание схем усилителей, представленных в схемных
файлах audioamp.са4, pwramp.ca4, classb.ca4.
352
Глава 10. Устройства на операционных усилителях
10.12. Преобразователи напряжение-ток
Преобразователи напряжения в ток применяются в случае, когда ток в нагруз-
ке должен быть пропорционален входному напряжению и не зависеть от сопротив-
ления нагрузки. В частности, при постоянном входном напряжении ток в нагрузке
гакже будет постоянным, поэтому такие преобразователи иногда условно называют
стабилизаторами тока.
Простейшая схема стабилизатора тока, показанная на рис. 10.41, а, представ-
ляет собой инвертирующий усилитель, в котором нагрузка Rn включена в цепь от-
рицательной обратной связи ОУ. Ток в нагрузке будет равен Ui/Rl. Для уменьшения
нагрузки на источник входного напряжения он подключается к неинвертирующему
входу ОУ. Именно так и сделано в стабилизаторе тока на рис. 10.41, б, для которого
гок в нагрузке равен (Ui/Rl)( 1 + RI/R2)( 1 + R2/R4) [27].
В стабилизаторах тока на рис. 10.41 нагрузка не заземлена, что не всегда удобно.
3 этой точки зрения предпочтительнее стабилизатор тока с заземленной нагрузкой
'рис. 10.42). Ток в нагрузке Rn такого стабилизатора определяется формулой li = UiA/B,
где А = R1(R4 + R5)R2-R4; В = [R1(R4 + R5) - R2 R3]Rn + R1R5(R3 + R4) [27]. Усло-
вием независимости li от Rn является равенство R1(R4 + R5) = R2-R3. В таком случае
5удем иметь И = Ui-R2/(R1R5).
R2
?ис. 10.41. Преобразователь напряжение-ток на базе инвертирующего усилителя (а) и его усо-
вершенствованный вариант (б)
R2 R5
’нс. 10.42. Преобразователь напряжение-ток с заземленной нагрузкой
Отметим, что если в стабилизаторе на рис. 10.42 подавать Ui через резистор R1
ia инвертирующий вход ОУ, а резистор R3 заземлить, то при выполнении условия
^1(R4 I R5) - R2 R3 [43] ток в нагрузке только изменит знак.
Одним из многочисленных применений преобразователей являются преобразо-
ватели сопротивления в напряжение (ПСП), применяемые в сочетании с резистивны-
ми датчиками. Для построения ПСН обычно включают преобразуемое сопротивление
j качестве нагрузки стабилизатора тока. Тогда падение напряжения на этом сопро-
тивлении будет пропорционально его величине. На практике удобно использовать
1СН, имеющие малое выходное сопротивление. Этому требованию в наибольшей сте-
тени отвечает ПСН на основе стабилизатора тока, схема которого показана на
>ис. 10.41, а. Действительно, напряжение на выходе ОУ в этом стабилизаторе равно
JiRn/Rl. Следовательно, в качестве выходного напряжения ПСН можно использо-
вать не падение напряжения на резисторе Rn, а выходное напряжение ОУ. При этом
выходное сопротивление такого ПСН будет весьма низким, как и в любом усилителе,
шеющем отрицательную обратную связь по напряжению.
J Ък. 206
353
Часть II. Моделирование схем и устройств
Удобен для применения ПСН, выполненный на основе стабилизатора тока на
рис. 10.42. Такой ПСН характеризуется не только малым выходным сопротивле-
нием, но и возможностью заземления резистивного преобразователя. Если при-
нять R4 = 0 и R1-R5 = R2R3, то выходное напряжение ОУ в этом стабилизаторе
равно Uo = Ui Rn(l + R2/R1)/R3 [27].
Дополнительным достоинством ПСН на стабилизаторе (рис. 10.42) является
возможность скорректировать погрешность нелинейности прибора, обусловленную
нелинейностью характеристики датчика. Если выбрать R1-R5 > R2 R3, то зависи-
мость Uo от Rn будет нелинейной: чувствительность будет падать с ростом Rn. Если
же поменять знак неравенства, то, наоборот, чувствительность будет расти с ростом
Rn. Следовательно, выбирая знак и величину разности R1R5 - R2-R3, можно полу-
чить характеристику преобразования сопротивления в напряжение с компенсацией
нелинейности датчика.
Контрольные вопросы и задания
1. Какую функцию выполняют преобразователи напряжение-ток и сопротивление-
напряжение?
2. Схема измерителя сопротивления (ПСН) на стабилизаторе тока по схеме
рис. 10.41, а показана на рис. 10.43. Какими должны быть значения напряже-
ния Ui и сопротивления R1, чтобы при измерении выходного напряжения Uo по-
казания мультиметра совпадали с сопротивлением измеряемого резистора Rx
с коэффициентом кратности 10 *, где к любое целое число, в том числе и ноль.
Расчеты подтвердите моделированием.
Ви
Рис. 10.43. Схема измерителя сопротивления Rx
3. Дополните схему преобразователя на рис. 10.42 необходимыми контрольно-из-
мерительными приборами и проведите ее моделирование, выбрав номиналы ре-
зисторов с помощью приведенных выше формул.
4. Проверьте справедливость формул, относящихся к схемам на рис. 10.41, а, 10.42.
10.13. Амплитудные ограничители
На практике часто возникает необходимость ограничить уровень выходного
сигнала. Чаще всего это требуется при усилении слабых сигналов при наличии ин-
тенсивных импульсных помех, приводящих к перегрузке усилителя. Перегрузка
выражается в том, что под воздействием помехи усилитель насыщается и, следова-
тельно, не может выполнять свои функции в течение достаточно длительного време-
ни восстановления (необходимого для перехода обратно в линейный режим).
Амплитудные ограничители, как правило, выполняются по схемам
(рис. 10.44), где в качестве примера используются инвертирующий усилитель
(рис. 10.44, а), в цепи обратной связи которого использованы встречно включенные
стабилитроны D1 и D2, и дифференциальный усилитель (рис. 10.44, б), в котором за-
щитные диоды D1, D2 включены во входной цепи.
Напряжение стабилизации встречно включенных стабилитронов определяет
пределы ограничения выходного напряжения. При отрицательном входном напря-
жении Ui напряжение ограничения определяется напряжением стабилизации D1
354
Глава 10. Устройства на операционных усилителях
и падением напряжения на прямосмещенном стабилитроне D2, при положитель-
ном — наоборот. При наличии двух стабилитронов схема называется двусторонним
ограничителем, при наличии одного — односторонним. Односторонние ограничите-
ли используются также при согласовании аналогового устройства на ОУ с цифровы-
ми схемами. В этом случае напряжение стабилизации стабилитрона выбирается
равным напряжению сигнала логической единицы.
Рис. 10.44. Двусторонние ограничители
Для дифференциального усилителя сопротивления резисторов Rll, R12 рас-
считываются таким образом, чтобы при перегрузке падение напряжения на диодах
DI, D2 не приводило к насыщению ОУ.
Контрольные вопросы и задания
1. Для какой цели используются амплитудные ограничители?
2. Возможно ли включение цепочки стабилитронов на входе усилителя?
3. Подготовьте модель одностороннего ограничителя для согласования аналогового
устройства с цифровыми ИМС серии 155 (напряжение питания +5 В). В качест-
ве источника входного сигнала выберите функциональный генератор в режиме
однополярного сигнала, а в качестве регистрирующего прибора — осциллограф.
10.14. RC-генераторы
RC-генераторы на базе ОУ выполняются с использованием фазосдвигающих
или частотно-избирательных цепей.
Схема RC-генератора первого типа показана на рис. 10.45, a [48]. В ней обрат-
ная связь вводится через фазосдвигающую цепь лестничной структуры, состоящую
из резисторов R и конденсаторов С. Для получения требуемого коэффициента уси-
ления ОУ охватывается дополнительно частотно-независимой обратной связью че-
рез резистор R3.
Для возникновения автоколебаний необходимо, чтобы коэффициент усиле-
ния был больше единицы. В то же время для получения минимальных искажений
генерируемого сигнала необходимо, чтобы он был близок к единице. Для разреше-
ния этих противоречивых требований в генераторе вводится нелинейная обратная
связь с помощью диодов VD1 и VD2, которые начинают открываться только после
того, как амплитуда автоколебаний превысит постоянное запирающее напряжение
смещения, задаваемое с помощью делителей на резисторах RI, R2. При открывании
диодов глубина обратной связи увеличивается и коэффициент усиления уменьшает-
ся, что приводит к стабилизации амплитуды автоколебаний. Напряжения смеще-
ния диодов обычно подбираются при настройке.
Ориентировочное значение частоты колебаний генератора по схеме на
рис. 10.45, а определяется по формуле [48]:
F = l/(27tRCx'3) - 1/(2л510’410с\3) « 4,6 Гц.
12*
355
Часть II. Моделирование схем и устройств
Теперь рассмотрим результаты осциллографических измерений (рис. 10.45, 6\.
Из осциллограмм видно, что форма колебаний далека от идеальной. Период колебаний,
определяемый временным интервалом Т2-Т1 между визирными линейками, равен 37:
мс, тогда как по расчету он равен 218 мс. Такое несоответствие вполне возможно, тах
как использованная формула имеет ориентировочный характер (см. разд. 8.1).
б)
Рис. 10.45. RC-генератор с фазосдвигающей цепью (а) и осциллограмма его выходного сигнала (бi
Перестройка частоты автоколебаний цепочечных генераторов затруднена, по-
этому их обычно используют только в неперестраиваемых генераторах. Перестраи-
ваемые RC-генераторы чаще всего создаются па основе многокаскадного усилителя,
охваченного избирательно!! положительной обратной связью через мостовую цейь,
например, мост Вина. В такой схеме для получения синусоидальных колебаний оп-
ределенной частоты необходимо, чтобы условия возбуждения выполнялись только
для этой частоты. Усилители переменного тока, используемые в подобных гспера^о-
рах, имеют четное число каскадов, которые обеспечивают фазовый сдвиг выходного
напряжения по отношению к входному, кратный 360 . Анализ генератора с мостбм
356
Глава 10. Устройства на операционных усилителях
Вина показывает [48], что при этом необходимо еще обеспечить коэффициент обрат-
ной связи, примерно равный 1/3.
Рис. 10.46. Генератор на базе моста Вина с диодным ограничителем (а), стабилитронами (б) и ос-
циллограмма выходного сигнала (в)
На рис. 10.46, а приведена схема генератора с мостом Вина, взятая из каталога
схем программы EWB (схемный файл wienoscl.ca4). В ней коэффициент обратной свя-
- >зи R2/(R1 4- R3) действительно близок к 1/3. Для положительной полуволны выход-
ного напряжения (начиная с 5 В) он несколько меньше за счет нелинейной обратной
.связи на диоде D, принцип работы которой аналогичен схеме на рис. 10.4.5, а. Вариант
сх,емы генератора с мостом Вина на рис. 10.46, б отличается применением симметрич-
ной нелинейной обратной связи для обеих полуволн выходного напряжения за счет ис-
пользования двух стабилитронов D (напряжение стабилизации 5 В) и возможности
. корректировки изменением соотношения сопротивлений резисторов R1 и R1'.
г- < Частота колебаний рассматриваемого генератора определяется формулой:
। Fl/(2nRC) = 1/(2ji20 10'10 10’) = 796 Гц. Из осциллограммы на рис. 10.46, в вид-
357
Часть II. Моделирование схем и устройств
но, что период колебаний составляет Т2 - Т1 = 1,26 мс, что достаточно близко к рас-
четному значению 1,256 мс.
Следует заметить, что в измерительных генераторах с использованием моста
Вина отрицательную обратную связь делают температурнозависимой, причем тер-
морезистор включается таким образом, чтобы с увеличением амплитуды выходного
напряжения и, соответственно, температуры терморезистора глубина обратной свя-
зи увеличивалась. Такая обратная связь позволяет стабилизировать амплитуду вы-
ходного напряжения и обеспечивает минимальное время установления амплитуды
автоколебаний [48].
Из схем на рис. 10.46 видно, что перестройка частоты генераторов может осу-
ществляться сдвоенными (находящимися на одной оси) потенциометрами.
Контрольные задания
1. Какие схемы используются при построении RC-генераторов на ОУ?
2. С помощью схемы на рис. 10.45, а исследуйте зависимость амплитуды и частоты
колебаний от напряжения смещения диодов, задаваемого делителем на резисто-
рах R1 и R2 (целесообразно варьировать сопротивление резистора R1).
3. Исследуйте зависимость формы и амплитуды выходного напряжения генератора
на рис. 10.46, а от напряжения смещения диода и коэффициента обратной связи.
4. Исследуйте зависимость амплитуды и формы выходного сигнала генератора на
рис. 10.46, бот напряжения стабилизации стабилитронов.
5. Используя схему на рис. 10.46, б, исследуйте зависимость амплитуды и формы
выходного напряжения от соотношения сопротивлений резисторов R1 и R1' при
неизменном коэффициенте обратной связи, т. е. при R2/(R2 + RI + RI') = const.
10.15. Усилители на ОУ с однополярным питанием
На практике широкое распространение получили устройства, в которых ОУ
используются с однополярным питанием. В основном это устройства портативного
типа с батарейным питанием (плееры, фотоаппараты, малогабаритные измери-
тельные приборы и т.п.), для которых использование двух источников вместо од-
ного является достаточно серьезной проблемой. В таких устройствах ОУ чаще
всего включается по схеме рис. 10.47, а, в которой режим по постоянному току за-
дается с помощью делителя на резисторах RI, R2, коэффициент деления которого
R1/(R1 + R2) обычно выбирается равным 0,5, чтобы рабочая точка находилась
в середине амплитудной характеристики усилителя. Источник входного сигнала
Ui подключается ко входу усилителя через разделительный конденсатор С. Для
развязки цепей усилителя по переменному току от источника питания и в общем
случае от других устройств, подключенных к этому источнику, используется бло-
кировочный конденсатор СЬ (в данном случае его наличие не обязательно, по-
скольку источник питания является идеальным генератором напряжения
и паразитная связь через его внутреннее сопротивление отсутствует).
По постоянному току усилитель охвачен 100-процентной отрицательной об-
ратной связью (элементы обратной связи — конденсатор Cos и резисторы Ro, Ros),
т. е. па пулевой частоте его коэффициент усиления близок к 1. В полосе рабочих ча-
стот, на которых сопротивлением конденсатора Cos можно пренебречь, коэффици-
ент усиления становится равным 1 + Ros/Ro.
Ранее мы уже неоднократно использовали измеритель АЧХ-ФЧХ для измере-
ния ампдитудно-частотных и фазо-частотных характеристик в логарифмическом
358
Глава 10. Устройства на операционных усилителях
масштабе (ЛАЧХ и ЛФЧХ). Кроме оперативного визуального анализа, такие харак-
теристики удобны тем, что при этом упрощается анализ многокаскадного усилите-
ля. Для иллюстрации проведем анализ схемы на рис. 10.46, а, коэффициент
передачи которого в операторной форме может быть записан в виде:
К(р) - КХрЖЛр), (10.10)
где К2(р) — коэффициент передачи входной цепи, образованной разделительным
конденсатором С и резисторами RI, R2; К2(р) — коэффициент передачи собственно
усилителя с учетом частотно зависимой отрицательной обратной связи; р — опера-
тор Лапласа.
Коэффициент передачи входной цепи определяется делителем, образованным
конденсатором С и параллельно соединенными (по переменному току) резисторами
RI, R2 (входным сопротивлением ОУ пренебрегаем ввиду его большого значения по
сравнению с R1 и R2), и равен:
К1(р) = рТ/(рТ+1), (10.11)
где Т = R^C, R,x = R1R2/(R1 + R2).
При выполняющихся на практике условиях Кс » 1 и KoRo » Ros (К„ — ко-
эффициент ОУ без обратной связи) коэффициент передачи
К2(р) = [1 + р(Т1 + Т2)]/( 1 + рТ1), (10.12)
где Т1 = RoCos, Т2 = RosCos.
Логарифмируя обе части выражения (10.10), получим
IgK(p) = IgKl(p) + lgK2(p). (10.13)
Как следует из (10.13), дальнейший анализ можно вести раздельно для каждой
составляющей этого выражения. В частности, построение ЛАЧХ сводится к построе-
нию зависимости модуля каждого слагаемого от частоты, а затем к суммированию их
ординат. Для упрощения операции суммирования ЛАЧХ каждого звена представля-
ют в виде отрезков сопрягающихся друг с другом прямых. При этом вместо операто-
ра р подставляют jo).
Для уяснения методики построения ЛАЧХ рассмотрим первую составляю-
щую. Прежде всего для этого необходимо ввести замену р = jw. В таком случае выра-
жение (10.11) преобразуется к виду K,(ju)) = jO)T/(l + jo)T). Модуль и аргумент этого
выражения соответственно равны:
|К1 (со)| - 2Olg(wT/>J(ojT)2 + 1); <p(ct>) = arc tg (1/wT). (10.14)
При упрощенном построении ЛАЧХ используются следующие допущения: если
(|)Т<1, то ((пТ)2<1 и этим членом можно пренебречь. Если wT»l, то пренебрегаем еди-
ницей, так как она значительно меньше члена (<оТ)г. Соответственно в диапазоне час-
тот, где й)<1/Т, коэффициент усиления (в дБ) |К((о)| = соТ, при ю>1/Т |К(св)| = 20Igl = 0,
при соТ = 1 |К(<о)| = lg(l/V2) - -3 дБ.
Таким образом, упрощенная ЛАЧХ может быть представлена в виде двух пря-
молинейных отрезков (асимптот), которые пересекаются при так называемой со-
прягающей частоте, равной 1/Т. Наклон асимптоты (в дБ) можно находить,
увеличивая частоту в два (на октаву) или в десять (на декаду) раз, т. е. |K(w)| - |К(2й))|
= 201g2 = 6; |K(w)' -| K(10w)| 201gl0 = 20. Таким образом, наклон 6 дБ на октаву эк-
вивалентен 20 дБ на декаду.
Как показано в [48], наибольшая ошибка в 3 дБ при замене реальной ЛАЧХ на
упрощенную имеет место при сопрягающей частоте. Вне интервала, равного двум-
трем октавам вправо и влево, точные и приближенные ЛАЧХ совпадают. При этом
ЛФЧХ является кососимметричной относительно точки сопряжения, в которой фа-
359
Часть II. Моделирование схем и устройств
зовый угол равен 45' (см. выражения (10.14) после подстановки значения сопрягаю-
щей частоты). ФЧХ строится в тех же координатах, что и ЛАЧХ, только по оси ор-
динат откладывают фазовый сдвиг в градусах. В пределах одной декады в ту
и другую сторону от частоты сопряжения фазовый сдвиг достигает соответственно
0 и 90" с погрешностью для рассматриваемого случая 5,7" и при дальнейшем измене-
нии частоты остается практически неизменным.
Таким образом, если известно аналитическое выражение передаточной функ-
ции и его можно разложить на простые сомножители, то построение ЛАЧХ и ФЧХ
не вызывает затруднений за исключением устройств второго порядка .
Рассмотрим вторую составляющую выражения (10.13). Для этого в первую
очередь произведем в (10.12) замену р jeo, после чего получим
K2(jco) = [1 + j<n(Tl + Т2)]/( 1 + jcoTl).
Избавимся от мнимого члена в знаменателе, умножив числитель и знамена-
тель на (1 - jcoTl). После несложных преобразований получим
K2(jco) = [1 - <0«Т1(Т1 + Т2) + j(0T2]/[l + (соТ2)2],
откуда получаем выражения для АЧХ и ФЧХ в следующем виде:
|К2(со) =<[1 + со2Т1(Т1 + Т2)]2 + (юТ1)2/[1 + (соТ1)2]; (10.15)
<р(со) - arctg{coT2/[l + со2Т1(Т1 + Т2)]}.
Далее поступаем аналогично вышеописанному. На низких частотах, когда
<пТ1<1 и соТ2<1 201g|K2(co)j = 201gl = 0; j(co) = arctg(coT2). В области средних и высо-
ких частот соТ1>1 и соТ2>1, в таком случае 201g Кг(со)| = 201g(l + Т2/Т1) = 201g(l +
Ros/Ro); ф((0) = arctg[T2/coTl(Tl + Т2)].
Рис. 10.47. Усилитель па ОУ с однополярным питанием (а) и его ЛАЧХ (б)
Для суммарной ЛАЧХ необходимо определить еще значение модуля |К2(Й)|
в точке сопрягающей частоты, равной, как говорилось выше, 1/Т. После построения
расчетной ЛАЧХ ее можно сравнить с результатами моделирования, для чего схеЙа
дополнена функциональным генератором и измерителем АЧХ-ФЧХ. Результаты
моделирования приведены на рис. 10.47, б. ,' '
360
Глава 10. Устройства на операционных усилителях
Заметим, что, кроме АЧХ и ФЧХ, на практике (чаще всего при анализе авто-
атических систем управления) используется амплитудно-фазовая характеристика
полярных координатах, которая строится следующим образом. При заданной час-
тге (начинают с самой низкой частоты, например, нулевой) по ФЧХ определяют фа-
евый угол и откладывают его в виде угла от горизонтальной оси или по часовой,
хли он положительный, или против часовой стрелки, если он отрицательный,
ia полученном таким образом луче откладывают значение модуля коэффициента
ередачи для той же частоты, взятой из АЧХ. Затем переходят к построению следу-
>щей точки искомой характеристики.
Контрольные вопросы и задания
. В каких случаях используется однополярное питание ОУ и как задается при
этом режим на постоянном токе?
. Чему равно максимальное выходное напряжение в усилителе на ОУ с однополяр-
ным питанием?
. Какие преимущества дает использование логарифмических АЧХ при анализе
усилительных устройств?
. Используя данные схемы на рис. 10.47, а и формулы (10.14), (10.15), определите,
на какой характерной частоте АЧХ на рис. 10.47, б установлена визирная линейка.
10.16. Усилители типа МДМ
Создание высокочувствительной аппаратуры для измерения малых токов (до
0,т А), напряжений (до 3...5 нВ) и больших сопротивлений (до 101в Ом) связано
применением усилителей постоянного тока (УПТ) с соответствующей разрешаю-
щей способностью по току и напряжению. Использование для этой цели ОУ ограни-
ивается напряжением смещения нулевого уровня и входными паразитными
оками (см. разд. 10.1), а также, что не менее важно, их зависимостью от температу-
ры и нестабильностью во времени [81, 82]. Поскольку частотный диапазон измеряе-
1ых величин и отмеченных дестабилизирующих факторов совпадает, то для их
разделения в частотной области стали применять метод переноса спектра полезного
игнала в более высокочастотную область с использованием модуляторов с последу-
>щим усилением на частоте преобразования и детектированием (демодуляцией).
ШТ с таким промежуточным преобразованием называют УПТ типа МДМ (с модуля-
цией-демодуляцией). Поскольку такие УПТ отличаются сравнительно малой поло-
ой пропускания, то в случае особых требований по быстродействию (например,
i случае аналоговых решающих устройств [81]) используется двухканальная струк-
ура, состоящая из УПТ-МДМ (модулятор М — усилитель несущей AmpAl — демо-
дулятор D на рис. 10.48, а) и широкополосного усилителя переменного тока АтрА2,
;ыходные сигналы которых затем суммируются с помощью сумматора S, аналогич-
юго рассмотренному в разд. 10.4.
Модель простейшего УПТ-МДМ содержит (см. рис. 10.48, б) однополупериод-
[ый модулятор (прерыватель) на ключе К1, управляемый от источника Uy, с резис-
ором Rm на входе и разделительным конденсатором Ст на выходе. Выходной
сигнал модулятора в виде последовательности прямоугольных импульсов (в данном
:лучае типа меандра), амплитуда которых пропорциональна напряжению Ui вход-
10^0 сигнала, поступает на вход неинвертирующего усилителя па ОУ 1 с коэффици-
ентом усиления 1 I R2/R1 = 101 и после усилителя (см. осциллограмму А на
>ис. 10.48, г) — на вход демодулятора, выполненного по схеме ФЧВ (см. разд. 10.9)
I синхронно управляемого от источника Uy. После детектирования сигнал фильтру-
361
Часть II. Моделирование схем и устройств
г)
Рис. 10.48. Схемы двухканального У ПТ (а), усилителя типа МДМ (б. в) и осциллограммы сигна
лов на входе (А) и выходе (В) демодулятора (г)
362
Глава 10. Устройства на операционных усилителях
ется КгСг-фильтром и таким образом опять переносится в исходную частотную
область (осциллограмма В на рис. 10.48, г), однако уже усиленный в заданное коли-
чество раз, что позволяет использовать для его дальнейшей обработки вторичные
преобразователи общего применения.
Коэффициент передачи УПТ-МДМ определяется коэффициентами передачи
модулятора, усилителя переменного тока и демодулятора. Поскольку источник вход-
ного сигнала Ui подключается к усилителю при разомкнутом ключе К1 на время, рав-
ное половине периода напряжения возбуждения Uy, и далее делится делителем
с коэффициентом деления Ri/(Ri + Rm)« 1 вследствие того, что входное сопротивле-
ние усилителя Ri» Rm (сопротивлением конденсатора Ст ввиду его малости прене-
брегаем), то коэффициент передачи модулятора в первом приближении можно
принять равным 0,5, что и подтверждается осциллограммой А на рис. 10.48, г, если
учесть, что коэффициент передачи усилителя на ОУ 1 равен 101. Коэффициент пере-
дачи демодулятора с НЧ-фильтром на выходе приблизительно равен 1. Следователь-
но, общий коэффициент передачи УПТ-МДМ на рис. 10.48, б составляет около 50, что
и подтверждается осциллограммой В на рис. 10.48, г, из которой также следует, что
длительность переходного процесса усилителя определяется в основном постоянной
времени НЧ-фильтра.
В практических конструкциях УПТ-МДМ в качестве модуляторов и демодуля-
торов используются электромеханические, полупроводниковые, магнитные, фотоэле-
ктрические устройства и др. [81, 82]. Они обладают следующими характеристиками
по дрейфу нуля по току и напряжению: электромеханические контактные вибропрео-
бразователи — температурный дрейф: (1...5)1013 А/’С, (0,02...0,2) мкВ/’С, временной:
(1... 5)-10'” А/день (8 часов), (0.1...1) мкВ/день; прерыватели на МОП-транзисторах —
(0,1...2)1012 А/’С, (0,1...0,5) мкВ/’С, временной: (0,1...2)10 12 А/день (8 часов),
(0,1... 1) мкВ/день; фотоэлектрические приближаются по рассматриваемым харак-
теристикам к вибропреобразователям, но требуют специальной настройки; динамиче-
ские конденсаторы (с вибрирующими электродами) — 100 мкВ/сутки при уровне
шумов 10 17 А и входном сопротивлении 1015 Ом.
Повышение коэффициента усиления УПТ-МДМ в два раза достигается приме-
нением двухполупериодного модулятора в сочетании с дифференциальным усилите-
лем. При этом в модуляторе используются два прерывателя К 1а, К11)
(см. рис. 10.48, в) с управлением от двух источников противофазных напряжений
Uya, Uyb, а его два выхода подключаются к дифференциальному усилителю, выпол-
ненному в данном случае по схеме рис. 10.7, б на ОУ 1 и 2 (см. разд. 10.3). В качест-
ве демодулятора используется аналогичная предыдущей схема ФЧВ с управлением
от одного из источников Uya или Uyb.
Контрольные вопросы и задания
1. Используя данные рис. 10.48, б, г, установите соответствие между постоянной
времени RfCf - 1 с и осциллограммой переходного процесса в точке установки ви-
зирной линейки 1.
2. Проведите испытание УПТ-МДМ на рис. 10.48, в. Какое свойство дифференци-
ального усилителя используется в этой схеме, позволяющее просуммировать
сигналы от двух одинаковых модуляторов?
3. Каким образом повлияет на работу УПТ-МДМ на рис. 10.48, в переключение ис-
точника управления демодулятора с Uyb на Uya?
363
Часть II. Моделирование схем и устройств
4. Какие типы модуляторов и демодуляторов используются в практических схемах
УПТ-МДМ? Назовите их характеристики.
5. Сформулируйте требования к НЧ-фильтру по допустимым пульсациям выходно-
го напряжениям УНТ-МДМ на рис. 10.48, б, если он используется для преобра-
зования постоянного напряжения 0,1 мВ с погрешностью 0,1%.
10.17. Аналоговые ключи
Как было показано в разд. 8.2, транзисторные ключи для коммутации анало-
говых сигналов обладают рядом недостатков: конечное сопротивление для открыто-
го и закрытого состояний, асимметрия передаточной характеристики для
разнополярных сигналов и др. Эти недостатки в значительной степени устраняются
в ключах с использованием ОУ. На рис. 10.49 в качестве примера показаны две схе-
мы таких ключей [23]. На первой схеме роль ключа выполняет “идеальный диод”,
сформированный ОУ 2 и включенным в цепь его обратной связи реальным диодом
D. При управляющем напряжении Uy (в положении ключа X на рис. 10.49) диод D
открыт, при этом напряжение в точке А из-за действия обратной связи практически
равно нулю и выходное напряжение ОУ 1 Uo также равно нулю [23]. При переводе
ключа X в правое положение на вход ОУ2 подается положительное напряжение
+Uy, в результате чего диод D закрывается и входной сигнал Ui (любой полярности)
без искажений передается на выход ОУ 1.
Рис. 10.49. Аналоговые ключи па ОУ
Вторая схема аналогового ключа выполнена на полевых транзисторах VT1
и VT2, включенных в цепь обратной связи ОУ 3. В положении “спаренного” ключа Z,
показанного на рис. 10.49, транзистор¥Т1 открыт (на его затворе потенциал +5 В),
а транзистор VT2 закрыт за счет нулевого потенциала на его затворе. При этом на
выходе ОУ 3 Uo = Ui Rt/Rl « 0, поскольку сопротивление открытого транзистора
Rt«Rl. При переводе ключа Z в левое положение транзистор VT1 закрывается,
a VT2 открывается. При этом выходное напряжение ОУЗ Uo и Ui-R2/Rl Ui.
Контрольные вопросы и задания
1. Хотя при управляющем напряжении -Uy входной сигнал Ui в диодном ключе це
передается на выход ОУ 1, проверьте истинность утверждения авторов [23], что
при этом напряжение в точке А равно нулю. ?
2. Каким электронным устройством может быть заменен переключатель Z в реаль-
ном коммутаторе? г :
3. Каким образом влияет сопротивление закрытого транзистора VT1 на коэффици-
ент передачи коммутируемого сигнала?
4. Исследуйте влияние напряжения смещения нуля и входных токов ОУ 1, 2 на
точность передачи коммутируемого сигнала (см. раздел 10.1).
364
Глава 10. Устройства на операционных усилителях
10.18. Релаксационные генераторы
Рассмотрим возможность моделирования релаксационных генераторов на ОУ
[23, 24].
Рис. 10.50. Схемы мультивибраторов и результаты осциллографических измерений
Мультивибраторы на ОУ классифицируются в [23] как устройства с заземлен-
ным (рис. 10.50, а) и незаземленным (рис. 10.50, б, в) хронирующим конденсатором.
Процесс формирования выходного сигнала в мультивибраторе первого типа можно
проследить по осциллограммам на рис. 10.50, г, из которых видно, что заряд и раз-
ряд конденсатора С (осциллограмма А) происходит в моменты времени, когда вы-
ходное напряжение (осциллограмма В) достигает значений U.(l - рп) или U (1 - |3„),
где U., U. — напряжение насыщения ОУ для положительной и отрицательной полу-
волны (в данном случае по абсолютному значению они равны VAI); |3„ = R3/(R3 +
R4) 10/(10 + 10) = 0,5 коэффициент положительной обратной связи (НОС). Сле-
довательно, U + (1 - р„) = |U.( 1 Р„)| = O,5|VA1| = 0,5VA2 = 4,54 В, что и подтвержда-
ется полученными при моделировании значениями VB1, VB2. Исходя из
365
Часть II. Моделирование схем и устройств
рассмотренного процесса, в работе [23] получена следующая формула для расчета
периода колебаний мультивибратора на рис. 10.50, а:
Т - Т1 + Т2; Т1 = TJn[(l + ft,lL/U-)/(l - pn)]; Т2 = TJn[(l + 0aU./U+)/( 1 - 0n)],
где TD = R2C.
Для рассматриваемого случая
U. - U. и Т = 2Toln[(l + рп)/(1 - ft)] = 2-104-10*1п[(1 + 0,5)/(1 - 0,5)] = 2,197102 с,
что практически совпадает со значением полупериода Т2 - Т1 на рис. 10.50, г. •
В схеме мультивибратора с незаземленным конденсатором (рис. 10.50, б)
отрицательная обратная (ООС) образована элементами RI, R2, а ПОС - элемента-
ми R3, R4, С1; напряжение на конденсаторе С в процессе генерирования колеба-
ний изменяется в диапазоне от U.(l - ft/ft) до U_( 1 - ft/ft), где ft = R1/(R1 + R2),
ft = R3/(R3 + R4) - коэффициенты ООС и ПОС соответственно. Период колебаний
мультивибратора определяется формулой [23]:
Т - Т1 + Т2; Т1 - Т01п[(1 + KU./U.)/K]; Т2 - Toln[(l + KU./UJ/K],
где То = (R3 + R4)C; К = Ьо/Ьп.
Одновибраторы представляют собой генераторы одиночных импульсов опре-
деленной длительности. Схемы таких устройств могут быть реализованы путем за-
тормаживания рассмотренных выше мультивибраторов. Так, в схеме одновибратора
на рис. 10.51, а (аналог мультивибратора на рис. 10.50, а) автоколебания затормо-
жены с помощью источника напряжения смещения Uf. При этом в исходном состо-
янии на выходе ОУ напряжение насыщения имеет отрицательную полярность, так
как при ft/ft<l напряжение на инвертирующем входе Uf(l - ft) - U_[30 больше напря-
жения на неинвертирующем входе U.ft, где ft — R1/(R1 + R2) = 15/35 = 0,428, ft =
R3/(R3 + R4) = 10/20 - 0,5. При поступлении входного импульса положительной
полярности от источника запуска Ut (осциллограмма А на рис. 10.51, б), длитель-
ность которого меньше длительности выходного импульса (осциллограмма В),
а амплитуда больше |U + ftR3/R4|, на выходе одновибратора формируется напряже-
ние положительной полярности U,. При этом конденсатор С будет перезаряжаться
через резистор R2 от исходного напряжения Uf(l - ft) - U.ft до напряжения U.ft, по-
сле чего на выходе ОУ вновь установится исходное напряжение U_. Длительность
сформированного при этом импульса определяется выражением [23]:
Т - ftR2-C-ln{ft(U. + U.)/[ftU. + (1 - ft)Uf - ftU,)]}.
Для рассматриваемого случая U_ = U, = U и Т = 2ftR2-C-ln[l - ft/ft- (Uf/U)(l
- 1/ft)] = 2-0,428-2 10410e-ln[l - 0,5/0,428 - (5/10)(1 -1/0,428)]= l,19102c, что не-
сколько больше полученного при моделировании (1,086-102 с), что объясняется тем,
что в приведенных формулах не учтено шунтирующее действие резистора R1.
В одновибратор? на рис. 10.51,6 источник смещения заменен диодом, при этом ав-
токолебания заторможены путем шунтирования конденсатора С сопротивлением от-
крытого диода. В исходном состоянии напряжение на выходе ОУ равно -U , на его
инвертирующем входе-----(рк (контактный потенциал диода, см. рис. 4.38), а на неинвер-
тирующем входе----------ftU. (pn = R3/(R3 + R4)). При этом коэффициент ft выбирается из
условия: ftU > (рк- 0,75 В. При поступлении на вход положительного импульса, дли-
тельность которого меньше длительности выходного, а амплитуда больше |U.(R3/R4|,
на выходе установится напряжение насыщения U_. При этом диод D закроется и конден-
сатор С будет заряжаться от до ftU., после чего на выходе опять восстановится состо-
яние U_. Длительность сформированного импульса при этом составит [23]
Т - R2Cln[(U4 + <pK)/U + (1 - ft)].
366
Глава 10. Устройства на операционных усилителях
Рис. 10.51. Одновибраторы на ОУ и результаты осциллографических измерений
Рис. 10.52. Генератор пилообразного напряжения и результаты его испытании
Генераторы пилообразных напряжений (ГПН) на ОУ отличаются более высо-
кими эксплуатационными характеристиками по сравнению с ГПН на транзисторах
(см. разд. 8.5), что достигается за счет использования более высококачественного
стабилизатора зарядного тока. Рассматриваемый ГПН (рис. 10.52) выполнен на базе
интегратора напряжения (ОУ 1, RC-цепь, источник напряжения Ui), управляемого
одновибратором на ОУ 2, напряжение срабатывания которого задается источником
напряжения Uf. Когда линейно изменяющееся напряжение на выходе интегратора
(осциллограмма А на рис. 10.52, а) достигает напряжения срабатывания одновибра-
тора, последний формирует короткий сигнал управления (осциллограмма В),
под действием которого ключ на полевом транзисторе VT открывается, разряжая
конденсатор С интегратора, в результате чего его выходное напряжение уменьшает-
ся практически до нуля и одновибратор переводится в первоначальное (ждущее) со-
стояние. Далее процесс повторяется с периодом Т « R-CUf/Ui = 10510с-5/2 = 0,25 с,
что практически совпадает с результатами моделирования на рис. 10.52, б.
Генератор трапецеидального напряжения (рис. 10.53, а) содержит однови-
братор на ОУ 1 и интегратор па ОУ 2. Формирование переднего фронта трапецеи-
367
Часть II. Моделирование схем и устройств
дальнего импульса происходит (см. рис. 10.53, б) при отрицательном напряжении
насыщения ОУ 1 U4 = -14,1 В. Когда в процессе интегрирования напряжение на ин-
вертирующем входе ОУ 2 (точка С) достигнет порога срабатывания одновибратора,
равного Ue = U„R3/(R3 + R4) = 14,110/(10 + 1) = 12,82 В, напряжение U, поменяет
свою полярность (на (J*. - г 14,1 В в данном случае), после чего начинает формиро-
ваться плоская часть трапецеидального импульса в результате перезаряда конденса-
тора С. Когда напряжение на нем уменьшится до напряжения Uc, одновибратор
переводится в исходное состояние, после чего начинается формирование заднего
фронта (среза) трапецеидального сигнала. Далее процесс повторяется, при этом дли-
тельность переднего фронта (на половинной высоте) [23]
Та = RC U,, /и.. = 10510* 14,1/14,1 = 0,1 с,
заднего —
Т, = RCUb./U._ = 10ь 10* 14,1/14,1 = 0,1 с,
длительность плоской части —
Т„ - RC ln[U., (U. + Uc)/U._(U1+ - Uc)] = 10s 10*-ln[14,1(14,1 + 12,82)/14,1(14,1 -
- 12,82)]-0,305 c.
При моделировании получен (см. рис. 10.53, б) несколько заниженный ре-
зультат по Тил (0,3 с).
Рис. 10.53. Генератор трапецеидального напряжения и результаты его испытании
Контрольные вопросы и задания
1. Исследуйте зависимость периода колебаний мульти вибратора на рис. 10.50, я от
параметров Т„, [3,., U_, U_, напряжения смещения нуля и входного тока ОУ. Выяс-
ните, при каких значениях этих параметров работа мультивибратора становится
неустойчивой (отсутствие колебаний после начала моделирования).
2. Проведите испытания модели мультивибратора на рис. 10.50, б в обьеме п. 1.
Проверьте истинность формулы для определения периода его колебаний и усло-
вие самовозбуждения р0/Р„ < 1.
3. В мультивибраторе на рис. 10.50, в реализована возможность регулировки
скважности колебаний (соотношение между Т1 и Т2), что достигается разделени-
ем цепи заряда и разряда конденсатора С за счет введения диодов D. При этом од-
на половина резистора R4 используется для заряда, а вторая для разряда
конденсатора. Составьте выражения для расчета слагаемых Tl, Т2 периода коле-
баний и проведите проверку полученных формул моделированием.
4. В реальных ОУ параметры U., U_ имеют разброс, что существенным образом вли-
яет на стабильность частоты колебаний мультивибраторов. Каким образом этот
недостаток можно в значительной степени устранить?
368
Глава 10. Устройства на операционных усилителях
5. Проведите испытания одновибратора на рис. 10.51, а, изменив полярность ис-
точника смешения и входного импульса, что должно привести к изменению по-
лярности выходного сигнала.
6. Составьте схему одновибратора на базе схемы рис. 10.50, б, подключив источник
напряжения смещения к резистору R3, а источник Ut - к инвертирующему вхо-
ду ОУ, исключив резисторы RI, R2.
7. Проведите испытание одновибратора на рис. 10.51, б. Установите зависимость
длительности формируемого импульса от контактной разности потенциалов jk,
изменяя ее в диалоговом окне диода.
8. Модернизируйте схему одновибратора на рис. 10.51, б путем замены диода D на
его “идеальный” аналог из схемы на рис. 10.49, после чего проведите его иссле-
дования в объеме п. 7.
9. Для ГПН на рис. 10.52 установите зависимость периода следования импульсов
и их формы от длительности импульса одновибратора, смещения нуля и входно-
го тока ОУ 1.
10. Какую роль выполняют диод D и резистор R1 в схеме ГПН на рис. 10.52?
11. Исследуйте зависимость временных параметров выходного сигнала генератора
на рис. 10.53 от Ub, Ua, напряжения смещения и входного тока ОУ 2 (согласно ре-
комендациям [23], целесообразно выбирать Ub < Ua).
10.19. Преобразователи электрических величин
Из многочисленного класса устройств для преобразования электрических ве-
личин мы здесь рассмотрим преобразователи напряжения во временной интервал,
тока и сопротивления в частоту.
Рис. 10.54. Простейший широтно-импульсный модулятор
Из преобразователей электрических величин во временной интервал наибольшее
распространение получили так называемые широтно-импульсные модуляторы (ШИМ).
Они находят применение в разнообразных устройствах автоматики (управление элект-
родвигателями, см. гл. 14), в источниках электропитания (импульсные стабилизато-
ры, см. гл. 12), в аналого-цифровых преобразователях и др. В простейшем случае ШИМ
содержит генератор пилообразного напряжения и компаратор (рис. 10.54). При входном
напряжении Ui (на рис. 10.54 1 В) и скорости изменения пилообразного напряжения
(осциллограмма В на рис. 10.54, в) v = U/T = 2/0,001 = 2000 В/с (см. рис. 10.54, б, в) сра-
батывание компаратора происходит в момент времени t( = Ui/v = 1/2000 = 0,0005 с
и поддерживается в таком состоянии до конца периода Т = 0,001 с, в результате че-
го на выходе компаратора формируется импульс положительной полярности дли-
тельностью Т„ = Т - t, = Т - Ui/v = 0,001 - 0,0005 = 0,0005 с, пропорциональной
входному напряжению.
369
Часть II. Моделирование схем и устройств
Преобразователи ток-частота (рис. 10.55) чаще всего выполняются по компен-
сационной схеме с использованием интегратора и порогового устройства, роль кото-
рого на схеме рис. 10.55, а выполняет управляемый напряжением ключ К. В первом
такте работы интегратора происходит заряд конденсатора С от источника преобразу-
емого тока 1х (см. рис. 10.55, б). Когда выходное напряжение Ix t/C интегратора че-
рез время ti достигнет порога Un срабатывания ключа К (оно равно 1 В), к входу
интегратора подключается противоположной полярности источник образцового то-
ка Is на время t2, в течение которого выходное напряжение интегратора (Is Ix) t/C
уменьшается до нуля, после чего процесс повторяется. Таким образом, при первом
такте t, = UcC/Ix, при втором — t2 = UnC/(Is - 1х). Следовательно, период колебаний
Т = t1 + t, = UeC[l/Ix + l/(Is - lx)]. Если выбрать Is » lx (в нашем случае это условие
не удалось выполнить из-за ограниченного быстродействия ключа К), то Т - UnC/Ix
й частота следования импульсов f = 1/Т = UnC Ix. Для нашего случая Т = 110 Л[1/10 ° +
+ 1 /(5 - 1)10Л] = 1,25 с, что совпадает с результатами моделирования на рис. 10.55, б.
Рис. 10.55. Преобразователь тока в частоту
Рис. 10.50. Преобразователь сопротивления и напряжения в частоту и осциллограмма его
выходного сигнала
Преобразователь на рис. 10.56 отличается от рассмотренного тем, что в нем
lx Ui/Rx, Is = Us/Rs, т. с. Т = t, + t, = UnC[Rx/Ui + l/(Us/Rs - Ui/Rx)]. Если вы-
полнить условие Us/Rs» Ui/Rx, то T = UnC-Rx/Ui. Из полученной формулы видно,
что в случае преобразователя сопротивления (при lx = const) целесообразно изме-
рять период колебаний, а в случае преобразователя напряжения (при Rx const) —
частоту, поскольку в таких случаях между указанными величинами имеется прямо
пропорциональная зависимость.
Контрольные вопросы и задания
1. Для ШИМ на рис. 10.54 получите зависимость Т„ - f(Ui) при Ui = 0,2, 0,5, 1,5
и 1,9 В.
2. Каковы соотношения в ШИМ между длительностью импульса и периодом пило-
образного напряжения? Может ли длительность импульса превышать период?
370
Глава 10. Устройства на операционных усилителях
3. При реализации компенсационных преобразователей электрических величин
в частоту находят применение схемы с использованием эталонных источников
заряда, образованных конденсатором и источником напряжения. В такте ком-
пенсации заряженный конденсатор подключается ко входу интегратора и после
компенсации заряда на его конденсаторе опять подключается к источнику опор-
ного (эталонного) напряжения. Составьте уравнение преобразования и схему
преобразователя.
10.20. Селекторы импульсов по длительности
С селекторами импульсов на транзисторах и их применением мы уже знако-
мились (см. разд. 8.6). Рассматриваемые ниже устройства па ОУ отличаются не-
сколько другими функциональными возможностями.
Устройство на рис. 10.57, а предназначено для подавления ложных импульсов,
длительность которых меньше заданной. Оно состоит из двух ключей на элементах
DI, VT1 и D2, VT2, времязадающей RC-цепи и ОУ. При положительной полярности
входного сигнала открывается ключ на DI, VT1, в результате чего заряжается конден-
сатор С и на выходе ОУ устанавливается напряжение насыщения U-, под действием
которого через резистор R1 поддерживается открытым транзистор VT1 и закрытым
VT2. Если вслед за положительным входным сигналом следует отрицательный, то для
пего ключ на D2, VT2 будет закрыт до тех пор, пока конденсатор С не разрядится че-
рез резистор R до нуля, после чего на выходе ОУ напряжение становится нулевым
и транзистор VT2 может быть открыт отрицательным входным сигналом, если его
длительность больше задаваемой постоянной времени RC-цепи. Аналогичным обра-
зом схема работает и при отборе по длительности сигналов положительной полярнос-
ти, поступающих после уже “проверенного” отрицательного сигнала.
а) б)
Рис. 10.57. Селекторы импульсов по длительности
Селектор на рис. 10.57, б предназначен для отбора импульсов, длительность
которых определяется формулой [23]:
Т - R2 Cln[(U. + Ui)/(Ui - U)],
где U = Ui R3/(R1 + R3) + Uf R1/(R1 + R3).
Контрольные вопросы и задания
1. С какой целью в эмиттерную цепь транзисторов включены диоды DI, D2?
2. Проведите испытания селектора на рис. 10.57, а, подавая на его вход с функци-
онального генератора двухполярные импульсы с различными частотой следова-
ния и коэффициентом заполнения.
3. Проведите испытания селектора на рис. 10.57 , б и проверьте справедливость
приведенной формулы. Исследуйте возможность использования селектора для
деления частоты входных импульсов на 2, 3 и 4.
371
Часть II. Моделирование схем и устройств
11. Аналого-цифровые
и цифро-аналоговые преобразователи
Аналого-цифровые (АЦП) и цифро-аналоговые преобразователи (ЦАП) при-
меняются в информационно-измерительных системах, в технике связи, в цифровом
телевидении, в бытовой технике и т.н. Дополнительные сведения по АЦП и ЦАП
приведены в Приложении 5.
11.1. ЦАП с весовыми резисторами
Цифро-аналоговые преобразователи используются для преобразования циф-
рового кода в аналоговый сигнал, например, для управления в автоматических сис-
темах исполнительными органами (электродвигателями, электромагнитами и т.п.).
Наиболее простой ЦАП с весовыми резисторами (рис. 11.1) состоит из двух уз-
лов: резистивной схемы (матрицы) на резисторах RI ...R4 и суммирующего усилите-
ля (ОУ OU с резистором обратной связи Ro). Опорное напряжение Uon (3 В)
подключается к резисторам матрицы переключателями D, С, В и А, управляемыми
одноименными клавишами клавиатуры и имитирующими преобразуемый код. Вы-
ходное напряжение По измеряется мультиметром. Такой ЦАП относится к устрой-
ствам прямого преобразования (см. Приложение 5).
Рис. 11.1. ЦАП с весовыми резисторами
Если все переключатели замкнуты на “землю”, как показано на рис. 11.1,
то напряжение на входе и выходе ОУ равно О В. Предположим теперь, что переклю-
чатель Л установлен в положение, соответствующее логической 1. Тогда на вход ОУ
через резистор R1 подается напряжение 3 В. Рассчитаем для этого случая коэффици-
ент усиления напряжения но формуле: К = Ro/Rl = 10000/150000 0,066. Отсюда
получаем, что выходное напряжение Uo = 0,066 3 = 0,2 В соответствует двоичной
комбинации 0001 на входе ЦАП.
Подадим теперь на входы ЦАП двоичную комбинацию 0010: для этого устано-
вим переключатель В в положение, соответствующее логической единице, тем са-
мым подадим на ОУ через резистор R2 напряжение 3 В. Для коэффициента усиления
в данном случае получаем К = Ro/R2 10000/75000 = 0,133. Умножив этот коэффи-
циент усиления на величину входного напряжения, найдем, что выходное напряже-
ние равно 0,4 В.
Таким образом, при переходе к каждому очередному двоичному числу, имити-
руемому ключами, выходное напряжение ЦАП увеличивается па 0,2 В. Это обеспе-
чивается за счет увеличения коэффициента усиления напряжения ОУ при
подключении различных по сопротивлению резисторов. Если бы в схеме на рис. 11.1
мы подключили только один резистор R4 (с помощью переключателя D), то тем са-
мым установили бы коэффициент усиления К = 10000/18700 = 0,535: при этом вы-
ходное напряжение ОУ составит около 1,6 В. Если все переключатели в схеме на
рис. 11.1 установлены в положения, соответствующие логическим единицам, вы-
372
Глава 11. Аналого-цифровые и цифро-аналоговые преобразователи
ходное напряжение ОУ равно Uon 3 В, поскольку коэффициент передачи в этом
случае становится равным 1.
Схема ЦАП на рис. 11.1 имеет два недостатка: во-первых, в ней сопротивле-
ния резисторов изменяются в широких пределах, во-вторых, точность преобразова-
ния невысока из-за влияния конечного сопротивления транзисторных ключей
в открытом и закрытом состояниях.
Контрольные вопросы и задания
1. По какому закону выбираются сопротивления в ЦАП с весовыми резисторами?
2. Рассчитайте коэффициент усиления напряжения ОУ и выходное напряжение
ЦАП в схеме на рис. 11.1 для случая, когда в положение, соответствующее логи-
ческой единице, установлен только переключатель С. Результаты расчета про-
верьте на модели.
3. Получите выражение для расчета выходного напряжения ЦАП в общем виде
и проверьте его на модели.
4. Замените переключатели А, В, С, D программными переключателями (реле вре-
мени), имитирующими последовательное во времени с интервалом 5 с появление
кодовых комбинаций 0001, ООН, 0111 и 1111.
11.2. ЦАП лестничного типа
Схема ЦАП такого типа (рис. 11.2) состоит из резистивной матрицы R-2R, на-
поминающей лестницу, и суммирующего усилителя. Преимущество использования
матрицы состоит в том, что в ней используются резисторы только двух номиналов.
Сопротивление каждого из резисторов R1...R5 равно 20 кОм, а резисторов R6...R8,
Ro 10 кОм. Отметим, что сопротивления горизонтально расположенных резисто-
ров “лестницы” ровно в 2 раза больше сопротивлений вертикальных.
Рис. 11.2. ЦЛП лестничного типа
ЦАП лестничного типа аналогичен ЦАП с весовыми резисторами. В рассмат-
риваемом примере схемы используется опорное напряжение 3,75 В. Переход к каж-
дой следующей двоичной последовательности на входах приводит к увеличению
аналогового выходного сигнала на 0,25 В. Опорное напряжение выбрано равным
3,75 В из соображения удобства сопряжения с ИМС семейства ТТЛ при замене клю-
чей A...D такими ИМС.
Выходное напряжение ЦАП на рис. 11.2 определяется по формуле [32]:
Uo = UonRo[S,2" •*+ S22-2+ ... + S.2M+S.2]/R2", (11.1)
где Si — значение цифрового сигнала (0 или 1) на i-м входе, п — число разрядов пре-
образования (для схемы на рис. 11.2 п= 4), R — сопротивление резистора матрицы
R-2R (R = 10 кОм для схемы на рис. 11.2).
Вариант ЦЛП с использованием в качестве коммутирующего устройства дво-
ично-десятичного счетчика 74160 (К155ИЕ9) показан на рис. 11.3, а.
373
Часть II. Моделирование схем и устройств
Из сравнения ЦАП на рис. 11.2 и 11.3 видно, что во втором отсутствует источ-
ник опорного напряжения: его роль выполняет сам счетчик-коммутатор. Эквивалент-
ное значение Uon можно получить на основании формулы (11.1) и результатов
осциллографических измерений, показанных на рис. 11.3, б. В частности, максималь-
ное выходное напряжение ЦАП VB2 = -2,8125 В, минимальное — VB1 = -0,3125 В,
их разность — VB2 - VB1 = -2,45 В.
а)
Т1 268750**00 12 4.8750Эе*00 Т2-Т1 1 98750**00
VC1 о.ооохч-юо UA2 О.ООООХ>*СО VA2-VAI 0.00000**00
VBJ •3124®о-и1 UB2 -2 8124Эс*СО VB2-VBI -2 49999ф*00
REDUCE j
reverse;
SAVE
Рис. 11.3. Четырехразрядный ЦАП лестничного типа на базе счетчика 74160 (а) и осцилло*
I раммы сигналов (б) на его счетном входе (А) и выходе ЦАП (В)
Контрольные вопросы и задания
1. Чем отличается ЦАП лестничного типа от ЦАП с весовыми резисторами? К ка-
кому типу ЦАП он относится?
2. С помощью формулы (11.1) рассчитайте выходное напряжение ЦАП на рис. 11.2
для всех 16 комбинаций переключателей А, В, С, D и сравните полученные ре-
зультаты с результатами моделирования.
3. Замените переключатели А, В, С, D в схеме на рис. 11.2 программными переклю-
чателями, имитирующими последовательное во времени с интервалом 5 с появ-
ление кодовых комбинаций 0001, 0010, 0100 и 1000.
374
Глава 11. Аналого-цифровые и цифро-аналоговые преобразователи
4. Используя формулу (11.1) и результаты моделирования, рассчитайте эквива-
лентное напряжение Uon для схемы на рис. 11.3, а.
11.3. АЦП прямого преобразования
АЦП прямого преобразования являются наиболее простыми и часто встраи-
ваются непосредственно в датчики. Основным функциональным элементом таких
АЦП является преобразователь электрической величины (тока, напряжения, со-
противления, емкости и др.) во временной интервал или частоту. Примерами та-
ких преобразователей могут служить устройства, рассмотренные в разд. 10.19,
11.4, 11.6, а также рассматриваемый ниже преобразователь постоянного положи-
тельного напряжения в частоту (рис. 11.4, б). Для преобразования временного ин-
тервала или частоты в цифровой код, что по существу является конечной задачей
любого АЦП, выполняется ЭВМ в случае АСУ или дополнительным устройством
в случае автономного АЦП. Пример такого устройства, осуществляющего преобра-
зование временного интервала в код, показан на рис. 11.4, а. В этом устройстве
временной интервал задается программным ключом Т, имитирующим, например,
ШИМ и определяющим количество импульсов, поступающих на четырехразряд-
ный счетчик с генератора опорной частоты Us. Рассматриваемое устройство по
существу является частотомером. Если преобразуемая величина прямо пропорци-
ональна периоду, то соответственно дополнительное устройство должно обеспе-
чить преобразование периода в код.
Преобразователь на рис. 11.4, б выполнен на двух ОУ: усилитель OU1 исполь-
зуется в интеграторе, a OU2 — в регенеративном компараторе с гистерезисом. Когда
выходное напряжение компаратора Ш имеет максимальное положительное значе-
ние Uo диод VD смещен в обратном направлении и напряжение Us на выходе OU1
(см. осциллограммы на рис. 11.4, в) уменьшается по линейному закону со скоро-
стью, определяемой амплитудой входного положительного сигнала Ui, до тех пор,
пока не достигнет значения UjRl/R2. В этот момент компаратор переключается
в другое состояние, при котором напряжение на его выходе равно максимальному
отрицательному значению U2, при этом диод VD открывается и выходное напряже-
ние интегратора быстро нарастает до значения U2R1/R2,.после чего компаратор воз-
вращается в первоначальное состояние и цикл повторяется.
Так как время нарастания выходного напряжения интегратора значительно
меньше времени спада, которое обратно пропорционально амплитуде входного сиг-
нала, частота циклов повторения F будет прямо пропорциональна входному напря-
жению. Пренебрегая собственным временем переключения компаратора, можно
записать следующее выражение для частоты выходных импульсов:
F = Ui-R3/[R1C R4(U1 - U2)]« 1000-Ui. (11.2)
На самом деле размах напряжения Us на выходе OU1 несколько больше вели-
чины (Rl/R2)(Uj - U2) из-за отличного от нуля значения времени переключения
компаратора, а частота соответственно меньше значения, определяемого выражени-
ем (11.2), причем это расхождение будет особенно значительным при больших амп-
литудах входного сигнала.
С указанными на рис. 11.4, б номиналами элементов схема должна обеспечи-
вать линейность преобразования не хуже ±1% в диапазоне изменения входных на-
пряжений 20 мВ...10 В, при этом частота выходных импульсов F должна изменяться
от 20 Гц до 10 кГц [25].
375
Часть II. Моделирование схем и устройств
в)
Рис. 11.4. АЦП прямого преобразования (а) и осциллограммы (в) сигналов на выходе интегра-
тора (В) и компаратора (А) (б)
Контрольные вопросы и задания
1. Что из себя представляет АЦП прямого преобразования, в каких устройствах его
целесообразно использовать?
2. Проверьте работоспособность схемы на рис. 11.4, б и исследуйте зависимость ча-
стоты выходного сигнала от входного напряжения в диапазоне 20 мВ... 10 В.
Проверьте справедливость формулы (11.2).
3. Какие дополнительные устройства необходимо подключить к схеме на рис. 11.4, б,
чтобы получить цифровой отсчет измеряемого напряжения?
11.4. Преобразователь на интегральном таймере
Интегральные таймеры являются наиболее яркими представителями уст-
ройств смешанного типа, из них наиболее популярным является таймер NE555 (оте-
чественный аналог КР1006ВИ1). Учитывая его широкое распространение
в различной аппаратуре промышленного и бытового назначения, рассмотрим крат-
ко характеристики и особенности применения NE555 [34].
376
Глава 11. Аналого-цифровые и цифро-аналоговые преобразователи
Функциональная схема таймера и его графическое обозначение в программе
EWB показаны на рис. 11.5. Таймер содержит два компаратора на OU1 и OU2, RS-
триггср, инвертирующий усилитель мощности UM, транзисторы VT1, VT2 для цепи
разряда и принудительного сброса соответственно. Внутренний резистивный дели-
тель задает пороговые напряжения, равные 2Ucc/3 для OU1 и Ucc/З для OU2.
а)
б)
Рис. 11.5. Функциональная схема таймера NE555 (а) и его графическое изображение в про-
грамме EWB (б)
Напряжение питания таймера Ucc — 5... 16,5 В, ток нагрузки (вывод 7) —
200 мА, что позволяет управлять непосредственно лампочками или электромагнит-
ными реле. Выходное сопротивление около 10 Ом как для низкого, так и для высо-
кого уровней выходного напряжения. Запуск таймера осуществляется подачей на
вывод 2 напряжения менее Ucc/З (эту цепь обычно называют триггерным входом).
При высоком напряжении на выводе 2 состоянием выхода таймера можно управлять
с помощью компаратора OU1 по выводу 6, называемому обычно пороговым входом.
Входной ток, втекающий в OU1 (вывод 6) и вытекающий из OU2 (вывод 2), не превы-
шает 0,5 мкА. Для сброса таймера, т. е. установки на его выходе низкого напряже-
ния независимо от напряжения на выводах 2 и 6 используется вывод 4. Если
напряжение на этом выводе меньше 0,4 В, напряжение на выходе равно 0,1...0,2 В,
а при напряжении более 1 В цепь сброса выключена и не влияет на работу таймера.
Кроме низкоомного выхода (вывод 3) таймер имеет и вспомогательный высокоом-
ный выход (вывод 7, коллектор транзистора VT1), который обычно используется для
организации обратной связи с выхода на входы (выводы 2 и 6) таймера. Допустимое
изменение напряжения на выводах 2, 4, 6 и 7 находится в пределах О...16,5 В. В тай-
мере имеется доступ через вывод 5 к входам внутренних компараторов, на которые
поданы пороговые напряжения. Этот вывод от резистивного делителя позволяет из-
менять пороговые напряжения компараторов при постоянном напряжении питания
и тем самым дополнительно управлять работой таймера. Чтобы избежать влияния
внешних помех и пульсации напряжения питания на точность работы таймера, ре-
комендуется шунтировать вывод 5 конденсатором емкостью 0,01 мкФ.
В режиме прямой трансляции сигнала с входа на выход таймер работает в ди-
апазоне частот до 10 МГц. Однако приводимое в справочных данных значение по-
грешности формирования временного интервала, равное 0,5%, измеряется обычно
при формировании импульсов длительностью более 10 мкс. Время нарастания вы-
ходного напряжения таймера не превышает 100 нс.
Временные параметры таймера незначительно зависят от изменений Ucc и тем-
пературы и полностью определяются компараторами и технологией их изготовления.
В таймерах, изготовленных по КМОП-технологии, отличающейся худшим согласова-
нием параметров парных транзисторов, зависимость характеристик от Ucc и темпера-
туры значительно выше, чем у таймеров, изготовленных по биполярной технологии.
377
Часть II. Моделирование схем и устройств
Чтобы параметры врсмязадающей RC-цепи не влияли на точность формирова-
ния временных интервалов, необходимо ограничить диапазон изменения сопротив-
ления R и емкости С. Максимальное сопротивление R определяется входным током
Ij компараторов. Для формирования устойчивых временных интервалов достаточно
выбрать максимальное сопротивление R из условия R^ < Ucc/Ii; при Ucc = 10 В и
I; = 0,5 мкА RBJlX = 20 МОм. При включении таймера по схеме мультивибратора, ког-
да выводы 2 и 6 объединены, таймер сохраняет работоспособность при R>Rm„,
при этом не рекомендуется использовать времязадающие резисторы с сопротивлени-
ем R > 10 МОм.
Минимальное сопротивление R определяется максимально допустимым то-
ком, протекающим через транзистор VT1 таймера при его насыщении. Хотя допу-
стимый выходной ток устанавливают обычно на уровне 100 мА, не рекомендуется
использовать малые сопротивления R в сочетании с большими емкостями С. Объ-
ясняется это тем, что при разряде конденсатора большой емкости транзистор VT1
переходит в режим насыщения через конечное время, в течение которого он нахо-
дится в активном режиме при напряжении коллектор-эмиттер UK!> = Ucc/2, и при
R„,K он может выйти из строя из-за большой рассеиваемой на нем мощности. По-
этому при формировании малых временных интервалов рекомендуется ограни-
читься значением Rmla = 1 кОм и выбрать исходя из этого емкость С. Если же
таймер применяется в схеме, где С < 100 пФ, то сопротивление R может быть
уменьшено до 150 Ом.
Минимальная емкость времязадающего конденсатора С должна быть значи-
тельно больше изменений емкости выводов 2, 6 и 7, зависящей от напряжения на
них. Поскольку эти изменения при перезаряде С нс превышают нескольких пикофа-
рад, при формировании точных временных интервалов целесообразно выбирать С <
100 пФ. Можно применять конденсаторы С сколь угодно большой емкости, если их
ток утечки пренебрежимо мал. Фактически же, чем больше емкость конденсатора,
тем больше его ток утечки; для нормальной работы таймера необходимо, чтобы этот
ток не превышал зарядный ток через резистор R. Для формирования точных (<1%)
временных интервалов ток утечки через С должен быть более чем на два порядка
меньше зарядного тока.
Выходной инвертирующий усилитель таймера UM работает в режиме АВ,
вследствие чего на переходной характеристике возникает “полка” длительностью
10...20 нс при напряжении 1,5 В. Если таймер нагружен на быстродействующие
ТТЛ-схемы (например, серий 130 или 533), то наличие такой “полки” недопустимо,
так как она может вызвать ложное срабатывание логического элемента. Для устра-
нения этого недостатка необходимо выход таймера зашунтировать конденсатором
емкостью около 100 пФ.
Преобразователи на интегральных таймерах отличаются весьма широким ча-
стотным диапазоном (в пределах 2...4 декад) [25]. Так, при включении таймера по
схеме самовозбуждающегося мультивибратора можно получить линейный преобра-
зователь напряжения в частоту, изменяющуюся от 10 Гц до 10 кГц, причем этот ди-
апазон может быть легко сдвинут в любую сторону заменой одного из элементов
схемы [25]. К сожалению, модель таймера NE555 в программе EWB далека от совер-
шенства и не позволяет это реализовать. Предварительное исследование преобразо-
вателя, схема которого приведена на рис. 11.6, показало, что преобразуемое
напряжение должно быть больше напряжения питания Ucc. Кроме того, модель нс
работает при отсутствии дополнительного сопротивления в цепи разряда интегриру-
378
Глава 11. Аналого-цифровые и цифро-аналоговые преобразователи
ющего конденсатора (транзистор VT1), поэтому сопротивление его заряда составле-
но из сопротивлений двух резисторов — R и R'.
В схеме на рис. 11.6 использована пассивная интегрирующая RC-цепь, по-
скольку преследовалась только цель проверки ее работоспособности. Для повыше-
ния линейности преобразователя на входе практического аналога такой схемы
используется преобразователь напряжение-ток (стабилизатор тока) [25].
Рис. 11.6. Преобразователь напряжение-частота на таймере NE555
REDUCE
CHANNEL S
REVERSE
1Г 2 V/Div
V POS 17247
.ftCjapcT
X POS I DOO _________, - . . . „
bza n/ei jhuTQ AjBj extj *9.1 s [cU
TIME 6ASE [ TRIGGER CHANNEL 6
|0.02g<dM^ kt | EDGE !~-f 3J 11 2 V/Civ
LEVEL | u.lu |^1 V POS [ООО
SAVE
Рис. 11.7. Осциллограммы сигналов на выходе таймера (А) и интегрирующем конденсаторе (В)
Осциллограммы сигналов на выходе OUT микросхемы и конденсаторе С пока-
заны на рис. 11.7.
Контрольные вопросы и задания
1. Что из себя представляют интегральные таймеры и почему они так называются?
2. Чем вызвана популярность интегрального таймера NE555?
3. Проверьте работоспособность схемы преобразователя на рис. 11.6 при Ui =
4...40 В с оценкой линейности преобразования в этом диапазоне.
4. Проведите анализ и испытание преобразователя напряжение-частота и мульти-
вибратора на NE555, схемы которых приведены в файлах 555fm.ca4 и 555-1.са4.
379
Часть II. Моделирование схем и устройств
11.5. Библиотечные ЦАП и АЦП
В библиотеке программы EWB 4.1 преобразователи представлены 8-разряд-
ными ЦАП и АЦП.
Схема включения библиотечного ЦАП (рис. 11.8) содержит собственно ЦАП
(DAC V), два источника опорного напряжения -Uop и -Пор, генератор слова и ос-
циллограф.
Рис. 11.8. Схема включения библиотечного ЦАП с установками генератора слова для его ис-
пытания
Выходное напряжение ЦАП определяется выражением [67]:
Uo = D[(+Uop) + (-Uop)]/256,
где D — десятичный эквивалент входного двоичного кода (например, при входном
коде 00000011 D = 3).
Задавая соответствующие кодовые комбинации на выходе генератора слова,
можно с помощью осциллографа измерить максимальное выходное напряжение
ЦАП, а также минимальное, соответствующее младшему разряду и определяющему
разрешающую способность ЦАП. Нумерация разрядов показана на графическом
значке ЦАП. осциллограмма выходного сигнала при указанных на рис. 11.8 кодо-
вых комбинациях — на рис. 11.9.
Для ЦАП с опорными источниками тока +Iop, -lop (DAC I см. разд. 2.7) ток
прямого и инверсного выхода определяется соответственно формулами [67]:
Io = D[(+Iop) + (-Iop)]/256; 1о' = 255[(+1ор) + (-1ор)]/256-1о.
Схема включения библиотечного АЦП (рис. 11.10) содержит собственно АЦП
(ADC), источники опорного напряжения, генератор слова для синхронизации и уп-
равления выходом АЦП, функциональный генератор в качестве источника входно-
го сигнала Ui, логический анализатор, преобразователь двоичный код-код ASCII
и осциллограф.
Назначение выводов АЦП: VIN — вход для источника преобразуемого сигна-
ла; VREF+, VREF- вход для источников опорного напряжения; SOC — вход син-
хронизации; ОЕ — разрешение на выдачу двоичной комбинации на выходы D0...D7;
ЕОС сигнал готовности данных (например, при выдаче данных на ЭВМ).
Для заданного значения входного напряжения Ui, зафиксированного, напри-
мер, с помощью устройства выборки и храпения (см. разд. 10.10), десятичный экви-
валент двоичного кода на выходе АЦП определяется выражением [67]:
D » 256Ui/ [(+Uop) + (-Uop)].
380
Глава 11. Аналого-цифровые и цифро-аналоговые преобразователи
Осциллограмма выходного напряжения ЦАП
Рис. 11.9.
Рис. 11.10.
Схема включения библиотечного АЦП
Рис. 11.11.
Осциллограммы выходного сигнала АЦП на экране логического анализатора
381
Часть II. Моделирование схем и устройств
Устройство ASCII позволяет записать данные в текстовый файл. После двой-
ного щелчка по его изображению вызывается стандартное диалоговое окно, в кото-
ром указывается имя файла. По умолчанию в меню предлагается имя схемного
файла с расширением .txt.
Полученные данные с АЦП можно анализировать с помощью логического
анализатора и осциллографа. Данные на экране логического анализатора при пре-
образовании синусоидального сигнала напряжением 1 В и частотой 1 кГц показа-
ны на рис. 11.11.
Рис. 11.12. Осциллограммы выходного сигнала ЦАП (Л) и входного АЦП (В)
Начальный участок данных на рис. 11.11 после их преобразования в аналого-
вый сигнал с помощью ЦАП показан в виде осциллограммы на рис. 11.12.
Контрольные вопросы и задания
1. Используя данные на рис. 11.8 и 11.9, установите, каким кодовым комбинациям
генератора слова соответствуют уровни выходного напряжения ЦАП в точках
установки визирных линеек на осциллограмме рис. 11.9. Определите разрешаю-
щую способность ЦАП (цепу младшего разряда — МР).
2. Составьте схему для испытания ЦАП с опорными источниками тока.
3. Используется ли ЦАП в составе библиотечного АЦП?
4. Проведите качественный сравнительный анализ осциллограмм на рис. 11.11
и 11.12.
5. Проведите сопоставительный анализ данных на рис. 11.11 и данных, зарегист-
рированных в текстовом файле.
б. Ознакомьтесь со схемой включения в АЦП библиотечного ЦАП DACI (схемный
файл adc-dac2.ca4), а также с применением библиотечных АЦП и ЦАП в им-
пульсно-кодовом модуляторе (схемный файл am&pcm.ca4), используемом в циф-
ровых системах связи.
11.6. Преобразователь на управляемых источниках
Источники напряжения из программы EWB 5.0, управляемые напряжением
(ИНУН), которые могут использованы в преобразователях напряжение-частота, по-
казаны на рис. 11.13.
Все три источника имеют практически одинаковый набор параметров. Например,
диалоговое окно источника с выходным сигналом прямоугольной формы содержит две
закладки со следующим набором редактируемых параметров: нижний L = 0 В
и верхний И = 1 В уровни прямоугольного импульса, т. с. задается последователь-
ность импульсов положительной полярности с амплитудой 1 В; коэффициент запол-
нения D = 0,2; длительность переднего TR = 1е~09 с и заднего TF = 1е-09 с фронтов;
382
Глава 11. Аналого-цифровые и цифро-аналоговые преобразователи
параметр N 3 определяет количество точек, в которых заданному входному напря-
жению в строках параметров С1...С5 (С1 = О В, С2 = 10 В, СЗ 20 В, С4 = Со 0 В)
будет соответствовать заданная частота в строках параметров F1...F5 (Fl = 1 Гц,
F2 = 10 Гц, F3 = F4 = F5 = 1 Гц), т. е. задаются участки с различным коэффициентом
преобразования (Гц/ В).
н фф фф
а) 6) в)
Рис. 11.13. ИНУН с выходным напряжением прямоугольной (а), треугольной (б) и синусоидаль-
ной формы (н)
Схема включения ИНУН с выходным напряжением прямоугольной формы (а) и ос-
циллограммы его входного (А) и выходного (В) сигналов (б)
Рис. 11.14.
Схема включения ИНУН с выходным напряжением прямоугольной формы
показана на рис. 11.14, а. Кроме собственно ИНУН XT схема содержит источник ли-
нейно изменяющегося (пилообразного) напряжения на интеграторе (элементы ОУ1,
R1 и С1)) постоянного напряжения U.
383
Часть II. Моделирование схем и устройств
Осциллограммы сигналов на входе и выходе ИНУН, параметры которого уста-
новлены в соответствии с приведенными выше данными, показаны на рис. 11.14, б,
откуда видно, что при входном напряжении около 10 В (результаты измерений
в строках VA1 и VA2 индикаторных окон) длительность двух периодов импульсной
последовательности составляет около 200 мс (результаты измерений в строке Т2-Т1
индикаторного окна), т. е. частота импульсов соответствует установленным значе-
ниям параметров С2 и F2 в диалоговом окне. Следовательно, коэффициент преобра-
зования составляет 1 Гц/В.
Контрольные вопросы и задания
1. Рассчитайте коэффициент нелинейности преобразования схемы на рис. 11.14
при малых входных напряжениях, если в качестве коэффициента преобразова-
ния принять значение 1 Гц/В?
2. Проведите испытания схемы преобразователя на рис. 11.14, а при значениях па-
раметров Fl, F2, и F3, увеличенных в 10 и 100 раз по сравнению с рассмотрен-
ным случаем. Определите минимальное входное напряжение, при котором
нелинейность преобразования не превышает 10%.
11.7. АЦП уравновешивающего типа
Задолго до появления современных АЦП в измерительной технике уже ис-
пользовались аналогичные устройства (так называемые потенциометры), позволяв-
шие получать цифровой отсчет измеряемой величины с достаточно высокой
точностью по положению ручек управления, с помощью которых производилось
ручное уравновешивание схемы. В четырехразрядном “потенциометре” на
рис. 11.15 измеряемое напряжение Ux сравнивается с падением напряжения на ре-
зисторах R...8R, включаемых в цепь калиброванного источника тока Is с помощью
сдвоенных переключателей 1...3; вторая половина этих переключателей использу-
ется в схеме индикации получаемого кода в двоичной и десятичной форме. Индика-
тором равенства измеряемого и компенсирующего напряжения служит
гальванометр G: при равенстве указанных напряжений гальванометр будет иметь
нулевые показания.
Как следует из рис. 11.15, самая первая (старшая) ступень равна 8 мВ, вто-
рая — 4 мВ, третья — 2 мВ и последняя (самая младшая) — 1 мВ. Перед уравнове-
шиванием все переключатели находятся в замкнутом положении, и нуль-орган
(гальванометр G) показывает, что измеряемое напряжение Ux превышает компенси-
рующее, равное в исходном состоянии нулю. Первой включается первая ступень,
включающая компенсирующее напряжение величиной 8 мВ. Поскольку Ux<8 мВ,
то нуль-орган зафиксирует перекомпенсацию, поэтому эта ступень выключается.
На втором шаге включается вторая ступень (4 мВ), при этом нуль-орган зафиксиру-
ет недокоыпенсацию, поэтому эта ступень остается включенной и к ней переключа-
телем 1 добавляется третья ступень величиной 2 мВ. Однако и в этом случае
нуль-орган зафиксирует недокомпенсацию. Поэтому на третьем шаге ключом 0 до-
бавляется четвертая ступень величиной 1 мВ, после чего нуль-органом фиксируется
нулевой результат, что соответствует равенству измеряемого и компенсирующего
напряжений. При этом на выходе “преобразователя” получаем двоичный код 0111
и его десятичный эквивалент 7. Рассмотренный алгоритм преобразования носит на-
звание поразрядного уравновешивания.
Возможен и другой способ уравновешивания, при котором этот процесс начи-
нается с четвертой ступени (1 мВ). Если при этом фиксируется недокомпенсация,
384
Глава 11. Аналого-цифровые и цифро-аналоговые преобразователи
то переключатель 0 выключается и переключателем 1 включается третья ступень
(2 мВ). При недокомпенсации переключателем 0 дополнительно подключается чет-
вертая ступень, что в сумме дает 3 мВ. При недокомпенсации четвертая и третья сту-
пени выключаются и переключателем 2 включается третья ступень (4 мВ). Далее
поочередно подключаю-гея четвертая и третья ступень, что обеспечивает увеличение
компенсирующего напряжения на каждом шаге уравновешивания на величину од-
ного кванта, равного в нашем случае 1 мВ. Уравновешивание заканчивается, когда
при очередном добавлении одного кванта к компенсирующему напряжению послед-
нее становится больше измеряемого. Рассмотренный метод преобразования получил
название метода последовательного счета или развертывающего преобразования.
Рис. 11.15. Упрощенная схема четырехразрядного АЦП
Рис. 11.16. Схема АЦП с ГПП (а) и осциллограммы его сигналов (б, в)
АЦП развертывающего типа может быть реализован также с использовани-
ем в качестве источника компенсирующего напряжения прецизионного ГПН. Схе-
ма шестиразрядного АЦП в таком исполнении содержит (см. рис. 11.16, а)
шестиразрядный счетчик на триггерах D0...D5, двухвходовой элемент И U, гене-
ратор опорной частоты Us, компаратор на ОУ I и ГПН па ОУ 2 с элементами R, С
и U. Для согласования выходного сигнала компаратора с логическим элементом
И положительное напряжение насыщения ОУ 1 выбрано равным +5 В, отрица-
13 Зак. 206
385
Часть II. Моделирование схем и устройств
тельное — О В. Переключатель X используется для оперативного контроля сигна-
лов на выходе компаратора и элемента И (осциллограммы А па рис. 11.16, б, в).
Скорость изменения выходного напряжения ГПН (осциллограммы В на
рис. 11.16, б, в) равна v = U/RC = 1/10е10 б = 1 В/с. В момент пуска АЦП (начало
моделирования) под действием преобразуемого напряжения Ux на выходе компа-
ратора формируется сигнал логической единицы (см. осциллограмму А на
рис. 11.16, б), в результате чего на вход счетчика через схему И начинают посту-
пать импульсы с источника однополярных импульсов Us (см. осциллограмму А на
рис. 11.16, в). Одновременно запускается и ГПН, выходное напряжение которого
Ug = v-t, начиная с момента t. = 0, непрерывно сравнивается с Ux. Когда в момент
времени t = t2 Ug достигает значения Ux, срабатывает компаратор, в результате че-
го на его выходе формируется сигнал логического нуля, схема И блокируется и по-
ступление импульсов на счетчик прекращается. Промежуток времени, в течение
которого импульсы от источника Us поступали на вход счетчика с частотой следо-
вания F = 10 Гц, равно At = t2 - tj = Ux/v. Зарегистрированное счетчиком за это
время число импульсов N = F4Ux/v = 10-2,5/1 = 25 совпадает с показаниями ин-
дикаторов 2° + 23 4- 2* - 25.
Контрольные вопросы и задания
1. Охарактеризуйте два способа уравновешивающего преобразования и проведите
их сравнительный анализ по длительности процесса уравновешивания.
2. Руководствуясь данными Приложения 5, определите основные характеристики
АЦП на рис. 11.16, а.
3. В АЦП на рис. 11.16, а обнуление (сброс) счетчика осуществляется программой ав-
томатически в момент пуска. Каким образом это может быть реализовано в прак-
тической конструкции АЦП аналогичного типа? Разработайте схему обнуления
счетчика перед каждым циклом преобразования и проведите ее испытания.
386
Глава 12. Источники электропитания
12. Источники электропитания
Электропитание радиоэлектронной аппаратуры (РЭА) осуществляется от ис-
точников постоянного или переменного тока, к которым предъявляются различные
требования в зависимости от выполняемых ими функций (см. Приложение 6). Са-
мый распространенный способ электропитания РЭА — от сети переменного тока —
предполагает использование выпрямителей, сглаживающих фильтров и стабилиза-
торов напряжения или тока.
12.1. Выпрямители и сглаживающие фильтры
Выпрямительные устройства используются для преобразования переменного
напряжения в постоянное. Они, как правило, состоят из трансформатора, полупро-
водниковых диодов, осуществляющих выпрямление переменного напряжения, и
сглаживающего фильтра, уменьшающего пульсацию выпрямленного напряжения.
Выбор схемы выпрямителя зависит от ряда факторов, которые должны учиты-
ваться в зависимости от требований, предъявляемых к выпрямительному устройству.
К ним относятся: выпрямленное н апряжение и мощность, частота пульсации выпрям-
ленного напряжения, число диодов, обратное напряжение на диоде, коэффициент ис-
пользования мощности трансформатора, напряжение вторичной обмотки. Повышение
частоты пульсации позволяет уменьшить размеры сглаживающего фильтра.
Однополупериодная схема выпрямления (рис. 12.1, а, б) обычно применяется
при токах нагрузки до нескольких десятков миллиампер и в тех случаях, когда не
требуется высокая степень сглаживания выпрямленного напряжения. Эта схема ха-
рактеризуется низким коэффициентом использования мощности трансформатора,
поскольку используется только один полупериод выпрямляемого напряжения. Этот
недостаток устраняется в двухполярных источниках (например, для питания ОУ),
который получается объединением схем на рис. 12.1, а, б путем использования од-
ного источника Ui (подключение к одной обмотке). Второй недостаток заключается
в том, что обратное напряжение выпрямительного диода должно быть примерно рав-
ным двойной амплитуде источника Ui, поскольку при его закрытом состоянии к не-
му приложено напряжение на конденсаторе С фильтра и напряжение обратной (для
схемы на рис. 12.1, а — отрицательной) полуволны источника Ui. Заметим, что при
больших токах нагрузки возможно существенное искажение формы сигнала из-за
подмагничивания сердечника трансформатора вследствие постоянной составляю-
щей тока нагрузки в его вторичной обмотке.
Двухполупериодный выпрямитель со средним выводом вторичной обмотки
трансформатора (рис. 12.1, в) применяют в низковольтных устройствах. По сравне-
нию с однофазным мостовым выпрямителем (рис. 12.2) он позволяет уменьшить
вдвое число диодов и тем самым понизить потери, однако по обратному напряжению
на диоде и коэффициенту использования мощности трансформатора он не отличает-
ся от схем на рис. 12.1, а, б. Единственное отличие — это отсутствие подмагничива-
ния, поскольку постоянные составляющие во вторичных обмотках трансформатора
имеют разное направление и поэтому создаваемые ими магнитные поля взаимно
компенсируются.
Следует отметить, что модель трансформатора в программе EWB не во всех
случаях применима из-за необходимости заземления обмоток (см. разд. 4.6). По этой
причине во всех схемах выпрямителей далее в качестве первичных источников ис-
пользованы источники переменного напряжения из библиотеки Passive или функ-
циональный генератор.
В*
387
Часть II. Моделирование схем и устройств
Выпрямленное напряжение при чисто активной нагрузке является пульсирую-
щим (осциллограммы на рис. 12.1, г, д для одно- и двухполупериодного выпрямите-
лей соответственно). Коэффициент пульсации, равный отношению амплитуды Un
импульсов выпрямленного напряжения основной частоты к среднему значению вы-
прямленного напряжения U, может быть определен из разложения последовательно-
сти импульсов на рис. 12.1, г, д в ряд Фурье. Для однополупериодного выпрямителя
это разложение имеет вид [44]: u - U„/7t + 0,5U„sin(ot - 2(UMsin2wt)/3n -..., откуда ко-
эффициент пульсации Кп = Uc/U - 0,5UM/(UM/n)в л/2 ~ 1,57 или 157%. Для т-фазно-
го выпрямителя u = (m/7t)UMsin(n/m) + (ш/л)[2/(т2 - l)][sin(7t/m)]UMcosmcot -
- (т/л)[2/(4тг - l)][sin(K/ni)]UMcos2mo)t -..., откуда
Ко - Un/U - 2/(т2 - 1) или К„ = [2/(т2 - 1)]100%, (12.1)
где т>1 — число фаз (для двухполупериодного выпрямителя т = 2 и, следователь-
но, К„ = 2/3 « 0,67 или 67%).
Выпрямители без сглаживающего фильтра применяют сравнительно редко и
в тех случаях, когда пульсации напряжения па нагрузке не имеют существенного
значения. Сглаживающий фильтр также часто отсутствует в многофазных выпря-
мителях, имеющих малую пульсацию выпрямленного напряжения.
Для характеристики выпрямителя с фильтром или стабилизатором использу-
ется коэффициент сглаживания Кс - Кп/Кпо, где Кп, — коэффициенты пульсации
до и после фильтра (стабилизатора).
а) б) в)
г) д)
Рис. 12.1. Одно- (а, б) и двухполупериодный (в) выпрямители и осциллограммы сигналов при
активной нагрузке (г, д)
TH
Выпрямители, нагруженные на фильтр в виде конденсатора (рис. 12.1, а, б),
используются в широком диапазоне выпрямленных напряжений и мощностей. К не-
достаткам выпрямителей с таким фильтром относятся большая амплитуда тока че-
рез выпрямительный диод в момент включения источника, а также необходимость в
трансформаторах большей мощности по сравнению с выпрямителями с индуктив-
ным фильтром (рис. 12.1, в). Коэффициент пульсации выпрямителя с емкостным
фильтром определяется приближенным выражением [44]:
Kn = [l/2mfCRn]-100%, (12.2) -
которое дает удовлетворительные результаты при Кп < 2...4%; при больших значе-
ниях погрешность расчета увеличивается до 10% и более [44].
388
Глава 12. Источники электропитания
Выпрямители с индуктивным фильтром применяются в широком диапазоне
выпрямленных напряжений при мощностях от десятков ватт до нескольких кило-
ватт и при токах свыше 1 А. Такие выпрямители имеют меньшее внутреннее сопро-
тивление по сравнению с выпрямителями с емкостным фильтром, что уменьшает
зависимость выпрямленного напряжения от тока нагрузки. Кроме того, применение
индуктивного фильтра ограничивает импульс тока через диод. Недостатком выпря-
мителей с таким фильтром являются перенапряжения, возникающие на выходной
емкости и на дросселе фильтра при включении выпрямителя и при скачкообразных
изменениях тока нагрузки, что представляет опасность для элементов самого вы-
прямителя и его нагрузки.
Коэффициент сглаживания для выпрямителя с индуктивным фильтром опре-
деляется формулой [44]:
Кс - + [2m7cfL/(Rn + Rd)]2, (12.3)
где L, Rd — индуктивность и активное сопротивление дросселя.
Однофазная мостовая схема (схема Греца [55], рис. 12.2, а) характеризуется
высоким коэффициентом использования мощности трансформатора; она применяет-
ся в устройствах повышенной мощности при выходных напряжениях от десятков до
сотен вольт. В мостовой схеме для двухполярного источника питания (рис. 12.2, б) в
качестве первичного источника используется функциональный генератор в парафаз-
ном режиме (рис. 12.2, в). Согласно (12.2), коэффициент пульсации для такого вы-
прямителя по каждому выходу Кп - [1/2 2-50 10Л10*] 100% = 5%. Проверим этот
результат моделированием, для чего обратимся к осциллограммам выходного напря-
жения (рис. 12.3), из которых следует, что коэффициент пульсации К„ = Uu/U0 ~-
= |VA2 - VA1|/[(VA2 + VAl)/2] - (VB2 - VB1|/[(VB2 + VBl)/2] = 0,332/[(4,355 +
+ 4,023)/2] = 0,08 или 8%, что несколько превышает расчетное значение.
Рис. 12.2. Мостовые выпрямители
—ГТ-ГП
FREQUEHCV 150 И|Ht |В1
CUTY CYCLE fro 1~=1
AMPLITUDE [5 [el [ У fei
0FrSET [О ... . fl
Симметричная схема удвоения напряжения (схема Латура [55], рис. 12.4, а)
представляет собой последовательное соединение двух однополупериодных выпря-
мителей и применяется при высоких напряжениях (до 1...2 кВ) и небольших токах
нагрузки. Пульсации на каждом конденсаторе схемы удвоения в 2 раза больше
пульсаций на ее выходе.
Несимметричные схемы с умножением напряжения применяются при малых
токах нагрузки, т. е. в режиме, близком к холостому ходу (одна из них показана на
рис. 12.4, б). В этой схеме выпрямленное напряжение почти в 5 раз больше амплиту-
ды йсточника напряжения Ui (вторичной обмотки трансформатора), так как коэффи-
циент умножения, равный числу диодов или конденсаторов, в данном случае
составляет 5. Увеличение выпрямленного напряжения достигается добавлением
нужного числа каскадов, каждый из которых состоит из диода и конденсатора. В схе-
мах умножения частота пульсаций равна частоте питающей сети; обратное напряже-
389
Часть II. Моделирование схем и устройств
ние на диодах и напряжение на всех конденсаторах (кроме первого) равно удвоенной
амплитуде напряжения Ui. Отметим, что в реальных выпрямителях при нечетном
числе каскадов но вторичной обмотке протекает постоянный ток, вызывающий неже-
лательное подмагничивание трансформатора, поэтому такого варианта следует избе-
гать. Аналитическое выражение для коэффициента пульсаций определяется
приближенной формулой [55]: К„ = lG00n2/Rn С. При этом емкость конденсатора
каждого плеча (в фарадах) выбирается одинаковой и равной С = 2(п 4- 2)/Rn f, где п —
коэффициент умножения, £ — частота источника питания, Гц.
Рис. 12.3. Осциллограммы выходных напряжений двухполярного источника питания
Рис. 12.4. Выпрямители с умножением напряжения
Трехфазная мостовая схема (рис. 12.5, а) обладает наилучшим коэффициен-
том использования мощности трансформатора, наименьшим обратным напряжени-
ем на диодах и высокой частотой пульсации выпрямленного напряжения. Схема
применяется в широком диапазоне выпрямленных напряжений и мощностей.
Допустимые пульсации на выходе источников питания зависят от характера
нагрузки и могут составлять от тысячных долей процента (первые каскады микро-
фонных усилителей) до единиц и десятков процентов (исполнительные устройства).
Для уменьшения пульсаций используются дополнительные фильтры.
390
Глава 12. Источники электропитания
Г-образный индуктивно-емкостный (LC) фильтр (рис. 12.5, б) применяется в
источниках средней и большой мощности, поскольку падение напряжения на фильт-
ре можно сделать сравнительно малым и тем самым обеспечить более высокий КПД.
Рис. 12.5. Трехфазный мостовой выпрямитель (а) и индуктивно-емкостиый и реостатно-емко-
стный фильтры (б)
Произведение L C (Гн-мкФ) зависит от необходимого коэффициента сглажива-
ния Кс (отношение коэффициента пульсации на входе фильтра к коэффициенту
пульсации на его выходе) и определяется формулой [44]: LC = (Кс + l)/(2nmf)8 (коли-
чество фаз для однополупериодпой схемы m = 1, для двухполупериодной и мосто-
вой, а также для параллельной схемы удвоения m = 2).
Для двухполупериодной или мостовой схемы при частоте сети 50 Гц L-С =
= 2,5(КС + 1). Величины L и С должны быть выбраны так, чтобы выполнялось усло-
вие 2rcmf-L > l/(2rnnf-C). Если произведение LC больше 200...250, то фильтр выпол-
няется двухзвенным, причем во втором звене можно использовать RC-фильтр.
Недостатки LC-фильтров:
1) сравнительно большие размеры и вес (при низкой частоте первичного источника);
2) дроссель фильтра является источником помех, создаваемых магнитным полем
рассеивания;
3) дроссель фильтра иногда является причиной сложных переходных процессов,
приводящих к искажениям в работе устройств (усилителя, передатчика и т.п.);
4) фильтр не устраняет медленных изменений питающих напряжений.
Г-образный реостатно-емкостный фильтр (рис. 12.5, 6) применяется при ма-
лых выпрямленных токах (менее 15...20 мА) и небольших значениях коэффициента
сглаживания. Такой фильтр является достаточно дешевым, имеет малые размеры и
вес. Его недостатком является низкий КПД из-за большого падения выпрямленного
напряжения на сопротивлении фильтра. Произведение R C (Ом мкФ) определяется
по формуле: R-C = 159000Kc/mf; сопротивление R выбирается из условия допусти-
мого падения выпрямленного напряжения на фильтре.
Более высокими сглаживающими свойствами обладают П-образные фильтры
(рис. 12.6, а, б). В практических конструкциях чаще всего используется фильтр на
рис. 12.6, а при Ск = 0 и Cl = С2, причем условие Cl = С2 соответствует условиям не
только оптимальной фильтрации, но и практической реализации [44]. Коэффициент
сглаживания для П-образных фильтров в первом приближении определяется произ-
ведением таких коэффициентов для емкостного и Г-образного LC-фильтра, при бо-
лее точных расчетах используются достаточно громоздкие графоаналитические
методы [44]. При Ск * 0 контур LkCk в фильтрах на рис. 12.6, а, б настраивается в ре-
зонанс с частотой пульсации f„, т. е. (LkCk)1'2 = l/2nfn, что обеспечивает более высо-
кий коэффициент сглаживания на основной частоте пульсации.
391
Часть II. Моделирование схем и устройств
Принцип действия фильтра с полупроводниковым триодом (рис. 12.6, в) осно-
ван на том, что для переменной составляющей пульсирующего тока транзистор
представляет сравнительно большое сопротивление, а для постоянного тока его со-
противление намного меньше. Транзистор включен последовательно с нагрузкой.
Цепочка R1-C1 обеспечивает постоянство тока эмиттера при кратковременных из-
менениях тока нагрузки и должна иметь большую постоянную времени. Сопротив-
лением R2 устанавливается режим транзистора по постоянному току. Транзистор
выбирается так, чтобы ток нагрузки фильтра был не менее, чем в 2 раза меньше мак-
симального допустимого тока коллектора. Наибольшее напряжение между коллек-
тором и эмиттером, которое может возникнуть в момент включения выпрямителя,
не должно превышать максимально допустимого напряжения на коллекторе. Мощ-
ность рассеивания на триоде также не должна превышать допустимой. Сопротивле-
ние резистора R1 выбирается в пределах 80... 100 Ом, R2 — порядка десятков кОм;
емкость конденсатора Cl > l/2mf„Rl.
Рис. 12.6. П-образные фильтры (а, 6) и фильтр с транзистором (в)
Контрольные вопросы и задания
1. Дайте определение коэффициента пульсаций, какие значения он может прини-
мать в зависимости от типа аппаратуры и отдельных ее блоков?
2. Для каждой из приведенных выше схем выпрямителей определите зависимость
коэффициента пульсации от емкости фильтрующего конденсатора и сопротивле-
ния нагрузки.
3. Путем моделирования проверьте справедливость приближенных выражений
для коэффициентов пульсации рассмотренных схем выпрямителей.
4. Проверьте эффективность использования в выпрямителях транзисторного, Г- и
П-образных фильтров (при моделировании выберите емкости конденсаторов
этих фильтров одинаковыми).
5. Установите зависимость напряжения пульсаций и постоянной составляющей в
схеме на рис. 12.2, в от формы выходного сигнала функционального генератора:
синусоидальной, пилообразной и прямоугольной при различных коэффициен-
тах заполнения.
6. Исследуйте зависимость коэффициента пульсаций для рассмотренных выше вы-
прямителей от сопротивления нагрузки.
7. Проведите испытание схем трехфазного выпрямителя (файл 3phase.ca4), двух-
полупериодных выпрямителей без фильтра (файл rectfier.cf4) и с Г-образным
LC-фильтром (файл choke.са4).
12.2. Параметрические стабилизаторы
Параметрические стабилизаторы напряжения (ПСН) используются в маломощ-
ных источниках (с выходным током до 15...20 мА), а также в качестве источников
опорного напряжения в компенсационных стабилизаторах и контрольно-измеритель-
392
Глава 12. Источники электропитания
ной аппаратуре. Для стабилизации постоянного напряжения в них применяются эле-
менты с нелинейной вольтамперной характеристикой, напряжение на которых мало
зависит от протекающего через них тока. В качестве таких элементов используются
полупроводниковые стабилитроны (диоды Зенера) и стабисторы.
Основная схема однокаскадного ПСН приведена на рис. 12.7, а. При измене-
нии входного напряжения Ui ток Is через стабилитрон VD изменяется, что приводит
к незначительным изменениям напряжения на стабилитроне, а следовательно, и на
нагрузке. Изменение Uo зависит от приращения напряжения AUi, сопротивления
ограничивающего резистора Ro и внутреннего (дифференциального) сопротивления
стабилитрона, равного Rs = dUs/dls.
Коэффициент стабилизации в общем случае определяется как
Кст = (AUi/AUo)(Uo/Ui). (12.4)
Для ориентировочных расчетов пользуются приближенной формулой:
К„ - (Uo/Ui)(Ro/Rs). (12.5)
Для более точных расчетов рекомендуется формула [44]:
К„ = (1 + Ro/Rs)/[1 + Ro(Is + In)/Uo], (12.6)
где Is, In — ток стабилитрона и нагрузки соответственно.
Коэффициент полезного действия рассматриваемого ПСН [44]:
КПД = Uoln/Ui(ln + Is). (12.7)
Внутреннее сопротивление стабилизатора, определяемое в основном диффе-
ренциальным сопротивлением стабилитрона, достигает минимального значения для
стабилитронов с напряжением стабилизации 6...8 В.
Температурный коэффициент напряжения К„ стабилитрона определяет от-
клонение выходного напряжения ПСН при изменении температуры. Установлено,
что наибольшая температурная зависимость наблюдается для приборов с напряже-
нием стабилизации Us > 5,5 В. Температурная компенсация в этом случае может
быть достигнута включением последовательно со стабилитроном диодов в прямом
направлении (VD2 и VD3 на рис. 12.7, б). Однако при этом возрастает внутреннее со-
противление ПСН за счет дифференциального сопротивления термокомпенсирую-
щих диодов. Кроме того, термокомпенсированный ПСН имеет повышенное значение
Us и пониженный коэффициент стабилизации. Коэффициент стабилизации ПСН по
схеме рис. 12.7, б равен К„ = (Uo Ro)/Ui(Rs + Rs'), где Rs'-— суммарное динамичес-
кое сопротивление термокомпенсирующих диодов VD2, VD3.
Рис. 12.7. Параметрический стабилизатор напряжения без термокомпенсации (а), с термоком-
пенсацией (б) и двухкаскадный (в)
•Ц
Если требуется повышенная стабильность выходного напряжения, то приме-
няются двухкаскадные (рис. 12.7, в), мостовые (рис. 12.10, а, б) схемы стабилизато-
393
Часть II. Моделирование схем и устройств
ров или ПСН со стабилизатором тока (рис. 12.10, в). Предварительная стабилизация
напряжения в двухкаскадном ПСН (рис. 12.7, в) с помощью элементов Ro и VD1 поз-
воляет получить достаточно высокий коэффициент стабилизации выходного напря-
жения, определяемый по формуле: К., = (IJo-Ro Ro')/(Ui Rs Rs'), где Rs, Rs'
динамические сопротивления стабилитронов VD1 и VD2.
Рассмотрим результаты испытаний простейшего ПСН (рис. 12.8) при
Ui = 10 В (12.8, а) и Ui = 9,5 В (12.8, б). Как следует из приведенных данных,
AUi = 10 - 9,5 = 0,5 В, AUo = 5,03 - 4,99 0,04 В, AIs = 4,71 - 3,84 - 0,87 мА. Следова-
тельно, Rs = AUo/AIs = 0,04/0,87 - 0,046 кОм = 46 Ом; согласно (12.4), эксперименталь-
ное значение Кст = (AUi/AUo)(Uo/Ui) = (0,5/0,04X5,03/10) = 6,29. Расчетное значение по
формуле (12.5) К„ = (Uo/Ui)(Ro/Rs) (5,03/10)(510/46) = 5,58, по формуле (12.6)
К„ = (14- Ro/Rs)/[1 4- Ro(Is 4- In)/Uo] = (14- 510/46)/[ 1 4- 0,51(4,71 4- 5,03)/10] = 8,75.
Таким образом, результаты расчета и моделирования по порядку величин достаточ-
но близки, причем расчет по приближенной формуле (12.5) дает более близкие к мо-
делированию результаты. Коэффициент полезного действия рассматриваемого ПСН
равен Uo-In/Ui(ln 4- Is) - 5,03-5,03/10(5,03 4- 4,71) 0,26.
Рис. 12.8. Результаты моделирования однокаскадного ПСН
Rc Iryn.
Ui 31 ОЙ I1V ।
и 'X VD
1Спй//5ОН»/ОС>м
20 мВ/лел
1 кВ/дел
б)
а)
Рис. 12.9. Моделирование фильтрующих свойств однокаскадного ПСН
Как и любой стабилизатор, ПСН обладает определенными фильтрующими свой-
ствами. Согласно [44], коэффициент сглаживания однокаскадного ПСН К. (1 • Ro/Rs),
а сам ПСН эквивалентен конденсатору фильтра емкостью l/2nfcRs. Для исследуемой
схемы (рис. 12.8,12.9, а) К,; = (14- 510/46) = 12,1. Из рис. 12.9, б видно, что на входе (ос-
циллограмма А) амплитуда пульсации, имитируемая источником -U, равна 14,1 мВ, на
выходе (осциллограмма В) — около 1 мВ, т. е. коэффициент сглаживания равен 14, что
согласуется с ориентировочным расчетным значением.
Повышение коэффициента стабилизации в мостовых схемах (рис. 12.10, а, б)
достигается за счет формирования компенсирующего напряжения на резисторе R2
или стабилитроне VD1 при изменениях входного напряжения. Коэффициент стаби-
лизации при Rn = const для схемы рис. 12.10, а К.., = Uo/Ui(Rs/R3 - R2/R1).
394
Глава 12. Источники электропитания
Для ПСН на рис. 12.10, б"К„ = Uo/Ui(Rs/Rl - Rs'/R2), где Rs, Rs' — дифферен-
циальные сопротивления стабилитронов VD1 и VD2. В мостовых параметрических
стабилизаторах коэффициент стабилизации теоретически может быть бесконечно
большим, если выбрать элементы, исходя из условий равенства нулю выражений в
скобках. Внутреннее сопротивление для схемы на рис. 12.10, a Ri = Rs + R2, а для
схемы на рис. 12.10, б Ri = Rs + Rs'.
Величина отклонения выходного напряжения мостовых ПСН при изменении
температуры зависит от температурных коэффициентов стабилитронов, а для схемы
на рис. 12.10, а еще и от температурных коэффициентов резисторов R1 и R2. Особен-
ностью мостовой схемы на рис. 12.10, б является возможность получения низких
выходных напряжений при небольшом температурном уходе за счет применения
стабилитронов с мало отличающимися температурными коэффициентами.
Следует отметить, что относительно высокая стабильность выходного напря-
жения в двухкаскадном и мостовых ПСН достигается за счет значительного ухудше-
ния КПД по сравнению со схемой на рис. 12.7, а. Повысить стабильность выходного
напряжения ПСН без ухудшения КПД позволяет схема на рис. 12.10, в за счет при-
менения источника тока, выполненного на транзисторе VT, стабилитроне VD1 и ре-
зисторах Re и Rb. Это позволяет стабилизировать ток, протекающий через
стабилитрон VD2 и тем самым уменьшить нестабильность напряжения на нагрузке
при изменениях входного напряжения. Температурный уход и внутреннее сопро-
тивление этого ПСН практически такие же, как и в рассмотренных ранее схемах.
а) б) в)
Мостовые ПСН с одним (а), двумя стабилитронами (б) и ПСН со стабилизатором тока (в)
Рис. 12.10.
Максимальная выходная мощность рассмотренных ПСН ограничивается пре-
дельными значениями тока стабилизации и рассеиваемой мощностью стабилитро-
нов. Если использовать транзистор в режиме эмиттерного повторителя с ПСН на
входе (рис. 12.11, а), мощность в нагрузке может быть увеличена. Коэффициент ста-
билизации такого ПСН К„ = pUo/Ui(l + uRs/Ro), а внутреннее сопротивление
Ri - (Rv + pRs/p)/(l + ц), где ц = l/[Rs-Uo/Ro-Us + (Rs 4- Rb 4 Re)/Rk - Rs/Ro],
Rv = p(Re + Ro/0); Rb, Re, Rk, (3 — сопротивления базы, эмиттера, коллектора и ко-
эффициент передачи тока транзистора в схеме с ОЭ соответственно.
Отметим, что ПСН по схеме рис. 12.11, а при Us > 5,5 В по температурной не-
стабильности уступает рассмотренным выше стабилизаторам.
На рис. 12.11, б приведена схема ПСН на транзисторах различной проводимос-
ти, выполняющих роль стабилизаторов тока. Для этого ПСН характерна высокая ста-
бильность выходного напряжения и возможность одновременного подключения двух
нагрузок Rn и Rn' к различным шинам входного напряжения. По коэффициенту ста-
билизации и температурному уходу эта схема незначительно превосходит схему на
рис. 12.11, а; внутренние сопротивления Rs и Rs' определяются стабилитронами
VD1 и VD2 соответственно.
395
Часть II. Моделирование схем и устройств
На рис. 12.11, в показан прецизионный ПСН на ОУ [23], для которого справед-
ливо следующее равенство: Uo - Us = Uo-0n, где Us — напряжение стабилизации ста-
билитрона ТО; р„ = R1/(R1 + R2) — коэффициент положительной обратной связи.
Из приведенного равенства получаем Uo e Us/(1 - р„). Результаты моделирования
этого ПСН с использованием модели ОУ рА741 с однополярным питанием показаны
на рис. 12. J 2, откуда видно, что при напряжении питания ОУ 10 (рис. 12.12, а), 15
(рис. 12.12, б) и 8 В (рис. 12.12, в) выходное напряжение ПСН остается неизменным
(в пределах точности вольтметра Uo). Из рис. 12.12 следует, что р„ — 1/(1 + 3) = 0,25
и Uo = 4,96/(1 - 0,25) = 6,613 В, что совпадает с показаниями вольтметра Uo.
Рис. 12.11. ПСИ с эмиттерным повторителем (а), стабилизатором тока (б) и ОУ (в)
а) б) в)
Рис. 12.12. Результаты моделирования ПСН с ОУ
Моделирование рассмотренных стабилизаторов можно проводить двумя спо-
собами — с использованием на входе стабилизатора источника постоянного напря-
жения с имитатором источника пульсаций (рис. 12.9, а) или с использованием
рассмотренных в предыдущем разделе выпрямителей. При этом последовательно со
стабилитроном необходимо включить амперметр, а на выход стабилизатора —
вольтметр. При наличии этих двух приборов можно определить дифференциальное
сопротивление Rs = dUo/dls в рабочей точке стабилитрона и затем рассчитать коэф-
фициент стабилизации по приведенным формулам. Поскольку они справедливы
только для ненагруженного стабилизатора, то сопротивление нагрузки Rn целесооб-
разно выбирать около 100 кОм. Для наблюдения и измерения пульсаций использу-
ется осциллограф. .
Контрольные вопросы и задания
1. Из (12.7) следует, что для повышения КПД необходимо увеличивать ток нагруз-
ки и уменьшать ток через стабилитрон. Однако при этом, как видно из (12.6), бу-
396
Глава 12. Источники электропитания
дет уменьшаться коэффициент стабилизации не только за счет In, но и косвенно
вследствие увеличения Rs при уменьшении Is. Найдите оптимальное значение
токов In, Is, при которых обеспечиваются максимальные значения КПД и коэф-
фициента стабилизации.
2. Что такое коэффициент стабилизации и как он связан с коэффициентом сглажи-
вания пульсаций? Проанализируйте данные расчета и моделирования схем на
рис. 12.8 и 12.9.
3. К двухполупериодному выпрямителю по схеме рис. 12.2, а (без Rn) подключите
каждый из вышерассмотренных стабилизаторов (также без Rn) и с помощью ос-
циллографа определите коэффициент стабилизации. Для задания значений па-
раметров стабилитронов и транзисторов используйте отдельную библиотеку,
скопировав туда необходимые компоненты.
4. Сравните значения коэффициентов стабилизации, полученные при моделирова-
нии, с результатами расчетов по формулам.
5. Установите зависимость выходного напряжения ПСН на рис. 12.12 от напряже-
ния смещения нуля ОУ и его выходного сопротивления (параметр Ro в диалого-
вом окне ОУ). При расчетах необходимо учитывать, что Uo Uo'Rn/(Rn + Ro).
12.3. Компенсационные стабилизаторы
В отличие от параметрических компенсационные стабилизаторы напряжения
обеспечивают необходимую стабильность напряжения на нагрузке при помощи от-
рицательной обратной связи, воздействующей на регулирующий элемент (РЭ). В за-
висимости от схемы включения РЭ компенсационные стабилизаторы разделяются
на последовательные и параллельные.
На рис. 12.13 приведена схема одного из наиболее распространенных (до появ-
ления интегральных стабилизаторов) транзисторных стабилизаторов напряжения
последовательного типа. Стабилизатор состоит из регулирующего элемента (транзи-
сторы VT1, VT2, VT3), усилителя постоянного тока (VTO, R1), источника опорного
напряжения (VD, R2), делителя напряжения R3...R5, резисторов R6, R7, использу-
емых для выбора режима по постоянному току транзисторов VT1, VT2, и конденса-
тора С1. В стабилизаторе предусмотрена регулировка выходного напряжения, для
чего в состав делителя включен потенциометр R4.
Рис. 12.13. Компенсационный стабилизатор
Число транзисторов, входящих в РЭ, зависит от тока нагрузки In. При
1п<(0,02...0,03) А можно использовать только один транзистор VT1; при
(0,02...0,03) А<1п<(0,5...0,6) А — можно использовать два транзистора VT1,VT2;
при (0,5...0,6) А<1п<(4...5) А — все три транзистора.
Стабилизатор может быть выполнен на транзисторах типар—п—р или п—р—п.
При использовании транзисторов типа р—п—р полярности напряжений на входе и
397
Часть II. Моделирование схем и устройств
выходе изменяются на противоположные (по сравнению со схемой на рис. 12.13). При
этом необходимо также переключить стабилитрон VD, чтобы напряжение на его ано-
де было положительным относительно катода.
Стабилизатор работает следующим образом. При увеличении входного напря-
жения Ui увеличивается и выходное напряжение Uo, что вызывает увеличение напря-
жения на входе транзистора VT0 и его коллекторного тока, в результате чего
напряжение на коллекторе уменьшается, а это вызывает уменьшение тока через тран-
зисторы РЭ и, следовательно, приводит к пропорциональному уменьшению Uo. Ана-
логичные процессы происходят и при уменьшении тока нагрузки, что приводит к
увеличению Uo. При уменьшении Ui или Uo (при увеличении тока нагрузки) транзис-
тор VTO начинает закрываться, напряжение на его коллекторе и на базе транзистора
РЭ увеличивается, в результате чего Uo увеличивается до номинального значения.
Для проведения моделирования необходимо предварительно провести его
приближенный расчет. Исходные данные для такого расчета: номинальное выход-
ное напряжение Uu, В; пределы регулирования выходного напряжения Uom„- Uemin;
ток нагрузки 1НСЛХ, А; минимальное и максимальное напряжение сети Uimox, Ui^.
Примерный порядок предварительного расчета:
1. Определяем минимальное входное напряжение Uimin = U0BMX I (4...5) В. Добавка
4...5 В требуется для обеспечения нормальной работы транзисторов РЭ. Макси-
мальное Uininx в этом случае задается из условия максимально возможного напря-
жения сети.
2. В зависимости от тока нагрузки определяем число транзисторов, входящих в РЭ
(см. вышеприведенную рекомендацию).
3. По Uim4X, UoinHX и Inw выбираются типы транзисторов или редактируются параме-
тры выбранного библиотечного компонента по максимально допустимым напря-
жению и току коллектора.
4. Выбирается тип стабилитрона VD по напряжению стабилизации из условия
Us «= U6B,i„ - (2...3) В. В этом случае сопротивление резистора R2 = (2...3)/Is„,n,
где Ism.n — минимальный ток стабилизации стабилитрона. Так, например, при
Isein = 5 мА R2 = 400...600 Ом. Сопротивление резистора R1 определяется из ус-
ловия, что при напряжении Ui,,,,,, - Uom„ но нему протекает ток 3...5 мА.
6. Рассчитывается суммарное Rs сопротивление резисторов делителя R3...R5 из
условия протекания по нему тока 5... 10 мА при номинальном напряжении Uo.
При этом сопротивления резисторов делителя определяются из выражений:
R5 = Rs Us/Uont„, R4 = Rs Us/U0Bllll, R3 - Rs - R4 - R5.
7. Сопротивления резисторов R7, R6 определяются как Uo/Ilirn, где 1^, — тепловой
ток эмиттерного перехода соответствующего транзистора.
Рассмотренный стабилизатор обладает сравнительно небольшим коэффициен-
том стабилизации из-за малого коэффициента усиления однокаскадного усилителя
постоянного тока (УПТ). Более высокими показателями обладают стабилизаторы с
УПТ на ОУ, один из вариантов которого показан на рис. 12.14. В этом стабилизато-
ре опорный стабилитрон VD включен в верхнее плечо моста, одна диагональ которо-
го присоединена к выходу стабилизатора, а вторая — ко входам ОУ. Выходное
напряжение стабилизатора Uo = Us(R2 + R3)/R3. Используя показания вольтметра
Us, находим Uo = 4,63(1 + 2)/2 = 6,945 В, что совпадает с показаниями вольтметра
Uo при входном напряжении Ui как 10 В (рис. 12.14, а), так и 15 В (рис. 12.14, б).
Для защиты регулирующего транзистора VT1 при коротком замыкании на
выходе устройства введены транзистор VT2 и резисторы R4 и R5. При увеличении
398
Глава 12. Источники электропитания
выходного тока выше допустимого падение напряжения на резисторе R5 (около
0,5 В) открывает транзистор VT2, в результате чего уменьшается выходное напря-
жение стабилизатора. При этом резистор R4 защищает выход ОУ от перегрузки при
открытом VT2.
Для создания стабилизаторов переменного напряжения используются такие
же структурные схемы, что и в стабилизаторах постоянного напряжения, но источ-
ники опорного напряжения и регулирующие элементы в них должны быть, естест-
венно, приспособлены для работы с переменным напряжением.
Что касается источников опорного переменного напряжения, то их обычно
выполняют на основе инерционно-нелинейных сопротивлений — полупроводнико-
вых или металлических терморезисторов. Регулирующие элементы, входящие в со-
став стабилизаторов, можно считать усилителями мощности, включенными на
выходе ОУ. Таким образом, РЭ для переменного напряжения — это усилители мощ-
ности переменного напряжения.
Рис. 12.14. Компенсационный стабилизатор с ОУ
б)
Рис. 12.15. Стабилизаторы переменного тока
В качестве примера на рис. 12.15 приведены две схемы стабилизаторов пере-
менного напряжения [27]. Стабилизатор на рис. 12.15, а состоит из резистивного
моста RI, R2, R3, R0, к одной диагонали которого присоединяется источник входно-
го переменного нсстабилизированного напряжения Ui, а к другой — входы диффе-
ренциального усилителя. Резистор Rt моста представляет собой маломощную лампу
накаливания, т. е. металлический терморезистор, сопротивление которого возраста-
ет за счет саморазогрева. Вследствие тепловой инерционности такого резистора его
сопротивление не будет изменяться синхронно с изменением мгновенных значений
тока, а будет реагировать только на относительно медленные изменения его действу-
ющего значения. К сожалению, модель лампы накаливания в программе EWB таки-
ми свойствами не обладает — это просто световой индикатор.
В стабилизаторе на рис. 12.15, б полупроводниковый терморезистор Rt, обла-
дающий отрицательным (падающим) участком ВАХ, включен в цепь отрицательной
399
Часть II. Моделирование схем и устройств
обратной связи. Последовательно с ним включен резистор R2, сопротивление кото-
рого равно отрицательному сопротивлению Rt. Образованный таким образом двух-
полюсник обладает свойствами стабилитрона для переменного тока. Выходное
напряжение стабилизатора определяется выражением Uo = Ui(l + R3/R4).
Контрольные вопросы и задания
1. Чем отличаются параметрические и компенсационные стабилизаторы?
2. Каким образом в компенсационном стабилизаторе формируется опорное на-
пряжение?
3. Проведите ориентировочный расчет транзисторного стабилизатора и его моделиро-
вание для определения коэффициента стабилизации. В процессе моделирования
уточните номинальные значения пассивных компонентов и по необходимости отре-
дактируйте параметры транзисторов и стабилитрона.
4. Выберите параметры компонентов и проведите моделирование стабилизатора с
ОУ для Uo “ 5 В и сравните его коэффициент стабилизации с данными для тран-
зисторного стабилизатора. Варьируя сопротивление нагрузки, проверьте работо-
способность схемы защиты стабилизатора от коротких замыканий.
5. Рассмотренные компенсационные стабилизаторы относятся к классу последова-
тельного типа, характеризующиеся последовательным включением РЭ и нагруз-
ки. На практике находят применение также стабилизаторы параллельного тина,
в которых РЭ включается параллельно нагрузке, а последовательно с ними — га-
сящий резистор или стабилизатор тока. Преобразуйте схему на рис. 12.14 в ста-
билизатор последовательного типа и проведите его испытание. Предварительно
ознакомьтесь со стабилизатором такого типа, схема которого приведена в файле
shuntreg.ca4.
12.4. Импульсные стабилизаторы
Общим недостатком компенсационных стабилизаторов напряжения является
низкий КПД из-за потерь в транзисторах регулирующего элемента, что, кроме того,
требует мощных теплоотводов, значительно превышающих по габаритам и массе
сами стабилизаторы. Более прогрессивным техническим решением являются
импульсные стабилизаторы напряжения (ИСН), в которых транзисторы регулирую-
щих элементов работают в ключевом режиме. При использовании высокочастотных
транзисторов проблема КПД и массо-габаритных характеристик в таких стабилиза-
торах решается достаточно радикально.
Существуют три основные схемы ИСН [55]: последовательный ИСП понижа-
ющего типа (рис. 12.16, а), параллельный ИСН повышающего (рис. 12.16, б) и па-
раллельный инвертирующего (рис. 12.16, в) типа. Все три схемы содержат
накопительный дроссель L, регулирующий элемент 1, блокировочный диод VD,
элементы управления 2, 3 и конденсатор фильтра С.
В последовательном ИСП понижающего типа (рис. 12.16, а) регулирующий
элемент 1 и дроссель L включены последовательно с нагрузкой Rn. В качестве РЭ ис-
пользуется транзистор, работающий в ключевом режиме. При открытом в течение
времени Т„ транзисторе энергия от входного источника постоянного тока Ui (или вы-
прямителя с выходным напряжением Uo) передается в нагрузку через дроссель L, в
котором накапливается энергия. При закрытом в течение времени Тп транзисторе
накопленная в дросселе энергия через диод VD передается в нагрузку. Период ком-
мутации (преобразования) равен Т = Т„ 4- Тп. Частота коммутации (преобразования)
400
Глава 12. Источники электропитания
F = 1/Т. Отношение длительности открытого состояния транзистора, при котором
генерируется импульс напряжения длительностью Ти, к периоду коммутации Т на-
зывается коэффициентом заполнения К, Т„/Т.
Таким образом, в импульсном стабилизаторе регулирующий элемент 1 преоб-
разует (модулирует) входное постоянное напряжение Ui в серию последовательных
импульсов определенной длительности и частоты, а сглаживающий фильтр, состоя-
щий из диода VD, дросселя L и конденсатора С, демодулирует их в постоянное на-
пряжение Uo. При изменении выходного напряжения Uo или тока в нагрузке Rn з
импульсном стабилизаторе с помощью цепи обратной связи, состоящей из измери-
тельного элемента 3 и схемы управления 2, длительность импульсов изменяется
таким образом, чтобы выходное напряжение Uo оставалось неизменным (с опреде-
ленной степенью точности).
Импульсный режим работы позволяет существенно уменьшить потери в регу-
лирующем элементе и тем самым повысить КПД источника питания, уменьшить его
массу и габариты. В этом и состоит основное преимущество импульсных стабилиза-
торов перед компенсационными стабилизаторами непрерывного действия.
В параллельном ИСН повышающего типа (рис. 12.16, б) регулирующий эле-
мент 1 подключен параллельно нагрузке Rn. Когда регулирующий транзистор от-
крыт, ток от источника питания Ui протекает через дроссель L, запасая в нем
энергию. Диод VD при этом находится в закрытом состоянии и поэтому не позволя-
ет конденсатору С разрядиться через открытый регулирующий транзистор. Ток в на-
грузку в этот промежуток времени поступает только от конденсатора С. В момент
времени, когда регулирующий транзистор закрывается, ЭДС самоиндукции дроссе-
ля L суммируется с входным напряжением и энергия дросселя передается в нагруз-
ку, при этом выходное напряжение оказывается больше входного напряжения
питания Ui. В отличие от схемы на рис. 12.15 здесь дроссель не является элементом
фильтра, а выходное напряжение становится больше входного на величину, опреде-
ляемую индуктивностью дросселя L и временем открытого состояния регулирующе-
го транзистора (или скважностью управляющих импульсов).
Рис. 12.16. Структурные схемы последовательного ИСН понижающего типа (а), параллельного
ИСН повышающего (б) и инвертирующего (в) типа
Схема управления стабилизатором на рис. 12.16, б построена таким образом,
что, например, при повышении входного напряжения питания Ui уменьшается дли-
тельность открытого состояния регулирующего транзистора на такую величину, что
выходное напряжение Uo остается неизменным.
В параллельном инвертирующем ИСН (рис. 12.16, в), в отличие от схемы на
< рис. 12.16, б, дроссель L включен параллельно нагрузке Rn, а регулирующий эле-
мент 1 — последовательно с ней. Блокирующий диод отделяет конденсатор фильтра
С и нагрузку Rn от регулирующего элемента по постоянному току. Стабилизатор об-
ладает свойством изменения (инвертирования) полярности выходного напряжения
1 Uo относительно полярности входного напряжения питания.
401
Часть II. Моделирование схем и устройств
Импульсные стабилизаторы в зависимости от способа управления регулирую-
щим транзистором могут выполняться с широтно-импульсной модуляцией (ШИМ),
частотно-импульсной модуляцией (ЧИМ) или релейным управлением. В ШИМ-ста-
билизаторах в процессе работы изменяется длительность импульса Та, а частота
коммутации остается неизменной; в ЧИМ-стабилизаторах изменяется частота ком-
мутации, а длительность импульса Т„ остается постоянной; в релейных стабилизато-
рах в процессе регулирования напряжения изменяется как длительность
импульсов, так и частота их следования.
Наибольшее распространение на практике получил последовательный ИСН
(рис. 12.16, а), в котором накопительный дроссель одновременно является элемен-
том сглаживающего LC-фильтра. В стабилизаторах на рис. 12.16, б и 12.16, в дрос-
сель L не участвует в сглаживании пульсации выходного напряжения: этих схемах
сглаживание пульсации достигается только за счет увеличения емкости конденсато-
ра С, что приводит к увеличению массы и габаритов фильтра и устройства в целом.
Статическая регулировочная характеристика, определяемая для стабилизато-
ра на рис. 12.16, а по формуле Uo/Ui = К,(1 - К,), представляет собой прямую, наклон
которой зависит (без учета потерь в регулирующем транзисторе и диоде) от отноше-
ния активных сопротивлений дросселя и нагрузки, т. е. К, - Rd/R„. Напряжение Uo
на нагрузке определяется относительной длительностью управляющих импульсов
(при постоянном Ui) и не может быть больше напряжения питания, а линейность дан-
ной характеристики соответствует условиям устойчивой работы ИСН.
Рассмотрим основные элементы ИСН (см. рис. 12.16, а). Начнем с основного
блока, схема которого показана на рис. 12.17.
Рис. 12.17. Силовой блок последовательного ИСН
Блок включает в себя силовую часть и регулирующий элемент на транзисторе
VT1, управляемый ключом на транзисторе VT2 (диод VD2 служит для защиты базо-
вого перехода VT2 при большом отрицательном входном сигнале управления). Со-
противление резистора R1 выбирается из условия обеспечения закрытого состояния
транзистора VT1 (100...900 Ом), a R2 — ориентировочно из условия K0Ui = R2 Ik^,
где к = 1,5...2 — коэффициент запаса по насыщению; £, Ikrax — коэффициент усиле-
ния тока и максимальный импульсный коллекторный ток транзистора VT1. Анало-
гичным образом выбирается сопротивление резистора R3, но при этом в расчетах Ui
заменяется амплитудой управляющего импульса функционального генератора. От-
метим, что при выборе количества транзисторов РЭ можно руководствоваться реко-
мендациями, приведенными для схемы на рис. 12.13.
Исходными данными для выбора параметров схемы на рис. 12.17 являются:
напряжение Ui и пределы его изменения; внутреннее сопротивление Ri источника
Ui; номинальное выходное напряжение стабилизатора Uo и допустимые пределы его
регулировки; максимальный 1пП|11Х и минимальный InmiF токи нагрузки, допустимая
402
Глава 12. Источники электропитания
амплитуда пульсации выходного напряжения стабилизатора; коэффициент стаби-
лизации Кст и внутреннее сопротивление R(1; максимальный температурный уход на-
пряжения Uo и др. Порядок выбора параметров следующий:
1. Выбираем частоту преобразования F (до 100 кГц, для модели — единицы кило-
герц) и принимаем ориентировочно КПД = 0,85...0,95.
2. Определяем минимальное и максимальное значения относительной длительнос-
ти (коэффициента заполнения) импульса напряжения на входе фильтра: Кз,,,,-
= и1т1П/ио_КПД, Кз_ = ии/иоЫпКПД.
3. Из условия сохранения режима непрерывности токов дросселя определяем его
минимальную индуктивность LraU1 = Uon,„(l - Кз„1П)/21нпппЕ.
4. Вычисляем произведение LC по заданному значению напряжения пульсаций
Unp L-C = Unmin(l - K3mb)/16Un?F2, откуда затем находим емкость конденсатора С.
Произведение L-С определяет не только уровень пульсаций, но и характер пе-
реходных процессов выходного напряжения после включения стабилизатора.
Па рис. 12.18 показаны результаты моделирования схемы на рис. 12.17 при
следующих данных: F = 1 кГц, Кз = 0,5, Rn = 100 Ом, L 200 мГн, С = 100 мкФ (для
рис. 12.18, а) и С - 1 мкФ (для рис. 12.18, 6). Как видно из осциллограмм, при срав-
нительно большом значении произведения L C переходная характеристика исследу-
емой схемы имеет колебательный характер, что приводит к скачкам выходного
напряжения, которые могут оказаться опасными для потребителя (нагрузки).
Рис. 12.18. Осциллограммы выходного сигнала ИСН при емкости С = 100 мкФ (а) и 1 мкФ (б)
Перейдем к рассмотрению следующего функционального узла ИСН — схемы
управления и измерительного элемента. При этом целесообразно рассмотреть харак-
теристики используемых в ИСН модуляторов.
Импульсные стабилизаторы с ШИМ по сравнению со стабилизаторами двух
других типов имеют следующие преимущества:
4 обеспечивается высокий КПД и оптимальная частота преобразования независи-
мо от напряжения первичного источника питания и тока нагрузки; частота
пульсации на нагрузке является неизменной, что имеет существенное значение
для ряда потребителей электроэнергии;
4- реализуется возможность одновременной синхронизации частот преобразования
неограниченного числа ИСН, что исключает опасность возникновения биений
частот при питании нескольких ИСН от общего первичного источника постоян-
ного тока. Кроме того, при работе ИСН на нерегулируемый преобразователь (на-
пример, усилитель мощности) возможна синхронизация частот обоих устройств.
Недостатком ИСН с ШИМ по сравнению со стабилизатором релейного типа яв-
ляется более сложная схема управления, содержащая обычно дополнительный зада-
ющий генератор.
403
Часть II. Моделирование схем и устройств
Импульсные стабилизаторы с ЧИМ, не имея существенных преимуществ пе-
ред другими типами ИСН, обладают следующими недостатками:
♦ сложность реализации регуляторов частоты в широких пределах, особенно при
больших изменениях напряжения питания и тока нагрузки;
♦ отсутствие возможности реализации отмеченных выше преимуществ системы
регулирования с ШИМ.
Последний недостаток относится и к релейным (или двухпозиционным)
ИСН, которые характеризуются также сравнительно большой пульсацией напря-
жения на нагрузке (в стабилизаторах с ШИМ или ЧИМ пульсации выходного на-
пряжения принципиально могут быть сведены к нулю, что невозможно достичь в
релейных стабилизаторах).
В общем случае блок 3 (рис. 12.19, а) содержит делитель напряжения, источ-
ник опорного напряжения ИОН, сравнивающий элемент и усилитель рассогласо-
вания. Эти элементы выполняют такие же функции, что и в компенсационных
стабилизаторах. Для ИСН с ШИМ к этим устройствам добавляются формирователь
синхронизирующего напряжения (задающий генератор) и пороговое устройство, с
помощью которых осуществляется формирование модулированных по длительнос-
ти импульсов. Изменение длительности управляющего импульса осуществляется
модуляцией его переднего или заднего фронта.
При модуляции переднего фронта линейно изменяющееся напряжение син-
хронизации на каждом периоде нарастает, а при модуляции заднего фронта управ-
ляющее напряжение в каждом периоде уменьшается. При модуляции по обоим
фронтам напряжение синхронизации на каждом периоде нарастает и спадает. Этот
вид модуляции по сравнению с односторонней модуляцией позволяет реализовать
более быстродействующие ИСН, так как в этом случае мгновенное значение управ-
ляющего напряжения влияет на формирование фронтов.
Коэффициент передачи схемы управления, устанавливающий связь между
изменениями относительной длительности импульсов на входе сглаживающего
фильтра и напряжения на нагрузке (для ШИМ), равен Кш = K^K^U,., где К„, Ку —
коэффициенты передачи делителя напряжения и усилителя рассогласования соот-
ветственно; Uy — амплитуда синхронизирующего напряжения.
Полная схема ИСН с элементами ШИМ показана на рис. 12.19, а. Делитель
напряжения выполнен на резисторах R3, R4, источник опорного напряжения — на
резисторе R5 и стабилитроне VD2, усилитель сигнала рассогласования — на 0U1,
пороговое устройство — на OU2. Поскольку оба ОУ питаются от однополярного ис-
точника, для согласования уровней в ключевом каскаде на VT2 в эмиттерную цепь
включен параметрический стабилизатор (VD3, R8). В качестве задающего исполь-
зован функциональный генератор в режиме пилообразных импульсов; при модуля-
ции по переднему фронту коэффициент заполнения (Duty cycle) выбирается
максимальным (99% ), при модуляции по заднему фронту - минимальным (0,1%),
при модуляции по обоим фронтам — 50%. На рис. 12.19, б показаны результаты
моделирования процесса формирования управляющих импульсов при модуляции
по переднему фронту; они получены при Rn •= 100 Ом и Ui - 20 В. Как видно из по-
лученных осциллограмм, сразу после включения источника питания формируются
импульсы управления максимальной длительности, затем наступает продолжи-
тельная пауза из-за положительного скачка выходного напряжения Uo, затем
опять идет форсированный режим из-за отрицательного скачка Uo. Установивший-
ся режим формирования управляющего импульса наступает через несколько пери-
одов управляющего сигнала задающего генератора.
404
Глава 12. Источники электропитания
Рис. 12.19. Схема ИСН, дополненная элементами ШИМ (а) и осциллограммы сигналов управле-
ния (А) и сигналов ШИМ (В) (б)
б)
Контрольные вопросы и задания
1. Назовите основные типы импульсных стабилизаторов напряжения.
2. Какие типы модуляторов используются в импульсных стабилизаторах?
3. Каким образом сказываются частотные характеристики регулирующего (сило-
вого) транзистора на КПД и габаритах ИСН?
4. Для схемы на рис. 12.17 получите зависимость Uo = f(K3) при F = 1 кГц, Uy 3 В
(однополярность управляющих прямоугольных импульсов обеспечивается уста-
новкой на функциональном генераторе постоянной составляющей Offset = 3 В,
коэффициент заполнения Кз задается выбором параметра Duty cycle), Ui = 30 В,
Rn = 100 Ом, L = 100 мГн, С — 100 мкФ.
5. Для схемы на рис. 12.17 исследуйте зависимость формы переходных процессов
от активного сопротивления потерь Rd, включая последовательно с дросселем
сопротивление 0,1... 10 Ом.
6. Исследуйте ИСН по схеме рис. 12.19 при модуляции заднего фронта, одновре-
менно переднего и заднего; сравните результаты по времени выхода устройств в
установившийся режим.
7. Для каждого способа формирования управляющих сигналов в установившемся
режиме получите зависимость периода формирования управляющих сигналов
от сопротивления нагрузки Rn в диапазоне 10... 1000 Ом и входного напряжения
Ui в диапазоне 15...40 В.
8. Проведите испытание ИСН, представленного в схемном файле sw_modps.ca4.
12.5. Транзисторные преобразователи
При использовании в качестве первичных источников постоянного тока (ак-
кумуляторов, солнечных батарей и т.п.) транзисторный преобразователь является
основным функциональным узлом преобразования входного напряжения постоян-
ного тока одного номинала в ряд постоянных напряжений различных номиналов и
полярностей, гальванически не связанных друг' с другом и с первичным источни-
ком. Транзисторный преобразователь применяется также в источниках питания с
бестрансформаторным входом, работающих от сети переменного тока промышлен-
ной частоты. Такие источники питания в настоящее время полностью вытеснили
громоздкие трансформаторные устройства из бытовой радиоаппаратуры, персональ-
ных компьютеров и других приборов различного назначения.
405
Часть II. Моделирование схем и устройств
Транзисторные преобразователи выполняются по однотактной или двухтакт-
ной схеме. Однотактные преобразователи выполняются по схеме релаксационного
автогенератора с трансформаторной обратной связью (рис. 12.20, а), преобразующе-
го постоянное напряжение питания Ucc в прямоугольные импульсы; выходное на-
пряжение Uo, получаемое на вторичной обмотке трансформатора Т, выпрямляется и
после фильтрации подается на стабилизатор и далее потребителю.
Двухтактный преобразователь выполняется, как правило, на двух транзисто-
рах, к коллекторам которых подключена первичная обмотка трансформатора. Ис-
точник питания Ucc подключается к эмиттерам транзисторов и среднему выводу
первичной обмотки трансформатора Т (рис. 12.20, б). Трансформатор содержит так-
же две обмотки, подключаемые к базам транзисторов и обеспечивающие режим ав-
тогенерации за счет положительной обратной связи.
Рис. 12.20. Однотактный (а) и двухтактный (б) преобразователи
В двухтактных автогенераторных преобразователях используются трансфор-
маторы в режиме насыщения или ненасыщения. В преобразователях с силовым
трансформатором в режиме насыщения переключение транзисторов осуществляется
за счет смены полярности напряжения на обмотках трансформатора в момент насы-
щения сердечника. В этих преобразователях цепь обратной связи (базовые обмотки,
обмотка Wb на рис. 12.20, а) находится на общем магнитопроводе трансформатора
питания. Частота преобразования определяется параметрами трансформатора и на-
пряжением на его первичной обмотке. Основным недостатком таких преобразовате-
лей является резкое увеличение тока через открытый транзистор в момент его
насыщения, что вызывает дополнительные потери мощности в транзисторах.
В преобразователях с непасыщающимся трансформатором переключение
транзистора осуществляется за счет введения в цепь обратной связи дополнитель-
ных элементов, которые переключают транзистор до насыщения трансформатора. В
качестве таких переключающих элементов могут использоваться маломощный пе-
реключающий трансформатор, дроссель насыщения или RC-цепи (параллельно ре-
зисторам Rb, Rbl, Rb2 подключаются конденсаторы).
Двухтактные преобразователи ввиду их простоты и высокой надежности широ-
ко используются в источниках питания с выходной мощностью до нескольких десят-
ков ватт. В более мощных преобразователях дополнительно используются
двухтактные или мостовые усилители на транзисторах большой мощности. В качест-
ве задающего генератора, который управляет переключением силовых транзисторов
усилителя мощности, используются двухтактные преобразователи с самовозбужде-
нием, автогенераторы на операционных усилителях или логических элементах с
внешними RC-цепями, задающими частоту преобразователя до 100 кГц и выше.
406
Глава 12. Источники электропитания
Достоинством преобразователей с усилителем мощности является отсутствие
влияния изменения нагрузки и напряжения питания на частоту преобразования; в
них также просто организуется управление силовыми транзисторами.
На практике получили также распространение преобразователи с дополни-
тельным стабилизатором напряжения на входе. При этом в зависимости от выход-
ной мощности применяются различные типы стабилизаторов. Преобразователи с
входным непрерывным стабилизатором используются при выходной мощности от
долей до единиц ватт, КПД такого преобразователя не выше 0,5. Преобразователи с
входным импульсным стабилизатором используются при выходной мощности от
единиц до сотен ватт; они имеют более высокий КПД до 0,6...0,8.
а)
б)
Рис. 12.21. Транзисторный преобразователь с независимым возбуждением (а) и осциллограмма
его выходного сигнала (б)
Схема преобразователя с усилителем мощности (преобразователь с независи-
мым возбуждением) приведена на рис. 12.21, а. Преобразователь содержит два тран-
зистора VT1, VT2, выходной Т1 и входной Т2 трансформаторы, между средними
точками обмоток которых включен источник преобразуемого постоянного напряже-
ния Ui. В качестве задающего генератора использован функциональный генератор в
режиме синусоидального сигнала напряжением 3 В. Выходной сигнал этого преоб-
разователя показан на рис. 12.21, б.
12.6. Элементы импульсных
стабилизаторов в программе EWB 5.0
В программе EWB 5.0 компоненты импульсных стабилизаторов находятся в
группе Miscellaneous под именами BUCK, BOOST и BUCK-BOOST. В документации
на программу приводятся схемы включения первых двух компонентов с результата-
ми моделирования в таком включении (рис. 12.22). Компоненты имеют два входа и
один выход. К первому входу подключается источник входного напряжения Ui (12 и
5 В), ко второму входу подключается источник управления Uc (0,1 В), напряжение
которого может меняться в пределах от 0,1 до 0,9 В, что соответствует изменению
коэффициента заполнения D импульсов встроенного генератора в пределах от 10 до
90%. При этом выходное напряжение компонентов должно меняться в соответствии
с выражениями [67J:
для компонента BUCK Uo = UiD;
для компонента BOOST Uo = Ui/(1 - D),
где Ui — входное напряжение.
Из анализа данных на рис. 12.22 видно, что результаты моделирования прак-
тически соответствуют результатам расчета по приведенным формулам. Кроме того,
можно сделать вывод, что компонент BUCK является моделью импульсного стаби-
407
Часть II. Моделирование схем и устройств
лизатора напряжения понижающего типа (рис. 12.16, а), а компонент BOOST — мо-
делью импульсного стабилизатора напряжения повышающего тина (рис. 12.16, б).
В диалоговом окне, которое является одинаковым для всех трех компонентов,
можно задать индуктивность накопительного дросселя (L = 500 mH), его активное со-
противление (R = 5 niQ) и частоту преобразования встроенного генератора (FS = 50 kHz).
500 ^Н/5 тй/50 kHz
б)
Рис. 12.22.
а)
Схема включения компонентов BUCK (а) и BOOST (б)
Рис. 12.23. ШИМ на управляемом источнике напряжения
Рассмотрим возможность использования источников напряжения, управляе-
мых напряжением (ИНУН), программы EWB 5.0 в качестве широтно-импульсного
модулятора (ШИМ) для ИСН. Схема такого модулятора (рис. 12.23) содержит управ-
ляемый источник VT, источник испытательного напряжения на интеграторе (эле-
менты ОУ1, R, С) с источниками постоянного напряжения UI, U2 на входе,
переключаемыми реле времени 1. Этот источник генерирует однополярный треу-
гольный импульс, который через переключатель X, управляемый одноименной кла-
вишей клавиатуры, может подключаться к каналу А осциллографа и через ключ
Z — к входу “ + “ ИНУН. В качестве задающего генератора используется функцио-
нальный генератор, работающий в режиме генерации однополярных импульсов с
коэффициентом заполнения 2%. Выход генератора подключен к входу запуска “П”
ИНУН (триггерный вход). Вход разрешения “С” ИНУН через реле времени 2 с вре-
менем задержки 4 с может подключаться или к общей шине (разрешение) или к ис-
точнику U1 (запрет). Источник напряжения U3 предназначен для получения
характеристики преобразования “вручную”, для чего ключ Z переводится в противо-
положное показанному на рисунке положение.
408
Глава 12. Источники электропитания
Параметры ИНУН задаются с помощью диалогового окна, имеющего две за-
кладки следующего содержания: CLKTR = 0,5 В — определяет минимальную ампли-
туду запускающих сигналов (чувствительность по запуску), L = 0 В и Н 1,5 В —
нижний и верхний уровень выходного напряжения, DTR = 1е-09 с и DPW 1е-09 с —
временную задержку (относительно сигналов запуска) формирования выходного им-
пульса и его ширины, TR « 1е-09 с и TF = 1е-09 с — длительность переднего и задне-
го фронта выходного импульса. Параметр N = 2 определяет количество задаваемых
участков по входному напряжению С1...С5 (С1 = 0 В, С2 = 5 В, СЗ = С4 = С5 = 0 В), в
которых длительность (ширина) выходного импульса будет равна соответственно ус-
тановленной длительности PW1...PW5 (PW1 = 0,001 с, PW2 0,05 с, PW3 = PW4 -
- PW5 = 1е-06 с).
Рис. 12.24. Осциллограммы входного (А) и выходного (В) сигналов ШИМ
б)
Рис. 12.25. Осциллограммы сигналов на входе запуска (А) и на выходе ИНУН (В) для области
малых значений напряжения входного сигнала на управляющем входе ИНУН (а) и
при сигнале разрешения длительностью 1,5 С (б)
Результаты моделирования схемы на рис. 12.23 при указанных выше значе-
ниях параметров показаны на рис. 12.24, откуда видно, что при входном напряже-
нии около 5 В (результаты измерений в строках VAI, VA2 индикаторных окон)
409
Часть II. Моделирование схем и устройств
длительность выходного импульса (результаты измерений в строке Т2-Т1 индика-
торного окна) составляет 50 мс, что соответствует заданному значению. Таким обра-
зом, коэффициент преобразования (крутизна характеристики преобразования)
ШИМ на рис. 12.23 составляет 10 мс/ В. Для входных сигналов напряжением мень-
ше 1 В осциллограммы в “увеличенном” масштабе (при более быстрой развертке) по-
казаны на рис. 12.25, а. На рис. 12.25, б приведены осциллограммы сигналов,
аналогичные показанным на рис. 12.24, но при длительности сигнала разрешения
1,5 с (после срабатывания реле времени 2, когда на вход разрешения “С" подается за-
прещающий сигнал положительной полярности от источника Ш).
Рис. 12.26. Осциллограммы входного (Л) и выходного (В) сигналов при значениях параметров
PW1 = 0.05 с и PW2 = 0.001 с
Если поменять местами значения параметров PW1 и PW2, то осциллограммы
сигналов на рис. 12.25, а приобретают вид, показанный на рис. 12.26, откуда видно,
что с увеличением уровня входного сигнала длительность выходных импульсов
уменьшается и при входном напряжении больше 5 В наблюдается пропадание вы-
ходного сигнала.
Контрольные вопросы н задания
1. Исследуйте зависимость Uo = f(Uc) в диапазоне Uc 0,01...0,95 В при указанных
на рис. 12.22 значениях Ui.
2. Объясните, почему при напряжении входного сигнала больше 5 В на осцилло-
грамме (рис. 12.26) наблюдается пропадание выходного сигнала?
3. Измерьте коэффициент преобразования ШИМ (рис. 12.23) при входных напря-
жениях 0,5...3 В, используя для этой цели источник напряжения U3.
4. Что нужно предпринять, чтобы устранить пропадание выходного сигнала, пока-
занное на рис. 12.26? Ответ проверьте на модели.
5. Используя команду Analysis/Forier..., проведите спектральный анализ выход-
ного напряжения схемы на рис. 12.23, качественно сопоставив полученные ре-
зультаты с результатами расчета по формуле:
U(t) - UJVT, + (AT/T0)sin27tFct + 1 Z (l/7rn)Jk(2^nAT/To)sin27i:(nFm + kFJt +
+ Е (l/7un)sin27mFmt],
где Uo — амплитуда импульсов; то — длительность импульса при отсутствии модуля-
ции; То - период следования импульсов; F,. частота модулирующего сигнала;
Fm = 1/Т0 — частота следования импульсов; Jk(2nnAT/T(.) — функция Бесселя поряд-
ка Л; Ат — наибольшее изменение длительности импульса; п — номер гармоники.
410
Глава 12. Источники электропитания
12.7. Тиристорные источники
питания с фазовым управлением
Такие устройства используются для регулирования среднего значения мощно-
сти, подводимой к.нагрузке (нагревательные приборы, источники питания, электро-
привод и т.п.). Регулирование производится изменением фазового угла, при котором
происходит отпирание тиристора.
Однополупериодный тиристорный источник состоит (рис. 12.27, а) из тиристора
(тринистора) VD3 и цепи управления из RC-цепи, вспомогательного выпрямительного
диода VD1 и порогового элемента, в качестве которой) в данном случае использован не-
управляемый тиристор (диод Шокли) VD2 с напряжением срабатывания VS = 100 В. В
качестве нагрузки выпрямителя использована лампочка накаливания L. Постоянное
U_ и действующее U, напряжение на нагрузке (осциллограмма В на рис. 12.27, в) опре-
деляются выражениями [86]: U. = UK(1 + сова)/2л; U, - 0,5U„[ 1 - а/л + (0,5sin2a)/n]1/2,
где U„ — амплитуда переменного напряжения (осциллограмма А на рис. 12.27, в);
a = 0...180'— угол отпирания тиристора VD3, который определяется постоянной
времени RC и напряжением срабатывания VD2. Расчет угла а производится с исполь-
зованием графоаналитических методов [86]. Для проведения исследований можно
воспользоваться также выражением для напряжения на конденсаторе С [79]
- UJcosP-cos(47tt/3T - Р) + (0,5sin2p) exp(-t/RC - 3T/8RC)], где Т — период источ-
ника Ui; tgp = 4nRC/3T. Из условия Uc = VS можно определить временной промежу-
ток, а по нему — угол а. При большом значении этого угла может создаться ситуация,
когда конденсатор С не успеет разрядиться, в результате чего будет “пропущен” оче-
редной период выпрямляемого напряжения. В этом случае рекомендуется диод VD1
заменить на резистор, что позволяет перезаряжать конденсатор С за счет отрицатель-
ной полуволны источника Ui [86].
Пример использования рассмотренного источника для управления двигателем
постоянного тока показан на рис. 12.27, б, где двигатель имитируется его противоЭДС
Ua, индуктивностью La и активным сопротивлением Ra якорной обмотки. Известно
(см. разд. 14.2), что противоЭДС двигателя постоянно!*© тока прямо пропорциональна
его скорости вращения, т. е. она может служить в качестве “датчика” такой скорости.
Если при положительной полуволне источника Ui амплитудное значение напряжения
на подвижном контакте резистора R2 (точка А схемы, осциллограмма А на
рис. 12.27, в) меньше напряжения Ua, то диод VD1 заперт и, следовательно, цепь уп-
равления тиристора VD3 заблокирована, и он будет находиться в закрытом состоянии.
Для наблюдения такого режима значение Ua устанавливается примерно равным амп-
литудному значению Ui; при этом осциллограмма В будет представлять собой прямую
линию, отражающую значение Ua. Если напряжение на подвижном контакте резисто-
ра R2 больше Ua, то тиристор VD3 открывается и на якорную обмотку поступает
импульс напряжения (см. осциллограмму В на рис. 12.27, в), равный разности указан-
ных напряжений. При этом скорость двигателя увеличивается, пока противоЭДС не
достигнет установленного резистором R2 значения.
В случае реального двигателя возможен режим его существенного разгона да-
же за один период подачи повышенного напряжения (например, при импульсной на-
грузке — как в ручной электродрели). Для устранения такого недостатка в схеме на
рис. 12.27, б используется конденсатор С, введение которого позволяет уменьшить
время открытого состояния тиристора VD3 с четверти периода до такой величины,
при которой подводимая мощность как раз равна потерям энергии в двигателе за
один период [86].
411
Часть II. Моделирование схем и устройств
®L
100V//220V
- - VD*.
UI
120V/5CHa/00c3
R
ГПУ1О»Л/25Х
VD2
-----И-----;
Рис. 12.27. Однополупериодные схемы с фазовым управлением (а, б) и осциллограммы сигна-
лов (в, г)
Наиболее простым вариантом схемы двухполупериодного управления являет-
ся сочетание двустороннего переключающего диода (симметричного динистора) VD1
с двунаправленным тиристором (симмистором) VD2 (рис. 12.28, а). Кроме VD1, в
схему управления входит RC-цепь, которая выполняет такие же функции, как и в
ранее рассмотренных схемах, но только для обеих полуволн источника Ui (см. ос-
циллограммы А и В на рис. 12.28, б).
а) б)
Рис. 12.28. Двухполупсриодный источник с фазовым управлением (а) и осциллограммы сигна-
лов (б)
Контрольные вопросы и задания
1. Можно ли тиристор VD3 (схема на рис. 12.27, а) перевести в режим неуправляе-
мого (см. разд. 4.7)?
2. Замените тиристор VD2 в схеме на рис. 12.27, а на равноценный ему по параме-
трам стабилитрон и проведите испытания схемы.
412
Глава 12. Источники электропитания
3. При увеличении индуктивности La в схеме на рис. 12.27, б будет наблюдаться
заметная задержка при закрывании тиристора VD3. Чем объясняется такая
задержка?
4. Получите зависимость угла а от постоянной времени RC-цепи управления для
схемы на рис. 12.28, а.
5. Какое дополнительное устройство потребуется для использования схемы на
рис. 12.28, а в системе управления асинхронного двухфазного двигателя
(см. разд. 14.3)?
6. Проведите испытания тиристорного источника питания по схеме, содержащей-
ся в файле dimmer.са4.
413
Часть II. Моделирование схем и устройств
13. Элементы приемо-передающих устройств
Приемо-передающие устройства на промежутке достаточно длительного вре-
мени являлись основным двигателем прогресса в области радиоэлектроники и ее
элементной базы (см. Приложение 4). Значимость этих устройств для общества не
преуменыпилась и после того, как в 70-х годах прошлого столетия с появлением ми-
кропроцессоров начали бурно развиваться средства вычислительной техники и соот-
ветствующая элементная база для ее аппаратного обеспечения.
13.1. Принципы построения
приемо-передающих устройств
Блок-схема типового супергетеродинного радиоприемника показана на
рис. 13.1, на котором обозначено: А — антенна, 1 — входное устройство, 2 — усили-
тель высокой частоты, 3 — преобразователь частоты, 4 — гетеродин, 5 — усилитель
промежуточной частоты, 6 — детектор, 7 — второй гетеродин, 8 — усилитель низ-
кой частоты, Gr — громкоговоритель. Отметим, что второй гетеродин 7 использует-
ся только в профессиональных приемниках для слухового телеграфного приема, в
радиовещательных приемниках он обычно не используется.
Рис. 13.1. Блок-схема радиоприемника
Рис. 13.2. Модель приемо-передающей системы
Для ознакомления с основными принципами построения приемо-передающих
устройств рассмотрим демонстрационную модель одного из таких устройств, содер-
жащуюся в каталоге программы EWB 4.1 (схемный файл moldition.ca4) и показан-
ную в несколько переработанном виде на рис. 13.2. В схеме использованы следующие
подсхемы (субблоки): carrier — генератор несущей частоты, modultr — амплитудный
модулятор, А — зажим антенны, prop-sky — аттенюатор, имитирующий потери в ан-
тенне и входном устройстве приемника, receiver — приемник.
Схема генератора несущей частоты в развернутом виде показана на рис. 13.3.
Это знакомая нам схема с мостом Вина (см. гл. 10), отличающаяся наличием делите-
ля выходного напряжения на резисторах R3, R4 и другой частотой колебаний —
3,3 кГц. Такая частота относится к диапазону звуковых частот и, конечно, в радиопе-
редатчиках не используется, но здесь речь идет о принципе работы и при необходимо-
сти повышения частоты в разумных пределах особенных проблем не возникнет.
Модулятор (рис. 13.4) выполнен на ОУ, в цепь ООС которого включен собст-
венно модулирующий элемент полевой транзистор VT в режиме регулируемого
сопротивления. Напряжение от генератора поступает на неинвертирующий вход
ОУ, а модулирующее напряжение — на затвор полевого транзистора, режим которо-
го по постоянному току задастся постоянной составляющей напряжения на выходе
функционального генератора (см. рис. 13.5). На выходе модулятора получаем амп-
литудно-модулированное колебание (осциллограмма на рис. 13.6).
414
Глава 13. Элементы приемо-передающих устройств
Рис. 13.4.
Рис. 13.5.
Рис. 13.3. Схема генератора несущей частоты
Схема амплитудного модулятора
Режимы работы функционального генератора
Рис. 13.6.
Осциллограммы сигналов на входе (А) и выходе (В) модулятора
415
Часть II. Моделирование схем и устройств
Аттенюатор представляет собой делитель на двух резисторах 10 и 1 Ом и обес-
печивает ослабление в 11 раз (примерно на 21 дБ). Схема его настолько проста, что
не имеет смысла приводить ее здесь.
Схема приемника в целом показана на рис. 13.7. Он содержит усилитель амп-
литудно-модулированных колебаний (в реальных приемниках его называют усили-
телем радиочастоты или усилителем высокой частоты) на ОУ с коэффициентом
усиления 1 + R2/R1 -Пи две подсхемы: detector — детектор (рис. 13.8) и lopsfltr —
фильтр. Как видно из рис. 13.8, детектор представляет собой простой однополупери-
одный выпрямитель.
Рис. 13.7. Схема приемника
Рис. 13.8. Схема детектора
С2
2O0TF
а) б)
Рис. 13.9. Схема фильтра (а) и осциллограммы сигналов на выходе приемника (В) и передатчи-
ка (А) (б)
Включенный на выходе детектора фильтр представляет собой активный ФВЧ
на ОУ (рис. 13.9, а). На частоте модуляции (100 Гц) коэффициент его передачи равен
1 + R3/R4 = 1,2, в то время как для частоты несущей (3,3 кГц) он существенно мень-
416
Глава 13. Элементы приемо-передающих устройств
ine. На выходе фильтра получаем сигнал (осциллограмма В на рис. 13.9, б), передан-
ный с помощью приемо-передающей системы на рис. 13.2. Таким образом, в резуль-
тате моделирования можно достаточно наглядно продемонстрировать основные
принципы построения приемно-передающих устройств.
Контрольные вопросы и задания
Вопросы составлены с учетом сведений, приведенных в Приложении 4.
1. Скопируйте подсхему фильтра lopsfltr в отдельный файл и исследуйте его АЧХ
и ФЧХ.
2. Чем отличается детекторный приемник от приемника прямого усиления и как
можно объяснить название последнего?
3. Какими преимуществами обладает супергетеродинный приемник по сравнению
с приемником прямого усиления?
4. Определите коэффициент модуляции показанного на рис. 13.6 АМ-колебания.
5. Какими элементами схемы модулятора на рис. 13.4 можно изменять коэффици-
ент модуляции? Проверьте свой ответ на модели.
6. По приведенному выше описанию аттенюатора подготовьте его схему и сверьте
ее с моделью.
13.2. Входные устройства
радиоприемных устройств
Входные устройства (ВУ, их называют еще преселекторами) радиоприемных
устройств представляют собой резонансную систему, схема которой определяется
типом связи с антенной и с первым каскадом приемника (рис. 13.10).
Входное устройство по схеме рис. 13.10, а рассчитано па применение в первом
каскаде приемника резонансного усилителя с достаточно высоким входным сопро-
тивлением (каскад на полевом транзисторе): катушка L1 в этом случае носит назва-
ние катушки связи, если L1 и L2 намотаны на одном каркасе.
а) б) в)
Рис. 13.10. Входные устройства с индуктивной (а), трансформаторно-емкостной (б) и емкостной (в)
связью с антенной
Входное устройство на рис. 13.10, б характерно для приемников с магнитной
антенной; оно обеспечивает также возможность подключения дополнительно внеш-
ней антенны (через конденсатор Са) при трансформаторной связи с первым каскадом
приемника. Отметим, что с целью минимизации влияния входного сопротивления
этого каскада на избирательные характеристики резонансного контура емкость кон-
денсатора связи Са с антенной выбирается достаточно малой.
Входное устройство на рис. 13.10, в является наиболее простым и широко ис-
пользуемым практически на всех диапазонах радиоволн; при необходимости согла-
сования с входным каскадом приемника от катушки L делается отвод, который
подключается к входному каскаду (автотрансформаторная связь с нагрузкой).
14 Зак. 206
417
Часть II. Моделирование схем и устройств
Рассмотрим эквивалентную схему ВУ с трансформаторно-емкостной связью с ан-
тенной на рис. 13.11, на котором обозначено: La, Саа, Ra — эквивалентная индуктив-
ность, емкость и активное сопротивление антенны, Em — ЭДС, наводимая в антенне.
Саа Са
Рис. 13.11. Входное устройство с трансформаторно-емкостной связью с антенной (на схеме ука-
заны параметры эквивалента антенны)
Как правило, в диапазоне частот вплоть до ультракоротких волн индуктивное
и активное сопротивление антенны значительно меньше емкостного [55], что позво-
ляет упростить схему на рис. 13.11 и привести ее к виду, показанному на рис. 13.12,
на котором Со = Саа Са/(Саа + Са); Le — индуктивность рассеивания первичной об-
мотки трансформатора (устанавливается в диалоговом окне параметров трансформа-
тора); Cn' = п2Сп — приведенная к первичной обмотке емкость нагрузки Сп [50], где
п — коэффициент трансформации, задаваемый в окне параметров трансформатора.
Сопротивление Rk состоит из активного сопротивления первичной обмотки трансфор-
матора Rp, которое устанавливается в окне его параметров и по умолчанию равно ну-
лю, и эквивалентного сопротивления нагрузки R,,' = n2Rn [50], пересчитанного
параллельно контуру. Для преобразования его в последовательно включенное, что бо-
лее удобно для дальнейшегоанализа, используется формула [51]: Rp' = (toLJVRn' -
= (n(oLk)2/Rn, где со = 1 LkCk - резонансная частота контура; Lk = L1 4- Le; Ck = С +
+ Сп' + Со. Таким образом, Rk = Rp + (co-Lk)2/n2Rn.
Поскольку, как указывалось выше, емкость конденсатора связи Са выбирает-
ся достаточно малой, ток, поступающий в параллельный колебательный контур, об-
разованный элементами С/, С, Le, L1 и Rn', равен
L = со-Со-Е». (13.1)
При резонансе ток в индуктивной или емкостной ветви параллельного ко-
лебательного контура[56]
C-QL, (13.2)
где Q = coLk/Rk = l/co-C^R, -— добротность контура.
После подстановки (13.1) в (13.2) получим = K„-En,/Rk, где К. = Со/(Со +
+ С + Сп').
Напряжение на первичной обмотке трансформатора mUm' = Ira'coLl =
= oLl-K.-Ejn/R*. Напряжение на выходе устройства (на вторичной обмотке транс-
форматора) U„ = (0-Ll Kt Ero/nRk. Следовательно, коэффициент передачи входного ус-
тройства
К = wN-Ll-K./Rk = K„(Ll)2/nRkCk2. (13.3)
Пренебрегая индуктивностью рассеивания, т. е. выбирая в окне параметров
трансформатора Le = 0, рассмотрим два случая: 1) активное сопротивление первич-
ной обмотки Rp = 0; 2) активное сопротивление значительно больше эквивалентно-
го сопротивления нагрузки. В первом случае Rk = (o) Lk)2/n2Rn и
К = nCoRn/VLA- (13.4)
Во втором случае Rp»Rp', следовательно, Rk = Rp и
К =Ка ^LVCT/nRp. (13.5)
418
Глава 13. Элементы приемо-передающих устройств
Перейдем к моделированию ВУ, показанного на рис. 13.13, а, для которого
приняты следующие значения параметров трансформатора: Rp *= 0 и п = 3. При ос-
тальных параметрах, указанных на схеме, расчеты по формуле (13.4) дают
К 3 0,05 10”-3 107^0.5-6.05 109= 0,0082 41,74 дБ, что близко к значению коэф-
фициента передачи -41,6 дБ, полученному при моделировании (см. АЧХ на
рис. 13.13, б). Отметим, что, как следует из АЧХ, расчетное значение резонансной
частоты (2,9 кГц) также близко к полученному при моделировании.
Рис. 13.12. Упрощенная эквивалентная схема входного устройства с трансформаторно-емкост-
ной связью
Рис. 13.13. Входное устройство с трансформаторно-емкостной связью (а) н его АЧХ (б)
Перейдем к рассмотрению процесса прохождения через ВУ AM-сигналов (схе-
ма на рис. 13.14, а). При моделировании используется источник АМ-сигнала
E(t) = Е„,(1 + MsinQt)sinwt =
= E„sin<Dt - 0,5ME„,cos(Q + w)t + 0,5MEmcos(£2 - co)t, (13.6)
где Еи — амплитуда несущей; М < 1 — коэффициент модуляции; со, Q — частота не-
сущей и частота модуляции.
Переключатель Z позволяет подключиться к функциональному генератору
для оперативного получения АЧХ входного устройства.
Как видно из выражения (13.6), спектр АМ-сигнала состоит из трех компонен-
тов: несущей и двух боковых колебаний. Для случая настройки колебательного кон-
тура на частоту сигнала ток на его входе определяется выражением [51]:
I(t) = (oCo-Ee{sin(ot - 0,5MAcos[(Q + co)t - В] + 0,5Mcos[(Q - co)t + В]} (13.7),
где A = 1 /\ 1 + С2 — коэффициент уменьшения модуляции; С = 2QQ/co абсолютная
величина обобщенной расстройки для верхней и нижней боковых частот; В = arctgC.
Из выражения (13.7) следует, что на верхней боковой частоте ток запаздыва-
ет, а на нижней он опережает напряжение на угол В, при этом коэффициент модуля-
ции уменьшается в соответствии с выражением: m = M/V1 + С2.
Попробуем воспользоваться приведенными формулами для расчета парамет-
ров выходного АМ-сигнала со следующими исходными данными (кроме показанных
на рис. 13.14, а): М - 1, Rn = 1 кОм, (о — 20000 рад/с, Q = 2л 500 = 3140 рад/с,
U 0,5 Гн, Ск = 5 нФ, контур настроен на несущую частоту. В результате расчетов по-
14*
419
Часть II. Моделирование схем и устройств
лучаем: Q = 0,5 20000/1000 = 10; С = 2 10 3140/20000 » 3,14; В = arctg3,14 = 72,33';
m = 1/л1 + 3.142 = 0,303.
Из осциллограмм, полученных при моделировании (рис. 13.14, б), видно, что
временной интервал Т2-Т1, характеризующий фазовый сдвиг выходного сигнала,
составляет около 0,4 мс, что при периоде модулирующей частоты 2 мс соответствует
примерно 72 , т. е. близко к расчетному.
а)
б)
Рис. 13.14. Схема для моделирования прохождения AM-сигналов через ВУ с трансформаторно-
емкостной связью (а) и осциллограммы ее входного (А) и выходного (В) сигналов (б)
Контрольные вопросы и задания
1. Проведите моделирование ВУ на рис. 13.13, а при Rp = 1 кОм и Rn = 1000 МОм
и сравните полученные результаты с расчетными ио формуле (13.5).
2. При расчетах зависимости резонансной частоты и коэффициента передачи ВУ по
формуле (13.5) от емкости нагрузки Сп получены, в частности, следующие ре-
зультаты (цифры в скобках относятся к результатам моделирования): при
Сп = 1нФ К = -32,26 дБ (-31,9 дБ), F - 2,87 кГц (2,87 кГц); при Сп = 10 нФ
К = -34,2 дБ (-31,6 дБ), F = 2,66 кГц (2,66 кГц). Из приведенных данных видно,
что если результаты расчета и моделирования по определению резонансной час-
420
Глава 13. Элементы приемо-передающих устройств
тоты совпадают, то по коэффициенту передачи они заметно отличаются. При-
чем, если расчетные значения К с ростом Сп уменьшаются, то при моделирова-
нии они, наоборот, увеличиваются. Чем объяснить такое явление и имеет ли оно
практическое значение?
3. Используя схему на рис. 13.13, а при Rn » Rp = 1 кОм, на основании выраже-
ния (13.3) рассчитайте зависимость резонансной частоты и коэффициента пере-
дачи ВУ от индуктивности рассеяния Le. Сопоставляя результаты расчета с
результатами моделирования, установите правомерность включения индуктив-
ности Le в соответствии с эквивалентной схемой на рис. 13.12.
4. Используя модель на рис. 13.14, а, исследуйте зависимость фазового угла и фор-
мы выходного сигнала от частоты модулирующего сигнала в диапазоне частот от
10 до 800 Гц.
5. Используя выражение (13.7), по аналогии с методикой получения формулы
(13.3) получите выражение для коэффициента передачи ВУ для АМ-колебаний.
6. Используя методику, изложенную в разд. 13.5, определите коэффициент моду-
ляции AM-колебания на рис. 13.14, б и сравните с расчетным значением.
13.3. Связанные контуры
Связанные контуры используются в резонансных усилителях приемно-пере-
дающих устройств. Наибольшее распространение получили двухконтурные систе-
мы. показанные на рис. 13.15 и 13.16, где обозначено: Ui, Uo — напряжения на
входе и выходе контуров; М — коэффициент взаимной индуктивности; Ro, Со, Lo —
элементы связи; LI, Cl, RI, L2, С2, R2 — элементы первого и второго контуров.
а) б) в)
Рис. 13.15. Связанные контуры с трансформаторной связью (а), с внутренней (б) и внешней (в)
емкостными связями
а) б) в)
Рис. 13.16. Связанные контуры с трансформаторно-емкостной (а), резистивной (б) и автотранс-
форматорной (в) связью
Одной из важнейших характеристик связанных контуров является коэффи-
циент связи К - VkjK2, где KI, К2 — коэффициенты связи для первого и второго кон-
туров. Коэффициент связи служит для количественной оценки взаимного влияния
контуров и в практических конструкциях обычно существенно меньше единицы.
Для схемы на рис. 13.15, а
К, - М/Ll; К2 = M/L2; К = M/VL1L2.
421
Часть II. Моделирование схем и устройств
Для схемы на рис. 13.15, б
К, = С1/(С1 + Со); К. = С2/(С2 + Со).
Для схемы на рис. 13.15, в
К, = Со/(Со 4- С2); К2 = Со/(Со 4- С1).
Для схемы на рис. 13.16, а
К, (соМ - 1/соСо)/(соЫ); Кг = (соМ - 1/соСо)/соЬ2.
Для схемы на рис. 13.16, б
К, - Ro/(Ro 4- R2); К2 = Ro/(Ro + R1).
Для схемы на рис. 13.16, в
К, = Lo/(Lo 4- L2); К, = Lo/(Lo + L1).
В качестве объекта исследования выберем схему на рис. 13.15, в, которая с до-
полнительными элементами показана на рис. 13.17. Она дополнена резисторами R1
и R2, имитирующими активные сопротивления катушек индуктивности. Переклю-
чатель Z позволяет реализовать два режима: измерение АЧХ и ФЧХ (в положении
переключателя, показанном на рисунке) и исследование прохождения АМ-сигналов
через систему связанных контуров.
Рис. 13.17. Система связанных контуров с внешней емкостной связью
Рис. 13.18. АЧХ системы связанных контуров при Со = 49,5 пФ (а) и Со = 1 нФ (б)
Параметры системы связанных контуров определяются коэффициентом свя-
зи, затуханием одиночного контура D (величина, обратная добротности) и резонанс-
ными частотами каждого контура. Поскольку для схемы на рис. 13.17 Cl = С2 = С,
LI = L2 = L, RI = R2 = R, то эти параметры определяются с помощью выражений
[58]: К - Со/(Со + С); D = R/2nF L; F = l/2nF\L(C 4- Со). Для связанных контуров
характерным является наличие двух частот связи [58] Fl = F/^'l + л/К2 - D2 и
F2 = F/Vl - у'К2 - D2. Для схемы на рис. 13.17 расчеты по этим формулам при К =
= D = 0,01 (режим критической связи) дают: Fl = F2 = F = 3,17 кГц, т. е. частоты
связи практически совпадают, а АЧХ (рис. 13.18, а) представляет собой одногор-
бую резонансную кривую.
422
Глава 13. Элементы приемо-передающих устройств
Увеличим коэффициент связи, выбрав Со - 1 нФ. Для этого случая параметры
схемы имеют следующие расчетные значения: К 0,176; F = 2,9 кГц; F1 = 2,7 кГц;
F2 = 3,18 кГц. Из АЧХ, полученной в результате моделирования схемы при таких
данных (рис. 13.18, б), видно, что при коэффициенте связи выше критического она
имеет двугорбый характер, соответствующий двум частотам связи, и отличается бо-
лее крутыми скатами при более широкой полосе пропускания, которая обычно опре-
деляется на уровне 0,707 (-3 дБ) и равна AF - F D (F — резонансная частота).
Анализ показывает [51, 58], что полоса пропускания связанных контуров при
критической связи (К " D) составляет 1,41F-D и достигает максимального значения
3.1F D при К = 2,41D. Следует отметить, что при связи контуров ниже критической
(K<D) полоса пропускания двухконтурной системы может быть меньше полосы пропу-
скания одиночного контура. Так, например, при К - 0,1 D полоса пропускания состав-
ляет 0,65F D. Это свойство связанных контуров часто используется на практике, когда
требуется получить полосу пропускания уже полосы пропускания одиночного контура.
Рис. 13.19. Схема четырехкоптурного ФСС (а) и его АЧХ (б)
В заключение рассмотрим многоконтурную систему связанных контуров, ис-
пользуемую в качестве фильтра сосредоточенной селекции (ФСС) в каскаде преобра-
зователя частоты многих радиоприемников. Анализ показывает [59], что наиболее
эффективной (по критерию качество-стоимость) является 4-контурная система
(рис. 13.19, а), представляющая собой набор из контуров двух типов: два крайних
имеют увеличенную в два раза индуктивность и уменьшенную в два раза емкость по
сравнению со средними двумя контурами, т. е. все четыре контура имеет одинаковую
собственную резонансную частоту. Увеличение индуктивности двух крайних конту-
ров позволяет увеличить характеристическое сопротивление этих контуров
Rx = %'Lk/CL. Такой выбор позволяет выровнять коэффициенты передачи всех конту-
ров при включении на входе и выходе фильтра согласующих сопротивлений Rix и
423
Часть II. Моделирование схем и устройств
Rox, шунтирующих Rx крайних контуров. Однако такое конструктивное выполне-
ние контуров, как будет показано ниже на практическом примере, не является обяза-
тельным. Заметим, что наибольшее влияние на форму АЧХ оказывает сопротивление
Rox, поэтому в схеме использован переключатель X для возможности оперативного
исследования влияния этого сопротивления. Емкость конденсаторов связи Со выби-
рается, в зависимости от требуемой полосы пропускания, из необходимого соотноше-
ния коэффициента связи К и затухания D. Указанное на рис. 13.19, а значение
емкостей Со, обеспечивающих связь выше критической, выбрано из соображения на-
глядности, чтобы показать основное преимущество рассматриваемого фильтра, за-
ключающееся в обеспечении широкой полосы пропускания при достаточно крутых
скатах резонансной кривой.
Из сравнения АЧХ фильтра (рис. 13.19, б), полученной при указанных на
рис. 13.19, а параметрах, с АЧХ двухконтурных систем (см. рис. 13.18) видно, что
АЧХ четырехконтурной системы имеет явно выраженную плоскую часть. Однако
такая гладкая вершина АЧХ достигается только при соответствующем выборе со-
противления согласующего резистора Rox.
Следует отметить, что расчет многозвенных фильтров является достаточно
сложной задачей. В работе [59] приводятся следующие соотношения для расчета
параметров рассматриваемого фильтра: Со = 10‘/2nF-Rx; LI = 10eAF Rx/4nF2;
С2 = 10°/kAF Rx - 2Со; LI = 2L2; С2 = 2С1, где AF — требуемая полоса; емкость —
в пФ; индуктивность — в мкГн; частота — в кГц; сопротивление — в кОм.
Рис. 13.20. ФСС приемника ВЭФ-12 (а) и его АЧХ (б)
б)
К сожалению, результаты расчета по приведенным формулам существенно от-
личаются от результатов моделирования. Поэтому нам пришлось обратиться к прак-
тическому примеру использования рассматриваемого фильтра в популярном в 70-е
годы прошлого столетия переносном приемнике ВЭФ-12, схема которого показана
424
Глава 13. Элементы приемо-передающих устройств
на рис. 13.20, а [60]. Фильтр составлен из 4-х совершенно одинаковых контуров,
причем емкость связи Со' правой и левой пар контуров выбрана несколько меньше
емкости связи Со в каждой из них.
Указанные на рис. 13.20, а номинальные значения конденсаторов и индуктив-
ностей позволяют рассчитать следующие параметры:
F - 1 /2ir/LkCk= 1 /2ю/118.10М09 = 465 кГц; R, - VLk/Ck = V118.10*/10-’ = 342 Ом.
Приведенные в [60] значения добротности 155 для первых трех контуров и 135
для третьего позволили рассчитать сопротивления потерь R = Rx/Q = 342/155 =
= 2,2 Ом; R' = 342/135 - 2,5 Ом. Согласование выхода фильтра с последующим тран-
зисторным каскадом с ОЭ осуществляется с помощью обмотки связи, имеющей
4 витка и размещаемой на одном каркасе с катушкой ЬГ с числом витков 75, т. е.
коэффициент трансформации составляет около 19. Если принять, что входное со-
противление транзисторного каскада равно 100 Ом, то это сопротивление приводит-
ся к первичной обмотке как Rox = 100 192 = 36 кОм, что и отражено на рис. 13.20, а.
Из АЧХ фильтра (рис. 13.20, б) видно, что расчетное значение частоты филь-
тра совпадает с полученным при моделировании. Таким образом, проведенные ис-
следования позволяют сделать вывод, что для ориентировочных расчетов
рассматриваемого ФСС можно пользоваться расчетными соотношениями для
двухконтурных связанных систем.
Контрольные вопросы и задания
1. Для каких целей используется система связанных контуров?
2. Какие типы связанных контуров Вам известны и чем они отличаются?
3. Проведите расчеты для схемы на рис. 13.17 при емкости конденсатора связи
Со = 500 пФ и сравните результаты расчета с результатами моделирования.
4. Для схемы на рис. 13.17 при К = 2,41D рассчитайте емкость конденсатора связи
и частоты связи. Результаты расчета и полосу пропускания (при К = 3,Ю) про-
верьте моделированием.
5. Используя схему на рис. 13.17, исследуйте процесс прохождения АМ-сигналов
через систему связанных контуров при различных значениях модулирующей и
несущей частот.
6. Подготовьте схему для моделирования связанных контуров с внутренней емкост-
ной связью (рис. 13.15, б), проведите расчеты частот связи при К = 0,01 (критиче-
ский режим) и K = 2,41D. Результаты расчета сравните с результатами
моделирования. Отметим в качестве подсказки, что значение емкости конденсато-
ра связи Со = 0,5 мкФ соответствует режиму критической связи. Кроме того, пред-
варительный анализ показывает, что при одинаковых параметрах обоих контуров
расчет частоты F ведется при эквивалентной емкости контура Ск — ССо/(С + Со).
7. Какие цели преследуются при использовании многоконтурных фильтров?
8. Используя схему на рис. 13.19, а и аналитические соотношения для системы
связанных контуров, определите значение емкости Со конденсаторов связи, со-
ответствующее режиму критической связи.
9. Исследуйте зависимость формы АЧХ от сопротивления резистора Rox в четырех-
контурной системе на рис. 13.19, а.
10. Исследуйте зависимость формы выходного сигнала схемы на рис. 13.19, а в режи-
ме передачи АМ-сигналов от соотношения частоты несущей и резонансной часто-
ты четырехзвенного фильтра при частоте модулирующего сигнала 100 Гц и 1 кГц.
425
Часть II. Моделирование схем и устройств
11. В режиме передачи АМ-сигнала в схеме на рис. 13.20, а исследуйте форму огиба-
ющей при частоте модулирующего сигнала 1, 10, 15 и 20 кГц.
13.4. Преобразователи частоты
Преобразователи частоты (ПЧ) используются в радиоприемных устройствах
для преобразования поступающего из антенны радиочастотного сигнала в сигнал
промежуточной частоты. Принцип преобразования частоты сигналов заключается в
перемножении двух гармонических колебаний Y(t) = Ym cos Qt и X(t) = Xmcoscot.
Результирующее колебание описывается выражением:
Z(t) = 0,5Ym-Xm[cos(Q - co)t + cos(£2 + <o)t]. (13.8)
6)
Рис. 13.21. Схема преобразователя частоты на библиотечном перемпожителе (а). АЧХ фильтра
ПЧ (б) и осциллограммы сигналов на выходе (А) перемножителя и фильтра (В) (е)
Это колебание представляет собой сумму двух колебаний с частотами (Q + со) и
(Q - со). Выделяя с помощью фильтра ту или иную составляющую выражения (13.8).
получим колебание с другой, более низкой или более высокой частотой. Схема ПЧ, ре-
ализующей такой алгоритм, показана на рис. 13.21, а. Она содержит два источника
гармонических колебаний X(t) и Y(t), перемножитель М с коэффициентом передачи 1,
426
Глава 13. Элементы приемо-передающих устройств
переключатель Z для переключения режимов моделирования, контрольно-измери-
тельные приборы и фильтр с резонансной частотой около 3,18 кГц в виде рассмотрен-
ной в разд. 13.3 двухконтурной системы с внешней емкостной связью.
В положении ключа Z, показанном на рис. 13.21, а, производится моделиро-
вание ПЧ. Согласно данным, приведенным на рис. 13.21, а для источников входных
сигналов, сигнал на выходе перемножителя имеет комбинационные составляющие с
частотами 16,82 и 3,18 кГц. Поскольку фильтр настроен на 3,18 кГц, будет выделе-
на комбинационная составляющая с разностной частотой, в чем можно убедиться из
рис. 13.21, в, из которого видно, что период сигнала на выходе ПЧ составляет
Т2 - Т1 = 0,325 мс, что соответствует частоте 3,18 кГц. Амплитуда сигнала на вы-
ходе фильтра составляет около 31 В. Поскольку коэффициент передачи пере-
множителя выбран равным 1, амплитуда сигнала на входе фильтра равна 1 В и,
следовательно, коэффициент передачи фильтра должен быть равен 31 на частоте
3.18 кГц. Проверим этот вывод на модели. Для этого переключатель Z переведем в
нижнее положение и снимем АЧХ фильтра, из которой следует (рис. 13.21, б), что
коэффициент передачи фильтра на частоте 3,16 кГц составляет 30 дБ, что в относи-
тельных единицах составляет 31,6, т. е. практически равен расчетному.
Контрольные вопросы и задания
1. Для каких целей используется преобразование частоты в радиоприемных уст-
ройствах?
2. Из каких соображений выбирается частота гетеродина ПЧ?
3. Можно ли использовать ПЧ для детектирования АМ-колебаний?
4. Проведите моделирование ПЧ при выделении верхней комбинационной состав-
ляющей, выбрав соответствующим образом параметры фильтра.
13.5. Модуляторы
Одним из основных элементов радиопередающего устройства является мо-
дулятор. Начнем с наиболее простой модуляции — амплитудной. Как и в случае
преобразователя частоты, модуляция по амплитуде сводится к перемножению моду-
лирующего сигнала Y(t) = Ео + Ym-cos Ш и несушего X(t) = Xm-coscot. После пере-
множения и тригонометрических преобразований получим результирующее
колебание в следующем виде:
Z(t) = Em{cos(0t + 0,5M[cos (Q - co)t + cos (Q 4- co)t]},
где M = Ym/Em — коэффициент модуляции; Em = Eo-Xm.
Схема амплитудного модулятора (рис. 13.22, а) содержит двухвходовой сумми-
рующий усилитель на ОУ, к одному входу которого подключен источник постоянного
напряжения Ео, а к другому — источник модулирующего напряжения Y'(t) амплиту-
дой Ym = 1,42 В. Поскольку коэффициент усиления по каждому входу R3/R1 - 1, на
выходе усилителя формируется сигнал Y(t) = Ео + Y'(t) = Ео + Ym-cos Ш, который по-
ступает на Y-вход перемножителя М с коэффициентом передачи 1. На Х-вход пере-
множителя подается сигнал несущей X(t) с амплитудой Хш - 5,66 В.
При указанных на рис. 13.22, а значениях параметров расчетные значения
М = 1,42/4 = 0,35; Em = 4-5,66 = 22,62. Проверим полученные результаты модели-
рованием, результаты которого показаны на рис. 13.23, а. Для определения коэффи-
циента модуляции по осциллограмме AM-сигналов используем методику из [51],
согласно которой М — Ам/Ас, где ( см. рис. 13.23, а) Ам = |VB2 - VB1J/2 = 15,76/2 =
— 7,88 В; Ас — Ам + |VB2| - 7,88 + 14,7 = 22,58 В и, следовательно, М = 0,349, т. е.
практически равно расчетному. Для проверки второго расчетного параметра (Em)
427
Часть II. Моделирование схем и устройств
необходимо исключить воздействие модулирующего сигнала. Для этого достаточно
сделать его пренебрежимо малым — в нашем случае вместо 1 В установим 1 мкВ. Ре-
зультаты моделирования показаны на рис. 13.23, б, откуда видно, что амплитуда не-
сущей Em - 23 В, что практически совпадает с расчетным значением. Отметим, что
оно равно среднему значению Ас амплитудно-модулированного колебания.
а)
Рис. 13.23. Осциллограммы амплнтудно-модулированного (В) и модулирующего (А) сигналов
(а), несущей (б) и АМ-сигналов балансного модулятора (в)
428
Глава 13. Элементы приемо-передающих устройств
На практике часто возникает необходимость получения двух боковых полос
модуляции без несущей или одной из боковых частот. Для этого используется баланс-
ный модулятор, схема которого (рис. 13.22, б) содержит два сумматора-выпрямителя
на ОУ 1, 2 и дифференциальный усилитель на ОУ 3. Напряжение несущей частоты (в
данном случае 1 кГц) преобразуется в однополярные импульсы полусинусоидальной
«формы (осциллограмма А на рис. 13.23, в), при этом модулирующее напряжение UM
суммируется с несущим U„ в каждом сумматоре-выпрямителе при выполнении усло-
вия [23]: 2UXKM < иаК„, где Км R3/R1; Ку = R3/R2. Результирующее АМ-колебание
(осциллограмма В) формируется на выходе дифференциального усилителя на ОУ 3.
Кроме рассмотренной амплитудной модуляции с гармонической несущей, в
системах управления и многоканальных устройствах связи широко используются
разнообразные виды импульсной модуляции. Наиболее простой из них является
амплитудно-импульсная (АИМ), которая чаще всего используется при реализации
более сложных видов импульсной модуляции (время-импульсной, фазоимпульсной,
частотно-импульсной и т.п.) [51]. Рассматриваемая схема амплитудно-импульсного
модулятора (рис. 13.24, а) содержит сумматор на ОУ 1 и сумматор-выпрямитель на
ОУ 2; в качестве несущей используется однополярная (положительной полярности)
последовательность прямоугольных импульсов с параметрами, определяемыми на-
стройками функционального генератора (см. рис. 13.24, а). Напряжение на выходе
сумматора-выпрямителя (т. А, осциллограмма А на рис. 13.24, б) [23] UA = (KMUB +
- К„ии + KfUf), Км = R7/R4; К, = R7/R5; К„ = R7/R3. Перечисленные коэффициенты
выбираются таким образом, чтобы при отсутствии несущей (Uh) напряжение в точ-
ке A UA = 0. При этом выходное напряжение (осциллограмма В) будет определяться
выражением [23]: Uo = -[UHR6/Rl-(K4Uln + KMU. + KfUf)R6/R2].
Рис. 13.24. Амплитудно-импульсный модулятор и результаты его испытаний
Другим распространенным типом модуляции является угловая. Такое назва-
ние является общим для частотной и фазовой модуляции. Связь между ними форму-
лируется следующим образом [51]: изменение частоты во времени по закону co(t)
эквивалентно изменению полной фазы по закону интеграла от o)(t), а изменение пол-
ной фазы по закону (p(t) эквивалентно изменению частоты по закону производной от
429
Часть II. Моделирование схем и устройств
<p(t). Это положение, являющееся основным в теории угловой модуляции, определя-
ет связь между изменениями частоты и фазы и указывает на общность, существую-
щую между двумя разновидностями угловой модуляции — модуляцией частоты
(ЧМ) и модуляцией фазы (ФМ).
Сигнал с частотной модуляции в простейшем случае описывается выражением:
A(t) = Aosin[cot + (Aco/£2)sinQt], (13.9)
где Ao — амплитуда несущей; Дсо — диапазон частотного отклонения (девиации) не-
сущей под действием модулирующего (в данном случае — синусоидального) сигнала.
Из выражения (13.9) видно, что периодическая модуляция частоты эквива-
лентна гармонической вариации фазы с той же частотой, при этом амплитуда полу-
чаемой вариации фазы равна Ф = До/Q. Это отношение численно равно индексу
модуляции М, являющемуся основным параметром угловой модуляции. Существен-
но, что индекс модуляции не зависит от средней (немодулированной) частоты со, а оп-
ределяется исключительно величиной девиации и модулирующей частотой.
Сигнал с фазовой модуляции описывается выражением:
A(t) = Aosinfcot + Фзй1 Qt] (13.10).
Поскольку выражения (13.9) и (13.10) получены для гармонического модули-
рующего сигнала, то из сравнения этих выражений с учетом обозначения Ф = Дсо/со
можно сделать вывод, что при модуляции гармоническим сигналом по характеру ко-
лебания и его свойствам нельзя сделать однозначное заключение о том, с какой мо-
дуляцией мы имеем дело — с частотной или фазовой. Различие между частотной и
фазовой модуляцией проявляется только при изменении частоты модуляции. При
этом различие заключается в следующем. При частотной модуляции величина деви-
ации Дсо пропорциональна амплитуде модулирующего напряжения и не зависит от
частоты модуляции Q, однако с ростом последней индекс модуляции уменьшается.
При фазовой же модуляции величина Ф пропорциональна амплитуде модулирую-
щего напряжения и не зависит от частоты модуляции Q.
Перейдем к рассмотрению схемы фазового модулятора (рис. 13.25, а), которая
содержит функциональный генератор в качестве источника модулирующего сигнала
(рис. 13.25, б), источник напряжения Ui несущей и фазовращатель на OU1 с полевым
транзистором VT в режиме управляемого сопротивления. Канал В осциллографа под-
ключен к выходу OU1, а канал А — к источнику несущей для возможности наблюде-
ния эффекта модуляции.
Анализ фазового модулятора, представляющего собой систему с переменными
параметрами, является достаточно сложной математической задачей. Поэтому огра-
ничимся рассмотрением статического режима, заменив сопротивление полевого тран-
зистора сопротивлением R. В таком случае напряжение на не инвертирующем входе
OU1 в операторной форме будет иметь вид: Ui'(p) = Ui(p)pRC/(l + pRC). Это напряже-
ние передается на выход OU1 с коэффициентом передачи 1 + R2/R1 = 2 (см. гл. 10).
Напряжение Ui(p) передается на выход того же усилителя с коэффициентом передачи
R2/R1 = 1, причем с инвертированием сигнала. Следовательно, выходное напряжение
OU1 Uof(p) = 2Ui'(p) - Ui(p) = Ui(p)(pRC - l)/(pRC + 1) и коэффициент передачи равен
К(р) - (pRC - l)/(pRC + 1). (13.11)
Вводя замену р = jco, из (13.11) получим выражение для частотной характери-
стики
K(jw) = (2jm + m2 - 1)/(1 + m2), (13.12)
где m = cdRC.
430
Глава 13. Элементы приемо-передающих устройств
RI R2
100*2 1GCKW
а)
б)
в)
Per 13.25. Схема фазового модулятора (а) с установками функционального генератора (б) и схе-
ма для исследования зависимости сопротивления полевого транзистора от входного
напряжения (в)
Рис. 13.26. Осциллограммы сигналов на входе (А) и выходе (В) модулятора
Из (13.12) нетрудно определить, что модуль коэффициента передачи равен 1, а
его аргумент с учетом известного из тригонометрии соотношения 2arctgm = 2ш/(1 - ш2)
будет определяться выражением
Ф = 2arctg (<oRC). (13.13)
Из (13.13) видно, что по сравнению с обычной RC-цепью рассматриваемый фа-
зовращатель обеспечивает возможность получения фазового сдвига в диапазоне от 0 до
180 . Поскольку в выражении (13.13) сопротивление R (сопротивление полевого тран-
зистора) изменяется под действием модулирующего сигнала, выражение (13.13) отра-
жает факт фазовой модуляции, что и подтверждается осциллографическими
измерениями на рис. 13.26, откуда видно, что максимальный временной сдвиг колеба-
ний на входе и выходе модулятора равен Т2-Т1 = 0,038 мс. Поскольку период несущей
составляет 0,1 мс, этот временной сдвиг эквивалентен фазовому сдвигу 136,8 .
431
Часть II. Моделирование схем и устройств
Контрольные вопросы и задания
1. Чем отличается процесс формирования AM-сигнала от преобразования частоты?
2. Проведите исследования балансного модулятора в объеме, аналогичном прове-
денным для схемы на рис. 13.22, а.
3. Подготовьте схему балансного модулятора в среде EWB 5.0. Используя команду
Analysis/Forier..., проведите спектральный анализ выходного напряжения та-
кого модулятора. Обратите внимание на отсутствие колебания с несущей часто-
той, поскольку выходное напряжение модулятора U(t) = 0,5MUr[cos2^(Fc + Fm)t +
4- cos2n(Fe - F„,)t] (сравните с формулой (4.2) в гл. 4).
4. Проведите испытания амплитудно-импульсного модулятора на рис. 13.24. Из ка-
ких соображений выбирается соотношение между несущей и модулирующей час-
тотой (см. Приложение 5)? С какой целью используется источник смещения Uf?
5. Подготовьте схему модулятора на рис. 13.24 в среде EWB 5.0 и проведите спект-
ральный анализ его выходного напряжения, качественно сопоставив получен-
ные результаты с результатами расчета по формуле:
U(t) = Uoto/To{1 + Msin2nFct + [2sin(2nnFmto/2)]/(27cnFmto/2)[f cos2HnF„t +
+ f 0,5Msin2n(nFm + FJt + f 0,5Msin2n(nFm - Fc)t},
где Uo — амплитуда импульсов при отсутствии модуляции; т0 — длительность им-
пульса; То — период следования импульсов; Fr — частота модулирующего сигна-
ла; Fm = 1 /То — частота следования импульсов; М = AUo/Uq — коэффициент
модуляции; AUO — наибольшее изменение амплитуды модулированных импуль-
сов; п — номер гармоники.
6. Используя схему на рис. 13.25, проведите расчеты и моделирование при посто-
янной составляющей функционального генератора Ео — 3 В.
7. В чем заключается различие между фазовой и частотной модуляцией?
8. Используя схему на рис. 13.25, а, исследуйте зависимость фазового сдвига (ин-
декса модуляции) от амплитуды модулирующего напряжения.
9. Используя схему на рис. 13.25, в, исследуйте зависимость сопротивления поле-
вого транзистора типа IDEAL от входного напряжения в диапазоне 0...4 В. На-
пряжение отсечки транзистора выберите равным -4 В. На основании
полученных данных по формуле (13.13) рассчитайте фазовый угол для двух-трех
значений сопротивления R и сравните полученные результаты с результатами
моделирования, для чего необходимо в схеме на рис. 13.25, а функциональный
генератор заменить на источник постоянного напряжения U, используемый в
схеме на рис. 13.25, в.
13.6. Детекторы
частотно-модулированных сигналов
Частотный детектор (ЧД) — это устройство, выходное напряжение которого
является функцией частоты входного сигнала. Частотные детекторы используются
при радиоприеме ЧМ-сигналов и в устройствах автоматической подстройки частоты
в разнообразных радиоэлектронных устройствах.
Основной характеристикой ЧД является его передаточная характеристика,
которая показывает зависимость постоянного выходного напряжения Uo от частоты
входного сигнала Fi. Чувствительность частотного детектора определяется крутиз-
432
Глава 13. Элементы приемо-передающих устройств
его характеристики S = AUo/AFi, где AUo, AFi — приращения выходного напря-
и частоты входного сигнала.
Принцип работы большинства ЧД основан на преобразовании частотно-моду-
вр?Бзнного напряжения в амплитудно-частотно-модулированное с последующим
амплитудным детектированием. В качестве преобразователя частотно-модулиро-
мвого напряжения в амплитудно-частотно-модулированное используется любая
военная система, коэффициент передачи которой зависит от частоты. Поскольку
Иьодное напряжение таких детекторов зависит не только от частоты, но и от амп-
ягтуды входного напряжения, их иногда называют также частотно-амплитудными
Ж*екторами. Если требуется устранить влияние амплитуды входного напряжения,
веред такими детекторами включается амплитудный ограничитель (см. гл. 8).
Наиболее простой схемой ЧД является схема с одиночным контуром на
р® 13.27, а. Она содержит параллельный колебательный контур на элементах L, С,
а* {вход которого через резистор 30 кОм и переключатель Z входной сигнал может по-
даваться или от функционального генератора (режим измерения АЧХ и ФЧХ) или
гт источника частотно-модулированных колебаний FM (режим детектирования).
Сикал с выхода колебательного контура через усилитель на OU с коэффициентом
-тг-ения 1 + R2/R1 = 2 подается на входы осциллографа и измерителя АЧХ-ФЧХ,
: - иже на вход субблока receiver, на выходе которого формируется модулирующее
< =^:зкочастотное) колебание (в данном случае частотой 100 Гц): его можно наблюдать
=г экране осциллографа после подключения канала В к выходу субблока с помощью
переключателя X.
Рис. 13.27. ЧД с одиночным колебательным контуром (а) и его .-VIX (б)
Основная идея схемы преобразовательной части детектора может быть пояс-
нена с помощью АЧХ колебательного контура (рис. 13.27, б). Рабочая точка ЧД мо-
жет быть выбрана как на правом, так и на левом скате АЧХ контура. Как видно из
рис. 13.27, б, левый скат более крутой, поэтому рабочая точка (2,53 кГц), отмечен-
ная визирной линией, выбрана на нем.
Как указывалось в разд. 13.5, модуляция с индексом модуляции Ф = 5 вызыва-
ет девиацию частоты AF - Ф12 - 5-100 = 500 Гц. Для проверки этих данных обратим-
ся к результатам осциллографических измерений, представленных на рис. 13.28,
откуда видно, что максимальное значение частоты составляет 1/[(Т2 - Т1)/2] -
= 2/6,73Ю4 = 2985 Гц, т. е. отклонение от средней частоты составляет 485 Гц, что
приблизительно равно расчетному значению AF. Переставив визирные линии на ос-
циллограмме в область минимальной частоты, можно убедиться, что она равна около
2000 Гц, т. е. и в этом случае отклонение близко к расчетному значению AF.
Перейдем к анализу коэффициента передачи детектора. Для этого найдем
крутизну левого ската резонансной кривой на рис. 13.27,6 в диапазоне частот
433
Часть II. Моделирование схем и устройств
2000...2985 Гц. Пользуясь визирной линейкой, находим, что коэффициент переда-
чи на частоте 2000 Гц составляет 0,65, а на частоте 2985 Гц — 1,7, т. е. средняя кру-
тизна резонансной кривой в указанном диапазоне частот составляет 1,05 103 1/Гц.
Учитывая, что амплитуда сигнала равна 1 В, эта крутизна в единицах напряжения
составит S = 1,05-10 1 В/Гц, т. е. размах (двойная амплитуда) огибающей амплитуд-
но-частотно-модулированного сигнала составит S-2AF = 1,05 103-985 - 1,034 В. Те-
перь обратимся к результатам моделирования (рис. 13.29). Из осциллограммы на
рис. 13.29 следует, что удвоенная амплитуда огибающей амплитудно-частотно-мо-
дулированного сигнала равна VB2 - VB1 =. 1,09163 В, что достаточно близко к рас-
четному значению.
Рис. 13.28. Осциллограммы частотно-модулмрованного (А) и амплитудно-частотно-модулиро-
ванного(В)сигналов
Сравнительно большие нелинейные искажения являются недостатком рассмо-
тренного детектора: расчеты показывают [56], что коэффициент второй гармоники
для этого детектора равен около 19%, а третьей — 3,6%. Для уменьшения нелиней-
ных искажений можно увеличивать затухание контура, однако это приводит к суще-
ственному уменьшению крутизны характеристики детектора, т. е. к уменьшению
напряжения на его выходе.
Более высокими показателями по нелинейным искажениям обладают баланс-
ный детектор с двумя взаимно расстроенными контурами и детектор со связанными
контурами, а также так называемый дробный детектор, который отличается от пер-
вых двух схемой построения выпрямительной части, обеспечивающей минималь-
ную зависимость выходного сигнала от изменений амплитуды входного [56].
Кроме рассмотренного ЧД классической структуры, на практике находят при-
менение так называемые импульсные ЧД [23]. Схема такого ЧД содержит (рис. 13.30)
формирователь-компаратор на ОУ 1 (см. разд. 10.7), дифференцирующую КЗС1-цепь
и одновибратор на ОУ 2 (см. разд. 10.18), на выходе которого формируются импульсы
434
Глава 13. Элементы приемо-передающих устройств
длительностью Т < l/2(f + ДГ), где f — несущая (центральная) частота ЧМ-сигнала,
д: — девиация частоты. При этом среднее значение напряжения на выходе ОУ 2 (ос-
zz.-: .до грамма В на рис. 13.30, б) [23]: U2 = f,T(U_ 4- U.) - U , где U , U — напряжения
ззсхщения ОУ 2, f, — текущее значение частоты ЧМ-сигнала (осциллограмма А на
□ис. 13.30, б); крутизна выходной характеристики ЧД S = T(U. + U ).
Рис. 13.29. Осциллограммы сигналов ЧД для режима измерения размаха огибающей аМплитуд-
но-частотно-модулированного колебания
Рис. 13.30. Частотный детектор па ОУ
2.0 мс/дел ; S В/дел
Ж/ШЙУШЖУЛ
6)
Контрольные вопросы и задания
1. В каких устройствах используются частотные детекторы?
2. Какой основной алгоритм преобразования сигналов используется при построе-
нии частотных детекторов?
3. Используя схему ЧД на рис. 13.27, а, выберите его рабочую точку на правом
склоне резонансной кривой на рис. 13.27, б. В соответствии с произведенным вы-
бором установите частоту несущей источника ЧМ и при индексе модуляции
Ф = 5 проведите измерения коэффициента передачи.
435
Часть II. Моделирование схем и устройств
4. Исследуйте зависимость формы продетектированного сигнала на выходе суббло-
ка receiver от индекса модуляции ЧМ-колебания в диапазоне Ф - 2...7.
5. Разработайте и подключите к ЧД на рис. 13.30 активный ФНЧ (см. разд. 10.5), в
котором необходимо предусмотреть возможность компенсации постоянной со-
ставляющей продетектированного сигнала.
6. В ЧД на рис. 13.30 тип запуска (по переднему или заднему фронту продифферен-
цированных импульсов) и полярность выходного напряжения ОУ 2 определяет-
ся полярностью включения диодов DI, D2. Используя это обстоятельство,
разработайте схему “балансного” ЧД с повышенным в два раза коэффициентом
передачи и компенсацией постоянная составляющей.
436
Глава 14. Электромеханические устройства
14. Электромеханические устройства
В главе рассматриваются устройства электромашинного, электромагнитного
привода и электромеханические измерительные преобразователи.
Электромашинный привод на базе электродвигателей постоянного и перемен-
ного тока используется в системах управления в качестве исполнительных органов,
предназначенных для поворота осей различного рода вентилей, задвижек, муфт, для
выполнения производственных операций (резание, обжатие, вытяжка, перемеще-
ние и др.), в качестве корректирующих звеньев (например, тахогенератор в каче-
стве дифференцирующего звена) и др.
Электромагнитный привод (ЭМП) отличается такими достоинствами, как про-
стота конструкции и управления, компактность, быстродействие, надежность, дли-
тельный срок службы в самых тяжелых условиях эксплуатации, широкие
функциональные возможности. Применяемые в настоящее время ЭМП имеют самые
разнообразные конструктивные выполнения, габаритные размеры, характеристи-
ки. Например, известны конструкции ЭМП как миниатюрного исполнения (разме-
ры составляют единицы миллиметров), применяемые в медицине, так и гигантские
ЭМП в ускорителях элементарных частиц. Масса ЭМП колеблется от долей грамма
до десятков тонн, потребляемая мощность — от милливатт до сотен киловатт, а раз-
виваемое тяговое усилие — от долей грамма до десятков тонн.
Электромеханические измерительные преобразователи представлены разно-
образными датчиками для измерения давления, скорости, ускорения, а также вспо-
могательными устройствами типа фазовращателей, модуляторов, телеметрических
приемопередатчиков (сельсинов, поворотных трансформаторов) и др.
14.1. Методы моделирования
При разработке автоматических систем управления и, в частности, электро-
механических устройств широко используются методы физического или математи-
ческого моделирования. При физическом моделировании исследования проводятся
на модели, физически однородной с оригиналом и отличающейся от него в некото-
рых случаях только количественно. Физическое моделирование применяется, на-
пример, при исследовании поведения самолета в воздухе путем продувки его модели
в аэродинамической трубе. При математическом моделировании исследования про-
водятся на модели, которая описывается такими же уравнениями, что и моделируе-
мое устройство.
При создании математических моделей используются цифровые или аналого-
вые вычислительные устройства. Исторически первыми для этих целей использова-
лись аналоговые устройства [29, 61], достоинством которых по сравнению с
цифровыми является простота модели и самого процесса моделирования, а также
наглядность результатов при непрерывном воспроизведении заданной математичес-
кой зависимости. Как показано ниже, EWB позволяет проводить моделирование
различных устройств электромеханики и автоматики с сохранением наглядности и
простоты аналоговых моделирующих устройств.
14.1.1. Моделирование по дифференциальному уравнению
Поскольку моделирование электромеханических систем управления чаще
всего сводится к решению дифференциальных уравнений, то в первую очередь рас-
смотрим устройства для их решения, которые в аналоговой вычислительной техни-
ке часто называют дифференциальными анализаторами.
437
Часть II. Моделирование схем и устройств
Первый дифференциальный анализатор был построен в 1876 г. Дж. Томпсо-
ном и Кельвином и представлял собой набор электромеханических интеграторов с
диском и шариком. Дальнейшее развитие техники дифференциальных анализато-
ров нашло отражение в работах акад. А. Н. Крылова (1904 — 1911 гг.), докто-
ра В. Буша (Массачусетский технологический институт, 1931 г.) и др.
В дифференциальных анализаторах реализуются два метода интегрирования
дифференциальных уравнений. Один из них основан на повышении порядка произ-
водных искомой функции, а другой — на его понижении [29, 61]. Рассмотрим эти
методы на примере линейного дифференциального уравнения с постоянными коэф-
фициентами третьего порядка
P3Z'" + Рг Z" + P,Z' + P„Z = F(t). (14.1)
Для интегрирования дифференциального уравнения методом повышения по-
рядка производных его необходимо решить относительно производной неизвестной
функции Z низшего порядка. Приняв Z за производную нулевого порядка, из (14.1)
получим
Z-f(t) - A1Z' - A2Z" - A3Z'", (14.2)
где f(t )= F(t)/P0; Al = Р,/Ро; А2 - Р2/Р0; АЗ = Р3/Ро.
Структурная схема модели для решения уравнения (14.2) показана на
рис. 14.1, а. Из формулы (14.2) следует, что для получения переменной Z необходи-
мы следующие вычислительные блоки: четырехвходовой сумматор (блок S на
рис. 14.1, а), три дифференциатора (блоки D) и три умножителя (блоки X) для умно-
жения на коэффициенты Ai. Выходной сигнал сумматора, обозначенный на
рис. 14.1, а буквой Z, будет искомым решением уравнения (14.1).
Рис. 14.1. Структурные схемы моделей для решения дифференциального уравнения методом
повышения (а) и понижения (б) порядка производных
Отметим, что метод повышения порядка производных почти не применяется
на практике, так как дифференцирующие блоки весьма чувствительны к помехам
(см. гл. 10), которые могут стать источником ошибок. Например, если в электронной
вычислительной машине возмущение f(t) подается на суммирующий блок от функ-
ционального потенциометра, то при переходе подвижного контакта с одного витка
на другой фактически сопротивление будет меняться не плавно, а ступенчато (см.
разд. 15.3), что будет регистрироваться дифференцирующими блоками в виде значи-
тельных всплесков напряжения. Существенные ошибки в определении мгновенного
значения производной имеют место и в точках перехода от одной апроксимирующей
прямой к другой, при вводе возмущения от диодного функционального апроксима-
тора и т.п. Метод повышения порядка производных используется только в тех
случаях, когда без него нельзя обойтись, например, в специализированных вычис-
лительных машинах. Однако в этом случае используются специальные дифференци-
438
Глава 14. Электромеханические устройства
рующие устройства, вырабатывающие не мгновенные, а усредненные (сглаженные)
значения производных.
Для интегрирования уравнения (14.1) методом понижения порядка производ-
ных его нужно решить относительно производной функции Z(t) высшего порядка, т. е.
Z'" = f(t) - B2Z" - BIZ' - BO Z, (14.3)
.-де f(t) = F(t)/P8; ВО = Р0/Р3; Bl = Р,/Р,; В2 - Р2/Р3.
Структурная схема модели для этого случая показана на рис. 14.1, б. Из фор-
мулы (14.3) видно, что для получения переменной Z необходимы следующие вычис-
лительные блоки: четырехвходовой сумматор (блок S на рис. 14.1, б), три
интегратора (блоки I) и три умножителя (блоки X) для введения коэффициентов Bi.
Выходной сигнал третьего интегратора, обозначенный на рис. 14.1, б буквой Z, бу-
дет искомым решением уравнения (14.3).
Достоинством метода понижения порядка, нашедшего наибольшее распрост-
ранение на практике, является высокая точность, обусловленная применением
только интеграторов, что устраняет в определенной мере влияние различных флук-
туаций, возникающих в схеме.
По конструктивному выполнению моделирующие устройства делятся на мат-
ричные и структурные. Устройства матричного типа представляют собой конструк-
тивно законченные наборы из разных вычислительных блоков, каждый из которых
позволяет моделировать одно из уравнений системы дифференциальных уравнений.
Такие устройства являются достаточно специализированными и в нашем случае не
представляют интереса. Устройства структурного типа реализуют решение диффе-
ренциальных уравнений и их систем в том виде, в каком они заданы. Они представ-
ляют собой наборы простейших вычислительных блоков, соединяемых между собой
определенным образом в зависимости от вида дифференциального уравнения высо-
кого порядка или системы дифференциальных уравнений первого порядка, и усту-
пают матричным только по оперативности набора подготовленных к решению задач.
В общем случае процесс решения дифференциального уравнения путем моде-
лирования состоит из следующих этапов:
приведение дифференциального уравнения к виду, удобному для моделирования;
при этом исходное уравнение, подлежащее воспроизведению, называют моделиру-
емым, а уравнение, описывающее связь между входными и выходными величина-
ми моделирующего устройства, — моделирующим или машинным уравнением;
♦ выбор масштабов машинного уравнения, под которыми подразумеваются отно-
шения математических величин к воспроизводящим их физическим величинам;
если некоторая математическая переменная величина X изображается физичес-
кой величиной, например, напряжением U, то масштаб Кх величины X (или мас-
штаб Ки величины U) определяется выражением К, = К„ - Х/U, т. е. масштаб
представляет собой число единиц математической величины, соответствующее
одной единице физической величины, моделирующей первую;
4- соединение вычислительных блоков для воспроизведения машинного уравнения
(в EWB — подготовка схемы модели);
4- проведение моделирования с регистрацией результатов и с последующим пере-
ходом при помощи ранее выбранных масштабов от переменных величин модели
к переменным величинам моделируемой системы-оригинала.
Перечисленные этапы часто относят к так называемому методу моделирова-
ния по уравнению: он позволяет не только решать различные уравнения, но и иссле-
439
Часть II. Моделирование схем и устройств
довать системы автоматического управления, для которых уже заранее выбраны все
параметры звеньев. Дальнейшим развитием этого метода является метод структур-
ного моделирования, который позволяет решать более сложные задачи выбора пара-
метров структурных звеньев системы-оригинала (см. разд. 15.5).
В качестве примера рассмотрим моделирование последовательного колебатель-
ного контура, показанного в верхней части рис. 14.2, а и состоящего из катушки ин-
дуктивности L с активным сопротивлением R и конденсатора Ск. В нижней части
рис. 14.2, а изображена электронная модель этого же контура на решающих элемен-
тах: сумматоре на ОУ 1, двух интеграторах на ОУ 2 и 3 и инвертирующем усилителе
на ОУ 4. Позиционное обозначение резисторов принято в соответствии с рекоменда-
циями [29]: порядковый номер резистора в цепи обратной связи совпадает с номером
ОУ, токозадающие резисторы имеют двухзначный номер, первым идет номер соот-
ветствующего ОУ, вторым — порядковый номер резистора данной группы. Для кон-
денсаторов интеграторов можно использовать такой же принцип формирования
позиционных обозначений, однако в связи с тем, что, как правило, в интеграторах
моделирующих установок они имеют одинаковое номинальное значение (в данном
случае 1мкФ), то они имеют и одинаковое позиционное обозначение. При обозначе-
нии выходных напряжений решающих элементов используется тот же принцип, для
наглядности в скобках указывается также и номер соответствующей производной.
Для регистрации результатов моделирования в схеме на рис. 14.2, а используется ос-
циллограф: канал А — для регистрации напряжения на конденсаторе Ск, канал В —
для регистрации напряжения на выходе модели. В качестве источника возмущающе-
го сигнала в рассматриваемом случае используется источник постоянного напряже-
ния U, однако в общем случае это может быть любая функция времени.
Запишем дифференциальное уравнение колебательного контура в следую-
щем виде:
P2Uc" + PiUc' + P0Uc = U, (14.4)
где Р2 = LCk; Р, = RCk; Ро = 1.
Приведем уравнение (14.4) к виду (14.3)
Uc" = UO - BlUc' - BOUc, (14.5)
где UO = U/LCk; Bl - R/L; ВО = 1/LCk.
Как следует из (14.5), модель колебательного контура должна содержать сумма-
тор (в схеме на рис. 14.2, а он выполнен на ОУ 1) и два интегратора (ОУ 2, 3). Посколь-
ку сигнал на выходе ОУ 2 имеет полярность, совпадающую с полярностью сигнала на
входе сумматора на ОУ 1, то для обеспечения устойчивости модели выход интегратора
на ОУ 2 соединен с входом сумматора через инвертирующий усилитель на ОУ 4.
Составим уравнения для каждого решающего блока:
для сумматора
U1 - -(КпиЗ + KI2U4 + K13U0), (14.6)
где Kn = R1/R11; К12 = R1/R12; К13 - R1/R13;
для первого интегратора
U2 = -(К21Ш)/Р, (14.7)
где К21 = 1/R21-C; Р = d/dT — машинный оператор дифференцирования; Т = Mtt —
машинное время; Mt = T/t — масштаб времени, т. е. Р = р/Ми
U3 - -(K31U2)/P, (14.8)
где К31 = 1/R3 C; ,
440
Глава 14. Электромеханические устройства
а)
б)
Схема последовательного колебательного контура и его модели (а), осциллограммы
сигналов на емкости колебательного контура (А) и на выходе его модели (В) (б)
Рис. 14.2.
для инвертирующего усилителя
U4 = -K„U2, (14.9)
где KUK41 = R4/R41.
Разрешая систему уравнений (14.6) — (14.9) относительно U3, являющейся в
данном случае искомой величиной, получим:
U3(P2 + РК„К21К41 + К12К21К;и) - K13K3lK81Uo. (14.10)
В общем случае величина U3 может представлять исходную переменную (в
1 данном случае — напряжение на конденсаторе Ск) в некотором масштабе, то же са-
1 мое относится и к независимой переменной (времени) и возмущающему воздейст-
441
Часть II. Моделирование схем и устройств
вию Uo. Поэтому в уравнение (14.10) необходимо ввести масштабные коэффициен-
ты, которые определяются уравнениями преобразования:
X = MXU3; Y = M,Uo; Р = р/М„ (14.11)
где Мх — масштаб представления искомой величины X в виде напряжения; Му —
масштаб представления возмущающего воздействия Uo.
С учетом соотношений (14.11) уравнение (14.10) запишется в виде:
X" + X'K„K21K41Mt + XKI2K21K31Mt2 = MxK13K2lK31YMyMt2. (14.12)
В таком же виде запишем исходное уравнение (14.4):
Uc" + Bl-Uc + Bo Uc «= Bo U. (14.13).
Очевидно, что из условия идентичности оригинала и его модели коэффициен-
ты при соответствующих переменных в уравнениях (14.12) и (14.13) должны быть
одинаковыми, т. е.
Bl = KuK2lK4IMt; Во - К12К21К31МЛ (14.14)
Из сравнения коэффициентов при старшей производной следует, что Мх = 1,
а из сравнения коэффициентов правой части каждого уравнения, — что при
К12 = К1Энеобходимо выбрать Мх = Му. Кроме того, из схемы на рис. 14.2, а видно, что
Кц = K4l = KI2 = К13 = 1. ПримехМ для упрощения последующих расчетов М, = 1. В та-
ком случае условия (14.14) запишутся в следующем виде: K2J = R/L; K2lK3l = l/(LCk)
или с учетом обозначений для К21 и К31
R21 = L/RC; R31 - RCk/C. (14.15)
Выражения (14.15) позволяют выбрать параметры интеграторов модели с ис-
пользованием параметров оригинала. При указанных на схеме номинальных значе-
ниях этих параметров для контура получаем R21 = 10 кОм и R31 = 100 Ом.
Перед проведением моделирования необходимо включить режим анализа пере-
ходных процессов и установить опцию для паузы после заполнения экрана осцилло-
графа (меню Circuit/Analysis Options). Результаты моделирования представлены
осциллограммами на рис. 14.2, б, из сравнения которых следует, что форма и ампли-
туда сигналов на емкости конденсатора Ск колебательного контура и на выходе его мо-
дели совпадают. Из рис. 14.2, б видно также, что период затухающих колебаний
колебательного переходного процесса равен Т = Т2-Т1 = 6,264 мс и практически совпа-
дает с расчетным с использованием формулы Т = 27iVLCk. Заметим, что для получения
осциллограмм сравнительно высокого качества необходимо увеличить количество
отображаемых точек на экране осциллографа до 600...1000 (меню Analysis Options...).
Контрольные вопросы и задания
1. В чем заключается различие между физическим и математическим моделиро-
ванием?
2. Какие средства вычислительной техники могут быть использованы при матема-
тическом моделировании?
3. Какие методы решения дифференциальных уравнений используются при их мо-
делировании с помощью EWB?
4. Что такое “структурное моделирование” и моделирование “по уравнению”? Ка-
кой метод использован при подготовке модели на рис. 14.2, а?
5. Из сравнения рис. 14.1, б и 14.2, а установите, каким образом в моделях вводят-
ся коэффициенты дифференциального уравнения (в частности, коэффициенты
В1 и ВО)? Обязательно ли при этом использование перемножающих устройств?
442
Глава 14. Электромеханические устройства
6. Из осциллограмм на рис. 14.2, б видно, что переходный процесс в резонансном
контуре имеет колебательный характер. Известно (это следует из решения урав-
нения (14.13)), что вид переходного процесса в колебательном контуре определя-
ется соотношениями [58]: R > 2W и R < 2W, где W = Vb/Ck — волновое
(характеристическое) сопротивление контура. Установите, какое из приведен-
ных соотношений соответствует колебательному переходному процессу, а ка-
кое — апериодическому. Для последнего случая рассчитайте параметры
интеграторов, используя формулы (14.15), и проведите моделирование.
7. В модели на рис. 14.2, а источник постоянного напряжения U замените на источ-
ник переменного напряжения с амплитудой 1 В и частотой, равной резонансной
частоте контура, и проведите моделирование.
14.1.2. Модели стандартных линейных звеньев
Для проведения структурного моделирования необходимо (см. разд. 15.5) рас-
полагать моделями (схемами набора) элементарных звеньев систем управления.
Рассмотрим такие модели, используя данные работ [63—65]; при составлении их
схем будем придерживаться системы обозначений, принятых в [29] и использован-
ных в разд. 14.1.1.
Апериодическое звено. Коэффициент передачи такого звена:
К(р) - Xo(p)/Xi(p) - К/(1 + рТ), (14.16)
где Хо(р), Xi(p) — выходная и входная величины соответственно; К — коэффициент
усиления звена; Т — его постоянная времени; р = d/dt — оператор Лапласа.
Запишем выражение (14.16) в следующем виде:
Хо(р) = [(k/T)Xi - (1/Т)Хо]/р. (14.17)
Введем масштаб времени М„ тогда оператор Лапласа в формуле (14.17) заменяет-
ся на P-Mt и маптинное уравнение модели может быть записано следующим образом:
Хо - (К,-Xi - К2 Хо)/Р, . (14.18)
где К, - К/Т-М,; К2 = l/TMt. (14.19)
а) б)
Рис. 14.3. Предварительная (а) и окончательная (б) схемы набора модели апериодического звена
Выражение (14.18) позволяет нам достаточно наглядно проследить процесс
формирования схемы набора. Действительно, из (14.18) видно, что он должен содер-
жать интегратор, о чем говорит множитель 1/Р, при этом он должен одновременно
выполнять и функции сумматора двух слагаемых (суммирующий интегратор). В та-
ком случае модель может быть представлена в виде схемы на рис. 14.3, а. При вы-
полнении условий
К/ЗД = 1/R1C; l/T Mt = 1/R2 C (14.20)
и с учетом выражений (14.19) выходное напряжение схемы на рис. 14.3, а будет рав-
но -Хо и, следовательно, выход можно соединить со вторым входом, поскольку они
эквипотенциальны. Таким образом, окончательная схема набора для апериодичес-
443
Часть II. Моделирование схем и устройств
кого звена будет иметь вид на рис. 14.3, б, а его коэффициент усиления, как видно
из выражений (14.19) и (14.20), определяется формулой К = Ki/K2 •= R2/R1.
Как видно из приведенного анализа, нами было использовано масштабирова-
ние только по времени. Обьясняется это тем, что масштабирование вводится с целью
обеспечения проведения моделирования в рамках технических возможностей ком-
понентов модели. Это в первую очередь относится к возможным перегрузкам опера-
ционных усилителей по максимально допустимому выходному напряжению
(например, в случае интеграторов). Однако такие ограничения устраняются не толь-
ко за счет масштабирования по входному и выходному напряжению, но и за счет вве-
дения масштаба по времени. Кроме того, для избежания перегрузок ОУ вводят
соответствующее распределение коэффициентов усиления по отдельным звеньям в
каждой прямой (без обратной связи) ветви моделируемой системы.
Колебательное звено [64]. Коэффициент передачи звена:
К(р) = Xo(p)/Xi(p) - К/(1 + 2рВТ + рТ2). (14.21)
Схема модели звена (рис. 14.4) отличается от аналогичной модели на
рис. 14.2, а тем, что в пей совмещены функции сумматора и первого интегратора,
что позволило уменьшить количество ОУ. Параметры компонентов модели опреде-
ляются из следующих соотношений:
K R11C = МД2; R12 C R31 = R3M»T2; 2B R13 C - М,Т; R21C - 1.
Рис. 14.4. Схема модели колебательного звена
Рис. 14.5. Схема модели дифференцирующего звена
Дифференцирующее звено [64]. Коэффициент передачи звена:
К(р) = Uo(p)/Ui(p) = рК/(1 + рТ). (14.22)
Параметры модели звена (схема на рис. 14.5) выбираются из соотношений:
R1T = K R11; R12 R21C R31 = R1R3 M. T.
Интегро-дифферепцирующсе звено [64]. Коэффициент передачи звена:
К(р) = Xo(p)/Xi(p) = К(1 + рТ1)/(1 + р-Т2). (14.23)
444
Глава 14. Электромеханические устройства
Для случая Т1 > Т2 (схема на рис. 14.6, а) параметры модели определяются из
соотношений:
R11-T2-R11 КТ1;
R22 С = М,Т; RI R3 М.Т2 R22 С = R12 R21 С R31(R22 С - М,Т2).
Для случая Т1 < Т2 (схема модели звена на рис. 14.6, б) выбираются из соотно-
шений:
R1T2-R11KT1;
R22 С - М.Т; RI-М,Т2 R22 С = R12 R21 C(MtT2 - R22 С). (14.24)
?жс. 14.6. Схема модели интегродифференцирующего звена первого (а) и второго (б) рода
Рее. 14.7.
Рабочая модель интегро-дифференцирующего звена второго рода (а), ее АЧХ (б), ос-
циллограммы сигналов на входе (А) и выходе (В) (в) и ФЧХ (г)
Проведем испытания модели на рис. 14.6, б при следующих исходных дан-
ных: Т1 - 0,1 с, Т2 - 0,2 с, К - 1, RI = 1 МОм, R12 = 1 МОм, М, = 1. Из условий
114.24) получаем значения остальных параметров: R11 2 МОм, R22 = 0,1 МОм,
R21 = 0,2 МОм. При таких данных схема модели с необходимыми контрольно-изме-
рительными приборами показана па рис. 14.7, а. Результаты ее испытания приведены
на рис. 14.7, б — АЧХ, на рис. 14.7, в — осциллограммы сигналов, на рис. 14.7, г —
ФЧХ. Для проверки результатов испытаний проведем необходимые расчеты, исполь-
445
Часть II. Моделирование схем и устройств
зуя формулу (14.23). После подстановки р = jco и несложных преобразований получим
выражения для АЧХ и ФЧХ в следующем виде:
|К((0)| = V[1V (0)Т1]7[1 + (0)Т2)2] (14.25)
В(ю) = arctg{[co(Tl — Т2)]/(1 4- (02Т1Т2)} (14.26)
При расчетах используем принятые для схемы на рис. 14.7, а значения
Т1 = 0,1 с, Т2 = 0,2 с и полученное в результате моделирования значение угловой ча-
стоты о) = 2л-1,02 = 6,41 рад/с (см. рис. 14.7, б и г). После подстановки этих значе-
ний в формулы (14.25) и (14.26) получим |К(со)| — 0,739 - -2,63 дБ, В(со) = -19,4°, что
практически совпадает с результатами моделирования (относительно фазы заметим,
что сигнал на выходе модели инверсный — см. обозначение —Хо на рис. 14.7, а и ос-
циллограммы на рис. 14.7, в).
Дифференцирующий трансформатор используется в системах управления в
качестве согласующего и корректирующего элемента. Типичные значения парамет-
ров трансформатора [64]: число витков, индуктивность и активное сопротивление об-
моток N, = 420, L, = 1,15 Гн, R: - 24 Ом — для первичной и ЬГ2 = 2680, L, = 47 Гн,
R2 — 2200 Ом — для вторичной; индуктивность и сопротивление нагрузки Ц. = 110 Гн,
R„ = 2200 Ом.
При работе на индуктивную нагрузку (например, ЭМУ) коэффициент переда-
чи трансформатора определяется выражением [64]:
К(р) = Io(p)/Ui(p) = К-р-Т1/(1 4- р-Т1)(1 4- р-Т2), (14.27)
где Io(p), Ui(p) — ток вторичной и напряжение первичной обмоток, К = n/Ro,
n = Nj/N, — коэффициент трансформации, Rn = R2 + R„ — суммарное сопротивле-
ние вторичной обмотки и нагрузки, Т1 - L,/(R. 4- R,) — постоянная времени пер-
вичной обмотки, Rt — внутреннее сопротивление источника входного сигнала,
Т2 = (I,2 4- LJ/R0 — постоянная времени вторичной обмотки.
Из выражения (14.27) видно, что в качестве модели дифференцирующего
трансформатора могут быть использованы последовательно включенные модели
дифференцирующего и апериодического звена.
Если трансформатор работает на высокоомную нагрузку (например, усили-
тель с высоким входным сопротивлением), то постоянной времени Т2 в формуле
(14.27) можно пренебречь и в этом случае дифференцирующий трансформатор мо-
жет моделироваться дифференцирующим звеном.
Звено с дробно-рациональной передаточной функцией вида К(р) =
» Y(p)/X(p) — (В2р2 + BiP 4- В0)/(А2р2 + Ajp + Ао) относится к классу комбинирован-
ных, т. е. составленных из рассмотренных выше стандартных звеньев и описыва-
емых дифференциальным уравнением, содержащим в правой части производные
входного воздействия. При составлении моделей таких звеньев используется ме-
тод преобразования исходного дифференциального уравнения в систему канони-
ческих уравнений или метод с применением вспомогательной переменной
[90, 91]. Заметим, что метод, рассмотренный в разд. 14.1.1, авторы работ [90, 91]
называют общим, а сам процесс подготовки схемы набора — программированием
дифференциального уравнения. Сущность метода с использованием вспомога-
тельной переменной Z(p) сводится к введению вспомогательного звена с переда-
точной функцией К.(р) = Z(p)/X(p) « 1/(А2р2 4- AiP + Ао), что позволяет
представить выходную величину как Y(p) = Z(p)(B2p2 4- В>р 4- Во) и, следовательно,
составить модель путем последовательного соединения модели вспомогательного
звена и сумматора, на вход которого подаются вспомогательная переменная и ее
446
Глава 14. Электромеханические устройства
производные. В качестве примера рассмотрим процесс составления модели систе-
мы, структурная схема которой (рис. 14.8, а) содержит апериодическое звено с
коэффициентом передачи К1(р) = Х1(р)/Х2(р) = Kj/CpT, i 1) и звено с коэффици-
ентом передачи К2(р) = Y(p)/X2(p) = К2(рТ2 + 1)/(р~’Тг 4- 2ррТ + 1) [90]. Если ввес-
ти дополнительное звено с коэффициентом передачи Кп(р) = 1/(рйТ- + 2р0Т 4-1), то
Y(p) = [К2Х2(р) + K2T2X2(p)]Ks(p) и, следовательно, для воспроизведения выход-
ной величины Y(p) необходимо на вход дополнительного звена, реализуемого,
например, схемой на рис. 14.4, подать величину Х2 и ее производную рХ2 с коэф-
фициентами передачи (весами) К2 и К2Т2 соответственно.
Рис. 14.8. Структурная схема системы с дробно-рациональной передаточной функцией (а) и ее
модель (б)
б)
В схеме набора модели (рис. 14.8, б) сумматор на ОУ 1 (далее указание на ОУ
опущено), инвертор 2 и интегратор 3 воспроизводят элемент сравнения и апериоди-
ческое звено, а интеграторы 4, 5 и инвертор 6 — колебательное (вспомогательное)
звено, функции которого реализуются за счет суммирования на интеграторе 4 вели-
чин -Х2 и рХ2. Главная обратная связь системы воспроизводится подачей на вход
сумматора 1 се выходной величины----Y, формируемой на выходе интегратора 5.
Параметры модели с учетом принятой в книге системой обозначений [90]:
К11 = R1/R11 - К./Т,; К12 - R1/R12 = 1/Т,; К13 = R1/R13 - К,/Т,;
К21 = R2/R21 = 1; К31 - 1/R31C = 1; К41 - К2Т2/Т2 = 1/R41-C;
К42 = K2/T2 - 1/R42-C; К43 = К2/Т2 = 1/R42 С; К44 - 2р/Т - 1/R41 С;
К51 - 1/R51-C; К61 = 1/R61C.
Заметим, что в случае ненулевых начальных условий они пересчитываются
для вспомогательного звена по методике, приведенной в [90, 91].
Сущность метода канонических уравнений рассмотрим на примере переда-
точной функции вида К(р) « Y(p)/X(p) = (b2p2 4- btp 4- b0)/(a3p* 4- агр2 + а,р 4- а„). ко-
торая может быть представлена в виде неоднородного дифференциального
уравнения: а3р’у 4- а2р2у 4- а,ру 4- аоу = Ь2р2х 4- btpx 4- box. Для преобразования этого
уравнения в систему канонических уравнений его интегрируют п раз, где п = 3
номер старшей производной. В нашем случае это сведется к троекратному делению
правой и левой части уравнения на оператор р. После первого интегрирования по-
лучим: а3ргу 4- а2ру 4- аху 4- аоу/р = Ь2рх 4- Ь,х 4- Ьох/р или аар2у 4- а.ру 4- а,у - Ь.рх -
b,x = V, = box/p - tuy/p; после второго — а3ру 4- а2у 4- а^/р - b:.x - b2x/p = V,/p или
447
Часть II. Моделирование схем и устройств
а3ру + а2у - b2x = V2 = V;/p - а,у/р + biX/p; после третьего — а3у + а2у/р - Ь2х/р -=
= V2/p или а,у - V3 = V2/p + b2x/p - а2у/р, откуда у = V3/a3. Расчет начальных усло-
вий для переменных Vi проводится по очевидным формулам: Vt(0) — а3р2у(0) +
+ а2ру(0) + а,у(0) - b2px(0) - b,x(O); V,(0) = а3ру(0) + а2у(0) - b2x(0); V3(0) = а3у(О), где
переменные х, у и их производные с индексом “(0)” соответствуют их заданным
значениям.
Как следует из проведенного анализа, порядок подготовки схемы набора моде-
ли и алгоритм ее функционирования должен быть следующим:
+ на вход первого суммирующего интегратора подаются входное (или возмущаю-
щее) воздействие х с коэффициентом передачи Ь. и инвертированное значение ис-
комой переменной у с коэффициентом передачи при этом на выходе
интегратора формируется переменная У,;
+ на вход второго суммирующего интегратора подаются переменная V, с выхода
первого интегратора, переменная х с коэффициентом передачи Ь, и инвертиро-
ванное значение переменной у с коэффициентом передачи а,; при этом на выхо-
де интегратора формируется переменная Уг;
♦ на вход третьего суммирующего интегратора подаются переменная V2 с выхода
второго интегратора, переменная х с коэффициентом передачи Ъ2 и инвертиро-
ванное значение переменной у с коэффициентом передачи ах; при этом на выхо-
де интегратора формируется переменная V3;
♦ на первом, втором и третьем интеграторах устанавливаются значения началь-
ных условий V,(0), V2(0) и V3(0) соответственно;
+ переменная V, подается на вход инвертора с коэффициентом передачи а3; при
этом на выходе инвертора формируется инвертированное значение искомой пе-
ременной у, которое подается на входы упомянутых выше интеграторов.
Как следует из вышесказанного, недостатком метода канонических уравне-
ний является невозможность получения значений старших производных искомой
переменной. Для получения некоторых производных используется модифицирован-
ный метод, при котором число шагов интегрирования равно номеру старшей произ-
водной правой части дифференциального уравнения. В нашем случае таких шагов
будет два; при этом уравнение а3ру + а2у - b2x = V2, позволяющее получить первую
производную ру и называемое уравнением связи, программируется уже обычным
(общим) методом (см. разд. 14.1.1).
Контрольные вопросы и задания
1. Чем отличаются схемы на рис. 14.6?
2. Для каких целей, кроме перечисленных, можно использовать дифференцирую-
щий трансформатор?
3. Используя формулу (14.16), составьте выражения для АЧХ и ФЧХ апериоди-
ческого звена. Проведите расчет этих характеристик при RI = R2 = 1 МОм и
С = 1 мкФ; результаты расчета проверьте на модели звена.
4. Подготовьте рабочую схему модели дифференцирующего звена (рис. 14.6) при
С = 1 мкФ и сопротивлении всех резисторов 1 МОм. Получите АЧХ, ФЧХ и пере-
ходную характеристику. Установите связь между АЧХ и переходной характери-
стикой, использовав сведения из разд. 10.4.
5. Проведите испытания модели на рис. 14.8 при следующих исходных данных:
К, = К2 - 1; Т, = Т - 0,1 с; Т2 - 0,2 с; 0 = 0,25.
448
Глава 14. Электромеханические устройства
6. Используя метод канонических уравнений, подготовьте схему модели звена с коэф-
фициентом передачи К(р) - Y(p)/X(p) - (ЬгР2 + Ь,р + Ь0)/(аэр3 + а2р2 + а,р + а„) и про-
ведите ее испытания при входном воздействии в виде потенциального скачка
амплитудой 1 В (x(t) = l(t)) и следующих значениях параметров: b„ = а„ = b2 = а2 = 1;
Ь, — а, “ 2; а, = 0,1.
14.1.3. Метод электромеханических аналогий
В электромеханических устройствах автоматики, акустики и измерительной
техники используются преобразователи, частотные характеристики которых опре-
деляются как электрическими, так и механическими (или акустическими) параме-
трами. В подобных случаях для удобства анализа все параметры таких устройств
стараются привести к какому-Го единому (лучше электрическому) виду и весь преоб-
разователь заменить эквивалентной электрической цепью, которая отражала бы как
электрические, так и механические свойства. Такое обьединение в некоторых случа-
ях достигается методом электромеханических аналогий [62, 76], который известен
также под названием “групповой метод” [61] и основывается на общности дифферен-
циальных уравнений электрических и механических систем. Заметим, что этот ме-
тод использовали еще Фарадей и Максвелл, которые с помощью механических
моделей пытались сделать более понятными трудно воспринимаемые в те времена
электромагнитные процессы. Кроме того, будучи более молодой по сравнению с ме-
ханикой, теория электрических цепей стала обладательницей тем не менее более
мощных и эффективных методов анализа и расчета, которые впоследствии оказа-
лись пригодными и для механики.
Аналогия между механическими и электрическими явлениями обычно иллю-
стрируется на колебательных механических и электрических системах, которые
описываются следующими уравнениями:
последовательный колебательный контур (рис. 14.9, а)
L(d*q/dt2) + R(dq/dt) + q/C = е; (14.28)
параллельный
C(de/dt) + e/R + (1/L) fe-dt; (14.29)
уравнение движения груза в вязкой жидкости под действием плоской пружи-
ны (механическая система) (рис. 14.9, б, в):
m(d2x/dt2) + r(dx/dt) + ex s f; (14.30)
или
m(d v/dt) + r-v + (1 /с) fv-dt. (14.31)
С математической точки зрения приведенные уравнения тождественны. Как
следует из (14.28) и (14.30), индуктивность L тождественна массе т.', электрический
заряд q — перемещению х; электрическое сопротивление R — вязкому (скоростному)
трению г; электрическая емкость С — жесткости (коэффициенту упругости) с; напря-
жение е — силе Л Это так называемая первая система аналогий, нашедшая наиболь-
шее распространение на практике [62]. Вторая система аналогий, предложенная
позднее Хенле и Файерстоном [62] и поэтому менее применяемая, заключается в тож-
дественности уравнений (14.29) и (14.31), из которых следует, что электрическая ем-
кость С тождественна массе т; напряжение е — скорости и; проводимость 1/R —
коэффициенту трения г; индуктивность L — жесткости с; электрический ток i — си-
ле f. Заметим, что перечень тождественных электрических и механических величин
можно продолжить, учитывая их зависимость от перечисленных.
15 Зак. 206
449
Часть II. Моделирование схем и устройств
Проиллюстрируем применение метода электромеханических аналогий на
примере мембранного преобразователя давления, комбинация которого с электроди-
намическим преобразователем перемещения подробно рассматривается в разд. 14.6.
Поскольку мембранные чувствительные элементы характеризуются существенной
нелинейностью статических характеристик, то передаточная характеристика преоб-
разователя может быть определена только в окрестности рабочей точки и поэтому
она записывается в следующем виде:
К(р) = ДЬ/Др - ки/(т2р2 4- 2т£р 4- 1),
(14.32)
где ДИ — перемещение мембраны при изменении давления на величину Др;
к„ = к,/к2 — статический коэффициент передачи; к! = Р/Др — коэффициент пропорци-
ональности; Р — статическое давление; т = (m/k2)lz2 — постоянная времени подвижной
части массой т; к2 — коэффициент упругости (жесткости) мембраны; с, = k3/2(k2m)12 —
затухание (коэффициент успокоения) системы; к3 — коэффициент трения.
В качестве электрического аналога рассматриваемого преобразователя выбе-
рем последовательный колебательный контур (рис. 14.9, а). Ток в цепи контура
I(p) = U(p)/(R 4- pL + 1/рС); напряжение на конденсаторе Uc(p) = 1(р)/рС =
= U(p)/(p2LC 4- pRC 4- 1). Умножив правую и левую части этого выражения на ем-
кость С, а затем поделив их на U(p), получим:
CUe(p)/U(p) = C/(p2LC 4- pRC + 1). (14.33)
Слагаемое CUc(p) представляет собой заряд конденсатора С, что, согласно при-
нятым выше соглашениям, тождественно перемещению ДЬ. Напряжение U(p) тож-
дественно движущей силе, которая, согласно (14.32), равна к,Др. Емкость С
является аналогом жесткости (упругости), равной коэффициенту к2. Учитывая так-
же, что L = ш и R = к3, выражение (14.33) можно записать в следующем виде:
ДЬ/Др = (ki/k2)/(p2m/k2 + рк3/к2 4- 1). (14.34)
Поскольку m/k2 = т2, ka/k2 - 2тс, - 2k8(m/k2),z2/2(k2m)12 и ku = kj/k2, то тождест-
венность выражений (14.32) и (14.34) можно считать доказанной. Следовательно, для
анализа рассматриваемого устройства можно воспользоваться эквивалентной схемой
на рис. 14.9, а, учитывая при этом, что индуктивность измеряется в кг, сопротивле-
ние в кг/с, емкость — в Н/м, напряжение — в ньютонах и т.д. (все в системе СИ).
Рис. 14.9. Электрическая (а) и механические (б, в, г) колебательные системы
При использовании метода электромеханических аналогий трудности возника-
ют при составлении кинематических схем механических систем (см. рис. 14.9, б, в, г).
Некоторые приемы выполнения этого подготовительного этапа заключаются в следу-
ющем [62, 76]:
450
a
i-
>.
й
>-
У
Глава 14. Электромеханические устройства
4 - все компоненты кинематической схемы представляются в виде двухполюсников;
♦ масса тл, как и пружины жесткости с и источники вязкого трения г (очевидные
двухполюсники), также изображается в виде двухполюсника, один зажим кото-
рого обязательно соединяется с неподвижной опорой, например, корпусом аппа-
рата, фундаментом и т.п, масса которых существенно больше участвующей в
движении массы т;
♦ для двухполюсника силы f одним зажимом является сама сила, а вторым — ре-
акция опоры;
♦ если все элементы механической системы движутся с одинаковой скоростью, то
их “двухполюсники” соединяются параллельно (соединение в узел) (рис. 14.9, в);
♦ если через все элементы передается одна и та же сила, то двухполюсники соеди-
няются последовательно (соединение цепочкой) (рис. 14.9, г);
4 все двухполюсники-эквиваленты располагаются так, чтобы движения всех вы-
водов происходили в параллельных направлениях; перпендикулярные к этому
направлению связки считаются абсолютно жесткими, невесомыми и двигающи-
мися в том же направлении.
Переход к эквивалентным электрическим схемам производится по следую-
щим правилам:
4 элементы, образующие узел, соединяются в электрической схеме последовательно;
4 элементы, образующие цепочку, соединяются в электрической схеме параллельно.
При составлении эквивалентных электрических схем можно воспользоваться
методом Г. А. Гамбурцева [62]. По этому методу электрическая эквивалентная схе-
ма получается нанесением ее контура на изображение кинематической схемы таким
образом, чтобы каждый из контуров охватывал один узел. Если затем по этим кон-
турам разрезать лист бумаги, то каждый из узлов получит возможность двигаться
независимо от остальных. Если теперь перечертить эти контуры на отдельный рису-
нок и поместить соответствующие электрические аналоги в местах, где контуры пе-
ресекали элементы механической схемы, то полученная таким путем схема и буде!
искомой эквивалентной электрической схемой.
Контрольные вопросы и задания
1. Какую электромагнитную величину в уравнении (14.28) можно считать анало-
гом количества движения m(d2x/dt2) = m-v?
2. Какую электромагнитную величину в уравнении (14.28) можно противопоста-
вить перемещению х?
3. Рассчитайте параметры последовательного колебательного контура, являюще-
гося электрическим эквивалентом преобразователя давления с характеристика-
ми: kj = 10* м2; k2 = 50 Н/ м; m = 0,004 кг; к3 = 0,01 кг/с; Др = 1000 Н/м2.
4. Проведите моделирование схемы на рис. 14.9, а при параметрах контура, получен-
ных в п. 3; в качестве источника Ui используйте источник постоянного напряже-
ния 1 В при исследовании переходных процессов и источник переменной:
напряжения — при исследовании АЧХ. Определите, какую точку схемы необхо-
димо заземлить, чтобы получить выходной сигнал, эквивалентный перемещению.
5. Установите соотношения между параметрами мембранного преобразователя
давления и эквивалентным ему параллельным колебательным контуром.
15*
451
Часть II. Моделирование схем и устройств
14.2. Электрические машины постоянного тока
Из машин постоянного тока наибольшее распространение получили электро-
двигатели. Они обладают весьма высокими энергетическими и эксплуатационными’
характеристиками, а их основной недостаток — наличие коллектора — в настоящее
время успешно преодолевается расширением разработок в области так называемых
вентильных двигателей с бесконтактной системой (такие двигатели, например' уже
давно используются для привода вентиляторов ПК).
Двигатели постоянного тока, как и генераторы, прежде всего различаются по
характеру возбуждения: независимого, параллельного (шунтового), последователь-
ного (сириесного) и смешанного возбуждения. В двигателях малой мощности часто
используют магнитоэлектрическое возбуждение от постоянных магнитов. При этом
существотно упрощается схема включения двигателя, уменьшается расход меди.
Широкому внедрению магнитоэлектрического возбуждения препятствует высокая
стоимость магнитных материалов, необходимых для изготовления полюсов машины.
Чем больше габариты двигателя, тем, естественно, больше развиваемый им мо-
мент и соответственно мощность. В первом приближении габариты машины (диаметр
D и длина L) определяют момент двигателя согласно эмпирической формуле
М = cD2L, где с — коэффициент, зависящий от конструктивных особенностей маши-
ны. Специфические требования к конструктивным формам двигателя предъявляются
при необходимости обеспечения высокого быстродействия. В этом случае двигатель
должен иметь специальную геометрию — малый диаметр якоря при большой его дли-
не, чтобы в итоге уложиться в требуемый объем активных материалов, диктуемый
приведенной формулой. Кроме того, для уменьшения индуктивности обмотки ее укла-
дывают не в пазы, а на поверхности гладкого якоря; при этом заметно улучшаются ус-
ловия работы коллектора при одновременном уменьшении его размеров.
14.2.1. Статические характеристики
Принцип работы любой электрической машины основан на законах электро-
магнитной индукции. В проводнике, движущемся в магнитном поле, возникает эле-
ктродвижущая сила и, наоборот, помещенный в магнитное поле проводник с током
испытывает механическое воздействие. Эти явления используются в электрогенёра-’
торах и электродвигателях в самых различных практических.реализациях: с непо-
движным магнитным полем и подвижными проводниками, с неподвижными
проводниками и вращающимся полем и т.п.
В машинах постоянного тока обычно имеется неподвижная часть (статор), со-
здающая магнитное поле, и вращающийся якорь с системой проводников. Магнит-
ное поле, как правило, создается электромагнитным путем — посредством обмотки
возбуждения, находящейся на полюсах магнитной системы, а в машинах малой
мощности — и с применением постоянных магнитов.
Если проводник перемещается в магнитном Поле в плоскости, перпендикуляр-
ной магнитным силовым линиям, то индуцированная в нем ЭДС
е = IvB, (14.35)
где I — длина активной части проводника, находящейся в магнитном поле, м; v —
скорость проводника, м/с; В — магнитная индукция, Тл.
Направление ЭДС определяется по известному правилу правой руки (см.
рис. 14.35): если ладонь руки расположить перпендикулярно магнитным силовым
линиям и отогнутый большой палец направить по движение проводника, то осталь-
ные пальцы будут указывать направление ЭДС.
452
Глава 14. Электромеханические устройства
Рассмотрим простейший случай, когда обмотка якоря, расположенного в
межполюсном пространстве, состоит из одного витка (рис. 14.10, а). Индукция под
полюсами распределена примерно по закону синуса за счет придания соответствую-
щей формы полюсным наконечникам. Поэтому при вращении в витке индуцируется
ЭДС, изменяющаяся по синусоидальному закону. Если виток замкнуть на какую-
либо нагрузку, то через нее потечет переменный ток с частотой f = pw/2n, где со — уг-
ловая скорость якоря, рад/с; р — число пар полюсов магнитной системы.
Чтобы ток протекал в одном направлении, он должен быть выпрямлен. Для
этого используется специальный механический выпрямитель — коллектор, рас-
положенный на валу генератора. В простейшем случае для обмотки, состоящей
лишь из одного витка, в качестве коллектора используются две пластины с нало-
женными на них щетками (рис. 14.10, а), которые должны быть расположены в
пространстве так, чтобы коммутация (переход токосъемного контакта — щет-
ки — с одной пластины на другую) происходила в момент перехода ЭДС ч«р«э ну-
левое значение. При этом ЭДС, снимаемая со щеток, будет иметь пульсирующий
характер с удвоенной частотой. Для уменьшения пульсаций на якоре размещают
не один, а много витков; соответственно коллектор должен иметь и большее чис-
ло токосьемпых пластин.
Рис. 14.10. Схема одновиткового (а) и практическая конструкция (б) генератора постоянного тока
Практическая конструкция генератора со снятой крышкой показана на
рис. 14.10, б, на котором обозначено: 1 — токосьемная щетка (вторая расположе-
на диаметрально противоположно); 2 — магнитная система (статор); 3 — якорь;
4 — коллектор. Якорь набирается из листовой стали, отдельные листы изолиру-
ются друг от друга (за счет покрытия их лаком) с целью снижения потерь от вих-
ревых токов (токов Фуко). В пазы якоря укладываются обмотки, которые
подсоединяются к соответствующим токосьемным пластинам (ламелям). Анало-
гичным образом (в пазах, образующих полюса) располагается статорная обмотка.
Для охлаждения на валу якоря устанавливается вентилятор, который прогоняет
воздух через воздушный зазор в пространстве между полюсами статора и якорем.
Подшипники, на которые опирается вал якоря, обычно помещаются в крышках
корпуса машины.
При числе витков больше одного ЭДС Е = eN/2a, где N — общее число провод-
ников якоря; 2а — число параллельных ветвей обмотки; е — среднее значение ЭДС
в проводнике, определяемое выражением (14.35), в котором v = coD/2; D — диаметр
якоря. С учетом приведенных обозначений
Е - (01DNB/4a. 1 (14.36)
453
Часть II. Моделирование схем и устройств
При числе полюсов статора 2р площадь полюсного наконечника S ~ лП1/2р.
При этом магнитный поток, проходящий через полюс и пронизывающий якорь,
Ф = BS. В таком случае ЭДС можно представить в следующем виде:
Е - сорНФ/2ла. (14.37)
Основная часть намагничивающей силы, создаваемой обмоткой возбуждения,
расходуется на преодоление воздушного зазора между полюсом и якорем. Часть маг-
нитного потока замыкается, минуя якорь, по путям рассеивания. Коэффициент рас-
сеивания, т. е. отношение полного потока полюса к полезному, составляет 1,1... 1,2.
При номинальном режиме работы магнитная цепь машины обычно находится в со-
стоянии, близком к насыщению. Однако насыщение, как правило, невелико: отно-
шение фактической намагничивающей силы к намагничивающей силе, которая
имела бы место при сохранении линейного закона, составляет не более 1,3...1,4. Маг-
нитное состояние машины существенно изменяется при нагрузке. Когда по обмотке
якоря проходит ток, то вследствие явления самоиндукции создается так называемый
магнитный поток реакции якоря, направление которого совпадает с линией располо-
жения щеток машины. При этом в номинальном режиме возникает продольная
(вдоль якоря и статора) размагничивающая составляющая магнитного поля. Для
нейтрализации реакции якоря используются компенсационные обмотки, размещае-
мые на полюсных наконечниках статора и включаемые последовательно с якорем.
В электродвигателях постоянного тока происходят те же физические процессы,
что и в генераторах, поскольку электрические машины являются обратимыми: гене-
ратор и двигатель отличаются только некоторыми конструктивными особенностями.
Принцип работы электродвигателей постоянного тока основан на взаимодей-
ствии магнитного поля и находящегося в нем проводника с током i. Если проводник
расположен в плоскости, перпендикулярной магнитным силовым линиям, то на не-
го действует сила F = ИВ, направление которой определяется по правилу левой руки
(см. рис. 14.35): если ее расположить так, чтобы магнитные силовые линии входили
в ладонь, а выпрямленные четыре пальца совпадали с направлением тока, то отогну-
тый большой палец будет указывать направление действия силы. При этом электро-
магнитный момент М = FND/2 = lBDNi/2. Если общий ток коллектора I, то ток в
отдельном проводнике i = 1/2а. Следовательно, М = lBDNI/4a, а с учетом приведен-
ных выше формул для генератора это выражение можно также записать как
М = рМФ1/2ла. (14.38)
При работе двигателя в установившемся режиме приложенное напряжение U
уравновешивается ЭДС двигателя Е и суммарным падением напряжения в цепи яко-
ря IR, т. е.
U = Е + IR, (14.39)
где I, R — ток и сопротивление цепи якоря, а Е определяется формулой (14.37), ко-
торую для рассматриваемого случая представим в следующем виде:
Е = соС.Ф, (14.40)
где С, = pN/2na. (14.41)
Из (14.38) находим
1»М/СмФ, (14.42)
где С„ = pN/2na. (14.43)
Как следует из (14.41) и (14.43), коэффициенты С„ и С„ равны друг другу, од-
нако это справедливо только при использовании системы единиц СИ и угловой ско-
454
Глава 14. Электромеханические устройства
рости вращения в рад/с [74]. Если, например, частота вращения измеряется в оборо
тах/ мин, а момент двигателя — в килограммометрах (кГм), то С,/С„ = 1,03.
На основании (14.39), (14.40) и (14.42) получаем выражение для механичес-
кой характеристики двигателя постоянного тока:
со = и/СсФ - ИМ/СеСмФ2. (14.44)
Заметим, что в полученном выражении М — электромагнитный момент дви-
гателя, а не момент на его валу, который отличается от электромагнитного на вели
чину механических и вентиляционных потерь. Выражение (14.44) справедливо дл^
любого типа двигателя постоянного тока. Однако в зависимости от способа возбуж-
дения его характеристики будут различны.
При независимом возбуждении двигателя (якорь и обмотка возбуждение
включены параллельно) магнитный поток можно считать величиной постоянной к
зависимость скорости двигателя от электромагнитного момента при постоянстве на-
пряжения питания и сопротивления в цепи якоря представляет собой прямую ли
нию, пересекающую ось скорости в точке с ординатой и/СеФ. Варьируя R и U.
можно получить множество различных искусственных характеристик, которые все
гда остаются линейными. При этом механическая характеристика при отсутствиг
добавочных сопротивлений в цепи якоря называется естественной.
Согласно (14.44), при постоянстве магнитного потока возможны два случае
управления скоростью двигателя: изменением сопротивления цепи якоря при посто
янстве питающего напряжения или изменением подводимого к щеткам двигателе
напряжения при постоянном сопротивлении цепи якоря. В первом случае все харак
теристики пересекаются в одной точке с координатами М = 0, со = и/СеФ ~ (о0. Ско
рость двигателя соо называется скоростью идеального холостого хода. При этом ЭДС
двигателя равна приложенному напряжению и уравнение механической характери
стики может быть записано в следующей форме:
о = со0 - RM/KX, (14.45)
где К. = СеФ; Км = СЧФ.
Тангенс угла наклона характеристик определяется величиной R/K.KM, т. е. за
висит только от сопротивления цепи якоря. С ростом этого сопротивления увеличи
вается угловой коэффициент прямой и характеристика становится более “мягкой”
Наименьшую крутизну имеет естественная характеристика. В частном случае, npi
U = 0, когда якорь отключен от сети и замкнут на некоторое сопротивление, все ха
рактеристики пересекаются в начале координат. Второе семейство характеристик
(при R = const и U = var) имеет вид параллельных линий с наклоном к оси абсцисс
определяемым сопротивлением цепи якоря.
Для того чтобы построить механическую характеристику двигателя независи
мого возбуждения, достаточно определить две ее точки. Удобно пользоваться точко!
идеального холостого хода и точкой номинального режима при номинальном М. Дл5
нахождения этих точек на естественной характеристике необходимо знать но
минальные (паспортные) данные двигателя и сопротивление обмотки якоря npi
расчетной температуре 75‘С. При этом скорость идеального холостого хода опреде
ляется выражением: со0 = соии/Ев, где со„ •= (U - I„R)/Kf = Еи/К„; 1„ Ен — номинальны*
ток и ЭДС якоря. Для второй точки определяется номинальный электромагнитны!
момент Мн - Рн/со,„ где Р„ — номинальная мощность. Заметим, что получаемое npi
этом значение равно моменту на валу двигателя, который равен разности электро
магнитного момента и момента механических потерь.
455
Часть II. Моделирование схем и устройств
Из уравнения механической характеристики двигателя (14.45) можно найти
статическое падение скорости Дсо при наличии нагрузки на валу двигателя. Часто Дй)
выражают в долях или процентах от скорости идеального холостого хода и называ-
ют скольжением S = Д(О/(Оо = (too - to)/to0 = М/М„, где М„= IMK„, 1ка - U/R — момент и
ток короткого замыкания (при неподвижном якоре).
В двигателе смешанного возбуждения магнитный поток создается за счет МД С
двух обмоток: последовательного и независимого возбуждения. Поэтому при токе
якоря, равном нулю, магнитный поток определяется магнитодвижущей силой МДС
(произведение тока на число витков) обмотки независимого возбуждения. Соответст-
венно механическая характеристика пересекает ось ординат и точка пересечения оп-
ределяет скорость идеального холостого хода. Магнитный поток двигателя
увеличивается за счет МДС обмотки последовательного возбуждения и поэтому с
ростом нагрузки скорость двигателя падает.
Исходными данными при расчете статических (в установившемся режиме) па-
раметров привода с двигателями постоянного тока (здесь и далее — с независимым
возбуждением) являются: номинальные мощность Р,„ Вт или момент на валу М,„ Н м;
напряжение питания U, В; ток якоря 1,„ Л; скорость вращения и, об/мин; момент
инерции двигателя Jv кг м2; сопротивление обмотки якоря Ri& при температуре 15 ’С;
число пар полюсов р; тип нагрузки, чаще всего — редуктор с заданным числом оборо-
тов на выходе пр, статическим Мр, Н м и моментом инерции Jp, кгм2. Иногда задает-
ся маховой момент двигателя mD2 = 4J, где m, D, J — масса, диаметр и момент
инерции ротора соответственно.
Далее рассчитываются следующие параметры [64, 74].
1. Номинальное значение угловой скорости в единицах СИ шв = лп/30, рад/с (допу-
скается использование рад/с - 1/с).
2. Индуктивность обмотки якоря L = 3U/pcoBIB, Гн, где коэффициент р рекоменду-
ется принимать равным 0,6 для машин без компенсации и 0,25 — с компенсаци-
ей реакции якоря [74].
3. Электромагнитная постоянная времени Те — L/R, с.
4. Номинальный момент двигателя на валу Мив = Р„/(ПИ, Н м (если он не задан).
5. Скоростной коэффициент двигателя (коэффициент противоЭДС)
Кс = (U - IaR)/(oH, В с.
6. Коэффициент момента на валу К„, = M.../I, Н м/ А (коэффициент пропорциональ-
ности между током якоря и номинальным моментом): при расчетах чаще всего
используется коэффициент электромагнитного момента Ки = Ке, Н-м/А и соот-
ветственно электромагнитный момент М. = КД, Н м.
7. Коэффициент передачи редуктора Кр = п/пр.
8. Момент инерции системы (с учетом редуктора) J = 5«1д + Jp/Kp2, кг-м2; коэффици-
ент 8 = 1,1...1,15 [74].
9. Электромеханическая постоянная времени Тч - JR/KeKM, с.
10. Статический момент Mt - Мр/Кр, Н м.
11. Сопротивление якоря при температуре 75°С RTS = R1S(1 + аДТ); а — темпера-
турный коэффициент сопротивления провода обмотки якоря (для меди
а — 0,004 1/’С); ДТ - 75 - 15 = 60‘С; результат расчета обычно округляется в
большую сторону, чтобы тем самым учесть сопротивление токопроводящих
проводников.
456
Глава 14. Электромеханические устройства
12. Статический (установившийся) ток 1с = 1ИМС/МИ, Л.
13. Статическая угловая скорость (0с = U/Kf - I<R7a/Kc, рад/с.
14. Передаточный коэффициент двигателя по скорости Кс = 1/Ке; является коэффи-
циентом пропорциональности между ЭДС двигателя и угловой скоростью враще-
ния якоря.
15. Передаточный коэффициент двигателя по моменту Кмм • K„B/R75.
16. Коэффициент внутреннего скоростного трения двигателя Кт = КеКмч, Н-м/(рад/с);
определяет наклон механической характеристики двигателя.
Рассмотрим несколько практических примеров.
Пример 1 [64]. Исходные данные двигателя: мощность Р = 9 кВт; напряжение
питания U — 220 В; ток якоря I = 46 А; число оборотов п = 780 об/мин; сопротивле-
ние обмотки якоря R = 0,218 Ом.
Рассчитываем: номинальное значение угловой скорости вращения якоря
со, = птс/30 = 780л/30 = 81,64 рад/с; скоростной коэффициент К. - (U - IR)/(i)„ =
— (220 - 46-0,218)/81,5 = 2,57 В/(рад/с); передаточный коэффициент по скорости
Кс = 1/К. = 1/2,57 = 0,39 рад/В-с; номинальный момент на валу М,„ = Р/со„ =
= 9000/81,64 = 110,24 Н м; коэффициент момента на валу Км, = Мим/1 - 110,24/46 -
= 2,4 Н-м/А; передаточный коэффициент двигателя по моменту Ким - KMB/R «•
= 0,24/0,218 = 1,12 кГм/В = 11 Н-м/В; коэффициент внутреннего скоростного тре-
ния двигателя К, — К,КМИ - 2,57 11 = 28,27 Н м/(рад/с).
Если на выходе двигателя стоит понижающий редуктор с коэффициентом ре-
дукции пр, то передаточный коэффициент двигателя по скорости К, = 1/К.пр.
Пример 2 [74]. Двигатель МИ-33: Р = 0,37 кВт; U - 100 В; I “ 4,4 А;
п = 3000 об/мин; сопротивление обмотки якоря при температуре 15’С
Ria “ 0,546 Ом; <ТД = 0,004 кг-м2; двигатель без компенсации (р = 0,6); число пар по-
люсов р = 2. Двигатель используется в системе стабилизации скорости и нагружен
редуктором с Jp = 2 кг-м2 с коэффициентом передачи п(, = 30 (100 об/мин на выходе).
Рассчитываем: приведенный момент инерции J e Ja8 + Jp/np2 - 0,004 1,1 +
+ 2/302 - 0,0066 кгм2; сопротивление обмотки якоря при температуре 75°С R-s =
— R15(l + аДТ); при температурном коэффициенте а = 0,004 и разности температур
ДТ = 60’С R71 = 0,68 Ом; с учетом сопротивления токопроводящих проводников прини-
маем R = 0,85 Ом; номинальное значение угловой скорости со, = 2яп/60 = 314 рад/с; ко-
эффициент К, = (U - IR)/(0M = (110 - 4,4 0,85) = 0,34 В-с/рад; в системе СИ Км - К, -
= 0,34 Н-м/А; электромеханическая постоянная времени Т„ = JR/K,KM =
= 0,0066 0,85/0,342 = 0,05 с; индуктивность якоря L = ри/рсоД = 0,6-110/2-314-4,4 =
= 0,02 Гн; электромагнитная постоянная времени Те = L/R в 0,02/0,85 — 0,024 с;
статический коэффициент передачи Кд - 1/Ке - 3 рад/В-с; в режиме слежения Кд =
- 1/К.Про, где Про — оптимальное по быстродействию значение коэффициента переда-
чи редуктора, определяемое формулой [74]:
Про = {(£ + Зц2)/2 + [(£ + Зц2)2/4 + ^Т2}’*,
где £ = Jp/pJa; ц = Мр/Мп; Мр, М„ — момент на выходе редуктора и пусковой момент
двигателя соответственно.
Контрольные вопросы и задания
1. Какое явление используется в электрических генераторах и двигателях и кто его
открыл?
457
Часть II. Моделирование схем и устройств
2. Какие правила используются для определения направления тока в проводнике
при его движении в магнитном поле и направление движения проводника с то- *
ком в магнитном поле?
3. Какие конструктивные решения используются для обеспечения синусоидальной
формы выходного напряжения генератора и для чего это нужно (например, с
точки зрения уменьшения помех радиоприему)?
4. Каким образом производится выпрямление напряжения в генераторах постоян-
ного тока?
5. Положение якоря относительно полюсов N и S, при котором ток равен нулю, на-
зывается геометрической, нейтралью генератора (двигателя). Установите, какое
положение якоря на рис. 14.10, а соответствует такой нейтрали.
6. Что является причиной возникновения магнитного потока реакции якоря, на-
правленного против основного потока? Каким правилом определяется его на-
правление и кто является его автором?
7. Какая часть проводника одновитковой обмотки якоря на рис. 14.10, а является
активной, т. е. участвующей в формировании ЭДС генератора?
8. При общей активной длине проводника обмотки якоря 1 = 1 м, токе I = 1А напря-
женность магнитного поля Н = 1/1 = 1 А/м. Обмотка, аналогичная по конструк-
ции обмотке на рис. 14.10, а, располагается на якоре диаметром D = 0,1м и
длиной L = 0,2 м. Материал якоря — сталь с относительной магнитной проница-
емостью 3000 (не путайте с магнитной постоянной цо в 1,257 10® В с/(А м)). Оп-
ределите: количество витков обмотки, скорректировав при необходимости
заданное значение Z; общую длину обмоточного провода; магнитную индукцию В
[Вс/м2] в материале якоря и магнитный поток.
9. Какая механическая характеристика двигателя называется естественной?
10. Что такое скорость холостого хода и скольжение двигателя?
11. Чем отличается электромагнитный момент двигателя от момента на валу и махо-
вого момента?
12. Если известны номинальные значения мощности, потребляемого тока и скоро-
сти вращения, то каким образом можно определить электромагнитный момент и
момент на валу двигателя?
13. Каким образом определяются коэффициенты передачи по скорости и моменту?
14.2.2. Динамические характеристики
Для определения динамических характеристик двигателя постоянного тока
воспользуемся уравнениями цепи якоря и баланса моментов:
U = L(di/dt) + Е + iR, (14.46)
М = J(dw/dt) + Мс, (14.47)
где L — индуктивность обмотки якоря, Гн; М, Мс — вращающий момент и момент
статической нагрузки, Н м; J — момент инерции всех вращающихся частей, кгм2.
Как было показано выше, ЭДС двигателя пропорциональна скорости вращения
якоря, т. е. Е = шК„ а вращающий момент — току якоря, т. е. из (14.47) i = М/Км =
= [J(dw/dt) + MJ/К,' = J(d(o/dt)/K„ + Ie (Ic = Mc/K„ — статический (установившийся)
ток якоря) и после дифференцирования di/dt = J(d2w/dt2)/KM. После подстановки
этих значений в уравнение (14.46) и деления на К, получим:
(d2co/dt2)TX + (d(D/dt)TM 4- со = (U - LRJ/K., (14.48)
458
Глава 14. Электромеханические устройства
где Т, = L/R, Т„ - JR/KCKM — электромагнитная и электромеханическая постоянные
времени двигателя.
Заметим, что правая часть уравнения (14.48) представляет собой статическое
I установившееся) значение угловой частоты сос.
Для ненагруженного двигателя (1с = 0) из (14.48) получаем выражение для ко-
эффициента передачи по скорости:
К(р) = co(p)/U(p) - КА/(ргТХ + РТИ + 1), (14.49)
где Кд = 1/Ке — статический коэффициент передачи двигателя; р = d/dt — оператор
дифференцирования.
Процесс моделирования рассмотрим на примера двигателя типа ПБСТ-32 с но-
минальными значениями параметров [74]: мощность Р„ = 1366 Вт; напряжение пита-
ния U - 220 В; ток 1„ = 6,5 А; скорость вращения п = 1500 об/ мин; число пар полюсов
2р — 4; сопротивление обмотки якоря Ru в 1,2 Ом; статическая нагрузка — редуктор
с числом оборотов на выходе 100 об/ мин и статическим моментом Мр = 135 Н-м; мо-
мент инерции двигателя и редуктора Jn = 0,026 и Jp — 6,5 кгм2 соответственно.
На основании приведенных данных рассчитываются следующие параметры дви-
гателя: номинальное значение угловой скорости сои = 2лп/60 - 2л-1500/60 =157 рад/с;
индуктивность обмотки якоря L = ри/рсон1н = 0,6-220/2-157-6,5 = 0,065 Гн; сопротивле-
ние обмотки якоря при температуре 75"С RT3 = Ri0(l +ссАТ) = 1,2(1 + 0,004-60) -1,49 Ом:
электромагнитная постоянная времени Те = L/R7i = 0,065/1,49 - 0,044 с; номиналь-
ный момент двигателя М„ — Р„/сои = 1366/157 = 8,7 Н-м; коэффициент противоЭДС
К. = (U - IMR)/co„ = (220 - 6,5-1,49)/157 = 1,34 В-с; коэффициент момента К„ = М„/1. =
= 8,7/6,5 = 1,34 Н-м/ А; передаточное отношение редуктора Кр — 1500/100 = 15; мо-
мент инерции системы (с учетом редуктора) J = 5JA + Jp/Kp2 = 1,15-0,026 + 6,5/15г -
= 0,059 кг-м2; электромеханическая постоянная времени Тм = JRTS/KeKM =
= 0,059-1,49/(1,34-1,34) = 0,049 с; статический момент М.; = Мр/Кр - 135/15 =
= 9,0 Н-м и соответствующие ему ток 1с = 1.МС/М„ = 6,5-9,0/8,7 — 6,7 А и угловая ско-
рость (0е - U/K, - I<R75/Kf = 220/1,34 - 6,7-1,49/1,34 - 156,8 рад/с.
Для подготовки схемы модели уравнение (14.48) представим в двух формах:
Х(р2 + рВ + С) = AU; (14.50)
Хр2 - AU - ХрВ - ХС, (14.51)
где X = со; р = dco/dt; р2 - d2co/dt2; А = С = 1/ТеТ„; В = 1/Т..
Схема модели (рис. 14.11, а), построенная на основании (14.51), содержиа
сумматор на операционном усилителе ОУ 1, выполняющий функцию суммирования
слагаемых правой части выражения (14.51). Формируемый на его выходе сигнал
второй производной X" поступает на вход интегратора на ОУ 2 с коэффициентом пе-
редачи К2> = 1/R21-C. Поскольку на выходе интегратора сигнал первой производной
X' имеет положительную полярность, то в таком виде он не может подаваться не
вход сумматора, поскольку будет иметь место положительная обратная связь и мо-
дель будет неработоспособной. Поэтому на вход сумматора он поступает через инвер-
тор на ОУ 4 с коэффициентом передачи К41 — R4/R41; на выход же сумматора он
передается с коэффициентом передачи К12 = R1/R12. Для формирования сигнала X
используется интегратор на ОУ 3 с коэффициентом передачи K3I = 1/R31-C. Посколь-
ку полярность сигнала X отрицательная, то он поступает на вход сумматора непо-
средственно (через резистор R13) и передается на его выход с коэффициентом
передачи Klt — R1/R13.
Входное воздействие имитируется источником постоянного напряжения Uy
или источником линейно изменяющегося напряжения, выполненном на интеграторе
459
Часть II. Моделирование схем и устройств
в составе ОУ 5, источника напряжения U и RC-цепи. Выбор того или иного вида вход-
ного воздействия осуществляется ключом Z, который подключен к входу сумматора
через резистор R11. Источник Uy используется для исследования переходных харак-
теристик, поскольку при включении моделирования напряжение Uy изменяется
скачком от нуля до установленного значения. Включенный в цепи этого источника
программируемый переключатель S позволяет имитировать режим торможения дви-
гателя путем отключения источника питания через заданное время после начала мо-
делирования. В исходном состоянии для переключателя S установлены следующие
значения параметров Toff я 2 с, Топ = 0 с (значение Топ индицируется над значком
компонента). Источник линейно изменяющегося напряжения позволяет исследовать
передаточную характеристику cd = f(U); при этом переключатель X переводится в по-
ложение, противоположное показанному на рис. 14.11, а.
Перейдем к выбору параметров модели в соответствии с методикой, изложен-
ной в разд. 14.1. Как следует из схемы модели, выходной сигнал сумматора
X" = U. = KnUy - KiaU4 - K13U„ (14.52)
где Кп — R1/R11; К12 = K1/R12; К13 = R1/R13; U4 = —K41U2 — выходное напряжение
ОУ 4; K4l - R4/R41; U2 = -UiK2I/P — выходное напряжение интегратора на ОУ 2;
К21 = 1/C R21; U3 = -U2K31/P — выходное напряжение интегратора на ОУ 3;
К31 - 1/C R31; Uy - myU; my — масштаб по входному воздействию; U3 - X — искомая
величина; Р = d/dT — машинный оператор дифференцирования; Т - mt — машин-
ное время; m = T/t — масштаб времени, т. е. Р = р/т.
Из уравнений (14.52) с учетом его слагаемых получаем машинное уравнение:
U3(P2 + РК12К21К41 + K13K21K3l) = K„K21K3lUy. (14.53)
С учетом введенных масштабов запишем уравнение (14.53) в более близкой к
(14.50) форме:
U3(p2 + pmK12K2JK4| + m2KuK21K3i) - m2KuKaiK31myU. (14.54)
Из требования идентичности оригинала и его модели коэффициенты уравне-
ний (14.50) и (14.54) должны совпадать, т. е.
А = m2myKnK21K31; В - mK12K2lK4l; С = т2К13Ка1К31. (14.55)
Задаваясь
К12 = К41-К13=1, (14.56)
из (15.55) получаем:
К21 = 1/тТе; К31 - 1/mTj Ки = 1/ту. (14.57)
Теперь условия (14.56), (14.57) и приведенные выше формулы для входящих в
них коэффициентов передачи можно использовать для выбора сопротивлений на вхо-
дах ОУ, предварительно задавшись сопротивлением резисторов RI = R4 = 1 МОм, ем-
костью конденсаторов С — 1 мкФ и масштабами m *= 1, m, = 10. Заметим, что в схеме
набора принято Kn = 1, а условие Kn = 1/ту заменено на равнозначное ему Uy - U/my.
Результаты моделирования переходного процесса по угловой скорости (осцил-
лограмма А) и ускорению (осциллограмма В) показаны на рис. 14.11, б (все ключи
находятся в положении, показанном на рис. 14.11, а). Анализ уравнения (14.48) по-
казывает [74], что при Т„ > 4Т. переходной процесс будет апериодическим, а при
Т„ < 4Те — колебательным; при этом угловая частота двигателя изменяется в соот-
ветствии с выражениями: со = 156,8 - 185,5exp(-ll,4t)sin(18,3t + 1,007). Из
рис. 14.11, б видно, что в точке установки визирной линейки 2 на осциллограмме А
время t - Т2 0,178 с, при этом угловая частота со = VA2my - 179 рад/с. Расчеты по
приведенной формуле дают со = 156,8- 185 0,1314 (-0,9013) = 178,7 рад/с, что прак-
460
Глава 14. Электромеханические устройства
ти чески совпадает с результатами моделирования. Такое же совпадение результатов
имеется и по установившемуся значению угловой скорости (расчетное значение
.156.^8 рад/с, результат моделирования — в окне VA1 на рис. 14.11, в).
Из рис. 14.11, б следует, что максимальное угловое ускорение (визирная линей-
ка 1 на осциллограмме В) VBl-m.z = 87,56 рад/с2 достигается при t = Т1 = 0,0612 с. Для
интерпретации этого результата продифференцируем обе части уравнения (14.46), в
результате получим: L(d2i/dt2) + R(di/dt) + K„(dco/dt) = 0. Поскольку в точке максиму-
ма первой производной функции i = f(t) ее вторая производная должна быть равна ну-
лю, то (di/dt) e -Ke(dco/dt)/R = -1,34-87,56/1,49 = -78,74 А-рад/с. Теперь
воспользуемся формулой для расчета тока в переходном режиме для рассматриваемо-
го устройства [74]: 1-6,7- 175exp(-ll,4t)sinl8,3t. При t = Т1 получаем I = 6,7
- 175 0,498 0,9 = -71,7 А, что отличается от динамического примерно на величину ста-
тического — 6,7 А. Следовательно, переходная характеристика по угловому ускорению
может служить мерой для оценки перегрузок по пусковому току: для рассматриваемо-
го двигателя он существенно выше допустимого, который обычно принимается равным
утроенному значению статического (в данном случае — около 20 А).
б)
461
Часть II. Моделирование схем и устройств
г)
Рис. 14.11. Схема модели двигателя (а), ее переходные (б. в) и передаточная (г) характеристики
Осциллограммы переходных процессов (рис. 14.11, в) для режима торможе-
ния двигателя путем отключения напряжения питания программным ключом S по-
лучены при параметре Toff = 0,65 с, приблизительно равном времени окончания
переходных процессов при включении двигателя. Из осциллограмм видно, что дли-
тельность переходных процессов в режиме торможения (Т2 - Т1 = 0,485 с) несколь-
ко меньше; при этом скачок тока противоЭДС (осциллограмма В) и его длительность
примерно совпадают с аналогичными параметрами для режима включения.
Передаточная характеристика со = f(U) при изменении напряжения питания
в диапазоне 0... 150 В (с учетом масштаба шу) показана на рис. 14.11, г: она получе-
на путем развертки сигнала X (канал А осциллографа), имитирующего угловую
скорость, напряжением сигнала управления, поступающего через переключатель
X на вход канала В. В начале полученной характеристики имеется небольшая зона
нечувствительности, обусловленная переходными процессами (см. осциллограммы
на рис. 14.11, б, в). Заметим, что аналогичные характеристики в литературных ис-
точниках изображаются смещенными по оси Y на величину соо (в соответствии с вы-
ражением (14.45)).
462
Глава 14. Электромеханические устройства
Аналогичная рассмотренной схема модели двигателя с использованием библи-
отечных компонентов программы EWB 5.0 (рис. 14.12, а), отличается меньшей на-
глядностью, однако при своей простоте обладает дополнительными возможностями.
Она выполнена на трехвходовом сумматоре S и двух интеграторах И, 12 из библиоте-
ки Controls. Коэффициенты передачи сумматора по каждому входу задаются в диало-
говом окне параметрами КА, КС и КВ: они выбраны в соответствии с рассмотренным
выше алгоритмом функционирования модели равными КА — КС = 1 и КВ = -1. Воз-
можность установки смещения нулевого уровня сумматора по каждому входу позво-
лило задать сигнал входного возмущения непосредственно в диалоговом окне
сумматора (параметр VAOFF = -15,68 В для входа А, его значение индицируется над
значком компонента только для входа А). Коэффициенты передачи интеграторов II,
12 равны К21 и К31 соответственно. Источник напряжения Ut с программным пере-
ключателем S предназначен для имитации режима торможения противовключени-
ем; осциллограммы переходных процессов по угловой скорости (В) и ускорению (А)
для этого случая показаны на рис. 14.12, б. Коэффициент передачи каждого интегра-
тора задается в диалоговом окне параметром К; его значения выбраны равными
К = 1/шТ, и К31 = 1/тТм для интеграторов II и 12 соответственно (их значения инди-
цируются над значком компонентов). Достоинством интеграторов является возмож-
ен
463
Часть II. Моделирование схем и устройств
Рис. 14.12. Схема модели двигателя в программе EWB 5.0 (а) и ее переходаые характеристи-
ки (б, в)
ность установки начальных условий (параметр VOIC в диалоговом окне). Это, в част-
ности, было использовано для моделирования включения двигателя с начальной уг-
ловой скоростью (VOIC в -10 В, что соответствует скорости -100 рад/с).
Осциллограммы переходных процессов для этого случая показаны на рис. 14.12, в.
Контрольные вопросы и задания
1. Каким образом составляется уравнение движения двигателя?
2. Какими параметрами двигателя определяются его динамические характеристики?
3. Каким условием определяется тип переходных процессов двигателя? Получи-
те это условие путем нахождения корней характеристического уравнения
р2ТХ + рТм + 1 = 0.
4. Используя схему на рис. 14.11, а, исследуйте зависимость времени переходных
процессов двигателя от момента его инерции при отключенном редукторе.
5. Поменяйте знак коэффициента передачи интеграторов на рис. 14.12, а, а затем
установите соответствующее значение коэффициентов передачи КВ и КС сумма-
тора и проверьте работоспособность модели.
6. Рассчитайте параметры модели двигателя с характеристиками: номинальная
мощность Рн = 220 Вт; напряжение питания U = 220 В; номинальный ток I, 1 А;
скорость вращения п — 5000 об/мин; сопротивление обмотки якоря при темпера-
туре 15 С R15 = 2,2 Ом; статическая нагрузка — редуктор с числом оборотов на вы-
ходе 100 об/мин и статическим моментом Мр = 25 Н м; момент инерции двигателя
и редуктора J, = 0,01 и Jp = 2,5 кг м2 соответственно.
464
Глава 14. Электромеханические устройства
14.2.3. Схемы включения двигателей постоянного тока
До сих пор мы рассматривали работу двигателя постоянного тока независимо-
го возбуждения с управлением по якорной обмотке. Как отмечалось ранее, возмож-
ны и другие способы включения таких двигателей: с управлением по обмотке
возбуждения, с параллельным и последовательным питанием. Для рассмотрения та-
ких способов включения используем библиотечную модель электродвигателя из
программы EWB 5.0.
Схема модели (рис. 14.13, а) содержит собственно модель двигателя М, источ-
ники питания якорной цепи Ua и обмотки возбуждения Uf, амперметры la, If для
измерения тока в указанных цепях и вольтаметр Uo для измерения выходного напря-
жения (числа оборотов) модели в статическом (установившемся) режиме. Посколь-
ку при моделировании требуется несколько секунд работы программы для
получения достоверных результатов, то в случае установленной опции Pause each
screen (остановка моделирования при заполнении экрана осциллографа) на заклад-
ке Instruments в меню Analysis/Analysis Options... ее необходимо выключить или ус-
тановить максимальную длительность развертки осциллографа (1 с/д ел). Для
исследования передаточных характеристик модели при различных схемах ее вклю-
чения используются ключи Z, X, интегратор I напряжения U, на выходе которого
формируется линейно изменяющееся напряжение со скоростью нарастания 10 В/с.
Программируемые ключи S1 и S2 предназначены для исследования режима тормо-
жения путем отключения через заданное время Toff напряжения питания якорной
или обмотки возбуждения. Заметим, что режим торможения противовключением в
самой модели не реализован: она рассчитана только на однополярное питание.
Характеристики модели М задаются установкой значений следующих пара-
метров (см. рис. 14.13, б, в):
Armature resistance (RA), Ом; Armature inductance (LA), Гн — сопротивление и ин-
дуктивность обмотки якоря;
Field resistance (RF), Ом; Field inductance (LF), Гн — сопротивление и индуктивность
обмотки возбуждения; . . ? б .
Shaft friction (BF) — коэффициент скоростного трения, Н м/с (рад/с);
Machine rotational inertia (J) — момент инерции, [НЧ м/(рад/с2) - кгм2];
Rated rotational speed (NN) — номинальное значение скорости вращения, об/мин;
Rated armature voltage (VAN), В; Rated armature current (IAN), A — номинальные
напряжение питания и ток обмотки якоря (ротора);
Rated field voltage ,(VF.N) — номинальное напряжение питания обмотки возбуж-
дения, В;
Load torque (TL) — момент статической нагрузки, Н-м.
При работе со схемой модели на рис. 14.13, а необходимо определить или уста-
новить (с учетом принятых в EWB 5.0 обозначений):
1. Электромагнитную постояннуя времени Те - (LA)/(RA), с.
2. Номинальное значение угловой скорости в единицах СИ о)„ = k(NN)/30, рад/с.
3. Скоростной коэффициент двигателя К, - [(VAN) (IAN) (RA)]/w„, В-с.
4. Коэффициент электромагнитного момента Км - Кс, Н-м/А (в модели использует-
ся именно такое значение коэффициента).
5. Номинальный момент двигателя М„ = K4(IAN), Н-м.
465
Часть II. Моделирование схем и устройств
б)
в)
Рис. М.13. Схема включения библиотечной модели двигателя (а) и диалоговые окна установки
ее параметров (б, в)
466
Глава 14. Электромеханические устройства
6. Электромеханическую постоянную времени Т„ = (J)-(RA)/KCK„, с.
7. Статический момент нагрузки Мен - (TL), Н-м.
8. Статическую (установившуюся) угловую скорость сос = nUo/ЗО, рад/с (Uo, В —
выходное напряжение модели двигателя, измеряемое одноименным вольтмет-
ром на рис. 14.13, а).
у. Момент трения Mf — coc(BF), Н-м.
10. Суммарный статический момент Мс = Мси + Мт = (TL) + М„ Н-м.
-1. Статический ток Ic = (IAN) M</MH, А (измеряется вольтметром 1а на рис. 14.13, а).
Проиллюстрируем применение приведенных формул для проверки результатов
моделирования, представленных на рис. 14.13, а и полученных при исходных дан-
ных, приведенных на рис. 14,13 б, в. Рассчитываем: номинальное значение угловой
скорости он = 71(NN)/3O = 1800я/30 - 188,4, рад/с; Ке = [(VAN) - (IAN)-(RA)]/coH =
= (115 - 8,81,1) = 0,56 В с; статическую угловую скорость сос = nUo/ЗО = 1899л/30 =
= 198,76 рад/с; момент трения Мт = wc(BF) - 198,76-0,01 = 1,988 Н-м; суммарный ста-
тический момент Мс = Мг- 1,988 Н-м; при К, = Км номинальный момент двигателя
М. = KM(IAN) « 0,56-8,8 = 4,928 Н-м. В заключение рассчитываем статический ток
1 = (IAN)-Mc/M„ = 8,8-1,988/4,928 = 3,55 А и убеждаемся, что он практически совпа-
дает с результатами моделирования, представленными на дисплее амперметра 1а
(см. рис. 14.13, а).
Продолжим испытания: введем статическую нагрузку Мс. = TL = 2 Н. В ре-
зультате моделирования получаем: 1С - 1а - 7,016 A; Uo = 1834 [В = об/мин]. Рассчи-
тываем: сое - 1834Я/30 = 191,96 рад/с; Мт = 1,92 Н-м; Mt = М, + TL = 3,92 Н-м.
В заключение рассчитываем установившееся значение ток 1с « 8,8-3,92/4,928 = 7 А
я убеждаемся, что он незначительно отличается от полученного при моделировании.
Для получения статических передаточных характеристик w = f(Ua) переклю-
чатель Z переводится в верхнее положение. При этом якорная цепь питается линей-
но изменяющимся напряжением с выхода интегратора I, этот же сигнал
используется для развертки по оси X выходного напряжения модели, пропорцио-
нального угловой скорости. Полученные таким образом характеристики при раз-
личных значениях статической нагрузки (рис. 14.14) представляют прямые
параллельные линии, смещенные по оси Y в зависимости от статической нагрузки
(аналогичные по характеру зависимости для промышленных двигателей приведены
з справочнике [75]). Заметим, что при TL = 0 также имеет место смещение характе-
ристики, обусловленное скоростным трением, однако из-за его незначительной ве-
личины на рис. 14.14, а это незаметно.
Для исследования динамических характеристик модели на рис. 14.14, а рас-
считаем электромагнитную Т. = (LA)/(RA) = 0,001/1,1 = 9,1-10 4 с и электромехани-
ческую постоянные времени Тм - (J)-(RA)/K,KM = 0,01-1,1/0,56-0,56 = 0,035 с.
Поскольку Т„ > 4Те, то переходный процесс имеет апериодический характер
(см. рис. 14.15, а) и будет определяться в основнохМ электромеханической постоян-
ной Т„ » Т„ т. е. в точке половинной высоты осциллограммы (Т1 - 0,024 с), где уста-
новлена визирная линейка 1, ехр(-Т1/Т) - 0,5, откуда постоянная времени
Т = 1,442-Т1 = 1,442-0,024 - 0,0346 с, что практически равно Т„.
Для испытания модели в режиме колебательного переходного процесса необ-
ходимо обеспечить ТМ>4Т«. Осциллограммы для этого случая показаны на
рис. 14.15, б (LA = 0,05 Гн) и 14.15, в (LA = 0,05 Гн, J = 0,001 Н-м/(рад/с2)); режимы
работы осциллографа аналогичны показанным на рис. 14.15, а.
467
Часть II. Моделирование схем и устройств
Рис. 14.14. Передаточные характеристики модели двигателя EWB при различной статической
нагрузке
Рис. 14.15. Осциллограммы переходных процессов в модели двигателя EWB 5.0
468
Глава 14. Электромеханические устройства
До сих пор мы рассматривали процессы, происходящие в электродвигателях не-
зависимого возбуждения с регулированием скорости путем изменения напряжения на
ясорной обмотке. Такая схема регулирования отличается широким диапазоном изме-
эения скорости вращения (15...25 раз), наибольшим быстродействием и получила
преимущественное применение, несмотря на сравнительную сложность, большую
х эщность дополнительного оборудования управления и низкий КПД при более про-
стом реостатном управлении. На практике находят применение также и электропри-
воды постоянного тока с управлением по обмотке возбуждения, хотя при этом
приходится использовать дополнительные средства для безопасного пуска и довольст-
воваться сравнительно узким диапазоном регулирования скорости 1,5...4 раза.
Рис. 14.16. Передаточные характеристики (а, б) и осциллограмма переходных процессов (в) при
управлении по обмотке возбуждения
Процессы, происходящие в электродвигателях независимого возбуждения с
управлением по обмотке возбуждения, описываются нелинейным дифференциаль-
ным уравнением, поскольку момент двигателя будет зависеть как от тока якоря, так
и тока возбуждения. При решении такого уравнения используется тот или иной ме-
тод линеаризации, а анализ переходных процессов ведется в окрестности точки ус-
тановившегося режима при выбранном напряжении возбуждения. Коэффициент
передачи для рассматриваемого случая имеет следующий вид [63, 74]:
К(р) - Дш/Ди = К(1 + раТг)/(р-‘Тм/ГгТЛ р-'Т,, JT, + Т.) + р(Тмм + Т.) + 1,
469
Часть II. Моделирование схем и устройств
где К = К [(2b 1)/(1 b)]; b (I/IM)(R/R„) относительное падение напряжения в
цепи якоря (0,5<b<l); 1,1„, R, R= — текущие и номинальные значения сопротивле-
ния и тока якорной обмотки; а = Ь(2Ъ - 1); Тхм = JR/c^XCJ,2; i,— ток возбуждения
с = ДФ/Ai. — относительное изменение магнитного потока системы возбуждения.
Передаточные характеристики двигателя с управлением по обмотке возбужде-
ния при различных статических нагрузках показаны на рис. 14.16, а, б; они получены
в верхнем положении ключа X и по характеру идентичны приведенным в справочнике
[75]; на рис. 14.16, а, б приведены также значения масштабов по оси X (входное напря-
жение), Y (обороты/мин в единицах напряжения) и значения статической нагрузки в
Н м (остальные значения параметров модели указаны на рис. 14.13, б).
в)
Рис. 14.17. I (ередаточные характеристики (а, б) и осциллограмма переходных процессов (в) при
параллельном включении двигателя
Из осциллограммы на рис. 14.16, в видно, что длительность переходного
процесса рассматриваемого режима на уровне 0,5 составляет Т1 = 0,1527 с; это
равноценно эквивалентной постоянной времени Т, = 1,442Т1 = 0,227 с, что суще-
ственно больше рассмотренных ранее постоянных времени модели и, следователь-
но, указывает на заметное ухудшение быстродействия при управлении по цепи
обмотки возбуждения.
470
Глава 14. Электромеханические устройства
в Схема на рис. 14.13, а позволяет также провести исследование режима парал-
лельного включения двигателя (ключи Z и X переводятся в верхнее положение), при
я котором напряжение питания обмоток якоря и возбуждения является и напряжени-
ем управления (такой способ включения используется в маломощных электроприво-
>- :ах, например, в бытовых швейных машинах с ножным угольным регулятором
я напряжения). Переходная и передаточные характеристики двигателя при различ-
е дых значениях статической нагрузки при таком способе управления приведены на
[- ис. 14.17, из которых видно, что регулировочные характеристики являются суще-
в ггвенно нелинейными, а быстродействие — невысоким и сравнимым со схемой уп-
равления по обмотке возбуждения (см. значения Т1 на рис. 14.16, в и 14.17, в).
В двигателе последовательного возбуждения обмотка возбуждения включает-
ся последовательно в цепь якоря (рис. 14.18, а). Поэтому магнитный поток не оста-
ется постоянным, а является функцией тока якоря, и при изменении нагрузки
скорость двигателя изменяется в основном не за счет увеличения падения напряже-
ния в цепи якоря, а в результате изменения магнитного потока. Это и обусловлива-
ет значительную крутизну механических характеристик и придает им нелинейный
характер. При малых нагрузках, когда магнитная цепь ненасыщена, зависимость
скорости двигателя от момента имеет вид гиперболы; при больших нагрузках, когда
мзгнитный поток практически становится постоянным, характеристика приближа-
ется к линейной. При средних нагрузках аналитически записать выражение для ме-
ханической характеристики крайне трудно. Попытки применить различные
аппроксимирующие законы для кривой намагничивания не дали должных резуль-
татов, так как выражения получаются весьма сложными и для расчета требуется
большое количество цифровых данных, характеризующих магнитные свойства ма-
териалов, использованных в магнитной цепи двигателя.
При малых нагрузках из-за ослабления магнитного потока скорость двигате-
1£ с последовательным возбуждением растет и, согласно формуле (14.45), стремится
х бесконечности. Однако вследствие механических потерь в самом двигателе, а так-
же из-за потока остаточного намагничивания скорость не может возрастать беспре-
жльно, тем не менее в режиме холостого хода она может достигать недопустимых
«ачений, превышающих в пять-шесть раз номинальную скорость. Поэтому режим
холостого хода должен быть исключен, поскольку в этом случае расцепление двига-
теля с механизмом невозможно [74]. В простейшем случае (при параметрическом
управлении) скорость может регулироваться введением добавочного сопротивления
э депь якоря. Реверс двигателя достигается переключением обмотки якоря. При по-
«гоянстве магнитного потока и изменении направления тока в якоре момент двига-
т*ля, а затем и скорость меняют свой знак. В отношении тормозных режимов у
лзлгателя последовательного возбуждения меньше возможностей, чем у двигателя
независимого возбуждения. Генераторный режим с отдачей энергии в сеть невозмо-
жен. Основной тормозной режим — режим противовключения. Режим динами-
Чвского торможения может использоваться в двух вариантах: при работе с
амовозбуждением и с независимым возбуждением. В первом случае двигатель от-
н0 »л:<-чается от сети и вся цепь якоря замыкается на тормозное сопротивление; при
го |жгом двигатель работает как генератор с самовозбуждением.
е- К Передаточные характеристики двигателя с последовательным возбуждением
ь- ?. 14.18, б, в), кроме нелинейности, обладают и заметной зоной нечувствительности
[И сж. рис. 14.18, б). Время переходных процессов на уровне 0,5 (см. рис. 14.18, в) состав-
»т Т1 - 0,2366 с, что равноценно эквивалентной постоянной Т, - 1,442Т1 = 0,34 с,
• е. быстродействие такой схемы включения заметно хуже быстродействия всех рас-
471
Часть II. Моделирование схем и устройств
смотренных ранее схем включения. Заметим, что сопротивление обмотки возбужде-
ния RF выбрано равным 32 Ом для обеспечения в установившемся режиме напряжет
ний на обеих обмотках примерно равным номинальному (115 В, контролируется
вольтметром Uar) при напряжении питания Ufa = 230 В. Остальные параметры моде-
ли выбраны по умолчанию (см. рис. 14.13).
Рис. 14.18. Схема включения с последовательным возбуждением (а) и ее передаточные (б, в) и
переходная (г) характеристики
472
Глава 14. Электромеханические устройства
Контрольные вопросы и задания
1. Назовите способы включения двигателей постоянного тока.
2. Установите в диалоговом окне на рис. 14.13, б значения параметров RA - 20 Ом,
RF = 100 Ом, NN = 3000 об/мин. Полученные в результате моделирования зна-
чения статического тока (по показаниям амперметра 1а на рис. 14.13, а) проверь-
те расчетохм. Аналогичные действия проведите при TL = 2 Н-м.
3. При указанных в п. 2 значениях параметров получите зависимость w = f(Ua) при
TL = 0,5 и 10 Н-м.
4. При указанных в п. 2 значениях параметров проведите исследование переходных
процессов модели на рис. 14.13, а. Результаты моделирования проверьте расчетом.
5. Назовите отличительные особенности схемы включения двигателя с управлени-
ем по обмотке возбуждения и при параллельном включении. Проведите модели-
рование схемы на рис. 14.13, а в этих режимах при значениях параметров по п.2.
5. Перечислите основные характеристики последовательной схемы включения
двигателя. Проведите моделирование схемы на рис. 14.18, а при значениях па-
раметров по п. 2.
14.2.4. Управление двигателями постоянного тока
Устройства для управления двигателями принято называть преобразователя-
ми [74]. Первые преобразователи были электромашинными и представляли собой
генератор постоянного тока независимого возбуждения (так называемая система
генератор-двигатель). С появлением электровакуумных приборов были разработаны
преобразователи на базе управляемых ртутных выпрямителей, тиратронов, игни-
тронов и др. Однако широкого применения они не нашли из-за существенных
эксплуатационных недостатков. Поэтому внимание вновь было обращено на элект-
ромашинные преобразователи со специальными электромашинными усилителями
(ЭМУ), которые обладают большим коэффициентом усиления и малой инерционно-
етью; они применяются и до настоящего времени.,Несколько позже появились сис-
темы магнитных усилителей-двигателей. Однако применительно к реверсивным
триводам постоянного тока выявились низкие энергетические показатели этих сис-
тем, и они в основном используются в приводах переменного тока.
Очередным этапом развития преобразователей явилось создание полупровод-
никовых преобразователей: при малых мощностях — транзисторные, а при мощно-
сти от одного киловатта и выше — тиристорные. По мере расширения номенклатуры
транзисторов с большими номинальными напряжениями и токами область примене-
ния транзисторных преобразователей расширяется в сторону больших мощностей —
10 кВт и более. Заметим, что с появлением полупроводниковых преобразователей и
произошла во многих случаях замена аналоговых способов управления на импульс-
ные, отличающиеся высоким КПД.
Рассмотрим некоторые типы преобразователей.
Электромашинный усилитель с поперечным полем. Электромашинный уси-
литель (ЭМУ) представляет собой устройство, состоящее из генератора постоянного
тока с одной или несколькими обмотками возбуждения (управления) и приводного
двигателя. Приводной двигатель предназначен для вращения ротора генератора с
некоторой постоянной скоростью и обычно представляет собой однофазный или
трехфазный асинхронный нерегулируемый электродвигатель с короткозамкнутым
якорем. ЭМУ применяются в схемах следящего привода совместно с двигателями
постоянного тока мощностью от нескольких десятков ватт до нескольких киловатт.
473
Часть II. Моделирование схем и устройств
Статические и динамические свойства ЭМУ определяются совокупностью сле-
дующих характеристик: I у
Характеристика холостого хода — определяет зависимость выходной ЭДС
ЭМУ от величины тока управления в установившемся режиме. Характеристика хо-
лостого хода является линейной функцией при условии, что магнитная система
ЭМУ не насыщена.
Внешняя (нагрузочная) характеристика — определяет функциональную за-
висимость выходного напряжения от тока нагрузки в установившемся режиме.
Коэффициент усиления напряжения — определяется обычным образом и ко-1
леблется в пределах от нескольких единиц до нескольких десятков. В г
Коэффициент усиления мощности — пропорционален скорости вращения!
якоря, колеблется в пределах от десятков до нескольких тысяч.
Добротность ЭМУ — характеризуется коэффициентом добротности, пред-1
ставляющим отношение коэффициента усиления по мощности к постоянной време-1
ни усилителя.
В зависимости от конструкции и способа возбуждения ЭМУ подразделяются В
на ЭМУ с независимым возбуждением, со смешанным и специальной ориентацией!
магнитных потоков. И Е
ЭМУ с независимым возбуждением представляет собой обычный генератор по-В
стоянного тока, обмотка возбуждения которого питается от регулируемого источни-В
ка напряжения. Выходное напряжение такого ЭМУ с достаточной степенью!
точности линейно зависит от скорости вращения его ротора; ЭМУ позволяет управ-В
лять значительными мощностями нагрузки при незначительных затратах мощное®
ти в обмотке управления. Коэффициент усиления по мощности для некоторых типов!
ЭМУ с независимым возбуждением может достигать значений 100 и более. Постоян-1
ная времени обмоток возбуждения обычно составляет десятые доли секунды.
ЭМУ со смешанным возбуждением представляет собой генератор постоянного®
тока, работающий в режиме самовозбуждения. Такие ЭМУ отличаются от усилите-!
лей с независимым возбуждением тем, что необходимая для создания магнитного!
потока возбуждения мощность почти целиком поступает с выхода по цепи положи®
тельной обратной связи, вследствие чего результирующий коэффициент усиления®
системы может быть достаточно большим.
Для третьего типа ЭМУ классификационными признаками являются число®
ступеней усиления и ориентация управляющего магнитного потока второй (и треть*
ей) ступени усиления по отношению к управляющему магнитному потоку первой сту-1
пени усиления. По числу ступеней усиления такие ЭМУ подразделяются на одно-,В
двух- и трсхступенчатые. По ориентации управляющего магнитного потока второ®
ступени двух- и трёхступенчатые ЭМУ подразделяются на ЭМУ с поперечным, с про-1
дольным и продольно-поперечным полем.
ЭМУ с поперечным полем представляет собой специальный генератор по-В
стоянного тока с якорем, выполненным по типу якорей обычных машин постоянно®
го тока, но с дополнительной парой поперечных короткозамкнутых щеток!
(см. рис. 14.19, а). Благодаря такой конструкции ЭМУ с поперечным полем требует®
для возбуждения мощность, в десятки раз меньшую, чем соответствующая мощ®
ность возбуждения обычных генераторов. На статоре ЭМУ расположены одна ил®
несколько обмоток управления (на рис. 14.19, а показана только одна обмотка Wy)®
обмотка дополнительных полюсов и компенсационная обмотка.
474
Глава 14. Электромеханические устройства
В ЭМУ с поперечным полем магнитный поток управления второй ступенью
усиления расположен перпендикулярно к магнитному потоку управления первой
ступенью. Так как принято считать, что магнитный поток первой ступени, создава-
емый входной управляющей обмоткой, направлен по продольной оси ЭМУ (перпен-
дикулярно рис. 14.19, а), то магнитный поток управления второй ступени
направлен по поперечной оси ЭМУ. Поэтому этот класс двухступенчатых ЭМУ и по-
лучил название ЭМУ с поперечным полем. ,
При подаче на обмотку управления Wy сигнала управления в ЭМУ возникает
продольный магнитный поток управления. В витках вращающегося с постоянной
скоростью ротора (якоря) наводится ЭДС, при этом наибольшего значения она дости-
гает в витках, расположенных в продольной плоскости ЭМУ. Напряжение этой ЭДС
снимается поперечными щетками 1 (см. рис. 14.19, а). Поскольку они закорочены и
сопротивление цепи мало, то в цепи протекает достаточно большой ток, что приводит
к формированию значительного по величине поперечного магнитного потока. Этот :
процесс называется реакцией якоря по поперечной цепи (первая ступень усиления i
ЭМУ). Под действием усиленного таким образом магнитного потока в витках враща-
ющегося якоря ЭМУ наводится ЭДС, максимальное значение которой имеет место в .
витках, расположенных в плоскости этого потока, т. е. в поперечной плоскости ЭМУ.
Напряжение этой ЭДС, снимаемое продольными щетками 2, является выходным сиг-
налом ЭМУ (вторая ступень усиления). Поскольку при подключенной нагрузке по по-
перечным виткам якоря ЭМУ протекает ток, то под действием этого тока в ЭМУ
создается магнитный ноток, направленный по продольной оси навстречу основному
потоку. Это так называемая реакция якоря ЭМУ по продольной оси. Таким образом,
в продольной оси ЭМУ будет действовать некоторый результирующий магнитный по-
ток, который является функцией не только управляющего напряжения в обмотке
Wy, но и параметров нагрузки. Для уменьшения противодействующего магнитного
потока в статоре ЭМУ используется компенсационная обмотка, с помощью которой
достигается компенсация продольной реакции якоря.
а)
б)
Рис. 14.19. Упрощенные схемы ЭМУ с поперечным полем (а) и вентильного двигателя (б)
Динамика работы ЭМУ описывается достаточно сложными и громоздкими вы-
ражениями [65]. На практике же при проведении расчетов систем управления ис-
пользуются упрощенные выражения. Для коэффициента передачи двухкаскадного
ЭМУ с поперечным полем оно имеет следующий вид:
К(р) = Е(р)/и,(р) = КДрЧЧ-Тг + р(Т1 + Т2) + 1], (14.58)
где Е(р), Uy(p) — ЭДС якоря по продольной оси и напряжение на управляющей об-
мотке; К = NyMe/Ry —коэффициент усиления ЭМУ по напряжению; Ny — число вит-
ков управляющей обмотки (3200, здесь и далее в скобках приводятся типичные
значения величин из работы [64]); МР — угловой коэффициент холостого хода ЭМУ,
определяемый отношением ЭДС якоря по продольной оси к магнитодвижущей силе,
создаваемой обмоткой управления (4,2 В/А-В); Ry — активное сопротивление обмот-
ки управления (2 кОм); Т1 = Ly/R,. — постоянная времени обмотки управления; Ly —
475
Часть II. Моделирование схем и устройств
индуктивность обмотки управления (80 Гн); Т2 = Lq/Rq — постоянная времени попе-
речной цепи якоря ЭМУ; Lq, Rq — индуктивность (0,16 Гн) и активное сопротивление
(1,23 Ом) поперечной цепи якоря.
Из выражения (14.58) видно, что ЭМУ с поперечным полем представляет со-
бой колебательное звено, т. е. в качестве его модели может быть использована схема
на рис. 14.4.
Тиристорные преобразователи выполняются на тиристорах (см. разд. 4.7) и
по существу являются управляемыми выпрямителями: тиристор включается пода-
чей в соответствующий момент напряжения на управляющий электрод, а затем от-
ключается принудительным разрывом цепи за счет отключения напряжения
питания при переходе его через нуль или включением гасящего напряжения обрат-
ного знака. Изменяя момент подачи управляющего напряжения, можно регулиро-
вать среднее значение выпрямленного напряжения и тем самым скорость двигателя
(см. разд. 12.7). Недостатками тиристорных преобразователей наряду с их достоин-
ствами (малая инерционность, отсутствие вращающихся элементов, малые по срав-
нению с электромеханическими преобразователями габариты) являются: жесткая
связь с питающей сетью (все колебания напряжения в сети непосредственно переда-
ются в систему привода, а изменение нагрузки на оси двигателя немедленно переда-
ются в сеть и вызывают всплески тока); низкий коэффициент мощности при
снижении напряжения; генерация высших гармоник в питающей сети; низкая пе-
регрузочная способность по току и ограничения по скорости его нарастания, чувст-
вительность к перенапряжениям.
Тиристорные преобразователи делятся на два класса: с нулевым выводом (как
двухполупериодный выпрямитель на рис. 12.1, б) и мостовые (см. рис. 12.2, а). В ус-
тановках средней и большой мощности преимущественно используются мостовые
схемы, отличающиеся меньшим напряжением на каждом из тиристоров и отсутст-
вием постоянной составляющей тока, протекающего по обмоткам трансформатора.
При этом схемы преобразователей могут также отличаться числом фаз: от одной в
маломощных преобразователях до 12...24 — в мощных.
Для управления тиристорами в настоящее время используют преимуществен-
но так называемое вертикальное управление, основанное на сравнении задающего
сигнала с пилообразно изменяющимся напряжением. В момент их равенства с помо-
щью компаратора подается сигнал на включение тиристора соответствующей фазы.
Импульсное управление двигателями осуществляется в основном с использо-
ванием широтно-импульсной модуляции (ШИМ). При этом среднее значение напря-
жения на якоря двигателя регулируется за счет изменения длительности (ширины)
импульса. Преобразователи с ШИМ отличаются высоким КПД (см. разд. 12.4) и пре-
красными интерфейсными возможностями при управлении от ЭВМ. Они незамени-
мы в бортовых системах, их применяют в прецизионных устройствах, в которых
необходим широкий диапазон регулирования скорости, плавность регулирования,
хорошие динамические характеристики привода [74].
Примеры использования ШИМ в импульсных стабилизаторах напряжения, по су-
ществу аналогичных рассматриваемым преобразователям, приведены в разд. 12.4 и 12.6.
Вентильные двигатели — бесконтактные (бесколлекторные) двигатели посто-
янного тока, в которых щеточный аппарат заменен полупроводниковым коммутато-
ром, при этом якорь неподвижен, а ротор представляет собой постоянный магнит
(см. рис. 14.19, б). Как правило, такие двигатели выполняются двухполюсными, ре-
же — четырехполюсными; возникающие при этом пульсации скорости двигателя
сглаживаются механической инерцией ротора.
Глава 14. Электромеханические устройства
Бесконтактный двигатель постоянного тока состоит из набора датчиков поло-
жения ротора фотоэлектрического, индуктивного, емкостного или другого типа (на
рис. 14.19, б он условно показан электромеханическим), по командам которых по-
следовательно включаются транзисторные пары (на рис. 14.19, б показана только
одна такая пара), подключающих соответствующую обмотку к выходу генератора,
в результате чего возникает вращающий момент. При импульсном управлении диа-
пазон регулирования скорости достигает значений 1:100.
Рассмотрим следящую схему управления скоростью двигателя с использо-
ванием его модели из программы EWB 5.0. Кроме самой модели М, схема содержит
(рис. 14.20) формирователь сигнала рассогласования на ОУ 1 с усилителем мощно-
сти на транзисторах VT1 и VT2 (см. также рис. 10.40), повторитель на ОУ 2, кор-
ректирующее звено в цепи делителя на резисторах R2, R21 с ускоряющим
конденсатором Ск, амперметры и вольтметры для контроля тока If обмотки возбуж-
дения, тока 1а и напряжения Ua якоря, выходного напряжения Uo (число об/мин),
источник опорного напряжения Uop, вспомогательный источник напряжения Uac и
переключатели Z, X для реализации различных режимов моделирования. Парамет-
ры модели М выбраны следующие: NN = 1000 об/мин, VAN - 25 В, VFN - 45 В; ос-
тальные — по умолчанию (как на рис. 14.13, б, в).
’ I Схема функционирует следующим образом. Напряжение опорного сигнала Uop
передается на выход усилителя мощности (через переключатели Z, X — на якорную
’ юмотку) без инвертирования с коэффициентом передачи R1/R11, т. е. составляющая
*• Ua^ = Uop(l + R1/R11) (см. разд. 10.1). Сигнал обратной связи через делитель на рези-
»- -горах R2, R21 (коэффициент деления R2/(R2 + R21)) поступает на инвертирующий
>- зход ОУ 1 и передается на якорную обмотку как Uao = -Uo-Rl-R2/R11(R2 + R21),
т >| арифметически суммируясь с Ua^, т. е. Ua - Uaop - Ua0 = Uop(l + Rl/Rll) -
I - Uo-R1R2/R11(R2 + R21) - 31(1 + 300/20) - 1569-3001/20(1 + 49) - 496 — 470,7 -
я = 25,3 В, что практически совпадает с показаниями вольтметра Ua. При переводе клю-
ча X влево последовательно с якорем включается резистор Ra сопротивлением 2 Ом.
477
Часть II. Моделирование схем и устройств
При этом ток If возбуждения не меняется, 1а =1,118 A, Ua = 27,4 В, Uo = 1562 В, т. е.
обороты падают примерно на 0,45%.
Проверим эффективность следящей системы. Для этого переведем ключ Z в
правое положение, при этом якорная обмотка будет питаться от постоянного
напряжения Uac, равного номинальному значению напряжения Ua в режиме сле-
жения. После моделирования получаем следующие результаты: при выключен-
ном добавочном резисторе Ra (ключ X в показанном на рис. 14.20 положении) —
1а = 1,133 A, Uo = 1583 В; после подключения резистора Ra — 1а = 1,041 А,
Uo — 1454 В, т. е. обороты падают на 8,15%, что боле чем в 18 раз хуже по сравне-
нию со случаем использования следящей системы. Заметим, что это достигнуто
при сравнительно малом значении коэффициента усиления в петле обратной свя-
зи системы, равном [3 = R1R2/R11(R2 + R21) = 300 1/20(1 + 49) = 0,3.
Контрольные вопросы и задания
1. Назовите основные способы управления электродвигателями постоянного тока.
2. Как устроен ЭМУ и чем он отличается от системы генератор-двигатель?
3. Используя приведенные в тексте данные ЭМУ, сделайте вывод, какой постоян-
ной времени в выражении (14.58) можно пренебречь и тем самым упростить рас-
чет системы управления двигателем.
4. Чем отличаются тиристорное и импульсное управление двигателями?
5. Какие требования предьявляются к силовым (выходным) транзисторам преобра-
зователя с ШИМ с точки зрения повышения КПД и уменьшения габаритов пре-
образователя?
6. Сформулируйте принцип действия бесколлекторных двигателей постоянного тока.
7. Проведите исследование предельных возможностей следящей системы на
рис. 14.20 по улучшению ее качественных показателей путем повышения усиле-
ния в петле обратной связи за счет увеличения Uop, коэффициента передачи де-
лителя на резисторах R2, R21 и выбора емкости ускоряющего конденсатора Ск.
8. Исследуйте возможность включения ускоряющего конденсатора параллельно
резистору R11. Сравните результаты с полученными в п. 7.
9. Пользуясь формулами из разд. 14.2.1 и 14.2.2 и полагая, что R = Ra + RA, уста-
новите, какому приращению статического момента соответствует включение в
якорную цепь дополнительного резистора Ra.
10. Измените схему на рис. 14.20 так, чтобы получить схему управления двигателем
по обмотке возбуждения с коммутируемым в ее цепи последовательно включен-
ным резистором Rf = 50 Ом (вместо исключаемого Ra); в окне параметров модели
М (рис. 14.13) установите VAN = 45 В, VFN = 25 В. Результаты моделирования
сравните с аналогичными результатами для схемы управления по якорной цепи.
14.3. Электрические машины переменного тока
Электрические машины переменного тока строятся на тех же принципах, что
и машины постоянного тока. Основное конструктивное отличие состоит в отсутст-
вии устройства для выпрямления тока, т. е. коллектора. Если в машине постоянно-
го тока вместо коллектора установить два кольца для подачи тока возбуждения в
якорную обмотку, а на статоре разместить три обмотки под углом 2л/3 друг к другу,
то получится трехфазный синхронный генератор переменного тока. Аналогичным
образом строятся и синхронные двигатели переменного тока, которые используются
478
Глава 14. Электромеханические устройства
или в мощных или микромощных электроприводах (в последнем случае — с исполь-
зованием постоянных магнитов в системе возбуждения). В электроприводах малой и
средней мощности преимущественно используются асинхронные двигатели.
В устройствах автоматики в качестве исполнительных и управляющих чаще
всего используются двухфазные асинхронные двигатели, что вызвано такими их по-
ложительными качествами, как малый момент инерции ротора, незначительные по-
тери на трение, удобство регулирования скорости вращения и реверсирования,
простота усиления управляющего сигнала и др. [75]. Двигатели этого типа имеют
две обмотки, расположенные на статоре и сдвинутые относительно друг друга на 90 .
Одна из обмоток (обмотка возбуждения) во время работы находится под неизменным
напряжением. На другую обмотку (обмотку управления) напряжение подается
лишь тогда, когда двигатель должен работать. Для создания вращающего момента
необходимо, чтобы напряжения на обмотках возбуждения и управления двигателя
были сдвинуты по фазе относительно друг друга. Сдвиг по фазе может быть осуще-
ствлен различными способами в зависимости от схемы включения (в простейшем
случае для этого используются конденсаторы).
Асинхронный двигатель состоит (см. рис. 14.21, а) из корпуса 1, статора 2 с об-
мотками, передней 3 и задней 4 крышек, ротора 6 с вентиляторными блоками 5. Ста-
тор представляет собой собранный из листовой стали цилиндр, на внутренней
поверхности которого имеются пазы, параллельные оси цилиндра, в которые укла-
дываются провода статорной обмотки. Ротор также набирается из отдельных пред-
варительно покрытых лаком листов стали.
По конструктивному исполнению ротора асинхронные двигатели делятся на
♦ двигатели с короткозамкнутым ротором в виде беличьего колеса (рис. 14.21, о);
♦ с полым ферромагнитным ротором;
с полым немагнитным ротором.
Ротор двигателей первого типа выполняется в виде цилиндра, набранного из
листов электротехнической стали. В пазы ротора укладываются отдельные провод-
ники, замыкаемые с торца двумя кольцами (см. рис. 14.21, в). Для обеспечения воз-
можности регулирования скорости в широком диапазоне сопротивление роторной
обмотки делается достаточно большим.
Двигатели второго типа имеют полый ферромагнитный ротор, который слу-
жит одноврехменно проводником магнитного потока и проводником электрического
тока. Двигатели с полым ферромагнитным ротором широко применяются в тех слу-
чаях, когда необходимо получить линейность механических и регулировочных ха-
рактеристик в широком диапазоне при относительно невысоких значениях момента
инерции ротора.
У двигателей с полым немагнитным ротором имеются наружный и внутрен-
ний статор (сердечник), которые набираются из листов электротехнической стали. В
зазоре между статором и сердечником вращается полый немагнитный ротор. Такие
двигатели отличаются весьма малыми значениями момента инерции ротора, что
обеспечивает высокое быстродействие привода. Кроме того, при соответствующем
подборе параметров схемы двигатели этого типа имеют достаточную для многих
практических случаев линейность механических и регулировочных характеристик.
Заметим, что трехфазные двигатели могут иметь так называемый фазный ро-
тор, состоящий из трех обмоток, размещаемых в пазах ротора и подключаемых к
трем кольцам на валу двигателя. Такая конструкция ротора позволяет использовать
его при управлении двигателем.
479
Часть II. Моделирование схем и устройств
Принцип действия асинхронных двигателей основывается на использовании
вращающегося магнитного поля, создаваемого статорной обмоткой. Чтобы понять
основную идею, лежащую в основе конструкции этих двигателей, обратимся к лабо-
раторному к опыту [77], в котором (рис. 14.21, б) вращающееся магнитное поле со-
здается подковообразным магнитом 2, приводимым во вращение с помощью
ременной передачи через колесо 3. При этом находящееся над магнитом металличе-
ское кольцо 1 начинает вращаться в ту же сторону, что и магнит. Причина такого
явления заключается в том, что при вращении магнита 2 его поле, оставаясь посто-
янным по величине, поворачивается вместе с ним, что вызывает изменение магнит-
ного потока через кольцо 1, приводящее к возникновению в нем индуцируемого
тока. По закону (правилу) Ленца этот ток создает силу, направленную против дви-
жения магнита, и, согласно третьему закону Ньютона, в результате противодейст-
вия кольцо само начинает вращаться. Применяя правило Ленца и принимая во
внимание третий закон Ньютона, можно убедиться, что кольцо, помещенное во вра-
щающееся магнитное поле, приходит во вращение в ту же сторону, в какую враща-
ется поле. Заметим, что эта идея была использована М. О. Доливо-Добровольским
при создании трехфазной машины переменного тока.
Рис. 14.21. Асинхронный двигатель в разобранном виде (а), лабораторный макет для создания
вращающегося магнитного поля (б) и конструкция беличьего колеса (в)
В асинхронных машинах, как и в других машинах переменного тока, статорная
обмотка размещается в пазах (см. рис. 14.21, а, позиция 2). В простейшем случае двух-
полюсной машины (см. рис. 14.22) обмотка фазы АХ из w витков размещается в двух
диаметрально противоположных пазах (такую обмотку называют сосредоточенной),
расстояние между которыми (по дуге длиной у) называется шагом обмотки, в данном
случае равном одному полюсному делению т TtD/p, где D — диаметр ротора; р — чис-
ло пар полюсов (в данном случае р = 2). При токе I в такой обмотке ее магнитодвижу-
щая сила (МДС) в воздушном зазоре F = I w распределена в поперечном сечении
статора (см. развертку статора на рис. 14.22, б) по прямоугольному закону [87, 88], что
вызывает недопустимо высокий уровень помех в питающей сети из-за значительного
содержания гармоник. Для исключения этого недостатка используют распределенную
обмотку для каждой фазы, размещаемую в нескольких пазах q = z/2pm >1, где z —
общее число пазов; m — число фаз. Развертка статора для q = 3 показана на
рис. 14.22, в, из которого видно, что распределение МДС в этом случае в большей сте-
пени приближается к синусоидальному закону. Правда, при этом первая гармоника
МДС F1 несколько меньше (с учетом так называемого обмоточного коэффициента
Кж = 0,9), чем при сосредоточенной обмотке, однако это наряду с другими мерами (ис-
пользование двухслойной обмотки и др. [87., 88]) позволяет существенно снизить уро-
вень гармоник и приблизить распределение МДС в воздушном зазоре к
480
Глава 14. Электромеханические устройства
синусоидальному закону. Следовательно, при подключении обмотки к питающей сети
частотой со распределение МДС в каждой точке воздушного зазора между статором и
ротором может быть записано в следующем виде [88]:
Fx = F„cos(nx/T) = Fni(sinwt)cos(rcx/T), (14.59)
где Fo = Fnisincot — МДС в точке, расположенной на оси АХ обмотки.
Проведя тригонометрические преобразования, из (14.59) получим:
Fx = O,5Fmsin(cot - лх/т) + 0,5Fmsin(wt + пх/т). (14.60)
Каждое слагаемое выражения (14.60) является уравнением бегущей (или вра
щающейся) волны МДС, т. е. каждое слагаемое представляет собой круговое поле.
Однако если первое слагаемое отображает движение волны по часовой стрелке (МДС.
обратной последовательности), то второе — против (МДС прямой последовательнос-
ти), т. е. суммарная МДС равна нулю. Это так называемый режим пульсирующего
магнитного поля.
Для обеспечения кругового поля в двухфазных асинхронных машинах ис-i
пользуют две обмотки АХ и ВХ, располагаемые на статоре под углом л/2 и сдвину-
тые на половину полюсного деления, а токи в обмотках сдвигают во времени также
на угол л/2. При этом МДС обмоток
F.x - 0,5Fmsin((ot - лх/т) + 0,5F„sin(<ot + лх/т);
FhX = O,5Fmsin((ot -лх/т) + O,5F,„sin(cot + лх/т - л), (14.61)
т. е. суммарная МДС (с учетом противофазности вторых слагаемых)
F„ = F.x + F.x = Fmsin(tot - лх/т) (14.62)
представляет собой бегущую волну магнитного поля.
Заметим, что в случае трехфазного двигателя со сдвинутыми по образующей ста-
тора обмотками на угол 2л/ш = 2л/3 и сдвигом на такой же угол тока в каждой обмотке
суммарная МДС в 1,5 раза больше, а для четырехфазного (угол сдвига л) — в 2 раза.
Рис. 14.22. Схема статора двухполюсного двигателя (а) и распределение его МДС при сосредото-
ченной (б) и распределенной (в) обмотках
Схема для моделирования магнитного поля статора двухфазного асинхронно-
го двигателя (рис. 14.23, а) содержит источники переменного напряжения Ua, Ub,
имитирующих токи в обмотках, и Uax, Ubx, имитирующих распределение их МДС.
Указанные источники попарно подключены к перемножающим устройствам Ml,
М2, с помощью которых производится их перемножение в соответствии с выражени-
ями (14.59) и (14.61). Суммарная МДС, имитируемая напряжением Us, формирует-
ся сумматором на ОУ 1 в соответствии с выражением (14.62). Инвертор на ОУ 2
использован для удобства интерпретации результатов осциллографических измере-
ний; ключи X и Z — для оперативного выбора режимов моделирования.
Указанные на рис. 14.23, а параметры источников имитирующих источников
соответствуют режиму двухполюсной машины, т. е. обмотки АХ и ВХ как бы разме-
16 Зак. 206
481
Часть II. Моделирование схем и устройств
щены на одних и тех же полюсах, что соответствует, как было указано выше, режи-
му пульсирующего магнитного поля, что и подтверждается осциллограммами сиг-
налов на выходе перемножителей Ml и М2 на рис. 14.23, б.
Для перевода схемы в режим моделирования кругового поля установим, в со-
ответствии с выражениями (14.62), фазовый угол источников Ub и Ubx равным 90 .
Но поскольку при этом число полюсов увеличится в два раза, то частота источников
Uax и Ubx должна быть выбрана равной f/2 = 25 Гц, поскольку при круговом поле за
один период питающего напряжения волна МДС проходит только одну пару полю-
сов. Результаты моделирования для этого случая показаны на рис. 14.23, в, г. Из ос-
циллограмм сигналов на выходах перемножителей (рис. 14.23, в) видно, что, кроме
пульсирующей составляющей, они содержат и более низкочастотную составляю-
щую кругового поля. После суммирования пульсирующие составляющие взаимно
уничтожаются и суммарная МДС представляет собой бегущую волну с частотой
25 Гц, что и подтверждается осциллограммой на рис. 14.23, г, полученной на выхо-
де сумматора после перевода ключей Z и X в положение, противоположное показан-
ному на рис. 14.23, а.
Рис. 14.23. Схема для моделирования магнитного поля статора (а) и осциллограммы сигналов
для режимов пульсирующего (б) и кругового магнитного поля (в, г)
Круговое поле статора, пересекая проводники роторной обмотки, индуцирует в
нем ЭДС, под действием которой возникает МДС ротора. Если ротор неподвижен (ре-
482
Глава 14. Электромеханические устройства
жим пуска или вариант машины с заторможенным ротором), то частота индуктируе-
мой в нем ЭДС (ее называют трансформаторной) равна частоте кругового поля и в та-
ком режиме асинхронный двигатель практически не отличается от обычного
трансформатора. Под действием наведенной ЭДС в проводниках роторной обмотки
возникают токи, которые в результате взаимодействия с магнитным полем статора
создают электромагнитную силу, приводящую ротор во вращательное движение.
При этом угловая скорость вращения ротора сор всегда меньше угловой скорости вра-
щения кругового поля статора <о„. Если бы ротор вращался синхронно с полем, то не
было бы относительного движения и в нем не возникала бы индуцированная ЭДС,
т. е. в роторе не было бы тока и не могли бы возникнуть силы, приводящие его во вра-
щение. При этом под индуцированной ЭДС подразумевается не трансформаторная со-
ставляющая, а составляющая, вызванная движением проводников обмотки ротора в
круговом поле статора. Следовательно, рассматриваемый двигатель может работать
только при числе оборотов, несколько отличающемся от числа оборотов поля. Поэто-
му такие двигатели и стали называть “асинхронными” (от греческого слова “синхро-
нос” — совпадающий или согласованный во времени, частица “а” означает
отрицание). Если ноле вращается с угловой скоростью и,, а ротор — со скоростью (ог,
то вращение поля относительно ротора происходит со скоростью (0Л - (0г, и именно этой
разностью в основном и определяется величина индуцируемой в роторе ЭДС и тока.
Величина S = (со, - а)г)/(0, называется скольжением (этот термин использовался уже в
разд. 14.2, однако в случае асинхронных двигателей, как следует из сказанного, он
имеет более весомое значение). Для асинхронных двигателей общего применения
скольжение составляет несколько процентов. Например, если для двухфазного дви-
гателя синхронная скорость равна 1500 об/мин (25 Гц при частоте питающей сети
50 Гц), то скорость вращения его вала (ротора) может составлять 1450 об/мин. По-
скольку при пуске ротор неподвижен (сог = 0), то S = 1; при идеальном холостом ходе,
когда (!)„ « o)r, S = 0.
Для проведения чисто качественных исследований процессов взаимодействия
статора и ротора асинхронной машины (обстоятельные исследования проведены в ра-
боте [89]) обратимся к ее упрощенной модели (рис. 14.24, а), состоящей из источника
питающего напряжения Uf, программируемого ключа TD с параметрами Топ = 0 с и
Toff = 0,1 с, источников напряжения Us и Ur, имитирующих МДС статора и ротора,
интегратора I напряжения U, который совместно с преобразователем напряжение-ча-
стота FS имитирует формирование МДС ротора после пуска и трехвходового суммато-
ра S для получения суммарной МДС (коэффициенты передачи по каждому входу
установлены равными 1). Ключи X и Z предназначены для выбора режима моделиро-
вания. Положение этих ключей на рис. 14.25, а соответствует стационарному режи-
му работы двигателя, когда на входы А, В сумматора подаются сигналы от
источников Us частотой 10 Гц (частота вращения кругового поля) и Ur частотой 9 Гц
(частотой вращения ротора, осциллограмма В на рис. 14.24, б), т. е. скольжение
S = (10 - 9)/10 = 0,1. Из рис. 14.24, б видно, что сигнал на выходе сумматора (осцил-
лограмма А), имитирующий суммарную МДС, представляет собой колебания типа
биений, при этом огибающая частотой, примерно равной 10-9-1 Гц, и определяет
характер изменения МДС ротора. Что же касается количественной оценки этой МДС,
то, как следует из осциллограммы, ее среднее значение будет определяться разностью
положительной и отрицательной полуволн огибающей, т. е. ее значение будет доста-
точно мало. Если установить частоту источника Ur равной 10 Гц, что соответствует
нулевому скольжению, то МДС ротора будет равна нулю, что в модели имитируется
нулевым уровнем сигнала на выходе сумматора и соответствует режиму идеального
холостого хода двигателя. С увеличением скольжения (с уменьшением частоты ис-
16*
483
Часть II. Моделирование схем и устройств
точника Ur), когда условие возникновения биений (со.- (ог«о.; о, - (or < сог [50]) нару-
шается, форма суммарного сигнала существенно меняется и при Fr = 1 Гц представля-
ет собой низкочастотный сигнал МДС ротора частотой 1Гц (осциллограмма А на
рис. 14.24, в) с наложенным на него сигналом МДС статора частотой 10 Гц (осцилло-
грамма В на рис. 14.24, в). Очевидно, что в этом, более близком к режиму пуска слу-
чае МДС ротора значительно больше, чем в предыдущем. Поэтому при включении
непогруженного двигателя, когда со, = 0 и, следовательно, частота вращения поля от-
носительно ротора со,— сог велика, индуцированная в роторе ЭДС достигает максималь-
ного значения — она в 10...20 раз превосходит ЭДС, которая возникает в роторе при
работе двигателя в стационарном (установившемся) режиме. Соответственно ток в ро-
торе при этом тоже значительно превосходит нормальный. Двигатель развивает в мо-
мент пуска довольно значительный вращающий момент, число оборотов ротора
быстро нарастает и почти сравнивается с числом оборотов поля, так что относитель-
ная скорость их становится почти равной нулю и ток в роторе быстро спадает.
Для двигателей малой и средней мощности кратковременная перегрузка при
пуске не представляет опасности, однако при запуске мощных двигателей (десятки
и сотни киловатт) приходится применять специальные пусковые устройства (напри-
мер, реостаты). По мере возрастания нагрузки двигателя число его оборотов умень-
шается, относительная скорость вращения поля относительно ротора возрастает,
одновременно увеличиваются ток в роторе и развиваемый двигателем вращающий
момент. Однако для изменения мощности двигателя от нуля до нормального значе-
ния требуется очень небольшое изменение скорости вращения ротора, примерно до
6% от максимального значения (в двухфазных двигателях с короткозамкнутым ро-
тором оно значительно больше).
При возрастании нагрузки двигателя, т. е. отдаваемой им механической мощ-
ности, должен возрастать не только ток ротора, но и статора. В асинхронном двига-
теле это происходит автоматически вследствие взаимодействия магнитного поля
ротора и статора. Хотя недогруженный двигатель и отбирает от сети такое количест-
во энергии, которое соответствует совершаемой им работе, однако при недогрузке
ток в статоре падает, что приводит к возрастанию его индуктивного сопротивления
и, как следствие — к заметному снижению коэффициента мощности, равного коси-
нусу угла между векторами напряжения и тока в цепи (в идеале равен единице,
см. гл. 6), что не только невыгодно, но и наказуемо в виде штрафных санкций со сто-
роны производителей электроэнергии. Здесь уместно заметить: если нагрузка трех-
фазного двигателя меньше 40% от нормальной, то обмотки статора включают по
схеме звезды; при этом напряжение на обмотках уменьшается в 1,73 раза, а МДС —
почти в три раза (см. разд. 6.6).
Режим пуска в рассматриваемой модели имитируется при переводе ключей
X и Z в нижнее положение. При этом ко входу С сумматора на время 0,1 с (два перио-
да) подключается источник сетевого питания Uf, а ко входу В — источник напряже-
ния переменной частоты. Скорость изменения частоты преобразователя FS задается
скоростью изменения выходного напряжения интегратора, которая при U = 0,1 В
равна v = 0,1 В/с. Параметры преобразователя FS (устанавливаются в диалоговом ок-
не): амплитуда положительной полуволны Н = 1,42 В, отрицательной — L = -1,42 В
(соответствует действующему значению 1 В); количество задаваемых участков вход-
ного напряжения N - 2; для начального (нулевого) участка по входному напряжению
С1 = 0 В частота F1 = 0,001 Гц; для второго участка С2 = 1 В частота F2 = 9 Гц. Значе-
ние параметра С2 соответствует скорости изменения частоты примерно равной
0,9 Гц/с, что при времени моделирования C2/v = 1/0,1 = 10 с в режиме ZOOM
484
Глава 14. Электромеханические устройства
। Expand) осциллографа позволяет получить осциллограммы сигналов при всех возмож-
ных вариантах соотношения частот (о„ о>г, включая и показанные на рис. 14.24, б, в.
На рис. 14.24, г показан начальный участок такой осциллограммы (А — выходной
сигнал преобразователя, В — выходной сигнал сумматора). На начальном участке b ос-
циллограммы В зафиксирован эффект воздействия на суммарный сигнал МДС двух
периодов питающего напряжения, имитирующих возможное его “просачивание” за
время формирования кругового поля статора. Как следует из осциллограммы, эффект
от такого маловероятного воздействия практически незаметен.
Рис. 14.24. Схема для моделирования взаимодействия статора и ротора (а) и результаты осцил-
лографических измерений (б, в. г)
Статические характеристики асинхронных двигателей. Исходными данными
при расчете статических (в установившемся режиме) параметров приводов с асин-
хронными двигателями являются: номинальные мощность Р„, Вт или момент на ва-
лу М„, Н м; напряжение питания U, В и частота питающей сети f, Гц ; скорость
вращения п, об/мин; момент инерции ротора J,, кгм2; число пар полюсов р; тип на-
грузки, чаще всего — редуктор с заданным числом оборотов на выходе пр, стати чес-
485
Часть II. Моделирование схем и устройств
ким Мр, Н-м и моментом инерции Jp, кг-м2; пусковой момент М., Н-м; электромеха-
ническая постоянная времени Тм, с в номинальном режиме [75].
Свойства двухфазных асинхронных электродвигателей определяются сово-
купностью трех видов характеристик: пусковых (зависимость момента двигателя и
тока управления от напряжения в цепи управления при неподвижном роторе), рабо-
чих (зависимость скорости вращения от момента двигателя при фиксированных зна-
чениях напряжения в цепи управления) и регулировочных (зависимость скорости
вращения от напряжения в цепи управления).
При анализе асинхронных двигателей используются Т-образная
(рис. 14.25, а) и Г-образная (рис. 14.25, б) схемы замещения, аналогичные схемам
замещения трансформатора. На схемах обозначено: U1 — напряжение питания; R1,
L1 — активное сопротивление и индуктивность статора; Lo, Ro — реактивная и ак-
тивная составляющие при холостом ходе; L21 = K„L2, R21 = KnR2 — приведенные к
обмотке статора индуктивность L2 и активное сопротивление R2 ротора; К„ = КТКО —
коэффициент приведения сопротивлений; Кс = Wjkwl/w2ke2 — коэффициент транс-
формации ЭДС (Е21 = К„Е2); К, = m1WjkWI/m2w2k4.2 — коэффициент приведения
(трансформации) токов (121 = KJ2); т(, т2 — число фаз статора и ротора; wn w2 — чис-
ло витков статорной и роторной обмоток; kwl, kw2 — обмоточные коэффициенты стато-
ра и ротора (определяются выбором конструкции обмоток из условия минимального
содержания гармоник (см. рис. 14.22), их значения находятся в пределах 0,9...0,96);
С - 1 + (RI + jcoeLl)/(Ro + jco.Lo) — коэффициент перехода к Г-образной схеме
(С = 1,02... 1,05); к = С2. Для короткозамкнутого ротора типа беличьего колеса при-
нимается: w, - 0,5; kw2 = 1; число фаз ш2 выбирается равным количеству Z2 стержней
(проводников); в такой обмотке ротора “фазы” сдвинуты на угол 2ti/Z2 при числе по-
люсов, равном числу полюсов статора.
Рис. 14.25. Эквивалентные схемы асинхронного двигателя
Основное отличие показанных на рис. 14.25 схем замещения от аналогичных
для трансформатора заключается в том, что в ней вторичная обмотка — ротор — на-
гружена на сопротивление R21 (1 - S)/S, зависящее от скольжения S и, следователь-
но, от режихмов работы двигателя.
При холостом ходе S = 0 и сопротивление нагрузки R21(l — S)/S - 00, что соот-
ветствует разомкнутой вторичной обмотке трансформатора. При этом потребляемая
мощность расходуется на покрытие потерь. Ток холостого 1о из-за наличия воздушно-
го зазора между статором и ротором значительно больше, чем у трансформатора
(20...40% от номинального тока по сравнению с 0,5...3% у трансформатора). Умень-
шение тока холостого хода достигается за счет уменьшения зазора до 0,1...0,3 мм.
В режиме пуска S = 1 и сопротивление нагрузки R21(l - S)/S = 0, что соответ-
ствует короткому замыканию вторичной обмотки трансформатора. Ток короткого
замыкания (ток пуска), как уже отмечалось, значительно превосходит номиналь-
ный и соответственно ток холостого хода.
486
Глава 14. Электромеханические устройства
Анализ эквивалентных схем на рис. 14.25 позволяет получить формулу для
электромагнитного момента асинхронного двигателя в следующем виде [88]:
М = тЛ/Ки/шД (14.63)
где 1„ - Ui/[(Rj + CR2t/S)2 + (X, + СХ21)2],/2 — приведенный к статору ток ротора: X, —
модуль индуктивного сопротивления статора; Х21 — модуль приведенного к статору
индуктивного сопротивления ротора.
Анализ выражения (14.63) показывает, что момент достигает максимального
значения при так называемом критическом скольжении:
Sk = CR21/[R>2 + (Xt + CX2I)T2. (14.64)
Поскольку асинхронные двигатели, в отличие от двигателей постоянного тока,
отличаются существенной нелинейностью характеристик, то при их расчете широко
применяются линеаризация рабочих характеристик, получаемых экспериментально
и приводимых в каталогах, а также приближенные формулы. При этом используют-
ся следующие параметры [64, 74, 75]:
1. Коэффициент управления а = U^/U., где Uy, U, — напряжения на управляющей
и обмотке возбуждения.
2. Синхронная скорость вращения сос = 2лГ/р, рад/с (р — число пар полюсов).
3. Скорость холостого хода (Во - 2асос/(1 + а2).
4. Электромагнитная мощность Рэ = 0)сМ, где М — электромагнитный момент.
5. Вращающий момент двигателя Мд - Р,/сос.
6. Механическая мощность двигателя Р„ = Мд(0с.
7. Коэффициент передачи по моменту КМ1 — M„/Uy = 2UM/0)eR, [П-м/В Ас], где R —
приведенное к управляющей обмотке сопротивление ротора.
8. Коэффициент внутреннего скоростного трения двигателя К, Uy2(l + a2)/coc2R,
Н-м-с; определяет наклон механической характеристики двигателя.
9. Электромеханическая постоянная времени Тч - J/D./M^l + а2К2), где К — отно-
шение числа витков обмотки возбуждения к числу витков обмотки управления.
10. Коэффициент передачи редуктора Кр = п/пр.
11. Момент инерции системы (с учетом редуктора) J = 5Ja + Jp/K(12, кг-м2; коэффици-
ент 5 = 1,1...1,15 [74].
12. Статический момент Мс - Мр/пр, Н-м.
13. Передаточный коэффициент двигателя по скорости Кс = 1/К„.
При ориентировочных расчетах с помощью приведенных формул используют-
ся табличные данные двигателей или их механические характеристики М = f(co)
(рис. 14.26, а) или чаще всего М = f(n) (рис. 14.26, б, цифрами обозначены характе-
ристики для различных значений напряжения на управляющей обмотке). Если на
характеристике выбрана рабочая точка В (см. рис. 14.26, а), то по ней можно опре-
делить момент холостого хода Мхх и момент короткого замыкания М„, численно рав-
ный пусковому. При скорости двигателя, составляющей не более 55% синхронной,
с помощью характеристик на рис. 14.26, б (из треугольника ЛВС) определяются
[64]: в качестве исходных данных — приращения угловой скорости Aw = л-Дп/30 -
= я-330/30 = 34,6 рад/с и момента ДМ « 1 Н-м при заданном приращении напряже-
ния управления AUy = 55 - 30 “ 25 В; далее рассчитываются: передаточный коэффици-
ент двигателя по скорости КР = 1/Кс = Дсо/Диу = 34,6/25 = 1,38 (рад/с)/ В; коэффициент
передачи по моменту Кив = M„/Uy = 2U,/wfR = AM/AUy = 2/25 = 0,08 [Н-м/В = Ас]; ко-
487
Часть II. Моделирование схем и устройств
эффициент внутреннего скоростного трения двигателя К, = U/(l 4- a^/to^R = АМ/Дсо =
= 2/34,6 = 0,058 Н-мс. Из рис. 14.26, б следует также, что для рабочей точки В момент
холостого хода М„ = 2 Н-м, а пусковой момент Мп =• Мк, = 4 Нм.
Рис. 14.26. Механические характеристики асинхронного двигателя (а, б) и схемы его включе-
ния (<», г)
Динамические характеристики асинхронных двигателей. Исследование та-
ких характеристик в полном объеме вызывает значительные трудности вследствие
сложности электромагнитных процессов, описываемых целой системой уравнений,
в том числе и нелинейных, в которые входят параметры или постоянные времени не-
скольких взаимосвязанных контуров. В связи с этим электромагнитные процессы
анализируют достаточно редко и только в случае приводов со сложной структурой
управления. Кроме того, электромагнитные переходные процессы в цепях перемен-
ного тока завершаются достаточно быстро — как правило, в течение одного периода
питающего напряжения. Поэтому в большинстве случаев учитываются только меха-
нические переходные режимы и передаточная функция асинхронного двигателя
представляется как
К(р) = Кд/(1 4- рТм), (14.65)
где постоянная времени Тм может принимать различные значения при переходе с од-
ной характеристики на другую вследствие их различной крутизны.
Если двигатель нагружен редуктором с коэффициентом передачи п, то с уче-
том скоростного трения Кд = п-К,/К.(п2Кт 4- Кр), Т„ = (n’J + J„)/(n2KT 4- Кр), где Кт, JM —
коэффициент скоростного трения и момент инерции редуктора [64].
Управление асинхронными двигателями может быть параметрическим или
активным — с применением преобразователей [74].
Параметрическое управление чаще всего реализуется введением сопротивле-
ния в цепь статора или ротора (в случае фазного ротора). Введение дополнительного
сопротивления в цепь статора мало влияет на скорость вращения и заметно умень-
шает момент, поэтому такой способ регулирования скорости малоэффективен и
практически не используется. Введение добавочного сопротивления в цепь ротора
является более эффективным, однако это возможно только для двигателей с фазным
ротором и связано с большими потерями энергии в реостатах. Поэтому параметриче-
ское управление в основном применяют для кратковременного снижения скорости и
лишь в тех случаях, когда управление скоростью сочетается с пуском и торможени-
ем рабочей машины, например, в подъемных установках.
Регулирование скорости изменением подводимого к статору напряжения;
такой способ для двигателей обычного исполнения малоэффективен и применяется
в основном в двухфазных исполнительных двигателях САУ, отличающихся повы-
шенным скольжением S (см. ниже). При этом напряжение меняется только на об-
488
Глава 14. Электромеханические устройства
мотке управления, а обмотка возбуждения подключается к питающей сети и ток в
ней не меняется. В качестве источников регулируемого напряжения используются
магнитные или транзисторные усилители или тиристорные преобразователи
(см. разд. 12.7). Эффект регулирования скорости достигается за счет внесения асим-
метрии в МДС обмоток, в результате чего вместо кругового вращающегося магнит-
ного поля возникает эллиптическое. При этом наряду с напряжением и токами
прямой последовательности фаз, обеспечивающими двигательный режим, возника-
ют напряжения и токи обратной последовательности фаз, вызывающие тормозное
действие (см. формулы (14.60) и (14.61)). В одном корпусе двигателя как бы сущест-
вуют две машины, из которых одна работает как двигатель, а вторая — как тормоз.
Меняя степень асимметрии, можно регулировать скорость двигателя. Естественно,
при таком способе регулирования имеют место значительные потери, которые при-
водят к заметному нагреву обмоток. Поэтому мощность выпускаемых промышлен-
ностью двухфазных двигателей не превышает 200 Вт.
В зависимости от вида формируемой асимметрии магнитного поля различают
три способа управления: амплитудный, фазовый и амплитудно-фазовый. При ампли-
тудном управлении (рис. 14.26, в) токи в обмотках возбуждения и управления фазос-
двигающим устройством сдвигаются на 90’ и регулирование осуществляется
изменением амплитуды тока в обмотке управления. При фазовом управлении
(рис. 14.26, в) модули токов в обеих обмотках остаются постоянными, а скорость дви-
гателя регулируется за счет фазового сдвига тока фазовращателем в обмотке управле-
ния в пределах от 0 до 90°. Амплитудно-фазовое управление (рис. 14.26, г) связано с
использованием конденсатора в цепи обмотки возбуждения, обеспечивающего смеще-
ние по фазе, близкое к 90 . Управление в основном осуществляется за счет регулирова-
ния амплитуды тока в обмотке управления. Однако при изменении скорости ротора
ЭДС, наводимая ротором в обмотках, и соответственно падение напряжения на кон-
денсаторе и ток в обмотке возбуждения изменяются как по амплитуде, так и по фазе.
Рис. 14.27. Форма поля при симметричном режиме асинхронного двигателя (а) и различных
способах управления (б, в, г)
Для демонстрации рассмотренных способов управления воспользуемся моде-
лью на рис. 14.23 в режиме моделирования кругового поля (необходимые установки
489
Часть II. Моделирование схем и устройств
были описаны выше). Введем дополнительные изменения в схему модели: выход ис-
точника Ur подключим к свободному выводу ключа X, переведем осциллограф в ре-
жим развертки A/В, ключ X — в нижнее положение, ключ Z — в верхнее. Поскольку
при этом схема остается симметричной, то вращающееся поле имеет форму круга
(рис. 14.27, а). Выберем теперь в качестве управляющей обмотку АХ и увеличим амп-
литуду источника Ua до 1,5 В (амплитудное управление). При этом форма вращающе-
гося поля приобретает вид, показанный на рис. 14.27, б. При изменении фазы
источника Ua на 30' (фазовое управление) форма поля показана на рис. 14.27, в, а при
одновременном увеличении амплитуды до 1,5 В и фазы на 30° (амплитудно-фазовое
управление) — на рис. 14.27, г.
Частотное управление является наиболее эффективным способом регулиро-
вания скорости асинхронного двигателя. Однако для его реализации необходим пре-
образователь, который мог бы преобразовывать ток постоянной частоты питающей
сети 50 Гц в ток перехменной регулируемой частоты, плавно изменяющейся в широ-
ких пределах. Для этого сначала пытались использовать электромашинные преобра-
зователи. Однако, чтобы получить ток переменной частоты от синхронного
генератора, необходимо вращать его ротор с переменной скоростью. При этом ско-
рость рабочего двигателя должен регулировать двигатель, приводящий во вращение
агрегат с синхронным генератором. Коллекторный генератор, который может гене-
рировать ток переменной частоты при постоянной скорости вращения, тоже не поз-
волил решить задачу, так как, во-первых, для его возбуждения необходим ток
регулируемой частоты, а во-вторых, как у всех коллекторных машин переменного
тока, возникают большие трудности с обеспечением нормальной коммутации на
коллекторе. Поэтому частотное управление начало практически развиваться лишь с
появлением полупроводниковых приборов. При этом оказалось возможным создать
преобразователи частоты для управления как установками большой мощности, так
и маломощными исполнительными двигателями следящих систем.
Преобразователи частоты для асинхронных двигателей обладают одной особен-
ностью, заключающейся в том, что с уменьшением частоты происходит насыщение
магнитной системы двигателя и он становится неуправляемым. Чтобы сохранить не-
измененным магнитный поток при уменьшении частоты, необходимо одновременно
снижать и уровень напряжения. Таким образом, при частотном управлении надо ис-
пользовать два канала управления: по частоте и по напряжению. Анализ показывает
[74], что закон изменения напряжения при частотном управлении определяется ха-
рактером изменения статического момента нагрузки от скорости: при постоянной на-
грузке он линеен, при линейно нарастающей — пропорционален степени 2/3, а при
квадратичной (вентиляторной) нагрузке — квадратичен.
Заметим, что в реальных условиях весьма трудно получить информацию о
значении магнитного потока: для этого необходимо помещать в зазоре датчик Холла
или размещать в пазах статора дополнительные измерительные обмотки. Поэтому
систему со стабилизацией магнитного потока как таковую (с контролем магнитного
потока) используют редко. Чаще всего используется косвенный метод контроля —
по падению напряжения на активном сопротивлении первичной цепи (так называе-
мая схема управления IR-компенсацией).
В системах управляемого электропривода используют два типа преобразовате-
лей частоты: с непосредственной связью первичной и вторичной цепей и со звеном
постоянного тока. В преобразователях первого типа переменная частота (более низ-
кая, чем в питающей сети) формируется из отрезков синусоид первичного напряже-
ния. В преобразователях второго типа напряжение питающей сети выпрямляется, а
490
Глава 14. Электромеханические устройства
затем с помощью инвертора преобразуется в напряжение переменного тока с регули-
руемой частотой и амплитудой.
Контрольные вопросы и задания
1. Чем отличаются машины переменного тока от машин постоянного тока?
2. Чем отличаются синхронные и асинхронные машины переменного тока?
3. Перечислите типы асинхронных двигателей.
4. В двухфазных асинхронных двигателях возможен вариант, при котором угол
сдвига статорных обмоток А л/2 и токов в обмотках В Ф л/2 [87]. Для получения
в этом случае кругового поля необходимо обеспечить, кроме симметрии обмоток,
равенство А + В = л. Проверьте истинность этого условия на модели рис. 14.23, а.
5. Для трехфазных асинхронных двигателей выражения для МДС каждой фазы
имеют вид: F„ = F,„[sinu)t]cos(Hx/T); F„ = Fp[sin(cot - 2л/3)]соз(лх/т - 2л/3);
F. = F„[sin((j)t - 4л/3)]соэ(лх/т - 4л/3). Составьте схему для моделирования маг-
нитного поля статора такого двигателя и проведите ее испытания. Какое количе-
ство пар полюсов при этом потребуется?
6. Возможно ли создание четырехфазного асинхронного двигателя с двумя парами
полюсов?
7. Перечислите критерии выбора двигателя по мощности.
8. Назовите параметры асинхронного двигателя, аналогичные параметрам двига-
теля постоянного тока.
9. Какие параметры можно получить из механической характеристики асинхрон-
ного двигателя?
10. Используя формулу (14.63), постройте зависимость М = f(S) при т, = 2,
R21 = 2 Ом, со. = 628 с•*, U, - 10 В, R, = 2 Ом, С = 1, X, = 10 Ом, Х21 = 10 Ом. Ис-
пользуя модель на рис. 14.24, постройте зависимость U=f(S), задавая S уста-
новкой частоты источника Ur в диапазоне 0,1...9,9 Гц и измеряя напряжение
U в режиме ZOOM (Expand) установкой визирной линейки на максимум полу-
волны напряжения Ur (осциллограмма А) с последующим вычислением
U=VA - VB1/2. Путем сравнения зависимостей М = f(S) и U = f(S) установите,
не соответствует ли граница перехода с режима биений (осциллограммы на
рис. 14.24, б) в режим наложения колебаний (осциллограммы на рис. 14.24, в)
критическому значению скольжения.
11. Используя формулы (14.63) и (14.64), составьте выражение для пускового и мак-
симального моментов асинхронного двигателя. Попытайтесь установить соот-
ветствие между расчетным значением пускового момента и полученным с
помощью характеристик на 14.26, б.
12. Каким образом происходит пуск асинхронного двигателя?
13. Назовите тип стандартного звена, которым чаще всего представляют асинхрон-
ный двигатель при анализе систем управления.
14. Перечислите способы управления асинхронными двигателями и дайте их крат-
кую характеристику.
14.4. Электродвигатели в системах управления
В качестве примера применения двигателей постоянного тока рассмотрим следя-
щую систему [64] в следующем составе (см. рис. 14.28, а): измерительный преобразова-
тель с коэффициентом передачи К1 = 0,87 В/град; ЭМУ с коэффициентом передачи
491
Часть II. Моделирование схем и устройств
К2(р) = К2/(1 4- рТ2), где К2 = 100 коэффициент усиления, Т2 = 0,12 с — постоянная
времени поперечной цепи; двигатель постоянного тока с редуктором и общим коэффи-
циентом передачи К3(р) “ К3/р(1 4- рТЗ), где КЗ = 1/n, п >= 165 — коэффициент переда-
чи редуктора, Кс« 0,0106 Вс/град — скоростной коэффициент двигателя, ТЗ = 0,25 с —
его электромеханическая постоянная времени; стабилизирующее (интегро-диффе-
ренцирующее) звено с коэффициентом передачи К4(р) - (К4 + рТ4)/(1 + рТ4), где
К4 = 0,2 — статический коэффициент передачи звена, Т4 = 0,05 с — его постоянная вре-
мени; звено гибкой обратной связи (дифферецирующее звено) с коэффициентом переда-
чи К5(р) = рКбК.п, где Кб = 0,2 — статический коэффициент передачи звена.
Определение коэффициента передачи системы в операторной форме произво-
дится по стандартной методике: находится коэффициент передачи разомкнутой це-
пи из звеньев К2...К5 путем перемножения их коэффициентов передачи;
определяется коэффициент передачи замкнутой цепи из указанных звеньев и тем са-
мым они заменяются одним звеном с коэффициентом передачи К2(р) =
К,(р) КЗ(р)/[1 4- К2(р) КЗ(р) К4(р) К5(р)]; определяется коэффициент передачи сис-
темы К(р) « К1(р)-К2(р)/[1 4- К1(р)-К2(р)]; после подстановки в это выражение значе-
ния К2(р) и приведенных выше численных значений получаем [64]:
К(р) = Qo(p)/Qi(p) - 33133(1 4- 0,05р)/(р4 + 32,Зр* 4- 94 7р2 + 4993р 4- 4- 33133).(14.66)
Представим выражение (14.66) в виде, удобном для составления модели и вы-
бора ее параметров:
Qo(p)p‘ = 33133(1 4- 0,05p)Qi(p) - Qo(p)(32,3p3 4- 947p2 4- 4993p + 33133); (14.67)
Qo(p)[p4 + 32,3pJ 4- 947p2 4- 4993p + 33133] - 33133(1 4- 0,05p)Qi(p). (14.68)
На основании (14.67) строим структурную схему модели (рис. 14.28, б), на ко-
торой обозначено: D, S1 — дифференциатор и сумматор, моделирующие первое сла-
гаемое правой части уравнения (14.67); S2 — сумматор всех слагаемых правой части
этого уравнения, включая входное возмущение U6, напряжения третьей U1, второй
U2, первой U3 и нулевой U4 производных, формируемых соответственно интеграто-
рами II, 12, 13, 14; на выходе сумматора S2 формируется напряжение U5 четвертой
производной; искомой величиной является напряжение U4.
Составим систему уравнений для схемы на рис. 14.28, б'.
U5 - U6 - UI - U2 - U3 - U4; U6 = Qi(p)(l 4- PKd)Ksl; UI - K1U5/P;
U2 = K2U1/P; U3 = K3U2/P; U4 = K4U3/P, (14.69)
где Kd, Kal, Kn K2, K3, К, — коэффициенты передачи соответственно дифференциато-
ра, первого сумматора и интеграторов И, 12,13, 14.
Учитывая, что машинный оператор дифференцирования Р = р/ш (ш — мас-
штаб времени), из (14.69) получаем машинное уравнение модели:
U4[p4 4- т’К,р3 4- тгК,К2р2 4- тК1К2К3р + т4К,К2К3К4] =
= m4K1K2K3K4Kal(l 4- Krfp/m)Qi(p). (14.70)
Исходя из требования идентичности уравнений оригинала и его модели, путем
сравнения коэффициентов в выражениях (14.68) и (14.70) получаем систему уравне-
ний для определения коэффициентов передачи решающих блоков модели:
ш’К, = 32,3; т2К,К2 = 947; тК1К2К3 = 4993;
т<КвК3К3К4 = 33133; т<К,К2К3К4К11 = 33133; Kd/m = 0,05. (14.71)
492
Глава 14. Электромеханические устройства
Предварительный анализ показывает, что вполне приемлемые для реализа-
ции модели коэффициенты передачи решающих блоков получаются при m e 1. В та-
ком случае из (14.71) получаем:
Kj - 32,3; К2 = 29,3; К3 - 5,3; К( = 6,6; К., = 1; К., - 0,05.
Схема модели на решающих блоках программы EWB 5.0, выполненная в соот-
ветствии со структурной схемой на рис. 14.28, б, содержит (рис. 14.28, в) дифференци-
атор D, сумматорS1, интеграторы II, 12,13,14 с рассчитанными выше коэффициентами
передачи (для дифференциатора и интеграторов они индицируются над значком компо-
нента). В качестве второго сумматора (рис. 14.28, б) используются два последовательно
включенных трехвходовых сумматора S2, S3; коэффициенты их передачи по входам В
и С выбраны равными -1 из условия обеспечения отрицательной обратной связи, по-
скольку у всех интеграторов коэффициенты передачи положительны. В качестве источ-
ника испытательного сигнала используется источник постоянного напряжения Ui,
имитирующий потенциальный скачок входного сигнала при включении режима моде-
лирования. При переводе ключа Z в верхнее положение ко входу системы подключает-
ся функциональный генератор и измеритель АЧХ и ФЧХ, что позволяет получить
амплитудно-частотную и фазочастотную характеристики исследуемой системы.
Рис. 14.28. Структурные схемы следящей системы (а, б) и ее модель (в)
Из осциллограмм переходных процессов (рис. 14.29, а) по ускорению (осцил-
лограмма А) и скорости (осциллограмма В) следует, что исследуемая система в пере-
ходном режиме характеризуется колебательностью с числом колебаний около двух
и перерегулированием, равном (VB1 - VB2)/VB2 = 0,24 при длительности переход-
ных процессов Т2 = 2 с.
Сравним результаты моделирования с данными работы [64], в которой расчет-
ным путем для переходного процесса при единичном входном возмущении получено
следующее выражение:
Qo(t)- 1 + 0,0906 exp(-13,7t)cos(24, It 0,14)- 1,118 exp(-2,48t)cos(6,09t - 0,256).
493
Часть II. Моделирование схем и устройств
При t = Т1 = 0,572 с (см. рис. 14.29, а) получаем Qo(t) = 1,32 В, что на 6% пре-
вышает результат моделирования VB1 = 1,246 В.
О характере переходных процессов можно судить по фазовой траектории сис-
темы (рис. 14.29, б), а также по АЧХ и ФЧХ (рис. 14.29, в, г).
а)
б)
Рис. 14.29. Осциллограммы переходных процессов (а), фазовая траектория (б). АЧХ (в) и ФЧХ
(г) следящей системы
494
Глава 14. Электромеханические устройства
Контрольные вопросы и задания
1. Какими звеньями представлены двигатель постоянного тока и ЭМУ в рассмот-
ренной системе? Какие постоянные времени исключены из коэффициентов пере-
дачи этих устройств и по каким причинам?
2. Как определяется коэффициент передачи системы по ее структурной схеме?
3. Используя модель на рис. 14.28, в, исследуйте зависимость переходных процес-
сов системы от коэффициента передачи дифференцирующего звена, задавшись
значениями Кб = 0,1, 0,3 и 0,6. Заметим, что при этом придется пересчитать зна-
чения коэффициентов передачи всех решающих блоков модели.
4. Каким образом по данным рис. 14.29, б можно судить о количестве колебаний,
совершаемых следящей системой в переходном режиме?
5. Вводя замену р - jco в формуле (14.66), получите выражения для АЧХ и ФЧХ си-
стемы. Рассчитайте значения коэффициентов передачи в точках установки ви-
зирной линейки на рис. 14.29, в, г.
14.5. Электромагнитный привод
Электромагнитные приводы (ЭМП) различают [69] по роду тока: постоянного и
переменного, со встроенными выпрямителями, смешанные или универсальные; по
числу приводимых в движение машин: групповые и индивидуальные; по функцио-
нальному назначению и характеру работы: силовые и управления, программные, не-
прерывные и стартстопные, шаговые, импульсные; по характеру перемещения
рабочего органа: с поступательным движением (толкающие, тянущие), возвратно-по-
ступательные, с вращательным движением (поворотные, колебательные), со сложным
движением, удерживающие, подъемные, парные, пробивные, прессовые, ударные, ре-
версивные; по значению перемещения рабочего органа: микроперемещения, малые,
средние, большие и неограниченные перемещения; по характеру действия: прямого
действия, с применением элементов сопряжения и устройств преобразования одного
вида движения в другой; по способу возврата в исходное положение: под действием
гравитационных сил (массы подвижных элементов), потенциальной энергии упругих
тел (возвратной пружины, упругого материала и т.п.), другого привода или вручную;
по числу фиксированных рабочих позиций: двухпозиционные, трехпозиционные (с
нейтральным положением), многопозиционные; по способу удержания (фиксации) в
рабочем положении: с механической фиксацией, с использованием маломощных (по
сравнению с основным) ЭМП или с помощью постоянных магнитов; по длительности
режима работы: продолжительный, кратковременный, повторно-кратковременный;
по быстродействию: сверхбыстродействующие, быстродействующие, нормальные, за-
медленные; по значению хода якоря: короткоходовые, нормальные, длинноходовые;
по типу магнитной цепи: с разомкнутой и замкнутой магнитной цепью; по форме маг-
нитопровода: П-, III-, Г-, С-, Т-, I-образные; по расположению якоря: с втягивающим-
ся или втяжным якорем, с внешним притягивающимся (дисковым) якорем, с
внешним поперечно движущимся якорем; по положению якоря относительно маг-
нитного потока: с торцевым и боковым расположением якоря; по наличию стопа: со
стопом, без стопа, телескопические; по форме якоря и стопа: плоская, коническая с
полным или усеченным конусом, ступенчатая, коническая без стопа, с ферромагнит-
ным шунтом постоянного или переменного сечения, сферическая, криволинейная;
по исполнению катушки: токовые, напряжения, каркасные, бескаркасные; по числу
обмоток: одно-, двух- и многообмоточные; по демпфированию якоря: демпфируемые
и недемпфируемые; по способу демпфирования якоря: пневматический (поршневого
495
Часть II. Моделирование схем и устройств
или игольчатого типа), фрикционный, электромагнитный, гидравлический, аэроди-
намический; по способу фиксации поворотного якоря (с вращением на призме, оси
или гибкой связи).
В подавляющем большинстве ЭМП строятся на основе электромагнитов (ЭМ)
постоянного тока с втяжным якорем различных форм стопа, которые обеспечивают
лучшие технико-экономические показатели по сравнению с другими типами (кла-
панными, поворотными и др.). Простейшими ЭМП общего применения являются
ЭМ с поступательным, вращательным или сложным движением тянущего или тол-
кающего прямого действия. Они сопрягаются с нагрузкой непосредственно без ка-
ких-либо элементов связи и широко применяются в электромагнитных клапанах,
контакторах, реле, фиксаторах, стопорах, замках и т.п.
14.5.1. Электромагниты.
Основным устройством электромагнитного привода, как уже отмечалось, явля-
ется электромагнит. Принцип действия такого устройства основан на использовании
сил взаимодействия ферромагнитного тела с магнитным полем. При прохождении то-
ка по обмотке ЭМ создается магнитное поле; в цепи магнитопровода возникает магнит-
ный поток, который, пронизывая магнитопровод и его подвижную часть — якорь,
создает в области рабочего зазора силу притяжения, под действием которой якорь пе-
ремещается в сторону стопа. В некоторых (достаточно редких) случаях подвижным
элементом является корпус ЭМ с катушкой. Если неподвижны и якорь и корпус, то в
рабочем зазоре создается магнитное поле определенной конфигурации. Такие устрой-
ства находят применение в аттенюаторах, циркуляторах, фазовращателях, переклю-
чателях электромагнитной энергии и других ферритовых СВЧ устройствах.
Временные параметры ЭМ характеризуются временем трогания (с момента
подключения источника питания до начала движения якоря), временем срабатыва-
ния (движения), когда якорь приходит в соприкосновение со стопом, и временем от-
пускания (возврата) якоря в исходное состояние после отключения источника
питания. Время трогания зависит от параметров электромагнита и противодейству-
ющих сил. Время движения (по параболической кривой) зависит от параметров эле-
ктромагнита, отношения его тягового усилия к противодействующей перемещению
силе (запаса по усилию) и инерционности подвижных частей. Время возврата зави-
сит от инерционности подвижных частей и значения возвращающей силы.
Основные параметры ЭМ и их значения устанавливаются ГОСТ 19264-82
“Электромагниты управления. Общие технические условия”. Этот стандарт распро-
страняется только па ЭМ управления постоянного и переменного тока, применяе-
мые в исполнительных механизмах различного промышленного назначения, а
также в качестве самостоятельных функциональных блоков. Стандарт не распрост-
раняется на ЭМ для управления контактными устройствами коммутационных аппа-
ратов, подъемные ЭМ, ЭМ для информационной техники, ЭМ для подвижных
установок наземного, водного и воздушного транспорта, а также ЭМ специального
назначения. Приведем некоторые нормируемые параметры ЭМ:
1. Номинальное рабочее напряжение; рекомендуемые значения: 12, 24, 48, 60,
110, 220 и 440 В — для ЭМ постоянного тока; 24, 42, 60, 110, 220 и 380 В — для
однофазных ЭМ; 220, 380 и 660 В — для трехфазных ЭМ.
2. Номинальная частота сети для питания ЭМ переменного тока — 50 или 60 Гц с
допускаемым отклонением ±3%.
3. Средний ресурс работы; выбирается из ряда: 10, 30, 100 и 300 тыс.; 1, 3, 4, 6,3,
10, 16, 20 и 30 млн. срабатываний.
496
Глава 14. Электромеханические устройства
4. Тяговое усилие (сила): начальное значение, текущее и удержания (отрыва); вра-
щающий момент: начальный, текущий, удерживающий; ход якоря: линейное
или угловое перемещение; сопротивление обмотки: в холодном или нагретом со-
стоянии; потребляемый ток: номинальный, пусковой и ток удержания; потреб-
ляемая мощность: номинальная, пусковая, удержания; температура обмотки:
максимальная, средняя, на поверхности, превышение температуры обмотки (пе-
регрев); времена срабатывания, трогания, движения, отпускания, успокоения
(время вибрации якоря); электрическая постоянная времени обмотки; частота
включений: в час, минуту, секунду; степень защиты; класс нагревостойкости
изоляции; сопротивление изоляции; испытательное напряжение; нормальное
рабочее положение; срок хранения; гарантийный срок эксплуатации.
5. Основные характеристики ЭМ: статическая и динамическая тяговые характери-
стики; механическая характеристика противодействующих сил; зависимости
тока в обмотке и перемещения якоря от времени; зависимости нагрева и охлаж-
дения от времени; магнитной проводимости рабочего зазора — от хода якоря,
магнитного потока — от тока в обмотке.
При ориентировочных расчетах ЭМ используются следующие соотношения [69]:
1. Конструктивный фактор КФ = 10’Р12/Ь, кН,/2/м, где Р — тяговое усилие, Н;
b (6) — рабочий ход, м. При КФ = 6,5...47 выбирается конструкция с плоским
стопом, при КФ = 0,15...11 — с коническим (рис. 14.30, а) с углом при вершине
а = 60" (наиболее типичный случай), при КФ >47 — с дисковым (с наружным,
как у реле) якорем.
2. Диаметр якоря d = 1,7910 Т1/2/В — для ЭМ с плоским стопом; d = 1,79-10’3Р,/2/В-
•sina/2 — с коническим; d = 1,265-10 3Р‘/2/В — с дисковым якорем; В - 0,7. ..1,1 Тл
(Тл = Вб/м2 = В-с/м2 = кг/А-с2) — магнитная индукция в зазоре (Вб = В-с — едини-
ца магнитного потока).
3. Размеры магнитной системы: наружный диаметр D = 2d, м; длина L = (0,7... 1,8)D, м,
для ЭМ с дисковым якорем L = (0,4...0,8)D, м; внутренний диаметр (под обмотку)
D| = 0,87D, м; толщина фланца со стороны якоря С = 0,12D, м, со стороны стопа —
С, = 0,06D, м; длина окна под катушку обмотки 1 = L 2С, м; длина стопа под катуш-
ку — (0,3...0,55)1, м.
Для иллюстрации результатов расчета и моделирования используем конст-
рукцию ЭМ на рис. 14.30, а [2]: он относится к ЭМ толкающего и тянущего типа с не-
изменным рабочим ходом и регулируемой силой возвратной пружины. ЭМ состоит
из корпуса 2, обмотки 3, намотанной на составной каркас (жестко соединенные фла-
нец 5 и втулка 4), якоря 6 с усеченным коническим стопом (сс = 60‘), возвратной пру-
жины 7, регулировочной гайки 8 и контргайки 9. В якоре с обеих сторон жестко
закреплены толкающий 1 и тянущий 10 штоки. Рабочий ход выставляется посред-
ством прокладок 11 и ограничивается крышкой 12. Втулка 4, штоки 1 и 10, набор
прокладок 11, крышка 12 изготавливаются из немагнитных материалов. Корпус 2,
якорь 6, фланец 5 изготовляются из магнитомягкой электротехнической стали и
хромируются во избежание залипания якоря и для повышения износоустойчивости.
Основные технические характеристики ЭМ: напряжение питания (постоянного то-
ка) — 60 В; число витков w = 3600 и активное сопротивление обмотки катушки
R = 240 Ом; рабочий ход b = 4 мм; геометрические размеры магнитной системы (ок-
ругленные данные): длина — 0,09 м, внешний диаметр — 0,04 м, диаметр якоря
d и 0,02 м; начальное тяговое усилие — 10 Н (в последующих расчетах примем пло-
скую форму стопа (а = 180:)).
497
Часть II. Моделирование схем и устройств
Для общего представления о характеристиках ЭМ на рис. 14.30, б приведе-
на статическая тяговая характеристика Р - f(b) при магнитодвижущей силе
(МДМ) F = 1600 А (произведение тока через обмотку и ее числа витков) для ЭМ с
плоским стопом (технические характеристики такого ЭМ приведены в списке во-
просов и заданий).
Рис. 14.30. Конструкция ЭМ с конусным стопом (а) и типичные характеристики ЭМП (б)
б)
Работа электромагнита описывается следующей системой уравнений [69, 70]:
U - iR + L(di/dt) + i(dL/di)(di/dt) + i(dL/dx)(dx/dt), (14.72)
m(d2x/dt2) = (P, - Po - P,) - KT(dx/dt) - xKy, (14.73)
P, = dWM/dx. (14.74)
Уравнение (14.72) является уравнением электрической цепи обмотки ЭМ. Пер-
вые два слагаемые типичны для обычной последовательной RL-цепи, состоящей из
активного сопротивления и индуктивности обмотки ЭМ. Третье слагаемое уравнения
(14.72) отражает факт зависимости индуктивности обмотки с сердечником от проте-
кающего по ней тока в соответствии с кривой намагничивания; в наибольшей степе-
ни оно характерно для систем с глубоким насыщением магнитопровода и в
большинстве практических случаев не рассматривается [69, 83]. Четвертое слагаемое
уравнения (14.72) отражает факт зависимости индуктивности обмотки от воздушно-
го зазора, меняющегося в процессе движения якоря. В качестве примера рассчитаем
эту зависимость для ЭМ на рис. 14.30, а, воспользовавшись формулой [63]:
L = w2/(RM + R,), (14.75)
где RM = l/|iaS — сопротивление ферромагнитного участка магнитной цепи; RB = 8/p0S —
сопротивление воздушного зазора; 1 — средняя длина магнитного пути (в нашем случае
1 - 0,18 м); = ццо — магнитная проницаемость ферромагнитного материала; ц — отно-
сительная магнитная проницаемость материала (для сталей ц = 200...5000, примем
п => 3000); щ = 1,257-10G В-с/А-м — магнитная постоянная; S — сечение магнитопрово-
да, примем его равным площади сечения якоря, т. е. S = 3,14-101 м2.
При указанных исходных данных получаем RM = 1,5210* А/В-с; R„ =
1,01-10’ А/В-с и R,u = 510* А/В-с — сопротивление воздушного промежутка при мак-
симальном (Ь = 4 мм) и минимальном (Ь = 0,2 мм) его значении соответственно. Сле-
довательно, при движении якоря индуктивность меняется от 1,26 до 19,7 Гн [В-с/А],
при этом зависимость L = f(8) в табличном виде имеет следующий характер:
8, мм 4 3 2 1 0,3 0,2 0,1
L, Гн 1,26 1,67 2,48 4,83 14,2 19,7 32
Таким образом, при движении якоря индуктивность меняется нелинейно и в
достаточно широких пределах, что существенно влияет на переходные процессы при
срабатывании ЭМ.
498
Глава 14. Электромеханические устройства
Уравнение (14.73) является уравнением движения якоря ЭМ. В этом уравнении
обозначено: m — масса подвижной части ЭМ (при длине якоря 4 см, его диаметре 2 см,
плотности стали 7,8 кг/дм3 и с учетом массы подсоединяемого к ЭМ механизма при-
мем ш = 0,1 кг); х — перемещение; Ро — начальное натяжение пружины, примем его
равным 1 Н; К, — коэффициент вязкого трения, примем Кт = 0,01 кг/с; Ку — коэффи-
циент натяжения пружины, примем Kr = 1 мм/Н = 0,001 м/Н; Р, = d(mv)/dt — сила
удара при соударении якоря и стопа; v — скорость якоря при ударе; Р, — сила элект-
ромагнитного притяжения, определяемая уравнением (14.74); как показывает анализ
[63], она может быть выражена формулой:
P.-K[F/(d-x)8], (14.76)
где К = w2poS/2 = 2,56 10 3 Н м/Агс.
Из приведенных данных видно, что ЭМ представляет собой систему с перемен-
ными параметрами, которая описывается целой системой дифференциальных урав-
нений. Начнем с уравнения движения. Введя обозначение Ре - (Р, - Ро - Ру),
представим его в следующих двух формах:
X" - СРе - АХ' - ВХ, • (14.77)
р2Х + рАХ + ВХ = СРе, (14.78)
где X" = d2x/dt2; X' = dx/dt; р — dx/dt — оператор дифференцирования; С = 1 /ш «
= 10 кг’; А = К,/т = 0,05 (ОД)с’; В = Ку/т - 0,005 (0,01) сЛ
Уравнение (14.77) используем для подготовки базовой схемы модели, а урав-
нение (14.78) — для выбора ее параметров.
Схема модели (рис. 14.31, а), построенная на основании уравнения (14.77), со-
держит сумматор на операционном усилителе ОУ 1, выполняющий функцию сумми-
рования слагаемых правой части выражения (14.77). Формируемый на его выходе
сигнал второй производной X" поступает на вход интегратора на ОУ 2 с коэффици-
ентом передачи К2, = 1/R21C. Сигнал первой производной X' поступает на вход
сумматора через инвертор на ОУ 4 с коэффициентом передачи К,, = R4/R41; на вы-
ход же сумматора он передается с коэффициентом передачи Ku = R1/R11. Для фор-
мирования сигнала X используется интегратор на ОУ 3 с коэффициентом передачи
К3| = 1/R31C. Поскольку полярность сигнала X отрицательная, то он поступает на
вход сумматора непосредственно (через резистор R12) и передастся на его выход с
коэффициентом передачи К12 = R1/R12.
Перейдем к выбору параметров модели, для чего составим ее машинное урав-
нение. Как следует из ее схемы, выходной сигнал сумматора
X" = и, - Кхие - К„и4 - K12U„ (14.79)
где Кх — обобщенный коэффициент передачи возмущающих сил Рс, имитируемых
неким источником U.; Ku = R1/R11; К12 = K1/R12; U4 = -K41U2 — выходное напря-
жение ОУ 4; К41 = R4/R41; U2 = -UiK2l/P — выходное напряжение интегратора на
ОУ 2; К21 = 1/C R21; U3 = -U2K3,/P — выходное напряжение интегратора на ОУ 3;
K3l = 1/C-R31; Р — d/dT — машинный оператор дифференцирования; Т = tm. — ма-
шинное время; mt = T/t — масштаб времени, т. е. Р = p/mt.
Из уравнения (14.79) с учетом его слагаемых получаем машинное уравнение:
p2U3 + pm,K.,K2,K4lU3 + т/К1гК21К31и, - mt*K21K31KxUc, (14.80)
где U3 = X — искомая величина.
Очевидно, что слагаемые правой и левой части уравнений (14.78) и (14.80)
должны совпадать с некоторым коэффициентом подобия, который называется в дан-
499
Часть II. Моделирование схем и устройств
ном случае масштабом. Начиная с первого слагаемого левой части, получаем U3---• х,
т. е. масштаб по перемещению mx = x/U3 = 1 [м/В]. Другими словами, измеренное на
выходе интегратора ОУ 3 напряжение в вольтах тождественно искомому перемеще-
нию в метрах (при условии, что для всех величин применяется одна и та же система
единиц измерения, например, СИ).
Проведя очевидное сокращение на оператор р, для второго слагаемого будем
иметь KTx/m = mtKnK21KnU3. После деления обеих частей на U3 в левой части равен-
ства получим множитель mx = x/U3 = 1, в результате чего К7 = П1.КИК21К41. Теперь не-
обходимо решить задачу соответствующего выбора двух из трех коэффициентов
передачи. Если, например, задаться произвольным значением коэффициента пере-
дачи К4, интегратора, то тем самым можно нарушить правильность формирования
сигнала X' в соответствии с уравнением (14.77). Если выбрать произведение безраз-
мерных коэффициентов КПК21 отличным от единицы, то получим тот же отрица-
тельный эффект и по той же причине. Поэтому следует выбрать K„K21 = 1, откуда
К„ = Задаваясь сопротивлением резисторов RI = R4 - 1 МОм, емкостью
конденсаторов С = 1 мкФ и принимая ш. — 1, получаем K2i = 0,01/0,1 — 0,1 и
R21 e l/K2jC = 1/0,1-10® = 10 МОм. Заметим, что значения коэффициентов К11 и
К21 могут быть любыми (если это не приводит к насыщению ОУ), однако их произ-
ведение должно быть равно единице. Как видно из схемы на рис. 14.31, а, они вы-
браны одинаковыми, т. е. равными единице каждый.
Третье слагаемое дает равенство Ky/m — m/K12K21K31, из которого, задаваясь
значением К12 = 1, после подстановки К21 = Kt/mm„ получаем К31 - Ку/ш,Кт =
= 0,001/0,01 = 0,1 и R31 - 1/К21С = 1/0,1-10® = 10 МОм.
Перейдем к анализу равенства, получаемого из правой части уравнений (14.78),
(14.80). Поделив его правую и левую часть на Uc, получим: Pe/mUt = mt2K21K3lKx. При-
нимая Кх 1, после подстановки значений K2i и К31 находим масштаб по входному воз-
мущению ша = P„/Uc = Ку.
Рассмотрим процесс формирования в схеме модели слагаемых Рэ, Ро, Ру правой
части уравнения (14.78).
Начальное натяжение возвратной пружины (или статическая нагрузка) Ро
имитируется источником Upo = 10 В; коэффициент передачи Кх для этого слагаемо-
го равен К,3 = R1/R31 = 1.
Слагаемое Р, формируется в соответствии с формулой (14.76): общий коэффи-
циент передачи для этого слагаемого Кн = R1/(R141 + R142), в котором Кх определя-
ется сопротивлением резистора R141, a R142 = R1/K - 1/2,56-10 ’ = 39 МОм; делитель
на этих резисторах с коэффициентом деления Кд = R141/(R141 + R142) = 40 исполь-
зуется для ослабления высоковольтного сигнала, пропорционального Рэ и превышаю-
щего верхний предел измерения осциллографа (5 кВ); сигнал, пропорциональный
разности (d - х), формируется источником Uxo = 3,8 мВ, имитирующим воздушный
зазор 6 = 3,8 мм, и сигналом X; далее сигнал (S - х) через перемножитель Хл2 по-
ступает на вход X делителя устройства деления Г2/Х*2; на вход делимого Y этого
устройства поступает сигнал 12 с перемножителя Г2, входной сигнал которого про-
порционален току в обмотке ЭМ и формируется на резисторе R7, совместно с резисто-
ром R6 имитирующий активное сопротивление обмотки.
Сигнал с выхода устройства деления Г2/Х*2 используется также для форми-
рования слагаемого Ру; в этом случае он подается на вход второго интегратора (ОУ 2)
через ключ S5, переключатель А и резистор R22; время включения ключа S5 соот-
ветствует времени соударения якоря со стопом в конце хода и задается установкой
уровня срабатывания Uon = 0,39 В (усиленный в 100 раз сигнал X).
500
Глава 14. Электромеханические устройства
Питание обмотки ЭМ осуществляется от источника, образованного компарато-
ром на ОУ б и диодом VD2, обеспечивающим положительную полярность питающего
напряжения; диод VD1 является шунтирующим для ЭДС самоиндукции, возникаю-
щей после выключения питания. ОУ б выполнен на базе ОУ Ideal, у которого макси-
мальные значения выходного напряжения (положительной и отрицательной
полярности) установлены равными 61 В, частота единичного усиления — 100 МГц и
быстродействие — 200 В/мкс. В исходном состоянии (начало моделирования) на ин-
вертирующий вход ОУ 6 подается напряжение Uxu 4 мВ отрицательной полярнос-
ти, в результате чего его выходное напряжение (после диода VD2) устанавливается
равным -60 В (заданное напряжение питания ЭМ). В процессе движения якоря на-
пряжение сигнала X, поступающее на неинвертирующий вход ОУ 6, увеличивается;
при достижении им значения, превышающем на несколько микровольт величину
Uxu (якорь через прокладки прижат к стопу), выходное напряжение ОУ становится
равным -61В, диод VD2 закрывается и питание обмотки ЭМ прекращается.
Режим работы “обмотки” ЭМ определяется переключателем Z. В положении,
показанном на рис. 14.31, а, имитируется режим с постоянной индуктивностью,
равной ее среднему значению за время движения якоря Lc (см. приведенные выше
результаты расчета индуктивности по формуле (14.75) для различных положений
якоря). В другом положении переключателя имитируется режим переменной ин-
дуктивности L = f(x). При этом может быть задано пять ее дискретных значений, на-
чиная от начального значения L-4 (при воздушном зазоре 4 мм) с последующим
подключением четырех индуктивностей, соответствующих зазорам 3, 2, 1, 0,3 мм
(указаны в обозначениях индуктивностей) и подключаемых ключами S1...S4, кото-
рые управляются усиленным в 100 раз (усилитель на ОУ 5) сигналом X. В исходном
состоянии (начало моделирования) указанные ключи переводятся в замкнутое со-
стояние, при этом все дополнительные “обмотки” оказываются закороченными и в
работе участвует только индуктивность L-4. По мере увеличения сигнала X и в соот-
ветствии с установленными уровнями Uoff (100, 200, 300 и 370 мВ) срабатывания
Рис. 14.31, а
501
Часть II. Моделирование схем и устройств
Рис. 14.31,6
Рис. 14.31, в
ключей их контакты, начиная с S1, размыкаются, в результате чего индуктивность -
обмотки увеличивается в соответствии с рассчитанными по формуле (14.75).
Рассмотрим результаты моделирования. В положении ключей А, X и Z, пока-
занных на рис. 14.31, а, проводится моделирование при постоянной индуктивности
обмотки ЭМ. Результаты моделирования представлены осциллограммами сигналов,
имитирующих тяговое усилие (осциллограммы В на рис. 14.31, б и на рис. 14.31, в —
в увеличенном масштабе) и перемещение якоря (осциллограммы А).
Из рис. 14.31, в можно видеть, что перемещению якоря х = 1 мм, определяемо-
му напряжением X = VA1 в точке установки визирной линейки 1 на осциллограмме А,
соответствует тяговое усилие, эквивалентное напряжению VB1 = 148 В. Для получе-;
ния тягового усилия в ньютонах необходимо это значение напряжения умножить на
коэффициент деления Кд делителя на резисторах R141, R142 (см. рис. 14.31, а) и мас-
штаб ПК = Pr/Ur = К,. = 0,001, после чего получаем 148-40 0,001 = 5,92 Н. Аналогичным
образом для перемещения х = 3,75 мм (значение напряжения VA2 в точке установки
визирной линейки 2) по значению VB2 определяем соответствующее ему тяговое уси-
лие, равное 11400 40-0,001 = 456 Н. Интересно отметить, что, если за ось X принять
502
Глава 14. Электромеханические устройства
Рис. 14.31. г
Рис. 14.31, д
визирную линейку 2 на рис. 14.31, в и левую от этой линейки часть осциллограммы В
повернуть на 90 по часовой стрелке, то получим график, аналогичный по виду тяговой
характеристике на рис. 14.30, б. Заметим также, что время Т2 «= 0,125 с является вре-
менем срабатывания ЭМ.
503
Часть II. Моделирование схем и устройств
е)
Рис. 14.31. Схема модели электромагнитного привода (а) и ее характеристики (б, в. г, д, е)
Если ключ А перевести в положение, противоположное показанному на
рис. 14.31, а у то тем самым дополнительно к рассмотренному режиму можно имити
ровать соударение якоря со стопом и наблюдать характерные для этого режима ко
лебания якоря (осциллограмма А рис. 14.31, г) и соответствующие ему изменение
тягового усилия (осциллограмма В).
При изменении положения переключателей X и Z моделируются переходные
процессы в обмотке при включении/выключении ЭМ как в режиме постоянной, та!
и переменной индуктивности (осциллограммы В на рис. 14.31, д, е соответственно)
Из рис. 14.31, д, в частности, видно, что при указанном на рис. 14.31, а значении ин
дуктивности Lc и заданном перемещении якоря (напряжение Uxu) ток в обмотке
равный UB1/R7 ~ 0,24 А, не достигает своего установившегося значения (0,25 А)
несмотря на то, что перемещение якоря составляет около 4,35 мм (см. данные окн!
VA1). В режиме переменной индуктивности ток в обмотке нарастает значительн(
быстрее, однако по мере движения якоря он заметно падает. Так, при перемещенш
якоря на расстояние около 1,24 мм (см. данные в окне VA1 на рис. 14.31, е) (поел»
срабатывания ключа S1) он уменьшается до значения VB1/R7 = 0,2 А, при переме
щении на 2,3 мм — до 0,177 А (см. данные VA2, VB2). При срабатывании ключей S5
и S4 из-за малой разницы в перемещениях и больших значений коммутируемых ин
дуктивностей граница перехода незаметна.
Контрольные вопросы и задания
1. Назовите области применения электромагнитных приводов.
2. Можно ли отнести к ЭМП электромагнитные реле?
3. Каким образохм выбираются основные размеры магнитной системы ЭМ?
4. Используя данные осциллографических измерений (рис. 14.31, в), постройте тя
говую характеристику Р = f(b).
504
Глава 14. Электромеханические устройства
5. Установите зависимость тягового усилия и времени срабатывания ЭМ от стати-
ческой нагрузки Ро, коэффициента трения Кт и коэффициента упругости Ку.
6. Проведите необходимые для подготовки модели расчеты ЭМ, характеристика
которого приведены на рис. 14.30, б. Другие технические характеристики уст-
ройства [69] (некоторые данные округлены): напряжение питания — 26 В; число
витков w = 3060 и активное сопротивление обмотки R = 48 Ом; рабочий ход
b =» 8 мм; геометрические размеры магнитной системы: длина — 0,1 м, внешний
диаметр — 0,06, диаметр якоря d = 0,03 м. Результаты моделирования по тяго-
вому усилию сравните с тяговой характеристикой на рис. 14.30, б.
7. При питании электромагнита на переменном токе формула (14.76) для тягового
усилия приобретает вид: Ра = K[Im2 sin20)t /(S - х)2], где 1га — амплитуда. Исполь-
зуя известное из тригонометрии выражение для sin2wt, преобразуйте приведен-
ную формулу и убедитесь в том, что ЭМ переменного тока обладают меньшим
тяговым усилием по сравнению с ЭМ постоянного тока.
8. На рис. 14.32 приведена схема модели, идентичная набору решающих блоков
схемы на рис. 14.31, а, но выполненная на библиотечных компонентах програм-
мы EWB 5.0. Она содержит интеграторы II, 12 и сумматоры SI, S2. Коэффициен-
ты передачи и их знаки выбираются в диалоговых окнах компонентов в
соответствии с рассчитанными для схемы на рис. 14.31, а. Для интеграторов их
значения и знак индицируются над значком компонента, для сумматоров инди-
цируется только установленное значение смещения нулевого уровня по входу А
(оно равно нулю). Установите значения и знак коэффициентов передачи КА для
сумматора S1 (к входу А этого сумматора подключается источник Upo), для сум-
матора S2: КА (к входу А подключается имитатор силы Р>) и КВ (к входу В под-
ключается имитатор силы Ру). Дополните схему необходимыми элементами из
схемы на рис. 14.31, а, а затем проведите моделирование и сопоставьте его ре-
зультаты с полученными с помощью схемы на рис. 14.31, а.
S1 И I2
Рис. 14.32. Схема набора решающих блоков модели ЭМ на библиотечных компонентах EWB 5.0
14.5.2. Электромагнитные реле
Электромагнитные реле являются наиболее распространенными устройства-
ми с электромагнитным приводом. Реле классифицируются по роду управляющего
тока: постоянного и переменного; по потребляемой мощности: высокочувствитель-
ные (до 10 мВт), чувствительные (до 0,1 Вт) и нормальные (более 0,1 Вт); по виду
жонтактов: с точечными, линейными, плоскостными и ртутными контактами; по
быстродействию: сверхбыстродействующие (время срабатывания и отпускания до
5 мс), быстродействующие (5...50 мс), нормальные (50... 150 мс), замедленные
(0,15... 1 с) и реле времени (более 1 с); по массогабаритным характеристикам: мало-
габаритные (обьемом — не более 40 см3 и массой — не более 250 г), миниатюрные
3,5...8 см3, 10...30 г) и сверхминиатюрные (не более 3,8 см* и 10 г).
505
Часть II. Моделирование схем и устройств
Функциональные возможности, допустимые режимы работы и области приме-
нения электромагнитных реле определяются [69]: рабочими напряжением и током;
током (или напряжением) срабатывания и отпускания; коэффициентом возврата, оп-
ределяемого отношением тока (или напряжения) отпускания к току срабатывания;
коммутируемой мощностью; временем срабатывания и отпускания; допустимой
(максимальной) частотой срабатывания; износоустойчивостью N =• (0,3...0,75)Nop, где
Nep — экспериментально определяемое число срабатываний до систематических отка-
зов (Nlip — 104...107 срабатываний для обычных реле, 10е... 108 — для поляризованных
(с постоянными магнитами, обеспечивающими три положения перекидного (средне-
го) контакта) и 10е... 10’ — для герметичных контактов (герконов)).
Исполнительным устройством реле является его контактная система, приводи-
мая в действие внешним якорем электромагнита.
Как уже отмечалось,
различают то-
чечные, линейные и плоскостные контакты. В точечных контактах, выполняемых в
виде двух сфер, сферы и плоскости, вершины конуса и плоскости и т.п., контакт обес-
печивается в одной точке; в линейных с контактами типа цилиндр-цилиндр
(рис. 14.33, а), цилиндр-плоскость и т.п. — не менее чем в двух; в плоскостных в ви-
де двух поверхностей — в трех и более. Для коммутации токов до 1 А применяют то-
чечные контакты; обладающие большей массой и теплоемкостью линейные
контакты используют в цепях с токами до сотен ампер, а плоскостные контакты с еще
большей массой и поверхностью охлаждения — для коммутации токов свыше 1 кА
при повышенной температуре.
В качестве материала контактов используются серебро, золото, платина, ни-
кель, медь, вольфрам, палладий и различные сплавы на их основе, включая иридий,
Выбор того или иного материала диктуется требованиями по электро- и теплопровод-
ности, температуре плавления, току и напряжению дугообразования, стойкости про-
тив эрозии и коррозии, стойкости к механическому износу при сравнительно малой
твердости (для снижения требуемого контактного давления) и др. Под эрозией контак-
тов понимают их разрушение вследствие переноса, расплавления, испарения и распы-
ления частиц металла с поверхности контактов при их замыкании/размыкании и
возникающего при этом газового разряда из-за пробоя межконтактного промежутка.
Тлеющий разряд возникает при отключении тока более 0,1 А и напряжении на кон
тактах 250...300 В, минимальный ток дуги для металлов — порядка 0,5 А. Наряду
эрозией при работе реле в агрессивных средах контакты подвергаются коррозии. Так
при работе реле в среде, содержащей кислород и серу, на поверхности контактов обра
зуются оксидные и сульфидные пленки, значительно увеличивающие переходное с<
противление. Для повышения коррозийной стойкости маломощных контакте
используют покрытия из благородных металлов (серебра, реже — из золота, плати:
и их сплавов). Для более мощных контактов (при токах 1...10 А) применяют конт;
ты из твердых и тугоплавких металлов (вольфрама, молибдена, их сплавов с иридиег
платиной и др.) и композиций, получаемых методами порошковой металлургии (пре
сование механической смеси нескольких металлов при высокой температуре).
Работа контактов сопровождается рядом весьма сложных физических проце
сов [37, 70] (см. также Приложение 2). Самый тяжелый режим работы имеет Meci
при размыкании контактов: по мере уменьшения контактного усилия (ослаблен!
сжатия контактов) возрастает переходное сопротивление, что вызывает (вследств!
увеличения выделяющегося тепла) нагрев контактов; при разрыве токопроводящ
го мостика из жидкого металла между контактами появляется искра, а при больше
токах и напряжениях — дуга, которая вследствие высокой плотности тока и темп
ратуры приводит к разрушению контактов.
506
Глава 14. Электромеханические устройства
ни- I
ий. I
ОД- I
:ро-|
пой
•ак-
пы-
и и
•ка.
юн-
5УС
’ак.
5ра-
! со-
:тоб
ты
гак-
1ем
рее-
те- I Особые требования к контактным системам реле возникают при их использо-
im; вании в высокочувствительной аппаратуре и, в частности, в аппаратуре для измере-
)П- ния малых постоянных и медленно меняющихся токов в диапазоне 10,3...10 17 А,
тя; I электрических зарядов 1012...1016 Кл и сопротивлений 1012...1010 Ом [78, 81]. В такой
ой I аппаратуре к реле предъявляются повышенные требования по дребезгу (вибрации)
’де контактов и генерируемого паразитного заряда.
<а' I Причина дребезга контактов заключается в том, что при соударении контак- i
ых I тов кинетическая энергия движущегося контакта частично превращается в энергию
не- I упругой деформации и частично — в энергию необратимой деформации, например,
работу пластической деформации или трения. Как правило, пластические деформа-
дИ. К ции проявляются только в начале эксплуатации реле, а в дальнейшем превалируют ’
то- I упругие деформации, которые при наличии нсскомпесированной кинетической
х в I энергии приводят к вибрации (дребезгу) контактов. Другой недостаток реле, связан-
;ес. I ный с генерацией паразитного заряда в момент его срабатывания, вызван, как пока-
{др I зали исследования [78], перемещением контактов в электростатическом поле их
ви- В изоляторов, и в значительной степени устраняется установкой экрана между изоля-
то- I ТОР°М и подвижным контактом.
:ые I Для устранения вибрации в [78] была предложена конструкция контактной
ще I системы (рис. 14.33, б, в, г), в которой неподвижный контакт (на рис. 14.33, б — верх-
кА £ ний контакт) выполнен в виде гибкой (из тонкой ленты) наклонной плоскости. При
срабатывании реле подвижный контакт скользит по наклонной плоскости, растрачи-
вая свою кинетическую энергию на трение. Экспериментальные исследования такой
конструкции контактов показали [78], что длительность переходных процессов (виб-
раций) зависит от межконтактного зазора и угла встречи (на рис. 14.33, в этот угол
равен 90‘ — а) контактных площадок. В частности, было установлено, что при угле
встречи 90° (горизонтальная плоскость) вибрации отсутствуют только при зазоре
1.01 мм, при угле 55' — при зазоре до 0,2 мм (дальнейшее увеличение зазора от 0,2 до
9.8 мм приводило к вибрациям длительностью от 0,5 до 6 мс), при угле 45° — при за-
зорах 0,01...0,8 мм, при угле 50* — до зазора 0,7 мм, при зазоре 0,8 мм происходило
заклинивание контактов. Заметим, что в поляризованных реле и близких им по кон-
струкции вибропреобразователях [81] компенсация дребезга контактов достигается
за счет дополнительной дугообразной пружины (с контактной площадкой), один ко-
зец которой жестко соединен с основной пружиной, а второй может свободно пере-
мещаться по торцу регулировочного винта, создавая необходимую для успокоения
зилу трения [63].
Практическая конструкция бездребезгового реле, выпускаемого в двух моди-
фикациях (РВ-3 и РВ-5) Минским приборостроительным заводом, содержит
гм. рис. 14.33, г) электромагнит 1 и контактную группу 6, отделенную от электро-
магнита зазором 3, размер которого определяется высотой установочного кольца 4,
«жатым между изолятором контактной группы 6 и электромагнитом; для исключе-
ния модуляции электростатического поля изолятора при перемещении нижнего (по-
движного) контакта используется дисковый экран 11; выводы 9 контактов,
«крепленные в изоляторе из янтаря, являются несущими как для неподвижного
контакта, так и для подвижного, жестко соединенного с якорем 10 из ферромагнит-
ного сплава 79НМ. Якорь 10 с приваренной к нему пружиной 12 крепится к диску 8,
заполненному из ферромагнитного и диамагнитного материалов в таком сочетании,
тто магнитное поле электромагнита через воздушный зазор и диск концентрируется
з точке, над которой на якоре расположен подвижный контакт, в результате чего
дри срабатывании электромагнита исключаются наводки на коммутируемую цепь и
обеспечивается равномерное движение якоря. Контакты реле РВ-3 выполнены из зо-
цес
ест:
!НИ<
гвие
(ще-
ли
«пе-
507
Часть II. Моделирование схем и устройств
литого сплава Эл-Н5 толщиной 0,15 мм в виде треугольной (для неподвижного
контакта) и прямоугольной рамок (для подвижного). Изолятор из янтаря обрабаты
вается по приведенной в [78] специальной технологии. Сила давления подвижного
контакта регулируется подгибанием пружины 12. После проведения всех регулиро
вок реле помещается в герметичный корпус фланцевого типа.
Реле имеют следующие характеристики: сопротивление изоляции контакте!
относительно корпуса и между собой — не менее 10й Ом; паразитный заряд, генериру
емый при переключении контактов, — не более 10’13 Кл (для серийных малогабари1
ных реле РЭС-10 он составляет около 10'12 Кл); переходное сопротивление контактов -
0,05...0,1 Ом; ток срабатывания — 20...30 мА при напряжении питания 12 В.
Рис. 14.33. Конструкция контактов обычного (а) и бездребезгового (б, в, г) реле
Рассмотрим механические процессы, происходящие при замыкании коитак
тов наиболее распространенного типа (рис. 14.33, а). При воздействии на нижни!
контакт массой шн силы Р, развиваемой якорем ЭМ, дифференциальное уравнение
движения на промежутке зазора Ь между контактами имеет вид: m„(dv/dt) + ЬК„ = Р
где К„ — коэффициент упругости контактной пружины; (dv/dt) — ускорение. По
лагая, что масса якоря шя существенно больше массы контактной пружины и
следовательно, его скорость v, останется неизменной, можно принять, что межко!
тактный промежуток будет пройден за At = b/v,, а контактная пружина в перво
приближении, как следует из приведенного уравнения, получит приращение скор*
сти Av„ - At(P - bK„)/m„ = b(P - bK„)/mBv.> т. е. после соударения с якорем скорое:
нижней пружины будет выше скорости якоря на вычисленное приращение. Качес
веяно аналогичный результат получим, исходя из закона сохранения импульса
предположении, что вся масса контактных пружин сосредоточена в точке прилож
ния силы, а реакция их узлов крепления пренебрежимо мала. Действительно, пр
таких допущениях после соударения якоря с нижней пружиной их скорости опред
ляются выражениями [72]:
v,0 = [m.vM + шиуи - (v, - vB)mMK,]/(m, + mH);
= [m„vB + m,v, + (v, - vH)mMK,]/(m. + mB),
где v,0, vMO — скорость якоря и нижней пружины после соударения; v„, vH — их ск
рости до соударения; к,< 1 — коэффициент восстановления (например, для сереб{
508
Глава 14. Электромеханические устройства
он составляет 0,2...0,3 [70]). Поскольку шя » mu и до соударения v„ и 0, то v„o = уя;
v„0 = v„(l 4- к.), т. е. скорость нижней контактной пружины после соударения дейст-
вительно будет выше скорости якоря на &vMO = v„k,.
При движении нижней пружины в межконтактном пространстве приоб-
ретенная кинетическая энергия WHO = m„vllo2/2 будет тратиться на работу Ь2К„/2
(двойка в знаменателе получается в результате интегрирования силы K„dx на
промежутке от нуля до Ь) по преодолению силы упругости ЪКИ и в момент соударе-
ния (после прохождения межконтактного расстояния Ь) станет равной
W„ = шиуяе2/2 = ni„v„2/2 - Ь:К„/2, т. е. ее скорость в момент соударения с верхним
контактом будет равна vHe = (m„vHO2 - b2KB/mB)1/2. Полагая, что средняя скорость
нижнего контакта на пути Ъ составляет (vM0 4- v„c)/2, находим время первого элект-
рического соединения контактов tj = 2b/(vK<1 4- vH<). Время замкнутого состояния
контактов определяется так называемым временем соударения, пропорциональ-
ным, согласно теории Герца, скорости соударения в степени 0,2 [73]. После перво-
го соударения скорости нижнего и верхнего контактов будут определяться
выражениями [72]:
vBr = [m.v. 4- muv« + (v, - vM)mBK J/(m. 4- mH);
v,r = [m,v, 4- m„v„c - (v, - - v,e)mBK,r]/(m. 4- m.).
Поскольку до соударения v, = 0, то
v„r = (mMvM - v-cm,Kw)/(ni, 4- mJ; vw = (mMvHC 4- v„emdKir)/(m1 4- m„),
где к>г<1 — также коэффициент восстановления, но уже для пары контакт-контакт.
Из полученных формул следует, что после соударения скорость верхнего контакта вы-
ше скорости нижнего, в результате чего контакты разьединяются (первый “дребезг”).
Дальнейшее движение контактов вверх будет происходить до тех пор, пока их
кинетические энергии
W„ = mHv1,r2/2 и W,r - m.vw.2/2 (14.81)
не будут израсходованы на преодоление сил упругости контактных пружин, т. е. при
WHr = Ьи2К,,/2 и W„ “ b,2 К./2. ‘ (14.82)
Определяя из (14.81), (14.82) значения Ь„ и Ь, и полагая, что средняя скорость
контактов на этих промежутках равна соответственно v„r/2 и vBr/2, находим время
ах остановки:
t„ = 2(ти/К„),/а и t.- 2(т„/К,),/2. (14.83)
Далее контакты начинают движение в обратную сторону за счет потенциаль-
ной энергии упругих сил. Из (14.83) видно, что при идентичности параметров кон-
тактов и их пружин (ш, - т„ Ка = К„) время t, - t„ и, следовательно, при нулевой
ткорости произойдет соединение контактов (второе включение) и обратное движение
:ни будут совершать в таком (соединенном) состоянии. При этом вследствие различ-
ных радиусов перемещения будет иметь место взаимное трение контактных площа-
док, что, с одной стороны, способствует потере энергии и, следовательно,
спокоснию контактов, однако, с другой стороны, это может приводить к наруше-
нию электрического контакта, воспринимаемого как дребезг.
Из приведенного анализа видно, что рабочий ход якоря целесообразно выби-
рать равным b 4- Ь„ 4- Ьм, поскольку в этом случае скорость контактов близка к нулю.
?днако на практике это условие выполнить не удается из-за высоких требований к
точности изготовления и необходимости индивидуальной настройки реле как в про-
цессе производства, так и в процессе эксплуатации.
509
Часть II. Моделирование схем и устройств
Перейдем к анализу контактной группы бездребезгового реле на рис. 14.33, г.
В этом реле замыкание контактов 6 происходит при обесточенной обмотке под дейст-
вием пружины 12, причем, в отличие от ранее рассмотренного случая (рис. 14.33, а),
процесс замыкания усложняется специфичной формой контактов, что далеко не со-
ответствует классическому варианту лобового соударения тел, который сам по себе
является сложным явлением и для его описания привлекается достаточно сложный
математический аппарат [73].
Проведем приближенный (в основном качественного характера) анализ кон-
тактной системы, полагая, что после соударения контактов их движение описывает-
ся линейным дифференциальным уравнением второго порядка:
mc(d2x/dt’) + KT(dx/dt) 4- К,х = F, (14.84)
где т, — суммарная масса подвижного и неподвижного контакта, К, — коэффициент
вязкого (скоростного) трения при скольжении верхнего контакта по поверхности
нижнего; Ку — коэффициент упругости (жесткости).
Для определения коэффициентов уравнения (14.84) обратимся к рис. 14.33, в,
на котором обозначено: Р — сила давления, развиваемая якорем 10 электромагнита
в момент соударения с неподвижным контактом; а — угол наклона неподвижного
контакта; Fe - Psina, F„ = Pcosa — слагаемые силы Р.
В момент соударения кинетическая энергия подвижного контакта W = mvz/2
или W = ЬгКя/2. Из равенства mv2/2 = bzK,/2 находим скорость подвижного контак-
та в момент соударения v = b(KM/m),z2, которая, по аналогии с силой Р, имеет состав-
ляющие vr = vsina и v„ - vcosa.
После соударения под действием нормальной составляющей F„ контактные
площадки прогибаются (деформируются) в точке контакта на Дп = F„/(K„ + К„) в на-
правлении силы F„ и на Дх = F„/cosa(Kn 4- Ки) в направлении силы Р, т. е. в уравнении
(14.84) коэффициент Ку = (Кп 4- K„)cosa, где Кп, К„ — жесткость подвижного и непо-
движного контактов.
Кинетическая энергия подвижного контакта частично тратится на работу
упругой деформации и на работу по преодолению сил трения при скольжении по
прогибающейся наклонной плоскости; эта работа равна AcFc - AcPsina = ДхР
(Дс = Дх-sina — деформация в направлении силы Fc) или, с другой стороны, как
mve2/2 = v2sin2a/2, т. е. ДхР = v2sin2a/2, откуда, вводя замену Дх - Р/(КП + К„), по-
лучаем составляющую трения Р = v sina[m(K. 4- К„)/2],/2, т. е. в уравнении (14.84)
коэффициент Кт — sina[m(KB 4- Ки)/2]1/2.
Далее поступаем уже по привычной для нас методике, т. е. представляем урав-1
нение (14.84) в двух формах:
X" - FC - AX' - ВХ, (14.85)
р2Х 4- рАХ 4- ВХ = FC, (14.86)
где А = Кт/тс; В = Ку/те; С - 1/тс; примем F = Ь(Ка 4- К„).
Схема модели на компонентах программы EWB 5.0, реализующая уравнение
(14.85), содержит (рис. 14.34, а) два интегратора II, 12, сумматор S и источник испы-
тательного сигнала Ui.
Для расчета параметров модели сначала определим значения слагаемых коэф-|
фициентов А, В, С. Начнем с контактного усилия (усилия сжатия контактов). По дан-
ным [70], это усилие составляет: для высокочувствительных реле — 0,001...0,02 Н:
для реле средней чувствительности (реле защиты, поляризованные реле и т.п.) — |
510
Глава 14. Электромеханические устройства
0,05...0,1 И; для телефонных реле — 0,2...0,3 Н, для мощных реле автоматики —
0,5...1 Н; для реле с вольфрамовыми и металлокерамическими контактами —
1...3,5 Н. Выберем для рассматриваемого реле (рис. 14.33, г) контактное усилие
0,02 Н, тогда при зазоре между контактами 0,2 мм жесткость пружины 12 должна быть
не менее Кя = 0,02/0,0002 = 100 Н/м. Примем: жесткость контактов 6 Кп = К„ = 0,5 Н/м;
приблизительные размеры якоря 10: диаметр — 15 мм, толщина — 2 мм, плотность ма-
териала (сталь) — 7,8 кг/дм3, при этом масса т якоря с учетом пружины 12 и неподвиж-
ного контакта составит около 0,005 кг; примем массу неподвижного контакта с учетом
его выводов также равным 0,005 кг, т. е. те = 0,01 кг.
Перейдем к выбору параметров модели, для чего составим ее машинное урав-
нение. Как следует из схемы на рис. 14.34, а, выходной сигнал сумматора
X" = UiKC - КВХ' - КАХ, (14.87)
где Кс, Кв, КА — коэффициенты передачи сумматоров по входам С, В и А соответст-
венно; X' = Х"К)/Р — выходное напряжение интегратора Ис коэффициентом пере-
дачи К»; X = Х'К2/Р — выходное напряжение второго интегратора с коэффициентом
передачи К2 на ОУ 3; Р = d/dT = p/mt — машинный оператор дифференцирования;
mt “ T/t — масштаб времени; Т = tmt — машинное время; X — искомая величина
(суммарное перемещение контактов после соударения).
Из уравнения (14.87) с учетом его слагаемых получаем машинное уравнение:
р2Х + рт.Кв^Х + m^KjKjX = m/KcKJ^Ui. (14.88)
Из сравнения коэффициентов при р2 уравнений (14.86) и (14.88) следует, что мас-
штаб по перемещению mx = 1 [м/В] и, следовательно, при зазоре b = 0,2 мм Ui 0,2 мВ.
При этом измеренное на выходе второго интегратора напряжение в вольтах будет рав-
но искомому перемещению в метрах (при условии, что для всех величин применяется
одна и та же система единиц измерения, например, СИ).
Для второго слагаемого: тДСцК, = А - Кт/те; задаваясь Кв » 1, получаем:
Ki = KT/mtme. Для третьего слагаемого: т/КлКзК, - В = Ку/т,; задаваясь КА •= 1 и под-
ставляя Ки получаем: К2 = Ky/KTmt. Здесь уместно напомнить, что при выборе коэф-
фициентов передачи комбинации интегратор-сумматор или интегратор-инвертор
необходимо всегда выбирать для сумматора или инвертора коэффициент передачи
равным единице, в противном случае будет нарушена правильность функционирова-
ния модели в соответствии с ее исходным уравнением, в данном случае — с уравне-
нием (14.85). Следует также обратить внимание на то, что в схеме на рис. 14.34, а
коэффициенты передачи интеграторов выбраны положительными, поэтому коэффи-
циенты КА и Кв должны иметь отрицательный знак.
Для коэффициентов правой части уравнений (14.86) и (14.88) при условии,
что масштаб по входной и выходной величине равен единице, получаем: int2KcK2Ki =
* С = 1/шс, откуда после подстановки значений К2 и К, определяем Кс = 1.
Используя полученные формулы, рассчитаем при а = 10“ и mt = 1:
Ку - (К„ + К,)соза = (0,5 + 0,5) 0,985 - 0,985 Н/м;
Кт = sina[m(K„ + Кя)/2],/г - 0,174-(0,005-1/2)‘Л - 0,0087 кг/с;
К, = KT/mtme = 0,0087/1 0,01 = 0,87 с1;
К2 = Ky/KTmt - 0,985/0,0087-1 = 113,2 с1.
Из осциллограммы переходного процесса (рис. 14.34, б) при рассчитанных
значениях параметров модели видно, что он является колебательным с числом коле-
баний около десяти при общей длительности Т2 = 6,52 с и максимальном прогибе
511
Часть II. Моделирование схем и устройств
контактной площадки (VAI - VA2)/2 = 0,156/2 0,078 мВ н 0,078 мм (предполага-
ется, что контактные площадки обоих контактов имеют одинаковый прогиб). С уве-
личением угла а работа контактной группы заметно улучшается: при а - 45’
(рис. 14.34, в) количество колебаний снижается до двух с половиной, прогиб — до
0,046 мм при общем времени переходного процесса 2,5 с; при а = 80 (рис. 14.34, г)
колебания отсутствуют, прогиб — 0,009 мм, время переходного процесса — 1с (за-
метим, что при таком угле возможно заклинивание контактов).
Рис. 14.34. Схема модели контактной группы бездребезгового реле (а) и результаты ее испыта-
ний (б. в. г)
512
Глава 14. Электромеханические устройства
Контрольные вопросы и задания
1. Какими физическими явлениями сопровождается коммутация сильноточных
цепей?
2. Назовите основные причины возникновения вибрации контактов реле.
3. К каким последствиям приводит вибрация контактов реле?
4. Рассчитайте параметры модели контактной группы реле на рис. 14.33, г при за-
зоре b = 0,8 мм и угле а = 70’; при наличии вибрации контактов примите меры по
ее устранению.
5. Для модели на рис. 14.34, а установите зависимость переходных процессов от уг-
ла а (80°, 45° и 10°) и жесткости контактов (Ки в Кп - 0,25, 1 и 10 Н/м).
14.6. Электромеханические
измерительные преобразователи
К электромеханическим измерительным преобразователям относятся преобра-
зователи как с вращательным движением (тахогенераторы, сельсины, поворотные
трансформаторы, модуляторы и т.п.), так и поступательным (чувствительные эле-
менты датчиков давления, скорости, ускорения, гироскопические устройства и др.).
Тахогенератор является электромеханическим преобразователем скорости
вращения в электрический сигнал постоянного или переменного тока. По существу
это обычные электрические генераторы малой мощности. Коэффициент передачи
тахогенератора постоянного тока определяется выражением [65, 74]:
К(р) - U(p)/Q(p) - р-К, (14.89)
где U(p), Q(p) — выходное напряжение тахогенератора и угловая скорость вращения
его вала, К - Р Ы-Ф/2ла, Р — число полюсов, N — число витков якоря, а — число пар
параллельных ветвей обмотки якоря (обычно а = 1), Ф — магнитный поток системы
возбуждения.
Как видно из выражения (14.89), тахометр является идеальным дифференци-
рующим звеном.
Сельсин как элемент синхронной передачи представляет собой электрическую
машину переменного тока с однофазной обмоткой возбуждения и трехфазной обмот-
кой синхронизации.
В зависимости от выполняемых функций в схемах синхронной передачи угла
и вращения сельсины разделяются на сельсины-датчики, сельсины-приемники,
дифференциальные сельсины-датчики и приемники, сельсины-трансформаторы.
Сельсин-датчик используется в качестве элемента, воспроизводящего угловые пере-
мещения командного вала и передающего их сельсину-приемнику. Сельсин-прием-
ник воспроизводит закон движения, заданный сельсином-датчиком, в виде углового
перемещения ротора, пропорционального угловому перемещению ротора сельсина-
датчика. С помощью дифференциального сельсина-датчика (или приемника) произ-
водится алгебраическое суммирование величин угловых перемещений.
Сельсин-трансформатор воспроизводит закон движения, заданный сельсином-дат-
чиком, в виде электрического напряжения, пропорционального угловым перемеще-
ниям ротора сельсина-датчика.
В системах автоматического регулирования сельсины обычно используются в
двух основных режимах работы индукционных синхроннных передач: индикатор-
ном и трансформаторном (измерительном).
17 Зак. 206
513
Часть II. Моделирование схем и устройств
При индикаторной синхронной передаче обмотку синхронизации сельсина-
датчика соединяют с обмоткой синхронизации сельсина-приемника. На обмотки воз-
буждения сельсинов подается напряжение питания. Если угловые положения
роторов датчика и приемника неодинаковы, то под действием возникающих синхро-
низирующих моментов они приходят в согласованное положение. При принудитель-
ном вращении ротора сельсина-датчика вал ротора сельсина-приемника вращается с
той же скоростью, что и вал ротора датчика, т. е. следит за угловым положением ро-
тора датчика.
При трансформаторной (измерительной) синхронной передаче обмотку син-
хронизации сельсина-датчика соединяют с обмоткой синхронизации сельсина-
трансформатора. Обмотку возбуждения сельсина-трансформатора включают на
нагрузку. Напряжение питания подается на обмотку возбуждения сельсина-датчи-
ка. При повороте ротора датчика на некоторый угол в однофазной обмотке сельсина-
трансформатора наводится ЭДС, амплитуда которой пропорциональна углу
рассогласования между угловыми положениями роторов сельсина-датчика и сельси-
на-трансформатора, а фаза зависит от направления или знака рассогласования.
Основными характеристиками сельсинов являются: статический и динамиче-
ский синхронизирующие моменты, крутизна кривой статического синхронизирую-
щего момента, точность синхронной передачи, влияние скорости и ускорения на
погрешности схемы, коэффициент добротности, устойчивость положения осей сис-
темы, влияние колебаний напряжения, частоты питающей сети и длины соедини-
тельной линии на погрешность системы, влияние количества приемников,
работающих одновременно от одного датчика.
Основной характеристикой дистанционной передачи является зависимость
статического синхронизирующего момента от угла рассогласования между ротора-
ми датчика и приемника в положении покоя (все характеристики передачи обычно
определяют по отношению к приемнику, поскольку роторы сельсинов-датчиков пе-
ремещаются принудительно).
Крутизна кривой статического синхронизирующего момента определяет
удельный синхронизирующий момент, развиваемый на валу приемника при его рас-
согласовании с датчиком на один градус.
Динамический синхронизирующий момент — это момент, развиваемый сис-
темой на валу приемника в режиме вращения.
Статическая точность передачи характеризуется величиной статической ошиб-
ки, определяемой углом рассогласования между осями датчика и приемника в состо-
янии равновесия (при отсутствии вращения). Величина статической ошибки зависит
от нагрузки или внешнего момента на валу приемника, а также от собственной по-
грешности сельсинов. В зависимости от величины собственной погрешности сельси-
ны различают по классам точности (от 0,25' до 1’ для датчиков и от 0,75е до 2,5“ для
приемников). Величина, обратная статической ошибке, характеризует добротность
синхронной передачи.
Динамическая точность характеризуется величиной динамической ошибки, оп-
ределяемой углом рассогласования между осями сельсина-датчика и сельсина-прием-
ника в режиме вращения. Динамические ошибки также измеряются в градусах.
Устойчивость положения осей системы в положении равновесия характеризу-
ет способность роторов сельсинов-приемников сохранять неизменным заданное по-
ложение при внешних воздействиях.
514
Глава 14. Электромеханические устройства
Динамика сельсинной передачи в большинстве практических случаев может
быть описана системой первого порядка, т. е. в качестве ее модели может быть ис-
пользована модель апериодического звена.
Вращающийся трансформатор (ВТ) представляет собой устройство, в конст-
руктивном отношении имеющее много общего с асинхронной машиной с неявно вы-
раженными полюсами. Принцип действия ВТ основан на использовании его свойства
изменять взаимоиндуктивность между обмотками статора и ротора (при повороте по-
следнего) по закону, близкому к синусоидальному. На статоре и роторе ВТ обычно
размещаются по две распределенные обмотки, магнитные оси которых взаимно пер-
пендикулярны. Ротор поворачивается относительно статора на некоторый произ-
вольный угол, максимальная величина которого зависит от конструкции ВТ.
Одна из обмоток ВТ (обычно статорная) питается однофазным переменным то-
ком и называется первичной или обмоткой возбуждения. Схема включения осталь-
ных обмоток определяется заданной зависимостью, воспроизводимой с помощью
ВТ. Выходная величина, пропорциональная воспроизводимой функции, снимается
в виде электрического напряжения переменного тока со вторичной обмотки. Вто-
ричная обмотка обычно располагается на роторе.
ВТ в различных модификациях применяются в качестве функциональных
преобразователей, а также как чувствительные элементы, фиксирующие отклоне-
ние системы от некоторого определенного положения.
По характеру токосъема ВТ делятся на контактные и бесконтактные. Контакт-
ные ВТ конструируются таким образом, что токосъем с обмотки ротора может быть
осуществлен либо с помощью колец и щеток, либо с помощью спиральных пружин. В
последнем случае угол поворота ротора ограничивается максимальным углом закру-
чивания спиральных пружин. Токосъем в конструкциях бесконтактных ВТ осуще-
ствляется за счет использования индуктивной связи статорных и роторных цепей.
Параметры ВТ определяются сопротивлением холостого хода, коэффициен-
том трансформации и материалом магнитопровода.
Сопротивление холостого хода измеряется на рабочей частоте при разомкну- ।
той вторичной цепи. Численные значения сопротивления холостого хода ВТ колеб-
лются в пределах 250...4500 ом.
Коэффициент трансформации определяется отношением максимального вто-
ричного напряжения к напряжению возбуждения. Численные значения коэффициен-
тов трансформации отдельных образцов ВТ могут изменяться в пределах от 0,1 до 1,0.
В качестве материала магнитопроводов ВТ применяется железо или пермал-
лой. Магнитопровод из железа обычно используется в тех случаях, когда ВТ работа-
ет непосредственно от сети или иного мощного источника питания; в многокаскадной
схеме или при работе от маломощного источника питания, как правило, используют
вращающиеся трансформаторы с магнитопроводом из пермаллоя.
Точность ВТ определяется максимальной погрешностью воспроизведения за-
данной функции. В зависимости от величины этой погрешности вращающиеся
трансформаторы делятся на группы, соответствующие трем классам точности: пер-
вый класс — с погрешностью до 0,1%; второй класс — от 0,1 до 0,25%; третий
класс — более 0,25%.
При моделировании систем управления ВТ представляется дифференцирую-
щим или апериодическим звеном.
Электромеханический преобразователь представляет собой (см. рис. 14.35, а)
диафрагму 1 с жестко закрепленной на ней катушкой и магнитной системой, состо-
17*
515
Часть II. Моделирование схем и устройств
ящей из двух магнитопроводящих колец 2, керна 3 и кольцеобразного постоянного
магнита 4, создающего в воздушном зазоре между керном 3 и отверстием в верхней
пластине 2 магнитный поток с индукцией В.
Заметим, что такая конструкция преобразователя используется в громкогово-
рителях и микрофонах и может быть использована также в качестве чувствительно-
го элемента генераторного преобразователя перемещения, например, в датчиках
давления, в которых диафрагма 1 выполняется в виде гофрированной или плоской
мембраны, герметично соединяемой с какой-либо емкостью или трубопроводом для
непрерывного контроля давления газа или жидкости.
На условной электрической схеме преобразователя (рис. 14.35, б) его подвиж-
ная часть представлена катушкой индуктивностью L с активным сопротивлением
Rk, нагруженной на сопротивление нагрузки Rn; катушка перемещается в магнит-
ном поле между полюсами N и S под действием усилия Р, развиваемого мембраной.
Рассматриваемый преобразователь обратим: если катушку подключить к источнику
напряжения Ui с внутренним сопротивлением Ri, то катушка при своем движении
будет развивать некоторое усилие Р (см. рис. 14.35, в); такой преобразователь-дви-
гатель используется, например, в современных винчестерах для перемещения (пози-
ционирования) головок записи/воспроизведения и известен под названием Voice
Coil (звуковая катушка).
В качестве практического примера используем следующие данные: диаметр ка-
тушки D = 1 см, ширина намотки h - 1 см, диаметр намоточного провода — 0, 05 мм
(погонное сопротивление — 9,3 Ом/м), количество витков w — 400 (два слоя); при этом
длина намотки составляет 1 = 2,6 м, индуктивность L = 0,08(wD)2/(3D + 9h) =
= 1000 мкГн = 103 Гн (см. Приложение 2), сопротивление Rk « 25 Ом. При воздушном
зазоре 1,5 мм между керном 3 и кольцом 2, в котором перемещается катушка, и ис-
пользовании в качестве постоянного магнита сплава ЮНДК 56А нетрудно обеспечить
в зазоре индукцию В = 0,5 Тл [76]. В качестве упругого элемента (чувствительного эле-
мента датчика давления) используется заделанная по краям круглая пластина (мемб-
рана) радиусом R = 2,5 см и толщиной b в 0,01 мм; материал пластины — сталь с
модулем упругости Е — 210” Па и коэффициентом Пуассона ц = 0,28 [72].
Для определения закона движения какой-либо системы в общем случае исполь-
зуются методы, основанные на применении вариационного принципа Гамильтона или
уравнений Лагранжа второго рода [73]. На практике для этого чаще всего используют
квазистатические способы, основанные на применении принципа Д'Аламбера или его
упрощенного варианта — принципа динамического равновесия, при котором сумма
всех действующих и противодействующих сил равна нулю —для поступательного
движения или баланс моментов — для вращательного. Для подвижной части преобра-
зователя на рис. 14.35, б справедливо следующее уравнение движения:
mpV(p) = Р(р) - Рс(р) - Ра(р), (14.90)
где m — масса подвижных частей (мембраны и катушки), кг; примем m = 0,01 кг;
р - d/dt — оператор дифференцирования (оператор Лапласа); V(p) — скорость пере-
мещения подвижной части (pV(p) = dv/dt — ускорение, умноженное на массу, рав-
но, согласно закона Ньютона, силе), м/с; Р(р) — движущая сила, Н; Ре(р), Р»(р) —
механическая и электрическая сила сопротивления соответственно.
Движущая сила в общем случае может быть выражена как
Р(р) = К.ДР(р), (14.91)
где К! — коэффициент пропорциональности, определяемый конструкцией чувстви-
тельного элемента (в данном Случае — мембраны), м2; для рассматриваемого случая
Kj = 0,25nR2[l - (D/2R)2]2« 4,52104 м2 [76]; ДР(р) — измеряемое давление, Н/м2.
516
Глава 14. Электромеханические устройства
Рис. 14.35. Конструкция (а), условные электромеханические схемы (б, в) электродинамического
преобразователя и правила определения взаимодействия его компонентов (г, д)
517
Часть II. Моделирование схем и устройств
Заметим, что чувствительный элемент в виде мембраны обладает существен-
ной нелинейностью и его динамические характеристики могут рассматриваться в
линейном режиме только в области ограниченных отклонений ДР.
Сила механического сопротивления может быть определена как
Рс(р) = K2V(p)/p + V(p)K3, (14.92)
где К2 — коэффициент упругости (величина, обратная податливости) упругого элемен-
та (мембраны), Н/м; для выбранной конструкции мембраны К, = nb*E/0,75R2(l - ц2)«
= 1,45 Н/м [76].
К3 — коэффициент трения, кг/с; зависит от конструкции передаточного меха-
низма (от мембраны к катушке), например, использование направляющей для пре-
дотвращения перекосов, возникающих при движении мембраны и недопустимых
при перемещении катушки в воздушном зазоре; примем Ка = 0,01 кг/с.
Заметим, что в формуле (14.92) множитель V(p)/p является перемещением,
поскольку деление на оператор “р” равносильно интегралу от скорости.
Слагаемое Р,(р) определяется следующим образом. Известно [72, 76], что при
движении проводника в магнитном поле (здесь и далее — перпендикулярно к сило-
вым линиям) длиной 1 = 7tDw (w — число витков катушки) со скоростью v в нем ин-
дуктируется ЭДС е = vM, где М - TtDwB, В с/ м — так называемый коэффициент
электромеханической связи (при указанных выше параметрах катушки и магнит-
ной системы М = 1,3 В-с/м). При направлении движения проводника, показанном на
рис. 14.35, г, ток в цепи катушки на рис. 14.35, в
I(p) - E(p)/(Rk + Rn + pL) = MV(p)/Z(p) (14.93)
будет иметь направление, определяемое по известному правилу правой руки
(см. рис. 14.35, г). В результате взаимодействия протекающего по катушке тока
1(р) и магнитного поля на катушку и, следовательно, на мембрану будет действо-
вать сила
Р,(р) = М-Цр) = V(p)M2/Z(p), (14.94)
направление которой, определяемое по правилу левой руки (см. рис. 14.35, д), будет
противоположно направлению основного движения.
После подстановки в уравнение движения (14.90) выражений (14.91), (14.92)
и (14.94) определяем скорость движения подвижной части
V(p) = К,ДР(р)/(шр + К2/р + К3 + M2/Z(p)). (14.95)
Поскольку, как следует из схемы на рис. 14.35, б, выходное напряжение пре-
образователя Uo(p) = l(p)Rn, то с учетом (14.93), (14.95) и после несложных преобра-
зований получим формулу для коэффициента передачи преобразователя в
следующем виде:
К(р) - Ио(р)/ДР(р) = К„(р)/(р3А3 + ргЛ2 + рА: + 1), (14.96)
где К„(р) = p(MKlRn/K2Ra) — рТжКм; Км = K,Rn/M — коэффициент преобразова-
ния, В-м2/Н; R. e Rk + Rn; если принять Rn - 25 Ом, то Rs = 50 Ом; при этом
Км « 8,7-103 В/(Н-м2); А3 = Тм2 Т»; Аа = Т? + ТЫСТ9; А: = Тх + Тмс + Т»; Т„ = (т/К2)1Л - по-
стоянная времени подвижной (механической) части; Т, - L/R, - - постоянная време-
ни электрической цепи; Ти, — К3/К2 — постоянная времени цепи механической
связи; = М2/ K2R, — постоянная времени цепи электромеханической связи.
Для рассматриваемого преобразователя Т„ = 8,3-102 с; Т, = 2-106 с; Тмг = 6,9-103 с;
Тк« 2,33-102 с.
518
Глава 14. Электромеханические устройства
Перейдем к моделированию, для чего уравнение (14.95) запишем в двух формах:
X" = YB - Х'В2 - ХВ, - ХВ0/р, (14.97)
Х(р2 + рВ2 + Bt + В0/р) = YB, (14.98)
где Y, X — входная и выходная величины соответственно; р2Х = X", рХ = X';
В = ТкКм/Т.Т/; В2 = (Т? + T^TJ/TX2; = (Тмс + Т, + TJ/TX2; Во = 1/МТХ2.
Уравнение (14.97) будет использовано для подготовки схемы набора модели, а
его эквивалент — выражение (14.98) — для выбора параметров модели.
Схема модели (рис. 14.36, а), построенная на основании формулы (14.97), со-
держит сумматор на операционном усилителе (ОУ) 1, выполняющий функцию сум-
мирования слагаемых правой части выражения (14.97). Формируемый на егс
выходе сигнал второй производной X" поступает на вход интегратора на ОУ 2 с ко-
эффициентом передачи К21 = 1/R21C; с выхода интегратора сигнал первой производ-
ной X' поступает через инвертор на ОУ 4 с коэффициентом передачи К41— R4/R41; на
выход же сумматора он передается с коэффициентом передачи Kl2 = R1/R12.
Для формирования сигнала X используется интегратор на ОУ 3 с коэффициен-
том передачи К31 = 1/R31-C; поскольку полярность сигнала X отрицательная, то он
поступает на вход сумматора непосредственно (через резистор R14) и передается на
его выход с коэффициентом передачи Ku = R1/R14.
Для формирования сигнала Х/Р используется интегратор на ОУ 5 с коэффи-
циентом передачи K5I = 1/R51-C; поскольку полярность сигнала Х/Р положитель-
ная, то он поступает на вход сумматора через инвертор на ОУ 6 с коэффициентом
передачи К61 = R6/R61 и далее на выход сумматора с коэффициентом передачи
К1з = R1/R13. В обозначении сигнала Х/Р Р = d/dT — машинный оператор дифферен-
цирования; Т = tmt — машинное время; m, = T/t — масштаб времени, т. е. Р = p/mt. ‘
Заметим, что в силу обратимости преобразователя-генератора и преобразова-
теля-двигателя их модели, как будет показано ниже, одинаковы за исключением це
пи входного возмущения. Для учета этого различия в схему набора включв!
“спаренный” переключатель X (на схеме рис. 14.36, а он показан в режиме модели-
рования преобразователя-генератора), с помощью которого переключается вход А
осциллографа и выбираются соответствующие коэффициенты передачи входной це-
пи коммутацией резисторов R11 и Rlld. Индекс “d” в обозначениях на схеме отно;
сится к модели преобразователя-двигателя.
Входное воздействие имитируется источником постоянного напряжения Uj
или источником линейно изменяющегося напряжения, выполненном на интегра
торе в составе ОУ 7, источника U, RiCi-цепи с программируемым переключателей’
TD из библиотеки Control, с помощью которого обеспечиваются два значения ско
рости выходного напряжения путем подключения в момент t = 0 (начало модели
рования, в диалоговом окне переключателя задается параметром Toff = О
параллельно резистору Rli резистора R2i и отключению его через заданное времУ
(в данном случае — 7 с, задается в диалоговом окне параметром Топ = 7). Источни?
Uy используется для исследования переходных характеристик преобразователя
поскольку при включении моделирования напряжение Uy изменяется скачком о:
нуля до установленного значения (в данном случае до 1 В). Использование же ис
точника линейно изменяющегося напряжения позволяет исследовать статичес
кую X = f(Y) и другие характеристики преобразователя. Выбор типа входной
воздействия осуществляется “спаренным” переключателем Z, управляемым одно
именной клавишей клавиатуры.
519
Часть II. Моделирование схем и устройств
Составим машинное уравнение модели в виде уравнения (14.98). Как следует'
из схемы на рис. 14.36, а, выходной сигнал сумматора
X" »U, = K„Uy- К12и4 - К13ив - К14и„ (14.99)
где Кп = R1/R11; К)2 = K1/R12; U4 = -K4,U2 — выходное напряжение инвертора на
ОУ 4; К4| = R4/R41; U2 = -U,K2I/P — выходное напряжение интегратора на ОУ 2;
Р = р/ш» — машинный оператор дифференцирования; К21 = 1/C R21; U3 = -U2K31/P —
выходное напряжение интегратора на ОУ 3; К31 = 1/C-R31: Ue * -UaK6l — выходное
напряжение инвертора на ОУ 6; K6J = R6/R61; Ua = -U3K31/P; Км =- 1/C-R51.
J
б)
520
Глава 14. Электромеханические устройства
Рис. 14.36. Схема модели преобразователя-генератора (а) и ее характеристики (б, в. г)
г)
Из уравнения (14.99) с учетом его слагаемых получаем машинное уравнение:
U,(p2 + pmtK12K2lK41 + mt2K14K21K31 + mt3KslKrttK2,K3lK13/p) =
- mt2 KuK2IK31Uy/my, (14.100)
где U3 = X — искомая величина; ту — масштаб по входному воздействию.
Из требования идентичности оригинала и его модели следует, что коэффици-
енты уравнений (14.98) и (14.100) должны быть одинаковыми, т. е.
В - m? K„K2IK3I/my; В2 = т.К12К21Кп; Bl = mt2Kl4K21K3I;
Во = ml3K13K«,1K61K21K3l.
Из этих условий получаем:
Кп = шуКм; К21 = Tx/mtTM2; К31 = 1/т£; К12К41 = (Т? + ТЖТ,)/ТХТЯ;
К14 = (TRr + Т. + TJ/T„; К,3 = КИ1 - 1; К., = 1/т.Тх. (14.101)
При выборе и распределении коэффициентов передачи необходимо следить за
их размерностью, в частности, для интегратора — это [с 1J, для инвертирующих уси-
521
Часть II. Моделирование схем и устройств
лителей и сумматора они безразмерные; поэтому размерность масштаба ту, исполь-
зуемого при определении К11, должна быть обратной Км, а именно [(Н/м2)/ В]. В
этом случае, используя испытательный сигнал в виде единичного потенциального
скачка, который реализуется в программе подключением источника постоянного
напряжения Uy -1 В, на выходе системы мы должны результат поделить на ni}. и тем
самым перейти к размерности искомой величины в [В/(Н/м2)]. Заметим, что, приняв
Ки = 1, произведение туКм можно учесть выбором Uy » l-myKM.
Теперь формулы (14.101) можно использовать для выбора сопротивлений на
входах ОУ, предварительно задавшись сопротивлением резисторов R4 = R6 =
- 1 МОм, емкостью конденсаторов С = 1 мкФ и масштабами mt - 1, my = 100. Рассчи-
тываем: Кп = 100-8,7-103 = 0,87 и Rll = Rl/K;1 — 1,15 МОм (округляем стандартным
способом); Кг1 = 2,33-102/6,9-103 - 3,38 с ’, R21 = 1/С-К21 = 1/10<3,38 = 296 кОм;
К31 = 1/2105 = 510‘ сR31 = 20 Ом; К,2КП = (6,9-10* + 6,9-103-5-105)/2,33-102-5-105 =
- 29614, К„ - Ки = (29614),/г - 172,1, R12 = R41 = 5,8 кОм; Км - (6,9-10а + 2-105 +
+ 2,33-10 г)/2,33-102 = 1,297, R14 - 771 кОм; R13 - R51 = 1 МОм; К51 - 1/2,33-102 =
= 42,92 с1, R51 = 23,3 кОм. Установив полученные значения для сопротивлений ре-
зисторов, переходим к моделированию.
Из осциллограммы переходного процесса (рис. 14.36, в) видно, что он отличает-
ся заметной колебательностью, а само устройство обладает свойствами дифференциру-
ющего звена, что следует из выражения (14.96) для передаточной характеристики и
легко объяснимо, поскольку ЭДС в катушке наводится только при ее движении. Таким
образом, данное устройство реагирует только на скорость изменения давления.
Реакция устройства при воздействии линейно изменяющегося входного воз-
действия иллюстрируется осциллограммами на рис. 14.36, в, полученными после
установки переключателя Z в положение, противоположное показанному на
рис. 14.36, а. В таком случае на вход преобразователя подается линейно изменяюще-
еся напряжение с выхода интегратора (осциллограмма А на рис. 14.36, в), скорость
изменения которого на первом участке Vj - U/[Rli-R2i/(Rli + R2i)]C = 4 В/с, а на
втором — V2 = U/Rli-C = 2 В/с. При этом выходное напряжение преобразователя
VB1 и VB2 (осциллограмма В на рис. 14.36, в с визирными линейками 1 и 2) пропор-
ционально скорости изменения входного с коэффициентом преобразования К21 =
= VBl/Vi « К|12 = VB2/V2 = 2,03 В-с/(Н/м2) (с учетом масштаба шу и его размерности).
Но поскольку Кп = КМТ^, (см. выражение (14.96)), то К„ = Кп/Т^ = 2,03-10 ‘/2,33-10'2 =
= 8,7-10 3 В/(Н/м2), что полностью совпадает с ранее рассчитанным. Заметим, что
в переходном режиме он достигает значения (см. рис. 14.36, б) (VBl/mJ/T». =
= 1,42-10 а/2,33-10’2 = 6,1-102 В/(Н/м2), т. е. почти на порядок больше.
Если с помощью переключателя F в режиме исследования переходных процес-
сов к входу осциллографа А подключить сигнал первой производной, то получим фа-
зовую траекторию преобразователя (рис. 14.36, г), на которой количество кругов
спирали соответствует количеству колебаний, а время от начала моделирования до
прихода изображающей точки к установившемуся значению (в данном случае — к
нулю) равно времени переходного процесса.
Перейдем к анализу преобразователя-двигателя. Для этого уравнение (14.90)
целесообразно записать в следующем виде:
тр2х = Р(р) - Рс(р) - Р,(р), (14.102)
где т — масса, кг; х — перемещение, м.
Поскольку ток в цепи катушки I(p) = Ui(p)/Z(p), где Z(p) = Rk + Ri + pL, то дви-
жущая сила в рассматриваемом преобразователе Р(р) = I(p)M = Ui(p)M/Z(p). Так как
в этом преобразователе также используется система упругих элементов (например,
522
Глава 14. Электромеханические устройства
возвратная пружина), то слагаемые Рг(р), Р;(р) в уравнении (14.102) будут опреде-
ляться выражениями, аналогичными (14.92) и (14.94), с тем отличием, что вместо
скорости будет использоваться производная от перемещения и другое значение Z(p),
т. е. Рс(р) = К2х(р) + рх(р)Кз и Р,(р) - pX(p)M2/Z(p). В таком случае коэффициент пе-
редачи преобразователя-двигателя будет определяться выражением (14.96), в кото-
ром Ка - К, = M/K2R, = M2/MK2R. = Т^/М — коэффициент преобразования, м/В;
R, = Rk - Ri; остальные обозначения аналогичны обозначениям в формуле (14.96).
Если принять Ri = 25 Ом, то R: = 50 Ом и К, = 1,79-108 м/ В; значения постоянных
времени аналогичны рассчитанным ранее для преобразователя-генератора; уравне-
ния для подготовки схемы модели:
Xd'" - УВС - Xd" В2 - Xd'-B, - Xd Во, (14.103)
Xd(p2 + рВ2 4- В, + Bn) = YB„ (14.104)
где Вл = K,/T,TW2; остальные коэффициенты совпадают с аналогичными для выраже-
ния (14.98).
б)
Рис. 14.37. Переходная (а) и передаточная (б) характеристики преобразователя-двигателя
Из уравнения (14.103) следует схема набора на рис. 14.36, а с тем отличием,
что на выходе сумматора будет формироваться сигнал Xd"' третьей производной, на
523
Часть II. Моделирование схем и устройств
выходе первого интегратора - сигнал Xd" второй производной и т.д. При этом схе-
ма набора модели будет описываться уравнением (14.99) и входящими в него слага-
емыми, однако искомой величиной будет не U3, a U5, и машинное уравнение будет
определяться выражением:
U6(p3 + p2mtKl2K2IK41 + pm/KHK„K31 + m13KblK61K2iK31K13) =
= KnK5,K,,K3IUy/my. (14.105)
Из условия равенства коэффициентов в уравнениях (14.104) и (14.105) полу-
чаем набор формул (14.101), отличающийся только значением KUd = m?K. =
при my = 100 K,ld = 100 2,33Ю’/М 1,79, откуда Rlld = Rl/Knd = 1/1,79 =
= 0,559 МОм. Заметим, что при определении коэффициентов К51, К21 и К31 в вы-
ражении для коэффициента Bd знаменатель и числитель нужно умножить на Т*. Как
и в случае преобразователя-генератора, при расчетах было принято m, = 1.
Переходная характеристика преобразователя-двигателя (рис. 14.37, а) также
отличается существенной колебательностью. Установившееся значение коэффици-
ента передачи, пропорциональное VA2/my = 1,789 10практически совпадает с его
расчетным значением, равным 1,79 102 м/ В, а длительность переходных процессов
при ошибке около 1% (см. VA2-VA1) составляет Т1 = 4,11с.
Статическая характеристика X - f(Y) рассматриваемого преобразователя
(рис. 14.37, б) получается в режиме развертки В/A, когда линейно изменяющееся
напряжение с выхода интегратора подается через переключатель Z как на вход мо-
дели, так и на вход канала А осциллографа. Начальный участок полученной харак-
теристики обладает заметной нелинейностью, обусловленной в данном случае
переходными процессами.
И 12 13
Рис. 14.38. Схема модели электромеханического преобразователя на компонентах программы
EWB 5.0
Контрольные вопросы и задания
1. Какие принципы реализованы в тахогенераторах, сельсинах и поворотных
трансформаторах и какими стандартными звеньями они могут быть представле-
ны?
2. Проведите исследования преобразователя-генератора при толщине мембраны
5 = 0,05 и 0,1 мм.
3. Установите зависимость коэффициентов преобразования от коэффициента ско-
ростного трения К3 при изменении его в диапазоне 0,1...0,001 кг/с.
524
Глава 14. Электромеханические устройства
4. Исследуйте переходные процессы преобразователей при массе подвижной части
5 и 50 г.
5. На рис. 14.38 приведена схема модели, идентичная схеме на рис. 14.36, а, но вы-
полненная на библиотечных компонентах программы EWB 5.0. Она содержит
интеграторы И, 12,13, сумматоры SI, S2, источник Uy и ключ X, показанный в
положении моделирования преобразователя-генератора. Коэффициенты переда-
чи и их знаки выбираются в диалоговых окнах компонентов в соответствии с рас-1
считанными выше. Для интеграторов их установленные значения и знак
индицируются над значком компонента, для сумматоров индицируется только
установленное значение смещения нулевого уровня по входу Л (оно равно нулю).
Установите значения коэффициентов передачи КА, КВ и КС каждого сумматора
(с учетом знаков) в соответствии со схемой их подключения и приведенными вы-
ше расчетными значениями, а затем проведите моделирование и сопоставьте его
результаты с полученными с помощью схемы на рис. 14.36, а.
Вк1-* КНЧрЛЯй F*>e9UTS»N«0iFlfjr*T-4 W WF.* Й0НПЗД*Г*>9РТ'Г*1 Я ГГ*Ъ'
€51
525
1
Часть II. Моделирование схем и устройств
15. Устройства автоматики
15.1. Универсальные
функциональные преобразователи
Функциональными преобразователями или нелинейными решающими блока
ми называют устройства, воспроизводящие заданные нелинейные функции одной
или нескольких аргументов. Кроме моделирующих устройств, они применяются
для линеаризации датчиков (см. разд. 10.2) и в качестве корректирующих звеньев в
автоматических системах управления для улучшения их динамических характери-
стик [29, 65].
Функциональные преобразователи разделяются на универсальные и специали-
зированные. Универсальные преобразователи позволяют с помощью одного устройст-
ва воспроизводить различные функциональные зависимости. Специализированные
же преобразователи используются, как правило, для воспроизведения только одной
определенной зависимости. Примерами специализированных преобразователей мо-
гут служить устройства, использующие квадратичные или логарифмические учас
ки вольтамперных характеристик электронных приборов и т.п. К ним относятс
также устройства для деления и перемножения сигналов, возведения в степень, ими-
таторы нелинейности звеньев автоматических систем управления.
При формировании нелинейной зависимости используется ступенчатая или
кусочно-линейная аппроксимация. При этом исходные данные задаются в виде ана-
литической зависимости, которая при реализации может быть расчленена на элемен-
тарные математические операции: в виде графической зависимости, в виде семейства,
кривых, записанных каким-либо способом, а также в виде таблиц с указанием спосо-
ба интерполяции между заданными точками.
Различают преобразователи разомкнутого и компенсационного (следящего)
типа. Основные требования, предъявляемые к функциональным преобразователям,
заключаются в следующем [29]:
1. Функциональное преобразование должно выполняться над входными величина-
ми, заданными в виде напряжений постоянного тока в диапазоне значений, до-
пускаемых для используемых при этом операционных усилителей.
2. Входное сопротивление функционального преобразователя не должно быть ни-
же 10...50 кОм, выходное — не выше 10...20 Ом. Функциональный преобразова-
тель должен обладать также достаточной выходной мощностью для удобства
сопряжения с другими элементами.
3. Воспроизведение заданной функции должно быть выполнено с точностью не ни-
же 1...2% от полной шкалы.
4. Уровень шумов в выходном напряжении (постоянного тока) не должен превы-
шать 5...10 мВ.
5. Функциональные преобразователи должны воспроизводить однозначные и неод-
нозначные нелинейные зависимости, а также нелинейные зависимости, приво-
димые к элементарным функциям и полученные в результате эксперимента.
6. Обеспечение возможности воспроизведения нелинейных зависимостей с малым
и большим значением первой производной, а также немонотонных функций с
большим числом экстремумов.
526
Глава 15. Устройства автоматики
I-
о
я
в
е
i
Из электронных функциональных преобразователей наибольшее распростране-
ние получили диодные. Они представляют собой в большинстве случаев параметричес-
кие устройства, использующие кусочно-линейную аппроксимацию заданной функции.
Диодные преобразователи делятся на две группы. Первая группа представля-
ет собой делители напряжения с переменным коэффициентом деления, вторая — ре-
шающие усилители с переменным коэффициентом передачи.
Схема преобразователя первой группы показана на рис. 15.1, а. Она содержит
два одинаковых плеча, одно из которых (левое) формирует синтезируемую функцию
в первом квадранте, а второе (правое) — в третьем. Каждое плечо схемы (далее ис-
пользуются обозначения только для левого плеча) содержит делитель опорного на-
пряжения Uop на резисторах R01...R04, три диода VD1...VD3 с последовательно
включенными резисторами R1...R3. Выходной сигнал преобразователя Uo подается
па вход канала А осциллографа, а входной Ui — на вход канала В и вход преобразо-
вателя. В качестве источника входного (испытательного) сигнала используется
функциональный генератор, режимы работы которого показаны на рис. 15.1,6.
Рис. 15.1. Схема диодного преобразователя (а) с установками функционального генератора (б)
и воспроизводимая им знакопеременная функция (в)
Формируемая преобразователем функция Uo = f(Ui) (рис. 15.1, в) содержит две
ветви (в первом и третьем квадрантах); они полностью идентичны вследствие симме-
трии плеч схемы на рис. 15.1, а. Каждая ветвь имеет три излома, что соответствует
использованию трех цепочек из последовательно включенных диода и резистора.
527
Часть II. Моделирование схем и устройств
Формирование функциональной зависимости Uo = f(Ui) происходит следую-
щим образом (на примере левого плеча). С помощью делителя на резисторах
R01...R04 и источника опорного напряжения Uop на катодах диодов VD1...VD3 фор-
мируются запирающие напряжения U01, U02, U03, равные 5, 10 и 15 В соответст-
венно. В исходном состоянии Ui = 0 и все диоды заперты. Когда Ui начинает
увеличиваться, формируется первый (начальный) участок зависимости, при этом
выходное напряжение изменяется в соответствии с выражением
Ud-UiS,, (15.1)
где Sj = Rn/(Rn + R) — крутизна первого участка.
Поскольку в нашем случае Rn » R, то S, - 1 и U01 = Ui. Заметим, что при оп-
ределении сопротивления нагрузки необходимо учитывать также сопротивление,
определяемое током утечки обратно смещенных диодов, если оно соизмеримо с со-
противлением резистора R.
Когда Ui достигает значения U01+ Ud (Ud — падение напряжения на открытом
диоде, примерно равное 0,6 В), открывается диод VD1 и начинается формирование
второго участка кривой, при этом выходное напряжение
U02 - UiS2, (15.2)
где S2 = Rel/(Re, + R) — крутизна второго участка; ReJ- RI + Rd + R01|| (R02 + R03 + R04);
|[ — значок параллельного включения резисторов; Rri — сопротивление открытого диода
VD1.
Когда Ui достигает значения U02 + Ud, открывается диод VD2 и начинается
формирование третьего участка кривой в соответствии с выражением:
U03-UiS3, (15.3)
где S3 = R,2/(R,2 + R) — крутизна третьего участка.
Выражение для Re2 в рассматриваемом случае получается значительно слож-
нее, чем для RM. Обычно на практике сопротивления резисторов R1...R3 выбирают-
ся достаточно большими, чтобы можно было пренебречь сопротивлением делителя
опорного напряжения и сопротивлением открытого диода. И дело здесь не только в
упрощении расчетов, но и в затруднении получить, например, точное значение со-
противления открытого диода, являющееся функцией проходящего через него тока.
Если пренебречь влиянием указанных сопротивлений, то для второго и третьего уча-
стков будем иметь
R.i = RI; Re2 = R.J|R - R1||R2 = R1R2/(R1 + R2). (15.4)
Аналогичным образом формируется и четвертый участок синтезируемой зависи-
мости. Заметим, что каждый следующий участок зависимости Uo = f(Ui) служит про-
должением предыдущего, являясь своеобразным “пьедесталом” для формирования
нового участка и обеспечивая тем самым непрерывность аппроксимируемой функции.
Из рис. 15.1, а нетрудно заметить, что с увеличением выходного напряжения
Uo приращения входного Ui уменьшаются. Поэтому такой преобразователь принято
называть преобразователем для воспроизведения функции с убывающей производ-
ной (выпуклая кривая). Для формирования функций с возрастающей производной
(вогнутая кривая) все диоды преобразователя в исходном состоянии должны быть
открыты, т. е. для реализации такого преобразователя достаточно изменить поляр-
ность включения диодов или полярность источника опорного напряжения. При
изменении входного напряжения будут поочередно закрываться диоды, что будет
вызывать увеличение крутизны при срабатывании очередного по порядку диода и,
528
Глава 15. Устройства автоматики
гледовательно, преобразователем будет формироваться функция с возрастающей
производной. Очевидно, что для такого преобразователя будут справедливы изло-
женные выше результаты анализа для схемы на рис. 15.1, а.
Из этого анализа видно, что для разработки функционального преобразовате-
ля рассмотренного типа необходимо:
♦ разбить заданную, например, в виде графика функцию на требуемое количество
участков аппроксимации по оси Uo, при этом будут получены соответствующие
значения Uo на каждом участке (узлы аппроксимации Uol, U^,..., Uon);
♦ по полученным значениям U^ рассчитать делитель опорного напряжения с уче-
том падения напряжения Ud на открытом диоде из условия, что ток через дели-
тель равен 50...100 мА (для схемы на рис. 15.1, а он равен 20/400 = 0,05 А =
50 мА), при этом на выходах делителя должны быть получены опорные напря-
жения U01 - UO1 - Ud, U02 = Uo2 - U,,..., UOn - Uon - Ud;
♦ по полученным в п. 1 разбиениям заданной функции определить приращения AUt
на каждом участке аппроксимации, соответствующие выбранным значениям Uo;
♦ для каждого участка аппроксимации заданной зависимости определить крутиз-
ну, т. е. S, = дип/ио1, S2 = AUi2/(Uo2 - Uol) и т.д.;
♦ задавшись сопротивлением резистора R в пределах 30...50 кОм и используя фор-
мулы (15.1) — (15.4) и полученные в п. 4 значения крутизны для каждого участ-
ка, рассчитать значения сопротивлений Rel, R.2,..., R№ и затем RI, R2,..., Rn.
Как видно из анализа схемы диодного преобразователя на рис. 15.1, а, он
-рост по устройству и легко может быть подстроен в процессе наладки (после прове-
дения ориентировочных расчетов), что позволяет достичь точности воспроизведения
заданной функции до десятых долей процента от ее максимального значения [61].
Основными недостатками таких преобразователей являются ограниченный динами-
ческий диапазон по выходному напряжению (по сравнению с входным), что накла-
дывает ограничения при воспроизведении немонотонных функций, а также сильная
зависимость точности воспроизведения от нагрузки.
Более совершенными являются диодные функциональные преобразователи,
реализующие метод решающего усилителя с переменным коэффициентом передачи.
В таких преобразователях чаще всего используются диодные ячейки, показанные на
рис. 15.2. Двухполюсная ячейка (рис. 15.2, а) отличается простотой расчета и после-
дующей настройки, однако для каждой ячейки требуется незаземленный источник
.торного напряжения U0. Для трехполюсной ячейки (рис. 15.2, б) источник опорно-
го напряжения U0 общий для всех ячеек, необходимое запирающее (или отпираю-
щее) напряжение на диоде VD формируется с помощью резисторов R0 и Ri, которые
•одновременно используются и при формировании крутизны моделируемой функции
на соответствующем участке аппроксимации. Это обстоятельство создает определен-
ные трудности при расчетах и последующей экспериментальной подстройке.
Ui Ri
W<
ио R0
*—-w.-
Uo
-и—
* Y° UM° UO
v*' "I rr *
a) 6)
Рис. 15.2. Двухполюсная («) и трехполюсная (б) диодные ячейки
При построении рассматриваемых преобразователей используются в различ-
ных комбинациях схемы на рис. 15.3. Если принять, что для данного участка вос-
529
Часть II. Моделирование схем и устройств
производимой функции сопротивление соответствующей диодно-резистивной ячей
ки равно Rdl, а для схемы на рис. 15.3, в — Rdl и Rd2, то крутизна формируемого уч1
стка (коэффициент передачи суммирующего усилителя) для схем на рис. 15.3, а, б,
соответственно составит: S. = -R/Rdl; S6 — -Rdi/R; S. - -Rei/Rd2« Знак указывав
на инвертирующие свойства суммирующего усилителя.
Рис. 15.3. Схемы включения диодного преобразователя Rdi на входе суммирующего усилите.!
(а), в цепи его обратной связи (б), на входе и в цепи обратной связи одновременно (<
В качестве примера рассмотрим функциональный преобразователь с двухпо-
люсными диодными ячейками, схема которого приведена на рис. 15.4, а. Преобра
зователь содержит два идентичных набора из трех двухполюсных диодных ячеек
опорными (запирающими) напряжениями 5,10 и 15 В (как и в схеме на рис. 15.1, а
Начальный участок моделируемой функции (до срабатывания диодов VD1 ил
VD1') формируется с помощью резистора R0. В положении “сдвоенного” переключ;
теля X, показанном на схеме и управляемого клавишей X клавиатуры, преобразов:
тель реализует схему включения на рис. 15.3, а; при переводе этого переключатся
в другое (противоположное) положение — схему на рис. 15.3, б. Суммирующий yci
литель выполнен на операционном усилителе OU1, на OU2 выполнен инвертируй
щий усилитель с коэффициентом передачи -1. В положении ключа Z, показанном н
схеме рис. 15.4, а, моделируемая знакопеременная функция имеет вид, показании
на рис. 15.4, б. При переводе ключа Z одноименной клавишей клавиатуры в друге
положение моделируемая функция принимает другой вид (рис. 15.4, в).
Из сравнения кривых на рис. 15.4, б и 15.4, в видно, что они абсолютно идеь
тичны, но располагаются в различных квадрантах; достигается это использование:
инвертирующего усилителя на OU2: в первом случае (рис. 15.4, б) выходной сигна
преобразователя снимается с выхода OU2, а во втором (рис. 15.4, в) — с выхода OU1
Теперь вернем переключатель Z в исходное состояние (показанное е
рис. 15.4, а), а переключатели X одноименной клавишей переведем в другое полож
ние. Для этого случая моделируемая функция показана на рис. 15.4, г.
Из сравнения функций на рис. 15.4, б и 15.4, г ылддъ, что эти функции отл1
чаются не только крутизной участков аппроксимации, но и характерохм произво,
ной: в первом случае она возрастающая, а во втором — убывающая; такой эффеЕ
достигается за счет включения собственно диодного преобразователя на входе реш
ющего усилителя на OU1 (реализуется схема на рис. 15.3, а) или в цепь его отриц
тельной обратной связи (реализуется схема на рис. 15.3, б).
Во всех рассмотренных режимах работы преобразователя на рис. 15.4, а фо;
мирование начального (нулевого) участка производится с помощью резисторов R
R0, т. е. крутизна этого участка равна So = R/R0 вплоть до момента срабатывания д:
ода VD1 (или VD1'). Однако из-за сравнительно большого сопротивления последов
телыю включенного с этим диодом резистора R1 = 10 кОм и существенно
нелинейности начального участка вольтамперной характеристики диода процесс ei
переключения затягивается. Это явление удобно наблюдать в увеличенном масшт
бе (в режиме ZOOM осциллографа). Кривая на рис. 15.4, б в таком режиме показа!
530
Глава 15. Устройства автоматики
Рис. 15.4. Функциональный преобразователь на двухполюсных диодных ячейках и суммирую-
щем усилителе (а) и воспроизводимые им знакопеременные функции (б, в, г)
на рис. 15.5, из которого следует, что первый излом функции наблюдается при
Ui Т1 = 5,6 В (в этой точке установлена визирная линейка 1), а второй — при
Ui = Т2 — 10,35 В (визирная линейка 2), т. е. с увеличением тока через диод (за счет
уменьшения сопротивления последовательно включенного с ним резистора) на-
пряжение его срабатывания как бы уменьшается. Однако это можно трактовать и
-□другому. Когда входное напряжение достигает опорного уровня, например,
U01 = 5 В, диод VD1 приоткрывается и начинается процесс шунтирования резис-
тора R0 сопротивлением RI + Rd(Ui). Когда напряжение Ui незначительно превы-
шает опорное напряжение U01, рабочая точка диода находится на пологом участке
характеристики и его сопротивление Rd(Ui) > RI. С увеличением Ui увеличивается
ток через диод и уменьшается Rd(Ui), однако за счет одновременного увеличения па-
дения напряжения на резисторе R1 этот процесс замедляется. Такое “топтание на
месте” за счет существенной нелинейности начального участка вольтамперной ха-
531
Часть II. Моделирование схем и устройств
рактеристики диода и вызывает наблюдаемую задержку в формировании очередно-
го участка аппроксимации. При этом с уменьшением сопротивления последователь-
но включенного с диодом резистора время “топтания на месте”, естественно,
уменьшается, что мы и наблюдаем на рис. 15.5.
Рис. 15.5. Начальный участок знакопеременной функции на рис. 15.4, б в увеличенном масштаб
Рис. 15.6.
Преобразователь с квадратичной характеристикой и лицевая папель функциона.
кого генератора с режимами его работы
Из имеющихся в программе EWB библиотечных компонентов в качестве уш
нереального функционального преобразователя может быть использован управля!
мый полиномиальный источник (в дальнейшем — блок), выходной сигнал которо!
описывается полиномом следующего вида (см. гл. 4):
Y - А + В VI + C-V2 + D V3 + E(V1)« + FV1V2 + G VI V3 + H(V2)2 +
+ IV2V3 + J(V3)2 + KV1V2V3.
Коэффициенты полинома А...К задаются с помощью диалогового окна. Н;
пример, для случая преобразователя с квадратичной передаточной характерист!
кой, схема которого показана на рис. 15.6, параметры диалогового окна имен
значения, приведенные на рис. 15.7.
532
Глава 15. Устройства автоматики
Как следует из рис. 15.6, источник входного сигнала подключен к входу 1 пре-
образователя, т. е. в вышеприведенной формуле VI = Ui. В таком случае на основа-
нии данных окна (рис. 15.7) выражение для выходного напряжения модели может
быть записано в следующем виде:
Uo-A + (Ui)I 2. (15.5)
Постоянная А в диалоговом окне задается в вольтах, входное напряжение (см.
лицевую панель генератора на рис. 15.6) Ui - 2sincot. Учитывая известное из триго-
нометрии выражение sin2a = 0,5(1 - cos2a), из (15.5) получаем
Uo » 4 - 2cos2cot. (15.6)
Polynomial Source
?пс. 15.7. Диалоговое окно полиномиального источника
8
омож
WVWW
I ?ис. 15.8. Осциллограммы сигналов на входе (А) и выходе (В) квадратичного преобразователя
Из осциллограмм на рис. 15.8 видно, что на выходе преобразователя действи-
е I Вельно формируется сигнал в соответствии с выражением (15.6).
го I
Передаточная характеристика преобразователя (рис. 15.9) действительно имеет
I квадратичный характер, однако ее изображение искажено. Искажения носят гистере-
I агсный характер и обьясняются дрожанием фазы колебаний функционального геие-
I ритора, поскольку формирование передаточной характеристики происходит за
[а- I несколько периодов колебаний. В связи с этим была разработана модель генератора
и- И|дипочного треугольного сигнала, оформленного в виде подсхемы genl (рис. 15.10, а).
m I Генератор выполнен на базе интегратора, двух источников постоянного напря-
жения UI, U2 и программно управляемых переключателей 1, 2, 3 из библиотеки
533
Часть II. Моделирование схем и устройств
Control, параметры которых с помощью диалогового окна выбраны следующим обрг
зом: время включения Топ = 0 для всех переключателей, время выключения Toff = J
6 и 8 с для переключателей 1, 2, и 3 соответственно. В момент t < 0 (перед пуском) вс
переключатели находятся в положении, показанном на рис. 15.19, в момент пуск
(t = 0) все переключатели переводятся в противоположное положение, при этом к вх<
ду интегратора оказывается подключенным источник напряжения U2 положительно
полярности и на его выходе начинает формироваться первая половина отрицательно
полуволны треугольного сигнала (см. осциллограмму на рис. 15.10, б). Поскольку m
точник напряжения U2 подключается ко входу интегратора на время 2 с, то за это вр<
мя напряжение на его выходе достигает значения Uo = t-U2/RC — 2/10е-10'* = 4 В, 4i
совпадает с амплитудным значением на осциллограмме. В момент t = 2 с переключи
тель 1 возвращается в исходное состояние и к входу интегратора на время 4 с подклк
чается источник отрицательного напряжения U2, после чего начинаете
формирование второй половины отрицательной полуволны и первой половины пол<
жительной полуволны. Нетрудно подсчитать, что амплитуда положительной полувол
ны также будет равна 4 В. В момент t 6 с ключ 2 переводится в исходное состояние
к входу интегратора на время 2 с подключается источник напряжения U2, в результг
те чего формируется вторая половина положительной полуволны выходного сигнал!
В момент t = 8 с формирование периода треугольного сигнала заканчивается и выха
интегратора переключателем 3 подключается к общей шине (заземляется).
ф
Рис. 15.9. Передаточная характеристика преобразователя с квадратичной передаточной
рактеристикой
Рис. 15.10. Генератор одиночного треугольного сигнала (а) и осциллограмма его выходного ci
нала (б)
Из результатов моделирования преобразователя с использованием рассмо?
репного генератора видно (рис. 15.11), что искажения изображения передаточнЫ
характеристики отсутствуют.
В заключение рассмотрим преобразователь с кубичной передаточной характе
ристикой (рис. 15.12, а). Преобразователь содержит два полиномиальных блока Р'
и Р2. В первом блоке реализуется рассмотренная выше квадратичная функцш
(при А = 0), а во втором — функция перемножения входного сигнала Ui и выходно
го сигнала первого блока (для Р2 выбрано А = 0 и F = 1, см. рис. 15.7). Таким обра
534
Глава 15. Устройства автоматики
ра-
= 2,
все
жа
хо-
гой
гой
ис-
ре-
что
ча-
тю-
гся
ло-
ол-
ie и
•та-
ла.
ход
сиг-
лот-
ной
кте-|
1P1I
ЦИЯI
дно-
5ра
зом, для этого преобразователя Uo - (Ui)3. В качестве источника испытательного сиг-
нала используется рассмотренный выше генератор genl. Передаточная характерис-
тика преобразователя показана на рис. 15.12, б.
Таким образом, на базе управляемого полиномиального источника напряже-
ния (блока) можно создавать разнообразные функциональные преобразователи для
моделирования элементов систем автоматического управления (к сожалению, их
нельзя встраивать в реальные системы).
ха-
Рис. 15.11. Передаточная характеристика квадратичного преобразователя с генератором оди-
ночного треугольного сигнала
Рис. 15.12. Схема преобразователя (а) с кубичной передаточной характеристикой (б)
Следует отметить, что наличие в системе регулирования звена с квадратичной
пли кубичной характеристикой приводит к увеличению коэффициента усиления с
увеличением входной величины. В одноконтурных системах регулирования это мо-
жет привести к сужению области устойчивости системы, способствуя возникнове-
нию расходящихся колебаний при больших начальных отклонениях там, где чисто
линейная система была бы устойчивой. В многоконтурных системах звено с квадра-
тичной или кубичной характеристикой может оказаться полезным. Звенья с такими
характеристиками иногда специально вводят в дополнительные обратные связи ре-
гулятора для улучшения качества процесса регулирования. Например, увеличение
коэффициента обратной связи в регуляторе при больших отклонениях с помощью
звена с кубичной характеристикой (в отличие от увеличения коэффициента усиле-
ния прямой цепи регулятора) может способствовать подавлению колебаний в про-
цессе регулирования и расширению области устойчивости.
Контрольные вопросы и задания
1. Дайте определение функционального преобразователя и области его использова-
ния.
2. Приведите краткую классификацию функциональных преобразователей и пере-
числите предъявляемые к ним требования.
535
Часть II. Моделирование схем и устройств
3. Какие принципы используются при построении диодных функциональных пре-
образователей? < н
4. Составьте аналитическое выражения для расчета четвертого участка аппрокси- I
мации функции на рис. 15.1, в. *
5. Можно ли использовать преобразователь на рис. 15.1, а для воспроизведения |
знакопеременной функции с возрастающей производной?
6. Составьте формулы для определения крутизны каждого участка аппроксимации I
преобразователя на рис. 15.4, а. Сопротивлением диодов Rd пренебрегите, кру- I
тизну начального участка примите равной So = R/R0.
7. Составьте схему преобразователя с квадратичной передаточной характеристи- I
кой с использованием двух полиномиальных блоков и проведите ее моделирова- I
ние. Полученные результаты сопоставьте с результатами на рис. 15.11.
8. Составьте схему преобразователя с кубичной передаточной характеристикой с I
использованием трех полиномиальных блоков. Результаты моделирования со- I
поставьте с результатами на рис. 15.12, б.
15.2. Специализированные
функциональные преобразователи
Специализированные преобразователи используются для моделирования не- I
линейных элементов (или просто нелинейностей) систем управления, связанных сс I
скачкообразными изменениями коэффициентов передачи отдельных звеньев (их ча- I
сто называют типичными нелинейностями). К таким нелинейностям приводит на- I
личие ограничения координат по модулю, наличие зоны нечувствительности. I
наличие люфта (зазора) в кинематических парах и др. Наряду с их отрицательнымг I
свойствами, они могут использоваться также для улучшения динамических харак- I
теристик систем управления [29, 65].
Моделирование ограничения по модулю. Ограничение по модулю имеет место I
при ограниченной мощности звена или задается из конструктивных соображение I
(например, для получения заданного закона регулирования). В качестве практичес-В
кого примера можно привести устройство с ограничением отклонения рулей самоле- I
та при помощи упоров.
Схема для воспроизведения рассматриваемой нелинейности показана hi I
рис. 15.13, а, на котором показана также лицевая панель функционального генери !
тора с режимами его работы. Схема преобразователя представляет собой масштаби-I
рующее звено на операционном усилителе с коэффициентом передачи К = R2/R1 I
Кроме резистора R2, в цепь обратной связи ОУ введена цепочка из встречно вклю-В
ченных стабилитронов VD1 и VD2, с помощью которых ограничивается величин*I
выходного напряжения и тем самым формируется требуемая характеристика. Ня
пряжение стабилизации обоих стабилитронов в данном случае установлено (с поме*В
щью диалогового окна) равным 1В. Напряжение ограничения определяется 1
напряжением U., равным сумме напряжения стабилизации и падения напряжение
на открытом стабилитроне (около 0,6 В). Таким образом, в данном случае U. == 1,6 В I
Из передаточной характеристики рассматриваемой схемы видно (рис. 15.13, <
что при входном напряжении |Ui| < U. оно передается на выход с коэффициентом пеI
редачи К«1. При |Ui| > U, один из стабилитронов открывается, а второй переходите
режим стабилизации (для положительной полуволны входного напряжения это бт<
дут соответственно стабилитроны VD2 и VD1) и коэффициент передачи становитсяВ
536
Глава 15. Устройства автоматики
равным К = (R2 j R,)/R1, где R. — суммарное сопротивление открытых стабилитро-
нов. Поскольку обычно выбирается R, « R2, то коэффициент передачи К = R,/R2
существенно уменьшается, что и приводит к ограничению выходного сигнала при-
мерно на уровне Us.
Рис. 15.13. Схема для воспроизведения звена с ограничением координат по модулю (а) и ее пе-
редаточные характеристики (б, в)
При размыкании ключа Z (нажатием клавиши Z) передаточная характеристи-
ка звена приобретает релейный характер (рис. 15.13, в), поскольку при |Ui| < U. цепь
обратной связи ОУ разомкнута и коэффициент передачи практически равен коэффи-
циенту усиления ОУ, установленному в данном случае равным 10й.
Следует отметить, что наличие рассмотренного звена в одноконтурной систе-
ме регулирования при больших возмущениях приводит к изменению формы кривой
процесса регулирования, однако это обычно не влияет на устойчивость системы. На-
оборот, наличие такой нелинейности приводит в большинстве случаев к повышению
устойчивости. Если в линейной неустойчивой системе возникающие колебания име-
ли бы расходящийся характер, то при наличии звена с характеристикой на
рис. 15.13, б они будут увеличиваться по линейному закону только до значения U,.
Далее выходная величина будет ограничена постоянным значением, что равносиль-
но снижению общего коэффициента усиления регулятора, вследствие чего раскачи-
вание системы прекратится. В этом смысле переход за границу устойчивости в
одноконтурной системе регулирования, включающей в себя звено с нелинейной ха-
рактеристикой тина рис. 15.13, б, является “безопасным” (по сравнению с чисто ли-
нейной системой).
Моделирование зоны нечувствительности. Такой вид нелинейности имеет ме-
сто во многих чувствительных элементах регуляторов и в устройствах привода. В
любой одноконтурной системе регулирования наличие зоны нечувствительности в
каком-либо звене приводит к появлению дополнительной статической ошибки. В
многоконтурных системах наличие зоны нечувствительности может привести к воз-
537
Часть II. Моделирование схем и устройств
никновению автоколебаний. Все это требует специального исследования в каждо]
конкретной системе.
Схема для воспроизведения звена с зоной нечувствительности (рис. 15.14, а)
отличается от показанной на рис. 15.13, а тем, что ограничивающая цепь из стаби-
литронов перенесена из цепи обратной связи ОУ в его входную цепь. При |Ui < U, ста-
билитроны VD1 и VD2 закрыты и входной сигнал на выход усилителя практически
не передается, поскольку R2 « R.', где R.' — сопротивление утечки закрытых ста
билитронов. При |Ui| > Us стабилитроны открываются и коэффициент передачи уси
лителя становится равным К - R2/(R1 4- RJ.
Из передаточной характеристики рассматриваемой схемы (рис. 15.14, б) еле
дует, что зона нечувствительности воспроизводимого звена близка к установленно
му значению напряжения ограничения Us.
Рис. 15.14. Схема модели звена с зоной нечувствительности (а) и ее передаточные характера
ки (б, в)
Если переключатель Z перевести в другое положение, то коэффициент усилены
возрастет примерно в 50 раз. При этом на передаточной характеристике звен
(рис. 15.14, в) появляется ограничивающая ветвь, вызванная ограничивающими свой
ствами уже самого ОУ. Из рис. 15.14, в видно, что ограничение наступает при выхол
ном напряжении 20 В, что соответствует максимальному выходному напряжению ОУ
Заметим, что наличие ограничивающих ветвей в передаточной характеристи
ке на рис. 15.14, в придает ей положительная качества, о которых говорилось выпи
применительно к характеристике на рис. 15.13, б.
Моделирования зазора (люфта) в механической передаче. Такой тип нелиней
ности характерен для кинематических пар, передающих вращательное или поступа
тельное движение. При этом различают ведущее и ведомое звено, например, ведущую
и ведомую шестерню при передаче вращательного момента, причем принимают, чт
ведомое звено не обладает моментом инерции. В модели такой нелинейности должнь
быть предусмотрены элементы, воспроизводящие зону нечувствительности, а такж<
элементы, воспроизводящие неизменность выходной координаты при изменении на
538
Глава 15. Устройства автоматики
правления движения на время, пока весь зазор (люфт) в узле сопряжения кинемати-
ческой пары не будет полностью выбран (пройден). В известных электронных моде-
лях люфта для этой цели используются диодные дискриминирующие элементы и
запоминающий конденсатор [29]. При этом модель выполняется по разомкнутой или ;
замкнутой (следящей) схеме.
Схема модели люфта разомкнутого типа (рис. 15.15, б) содержит цепочку из
встречно включенных стабилитронов и элемент памяти в виде операционного усили-
теля с конденсатором С2 в цепи обратной связи и конденсатором С1 на входе. В каче-
стве источника испытательного сигнала используется рассмотренный в предыдущем
разделе генератор, отличающийся тем, что в нем формируется дополнительно еще од-
на четверть второго периода (за счет увеличения Toff переключателя 3 на 2 с).
Передаточная характеристика Uo f(Ui) исследуемого звена имеет гистерезис-
ный характер (рис. 15.15, б); наклон гистерезисной кривой определяется коэффици-
ентом передачи К = -С1/С2, а ее ширина — удвоенным напряжением срабатывания
диодной цепочки, которое за^метно меньше ожидаемого (около 3 В) и составляет, как
показали измерения в режиме ZOOM, 2,46 В. Объясняется это тем, на наш взгляд (в
работе [29] отсутствует анализ этого обстоятельства), что работа диодной цепочки в
схеме модели все время происходит на пологом участке ее ВАХ, т. е. диодная цепоч-
ка выполняет роль нелинейного сопротивления, а роль переключающего элемента —
только в течение короткого времени после пуска (передаточная характеристика, как
видно из рис. 15.15, б, начинается с начала координат), когда начинается интенсив-
ный заряд конденсаторов С1 и С2 (см. осциллограмму на рис. 15.15, в). Это приводит
к фазовому сдвигу выходного сигнала (трапецеидальной формы) и, как следствие, к
тому, что передаточная характеристика не “дорисовывается” в течение одного перио-
да сигнала genl. Поэтому пришлось увеличить длительность входного сигнала еще на
четверть периода.
Рмс. 15.15. Схема модели люфта разомкнутого типа (а), се передаточная характеристика (б) и
осциллограммы входного (А) и выходного (В) сигналов (в)
Схема модели люфта следящего (замкнутого) типа (рис. 15.16) состоит из сум-
матора на ОУ 1, инвертора на ОУ 2, интегратора на ОУ 3 и диодной цепочки. Переда-
точная характеристика схемы идентична показанной на рис. 15.15, б, ширина петли
539
Часть II. Моделирование схем и устройств
гистерезиса также равна 2,46 В, угол ее наклона определяется отношением
R12/R11. Напряжение входного сигнала Ui в этой схеме непрерывно сравнивается с
выходным напряжением Uo (с помощью ОУ 1). Если |Uo Ui| превышает напряже-
ние полуширины гистерезиса (1,23 В в данном случае), то происходит срабатывание
диодной цепочки и выходное напряжение начинает ограничиваться, в результате]
чего ширина гистерезиса поддерживается постоянной.
С
Z
т
Е
с
('
Е
Е
X
Рис. 15.16. Схема модели люфта следящего типа
Заметим, что наличие звена с люфтом (зазором) в одноконтурной системе ре-Я
гулирования может приводить к возникновению колебаний в процессе регулировав
ния с тем большей амплитудой, чем больше ширина петли, т. е.. размер зазора. При |
этом влияние зазора на процесс регулирования будет более заметным при малыхИ
значениях входной величины и становится несущественным при достаточно боль-И
ших значениях (так же как и влияние зоны нечувствительности). Наличие звена сИ
люфтом в многоконтурной системе регулирования может во многих случаях ока-Я
заться полезным, поскольку вводимое им в обратную связь запаздывание может бла-И
гоприятно влиять на качество процесса регулирования.
Моделирование статических релейных характеристик. С простейшей релейной®
характеристикой мы уже встречались (см. рис. 15.13, в) при рассмотрении модели огв
раничителя на рис. 15.13, а (при разомкнутом ключе Z). Более универсальная схеме
для воспроизведения таких характеристик (рис. 15.17, а) [29] состоит из ОУ 1,2 с ог-И
раничительной диодной цепочкой в обратной связи, сумматора на ОУ 3, источников
постоянного напряжения UI, U2 и цепи положительной обратной связи (ПОС), обра
зованной делителем на потенциометре R и резисторами R13, R23. Напряжение U3 нЛ
подвижном контакте потенциометра при указанном на рис. 15.17, а положении этого® .
контакта (50% от правого контакта потенциометра) составляет 0,5Uo. Для улучшение
формы передаточной характеристики и получения других эффектов нами был введем
конденсатор С в цепи обратной связи ОУ сумматора.
Передаточная характеристика (рис. 15.17, 5) схемы при указанных на пев
значениях параметров формируется следующим образом. Поскольку ’Ш| = |U2| > U®
(U, — напряжение срабатывания ограничивающей диодной цепочки, равного, как в
для ранее рассмотренных схем, ориентировочно 1,6 В), то при t < 0, т. е. перед пус-И
ком, напряжения на выходах ОУ 1 и 2 будут соответственно равны -U, и 4-U., а па вы-И «
ходе сумматора — Uo = 0. После пуска, когда напряжение генератора genl достигнеД
значения -U1 (см. осциллограмму на рис. 15.17, в), напряжение на выходе ОУ 11 -
скачком изменится до значения +U., т. е. на входе сумматора будут действовать две -
напряжения — U, и, следовательно, его выходное напряжение Uo = -2U, (примерив
2,6 В). При этом сформируется (см. рис. 15.17, б) горизонтальная и вертикальная :
часть передаточной характеристики в третьем квадранте, после чего начинаетоИх
540
Глава 15. Устройства автоматики
формирование ее плоской части. Одновременно на входы ОУ 1 и ОУ 2 по цепи ПОС
подается напряжение -K„Uo (К„ — коэффициент ПОС, равный в данном случае 0,5),
т. е. на входе ОУ 1 будет действовать в качестве ограничительного уже не U1, а
напряжение UI - KBUo = UI - 2K-U, (около 0.7 В). Когда после формирования плос-
кой части передаточной характеристики выходное напряжение генератора genl
(см. рис. 15.17, в) достигнет этого напряжения, выходное напряжение ОУ 1 скачком
изменится до значения -U„ схема возвращается в исходное состояние и формирова-
ние передаточной характеристики в третьем квадранте завершается. Формирование
характеристики в первом квадранте происходит аналогичным образом с той лишь
разницей, что при ее формировании участвует только ограничитель на ОУ 1.
Рис. 15.17.
Схема универсальной модели для воспроизведения релейных характеристик (а), ее
передаточная характеристика (б) и осциллограммы входного (Л) и выходного (В)
сигналов(в)
Передаточной характеристикой типа показанной на рис. 15.17, б обладают
трехпозиционные, например, поляризованные реле, имеющие три положения
контактной системы: среднее (в обесточенном состоянии) и два крайних, соответ-
ствующих двум направлениям токов в обмотке. Реле характеризуются током или
напряжением срабатывания (в рассмотренной схеме имитируется напряжениями
U1 и U2) и током или напряжением отпускания (имитируется напряжениями
UI - 2KnU5 и -U1 4- 2KnUM). Отношение тока (напряжения) отпускания к току (на-
пряжению) срабатывания называют коэффициентом возврата реле [38].
Схема на рис. 15.17, а позволяет воспроизводить не только релейные характе-
ристики, но и близкие к кривым намагничивания магнитных материалов гистере-
зисные передаточные характеристики. В качестве примера на рис. 15.18 приведена
541
Часть II. Моделирование схем и устройств
такая характеристика, полученная при напряжениях ограничения Ul = U2 = 0B,
коэффициенте ПОС Кп = 0,2 и емкости конденсатора С « 0,2 мкФ.
Рис. 15.18. Передаточная характеристика модифицированной схемы с гистерезисом
Divider
Divider Constant (К):
Accept |
Cancel
б)
И
Рис. 15.19. Схема включения устройства деления (а) и окно установки его параметров (б)
Моделирование сухого трения. Сухое (кулоново) трение в кинематических па-
рах проявляется по-разному. В некоторых случаях оно может воспроизводиться пере
даточной характеристикой, показанной на рис. 15.13, в, в других — гистерезиснот
кривой (как у люфта). В случае вращательного движения такое звено характеризует
ся нелинейной зависимостью момента сухого трения от угловой скорости, а в случа<
поступательного движения — нелинейной зависимостью силы сухого трения от по
ступательной скорости перемещения. Представление этой зависимости в виде релей
ной характеристики на рис. 15.13, в справедливо только для случая, когда момен
(или сила) сухого трения имеет постоянное значение независимо от величины скорс
сти или когда вращающий момент при трогании механизма существенно превосхс
дит момент сухого трения. Если вращающий момент при этом меньше максимальн
возможного значения момента сухого трения, то последний может принимать раз
личные (в том числе и непредсказуемые) значения в диапазоне от минимального д
максимального. В различных системах влияние сухого трения на процесс регули;
вания может быть самым разнообразным. Во многих случаях оно дает полезный ai
фект демпфирования колебаний. В некоторых особых случаях оно может служи1
причиной возникновения нежелательных колебаний,
в частности,
автоколебаний
Часто сухое трение может быть причиной различных застоев и нечувствительност]
регулятора к малым отклонениям. Оно может иногда вызывать неплавное движеи
с задержками и рывками и т.п.
В заключение рассмотрим компоненты программы EWB 4.1, которые могу
быть использованы для воспроизведения характеристик элементов автоматически
систем. К таким моделям могут быть отнесены в первую очередь устройства умноже
ния и деления. Множительное устройство было рассмотрено в гл. 13 при моделирс
вании модулятора амплитудно-модулированных колебаний и преобразовател.
частоты. Схема для демонстрации работы делительного устройства показана н
рис. 15.19, а, а диалоговое окно для задания его параметров — на рис. 15.19, б. Н
542
Глава 15. Устройства автоматики
in Y элемента подается делимое, а на вход X — делитель. Выходное напряжение
ройства Uo = KY/X, где К — коэффициент передачи устройства (индицируется
графическим изображением компонента), задаваемый в диалоговом окне на
. 15.19, б. Как видно из рис. 15.19, а, показания включенного на выходе вольт-
ра соответствуют расчетному значению Uo с учетом знака делителя.
Контрольные вопросы и задания
Какую передаточную характеристику имеет звено с ограничением координат?
Приведите пример такого звена.
Какие элементы в схеме на рис. 15.13, а используются для формирования облас-
ти ограничения на передаточной характеристике?
Получите передаточные характеристики схемы на рис. 15.13, а при напряже-
нии стабилизации стабилитронов 3, 5 и 10 В. Каким образом можно выполнить
ограничивающую цепь на обычных диодах?
Чем отличается модель звена с зоной нечувствительности от модели звена с огра-
ничением координат?
Исследуйте передаточные характеристики схемы на рис. 15.14, а при напряже-
нии стабилизации стабилитронов 3, 5 и 10 В.
Приведите пример механической передачи с люфтом. Какой характеристикой
обладает такое звено и к каким эффектам приводит его использование в системах
управления?
С помощью каких элементов в схеме на рис. 15.15, а формируется ширина гисте-
резиса, имитирующая зону нечувствительности звена с люфтом?
К какому типу релейных элементов можно отнести элемент с передаточной ха-
рактеристикой на рис.15.13, в?
Что такое коэффициент возврата реле?
Каким образом в схеме на рис. 15.17, а задается напряжение срабатывания реле?
Получите передаточную характеристику схемы на рис. 15.17, а при U1 = 3 В и
U2 = 0 В. Какому типу реле соответствует полученная характеристика?
Каким образом в схеме на рис. 15.17, а задается напряжение отпускания реле?
С помощью какой схемы можно воспроизвести кинематическую пару с сухим
трением? Разработайте модель для случая, когда момент на ведущем валу (на ве-
дущей шестерне) меньше момента трения.
15.3. Примеры использования
моделей с релейными характеристиками
Учет влияния нелинейностей в любой системе автоматического управления
эечает большие трудности, поскольку приходится сталкиваться с решением не-
ейных дифференциальных уравнений высоких порядков. В большинстве случа-
учет нелинейностей не может быть выполнен в общем виде и позволяет
ьзоваться лишь частными решениями, выполняемыми с той или иной степенью
ближения. Поэтому большую роль приобретают различные упрощенные и при-
женные методы, при помощи которых можно получить ответы лишь на отдель-
• интересующие исследователей вопросы (устойчивость в определенных
овиях, наличие автоколебаний, поведение системы в каком-либо частном режи-
например, при установившейся скорости, при трогании с места и т.п.).
543
Часть II. Моделирование схем и устройств
В настоящее время разработано большое число приближенных методов иссле-
дования нелинейных систем автоматического управления. Дадим краткую характе-
ристику тем из них, которые получили наибольшее распространение при решении
практических задач.
Метод малых отклонений используется для исследования устойчивости сис-
тем по Ляпунову. При этом составляются уравнения для малых отклонений от состо-
яния равновесия либо от установившегося движения, причем исследуется
устойчивость данного состояния равновесия или данного движения. Если считать,
что все отклонения достаточно малы, то можно пренебречь в первом приближении
их высшими степенями и произведениями. Тогда получаются уравнения первого
приближения, которые и могут быть подвергнуты исследованию на устойчивость ।
при учете той или иной нелинейности.
Методы аппроксимации. В этом случае решение уравнений находят, заменяя
характеристику нелинейного элемента некоторой близкой к ней кривой, которая
может быть записана в аналитической форме.
Метод малого параметра возник в небесной механике в связи с решением за-
дачи о трех телах. Основные исследования по этому методу принадлежат француз-]
скому математику Пуанкаре. В дальнейшем были разработаны различные варианты
метода, применяемые в радиотехнике и теории автоматического управления. Наибо-
лее известными являются методы Ляпунова, Рэйля и Ван-дер-Поля. Метод послед-1
него был строго обоснован Мандельштамом, Папалекси и Андроновым.
Общая идея метода малого параметра основана на том, что ряд членов левой!
части дифференциальных уравнений нелинейных систем можно в ряде случаев счи-|
тать малыми по сравнению с остальными членами, определяющими характер дви-1
жения системы. Метод позволяет определить приближенные значения амплитуды и I
частоты основной гармоники периодических колебаний при гармонических возму-1
щениях на входе системы, что позволяет рассчитать коэффициент усиления нели-|
нейного звена по первой гармонике.
Численно-графические методы. Исследование нелинейной системы произвол
дится путем численных и графических способов интегрирования нелинейных диф-|
ференциальных уравнений, например, интегрирование по разностному методу!
Адамса-Штермера, способ приближенного интегрирования Чаплыгина, метод Эйле-|
ра, который является одним из наиболее простых. Он положен в основу почти всех!
графических способов, отличающихся друг от друга только по характеру геометри-1
ческих построений. К более простым методам относятся метод секущих, метод каса-|
тельных и метод с использованием решения уравнений в конечных разностях.
Метод фазовых траекторий. Метод основан на понятии фазового пространства!
Он отличается наглядностью и возможностью получения полного представления I
характере возможных состояний системы. Сущность его заключается в следующем Л
Пусть система описывается дифференциальным уравнением n-го порядка. Ее состоя!
ние может быть задано п числами, определяющими координаты некоторой точки в i; 1
мерном пространстве, причем каждой точке этого пространства будет соответствовать!
одно определенное состояние (определенная фаза) системы. Поэтому такое простран-!
ство называется фазовым. Для систем, описываемых дифференциальным уравнений
ем второго порядка, фазовое пространство является двухмерным и в этом случае он!
превращается в фазовую плоскость, на которой по двум осям координат (X, Y) отклай
дываются какие-либо две переменные, характеризующие поведение данной систем!
в динамике (в переходном процессе). В качестве таких переменных чаще всего ней
ПС
за
ос
КС
иг
за
08
И
от
31
HI
хс
36
КС
Н£
KI
чс
Т€
И
HI
□С
К(
(F
ст
С£
ТС
и:
м
а»
тс
ГС
(Г
Р
п<
pi
ГС
п;
К
п;
544
18
Глава 15. Устройства автоматики
пользуется отклонение регулируемой величины X (откладывается по оси X) и ее пер-
вая производная X', т. е. скорость изменения этого отклонения (откладывается по
оси Y). В случае колебательного процесса с постоянными амплитудой и частотой,
когда корни характеристического уравнения системы являются чисто мнимыми,
изображение на фазовой плоскости будет представлять собой замкнутый контур —
замкнутую фазовую траекторию, например, в виде эллипса. Каждому периоду коле-
баний соответствует прохождение изображающей точкой всего контура. В случае за-
тухающего колебательного процесса (корни характеристического уравнения имеют
отрицательную вещественную часть) изображение на фазовой плоскости будет иметь
вид сходящейся к началу координат (или к определенному установившемуся значе-
нию при наличии внешнего возмущения) спиралевидной фазовой траектории и рас-
ходящейся — при расходящемся колебательном процессе (корни с положительной
вещественной частью, система неустойчива).
Следует заметить, что фазовые траектории представляют собой геометричес-
кое отражение процессов динамики в системе. В это отражение входят лишь коорди-
наты и отсутствует время. Поэтому фазовая траектория сама по себе дает лишь
качественное представление о характере поведения системы. Чтобы получить коли-
чественное положение изображающей точки в любой момент времени, нужно найти
тем или иным способом решение переходного процесса во времени.
Методы моделирования являются наиболее эффективным средством анализа
и синтеза, поскольку не требуют громоздких вычислений и графических построе-
ний, особенно в случае сложных нелинейных систем управления. Рассмотрим наи-
более простые примеры систем, содержащих нелинейности релейного типа, о
которых речь шла в предыдущем разделе.
Модель потенциометрического датчика перемещения. Потенциометрические
(реостатные) датчики широко применяются в системах управления и контроля, в ча-
стности, в уровнемерах (в том числе и бензобаках автомобилей), в которых поплавок
связан с подвижным контактом, перемещающимся по виткам проволочного резис-
тора (см. разд. 16.2). Перемещение подвижного контакта вызывает скачкообразное
изменение сопротивления на величину сопротивления одного витка, что в общем
случае является признаком наличия нелинейности в таком датчике.
Схема модели потенциометрического датчика с использованием релейного эле-
мента на рис. 15.17, а (для имитации скачкообразного изменения сопротивления при
переходе подвижного контакта с витка на виток) состоит (см. рис. 15.20, а) из сумма-
тора на ОУ 1, интегратора на ОУ 2, инвертирующего усилителя на ОУ 3, счетверенно-
го переключателя Z, управляемого одноименной клавишей, и модели релейного звена
(рис. 15.17, а), представленного подсхемой UniversR и имеющего передаточную ха-
рактеристику на рис. 15.20, б, полученную при UI = U2 « 1 В, Кп •= 0,4 и С * 100 пФ в
положении переключателей Z, показанном на рис. 15.20, а.
Моделирование собственно потенциометрического датчика производится по-
сле перевода переключателей Z в положение, противоположное показанному на
рис. 15.20, а. Полученная передаточная характеристика (рис. 15.20, в) представля-
ет собой многоступенчатую прямую линию. Согласно [29], величина ступеньки по
горизонтали (входное напряжение Ui) равна U<PR11/R1, по вертикали (выходное на-
пряжение Uo) — UcpR12R31/RlR3, скорость нарастания ступеньки — U./C-R21.
Как следует из рис. 15.20, б, напряжение срабатывания релейного элемента U^ и на-
пряжение срабатывания диодной цепочки U, примерно равны 1,1 и 2,4 В.
В Зак. 205
545
Часть II. Моделирование схем и устройств
Релейная система автоматического регулирования [29]. Уравнение релейной
системы задается в следующем виде:
(р2 + 2,5р + 1)Х = -КХ,; X, - F(X), (15.7)
где р = d/dt — оператор дифференцирования.
Функция F(X) задается в виде передаточной функции на рис. 15.17, б с пара-
метрами (в относительных единицах): напряжение срабатывания Ucp = 1, напряже-
ние отпускания U^, = 0,6, выходная амплитуда (напряжение срабатывания диодной
цепочки) ия = 1. Задачей моделирования является определение характера переход-
ных процессов при начальных условиях Х(0) = 1, Х'(0) = 0 и значениях коэффици-
ента К - 304, 400,200 и 100.
Рис. 15.20. Схема модели проволочного потенциометрического датчика перемещения (а) и ее
передаточные характеристики (б, в)
Параметры модели (рис. 15.21, а) выбираются таким же образом, как и в раз-
деле 14.1. Начнем с составления уравнений для выходного напряжения каждого
блока. В данном случае они будут определяться выражениями:
для сумматора на ОУ 1 UI = -(K11-U6 + К12 А2 U3 + К13 A1U4);
для первого интегратора на ОУ 2 U2 = -К21-Ш/р;
для второго интегратора на ОУ 3 U3 = -К31 U2/p;
для масштабирующего усилителя на ОУ 4 U4 = -K41U2;
для релейного элемента U6 = F(U3).
С помощью приведенных формул получаем:
(р2 + К21 К13 К41А1 р + К21 К31 К12 А2)Х = -К21К31 КП F(U3).
После преобразования переменных путем введения масштабов X = MXU3 и
X, = MIXU6
(р2 + К21 К13 К41 А1-Р + К21 К31 К12 А2)Х =
= -МХК21 K31KllF(X/MJ/Mlx. (15.8)
546
।
Глава 15. Устройства автоматики
Примем Мх = X(0)/U3 = 1/10 = 0,1 и Мх - М1Х - 0,1. В таком случае из сопос-
тавления исходного (15.7) и машинного (15.8) уравнений получаем выражения для
выбора параметров модели в следующем виде:
К21К13К41А1 = 2,5; К21К31К12 А2 = 1;
К21К31К11 = К; U6 = F(U3); U3 - 10Х. (15.9)
Задаемся значениями коэффициентов передачи К12 = К41 = 1, что соответству-
ет выбору сопротивлений резисторов RI = R12 = R4 = R41 = 1 МОм. Задаемся также
значениями коэффициентов деления делителей Al - А2 — 1 на потенциометрах с од-
ноименными позиционными обозначениями (установлены на 100%) и коэффициента-
ми передачи К21 = К31 = 1 с, что при С = 1 мкФ соответствует выбору сопротивлений
резисторов R21 — R31 = 1 МОм. При указанном выборе для обеспечения коэффициен-
та 2,5 в уравнении (15.7) коэффициент передачи К13 должен быть равен, как следует
из условий (15.9), 2,5, т. е. сопротивление резистора R13 — 1/2,5 = 0,4 МОм. Для обес-
печения заданного значения коэффициента К = 304 сопротивление резистора R11
должно быть равно R1/304 - 3,29 кОм, для К = 400 - 2,5 кОм, для К = 200 - 5 кОм,
для К = 100 - 10 кОм. Для введения начального условия Х(0) = 10 В (с учетом при-
нятого масштаба) в схеме используется источник заряда, образованный источником
постоянного напряжения Х(0) и конденсатором Со и подключаемый на короткое вре-
мя (0,06 с) после запуска моделирования к входу интегратора на ОУ 2 с помощью
программного переключателя Х(0), установленные параметры которого Топ = 0 и
Toff = 0,06 с выбраны опытным путем из условия обеспечения Х(0) = 10 В за мини-
мально возможное короткое время. Введение условия Х'(0) достигается закорачива-
нием на короткое время (0,06 с) после пуска выхода ОУ 2 на общую шину с помощью
программного переключателя Х'(0), параметры которого выбраны аналогичными
переключателю Х(0).
В качестве релейного элемента в схеме на рис. 15.21, а использована схема на
рис. 15.17, а, оформленная в виде подсхемы UniverR2 и имеющая, согласно усло-
виям задачи и принятому масштабу, следующие параметры (см. рис. 15.21, б): на-
пряжение срабатывания U<p = 10 В, напряжение отпускания Uurn = 6 В, выходное
напряжение (напряжение срабатывания диодной цепочки) U, = 10 В. Для обеспече-
ния такого значения U, напряжение стабилизации стабилитронов было установле-
но равным 5,5 В. Для возможности оперативного изменения параметров модели
релейного элемента и наблюдения ее передаточной характеристики в схеме на
рис. 15.21, а предусмотрен счетверенный переключатель Z, показанный в положе-
нии контроля релейного элемента, и генератор одиночного треугольного сигнала
gen 2, отличающийся от genl только тем, что в нем установлено UI — U2 = 10 В
(см. схему на рис. 15.10, а).
Для проведения моделирования переключатель Z нажатием клавиши Z пере-
золится в противоположное показанному на рис. 15.21, а положение. При этом на
входы осциллографа подаются сигналы X (канал В, ось X прямоугольных коорди-
нат) и ее первая производная X' (канал А, ось Y), т. е. на экране осциллографа полу-
чаем фазовую траекторию (или фазовый портрет) исследуемой системы, которая для
различных значений коэффициента К показана на рис. 15.22.
Из рис. 15.22 видно, что для всех значений К фазовые траектории имеют вид
сходящихся к началу координат спиралей. Следовательно, переходный процесс в
рассматриваемой системе носит затухающий колебательный характер, причем раз-
мах колебаний и, следовательно, длительность переходного процесса уменьшается с
уменьшением коэффициента К, определяющего влияние релейного элемента.
1Р
547
Часть II. Моделирование схем и устройств
б)
Рис. 15.21. Схема модели релейной системы регулирования (а) и ее передаточная характер,
тика (б)
Рис. 15.22. Фазовые траектории схемы на рис. 15.21 при К = 304 (о), К = 200 (б), К = 100 (в)
К - 400 (г)
548
Глава 15. Устройства автоматики
Контрольные вопросы и задания
1. В чем заключается основное различие между линейными и нелинейными систе-
мами автоматического регулирования?
2. Назовите приближенные методы анализа автоматических систем. В чем заклю-
чается сущность метода фазовых траекторий?
3. Какой тип нелинейности используется при моделировании потенциометричес-
кого датчика перемещения?
4. Какие функции выполняют решающие блоки на ОУ 2 и 3 в модели потенциоме-
трического датчика?
5. Если выбрать коэффициент деления А2 = 0,5 на одноименном потенциометре, то
как это скажется на выборе коэффициентов передачи других блоков в схеме на
рис. 15.21, а?
6. Если из схемы на рис. 15.21, а исключить устройства для ввода начальных усло-
вий (Х(0) и Х'(0)), то как это скажется на результатах моделирования? Ответ
проверьте на модели.
7. Отключите в схеме на рис. 15.21, а устройства ввода начальных условий. Под-
ключите к суммирующему узлу сумматора на ОУ 1 через резистор R14 - 1 МОм
источник постоянного напряжения. Установите зависимость фазовых траекто-
рий схемы при К * 100 и 400 от напряжения подключенного источника, выбрав
его равным 1, 3, 10 и 12 В.
8. В некоторых случаях задаваемые параметры моделирования (например, коэф-
фициент К в схеме на рис. 15.21, а) могут меняться в достаточно широких преде-
лах, что может привести к дополнительной нелинейности в виде насыщения ОУ.
Для предотвращения таких явлений используют масштабирование не только по
напряжению, но и по времени. Для примера для схемы на рис. 15.21, а введем
масштаб времени Mt = t/T = 1/3. В этом случае в уравнении (15.7) оператор
р — d/dt станет равным 3(d/dT), а само уравнение, разрешенное относительно
старшей производной, примет следующий вид:
X" = -0,835 X'- 0,111Х - КХ,/9.
В таком случае первые три условия из (15.9) запишутся следующим образом:
К21К13К41А1 = 0,835; К21К31К12 А2 = 0,111;
К21К31К11 = К/9. (15.10)
Используя выражения (15.10), выберите коэффициенты передачи для схемы
на рис. 15.21, а и проведите моделирование при указанных выше значениях коэффи-
циента К. Полученные результаты сравните с данными, приведенными на рис. 15.22.
9. Измерьте время моделирования от момента пуска до момента прихода отобража-
ющей точки фазовой траектории в начало координат для указанных значений
коэффициента К. Для измерения времени воспользуйтесь счетчиком, табло ко-
торого находится рядом с выключателем и который запускается одновременно с
запуском моделирования. Для получения отсчета в секундах показания счетчи-
ка необходимо умножить примерно на 10. Полагая, что измеренное таким обра-
зом время определяет время переходных процессов, определите, при каком
значении коэффициента К оно минимально.
549
Часть II. Моделирование схем и устройств
15.4. Элементы автоматики в программе EWB 5.0
Большинство компонентов программы EWB 5.0, которые могут быть использо-
ваны в качестве моделей элементов автоматических устройств, сосредоточены в биб-
лиотеке Controls. Полиномиальный источник, который мы рассматривали в разделе
15.1 в качестве универсального преобразователя, в EWB 5.0 отнесен в каталог библи-
отеки Sources и ничем не отличается от аналогичного устройства программы EWB
4.1. Из других компонентов был выбран только управляемый источник напряжения
из библиотеки Sources. Рассмотрение начнем с компонентов библиотеки Controls.
Поскольку устройства масштабирования, суммирования, интегрирования и
дифференцирования уже рассматривались в гл. 10, то ниже по этим устройствам бу-
дут приведены самые краткие сведения. Кроме того, эти устройства уже использова-
лись в гл. 14.
Рис. 15.23. Схема включения масштабирующего блока (а) и осциллограммы сигналов на входе
(Л) и выходе (В) (б)
Масштабирующий блок (схема включения на рис. 15.23, а). Параметры бло-
ка задаются в диалоговом окне, в котором можно установить требуемый коэффици-
ент усиления К = 2, постоянную составляющую на входе VIOFF = -2 В и выходе
VOOFF = 2 В (здесь и далее численные значения параметров приводятся для демон-
страции возможностей компонента). По постоянной составляющей выходное на-
пряжение блока Uo = К-VIOFF + VOOFF с учетом знаков входящих в формулу
составляющих. При указанных значениях параметров справедливость формулы
иллюстрируется результатами осциллографических измерений на рис. 15.23, б, от-
550
Глава 15. Устройства автоматики
куда видно, что разность между амплитудами положительной и отрицательной
полуволн синусоиды (величины VB1 и VB2) составляет 4 В, т. е. постоянная состав-
ляющая равна 2 В, что соответствует расчетному значению.
Трехвходовой суммирующий блок. На схеме включения блока (рис. 15.24) Ua,
Ub, Uc — источники входных сигналов, в данном случае — постоянного напряжения, но
в общем случае могут быть любыми функциями времени. Параметры блока задаются в
диалоговом окне, в котором параметры VAOFF = -0,5 В, VBOFF = VCOFF = 0,5 В опре-
деляют постоянную составляющую на входах А, В и С, параметры КА = КВ - КС =1 —
коэффициент усиления по напряжению для каждого входа, KOUT = 1 — общий для трех
каналов коэффициент усиления, VOOFF = 0,25 В — постоянную составляющую на вы-
ходе. Выходное напряжение определяется по формуле:
Uo = KOUT[KA(Ua - VAOFF) + KB(-Uc + VBOFF) + KC(Uc + VCOFF)] + VOOFF.
При указанных значениях параметров выходное напряжение схемы, измеря-
емое вольтметром Uo, соответствует расчетному по приведенной формуле.
Uc
Рис. 15.24. Схема включения трехвходового суммирующего блока
Рис. 15.25. Схема включения интегрирующего блока (а) и осциллограммы входного (А) и вы-
ходного (В) сигналов (б)
Итегрирующий блок (схема включения на рис. 15.25, а). Параметры блока зада-
ются в диалоговом окне, в котором К = 1 с1 — коэффициент передачи; VIOFF = 3 В —
напряжение постоянной составляющей на входе; VL =-1е+12 - 10’ В, VU =
= 1е+12 = 1012 В — предельные значения выходного напряжения отрицательной и
положительной полярности; VS = 1е-06 = 10‘6 В/с — минимальная скорость измене-
ния выходного напряжения; VOIC — -10 В — начальное напряжение на интегриру-
ющем конденсаторе (на выходе). Параметры V1OFF и VOIC служат для установки
начальных условий (в схеме на рис. 15.21, а мы использовали для этой цели специ-
альные устройства). При указанных значениях параметров результаты моделирова-
ния показаны на рис. 15.25, б, откуда видно, что в момент времени t = 0 (начало
моделирования) выходное напряжение интегратора (осциллограмма В) скачком
принимает установленное значение VOIC = -10 В, затем следует интегрирование на-
551
Часть II. Моделирование схем и устройств
пряжения VIOFF = 3 В и входных двухполярных импульсов с функционального ге-
нератора (осциллограмма А).
Дифференцирующий блок (схема включения на рис. 15.26, а). В диалоговом
окне блока параметр К - 1 с — коэффициент передачи; VOOFF = 3 В — напряжение
постоянной составляющей на выходе (начальное условие); VL = -1е+12 — 1О'2 В, VU
= 1е+12 = 101- В предельные значения выходного напряжения отрицательной и
положительной полярности; VS 1е-06 = 10 г' В/с — скорость изменения входного
напряжения. При таких значениях параметров результаты моделирования пред-
ставлены на рис. 15.26, б, где показан процесс формирования прямоугольных им-
пульсов (осциллограмма В) путем дифференцирования входных пилообразных
импульсов (осциллограмма А).
Рис. 15.26. Схема включения дифференцирующего блока (а) и осциллограммы входного (А) и
выходного (В) напряжений (б)
р
Формирователь передаточных характеристик. Этот компонент позволяет
формировать передаточные характеристики в соответствии с выражением:
К(р) = К(р‘2АЗ + р2А2 + рА1 + А0)/(р3ВЗ + р2В2 + рВ1 + ВО), (15.11)
где р — оператор Лапласа.
Коэффициенты полиномов А, В и коэффициент усиления К задаются в диало-
говом окне в виде двух закладок (на рис. 15.27 — первая закладка, на непоказанной
второй закладке В1 = 0,05, ВО = 1). В окне можно также задать смещение на входе
(постоянную составляющую) VIOFF, установку начальных условий в режиме интег-
ратора VINT и частоту среза W.
Схема включения формирователя показана на рис. 15.28, а. Его входные за-
жимы обозначены цифрами 1 и 2, выходные — цифрами 3 и 4. В качестве контроль-
но-измерительного прибора использован измеритель АЧХ-ФЧХ.
При указанных на рис. 15.27 значениях параметров получаем передаточную
характеристику звена второго порядка в следующем виде: К(р) = 1/(р2 + 0,05р 4- 1).
Результаты моделирования этой передаточной характеристики при выбранной час-
тоте среза 62800 рад/с (10 кГц) показаны на рис. 15.28, б. Коэффициент передачи на
резонансной частоте (частоте среза) при этом равен 1/В1 = 1/0,05 - 20 = 26 дБ, что
совпадает с измеренным значением.
Испытания формирователя при значениях параметров по умолчанию (АО = ВО = 0,
K = 1,W«1, остальные параметры с нулевым значением) показали, что он позволя-
ет микшировать (объединять) сигналы от трех источников. Если в качестве выход-
ного использовать вывод 3, то сигнал с вывода 2 будет передаваться с инверсией, а с
выводов 1 и 4 — без инверсии, при этом неиспользуемые входы можно не заземлять
(пример такого применения см. на рис. 15.32, а).
552
Глава 15. Устройства автоматики
Рис. 15.27. Диалоговое окно установки параметров формирователя передаточных характеристик
Рис. 15.28. Схема включения формирователя передаточных характеристик (а) и его АЧХ (б)
Модель с ограничением координат по входу и выходу. Схема включения ограни-
чителя, который может быть использован для имитации звена с ограничением коорди-
нат, показана на рис. 15.29, а, его передаточная характеристика на рис. 15.29, б при
следующих значениях параметров: VIOFF - -1 В, К = 0,5, VL = -1 В, VU = 0,5 В,
VS = 1е-06 ~ 10 6 В/с. В качестве источника испытательного сигнала используется им-
портированная из EWB 4.1 схема генератора одиночного треугольного сигнала genlewb
(см. рис. 15.10, а). Как видно из рис. 15.29, б, насыщение наступает при выходном на-
пряжении, определяемом заданными значениями нижнего VL и верхнего VU уровней
ограничения. На линейном участке выходное напряжение определяется выражением
Uo = K(Ui + VIOFF) с учетом знаков входного напряжения Ui и заданного напряжения
смещения VIOFF. При увеличении коэффициента усиления К необходимо, чтобы ско-
рость изменения выходного напряжения от значения VL до VU не превышала заданной
в окне величины VS.
Следует отметить, что рассмотренная схема является достаточно универсаль-
ной. Так, например, за счет увеличения коэффициента К можно имитировать релей-
ный элемент. Передаточная характеристика для такого случая показана на
рис. 15.30, а. Она получена при установке следующих значений параметров: VIOFF
= 0 В; К = 1000; VL = —1 В; VU - 1 В; VS = 0,0001 В/с. Если при этом выбрать VIOFF
553
Часть II. Моделирование схем и устройств
= -1 В, К = 0,5 и VL = 0 В, то получим характеристику звена с зоной нечувствител:
ности при Ui < 1 В, показанную на рис. 15.30, б.
Н 111
Рис. 15.29. Схема включения ограничителя (а) и его передаточная характеристика (б)
Рис. 15.30. Передаточная характеристика ограничителя в режиме воспроизведения релейно)
звена (а) и звена с зоной нечувствительности и ограничением (б)
=
Рис. 15.31. Схема включения блока с гистерезисной характеристикой (а) и его передаточные ха-
рактеристики (б, в)
Модель звена с гистерезисной характеристикой. Схема для испытаний это
го компонента показана на рис. 15.31, а, передаточные характеристики — на
рис. 15.31, б, в при следующих значениях параметров: VIL = -3 В, VIH = 2В-
нижний и верхний пороги ограничения по входному напряжению; Н = 1 В — ши-
рина гистерезиса; VOL = -1 В, VOH = 1 В — нижний и верхний пороги ограниче-
554
Глава 15. Устройства автоматики
ния по выходному напряжению; ISD = 0 и 50% — параметр нелинейности перехо-
да в зону ограничения. В качестве источника испытательного сигнала Ui использо-
ван генератор одиночного треугольного сигнала genlewb.
Формирование передаточной характеристики рассматриваемой схемы начи-
нается с ограничения выходного напряжения снизу по заданному значению параме-
тра VOL, равного в данном случае -1 В (см. рис. 15.31,6). Когда входное напряжение
Ui достигает значения VIL, начинается формирование правой вертикальной ветви
характеристики. Когда входное напряжение достигает значения VIH, начинается
формирование верхнего участка насыщения по заданному уровню ограничения
сверху VOH = 1 В. Левая вертикальная ветвь характеристики формируется по задан-
ному значению напряжения Н = 1 В ширины гистерезиса. Если выбрать параметр
ISD = 50%, то передаточная характеристика принимает вид кривой намагничива-
ния (рис. 15.31, в).
На рис. 15.32, а показана схема, которая позволяет воспроизвести передаточ-
ную характеристику, близкую по характеру к характеристике на рис. 15.17, б. Схема
содержит два блока с гистерезисной характеристикой. Для элемента 1, формирующе-
го левую часть характеристики, значения параметров были выбраны следующими:
VIL = -3 (1) В; VIH = -2 (2); Н = 0,5 (0,2) В; VOL = -1 (0) В; VOH = 0 (1); IDS = 0 (0)%.
Для элемента 2, формирующего правую часть характеристики, значения параметров
приведены в скобках. Выходы элементов 1 и 2 объединены с помощью формировате-
ля передаточных характеристик. Передаточная характеристика показана на
рис. 15.32, б.
Рис. 15.32. Схема для воспроизведения звена с двухкомпонентной гистерезисной характеристи-
кой (а) и ее передаточная характеристика (б)
а)
Из приведенных данных нетрудно заметить, что наклон гистерезисных кри-
вых определяется соотношением значений параметров VIL и VIH: чем меньше сум-
ма их абсолютных значений, тем меньше наклон характеристики. В некоторых
555
Часть II. Моделирование схем и устройств
случаях такая зависимость может быть использована, например, для воспроизведе-
ния времени переключения реле, определяемого временем перемещения подвижно-
го контакта реле, или для воспроизведения производственного разброса реле по
напряжению срабатывания.
Множительное устройство. Для схемы включения устройства на рис. 15.33
выходное напряжение определяется выражением:
Uo = K[YK(Uy + YOFF)XK(Ux + XOFF)] + OFF,
где задаваемые с помощью диалогового окна параметры имеют следующие назначе-
ния: К = 0,5 — общий коэффициент передачи; YK = ХК = 1 — коэффициенты пере-
дачи по входам Y и X; YOFF = -1 В,XOFF - 1 В, OFF = 1 В — постоянные
составляющие (или смещения нулевого уровня) соответственно на входах Y, X и вы-
ходе. Значение входящих в формулу параметров подставляются с учетом их знаков.
После подстановки указанных значений параметров получим результат, совпадаю-
щий с расчетным и индицируемый на табло подключенного к выходу вольтметра.
Рис. 15.33. Схема включения множительного устройства
Рис. 15.34. Схема включения делительного устройства
Как видно из проведенного рассмотрения, множительное устройство в про-
грамме EWB 5.0 существенно отличается от аналогичного компонента EWB 4.1 по
количеству задаваемых параметров (в EWB 4.1 задавался только общий коэффици-
ент передачи).
Делительное устройство. Для схемы включения устройства на рис. 15.34 вы-
ходное напряжение определяется выражением:
Uo - K[YK(Uy + YOFF)/XK(Ux + XOFF)] + OFF.
Входящие в формулу параметры имеют аналогичные с множительным уст-
ройством назначения; для эксперимента выбрано: К = 0,5, OFF = 1 В, YOFF = -1 В,
YK - 1, XOFF = 1 В, ХК = 1. Содержащиеся в диалоговом окне параметры XLOWLIM
(ограничение на минимальное значение X) и XCD (параметр сглаживания) на ре-
зультат влияния не оказывали при изменении их значения от 0 до 100 (значение
100 — по умолчанию для обоих параметров).
556
Глава 15. Устройства автоматики
Значения входящих в формулу параметров подставляются с учетом их знаков.
После подстановки указанных значений параметров получим результат, совпадаю-
щий с расчетным и индицируемый на табло вольтметра.
Модель с управляемым ограничением координат. Схема включения блока с
управляемыми параметрами ограничения (управляемого ограничителя) показана
на рис. 15.35, а, передаточная характеристика на рис. 15.35, б. Блок отличается
от вышерассмотренного тем, что напряжение ограничения сверху и снизу может
быть задано с помощью внешних управляющих сигналов, источниками которых в
данном случае являются источники постоянного напряжения Uu и Un. Напряжение
ограничения может быть скорректировано установкой в диалоговом окне соответст-
вующих значений параметров VOUD (напряжение ограничения сверху, 0,5 В) и
VOLD (напряжение ограничения снизу, 0,5 В). Влияние параметра ULSR на переда-
точную характеристику в данном случае не обнаружено.
Рассмотренная схема ограничителя может быть использована для воспроизве-
дения звена с сухим трением для случая, когда момент на ведущем валу (при пере-
даче вращательного движения) меньше момента трения. В этом случае напряжение,
имитирующее момент на валу, должно быть подано на основной вход модели, а на
входы U и L — парафазное (на случай реверса) напряжение от генератора шума,
имитирующего момент сухого трения.
Рис. 15.35. Схема с управляемым ограничением координат (а) и ее передаточная характеристика (б)
а)
Селектор сигналов по знаку первой производной (схема включения на
рис. 15.36, а). Переключатель Z используется для переключения фазы входного сиг-
нала (у функционального генератора парафазный выход) с целью оперативного из-
менения режимов отображения работы рассматриваемого компонента на экране
осциллографа. Режим работы селектора задается в диалоговом окне установкой на
ноль или единицу всего двух параметров: RSMAX (регистрация нарастающих сигна-
лов с запоминанием положительной амплитуды) и FSMAX (регистрация спадающих
сигналов с запоминанием отрицательной амплитуды). При комбинации 11 сигнал
передается на выход селектора без ослабления и искажений. При комбинации 10
557
Часть II. Моделирование схем и устройств
(ключ Z находится в показанном на рис. 15.36, а положении) на выход передается
нарастающая часть периода входного сигнала (или передний фронт в случае импульс-
ного сигнала) с запоминанием его положительной амплитуды (см. рис. 15.36, б). При
комбинации 01 (ключ Z переводится в противоположное положение) на выход пере-
дается ниспадающая часть входного сигнала с запоминанием его отрицательной амп-
литуды (см. рис. 15.36, в). При комбинации 00 на выход передается только
амплитудное значение сигнала соответствующей его фазе полярности, т. е. в зависи-
мости от положения ключа Z.
а)
4i
в)
б)
Рис. 15.36. Схема включения временного селектора сигналов (а) и осциллограммы входного (А)
и выходного (В) сигналов при установке параметров в комбинации 10 (б) и 01 (в)
Рис. 15.37. Схема функционального преобразователя на ИНУН
Из сравнения полученных в этом разделе передаточных характеристик моде-
лей нелинейных компонентов с аналогичными характеристиками, полученными в
разделе 15.1, видно, что они обладают более “идеальной” формой, однако они не мо-
гут быть использованы в качестве реальных звеньев систем управления.
Функциональный преобразователь на управляемом источнике (схема на
рис. 15.37) содержит собственно источник напряжения, управляемый напряжением
(ИНУН) 2 и источник испытательного напряжения на интеграторе 1 с источником
постоянного напряжения U на входе.
Значения параметров ИНУН устанавливаются с помощью двух диалоговых
окоп-закладок, где параметр N = 5 определяет количество точек кусочно-линейного
558
Глава 15. Устройства автоматики
выходного сигнала с координатами в единицах напряжения входного XI...Х5 и вы-
ходного Y1...Y5 напряжения (для рассматриваемого случая XI г 2 В, Y1 = О В,
Х2 = -1 В, Y2 = -2 В, ХЗ = О В, Y3 = О В, Х4 = 1 В, Y4 = 2 В, Х5 = 2 В, Y5 = О В). Пара-
метром ISD (1% по умолчанию) определяется нелинейность в точках излома кривой.
При указанных значениях параметров и пилообразном входном сигнале Ui (с
постоянной составляющей -3 В) результаты моделирования показаны на рис. 15.38,
откуда следует, что выходное напряжение изменяется в соответствии с заданными
значениями параметров. Особенностью преобразователя является то, что его выход-
ное напряжение за пределами заданных значений ((XI,Y1) и (X5,Y5)) повторяет за-
кон его изменения на предыдущем отрезке. Для случая ISD = 50% осциллограммы
сигналов показаны на рис. 15.39.
Рис. 15.38. Осциллограммы входного (А) и выходного (В) сигналов преобразователя при значе-
нии параметра ISD = 1%
Рис. 15.39. Осциллограммы входного (А) и выходного (В) сигналов преобразователя при значе-
нии параметра ISD = 50%
Контрольные вопросы н задания
1. Составьте эквивалентную схему масштабирующего блока на ОУ с коэффициен-
том передачи К = 2 и VIOFF = VOOFF = 0 (см. гл. 10).
2. Каким образом в эквивалентной схеме по п. 1 можно ввести постоянную состав-
ляющую по входу и выходу?
3. Составьте эквивалентную схему на ОУ трехвходового суммирующего блока с ко-
эффициентами передачи КА = 0,5, КВ = 2 и КС - 1 при нулевых значениях по-
стоянных составляющих.
•1. Напишите выражения для выходного напряжения интегрирующего и диффе-
ренцирующего блоков в виде Uo(t). Для интегрирующего блока определите допу-
стимое время интегрирования при указанных на рис. 15.25, б значениях
параметров VL, VU и VS.
559
Часть II. Моделирование схем и устройств
5. Выберите значения параметров схемы на рис. 15.29, а таким образом, чтобы по-
лучить смещенную по оси X на 2 В релейную характеристику
6. Выберите значения параметров схемы на рис. 15.31, а таким образом, чтобы пе-
редаточная характеристика имела минимальный наклон к оси X.
7. Проведите испытания схемы делительного устройства на рис. 15.34, а для слу-
чая деления двух синусоидальных сигналов одинаковой частоты, но разной амп-
литуды или фазы.
8. Приведите пример использования схемы на рис. 15.36, а для воспроизведения
элементов электропривода или исполнительных органов релейного типа в режи-
ме реверса.
9. Используя схему включения формирователя передаточных характеристик на
рис. 15.28, а и выражение (15.11), проведите исследование приведенных ниже
звеньев с указанными для каждого из них коэффициентами передачи К(р). Для
каждой схемы получите АЧХ и ФЧХ, подключив к ним функциональный гене-
ратор и измеритель АЧХ-ФЧХ, и сравните результаты с данными, полученными
с использованием формирователя передаточных характеристик при одинаковых
исходных данных: W = 62800 рад/с, Cl — С2, R2 - O,5R1, W R1-C1 = 1.
9.1. Форсирующее (ускоряющее) звено (рис. 15.40, а); К(р) - (R2/R1)(R1-Cl p + 1).
Рис. 15.40. Схемы форсирующего звена (а) и комбинированных звеньев 1 (б), 2 (в). 3 (г), 4 (<?) и 5 (е)
9.2. Комбинированное звено (КЗ) 1 (рис.15.40, б); К(р) = p-R2 Cl/(Rl Cl p + 1).
9.3. КЗ 2 (рис. 15.40, в); К(р) = (R2 C2 p + 1)(R1-Cl p + 1)/P R1C2.
9.4. КЗ 3 (рис. 15.40, г); К(р) - R2(R1-Cl p + l)/Rl(R2 C2 p + 1).
9.5. КЗ 4 (рис. 15.40, 5); К(р) = Cl(R2 C2 p + 1)/C2(R1-Cl p + 1).
9.6. КЗ 5 (рис. 15.40, е); К(р) - p R2-Cl/(R2 C2-p + 1)(R1-Cl p + 1).
9.7. КЗ 6 (рис. 15.41, а); К(р) = l/Rl-C2 p(Rl Cl p + 1).
9.8. КЗ 7 (рис. 15.41, б); К(р) = R2/2Rl(R2 C2 p + 1)(R1-Cl p + 1).
9.9. КЗ 8 (рис. 15.41, в); К(р) = R3(nRl Cl p + l)/2Rl(nRl-Cl p + l)(R2 C2 p + 1); n «
2C2/C1 - 2R1/R2.
9.10. КЗ 9 (рис. 15.41, г); К(р) = l/4p2(RC)2.
9.11. КЗ 10 (рис. 15.41,5);
К(р) = R3(2R2-C2p + 1 )/RlL 1 + 2R2C2p + (C2)2R3R2p2].
560
Глава 15. Устройства автоматики
9.12. КЗ 11 (рис. 15.41, е);
К(р) = R2Clp(2R2C2p + 1)/4(R1-Clp + 1)[1 + R2C3p/4 + (R2)2C3-C2p2j.
10. Проведите сравнение приведенных в п. 9 схем звеньев, используемых в различ-
ном качестве в САУ [29, 90], с рассмотренными в гл. 10 фильтрующими устрой-
ствами на ОУ.
11. Проведите моделирование преобразователя на рис. 15.37, изменив знаки в зна-
чениях его координат ((XI, Y1) и (Х5, Y5)).
Рис. 15.41. Схема комбинированных звеньев 6 (а), 7 (б), 8 (в), 9 (г), 10 (д) и 11 (е)
15.5. Структурное моделирование
При структурном моделировании моделируемая система, например, система
автоматического управления, задается в виде структурной схемы, в которую могут
быть включены и отдельные ее реальные элементы (регуляторы, исполнительные
органы и т.п.). В структурной схеме задаются параметры основных звеньев и указы-
ваются ориентировочные пределы изменения варьируемых параметров, например,
коэффициентов усиления и постоянных времени звеньев. Моделирование каждого
звена системы-оригинала осуществляется в отдельности, а затем из моделей звеньев
составляется общая модель, точно воспроизводящая структурную схему оригинала.
Метод структурного моделирования имеет по сравнению с методом моделиро-
вания по уравнению (см. разд. 14.1) то преимущество, что он позволяет включать в
состав модели элементы реальной системы регулирования и легко подбирать пара-
метры каждого звена модели, добиваясь желаемого закона регулирования. Кроме
того, такой метод дает ясное представление о соответствии параметров исследуемой
системы ее модели, что создает определенные удобства как при подборе параметров
самих звеньев, так и корректирующих связей. Так как параметры каждого звена мо-
дели однозначно связаны с параметрами соответствующих звеньев реальной систе-
мы через постоянные масштабы, то полученные при моделировании результаты
могут быть пересчитаны затем в параметры звеньев реальной системы, при которых
достигается требуемый закон управления.
Для проведения структурного моделирования необходимо располагать моде-
лями (схемами набора) элементарных звеньев систем управления (см. разд. 14.1). В
качестве примера рассмотрим процесс моделирования следящей системы копиро-
561
Часть II. Моделирование схем и устройств
вально-фрезерного станка [64], структурная схема которой показана на рис. 15.42.
Для этой системы необходимо провести исследование переходных процессов при
входном воздействии Si(p) = 1. В состав системы входят (см. рис. 15.42): преобразу-
ющее устройство с коэффициентом передачи К1 = 10 В/мм; дифференцирующий
трансформатор с коэффициентом передачи К2(р) = р-К2/(1 4- р-Т2), где К2 = 0,104 с,
Т2 = 0,0303 с; электронный усилитель с коэффициентом передачи КЗ = 6,3; ЭМУ с
коэффициентом передачи К4(р) = К4/ (1 + рЧТ4), где К4 = 35,6, Т4 = 0,0616 с — по-
стоянная времени поперечной цепи якоря; звено обратной связи по скорости с коэф-
фициентом передачи К5(р) = р-К5/(1 + р-Т5), где К5 = 0,027 с, Т5 = 0,134 с —
электромеханическая постоянная двигателя; электродвигатель с редуктором с коэф-
фициентом передачи К6(р) = р-Кб/(1 4- р-Т5), где Кб = 0,053 мм/В с — передаточный
коэффициент электродвигателя по скорости (схема модели состоит из последова-
тельно включенных модели апериодического звена и интегратора); масштаб по вре-
мени Mt = 20. Дополнительным условием является введение ограничения на
коэффициент усиления ОУ с ООС — не более 10 (такие ограничения характерны для
реальных моделирующих установок).
Site) So(p)
Рис. 15.42. Структурная схема следящей системы копировально-фрезерного станка
Рабочая модель (схема набора) рассматриваемой системы показана на
рис. 15.43. Входное единичное воздействие в схеме модели имитируется источником
постоянного напряжения Ui = 1 В, преобразующее устройство — сумматором на ОУ 1,
дифференцирующий трансформатор — дифференцирующим звеном на ОУ 2, 3 и 4,
электронный усилитель — сумматором на ОУ 5, ЭМУ — апериодическим звеном на
ОУ 6, звено гибкой обратной связи — дифференцирующим звеном на ОУ 7, 8 и 9, эле-
ктродвигатель с редуктором — апериодическим звеном на ОУ 10 и интегратором на
ОУ 11. Таким образом, модель составлена в соответствии со структурной схемой из мо-
делей типовых звеньев.
Проведем предварительный выбор передаточных коэффициентов каждого
компонента модели, отмечая их штрихом и следуя методике, изложенной в [64], и
системе обозначений, принятой в [29]. Для преобразовательного звена задаемся
К1Г = R1/R12 = 1, К12' - R1/R12 = 1 (коэффициент передачи звена К1 будет учтен
при выборе параметров интегратора на ОУ 11). Для дифференцирующего трансфор-
матора задаемся К31' = 1, после чего находим К21' = R2/R21 = К2/Т2 »
= 0,104/0,0303 = 3,43, К22'К4Г = (R2/R22)(1/R41C) - 1/М.. Т2 = 1/20 0,0303 =
= 1,65, откуда, задавшись К4Г = 1/R41 С = 1, получим К22' - R2/R22 = 1,65. Для сум-
матора на ОУ 5 задаемся К5Г - R5/R51 — 1, К52' = R5/R52 = 1, К53' = R5/R53 = 1 (ко-
эффициент усиления звена КЗ будет учтен при выборе параметров интегратора на
ОУ 11). Для ЭМУ рассчитываем К6Г = 1/R61C = К4/М. Т4 = 35,6/20 0,0616 - 28,9,
К62' - 1/R62 C = 1/Mt-T4 = 1/20-0,0616 = 0,812. Для элемента обратной связи по
скорости рассчитываем К7Г = R7/R71 = К5/Т5 - 0,027/0,134 - 0,202,
К72' К81' К9Г = (R7/R72)(R8/R81)(1/R91C)= 1/МД5 = 1/20 0,134 - 0,373, откуда,
задавшись К72' = (R7/R72) = 1, К91' = 1/R91C - 1, получим К8Г = R8/R81 = 0,373.
Поскольку электродвигатель с редуктором представлен апериодическим звеном на
ОУ 10 и интегратором на ОУ 11, то его коэффициент передачи Кб = 0,053 разобьем
562
Глава 15. Устройства автоматики
на два: 1 — для апериодического звена и 0,053 — для интегратора. В таком случае
для апериодического звена на ОУ 10 получаем К10Г = 1/R1014C = 1/М.-Т5 =
= 1/20 0,134 = 0,373, К102' = 1/R102C = 1/М.-Т5 = 1/20 0,134 = 0,373. Для инте-
гратора на ОУ 11 с учетом принятых выше условий коэффициент передачи
К11Г = 1/R111 С = К1КЗ К6Ж- (10 6,3(0,053)/20 - 0,167.
Поскольку коэффициент передачи К6Г получился больше оговоренного в ус-
ловиях задачи, то уменьшим его в 10 раз, при этом для сохранения прежнего значе-
ния петлевого усиления (в петле обратной связи) необходимо увеличить в 10 раз
коэффициент передачи К7Г. Кроме того, для сохранения произведения К1КЗК4К6
необходимо увеличить в 10 раз и значение коэффициента Kill'. Последнее измене-
ние связано с обеспечением удобства набора на реальной моделирующей установке —
выбираем коэффициент передачи К11Г = 1, при этом коэффициент К10Г необходи-
мо увеличить в 1,67 раза. После внесения указанных изменений коэффициенты пере-
дачи модели на рис. 15.43 принимают следующие окончательные значения, на
основании которых и были выбраны параметры ее компонентов:
К11 = R1/R12 = 1; К12 = R1/R12 = 1; К31 = R3/R31 - 1;
К21 - R2/R21 = 3,43; К41 ~ 1/R41 С = 1; К22 = R2/R22 = 1,65;
К51 - R5/R51 = 1; К52 = R5/R52 = 1; К53 = R5/R53 - 1;
К61 - 1/R61 С = 2,89; К62 = 1/R62 С = 0,812; К71 = R7/R71 = 2,02;
К72 = R7/R72 = 1; К91 = 1/R91C = 1; К81 = R8/R81 - 0,373;
К101 = 1/R101C = 0,623; К102 = 1/R102 С = 0,373;
Kill = 1/R111C = 1.
Рис. 15.43. Модель следящей системы копировально-фрезерного станка
Результаты моделирования рассматриваемой системы при входном воздейст-
вии в виде единичного потенциального скачка представлены на рис. 15.44, а осцил-
лограммами переходного процесса. Длительность переходного процесса с учетом
принятого масштаба составляет (см. результаты измерения в индикаторных окнах
на рис. 15.44, а) Т2/М. = 10,08/20 ~ 0,5 с, количество колебаний — 1, что полностью
совпадает с результатами расчета и моделирования на моделирующей установке
563
Часть II. Моделирование схем и устройств
МН-7, полученными в работе [64]. Величина перерегулирования, как видно из стро-
ки VA1 индикаторного окна, составляет около 0,42 В, т. е. 42%, что на 8% меньше
полученного в [64]. Результаты осциллографических измерений дополним фазовой
траекторией модели, показанной на рис. 15.44, б. Как показали измерения, время от
начала моделирования до прихода изображающей точки к установившемуся значе-
нию выходной величины соответствует времени переходного процесса. Кроме того, с
помощью фазовой траектории можно определить (см. рис. 15.44, б) величину пере-
регулирования и число колебаний.
Рис. 15.44. Осциллограмма переходного процесса модели на рис. 15.43 (а) и ее фазовая траек-
тория (б)
6)
Схема на рис. 15.43 может быть использована также для исследования нели-
нейностей в автоматических системах. Ее схема для такого применения показана на
рис. 15.45. В ней изменены коэффициенты передачи К21, К62, К81, К101, К102 и
Kill, что позволило повысить колебательность и уменьшить масштаб времени для
обеспечения возможности наблюдения переходного процесса при ограниченной дли-
тельности развертки (1 с/дел). Схема модели дополнена переключателем Z, с помо-
щью которого в цепь обратной связи ОУ 1 можно включить ограничительную цепь
564
Глава 15. Устройства автоматики
из параллельно включенных диодов VD1, VD2 и тем самым имитировать нелиней-
ность типа насыщения ОУ (ограничения по координатам).
Рис. 15.45. Модель для исследования влияния нелинейностей в следящих системах
Рис. 15.46. Осциллограммы переходных процессов при отсутствии (а) и наличии (б) нелинейности
Осциллограмма переходных процессов при входном воздействии в виде потенци-
ального скачка 10 В (Ui = 10 В) в положении ключа Z, показанном на рис. 15.45 (цепь
ограничения отключена), приведена на рис. 15.46, а, а при замкнутом ключе Z (цепь ог-
раничения включена) — на рис. 15.46, б. Из сравнения осциллограмм на рис. 15.46 вид-
но, что введение нелинейности в систему управления существенно влияет на
переходные процессы — уменьшается перерегулирование, сокращается время переход-
ных процессов и уменьшается колебательность (увеличивается демпфирование).
Контрольные вопросы и задания
1. Назовите элементы схемы на рис. 15.43, имитирующие дифференцирующий
трансформатор.
2. Проведите расчеты переходного процесса следящей системы на рис. 15.43, если из-
вестно, что при единичном входном сигнале ее выходное напряжение определяется
выражением [64]: So(t) = 1 + l,12exp(-14,75t) + 2,1 lexp(-7,6t) cos(12,9t + 3,37) -
+ 0,025exp(-143t). Результат расчета сравните с результатами моделирования.
3. В какую точку схемы на рис. 15.43 необходимо подключить вход канала В ос-
циллографа, чтобы получить фазовую траекторию на рис. 15.44, б.
565
Часть II. Моделирование схем и устройств
4. Отключите в модели на рис. 15.43 элементы, имитирующие дифференцирую-
щий трансформатор, и проведите моделирование. Полученные результаты срав-
ните с результатами на рис. 15.44.
5. В модели на рис. 15.43 отключите элементы, имитирующие цепь обратной связи
по скорости, и проведите моделирование. Полученные результаты сравните с ре-
зультатами на рис. 15.44.
6. Исследуйте зависимость перерегулирования, времени переходных процссов и
колебательности (числа колебаний за время переходных процессов) от входного
сигнала (воздействия) Ui в диапазоне от 0,5 до 15 В в модели на рис. 15.45. Ис-
пользуйте для этой цели как осциллограммы переходных процессов, так и фазо-
вые траектории.
15.6. Элементы моделей цифровых САУ
Цифровые САУ состоят из устройств непрерывного действия (непрерывная
часть системы), управляющей ЭВМ и преобразователей формы представления ин-
формации — АЦП и ЦАП, обеспечивающих информационную связь непрерывной и
цифровой части системы. Для моделирования таких систем создавались достаточно
сложные и дорогостоящие гибридные аналого-цифровые вычислительные комплек-
сы или, в более простых случаях, обходились имитаторами основных функциональ-
ных узлов цифровой части системы, к краткому рассмотрению которых мы и
перейдем (в обьеме работы [90] и с учетом возможностей EWB).
Рис. 15.47. Амплитудно-импульсный модулятор (а) и осциллограммы его выходных сигналов (б)
Амплитудно-импульсный модулятор и экстраполятор (рис. 15.47, а) содер-
жит элемент аналоговой памяти на интеграторе 1, на вход которого через интервалы
времени, равные положительному полупериоду источника Us (в соответствии со схе-
мой включения ключа S1), поступают выборки входного сигнала Ui(t)R2/Rl (при
замкнутом ключе S1 ОУ работает в режиме инвертирущего усилителя с коэффици-
ентом передачи R2/R1 = 1 при условии, что постоянная времени заряда конденсато-
ра R2 C - 0,01 с в 5...10 раз меньше времени замкнутого состояния ключа, равного в
нашем случае At = 1 /210 = 0,05 с). После размыкания ключа S1 выборка входного
сигнала запоминается па конденсаторе С, что иллюстрируется осциллограммой А
напряжения Uoe на рис.15.47, б. Заметим, что рассмотренный процесс напоминает
566
Глава 15. Устройства автоматики
работу экстраполятора нулевого порядка и аналогичен алгоритму работы устройст-
ва выборки и хранения (см. разд. 10.10). Вторая же часть схемы, выполненная на ОУ
2 (инвертирующий усилитель с коэффициентом передачи R4/R3 = 2) и управляемом
от того же источника Us при ключе S2, формирует из выборок амплитудно-импульс-
ный сигнал Uoi (осциллограмма В на рис. 15.47, б). Поскольку ключи S1 и S2 рабо-
тают синхронно и, следовательно, время их замкнутого состояния одинаково, то
такой режим авторы работы [90] назвали режимом единичной скважности (отноше-
ние длительности импульса к паузе равно единице). Однако при моделировании ци-
фровых САУ представляет интерес и режим неединичной скважности, что может
быть реализовано применением специального формирователя сигнала управления
ключом S2, в качестве которого, в частности, может быть использовано рассматри-
ваемое ниже устройство.
Рис. 15.48. Широтно-импульсный модулятор (а) и осциллограммы сигналов (б. в)
Широтно-импульсный модулятор отличается от рассмотренного в разд. 10.19
тем, что в нем модуляция производится симметрично как по переднему, так и по зад-
нему фронту, что в некоторых случаях применения ШИМ обеспечивает повышение
эксплуатационных характеристик устройств (см. разд. 6.5, 12.4 и 12.6). Модулятор
содержит (см. рис. 15.48, а) источник модулирующего напряжения (в данном случае
это источник постоянного напряжения Uo), функциональный генератор в качестве
источника входного сигнала Ui, дискриминирующие диоды DI, D2, два усилителя-
ограничителя на ОУ 1, 3 и стабилитронах Zl, Z2 и сумматор на ОУ 4. Инвертор на
ОУ 2 предназначен для формирования парафазного модулирующего сигнала (можно
было обойтись и без него, использовав дополнительный источник Uo положительной
полярности, т. е. с заземленной минусовой клеммой). При отсутствии входного на-
пряжения диоды DI, D2 открыты и выходные напряжения усилителей-ограничите-
лей равны, но противофазны, поэтому выходное напряжение сумматора 4 равно
нулю. Когда входное напряжение, например, положительной полярности достигает
значения Uo, срабатывает (закрывается) диод D1, на выходе усилителя 1 устанавли-
вается нулевое напряжение и на выходе сумматора 4 формируется передний фронт
импульса. При уменьшении входного сигнала до значения Uo диод D1 закрывается,
567
Часть II. Моделирование схем и устройств
в результате чего на выходе сумматора 4 формируется задний фронт импульса. При
этом импульс будет расположен симметрично относительно положительного полу-
периода и будет иметь длительность, пропорциональную входному напряжению.
При отрицательной полуволне входного напряжения формирование выходного сиг-
нала происходит аналогичным образом, но с участием диода D2 и усилителя 3. Рас-
смотренный процесс иллюстрируется осциллограммами входного (А) и выходного
(В) напряжения при Uo = 5 В (рис. 15.48, б) и 8 В (рис. 15.48, в). Очевидно, что такой
модулятор можно использовать для управления ключом S2 в схеме на рис. 15.47 при
неединичной скважности.
а)
Рис. 15.49. Имитатор ЦАП (а) и осциллограммы его входного (А) и выходного (В) сигналов (б)
б)
Имитатор цифро-аналогового преобразователя. Из трех схем таких устройств
(авторы [90J называют их квантователями по уровню) рассмотрим одну; она содер-
жит (рис. 15.49, а) уже знакомый нам запоминающий элемент на ОУ 2 с ключом S во
входной цепи, источник опорного напряжения Uo с инвертором на ОУ 1, два усили-
теля (ОУ 3, 4) с двухсторонним ограничением на стабилитронах Z31...Z42 с напря-
жением стабилизации Ео = 3,5 В (устанавливается в диалоговом окне параметров
стабилитрона, сумматор 5, двухполупериодный выпрямитель на ОУ 6 и диодах D1,
D2 и компаратор на ОУ 7 с источником порогового напряжения Uop, обеспечиваю-
щего выключение ключа S в режиме Uoff = 0 (задается в диалоговом окне ключа), и
RC-цепи для обеспечения устойчивой работы схемы (постоянная времени этой цепи
подбирается при настройке модели).
В исходном состоянии (при входном сигнале Ui = 0) выходное напряжение ОУ
1 Uin = 0 и на входы усилителей 3, 4 поступают только разнополярные сигналы Uo,
соответствующие младшему разряду имитируемого ЦАП. При этом на выходах уси-
568
Глава 15. Устройства автоматики
Рис. 15.50. Схема модели САУ (а) и осциллограммы переходных процессов при замкнутой ОС
(б), при включении в цепь ОС ЛИМ (в, г) и квантователя по уровню (д, е)
лителей формируются разнополярные уровни напряжения, равные Ео| = 3,5 В, в ре-
зультате чего на выходе сумматора 5 и неинвертирующем входе ОУ 7 устанавливает-
ся нулевой уровень напряжения, что вызывает переход ОУ 7 в режим насыщения с
отрицательной полярностью выходного напряжения, при котором ключ S находит-
ся в открытом состоянии. При уровне входного напряжения, например, положи-
тельной полярности, равном Uo, на выходе ОУ 4 формируется напряжение нулевого
уровня, на выходе сумматора 5-Ео (с выхода усилителя 3), которое через инвер-
тор 6 и диод D1 заряжает конденсатор С, вызывая срабатывание компаратора 7 и
569
Часть II. Моделирование схем и устройств
ключа S, в результате чего “порция” входного напряжения, равная Uo и соответст-
вующая младшему разряду ЦАП, запоминается и передается с единичным коэффи-
циентом передачи на выход ОУ 2 в противоположной полярности и тем самым
повышается порог срабатывания ОУ 4 до 2Uo, т. е. формирование очередной “сту-
пеньки” выходного напряжения ОУ 2 будет происходить при уровне входного напря-
жения 2Uo, 3Uo, 4Uo и т.д., то есть квантами величиной Uo, что иллюстрируется
осциллограммами на рис. 15.49, б. При отрицательной полуволне входного напря-
жения формирование выходного сигнала ОУ 2 происходит аналогичным образом, но
с участием усилителя 3 и диода D2.
Рассмотрим влияние на динамику САУ амплитудно-импульсного модулятора
(рис. 15.47) и квантователя по уровню (рис. 15.49) на примере непрерывной части
цифровой САУ [90] с передаточной функцией К(р) - К(рТ, + 1)/р(рТ1 + 1)(рТг + 1),
где К =100 с1 — коэффициент усиления; Т1 « 0,2 с, Т2 - 0,017 с, ТЗ = 0,064 с — по-
стоянные времени. Схема набора модели, выполненная на основании расчетов [90],
содержит (рис. 15.50, а) сумматор 1, инвертор 2 и интеграторы 3, 4, 5. В положении
переключателя Z цепь ОС САУ замкнута накоротко и для этого случая осциллограм-
ма переходного процесса показана на рис. 15.50, б. При переводе ключа Z в верхнее
положение в цепь ОС переключателем X может быть включен модулятор AIM или
имитатор ЦАП DACsim, оформленные в виде подсхем; в случае включения ЦАП ис-
пользуется дополнительно инвертор 6 для обеспечения ООС.
Из сопоставления осциллограмм на рис. 15.50, б и 15.50, в, г, полученных при
частоте источника Us на схеме рис. 15.47 10 и 2 Гц соответственно, видно, что вклю-
чение в цепь ОС САУ АИМ-модулятора несущественно влияет на ее динамику, за ис-
ключением увеличения пульсации при пониженной частоте модуляции
(осциллограмма на рис. 15.50, г).
При включении в цепь ОС САУ квантователя наблюдается существенная зави-
симость переходных процессов от значения “цены” младшего разряда, задаваемого
напряжением источника Uo на рис. 15.49. Из осциллограмм на рис. 15.50, д, е, по-
лученных при Uo = 0,5 и 0,2 В соответственно, видно, что с уменьшением Uo перере-
гулирование, колебательность и длительность переходных процессов уменьшаются.
Контрольные вопросы и задания
1. Процесс работы ШИМ на рис. 15.48 был рассмотрен в предположении, что источ-
ники Uo и Ui идеальны. Реальные же источники могут отличаться по внутренне-
му сопротивлению. Каким образом это скажется на точности работы модулятора?
При этом необходимо учесть, что диоды DI, D2 закрываются при равенстве про-
тивоположно направленных токов от указанных источников. Какими должны
быть выбраны сопротивления резисторов RI, R2, чтобы можно было пренебречь
влиянием внутренних сопротивлений источников Uo и Ui?
2. Полагая, что сопротивление диодов DI, D2 (задается в диалоговом окне параме-
тров диода) существенно меньше сопротивления резистора R, определите за-
держку в срабатывании компаратора 7 при указанном на схеме значении Uop.
Полагая, что постоянная времени разряда конденсатора С в имитаторе ЦАП оп-
ределяется только сопротивлением резистора R, определите задержку в выклю-
чении ключа S при заданном Uoff = 0.
3. Учитывая, что усилители 3, 4 в схеме имитатора ЦАП по существу выполняют
алгебраическое суммирование токов, протекающих через резисторы R31...R43
под действием соответствующих входных напряжений, и используя данные
570
Глава 15. Устройства автоматики
разд. 10.4, составьте выражения, объясняющие процесс формирования выходно-
го напряжения ОУ 4.
4. После выполнения п. 3 проанализируйте справедливость утверждения, что мак-
симальное число уровней квантования определяется формулой N = |Eo|/|Uo| [90].
5. Используя режим ZOOM осциллографа, проведите дополнительные испытания
модели на рис. 15.50 для получения количественных оценок показателей каче-
ства САУ (перерегулирование, колебательность, длительность переходных про-
цессов и др.).
15.7. Моделирование
управляющих и возмущающих воздействий
При моделировании воздействия на модель задаются в виде изменяющихся во
времени напряжений, которые можно получить с помощью внешних генераторов
или с помощью самого моделирующего устройства. Второй способ наиболее распро-
странен, особенно для генерирования детерминированных воздействий. При этом
генерируемые сигналы могут воспроизводится заданной функцией или ее апрокси-
мацией (приближением). К апроксимации прибегают в тех случаях, когда воздейст-
вие задано в виде трудно реализуемой на решающих блоках аналитической функции
или таблицы, полученной, например, при экспериментальном изучении какого-ли-
бо реального воздействия на исследуемую систему. При этом апроксимирующая не-
прерывная функция наилучшим образом должна отражать характер реального
воздействия на систему и легко воспроизводится внешним генератором сигналов
или схемой из решающих блоков моделирующего устройства. При выборе апрокси-
мирующей функции и ее параметров используются различные методы, в частности,
метод наименьших квадратов [91].
При разработке генераторов на базе решающих блоков в работе [91] использу-
ется достаточно эффективный метод определяющих уравнений, который может
представлять интерес и для разработчиков другой аппаратуры. Сущность метода за-
ключается в отыскании такого дифференциального уравнения (называемого опреде-
ляющим), решением которого является заданная функция, воспроизводимая затем
на выходе модели, построенной на базе такого уравнения. Метод можно использо-
вать в тех случаях, когда заданная к воспроизведению функция представлена в виде
аналитического выражения (или аппроксимирована таким выражением), причем
функция и ее первые производные непрерывны и, кроме того, эти производные мож-
но вычислить. Приведем несколько примеров использования метода для воспроиз-
ведения некоторых функций [91].
1. Функция у = At2exp(—at) может быть представлена как решение дифферен-
циального уравнения (здесь и далее — в операторной форме)
р3у + В2ргу + В,ру + Воу = 0. (15.12)
Для определения коэффициентов уравнения (15.12) найдем производные за-
данной функции:
ру = 2Atexp(-at) - aAt2exp(-at);
р2у = 2Aexp(-at) - 4aAtexp(-at) + a2At2exp(-at);
рЗу = -6aAexp(-at) + Ga2Atexp(-at) - a3At2exp(-at).
Подставляя эти производные в (15.12) и сравнивая подобные коэффициенты, по-
лучим систему линейных алгебраических уравнений относительно коэффициентов В,
571
Часть II. Моделирование схем и устройств
а2В2 - aBi + Ва = а3 *; 4аВ2 - 2В] = 6а2; В2 = За.
Решая эту систему, получаем значения коэффициентов В( и затем представля-
ем уравнение (15.12) в виде, удобном для составления схемы набора (см. разд. 14.1)
ряу = -Зар2у - За2ру - asy (15.13)
при начальных условиях р2у(0) — 2А; ру(0) у(0) — 0.
Схема набора, составленная на основании (15.13), содержит (рис. 15.51, а) три
интегратора II, 12, 13 с коэффициентами передачи -1 и трехвходовой сумматор S с
коэффициентами передачи по входам КА = 3, КВ = -3, КС = 1, установленными в со-
ответствии с (15.13) при а = 1. Начальное условие р2у(О) = 2А при А — 1 В реализует-
ся установкой в диалоговом окне интегратора И параметра VOIC = 2 В (начальное
напряжение на конденсаторе). Результаты осциллографических измерений пред-
ставлены на рис. 15.51, б осциллограммой В воспроизводимой функции у и осцилло-
граммой Л ее первой производной у'.
н
3
Рис. 15.51. Схема для воспроизведения функции у = At2exp(-at) (а) и осциллограммы сигна-
F
лов (б)
Рис. 15.52. Схема для воспроизведения функции у= Aexp(-at) (а) и ее осциллограмма (б)
2. Функция у = Aexp(-at) воспроизводится схемой на рис. 15.52, а, выполнен-
ной на основании определяющего уравнения, полученного путем однократного диф-
ференцирования функции, т. е. ру = -aAexp(-at) = -ay, откуда ру + ау - 0 и у(0) = А.
Начальное условие реализуется установкой в диалоговом окне интегратора II пара-
метра VOIC = А, параметр а задается коэффициентом деления делителя на перемен-
F
г
г
с
в
Г
т
1
I
г
д
ь
(
I
572
Глава 15. Устройства автоматики
ном резисторе. Осциллограмма выходного сигнала при Л = 1 и указанном на схеме
значении сопротивления резистора показана на рис. 15.52, б.
Схема для воспроизведения функций у = Asin((tX + (р), z = Acos((Ot + (p) (а) и их ос-
циллограммы (б)
Рис. 15.53.
3. Функции у = Asin(cot 4- j) и z = Acos(cot + j) воспроизводятся с помощью оп-
ределяющих дифференциальных уравнений:
ру - coz = 0, у(0) - Asincp и pz + соу = 0, z(0) - Acoscp, (15.14)
полученных путем сравнения заданных функций с выражениями для их первых
производных: ру = coAcos(cot + ср) - coz и pz - -coAsin((dt + <р) = -coy. Заметим, что си-
стема уравнений первого порядка (15.14) может быть заменена одним уравнением
второго порядка. Действительно, исключая из (15.14) переменную г, получаем:
р2у = -со2у, откуда следует схема набора модели (рис. 15.53, а), содержащая два ин-
тегратора И, 12 и два делителя на “сдвоенных” (управляемых клавишами R или
Shift+R) резисторах, с помощью которых устанавливается необходимая частота со.
Начальные условия у(0) = Asincp и z(0) = Acoscp устанавливаются на интеграторах 12,
II соответственно (с помощью параметра VOIC). Результаты испытаний модели
при А = 1 В и ср =30 представлены осциллограммами А (косинусоида) и В (синусои-
да) на рис. 15.53, б, из которого следует, что период колебаний, определяемый вре-
менным промежутком между визирными линейками 1 и 2, равен Т Т2 - Т1 = 7 с
(угловая частота со = 2я/Т = 2я/7 = 0,898 с ’, что практически соответствует коэффи-
циенту деления резистивных делителей напряжения на схеме), а начальная фаза
573
Часть II. Моделирование схем и устройств
колебаний (р = 360-Т1/Т = 360-0,5828/7 = 29,97 практически совпадает с установ-
ленными в схеме начальными условиями.
4. Функция у = kt1 (i=2, 3,..., п) воспроизводится с помощью определяющего
уравнения: pny = n!k, рв 'у(О) =... - ру(О) = у(0) - 0, полученного путем n-кратного диф-
ференцирования заданной функции и реализуемого схемой на рис. 15.54, а, которая
для случая п « 3, k = 1 содержит три интегратора II, 12, 13 и источник напряжения
-U. Полярность и напряжение источника определяются формулой U = (-l)"n!k.
Рис. 15.54. Схема для воспроизведения функции у= kt (а) и ее осциллограмма (б)
Рис. 15.55. Схема для воспроизведения АКФ К,(Т) = Аехр(—ЩТ1) (а) и ее осциллограмма (б)
Контрольные вопросы и задания
1. Как отмечается в [91], метод определяющих дифференциальных уравнений не
обладает формальными приемами, позволяющими по каким-либо правилам по-
строить лучший в том или ином смысле генератор заданной функции. Далее в
[91] отмечается, что нахождение определяющих дифференциальных уравнений,
напоминающее процесс определения первообразных функций при интегрирова-
нии, является скорее искусством, чем обычной работой разработчика. А почему
в таком случае нельзя использовать таблицы преобразованных функций по Ла-
пласу (см., например, [79])?
2. Функция у = Aexp(at) воспроизводится схемой, выполненной на основании оп-
ределяющего уравнения ру - ау = 0 (у(0) = А), полученного путем однократного
дифференцирования функции. Составьте схему модели и проведите ее испыта-
ния при значении параметров, аналогичных со схемой на рис. 15.52. Заметим,
что возможны два варианта выполнения схемы. Выберите наиболее простой, ис-
пользуя соответствующим образом параметры интегратора.
3. Проведите испытания модели на рис. 15.53 при ю = 0,5с1 и (р — 45 и 60 .
4. Составьте схему модели для воспроизведения функций у = Ashat и z = Achat, ис-
пользуя систему определяющих уравнений:
ру - az = 0, у(0) = 0; pz - ау = 0, z(0) = А, (15.15)
574
Глава 15. Устройства автоматики
полученной путем однократного дифференцирования указанных функций. При
подготовке схемы обратите внимание на сходство уравнений (15.14) и (15.15).
5. Для схемы на рис. 15.54 проведите расчет выходного напряжения при t — 0,6, 1,
1,4 и 1,8 с и сравните полученные данные с результатами осциллографических
измерений (осциллограмма на рис. 15.54, б).
6. В тех случаях, когда трудно найти определяющее дифференциальное уравнение
для какой-либо сложной функции, ее можно представить или суммой, или про-
изведением, или комбинацией сумм и произведений функций, для которых за-
ранее известны простые определяющие уравнения. Руководствуясь этим
правилом и используя опыт работы со схемами на рис. 15.51 и 15.54, составьте
схемы моделей для произведения и суммы функций у «= At2exp(-at) и у = kt‘.
7. Для определения дисперсий и корреляционных функций при статистическом
моделировании САУ используются генераторы автокорреляционных функций
(АКФ) случайных процессов, схемы моделей которых для наиболее распростра-
ненных АКФ приведены в [91]. Одна из таких схем для воспроизведения АКФ
Кх(т) = Аехр(-ц2т2) (рис. 15.55, а) содержит два интегратора И, 12, множительное
устройство М и делитель на переменном резисторе. По данным [91] U = -2ц, на-
чальные условия для первого и второго интеграторов VOIC = -2pto и Кх(т = t„)
соответственно, коэффициент деления резистивного делителя равен ц. Приве-
денная на рис. 15.55, б осциллограмма получена при ц = 0,5, 2pto = -5 В,
U = -1 В и Кх(т — to) = 0,001. Проверьте результаты моделирования расчетом зна-
чений воспроизводимой функции при различных значениях т.
575
Часть II. Моделирование схем и устройств
16. Измерительные преобразователи
Ни одна система управления не может работать без информации о состоянии объ-
екта управления и его реакции на управляющие воздействия. Элементами, обеспечива-
ющими получение такой информации, являются датчики — конструктивно
законченные устройства, состоящие из чувствительного элемента (первичного измери-
тельного преобразователя — ИП) и дополнительных (вторичных) преобразователей,
обеспечивающих в соответствии с требованиями ГСП — государственной системы про-
мышленных приборов и средств автоматизации — унификацию выходного сигнала по
его виду и уровню, например, по постоянному току: 0...5, 0...20, О...±5, 4...20 мА; по
постоянному напряжению: 0...10, 0...20, 0...il0 мВ, 0...1, 0...10, 0...±1 В; по перемен-
ному напряжению: 0...2, 0...±1 В; по частоте 2...4, 4...8 кГц и т.д. [63].
Следует заметить, что во многих случаях разработки информационно-измери-
тельных и автоматических систем управления проблема выбора датчика является
настольно важной и часто трудно разрешимой, что она становится определяющей в
целесообразности продолжения работ по таким системам.
Статистика применения датчиков в промышленности по виду контролируе-
мых параметров [63]: температура — 50%, объемный и массовый расход — 15%,
давление — 10%, уровень (жидкости) — 5%, масса, объем — 5%, время — 4%, эле-
ктрические и магнитные величины — менее 5%; по количеству точек контроля:
атомная электростанция средних размеров — около 3000; крупное химпредприя-
тие — около 20 000 только для измерения температуры.
16.1. Типы и характеристики преобразователей
Датчики делятся на генераторные и параметрические. В генераторных дат-
чиках осуществляется преобразование измеряемого параметра непосредственно в
электрический сигнал; к таким датчикам относятся (в скобках указано используе-
мое физическое явление и вид измеряемой величины):
♦ пьезоэлектрические (зависимость параметров пьезоэффекта некоторых кристал-
лов (кварца, турмалина и др.) и специальной керамики от значений и характера
воздействующих сил; измерение давления, вибрации, ускорения, уровня жид-
кости, расхода по уровню);
♦ индукционные (явление электромагнитной индукции; расход жидкости и газа,
частота вращения) (см. разд. 14.6);
♦ фотоэлектрические (зависимость ЭДС фотоэлемента с запирающим слоем от ос-
вещенности; частота вращения, вращающий момент, линейные размеры);
4- термоэлектрические (термопары) (термоэлектрический эффект; температура и
зависящие от нее физические величины);
4 гальванические (зависимость ЭДС гальванического элемента от состава и кон-
центрации растворов электролитов);
4 электрокинетические (явление электрокинетического потенциала, возникающе-
го при протекании полярной жидкости через пористую стенку);
4 датчики с времяимпульсным выходом (контролируемый параметр преобразует-
ся в пропорциональный по длительности импульс);
4 частотные датчики (с частотным выходом).
В параметрических датчиках измеряемая величина преобразуется в параметр
электрической цепи — сопротивление, индуктивность, емкость и т.п.; к таким дат-
чикам относятся:
576
Глава 16. Измерительные преобразователи
4- емкостные (зависимость емкости конденсатора от размеров и взаимного располо-
жения его обкладок; давление, перемещения, уровень, концентрация веществ);
♦ индуктивные (зависимость индуктивности дросселя от длины и площади сече-
ния его сердечника под воздействием механических перемещений);
♦ трансформаторные (изменении взаимной индуктивности обмоток под воздейст-
вием механических перемещений);
♦ магнитоупругие (изменение магнитной проницаемости (или индукции) ферро-
магнитных тел под воздействием приложенных к ним механических сил или
напряжений);
4 электроконтактные, коммутирующие электрическую цепь под воздействием из-
меряемого параметра;
4 потенциометрические (реостатные) (зависимость сопротивления реостата от по-
ложения его движка, перемещающегося под воздействием контролируемого па-
раметра; абсолютное, избыточное давление жидких и газообразных сред и
перепады давлений; координаты и относительные перемещения; линейные уско-
рения; угловые скорости; скоростной напор и др.);
4- жидкостные (электролитические) (изменение сопротивления электропроводя-
щей жидкости при взаимном перемещении электродов или изменении геометри-
ческой формы корпуса чувствительного элемента);
4 механотронные (преобразование контролируемого параметра в перемещение
электродов электровакуумной лампы);
4 тензорезисторные (тензометрические) (изменение сопротивления проводников и
полупроводников при упругих деформациях — измерение давлений, усилий, вра-
щающих моментов, относительных перемещений, линейных ускорений и др.);
4 датчики контактного сопротивления (зависимость контактного сопротивления
между поверхностями двух твердых тел от усилия их сжатия);
4 магнитомодуляционные (модуляция магнитного потока за счет контролируемо-
го параметра, например, перемещения);
4- датчики термосопротивления, пьезосопротивления, фотосопротивления и др.
(свойство цепи, составленной из указанных элементов, менять свое сопротивле-
ние соответственно в зависимости от температуры, механического напряжения,
освещенности и т.д.).
Датчики генераторного типа с коэффициентом передачи К = Y/Х чаще всего
выполняются по схеме прямого однократного преобразования (рис. 16.1, а); при не-
обходимости получения унифицированного выходного сигнала используют много-
звенную структуру из нескольких ИП с коэффициентами передачи К1...Кп
(рис. 16.1, б). В датчиках, построенных по дифференциальной схеме (рис. 16.1, в),
измеряемая величина подается одновременно на два идентичных ИП (KI = К2), при
этом выходной сигнал датчика пропорционален разности выходных сигналов ИП
каждого из каналов; к достоинствам таких датчиков относятся: повышенная поме-
хозащищенность, возможность реверсирования статической характеристики и
уменьшение ее нелинейности.
Наиболее совершенной схемой является схема с обратной связью (компенсаци-
онная схема) (рис. 16.1, г), в которой обеспечивается автоматическое уравновешивание
контролируемой величины компенсирующей величиной того же вида непосредственно
или после предварительного преобразования; здесь К2 — коэффициент передачи цепи
обратной связи, зачастую содержащий обратный по отношению к ИП на входе преобра-
19 Зак. 206
577
Часть II. Моделирование схем и устройств
зователь (например, на входе — преобразователь перемещение-напряжение, тогда в це-
пи обратной связи — преобразователь напряжение-перемещение).
а)
б)
в)
г)
Структурные схемы датчиков
Рис. 16.1.
Рассмотрим характеристики датчиков.
Статическая характеристика — это функциональная зависимость между
входной X и выходной Y величинами датчика в установившемся режиме; она может
быть линейной (рис. 16.2, а) или нелинейной (рис. 16.2, б) и представляться анали-
тически (уравнением) в виде графика или таблично. В общем случае для линейной
статической характеристики уравнение имеет вид:
Y = F(X) = ±В + КХ,
где К — коэффициент преобразования; В — постоянная.
Если В = 0, то характеристика проходит через начало координат (рис. 16.2, а);
при В>0 характеристика смещена относительно начала координат по оси абсцисс на
величину выходного сигнала холостого хода у0 - В (рис. 16.2, в, прямая 1); при В < О
характеристика имеет зону нечувствительности 0...Хо(рис. 16.2, в, прямая 2). Если
характеристика имеет участок насыщения (рис. 16.2, г), то она описывается двумя
уравнениями: на участке О...ХК — У = КХ; на участке X > Хк — У = Ум. При К - «> ха-
рактеристика принимает релейный характер (рис. 16.2, д'); такая характеристика
присуща датчикам позиционного регулирования и характеризуется коэффициентом
возврата К, = Хо/Х*, где Хи, Хс — значения входного сигнала отпускания и срабаты-
вания датчика. Гистерезисная характеристика (рис. 16.2, е) характеризуется коэф-
фициентом неоднозначности Кг = ХГ/(ХК - Хи), где Хг, Хи, Х„ — ширина зоны
неоднозначности, конец и начало рабочего диапазона входной величины. Характе-
ристики двухтактных (реверсивных) датчиков имеют вторую (зеркально отображен-
ную) ветвь в третьем квадранте.
Для датчиков с нелинейными характеристиками (рис. 16.2, б) используют
дифференциальный коэффициент преобразования К. = dY/dX, определяемый углом
наклона касательной к характеристике в рабочей точке; на практике же чаще всего
применяют кусочно-линейную аппроксимацию или аппаратные методы линеариза-
ции (см. разд. 10.2).
д) е)
Рис. 16.2. Статические характеристики датчиков
Чувствительность датчика — отношение выходной величины к входной в со-
ответствующих единицах. Например, для реостатного датчика единица чувстви-
тельности — Ом/мм, для термопары — мВ/K, для фотоэлемента—мкА/лм и т.д.
Порог чувствительности — минимальное значение входного сигнала X, вызы-
вающего появление регистрируемого выходного сигнала Y.
578
Глава 16. Измерительные преобразователи
Погрешности датчиков делятся на основные и дополнительные. Основная по-
грешность — это максимальная разность между измеренным значением выходного
сигнала и его истинным значением, определяемым по идеальной статической харак-
теристике для данной входной величины при нормальных эксплуатационных усло-
виях. Она может выражаться как в абсолютных единицах, так и в относительных;
в последнем случае она равна отношению абсолютной погрешности к истинному зна-
чению выходного сигнала и чаще всего дается в процентах. Кроме того, использует-
ся также относительная приведенная погрешность, равная отношению
максимальной абсолютной погрешности в диапазоне измеряемой величины к ее
верхнему значению (в процентах). Дополнительные погрешности вызываются изме-
нениями условий внешней среды и внутренними процессами в датчиках (изменение
температуры, влажности, колебания напряжения источника питания, механичес-
кие воздействия, старение и износ материала и т.п.). Дополнительная погрешность
выражается обычно в процентах изменения выходной величины на определенную
величину возмущающего параметра (например,% /°C).
В зависимости от специфики применения погрешности датчиков нормируются
абсолютным значением, относительным или классом точности, являющимся обоб-
щенной характеристикой основной приведенной и дополнительных погрешностей.
Динамическая характеристика определяет скорость отклика датчика на из-
менение контролируемого параметра; по динамическим характеристикам большин-
ство датчиков относится к усилительным, апериодическим или колебательным
звеньям (см. разд. 14.1 и 16.6).
Контрольные вопросы н задания
1. Что такое унификация датчиков? Входит ли в это понятие определенный тип его
выходного разъема с соответствующим распределением их контактов?
2. Чем отличается датчик от измерительного преобразователя?
3. Какова статистика использования датчиков в промышленных системах контро-
ля и управления?
4. Имеется ли связь между7 статической и динамической характеристиками датчика?
5. К какому типу датчиков относится преобразователь, рассмотренный в разд. 14.6?
6. Соберите цепь, состоящую из батареи напряжением 1,51667 В и мультиметра.
Определите абсолютную и относительную погрешность измерения напряжения в
программах EWB 4.1 и EWB 5.0. Установите выходное напряжение батареи
1,5165 В и повторите измерения. Объясните причину несовпадения результатов
измерения в EWB разных версий.
7. ИП генераторного датчика (для примера см. рис. 16.4, в) при некотором значе-
нии преобразуемой величины X характеризуется выходной ЭДС Е(х) = Ui - 1 мВ
и внутренним сопротивлением Ro = 1 Ом. Определите расчетным путем опти-
мальное значение сопротивления нагрузки Rn из условия максимальной выде-
ляемой в нем мощности. Результаты расчета проверьте моделированием,
построив зависимость мощности Р от отношения а = Rn/Ro.
16.2. Резистивные преобразователи
Резистивные датчики выполняются с использование^м трех типов первичных
преобразователей, рассматриваемых ниже.
Реостатные преобразователи выполняются в виде реостата, подвижный кон-
такт которого перемещается под воздействием измеряемой величины (при включе-
19*
579
Часть II. Моделирование схем и устройств
нии такого ИП в измерительную цепь по схеме потенциометра используется термин
“потенциометрические преобразователи”); выходной величиной ИП является элек-
трическое сопротивление, функционально связанное с положением подвижного
контакта при его вращательном или линейном перемещении. Так как в перемеще-
ние могут быть преобразованы многие неэлектрические величины (давление, рас-
ход, уровень и др.), то реостатные преобразователи очень часто используются также
в качестве промежуточных преобразователей неэлектрических величин в электри-
ческие. В устройствах автоматики наибольшее распространение находят проволоч-
ные реостатные и реохордные (безвитковые) ИП, отличающиеся высокой точностью
и стабильностью функции преобразования, возможностью получения необходимых
функциональных зависимостей относительно простыми средствами, низкими зна-
чениями переходного сопротивления, уровня собственных шумов и температурного
коэффициента сопротивления (ТКС). К недостаткам ИП относятся: подверженность
электроэррозии из-за электрических разрядов при движении токосъемника, ограни-
ченная скорость его перемещения и низкая износоустойчивость, сравнительно невы-
сокое сопротивление (до десятков кОм), ограниченная возможность применения на
переменном токе (до 1000 Гц), обусловленная индуктивностью и емкостью обмотки;
низкая разрешающая способность из-за дискретного характера изменения сопро-
тивления (исключая реохордные).
По конструктивному исполнению реостатные ИП делятся на преобразователи с
поступательным (рис. 16.3, а) и вращательным (рис. 16.3, б) перемещением подвиж-
ного контакта: последние, кроме того, бывают одно- и многооборотными. Реостатные
ИП состоят из выводов 1, 2, 3, каркаса 4, токосъемного контакта 3, скользящего по
виткам обмотки из высокоомного провода 5 с повышенной износо- и коррозионной
стойкостью (различные сплавы платины, иридия, а также манганин, константан, фе-
храль и др.). Каркас из изоляционного материала (гетинакс, текстолит, керамика
или металл, покрытый оксидной пленкой) может иметь форму стержня, кольца, изо-
гнутой пластины и должен сохранять свои размеры в широком температурном диапа-
зоне (в условиях повышенной влажности и химической загрязненности атмосферы),
а также обладать высокой теплопроводностью для увеличения рассеиваемой ИП
мощности. Диаметр обмоточного провода зависит от точности и номинального сопро-
тивления ИП: 0,01...0,1 мм для датчиков высокого класса и 0,1...0,4 мм — низкого.
Подвижный контакт (щетка, движок) изготавливаются в виде двух-трех параллель-
ных проволочек диаметром 0,1...0,2 мм.
Реохордные ИП выполняются в виде прямолинейного проводника или одного
большого витка с токосъемным контактом.
Преобразователи контактного сопротивления основаны на изменении (под
действием давления) сопротивления между проводящими элементами, разделенны-
ми слоями резистивного материала; ИП такого типа имеют большие погрешности
гистерезиса и линейности (до 10%), но очень просты по конструкции и обладают вы-
сокой надежностью. ИП выполняется в виде столбика из ряда слоев электропроводя-
щей бумаги, электропроводящей резины или металлических пластин, на которые
путем напыления наносится высокоомный резистивный слой (или наполнение из
угольного порошка, как в микрофонах). В качестве примера на рис. 16.3, в показана
конструкция ИП для биоэлектрического протеза [76], содержащего два электрода 1
с припаянными к ним гибкими выводами 5, 6 и приклеенным по периметру изоля-
тором 4 из резины (3 — слой клея); внутренний объем 2 заполняется резистивным
материалом. При изменении давления от 0 до 10е Па сопротивление ИП меняется от
100 до 2 кОм при деформации чувствительного элемента до 50%, допустимая мощ-
ность рассеяния — 0,5 Вт. Аналогичные ИП используются в тактильных датчиках
580
Глава 16. Измерительные преобразователи
роботов, манипуляторов, в медицинских приборах (электростимуляторы с обратной
связью по глубине дыхания пациента).
Разновидностью контактных ИП являются тензолитовые преобразователи,
которые выполняются в виде полосок, наклеиваемых на испытуемую деталь и состо-
ящих из смеси графита, сажи, бакелитового лака и других компонентов.
Тензолитовые ИП применяются при измерении быстроменяющихся ударных
напряжений в движущихся деталях небольшого размера, при этом преобразователи
работают как на растяжение, так и сжатие; коэффициент чувствительности выше,
чем у тензорезисторов, и составляет 15...20.
Тензорезистивные ИП характеризуются коэффициентом тензочувствительно-
сти Кт = 1 + 2ц + 5р/51, где ц — коэффициент Пуассона; 5р — относительное прира-
щение удельного сопротивления р сопротивления при деформации 51. Коэффициент
тензочувствительности для металлрв, наиболее часто применяемых для тензорезис-
торов, близок к двум: для константана 2, для нихрома 2,2, для хромеля 2,5. Для по-
лупроводниковых материалов коэффициент тензочувствительности намного
больше, чем у металлов (например, для германия он равен -100), однако полупро-
водниковые тензометры характеризуются малой механической прочностью и суще-
ственной нестабильностью характеристик по сравнению с металлами.
г) д) е)
Рис. 16.3. Конструктивные схемы реостатных ИП (а. б). ИП контактного сопротивления (в) и
тензометрических ИП (г, д, е)
Тензорезисторы из металла разделяются па проволочные и фольговые. Прово-
лочные выполняются из проволоки диаметром 0,002...0,05 мм, которую укладыва-
ют петлями на тонкую бумагу или лаковую пленку с последующей пропиткой клеем
БФ-2 для работы в диапазоне температур от -40 до +70С или бакелитовым лаком —
при работе до +200 С; для более высоких температур используют специальные клеи
и цементы. Тензорезистор наклеивается на поверхность испытуемой детали таким
образом, чтобы его продольная ось (база) была расположена в направлении измеряе-
мой деформации детали, т. е. чтобы возможные деформации детали происходили
вдоль петель резистора. Наиболее часто используют ИП с базой 5...20 мм; они име-
ют сопротивление 30...500 Ом, номинальный рабочий ток, определяемый условия-
ми теплоотвода, — в пределах десятков миллиампер и максимально допустимые
относительные деформации - не более 0,3%.
Поскольку изменение сопротивления тензорезисторов, вызванное деформаци-
ей, незначительно и колеблется от единиц миллиом до нескольких десятков долей
581
Часть II. Моделирование схем и устройств
ома, то для измерений применяют высокочувствительные потенциометрические и
мостовые схемы; для повышения чувствительности тензорезисторы включают в два
и даже четыре плеча мостовой схемы. Нелинейность статической характеристики
проволочных тензорезисторов в пределах упругой деформации не превышает 0,1%.
Фольговые тензорезисторы более совершенны, чем проволочные. Они имеют
решетку из тонких полосок фольги прямоугольного сечения толщиной 4... 12 мкм,
полученную травлением и нанесенную на лаковую подложку (см. рис. 16.3, г, д, е).
Благодаря большей площади контакта полосок тензорезистора с объектом измерения
его теплоотдача значительно выше чем у проволочного, что позволяет увеличить ра-
бочий ток до 0,5 А и тем самым повысить чувствительность ИП. Другое достоинство
фольговых тензорезисторов заключается в возможности изготовления решеток слож-
ного профиля, которые наиболее полно удовлетворяют условиям измерений.
При использовании резистивных ИП в цепях переменного тока приходится
учитывать реактивные составляющие сопротивления. Для ИП реохордного типа
учитывается индуктивность: для линейного реохорда (проводник радиусом г0 и дли-
ной 1) она равна L = цо1[1п(21/го) - 1 ]/2л; для вращательного (виток радиусом г из то-
го же проводника) — по формуле: L = р^[1п(8г/г0) - 2], где = 1,257-106 В-с/(А-м). В
более общем случае резистивный ИП представляется последовательной или парал-
лельной схемой замещения (рис. 16.4, а, б), параметры которых определяются по
формулам [76]
Rs = R0[l + co2C,(2L, - C.R.2)]; Xs = w(U - C.RO2) = wL.;
Rn = Rc[l + (02(L,/Ro)2)]; Xn = l/co(C. - L./R.2) = 1/wC.,
где Ro — сопротивление резистивного ИП на постоянном токе; С„ L, — емкость и ин-
дуктивность намотки (см. [45, 46], а также Приложение 2).
Расчеты показывают [76], что при постоянных времени L,./Rn или ROC„ = 10* с из-
менение Ro на 0,01% происходит на частоте 1000 Гц. Аналогичное изменение Ro про-
исходит на частоте 10 кГц за счет поверхностного эффекта. Уменьшение влияния L,,
достигается за счет использования бифилярной (в два провода) намотки, а Сс — за счет
использования корректирующих конденсаторов.
Резистивные ИП чаще всего используются с питанием на постоянном токе.
При этом используются три схемы включения: последовательного включения, схе-
ма делителя и мостовая схема. Для последовательного включения (рис. 16.4, в) вы-
ходное напряжение ИП
Uo = Ui-Rn/(Rn + Ro±AR). (16.1)
Для схем с делителем напряжения (рис. 16 .4, г):
Uo - Ui-Rn(Ro±AR)/[Ro(Rn + Ro±AR) + Rn(Ro±AR)]; (16.2)
для схемы на рис. 16.4, д:
Uo = Ui-Rn(Ro±AR)/(2Ro-Rn + Ro2 - AR2). (16.3)
Как следует из (16.1) — (16.3), зависимость Uo = f(Ui) для всех трех схем явля-
ется нелинейной; для схем делителей она становится линейной только при Rn » Ro,
однако общий недостаток — наличие постоянной составляющей — устраняется
только применением мостовых схем (рис. 16.4, е, ж, з) [76], на которых резистивные
ИП изображены переменными сопротивлениями. Выходной ток мостовых схем при
питании от источника постоянного напряжения
I„ = Ui(Rl-R4 - R2 R3)/[Rn(Rl + R2)(R3 + R4) + R1-R2(R3 + R4) +
4- R3-R4(R1 + R2)]. (16.4)
582
Глава 16. Измерительные преобразователи
При питании от источника постоянного тока (Ui рис. 16.4, е, ж, з заменяете*
на П)
1М - Ii( R1R4 - R2 R3)/[Rn(Rl + R2 + R3 + R4) +
+ (R3 + R4)(R1 + R2)]. (16.5)
Наибольший интерес представляет мостовая цепь с дифференциальным пре-
образователем, для которой возможны следующие варианты: включение половив
ИП в плечи R1 и R2 или R1h R3 при питании моста от источника заданного напря-
жения или от источника заданного тока и использовании ИП с функцией преобразо-
вания вида R — Ro + КХ. Для схемы на рис. 16.4, е из (16.4) получаем (здесь и далее
принимается R1 = R2 = R3 = R4 Ro):
Uo = 0,5Ui(AR/Ro)/{l + (Ro/Rn)[l - 0,5(AR/Ro)2]}. (16.6)
Из (16.6) видно, что линейность функции преобразования Uo = f(Ro) обеспечи-
вается при Rn » Ro. Для той же схемы при питании от источника тока из (16.5) по-
лучаем:
Uo - 0,5IiAR/(l + Ro/Rn), (16.7)
т. е. характеристика преобразования линейна при любом значении Rn.
Мостовая схема на рис. 16.4, ж при питании от источника напряжения нели-
нейна при любых значениях Rn, а при питании от источника тока линейна лишь при
Rn » Ro, в чем можно убедиться, анализируя приводимые ниже выражения для их
функций преобразования:
Uo - 0,5Ui(AR/Ro)/{[l - 0,25(AR/Ro)2] + (Ro/Rn)[l - 0,5(AR/Ro)2]}. (16.8)
Uo = 0,5Ii(AR/Ro)/{l + (Ro/Rn)[l - 0,25(AR/Ro)2]}. (16.9)
Заметим, что мостовая схема включения ИП на базе ОУ с линейной характе-
ристикой преобразования рассмотрена в разд. 10.3.
а) б) в) г) д)
е) ж) з)
Рис. 16.4. Последовательная (а) и параллельная (б) схемы замещения резистивного ИП и схе-
мы его включения (в, г, д, е, ж, з)
Контрольные вопросы и задания
1. Назовите типы резистивных преобразователей и области их применения?
2. Какой тип резистивного ИП используется для преобразования перемещений по-
плавкового уровнемера бензобака автомобиля? Почему при переполнении бака
иногда возможны нулевые показания индикатора уровня на приборной доске?
583
Часть II. Моделирование схем и устройств
3. Принцип действия ИП контактного сопротивления основан на том, что при сдав-
ливании резистивного материала увеличивается количество контактирующих
друг с другом кристалликов. Возможен ли случай, когда после снятия давления
некоторая часть кристалликов не вернется в исходное “неконтактное” состояние?
Зависит ли такой процесс “укрупнения” от рабочего тока и времени работы ИП?
4. Каким образом необходимо расположить тензорезистор, показанный на
рис. 16.3, д, на валу двигателя, чтобы можно было получить данные о его крутя-
щем моменте? Какие при этом потребуются дополнительные устройства для свя-
зи тензорезистора с системой контроля или управления?
5. Подготовьте схемы моделей для исследования резистивного ИП при включении
его по схеме делителя (рис. 16.4, г, д) при Ui = 1 В, Ro = 10 кОм, DR = 1, 2, 3, 5 и
8 кОм. В качестве нагрузки используйте мультиметр. Результаты моделирова-
ния сравните с расчетными по формулам (16.2) и (16.3).
6. Составьте схемы моделей мостовых схем включения ИП на рис. 16.4, е, ж, з. При
Ui - 1 В, И - 0,1 мА, Ro - 10 кОм, DR - 1, 3 и 5 кОм проверьте истинность фор-
мул (16.6—16.9) и полученных с их помощью выводов. В качестве нагрузки ис-
пользуйте мультиметр.
16.3. Емкостные преобразователи
Принцип действия ИП емкостных датчиков основан на изменении емкости
конденсатора при воздействии входной преобразуемой величины на один из его кон-
структивных параметров в соответствии с формулой:
C = eeoS/5, (16.10)
где 8 — относительная диэлектрическая проницаемость диэлектрика;
Ео = 8,85-1012 Ф/м — электрическая постоянная; S — площадь перекрытия пластин, м2;
d — толщина диэлектрика или расстояние между пластинами, м.
Как следует из (16.10), изменение площади перекрытия пластин S за счет их
взаимного перемещения приводит к линейной функции преобразования С = f(X)
(рис. 16.5, а); в данном случае С = ЕЕоаХ/б, где а — ширина пластины. Естественно,
что аналогичным образом могут быть преобразованы и угловые перемещения при
вращательном движении.
а) б) в)
Рис. 16.5. Конструктивные схемы ИП емкостных датчиков
Из (16.10) видно, что при изменении расстояния 5 между пластинами конден-
сатора функция преобразования является нелинейной (рис. 16.5, б), поэтому такие
ИП используются преимущественно для преобразования малых перемещений. Ем-
костные ИП с измененяемой диэлектрической проницаемостью обладают линейной
584
Глава 16. Измерительные преобразователи
характеристикой, смещенной относительно начала координат за счет начальной ем-
кости (рис. 16.5, в).
Конструктивно ИП емкостных датчиков могут быть выполнены с плоскопа-
раллельными, цилиндрическими, штыревыми электродами, с наличием или отсут-
ствием диэлектрика между пластинами.
Преобразователи с изменением диэлектрической проницаемости используются
для измерения уровня жидких и сыпучих материалов, анализа состава и концентра-
ции веществ в химической, нефтеперерабатывающей промышленности, температу-
ры, давления, а также для подсчета изделий, охранной сигнализации и т.п.
Для повышения чувствительности и линейности характеристик используют
дифференциальные преобразователи, у которых изменение состояния контролируе-
мой величины приводит к изменению емкости одновременно у двух чувствительных
элементов, включаемых в разные плечи мостовой измерительной схемы. В этом слу-
чае формируется реверсивная (двухтактная) статическая характеристика: при изме-
нении направления перемещения подвижного элемента ИП фаза выходного сигнала
меняется на 180' относительно фазы напряжения питания, что фиксируется фазо-
вым детектором (см. разд. 10.9). Немаловажное значение для повышения чувстви-
тельности ИП S = ДС/СО является уменьшение начального значения емкости Со, куда
входит и емкость измерительной схемы. Если для ИП на рис. 16.5, а значение Со мо-
жет быть сведено к пренебрежимо малым значениям, то для остальных двух схем
наличие Со неизбежно.
Погрешность емкостных ИП, определяемая влиянием температуры и влажно-
сти, в значительной степени зависит от оптимального выбора конструкционных ма-
териалов и возможностей герметизации.
Достоинства емкостных ИП: простота конструкции, малые размеры и масса,
высокая чувствительность и разрешающая способность, отсутствие подвижных то-
косъемных контактов, высокое быстродействие, возможность функционального
преобразования за счет соответствующего выбора формы электродов, практически
полное отсутствие влияния на объект контроля; недостатки: сравнительно низкий
уровень выходного сигнала, нестабильность характеристик при изменении параме-
тров окружающей среды, влияние паразитных емкостей.
Для согласования емкостных ИП, обладающих достаточно высоким выходным
сопротивлением даже при сравнительно высокой частоте питающего напряжения
(10s... 10? Гц), с последующими схемами преобразования используются усилители с
высоким входным сопротивлением, в частности, ОУ, которые по возможности распо-
лагаются в непосредственной близости от ИП и тщательно экранируются. Одиночные
(не дифференциальные) ИП обычно включаются по схеме делителя напряжения
(рис. 16.6, а) с использованием инвертирующего усилителя на ОУ с конденсатором
(элементом делителя) в цепи обратной связи. Показанные на рис. 16.6, а конденсато-
ры С1е, С2е и СЗе имитируют емкости элементов схемы относительно экранов или ли-
ний связи и практически не оказывают влияния на результат измерения, поскольку
они оказываются подключенными к низкоомным цепям (емкости С1е и СЗе) или к
точке с нулевым потенциалом (емкость С2е); выходное напряжение схемы
Uo = UiCl/C2. (16.11)
При указанных на схеме значениях входящих в формулу (16.11) параметров
Uo = 1-910,2/1010 12 = 0,9 В, что совпадает с показаниями включенного на выходе
вольтметра.
585
Часть II. Моделирование схем и устройств
Наиболее простая схема включения дифференциального ИП (С1 и С2 на
рис. 16.6, б) реализуется на базе суммирующего усилителя (ОУ 1 с конденсатором СЗ
в цепи обратной связи) с питанием ИП парафазным напряжением от трансформато-
ра Т. Показанные на схеме паразитные емкости С1е...С4е по указанным выше при-
чинам не оказывают влияния на работу ИП. При единичном коэффициенте
трансформации выходное напряжение схемы
Uo = Ui(C2 - Cl)/C3. (16.12)
При указанных на схеме значениях параметров Uo = 1(20 0,5 - 200,45)/10 = 0,1 В,
что и регистрируется включенным на выходе вольтметром.
Недостатком рассмотренной схемы является невозможность заземления ИП,
что часто требуется на практике. Для исключения этого недостатка можно исполь-
зовать мостовую схему включения ИП (элементы Cl, С2 и С12 на рис. 16.6, в) с ис-
пользованием дифференциального усилителя на двух ОУ (см. разд. 10.3), в котором
резистивные элементы цепей обратной связи заменены на емкостные. Коэффициент
передачи такого усилителя равен 1 + СЗ/С4, а характеристика преобразования ИП
на его базе
Uo - Ui(Cl - C2)(l + СЗ/С4)/(1 + С1/С12)(1 + С2/С12).
(16.13)
При указанных на схеме значениях параметров получаем: Uo = 1(20-0,55 -
- 20-0,5)(1 + 1/1)/(1 + 200,55/10)(1 + 20-0,5/10) - 0,0476 В, что практически совпа-
дает с показанными на схеме результатами измерения.
б)
СЗ
Рис. 16.6. Схемы включения ИП емкостных датчиков
г)
Еще один вариант включения дифференциального ИП с возможностью зазем-
ления нужной пары электродов (рис. 16.6, г) представляет собой по существу мосто-
вой выпрямитель на диодах VD1...VD4, в одну диагональ которого включен
емкостной ИП на Cl, С2, а ко второй диагонали через конденсаторы СЗ подключен ис-
точник измерительного напряжения Ui, при каждом полупериоде которого открыва-
586
Глава 16. Измерительные преобразователи
ется соответствующая пара диодов — VD1, VD4 или VD2, VD3. При этом каждый из
конденсаторов СЗ соединяется последовательно то с емкостью С1, то с емкостью С2
преобразователя. При нарушении равенства емкостей С1 и С2 токи через конденсато-
ры СЗ, текущие в положительном и отрицательном направлениях, будут не равны
между собой, в результате чего на этих конденсаторах формируется постоянное на-
пряжение, величина которого определяется приближенным соотношением [76]:
Uo - Ui(Cl - С2)/(С1 + С2 4- 2-С1-С2/СЗ).
При указанных на схеме значениях параметров получаем: Uo = 30(2000,55 -
- 200 0,5)/(200 0,55 + 200 0,5 4- 2-200-0,55-200-0,5/100) = 0,698 В, что на 3,5% мень-
ше полученного при моделировании.
Контрольные вопросы и задания
1. Какие функции преобразования могут быть реализованы емкостным ИП?
2. Руководствуясь формулой (16.11), в схеме на рис. 16.6, а включите емкостной
ИП (С1) таким образом, чтобы при реализации преобразователя по схеме
рис. 16.5, б (с переменным зазором) получить линейную характеристику преоб-
разования.
3. Каким образом с помощью схем на рис. 16.6, б, в можно сформировать реверсив-
ную (двухтактную) характеристику преобразования?
4. Используя формулу (16.13), исследуйте (с проверкой на модели) зависимость
функции преобразования от емкости конденсатора СЗ.
5. Используя формулы (16.10)—(16.13), составьте выражения для статических ха-
рактеристик ИП для преобразования линейного перемещения путем изменения
площади перекрытия и расстояния между электродами.
6. Если известно, что в емкостном ИП применяется источник измерительного на-
пряжения частотой 100 кГц, то нужно ли учитывать инерционность такого ИП
при его использовании в качестве датчика угловой скорости двигателя постоян-
ного тока с номинальным значением п = 2000 об/мин?
16.4. Электромагнитные преобразователи
ИП электромагнитных датчиков составляют большую группу преобразова-
телей для измерения различных физических величин, которые в зависимости от
принципа действия могут быть как параметрическими, так и генераторными. К па-
раметрическим относятся ИП, преобразующие изменение входного механического
воздействия в изменение параметров магнитной цепи: магнитного сопротивления,
индуктивности и взаимоиндуктивности обмоток (рис. 16.7, а), магнитной проницае-
мости (рис. 16.7, б); к генераторным — ИП индукционного типа, основанные на эле-
ктромагнитной индукции и реализуемые на базе трансформаторов (рис. 16.7, в) и
электрических машин (см. разд. 14.6).
Если пренебречь потоками рассеивания, то для ИП на рис. 16.7, а формулы
для расчета индуктивности L и взаимоиндуктивности М обмоток имеют следующий
вид [63, 76]:
L - Wj2/(Rm 4- Rb); М = WjW2/(Rm 4- Rb), (16.14)
где wn w2 — число витков первичной и вторичной обмоток; RM = l/p„S — сопротивле-
ние ферромагнитного участка магнитной цепи 2, включая и ее верхнюю подвижную
часть 1 (якорь); R» S/p0S — сопротивление воздушного зазора между якорем 1 и ос-
новным магнитопроводом 2; 1 — средняя длина магнитного пути; щ — рц0 — магнит-
ная проницаемость ферромагнитного материала; ц — относительная магнитная
587
Часть II. Моделирование схем и устройств
проницаемость материала (для сталей ц = 200...5000); - 1,257 106 В-с/А-м — маг-
нитная постоянная; S — поперечное сечение магнитопровода.
Как следует из (16.14) и рис. 16.7, а, значением L и М можно управлять, изме-
няя зазор между якорем 1 и магнитопроводом 2 перемещением якоря 1 в вертикаль-
ной плоскости, изменяя сечение магнитного потока при вращении якоря
относительно неподвижной части магнитной цепи 2, вводя в воздушный зазор плас-
тину 3 из ферромагнитного или электропроводящего неферромагнитного материала
и тем самым уменьшая или увеличивая магнитное сопротивление воздушного зазо-
ра. Преобразователи перемещения в изменение индуктивности называются индук-
тивными, а преобразователи перемещения в изменение взаимоиндуктивности —
тра нс форма т ор н ым и.
В трансформаторных ИП изменение взаимоиндуктивности М можно получить
не только при изменении магнитного сопротивления, но и при перемещении одной
из обмоток вдоль или поперек магнитной цепи. Кроме П-образной конструкции маг-
нитопровода (рис. 16.7, а), в дифференциальных трансформаторных ИП использует-
ся и Ш-образная; в этом случае обмотки с числом витков w, = w2 на двух крайних
сердечниках включаются встречно-последовательно и подключаются к источнику
измерительного напряжения, а третья обмотка, располагаемая на среднем сердечни-
ке магнитопровода, является выходной [63, 76].
Рис.16.7. Конструктивные схемы электромагнитных ИП
Третий тип электромагнитного ИП — магнитоупругий (рис. 16.7, б), основан-
ный на изменении магнитной проницаемости замкнутого сердечника под воздейст-
вием сжимающего, растягивающего или скручивающего усилия, что, согласно
(16.14), приводит к изменению магнитного сопротивления сердечника и соответст-
венно к изменению L или М.
В общем случае магнитоупругий эффект имеет нелинейный характер и зави-
сит от напряженности магнитного поля. Относительная чувствительность магнито-
упругих ИП характеризуется (подобно тензорезисторам) коэффициентом
тензочувствителыюсти К, = (Дц/р)/(Д1/1), который может достигать нескольких со-
тен; при использовании ИП для измерения усилия его чувствительность составляет
несколько милливольт на ньютон (мВ/Н).
Питание магнитоупругих ИП осуществляется чаще всего от сети промышлен-
ной частоты, однако при динамических измерениях частота питающего тока долж-
на быть в 5... 10 раз выше частоты контролируемого процесса. Погрешность
магнитоупругих ИП определяется в основном температурной нестабильностью (око-
ло 2% на 10°С), гистерезисом (около 4% при статических и 1% при динамических
нагрузках) и временной нестабильностью (после нескольких циклов термообработ-
ки и многократного нагружения (искусственное старение) — до 0,5% для ИП из
сплошного материала и до 2% — из листового).
588
Глава 16. Измерительные преобразователи
Четвертый тип электромагнитного ИП — индукционный (рис. 16.7, в), осно-
ванный на явлении электромагнитной индукции: наведенная ЭДС в катушке, пере-
мещающейся в магнитном поле, прямо пропорциональна числу витков w2 и скорости
изменения магнитного потока <1Ф/<1Ъ (или скорости перемещения катушки при по-
стоянном потоке).
Схема включения однотактного индуктивного ИП представляет собой последо-
вательную RL-цепь (рис. 16.8, а), на которой ИП представлен переменной индуктив-
ностью L, управляемой одноименной клавишей клавиатуры. Сопротивление нагрузки
Rn выбрано равным индуктивному сопротивлению ИП на рабочей частоте источника
измерительного напряжения Ui; сопротивление Ra — активное сопротивление обмот-
ки ИП. Действующее значение тока в RL-цепи, измеряемое амперметром,
I = Ui/[(Ra + Rn)2 + (2л£Ь)2]1/2. (16.15)
Для модели I = 10/[(10 + 6280)2 + (2л 10’ 0,2 0,5)2]’2 = 1,125 мА совпадает с изме-
ренным. Выходное напряжение схемы Uo = I Rn = 1,125103 6280 = 0,7065 В также сов-
падает с показаниями вольтметра Uo. Если ИП используется для измерения линейного
перемещения, то после подстановки из (16.14) значения индуктивности
L = f(5) в (16.15) находим: Uo = Rn Ui/[(Ra + Rn)2 + (2jrfw2j.ijS/5)2]’2, где w — число вит-
ков обмотки ИП. Если параметры ИП выбрать из условия (Ra + Rn) «(2nfw2p)1S/5), то
Uo = 6-Rn •Ui/2icfw2p0S = Кб, (16.16)
где К - RnUi/2nfw2p0S — коэффициент преобразования, В/м.
Рис. 16.8. Схема включения одпотактного индуктивного ИП (а) и результаты осциллографиче-
ских измерений (б)
б)
Из-за ряда недостатков однотактные ИП не нашли широкого распространения
и используются преимущественно в качестве вспомогательных устройств, напри-
мер, обратных ИП в компенсационных схемах. Более распространенными в практи-
ке измерений и контроля являются дифференциальные ИП, которые содержат
дополнительный магнитопровод, аналогичный магнитопроводу 2 на рис. 16.7, а и
зеркально расположенный относительно него. Схема включения такого ИП
(рис. 16.9, а, б) содержит трансформатор Т, к вторичной обмотке которого подклю-
чены обмотки ИП; нагрузка Rn подключается между средней точкой вторичной об-
мотки трансфоматора и средней точкой обмоток ИП. Ток, протекающий по
сопротивлению нагрузки, равен разности токов через обмотки ИП; при равенстве их
индуктивностей выходное напряжение равно нулю. Полагая, что на выходе каждой
589
Часть II. Моделирование схем и устройств
половинки вторичной обмотки напряжение равно Ui, и применяя к цепи на
рис. 16.9, а метод наложения (см. разд. 5.4), находим, что ток в нагрузке
I = Ui-AL/L[Rn2 + (2jtfLl-L2/L)2]12, (16.17)
где AL = LI - L2; L = LI + L2.
Для модели на рис. 16.9, б AL = 0,2-0,51 0,2 0,49 = 0,004 Гн; L = 0,2 0,51 +
+ 0,2 0,49 = 0,2 Гн; на основании (16.17) ток в нагрузке I = 28,48 мкА и выходное на-
пряжение Uo = I Rn = 178,9 мВ, что практически совпадает с показаниями прибо-
ров. Заметим, что L1-L2 = L2 - AL = L2, что позволяет упростить формулу (16.17), и
выражение для выходного напряжения схемы записать в следующем виде:
Uo = Rn-Ui-AL/LfRn* + (2nf L)2]12. (16.18)
Рис. 16.9. Схема включения дифференциального индуктивного ИП
Контрольные вопросы и задания
1. Назовите типы электромагнитных ИП и дайте их краткую характеристику.
2. Используя формулы (16.15) и (16.18), определите оптимальное значение часто-
ты, при котором выходной сигнал схем на рис. 16.8 и 16.9 максимален.
3. В каком случае выходной сигнал схемы на рис. 16.8 не будет зависеть от частоты
измерительного напряжения?
4. Формула (16.16) получена в предположении, что Rm « Rb. Однако при малых зна-
чениях воздушного зазора 5 это условие может быть нарушено вследствие сущест-
венного уменьшения R,. Каким образом это скажется на функции преобразования
однотактного ИП? Составьте аналитическое выражение Uo = f(6) для этого случая.
5. Используя формулы (16.14) и (16.18), составьте выражение Uo = f(6) для диффе-
ренциального ИП.
6. Используя данные разд. 14.5.1, оцените силу воздействия однотактного ИП на
объект контроля при 6 = 0,1 мм и токе обмотки 2 мА (действующее значение).
При этом необходимо учесть, что на переменном токе развиваемое усилие Р, =
0,5w2p<jS[Im* sin2o)t /62], где 1,„ — амплитуда тока.
7. Каким образом скажется на характеристике однотактного ИП насыщение маг-
нитной цепи?
8. Используя результаты осциллографических измерений (рис. 16.8, б), проведите
исследование фазовых соотношений в схеме однотактного ИП и сделайте вывод
о возможности получения реверсивной характеристики преобразования.
16.5. Пьезоэлектрические преобразователи
Принцип действия ИП пьезоэлектрических датчиков основан па использовании
прямого или обратного пьезоэффектов. Прямой пьезоэффект заключается в способно-
сти некоторых материалов генерировать электрические заряды при приложении ме-
590
Глава 16. Измерительные преобразователи
ханической нагрузки, обратный — в изменении механического напряжения или гео-
метрических размеров образца материала под воздействием электрического поля. В
качестве пьезоэлектрических материалов используются кварц, турмалин и искусст-
венно поляризованная керамика на основе титаната бария (ВаТЮ3), титаната свинца
(PbTiO,), цирконата свинца (PbZrO3) и др.
Количественно пьезоэффект характеризуется пьезомодулем
Kd = Q/F, (16.19)
где Q — генерируемый заряд при воздействии силы F.
Наиболее распространен кварц; он имеет незначительный коэффициент ли-
нейного расширения при модуле упругости Е = 7,71010 Па, высокое удельное элект-
рическое сопротивление (порядка 10,в Ом/м) и сравнительно незначительную
зависимость пьезомодуля (2,ЗЛО’2 Кл/Н) от температуры в диапазоне 200...500 С.
Пьезокерамика является продуктом отжига спрессованной смеси, содержа-
щей мелко раздробленные сегнетоэлектрические кристаллы; пьезоэлектрические
свойства такая керамика приобретает после поляризации в электрическом поле. Ме-
ханическая прочность пьезокерамики зависит от технологии и качества обработки
соприкасающихся плоскостей; пьезомодуль, диэлектрическая проницаемость и их
стабильность зависят от выбора направления поляризации, направления действия
силы Р и способа съема заряда.
Пьезокерамика на основе ниобата свинца (НБС) и цирконата-титаната свинца
(ЦТС) более стабильна, чем на основе титаната бария, однако уступает им по чувст-
вительности. Так, пьезокерамика на основе титаната бария имеет точку Кюри 120’С
(температура, при которой теряются пьезоэлектрические свойства) при пьезомодуле
порядка 1001012 Кл/Н, а пьезокерамика ЦТС-19 точку Кюри 290’С и в два раза более
высокое значение пьезомодуля.
Все природные пьезоматериалы имеют кристаллическую структуру. Так,
кварц имеет шестигранную структуру кристалла: пьезочувствительный элемент
обычно вырезают из кристалла кварца в виде пластины (параллелепипеда), стороны
которой параллельны осям кристалла (рис. 16.10, а). В свободном (ненапряженном)
состоянии в пластине все заряды скомпенсированы и она является электрически
нейтральной.
Если к пластине кварца приложена сила F вдоль оси X (см. рис. 16.10, а), то
на ее гранях, перпендикулярных оси X, возникают разнополярные электрические
заряды Q, значения которых в пределах упругих деформаций прямо пропорцио-
нальны силе F в соответствии с выражением (16.19). Такой пьезоэффект называется
продольным. Значения зарядов при этом не зависят от геометрических размеров
пластины, а определяются лишь силой F.
Если пластину подвергнуть сжатию по оси Y (поперечный пьезоэффект), то на
тех же гранях генерируется заряд Q = -Kd(b/a)F, где а и b — размеры пьезоэлемента
в направлении осей X и Y. В зависимости от направления действия силы F (сжатие
или растяжение) знак заряда на гранях пластины меняется.
Турмалин, в отличие от кварца, имеет не две, а одну пьезочувствительную
плоскость, перпендикулярную к оптической оси Z. Благодаря такой особенности
турмалин применяется для измерения обьемного давления, что делает его незамени-
мым при измерении давления в жидкостях.
Конструктивно такой ИП представляет собой пластину из пьезоматериала, на
две грани которого наносятся электроды для подключения к измерительной схеме.
591
Часть II. Моделирование схем и устройств
Для увеличения выходного сигнала из пластин набирают батарею из последователь-
но включенных пьезоэлементов (рис. 16.10, б).
Для измерения деформации сдвига конструкция ИП представляет собой ци-
линдр 1 из пьезокерамики с электродами 2, 3 (рис. 16.10, в). Под действием силы F
происходит деформация сдвига плоскостей, параллельных направлению поляриза-
ции, что вызывает генерацию заряда.
При измерении параметров изгиба ИП представляет собой две одинаковые
склеенные между собой пластины; при изгибе одна пластина удлиняется, а другая
укорачивается. В зависимости от схемы подключения можно получить сигнал, про-
порциональный сумме зарядов (рис. 16.10, г) или сумме напряжений (рис. 16.10, д').
Рис. 16.11. Эквивалентные схемы включения пьезоэлектрических ИП (а. б) и осциллограммы
выходных сигналов (в. г)
Преобразователи с обратным пьезоэффектом используются в качестве источ-
ников ультразвуковых и звуковых колебаний (при гидродинамических измерениях
и в акустике), в исполнительных устройствах автоматики (перемещение зеркал оп-
тических приборов), в качестве обратных ИП и др.
Погрешности пьезоэлектрических ИП определяются температурной неста-
бильностью пьезомодуля, неправильной установкой пластин, недостаточной изби-
рательностью по направлению измеряемых деформаций (чувствительность к
боковым силам) и зависимостью коэффициента преобразования от частоты (напри-
592
Глава 16. Измерительные преобразователи
мер, верхняя рабочая частота таких ИП достигает 200 кГц при чувствительности
0,004 пКл/(м/с2), однако при предельной чувствительности 1000 пКл/(м/с2) она сни-
жается до 1 кГц).
Достоинства пьезоэлектрических ИП: простота конструкции, малые габариты
и стоимость, высокая надежность, возможность измерения быстропеременных вели-
чин; недостатки: невысокая чувствительность, непригодность к измерению статиче-
ских величин, высокое входное сопротивление измерительной цепи, относительно
невысокий уровень выходного сигнала, что требует дополнительного усиления.
Наиболее распространенными схемами включения пьезоэлектрических ИП
являются схемы с усилителем напряжения (рис. 16.11, а) и усилителем заряда
(рис. 16.11, б); ИП на этих схемах имитируется источником заряда, образованным
источником постоянного напряжения Ui и конденсатором Со; кроме того, на схемах
обозначено: Rn, Сп — сопротивление утечки и емкость ИП и соединительного кабе-
ля (собственная емкость ИП на пьезокерамике достигает указанных на схемах зна-
чений Cn); С — запоминающая емкость зарядочувствительного усилителя; RI, R2 —
элементы цепи обратной связи усилителя на рис. 16.11, а, обеспечивающие по пеин-
вертирующему входу коэффициент усиления К = 1 + R2/R1 = 2 (см. разд. 10.1).
В момент t = 0 (включение моделирования) выходное напряжение усилителя (см. ос-
циллограмму на рис. 16.11, в, принудительно сдвинутую по оси времени) равно
K-Ui-Co/(Co + Сп) = 2-1 -1/(1 + 1) = 1 В и затем по экспоненте спадает до нуля, что су-
щественно затрудняет дальнейшую обработку сигнала, например, с помощью АЦП
(см. гл. 11). Кроме того, выходное напряжение и соответственно результат измерения
зависят от емкости Сп, значение которой, в свою очередь, зависит как от характеристик
ИП, так и характеристик соединительного кабеля. В схеме же с зарядочувствительным
усилителем влияние этой емкости уменьшается в А раз (так обозначается, напоминаем,
коэффициент усиления ОУ), т. е. для схемы на рис. 16.11, б выходное напряжение
(см. осциллограмму на рис. 16.11, г) равно UiCo/(C + Сп/ А) = 11/(1 + 1/106) = 1 В. Не-
достатком такой схемы включения ИП является необходимость сброса заряда с запоми-
нающего конденсатора С и применения для этой цели соответствующего ключа
(электромеханического или электронного). Однако в случае сопряжения датчика с
АЦП этот недостаток несущественен и даже полезен, поскольку при этом не потребует-
ся устройство выборки и хранения (см. разд. 10.10).
Контрольные вопросы и задания
1. Какие физические явления используются в пьезоэлектрических ИП?
2. Что такое продольный и поперечный пьезоэффекты? Возможен ли он в пьезоке-
рамике?
3. Можно ли использовать кварцевый генератор (см. разд. 8.7) в качестве пьезоэле-
ктрического ИП?
4. Используя формулу (16.19), составьте выражение для функции преобразования
Uo = f(F) для схем на рис. 16.11.
5. Каким стандартным звеном (см. разд. 14.1.2) можно представить пьезоэлектри-
ческий датчик, если известно, что его рабочая частота равна 10 кГц и он исполь-
зуется для измерения линейных ускорений в диапазоне 5... 100 м/с2?
16.6. Термометрические преобразователи
Измерительные преобразователи термометрических датчиков применяются
не только для измерения температуры, но и таких связанных с пей величин, как
тепловой поток, скорость потока газа или жидкости, расход, химический состав и
593
Часть II. Моделирование схем и устройств
давление газов, влажность, СВЧ-мощность, уровень жидкости и т.п. При практиче-
ской реализации термометрических ИП наиболее часто используется явление
термоэлектричества, открытое в 1823 г. Зеебеком, и зависимость сопротивления
материалов от температуры.
Термоэлектрические ИП (термопары) представляют собой конструкцию из
двух разнородных проводников или полупроводников (АБ и ВГ на рис. 16.12, а, б, в),
места соединения (спаи) которых (точки То и Ти) имеют различную температуру. При
небольшом перепаде температур между спаями термоЭДС можно считать пропорцио-
нальной разности температур
ДТ = Ти - То, т. е. Еав = Ебг - КДТ, (16.20)
где К — коэффициент преобразования.
Если к точкам А, В подключить милливольтметр (рис. 16.12, б), то при усло-
вии, что температура в этих точках равна То, он будет измерять ЭДС, определяемую
формулой (16.20). Такие же результаты получим и в случае включения милливольт-
метра по схеме на рис. 16.12, в [76]. Чтобы получить достоверные результаты, необ-
ходимо спай термопары Б-Ти-Г, называемый рабочим, поместить в объект с
контролируемой температурой Ти, а температуру То нерабочего (холодного, свобод-
ного) спая А-То-В поддерживать постоянной (при особо ответственных измерениях
для этого используются специальные средства термостатирования). Обычно термо-
ЭДС не рассчитывают аналитически, а определяют по градуировочным таблицам
или графикам, получаемым экспериментально, для различных материалов при тем-
пературе холодных спаев То = 0.
В качестве материалов для термопар используются как драгоценные металлы
(платина, золото, иридий, родий и их сплавы), так и обычные (неблагородные) ме-
таллы (сталь, никель, хром, сплавы нихром, копель, аллюмель и др.). Сравнительно
редко (из-за низкой механической прочности) применяют термопары из полупро-
водниковых материалов (кремния, селена и др.), которые хотя и обладают большим
внутренним сопротивлением, но обеспечивают большую термоЭДС по сравнению с
металлами.
Как уже отмечалось, термоЭДС возникает только в спаях разнородных матери-
алов. При этом в качестве базовой используется термоЭДС платины, по отношению к
которой определяются термоЭДС других материалов. Например, если термопара со-
ставлена из хромеля с термоЭДС +31,3 мкВ/вС и алюмеля с термоЭДС -10,2 мкВ/:С,
то термоЭДС термопары хромель-алюмель составит 31,3 + 10,2 - +41,5 мкВ/С. Для
повышения выходной ЭДС используется последовательное включение термопар, об-
разующее термобатарею, свободные спаи которой должны находиться при постоян-
ной температуре (в идеальном случае — при О С). В некоторых случаях применяются
специальные термопары: иридий-иридий-родиевую — для измерения температуры
до 2000 С; вольфрам-вольфрам-молибденовую — для измерения температур свыше
2000°С; вольфрам-молибденовую — для измерения в диапазоне до 2600°С; тантал-мо-
либденовую — до 2600 С; вольфрам-танталовую — до ЗОООС.
Для подключения термопар к измерительным приборам или другим преобра-
зователям используются так называемые удлиняющие термоэлектроды (на
рис. 16.12, а, б, в — проводники АБ и ВГ), к которым для обеспечения минимальной
погрешности предъявляются следующие требования: термоЭДС удлинительного
электрода должна быть равна термоЭДС основного электрода; место присоединения
удлинительных термоэлектродов к основным термоэлектродам термопары должно
иметь одинаковую температуру.
594
Глава 16. Измерительные преобразователи
Для промышленно выпускаемых термопар платинородий-платина применя-
ют удлинительные электроды из меди и сплава ТП, для терглопар хромель-алю-
мель — из меди и константана, для термопар хромель-копель — материал основных
термоэлектродов в виде гибких выводов.
д)
Рис. 16.12. Конструктивные схемы термоэлектрических ИП (а, б, в) и потенциохметрические схе-
мы измерения термоЭДС (г, д)
В зависимости от назначения термопары делятся на погружные, предназначен-
ные для измерения температуры жидких и газообразных сред, и поверхностные,
едназначенные для измерения температуры поверхности. Обычно термопары поме-
1ются в защитный чехол из металла или керамики; для изоляции используется стек-
, асбест, фарфор, шамот, а при низких температурах — шелковая или эмалевая
оляция. Использование таких защитных средств приводит к существенному повыше-
ю инерционности термопар. Поэтому в наиболее худшем случае динамика термопар
исывается передаточным коэффициентом К(р) = КДрЧ’Дг + р(Т, + Т2 + Т3) + 1],
е Т„ Т2, Т3 — постоянные времени соответственно защитной оболочки, самой тер-
нары и теплообмена между оболочкой и термопарой. Поскольку в большинстве
учаев Т1 « Т2, то принимается: К(р) - К/[р(Т2 4- Т3) + 1]. В зависимости от инер-
онности различают термопары малоинерционные, тепловая постоянная времени
торых не превышает 5 с для погружных и 10 с для поверхностных; средней инер-
онности — соответственно не более 60 и 120 с и большой инерционности — с теп-
вой постоянной 180 и 300 с. Достоинства термоэлектрических ИП: большой
апазон измеряемых температур, простота устройства, надежность в эксплуата-
и; недостатки: невысокая чувствительность, большая инерционность, необходи-
:ть поддержания постоянной температуры свободных спаев.
Измерение термоЭДС производится с использованием обычных методов изме-
ни напряжения с использованием милливольтметров (как на рис. 16.12, б) или
енциометрических схем с ручным (рис. 16.12, г) или автоматическим уравно-
тиванием. При использовании милливольтметров сопротивление термопары
595
Часть II. Моделирование схем и устройств
(вместе с соединительными проводами) принимается равным 5 Ом и корректируется
при наладочных работах с использованием добавочных резисторов из манганина.
При потенциометрических измерениях эта операция необязательна, поскольку
(см. рис. 16.12, г) после уравновешивания схемы на выходе управляемого (в данном
случае — вручную) делителя Ro формируется напряжение, равное и противополож-
ное по знаку термоЭДС Ех, в результате чего ток через внутреннее сопротивление
термопары Rx равен нулю (см. показания гальванометра G) и, следовательно, значе-
ние этого сопротивления в данном случае несущественно. В качестве образцового на-
пряжения Uo в потенциометрах используются высокоточные гальванические
(нормальные) элементы технического применения (ненасыщенного типа); в данном
случае это элемент типа Э-303 класса 0,02, т. е. с гарантируемой точностью 0,02% ;
для ответственных измерений, например, при поверке приборов используются на-
сыщенные нормальные элементы класса 0,005 и 0,001.
В автоматических потенциометрах в качестве нуль-органа (“гальванометра”!
используется высокочувствительный усилитель МДМ (см. разд. 10.16); формируе-
мый на его выходе сигнал рассогласования подается на реверсивный двигатель, ко-
торый перемещает ползунок реохорда (см. разд. 16.2) в ту или иную сторону до
полного уравновешивания схемы.
Схема модели автоматического потенциометра содержит (см. рис. 16.12, д) ин-
вертирующий усилитель на ОУ 1 с коэффициентом передачи R2/R1 = 100 (нуль-орган I
и управляемый источник напряжения U/U с коэффициентом передачи 100, выполня-
ющий роль исполнительного органа и формирующий компенсирующее напряжение
Uo - Ux, измеряемое одноименным вольтметром. Как следует из показаний вольтмет-
ра, они соответствуют расчетному значению Uo - Ux я 1019 - 102 — 917 мВ.
Терморезистивные ИП основаны на свойстве проводников и полупроводникоБ
изменять свое электрическое сопротивление при изменении температуры. Для та-
ких ИП используются материалы, обладающие высоким температурным коэффици-
ентом сопротивления (ТКС) и его стабильностью, высокой воспроизводимостьк
электрического сопротивления при данной температуре, значительным удельных
электрическим сопротивлением, стабильностью химических и физических свойств
при нагревании, инертностью к воздействию контролируемой среды. К таким мате-
риалам относятся платина, медь, никель, вольфрам и др.; наибольшее распростране-
ние получили платиновые и медные терморезисторы.
Недостатки платиновых ИП: высокая загрязняемость платины парами метал-
лов (особенно железа) при высоких температурах, сравнительно невысокая химиче-
ская стойкость в восстановительной среде, вследствие чего материал становится
хрупким и теряет стабильность характеристик. Медные ИП отличаются низкой сто-
имостью; их применение ограничивается диапазоном температур 50...180 С в средах
с низкой влажностью и отсутствием агрессивных газов. Никель, химически стойки?,
материал даже при высоких температурах, имеет сложную зависимость сопротивле-
ния от температуры и невысокую ее воспроизводимость (повторяемость результа-
тов). Тугоплавкие металлы — вольфрам, молибден, тантал, ниобий — применяют
редко из-за влияния температуры на структуру металла, что делает его хрупким.
Сплавы, обладающие более высоким удельным сопротивлением, чем чистые метал-
лы, в качестве материалов для преобразователей не используют из-за сравнительнс
низкого ТКС, значение которого в значительной степени зависит от количественно-
го и качественного состава примесей.
Выпускаемые промышленностью термометры сопротивлений с платиновыми
(ТСП) и медными (ТСМ) чувствительными элементами обладают наибольшей надеж-
Глава 16. Измерительные преобразователи
лью и обеспечивают точность измерения 0,001'С в диапазоне температур от -200
+1100“С. Основным недостатком этих термометров являются большие габариты,
> ограничивает их применение при измерениях температур в малых объемах.
Полупроводниковые ИП сопротивления в основном представлены полупро-
дниковыми термосопротивлениями (термисторами), сопротивление которых, в
личие от металлических термометров, увеличивается с понижением температуры,
о связано с уменьшением подвижности носителей и их количества. Недостатком
рмисторов является нелинейность характеристик: их сопротивление меняется по
споненциальному закону.
На основе медно-марганцевых и кобальто-марганцевых соединений промы-
ленностью выпускаются термисторы КМТ-1, КМТ-4, ММТ-4, ММТ-6, ТОС-М;
и изготовляются в виде стержней (ММТ-1, КМТ-1 и др.), а также в виде дисков
ОС-М) или шариков (бусинок). Термисторы шариковой формы монтируются на
нких проводах в вакуумированной или наполненной газом ампуле. Небольшие
бариты и низкая теплоемкость термисторов обеспечивают меньшие значения по-
оянной времени по сравнению с другими термометрами сопротивления; они поз-
ляют измерять температуру с точностью до 0,0005’ С; диапазон измеряемых
мператур---6О...+18О’С.
Угольные термометры сопротивления изготавливаются из графита и углей,
ри низких температурах графит имеет отрицательный ТКС, зависящий от содер-
ания примесей и от размера кристаллических зерен; для чистого графита удельное
противление при низких температурах обратно пропорционально температуре.
>афит не теряет своих свойств и при высоких температурах и поэтому может при-
еняться для измерения температур до 2300°К.
Контрольные вопросы и задания
, Какие физические явления используются в термометрических датчиках?
. Каким образом на точность измерения температуры может повлиять пропускае-
мый при этом через термопару ток, если не учитывать эффект Пельтье (выделе-
ние или поглощение теплоты) и ЭДС Томсона?
Используя схему на рис. 16.12, <?, разработайте модель потенциометра с возмож-
ностью заземления термопары.
При использовании термопар вводятся поправки на температуру ее свободных
спаев, что может быть осуществлено автоматически, например, с помощью мосто-
вой или потенциометрической схемы с использованием терморезистора, распола-
гаемого на свободных спаях и имеющего одинаковую с ними температуру. Если в
исходном состоянии мост или потенциометр находятся в равновесии, то при изме-
нении температуры холодных спаев это равновесие нарушается и возникающее
при этом напряжение рассогласования можно использовать для корректировки
измеряемой термоЭДС. Используя этот алгоритм и опыт, приобретенный в про-
цессе знакомства с материалами этой главы, разработайте модель устройства.
Назовите основные характеристики металлических терморезистивных ИП и об-
ласти их применения.
Какими свойствами обладают полупроводниковые термометры сопротивлений?
Проанализируйте возможности использования схем на рис. 16.4 для подключе-
ния терморезистивных ИП.
597
Часть II. Моделирование схем и устройств
16.7. Методы уменьшения
погрешностей преобразователей
Используя данные, приведенные в работах [76, 80], рассмотрим источники до-
полнительных погрешностей ИП и способы уменьшения их влияния.
Четырехзажимное включение (рис. 16.13) позволяет уменьшить влияние со-
противления соединительных проводов и переходного сопротивления контактов. В
качестве примера практической реализации такого включения на рис. 16.13, а при-
ведена верхняя часть конструкции измерительной (образцовой) катушки сопротив-
ления, где обозначено: 1 — токовые зажимы; 2 — потенциальные зажимы; 3 —
контактные площадки зажимов; 4 — изолятор; 5 — выводы катушек сопротивле-
ния; 6 — канал для термометра; 7 — металлический корпус устройства. Приведен-
ная конструкция зажимов применяется во всех измерительных катушках с
номинальным сопротивлением 1000 Ом и менее. Несмотря на массивность контакт-
ной площадки, она обладает конечным сопротивлением между потенциальными и
токовыми зажимами (R и R' на схеме модели), на которых и создается падение на-
пряжения, суммируемое с падением напряжения на сопротивлении катушки Rk и
измеряемое вольтметром U1, входное сопротивление которого существенно больше
(в данном случае — на пять порядков) сопротивления катушки и поэтому не оказы-
вающего влияния на результат измерения. При подключении аналогичного по вход-
ному сопротивлению вольтметра U2 к потенциальным зажимам 2 и 2' измеряется
падение напряжения от тока I только на сопротивлении катушки, чем и достигается
существенное повышение точности измерения заданной величины — падения на-
пряжения на сопротивлении измерительной катушки.
Рис. 16.13. Конструкция четырехзажимного контакта (а) и его модель (б)
Рис. 16.14. Конструкция измерительной камеры с эквипотенциальной защитой (а) и схемы ее
модели (б, в)
Эквипотенциальная защита обеспечивает уменьшение влияния токов утечки,
что достигается применением дополнительного электрода Э (см. рис. 16.14, а) меж-
598
Глава 16. Измерительные преобразователи
ду изолятором, через который проходит защищаемый проводник, и основным изо-
лятором, установленным в заземленном корпусе устройства (в данном случае — в из-
мерительной камере измерителя высокоомных резисторов). При этом электрод Э
подключается к точке измерительной цепи, имеющей потенциал, возможно близ-
кий к потенциалу защищаемого от утечек проводника. При отсутствии защитного
электрода (схема модели на рис. 16.14, б) ток через микроамперметр больше тока че-
рез резистор lx = Ui/Rx = 100/10° - 0,1 мкА на величину тока утечки Iy = Ui/Ry =
= 100/10’ = 0,1 мкА, т. е. суммарный ток, регистрируемый одноименным амперме-
тром, II = 1у + 1х - 0,2 мкА и, следовательно, ошибка определения тока через из-
меряемый резистор составляет 100%. При наличии защитного электрода и
подключении его в соответствии с рис. 16.14, а (схема модели на рис. 16.14, 6} (со-
противление его утечки также примем равным Ry) ток, измеряемый амперметром
12, равен току через измеряемый резистор, т. е. в этом случае погрешность измере-
ния тока исключается.
ТермоЭДС соединительных проводников учитывается при питании измери-
льных цепей постоянным током и использовании разнородных соединительных
эоводников между первичными и вторичными ИП.
Электрохимическая ЭДС учитывается в электромеханических контакных
ройствах (реостатные ИП со скользящим контактом, электромеханические ком-
мутаторы системы опроса датчиков и т.п.), работающих в условиях повышенной
злажности, когда в результате растворения пленки окислов на поверхности контак-
та образуется электролит и возникает ЭДС, значение которой зависит от количества,
вида электролита и материала контактов.
Защита от влияния магнитных полей сводится к уменьшению площади S кон-
ура, образованного измерительной цепью, поскольку в переменном магнитном по-
ie с индукцией В = Bmsincot в этом контуре наводится ЭДС е - -coSBmcoscot. Другим
пособом уменьшения наводимой ЭДС является экранирование с использованием
альных корпусов или кожухов с толщиной стенки d > 2 мм для промышленной ча-
эты 50 Гц (наиболее типичный случай наводки).
Линии связи (ЛС) между первичными и вторичными ИП подвержены влия-
:ю как магнитных, так и электрических цепей. Приведем результаты эксперимен-
пьного исследования нескольких схем ЛС, расположенных на расстоянии 25 мм
д поверхностью условного нулевого потенциала (“земли”) и используемых на час-
гах до 100 кГц [80].
ЛС на рис. 16.15, а имеет большую площадь петли, образованной “прямым”
оводом и “землей”. Эта ЛС подвержена прежде всего магнитному влиянию, по-
ольку экран заземлен на одном конце и не защищает от магнитных полей. Пере-
дное затухание для этой ЛС принимается равным 0 дБ для возможности
внения с помехозащищенностью других схем (рис. 16.15).
Схема Л С на рис. 16.15, б практически не уменьшает магнитную связь, так
< обратный провод заземлен с обоих концов, и в этом смысле она аналогична схе-
на рис. 16.15, а. ЛС на рис. 16.15, в отличается от ЛС на рис. 16.15, а наличием
•атного провода — коаксиального экрана, однако экранирование магнитного по-
ухудшено, так как цепь заземлена на обоих концах, в результате чего с “землей”
эазуется петля большой площади. Схема на рис. 16.15, г позволяет повысить за-
;енность цепи до -49 дБ (на рис. 16.15 знак опущен) благодаря скрутке про-
дов (18
витков на метр). В этом случае (по сравнению со схемой на рис. 16.15, б)
'ли нет, поскольку правый конец цепи не заземлен. Дальнейшее повышение за-
щенности ЛС достигается применением схемы на рис. 16.15, д, коаксиальная
599
Часть II. Моделирование схем и устройств
цепь которой обеспечивает лучшее магнитное экранирование, чем скрученная пара
на рис. 16.15, г. Площадь петли в схеме на рис. 16.15, д не больше, чем в схеме Hi
рис. 16.15, г, так как продольная ось экрана коаксиального кабеля совпадает с егс
центральным проводом. ЛС на рис. 16.15, е позволяет повысить защищенность бла-|
годаря тому, что скрученная пара заземлена лишь на одном конце. Кроме того, в
этой схеме используется независимый экран. Схема на рис. 16.15, ж имеет такуюжи
защищенность, что и схема на рис. 16.15, е: эффект заземления экрана на одном кон-
це тот же, что и при заземлении на обоих концах, поскольку длина цепи и экрана су-
щественно меньше рабочей длины волны. Возможной причиной улучшения
защищенности ЛСна рис. 16.15, з по сравнению с ЛС на рис. 16.15, ж, по мнению ав-
торов работы [80], является уменьшение площади эквивалентной петли. Более плот-
ная скрутка проводов (54 витка на метр, схема на рис. 16.15, и) позволяет
дополнительно уменьшить магнитную связь. Кроме того, при этом уменьшается z
электрическая связь, поскольку в обоих проводах наводятся компенсирующие друг
друга одинаковые токи.
Заметим, что эффективным средством повышения помехозащищенности из-
мерительных цепей датчиков является использование ИП дифференциального типа
и симметричных линий связи с симметричным приемником, например, дифферен-
циальным усилителем (см. разд. 10.3).
1
1
(
I
/
1
I
Сравнительная помехозащищенность линий связи при воздействии внешних маг-
нитных и электрических полей
Рис. 16.15.
Контрольные вопросы н задания
1. Объясните сущность четырехзажимного включения.
2. Составьте схему модели измерительной камеры с эквипотенциальной защитой е I
измерительным источником тока вместо источника напряжения. Результаты I
моделирования сопоставьте с результатами расчета. Проведите сравнительный I
анализ измерительной схемы с источником тока и источником напряжения.
3. Милливольтметр с верхним пределом измерения 10 мВ подсоединяется медными I
проводниками (термоЭДС — +7,6 мкВ/’С) к контролируемому объекту с помо- I
щью зажимов с палладиевым покрытием (термоЭДС--5,7 мкВ/’С). Определите I
относительную приведенную погрешность измерения, если известно, что раз- I
ность температур объекта и выносного милливольтметра может достигать 50‘С.
4. На рис. 16.16 показана измерительная цепь и ее эквивалентная схема [76], состо- I
ящая из термопары с внутренним сопротивлением Ri - 2 Ом, симметричной эк- I
ранированной линии связи с активным сопротивлением каждого провода I
600
Глава 16. Измерительные преобразователи
за I
ia I
го I
а- I
е I
ее I
н- I
У- I
I
в- I
т- I
87 I
I! I
УЧ
13- I
за I
Е- I
RI = R2 = 10 Ом и усилителя с входным сопротивлением Rn = 100 кОм. Тер-
мопара заключена в кожух-экран 1, который заземлен в точке 5 на объекте контро-
ля. Между термопарой и экраном 1 образуется паразитная емкость
Ci = 20 пФ. Экран линии связи соединен с корпусом (экраном) усилителя и зазем-
лен в точке 6 аппаратной. Между элементами входной цепи усилителя и его экра-
ном образуется паразитная емкость Сп = 20 пФ. Между точками заземления 5 и 6
действует так называемая помеха общего вида (или продольная помеха) Ur, кото-
рая возникает из-за блуждающих токов и токов заземленных силовых установок и
может достигать нескольких десятков вольт. Обозначая RI + Ri/2 - R2 + Ri/2 = R,
Ci = Cn — С и учитывая, что Rn»R, получим приближенное выражение для рас-
чета напряжения помехи на входе усилителя в следующем виде: Uo = 2Ui-7tf-R-C =
= 210-Л-50 11-201012 = 690,810'9 В - 0,69 мкВ, что совпадает с показаниями вольт-
метра на рис. 16.16. Используя приведенную формулу, исследуйте зависимость
напряжения помехи на входе усилителя от частоты сигнала помехи, внутреннего
сопротивления термопары и активного сопротивления линии связи. Результаты
расчетов проверьте на модели.
RI/2 R1
1Й 102 Цо
[с. 16.16. Термоэлектрический ИП с линией связи (а) и его эквивалентная схема с учетом по-
мехи общего вида (б)
601
Часть III. Разработка печатных плат
Часть III. Разработка,
печатных плат
17. Программа EWB Layout
Программа EWB Layout предназначена для разработки печатных плат. Ни
приводится ее краткое описание, составленное в результате анализа демонстраци!
ной версии.
17.1. Рабочее окно программы
Рабочее окно программы EWB Layout показано на рис. 17.1. В интегриров;
ном пакете EWB+EWB Layout оно вызывается автоматически после выбора коман
Export to EWB Layout из меню File программы EWB 5.0. При этом все компонен
экспортируемой из EWB схемы располагаются в верхней части рабочего поля,
рис. 17.1 показаны компоненты схемы генератора Колпитца (рис. 1.23, см. так
рис. 17.25). Окно содержит поле меню, линейку инструментов с кнопками наибо;
употребляемых команд, окно-видоискатель Birdseye с уменьшенной копией рабоч<
окна (стола), расположенное в верхнем левом углу окна над меню Trace (вертика.
ный блок с левой стороны окна). Это меню можно перетаскивать мышью в любое г
сто экрана; с его помощью оперативно выбираются следующие параметры:
с CQ
45+90
<• Пазе
Tyns
G v>ubc
__________
3
Wdft__________
(с 1 w $15 j3
'Ля cod;.______
Рис. 17.1. Рабочее окно программы EWB Layout
V-iShh
г с н«!р. c<ei: Я
Draw angle — выбор угла поворота при прокладке печатных проводников (под у
лом, кратным 90‘ или 45‘, или под любым углом (all angles));
Method — прокладка прямолинейных проводников (trace) или дуг окружностей (ап
602
Глава 17. Программа EWB Layout
Туре назначение атрибутов проводников: неперемещаемый (fixed) или перемеща-
емый (variable);
Layer — вывод на передний план верхней (ТОР) или нижней (BOTTOM) стороны пе-
чатной платы;
Width — выбор ширины печатного проводника: номер набора, ширина (с:1,
W1S15) — всего 32 набора (о единицах измерения см. рис. 17.17);
Via code — выбор диаметра межслойных соединений — одного из 16 наборов: номер
набора, диаметр отверстия (с:0, s:S24) или вычисляемое значение (calculated);
Via Shift — сдвиг межслойного соединения.
Заметим, что по умолчанию фон рабочего поля (параметр Background color на
рис. 17.6) — черный, на рис. 17.1 он заменен на белый, чтобы можно видеть изобра-
жения элементов в черно-белом исполнении. Компоненты генератора Колпитца по-
казаны в увеличенном масштабе (см. меню View), чтобы можно было рассмотреть их
изображения и позиционные обозначения. Граница печатной платы (Board) па рабо-
чем поле выделяется синей линией с отверстием в левом нижнем углу платы (на
рис. 17.1 не показано), который принят в качестве начала координат платы (теку-
щие координаты курсора индицируются в строке состояния, расположенной в пра-
вой нижней части экрана).
17.2. Меню File
Меню File предназначено для работы с файлами и вывода информации о раз-
рабатываемой печатной плате на периферийные устройства. Оно содержит следую-
щие команды.
Команды New (Ctrl+N), Open (Ctrl+O), Save (Ctrl+S), Close, Save As... являют-
ся типичными для системы Windows. Для первых трех команд на линейке инстру-
ментов предусмотрены стандартные кнопки с подсветкой;
Print... (Ctrl+P) — вывод изображения платы на периферийное устройство;
1 Drill... — создание управляющего файла для сверлильного станка;
I import. Export — импорт/экспорт библиотечных файлов компонентов, списков со-
единений и др.
17.3. Меню View
Меню View предназначено для управления элементами рабочего окна про-
раммы и масштабирования изображения. Меню содержит следующие команды:
tandard — включение/выключсние на линейке инструментов первых 12 кнопок;
iterface — включение/выключение на линейке инструментов кнопок обо-
значающих включение (to autorouter) и выключение (from autorouter) соответст-
венно режима загрузки файлов для трассировки;
iseye — включение/выключение окна-видоискател я Birdseye;
се — включение/выключение меню Trace;
tus Bar — включение/выключение строки состояния;
m Full (F7) отмена операций масштабирования с использованием двух приве-
денных ниже команд;
m In (F8) — увеличение изображения рабочего поля;
m Out (F9) - уменьшение изображения рабочего поля;
603
Список литературы
Список литературы
1. Разевиг В. Д. Применение программ Р-CAD и PSpice для схемотехнического мо-
делирования на ПЭВМ: ВВ 4 выпусках. М.: Высш, школа, 1989.
2. Разевиг В. Д. Система сквозного проектирования электронных устройств
DesignLab 8.0. М.: Солон, 1999, 698 с.
3. Разевиг В. Д. Система схемотехнического моделирования Micro-Cap V. М.: Со-
лон, 1997, 273 с.
4. Цифровые и аналоговые интегральные микросхемы. Справочник/ С. В. Якубов-
ский и др. М.: Радио и связь, 1990, 495 с.
5. Пухальский Г. И., Новосельцева Т. Я. Проектирование дискретных устройств на
интегральных микросхемах. Справочник. М.: Радио и связь, 1990, 304 с.
6. Пучков II. А. Зарубежные интегральные микросхемы и их отечественные анало-
ги. Справочник. М.: Машиностроение, 1993, 187 с.
7. Шило В. Л. Популярные цифровые микросхемы. Справочник. М.: Металлургия,
1988, 352 с.
8. Зельдин Е. А. Цифровые интегральные микросхемы в информационно-измери-
тельной аппаратуре. Л.: Энергоатомиздат, 1986, 280 с.
9. Воробьев Е. П., Сенин К. В. Интегральные микросхемы производства СССР и их
зарубежные аналоги. Справочник. М.: Радио и связь, 1990, 352 с.
10. Муоцик Е. Таблицы аналогов цифровых интегральных микросхем. Справочник.
М.: Радио и связь, 1992, 352 с.
11. Нефедов А. В., Гордеева В. И. Отечественные полупроводниковые приборы и их
зарубежные аналоги. Справочник. М.: Радио и связь, 1990, 491 с.
12. Степаненко И. П. Основы микроэлектроники. М.: Сов. радио, 1980, 423 с.
13. Транзисторы. Справочник/О. П. Григорьев, В. Я. Замятин и др. М.: Радио и
связь, 1989, 272 с.
14. Полупроводниковые приборы: транзисторы. Справочник/Под ред. Н. Н. Горю-
нова. М.: Энергоатомиздат, 1985, 902 с.
15. Справочник по полупроводниковым приборам и их аналогам/Под ред. А. М. Пы-
жевского. М.: АО “Роби”, 1992, 316 с.
16. Полупроводниковые приборы. Диоды выпрямительные, стабилитроны, тирис-
торы. Справочник/Под ред. А. В. Голомедова. М.: Радио и связь, 1988, 527 с.
17. Диоды. Справочник/О. П. Григорьев, В. Я. Замятин и др. М.: Радио и связь,
1990, 336 с.
18. Сопряжение датчиков и устройств ввода данных с компьютерами IBM РС/Под
ред. У. Томпкинса и Дж. Уэбстера. Пер. с англ. Ю. А. Кузьмина и В. М. Матвее-
ва. М.: “Мир”, 1992, 590 с.
19. Како И., Яманэ Я. Датчики и микроЭВМ/Пер. с японского Г. II. Горбунова. Л.:
Энергоатомиздат, 1986, 128 с.
20. Токхейм Р. Основы цифровой техники/Пер. с англ.; Под ред. Е. К. Масловского.
М.: “Мир”, 1988, 383 с.
21. Уильямс Г. Б. Отладка микропроцессорных систем / Пер. с англ. В. Л. Григорь-
ева; Под ред. В. В. Сташина. М.: Энергоатомиздат, 1988, 253 с.
714
Список литературы
22. Часто задаваемые вопросы / Е. Музыченко, 2:5000/14@FidoNet, music@spi-
der.nstu.nsk.su.
23. Щербаков В. И., Грездов Г. И. Электронные схемы на операционных усилите-
лях. Справочник. Киев: Технгка, 1983, 213 с.
24. Нестеренко Б. К. Интегральные операционные усилители. Справочное пособие
по применению. М.: Энергоиздат, 1982, 127 с.
25. Алексенко А. Г., Коломбет Е. А., Стародуб Г. И. Применение прецизионных ана-
логовых микросхем. М.: Радио и связь, 1985, 254 с.
26. Волгин Л. И. Линейные электрические преобразователи для измерительных
приборов и систем. М.: Сов. радио, 1971, 332 с.
27. Гутников В. Применение операционных усилителей в измерительной технике.
Л.: Энергия, 1975, 116 с.
28. Функциональные устройства на микросхемах. Под ред. В. 3. Найдерова. М.: Ра-
дио и связь, 1985, 198 с.
29. Коган Б. Я. Электронные моделирующие устройства и их применение для иссле-
дования систем автоматического регулирования. М.: Физматгиз, 1959, 491 с.
30. Горошков Б. И. Радиоэлектронные устройства. Справочник. М.: Радио и связь,
1984, 399 с.
31. Справочник по расчету и проектированию ARC-схем / Под ред. А. А. Ланнэ. М.:
Радио и связь, 1984, 366 с.
32. Федорков Б. Г., Телец В. А., Дегтяренко В. II. Микроэлектронные цифро-анало-
говые и аналого-цифровые преобразователи. М.: Радио и связь, 120 с.
33. Clayton G. В. Experiments with operational amplifiers. Voltage-to-frequeney con-
version// Wireless World, 1973, v. 79, № 1458, p. 582.
34. Коломбет E. А. Таймеры. M.: Радио и связь, 1983, 125 с.
35. Шебес М. Р. Сборник упражнений и задач по теоретическим основам электротех-
ники. М.: Высш, школа, 1962, 476 с.
36. Вуколов Н. И., Михайлов А. Н. Знакосинтезирующие индикаторы. Справочник
/Под ред. В. П. Балашова. М.: Радио и связь, 1987, 590 с.
37. Хольм Р. Электрические контакты/Пер. с англ.; под ред. Д. Э. Брускина
и А. А. Рудницкого. М.: ИЛ, 1961, 464 с.
38. Коммутационные устройства радиоэлектронной аппаратуры / Под ред. Г. Я. Ры-
бина. М.: Радио и связь, 1985, 263 с.
39. Ренне В. Т. Электрические конденсаторы. Л.: Энергия, 1969, 591 с.
40. Справочник по электрическим конденсаторам / Под ред. И. И. Четверткова
и В. Ф. Смирнова. М.: Радио и связь, 1983, 575 с.
41. Эпштейн С. А. Измерение характеристик конденсаторов. М.: Энергия, 1971, 219с.
42. Степаненко И. П. Основы теории транзисторов и транзисторных схем. М.: Энер-
гия, 1967, 605 с.
43. Резисторы. Справочник/Под ред. И. И. Четверткова и В. М. Терехова. М.: Радио
и связь, 1991, 527 с.
44. Рогинский В. Ю. Электропитание радиоустройств. Л.: Энергия, 1970, 319 с.
45. Терещук Р. М., Домбругов Р. М., Домбругов II. Д. Справочник радиолюбителя.
Киев: Изд-во технической литературы УССР, 1961, 840 с.
715
Список литературы
46. Справочник радиолюбителя-конструктора. М.: Радио и связь. 1983, 560 с.
47. Сифоров В. И. Радиоприемники сверхвысоких частот. Изд-во Минобороны
СССР. М.: 1955, 595 с.
48. Гусев В. Г., Гусев Ю. М. Электроника. М.: Высш, школа, 1991, 495 с.
49. Скарлетт Дж. Транзисторно-транзисторные логические интегральные схемы и
их применение / Пер. с англ.; Под ред. Б. И. Ермолаева. М.: “Мир”, 1974, 287 с.
50. Нейман Л.Р., Калантаров П. Л. Теоретические основы электротехники: Ч. 2.
М.—Л.: Гос. энергетич. изд-во, 1959, 444 с.
51. Гоноровский И. С. Радиотехнические цепи и сигналы: В двух частях. М.: Сов. ра-
дио, 1967.
52. Гозлинг ВВ. Применение полевых транзисторов / Пер. с англ. А. М. Рогалева и
др. М.: Энергия, 1970, 160 с.
53. Расчет транзисторных цепей/Под ред. Р. Ф. Ши; Пер. с англ.; Под ред. Г. И. Ата-
бекова. М.—Л.: Энергия, 1964, 262 с.
54. Гольденберг А. М. Импульсные устройства. М.: Радио и связь, 1981, 221 с.
55. Источники электропитания РЭА. Справочник/Под ред. Г. С. Найвельта. М.: Ра-
дио и связь, 1986, 726 с.
56. Чистяков И. И., Сидоров М. В., Мельников В. С. Радиоприемные устройства. М.:
Гос. изд-во литературы по вопросам связи и радио, 1959, 836 с.
57. Изюмов Н. М. Курс радиотехники. М.: Военное изд-во мин.обороны СССР, 1958,
688 с.
58. Асеев Б. П. Колебательные цепи. М.: Гос. изд-во литературы по вопросам связи
и радио, 1955, 462 с.
59. Бобров В. В., Максимов Г. В., Мичурин В. И., Николаев Д. П. Расчет радиопри-
емников. М.: Изд-во Минобороны СССР, 1971, 496 с.
60. Новоселов Л. Е. Транзисторные приемники. Л.: Энергия, 1972, 121 с.
61. Смолов В. Б., Лебедев А. II. и др. Вычислительные машины непрерывного дейст-
вия. М.: Высш, школа, 1964, 553 с.
62. Римский-Корсаков А. В. Электроакустика. М.: Связь, 1973, 272 с.
63. Подлипснский В. С., Сабинин Ю. А., Юрчук Л. ТО. Элементы и устройства авто-
матики. C.-П.: Политехника, 1995, 471 с.
64. Васильев Д. В., Чуич В. Г. Системы автоматического регулирования и управле-
ния. М.: Высш, школа, 1967, 417 с.
65. Устройства и элементы автоматического регулирования и управления: В 3-х
книгах/Под ред. В. В. Солодовникова. М.: Машиностроение, 1975.
66. Разевиг В. Д. Electronics Workbench 5 предлагает комплексное решение//РС
Week/RE, № 37, 1998, с. 14-15.
67. Electronics Workbench Professional Edition. Technical Reference. Ver. 5.
Interactive Image Technologies Ltd. Toronto, Ontario, Canada, 1996.
68. Разевиг В. Д. Соперничество Micro-Cap и Electronics Workbench//PC Weck/RE,
№29-30, 1999, c. 18.
69. Казаков Л. А. Электромагнитные устройства РЭА. Справочник. М.: Радио и
связь, 1991, 351 с.
716
Список литературы
70. Сотсков Б. С. Основы расчета и проектирования электромеханических элемен-
тов автоматических и телемеханических устройств. М.: Энергия, 1965, 575 с.
71. Шуклин К. С. Опыт создания элементов и узлов для входных цепей электромет-
ров//Исследования в области электрометрии/Труды ВНИИФТРИ, вып.
1(31), чч. 2. М., 1970, с. 166-206.
72. Кухлинг X. Справочник по физике/Пер. с нем.; Под ред. Лейкина Е. М. М.: Мир,
1982, 519 с.
73. Бидерман В. Л. Прикладная теория механических колебаний. М.: Высшая шко-
ла, 1972,415 с.
74. Сабинин Ю. А. Электромашинные устройства автоматики. М.: Энергоатомиздат,
1988,407 с.
75. Панасенко В. Д. Элементы автоматических устройств и вычислительной техни-
ки. Справочник. М.: Оборонгиз, 1962, 300 с.
76. Левшина Е. С., Новицкий П. В. Электрические измерения физических величин.
Измерительные преобразователи. Л.: Энергоатомиздат, 1983, 320 с.
77. Элементарный учебник физики: ВВ трех томах / Под ред. акад. Г. С. Ландсбер-
га. М.: Наука, 1973.
78. Шуклин К. С. Опыт создания элементов и узлов для входных цепей электромет-
ров//Исследования в области электрометрии/Труды ВНИИФТРИ, вып.
1(31), чч. 2. М., 1970, с. 166-206.
79. Теумин И. И. Справочник по переходным электрическим процессам. М.: Связь-
издат, 1952, 409 с.
80. Электромагнитная совместимость радиоэлектронных средств и непреднамерен-
ные помехи: ВВ 3-х выпусках//Составитель Дональд Р. Ж. Уайт/Пер. с англ.;
Под ред. А. И. Сапгира. М.: Советское радио, 1977.
81. Половников Д. Е. Решающие усилители. М.: Энергия, 1973, 246 с.
82. Беленький Б. И., Минц М. Б. Высокочувствительные усилители постоянного то-
ка с преобразователями. Л.: Энергия, 1970, 383 с.
83. Ступель Ф. А. Электромеханические реле // Основы теории, проектирования и
расчета. Харьков: Изд. Харьковского университета, 1956, 354 с.
84. UPGRADE — новый уровень ваших компьютеров. М.: Пирит, вып. 7,1999, 166 с.
85. Электротехника и электроника в экспериментах и упражнениях: Практикум на
Electronics Workbench: В 2-х томах/Под общей ред. Д. И. Панфилова. М.: ДОДЭ-
КА, 2000.
86. Тиристоры. Технический справочиик/Пер. с англ.; Под ред. В. А. Лабунцова и
др. М.: Энергия, 1971, 560 с.
87. Армейский Е. В., Кузина И. В., Фалк Г. Б. Электромашинные устройства авто-
матики. М.: Высшая школа, 1986, 344 с.
88. Брускин Д. Э., Зорохович А. Е., Хвостов В. С. Электрические машины и микро-
машины. М.: Высшая школа, 1990, 527 с.
89. Копылов И. П. Электромеханические преобразователи энергии. М.: Энергия,
1973, 400 с.
90. Горбацевич Е. Д., Левинзон Ф. Ф. Аналоговое моделирование систем управле-
ния. М.: Наука, 1984, 303 с.
717
Список литературы
91. Кириллов В. В., Моисеев В. С. Аналоговое моделирование динамических систем.
Л.: Машиностроение, 1977, 287 с.
92. Мак-Кракен Д., Дорн У. Численные методы и программирование на Фортра-
не/Пер. с англ, под ред. Б. М. Наймарка. М.: Мир, 1977, 584 с.
93. Каган Б. М., Тер-Микаэлян Т. М.: Решение инженерных задач на цифровых вы-
числительных машинах. М.—Л.: Энергия, 1964, 592 с.
94. Бибило Г. Н. Основы языка VHDL. М.: Солон-Р, 2000, 208 с.
718
Содержание
Содержание
Введение ...........................................................3
Часть I. Система моделирования Electronics Workbench . .8
1. Структура окна и система меню
программы Electronics Workbench версий 4.1 и 5.0....................8
1.1. Меню File ............................................10
1.2. Меню Edit ............................................11
1.3. Меню Circuit .........................................11
1.4. Меню Window ..........................................21
1.5. Меню Help ............................................21
1.6. Меню Analysis программы EWB 5.0.......................21
1.7. Обмен данными с программой PSpice.....................52
Контрольные вопросы и задания .............................56
2. Создание схем ..................................................58
2.1. Технология подготовки схем ...........................58
2.2. Группа Custom — вспомогательные компоненты ...........60
2.3. Группа Passive — пассивные компоненты ................60
2.4. Группа Active — активные компоненты ..................62
2.5. Группа FET — полевые транзисторы .....................63
2.6. Группа Control — коммутационные
устройства и управляемые источники ........................64
2.7. Группа Hybrid — гибридные компоненты .................64
2.8. Группа Indic — индикаторные приборы ..................65
2.9. Группа Gates — логические элементы ...................66
2.10. Группа CombT — комбинированные цифровые компоненты . . . .66
2.11. Группа Seg’I — триггеры .............................66
2.12. Группа IC — цифровые микросхемы .....................67
2.13. Библиотека компонентов EWB 5.0 ......................67
Контрольные вопросы и задания .............................71
3. Контрольно-измерительные приборы ...............................73
3.1. Мультиметр (Multimeter) ..............................73
3.2. Функциональный генератор (Function Generator) ........74
3.3. Осциллограф (Oscilloscope) ...........................74
3.4. Измеритель АЧХ и ФЧХ (Bode Plotter) ..................76
3.5. Генератор слова (Word Generator) .....................77
3.6. Логический анализатор (Logic Analyzer) ...............78
3.7. Логический преобразователь (Logic Converter) .........78
3.8. Приборы программы EWB 5.0 ............................79
Контрольные вопросы и задания .............................82
4. Элементная база ................................................84
4.1. Источники тока........................................84
Контрольные вопросы и задания .............................89
4.2. Индикаторные приборы .................................90
Контрольные вопросы и задания .............................93
4.3. Коммутационные устройства ............................94
719
Содержание ЬМорЫрШ е/
Контрольные вопросы и задания ............................97
4.4. Конденсаторы ....................................... 97
Контрольные вопросы и задания ...........................100
4.5. Резисторы ........................................ 101
Контрольные вопросы и задания .......................... 101
4.6. Индуктивные элементы ...............................102
Контрольные вопросы и задания ...........................103
4.7. Полупроводниковые диоды........................... 104
Контрольные вопросы и задания ...........................110
4.8. Биполярные транзисторы .............................110
Контрольные вопросы и задания .......................... 116
4.9. Полевые транзисторы ................................116
Контрольные вопросы и задания .......................... 122
4.10. Операционные усилители ............................123
Контрольные вопросы и задания . .........................130
4.11. Цифровые микросхемы................................131
Контрольные вопросы и задания ...........................141
Часть II. Моделирование схем и устройств ........................142
5. Цепи постоянного тока ........................................142
5.1. Закон Ома ..........................................142
Контрольные вопросы и задания ...........................143
5.2. Законы Кирхгофа .................................. 144
Контрольные вопросы и задания ...........................145
5.3. Методы контурных токов и узловых потенциалов .......146
Контрольные вопросы и задания ...........................149
5.4. Метод наложения ....................................149
Контрольные вопросы и задания ...........................151
5.5. Метод эквивалентного генератора ....................151
Контрольные вопросы и задания ...........................154
5.6. Моделирование механических Сил и моментов ..........154
5.7. Законы Ома и Кирхгофа для магнитных цепей ..........155
Контрольные вопросы и задания ...........................156
6. Цепи переменного тока ........................................157
6.1. Операции с гармоническими колебаниями ..............157
Контрольные вопросы и задания ............................162
6.2. Законы Ома и Кирхгофа ..............................163
Контрольные вопросы и задания ............................164
6.3. Индуктивность и емкость в цепи переменного тока.....165
Контрольные вопросы и задания ...........................166
6.4. Резонансные цепи ...................................167
Контрольные вопросы и задания ...........................170
6.5. Измерение частоты, фазы и мощности .................170
Контрольные вопросы и задания ...........................175
6.6. Многофазные цепи .................................. 175
Контрольные вопросы и задания ......................... 185
6.7. Цепи с несинусоидальными тиками -. . .iPi. .'.......186
720
Содержание
Контрольные вопросы и задания ............................189
6.8. Цепи с распределенными параметрами ..................189
Контрольные вопросы и задания ............................195
6.9. Переходные процессы .................................196
Контрольные вопросы и задания ............................201
7. Транзисторные усилительные схемы ..............................202
7.1. Базовые усилительные каскады ........................202
Контрольные вопросы и задания ............................208
7.2. Дифференциальный усилитель...........................209
Контрольные вопросы и задания ............................215
7.3. Каскодная схема .....................................215
Контрольные вопросы и задания ............................216
7.4. Выходные каскады ....................................217
Контрольные вопросы и задания ............................220
7.5. Многокаскадные усилители ............................221
Контрольные вопросы и задания ............................224
8. Устройства на полупроводниковых приборах ......................225
8.1. Генераторы гармонических колебаний...................225
Контрольные вопросы и задания ............................232
8.2. Транзисторные ключи..................................232
Контрольные вопросы и задания ............................240
8.3. Ограничители и фиксаторы уровня .....................241
Контрольные вопросы и задания ............................246
8.4. Преобразователи формы сигналов ......................246
Контрольные вопросы и задания ............................251
8.5. Генераторы пилообразного напряжения .................251
Контрольные вопросы и задания ............................254
8.6. Селекторы импульсов .................................254
Контрольные вопросы и задания ............................256
8.7. Генератор с кварцевым резонатором ...................256
Контрольные вопросы и задания ............................260
8.8. Мультивибратор ......................................260
Контрольные вопросы и задания ............................261
8.9. Триггер Шмитта ......................................262
Контрольные вопросы и задания ............................263
9. Цифровые устройства ...........................................264
9.1. Логические элементы .................................264
Контрольные вопросы и задания . . ........................271
9.2. Арифметические сумматоры ............................272
Контрольные вопросы и задания ............................274
9.3. Логический элемент с тремя состояниями ..............274
Контрольные вопросы и задания ............................277
9.4. Мультиплексоры и демультиплексоры ...................277
Контрольные вопросы и задания ............................278
9.5. Шифраторы и дешифраторы..............................279
Контрольные вопросы и задания ............................281
721
Содержание
9.6. Цифровые компараторы ................................281
Контрольные вопросы и задания ............................282
9.7. Устройство контроля четности ........................283
Контрольные вопросы и задания ......................... .284
9.8. Устройство ввода-вывода для IBM PC...................285
Контрольные вопросы и задания ............................289
9.9. Триггеры ............................................289
Контрольные вопросы и задания ............................293
9.10. Счетчики ...........................................293
Контрольные вопросы и задания ............................301
9.11. Регистры ...........................................302
Контрольные вопросы и задания ............................306
9.12. Оперативные запоминающие устройства ................306
Контрольные вопросы и задания ............................313
9.13. Постоянные запоминающие устройства .................313
Контрольные вопросы и задания ............................318
9.14. Арифметико-логическое устройство....................318
Контрольные задания ......................................321
10. Устройства на операционных усилителях.........................322
10.1. Масштабирующие преобразователи .....................322
Контрольные вопросы и задания ............................324
10.2. Корректор нелинейности датчика......................325
Контрольные вопросы и задания ............................326
10.3. Дифференциальные и мостовые усилители ..............326
Контрольные вопросы и задания ............................328
10.4. Аналоговые вычислительные устройства................329
Контрольные вопросы и задания ............................336
10.5. Активные фильтры ...................................336
Контрольные вопросы и задания ............................342
10.6. Логарифмические усилители ..........................343
Контрольные вопросы и задания ............................344
10.7. Компараторы.........................................344
Контрольные вопросы и задания ............................347
10.8. Прецизионные выпрямители ...........................347
Контрольные вопросы и задания ............................348
10.9. Фазочувствительные выпрямители .....................348
Контрольные вопросы и задания ............................349
10.10. Устройства выборки и хранения......................349
Контрольные вопросы и задания ............................351
10.11. Усилители мощности ................................352
Контрольные вопросы и задания ............................352
10.12. Преобразователи напряжение-ток ....................353
Контрольные вопросы и задания ............................354
10.13. Амплитудные ограничители...........................354
Контрольные вопросы и задания ............................355
10.14. RC-генераторы......................................355
722
Содержание
Контрольные задания .......................................358
10.15. Усилители на ОУ с однополярным питанием ............358
Контрольные вопросы и заданий..............................361
10.16. Усилители типа МДМ .................................361
Контрольные вопросы и задания .............................362
10.17. Аналоговые ключи ...................................364
Контрольные вопросы и задания .............................364
10.18. Релаксационные генераторы...........................365
Контрольные вопросы и задания .............................368
10.19. Преобразователи электрических величин ..............369
Контрольные вопросы и задания .............................370
10.20. Селекторы импульсов по длительности ................371
Контрольные вопросы и задания .............................371
11. Аналого-цифровые и цифро-аналоговые преобразователи ...........372
11.1. ЦАП с весовыми резисторами...........................372
Контрольные вопросы и задания .............................373
11.2. ЦАП лестничного типа ................................373
Контрольные вопросы и задания .............................374
11.3. АЦП прямого преобразования ..........................375
Контрольные вопросы и задания .............................376
11.4. Преобразователь на интегральном таймере .............376
Контрольные вопросы и задания .............................379
11.5. Библиотечные ЦАП и АЦП ..............................380
Контрольные вопросы и задания .............................382
11.6. Преобразователь на управляемых источниках............382
Контрольные вопросы и задания .............................384
11.7. АЦП уравновешивающего типа ..........................384
Контрольные вопросы и задания .............................386
12. Источники электропитания ................................ .387
12.1. Выпрямители и сглаживающие фильтры...................387
Контрольные вопросы и задания .............................392
12.2. Параметрические стабилизаторы .......................392
Контрольные вопросы и задания .............................396
12.3. Компенсационные стабилизаторы .......................397
Контрольные вопросы и задания .............................400
12.4. Импульсные стабилизаторы ............................400
Контрольные вопросы и задания .............................405
12.5. Транзисторные преобразователи........................405
12.6. Элементы импульсных стабилизаторов в программе EWB 5.0 . .407
Контрольные вопросы и задания .............................410
12.7. Тиристорные источники питания с фазовым управлением .411
Контрольные вопросы и задания .............................412
13. Элементы приемо-передающих устройств ..........................414
13.1. Принципы построения приемо-передающих устройств .....414
Контрольные вопросы и задания .............................417
13.2. Входные устройства радиоприемных устройств...........417
723
Содержание
Контрольные вопросы и задания ............................420
13.3. Связанные контуры...................................421
Контрольные вопросы и задания ............................425
13.4. Преобразователи частоты ........... — . ............426
Контрольные вопросы и задания ............................427
13.5. Модуляторы .........................................427
Контрольные вопросы и задания ............................432
13.6. Детекторы частотно-модулированных сигналов .........432
Контрольные вопросы и задания ............................435
14. Электромеханические устройства ...............................437
14.1. Методы моделирования................................437
14.1.1. Моделирование по дифференциальному уравнению .....437
Контрольные вопросы и задания ............................442
14.1.2. Модели стандартных линейных звеньев...............443
Контрольные вопросы и задания ............................448
14.1.3. Метод электромеханических аналогий ...............449
Контрольные вопросы и задания ............................451
14.2. Электрические машины постоянного тока ..............452
14.2.1. Статические характеристики........................452
Контрольные вопросы и задания ............................457
14.2.2. Динамические характеристики ......................458
Контрольные вопросы и задания ............................464
14.2.3. Схемы включения двигателей постоянного токай......465
Контрольные вопросы и задания ............................473
14.2.4. Управление двигателями постоянного тока...........473
Контрольные вопросы и задания ............................478
14.3. Электрические машины переменного тока...............478
Контрольные вопросы и задания ............................491
14.4. Электродвигатели в системах управления .............491
Контрольные вопросы и задания ........................... 495
14.5. Электромагнитный привод ............................495
14.5.1. Электромагниты....................................496
Контрольные вопросы и задания ............................504
14.5.2. Электромагнитное реле.............................505
Контрольные вопросы и задания ............................513
14.6. Электромеханические измерительные преобразователи ..513
Контрольные вопросы и задания ............................524
15. Устройства автоматики ........................................526
15.1. Универсальные функциональные преобразователи .......526
Контрольные вопросы и задания ............................535
15.2. Специализированные функциональные преобразователи ..536
Контрольные вопросы и задания ............................543
15.3. Примеры использования
моделей с релейными характеристиками.......................543
Контрольные вопросы и задания . к. .......................549
15.4. Элементы автоматики в программе EWB 5.0 ............550
724
Содержание
Контрольные вопросы и задания ............................559
15.5. Структурное моделирование...........................561
Контрольные вопросы и задания ............................565
15.6. Элементы моделей цифровых САУ ......................566
Контрольные вопросы и задания ............................570
15.7. Моделирование управляющих и возмущающих воздействий . . .571
Контрольные вопросы и задания ............................574
16. Измерительные преобразователи.................................576
16.1. Типы и характеристики преобразователей..............576
Контрольные вопросы и задания ............................579
16.2. Резистивные преобразователи ........................579
Контрольные вопросы и задания ............................583
16.3. Емкостные преобразователи ..........................584
Контрольные вопросы и задания ............................587
16.4. Электромагнитные преобразователи ...................587
Контрольные вопросы и задания ............................590
16.5. Пьезоэлектрические преобразователи .................590
Контрольные вопросы и задания ............................593
16.6. Термометрические преобразователи....................593
Контрольные вопросы и задания ............................597
16.7. Методы уменьшения погрешностей преобразователей.....598
Контрольные вопросы и задания ............................600
Часть III, Разработка печатных плат ..............................602
17. Программа EWB Layout .........................................602
17.1. Рабочее окно программы..............................602
17.2. Меню File...........................................603
17.3. Меню View...........................................603
17.4. Меню Traces ........................................604
17.5. Меню Components ....................................609
17.6. Меню Texts .........................................613
17.7. Меню Block ....................................... 614
17.8. Меню Shapes ........................................615
17.9. Меню Netlist .......................................619
17.10. Меню Tools ........................................622
17.11. Настройки общего характера ...................... 628
Контрольные вопросы и задания ............................629
Приложения .......................................................630
Приложение 1. Каталог схемных файлов .............................630
1.1. EWB3.0...............................................630
1.2. EWB4.1...............................................632
1.3. EWB5.0...............................................635
1.4. Схемы, используемые в книге .........................635
Приложение 2. Дополнительные сведения по элементной базе..........645
2.1. Конденсаторы ...................................... 645
2.2. Коммутационные устройства ...........................649
2.3. Резисторы ...........................................651
725
Содержание
2.4. Индуктивные элементы ..............................655
2.5. Полупроводниковые диоды............................657
2.6. Биполярные транзисторы ............................659
Приложение 3. Элементы интерфейса ЭВМ .........................663
Приложение 4. Из истории радиосвязи ...........................673
Приложение 5. Характеристики АЦП и ЦАП ........................678
Приложение 6. Источники вторичного электропитания .............684
Приложение 7. Программа Electronics Workbench 6.02 (MultiSim) .687
7.1. Система меню ......................................687
7.2. Редактор компонентов . . ..........................694
7.3. Состав библиотек и подготовка схем ................697
7.4. Новые средства анализа ............................703
Заключение ...................................................712
Список литературы ............................................714
Содержание ...................................................719
726
2-е издание дополненное
। । q g q £ и переработанное -солон-р-
... Электромеханика
Измерительные преобразователи
Новая версия программы EWB 6 02 ...
1ПЕКТР0ННАЯ ЛАБОРАТОРИЯ
НА IBM PC
рограмма Electronics Workbench и ее применение
В. И. КАРЛАЩУК
7