/




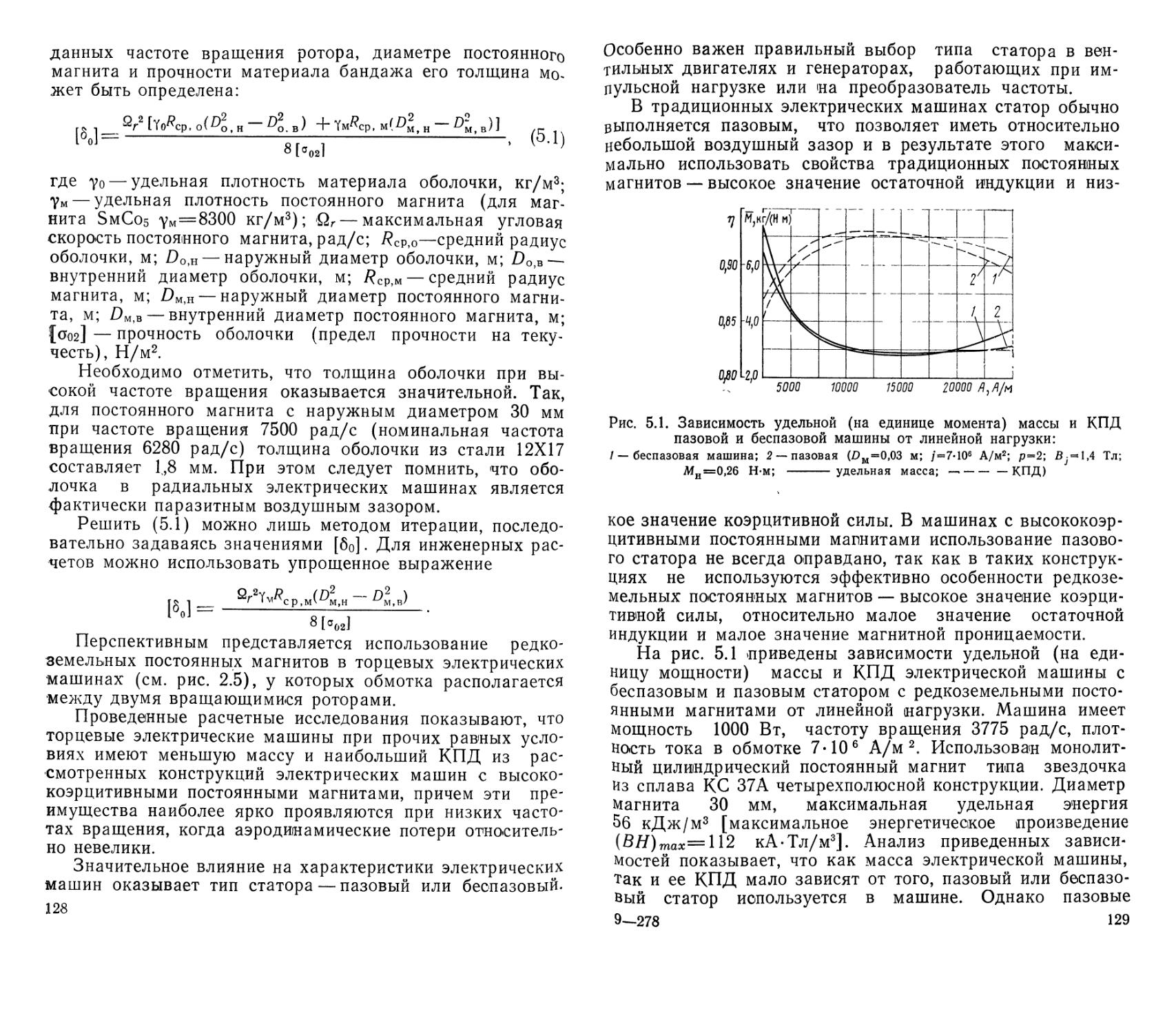




Текст
621.313 Л39 85-12510
IIIIIIIIIIIIIIIIIIIIIIIIIIII
Дедовский А Н.
Электрические машины с высококоэрцитивными пос
A. H. Ледовский
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ С ВЫСОКОКОЭРЦИТИВНЫМИ постоянными МАГНИТАМИ
Москва Энергоатомиздат 1985
ББК 31.261
Л 39
УДК 621.313.8
Рецензент доктор техн, наук, проф. | В. А. Балагуров
Ледовский А. Н.
Л 39 Электрические машины с высококоэрцитивными постоянными магнитами. — М.: Энергоатомиздат, 1985. — 168 с.; ил.
50 к, 3300 экз.
Рассмотрены особенности рабочего процесса и проектирования электрических машин с высококоэрцитивными постоянными магнитами Дан обзор магнитных систем электрических машин с высококоэрцитивными постоянными магнитами, приведены результаты расчета магнитного поля и даны рекомендации по выбору конструкций ротора и статора.
Рассчитана на инженеров и научных работников, занятых разработкой электрических машин для автономных систем электроснабжения и вентильных электроприводов
2302030000-092 ББК 31.261
л 051(01)-85 73’85 6П2.1.081
Андрей Николаевич Ледовский
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ С ВЫСОКОКОЭРЦИТИВНЫМИ ПОСТОЯННЫМИ МАГНИТАМИ
Редактор В С. Павлихин
Редактор издательства Т Н Платова Обложка художника И. Е. С а й к о Художественный редактор В А Г о з а к-Х о з а к Технический редактор О Н Ад а с к ин а Корректор 3. Б Доановская ИБ № 851
Сдано в набор 10.04.85 Подписано в печать 28.06.85 Т-08987 Формат 84Х1081/32 Бумага кн.-журн. имп.
Гарнитура литературная Печать высокая У с л. печ. л. 8,82 Усл. кр.-отт. 9,08 Уч.-изд л 9,84 Тираж 3 300 экз Заказ 278 Цена 50 к.
Энергоатомиздат, 113114, Москва, М-114, Шлюзовая
наб , 10
Ордена Октябрьской Революции и ордена Трудового Красного Знамени МПО «Первая Образцовая типография имени А. А Жданова» Союзполиграфпрома при Государственном комитете СССР по делам издательств, Полиграфии и книжной торговли 113054, Москва, М-51, Валовая, 28
© Энергоатомиздат, 1985
светлой памяти
ВЛАДИМИРА АЛЕКСАНДРОВИЧА
БАЛАГУРОВА ПОСВЯЩАЕТСЯ
ПРЕДИСЛОВИЕ
В последнее время в ряде областей техники, таких, как автомобилестроение, авиация, бытовая электротехника, нашли применение электрические машины с постоянными магнитами. Интерес к этому классу электрических машин обусловлен их высокими массоэнергетическими показателями, большим сроком службы, надежностью, способностью работать при высоких частотах вращения, в тяжелых условиях эксплуатации.
Электрические машины с постоянными магнитами были разработаны уже в 30-е годы. Однако невысокие удельные характеристики постоянных магнитов ограничивали их использование в электрических машинах. С разработкой новых материалов постоянных магнитов в 50—60-е годы электрические машины с постоянными магнитами получили также применение в электрооборудовании автономных систем электроснабжения и других областях техники.
Новый импульс развитию электрических машин с постоянными магнитами дала разработка высококоэрцитивных магнитов на основе интерметаллических соединений кобальта с редкоземельными элементами.
В настоящее время в СССР уже накоплен определенный опыт проектирования, разработки, производства и эксплуатации электрических машин с высококоэрцитивными постоянными магнитами. Этот опыт показал их высокие технико-экономические характеристики, обоснованность и целесообразность их применения в системах электроснабжения и электроприводах различного назначения.
Настоящая книга является попыткой обобщить результаты работ советских и зарубежных ученых и инженеров по проектированию электрических машин с высококоэрцитивными магнитами.
В книге рассмотрен метод расчета магнитного поля в электрических машинах с высококоэрцитивными постоянными магнитами, основанный на аналитическом решении уравнений магнитного поля, который позволяет получать
з
не только аналитические выражения Для распределения вектора магнитной индукции по объему активной части машины, но и достаточно простые формулы для определения индуктивных сопротивлений. Приведены расчетные выражения для определения размеров электромагнитной части радиальных и торцевых электрических машин с различными типами роторов с пазовыми и беспазовыми статорами. Даны рекомендации по выбору электромагнитных нагрузок и конструктивных параметров, обеспечивающих оптимальные с точки зрения массы размеры машины.
В книге учтен ряд полезных замечаний, сделанных при рецензировании рукописи доктором техн. наук, проф. В. А. Балагуровым. Автор выражает глубокую признательность канд. техн, наук В. С. Павлихину за большую работу по редактированию книги.
Автор с благодарностью примет все замечания, которые следует направлять по адресу: 113114, Москва, М-114, Шлюзовая наб., 10, Энергоатомиздат.
Автор
ВВЕДЕНИЕ
Опыт применения постоянных магнитов в автономных системах электроснабжения и приводах имеет давнюю историю.
Такие достоинства электрических машин с постоянными магнитами, как простота конструкции, бесконтактность электромагнитной части, относительно высокая механическая прочность вращающихся элементов конструкции, отсутствие потерь мощности на возбуждение, привлекали и привлекают инженеров-разработчиков электрооборудования. В нашедших применение двигателях постоянного тока и синхронных генераторах с постоянными магнитами были успешно решены вопросы стабилизации частоты вращения и напряжения, найдены удачные конструктивные решения, позволяющие наиболее полно реализовать достоинства постоянных магнитов.
В последнее время постоянные магниты нашли применение в вентильных двигателях, что помимо бесконтактно-сти последних обеспечивает возможность совмещения датчика положения ротора с электрической машиной.
Несмотря на перечисленные достоинства, электрические машины с постоянными магнитами в большинстве случаев имеют большую массу по сравнению с машинами с электромагнитным возбуждением, что, несомненно, ограничивает их применение в качестве источников питания автономных систем электроснабжения.
Высокая магнитная энергия редкоземельных постоянных магнитов позволяет существенно снизить массу и габаритные размеры машин, что делает их не только конкурентоспособными с электрическими машинами с электромагнитным возбуждением, но и значительно превосходящими их по массогабаритным и энергетическим показателям. Зачастую только применение высококоэрцитивных магнитов позволяет успешно решать поставленные технические задачи. Так, при разработке кинетических аккумуляторов энергии для транспортных средств только применение электрических машин с высококоэрцитивными маг-
5
нитами делает разработку этих аккумуляторов технически оправданной.
Особенностями параметров редкоземельных магнитов являются низкое значение магнитной проницаемости, которая незначительно превышает магнитную проницаемость воздуха, высокое значение коэрцитивной силы по намагниченности, слабая зависимость вектора намагниченности, от напряженности магнитного поля.
Как показала практика, попытки использования редкоземельных магнитов в традиционных конструкциях электрических машин, как правило, не дают желаемого эффекта— снижения массы и габаритных размеров, увеличения КПД. Их эффективное использование возможно только при специальных конструкциях как ротора, так и статора электрической машины. Сейчас наиболее широко редкоземельные магниты применяются в роторах типа звездочка и коллекторного типа при беспазовых статорах. Подобные конструкции позволяют наиболее полно использовать такие свойства редкоземельных магнитов, как высокое значение коэрцитивной силы и малое значение магнитной проницаемости.
Проведенные теоретические исследования, а также опыт применения первых машин с высококоэрцитивными магнитами показывают существенное различие характеристик этих машин по сравнению с машинами с традиционными магнитами. Особенности конструктивного исполнения и характеристик магнитов требуют не только особого подхода к проектированию, но и тщательного анализа их работы в электроприводах и системах электроснабжения.
Глава первая МАТЕРИАЛЫ СОВРЕМЕННЫХ ПОСТОЯННЫХ МАГНИТОВ
1.1. Основные параметры, характеризующие постоянные магниты
Постоянные магниты являются ферромагнитными телами, и их магнитные свойства описываются, в частности, кривой перемагничивания — петлей гистерезиса, диаграммой магнита, которая представляет собой зависимость индукции от напряженности магнитного поля
В ряде случаев удобнее оказывается использовать зависимость намагниченности постоянного магнита от напряженности магнитного поля Связь между напря-
женностью магнитного пбля, индукцией и намагниченностью записывается в виде
В=Ио(М+Я), (1.1)
где В, М, Н — индукция, намагниченность и напряженность магнитного поля соответственно; р,о — магнитная постоянная, Гн/м.
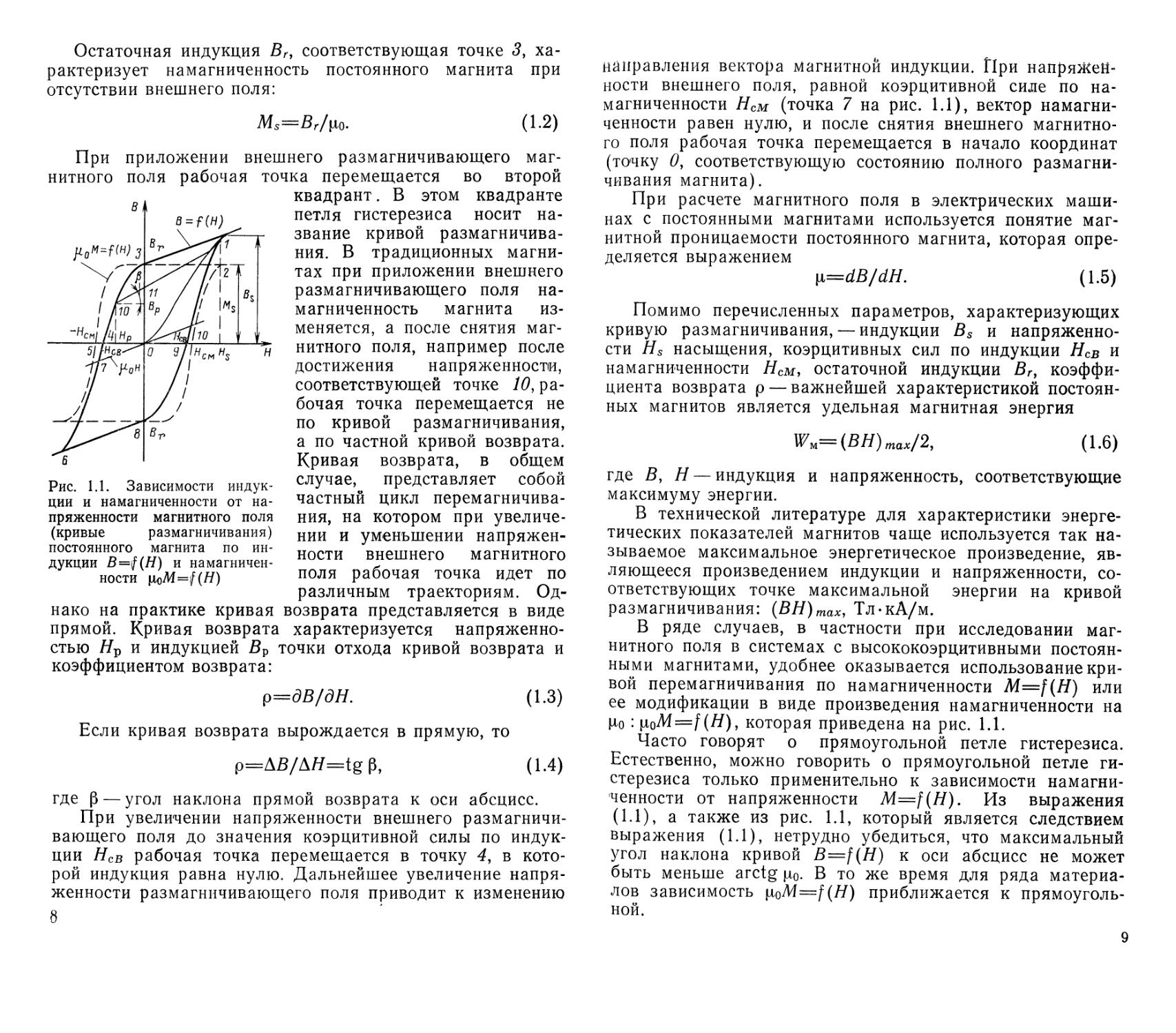
На рис. 1.1 приведены зависимости индукции от напряженности магнитного поля (петля гистерезиса), а также зависимость намагниченности (точнее, произведения намагниченности на ц0) от напряженности магнитного поля.
При намагничивании магнита рабочая точка на диаграмме магнита перемещается из точки 0 в точку 1. Точка 1 соответствует насыщению постоянного магнита и характеризуется индукцией и напряженностью насыщения — Bs и Hs- После достижения насыщения намагниченность магнита при дальнейшем увеличении напряженности магнитного поля не изменяется. Поэтому при H>HS индукция возрастает по линейному закону:
В=Ио(Я-Я5)+В5.
При снятии внешнего намагничивающего поля рабочая точка переместится из точки 1 в точку 3, при этом намагниченность магнита практически не изменится.
7
Остаточная индукция Вг, соответствующая точке 3, характеризует намагниченность постоянного магнита при отсутствии внешнего поля:
Ms=Br/^. (1.2)
При приложении внешнего размагничивающего магнитного поля рабочая точка перемещается во второй
Рис. 1.1. Зависимости индукции и намагниченности от напряженности магнитного поля (кривые размагничивания) постоянного магнита по индукции и намагничен-
ности goAf==if (//)
квадрант. В этом квадранте петля гистерезиса носит название кривой размагничивания. В традиционных магнитах при приложении внешнего размагничивающего поля намагниченность магнита изменяется, а после снятия магнитного поля, например после достижения напряженности, соответствующей точке 10, рабочая точка перемещается не по кривой размагничивания, а по частной кривой возврата. Кривая возврата, в общем случае, представляет собой частный цикл перемагничивания, на котором при увеличении и уменьшении напряженности внешнего магнитного поля рабочая точка идет по различным траекториям. Од
нако на практике кривая возврата представляется в виде прямой. Кривая возврата характеризуется напряженностью Яр и индукцией Вр точки отхода кривой возврата и коэффициентом возврата:
р=дВ/дН.
(1.3)
Если кривая возврата вырождается в прямую, то
p=AB/AH=tg р,
(1.4)
где |3 — угол наклона прямой возврата к оси абсцисс.
При увеличении напряженности внешнего размагничивающего поля до значения коэрцитивной силы по индукции НсВ рабочая точка перемещается в точку 4, в которой индукция равна нулю. Дальнейшее увеличение напряженности размагничивающего поля приводит к изменению 8
направления вектора магнитной индукции. При напряженности внешнего поля, равной коэрцитивной силе по намагниченности Нсм (точка 7 на рис. 1.1), вектор намагниченности равен нулю, и после снятия внешнего магнитного поля рабочая точка перемещается в начало координат (точку 0, соответствующую состоянию полного размагничивания магнита).
При расчете магнитного поля в электрических машинах с постоянными магнитами используется понятие магнитной проницаемости постоянного магнита, которая определяется выражением
V=dB/dH. (1.5)
Помимо перечисленных параметров, характеризующих кривую размагничивания, — индукции Bs и напряженности Hs насыщения, коэрцитивных сил по индукции НсВ и намагниченности Нсм, остаточной индукции Вг, коэффициента возврата р — важнейшей характеристикой постоянных магнитов является удельная магнитная энергия
lFM=(B//)wax/2, (1.6)
где В, Н — индукция и напряженность, соответствующие максимуму энергии.
В технической литературе для характеристики энергетических показателей магнитов чаще используется так называемое максимальное энергетическое произведение, являющееся произведением индукции и напряженности, соответствующих точке максимальной энергии на кривой размагничивания: {BH)maXl Тл-кА/м.
В ряде случаев, в частности при исследовании магнитного поля в системах с высококоэрцитивными постоянными магнитами, удобнее оказывается использование кривой перемагничивания по намагниченности M=f(H) или ее модификации в виде произведения намагниченности на Цо '• ЦоЛ1=/(//), которая приведена на рис. 1.1.
Часто говорят о прямоугольной петле гистерезиса. Естественно, можно говорить о прямоугольной петле гистерезиса только применительно к зависимости намагниченности от напряженности Из выражения
(1.1), а также из рис. 1.1, который является следствием выражения (1.1), нетрудно убедиться, что максимальный угол наклона кривой B=f(H) к оси абсцисс не может быть меньше arctg ц0. В то же время для ряда материалов зависимость приближается к прямоуголь-
ной.
9
Как следует из рис. 1.1, петля гистерезиса для индукции является деформированной петлей гистерезиса по намагниченности [1], а различаются эти петли на величину ц0Я. Из анализа выражения (1.1) нетрудно убедиться, что максимально возможное значение коэрцитивной силы по индукции определяется из выражения
(Нсв) max^^BrjЦ0> (1.7)
которое соответствует случаю Нсм->°°, а минимальный тангенс угла наклона кривой размагничивания по индукции к оси абсцисс равен ц0. При этом магнитная проницаемость постоянного магнита равна магнитной проницаемости воздуха.
Значение коэрцитивной силы по индукции, определяемой по (1.7), могут иметь и материалы, у которых зависимость ц0А1=/(Я) параллельна оси абсцисс до значений напряженности магнитного поля, соответствующих (Ясв) max*
Из (1.1) и (1.7) следует также, что максимальная удельная магнитная энергия постоянных магнитов не может превышать значения
(WM)max=Br2/8^ (1.8)
а максимальное энергетическое произведение — значения (ВЯ)^=Вг2/4ц0. (1.9)
1.2. Классификация и особенности постоянных магнитов, используемых в электрических машинах
В настоящее время в качестве постоянных магнитов используется множество сталей, сплавов и композиций, различающихся по магнитным свойствам и по технологии производства [8].
По технологическому признаку с учетом химического состава постоянные магниты можно разделить на следующие группы [8]:
1. Ковкие, закаливаемые на мартенсит стали.
2. Ковкие безуглеродистые стали на основе а-железа: железокобальтомолибденовые сплавы, имеющие Нсв= = 12-4-28 кА/м и максимальное энергетическое произведение (В//)тах=Ю Тл-кА/м.
3. Литые сплавы на основе систем железо—никель— алюминий и железо—никель—алюминий—кобальт. Эти ю
магниты имеют максимальное энергетическое произведение до 96 Тл-кА/м.
4. Сплавы с драгоценными материалами. В сплавах на основе железа и кобальта с платиной максимальное энергетическое произведение достигает 76 Тл-кА/м.
5. Прессованные постоянные магниты из порошков системы железо—никель—алюминий—кобальт. Эти магниты просты в изготовлении и не требуют механической обработки, но имеют более низкие магнитные свойства, чем литые магниты.
6. Металлокерамические постоянные магниты из сплавов системы железо—никель—алюминий—кобальт. Эти магниты изготавливаются методами порошковой металлургии, и магнитные свойства их несколько хуже, чем литых.
7. Постоянные магниты на основе интерметаллических соединений кобальта с редкоземельными элементами. Эти постоянные магниты имеют высокую коэрцитивную силу по индукции и по намагниченности и максимальное энергетическое произведение до 240 Тл-кА/м.
8. Магнитопласты и магнитоэласты. Они имеют низкие магнитные свойства, однако эти магниты весьма технологичны.
Все постоянные магниты, применяемые в электрических машинах, по своим магнитным свойствам могут быть разделены на два больших класса: магниты, у которых коэрцитивная сила по индукции значительно меньше (в 4—20 раз) отношения Вг/ц0, и постоянные магниты, у которых коэрцитивная сила по индукции приближается к отношению Вг/цо.
До последнего времени в электрических машинах в основном находили применение постоянные магниты первого класса, к которому можно отнести литые магниты ЮНДК 25БА, ЮНДК 35Т5, ЮНДК 38Т7И. Эти магниты, за исключением ЮНДК 38Т7И, который занимает промежуточное положение, характеризуются следующими особенностями [1]:
магниты имеют высокое значение остаточной индукции: Вг=0,9н-1,4 Тл;
коэрцитивная сила по индукции НсВ^ 150 кА/м;
коэрцитивная сила по намагниченности значительно меньше отношения Вг/ц0. Для магнита ЮНДК 25БА Вг/ц0—1070 кА/м, а ЯсВ=56 кА/м, для ЮДНК 35Т5БА Вг/Мо=89О кА/м, а ЯсВ=125 кА/м, для ЮНДК 38Т7И Вг/ц0=540 кА/м. а Ясв=147 кА/м:
11
максимальное энергетическое произведение не превышает 100 Тл-кА/м;
значение намагниченности магнита существенно зависит от напряженности магнитного поля.
Зависимость намагниченности от напряженности магнитного поля приводит к тому, что после снятия внешнего размагничивающего поля рабочая точка перемещается по кривой возврата. Это является одним из наиболее существенных недостатков постоянных магнитов первого класса, приводящим к неполному использованию объема магнита, так как точка отхода кривой возврата рассчитывается исходя из нестационарных режимов, например ударного короткого замыкания, при которых ток, создающий размагничивающую МДС, многократно превышает свое номинальное значение. Поэтому при номинальной мощности, когда рабочая точка находится на кривой возврата, энергия магнита оказывается существенно меньше своего максимального значения.
Несмотря на высокое значение максимального энергетического произведения (ВН) max отдельных магнитов первого класса [у ЮНДК 35Т5БА (ВН)тах=96 Тл-кА/м], не представляется возможным спроектировать электрическую машину, по своим массогабаритным показателям превосходящую машины с электромагнитным возбуждением.
Кардинальное решение вопроса увеличения магнитной энергии постоянных магнитов было получено при исследовании интерметаллических соединений кобальта с редкоземельными элементами, получивших название редкоземельных магнитов и открывших новый этап в развитии электрических машин с постоянными магнитами.
Соединения лантана La, самария Sm, празеодима Рг, церия Се, неодима Nd, тербия ТЬ, европия Ей и других редкоземельных металлов с кобальтом типов RCo5, R2C017, R2C07, RC03 имеют значения максимального энергетического произведения, значительно превосходящие аналогичную характеристику магнитов первого класса.
По данным [3] для сплава SmCo5 достигнуто значение (ВН) max — 190,5 Тл-кА/м, что соответствует 86% теоретического предела, составляющего 222 Тл-кА/м. Перспективным является разработка магнитов типа R2(CoFe)i7, которые позволяют достичь (ВН)тах~240-~ 800 Тл’кА/м [4]. Следует также отметить работы по совершенствованию сплавов алнико, имеющих к настоящему
времени (В//)Шах=111,5 Тл-кА/м, что составляет всего 31% его теоретического предела.
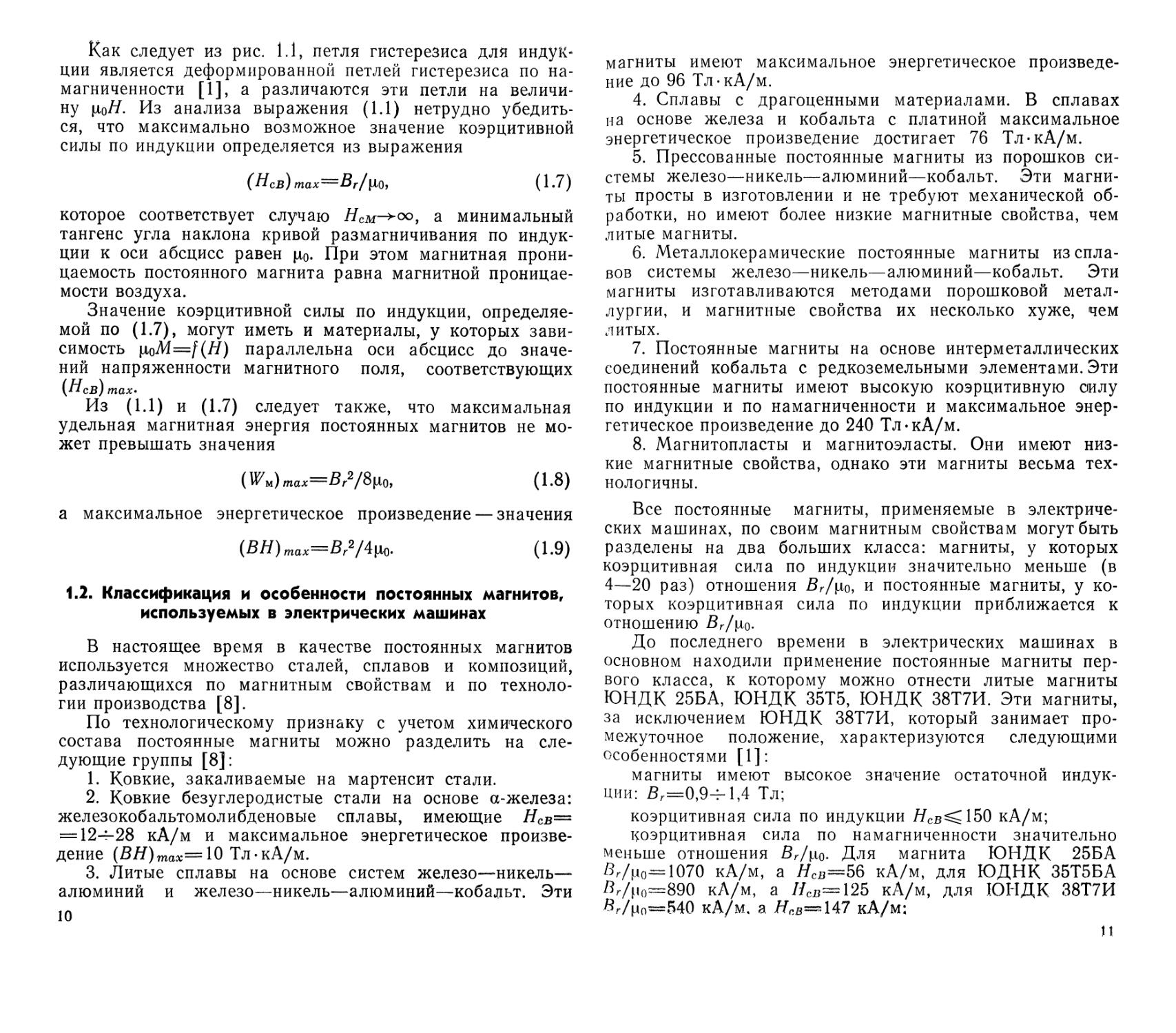
Отечественная промышленность выпускает сплавы SmCos и (Smo,5, Рг0,5)Со5, зависимости B=f(H) и цоМ— для одного из которых (КС 37А) приведены на рис. 1.2.
Для этого магнита, достаточно широко применяемого в магнитных системах электрических машин и аппаратов,
характерны все основные особенности высококоэрцитивных редкоземельных постоянных магнитов:
постоянный магнит имеет высокие значения коэрцитивных сил по индукции и намагниченности: ЯсВ=560 кА/м, НсМ= = 1000 кА/м;
коэрцитивная сила по индукции приближается к своему максимально возможному значению, равному Вг/р,о=650 кА/м;
намагниченность постоянного магнита при изменении напряженности магнитного поля от 0
Рис. 1.2. Кривые размагничивания высококоэрцитивного магнита КС 37А по индукции и на-
магниченности цоМ=/ (В)
до НсВ практически постоянна;
магнитная проницаемость на большей части кривой размагничивания незначительно отличается от магнитной
проницаемости воздуха;
магнит имеет высокое максимальное энергетическое произведение: (ВЯ)тах=130 Тл-кА/м;
кривые возврата совпадают (практически) с кривой размагничивания, что при проектировании машины позволяет не принимать во внимание кратковременные увеличения размагничивающего магнитного поля.
Достоинством редкоземельных постоянных магнитов является их высокая температурная стабильность [5]. Так, точка Кюри для LaCos соответствует 570 °C, для SmCos— 725 °C, для CeCos — 375 °C, для PrCos — 610 °C, для NdCo5 — 630 °C. Температурный коэффициент индукции сплавов SmCos и (Sm0>5, Pro.s) Со5 не превышает 0,06 %/°C в диапазоне температур от —60 до +200 °C.
Магниты второго класса типов RCo5 й R2(Co, Ре) 17^ обладающие высокой магнитной энергией и высокими зна* нениями Не® и Н$м* имеют наиболее обоснованные пред* 13
посылки для применения в высокоиспользованных электрических машинах автономных систем электроснабжения и приводов.
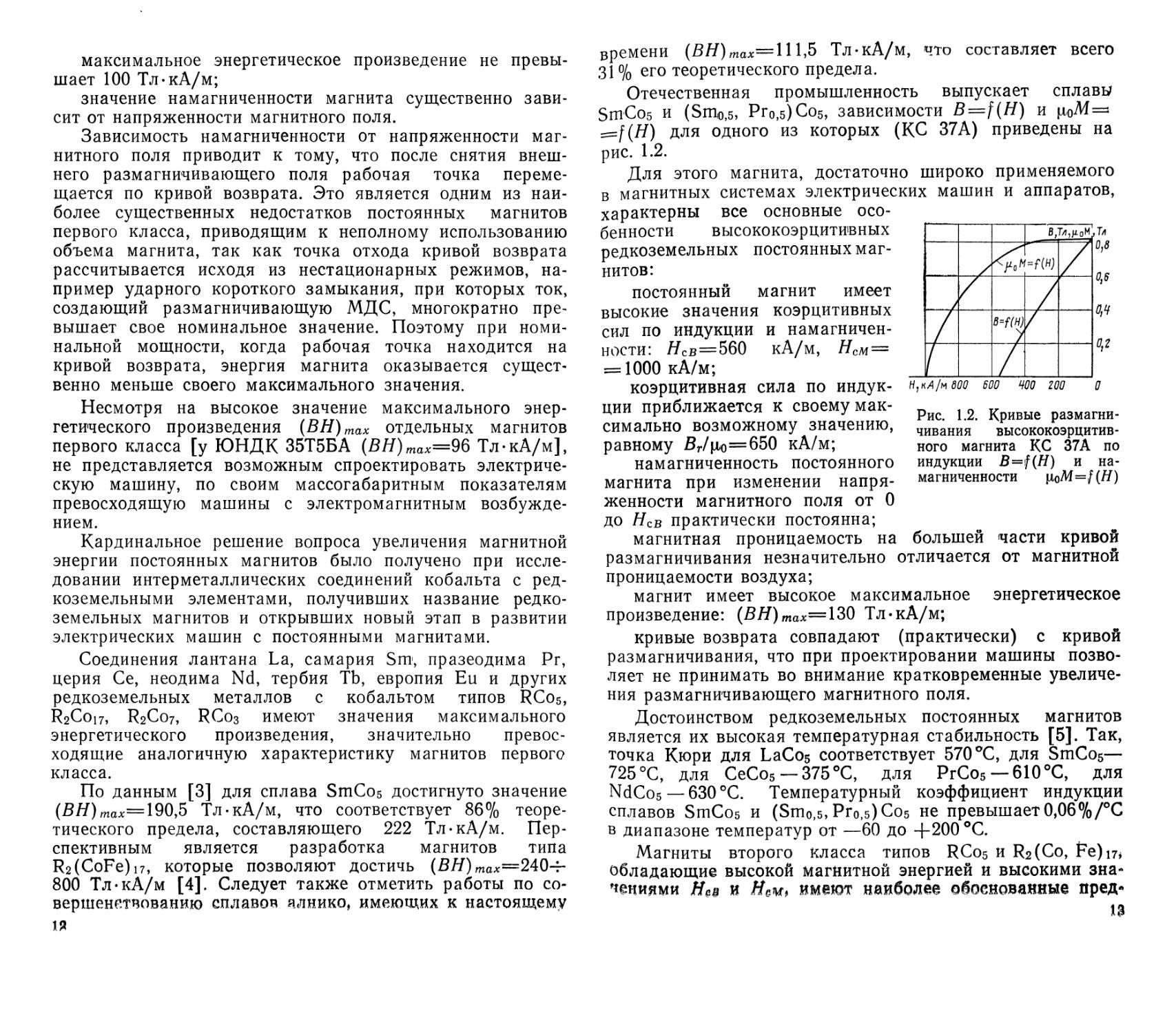
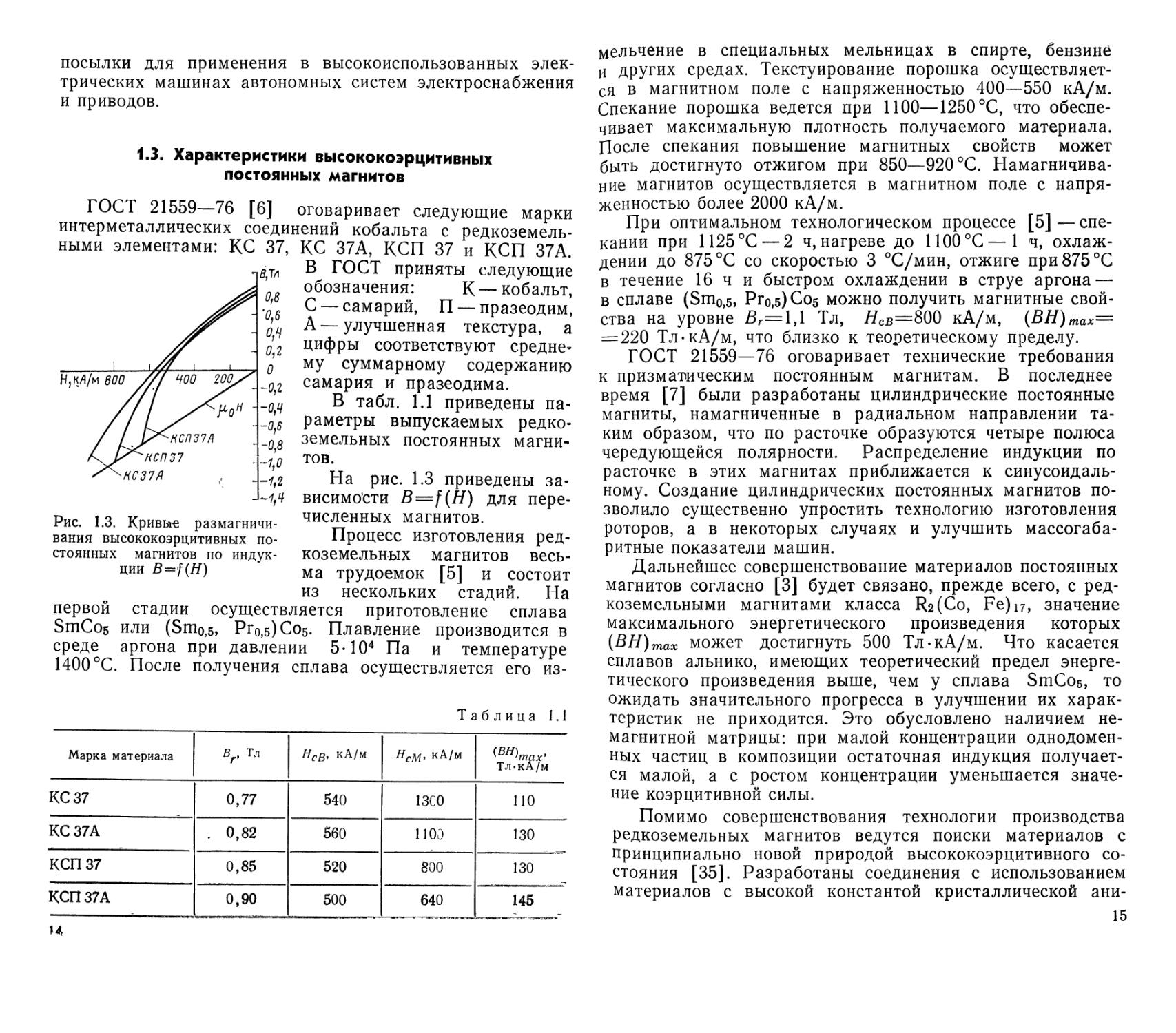
1.3. Характеристики высококоэрцитивных постоянных магнитов
ными элементами: КС 37,
Рис. 1.3. Кривые размагничивания высококоэрцитивных постоянных магнитов по индукции B=f(H)
ГОСТ 21559—76 [6] оговаривает следующие марки интерметаллических соединений кобальта с редкоземель-КС 37А, КСП 37 и КСП 37А. В ГОСТ приняты следующие обозначения: К — кобальт,
С — самарий, П — празеодим, А — улучшенная текстура, а цифры соответствуют среднему суммарному содержанию самария и празеодима.
В табл. 1.1 приведены параметры выпускаемых редкоземельных постоянных магни* тов.
На рис. 1.3 приведены зависимости для пере-
численных магнитов.
Процесс изготовления редкоземельных магнитов весьма трудоемок [5] и состоит из нескольких стадий. На
первой стадии осуществляется приготовление сплава SmCos или (Smo,5, Рг0,б)Со5. Плавление производится в среде аргона при давлении 5-104 Па и температуре 1400 °C. После получения сплава осуществляется его из-
Таблица 1.1
Марка материала Вг Тл HCft, кА/м НсМ, кА/м <вн>тах’ Тл-кА/м
КС 37 0,77 540 13С0 110
КС 37А . 0,82 560 1100 130
КСП 37 0,85 520 800 130
КСП37А 0,90 500 640 145
мельчение в специальных мельницах в спирте, бензине и других средах. Текстуирование порошка осуществляется в магнитном поле с напряженностью 400—550 кА/м. Спекание порошка ведется при 1100—1250 °C, что обеспечивает максимальную плотность получаемого материала. После спекания повышение магнитных свойств может быть достигнуто отжигом при 850—920 °C. Намагничивание магнитов осуществляется в магнитном поле с напряженностью более 2000 кА/м.
При оптимальном технологическом процессе [5]—спекании при 1125 °C —2 ч, нагреве до 1100 °C—1 ч, охлаждении до 875 °C со скоростью 3 °С/мин, отжиге при 875 °C в течение 16 ч и быстром охлаждении в струе аргона — в сплаве (Sm0,5> Pro,s)Co5 можно получить магнитные свойства на уровне Вг=1,1 Тл, //св=800 кА/м, (ВН)тах= = 220 Тл-кА/м, что близко к теоретическому пределу.
ГОСТ 21559—76 оговаривает технические требования к призматическим постоянным магнитам. В последнее время [7] были разработаны цилиндрические постоянные магниты, намагниченные в радиальном направлении таким образом, что по расточке образуются четыре полюса чередующейся полярности. Распределение индукции по расточке в этих магнитах приближается к синусоидальному. Создание цилиндрических постоянных магнитов позволило существенно упростить технологию изготовления роторов, а в некоторых случаях и улучшить массогабаритные показатели машин.
Дальнейшее совершенствование материалов постоянных магнитов согласно [3] будет связано, прежде всего, с редкоземельными магнитами класса Кг(Со, Fe)i7, значение максимального энергетического произведения которых (ВН)тах может достигнуть 500 Тл-кА/м. Что касается сплавов альнико, имеющих теоретический предел энергетического произведения выше, чем у сплава SmCo5, то ожидать значительного прогресса в улучшении их характеристик не приходится. Это обусловлено наличием немагнитной матрицы: при малой концентрации однодоменных частиц в композиции остаточная индукция получается малой, а с ростом концентрации уменьшается значение коэрцитивной силы.
Помимо совершенствования технологии производства редкоземельных магнитов ведутся поиски материалов с принципиально новой природой высококоэрцитивного состояния [35]. Разработаны соединения с использованием материалов с высокой константой кристаллической ани
15
14
зотропии. Так, соединение ДузА12 имеет максимальное энергетическое произведение (В//)тах=584 Тл-кА/м, а соединение ТЬзСо--(S/7)max=816 Тл-кА/м. Эти результаты получены при температуре 4,2 К на монокристаллах, однако они показывают наличие больших резервов при создании новых материалов.
Глава вторая
КОНСТРУКЦИИ ЭЛЕКТРИЧЕСКИХ МАШИН С ВЫСОКОКОЭРЦИТИВНЫМИ МАГНИТАМИ
2.1. Общие требования к электрическим машинам автономных систем электроснабжения
Развитие автономных систем электроснабжения и электроприводов характеризуется следующими особенностями:
ужесточение требований к массогабаритным показателям;
требование высокого КПД, что обусловлено повышением требований экономичности транспортных средств, а также уменьшением габаритов агрегатов и, следовательно, увеличением количества тепловой энергии, проходящей через единицу поверхности;
требование максимальной надежности и функциональной автономности.
Помимо перечисленных общих требований к системам электроснабжения зачастую предъявляются также специфические требования:
высокое качество вырабатываемой электрической энергии;
работоспособность при импульсных нагрузках;
обеспечение потребителей рядом номиналов напряжений при их максимальной независимости друг от друга.
К быстродействующим электроприводам автономных систем электроснабжения также предъявляются некоторые специфические требования:
максимум энергетического кпд не только в установившихся, но и в переходных режимах;
минимум искажений формы кривой напряжения питающей сети при работе электропривода;
работоспособность электропривода при возмущениях в питающей сети.
Рассмотренные специфические требования к системам электроснабжения и электроприводам приводят к допол-16
нительным ограничениям на выходные Параметры (характеристики) машин. Ограничения выходных параметров машин при проектировании выливаются в ограничения, накладываемые на внутренние параметры (размеры активной части) и функцию оптимизации.
Поэтому формирование требований к выходным параметрам машин является, пожалуй, одной из самых актуальных задач современного проектирования электрооборудования. Среди наиболее характерных требований, предъявляемых в настоящее время к электрическим машинам, можно выделить следующие:
минимум массы и габаритов;
максимум КПД;
минимум стоимости, в которую входят не только стоимость производства, но и стоимость эксплуатации;
ограничение электромагнитной постоянной времени (часто ограничивают не только максимальное, но и минимальное значение постоянной);
возможность совмещения в одной машине двигательного и генераторного режимов;
синусоидальность формы кривой напряжения или минимум пульсации выпрямленного напряжения;
высокая механическая прочность, в первую очередь вращающихся элементов конструкции;
совместимость электрической машины с электронной аппаратурой управления и системой электроснабжения;
требование жесткости внешней характеристики;
технологичность конструкции собственно машины и всего конструктивного узла, в который она входит.
Большинство из перечисленных требований к электрическим машинам являются числовыми, некоторые_______
ранжируемыми,^ а часть — бинарными. К последнему виду ограничений могут быть отнесены технологические требования: есть ли возможность реализации заданной технологии на предприятии или нет.
Выходные параметры машин с высококоэрцитивными магнитами отвечают перечисленным ранее требованиям к электрическим машинам.
2.2. Типы роторов электрических машин с высококоэрцитивными постоянными магнитами
Такие особенности применения высококоэрцитивных постоянных магнитов в электрических машинах, как сложность регулирования напряжения традиционными спосо-ами при изменении нагрузки и частоты вращения, ма
лые значения индуктивности обмотки якоря, жесткость внешней характеристики в сочетании с высокими массо-габаритными показателями, предопределили специфику подхода к выбору конструкции машин с редкоземельными магнитами и построение структурных схем систем электроснабжения и электроприводов.
Первые попытки применения высококоэрцитивных постоянных магнитов базировались на том положении, что поскольку они обладают высокой удельной энергией и большой коэрцитивной силой, то заменят традиционные постоянные магниты в существующих конструкциях электрических машин, обеспечив при этом снижение массы и габаритов пропорционально увеличению удельной энергии магнитов.
Созданные образцы таких машин с высококоэрцитивными постоянными магнитами не оправдали возлагавшихся надежд. Так, попытка установить призматические редкоземельные магниты вместо магнитов ЮНДК 35Т5 в цепи возбуждения разноименнополюсных индукторных генераторов с коммутацией магнитного потока [8] хотя и позволила снизить размеры магнита, но не дала никакого выигрыша ни в размерах ротора, ни в размерах машины. Отсутствие выигрыша в массе и габаритах связано с тем, что применение редкоземельных магнитов не увеличило значение индукции в воздушном зазоре, которая ограничивается, прежде всего, насыщением стальных участков магнитной цепи. Габариты же статора в индукторных машинах определяются в основном размерами обмотки якоря и стали магнитопровода.
Конструкция сборного ротора типа звездочка была предложена В. А. Балагуровым [8] и нашла широкое применение в электрических машинах, она обеспечивает высокие массогабаритные показатели электрических машин. Поэтому была сделана попытка использовать редкоземельные постоянные магниты в традиционной конструкции электрической машины с ротором типа звездочка.
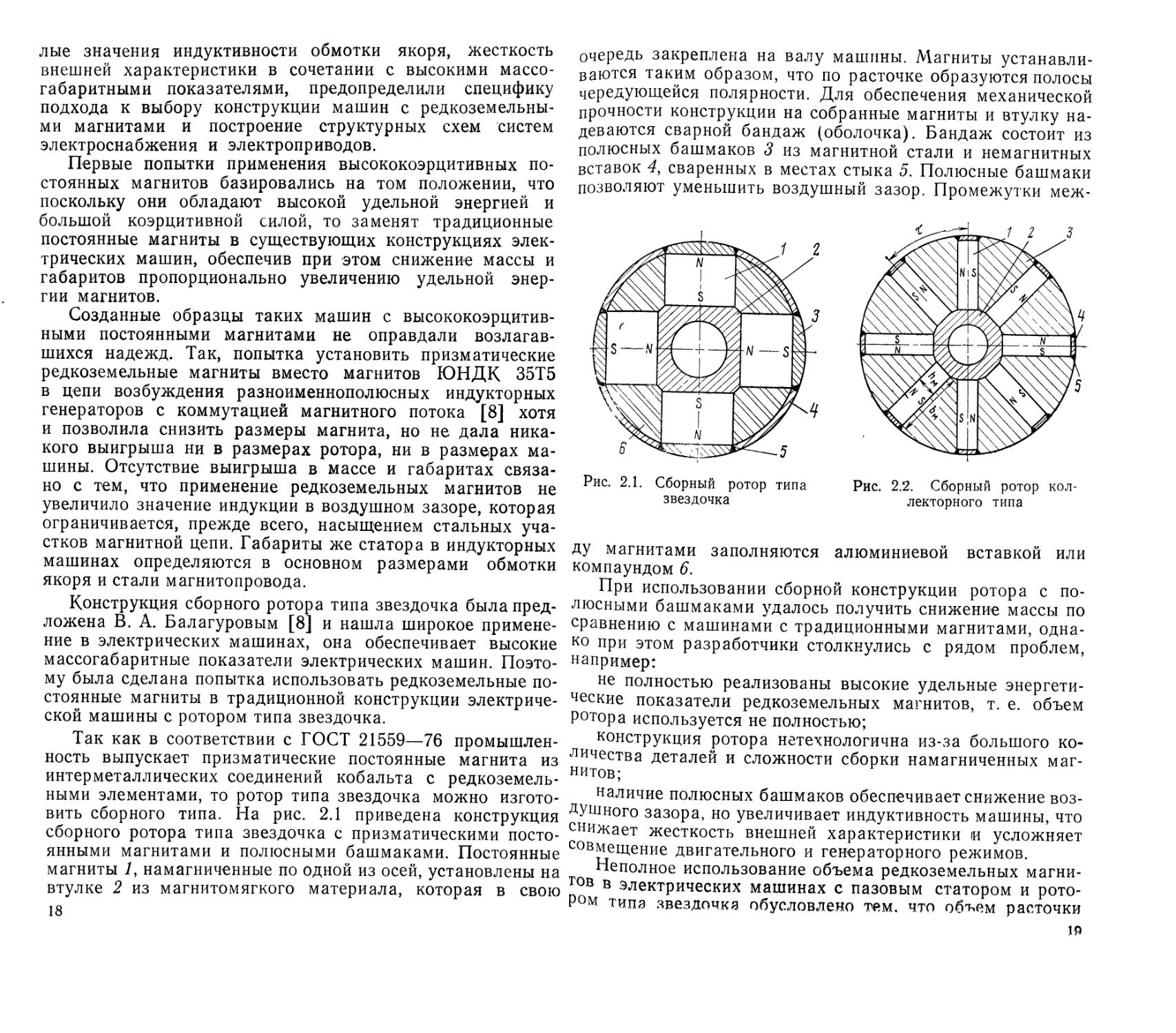
Так как в соответствии с ГОСТ 21559—76 промышленность выпускает призматические постоянные магнита из интерметаллических соединений кобальта с редкоземельными элементами, то ротор типа звездочка можно изготовить сборного типа. На рис. 2.1 приведена конструкция сборного ротора типа звездочка с призматическими постоянными магнитами и полюсными башмаками. Постоянные магниты /, намагниченные по одной из осей, установлены на втулке 2 из магнитомягкого материала, которая в свою 18
очередь закреплена на валу машины. Магниты устанавливаются таким образом, что по расточке образуются полосы чередующейся полярности. Для обеспечения механической прочности конструкции на собранные магниты и втулку надеваются сварной бандаж (оболочка). Бандаж состоит из полюсных башмаков 3 из магнитной стали и немагнитных вставок 4, сваренных в местах стыка 5. Полюсные башмаки позволяют уменьшить воздушный зазор. Промежутки меж
Рис. 2.1. Сборный ротор типа звездочка
Рис. 2.2. Сборный ротор кол-
лекторного типа
ду магнитами заполняются алюминиевой вставкой или компаундом 6.
При использовании сборной конструкции ротора с полюсными башмаками удалось получить снижение массы по сравнению с машинами с традиционными магнитами, однако при этом разработчики столкнулись с рядом проблем, например:
не полностью реализованы высокие удельные энергетические показатели редкоземельных магнитов, т. е. объем ротора используется не полностью;
конструкция ротора нетехнологична из-за большого количества деталей и сложности сборки намагниченных магнитов;
наличие полюсных башмаков обеспечивает снижение воздушного зазора, но увеличивает индуктивность машины, что снижает жесткость внешней характеристики и усложняет совмещение двигательного и генераторного режимов.
Неполное использование объема редкоземельных магни-гов в электрических машинах с пазовым статором и ротором типа звездочка обусловлено тем. что объем расточки
w
статора определяется реализуемыми в машине электромагнитными нагрузками. Этот объем значительно больше объема редкоземельного магнита, требуемого для создания в относительно небольшом воздушном зазоре расчетного значения индукции.
Решение возникших вопросов шло двумя путями: разработкой новых структурных схем систем электроснабжения и электроприводов, а также конструкций электрических машин, наиболее полно учитывающих специфические особенности характеристик машин с редкоземельными постоянными магнитами.
Первым шагом на пути совершенствования конструкций роторов с высококоэрцитивными магнитами оказалась разработка так называемых роторов коллекторного типа*, эскиз магнитной цепи которых приведен на рис. 2.2. Конструкция ротора коллекторного типа была предложена В. А. Балагуровым и А. А. Кецарисом [27].
Ротор набирается из призматических постоянных магнитов /, намагниченных по короткой оси. Магниты устанавливаются на немагнитную втулку (вал) 2 таким образом, чтобы оси намагничивания были направлены тангенциально, причем полярность смежных постоянных магнитов одно-именна. Между магнитами устанавливаются полюсы (концентраторы магнитного потока) 3 из магнитной стали. Для обеспечения механической прочности на магниты сверху накладываются вставки 4 из немагнитного материала, которые привариваются к полюсам 3 (на рис. 2.2 позицией 5 обозначены места сварки). Иногда вместо вставок 4 на собранные магниты и полюсы надевают сборный бандаж (оболочку), аналогичный бандажу на рис. 2.1. Магнитный поток, созданный постоянными магнитами, концентрируется в полюсах, что обеспечивает высокое значение индукции в воздушном зазоре.
Основным достоинством коллекторной конструкции ротора является максимальное использование энергии магнита. Действительно, редкоземельные магниты обладают невысокой остаточной индукцией. Поэтому в роторах типа звездочка индукция в воздушном зазоре относительно невелика. В коллекторной же конструкции обеспечивается концентрация магнитного потока, так как отношение &м/ (их) может быть достаточно большим (&м — ширина магнита, т — полюсное деление, а—коэффициент полюсного перекрытия).
* В зарубежной литературе ротор коллекторного типа часто называют ротором типа сэндвич или ротором с тангенциально намагниченными магнитами^
Естественно, что наибольший эффект коллекторная конструкция дает при большом числе полюсов, когда удается обеспечить высокое отношение &м/(«х). Применение коллекторной конструкции ротора позволяет снизить массу синхронных генераторов на 30% [27].
К достоинствам электрических машин с коллекторными роторами следует также отнести возможность использования призматических постоянных магнитов с высокой удельной энергией (высокое значение намагниченности благодаря простой форме), большие диаметры, а следовательно, возможность разработки машин большой мощности. В настоящее время коллекторные роторы являются по существу единственной конструкцией ротора для применения в генераторах мощностью свыше 60 кВ-А перспективных систем электроснабжения.
Однако, как и всякое компромиссное решение, коллекторная конструкция не свободна от недостатков, а именно: несмотря на высокое использование объема собственно магнита, их доля в объеме ротора относительно невелика, поэтому интегральное значение удельной энергии ротора значительно ниже удельной энергии магнита;
наличие полюсов из магнитомягкой стали увеличивает индуктивность и, следовательно, снижает жесткость внешней характеристики, усложняет совмещение двигательного и генераторного режимов [36];
сложность конструкции;
наличие паразитных воздушных зазоров между полюсами и магнитами.
Дальнейшее совершенствование магнитных систем электрических машин с редкоземельными постоянными магнитами пошло по пути создания конструкций, обеспечивающих максимальное использование таких особенностей редкоземельных магнитов, как высокое значение коэрцитивных сил по индукции и намагниченности, низкое значение магнитной проницаемости.
Совершенствование технологии производства редкоземельных постоянных магнитов привело к созданию цилиндрических магнитов с радиальной намагниченностью [7]. Этот магнит является одной из разновидностей магнитных систем типа звездочка.
Формирование требуемого распределения вектора намагниченности осуществляется на специальной намагничивающей установке. Отверстие под вал может изготавливаться либо в процессе прессования, либо путем прожигаййя в готовом магните.
^1
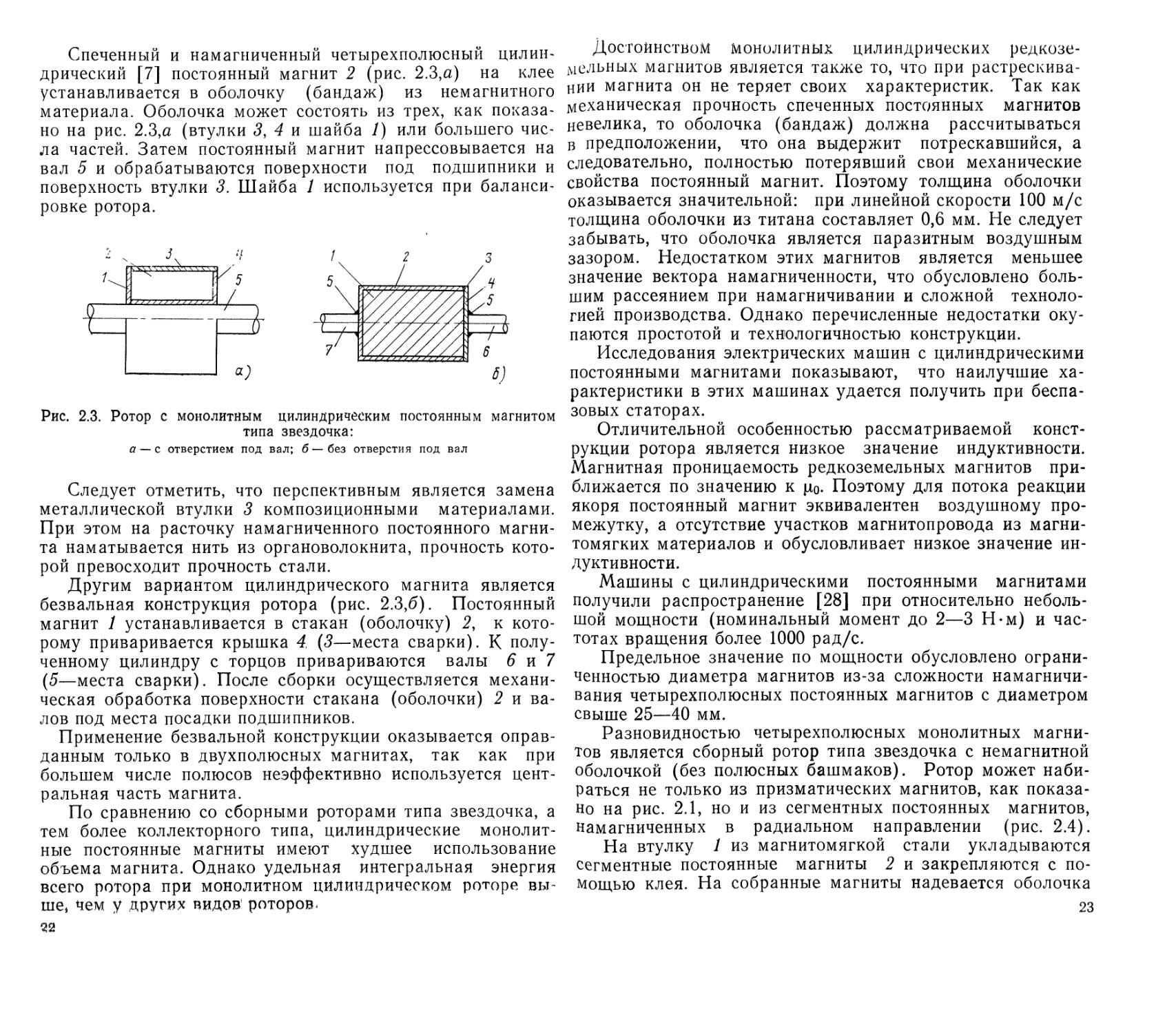
Спеченный и намагниченный четырехполюсный цилиндрический [7] постоянный магнит 2 (рис. 2.3,а) на клее устанавливается в оболочку (бандаж) из немагнитного материала. Оболочка может состоять из трех, как показано на рис. 2.3,а (втулки 3, 4 и шайба /) или большего числа частей. Затем постоянный магнит напрессовывается на вал 5 и обрабатываются поверхности под подшипники и поверхность втулки 3. Шайба 1 используется при балансировке ротора.
Рис. 2.3. Ротор с монолитным цилиндрическим постоянным магнитом типа звездочка:
а — с отверстием под вал; б — без отверстия под вал
Следует отметить, что перспективным является замена металлической втулки 3 композиционными материалами. При этом на расточку намагниченного постоянного магнита наматывается нить из органоволокнита, прочность которой превосходит прочность стали.
Другим вариантом цилиндрического магнита является безвальная конструкция ротора (рис. 2.3,6). Постоянный магнит 1 устанавливается в стакан (оболочку) 2, к которому приваривается крышка 4, (3—места сварки). К полученному цилиндру с торцов привариваются валы 6 и 7 (5—места сварки). После сборки осуществляется механическая обработка поверхности стакана (оболочки) 2 и валов под места посадки подшипников.
Применение безвальной конструкции оказывается оправданным только в двухполюсных магнитах, так как при большем числе полюсов неэффективно используется центральная часть магнита.
По сравнению со сборными роторами типа звездочка, а тем более коллекторного типа, цилиндрические монолитные постоянные магниты имеют худшее использование объема магнита. Однако удельная интегральная энергия всего ротора при монолитном цилиндрическом роторе выше. чем у других видов' роторов* 32
Достоинством монолитных цилиндрических редкоземельных магнитов является также то, что при растрескивании магнита он не теряет своих характеристик. Так как механическая прочность спеченных постоянных магнитов невелика, то оболочка (бандаж) должна рассчитываться в предположении, что она выдержит потрескавшийся, а следовательно, полностью потерявший свои механические свойства постоянный магнит. Поэтому толщина оболочки оказывается значительной: при линейной скорости 100 м/с толщина оболочки из титана составляет 0,6 мм. Не следует забывать, что оболочка является паразитным воздушным зазором. Недостатком этих магнитов является меньшее значение вектора намагниченности, что обусловлено большим рассеянием при намагничивании и сложной технологией производства. Однако перечисленные недостатки окупаются простотой и технологичностью конструкции.
Исследования электрических машин с цилиндрическими постоянными магнитами показывают, что наилучшие характеристики в этих машинах удается получить при беспа-зовых статорах.
Отличительной особенностью рассматриваемой конструкции ротора является низкое значение индуктивности. Магнитная проницаемость редкоземельных магнитов приближается по значению к р0. Поэтому для потока реакции якоря постоянный магнит эквивалентен воздушному промежутку, а отсутствие участков магнитопровода из магнитомягких материалов и обусловливает низкое значение индуктивности.
Машины с цилиндрическими постоянными магнитами получили распространение [28] при относительно небольшой мощности (номинальный момент до 2—3 Н-м) и частотах вращения более 1000 рад/с.
Предельное значение по мощности обусловлено ограниченностью диаметра магнитов из-за сложности намагничивания четырехполюсных постоянных магнитов с диаметром свыше 25—40 мм.
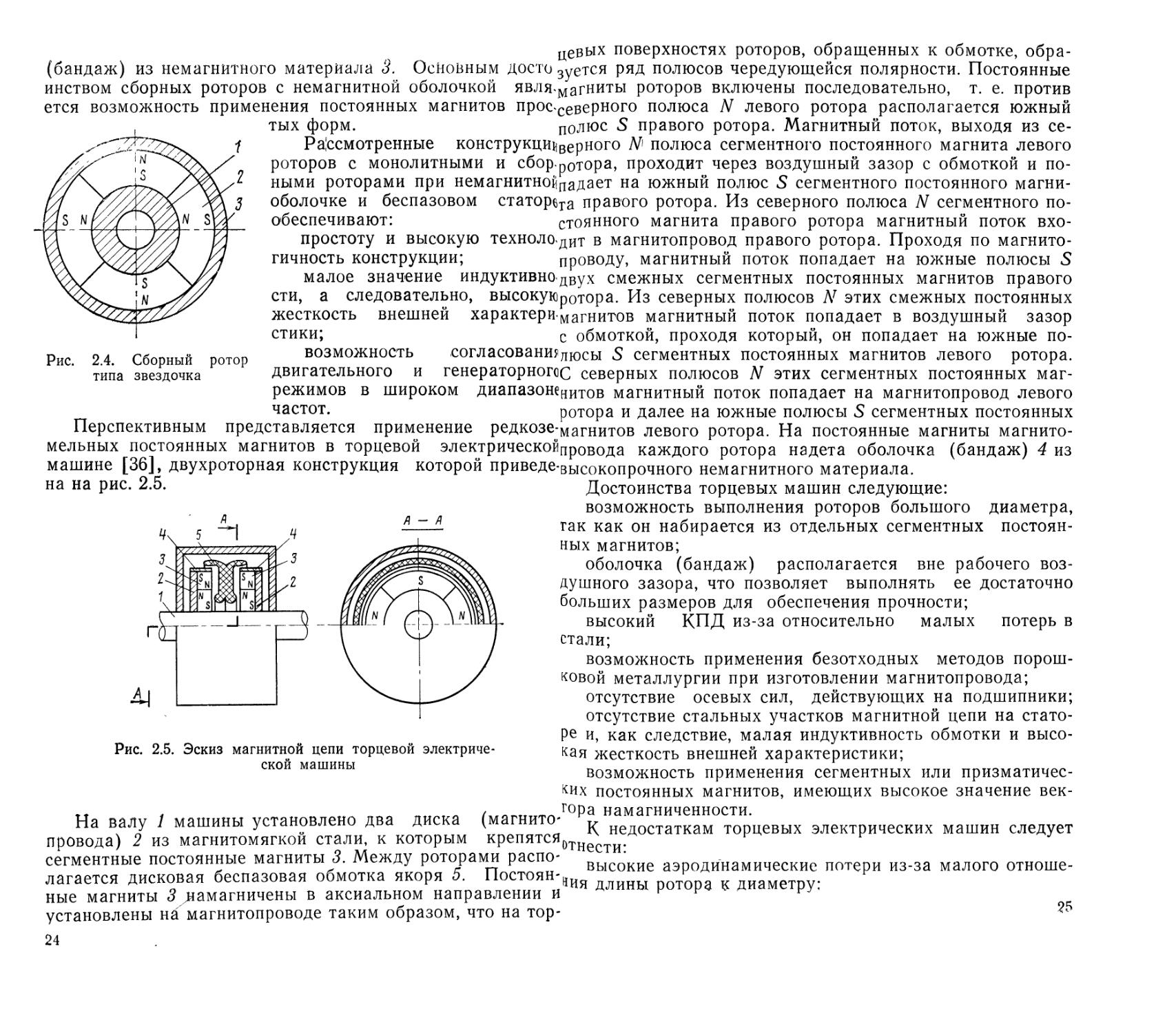
Разновидностью четырехполюсных монолитных магнитов является сборный ротор типа звездочка с немагнитной оболочкой (без полюсных башмаков). Ротор может набираться не только из призматических магнитов, как показано на рис. 2.1, но и из сегментных постоянных магнитов, намагниченных в радиальном направлении (рис. 2.4).
На втулку 1 из магнитомягкой стали укладываются сегментные постоянные магниты 2 и закрепляются с помощью клея. На собранные магниты надевается оболочка
23
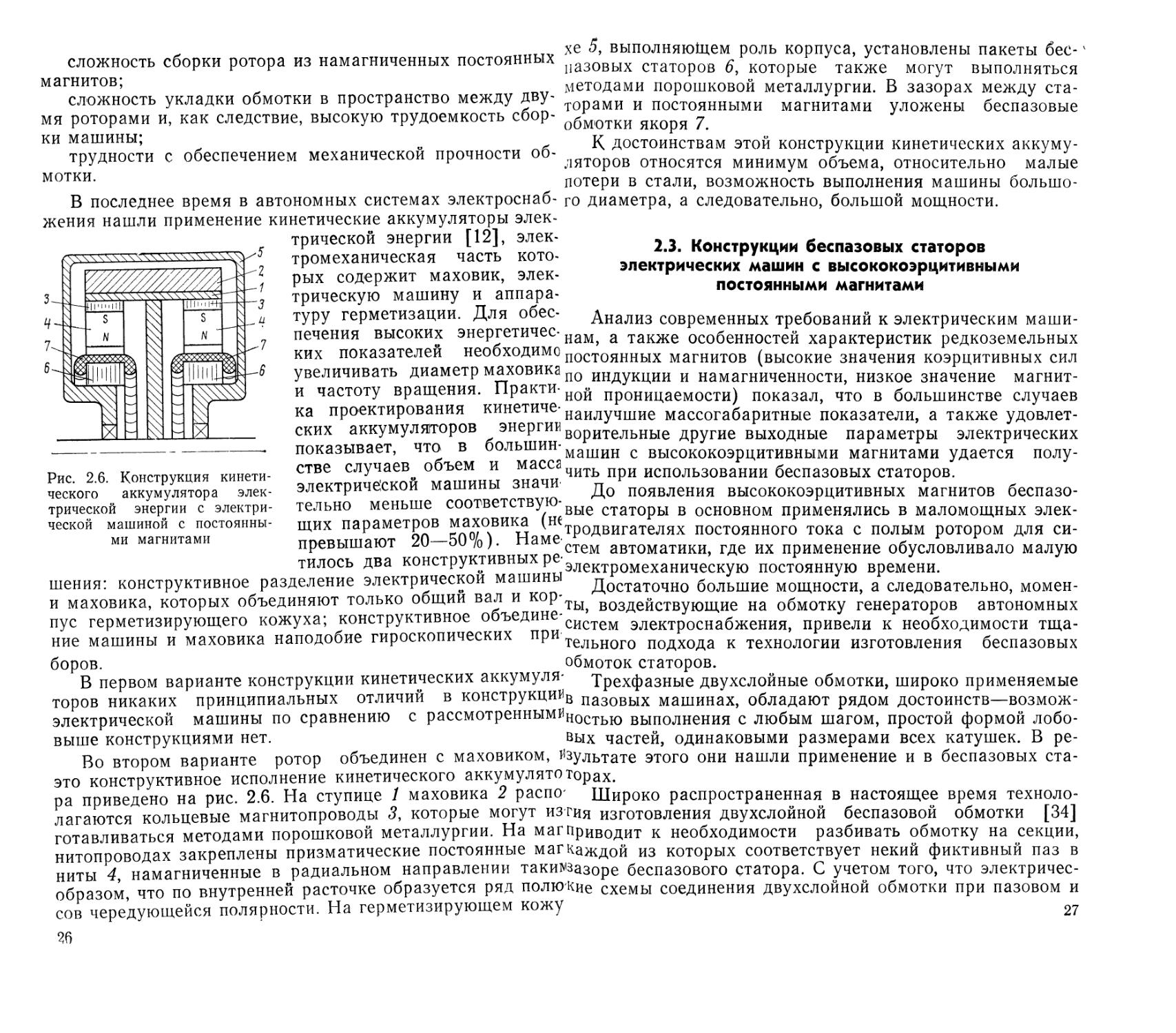
цевых поверхностях роторов, обращенных к обмотке, обра-(бандаж) из немагнитного материала 5. Основным досто Зуется ряд полюсов чередующейся полярности. Постоянные инством сборных роторов с немагнитной оболочкой явля>магниты роторов включены последовательно, т. е. против
ется возможность применения постоянных магнитов просхеверного полюса N левого ротора располагается южный
Рис. 2.4. Сборный ротор типа звездочка
тых форм. полюс S правого ротора. Магнитный поток, выходя из се-
Ра^ссмотренные конструкцщверного № полюса сегментного постоянного магнита левого роторов с монолитными и сборфОтора, проходит через воздушный зазор с обмоткой и по-ними роторами при немагнитнойпадает на южный полюс S сегментного постоянного магни-оболочке и беспазовом статору правого ротора. Из северного полюса N сегментного по-обеспечивают: стоянного магнита правого ротора магнитный поток вхо-
простоту и высокую техноло дит в магнитопровод правого ротора. Проходя по магнито-гичность конструкции; проводу, магнитный поток попадает на южные полюсы S
малое значение индуктивно двух смежных сегментных постоянных магнитов правого сти, а следовательно, высокуюротора. Из северных полюсов N этих смежных постоянных жесткость внешней характери-Магнитов магнитный поток попадает в воздушный зазор
стики;
с обмоткой, проходя который, он попадает на южные по-
возможность согласованшЛЮсы S сегментных постоянных магнитов левого ротора, двигательного и генераторногос северных полюсов N этих сегментных постоянных маг-
режимов в широком диапазонеНИтов магнитный поток попадает на магнитопровод левого частот. ротора и далее на южные полюсы S сегментных постоянных
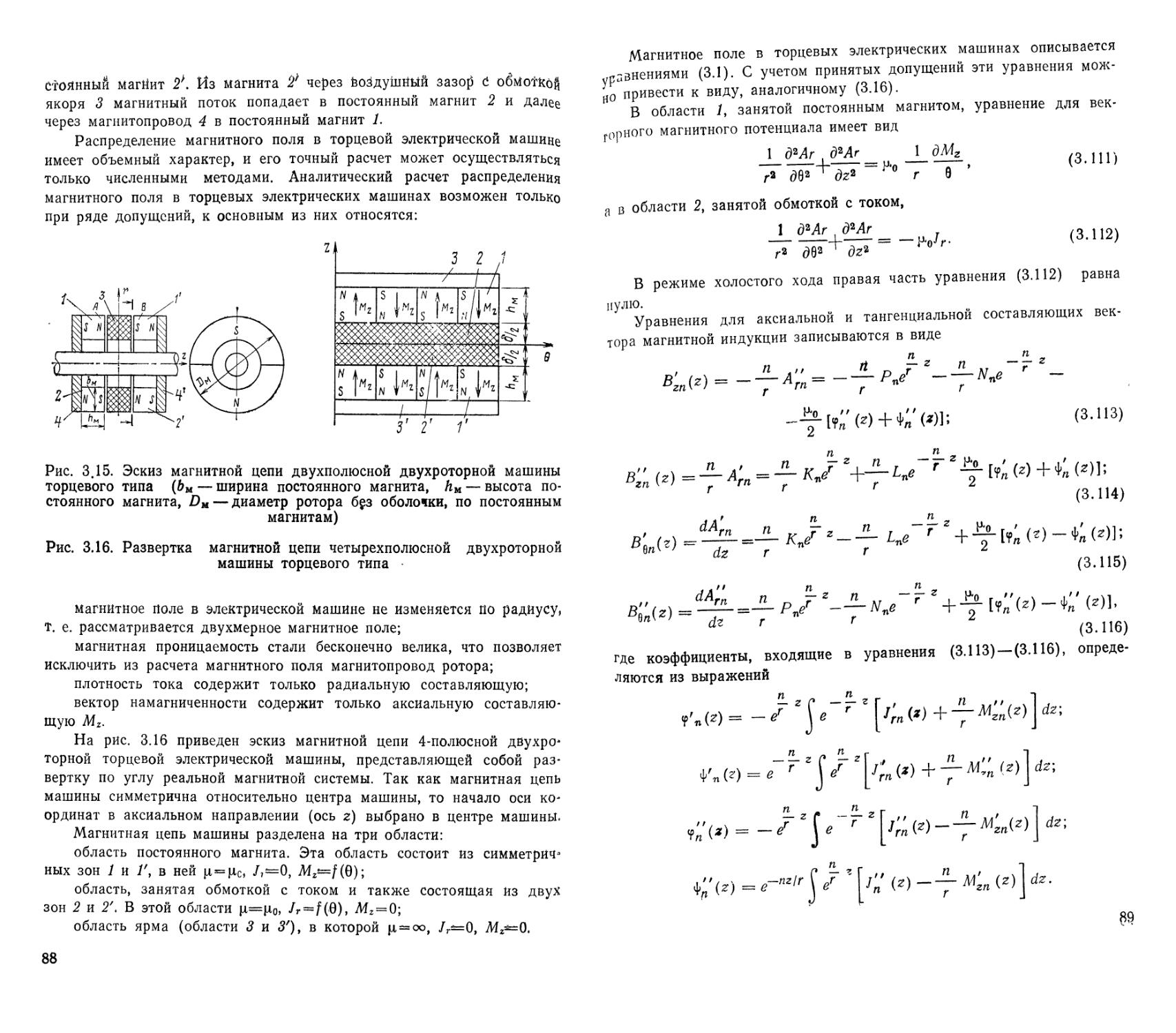
Перспективным представляется применение редкозе-магнитов левого ротора. На постоянные магниты магнито-мельных постоянных магнитов в торцевой электрическойПрОвода каждого ротора надета оболочка (бандаж) 4 из машине [36], двухроторная конструкция которой приведе-ЗЫС0К0Пр0ЧН0Г0 немагнитного материала.
на на рис. 2.5. Достоинства торцевых машин следующие:
возможность выполнения роторов большого диаметра, гак как он набирается из отдельных сегментных постоянных магнитов;
оболочка (бандаж) располагается вне рабочего воздушного зазора, что позволяет выполнять ее достаточно больших размеров для обеспечения прочности;
высокий КПД из-за относительно малых потерь в стали;
возможность применения безотходных методов порошковой металлургии при изготовлении магнитопровода;
отсутствие осевых сил, действующих на подшипники;
отсутствие стальных участков магнитной цепи на стато-
Рис. 2.5. Эскиз магнитной цепи торцевой электриче ской машины
ре и, как следствие, малая индуктивность обмотки и высокая жесткость внешней характеристики;
возможность применения сегментных или призматичес-
КИХ постоянных магнитов, имеющих высокое значение век-
На валу 1 машины установлено два диска (магнито недостаткам торцевых электрических машин следует провода) 2 из магнитомягкои стали, к которым крепятся0тне^ти. 1 r J
сегментные постоянные магниты 3. Между роторами распо высокие аэродинамические потери из-за малого отноше-лагается дисковая беспазовая обмотка якоря 5. Постоян^ ппТоПя к пиямртпу-
ные магниты З щамагничены в аксиальном направлении и д р ра к д ру. установлены на магнитопроводе таким образом, что на тор-24
25
сложность сборки ротора из намагниченных постоянных магнитов;
сложность укладки обмотки в пространство между дву-мя роторами и, как следствие, высокую трудоемкость сборки машины;
трудности с обеспечением механической прочности обмотки.
В последнее время в автономных системах электроснаб-
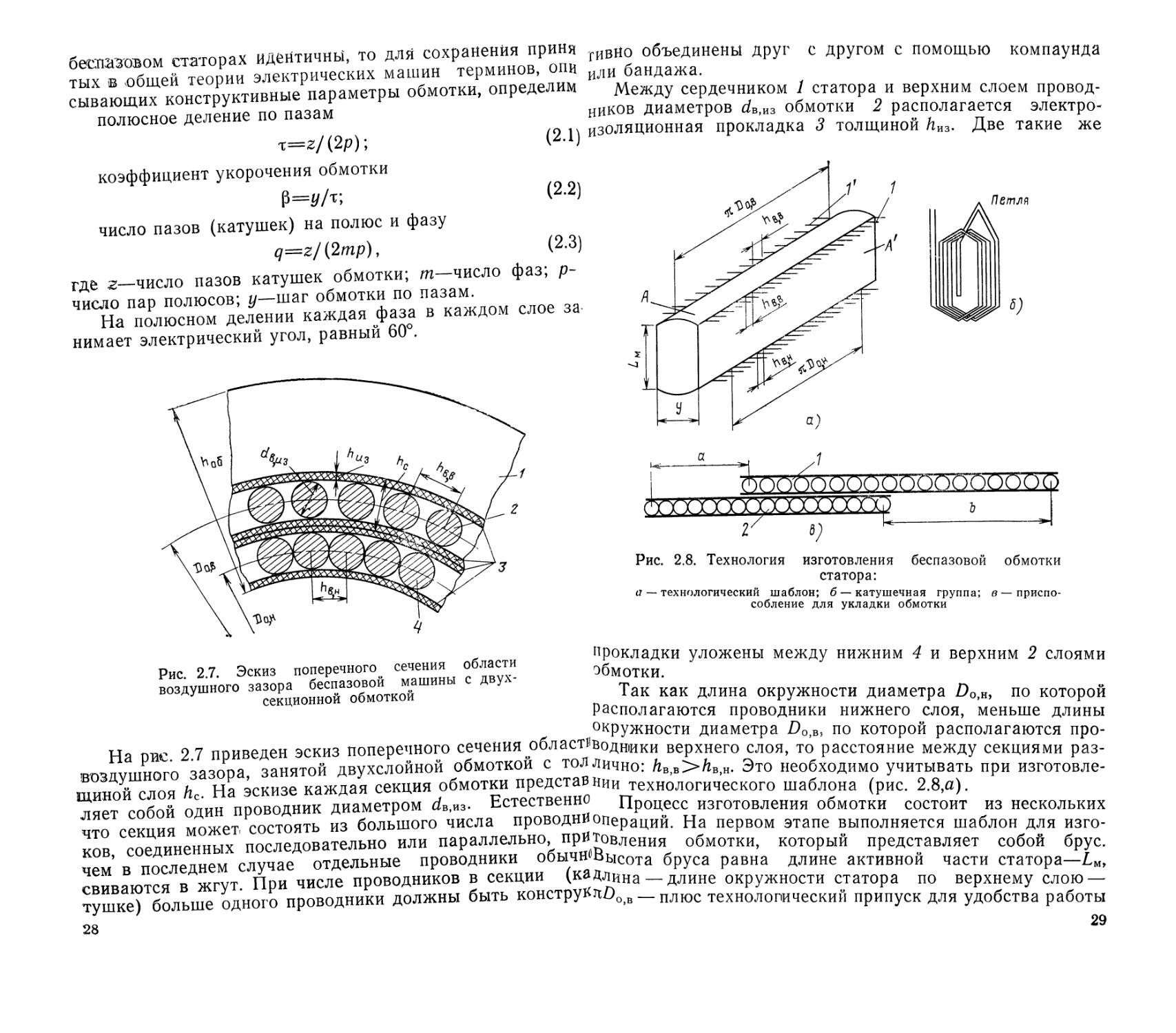
хе 5, выполняющем роль корпуса, установлены пакеты бес-пазовых статоров 6, которые также могут выполняться методами порошковой металлургии. В зазорах между статорами и постоянными магнитами уложены беспазовые обмотки якоря 7.
К достоинствам этой конструкции кинетических аккумуляторов относятся минимум объема, относительно малые потери в стали, возможность выполнения машины большого диаметра, а следовательно, большой мощности.
жения нашли применение кинетические аккумуляторы электрической энергии [12], электромеханическая часть которых содержит маховик, электрическую машину и аппаратуру герметизации. Для обеспечения высоких энергетических показателей необходимо увеличивать диаметр маховика и частоту вращения. Практика проектирования ских аккумуляторов показывает, что в
стве случаев объем и масса электрической машины значи тельно меньше соответствующих параметров маховика (не
Рис. 2.6. Конструкция кинетического аккумулятора электрической энергии с электрической машиной с постоянными магнитами
2.3. Конструкции беспазовых статоров электрических машин с высококоэрцитивными постоянными магнитами
Анализ современных требований к электрическим машинам, а также особенностей характеристик редкоземельных постоянных магнитов (высокие значения коэрцитивных сил по ^индукции и намагниченности, низкое значение магнитной проницаемости) показал, что в большинстве случаев наилучшие массогабаритные показатели, а также удовлет-
кинетиче-
ЭНеОГИК J ...VX XtXXWXKV
больший-В0Рительные дРУгие выходные параметры электрических машин с высококоэрцитивными магнитами удается получить при использовании беспазовых статоров.
До появления высококоэрцитивных магнитов беспазовые статоры в основном применялись в маломощных элек-Ш.ИА "“-—“1П„.\ТтР°ДВИГатеЛЯХ постоянного тока с полым ротором для си-
превышают 20-50%). Наме-Стем автоматики гле их nDHMeHeHIfft обусловлипало мялто тилось два конструктивных решения: конструктивное разделение электрической машины и маховика, которых объединяют только общий вал и корпус герметизирующего кожуха; конструктивное объединение машины и маховика наподобие гироскопических при
стем автоматики, где их применение обусловливало малую электромеханическую постоянную времени.
Достаточно большие мощности, а следовательно, моменты, воздействующие на обмотку генераторов автономных систем электроснабжения, привели к необходимости тщательного подхода к технологии изготовления беспазовых
боров. обмоток статоров.
В первом варианте конструкции кинетических аккумуля- Трехфазные двухслойные обмотки, широко применяемые торов никаких принципиальных отличий в конструкций пазовых машинах, обладают рядом достоинств—возмож-электрической машины по сравнению с рассмотреннымйНостью ВЬ1ПОлнения с любым шагом, простой формой лобо-выше конструкциями нет. вых частей, одинаковыми размерами всех катушек. В ре-
Во втором варианте ротор объединен с маховиком, ^зультате этого они нашли применение и в беспазовых ста-это конструктивное исполнение кинетического аккумулято торах.
ра приведено на рис. 2.6. На ступице 1 маховика 2 распо' Широко распространенная в настоящее время техноло-лагаются кольцевые магнитопроводы 3, которые могут изгия изготовления двухслойной беспазовой обмотки [34] готавливаться методами порошковой металлургии. На маг Приводит к необходимости разбивать обмотку на секции, нитопроводах закреплены призматические постоянные маг Каждой из которых соответствует некий фиктивный паз в ниты 4, намагниченные в радиальном направлении такимзазоре беспазового статора. С учетом того, что электричес-образом, что по внутренней расточке образуется ряд полюКие схемы соединения двухслойной обмотки при пазовом и сов чередующейся полярности. На герметизирующем кожу 27
26
бегивзовом статорах идентичны, то для сохранения приня тых в общей теории электрических машин терминов, опц сывающих конструктивные параметры обмотки, определим
полюсное деление по пазам
т=х/(2р); (2.1)
коэффициент укорочения обмотки
₽=уЛ; (2.2)
число пазов (катушек) на полюс и фазу
<7=г/(2тр), (2.3)
где z—число пазов катушек обмотки; т—число фаз; р~ число пар полюсов; у—шаг обмотки по пазам.
На полюсном делении каждая фаза в каждом слое за нимает электрический угол, равный 60°.
гивНо объединены друг с другом с помощью компаунда или бандажа.
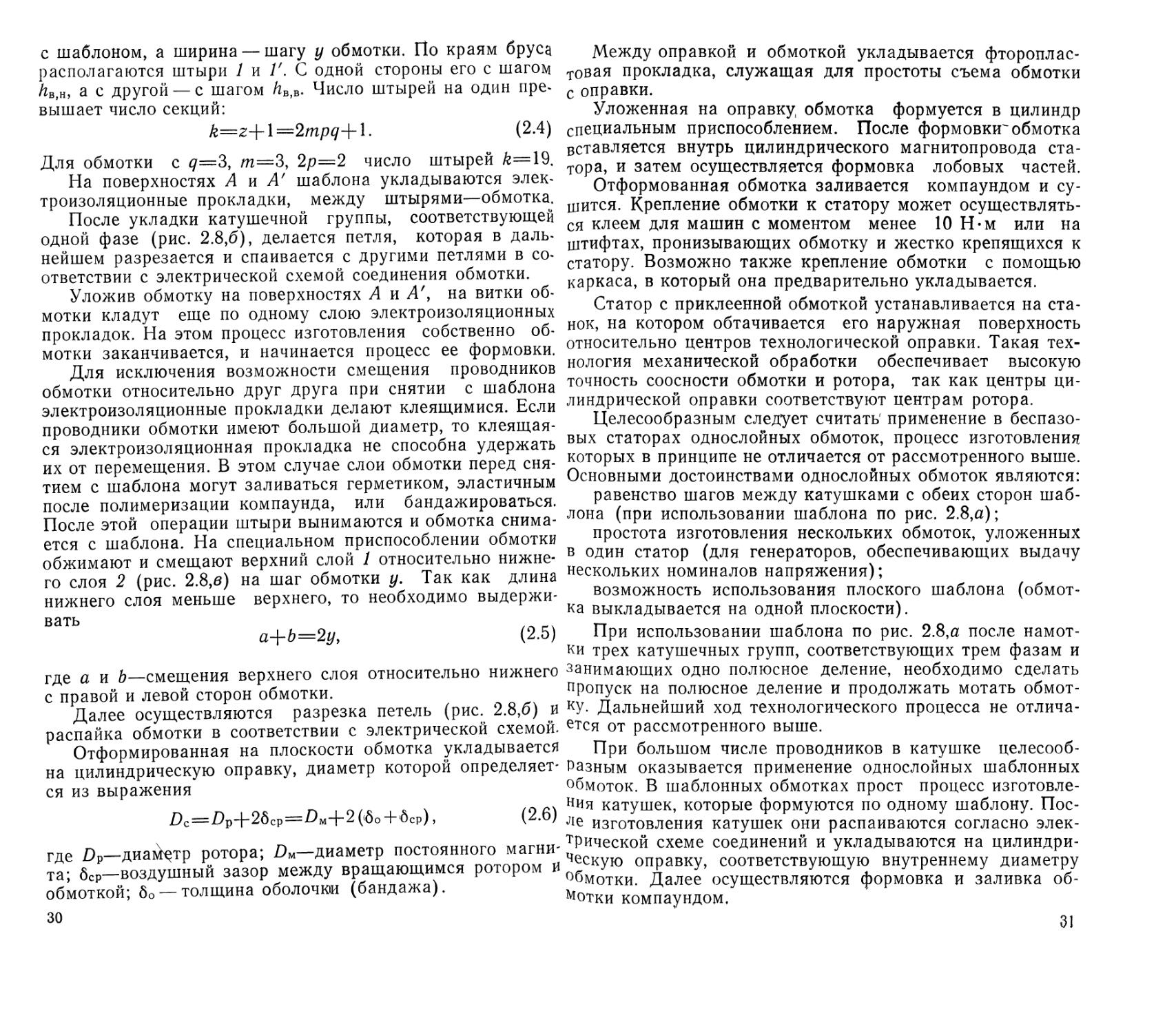
Между сердечником 1 статора и верхним слоем проводников диаметров с?в,из обмотки 2 располагается электроизоляционная прокладка 3 толщиной /iH3. Две такие же
Рис. 2.8. Технология изготовления беспазовой обмотки статора:
а ~ технологический шаблон; б — катушечная группа; в — приспособление для укладки обмотки
Рис. 2.7. Эскиз поперечного сечения области воздушного зазора беспазовой машины с двухсекционной обмоткой
прокладки уложены между нижним 4 и верхним 2 слоями эбмотки.
Так как длина окружности диаметра £>0,н, по которой Располагаются проводники нижнего слоя, меньше длины А п окружности диаметра £)о,в, по которой располагаются про-На рис. 2.7 приведен эскиз поперечного сечения областиводники верхнего слоя, то расстояние между секциями раз-воздушного зазора, занятой двухслойной обмоткой с тол лично: /гв,в>/гв,н. Это необходимо учитывать при изготовле-щиной слоя hc. На эскизе каждая секция обмотки представнии технологического шаблона (рис. 2.8,а).
ляет собой один проводник диаметром dB,H3. Естественно Процесс изготовления обмотки состоит из нескольких что секция может состоять из большого числа проводив операций. На первом этапе выполняется шаблон для изго-ков, соединенных последовательно или параллельно, притовления обмотки, который представляет собой брус чем в последнем случае отдельные проводники обычн<НыСОта бруса равна длине активной части статора—£м свиваются в жгут. При числе проводников в секции (каДлина — длине окружности статора по верхнему слою — тушке) больше одного проводники должны быть конструкл£)о в — плюс технологический припуск для удобства работы
с шаблоном, а ширина —шагу у обмотки. По краям бруса располагаются штыри 1 и Г. С одной стороны его с шагом Лв,н, а с другой — с шагом Лв,в. Число штырей на один пре» вышает число секций:
k=z-\-1 =2mp^+1 • (2-4)
Для обмотки с д=3, т=3, 2р=2 число штырей &=19.
На поверхностях А и Д' шаблона укладываются элек-троизоляционные прокладки, между штырями—обмотка.
После укладки катушечной группы, соответствующей одной фазе (рис. 2.8,6), делается петля, которая в дальнейшем разрезается и спаивается с другими петлями в соответствии с электрической схемой соединения обмотки.
Уложив обмотку на поверхностях А и Д', на витки обмотки кладут еще по одному слою электроизоляционных прокладок. На этом процесс изготовления собственно обмотки заканчивается, и начинается процесс ее формовки.
Для исключения возможности смещения проводников обмотки относительно друг друга при снятии с шаблона электроизоляционные прокладки делают клеящимися. Если проводники обмотки имеют большой диаметр, то клеящаяся электроизоляционная прокладка не способна удержать их от перемещения. В этом случае слои обмотки перед снятием с шаблона могут заливаться герметиком, эластичным после полимеризации компаунда, или бандажироваться. После этой операции штыри вынимаются и обмотка снимается с шаблона. На специальном приспособлении обмотки обжимают и смещают верхний слой 1 относительно нижнего слоя 2 (рис. 2.8,в) на шаг обмотки у. Так как длина нижнего слоя меньше верхнего, то необходимо выдерживать
a-\-b=2y, (2.5)
где а и b—смещения верхнего слоя относительно нижнего с правой и левой сторон обмотки.
Далее осуществляются разрезка петель (рис. 2.8,6) и распайка обмотки в соответствии с электрической схемой.
Отформированная на плоскости обмотка укладывается на цилиндрическую оправку, диаметр которой определяется из выражения
/)с=^р+2бср==^м+2((бо+|дср), (2.6)
где Dp—диат^тр ротора; DM—диаметр постоянного магни' та; бср—воздушный зазор между вращающимся ротором и обмоткой; 6о — толщина оболочки (бандажа).
зо
Между оправкой и обмоткой укладывается фторопластовая прокладка, служащая для простоты съема обмотки с оправки.
Уложенная на оправку обмотка формуется в цилиндр специальным приспособлением. После формовки" обмотка вставляется внутрь цилиндрического магнитопровода статора, и затем осуществляется формовка лобовых частей.
Отформованная обмотка заливается компаундом и сушится. Крепление обмотки к статору может осуществляться клеем для машин с моментом менее 10 Н-м или на штифтах, пронизывающих обмотку и жестко крепящихся к статору. Возможно также крепление обмотки с помощью каркаса, в который она предварительно укладывается.
Статор с приклеенной обмоткой устанавливается на станок, на котором обтачивается его наружная поверхность относительно центров технологической оправки. Такая технология механической обработки обеспечивает высокую точность соосности обмотки и ротора, так как центры цилиндрической оправки соответствуют центрам ротора.
Целесообразным следует считать' применение в беспазо-вых статорах однослойных обмоток, процесс изготовления которых в принципе не отличается от рассмотренного выше. Основными достоинствами однослойных обмоток являются: равенство шагов между катушками с обеих сторон шаблона (при использовании шаблона по рис. 2.8,а);
простота изготовления нескольких обмоток, уложенных в один статор (для генераторов, обеспечивающих выдачу нескольких номиналов напряжения);
возможность использования плоского шаблона (обмотка выкладывается на одной плоскости).
При использовании шаблона по рис. 2.8,а после намотки трех катушечных групп, соответствующих трем фазам и занимающих одно полюсное деление, необходимо сделать пропуск на полюсное деление и продолжать мотать обмотку. Дальнейший ход технологического процесса не отличается от рассмотренного выше.
При большом числе проводников в катушке целесообразным оказывается применение однослойных шаблонных °бмоток. В шаблонных обмотках прост процесс изготовления катушек, которые формуются по одному шаблону. Пос-Ле изготовления катушек они распаиваются согласно электрической схеме соединений и укладываются на цилиндрическую оправку, соответствующую внутреннему диаметру °бмотки. Далее осуществляются формовка и заливка обмотки компаундом,
31
Магнитопровод статора беспазовых радиальных электрических машин изготавливается из листов магнитомягкой стали, каждый из которых имеет форму кольца. Листы склеиваются в пакет железа, внутренняя поверхность которого, как правило, не обрабатывается, что исключает возможность электрического замыкания листов и увеличение потерь на вихревые токи и улучшает механическую прочность места склеивания обмотки и пакета статора.
Штамповка кольцевых листов пакета дает большой отход материалов. Поэтому в последнее время нашли применение магнитопроводы статора, изготовленные на базе порошковой металлургии. Разработанный порошковый материал на базе кобальтового сплава 49К2ФА имеет высокие магнитные характеристики. Так как магнитопроводы прессуются из магнитомягкого порошка, то это, во-первых, обеспечивает безотходность производства, а во-вторых, уменьшает потери на вихревые токи. По своим магнитным свойствам магнитопровод из порошкового материала не уступает обычному шихтованному магнитопроводу из стали 1521.
Узкое место технологического процесса изготовления узла статора — процесс установки обмотки внутрь магнитопровода статора. При протаскивании обмотки через внутреннее отверстие магнитопровода статора возможно повреждение проводников обмотки. Поэтому внутренний диаметр магнитопровода приходится выполнять несколько большим наружного диаметра обмотки. Из-за этого допуска на протаскивание обмотки через внутреннее отверстие магнитопровода увеличивается длина полного воздушного зазора и уменьшается коэффициент заполнения места под обмотку медью. Так как наибольший диаметр имеют лобовые части обмотки, то после их прохождения через отверстие магнитопровода и установки обмотки по месту возможно смещение осей обмотки и магнитопровода. Эксцентричное расположение магнитопровода относительно обмотки приводит и к эксцентричному его расположению и относительно постоянного магнита. При этом появляются низкочастотные составляющие (правда, для машин с редкоземельными магнитами весьма незначительные) силы одностороннего притяжения, повышается шум машины и снижается КПД.
Одним из возможных путей упрощения технологии изготовления статора является намотка магнитопровода из магнитомягкой проволоки. Процесс изготовления статора 32.
заключается в следующем. На отформованную на цилиндрической оправке обмотку с усложненной электроизоляционной прокладкой наматывается из проволоки магнитопровод статора. После намотки магнитопровода весь узел статора пропитывается клеем для обеспечения конструктивной целостности и механической прочности. По окончании процессов пропитки и сушки узла статора производится механическая обработка (обточка) наружной поверхности под посадку в корпус машины. Обработка посадочного места осуществляется относительно центров технологической оправки.
Применение намотанного магнитопровода статора позволяет:
устранить паразитный зазор между обмоткой и магнитопроводом;
исключить возможность повреждения обмотки при протаскивании ее через отверстие в магнитопроводе статора;
исключить магнитную асимметрию магнитопровода относительно постоянного' магнита.
Упрощение технологии изготовления обмотки осуществляется за счет ухудшения магнитных характеристик магнитопровода, коэффициент заполнения которого не превышает* 0,85, причем воздушные промежутки располагаются на пути прохождения магнитного потока. Ухудшение магнитных характеристик происходит также из-за невозможности отжига магнитопровода после намотки.
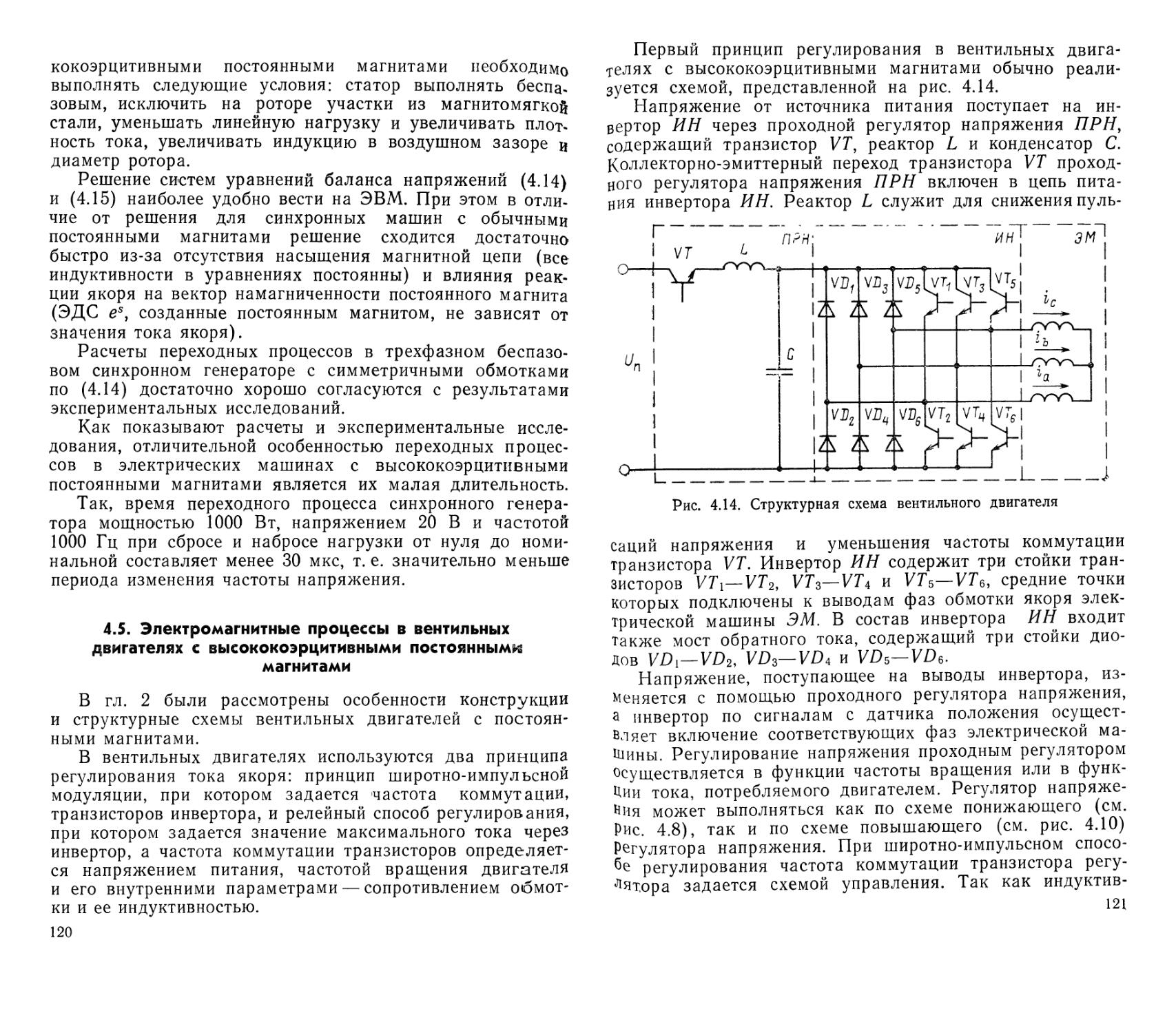
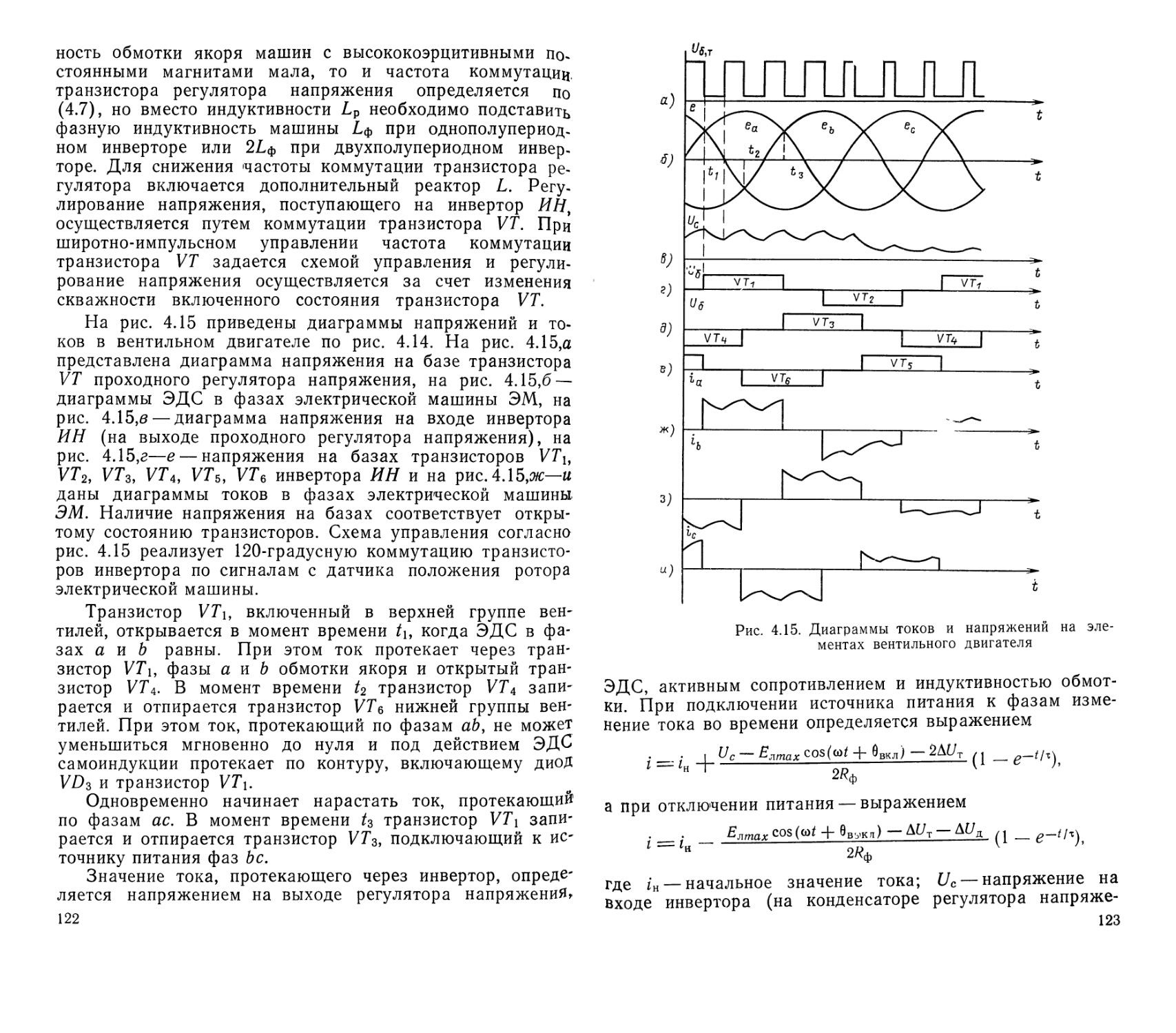
2.4. Вентильные двигатели с высококоэрцитйвными магнитами
Первые промышленные образцы вентильных двигателей, появившиеся в 50-х—начале 60-х годов, имели электрические машины с традиционными постоянными магнитами. Это положение сохранялось и отчасти сохраняется до последнего времени.
Вентильные двигатели прежде всего находят применение в маломощных электроприводах, что вызвано сложностью создания мощных инверторов при существующем положении в области разработки силовых транзисторов [10, И]. Применение вентильных двигателей в электроприводах стеклоочистителей и стеклоподъемников автомобилей, в приводах станков, в электроприводах электромобилей определило основные требования, предъявляемые к этой категории электрических машин: минимум стоимости при максимальной надежности. Это в свою очередь опре-3—278 33
делило и подход к выработке технических требований щ двигатели: максимальная дешевизна материалов и комп лектующих изделий, простота схемы инвертора, простоту схемы управления, пренебрежение некоторыми принцц пиальными достоинствами в пользу упрощения схем конструкций.
Вентильные двигатели находят применение в электро, приводах магнитофонов и электрофонов [37], где требу^ ются высокая стабильность частоты вращения и плавность хода, в электроприводах ткацких станков и часах.
Вентильные двигатели мощностью от 20 до 200 кВт используются в электроэнергетических системах судов и в электроприводах высокоскоростного наземного транспорта в электроприводах общепромышленного назначения.
В последнее время наметилась тенденция применения вентильных двигателей в кинетических аккумуляторам энергии [12], авиационных электроприводах систем управления полетом [13, 14], стартер-генераторах [15], гироскопических приборах. Основным требованием к электро» оборудованию перечисленных областей техники является максимум массоэнергетических показателей при максимальном использовании функциональных возможностей агрегатов и систем, в рассматриваемом случае—вентильным двигателей. Именно в вентильных двигателях указанным агрегатов нашли применение высококоэрцитивные постоянные магниты, обеспечивающие минимум массы при максимальном КПД. Конструктивно вентильные двигатели выполняются с учетом максимального приближения конструкции машины к тем требованиям, которые обеспечивают электропривод. Так, роторы вентильных двигателей и гироскопических приборов конструктивно объединены с маховиком.
Вентильные двигатели состоят из собственно синхронной электрической машины, датчика положения ротора, инвертора и его схемы управления.
Электрические машины вентильных двигателей относительно небольшой мощности имеют цилиндрические постоянные магниты типа звездочка (см. рис. 2.3).
В кинетических аккумуляторах энергии также используются электрические машины с цилиндрическим ротором типа звездочка, а при относительно большой мощности ротор машины обычно конструктивно объединен с маховиком (см. рис. 2.6).
В мощных вентильных машинах—в стартер-генераторах и авиационных электроприводах систем управления поле-34
тОм—применяются, прежде всего, роторы коллекторного типа (см. рис. 2.4). Перспективным следует считать применение в этих машинах сборных роторов типа звездочка с сегментными постоянными магнитами без полюсных башм аков.
В первых конструкциях вентильных двигателей применялись датчики положения ротора индуктивного типа [10], содержащие катушку индуктивности, подключенную к источнику переменного тока высокой частоты. При повороте ротора в результате насыщения магнитной цепи датчика изменяется индуктивность (взаимоиндуктивность между обмотками) обмотки, что и позволяет получить сигнал по положению ротора. К недостаткам таких датчиков относят низкую технологичность конструкции, большие габаритные размеры, наличие источника переменного тока высокой частоты.
В некоторых конструкциях вентильных двигателей применяются оптические датчики положения [10], состоящие из светоизлучающего диода, фототранзистора и непрозрачного диска с отверстиями (прорезями). Применение таких датчиков оправдано в кинетических аккумуляторах энергии, где ступица маховика выполняет роль диска. Светоизлучающий диод и фототранзистор располагаются с противоположных сторон диска. Поэтому при повороте ротора (диска) свет от светоизлучающего диода попадает на фототранзистор импульсно, в зависимости от положения диска.
Наибольшее применение в датчиках положения ротора находят элементы Холла, которые выпускает отечественная промышленность. Несмотря на относительно высокое значение остаточного напряжения арсенид-галлиевых элементов, их применение в вентильных двигателях благодаря высокой чувствительности и высокой рабочей температуре наиболее предпочтительно [10].
Датчики выпускаются в металлическом и слюдяном корпусах, а также в бескорпусном исполнении. Габаритные размеры активной части датчика составляют 4X2X0,15 мм. Основными достоинствами датчиков положения с элементами Холла являются простота конструкции, расположение элемента Холла непосредственно в воздушном зазоре машины, высокая чувствительность и помехозащищенность, Широкий температурный диапазон: от —60 до +150 °C.
Обычно элементы Холла приклеивают непосредственно К обмотке машины со стороны воздушного зазора. Благодаря высокой чувствительности арсенид-галлиевых элемен-3* 35
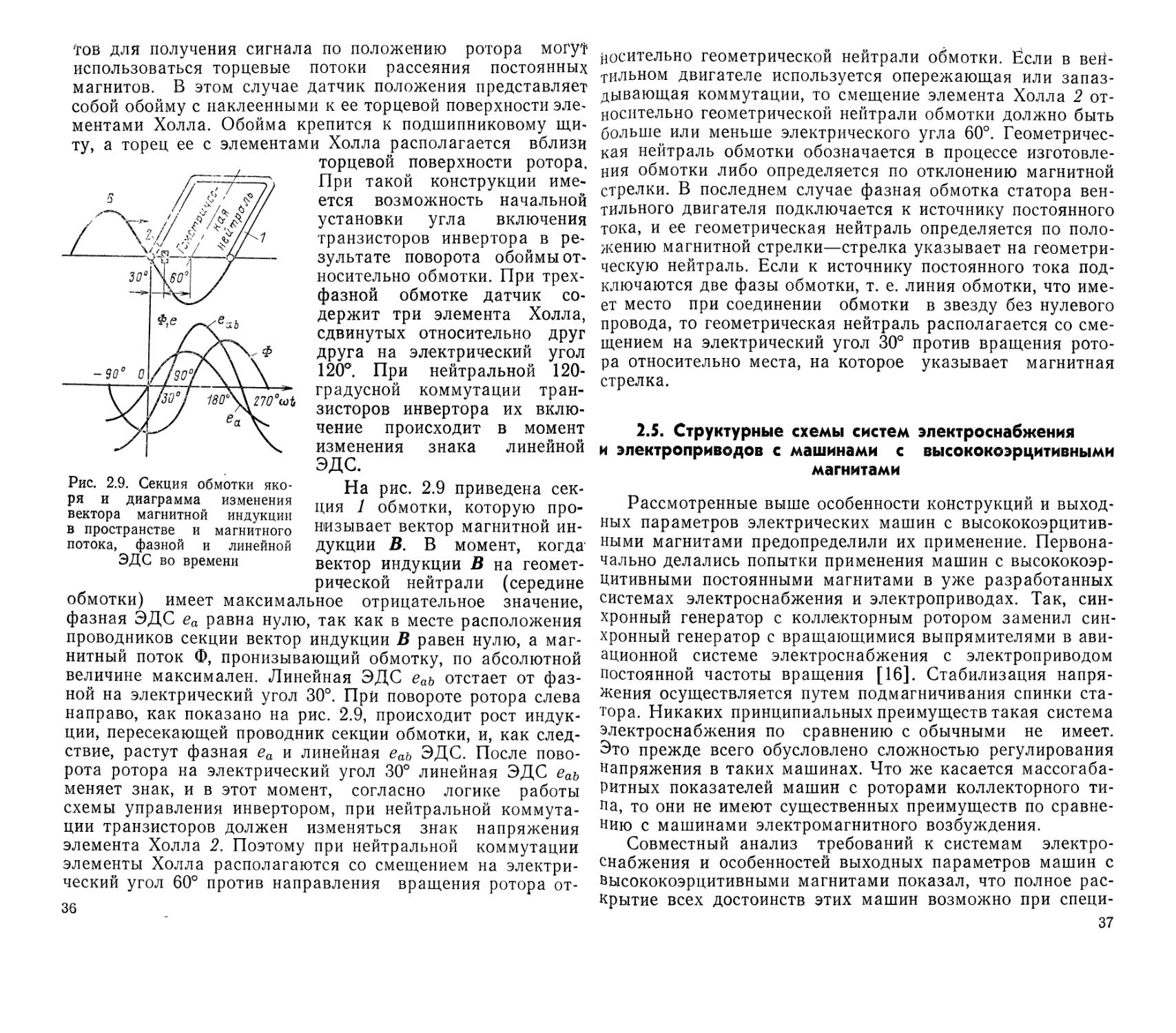
Рис. 2.9. Секция обмотки якоря и диаграмма изменения вектора магнитной индукции в пространстве и магнитного потока, фазной и линейной ЭДС во времени
Тов для получения сигнала по положению ротора могу!1 использоваться торцевые потоки рассеяния постоянных магнитов. В этом случае датчик положения представляет собой обойму с наклеенными к ее торцевой поверхности элементами Холла. Обойма крепится к подшипниковому щиту, а торец ее с элементами Холла располагается вблизи торцевой поверхности ротора. При такой конструкции имеется возможность начальной установки угла включения транзисторов инвертора в результате поворота обоймы относительно обмотки. При трехфазной обмотке датчик содержит три элемента Холла, сдвинутых относительно друг друга на электрический угол 120°. При нейтральной 120-градусной коммутации транзисторов инвертора их включение происходит в момент изменения знака линейной ЭДС.
На рис. 2.9 приведена секция 1 обмотки, которую пронизывает вектор магнитной индукции В. В момент, когда1 вектор индукции В на геометрической нейтрали (середине
обмотки) имеет максимальное отрицательное значение, фазная ЭДС еа равна нулю, так как в месте расположения проводников секции вектор индукции В равен нулю, а магнитный поток Ф, пронизывающий обмотку, по абсолютной величине максимален. Линейная ЭДС еаъ отстает от фазной на электрический угол 30°. При повороте ротора слева направо, как показано на рис. 2.9, происходит рост индукции, пересекающей проводник секции обмотки, и, как следствие, растут фазная еа и линейная еаъ ЭДС. После поворота ротора на электрический угол 30° линейная ЭДС еаъ меняет знак, и в этот момент, согласно логике работы схемы управления инвертором, при нейтральной коммутации транзисторов должен изменяться знак напряжения элемента Холла 2. Поэтому при нейтральной коммутации элементы Холла располагаются со смещением на электрический угол 60° против направления вращения ротора от-36
цосительно геометрической нейтрали обмотки. Если в вей-тильном двигателе используется опережающая или запаздывающая коммутации, то смещение элемента Холла 2 относительно геометрической нейтрали обмотки должно быть больше или меньше электрического угла 60°. Геометрическая нейтраль обмотки обозначается в процессе изготовления обмотки либо определяется по отклонению магнитной стрелки. В последнем случае фазная обмотка статора вентильного двигателя подключается к источнику постоянного тока, и ее геометрическая нейтраль определяется по положению магнитной стрелки—стрелка указывает на геометрическую нейтраль. Если к источнику постоянного тока подключаются две фазы обмотки, т. е. линия обмотки, что имеет место при соединении обмотки в звезду без нулевого провода, то геометрическая нейтраль располагается со смещением на электрический угол 30° против вращения ротора относительно места, на которое указывает магнитная стрелка.
2.5. Структурные схемы систем электроснабжения и электроприводов с машинами с высококоэрцитивными магнитами
Рассмотренные выше особенности конструкций и выходных параметров электрических машин с высококоэрцитивными магнитами предопределили их применение. Первоначально делались попытки применения машин с высококоэрцитивными постоянными магнитами в уже разработанных системах электроснабжения и электроприводах. Так, синхронный генератор с коллекторным ротором заменил синхронный генератор с вращающимися выпрямителями в авиационной системе электроснабжения с электроприводом постоянной частоты вращения [16]. Стабилизация напряжения осуществляется путем подмагничивания спинки статора. Никаких принципиальных преимуществ такая система электроснабжения по сравнению с обычными не имеет. Это прежде всего обусловлено сложностью регулирования напряжения в таких машинах. Что же касается массогабаритных показателей машин с роторами коллекторного типа, то они не имеют существенных преимуществ по сравнению с машинами электромагнитного возбуждения.
Совместный анализ требований к системам электроснабжения и особенностей выходных параметров машин с высококоэрцитивными магнитами показал, что полное раскрытие всех достоинств этих машин возможно при специ-37
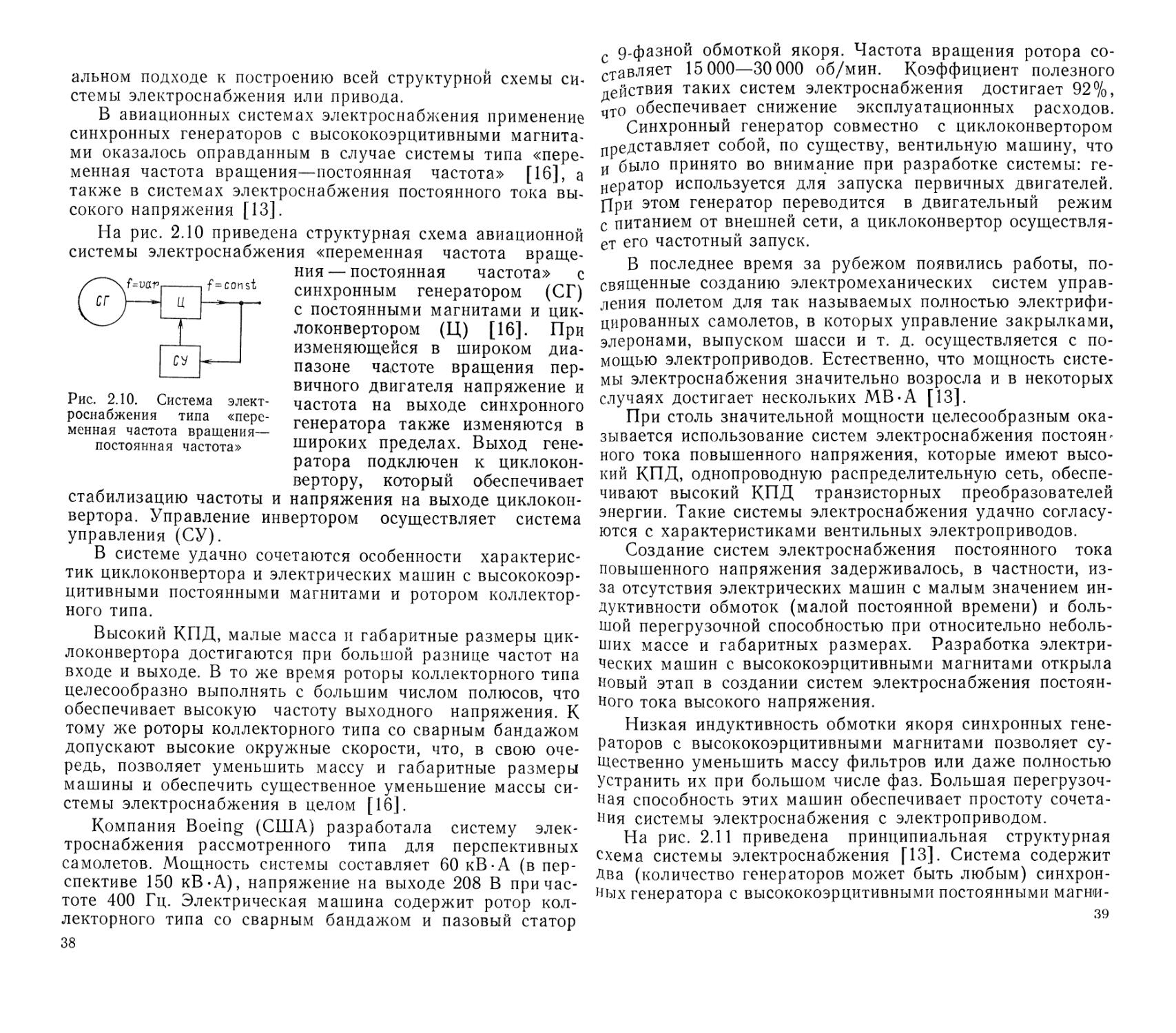
Система элект-«пере-
Рис. 2.10.
роснабжения типа
менная частота вращения— постоянная частота»
частоты и
альном подходе к построению всей структурной схемы си-* стемы электроснабжения или привода.
В авиационных системах электроснабжения применение синхронных генераторов с высококоэрцитивными магнитами оказалось оправданным в случае системы типа «переменная частота вращения—постоянная частота» [16], а также в системах электроснабжения постоянного тока высокого напряжения [13].
На рис. 2.10 приведена структурная схема авиационной системы электроснабжения «переменная частота вращения — постоянная частота» с синхронным генератором (СГ) с постоянными магнитами и циклоконвертором (Ц) [16]. При изменяющейся в широком диапазоне частоте вращения первичного двигателя напряжение и частота на выходе синхронного генератора также изменяются в широких пределах. Выход генератора подключен к циклоконвертору, который обеспечивает напряжения на выходе циклокон
вертора. Управление инвертором осуществляет система управления (СУ).
В системе удачно сочетаются особенности характеристик циклоконвертора и электрических машин с высококоэрцитивными постоянными магнитами и ротором коллекторного типа.
Высокий КПД, малые масса и габаритные размеры циклоконвертора достигаются при большой разнице частот на входе и выходе. В то же время роторы коллекторного типа целесообразно выполнять с большим числом полюсов, что обеспечивает высокую частоту выходного напряжения. К тому же роторы коллекторного типа со сварным бандажом допускают высокие окружные скорости, что, в свою очередь, позволяет уменьшить массу и габаритные размеры машины и обеспечить существенное уменьшение массы системы электроснабжения в целом [16].
Компания Boeing (США) разработала систему электроснабжения рассмотренного типа для перспективных самолетов. Мощность системы составляет 60 кВ-А (в перспективе 150 кВ-А), напряжение на выходе 208 В при частоте 400 Гц. Электрическая машина содержит ротор коллекторного типа со сварным бандажом и пазовый статор 38
с 9-фазной обмоткой якоря. Частота вращения ротора составляет 15 000—30 000 об/мин. Коэффициент полезного действия таких систем электроснабжения достигает 92%, чТо обеспечивает снижение эксплуатационных расходов.
Синхронный генератор совместно с циклоконвертором представляет собой, по существу, вентильную машину, что и было принято во внимание при разработке системы: генератор используется для запуска первичных двигателей. При этом генератор переводится в двигательный режим с питанием от внешней сети, а циклоконвертор осуществляет его частотный запуск.
В последнее время за рубежом появились работы, посвященные созданию электромеханических систем управления полетом для так называемых полностью электрифицированных самолетов, в которых управление закрылками, элеронами, выпуском шасси и т. д. осуществляется с помощью электроприводов. Естественно, что мощность системы электроснабжения значительно возросла и в некоторых случаях достигает нескольких МВ-А [13].
При столь значительной мощности целесообразным оказывается использование систем электроснабжения постоянного тока повышенного напряжения, которые имеют высокий КПД, однопроводную распределительную сеть, обеспечивают высокий КПД транзисторных преобразователей энергии. Такие системы электроснабжения удачно согласуются с характеристиками вентильных электроприводов.
Создание систем электроснабжения постоянного тока повышенного напряжения задерживалось, в частности, из-за отсутствия электрических машин с малым значением индуктивности обмоток (малой постоянной времени) и большой перегрузочной способностью при относительно небольших массе и габаритных размерах. Разработка электрических машин с высококоэрцитивными магнитами открыла новый этап в создании систем электроснабжения постоянного тока высокого напряжения.
Низкая индуктивность обмотки якоря синхронных генераторов с высококоэрцитивными магнитами позволяет существенно уменьшить массу фильтров или даже полностью Устранить их при большом числе фаз. Большая перегрузочная способность этих машин обеспечивает простоту сочетания системы электроснабжения с электроприводом.
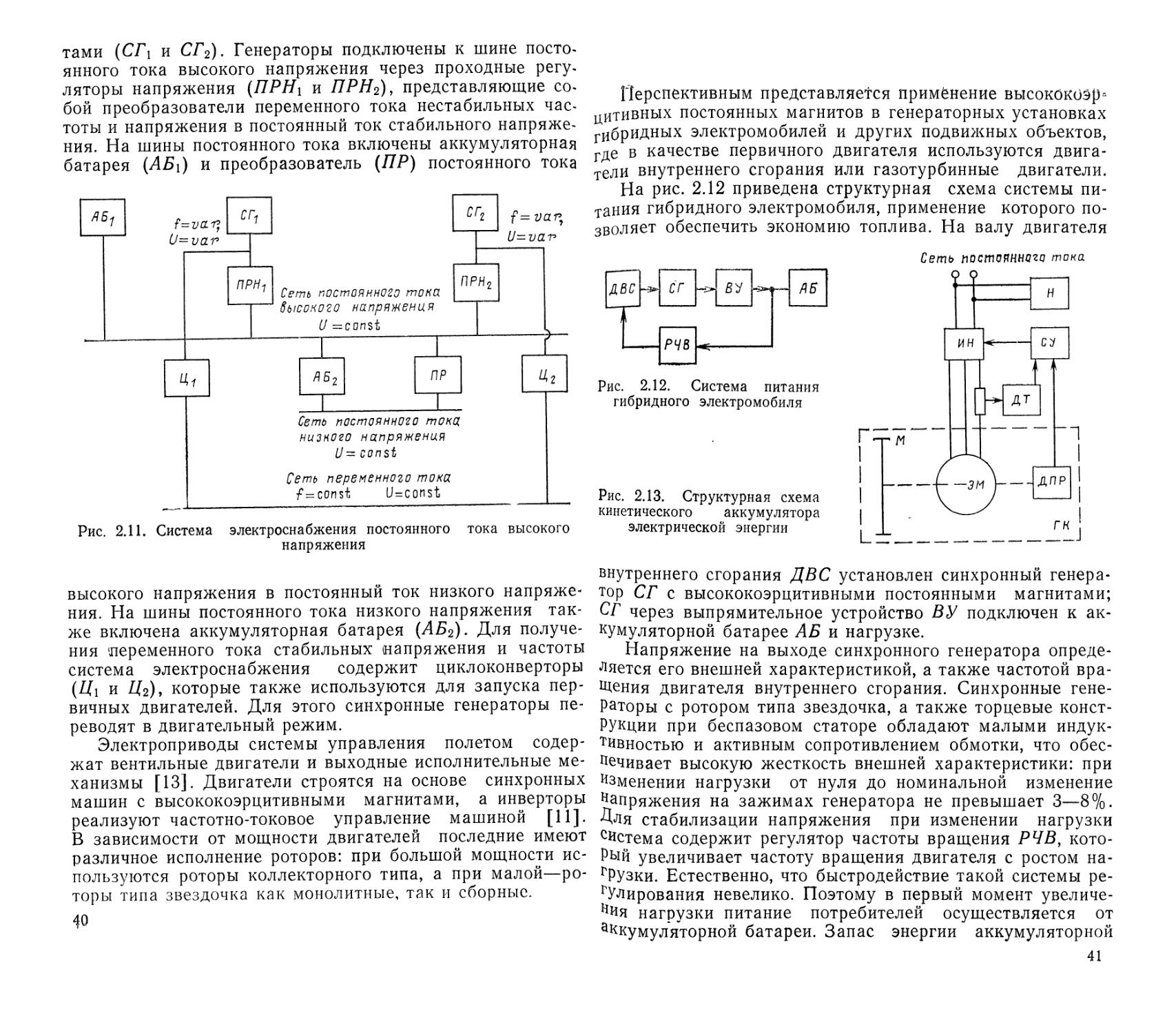
На рис. 2.11 приведена принципиальная структурная схема системы электроснабжения [13]. Система содержит Два (количество генераторов может быть любым) синхронных генератора с высококоэрцитивными постоянными магни-
39
тами (СГ[ и СГ2). Генераторы подключены к шине постоянного тока высокого напряжения через проходные регуляторы напряжения (ПРНХ и ПРН2), представляющие собой преобразователи переменного тока нестабильных частоты и напряжения в постоянный ток стабильного напряжения. На шины постоянного тока включены аккумуляторная батарея (АБ\) и преобразователь (ПР) постоянного тока
Рис. 2.11. Система электроснабжения постоянного тока высокого напряжения
высокого напряжения в постоянный ток низкого напряжения. На шины постоянного тока низкого напряжения также включена аккумуляторная батарея (Л52). Для получения ‘переменного тока стабильных напряжения и частоты система электроснабжения содержит циклоконверторы (Д1 и Цъ), которые также используются для запуска первичных двигателей. Для этого синхронные генераторы переводят в двигательный режим.
Электроприводы системы управления полетом содержат вентильные двигатели и выходные исполнительные механизмы [13]. Двигатели строятся на основе синхронных машин с высококоэрцитивными магнитами, а инверторы реализуют частотно-токовое управление машиной [И]-В зависимости от мощности двигателей последние имеют различное исполнение роторов: при большой мощности используются роторы коллекторного типа, а при малой—роторы типа звездочка как монолитные, так и сборные. 40
Перспективным представляется применение высококоэр-цитивных постоянных магнитов в генераторных установках гибридных электромобилей и других подвижных объектов, где в качестве первичного двигателя используются двигатели внутреннего сгорания или газотурбинные двигатели.
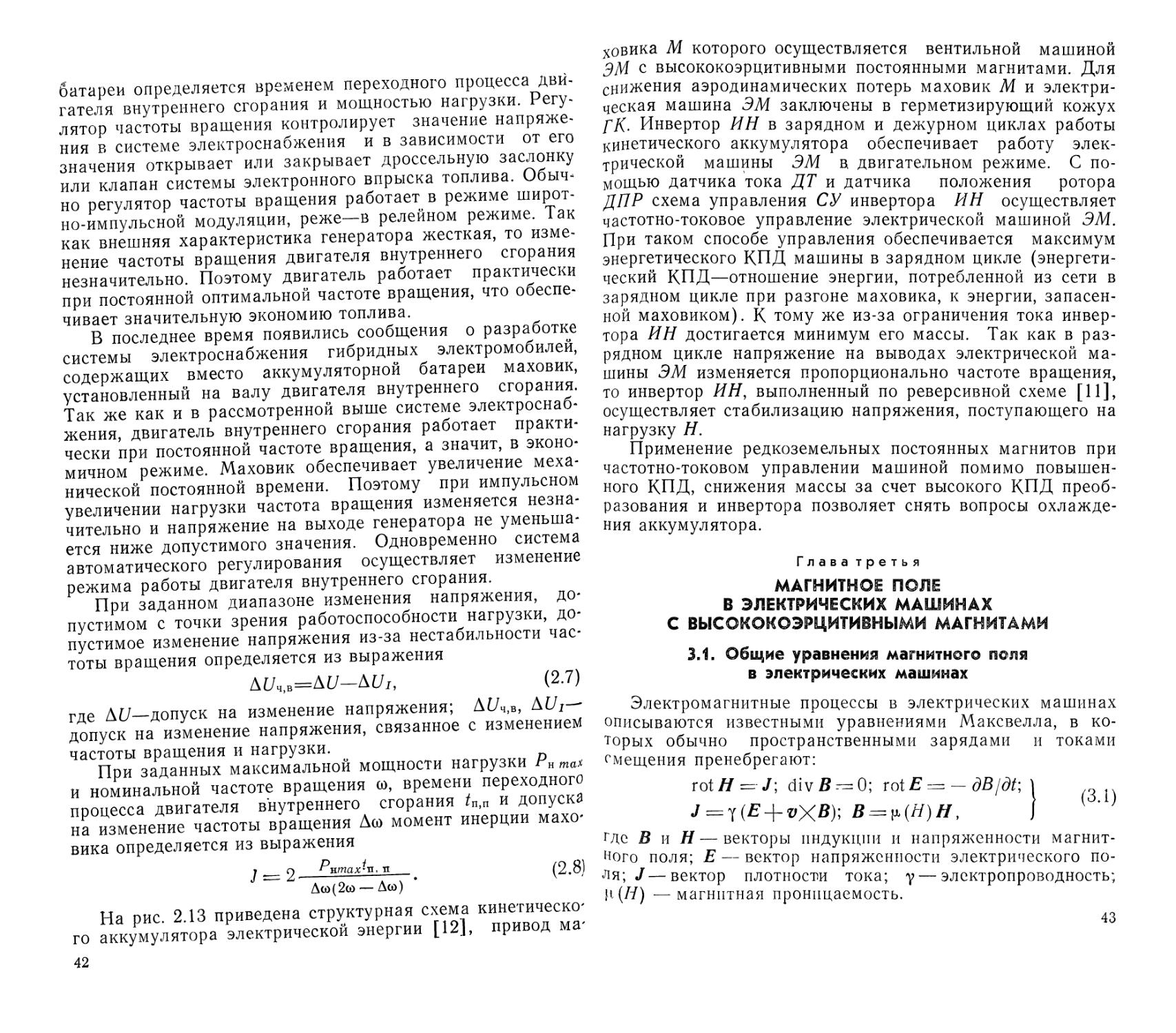
На рис. 2.12 приведена структурная схема системы питания гибридного электромобиля, применение которого позволяет обеспечить экономию топлива. На валу двигателя
Рис. 2.13. Структурная схема кинетического аккумулятора электрической энергии
Рис. 2.12. Система питания гибридного электромобиля
внутреннего сгорания ДВС установлен синхронный генератор СГ с высококоэрцитивными постоянными магнитами; СГ через выпрямительное устройство ВУ подключен к аккумуляторной батарее АБ и нагрузке.
Напряжение на выходе синхронного генератора определяется его внешней характеристикой, а также частотой вращения двигателя внутреннего сгорания. Синхронные генераторы с ротором типа звездочка, а также торцевые конструкции при беспазовом статоре обладают малыми индуктивностью и активным сопротивлением обмотки, что обеспечивает высокую жесткость внешней характеристики: при Изменении нагрузки от нуля до номинальной изменение Напряжения на зажимах генератора не превышает 3—8%. Для стабилизации напряжения при изменении нагрузки система содержит регулятор частоты вращения РЧВ, который увеличивает частоту вращения двигателя с ростом на-гРУзки. Естественно, что быстродействие такой системы регулирования невелико. Поэтому в первый момент увеличения нагрузки питание потребителей осуществляется от аккумуляторной батареи. Запас энергии аккумуляторной
41
батареи определяется временем переходного процесса двигателя внутреннего сгорания и мощностью нагрузки. Регулятор частоты вращения контролирует значение напряжения в системе электроснабжения и в зависимости от его значения открывает или закрывает дроссельную заслонку или клапан системы электронного впрыска топлива. Обычно регулятор частоты вращения работает в режиме широтно-импульсной модуляции, реже—в релейном режиме. Так как внешняя характеристика генератора жесткая, то изменение частоты вращения двигателя внутреннего сгорания незначительно. Поэтому двигатель работает практически при постоянной оптимальной частоте вращения, что обеспечивает значительную экономию топлива.
В последнее время появились сообщения о разработке системы электроснабжения гибридных электромобилей, содержащих вместо аккумуляторной батареи маховик, установленный на валу двигателя внутреннего сгорания. Так же как и в рассмотренной выше системе электроснабжения, двигатель внутреннего сгорания работает практически при постоянной частоте вращения, а значит, в экономичном режиме. Маховик обеспечивает увеличение механической постоянной времени. Поэтому при импульсном увеличении нагрузки частота вращения изменяется незначительно и напряжение на выходе генератора не уменьшается ниже допустимого значения. Одновременно система автоматического регулирования осуществляет изменение режима работы двигателя внутреннего сгорания.
При заданном диапазоне изменения напряжения, допустимом с точки зрения работоспособности нагрузки, допустимое изменение напряжения из-за нестабильности частоты вращения определяется из выражения
ДЯч,в=Д£7—А[Д, (2.7)
где ДС7—допуск на изменение напряжения; А(7Ч)В, AUi— допуск на изменение напряжения, связанное с изменением частоты вращения и нагрузки.
При заданных максимальной мощности нагрузки Рн max и номинальной частоте вращения со, времени переходного процесса двигателя внутреннего сгорания /п,п и допуска на изменение частоты вращения Асо момент инерции махо* вика определяется из выражения
J — 2__Р. (2.8)
Дсо(2со — Дсо)
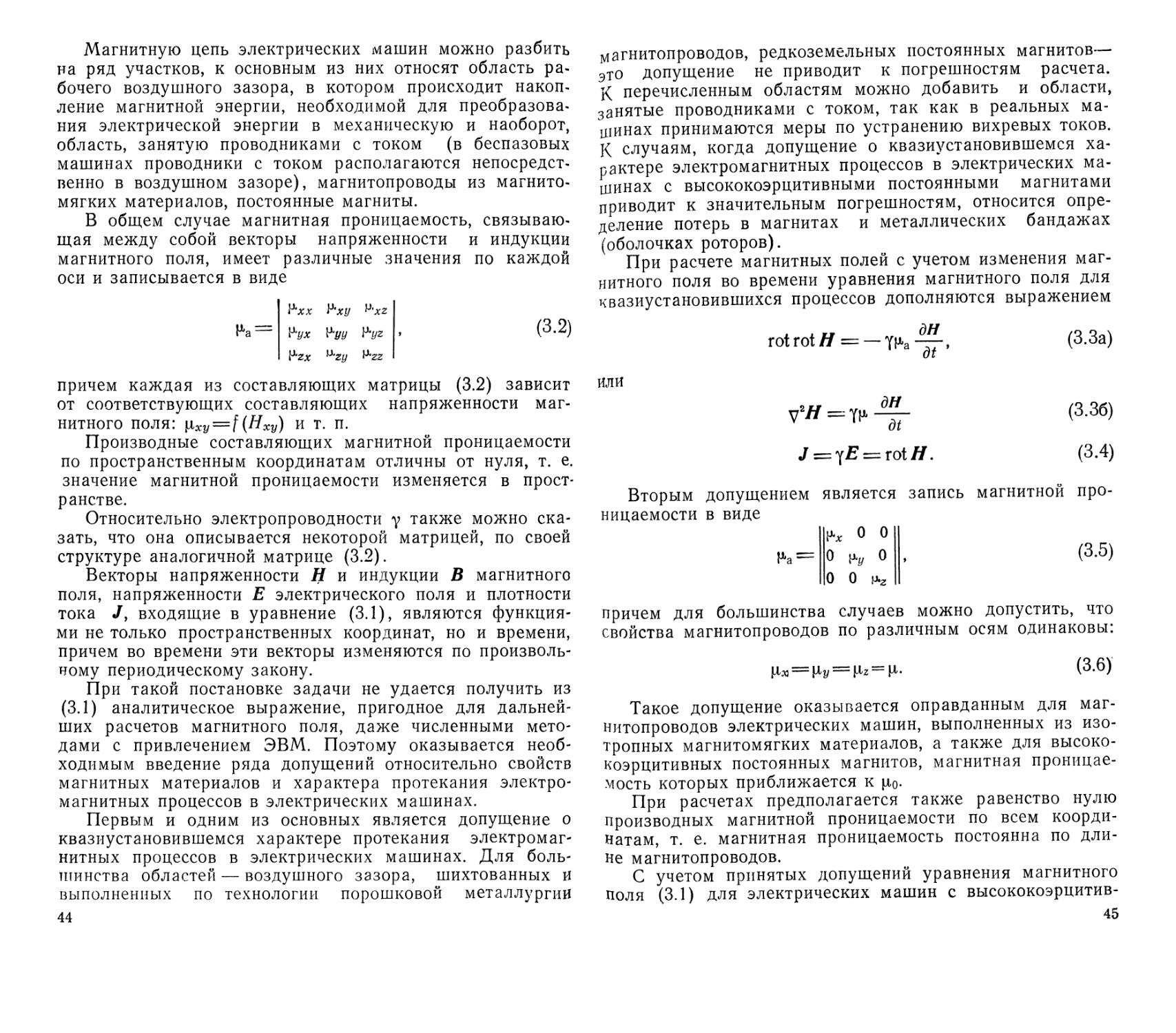
На рис. 2.13 приведена структурная схема кинетическо' го аккумулятора электрической энергии [12], привод ма' 42
ховика М которого осуществляется вентильной машиной с высококоэрцитивными постоянными магнитами. Для снижения аэродинамических потерь маховик М и электрическая машина ЭМ заключены в герметизирующий кожух ГК- Инвертор ИН в зарядном и дежурном циклах работы кинетического аккумулятора обеспечивает работу электрической машины ЭМ в двигательном режиме. С помощью датчика тока ДТ и датчика положения ротора ДПР схема управления СУ инвертора ИН осуществляет частотно-токовое управление электрической машиной ЭМ. При таком способе управления обеспечивается максимум энергетического КПД машины в зарядном цикле (энергетический КПД—отношение энергии, потребленной из сети в зарядном цикле при разгоне маховика, к энергии, запасенной маховиком). К тому же из-за ограничения тока инвертора ИН достигается минимум его массы. Так как в разрядном цикле напряжение на выводах электрической машины ЭМ изменяется пропорционально частоте вращения, то инвертор ИН, выполненный по реверсивной схеме [11], осуществляет стабилизацию напряжения, поступающего на нагрузку Н.
Применение редкоземельных постоянных магнитов при частотно-токовом управлении машиной помимо повышенного КПД, снижения массы за счет высокого КПД преобразования и инвертора позволяет снять вопросы охлаждения аккумулятора.
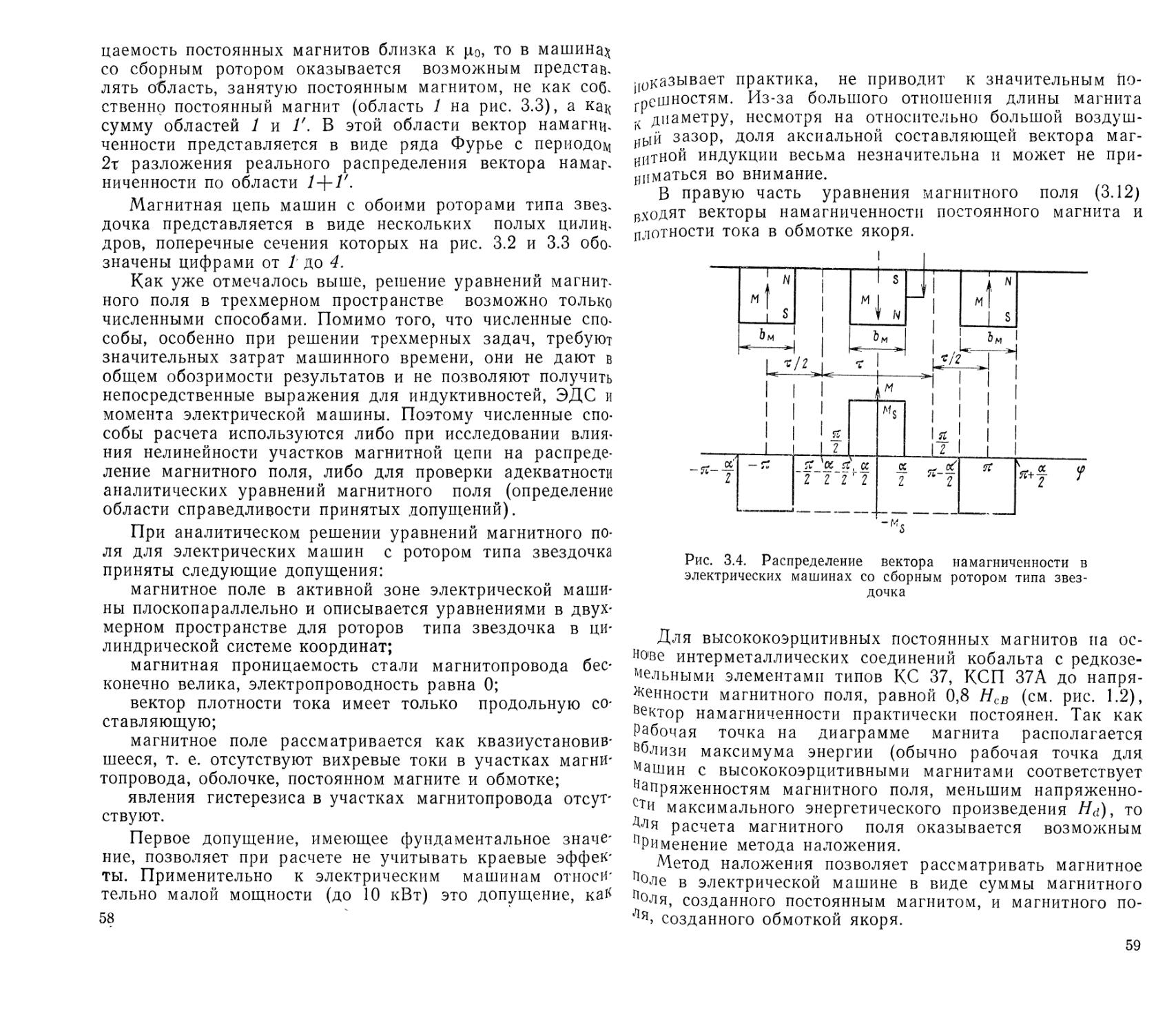
Глава третья МАГНИТНОЕ ПОЛЕ В ЭЛЕКТРИЧЕСКИХ МАШИНАХ С ВЫСОКОКОЭРЦИТИВНЫМИ МАГНИТАМИ
3.1. Общие уравнения магнитного поля в электрических машинах
Электромагнитные процессы в электрических машинах описываются известными уравнениями Максвелла, в которых обычно пространственными зарядами и токами смещения пренебрегают:
rot Я — J; div 5---0; rotE — — dB/dt; 1 j = В = ?ДН)Н, |
где В и Н — векторы индукции и напряженности магнитного поля; Е — вектор напряженности электрического поля; J— вектор плотности тока; у — электропроводность; Ц (Я) —магнитная проницаемость.
43
Магнитную цепь электрических машин можно разбить на ряд участков, к основным из них относят область рабочего воздушного зазора, в котором происходит накопление магнитной энергии, необходимой для преобразования электрической энергии в механическую и наоборот, область, занятую проводниками с током (в беспазовых машинах проводники с током располагаются непосредственно в воздушном зазоре), магнитопроводы из магнитомягких материалов, постоянные магниты.
В общем случае магнитная проницаемость, связывающая между собой векторы напряженности и индукции магнитного поля, имеет различные значения по каждой оси и записывается в виде
Рхх №xtj V'xz
Hr/x \^уу \^yz >
№zx ^zy ^zz
причем каждая из составляющих матрицы (3.2) зависит от соответствующих составляющих напряженности магнитного поля: [ixy — f(Hxy) и т. п.
Производные составляющих магнитной проницаемости по пространственным координатам отличны от нуля, т. е. значение магнитной проницаемости изменяется в пространстве.
Относительно электропроводности у также можно сказать, что она описывается некоторой матрицей, по своей структуре аналогичной матрице (3.2).
Векторы напряженности Н и индукции В магнитного поля, напряженности Е электрического поля и плотности тока J, входящие в уравнение (3.1), являются функциями не только пространственных координат, но и времени, причем во времени эти векторы изменяются по произвольному периодическому закону.
При такой постановке задачи не удается получить из (3.1) аналитическое выражение, пригодное для дальнейших расчетов магнитного поля, даже численными методами с привлечением ЭВМ. Поэтому оказывается необходимым введение ряда допущений относительно свойств магнитных материалов и характера протекания электромагнитных процессов в электрических машинах.
Первым и одним из основных является допущение о квазиустановившемся характере протекания электромагнитных процессов в электрических машинах. Для большинства областей — воздушного зазора, шихтованных и выполненных по технологии порошковой металлургии 44
магнитопроводов, редкоземельных постоянных магнитов— это допущение не приводит к погрешностям расчета. К перечисленным областям можно добавить и области, занятые проводниками с током, так как в реальных машинах принимаются меры по устранению вихревых токов. К случаям, когда допущение о квазиустановившемся характере электромагнитных процессов в электрических машинах с высококоэрцитивными постоянными магнитами приводит к значительным погрешностям, относится определение потерь в магнитах и металлических бандажах (оболочках роторов).
При расчете магнитных полей с учетом изменения магнитного поля во времени уравнения магнитного поля для квазиустановившихся процессов дополняются выражением
(3.2)
, , „ дН
rot rot Я = —
(3.3а)
или
(3.36)
/ = у£ = го1Я. (3.4)
Вторым допущением является запись магнитной ницаемости в виде
О О
Р*а 0 0 >
О 0 р.2
про-
(3.5)
причем для большинства случаев можно допустить, что свойства магнитопроводов по различным осям одинаковы:
= = =
(3.6)
Такое допущение оказывается оправданным для магнитопроводов электрических машин, выполненных из изотропных магнитомягких материалов, а также для высококоэрцитивных постоянных магнитов, магнитная проницаемость которых приближается к ц0-
При расчетах предполагается также равенство нулю производных магнитной проницаемости по всем координатам, т. е. магнитная проницаемость постоянна по длине магнитопроводов.
С учетом принятых допущений уравнения магнитного поля (3.1) для электрических машин с высококоэрцитив-
45
ними магнитами целесообразно рассчитывать с привлечением векторного магнитного потенциала А:
В rot Л. (3.7)
После подстановки (3.7) в (3.1) с учетом (3.6) и с учетом предположения, что
div Л — 0. (3.8)
для областей, не занятых током, уравнения магнитного поля (3.1) запишутся в виде
?2Л = 0, (3.9
а для областей, занятых проводниками с током, — в виде
= (3.10
Отдельно следует рассмотреть особенности расчета постоянных магнитов, для которых связь между векторами индукции и напряженности целесообразно записать через вектор намагниченности:
В = Ио(АГ+Я). (3.11)
Вектор намагниченности М. является, в общем случае, функцией не только напряженности магнитного поля, но и пространственных координат. Составляющие вектора намагниченности по каждой из координат зависят не только от напряженности магнитного поля по соответствующей координате, но и от составляющих напряженности магнитного поля по другим координатам.
При такой постановке задачи поиск решения уравнения (3.1) практически не представляется возможным ввиду чрезмерной сложности. Поэтому при дальнейшем анализе магнитных систем с постоянными магнитами приняты следующие допущения:
намагниченность постоянного магнита отличается от нуля только по главной оси намагничивания;
намагниченность зависит только от напряженности магнитного поля по главной оси намагничивания;
применительно к высококоэрцитивпым постоянным магнитам намагниченность принимается постоянной и равной Ms = Brl\iQ в пределах изменения напряженности магнитного поля от нуля до значения, равного коэрцитивной силе по индукции;
46
магнитная проницаемость постоянного магнита по всем координатам одинакова и равна магнитной проницаемости по главной оси намагничивания (для высококоэрцитивных постоянных магнитов проницаемость при изменении Н от О до НсВ принимается равной ц0) •
С учетом принятых допущений после подстановки (3.11) в (3.1) можно получить
— rot rot Л = J rot Ж (//), (3-12)
пли с учетом (3.<8)
-L 72л = - J - rot М (Н). (3.13)
Уравнения (3.9), (3.10) и (3.13) являются дифферен-циальной формой записи уравнений магнитного поля, и их непосредственное аналитическое решение возможно только для простых конфигураций активной зоны электрической машины.
В трехмерной анизотропной среде применение выражения (3.8) не позволяет получить упрощений. При рассмотрении двухмерного пространства уравнения магнитного поля для анизотропной среды оказываются достаточно простыми и для большинства случаев поддаются непосредственному аналитическому решению. Для декартовой системы координат уравнение магнитного поля для анизотропной среды имеет вид
1 , 1 дМг______/ /3 141
Ру дх2 “Г ду2 2 ‘ ду дх \ * )
Естественно, что аналогичное уравнение можно записать и для цилиндрической системы координат.
Использование координат 0, г наиболее удобно при анализе радиальных электрических машин; применение этих координат предполагает, что магнитное поле не изменяется по оси машины (по оси г), а векторный магнитный потенциал имеет только аксиальную составляющую:
Н'б г дг \ дг) г2 рг дб2 2 г L dr J
(3.15)
В торцевых электрических машинах удобнее оказывается использование координат 0, z. При этом предполагается, что по радиусу машины магнитное поле не изменя
47
ется, а вектор плотности тока и векторный магнитный потенциал имеют только радиальную составляющую:
J__1 д2Аг । 1 <)2АГ . . <W9 1 дМг ,.у
р.г г2 о62 1ле dz2 r'dz г дв '°' '
3.2. Задачи и методы расчета магнитных полей
3.2.1. Анализ задач магнитного поля. Прежде чем перейти к анализу методов расчета уравнений магнитного поля, кратко рассмотрим те задачи, которые стоят перед разработчиками электрических машин с высококоэрцитивными постоянными магнитами. К наиболее часто встречающимся задачам расчета магнитного поля следует отнести:
определение распределения вектора намагниченности по объему постоянного магнита при намагничивании;
определение магнитного поля, создаваемого намагниченным постоянным магнитом;
определение магнитного поля, создаваемого обмоткой якоря, — поле реакции якоря.
Расчет распределения вектора намагниченности по объему постоянных магнитов является одной из наиболее важных задач. Свойства постоянных магнитов определяются его так называемой предысторией, т. е. каким образом намагничивается и как промагничен постоянный магнит. Естественно, что знание распределения магнитного поля, создаваемого намагничивающей установкой в объеме постоянного тока, позволяет уточнить требования и к самой намагничивающей установке, а также учитывать распределение вектора намагниченности по объему магнита при расчете создаваемого им поля.
Характер распределения магнитного поля по объему активной зоны машины определяет ее массоэнергетические показатели. Поэтому расчет магнитного поля, создаваемого постоянным магнитом и обмоткой якоря, является основой математической модели, описывающей электромагнитные процессы в электрических машинах. Ниже основное внимание будет уделено расчету именно этих полей.
Такие особенности электрических машин с редкоземельными постоянными магнитами, как линейность кривой размагничивания по индукции и слабое насыщение стальных участков магнитной цепи, позволяют разделить магнитные поля, создаваемые постоянным магнитом и обмоткой якоря, и рассматривать их отдельно.
48
Слабое насыщение магнитопровода электрических Мй-ц1ин с беспазовым статором обусловлено относительно малым значением индукции в воздушном зазоре — на поверхности магнитопровода индукция составляет обычно О 2—0,4 Тл. Поэтому высота магнитопровода ярма определяется в основном механической прочностью и индукция в кольцевом магнитопроводе не превышает 1,2 Тл (обычно 0,6—0,8 Тл).
Магнитное поле в воздушном зазоре машины, создаваемое постоянным магнитом, может рассчитываться исходя из двух предпосылок: задано распределение вектора магнитной индукции по расточке постоянного магнита, задано распределение вектора намагниченности по объему постоянного магнита. Естественно, что наиболее общим является задание распределения вектора намагниченности по объему магнита, так как это позволяет учесть предысторию магнита — учесть неравномерность намагниченности по объему магнита. При этом собственно распределение вектора намагниченности по объему магнита определяется исходя из расчета магнитного поля, создаваемого Намагничивающей установкой. Естественно, что при такой постановке задачи функция, описывающая распределение вектора намагниченности по объему магнита, имеет весьма сложный характер. Поэтому на практике обычно предполагается равномерное распределение вектора намагниченности по объему, причем, как уже отмечалось выше, вектор намагниченности содержит только одну составляющую, направленную по главной оси намагничивания. Это Допущение исключает учет влияния предыстории на магнитное поле, создаваемое магнитом.
Задание распределения вектора намагниченности обеспечивает более высокую точность расчета магнитного поля по сравнению со способом, когда задается распределение вектора магнитной индукции по поверхности (расточки) магнита.
Это связано с тем, что при заданной намагниченности реальные значения векторов магнитной индукции и напряженности определяются исходя из расчета магнитного поля в магнитной цепи машины на основе дифференциального уравнения (3.12). Поэтому каждой пространственной точке в области постоянного магнита соответствуют свои В. и Н. В то же время, если задается распределение вектора индукции по расточке, постоянный магнит описывается некоторой усредненной зависимостью В(Н). При этом в нейтральном сечении магнита значения В и Н 4—278 49
рассчитываются исходя из интегрального представления магнитного поля в магнитопроводе машины, а значения В на поверхности магнита определяются путем вычитания поля рассеяния магнита.
Обычно задается трапецеидальное, прямоугольное или синусоидальное распределение радиальной составляющей вектора магнитной индукции Вт. В наиболее общем виде это распределение записывается в виде
Br — J] ВГп cos zz0, (3.17)
п=1
где Вт — п-я гармоника разложения кривой распределения радиальной (нормальной) составляющей вектора магнитной индукции по расточке; 0 — угол по расточке, отсчитываемый от середины полюса; п — номер гармоники.
Амплитудное значение вектора индукции (до разложения в ряд Фурье) определяется из расчета магнитной цепи электрической машины интегральным способом; МДС, создаваемая постоянным магнитом, приравнивается сумме МДС реакции якоря и падения МДС в воздушном зазоре и магнитной цепи. Связывая МДС, создаваемую постоянным магнитом, с остаточной индукцией и коэрцитивной силой, получаем уравнения для определения индукции на поверхности магнита.
Для радиальных машин с ротором типа звездочка максимальное значение индукции на поверхности магнита
У 2 feo6 А sin ф
1
jg ___________Вг
М"”1+А _1____вГ
+ г Р-0 Нв,
где р — число пар полюсов: для торцевой конструкции
I 1 ^рб А
п — р 2hM Вг
А С В?
где А —линейная нагрузка; koQ — обмоточный
циент обмотки якоря; ф — сдвиг фаз между ЭДС XX и током; 6*=26/£>м—относительная длина воздушного зазора (6 — длина зазора под оболочку магнита, обмотку якоря и собственно зазор между вращающимися и непод-50
(3.18)
(3.19)
коэффи-
рижными частями; —диаметр магнита); LM* = LM/DM— оТносительная длина средней силовой линии на два полюса; kz — коэффициент, учитывающий уменьшение нормальной составляющей индукции по зазору; йм — высота одно-г0 магнита в торцевых машинах; Ьм — ширина магнита;
— остаточная индукция; НсВ — коэрцитивная сила по индукции; kF — коэффициент, учитывающий насыщение магнитной цепи:
^=(Гб + ^)/^; (3.20)
здесь Fe, Fz— падение /МДС в воздушном зазоре и ярме статора.
Для радиальных электрических машин kz определяется так:
kz = ±- (3.21а)
р8* (1+5J3P+1
а для торцевых
(3-21б> °* — Л
Распределение вектора магнитной индукции в воздушном зазоре, исходя из (3.18) и (3.19), целесообразно определять при предварительных инженерных расчетах.
Следует также заметить, что в настоящее время в монолитных цилиндрических магнитах [7] контроль магнитных характеристик осуществляется обычно путем замера индукции на поверхности в разомкнутой цепи — при отсутствии ярма статора. В этом случае контроль значений Вг и Нсв и определение магнитного поля в реальной конструкции машины возможны только путем расчета магнитного поля при заданном распределении индукции по поверхности магнита.
Для расчета магнитного поля могут быть использованы графоаналитические, численные и аналитические методы.
Графоаналитический метод решения уравнений магнитного поля нашел широкое применение на ранних этапах развития электромеханики. Для расчета магнитного поля строится картина распределения вектора магнитной Индукции в виде силовых трубок. Затем каждая силовая трубка описывается аналитическим уравнением.
Достоинством графоаналитического метода является Простота расчета магнитного поля при сложных конфигурациях границ. Однако этот метод практически не позволяет учитывать влияние насыщения магнитной цепи на Характер распределения магнитного поля и не обеспечи-. Пает достаточной точности. Низкая точность обусловлена 4* 51
как априорным построением картины магнитного поля так и заменой реальных дифференциальных уравнен^ Максвелла эквивалентными интегральными уравнениями предполагающими постоянство значения вектора магнит ной индукции в силовой трубке. Графоаналитические ме. тоды иногда используются при расчете трехмерных магнит, ных полей.
В последнее время широко используются численные методы определения векторов индукции и напряженности Достоинствами численных методов являются возможность расчета трехмерных магнитных полей, возможность учета насыщения магнитной цепи и зависимости вектора намагниченности постоянного магнита от напряженности магнитного поля, высокая точность. Численные методы целесообразно использовать на стадии поверочного расчета.
На этапе проектного расчета (синтеза конструктивных параметров) целесообразнее использовать аналитические методы расчета, которые позволяют получать аналитические выражения для вектора магнитной индукции и индуктивностей обмоток.
3.2.2. Метод разделения переменных. Наиболее распространенным аналитическим методом решения уравнений (3.10), (3.13) для определения векторного магнитного потенциала является использование метода разделения переменных с привлечением гармонического анализа. Векторный магнитный потенциал, а также векторы плотности тока и намагниченности представляются в виде произведения двух функций, каждая из которых зависит только от одной координаты. Применительно к прямоугольной системе координат можно записать:
Л(х, у) = Лх(х) А2(у)\ 'J
/(х, !/) =/1(х) J2(z/); f (3.22)
М (х, у) = (х) М2 (у), '
где Л1(х), Л(х), 7И1(х), А2(у), J2(y), М%(у) — функции, зависящие от одной из координат.
Так как магнитное поле в электрических машинах имеет периодический по углу характер, то наиболее удобно представить функции, входящие в (3.22), в виде ряда Фурье: (
00
л (х, у) — рп (у) «г п ~ х + Ап (у) sin п х1,
л л , л (3.23)
где До, Ап , Дп"— коэффициенты разложения функции векторного магнитного потенциала в ряд Фурье, 2т — период изменения магнитного поля; т — полюсное деление.
52
Аналогичные уравнения записываются и для векторов плотности
и напряженности магнитного поля:
00
j (х, = [// (y)cosn — x + J'^ (y)sinn — xl; (3.24)
2 ш L T T J
n—\
(и) VI К , ,
Л4(х, y) = - - -+7. Ч/ (У) cosп—%+ Mn(y)sinn—х ,
/2—1
(3.25)
После подстановки выражений (3.23) —(3.25) в (3.10), дифференцирования по х и приравнивания коэффициентов правых и левых частей уравнений при соответствующих гармониках получим 2п-1-1 независимое уравнение для расчета постоянной составляющей и п—х гармоник синусной и косинусной составляющих векторного магнитного потенциала *:
д2А ' (и}
< (у) = -(ЛоД (у) -у-0Мп (у); (3.26)
оу
d2A"(tn
---^-А,;(у) = -^1”(у)~^Мп(уУ (3.27) ду*
д2А
-TV = -НЛО). (3.28)
Решение (3.26) — (3.28) ищется методом собственных функций, а значения составляющих вектора индукции определяются так:
ду у дх
(3.29)
При расчете магнитного поля распределения векторов плотности тока и намагниченности бывают заданы.
3.2.3. Метод конечных элементов. Расчет магнитных полей в случае сложных конфигураций области, а также расчет поля в трехмерном пространстве эффективнее вести численными методами на ЭВМ. К числу наиболее широко распространенных численных способов следует отнести метод конечных элементов [18].
Область, в которой производится расчет магнитного поля, разбивается на лг-е число треугольных или прямоугольных элементов, и расчет векторного магнитного потенциала (3.14) — (3.16) ведется только в узловых точках, соответствующих вершинам. При разбивке области
' Здесь полагается, что магнитная проницаемость равна Цо, а вектор намагниченности содержит только составляющую Л4У.
53
Рис. при
3.1. Треугольный элемент расчете магнитного поля
на элементы важными оказываю^ ся выбор числа элементов и опр^ч деление наиболее важных точек, * которых необходимо вести расч^ векторного магнитного потенциала При выборе числа элементов еле. дует помнить, что помимо точное^ их число определяет также и вре мя, затрачиваемое ЭВМ на расчет.
Уравнение магнитного поля (3.14) и граничные условия одно, значно определяют задачу. Для численного решения уравнения магнитного
димым, чтобы некоторый функцио-уравнения (3.12) таким функционалом
поля оказывается необхо-
был
нал является
минимизирован. Для выражение
— (J + rot Af) А } dx dy dz\
J и M являются заданными, так же как и заданным оказы-
векторы
вается вектор rotM
Для двухмерных задач функционал, который должен быть минимизирован, для областей, занятых проводниками с током, имеет вид
W =
dxdy. (3.30)
Для областей, занятых постоянным магнитом, функционал принимает вид
а для чению
dx dy,
областей, занятых магнитомягкой сталью с' различными по зна-магнитными проницаемостями по осям;
Г= 0,5
dx dy.
(3.30а)
В заданы для каждого элемента.
На рис. 3.1 показан треугольный элемент с вершинами (узлами) i, j, k. При заданных значениях в узловых точках функция внутри и,-
уравнениях (3.30) — (3.30a) значения J, дМх/ду, дМу/дх, и
векторного магнитного потенциала элемента определяется выражением
Ni, Nj, Mk — весовые функции вершин; A Aj, A k — векторный маП{Игпый потенциал в вершинах элемента;
лэ =
At
Ai
Ак
Для весовой функции первого порядка, когда значения векторно-г0 магнитного потенциала определяются только в узловых точках (вершинах) элемента, сами весовые функции имеют вид
= (Цг+^гХ-]-Сг(/)/(2Д);
Nj = (aj-^-bjxAf-Cjy) I (2А);
Nk= (ah + bkx-\-cky)/ (2lA);
Cli=X эУ к ХкУ j', aj = xkyi—Xiyk-, CLk — Xiy у X j у i\
Ьг=У~Уь;
Ьк=Уг—уГ, Ci~ Xk Xj J
Cj-—Xi Xk,
Ck~ >
1
2А — det 1 Xj
1 %k
У1
У]
Ук
потенциала однозначно опре-
__________________________ ВО всех элементах, функционал W может быть минимизирован по отношению к Аг, Aj, Ак и для (3.30) можно записать
Так как значения векторного магнитного Деляют векторный магнитный потенциал
|Wfc|X
wJJ V 1 k'^
Ai
Ак
2Д"УJ7 + Ь‘Х + Cl^ dX dy'
гДе IF э — функционал элемента.
Аналогичные уравнения можно получить и для производных функционала по Aj и Ah. Учитывая, что интеграл по площади треугольного 55
54
получим
Г' г3 dxdy = А,
V с
(dW3 ]
1ат)=|А|ХМэ} + {Л.
(3.31)
где
u bibl l^l = 4T b^bi bibk
bjt>i b!bi bibk
bkb[
bkbj “b ciCj b^k
С jci CiCj Cjck
V/ ckc j ckck
При постоянном значении J внутри элемента
{Я} = _^
1 ' 3
1
1
1
Окончательное уравнение минимизации получается путем объединения уравнения (3.31) для всех элементов области:
Ш1‘ЦлГ("0, ( }
Уравнения, аналогичные (3.31) и (3.32), можно получить и для других типов функционалов, при этом слагаемое имеет вид
цэ} =
дМу дМх 1
дх ду 1
------~~ А
3 1
Для функционала (3.30) окончательное решение упрощается, так как {F3} = 0, а значение матрицы |/г| для изотропной среды определяется из выражения
^1 =
Р'х
4Д
Ь[Ь[ bjbj bibk
bjbi bibi
b^i, bkbj
bjbk bkbk
I Iх//
‘ 4A
CiCi CiCj cick
cjci ckci
CjCj CkCj
CiCk ckck
(3.33)
3.3. Магнитное поле в радиальных электрических машинах с ротором типа звездочка
Рассмотрим расчет магнитного поля в радиальных электрических машинах с ротором типа звездочка. В автономных системах электроснабжения и электроприводах в основном получили применение электрические машины с ротором типа звездочка без полюсных башмаков. Оболочка (бандаж) ротора выполняется из немагнитного ма-56
териала. Магнитная проницаемость редкоземельных по-сТОянных магнитов близка к цо- Поэтому при расчете маг-ицтного поля не играет роли, собран ли ротор из отдель-нь1х призматических постоянных магнитов или изготовлен 1{3 монолитного цилиндрического магнита. Естественно, это значительно сокращает круг рассматриваемых задач.
Рис. 3.2. Эскиз магнитной цепи машины с цилиндрическим постоянным магнитом типа звездочка:
<1 — радиус вала (внутренний радиус постоянного магнита или ротора); г2 — внешний радиус постоянного магнита (ротора); г3 — внутренний радиус магнитопровода; Н$ [ и Яд | тангенциальные составляющие вектора напряженности магнитного поля на внешней поверхности вала и внутренней поверхности магнитопровода
Рис. 3.3. Эскиз магнитной цепи машины со сборным ротором типа звездочка:
И — радиус вала; г2 — радиус ротора; г3 — внутренний радиус магнитопровода: \ — ширина призматического постоянного магнита; hM — высота призматического постоянного магнита; Мг — радиальная составляющая вектора намагниченности постоянного магнита; Яд Г1 и Яд |f—г3 --тангенциальные составляющие вектора магнитной индукции на внешней поверхности вала и внутренней поверхности магнитопровода
Эскиз магнитной цепи электрической машины с цилиндрическими постоянными магнитами приведен на рис. 3.2. Магнитная цепь машины состоит из области /, занятой Постоянным магнитом, области 2, занятой обмоткой с током, вала 3 и магнитопровода 4.
Эскиз магнитной цепи электрической машины со сборным ротором приведен на рис. 3.3. Магнитная цепь таких Машин также состоит из области 1, занятой постоянным Магнитом, области 2, занятой обмоткой якоря, вала <3, Магнитопровода 4 и области Г между призматическими постоянными магнитами. Так как магнитная пронп-
цаемость постоянных магнитов близка к |а0, то в машинах со сборным ротором оказывается возможным представ, лять область, занятую постоянным магнитом, не как собственно постоянный магнит (область 1 на рис. 3.3), а ка^ сумму областей 1 и 1'. В этой области вектор намагниченности представляется в виде ряда Фурье с периодом 2т разложения реального распределения вектора намаг-ниченности по области
Магнитная цепь машин с обоими роторами типа звездочка представляется в виде нескольких полых цилиндров, поперечные сечения которых на рис. 3.2 и 3.3 обозначены цифрами от 1 до 4.
Как уже отмечалось выше, решение уравнений магнитного поля в трехмерном пространстве возможно только численными способами. Помимо того, что численные способы, особенно при решении трехмерных задач, требуют значительных затрат машинного времени, они не дают в общем обозримости результатов и не позволяют получить непосредственные выражения для индуктивностей, ЭДС и момента электрической машины. Поэтому численные способы расчета используются либо при исследовании влияния нелинейности участков магнитной цепи на распределение магнитного поля, либо для проверки адекватности аналитических уравнений магнитного поля (определение области справедливости принятых допущений).
При аналитическом решении уравнений магнитного поля для электрических машин с ротором типа звездочка приняты следующие допущения:
магнитное поле в активной зоне электрической машины плоскопараллельно и описывается уравнениями в двухмерном пространстве для роторов типа звездочка в цилиндрической системе координат;
магнитная проницаемость стали магнитопровода бесконечно велика, электропроводность равна 0;
вектор плотности тока имеет только продольную составляющую;
магнитное поле рассматривается как квазиустановив-шееся, т. е. отсутствуют вихревые токи в участках магнитопровода, оболочке, постоянном магните и обмотке;
явления гистерезиса в участках магнитопровода отсут' ствуют.
Первое допущение, имеющее фундаментальное значение, позволяет при расчете не учитывать краевые эффекты. Применительно к электрическим машинам относИ' тельно малой мощности (до 10 кВт) это допущение, каК 58
указывает практика, не приводит к значительным погрешностям. Из-за большого отношения длины магнита диаметру, несмотря на относительно большой воздуш-0Ый зазор, доля аксиальной составляющей вектора магнитной индукции весьма незначительна и может не приниматься во внимание.
В правую часть уравнения магнитного поля (3.12) входят векторы намагниченности постоянного магнита и плотности тока в обмотке якоря.
Рис. 3.4. Распределение вектора намагниченности в электрических машинах со сборным ротором типа звездочка
Для высококоэрцитивных постоянных магнитов па основе интерметаллических соединений кобальта с редкоземельными элементами типов КС 37, КСП 37А до напряженности магнитного поля, равной 0,8 НсВ (см. рис. 1.2), Вектор намагниченности практически постоянен. Так как Рабочая точка на диаграмме магнита располагается вблизи максимума энергии (обычно рабочая точка для Машин с высококоэрцитивными магнитами соответствует Напряженностям магнитного поля, меньшим напряженности максимального энергетического произведения ЯД, то расчета магнитного поля оказывается возможным Применение метода наложения.
Метод наложения позволяет рассматривать магнитное Н°ле в электрической машине в виде суммы магнитного Ноля, созданного постоянным магнитом, и магнитного по-‘Ия, созданного обмоткой якоря.
59
Согласно тфийятому в § 3.1 допущению вектор наМак ниченности отличен от нуля только по главной оси намаг ничивания. Применительно к четырехполюсным цилиндра, ческим монолитным постоянным магнитам практически не представляется возможным задать распределение вектора намагниченности по объему магнита, что вызвано слож-ной конфигурацией распределения вектора намагниченно. сти. Поэтому при расчете магнитного поля, созданного постоянным магнитом в электрических машинах с цилиндрическим монолитным ротором, приходится задаваться значением вектора магнитной индукции на поверхности магнита (см. п. 3.2.1).
В электрических машинах со сборным ротором типа звездочка вектор намагниченности параллелен боковым граням призматических постоянных магнитов. На рис. 3.4 представлены развертка ротора и распределение вектора намагниченности по углу:
М, при I —
I Я — pbat^r < <Р < я;
м =1 0 ( — п+рЬы/2г<?<—р'ок/2г;
( I Pbul^r < ? < л — pbK/2r,
( —Ms при — pb,,</2r < <? < рЬ^!2г,
(3.34)
где Ьм — ширина постоянного магнита; г — текущее значение радиуса. Раскладывая выражение (3.34) в ряд Фурье, получаем
00
Л4 = sin kp~^~ cos/г 9, (3.35)
fe=i
где 0 — текущее значение угла по расточке; k — номер гармоники вектора намагниченности; п — число периодов вектора намагниченности или других векторов по расточке: n = kp.
Магнитодвижущая сила m-фазной обмотки описывается выражением
00
F = 2 Fkmax cos (“Z — fea), k=l
(3.36;
где co — круговая частота изменения магнитного поля; a — текущее значение угла по расточке; Fhmax — амплитуда &-й гармоники МДС
8 КТ 1 Лртф&обй
Fk4iax= k 2р ’
здесь k — номер гармоники МДС; т-—число фаз обмотки; /ф — дей' ствующее значение тока в фазе; — число витков в фазе; kodk^ обмоточный коэффициент для £-й гармоники.
60
Амплитуда k-n гармоники плотности тока определяется уравнением 4КТ «Г [kn ' АлАбб 1
Jk = я k- sin 2т 2р ог2 ’
иди _
8К2 тг. I$wbko6k 1
LA = —— ^isin ~2^ 2р ’
где —диаметр постоянного магнита; 6 — длина воздушного зазора; Г2 — радиус постоянного магнита (см. рис. 3.2).
3.3.1. Общее решение уравнений магнитного поля для радиальных электрических машин с ротором типа звездочка. Аналитическое решение уравнений магнитного поля (3.1) применительно к радиальным машинам с ротором типа звездочка целесообразно искать с привлечением векторного магнитного потенциала. С учетом рассмотренных выше (см. § 3.1) допущений о характере распределения вектора намагниченности по объему постоянного магнита, а также с учетом изотропности материала магнита и магнитопровода уравнения (3.1) преобразуются к виду (3.13). К рассмотренным в § 3.1 допущениям при аналитическом решении уравнения (3.13) добавляется ряд дополнительных допущений:
магнитное поле плоскопараллельно, и решается задача для двухмерного магнитного поля;
магнитная проницаемость стали участков магнитной цепи бесконечно велика и, следовательно, тангенциальная составляющая напряженности магнитного поля на поверхности магнитопровода (см. рис. 3.2 и 3.3) и вала из магнитомягкой стали равна нулю:
М=п = °: //е|г=гЛ0; (3.37)
вектор плотности тока и векторный магнитный потенциал содержат только аксиальную составляющую. Задано распределение плотности по объему пазовой области;
задано распределение радиальной составляющей вектора намагниченности по объему постоянного магнита (тангенциальная составляющая вектора намагниченности равна нулю).
С учетом сказанного уравнение (3.13) для областей, занятых проводниками с током, может быть переписано в виде
| а ! мг(«. И > , 1 м.(«, г)
<э.зв,
Для областей воздушного зазора, не занятых проводниками с то-к°м, в уравнении (3.38) правая часть равна нулю.
Для областей, занятых высококоэрцитивными постоянными магни-Тами, уравнение (3.13) имеет вид
LJL( дА*(в> г)\ 1 г)_н<>
г дг \ дг /г2 дв2 г I <50
д
61
Для расчета удобным оказывается объединение уравнении (З.Ц и (3.39). В этом случае уравнение имеет вид (3.13), в котором
Представим векторный магнитный потенциал, векторы плотное-^ тока, намагниченности постоянного магнита, индукции и напряженно, сти магнитного поля в виде рядов Фурье [19—21] с периодом, рав. ным полюсному делению1
00
^2 (9, г) = (г) COS/20 + А'п' (г) sin /20]; (3.40)
п=1
оо
4 (8, Г) = [Д (О cos718 + Д' (г) sin 718];
(3.41)
оо
^r(9>^) = 2 l^m(r) cos/?0 + M"n (r) sinnO]; (3.42) n=l
oo
jWe(^'') = 3 ['M0n('')cosn0+Ale«(r)sin/j9l, (3-43) n=l
где JQ(r), Jn"(r)—постоянная составляющая и k-e гармоники
косинусной и синусной составляющих вектора плотности тока; Л0(г), Л'п(/*), Л"п(г)—постоянная составляющая и k-e гармоники косинусной и синусной составляющих векторного магнитного потенциала:
Мгп"(<г) —k-e гармоники косинусной и синусной составляющих вектора намагниченности по радиусу (радиальная составляющая); Af0n'(r), MQn(r)—k-Q гармоники косинусной и синусной составляющих вектора намагниченности по углу (тангенциальная составляющая). Индексу п соответствует ^-гармоника соответствующего вектора (3.36).
Здесь следует отметить, что постоянной составляющей вектора намагниченности не существует и этим объясняется соответствующая форма записи уравнений (3.42) и (3.43).
Подставляя (3.40) — (3.43) в (3.38) и (3.39) и приравнивая коэф* фициенты при постоянной, косинусной и синусной составляющих соответствующих гармоник правой и левой частей полученных выражений» получаем 2£-]-1 независимое уравнение. Для k-x гармоник косинусной и синусной составляющих и постоянной составляющей уравнения имею'1’ вид
j__a_ г дг
dAnf(r) \ / п \2 л Г , п t,
---А” = - 'Хо рДИ + — мгп(г'> +
(3.44)
(3.45)
д-^Г = - н/о (г). (3.46)
dr2 г dr
Решение записанных неоднородных дифференциальных уравнений в частных производных целесообразно искать методом вариации переменных при условии, что значения составляющих векторов плотности тока и намагниченности постоянного магнита, а также их производные По соответствующим координатам известны.
Решение (3.44) ищется в виде
я/ (Г) = Knrn + Апг-«;
d-A'^- = Knrrn + Knnrn^ + Ln’r~n - Ln7ir-«-i, dr
где Кп и Ln — постоянные коэффициенты.
Полагая Kn'rnJrLn'r~n = ®, имеем
+ КпП (П - 1) Г1’-* - Ln'nr-^ + dr2
+ n(n + l)Lnr^-2.
Подставляя полученные выражения для второй производной косинусной составляющей векторного магнитного потенциала в (3.44) (аналогичные уравнения могут быть получены и для синусной составляющей векторного магнитного потенциала), получаем систему уравнений
f п ,,
Кп'пгп~1 - Ln'tir~~n~~1 = -н,11гп (г) + — Мгп (г) +
(3.48)
После интегрирования полученного при решении системы уравнений (3.48) выражения для коэффициентов Кп и Ln и подстановки результатов в (3.47) получим уравнение для косинусной составляющей векторного магнитного потенциала
А'п(г) - Кпг“ + Lnr~~n + [?п'(г) + ф\.(г)],
63
62
где
?n'(r)=r'
r«+ipn'(r) + -^-/w;;(r)+ r-«+i Л/(0 +-7 С (ни-
dM'f)n (И x 1
dr 1 r
dMf)n<r) I 1 dr r
м’еп (г) dr;
dr.
Выражение для синусной составляющей векторного магнитного по. тенциала аналогично:
A^(r) = Pnrn+Nnr-" + ^[<f'n'(r) + ф”(г)]; (3.49)
,, п , '•"+1 z« (О - — мгп(г)1
М'в'„(г) dr;
(3.50)
’ п ,, (r) 1 //
r~" + ' ^п(г)- — Мгп(г)+—-----------+— -W0„(r)j dr.
(3.51)
дМ'вп(г) , 1 dr
дМ'в'п (г) dr
Для постоянной составляющей векторного магнитного потенциала решение (3.46) имеет вид
До(^)”Со In (r)“h4Mr) ] j
Фо(О = j rlnr/o (Ч dr;
Фо(П =Inr j* rZ0 <0 dr.
Составляющие вектора магнитной индукции определяются из (3.7), и с учетом принятых допущений можно записать
1 дАа(г) дАп (г)
гп~ ~ г дВ ’ еп~ дг ’
и, следовательно,
Вг(9, г) = 2 lBrn(r)c°Sfie +В'гп (г) sinnS]; (3.52) п—1
Впм(г) ,,
BS <9> г> = —9—± 7j [Be„(r)cosn9 +Ве„ (r)sinп9]. (3.537
лиаЯ п—1
Коэффициенты, входящие в (3.52) и (3.53), определяются из вЫ ражений
В, п'(г) =—пЛп" (г) /г = —пКпГп~'—пЬпГ~п-' —
— (|Хо/2г) [фп//(г)— фп'Ч'')!: (3.54)
64
Вт"(г) =пАп'(г) /r=nP„rn-i-\-nNnr-n-'l-\-
-р(Рю/2г)[фп'(г)— tn'e)]; (3 55)
Beo(.r)=dAo(r)/dr= (1/г)[Со—Цо (3.56)
Веп'(г)=б/Дп'(г)/(/г=иР?ггп-1^-п^пГп-1—
-(^^[фпДО+фпДг)]; (3.57)
BQn"(r)^dAn"(r)/dr=nKnrn^-nLr-n-^
-(|Ио/2г) [фп"(г)+фп"(г)]. (3.58)
Уравнения (3.54) — (3.58) являются общим решением уравнений магнитного поля для радиальных электрических машин с ротором типа звездочка, эскизы магнитных цепей которых приведены на рис. 3.2 и 3.3.
Частные решения ищутся с учетом граничных условий: нормальные составляющие вектора индукции и тангенциальные составляющие вектора напряженности магнитного поля на границе двух сред равны. При этом следует помнить, что для постоянных магнитов вектор напряженности поля определяется по формуле Я=В/р0—
3.3.2. Распределение вектора магнитной индукции при холостом ходе. Магнитная цепь электрических машин с высококоэрцитивными постоянными магнитами практически линейна, что позволяет независимо рассматривать магнитное поле, создаваемое постоянным магнитом и обмоткой якоря.
Распределение магнитного поля при холостом ходе, т. е. поля, создаваемого постоянным магнитом, определяет ЭДС и мощность электрической машины, характеризует степень использования объема постоянного магнита, в значительной степени определяет форму кривой выходного напряжения и пульсации выпрямленного напряжения электрической машины в генераторном режиме, частоту переключения транзисторов инвертора на интервале коммутации при работе машины в режиме вентильного двигателя.
Используя общее решение уравнения магнитного поля, можно получить решения для частных случаев применительно к конкретной магнитной системе и конкретным граничным условиям. Для магнитной Цепи рассматриваемой синхронной машины распределение магнитного поля, создаваемого постоянным магнитом, можно получить из (3.54) — (3.58). Для решения уравнений магнитного поля магнитную цепь машины целесообразно разделить на четыре области, как это сделано на Рис. 3.2 и 3.3:
область постоянного магнита (область 1 на рис. 3.2 и 3.3). В этой области ц = |1о, Лп(г)=0> а вектор намагниченности определяется выражением (3.35);
область воздушного зазора (область 2). В этой области p, = p0, и при холостом ходе Jzn(r)=0;
6—278 65
область вала (магнитной втулки) (область 5). В этой области ц->оо;
область магнитопровода (область 4). В этой области ц->оо.
С учетом сказанного граничные условия можно сформулировать следующим образом:
тангенциальные составляющие на поверхности магнитопровода ц вала (магнитной втулки) (см. рис. 3.2 и 3.3) равны нулю:
где Г1 — радиус вала; гз — внутренний радиус магнитопровода;
тангенциальные составляющие вектора напряженности магнитного поля и радиальные составляющие вектора магнитной индукции на гра< нице раздела областей 1 и 2 (см. рис. 3.2 и 3.3) равны:
где В^, В^ — п-е гармоники радиальных составляющих вектора магнитной индукции в областях 1 и 2 соответственно; __п-е
гармоники тангенциальных составляющих вектора напряженности магнитного поля в областях 1 и 2; г2— радиус наружной поверхности постоянного магнита;
в области /, занятой постоянным магнитом, векторы напряженности и индукции связаны соотношением (3.11).
При использовании (3.35) для описания распределения вектора намагниченности по области 1 не имеется аналитического решения для коэффициентов фиф. Поэтому для получения аналитического решения приходится полагать радиальную составляющую вектора намагниченности постоянного магнита не зависящей от радиуса, а значение радиальной составляющей определять как усредненное по высоте постоянного магнита /гм (см. рис. 3.3).
Амплитуда k-n гармоники вектора намагниченности определяется выражением
Гз
Мгп= — у—у- f ~~dr, (3.59)
гс kp hM J 2r
где hM — высота постоянного магнита;
00
=2 Af^cosnO. (3.60)
Если радиальная составляющая вектора намагниченности содержит только косинусную составляющую по всем п гармоникам М, п', то векторный магнитный потенциал согласно (3.44) — (3.46) содержит только синусную составляющую Ап"(г). Тогда вектор магнитной индукции содержит косинусную составляющую радиальной составляющей Вгп'
0 синусную составляющую тангенциальной составляющей В$п»\ оо
Вг = 2 ^rn cos
У1 (3.6!)
= 2 sin л9’ п—\
Нетрудно убедиться, что при п—\ формулы для Вгп' и В^п" отличаются от формул для ВГп И BQn" при П#=1.
Решая (3.50) и (3.51) для каждой из областей при п=1 и подставляя полученные выражения в (3.54) и (3.58), с учетом рассмотренных выше граничных условий будем иметь систему уравнений для определения постоянных коэффициентов, входящих в (3.54) и (3.58):
К<2)-£}2) г~2=0; ]
К<1) _ £.U) r-2 _ 0,5;j.o/Wr; (0,5 + In rt) = 0;
К'1’ - L<‘> гУ - 0,5^^(0,5 + In r2) = - 42) r2“2; j
I*/0 + r? +.0,5^(0,5- In r2) = K<2> + L[2> r^2. J
Здесь и далее верхний индекс (1) или (2) обозначает принадлежность первой (постоянному магниту) или второй (воздушный зазор) области магнитной цепи машины.
Аналогичная система уравнений для коэффициентов (3.54) и (3.58) может быть записана и при п=£\:
rT~l-nLn} = °;
г"-1 — nil» rf"-1 - ^nM'rn = 0;
nI^n} r2~l — nLn} г~п~' — vX = nKn ’ r2-1 + nLn}
nKnl) r^n~' - ponM'rn = nK{2) r%~1 - nl™ ,
Решая системы уравнений относительно коэффициентов /С/2),
^n(1\ Kn(2), L/2), Ln(1), Ln(2) и подставляя полученные результаты
в уравнение для определения амплитуд k-x гармоник радиальной и тангенциальной составляющих вектора магнитной индукции, при п— ^pk=l получаем:
первая область (область постоянного магнита)
, 0,5jxn44L / . . л г- Г ( г2 \2 । f гз \21 ।
(Brl) /Д* l~ Ibr) +и) 1+
\ t\ /
, / \2 г2 г . Гл-/г2\2 г2 1 ( г2 \2)
-Н— | In — + In —4- 0,5 — — 0,5 + In — — >;
\ ri / г г± [ \ г3 / гг J \ г J I
(3.62) 5* б7
68
_ °^X1 |o,5
I—I -1
гз \
г \ 2 '2 \
2
1 r*
In-----—
r
ZlY _ 0,5+ In — Гз / ''i
вторая область (область воздушного зазора)
, /л\ О,5^оЛ4г1 f / /- \ 2 «.
= z r ?2 jo,5 — — 0,5 + 1п—+
— In
[/ r \ 2
0,5 ( y-j —0,5 +In
(В;;)Ю= °.»Л. (05_
Рч -1 1
V-ln—+
(3.63)
(3.64)
2
— 0,5 +In
2
(3.65)
А при n=pk^l получим:
первая область (область постоянного магнита) 0,5м^оЛ)_
, гИ2п {[-2гГ+1 + (1 -— — 1
K)U) =
n) rf2" 4+I
+ (1 +n)r] 2п r2 n+1 r2n] rn 1 + ( — 2fj "+1 r2” + (1 — n) r"+i +
+ (1 +n)/--"+I r2"]r-"-1 — 2nrf2" rln + 2n}-, (3.66)
(B.. ) „> ([ _ 2,r+l + (l _„) . +
+ (1+n) rf2" nfrt+1 r^n]rn~l— [ — 2r^n+i + (1 — «) r”+1 +
+ (1 +n)r7ra+l r2re] r-”-’ - 2Г1-2п 4n+2}\ (3.67)
вторая область (область воздушного зазора)
/о' \(2) . rf о га + 1 . ~2п п+1 (
(^Гп)------/ г, \2п<1 — 2rl +U— п)г1 г2 +
— ) — 1
\ ' 1 /
+ (1 +/2)>Tn+1] (гп~1 +г-п~1 г2")}; (3.68)
<«;; >(я = /о;,у,'‘«- 2'г"+|+< 1 - »> rf” 4+i+
(Ч
+ (1 +п)г7"+1 JR"-1 — Г-"-1 Гз")}. (3.69)
Уравнения (3.62)—(3.69) получены в предположении о существовании только косинусной составляющей радиальной составляющей вектора намагниченности постоянного магнита. Если вектор намагниченно-сТн содержит не только косинусную, но и синусную составляющую, то уравнения (3.62) — (3.69) должны быть дополнены уравнениями для сИцусной составляющей радиальной составляющей и косинусной составляющей тангенциальной составляющей вектора магнитной индукции. В этом случае составляющие вектора магнитной индукции определяются выражениями (3.52) и (3.53). Для определения В™" в уравнениях (3.62), (3.64), (3.66) и (3.68) необходимо заменить Мгп' на Мгп", а для определения B0nz необходимо в (3.63), (3.65), (3.67) и (3.69) заменить знак на противоположный, а Мгп' на Мгп"-
Приведенные уравнения позволяют определить распределение вектора магнитной индукции, создаваемой постоянным магнитом, при заданной намагниченности. Для монолитных цилиндрических постоянных магнитов типа звездочка определение распределения вектора намагниченности по объему постоянного магнита является весьма трудоемкой и практически неразрешимой задачей. И даже в случае ее успешного решения распределение вектора намагниченности имеет столь сложный характер, что не имеется аналитического решения для интегралов, входящих в коэффициенты (риф.
Поэтому для таких постоянных магнитов удобнее оказывается определение распределения вектора магнитной индукции в воздушном зазоре при заданном распределении нормальной составляющей вектора индукции на поверхности постоянного магнита в виде ряда
ОО
г2—2 ^Гптах QQS> > (3.70)
п—\
где 0 — угол по расточке, отсчитываемый от середины полюса.
Амплитуда &-й гармоники радиальной составляющей вектора магнитной индукции при прямоугольном распределении индукции по расточке определяется выражением
и/2
В г птах I г—Гн ~ Cos2
Где Вм— определяемая уравнением (3.18) индукция на поверхности Магнита на середине полюса.
Амплитуды k-x гармоник определяются путем разложения в ряд Фурье реального распределения вектора индукции на поверхности магнита по углу. Для первой гармоники уравнения (3.70) амплитуда мо-}кет браться из (3.18).
Как и ранее, магнитная проницаемость стали магнитопровода (ярма) бесконечно велика и, следовательно,
^e(9)U8 = 0.
69
С учетом граничных условий (3.70) запишем систему уравнений для определения коэффициентов, входящих в уравнения для составляющих вектора магнитной индукции:
вгптах = “ пКпгп~х — nLnr~n~i;
0 = пКп^-1 — nLnr-n-^.
Решая систему уравнений относительно Кп и Ln и подставляя полученные результаты в (3.54), (3.58) и (3.52), (3.53), получаем выра
Рис. 3.5. Зависимость отношения первой гармоники радиальной составляющей индукции в воздушном зазоре к индукции на поверхности постоянного магнита от радиуса при р=1, р=(г—г2)/Ь
жения для расчета радиальной и тангенциальной составляющих век* тора магнитной индукции, создаваемого постоянным магнитом в воздушном зазоре беспазовой синхронной машины:
п (fl М - V R Тг (г/гз)п+(гз/г)п ..
г)— / I вгптах / / V? ! / / \п cos^v, Ы г (ra/r2)n + (r2/r3)n
п=1
R /Й М - V R rZl. —(r/f3)ra—(''з/'-Ц . д
8 ( ’ } “ L Гт Г (г8/г2)« + (г2/г8Ц 8Ш"9’ п—\
где Г1 — внутренний радиус постоянного магнита (внешний радиус вала ротора); Г2 — внешний радиус постоянного магнита; г3 — внутренний радиус магнитопровода.
На рис. 3.5 и 3.6 приведены зависимости распределения радиальной составляющей вектора магнитной индукции по длине воздушного зазора (радиусу) при различных значениях относительного воздушного зазора 6*=б/г2 (б — длина воздушного зазора) и синусоидальном ха-70
оактере распределения радиальной составляющей вектора магнитной индукции на поверхности магнита.
Анализ приведенных зависимостей показывает, что по мере удале-от поверхности магнита радиальная составляющая индукции
Рис. 3.6. Зависимость отношения первой гармоники радиальной составляющей индукции в воздушном зазоре к индукции на поверхности по стоянного магнита от радиуса при р=2, р=(г—г2)/6
уменьшается. Необходимо также отметить, что с ростом длины воздушного зазора машины б* уменьшается средняя по длине воздушного зазора индукция.
При расчете электрических машин интерес представляет усреднен-ная по длине воздушного зазора индукция
г. о 1 (1+&*)2р— П
5ср (1+^)2Р+1 ’
(3-71)
На рис. 3.7 приведены зависимости относительного значения средней по длине воздушного зазора индукции (отношение средней по длине воздушного зазора индукции к индукции на поверхности магнита) от относительной длины воздушного зазора б* при различных числах полюсов. Анализ приведенных зависимостей позволяет сде-
Рис. 3.7. Зависимость отношения средней по длине зазора индукции к индукции на поверхности магнита от длины воздушного зазора
Дать вывод, что при увеличении длины воздушного зазора при заданном значении внешнего радиуса постоянного магнита (диаметра магнита DM) мощность, снимаемая с электрической машины, увеличивается, а затем, достигнув максимума, уменьшается. Для цилиндрического постоянного магнита из сплава SmCo5 с числом пар полюсов р=2, ко-
71
эрцитивной силой //сВ=450 кА/м и остаточной индукцией Вг = 0,8 оптимальная относительная длина воздушного зазора 6*=0,4-тОд С увеличением коэрцитивной силы и уменьшением остаточной индукц^ оптимальная длина воздушного зазора возрастает, а с уменьшением коэрцитивной силы и ростом остаточной индукции уменьшается. Необ. ходимо также заметить, что с ростом длины воздушного зазора воз. растает тангенциальная составляющая вектора магнитной индукции что приводит к увеличению потерь на вихревые токи в проводниках обмотки якоря.
3.3.3. Распределение поля реакции якоря в активной зоне электрц. ческих машин с ротором типа звездочка. В реальных электрических машинах с высококоэрцитивными постоянными магнитами поле реакции якоря практически не оказывает влияния на значение вектора намагниченности. Поэтому расчет распределения магнитного поля, созда-ваемого обмоткой якоря, представляет интерес, прежде всего, с точки зрения определения индуктивностей обмотки. Расчет поля реакции якоря необходим также для определения распределения вектора намагниченности по объему постоянного магнита при намагничивании.
Для определения поля, создаваемого обмоткой якоря, расположенной в области между наружной поверхностью магнита и внутренней поверхностью магнитопровода (область 2 на рис. 3.2 и 3.3), также воспользуемся уравнениями (3.54) — (3.58):
00
г) =2 Sinn9, (3.72)
п—\
будем искать решение для радиальной и тангенциальной составляющих вектора магнитной индукции в виде (3.61) при следующих граничных условиях:
тангенциальные составляющие вектора напряженности магнитного поля на поверхности магнитопровода и на внутренней поверхности постоянного магнита равны нулю (если вал изготовлен из немагнитной стали, то при расчете поля, создаваемого обмоткой, необходимо положить Г1 = 0):
Я | =0; ЯЙ1 =0;
магнитная проницаемость постоянного магнита постоянна (для магнита из сплава SmCo5 можно положить цм = Цо)-
Для решения уравнений магнитного поля целесообразно разделить магнитную цепь машины на две области: область постоянного магнита (область 1 на рис. 3.2), в которой р,=ц,0» Лп/,=0, и область, занятую обмоткой с током (область 2 на рис. 3.2), в которой |i = |i0 и плотность тока определяется по (3.72).
Исходя из непрерывности магнитного поля на границе областей» запишем также
гп |Г=Г2 rn \r=r^ вп |r==fa ™\г==г?'
73
из областей и под-с учетом граничных
В^____k-e гармоники радиальных составляющих вектора
магнитной индукции в областях 1 и 2 соответственно; —k-Q
гармоники тангенциальных составляющих вектора напряженности магнитного поля в областях 1 и 2 соответственно.
Подставляя в (3.50) и (3.51) выражение для плотности тока (3.72), нетрудно убедиться, что при и=2 выражения для Вгп и В0П будут отличаться от выражений для Вгп и BQn при пф2.
Решая (3.50) и (3.51) при п^=2 для каждой ставляя полученные выражения в (3.54) и (3.58), < условий будем иметь
пК^ r?-l—nL(V г-«-1 = 0; fl I ib 1
п^2) г^"-1
пК^ гГ1 ~ r-n~' = пК^ г*~' -
, 1 , л J znmax
-nlJM r~n ' + W. —-
1
пК^ гГ1 +nLn} гп2-'
zn max
+ г2п ’ + «№ n2_4> I
где Г1 — внутренний радиус постоянного магнита; г2— внешний радиус постоянного магнита; гз — внутренний радиус магнитопровода.
Аналогичная система уравнений может быть записана и для и=2.
При большем количестве областей и, следовательно, большем количестве поверхностей раздела решение ищется аналогичным образом, а число уравнений в системе равно 2L-J-2, где L — число поверхностей Раздела.
Решая систему уравнений относительно коэффициентов Ап(1), Ап(1), V), £п(2) и подставляя полученные результаты в уравнения для определения амплитуд k-x гармоник радиальной и тангенциальной составляющих вектора магнитной индукции, получаем при п^=2:
первая область
А(1) п 1" Гз (гз/г^П+1 Г 4 . / 2 , vl+2 .
~ 2 («2 - 4) (rj/r^ - 1 [ п Д п Д2/Гз) +
/ 2 \ 1
+(— +1) (г3/г2)”-а][(г/'-1)а'г + 11; (3.73)
~ 2 (л» - 4) Р'° гптах (г3/Г1)*п - 1 [ п \ п ) / 2 \ 1
X (Га/гз)^2 + (“+') ~ ’Г (3-74>
73
втбрая область
+ 2[(r8/r1)2'i-lk}; (3.75)
+ (Y + 1) г^+2 + (y - 1) rf2n Г^+2 j г""1 -
-["Y 4+2+ (4 + 9 rr"+2'T+ (v~ 9rf2n r*+2 rHx
r-«-i_|_A[(r ,/fl)2«-l]rl; (3.76)
n J
при n = 2: первая область
„,(Г,Л1).+
+ 4 in (r8/r2)] [(r/n) + (rx/r)3]; (3.77)
<> = (r^JTZ7 I» “ (^Аз)4 + 41n (r8/r2)J [(r/rj +
+ (ri/r)’J; (3-78)
вторая область
BS . 1+2(ri/,J4_(r,/ri).+
+ 4(гзЛ1)4 >n(r8/r) — 41n(r2/r)J r + [— 1 — (rz/r^ + + 41n(r8/r2)]r84r~3}; (3.79)
(2) = 1 ---- _ ( /rj4 + 4 (ГзуГ1) ln (rg/r) _
2 8 (Г3/Г1)4 — 1
— 41n (r2/r)] r — [1 — (r2/rx)4 + 41n (r8/r2)] r8*r~3}, (3-80)
где и —число периодов изменения вектора магнитной индукции по расточке [определяется по (3.35)].
На рис. 3.8 и 3.9 приведены зависимости радиальной и тангенциальной составляющих вектора магнитной индукции от радиуса длИ постоянного магнита с р—2. При расчете магнитного поля принималась во внимание только первая гармоника пространственного распредели
яйя плотности тока, радиус наружной поверхности магнита принят за базу Г2*=1, радиус магнитопровода принят равным r3*=r3/r2= 1,5, а радиус внутренней поверхности /5*—гх/г2 постоянного магнита изменялся от 0 до 0,8.
Анализ приведенных зависимостей показывает, что при изменении
магнита гх* = гх/г2 от 0 до 0,4—0,5 удается обеспечить примерно одинаковую намагниченность постоянного магнита. Поэтому нет необходимости изготавливать постоянный магнит с малым
внутреннего радиуса постоянного
Рис. 3.8. Зависимость отношения первой гармоники радиальной составляющей индукции Вг к индукции на поверхности магнита Вг|г=Гз от радиуса при намагничивании
Рис. 3.9. Зависимость отношения первой гармоники тангенциальной составляющей индукции В^ к индукции на поверхности магнита jr=r2 от радиуса при намагничивании
внутренним радиусом. С увеличением числа пар полюсов постоянного магнита значение внутреннего радиуса может быть увеличено. Необходимо также отметить, что с ростом номера пространственной гармоники намагничивающего тока (тока якоря) глубина проникновения создаваемых ею радиальной и тангенциальной составляющих индукции уменьшается. С увеличением номера гармоники (или числа Пар полюсов) уменьшается также амплитуда индукции на поверхности магнита при том же значении амплитуды намагничивающего тока (плотности тока).
В связи с этим для обеспечения синусоидального характера распределения магнитного поля, создаваемого после намагничивания постоянным магнитом в воздушном зазоре, нет необходимости приклады-
75
74
вать синусоидальное внешнее поле (добиваться синусоидального рас» пределения тока в зазоре).
Уравнения (3.73) —(3.80) позволяют определить распределение век. тора намагниченности по объему постоянного магнита при намагничи* вании. Полученное выражение для распределения вектора намагниченности подставляется в уравнения для коэффициентов, входящих в урав-нения (3.54) — (3.58) для составляющих вектора индукции. Реализация такого алгоритма расчета магнитного поля возможна только числен* ными методами на ЭВМ.
При пазовом статоре расчет поля реакции якоря может осуществляться по приведенным выше выражениям с учетом того, что область 2 (см. рис. 3.2), в которой располагается обмотка якоря, бесконечно мала.
3.4. Расчет магнитного поля в радиальных электрических машинах с ротором коллекторного типа
Роторы коллекторного типа нашли применение, прежде всего, в системах электроснабжения и приводах относительно большой мощности. Эта конструкция ротора позволяет максимально использовать энергетические возможности редкоземельных постоянных магнитов. В то же время создание роторов с высококоэрцитивными постоянными магнитами относительно больших размеров возможно только при сборной конструкции. Наличие полюсов (вставок) из магнитомягкой стали, в которых концентрируется магнитный поток, создаваемый постоянными магнитами, приводит к существенному отличию картины магнитного поля от распределения магнитного поля в цилиндрических монолитных роторах типа звездочка, рассмотренных в предыдущих параграфах [22].
На рис. 3.10 приведен эскиз магнитной цепи электрической машины с ротором коллекторного типа.
Между двумя призматическими постоянными магнитами /, намагниченными вдоль своей короткой оси, располагается полюс (вставка) 2 из магнитомягкой стали. Полюсы 2 и постоянные магниты 1 установлены на валу 5 из немагнитного материала. Полюсы постоянных магнитов, направленных к общей магнитомягкой вставке, одноименные. Крепление магнитов и полюсов осуществляется оболочкой из немагнитного материала (на рис. 3.10 не показана). Статор (магнитопровод) охватывает ротор и представляет собой шихтованный сердечник 4, набранный из листов электротехнической стали. При беспазовом статоре обмотка 3 укладывается в пространство между ротором и магнитопроводом. При пазовом статоре обмотка укладывается в полузакрытые или открытые пазы сердечника.
Анализ эскиза магнитной цепи показывает сложность конфигурации границ областей, занятых материалами с различными магнитными свойствами, что требует для аналитического решения принятия ряда упрощающих геометрию допущений. Магнитную цепь, представленную 76
на рис. 3.10, целесообразно преобразовать к виду, представленному на рис. 3.11. На рис. 3.11 призматические постоянные магниты 1 заменены сегментными. В виде сегментов представлены и полюсы 2 из магнито мягкой стали. Высота сегмента постоянного магнита на диаметре маг нита сохранена равной Ам. Обмотка якоря и магнитопровод представ лены в виде двух колец, а вал — в виде круга. Такое представление магнитной цепи позволяет использовать цилиндрическую систему коор
Рис. 3.10. Эскиз магнитной цепи машины с ротором коллекторног типа
Рис. 3.11. Эскиз преобразованной магнитной цепи электрической мапп ны с ротором коллекторного типа:
1 — постоянный магнит; 2 — полюсы из магнитомягкой стали; 3 — обмотка як ря; 4 — ярмо статора; 5 — вал
динат для расчета магнитного поля. К тому же при принятом допущ нии упрощается запись граничных условий.
3.4.1. Распределение магнитного поля в электрических машин< с ротором коллекторного типа при холостом ходе. Так же как и в р диальных машинах с ротором типа звездочка, в рассматриваемых эле трических машинах поле, создаваемое постоянным магнитом, опред ляет в значительной степени важнейшие характеристики как двигател ного, так и генераторного режимов работы.
Применительно к магнитной цепи коллекторных электрических м шин (см. рис. 3.10) расчет магнитного поля при холостом ходе цел сообразно осуществлять исходя из заданного распределения векто' магнитной индукции на поверхности постоянного магнита. Такой по ход к определению магнитного поля обусловлен, прежде всего, нал чием полюсов из магнитомягкой стали, являющихся концентратора! магнитного потока. Магнитная проницаемость полюсов обычно чрезв чайно высока и не оказывает практически существенного влияния i характер распределения магнитного поля, создаваемого в воздушнс зазоре постоянным магнитом. Благодаря высокой магнитной пронпца мости полюсов тангенциальная составляющая напряженности магнг
ного поля на их поверхности пренебрежимо мала по сравнению с нор. мальной составляющей. Поэтому с высокой степенью достоверности можно считать, что вектор магнитной индукции содержит только ра. диальную составляющую.
Распределение радиальной составляющей вектора магнитной индук. ции по расточке ротора близко к прямоугольному (рис. 3.12).
Рис. 3.12. Развертка магнитной цепи машины с коллекторным ротором и распределение вектора индукции по поверхности постоянного магнита
Максимальное значение индукции на поверхности магнита определяется путем упрощения (3.18):
1 Вг
\+kz^kFBr/^h^HcB 0’ (3’81)
где Вг — остаточная индукция, Тл; kz — коэффициент, учитывающий уменьшение нормальной составляющей индукции по зазору; 6* — относительная длина воздушного зазора; kF— коэффициент, учитывающий насыщение магнитной цепи [определяется по (3.20)]; /гм* — относительная высота постоянного магнита; о — коэффициент рассеяния; НсВ — коэрцитивная сила по индукции, А/м; hM^hM/DM.
Коэффициент kz, учитывающий изменение радиальной составляющей вектора магнитной индукции по длине воздушного зазора, определяется так:
1 (1+^)2р-1
р8 (1+^)2р+1 ’
(3.82)
Раскладывая кривую магнитной индукции в ряд Фурье, получаем амплитуды гармонических составляющих индукции на поверхности магнита:
4
В птах = (т — ^м/2) , (3.83)
77
где т — полюсное деление.
78
Распределение радиальной и тангенциальной составляющих вектд-ра магнитной индукции по длине воздушного зазора определяется так я<с, как и в машинах с ротором типа звездочка, при этом значение Витах определяется из (3.83) с учетом (3.81).
3.4.2. Особенности расчета поля реакции якоря в электрических машинах с ротором коллекторного типа. Наиболее характерной особенностью электрических машин с ротором коллекторного типа является наличие магнитомягких полюсов. Эта особенность наиболее сильно влияет на распределение поля реакции якоря. Одна, например первая, пространственная гармоника плотности тока (МДС якоря) благодаря чередованию участков (областей) с различным значением магнитной проницаемости приводит к появлению целого спектра пространственных гармоник вектора магнитной индукции.
Наличие полюсов обусловливает особенности расчета магнитного поля, так как в отличие от машин с ротором типа звездочка в электрических машинах с ротором коллекторного типа магнитное поле по продольной и поперечной осям отличаются друг от друга не только по значению, но и по характеру его распределения в пространстве. Это приводит к необходимости отдельного рассмотрения полей реакции якоря по продольной и поперечной осям.
Другой отличительной особенностью электрических машин с ротором коллекторного типа является невозможность представления ротора единой областью. На рис. 3.10 и 3.11 нетрудно видеть, что ротор коллекторного типа разбивается на ряд идентичных секторов, в каждый из которых входят постоянный магнит и два полюса (точнее, половины полюсов).
На рис. 3.13 представлен один из секторов ротора. Плотность тока распределена соответственно продольной составляющей МДС реакции якоря, а на рис. 3.14 представлен аналогичный сектор с распределением плотности тока, соответствующей поперечной реакции якоря.
На рис. 3.13 и 3.14 радиус ц соответствует валу машины, г2 — наружному радиусу ротора, а г3 — внутреннему радиусу магнитопровода (ярма).
Каждый из секторов (рис. 3.13 и 3.14) разбит на четыре области: область постоянного магнита, в которой ц = ц0, Л^=0;
область воздушного зазора (область 2) с беспазовой обмоткой якоря, в которой ц~ц0, ах sin 0 для поперечной реакции якоря и Л =/max cos 0 для продольной реакции якоря;
область магнитопровода (ярма — область 3), в которой ц = оо, Л=0;
область полюсов ротора (область 4), в которой ц=оо, /2=0.
Угол, занимаемый полюсным делением, обозначен на рис. 3.13 и 3.14 как 0=л, а угол, занимаемый постоянным магнитом, — как
®м =----0. (3.84)
т
79
Для расчета магнитного поля в машинах с ротором коллекторного типа используются те же уравнения (3.38) и (3.39) для векторного магнитного потенциала, что и в машинах с ротором типа звездочка Для областей, занятых обмоткой с током, общее уравнение для вектор, ного магнитного потенциала имеет вид
2 г
д / дАг (9, г) \ 1 д2А2 (8, г)
дг \ дг г* л д№
“* Рч/z (^» О-
(3.85)
Однако решение выше. Это связано с
(3.85) несколько отличается от рассмотренного тем, что имеются, в общем случае, отличные от
Рис. 3.13. Сектор магнитной цепи машины с ротором коллекторного типа и распределение плотности тока при продольной реакции якоря
Рис. 3.14. Сектор магнитной цепи машины с ротором коллекторного типа и распределение плотности тока при поперечной реакции якоря
нуля радиальные составляющие вектора напряженности магнитного поля на границах областей. Решение уравнений магнитного поля для этого случая предложено Г. А. Гринбергом [19].
3.4.3» Поле реакции якоря. Обратимся к рис. 3.13, на котором пред4 ставлены эскиз магнитной цепи электрической машины с ротором Колл лекторного типа и распределение по углу первой гармоники вектора плотности тока, соответствующее продольной реакции якоря:
/«-//(г) sin п0. (3.86)
Будем искать решение (3.85) в виде ряда Фурье для синусных со-ставляющих векторного магнитного потенциала. Для этого умножим 80
правую и Левую части (3.85) на (2/0) sin (пл0/0) и проинтегрируем цо УГЛУ от 0 до После преобразований (3.85) примет вид
1 d ( dAn (ГЛ / птЛ2 1 // ..и . ч
-----— г—--------- - — — (3.87)
г dr \ dr J \ & г2
где гармоники синусных составляющих векторного маг-
нитного потенциала:
о
>Д'(г)=-£-Ja,(0, r)sin-y 0d0, (3.88)
о
а Фп"(г)—некоторый функционал, определяемый из выражения
С(0=/;-(г) И (°- г)]> (3.89)
где А(0, г), А(0, г)—значения векторного магнитного потенциала на границе области.
Решение (3.87) ищется методом собственных функций и имеет вид уравнений (3.49).
Функции фпх/ (г) и фп"(г) определяются из выражений
<f'n' (г) = ~п J г"+'ф"(г) dr-, (3.90)
ф''(г) = г« J г-”+1ф”(г)</г. (3.91)
Так как векторный магнитный потенциал имеет только синусную составляющую, то радиальная и тангенциальная составляющие определяются выражениями (полагается, что двойное полюсное деление соответствует периоду разложения функции в ряд Фурье, поэтому в дальнейшем множитель л/0 опускается)
00
Вг(9, г) =S Sr„cos/i8; 3.92)
п=1
00
ве(9’ r) =S fi0nsinnfl; (3-93)
n = l
и BQn" определяются уравнениями (3.77) и (3.81) соответст-венно.
На полюсном делении может быть выделено две основные облачи: область постоянного магнита — 1 и область воздушного зазора — 2. & области воздушного зазора распределение векторного магнитного Потенциала описывается (3.87), причем вектор плотности тока в (3.89) с0Держит только первую гармонику, а распределение радиальной и тан-Унциальных составляющих — (3.92) и (3.93).
6"-278 81
Ё области постоянного магнита (область 1) разложение вектору го магнитного потенциала, векторов индукции и напряженности маг. нитного поля в ряд Фурье необходимо проводить с периодом 20м, где 0м — угол, занимаемый постоянным магнитом. Угол 0М является частью угла 0, соответствующего полюсному делению:
0М= (Ам/т)0.
(3.94)
Поэтому выражения для радиальной и тангенциальной составляющих вектора магнитной индукции для области постоянного магнита (для области 1) имеют вид
00
8^ (8. г)^У.В^'(г)сО8п^(9-п/2+@к/2)-, (3.95)
ми “м
п=1
00
Вв(1)(0. г)=^В^"(г)8!ппу-(0-к/2 + 0м/2). (3.96)
п=1
Как и в п. 3.3.2, верхний индекс (1) или (2) означает принадлеж-ность физического параметра области 1 (области постоянного магнита) или 2 (области воздушного зазора) соответственно.
В уравнении для векторного магнитного потенциала функционал Фп"(Н в области постоянного магнита, где Jz = 0, определяется из выражения
jja границе раздела областей У и 2 равны между собой: при л/2—
^-0м/2<0<л/2+0м/2
=В<2)|г-г = )
Г lr-r„ г |r-r2 I (3.98)
t? |Г—Г 2 v И—г 2 /
распределение тангенциальной составляющей на нижней границе области 1 (г=Г1) определяется из закона полного тока:
*/2+0м/2
ф/7Л=р I J2(®,r)dr d®.
J It J м
Г1 2 2
Так как плотность тока в области 1 равна нулю, то уравнение преобразуется к виду
^enlr=r/i== Н$п |г=г2Г2’
аксиальная составляющая векторного магнитного потенциала на границах областей равна нулю:
л<1)(4—= <3")
\ £ & I \ 4 j
г)х=Л2(2)(0, г)=0.
(Ф"(гП(|) =_____2______L_Lh0L_!k Л л (JL Л* .
( " ° (6мЛ) ® Г2 г ( 2 2 ’ / А I 2 + 2 ’
(3.97)
В области воздушного зазора радиальная В№ и тангенциальная Bq2 составляющие индукции определяются по (3.92) и (3.93).
Для определения постоянных коэффициентов, входящих в (3.54) и (3.58) для гармонических составляющих вектора магнитной индукции, обратимся к граничным условиям:
магнитная проницаемость магнитопровода бесконечно велика, поэтому
\rt= г9 = О’
магнитная проницаемость полюсов бесконечно велика, что позволяет записать
ИГ le^u/2-0M/2— ’|
1о=^/2+ем/2 = 0; J
Ш =0 при |0<е = п/2 —ем/2;
1 Ь/2 + 0м/2<0<л;
радиальные составляющие вектора магнитной индукции, а такЖе тангенциальные составляющие вектора напряженности магнитного пол#
Равенства (3.99) вытекают из характера распределения векторного магнитного потенциала в областях 1 и 2, заданного в виде синусного ряда. Естественно, что в области 1 при 0=л/2—0м/2 и 0=л/2-|-0м/2, а также в области 2 при 0 = 0 и 0 = л векторный потенциал равен нулю.
Рассмотренные граничные условия позволяют записать систему алгебраических уравнений для расчета постоянных коэффициентов. Однако прежде более подробно остановимся на условии (3.98).
Период разложения в ряд Фурье векторов магнитной индукции и напряженности магнитного поля в областях 1 и 2 различен. К тому же граничные условия на границе раздела областей 1 и 2 при л/2—0м/2^0^п/2ч-0м/2
в то же время
^2>|г=г2 = О
при
0<9<тс/2 —0м/2;
тс/2 + 0м/2 < 9 < тс.
неоднородны:
(3.100)
(3.101)
Указанное приводит к необходимости особого подхода при раскрыли условий (3.98).
6* 83
82
Прежде всего необходимо уравнение для вектора напряженное^ магнитного поля для области 1 на границе областей разложить в рЯд Фурье с периодом 2л (20) при учете (3.101).
Согласно (3.96) и (3.57), а также с учетом того, что «ВдСО/цо, получим
Так как плотность тока содержит только первую гармонику, то с учетом условия (3.99)
(ф1")(2> = Л; |
^ek\r=r2~ р,0 r2 r 2k ) 2г2
тогда
ОО
"Е sinfet//iM (9 — я/2 + 0м/2).
r=r2 &==! r=r2
(¥1")(2)=-’-Г22Л;
(Ф1")<2> = га2Л;
(3.104)
С учетом (3.99) выражения для гармонических составляющих напряженности значительно упрощаются, так как в области 1 а векторный магнитный потенциал на границе области равен нулю. Следовательно,
<Р/ (гг)=^к' (га) =0.
Разложим выражение для тангенциальной составляющей напряжен-ности магнитного поля в ряд с периодом 2л:
(^9 )|r=r2)np — (^(t?|r=rr2)np sin п9, (3.102)
п=1
где (Я9(1) |г=Га)лр и |г=Г2)пр — преобразованные к периоду 2п(28) вектор напряженности магнитного поля и я-я гармоника напряженно-сти магнитного поля на границе областей для области /;
1" + 17 оо
(ЛГ0Л)|г=г2)пр= ~ J sin^”^7X
2 2 Г=Г2
X^9 — 7+'ir) sinn9d9. (3.103)
При раскрытии условия B/JI)|r=r2 = В^2)[Г=Г2 уравнение для радиальной составляющей вектора магнитной индукции для области 2 на границе областей (при г=г2) необходимо разложить в ряд Фурье с периодом 20м.
Радиальная составляющая вектора магнитной индукции при г=/'2 записывается в виде
00
S(2>|r=ncosfe9;
А>=1
Brk} lr_f =-^2) - kL'V r-k-l _ „ (Г2) _ ф ,7 я
• —/ я ^1 2 84
84
Так как равенство В^ = В^ соблюдается только при л/2—0м/2^9Сл/2+0м/2, (3.105)
то раскладывать функцию (3.100) в ряд с периодом 20м необходимо в пределах указанного угла:
(^2) (9)|г=Г2)Пр = оо
s S 1г=Г2^пр C0S п ~ 2) ’ 106)
£=1
где (Вг(2) (0)|г_Г2)пр и (В™ |г=Г2)пр — преобразование к периоду 20м в пределах угла (3.105) радиальная составляющая и п-я гармоника вектора магнитной индукции при г=г2:
2 2
X cos&9 cos и (0 — (3.107)
Таким образом, с помощью (3.102) и (3.103) вектор напряженности магнитного поля в области 1 на ее границе с областью 2 представлен в виде ряда с периодом 2л, т. е. с тем же периодом, что и вектор напряженности магнитного поля в области 2. Аналогично с помощью (3.106) и (3.107) радиальная составляющая индукции в области 2 на границе с областью 1 записана в виде ряда с периодом 20м. Сказанное позволяет переписать уравнение (3.98) в виде системы уравнений для гармонических составляющих векторов индукции и напряженности.
Теперь можно записать систему уравнений для расчета постоянных коэффициентов, входящих в уравнения для гармонических составляющих радиальной и тангенциальной составляющих вектора магнитной
85
индукции. В отличие от аналогичных систем алгебраических уравнение рассмотренных выше, не представляется возможным независимо рас* считать коэффициенты для каждой гармонической составляющей. Эт0 обусловлено тем, что при записи граничных условий (3.98) каждая гармоническая составляющая соответствующих векторов в области 2 определяется всем спектром гармонических составляющих в области 1 и наоборот.
Система уравнений состоит из следующих уравнений:
(3.108)
Каждое из уравнений системы (3.108) состоит из п уравнений, где п — число принятых для расчета гармонических составляющих.
Первое уравнение системы (3.108) раскрывается путем подстановки г=г3 в уравнение (3.58) с учетом
(<Р1")<2) |r=r, = yrVr.
(+1 )(г> |r=ra = 4Ji;
(3.109)
После подстановки (3.109) в (3.58) первое уравнение заменяется системой из п^уравнений для каждой гармонической составляющей вектора напряженности магнитного поля.
Второе уравнение системы (3.108) представляет собой равенство
В™1Г=Гг — (Вт|г=Г2)пр-
где приведенные гармонические составляющие вектора магнитной индукции в области 2 определяются из (3.107). Входящие в (3.107) значения гармонических /^определяются из (3.54) при подстановке в последнее выражение значений и из (3.04), а значения определяются из (3.54) при подстановке
<Рп,,(г2)='фп"(г2)=0.
Поэтому второе уравнение системы (3.108) n-pfe уравнений.
(3.109а)
заменяется системой из
При раскрытии равенства
^Ч=г2 = <1г=г2 (3110>
последнее заменяется системой из п равенств (принятых при расчете ц0 числу гармоник). Для i-й гармонической составляющей равенство имеет вид
Значение Н$\г=_г^ определяется из (3.58) при подстановке у"(г2) И Ф"(г2) из (3.104); )пр подставляется из (3.103), причем
|г_г ’ входящие в (3.103), определяются из выражения (3.58) при подстановке в него уравнения (3.109а). Таким образом, равенство (3.110) представляет собой систему из n-[-k равенств.
Последнее уравнение системы (3.108) заменяется уравнениями, в каждом из которых и ^е/?|г_Г2 определяются из (3.58)
при подстановке г=ц и г=г2 соответственно, при этом (pn/z(ri), фп"(и), <Pn"(rg) и Цп"(Г2) равны нулю.
Рассмотренная система уравнений (3.108) позволяет осуществить расчет распределения тангенциальной и радиальной составляющих вектора магнитной индукции при продольной реакции якоря. Естественно, что решение системы уравнений (3.108) возможно только на ЭВМ, а непосредственное аналитическое решение — только при учете одной пространственной гармоники распределения.
Система уравнений, аналогичная (3.108), может быть получена и для поперечной реакции якоря, которой соответствует распределение вектора плотности по углу, приведенное на рис. ЗД4.
3.5. Магнитное поле в торцевых электрических машинах
Торцевые электрические машины, конструктивные исполнения которых рассмотрены в гл. 2, нашли применение в кинетических аккумуляторах электрической энергии и в шаговых двигателях. Эта конструкция электрических машин позволяет исключить из магнитной цепи статора магнитопровод (ярмо), что устраняет потери в стали.
Эскиз поперечного сечения двухполюсной электрической машины е двойным ротором торцевого типа представлен на рис. 3.15. Электрическая машина состоит из двух роторов А и В и обмотки 3. Каждый ротор в свою очередь содержит магнитопровод 4 или 4' и два сегментных постоянных магнита /, 2 и 2'. Число магнитов на каждом Роторе определяется числом пар полюсов машины. Между роторами Располагается обмотка якоря 3, отформованная в виде тора.
Магнитный поток, выходя из северного полюса постоянного магнита 1 и проходя через воздушный зазор с обмоткой якоря 5, попадает в южный полюс правого постоянного магнита 1'. Далее магнит-ный поток проходит через магнитопровод ротора 4' и попадает в по-
86
87
стоянный магйит 2< Из магнита 2' через ЬоЗдушйЫй зазор С ofkotKofl якоря 3 магнитный поток попадает в постоянный магнит 2 и далее через магнитопровод 4 в постоянный магнит 1.
Распределение магнитного поля в торцевой электрической машине имеет объемный характер, и его точный расчет может осуществляться только численными методами. Аналитический расчет распределения магнитного поля в торцевых электрических машинах возможен только при ряде допущений, к основным из них относятся:
Рис. 3.15. Эскиз магнитной цепи двухполюсной двухроторной машины торцевого типа (Ьм — ширина постоянного магнита, Лм — высота постоянного магнита, DM — диаметр ротора б§з оболочки, по постоянным магнитам)
Рис. 3.16. Развертка магнитной цепи четырехполюсной двухроторной машины торцевого типа
магнитное ноле в электрической машине не изменяется по радиусу, т. е. рассматривается двухмерное магнитное поле;
магнитная проницаемость стали бесконечно велика, что позволяет исключить из расчета магнитного поля магнитопровод ротора;
плотность тока содержит только радиальную составляющую;
вектор намагниченности содержит только аксиальную составляющую Mz.
На рис. 3.16 приведен эскиз магнитной цепи 4-полюсной двухро-торной торцевой электрической машины, представляющей собой развертку по углу реальной магнитной системы. Так как магнитная цепь машины симметрична относительно центра машины, то начало оси координат в аксиальном направлении (ось г) выбрано в центре машины.
Магнитная цепь машины разделена на три области:
область постоянного магнита. Эта область состоит из симметрии3 ных зон 1 и в ней Л—О, Mz^=f(0);
область, занятая обмоткой с током и также состоящая из двух зон 2 и 2'. В этой области ц=ц0, A=f(0), Л42 = 0;
область ярма (области 3 и 5'), в которой р. = оо, Jr±=0, М2^=0.
88
Магнитное поле в торцевых электрических машинах описывается уравнениями (3.1). С учетом принятых допущений эти уравнения мож-й0 привести к виду, аналогичному (3.16).
В области /, занятой постоянным магнитом, уравнение для век-горного магнитного потенциала имеет вид
1 д2Аг д2Аг 1 дМг г* д02 “Г dz2 - р‘° г 0 ’
(З.Ш)
а в области 2, занятой обмоткой с током,
1 д2Аг , д2Аг
г» дв2 + dz2 ~ ~Р'° г'
(3.112)
(3.112) равна
В режиме холостого хода правая часть уравнения нулю.
Уравнения для аксиальной и тангенциальной составляющих вектора магнитной индукции записываются в виде п /2 fl — Z ц
&zn ~ ^пе Nne
п ----Z
(2)+Ф«'(ж)]: (3.113)
п п
,, П , П — z п 7“ 2 / /
Вг„(г)= —Лг„ = —KZ +— Lne г (О+ФЯ (ОВ
ft Г £
(3.114) J Л ' п п
Со; v г-у [?; (о - ф; (ов
(3.115)
В'ч'п(^ РУ Z~'~N*e Г
u2 Г Г £
(3.116) где коэффициенты, входящие в уравнения (3.113) —(3.116), определяются из выражений п п
Г prnW +~Л4гп(2Г) j
п Л п
----------------Z (* — Z ф'п (г) = е г---\ ег
7г«0) + 7-К (2ndz>
и — Z f -z ,, п I 1
Vn(») = — j Г [•МО—— M2„(z) j dz;
р 1 +;'(z) = е-п^ er
}'п <z)--M*n(z)]dz.
3.5.1. Распределение магнитного поля в режиме холостого хода Отсутствие стальных участков магнитной цепи на статоре торцевых электрических машин, а также относительно небольшое их количество на роторе позволяют независимо рассматривать магнитные поля, соз-данные постоянным магнитом и обмоткой якоря.
Роторы торцевой электрической машины набираются из сегментных или призматических постоянных магнитов, намагниченных в аксиальном направлении. Так как намагничивание каждого магнита ротора осуществляется на специальной намагничивающей установке, то с большой степенью достоверности можно считать в пределах одного магнита
Mz(r, 0, z) — Mz max = const.
Для области 2 воздушного зазора с обмоткой
В(2) zn
0>5?qM'z„ [ Г (2/’m+2 j _ r-7
^(2"м + &) . e
er — 1
(2) = О'^оМ'гл [г |X<+ г) _ Г 6" р-(2^м + 6)
e' — 1
-7Z)
+ e
(3.119)
n
7
z
Для решения уравнений магнитного поля используется разложение физических величин в ряд Фурье с периодом 2л, и уравнение переписывается в виде
СО
Л4г(0) = 2 Mrrncosn$,
п=1
где М'т — амплитуда 6-й гармоники косинусной составляющей векто-ра намагниченности;
тс/2
т — М%тах cos dft,
—тс/2
Так как вектор намагниченности содержит только косинусную составляющую, то можно записать:
00 Вг(в, г) = S B'znCosnO;
п=1
00
Bf) (9, 2) =2 в'6'п sinn9.
п=1
(3.120)
При инженерных расчетах без привлечения ЭВМ использование
(3.117) — (3.120) затруднительно. Для этих целей удобнее рассчиты-
вать распределение магнитного поля в зазоре исходя из заданного распределения аксиальной составляющей вектора магнитной индукции на поверхности постоянного магнита:
Bz
00
_5_=2 B'zn cosn9,
Z ~ 2~ п=1 г=б/2
(3.121)
где B'zn — амплитуда 6-й гармоники радиальной составляющей индук-
ции на поверхности магнита.
Предполагая прямоугольное распределение радиальной составляющей вектора индукции на поверхности, получаем для амплитуды 6-й
гармоники
В'гп г
_ _2
5 п 2
тс/2
J BMcosn8d9,
—тс/2
(3.122)
90
Для области /, занятой постоянным магнитом,
„(1) _ О,5|хоЛ4^Л Bzn — п ,
- (2Лм+5)
еТ — 1
(2Ч+5)] , J ^м+&) t
ег ] + 2 ler — 1
.(!) _ 0,5р.оМгп' JT _ “ Г Г
tin ~~п \е е
— (2Лм + &) е —
+ <?
1 г (2Лм+8)
' е
(3.117)
(3.118)
где Вм определяется из (3.20).
Для определения распределения индукции по длине воздушного зазора обратимся к граничным условиям, согласно которым аксиальная составляющая на поверхности постоянных магнитов обоих роторов задается уравнением
Подставляя граничные условия в (3.113) и решая полученную систему уравнений относительно входящих в уравнение постоянных коэффициентов Рп и Мп, получаем выражения для определения аксиаль-н°й и тангенциальной составляющих вектора индукции
В<2>
п б п 5
- -
Z2 «•9/72 п \ — е Г т 2 Т2!
s {La п у ег 4- е у cos б
Г ег — е Г
(3.123)
91
h б ti I
V F I n ft \
ЬЛ J fr » - 7- »
n=ri z = — er — e r
(3.124)
Анализ (3.123) и (3.124) показывает, что аксиальная составляющая вектора магнитной индукции имеет минимальное значение в середине воздушного зазора при г = 0. Следует также отметить, что значения аксиальной и тангенциальной составляющих индукции зависят от значения радиуса, что необходимо учитывать при проектировании торцевых машин. Расчеты показывают, что аксиальная составляющая индукции в реальных торцевых машинах изменяется по длине воздушного зазора незначительно. Это является отличительной чертой магнитного поля беспазовых торцевых машин.
3.5.2. Поле реакции якоря в торцевых электрических машинах. Так же как и в радиальных электрических машинах, в торцевых машинах с высококоэрцитивными постоянными магнитами поле реакции якоря практически не оказывает влияния на намагниченность постоянного магнита. К тому же в отличие от радиальных электрических машин с монолитным цилиндрическим ротором типа звездочка намагничивание магнитов, составляющих ротор, осуществляется по отдельности (ротор собирается из заранее намагниченных призм), поэтому расчет распределения поля реакции якоря представляет интерес только с точки зрения расчета индуктивности обмотки.
Магнитная проницаемость среды по углу поворота ротора во всех сечениях в плоскости 9—г на оси z не изменяется, и индуктивности обмоток по продольной и поперечной осям одинаковы.
Полагая, что плотность тока в обмотке распределена в пространстве по закону
00
4(9> г) =2 Jzn sin«0.
п=1
для определения аксиальной и тангенциальной составляющих вектора магнитной индукции воспользуемся (3.113) и (3.116), постоянные коэффициенты которых определяются граничными условиями.
После решения системы уравнений для постоянных коэффициентов и подстановки полученных выражений в (3.113) и (3.116) получим:
для области постоянного магнита (область 1 на рис. 3.16)
00
п_ __ и б
/ 2 -е~~г^
<2Ам + 8)
/ — 1
п
г Г <2Лм + 5) е cos ria;
(3.125)
92
— е
А п & п 8
бо -- -----— гй
S. . рт _е г 2 Г — г
---------к -
>(2A“+S)_1
— — г — (2ЛМ 4- б) 1
— е r er JsinnO; (3.126)
для области, занятой обмоткой с током (область 2 на рис. 3.16),
00 2-1- -2-(2*м+5)
Sr 11 (Г * ______в 1
0 ’5Н) ~ 1гп — (2ftM+&) n=i ег — 1
_ — г\ [ — (2Лм+г>) 11
+ е Г )+2|у -l](cosn9; (3.127) п б п , х
00 р-2“ — р-(2Лм + 5)
5о(2) (9. г) = °.5^0 — Jzn п_ (2Ам+5) х
и=1 ег -- 1
__п г
ег —е r sin .
(3.128)
Полученные уравнения для составляющих вектора магнитной индукции позволяют рассчитать индуктивность обмотки и потери (см. гл. 5).
Глава четвертая
ОСОБЕННОСТИ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
С ВЫСОКОКОЭРЦИТИВНЫМИ постоянными
МАГНИТАМИ
4.1. Особенности работы электрических машин на выпрямитель
В гл. 2 были рассмотрены типичные структурные схемы автономных систем электроснабжения с электрическими машинами с высококоэрцитивными постоянными магнитами. Характерной особенностью всех систем электроснабжения является работа электрической машины на выпрямитель или преобразователь частоты со звеном или без звена постоянного тока. Это обусловлено современными требованиями к системам электроснабжения и особенностями характеристик электрических машин с высококо-
93
эрйитивными магнитамй— малое значение индуктивности обмотки якоря, жесткость внешней характеристики, слож* ность регулирования напряжения.
На рис. 4.1,а приведена схема подключения обмотки якоря трехфазного синхронного генератора к нагрузке че-рез трехфазный мостовой выпрямитель, а на рис. 4.1,6 — схема подключения трехфазного генератора к нагрузке через трехфазный однополупериодный выпрямитель.
Рис. 4.1. Схемы подключения
генератора к нагрузке
Обе схемы находят широкое применение в автономных системах электроснабжения относительно небольшой мощности. Зачастую в системах электроснабжения применяются трехфазные двухполупериодные выпрямители со средней точкой (рис. 4.1,в). Эта схема эквивалентна по цепи нагрузки однополупериодной схеме, а по коэффициенту использования активных материалов генератора — схеме выпрямления Ларионова.
Значительно реже используются электрические машины с большим числом фаз, а также одно- и двухфазные генераторы и выпрямители.
Напряжение, ток и мощность на входе (на стороне переменного тока) и на выходе (на стороне постоянного тока) без учета коммутационных процессов связаны соотношениями
U ^=kxjU
I nd} P эмо===^Р^ Hd>
где [/фо — расчетное (без учета коммутационных процессов в выпрямителе) фазное напряжение; 1$ — фазный тоК на входе выпрямителя; Рэм0 — расчетная (без учета коммутационных процессов в выпрямителе) электромагнитная мощность на входе выпрямителя; ku, ki, kp — коэффицй-94
енты выпрямления для напряжения, тока и мощности; коэффициенты выпрямления определяются схемой выпрямителя; [/Hd, hd, Pad — напряжение, ток и мощность на нагрузке на стороне постоянного тока.
Для трехфазного двухполупериодного выпрямителя, собранного по схеме Ларионова, коэффициенты выпрямления ^=0,43; ^=0,82; ЛР=1,05, а для трехфазной однополупериодной схемы Л(7=0,85; &/=0,82; йр=2,09.
В трехфазном двухполупериодном выпрямителе со средней точкой коэффициенты выпрямления по напряжению и току для каждого канала выпрямленного напряжения такие же, как и у трехфазного однополупериодного выпрямителя, а суммарный коэффициент выпрямления по мощности по двум каналам такой же, как и у схемы выпрямления Ларионова.
Коэффициенты выпрямления по напряжению, току и мощности для других схем выпрямления приведены в [23].
Приведенные выше коэффициенты выпрямления получены без учета коммутационных процессов. Реальные значения коэффициентов выпрямления [23] при нагрузке можно получить путем расчета форм тока и напряжения после того,, как электрическая машина спроектирована. На начальном этапе проектирования в расчет необходимо вводить теоретические значения коэффициентов выпрямления, а после расчета характеристик повторять (если будет необходимость) расчет конструктивных параметров машины при новых значениях коэффициентов выпрямления. Следует заметить, что в электрических машинах с высококоэрцитивными постоянными магнитами и беспазо-выми статорами индуктивность обмотки мала и значения коэффициентов выпрямления при нагрузке практически не отличаются от теоретических. Коэффициенты выпрямления играют важную роль при проектировании генераторов, работающих на выпрямитель.
Так, коэффициент выпрямления по напряжению позволяет определить значение фазного напряжения генератора, обеспечивающего требуемое выпрямленное напряжение. В схеме выпрямления Ларионова напряжение генератора определяется выражением
[/ф=^[/н</+2Д1Л/, (4.1)
где \Ud — падение напряжения на одном открытом диоде, и расчетная электромагнитная мощность генератора определяется уравнением
Р ыц—^ЬрР нй~(”2Д[/dkllwl'
рб
При работе генератора на выпрямитель расчетная электромагнитная мощность генератора должна быть больше, чем мощность нагрузки. Это обусловлено тем, что каждая фаза из-за выпрямителя оказывается подключенной к нагрузке только часть периода, а также из-за падения напряжения на диодах выпрямителя. На рис. 4.2 приведены зависимости тока и напряжения на выводах гене-
Рис. 4.2. Диаграммы напряжения и тока генератора, работающего совместно с трехфазным однополупериод-ным выпрямителем
ратора при работе на трехфазный однополупериодный выпрямитель для случая, когда индуктивность обмотки якоря генератора равна нулю, а выпрямитель подключен к активному сопротивлению. Точки пересечения кривых фазных напряжений определяют зоны подключения каждой из фаз генератора к нагрузке (для фазы а эта зона лежит между л/6 и 5л/6). При активной нагрузке форма тока на межкоммутационном интервале повторяет форму кривой напряжения (см. заштрихованный участок диаграммы тока на рис. 4.2). Для того чтобы при работе на выпрями; тель генератор мог отдать в нагрузку ток показанной формы, его электромагнитная часть должна быть спроектирована исходя из того, что при отсутствии выпрямителя 96
генератор может отдавать в нагрузку синусоидальный ток, амплитуда которого равна амплитуде тока при работе генератора на выпрямитель (см. пунктирную линию на рис. 4.2). В рассматриваемом выпрямителе действующее значение выпрямленного тока превышает действующее значение расчетного тока в 1,22 раза. То же можно сказать и о напряжении: значение выпрямленного напряжения больше действующего значения напряжения фазы (для однополупериодного выпрямителя в 1,17 раза).
Что касается расчетной электромагнитной мощности генератора, то она оказывается выше мощности, поступающей в нагрузку.
Такие соотношения между выпрямленным током, напряжением и мощностью и аналогичными выходными параметрами генератора обусловлены тем, что на части периода каждая из фаз генератора из-за нелинейности характеристик выпрямителя оказывается отключенной от нагрузки. И фактически к нагрузке в зависимости от схемы выпрямителя одновременно оказываются подключенными одна или две фазы генератора.
В то же время сечения проводников обмотки якоря определяются реальным значением тока, протекающего по проводникам обмотки якоря, который, естественно, меньше расчетного.
Подробно работа различных схем выпрямления рассмотрена в [23].
4.2. Особенности генераторного режима электрических машин
с высококоэрцитивными постоянными магнитами
Независимость вектора намагниченности высококоэрцитивных постоянных магнитов от напряженности внешнего размагничивающего поля позволяет использовать аналитические методы расчета магнитной цепи и характеристик Генератора.
Кривая размагничивания постоянного магнита на основе интерметаллического соединения кобальта с редкоземельными элементами (аналогичную кривую размагничивания имеет магнитный сплав КС 37А, широко применяемый в магнитных системах электрических машин) име-ет линейный характер, а зависимость индукции от напряженности магнитного поля для кривой размагничивания °писывается уравнением
В=(1— Н/Нсв)Вг.
7^278 97
Для определения рабочей точки на диаграмме постоя^ ного магнита в режиме холостого хода необходимо запц. сать уравнение связи индукции и напряженности во внещ. ней магнитной цепи. Полагая магнитную цепь линейной (насыщение ярма статора учитывается введением соответ, ствующего коэффициента), МДС (на два полюса), при. ложенную к постоянному магниту, можно записать
F = 2M2—8,
Р'О
где kF — коэффициент, учитывающий падение МДС в стальных участках магнитопровода: ^F=(F6-)-F/)/f6 (здесь F& — падение МДС в воздушном зазоре; Fj — падение МДС в стальных участках магнитопровода); #м0 — максимальное значение индукции на поверхности постоянного магнита; kz — коэффициент, учитывающий изменение вектора магнитной индукции по длине воздушного зазора.
В радиальных электрических машинах коэффициент kz определяется по (3.21), а в торцевых — по (3.22).
Для определения значения вектора магнитной индукции на поверхности постоянного магнита необходимо приравнять падение МДС во внешней магнитной цепи (внешней по отношению к постоянному магниту) МДС, создаваемой постоянным магнитом. Тогда, с учетом того что индукция на поверхности постоянного магнита Вм связана с индукцией в нейтральном сечении отношением
Вм=В/о,
где о — коэффициент, учитывающий рассеяние постоянного магнита [8, 9], получим
В =_______________1
мо l + (28/LM)kFkz(l/^0)(Br/'HeB\ 0 >
где /м — длина средней силовой линии на два полюса.
Для радиальных электрических машин с цилиндриче-ским монолитным ротором
__(ДД8 при \DMp~Q'Q при >2,
где £>м — диаметр постоянного магнита.
Для радиальных электрических машин со сборным р0' тором типа звездочка
--2/lMr
где Ам — высота постоянного магнита (одной призмы). 98
Рис. 4.3. Рабочая диаграмма высококоэрцитивного магнита в режиме холостого хода
В радиальных электрических машинах с ротором коллекторного типа ZM=ftM.
Для торцевых электрических машин /м=4йм.
Значение радиальной (аксиальной) составляющей вектора магнитной индукции на поверхности постоянного магнита и ее распределение по длине воздушного зазора мож-00 получить из аналитических выражений (3.64), (3.65), (3.68), (3.69) для радиальных Машин и из (3.127), (3.128) для торцевых машин при заданном распределении вектора намагниченности по объему постоянного магнита.
Расчет значения магнитного потока индукции на поверхности постоянного магнита, потока рассеяния и потока постоянного магнита в нейтральном сечении может осуществляться и из расчета рабочей диаграммы магнита на рис. 4.3.
На рис. 4.3 в осях магнитного потока и МДС построе
на кривая размагничивания постоянного магнита (прямая 7), на которой точка Фг, соответствующая остаточному магнитному потоку, определяется как
Фг-BrS^
где Sм — поперечное сечение постоянного магнита.
Для цилиндрического магнита типа звездочка с синусоидальным распределением радиальной составляющей индукции для расчета потока Фг удобно использовать выражение
фг=
Точка, соответствующая коэрцитивной силе, определяется Как
Fс== Н
где /м—средняя длина силовой линии постоянного магнита на два полюса.
Кривая Фб0=/(Л (рис. 4.3) представляет собой характеристику внешней магнитной цепи, которая при отсутствии Насыщения, что характерно для электрических машин с Нысококоэрцитивными постоянными магнитами, изобража-7» 99
ется в виде прямой линии. При насыщении магнитопров0ч да зависимость Фбо=И^) становится нелинейной (С1^ пунктирную линию на рис. 4.3). При синусоидальном рактере изменения магнитного поля в зазоре
®60=== (^м/р) LmBmuIZz)
F=2kzkFBMQ8/ikQ.
Кривая $s=f(F) представляет собой характеристику по. тока рассеяния постоянного магнита и определяется как
$S=G SF,
где Gs—проводимость потока рассеяния, определяемая по [8, 9].
Как видно из диаграммы магнита (рис. 4.3), магнитный поток Фм, создаваемый магнитом, складывается из потока рассеяния Ф5 и рабочего потока Фб0, проходящего через воздушный зазор.
При нагрузке магнитный поток (индукции) в воздушном зазоре зависит также и от МДС реакции якоря. Так как магнитная цепь электрических машин с высококоэрцитивными постоянными магнитами с высокой степенью достоверности может считаться линейной, то МДС якоря можно разложить на продольную и поперечную составляющие, выражения для которых (на два полюса) имеют вид
Fad=0^m (о/фйобЛР) /ф,нМтф3;
Faq=Q,9m (^фАоб/р) /ф,н^а^СО8фз,
где Fad, Faq—МДС якоря по продольной и поперечной осям; т—число фаз обмотки якоря; Доф—число витков в фазе; /ф,н—действующее значение тока якоря; koe—обмо-точный коэффициент; kad, kaq—коэффициенты приведения МДС реакции якоря по продольной и поперечной осям соответственно к МДС постоянного магнита; ф—фазовый угол сдвига между векторами ЭДС холостого хода и током.
Коэффициенты kad и kaq определяются соотношениями
kad= (Bad\/Bad) (^бо/^бО1) \ kaq^^ (Вaq\/Вaq) (^бо/^бО1)?
где Ваал, Baqi, Beoi—первые гармоники индукции, создав ные МДС якоря по продольной и поперечной осям постояв ным магнитом; Bad, Baq, Bqq—максимальные значения мН"
юо
дукций, созданных МДС якоря по продольной и поперечной осям и постоянным магнитом.
Точное их определение возможно только путем расчета распределения составляющих магнитного поля по соответствующим осям (см. гл. 3).
Для инженерных расчетов коэффициента kad можно воспользоваться уравнением [24]
__ ал + sin ал;
aq 4sin(owr/2) где а—коэффициент полюсного перекрытия.
Так как в рассматриваемых машинах отсутствуют полюсные башмаки, то для определения коэффициента kaq можно использовать выражение [8]
kaqz=:=B^q8/ ,xBqi где Suq—площадь поперечного сечения постоянного магнита (поперек потоку продольной реакции якоря); т—полюсное деление; б—длина воздушного зазора; Lq—средняя длина силовой линии поперечного потока;
Sm<7= (jDm+26) Ьм/2р, где LM—длина постоянного магнита.
При протекании тока по обмотке якоря уравнение (4.7), представляющее собой уравнение магнитной цепи, дополняется МДС якоря по продольной оси:
D П и и В-м $ I 2 V 2 ^об Т 1 .
F = 2kpkz — б 4--------— /ф> vkad sm ф.
После проведения преобразований индукция на поверхности постоянного магнита при воздействии МДС якоря определяется по (3.18) и (3.19).
При нагрузке рабочая точка на диаграмме магнита определяется 'следующим образом (рис. 4.4).
Из кривой размагничивания постоянного1 магнита 1 вычитается поток рассеяния [зависимость Ф5=/:(Т?) —кривая 5]. При этом получаем зависимость потока на поверхности магнита от МДС — кривая 2. Далее строится магнитная характеристика внешней цепи (D62=f(F), соответствующая режиму холостого Хода — кривая 3 на рис. 4.4.
Рис. 4.4. Рабочая диаграмма высококоэрцитивного постоянного магнита при нагрузке
101
Для определения рабочей точки на диаграмме магнита необходимо сместить построенную зависимость <b6z=f(p) параллельно самой себе вдоль оси абсцисс на Faa (кри^ вая 4). Точка пересечения этой кривой с кривой 2 и опре~ делит рабочую точку на диаграмме магнита—точку А.
В отличие от электрических машин с традиционными постоянными магнитами в машинах с высококоэрцитивны-ми магнитами вид внешней характеристики не зависит от того, каким образом осуществляется стабилизация магнита. Это связано с независимостью намагниченности редкозе-мельных постоянных магнитов от напряженности магнитного поля.
Действующее значение ЭДС холостого хода в фазе определяется уравнением
£фо=^ЧРЛАСро, или
£ф0 w^DaLnBicp0 а-ы,
где о/ф—число витков в фазе; koe—обмоточный коэффициент; Вбсро—среднее по длине воздушного зазора значение магнитной индукции в режиме холостого хода, создаваемое постоянным магнитом; f—частота изменения магнитного поля; «б/—расчетный коэффициент полюсного перекрытия; &Ф—коэффициент формы магнитного поля, представляющий собой отношение действующего ц среднего значений индукции в воздушном зазоре.
При синусоидальном распределении магнитного поля в зазоре кф= 1,11.
Среднее по длине воздушного зазора значение магнитной индукции в радиальных электрических машинах определяется из выражения
ср pH* (1+8*)2Р+1
*
где 6*—относительная длина воздушного зазора: б*^ =2б/£>м.
В торцевых электрических машинах среднее по длине воздушного зазора значение магнитной индукции определяется уравнением
_ 1 Ан-_г‘-2п
В5ср°—«Г Вм.-
— е
8*=--28/(DM-Z>M), (4.2)
здесь Ьм—ширина постоянного магнита.
Так как насыщение магнитной цепи электрических машин с высококоэрцитивными постоянными магнитами незначительно, то внешняя характеристика описывается системой уравнений
Ефо = ^ф. Н cos (ф - <РН) + /ф, Hxd sin ф 4- /ф, н/?ф cos ф; | 3)
0 = С/ф>н5Ш(ф-<рн)4-/ф.нх,гсо5ф4-/ф1Н/?фЗтф1 |
где ха, xq—полные индуктивные сопротивления по продольной и поперечной осям; £ф0—ЭДС холостого хода; /ф,н, [7ф,н—фазные ток и напряжение на нагрузке; /?ф—активное сопротивление обмотки якоря; <рн—фазовый угол между током и напряжением на нагрузке.
В общей теории электрических машин полные сопротивления Xd и xq обычно представляются в виде суммы:
Xd=Xad+Xs\ Xq=Xaq+Xs, (4.4)
где Xad, xaq—индуктивные сопротивления по продольной и поперечной осям; xs—индуктивное сопротивление рассеяния.
Формулы для расчета индуктивных сопротивлений по продольной и поперечной осям, а также для расчета активного сопротивления обмотки якоря приведены в гл. 5.
В ряде случаев удобнее оказывается использование системы уравнений внешней характеристики генератора, записанной в относительной системе единиц:
j kEo = cos (ф - <f>H) + xd* sin ф + /?ф» cos ф;
1 + (4.5)
I ф = arctg v 7
k + cos
где Xd*, Xq*—относительные значения полных индуктивных сопротивлений по продольной и поперечной осям; /?ф*—относительное значение активного сопротивления обмотки якоря; —коэффициент, связывающий ЭДС холостого хода и напряжение на нагрузке:
^ЕО==^,фо/^Ф,н; Xd*:=zXd/Г2Н; Х<7* =
’^Xq/Zn, 7?ф*=7?фI
здесь 2Н—полное сопротивление нагрузки.
103
102
Системе уравнений (4.3) соответствует векторная диа-грамма напряжений, представленная на рис. 4.5. Векторная диаграмма напряжений строится следующим образом:
откладывается отрезок оа, соответствующий ЭДС холостого хода;
при заданных внутренних параметрах генератора и нагрузки определяется угол гр между векторами ЭДС холос-
Рис. 4.5. Векторная диаграмма напряжений синх-
того хода и тока нагрузки;
под углом гр к вектору ЭДС холостого хода откладывается вектор ob тока нагрузки /ф>н, значение которого определяется путем следующих вычислений. Из первого уравнения системы уравнений (4.5) определяется напряжение на нагрузке. Разделив напряжение на полное сопротивление нагрузки, получим ток нагрузки;
из вектора оа ЭДС холостого хода вычитается ЭДС реакции якоря по продольной оси (вектор ас):
Е а^=^/ф,нХа/б/8Шгр;
ронного генератора с по-
стоянными магнитами перпендикулярно полученно-
му вектору откладывается век-
тор cd, соответствующий поперечной реакции якоря,
Eaq—/ф,нХааСО8г|9;
из конца вектора cd перпендикулярно вектору тока ob проводится вектор de, соответствующий падению ЭДС на индуктивном сопротивлении рассеяния;
из конца вектора de параллельно вектору тока проводится вектор ef, соответствующий падению напряжения на активном сопротивлении обмотки якоря.
Полученный вектор of представляет собой напряжение на нагрузке. Вектор od является так называемой внутренней ЭДС или ЭДС в воздушном зазоре. Этот вектор соответствует ЭДС, создаваемой магнитным полем машины при нагрузке в обмотке якоря.
Угол между внутренней ЭДС и ЭДС холостого хода характеризует поворот вектора магнитного поля относитель-104
но центра полюса при нагрузке:
п ^ф. u%aq со$ Ф
0 = arctg Е^-К x,sM'
23фо 2ф, n-^ad Ь1П т
Вектор fd на рис. 4.5 представляет собой падение напряжения на внутреннем сопротивлении нагрузки:
а^-/ф.н)Чч/?ф!,
отношение внутренней ЭДС к падению напряжения на нагрузке обозначается как
kE =--- — =---------------- 1 ---, (4.6)
^ф- н Jcos(<f' — <рв) — l/cos^»' — <ря) — (1 — Д1/ф#)
где <р'—фазовый угол между внутренней ЭДС и током; А[/*ф—относительное значение падения ЭДС на внутреннем сопротивлении нагрузки:
A ZV *ф=А[/ ф/^ф,н;
q/=arctg(xs*+sir^H) /(/?ф*+созфн),
где xs*—относительное значение индуктивного сопротивления: X$*=Xs/zH.
В беспазовых электрических машинах практически не представляется возможным выделить индуктивное сопротивление рассеяния из полного сопротивления по продольной и поперечной осям, поэтому в таких машинах становится бессмысленным понятие внутренней ЭДС, а векторная диаграмма напряжений имеет вид, представленный на рис. 4.6, где Xd и xq определяются выражением (4.4).
В беспазовых электрических машинах с ротором типа звездочка и в торцевых машинах с высококоэрцитивными постоянными магнитами индуктивные сопротивления по продольной и поперечной осям равны друг другу: Xd=xq= ^=%Ф, где %ф—полное индуктивное сопротивление генератора.
Поэтому система уравнений внешней характеристики в этом случае имеет вид
£фо = ^ф. н cos (Ф - Тн) + 2Ф. н*ф sin ф + /ф. Л cos ф; , х *ф + Sin ?н
* = arCtg~^ + *BcosyH
105
Векторная диаграмма напряжений при равенстве ин. дуктивных сопротивлений генератора по продольной и п0' перечной осям значительно упрощается (рис. 4.7). Здесь разница между векторами напряжения на нагрузке и ЭДс холостого хода выражается в виде падения напряжения на
Рис. 4.6. Векторная диаграмма напряжений синхронного генератора с постоянными магнитами
Рис. 4.7. Векторная диаграмма напряжений синхронного генератора с постоянными магнитами при одинаковых индуктивных сопротивлениях по продольной и поперечной осям
индуктивном сопротивлении /ф,нХф и падения напряжения на активном сопротивлении обмотки якоря генератора /ф>н/?ф.
4.3. Регулирование напряжения в генераторах с высококоэрцитивными постоянными магнитами
Одной из наиболее сложных проблем применения электрических машин с высококоэрцитивными постоянными магнитами является регулирование напряжения. Частным вопросом регулирования является стабилизация напряжения при изменении нагрузки.
Прежде чем рассмотреть способы стабилизации и регулирования напряжения в машинах с высококоэрцитивными постоянными магнитами, рассмотрим кратко те проблемы, с которыми сталкивается проектировщик таких машин:
106
значение вектора намагниченности постоянного магнита от образца к образцу, а следовательно, значение ЭДС холостого хода электрической машины изменяются в достаточно широких пределах. Разброс характеристик реальных постоянных магнитов достигает ±20%;
в отличие от электрических машин с традиционными постоянными магнитами, где путем их стабилизации осуществляется установка точки отхода кривой возврата, а следовательно, ЭДС холостого хода, в генераторах с высококоэрцитивными магнитами стабилизировать постоянный магнит невозможно;
большие воздушные зазоры в беспазовых электрических машинах и слабая зависимость вектора намагниченности от напряженности магнитного поля практически исключают возможность регулирования магнитного потока.
Традиционный способ регулирования напряжения в электрических машинах с постоянными магнитами с помощью подмагничивания спинки статора можно использовать только в конструкциях с большими участками магнитомягкой стали, например в индукторных генераторах, генераторах с когтеобразным ротором.
В беспазовых машинах применение подмагничивания спинки неэффективно из-за большой мощности, необходимой для изменения магнитного потока машины.
Поэтому в системах электроснабжения постоянного тока для стабилизации напряжения целесообразно использовать параметрическую стабилизацию. При таком способе стабилизации напряжения генератор проектируется с такой внешней характеристикой, чтобы в диапазоне изменения нагрузки от нуля до номинальной изменение напряжения не превышало заданного значения. В электрических машинах с традиционными постоянными магнитами параметрическая стабилизация напряжения практически не нашла применения из-за необходимости значительного увеличения массы электрической машины [8, 9].
Другое дело—генераторы с высококоэрцитивными магнитами. В этих машинах предел электромагнитной мощности наступает значительно позже, чем тепловой предел. Поэтому даже при высокоэффективных системах охлаждения (не криогенных), когда плотность тока в обмотке якоря достигает (30—35) • 106 А/м2, максимальная электромагнитная мощность значительно превышает номинальную, т. е. электрическая машина по электромагнитной мощности оказывается недоиспользованной. Это позволяет практически без снижения массогабаритных показателей
107
использовать параметрический способ стабилизации
напряжения.
Установка требуемой ЭДС холостого хода осуществля-
ется путем изменения частоты вращения приводного двигателя. Определение допустимого изменения напряжения генератора при заданном изменении напряжения в системе электроснабжения рассмотрено в § 2.5.
Перспективным является применение в системах электроснабжения постоянного тока транзисторных проходных
регуляторов напряжения. Регуляторы могут осуществлять стабилизацию напряжения на нагрузке как путем понижения, так и путем повышения напряжения.
На рис. 4.8 приведена
Рис. 4.8. Схема проходного понижающего регулятора напряжения
принципиальная схема импульсного проходного понижающего регулятора напряжения. Регулятор состоит из транзистора VT, коллек-торно-эмиттерный переход которого включен в цепь меж-
ду выводами постоянного тока выпрямителя и нагрузки. На схему управления СУ поступают сигналы с источника эталонного напряжения и с чувствительного элемента ЧЭ. Последовательно с коллекторно-эмиттерным переходом транзистора включен реактор L, а на выводы регулятора— конденсатор С.
Регулирование напряжения осуществляется путем изменения времени открытого состояния транзистора,
когда к нагрузке прикладывается полное напряжение генератора, и закрытого его состояния. Реактор L служит для сглаживания пульсаций тока, а конденсатор С сгла-
живает пульсации напряжения.
Схема управления регулятора может реализовывать как широтно-импульсный, так и релейный способ изменения (стабилизации) напряжения. В первом случае стабилизация напряжения обеспечивается путем изменения скважности открытого состояния транзистора регулятора, причем частота коммутации транзистора постоянна и задается специальным генератором.
При релейном способе стабилизации напряжения изменяются как скважность, так и частота коммутации транзистора регулятора.
юа
Диаграммы напряжений, характеризующие работу регулятора при широтно-импульсном способе регулирования, приведены на рис. 4.9. При отпирании в момент транзистора падение напряжения на последнем незначительно и напряжение генератора через реактор L прикладывается к нагрузке и конденсатору С. Конденсатор заряжается, и напряжение на нагрузке возрастает. При запирании транзистора в момент времени t2 конденсатор разряжа-
Рис. 4.9. Диаграммы напряжений на коллектор-но-эмиттерном переходе транзистора Uvt и на нагрузке при работе проходного понижающего регулятора напряжений
ется на нагрузку. При изменении скважности открытого состояния транзистора изменяется значение напряжения на нагрузке.
На рис. 4.10 приведена схема проходного повышающего регулятора напряжения, который подключен к генератору Г через выпрямитель В и содержит транзистор VT, реактор L, конденсатор С, схему управления СУ и чувствительный элемент ЧЭ.
Повышение напряжения осуществляется путем импульсной коммутации транзистора VT. При открытом транзисторе ток, протекающий через реактор, состоит из суммы тока транзистора VT и тока нагрузки. При запирании транзистора VT ток дросселя не может измениться мгновенно. Поэтому напряжение на транзисторе и нагрузке возрастает. После достижения заданного значения напряжения транзистор VT открывается и напряжение на нагрузке начинает понижаться.
Частота коммутации транзисторов в схемах понижающего (см. рис. 4.8) и повышающего (рис. 4.10) регулято-
109
ров определяется индуктивностью реактора L а максимальное ее значение — выражением
где Un- ------------ -
— индуктивность реактора; реакторе.
fmax — U п/4АрД/р,
(4.7)
— напряжение на входе регулятора напряжения-дуктивность реактора; — пульсации тока »е.
и
Рис. 4.10. Схема проходного повышающего регулятора напряжения
Рис.
стика генератора с постоянными магнитами t/r = f(/r) и вольт-амперная характеристика нагрузки uK=f(ia)
4.11. Внешняя характера-
4.4. Особенности переходных процессов в электрических машинах с высококоэрцитивными магнитами
Электрические машины современных систем электроснабжения работают в комплекте с выпрямителем илд преобразователем частоты со звеном или без звена постоянного тока, поэтому характерной чертой работы электрической машины является непрерывный переходный процесс. Повышение требований к качеству электрической энергии в системе электроснабжения и импульсный характер нагрузки также требуют тщательного исследования работы машины в переходных режимах.
Прежде чем рассмотреть уравнения, описывающие электромагнитные процессы, коротко рассмотрим характерные особенности переходных процессов в машинах с редкоземельными магнитами.
Если машина работает в режиме холостого хода, то напряжение на нагрузке равно: (7ф,н=£’фо.
После подключения нагрузки и установления переходных процессов напряжение на нагрузке определяется точкой пересечения внешней характеристики генератора с вольт-амперной характеристикой нагрузки J7h=/(/h) — точкой А на рис. 4.11. Значение напряжения ПО
при заданном сопротивлении нагрузки определяется уравнением (4.5) и равно Изменение напряжегия после переходного процесса составляет АСУ, поэтому чем жестче внешняя характеристика генератора, тем меньпе изменение при том же сопротивлении нагрузки.
При импульсном подключении нагрузки из-за индуктивности обмотки генератора ток электрической машины, а следовательно, ток нагрузки не могут измениться мгновенно, поэтому в первый момент времени напряжение на нагрузке определяется из выражения
^Ф.Н /=/+~ 7Ф.н
*=*Г
где t\ — момент изменения нагрузки (коммутации); tr — момент времени, предшествующий коммутации нагрузки; tt+ — момент времени сразу после юммутации нагрузки; С7ф> н | + _ напряжение на нагрузке сразу
после коммутации (изменения нагрузки); /ф,г
в момент времени, предшествующий коммутации; /?ф Н | +_ сопротивление нагрузки в момент времени
сразу после коммутации нагрузки.
Если до коммутации нагрузки генератор работал в режиме холостого хода, как показано на рис. 4.12, то напряжение на выводах генератора равно ЭДС холостого хода Ефо. При изменении нагрузки в первый момент времени напряжение на нагрузке равно или близю к нулю (на рис. 4.12 это напряжение обозначено как 27п). Отличное от нуля напряжение на нагрузке связано с наличием внутренней емкости. Затем в зависимости от характера нагрузки происходит апериодический или колебательный процесс установления напряжения на нагрузке. Время установления процесса в значительной степени определяется индуктивностью обмотки якоря: чем меньше она, тем быстрее заканчивается переходный процесс.
При работе машины в комплекте с выпрямителем на выводы последнего включается конденсатор. В этом случае провалы напряжения на нагрузке значительно меньше, так как в первый момент времени энергия, запасенная в конденсаторе, поступает в нагрузку.
В общем случае уравнение баланса напряжений выводах электрической машины записывается в виде
di
(4.8)
где U — матрица напряжения на зажимах машины; R—матрица фазных сопротивлений обмотки; i — матрица токов; Y — матрица потокосцеплений.
Рис. 4.12. Диаграмма изменения напряжения генератора с постоянными магнитами при подключении нагрузки
Рис. 4.13. Схема соединений обмоток электрической машины
Численный способ решения уравнения (4.8) является наиболее универсальным и позволяет моделировать любые режимы работы, например работу машины совместно с инвертором, выпрямителем и проходным регулятором напряжения без привлечения громоздкого математического аппарата.
При известном распределении индукции в пространстве и изменении ее во времени потокосцепление f-й обмотки может быть записано в виде
ф •
'flu
где фг-н, фгК — начальное и конечное значение пространственного угла расположения i-й обмотки.
При исследовании электрических машин с высококоэрцитивными постоянными магнитами потокосцепление, входящее в (4.8), целесообразно раскрыть через индук-112
тивности обмоток. Такой подход оказывается оправданным ввиду слабого насыщения магнитной цепи рассматриваемых машин:
U = RXi+-f-(LXi)4e. (4-9)
где L — матрица индуктивностей обмэток; е — матрица ЭДС, наводимых в обмотках магнитным потоком постоянного магнита.
Для расчета токов и напряжений к системе уравнений (4.9) необходимо добавить уравнения баланса напряжений на нагрузке, которые при активно-индуктивной нагрузке генератора имеют вид
, (4-Ю)
£1 о d-ti LIS I tJ-ri *
где Uas, ias — напряжение и ток на зажимах обмотки фазы а статора; Лан, Лт— индуктивность и активное сопротивление нагрузки в фазе а.
Уравнение (4.10) соответствует последовательно соединенным активному и индуктивному сопротивлениям нагрузки.
Если генератор подключается к нагрузке через выпрямитель или инвертор, то к уравнениям (4.9) и (4.10) необходимо добавить алгоритм работы управляемого выпрямителя или инвертора. В этом случае начальные условия переходных процессов ищутся методохМ итерации путем «сшивки» пограничных значений токов и напряжений.
В общем случае на статоре электрической машины располагается m-фазная обмотка (рис. 4.13), причем фазовый угол между фазами обмотки (определяется выражением
а5 = 2л/т. (4.11)
На роторе машины располагается постоянный магнит, влияние которого на электромагнитные процессы учитывается путем введения соответствующих ЭДС в уравнения Напряжений для фаз обмотки статора, Оболочка и сам Постоянный магнит являются демпферами для потока Реакции якоря, поэтому ротор представлен в виде двух Демпферных обмоток по продольной и поперечной осям с фазовым углом
аг=л/2. (4.12)
При раскрытии уравнения (4.9) с учетом (4.11) и (4.12) вьтберем за начало отсчета угла центр обмотки фазы 1 8-278 из.
(рис. 4.13) статора. Предполагается что ротор вращается с частотой вращения Qr. При этом круговая частота изменения магнитного поля соответственно равна:
(Ог —
где — круговая частота вращения ротора; р — число пар полюсов.
Для общности результата положим, что в момент времени t=Q ось демпферной обмотки по поперечной оси смещена относительно оси отсчета угла на 0К.
При раскрытии системы уравнений (4.9) предполагается синусоидальное изменение взаимных индуктивностей между обмотками статора и ротора, постоянство собственных индуктивностей обмотки статора и ротора, постоянство (независимость от частоты вращения) взаимоиндук-тивностей между обмотками статора, а также между обмотками ротора, синусоидальность изменения ЭДС, создаваемых постоянным магнитом в обмотках статора.
Система уравнений для машины с m-фазной обмоткой статора и двумя демпферными обмотками на роторе приведена на с. 116. В системе уравнений сделаны следующие обозначения: t/ms, ism — мгновенные значения фазных напряжений и тока в т-й фазе статора генератора; ems — мгновенное значение ЭДС, наводимой в т-й фазе обмотки якоря постоянным магнитом; f/, iqr — мгновенные значения токов в демпферных обмотках ротора по продольной и поперечной осям; rr — активные сопротивления обмоток статора и ротора; Ls,Lr — собственные индуктивности обмоток статора и ротора; Msksm —взаимные индуктивности между фазами обмотки статора; Msr — взаимная индуктивность между обмотками статора и ротора-
Мгновенное значение угла между осью демпферной обмотки ротора по поперечной оси и осью начала отсчета определяется выражением
’У=со/Х6к,
где (ог — угловая частота вращения ротора; t — время; 0К— начальное значение угла между демпферной обмоткой по поперечной оси и осью отсчета угла.
ЭДС, создаваемые в фазах обмотки якоря магнитным потоком постоянного магнита, определяются уравнением
ems = /TE^sin[o>/ + 0K -~(т- 1)аД (4.13) где Еф$ — действующее значение ЭДС холостого ходя-114
Если на статоре располагается симметричная трехфаз-ная обмотка, то матрица (4.14) значительно упрощаете; и после подстановки в (4.14) т = 3, а$ = 2л/3 получаем систему уравнений для этого случая.
В последнее время получили распространение электрические машины, содержащие две (иногда и более) симметричные гальванически развязанные трехфазные обмотки на статоре. При записи уравнений баланса напряжений для этого случая за начало отсчета координат (угла) примем центр фазы первой обмотки. Фаза а2 второй обмотки смещена относительно фазы а\ первой обмотки на угол 0О. Так же как и при записи системы уравнений для машины с m-фазной обмоткой статора, предполагаем, что на роторе располагаются две демпферные обмотки, причем в момент времени £=0 ось демпферной обмотки по поперечной оси смещена относительно оси отсчета угла на 0К.
Система уравнений для машины с двумя «независимыми» обмотками на статоре представлена на с. 116—117.
В ней обозначены: fs? Ub — мтновенные значения тока и напряжения па зажимах обмотки статора; rs, rr — активные сопротивления обмоток статора и ротора; es — мгновенное значение ЭДС, наводимой в обмотках статора магнитным потоком постоянного магнита; Ls, Lr — собственные индуктивности статора и ротора; Mss — взаимная индуктивность между обмотками статора; М&г — взаимная индуктивность между обмотками статора и ротора. Нижние индексы 1 и 2 обозначают принадлежность первой или второй обмоткам статора: нижние индексы при взаимных индуктивностях обмоток статора (например, а!с2), обозначают, между какими фазами первой и второй обмоток (в рассматриваемом случае между фазой а первой обмотки и фазой с второй обмотки) рассматривается взаимодействие.
Уравнения (4.14) и (4.15), записанные в естественной, фазовой системе координат, позволяют рассчитывать переходные процессы в электрической машине и системе электроснабжения при различных, внешних воздействиях.
Форма записи уравнений баланса напряжений в фазовой системе координат удобна при исследовании электромагнитных процессов в системах, напряжение на зажимах электрических машин которых изменяется по сложному закону. Поэтому уравнения в фазовой системе координат удобно использовать при работе электрической машины в комплекте с проходным регулятором напряжения или преобразователем частоты. Удобна форма записи уравнений баланса напряжений в виде (4.14) и (4.15) и при исследовании вентильных двигателей.
При исследовании же электромагнитных процессов в электрических Машинах, работающих в системах электроснабжения переменного тока, а также на выпрямитель, целесообразным является применение к (4.14) к (4.15) линейных преобразований Горева — Парка.
115,
rs + pLs pM^2 P^m
и/ pMs£ rs + pLs • . .
•
rs + pLs
0 pMrs cos(y—ar) pMrs cos(y — — as — О * • • pMrs cos (y — — (m—l)a^ — ar]
0 pMrs cos у pMrs c os (Y — as) . . . pMr's cos (y — — (m— 1)0
rf + Xf pMsis PMf PMsasia2 pMs^b2
Usbi rf+x4 pM? pM°°a2 pMflb2
"cl pUfs /7/UfS rs,+pL° pM^ pM^b2
PMa2al PMa2b\ P^a2d rs2 + pLs2 pMs2s
Tls Ub2 = PMb2al Р^Ъ2Ы PMb2cl PM2 rS2+PL2
IIs Uc2 PMc2al PMScS2bl PMc2ct PM2 PM2
0 pM^X Xcos (y—ar pMrxs cos(y— ) — “s— “r) /M-ifXos (y— /lW^cos (y+ /z'V1£scos(y+ —2a3 — ar) +90 — ar) 4-0o—ar— as)
0 pM (S cos y рЛ4^Х x cos (y—a, pM[scos (y— p34jScos (y+ XW£scos (y+ ;) — 2as) -j- 0O) + 0e — «s)
.116
pNiSr COS (у — ar)
pMsr COS (Y — as — ar)
pMsr cos [y —
— (m — l)as-“'ar]
rr + pLr
0
P^c2 P^elc2 pM2 pMs2s p44frX X COS (Y—ar) /?2Wfrcos (y— — ar — <*s) pA4jrcos (y— cf.f. 2as) pMS2 COS (y+ + % — ar) pM%cos (y+ + 90—ar—as) pM]r cos y pAffrX X cos (y—as) P^trX Xcos(y— 2as) P^fX Xcos (y+0o) pMs^cos (y+ + 60 — as) X & lb\ lcl la2 ^b2 + eal ebl eSc\ ea2 eb2 .(4.15)
r2 + P^2 pMsJ cos (y+ + %— ar— 2a5) pM% cos (y+ + 90 — 2as) ‘c2 • ec2
P-M2scos (y+ + ®o — ar— 2«j) rr+pL^ 0 0
Mf£scos (y+ +9 0—2as) 0 r' + pU 0
117
Применительно к синхронным машинам с высококоэрцитивньцц магнитами нет ограничений по применению линейных преобразований так как магнитная цепь рассматриваемых машин линейна, распредели ние магнитного поля в зазоре машин синусоидально, рассматриваемы^ машины имеют симметричную магнитную цепь и симметричные обмотки, на статоре отсутствует явно выраженная зубчатость (в беспазо-вых машинах статор совершенно гладкий).
В машинах с постоянными магнитами удобным оказывается пре-образование к вещественным ортогональным осям d, q, 0, неподвижным относительно ротора.
Исходя из инвариантности мощности переход к новым координатам осуществляется по известным выражениям [26]:
i=cXi';
U'-c.XU;
e'=CfXe>
где i, i' — матрицы тока и преобразованного тока; U, U'— матрицы напряжения и преобразованного напряжения; е, е' — матрица ЭДС и матрица преобразованной ЭДС; с — матрица линейного преобразования; Ct — транспонированная матрица.
Преобразование для сопротивления имеет более сложный вид:
z'=cfXzXc,
(4.16)
где z, zz — матрица сопротивления и преобразованного сопротивления.
При расчете матрицы преобразованного сопротивления z' по (4.16) необходимо сначала умножить z на с, а затем полученный результат умножить на матрицу преобразованного тока V и продифференцировать. Далее осуществляется умножение матрицы Ct на полученный ре-
зультат.
Для электрической машины с m-фазной обмоткой статора матрица преобразований имеет вид
d q 6
1
cos y sin y KT
cos (у — as) sin (y — as) 1
cos (y — 2as) sin (y — 2as) 1 v~
cos [y—(m— 1) as] sin [y~(m— 1) as] i v~
’ (4.17)
118
Обратная матрица преобразования подобна транспонированной и имеет вид
12 3 т
d q
о
cos у
sin у
1
v~
COS (f — as) cos (y — 2as) sin(Y~ as) sin(Y~ 2as)
1 1
V~
cos [y — (m — 1) as] sin[Y — (m — l)as] 1
Для трехфазной обмотки якоря матрица преобразований (4.17) имеет только три строки, а угол между фазами статора равен: as = =2л/3.
При соединении обмотки в звезду нулевая составляющая преобразования отсутствует. Так как в большинстве случаев обмотка машин соединена в звезду, то при записи уравнений в координатах, неподвижных относительно ротора, составляющая нулевой последовательности опущена.
Преобразованное уравнение машины в осях d, q имеет вид
Usd
О о
rsd+pLsd pMsr -^rq
vrMss rsq+pLsg <i>rLdr pMsr pMsr 0 r'd+pLdr 0
X
(4.18)
где Uqs — мгновенные значения напряжений статора по продольной и поперечной осям; ids, iq\ idr, iqr— мгновенные значения токов статора и ротора по продольной и поперечной осям; Lds, Lqs, Ldr, Lqr — собственные индуктивности обмоток статора и ротора по продольной и поперечной осям; rds, rqs, rdr, rqr — активные сопротивления обмоток статора и ротора; М$г— взаимная индуктивность между обмотками статора и ротора; eds, eqs — ЭДС, наводимая в обмотках статора постоянным магнитом по продольной и поперечной осям; Mss — взаимная индуктивность между обмотками статора.
Для обеспечения малой длительности переходных процессов при проектировании электрических машин с высо-119
кокоэрцитивными постоянными магнитами необходимо выполнять следующие условия: статор выполнять беспа-зовым, исключить на роторе участки из магнитомягкой стали, уменьшать линейную нагрузку и увеличивать плотность тока, увеличивать индукцию в воздушном зазоре ц диаметр ротора.
Решение систем уравнений баланса напряжений (4.14) и (4.15) наиболее удобно вести на ЭВМ. При этом в отличие от решения для синхронных машин с обычными постоянными магнитами решение сходится достаточно быстро из-за отсутствия насыщения магнитной цепи (все индуктивности в уравнениях постоянны) и влияния реакции якоря на вектор намагниченности постоянного магнита (ЭДС es, созданные постоянным магнитом, не зависят от значения тока якоря).
Расчеты переходных процессов в трехфазном беспазо-вом синхронном генераторе с симметричными обмотками по (4.14) достаточно хорошо согласуются с результатами экспериментальных исследований.
Как показывают расчеты и экспериментальные исследования, отличительной особенностью переходных процессов в электрических машинах с высококоэрцитивными постоянными магнитами является их малая длительность.
Так, время переходного процесса синхронного генератора мощностью 1000 Вт, напряжением 20 В и частотой 1000 Гц при сбросе и набросе нагрузки от нуля до номинальной составляет менее 30 мкс, т. е. значительно меньше периода изменения частоты напряжения.
4.5. Электромагнитные процессы в вентильных двигателях с высококоэрцитивными постоянными магнитами
В гл. 2 были рассмотрены особенности конструкции и структурные схемы вентильных двигателей с постоянными магнитами.
В вентильных двигателях используются два принципа регулирования тока якоря: принцип широтно-импульсной модуляции, при котором задается частота коммутации, транзисторов инвертора, и релейный способ регулирования, при котором задается значение максимального тока через инвертор, а частота коммутации транзисторов определяется напряжением питания, частотой вращения двигателя и его внутренними параметрами — сопротивлением обмотки и ее индуктивностью.
120
Первый принцип регулирования в вентильных двигателях с высококоэрцитивными магнитами обычно реализуется схемой, представленной на рис. 4.14.
Напряжение от источника питания поступает на инвертор ИН через проходной регулятор напряжения ПРН, содержащий транзистор VT, реактор L и конденсатор С. Коллекторно-эмиттерный переход транзистора VT проходного регулятора напряжения ПРН включен в цепь питания инвертора ИН. Реактор L служит для снижения пуль-
Рис. 4.14. Структурная схема вентильного двигателя
саций напряжения и уменьшения частоты коммутации транзистора VT. Инвертор ИН содержит три стойки транзисторов VT\—VT2, VT3—VT4 и VT5—VT6, средние точки которых подключены к выводам фаз обмотки якоря электрической машины ЭМ. В состав инвертора ИН входит также мост обратного тока, содержащий три стойки диодов m—m, VD^—VD, и VDb— VD&.
Напряжение, поступающее на выводы инвертора, изменяется с помощью проходного регулятора напряжения, а инвертор по сигналам с датчика положения осуществляет включение соответствующих фаз электрической машины. Регулирование напряжения проходным регулятором осуществляется в функции частоты вращения или в функции тока, потребляемого двигателем. Регулятор напряжения может выполняться как по схеме понижающего (см. Рис. 4.8), так и по схеме повышающего (см. рис. 4.10) Регулятора напряжения. При широтно-импульсном способе регулирования частота коммутации транзистора регулятора задается схемой управления. Так как индуктив
121
ность обмотки якоря машин с высококоэрцитивными постоянными магнитами мала, то и частота коммутации, транзистора регулятора напряжения определяется по (4.7), но вместо индуктивности Лр необходимо подставить фазную индуктивность машины L$ при однополупериод, ном инверторе или 2Лф при двухполупериодном инверторе. Для снижения частоты коммутации транзистора регулятора включается дополнительный реактор L. Регулирование напряжения, поступающего на инвертор ИН, осуществляется путем коммутации транзистора VT. При широтно-импульсном управлении частота коммутации транзистора VT задается схемой управления и регулирование напряжения осуществляется за счет изменения скважности включенного состояния транзистора VT.
На рис. 4.15 приведены диаграммы напряжений и токов в вентильном двигателе по рис. 4.14. На рис. 4.15,а представлена диаграмма напряжения на базе транзистора VT проходного регулятора напряжения, на рис. 4.15,6 — диаграммы ЭДС в фазах электрической машины ЭМ, на рис. 4.15,в — диаграмма напряжения на входе инвертора ИН (на выходе проходного регулятора напряжения), на рис. 4.15,г—е — напряжения на базах транзисторов V7\, VT2, VT3, VTt, VT5, VTq инвертора ИН и на рис. 4.15,ж—и даны диаграммы токов в фазах электрической машины ЭМ. Наличие напряжения на базах соответствует открытому состоянию транзисторов. Схема управления согласно рис. 4.15 реализует 120-градусную коммутацию транзисторов инвертора по сигналам с датчика положения ротора электрической машины.
Транзистор V7\, включенный в верхней группе вентилей, открывается в момент времени Л, когда ЭДС в фазах а и b равны. При этом ток протекает через транзистор VT\, фазы а и Ь обмотки якоря и открытый транзистор Vl\. В момент времени t2 транзистор VT4 запирается и отпирается транзистор VT& нижней группы вентилей. При этом ток, протекающий по фазам ab, не может уменьшиться мгновенно до нуля и под действием ЭДС самоиндукции протекает по контуру, включающему диод У£>з и транзистор Vl\.
Одновременно начинает нарастать ток, протекающий по фазам ас. В момент времени /з транзистор VI\ запирается и отпирается транзистор VT3, подключающий к ис~ точнику питания фаз Ьс.
Значение тока, протекающего через инвертор, опреде' ляется напряжением на выходе регулятора напряжения? 122
Рис. 4.15. Диаграммы токов и напряжений на элементах вентильного двигателя
ЭДС, активным сопротивлением и индуктивностью обмотки. При подключении источника питания к фазам изменение тока во времени определяется выражением
•__ ♦ । Uс Дитах COS((df0вкл) 2А£/Т /| __
2/?ф V
а при отключении питания — выражением
.__. _ Елтах cos (at + 9ВЬ,КЛ) — и _ e-t!z\
l~ta 2Яф
где /н —начальное значение тока; Uc — напряжение на входе инвертора (на конденсаторе регулятора напряже-
123
ния); Елтах— амплитуда линейной ЭДС; 0ВКл — угол, пр^ котором происходит включение фазы; Овыкл — угол, пр^ котором происходит выключение фазы; ДС7Т — падение напряжения на транзисторе; At/д — падение напряжения на диоде; т — постоянная времени обмотки; t — время.
Функции проходного регулятора напряжения может выполнять и сам инвертор. При этом схема управления формирует сигнал управления транзисторами VTi—Vl\ не только в зависимости от положения ротора электрической машины, но и по сигналам с широтно-импульсного регулятора. Такого рода инверторы получили достаточно широкое распространение в вентильных двигателях, а также в системах частотного управления асинхронными двигателями. Однако применение такой схемы управления в вентильных двигателях с высококоэрцитивными постоянными магнитами ограничивается малой постоянной времени обмотки якоря.
Другим способом управления вентильными двигателями является использование релейного принципа регулирования, при котором частота коммутации транзисторов при регулировании тока не остается постоянной, а изменяется в зависимости от частоты и нагрузки машины. При релейном способе регулирования ток в машине формируется с учетом параметров нагрузки и требований, предъявляемых к регулировочным характеристикам и режимам работы машины и привода в целом. Вентильная машина в этом случае отличается от рассмотренной выше и представленной на рис. 4.14 отсутствием проходного регулятора напряжения ПРИ и наличием в цепи питания датчика тока. В качестве последнего могут использоваться резисторы, а также специальные датчики с элементами Холла [25].
Датчик тока с элементом Холла состоит из тороидального магнитопровода, через окно которого пропущен провод, питающий вентильный двигатель. Тороидальный магнитопровод разрезан, и в образованный воздушный зазор введен элемент Холла. При изменении тока, протекающего через проводник, пронизывающий магнитопровоД датчика, изменяется магнитный поток, а следовательно, значение сигнала на выходе элемента Холла. Достоинством такого датчика тока является его быстродействие.
В вентильном двигателе с релейным принципом регУ' лирования мгновенное значение тока в фазах электрической машины сравнивается схемой управления с задан-124
1ф
ij'f ^2
Рис. 4.16. Диаграмма тока в фазе вентильного двигателя при релейном способе управления
фазе обмотки при высокой
ным значением и путем коммутации транзисторов инвертора значение тока поддерживается в пределах
1ф= [i] ±Ai/2, где [г]—заданное схемой ограничения тока значение тока в фазах электрической машины; Аг— значение токового коридора.
На рис. 4.16 приведена диаграмма изменения тока в фазе электрической машины. В момент времени t\ (см. рис. 4.15) происходит включение транзистора VT\ инвертора'и фаза а электрической машины оказывается подключенной к источнику питания; напряжение питания приложено к линии ab через открытые транзисторы VT\ и VT4.
Момент включения фазы а обычно соответствует моменту времени, когда ЭДС в фазах а и b равны. Этот момент соответствует углу поворота ротора относительно центра фазы обмотки а на электрический угол 30°. Так как время нарастания тока в
частоте вращения оказывается соизмеримым со временем включенного состояния фазы, то целесообразно иметь опережающую коммутацию: момент включения фазы соответствует углу поворота ротора относительно центра фазы обмотки а, меньшему 30° (обычно 25°).
Под действием напряжения питания ток в фазе а нарастает:
' Uy еаЬ Ц __
а
где еаъ — мгновенное значение линейной ЭДС; Un — напряжение питания;
здесь Ал — индуктивность линии обмотки электрической машины с учетом взаимоиндуктивности между обмотками статора; 7?л— активное сопротивление линии электриче-125.
скои машины.
/?л=2/?ф, ЬЛ=2Ь*+М™-, ел — У^ Еф sin(«rf —
где Еф — действующее значение ЭДС в фазе.
При достижении током в фазе значения [f] +At/2 транзистор VTi запирается и происходит отключение линии ab от источника питания. При этом под действием противо-ЭДС машины происходит уменьшение тока в фазе.
При достижении током значения [/]—Д//2 транзистор VI\ вновь отпирается и подключает линию ab к источнику питания.
Частота коммутации транзисторов инвертора определяется параметрами электрической машины, частотой вращения, напряжением питания и значением гистерезиса тока Дк
Rn
In
_______________________1__________________________________
UJ — А£/2— еп)/А?л [/] + д;/2 + ^//?л ’* [/] + А//2 - (1/п- гл)//?л [ Z] - Af/2 + ел/Ял.
(4.19)
Следует заметить, что релейный принцип регулирования может быть реализован и в схеме вентильного двигателя, приведенной на рис. 4.14. В этом вентильном двигателе регулирование тока осуществляется путем коммутации транзистора проходного регулятора напряжения. Однако [25] вентильные двигатели с проходными регуляторами напряжения — повышающими или понижающими, работающими в импульсном режиме при релейном способе управления, проигрывают по мощности потерь, а следовательно, по массе и КПД на 20—30%' вентильным двигателям, регулирование тока которых осуществляется инвертором при релейном способе управления.
Мгновенное значение электромагнитного момента вентильного двигателя определяется выражением
tn
Мвд = BicpDvLMu^ko6 £ in (9) cos [9 — (т - 1) 2^/т], п=1
где in (6)—мгновенное значение тока в n-й фазе вентильного двигателя; 0 — угол поворота ротора; 0 = cor/=pQrZ.
126
Глава пятая
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН
С ВЫСОКОКОЭРЦИТИВНЫМИ МАГНИТАМИ
5.1. Радиальные и торцевые электрические машины. Выбор типа ротора, сравнение пазовой
и беспазовой конструкций статора
Эффективным путем снижения массы автономных систем электроснабжения и электроприводов является использование в электрических машинах постоянных магнитов на основе интерметаллических соединений кобальта с редкоземельными элементами. Можно выделить два основных конструктивных решения машин с редкоземельными постоянными магнитами: машины с радиальным магнитным потоком и машины с аксиальным магнитным потоком — торцевые электрические машины. Радиальные электрические машины с высококоэрцитивными магнитами в настоящее время нашли достаточно широкое применение.
Торцевые машины используются реже, хотя имеют ряд достоинств, таких, как простота изготовления обмотки, возможность применения призматических постоянных магнитов с большой удельной энергией, высокий КПД.
В радиальных машинах можно выделить два основных конструктивных решения: электрические машины с тангенциально намагниченными магнитами и машины с радиально намагниченными постоянными магнитами. Машины первой группы, как правило, используются при мощности Рн>Ю00 Вт, причем в машинах с тангенциально намагниченными магнитами — с роторами коллекторного типа — применение постоянных магнитов на основе интерметаллических соединений кобальта с редкоземельными элементами позволяет сконцентрировать магнитный поток и обеспечить в воздушном зазоре индукцию 1 —1,2 Тл. Роторы с радиально намагниченными постоянными магнитами используются при мощностях Рн<10 кВт и относительно высоких частотах вращения. Применение редкоземельных магнитов в электрических машинах с радиально намагниченными магнитами позволяет выполнить статор беспазовым.
Как в роторах типа звездочка, так и в роторах коллекторного типа магнит заключается в оболочку из немагнитной стали, которая выполняет роль бандажа. При за-
127
данных частоте вращения ротора, диаметре постоянного магнита и прочности материала бандажа его толщина мо-жет быть определена:
Qr2 [Yo^cp, О^р, Н в) Тм#ср, м(^, н в)1 /5 1
8[с021 ’ 1 }
где 7о — удельная плотность материала оболочки, кг/м3; ?м — удельная плотность постоянного магнита (для магнита SmCo5 ум=8300 кг/м3); Qr — максимальная угловая скорость постоянного магнита, рад/с; /?ср,о—средний радиус оболочки, м; £>0,н — наружный диаметр оболочки, м; DO)B — внутренний диаметр оболочки, м; /?Ср,м — средний радиус магнита, м; 2)м,н — наружный диаметр постоянного магнита, м; £>м,в — внутренний диаметр постоянного магнита, м; [002] — прочность оболочки (предел прочности на текучесть), Н/м2.
Необходимо отметить, что толщина оболочки при высокой частоте вращения оказывается значительной. Так, для постоянного магнита с наружным диаметром 30 мм при частоте вращения 7500 рад/с (номинальная частота вращения 6280 рад/с) толщина оболочки из стали 12X17 составляет 1л8 мм. При этом следует помнить, что оболочка в радиальных электрических машинах является фактически паразитным воздушным зазором.
Решить (5.1) можно лишь методом итерации, последовательно задаваясь значениями [60]- Для инженерных расчетов можно использовать упрощенное выражение
IS1 WcpA'C)
|§о] = ------Е-77—---------
О Iа021
Перспективным представляется использование редкоземельных постоянных магнитов в торцевых электрических машинах (см. рис. 2.5), у которых обмотка располагается между двумя вращающимися роторами.
Проведенные расчетные исследования показывают, что торцевые электрические машины при прочих равных условиях имеют меньшую массу и наибольший КПД из рассмотренных конструкций электрических машин с высококоэрцитивными постоянными магнитами, причем эти преимущества наиболее ярко проявляются при низких частотах вращения, когда аэродинамические потери относительно невелики.
Значительное влияние на характеристики электрических машин оказывает тип статора — пазовый или беспазовый. 128
Особенно важен правильный выбор типа статора в вентильных двигателях и генераторах, работающих при импульсной нагрузке или на преобразователь частоты.
В традиционных электрических машинах статор обычно выполняется пазовым, что позволяет иметь относительно небольшой воздушный зазор и в результате этого максимально использовать свойства традиционных постоянных магнитов — высокое значение остаточной индукции и низ-
Рис. 5.1. Зависимость удельной (на единице момента) массы и КПД пазовой и беспазовой машины от линейной нагрузки:
1 — беспазовая машина; 2 — пазовая (£>м=0,03 м; /=7-106 А/м2; р=2; В; = 1,4 Тл; Мн=0,26 Н-м; ------------------ удельная масса; —------КПД)
кое значение коэрцитивной силы. В машинах с высококоэрцитивными постоянными маннитами использование пазового статора не всегда оправдано, так как в таких конструкциях не используются эффективно особенности редкоземельных постоянных магнитов — высокое значение коэрцитивной силы, относительно малое значение остаточной индукции и малое значение магнитной проницаемости.
На рис. 5.1 приведены зависимости удельной (на единицу мощности) массы и КПД электрической машины с беспазовым и пазовым статором с редкоземельными постоянными магнитами от линейной нагрузки. Машина имеет мощность 1000 Вт, частоту вращения 3775 рад/с, плотность тока в обмотке 7-106 А/м2. Использован монолитный цилиндрический постоянный магнит типа звездочка из сплава КС 37А четырехполюсной конструкции. Диаметр магнита 30 мм, максимальная удельная энергия 56 кДж/м3 [максимальное энергетическое произведение (ВН)тах= 112 кА-Тл/м3]. Анализ приведенных зависимостей показывает, что как масса электрической машины, так и ее КПД мало зависят от того, пазовый или беспазовый статор используется в машине. Однако пазовые 9—278 I29
электрические машины имеют большие индуктивные сопротивления (примерно в 1,5—)3 раза), что обусловлено наличием в этих машинах потока пазового рассеяния. Это и является основным отличием пазовых и беспазовых машин с высококоэрцитивными магнитами. Поэтому целесообразность выбора конструкции статора следует определять исходя из указанного отличия.
Так, беспазовая конструкция эффективна в электрических машинах автономных систем электроснабжения постоянного тока, в которых стабилизация напряжения при изменении нагрузки обеспечивается за счет жесткости внешней характеристики. В вентильных двигателях применение беспазовой конструкции не всегда оправдано из-за малой индуктивности. Так как частота коммутации транзисторов инвертора при беспазовом статоре машины в 1,5—3 раза выше, чем при пазовом, то необходимо применение специальных схем управления транзисторами.
5.2. Влияние характеристик постоянного магнита на массоэнергетические показатели электрических машин
В отличие от литых и металлокерамических постоянных магнитов магниты на основе интерметаллических соединений кобальта с редкоземельными элементами характеризуются высокой стойкостью к размагничиванию внешним магнитным полем. Намагниченность редкоземельного постоянного магнита при изменении напряженности внешнего магнитного поля от 0 до Н^2НсВ (Нсв — коэрцитивная сила по индукции) сохраняется практически постоянной. Поэтому, во-первых, кривая возврата совпадает с кривой размагничивания, а, во-вторых, для размагничивания редкоземельного постоянного магнита к нему необходимо приложить напряженность магнитного поля, вдвое превышающую коэрцитивную силу по индукции НсВ.
Весьма важным свойством высококоэрцитивных постоянных магнитов является малое значение магнитной проницаемости, что оказывает значительное влияние на характеристики электрических машин. К недостаткам редкоземельных магнитов следует отнести низкую механическую прочность ротора, значительный разбро-с свойств от образца к образцу. Опыт проектирования электрических машин с высококоэрцитивными постоянными магнитами показывает существенное отличие в подходе к проектированию этих машин по сравнению с машинами с литыми и металл0' керамическими постоянными магнитами.
130
Электрические машины с обычными постоянными магнитами имеют пазовую конструкцию статора, и характерным для них является то, что электромагнитный предел мощности машины, спроектированной на минимум массы, и при длительном, и при кратковременном режиме работы наступает раньше теплового, поэтому номинальная точка на внешней характеристике такой машины располагается вблизи точки максимальной мощности. К тому же при проектировании машин с обычными постоянными магнитами необходимо принимать во внимание способ стабилизации постоянного магнита, так как он в значительной степени определяет массу электрической машины. Естественно, что минимум массы удается получить при стабилизации постоянного магнита током, близким к номинальному. Однако в этом случае характеристики машины оказываются нестабильными, так как точка отхода кривой возврата может измениться при случайных возмущениях.
Проблем стабилизации и размагничивания в машинах с высококоэрцитивными постоянными магнитами нет. При использовании высококоэрцитивных магнитов с удельной энергией меньше IFM=504-70 кДж/м3 (максимальное энергетическое произведение (ВН)тах= 1004-140 кА-Тл/м3) машины с пазовым и беспазовым статором, как уже подчеркивалось ранее, имеют практически одинаковую массу, причем удельная масса машин с магнитами SmCos в 1,5— 7 раз меньше массы машин с литыми и металлокерамическими постоянными магнитами. Наиболее характерным для машин с высококоэрцитивными магнитами является существенное недоиспользование объема ротора электрической машины, т. е. электромагнитный предел мощности в этих машинах значительно больше теплового при естественном охлаждении, когда в длительном режиме работы плотность тока в обмотке не превышает (5—10) • 10б А/м2, а в кратковременном — 25-106 А/м2. При интенсивном охлаждении плотность тока в обмотке достигает (50— 70)-106 А/м2. Однако и в этом случае спроектированная машина способна отдавать большую мощность. Электрические машины с пазовым статором имеют меньший запас электромагнитной мощности.
Положительной чертой электрических машин с высококоэрцитивными постоянными магнитами является допустимость перегрузки и даже ударных коротких замыканий. При использовании редкоземельных постоянных магнитов значение МДС реакции якоря по продольной оси „ может превышать МДС, соответствующую коэрцитивной силе 9* 131
по индукции. Такой режим, являющийся неестественным для генераторов и вентильных двигателей, возможен в шаговых двигателях.
Основными причинами высоких массоэнергетических показателей электрических машин с высококоэрцитивными постоянными магнитами являются высокое значение коэрцитивной силы по намагниченности и малое значение магнитной проницаемости постоянного магнита. Свойства постоянного магнита оказывают влияние не только на массу и КПД машины, но и на внешнюю характеристику генератора и частоту коммутации транзистора вентильного двигателя. При постоянном значении вектора намагниченности в пределах изменения напряженности магнитного поля от 0 до НсВ кривые возврата совпадают с кривой размагничивания и имеют вид прямой.
Магнитная проницаемость постоянного магнита записывается в виде
= НсВ,
где Вг — остаточная индукция; НсВ — коэрцитивная сила по индукции.
Среднее значение индукции по длине воздушного зазора, создаваемой постоянным магнитом в радиальных электрических машинах, определяется по (3.71), в котором значение индукции на поверхности магнита определяется из (3.18). Пренебрегая влиянием МДС реакции якоря на значение индукции, (3.71) переписываем в виде
п_________________________1_ (1 +а*)2Р_!
6ср0 - j + {BriHcB} Wo) (i + + 1 •
Для анализа влияния свойств' постоянного магнита на характеристики машины (5.2) удобно записать в виде
^бсро=^1^г/ (l-j-^Br/HcB) =&1Вг/14"&2Нм, (5.3)
где ki, &2—коэффициенты, не зависящие от свойств магнита:
k 1 (1+^-1 . k К
1~ Р** (1+^)2/9+1 ’ 2 Wo'
При постоянных диаметре магнита и линейной нагрузке длина постоянного магнита обратно пропорциональна Вбсро, а число витков в обмотке не зависит от значения индукции В6сро. С учетом сказанного, а также (5.3) можно 132
записать выражения для индуктивного и активного сопротивлений фазы обмотки якоря:
_ 4 W2 йЕ0Рн(1 +£2вг/^сВ) z, , н
Ф Я q Wd>«6; AD^ (5.4)
1 + k2BrIHcB k-fi3Br
(5.5)
k3=7l2k06k^6iAD2Mf/pkE()PH
где kEQ—коэффициент, учитывающий падение напряжения на внутреннем сопротивлении машины; —число витков в фазе; Рн—мощность нагрузки, Вт; —коэффициент формы поля; ^об—обмоточный коэффициент; q—число пазов на полюс и фазу; А—линейная нагрузка, А/м; —коэффициент полюсного перекрытия; Хаф—удельная проводимость потока реакции якоря; Хл—удельная проводимость лобового рассеяния; pt—удельное сопротивление меди, Ом-м; sB—сечение проводника обмотки якоря, м2; f—частота, Гц; Ьл—средняя длина лобового вылета, м.
Анализ (5.4) и (5.5) позволяет сделать вывод, что при увеличении остаточной индукции Вг при постоянной коэрцитивной силе по индукции НсВ сначала происходит уменьшение падения напряжения на внутреннем сопротивлении (на активном и индуктивном) обмотки машины, а затем, после достижения Вг определенного значения,—к его росту. Значение Вг, при котором имеет место минимум внутреннего сопротивления, для реальных электрических машин составляет 0,05—0,3 Тл, поэтому увеличение остаточной индукции при постоянной коэрцитивной силе приводит к снижению жесткости внешней характеристики и увеличению индуктивности генератора. Если же удельная энергия постоянного магнита увеличивается в результате одновременного увеличения Вг и НсВ, то жесткость внешней характеристики растет, а индуктивность падает.
На рис. 5.2 приведены зависимости массы пазовой и беспазовой электрических машин от удельной энергии постоянного магнита. Изменение удельной энергии магнита достигается изменением коэрцитивной силы:
Br=const; 77cB=var.
Из приведенных зависимостей следует, что с ростом удельной энергии магнита вплоть до 1^м=25 кДж/м3 (максимальное энергетическое произведение 50 кА-Тл/м), что соответствует ЯсВ=250 кА/м, уменьшается масса как па-
133
зовой, так и беспазовой электрических машин. При дальнейшем же росте коэрцитивной силы магнита НсВ уменьшается масса только беспазовой электрической машины, а масса пазовой машины не только не уменьшается, а при определенном сочетании электромагнитных нагрузок—при больших линейных нагрузках и малых плотностях тока— даже возрастает. Рост массы пазовых машин с ростом
Рис. 5.2. Зависимость удельной (на единицу момента) массы пазовой (-------) и беспазовой (------) машин от энергии постоянного магни-
та при изменении энергии в результате изменения коэрцитивной силы (£м = 0,03 м; J=107 А/м2; р=2; Вг = 0,8 Тл; Bj=l,4 Тл; Мн= = 0,26 Н-м)
Рис. 5.3. Зависимость удельной (на единицу момента) массы пазовой (-------) и беспазовой (-----) машин от энергии постоянного магни-
та при изменении энергии в результате изменения остаточной индукции (£м = 0,03 м; J=107 А/м2; р=2; #св = 500 кА; В;=1,4 Тл; Мн= =0,26 Н-м)
Нсв при таких электромагнитных нагрузках обусловлен насыщением зубцовой зоны.
Снижение массы беспазовых машин связано с увеличением индукции в воздушном зазоре при увеличении Нсв, а также с уменьшением проводимости потоку реакции якоря из-за уменьшения магнитной проницаемости постоянного магнита. Последний факт приводит, прежде всего, к снижению индуктивности и увеличению, как следствие, жесткости внешней характеристики.
На рис. 5.3 приведены зависимости удельной массы пазовой и беспазовой электрических машин от энергии постоянного магнита при изменении последней в результате остаточной индукции:
Br=var; //eB=const,
134
а на рис. 5.4—зависимости удельной массы машин от энергии постоянного магнита при пропорциональном изменении остаточной индукции и коэрцитивной силы магнита:
Br=var; //cB=var; pM=const.
Анализ приведенных зависимостей показывает, что наиболее эффективным способом снижения массы беспазовых электрических машин с высококоэрцитивными постоян-
Рис. 5.4. Зависимость удельной (на единицу момента) массы пазовой (------) и беспазовой (------) машин от энергии постоянного магни-
та при пропорциональном изменении остаточной индукции и коэрцитивной силы
(£)м=0,03 м; J=107 А/м2; р=2; Bj=l,4 Тл; Мн=0,26 Н-м)
ными магнитами является увеличение остаточной индукции. Однако при этом следует помнить, что увеличение Вг и, следовательно, магнитной проницаемости магнита может привести к росту индуктивности обмотки.
5.3. Определение размеров радиальных электрических машин
При проектировании машин обычно оговаривают следующие исходные данные: мошность нагрузки Рн, В-А; коэффициент мощности нагрузки cos<pH; коэффициент полезного действия т); напряжение в фазе 1/ф,н, В; частоту напряжения f, Гц; угловую частоту вращения ротора Qr, рад/с, или круговую частоту изменения магнитного поля сог, рад/с; максимальный нагрев обмотки якоря [0], °C; время работы /р, с. В специальных случаях оговаривают и другие выходные параметры электрической машины. Эти специальные ограничения либо уменьшают число варьи-
135
руемых параметров, либо приводят к изменению алгоритма расчета.
В качестве варьируемых параметров при проектировании электрических машин с высококоэрцитивными постоянными магнитами целесообразно использовать:
наружный (без оболочки) диаметр постоянного магнита (для торцевых машин—диаметр ротора) DM, м;
линейную нагрузку А, А/м;
плотность тока в обмотке якоря J, А/м2;
индукцию в стали ярма статора В;, Тл;
индукцию в стали зубцов статора для пазовых статоров Bgs, Тл;
число пар полюсов р (для машин, работающих на выпрямитель или совместно с инвертором);
число пазов на полюс и фазу (для беспазовых машин— число проводников на полюс и фазу) q.
Рис. 5.5. Эскиз магнитной цепи электрической машины с цилиндрическим ротором типа звездочка и беспазовым статором:
/ — магнитопровод (ярмо статора); 2 — обмотка якоря; 3 — оболочка (бандаж);
4 — ротор; 5 — вал
Для радиальных электрических машин линейная нагрузка определяется так:
A—2tnw^I^,K/nDM,
а для торцевых
А=2/пйУф/ф,н/л:(Дм—6М),
где т—число фаз обмотки якоря; а)ф—число витков в фазе; /ф,н—действующее значение тока в фазе, А; Ьм—ширина магнита в торцевых машинах, м.
5.3.1. Основные размеры радиальных электрических
машин. На рис. 5.5 приведена конструкция электрической 136
машины с монолитным ротором типа звездочка. Характерными особенностями приведенной конструкции электрической машины являются наличие оболочки из немагнитного материала, схватывающей постоянный магнит, и шаблонная двух- или односекционная обмотка, уложенная между ротором и статором.
На рис. 5.6 приведена конструктивная схема электрической машины с ротором коллекторного типа и пазовым
Рис. 5.6. Эскиз магнитной цепи электрической машины с ротором коллекторного типа и пазовым статором:
/—вал; 2 — ротср; 3 — постоянные магниты; 4 — полюсы (вставки); 5 — оболочка; 6 — статор; 7 — обмотка якоря
Рис. 5.7. Эскис магнитной цепи беспазовой электрической машины со сборным ротором типа звездочка:
/ — вал; 2 — ротср; 3 — постоянные магниты; 4 — немагнитные вставки; 5 — оболочка; 6 — обмотка якоря; 7 — магнитопровод (ярмо) ротора; 8 — магнитопровод (ярмо) статора
статором, отличительной особенностью которого является тангенциальная (по отношению к ротору) намагниченность постоянных магнитов, а на рис. 5.7—конструкция сборного ротора типа звездочка.
Характерной особенностью беспазовых электрических машин с постоянными магнитами является связь плотности тока в обмотке якоря и линейной нагрузки с длиной суммарного воздушного зазора, а следовательно, с рабочей точкой на диаграмме магнита. Так как плотность тока и линейная нагрузка связаны о температурой обмотки, то длина воздушного зазора и рабочая точка на диаграмме магнита в конечном счете определяются допустимой температурой обмотки якоря.
10—278 137
При заданных линейной нагрузке Л, диаметре ротора DM и плотности тока J длина воздушного зазора при кратковременном режиме, когда нагрев обмотки статора носит адиабатический характер, определяется из выражения
5 = - DM/2 + ]/(Рм/2)2Н-ЛДм/^3.м. (5.6)
Если задана предельная температура нагрева обмотки статора, то
8 — __ 2* I 1/7222-j- d2* 1 fР.^р- (5 7)
2 \ 2 J k3,M V WcmYm’ V j
где ^з,м—коэффициент заполнения пазовой области медью; — удельное сопротивление обмотки при температуре t в °C, Ом-м; См—удельная теплоемкость меди,
кДж/(кг-град); ум—удельная масса меди, кг/м3.
Для беспазовых машин коэффициент Л3,м выбирается равным 0,25—0,35, а удельное сопротивление меди определяется выражением
Р/=р20 [14~ам —20) ],
где р2о—удельное сопротивление меди при температуре 20°C, Ом-м; (Хм—температурный коэффициент сопротивления (ам=0,04).
Следует заметить, что (5.6) и (5.7) определяют полный воздушный зазор, т. е. воздушный зазор, определяемый уравнением
6=Л о бб о 4" с р,
где Лоб—высота обмотки статора, м; бо—толщина оболочки (бандажа), м; бср—зазор' между вращающимся ротором и обмоткой статора, м.
Поэтому в (5.6) и (5.7) входит интегральный (полный) коэффициент заполнения пазовой области медью:
Лз,м==(2/77йУф(/в,из/2 (£>м 4~б) б,
где а—число параллельных ветвей; с1в,кз—диаметр проводника по изоляции, м.
В пазовых электрических машинах обмотка якоря располагается в пазах статора и значение воздушного зазора определено в виде суммы
б=бо4"бср
и не зависит от плотности тока в обмотке якоря, 138
Плотность тока при кратковременном режиме работь! связана с температурой обмотки соотношением
7=1/10] См ТыМ-
При длительном режиме работы, когда температура нагрева обмотки зависит от потерь в обмотке и потерь в магнитопроводе, а также связана с коэффициентом теплопроводности изоляции обмотки и коэффициентом теплопередачи с поверхности, связь между температурой обмотки, длиной воздушного зазора и независимыми переменными определяется соотношением
й Л2АсРР/ 1
У =-----------------------------------1-----
j * + 0,5DH2 + — тс
, ^/400 5^3,cTctMDm(1 +8J +M(f/400)2/3
'3,С
4db^h+0,5Dh2+—5'хл
7U
А^ср [^м( 1 - &з,м) ^И3^3,м1
2/гз,мМиз(1+а*)а
где Аср—средняя длина витка обмотки якоря, м; а—коэффициент теплопередачи в окружающую среду с поверхности электрической машины, Вт/(м2-°С); Z)H, £н—габаритные диаметр и длина электрической машины, м; З'охл—дополнительная поверхность охлаждения, м2 (поверхность ребер охлаждения); -Р1/400—удельные потери в стали при частоте 400 Гц и индукции 1 Тл, Вт/кг; k&~коэффициент, учитывающий увеличение потерь в стали в результате технологической обработки; уст—удельная масса стали, кг/м3; £3,с—коэффициент заполнения пакета статора сталью; hj—высота ярма пакета статора для беспазовых машин и суммарная высота ярма и зубцов статора для пазовых машин, м; Хм—удельная теплопроводность меди, Вт/(м-°С); Хиз—удельная теплопроводность изоляции, Вт/(м-°С); б* — относительная длина воздушного зазора; Bj— индукция в магнитопроводе, Тл.
При заданных значениях линейной нагрузки, плотности тока в обмотке, диаметре и магнитных свойствах постоянного магнита индукция на поверхности магнита определяется выражением
1 р) (A sin / 1^Нсв) Вг (5 81
10*
139
здесь ZM* — относительная длина средней силовой линии магнита, м; if) — угол между током и ЭДС, создаваемой магнитом, рад; kz — коэффициент, учитывающий изменение радиальной составляющей индукции по длине воздушного зазора; о — коэффициент, учитывающий рассеяние магнита [8,9]; £Об— обмоточный коэффициент;^ — коэффициент, учитывающий падение МДС в стальных участках магнитопровода.
Для беспазовой электрической машины
kF={F.+Fj)/F^
где F& — МДС в воздушном зазоре, А/м; Fj— МДС в магнитопроводе (ярме) статора, А/м.
Для пазовой машины
kF= (Fe+^+Fj) / F&,
где Fz— МДС в зубцах статора, А/м; Fj — МДС в ярме магнитопровода статора, А/м;
k _ 1 (I + М2Р~! .
2 Л (1+^)2Р + 1
В первом приближении можно принять sin ф=1. После расчета электрической машины и определения угла между током и ЭДС значение sin ф необходимо уточнить.
Иногда вместо выражения (5.8), представляющего собой значение вектора магнитной индукции на поверхности магнита при нагрузке, можно использовать значение вектора магнитной индукции при холостом ходе:
р_______________J_____________&Г /Г, О\
мо~" \ + 0 • '
Значение относительной длины средней силовой линии определяется конструкцией ротора.
Для электрических машин с цилиндрическим монолитным ротором типа звездочка средняя длина силовой линии определяется выражением
j 0,8 при р—\\ = = ПрИ
Для электрических машин со сборным ротором типа звездочка
/ *—2/?м/
140
где h„ — высота одного призматического постоянного магнита, м (см. рис. 5.7).
В электрических машинах с ротором коллекторного типа средняя длина силовой линии определяется выражением
1м* — hw/
В электрических машинах с пазовым статором необходимо учитывать ослабление магнитного поля, связанное с зубчатой структурой поверхности расточки статора. Обычно ослабление магнитного поля, обусловленное наличием зубцов и пазов на статоре, учитывается с помощью коэффициента Картера на который необходимо умножить реальный воздушный зазор, для того чтобы получить воздушный зазор бр:
бР—k&8.
Коэффициент Картера подсчитывают по формуле k$=tz/ (tz—уб),
где tz — зубцовое деление статора, м; у — коэффициент, определяемый из выражения
у=(&ш/б) (5+&ш/б),
а Ьш — ширина шлица между зубцами статора;
^=31 (Z)m~|“26) / Zs,
здесь zs— число зубцов статора.
Для пазовых машин индукция на поверхности постоянного магнита при нагрузке определяется выражением
I + (V2ko6/p)(Asin^/l^HcB) вг ,г
м-п— 1 + (м8/^)(ад.лгВ’) =• ’ }
В режиме холостого хода индукция на поверхности постоянного магнита Вм,по также может быть рассчитана по (5.10) при условии, что Л=0, т. е. второе слагаемое в числителе (5.10) отсутствует.
Используя выражение постоянного магнита (5.8), длине воздушного зазора
альных машин определяется из выражения
r — R (1 +aj8P-l 1 Ьср м (1+о\)2Р+ 1 р8*
для индукции на поверхности можно определить среднюю по индукцию, которая для ради-
(5.Н)
141
В пазовых электрических машинах относительная длина воздушного зазора 6,. невелика (обычно 6*=0,002-ь 0,01), поэтому в машинах с пазовым статором можно не учитывать уменьшение радиальной составляющей по длине воздушного зазора, и, следовательно,
/?6ср,п=5М)П.
Средняя индукция по длине воздушного зазора в режиме холостого хода ВбСро определяется из уравнения, аналогичного (5.11), в которое вместо индукции на поверхности магнита 5М подставляется индукция на поверхности магнита в режиме холостого хода Вмо (5.9).
При заданных значениях линейной нагрузки, мощности, частоты напряжения и числе пар полюсов удельный (на единицу мощности) объем постоянного магнита определяется выражением
у __ VM _ pkE ““A, 8k0^fBicpA’ или
у ______Р^Е______
А К2 л^об fBScp4aiz
При расчете объема постоянного магнита по (5.12) коэффициент kE представляет собой отношение внутренней ЭДС (ЭДС в воздушном зазоре) к напряжению (&е= —Еъ/и^к) [см. (4.6)] и определяет падение напряжения на активном сопротивлении и индуктивном сопротивлении рассеяния. Учет изменения вектора магнитной индукции из-за реакции якоря необходимо проводить при расчете среднего значения которое определяется из (5.11) при подстановке в него значения индукции на поверхности постоянного магнита (5.8).
Объем постоянного магнита может также рассчитываться по формуле
у PkE0 /~
или
V pk™ .
К2 Tt2^o6f^sCp0^a6i
В этом уравнении kEv определяется по (4.5) и представляет собой отношение ЭДС, созданной постоянным магнитом, к напряжению (Йео=^фо/^ф,н) и учитывает не толь-142
ко падение напряжения на индуктивном сопротивлении рассеяния и активном сопротивлении обмотки, но и на индуктивном сопротивлении реакции якоря.
Так как в электрических машинах с беспазовым статором нецелесообразно разделение магнитного потока на поток реакции якоря и поток рассеяния, то предпочтительнее использовать для расчета объема постоянного магнита выражения (5.13).
Коэффициентами kE и входящими в уравнения для расчета объема магнита, необходимо задаться (на первом шаге kE=kEo=l), а после расчета конструктивных параметров и параметров обмотки следует уточнить и провести расчет магнита с уточненным значением коэффициента kE ИЛИ kEQ.
Коэффициент формы магнитного поля йф определяется из выражения [24]
^ = G/2/2)^.
Коэффициент £ф учитывает насыщение магнитной цепи:
1,122-0,122/Гг,
где kz—коэффициент, учитывающий насыщение зубцового слоя:
где F&—падение МДС в воздушном зазоре, A; F?—падение МДС в зубцах пакета статора, А.
Так как в беспазовых машинах зубцы отсутствуют, то /г2=1 и, следовательно, |ф==1.
Расчетный коэффициент полюсного перекрытия представляет собой отношение средней на полюсном делении (по углу) индукции к максимальной по расточке индукции:
ср/Втах,
где Вср—средняя по углу на полюсном делении индукция, Тл; Втах—максимальная (под серединой полюса) индукция, Тл.
В электрических машинах с цилиндрическим монолитным ротором типа звездочка, для которых характерно синусоидальное по расточке распределение радиальной составляющей вектора магнитной индукции, расчетный коэффициент полюсного перекрытия определяется уравнением
Ct fl; 2^^,/jT,
143
где —коэффициент, учитывающий изменение формы маг-нитного поля из-за насыщения зубцовой зоны: ga=—0,58— —0,64^+2,22^2г. В беспазовых машинах зубцы отсутствуют и ga=l.
В роторах коллекторного типа и сборных роторах типа звездочка расчетный коэффициент полюсного перекрытия определяется выражением
где «6—коэффициент полюсного перекрытия, представляю’ щий собой отношение ширины полюса к полюсному деле’ нию:
«6=&п/т,
где Ьп—ширина полюса, м; т—полюсное деление, м:
т=л£м/2р.
В радиальных электрических машинах со сборным рото-ром типа звездочка
&п=&м,
где Ьм—ширина постоянного магнита, м.
В машинах с ротором коллекторного типа
6п=т—Z)Marctg
Обмоточный коэффициент £Об определяется из уравнения
ko6z===kyklpkcK,
где ky—коэффициент укорочения обмотки; £р—коэффициент распределения обмотки; kCK—коэффициент скоса.
Все перечисленные коэффициенты характеризуют снижение значения ЭДС в машине (значения первой гармоники магнитного потока, сцепленного с обмоткой) из-за мер, принимаемых для улучшения формы магнитного поля и определяются по формулам:
&y=(sinn/2)j//r,
где у—шаг обмотки, м;
для m-фазной симметричной обмотки коэффициент распределения определяется выражением
__ sin (к/2т)
р q sin(n/2mq) 144
а коэффициент скоса
/, __ Sitl &ск
/Сск — >
, аск/2
где аск—угол скоса полюсов ротора или зубцов статора, рад.
В электрических машинах с постоянными магнитами скос полюсов ротора, как правило, не выполняется, поэтому учет коэффициента скоса в обмоточном коэффициенте необходимо производить только в машинах с пазовыми статорами.
При известных объеме и диаметре постоянного магнита длина постоянного магнита определяется из выражения
LM=(4/ji)(VMPe/Z>2M).
5.3.2. Определение размеров ротора. Монолитный цилиндрический ротор типа звездочка. Диаметр ротора определяется размерами постоянного магнита и оболочки (бандажа) :
Дг==.Ом-|_ Збо-
Диаметр вала выбирается из условий механической прочности конструкции: при р^2 DB-^0,3Dr, а при р>2 DB= (0,34-0,5) Dr.
Масса постоянного магнита
Масса оболочки
(5.14)
Масса вала
Мв = Тсг-^£в, (5.15)
где LB—длина вала, м.
Сборный ротор типа звездочка. Эскиз сборного ротора типа звездочка приведен на рис. 5.7.
Так же как и в машинах с монолитным ротором, диаметр вала выбирается' исходя из механической прочности: L>B^0,3L>r.
Если вал изготовлен из немагнитного материала, то между валом и постоянными магнитами должна устанавливаться магнитопроводящая втулка, высота которой определяется уравнением
й/г=(6м/2) (Вм/В/г), где В]Г—индукция в ярме (втулке) ротора, Тл.
145
Масса постоянного магнита
Мм—у2р/1м&мАм. (Б.16)
Масса немагнитных вставок между постоянными магнитами
Мв ст==Ув ст [л(£)м3—Z)/2) /4—
—2рйм&м] Lm, (5.17)
где ув ст—удельная масса материала вставок, кг/м3; D,— наружный диаметр магнитной втулки, м (при отсутствии втулки Dj=DB).
Масса оболочки и вала сборного ротора определяется по (5.14) и (5.15).
Ротор коллекторного типа. В коллекторных роторах призматические магниты располагаются между полюсами из магнитомягкой стали, а сверху надевается сварная (при пазовом статоре) или цельная оболочка.
Масса постоянных магнитов определяется по (5.16), масса полюсов из магнитомягкой стали—по (5.17), в котором ув ст=?ст, масса оболочки—по (5.14), а масса вала — по (5.15).
5.3.3. Определение размеров статора. Число витков в фазе электрической машины определяется из уравнения
pkEf}Jfy,n
= 4^ФгВгср0РмАм ’ (5‘18а>
ИЛИ
w= , (5.186)
Лоб f^ScpO
где [/Ф,н—напряжение в фазе нагрузки, В.
Так же как и при расчете объема постоянного магнита, при определении числа витков в фазе обмотки коэффициент kEo используется, если индукция определяется как индукция в воздушном зазоре в режиме холостого хода (создаваемая постоянным магнитом) В& ср 0. Если же для расчета числа витков используется индукция при нагрузке Beep, то в (5.18) вместо коэффициента kEo необходимо подставить коэффициент
Сечение проводников обмотки якоря определяется заданной плотностью тока:
5в2=/ф,н//, (5.19)
где /ф,н—ток в фазе обмотки якоря, А.
146
Пазовый статор. Пазовые статоры обычно набираются из листов электротехнической стали, а длина воздушного зазора определяется конструктивными и технологическими возможностями. В машинах мощностью до 3 кВт длина зоздушного зазора обычно выбирается равной: 6=0,154-0,25 мм. При большей мощности длина воздушного зазора берется большей.
Следует также отметить, что размер воздушного зазо-эа оказывает влияние на индуктивные сопротивления ма-
Рис. 5.8. Эскизы пазов статора-а — трапецеидальный; б — прямоугольный
шины. С ростом воздушного зазора уменьшаются индуктивности машины по продольной и поперечной осям и возрастает перегрузочная способность.
Число зубцов статора
zs=2mpq.
Диаметр статора определяется выражением
Ds=Dr-]-28Cp.
Определим высоты hn и ширины Ьп паза, ширины зубца bz статора (эскиз пазов статора приведен на рис. 5.8): а) для трапецеидального паза
/ о-
/гп = О,5Г>.
^5ср0 \2
4А
^3, м ^Ds
~0,5Ds (1 —
^ScpO
^3,C^ZS
где йз.с—коэффициент заполнения пакета статора сталью (для стали толщиной Л=0,2 мм, широко используемой в машинах автономных систем электроснабжения, &3,с=
147
=0,894-0,91); k3,№—коэффициент заполнения паза медью;
Bzs—индукция в зубцах статора, Тл.
kDs (
_ * I 1 сери %S \ *3,0^3
__ £gcpo .
2 7 Ь R '
б) для прямоугольного паза
hn=——
2Jk (1--^.'
X k3,QdZC i
ьп
(5.20)
(5.21)
b
Выражения для ширины паза Ьп и минимальной ширины зубца Ьг аналогичны (5.20) и (5.21).
Высота Иш и ширина Ьш шлицев статора определяются технологией производства, а при всыпной обмотке— и условием прохождения проводника через шлиц. Соотношение между высотой и шириной шлица обычно лежит в пределах: /гш/6ш=0,54-1,5.
Высота ярма статора , _ ' АсрО k3iCBzs'
Диаметр и длина радиальной машины:
Z)p,M=Z)s+2ftm+2/zn+2/z/;
L р,м ==Lm 4~ 2 Lb , где LB—длина лобового вылета обмотки.
Lb=0,5 [n(Ds+ftn+2/im) /2p].
Масса меди обмотки статора
ЛГоб=Ум/?2а»ф£ср5в2, (5.22)
где Lcp—средняя длина витка, м: £ср=2(£м+1л); (5.23)
L»—средняя длина лобовой части полувитка, м: £л=1,25|Мл(£б+2йш-|-/1п)/2р]; (5.24)
[3—коэффициент укорочения обмотки: $=у/х Масса зубцов статора: а) трапецеидальный паз
Мг----YcT^S^3,C (Йп~|-/1ш) bzL-M)
148
б) прямоугольный паз
Мг = Те^з.с (y l(Ps + 2/zn + 2/zlu)2 - Ds2] - zshab^ LM.
Масса ярма статора
Afy ==YcT^3,cJt (Z) hj^ hjL^>
Беспазовые статоры. Беспазовый статор имеет форму полого цилиндра и, как правило, набирается из листов электротехнической стали аналогично пазовому статору. Статор может также наматываться из магнитомягкой проволоки, что упрощает технологию изготовления узла статора. Коэффициент заполнения пакета статора сталью при намотанном из проволоки пакете &з,с=0,784-0,85.
Развитие порошковой металлургии позволяет прессовать кольцевой статор из порошка кобальтового сплава 49К2ФА, причем характеристики магнитопровода из порошка сплава 49К2ФА не хуже характеристик шихтованного магнитопровода из стали 1521.
Беспазовые обмотки выполняются обычно одно- или двухслойными петлевыми и при относительно небольшой мощности приклеиваются к магнитопроводу.
Так как обмотка располагается непосредственно в рабочем воздушном зазоре и пересекается с полным магнитным потоком, то в ней наводятся вихревые токи. Для снижения потерь от вихревых токов обмотка разбивается на ряд параллельных проводников. Для уменьшения уравнительных токов между проводниками последние свиваются в жгут с шагом h=L^k, где k — любое целое положительное число.
Высота ярма статора определяется из уравнения
Л/ = (D^/2p) (-Вмо/^з.с-®j) •
Внешний диаметр беспазовой машины определяется уравнением
“ Т^рм=D я+26+2hj,
а длина — уравнением Lpm = ^m+2Lb, в котором длина лобового вылета записывается в виде
Лв=0,5я (7)м4"6) /2р.
Масса меди обмотки статора определяется по (5.22), где средняя длина лобовой части полувитка
£л = 1Д5|М°м+6)/2. (5.25)
Масса ярма статора
Л4; = уС1^з,сЛ (7)мН“2б + Л/) Л^м.
149
5.4. Определение основных размеров торцевых электрических машин
На рис. 5.9 приведен эскиз магнитной цепи торцевых электрических машин, отличительной особенностью которых является аксиальное направление магнитного потока в области рабочего воздушного зазора б. В отличие от радиальных электрических машин, в которых в воздушном зазоре располагается оболочка (бандаж) ротора, в торцевых машинах воздушный зазор складывается из высо-
Рис. 5.9. Эскиз магнитной цепи торцевой электрической машины:
/ — вал; 2 и 2' — роторы; 3 и 3' — постоянные магниты; 4 и 4' — ярмо ротора; 5 и 5' — оболочка; 6 — обмотка якоря
ты обмотки и двух зазоров между роторами и обмоткой бср*
б=/гОб+2бСр.
При заданной плотности тока в обмотке, коэффициенте заполнения пазовой области медью, линейной нагрузке высота обмотки определяется уравнением
^об===у4/Jk з,м,
где F3,M — коэффициент заполнения области, занятой обмоткой, медью.
Так как обмотка укладывается по радиусу, то для внутренней (вблизи вала) и наружной (вблизи корпуса) сторон обмотки имеется различное пространство. Поэтому коэффициент заполнения определяется исходя из наиболее тяжелых условий расположения обмотки:
А’,з1М = 2/?2^ф5В2/ЛобЛ (£>м—2&м) ,
где sBs — сечение проводника обмотки по меди, м2; Ьм —• ширина постоянного магнита, м (рис. 5.9).
150
Иногда удобнее задавать полный коэффициент заполнения воздушного зазора медью:
^з,м = 2/71и)ф8В2/бл (£>м—2^м),
который позволяет сразу определить длину воздушного зазора:
б=Л//^3,м. (5.26)
При заданных диаметре ротора Вм, размерах постоянного магнита — высоте /?м и ширине &м, длине воздушного зазора б, линейной нагрузке А и магнитных свойствах материала постоянного магнита — коэрцитивной силе 7/св и остаточной индукции Вг средняя по длине воздушного зазора индукция в режиме холостого хода (создаваемая постоянным магнитом) определяется выражением
Bscp0 = l V (5,27)
где kz — коэффициент, учитывающий изменение аксиальной составляющей по длине воздушного зазора:
б* —
_ 1 g*+g — 2 А-<г8* ;
8,^2§/(Рм-бм).
Коэффициент о характеризует рассеяния с торцевых поверхностей постоянного магнита, обращенных к валу и корпусу (и оболочке ротора) электрической машины [8, 9]. Рассеяние с торцевых поверхностей, прилегающих к смежным магнитам, учитывается при расчете магнитного поля.
Среднее по длине воздушного зазора значение вектора магнитной индукции при нагрузке в торцевых машинах определяется выражением
1-(Г2^)ЛзШФ[рм-&м)/2йм//еВ] В
Так же как в радиальных машинах, значением sin ф при расчете необходимо предварительно задаться, а после определения размеров и параметров электрической машины значение sin ф уточняется.
151
Зная Вбсро, можно определить число витков в фазе:
__ К2 ^ф.н
Ф л2М\)б^асро(^м — Ьм)Ьма§1 ’
ИЛИ
__ /^Е0^Ф>н
4&ф/гоб [^§Сро( Ал ^м)
Применительно к торцевым электрическим машинам расчетный коэффициент полюсного перекрытия равен: абг=2/л, а &ф = 1,11.
Определение средней по длине воздушного зазора индукции по (5.27) и (5.28) возможно при заданных размерах постоянного магнита и диаметре ротора. Если же размеры постоянного магнита неизвестны, то средняя по длине воздушного зазора индукция используется в качестве одного из независимых переменных. Тогда, если задана средняя по длине воздушного зазора индукция в режиме холостого хода, определяемая по (5.27), диаметр магнита (ротора по постоянныхМ магнитам) определяется выражением
Р | P^EQ^v.
М V ^q6B^A [(2 - ^)/ (2 + kK) ]2 kK«bi ’
а если задана средняя по длине воздушного зазора индукция в режиме нагрузки, определяемая из (5.28), — то выражением
q ___ | I 4 1^2
М“ F ^q6B^A [(2 - ад/(2 + W k^t ‘
Коэффициент kK характеризует конструкцию ротора постоянного магнита:
kK=2b м/ (Z?m—&м) •
Как показывают расчеты, максимальные массоэнергетические показатели достигаются при выборе конструктивного коэффициента &к = 0,44-0,7.
После определения длины воздушного зазора по (5.26) можно вычислить высоту постоянного магнита, обеспечивающую заданную индукцию в воздушном зазоре в режи-152
ме нагрузки:
V 2 Л sin ф 1
+ —Wo—
(5.29)
п-~^н^в
Если при расчете задается индукция, созданная в воздушном зазоре постоянным магнитом, то в (5.29) второй член в числителе отсутствует.
Постоянные магниты устанавливаются на сердечнике ротора (см. рис. 5.10); высота магнитов определяется так:
1 ^бсрО 2ЬМ)
hi^~B7r-------ТР---(5-30)
где Bjr — индукция в сердечниках ротора.
Магнитный поток в сердечниках ротора практически постоянен: переменная составляющая потока в сердечнике обусловлена только высшими временными гармониками МДС якоря, поэтому сердечники ротора изготавливаются монолитными или прессуются из порошка магнитомягкой стали.
Коэффициентами kE или kEQ задаются в начале расчета электрической машины. После определения размеров и параметров обмоток эти коэффициенты уточняются. Коэффициенты kEQ или kE определяются из (4.5) и (4.6).
Коэффициент &к, помимо того, что он характеризует геометрию постоянного магнита, определяет также возможности размещения обмотки. Действительно, лобовой вылет внутренней, примыкающей к валу части обмотки должен уложиться в пространстве между валом машины и нижней кромкой постоянного магнита, поэтому конструктивный коэффициент вычисляется исходя из условия размещения лобового вылета:
(Dm—DB—2Lb,b)/ (Dm—&м) ?
где DB — диаметр вала электрической машины, м; LB)B — длина лобового вылета внутренней части обмотки, м:
LB)B—0,5л (Dm—2Ьм)/2р> (5.31)
Диаметр ротора равен:
Dr— £)м-|~26о,
11—278
153
Диаметр и длина активной части машины определи» ются соотношениями
^Т,М =Dm + 2LB,h;
^т,м=6~l“2Aj + 2ЛМ,
где Lb.h — длина лобового вылета наружной части обмотки, которая также определяется из (5.31), м.
Масса активных материалов торцевых электрических машин. Масса постоянных магнитов роторов ( двух)
^п,м==2умЯ (DM
Масса сердечников роторов (двух)
Масса обмотки якоря определяется из (5.22), где средняя длина витка подставляется из уравнения
Лср=2(&м-Лл); (5.32)
здесь
Дл = 1,250л (Dm-Ьм) /2р. (5.33)
Масса оболочки
Мо = 2уСтЛ (-Ом“|“6о) (^м“Н^/).
5.5. Определение параметров обмоток электрических машин с высококоэрцитивными магнитами
5.5.1. Активное сопротивление обмотки якоря. Активное сопротивление обмотки якоря в радиальных и торцевых электрических машинах с пазовым и беспазовым статором определяется уравнениями
Яф = Р/^Ср^ф /{$в2,
где Sbs “ суммарное сечение проводника фазы обмотки якоря, м2;
^?ф = Р^ср^ф/
где sB — сечение проводника параллельной ветви обмотки якоря, м2; а —число параллельных ветвей обмотки.
В зависимости от типа машины средняя длина витка определяется по-разному: для радиальных машин с беспа-154
зовым статором — по (5.25), с пазовым —по (5.23), а в торцевых машинах — по (5.32).
5.5.2. Индуктивное сопротивление обмоток якоря беспазовых электрических машин. Индуктивные сопротивления электрических машин определяются проводимостями потоку реакции якоря, проводимостями пазового и дифференциального рассеяния (для пазовых обмоток) и проводимостью лобового рассеяния. В общем виде уравнения для полных индуктивных сопротивлений по продольной и поперечной осям записываются в виде
Xd=z4nf Цо (^ф2/Р^) (^айН“Кл4“21д)’, (5.34)
Xq = 4jrf|T<o (^ф2/Р^) Lm (А«ад-|-^/л_|“^д) , (5.35)
где had — удельная проводимость для потока реакции якоря по продольной оси; haq— удельная проводимость для потока реакции якоря по поперечной оси; Хл — удельная проводимость лобового рассеяния; Хд-удельная проводимость дифференциального рассеяния.
Индуктивное сопротивление дифференциального рассеяния учитывает несинусоидальность пространственного распределения МДС якоря. Вид выражений для расчета удельных проводимостей, входящих в (5.34) и (5.35), зависит от типа электрической машины (торцевая или радиальная), вида статора (пазовый или беспазовый), типа ротора (звездочка, коллекторный, монолитный, с полюсными башмаками или без них).
Уравнения (5.34) и (5.35) для индуктивных сопротивлений удобно использовать при проектировании электрической машины —для расчета коэффициентов kEQ и kE.
Расчет токов и напряжений машины при импульсном характере нагрузки и в вентильном двигателе осуществляется с помощью матрицы баланса напряжений (4.15), в которую входят собственные и взаимные индуктивности обмотки, поэтому в дальнейшем будут приведены уравнения для собственных и взаимных индуктивностей, а полная индуктивность машины при синусоидальном симметричном токе, протекающем по трехфазной обмотке, и определяющая индуктивные сопротивления
Xd == 2n^L>d\ Xq~-—2лД£^, определяется выражениями
Ld = LsQ+2Mss;
Lq = Lsq+2Ms\ 11*
(5.36а)
(5.366)
155
где Lds — собственная индуктивность обмотки по продольной оси, Гн; Lqs — собственная индуктивность обмотки по поперечной оси, Гн; Mss — взаимная индуктивность между обмотками статора, Гн.
Прежде чем рассмотреть индуктивности электрических машин различного типа, отметим, что проводимости лобового рассеяния не определяются типом ротора или статора машины, а зависят от способа укладки обмотки [29]:
для двухслойной петлевой обмотки
п пол Чг пйло 4- 2§Ср + /гоб)1 /г- о_. Ял=0’34~гл“0,64Р -’ (5-37)
где Лл — средняя длина лобового вылета, м;
для однослойной петлевой и простой шаблонных обмоток
Ял = °’67 i [L- - °>64Р ”(-- + ^cp + M]- (5.38)
В зависимости от типа электрической машины (радиальная или торцевая), типа статора (пазовый или беспа-зовый), значение Ьл, входящее в (5.37) и (5.38), определяется из уравнений (5.24), (5.25) и (5.33).
Индуктивности беспазовой электрической машины с монолитным и сборным роторами типа звездочка. Для этих машин характерным является равенство индуктивностей, а следовательно, индуктивных сопротивлений по продольной и поперечной осям:
Ld==zLq'=-L,(p',
Xd — Xq —• Хф.
Собственная и взаимная индуктивности беспазовой электрической машины определяются уравнениями
Ls$—рю (^ф2/Р7) (ХафЧ“Агл~|“Хд); (5.39)
Afss==O,5po (^ф2/Р7) (Лаф4“%л4“%д) • (5.40)
В беспазовых электрических машинах не представляется возможным отделить удельные проводимости потоку реакции якоря от удельной проводимости пазового рассеяния Хп. Вид выражения для удельной проводимости потоку реакции якоря по первой гармонике зависит от числа пар полюсов:
156
при р=2.
*=4s? [('+s-)’ -5+-4,п"+у
при р=^2
где Иск — коэффициент, учитывающий скос пазов; аСк— = 1+0,41аСк/л (здесь аск — угол скоса пазов, рад).
В пазовых машинах для устранения зубцовых пульсаций магнитного потока угол скоса необходимо выбирать равным aCK = 2n/Zs, где zs— число зубцов статора.
Удельная проводимость дифференциального рассеяния Хд определяется потоками, создаваемыми в воздушном зазоре и роторе высшими пространственными гармониками МДС, и записывается в виде
где v — номер пространственной гармоники МДС. При симметричной обмотке v=£3k (k— любое целое положительное число, большее нуля); feO6v — обмоточный коэффициент для v-й гармоники МДС [29]. Выражения удельной проводимости лобового рассеяния, входящее в уравнения (5.39) и (5.40), приведены в [29].
Индуктивности беспазовой электрической машины с ротором коллекторного типа. В машинах коллекторного типа индуктивности по продольной и поперечной осям различны и определяются выражениями (5.36):
Lds—[i о (W2/pq) (Хас/4"^л+\дд);
Lds= но (^ф2/ pq) Am (А/а^+А/л+А/д^);
Mdss==0,5Lds;
MqSS=0,5LqS,
где Хдс;, hRq — удельные проводимости дифференциального рассеяния по осям d и q.
157
Непосредственное аналитическое решение для удельных проводимостей потоку реакции якоря по продольной had и поперечной haq осям в электрических машинах с ротором коллекторного типа получить не представляется возможным, что обусловлено сложностью получения непосредственных аналитических уравнений для радиальной составляющей вектора магнитной индукции по продольной и поперечной осям (см. § 3.4).
Выражения для удельных проводимостей можно записать в виде
б
J ^rdi
О
7^обаск
,2 &
Л = 9 06 °ск f Br dS, ^0Г22Л J Я
О
где ВГ(ц, Brq\—1-е гармоники радиальной составляющей вектора магнитной индукции по продольной и поперечной осям, Тл; /1 — 1-я гармоника плотности тока, А/м2; г2—радиус постоянного магнита, м.
Значения ВГ(п и Brq\ определяются после решения системы уравнений (3.108).
Удельные проводимости дифференциального рассеяния по продольной и поперечной осям определяются из уравнений б 00
7 __ СТ1
дс? j
О у=3 б оо
Д<? б№2 J L
о v-3
где Brdv, Brqv-—v-e гармоники радиальной вектора магнитной индукции по осям Am-i-—(2&+1)-я гармоника плотности тока, Для инженерных расчетов можно уравнениями
о — 9/7 ^мТ(Х5/ Ь2 •
2&мг + Ма8/
(<7/6*) (л/2р)а6^об.
Значение удельной проводимости лобовой части обмотки определяется в зависимости от типа обмотки по (5.37) или (5.38).
158
2 В .
_^db-,
2-^db, г 1
Маб/
составляющей
>d и q, Тл; А/м2.
воспользоваться
Индуктивности торцевых электрических машин. Ё торцевых электрических машинах с высококоэрцитивными постоянными магнитами индуктивности по продольной и поперечной осям одинаковы и определяются уравнением
£фь—ЦО (ЛУф2/pq) Ьа (Лаф+^14"^д) •
Удельная проводимость лобового рассеяния определяет ся из (5.37) или (5.38):
ф
„,2 8,/2 2(Л„ +8,)
= й^“s‘/24-8 e2(ftw*+5,)-8 1
V е2<Лм* + 8*’_ 1
где /гм* — относительная высота постоянного магнита ротора: Лм*=2/гм/ (DM—Ьм).
Удельная проводимость дифференциального рассеяния
д 52 Li Ц V ) х
* у=3
е----е^2 +е-А/2 + vS _ vS J
_ ! /
5.5.3. Особенности расчета индуктивностей электрических машин с пазовыми статорами. При расчете индуктивностей пазовых электрических машин необходимо учитывать, что приведенные выше выражения для ХЯф, Хя<г, ла<2 описывают только удельные проводимости потоку реакции якоря по соответствующим осям, поэтому индуктивные сопротивления электрической машины по продольной и поперечной осям определяются выражениями
X,j==4jlf Цо (^ф/Р*?) LmGCk (^а<Г"1_А.п~И‘'л4~Уц<1)
Х« = 4л/цо (йУ2ф/р^) LmOck (Ха<-/“|_%п_|-Кл +%дд),
где (Тек — коэффициент, учитывающий скос пазов статора [32]; Ли — удельная проводимость пазового рассеяния;
ОСК= 1+0,41-^, я
здесь аск — угол скоса зубцов статора: aov—2np/zs.
Удельные проводимости потоку реакции якоря Хяа и Хяд, а также удельные проводимости дифференциального рас сеяния определяются по формулам, приведенным в п. 5.6.2, 159
ё которых вместо относительного воздушного зазора 6* необходимо подставлять расчетный относительный воздушный зазор 6Р*:
Удельные проводимости лобового рассеяния определяют по формулам (5.37) и (5.38) в зависимости от типа обмотки, а удельные проводимости пазового рассеяния зависят от конструкции паза [29]:
а) для трапецеидального паза (см. рис. 5.8)
Хп:=^р^п/3&п“|~^/р [ (0,785—^ш/2&п)
где — коэффициенты, учитывающие укорочение обмотки:
^=(1+3р)/4;
^=(1+3^)/4;
б) для прямоугольного паза
iA/ji==^p/in/3Z?ii_f_i^ Ьтп.
5*5.4. Определение параметров эквивалентных демпферных контуров. При несимметричной нагрузке в переходных режимах, а также при работе электрической машины в комплекте с полупроводниковой аппаратурой значение вектора магнитной индукции, создаваемой обмоткой якоря в роторе, изменяется, что приводит к наведению ЭДС в контурах ротора и протеканию вихревых токов. Учет этого явления осуществляется путем введения в систему уравнений баланса напряжений (4.14) уравнений для демпферных контуров по продольной и поперечной осям. Параметры демпферных контуров rrd, rrq, Lrd> Lrq определяются из расчета магнитного поля [30].
Роторы электрических машин с высококоэрцитивными постоянными магнитами состоят из собственно высококоэрцитивного постоянного магнита, оболочки и вставок из магнитомягкого или немагнитного материала. Сами высококоэрцитивные постоянные магниты изготавливаются методом порошковой металлургии, и значение активного сопротивления вихревым токам в них значительно, поэтому при определении параметров эквивалентных демпферных контуров будем учитывать только оболочку постоянного магнита.
Активное сопротивление демпферного контура по продольной и поперечной осям в симметричных электрических 160
машинах одинаковы и определяются выражением
где р/о — удельное сопротивление материала оболочки при температуре окружающей среды /°C, Омм; — коэффициент, учитывающий краевые эффекты:
^г=1-|-Табг/^м.
Собственные индуктивности демпферного контура определяются выражениями
(7>м/р<7) (5.41)
(’Т'м/Р?) (5.42)
Взаимные индуктивности между обмотками статора и демпферных контуров определяются выражениями, аналогичными (5,41) и (5.42):
Afdrs=[Xo(W(|)^o6i/p^) L^Kad', (^ф&об/р?) P^Kaq-
Выражение для удельных проводимостей потоку реакции якоря Kad и Kaq приведены в п. 5.5.2 и зависят от типа ротора.
5.6. Определение потерь в машинах с высококоэрцитивными магнитами
Потери электрической машины с постоянными магнитами складываются из джоулевых потерь в меди обмотки статора, потерь на вихревые и уравнительные токи в обмотке, потерь на вихревые токи в оболочке ротора, потерь в стали магнитопровода статора и механических потерь.
Джоулевы потери в меди обмотки статора
Р м=Ш/2ф,н/?ф.
Потери на вихревые токи в беспазовой обмотке статора. Так как беспазовая обмотка располагается непосредственно в воздушном зазоре и пронизывается полным магнитным потоком, то в проводниках ее наводятся вихревые токи [31]. В целях снижения вихревых токов проводники 161
обмотки сечением sBs — полное сопротивление проводника, определяемое из (5.19), — разбиваются на параллельные ветви, число пар которых обозначается буквой а. Потери на вихревые токи могут быть подсчитаны по формуле
Р = -*-
ГС
<2 L
где atol — глубина проникновения магнитного поля, м:
В пазовых электрических машинах полный магнитный поток постоянного магнита не пересекает проводники обмотки и в них отсутствуют потери на вихревые токи в проводниках обмотки.
Потери на уравнительные токи в обмотке. При разбиении обмотки на параллельные ветви по проводникам начинают протекать уравнительные токи, обусловленные различными значениями ЭДС в проводниках, расположенных в различных точках по расточке и по длине воздушного зазора (по высоте обмотки). Эти потери [23]
2. 2 2 2 S Emi ~~ ^Enk 1
Pv, -1~ f 1
У| 2тс J а/?ф
О ф
где t^irp — количество проводников по высоте обмотки; оно зависит от числа параллельных ветвей и способа укладки проводников, составляющих параллельные ветви, в пазовой области.
Электродвижущие силы /г-го по высоте и k-ro по углу (от начала отсчета проводников в параллельной ветви) проводника, входящие в уравнения, определяются из выражения
4Г2Лоб£ф fnr R 1 ^+(1 + 8*)2%:nz /
------- w^DMLKBM — _——sm (Wrt 0ft),
где rn*=rnlr2 — относительный радиус (отношение радиуса к радиусу постоянного магнита) расположения n-й по высоте обмотки параллельной ветви; 0К — электрический 162
угол смещения k-ro проводника параллельной ветви относительно среднего проводника параллельной ветви, рад:
Qk=(n/mq) (iknpla) (k—а/2&пр).
Для предварительной инженерной оценки потерь на уравнительные токи при отсутствии транспонирования параллельных проводников можно воспользоваться уравнением
РУР=-'2 -sin(r/2mv)/7t/2m7]}.
Потери в оболочке (бандаже) ротора. Потери в оболочке создаются токами обратной последовательности. Эти токи возникают при несимметричных режимах работы генератора, при работе генератора на выпрямитель, в вентильных двигателях. Эти потери можно определить из выражения [28]
(2f)2Cp 2
— 97 ~ Ьобр г#=1 >
2р
где pz — удельное электрическое сопротивление материала оболочки, Ом-м; — коэффициент потерь [31]; Вобр |r=i —радиальная составляющая вектора магнитной индукции на поверхности постоянного магнита, созданная током обратной последовательности, Тл.
При р=2 n I m .гс
Х^р-11 - d+s,)4-41ti(l +«,)]:
при
X - -7(1 + 8*ГР4- - 1) (14- + а _ 1
L Р \ Р J Р
где /ф.обр — ток обратной последовательности в фазе, А.
Следует отметить, что для обеспечения высокой механической прочности оболочки она изготавливается из нержавеющей стали или титана, имеющих большое удельное сопротивление. Этот факт, а также малые при реальных токах /ф,Обр значения ВОбр приводят к тому, что значение потерь Ро в электрических машинах с высококоэр-
163
цитивйЫми постоянными магнитами пренебрежимо мало.
Потери в стали ярма статора. В беспазовых электрических машинах потери в стали магнитопровода (ярма) записываются в виде
Р^Р1/тВ^М^ (f/400) Ч (5.43)
где Ад — коэффициент, учитывающий увеличение потерь в стали в результате технологической обработки; Р1/400 — удельные потери в стали при индукции 1 Тл и частоте 400 Гц, Вт/кг; М}- — масса ярма, кг.
В машинах с пазовым статором к перечисленным выше потерям добавляются потери в зубцах статора. Потери в зубцах статора определяются из выражения (5.43), в котором вместо индукции и массы ярма подставляют индукцию в зубцах и массу зубцов.
Механические потери. Механические потери состоят из аэродинамических потерь и потерь в подшипниках. Аэродинамические потери на трение о воздух определяются выражением [32]
Раэ=0,744 • 10-W’7Pa°’7 (1+4,4Лм/£>м) Г>м4’4,
где ра — давление окружающей среды, Па; Qr — угловая скорость ротора, рад/с.
Потери на трение в подшипниках могут быть вычислены по формуле
Лг.п=0,27. lO-U^Pa0’7 (1+4,4LM//)M) Dm1’63.
5.7. Выбор электромагнитных нагрузок и конструктивных параметров при проектировании машин с высококоэрцитивными магнитами
Проведенные расчеты, а также практика проектирования электрических машин с высококоэрцитивными постоянными магнитами с различными типами роторов при пазовом и беспазовом статоре показали, что в синхронных генераторах и двигатель-генераторах целесообразно использовать беспазовые статоры, а в вентильных двигателях в ряде случаев имеет смысл использовать машины с пазовым статором, индуктивность которых больше, чем у беспазовых, и меньше частота коммутации транзисторов.
Выбор диаметра магнита и конструкции ротора. При относительно небольших моментах (отношениях мощности 164
К угловой скорости) Л1н=Рн/&г=0,025-5-0,25 Н-м Целесообразно использовать радиальные электрические машины с монолитным цилиндрическим ротором типа звездочка. При таких моментах оптимальный, с точки зрения минимума массы, диаметр постоянного магнита составляет £>м=0,02-5-0,03 м. В настоящее время монолитные постоянные магниты выполняются диаметром, не превышающим 0,04 м. При моментах 0,25-5-10 Н-м наиболее перспективным является применение сборного ротора типа звездочка, а при моментах свыше 10 Н-м — роторов коллекторного типа. Единственным ограничением на диаметр сборных роторов типа звездочка и коллекторного типа является механическая прочность оболочки. Торцевые электрические машины целесообразно использовать в кинетических аккумуляторах энергии, и диаметр ротора в этих машинах обычно соответствует внутреннему диаметру обода маховика.
Выбор числа пар полюсов. В системах электроснабжения переменного тока стабильной частоты (если отсутствует преобразователь частоты) проблема выбора числа пар полюсов электрической машины отсутствует, так как оно соответствует заданным частоте напряжения и угловой скорости: p=arJQr-
В вентильных двигателях, а также генераторах систем электроснабжения переменного тока со статическим преобразователем частоты число пар полюсов можно выбрать, исходя из заданного критерия качества. В машинах с ротором типа звездочка целесообразно, с точки зрения минимума массы электрической машины, выбирать р=2. При большем числе пар полюсов масса машины возрастает.
Некоторое уменьшение массы машины может быть достигнуто при р—1 при использовании «безвального» ротора (магнита без отверстия под вал, см. гл. 2).
В машинах с ротором коллекторного типа и торцевых электрических машинах оптимальное, с точки зрения минимума массы, число пар полюсов p=3-j-4.
Выбор линейной нагрузки. Линейная нагрузка оказывает наиболее существенное влияние на массу и КПД электрических машин. Расчеты показывают, что ее целесообразно выбирать в пределах А=75004-25 000 А/м. Меньшие линейные нагрузки относятся к машинам меньшей мощности, а также к машинам с пазовым статором. Следует также отметить, что с уменьшением плотности тока оптимальные линейные нагрузки уменьшаются.
Выбор плотности тока. Так же как и линейная нагрузка, плотность тока оказывает существенное влияние на 165
Массу и КПД электрической машины. Расчеты показывают, что с увеличением плотности тока масса электрической машины уменьшается, однако при естественном охлаждении при />25ХЮ6 А/м2 наблюдается увеличение массы машины, что связано с возрастанием коэффициента kEf к тому же при таких плотностях тока уменьшается КПД, а температура обмотки оказывается недопустимо высокой. При интенсивной воздушной или испарительной системе охлаждения плотность тока может выбираться большей.
Для кратковременного режима работы эффективным является использование системы охлаждения, основанной на фазовом переходе хладагента [33] — используется скрытая теплота плавления хладагента. Следует также отметить, что если скорость нарастания температуры в обмотке в кратковременном режиме работы превышает 2— 5°С/мин, то это приводит к ее деформации и может вызвать нарушение изоляции.
СПИСОК ЛИТЕРАТУРЫ
1. Постоянные магниты. Справочник/ Под ред. Ю. М. Пятина.— 2-е изд. — М.: Энергия, 1980. 488 с.
2. Постоянные магниты. Справочник. Пер. с англ./ Под ред. Л. Ш. Казарновского. М.: Госэнергоиздат, 1963. 294 с.
3. Пятин Ю. М. Проблема магнитной одорыг в свете использования новых магнитотвердых материалов. — Изв. вузов. Электротехника, 1980, № 7, с. 703—709.
4. Стрнат К. Дж. Обзор и анализ промышленных магнитов из редкоземельных металлов с кобальтом. — В кн.: Магниты из сплавов редкоземельных металлов с кобальтом. Пер. с англ/ М.: Металлургия, 1978, с. 11—33.
5. Сергеев В. В., Булыгина Т. И. Магнитотвердые материалы. М.: Энергия, 1980. 224 с.
6. ГОСТ 21559-76. Материалы магнитотвердые спеченные. .Марки, технические требования, методы контроля.
7. Исследование магнитных полей в воздушных зазорах электрических машин с постоянными магнитами из сплава SmCos/ Е. А. Анищенко, Ю. М. Запорожец, Н. А. Келин, В. С. Растягаев. — Электротехника, 1977, № 9, с. 56—59.
8. Балагуров В. А., Галтеев Ф. Ф., Ларионов А, Н. Электрические машины с постоянными магнитами. М.: Энергия, 1964. 480 с.
9. Бертинов А. И. Авиационные электрические генераторы. М.: Государственное издательство оборонной промышленности, 1959, 594 с.
10. Овчинников И. Е., Лебедев Н. И. Бесконтактные двигатели постоянного тока. Л.: Наука, 1979. 270 с.
11. Мелихов Н. Н., Морозов В. А. Автоматизированные вентильные электромеханические системы автономных объектов.—Тр. МЭИ, 1980, вып. 487, с. 9—14.
12. Проблемы создания кинетических аккумуляторов электрической энергии/ А. Н. Ледовский, М. Э. Новиков, И. И. Литвинов, А. Т. Тимофеев. — Электричество, 1978, № 3, с. 45—49.
13. Reiquam Е. Т. Electrical Power System for new technology transport power — by wire airplane. — Proceeding IEEE National Aerospace and Electronical Conference — NAECON, 1979, Dayton, 1979, vol. 1, New York, 1979, p. 254—261.
14. Parker R. J. Rare — earth permanent magnets and energy conversion processes. — Proceeding National Aerospace and Electrical Conference.— NAECON, 1977, Dayton, 1977, New York, 1977, p. 1089—1093.
15. O’Neill J. J. Ahidden advantage of permanent magnet electrical generating systems —Proceeding 16-th Intersociety Energy Conversion Engineering Conference, Atlanta, 1981, vol. 1, p. 136—139.
16. Webb R. C. 60 kB-A ADRT Permanent magnet VSCF Starter — generator System. — Generator System Performance characteristics. — Proceeding 16-th Intersociety Energy Conversion Engineering Conference, Atlanta, 1981, vol. 1, p. 140—145.
17. Корн Г., Корн T Справочник по математике- Пер с англ./ Под ред. И. Г. Арамановича. М.: Наука, 1977. 832 с.
167
18. Зенкевич О., Чанг И. Метод конечных элементов в теории сооружений и механике сплошных сред- Пер. с англ./ Под ред, Ю. К- Зарецкого. М.: Недра, 1974. 240 с.
19. Гринберг Г. А. Избранные вопросы математической теории электрических и магнитных явлений. М. — Л.: Изд-во АН СССР, 1948, 728 с.
20. Апсит В. В., Дикин Ю. И., Лапшин В. К. Методика расчета плоского магнитного поля в поперечном сечении электрической! машины. Рига: Зинатне, 1975 56 с.
21. Ледовский А. Н., Сугробов А. М. Расчет магнитного поля в электрических машинах с постоянными магнитами из сплава SmCo^.— Электричество, 1982, № 7, с. 65—68.
22. Зечихин Б. С. Электромагнитные поля в электрических машинах. М.- МАИ, 1976. 88 с.
23. Векслер Г. С., Тейтельбаум Я. И. Электропитание радиоустройств. Киев: Техника, 1964. 326 с.
24. Костенко М. П., Пиотровский Л. М. Электрические машины. Ч. II. Л.: Энергия, 1973. 648 с.
25. Исследование особенностей рабочего процесса силовой части реверсивных вентильных преобразователей в вентильных электрических системах с магнитоэлектрическими двигательщенераторами/ Н. Н. Мелихов, В. А. Морозов, А. А. Мельников, В. В. Трифонов. — М.: Тр. Моск, энерг. ин-та, 1981, вып. 523, с. 25—32.
26. Хэнкок Н. Матричный анализ электрических машин/- Пер. с англ. М.: Энергия, 1967, 224 с,
27. Балагуров В. А., Кецарис А А., Лохнин В. В. Перспективы развития магнитоэлектрических генераторов с применением высококоэрцитивных постоянных магнитов. — Электричество, 1977, № 3 с. 54—58.
28. Ледовский А. Н. Особенности проектирования электрических машин с цилиндрическими постоянными магнитами из сплава SinCos.— Электричество, 1981, № 10, с. 36—41.
29. Сергеев П. С., Виноградов Н. В., Горяйнов Ф. А. Проектиро вание электрических машин. М : Энергия, 1969. 632 с.
30. Куцевалов В. М. Вопросы теории и расчета асинхронных машин с массивными роторами. М. — Л.: Энергия, 1966. 304 с.
31. Иванов-Смоленский А. В. Электромагнитные поля и процессы в электрических машинах и их физическое моделирование. М.: Энергия, 1969. 304 с
32. Делекторский Б А., Мастяев Н. 3., Орлов И. Н. Проектирование гироскопических электродвигателей. М.: Машиностроение, 1968. 251 с.
33. Перспективы применения легкоплавких веществ для охлаждения асинхронных двигателей/ В. М Петров, Э. А. Мотин, Я. Б. Тубис, В. Е. Коркин. — Электротехника, 1978, № 9, с 39—42
34. Овчинников И Е., Лебедев Н. И., Гращенков В. Т. Выбор параметров управляемых бесконтактных двигателей постоянного тока с беззубцовым статором. — Электричество, 1979, № 3, с. 45—48.
35. Лившиц Б. Г., Лилеев А. С. Современное состояние и перспективы развития материалов для постоянных магнитов. — Тр Моск, энерг. ин-та, 1980, вып. 416, с. 3—15.
36. Паластин Л. М. Электрические машины автономных источников питания. М : Энергия, 1972. 464 с.
37. Мейстель А. М, Наумычева К. И. Электропривод и автоматизация промышленных установок Итоги пауки и техники/ Пот ред. И. И Петрова. М.- ВИНИТИ, 1974. т 4. 217 с.
Огла вление
Предисловие ............................................................ &
Введение ............................................................... 5
Глава первая. Материалы современных постоянных магнитов . 7
1.1 Основные параметры, характеризующие постоянные магниты . 7
1.2. Классификация и особенности постоянных магнитов, используемых в электрических машинах ....................................... 10
1.3. Характеристики высококоэрцитивных постоянных магнитов . . 14
Глава вторая. Конструкции электрических машин с высококоэрци-ными магнитами...................................................... 16
2.1. Общие требования к электрическим машинам автономных систем электроснабжения .... ............... 16
2.2 Типы роторов электрических машин с высококоэрцитивными постоянными магнитами . ....................... . 17
2.3. Конструкции беспазовых статоров электрических машин с высококоэрцитивными постоянными магнитами.................................27
2.4 Вентильные двигатели с высококоэрцитивными магнитами . . 33
2.5. Структурные схемы систем электроснабжения и электроприводов с машинами с высококоэрцитивными магнитами .... 37
Глава третья Магнитное поле в электрических машинах с высококоэрцитивными магнитами . ...............................43
3.1. Общие уравнения магнитного поля в электрических машинах 43
3.2. Задачи и методы расчета магнитных полей .... 48
3.3. Магнитное поле в радиальных электрических машинах с ротором типа звездочка . ... .... 56
3.4. Расчет магнитного поля в радиальных электрических машинах с ротором коллекторного типа .... .... 76
3.5 Магнитное поле в торцовых электрических машинах ... 87
Глава четвертая. Особенности электромагнитных процессов в электрических машинах с высококоэрцитивными постоянными магнитами 93
4.1. Особенности работы электрических машин на выпрямитель . . 93
4.2. Особенности генераторного режима электрических машин с высококоэрцитивными постоянными магнитами .... 97
4 3 Регулирование напряжения в генераторах с высококоэрцитивными магнитами . . ...................................106
4.4. Особенности переходных процессов в электрических машинах с высококоэрцитивными магнитами......................................110
4.5. Электромагнитные процессы в вентильных двигателях с высококоэрцитивными постоянными магнитами..............................120
Глава пятая Особенности проектирования электрических машин с высококоэрцитивными магнитами ........ 127
5.1. Радиальные и торцевые электрические машины. Выбор типа ротора, сравнение пазовой и беспазовой конструкций статора 127
5.2. Влияние характеристик постоянного магнита на массоэкерге-тические показатели электрических машин ............................130
5.3. Определение размеров радиальных электрических машин . . 135
5 4 Определение основных размеров торцевых электрических машин 150
5.5. Определение параметров обмоток электрических машин с высококоэрцитивными магнитами . . ........................154
5.6. Определение потерь в машинах с высококоэрцитивными магнитами 161
5.7. Выбор электромагнитных нагрузок и конструктивных параметров при проектировании машин с высококоэрцитивными магнитами . . . . ...................................164
Список литературы.......................................................168