/

















































































































































































































































Автор: Лебедев А.А. Карабанов В.А.
Теги: авиация летательные аппараты системы управления беспилотные летательные аппараты
Год: 1965




Текст
4
Предисловие
Книга рассчитана на читателя, которому известны основные све-
дения по теории автоматического управления и элементам автома-
тики, по автоматическим и радиотехническим устройствам систем
управления, по конструкции беспилотных летательных аппаратов,
по теории вероятностей и случайных процессов.
Книга является учебным-пособием для студентов втузов. Авторы
надеются, что она окажется полезной также для инженерно-техни-
ческих работников, занимающихся проектированием летательных
аппаратов и их систем управления.
Гл. I — IV написаны А. А. Лебедевым, а гл. V — VIII — В. А. Ка-
рабановым.
Авторы считают своим приятным долгом выразить благодар-
ность рецензентам Л. Т. Кузину, И. Е. Митрофанову,
Э. Ф. Фатхуллину и инж. Л. И. Кирьянову за помощь в подготовке
рукописи к печати.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
а — скорость звука в м/сек-,
aiK —динамические коэффициенты летательного аппарата в продольном
движении;
biK —динамические коэффициенты летательного аппарата в движении
рыскания;
ЬА —средняя аэродинамическая хорда крыльев с подфюзеляжной частью
в л;
Ьр — средняя хорда рулей в м;
сх —коэффициент лобового сопротивления летательного аппарата;
Су—коэффициент подъемной силы летательного аппарата;
с2 — коэффициент боковой силы летательного аппарата;
С(к — динамические коэффициенты летательного аппарата в движении
крена;
Со. Clt С2—коэффициенты ошибки; постоянные интегрирования;
EJ —изгибная жесткость в кГ л2(н-л2);
f — частота колебаний в гц-,
F — погонная нагрузка в кГ/м(н/м), площадь в л2;
G —вес летательного аппарата в кГ(н);
G(p)— передаточная функция разомкнутой системы;
g — ускорение силы тяжести в м/сек?-,
И — высота полета в м\
h — промах (пролет) в м;
Лс, ly, Iz —моменты инерции летательного аппарата относительно связанных
осей Охи Оуи Ozt в кГ • м • сек2 (кг • м2);
/ — мнимая единица; нормальное ускорение в м/сек2-,
К — передаточный коэффициент;
К»— передаточный коэффициент разомкнутой системы;
L —длина фюзеляжа (корпуса) в м; относительная амплитуда в дб для
разомкнутой системы; преобразование Лапласа;
I —полный размах крыльев в м;
528
Оглавление
521 Стр.
2.2. Классификация методов самонаведения........................415
2.3. Основные свойства траекторий прн различных методах самона-
ведения ................................................. 416
§ З-Г.пособы формирования сигнала ошибки наведения................438
•ГЗЛу Основные способы ориентирования чувствительных элементов
''-^.координаторов цели и использования их сигналов..............439
• /3.2.) Возможные варианты формирования сигнала ошибки для раз-
личных методов самонаведения.................................442
§ 4. Динамические свойства координаторов цели, ориентированных
/-"ч по линии визирования цели...................................448
Координатор цели со следящей системой.......................448
<^2у Гиростабилизированный координатор цели.......................452
§о-Формирование сигнала наведения................................462
§ 6. Кинематическое звено; уравнения и передаточные функции . . . 464
7^ Промах самонаводящейся ракеты................................468
§лСОбщая характеристика системы самонаведения.....................473
’ Расчетная структурная схема....................................473
< §4. Управляющие и возмущающие воздействия ...... 475
jray Основные особенности процесса самонаведения.............479
§'ЗТ'Методы исследования динамики самонаведения..................485
t '9. Ц Приближенные аналитические методы..........................487
> 1 9.2/’Частотный метод исследования..............................501
/ "Литература............................................. . . . 513
П риложения
I. Таблица единиц физических величин в системах МКГСС и СИ 514
II. Расчет дифференцирующего фильтра........................518
III. Решение линейного дифференциального уравнения (8.49) . . .-520
Александр Александрович Лебедев
и Владимир Алексеевич Карабанов
ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ
Редактор Г. Ф. Лосева
Техн, редактор В. И. Орешкина
Г—27251 Подписано в печать 7/Х 1965 г. Учетно-изд. л. 30,83
Формат бумаги 60 X90!/ie= 16,50 бум. л.— 33,00 печ. л.
Цена 1 р. 23 к. Б. 3 № 26 1965 г. Тираж 6000 экз. Зак 1242/1923
Экспериментальная типография ВНИИПП
Государственного комитета Совета Министров СССР по печати
Москва И-51, Цветной бульвар, 30.
Замеченные опечатки
Стр. Строка Напечатано Должно быть
50 В сноске в учебных пособиях |37], [38] и справочнике [39]. в учебных пособиях [38], [39] и справочнике [40].
99 12 снизу постоянными (см. рис. 1 .16) постоинными.
190 Формула Ку. пр е ТР Ку.
(3.102) р ~ р
256 14 снизу форме [см. (3.11)]: форме:
287 4 снизу изменять произвольное изменять в произвольное
290 5 сверху L (®) > 1 L (<о) > 0
294 7 сверху мало ослабляет сильно ослабляет
296 18 снизу « < 1 /и,ф <О< 1/Т0
316 21 сверху снова сноса
318 13 снизу акселерометр интегратор акселерометр и интегратор
321 5 снизу (6.26) (6.25)
378 8 сверху (7.26) (7.20)
399 4 снизу (рис. 2.9) (рис. 1.24)
401 20 сверху из рис. 7.29 из рис. 1.24
483 10 снизу к + 1<₽ М +
Заказ 1242/1923
6
Основные обозначения
М —число Маха; относительная амплитуда в дб для замкнутой системы,
момент силы в кГ • м(н м);
Мх—момент крена в кГ • м(н м);
Му —момент рыскания в кГ • м(н • м);
М2 —момент тангажа в кГ м(н м) ,
Мш — шарнирный момент органов управления в кГ м(н м)\
т —масса летательного аппарата в кГ-сек2/м (кг) ^математическое ожи-
дание случайной величины; ;
тх —коэффициент момента крена;
Шу — коэффициент момента рыскания;
mz —коэффициент момента тангажа;
тш — коэффициент шарнирного момента;
пх. Пу, пг —проекции вектора перегрузки на скоростные оси;
п — проекция вектора перегрузки на скоростную ось Оу или Oz;
Р —сила тяги двигателей в кГ(н); ордината вещественной частотной ха-
рактеристики; вероятность события; вероятность поражения цели;
р—давление в кГ/м2(н/м2); оператор Лапласа; отношение скорости ле-
тательного аппарата к скорости цели; плотность вероятности;
<7=В1_ — скоростной напор в кГ1м2(н)м2);
г — наклонная дальность — расстояние между центрами масс летатель-
ного аппарата и цели или расстояние между центром масс летатель-
ного аппарата и командным пунктом в м;
S(u>)—спектральная плотность;
S —характерная для летательного аппарата площадь (площадь крыльев
с подфюзеляжной частью или площадь миделевого сечения корпу-
са) в .и2;
Sp — площадь рулей в м2;
Т — постоянная времени звена автоматической системы в сек;
Тк—период колебаний в сек;
t — время в сек;
и —сигнал; аргумент функции Лапласа Ф(ц); напряжение;
V —скорость центра масс летательного аппарата относительно воздуха
(при отсутствии ветра скорость относительно Земли) в л/сек;
W(p) — передаточная функция;
X —лобовое сопротивление летательного аппарата в кГ(н);
х —сигнал; координата вдоль связанной оси х\, отсчитываемая от носа
фюзеляжа, в м; координата центра масс летательного аппарата
вдоль земной оси Ахо в .и;
xF —расстояние от носа фюзеляжа до фокуса летательного аппарата в лг.
Основные обозначения
7
хт —расстояние от носа фюзеляжа до центра тяжести летательного аппа-
рата в м;
У —подъемная сила летательного аппарата в к/'(н);
У — сигнал; координата вдоль связанной оси Оу} в м; координата центра
масс летательного аппарата вдоль земной оси Ау0 в м;
Z —боковая сила летательного аппарата в кГ(н);
г —сигнал; координата центра масс летательного аппарата вдоль зем-
ной оси Az0 в м;
а —угол атаки летательного аппарата;
₽ — угол скольжения летательного аппарата;
у —угол крена летательного аппарата;
"Ус — угол крена скоростной системы координат;
Д — приращение какой-либо величины; Д-функция;
6 — угол отклонения органов управления тангажом или рысканием;
6в — угол отклонения органов управления (рулей высоты);
6Я — угол отклонения ния); органов управления рысканием (рулей направле-
6., — угол отклонения органов управления креном (элеронов);
£ — ошибка (рассогласование) автоматической системы с обратной
связью;
С — угол пеленга цели;
т] — угол упреждения;
т1Ч — курсовой угол;
6 — угол наклона траектории к горизонту;
© — угол тангажа;
— передаточный коэффициент /г-й гармоники упругих колебаний;
р. —погонная масса в кГ • секЦм2 (кг/м);
5 — относительный коэффициент демпфирования;
р — плотность воздуха в кГ секЧмА (кг/м3);
о — перерегулирование; среднее квадратическое отклонение случайной
величины;
т —запаздывание идеального запаздывающего звена и эквивалентное за-
паздывание; постоянная времени в сек;
— передаточная функция замкнутой автоматической системы;
Ф(и) —функция Лапласа;
у — угол между вектором дальности г и координатной плоскостью AxqZq
земных осей (угол места); сдвиг фазы вынужденных колебаний; соб-
ственная функция;
X — угол между проекцией вектора дальности г на координатную плос-
кость АхоУо земных осей и земной осью Ах0 (угол азимута);
ф — угол рыскаиия;
8
Основные обозначения
¥ — угол поворота траектории;
2 — значения угловой частоты в 1/сек;
(Ох, а>у, (Oz — проекции вектора угловой скорости летательного аппарата иа свя-
занные оси координат Ox\y\Z\ в 1/сек;
ш — угловая частота колебаний в 1/сек;
ша — собственная частота летательного аппарата в 1/сек;
— частота среза в 1/сек;
“ст и “« —частоты среза систем стабилизации и наведения в 1/сек.
Частные производные от сил и моментов и их коэффициентов по парамет-
рам движения обозначаются верхним индексом, например: •
ВВЕДЕНИЕ
Для того чтобы привести беспилотный летательный аппарат к
цели или осуществить полёт по заданной траектории, ему нужно со-
общить некоторую скорость и в процессе движения определенным
образом изменять направление (а в некоторых случаях и величину)
вектора скорости полёта. Изменение величины и направления век-
тора скорости летательного аппарата осуществляется с помощью
системы управления полётом,-
Система управления полётом представляет собой совокупность
устройств, предназначенных для воздействия на движение летатель-
ного аппарата таким образом, чтобы обеспечить с определенной точ-
ностью выведение аппарата в район цели* или полёт по заранее
намеченной траектории.
Задача проектирования и конструирования беспилотного лета’
тельного аппарата и его системы управления чрезвычайно сложна,
так как охватывает очень много различных областей науки и тех-
ники. Одной из важнейших научных дисциплин, на которую опира-
ется проектирование летательного аппарата и системы управления,
является динамика систем управления летательными аппаратами.
Основным содержанием этой теории является изучение динамичес-
ких свойств летательных аппаратов как объектов управления и ди-
намических свойств элементов систем управления, исследование
полёта летательного аппарата с учётом процессов управления
(анализ процессов стабилизации, управления нормальными пере-
грузками и наведения, анализ рассеивания летательных аппаратов
и др.), выбор оптимальных характеристик систем управления на ос-
нове исследования динамики процессов управления, разработка
соответствующих методов расчёта.
Наряду с этими вопросами в настоящей книге рассматриваются
принципы построения систем управления полётом и . приводятся
структурные схемы наиболее распространенных систем.
При изложении динамики систем управления полётом приходит-
ся опираться на ряд дисциплин. К ним в первую очередь относятся
динамика полёта и теория автоматического управления с такими
* Под целью в общем случае можно понимать некоторую точку, движущую-
ся в пространстве известным образом, в частном случае неподвижную.
10
Введение
новыми разделами, как статистическая динамика и теория опти-
мальных систем, а также дисциплины, в которых рассматриваются
основные элементы систем управления полётом (автоматические и
радиотехнические устройства систем управления, рулевые приводы
и др.). При решении задач динамики систем управления широко
применяется современная вычислительная техника (моделирующие
устройства и цифровые электронные машины).
Изучение систем управления полётом, конечно, не исчерпывает-
ся вопросами динамики. При проектировании систем управления
приходится находить рациональные компромиссные решения по
многочисленным взаимосвязанным вопросам. Среди них, помимо
вопросов динамики системы, следует отметить вопросы аэродинами-
ческой компоновки и конструкции летательного аппарата, боевой
эффективности управляемого снаряда, электроники, технологии, на-
дежности, экономики и др.
Это объясняется тем, что система управления полётом является
частью более сложной системы, называемой комплексом беспилот-
ного летательного аппарата. Этот комплекс представляет собой со-
вокупность самого летательного аппарата и всех прочих устройств,
предназначенных для пуска аппарата и управления им, а также для
проверочных работ и эксплуатации. Комплекс в целом и выполняет
возложенную на него задачу.
Так, например, комплекс управляемого снаряда (или, другими
словами, система оружия) складывается из следующих частей:
1) снарядов, которые, в свою очередь, состоят из планера или
корпуса, двигательной установки с топливом, бортовой аппаратуры
системы управления полётом, бортовой энергосистемы, боевой час-
ти и взрывателя;
2) внебортовой аппаратуры управления их полётом;
3) носителей (самолёты, корабли, подводные лодки);
4) пусковых установок;
5) испытательного, заправочного и подъёмно-транспортного обо-
рудования,
которые все вместе выполняют задачу поражения цели.
Задачи проектирования отдельных частей комплекса беспилот-
ного летательного аппарата (например, самого аппарата, системы
управления, пусковой установки) взаимосвязаны и не могут решать-
ся независимо друг от друга. Изменение какой-нибудь отдельной
части комплекса может существенным образом повлиять на усло-
вия работы других ее частей. Основное правило проектирования
комплекса беспилотного летательного аппарата состоит в том, что-
бы, рассматривая комплекс как единое целое, добиваться макси-
мальной его эффективности при наименьших затратах на разра-
ботку, серийное производство и эксплуатацию.
Глава 1
ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ УПРАВЛЕНИЯ ПОЛЕТОМ
И МЕТОДАХ ИХ ИССЛЕДОВАНИЯ
§ 1. ОСНОВНЫЕ ПРИНЦИПЫ УПРАВЛЕНИЯ
ЛЕТАТЕЛЬНЫМ АППАРАТОМ
Создание беспилотного летательного аппарата нельзя рассмат-
ривать как простое механическое добавление аппаратуры управле-
ния к неуправляемому снаряду или же как механическую замену
пилота соответствующими приборами. При проектировании лета-
тельного аппарата необходимо учитывать специфику системы уп-
равления. В свою очередь конструкция летательного аппарата
настолько глубоко влияет на систему управления, что приходится
изыскивать оптимальный вариант всего беспилотного летательного
аппарата в целом, а не отдельных его составных частей. Взаимодей-
ствие между конструкцией летательного аппарата и системой
управления происходит через силы и моменты, действующие на ле-
тательный аппарат. Свои задачи система управления полётом
выполняет, изменяя эти силы и моменты.
1.1. Силы и моменты, действующие на летательный аппарат
Тангенциальная и нормальная управляющие
силы*
На летательный аппарат в полёте в общем случае действуют
силы тяги двигателей, аэродинамические силы и сила веса. Чтобы
воздействовать на траекторию полёта летательного аппарата, нуж-
но изменять величину и направление равнодействующих этих сил.
Поскольку на силу веса пока еще влиять невозможно, то практиче-
ски управление полётом осуществляется путем изменения величины
и направления равнодействующей N сил тяги двигателей и аэроди-
намических сил. Эту равнодействующую N условимся называть
управляющей силой. Отношение управляющей силы к весу лета-
тельного аппарата п = N/G называют вектором перегрузки.
* Более подробно этот вопрос изложен в книге [1].
12
Глава I. Общие сведения о системах управления полетом
Управляющую силу можно разложить на две составляющие: на
тангенциальную управляющую силу, направленную вдоль вектора
скорости полёта, и на нормальную управляющую силу, перпендику-
лярную к вектору скорости.
Чтобы воздействовать на величину скорости полёта, необходимо
изменить силу, действующую на летательный аппарат в направле-
нии движения, т. е. тангенциальную управляющую силу. Это дости-
гается изменением тяги двигателей или силы лобового сопротив-
ления. Силу тяги можно регулировать изменением секундного
расхода топлива, включением или выключением различных двига-
телей, а также использованием реверса тяги, т. е. изменением на-
правления тяги на обратное. Для увеличения лобового сопротивле- '
ния обычно применяются воздушные тормоза и парашюты.
Для того чтобы изменить направление полёта, необходимо при-
ложить к летательному аппарату силу, перпендикулярную вектору
скорости, т. е. нормальную управляющую силу*.
Очевидно, что, обеспечивая требуемые величины и направления
тангенциальной и нормальной управляющих сил, можно привести
летательный аппарат в заданную точку пространства в нужное
время. На беспилотном летательном аппарате задача изменения
нормальной управляющей силы возложена на систему управления
нормальными перегрузками. Эта система является как бы «муску-
лами» системы управления полетом, её назначение — преобразова-
ние управляющих сигналов в нормальные перегрузки.
Принципиальная схема системы управления нормальными пере-
грузками во многом определяется способом создания нормальной
силы, т. е. конструктивной (или аэродинамической) схемой лета-
тельного аппарата.
Рассмотрим сначала, как можно получить нормальную силу при
полёте в вертикальной плоскости.
Если полёт происходит в достаточно плотных слоях атмосферы,
основную роль в образовании нормальной силы играет аэродина-
мическая подъёмная сила, создаваемая крыльями при наличии угла
атаки. Чтобы получить нормальную силу различной величины, не-
обходимо изменять угол атаки, поворачивая летательный аппарат
вокруг центра масс.
Нормальная сила может быть также создана силовой установ-
кой, развивающей достаточно большую силу тяги.
Если двигатель установлен так, что его сила тяги направлена
вдоль продольной оси летательного аппарата (или составляет с ней
пренебрежимо малый угол), то для создания нормальной силы кор-
пус летательного аппарата вместе с двигателем должен отклонять-
ся от направления полёта на некоторый угол атаки.
* Иногда именно эту силу называют управляющей.
§ 1. Основные принципы управления летательным аппаратом
13<
В ряде случаев, например, у некоторых вертикально взлетающих,
самолётов, нормальная сила создается поворотными двигателями,
расположенными таким образом, что сила тяги при любом положе-
нии двигателя проходит через центр масс летательного аппарата.
В этом случае нормальная сила получается за счет отклонения оси
двигателя от направления полета на некоторый угол, который мо-
жет достигать 90°.
Для создания нормальной силы используются также двигатели,
развивающие тягу в плоскости, перпендикулярной продольной оси
летательного аппарата и проходящей через его центр масс. Вели-
чина поперечной силы тяги регулируется расходом топлива.
Чтобы реализовать любой из способов получения нормальной
силы, необходимо определенным образом регулировать угловое
положение летательного аппарата в пространстве. С этой точки
зрения все способы создания нормальной силы можно подразделить
на две основные группы:
1) наиболее распространенные способы связаны с поворотом
летательного аппарата вокруг центра масс, вызывающим появле-
ние нормальной силы;
2) при непосредственном способе создания нормальной силы
такого поворота не требуется.
К первой группе относятся способы создания нормальной силы
с помощью аэродинамических сил или тяги двигателя, направлен-
ной вдоль оси летательного аппарата, когда для изменения вели-
чины нормальной силы необходимо изменять угол атаки аппарата.
При непосредственном способе создания нормальной силы от-
сутствует необходимость в изменении угла атаки летательного
аппарата: нормальная сила создается непосредственно тягой дви-
гателя, проходящей через центр масс аппарата. Однако для того
чтобы нормальная сила имела при этом нужное направление, необ-
ходимо определенным образом регулировать угловое положение
летательного аппарата в пространстве.
Промежуточное положение между двумя указанными группами
занимает способ создания нормальной силы с помощью поворот-
ных крыльев. В идеальной схеме летательного аппарата с поворот-
ными крыльями, когда их центр давления совпадает с центром масс
аппарата, нормальная сила получается лишь за счёт поворота
крыльев относительно корпуса. При этом летательный аппарат не
изменяет свой угол атаки, т. е. имеет место непосредственный спо-
соб создания нормальной силы.
Однако в реальных условиях не удается обеспечить совпадения
центра давления поворотных крыльев и центра масс летательного
аппарата, так как эти точки в процессе полёта значительно пере-
мещаются (центр давления из-за изменения числа М и угла атаки,
центр масс из-за выгорания топлива). Поэтому обычно при пово-
роте крыльев относительно корпуса возникает момент, вращающий
14
Глава I. Общие сведения о системах управления полетом
корпус вокруг центра масс. В результате нормальная сила полу-
чается как за счет поворота крыльев относительно корпуса, так и
за счет изменения угла атаки крыльев, вызванного поворотом
корпуса.
Рассмотрим теперь, каким образом можно обеспечить нужное
направление нормальной силы в пространстве (точнее в плоскости,
перпендикулярной к направлению полета), если эта нормальная
сила создается одним из способов, рассмотренных выше.
Если летательный аппарат может создавать нормальную силу
лишь в одной продольной плоскости то для того чтобы из-
менять направление нормальной силы в пространстве, аппарат дол-
жен поворачиваться относительно своей продольной оси. Такой
способ управления нормальными силами называют иногда «управ-
лением в полярных координатах».
Примером может служить летательный аппарат обычной само-
лётной схемы, т. е. с крыльями, расположенными в одной плоскости.
В этом случае для создания нормальной силы различной величины
в различных направлениях летательный аппарат изменяет углы
атаки и крена.
Другой способ получения нормальной силы в любых направле-
ниях состоит в геометрическом сложении нормальных сил, созда-
ваемых в двух взаимно перпендикулярных плоскостях; при этом
предварительное накренение летательного аппарата уже не требует-
ся («управление в декартовых координатах»).
Таким способом, а именно путем определенного сочетания уг-
лов атаки и скольжения, создают нормальную силу крылатые ле-
тательные аппараты с + и Х-образными и кольцевыми крыльями,
а также бескрылые летательные аппараты с тягой двигателя, на-
правленной вдоль продольной оси корпуса. Управление в декарто-
вых координатах может также применяться у летательных аппара-
тов с поперечными двигателями.
Управляющие моменты
Как было сказано выше, для получения требуемой по величине
и направлению нормальной силы необходимо определенным обра-
зом регулировать угловое положение летательного аппарата в про-
странстве. Эта задача решается путем создания управляющих мо-
ментов, которые вращают летательный аппарат вокруг трех его
осей Oxi, Оу} и Ozi, проходящих через центр масс*. Для образо-
вания управляющих моментов на летательном аппарате имеются
органы управления. Они создают сравнительно небольшие аэроди-
намические или реактивные силы, моменты которых относительно
центра масс аппарата являются достаточными для управления уг-
Более подробно об управляющих моментах рассказано в книге [1].
§ 1. Основные принципы управления летательным аппаратом
15
левыми движениями аппарата. Обычно эти силы сравнительно
слабо влияют на нормальную силу летательного аппарата. Исклю-
чением служат лишь поворотные крылья, которые создают одно-
временно и большую часть нормальной силы и управляющий мо-
мент.
Величина сил, создаваемых органами управления, обычно зави-
сит или от углового положения этих органов, или от расхода топ-
лива, если органом управления служит специальный (рулевой)
ракетный двигатель.
Управляющие моменты относительно осей Оу\ и Oz( (моменты
рыскания и тангажа) могут быть созданы как с помощью аэроди-
намических, так и реактивных сил.
Для создания управляющих моментов с помощью аэродинами-
ческих сил используются воздушные рули различных типов, пово-
ротные крылья и интерцепторы.
Для образования управляющих моментов с помощью реактив-
ных сил применяются газовые рули, поворотные маршевые двига-
тели, а также специальные рулевые двигатели. При наличии не-
скольких маршевых двигателей или нескольких сопел у одного мар-
шевого двигателя необходимые управляющие моменты можно
получить путем изменений сил тяги у соответствующих сопел.
Управляющий момент крена (относительно оси Oxi) может быть
создан элеронами, воздушными и газовыми рулями, а также пово-
ротными крыльями с дифференциальным управлением, интерцепто-
рами, рулевыми ракетными двигателями.
Возмущающие силы и моменты
Кроме управляющих сил и моментов, вызывающих желаемое
изменение интересующих нас параметров движения, на летатель-
ный аппарат всегда действуют возмущающие силы и моменты. Они
отрицательно влияют на процессы управления, снижая точность
управления.
К возмущающим относятся силы и моменты, обусловленные та-
кими случайными факторами, как эксцентриситет тяги и различного
рода производственные погрешности (несимметрия летательного
аппарата, перекос корпуса и др.).
Другой источник возмущений — это ветровые воздействия на
летательный аппарат, имеющие характер случайных процессов.
Они приводят к появлению возмущающих аэродинамических сил
и моментов, являющихся случайными функциями времени.
Все эти возмущающие силы и моменты приложены непосредст-
венно к летательному аппарату. Кроме них, всегда действуют воз-
мущающие силы и моменты, возникающие в результате различных
ошибок в отклонении органов управления.
16
Глава I. Общие сведения о системах управления полетом
Обычный источник таких возмущающих воздействий — погреш-
ности в работе аппаратуры, отклонения параметров аппаратуры от
их номинальных значений, приводящие к различным ложным сиг-
налам в элементах и цепях системы управления полётом и соответ-
ственно к ложным отклонениям органов управления. Эти ложные
отклонения органов управления, вызывающие'появление возмущаю-'
щих сил и моментов, являются, вообще говоря, случайными вели*
чинами.
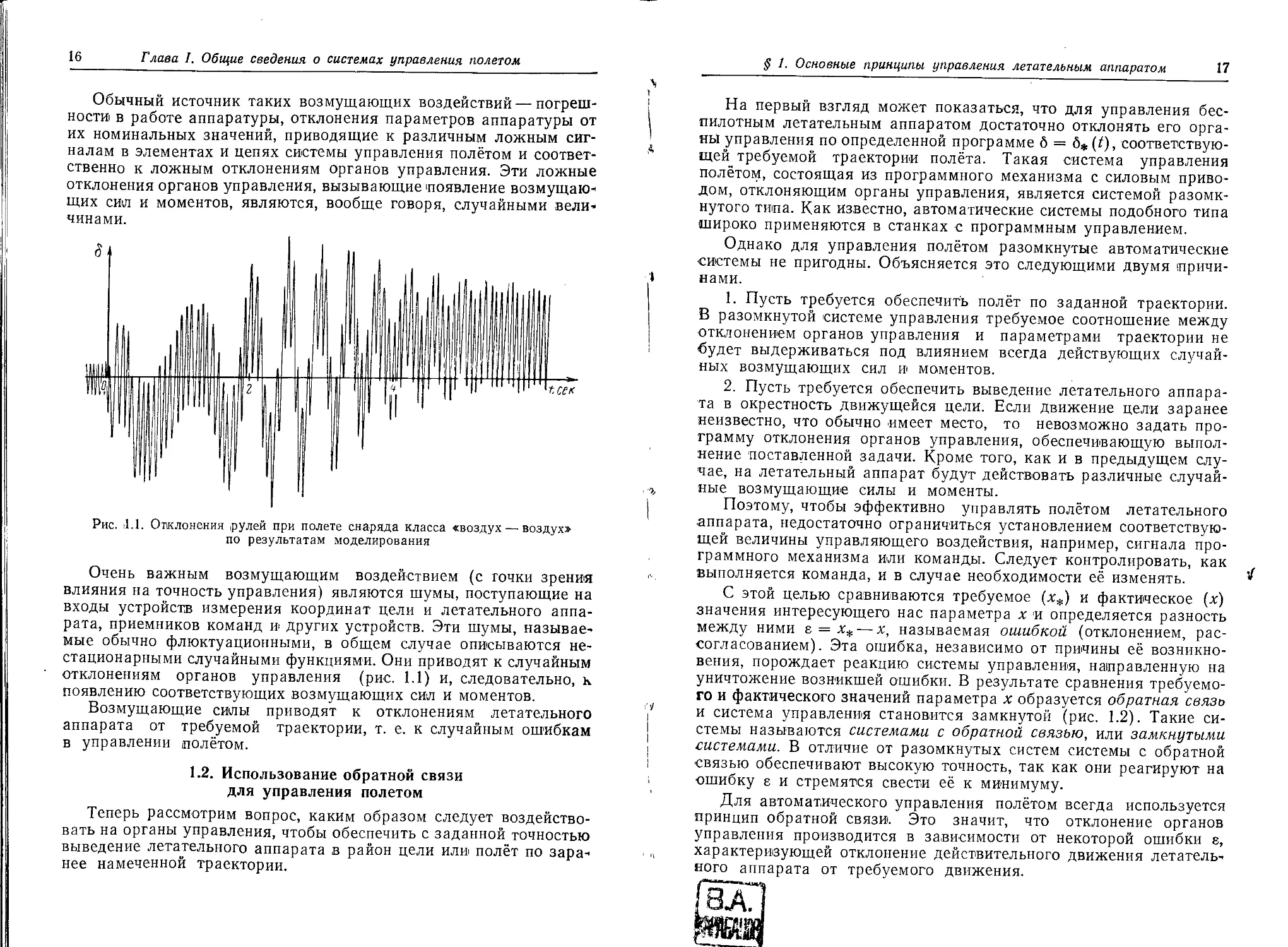
Рис. 1.1. Отклонения рулей при полете снаряда класса «воздух — воздух»
по результатам моделирования
Очень важным возмущающим воздействием (с точки зрения
влияния на точность управления) являются шумы, поступающие на
входы устройств измерения координат цели и летательного аппа-
рата, приемников команд и других устройств. Эти шумы, называе-
мые обычно флюктуационными, в общем случае описываются не-
стационарными случайными функциями. Они приводят к случайным
отклонениям органов управления (рис. 1.1) и, следовательно, к
появлению соответствующих возмущающих сил и моментов.
Возмущающие силы приводят к отклонениям летательного
аппарата от требуемой траектории, т. е. к случайным ошибкам
в управлении полётом.
1.2. Использование обратной связи
для управления полетом
Теперь рассмотрим вопрос, каким образом следует воздейство-
вать на органы управления, чтобы обеспечить с заданной точностью
выведение летательного аппарата в район цели или полёт по зара-
нее намеченной траектории.
§ 1. Основные принципы управления летательным аппаратом 17
На первый взгляд может показаться, что для управления бес-
пилотным летательным аппаратом достаточно отклонять его орга-
ны управления по определенной программе 6 = б*(/), соответствую-
щей требуемой траектории полёта. Такая система управления
полётом, состоящая из программного механизма с силовым приво-
дом, отклоняющим органы управления, является системой разомк-
нутого типа. Как известно, автоматические системы подобного типа
широко применяются в станках с программным управлением.
Однако для управления полётом разомкнутые автоматические
системы не пригодны. Объясняется это следующими двумя причи-
нами.
1. Пусть требуется обеспечить полёт по заданной траектории.
В разомкнутой системе управления требуемое соотношение между
отклонением органов управления и параметрами траектории не
будет выдерживаться под влиянием всегда действующих случай-
ных возмущающих сил и моментов.
2. Пусть требуется обеспечить выведение летательного аппара-
та в окрестность движущейся цели. Если движение цели заранее
неизвестно, что обычно имеет место, то невозможно задать про-
грамму отклонения органов управления, обеспечивающую выпол-
нение поставленной задачи. Кроме того, как и в предыдущем слу-
чае, на летательный аппарат будут действовать различные случай-
ные возмущающие силы и моменты.
Поэтому, чтобы эффективно управлять полётом летательного
аппарата, недостаточно ограничиться установлением соответствую-
щей величины управляющего воздействия, например, сигнала про-
граммного механизма или команды. Следует контролировать, как
выполняется команда, и в случае необходимости её изменять.
С этой целью сравниваются требуемое (х*) и фактическое (х)
значения интересующего нас параметра х и определяется разность
между ними е = х* — х, называемая ошибкой (отклонением, рас-
согласованием). Эта ошибка, независимо от причины её возникно-
вения, порождает реакцию системы управления, направленную на
уничтожение возникшей ошибки. В результате сравнения требуемо-
го и фактического значений параметра х образуется обратная связь
и система управления становится замкнутой (рис. 1.2). Такие си-
стемы называются системами с обратной связью, или замкнутыми
системами. В отличие от разомкнутых систем системы с обратной
связью обеспечивают высокую точность, так как они реагируют на
ошибку е и стремятся свести её к минимуму.
Для автоматического управления полётом всегда используется
принцип обратной связи. Это значит, что отклонение органов
управления производится в зависимости от некоторой ошибки е,
характеризующей отклонение действительного движения летатель-
ного аппарата от требуемого движения.
18
Глава I. Общие сведения о системах управления полетом
В качестве примера рассмотрим автоматическое управление ле-
тательным аппаратом по программе при полёте в вертикальной
плоскости (рис. 1.3). Систему управления такого типа имела, на-
пример, баллистическая ракета V-2.
Рис. 1.2. Схема замкнутой системы управления
(X»—'управляющее воздействие, у — выходная
величина)
Пусть —значение угла тангажа, требуемое программой
полёта. Отклонение действительного угла тангажа й от желаемого
\ определяется с помощью свободного гироскопа, снабженного
потенциометром. Нулевое положение потенциометра соответствует
требуемому углу тангажа О’* и задается программным механизмом.
Напряжение на выходе потенциометра ие пропорционально ошиб-
ке е = -О’* — О.
Возмущающие
воздействия
Рис. 1.3. Пример замкнутой автоматической системы управления полетом
Напряжение представляет собой сигнал ошибки. Обычно
сигнал ошибки щ определенным образом, преобразуется в управ-
ляющий сигнал иу. Вопрос о том, какими способами осуществляет-
ся это преобразование, будет изложен ниже. Сейчас ограничимся
замечанием, что в системах рассматриваемого типа для образова-
ния управляющего сигнала к сигналу ошибки добавляются сигна-
лы, пропорциональные его производным и интегралам. Эта one-
§ 1. Основные принципы управления летательным аппаратом
19
рация осуществляется с помощью какого-либо корректирующего
устройства, например, электрической 7?С-цепи.
Затем электрический сигнал обычно усиливается с помощью
усилителя (электронного, магнитного и др.). На выходе усилите-
ля получают ток 1У, который управляет рулевой машинкой. Руле-
вая машинка поворачивает на угол д органы управления (рули),
которые создают момент, вращающий летательный аппарат вокруг
центра масс и изменяющий при этом угол тангажа fl. Этот угол fl
сравнивается с требуемым углом fl*, и таким путем система управ-
ления замыкается обратной связью. Управляющим воздействием
в этой системе является программное значение выходной величины
&*(/)• Возмущающие воздействия здесь — силы и моменты, прило-
женные к летательному аппарату и вызываемые производственны-
ми погрешностями и ветром.
Как в этом примере, так и в любой замкнутой системе, введе-
ние обратной связи создает систему, слабо реагирующую на воз-
мущающие воздействия и подчиняющуюся главным образом только
управляющему воздействию. Другими словами, замкнутая система
представляет собой фильтр, который достаточно точно передает
управляющее воздействие и подавляет возмущающие воздействия.
Рассмотрим еще одно важнейшее свойство замкнутой автома-
тической системы. Благодаря обратной связи замкнутая система
обладает способностью в некоторой степени учитывать непредви-
денные обстоятельства аналогично человеку. Действительно, обрат-
ная связь появляется потому, что система контролирует результа-
ты управления, чтобы в случае необходимости изменить свое воз-
действие на объект управления. На этом основании почти все
системы, где в качестве оператора выступает человек, являются
системами с обратной связью.
В качестве примера рассмотрим ручное управление самолетом.
При равномерном горизонтальном полёте пилот стремится со-
хранить неизменной ориентацию самолёта в пространстве, опреде-
ляемую углом fl*. Для этого он воздействует на ручку управления
так, чтобы свести к нулю отклонение действительного угла fl от
требуемого значения fl*. Таким образом, в данном случае имеем
систему управления, блок-схема которой, представленная на
рис. 1.4, аналогична схеме предыдущего примера (см. рис. 1.3).
Как видно, пилот заменяет чувствительный элемент, корректирую-
щую цепь, усилитель и рулевую машинку, а вся система, состоящая
из самолёта с пилотом, представляет собой систему с обратной
связью.
Введение в систему управления оператора предусматривает
обычно использование человеческого разума, способного оценивать
результаты непредвиденных обстоятельств и управлять, приспосаб-
ливаясь к ним. Автоматические системы с обратной связью содер-
жат в некотором смысле ту же «черту разумности». Чтобы убе-
20
Глава I. Общие сведения о системах управления полетом
диться в этом, достаточно сравнить неуправляемый и управляемый
зенитные снаряды. Неуправляемый зенитный снаряд выстрели-
вается с установки, снабженной системой прицеливания, которая
следит за самолётом-целью до момента выстрела. Полёт снаря-
да является неуправляемым, и его траектория определяется на-
чальными условиями и внешними возмущениями. Такую артилле-
рийскую систему можно уподобить разомкнутой системе управле-
ния. Если появляется какое-либо непредвиденное обстоятельство,
например, самолёт совершает внезапный маневр, то снаряд не
поражает цель. Напротив, управляемый снаряд благодаря обрат-
ной связи может в течение полёта исправить свою траекторию, что-
бы поразить цель независимо от её маневров и от внешних возму-
щающих воздействий.
Пилот
Рис. 1.4. Аналогия между ручным и автоматическим пилотированием
Хотя обратная связь и придает обыкновенной автоматической
системе некоторые свойства приспособляемости, для создания
системы управления полётом, обладающей более или менее доста-
точной способностью приспосабливаться к изменяющимся внеш-
ним условиям, необходимо применение так называемых самона-
страивающихся систем.
Самонастраивающиеся системы — это быстро развивающийся
класс автоматических систем с обратной связью, находящий в пос-
леднее время за рубежом все большее и большее применение
в системах управления полетом. Принципы построения таких си-
стем в настоящее время только формируются. С теорией самонаст-
раивающихся автоматических систем читатель может ознакомиться,
например, по книгам [19], [21], [23].
1.3. Составные части автоматической системы
управления полетом
Система управления полётом в общем случае состоит из
1) системы стабилизации;
2) системы наведения;
3) системы управления скоростью.
§ 1. Основные принципы управления летательным аппаратом
21
Система стабилизации — это группа устройств, расположенных
на летательном аппарате и обеспечивающих сохранение требуемого
углового положения или установившегося углового движения лета-
тельного аппарата. Иногда эту группу устройств называют авто-
матом стабилизации.
Обычно беспилотный летательный аппарат стабилизируется от-
носительно всех трех его координатных осей.
В некоторых системах управления полётом принципиально
можно обойтись без стабилизации крена, однако с целью повыше-
ния точности управления и улучшения условий пуска беспилотные
летательные аппараты и в таких случаях, как правило, снабжают-
ся системой стабилизации угла крена или угловой скорости крена.
Заметим, что при полёте в достаточно плотных слоях атмосфе-
ры стабилизация беспилотного летательного аппарата относитель-
но осей Oyt и Огг в некоторых случаях может осуществляться без
применения автоматических устройств — аэродинамическими сред-
ствами путем придания летательному аппарату свойств статиче-
ской устойчивости. Так как при вращении летательного аппарата
вокруг продольной оси Oxi аэродинамические силы практически не
изменяются, то стабилизация крена не может быть получена с по-
мощью аэродинамики. Для этой цели могут служить лишь авто-
матические системы стабилизации угла или угловой скорости
крена.
Так как на летательный аппарат беспрерывно действуют воз-
мущающие силы и моменты, автоматические системы стабилизации,
очевидно, должны быть системами замкнутого типа. В таких си-
стемах стабилизация осуществляется путем создания управляю-
щих моментов, направленных на уничтожение возникшей ошибки
(рассогласования) е.
Пример системы стабилизации можно видеть на рис. 1.5, а.
Задача системы, в состав которой входят измеритель угловой ско-
рости летательного аппарата — дифференцирующий гироскоп и ру-
левой привод, состоит в том, чтобы независимо от действия возму-
щающих моментов сохранить требуемое значение угловой скорости
тангажа О, задаваемое сигналом наведения ин. Так, например, при
постоянном сигнале наведения в астатической системе стабилиза-
ции (е = 0) установившееся значение й определяется соотношением
(1.1)
где Кд. г — передаточный коэффициент дифференцирующего гиро-
скопа.
Нетрудно видеть, что благодаря обратной связи такие сущест-
венно отличающиеся друг от друга технические изделия, как лета'
тельный аппарат и автоматическая аппаратура, предназначенная
22
Глава I. Общие сведения о системах управления полетом.
для стабилизации, объединяются в одну динамическую систему.
Естественно, что при производстве и эксплуатации летательных ап-
паратов проводится различие между летательным аппаратом и ап-
паратурой системы стабилизации. Агрегаты и детали летательного
аппарата, с одной стороны, и аппаратуры стабилизации, с другой,
конструируются на различных предприятиях разными специалиста-
ми. Однако при проектировании и исследовании летательного ап-
парата и его системы стабилизации трудно провести между ними
линию раздела, так как автоматическая система стабилизации яв-
ляется замкнутой.
Рис. 1.5. Система стабилизации с дифференцирующим гироскопом
(датчиком угловой скорости):
а — режим стабилизации; б — режим управления.
При наличии замкнутой системы стабилизации летательный
аппарат с автоматической аппаратурой образуют единую динами-
ческую систему, в которой летательный аппарат является одним из
элементов этой системы. При этом динамические свойства замкну-
той системы стабилизации в заметной степени определяются дина-
мическими свойствами летательного аппарата.
В дальнейшем под системой стабилизации будем понимать ав-
томатическую систему, состоящую из летательного аппара-
та и аппаратуры, предназначенной для его стабилизации.
Системой наведения будем называть группу устройств, задаю-
щих закон движения центра масс летательного аппарата и обеспе-
чивающих полёт по этому закону путем соответствующего измене-
§ 1. Основные принципы управления летательным аппаратом
23
ния нормальных управляющих сил. Другими словами, систему на-
ведения можно определить как систему управления движением
центра масс летательного аппарата путем изменения нормальных
управляющих сил. Соответственно под наведением будем понимать
управление движением центра масс летательного аппарата с
помощью нормальных сил.
Чтобы осуществить наведение, необходимо изменять направле-
ние вектора скорости летательного аппарата. Так как направление
вектора в пространстве определяется двумя координатами, то для
наведения летательного аппарата необходимо и достаточно, чтобы
система наведения состояла из двух каналов. „
Часть устройств системы наведения может быть расположена
на самом летательном аппарате (бортовая аппаратура системы
наведения), другая часть может находиться вне его, т. е. на земле,
корабле, самолёте и т. д. (внебортовая аппаратура системы наве-
дения).
Система наведения выполняет обычно следующие функции: ул' '
1) получает и обрабатывает информацию о движении цели и ле-(
тательного аппарата, на основании которой вырабатывает сигналы
наведения-,
2) передает сигналы наведения на борт летательного аппарата,
если первая функция выполняется внебортовой аппаратурой;
3) преобразует сигналы наведения в нормальные управляющие
силы, другими словами, в нормальные перегрузки летательного
аппарата.
Последняя функция выполняется группой устройств, которую
условимся называть системой управления нормальными перегруз-
ками. Можно различать два типа таких систем в зависимости от
применяемого способа создания нормальной силы.
При непосредственном способе создания нормальной перегруз-
ки эта система управления состоит из двигателей, создающих
поперечные силы, и аппаратуры, включающей и выключающей
двигатели или изменяющей их силы тяги.
Однако в большинстве случаев нормальные перегрузки созда-
ются путем изменения углового положения корпуса летательного
аппарата относительно его вектора скорости, т. е. путем изменения
углов атаки и скольжения («управление в декартовых координа-
тах») или углов атаки и крена («управление в полярных коорди-
натах»), Изменение углового положения летательного аппарата
достигается с помощью управляющих моментов, создаваемых ор-
ганами управления летательного аппарата.
Система управления нормальными перегрузками состоит в этом
случае в основном из устройств, преобразующих сигналы наведе-
ния в отклонения органов управления.
При непосредственном способе создания нормальных перегру-
зок система управления нормальными перегрузками и система
24
Глава I. Общие сведения о системах управления полетом
стабилизации являются обычно независимыми (в том смысле,
что они не имеют общих устройств). В этом случае органы управ-
ления летательным аппаратом используются только для его ста-
билизации.
Если нормальные перегрузки создаются путем изменения угло-
вого положения летательного аппарата, то можно различать две
схемы стабилизации и управления перегрузками.
В первой схеме, наиболее простой, используется аэродинами-
ческая стабилизация углов атаки и скольжения, а управление нор-
мальными перегрузками осуществляется с помощью рулевого при-
вода, преобразующего сигналы наведения в отклонения органов
управления. Система управления нормальными перегрузками полу-
чается при этом разомкнутой. (Следует помнить, что система на-
ведения, в состав которой входит система управления нормальными
перегрузками, является замкнутой).
Во второй схеме два канала замкнутой автоматической систе-
мы стабилизации используются для управления нормальными
перегрузками. Другими словами, система управления нормальны-
ми перегрузками и соответствующие два канала системы стабили-
зации состоят из одних и тех же устройств, т. е. тождественны.
Такая система выполняет одновременно следующие функции:
1) преобразует сигналы наведения в нормальные перегрузки
летательного аппарата;
2) стабилизирует при воздействии возмущений угловое положе-
ние летательного аппарата, задаваемое сигналами наведения.
Этим функциям автоматической системы соответствуют два ре-
жима её работы: режим управления и режим стабилизации.
j В качестве примера рассмотрим систему стабилизации угловой
скорости тангажа, приведенную на рис. 1.5. Работа этой системы
в режиме стабилизации уже описывалась выше (см. рис. 1.5, а).
В режиме управления (см. рис. 1.5,6) сигнал наведения изменяет-
ся как функция времени ик(/), задавая непосредственно требуемое
значение угловой скорости тангажа и косвенно — нормальные
перегрузки пу «= VQ/g. Так, например, в соответствии с выражени-
ем (1.1) связь между сигналом наведения и нормальной перегруз-
кой в установившемся режиме, когда а = const и 0 = ф опреде-
ляется соотношением
Задача системы в режиме управления состоит в том, чтобы,
несмотря на воздействие возмущающего момента, создавать требуе-
мые нормальные перегрузки. Следует иметь в виду, что режимы
управления и стабилизации представляют собой модели или рас-
§ 1. Основные принципы уравнения литательным аппаратом
25
четные схемы реального сложного процесса, в котором функции
управления и стабилизации выполняются одновременно.
Как видно, термин система стабилизации, часто ис-
пользуемый для рассматриваемой автоматической системы, не
вполне точен. В американской литературе такая система называется
обычно системой управления. Так как в отечественной ли-
тературе понятие системы управления имеет более широкий смысл,
а точное определение система стабилизации и управления нормаль-
ными перегрузками слишком громоздко, приходится обычно поль-
зоваться термином система стабилизации.
Таким образом, когда нормальные перегрузки создаются по-
средством изменения углового положения летательного аппарата,
два канала системы стабилизации являются структурными элемен-
тами системы наведения. Эти два канала системы стабилизации,
используемые для управления нормальными перегрузками, пред-
ставляют собой по отношению к системе наведения некоторый
сложный «объект управления»^ который, очевидно, должен обладать
определенными динамическими свойствами.
Система наведения является замкнутой автоматической систе-
мой. Это значит, что система наведения стремится уничтожить
некоторую ошибку е, посылая в систему управления нормальными
перегрузками соответствующие сигналы. За ошибку системы наве-
дения е принимается обычно отклонение какой-либо функции па-
раметров движения летательного аппарата от значений этой функ-
ции, соответствующих требуемому движению. Так, например, при
наведении летательного аппарата методом совмещения за ошибку
системы наведения принимается линейное отклонение аппарата от
линии «пункт управления — цель».
В замкнутую систему наведения входит в качестве одного из
звеньев объект управления: либо сам летательный аппарат, либо
система стабилизации — самостоятельная замкнутая система, в со-
став которой входит летательный аппарат. Хотя летательный аппа-
рат и система (аппаратура) наведения как технические изделия
существенно отличаются друг от друга, они вместе составляют
единую динамическую систему. Поэтому под системой наведения
будем понимать автоматическую систему, состоящую из аппара-
туры наведения и летательного аппарата.
Система управления скоростью представляет собой группу уст-
ройств, обеспечивающих требуемый закон изменения скорости по-
лёта путем соответствующего изменения тангенциальных управля-
ющих сил. Так как для решения ряда задач наведения управление
скоростью не требуется, то эта система часто отсутствует в составе
системы управления полётом многих летательных аппаратов.
Системы управления скоростью могут быть как разомкнутыми,
так и замкнутыми. Летательный аппарат входит в состав замкну-
той системы управления скоростью как объект управления.
26
Глава I. Общие сведения о системах управления полетом
В зависимости от источника информации, используемого для
управления, системы управления скоростью могут быть разделены
на два типа. В автономных системах все устройства, вхо-
дящие в систему управления скоростью, находятся на борту лета-
тельного аппарата и не получают в процессе полёта никакой ин-
формации извне. В системах телеуправления бортовые
устройства получают информацию от источника, находящегося вне
летательного аппарата, например, с командного пункта.
Система управления полётом, как следует из вышеизложенного,
представляет собой сложную автоматическую систему, состоящую
в общем случае из систем стабилизации, наведения и управления
скоростью. Поскольку мы условились рассматривать летательный
аппарат как элемент этих систем, то логично теперь в отличие от
определения на стр. 9 понимать под системой управления полётом
автоматическую систему, состоящую из летательного аппа-
рата (объекта управления) и аппаратуры управления.
§ 2. КЛАССИФИКАЦИЯ СИСТЕМ НАВЕДЕНИЯ
Системы управления полётом обычно классифицируют по типу
системы наведения. Это объясняется тем, что системы стабилиза-
ции и управления скоростью у большинства беспилотных летатель-
ных аппаратов сходны, причем система управления скоростью
часто может отсутствовать. В то же время системы наведения могут
существенно отличаться друг от друга по принципам своего дей-
ствия.
Прежде всего все системы наведения можно подразделить на
два типа:
1) программные системы наведения;
2) системы наведения, получающие информацию от цели.
В программных системах наведения управляющим воздействи-
ем служит сигнал, вырабатываемый программным механизмом.
Этот сигнал определяет требуемую траекторию полёта, отклонения
от которой система наведения стремится уничтожить. Программа
полёта задается перед пуском летательного аппарата в зависимо-
сти от координат цели. Какая-либо информация о координатах це-
ли во время полёта в систему наведения не поступает, и траекто-
рия летательного аппарата, заданная перед пуском, в процессе
полёта не может изменяться. По этой причине наводить летатель-
ные аппараты по программе можно только на неподвижные цели.
Напротив, системы наведения, имеющие устройства для полу-
чении информации о положении цели, могут изменять в течение
полёта траекторию летательного аппарата в соответствии с движе-
нием цели. Благодаря этому такие системы могут наводить лета-
тельные аппараты как на неподвижные, так и на движущиеся цели.
В рассматриваемом случае параметры движения цели или её коор-
§ 2. Классификация систем наведения
27
динаты служат управляющим воздействием для системы наве-
дения.
Приведенная классификация систем наведения принимает во
внимание лишь самые общие свойства этих систем. Если в основу
классификации положить принцип действия системы наведения,
определяющий, на основании какой информации вырабатывается
сигнал наведения и какие физические явления используются для
определения координат цели и летательного аппарата, то приходим
к следующему общепринятому разделению систем наведения:
1) автономные системы;
г 2) системы самонаведения;
3) системы теленаведения;
4) комбинированные системы.
Рассмотрим краткую характеристику этих классов систем на-
ведения.
2.1. Автономные системы
Автономные системы наведения в процессе полёта летательного
аппарата не получают никакой информации ни от цели, ни от
командного пункта, ни от какого-либо другого искусственного
* источника информации (например, от радиомаяка), что и объясня-
ет название этих систем. Положение цели относительно поверхно-
сти Земли предполагается известным. Аппаратура наведения, це-
ликом размещенная на борту летательного аппарата, определяет
его местонахождение относительно земной поверхности, вычисляет
отклонения от заданной траектории полёта и в соответствии с эти-
ми отклонениями вырабатывает сигналы наведения.
4 Для определения местонахождения летательного аппарата ис-
пользуют измерительные системы, принцип действия которых осно-
вывается на известных законах механики и физических свойствах
Земли и Вселенной. По методу определения координат центра масс
аппарата различают магнитометрические, инерциальные, астрона-
вигационные и другие измерительные системы. По такому же при-
знаку классифицируют и автономные системы наведения.
В магнитометрической системе для определения ме-
' стонахождения летательного аппарата используется явление зем-
ного магнетизма.
Принцип действия инерциальной системы основан на
измерении ускорений и использовании инерционных свойств гиро-
скопов.
' Астронавигационная система основана на принци-
пах навигации по небесным светилам.
Аппаратура для автономного наведения может представлять
собой весьма сложную динамическую систему, состоящую из боль-
шого числа разнообразных по принципу действия приборов.
28
Глава I. Общие сведения о системах управления полетом
В некоторых случаях контроль координат центра масс лета-
тельного аппарата может быть заменен контролем его угловых
координат. Тогда для измерения фактических значений угловых
координат используются гироскопические приборы, например, сво-
бодные гироскопы, а требуемые значения угловых координат зада-
ются программным механизмом. Блок-схема такой простейшей
инерциальной системы приведена на рис. 1.3.
2.2. Системы самонаведения
В системах самонаведения устройства, находящиеся на борту
летательного аппарата, получают информацию непосредственно от
цели.
Блок-схема системы самонаведения показана на рис. 1.6. Для
получения сигнала ошибки ие координатор цели определяет поло-
жение цели относительно системы осей, связанных с координатором
Аппаратурные
ошибки
Устройство ин
выработки —*
команд
Возмущающие
силы и
моменты
Система
управления
нормальными
перегрузками
Рис. 1.6. Система самонаведения
и ориентированных в пространстве определенным образом в за-
висимости от принятого метода наведения. Сигнал ошибки преоб-
разуется затем в сигнал наведения ин, поступающий в систему
управления нормальными перегрузками, в результате действия
которых изменяется направление вектора скорости полёта и, сле-
довательно, положение цели относительно осей, связанных с коор-
динатором.
Системы самонаведения можно назвать полуавтономными, так
как для них характерно отсутствие связи между летательным ап-
паратом и командным пунктом при наличии связи с целью.
2.3. Системы теленаведения
В системах теленаведения бортовые устройства получают ин-
формацию (командные сигналы или опорные сигналы) от источ-
ника, находящегося вне летательного аппарата: с командного
пункта, радиомаяков и т. п.
§ 2. Классификация систем наведения
29
Системы теленаведения в свою очередь можно разбить на три
подкласса:
1) командные системы наведения;
2) системы наведения по лучу;
3) радионавигационные системы.
Командные системы наведения
Наиболее характерной чертой командной системы является
наведение летательного аппарата с помощью сигналов (команд),
которые формируются на командном пункте и по линии связи
передаются на борт летательного аппарата.
Для выработки сигналов наведения необходимо определять
положения в пространстве летательного аппарата и цели. С этой
точки зрения возможны два способа наведения. В первом способе
координаты летательного аппарата и цели определяются в осях,
связанных с командным пунктом (наведение в координатах
командного пункта)-, во втором—координаты цели определяют-
ся в осях, связанных с летательным аппаратом (наведение в ко-
ординатах летательного аппарата).
Система наведения в координатах командного
пункта (рис. 1.7)
Измерение координат цели и летательного аппарата относи-
тельно командного пункта производится с помощью устройств, на-
зываемых координаторами.
Координаты летательного аппарата и цели используются для
определения отклонения летательного аппарата от требуемой тео-
ретической траектории, а затем для формирования сигнала наве-
дения.
Вычисление параметров теоретической траектории, определе-
ние отклонения летательного аппарата от этой траектории и вы-
работка сигналов наведения выполняются с помощью устройства
выработки команд.
Сигналы наведения по линии связи (по радио, по радиолока-
ционному каналу, по проводам) передаются на борт летательного
аппарата и затем поступают в систему управления нормальными
перегрузками.
Таким образом, основными элементами командной системы на-
ведения в координатах командного пункта являются (см. рис. 1.7):
1) координаторы цели и летательного аппарата;
2) устройство выработки команд;
3) устройства радиотелеуправления;
4) система управления нормальными перегрузками.
Всю аппаратуру, предназначенную для определения координат
цели и летательного аппарата, выработки и передачи сигналов
30
Глава I. Общие сведения о системах управления полетом
наведения, часто называют станцией наведения. (Дополнитель-
ными задачами станции наведения являются обнаружение цели,
подготовка к пуску и пуск снаряда).
Устройства радиотелеуправления состоят из блоков, располо-
женных на станции наведения (шифратор, передатчик сигналов
наведения) и на борту летательного аппарата (приемник сигналов
наведения, дешифратор).
Как видно из рис. 1.7, систему наведения в координатах
командного пункта можно рассматривать как своеобразную следя-
щую систему, стремящуюся совместить центр масс летательного
Аппаратурные Возмищаю-
оишоки. щие силы и
Рис. 1.7. Командная система наведения в координатах командного
пункта (ип—сигнал наведения)
аппарата с теоретической траекторией, соответствующей принято-
му методу наведения. Система наведения имеет замкнутый дина-
мический контур. Сигналы, поступающие от координатора цели в
этот замкнутый контур, служат управляющим воздействием для
последнего. Возмущающими воздействиями являются флюктуа-
ционные шумы, поступающие на входы координаторов, шумы и
помехи, действующие на линию связи между станцией наведения
и летательным аппаратом, аппаратурные ошибки, а также возму-
щающие силы и моменты, действующие на летательный аппарат.
При наведении в координатах командного пункта для правиль-
ного выполнения команд, передаваемых со станции наведения на
борт летательного аппарата, необходимо обеспечивать совпадение
осей системы координат на станции наведения и на борту. Эта за-
дача, характерная для рассматриваемых систем наведения, ре-
шается системой стабилизации крена.
§ 2. Классификация систем наведения
31
Система наведения в координатах
летательного аппарата (рис. 1.8).
В этом случае координаты цели определяются на борту лета-
тельного аппарата относительно осей, связанных с координатором,
а затем передаются по линии связи на станцию наведения. В та-
кой системе не требуется стабилизировать крен, чтобы обеспечить
совпадение двух систем координат на борту летательного аппара-
та и на станции наведения, так как сигналы наведения вырабаты-
ваются в координатах летательного аппарата.
Чноавляемыа снаряд Станция наведения
Рис. 1.8. Командная система наведения в координатах летательного
аппарата
Системы наведения по лучу
В системе наведения по лучу сигналы наведения вырабатыва-
ются на борту летательного аппарата по измеренным отклонениям
Рис. 1.9. Однолучевая система наведения по лучу
аппарата от оси луча радиолокатора, который перемещается в
пространстве в соответствии с принятым методом наведения.
32
Глава I. Общие сведения о системах управления полетом
В зависимости от способа управления перемещением луча си-
стемы наведения по лучу могут быть двух вариантов: однолучевые
и двухлучевые.
В однолучевой системе наведения (рис. 1.9) координатор цели
(луч) непрерывно следит за целью, а координатор на борту аппа-
рата определяет его отклонение от оси этого радиолуча.
В двухлучевой системе один луч используется для определения
координат цели, которые поступают в устройство выработки
команд. Последнее вырабатывает сигналы, управляющие переме-
щением второго луча радиолокатора, вдоль оси которого движется
Станция наведения Управляемый снаряд
Рис. 1.10. Двухлучевая система наведения по лучу
летательный аппарат. На рис. 1.10 приведена блок-схема двухлу-
чевой системы наведения, подробно рассматриваемой ниже в
гл. VII § 7.
Радионавигационные системы
К системе наведения по лучу примыкают радионавигационные
системы наведения. Три или четыре наземные станции наведения
передают синхронизированные сигналы, задающие определенным
образом траекторию летательного аппарата. Бортовая аппаратура
наведения, сравнивая эти сигналы, определяет отклонение лета-
тельного аппарата от заданной траектории и вырабатывает сигна-
лы наведения, корректирующие движение аппарата.
2.4. Комбинированные системы
Выбор системы наведения определяется тактическими сообра-
жениями боевого применения снаряда, техническими возможно-
стями каждой системы наведения (главным образом, дальностью
действия и точностью наведения) и техническими характеристика-
ми пусковых устройств. Часто для того чтобы удовлетворить
сложным тактико-техническим требованиям, применяют комбинщ
рованные системы наведения.
§ 2. Классификация систем наведения
33
В комбинированных системах различные системы наведения
используются последовательно или параллельно во времени.
В первом случае на разных этапах движения летательного ап-
парата применяют различные системы наведения. Так, например,
для зенитного управляемого снаряда возможно следующее комби-
нирование систем наведения:
1) автономное наведение на начальном участке траектории;
2) наведение по командам или по лучу на среднем участке;
3) самонаведение на конечном участке.
Во втором случае различные системы наведения используют
одновременно. Примером может служить астроинерциальная си-
стема, представляющая собой комбинацию инерциальной и астро-
навигационной систем. Такая система считается практически наи-
лучшим вариантом автономной системы [6], [11].
2.5. Возможные методы наведения
Укажем теперь, какие методы наведения могут быть реализо-
ваны посредством той или иной системы наведения.
Автономные и радионавигационные системы могут наводить
летательные аппараты только по программе, вследствие чего их
и называют программными системами наведения. Метод наведе-
ния по программе может осуществляться с помощью командных
систем и систем наведения по лучу. Для этого необходимо выраба-
тывать в соответствии с заданной программой сигналы, которые
передаются на борт аппарата или вводятся в устройство наведе-
ния радиолуча. В частном случае луч может быть неподвижен.
Так как командные системы наведения, системы наведения по
лучу и системы самонаведения получают информацию от цели,
они могут наводить летательные аппараты как на неподвижные,
так и на движущиеся цели.
Командные системы в координатах командного пункта и двух-
лучевые системы могут в принципе обеспечивать наведение любым
методом. (Метод наведения сказывается здесь лишь на степени
сложности системы).
Однолучевая система может наводить летательные аппараты
методом совмещения и угловым методом.
Системы самонаведения и командные системы в координатах
летательного аппарата позволяют реализовать все методы наведе-
ния, определяющие относительное движение двух точек (летатель-
ный аппарат и цель): прямое наведение, наведение с постоянным
углом пеленга цели, погоня, наведение с постоянным углом
упреждения, параллельное сближение, пропорциональное сближе-
ние. Метод совмещения и угловой метод, определяющие взаимное
движение трех точек (пункт управления, летательный аппарат и
цель), очевидно, непригодны для этих систем.
2 Заказ 1242
34
Глава I. Общие сведения о системах управления полетом
§ 3. ВЕРОЯТНОСТЬ ПОРАЖЕНИЯ ЦЕЛИ И ТОЧНОСТЬ НАВЕДЕНИЯ
Для решения задачи проектирования комплекса беспилотного
летательного аппарата как единого целого необходимо требования
к комплексу сформулировать на математическом языке в виде не-
которого критерия эффективности комплекса. Такой критерий даст
возможность сравнивать между собой различные варианты систе-
мы оружия и находить оптимальную систему.
Могут быть предложены различные критерии эффективности
системы оружия, учитывающие как тактические, так и производст-
венно-экономические соображения [5], [6], [8]. Согласно одной из
точек зрения, тактические соображения должны быть ведущими
на всех стадиях проектирования системы и, следовательно, крите-
рием эффективности комплекса управляемого снаряда может слу-
жить веррятность поражения цели.
Вероятность поражения цели одним снарядом Р может быть
определена как произведение трех вероятностей:
Р=РаРьРс. (1-3)
Здесь Рс — надежность комплекса, которую можно определить
как вероятность того, что снаряд достигнет цели и при том без
технических неисправностей (другими словами, вероятность того,
что все части комплекса будут работать безотказно);
Рв — вероятность того, что снаряд не будет выведен из строя
действиями' противника;
Ра — вероятность того, что надежные снаряды, не сбитые про-
тивником, уничтожат цель; другими словами, это вероятность
поражения цели без учёта надежности комплекса и противодейст-
вия противника.
Надежность комплекса зависит от надежности каждой
из составных его частей и, в частности, от надежности системы
управления. По данным, опубликованным в зарубежной печати,
надежность комплексов некоторых управляемых снарядов состав-
ляет 0,70 ~ 0,80 *.
Надежность является важнейшим показателем качества любо-
го технического устройства, а проблема обеспечения надежности —
одна из наиболее острых проблем современной техники **.
Эффективность противодействия противника
зависит от живучести снаряда и системы обороны противника. Ве-
роятность того, что противодействие будет безуспешным, ориенти-
ровочно оценивается в пределах от 0,40 до 0,95 [6], [8], [34].
* Interavia Air Letter, 1962, No. 5137; Space Age Catalogue, Interavia, 1961,
No. 12; Aviation Week, 1962, No. 11, 15; Missiles and Rockets, 1962, No. 20; Inte-
ravia Review, 1961, No. 7, 1962, No. 3; Flight, 1960, No. 2695.
** С вопросами надежности систем управления полетом читатель может озна-
комиться по книгам [5], [7], [16], [33], {34].
§ 3. Вероятность поражения цели и точность наведения
35
Вероятность поражения цели Ра (без учёта на-
дежности комплекса и противодействия противника) зависит от
эффективности боевой части, свойств взрывателя, уязвимости цели
и точности системы управления полётом.
Точность системы управления полётом принято
оценивать ошибками наведения, которые представляют собой от-
клонения каких-либо параметров движения летательного аппара-
та от их требуемых значений. Выбор этих параметров определяет-
ся 'Задачей, решаемой системой управления. Так, например, точ-
ность системы управления ракетой-носителем искусственного спут-
ника Земли оценивается отклонениями скорости ДТ, угла наклона
траектории Д0 и высоты полёта АН последней ступени ракеты-
носителя в момент выключения двигателя, так как значениями
скорости, высоты и угла наклона траектории в этот момент опре-
деляется орбита спутника.
Точность системы управления снарядом оценивается обычно
минимальным расстоянием между снарядом и целью, которое бу-
дет иметь место в процессе наведения. Это расстояние называют
промахом, или пролётом.
Причинами ошибок наведения являются инерционность и нели-
нейность системы управления и возмущающие воздействия. По-
скольку возмущающие воздействия являются случайными, естест-
венно, что и ошибки наведения являются случайными величинами
и характеризуются некоторыми законами распределения.
Закон распределения ошибки наведения, например, промаха *
управляемого снаряда, определяется многими факторами [8]:
1) динамическими свойствами снаряда и системы управления
и, в частности, уровнями насыщения элементов системы, законом
изменения скорости снаряда по времени, маневренными возмож-
ностями снаряда;
2) возмущающими воздействиями (шумы, атмосферные возму-
щения, отклонения в работе аппаратуры, погрешности изготовле-
ния элементов снаряда и системы управления);
3) начальными условиями, т. е. параметрами движения снаряда
и цели в момент пуска (например, дальность до цели, высота по-
лёта самолета-носителя и цели, ошибки прицеливания и т. д.);
4) законом движения цели (скорость и высота полёта, маневр
цели).
Обычно для упрощения исследований считают, что ошибки на-
ведения распределяются по нормальному закону. В этом случае
ошибка наведения (промах) h полностью характеризуется двумя
параметрами: математическим ожиданием mh и средним квадра-
тическим отклонением он. Вследствие нелинейности системы управ-
ления значения тн и од определяются совместным влиянием дина-
мических свойств системы, всех возмущающих воздействий, на-
чальных условий полёта и закона движения цели.
2*
36
Глава I. Общие сведения о системах управления полетом.
Эффективность боевой части и уязвимость
цели могут быть охарактеризованы вероятностью поражения це-
ли в зависимости от координат снаряда относительно цели в мо-
мент взрыва, величины и направления вектора скорости снаряда
относительно цели в этот же момент, высоты и скорости полёта
снаряда [34].
Так как момент подрыва боевой части определяется взрывате-
лем, то принцип действия взрывателя и его устройство, согласова-
ние действия взрывателя с диаграммой направленности боевой
части и условиями встречи снаряда с целью играют решающую
роль в обеспечении поражения цели.
Р.ис. 1.11. Простейшие координатные законы поражения цели
Для получения надежных данных о вероятности поражения
цели боевой частью необходимо весьма большое количество доро-
гостоящих экспериментов. Поэтому конструкторы обычно не рас-
полагают достаточными сведениями о действии различных видов
боевых частей. Имеющаяся скудная информация используется в
качестве основы для определения эффективности боевых частей
расчётным путем с помощью цифровых электронных .машин [8].
При расчётах вероятностей поражения цели снарядом Р удоб-
но вероятность поражения цели боевой частью с данным взрыва-
телем Рк представлять функцией промаха h, рассматривая все
прочие факторы в качестве параметров.
Ниже для наглядности будем рассматривать лишь упрощенную
задачу, когда вероятность поражения цели боевой частью Рк оп-
ределяется только промахом h. Поскольку данные о вероятности
поражения цели для существующих систем оружия не публику-
ются, для учебных целей могут быть использованы условные зако-
ны распределения вероятности поражения цели Рк по промаху h.
Простейшие из них приведены на рис. 1.11. В некоторых случаях
возможно применение этих законов и при теоретических исследо-
ваниях.
Вероятность поражения цели Ра нетрудно вычис-
лить, зная закон распределения PK(h) и распределение вероятно-
стей промаха р(й). Очевидно, что вероятность попадания снаряда
в отрезок (th, находящийся от цели на расстоянии h, равна
§ 3. Вероятность поражения цели и точность наведения
37
p(h)dh. Следовательно, вероятность поражения цели Ра может
быть выражена формулой
СО
Pa = ^PK(h)p(h)dh. (1.4)
СО
Возвращаясь к формуле (1.3), можно теперь сказать, что кри-
терий вероятности поражения цели учитывает точность системы
управления, эффективность боевой части и свойства взрывателя,
уязвимость цели, надежность комплекса управляемого снаряда,
живучесть снаряда и противодействие противника.
При проектировании комплекса управляемого снаряда стре-
мятся к получению заданной вероятности поражения цели. В при-
мерах, приведенных в книгах [6], [8], требуется, в частности, чтобы
вероятность поражения цели одним снарядом на максимальной
дальности была не менее 0,50.
По данным иностранной печати вероятность поражения цели
снарядом «Сайдуиндер» (класс «воздух — воздух») составля-
ет 0,47*.
Использование критерия вероятности поражения цели на на-
чальных стадиях проектирования затруднительно вследствие
сложности критерия и отсутствия достаточно достоверных исход-
ных данных. В этом случае может быть применен более простой
критерий вероятности попадания в отрезок, длиной 2г (или в
окружность, или сферу радиуса г). Этот критерий не учитывает
надежности комплекса и противодействия противника, а эффек-
тивность боевой части и уязвимость цели учитывает лишь прибли-
женно величиной г. Действительно, если принять равновероятный
закон поражения Рк = 1 при —г h г (см. рис. 1.11, а), то
вероятность поражения Ра будет совпадать с вероятностью попа-
дания в отрезок длиной 2г:
Г
Ра = § р (h) dh. (1.5)
—г
Отсюда видно, что при нормальном распределении промаха h
вероятность попадания в отрезок длиной 2г является функцией
величин mh, щ и г. В табл. 1.1 дана эта зависимость, подсчитанная
по формуле (1.5). Примером возможных требований к вероятности
попадания может служить условие, чтобы вероятность*попадания
одним снарядом составляла 0,60 4- 0,75; двумя снарядами
0,90 [6], [8].
Более полный учёт эффективности боевой части и уязвимости
цели можно получить, если воспользоваться координатным зако-
ном поражения, представленным на рис. 1.11,6. Тогда по формуле
* Aviation Week, 1959, No. 19, 22; Missiles and Rockets, 1959, No. 45.
38
Глава I. Общие сведения о системах управления полетом.
Таблица 1.1
Вероятность попадания в отрезок длиной 2г
тъ!г Вероятность попадания при различных значениях ahJr
0,1 0,2 0,3 0.4 0.5 0,6 0,7 0.8 0,9
0 1,000 1,000 0,999 0,988 0,955 0,905 0,847 0,789 0,733
0,1 1,000 1,000 0,999 0,985 0,950 0,900 0,842 0,785 0,730
0,2 1,000 1,000 0,996 0,976 0,937 0,886 0,830 0,775 0,722
0,3 1,000 1,000 0,990 0,959 0,915 0,863 0,810 0,757 0,707
0,4 1,000 0,999 0,977 0,933 0,882 0,832 0,782 0,733 0,688
0,5 1,000 0,994 0,952 0,894 0,840 0,792 0,746 0,704 0,663
0,6 1,000 0,977 0,909 0,841 0,787 0,744 0,705 0,669 0,634
0,7 0,999 0,933 0,841 0,773 0,725 0,689 0,658 0,629 0,601
0,8 0,977 0,841 0,748 0,691 0,655 0,629 0,607 0,586 0,565
0,9 0,841 0,691 0,631 0,599 0,579 0,565 0,554 0,541 0,527
(1.4), предполагая, что промах подчиняется нормальному закону
Рис. 1.12. Вероятность поражения
цели при координатном законе по-
ражения, приведенном на рис. 1.11,6
соответствующую зависимость ве-
(без учёта надежности комплекса
и противодействия противника)
от величин rrihlr и aft/r (рис. 1.12).
Кривые вероятности пораже-
ния цели, аналогичные приведен-
ным на рис. 1.12, анализируют
обычно совместно с кривыми, вы-
ражающими зависимость tnh от
ок при различных значениях па-
раметров системы наведения.
Динамические свойства си-
стемы управления обычно тако-
вы, что при увеличении гпк (в ре-
зультате изменения какого-либо
параметра или элемента систе-
мы) уменьшается <Ук и наоборот
(см. ниже, разд. 6.4 этой главы).
На рис. 1.12 в качестве приме-
ра дана гипотетическая кривая
tTlh с / \
— = t \ ~ \ для различных ко-
г \ г /
эффициентов усиления системы
К\, К2, К3....
Как видно из графиков на
рис. 1.12, максимальной вероятности поражения цели соответствует
точка касания рассматриваемых кривых, соответствующая коэффи-
циенту усиления Кг.
§ 4. Некоторые сведения о проектировании систем управления
39
Итак, ошибки наведения снаряда прямо влияют на вероят-
ность выполнения комплексом управляемого снаряда своего на-
значения. Между вероятностью поражения цели (или вероятно-
стью попадания) и параметрами распределения ошибок наведения
mh и ок имеются определенные связи. Однако эти связи очень
сложны, вследствие чего при проектировании системы управления
могут применяться и более простые критерии, учитывающие лишь
свойство точности системы.
Широкое распространение в литературе по теории автоматиче-
ского управления получила оценка точности системы по величине
среднеквадратичного значения ошибки. Этот критерий использует-
ся и для систем управления снарядами под названием средний
квадрат промаха, или эффективный промах и определяется соот-
ношением [14] ______
Иэф = V^ml + oh- (!-6)
Одним из возможных критериев точности системы управления
является максимальный промах [6], определяемый с вероятностью
Ф(м) по формуле
Ащах = mh + UGh, (1.7)
где Ф(«) —функция Лапласа, равная, например, 0,954 при и = 2;
0,900 при и = 1,65 и 0,800 при и = 1,28.
Нетрудно видеть, что все рассмотренные критерии определяют
некоторые оптимальные (с точки зрения данного критерия) соот-
ношения между математическим ожиданием гпк и средним квадра-
тическим отклонением Oh промаха. Для использования этих кри-
териев при анализе и проектировании системы наведения необхо-
димо знать связи между величинами mh и он и параметрами си-
стемы.
§ 4. НЕКОТОРЫЕ СВЕДЕНИЯ О ПРОЕКТИРОВАНИИ СИСТЕМ
УПРАВЛЕНИЯ ПОЛЕТОМ
4.1. Основные этапы процесса создания комплекса
управляемого снаряда
Процесс создания нового комплекса управляемого снаряда
очень сложен. Чтобы выяснить роль различных методов, исполь-
зуемых при проектировании систем управления, рассмотрим при-
мерные этапы этого процесса, используя материалы из книг
[7], [8], [9], [10].
Необходимость создания новой системы оружия определяется
главным командованием, которое поручает военно-техническим
управлениям (заказчику) разработку тактико-технических требо-
* Таблица функции Лапласа приведена, например, в книге [33].
40
Глава I. Общие сведения о системах управления полетом
ваний. В этой работе принимают участие производственные орга-
низации, которые будут вести проектирование. После получения от
заказчика тактико-технического задания начинается первый этап
создания системы оружия, который состоит в предварительных
исследованиях и разработке эскизного проекта комплекса управ-
ляемого снаряда. В результате защиты эскизного проекта опреде-
ляется техническая осуществимость проекта, ценность данного
комплекса как боевого средства и принимается решение о целесо-
образности продолжения работ.
Следующий этап — разработка технического проекта и изготов-
ление опытных образцов материальной части.
Полигонные испытания опытных образцов предназначены для
усовершенствования конструкции снаряда, аппаратуры управле-
ния, пусковой установки и т. д. Этот этап играет важную роль в
создании комплекса управляемого снаряда: на основании резуль-
татов испытаний вносят необходимые изменения в конструкцию
материальной части.
После получения удовлетворительных результатов летных
испытаний опытных образцов проектируют и изготовляют штат-
ные образцы оружия, для оценки качеств которых проводят вой-
сковые летные испытания. Если испытания показывают, что систе-
ма оружия соответствует тактико-техническим требованиям, она
поступает на вооружение.
Принятие новой системы на вооружение представляет сложный
и длительный процесс. При эксплуатации боевой техники проис-
ходит отработка системы оружия, устраняются неизбежно возни-
кающие технические дефекты. Одновременно разрабатывается
улучшенная модель уже находящегося в процессе производства
комплекса управляемого снаряда.
4.2. Тактико-технические требования
Разработка тактико-технических требований является очень
ответственным этапом и требует глубокого анализа тактических
и стратегических вопросов, связанных с боевым применением
вновь создаваемой системы оружия в общей системе обороны
страны. Тактико-технические требования основываются на пер-
спективах развития систем оружия как своей, так и противной
стороны, учитывают накопленный опыт создания аналогичных си-
стем, их недостатки, а также производственно-экономические фак-
торы.
Требования заказчика к системе оружия обычно содержат сле-
дующие разделы:
1) тактическую обстановку (назначение системы оружия, тип
цели и её основные характеристики, условия полёта снарядов, об-
становка на стартовой позиции) и тактические требования;
§ 4. Некоторые сведения о проектировании систем управления
41
2) основные характеристики системы оружия (тип системы
наведения и дальность её действия, тип боевой части и взрывате-
ля, тип двигательной установки, тип пусковой установки, вероят-
ность поражения цели или точность наведения);
3) общие требования к снаряду и двигателю (летные характе-
ристики, например, дальность, скорость, маневренность; габариты,
вес; надежность, стоимость, производственные возможности);
4) требования к отдельным агрегатам системы: боевой части,
взрывателю, корпусу, бортовой аппаратуре управления, силовой
установке, станции наведения, пусковой установке, испытательно-
му, заправочному и подъёмно-транспортному оборудованию (с
учётом того, что отдельные агрегаты системы могут проектиро-
ваться различными организациями);
5) производственно-экономические требования;
6) требования по организации военного снабжения (касаю-
щиеся условий хранения, транспортировки, технического обслужи-
вания, техники безопасности и пр.).
4.3. Предварительные исследования
и эскизное проектирование
Между исследованием, проводящимся для выяснения необхо-
димости разработки новой системы оружия, анализом для опре-
деления тактико-технических требований и предварительными ис-
следованиями нет четкой границы. Одно естественно вытекает из
другого. Основное различие заключается в конечной цели иссле-
дования. В первом случае исследование служит основой для при-
нятия решения о разработке нового оружия, во втором — для вы-
работки реальных требований к создаваемому оружию, в треть-
ем— для обоснования возможности выполнения этих требований и
получения исходных данных для эскизного проектирования, отсут-
ствующих в тактико-технических требованиях.
Эскизный проект предназначен для выяснения основных разме-
ров и характеристик снаряда, аппаратуры управления и вспомога-
тельного оборудования. На этой стадии проектирования для обос-
нования принятых решений проводятся расчёты, моделирование,
лабораторные испытания и другие исследования. Чтобы зрительно
представить готовый снаряд, изготовляется макет. В результате
эскизного проектирования обычно получают:
1) чертежи общего вида снаряда, основные конструктивные
и монтажные чертежи с указанием расположения, габаритов и
весов основных агрегатов, узлов и систем;
2) номенклатуру готовых изделий аппаратуры управления и
технические условия на проектирование новой аппаратуры управ-
ления;
42
Глава I. Общие сведения о системах управления полетом
3) то же для пусковой установки, испытательного, заправочно-
го и подъёмно-транспортного оборудования;
4) отчёты с результатами исследований, проведенных при раз-
работке проекта.
Из большого числа вопросов, обычно рассматриваемых при
разработке эскизного проекта, отметим в качестве примера сле-
дующие:
1) определение аэродинамических характеристик снаряда (пу-
тем расчётов и испытаний в аэродинамических трубах) и их
анализ;
2) расчёты и анализ траекторий полёта и летных характери-
стик снаряда;
3) выбор функциональной схемы системы стабилизации;
4) исследование динамических свойств системы стабилизации;
5) построение возможных зон применения снаряда.
4.4. Особенности проектирования систем
управления полетом
От многих промышленных автоматических систем системы
управления полётом отличаются большой сложностью. Это объяс-
няется особыми условиями работы систем управления полётом и
высокими требованиями, предъявляемыми к ним в отношении точ-
ности и надежности.
Условия работы системы управления полётом, отражающиеся
на динамике процессов управления, характеризуют, в частности,
следующие факторы:
а) сложные связи между отклонениями органов управления и
параметрами движения летательного аппарата, обусловленные
пространственным движением аппарата, его взаимодействием с
воздушной средой и упругостью конструкции;
б) сильная зависимость динамических свойств летательного
аппарата от быстро меняющихся во время движения скорости и
высоты полёта, массы и моментов инерции аппарата;
в) сложное взаимодействие между каналами системы управле-
ния;
г) нелинейность аэродинамических характеристик летатель-
ного аппарата и элементов аппаратуры управления;
д) большое число возмущающих воздействий разного рода;
е) разнообразные условия пуска и полёта, характеризующиеся
высотой полёта, параметрами относительного движения летатель-
ного аппарата и цели в момент пуска и последующим движением
(маневром) цели.
Проблемы, связанные с созданием систем управления беспи-
лотными летательными аппаратами, чрезвычайно разнообразны.
Одной из наиболее важных является проблема синтеза, т. е. про-
§ 4. Некоторые сведения о проектировании систем управления
43
блема разработки таких методов проектирования, которые позво-
ляли бы прямым путем в соответствии с заданными техническими
требованиями определить оптимальную структуру системы управ-
ления, найти оптимальные её параметры и выбрать элементы си-
стемы.
Проблема синтеза представляет собой весьма сложную задачу,
которая в общем виде еще не решена даже для промышленных
автоматических систем. На практике решаются в основном про-
блемы частичного синтеза, которые могут быть сформулированы
следующим образом. При условии, что некоторые элементы авто-
матической системы заданы, нужно спроектировать другие элемен-
ты, которые могли бы обеспечить для всей системы необходимые
качества.
В качестве примера частичного синтеза можно привести ис-
пользование автопилота*, установленного на самолете А, для ста-
билизации самолёта В. Так как самолет В и основные элементы
автопилота (чувствительные элементы, усилители, рулевая ма-
шинка) заданы, то задача заключается в том, чтобы спроектиро-
вать корректирующее устройство и некоторые другие элементы.
Другим примером является проектирование автопилота (начиная
от чувствительного элемента и кончая рулевой машинкой), обеспе-
чивающего устойчивость данного самолёта в соответствии с техни-
ческими требованиями. Как видно, в зависимости от числа эле-
ментов системы, подлежащих проектированию, проблема частич-
ного синтеза может более или менее приближаться к проблеме
общего синтеза.
В случае создания автопилота для управляемого снаряда пос-
ледний не может рассматриваться как полностью известный эле-
мент и, следовательно, требуется спроектировать почти все эле-
менты системы стабилизации и управления нормальными пере-
грузками. Это задача уже приближается к проблеме общего син-
теза.
В настоящее время общепризнано, что при проектировании си-
стемы управления (в состав которой входит беспилотный летатель-
ный аппарат) эта система должна рассматриваться как единое
целое. Поэтому каждый этап проектирования должен проводиться
с учётом свойств всей системы в целом, причём конструктор каж-
дого элемента системы должен обращать особое внимание на то,
что его элемент важен не только сам по себе, но и как часть рабо-
тоспособного целого. В частности, проектирование беспилотного
летательного аппарата необходимо вести не только в соответствии
с требованиями, предъявляемыми непосредственно к нему самому,
* Автопилотом часто называют группу устройств, расположенных на лета-
тельном аппарате н служащих для управления нормальными перегрузками
и стабилизации летательного аппарата.
44
Глава I. Общие сведения о системах управления полетом
но и с учётом требований к системе управления в целом. При та-
ком проектировании должна существовать координация между
конструкторами отдельных физически разнородных элементов
системы. Так, например, проектировщик системы управления дол-
жен отчетливо представлять динамические свойства проектируе-
мого летательного аппарата и их зависимость от конструкции ап-
парата; в свою очередь, проектировщик летательного аппарата
должен хорошо знать, как конструктивные особенности аппарата
влияют на структуру системы управления и её динамические свой-
ства, и наоборот, как особенности системы управления влияют на
конструкцию летательного аппарата.
4.5. Методы исследования и проектирования
систем управления
Поскольку системы управления полётом являются замкнутыми
автоматическими системами, то методы исследования и проекти-
рования этих систем являются по существу методами теории авто-
матического управления (регулирования) [6], [10].
Ввиду чрезвычайной сложности проблемы общего синтеза си-
стемы управления эта задача решается на практике путем после-
довательных приближений и сравнительного анализа возможных
вариантов решений одной и той же задачи. При этом на каждом
этапе проектирования, начиная со стадии предварительных иссле-
дований, стремятся учитывать свойства всей системы как единого
целого.
В процессе создания системы управления используются как
теоретические, так и экспериментальные методы исследования.
Теоретические методы преобладают на первых этапах, эксперимен-
тальные— на последних.
Теоретический анализ опирается на исследование дифферен-
циальных уравнений системы управления, для чего обычно ис-
пользуются аналитические решения в общем виде, ручные вычис-
ления, математическое моделирование, вычисления на цифровых
электронных машинах.
На этапах предварительного исследования и эскизного проек-
тирования применяются главным образом теоретические методы
исследования. При этом используются экспериментальные дан-
ные, полученные при разработке предшествующих образцов ле-
тательных аппаратов.
При разработке технического проекта в значительной степени
основываются на экспериментальных исследованиях опытных об-
разцов материальной части. Примером может служить отработка
аппаратуры управления на динамических стендах, сопряженных с
моделирующим устройством, имитирующим полёт летательного
аппарата.
j • ,
§ 5. Обзор методов теоретического исследования систем управления
45
Экспериментальные данные, полученные при летных испыта-
ниях опытных летательных аппаратов, подвергаются обычно тео-
ретическому анализу с целью выявления способов усовершенство-
вания конструкции летательного аппарата и системы управления.
§ 5. КРАТКИЙ ОБЗОР МЕТОДОВ ТЕОРЕТИЧЕСКОГО ИССЛЕДОВАНИЯ
СИСТЕМ УПРАВЛЕНИЯ
Теоретический анализ систем управления основывается на ис-
следовании дифференциальных уравнений, представляющих собой,
как иногда говорят, «математическую модель» системы *. Непре-
менным условием теоретического анализа является оправданность
допущений, принятых при составлении уравнений и их иссле-
довании.
Составление уравнений имеет весьма важное значение. Прак-
тика проектирования показывает, что большая часть ошибок появ-
ляется не из-за неправильного решения уравнений, а из-за неточ-
ного их составления. Если уравнения составлены, то исследование
их может быть проведено с помощью вычислительной машины,
тогда как ни одна машина не может составить уравнений иссле-
дуемой системы. Чтобы допущения, использованные при состав-
лении уравнений, были оправданы, необходимо достаточно хоро-~
шо экспериментально и теоретически изучить процессы, протекаю-
щие в отдельных элементах системы. , , •< • > \
При теоретическом изучении интересующих нас свойств систе-
мы путем исследований её уравнений также приходится прини-
мать те или иные допущения, которые, естественно, должны быть
достаточно оправданы.
Возможны два различных подхода к составлению и решению
уравнений.
В первом случае чисто аналитическим путем находят общее ре-
шение дифференциальных уравнений. Этот способ позволяет полу-
чить общие выводы о свойствах системы для любых значений её
параметров и начальных условий. К сожалению, дифференциаль-
ные уравнения системы в том виде, в каком мы их можем запи-
сать, обычно очень сложны и в большинстве практических задач не
удается найти решение исходных уравнений в общем виде. Чтобы
найти общее аналитическое решение уравнений системы, их при-
ходится предварительно упрощать, вводя различные более или
менее грубые упрощающие предположения.
Примером общего аналитического решения упрощенных урав-
нений может служить интегрирование кинематических уравнений
* Говоря здесь о математической модели, мы не имеем в виду моделирующее
устройство.
46
Г лава I. Общие сведения о системах управления полетом
движения центра масс летательного аппарата при наведении ме-
тодом погони или методом пропорционального сближения *.
В большинстве случаев необходимые упрощения могут быть
настолько серьезными, что полученное общее решение дает лишь
качественную оценку свойств изучаемой системы. Очевидно, что
для получения правильной оценки свойств системы, хотя бы
качественной, упрощающие предположения не должны нарушать
основных, наиболее характерных закономерностей изучаемого яв-
ления. С другой стороны, эти упрощения должны быть такими,
чтобы можно было получить решение уравнений в общем виде.
Разрешение этого противоречия является обычно трудной задачей
и успех во многом зависит от опыта и искусства исследователя.
Второй подход к теоретическому исследованию дифферен-
циальных уравнений состоит в их приближенном численном инте-
грировании. При этом не требуется существенного упрощения
уравнений, а в ряде случаев их можно и совсем не упрощать. По-
этому такой метод позволяет получить достаточно точные количе-
ственные результаты.
От степени упрощения уравнений зависит, очевидно, трудоем-
кость вычислений. Ввиду того, что системы управления полётом
весьма сложны, численный анализ их посредством ручных вычис-
лений представляет немалые трудности из-за большой трудоемко-
сти расчётов. Поэтому ручные вычисления позволяют достаточно
просто получить только весьма приближенные оценки свойств рас-
сматриваемой системы.
Для более полного анализа свойств системы управления широ-
ко используются моделирующие устройства. Применение быстро-
действующих электронных цифровых машин дает возможность
чрезвычайно быстро провести расчёт с нужной степенью точности.
Заметим, что для эффективного использования моделирующих
устройств и цифровых машин необходимы предварительные, хотя
и грубые ручные вычисления, ускоряющие поиск оптимального ва-
рианта решения задачи на модели или на машине. Результаты
подобных ручных вычислений позволяют, например, вносить в за-
дачу обоснованные упрощения.
Ошибочно было бы полагать, что применение вычислительной
техники позволяет отказаться от аналитических методов исследо-
вания. Численный анализ предполагает конкретное (численное)
задание всех параметров системы и начальных условий. Получен-
ные при этом результаты не имеют той общности, которую дает
аналитическое решение, и носят частный характер. Метод иссле-
дования, основанный на многократном решении уравнений систе-
мы при различных численных значениях её параметров и началь-
* См., например, в (1] гл. X, разд. 2.1 и 2.4, а также гл. VIII, разд. 2.3 в на-
стоящей книге.
§ 5. Обзор методов теоретического исследования систем управления
47
ных условий, который обычно используется на практике, является
весьма трудоемким и не всегда позволяет выявить достаточно об-
щие закономерности.
Таким образом, два указанных подхода к теоретическому ис-
следованию систем управления имеют свои преимущества и недо-
статки. Поэтому на практике используют их разумное сочетание.
Обычно на первых этапах исследования интересуются аналитиче-
скими методами решения, позволяющими получить, хотя и качест-
венные, но зато общие результаты. Выявление основных качествен-
ных закономерностей позволяет представить в общих чертах
облик проектируемой системы, а дальнейшая конкретизация и
уточнение результатов выполняются путем численного анализа с
использованием вычислительной техники.
5.1. Исследование уравнений движения
летательного аппарата
Общая задача проектирования и исследования системы управ-
ления может быть разбита на несколько этапов. На первых ста-
диях проектирования используют наиболее простые методы дина-
мики полёта [1], [2].
Вначале проводят приближенное исследование кинематических
уравнений движения летательного аппарата. Предположения об
идеальной работе системы наведения, упрощения законов движе-
ния цели и летательного аппарата позволяют часто получить в
обшем виде уравнение кинематических траекторий и подробно
изучить их свойства *.
Дальнейшее уточнение движения летательного аппарата полу-
чают, проводя упрощенное динамическое исследование движения
центра масс аппарата **. Здесь также обычно предполагают, что
система наведения работает идеально, причём считают, что вра-
щательное движение летательного аппарата вокруг центра масс
является безынерционным. Получающаяся в этом случае система
уравнений движения центра масс летательного аппарата обычно
имеет сравнительно невысокий порядок.
На этом этапе исследования уже приходится прибегать к по-
мощи численных методов решения уравнений. Так, например, для
определения скорости ракеты как функции времени приходится
численно интегрировать нелинейные дифференциальные уравне-
ния, но в силу невысокого порядка уравнений здесь можно обой-
тись простейшими способами численного решения без применения
быстродействующих вычислительных машин ***.
* См., например, в [1] гл. X, § 1 и 2.
** См., например, в (1] гл. IX и гл. X, § 3, а также в (2] гл. VI, § 2.
*** См. [1], гл. IX, § 3.
48 Глава I. Общие сведения о системах управления полетом
Таким путем можно построить систему невозмущенных (опор-
ных) траекторий летательного аппарата. Для этих траекторий
определяют законы изменения по времени основных параметров
движения, таких, как скорость и высота полёта, угол атаки, рас-
полагаемые перегрузки и т. д. Тем самым определяется теоретиче-
ское (невозмущенное) движение летательного аппарата *.
Кинематический и приближенный динамический анализ движе-
ния центра масс летательного аппарата дают возможность доста-
точно простыми и наглядными способами оценить преимущества и
недостатки различных методов наведения и сформулировать неко-
торые основные требования к параметрам летательного аппарата и
системы управления. Однако такие исследования дают, конечно,
только основные, качественные представления о движении лета-
тельного аппарата, да и то не на всех этапах полёта. Исследова-
ние полёта летательного аппарата с более ил'и менее полным
учётом реальных свойств аппарата, автоматических устройств и
возмущающих воздействий невозможно без рассмотрения процес-
сов, протекающих в системе управления.
5.2. Исследование уравнений системы управления
На последующих этапах исследования рассматривают уже до-
статочно полную систему уравнений управляемого движения ле-
тательного аппарата, учитывающую его вращательное движение и
процессы в элементах системы управления. При этом учитывают
возмущающие воздействия, не рассматривавшиеся при определе-
нии теоретического движения центра масс летательного аппарата.
Для упрощения исходных уравнений, большинство которых яв-
ляется нелинейными, обычно проводят их линеаризацию. Уравне-
ния летательного аппарата и системы управления линеаризуют
относительно достаточно малых отклонений параметров действи-
тельного движения от ранее найденных параметров теоретическо-
го движения **. Естественно, что для осуществления линеаризации
приходится пренебрегать влиянием на работу системы таких
существенных нелинейностей, как люфт, насыщение и т. п., кото-
рые не линеаризуются. В результате линеаризации получают си-
стему линейных обыкновенных дифференциальных уравнений с
переменными коэффициентами. Эта система уравнений определяет
отклонение параметров движения летательного аппарата от пара-
метров идеального, теоретического движения, которое имело бы
место, если бы на аппарат не действовали возмущения, а система
управления работала идеально.
Чтобы получить возможность применять при исследовании
* См. [1], гл. XI, § 4.
** См. [1], гл. XI, § 1, а также в настоящей книге гл. II, разд. 1.2.
§ 5. Обзор методов теоретического исследования систем управления
49
хорошо разработанные методы теории автоматического управле-
ния, обычно идут на дальнейшее упрощение линеаризированных
уравнений системы управления. Предполагают, что случайные воз-
мущающие воздействия описываются стационарными случайными
функциями, а сама система управления — линейными дифферен-
циальными уравнениями с постоянными коэффициентами (прием
«замораживания» коэффициентов) *.
В случае использования методов линейной теории автомати-
ческого управления ** исследование системы управления значи-
тельно упрощается. Достоинством этих методов является то, что
они позволяют выяснить качественное, а иногда и количественное
влияние многих характеристик и параметров летательного аппа-
рата и элементов системы управления на свойства последней.
Простота и тесная связь с физической картиной исследуемых яв-
лений делают эти методы удобными для предварительного выбо-
ра параметров летательного аппарата и системы управления.
Так, например, применение частотных методов с широким ис-
пользованием графических построений делает исследование си-
стемы особенно простым и наглядным. Используя частотные ме-
тоды, можно исследовать устойчивость системы и качество пере-
ходных процессов, оценить приближенно точность системы и тем
самым получить базу для предварительного выбора основных па-
раметров системы управления.
На практике, как только выбрана структурная схема системы
управления и определены приближенно основные ее параметры,
анализ системы продолжается с помощью моделирующих ус-
тройств *** ****. При моделировании можно просматривать большое
число различных вариантов, изменяя в широких пределах пара-
метры системы и начальные условия (такие, как высота и даль-
ность цели, скорость снаряда и цели и т. п.).
Для уточнения параметров системы управления требуется
подробное и полное исследование движения летательного аппа-
рата с учетом всех факторов, влияющих на полет, в том числе
случайных возмущений и существенных нелинейностей, характер-
ных для летательного аппарата и многих элементов аппаратуры
управления. Для теоретического исследования в этом направле-
нии используют статистическую динамику систем автоматическо-
го управления, а также методы исследования нелинейных систем
автоматического управления *•***. Применение теоретических мето-
* См. [1], гл. XII, § 1, а также в настоящей книге гл. II, разд 2 1
** См., например, {18], (19], (20], (21], [22].
*** С методами моделирования можно ознакомиться, например, по книгам
[35], [36], (37].
**** С этими методами можно ознакомиться по книгам [18], [19], [21], [22], [24],
[25], [26], [27], [28], [29], [30].
50
Глава I. Общие сведения о системах управления полетом
дов, а также электронной вычислительной техники позволяет ре-
шать задачу анализа для большей части нелинейных систем.
Анализ нелинейных систем проводится обычно следующим обра-
зом. Сначала рассматривают более простые задачи, для решения
которых применяют приближенные методы нелинейной теории ав-
томатического регулирования и среди них чаще всего методы
гармонического баланса и статистической линеаризации, близкие
к частотным методам линейной теории автоматического регули-
рования. Затем решают задачу на электронных моделирующих
устройствах или цифровых машинах *. Благодаря этим методам
удается на начальных стадиях проектирования проводить анализ
нелинейных систем, например, получать оценку точности системы.
Итак, проектирование системы управления ввиду очень боль-
шой сложности задачи проводится путем последовательных при-
ближений. По мере появления новых данных «математическая
модель» системы управления шаг за шагом усложняется и посте-
пенно уточняются ранее выбранные параметры.
§ 6. ОСНОВНЫЕ ДИНАМИЧЕСКИЕ СВОЙСТВА И КРИТЕРИИ КАЧЕСТВА
СИСТЕМ УПРАВЛЕНИЯ
Рассмотренные выше обобщенные критерии качества системы
управления полетом (вероятность поражения цели, эффективный
промах и др.) не всегда могут быть использованы при проектиро-
вании системы управления. Чтобы применить эти критерии, необ-
ходимо предварительно установить весьма сложные связи между
математическим ожиданием rrih и средним квадратическим откло-
нением ап промаха, с одной стороны, и параметрами системы уп-
равления, с другой. Это не всегда возможно, особенно на началь-
ных стадиях проектирования. Поэтому большой практический ин-
терес представляют классические критерии качества автоматичес-
ких систем, более просто связанные с их основными параметрами
и косвенно учитывающие точность системы. Ниже будут рассмот-
рены особенности использования таких критериев при исследо-
вании и проектировании систем управления полетом.
6.1. Устойчивость
Условие устойчивости является обязательным для многих ав-
томатических систем. К ним относятся, например, измеритель-
ные системы, следящие системы и системы стабилизации. Приме-
рами измерительных систем, используемых в командных системах
наведения, являются устройства измерения координат цели и ле-
тательного аппарата, представляющие собой типичные следящие
* Методы решения задач на цифровых электронных машинах и программи-
рование освещены в учебных пособиях {37], {38] и справочнике {39].
§ 6. Динамические свойства и критерии качества систем управления
51
системы. Другим примером может служить система стабилизации
крена летательного аппарата. Все такие системы в случае не-
устойчивости не могут удовлетворять своему назначению.
Однако в некоторых автоматических системах с ограниченным
временем работы иногда может быть допущена неустойчивость.
Так, например, по отношению к системе наведения управляемого
снаряда требование устойчивости не всегда является обязатель-
ным. Основное требование, которому должна удовлетворять си-
стема наведения,— это обеспечение необходимой точности наве-
дения. Требование же устойчивости является подчиненным этому
основному требованию. Принципиально можно допустить неустой-
чивую систему наведения при условии обеспечения ею заданной
точности. С другой стороны, устойчивая система наведения может
оказаться непригодной, если она не дает нужной точности
Обеспечение устойчивости не является, как правило, достаточ-
ным условием удовлетворительного качества автоматической си-
стемы. Действительно, когда выполняется условие устойчивости
линейной системы, ее характеристическое уравнение не имеет
корней с положительной вещественной частью. Однако при этом
могут быть не удовлетворяющие нас корни, если переходный про-
цесс слабо затухает. Кроме того, должно быть гарантировано сох-
ранение устойчивости, несмотря на непредвиденные обстоятель-
ства. Другими словами, устойчивость в математическом смысле
не обязательно обеспечивает хорошую устойчивость в практичес-
ком смысле. Необходимо, чтобы система была не просто устойчи-
вой, но и имела бы достаточно надежную устойчивость и хорошее
качество переходного процесса.
6.2. Поведение системы в переходном процессе
Качество автоматической системы, удовлетворяющей условию
устойчивости, может быть охарактеризовано тремя важными ди-
намическими свойствами:
1) демпфированием;
2) быстродействием;
3) ошибками в установившихся режимах.
Для формулировки критериев, определяющих эти динамичес-
кие свойства, часто рассматривают реакцию автоматической си-
стемы на ступенчатое воздействие, т. е. переходный процесс, и по
виду графика переходной функции (рис. 1.13) оценивают качест-
во переходного процесса и, следовательно, автоматической систе-
мы. Как известно, форма графика переходной функции определя-
ется следующими величинами:
1) временем затухания переходного процесса — временем ре-
гулирования tP, по истечении которого выходная величина откло-
няется от установившегося значения не более чем на 5%;
52
Глава I. Общие сведения о системах управления полетом
2) периодом колебаний Тк, т. е. промежутком времени между
двумя последовательными максимумами в переходной функции,
или частотой свободных колебаний ®к, равной
<пк = — 1/сек; (1.8)
Тк
3) временем выхода на установившийся режим t0, или време-
нем нарастания tH, которые определяются, как показано на
рис. 1.13;
Рис. 1.13. График переходного процесса и основные пока-
затели его качества
4) временем 1-го (2-го и т. д.) выброса tp,
5) относительной величиной максимального выброса
или перерегулированием
-^тах/Хоо
(1-9)
.1
6) затуханием за период
z = /1 —2Ц Ю0%,
\ *со ]
(1-10)
где хх — величина начальной амплитуды, a — последующей ам-
плитуды, отстоящей на период (см. рис. 1.13);
7) числом колебаний или полуколебаний за время переходно-
го процесса;
§ 6. Динамические свойства и критерии качества систем управления
53
8) интегральными оценками:
а) линейной
б) квадратичной
(1-Н)
(М2)
и другими.
Демпфирующие свойства автоматической системы оце-
ниваются чаще всего величиной перерегулирования а, которая
представляет собой, как нетрудно видеть, отношение последую-
щей амплитуды Хщах — к предыдущей %™, отстоящей от первой
на полупериод, и, следовательно, служит показателем степени за-
тухания свободных колебаний системы с частотой ®к за полупе-
Тк я
риод —.
2 <лк
Склонность автоматической системы к колебаниям обычно ха-
рактеризуют понятием колебательности системы. Непосредствен-
но колебательность системы можно оценить числом колебаний за
время переходного процесса.
Свойства демпфирования и колебательности являются в опре-
деленной степени обратными. Чем сильнее затухание свободных
колебаний за период (полупериод), тем ниже колебательность, и
наоборот. Поэтому такой показатель, как перерегулирование,
оценивает одновременно и демпфирующие свойства, и колебатель-
ность автоматической системы.
Выбор критерия для оценки быстродействия системы,
т. е. задержки реакции системы по времени, представляет опре-
деленную трудность. Некоторые авторы считают, что быстродей-
ствие системы характеризуется временем переходного процесса tP.
К сожалению, этот показатель быстродействия в известной сте-
пени произволен. На рис. 1.14, а показаны различные переходные
процессы с одинаковым временем tp. Очевидно, что в каждом
варианте задержка реакции системы различна, вместе с тем оста-
ется неясным, в каком случае быстродействие выше, а в каком
ниже.
Часто быстродействие системы оценивают одним из следую-
щих, близких друг другу показателей: временем нарастания tH,
временем выхода на установившийся режим to, периодом Тк или
частотой <ак колебаний. Однако и при использовании этих пока-
зателей оценка быстродействия остается все же в некоторой мере
неопределенной. Рассмотрим к примеру частоту колебаний гок
как критерий быстродействия системы.
54
Глава I. Общие сведения о системах управления полетом
Частота колебаний определяет масштаб времени переходного
процесса и тем самым его длительность tp. В системах с одинако-
вым перерегулированием а, т. е. одинаковым затуханием за пе-
риод, время переходного процесса tp, очевидно, обратно пропор-
ционально частоте В подобных случаях, т. е. в системах с оди-
наковыми демпфирующими свойствами, можно считать, что бы-
стродействие определяется частотой колебаний <oK: чем больше
частота ®к, тем выше быстродействие системы. Такой определен-
ный вывод можно сделать потому, что переходные функции в рас-
сматриваемом случае отличаются друг от друга только масшта-
бом времени (см. рис. 1.14,5). Если же необходимо оценить быст-
Рис. 1.14. Примеры переходных процессов с раз-
личным быстродействием
родействие переходных процессов с различным затуханием, то
частота колебаний сок становится таким же неопределенным кри-
терием быстродействия, как и время регулирования tp (см.
рис. 1,14,а). Ясно, что все сказанное об оценке быстродействия
посредством частоты справедливо и по отношению к аналогич-
ным показателям t0, tH и Тк.
Довольно часто автоматические системы проектируются так,
чтобы они удовлетворяли обычным «стандартным» требованиям в
отношении перерегулирования. Очевидно, что такие системы мож-
но сравнивать по быстродействию с помощью частоты свободных
колебаний ®к.
Удобной мерой быстродействия летательного аппарата, его си-
стемы стабилизации, а также некоторых других систем может
служить линейная интегральная оценка
<1J3>
Этот интеграл, очевидно, равен площади, заштрихованной на
рис. 1.15, а. У идеального запаздывающего звена, быстродействие
которого естественно оценивается временем «чистого» запаздыва-
§ 6. Динамические свойства и критерии качества систем управления
55
ния т, интеграл Л как раз равен величине т (см. рис. 1.15,5):
%зап
(1-14)
о
Следовательно, в качестве критерия быстродействия автома-
тической системы можно принять запаздывание т = 7\, определяе-
мое формулой (1.13). Оно бу-
дет равно «чистому» запазды-
ванию такого эквивалентного
запаздывающего звена, для ко-
торого
Хзап %
интеграл разности
равен нулю:
x^-x-dt = 0!
х~
Рис. 1.15. Линейная интегральная оценка
и эквивалентное запаздывание
О 00
т. е. равна нулю площадь, за-
штрихованная на рис. 1.15, в.
Эквивалентное запаздыва-
ние т легко может быть опре-
делено по коэффициентам пе-
редаточной функции
Ф(Р) = ^ =
Хвх (₽)
__ bmff1 + . + &1Р -р 1 /|
апРЧ + ... + Щр + 1
с помощью формулы [10]
т= аг— bv. (1.16)
В литературе по теории ав-
томатического управления (ре-
гулирования) считается, что
линейная интегральная оценка
качества переходного процесса
цесс монотонный. Такое утверждение справедливо, если выходная
координата системы х является регулируемой величиной, как это
обычно и бывает.
Выходной величиной системы стабилизации летательного ап-
парата является нормальная перегрузка аппарата: при изменении
сигнала наведения или при воздействии возмущений меняется
нормальная перегрузка пу = — <Э,т. е. нормальное ускорение
у = V0 или угловая скорость касательной к траектории @. Одна-
ко для осуществления наведения необходимо либо изменять нап-
равление полета на некоторый угол А0, либо перемещать лета-
/1 = т может служить показателем
лишь в том случае, когда этот про-
56
Глава I. Общие сведения о системах управления полетом
тельный аппарат на некоторое расстояние Лу в направлении, пер-
пендикулярном вектору скорости. Система стабилизации как
элемент системы наведения должна достаточно быстро изменять
направление полета или перемещать летательный аппарат в попе-
речном направлении. Другими словами,
должна
система стабилизации
обладать достаточным быстродействием в установлении ве-
или Ау = Яydt2. Отсюда следует, что эквива-
запаздывание т, найденное с помощью линейной интег-
оценки, является подходящей мерой для оценки быстро-
его системы стабилизации.
личины
лентное
ральной
действия летательного аппарата
Рис. 1.16. Переходная функция и ее интеграл
Сказанное иллюстрируется рис. 1.16, а, где даны
функция системы стабилизации B(t') и ее интеграл.
Чем больше частота свободных колебаний системы ®к, тем
меньше, очевидно, эквивалентное запаздывание т при прочих рав-
ных условиях (см. рис. 1.14,5). С увеличением перерегулирова-
ния о запаздывание т уменьшается, хотя длительность переходно-
го процесса tp возрастает. В случае незатухающих колебаний
(а =100%) величина т становится неопределенной, так как
tp = со. Однако и в этом случае быстродействие, характеризуе-
мое линейной, интегральной оценкой в пределах от нуля до неко-
торого t, оказывается выше быстродействия в системе с обычным
хорошо затухающим переходным процессом той же частоты (см.
рис. 1.16,5).
переходная
§ 6. Динамические свойства и критерии качества систем управления
57
6.3. Реакция системы на гармоническое воздействие
Многие динамические свойства линейной автоматической си-
стемы и в том числе качество переходного процесса можно выяс-
нить с помощью частотных характеристик. Частотные характери-
стики дают представление о вынужденной реакции системы на
гармоническое воздействие xax(t) = а sin at при различных значе-
ниях частоты со. Эта реакция у линейной системы представляет
собой гармонические колебания с той же частотой со. Частотные
характеристики определяют изменение амплитуды и фазы коле-
баний данной частоты при прохождении их через линейную систе-
му. При этом свободное движение системы не рассматривается,
так как оно обычно затухает через некоторое время (свойства сво-
бодного движения подробно изучаются при исследовании реакции
на ступенчатое воздействие).
Запасы устойчивости
Об устойчивости замкнутой автоматической системы можно
судить по частотным характеристикам этой системы в разомкну-
том состоянии *. Чтобы при проектировании автоматических си-
стем обеспечить хорошую устойчивость в практическом смысле,
т. е. надежную устойчивость и хорошее затухание переходного
процесса, широко пользуются понятиями запасов устойчивости
по амплитуде и фазе.
Запасом устойчивости по амплитуде (или по модулю) замкну-
той системы называется возможное относительное увеличение пе-
редаточного коэффициента разомкнутой системы, при котором
замкнутая система достигает границы устойчивости.
На рис. 1.17 показано, как определяется запас устойчивости
по амплитуде по логарифмическим частотным характеристикам.
Запас устойчивости по амплитуде в децибелах' (дб) равен абсо-
лютной величине отрицательной ординаты логарифмической ам-
плитудной характеристики Л(®) при той частоте ® = <ог, при ко-
торой запаздывание по фазе достигает —л.
Запас устойчивости по амплитуде гарантирует сохранение
устойчивости, несмотря на непредвиденные изменения передаточ-
ного коэффициента разомкнутой системы, например, вследствие
отклонения параметров элементов от их расчётных значений из-
за производственных погрешностей или изменения скорости и вы-
соты полёта. Представим себе, к примеру, что вследствие некото-
рых причин передаточный коэффициент разомкнутой системы ста-
билизации увеличился в два раза, т. е. на 6 дб. Если при этом
запас устойчивости по амплитуде меньше 6 дб, то указанное из-
* См., например, [19], § 6.3.
8
Глава I. Общие сведения о системах управления полетом
Рис. 1.17. Определение запасов устойчи-
вости по логарифмическим частотным харак-
теристикам
меление передаточного коэффициента приведет к неустойчивости
замкнутой системы стабилизации.
Запасом устойчивости по фазе замкнутой системы называется
возможное увеличение запаздывания по фазе разомкнутой си-
стемы на частоте среза <ос, при котором замкнутая система ока-
зывается на границе устойчивости. (При частоте среза ®с относи-
тельная амплитуда вынужденных колебаний разомкнутой систе-
мы равна единице, а при
со > <ос меньше единицы).
Определение частоты среза
и запаса устойчивости по
фазе по логарифмическим
частотным характеристикам
показано на рис. 1.17.
Запас устойчивости по
фазе гарантирует сохранение
устойчивости, несмотря на
наличие непредвиденных за-
паздываний, а также запаз-
дываний, не учитывавшихся
при проектировании.
При проектировании ав-
томатических систем реко-
мендуется выбирать запас
устойчивости по фазе не
меньше 30°, а в случае воз-
можности — не меньше 45°.
Запас устойчивости по амп-
литуде рекомендуется брать
не меньше 6 дб [19].
Частотные характеристики замкнутой системы
Рассмотрим частотные характеристики замкнутой автомати-
ческой системы (рис. 1.18). При со = 0 модуль М передаточной
функции замкнутой системы равен Л1(0) = 201g |Ф(0) | дб-, при
увеличении со происходит некоторое возрастание М, причём при
со = о>р модуль передаточной функции замкнутой системы прини-
мает максимальное значение. При дальнейшем увеличении со мо-
дуль М быстро убывает, проходя через значение /И(0) при со = coi.
Частоту замкнутой системы <»Р, при которой амплитудная ча-
стотная характеристика имеет максимум, называют резонансной
частотой. Эта частота несколько меньше частоты свободных коле-
баний «к и частоты среза сос.
§ 6. Динамические свойства и критерии качества систем управления
59
При исследовании систем, имеющих порядок выше второго,
часто не проводят различия между этими тремя частотами. Они
практически не различаются между собой и тем ближе друг к
другу, чем ярче выражен резонанс. Поэтому в настоящей книге
будем пользоваться только понятием о частоте среза, принимая,
что эта частота эквивалентна резонансной частоте и частоте сво-
бодных колебаний.
Частота среза ®с является весьма важной характеристикой ав-
томатической системы, так как она определяет: а) быстродейст-
вие системы, о чем говори-
лось выше, и б) полосу про-
пускания системы.
Нетрудно видеть, что
замкнутая автоматическая
система неодинаково пропу-
скает частоты: гармониче-
ские колебания, подаваемые
на вход системы с частотой
®, лежащей в диапазоне от
О до «и, пропускаются си-
стемой без всякого ослабле-
ния, в то время как сигналы
с частотами, превышающи-
ми о)1, существенно ослабля-
ются. Это значит, что замк-
замкнутои системы
нутая автоматическая систе-
ма представляет собой фильтр низких частот.
Существуют различные определения полосы пропускания.
Наиболее удобно определять полосу пропускания приближенно,
учитывая, что частоты (ос и ®i примерно равны. Поэтому полосой
пропускания замкнутой автоматической системы будем называть
диапазон частот от нуля до частоты среза (ос.
Другим параметром амплитудно-частотной характеристики
замкнутой системы, характеризующим динамические свойства
системы, является коэффициент резонанса, или резонансный пик,
представляющий собой разность максимального значения логариф-
мической амплитудной характеристики и её значения при нулевой
частоте (см. рис. 1.18):
Mp = Mmax-M(0).
(1-17)
Для характеристики резонансных свойств автоматической си-
стемы часто применяют термин колебательность. Чем выше резо-
нансный пик Мр, тем выше, говорят, колебательность системы.
С другой стороны, величина резонансного пика Мр характеризует
60
Глава I. Общие сведения о системах управления полетом
поведение системы в переходном процессе [20]. Чем ниже Мр, тем
лучше демпфирование — слабее перерегулирование, меньше число
колебаний, меньше время регулирования.
В теории автоматического управления доказывается, что дос-
таточные запасы устойчивости обеспечивают невысокое значение
резонансного пика, т. е. хорошие свойства системы в отношении
демпфирования и колебательности. Так, например, запасам устой-
чивости в 10-т- 15 дб и 45—50° соответствуют значения Мр в пре-
делах 1,25—1,5.
Эквивалентное запаздывание т, характеризующее быстродей-
ствие системы в переходном процессе, может быть определено по
фазо-частотной характеристике замкнутой системы. Для доста-
точно низкой частоты передаточная функция (1.15) может быть
представлена в виде
Ф (р) К [ 1 + (&! — ах) р + (Ь2 — а2 — а1Ь1 + а2) р2 -ф ... ]. (1.18)
Отсюда получим, что
lim — =bi — aY~—т. (1-19)
Как видно, эквивалентное запаздывание т может рассматри-
ваться как величина наклона фазо-частотной характеристики
замкнутой системы на низких частотах. Такого результата можно
было ожидать, так как сдвиг фазы синусоиды <р равен по величи-
не её частоте ®, умноженной на сдвиг по времени т.
Частотный спектр управляющего воздействия
Вообще говоря, управляющее воздействие в системах управле-
ния полётом является случайной функцией времени, так как дви-
жение цели имеет случайный характер и, кроме того, случайны
координаты цели в начальный момент полёта летательного аппа-
рата. Однако при исследовании систем управления обычно приня-
то в качестве управляющих воздействий рассматривать неслучай-
ные функции времени, соответствующие наиболее типичным слу-
чаям движения летательного аппарата или наиболее неблагопри-
ятным случаям с точки зрения точности управления и
нормального функционирования системы.
Любое неслучайное управляющее воздействие x(Z) может
быть представлено в виде суммы гармонических составляющих
различной частоты. Так, например, периодическую функцию мож-
но разложить в ряд Фурье. Зависимость амплитуды гармоничес-
ких составляющих этого ряда от дискретных значений частоты
представляет собой частотный спектр данной периодической
функции.
6. Динамические свойства и критерии качества систем управления
61
Непериодическая функция х(/), удовлетворяющая определен-
ным ограничениям, может быть представлена в виде интеграла
Фурье
СО Со
х (0 — 2л” e>atd(i> J х (т) e ~i':Xd~. (1.20)
—со —со
Интеграл
F (/®) = j х (т) (1.21)
представляет собой преобразование Фурье функции x(t). Обычно
рассматривается функция x(t), равная нулю при / <0 и t>T,
так как время полета летательного аппарата ограничено. Тогда
т
F (j®) = х(т)е~'шТб/т. (1-22)
о
Интеграл F(ja>) является комплексным спектром функции
x(t). Модуль интеграла |Е(/ю) | определяет амлитудный частот-
ный спектр функции х(1), т. е. зависимость амплитуд гармоничес-
ких составляющих x(Z) от частоты ®, а аргумент — зависимость
фаз гармонических составляющих x(t) от частоты ®. В отличие от
дискретного спектра периодической функции частота ® изменяет-
ся здесь непрерывно от 0 до <х>. Поэтому граница частотного
спектра условна. Для практических целей её достаточно опреде-
лить по уровню Д(ю) = (0,05 4-0,10) А (0).
Диапазон частот, в котором расположен спектр управляющего
сигнала, очевидно, зависит от скорости изменения сигнала. Если
управляющее воздействие является медленно меняющейся функ-
цией времени, то его частотный спектр сосредоточен на малых ча-
стотах. Если же управляющее воздействие изменяется быстро, то
его спектр охватывает широкий диапазон частот.
В качестве примера приведем частотный амплитудный спектр
угловой скорости касательной к траектории 0. Сигнал наведения,
поступающий в систему стабилизации, при идеальной работе си-
стемы наведения должен быть пропорционален угловой скорости
0, потребной для осуществления принятого метода наведения.
При наведении по лучу, если принять, что скорости летательного
аппарата и цели постоянны, цель летит прямолинейно, а станция
наведения неподвижна, угловая скорость 0 может быть вычисле-
на по известным формулам, см, например, [1], [6]. В качестве при-
мера на рис. 1.19 и 1.20 приведены зависимость угловой скорости
0 от времени и соответствующий амплитудный спектр, заимство-
ванные из книги [6]. Чем ниже летит цель, тем меньше время
62
Г лава I. Общие сведения о системах управления полетом
полёта и шире спектр частот 0 (при прочих равных условиях).
Как видно из графика на рис. 1.20, при tn = 60 сек частотный
спектр 0 расположен в интервале от 0 до 10 \/сек.
В качестве второго примера рассмотрим полёт баллистической
ракеты типа V-2 на активном участке траектории. Управляющим
воздействием является здесь программное значение угла тангажа
8*(0, изменяющееся за 65 сек активного полёта от 90 до 45°.
Так как управляющее воздействие (/) медленно меняется по
времени, то его частотный спектр расположен в диапазоне частот
от 0 до нескольких десятых \[сек, т. е. является довольно узким.
Рис. 1.19. Угловая скорость
касательной к траектории
при наведении методом сов-
мещения:
е0 = 45°; V/V;< = 1,5; f„ — вре-
мя полета.
Рис. 1.20. Частотный спектр угловой
скорости касательной к траектории при
наведении методом совмещения:
00 = 45°; VIV1,5.
Прохождение управляющего сигнала через
замкнутую автоматическую систему
Если бы к автоматической системе было приложено только
управляющее воздействие, то наилучшей с точки зрения точности
была бы та система, которая передавала бы входной управляю-
щий сигнал без искажений. Такая идеальная система имела бы
передаточную функцию, равную Ф(р) = = К, а её частот-
ные характеристики имели бы вид А = К и <р = 0. Однако физи-
чески невозможно выполнить систему, которая могла бы коле-
баться с бесконечно большой частотой и конечной амплитудой.
Поэтому любая реальная автоматическая система является филь-
тром низких частот, подавляющим высокочастотные колебания, и
управляющий сигнал произвольного вида всегда как-то искажа-
ется реальной системой.
Частотный спектр управляющего сигнала обычно лежит в ог-
раниченном диапазоне частот, начинающемся от нуля. Чтобы ре-
§ 6. Динамические свойства и критерии качества систем управления
63
практи-
затем по мере увеличения час-
рез замкнутую автоматическую
систему
альный управляющий сигнал прошел через автоматическую си-
стему 'практически неискаженным, желательно, чтобы частотные
характеристики системы в этом диапазоне были близки к идеаль-
ным.
Амплитудная и фазовая частотные характеристики замкнутой
автоматической системы при частотах, близких к нулю,
чески совпадают с идеальными, а
тоты все более и более отклоняют-
ся от идеальных (см. рис. 1.18).
Эти отклонения тем меньше, чем
ниже колебательность системы и
выше частота среза.
На рис. 1.21 приведены при-
мерные частотные характеристи-
ки двух систем: первая имеет
большой резонансный пик Мр и
малую частоту среза юс, вто-
рая— малый пик Мр и высокую
частоту юс. Как следует из этого
рисунка, при данном частотном
спектре управляющего сигнала
Sm (ю) в первой системе выходной
сигнал заметно отличается от
управляющего, во второй — прак-
тически не отличается от него.
В результате в первом случае бу-
дут большие ошибки воспроизве-
дения управляющего сигнала, обусловленные инерционностью ре-
альной системы, а во втором — малые. Таким образом, чтобы авто-
матическая система с необходимой точностью воспроизводила
управляющее воздействие, она должна иметь достаточное быстро-
действие (т. е. достаточно широкую полосу пропускания) при огра-
ниченной колебательности.
Выбор полосы пропускания (частоты среза ®с) для достаточно
точного воспроизведения управляющего воздействия при отсут'
ствии возмущений зависит в основном от скорости изменения это-
го воздействия. Спектр последнего должен быть сосредоточен
полосе частот (О, Q), соответствующих малым амплитудным
фазовым искажениям.
Для промышленных автоматических систем обычно требуется,
чтобы искажения не превосходили 10% по амплитуде. У системы
2-го порядка такое требование приводит к выбору собственной
частоты юс на две или три октавы выше (в 4—8 раз больше), чем
наиболее высокая частота Q, содержащаяся в управляющем воз-
действии. Эта рекомендация распространяется по аналогии и на
системы высоких порядков.
В
и
64
Глава I. Общие сведения о системах управления полетом
6.4. Системы управления при случайных воздействиях
Выше рассматривалась реакция замкнутой автоматической си-
стемы на типовые воздействия (ступенчатое, гармоническое) и на
произвольное, но известное управляющее воздействие. Так как
системы управления полётом всегда находятся под влиянием слу-
чайных воздействий, рассмотрим теперь реакцию линейной авто-
матической системы на случайную входную величину.
Спектральная плотность
Чтобы исследовать реакцию системы на случайные воздействия,
необходимо описать их математически (статистически) и опреде-
лить их характеристики*.
Случайной функцией времени называют функцию, значение ко-
торой в каждый момент времени является случайной величиной.
Реализацией случайной функции называют конкретное её осущест-
вление (например, в виде записи) на некотором интервале времени.
Процессы, описываемые случайными функциями, называются
случайными. Среди них выделяют такие процессы, вероятностные
характеристики которых не изменяются при сдвиге во времени на
некоторый интервал. Эти процессы и соответствующие им случай-
ные функции называют стационарными.
Важное практическое значение имеют стационарные процессы,
обладающие свойством эргодичности, которое кратко можно сфор-
мулировать так: для стационарного эргодического случайного про-
цесса среднее по множеству реализаций (т. е. математическое
ожидание) при фиксированном времени равно среднему по време-
ни для одной реализации.
Свойства стационарности и эргодичности случайной функции
являются следствием того факта, что физические причины, форми-
рующие случайный процесс, остаются неизменными во времени при
всех опытах (реализациях).
Если случайная функция стационарна и эргодична, то знание её
реализации для достаточно большого промежутка времени дает
полные сведения о случайной функции. Свойство эргодичности ле-
жит в основе большей части вычислений, осуществляемых над слу-
чайными функциями, и используется для практического определе-'
ния характеристик случайной функции по данным её реализации.
Приведем основные вероятностные характеристики стационар-
ной случайной функции х(0> обладающей эргодическим свойством.
* Чтобы получить основные представления о теории случайных функций,
можно прочесть учебник (32], гл. 15 и 17. Для более глубокого изучения ста-
тистических методов теории автоматического управления следует обратиться
к книгам (24], [25], (26], [28], [30].
§ 6. Динамические свойства и критерии качества систем управления
65
Математическое ожидание, или среднее значение
| т
*' x(/) = lim^ [x(t)dt. (I-23)
Дисперсия
т
о^ = Нтд7 f [х (0 - х (0J2 dt. (1.24)
т^°2Г Л
J В дальнейшем будем рассматривать только центрированные
случайные функции x4(t) = x(t)—x(t), опуская для сокращения
записи индекс «ц» в обозначении этих функций.
Спектральная плотность. Допустим, что x(t)—стационарная
эргодическая случайная функция времени, a Xr{t) —достаточно
продолжительная реализация этой случайной функции, определен-
ная на интервале времени —Т t Т. Функция хт(/) имеет комп-
лексный спектр
т
ЛГу (/«>) = J Xi{t)e^latdt. (1.25)
* —т
Относительную величину квадрата амплитуды гармоники с ча-
стотой со
Sr(®) = ^|Xr(j<a)|2 (1.26)
можно назвать спектральной плотностью реализации случайной
функции. Спектральной плотностью S(co) случайной функции x(t)
называется математическое ожидание спектральных плотностей
реализаций этой функции St(co).
Используя свойство эргодичности, можно записать, что спект-
ральной плотностью S(a) функции х(/) является выражение
S(<o) = lira -L|Xr(/<o)|2. (1.2/)
Г->-ое2Т
Приведенное определение спектральной плотности, хотя и не
; вполне строгое, раскрывает физическое содержание этого понятия.
Кривая S(co) характеризует распределение мощности по часто-
там (от 0 до оо); при этом площадь, ограниченная кривой S(w) и
осью абсцисс, соответствует общей мощности; ордината кривой
представляет «плотность» мощности, т. е. среднюю мощность на
единицу оси абсцисс, а максимум указывает на доминирующую
(преобладающую) частоту.
Приведем для наглядности примеры.
3 Заказ 1242
66
Г лава I. Общие сведения о системах управления полетом
1. Спектральная плотность неслучайного процесса — гармониче-
ских колебаний с частотой соо, определяется выражениями:
S (со) = О при (о ¥= со0;
S (соо) — ос при (О = со0,
00
причем jS(oj)rfo) конечен. Здесь вся мощность физического процес-
—оо
с а сосредоточена на частоте соо-
2. Другим крайним случаем является случайный процесс, назы-
ваемый белым шумом. Мощность такого процесса равномерно рас
пределена по всем частотам от 0 до оо, т. е. 5 (ю) = const.
Рис. 1.22. Пример графика спектральной
плотности нормальной перегрузки лета-
тельного аппарата при полете в возмущен-
ной атмосфере
Некоторым физическим
аналогом белого шума мо-
жет служить «белый свет»,
в спектре которого содер-
жатся колебания одинако-
вой амплитуды всех частот,
принадлежащих к световому
диапазону электромагнит-
ных волн. Следует отметить,
что случайный процесс, типа
белого шума физически реа-
усек пизовать нельзя, так как
мощность, необходимая для
создания такого процесса,
бесконечно велика. Белый
шум является математиче-
ской идеализацией реально-
го случайного процесса, ус-
пешно используемой при исследовании автоматических систем.
Если, например, спектральная плотность случайного воздействия
равномерно распределена в диапазоне частот, значительно превос-
ходящем полосу пропускания исследуемой системы, то реальное
воздействие можно заменить белым шумом. Если же такая замена
недопустима, то случайное воздействие можно представить в виде
белого шума, проходящего через так называемый формирующий
фильтр.
3. В общем случае на графике спектральной плотности можно
наблюдать преобладающие частоты. .Так, например, на рис. 1.22
максимум спектральной плотности соответствует частоте
3,3 1/сек.
Спектральная плотность обладает следующими свойствами:
а) спектральная плотность является положительной функцией
во всем диапазоне частот от 0 до ± оо, так как мощность случай-
ного процесса, распределение которой по частотам характеризуется
спектральной плотностью, не может быть отрицательной;
§ 6. Динамические свойства и критерии качества систем управления
67
б) спектральная плотность есть четная функция частоты:
S(a>) = S(—ю);
в) дисперсия связана со спектральной плотностью соотноше-
нием
ОО
—оо
(1-28)
Прохождение случайного сигнала
через замкнутую автоматическую систему
Спектральная плотность как характеристика случайного про-
цесса позволяет изучать реакцию системы на входной сигнал,
представляющий собой случайную функцию времени.
Если к линейной системе с передаточной функцией Ф(р) при-
ложен стационарный случайный сигнал xex(t) со спектральной
плотностью Sex(t), то спектральная плотность выходной величины
хвых(1) определяется выражением
5вых(со) = |Ф(7<»)125вж(со). (1.29)
Физический смысл этого выражения в достаточной степени
очевиден: распределение мощности случайного сигнала по часто-
там в результате прохождения через автоматическую систему ви-
доизменяется в зависимости от квадрата модуля передаточной
функции. Система подобна фильтру, который пропускает низкие
частоты, подавляет частоты, превосходящие частоту среза, и уси-
ливает частоты, близкие к резонансным.
Очевидно, что дисперсия выходного сигнала определяется вы-
ражением
ОО
£ых = J | Ф (/«) I2 sex (со) Ло.
(1.30)
Рассмотрим
мом. Тогда .
случай, когда входной сигнал является белым шу-
оо
JI ф(/“) N<°-
—оо
(1-31)
При расширении полосы пропускания и увеличении колебатель-
ности системы подынтегральное выражение, а вместе с ним и
дисперсия выходного сигнала возрастают.
Отсюда следует, что для подавления случайных возмущений
целесообразно сужать полосу пропускания автоматической систе-
мы и уменьшать её колебательность.
3*
68
Глава I. Общие сведения о системах управления полетом
Понятие об оптимальной полосе пропускания
В реальных условиях к автоматической системе обычно прило-
жены и управляющее воздействие и случайные возмущения. В ре-
зультате искажения управляющего сигнала при его прохождении
через систему возникают динамические ошибки, случайные возму-
щения являются причиной случайных ошибок. Если для уменьше-
ния динамических ошибок увеличить полосу пропускания, то это
приведет к возрастанию случайных ошибок. Как видно, требования
к ширине полосы пропускания — величине частоты среза ис, предъ-
являемые условиями достаточно точного воспроизведения управля-
ющего воздействия и подавления случайных возмущений, проти-
воречивы.
Пусть, например, амплитудно-частотная характеристика рас-
сматриваемой автоматической системы и частотный спектр
управляющего воздействия имеют вид, изображенный на рис. 1,21,
а случайные возмущения представлены белым шумом.
Если сузить полосу пропускания системы (кривая /), то систе-
ма будет сравнительно слабо реагировать на помехи и случайные
ошибки будут малы. Однако при этом очень сильно возрастают
ошибки воспроизведения управляющего воздействия, т. е. динами-
ческие ошибки. При значительном расширении полосы пропускания
(кривая 2) управляющее воздействие практически не искажается
(динамические ошибки малы), но весьма существенно возрастает
влияние помех.
Очевидно, что при выборе полосы пропускания приходится идти
на некоторый компромисс, обеспечивающий наивыгоднейшее соот-
ношение между динамическими и случайными ошибками. Так, на-
пример, при выборе полосы пропускания системы наведения стре-
мятся получить оптимальное соотношение между математическим
ожиданием mh и средним квадратическим отклонением щ пролёта
в соответствии с одним из обобщенных критериев, рассмотренных
выше, в § 3. Поскольку специальные исследования, проводимые с
целью определения оптимальной полосы пропускания, являются
достаточно сложными, задачу выбора полосы пропускания на ста-
диях предварительного проектирования решают обычно частотны-
ми методами.
Прохождение сигнала,
засоренного случайными помехами,
через звено с насыщением
, Чтобы пояснить сущность явлений, имеющих место при про-
хождении полезного сигнала и шумов через звено с насыщением,
рассмотрим рис. 1.23, где изображены характеристика нелинейного
звена, входной x(t) щ выходной y(t) сигналы. На рис. 1.23,6 кри-
вая 1 показывает изменение входного полезного сигнала, который
§ 6. Динамические свойства и критерии качества систем управления
69
можно считать математическим ожиданием mx(t) случайного сиг-
нала x(t), а кривые 2 — границы случайных выбросов этого сигна-
ла, соответствующие уровню иах с вероятностью Ф(и). На
рис. 1.23,в приведены аналогичные кривые 1 и 2 для выходного
случайного сигнала у (0, построенные в предположении, что слу-
чайные выбросы сигнала y(t) не ограничены. Это имеет место при
малом уровне флюктуаций выходного сигнала, оцениваемом ве-
Рис. 1.23. Прохождение по-
лезного сигнала и шумов че-
рез звено с насыщением.
Случайные колебания изобра-
жены условно
личиной иоу, по сравнению с уровнем насыщения утах- При боль-
шом уровне флюктуаций входного сигнала граница флюктуаций
выходного сигнала в значительной мере определяется уровнем на-
сыщения, как это видно из рис. 1.23, в. В результате полезный вы-
ходной сигнал my(t), изображенный пунктирной кривой 3, искажа-
ется в сторону меньших значений. Другими словами, снижается
статистический коэффициент усиления полезного сигнала, равный
k0 = mylmx (рис. 1.24).
При слишком большом уровне флюктуаций выходного сигнала
по сравнению с уровнем насыщения выходной сигнал будет беспо-
рядочно колебаться между крайними значениями +уmax И —Утах
и его среднее значение my(t) будет близко к нулю. Следовательно,
полезный сигнал практически не будет проходить через звено с на-
сыщением. О таких случаях говорят, что шумы подавляют («заби-
вают») полезный сигнал. Чтобы не допустить существенного сни-
жения статистического коэффициента усиления полезного сигнала.
70
Глава I. Общие сведения о системах управления полетом
обычно стремятся рационально выбирать уровень насыщения и по-
давлять по мере возможности шумы.
Задачи о выборе уровня насыщения элемента, через который
проходит сигнал, засоренный помехами, всегда возникают при
проектировании систем управления, поскольку большинство их эле-
ментов (усилители, измерители, приводы и т. д.) имеют характери-
стики с насыщением.
тхКо
Рис. 1.24. Влияние шумов на статистический коэффициент усиления элемента
с насыщением
6.5. Заключение
Система управления полётом складывается из ряда замкнутых
автоматических систем — в общем случае из систем стабилизации,
наведения и управления скоростью, которые в свою очередь также
могут содержать автоматические устройства с обратной связью,
например, координаторы цели, рулевые приводы и др.
Требования, предъявляемые ко всем этим автоматическим си-
стемам и устройствам, различны. С одной стороны, к ним предъяв-
ляются некоторые более или менее общие требования как к состав-
ным частям системы управления полётом.
С другой стороны, задачи, решаемые автоматической системой
(или устройством) в процессе управления полётом, и конкретные
условия работы обусловливают определенные специфические тре-
бования, которым должна удовлетворять эта система.
Какое-либо отдельное требование может иметь первостепенное
значение лишь для одной автоматической системы и в то же время
быть маловажным для другой системы или для той же системы,
§ 6. Динамические свойства и критерии качества систем управления
71
но в другой области её применения. Так, например, требование к
величине перерегулирования в переходном процессе системы ста-
билизации играет большую роль при полёте летательного аппара-
та в плотных слоях атмосферы, когда нормальные перегрузки
создаются за счёт аэродинамических сил. Если в этих условиях
допустить излишне большое перерегулирование, то оно приведет к
значительным поперечным нагрузкам на конструкцию летательно-
го аппарата и, как следствие, либо к завышенному весу аппарата,
либо к уменьшенному запасу прочности. Понятно, что при полёте
в разреженных слоях атмосферы или за её пределами нагрузки на
конструкцию аппарата создаются только реактивными силами и не
зависят от перерегулирования системы стабилизации.
Основными требованиями, предъявляемыми к системам стаби-
лизации и наведения, а также к различным автоматическим устрой-
ствам с обратной связью, входящим в состав этих систем, явля-
ются требования высоких показателей точности и надежности
системы.
Очевидно, что каждое автоматическое устройство, каждый эле-
мент системы управления полётом должны способствовать высокой
точности и надежности системы в целом.
Надежность автоматической системы в определенной сте-
пени обеспечивается такими динамическими свойствами, как устой-
чивость линейной модели системы и ограниченное перерегулирова-
ние. (При неустойчивости линейной модели системы в реальной
нелинейной системе могут возникнуть автоколебания, а при излиш-
не большом перерегулировании в системе могут возникать опасные
перегрузки). Эти свойства могут быть достигнуты выбором доста-
точных запасов устойчивости по амплитуде и фазе.
Различают статическую и динамическую точность автоматиче-
ской системы.
Статическая точность оценивается ошибками автома-
тической системы в установившемся состоянии (т. е. когда пере-
ходный процесс закончился). Эти ошибки вызываются систематиче-
скими, т. е. неслучайными, воздействиями — управляющим и воз-
мущающими.
Так как системы наведения ракет часто не имеют установив
шихся состояний за счёт быстрого изменения скорости, высоты по-
лета и маневра цели, то ошибки наведения, аналогичные статиче-
ским ошибкам, принято называть установившимися динамически-
ми ошибками наведения, или просто динамическими ошибками
наведения.
Малые статические ошибки (или установившиеся динамические
ошибки наведения) обеспечиваются надлежащим выбором струк-
туры системы (статической или астатической) и достаточно боль-
шим значением передаточного коэффициента разомкнутой систе-
мы. Увеличение этого коэффициента приводит, как известно, к
72
Глава I. Общие сведения о системах управления полетом
повышению точности в установившемся режиме, к снижению чув-
ствительности системы к воздействию низкочастотных возмуще-
ний.
Динамическая точность (или точность в переходном
процессе) характеризует способность автоматической системы вос-
производить управляющий сигнал, следить за его быстрыми изме-
нениями. Необходимая динамическая точность линейной системы
обеспечивается такими ее динамическими свойствами, как доста-
точно высокое быстродействие и хорошее демпфирование (малая
колебательность).
Если быстродействие слишком мало, то система «вяло» и неточ-
но отслеживает управляющий сигнал, «сглаживая» его пики, так
как не успевает реагировать на изменения этого сигнала. Если же
система имеет высокую колебательность, то на управляющий сиг-
нал накладываются собственные колебания системы.
Как было сказано выше, хорошие демпфирующие свойства си-
стемы достигаются выбором достаточных запасов устойчивости, а
высокое быстродействие при данном демпфировании — достаточно
большим значением частоты среза.
Быстродействие автоматической системы всегда имеет некото-
рый оптимум, так как с повышением быстродействия возрастает
чувствительность системы к высокочастотным случайным возмуще-
ниям и, следовательно, увеличиваются случайные ошибки. Кроме
того, повышение быстродействия системы приводит к существенно-
му усложнению ее элементов и, в частности, к повышению мощно-
сти, а также веса и габаритов рулевого привода.
В соответствии с изложенным выше принято считать «хорошей»
ту автоматическую систему, которая имеет допустимые запасы
устойчивости, достаточно высокий передаточный коэффициент ра-
зомкнутой цепи и оптимальную частоту среза.
В процессе проектирования автоматической системы, удовлет-
воряющей этим требованиям, часто возникает следующая задача.
Известна передаточная функция разомкнутой системы ц все её
параметры, за исключением передаточного коэффициента Ко. Необ-
ходимо выбрать величину так, чтобы получить требуемые свой-
ства системы. При выборе этого коэффициента всегда приходится
разрешать противоречивые требования.
Во-первых, передаточный коэффициент разомкнутой системы
влияет на устойчивость и колебательность замкнутой системы.
Как известно, при увеличении передаточного коэффициента Ко за-
пасы устойчивости уменьшаются, колебательность системы возра-
стает и, наконец, при некотором значении Ко система оказывается
на границе устойчивости. Поэтому слишком большое значение Ко
является опасным из-за возможной потери устойчивости линейной
системы, сопровождаемой обычно в реальной системе автоколе-
баниями.
§ 6. Динамические свойства и критерии качества систем управления
73
Во-вторых, при данной передаточной функции разомкнутой си-
стемы величина передаточного коэффициента Ко определяет часто-
ту среза. При малом значении Ко быстродействие системы невели-
ко, она неточно отслеживает управляющий сигнал, но при этом
слабо реагирует на высокочастотные возмущения. Увеличение пе-
редаточного коэффициента Ко приводит к возрастанию частоты
среза (за счёт сдвига вверх вдоль оси ординат логарифмической
амплитудно-частотной характеристики разомкнутой системы) и по-
вышению быстродействия. При этом повышается динамическая
точность и возрастает влияние высокочастотных возмущений.
В-третьих, увеличение передаточного коэффициента разомкну-
той системы приводит к повышению точности в установившемся
режиме и снижению чувствительности системы к низкочастотным
возмущениям.
В наиболее простых задачах все требования к динамическим
свойствам автоматической системы удается удовлетворить надле-
жащим выбором передаточного коэффициента разомкнутой систе-
мы. Однако в большинстве случаев, чтобы разрешить противоре-
чия, связанные с выбором этого коэффициента, приходится изме-
нять структуру проектируемой системы введением корректирующих
звеньев и внутренних обратных связей. Соответствующие методы,
известные в теории автоматического управления как методы кор-
рекции, достаточно подробно изложены в обширной литературе
[6], [18], [20], [21] и др. Применение этих методов к задачам проекти-
рования систем управления полётом будет рассмотрено ниже,
в гл. III—VIII.
ЛИТЕРАТУРА
Учебные пособия по управлению полетом и динамике летательных аппаратов
1. Лебедев А. А., Чернобровкин Л. С., Динамика полета беспилот-
ных летательных аппаратов, Оборонгиз, 1962.
2. Остославский И. В., Стражева И. В., Динамика полета. Траек-
тории летательных аппаратов, Оборонгиз, 1963.
3. Доброленский Ю. П., Иванова В. И., Поспелов Г. С., Авто-
матика управляемых снарядов, Оборонгиз, 1963.
4. Павлов В. А., Понырко С. А., Хованский Ю. М., Стабилизация
летательных аппаратов и автопилоты, «Высш, школа», 1964.
V 5. Т и п у г и н В. Н., В е й ц е л ь В. А., Радиоуправление, «Советское радио»,
1962.
Управление летательными аппаратами
6. Локк А. С., Управление снарядами, Гостехтеоретиздат, 1957.
v 7 Бонни Э. А, Зукроу М. Дж., Бес с ер ер К. У., Аэродинамика. Ре-
активные двигатели. Практика конструирования и расчета, Физматгиз, 1960.
8. Мерилл Г., Гольдберг Г., Гельмгольц Р., Исследование опе-
раций. Боевые части. Пуск снарядов, ИЛ, 1959.
74
Глава I. Общие сведения о системах управления полетом
9. Инерциальные системы управления, под ред. Д. Питтмана, Воениздат,
1964.
10. Конструирование управляемых снарядов, Под ред. Пакета А. Е. и Ра-
мо С., Воениздат, 1963.
11. Крысе нк о Г. Д., Управление реактивными снарядами, Воениздат,
1960.
12. Марисов В. И., Кучеров И. К., Управляемые снаряды (по ино-
странным данным), Воениздат, 1959.
13. Максимов М. В., Гортонов Г. И., Радиоуправление ракетами, «Со-
ветское радио», 1964.
14. Гу тки и Л. С., Принципы радиоуправления беспилотными объектами,
«Советское радио», 1959.
15. Алексеев-К. Б., Бебенин Г. Г., Управление космическим летатель-
ным аппаратом, «Машиностроение», 1964.
ч/ 16. Кочетков В. Т., По ловко А. М„ Пономарев В. М., Теория си-
стем телеуправления и самонаведения ракет, «Наука», 1964.
17. Боднер В. А., Теория автоматического управления полетом, «Наука»,
1964.
Теория автоматического управления и теория вероятностей
18. Основы автоматического регулирования. Теория, Под ред. Солодовнико-
ва В. В., Машгиз, 1954.
19. Основы автоматического управления, Под ред. Пугачева В. С., Физмат-
гиз, 1963.
20. Кузовков Н. Т., Теория автоматического регулирования, основанная
на частотных методах, Оборонгиз, 1960.
21. Красовский А. А., Поспелов Г. С., Основы автоматики и техни-
ческой кибернетики, Госэиергоиздат, 1962.
22. Жиль Ж., Пелегрен М„ Д е к о л ь н П., Теория и техника следящих
систем, Машгиз, 1961.
23. Ивахненко А. Г., Техническая кибернетика (системы автоматического
управления с приспособлением характеристик), Гостехиздат УССР, 1962.
24. Солодовников В. В., Статистическая динамика линейных систем
автоматического управления, Физматгиз, 1960.
25. Солодов А. В., Линейные системы автоматического управления с пе-
ременными параметрами, Физматгиз, 1962.
26. Лифшиц Н. А., Пугачев В. Н., Вероятностный анализ систем авто-
матического управления, т. I и II, «Советское радио», 1963.
27. Попов Е. П., П а л ь т о в И. П., Приближенные методы исследования
нелинейных автоматических систем, Физматгиз, 1960.
28. П ер в о з в а и с к и й А. А., Случайные процессы в нелинейных автома-
тических системах, Физматгиз, 1962.
29. Кринецкий И. И., Расчет нелинейных автоматических систем, Гос-
техиздат УССР, 1962.
30. Казаков И. Е., Доступов Б. Г., Статистическая динамика нели-
нейных автоматических систем, Физматгиз, 1962.
31. Летов А. М., Устойчивость нелинейных регулируемых систем, Физмат-
гиз, 1962.
32. В е н т ц е л ь Е. С., Теория вероятностей, Физматгиз, 1962.
33. Шор Я. Б., Статистические методы анализа и контроля качества и на-
дежности, «Советское радио», 1962.
S 34. В е н т ц е л ь Е. С., Введение в исследование операций, «Советское ра-
дио», 1964. г
§ 6. Динамические свойства и критерии качества систем управления
75
Вычислительная техника
35. Корн Г. А., Корн Т. М., Электронные моделирующие устройства, ИЛ,
1955.
36. Э т е р м а н И. И., Математические машины непрерывного действия,
Машгиз, 1957.
• 37. К о г а н Б. Я., Электронные моделирующие устройства и их применение
для исследования систем автоматического регулирования, Физматгиз, 1963.
38. Китов А. И., К Р и н и ц к и й Н. А., Электронные цифровые машины
и программирование, Физматгиз, 1961.
39. Гнеденко Б. В., Кор о люк В. С., Ющенко Е. Л., Элементы про-
граммирования, Физматгиз, 1963.
40. Криницкий Н. А., Миронов Г. А„ Фролов Г. Д., Программиро-
вание, «Справочная математическая библиотека», Физматгиз, 1963.
Глава II
ДИНАМИЧЕСКИЕ СВОЙСТВА ЛЕТАТЕЛЬНОГО АППАРАТА
В начале данной главы будут кратко изложены без каких-либо
обоснований и доказательств некоторые основные положения дина-
мики летательного аппарата (главным образом уравнения движе-
ния и их линеаризация), подробно рассмотренные в книге «Дина-
мика полёта беспилотных летательных аппаратов» [1]. В последу-
ющих параграфах будут даны дополнительные материалы по
динамическим свойствам летательного аппарата, необходимые для
изучения процессов, протекающих в системе управления. Изложе-
ние вопросов динамики летательного аппарата начнем с рассмотре-
ния его уравнений движения.
§ 1. УРАВНЕНИЯ ДВИЖЕНИЯ АБСОЛЮТНО ЖЕСТКОГО
ЛЕТАТЕЛЬНОГО АППАРАТА
1.1. Система нелинейных уравнений
Обычно полёт летательного аппарата рассматривают как дви-
жение в пространстве абсолютно жесткого тела, имеющего шесть
степеней свободы. Такое предположение при решении большинства
задач не приводит к большим погрешностям, однако довольно ча-
сто встречаются случаи, когда нежесткость конструкции летатель-
ного аппарата существенно влияет на работу системы управления.
В таких случаях летательный аппарат уже нельзя рассматривать
как абсолютно жесткое тело и проходится учитывать деформации
элементов конструкции аппарата. Благодаря нежесткости кон-
струкции летательный аппарат имеет дополнительные степени
свободы. В соответствии с этим система уравнений, описывающая
движение аппарата, становится еще более сложной.
Дальше, в § 1—4 этой главы, будем рассматривать летательный
аппарат как абсолютно жесткое тело и только в конце главы озна-
комимся с методами учёта влияния нежесткости конструкции аппа-
рата на его динамические свойства.
При составлении уравнений движения летательного аппарата
используют общие законы механики, позволяющие в самом общем
§ 1. Уравнения движения абсолютно жесткого аппарата
77
виде записать уравнения движения центра масс аппарата и его
вращательного движения вокруг центра масс. В тех случаях, когда
изучается движение реактивного летательного аппарата, при со-
ставлении уравнений приходится использовать выводы механики
тела переменной массы.
Исходные уравнения движения вначале записывают в вектор-
ной форме, после чего переходят к обычной скалярной записи урав-
нений, проектируя векторные уравнения на некоторую систему ко-
ординатных осей. Полученная система скалярных уравнений
может иметь различный вид в зависимости от того, какой системой
координат пользуются при описании движения летательного аппа-
рата. Выбор системы координат, очевидно, обусловлен характером
рассматриваемой задачи.
Обычно динамические уравнения движения центра масс лета-
тельного аппарата записывают в проекциях на скоростные или на
полускоростные оси. Эти уравнения в полускоростных осях имеют
вид:
m — = Р cos a cos В — X — G sin 0,
dt
mV — =(Psin а-рУ)cos yr+(P cos а sin р—Z)sinyc—Gcos0, (2.1)
— mV cos 0 — = (P sin а ф- Y) sin yc—(P cos a sin p —Z) cos yc.
dt
Здесь m— масса летательного аппарата;
V — его скорость;
Р — сила тяги двигателя;
G—‘сила веса;
X, Y, Z — проекции полной аэродинамической силы на ско-
ростные оси;
0 и Т — углы наклона и поворота траектории;
а и р — углы атаки и скольжения;
ус — угол крена скоростной системы координат.
Динамические уравнения вращательного движения летательно-
го аппарата вокруг центра масс принято записывать в проекциях
на связанные оси Ox\y{Z\. В том случае, когда можно не учитывать
перемещение центра масс и поворот главных осей инерции аппара-
та из-за сгорания топлива, эти уравнения совпадают по форме с
уравнениями тела постоянной массы с той лишь разницей, что мо-
менты инерции зависят от времени. Если связанные оси при этом
совпадают с главными осями инерции, то динамические уравнения
вращательного движения записывают в следующем виде*:
* Для упрощения записи этих уравнений мы опускаем второй индекс «1»>
обозначающий связанные оси Oxiy^Zi.
78
Г лава II. Динамические свойства летательного аппарата
dm,,
Iy^- + <Wx(Ix-I2) = My,
^ + ю/М'У-О = мг.
(2-2)
Здесь lx, Iv, Л — моменты инерции аппарата относительно свя-
занных осей;
co.,., соа, (oz — проекции вектора угловой скорости аппарата
на те же связанные оси;
Мх, Mv, Mz — проекции моментов всех внешних сил.
Сила тяги, аэродинамические силы и их моменты являются
сложными нелинейными функциями кинематических параметров
движения и углов отклонения органов управления. В основном
эти силы и моменты зависят от следующих параметров:
P(V, Н, 8дрУ,
X (а, ₽, бв, 6К, V, Н);
Y (а, 8„, V, Ну
Z®, 6„, V, ну
Мх (а, р, 66, 6„, 6Э, сох, соу, (0г, V, ну
Му®, 8К, ®у, ₽, L V, НУ
Mz(a, 8в, a>z, а, 6в, V, Н),
где 6в, 8Н, 8Э и 8дР — углы отклонения органов управления (на-
пример, рулей высоты и направления, элеронов и дроссельной за-
слонки, служащей для регулирования тяги двигателя), Н — высо-
та полёта.
После динамических уравнений следует записать кинематиче-
ские уравнения, описывающие вращение летательного аппарата от-
носительно земных осей: *.
й?ф 1 / ,
— = —-(со cosy —sin у),
at cos и ’
М . ,
— = (0„stny -4- (О cosy,
_dt у 1 z Y
~ =®х— tg S-(coy cos у—or, sin у),
где ф, й, у — углы рыскания, тангажа и крена.
(2.3)
* Уравнения (2.3) при Ф = 90° вырождаются. Поэтому для исследования
полета с # = 90° необходимо ввести другую систему углов ф, О, у.
$ 1. Уравнения движения абсолютно жесткого аппарата
79
Так как динамические уравнения движения центра масс лета-
тельного аппарата (2.1) были записаны в полускоростных осях,
уравнения вращательного движения вокруг центра масс (2.2) и
(2.3) — в связанных осях, а аэродинамические силы и моменты в
правых частях уравнений (2.1) и (2.2) зависят, в частности, от
углов аир между скоростными и связанными осями, то возникает
необходимость в добавлении к записанным уравнениям геометри-
ческих соотношений между углами Т, 0, ус и углами ф, О, у, р, а:
sin 0 = cos а cos р sin & — (sin а cos р cos у 4- sin р sin у) cos S',
sin T cos 0 = cos a cos p sin ф cos S 4- sin a cos p (cos ф sin у 4-
4- sin ф sin Seos y) — sin p (cos ip cos у — sinф sin S sin у), ।
sin yc cos 0=cos a sin p sin S—(sin a sin p cos у—cos p sin y) cos S. ]
Далее необходимо привести кинематические уравнения движе-
ния центра масс летательного аппарата. Эти уравнения в проекци-
ях на земные декартовы оси имеют вид:
— — V cos 0 cos T,
dt
— =Vsin0,
dt
—=—Vcos 0 sinV,
dt 1
(2-5)
где x, у, z—координаты центра масс аппарата в земных декарто-
вых осях.
Принимая во внимание, что аэродинамические силы зависят от
высоты, следует ввести еще геометрическое соотношение
Н = Н (х, у, z), (2.6)
учитывающее сферическую форму Земли. Если пренебречь этим
обстоятельством и совместить координатную плоскость ху с гори-
зонтальной, то будем иметь
Н — у. (2.6а)
В дальнейшем сферическую фо<рму Земли учитывать не будем.
При наведении с неподвижного командного пункта по лучу или
с помощью команд, формируемых в координатах командного пунк-
та, удобно для описания движения центра масс летательного
аппарата использовать сферическую систему земных осей коорди-
80
Глава II. Динамические свойства летательного аппарата
нат. Тогда в дополнение к уравнениям (2.5) получают:
— = V cos 0 cos (Т — /) cos с? + V sin 0 sin ср,
dt - ' -
'Z г —=—Ecos0 cos(Т—y)sincp-|-Vsin0cos ср,
' Z dt ' '
г cos ср = Vcos0sin(4f— х),
dt
(2.7а)
где г, tp, % — координаты центра масс аппарата в земных сфери-
ческих осях (наклонная дальность, угол места и азимут).
Если командный пункт расположен на движущемся носителе, то,
рассматривая движение летательного аппарата относительно но-
сителя, получают вместо (2.7а) следующие кинематические уравне-
ния:
— = у cos0cos (Т— х)со5ср-(-У sin 0 sin ср —
dt
— VH cos 0,, cos (Тя — x) cos cp — sin &H sin cp,
r~ = — V cos 0 cos (T — /) sin cp V sin 0 cos ср ф-
dt
+ VH cos 0H cos (TH — x) sin ? — sin cos ?,
r cos cp — = V cos 0 sin (T — x) — V„. cos 0„ sin (Тя — /).
(2.76)
Здесь r, cp, x— координаты центра масс аппарата в сферических
осях, перемещающихся поступательно вместе с центром масс но-
сителя; — скорость носителя; 0„ и Тн — углы наклона и пово-
рота траектории носителя.
При самонаведении или наведении с помощью команд, форми-
руемых в координатах летательного аппарата, рассматривают
движение цели относительно летательного аппарата. Тогда полу-
чают кинематические уравнения, аналогичные уравнениям (2.76):
~ cos ©м cos (Тц — х) cos ср ф- V,. sin 0.. sin ср —
— V cos 0 cos (T — x) cos cp — У sin 0 sin cp,
r — V4cos0!!cos(T4—x)sincp +V4sin©4coscp +
ф- V cos 0 cos (ЧГ — y) sin « — V sin 0 cos cp,
r cos ср = Уц cos 0H sin (TM — x) — У cos 0 sin (T — x),
(2.7b)
где r, q>, x — координаты центра масс цели в сферических осях,
перемещающихся поступательно вместе с центром масс летатель-
§ 1. Уравнения движения абсолютно жесткого аппарата
81
ного аппарата; V4 — скорость цели; и — углы наклона и по-
ворота траектории цели.
Кроме записанных уравнений движения летательного аппарата,
необходимо еще использовать дифференциальное уравнение, опи-
сывающее изменение массы:
= (2-8)
где /Исе» (V, Н, бэр) —секундный расход топлива, зависящий от
типа двигателя, режима его работы, скорости и высоты полёта.
Уравнения (2.1) — (2.8) составляют систему уравнений движе-
ния летательного аппарата, рассматриваемого как абсолютно
жесткое тело *. Она содержит четыре лишних неизвестных. Чтобы
система уравнений движения летательного аппарата стала замк-
нутой, необходимо или задать четыре функции параметров движе-
ния и времени, или задать отклонения органов управления
в функции времени, или добавить уравнения, описывающие про-
цессы управления отклонениями этих органов.
1.2. Линеаризация уравнений
Система уравнений (2.1) — (2.8), характеризующая движение
летательного аппарата, является очень сложной системой нели-
нейных дифференциальных уравнений. Сложные нелинейные зави-
симости имеют место, в частности, в правых частях уравнений (2.1)
и (2.2), записанных в общем виде и представляющих собой состав-
ляющие сил и моментов, действующих на летательный аппарат.
Основные методы исследования нелинейных уравнений (2.1) —
(2.8) связаны с предварительным их упрощением. Одним из таких
упрощений, как уже отмечалось, является линеаризация этих урав-
нений относительно малых отклонений параметров движения от их
значений для некоторого теоретического (невозмущенного) движе-
ния. Параметры невозмущенного движения обычно определяют -
приближенно с помощью численного интегрирования уравнений
движения центра масс летательного аппарата **
Рассмотрим особенности линеаризации уравнений движения ле-
тательного аппарата на примере, первого из уравнений (2.1)
tn — = Pcosa — X— Gsin©. (2.9)
dt
Для наглядности предположим, что движение аппарата проис-
ходит в одной и той же вертикальной плоскости, т. е. р = 0 и
* В этих уравнениях не учитывается также влияние ветра и суточное вра-
щение Земли.
** Методы расчета невозмущенного движения могут быть различными в за-
висимости от характера рассматриваемой задачи. Некоторые из них рассмот-
рены в книге {1] (см., например, гл. XI, § 4).
82
Глава II. Динамические свойства летательного аппарата
дн = 0. Будем считать, что масса аппарата и тяга двигателя яв-
ляются известными функциями времени m(t) и P(t), а лобовое
сопротивление X зависит от угла атаки, скорости и высоты полёта:
Х(а, V, Н).
Параметры невозмущенного движения являются известными
функциями времени. Будем отмечать их индексом «*»: а* , V *,
Н*, 0*. Невозмущенное (теоретическое) движение описывается
одним из частных решений системы уравнений управляемого дви-
жения летательного аппарата. Поэтому должно быть справедливо
тождество
,П^Г= Pcosa* —V*> Я*) —Gsin0* (2.Ю)
at
Параметры действительного (возмущенного) движения отли-
чаются от параметров теоретического (невозмущенного) движения:
V -- И* + ДИ; 0 = 0* + Д0; a ~ а* + Да; Н = ХН.
Кроме того, на летательный аппарат в возмущенном движении
действуют силы, отсутствовавшие в невозмущенном полёте или не
принимавшиеся во внимание при расчёте невозмущенного полёта.
Обозначим эти силы через Хв и назовем их возмущающими.
Придавая параметрам V, 0, a, Н в уравнении (2.9) приращения
ДИ, Д0, Да, ДЯ и учитывая возмущающие силы, получим
m = р cos (a* + Да)-X (а* + Да, И* + ДИ, Н* + \Н) -
at
— Gsin (0* + Д0)+Ag. (2.11)
Предположив, что отклонения параметров движения от их не-
возмущенных значений являются достаточно малыми, разложим
все функции в уравнении (2.11) в ряд Тейлора по степеням прира-
щений ДИ, Д0, Да и \Н. Сохранив в этих рядах члены не выше пер-
вой степени, найдем
m^- +т^~ ==Pcosa* — Psina-Да — X (а*, И*, НД —
(дХ\ . /дХ\ Ат/ /дХ\ ,гг
— — Да — — 1 ДИ — — dH —
\Оа /а=а* / а=а* \дН J
Г=Ж. V=V, V=V-.
Н=Н, Н=Н. Н=Н,
— GsinO* — Geos 0* ДН Д-Хв.
Учитывая тождество (2.10), получим -
/п ^ == — Р sin аДа — №Да — АТДИ — ХНЬН —
— Geos 0Д0 + X,..
(2.12)
§ 1. Уравнения движения абсолютно жесткого аппарата
83
Здесь для упрощения записи опущен индекс «* » при парамет-
рах опорного теоретического движения. Кроме того, введены обо-
значения, которыми обычно широко пользуются:
X* =(
Как видно, верхний индекс указывает на производную по соот-
ветствующей переменной. Хотя нижний индекс «* » опущен, сле-
дует иметь в виду, что эти производные вычисляются для значений
параметров движения, отвечающих опорной теоретической траек-
тории.
Для примера найдем развернутое выражение для одной из про-
изводных, а именно Xv. Учитывая, что коэффициент лобового со-
противления сх зависит от угла атаки а и числа М = V/a, где а —
скорость звука, зависящая от высоты полёта Н, можно записать
ХУ = / —'l
IdV /а=а^
/ \ т/ о I / дсх 0
— сх (а*> + I —- — —— S.
\ ОМ dV а=а, 2
Обозначив
8
получим
Xv = (сх, + £ p^S.
Коэффициент сх и производную с1^ можно вычислить по гра-
фику сДа, М) для заданных значений а* и М
Аналогично вычисляются производные Ха, Хн и др.
С целью упрощения получаемых линеаризованных уравнений
обычно принимают ряд допущений, которые чаще всего сводятся
к следующему.
Учитывая, что в невозмущенном движении углы а* и Р* обыч-
но невелики, полагают, что sin а* ~а*, sin р* ~ р* , cos а* »
« cos Р* « 1.
Предполагают, что составляющие угловой скорости вращения
летательного аппарата в невозмущенном полёте , <оу*, ®2*
являются малыми величинами. Поэтому после линеаризации от-
брасывают, как величины второго порядка малости, все члены, в
которые входят произведения угловых скоростей , ®у*, ®г*
друг на друга и на вариации параметров движения. Такое упроще-
84 Глава II. Динамические свойства летательного аппарата
ние поясним примером линеаризации второго из уравнений (2.3)
= «У sin у + ®гcos у. (2.13)
После линеаризации получим
= sin узЛШу + cos у*Ду + cos у*Л(Ог — sin у^Ду.
Члены с произведениями Ду и <£ц*Ду отбрасываем как малые
второго порядка. Окончательно получаем
= sin уД<ву 4- cos уД®г. (2-14)
Как будет видно в дальнейшем, линеаризованные уравнения
можно существенно упростить, если предположить, что в невозму-
щенном движении боковые кинематические параметры 0*, тс*, у*,
а также углы отклонения органов управления боковыми движения-
ми и 6Э* являются достаточно малыми величинами. Это до-
пущение в большинстве случаев не является грубым, особенно для
аппаратов, у которых применяется стабилизация крена и траекто-
рия которых лежит в пределах сравнительно небольшого простран-
ственного угла. Кроме того, можно выбрать направление земной
оси Ох0 таким, чтобы значения углов V и ф изменялись бы в не-
больших пределах около нулевого значения. Приняв эти предполо-
жения, можно считать косинусы соответствующих углов равными
единице и отбрасывать члены с произведениями боковых парамет-
ров на другие малые величины. Например, вместо уравнения
(2.14) получают
Очень часто при линеаризации уравнений пренебрегают вариа-
циями высоты ДЯ, так как их влияние на другие вариации пара-
метров движения мало. Поэтому учитывать вариации высоты име-
ет смысл только в том случае, если высота является одной из ко-
ординат, подлежащих регулированию, и система управления для
осуществления такого регулирования имеет соответствующий изме-
рительный элемент.
Выполнив линеаризацию всех уравнений системы (2.1) — (2.8),
получают систему линейных дифференциальных уравнений, при-
чём с переменными коэффициентами в общем случае. Это можно
видеть на примере линеаризации уравнения (2.9). Если в невоз-
мущенном полёте параметры V* , Я*, 0*, а* изменяются со вре-
менем, то коэффициенты уравнения (2.12) являются переменными.
Так как летательные аппараты имеют обычно плоскость симмет-
рии Охгу1, то при указанных выше упрощениях линейная система
уравнений движения летательного аппарата распадается на две
независимые подсистемы. В первую входят переменные ДУ, Д0,
§ 1. Уравнения движения абсолютно жесткого аппарата
85
A®z, Aft, Да, А//, Ах (или Аг, Аср), а во вторую — переменные АТ,
А®х, Аыу, Дф, Ау, Дус, др и z (или /) и, следовательно, эти подсис-
темы не имеют общих переменных. Первая подсистема уравнений
определяет продольное возмущенное движение летательного аппа-
рата, а вторая — боковое возмущенное движение. При условиях,
использованных при линеаризации уравнений, эти два движения
можно считать независимыми.
Разделение общего движения летательного аппарата на про-
дольное и боковое является весьма существенным упрощением, так
как в значительной степени облегчает задачу исследования движе-
ния аппарата. Вместо того чтобы исследовать систему уравнений
высокого порядка, исследуют две независимые системы уравнений
более низкого порядка. Такой метод исследования движения лета-
тельного аппарата широко применяется и, как показывает практи-
ка, не приводит к большим погрешностям. В этой книге продольное
и боковое движения также будут изучаться независимо одно от
другого.
Запишем две линейные системы дифференциальных уравнений
движения летательного аппарата, полученные путем линеаризации
уравнений (2.1) — (2.8) при указанных выше допущениях *.
Уравнения продольного движения летательного аппарата с
учётом возмущающих сил и моментов Хв, Ye, Zg, Мхв, Мув, Mza запи-
шутся в виде:
dXV Pv — XVA1/ Ра-V Ха А ПАЛ X8«as , Хв
—— —---------AV-------— Да—g cos 0А0-------A6e-I—
dt m m mm
d^e = P^ + Yv ,
dt mV
p+Xl^+s^>^ +
mV V
yse у
— A6e+J_L,
mV mV
dXmz
dt
(2.16)
dXtt
dt
Д®г,
Да = Д&— A0,
= cos t'AV — V sin 0A9,
— = sin hav + v cos еде.
dt
Линеаризация уравнений (2.1) — (2.8) более подробно изложена в книге [1].
86
Глава II. Динамические свойства летательного аппарата
Уравнения бокового движения
r. dM P — Z?
COS 0 ----- = ---------
dt mV
Pa,-\-Y л
A₽-------т—ДУ,
mV
mV н mV
d^(o
~~dT
d&Oy
dt ''
X
h
д«₽ ... .
= др + д®х+ -ц- д®у+
Л4 э М & пд
+ -^Мз+-^Мн+^>
*Х 1х *х
„ м*х
Мх
(О
му
M x M v
= —рДр+ yLA(0x+ > дю +
1 ‘y ‘y
I Sh 8
-ДЗ+^Д6н+^А6н+^.,
У ‘У ‘У ‘у
^ = _ЬД(0
dt cos ft у
~ = А®х—tg»A®y,
Д₽ = cos @Д-ф — cos ©AV + аДу,
ДТ =tg0A₽+ ^^Ат,
cos В
^£ = —ycos ед1?.
dt
(2.17)
)
Линеаризация кинематических уравнений, описывающих изме-
нение сферических координат г, <р, х, будет рассмотрена ниже,
в гл. VII и VIII.
§ 2. ПРОДОЛЬНОЕ ВОЗМУЩЕННОЕ ДВИЖЕНИЕ
2.1. Уравнения движения
и соответствующие им передаточные функции
Проведем анализ динамических свойств продольного возмущен-
ного движения. Очевидно, что первые четыре уравнения системы
(2.16) можно исследовать независимо от кинематических уравне-
ний, описывающих изменение Дх и Д/7, так как эти ва'риации не
входят в первые уравнения. Запишем систему уравнений (2.16),
используя для упрощения записи сокращенные обозначения коэф-
фициентов уравнений, принятые в [1]. Предварительно исключим
§ 2. Продольное возмущенное движение
87
вариацию Д®г с помощью уравнения
dAft А
---- = Дсщ.
dt z
Тогда уравнения продольного движения (2.16) примут вид:
+ а00Д V + а02Да + аО4Д0 = — <203Д6 + а06Хс,
at
Л1, , d2A'O' . dA’O' , ’ d&a .
Н—— + ап —— + а 12 —— + о12Да —
dt2 dt dt
' dA§ A S I ЛЛ
= —an —--------als^8 + a15Mze,
at
а40ДУ + а42Да + а44Д0 — = —а43Д6 + а4БУв,
at
— ДО + Да + Д0 = 0.
(2-18)
Динамические коэффициенты связаны с аэродинамическими
и конструктивными характеристиками летательного аппарата сле-
дующими формулами:
°00 — Xv— Pv ,, 1 сек, т ’ ха+ Ра . 2 «02= М/сек2,
аоз = X5* м/сек2, т aoi = geos 0 м/сек2,
а1о — mvz 1/м-сек, <0- Мгг , а-п = т~ 1/сек,
«12 = Мг , у— 1/се№, *z Мг , 012 = т~ 1/сек, 1Z
013 = MzSe — 1/сек2, м1в 013= 1/сек, Iz (2-19)
а«о = Pva+ Yv , . тт 1/-«, mV ‘ ’ P+Y* ,, «42 = 1/сек,
а43 = у5« 1 /сек, mV o44 = -^-sin0 1/сек,
«05 = — м/кГ*сек\ т Ou = у- 1/кГм-сек2, *z
— —\/кГ-сек. mV
В выражениях (2.19) коэффициентов уравнений (2.18) все па-
раметры движения, в том числе углы а и 0, соответствуют невоз-
88
Глава II. Динамические свойства летательного аппарата
мущенной траектории и, следовательно, эти коэффициенты яв-
ляются известными функциями времени.
Ниже для выяснения некоторых общих свойств продольного воз-
мущенного движения летательного аппарата будем использовать
прием «замораживания» коэффициентов. О допустимости этого
приема с достаточной для практики достоверностью можно судить
только после анализа конкретных характеристик летательного ап-
парата и системы стабилизации с помощью вычислительной тех-
ники. При общих исследованиях приходится ограничиваться следу-
ющей чисто качественной оценкой.
Для того чтобы можно было применять метод «замораживания»
коэффициентов, необходимо, чтобы эти коэффициенты изменялись
достаточно медленно. Это означает, что в течение интервала вре-
мени, равного времени переходного процесса исследуемой систе-
мы, ее переменные коэффициенты не должны успевать заметно
^изменяться. Практически это изменение не должно превышать
15-и 20% от начального значения коэффициента на указанном ин-
тервале.
Заключение о возможности применять метод замораживания
коэффициентов зависит не только от конкретных характеристик
летательного аппарата и системы стабилизации, но и от того, какая
составляющая продольного возмущенного движения нас интере-
сует,— быстро затухающая или медленно затухающая.
Как известно, продольное возмущенное движение любого ле-
тательного аппарата можно представить в виде суммы двух дви-
жений: быстро затухающего (короткопериодического колебатель-
ного или апериодического) движения и медленно затухающего
(длиннопериодического колебательного или апериодического) дви-
жения [1]. Первое из них будем называть быстрым, а второе — мед-
ленным движением.
Обычно за время затухания быстрого движения, которое имеет
порядок долей секунды или нескольких секунд, переменные коэф-
фициенты уравнений движения летательного аппарата не успевают
заметно изменяться. (Темп изменения этих коэффициентов опре-
деляется быстротой изменения скорости и высоты полёта). Поэтому
при исследовании быстрых движений обычно можно применять
метод «замораживания» коэффициентов, не допуская при этом
заметной погрешности.
Напротив, медленное движение уже существенно зависит от
характера изменения коэффициентов уравнений, так как время за-
тухания этой составляющей движения велико и измеряется десят-
ками и даже сотнями секунд. За такое время переменные коэффи-
циенты уравнений могут существенно измениться, и при использо-
вании метода «замораживания» коэффициентов для анализа
медленного движения можно получить ошибочный результат.
§ 2. Продольное возмущенное движение
89
Поэтому исследование системы уравнений продольного движе-
ния (2.18) путем «замораживания» коэффициентов имеет в опре-
деленной степени условный характер: изучаются динамические
свойства летательного аппарата, которые он имел бы, если бы, на-
чиная с данного момента времени, коэффициенты уравнений оста-
вались постоянными. Такой анализ следует рассматривать как
качественный. Он допустим при условии, что коэффициенты урав-
нений изменяются достаточно медленно, при этом не следует за-
бывать об условности получаемых результатов.
Рассматривая коэффициенты уравнений (2.18) как величины
постоянные, можно эти уравнения преобразовать по Лапласу (при
нулевых начальных условиях) и в дальнейшем оперировать с ни-
ми, как с алгебраическими уравнениями. После выполнения преоб-
разования Лапласа уравнения (2.18) запишутся в операторной
форме:
(Р А а00) ДР (р) + а02Д« (Р) А «мд0 (Р) = — «озд6 (р) А
A «05 А (Р),
«10Д^ (Р) А (Р2 + «11Р) Да> (Р) А («!2Р + flis) Да (Р) =
= — (а(3Р + а13) Дб (р) + а1ъМ2в (р),
а40ДУ (р) 4- а42Да (р) ф (а44 — р) Д0 (р) = — а43Дб (р) ф
А«4бА (Р),
— Д9- (р) ф Да (р) ф Дв (р) = 0.
Определитель этой системы равен
Р А «00 0 «02 «04
- 2; «ю Р(р + «н) «1'2Р + «12 0
А VP а40 0 а45 а44 — р
1 А 16.
= р4 А Ар3 А Ар2 +АзР A А,
где
А — «00 4" «и Ф «12 А «42---------- «44,
А == «00 («11 А «1 2 А «42 «44) А «40 («04 «02) А
А («11 + «1'2) («42 — «44) — «1'2«42 А «12,
А = «00 [(«11 А «12) («42 ------«44) А «12] А «40 («04 «02) X
X («П А «]2) «02«10 А «12 («02«40 «00«Г’) «12«14,
А 4 = «00«12«44 А («04 «0г) («40«12 «10«42)
«02 1«10 («42 «41) «40«1г]-
(2.20)
(2.21)
(2.22)
90
Глава II. Динамические свойства летательного аппарата
Используя систему уравнений (2.20), можно определить все
передаточные функции летательного аппарата, характеризующие
его продольное возмущенное движение. Так как в этом движении
изменяются вариации AV, А0, Aft и Аа, являющиеся выходными
величинами, а входными величинами являются управляющее воз-
действие А6в и возмущающие воздействия Хв, Ув, Мгв, то для каж-
дой пары входных и выходных величин можно записать свою пере-
даточную функцию.
Рассмотрим в качестве примера вывод передаточных функций
летательного аппарата для выходной величины Aft. Решая систему
алгебраических уравнений (2.20) относительно Aft(p), получим
Aft = 77Т
А (р)
Р 4" «00 «ОЗ^^в -р «05^в
«ю —(а;зр+а13)Абв+й15Мгв
«о о «43Абв -р <з45Ув
о о
«02 «04
«12Р4"«12 0
«42 р
1 1
(2.23)
Это соотношение определяет передаточные функции летатель-
ного аппарата для случая, когда входными величинами являются
Абв, Хв, Ув и Mze.
Раскрыв определитель, получим следующее выражение:
АЙ' (р) = Wt(p) Абв (р) +Г1(р) Хв (р)+^(р)¥Й (p)+W^p)Mze(p), (2.24)
где (р) = ..., Я?®, (р) = — передаточные функ-
ции летательного аппарата, соответствующие различным входным
величинам (в обозначениях передаточных функций нижний индекс
отвечает входной величине, верхний — выходной).
Так, например, передаточная функция ^g(p) определяется
выражением
W'l (р) = (2.25)
где
—а;3,
S2 = Ц]3 («00 + «42 аи) 4" «43«12 «13,
^3 = «1з[«00 («42 «44) 4" «40 («04 «0г) 1 «03 («40«]2
«1о) 4" «43 («00« J 2 4“ «1з)-«13 («00 4* «42 «44),
В4 = «03 [«10 («42 «44) «40«1г1 4" «43 [«00«12 4" «10 X
X («04 «0а)1 «13 [«Оо(«42- «11) 4- «40 («04 «Ог)!*
(2.26)
§ 2. Продольное возмущенное движение
91
Аналогично можно определить и другие передаточные
функции летательного аппарата, принимая за выход-
ные величины AV, Aft, А€) и Да, а за входные Абв, Хв, Ув и Mze.
Для построения частотных характеристик летательного аппара-
та и исследования его динамических свойств требуется разложить
на элементарные множители числители и знаменатели пере-
даточных функций аппарата. С этой целью необходимо предвари-
тельно определить корни числителя и знаменателя. Методы
определения корней полиномов, получившие наибольшее распрост-
ранение в практике вычислений, подробно изложены в литературе
по теории автоматического управления [5], [6], [7], [8].
2.2. Характеристическое уравнение
Разложение на множители
Как известно [1], корни знаменателя передаточной функции
(2.25), т. е. характеристического полинома
А (р) — Р* + Ар3 + Др2 + Др + А, (2 27)
очень сильно отличаются друг от друга по модулю: они разделяют-
ся на два малых и два больших. Это явление типично для продоль-
ного возмущенного движения любого летательного аппарата. По-
этому при анализе характеристического полинома (2.27) целесооб-
разно представлять его в виде произведения двух квадратичных
трехчленов
Л(р) = Д(ар24-6р+ 1)(а0Р2 + Др+ М- (2-28)
Первый из этих трехчленов соответствует паре больших кор-
ней, т. е. быстрому движению, второй (с индексами «О») — паре
малых корней и медленному движению. Дальнейшее разложение
на множители квадратичных трехчленов зависит от распределения
их корней на комплексной плоскости, что зависит уже от динами-
ческих свойств данного летательного аппарата. Разложение на
множители квадратичного трехчлена вида ар2 + bp + 1 приведено
в табл. 2.1.
В дальнейшем для сокращения записи трехчлен, характеризую-
щий быстрое движение, будем записывать в виде Т2р2 + 2g7’p + 1,
имея в виду, что он может распадаться на два множителя в соот-
ветствии с табл. 2.1. Квадратичный трехчлен, соответствующий ма-
лым корням характеристического уравнения, условимся также за-
писывать в общем виде т2р2 + 2g/rp + 1, не занимаясь детально
его структурой. Таким образм, характеристический полином мо-
жет быть представлен в виде
А (р) = Л (Гр2 + 2^Тр + 1) (т2р2 4- 21-ттр +1). (2.29)
92
Глава IJ. Динамические свойства летательного аппарата
Таблица 2.1
Разложение на множители квадратичного трехчлена ар2 4- Ър 4- * **
Корни трехчлена
Знак— Дискриминант £
Множители трехчлена
Пара комплексных соп-
ряженных с отрицатель-
ной вещественной частью
62 — 4а < О £ < 1 Т2р2 + Ч'ДГр + 1
Кратные вещественные
отрицательные
fe2 — 4а = О £ = 1 (7> + 1)2
Вещественные отрица-
тельные
Ь2 — 4а > О Е, > 1
(Т'р + 1)(Т''р+1)
Нулевой и веществен-
ный отрицательный
Вещественные отрица-
тельный и положительный
р(Тр + 1)
(Т'р + 1)(Т"р+1)
Т’ < о
* В отличие от книги [1], где все постоянные времени считались положительными, и мно-
житель, соответствующий положительному корню, записывался в виде — (Т'р — 1), здесь
постоянные времени рассматриваются как алгебраические величины и положительному корню
отвечает множитель Т'р-[- 1, где Т’ < 0.
Приближенный способ определения корней
Благодаря тому, что две пары корней характеристического по-
линома (2.27) сильно отличаются друг от друга по модулю, для их
определения могут быть использованы различные приближенные
способы. Простейший из них состоит в решении двух квадратных
уравнений:
^ + Др+Л = 0; (2.30)
Лар3 + АР + Л = 0- (2.31)
Первое из них определяет большие корни, второе — малые. По-
лученные таким путем значения корней можно при желании уточ-
нить (7].
Рассмотрим приближенное определение больших корней с
помощью уравнения (2.30). Это уравнение, как видно, получено из
характеристического уравнения
Л (р) = pi Д- Л4р3 -р Л2р2 4- А3р 4- Л4 = 0 (2.32)
путем отбрасывания членов А3р и Л4. Поскольку, положив Л3 =
= А4 =0, мы пошли на весьма существенное упрощение задачи, то
чтобы быть последовательным, целесообразно соответственно
упростить и выражения для коэффициентов At и Л2. Нетрудно ви-
деть, что Л3 и Л4 обращаются в нуль, если положить, что
aot = ako = 0 и аи = 0, (2.33)
$ 2. Продольное возмущенное движение
93
(2.35)
т. е. если пренебречь вариациями скорости ДУ и влиянием силы
тяжести на возмущенное движение. Приняв это допущение, полу-
чим, что большие корни характеристического уравнения (2.32)
могут быть приближенно найдены, как корни квадратного уравне-
ния
Р3 + А\р + А; = 0, (2.34)
в котором
А1 = йц 4* ®12 4" O42,
Л2 = 012 4“ ОцО42
Для иллюстрации сказанного приведем пример. Рассмотрим
полет реактивного самолёта на высоте 12000 м со скоростью
800 км1час [1], [9]. Коэффициенты уравнений (2.18) имеют следую-
щие значения: Соо = 0,0134 1/сек; с02 = 9,35 м/сек2; аоз = 0; а04 —
= 9,81 м/сек2; а10 = 0; оп = 0,49 1/сек; а12 = 2,98 1/сек2; aj2 =
= 0,22 1/сек; а13 — 2,32 1/сек2; oj3 = 0; а40 = 0,0007 1/м; с42 =
= 0,577 1/сек; а43 = 0; а44 = 0. В этом примере характеристический
полином
р4 + 1,299р« + З,278р3 + 0,0455р + 0,0201
имеет две пары сопряженных комплексных корней:
р! ,2 = — 0,644 + 1,687/; р3.4 = — 0,0056 + 0,0783/.
Корни квадратного уравнения (2.30)
р3 + 1,299р + 3,278 = 0
равны
Pi, 2 = — 0,650 ± 1,690/,
а корни уравнения (2.34)
р2+ 1,287р 4-3,263 = 0
равны
Р1,2 = —0,6435 ± 1,688/,
т. е. практически не отличаются от «точных» значений корней.
Корни уравнения (2.31)
3,278р3 4- 0,0455р + 0,0201 = 0
равны
Рз ,4 ==—0,0069 + 0,0780/.
Как видно, большие корни характеристического уравнения
(2.32) с достаточной для практики точностью могут быть найдены
как корни характеристического уравнения (2.34) упрощенной си-
стемы уравнений, полученной в результате пренебрежения вариа-
циями скорости и влиянием силы тяжести на возмущенное дви-
жение *.
* Эта система уравнений приведена ниже, в § 3, см. (2.73).
94
Глава II. Динамические свойства летательного аппарата
2.3. Реакция угла тангажа
на отклонение органов управления
Определение реакции угла тангажа на отклонение органов уп-
равления необходимо при проектировании и исследовании системы
стабилизации, в которой при помощи свободного гироскопа изме-
ряется отклонение угла тангажа от некоторого заданного значе-
ния. При помощи такой системы может быть реализован полет
по программе (см. пример в гл. I, разд. 1.2).
Реакция угловой скорости тангажа на отклонение органов уп-
равления важна при проектировании системы стабилизации, в ко-
торой для формирования управляющего сигнала измеряется эта
угловая скорость, например, посредством дифференцирующего
гироскопа. Такие системы стабилизации получили широкое рас-
пространение (см. ниже, гл. V).
Разложение передаточной функции W'^(p)
на множители
Реакция угла тангажа на отклонение органов управления опи-
сывается передаточной функцией (2.25)
(р\ — В%Р2 + — В (2 36)
Р4+-^1Р3+^2Р2+^зР+^4 (Р)
в которой коэффициенты AIt...,A4 и В\,... ,В4 определяются фор-
мулами (2.22) и (2.26).
Для приближенного разложения на множители числителя пе-
редаточной функции (2.36)
В (р) = В1Р3 + В2р* + В3р + В, (2.37)
воспользуемся свойствами продольного возмущенного движения.
Корни полинома В(р), соответствующие быстрому движению,
найдем, положив в выражениях (2.26) коэффициенты aOi, и a4i
равными нулю. Это будут корни квадратичного трехчлена *
В'(р) = Вхр® + В'р + В', (2.38)
так как В4 обращается в нуль. Здесь
В1 = — <3,
^2 = ^13^42 4" ^43^12 ^13>
В % ^13^42 4" ^12^43’
(2.39)
* Квадратичный трехчлен (2.38) совпадает с числителем передаточной функ-
ции (2.74), полученной в предположении, что ДР и а44№ равны нулю. Разло-
жение этого трехчлена на множители представлено в табл. 2.2 на стр. 112.
§ 2. Продольное возмущенное движение
95
Корни полинома (2.37) сильно отличаются друг от друга по
модулю: он имеет два больших и один малый корень. Поэтому
старшие члены этого полинома
В1Р2 + В2р + В3 В1Р* + В'2р +В'. (2.40)
определяют два больших корня, соответствующих быстрому дви-
жению, а младшие члены полинома (2.37) В3р + В4 определяют
малый вещественный корень, соответствующий медленному движе-
нию. Этот корень приближенно равен
* Р3-~~. (2-4!)
&3
Рассматривая пример с тем же реактивным самолётом, найдем,
что полином в числителе передаточной функции (2.36) имеет вто-
рой порядок, так как В\ = 0:
— (2,32р2 + 1,370р + 0,01868),
причём его корни равны р\ — —0,576 и рз = —0,0140.
Приближенное значение малого корня
р - — h. = _ °д0^6-8 = — 0 0136.
3 в3 1,370
Приближенное значение большого корня находим из уравнения
* 2,32р+ 1,370 = 0,
т. е.
1,370 п ГПП
р, —-------= — 0,590.
1 2,32
Учитывая сказанное выше, полином в числителе передаточной
“ функции (2.36) можем разложить на множители следующим об-
разом:
S(P) = B4(7’1P+1)(7,2P+0(^+1), (2.42)
где Т{ и Т2 — постоянные времени, соответствующие быстрому
, движению, а г, — постоянная времени, отвечающая медленному
движению *.
Таким образом, передаточная функция летательного аппарата
‘ (2.36) может быть представлена в виде
_______ К’ (Т 4" 1) (РзР + 1) (Т1Р + 1) /о
^8 (Р) — As (Г2р2 2^Тр + (т2р2 2Гтр + 1)~ ' 1-1
если В{ — —а'3 0, или в виде
’ — А”9 _____(Т1Р + 1) (Т1Р + 1)_ m
Wъ(р) - Л5 (Т2р2 + 22Гр + р (Т2Р2+2ЕТТР +1) ’ { '
если В{ = —а'хз = 0.
* Постоянные времени 7\ и Г2 приближенно определяются выражениями
(2.108) и (2.116,) а т — формулой т = — 1/р3.
96
Глава II. Динамические свойства летательного аппарата
В этих формулах
Xf = —----передаточный коэффициент летательного аппа-
Л4
рата;
Ть т, —параметры, соответствующие медленному движе-
нию;
Ть Т2) Т, |—параметры, отвечающие быстрому движению.
Для рассматриваемого реактивного самолёта:
Д’® = —0,929; 7 = 0,544 секи g = 0,357; т = 12,73 сек и
Ь= 0,0713; ?! = 1,762 сек; Т2 = 0, П = 71,43 сек.
В качестве второго примера приведем результаты разложения
на элементарные множители передаточной функции (2.36) для бал-
листической ракеты типа V-2 на 50-й секунде активного полёта:
= Kt,-----giP+iH^+J)---------- (2.45)
(Т2р2 + 2$Гр + 1) (т2р+1) (т3р+1)
Здесь К|= —4,125; Т = 0,23 сек; 5, = 0,06; = 3,4 сек;
Т2 = —210 сек; тз = 100 сек; ti = 75 сек.
Из рассмотренных примеров видно, что быстрое движение ле-
тательного аппарата характеризуется постоянными времени, изме-
ряющимися долями и единицами секунд, тогда как постоянные вре-
мени, определяющие медленное движение, измеряются десятками
и сотнями секунд.
Характерной особенностью передаточных функций летательного
аппарата при полете с достаточно большим положительным углом
наклона траектории, например, передаточной функции (2.45), яв-
ляется наличие в выражении передаточной функции аппарата од-
ного или двух неустойчивых апериодических звеньев с большой
постоянной времени. Это обстоятельство говорит об апериодиче-
ской неустойчивости медленного движения и объясняется влиянием
силы тяжести, в чем нетрудно убедиться из третьего уравнения си-
стемы (2.18). Действительно, угловая скорость
— = JLsin GAG, (2.46)
dt V v
обусловленная действием силы тяжести, имеет одинаковый знак
с AG, когда G > 0.
2.4. Реакция угла наклона траектории
и угла атаки на отклонение органов управления
Определение реакции угла наклона траектории G на отклонение
органов управления необходимо при проектировании и исследова-
нии такой системы стабилизации, в которой выходной величиной
служит угол G или угловая скорость касательной к траектории
0. Первый случай может иметь место при исследовании движения
§ 2. Продольное возмущенное движение
97
(2.47)
самонаводящихся летательных аппаратов, второй — при исследо-
вании полёта телеуправляемых аппаратов.
Реакция угла наклона траектории на отклонение органов уп-
равления описывается передаточной функцией
__ 7?1Р3 4- С2р2 4 СзР 4~ С4
pi 4- 4р3 4- &гР2 4- АзР-\~ 4
в которой коэффициенты Л1,...,Л4 определяются формулами
(2.22), а коэффициенты С\, . . ., С4 формулами:
С4 = я43,
С3 = <243 (<200 4" «11 4- а 12) <21 з<242 «оз«4О>
77з=<243 [<200 (а414- <212) 4* а12] — <2i3<242 4 «13 («ог«4о «оо«4г)
— «оз«и («11 + «12),
С4 = <243 (<2w<242 <2ц)<202) 4" «13 («02«40 «00«4з) 4
4 «93 («10«42 ' «4С«1а)-
Реакция угловой скорости касательной к траектории, очевидно,
определяется передаточной функцией
0 _ р (CiP3 4 С2р2 4- С3р 4- С4)
р4 4 Д1Р3 4 АъР2 4 71зР 4^4
Реакция угла атаки на отклонение органов управления описьь
вается передаточной функцией
(n)= Т71Р3 4 РгР2 4 DzP 4 74
pi 4 ^щ3 4 ^гР24 ^зр4 ^4
(2.48)
(2.49)
(2.50)
где
Dl = —<213 — «43,
T-lj = <243 («оо 4 «11) <21з «13 («00 <2M) 4* «оз«4о,
7)3 = ^43^00^11 «13 («00 «44) 4 «1 3 («00«44 «40«0d) 4
4- a03 (<210ац -f- o10),
7^4 = «43<2i14<204 4- als (<200a44 «oi«<io) «оз«1о«44-
(2.51)
)
Передаточные функции (2.47) и (2.50) могут быть разложены
на элементарные множители подобно тому, как это делалось в пре-
дыдущем разделе.
2.5. Реакция угла тангажа на возмущающий момент
Влияние возмущающего момента на движение летательного
аппарата обычно приходится учитывать при исследовании процес-
сов стабилизации. В общем случае для изучения влияния возму-
£ Заказ 1242
98
Глава II. Динамические свойства летательного аппарата
щающего момента составляют передаточную функцию летательно-
го аппарата, приняв за входную величину возмущающий момент.
Если за выходную величину взять угол тангажа, то с помощью
(2.23) получим передаточную функцию
W м(р) =-+ --,
v р^А^+А^Д-Аьр+Аь
где
Е1 = «16,
Е2 = ^15 (^00 Ч~ ^42 ^44),
Е3 = а161 йоо(а42 аи) 4* а4о(ао4 аог) ] •
(2,52)
(2.53)
При составлении расчётной структурной схемы системы стаби-
лизации возмущающий момент может быть учтен в соответствии со
схемами, приведенными на рис. 2.1. Схемы а и б, очевидно, эквива-
лентны.
Чтобы привести возмущающий момент к углу отклонения орга-
нов управления, необходимо составить передаточную функцию
(Р)- Разделив (2.52) на (2.36):
„ .ТД.ТСЪ - <2-54>
В1Р3 + В2Р2 + ВзР + Bt
Если отклонение органов управления мало влияет на момент от
запаздывания скоса потока, лобовое сопротивление и подъемную
силу аппарата, то учет возмущающего момента можно упростить.
Действительно, положив в выражениях (2.26) коэффициенты a'lz,
а03 и «43 равными нулю, получим
U4(P)= —(2.55)
Я13
§ 3. Первый этап продольного возмущенного движения
99
В этом случае влияние возмущающего момента эквивалентно
отклонению органов управления на угол
8ао3л. = - —(2.56)
“13 Л4®
Следовательно, передаточную функцию (р) или (р)
можно не составлять, если при исследовании полёта динамические
коэффициенты а'13, Доз и Д43 не принимаются во внимание. (Такой
случай может иметь место для летательных аппаратов обычной
схемы с хорошо развитыми крыльями). При этом учет возмущаю-
щего момента выполняется в соответствии с формулой (2.56) и схе-
мой на рис. 2.1, в.
§ з. приближенные уравнения и ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
ДЛЯ ПЕРВОГО ЭТАПА ПРОДОЛЬНОГО ВОЗМУЩЕННОГО ДВИЖЕНИЯ
3.1. Роль быстрой и медленной составляющих
продольного возмущенного движения
Известно, что продольное возмущенное движение летательного
аппарата разлагается на вынужденное движение и на быстро зату-
хающую и медленно затухающую составляющие свободного дви-
жения. В быстром свободном движении изменяются главным обра-
зом кинематические параметры а, 0, ft, 0, ft, в медленном — преи-
мущественно V, 0, <1. Быстрое движение преобладает в первые се-
кунды возмущенного движения, медленное движение развивается
в последующие моменты времени.
В процессе управления летательным аппаратом основную роль
играет первый этап возмущенного движения. На этом этапе снача-
ла преобладает быстрое свободное движение, после затухания ко-
торого устанавливаются некоторые значения параметров а, 0 и &,
затем в течение 'некоторого интервала времени медленное свобод-
9 f
ное движение протекает так, что параметры а, 0 и О остаются при-
мерно постоянными (см. рис. 1.16). Во время первого этапа возму-
щенного движения угол наклона траектории монотонно возрастает,
а центр масс летательного аппарата перемещается в направлении,
перпендикулярном первоначальному направлению полета, на не-
которое расстояние.
На втором этапе развивается медленное возмущенное движение,
связанное с изменением кинематических параметров V, 0 и #.
Этот процесс является или колебательным с большим периодом,
или апериодическим и притом слабо затухающим.
У летательного аппарата, управляемого пилотом или автомати-
чески, второй этап продольного возмущенного движения обычно не
успевает развиться. Объясняется это тем, что пилот или система
4*
100
Глава II. Динамические свойства летательного аппарата
стабилизации реагируют на изменение кинематических параметров
в медленном движении соответствующими отклонениями органов
управления, после чего возникает новое возмущенное движение.
Кроме того, органы управления достаточно часто отклоняются, что-
бы парировать действие возмущений. По этим причинам взятое в
чистом виде свойство продольной динамической устойчивости лета-
тельного аппарата, т. е. способность свободного возмущенного
движения затухнуть через некоторое продолжительное время, не
представляет собой интереса для управляемого летательного аппа-
рата. Важно другое—как динамические свойства летательного
аппарата и, в частности, характеристики медленного возмущенного
движения влияют на процессы управления.
Роль медленного возмущенного движения может быть различ-
ной в зависимости от типа летательного аппарата, условий полёта
и задач, решаемых системой управления.
Так как в медленном движении существенно изменяются ско-
рость и угол наклона траектории, то в процессах управления ско-
ростью и регулирования высоты полёта эта составляющая возму-
щенного движения играет первую роль.
В процессах стабилизации и наведения значение медленного
возмущенного движения определяется соотношением между вели-
чинами постоянных времени, характеризующих медленное движе-
ние, и временем протекания данного процесса.
Если постоянные времени, характеризующие медленное движе-
ние, намного превышают время наведения, то, естественно, влия-
ние медленной составляющей возмущенного движения на процесс
наведения незначительно. Такой случай может иметь место, напри-
мер, у баллистической ракеты, у которой постоянные времени
медленного движения могут в несколько раз превышать время уп-
равляемого полёта, см. ниже, гл. VI, разд. 2.1.
Динамические свойства системы стабилизации слабо зависят от
характеристик медленного движения, если постоянные времени,
соответствующие этому движению, велики по сравнению со време-
нем переходного процесса, а другими словами, если сопрягающие
частоты, характеризующие медленное движение, много меньше ча-
стоты среза, определяющей время переходного процесса. Так, на-
пример, неустойчивость маневренного летательного аппарата в мед-
ленном движении практически не будет сказываться на характе-
ристиках системы стабилизации, если постоянная времени, харак-
теризующая возрастающую экспоненциальную составляющую воз-
мущенного движения, велика, а время переходного процесса систе-
мы стабилизации мало.
Часто постоянные времени медленного движения, увеличиваю-
щиеся с возрастанием высоты полёта, оказываются настолько
большими, что медленное возмущенное движение летательного ап-
парата не представляет какого-либо интереса для исследования
§ 3. Первый этап продольного возмущенного движения
101
процессов стабилизации. Напротив, динамические свойства аппа-
рата, проявляющиеся в его быстром движении, существенно влия-
ют на процессы стабилизации.
Для упрощения анализа процессов стабилизации часто схема-
тизируют явления продольного возмущенного движения летатель-
ного аппарата, рассматривая только первый этап этого движения,
на котором можно пренебречь вариациями скорости [1]. Конечно,
так позволительно поступать, если не требуется рассматривать
процессы регулирования скорости или высоты полёта. Возмож-
ность пренебрежения вариациями скорости на первом этапе про-
дольного возмущенного движения подтверждается анализом мно-
гочисленных примеров. Во всяком случае, для ракет, имеющих
большую тяговооруженность Р/G, например для снарядов классов
«земля—воздух» и «воздух—воздух», такое допущение не дает
больших погрешностей и обычно принимается. Однако при прове-
дении конкретных исследований следует иметь в виду, что рассмат-
риваемое допущение должно быть обосновано не только общими
соображениями, но и соответствующим численным анализом.
3.2. Неманевренные летательные аппараты
Приближенные уравнения для первого этапа возмущенного
движения летательного аппарата получают, отбросив первое урав-
нение в системе (2.18) или (2.20) и положив AV = 0 в оставшихся
уравнениях:
d2b® ,
dt2 ~Г
d&® , ' б/Да . А
Цц—-—h СО 2 ———h ai2A<x =
at at
а42Да -j- а44Д0 — = — а13Д6 + а45У8,
at
— Д81 ф- Да + Д0 = 0.
(2-57)
Составим по известным правилам передаточные функции, соот-
ветствующие уравнениям (2.57) *.
Характеристический полином имеет вид
А" (Р) = Р3 + Лр2 + А^р + Аз, (2-58)
где
А = аи + fl12 + а42 а44’
~а12~Ьа11а42 (а11 аИ’ (2.59)
= а12а44.
* Передаточные функции летательного аппарата для первого этапа возму-
щенного движения можно найти также непосредственно из выражений (2.25),
(2.47) и (2.50), приняв в них равными нулю все коэффициенты с индексами,
содержащими «0», например, а02 и aw.
102 Глава II. Динамические свойства летательного аппарата
Реакция угла тангажа на отклонение органов управления ха-
рактеризуется передаточной функцией
tv?»/ \ В1р2 +в20 + вз
lFs(p) =-----------------------
. p3 + a> + a;.p-i- а;
(2.60)
где
#!=—«13,
В2 = «13 («42 «44) ~Ь «43«12 «13,
В3 = «4з«12 «13 («42 ’ «4-1) •
Реакция угла наклона траектории на отклонение
равления описывается передаточной функцией
С\р2 + С2р+ С3
где
(2.61)
органов уп-
Р + Д1Р -г А2р+ А3
(2.62)
А — «48,
С2 ~ «43 («ц + «12) --- «13«42,
С'Л — «43«12 «42«13*
Реакция угла атаки
(2.63)
„ £>,p2+D2p+D3
= з, г 2 > ' ’
р Т А\Р + ^2^4“ ^3
(2-64)
где
А = — а'} з —«лэ,
А =------«1з + «13«44--- а43а11, '
£>3 = «13«44-
Реакция угла тангажа на возмущающий момент
ется передаточной функцией
- 2 . ,,-
Р + А\Р г А2р+ А3
(2.65)
характеризу-
(2.66)-
где
Ei =аи, (
Т?2 = «15 («42 «44)- j
Сравнивая передаточную функцию (2.36) с упрощенной пере-
даточной функцией (2.60), замечаем, что в результате пренебре-
жения вариациями скорости коэффициенты Л4 и В4 становятся!
(2.67)'
§ 3. Первый этап продольного возмущенного движения
103
равными нулю. В результате этого один из множителей в знамена-
теле (тзр + 1) и множитель в числителе (х\р +1), отвечающие ме-
дленному движению, обращаются во множитель р и сокращаются.
Коэффициенты At, А2 и А3 несколько изменяются, так как из вы-
ражений для них выпадают динамические коэффициенты а,к с ин-
дексами. содержащими «0», например, а02 и «40- При этом пара
больших корней изменяется незначительно, в то время как значе-
ние оставшегося малого корня может заметно отличаться от преж-
него значения.
Коэффициенты В" и В" теперь немного отличаются от коэф-
фициентов В' и В’ъ , приближенно определяющих постоянные вре-
мени Т\ и Т2, соответствующие быстрому движению, за счёт замены
а42 в формулах (2.39) на а42 — 044-
Как и прежде, корни характеристического полинома можно
рассчитать довольно точно с помощью несложного приема. Стар-
шие члены полинома (2.58) определяют пару больших корней, как
корни квадратного уравнения
р% -ф А\р А2 — 0. (2.68)
Два младших члена полинома (2.58) определяют малый веще-
ственный корень, приближенно равный
д;
Рз =-----г. (2.69)
Д2
Учитывая сказанное, передаточную функцию (2.60) можно
представить в виде
И (р) = К СГ1Р.+ 1)(Г2Р+1)
(Т^+^Тр+1)(т2р+1У
(2.70)
Здесь К — передаточный коэффициент летательного аппара-
та, равный
Во
К = (2.71)
12 — постоянная времени медленного движения, равная
Рз а"
Л ё. Л и Т2 — параметры, характеризующие быстрое движение.
Пример использования передаточной функции (2.70) можно ви-
деть в гл. VI.
104
Глава II. Динамические свойства летательного аппарата
3.3. Маневренные летательные аппараты
Дальнейшее упрощение уравнений продольного движения мо-
жет состоять в отбрасывании члена «44Д0, учитывающего влияние
силы тяжести на возмущенное движение аппарата, т. е. на вариа-
ции Д0, Да, ДФ и ДО. Указанное упрощение особенно справедливо
по отношению к летательным аппаратам, имеющим высокие мане-
вренные качества. У таких аппаратов подъёмная сила крыльев с
нормальной составляющей силы тяги может быть во много раз
больше веса самого аппарата. В этом случае пренебрежение вли-
янием силы тяжести на возмущенное движение не приводит к боль-
шим погрешностям.
Запишем теперь систему уравнений для первого этапа продоль-
ного возмущенного движения, пренебрегая вариациями скорости и
членом а44Д0 в уравнениях (2.18):
d2&& , d&& , ' dAa , Л
—— + «п — + «12 — + «12Да =
at2 dt dt
= —«13 - — «is^^a + «IsMsa,
dt
(2.73)
~ а^2Да а43Д6й
dt
Д» — Да — Д0 = 0.
Рассмотрим передаточные функции летательного аппарата *,
принимая за выходные величины углы О, 0, а, а за входную вели-
чину угол отклонения органов управления бв:
. —а13р2~(а1з+а13а42 —а12а43^+а12а43~а13а42 .
Wdp) =-------------------------------------------,
Р\Р 4~ (°1 1 + а1 2 4~ а42 ) Р 4" а1 2 + °1 1а421
1Р70 . . °43Р2+(а1 1а4з+а12а43'~а13а42)А+а12Л43—а!13а42 7t-,
" S (р)= ----------------;-------------------------- ; р!. /О)
Р [Р + (°i 1 + °i2 + а42) Р + а12 at 1а4г1
VS(р) = w °(2 76>
Р~ + (а1 1 + а12 4“ а42)рУ«124“ а\ 1в42
Сравнивая передаточные функции (2.60) и (2.74), (2.62) и
(2.75), (2.64) и (2.76), замечаем, что в результате пренебрежения
членом а44Д0 коэффициент А" в характеристическом полиноме
* Эти передаточные функции можно найти либо обычным способом из урав-
нений (2.73), либо из выражений полных передаточных функций (2.25), (2.47)
и (2.50), положив в них коэффициенты с индексами «0» и коэффициент а44 рав-
ными нулю.
§ 3. Первый этап продольного возмущенного движения
105
(2.58) стал равным нулю .и соответственно множитель характери-
стического полинома х%р + I, отвечающий медленному движению,
обратился в множитель р. В передаточной функции для угла атаки
этот множитель сократился с множителем р в числителе, в который
обратился множитель вида хр + 1 в передаточной функции (2.64)
при «44 = 0. В итоге передаточные функции (2.74), (2.75) и (2.76)
состоят из множителей, приближенно (но достаточно точно) опи-
сывающих быстрое движение и, кроме того, передаточные функции
для углов & и 0 имеют в знаменателе множитель р, приближенно
описывающий медленное движение на первом этапе продольного
возмущенного движения.
Состав сомножителей в выражениях передаточных функций
(2.74) — (2.76) зависит от аэродинамической компоновки летатель-
ного аппарата, а именно от его аэродинамической схемы (обычная
схема, «бесхвостка», «утка», схема с поворотными крыльями),
свойства устойчивости (устойчивый, нейтральный, неустойчивый
летательный аппарат), а также от степени статической устойчиво-
сти и демпфирующих свойств аппарата.
Передаточные коэффициенты летательного аппарата,
очевидно, определяются формулами:
/ •& \ [ 0 \ Л12в43 О13а42 , (2 77)
\ бв 'yctn V бе /уст 412 + 411442
Кх,_ = (— 'j = — (2.78)
\ Ф J ycm a12 + 011042
Физический смысл этих коэффициентов достаточно ясен.
В результате ступенчатого отклонения органов управления на не-
который угол бв после некоторого переходного процесса устанав-
ливаются постоянные значения угловой скорости тангажа, угловой
скорости касательной к траектории и угла атаки, равные
= = - (2.79)
Кует^К? А. (2.80)
Передаточный коэффициент летательного аппарата К харак-
теризует его маневренные свойства. Так как отклонение органов
управления всегда ограничено некоторым максимальным значени-
ем бетах, то чем больше передаточный коэффициент К, тем выше
максимально возможная угловая скорость касательной к траек-
тории
©хпах-^бвтах (2.81)
и тем выше маневренные свойства летательного аппарата.
Иногда удобнее в качестве выходной величины летательного
аппарата, связанной с его маневренными свойствами, брать не
угловую скорость 0, а нормальное ускорение jv = V© или нормаль-
106
Глава II. Динамические свойства летательного аппарата
ную перегрузку пу « — ©. Тогда рассматривают передаточные
g
коэффициенты летательного аппарата по нормальному ускорению
или по нормальной перегрузке
) = К — . (2.83)
' lycm g
Очевидно, что максимально возможная установившаяся пере-
грузка, т. е. располагаемая перегрузка, равна
«у расп = К -у 6e тах. (2.84)
Располагаемая перегрузка наряду с максимальными значения-
ми нормального ускорения /„щах = XVSemax и угловой скорости
касательной к траектории 0тах = Дзетах определяет маневренные
возможности летательного аппарата.
Выясним кстати влияние конструктивных и аэродинамических
параметров летательного аппарата, высоты и скорости полета на
маневренные свойства аппарата. Обычно при достаточной степени
статической устойчивости произведение коэффициентов ока-
зывается в несколько раз меньше коэффициента а^„ Поэтому
можно приближенно записать, что
К~ а43~— Й42
«12
1
mV
У8-----г~ (P-\-Ya)
т*
(2.85)
(2.86)
V_________1_
g G
Отсюда следует, что с увеличением высоты полета маневрен-
ность аппарата ухудшается (уменьшается коэффициент К). Важно
также отметить, что с возрастанием степени статической устойчи-
вости (т. е. с увеличением по модулю коэффициента т* ) манев-
ренные свойства летательного аппарата снижаются (противоречие
между статической устойчивостью и маневренностью).
Передаточный коэффициент по углу атаки характеризует
статическую управляемость летательного аппарата, рассматривае-
мую как способность изменять угол атаки при отклонении органов
управления. Если пренебречь влиянием демпфирования, то этот
передаточный коэффициент можно представить в виде
(2.87)
013
а 2
$ 3. Первый этап продольного возмущенного движения
107
Важным признаком, характеризующим аэродинамическую схе-
му летательного аппарата, является знак передаточного коэффи-
циента по углу атаки. У статически устойчивых летательных аппа-
ратов (т“ < 0) схемы «утка» для создания положительного угла
атаки требуется отклонить органы управления на положительный
угол, так как в этом случае т® > 0 и I> 0.
\ О / уст
Чтобы сбалансировать статически устойчивый летательный
аппарат обычной схемы или схемы «бесхвостка» * на положитель-
ном угле атаки, требуется отклонить органы управления на от-
рицательныи угол, так как у аппаратов этих схем тг < 0 и по-
этому ( —) <0.
\ б /уст.
Знак передаточного коэффициента по углу атаки у летательно-
го аппарата с поворотными крыльями зависит главным образом от
взаимного положения поворотных крыльев и центра масс аппара-
та, а также от размеров стабилизатора. Если, например, точка
приложения равнодействующей подъемных сил, вызванных откло-
нением крыльев, находится впереди центра масс, то > 0
и | —) > 0. В этом случае схема с поворотными крыльями
' <5 Лет
может рассматриваться как разновидность «утки». Другие воз-
можные варианты схемы с поворотными крыльями, когда т® = 0
(идеальная схема) и т®<0 (разновидность обычной схемы),
значительно уступают первому по маневренным возможностям,
так как передаточный коэффициент К при прочих равных условиях
существенно снижается.
Характер свободного возмущенного движе-
ния. Чтобы разложить на элементарные множители знаменатели
передаточных функций (2.74) — (2.76), необходимо проанализиро-
вать квадратичный трехчлен
1 а -р л -р а
а (р) =---:-----Р2 + р + 1, (2.88)
а’2 -р а11а42 а12 -р
приняв во внимание, что у любого летательного аппарата коэф-
фициенты йп, а[2 и а42 положительны, вследствие чего всегда
«п + а'Х2 + а42 > 0. Устойчивость летательного аппарата в быстром
движении определяется поэтому знаком члена «12 + «ца42.
При «12 + «и«42 > 0 летательный аппарат устойчив, при «12 +
+ «ц«42 = 0 он нейтрале^, а при «12 + «и«42 <0 — неустойчив.
----Г. f Г< ’ Р- . Г-Х < =- сч- . Р р, .
* ^Бесхвостка» является разновидностью обычной схемы. Между этими схе-
мами нет принципиальных различий. Однако у «бесхвостки» обычно нельзя пре-
небрегать подъемной силой органов управления У5 б, тогда как у нормальной
схемы часто возможно допущение, что У5 б~0.
108
Глава II. Динамические свойства летательного аппарата
Устойчивый летательный аппарат. Характер переходного про-
цесса устойчивого летательного аппарата (Щг + ацЩ2 > 0) опре -
деляется относительным коэффициентом демпфирования, равным
5 ап + *2 + . (2.89)
2 Я12 Ч* а’1а42
Пренебрегая, как и выше, произведением ацй42 по сравнению
с ai2, можем записать
_ М“г + Л4“ P + Ya
е _ аи + а12~Ьа42 _ 1г + mV ол.
Из этого выражения следует, что относительный коэффициент
демпфирования почти не зависит от скорости полета и убывает
с ростом высоты полета, как V р.
При g< 1 переходный процесс колебательный
(корни квадратичного трехчлена комплексные сопряженные с от-
рицательной вещественной частью); трехчлен (2.88) имеет вид
д(р) = Т2р2 +2£Гр+1, (2.91)
где Т — постоянная времени, равная
Т = —г -1- (2.92)
V “12 + “11“42
Эта постоянная времени пропорциональна периоду колебаний
и обратно пропорциональна их частоте. Собственная частота, опре-
деляемая формулой
(йа = -1- 1 /сек (2.93)
или
= <2-94)
является важной динамической характеристикой летательного ап-
парата. Влияние конструктивных параметров аппарата, а также
параметров движения V и Н на собственную частоту легко про-
следить с помощью приближенной формулы
<йа « = 1 / , (2.95)
г * Z
где
^£'7’ ' X Р
= су- <2-96)
°А
§ 3. Первый этап продольного возмущенного движения
109
Как видно, собственная частота летательного аппарата зависит
главным образом от момента инерции, степени статической устой-
чивости, скорости и высоты полета (пропорциональна V^p-V ).
Длительность переходного процесса обратно пропорциональна
декременту затухания
Е,_а1 1 + а12 + а42 __ j_ / _ М".1 2 + М* . р \ (2 97)
Т ~ 2 2 \ 77 '
Эта формула показывает, что время переходного процесса
летательного аппарата обратно пропорционально pV (если пре-
небречь влиянием составляющий тяги по нормали к траектории
Ра).
При g=l переходный процесс апериодический
(корни квадратичного трехчлена кратные вещественные, отрица-
тельные); трехчлен (2.88) в этом случае имеет вид
а(р) = (7>+1)\ (2.98)
причем постоянная времени Т определяется по-прежнему форму-
лой (2.92).
При g>l переходный процесс апериодический
(корни трехчлена (2.88) вещественные, отрицательные); трех-
член а(р) разлагается на два множителя
а(р) = (Т’р+ 1)(Г>4- i), (2.99)
где
Т = Т(£, 4- ]/^Л); Т" = Т(£ — /^Т). (2.100)
Неустойчивый летательный аппарат: аХ2 + ОпОдг <0 (корни
трехчлена а(р) вещественные, один из них отрицательный, другой
положительный); трехчлен а(р) распадается на множители
а(р) = (Гр+1)(Г>+1), (2.101)
где
Т = 1 (— b + 1А2 —4й) < 0, Т" = у (b + /F2 —4а),
1 ь = «п+а;2+а42
а12 4- а11 а42 а12 + а1?а42
(2.102)
Нейтральный летательный аппарат: а\2 + Яцй42 = 0 (у трехчле-
на а(р) один корень нулевой, другой вещественный, отрицатель-
ный); трехчлен а(р) имеет вид
а(р) = Р(ТР + !)> (2.ЮЗ)
где
Т =________!------. (2.Ю4)
а1 1 + а12 + °42
по
Глава И. Динамические свойства летательного аппарата
При этом передаточные коэффициенты определяются уже другими
выражениями: % = ^43-^3042 (2.105) «ц + «12 + «42 = «13+ «11 «43... . 1/сек_ (2 10б) «11 + «12 + «42
Возможные варианты разложения на множители квадратичного
трехчлена а(р) сведены в табл. 2.1.
Разложение на множители числителей пере-
даточных функций (2.74) — (2.76) проведем для статиче-
ски устойчивых летательных аппаратов (а12 > 0), разделяя извест-
ные аэродинамические схемы на две группы:
1) летательные аппараты с, положительным передаточным
коэффициентом по углу атаки: J уст > 0 (схемы «утка» и с по-
воротными крыльями);
2) летательные аппараты с отрицательным передаточным коэф-
фициентом по углу атаки: ( — ] < 0 (обычная схема и «бес-
\ б / уст
хвостка»).
Схемы «утка» и с поворотными крыльями. У статически устой-
чивых летательных аппаратов этих схем передаточный коэффи-
циент К всегда положителен, т. е.
^12^43 ^13^42
Числитель передаточной функции (2.74), учитывая, что aj3 0,
можно представить в виде
(Т1Р + 1) (Т2р + 1), (2.107)
где '-ц 7, '7г -- / Pj .
. -, / Л = в + /лТв2, т2 = в - /л + в2,
. ° Д- + а,'з________ :в ~а18~^за42 + «1'2«43 . (2.Ю8)
°13й42 ** #12^43— а13^42 '
Числитель передаточной функции (2.75), принимая во внима-
ние, что «43 > 0, представим в виде
Тер2+ 2^Гвр+1, ! (2.109)
где ___________
Те =1/-----------; (2.110)
У #12^43 — ^13^42
£0 = —11 43 12 43 13 42 . (2.1 1 1)
2 Г «43 («12«43 - «13«4г)
§ 3. Первый этап продольного возмущенного движения
111
Разложим на множители числитель передаточной функции
(2.76), учитывая, что очз + а ;3 > 0. Предполагая, что ахз +
+ йпйдз < 0, представим числитель этой передаточной функции
в виде .
Т.р+1, ' (2.112)
где
_ а4з+а13
1 в —
а13 + а11а43
(2.113)
Обычная схема и «б^схвостка». Передаточный коэффициент X
у статически устойчивых летательных аппаратов этих схем отри-
цателен, т. е. м ...
^12^43 ^13^42 0- (2.114)
У летательных аппаратов обычной схемы коэффициент а'13
практически равен нулю, и числитель передаточной функции (2.74)
запишется в виде
Т1Р+1, (2.П5)
где
_ ~Та13 + а12а43
- 012^43 "Т а1 За42
(2.116)
В рассматриваемом случае корни квадратичного трехчлена
в числителе передаточной функции (2.75) вещественны и его мож-
но записать в виде
-Г. Z . (Т3р+ 1)(Лр+ 1),
где
3 Т3 = D + VC + D\ T^D — УС 4- D\
.... q = —«4з d _ а4з (ап + а)г)
' / О al2ai3- 012°43 °13а42
(2.117)
(2.118)
Так как у аппаратов обычной схемы aj3 + аца43 > 0, то в чис-
лителе передаточной функции (2.76) получим
Т.р+К (2.П9)
где
у ____ ^43
°13 + аиа43
(2.120)
Полученные результаты для устойчивых летательных аппара-
тов сведем в табл. 2.2. При этом для упрощения записи квадра-
тичный трехчлен в знаменателях передаточных функций предста-
вим в общем виде
Т^р2 + 2^Тр+ 1,
112
Глава II. Динамические свойства летательного аппарата
имея в виду, что коэффициент | может быть меньше или больше
единицы или равен ей, как показано в табл. 2.1.
Таблица 2.2
Схемы «утка» и с поворотными крыльями Схемы обычная и «бесхвостка»
^(Р) " ’ (Лр+1)(Т2р+1) Л 7"2р2 + 2^Тр + 1 К Т-^±1 Г2Р2 _]_ 2*Тр + 1
w'l (р) Т& + 2£еТер + 1 к TW + ЦТр + 1 (ТзР +1) (Г4р +1) Т2р2 + 2*Тр + 1
К ' 7 6р + 1 тър +1
^8 (р) 72^2 + 2?Тр + 1 1=1 72^2 + 2^Тр + 1
Аналогичным образом можно получить передаточные функции
неустойчивых и нейтральных летательных аппаратов.
В пределах допущений, указанных выше, полученные переда-
точные функции справедливы для любых схем летательных аппа-
ратов как с аэродинамическим управлением, так и с управлением
поворотом газовой струи.
3.4. Маневренные летательные аппараты
с малой нормальной силой,
создаваемой органами управления
У летательных аппаратов с хорошо развитыми крыльями
и с органами управления, расположенными достаточно далеко от
центра масс, т. е. у многих летательных аппаратов обычной схемы
и схемы «утка», нормальная сила органов управления мала
и ее можно не учитывать при составлении передаточных функций
летательных аппаратов. Такое допущение, очевидно, нельзя при
нимать для летательных аппаратов схем «бесхвостка» и с поворот-
ными крыльями и для бескрылых аппаратов типа баллистических
ракет. В этих случаях обязательно приходится учитывать нормаль-
ную силу органов управления У83.
Если нормальная сила органов управления пренебрежимо мала,
то в уравнениях возмущенного движения (2.73) или в выражениях
передаточных функций (2.74) — (2.76) можно положить
а43 =---~0; а'. =-------^0. (2.121)
mV А
§ 3. Первый этап продольного возмущенного движения
113
Эти упрощения в значительной степени помогают выявить физиче-
ский смысл различных параметров передаточных функций, а так-
же влияние параметров летательного аппарата на его динамиче-
ские свойства.
Принимая во внимание (2.121), получим следующие передаточ-
ные функции:
И (р) =-----. (2.122)
(p) =--------; (2.123)
p(TV + 2*Tp + l) v
UZg (p) =---—. (2.124)
7 72^2 + 2£Tp + 1 v '
Здесь
К = -awaM l/ce^
012 4“ a11042
rr 1
Tj =----- сек,
a42
= - .~ai3 ,
012 + 01ia42 {
T = —1 сек,
V &12 4" all a42
, оц+а;2+о18
2 1 o12 4- аца42
(2.125)
Постоянная времени Tt имеет простой физический смысл. Вели-
чина, обратная 7\, представляет ообой отношение угловой скоро-
сти касательной к траектории к углу атаки
1
Л
P + Ya
mV
Чем больше 7\, тем больший угол атаки требуется для созда-
ния нужной угловой скорости Qycr. С увеличением высоты эта по-
стоянная времени возрастает.
3.5. Частотные характеристики
При проведении конкретных исследований для решения вопроса
о допустимости тех или иных упрощений уравнений движения
и передаточных функций летательного аппарата обычно строят
частотные характеристики по приближенным и «точным» переда-
точным функциям. Если эти частотные характеристики в интере-
сующем нас диапазоне частот практически мало отличаются друг
от друга, то рассматриваемое упрощение задачи вполне возможно.
114
Глава II. Динамические свойства летательного аппарата
Для оценки влияния вариаций скорости и силы тяжести на
реакцию угла тангажа, вызванную отклонением органов управле-
ния, представим передаточную функцию (2.43) в виде произведе-
ния двух передаточных функций
\ I „ СГ1Р+1)(7\р+1) } ( 4 р(т1Р+1) |
5 р р(Т2Р2 + 2-ГГР+ 1) Н К т2р2 + 2^тр+1 /•
Первая передаточная функция
IFi (р) = К
(Т1Р+1)(Т2р+1)
р(Т2р2 + 2^Тр+ 1)
(2.127)
соответствует упрощенным уравнениям возмущенного движения
летательного аппарата (2.73), полученным путем пренебрежения
вариациями скорости и влиянием силы тяжести на возмущенное
движение. Она состоит из множителей, отвечающих быстрому дви-
жению, и множителя 1/р, приближенно учитывающего медленное
движение. Частотные характеристики этой передаточной функции
были подробно рассмотрены в книге [1]. Ниже на рис. 2.3 (кри-
вая б) приведен пример упрощенных частотных характеристик
рассмотренного выше реактивного самолета. Эти характеристики
соответствуют передаточной функции (2.127) при Т\ = 0.
С помощью множителей
Г2 (р) = 2 2РГ^+1). 1 - (2 •128)
2 К х2Р2 + 2Еттр +1 ' v ’
появившихся в результате учета влияния силы тяжести и вариаций
скорости, осуществляется переход от упрощенной передаточной
функции (2.127) к полной функции (2.43).
Здесь
д- _ 53 __ О12а43— а13а42
А 2 “12 + °па42 (2 129)
Bj
Л 8 = — •
Л4
Частотные характеристики множителей, учитывающих влияние
силы тяжести и вариаций скорости, показаны на рис. 2.2. При
достаточно больших частотах по сравнению с частотой 1/т лога-
рифм амплитуды и фаза поправочных множителей обращаются
в нуль. Влияние силы тяжести и вариаций скорости проявляется
на низких частотах, близких к частоте 1/т и меньших ее. На этих
частотах наблюдается падение усиления и положительный сдвиг
фазы, превышающий 90°. Кроме того, для медленного движения
характерен остоый резонансный пик и резкое изменение фазового
§ 3. Первый этап продольного возмущенного движения
115
сдвига при частоте длиннопериодических колебаний 1/т, что обу-
словлено малыми значениями относительного коэффициента демп-
фирования
Рис. 2.2. Реакция угла тангажа на отклонение органов
управления: частотные характеристики множителей, учиты-
вающих влияние силы тяжести и вариаций скорости (случай,
когда медленное движение является колебательным)
Логарифмические частотные характеристики полной передаточ-
ной функции (2.126) складываются из частотных характеристик
приближенной передаточной функции (2.127) и поправочных мно-
8*
116
Глава II. Динамические свойства летательного аппарата
жителей (2.128). Пример представлен на рис. 2.3 (кривая а). Не-
трудно заметить важные свойства поправочных множителей, учи-
Рис. 2.3. Реакция угла тангажа на отклонение органов
управления; пример частотных характеристик реактивного
самолета (Т = 0,55 сек; £ = 0,35; 7\ = 1,76 сек; 7 ч — 0;
Г = 12,7 сек; = 0,07; Tj = 71,4 сек):
а — полные частотные характеристики; б — при допущениях
ДУ Ми а44Д0 ~ 0
тывающих влияние ДУ и а44ЛО. Частоты 1/т и 1/ti значительно
ниже частот 1/7 и 1/71; соответствующих быстрому движению,
§ 3. Первый этап продольного возмущенного движения
117
и частотные характеристики приближенной передаточной функции
(2.127) при со 1/т практически совпадают с характеристиками
полной передаточной функции.
3.6. Оценка влияния силы тяжести и вариаций скорости
С помощью частотных характеристик можно ориентировочно
оценить, какие упрощения передаточной функции летательного
аппарата допустимы при анализе процессов управления. Как из-
вестно, частотные характеристики обладают следующим свойством:
в области высоких частот они определяют начало переходного
процесса, в области низких частот—протекание переходного про-
цесса при больших значениях времени. Так как нас интересуют
переходные процессы в системе только в течение ограниченного
интервала времени, то, учитывая отмеченное свойство, можно
в передаточной функции летательного аппарата отбросить звенья
с достаточно большими постоянными времени, а именно те звенья,
которые исчезают при отбрасывании вариаций скорости AV или
при отбрасывании вариаций скорости совместно с членом ЦддАО,
учитывающим влияние силы тяжести.
Для оценки возможных погрешностей необходимо построить
частотные характеристики летательного аппарата по точной
и упрощенной передаточным функциям, а затем -соответствующие
характеристики замкнутой системы стабилизации.
Так как частотные характеристики летательного аппарата, по-
строенные для этих двух случаев, практически совпадают при
частотах, превышающих некоторое значение , то и частотные
характеристики замкнутой системы стабилизации в области высо-
ких частот остаются неизменными, независимо от того, какая ис-
пользована передаточная функция летательного аппарата, точная
или упрощенная. При этом в области низких частот рассматривае-
мые характеристики могут заметно отличаться (в примере на
рис. 2.3 при со < 0,2 .1/сек).
Для того чтобы выяснить, как влияет это различие на переход-
ные процессы в системе, рассмотрим вещественные частотные
характеристики замкнутой системы стабилизации, построенные для
точной и упрощенной передаточной функции летательного аппа-
рата. На рис. 2.4 приведен примерный 'вид таких характеристик.
Они отличаются только в полосе низких частот 0 со < Qj.
Для оценки расхождения переходных функций можно исполь-
зовать метод, предложенный в [18]. Составим разность
р(ю) = Р(ю) — Р0(со),
где Ро(а>)—вещественная частотная характеристика замкнутой
системы, построенная без упрощений, а Р(со) —упрощенная харак-
теристика. Очевидно, что р(со) = 0 при со СД.
118
Глава II. Динамические свойства летательного аппарата
Переходные функции, соответствующие указанным характе-
ристикам, будут отличаться друг от друга на величину
в (/) = —( р (®) sin-Z dm. (2.130)
Л ,) о>
о
Учитывая, что время работы системы стабилизации ограничено
некоторым значением tp, а наибольшее расхождение переходных
Рис. 2.4. Вещественные частотные характеристики замк-
нутой системы стабилизации
а — точная; б — упрощенная.
функций должно быть при больших значениях времени, оценим
е(0 в момент времени t = tP:
п \ 2 t \ sin о)/р 1 *
е (*Р) = — Р (®)—~ •
л J
о
Если выполняется условие
2Л <
то последнее равенство можно заменить неравенством
Мр)1<^ f р(ш)Ло = ^,
•ГС тс
о
где F— площадь, заштрихованная на рис. 2.4.
Для приближенной оценки можно принять, что
Е ~ ? (в) ' (в) Q
2 “Ъ
поэтому
Л
(2.131)
(2.132)
(2.133)
(2.134)
(2.135)
§ 4. Боковое возмущенное движение осесимметричного аппарата
119
Расхождение переходных функций можно отнести к установив-
шемуся значению. Тогда для оценки относительной погрешности
получим формулу
I eomH (Q I —р^-(0)1 (2 136>
при
Фактическая погрешность, как следует из вывода, будет меньше.
Если относительная погрешность, вычисленная по этой форму-
ле, оказывается в допустимых пределах, то при анализе свойств
рассматриваемой системы можно не учитывать большие постоян-
ные времени в передаточной функции летательного аппарата,
которым соответствуют сопрягающие частоты и < Qi, так как
учет этих постоянных времени окажет несущественное влияние на
переходную функцию. С помощью аналогичных приемов можно
достаточно просто обосновать возможность тех или иных упроще-
ний рассматриваемых передаточных функций в любом конкретном
случае. Пример оценки влияния вариаций скорости на процессы
стабилизации ракеты V-2 можно найти ниже, в гл. VI.
В заключение отметим, что возможность пренебрежения вариа-
циями скорости и влиянием силы тяжести (и соответствующего
упрощения передаточных функций летательного аппарата) зависит
от рассматриваемой задачи и характеристик замкнутой системы
стабилизации.
Так, например, при анализе устойчивости замкнутой системы
стабилизации и характера переходного процесса маневренного ле-
тательного аппарата обычно не учитывают влияние силы тяжести
и вариаций скорости (см. гл. V). Однако при оценке устойчивости
и точности системы стабилизации неманевренного летательного ап-
парата следует учитывать хотя бы составляющую медленного дви-
жения, обусловленную влиянием силы тяжести (см. гл. VI). Воз-
можность пренебрежения вариациями скорости и влиянием силы
тяжести при конкретных исследованиях целесообразно обосновы-
вать расчетом, например, по приведенной выше методике.
§ 4. ПРИБЛИЖЕННЫЕ УРАВНЕНИЯ И ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
ДЛЯ БОКОВОГО ВОЗМУЩЕННОГО ДВИЖЕНИЯ ДИНАМИЧЕСКИ
ОСЕСИММЕТРИЧНОГО ЛЕТАТЕЛЬНОГО АППАРАТА
4.1 Движение рыскания
Система уравнений бокового возмущенного движения летатель-
ного аппарата может быть записана в более или менее сложной
форме в зависимости от характера конкретной рассматриваемой
задачи.
120
Глава II. Динамические свойства летательного аппарата
Для аэродинамически осесимметричных летательных аппаратов
эти уравнения можно записать более просто, чем для аппаратов
обычной самолетной схемы, имеющих только одну плоскость сим-
метрии. У аппаратов самолетной схемы наблюдается сильное
взаимодействие движений рыскания и крена, в то время как
у осесимметричных аппаратов влияние движения крена на движе-
ние рыскания невелико и его часто можно не учитывать.
Угловая скорость крена приводит к появлению момента рыска-
ния М ухЬм>х, которым в уравнениях бокового возмущенного движе-
ния осесимметричных аппаратов можно пренебречь *. Кроме того,
влияние крена на рыскание проявляется в том, что при накренении
летательного аппарата возникает боковая сила, вызывающая
скольжение. Если система стабилизации достаточно быстро ликви-
дирует крен, то влияние указанной боковой силы на движение
рыскания мало и в первом из уравнений (2„17) можно опустить
член —Если принять указанные допущения, то из си-
стемы уравнений бокового движения можно выделить независимую
группу уравнений, описывающую движение рыскания.
Для упрощения кинематических и геометрических соотношений
в уравнениях возмущенного движения летательного аппарата
удобно использовать наклонную земную систему осей координат,
которая получается из обычной земной системы поворотом послед-
ней относительно оси AzQ на некоторый угол 0Н- Если при этом
направление земной оси Ахн будет близко к направлению полета,
то можно считать малыми не только углы Д и ip, но и углы 0
и О**.
Введение наклонной системы координат возможно потому, что
движение ряда летательных аппаратов, например, движение ракет
классов «воздух — воздух» и «земля — воздух» на участке сближе-
ния, часто происходит с мало изменяющимся углом наклона
траектории 0.
Если измерять углы ip, О, у, Д, 0, ус в наклонной системе коор*
динат, когда траектория полёта близка к оси Ахн этой системы, то
существенно упрощаются кинематические и геометрические соотно-
шения в системе уравнений бокового движения за счёт замены
косинусов углов О и 0 единицами, синусов этих же углов — самими
углами и отбрасывания членов с произведениями малых углов О, 0
* Влияние отклонения элеронов на момент рыскания в большинстве случаев
мало даже для аппаратов самолетной схемы, т. е. МДба«0.
** Для наклонных земных осей мы сохраняем те же обозначения углов, что
и для обычных земных осей.
§ 4. Боковое возмущенное движение осесимметричного аппарата
121
и а на вариации параметров движения. В результате
йДф Л
—= А<ву,
dt у
dt
получают
(2.137)
А₽ = Аф — Д¥,
ДУС = д Y •
Принимая во внимание сказанное выше и учитывая уравнения
(2.137), можно из уравнений бокового движения (2.17) выделить
независимую группу уравнений, описывающую движения рыскания:
с!2Дф , с!Дф <7Aj3 , до
dt2 dt dt
— Ь\з^—Ь^я + Ь1ъМув,
dt \
^--b^=bi3^-b45Ze,
Дф —др —AT = 0.
В этих уравнениях введены следующие обозначения:
—— 1/сек, Ь12 --------------~ I/сек2,
1у ' . !у
М*
Ь\2=--------— \/сек,
1у
м8/г ,
----f— 1/сек2, b'i3 =--------\/сек,
У 1 {у
615 = — 1/кГм-сек2,
!у
Zbft
1/сек, Ь43 ~----------1/сек, Ь45 =--------
mV mV
(2.139)
\/кГ-сек.
Очевидно, что уравнения (2.138) можно исследовать без кине-
матического уравнения, описывающего изменение вариации Az.
Легко проверить, что уравнения (2.138), характеризующие дви-
жение рыскания, ничем не отличаются по форме от уравнений про-
дольного движения (2.73). Первые уравнения можно получить
из последних, заменив коэффициенты коэффициентами b{h. При
этом совпадает не только форма уравнений, но и числовые значе-
ния коэффициентов, так как для динамически осесимметричных
летательных аппаратов аи = Ьп-, а12 = i>12; а'12= b '2 а!3 = bis:
а13= ^13 ’ °42 ~ aiS = ^43’ а45 ~ Ь>45.
122
Глава II. Динамические свойства летательного аппарата
Используя уравнения (2.138), можно найти выражения для пе-
редаточных функций динамически осесимметричных летательных
аппаратов. В силу совпадения уравнений (2.73) и (2.138) переда-
точные функции, характеризующие движение рыскания, ничем не
будут отличаться от упрощенных передаточных функций (2.74),
(2.75) й (2.76), описывающих первый этап продольного возмущен-
ного движения.
4.2. Движение крена
Обычно принято при исследовании процессов стабилизации кре-
на описывать динамические свойства летательного аппарата только
одним из уравнений (2.17):
+ СцДш, + СнДс», + с12Д₽ =— с13Аб3 — с;зДбй + с16Мхв, (2.140)
в котором введены обозначения:
С11 — 1х . 1/сек, с12 = —. Мх 1/сек2, 1Х
С13 — 1х 1/сек2, с'3 = — мх№ , • —— 1/сек2,
Сц — (О мх 1х , 1 1/сек, с,5 = — 1х 1/кГм-сек2.
(2.141)
Если использовать наклонную систему земных осей координат,
то уравнение, описывающее движение крена, можно представить
в виде
^ + C11^L = _C13A63+cAeo3A(> (2.142)
at2 (и
где Л4Х воэм — возмущающий момент крена, учитывающий, в част-
ности, влияние движения рыскания на движение крена:
Мхвозм = мхв + MUP + м’«Д6к + М/А%. (2.143)
Составляющие возмущающего момента крена рассмотрены ниже,
в гл. IV, разд. 1.2.
В уравнении (2.142) коэффициент Си, равный
м“х nTrxqSl 1
----(2J44)
характеризует аэродинамическое демпфирование летательного ап-
парата. Величина —сц представляет собой приращение углового
ускорения крена, вызванное приращением угловой скорости крена
на единицу. Это угловое ускорение направлено всегда в сторону,
§ 4. Боковое возмущенное движение осесимметричного аппарата
123
противоположную угловой скорости, так как М/ < 0 и, следова-
тельно, демпфирует вращение летательного аппарата относительно
продольной оси.
Коэффициент С1з, равный
м\э — 57,3tnJ>qSl
— \/сек2,
С13
(2.145)
(2.146)
характеризует эффективность органов управления креном. Вели-
чина —Cis представляет собой приращение углового ускорения ле-
тательного аппарата, создаваемое отклонением органов управления
на единицу угла 6а.
Коэффициент cis, равный
с16 = — I/кГм. сек2,
представляет собой приращение углового ускорения крена, обу-
словленное действием единичного возмущающего момента.
При исследовании процессов стабилизации крена удобно воз-
мущающий момент выразить через эквивалентное отклонение ор-
ганов управления бэвозм’
. Л4хвОЗЛ1=А4>6эво.,и. (2.147)
Тогда уравнение движения крена можно записать в виде
К С11 — £13 воэм)-
№ dt
Поскольку процессы стабилизации угла крена или
скорости крена протекают достаточно быстро, обычно при
вании этих процессов используют прием замораживания
циентов. Передаточная функция, соответствующая уравнению
(2.148), очевидно, имеет вид
WI (р) =------.
р(ТэР+1)
Здесь — передаточный коэффициент летательного аппарата
в движении крена, определяемый формулой
= — —1/сек
Сц
(2.148)
угловой
исследо-
коэффи-
(2.149)
(2.150)
или
Мх
mxa 21/
I
(2.151)
В соответствии с правилами знаков, принятыми в аэродинамике,
коэффициент Кэ отрицателен, поскольку положительные отклоне-
ния бэ вызывают отрицательную угловую скорость у.
124-
Глава II. Динамические свойства летательного аппарата
Постоянная времени летательного аппарата Тэ, характеризую-
щая быстроту протекания переходного процесса, равна
7\=—=---------^сек (2.152)
Си Мхх
и всегда положительна у любого летательного аппарата, так как
< о
X
Рассмотренные выше, в § 3 и 4, упрощения уравнений продоль-
ного и бокового возмущенных движений обычно используют при
изучении процессов управления снарядами [1], [2], [3], [4].
Напомним еще раз, что возможность того или иного упрощения
уравнений летательного аппарата может быть выявлена только
в результате анализа конкретных числовых характеристик лета-
тельного аппарата и системы стабилизации и поэтому к различным
рекомендациям относительно упрощения уравнений движения
всегда следует подходить осторожно, сообразуясь с конкретными
данными задачи.
§ 5. ДИАПАЗОН ЧАСТОТ, В КОТОРОМ СПРАВЕДЛИВА ПЕРЕДАТОЧНАЯ
ФУНКЦИЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Как известно, передаточные функции характеризуют динамиче-
ские свойства соответствующего элемента или динамической систе-
мы в частотной области. При выводе передаточных функций како-
го-либо элемента системы управления, в том числе, и летательного
аппарата, обычно принимают ряд упрощающих предположений.
Поэтому передаточные функции элементов систем управления оп-
ределяют с достаточной точностью динамические свойства этих
элементов только в ограниченной области частот.
Рассмотренные выше уравнения движения и передаточные
функции летательного аппарата были выведены на основе предпо-
ложения, что аппарат является абсолютно жестким, другими сло-
вами, пренебрегалось свойством упругости летательного аппарата.
Однако в области высоких частот (порядка десятков герц) упру-
гость корпуса аппарата играет значительную роль. Так, например,
колебания рулей с высокой частотой, близкой к частоте свободных
изгибных колебаний корпуса летательного аппарата, могут вызвать
явление резонанса. Как видно, частотные характеристики, соответ-
ствующие передаточным функциям «абсолютно жесткого» лета-
тельного аппарата, в области высоких частот не соответствуют
действительности. Поэтому и обычные передаточные функции ле-
тательного аппарата справедливы лишь в некоторой ограниченной
области частот (О, Q).
Рассмотрим теперь передаточные функции летательного аппа-
рата, приведенные в табл. 2.2. Как только что было отмечено, они
§ 6. Передаточная функция летательного аппарата
125
перестают быть справедливыми в области высоких частот вследст-
вие упругости летательного аппарата. С другой стороны, условия,
для которых были получены эти выражения (допущения, что
вариации скорости пренебрежимо малы и что влиянием силы тя-
жести на возмущенное движение можно пренебречь), не соответ-
ствуют медленным (содержащим очень низкие частоты) движени-
ям аппарата. Следовательно, передаточные функции из табл. 2.2
справедливы только в некоторой полосе частот (Qb Q). В примере,
данном на рис. 2.3, эта полоса частот начинается с Qi ~ 0,2 \]сек.
Учитывая влияние силы тяжести на возмущенное движение, как
это делается в разд. 3.2, можно несколько расширить диапазон
применения передаточных функций летательного аппарата в сто-
рону меньших частот. Полные передаточные функции летательного
аппарата, учитывающие влияние силы тяжести и вариации скоро-
сти, имеют диапазон применения, начинающийся с нулевой частоты,
если коэффициенты исходных уравнений движения (2.18) посто-
янные.
Однако при переменных коэффициентах этих уравнений вслед-
ствие использования приема замораживания появляются ошибки
в области низких частот и полные передаточные функции достаточ-
но точно описывают динамические свойства аппарата лишь в неко-
торой области частот (й2, □ ) •
Таким образом, любая передаточная функция летательного
аппарата правильно описывает его динамические свойства только
в некоторой ограниченной полосе частот. В этой полосе модуль
передаточной функции равен экспериментальному отношению
амплитуд, а аргумент передаточной функции равен эксперимен-
тальному фазовому сдвигу (с интересующей нас точностью, на-
пример, до 5%).
§ 6. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С УЧЕТОМ
ЕГО УПРУГОСТИ
В некоторых случаях предположение о том, что летательный
аппарат является абсолютно жестким телом, приводит к заметным
погрешностям и тогда при исследовании системы стабилизации
приходится учитывать упругие свойства летательного аппарата.
Такие случаи чаще всего имеют место при изучении полёта балли-
стических ракет [11], [14], [15], [20] и др.]. При конструировании
баллистических ракет всегда стремятся уменьшить отношение веса
конструкции к весу топлива. Это приводит к уменьшению жестко-
сти конструкции ракеты и, как следствие, к заметным упругим
изгибам корпуса ракеты при её полёте. Упругие деформации кор-
пуса влияют на аэродинамические силы и моменты, что вызывается
изменением местных углов атаки. Кроме того, они влияют на рабо-
ту системы стабилизации, так как гироскопические измерительные
126
Глава II. Динамические свойства летательного аппарата
приборы и датчики ускорений реагируют на изгибные деформации.
В тех случаях, когда корпус летательного аппарата имеет большое
удлинение, а частота свободных изгибных колебаний корпуса низка
и соизмерима с резонансной частотой системы стабилизации, мож-
но ожидать, что влияние упругих колебаний на процессы стабили-
зации будет значительным.
В этом параграфе рассмотрим вывод передаточной функции ле-
тательного аппарата с учётом его упругих свойств, основываясь
на результатах исследований, изложенных в работе [11].
6.1. Основные допущения.
Уравнение поперечных колебаний
Летательный аппарат можно рассматривать как прямую упру-
гую балку (стержень) переменной жесткости с незакрепленными
концами. При составлении дифференциального уравнения попе-
речных колебаний корпуса аппарата, вообще говоря, следует учи-
тывать силы внутреннего неупругого сопротивления и продольные
усилия, вызванные тягой двигателя и силой тяжести. Однако для
упрощения задачи часто принимают [11], что внутреннее сопротив-
ление отсутствует, и не учитывают продольные усилия. Тогда
дифференциальное уравнение поперечных колебаний прямой балки
записывается в виде [12]
3 = ГЧЧ). <2.153>
Здесь х — координата точки на продольной оси, отсчитанная
от носа корпуса летательного аппарата;
у(х, t) —прогиб оси балки в сечении х, измеренный в на-
правлении, перпендикулярном к недеформирован-
ной оси балки;
Е — модуль упругости;
1 (х) — момент инерции поперечного сечения балки отно-
сительно нейтральной оси сечения, перпендикуляр-
ной к плоскости колебаний;
EJ (х) —изгибная жесткость балки в сечении х;
ц(х) —масса единицы длины балки;
F (х, t)—внешняя нагрузка, отнесенная к единице длины
балки.
Существенное влияние на упругие колебания летательного ап-
парата при его полёте в плотных слоях атмосферы оказывают
аэродинамические силы. Для упрощения задачи часто предполага-
ют, что эти силы не зависят от деформаций аппарата, т. е. опреде-
ляются только движением соответствующего абсолютно жесткого
летательного аппарата. Составляющими силы тяжести, перпенди-
кулярными оси летательного аппарата, обычно пренебрегают [11].
§ 6. Передаточная функция летательного аппарата
127
Для примера составим упрощенное выражение F(x, t), соответ-
ствующее указанным допущениям. При этом будем считать угол
атаки аппарата малый, что позволит принимать нормальную силу
I7! равной подъёмной силе У.
Подъёмная сила Ry(x), приходящаяся на единицу длины про-
дольной оси, пропорциональна углу атаки аппарата:
Ry (х) = Ry (х) а.
(2.154)
Здесь через R“(x) обозначена производная от погонной подъём-
ной силы R у(х) по углу атаки.
При вращении летательного аппарата каждый элемент его по-
верхности приобретает дополнительные углы атаки а' (х).
Так как дополнительная скорость и, вызванная вращением ап-
парата, равна
0==_(х_х ) JL (2.155)-
at
и направлена перпендикулярно продольной оси аппарата, то при-
ращение местного угла атаки определяется формулой
= (2.156)
v ’ И dt
Соответствующая составляющая погонной подъёмной силы
будет равна
^(х) = 7?“(х)а'(х). (2.157)
Пусть Ry(x, 6) — нормальная к оси аппарата сила, вызванная
отклонением органов управления. Так как эта сила сосредоточена
в точке с координатой хр, можно записать
^(х, б) = У6бА(х — хр),
*де Д(х— хр)—дельта-функция, определяемая соотношениями:
А (х — хр) = 0 при х ф Хр,
А (х — Хр) = оо при х = Хр,
ь
(2.158)
(2.159)
о
Суммируя (2.154), (2.157) и (2.158), найдем, что погонная на-
грузка приближенно определяется выражением
F(x,0 = 7?;(x)
X Х'р z/Л х
а +------ — +У6бА(х—Хр).
V di v р>
(2.160)
128
Глава II. Динамические свойства летательного аппарата
6.2. Решение уравнения поперечных колебаний
Для определения деформации продольной оси аппарата необхо-
димо решить линейное дифференциальное уравнение в частных
производных (2.153), описывающее упругие колебания балки.
При решении уравнения (2.153) необходимо учитывать как
начальные условия, определяющие форму деформированной оси
балки в начальный момент времени, так и граничные условия, учи-
тывающие способ закрепления балки. Начальные условия при t =
= 0 имеют вид
у(х,0) = Х(х); -^^ = ф(х). (2.161)
В нашем случае, когда .рассматривается балка со свободными
концами, граничные условия имеют следующий вид:
д2у(0, /) = d2y(L,t) = с
дх2 dx2
д3У (0, 0 = сРу (L, 0 = 0
дх3 dx?
(2.162)
где L — длина балки, т. е. корпуса летательного аппарата.
Эти граничные условия учитывают, что в концевых сечениях
балки со свободными концами перерезывающие силы и изгибаю-
щие моменты равны нулю.
Так как уравнение (2.153) является линейным, то его решение
находят как сумму решения соответствующего однородного урав-
нения
~ [£J (х) 1 + р (х) = 0, (2.163)
дх2 [ дх2 J di2
удовлетворяющего начальным и граничным условиям (2.161) и
(2.162), и частного решения исходного неоднородного уравнения
(2.153), удовлетворяющего тем же граничным условиям и нулевым
начальным условиям.
Решение задачи можно несколько упростить, если, воспользо-
вавшись преобразованием Лапласа, преобразовать по переменной
t левую и правую части уравнения (2.153). Тогда получим уже
обыкновенное дифференциальное уравнение, в котором искомая
функция у(х, р) зависит от одной независимой переменной х, а пе-
ременная р рассматривается как параметр *:
* Для преобразования по Лапласу функции у(х, /) введено обозначение
У = У {х, р) =- L {у (х, /)} = J у (х, /) e~ptdt.
о
§ 6. Передаточная функция летательного аппарата
129
где
— EJ (х)
dx2
d2y
dx2
+ Р2Ц (X) У = Ф (*, Р),
(2.164)
Ф (х, р) = F (х, р) + рц (х) х (х) + ц (х) ф (х).
(2.165)
Члены рц(х)%(х) + р,(х)ф(х) в последнем выражении учиты-
вают начальные условия (2.161) в соответствии с известной фор-
мулой
L{y,n}] =рпу(р)-рГ1-1 р (0) —. .. — рр^п—(0) — (0).. (2.166)
Изображение поперечной погонной нагрузки в нашем примере
имеет вид
F (х, р) = [У5А (х - хр) + Ry (х) Wl (р) + R* (х)
X " Х'Г G
1
pWl(p) 8(р),
(2.167)
где W£(p) и 1Г| (p) —передаточные функции абсолютно жесткого
летательного аппарата.
Граничные условия (2.162) для преобразованного уравнения
можно записать так:
d2y (0, р) = d2y(L, р) = q
dx2 dx2 ’
rfW, р) = d3y(L, р) = q
dx3 dx3
Рассмотрим вначале решение однородного уравнения
d2y
dx2
(2.168)
7Т
ах2
+ р2ц (х) у = О,
(2.169)
определяющего свободные колебания балки, которые возникнут,
если в начальный момент t = 0 балка деформирована. Решение
этого уравнения удовлетворяет граничным условиям (2.168), когда
параметр р2 принимает вполне определенные числовые значения р2.
Они называются собственными, значениями, а соответствующие им
решения <рп(х, р„)—собственными функциями. В нашей задаче
имеет смысл рассматривать только отрицательные собственные
значения р2 = —Кп < 0, которым соответствует колебательный про-
цесс. В этом случае
Рп = +1 Vln = ± /®л- (2 •17 °)
Величина wn представляет n-ю собственную частоту колебаний
балки, которая как тело с распределенными параметрами имеет
бесчисленное множество собственных частот, определяемых собст-
5 Заказ 1242
130
Глава II. Динамические свойства летательного аппарата
венными значениями р2п. Собственная функция <pn(x, wn) определя-
ет п-ю гармонику деформированной оси балки (рис. 2.5)
где Ап — произвольный пока множитель, не зависящий от х. (Как
будет видно ниже, этот множитель зависит от параметра р). Так
как уравнение (2.169) является линейным, то сумма этих гармоник
определяет форму балки:
У(х,Р) = ^Ап(р)<?п(х,ап). (2.171)
П=1
Это выражение является общим решением уравнения (2.169),
удовлетворяющим граничным
Рис. 2.5. Первые три формы коле-
баний балки со свободными кон-
цами
условиям (2.168), но пока не удов-
летворяющим начальным усло-
виям (2.161).
Для того чтобы найти реше-
ние неоднородного уравнения
(2.164),. используем выражение
(2.171) и определим коэффициен-
ты Ап(р) таким образом, чтобы
решение (2.171) удовлетворяло
бы и неоднородному уравнению
(2.164). Решение, найденное та-
ким образом, обязательно будет
удовлетворять и начальным ус-
функцию Ф (х, р) и учитываются
В
тождество
ловиям,так как они входят
поэтому автоматически.
Для определения коэффициентов Ап(р) подставим решение
(2.171) в неоднородное уравнение (2.164). Учитывая
— ГEJ (х) 1 — (02ц (%) (х, ш„) ES 0,
(2. 172)
dx2
получим
У^Ап(Р) (Р2 + ®п) И (*) (х, <о„) = Ф (х, р).
п=1
(2.173)
Используя свойство ортогональности собственных функций *,
можем записать
(р2 + ®2) А„ (р) J ц (х) <р2 (Х> ап) dx = уФ (х, р) (х, ю„) dx. (2.174)
о о
\Собственные функции фтг(^, (оп) ортогональны с весом ц(х), если при лю-
бых i^=k справедливо соотношение
L
j ?i(x, 0)к) ц (х) dx = 0.
§ 6. Передаточная функция летательного аппарата
131
--------1 //7
88
Из этих равенств и определяются искомые коэффициенты Ап:
L
ф (х, р) <fn (х, +)4х
= --------------- (2.175)
р2 4- со: р о
| Р W <Рд (х, <%) Л
О
Общим решением уравнения (2.164) является выражение
(2.171), в котором коэффициенты Ап(р) определяются формулой
(2.175). Таким образом, решение уравнения (2.164) сводится к за-
даче отыскания собственных
частот и собственных функ-
ций, которая является очень
сложной. При произвольных
зависимостях EJ(x) и ус(х)
эта задача не решается в об-
щем виде и приходится ис-
пользовать приближенные
численные методы.
Общее решение уравне-
ния (2.164) удается полу-
чить только в простейших
случаях, например, когда
балка однородная, т. е.
EJ(x) = const и р.(х) =
= const. Исследование этой
частной задачи можно най-
ти в соответствующей лите-
ратуре, в частности, в [12].
Здесь приведем лишь приближенную формулу для частоты свобод-
ных колебаний однородной балки
(2J76)
которую можно использовать для оценки частоты упругих колеба-
ний корпуса летательного аппарата, вычислив по формулам сопро-
тивления материалов средние по длине корпуса значения EJ и ц.
Для примера рассмотрим ракету с указанным на рис. 2.6 рас-
пределением массы и жесткости [14]:
\ I I
и1______________।______i____________L_
О 2,03 3,05 „ 5.OS хм
/4,7
11 Щ5 I
| 7,05
О 203 3,05 5,08 х м
Рис. 2.6. К примеру проближениой оценки
частоты упругих колебаний ракеты
„ „ .= Ю.5-2,03 + 7,05-1,02+ 14,1.2,03 j j 3
5,08
) „ = 1Q4 88-2.03+ 146. 1,02 + 117- 2,03 = П1 . 1Q4 кГ.
ср 5,08
Ы1 = 1/ — = 269. 1/се/с = 42,8 гц.
L2 V И
5*
132
Глава II. Динамические свойства летательного аппарата
6.3. Влияние сил внутреннего неупругого сопротивления
При составлении исходного дифференциального уравнения
(2.153), описывающего упругие поперечные колебания прямой бал-
ки, не учитывались силы внутреннего неупругого сопротивления,
которые демпфируют эти колебания. Учёт сил внутреннего сопро-
тивления чрезвычайно сложен. В первом приближении можно
предположить, что силы внутреннего сопротивления пропорцио-
нальны скоростям деформации. При такой постановке задачи в вы-
ражении (2.175) для коэффициентов Ап(р) получают вместо
множителя ---------, характеризующего незатухающие колебания,
Р2 + ^п
1
множитель ------------------, соответствующий затухающим коле-
Р24-2 '-_п"’пР
баниям;
L
I Ф (х, р) (х, dx
1_________j________________________
р2 + 25„<опр + р
j ^n)dx
и
Ап (р) =
(2.177)
Относительный коэффициент демпфирования имеет порядок
сотых долей единицы; примерное его значение равно 0,07.
6.4. Передаточная функция
упругого летательного аппарата
Как было показано выше, поперечные колебания упругого лета-
тельного аппарата описываются решением (2.171) уравнения
У(х,р) = (2.178)
в котором коэффициенты Ап(р) определены формулой (2. 175) или
(2.177). Заметим, что при составлении этого общего решения не
учитывался случай, соответствующий нулевому собственному зна-
чению р2 = 0, когда юп = 0. В этом случае уравнение (2. 169) при-
нимает вид
(2.179)
Очевидно, что этому уравнению при рассматриваемых гранич-
ных условиях (2. 168) удовлетворяют решения:
У_1 = А^ (р) = const; (2.180)
§ 6. Передаточная функция летательного аппарата
133
Уо =4_1 (р) + А0(р)х. (2.181)
Первое определяет поступательное движение в направлении
оси у, одинаковое для всех точек балки; второе — вращательное
вокруг некоторой оси, положение которой находится из начальных
условий. В нашей задаче это ось, проходящая через центр массы
летательного аппарата. Как видно, решениям (2.180) и (2. 181)
соответствует движение летательного аппарата, как абсолютно
жесткого тела под действием внешних сил F (х, t). Эти решения не
представляют для нас интереса, так как выше уже были получены
передаточные функции абсолютно жесткого летательного аппарата
и притом с более полным учетом условий движения летательного
аппарата, чем в настоящем параграфе. Воспользовавшись для по-
лучения окончательного результата правилом суперпозиции, можно
будет впоследствии сложить решение, полученное ранее для абсо-
лютно жесткого летательного аппарата, с решением, найденным
здесь для упругого аппарата.
Приступая к составлению передаточной функции упругого лета-
тельного аппарата, примем во внимание, что при анализе процес-
сов стабилизации нас интересуют не смещения элементов продоль-
ной оси аппарата y(x,t), а угол поворота или угловая скорость
того элемента продольной оси, у которого размещен гироскопи-
ческий измерительный прибор.
Угол поворота элемента продольной оси с координатой х = хг
найдем, вычислив производную
ИЛИ
= & (хг, t) =»г (/),
Мр)
(2.182)
(2.183)
Учитывая (2. 178), получим
ОО
(р)= 2 Ап
П=1
d<fn (х, и>л)
dx
(2.184)
Используя выражение (2. 177) и принимая начальные условия
нулевыми, получим передаточную функцию, описывающую упругие
колебания элемента корпуса летательного аппарата:
А? (?) = у
6 (р) р2+ 25„<опр4-<о2
И — 1 «
(2.185)
134
Глава II. Динамические свойства летательного аппарата
где
р F (х,р)
——— <p„(x,<o„)dx
о Й(р)Г ^п(х,^п)
£ L dx
I p.(x)cp2(x,<on)dx
о
(2. 186)
г
Часто для упрощения анализа влияние аэродинамических сил
на упругие колебания летательного аппарата не учитывают и рас-
сматривают только деформации аппарата от сосредоточенной по-
перечной силы, создаваемой органами управления. В этом случае
коэффициента записывается в такой форме:
Z =- — у5у,г J (2 187)
Jp, (x)^(x,u>n)dx L х=хг
о
Полученные передаточные функции описывают лишь упругие
колебания летательного аппарата. Чтобы рассмотреть полную реак-
цию аппарата на отклонение органов управления, к передаточной
функции Ог (р) /6 (р) следует добавить, основываясь на правиле
суперпозиции для линейной системы, соответствующую передаточ-
ную функцию 1F| (р) абсолютно жесткого летательного аппарата
'О'г (Р)
6 (р)
*Л
(2.188)
Л=1
Эта передаточная функция связывает угол отклонения управ-
ляющего органа с углом, измеряемым при помощи свободного
гироскопа. Коэффициенты при этом зависят от координаты
гироскопа хг.
Передаточная функция, определяющая угловую скорость, изме-
ряемую дифференцирующим гироскопом, имеет вид
(р)
5 (Р)
_______^пР_______
Р2 + 21п^пР +
(2.189)
Из вида передаточных функций (2. 188) и (2. 189) следует, что
блок-схема упругого летательного аппарата состоит из основного
блока, характеризующего движение эквивалентного жесткого лета-
тельного аппарата, и одного параллельного блока для каждой из
рассматриваемых гармоник (рис. 2.7). В технических приложениях
обычно достаточно учитывать лишь 1-ю гармонику или 1 и 2-ю гар-
моники упругих колебаний. Так, например, пренебрегая влиянием
§ 7. Требования к динамическим свойствам летательного аппарата 135
силы тяжести и вариаций скорости и учитывая только 1-ю гармо-
нику колебаний корпуса, получим
Д’ (Р) __ К (Т\р + I)|Х1 (2 190)
6(д) р(Г2р2 + 2^бр+1) Р2 + + “1
Таким образом, упругий летательный аппарат с достаточной для
предварительных исследований точностью рассматривают как
упругую балку со свободными концами, обладающую заданными
Рис. 2.7. Структурная схема продольного движения
летательного аппарата с учетом первого тона
упругих колебаний
распределениями массы ц(х) и жесткости EJ(х) по длине. Для по-
лучения более точных результатов прибегают к физическому моде-
лированию и эксперименту.
§ 7. ОСНОВНЫЕ ТРЕБОВАНИЯ К ДИНАМИЧЕСКИМ СВОЙСТВАМ
ЛЕТАТЕЛЬНОГО АППАРАТА
Динамические свойства летательного аппарата, являющегося
элементом замкнутой автоматической системы, определяют в из-
вестной степени структуру и характеристики систем стабилизации
и наведения и, кроме того, влияют на характеристики отдельных
элементов этих систем. При проектировании летательного аппара-
та как объекта управления считают необходимым учитывать тре-
бования, предъявляемые к нему системами стабилизации и наве-
дения. Такой подход дает возможность рационально сформировать
системы стабилизации и наведения. При этом требования к эле-
ментам системы стабилизации не оказываются излишне жесткими
или неосуществимыми, не усложняются элементы и не происходит
усложнения систем стабилизации и наведения в целом. Проекти-
рование летательного аппарата и его системы управления с учетом
взаимных требований приводит в результате к разумным решени-
ям', к созданию простых и надежных систем стабилизации и наве-
дения.
136
Глава II. Динамические свойства летательного аппарата
На основании общих положений теории автоматического управ-
ления и материалов, опубликованных в иностранной печати, мож-
но сформулировать приведенные ниже требования к динамическим
свойствам летательного аппарата. Поскольку эти свойства пол-
ностью определяются параметрами передаточных функций лета-
тельного аппарата (в рамках приема «замораживания» коэффици-
ентов), то требования к динамическим свойствам аппарата можно
сформулировать по отношению к параметрам его передаточных
функций и, следовательно, к динамическим коэффициентам, через
которые выражаются эти параметры.
7.1. Демпфирование
Относительный коэффициент демпфирования летательного ап-
парата
о. + <г + ^ (2 191)
2 У °12 + а11 а42
при данных значениях коэффициентов а)2 и а42, характеризующих
статическую устойчивость и нормальную силу, определяется коэф-
фициентами «и и а'12, характеризующими демпфирование враща-
тельного движения аппарата вокруг центра масс. Относительный
коэффициент демпфирования £ определяет величину перерегулиро-
вания по углу атаки и нормальной перегрузке во время переходно-
го процесса летательного аппарата, вызванного скачкообразным
отклонением органов управления.
Величины /перерегулирования по перегрузке и по углу атаки не
должны превосходить некоторых допустимых значений, которые
определяются соображениями прочности летательного аппарата,
линейности его аэродинамических характеристик и работоспособ-
ности аппаратуры управления. Допустимые значения перерегули-
рования обычно не превышают 30% [10], что соответствует относи-
тельному коэффициенту демпфирования летательного аппарата
g = 0,35. Такое высокое значение относительного коэффициента
демпфирования обычно не удается обеспечить для всех точек воз-
можных траекторий полета современных беспилотных летательных
аппаратов. Так, например, на одной из траекторий зенитной управ-
ляемой ракеты «Эрликон» коэффициент § изменяется от 0,35 в на-
чале полета до 0,08 в конце [1]. У баллистической ракеты V-2 на
большей части активного участка траектории g < 0,10 (см. ниже,
рис. 5.5). Низкие демпфирующие свойства многих управляемых
ракет объясняются тем, что они имеют обычно слаборазвитое опе-
рение, причем иногда с малым плечом, а полет часто происходи!
на больших высотах.
§ 7. Требования к динамическим свойствам летательного аппарата 137
При полете на больших высотах не представляется возможным
существенно увеличить аэродинамическое демпфирование за счет
увеличения площади и плеча оперения летательного аппарата.
В этом случае аэродинамическая компоновка летательного аппара-
та оказывается неэффективной в деле упрощения системы управ-
ления полетом. Вместе с тем получение требуемого значения g
сравнительно просто обеспечивается путем охвата летательного
аппарата обратной связью по его угловой скорости или обратными
связями по угловой скорости и угловому ускорению (см. ниже,
гл. V и VI). Этот способ по сравнению с упомянутыми аэродинами-
ческими средствами имеет то преимущество, что приводит к умень-
шению веса аппарата за счет снижения веса оперения, уменьшения
его лобового сопротивления и уменьшения нагрузок на конструк-
цию аппарата.
Все сказанное выше относительно возможностей улучшения
демпфирующих свойств летательного аппарата средствами аэро-
динамики и автоматики распространяется и на движение крена.
Аэродинамическое демпфирование этого движения, характеризуе-
мое декрементом затухания
1 мшхх
тэ = С11 = ' 77~ ~ 2/
на больших высотах также недостаточно и не может быть улучше-
но за счет конструкции планера (или корпуса) летательного ап-
парата.
Таким образом, к динамическим коэффициентам летательного
аппарата Яп, а'2, Ьп, &'12и сп, характеризующим его демпфирую-
щие свойства, обычно не предъявляются особые требования [13].
mxx pVSl2
(2.192)
7.2. Статическая устойчивость
Обычно для упрощения системы стабилизации требуется, чтобы
крылатый летательный аппарат был статически устойчив, т. е. что-
бы выполнялось условие
= -T--F- с* < 0 (2.193)
° А
ИЛИ
(2.194)
Как видно, статическая устойчивость обеспечивается располо-
жением центра масс аппарата впереди его центра давления. От
степени статической устойчивости, характеризуемой производной
щр’, в значительной мере зависит собственная частота летательно-
го аппарата, требования к которой будут рассмотрены ниже.
138
Глава II. Динамические свойства летательного аппарата
Для нормальной работы системы стабилизации, рассчитанной
на статически устойчивый летательный аппарат, требуется, чтобы
в летном диапазоне углов атаки зависимость mz(a) была линейной.
Это достигается правильной аэродинамической компоновкой лета-
тельного аппарата и, в частности, назначением достаточной степе-
ни статической устойчивости, с увеличением которой диапазон
линейного изменения аэродинамических характеристик расши-
ряется.
В случае статически неустойчивого летательного аппарата
устойчивость замкнутой системы стабилизации обеспечивается пу-
тем охвата летательного аппарата обратными связями по углу
тангажа (рыскания) или по нормальной перегрузке (см. ниже,
гл. V и VI). При этом конструктор летательного аппарата освобож-
дается от трудных задач, связанных с обеспечением статической
устойчивости, и перекладывает все трудности на конструкторов си-
стемы стабилизации.
Такой случай, например, имеет место при проектировании си-
стем стабилизации баллистических ракет, которые часто являются
статически неустойчивыми вследствие отсутствия оперения или
малой его площади. Однако статическая неустойчивость крылатого
летательного аппарата обычно оказывается нежелательной из-за
усложнения системы стабилизации и снижения ее надежности [13].
7.3. Собственная частота
Собственная частота, вычисляемая с достаточной степенью точ-
ности по формуле
<oa ss Va^2 = \ f -57,Зтгус*д8ЬА , (2 д 95)
' Iz
является важной динамической характеристикой летательного ап-
парата. Как видно, эта частота зависит от размеров летательного
аппарата (его момента инерции), скоростного напора и степени
статической устойчивости. При полете в достаточно плотных слоях
атмосферы собственная частота для большого транспортного са-
молета имеет порядок 1-4-2 1/сек, для малого самолета 3-4-4 1/сек
и для сверхзвукового снаряда 6-^18 Х/сек [10]. При полете на боль-
ших высотах собственная частота летательного аппарата значитель-
но снижается и имеет порядок от 0 до 1-4-1,5 Х/сек.
Чтобы сформулировать требования к величине собственной ча-
стоты летательного аппарата, рассмотрим вкратце взаимодействие
между летательным аппаратом, системой стабилизации и системой
наведения.
Полоса пропускания системы наведения, т. е. резонансная ча-
стота, или частота среза сои, должна быть такой, чтобы обеспечить
оптимальное соотношение между математическим ожиданием
§ 7. Требования к динамическим свойствам летательного аппарата
139
и средним квадратическим отклонением Ой. пролета. Для этого
система наведения должна достаточно точно реагировать на
управляющее воздействие (движение цели) и подавлять случайные
возмущения. Порядок величины частоты среза можно оценить,
например, по ширине амплитудно-частотного спектра управляюще-
го воздействия, известного из расчета кинематических траекторий
наведения. Так, для условий примера, приведенного на рис. 1.20,
частота среза системы наведения по лучу имеет порядок 1 \/сек..
Система стабилизации в свою очередь призвана достаточно
точно воспроизводить сигнал наведения при достаточно хороших
фильтрующих свойствах. При малой частоте среза системы стаби-
лизации юст последняя вносит большие амплитудные и фазовые
искажения в процессы наведения, что затрудняет формирование
системы наведения. Чтобы создать удовлетворительные условия
для работы системы наведения, необходимо частоты среза Ыи и ыСт
разнести, как это следует из теории автоматического управления
[10], хотя бы на 2 октавы. Это означает (если рассматривать систе-
му стабилизации как колебательное звено), что при ыСг^4 и
?ст^0,1 искажения по амплитуде не превосходят 10%. При лучших
демпфирующих свойствах системы стабилизации, когда '£,С7-^0,3,
искажения по амплитуде находятся в таких же пределах при
(Осг^Зши. Следовательно, можно ориентировочно принять, что ча-
стота среза системы стабилизации должна удовлетворять следую-
щему условию достаточно точного воспроизведения сигнала наве-
дения:
<псТ Д 3соя. (2.196)
Задача обеспечения определенного оптимального значения ча-
стоты среза системы стабилизации в общем случае решается
совместно средствами аэродинамики и автоматики. Рассмотрим
сначала два крайних случая.
Как уже отмечалось в гл. I (см. разд. 1.3), стабилизация ле-
тательного аппарата при определенных условиях может осуществ-
ляться только аэродинамическими средствами. Очевидно, что в этом
случае к собственной частоте летательного аппарата необходимо
предъявить требование
ttu>3U)H. (2.197)
При полете в разреженных слоях атмосферы или за ее преде-
лами собственная частота летательного аппарата равна нулю.
В этом случае задача обеспечения требуемой величины частоты
среза системы стабилизации решается только средствами автома-
тики путем охватывания летательного аппарата обратными связя-
ми по углу тангажа или по нормальной перегрузке. Другим слу-
чаем, когда задача обеспечения нужной частоты среза системы
стабилизации возлагается полностью на эту систему, является про-
140
Глава II. Динамические свойства летательного аппарата
ектирование системы стабилизации для неустойчивого летательного
аппарата.
Чтобы упростить систему стабилизации, целесообразно, когда
это возможно, решать рассматриваемую задачу одновременно
средствами аэродинамики и автоматики. Обычно конструктор ле-
тательного аппарата может в известных пределах распоряжаться
собственной частотой аппарата путем изменения степени статиче-
ской устойчивости, зависящей от конструктивной и аэродинамиче-
ской компоновки летательного аппарата. Конструктор системы ста-
билизации может в свою очередь повысить частоту среза системы
стабилизации по отношению к собственной частоте летательного
аппарата
(ост = kua. (2.198)
Коэффициент k здесь составляет 1,14-1,4 для системы стабили-
зации со средним быстродействием и 1,5-4-1,8 при высоком быстро-
действии [10]. Учитывая сказанное, условие (2. 196) можно пере-
писать в виде
3<<>ч. (2.199)
Чем выше требуемое значение коэффициента k, тем сложнее
система стабилизации и тем большие трудности перекладываются
на плечи проектировщика системы управления. Поэтому при по-
лете на достаточно малых высотах целесообразно, чтобы собствен-
ная частота летательного аппарата была не меньше некоторого
допустимого значения <samin- Например, если при ®и = 1 1/сек же-
лательно, чтобы k = 1, то <oamin = 3 1/сек. Однако при полете на
больших высотах стремление обеспечить значение собственной
частоты не меньшее, чем <oamin> оказывается неразумным из-за
существенного ухудшения прочих характеристик летательного ап-
парата.
Дело в том, что полет на больших высотах, предельных для
данного летательного аппарата, является расчетным случаем для
определения располагаемой нормальной перегрузки. При увеличе-
нии собственной частоты ыа~ ]/' aI2 за счет повышения степени
статической устойчивости располагаемая перегрузка уменьшается
и, чтобы сохранить ее требуемое значение, необходимо увеличивать
эффективность органов управления. Это приводит к излишнему
возрастанию площади рулей и, как следствие, к увеличению лобо-
вого сопротивления и шарнирных моментов, а в конечном счете
к повышению веса летательного аппарата и усложнению рулевого
привода.
При полете на малых высотах приведенные соображения не
играют роли и для упрощения системы стабилизации целесообраз-
но повышать собственную частоту летательного аппарата, но лишь
до известного предела wa тах. При слишком большой собственной
§ 7. Требования к динамическим свойствам летательного аппарата
14Г
частоте летательного аппарата затрудняется формирование систе-
мы стабилизации, которая в этом случае должна обладать высоким
быстродействием, а ее элементы не должны вносить заметные
амплитудные и фазовые искажения в процессы стабилизации. Уз-
ким местом при этом может оказаться рулевой привод, быстродей-
ствие которого всегда ограничено мощностью исполнительного дви-
гателя и шарнирными моментами. Поэтому максимальное значение
собственной частоты летательного аппарата на малых высотах
может зависеть от типа рулевого привода (гидравлического, пнев-
матического и т. д. ).
7.4. Эффективность органов управления креном
Задача обеспечения необходимой эффективности органов управ-
ления тангажом, рысканием и креном решается конструктором
летательного аппарата, однако требования к эффективности этих
органов окончательно формулируются в результате анализа про-
цессов в системах стабилизации и наведения с учетом того, что
управляющий момент или отклонение органов управления всегда
ограничены некоторым максимальным значением.
Эффективность органов управления креном определяется ди-
намическим коэффициентом
/И8’
С13=-----(2.200)
1 X
и максимальным моментом крена, создаваемым органами управ-
ления
Л1Ншах = --^батах. (2.201)
с15
От величины коэффициента Cis зависит передаточный коэффи-
циент автомата стабилизации крена КЛ (см. гл. IV). Чтобы вели-
чина этого передаточного коэффициента была в разумных пределах,
целесообразно, чтобы значения коэффициента Щз были ограничены
по модулю
I С13 [min | с13 I I С13 [max- (2 • 202)
Значения коэффициента эффективности органов управления Щз
и максимального угла их отклонения бэтах должны быть таковы,
чтобы максимальный момент, развиваемый органами управления,
был равен возмущающему моменту крена или превосходил его
лАл (2.203)
/V1x иэ max 1 У1х возле V '
При этом выбросы угла крена (или угловой скорости крена) в
переходном процессе, вызванном ступенчатым возмущающим мо-
142
Глава II. Динамические свойства летательного аппарата
ментом, не должны превосходить допустимой величины
i max Тдоп ИЛИ Ттах^СТдол- (2.204)
Величина максимального угла отклонения органов управления
креном датах определяется обычно конструктивными и аэродинами-
ческими соображениями. Если управление движением крена осу-
ществляется с помощью аэродинамических сил, то расчетным слу-
чаем для определения требований к эффективности органов управ-
ления является, очевидно, полет на максимальной высоте.
7.5. Эффективность органов управления тангажом и рысканием
Эффективность органов управления тангажом и рысканием ха-
рактеризуется величинами коэффициентов п13 и и максимальны-
ми моментами, создаваемыми органами управления. Например,
для движения тангажа эти характеристики равны:
Л1*
«13 =----(2-205)
iz
^6emax = ~^6etnax. (2.206)
«15
Характер требований к эффективности органов управления тан-
гажом и рысканием зависит от того:
а) на каких высотах происходит полет — в достаточно плотных
слоях атмосферы, где действуют аэродинамические силы, или в раз-
реженных слоях, где эти силы пренебрежимо малы;
б) является ли летательный аппарат статически устойчивым,
нейтральным или неустойчивым;
в) каков тип системы стабилизации (статическая или астатиче-
ская система).
Чтобы показать, как взаимодействуют задачи проектирования
органов управления летательным аппаратом и систем стабилиза-
ции и наведения, рассмотрим требования к эффективности органов
управления статически устойчивого летательного аппарата, управ-
ляемого посредством статической системы стабилизации,
когда сигнал наведения преобразуется в положение органов
управления.
В этом случае максимальный угол отклонения органов управле-
ния во всех точках всевозможных траекторий полета должен удов-
летворять условию [1]
|6гаах|>Я0Тр| + Ьзап, (2.207)
где Ьпотр — угол отклонения органов управления, потребный для
полета по теоретической траектории, а 63ап >0 — запас отклонения
органов управления.
120
£ 7. Требования к динамическим свойствам летательного аппарата
143
Величина максимального угла отклонения органов управления
бтах не может быть выбрана произвольно большой. Она, естествен-
но, ограничена конструктивными соображениями и рядом аэродина-
мических соображений, рассмотренных в книге [1].
Правая часть неравенства (2.207) складывается из угла 6Потр,
необходимого для создания «установившейся» перегрузки ппОтр (0,
и некоторого зэпзсз отклонения органов управления бзап? необхо-
димого для осуществления процессов стабилизации и наведения.
Величина угла бпОтр определяется, во-первых, нормальной пере-
грузкой Ппотр, которая необходима для полета по теоретической
траектории и обусловлена принятым методом наведения, началь-
ными условиями полета и движением цели и, во-вторых, передаточ-
ным коэффициентом летательного аппарата по перегрузке К~'-
дпотр=^-, (2.208)
где
Д’ _К_ — а12а43 — а13°42 (2 209)
8 8 а12 + а11а42
Величина запаса дзап определяется характером процессов стаби-
лизации и наведения.
Полет летательного аппарата происходит не обязательно с «ус-
тановившимся» значением перегрузки пП0Тр (t). В системах стаби-
лизации и наведения возможны различные переходные процессы,
вызванные начальными ошибками наведения при пуске или пере-
ходе с одного способа наведения на другой (например, при входе в
радиолуч после автономного полета на начальном участке траекто-
рии, при переходе с теленаведения на самонаведение и т. п.) и не-
случайными возмущениями, связанными, например, со сходом с
пусковой установки, разделением ступеней, включением и выключе-
нием двигателей, постоянным ветром и т. д.
В результате исследования этих переходных процессов с более
или менее полным учетом различных факторов уточняются основ-
ные параметры систем стабилизации и наведения с тем, чтобы обес-
печить требуемые качества этих систем в отношении быстродейст-
вия, колебательности и точности, и, кроме того, определяются углы
отклонения органов управления в зависимости от времени. Послед-
ние данные позволяют назначить запас отклонения органов управ-
ления дзапь необходимый для отработки начальных ошибок наведе-
ния и парирования возмущений. Величина этого запаса зависит от
величин начальных ошибок и возмущающих воздействий и дина-
мических свойств систем стабилизации и наведения.
144
Глава II. Динамические свойства летательного аппарата
Другая составляющая запаса органов управления связана с тем,
что ограничение отклонения органов управления действует как не-
линейный элемент с насыщением, характеристики которого даны
на рис. 1, 23, а. Так как сигнал наведения обычно засорен шумами,
то на полезное отклонение органов управления накладываются слу-
чайные отклонения. При неправильном выборе уровня ограничения
среднее отклонение органов управления mg , несущее полезную ин-
формацию, может быть значительно искажено.
По этим же самым соображениям назначают флюктуационный
запас отклонения органов управления дзап2, необходимый для того,
чтобы в процессе стабилизации при наличии случайных возмуще-
ний органы управления с достаточно большой вероятностью Ф(ц)
не доходили до.уровня ограничения dmax- Величина этого запаса
равна
= (2.210)
причем коэффициент и выбирается из условия работы органов уп-
равления в линейной зоне с вероятностью Ф(и). Так, например,
Ф(1,28) = 0,80 и Ф(1,65) = 0,90.
Величина среднеквадратического отклонения о», очевидно, за-
висит от динамических свойств замкнутой системы стабилизации,
характеризуемых передаточной функцией (р), и спектральной
плотности шумов в сигнале наведения Su (а):
СО
°! = J | < ИХ (“) (2 • 211)
—оо
В свою очередь спектральная плотность 3«я(о)) определяется
динамическими свойствами системы наведения и спектральной
плотностью флюктуационных шумов, действующих на эту систе-
му 5п(со):
5%И = |Ф“«(/«))|25л(®). (2.212)
Такой путь определения os возможен, если только системы ста-
билизации и наведения в основном сформированы. На первых ста-
диях проектирования, когда структура и параметры системы управ-
ления еще не ясны, величина флюктуационного запаса отклонения
органов управления uog или спектральная плотность шумов в сиг-
нале наведения 5'„н(и) могут быть заданы приближенно по данным
статистики.
Теперь, после того как рассмотрены все члены, входящие в
неравенство (2.207), можно сформулировать одно из требований
к динамическому коэффициенту ai3, характеризующему эффектив-
ность органов управления. Величина этого коэффициента при дан-
§ 7. Требования к динамическим свойствам летательного аппарата
145
ных коэффициентах «i2, ai2 и «43 должна быть достаточна для того,
чтобы обеспечить необходимое значение передаточного коэффици-
ента по перегрузке д — с тем, чтобы выполнялось условие, выте-
кающее из (2.207) и (2.208):
I ^max I
Ппотр
V
к—
g
+ ^зап-
(2.213)
Смысл этого условия состоит в том, что эффективность органов
управления должна обеспечивать выход летательного аппарата на
установившийся режим с необходимой нормальной перегрузкой при
ограниченном (указанными выше требованиями) отклонении орга-
нов управления.
При этом совсем не безразлично, на каком угле атаки апотр
будет получена необходимая установившаяся перегрузка. Как сле-
дует из (2.77) и (2.78), установившийся угол атаки а„.,>тр, при кото-
ром летательный аппарат развивает требуемую нормальную пере-
грузку пупотр, определяется выражением
Ку потр
^notnp ,,
V Qj3Q42 ------------------ Ql2Q43
S а13 + #ilG43
(2.214)
120
Чем больше этот угол, тем меньше необходимые значения коэф-
фициентов а42 и «4з и меньше площадь крыльев. Однако угол атаки
апотр ограничен сверху условием, аналогичным (2. 207):
^доп I I ^nomp I 4“ aja«‘
(2.215)
Здесь азап >0 — запас угла атаки, аналогичный запасу дзап;
адоп — предельно допустимое значение угла атаки, опре-
деляемое соображениями аэродинамики [1].
Неравенство (2.215) накладывает другое условие на величину
коэффициента «13. Эффективность органов управления должна обес-
печивать выход летательного аппарата на установившийся режим с
требуемой нормальной перегрузкой при возможно большем у:ле
атаки, ограниченном неравенством (2.215).
Рассмотренный пример показывает, что требования к эффектив-
ности и максимальным углам отклонения органов управления тан-
гажом и рысканием, которым должен удовлетворить конструктор
летательного аппарата, устанавливаются при формировании систем
стабилизации и наведения и зависят как от задач, возложенных на
эти системы, так и от условий их работы.
146
Глава II. Динамические свойства летательного аппарата
7.6. Маневренность
Маневренность летательного аппарата, как и эффективность
органов управления, принадлежит к тем динамическим свойствам
летательного аппарата, которые невозможно улучшить средствами
автоматики из-за ограниченности управляющих моментов и нор-
мальных управляющих сил.
Маневренные свойства летательного аппарата можно охаракте-
ризовать его передаточным коэффициентом по перегрузке К— и
располагаемой перегрузкой, которая выражается через этот переда-
точный коэффициент формулой (для определенности рассматриваем
движение тангажа)
„ V с V 012^43 а13°42 £ /О 91 Щ
Пурасп = К— 8в гаах = — ----0в тах • (2.2Jb)
S S а12 “Г а11а42
Передаточный коэффициент летательного аппарата по пере-
грузке определяется, с одной стороны, коэффициентами щ2 и п43, ха-
рактеризующими нормальную силу, развиваемую летательным ап-
паратом, а с другой стороны, коэффициентами щ2 и 043, характери-
зующими статическую устойчивость аппарата и эффективность ор-
ганов управления. Конструктор летательного аппарата обеспечивает
необходимую величину передаточного коэффициента по перегруз-
ке с учетом требований, вытекающих из анализа траекторий полета
и процессов стабилизации и наведения. Эти требования формули-
руются неравенством, которому должна удовлетворять располагае-
мая перегрузка:
I Прасп I i H-notnp I “Ь Ч3ап • (2.217)
Здесь пзап >0 — запас нормальной перегрузки, складывающий-
ся из запаса пзап1, необходимого для отработки начальных ошибок
наведения и парирования возмущений, и запаса пзап2, расходуемого
на случайные колебания перегрузки. Запас нормальной перегрузки
определяется так же, как и запас угла отклонения органов управ-
ления.
Величина передаточного коэффициента К— , зависящая главным
образом от площади крыльев, статической управляемости аппарата
и скоростного напора, должна быть достаточной для того, чтобы во
всех точках всевозможных траекторий полета обеспечить выполне-
ние условия (2.217). Следовательно, расчетным случаем для выбо-
ра площади крыльев является полет с минимальным скоростным
напором при возможно большем угле атаки, не превосходящем пре-
дельно допустимый. В этих условиях площадь крыльев должна быть
достаточной для создания необходимой перегрузки, но не больше,
так как излишняя площадь крыльев приводит к завышению веса
летательного аппарата.
§ 7. Требования к динамическим, свойствам летательного аппарата
147
7.7. Стабильность динамических свойств
Характерной особенностью такого объекта управления, как ле-
тательный аппарат, является сильная зависимость его динамических
свойств от скорости и высоты полета. В качестве примера можно
указать на зенитную управляемую ракету «Эрликон» [1]. Ее ма-
невренные свойства, характеризуемые передаточными коэффициен-
тами К— и К, изменяются вдоль одной из траекторий соответствен-
но в 10 и 20 раз. При этом собственная частота 1/Т меняется более
чем в 7 раз, относительный коэффициент демпфирования g в 5 раз,
а декремент затухания ZJT в 7 раз. В зависимости от графика ско-
рости V(t), диапазона высот, характера траектории и аэродинами-
ческой компоновки летательного аппарата изменения его динамиче-
ских свойств могут быть и более сильными. У современных
летательных аппаратов диапазон скоростей и высот настолько воз-
рос, что параметры, характеризующие динамические свойства лета-
тельного аппарата, могут изменяться в 100 и более раз.
Сильная зависимость динамических свойств летательного аппа-
рата от скорости и высоты полета существенно затрудняет разра-
ботку систем стабилизации и наведения, которые должны удовле-
творять предъявляемым к ним высоким требованиям в любых
условиях полета. Система управления полетом, в состав которой
входит как объект управления летательный аппарат, должна обла-
дать возможно более стабильными характеристиками.
Задача обеспечения стабильности динамических свойств систе-
мы управления возлагается частично на конструктора летательного
аппарата и в основном на конструктора системы управления, при-
чем распределение обязанностей между ними всегда зависит от
конкретных условий.
Как уже отмечалось в гл. I, важнейшие свойства замкнутой
системы стабилизации (устойчивость, точность, резонансная часто-
та, колебательность, передаточный коэффициент замкнутой систе-
мы) зависят в сильной степени от передаточного коэффициента
разомкнутой системы Ко. Поэтому первой задачей в рассматривае-
мой проблеме является обеспечение стабильности этого коэффици-
ента Ко, в состав которого в качестве одного из сомножителей вхо-
дит передаточный коэффициент летательного аппарата К.
Конструктор летательного аппарата может несколько сузить
диапазон изменения передаточного коэффициента аппарата, вое
пользовавшись следующими средствами:
а) рациональной аэродинамической компоновкой летательного
аппарата, обеспечивающей малую зависимость аэродинамических
характеристик от числа М;
б) разумной конструктивной компоновкой летательного аппара-
та, приводящей к благоприятному перемещению центра масс
148
Глава //. Динамические свойства летательного аппарата
аппарата с течением времени за счет соответствующего размещения
топлива и порядка его расходования;
в) перемещением крыльев вдоль продольной осн летательного
аппарата * *.
Следует заметить, что при перемещении центра масс или крыль-
ев изменяется не только передаточный коэффициент, но и собствен-
ная частота летательного аппарата.
Еще один способ, которым располагает конструктор летатель-
ного аппарата, состоит в использовании такого механизма, связы-
вающего шток (или вал) рулевой машинки с органами управления,
у которого передаточное число ip изменяется или по программе
или в зависимости от одного из следующих параметров: Н, V,
q. Если, например, удается получить обратно пропорциональную
зависимость ip от q, то произведение ipK— и, следовательно, пере-
даточный коэффициент системы стабилизации, выходной величиной
которой является нормальная перегрузка, не будет зависеть от ско-
ростного напора.
В распоряжении конструктора системы управления имеются
следующие средства для решения рассматриваемой задачи **:
а) применение рулевого привода без обратной связи;
б) охват летательного аппарата глубокими обратными связями,
в частности, по нормальной перегрузке;
в) использование рулевого привода с обратной связью, глубина
которой пропорциональна скоростному напору;
г) изменение передаточных коэффициентов некоторых элемен-
тов системы стабилизации, главным образом усилителей, в зависи-
мости от времени или одного из параметров; Н, V, q.
При использовании двух последних способов получают простей-
шие самонастраивающиеся системы стабилизации, в которых про-
цесс самонастройки осуществляется по разомкнутой схеме. Расши-
рение диапазона скоростей и высот летательных аппаратов и повы-
шение требований к их системам управления поставили перед
современной техникой задачу разработки более совершенных само-
настраивающихся систем стабилизации;
7.8. Максимальные нормальные перегрузки
Максимальные нормальные перегрузки, испытываемые лета-
тельным аппаратом, как известно, не должны превосходить некото-
рых предельно допустимых значений, определяемых условиями
прочности аппарата. Если летательный аппарат предназначен для
полета в широком диапазоне скоростей и высот, а точнее, в широ-
* Этот способ применяется на зенитном управляемом снаряде «Эрликон».
* Все эти вопросы будут рассмотрены ниже в гл. III и V.
§ 7. Требования к динамическим свойствам летательного аппарата
149
ком диапазоне скоростных напоров, то обычно при проектировании
летательного аппарата и системы стабилизации приходится решать
задачу ограничения максимальных нормальных перегрузок и углов
атаки и скольжения [2].
Площадь крыльев, как известно, выбирается для полета с мини-
мальным скоростным напором из условия получения нужных пере-
грузок при достаточно больших углах атаки, т. е. из условий (2.215)
и (2.217). В установившемся режиме определенному сигналу наве-
дения соответствует определенная перегрузка
« = (—'! ин. (2.218)
\ / уст
Передаточный коэффициент замкнутой системы стабилизации
I—-I зависит от передаточного коэффициента летательного ап-
\ ин ) У'-т
„V „
парата Л— и, следовательно, от скоростного напора q. Если не
ё
предусмотреть специальных мероприятий, то одному и тому же
сигналу наведения будут соответствовать большие перегрузки при
больших скоростных напорах q и малые перегрузки при малых q.
Сигнал наведения на малых высотах (при больших q) может быть
очень велик из-за начальных ошибок наведения. Если при этом весь
сигнал наведения будет использован для создания перегрузки, то
она окажется настолько большой, что приведет к разрушению лета-
тельного аппарата. Рассчитывать же прочность летательного аппа-
рата на этот случай невыгодно, так как вес аппарата окажется чрез-
мерно большим. Поэтому возникает задача ограничения величины
максимальных перегрузок при больших скоростных напорах.
С уменьшением скоростного напора снижается перегрузка, соот-
ветствующая данному сигналу наведения, но при этом возрастает
угол атаки. В полете с малыми скоростными напорами, если сигнал
наведения окажется очень велик, летательный аппарат может
выйти на углы атаки, превышающие допустимые. Так, например,
при больших углах атаки летательный аппарат может стать стати-
чески неустойчивым, а органы управления — неэффективными.
В связи с этим ограничивают величину максимального угла атаки
при полете с малыми скоростными напорами.
Задача ограничения максимальных перегрузок и углов атаки
может решаться в зависимости от конкретных условий как конст-
руктором летательного аппарата, так и конструктором системы ста-
билизации. Из формулы (2.218) следует, что максимальная пере-
грузка может зависеть от величины передаточного коэффициента
замкнутой системы стабилизации ( —) передаточных коэффици-
\ ин / уст»
ентов элементов с насыщением и уровней этих насыщений
(например, от передаточного коэффициента летательного аппарата
150
Глава II. Динамические свойства летательного аппарата
и максимального угла отклонения органов управления), и, кроме
того, от величины максимального сигнала наведения. В связи с этим
возможные способы ограничения максимальных перегрузок могут
быть разделены на две группы. К первой группе следует отнести
способы, связанные с ограничением отклонения органов управле-
ния, а ко второй — с ограничением сигнала наведения.
Простейший из способов первой группы состоит в механическом
ограничении отклонения органов управления до некоторого посто-
янного угла dmax- Как бы ни был велик сигнал наведения, макси-
мальная перегрузка в этом случае будет определяться значением
угла дщах и передаточным коэффициентом летательного аппарата по
перегрузке К—. При этом максимальная перегрузка оказывается
пропорциональной скоростному напору, вследствие чего рассматри-
ваемый способ пригоден лишь для летательных аппаратов, имею-
щих достаточно узкий диапазон изменения скоростей и высот. От-
меченный недостаток механического ограничения отклонения
органов управления можно в некоторой мере сгладить, если удается
добиться сравнительно малой изменяемости передаточного коэффи-
циента летательного аппарата одним из рассмотренных выше спо-
собов.
Другой способ состоит в использовании механизма изменения
передаточного числа ip от рулевого привода к органам управления.
Максимальному перемещению штока (или вала) рулевой машинки
соответствуют тогда различные углы Если передаточное чис-
ло ip изменяется обратно пропорционально скоростному напору q,
то и угол 6тах обратно пропорционален q, а максимальная пере-
у
грузка, зависящая от К— 6тах, остается неизменной.
Третий из способов ограничения перегрузок посредством ограни-
чения dmax заключается в применении рулевого привода без обрат-
ной связи. В этом случае максимальный угол отклонения органов
управления определяется максимальным моментом ЛТр.^тах, разви-
ваемым рулевой машинкой, и шарнирным аэродинамическим мо-
ментом
Мр.жтах^МХах- (2-219)
Так как производная пропорциональна скоростному напо-
ру q, то угол 6mav обратно пропорционален q. Такая зависимость
dmax от q дает, как было сказано выше, независимость максималь-
ных перегрузок от скоростного напора.
Рассматриваемая задача может решаться также многими сред-
ствами автоматики. Самым простым из них является ограничение
сигнала наведения некоторым уровнем иитаХ- Этот способ может
оказаться достаточно эффективным только в том случае, если пере-
£ 7. Требования к динамическим свойствам летательного аппарата
151
даточный коэффициент замкнутой системы стабилизации! —
\ин I уст
слабо зависит от скоростного напора. Если же этот коэффициент
изменяется в широком диапазоне, можно снижать уровень ограниче-
ния сигнала наведения в зависимости от времени, или высоты, или
скорости полета, или скоростного напора.
Другие мероприятия связаны с обеспечением слабого изменения
передаточного коэффициента замкнутой системы стабилизации
( —| пр» ПОСТОЯННОМ ограничении Ннтах- Для этой цели могут
' / уст
применяться рассмотренные в предыдущем разделе способы полу-
чения малоизменяющегося передаточного коэффициента замкнутой
системы стабилизации. Основные способы ограничения максималь-
ных перегрузок средствами автоматики более подробно будут рас-
смотрены в гл. V при изложении принципов формирования системы
стабилизации.
7.9. Жесткость конструкции
Наблюдающаяся в последнее время тенденция к повышению
летных данных летательных аппаратов за счет уменьшения отноше-
ния веса конструкции к весу топлива при заданных значениях веса
полезной нагрузки и дальности полета приводит к уменьшению
жесткости конструкции аппарата. Это заставляет при проектирова-
нии летательного аппарата и его системы стабилизации учитывать
влияние упругости конструкции на процессы стабилизации.
Когда к корпусу упругого летательного аппарата прикладывает-
ся управляющий момент, то, кроме вращения корпуса вокруг цент-
ра масс, возникают упругие поперечные колебания корпуса, имею-
щие бесконечное число форм изгиба — тонов колебаний. Наиболее
интенсивными оказываются колебания первых тонов. Если измери-
тельные элементы (гироскопические приборы и датчики линейных
ускорений) не расположены точно в узлах этих колебаний, то они
формируют сигналы, зависящие не только от перемещений лета-
тельного аппарата как жесткого тела, но и от упругих деформаций
изгиба. В результате этого через измерительные элементы, воспри-
нимающие упругие колебания, возникают дополнительные обрат-
ные связи и колебания в системе стабилизации оказываются взаи-
мосвязанными с упругими колебаниями. Отклонения органов
управления вызывают упругие колебания, которые в свою очередь
непосредственно влияют на отклонение органов управления и, сле-
довательно, на устойчивость замкнутой системы стабилизации.
Если частота среза системы стабилизации и частота упругих коле-
баний близки друг к другу, может возникнуть явление резонанса.
152
Глава II. Динамические свойства летательного аппарата
Для преодоления влияния упругости на процессы стабилизации
существуют два пути.
Первый — это проектирование конструкции летательного аппа-
рата таким образом, чтобы обеспечить необходимое значение час-
тоты первого тона колебаний (а иногда и второго тона). Для этого
нужно выдержать требуемые средние значения жесткости EJ и по-
гонной массы ц. Частота 1первого тона упругих колебаний должна
значительно превышать, например, в пять раз, частоту среза систе-
мы стабилизации.
Второй путь состоит в рациональном проектировании системы
стабилизации. Сюда относятся следующие мероприятия:
а) правильное расположение измерительных элементов в узлах
упругих колебаний (с этой целью исследуют влияние местоположе-
ния измерительных элементов на устойчивость системы стабилиза-
ции и находят такое их расположение, при котором влияние упру-
гих колебаний оказывается наименьшим);
б) подавление упругих колебаний соответствующими фильтрами;
в) использование самонастройки.
Наиболее правильным является разумное сочетание различных
способов. Часть задачи должна быть возложена на конструктора
системы управления, другая — на конструктора летательного аппа-
рата. По этой причине при проектировании летательных аппаратов,
особенно больших ракет, конструкторы учитывают требования к их
жесткости, предъявляемые со стороны системы стабилизации. Спе-
циалисты же в области управления в последнее время уделяют
большое внимание вопросам создания самонастраивающихся си-
стем стабилизации для упругих ракет [21, 22].
ЛИТЕРАТУРА
1. Лебедев А. А., Чернобровкин Л. С., Динамика полета беспилот-
ных летательных аппаратов, Оборонгиз, 1962.
2. ЛоккА. С., Управление снарядами, Гостехтеоретиздат, 1957.
3. Бонни Э. А., 3 у к р о у М. Дж., Б е с с е р е р К. У., Аэродинамика. Реак-
тивные двигатели. Практика конструирования и расчета, Физматгиз, 1960.
4. Spearman F. R. J., The Derivation and Use of Aerodynamic Transfer
Functions of Airframes, J. Roy. Soc., 1955, vol. 59, No. 539.
5. Крыжан OB ский О. M., Итерационный метод определения корней ха-
рактеристического управления, «Автоматика и телемеханика», 1960, № 5.
6. Колосов С. П. и Стромилов В. М., Основы автоматического пило-
тирования, Оборонгиз, 1959.
7. Матвеев В. Н„ Расчет возмущенного движения самолета Оборонгиз,
1960.
8. Кузовков Н. Т., Теория автоматического регулирования, основанная
на частотных методах, Оборонгиз, 1960.
9. Ведров В. С., Романов Т. Л., Сурина В. И., Самолет как объект
регулирования, Оборонгиз, 1957.
10. Жиль Ж., Пелегрен М., Декольн И., Теория и техника следящих
систем, Машгиз, 1961.
Литература
153
11. Beharrell J., Friedrich FL, The transfer function of a rockettype
guided missile with consideration of its structural elasticity, Journal of the Aero-
nautical Sciences, 1954, vol. 21, No. 7.
12. Бабаков И. M., Теория колебаний, Гостехтеоретиздат, 1958.
13. Конструирование управляемых снарядов, Под ред. А. Е. Пакета
и С. Рамо, Воениздат, 1963.
14. Фрейн У. Е., Вонг Б., Метод предварительного проектирования си-
стемы стабилизации с учетохМ упругости конструкции ракеты, «Вопросы ракетной
техники», 1963, № 8.
15. Бейли Ф. Б., Измерение формы изгиба как метод борьбы с влиянием
аэроупругости на контур управления, «Вопросы ракетной техники», 1961, № 6.
16. Павлов В. А., Понырко С. А„ Хованский Ю. М., Стабилизация
летательных аппаратов и автопилоты, «Высшая школа», 1964.
17. Эткин Б’., Динамика полета, «Машиностроение», 1964.
18. С о л о д о в н и к о в В. В., О частотных условиях монотонности и об
оценке погрешности в определении переходных процессов по частотным харак-
теристикам, «Автоматика и телемеханика», 1950, № 1.
19. Основы автоматического управления, Под ред. В. С. Пугачева, Физмат-
гиз, 1963.
20. Люкенс Д. Р., Методы анализа системы управления большой упругой
ракеты, «Вопросы ракетной техники», 1961, № 9.
21. Смит Дж., Синтез самонастраивающегося автопилота для управления
ракетой дальнего действия с учетом упругости корпуса, «Вопросы ракетной тех-
ники», 1961, № 11.
22. Н ай лэнд Ф. С„ Самонастраивающаяся система управления для боль-
шой упругой ракеты, «Вопросы ракетной техники», 1962, № 1.
23. Эндрю, Джонсон, Автоматическое управление аэроупругими коле-
баниями, «Вопросы ракетной техники», 1964, № 7.
f Lj
Глава III
ДИНАМИЧЕСКИЕ СВОЙСТВА ЭЛЕМЕНТОВ
СИСТЕМЫ СТАБИЛИЗАЦИИ
В состав замкнутой системы стабилизации, не считая объекта
управления — летательного аппарата, входят различные приборы
и устройства, которые можно подразделить на следующие группы.
1. Измерительные элементы.
2. Усилительно-преобразовательные элементы:
а) усилители;
б) вычислительные элементы и промежуточные устройства;
в) корректирующие устройства.
3. Рулевые машинки.
Измерительные элементы служат для определения параметров
движения летательного аппарата. Усилительно-преобразовательные
элементы выполняют функции усиления, преобразования и сумми-
рования сигналов. Рулевые машинки преобразуют управляющие
сигналы в отклонения органов управления.
В настоящей главе будут кратко рассмотрены динамические
свойства, играющие существенную роль в динамике процессов ста-
билизации; приведены передаточные функции элементов с теми
упрощениями, которые обычно принимаются при исследовании про-
цессов стабилизации.
При этом не будем рассматривать принципы действия, устрой-
ство, методы расчета элементов и другие вопросы, относящиеся к
специальным курсам, по которым имеется обширная учебная и спе-
циальная литература (16], [18], [19], [20]. Кроме того, следует иметь
в виду, что все эти элементы, различающиеся физической природой,
принципом действия и устройством, в большинстве случаев пред-
ставляют собой обычные элементы автоматических устройств, но
спроектированные и сконструированные применительно к особым
условиям работы, например, с учетом требований минимальных ве-
сов и габаритов и высокой надежности. Указанные требования ча-
сто накладывают особый отпечаток на конструктивное оформление
элементов систем стабилизации, но тем не менее их динамические
характеристики принципиально не отличаются от соответствующих
характеристик обычных элементов.
§ 1. Измерительные элементы
155
§ 1. ИЗМЕРИТЕЛЬНЫЕ ЭЛЕМЕНТЫ
Возможна различная классификация элементов, служащих для
определения параметров движения летательного аппарата. В част-
ности, эти элементы могут быть разделены на следующие две
группы:
1) измерители параметров угловых движений летательного ап-
парата;
2) измерители параметров движения центра масс аппарата.
К первой группе, очевидно, относятся измерители углов танга-
жа, рыскания и крена, угловых скоростей и ускорений, углов атаки
и скольжения. Ко второй группе можно отнести измерители линей-
ных ускорений, высотомеры, измерители скоростного напора и др.
Измерительные элементы снабжаются обычно датчиками сигна-
лов, которые представляют собой устройства, превращающие сиг-
налы измерителей (обычно угловые или линейные смещения) в бо-
лее удобные сигналы. Обычно в системах управления беспилотны-
ми летательными аппаратами применяются электрические датчики,
т. е. датчики, производящие электрические сигналы. К ним отно-
сятся, например, потенциометрические, сельсинные, индукционные
и емкостные датчики [3].
Датчики можно считать безынерционными элементами, а их
передаточные коэффициенты удобно объединять с передаточными
коэффициентами соответствующих измерителей параметров движе-
ния летательного аппарата.
Принципы действия различных датчиков сигналов, их схемы,
характеристики и динамические свойства описаны в обширной лите-
ратуре [2], [3], [6], [8], [14], [16]. Для ознакомления с динамикой про-
цессов, протекающих в датчиках сигналов, мы отсылаем читателя
к книге [2].
Перечень измерителей, применение которых возможно в систе-
мах стабилизации, весьма широк. Крайнее разнообразие типов из-
мерительных элементов делает невозможным рассмотрение всех их
в настоящей книге. Поэтому остановимся кратко лишь на основных
измерительных элементах, к числу которых следует отнести гиро-
скопические приборы и измерители линейных ускорений, отослав
читателя за более подробными сведениями к литературе [3], [6], [8],
[10], [12], [13], [14], [15] и др.
1.1. Гироскопические измерители
Из гироскопических приборов наиболее часто встречаются в си-
стемах стабилизации свободный, дифференцирующий и интегрирую-
щий гироскопы.
156 Глава III. Динамические свойства элементов системы стабилизации
Свободный гироскоп
Свободный гироскоп * применяется для измерения углов танга-
жа, рыскания и крена. Этот прибор можно считать практически
безынерционным устройством, и единственным параметром, кото-
рый следует учитывать при анализе систем стабилизации, является
передаточный коэффициент потенциометрического или какого-либо
другого датчика гироскопа Кс.г. Поэтому передаточная функция
свободного гироскопа записывается в виде
WC.S(P) = ^~- = K,S, (3.1)
А¥ (р)
где ыс.г — электрический сигнал на выходе датчика гироскопа;
Дф — разность между измеряемым углом ф и некоторым фикси-
рованным углом ф*.
Дифференцирующий гироскоп
Дифференцирующий гироскоп ** служит для измерения угловой
скорости вращения летательного аппарата относительно какой-либо
оси.
Дифференцирующий гироскоп по своим динамическим свойствам
представляет собой колебательное звено.
При составлении его передаточной функции целесообразно за
выходную величину принимать не угол поворота рамки гироскопа, а
электрический сигнал на выходе датчика гироскопа идг , объединяя
при этом передаточный коэффициент гироскопа с передаточным ко-
эффициентом датчика. Тогда получают
Ur) . (р)
wa.s(p)=
“(₽) Тд.гР2 + 2*д.гТд.гР + 1
(3.2)
где и — измеряемая угловая скорость.
Интегрирующий гироскоп
Интегрирующий гироскоп, так же как и дифференцирующий,
имеет две степени свободы, но отличается от последнего тем, что не
имеет пружины, ограничивающей вращение рамки гироскопа и соз-
дающей упругую восстанавливающую силу. Вращение всего прибо-
ра вокруг входной оси относительно инерциального пространства
вызывает прецессионное движение относительно выходной оси,
которое встречает лишь сопротивление вязкой жидкости. При этом
* Следует заметить, что в литературе часто встречаются другие наимено-
ния этого гироскопа: трехстепенный, позиционный.
** Другие наименования этого гироскопа: двухстепенный, прецессионный,
скоростной, гиротахометр, датчик угловых скоростей.
# 1. Измерительные элементы
157
изменение угла отклонения рамки, т. е. угла на выходе, восприни-
маемого датчиком сигналов, прямо пропорционально углу, на ко-
торый повернулся кожух (прибора вокруг входной оси относитель-
но инерциального пространства. Это основное свойство интегрирую-
щего гироскопа.
С помощью интегрирующего гироскопа можно получить также
сигнал, пропорциональный угловой скорости кожуха прибора.
С этой целью используется моментный датчик, создающий вращаю-
щий момент, приложенный к рамке гироскопа. Этот момент вызы-
вает такое же вращение рамки, как и прецессионное движение,
которое возникает при вращении кожуха гироскопа. Выходной сиг-
нал датчика сигналов усиливается и (подается на моментный дат-
чик, чтобы получить пропорциональный углу отклонений рамки
вращающий момент, который в обычных приборах создается пру-
жиной. При этом образуется «электрическая пружина», «отклоне-
ние» которой (Пропорционально угловой скорости относительно вход-
ной оси прибора.
Более подробно принцип действия и устройство интегрирующего
гироскопа описаны в [12]. Там же приведены простейшие уравне-
ния этого гироскопа, полученные без учета момента инерции рамки
гироскопа и ряда других величин. Если принять во внимание, что
благодаря «электрической пружине» интегрирующий гироскоп яв-
ляется колебательной системой и что в общем случае на выходе
интегрирующего гироскопа можно получить сумму сигналов, про-
порциональных углу отклонения и угловой скорости кожуха при-
бора, то передаточную функцию интегрирующего гироскопа можно
записать в виде
Wu.e(p) =
ии.г^
®(р)
Ки.г (хи.гР + О
Р(^Р2 + 2^.Л.гР+1) ’
(3.3)
Здесь передаточный коэффициент гироскопа Ки.г включает в се-
бя и коэффициент выходного датчика. Как видно, передаточная
функция интегрирующего гироскопа отличается от передаточной
функции дифференцирующего гироскопа множителем (ти.г+1/р).
Это обстоятельство и свидетельствует о том, что на выходе интег-
рирующего гироскопа можно получать сумму сигналов, пропорцио-
нальных углу отклонения и угловой скорости основания прибора.
Интегрирующий гироскоп может быть использован не только
как измерительный элемент, совмещающий в себе свойства свобод-
ного и дифференцирующего гироскопа, но и как преобразователь-
ный элемент. Подаваемые на моментный датчик сигналы ивх созда-
ют момент
М Л = К яи г. (3.4)
м.д 'м.д вх* \ 7
Выходной сигнал при этом получается таким, как будто кожух
прибора повернулся относительно инерциального пространства
158 Глава III. Динамические свойства элементов системы стабилизации
с угловой скоростью со, пропорциональной приложенному вращаю-
щему моменту моментного датчика:
Мм,э = Н(о. (3.5)
Другими словами, интегрирующий пироскоп может преобразо-
вывать электрические сигналы в соответствии с передаточной функ-
цией
,у,' , , _ ии.г (р) _ ^м.д _____^и г (хи.гР ~Е 1)_
UAP}~ ~ Н P^LP2 + 2k^P+!) ’ <3‘
Это свойство интегрирующего гироскопа позволяет вводить кор-
рекцию в систему стабилизации и обеспечивать гибкое взаимодей-
ствие гироскопа с другими элементами системы.
1.2. Датчики ускорений
Из других типов измерительных элементов систем стабилиза-
ции наиболее часто после гироскопов встречаются приборы для
измерения проекций перегрузок. Эти приборы не совсем
точно называют датчиками ускорений *. В системах стабилизации
они используются для измерения поперечных перегрузок.
Датчик ускорений чаще всего представляет собой механическую
колебательную систему (груз на пружине и демпфер). Поэтому его
передаточная функция имеет вид
Tvz t„\ _ ид.у(Р) _ Кд.у
w д.у \Р) — ~' ^г2 г „ । < •
(Р) д.уР “Ь ^д.у^д.уР ~Ь 1
Здесь входной величиной является ns—проекция перегрузки на
ось чувствительности прибора Os; выходной величиной — у —
электрический сигнал датчика; Кд.у— передаточный коэффициент
прибора с учетом передаточного коэффициента датчика сигналов.
Если датчики ускорений прикреплены к корпусу летательного
аппарата, то они измеряют проекции перегрузки на связанные
с аппаратом оси координат, совпадающие с осями чувствительности
прибора. Однако выходными координатами летательного аппара-
та, наиболее близкими к измеряемым проекциям перегрузки, яв-
ляются угловые скорости касательной к траектории. Поэтому три
составлении структурной схемы системы стабилизации необходимо
учитывать связь между угловой скоростью касательной к траекто-
рии и измеряемой проекцией перегрузки.
Пусть, например, датчик ускорений измеряет поперечную пере-
грузку n»i, равную [5]
У cos а 4- X sin а У + Ха о.
«у1 =-------д------~-----д---• (3.8)
* Другие наименования: акселерометр, датчик линейных ускорений, датчик
перегрузок.
§ 1. Измерительные элементы
159
Переход к угловой скорости 0 осуществляется с помощью со-
отношения
(3-9)
Учитывая, что нормальная перегрузка пу равна
Р sin а + Y _____ Ра + Y
(3.10)
найдем отношение перегрузок
та
Ya + X — —L 7s
_ пУ1 = (У* + Л) а + =____________тг
73 пу (у« + р) а 4- ys6 vg , р . yi'
Пренебрегая величиной cos © по сравнению с относительным
ускорением V@/g, из уравнения движения центра масс летательного
аппарата в проекциях на нормаль к траектории найдем
пу 1 /' V0 , n\ V Zo
-4-= —---------Pcos© . (3.12)
ь W \ g / g
Следовательно,
nyl^7} (3.13)
Вычислим коэффициент ц — для маневренного летательного
е
аппарата с малой нормальной силой органов управления (У8~0).
Принимая во внимание, что
Р-Х ZQ 1
пх = - , (3.14)
G
получим
Формула (3.13) получена в предположении, что датчик ускоре-
ний расположен в центре масс летательного аппарата. Если же
датчик находится на некотором расстоянии (ха.у — хт) от центра
масс, то необходимо учесть, что он воспринимает еще и линейное
ускорение, возникающее при колебаниях летательного аппарата
около центра масс. Это ускорение равно
bi = — (xdy — xT)&, (3-16)
160 Глава III. Динамические свойства элементов системы стабилизации
поэтому входной величиной датчика ускорений (с точностью до
cos 0) является
= 0-(^-*тН- (3-17)
Переходя к изображениям, получим
= ~(хдл,~~хт)Р^- (3-18)
Передаточная функция датчика ускорений, расположенного на
некотором расстоянии от центра масс с осью чувствительности,
направленной по связанной оси Оу\, может быть теперь записана
в следующем виде:
^(Р)= . . . .
У (р) пу1 (Р) в (р)
' V ,
ид.у (р) _ ид.у (р) ПУ1 (Р)
К-д.у
-xT)pW^(p) . (3.19)
Т’д.уР'2' + ^д.уТд.уР + 1
Здесь IF|(p)—передаточная
равная
функция летательного аппарата,
Wl (р) =
& (р) ^6 (Р)
t»(p) И7? (₽)
(3.20)
Так, например, для маневренных летательных аппаратов с ма-
лой нормальной силой, создаваемой органами управления, из
(2. 122) и (2. 123) следует, что
Wl(p) = 7\p+ 1. (3.21)
1.3. Упрощение передаточных функций измерителей
Возможность упрощения передаточных функций рассмотренных
измерительных элементов обусловлена соотношением собственной
частоты измерителя и частоты среза исследуемой системы стаби-
лизации. Если собственная частота измерителя значительно пре-
вышает частоту среза системы стабилизации, то с целью упроще-
ния исследования можно пренебрегать постоянной времени, опре-
деляющей эту собственную частоту. Тогда получают следующие
приближенные передаточные функции:
Wg.^p) = Кд.Г, (3.22)
= <3-23>
= Ка... (3-24)
§ 2. Усилительно-преобразовательные элементы
161
Другие измерители
Кроме гироскопических приборов и датчиков ускорений, в не-
которых системах стабилизации беспилотных летательных аппара-
тов применяются датчики высоты, скоростного напора, воздушной
скорости и др. Эти приборы могут использоваться как для форми-
рования управляющих сигналов, так и для изменения параметров
системы стабилизации [15], [17].
§ 2. УСИЛИТЕЛЬНО-ПРЕОБРАЗОВАТЕЛЬНЫЕ ЭЛЕМЕНТЫ
2.1 Усилители сигналов
Необходимость усиления сигналов имеет место в любой системе
автоматического управления. Под усилителем следует понимать
устройство, осуществляющее преобразование сигнала с усилением
по мощности и имеющее входные и выходные величины одинако-
вой физической природы.
В системах управления летательными аппаратами могут приме-
няться магнитные, электромашинные, релейные, электронные и по-
лупроводниковые усилители [14]. Поскольку эти усилители явля-
ются в принципе обычными элементами автоматики, их схемы,
принципы действия и характеристики можно найти в литературе
по автоматике [2], [3], [6], [8], [14] и др.
При исследовании процессов стабилизации летательного аппа-
рата в большинстве случаев можно рассматривать усилитель как
безынерционное звено. Если же оказывается необходимым учесть
инерционность усилителя, например, при анализе системы стабили-
зации с высоким быстродействием, то в первом приближении уси-
литель можно представить в виде апериодического звена.
2.2. Вычислительные элементы
Наиболее простыми и самыми распространенными вычислитель-
ными элементами систем стабилизации являются устройства для
алгебраического суммирования информации от двух или большего
числа источников. Суммирующее устройство, или сумматор всегда
имеется в любой системе стабилизации. Для суммирования элек-
трических сигналов используются различные электрические цепи.
При исследовании процессов стабилизации считают, что операция
суммирования выполняется без какого-либо запаздывания. Прин-
ципы действия и схемы некоторых суммирующих устройств, при-
меняемых в системах стабилизации, описаны, например, в учебных
пособиях [14], [17].
Требования высокой точности, предъявляемые к современным
системам стабилизации, выдвигают задачу применения для форми-
рования управляющих сигналов цифровых вычислительных уст-
6 Заказ 1242
162 Глава III. Динамические свойства элементов системы стабилизации
ройств. Эти устройства, в частности, могут использоваться в целях
коррекции динамических свойств системы стабилизации.
Иногда к вычислительным элементам относят дифференцирую-
щие и интегрирующие /?С-цепи. В нашей книге эти элементы
рассматриваются как корректирующие устройства (см. ниже,
разд. 2.3).
2.3. Корректирующие устройства
Корректирующими устройствами называют элементы, которые
вводятся в автоматическую систему для улучшения в нужном на-
правлении ее динамических свойств. Корректирующие звенья вклю*
чают как в прямой канал прохождения сигнала управления, так
и в обратные связи.
В качестве примера использования корректирующих устройств
на рис. 3. 1 приведена блок-схема одной из возможных систем ста-
билизации ракеты [10].
Прямая цепь
Рис. 3.1. Блок-схема системы стабилизации с дифференцирующим
гироскопом и датчиком ускорений
Наибольшее распространение в системах стабилизации лета-
тельных аппаратов получили корректирующие элементы, выполнен-
ные в виде электрических цепей. Эго так называемые корректиру-
ющие цепи.
Корректирующие цепи могут быть активного и пассивного
типов. Цепь пассивного типа не содержит источников энергии и
мощность сигнала на ее выходе меньше мощности па входе. Кор-
ректирующая цепь активного типа содержит усилитель и потребля-
ет энергию источников питания. Так как вид электрического сигна-
ла (постоянный или переменный ток) создает существенные
§ 3. Рулевые машинки
163
отличия в построении корректирующих цепей, то различают кор-
ректирующие цепи постоянного и переменного тока.
Наибольшей конструктивной простотой обладают пассивные
корректирующие цепи постоянного тока, благодаря чему они чаще
всего применяются в системах стабилизации беспилотных летатель-
ных аппаратов. Такие цепи обычно состоят из сопротивлений R
и емкостей С и называются пассивными RC-цепями, или КС-фильт-
рами, или корректирующими фильтрами.
Для коррекции динамических свойств системы стабилизации
могут использоваться и цифровые вычислительные устройства. Ди-
намические свойства корректирующих цепей различных типов
достаточно полно освещены в литературе [2], [3], [8], [10], [И], [14]
и др. Примеры использования корректирующих фильтров в систе-
мах стабилизации и наведения будут неоднократно встречаться
в дальнейшем изложении. Передаточные функции и частотные ха-
рактеристики наиболее распространенных /?С-фильтров приведены,
например, в [10], [17].
§ 3. РУЛЕВЫЕ МАШИНКИ
Исполнительные элементы системы стабилизации и управления
нормальными перегрузками — рулевые машинки служат для пере-
мещения органов управления летательным аппаратом в соответст-
вии с управляющими сигналами. Этот процесс происходит с у с и-
лением мощности: незначительному расходу энергии на
перемещение управляющего элемента соответствуют большие за-
траты энергии на перемещение органов управления. Энергия для
перемещения органов управления поступает от специального источ-
ника. В зависимости от вида этой энергии различают рулевые
машинки: электрические, гидравлические, пневматические и рабо-
тающие на горячем газе.
Для управления рулевой машинкой управляющие сигналы пре-
образовываются в перемещение управляющего элемента (золотни-
ка, струйной трубки и т. п.). Это осуществляется с помс.щью
усилительно-преобразовательных элементов, которые вместе с ру-
левой машинкой образуют рулевой привод (или рулевой тракт).
Рулевые машинки почти всегда управляются с помощью элект-
рических сигналов. Это обусловлено рядом причин и, в частности,
большими удобствами передачи и преобразования электрических
сигналов, весьма малыми запаздываниями преобразований этих
сигналов, что важно во всех случаях, когда требуется высокое
быстродействие.
Управление рулевой машинкой может осуществляться либо ПО'
разомкнутой схеме, т. е. без обратной связи, либо по замкнутой
схеме. Рулевые приводы с обратной связью представляют собой
типичные замкнутые системы автоматического управления непря-
6*
164 Глава III. Динамические свойства элементов системы стабилизации
мого действия (с усилением мощности). В качестве примера на
рис. 3. 2 приведена блок-схема гидравлического рулевого привода,
по которой построены рулевые приводы большинства зарубежных
ракет [1]. Аналогичную схему обычно имеют и пневматические ру-
левые приводы.
В рассматриваемой схеме рулевого привода применяется элект-
рическое управление рулевой машинкой. Напряжение сигнала
ошибки иг поступает в усилитель, который создает электрический
сигнал I. В зависимости от этого сигнала электромеханический пре-
образователь устанавливает положение х управляющего элемента,
от которого зависит распределение энергии.
Рис, 3.2. Типовая блок-схема гидравлического руле-
вого привода
Ниже в этом параграфе будут рассмотрены уравнения, переда-
точные функции и динамические свойства гидравлических и пнев-
матических рулевых машинок, получивших большое распростране-
ние благодаря своей высокой точности, быстродействию и надеж-
ности и сравнительно малому весу. От электрических рулевых
машинок они существенно отличаются более высоким быстродейст-
вием.
3.1. Уравнение движения органов управления;
нагрузка на рулевую машинку
Уравнение движения подвижных частей рулевой машинки
(поршня со штоком, механической передачи, органов управления)
является одним из основных уравнений, описывающих процессы
в рулевой машинке. Так как органы управления механически свя-
заны с рулевой машинкой, то все ее подвижные части можно рас-
сматривать вместе с органами управления как одно целое.
Координатой, характеризующей состояние этой механической
системы, может служить положение поршня или (штока) двигате-
ля s или угол отклонения органов управления 6. Угол S однозначно
связан с координатой s передаточным коэффициентом механиче-
ской передачи от штока двигателя к органам управления
6 = ips.
§ 3. Рулевые машинки
165
Приведя движение всех подвижных частей двигателя и механи-
ческой передачи к повороту органов управления, получим уравне-
ние движения этой системы в виде
Iр — Мр.м -ф МТр + Мш,
где 1Р — момент инерции всех подвижных частей, приведенный
к оси вращения органов управления;
Мтр — момент всех сил трения, приведенный к оси вращения ор-
ганов управления;
Мр.м — момент рулевой машинки;
Мш — аэродинамический шарнирный момент.
Нагрузка в виде шарнирного момента имеет место при управле-
нии с помощью воздушных и газовых рулей и поворотных крыльев.
Аэродинамический шарнирный момент может быть представлен
в виде линейной функции от а, 6 и 6:
Мш = МШО + М^+ М6Ш 8 + М*ш8,
где Мш0, и зависят от скорости и высоты полета,
размеров и геометрической формы органов управления, а также от
взаимного влияния между органами управления и летательным ап-
паратом [5]. Составляющей шарнирного момента Л1ш0 при а = 8 =
= 6 = 0 при исследовании процессов стабилизации часто пренебре-
гают.
Составляющая шарнирного момента + возникает
вследствие того, что центр давления аэродинамических сил, дейст-
вующих на органы управления, не совпадает с их осью вращения.
Обычно центр давления расположен позади оси вращения.
Положение центра давления зависит от числа М; при переходе
от дозвуковых скоростей к сверхзвуковым центр давления сме-
щается назад.
Шарнирный момент пропорционален скоростному напору и по-
этому во время полета изменяется в широких пределах. Для полу-
чения наименьшей мощности рулевой машинки и, следовательно,
минимальных ее размеров и веса рекомендуется проектировать
органы управления таким образом, чтобы ось вращения находилась
близко от середины диапазона перемещения центра давления [4].
В этом случае в процессе полета знак производных и из-
меняется. При дозвуковых скоростях полета получается так назы-
ваемая аэродинамическая перекомпенсация рулей: центр давления
располагается впереди оси вращения, и рули являются «статиче-
ски неустойчивыми», так как >0 и М* >0. При сверхзвуковых
скоростях, как обычно, знак производных и становится
отрицательным.
166 Глава III. Динамические свойства элементов системы стабилизации
Момент трения Мтр представляет собой сумму моментов сил
трения различных подвижных частей, в том числе и самих органов
управления относительно их оси вращения. В первом приближении
принимают, что момент трения пропорционален угловой скорости
б, и объединяют его с аэродинамическим демпфирующим момен-
том б. Поскольку момент трения обычно больше аэродинами-
ческого демпфирующего момента, то величина не изменяется
значительно во время полета.
Принимая во внимание отмеченное выше допущение о силах
трения, уравнение движения подвижных частей рулевой машинки
можно записать в виде
/ = + (3.25)
at2 dt
3.2. Гидравлическая рулевая машинка
Гидравлические рулевые машинки наиболее часто применяются
в тех случаях, когда от сравнительно небольших рулевых машинок
требуются очень большие моменты (для отклонения рулей или
поворотных двигателей в ракетах больших габаритов, для откло-
нения поворотных крыльев).
В гидравлических рулевых машинках для перемещения органов
управления используется энергия жидкости, поступающей от спе-
циального насоса. Распределение потоков жидкости между каме-
рами гидравлического двигателя и регулирование ее расхода осу-
ществляется гидроусилителем. Иначе говоря, гидроусилитель рас-
пределяет давление между полостями двигателя. Разность давлений
в этих полостях образует силу, вызывающую перемещение поршня
и штока двигателя.
В рулевых машинках беспилотных летательных аппаратов при-
меняются все обычные типы гидравлических двигателей, причем
конструкции их довольно разнообразны. Чаще всего применяются
гидродвигатели поршневого типа.
В большинстве конструкций гидравлических рулевых машинок
зарубежных ракет почти всегда используется золотниковый гидро-
усилитель, в котором расход жидкости зависит от положения зо-
лотника. Этот тип гидроусилителя считается наиболее удачным.
Однако применяются и другие схемы. Достаточно распространены,
например, струйные гидроусилители, при использовании которых
поступление жидкости в полости гидродвигателя зависит от по-
ложения подвижного сопла (струйной трубки) относительно двух
отверстий, через которые жидкость попадает в двигатель.
Составим уравнения и передаточные функции гидравлической
рулевой машинки с учетом нагрузки для наиболее распространен-
§ 3. Рулевые машинки
167
ного за рубежом типа — с поршневым двигателем и золотниковым
гидроусилителем (рис. 3.3). Эти уравнения будут справедливы
и для рулевых машинок с лопастным двигателем и золотниковым
гидроусилителем.
Определим сначала расход жидкости через золотниковый гид-
роусилитель, пренебрегая утечками.
Секундный расход жидкости, поступающей через золотник в по-
лость гидродвигателя а, очевидно, равен
Q = Hf|/A-|-(Po — Ра) ,
где р, — коэффициент расхода;
f — площадь проходных сечений,
пропорциональная отклоне-
нию золотника от среднего
положения на величину х:
f = bx;
ро — давление жидкости на входе
в золотник, т. е. в питающей
магистрали;
ра— давление в полости гидро-
двигателя, в которую посту-
пает жидкость;
Рис. 3.3. Схема гидравличе-
ской рулевой машинки:
/ — перемещение золотника х;
2 — перемещение штока $; 3 —
питание; 4 — слив.
р — ПЛОТНОСТЬ ЖИДКОСТИ.
Пренебрегая атмосферным давлением, получим
Ро = Ра + Рь-
Отсюда вытекает
Ро Ра
Ро — Ьр
2
(3.26)
где Др = ра — рь — перепад давлений на поршне (лопасти), обу-
словленный нагрузкой в виде инерционных сил, сил трения и аэро-
динамических сил, действующих на органы управления.
Следовательно,
Q = pbxy
— (ро — &р)-
р
(3.27)
Введем относительное перемещение золотника
х =
х
^тах
(- 1 <Х< 1),
которое будем рассматривать как входную величину рулевой ма-
шинки.
168 Глава III. Динамические свойства элементов системы стабилизации
Принимая во внимание, что при отсутствии нагрузки (Ар = 0)
максимальный расход жидкости равен
Qtnax = Р-^тах^/ ,
выражение (3. 27) можно представить в виде
Q = Qmaxx-i/ 1-Al.
V Ро
Как видно, расход жидкости Q зависит от перепада давлений
Ар, т. е. от нагрузки на рулевую машинку, причем эта зависимость
является нелинейной.
Нелинейная зависимость расхода от нагрузки сказывается лишь
в рулевых машинках с жестким механическим управлением поло-
жением золотника. Как показано в работе [1], при помощи соответ-
ствующей конструкции электромеханического преобразователя
и гидроусилителя можно обеспечить практически линейную зави-
симость между расходом и сигналом i на входе в электромеханиче-
ский преобразователь
г(Р)
Такая зависимость объясняется тем, что при данном сигнале I
тенденция к увеличению расхода, обусловленная возрастанием
перепада давления на__золотнике р0 — ра, компенсируется уменьше-
нием хода золотника х, вызванным возрастанием силы реакции
потока, действующей на золотник.
Составим теперь уравнение расхода жидкости. Проходящая
через золотник жидкость, очевидно, должна восполнять объем, об-
разовавшийся при перемещении поршня (лопасти), и объем, поте-
рянный в результате утечек и сжатия жидкости.
Рассмотрим сначала простейший случай, когда можно прене-
бречь влиянием нагрузки на секундный расход, утечками и сжатием
жидкости. Объем, освобождающийся в секунду при перемещении
tZs
поршня s, очевидно, равен F —, где F— площадь поршня.
Для общности рассуждений вместо перемещения поршня s удоб-
но рассматривать пропорциональное ему отклонение органов упра-
вления 6
r d8
Г --- = V--- ,
dt dt
где v — изменение объема цилиндра вследствие перемещения
поршня при отклонении органов управления на единицу угла б,
равное
с d s F
v — Г -— — —
d8 ip
§ 3. Рулевые машинки
169
Здесь iP = d^jds — передаточный коэффициент механизма, связы-
вающего шток двигателя с органами управления. Очевидно, что
объем, освобождающийся в секунду при перемещении поршня, так-
d8
же можно представить в виде v —.
dt
Приравнивая объемный расход жидкости через золотник Q
объему, образовавшемуся при перемещении поршня (лопасти), по-
лучим
Q = Qm^ = v^~. (3.28)
at
Как видно, угловая скорость отклонения органов управления б
пропорциональна секундному расходу Q и, следовательно, относи-
тельному перемещению золотника х. При максимальном переме-
щении золотника х = 1 скорость отклонения органов управления
также максимальна. Поэтому
Qmax ^max>
следовательно,
d& ____________________________ ь ~
Г~ ОтахХ.
dt
Соответствующая передаточная функция записывается в виде
Wp.M(p) = 4^- = -^. (3.29)
х(р) р
Таким образом, гидравлическая рулевая машинка при указан-
ных выше допущениях имеет передаточную функцию интегрирую-
щего звена. Передаточный коэффициент этого звена — максималь-
ная угловая скорость отклонения органов управления бтах служит
показателем быстродействия рулевой машинки.
Передаточную функцию (3. 29) часто используют для прибли-
женного описания динамических свойств гидравлических рулевых
машинок различных типов даже при наличии значительной нагруз-
ки [2].
При исследовании гидравлических рулевых машинок в некото-
рых случаях учитывают «сжимаемость» рабочей жидкости. Хотя
сжимаемость самой жидкости и невелика, следует принимать во
внимание сжимаемость растворенного в жидкости воздуха, а в не-
которых случаях и упругость трубопроводов. Говоря о «сжимаемо-
сти» жидкости в гидравлическом двигателе, обычно и подразуме-
вают упомянутые выше явления.
Степень влияния растворенного в жидкости воздуха на ее сжи-
маемость можно оценить следующим образом. Изменение ДГ
170 Глава III. Динамические свойства элементов системы стабилизации
объема капельной жидкости V при изменении давления на величи-
ну Др, как известно, определяется формулой
ДИ Др
V Е '
где Е — объемный модуль упругости жидкости, зависящей от рода
жидкости, ее температуры и давления. Модуль Е имеет размерность
давления, причем порядок его величины для масел составляет
104 кГ1см2.
Пусть в объеме жидкости V при давлении р содержится некото-
рый объем воздуха Пеозэ. Так как модуль объемной упругости газа
при изотермическом процессе равен его давлению, то изменение об-
щего объема V + Ув0зд с увеличением давления на величину Др
будет равно
Л (V + vemd) = - (4 + — ^Р-
\ Е р )
Если Veoad = 0,001V при р = 10 кГЕм2 и Е = 104 к.Г]см2, то вли-
яние растворенного воздуха на изменение общего объема равно
влиянию сжимаемости капельной жидкости.
Таким образом, на модуль объемной упругости Е большое вли-
яние оказывает процент содержания воздуха в масле. С целью
уменьшения влияния сжимаемости воздуха применяют возможно
более высокое давление масла.
Чтобы учесть влияние сжимаемости, определим изменение объ-
ема жидкости при возрастании давления ра на dpa под действием
нагрузки
—-----, (3.30)
Va Е
Здесь Va — начальный объем жидкости, находящейся в полости
двигателя.
Из выражения (3. 30) следует
dVg = dpa
dt Е dt
На основании равенства (3- 26) имеем
dpa __ 1 йДр
dt 2 dt
Следовательно,
dVg = Vg dkp
dt 2E dt
Принимая во внимание, что жидкость, протекающая через зо-
лотник, заполняет объем, освободившийся в результате перемеще-
§ 3. Рулевые машинки
171
ния поршня (лопасти) [см. формулу (3.28)] и сжатия жидкости,
получим
QmaxFl/ =
У р0 dt 2Е dt
Выразив объем жидкости в полости двигателя через отклонение
органов управления
Va = VQ + v8,
где Va — объем половины цилиндра, получим
QmaJ]/i„ = + (3.31)
ах у р0 dt iE dt к '
Полученный результат объединим с уравнением моментов
(3. 25)
/р-^-<^-<6 = щХр, (3.32)
в котором член v\p представляет собой момент, развиваемый дви-
гателем, так как
р
Мр.я = — Др = иДр.
1р
Система двух уравнений (3.31) и (3.32) с незивестными Др и б
определяет отклонение органов управления в зависимости от пере-
мещения золотника х с учетом нагрузки на двигатель и сжимаемо-
сти жидкости. Эта система является нелинейной. Одним источником
нелинейности является зависимость расхода жидкости через золот-
ник от нагрузки Др, другим — переменный объем жидкости, под-
вергающийся сжатию.
Исследование работы гидравлической рулевой машинки нели-
нейными методами является очень трудоемкой задачей, а получен-
ные при этом результаты трудно использовать для исследования
процессов управления летательным аппаратом. Поэтому в некото-
рых работах [1], [9] используется линеаризация характеристик ма-
шинки, определяющих расход Q.
Одним из возможных вариантов линеаризации является идеа-
лизация экспериментальных характеристик рулевой машинки. Эти
характеристики, связывающие расход Q, перемещение золотника х
и разность давлений Др, в некотором диапазоне Др могут быть
представлены в виде прямых линий (рис. 3.4, а). Тогда можно на-
писать выражение [9]
dQ = Crdx — C2dAp,
(3.33)
172 Глава III. Динамические свойства элементов системы стабилизации
„ dQ
где Ci = —5 — изменение объемного расхода на единицу относи-
сь
тельного перемещения золотника при постоянной
разности давлений Л.р;
о дО ,
—С2 = —------изменение объемного расхода на единицу перепа-
дкр
да давлений Др при постоянном положении золот-
ника.
Для данной рулевой машинки коэффициенты С; и С2 имеют оп-
ределенные значения и без особого труда могут быть найдены по
экспериментальным характеристикам.
Рис. 3.4. Идеализированная характеристика гидравлической рулевой
машинки
Такая линеаризация является, вообще говоря, удовлетворитель-
ной при малых нагрузках Др, по крайней мере, для обычно приме-
няемых значений коэффициента запаса по нагрузке kH = Ро/Дртах
от 7 до 1,5, т. е. для Дршах/Ро = 0,15-4-0,65. Однако в ракетостроении
в случае необходимости проектируются приводы поворотных крыль-
ев и рулей, не имеющие запасов по нагрузке (Дртах = Ро) [1]. Для
качественной оценки динамических свойств рулевой машинки
в этом случае мы также будем пользоваться выражением (3.33),
положив в нем
= Qtnaxl
f . _ Qmax
Тогда получим (см. рис. 3. 4, б)
Q = Qmax('*-— Ь
Нелинейность, обусловленная переменным объемом жидкости
Va = То + подвергающейся сжатию, проявляется значительно
§ 3. Рулевые машинки
173
при больших углах отклонения органов управления. При малых
углах 6 с целью линеаризации уравнения (3.31) можно осреднить
этот объем, приняв Va ~ По.
В результате проведенной линеаризации уравнение расхода
(3. 31) примет вид
Ар \ Л
С/щЯХ I х — ---- — v ----- Ч-
х. IIldA | I . . I
\ р0 / dt
Уо d&p
2Е dt
Принимая во внимание, что Qmax = Убтах, получим
d8 __ к /—_____________________ Др \___ Vo dkp
dt "!аА' ро / 2Ev dt
(3.34)
(3.35)
В этом уравнении величина
ный коэффициент ненагру-
женной рулевой машинки
(при /\р = 0); коэффициент
бщах/Ро характеризует поте-
ри расхода на золотнике,
создаваемые нагрузкой Др;
коэффициент V0/2Ev харак-
теризует влияние сжимаемо-
сти жидкости.
Последний коэффициент
представим в виде
-^=тр.м^, (3.36)
2£р р0
бшах представляет собой передаточ-
Рис. 3.5. Внешняя характеристика электри-
ческого двигателя постоянного тока
MATRA Р. ЮС, применяемого в автопилотах
телеуправляемых объектов
где Тр.м — величина, имеющая размерность времени и равная
У ___ Ур Ро __ втах Ро ?о
Р'М 2Fn Л Л 2F ’ \ • /
4-r.u Umax v>niax z,-c
Используя (3. 37), запишем уравнение (3. 35) в форме
4- = 6тахГх--^(тд.Л-^- + Др)]. (3.38)
Если пренебречь сжимаемостью жидкости, будем иметь
(3.39)
dl \ Ро 1
Аналогичная зависимость угловой скорости отклонения органов
управления 6 от нагрузки характерна в той или иной степени и для
других типов рулевых машинок. В качестве примера на рис. 3. 5
приведена внешняя характеристика (зависимость числа оборотов
от момента) для двухфазного электродвигателя [8]. Ниже, в разд.
3. 3, будет выведено уравнение пневматической рулевой машинки,
аналогичное уравнению (3.38).
174 Глава III. Динамические свойства элементов системы стабилизации
3.3. Пневматическая рулевая машинка
Небольшие зарубежные ракеты, например, класса «воздух —
воздух», часто имеют пневматический рулевой привод, отличаю-
щийся сравнительной простотой изготовления и эксплуатации при
достаточно хорошем быстродействии. Так же как и в гидравличе-
ских рулевых приводах, перемещение управляющего элемента
обычно осуществляется электрическими устройствами, а отклоне-
ние органов управления производится пневматическими двигателя-
ми, другими словами, применяются электропневматические руле-
вые приводы [1], [3]. Схема такого привода аналогична рассмотрен-
ной выше схеме на рис. 3. 2. В пневматических рулевых машинках,
как и в гидравлических, в качестве управляющего элемента могут
применяться золотник или струйная трубка. Принципиальная схе-
ма пневматической рулевой машинки с золотниковым пневмоуси-
лителем аналогична схеме, приведенной на рис. 3. 3.
Пневматические рулевые машинки существенно отличаются от
гидравлических в связи с использованием рабочего тела с очень
высокой сжимаемостью. Для уменьшения влияния сжимаемости
в качестве рабочего тела используют горячий газ. Поскольку тем-
пература газа непосредственно не связана с динамическими харак-
теристиками рулевой машинки, то под пневматическими будем
понимать рулевые машинки, работающие как на горячем, так и на
холодном газе.
В идеальном случае можно считать, что:
а) объем газа, поступающего в секунду в расширяющуюся по-
лость пневмоцилиндра, пропорционален относительному перемеще-
нию управляющего элемента;
б) утечки газа отсутствуют;
в) в полостях пневмоцилиндра газ ведет себя как несжимаемая
жидкость.
При указанных допущениях передаточную функцию пневмати-
ческой рулевой машинки можно записать в виде, аналогичном пе-
редаточной функции (3. 29) гидравлической рулевой машинки:
в (Р) ^тах
х (р) ;•
Максимальная скорость отклонения органов управления бшат
служит показателем быстродействия пневматической рулевой ма-
шинки.
Передаточная функция (3.40) справедлива лишь при отсутст-
вии инерционной и внешней нагрузок, а практически при достаточ-
но большом запасе по нагрузке и достаточно медленно меняющихся
входных сигналах, когда можно принять отмеченные выше допуще-
ния.
(3.40)
§ 3. Рулевые машинки
175
Чтобы составить приближенные уравнения, описывающие рабо-
ту пневматической рулевой машинки, рассмотрим характеристики
управляющего элемента и процессы в камерах силового цилиндра.
Характеристики управляющего элемента. Для
учета сжимаемости газа теперь
секундный расход газа в каме-
ру цилиндра W.
Расход W является слож-
ной нелинейной функцией дав-
ления в питающей магистрали
Ра, давления в камере цилинд-
ра р и относительного переме-
щения управляющего элемен-
та х. В качестве примера на
рис. 3.6 показана расчетная
зависимость между расходом
W, давлением р и перемещени-
ем управляющего элемента х
для идеального четырехщеле-
вого плоского золотника с пе-
рекрытием [9]. Величина I^max
представляет собой наиболь-
ший расход воздуха в силовой
цилиндр при х = 1. В общем
виде, считая давление за-
данным, рассматриваемую за-
висимость можно записать как
^о = Ичра); (3.41)
= рД (3.42)
необходимо рассматривать весовой
ления для идеального плоского золотника
где индексы а и Ь соответству-
ют двум камерам силового цилиндра. Поскольку половина b зо-
лотника идентична половине а, то, очевидно, характеристики обе-
их половин золотника являются одними и теми же, за исключени-
ем того, что положительным значениям х половины а соответству-
ют кривые, построенные для отрицательных значений х половины
Ь, и наоборот.
Процессы в камерах силового цилиндра.
В быстродействующих пневматических системах скорость тепло-
передачи через стенки цилиндра, даже не имеющего специальной
изоляции, пренебрежимо мала по сравнению со скоростями процес-
сов в камере [9]. На этом основании можно считать, что приток
энергии в камеру цилиндра равен энергии, приносимой газом:
176 Глава III. Динамические свойства элементов системы стабилизации
JcpT'a Wa, где Т'а — температура газа, поступающего в камеру,
ср — удельная теплоемкость при постоянном давлении, / — меха-
нический эквивалент теплоты. В первом приближении считают, что
температура Т'а все время равна температуре в магистрали пита-
ния То, и, кроме того, полагают, что То— известная постоянная ве-
личина.
Приняв во внимание, что приток энергии извне идет на увеличе-
ние внутренней энергии и на совершение газом работы против
внешних сил, запишем уравнение энергии в виде
+ Ра (3 •43)
И at at
Поскольку температура в камере цилиндра Та не представляет
интереса в рассматриваемой задаче, целесообразно эту величину
исключить из уравнения (3. 43) с помощью уравнения состояния
Pa = gPaRTa, (3 • 44)
где R — газовая постоянная. Тогда получим
Wa = — — (paVa) + Ра dVa (3.45)
а *RT0 dt а а’ JcpT0 dt
Используя зависимость
— + , (3.46)
y.R Jcp R
Ср
где х = —, можно записать
Cv
а । dPa 47)
“ “ RT0 dt “Г x.RT0 dt ’ \ • I
Выразив объем газа в камере через отклонение органов управления
= П + (3.48)
где Vo — объем половины цилиндра, получим
у?___РаР d& । Ур dpa 49)
а ~~ RT0 dt -Г v.RT0 dt ’ \ I
Преобразование и упрощение уравнений. В по-
лученных двух уравнениях (3.41) и (3.49) имеется три неизвест-
ных: И7О, ра и 6. Поскольку уравнение движения органов управления
Л — — М* —------AR8 = v(p — р.) (3.50)
содержит неизвестную ръ, необходимо добавить уравнения, описы-
вающие процессы во второй камере пневмоцилиндра:
§ 3. Рулевые машинки
177
Wb = f(-x, рьУ,
Pt>v d6 Vo — v8 dpt,
RT0 dt xRT0 di
(3.51)
(3.52)
Таким образом, имеем пять нелинейных уравнений с пятью не-
известными: Wа, ра, Wb, ръ, б, решение которых дает связь между
отклонением органов управления 6 и относительным перемещением
управляющего элемента х.
Для упрощения исследования полученную систему уравнений
обычно линеаризуют относительно некоторых невозмущенных зна-
чений Wa*, Wb*, ра*, ръ*, д*. При малых отклонениях всех парамет-
ров от этих значений исследование линейных уравнений дает доста-
точно точное описание динамических свойств пневматической руле-
вой машинки.
Для исследования процессов управления летательным аппара-
том удобно придти к «симметричной» схеме, положив, что в невоз-
мущенном состоянии х*. = 0, 6* = 0, Wa* = ИД* = 0. В этом случае
невозмущенные значения давлений в камерах двигателя равны
ра*— ръ* = Р*, что возможно только при отсутствии нагрузки.
Представим давления в камерах цилиндра в виде
и
Ра = Д + Ра
Pb = Pf+P'b,
(3.53)
где р’а и р’ь — отклонения давления от невозмущенного значения.
,—, , d& dp,
Пренебрегая произведениями малых величин р а~’ °
и т. д. и вычитая уравнение (3.52) из (3.49), получим
цу _ цу 2Р*а । d\p
с b ’ RT0 dt ' v.RTa dt ’
(3.54)
где Ар = ра — ръ — перепад давлений на поршне двигателя.
В первом приближении характеристики золотника могут быть
линеаризованы следующим образом [9]:
Wa = C1x~ С2р’а\ (3.55)
Wb = ~C~x-C2p'b. (3.56)
Коэффициент Ci характеризует чувствительность золотника по
расходу для случая, когда давление в камере цилиндра остается
неизменным. Коэффициент С2 характеризует потери расхода на зо-
лотнике на единицу перепада давлений Ар, создаваемого нагрузкой.
178 Глава III. Динамические свойства элементов системы стабилизации
Вычитая (3.56) из (3.55), получим
Wa — Wb = 2Сгх — С2Др. (3.57)
Из уравнений (3. 54) и (3. 57) имеем
2С^х — С2\р = ^- — +—(3.58)
r RT0 dt xRT0 dt ’ '
или
46 _ C}RT0 C2RT0 Vo d&p (2 gg)
dt p„v 2ptv 2*r*v dt
Это уравнение запишем в виде
46 , d&p — = kiX — k2\p — k3—— , dt dt (3.60)
, CiRT0 где ^1 = ——у р»и — передаточный коэффициент ненагруженной рулевой машинки (при Др = 0);
L о — коэффициент, характеризующий потери рас-
хода на золотнике, создаваемые нагрузкой;
ь — "° 2*P,v — коэффициент, характеризующий влияние ежи-
маемости газа.
Уравнение (3. 60) достаточно точно описывает процессы в пнев-
матическом двигателе лишь при малых нагрузках. Однако мы
будем пользоваться этим уравнением для качественной опенки ди-
намических свойств рулевой машинки во всем диапазоне возмож-
ных нагрузок Др от 0 до Ро. С этой целью соответствующим образом
определим коэффициенты уравнения (3. 60) и представим их в фор-
ме, более удобной для дальнейшего изложения.
Очевидно, что при отсутствии нагрузки (Др_= 0) и максималь-
ном перемещении управляющего элемента (х = 1) угловая ско-
рость отклонения органов управления максимальна. Следова-
тельно,
= (3-61)
P*V
6G I
Рулевая машинка развивает наибольший перепад давлений в
установившемся состоянии (6 = 0, Др — 0) при максимальном пе-
ремещении управляющего элемента (х = 1). Полагая, что Дртах~
~Ро, для этого случая из уравнения (3. 60) получим
Jfe2 = A12L. (3.62)
Ро
§ 3. Рулевые машинки
179
Коэффициент, характеризующий влияние сжимаемости газа,
представим в виде
<3.63)
Ро
где Тр.м — величина, имеющая размерность времени и равная
Т — k = ^тах (3 64)
Фпах 2xp#V 6тах Кпах 2хр#
Если, например, Ко = ц6тах и 2р* = р0, то
ТР.М=— • (3-65)
Х^тах
Используя (3. 61), (3. 62) и (3. 63), перепишем уравнение (3. 60)
в форме
— = 6max[x— — (Тпм d-^- + Др^1. (3.66)
dt L Ро \ И dt )\
Уравнение (3.66) идентично уравнению гидравлической руле-
вой машинки (3. 38). Пневматические рулевые машинки при малых
нагрузках во многом сходны с гидравлическими, за исключением
того, что модуль объемной упругости газа пропорционален давле-
нию: Егаза = хр*, а модуль упругости рабочих жидкостей гидроси-
стем почти не зависит от давления.
3.4. Влияние нагрузки на динамические свойства
рулевой машинки
Чтобы составить передаточные функции нагруженной рулевой
машинки, воспользуемся уравнениями (3.38) и (3.66), описываю-
щими в линейном приближении процессы в двигателе, и уравнени-
ем движения органов управления (3.25). Учитывая, что момент
рулевой машинки равен
= ~> (3.67)
к. л f
1р
перепишем уравнение (3. 25) в виде
+ + + ) Р-68»
Ро Рор. \ dt dt 1
или
АР = _ . (3.69)
Ро Мторм
Здесь Мн — момент нагрузки, равный
мн = — 1Р + АО + М*ШЧ, (3.70)
182 Глава III. Динамические свойства элементов системы стабилизации
(р) = — передаточная функция замкнутого контура
х х (р)
рулевой машинки, образованного естествен-
ной обратной связью по шарнирному моменту
W^(p) = — передаточная функция того же замкнутого
контура рулевой машинки, но для входного
воздействия сс;
IFg (р)—передаточная функция летательного аппа-
рата.
Рис. 3.8. Структурная схема нагруженной рулевой
машинки
Используя уравнения (3. 72) или структурную схему на рис. 3. 7,
можно получить передаточную функцию нагруженной рулевой ма-
шинки для случая, когда входной величиной является перемещение
управляющего элемента х:
1
х Р’ (_ aspa + а2р2 + ар + 1 ’
(3.78)
где
_ _ т MS + Мторм
1¥iiu 1 p.seViui ь :
бщах
(3.79)
Передаточную функцию нагруженной рулевой машинки для
случая, когда входной величиной является угол атаки, получаем
в виде
§ 4. Рулевой привод
183
w*‘ (р) =
тш \_______ТР'МР + 1_______
m5, I азрз + aipi _|_ aip _|_ 1
(3.80)
Если оказывается возможным пренебрегать инерционным
и демпфирующим моментами нагрузки, то в этом случае аз~й2~0
и, следовательно:
^(Р) = (
W*’(p) =
Мторм \ 1
) Я1Р + 1
ТР'Мр 4~ 1
J О1Р +1
г
bi'- If"'
- <ад?)
рулевой машинки
Составим теперь передаточную функцию
с учетом всех составляющих шарнирного момента, приняв за вы-
ходную величину угол <5, а за входную — перемещение управляю-
щего элемента х. Учитывая, что передаточная функция замкнутого
контура на рис. 3. 8 определяется выражением
Фз, (р) = =--------!-----,
Мр)
(3.83)
получим, что передаточная функция рулевой машинки может быть
записана в виде
=
1-Fas* (р)Г“(р)
(3.84)
Передаточный коэффициент рулевой машинки определяется по-
прежнему формулой (3. 76).
§ 4. РУЛЕВОЙ ПРИВОД
Органы управления летательным аппаратом приводятся в дей-
ствие с помощью специальных приводов. Если этими органами яв-
ляются воздушные или газовые рули, поворотные крылья или
поворотные двигатели, то привод называется рулевым и его основу
составляет рулевая машинка.
Рулевой привод можно рассматривать как автоматическую си-
стему, предназначенную для управления перемещением органов
управления. Объектом управления являются органы управления
летательным аппаратом, а исполнительным элементом — рулевая
машинка. В состав рулевого привода входят также усилительно-
преобразовательные элементы, служащие, во-первых, для усиления
и преобразования электрического сигнала, поступающего на вход
рулевого привода, и, во-вторых, для преобразования электрическо-
184 Глава III. Динамические свойства элементов системы стабилизации
го сигнала в перемещение управляющего элемента рулевой -машин-
ки. С целью придания рулевому приводу нужных динамических
свойств используются корректирующие устройства и различного
рода обратные связи. Для образования сигналов обратной связи
необходимы измерительные элементы. Основным сигналом обрат-
ной связи является обычно положение органов управления. Кроме
того, возможны внутренние обратные связи, сигналами которых
могут быть электрический сигнал преобразователя, положение уп-
равляющего элемента рулевой машинки, расход жидкости и т. д.
На беспилотных летательных аппаратах находят применение и ру-
левые приводы, построенные по разомкнутой схеме, т. е. без обрат-
ной связи.
В зависимости от типа рулевой машинки различают рулевые
приводы: электрические, гидравлические, пневматические и на го-
рячем газе. Гидравлические и пневматические рулевые приводы
с электрическим управлением часто называют электрогидравличе-
скими и электропневматнческими рулевыми приводами.
При проектировании рулевых приводов возникает ряд сравни-
тельно трудных проблем, из которых одной из наиболее важных
является обеспечение требуемых динамических характеристик при-
вода.
4.1. Усилительно-преобразовательные элементы
рулевого привода
Остановимся кратко на характеристиках и динамических свой-
ствах наиболее часто встречающихся усилительно-преобразова-
тельных элементов гидравлического или пневматического рулевого
привода.
Для усиления сигнала обычно используются электронные и маг-
нитные усилители. Первые можно считать практически безынерци-
онными устройствами. Магнитные усилители, для которых харак-
терно некоторое запаздывание, достаточно точно представляются
апериодическими звеньями.
Динамические свойства электромеханических преобразователей
в зависимости от схемы их устройства описываются передаточными
функциями колебательного или апериодического звеньев с малыми
постоянными времени:
» (р)
(3.85)
Хотя постоянные времени каждого из усилительно-преобразова-
тельных элементов весьма малы (порядка сотых и тысячных долей
секунды), ими не всегда можно пренебрегать, так как суммарное
запаздывание может быть существенным. Однако даже самое про-
стое описание динамических свойств рассматриваемых элементов
§ 4. Рулевой привод
185
передаточными функциями апериодических звеньев приводит к до-
вольно сложным и неудобным для анализа системы стабилизации
выражениям.
В тех случаях, когда в реальной системе имеется совокупность
звеньев с малыми постоянными времени, для упрощения анализа
их динамические свойства часто учитывают приближенно путем
введения в уравнение подходящей величины чистого запаздывания
т [11]. Так можно поступить, в частности, и при описании динами-
ческих свойств усилительно-преобразовательных элементов рулево-
го привода, здписав уравнение
х (/) = Ky.npU (t — т), (3.86)
где Ку.пр — передаточный коэффициент усилительно-преобразова-
тельных элементов;
и — сигнал, поступающий на вход рулевого привода,
х — относительное перемещение управляющего элемента
гидро- или пневмоусилителя.
Уравнению (3. 86) соответствует передаточная функция
(3'87>
Амплитудно-фазовая частотная характеристика идеального за-
паздывающего звена с временем запаздывания т
W (» = (3.88)
имеет постоянный модуль, равный единице, и переменный фазовый
сдвиг
= —ти>. (3.89)
Следовательно, принимая такую математическую модель усили-
тельно-преобразовательных элементов, мы считаем, что сигнал пе-
редается без амплитудных искажений только с фазовым сдвигом.
Время чистого запаздывания т, очевидно, можно найти путем
подбора, добиваясь хорошего совпадения (в пределах полосы про-
пускания привода) частотных характеристик, использующих пере-
даточную функцию (3.87), и характеристик, построенных по урав-
нениям усилительно-преобразовательных элементов или получен-
ных экспериментально. Экспериментальный способ определения
величины запаздывания т позволяет учесть ряд факторов, влияние
которых не удается описать математически.
4.2. Рулевой привод без обратной связи
Если управление рулевой машинкой осуществляется по разомк-
нутой схеме (без искусственной обратной связи), то передаточная
функция рулевого привода является произведением передаточных
186 Глава III. Динамические свойства элементов системы стабилизации
функций усилительно-преобразовательных элементов и рулевой
машинки:
(3.90)
Поэтому для выяснения свойств рулевого привода без обратной
связи достаточно рассмотреть свойства самой рулевой машинки и
влияние их на динамические свойства летательного аппарата.
Привод без нагрузки
Если тормозной момент достаточно велик, то динамические
свойства рулевой машинки описываются интегрирующим звеном.
В этом случае с помощью рулевого привода без обратной связи
осуществляется управление скоростью отклонения органов
управления. Такой привод в некоторых случаях может использо-
ваться для введения астатизма в систему стабилизации.
Привод с нагрузкой
Влияние шарнирных моментов на динамические свойства руле-
вой машинки, как уже было сказано в предыдущем разделе, опи-
сывается обратными связями, охватывающими рулевую машинку.
Наиболее существенной является жесткая обратная связь по шар-
нирному моменту с коэффициентом Коа, определяемым формулой
(3.73), благодаря которой динамические свойства нагруженной
рулевой машинки описываются передаточной функцией апериоди-
ческого звена. Рулевой привод в этом случае управляет положе-
нием органов управления, которое определяется не только вели-
чиной управляющего сигнала х, но и величиной шарнирного момен-
та. Это следует из выражения (3. 76) для передаточного коэффици-
ента нагруженной рулевой машинки
Мгпорм
/ т,.,
\ т.п
Благодаря тому, что этот передаточный коэффициент обратно
пропорционален скоростному напору, нагруженный рулевой при-
вод без обратной связи позволяет естественным образом обеспечить
стабильность передаточного коэффициента системы стабилизации
по перегрузке I— I и ограничить максимальные нормальные
ин 'УСТ
перегрузки летательного аппарата.
§ 4. Рулевой привод
187
Нетрудно убедиться, что произведение передаточных коэффици-
ентов рулевой машинки без обратной связи и летательного аппара-
та по перегрузке, равное
I пи\ KV
^торм
(3.91)
уст S
т \
,lltu 1
1+^«—
/
практически не зависит от скоростного напора, что и обеспечивает
стабильность соответствующего передаточного коэффициента си-
стемы стабилизации.
Выясним теперь возможные способы ограничения максимальной
перегрузки. При запасе по нагрузке Аи>1 максимальное отклоне-
ние органов управления ограничивается механически некоторым
значением бтах. Максимальная перегрузка в этом случае может
быть ограничена максимальным сигналом наведения «нтах- Так
как передаточный коэффициент 1 — 1 уСГ не зависит от скоростного
' ин '
напора, то и максимальная перегрузка, определяемая выражением
Пу max
, , _Рн max,
1н / уст
будет неизмененной при различных скоростях и высотах полета.
Если запас по нагрузке
где
j-
Мш max = Мш
MfnopM
max
1,
т \
1 + Кта-^ бшах,
(3.92)
то максимальное отклонение органов управления, имеющее место
при х — 1, будет определяться величиной шарнирного момента в со-
ответствии с формулой
о МП10рМ
«max = ---------------- — • (3-93)
/ т \
(-<)
\ тш)
Поэтому максимальная перегрузка определится выражением
п я = ________Мторм------- (3.94)
"•у max , а X ' >
и не будет зависеть от скоростного напора. Такой способ ограниче-
ния максимальных перегрузок называют ограничением по шарнир-
ному моменту.
188 Глава III. Динамические свойства элементов системы стабилизации
Благодаря нагрузке на рулевую машинку, зависящей от угла
атаки, рулевой привод без обратной связи взаимодействует с лета-
тельным аппаратом и при существенном влиянии нагрузки должен
рассматриваться как неотъемлемая часть летательного аппарата.
Как следует из схем, приведенных на рис. 3. 7 и 3. 8, рулевая
машинка без обратной связи и летательный аппарат образуют
замкнутый контур. Его передаточная функция, если за выходную
величину принять угол атаки, имеет вид
{р) = ---- . (3.95)
Приведем пример анализа этого замкнутого контура, показан-
Рис. 3.9. Влияние шарнирного момента М £ а
на динамический свойства летательного аппарата
ного на рис. 3. 9. Пусть дан летательный аппарат с передаточной
функцией
(р) =----------------- (3.96)
'' Т2р2 + + 1 '
и рулевой привод с достаточно высоким быстродействием, так что
аг~а2~а\~Тр.м~0. В этом случае передаточная функция (3.95)
будет иметь вид
П (р) = 2 - ---------- (3.97)
Г*?2 + 250Tgp + 1
где
-------L-----; (3.98)
„,а / ™8
§ 4. Рулевой привод
189
Принимая во внимание, что обычно тг,ш <0 и < 0, можно
сделать вывод, что в случае использования рулевого привода без
обратной связи влияние шарнирного момента а приводит у ста-
тически устойчивого (т* < 0) летательного аппарата схемы «утка»
(щ®>0) к уменьшению передаточного коэффициента летательно-
го аппарата по углу атаки, к уменьшению относительного коэффи-
циента демпфирования и к повышению собственной частоты. Влия-
ние шарнирного момента а на динамические свойства лета-
тельного аппарата обычной схемы (т^<0) будет противополож-
ным.
Чтобы выяснить динамические свойства звена «рулевая машин-
ка — летательный аппарат», необходимо исследовать передаточную
функцию
W^x(p) = = W;' (р) (р), (3.101)
X {Р)
представляющую собой произведение передаточной функции руле-
вой машинки W— (р), полученной без учета шарнирного момента
а, и передаточной функции W£ (р) летательного аппарата, ох-
ваченного через рулевую машинку обратной связью по шарнирному
моменту а.
4.3. Рулевой привод с жесткой обратной связью
На зарубежных летательных аппаратах чаще всего применяются
рулевые приводы с жесткой обратной связью. Жесткая обратная
связь призвана обеспечить
управление положением ор-
ганов управления, т. е. обес-
печить пропорциональность
угла отклонения органов
управления б величине
управляющего сигнала и и
слабую зависимость этого
отклонения от нагрузки.
С этой целью сигнал, про-
порциональный углу откло-
Рис. 3.10. Структурная схема руле-
вого привода с жесткой обратной связью
нения органов управления, сравнивается с помощью цепи обрат-
ной связи с управляющим сигналом (рис. 3.10).
190 Глава III. Динамические свойства элементов системы стабилизации
Привод без нагрузки
Основные свойства рулевого привода с жесткой обратной
связью легко выясняются при анализе передаточной функции не-
нагруженного привода. Используя расчетную структурную схему,
приведенную на рис. 3.10, где
„ — тр г»
wp.n без о.с(?) = -^4 = у пр„—Ц— - (3.102)
и(р) Р
получаем, что передаточная функция рулевого привода с жесткой
обратной связью без нагрузки имеет вид
= Кр.п (3.103)
U(P} тр.п^Рр+^
где Кр.п = -г----передаточный коэффициент руле-
АО.С
вого привода;
Т - 1 _ 1
р'п ~ v „ /( — постоянная времени рулевого
До.сКу .прОщах
привода;
. прбтах — передаточный коэффициент разом-
кнутой цепи привода.
Рулевой привод будет находиться на границе устойчивости, ес-
ли амплитудно-фазовая характеристика разомкнутой цепи
—/сот
(?(/«) = Л— (3.104)
гр.п/м
проходит через критическую точку (—1, /0). Так как в этой точ-
ке G (/а) = —1, то
-Tp.nja = e-iu,\
Воспользовавшись формулой Эйлера, получим
— Т п ]'(£> = cos ют — /sin сот.
Отсюда найдем
coscot = 0; sincoT = 7\ m = 1.
р.п
Следовательно,
гтт ZT
Трп==~' (3.105)
§ 4. Рулевой привод
191
Последнее уравнение определяет границу устойчивости в плос-
кости Тр.п, х. В реальном (нелинейном) приводе на границе устой-
чивости возникнут автоколебания с частотой
(3.106)
Это соотношение позволяет определять величину запаздывания
т экспериментальным путем по частоте автоколебаний рулевого
привода. Такой способ определения т дает возможность учесть
суммарный эффект явлений, которые не удается описать математи-
чески достаточно просто.
В рассматриваемом случае мы встречаемся с типичным приме-
ром влияния передаточного коэффициента разомкнутой системы
Ко = \1Тр п на динамические свойства замкнутой системы. С уве-
личением Ко возрастает быстродействие привода (уменьшается
Тр. п), но при этом уменьшаются запасы устойчивости; при Ко =
=«/2т рулевой привод достигает границы устойчивости.
Так как рулевая машинка в действительности является нели-
нейным элементом, то за счет увеличения коэффициента Ко невоз-
можно получить угловую скорость отклонения органов управления,
большую, чем бщах. Поэтому передаточный коэффициент Ко целе-
сообразно выбирать так, чтобы обратная связь не снижала быст-
родействия рулевого привода и приближала бы его по динамиче-
ским свойствам к колебательному звену с оптимальным коэффи-
циентом демпфирования £ = 0,5-=-0,7.
Привод с нагрузкой
Основываясь на расчетной структурной схеме, приведенной на
рис. 3.10, и используя передаточную функцию (3.90) нагруженно-
го рулевого привода без обратной связи
Г’ (р) = =Ку.Пр е~'Р Wl (р), (3.107)
и(р)
получим передаточную функцию нагруженного рулевого привода,
охваченного жесткой обратной связью
ф« (Р) =
\.Пр*~тр^(Р)
i + K0.cKy.npe-xpW\(p) •
(3.108)
Передаточный коэффициент рулевого привода будет равен
К = Ф5 (0) = —i—
''р.п и ' ' К
*'о.с
1
{ + Кха—^
1 “ 8
_________тш
К К ^торм
°'С У ПР(- <)
(3.109)
192 Глава III. Динамические свойства элементов системы стабилизации
Из анализа передаточной функции (3.108) и выражения (3.109)
для передаточного коэффициента следует, что с увеличением коэф-
фициента жесткой обратной связи Ко. с и тормозного момента
влияние шарнирных моментов на динамические свойства рулевого
привода с жесткой обратной связью уменьшается. При достаточно
большом значении Ко. с Мторм влиянием шарнирных моментов
можно пренебречь. Тогда
кр.п^^-. (З.но)
I'o.c
Жесткая обратная связь снижает, в частности, влияние шарнир-
ного момента М “ а на динамические свойства звена «рулевой при-
вод— летательный аппарат». При достаточно глубокой обратной
связи собственная частота и относительный коэффициент демпфи-
рования этого звена практически не отличаются от соответствую-
щих величин для летательного аппарата.
С помощью глубокой обратной связи в рулевом приводе можно
добиться нормальной работы рулевого привода и в случае аэроди-
намической перекомпенсации рулей, когда тъш > 0.
Введение жесткой обратной связи в рулевой привод эквива-
лентно умножению передаточного коэффициента летательного аппа-
рата на множитель 1/К0.с. Если изменять Ко.е пропорционально
скоростному напору, передаточный коэффициент звена «рулевой
привод — летательный аппарат» не будет зависеть от скоростного
напора. Это свойство позволяет ограничить максимальные пере-
грузки одним и тем же уровнем при любых скоростных напорах
путем ограничения сигнала наведения или сигнала на входе в ру-
левой привод.
4.4. Рулевой привод с изодромной обратной связью
Кроме рулевых приводов без обратной связи и с жесткой обрат-
ной связью, на летательных аппаратах используются также руле-
вые приводы с изодромной обратной связью (рис. 3.11).
Для выяснения основных динамических свойств такого привода
пренебрежем нагрузкой на рулевую машинку и запаздыванием т
в усилительно-преобразовательных элементах. Передаточная функ-
ция изодромной обратной связи имеет вид
Wo.e(p)^Knom-^-r, (3.111)
где Кпот — передаточный коэффициент потенциометра обратной
связи. Эта передаточная функция реализуется с помощью электри
ческой 7?С-цепи.
§ 4. Рулевой привод
193
Для передаточной функции замкнутого рулевого
лучим выражение
привода по-
и(р) р
7>+ 1
Т„„р+1 ’
(3.112)
р.п
где
is ______Ку.пр Фпах_
РП^ 1 + ЧпР^КпотТ ’
(3.113)
т
Т —________________________
‘ "Ь ^y.np^ma^nonJ'
Если пренебречь величиной
ние (3.112) принимает вид
wp.n(p) =кР.п(3.114)
р
или
^.П(Р) = ^.П(7’ + -Г). (З.Н5)
Тр п по сравнению с Т, то выраже-
Следовательно, в таком ру- Рис. 3.11. Структурная схема рулевого
левом приводе отклонение привода с изодромной обратной связью
органов управления определя-
ется не только управляющим сигналом, но и интегралом от него.
Смысл введения в рулевой привод изодромной обратной связи
состоит в следующем. На малых частотах, определяющих пара-
метры установившегося режима (р->0), обратная связь как бы
отсутствует: рулевой привод сохраняет свойства интегрирующего
звена и в установившемся режиме осуществляется управление
скоростью отклонения рулей:
(3.116)
На средних и больших частотах подбором постоянной времени
Т добиваются того, чтобы сигналы потенциометра обратной связи
передавались /?С-цепочкой почти без искажений. Поэтому работа
рулевого привода на больших частотах практически не отличается
от работы привода с жесткой обратной связью
6(Р) 1
и (Р)
= КР.пТ.
(3.117)
Таким образом, при изодромной обратной связи процесс начи-
нается, как в приводе с жесткой обратной связью, а заканчивается,
как в приводе без обратной связи. Этим объясняется другое назва-
ние рассматриваемой обратной связи — исчезающая обратная
связь.
7 Заказ 1242
194 Глава III. Динамические свойства элементов системы стабилизации
4.5. Основные требования,
предъявляемые к динамическим свойствам рулевого привода
Общие требования
От промышленных приводов, т. е. силовых приводов, применяю-
щихся в других областях техники, рулевые приводы управляемых
ракет отличаются значительно большим быстродействием и особен-
ностями конструкции, приспособленной к особым условиям их ра-
боты. В первую очередь здесь следует отметить жесткие требования
к весу и габаритам привода и к расходу энергии на управление ле-
тательным аппаратом. Кроме того, конструктор рулевого привода
должен обеспечить достаточную величину тормозного момента для
преодоления момента нагрузки и мощность, необходимую для до-
статочно быстрого отклонения органов управления при наличии на-
грузки (12]. Все эти характеристики (вес, габариты, затраты энер-
гии, тормозной момент, мощность) зависят от требуемого быстро-
действия привода и от нагрузки. Следует также отметить, что ру-
левые приводы управляемых ракет должны действовать с высокой
степенью надежности в условиях высоких перегрузок, интенсивных
вибраций с большим диапазоном частот, высоких уровней электри-
ческих шумов, в широких температурных пределах и т. д.
Перечисленные конструктивные и эксплуатационные требо-
вания настолько существенно влияют на выбор типа и характери-
стик рулевого привода, что при проектировании системы стабили-
зации рулевой привод приходится рассматривать как заданный
элемент этой системы, как часть летательного аппарата.
Хотя основные характеристики привода выбираются без учета
тех свойств, которыми должна обладать система стабилизации, он
все же является одним из элементов этой системы. Поэтому ха-
рактеристики рулевого привода должны быть согласованы с харак-
теристиками других элементов системы стабилизации и с характе-
ристиками этой системы в целом. Со стороны системы стабилиза-
ции, например, предъявляются требования, чтобы рулевой привод
имел малую колебательность, а его полоса пропускания заметно
превышала полосу пропускания системы стабилизации. При вы-
полнении этих условий рулевой привод не будет давать больших
амплитудных и фазовых искажений в полосе частот, пропускаемых
системой стабилизации [4].
Динамические характеристики рулевого привода как элемента
системы стабилизации могут быть улучшены выбором соответству-
ющей обратной связи привода, добавлением внутренних обратных
связей и введением в цепь обратной связи корректирующих звень-
ев [1], [10].
§ 4. Рулевой привод
195
Требования к быстродействию привода
От быстродействия рулевого привода во многом зависят точность
управления летательным аппаратом, с одной стороны, и конструк-
гивные и динамические характеристики рулевого привода, с другой.
Поэтому при выборе типа привода и его параметров в первую оче-
редь приходится оценивать необходимое его быстродействие.
Наиболее полные и точные сведения о необходимом быстродей-
ствии рулевого привода можно получить лишь на заключительном
этапе проектирования при исследовании процессов в системах на-
ведения и стабилизации, вызываемых действием типовых или наи-
более характерных управляющих и возмущающих воздействий.
В этом случае исследование производят с помощью средств вычис-
лительной техники, что позволяет решать задачу без существенных
упрощений. На предварительном же этапе проектирования для ре-
шения этой задачи приходится использовать более простые и со-
ответственно более грубые методы оценки необходимого быстродей-
ствия привода.
В тех случаях, когда привод не охвачен цепью обратной связи
и влиянием нагрузки на работу привода можно пренебречь, его
динамические свойства достаточно точно могут быть охарактери-
зованы интегрирующим звеном. В этом случае основным динами-
ческим параметром привода является время перекладки рулей из
нейтрального в крайнее положение, равное
= (3.118)
^гп ах
Если привод охвачен жесткой обратной связью или влиянием
нагрузки нельзя пренебрегать, то его динамические свойства во
многих случаях приближаются к свойствам апериодического звена,
В этом случае основным динамическим параметром является по-
стоянная времени привода, которая в свою очередь существенно
зависит от того же времени перекладки рулей из нейтрального по-
ложения в крайнее.
Так как это время зависит от максимальной скорости бщах» КО-
торую может развивать ненагруженный привод, то, следовательно,
от величины этой скорости существенно зависят динамические
свойства привода и, в частности, его быстродействие.
При оценке необходимого быстродействия рулевого привода
можно исходить из требований, предъявляемых к нему как элемен-
ту системы стабилизации.
Чтобы уяснить смысл таких оценок, необходимо учитывать сле-
дующие обстоятельства. Обычно полоса частот, которую пропу-
скает система стабилизации и управления нормальными перегруз-
ками, оказывается непосредственно связанной с динамическими
характеристиками летательного аппарата. Частота среза системы
7*
196 Глава III. Динамические свойства элементов системы стабилизации
стабилизации, с помощью которой оценивается ширина полосы
пропускания, обычно незначительно превышает собственную ча-
стоту короткопериодического движения летательного аппарата. Это
связано с тем, что заметное увеличение частоты среза сверх этого
значения усиливает влияние малых параметров элементов системы
стабилизации на ее динамические свойства, затрудняет обеспече-
ние условий устойчивости, в силу чего усложняется коррекция ха-
рактеристик системы. При слишком же малом значении частоты
среза не используются полностью маневренные возможности лета-
тельного аппарата.
Если учесть эти обстоятельства, то нетрудно догадаться, почему
обычно рекомендуют выбирать постоянную времени привода так,
чтобы она была примерно на порядок меньше постоянной време-
ни Т колебательного звена передаточной функции летательного
аппарата. При таком выборе постоянной времени привода сам при-
вод не будет усложнять обеспечение условий устойчивости системы
стабилизации, так как на частоте среза он будет вносить фазовое
запаздывание, не превышающее нескольких градусов.
Однако при таком подходе к выбору постоянной времени при-
вода в некоторых случаях может оказаться, что необходим при-
вод с очень высоким быстродействием. Такой привод в одних слу-
чаях просто нельзя реализовать, в других случаях он будет слиш-
ком громоздким и тяжелым. Например, для летательного аппарата
с собственной частотой короткопериодических колебаний, равной
1,5 гц, при указанном способе оценки необходим привод с постоян-
ной времени около 0,01 сек, что соответствует полосе частот, про-
пускаемых приводом, около 15 гц. Такой привод, конечно, реали-
зовать невозможно. Например, полоса пропускания гидравлических
рулевых приводов составляет обычно 5 гц [1].
В таких случаях для предварительной оценки необходимого бы-
стродействия привода можно исходить из других соображений.
Можно, например, выбирать быстродействие привода таким, чтобы
он не ухудшал маневренных возможностей летательного аппарата.
Естественно, что при таком подходе привод рассматривается как
часть летательного аппарата и быстродействие привода выбира-
ется без учета тех требований, которым должны удовлетворять
элементы системы стабилизации.
Маневренные свойства летательного аппарата характеризуются
располагаемой нормальной перегрузкой и быстродействием, кото-
рое можно оценить временем, в течение которого он выходит на
располагаемую перегрузку после мгновенной (ступенчатой) пере-
кладки рулей. Очевидно, что быстродействие рулевого привода дол-
жно быть таким, чтобы время выхода летательного аппарата на
располагаемую перегрузку с учетом динамического запаздывания
привода не превышало бы существенно этого времени для случая
«идеального», безынерционного привода.
§ 4. Рулевой привод
197
Чтобы пояснить такой способ оценки необходимого быстродей-
ствия привода, рассмотрим следующий пример.
Как известно, передаточная функция крылатого, маневренного
летательного аппарата по отношению к выходной величине 0, про-
порциональной нормальной перегрузке, имеет следующий вид:
ё(р) к
6(р) TV + 257p+l •
Если рули мгновенно поворачиваются на полный угол бтах,
то в переходном процессе координата 0 изменяется по закону
_ ___________________________________________
0(О = ^таЛ1 + -711=-е
L У1 — 5® \ т / J
где
ф = — фаге tg —-Л=_--.
т 2 6 /1 — ?2
При этом установившееся значение координаты 0 равно
0 = Кб
^тах — J\vmax*
Одной из возможных характеристик быстродействия летатель-
ного аппарата может служить время /0, по истечении которого
координата 0 первый раз достигает установившегося значения
©max (рис. 3.12). Такой выбор характеристики быстродействия не-
сколько условен, но он позволяет получить относительно простые
расчетные соотношения.
Время /о нетрудно рассчитать. Оно определяется из соотношения
л . 5.
. — + arc tg г
А — Ф __ 2 /1 — £2
Т ~~ К 1 — 52 — /Г^2
Рассмотрим теперь случай, когда рули летательного аппарата
отклоняются рулевым приводом с ограниченной постоянной ско-
ростью бтах. Если на вход такого привода поступает ступенчатый
сигнал управления, то в этом случае угол поворота рулей следует
закону (рис. 3.13)
б(0 = 6тах^ 0</<Гл;
6 (0 = 6max, t > тм,
где Тм—время перекладки рулей, определяемое формулой (3.118).
Как и в предыдущем случае, можно рассчитать время, в течение
которого координата 0 впервые достигает значения, равного ©max-
Обозначим это время через /0'.
198 Глава III. Динамические свойства элементов системы стабилизации
Опуская выкладки, приведем окончательный результат. Вре-
мя t’o определяется соотношением
% _ 2ф — а
Т ~ ’
где
ф = — + arc tg —~
' 2 s /1 -
tg а =-.
— 5/ ____ т* \
е т — cos I / 1 — С2 )
Увеличение времени выхода на перегрузку по сравнению с пре-
Рис. 3.12. График переходного про-
цесса ракеты
Рис. 3.13. Зависимость угла пово-
рота рулей от времени
дыдущим случаем определяется выражением
Д/о _ 1о ~ % _ ф —а
Т ~ Т ~ /1 — ?2 ’
а относительное увеличение этого времени может быть подсчитано
с помощью формулы
Д^о _ |___О
^0 Ф ’
На рис. 3.14 приведены графики, иллюстрирующие полученное
соотношение. Из этих графиков видно, что при значении отноше-
ния Тм/Т, равном 0,5, время выхода на располагаемую перегрузку
увеличивается примерно на 15%, а при значении отношения Тм/Т,
примерно равном трем, это время удваивается (для случая, когда
1).
§ 4. Рулевой привод
199
Если, например, допустить увеличение времени выхода на пере-
грузку на 15%, то тогда следует назначать время перекладки ру-
лей Тм, равное 0,5 Т.
Аналогичные расчеты можно
намические характеристики
привода аппроксимируются
апериодическим звеном или
когда летательный аппарат в
движении крена описывается
апериодическим звеном,
При таком способе оценки
необходимого быстродействия
рулевого привода получаются
большие значения постоянной
времени привода и поэтому
обеспечение запасов устойчи-
вости системы стабилизации
затрудняется. Это может по-
требовать более сложной кор-
рекции динамических харак-
теристик системы стабилиза-
ции, но вместе с тем требова-
ния к приводу несколько об-
легчаются.
проделать и для случаев, когда ди-
Рис. 3.14. Зависимость относительного
увеличения длительности переходного
процесса от параметров привода и ракеты
ЛИТЕРАТУРА
1. Бойер П. Д., Гидравлические сервосистемы ракет, «Вопросы ракетной
техники», 1961, № 7, 8.
2. Красовский А. А. и Поспелов Г. С., Основы автоматики и техни-
ческой кибернетики, Госэнергоиздат, 1962.
3. Управляемые снаряды, Пер. с англ, под ред. И. Е. Петрова, ИЛ, 1960.
4. Р и л Дж., Требования к системам управления снарядами. Стабилизация
и наведение, «Вопросы ракетной техники», 1958, № 4.
5. Лебедев А. А., Чернобровкин Л. С., Динамика полета, Оборонгиз,
1962.
6. Основы автоматического регулирования, Под ред. В. В. Солодовникова,
т. II, Элементы систем автоматического регулирования, ч. 1 и 2, Машгиз, 1959.
V 7. Некоторые вопросы расчета и конструирования авиационных гидравличе-
ских систем (по зарубежным источникам), Под ред. С. Н. Рождественского,
Оборонгиз, 1962.
8. Жиль Ж., Пелегрен М., Декольн П., Теория и техника следящих
систем, Машгиз, 1961.
V 9. Гидравлические и пневматические силовые системы управления, Под ред.
Дж. Блэкборна, Г. Ритхофа, Дж. Шерера, ИЛ, 1962.
10. Локк А. С., Управление снарядами, Гостехтеоретиздат, 1957.
И. Основы автоматического управления, Под ред. В. С. Пугачева, Физмат-
гиз, 1963.
12 Конструирование управляемых снарядов, Под ред. А. Е. Пакета и С. Ра-
мо, Воениздат, 1962.
200 Глава III. Динамические свойства элементов системы стабилизации
13. Феодосьев В. И. и Синярев Г. Б., Введение в ракетную технику,
Оборонгиз, 1960.
14. Колосов С. П. и Стромилов В. М., Основы автоматического пило-
тирования, Оборонгиз, 1959.
15. Павлов В. А., Понырко С. А., Хованский Ю. М., Стабилизация
летательных аппаратов и автопилоты, «Высшая школа», 1964.
16. Колосов С. П., Элементы авиационных автоматических устройств,
Оборонгиз, 1963.
17. Добро ле некий Ю. П., Иванова В. И., Поспелов Г. С., Авто-
матика управляемых снарядов, Оборонгиз, 1963.
18. Фридлендер Г. О., Козлов М. С., Авиационные гироскопические
приборы, Оборонгиз, 1961.
19. Г а м ы н и н Н. С., Основы следящего гидравлического привода, Оборон-
гив, 1962.
20. Пельпор Д. С., Гироскопические приборы и автопилоты, «Машино-
строение», 1964.
Глава IV
СТАБИЛИЗАЦИЯ ДВИЖЕНИЯ КРЕНА
§ 1. ВВЕДЕНИЕ
1.1. Принцип классификации систем стабилизации
В настоящей и следующей главах будут рассмотрены некото-
рые схемы замкнутых систем стабилизации, классифицированные
в зависимости от выбора контролируемого параметра движения
(системы с обратной связью по угловой координате, по угловой
скорости, по линейному (нормальному ускорению и т. д.). Такая
классификация отличается от распространенной классификации
систем стабилизации (автопилотов) по виду обратной связи руле-
вого привода [1], £5], [7], [12] и представляется более удобной. Это
следует прежде всего из того, что обратная связь рулевого привода,
хотя и влияет на динамические свойства системы стабилизации,
является корректирующей обратной связью, а не главной. Несмотря
на разнообразие конструктивных форм, вида используемой энер-
гии и характера обратной связи, динамические свойства рулевых
приводов, как это было показано в гл. III, сравнительно однооб-
разны.
Динамические свойства привода без обратной связи и с обрат-
ной связью существенно различаются только в том случае, когда
максимальный момент, развиваемый приводом, значительно превос-
ходит момент нагрузки и вследствие этого привод без обратной
связи можно достаточно точно аппроксимировать интегрирующим
звеном. Как было показано в гл. III, влияние нагрузки (например,
шарнирных моментов), пропорциональной перемещению органов
управления, эквивалентно по своему действию жесткой обратной
связи. Но у многих летательных аппаратов, особенно у управляе-
мых ракет с относительно небольшими размерами, для экономии
веса и габаритов привода и расхода энергии источников питания
запас по нагрузке у рулевого привода не бывает большим. По-
этому даже без жесткой обратной связи такой привод ведет себя
как апериодическое звено и, следовательно, не вносит в систему
стабилизации астатизма.
202
Глава IV. Стабилизация движения крена
Следует также иметь в виду, что на многих управляемых раке-
тах не применяют каких-либо эффективных способов компенсации
шарнирных моментов, используемых, например, на самолетах. По-
этому для уменьшения влияния нестабильности шарнирных мо-
ментов на динамические характеристики привода в этом случае,
как правило, вводят жесткую обратную связь.
В рассмотренных случаях, как и во многих других, когда на
выбор типа и характеристик рулевого привода существенно влияют
эксплуатационные и конструктивные требования, такие как требо-
вания к весу, габаритам, расходу энергии, условиям сопряжения
с органами управления и пр., привод приходится рассматривать
как заданный элемент системы стабилизации. В этих случаях руле-
вой привод оказывается более тесно связанным с летательным
аппаратом — объектом регулирования, а не с аппаратурой стабили-
зации— регулятором. Поэтому характер обратной связи привода
часто выбирают исходя не из требований динамики системы ста-
билизации, а из необходимости улучшить и исправить характери-
стики привода как элемента системы стабилизации.
Все это показывает, что часто (особенно для многих классов
управляемых ракет) классификация систем стабилизации по ха-
рактеру обратных связей рулевого привода, принятая при рассмот-
рении систем стабилизации самолетов, является неудобной. В связи
с этим рассматриваемые ниже в гл. IV и V схемы систем стабили-
зации и управления нормальными перегрузками подразделяются
по виду главной обратной связи.
1.2. Основные задачи,
решаемые системой стабилизации крена
Задачи, решаемые системой стабилизации крена, определяются
способом создания аэродинамической нормальной силы, типом
системы наведения и способом преобразования сигналов наведения
в отклонения органов управления.
У летательного аппарата обычной самолетной схемы, например,
самолета или самолета-снаряда, когда крылья расположены в
одной плоскости, аэродинамическая нормальная сила создается
путем поворота аппарата относительно поперечной и продольной
осей (Oz] и Oxi), т. е. изменением углов атаки и крена. При этом
величина аэродинамической нормальной силы определяется углом
атаки, а ее направление — углом крена. Такой способ управления
полетом летательного аппарата получил название полярного управ-
ления (т. е. управления в полярной системе координат).
Аэродинамически осесимметричный летательный аппарат соз-
дает необходимую по величине и направлению нормальную силу
посредством поворота относительно осей Oz\ и Oylt т. е. измене-
нием углов атаки и скольжения. Такой способ управления полетом
§ 1. Введение
203
называется управлением в прямоугольной системе координат, или
декартовым управлением.
Как при полярном, так и декартовом управлении нормальная
сила создается путем поворота летательного аппарата вокруг ка-
ких-либо двух осей. Поскольку летательный аппарат имеет три
вращательные степени свободы, возможны различные схемы управ-
ления в зависимости от способа регулирования вращения аппарата
относительно третьей оси.
При полярном управлении вращение летательного аппарата
относительно нормальной оси Оу, может быть свободным, при этом
будут отсутствовать органы управления рысканием. Такая схема
управления была, например, у немецкой планирующей бомбы
Hs-293. Обычно у аппаратов с полярным управлением движение
рыскания регулируется таким образом, чтобы маневр выполнялся
без скольжения. Такой маневр называют координированным.
Координированный маневр самолета необходим для выполнения
весьма ответственной операции — боковой наводки самолета (при-
целивания по направлению), так как маневр со скольжением не
позволяет осуществить точное прицеливание самолета на назем-
ные или воздушные цели. У беспилотных летательных аппаратов
использование координированного маневра способствует упроще-
нию системы управления и повышению точности наведения.
Очевидно, что основной задачей системы управления креном
у летательного аппарата с полярным управлением является изме-
нение угла крена в соответствии с заданной программой полета
или сигналами наведения. Пусть, например, координированный ма-
невр летательного аппарата при полете в горизонтальной плоскости
задан программой изменения угла поворота траектории Т = (0-
Тогда система управления креном должна обеспечить изменение
угла крена в соответствии с формулой [8]
, V ЛЧ.
lg Y ~----------1
’ 57,3g dt
При полете самонаводящейся ракеты с полярным управлением
углы атаки и крена должны изменяться таким образом, чтобы обес-
печить наведение принятым методом при отсутствии скольжения.
При этом скорость и точность управления креном оказывают чрез-
вычайно большое влияние на процесс наведения.
Реализация управления в полярной системе координат обычно
приводит к более сложной системе управления по сравнению с си-
стемой управления осесимметричным летательным аппаратом. В по-
следнем случае можно часто рассматривать каналы управления
движениями тангажа и рыскания как независимые друг от друга
и выполнять их идентичными. Такое упрощение в случае полярного
управления невозможно. При исследовании и проектировании си-
стем с полярным управлением возникает ряд специфических слож-
ных проблем. В частности, обычно приходится рассматривать про-
(4-1)
204
Глава IV. Стабилизация движения крена
странственную (трехмерную) задачу наведения летательного аппа-
рата. Получающиеся при этом уравнения очень сложны для
анализа, поэтому 'исследование и проектирование систем с поляр-
ным управлением требует широкого применения моделирования
и цифровых электронных машин.
Исследование систем с полярным управлением в настоящей
книге рассматриваться не будет вследствие сложности вопроса
и ограниченного распространения таких систем. Теория автомати-
ческого управления боковым движением самолета и, в частности,
координированным маневром достаточно освещена в литературе [7],
[12]. С некоторыми проблемами полярного управления ракетами
можно ознакомиться в статье [6].
Хотя у аэродинамически осесимметричных летательных аппара-
тов вращение относительно продольной оси не участвует в созда-
нии нормальной силы, для осуществления наведения не безразлич-
но, как регулируется это движение. Здесь тип системы наведения
и способ преобразования сигналов наведения в отклонения органов
управления предъявляют определенные требования к характеру
движения крена.
Пусть, например, при наведении по командам сигналы наведе-
ния формируются в координатах командного пункта. В этом слу-
чае необходимо обеспечить согласование системы координат, свя-
занной с летательным аппаратом (в которой выполняются коман-
ды), с системой координат, в которой формируются сигналы
наведения. Если такое согласование отсутствует, то в результате
поворота летательного аппарата относительно продольной оси, на-
пример, на 90°, рули высоты и направления поменяются местами
и сигнал, который должен был воздействовать на движение в вер-
тикальной плоскости, изменит направление полета в горизонталь-
ной плоскости.
Возможны два способа согласования систем координат на борту
летательного аппарата и на командном пункте. Можно, оставив
вращение летательного аппарата относительно продольной оси
свободным, распределять сигналы наведения между каналами
управления тангажом и рысканием в зависимости от угла крена.
Такую схему управления имел, например, немецкий управляемый
снаряд Х-4 класса «воздух—воздух». Однако более простое ре-
шение получается, если обеспечить совпадение рассматриваемых
систем координат путем стабилизации крена летательного аппа-
рата. При этом управление становится более точным и надежным.
Аналогичное явление имеет место и при автономном наведении.
Программа полета задается в земных осях, и для правильного вы-
полнения сигналов программного механизма необходимо стабили-
зировать летательный аппарат относительно продольной оси так,
чтобы полет происходил без крена. Примером такой схемы управ-
ления может служить управление баллистической ракетой V-2.
§ 1. Введение
205
Таким образом, основной задачей системы стабилизации крена
при автономном наведении и теленаведении осесимметричных ле-
тательных аппаратов является сохранение угла крена неизменным
и равным нулю. Эту задачу иногда называют жесткой стабилиза-
цией крена.
В случае формирования сигналов наведения на борту летатель-
ного аппарата, т. е. при самонаведении и командном наведении
в координатах летательного аппарата, стабилизация угла крена
не требуется. При вращении летательного аппарата вокруг про-
дольной оси поворачивается и система координат, в которой про-
изводится измерение координат цели и вырабатываются сигналы
наведения. При этом не нарушается правильная координация
между сигналами наведения и каналами автопилота.
Однако угловая скорость крена у обычно приводит к появлению
перекрестных связей между каналами тангажа, рыскания и крена,
которые могут существенно повлиять на процесс самонаведения.
Одной из причин этих связей могут являться некоторые особен-
ности аппаратуры управления. Так, например, из-за конструктив-
ных особенностей силового следящего гиростабилизатора, обеспе-
чивающего совмещение оси чувствительного элемента координа-
тора с направлением на цель, при ненулевых углах пеленга цели
(т. е. углах между продольной осью летательного аппарата и на-
правлением на цель) угловая скорость крена создает ложные сиг-
налы наведения [6].
Для того чтобы возможно больше ослабить влияние перекрест-
ных связей на процесс самонаведения осесимметричных летатель-
ных аппаратов, на систему стабилизации крена обычно возлагают
задачу ограничения угловой скорости крена [2].
При пуске управляемого снаряда с самолета-носителя может
оказаться необходимой стабилизация движения крена независимо
от того, какая используется система наведения. В результате вза-
имного влияния крыла самолета-носителя, пилона и снаряда, на-
ходящегося на пусковой установке под крылом, снаряд обтекается
неоднородным потоком и плоскости крыльев и оперения приобре-
тают различные углы атаки. Это приводит к появлению возмущаю-
щих сил и моментов, под действием которых снаряд после схода
с пусковой установки стремится отклониться от заданного направ-
ления полета и от заданного положения. Если не предусмотреть
надлежащих конструктивных мероприятий, о которых речь будет
ниже, то может возникнуть ряд нежелательных явлений: повреж-
дение самолета или снаряда, «потеря» снаряда системой телена-
ведения или «потеря» цели головкой самонаведения и др.
Пусть, например, для пуска используется установка «с нулевым
разбегом». Примем, что максимальный момент крена, действую-
щий на снаряд во время пуска, равен 2,8 кГ -м, а момент инерции
206
Глава IV. Стабилизация движения крена
1Х = 0,04 кГ-м-сек2 [10]. Следовательно, угловое ускорение, если
пренебречь моментом аэродинамического демпфирования, будет
равно
Y = —- = —= 70 1/сек2.
I* 0,04
Допустим, что это угловое ускорение будет иметь место в тече-
ние всего отрезка времени от момента схода снаряда с пусковой
установки до прохождения крыльями снаряда ее переднего конца.
Примем, что за эю время снаряд пройдет 1,5 м с ускорением 26,7 g.
Тогда время, необходимое снаряду для прохождения рассматривае-
мого пути, будет равно
Если движение крена на этом участке не стабилизируется, то
снаряд повернется вокруг своей продольной оси на угол
т = 57,3^-= 23°. (4-2)
Пусть, например, для того чтобы крыло снаряда не зацепило
пусковую установку, требуется, чтобы крен снаряда не превышал
15°. Тогда полученное значение угла крена означает, что при пуске
может произойти авария.
Для избежания аварии при пуске в результате поворота сна-
ряда вокруг своей продольной оси можно предусмотреть пусковую
установку с направляющими достаточной длины или систему ста-
билизации крена, которая работала бы с самого сначала пуска.
Выбор того «ли иного решения, естественно, зависит от конкрет-
ных условий. В частности, для стабилизации крена при пуске не-
обходимо обеспечить достаточную эффективность органов управ-
ления креном в условиях неоднородного потока в зоне сочленения
крыла самолета, пилона и снаряда.
Таким образом, при пуске управляемых снарядов классов «воз-
дух— земля» и «воздух—воздух» в ряде случаев требуется стаби-
лизация движения крена с целью предотвращения аварии [10].
1.3. Возмущающий момент крена
Аэродинамический момент крена возникает всегда при несим-
метричном обтекании аппарата набегающим потоком воздуха. Сим-
метрия обтекания может нарушаться при полете со скольжением,
при отклонении тех или иных органов управления, при вращении
летательного аппарата вокруг осей Oxit Оух и Ozx. К асимметрии
обтекания приводят также производственные ошибки, например,
различия в углах установки крыльев и стабилизаторов. Очевидно,
§ 1. Введение
207
что аэродинамическая симметрия нарушается при воздействии на
летательный аппарат порывов ветра, из-за срыва потока с крыльев
или оперения, вследствие взаимного влияния между аппаратом и
самолетом-носителем и т. д.
Рассмотрим основные составляющие момента крена у аэродина-
мически осесимметричного летательного аппарата. Для такого
аппарата общее выражение момента крена можно записать в
виде [8]
5 со
Мх = Мхо + М’8Э + мхх со, + мх К О (а, ₽, 8в, 8К) +
+ ^хтурб + Мхпрсч- (4-3)
Происхождение выписанных здесь составляющих момента крена
следующее:
Мхо — от асимметрии летательного аппарата и произ-
водственных ошибок;
— от отклонения органов управления креном;
М”ж<ох—от демпфирования движения крена, создаваемо-
го крыльями и оперением;
Л1ХЛ.0(а, р. 8J—от несимметричного обтекания, другими слова-
ми, от «косой обдувки» при полете с нормаль-
ными перегрузками пу и пг\
^хтурб — от турбулентности атмосферы (порывов ветра);
^хпроч—от всех прочих факторов, вызывающих асим-
метрию обтекания, например, от вращения аппа-
рата вокруг осей Оу\ и Ozx.
Принимая во внимание, что составляющие момента крена МхэЪ3
и М“х(их уже учтены в уравнении (2.142), можно записать следую-
щее выражение возмущающего момента крена:
МХвозм ~ Мхо + МХК'О (а, р, 8в, 8Н) + Мх т!/рб -ф Мхпроч. (4.4)
Момент Мхо, возникающий от асимметрии летательного аппа-
рата, в частности, от погрешностей, допущенных при изготовлении
и сборки аппарата, действует, как правило, в одном направлении
и сравнительно мало изменяется по сравнению с другими состав-
ляющими возмущающего момента. Поэтому без особых трудностей
он может быть уравновешен (скомпенсирован) моментом органов
управления креном.
Наибольшие трудности при проектировании системы управле-
ния доставляет момент косой обдувки Л4ХК.О. Этот момент может
быть весьма большим, в особенности у летательных аппаратов схем
«утка» и с поворотными крыльями. В этих случаях передние под-
вижные несущие поверхности создают скос потока, зависящий от
углов а, р, 8в и 8Н. Скошенный поток, попадая на расположенные
208
Глава IV. Стабилизация движения крена
сзади неподвижные поверхности, обдувает их несимметрично, вслед-
ствие чего и возникает момент крена.
Зависимость момента косой обдувки от углов а, р, бв и б« нели-
нейная. В первом приближении этот момент у летательных аппа-
ратов аэродинамически осесимметричной схемы может быть выра-
жен формулой [8]
MXK.0^B(a8H-^e)qSl, (4.5)
где коэффициент В зависит от аэродинамической компоновки лета-
тельного аппарата, его геометрических параметров и числа М.
Из формулы (4.5) следует, что момент косой обдувки может
достигать значительной величины при полете с большими нормаль-
ными перегрузками, когда велики углы а, ₽, бв и бм. Этот момент
может очень быстро изменяться по величине и направлению, по-
скольку углы а, р, и би определяются переходными процессами
в каналах системы управления, вызванными переменными сигна-
лами наведения и воздействием случайных возмущений (шумов).
Поэтому момент косой обдувки всегда содержит случайную состав-
ляющую.
Благодаря зависимости момента косой обдувки от углов а, р,
бе и би существуют сложные перекрестные связи между каналами
системы управления: сигналы наведения вызывают отклонения ру-
лей и изменение углов атаки и скольжения, что приводит к обра-
зованию момента косой обдувки; последний вызывает угловую
скорость крена, которая из-за некоторых особенностей аппаратуры
приводит к появлению ложных сигналов наведения (см. выше
разд. 1.2). Эти связи иногда выдвигают весьма сложную задачу
анализа пространственного наведения летательного аппарата [3].
Рассчитать момент крена из-за большой сложности явлений
с достаточной точностью не удается. Поэтому обычно, чтобы полу-
чить исходные данные для проектирования системы стабилизации,
момент крена определяют посредством испытаний в аэродинамиче-
ской трубе. Момент крена, возникающий из-за неоднородности воз-
душного потока в зоне пусковой установки под крылом самолета-
носителя, достаточно надежно может быть определен лишь при
реальных летных испытаниях.
Для качественного анализа и оценки величин различных со-
ставляющих момента крена можно воспользоваться формулами,
приведенными в [8].
Чтобы оценить возможную величину момента косой обдувки,
можно рассчитать переходный процесс в одном из каналов системы
управления как реакцию углов а и бв на ступенчатое изменение
сигнала наведения или возмущающего воздействия. Считая кана-
лы системы управления идентичными, можно затем по форму-
ле (4.5) определить момент косой обдувки. Расчетными являются,
очевидно, те случаи, когда ожидается наибольшая величина мо-
§ 2. Стабилизация угловой скорости крена
209
мента косой обдувки (максимальное изменение сигнала наведения,
например, при входе снаряда в радиолуч или при включении си-
стемы самонаведения, максимальное возмущающее воздействие,
например, при пуске снаряда или отделении ускорителя и т. п.).
§ 2. СТАБИЛИЗАЦИЯ УГЛОВОЙ СКОРОСТИ КРЕНА
При исследовании различных вопросов стабилизации крена бу-
дем пользоваться передаточной функцией летательного аппара-
та (2.149) W](p) = (4.6) 8^’ р(Гэр+1) v
соответствующей уравнению (2.148). Здесь
м5® Кэ —, (4.7) тэ = *=* .со мхх
2.1. Роль обратной связи по угловой скорости крена
Как уже говорилось выше, при самонаведении обычно требуется
стабилизировать угловую скорость крена. Если летательный аппа-
рат неуправляем, то в результате воздействия на него ступенча-
того возмущающего момента крена
Мхв = М^8эв(13м (4.8)
возникает вращение вокруг продольной оси с угловой скоростью
Y = U еоз,.( (1 - е ^) = -^(l-e Гэ), (4.9)
причем после затухания переходного процесса устанавливается по-
стоянная угловая скорость
= = (4.Ю)
Мхх
Снижение установившейся угловой скорости крена путем уве-
личения аэродинамического демпфирования при полете на малых
высотах нереально, так как требует значительного увеличения пло-
щади крыльев и оперения, а при полете на больших высотах, есте-
ственно, невозможно. Указанная задача может быть решена только
средствами автоматики путем охвата летательного аппарата об-
ратной связью по угловой скорости крена.
210
Глава IV. Стабилизация движения крена
С этой целью за рассогласование принимается угловая скорость
крена е = у, и автомат стабилизации отклоняет органы управле-
ния креном таким образом, чтобы создать момент, вызывающий
угловое ускорение летательного аппарата, направленное на уничто-
жение возникшей угловой скорости у.
Структурная схема системы стабилизации угловой скорости
крена в достаточно общем виде представлена на рис. 4.1. На нем
даны обозначения: Ка=|-4-) —передаточный коэффициент
\ у / уст
Рис. 4.1. Структурная схема
системы стабилизации угловой
скорости крена
редаточной функцией замкнутой
автомата стабилизации крена;
Wa(p) — его передаточная функ-
ция при К.а = 1. Передаточная
функция разомкнутой системы
стабилизации имеет вид
= (4.И)
ТэР+ 1
Реакция системы стабилиза-
ции на возмущающий момент
описывается соответствующей пе-
системы
Фj Ip) = -VW— = =. (4.12)
э возя (p) 1+G(p) r9p+l+W«(P)'
Роль обратной связи по угловой скорости крена можно выяс-
нить, предположив, что процесс стабилизации является безынер-
ционным, т. е. Wa(p) = 1, и отклонение органов управления креном
пропорционально угловой скорости крена
Ъ = (4.13)
В этом случае
V (Р) ______Кэ_______ К3_____________J______ м 14)
&3возм(Р) Тэр+1+КвКа 1+КэКа Тэ '
7 + «7’+1
Сравнивая это выражение с передаточной функцией летатель-
ного аппарата
У(р) _ Ъ
ВОЗМ (р) ?эР 4- 1
видим, что благодаря обратной связи по угловой скорости крена
постоянная времени системы стабилизации меньше постоянной вре-
мени летательного аппарата в (1 + КХа) раз. Следовательно,
§ 2. Стабилизация угловой скорости крена
211
эффект обратной связи по угловой скорости крена эквивалентен
повышению аэродинамического демпфирования или снижению
инерционности летательного аппарата. В результате переходный
процесс затухает значительно быстрее. Увеличивая передаточный
коэффициент автомата стабилизации Ко, можно повысить быстро-
действие системы стабилизации.
Установившееся значение угловой скорости крена после прило-
жения ступенчатого возмущающего момента определяется, очевид-
но, выражением
(—?—] =-----, (4.15)
\ возм / ycm 1 Т" К-,Ка
И ТИ
у _ Кэ M.rn ; 1 /__ Мхв \ /4 16)
Ъст 1+КэКа 1 + КэКа ( МШ/)'
Этот же результат имеет место для любого автомата стабилизации,
не содержащего интегрирующих звеньев, так как при указанном
условии Wa(0) = 1.
Сравнивая полученное выражение с выражением для установив-
шейся угловой скорости крена летательного аппарата без автомата
стабилизации, находим, что присоединение автомата существенно
улучшает динамические свойства аппарата: установившаяся угло-
вая скорость крена, вызванная ступенчатым возмущающим мо-
ментом, уменьшается в (1 + KsKa) раз. При этом автомат стабили-
зации без интегрирующих звеньев не уничтожает полностью угло-
вую скорость крена. Эта угловая скорость тУСТ является
установившейся ошибкой системы стабилизации, поскольку авто-
мат предназначен поддерживать нулевую угловую скорость (у = 0).
Чтобы уменьшить ошибку, надо выбирать возможно большее зна-
чение передаточного коэффициента разомкнутой системы Ко=КэКа-
Техническими условиями на проектирование системы стабили-
зации обычно задается наибольшая допустимая установившаяся
ошибка уусттах при реально возможном в данной системе Мхв. Из
этого условия по формуле (4.16) определяется необходимое зна-
чение Ко, а затем и Ка.
Рассмотрим возможные способы реализации обратной связи по
угловой скорости крена. Все они различаются главным образом:
1) способом получения информации;
2) способом преобразования информации в отклонения орга-
нов управления.
Информация об угловой скорости крена, вообще говоря, может
обеспечиваться:
1) дифференцирующим гироскопом;
2) свободным гироскопом с дифференцирующим устройством;
3) интегрирующим гироскопом (см. гл. III, разд. 1. 1).
212
Глава IV. Стабилизация движения крена
2.2. Стабилизация с помощью роллеронов
Простейшую систему стабилизации угловой скорости крена, ис-
пользующую в качестве источника информации дифференцирую-
щий гироскоп, представляет летательный аппарат с роллеронами
(рис. 4.2).
Роллерон — это отклоняющаяся наподобие элерона аэродина-
мическая поверхность, на которой установлен достаточно массив-
Рис. 4.2. Принцип действия роллеронов
ный ротор (с моментом
инерции 1р), вращаю-
щийся под действием воз-
душного потока с некото-
рой угловой скоростью Q.
Благодаря тому, что ро-
тор вместе с аэродинами-
ческой поверхностью мо-
жет поворачиваться отно-
сительно ее оси враще-
ния, он обладает свойст-
вом дифференцирующего
гироскопа, предназначен-
ного для измерения угло-
вой скорости крена. Вра-
щение летательного аппа-
рата относительно про-
дольной оси с угловой
скоростью у сопровожда-
ется отклонением рамки
гироскопа — аэродинамической поверхности на угол д.,. При этом
возникает момент крена А4^’бэ и соответствующее угловое ускоре-
ние у, направленное против возникшей угловой скорости у- Как
видно, рассматриваемая система стабилизации угловой скорости
крена является системой прямого действия.
Уравнение движения рамки гироскопа, т. е. роллерона, как из-
вестно, можно записать в виде
I ----------ЛР — 44 X = — /_2у + 44“а.
3 dfl ш dt ш 3 р 1
Считая процесс отклонения роллерона безынерционным, полу-
чим для одного роллерона
/р^7 = Л4^6, + <1а,
(4-17)
а для другого
-7Л = -<^ + М“а.
§ 2. Стабилизация угловой скорости крена
213
Отсюда найдем
КЯ=(А) =-¥- (4.18)
\ V hem Мшэ
Это отношение определяет передаточный коэффициент автомата
стабилизации — роллерона. Поскольку вращение ротора создается
воздушным потоком, угловая скорость Q, так же, как и производ-
ная пропорциональна скоростному напору и, следовательно,
передаточный коэффициент Ка слабо зависит от высоты и скорости
полета.
Динамические свойства системы стабилизации с идеальными
роллеронами, т. е. отклоняющими органы управления в соответст-
вии с формулой (4.18), описываются приведенными ранее выра-
жениями (4.14) и (4.16). Основными достоинствами такой системы
стабилизации являются, очевидно, ее простота, малый вес и надеж-
ность. Однако возможности ее применения сильно ограничены. Как
это следует из формулы (4.18), передаточный коэффициент ролле-
рона определяется его конструкцией и диапазон возможных значе-
ний этого коэффициента невелик. Поэтому задача проектирования
системы стабилизации угловой скорости крена посредством ролле-
ронов состоит в рациональном выборе конструкции роллерона и
таких аэродинамических характеристик летательного аппарата,
как тхэ и тхх. Поскольку эта задача решается чисто аэродина-
мическими средствами, удачное решение, по-видимому, возможно
лишь при полете в достаточно плотных слоях атмосферы сравни-
тельно небольших управляемых ракет, у которых возмущающие
моменты крена невелики.
2.3. Система стабилизации с дифференцирующим гироскопом
Простейшая система стабилизации угловой скорости крена не-
прямого действия показана на рис. 4.3. Угловая скорость крена
измеряется дифференцирующим гироскопом, сигнал которого ис-
пользуется для того, чтобы при помощи рулевого привода откло-
нять органы управления креном. Передаточная функция автомата
стабилизации имеет вид
= KaWa (р) = Kd.eKP.nWp.n (р), (4.19)
У\Р)
где Ка = Кд.гКр.п — передаточный коэффициент автомата стаби-
лизации;
Кд.г И Кр.п —-передаточные коэффициенты дифференци-
рующего гироскопа и рулевого привода;
Wa(p)=Wp.n(p) — передаточная функция рулевого привода при
Кр.п = 1.
214
Глава IV. Стабилизация движения крена
В рассматриваемом случае динамические свойства системы ста-
билизации во многом зависят от рулевого привода, т. е. от его
передаточной функции WP.n(p).
Пусть рулевой привод имеет жесткую обратную связь. При до-
статочной глубине обратной связи такой рулевой привод в первом
приближении можно считать безынерционным Wp.n(p)=l. Тогда
остается в силе все сказанное выше о динамике идеальной системы
Рис. 4.3. Система стабилизации угло-
вой скорости крена с дифференцирую-
щим гироскопом
стабилизации угловой ско-
рости крена.
Чтобы выяснить в пер-
вом приближении характер
влияния инерционности при-
вода на динамику стабили-
зации крена, представим
рулевой привод в виде апе-
риодического звена
WP.n(p) = -T..1 . (4.20)
Тр.пР+ 1
р.п
Тогда для передаточной функции (4.12) получим выражение
Т(р) _ Кэ Тр.пР + 1
Ъвозм(р) 1+КэКа Т*р* + ^Тр + 1 ’
(4-21)
где
Т — Л / ТаТрл .
V 1 + КэКа ’
р__ 1______Тэ+Тр п____
“ 2 утэтрп(1+кэка) ‘
(4.22)
(4.23)
Как видно, с учетом инерционности привода замкнутая система
стабилизации крена является системой второго порядка. При до-
статочно большом значении Ка система может стать колебатель-
ным звеном (g < 1). Следовательно, для увеличения коэффициен-
та Ка имеется предел, обусловленный требованием малой колеба-
тельности системы.
Для правильного выбора структуры и параметров системы ста-
билизации необходим более полный учет динамических свойств
рулевого привода, по крайней мере, учет запаздывания т в его уси-
лительно-преобразовательных элементах. Тогда передаточную
функцию рулевого привода можно записать в виде
Wp.n (Р) =
1
Тр.пехрр+^
е-хР
Тр.п Р + 1
(4.24)
§ 2. Стабилизация угловой скорости крена
215
Передаточная функция разомкнутой системы будет иметь вид
G(p) =------__________
(ТэР+1)(ТрпР+1)’
(4.25)
где Ка — КэКэ.гКр.п — передаточный коэффициент разомкнутой
системы.
Уже отсюда видно, что вследствие запаздывания т запаздыва-
ние по фазе ф на больших частотах может превышать 180°, и при
некотором достаточно большом значении Ко система теряет устой-
чивость.
Выбор передаточного коэффициента Ко проводят с помощью ча-
стотных характеристик системы таким образом, чтобы обеспечить:
1) требуемые запасы ус-
тоичивости;
2) допустимую устано-
вившуюся ошибку Ууст!
3) необходимую частоту
среза.
При выборе частоты сре-
за, помимо обычных сооб-
ражений, изложенных в гл. I
§ 6, учитывают еще следу-
ющее. В рассматриваемой
системе стабилизации нель-
Рис. 4.4 Структурная схема рулевого
привода, обеспечивающего высокую ча-
стоту среза системы стабилизации угло-
вой скорости крена
зя полностью избавиться от установившейся ошибки — медленного
вращения летательного аппарата с угловой скоростью \уст. Для
того чтобы ослабить перекрестные связи между каналами крена,
тангажа и рыскания, обусловленные этой угловой скоростью, ре-
комендуется, чтобы частота среза в канале крена была значительно
выше частоты среза в каналах управления тангажом и рысканием.
Целесообразным запасом частот считается одна декада [2]. Так,
например, если частота среза каналов тангажа и рыскания состав-
ляет 2 l/сек, то для канала крена она должна быть 20 \!сек. Боль-
шая частота среза обеспечивает в то же время высокое быстродей-
ствие системы стабилизации угловой скорости крена.
Если выбором передаточного коэффициента разомкнутой систе-
мы Ко не удается обеспечить требуемые значения запасов устойчи-
вости, установившейся ошибки и частоты среза, то прибегают
к коррекции динамических характеристик системы.
Один из возможных способов повышения частоты среза системы
и притом довольно простой приведен в [2]. Корректирующий
КС-фильтр с передаточной функцией
гф(р) = Лр+1. (4-26>
ф W ТгР + 1
216
Глава IV. Стабилизация движения крена
вводится в обратную связь рулевого привода (рис. 4.4). Постоян-
ная времени Т2 выбирается примерно равной постоянной времени
летательного аппарата Та. Тогда множитель \/Т2р + 1 в переда-
точной функции обратной связи рулевого привода компенсирует
множитель в прямой цепи системы имеющий сравни-
тельно невысокую сопрягающую частоту \/Тэ.
2.4. Астатические системы стабилизации
Рассмотренная выше система стабилизации угловой скорости
крена является статической, она по’ принципу своего действия все-
гда имеет установившуюся ошибку ууст, если возмущающий момент
постоянный. Эту ошибку можно уменьшить путем увеличения пере-
даточного коэффициента разомкнутой системы Ко- Однако увели-
чение коэффициента Ко всегда ограничено: или потому, что при
больших значениях Ко возрастает колебательность системы и по-
является неустойчивость, или вследствие физической неосуществи-
мости большого значения коэффициента Ко-
В одних случаях удается подобрать передаточный коэффициент
разомкнутой системы Ко так, чтобы и установившаяся ошибка уУст
не превышала допустимого значения и чтобы другие динамические
характеристики системы были хорошими. В других случаях этого
достигнуть не удается. Как известно, имеется два пути для преодо-
ления указанных противоречий:
1) введение в систему стабилизации корректирующих уст-
ройств, позволяющих повысить передаточный коэффициент Ко для
уменьшения установившейся ошибки ууСт без повышения колеба-
тельности системы;
2) изменение структурной схемы системы стабилизации таким
образом, чтобы она по принципу своего действия не имела уста-
новившейся ошибки у, т. е. чтобы система была астатической по
координате у.
Рассмотрим второй путь, связанный всегда с введением тем или
иным способом интегрирующего звена в автомат стабилизации.
Интегрирующие звенья, очевидно, могут вводить:
1) рулевой привод без обратной связи или с изодромной об-
ратной связью (при достаточно большом тормозном моменте);
2) интегрирующий фильтр;
3) интегрирующий гироскоп, являющийся измерителем угловой
скорости.
Во всех системах стабилизации с измерителем угловой скорости
крена и одним из возможных интегрирующих звеньев установив-
шаяся угловая скорость крена равна нулю. Пусть, например, авто-
мат стабилизации состоит из дифференцирующего гироскопа и ру-
§ 2. Стабилизация угловой скорости крена
217
левого привода без обратной связи. В этом случае летательный
аппарат охватывается обратной связью по углу крена. Передаточ-
ная функция автомата стабилизации, реализующего эту обратную
связь, имеет вид
(Р) = ХР
?(р) р
(4-27)
то есть
— К.д.гКр.п>
е~хр
wa(p) = ^-.
(4.28)
Пользуясь выражением (4.12), получим, что уус7- = 0. Хотя в
этой астатической (по координате у) системе установившаяся
ошибка уУст в принципе ликвидируется, динамические свойства
системы, в частности, ее колебательность, могут быть хуже, чем
свойства статической системы. Объясняется это тем, что сигнал,
пропорциональный интегралу от угловой скорости крена, изменя-
ется сравнительно медленно и потому сказывается главным обра-
зом в конце переходного -процесса. При этом в системе почти не
возникает противодействия быстрому изменению угловой скоро-
сти, наблюдающемуся в начале процесса, так как нет сигнала,
пропорционального угловой скорости крена.
Для улучшения динамических свойств астатической системы
стабилизации необходимо наряду с введением интегрирования
сохранить обратную связь по угловой скорости крена. Этого мож-
но достигнуть, например, использованием рулевого привода с изо-
дромной обратной связью, в результате чего получаем автомат
.стабилизации с передаточной функцией
-W = Кэ.гКр.п To--c~p+ l-. (4.29)
Y (р) Р
Рулевой привод с изодромной обратной связью позволяет объ-
единить в одной системе свойства статического автомата стабили-
зации (в начале переходного процесса) и астатического (в конце).
На низких частотах, играющих основную роль в конце переходно-
го -процесса, изодромная обратная связь практически не проявля-
ется -и система стабилизации в установившемся режиме является
астатической за счет интегрирующих свойств рулевого -привода
без обратной связи. Такая система стабилизации при ступенчатом
возмущающем моменте крена имеет нулевую установившуюся
-ошибку. На больших частотах (в начале переходного процесса)
динамические свойства системы стабилизации практически не от-
личаются от свойств статической системы (с жесткой обратной
связью в рулевом приводе), рассмотренной выше, в разд. 2.3.
218
Глава IV. Стабилизация движения крена
Если для отклонения органов управления используется руле-
вой привод с жесткой обратной связью, то систему стабилизации
с аналогичными свойствами можно получить с помощью интегри-
рующего фильтра или интегрирующего гироскопа.
В первом варианте сигнал дифференцирующего гироскопа «а.г
преобразуется в соответствии с приближенной передаточной
функцией интегрирующего фильтра
т фр +1
р
»»(Р)
“а.г(Р)
Кф
(4.30)
а затем поступает в рулевой привод.
Во втором варианте в рулевой привод подается сигнал интег-
рирующего гироскопа «и. г, определяемый передаточной функцией
и«.г(Р) тИ.гР+1
• , Т — Ли.г
?(Р) Р
(4.31)
Рассмотренные выше астатические системы стабилизации угло-
вой скорости крена: с дифференцирующим гироскопом и рулевым
приводом с изодромной обратной связью; с дифференцирующим
гироскопом, интегрирующим фильтром и рулевым приводом с жест-
кой обратной связью; с интегрирующим гироскопом и рулевым
приводом с жесткой обратной связью позволяют получить высокое
качество стабилизации (быстро затухающую малоколебательную
реакцию угловой скорости крена на ступенчатый возмущающий
момент с нулевым установившимся значением этой угловой ско-
рости).
§ 3. СТАБИЛИЗАЦИЯ УГЛА КРЕНА
3.1. Обратная связь по углу крена
При автономном наведении и теленаведении обычно требуется
стабилизация угла крена. Рассмотренные выше системы стабили-
зации угловой скорости крена не обеспечивают сохранение в по-
лете заданного положения летательного аппарата (по крену).
На первый взгляд может показаться, что для этой цели могли бы
использоваться астатические системы стабилизации угловой ско-
рости крена, поскольку в них вырабатывается управляющий сиг-
нал, пропорциональный интегралу от угловой скорости крена.
Однако в таких системах рассогласование угла крена 8 = у* —у
постепенно возрастает вследствие отсутствия информации о вели-
чине этого рассогласования и реакции системы, направленной на
его уничтожение.
§ 3. Стабилизация угла крена
219
Рис. 4.5. Простейшая система стаби-
лизации угла крена
Поэтому для стабилизации определенной ориентации нор-
мальной оси летательного аппарата Oyit например, относительно
земных осей координат, т. е. стабилизации угла крена, требуется
измерять отклонение фактического угла крена от заданного, для
чего необходим свободный гироскоп.
С помощью свободного гироскопа, измеряющего ошибку ста-
билизации е, т. е. разность между требуемым и действительным
углом крена, летательный аппарат охватывается обратной связью
по углу крена: сигнал ошиб-
ки поступает в рулевой при-
вод, который отклоняет ор-
ганы управления креном
так, чтобы создать момент,
направленный на уничтоже-
ние возникшей ошибки.
Рассмотрим основные
свойства простейшей систе-
мы стабилизации крена, ко-
торая состоит из объекта
управления, свободного гироскопа и рулевого привода
Передаточная функция замкнутой системы имеет вид
Ка
(рис. 4.5).
у(р)
Ъ S03M (Р)
р(Тэр+\)
р^р+^^Р^Р-^
(4.32)
•3
ИЛИ
т(р)
К3
в о эм (р) p(T3p + \)+K3KaWP.n(p)
(4.33)
Здесь Ка = Кс.г^р.п = ( — — передаточный коэффициент ав-
\ у / уст
томата стабилизации;
Wp.n(p)—передаточная функция рулево-
го привода при Кр.п = 1.
Если рулевой привод имеет жесткую обратную связь, то рас-
сматриваемая система стабилизации является статической. После
затухания переходного процесса, вызванного приложением сту-
пенчатого возмущающего момента, угловая скорость крена рав-
няется нулю, а угол крена определяется выражением
в ОЗМ _. 41xg
КаМ*3
Отсюда следует, что для уменьшения установившейся ошибки
Туст необходимо увеличение передаточного числа автомата стаби-
_ <9 8 03М
Чуст ~
(4.34)
220
Глава IV. Стабилизация движения крена
лизации Ка- Однако с увеличением этого коэффициента возраста-
ет колебательность системы стабилизации. Чтобы обеспечить тре-
буемую величину установившейся ошибки при хорошем качестве
переходного процесса, обычно в закон управления вводят сигнал,
пропорциональный угловой скорости крена, другими словами,
вводят обратную связь по угловой скорости крена.
3.2. Статические системы стабилизации
Обратная связь по угловой скорости крена, основное назначе-
ние которой— обеспечить достаточное демпфирование, может
Рис. 4.6. Система стабилизации крена
со свободным и дифференцирующим
гироскопами
быть реализована раз-
личными способами: из-
мерением угловой скоро-
сти крена с помощью
дифференцирующего ги-
роскопа или дифферен-
цированием сигнала со
свободного гироскопа с
помощью 7?С-фильтра
(рис. 4.6 и 4.7). При этом
управляющий сигнал об-
разуется как сумма сиг-
налов, пропорциональных
углу крена и угловой ско-
рости крена.
В первом случае управляющий сигнал формируется в соответ-
ствии с передаточной функцией
W'.c (р) = = Кс.г + Ка.гр. (4.35)
Рис. 4.7. Система стабилизации крена со свобод-
ным гироскопом и дифференцирующей 7?С-цепью
Во втором случае
W0.c(p) = ^-=Кс.^ф(р). (4.36)
Рассмотрим основные свойства статической системы стабили-
зации угла крена, образованной посредством охвата летательно-
§ 3. Стабилизация угла крена
221
го аппарата двумя обратными связями — по углу и угловой ско-
рости крена. Предположим, что обратные связи по углу и угловой
скорости крена реализуются идеально и что рулевой привод с жест-
кой обратной связью также является идеальным, т. е. Wp.n(p) = 1.
Передаточная функция автомата стабилизации записывается тогда
в виде
Wa (р) = = К р.п (Кс.г + Кд.гР), (4.37)
т(р)
где Кэ.г — передаточный коэффициент дифференцирующего гиро-
скопа или дифференцирующей цепи.
Реакция угла крена на возмущающий момент описывается пе-
редаточной функцией замкнутой системы
Y (р) _ Р(Т^р + 1) 2g\
возм (Р) 1 + G (р)
где
G (Р) = - ^,7 КР.п (Кс.г + Кд.г р), (4.39)
р(Тэр + 1)
или
—------------------------------L2-------, (4.40)
возм (р) Кр.пКс.г Г2р2 + 2^р+1 ’ V
где
= 1/______
|/ КэКр.пКс.г ’
1 + КЛр.пКд.г
2УТэКэКр,пКс.г'
(4-41)
(4.42)
Таким образом, идеальная система стабилизации крена пред-
ставляет собой колебательное звено. Для повышения быстродей-
ствия системы, определяемого частотой колебаний 1/Т, очевидно,
необходимо увеличивать передаточный коэффициент автомата
стабилизации Ка = Кр.пКс.е, что одновременно уменьшает устано-
вившуюся ошибку ууСт. Необходимое демпфирование колебаний
может быть достигнуто соответствующим выбором коэффициен-
та Кд.г.
Структуру рассматриваемой системы стабилизации (способ
реализации обратной связи по угловой скорости, вид передаточ-
ной функции дифференцирующей цепи) и основные параметры си-
222
Глава IV. Стабилизация движения крена
стемы выбирают так, чтобы получир требуемые значения запасов
устойчивости, частоты среза /и установившейся ошибки.
Определение запасов устойчивости и частоты среза выполня-
ют путем построения частотных характеристик разомкнутой си-
стемы по ее передаточной функции
G = 7/Лп К <4-43>
P(Tap+l)
Для исследования реакции угла крена на возмущающий мо-
мент используется передаточная функция- замкнутой системы
—УМ------=----------------------------- (4.44)
^.9 вОЗМ (р) р(Г3р+1) + КЛр.„Грп(р)^.Др) ’ v
причем установившаяся ошибка определяется по-прежнему фор-
мулой (4.34).
3.3. Астатические системы стабилизации
В ряде случаев, когда к точности стабилизации угла крена
предъявляются повышенные требования, для устранения устано-
вившихся ошибок применяются астатические системы стабилиза-
ции. При этом введение интегрирования может осуществляться раз-
личными способами, например, путем использования рулевого
привода с изодромной обратной связью в системе стабилизации
со свободным гироскопом и дифференцирующей цепью или диффе-
ренцирующим гироскопом. Другой вариант астатической системы
стабилизации крена состоит в комбинации свободного гироскопа
с интегрирующим при рулевом приводе с жесткой обратной
связью. В этом случае для введения интегрирования электрический
сигнал свободного гироскопа должен подаваться на моментный
датчик интегрирующего гироскопа.
* *
*
Выше были рассмотрены основные свойства различных систем
стабилизации угловой скорости или угла крена. Выбор той или
иной структурной схемы системы стабилизации и ее основных
параметров, как и решение любой технической задачи, определяет-
ся конкретными условиями, в которых работает система, и техни-
ческими требованиями, предъявляемыми к ней. Для решения этой
задачи проводят большое число разнообразных теоретических и
экспериментальных исследований. Некоторое представление о со-
держании и объеме таких исследований можно получить на осно-
вании приводимого в [4] краткого обзора вопросов, решаемых при
проектировании системы стабилизации крена.
§ 3. Стабилизация угла крена 223
ЛИТЕРАТУРА
1. До б р о л е н с к и й Ю. П., Иванова В. И., Поспелов Г. С., Авто-
матика управляемых снарядов, Оборонгиз, 1963.
2. Локк А. С., Управление снарядами, Гостехтеоретиздат, 1957.
3. Конструирование управляемых снарядов, Под ред. А. Е. Пакета и С. Ра-
мо, Воениздат, 1963.
4. Б е с с е р е р К. У., Инженерный справочник по управляемым снарядам,
Воениздат, 1962.
5. Пельпор Д. С., Гироскопические приборы и автопилоты, «Машино-
строение», 1964.
6. Б е с т Д. и Е н г В., Некоторые проблемы полярного управления ракета-
ми, «Вопросы ракетной техники», 1961, № 3.
7. Боднер В. А., Козлов М. С., Стабилизация летательных аппаратов
и автопилоты, Оборонгиз, 1961.
8. Лебедев А. А., Чернобровкин Л. С., Динамика полета беспилот-
ных летательных аппаратов, Оборонгиз, 1962.
9. Ф е о д о с ь е в В. И., С и н я р е в Г. Б., Введение в ракетную технику,
Оборонгиз, I960.
10. Мери л л Г., Гольдберг Г., Гельмгольц Р., Исследование опе-
раций. Боевые части. Пуск снарядов, ИЛ, 1959.
11. П о п о в Е. П., Автоматическое регулирование, Гостехтеоретиздат, 1957.
12. Павлов В. А., Понырко С. А., Хованский Ю. М., Стабилиза-
ция летательных аппаратов и автопилоты, «Высшая школа», 1964.
Глава V
УПРАВЛЕНИЕ НОРМАЛЬНЫМИ ПЕРЕГРУЗКАМИ
И СТАБИЛИЗАЦИЯ ЛЕТАТЕЛЬНОГО АППАРАТА
§ 1. ВВЕДЕНИЕ
В гл. I было показано, что для того чтобы изменять направле-
ние полета летательного аппарата, необходимо управлять нор-
мальными силами (перегрузками). На беспилотных летательных
аппаратах эту задачу решает система управления нормальными
перегрузками.
В большинстве случаев для создания нормальных управляю-
щих сил регулируют угловое положение корпуса летательного ап-
парата относительно вектора его скорости. Тогда для автоматиче-
ского управления нормальными перегрузками используют соответ-
ствующие каналы системы стабилизации, так как одной из задач
этой системы и является поддержание заданного (постоянного или
изменяющегося) углового положения летательного аппарата.
Летательный аппарат обычно стабилизируется относительно
трех осей, в соответствии с этим система стабилизации имеет три
канала. В то же время для управления нормальными перегрузка-
ми достаточно использовать два канала: каналы стабилизации
углов крена и тангажа при управлении «в полярных координатах»
или каналы углов тангажа и рыскания при управлении «в декар-
товых координатах». В последнем случае при осесимметричном
летательном аппарате два указанных канала идентичны.
Как было указано в главе I, при управлении нормальными
перегрузками посредством изменения углового положения лета-
тельного аппарата соответствующие каналы системы стабилизации
становятся составной частью системы наведения. Поэтому выбор
характеристик и параметров этих каналов системы стабилизации
зависит от требований, предъявляемых к системе наведения.
В этой главе рассматриваются некоторые возможные схемы тех
каналов замкнутых систем стабилизации, которые одновременно
используются для управления нормальными перегрузками. (Ра-
зомкнутые системы, в которых управление перегрузками осущест-
вляется путем воздействия сигналов наведения непосредственно
на исполнительные элементы, встречаются относительно редко).
§ 1. Введение
225
1.1. Основные требования,
предъявляемые к системам стабилизации
и управления нормальными перегрузками
.Для того чтобы в общих чертах сформулировать основные тре-
бования, предъявляемые к системам стабилизации, выполняющим
одновременно функцию управления нормальными перегрузками,
необходимо отметить некоторые динамические особенности лета-
тельных аппаратов.
Для большинства современных летательных аппаратов харак-
терным является слабое затухание быстрого возмущенного движе-
ния, что вызывается относительно небольшой площадью оперения
и большими высотами полета. Коэффициент относительного демп-
фирования колебательного звена в передаточных функциях лета-
тельных аппаратов, характеризующих движения рыскания и тан-
гажа, редко превышает 0,14-0,15. Это обстоятельство затрудняет
обеспечение условий устойчивости и точности системы наведения,
если управление нормальными перегрузками осуществляется по
разомкнутой схеме.
Весьма неблагоприятно на процессы наведения может влиять
непостоянство динамических характеристик летательных аппара-
тов, существенно зависящих от высоты и скорости полета. Неред-
ко на работе системы наведения заметно сказывается нелиней-
ность аэродинамических характеристик.
Все это не позволяет в большинстве случаев управлять нор-
мальными перегрузками по разомкнутой схеме. Поэтому одна из
основных задач системы стабилизации заключается в исправлении
динамических характеристик летательных аппаратов.
Исходя из этой задачи рассмотрим, каким требованиям долж-
на удовлетворять система стабилизации.
Прежде всего, свободное движение системы стабилизации дол-
жно быть хорошо задемпфированным. Это необходимо для того,
чтобы облегчить выполнение условий устойчивости контура наве-
дения, в который как составной элемент входит система стабили-
зации. Степень демпфирования свободных колебаний системы
стабилизации должна выбираться такой, чтобы при резко изме-
няющихся сигналах наведения (близких к ступенчатым) величина
перерегулирования угла атаки не была бы слишком большой.
Обычно требуют, чтобы выполнялось неравенство о <30%. Это
необходимо для ограничения выбросов нормальной перегрузки и в
некоторых случаях для того, чтобы избежать влияния нелинейности
аэродинамических характеристик, проявляющейся при больших
углах атаки.
Для повышения точности наведения необходимо, чтобы дина-
мические характеристики системы стабилизации слабо зависели
8 Заказ 1242
226 Глава V. Управление нормальными перегрузками и стабилизация
от высоты и скорости полета летательного аппарата. В первую
очередь требуется возможно меньшее изменение передаточного
коэффициента замкнутого контура стабилизации по нормальной
перегрузке. Это связано с тем, что неконтролируемые его измене-
ния могут потребовать уменьшения передаточного коэффициента
разомкнутого контура наведения для обеспечения необходимых
запасов устойчивости, что в свою очередь может оказать влияние
на точность наведения.
Таким образом, для исправления динамических характеристик
летательного аппарата система стабилизации должна удовлетво-
рять следующим требованиям.
1. Свободные колебания системы стабилизации должны быть
хорошо задемпфированы. Степень демпфирования определяется
или заданием допустимого перерегулирования по углу атаки при.
ступенчатом управляющем воздействии, или соответствующими
запасами устойчивости по амплитуде и фазе.
2. Динамические характеристики системы стабилизации долж-
ны слабо зависеть от режима полета; в особенности это относится
к передаточному коэффициенту по перегрузке. Необходимая сте-
пень стабильности характеристик может быть определена при
анализе процессов наведения.
Кроме задачи, связанной с исправлением динамических харак-
теристик летательного аппарата, система стабилизации должна
решать ряд других задач. Отметим некоторые из них.
Система стабилизации должна иметь ширину полосы пропускае-
мых частот не меньше некоторой заданной. Необходимая ширина
полосы пропускания зависит от условий работы системы наведения
(от характера полезных и возмущающих сигналов), а также от тех
требований, которые предъявляются к этой системе.
Система стабилизации должна достаточно эффективно подав-
лять действие внешних возмущений, приложенных к летательному
аппарату, а также действие внутренних возмущений со стороны
аппаратуры самой системы стабилизации. В некоторых системах
наведения, особенно программных, эти возмущения могут суще-
ственно влиять на точность наведения. Поэтому компенсация влия-
ния возмущений может быть в некоторых случаях важной зада-
чей системы стабилизации.
Наконец, дополнительной задачей системы стабилизации мо-
жет быть ограничение максимальных перегрузок на некотором за-
данном уровне, обычно зависящем от прочности элементов конст-
рукции летательного аппарата и бортовой аппаратуры управ-
ления.
§ 1. Введение
227
Так как система стабилизации является одним из элементов,
входящих в замкнутый контур наведения, то естественно, что
перечисленные выше требования, которым должна удовлетворять
система стабилизации, существенно зависят от требований, предъ-
являемых к системе наведения.
Требования к системам наведения и стабилизации нередко про-
тиворечат друг другу. Поэтому при проектировании систем стаби-
лизации нередко приходится искать компромиссные решения.
В этом случае из всех требований, которые предъявляются к систе-
ме стабилизации, учитывают в первую очередь те, от удовлетворе-
ния которых в наибольшей степени зависят в данных условиях
наиболее важные характеристики автоматической системы управ-
ления полетом.
Система стабилизации летательного аппарата является типич-
ной системой автоматического регулирования, выполняющей
простые функции управления. Эти функции заключаются в том, что-
бы поддерживать значения некоторых координат летательного
аппарата равными или постоянными, или изменяющимися по опре-
деленной программе, или, наконец, произвольно изменяющимися
по времени и задаваемыми системой наведения. Во всех перечис-
ленных случаях принцип действия замкнутых систем стабилизации
остается одним и тем же, изменяется лишь характер входных уп-
равляющих воздействий. Однако от характера этих воздействий
в значительной степени могут зависеть требования, предъявляемые
к системе стабилизации. Поэтому целесообразно рассмотреть неко-
торые особенности управляющих воздействий для случаев наведе-
ния по программе и наведения на цель.
1.2. Особенности управления нормальными перегрузками
при программном наведении и наведении на цель
В программных системах наведения траектория полета лета-
тельного аппарата предопределяется программой полета, которая
задается перед пуском и в процессе полета не изменяется. Очевид-
но, что такой способ наведения может применяться только при
неподвижных целях и в этом случае программную траекторию
полета можно почти всегда задать так, чтобы потребные перегруз-
ки были небольшими.
Если дополнительно учесть, что программа полета задается
в виде зависимости параметров движения от времени, а сам полет
по программе относительно продолжителен, то по этим причинам
программное значение нормальной перегрузки (или угловой ско-
рости 0) является медленно изменяющейся функцией времени и,
следовательно, амплитудный частотный спектр программного сиг-
нала наведения характеризуется обычно узкой полосой.
8*
228 Глава V. Управление нормальными перегрузками и стабилизация
Таким образом, характерной чертой многих систем управления
полетом при наведении по программе является узкополосный
спектр сигнала наведения.
Другой особенностью таких систем является относительно не-
большой уровень шумов в управляющих сигналах, так как при на-
ведении по программе не используется информация от цели, а при
полностью автономной системе и от командного пункта. Поэтому
в системе стабилизации нет внешних источников шумов, хотя и
остаются источники внутренние (например, шумы на выходе гиро-
скопических измерителей углов, вызванные действием вибра-
ций). Это обстоятельство позволяет использовать для коррекции
динамических свойств системы стабилизации введение в управляю-
щий сигнал производных от сигнала ошибки, что обычно непри-
емлемо при наличии в сигнале наведения значительных по уровню
шумов.
Если уровень шумов в программной системе наведения мал, то
основными возмущающими воздействиями для системы стабилиза-
ции оказываются действующие на летательный аппарат силы и мо-
менты, вызываемые производственными погрешностями и не-
спокойной атмосферой. В некоторых случаях заметное влияние на
точность наведения могут оказать и возмущения со стороны ап-
паратуры (уходы гироприборов, уходы нулей усилителей, самоход
рулевых машин и т. д.).
При исследовании программных систем наведения следует
иметь в виду особенность, заключающуюся в том, что в таких
системах контроль положения центра масс летательного аппарата
относительно программной траектории может заменяться контро-
лем каких-либо других параметров движения, например, угловых
координат корпуса летательного аппарата, скорости полета и т. д.
При продолжительном времени полета по программе возмущаю-
щие силы -и моменты в этих условиях могут вызвать большие от-
клонения центра масс летательного аппарата от требуемой траек-
тории, хотя за то же время отклонения регулируемых координат
от их программных значений могут быть небольшими. Поэтому
при формировании системы стабилизации при программном наве-
дении и выборе ее параметров необходимо оценивать точность
реализации программы не только по регулируемым координатам,
на основании измерения которых замыкается контур стабилиза-
ции, но и по некоторым другим координатам, более полно харак-
теризующим точность наведения.
Если рассмотреть особенности управления летательными аппа-
ратами при наведении на цель, когда сигнал наведения является
произвольной, заранее неизвестной функцией времени, то можно
отметить, что в этом случае потребные нормальные перегрузки
(или угловые скорости ®) обычно велики и быстро изменяются по
§ 2. Система стабилизации со свободным гироскопом
229
времени. Это особенно справедливо в случае быстро летящих и ма-
неврирующих целей.
В рассматриваемом случае амплитудный частотный спектр сиг-
налов наведения характеризуется широкой полосой, в результате
чего система стабилизации и управления нормальными перегрузка-
ми должна обладать высоким быстродействием для точного вос-
произведения сигналов наведения.
Работа системы стабилизации при наведении на цель ослож-
няется влиянием относительно интенсивных по уровню шумов, по-
ступающих вместе с полезной информацией от цели или с команд-
ного пункта. Источником шумов обычно являются радиоканалы уст-
ройств измерения координат летательного аппарата и цели и
устройств телеуправления.
Таким образом, системы программного наведения и наведения
на цель представляют как бы два крайних варианта условий рабо-
ты системы стабилизации. В одном случае имеет место узкополос-
ный сигнал наведения, относительно низкий уровень случайных
помех и существенное влияние возмущений, приложенных к лета-
тельному аппарату, в другом — широкополосный сигнал наведения
и высокий уровень шумов.
По этим причинам в системах программного наведения и систе-
мах наведения на цель применяются различные по структуре и со-
ставу системы стабилизации.
§ 2. СИСТЕМА СТАБИЛИЗАЦИИ СО СВОБОДНЫМ ГИРОСКОПОМ
Для сравнения различных схем систем стабилизации и управ-
ления нормальными перегрузками необходимо оценивать свойст-
ва установившихся режимов и переходных процессов по отношению
к управляющему воздействию (сигналу наведения) ин и возму-
щающему воздействию, приведенному для удобства дальнейшего
исследования к эквивалентному углу поворота рулей 6в. Кроме
того, необходимо оценивать степень улучшения демпфирования
короткопериодических колебаний, а также степень стабильности
динамических характеристик системы стабилизации при измене-
нии динамических свойств летательного аппарата.
Ниже в настоящем разделе, а также во всех последующих раз-
делах для примера рассматривается канал продольного движения.
В качестве основной выходной величины системы принято нор-
мальное линейное ускорение летательного аппарата или пропор-
циональная ему величина 0, так как в этой главе рассматривается
работа систем стабилизации, выполняющих функцию управления
нормальными перегрузками. Передаточные функции летательного
аппарата, характеризующие продольное возмущенное движение,
записываются в упрощенном виде [(2. 122) — (2. 124)].
230 Глава V. Управление нормальными перегрузками и стабилизация
Для того чтобы выяснить основные свойства системы стабили-
зации со свободным гироскопом, рассмотрим вначале упрощенный
вариант структурной схемы системы, в состав которой входят уп-
равляемая ракета, свободный гироскоп (в качестве измерительного
элемента) и рулевой привод (рис. 5.1).
Схема составлена в предположении, что рулевой привод яв-
ляется статическим, безынерционным элементом, характеризую-
щимся передаточным коэффициентом Кр.п. Свободный гироскоп,
измеряющий отклонение угла тангажа й1 от заданного (базового)
значения й* , также является безынерционным и характеризуется
Рис. 5.1. Структурная схема системы стабилизации
со свободным гироскопом
передаточным коэффициентом Кс.г. Какие-либо корректирующие
элементы в схеме отсутствуют. (С учетом указанных предположе-
ний, очевидно, всегда можно обеспечить устойчивость замкнутой
системы с определенным запасом только за счет выбора переда-
точного коэффициента разомкнутого контура стабилизации).
Из схемы следует, что управляющий сигнал наведения можно
ввести в систему или в виде электрического сигнала ин на вход
усилителя рулевого привода, или при помощи изменения базового
значения угла тангажа Э1* , что осуществляется обычно за счет по-
ворота основания потенциометрического датчика гироскопа. Из
структурной схемы видно, что указанные способы введения управ-
ляющего сигнала эквивалентны с точки зрения динамики системы,
хотя в этих двух случаях сигналы имеют различную физическую
природу.
В соответствии с упрощенной структурной схемой можно запи-
сать передаточную функцию разомкнутого контура стабилизации
в виде
Г (р) =----K»(TiP+ *)--- (5.1)
v ’ plT^ + ^Jp+l) v 7
где Ко = Кс.гКр.пК.
Если бы система стабилизации не была замкнута, то тогда по-
стоянному, отличному от нуля сигналу наведения ин соответство-
§ 2. Система стабилизации со свободным гироскопом
231
вало бы в установившемся режиме некоторое постоянное значение
угловой скорости б' или 0, т. е.
' / уст \ “« / уст
При замыкании обратной связи по углу тангажа устанавли-
вается пропорциональная зависимость между сигналом наведения
и углом ft или 0. Действительно, для замкнутой системы стабили-
зации можно записать следующую передаточную функцию:
1 Т\р + 1
До До ' До >
ft(p) =
“«(Р)
и, следовательно, в
установившемся режиме
/j&_\ _ 1
\ин / уст ^с.г
рассматриваемая система стабилизации может
система управления угловым положением ле-
сигнал наведения ыи* в этом
Таким образом,
использоваться как
тательного аппарата. Постоянный
случае эквивалентен изменению базового значения угла тангажа
на величину
с г
Из структурной схемы системы следует, что по отношению к уп-
равляющему воздействию ft* и выходной угловой координате Aft
система является астатической, т. е. при постоянном управляющем
воздействии ft* ошибка системы Aft равна нулю. Однако этот вывод
справедлив, если передаточная функция летательного аппарата со-
держит интегрирующее звено, т. е. только в том случае, когда при
изучении возмущенного движения летательного аппарата можно
пренебречь влиянием силы тяжести и вариаций скорости.
Обычно при наведении управляемых ракет на подвижные, ма-
неврирующие цели требуется обеспечить пропорциональность меж-
ду сигналом наведения и перегрузкой (или угловой скоростью 0)
ракеты, так как ошибка наведения в этом случае характеризуется
линейным отклонением ракеты от требуемой траектории. Чтобы
обеспечить такую пропорциональность, в рассматриваемой системе
стабилизации необходимо преобразовать сигнал наведения так.
чтобы при постоянном его значении сигнал на входе системы ста-
билизации изменялся с постоянной скоростью.
Для реализации этого требуется введение интегрирующего эле-
мента. В некоторых системах наведения для этой цели использу-
232 Глава V. Управление нормальными перегрузками и стабилизация
ются электродвигатели. Так, например, в системе наведения зенит-
ной ракеты «Вассерфаль» [5] подобный двигатель использовался
для поворота базового устройства свободного гироскопа. В этом
случае при постоянном сигнале наведения, действующем на входе
такого двигателя, базовое значение угла тангажа 'fl'* будет изме-
няться с постоянной скоростью, пропорциональной сигналу наве-
дения. В соответствии с этим изменением базового угла fl1* будет
изменяться и угол тангажа ракеты fl1. Естественно, что введение
интегрирующего элемента усложняет систему наведения, ухудшает
ее надежность. По этой причине система стабилизации со свобод-
ным гироскопом неудобна для управления нормальными пере-
грузками.
С помощью структурной схемы (см. рис. 5. 1) нетрудно опреде-
лить передаточную функцию ошибки замкнутой системы по отно-
шению к возмущающему воздействию бв. Из этой передаточной
функции для установившегося режима можно получить следующее
соотношение:
К
Ко
1
Кс.гКр.п
(5.2)
Таким образом, по отношению к возмущающему воздействию
бв и угловым координатам fl1 или © система является статической.
Очевидно, что в разомкнутой системе стабилизации при дей-
ствии постоянного возмущения бв на выходе установится пропор-
циональная возмущению угловая скорость fl1 или О, так как
\ бе 'уст \ бв /уст
= к.
Следовательно, ступенчатый возмущающий момент в системе
стабилизации со свободным гироскопом вызывает лишь постоян-
ную установившуюся ошибку №уСт, обратно пропорциональную
передаточному коэффициенту разомкнутого контура Ко- Непрерыв-
ного отклонения оси летательного аппарата и касательной к тра-
ектории от требуемых направлений после затухания переходных
процессов здесь не происходит. Это свойство системы стабилиза-
ции со свободным гироскопом весьма существенно при наведении
по программе.
Используя передаточную функцию разомкнутого контура ста-
билизации в ее наипростейшем виде (5.1), можно установить, что
передаточный коэффициент Ко не может быть большим. Для полу-
чения приемлемых запасов устойчивости, например, запасов устой-
чивости по фазе около 35—45°, следует выбирать частоту среза
близкой к сопрягающей частоте колебательного звена, т. е. долж-
но быть (Ос ~ 1/Т. Действительно, при достаточно высоких часто-
тах, когда coi^l/Tj, динамические свойства системы хорошо
§ 2, Система стабилизации со свободным гироскопом
233
описываются передаточной функцией
Г (Р) =-----.
Т2р2 + 2£Тр + 1
Для того чтобы получить, например, запас устойчивости по фа-
зе, равный 45°, необходимо выбрать частоту среза равной
сос=--у(^ + ГГ+^),
так как фазовая частотная характеристика
<р (со) = arc tg-2--
т . 1 — TW
на частоте со = сос должна быть равна
T(coJ = -135°.
Учитывая, что на частоте среза амплитудная частотная харак-
теристика равна единице, из соотношения
А Ю = —==&== = 1
]/(1_Г2т2)2 + 4^г2т2
можем определить необходимое значение передаточного коэффи-
циента Ко-
Например, для £ = 0,1 частота среза определяется из соотно-
шения
®сТ = £ + /1 +^= 1,1.
Тогда
К0Т± = /(1—со2Т2)2 + 4^со2Г = 0,3.
Ввиду того, что постоянная времени Л обычно измеряется
единицами и даже десятками секунд, передаточный коэффициент
Ко будет заметно меньше единицы. Однако при малых значениях
коэффициента Ко установившиеся ошибки системы, вызванные
действием возмущения 6в, могут быть недопустимо большими [см.
(5.2)].
Если учесть, что рулевой привод является инерционным эле-
ментом и часто характеризуется передаточной функцией аперио-
дического звена, то для получения необходимых запасов устойчи-
вости придется принять меньшее значение передаточного
коэффициента Ко по сравнению со случаем, когда рулевой привод
можно рассматривать как безынерционный элемент.
Чтобы увеличить значение передаточного коэффициента Ко
при сохранении требуемых запасов устойчивости, в систему стаби-
лизации со свободным гироскопом, как правило, вводят в качестве
последовательного корректирующего устройства одно- или двух-
234 Глава V. Управление нормальными перегрузками и стабилизация
звенный пассивный дифференцирующий фильтр. С помощью этого
фильтра удается выполнить условия устойчивости при достаточно
большом значении передаточного коэффициента Ко, что и позво-
ляет уменьшить статические ошибки системы стабилизации.
На структурной схеме (рис. 5.2) указан этот фильтр, имеющий
обычно передаточную функцию
+ 2g^p+ 1)
(Т1фР + 1) (Т^р + 1)
(5-3)
Так как пассивный дифференцирующий фильтр сильно ослаб-
ляет низкочастотную составляющую сигналов (К& 1), то после
Рис. 5.2. Структурная схема системы стабилизации
со свободным гироскопом
фильтра для компенсации этого ослабления приходится вводить
дополнительный усилитель, указанный на рис. 5.2, с коэффициен-
том усиления Ку- Естественно, что это усложняет систему.
Следует заметить, что если система стабилизации со свободным
гироскопом и дифференцирующим фильтром используется для
управления нормальными перегрузками, то сигнал наведения ик
нельзя подавать, как это было на схеме рис. 5.1, на вход II. Дейст-
вительно, в рассматриваемом случае входы I и II не эквивалентны,
так как они разделены дифференцирующим фильтром. При по-
даче сигнала наведения на вход II дифференцирующий фильтр
окажется в цепи обратной связи и обратная связь станет «форси-
рованной». Это приведет к тому, что замкнутая система будет
иметь более узкую полосу пропускания и, следовательно, меньшее
быстродействие по сравнению с вариантом подачи сигнала наве-
дения на вход I.
Так как дифференцирующий фильтр вводит в закон регулиро-
вания производные, то возможным эквивалентным вариантом си-
стемы стабилизации может служить система со свободным и диф-
§ 2. Система стабилизации со свободным гироскопом
235
ференцирующим гироскопами. Дифференцирующий гироскоп по-
зволяет измерять первую и вторую производные от угла тангажа
О’ [2]. Поэтому, комбинируя сигналы свободного и дифференцирую-
щего гироскопов, можно получить тот же сигнал, что и на выходе
дифференцирующего фильтра. Но такой вариант удобен только
для решения задач стабилизации, так как подавать сигнал на
вход //, как было указано выше, невыгодно, а вводить сигнал наве-
дения в виде механической координаты 'О'* в этом случае очень
сложно. Кроме того, необходимая аппаратура здесь будет более
сложной.
Наличие дифференцирующего фильтра является весьма сущест-
венным недостатком системы стабилизации со свободным гироско-
пом в случае использования ее для управления нормальными пе-
регрузками. Это связано с тем, что при наведении управляемых
ракет на цель сигнал наведения бывает обычно засорен шумами
(сигнал n(t) на рис. 5.2). Даже при программном наведении сиг-
нал на выходе свободного гироскопа содержит шумы, вызываемые
вибрацией корпуса. Так как шумы обычно имеют высокочастотный
спектр, то после дифференцирования их уровень существенно повы-
шается.
Это может привести к целому ряду нежелательных последствий
в том случае, если элементы системы, следующие за дифферен-
цирующим фильтром, имеют статические характеристики с насы-
щением. Когда полезный сигнал вместе с шумом выходит за пре-
делы линейнего участка статической характеристики такого элемен-
та, то его эквивалентный коэффициент передачи по отношению к
полезному сигналу уменьшается (см. рис. 1.23). В свою очередь
уменьшение передаточного коэффициента может ухудшить стати-
ческую точность, уменьшить быстродействие и в некоторых слу-
чаях привести к потере устойчивости системы стабилизации. В свя-
зи с этим параметры дифференцирующего фильтра, как будет по-
казано в гл. VI, выбирают с учетом влияния шумов.
Из структурной схемы на рис. 5.2 видно, что передаточный ко-
эффициент замкнутой системы стабилизации по координате ДФ в
отношении сигнала наведения ^*(t) не зависит от передаточного
коэффициента летательного аппарата, так как система с этой точки
зрения является астатической. Вместе с тем, при изменении дина-
мических характеристик летательного аппарата (/<, g, Т, при
движении по траектории запасы устойчивости рассматриваемой
системы могут изменяться в широких пределах. В некоторых слу-
чаях с помощью дифференцирующего фильтра с постоянными па-
раметрами не удается обеспечить устойчивость системы стабилиза-
ции на всех возможных режимах движения летательного аппарата.
Тогда можно использовать фильтр с переменными параметрами,
динамические характеристики которого или изменяются по некото-
рой заранее предопределенной программе, или подстраиваются в
236 Глава V. Управление нормальными перегрузками и стабилизация
зависимости от изменений режима движения летательного аппа-
рата.
Способ выбора параметров дифференцирующего фильтра до-
статочно подробно рассмотрен в гл. VI в связи с анализом дина-
мики систем программного наведения, поэтому приведем здесь
только некоторые соображения общего характера.
При выборе параметров фильтра следует иметь в виду, что
дифференцирующее звено в передаточной функции (5.3) фильтра
V + 1
компенсирует неблагоприятное влияние на устойчивость системы
колебательного звена передаточной функции летательного аппа-
рата
тгрг + 2фр + 1 ’
имеющего небольшой коэффициент относительного затухания
Если бы параметры летательного аппарата и главным обра-
зом постоянная времени Т были постоянными, то нетрудно было
бы выбрать необходимые для компенсации параметры дифферен-
цирующего фильтра, приняв, например, Хф = Т. Но так как пос-
тоянная времени Т обычно изменяется в некоторых пределах, на-
пример, от Т' до Т", то выбор параметров фильтра осложняется.
Здесь полезно учитывать следующее. Дифференцирующий фильтр
дает наибольший положительный фазовый сдвиг в интервале
частот от 1/тдд до Т2ф , а частота среза контура стаби-
лизации обычно близка к сопрягающей частоте колебательного
звена и, следовательно, заключается в интервале от 1/Т" до 1/Т'.
Именно в этом интервале и требуются максимальные положитель-
ные фазовые сдвиги для получения необходимых запасов устойчи-
вости. Поэтому при ориентировочном выборе параметров диффе-
ренцирующего фильтра можно исходить из неравенств:
Уточнить этот результат можно с помощью построения частот-
ных характеристик системы.
Из всего изложенного выше следует, что система стабилизации
со свободным гироскопом может найти применение в двух случаях.
Во-первых, когда задача управления полетом сводится исключи-
тельно к стабилизации углового положения летательного аппара-
та, например, к стабилизации горизонтального прямолинейного
полета самолета или самолета-снаряда. Такую систему стабили-
зации имел, например, самолет-снаряд V-1 [4], [6]. Другой случай
соответствует управлению относительно медленными угловыми
движениями или в программных системах наведения, или в систе-
§ 3. Система стабилизации с дифференцирующим гироскопом
237
мах теленаведения и самонаведения на малоподвижные цели.
В последнем случае возможность применения системы стабилиза-
ции со свободным гироскопом для управления нормальными пере-
грузками существенно зависит от наличия и уровня шумов в сиг-
налах наведения. При этом сигнал наведения в систему стабили-
зации обычно вводится в виде механической величины
соответствующей повороту базового устройства гироскопа.
§ 3. СИСТЕМА СТАБИЛИЗАЦИИ С ДИФФЕРЕНЦИРУЮЩИМ
ГИРОСКОПОМ
Одной из простейших схем систем стабилизации является
схема с дифференцирующим гироскопом. Структурная схема такой
системы, отвечающая каналу продольного движения, приведена на
рис. 5.3.
Рис. 5.3. Структурная схема системы стабили-
зации с дифференцирующим гироскопом
Рис. 5.4. Преобразование структурной схемы
На схеме обозначены основные функциональные элементы си-
стемы стабилизации: рулевой привод с передаточной функцией
^р.п(р) и дифференцирующий гироскоп с передаточной функцией
^э.г(р). Сигнал наведения им и сигнал с дифференцирующего
гироскопа Идг суммируются обычно в усилителе рулевого приво-
да, имеющего в данном случае два входа. Несмотря на то, что
коэффициенты усиления каждого из этих двух входных сигналов
могут быть различными, на структурной схеме можно не представ-
лять усилитель в виде отдельного элемента, а считать, что он
входит в состав рулевого привода. Это поясняет пример преобра-
зования структурной схемы, приведенный на рис. 5.4, а, б, в.
238 Глава V. Управление нормальными перегрузками и стабилизация
3.1. Расчетная схема с безынерционными приводом
и гироскопом
Для того чтобы выявить наиболее характерные свойства рас-
сматриваемой системы, исследуем вначале ее упрощенный
вариант, предположив, что рулевой привод и дифференцирующий
гироскоп можно рассматривать как безынерционные элементы.
В этом случае единственными характеристиками этих элементов
будут их передаточные коэффициенты Кр.п и /<э.г.
Тогда передаточная функция разомкнутого контура приобре-
тает следующий вид (в качестве выходной величины рассматри-
вается координата @):
T^pi + + 1 ’
где Ко = Кр.пККд.г.
Единственным параметром, который здесь можно произвольно
изменять, является передаточный коэффициент разомкнутого кон-
тура Ко
Рассмотрим передаточную функцию замкнутого контура стаби-
лизации по отношению к управляющему воздействию:
кр,пк
[±Ко
Ь>(Р) = _______
и«(₽) Т2
1+*о
(5-4)
Из этого выражения видно, что постоянному значению сигнала
наведения ин в установившемся режиме соответствует постоянное
значение угловой скорости @ (и, следовательно, нормальной пере-
грузки) :
кр,пк
ин /уст 1 4- Ко
Поэтому соответствующие каналы системы стабилизации с диффе-
ренцирующим гироскопом удобно использовать для управления
нормальными перегрузками.
Из передаточной функции (5.4) следует, что в рассматривае-
мом варианте можно обеспечить практически любую степень демп-
фирования колебаний летательного аппарата. Нетрудно составить
выражение, определяющее относительный коэффициент демпфиро-
вания колебательного звена в передаточной функции (5.4). Вели-
чина этого коэффициента определяется соотношением
Ко_Т\
,+ 2 Т
V 1 ~НАо
(5.5)
§ 3. Система стабилизации с дифференцирующим гироскопом
239
у
Рис. 5.5. Корневой годограф
«безынерционной» системы ста-
билизации с дифференцирую-
щим гироскопом
Если учесть, что минимальное время переходного процесса
имеет место при % ~ 0,7 (при этом перерегулирование не превы-
шает 5%), то из выражения (5.5) можно подсчитать оптимальное
значение передаточного коэффициента Ко- Такой подсчет показы-
вает, что это значение получается заметно меньшим единицы. Так
например, при £ = 0,1 и TJT = 10 соответствующее значение Ко
составляет 0,13, а при g = 0,1 и Л/Г = 5 коэффициент Ко = 0,28.
? / При увеличении коэффициента Ко сверх оптимального значе-
/7 ния будет увеличиваться время переходного процесса и соответ-
7 ственно сужаться полоса частот, про-
. пускаемых системой. Из передаточной
функции (5.4) видно, что при неогра-
ниченном увеличении этого коэффици-
ента передаточная функция вырожда-
ется в апериодическое звено с постоян-
ной времени Ть (В реальных условиях
неограниченное увеличение коэффици-
ента Ко невозможно, так как тогда
предположение о безынерционности
дифференцирующего гироскопа и ру-
' левого привода будет недопустимым,
а с учетом инерционности этих элемен-
тов при больших значениях Ко систе-
ма станет неустойчивой).
Очень наглядно свойство «безынер-
ционной» системы стабилизации мож-
но иллюстрировать графиком корнево-
го годографа, который показывает,
как изменяются полюсы передаточной функции замкнутой системы
при изменении коэффициента Ко от нуля до бесконечности. Такой
график приведен на рис. 5. 5.
Основные правила построения корневого годографа можно
найти, например, в книге [7]. График корневого годографа нагляд-
но характеризует изменение динамических свойств замкнутой
системы при изменении передаточного коэффициента разомкнутого
контура.
Для случая безынерционных элементов системы стабилизации
с увеличением передаточного коэффициента разомкнутого контура
Ко пара комплексных полюсов передаточной функции (5.4) пере-
мещается так, что угол ф, характеризующий колебательность си-
стемы, непрерывно уменьшается, ибо
cos ф = ?.
Это свидетельствует о том, что в системе увеличивается степень
демпфирования колебаний.
1К6
240 Глава V. Управление нормальными перегрузками и стабилизация
При дальнейшем увеличении Ко комплексные корни сливаются
в кратный вещественный корень (точка С на рис. 5.5), который
распадается на пару вещественных корней. Один из этих корней
с ростом Ко уходит в бесконечность (соответствующая ему по-
стоянная времени апериодического звена стремится к нулю), а
другой стремится к значению l/Tj, совпадающему с нулем переда-
точной функции разомкнутой системы (точка D).
Приведенный анализ системы в ее упрощенном виде вскрывает
ее основной недостаток, еще более резко проявляющийся в том
случае, когда рулевой привод и дифференцирующий гироскоп
нельзя рассматривать как безынерционные элементы. Этот недо-
статок сводится к тому, что в рассматриваемой системе стабилиза-
ции невозможно выбрать достаточно большое значение переда-
точного коэффициента Ко-
Если учесть, что рассматриваемая система является статиче-
ской по отношению к управляющему ин и возмущающему 8в воз-
действиям, то при малых значениях передаточного коэффициента
Ко система будет иметь плохие статические свойства.
Так, например, передаточный коэффициент замкнутой системы
V
1 + К0
будет существенно изменяться при изменении передаточного коэф-
фициента летательного аппарата К- Очевидно, что если бы выпол-
нялось неравенство Ко 1, то в этом случае передаточный коэф-
фициент замкнутой системы практически не зависел бы от К-
При малых значениях Ко система стабилизации с дифференци-
рующим гироскопом плохо подавляет внешние возмущения.
По отношению к возмущению 6в передаточный коэффициент
замкнутой системы равен
К
1+Яо ’
и если Ко мал по сравнению с единицей, то внешнее возмущение
8в будет действовать на ракету так же, как и без системы стаби-
лизации.
Таким образом, система стабилизации в рассматриваемом
случае удовлетворяет только одному требованию — требованию
демпфирования свободного движения. Однако если учесть инер-
ционность элементов системы стабилизации, то можно убедиться,
что и эта задача не всегда решается удовлетворительно.
3.2. Расчетная схема, учитывающая инерционность привода
Рассмотрим теперь более сложный случай, когда рулевой при-
вод нельзя рассматривать как безынерционный. Будем считать,
что динамические свойства привода достаточно хорошо характери-
§ 3. Система стабилизации с дифференцирующим гироскопом
241
зуются передаточной функцией апериодического звена, когда
WP.n(p) =
Кр.п
Тр.пТ-
своиства привода
Рис. 5.6. Корневой годо-
граф системы стабилизации
с дифференцирующим гиро-
скопом с учетом инерцион-
ности привода
Такой случай имеет место, когда нельзя пренебрегать нагруз-
кой привода или когда в приводе применяется не очень глубокая
жесткая обратная связь. (В случае применения жесткой обратной
связи, близкой к критической, динамич«
более точно характеризуются колебатель-
ным звеном).
Теперь передаточная функция разомк-
нутого контура управления имеет вид
G (р) =_______^(Tip + 1)_____
W (Tp_np+l)(T^p\+^Tp + l)-
Как и в предыдущем случае, здесь
единственным параметром, который
можно изменять, является передаточный
коэффициент Ко, так как постоянная
времени привода Тр.п обычно является
величиной задайнсщ.
При увеличений передаточного коэф-
фициента Ко степень’'демпфирования ко-
роткопериодических колебаний будет
вначале возрастать, но; при дальнейшем
увеличении Ко, в отличие от предыдущего
случая, колебательность переходных про-
цессов будет увеличиваться, так как при
Ко^-оо система выходит на границу
устойчивости.
Очень наглядно это иллюстрирует кор-
невой годограф системы. На рис. 5.6 приведен его примерный вид.
С увеличением Ко два комплексных сопряженных полюса переда-
точной функции замкнутой системы уходят в бесконечность и их
траектории приближаются к вертикальным асимптотам, указан-
ным на рис. 5.6 пунктирными линиями. Положение этих асимптот
определяется координатой I, причем
z = _!_ f _____
2 \ Тг Тр п т J
Угол выхода годографа из точки А, обозначенный у, опреде-
ляется соотношением л.
у =фоэ + а2 — аь
где оц и а2 указаны на рис. 5.6. Если этот угол больше угла
(180° — ф), то в этом случае с увеличением передаточного коэф-
242 Глава V. Управление нормальными перегрузками и стабилизация
фициента Ко демпфирование колебаний будет улучшаться, а при
дальнейшем увеличении этого коэффициента — начнет ухудшать-
ся. Очевидно, что можно определить такое значение Ко, при
котором демпфирование колебаний будет наилучшим.
Легко представить случай, когда с увеличением коэффициента
Ко начиная с нулевого значения (Кд-г = 0) демпфирование колеба-
ний будет только ухудшаться (у < 180° — ф). В этом случае, очевид-
но, применять рассматриваемую схему системы стабилизации не
имеет смысла, так как она не решает ни одной из требуемых
задач.
С помощью графиков корневого годографа можно оценить то
наибольшее значение постоянной времени рулевого привода Тр.п,
при котором будет иметь место такой «критический» случай.
Как было указано, чтобы добиться улучшения демпфирования
колебаний ракеты, необходимо, чтобы выполнялось неравенство
у>180° — ф, эквивалентное неравенству щщ > 90° — ф. Из
рис. 5.6 можно определить, что последнее неравенство будет вы-
полняться при условии
где
Например, в случае, когда Т\ = 5, £ = 0,1, должно выполняться
неравенство
ТР.„<3,3
или
Тр.п < 3,ЗТ,
в противном случае применение схемы с дифференцирующим ги-
роскопом теряет смысл, так как при любых значениях Ко колеба-
тельность переходного процесса увеличится.
Для оценки оптимального значения передаточного коэффи-
циента Ко, при котором обеспечивается наилучшее демпфирование
колебаний, можно воспользоваться или частотным методом или
использовать диаграммы Вышнеградского, так как применение
для этих целей метода корневого годографа требует хотя и не-
сложных, но громоздких вычислений.
Рассмотрим, как можно использовать диаграммы Вышне-
градского для оценки оптимального значения передаточного коэф-
фициента Ко-
§ 3. Система стабилизации с дифференцирующим гироскопом
243
Запишем передаточную функцию замкнутой системы стабили-
зации по отношению к управляющему воздействию
ё (р) =_________________________________ (К)
u„(p) rp.j)-M)(TV + 2£Tp+l) + K0(T1p+l)’ ’
где Ко — по-прежнему передаточный коэффициент разомкнутого
контура управления.
Характеристическое уравнение системы имеет следующий вид:
Тр.пт*р* + (Т2 + 2^ТТрп) р* + (2£Г + Тр.п + К0Л) р + Ко + 1 = О,
или
2£
2£_ , J_ , ХоТщ) „ , 1+Ао _ 0
\‘Р.п 1 ] \*Р.пт + Т2 + трпт*1Р + тр.пт* и-
Последнее уравнение можно записать в следующем виде:
/Я + Лйор2 + BQ2op + Q% = O, ,
где
2?
Т
1 • А — 1 / 1
V тР.пт*' Л qb{tpji
о____ । \
(5.7)
Если в исходных дифференциальных уравнениях ввести безраз-
мерное время
то после преобразований
Р =
Р2 =
= Q03/3
им будет соответствовать характеристическое уравнение
)<3 +Дк2 4-ВХ+1 = 0. (5.8)
Как видно, динамические свойства системы третьего порядка
определяются двумя параметрами: А и В. Вычислив корни харак-
теристического уравнения (5.8) и выявив их зависимость от пара-
метров А и В, можно оценить свойства переходного процесса си-
стемы. Для перехода от безразмерного времени т к истинному
времени необходимо воспользоваться формулой
Утп т*
t = ~
у,
244 Глава V. Управление нормальными перегрузками и стабилизация
Зависимость числовых характеристик корней уравнения (5.8)
от параметров А и В можно определить с помощью диаграмм
Вышнеградского [8]. Для систем третьего порядка обычно учиты-
вают две числовые характеристики, определяющие распределение
корней. Эти характеристики ц и ф указаны на рис. 5.7, а, б. Вели-
чина т], которую иногда называют степенью устойчивости, опре-
деляет расстояние от мнимой оси до ближайшего корня. Эта вели-
чина характеризует длительность переходного процесса: чем
меньше т], тем больше время регулирования. Величина угла ip,
характеризующая положение комплексных корней, определяет
Рис. 5.7. Параметры, определяющие положение
корней на комплексной плоскости
коэффициент относительного затухания g колебательного звена,
соответствующего паре комплексных сопряженных корней. Этот
коэффициент и угол ip связаны соотношением
cosip = £,
или
у'1 — F2
Р = tgip = ^--
На рис. 5.8 представлены две диаграммы Вышнеградского, с
помощью которых можно определить величины ц и ц для различ-
ных значений параметров А и В. Следует помнить, что эти диа-
граммы определяют распределение корней для уравнения (5.8).
Поэтому для исходного характеристического уравнения величина
степени устойчивости ц определится соотношением
т; = rtQ0.
Для иллюстрации применения диаграмм Вышнеградского рас-
смотрим пример. Пусть заданы следующие значения параметров
передаточной функции системы:
§ 3. Система стабилизации с дифференцирующим гироскопом
245
Т = 0,1 сек-. Т\ = 0,5 сек-, g = 0,05; Тр.п = 0,1 сек.
Результаты расчета параметров й0, А и В в зависимости от Ко,
произведенного по формулам (5.7), приведены в табл. 5.1.
Таблица 5.1
к0 0 о,1 0,2 0,4 1,0 2,0
20 10 10,3 10,6 11,2 12,6 14,4
А 1,1 1,07 1,04 0,98 0,87 0,77
В 1,1 1,51 1,87 2,47 3,84 5,35
На рис. 5.8 указаны соответствующие точки. Из построения
видно, что с увеличением Ко до определенного предела колеба-
тельность системы уменьшается, а «степень устойчивости» т] уве-
Р.ис. 5.8. Диаграммы Вышнеградского
личивается. При дальнейшем увеличении Ко качество системы на-
чинает ухудшаться. Наилучшим значением является Ко =
= 0,5 4- 1,5, которому соответствует т] ~ 0,3 и ц ~ 5.
Таким образом, и в этом примере наиболее приемлемое значе-
ние коэффициента Ко, при котором обеспечивается удовлетвори-
тельное демпфирование колебаний, невелико.
Для оценки оптимального значения коэффициента Ко можно
использовать частотный метод. Для этого необходимо прежде
всего построить логарифмические амплитудную и фазовую частот-
ные характеристики разомкнутой системы стабилизации. На
рис. 5.9 приведены такие характеристики, соответствующие только
что рассмотренному примеру. Амплитудная характеристика В (со)
на этом рисунке отвечает Ко = 1-
246 Глава V. Управление нормальными перегрузками и стабилизация
Как известно, колебательность переходного процесса системы
зависит от величины резонансного пика амплитудной частотной
характеристики замкнутой системы (Мр на рис. 5.9). Поэтому
желательно подобрать такое значение передаточного коэффициен-
та Ко, чтобы величина резонансного пика была бы наименьшей.
В нашем примере этим значением является Ко = 1.
Для оценки величины резонансного пика амплитудной харак-
теристики замкнутой системы, а также и других динамических
Рис. 5.9. Амплитудные и фазовые частотные характеристики
системы стабилизации с дифференцирующим гироскопом
свойств замкнутой системы удобно использовать номограммы
«для замыкания». Такая номограмма с нанесенной на ней лога-
рифмической- амплитудно-фазовой характеристикой приведена на
рис. 5.10.
Изменению передаточного коэффициента Ко соответствует пе-
ремещение амплитудно-фазовой характеристики вдоль вертикаль-
ной оси номограммы. Поэтому удобно амплитудно-фазовую харак-
теристику вычертить на прозрачной бумаге и тогда для изменения
Ко достаточно перемещать ее вверх или вниз.
С помощью номограммы для замыкания легко убедиться, что
по мере увеличения передаточного коэффициента Ко величина
резонансного пика замкнутой системы вначале уменьшается, до-
стигает минимума, а затем снова возрастает. Поэтому можно
§ 3. Система стабилизации с дифференцирующим гироскопом
247
определить некоторое «оптимальное» значение Ко- Обычно полу-
чающийся экстремум является пологим. Так, для нашего примера
при изменении Ко в пределах от —5 дб (0,6) до +4 дб (1,6) вели-
чина резонансного пика замкнутой системы минимальна и состав-
ляет Мр = 15 дб. Этот результат полностью совпадает с резуль-
татом, который был получен с помощью диаграмм Вышнеград-
ского.
Рис. 5.10. Амплитудно-фазовая характеристика системы стабилизации и номо-
грамма для замыкания
Если окажется, что ни при каких значениях Ко величина резо-
нансного пика замкнутой системы Мр не получается меньше соот-
ветствующего значения Lm для разомкнутой системы, то приме-
нять схему с дифференцирующим гироскопом нет смысла, так как
в этом случае система стабилизации может только увеличить ко-
лебательность процессов.
3.3. Расчетная схема,
учитывающая инерционность привода и гироскопа
Для систем стабилизации с дифференцирующим гироскопом
наиболее неблагоприятен тот случай, когда летательный аппарат
имеет высокую частоту собственных колебаний, т. е. постоянная
248 Глава V. Управление нормальными перегрузками и стабилизация
времени Т колебательного звена мала. Тогда дифференцирующий
гироскоп нельзя считать безынерционным, так как при достаточно
высокой частоте среза системы малые постоянные времени ее эле-
Рис. 5.11. Корневой годограф системы стабилизации с учетом
инерционности рулевого привода и дифференцирующего гироскопа
ментов начинают оказывать существенное влияние на качество
и устойчивость системы стабилизации.
Для того чтобы получить приемлемое качество системы стаби-
лизации, здесь приходится предъявлять жесткие требования к
§ 3. Система стабилизации с дифференцирующим гироскопом
249
динамическому запаздыванию рулевого привода и дифференци-
рующего гироскопа, которым не всегда легко удовлетворить.
При исследовании этого варианта можно воспользоваться или
методом корневого годографа, или частотным методом.
Метод корневого годографа позволяет очень быстро и просто
установить, возможно ли улучшить демпфирование колебаний за
счет выбора передаточного коэффициента Ко при заданных харак-
теристиках привода и дифференцирующего гироскопа, или решить
обратную задачу—определить требования, которым должны
удовлетворять параметры передаточных функций привода и гиро-
скопа, чтобы рассматриваемая система имела лучшие динамиче-
ские показатели по сравнению с летательным аппаратом без сис-
темы стабилизации.
Для решения подобных задач достаточно определить угол вы-
хода корневого годографа из комплексного полюса, соответствую-
щего колебательному звену передаточной функции летательного,
аппарата. На рис. 5.11 показана примерная схема корневых годо-
графов для этого случая. Предполагается, что передаточная функ-
ция дифференцирующего гироскопа представляется колебатель-
ным звеном.
^.ДР)-г2 ^'гт
?д.гР +25д.еГд.г₽+ 1
так же, как и передаточная функция рулевого привода
Тр.пР
Если все параметры передаточных функций заданы, то нетруд-
но подсчитать угол выхода корневого годографа из колебательно-
го полюса передаточной функции ракеты. Этот угол определяется
из соотношения
— 90° + а, — а2 — а3 — а4 — а5 — у = 180° ± п 360°,
где углы обозначены по рис. 5.11.
При желании можно составить и аналитическое выражение для
угла у, выражающее его величину непосредственно через пара-
метры передаточных функций, но это выражение получается гро-
моздким. Как и в разд. 3.2, для получения эффекта демпфирова-
ния колебаний необходимо, чтобы выполнялось неравенство
у> 180° —ф,
где
ф = arc cos 5.
250 Глава V. Управление нормальными перегрузками и стабилизация
Частотный метод также позволяет провести аналогичное иссле-
дование, причем этот метод предпочтительнее, когда в передаточ-
ные функции элементов системы стабилизации входят запаздыва-
ющие звенья. (Как было показано в гл. III, такое звено, напри-
мер, включают в передаточную функцию рулевого привода).
Как и в предыдущем случае, при использовании частотного ме-
тода выбор передаточного коэффициента определяется стремле-
нием уменьшить величину резонансного пика амплитудной частот-
ной характеристики замкнутой системы МР по сравнению с анало-
гичным пиком характеристики разомкнутой системы.
При учете инерционности гироскопа значения передаточного
коэффициента Ко получаются, как правило, заметно меньше
единицы. Так, для примера, рассмотренного при построении кор-
невого годографа на рис. 5.11, значение Ко, при котором Мр имеет
минимум, равно 0,126, или—18 дб.
Выше, при исследовании системы стабилизации с дифференци-
рующим гироскопом, предполагалось, что динамические свойства
летательного аппарата постоянны. На самом деле они могут
изменяться и иногда в широких пределах. Поэтому при проекти-
ровании систем стабилизации и наведения приходится просматри-
вать несколько характерных траекторий и точек на этих траекто-
риях, например, соответствующих максимальному и минимальному
значениям скоростного напора, моментам включения и выключе-
ния двигателей и т. д.
При этом может оказаться, что невозможно обеспечить удов-
летворительные динамические свойства системы стабилизации при
неизменном значении передаточного коэффициента автопилота,
равного
Ка — Кр.пКд.г-
В таких случаях иногда программируют по времени этот коэф-
фициент, чтобы при изменении передаточного коэффициента лета-
тельного аппарата получать всякий раз «оптимальные» условия
для системы стабилизации. Можно, например, подсчитав для раз-
личных характерных точек траектории значения коэффициента Ко,
обеспечивающие наилучшее демпфирование колебаний, опреде-
лить, как следует изменять передаточный коэффициент автопило-
та Ка по времени. Более эффективные результаты можно полу-
чить, если изменять передаточный коэффициент автопилота Ка в
зависимости от скоростного напора. Это объясняется тем, что
передаточный коэффициент ракеты К наиболее существенно зави-
сит от величины скоростного напора.
Некоторое улучшение характеристик системы стабилизации
можно получить, если после гироскопа в цепи обратной связи по-
ставить корректирующую цепочку, например, пассивный диффе-
ренцирующий фильтр. Такой фильтр увеличивает запас устойчиво-
§ 4. Система стабилизации с интегрирующим гироскопом
251
сти и, следовательно, позволяет назначить большее значение
передаточного коэффициента /Со-
Однако такой способ используют, когда от системы стабилиза-
ции не требуется широкой полосы пропускания. Это связано с тем,
что положительный эффект коррекции можно получить только при
достаточно больших значениях постоянной времени форсирующе-
го звена. Но эффект дифференцирования в цепи обратной связи
может привести к сужению полосы частот, пропускаемых систе-
мой, что может оказать влияние на характеристики системы наве-
дения.
Таким образом, исследование общих свойств системы стабили-
зации с дифференцирующим гироскопом показывает, что такая си-
стема имеет ограниченные возможности, особенно тогда, когда
параметры ракеты изменяются в широких пределах. В большинст-
ве случаев она позволяет только «исправить» динамические харак-
теристики летательного аппарата, улучшая демпфирование корот-
копериодических колебаний.
Из-за того, что в этой системе (статической по отношению к
внешним возмущениям) не удается получить значение передаточ-
ного коэффициента разомкнутого контура Ко, заметно большее
единицы, она плохо противодействует возмущениям, действующим
на ракету, и динамические характеристики ее существенно изме-
няются при изменении характеристик летательного аппарата, если
не используется программирование передаточного коэффициента
автопилота по времени или скоростному напору.
Кроме того, как было показано выше, и демпфирование коле-
баний не может быть обеспечено без предъявления очень жестких
требований к рулевому приводу и гироскопу, если летательный ап-
парат имеет высокую частоту собственных колебаний.
Таким образом, применение рассматриваемой схемы ограничи-
вается случаями, когда от системы стабилизации, управляющей
нормальными перегрузками, не требуется очень широкой полосы
пропускания, а изменение динамических свойств летательного ап-
парата происходит не в очень широких пределах.
§ 4. СИСТЕМА СТАБИЛИЗАЦИИ С ИНТЕГРИРУЮЩИМ ГИРОСКОПОМ
В настоящем разделе рассмотрим краткую характеристику си-
стемы стабилизации с интегрирующим гироскопом, понимая под
последним ту его разновидность, которая позволяет получать сиг-
нал, представляющий собой сумму сигналов, пропорциональных
угловой скорости корпуса ракеты и интегралу от нее, т. е. углу
поворота &.
Как известно [4], [9], передаточная функция такого гироскопа
отличается от передаточной функции дифференцирующего гиро-
252 Глава V. Управление нормальными перегрузками и стабилизация
скопа наличием множителя
хи,гР + 1
р
Интегрирующий гироскоп снабжается обычно датчиком момен-
та, что дает возможность подавать управляющий сигнал непосред-
ственно на вход гироскопа.
Для выяснения особенностей системы и ее основных динами-
ческих свойств рассмотрим структурную схему, приведенную на
рис. 5.12. На структурной схеме обозначены передаточные коэф-
фициенты гироскопа по отношению к измеряемой угловой скоро-
сти Ф и сигналу наведения ин, как Ки.г и К и.г соответственно.
Рис. 5.12. Структурная схема системы стабилизации с интегрирующим
гироскопом
Если бы моментный датчик у интегрирующего гироскопа отсут-
ствовал, то в этом случае сигнал наведения можно было бы вво-
дить в систему только на участке между выходом гироскопа и вхо-
дом рулевого привода. В этом случае система стабилизации по
своим свойствам была бы близка к системе стабилизации со сво-
бодным гироскопом и дифференцирующим фильтром при условии
подачи сигнала наведения на вход рулевого привода. Как было по-
казано выше, такой вариант мало пригоден для управления нор-
мальными перегрузками.
Моментный датчик интегрирующего гироскопа позволяет над
сигналом наведения ин проделать такие же преобразования, как
и над сигналом измеряемой скорости тЭ. В силу этого на элементе
сравнения как бы сравниваются заданное значение угловой ско-
рости и ее фактическое значение <1.
Поэтому рассматриваемая система по своим свойствам близка
к системе с дифференцирующим гироскопом, отличаясь от послед-
ней наличием в передаточной функции разомкнутой системы мно-
жителя
хи.гР + 1
р
§ 4. Система стабилизации с интегрирующим гироскопом
253
Отсюда также следует, что аналогичную по основным динами-
ческим свойствам схему можно получить из схемы системы стаби-
лизации с дифференцирующим гироскопом (см. рис. 5.3), если пе-
ред рулевым приводом ввести корректирующую цепь
с передаточной функцией
тр+ 1
р
Таким образом, рассматриваемый вариант может быть реали-
зован и без специального интегрирующего гироскопа.
Из структурной схемы прежде всего видно, что рассматривае-
мая система является астатической по ошибке ДО = Ф по от-
ношению и к возмущающим воздействиям, действующим на лета-
тельный аппарат, и к сигналу наведения. В связи с этим, при по-
стоянных воздействиях и 6в в установившемся режиме справед-
ливы соотношения:
—
л /
v н / yctn
Таким образом, рассматриваемая система обеспечивает более
высокую статическую точность и более полную компенсацию, по
крайней мере, медленно изменяющихся внешних возмущений.
Так как система является астатической по отношению к ошиб-
ке Д'&, то динамические характеристики этой системы более
стабильны и слабее зависят от изменения параметров передаточной
функции ракеты. Легко, например, проверить, что передаточный
коэффициент замкнутого контура по координате 0 по отношению к
сигналу наведения не зависит от передаточного коэффициента ра-
кеты и равен //См.г. Другие динамические характеристики сис-
темы (например, полоса пропускаемых частот, величина резонанс-
ного пика и др.) будут, конечно, изменяться при изменении харак-
теристик летательного аппарата.
Таким образом, введение интеграла в закон регулирования су-
щественно улучшает динамические свойства системы стабилизации.
Во многих случаях оказывается, что в системе стабилизации
с интегрирующим гироскопом можно получить большее значение
передаточного коэффициента разомкнутого контура по сравнению
с системой с дифференцирующим гироскопом. Этот выигрыш тем
более заметен, чем выше частота собственных колебаний лета-
тельного аппарата. Наиболее наглядно это можно уяснить, если
рассмотреть частотные характеристики системы управления.
При анализе системы управления следует иметь в виду, что.
кроме передаточного коэффициента разомкнутой системы стабили-
254 Глава V. Управление нормальными перегрузками и стабилизация
зации /Со, в данном случае можно в некоторых пределах изменять
постоянную времени интегрирующего гироскопа тм.г. Поэтому
в данной системе приходится выбирать два параметра, что не-
сколько усложняет задачу проектирования.
При выборе постоянной времени интегрирующего гироскопа
ти.г проще всего исходить из следующих соображений. Если рас-
смотреть амплитудно-фазовые характеристики, отвечающие пере-
даточной функции
хи.гР + 1
р
то нетрудно убедиться в том, что фазовая частотная характеристи-
ка такой комбинации звеньев при со 1/тм.г близка к нулю,
а амплитудная характеристика близка к постоянному значению,
равному Хи.г.
Представим теперь, что в схеме системы управления с диффе-
ренцирующим гироскопом передаточный коэффициент Ко выбран
так, чтобы обеспечить наилучшее демпфирование колебаний раке-
ты. Если теперь ввести в систему корректирующее устройство
с передаточной функцией
хи.гР+ 1
Р
причем постоянная времени тм.г мала (1/ти.г>сос, где сос — часто-
та среза системы), то условия устойчивости резко ухудшатся, так
как на частоте среза контура такое устройство внесет большой
отрицательный фазовый сдвиг. В таком случае придется суще-
ственно уменьшить передаточный коэффициент разомкнутой си-
стемы, что в свою очередь приведет к существенному сужению
полосы пропускаемых частот и понижению быстродействия.
В том случае, когда постоянная времени тм.г достаточно велика,
так что \/хи-г < йс, то тогда в области частоты среза фазовые ха-
рактеристики не претерпевают заметных изменений и запасы
устойчивости не изменяются. Однако при значениях тм.г > 1 сек
в' области высоких частот ординаты аплитудной характеристики
увеличатся в ги.г ра^для сохранения прежнего запаса устой-
чивости придется уменьшить в хи.г раз передаточный коэффициент
разомкнутого контура. Поэтому принимать значение ти.г, значи-
3 тельно превышающее 1 сек, невыгодно как из-за того, что при
этом придется уменьшать передаточный коэффициент, так и пото-
му, что при этом в переходном процессе появится медленно изме-
\ няющаяся составляющая (с постоянной времени, близкой к ти.г).
Таким образом, оказывается, что при введении звена с пере-
даточной функцией
тр 4~ ।
Р
§ 5. Система стабилизации с гироскопом и датчиком ускорений
255
приходится уменьшать передаточный коэффициент /(о и при слиш-
ком малых значениях постоянной времени хи.г, и при слишком
больших ее значениях. В качестве наилучшего можно считать
то значение тм.г, которое требует минимального уменьшения пере-
даточного коэффициента Ко, определенного для случая, когда
в системе отсутствует звено с передаточной функцией
ТР 4~ 1
Р
Это значение обычно близко к 1 сек, или несколько меньше, что
зависит от частоты среза контура.
Итак, можно отметить, что система стабилизации с интегри-
рующим гироскопом обеспечивает более высокую динамическую
точность по сравнению с системой с дифференцирующим гиро-
скопом. Однако и у этой системы динамические свойства зависят
от параметров движения летательного аппарата, что может по-
требовать в некоторых случаях программирования передаточного
коэффициента автопилота по времени, высоте или скоростному
напору.
С помощью структурной схемы на рис. 5.12 нетрудно убедиться,
что система стабилизации с интегрирующим гироскопом, как
и схема со свободным гироскопом, позволяет осуществлять стаби-
лизацию углового положения летательного аппарата, а также
управление угловым положением, например, по программе. Эту
задачу система стабилизации с интегрирующим гироскопом ре-
шает намного точнее, чем система с дифференцирующим гироско-
пом, так как последний не измеряет угловые координаты. Поэтому
применять рассматриваемую систему целесообразно в тех случаях,
когда, кроме этапа управления нормальными перегрузками при
теленаведении или самонаведении, необходимо осуществлять
и программное управление угловым положением на этапе автоном-
ного движения.
Следует также иметь в виду, что сам интегрирующий гироскоп
имеет большие габариты и вес, чем гироскоп дифференцирующий,
и поэтому менее удобен в эксплуатации.
§ 5. СИСТЕМА СТАБИЛИЗАЦИИ С ИНТЕГРИРУЮЩИМ ГИРОСКОПОМ
И ДАТЧИКОМ НОРМАЛЬНЫХ УСКОРЕНИЙ
Структурная схема системы стабилизации приведена на
рис. 5.13. В отличие от предыдущей схемы здесь введена еще одна
обратная связь, которая реализуется с помощью датчика нормаль-
ных ускорений. В качестве выходной величины системы принята
нормальная перегрузка.
256 Глава V. Управление нормальными перегрузками и стабилизация
Как было показано в гл. III, передаточная функция датчика
ускорений обычно имеет вид [см. (3.19)]
Т?уРЧ2'д,уТауР^ пн{р) ’
если при ее выводе предположить, что датчик ускорений распола-
гается вблизи от центра масс ракеты.
Рис. 5.13. Структурная схема системы стабилизации с интегрирующим гиро-
скопом и датчиком нормальных ускорений
Если датчик передемпфировать, то его передаточная функция
может быть записана в следующей форме [см. (3.11)]:
Га> W
Тд.уР+{
(5.9)
Иногда после датчика ускорений включают корректирующий
фильтр.
На рис. 5.13 введено обозначение К" г для передаточного ко-
эффициента интегрирующего гироскопа по отношению к сигналу
датчика ускорений, так как этот коэффициент может отличаться
от передаточного коэффициента К."и г гироскопа по отношению
к сигналу наведения ин. В дальнейшем для упрощения записи
введем обозначение
г
и.г
считая
связи с
„ %'и.г
*\д.у - ^l\d.y дг »
1Хи.г
в соответствии с рис. 5.13, что на входе цепи обратной
датчиком ускорений действует нормальная перегрузка
п„ = —©•
н g
§ 5. Система стабилизации с гироскопом и датчиком ускорений
257
Рассматривая схему на рис. 5.13, можно убедиться, что введе-
ние цепи обратной связи с датчиком ускорений позволяет расши-
рить полосу частот, пропускаемых системой стабилизации. Наибо-
лее просто это можно увидеть, если предположить, что датчик ус-
корений является безынерционным устройством и вся цепь обрат-
ной связи с этим датчиком характеризуется единственным пара-
метром— передаточным коэффициентом К’д у.
Объединяя параллельные цепи обратной связи, можно полу-
чить для этого случая выражение эквивалентной передаточной
функции
w0.c (р)=4 (т1Р.+1) + кд.У=(4+ р+1 У
V \ V VKdy )
из которого видно, что постоянная времени форсирующего звена
этой передаточной функции уменьшается в
g
g
раз по сравнению со случаем, когда цепь датчика ускорений отсут-
ствует. Но известно, что уменьшение постоянной времени форси-
рующего звена в цепи обратной связи увеличивает быстродействие
и расширяет полосу частот замкнутой системы.
\ Если рассмотреть случай, когда передаточная функция инер-
ционного датчика ускорений соответствует выражению (5.9), то
для передаточной функции цепи обратной связи получается более
сложное выражение
W7 /М ® /Тп-Lllj- PC То.сР + ^о.сРо.сР + 1
V°M = -у -------
где
Кос = 4 + Кд.у',
V 8+ VKd.y
г _ Т1 + Тд-^ . / 8
Если принять, что передаточная функция рулевого привода мо-
жет быть записана в форме апериодического звена
WP.n (р) =
К р.п
Тр.-гР + 1
9 Заказ 1242
258 Г шва V. Управление нормальными перегрузками и стабилизация
то в этом случае передаточная функция разомкнутого контура си-
стемы стабилизации будет иметь вид
г=________________^(ти.гр+1)(Г02сР2+2Е0.Л.сР+1)______________
р (Т*р* Н- 2-Jp 4-1) (Трпр 4- 1) (Тд уР 4- 1) (Т2и гр2 + %,и гТи гр +1)
(5.10)
Где Ко = Ки.гКр.пККо.с-
Как видно, в данной схеме за счет подбора величин То.с и ?0.с
имеется дополнительная, по сравнению с предыдущей схемой,
возможность скорректировать динамические характеристики систе-
мы стабилизации.
Провести аналитическое исследование динамических свойств
рассматриваемой системы ввиду сложности передаточной функ-
ции (5.10) не представляется возможным. Поэтому наиболее
удобным здесь является исследование с помощью построения ча-
стотных характеристик.
Не приводя здесь результатов анализа с помощью частотного
метода, отметим, что обычно в данной системе в отличие от двух
предыдущих удается получить, если это требуется, большое зна-
чение передаточного коэффициента Ко и соответственно высокую
частоту среза и большое быстродействие.
Нетрудно определить, что передаточный коэффициент замкну-
той системы, характеризующий ее статические (в установившемся
режиме) свойства, определяется выражением, вытекающим из
расчетной схемы на рис. 5.13:
/ М = = ~ ,
\ ин ! успг Ки.гК0.с к t-Lir'] Киг^Кду
'и.г \ у ‘'д.У)
если
— Кд.у-
Таким образом, в системе с интегрирующим гироскопом и дат-
чиком ускорений устанавливается пропорциональная связь между
постоянным 'сигналом наведения ин и нормальной перегрузкой,
причем соответствующий коэффициент пропорциональности почти
не зависит от параметров движения ракеты. Такая пропорцио-
нальность очень удобна для систем теле- и самонаведения, так
как для этих систем основной ошибкой наведения является линей-
ное, а не угловое отклонение ракеты от требуемой траектории
движения. При выполнении некоторых условий и другие динами-
ческие характеристики системы стабилизации можно сделать
сравнительно мало зависящими от параметров движения лета-
тельного аппарата. Эти условия нетрудно выяснить.
§ 5. Система стабилизации с гироскопом и датчиком ускорений
259
На рис. 5.44 представлена общая структурная схема системы.
Передаточная функция замкнутой системы определяется соотно-
шением
Ф(р) =
^i(p)
1 + ^0.ДрЖ(р) •
В том интервале частот, где выполняется неравенство
(/ю) W0.c(j(£i) | 1, это выражение можно упростить:
1
ф(р) =__________________________
Отсюда следует, что в указанном интервале частот свойства замк-
нутой системы стабилизации практически не зависят от характе-
ристик летательного аппарата, а зави-
сят только от характеристик цепи об-
ратной связи. Поэтому в тех случаях,
когда сопрягающие частоты, соответ-
ствующие постоянным времени пере-
даточной функции летательного аппа-
рата, попадают в указанный интервал
частот, ни запасы устойчивости, ни
Рис. 5.14. Упрощенная струк-
турная схема системы стаби-
лизации
другие динамические характеристики
системы практически не зависят от ди-
намических свойств летательного ап-
парата.
Для того чтобы добиться такого положения, необходимо выби-
рать настолько большой передаточный коэффициент разомкнутого
контура Ко, чтобы частота среза была заметно больше собствен-
ной частоты колебаний летательного аппарата. Именно поэтому
при высокой собственной частоте летательного аппарата трудно
достигнуть неизменных динамических свойств системы стабилиза-
ции, так как для этого требуется излишне широкая полоса про-
пускания системы, и становится затруднительным обеспечение
запасов устойчивости без сложных корректирующих фильтров.
Следует заметить, что хорошие динамические характеристики
можно получить и у системы с дифференцирующим гироскопом
и датчиком нормальных ускорений.
Выбор параметров системы стабилизации с интегрирующим
гироскопом и датчиком ускорений Ко, ти.г, То.с, Ко ,с требует доста-
точно кропотливого анализа. Наиболее просто эта задача решается
с помощью построения логарифмических частотных характеристик.
В случае применения датчика ускорений в системе стабилиза-
ции в некоторых случаях необходимо учитывать, что датчик уско-
рений измеряет не только линейное нормальное ускорение цен-
тра масс летательного аппарата, но и ускорение, возникающее
при колебаниях его около центра масс.
9*
260 Глава V. Управление нормальными перегрузками и стабилизация
В гл. III была составлена передаточная функция датчика уско-
рений для такого случая [см. (3.19)]. Этой передаточной функции
соответствует структурная схема, представленная на рис. 5.15.
[По-прежнему рассматривается случай, когда приближенно мож-
но считать, что W®(p) = Т}р + 1].
Легко проверить, что с учетом углового ускорения передаточная
функция цепи обратной связи W0.a(p) сохраняет свою форму,
хотя числовые значения параметров изменяются.
Рис. 5.15. Структурная схема системы стаби-
лизации с учетом установки датчика ускорений
не в центре масс ракеты
Действительно, из структурной схемы на рис. 5.15 следует, что
W0.c (Р) (Т1Р + 1) + Г1 + (хт - хд.у) {TlP +1) р] =
V * о.уг 1 L J
т2гР2 + 2с0.70.сР+‘
~ Ло'С Тд.уР + 1
где
Кос = + Кд.у,
S,T]TSy-{- -— (Ху Хду)Тг
У 2 — ________У_____________ •
°'С ё+^д.у
К'д.у
С Vg Tl+Td.y + (хТ~хд.у)
Ъ0,С -----~Г ' = ----- ~ . •
2/е+теа, /
/ Т\Тд.у+1 (хТ-~хд.у)Т1
§ 6. Особенности систем стабилизации при теленаведении
261
Таким образом, система стабилизации с интегрирующим гиро-
скопом (или дифференцирующим гироскопом и корректирующим
звеном, повышающим порядок астатизма) и датчиком нормальных
ускорений является наиболее гибкой и позволяет в большинстве
случаев удовлетворить всем требованиям, предъявляемым к си-
стеме. Возможности системы дополнительно расширяются при ис-
пользовании в цепи датчика нормальных ускорений различных
корректирующих фильтров.
§ 6. НЕКОТОРЫЕ ОСОБЕННОСТИ СИСТЕМ СТАБИЛИЗАЦИИ
ПРИ ТЕЛЕНАВЕДЕНИИ ПО КОМАНДАМ ИЛИ ПО ЛУЧУ
При наведении по командам (в координатах командного пунк-
та) или по лучу дополнительной задачей системы стабилизации,
кроме перечисленных в начале настоящей главы, является вывод
летательного аппарата после пуска в ту область пространства,
где начинается действие станции наведения и управление лета-
тельным аппаратом по командам или по лучу.
Рис. 5.16. Пример структурной схемы системы стабилизации
при теленаведении
В качестве примера одной из возможных схем системы стаби-
лизации, решающей эту дополнительную задачу, на рис. 5.16 при-
ведена схема с дифференцирующим гироскопом и датчиком нор-
мальных ускорений.
В схеме предусмотрен вывод летательного аппарата в зону дей-
ствия станции наведения с помощью автономной системы. Основ-
ным устройством этой системы является программный механизм.
Для контроля движения летательного аппарата по програм-
мной траектории можно было бы измерять его угловое положение
с помощью свободного или интегрирующего гироскопа. Но если
262 Глава V. Управление нормальными перегрузками и стабилизация
высокой точности движения по программной траектории не тре-
буется, то чтобы не вводить в систему элемент, ненужный на уча-
стке наведения, задачу вывода можно решить с помощью диф-
ференцирующего гироскопа. Очевидно, что в этом случае должна
быть задана программа изменения угловой скорости.
В этом случае для повышения точности реализации программы
на участке вывода включается только гибкая обратная связь ру-
левого привода, благодаря чему рулевой привод на низких часто-
тах имеет характеристики, близкие к характеристикам интегри-
рующего звена. В силу этого система- стабилизации становится
астатической по отношению к возмущающим воздействиям, прило-
женным к летательному аппарату. (На участке вывода контакты
«а», «в» и «д» разомкнуты, а контакты «б» и «г» замкнуты).
Для того чтобы обеспечить устойчивость системы стабилиза-
ции, у которой рулевой привод имеет гибкую обратную связь, по-
сле дифференцирующего гироскопа иногда приходится вводить
корректирующий фильтр ITgsi — дифференцирующую цепочку,
с помощью которой к сигналу гироскопа добавляется производная
от измеряемой угловой скорости При таком варианте реализа-
ции полета по программе точность вывода существенно зависит от
величины зоны нечувствительности дифференцирующего гироскопа
и погрешностей установки «нулей» гироскопа и усилителей.
При переходе на режим наведения по командам или по лучу
размыкаются контакты «б» и «г» и замыкаются контакты «а», «в»
и «д». В результате получается обычная система управления
с дифференцирующим гироскопом, датчиком нормальных ускоре-
ний и рулевым приводом с жесткой обратной связью.
Дополнительной особенностью системы стабилизации может
быть сложный фильтр в цепи датчика нормальных ускорений, если
летательный аппарат наводится по лучу. Назначение этого филь-
тра будет рассмотрено в гл. VII при анализе систем наведения
по лучу.-
§ 7. ОГРАНИЧЕНИЕ НОРМАЛЬНЫХ ПЕРЕГРУЗОК
Если летательный аппарат предназначается для полета в ши-
роком диапазоне скоростных напоров, то обычно при проектирова-
нии летательного аппарата и системы стабилизации приходится
решать задачу ограничения максимальных нормальных перегру-
зок. В гл. II были отмечены некоторые способы решения этой за-
дачи, основанные на ограничении отклонения органов управления.
Указанная задача может решаться также с помощью средств,
автоматики.
Рассмотрим некоторые возможные способы ее решения.
Проще всего решается задача, когда в схеме системы стабили-
зации используется датчик нормальных ускорений. В этом случае,.
§ 7. Ограничение нормальных перегрузок
263
как было показано выше, в § 5, между сигналом наведения и нор-
мальной перегрузкой летательного аппарата в установившемся
режиме существует прямая пропорциональность с коэффициентом
пропорциональности, слабо зависящим от скоростного напора.
Тогда для ограничения нормальных перегрузок достаточно огра-
ничить сигнал наведения. Для этого можно использовать любой
элемент с характеристикой насыщения. .
Если для управления нормальными перегрузками используется
система стабилизации без датчика нормальных ускорений, то этот
датчик может быть введен в схему специально, только для ограни-
чения перегрузок. На рис. 5.17 показана возможная схема включе-
Рис. 5.17. Схема включения
датчика нормальных ускорений
для ограничения перегрузки:
/ — система стабилизации; II —
датчик нормальных ускорений
Рис. 5.18. Ста-
тическая характе-
ристика системы
стабилизации при
ограничении пере-
грузки
ния датчика в этом случае. Когда перегрузка будет превышать
максимально допустимую, то на выходе нелинейного элемента
с зоной нечувствительности появится большой по уровню сигнал
отрицательной обратной связи по перегрузке. Следует иметь
в виду, что для эффективной работы такой схемы требуется, чтобы
обратная связь по перегрузке была сильной, но это в некоторых
случаях может нарушить устойчивость системы стабилизации
и вызвать появление автоколебаний. При правильном подборе па-
раметров схемы можно получить статическую характеристику си-
стемы стабилизации, подобную приведенной на рис. 5.18.
Способ ограничения нормальных перегрузок, сводящийся к из-
менению передаточного коэффициента рулевого привода таким
образом, чтобы произведение передаточных коэффициентов лета-
тельного аппарата по перегрузке и привода оставалось примерно
постоянным, требует более сложного аппаратурного решения. Та-
кое изменение передаточного коэффициента рулевого привода мо-
жет осуществляться или по программе (по времени), или в соот-
ветствии с результатами измерения некоторых параметров (на-
пример, скоростного напора), характеризующих режим полета.
Такой способ сложен, но, кроме ограничения нормальных пере-
грузок, он позволяет стабилизировать динамические характери-
стики замкнутой системы стабилизации.
264 Глава V. Управление нормальными перегрузками и стабилизация
ЛИТЕРАТУРА
1. Добр о ленский Ю. П., Иванова В. И., Поспелов Г. С., Ав-
томатика управляемых снарядов, Оборонгиз, 1963.
2. Пель пор Д. С., Гироскопические приборы и автопилоты, «Машиностро-
ение», 1964.
3. Боднер В. А., Теория автоматического управления полетом, «Наука»,
1964.
4. Павлов В. А., П о н ы р к о С. А., Хованский Ю. М., Стабилизация
летательных аппаратов и автопилоты, «Высшая школа», 1964.
5. Мюллер Ф., Телеуправление, ИЛ, 1957.
6. Локк А., Управление снарядами, Гостехтеоретиздат, 1957.
7. Бендриков Г. А., Тео дорчи к К. Ф., Траектории корней линейных
автоматических систем, «Наука», 1964.
8. Основы автоматического регулирования. Теория, Под ред. В. В. Солодов-
никова, Машгиз, 1954.
9. Основы автоматического регулирования, Сборник под ред. В. В. Солодов-
никова, т. II, ч. 2, Машгиз, 1959.
Глава VI
ДИНАМИКА БАЛЛИСТИЧЕСКИХ РАКЕТ
§ 1. ВВЕДЕНИЕ
В настоящей главе будут рассмотрены системы управления по-
летом баллистических ракет. Эти системы, вообще говоря, могут
быть командными, инерциальными или могут представлять собой
комбинацию указанных двух систем. В связи с тем, что команд-
ным системам посвящается следующая глава, основное внимание
будет уделено инерциальным системам управления баллистиче-
скими ракетами. Несмотря на это, содержание главы будет до-
статочно общим и сможет быть применено для других вариантов
систем управления баллистическими ракетами.
Выбор типа и структуры системы автоматического управления
полетом и ее основных параметров определяется условиями поле-
та летательного аппарата, задачами, которые возлагаются на эту
систему, и требованиями, предъявляемыми к ней. В связи с этим
ниже будут рассмотрены особенности траекторий баллистических
ракет, задачи, решаемые их системами управления, и характери-
стики возмущающих воздействий.
1.1. Особенности траекторий
Траектория ракеты может быть разделена на участки трех ти-
пов, как показано на рис. 6.1. и 6.2. Участок <4 —это активный уча-
сток, т. е. участок полета с работающим двигателем. Участок В —
это участок свободного полета, на котором ракета движется как
свободное тело. Обычно этот участок располагается на сравни-
тельно большой высоте, где аэродинамические силы очень малы.
Поэтому на участке свободного полета движение происходит
практически только под действием силы тяжести. Участок С —
это участок снижения в плотных слоях атмосферы, на котором
аэродинамические силы оказывают существенное воздействие на
полет ракеты.
Активных участков и участков свободного полета может быть
несколько. Единственный участок снижения в атмосфере имеется
тогда, когда ракета или космический корабль возвращается на
266
Глава VI. Динамика баллистических ракет
Землю или прибывает на другую планету, обладающую атмосфе-
рой. Траектории баллистических ракет обычно состоят из трех уча-
стков: А, В и С (см. рис. 6.1). Так как на участках В п С дейст-
вуют только силы тяжести и аэродинамические силы, траектория
полета является баллистической, а участок В — С называется пас-
сивным, или баллистическим.
У ракет других назначений, например, ракет-носителей косми-
ческих летательных аппаратов, сочетание активного и свободного
участков может быть повторено любое число раз в зависимости от
поставленной задачи.
Рис. 6.1. Траек-
тория баллистиче-
ской ракеты
Рис. 6.2. Траектории ра-
кеты-носителя и искусствен-
ного спутника Земли
Управление полетом обычно осуществляется на активных уча-
стках траектории. При снижении в атмосфере наличие ветра и от-
клонение плотности воздуха от стандартных условий являются
причинами рассеивания ракеты вокруг цели. Так как эти возмуще-
ния не могут быть оценены во время управляемого полета на ак-
тивном участке, то их влияние может быть уменьшено или уни-
чтожено при использовании управления на участке снижения в ат-
мосфере.
Во время свободного полета единственной силой, действующей
на ракету, является сила тяжести. Поэтому траектория свобод-
ного полета лежит в плоскости, проходящей через центр Земли,
и представляет собой одно из конических сечений —эллипс, пара-
болу или гиперболу, в зависимости от того, является ли скорость
ракеты меньше или больше второй космической скорости (пара-
болическая траектория соответствует второй космической скооо-
сти). У баллистических ракет эллипс пересекает поверхность
Земли в точке цели.
Траектория свободного полета полностью определяется пара-
метрами движения в начале свободного полета, т. е. в конце актив-
ного участка: 0Л, уА и хА. В частности, расстояние L, которое
§ 1. Введение
267
проходит баллистическая ракета по дуге большого круга от точки
пуска до точки падения, зависит от параметров движения ракеты
в конце активного участка (рис. 6.3):
L=L(Va, ©а, Уа, ха. с), (6.1)
где с — параметр, характеризующий влияние прочих факторов, на-
пример, состояния атмосферы на участке снижения, несферичности
Земли и пр.
Таким образом, для того чтобы ракета выполнила поставлен-
ную перед ней задачу, необходимо в конце активного участка
иметь вполне определенные значения параметров движения Va,
©а, Уа и ха- Выбор этих параметров рассматривается в соответ-
ствующей литературе, например, [2], [10], к которой мы отсылаем
читателя. Отметим здесь лишь то, что для баллистических ракет
значения скорости Va и угла ©а зависят от заданной дальности L.
Чем больше требуемая дальность, тем большей должна быть
скорость VA и тем меньше требуемый угол ©а. Обычно значение
угла ©а выбирают равным по величине значению угла максималь-
ной дальности. Это обеспечивает при данной скорости VA не
только максимальную дальность, но и минимальные изменения
дальности ДА при отклонениях угла © от требуемого значения ©а-
Требуемые значения Va, ©а, Уа и Ха обеспечиваются заданием
определенного закона движения ракеты на активном участке, или,
другими словами, метода наведения, который предусматривает
268
Глава VI. Динамика баллистических ракет
метод управления скоростью ракеты и метод изменения угла на-
клона траектории. Выбор метода наведения является одной из
важнейших задач проектирования ракеты, причем ее решение ока-
зывается наиболее сложным для участка активного полета в ат-
мосфере.
Обычно изменение угла наклона траектории программируется
в функции времени. При разработке такой программы учитывают
большое число зачастую противоречивых требований [2].
Очевидно, что одним из основных является требование мини-
мального расхода топлива для обеспечения заданной максималь-
ной дальности полета. Однако степень влияния возмущающих
воздействий на рассеивание ракеты оказывается существенно за-
висящей от вида программы. Поэтому для баллистических ракет
программа изменения угла 0 выбирается не только из условия наи-
меньшего расхода топлива, но также из требования минимального
рассеивания.
Требования к программе изменения угла наклона траектории
зависят также от способа управления скоростью ракеты. Решаю-
щее влияние на выбор программы оказывают поперечные нагрузки
на корпус ракеты при полете в атмосфере. Ни одна программа не
может быть принята, если она приводит к недопустимо большим
поперечным перегрузкам. При выборе программы угла наклона
траектории учитывается также целый ряд других требований, ка-
сающихся условий пуска, возможности получения любой дальности
в заданном диапазоне и т. п. Практически выбор программы 0* (t)
непосредственно связан с выбором параметров проектируемой
ракеты.
Несмотря на то, что каждая ракета имеет свою программу по-
лета, можно указать общие черты начала активного полета в ат-
мосфере, характерные для любой ракеты. Полет начинается верти-
кальным подъемом ракеты в течение нескольких секунд. Затем
траектория обычно отклоняется от вертикали в сторону цели, угол
0 уменьшается. Этот маневр происходит следующим образом.
Сначала создается нормальная к траектории сила за счет отри-
цательного угла атаки. После короткого участка разворота каса-
тельной к траектории при отрицательном угле атаки начинается
разворот при нулевом угле атаки под действием только силы тя-
жести. Такой выбор траектории связан с тем, что при полете в ат-
мосфере с большими скоростными напорами максимально сни-
жаются аэродинамическое сопротивление, поперечные аэродинами-
ческие нагрузки и кинематический нагрев, если угол атаки ракеты
равен нулю. Полет с нулевым углом атаки продолжается до тех
пор, пока ракета не выйдет из плотных слоев атмосферы, после
чего возможен более свободный выбор траектории полета. Как
видно, начало активного полета ракеты в атмосфере состоит из
трех этапов.
§ 1. Введение
269
На рис. 6.4 для примера приведены графики изменения углов 0,
0 и а по времени у ракеты V-2. Нетрудно видеть, что активный уча-
сток полета этой ракеты подразделяется на три характерных этапа,
указанных выше. На последнем, четвертом, этапе ракета летит
с положительным углом атаки, который выбирается так, чтобы вы-
держивался прямолинейный полет с углом наклона траектории
0 = 0а. Это позволяет несколько уменьшить ошибки реализации
программы Д0 = 0* — 0.
Рис. 6.4. Зависимость параметров движения баллистической
ракеты от времени
1.2. Задачи управления полетом
баллистической ракеты
Учитывая отмеченные особенности траекторий баллистических
ракет, можно сформулировать основные задачи системы управле-
ния полетом.
Анализ развернутого выражения (6.1) показывает, что даль-
ность весьма существенно зависит от скорости ракеты в конце
активного участка. Незначительное отклонение скорости от тре-
буемого значения вызывает существенное изменение дальности.
Поэтому одной из основных задач системы управления полетом яв-
ляется управление скоростью, сводящееся к тому, чтобы своевре-
менно выключить двигатель при достижении ракетой требуемой
скорости. Эта задача решается системой управления скоростью.
Второй задачей системы управления полетом является обеспе-
чение требуемого закона изменения угла 0 по времени. Это необ-
270
Глава VI. Динамика баллистических ракет
ходимо для того, чтобы в момент выключения двигателя ракета
имела координаты хА и уА и наклон вектора скорости к горизон-
ту 0.4, обеспечивающие падение ракеты в заданной окрестности
цели.
Третья задача системы управления полетом состоит в ведении
ракеты на активном участке полета в заданной вертикальной пло-
скости. Это необходимо для того, чтобы вектор скорости ракеты
в момент выключения двигателя имел требуемое направление.
Задачи ведения ракеты в плоскости стрельбы с требуемым за-
коном изменения угла © решаются системой наведения.
Для нормальной работы системы наведения необходимо, чтобы
полет ракеты происходил без крена. При накренении ракеты про-
грамма полета в вертикальной плоскости ©* (/) будет выпол-
няться неточно вследствие уменьшения перегрузки rev по сравне-
нию с ее требуемым значением Пу* (пу = cosy) и, кроме того,
появится боковая перегрузка nz — ny*siny, вызывающая боковой
снос ракеты z, т. е. отклонение центра масс ракеты от плоскости
стрельбы. Задача предотвращения накренения ракеты при воздей-
ствии внешних возмущений решается системой стабилизации
крена.
Таким образом, система управления полетом баллистической
ракеты может быть подразделена на следующие составные части.
1. Система управления скоростью.
2. Система наведения, состоящая из двух каналов:
а) канал продольного движения, обеспечивающий полет с тре-
буемым законом изменения угла 0;
б) канал бокового движения, обеспечивающий полет ракеты
в заданной плоскости стрельбы.
3. Система стабилизации крена.
Приведем теперь краткую характеристику системы наведения
баллистической ракеты.
Так как нормальные перегрузки у баллистической ракеты со-
здаются посредством ее поворота вокруг центра масс, то в связи
с этим задача преобразования сигналов наведения в нормальные
перегрузки возлагается на систему стабилизации. Эта система
имеет, естественно, два канала: каналы продольного и бокового
движений, или, иначе говоря, каналы тангажа и рыскания.
Формирование сигнала наведения, задающего изменение угла 0,
у баллистических ракет осуществляется с помощью автономной
системы наведения, обычно инерциальной.
В простейших инерциальных системах наведения (например,
на ракете V-2) контроль продольного движения центра масс заме-
няется контролем углового положения ракеты. Так как измерение
угла наклона траектории 0 является достаточно сложной зада-
чей, то реализация заданной программы изменения угла 0 осу-
ществляется с помощью свободного гироскопа, позволяющего оп-
§ 1. Введение
271
ределить угловое отклонение продольной оси ракеты ДО от неко-
торого фиксированного направления, определяемого углом Ф*. Для
этого программу изменения угла наклона траектории преоб-
разуют в программу изменения угла тангажа b*(t) с помощью
соотношения
& = 0 -г а.
Характерной особенностью этой программы является медлен-
ное изменение угла тангажа от 90° до 40—45° на протяжении
десятков секунд (длительность активного участка)'. Так как мак-
симальная скорость изменения угла тангажа не превышает 1 —
2°/сек, то представление программы в виде частотного
спектра показывает, что этот спектр практически занимает полосу
частот от нуля до нескольких десятых долей радиана в секунду.
Поэтому для точного воспроизведения такой программы от канала
тангажа системы стабилизации не требуется высокого быстродей-
ствия и соответственно широкой полосы пропускания.
Программное значение угла тангажа задается с помощью
специального программного механизма, который вращает основа-
ние потенциометрического датчика свободного гироскопа, контро-
лирующего угловое положение ракеты. Нулевому напряжению,
снимаемому с потенциометра, соответствует требуемое значение
угла тангажа ракеты &#, которое может рассматриваться как сиг-
нал наведения, поступающий в систему стабилизации.
Таким образом, канал продольного движения системы наведе-
ния состоит из двух основных структурных элементов: программно-
го механизма, задающего сигнал наведения и системы ста-
билизации.
Заметим, что для образования сигнала наведения ^*(0 обрат-
ная связь не используется, т. е. канал продольного движения си-
стемы наведения может быть отнесен к автоматическим системам
разомкнутого типа.
Задача ведения ракеты в заданной плоскости стрельбы может
решаться как с помощью автономной системы наведения, так
и с помощью системы теленаведения, т. е. с использованием на-
земных радиотехнических устройств [1], [6]. Эта задача сводится
к стабилизации движения центра масс ракеты в заданной пло-
скости. Для формирования сигнала наведения определяется
ошибка — отклонение ракеты z от плоскости стрельбы, в резуль-
тате чего канал бокового движения системы наведения является
замкнутым. Поскольку боковой снос является весьма медленно
меняющейся функцией времени z(0, частотный спектр сигнала на-
ведения получается довольно узким и от канала рыскания систе-
мы стабилизации также не требуется широкой полосы пропу-
скания.
272
Глава VI. Динамика баллистических ракет
1.3. Характеристики возмущающих воздействий
Рассмотрим общие характеристики возмущающих воздейст-
вий, которые могут влиять на точность наведения баллистической
ракеты. К ним относятся возмущающие силы и моменты, прило-
женные к ракете, погрешности аппаратуры, шумы.
Одной из причин, вызывающих появление возмущающих сил
и моментов, является несимметрия ракеты, обусловленная погреш-
ностями монтажа и сборки двигателя и отсеков ракеты. Неточная
установка двигателя приводит к некоторому смещению линии дей-
ствия тяги и ее повороту относительно базовой оси. Когда ось
двигателя повернута относительно базовой оси на угол е, появ-
ляется возмущающая поперечная сила Ре,, где Р— тяга двигателя,
и возмущающий продольный момент
Мгв = Р (хт — хдв) е,
где хЭв— расстояние от носа корпуса до среза сопла двигателя;
хт — координата центра масс ракеты, измеренная от носа
корпуса.
Погрешности в изготовлении и сборке отсеков ракеты приво-
дят к смещению центра масс ракеты относительно базовой оси.
При смещении линии действия тяги и центра масс относитель-
но базовой оси появляется возмущающий момент, равный Ре, где
е — эксцентриситет, характеризующий это смещение.
Все величины, характеризующие технологические погрешности,
могут быть рассчитаны по допускам на изготовление и сборку.
Несимметрия ракеты, кроме возмущений со стороны двигателя,
вызывает также аэродинамические возмущающие силы и моменты.
Так, например, перекос отсеков эквивалентен по своему действию
как бы некоторому дополнительному углу атаки.
Если ракета имеет стабилизаторы, то возмущающие силы и
моменты возникают также из-за неточной установки стабилизато-
ров. Зная аэродинамические характеристики стабилизаторов и
возможные, угловые ошибки их установки, можно оценить возму-
щающие силы и моменты по обычным формулам:
^ = C^mA,.qS-,
= (xT — xd,T)qS,
где Да — угол перекоса стабилизатора;
х<1ст — расстояние от носа корпуса до центра давления ста-
билизатора.
Другим 'источником аэродинамических возмущений являются
ветровые воздействия на ракету. Они могут оказывать существен-
ное влияние на точность наведения. Так как в каждый момент
времени продольная ось ракеты стабилизируется в пространстве,
§ 1. Введение
273
то действие ветра на ракету эквивалентно изменению угла атаки
(рис. 6.5). Если w — горизонтальная компонента скорости ветра,
действующая в плоскости полета ракеты, то изменение угла атаки
определится соотношением
и» sin О
V + w cos 0 ’
Да = arc tg
Изменение угла атаки ракеты вызывает появление возмущаю-
щей подъемной силы Ув = c*\aqS и возмущающего продольного
момента = m^kaqSl Величины возмущающих сил и момен-
тов, вызываемых действием вет-
ра, могут достигать больших ве-
личин, измеряющихся тоннами и
десятками тысяч килограммо-
метров для ракет с дальностью
действия в несколько сот кило-
метров.
Рассмотрим пример, восполь-
зовавшись аэродинамическими и
баллистическими характеристи-
ками ракеты V-2 [2]. На 35-й се-
кунде полета ракета имеет ско- Рис. 6.5. Изменение угла атаки
рость, близкую к 500 м/сек, и ракеты при действии ветра
угол 0 = 50°. Предположим, что
на ракету действует встречный ветер со скоростью 20 м/сек. Это
вызовет изменение угла атаки на величину
, ,20 sin 50°
Да = arc tg------—
ь 500 + 20 cos 50'
0,03 рад = 1,7°.
Так как ракета V-2 к рассматриваемому моменту времени нахо-
дится на высоте около 7 км и для скорости V = 500 м/сек коэф-
фициент с“ ~ о,16 \/град, то для Ув получим
Ув = саДа^5 = °-057'5002 2,2 - 0,16-1,7 ^4000 кГ.
в У 2 2 ’
Для 35-й секунды расстояние между центром давления и
центром тяжести составляет около 3 м. Поэтому возмущающая
сила в 4000 кГ вызовет появление возмущающего момента в
12000 кГ • м.
Для расчета ветровых нагрузок необходимо знать статистиче-
ские характеристики ветра на различных высотах. Некоторые све-
дения об этих характеристиках опубликованы в работах [11] и [14].
Очевидно, при действии порывов ветра в системе могут возни-
кать интенсивные переходные процессы, так как порыву ветра
соответствует ступенчатое изменение угла атаки. Особенно силь-
274
Глава VI. Динамика баллистических ракет
ное воздействие на систему оказывают порывы ветра на началь-
ном этапе движения, когда скорость ракеты мала, а угол 0 близок
к 90°.
Источником возмущающих воздействий являются также ошибки
функционирования элементов системы стабилизации. При анализе
линейной системы стабилизации для упрощения расчетов удобно
все эти ошибки пересчитать на эквивалентную величину угла от-
клонения рулей, которую можно назвать ложным углом отклоне-
ния рулей 6л. В случае необходимости можно перейти к возму-
щающим силам и моментам, рассчитав их по формулам:
Уя = Ур8л-
мгв = М*8Л.
К ошибкам элементов системы стабилизации можно отнести
отклонение рулей, вызванное самоходом рулевых машин, неточной
статической балансировкой золотникового устройства и механиз-
мов, приводящих его в действие. Ошибки системы управления мо-
гут вызываться уходом гироскопов, неточной установкой ракеты
перед пуском, перекосом оси приборного отсека из-за производ-
ственных погрешностей и т. п.
При определении величины ложного угла отклонения рулей
в некоторых случаях можно исходить из технических условий
и допусков на отдельные элементы системы; в других случаях
требуется постановка специальных экспериментов.
Следует иметь в виду, что при анализе точности наведения
можно задаваться произвольными значениями возмущений, чтобы
после оценки точности рассчитать допустимые значения возмуще-
ний. Такой прием основан на том, что аналитическое исследование
точности проводят, рассматривая систему в линейном приближе-
нии. В этом случае, определив ошибки системы при «единичном»
возмущении, нетрудно найти их для любого другого уровня воз-
мущений.
Так как почти все рассмотренные возмущения зависят от вре-
мени, то по окончании расчетов получают графики, характеризую-
щие зависимость возмущающих сил и моментов от времени.
Поскольку все возмущения являются случайными величинами
(а ветровые нагрузки являются случайным процессом), то при их
суммировании следует пользоваться правилом суммирования слу-
чайных величин. При расчете обычно рассматривают средние
квадратические значения соответствующих величин (эксцентри-
ситета, углов перекоса, ложных сигналов и т. д.). Поэтому пред-
полагая, что отдельные возмущения являются статистически неза-
висимыми величинами, эквивалентную возмущающую силу или
момент определяют как корень квадратный из суммы квадратов
отдельных составляющих.
§ 2. Особенности передаточных функций и частотных характеристик 275
Результаты расчетов возмущающих сил и моментов служат
исходными данными для проектирования системы стабилизации
и, в частности, для расчета отклонений ракеты от программной
траектории.
§ 2. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ, ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
И ДИНАМИЧЕСКИЕ ОСОБЕННОСТИ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ
Уравнения движения и следующие из них передаточные функ-
ции летательных аппаратов различных схем были рассмотрены
ранее, в гл. II. Поэтому здесь нет необходимости повторять соот-
ветствующие выводы и можно ограничиться изложением динами-
ческих особенностей баллистических ракет.
Баллистическая ракета по своей аэродинамической схеме яв-
ляется бескрылым динамически осесимметричным летательным
аппаратом. Из-за отсутствия крыльев ей присущи некоторые осо-
бенности динамики, не характерные для крылатых маневренных
летательных аппаратов.
При анализе возмущенного движения крылатых летательных
аппаратов, способных развивать большие подъемные силы и, сле-
довательно, создавать большие нормальные ускорения, очень
часто можно пренебрегать влиянием силы тяжести и подъемной
силы рулей. Такое упрощение недопустимо по отношению к балли-
' стическим ракетам, так как здесь сила тяжести и подъемная сила
рулей могут составлять заметную долю в общем балансе нормаль-
ных сил. Поэтому передаточные функции баллистической ракеты
имеют более сложную структуру, особенности которой будут рас-
смотрены несколько ниже.
Вопросом, требующим исследования, является также оценка
влияния вариаций скорости на процессы стабилизации. Учитывая
о это, рассмотрим сначала уравнения возмущенного движения с уче-
том вариаций скорости.
Для анализа процессов стабилизации уравнения движения
ракеты линеаризуют, принимая движение по программной траек-
тории за невозмущенное движение.
После линеаризации уравнения движения распадаются на не-
зависимые подсистемы, описывающие движения тангажа, рыска-
ния и крена, вследствие того, что ракета является динамически
осесимметричной, а возмущения предполагаются малыми.
Рассмотрим уравнения продольного движения (2.18). Так как
движение ракеты по программной траектории является неустано-
вившимся, то коэффициенты линеаризованных уравнений зависят
от времени. Поэтому для дальнейшего анализа будет использован
метод фиксации, «замораживания» коэффициентов. Общие сооб-
ражения о возможности использования этого метода были рас-
смотрены в гл. II. Здесь лишь еще раз подчеркнем, что заключение
276
Глава VI. Динамика баллистических ракет
о допустимости «замораживания» коэффициентов можно принять
только после анализа конкретных характеристик ракеты и системы
стабилизации с учетом того, какая составляющая возмущенного
движения нас интересует, быстрая или медленная.
2.1. Продольное движение
Так как возмущенное движение ракеты характеризуется пере-
менными ДУ, Лй, Да и Д0, являющимися выходными величинами,
и входными воздействиями: управляющим Д68 и возмущающими
АХв, ДУв и AMze, то для каждой пары входных и выходных величин
можно записать свою передаточную функцию.
Рассмотрим более подробно структуру передаточной функции
которую запишем без вывода, воспользовавшись выражением
(2.25). Эту передаточную функцию можно несколько упростить,
если учесть, что сила лобового сопротивления рулей слабо зависит
Л8
от углов их поворота, и принять, что йоз= — =« 0. Кроме того, ко-
, МЛ , м8
эффициенты а12 = — и «13 = •—_Ц учитывающие влияние не-
Iz Iz
стационарного скоса потока, создаваемого передней аэродинами-
ческой поверхностью, на аэродинамические характеристики задней
поверхности, равны нулю, так как ракета не имеет крыльев.
Тогда можно получить следующее выражение для передаточ-
ной функции:
Гt (р) =-----В2^+ВзР + В,—_ , (6 2)
Р4+^1Р3Ч~'42Р2-Ь/1зРТ- ^4
где
•^1 = а00 "У а11 + «42-
^2 = а00 (а11 + а42- a4i) + й40 (°04 -^Ог) + °11 (fl42 °41) + а12^
^3 “= G00 1Д11 (а42 a4i) + ^121 "У а4оа11 (а04 аог) ^02^10-а12С44;
^4 = «00й12й44 ~У (й04 "У^ог) (й40°12 а10а4г) G02[Qlo(a42 a4i) -«40«12];
В2 = «1з>
В3 = «43«12 «13 («оо "У ^42 - а44)’
54 = «43 [«00«12 ~У «10 (^04 6tg2) ] «13 («00 (^42 ^44) "У ^40 (^04 fl02)b
Это выражение очень громоздко и его анализ может быть вы-
полнен только в том случае, когда заданы числовые значения
коэффициентов.
Для того чтобы выявить основные динамические особенности
рассматриваемого класса летательных аппаратов и сделать более
I
§ 2. Особенности передаточных функций и частотных характеристик 277
наглядным изложение методов анализа системы стабилизации,
рассмотрим числовой пример, в котором используем конструк-
тивные данные и характеристики ракеты V-2 [2], [7], [8], [9].
Чтобы привести передаточную функцию (6.2) к стандартному
виду, необходимо разложить ее числитель и знаменатель на
элементарные множители, соответствующие типовым звеньям. Это
требует определения корней числителя и знаменателя. Обычно
такая операция не вызывает затруднений, так как корни очень
существенно отличаются друг от друга по модулю. Это обстоя-
тельство характерно для любых летательных аппаратов ввиду
того, что корни характеристического уравнения с малым модулем
определяют медленное движение, а корни с большим модулем —
быстрое движение, причем время затухания этих движений может
отличаться в десятки раз [5]. У баллистических бескрылых ракет
указанное отличие может быть еще более резким. Так, например,
для ракеты V-2 на 30-й секунде полета знаменатель передаточной
функции (6.2), т. е. характеристический полином, имеет следующее
выражение:
А (р) = р4 + 0,78р»+ 27,9р2 + 0,16р — 0,013.
Младшие члены полинома определяют малые по модулю корни
27,9р2 + 0,16р — 0,013— 0,013 (41р + 1)(53р—1),
а старшие члены — большие по модулю корни
р2 + 0,78р + 27,9 27,9 (О.ОЗбр2 + 0,028р + 1).
Поэтому
Л(р)^ —0,013(0,036р2 + 0,028р+ 1)(41р+ 1)(— 53р + 1).
После разложения на множители числителя передаточную
функцию (6.2) для числовых значений рассматриваемого примера
можно представить в следующей форме:
И . (6.3>
(7’2р2+2Е7’р+1)(Т2р+1)(Тзр+1)
На рис. 6.6 приведены зависимости параметров этой переда-
точной функции от времени полета на активном участке траекто-
рии. Из этих графиков видно, что быстрое движение характери-
зуется постоянной времени Т, измеряющейся долями и единицами
секунды, тогда как постоянные времени медленного движения то-
и тз измеряются десятками и сотнями секунд.
Обратим внимание на характер изменения постоянной време-
ни Т. Так как
Т ч /*------= 1 /---------—
pVsSlm‘.
г
278
Глава VI. Динамика баллистических ракет
Рис. 6.6. Зависимость параметров передаточной функ-
ции продольного движения от времени:
вверху —- параметры быстрого движения; внизу — параметры мед-
ленного движения.
В точке А два апериодических звена с постоянными времени т2 и
Тз сливаются и образуют колебательное звено с постоянной вое
меня т
§ 2. Особенности передаточных функций и частотных характеристик 279
то постоянная времени Т сначала убывает с ростом скоростного
напора рЕ2/2, достигает минимума при максимальном значении
скоростного напора (если не очень существенно зависит от
числа М), а затем возрастает из-за уменьшения скоростного напо-
ра с ростом высоты полета. Соответственно изменяются и частота
быстрого движения 1/Т, которая сначала возрастает, а затем, до-
стигнув максимума, убывает.
Характерной особенностью передаточной функции является
также наличие неустойчивых звеньев с отрицательными постоян-
ными времени, соответствующих медленному движению. Это
объясняется влиянием силы тяжести, стремящейся при подъеме
любого летательного аппарата увеличивать возникшие отклонения
направления полета от исходного (невозмущенного) направления.
Рассмотрим теперь передаточную функцию ^(р), составлен-
ную без учета вариаций скорости. Выполнив вычисления, получим
И(р)
____________— а1зР 4- а43а12 4~ а13 (а44 — а4г)______
Р3 4* (а42 4* а11 — аи)'Р2 4- (а11а42 4" а12— а11а44)Р—а12а44
так как здесь В4 = А4 = 0, или в стандартной форме
Т1Р+ 1
W* (р) = xt
w {Т2Р2 + 2£7р + 1} (Т2Р + 1}
(6Л)
В этом случае параметры 74, Т и 5, характеризующие быстрое
движение, по величине не отличаются от соответствующих пара-
метров передаточной функции (6.3), а постоянная времени т2 при-
нимает другие значения, указанные на рис. 6.6 пунктирной линией.
На этом примере можно еще раз убедиться в том, что динамиче-
ские коэффициенты с индексами, содержащими «О», практически
не влияют на характеристики быстрого движения и при исследо-
вании свойств последнего можно не принимать во внимание вариа-
ции скорости.
Если построить частотные характеристики для двух передаточ-
ных функций (6.3) и (6.4), то легко обнаружить, что при доста-
точно больших частотах эти характеристики, отвечающие одному
и тому же моменту времени, совпадают, тогда как при очень малых
частотах они могут существенно различаться. Так, в нашем приме-
ре эти частотные характеристики практически совпадают при
значениях частоты со > 0,03 \/сек. Если учесть, что частота среза
системы стабилизации в нашем примере близка к 10 \/сек, то от-
сюда следует, что при анализе устойчивости замкнутой системы
стабилизации можно не учитывать вариаций скорости и исполь-
зовать более простое выражение передаточной функции (6.4).
Естественно, этот вывод может быть основан только на анализе
конкретных числовых характеристик.
280
Глава VI. Динамика баллистических ракет
Итак, основное отличие рассмотренных передаточных функций
баллистических ракет от передаточных функций крылатых лета-
тельных аппаратов заключается в том, что в них входят неустой-
чивые звенья, поэтому движение неуправляемой ракеты по про-
граммной траектории неустойчиво.
Можно также отметить, что быстрое движение характеризуется
весьма малым затуханием (на большей части активного участка
траектории коэффициент относительного демпфирования ?<0,1),
Рис. 6.7. Зависимость параметров передаточной функ-
ции W's продольного движения от времени
что вызывается отсутствием развитого оперения и большой высо-
той полета. Поэтому система стабилизации должна обеспечивать
хорошее демпфирование этого движения.
В заключение составим выражение передаточной функции
Wf (р), характеризующей изменение угла 0 при отклонении рулей
высоты. Это выражение без учета вариаций скорости имеет вид
ЦУ® ___ __________амР2 Ч~ °Г1а4зР ~Г а12а43 — а42а13_
Р3 Ч- (а42 Ч- °и аоо) Р2 Ч- (апа42 Ч- а12 аиац)р—а12а^
или
WS (р) = -----(ГзРЧ-1)(Лр+1)----- (6.5)
5 (Г2р2 + 2!=Тр + 1) (т2р + 1) '
Зависимость параметров Kf, Т3 и Т4 от времени приведена
на рис. 6. 7.
Основные динамические особенности баллистической ракеты
как объекта управления наглядно выявляются и при рассмотре-
нии ее частотных характеристик.
§ 2. Особенности передаточных функций и частотных характеристик 281
Для примера рассмотрим частотные характеристики, отвечаю-
Рис. 6.8. Амплитудные и фазовые частотные характеристики ракеты
для продольного движения
На рис. 6.8 показано семейство частотных характеристик для
различных моментов времени полета. Обращают на себя внимание
282
Глава . VI. Динамика баллистических ракет
острые резонансные пики амплитудных частотных характеристик,
указывающие на медленное затухание колебаний, и смещение
характеристик вдоль оси абсцисс с течением времени. В соответст-
вии с изменением постоянной времени Т частотные характеристики
вначале смещаются вправо, в сторону больших значений частоты,
а затем перемещаются влево, в сторону более низких частот.
Благодаря этому в области достаточно высоких частот семейства
амплитудных и фазовых частотных характеристик образуют пучки,
в которых все характеристики заключены между двумя крайними:
одна из них соответствует начальному этапу движения, а другая —
примерно середине активного участка и минимальному значению
постоянной времени Т.
На рис. 6.8 пунктирными линиями указаны асимптотические
амплитудные характеристики. Штрих-пунктирная линия отвечает
асимптотическим характеристикам, соответствующим передаточной
функции (6.3) с учетом вариаций скорости AV.
2.2. Боковое движение
Так как баллистическая ракета является динамическим осе-
симметричным летательным аппаратом, то по этой причине пере-
даточная функция, характеризующая движение рыскания, совпа-
дает с передаточной функцией продольного движения, составлен-
ной без учета вариации скорости. Все другие упрощения уравнений
движения приняты такими же, как и для случая продольного дви-
жения, поэтому нет необходимости их повторять.
Единственное, что здесь должно быть принято во внимание,—
это способ определения угла рыскания, отличающийся от общепри-
нятого. Обычно угол рыскания ф определяется как угол между
проекцией продольной оси летательного аппарата на горизонталь-
ную плоскость и земной осью Ох0. (В нашем случае земная ось Ох0
лежит в плоскости стрельбы.) Однако свободный гироскоп, уста-
новленный на летательном аппарате, не может измерять этот угол,
поскольку гироскоп не получает никакой информации о направле-
нии продольной оси аппарата относительно горизонтальной плос-
кости. Гироскоп в канале бокового движения системы управления
измеряет угол поворота корпуса ракеты вокруг ее нормальной оси
Oz/i, лежащей при правильном движении ракеты в вертикальной
плоскости стрельбы, т. е. угол между продольной осью ракеты и
вертикальной плоскостью стрельбы.
Этот угол будем обозначать через ср и называть по-прежнему
углом рыскания.
Различие между углом рыскания ср, измеряемым свободным
гироскопом, и обычным углом рыскания ф не имеет значения при
горизонтальном полете летательного аппарата или полете с не-
большими углами наклона траектории. В этих случаях углы ср
и ф практически не отличаются друг от друга.
§ 2. Особенности передаточных функций и частотных характеристик 283.
Другая картина получается при полете с большими углами
Й и, в частности, при вертикальном подъеме. Пусть, например, при
вертикальном полете ось ракеты Ох\ отклонилась от плоскости
стрельбы в направлении, перпендикулярном этой плоскости, на
малый угол <р; угол рыскания ip при этом будет равен 90°. Поэтому
при исследовании процессов управле-
ния боковым движением баллистиче-
ской ракеты необходимо в ее уравне-
ния движения ввести новый угол ры-
скания <р.
Аналогично этому удобно ввести
также новый угол поворота траекто-
рии Ф, как угол между вектором ско-
рости ракеты и вертикальной плос-
костью стрельбы. Этот угол будем на-
зывать углом пути.
На схеме, представленной на
рис. 6.9, изображены упомянутые уг-
лы, а также указаны основные силы,
действующие на ракету. Плоскость
чертежа здесь соответствует плоско-
сти, проходящей через продольную
ось ракеты Ох\ и перпендикулярную
вертикальной плоскости стрельбы. Эта
плоскость наклонена к горизонту под
углом Ввиду малости угла атаки а
на схеме вместо величин Vcos а и
X cos а указаны величины V и X. Про-
екция силы тяжести приближенно за-
писана как mg'sin О. Учитывая, что
обычно углы скольжения р, рыскания
<р и пути Ф являются малыми, можно
записать следующую систему уравнений
Рис. 6.9. Схема сил и мо-
ментов, определяющих боко-
вое движения
бокового движения:
= Р? + ®mg sin 0 - - z4„ - Ze,
at
Д -^ = Mmy +M^ + Л45н6я + Mve,
y dt^ y dt y y " y ’
Ф = Ф + 3,
— = — УФ.
dt
Так как невозмущенные значения углов q>, р и ф равны нулю,
то в приведенных уравнениях можно не вводить специальных
обозначений для их вариаций. При составлении уравнений уже-
284
Глава VI. Динамика баллистических ракет
была учтена малость углов 0, <р и Ф, поэтому система уравнений
является линейной.
Если в этих уравнениях сделать замену Ф->@, 0->а,
6н -> бв и учесть, что для динамически осесимметричной ракеты
/у = /2; — Z'? = У*; — Z5« = Y\
Муу = Mz* Ml = = М^,
то легко убедиться в том, что эти уравнения полностью совпадают
с уравнениями продольного движения, составленными без учета
вариаций скорости. Поэтому можно считать, что
Wf (р) = W* (р);
Н в
W* (р) = IF® (р).
н в
Аналогичные равенства справедливы и для других передаточ-
ных функций, определяющих возмущенное движение ракеты,
обусловленное воздействием боковой силы Zg и момента Мув.
В связи с этим все особенности динамических свойств ракеты, от-
меченные для продольного движения, имеют силу и по отношению
к боковому движению.
§ 3. СТРУКТУРНАЯ СХЕМА КАНАЛА ПРОДОЛЬНОГО ДВИЖЕНИЯ
Канал продольного движения системы управления баллисти-
ческой ракетой можно рассматривать независимо от каналов бо-
кового движения и крена, так как ракета является осесимметрич-
ным телом и при нормальной работе системы управления откло-
нения угловых координат &, ф и у от их расчетных значений не-
велики.
3.1. Пример структурной схемы
В качестве примера на рис. 6. 10 представлена функциональ-
ная схема канала тангажа системы управления ракетой V-2 [2].
По существу эта схема представляет собой обычную систему ста-
билизации со свободным гироскопом в качестве измерительного
элемента, дополненную программным механизмом для осуществле-
ния криволинейного движения ракеты в вертикальной плоскости.
Для исправления динамических характеристик системы стабилиза-
ции и обеспечения запасов устойчивости в схему усилителя-пре-
образователя введены специальные корректирующие цепи, методи-
ка выбора и расчета которых будет рассмотрена ниже.
Управление угловыми движениями ракеты осуществляется с
помощью газовых рулей, в дополнение к которым используются
воздушные рули.
§ 3. Структурная схема канала продольного движения
285
Из особенностей канала тангажа следует отметить наличие
цепи синхронизации отклонения рулей. Так как рули ракеты,
управляющие продольным движением, приводятся в действие каж-
дый своей рулевой машиной, то при подаче на их вход одинаковых
сигналов возможен случай, когда рули повернутся на неодинако-
вые углы, что приведет к возникновению момента крена. Чтобы
разгрузить канал стабилизации крена и избежать влияния канала
тангажа на канал крена, вводится дополнительная обратная связь
с сигналом, пропорциональным разности углов поворота рулей и
вызывающим поворот рулей в противоположные стороны. (Доста-
точно подробное и полное описание органов управления ракеты
V-2, а также описание других элементов системы управления этой
ракеты можно найти в работах [2], [7] и [8]).
Рис. 6.10. Блок-схема системы стабилизации продольного движения:
ПМ — программный механизм; ГГ — гирогоризонт; УП — усилитель-преобразова-
тель; РМ — рулевые машины; Р — ракета.
Приведем теперь краткую характеристику основных элементов,
входящих в канал тангажа. Для образования сигнала ошибки щ
используется свободный гироскоп с потенциометрическим датчи-
ком. Гироскоп является практически безынерционным элементом
и поэтому его единственной характеристикой служит передаточ-
ный коэффициент потенциометрического датчика. Усилители, вхо-
дящие в схему усилителя-преобразователя, а также преобразова-
тели рода сигнала, модуляторы и демодуляторы характеризуются
очень малыми постоянными времени, которыми при анализе систе-
мы можно пренебречь. Гидравлический рулевой привод с учетом
момента нагрузки (даже без жесткой обратной связи, как это
имело место у ракеты V-2) характеризуется передаточной функ-
цией апериодического звена
WP.n(p)
Кр.п
Тр.пР+ 1
Конечно, возможны и другие схемы приводов. Им будут соот-
ветствовать иные передаточные функции.
С учетом этих замечаний можно составить расчетную структур-
ную схему системы стабилизации Продольного движения бал-
286
Глава VI. Динамика баллистических ракет
.диетической ракеты (рис. 6. 11). На схеме в виде отдельного струк-
турного элемента указан корректирующий фильтр, который вво-
дится для получения нужных динамических характеристик системы..
Рис. 6.11. Структурная схема системы стабилизации продольного движения
3.2. Основные задачи формирования канала
продольного движения
Выбор структурной схемы системы стабилизации и значений
параметров ее элементов всегда вытекает из тех задач, которые
должна решать система стабилизации.
Для рассматриваемого канала системы основной задачей яв-
ляется точное воспроизведение программы движения ракеты на
активном участке траектории, заданной в виде программы измене-
ния угла тангажа по времени (/). Необходимость обеспечить-
требуемое угловое положение корпуса ракеты предопределяет вы-
бор основного измерительного элемента системы — свободного
гироскопа. Свободный гироскоп без каких-либо дополнительных
преобразований сигнала дает возможность непосредственно изме-
рять и, следовательно, контролировать отклонения угла тангажа
от требуемого, программного значения.
Выбор свободного гироскопа в качестве основного измеритель-
ного элемента предопределяет структурную схему системы. Вход-
ным управляющим воздействием — сигналом наведения системы
является программа изменения угла тангажа (0. Как уже ука-
зывалось, эта программа является медленно изменяющейся функ-
цией времени и для ее точного воспроизведения от системы не тре-
буется высокого быстродействия. По этой же причине динамиче-
ские ошибки воспроизведения программы е = —-& сводятся к
статическим. Если учесть, что статические ошибки воспроизведения
программы всегда могут быть учтены и сама программа может
быть скорректирована соответствующим образом, то система ста-
билизации может быть статической по отношению к сигналу на-
ведения. (Статические ошибки воспроизведения программы можно-
оценить при расчете траектории, если воспользоваться упрощен-
ными статическими уравнениями системы управления е = &* —
ёв = Ке, К = КпКфКиКр.п).
§ 3. Структурная схема канала продольного движения
287
Кроме управляющего воздействия, к системе управления при-
ложены возмущения. Типовые возмущения были перечислены вы-
ше. Дополнительно следует отметить в качестве источника возму-
щений шумы потенциометрического датчика гироскопа. Ввиду
дискретного характера съема сигнала с потенциометра, а также
из-за вибраций основания полезный выходной сигнал потенцио-
метра засорен шумами. Хотя уровень-этих шумов обычно невысок
по сравнению с уровнем шумов в системах наведения, получающих
информацию от цели, в состав которых обязательно входят шумя-
щие каналы связи, в автономных системах наведения все же при-
ходится считаться с этими шумами и ограничивать их влияние.
Указанные возмущающие воздействия действуют непрерывно в
течение всего времени активного полета. Поэтому для ограничения
их влияния на точность реализации программного движения необ-
ходимо иметь достаточно большой передаточный коэффициент
разомкнутого контура управления, так как в отношении этих воз-
мущений система также является статической по ошибке е =
= 0* — 0. (Введение интеграла от сигнала ошибки в значительной
степени осложняет выполнение условий устойчивости).
Таким образом, предварительный анализ условий работы ка-
нала тангажа системы стабилизации и тех задач, которые он дол-
жен решать, показывает, что формирование канала тангажа долж-
но сводиться к обеспечению запасов устойчивости системы на всем
протяжении активного участка траектории при некотором задан-
ном значении передаточного коэффициента разомкнутой системы,
выбираемом из условия точности. Так как выбор этого значения пе-
редаточного коэффициента связан с анализом точности наведения,
что будет рассмотрено ниже, то здесь будем предполагать, что это
значение нам задано и известно.
3.3. Выбор типа коррекции
Как было отмечено в разд. 3. 1, из всех элементов аппаратуры
системы стабилизации, не считая корректирующего фильтра, учи-
тывается инерционность только рулевого привода. Так как харак-
теристики рулевого привода при анализе системы обычно рассмат-
риваются как заданные, то представляет интерес построить
частотные характеристики разомкнутого контура стабилизации без
учета корректирующего устройства. Эти характеристики, очевидно,
будут суммой частотных характеристик ракеты (см. рис. 6.8) и
рулевого привода. При построении необходимо учитывать измене-
ние передаточного коэффициента ракеты с течением времени,
однако его значения можно изменять произвольное число раз. Это
связано с тем, что общий передаточный коэффициент разомкнутого
контура стабилизации еще неизвестен и должен быть назначен
при проектировании системы.
288
Глава VI. Динамика баллистических ракет
Рис. 6.12. Амплитудные и фазовые частотные характеристики ракеты
с рулевым приводом
На рис. 6. 12 приведен пример частотных характеристик раке-
ты с гидравлическим рулевым приводом, динамические свойства
§ 3. Структурная схема канала продольного движения
289
которого с учетом момента нагрузки описываются приближенно
передаточной функцией апериодического звена
WP.n(p)
Кр.п
Тр.пР + 1
При построении этих характеристик учитывался также обычно
известный передаточный коэффициент потенциометрического дат-
чика гироскопа.
Как уже отмечалось, у ракеты V-2 семейства амплитудных
и фазовых частотных характеристик разомкнутой системы стаби-
лизации, построенные без учета корректирующего устройства для
различных моментов времени движения ракеты, при достаточно
высоких частотах образуют сравнительно узкие пучки (см. рис.
6.12). В этом случае можно указать две частотные характеристики,
которые как бы являются границами пучка частотных характерис-
тик, а все остальные, построенные для других моментов времени,
располагаются между ними. Анализ частотных характеристик
показывает, что такими граничными кривыми для нашего примера
являются характеристики, отвечающие начальному этапу движе-
ния ракеты (5-я секунда) и моменту времени (35-я секунда), когда
частота собственных колебании ракеты —st; Г/ —~ достигает
наибольшего значения. Если обеспечить требуемые запасы устой-
чивости для отмеченных граничных частотных характеристик, то
они будут обеспечены и для всех остальных. Это обстоятельство
в некоторой степени упрощает выбор корректирующего устрой-
ства.
Прежде чем выбирать тип корректирующего устройства, необ-
ходимо проверить, нельзя ли выполнить требования устойчивости
без корректирующего устройства за счет только выбора величины
передаточного коэффициента разомкнутой системы стабилизации,
так как чем проще будет схема системы, тем надежнее будет ее
работа. Анализ частотных характеристик разомкнутой системы
стабилизации без корректирующего фильтра, приведенных на
рис. 6. 12, показывает, что для ракеты V-2 нельзя подобрать коэф-
фициент усиления усилителя так, чтобы без корректирующего
устройства обеспечить устойчивость движения ракеты на всем
протяжении активного участка траектории. В этом легко убедить-
ся, если рассмотреть рис. 6.13, на котором даны амплитудно-фа-
зовые характеристики системы стабилизации для 5 и 35-й секунд
движения. (Для удобства при построении принят логарифмиче-
ский масштаб амплитуд. Критической точке соответствует точка
с отметкой «О» дб).
Применяя в нашем случае частотный критерий устойчивости,
следует помнить, что разомкнутая система стабилизации неустой-
Ю Заказ 1242
290
Глава VI. Динамика баллистических ракет
чива (передаточная функция ракеты имеет одно неустойчивое
апериодическое звено). Поэтому для устойчивости замкнутой
системы необходимо, чтобы амплитудно-фазовая характеристика
начиналась левее критической точки, т. е. при и = 0 должно быть
Л (со) >1, а <р((о) = 180°. (Число положительных переходов ам-
плитудно-фазовой характеристики через отрезок действительной
оси от —оо до 0 дб должно быть равно +
Из рис. 6. 13 видно, что если изменить передаточный коэффи-
циент системы так, чтобы система стала устойчивой на 5-й секун-
Рис. 6.13. Амплитудно-фазовые частотные
характеристики системы стабилизации без кор-
ректирующего фильтра
де, то тогда система будет неустойчивой на 35-й секунде и,
наоборот, выбор' передаточного коэффициента, при котором систе-
ма устойчива на 35-й секунде, делает систему неустойчивой на
5-й секунде. (Так как на рис. 6.13 принят логарифмический мас-
штаб амплитуд, то изменению передаточного коэффициента на
некоторое число децибел соответствует простое изменение отметок
на это же число децибел).
Таким образом, простое рассмотрение частотных характеристик
разомкнутого контура стабилизации ракеты V-2 показывает, что
без корректирующего устройства только при помощи подбора
передаточного коэффициента нельзя обеспечить выполнение усло-
вий устойчивости на всем активном участке траектории.
§ 3. Структурная схема канала продольного движения
291
Как известно, одним из эффективных способов улучшения ди-
намических свойств систем автоматического управления, одновре-
менно облегчающим выполнение условий устойчивости, является
введение производных сигнала ошибки е в управляющий сигнал.
Простейшими устройствами, с помощью которых можно реали-
зовать такой способ улучшения динамических свойств системы,
являются пассивные дифференцирующие фильтры как однозвен-
ные, так и многозвенные. Эти фильтры обычно следуют за элемен-
том, измеряющим сигнал ошибки.
Известно, что применение дифференцирующих фильтров в пря-
мой цепи контура стабилизации нерационально, если входной
сигнал такого фильтра содержит высокочастотные шумы с боль-
шим уровнем. Это связано с тем, что дифференцирующий фильтр
ухудшает соотношение между полезным сигналом (обычно имею-
щим низкочастотный спектр) и шумом, что в свою очередь может
привести к эффекту полного подавления полезного сигнала, если
последующие элементы имеют статическую характеристику с на-
сыщением.
По этой причине системы стабилизации со свободным гиро-
скопом и дифференцирующим фильтром не находят применения в
неавтономных системах наведения, где входные сигналы системы
обычно засорены шумами. В автономной системе, как это уже
было отмечено, уровень шумов обычно невелик, что и дает возмож-
ность использовать в качестве корректирующего устройства диф-
ференцирующий пассивный фильтр.
Анализ частотных характеристик, приведенных на рис. 6. 12,
показывает, что для обеспечения требуемых запасов устойчивости
системы на всем активном участке траектории необходим фильтр,
дающий в некотором интервале частот положительный фазовый
сдвиг, больший, чем 90°. Такой сдвиг может обеспечить только
двухзвенный дифференцирующий фильтр, имеющий передаточную
функцию следующего вида:
(?) = **(T^2 + 2W+ .
ф (W+1)(W + 1)
Благодаря введению такого фильтра осуществляется управле-
ние не только по сигналу ошибки, но и по первой и второй произ-
водной от сигнала ошибки. Эффект улучшения устойчивости
системы достигается в этом случае благодаря тому, что дифферен-
цирующий фильтр в довольно широком интервале частот может
создавать положительные фазовые сдвиги и тем самым компенси-
ровать отрицательные фазовые сдвиги колебательного звена объек-
та управления, ухудшающие устойчивость.
На рис. 6. 14 для примера приведены амплитудная и фазовая
частотные характеристики двухзвенного дифференцирующего
10*
292
Глава VI. Динамика баллистических ракет
фильтра с передаточной функцией (Кф = 1)
WM = W-+-^+1-
ф ’ (0,15р+1) (0,024р+1)’
Из построения следует, что этот фильтр в интервале частот
около одной декады создает положительные фазовые сдвиги, по
величине большие 90°.
Рис. 6.14. Амплитудная и фазовая частотные характеристики
корректирующего фильтра
На рис. 6. 15 приведены семейства частотных характеристик
разомкнутого контура стабилизации с рассматриваемым фильт-
ром. Из рисунка видно, что для всех моментов времени движения
ракеты на активном участке траектории выполняются условия
устойчивости, а получающиеся частоты среза занимают сравни-
тельно узкий интервал (в нашем примере от 7 до 10 1/сек). Это
объясняется тем, что при высоких частотах все амплитудные
частотные характеристики в рассматриваемом примере имеют об-
щую асимптоту.
Из этих же графиков можно выявить очень важное свойство,
которое приобретает система стабилизации, когда для коррекции
применяется двухзвенный дифференцирующий фильтр. Это свойст-
во сводится к следующему. В районе частоты среза амплитудные
частотные характеристики имеют сравнительно большой наклон
(в нашем примере больше 30 дб на декаду). Поэтому при доволь-
но больших изменениях передаточного коэффициента разомкнуто-
го контура частота среза меняется незначительно, а следовательно,
§ 3. Структурная схема канала продольного движения
293
и незначительно изменяется запас устойчивости. В результате кон-
тур стабилизации с двухзвенным дифференцирующим фильтром
Рис. 6.15. Амплитудные и фазовые частотные характеристики разомк-
нутого контура стабилизации с корректирующим фильтром
оказывается малочувствительным к изменению передаточного
коэффициента. Это свойство является весьма ценным, так как
оно позволяет при проектировании системы принимать меньшие
294
Глава VI. Динамика баллистических ракет
запасы устойчивости, что в свою очередь позволяет получить боль-
шее значение передаточного коэффициента разомкнутого контура
Кроме того, можно назначать более широкие допуски на переда-
точные коэффициенты отдельных элементов системы стабилизации.
Отметим теперь некоторые недостатки применения дифферен-
цирующего фильтра в качестве корректирующ^го^устройства. Пас-
сивный дифференцирующий фильтр очень мало ослабляет сигна-
лы низких частот (т. е. такой фильтр имеет передаточный коэффи-
циент много меньше единицы). Поэтому для компенсации ослабле-
ния сигнала требуется увеличивать коэффициент усиления усили-
теля, что, конечно, усложняет его схему. Кроме того, такой способ
коррекции приводит к излишнему расширению полосы частот,
пропускаемой системой, тогда как для точного воспроизведения
управляющего воздействия такой полосы не требуется.
Слишком высокое значение частоты среза приводит к тому, что
система становится более чувствительной ко всякого рода внешним
возмущениям, частота колебаний в переходном процессе повыша-
ется. Последнее может привести к появлению заметных инерцион-
ных нагрузок при колебаниях ракеты. Однако при применении
дифференцирующих корректирующих фильтров избавиться от
этих недостатков не представляется возможным. Единственным
способом улучшения частоты среза в этом случае является умень-
шение частоты собственных колебаний ракеты, но это может быть
достигнуто только за счет уменьшения ее статической устойчивости.
Можно было бы вместо двухзвенного дифференцирующего
фильтра применить фильтр другого типа, например, интегро-диф-
ференцирующий, с помощью которого можно получить меньшие
значения частоты среза. Но анализ показывает, что в этом случае
для обеспечения требуемых запасов устойчивости на всем протя-
жении активного участка траектории необходим многозвенный
фильтр с большим числом степеней свободы, что значительно ус-
ложняет схему такого фильтра. Кроме этого, при таком способе кор-
рекции система стабилизации становится в значительно большей
степени чувствительной к изменениям передаточных коэффициентов
отдельных элементов и, следовательно, менее надежной, что тре-
бует более жестких допусков на элементы.
Применение в системе управления параллельных корректирую-
щих цепей может оказаться невыгодным, так как потребует введе-
ния в схему дополнительных измерительных элементов, например,
дифференцирующего гироскопа, что усложняет схему и уменьшает
ее надежность. Поэтому, вероятно, применение двухзвенного диф-
ференцирующего фильтра в системе стабилизации ракеты V-2 яв-
лялось одним из рациональных способов коррекции.
Применение в качестве корректирующего устройства двухзвен-
ного дифференцирующего фильтра позволяет обеспечить запасы
устойчивости на всем протяжении активного участка траектории.
§ 4. Выбор схемы и параметров дифференцирующего фильтра
295
а также сообщает системе стабилизации свойство «грубости», ма-
лой чувствительности к изменениям передаточного коэффициента
разомкнутого контура. При этом необходимо правильно назначать
диапазон линейности элементов с насыщением, следующих за
фильтром, чтобы шумы с потенциометра гироскопа, подчеркнутые
дифференцирующим фильтром, не вызывали перегрузки нелиней-
ных элементов. Кроме того, влияние шумов можно в некоторой
степени ограничить за счет правильного выбора схемы и парамет-
ров самого дифференцирующего фильтра, что будет рассмотре-
но ниже.
§ 4. ВЫБОР СХЕМЫ И ПАРАМЕТРОВ ДВУХЗВЕННОГО
ДИФФЕРЕНЦИРУЮЩЕГО ФИЛЬТРА
Поскольку применение двухзвенного дифференцирующего
фильтра является одним из рациональных способов коррекции
системы стабилизации баллистической ракеты, рассмотрим методи-
ку выбора схемы и параметров такого фильтра.
4.1. Общие свойства двухзвенных дифференцирующих фильтров
На рис. 6. 16 приведены некоторые возможные схемы фильтров,
имеющих в общем случае передаточную функцию вида
w (} = «*(фг + ^у’ + о 6
где ’ (Tvp+ l>(Tv/>+1)
„ __ _
^Ф ~ 2
ТФ
Возможны и другие варианты фильтров, в схему которых,
кроме сопротивлений и емкостей, входят индуктивности. Но такие
фильтры более громоздки и тяжелы, так как при значениях по-
стоянных времени, измеряющихся единицами секунд, требуются
большие индуктивности в виде катушек с железным сердечником.
Из трех схем, приведенных на рис. 6. 16, наиболее удобной
является схема «в». С помощью такой схемы можно обеспечить
в передаточной функции (6. 6) значение коэффициента меньшее
единицы, что позволяет получить большие положительные фазо-
вые сдвиги при неизменном Кф, тогда как для схемы «а» при лю-
бых значениях R и С коэффициент 1. Схема «б» имеет тот не-
достаток, что она очень чувствительна к изменению ее параметров
и, кроме того, при том же значении передаточного коэффициента
Кф, что и у схемы «в», дает меньшие положительные фазовые
сдвиги.
Очевидно, что первая задача, которую необходимо решить, за-
ключается в выборе параметров передаточной функции (6. 6) диф-
296
Глава VI. Динамика баллистических ракет
ференцирующего фильтра. На этом этапе нужно назначить пара-
метры Тдб, Hgs, Т\ф и Тчф, зная которые уже можно рассчитать схему
фильтра. Для анализа эту передаточную функцию удобно записать
в такой форме:
-МР)^У+2^ + 2>
Т2фР2 + 2£т тфр + 1
(6-7)
где
5r > 1; Тф = 1\ф1\ф и 2^Тф = 7\ф + Т,ф.
Анализ частотных характеристик, соответствующих передаточ-
ной функции (6.7), позволяет выявить некоторые общие свойства
а) 6) Ь)
Рис. 6.16. Схемы двухзвенных дифференцирующих 7?С-фильтров
двухзвенного дифференцирующего фильтра, которые полезно учи-
тывать при проектировании. Прежде всего надо иметь в виду,
что передаточный коэффициент фильтра Кф, т. е. ослабление фильт-
ром сигналов низких частот (частота со < 1/со^), определяется соот-
ношением Кф = Т'ф/г‘ф- Поэтому для высоких частот справедиво
соотношение (^(/и) | = 1, когда и> 1 /Т ф. С другой стороны, мак-
симальный положительный сдвиг фазы и ширина интервала частот,
в котором фазовый сдвиг превышает 90°, зависит от отношения
г-ф/Т ф.
Чем больше это отношение, тем больше указанные величины.
Поэтому для получения больших фазовых сдвигов в более широ-
ком интервале частот приходится применять фильтр с меньшим
передаточным коэффициентом. Так как это ослабление сигналов
на низкой частоте приходится компенсировать с помощью усили-
теля, чтобы получить требуемое значение общего передаточного
коэффициента разомкнутой системы стабилизации, то естественно
стремление брать передаточный коэффициент фильтра по возмож-
ности большим, уменьшая для этого отношения Хф)Тф. Максималь-
ный фазовый сдвиг фильтра зависит также от коэффициента £г. Чем
меньше этот коэффициент, тем больше максимальный фазовый
сдвиг и шире интервал частот, в котором этот сдвиг превышает
§ 4. Выбор схемы и параметров дифференцирующего фильтра
297
90°. Но уменьшать коэффициент можно только до вполне опре-
деленных пределов. (Для ^С-фильтра этот коэффициент вообще
не может быть меньше единицы). В случае, когда < 1,3, ста-
новится трудным выбрать практически приемлемые значения R
и С, необходимые для согласования фильтра с выходом предыду-
щего и входом последующего элементов. Следует также иметь в ви-
ду, что при значениях близких к единице, спадающая ветвь фа-
зовой характеристики в области высоких частот (со ~ l/Тф) идет
более круто, что увеличивает чувствительность системы управления
к изменениям передаточного коэффициента. Обычно -.т ~ 1,3 ч- 1,8.
В качестве примера на рис. 6.17 приведены фазовые характе-
ристики, отвечающие передаточной функции (6.7) для случая,
когда Гф/Тф = 10; Тдб = 1 и для различных значений и 5$. Для
удобства использования основные параметры этих характеристик
сведены в табл. 6. 1. В этой таблице указано максимальное значе-
ние фазового сдвига фтах, значения частоты ом и &>2, для которых
<р(<ю) = 90°, а также крутизна фазовой характеристики при и =
= «2 = МТф.
Таблица 6.1
£ т ^тах 2 ф д'Ф,'д (1g со) град.'октава
I. Параметры фазовой характеристики фильтра для Д = 0,3
1,0 140° 1,02 0,98 38
1,5 129° 1,12 0,82 27
2,0 119° 1,13 0,80 21
П. Параметры фазовой характеристики фильтра для Д = 0,6
1,0 127° 1,04 0,95 32
1,5 113° 1,26 0,75 23
2,0 104° 1,45 0,72 18
Отмеченные основные свойства дифференцирующего фильтра
относятся к схеме «в» на рис. 6. 16. Однако на практике использу-
ется другая схема, указанная на рис. 6. 18 [2], которая отличается
от первоначальной схемы наличием сопротивления Ro. Следует
иметь в виду, что если в схеме фильтра не было бы сопротивле-
ния Ro, то такое же влияние на его характеристики оказывало бы
выходное сопротивление потециометрического датчика гироскопа,
сигнал с которого и подается на вход фильтра. Поэтому при рас-
чете фильтра необходимо считать, что величина Ro равна сумме
выходного сопротивления датчика гироскопа и соответствующего
сопротивления, входящего в схему фильтра.
Это сопротивление Ra вводится в схему для ограничения уров-
ня шумов на выходе фильтра. Выше уже отмечалось, что выход-
298
Глава VI. Динамика баллистических ракет
ной сигнал потенциометрического датчика гироскопа засорен
шумами, которые проходят через дифференцирующий фильтр
практически без ослабления. Так как все последующие элементы
Рис. 6.17. Фазовые частотные характеристики двухзвенного дифференцирую-
щего фильтра
системы стабилизации (модулятор, усилитель, демодулятор, руле-
вой привод) имеют характеристики с насыщением, то, чтобы
не допустить подавления полезного сигнала шумами, необходимо
ограничить уровень шумов, для чего и вводят в схему фильтра
сопротивление Ro.
§ 4. Выбор схемы и параметров дифференцирующего фильтра
299
Введение этого сопротивления не изменяет вида передаточной
функции фильтра, при этом изменяются только числовые значения
некоторых параметров передаточной функции (Кф, Тф и ggg) и из-
Рис. 6.18. Схема двухзвенного дифференцирую-
щего ^С-фильтра
меняются так, что при высоких частотах амплитудная частотная
характеристика будет меньше единицы, т. е. в этом случае
К т?
Пт|Гф(/о))| = ^<1.
о)->оо Т1,
Ф
На рис. 6. 19 показаны логарифмические амплитудные частот-
ные характеристики двух фильтров (с одинаковым отношением
Рис. 6.19. Логарифмическая амплитудная частот-
ная характеристика дифференцирующего фильтра
хФ1Тф) Для случаев Ro = 0 и построенные в предположении,
что параметры фильтра выбраны так, что этим двум случаям от-
вечают равные Тф. Для характеристики свойств фильтра на высо-
ких частотах можно ввести коэффициент ослабления высоких
К т2
частот Кф= —Представим себе, что этот коэффициент при-
ТФ
300
Глава VI. Динамика баллистических ракет
нят равным 0,5, тогда из рис. 6.20, где построены амплитудные ча-
стотные характеристики фильтра в натуральном масштабе, видно,
что уровень шумов (среднеквадратичное значение) на выходе
фильтра уменьшится вдвое, так как дисперсия шума зависит от
площади, которую ограничивает амплитудная частотная характе-
ристика, если шумы на входе фильтра имеют высокочастотный
спектр.
Для того чтобы при проектировании правильно назначить
коэффициент ослабления высоких частот, необходимо располагать
Рис. 6.20. Амплитудная частотная харак-
теристика дифференцирующего фильтра
данными о характеристи-
ках шумов и иметь стати-
ческие характеристики
всех элементов (или знать
диапазон линейности этих
элементов). Так как та-
кие данные при проекти-
ровании системы не всег-
да имеются и часто полу-
чить их можно только
после испытания опытных
образцов, то коэффициент
ослабления высоких ча-
стот приходится подбирать экспериментально при обработке опыт-
ных образцов элементов системы стабилизации.
4.2. Выбор параметров передаточной функции фильтра
Для того чтобы однозначно выбрать параметры передаточной
функции дифференцирующего фильтра, необходимо задаться ми-
нимально допустимым значением передаточного коэффициента
разомкнутой системы стабилизации. Выбор этого значения связан
с анализом точности системы, что будет рассмотрено ниже. По-
этому здесь будем предполагать, что это значение задано.
При выборе параметров передаточной функции фильтра основ-
ной величиной является отношение Как уже указывалось,
чем больше это отношение, тем больший положительный фазовый
сдвиг обеспечивает фильтр и тем большие запасы устойчивости
можно получить при определенном значении передаточного коэф-
фициента Ко контура стабилизации. Так как с помощью анализа
или расчетов трудно установить, какое отношение следует
назначить, чтобы получить необходимые запасы устойчивости, то
эту задачу приходится решать подбором.
Задавшись некоторым значением отношения т^/Тд?, назначаем
~ 1,5 и строим фазовую и амплитудную частотные характери-
стики фильтра. Выбор параметра мало влияет на условия устой-
§ 4. Выбор схемы и параметров дифференцирующего фильтра
301
чивости, хотя и влияет на характер переходных процессов. Поэто-
му при первом расчете его величину можно назначить ориентиро-
вочно, в пределах ^—0,3 -ь 0,7.
Дальнейшие действия связаны с тем, чтобы определить постоян-
ную времени Тдб (и, следовательно, Т$, так как значением тф/Тф
уже задались). Проще всего это сделать, используя графическое
построение логарифмических частотных характеристик. Суммируя
частотные характеристики разомкнутого контура стабилизации
с частотными характеристиками фильтра при произвольном зна-
чении Тдб, можно определить, будет ли контур устойчив на всем
протяжении активного участка траектории и, если условия устой-
чивости выполняются, то каковы минимальные запасы устойчивос-
ти. Назначая несколько различных значений постоянной времени
Tgg, в конце концов останавливаются на варианте, для которого
удается получить примерно одинаковые запасы устойчивости по
фазе для тех моментов времени, которым соответствуют в области
высоких частот крайние частотные характеристики. (Все необхо-
димые построения выполняются чрезвычайно просто, если лога-
рифмические частотные характеристики фильтра вычертить на
прозрачной бумаге и использовать то обстоятельство, что измене-
нию постоянной времени фильтра при неизменном отношении
Гф!Тф соответствует простой сдвиг его частотных характеристик
вдоль оси частот).
Если при выполнении всех указанных операций окажется, что
полученное минимальное значение запаса устойчивости по фазе
слишком мало (или велико), то необходимо увеличить (или умень-
шить) отношение Тф!Тф. Если же для получения нужных резуль-
татов требуется небольшое увеличение положительного фазового
сдвига, то для достижения этого можно несколько уменьшить
коэффициент £т.
При выборе параметров фильтра можно также исходить из
следующих соображений. Для того чтобы легче обеспечить выпол-
нение условий устойчивости на всем протяжении активного участ-
ка траектории, желательно, чтобы частоты среза, отвечающие раз-
личным моментам времени, занимали сравнительно узкий интервал
частот, как. например, на рис. 6. 15. Кроме того, для обеспечения
малой чувствительности системы к случайным изменениям пере-
даточного коэффициента частотам среза должны соответствовать
участки фазовых характеристик с малым наклоном. Поэтому-
обычно частоты среза имеют значения, несколько большие, чем
значения частот собственных колебаний ракеты, которым соответ-
ствуют резонансные пики амплитудных и крутые спады фазовых
характеристик. Оценив с учетом этого ориентировочные значения
частоты среза, по фазовым характеристикам можно определить,
какой положительный фазовый сдвиг необходимо обеспечить, что-
бы получить требуемый запас устойчивости по фазе. На основании
302
Глава VI. Динамика баллистических ракет
этих данных можно определить верхнюю сопрягающую частоту
фильтра со2=1/Т’еб. Пусть, например, на частоте сос = 10 Цсек. не-
обходим положительный фазовый сдвиг в 115°. Из табл. 6. 1 имеем,
что при ^=1,5 на частоте 0,7со2 фазовый сдвиг равен +90°, а кру-
тизна фазовой характеристики составляет 25 град!октава. Поэтому
при со = 0,7со2?2 фазовый сдвиг будет равен П5°=90° + 25°.
Отсюда найдем
со2 = 30 1/се/с.
Естественно, что такой метод позволяет получить только ориен-
тировочные значения параметров фильтра и применение его
основано на использовании готовых результатов расчета, подоб-
ных тем, которые были приведены выше в таблице.
Итак, использование частотных методов позволяет сравнитель-
но просто определить параметры передаточной функции коррек-
тирующего фильтра Тдд, Тф, и %т. На основании этих данных
можно рассчитать схему фильтра. Один из возможных методов
расчета схемы приведен в приложении II.
§ 5. ОЦЕНКА КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ
После выбора типа и параметров корректирующего фильтра,
с помощью которого обеспечиваются запасы устойчивости системы
на всем протяжении активного участка траектории, проверяют
основные динамические свойства системы стабилизации. Наиболь-
ший интерес представляет оценка качества переходных процессов
по углам тангажа О и наклона траектории 0 и оценка возможного
рассеивания координат 0, х и у в конце активного участка траек-
тории. Так как подобные расчеты выполняют с учетом целого
ряда упрощений, окончательная проверка свойств и выбор пара-
метров системы стабилизации выполняется о помощью методов
математического и физического моделирования.
5.1. Построение переходных процессов
Для определения качества переходного процесса по углу тан-
гажа рассматривают в роли входных воздействий ступенчатые из-
менения возмущающих сил и моментов.
При использовании частотного метода для построения переход-
ных процессов прежде всего необходимо записать передаточные
функции замкнутой системы, связывающие возмущающие воздей-
ствия Ye и Мгв с выходной координатой ДО. Используя принятые
обозначения передаточных функций ракеты WY и и обозна-
чая через
G (р) = (р) KyWp.n (р) 1Е59 (р)
§ 5. Оценка качества переходных процессов
303
передаточную функцию разомкнутой системы стабилизации, можно
получить передаточные функции, характеризующие свойства зам-
кнутой системы:
W Э пр®
Д*>(р) = -у-Гв(р) + ^-Мгв(р). (6.8)
Соотношение (6.8) иллюстрирует структурная схема на
рис. 6.21.
Рис. 6.21. Структурная схема системы стабилизации
продольного движения с учетом внешних возмущений
Чтобы найти частотные характеристики, соответствующие
замкнутой системе, требуется выполнить несколько дополнитель-
ных построений.. Прежде всего необходимо предварительно по-
строить частотные характеристики замкнутой системы для пере-
даточной функции 6/14-G. Это построение легко выполняется с по-
мощью общеизвестных номограмм. Затем следует определить
частотные характеристики, соответствующие передаточным функ-
циям
G Н G Ум
1 + G G 1-J-G G
(6-9)
что несложно сделать, если применять при построении логарифми-
ческий масштаб. Для построения переходного процесса системы
по углу тангажа, вызванного скачком возмущающего момента Мгв
или подъемной силы Ув, необходимо с помощью соответствующей
номограммы построить вещественные частотные характеристики
передаточных функций (6.9).
Поскольку все эти построения и примеры использования номо-
грамм подробно рассмотрены в литературе (см., например, .[12]),
то здесь в качестве примера на рис. 6.22 приведен окончательный
304
Глава VI. Динамика баллистических ракет
результат построения — вещественные частотные характеристики
для 5 и 35-й секунд движения, когда возмущением является
момент Mze. С помощью этих графиков, используя метод трапеце-
идальных характеристик, можно построить переходные процессы
Рис. 6.22. Вещественные частотные характеристики
120
системы. На рис. 6.23 показаны переходные процессы, соответ-
ствующие вещественным характеристикам на рис. 6.22 (кривые 1
и 2). Эти процессы слабоколебательные и относительно быстро
затухающие.
*
§ 5. Оценка качества переходных процессов
305
Аналогично можно исследовать переходные процессы, вызван-
ные порывом ветра, так как порыв ветра вызывает ступенчатое
изменение угла* атаки и соответствующее изменение подъемной
силы и момента. Эти процессы имеют более колебательный
характер.
С помощью частотного метода можно исследовать также пере-
ходные процессы по углу наклона траектории А0. Для этого надо,
Использовав соотношение (см. рис. 6.21)
G W°Wy
1 Wf
А© (р) = Wy
УЛР) +
построить вещественные частотные характеристики.
В этом случае приходится выполнять большие по объему по-
строения из-за того, что формула (6.10) имеет сложную структуру.
Так как передаточные функции замкнутой системы для координаты
А0 имеют вид суммы двух слагаемых, то искомая вещественная
частотная характеристика может быть определена как сумма
вещественных характеристик, соответствующих каждому из сла-
гаемых.
Можно отметить, что в соответствующих передаточных функци-
ях первое слагаемое характеризует переходный процесс для слу-
чая, когда система стабилизации выключена, а второе слагаемое
определяет составляющую процесса, вызванную действием системы
стабилизации угла тангажа.
Если на основании выражения (6.10) определить соотношения,
связывающие величины А0, Mze и Ув в установившемся состоянии,
то легко обнаружить, что величина A©^ уменьшается с увеличе-
нием передаточного коэффициента разомкнутой системы стабили-
зации, причем уменьшается только до определенного предела.
Дальнейшее увеличение передаточного коэффициента разомкнутой
системы практически не влияет на эту величину (если предполо-
жить, что система при этом не теряет устойчивости). Поэтому
ошибки реализации программы А0уст в данной системе, являющей-
ся статической, принципиально нельзя уменьшить до нуля и их
минимальные значения зависят как от динамических свойств
ракеты, так и от динамических свойств системы стабилизации,
характеризуемых максимально возможным значением передаточ-
ного коэффициента разомкнутой системы Д0-
Если выполнить построение вещественных частотных характе-
ристик, то можно заметить, что в области низких частот они по
форме почти точно совпадают с вещественной частотной характе-
ристикой апериодического звена со сравнительно большой постоян-
306
Глава VI. Динамика баллистических ракет
ной времени (рис. 6.24). В области более высоких частот, близких
к частоте среза системы стабилизации, эти характеристики мало
отклоняются от оси абцисс, за исключением, может быть, первых
секунд движения.
По этой причине передаточные функции, связывающие вариа-
ции угла А0 с возмущающими силой и моментом, можно с высокой
степенью точности заменить передаточными функциями апериоди-
ческих звеньев. Учитывая, что для апериодического звена с пере-
даточной функцией KiTp +1 ордината вещественной частотной
характеристики при частоте и = 1/Т равна половине ее начального
значения
р (±\ р(°) _ *
\ Т ) 2 2 ’
по графикам вещественных частотных характеристик без труда
можно определить передаточный коэффициент и постоянную вре-
мени, соответствующие различным моментам полета. На рис. 6.25
приведены графики, характеризующие изменение этих двух пара-
метров по времени, построенные для рассматриваемого нами при-
мера. На графике в районе 35-й секунды наблюдается увеличение
передаточного коэффициента К. Это объясняется тем, что в этот
момент времени передаточный коэффициент разомкнутой системы
Ко имеет наименьшее значение.
§ 5. Оценка качества переходных процессов
307
Итак, передаточную функцию по координате А0 в отношении
возмущающего момента при условии, что рассматривается замкну-
тая система стабилизации, можно приближенно записать в следую-
щей форме:
Аппроксимация сложных передаточных функций, характеризую-
Рис. 6.25. Зависимость параметров эквивалентного звена
от времени
жениями позволяет просто рассчитать отклонения координаты 0
от ее программного значения, если известны возмущающие воз-
действия.
5.2. Влияние вариаций скорости
При исследовании переходных процессов в системе стабилиза-
ции в ряде случаев можно в передаточной функции ракеты отбро-
сить все звенья с достаточно большими постоянными времени, а
именно те звенья, которые получают при учете вариаций скорости
ракеты Д7. Для того чтобы выяснить, какие ошибки получают
из-за этого упрощения при анализе переходных процессов в систе-
ме, следует рассмотреть вещественные частотные характеристики
замкнутой системы, построенные с учетом вариаций скорости и без
них (см. гл. II, разд. 3.6). Примерный 'вид таких характеристик
308
Глава VI. Динамика баллистических ракет
показан на рис. 2.4. Эти характеристики различаются только в ин-
тервале низких частот 0 < со < Qi. Для частотных характеристик
ракеты, рассмотренных в разд. 2.1 этой главы, Q] 0,03 \/сек в лю-
бой момент времени.
Следует иметь в виду, что различия рассматриваемых частот-
ных характеристик замкнутой системы в области низких частот
зависят не только от расхождения частотных характеристик раке-
ты в этом интервале частот, но и от такого параметра разомкнутой
системы, как ее передаточный коэффициент Ко- Так как рассмат-
риваемая система стабилизации является статической, то чем
больше коэффициент Ко, тем меньше будет различие вещественных
частотных характеристик замкнутой системы в области низких
частот. При Ко 1 это отличие становится несущественным.
Используем для оценки расхождения переходных процессов
формулу (2.136)
, ,5МР(0)-Л.(0)1
I Vo) I Ч я- ро (0)
при
Для определения начальных ординат вещественных частотных
характеристик Р(0) и Ро(0) необходимо знать передаточные коэф-
фициенты разомкнутой системы стабилизации для двух случаев:
с учетом вариаций скорости и без такого учета, причем для оценки
необходимо выбрать момент времени, которому соответствуют ми-
нимальные значения передаточных коэффициентов, так как в этом
случае мы получим наибольшее значение разности Р(0) —Ро(О).
Так, например, в рассматриваемом нами примере на 35-й секунде
полета передаточный коэффициент ракеты с учетом вариаций
скорости составляет 6 дб, а без учета 0 дб. При этом передаточный
коэффициент разомкнутой системы стабилизации соответственно
равен 18 и 12 дб. Эти цифры дают Р(0) = 1,15 и До(0) = 1,30,
поэтому
|еОг«1<— Ч5°Я
к| л 1,30 р
при
L<-^-st;100 сек.
р 0,03
Если, например, tp = 60 сек, то | е0™ | ^ 0,075 = 7,5%. Этот
пример показывает, что при анализе свойств рассматриваемой си-
стемы можно не учитывать большие постоянные времени, которым
соответствуют сопрягающие частоты и 0,03 1/сек, так как учет
этих постоянных времени окажет несущественное влияние на
характер переходных процессов.
§ 6. Структурная схема канала бокового движения
309>
§ 6. СТРУКТУРНАЯ СХЕМА КАНАЛА БОКОВОГО ДВИЖЕНИЯ
6.1. Пример функциональной схемы
Основная задача канала бокового движения системы наведе-
ния баллистической ракеты заключается в стабилизации около
нулевого значения линейной координаты центра массы z, характе-
ризующей отклонение (боковой снос) ракеты от плоскости стрель-
бы. Эта задача решается с помощью системы стабилизации угло-
вого движения рыскания, создающей боковое ускорение z, на-
правленное в сторону, противоположную боковому сносу.
Рис. 6.26. Блок-схема системы стабилизации бокового
движения:
ГВ — гировертикант; УП — усилитель-преобразователь; РМ — ру-
левые машины; Р — ракета; КЗ — кинематическое звено; УБК —
устройство боковой коррекции
Функциональная схема канала бокового движения ракеты
приведена на рис. 6.26 [2], [6], [8]. Для управления движением
рыскания и стабилизации крена в канале бокового движения ис-
пользуется один и тот же свободный гироскоп. Сигнал наведения
относительно координаты г поступает непосредственно на вход
усилителя-преобразователя.
Другой особенностью схемы является дифференциальное от-
клонение рулей для управления движением крена.
При малых значениях угловых координат ср и у процессы ста-
билизации углов крена и рыскания можно рассматривать как неза-
висимые.
В соответствии с задачей, возложенной на канал бокового
движения системы наведения, за ошибку (рассогласование) систе-
мы наведения принимается величина бокового сноса z ракеты.
Если для формирования сигнала наведения используется автоном-
ная система, то основным элементом ее является акселерометр,
измеряющий боковое ускорение z. В этом случае простым интегри-
рованием получают сигнал, пропорциональный скорости бокового
310
Глава VI. Динамика баллистических ракет
сноса z и линейной величине бокового сноса z. При использовании
для этих целей системы теленаведения на выходе бортового при-
емника получают сигнал, пропорциональный углу бокового сноса:
Z
г W
где R(t) —-наклонная дальность ракеты, отсчитываемая от -стан-
ции наведения.
Очевидно, что для увеличения точности стабилизации координа-
ты z необходимо осуществлять регулирование именно, по этой ко-
ординате, а не по углу сноса ez. По этой причине при использова-
нии радиотеленаведения необходимо преобразовать измеряемую
угловую координату ez в линейную координату z с помощью со-
отношения
z = Т?е2.
Величину 7? (7) можно рассматривать как известную функцию
времени, так как известно изменение координат ракеты x(t) и y(t)
при движении ее по программной траектории и расстояние х0 от
станции наведения до точки пуска:
7? (7) = У(х + х0Г + у2.
Поэтому сигнал, пропорциональный ez, можно преобразовать
в сигнал, пропорциональный z, с помощью простейшего програм-
много механизма.
6.2. Расчетные структурные схемы
Структурная -схема канала бокового движения системы наве-
дения баллистической ракеты (рис. 6.27) состоит из двух контуров:
1) контура наведения, или -контура стабилизации бокового
сноса;
2) контура стабилизации движения рыскания.
Так как баллистическая ракета является динамически осесим-
метричной, контур стабилизации рыскания обычно имеет такую же
структурную схему, как и контур стабилизации тангажа. В неко-
торых случаях могут различаться корректирующие фильтры этих
контуров в связи с тем, что контур стабилизации рыскания являет-
ся составной частью контура стабилизации бокового сноса.
На схеме, приведенной на рис. 6.27, в качестве выходной ко-
ординаты ракеты принят угол рыскания ср для того, чтобы можно
было использовать передаточные функции для продольного дви-
жения ракеты. На схеме передаточная функция
^(р) = -~ (6.12)
Р
является передаточной функцией кинематического звена, связы-
вающего координаты Ф и z.
§ 6. Структурная схема канала бокового движения
311
Так как рассматриваемая система является системой1 стабили-
зации, обеспечивающей равенство «улю координат ср и z, то можно
было бы на структурной схеме не изображать элементы сравнения
в цепях обратных связей, заменив эти элементы структурными
элементами с передаточными функциями, равными минус единице.
Но для того чтобы можно было воспользоваться стандартными
выражениями, связывающими передаточные функции замкнутых
и разомкнутых контуров, на схеме эти элементы сравнения со-
хранены.
Рис. 6.27. Структурная схема системы стабилизации бокового движения
На расчетной структурной схеме (см. рис. 6.27) указано только
одно возмущение — возмущающий момент Мув рыскания. Это свя-
зано с тем, что все расчеты по отношению к возмущающей силе
ze и возмущению угла скольжения выполняются аналогично.
Для исследования свойств системы стабилизации бокового
сноса удобно структурную схему, приведенную на рис. 6.27, пре-
образовать в схему, в которой система стабилизации движе-
ния рыскания представлена одним структурным элементом
(рис. 6.28,а). На этой схеме через Wq обозначена передаточная
функция разомкнутого контура стабилизации рыскания
Г? = (6.13)
составленная в предположении, что контур стабилизации бокового
сноса также разомкнут. Нетрудно видеть, что передаточная функ-
ция разомкнутого контура стабилизации бокового сноса (при усло-
вии, что контур управления движением рыскания замкнут) опре-
деляется выражением
г. V
^z(P) KdzW фгКуг
1 + С и К
(6-14)
312
Глава VI. Динамика баллистических ракет
Для исследования стабилизации угла рыскания целесообразно
исходную структурную схему (см. рис. 6.27) преобразовать к виду,
изображенному на рис. 6.28, б. Здесь введены следующие обозна-
чения. Через Wg обозначена передаточная функция разомкнутого
контура стабилизации бокового сноса (при условии, что контур
стабилизации рыскания тоже разомкнут)
= KdzW^yzWp,nWtWK. (6.15)
Передаточная функция разомкнутой системы стабилизации
угла рыскания (при условии, что контур стабилизации бокового
5)
Рис. 6.28. Преобразованные структурные схемы системы стабилизации бокового
движения
сноса замкнут) определяется выражением
W W’? W%
g. (р) = -р~ =—
1+^ 1+И720
(6.16)
6.3. Установившиеся ошибки стабилизации
Для выяснения основных свойств рассматриваемо?! системы
в установившемся состоянии составим передаточные функции, свя-
зывающие координаты ср, Ф и z с возмущающим моментом Мув
для случая, когда оба контура замкнуты.
§ 6. Структурная схема канала бокового движения
313
На основании структурных схем, приведенных на рис. 6.28,
можно получить следующие передаточные функции:
?(р)
MyS (р)
Ф (Р)
Мув (р)
П (1 + Ю Kt-«м —~г -
________________“о _ _ 1 + о
1 + №г0+
1 +
1+^о
. W7* Г? Г*
С)~ — WZ- W't----------
М 0 М ° Wf 1+№^
1+г20+г’ 1 , rg
^'1+С
г (р) _ де? ф (р) .
Л1йв(р) кМув(р)
(6.17)
(6.18)
(6.19)
Для оценки значений координат ср, Ф и z после затухания
переходного процесса, вызванного ступенчатым возмущающим
моментом Му0, необходимо вычислить значения соответствующих
передаточных функций замкнутой системы при р = 0. Так как
VW) = -Л то для облегчения вычислений целесообразно
р
ввести обозначение
Wo (0) = — ,
Р
где
До = КдгКфгКУгКр ,nKlV.
Рассмотрим случай, когда среди элементов аппаратуры не со-
держится интегрирующих звеньев, т. е. когда
^(0) = Д,гД^ДР.„ = ^:
И7ф (0) = К^Кф^Ку^Кр.п = К*.
Передаточные коэффициенты Д® и Д® определяют отношение
угла отклонения рулей б к отклонению соответствующей координа-
ты в установившемся режиме
\ ? /уст \ <Р /уст
314 Глава VI. Динамика баллистических ракет
Выполнив вычисления, получим следующий результат:
, W®, (0) IF? 60)
----J—5.А2
.Мув i уст №®(0)
z5
---------------; (6.20)
Z5M“—(P+Z3)A1|
1
' Ф \
— =0;
№ув /уст
Ш(о)
Г /О' P +Z₽
А ф
z6
<(0) ^м(О)
r* (0)
(6.21)
(0)] _
< (0) j
(6.22)
Из полученных выражений следует, что в рассматриваемом
случае автоматическая система является астатической по отноше-
нию к координате Ф и статической по отношению к координатам
<р и z.
Точность наведения по каналу бокового движения характери-
зует величина бокового сноса г. Из формулы (6.22) видно, что
боковой снос при воздействии на ракету постоянного возмущаю-
щего момента обратно пропорционален передаточному коэффи-
циенту и для повышения точности наведения этот передаточ-
ный коэффициент необходимо увеличивать. Так как обыч-
но К? < Р + Z3 IZ\ то увеличение коэффициента также
способствует повышению точности стабилизации.
§ 7. ВЫБОР ТИПА КОРРЕКЦИИ И ОСНОВНЫХ ПАРАМЕТРОВ КАНАЛА
БОКОВОГО ДВИЖЕНИЯ
Задача выбора типа и параметров корректирующих фильтров
для канала бокового движения системы наведения баллистической
ракеты в общем случае должна решаться более сложным путем
по сравнению с аналогичной задачей для канала продольного
движения. Это объясняется тем, что в рассматриваемой двухкон-
турной системе оба контура вместе образуют единую систему
стабилизации угла рыскания <р и бокового сноса z. При этом
всякое изменение параметров элементов, входящих в один из кон-
туров стабилизации, влияет, вообще говоря, на характеристики
и свойства другого контура стабилизации. Поэтому в общем случае
вопрос о выборе типа и параметров корректирующих фильтров
в двух контурах стабилизации следует решать, рассматривая оба
контура совместно.
Однако обычно частота среза контура стабилизации бокового
сноса оказывается по крайней мере на порядок меньше частоты
среза контура стабилизации угла рыскания и может лежать, на-
$ 7. Выбор типа коррекции и параметров канала бокового движения
315
пример, в пределах 0,1—1,0 \/сек. Это облегчает формирование
канала бокового движения.
Действительно, если контур стабилизации бокового сноса
имеет низкую частоту среза, то значение передаточной функции
1/1 + W* при частотах, близких к частоте среза контура стабили-
зации угла рыскания, близко к единице и, следовательно, динами-
ческие свойства контура стабилизации угла рыскания мало зави-
сят от IF*. Это свойство является взаимным: всякие изменения
частотных характеристик контура стабилизации угла рыскания
в области высоких частот не вызывают изменений частотных
характеристик контура стабилизации бокового сноса в области
низких частот, близких к частоте среза этого контура.
Принимая во внимание указанные обстоятельства, можно фор-
мировать контур стабилизации угла рыскания независимо от
контура стабилизации бокового сноса.
Так как динамические свойства ракеты в движениях тангажа
и рыскания совпадают, то все рассуждения относительно выбора
типа и параметров корректирующего фильтра в канале продоль-
ного движения сохраняют свою силу и для рассматриваемого
случая. Это позволяет выбрать для контура стабилизации угла
рыскания тот же корректирующий фильтр, который был выбран
для канала тангажа, т. е. двухзвенный дифференцирующий фильтр.
Тем самым определяется передаточная функция разомкнутого
контура стабилизации угла рыскания IFo и соответствующие ча-
стотные характеристики.
Используя эти характеристики, теперь можно провести форми-
рование контура стабилизации бокового сноса z в предположении,
что контур стабилизации угла рыскания замкнут (см. рис. 6.28, а).
В этом случае передаточная функция разомкнутого контура ста-
билизации бокового сноса определяется выражением
Частотные характеристики замкнутого контура стабилизации
рыскания, соответствующие передаточной функции IFS/1 + IFo,
совпадают с частотными характеристиками замкнутого кон-
тура стабилизации угла тангажа. Далее можно построить частот-
ные характеристики, соответствующие множителю
Уф^у^к
«^0
предполагая вначале, что корректирующий фильтр в контуре
стабилизации бокового сноса отсутствует, т. е. что IFgSz = 1. После
этого можно построить семейство частотных характеристик разом-
316
Глава VI. Динамика баллистических ракет
кнутого контура стабилизации бокового сноса без корректирую-
щего фильтра. Анализ этих характеристик позволяет выбрать тип
корректирующего устройства и рассчитать его параметры.
При оценке устойчивости здесь следует помнить, что передаточ-
ная функция разомкнутого контура стабилизации бокового сноса
Gz(p) не имеет полюсов в правой полуплоскости и содержит одно
интегрирующее звено. Это легко установить с помощью структур-
ной схемы на рис., 6.28, а. Действительно, если контур стабилиза-
ции угла рыскания в замкнутом состоянии устойчив, то передаточ-
ная функция
1
(Р)
не имеет полюсов в правой полуплоскости, а нули этой передаточ-
ной функции компенсируют полюсы передаточной функции ракеты
Wf. Поэтому передаточная функция разомкнутого контура стаби-
лизации бокового сноса Gz(p) не имеет полюсов в правой полу-
плоскости.
Обычно для обеспечения устойчивости и получения приемле-
мого с точки зрения точности значения передаточного коэффициен-
та Добывает достаточно ограничиться введением в закон регулиро-
вания первой производной от сигнала ошибки.
В том случае, когда стабилизация снова осуществляется с по-
мощью автономной системы, т. е. за счет измерения бокового
ускорения ракеты, сигнал, пропорциональный первой производной
от z, можно получить после первого интегрирования ускорения и,
следовательно, можно осуществить закон регулирования вида
A(z + tz) без применения корректирующего фильтра.
В случае использования системы теленаведения для устранения
бокового сноса закон регулирования A(z + tz) можно осуществить
следующим образом. Так как z = Де2, то
К (z + tz) = К {Rez + т(Де2 4- Дег)] = KR (1 + ег+тег •
Поскольку величина Г— обычно много меньше единицы, то
R
достаточно реализовать закон A7?(ez + те2). Для задания величи-
ны R в схему формирования сигнала наведения необходимо ввести
простейший программный механизм, а для введения в сигнал на-
ведения производной от сигнала ошибки ие можно использовать
однозвенный дифференцирующий фильтр с передаточной функцией
$ 8. У правление скоростью ракеты
317
При использовании частотного метода определение параметров
такого фильтра, как и обычно, проще всего проводить подбором.
Задаваясь отношением Хф/Тф, подбором находим наилучшее зна-
чение постоянной времени Хф (и, следовательно, обеспечиваю-
щее устойчивость на всем протяжении активного участка траекто-
рии. При увеличении отношения Хф)Тф можно обеспечить устойчи-
вость при больших значениях частоты среза и передаточного ко-
эффициента разомкнутого контура. Однако при использовании
однозвенного дифференцирующего фильтра увеличивать частоту
среза и передаточный коэффициент можно только до вполне
определенного предела. Обычно приемлемые значения передаточ-
ного коэффициента получаются при значениях частоты среза в пре-
делах 0,1-4- 1,0 1/ сек.
В тех случаях, когда оказывается необходимым учет взаимного
влияния контуров стабилизации угла рыскания и бокового сноса,
можно применить метод последовательных приближений, весьма
наглядно и быстро ведущий к цели. Рассмотренные выше построе-
ния можно принять за первое приближение. Тогда следующий шаг
после подбора корректирующего фильтра контура стабилизации
бокового сноса будет заключаться в проверке характеристик
разомкнутого контура стабилизации угла рыскания с учетом влия-
ния контура стабилизации бокового сноса.
Очевидно, что в этом случае задача сводится к построению
частотных характеристик, определяемых передаточной функцией
G* р) =------ —
1+ Wz0 К
(см. рис. 6.28,6). Если при этом построении обнаружится, что по
сравнению с первым приближением (когда предполагалось, что
Wo = 0) частотные характеристики существенно изменились в не-
благоприятную сторону, то необходимо изменить параметры кор-
ректирующего фильтра IFgs,,. После этого следует проверить, как
изменятся частотные характеристики разомкнутого контура стаби-
лизации бокового сноса и т. д.
После выбора параметров корректирующих устройств можно
проверить качество переходных процессов системы по координатам
z и ф, вызываемых возмущающими силами и моментами.
§ 8. УПРАВЛЕНИЕ СКОРОСТЬЮ РАКЕТЫ
Система управления скоростью может принадлежать или
к классу автономных систем, или к классу систем радиотелеуправ-
ления. В первом варианте измерение скорости осуществляется
бортовыми приборами — акселерометрами, измеряющими продоль-
ное ускорение, и интеграторами, вычисляющими скорость ракеты.
318
Глава VI. Динамика баллистических ракет
Во втором варианте скорость ракеты определяется с помощью на-
земных радиотехнических устройств, и команда на включение дви-
гателя передается с пункта управления на борт ракеты по линии
радиосвязи.
Рассмотрим самый простой'способ управления скоростью, кото-
рый применялся на ракете V-2. Этот способ состоит в выключении
двигателя ракеты — отсечки двигателя, в момент, когда ракета
достигает необходимой для данной дальности скорости Va- Для
этой цели необходимо измерять фактическую скорость ракеты V
и сравнивать ее со скоростью Va.
В простейшей инерциальной системе акселерометр устанавли-
вается на корпусе ракеты так, что его ось ориентирована вдоль
продольной оси .ракеты Выходной сигнал акселерометра, как
следует из уравнения движения центра масс ракеты в проекциях
на ее продольную ось
mdy^ = p_x (?sin^,
dt
пропорционален продольной перегрузке *
Р~Хх 1 ,dVxl . .
«, 1 =------ = — —- + gH sin В- .
* mgo go \ dt J
Так как углы атаки на активном участке невелики, можно при-
нять Vxi ~ V. Следовательно, для получения скорости необходимо
проинтегрировать показания акселерометра и ввести поправку,
учитывающую гравитационное ускорение
i nxldt — ( V Т- С gH sin bdt j
J So \ J /
0 \ 0 /
Одним из возможных приборов, реализующих этот способ опре-
деления скорости, является гироскопический интегратор — прибор,
в котором совмещены акселерометр интегратор. Этот прибор
описан, например, в работах [1], [2]. Сигнал интегратора пропор-
ционален jonXldt. Поэтому для определения скорости необходимо
знать величину интеграла sin Mt, которая вычисляется в со-
ответствии с заданной программой изменения угла тангажа и рас-
четным временем полета. Так как программа в полете реализуется
с некоторыми ошибками, то последние сказываются и на определе-
нии интегратором скорости ракеты V. Эти ошибки в определении
скорости приводят к дополнительным ошибкам по дальности ДА.
Рассмотренный способ управления скоростью не учитывает также
влияние на ошибки по дальности и многих других факторов.
* Здесь go и gH — ускорения силы тяжести на уровне моря и на высоте Н
соответственно.
§ 9. Рассеивание ракет
319
В частности, не учитываются ошибки в координатах конца актив-
ного участка траектории, из которых наиболее существенна ошиб-
ка по высоте конца активного участка траектории.
Как видно, в описанной системе для управления скоростью
ракеты обратная связь не используется. Точность такой системы
управления скоростью невысока. Возможны и более точные методы
управления скоростью, основанные на использовании обратной
связи. Так, например, предлагается вычислять ошибки по даль-
ности в течение всего активного полета по результатам определе-
ния отклонений параметров движения ракеты от их программных
значений и воздействовать на тягу двигателя и угловое положение
ракеты таким образом, чтобы свести эту ошибку к минимуму.
Однако реализация этого способа связана со значительными тех-
ническими трудностями и требует установки цифровой вычисли-
тельной машины на борту ракеты [13].
§ 9. РАССЕИВАНИЕ РАКЕТ
9.1. Коэффициенты промаха
Как известно, управление полетом ракеты на активном участке
производится так, чтобы в момент выключения двигателя получи-
лось необходимое для попадания в цель сочетание параметров VA,
0а, ха и уА. В реальных условиях вследствие воздействия возму-
щений и ошибок управления действительные значения параметров
V, 0, х, у всегда отличаются от их программных значений, а сле-
довательно, эти параметры отклоняются от требуемых значений
и в конце активного участка полета: V = VA + АУ, 0 = 0 а + А0,
х = хА + Ах, у = уА + Дг/. Отклонения ДУ, А0, Ах и At/ в конце
активного полета приводят к отклонению дальности АЛ. Аналогич-
но ошибки боковых параметров движения ракеты в конце актив-
ного участка А1!7 = Т и AZ = Z приводят к ошибкам падения
ракеты у цели в боковом направлении AM.
Для оценки влияния ошибок параметров движения ракеты
в конце активного участка (AV, А0 и др.) на составляющие про-
маха ракеты АЛ и AM обычно пользуются коэффициентами про-
маха, под которыми понимают частные производные от составляю-
щей промаха (АЛ или ДМ) по соответствующей ошибке параметра
движения в конце активного участка (ДУ, А0,...).
В соответствии с этим методом выражения для составляющих
промаха записывают в виде
ДА = АУ + — Д0 + — Ах+ — Az/;
dV д'-) дх ду
ДМ = ДТ+— Az.
дг
320
Глава VI. Динамика баллистических ракет
Для приближенной оценки коэффициентов промаха могут быть
использованы аналитические выражения, полученные из теории
полета ракеты в идеальном центральном поле силы тяжести [10],
[15]. На практике эти коэффициенты обычно вычисляют на ЭЦВМ,
интегрируя уравнения движения ракеты с учетом вращения Земли,
ее несферичности, а также атмосферных условий с момента входа
в плотные слои атмосферы [1].
Для определения характеристик рассеивания ракеты ДА и AM,
очевидно, необходимо знать, помимо коэффициентов промаха
dLfdV, dL/d@ и других, рассеивание параметров движения ракеты
в конце активного участка ДУ, А0 и т. п.
Если для управления скоростью применяется система, работаю-
щая по разомкнутой схеме подобно описанной выше системе
ракеты V-2, то ошибки в скорости в конце активного участка ДУ
определяются исключительно инструментальными и методическими
погрешностями приборов и не зависят от динамических свойств
ракеты.
Для оценки ошибок А0, Ау и Ах в конце активного участка
обычно рассчитывают траектории полета ракеты с учетом возму-
щающих сил и моментов и аппаратурных погрешностей с помощью
цифровых вычислительных машин. Однако для предварительной
приближенной оценки этих ошибок целесообразно использовать
аналитические методы. Одним из таких методов является метод
последовательных приближений, рассматриваемый ниже.
9.2. Оценка точности наведения
методом последовательных приближений
Метод последовательных приближений при оценке точности
наведения баллистической ракеты на активном участке траектории
опирается на использование общего физического свойства возму-
щенного движения летательного аппарата. Хорошо известно, что
продольное возмущенное движение можно представить в виде
суммы двух составляющих: одна из них описывает относительно
быстрые изменения углов атаки и тангажа, другая — более мед-
ленное изменение угла наклона траектории 0 и более медленное
изменение скорости У. Поскольку в данном случае точность на-
ведения определяется отклонением ракеты от программной траек-
тории, то для оценки этой точности необходимо определить вели-
чины А0, Ах и Ау в конце активного участка полета. Таким
образом, нас интересует медленная составляющая движения. Так
как быстрое движение относительно скоро затухает, то оно прак-
тически не сказывается на характере медленного движения. (Более
подробно об этом см. [5]). На использовании отмеченного обстоя-
тельства и основывается метод последовательных приближений.
£ 9. Рассеивание ракет
321
Рассмотрим линеаризованные уравнения продольного движе-
ния баллистической ракеты. Эти уравнения, записанные без учета
вариаций скорости (2'57), имеют вид:
AS- -р ДцАЭ’ д12Ла ~р а13Абв — ai5-^ze>
Ав — а44Д0 — о42Да — о43Дбв = — а45Уе,
Аос -р Ав — АВ- = 0.
(6.23)
К этой системе уравнений необходимо добавить уравнение си-
стемы стабилизации, объединяющее уравнения дифференцирую-
щего фильтра и рулевого привода. Учитывая, что
Дб (р) = К,. хфР2 + 2Ц 1фР + 1
дя (р) к (^p+i)(W+i)(W+1) ’
запишем это уравнение в такой форме:
т3А6 -р m2AS -р До т0Аб = «2AS- 4- AS- 4- «nAS-. (6.24)
Для определения нулевого приближения предположим, что
быстрое движение прекратилось и поэтому все производные от бы-
стро меняющихся координат близки к нулю, т. е.
AS- = AS = Дб = Дб = Лб~ 0.
Тогда можно исходную систему уравнений упростить и вместо
(6.23) и (6.24) записать:
а12Да 4- а13Дб = а15Мгв (t),
А6 — а44ДО — а42Аа — а43Дбв = -- а45Ув (f), 9
Да _р Д0 — AS-= 0, ( ’
т0АЗ — «UAS = 0.
Исключив из этой системы все неизвестные, кроме Ав, получим
линейное дифференциальное уравнение первого порядка с пере-
менными коэффициентами
Д0 4-Р (/) А0 = Q (/), (6.26)
решение которого просто выражается в квадратурах
А0 (/) = ехр
Определив «нулевое» приближение Д0о(/) и подставив его
в (6.26), найдем АОо(^) и Дбо(/). Зная в «нулевом приближении»,
как изменяются координаты Afh и Дбо, после подстановки этих
величин в исходную систему уравнений (6.23) и (6.24) определим
добавочные функции времени, соответствующие ранее отброшен-
ным членам:
Н Заказ 1242
322
Глава VI. Динамика баллистических ракет
Mr(0 = -Ai9-o (0-апАё-о(0;
Nx (/) = «2А&0 (t) + «jA&o (/) — m3A60 (/) — m2A60 (/) — miA60 (t).
Для уточнения полученного решения следует рассчитать первое
приближение с помощью системы уравнений:
а12Аа 4- а13Аб = albMze(t) + ЛМ0;
А0 — а44А0 — а42Аа — а43Аб = — а45Ув (0;
Аа А0 — AS- = 0;
т0Аб — «0А5- = Afj (/).
Решая эту систему уравнений так же, как и систему (6.25),
получим первое приближение. Этот процесс продолжается до тех
пор, пока не будет получен повторяющийся результат. Очень часто
удается ограничиться вычислением нулевого приближения; в более
редких случаях приходится вычислять первое приближение. Здесь
все зависит от соотношения постояннных времени Т и т2 в переда-
точной функции №|(р). В рассмотренном выше примере (см.
рис. 6.6) эти постоянные времени отличались в десятки раз. По-
этому в этом примере при оценке точности с помощью метода
последовательных приближений достаточно определить только
«нулевое приближение».
Определив закон изменения по времени отклонения А0(/),
можно легко рассчитать и отклонения координат х и у.
Из кинематических уравнений
— = V cos О;
dt
= V sin 0
dt
следуют линеаризованные уравнения
— = —VsinOAO;
dt
^ = 7 cos ©АО.
dt
Поэтому для вычисления отклонений координат используются
соотношения
t
. < Ах = — J V sin ©А© (/) dt\
- о
t
*./ f V cos ©А© (/) dt.
§ 10. Заключение
323
Здесь величины К(/) и соответствуют движению по про-
граммной траектории.
9.3. Оценка точности стабилизации бокового сноса
Последний этап расчетов при проектировании заключается
в оценке точности стабилизации координаты z. Все, что говорилось
выше о возмущающих силах и моментах, остается в силе и для
бокового движения с той только разницей, что боковой ветер вы-
зывает возмущение угла скольжения Ар, величина которого опре-
деляется формулой
Л г, , W
A[B = arctg—.
Как и в предыдущем случае, для расчета точности можно восполь-
зоваться аналитическим способом, основанным на применении
метода последовательных приближений.
В этом случае систему дифференциальных уравнений упроща-
ют, полагая равными нулю производные ср, ср, а также производ-
ные от угла поворота руля б, б и т. д. В результате получается
упрощенная система дифференциальных уравнений с переменными
коэффициентами, которую можно свести к одному дифференциаль-
ному уравнению второго порядка относительно переменной z:
z+Az + Bz--=F, (6.27)
где Л(/), B(t) и F(/) —известные функции времени.
Это упрощенное уравнение уже сравнительно нетрудно решить,
используя или методы численного интегрирования, или аналитиче-
ские методы решения дифференциальных уравнений. Найденное
решение определяет нулевое приближение, зная которое, по упро-
щенной системе дифференциальных уравнений можно рассчитать
остальные координаты.
Подставляя нулевое приближение в исходные, неупрощенные
уравнения, можно вычислить поправочные члены и, исправив пере-
менные коэффициенты уравнения (6.27), рассчитать первое при-
ближение. Как и при анализе продольного движения, в большин-
стве случаев оказывается, что достаточно ограничиться нулевым
приближением.
§ 10. ЗАКЛЮЧЕНИЕ
В заключение настоящей главы можно сделать следующие за-
мечания. Рассмотренные примеры анализа автономной системы
управления полетом баллистической ракеты показывают, что от
системы не требуется высоких динамических показателей. Поэтому
основное внимание при коррекции динамических характеристик
приходится обращать на выполнение условий устойчивости, учиты-
вая, что при этом необходимо получить достаточно большое зна-
11*
324
Глава VI. Динамика баллистических ракет
чение передаточного коэффициента разомкнутого контура, которое
определяется из условий точности. В связи с этим при выборе
параметров корректирующих фильтров очень часто используют
построение областей устойчивости, с помощью которых легко вы-
являются значения параметров, обеспечивающих выполнение усло-
вий устойчивости. (Границы областей устойчивости, конечно, по-
лучаются подвижными, так как коэффициенты уравнений движе-
ния ракеты зависят от времени.)
Весьма широкое применение при выполнении всякого рода
расчетов, связанных с анализом систем управления, находит в на-
стоящее время вычислительная техника — моделирующие устрой-
ства и цифровые вычислительные машины. Следует заметить, что
самое широкое внедрение вычислительной техники в практику
расчетов ни в какой мере не снимает необходимость усовершен-
ствования и развития аналитических и графо-аналитических мето-
дов исследования систем управления. Это связано с тем, что
численные методы анализа не дают возможности выявить общие
закономерности, характерные для процессов в исследуемых систе-
мах, и, следовательно, не позволяют вести целеустремленный поиск
наилучших решений, сводя задачу проектирования системы управ-
ления к методу проб. Поэтому наиболее целесообразным при
проектировании систем управления представляется разумное соче-
тание численных расчетов, выполняемых с помощью машин, с по-
исками общих закономерностей, присущих изучаемой системе,
которые производятся с помощью аналитических методов расчета.
ЛИТЕРАТУРА
1. Инерциальные системы управления, Под ред. Д. Питтмана, Воениздат,
1964.
2. Ф е о д о с ь е в В. И., С и н я р е в Г. Б., Введение в ракетную технику,
Оборонгиз, 1960.
3. Остославский И. В., Стражева И. В., Динамика полета. Траек-
тории летательных аппаратов, Оборонгиз, 1963.
4. Селезнев В. П., Навигационные устройства, Оборонгиз, 1961.
5. Лебедев А. А.. Чернобровкин Л. С., Динамика полета, Оборон-
гиз, 1962.
6. Типугин В. Н., Вейцель В. А., Радиоуправление, «Советское радио»,
1962.
7. Ко ой И., Ютенбогарт И., Динамика ракет, Оборонгиз, 1950.
8. Мюллер Ф., Телеуправление, ИЛ, 1957.
9. Бургес Э., Управляемое реактивное оружие, ИЛ, 1958.
10. Алексеев К. Б., Бебенин Т. Т., Управление космическим летатель-
ным аппаратом, «Машиностроение», 1964.
11. Пелегрен М., Статистический расчет следящих систем, ИЛ, 1957.
12. Солодовников В. В., Топчеев Ю. И., Крутикова Г. В., Час-
тотный метод построения переходных процессов, Гостехтеоретиздат, 1955.
13. Цянь Сюэ Сень, Техническая кибернетика, ИЛ, 1957.
14. Доброленский Ю. П'., Иванова В. И., Поспелов Г. С., Авто-
матика управляемых снарядов, Оборонгиз, 1963.
15. Уиллон А., Свободный полет баллистической ракеты, «Вопросы ра-
кетной техники», 1960, № 7.
Глава VII
ДИНАМИКА ТЕЛЕУПРАВЛЯЕМЫХ РАКЕТ
§ 1. ВВЕДЕНИЕ
В гл. I, в которой рассматривалась классификация систем на-
ведения беспилотных объектов, было указано, что для систем теле-
наведения наиболее характерной чертой является управление
движением ракеты с помощью команд, которые формируются вне
ракеты, на командном пункте. Этот командный пункт может
находиться на земле, как это имеет место при управлении зенит-
ными управляемыми ракетами, на самолете — при управлении
авиационными противосамолетными ракетами или ракетами, от-
носящимися к классу «воздух — земля» и т. д.
По принципу действия системы теленаведения ракет представ-
ляют собой обычные телемеханические системы, теория и техника
которых были в достаточной степени развиты, а сами системы при-
менялись задолго до появления первых управляемых ракет.
По этой причине первые системы управления ракетами были
системами теленаведения.
Всякая система теленаведения имеет устройства управления
и контроля. Устройства телеконтроля дают возможность судить
о взаимном положении и движении в пространстве ракеты и цели.
Основными устройствами здесь являются радиолокационные
и радионавигационные системы. Однако для определения коорди-
нат ракеты и цели можно использовать любой вид энергии, излу-
чаемой или отражаемой ракетой и целью. Поэтому устройства
телеконтроля могут быть визуальными, тепловыми и т. д. Способы
контроля за положением ракеты могут отличаться от способов
контроля за положением цели, так как на управляемой ракете
можно установить специальные приборы, так называемые ответчи-
ки, облегчающие контроль положения ракеты (1], [12].
Определение положения ракеты и цели и сравнение их коорди-
нат позволяют на основании принятого метода наведения сформи-
ровать команды управления, которые вырабатываются или опера-
тором, или автоматически в устройстве выработки команд, пред-
ставляющем собой специальный счетно-решающий прибор. В по-
326
Глава VII. Динамика телеуправляемых ракет
следнем случае система теленаведения становится полностью
автоматической системой, так как исполнение команд на борту
ракеты осуществляется автоматически, без участия пилота.
Полностью автоматизированная система теленаведения являет-
ся системой автоматического управления с замкнутой цепью воз-
действия, в которой для передачи информации используются
средства телемеханики.
Сформированные команды с помощью устройств телеуправле-
ния передаются на борт ракеты. В состав устройства телеуправле-
ния входят шифратор, передающее устройство, линия связи,
приемное устройство и дешифратор. Команды управления, выра-
ботанные оператором или в устройстве выработки команд, коди-
руются в шифраторе и передаются по линии связи на ракету. На
борту ракеты принятые сигналы декодируются и передаются
к исполнительным устройствам для автоматического исполнения
команды.
Кодирование передаваемых сигналов управления имеет целью
повышение помехоустойчивости системы и передачу по одной
линии связи нескольких команд одновременно.
Для передачи сигналов с командного пункта на ракету приме-
няются проводные линии связи и линии связи, основанные на пере-
даче электромагнитной энергии, когда используются электромаг-
нитные волны видимого, инфракрасного и радиотехнического диа-
пазонов.
Наиболее часто в каналах контроля и управления систем
теленаведения применяют радиотехнические средства. Однако в не-
которых случаях более целесообразными могут оказаться визуаль-
ный и тепловой методы контроля.
Таким образом, в полностью автоматизированной системе теле-
наведения, в которой используются радиотехнические средства
контроля и управления, на командном пункте должны находиться
радиолокационные станции для измерения координат цели и раке-
ты, специальный счетно-решающий прибор для вычисления по
результатам измерения координат цели и ракеты отклонений
ракеты от желаемой траектории и формирования команд управле-
ния, а также передатчик, передающий эти команды на борт раке-
ты. Все это оборудование будем называть станцией наведения (см.
рис. 1.7).
В некоторых случаях для измерения координат ракеты и цели
используется один радиолокатор. Реализация такого варианта воз-
можна, если траектория ракеты при принятом методе наведения не
выходит за пределы луча радиолокатора, следящего за целью. Оче-
видно, что применение двух радиолокаторов для измерения коорди-
нат ракеты и цели позволяет более свободно выбирать метод наве-
дения и, в частности, использовать методы наведения с упрежде-
нием.
§ 1. Введение
327
Можно представить себе вариант реализации системы телена-
ведения, когда сложная радиолокационная система и система пере-
дачи команд обеспечивает одновременное и независимое слежение
за несколькими целями и наведение нескольких ракет [2]. Для
рассмотренного «классического» способа теленаведения характер-
но, что управление движением ракеты осуществляется с помощью
команд управления, формируемых на командном пункте и пере-
дающихся по линии связи на борт ракеты. Поэтому такие системы
теленаведения, как это было указано в гл. I, называют командны-
ми, или системами с линией связи.
Но существует и другая разновидность систем теленаведения,
не требующая наличия устройств для передачи командных сигна-
лов. Основным элементом таких систем является управляющий
луч, или «тропа», который создается специальной установкой на
станции наведения. В этом случае на борту ракеты имеется устрой-
ство для автоматического определения положения ракеты в луче.
При отклонении ракеты от оси луча на выходе этого устройства
вырабатывается сигнал, пропорциональный этому отклонению [12].
Таким образом, формирование команды управления происходит
на борту ракеты, а на станции наведения задается определенная
линия в пространстве, вдоль которой ракета должна двигаться.
(В некоторых случаях вместо луча используется направляющая
плоскость).
Наведение ракеты обеспечивается перемещением луча таким
образом, чтобы ракета, все время движущаяся вдоль него, попала
в цель. В простейшем случае в качестве управляющего луча может
использоваться равносигнальная зона радиолокатора, следящего
за целью. В этом случае ракета будет все время удерживаться на
линии визирования цели. В более общем случае для формирова-
ния радиолуча необходим специальный радиолокатор .[1], [12]. Для
создания луча можно также использовать не только радиоволны,
но и видимые, и инфракрасные лучи.
В рассматриваемом случае, как это было указано, систему
теленаведения называют системой наведения по лучу.
Кроме рассматриваемых двух возможных вариантов реализа-
ции систем теленаведения, можно использовать и навигационные
системы, которые по принципу действия не отличаются от систем,
применяющихся для навигации самолетов и кораблей. Краткое
изложение этих принципов можно найти в литературе (3], [4], [14].
Рассматривая функциональную схему командной системы теле-
наведения, представленную на рис. 1.7, можно видеть замкнутый
контур наведения, характерный для подавляющего большинства
систем автоматического управления. Основными внешними управ-
ляющими воздействиями здесь являются изменения координат
движущейся цели. На основании измеренных координат цели
п ракеты устройство выработки команд, представляющее счетно-
328
Глава VII. Динамика телеуправляемых ракет
решающий прибор, вычисляет команды, которые по линии связи
передаются на борт ракеты. Вся система имеет два, в первом при-
ближении независимых, канала управления по высоте и направле-
нию. Счетно-решающий прибор прежде всего вычисляет парамет-
ры траектории, по которой должна лететь ракета при имеющем
место законе движения цели. Характер этой расчетной траектории
зависит как от закона движения цели, так и от принятого метода
наведения. Метод наведения должен обеспечивать необходимую
точность наведения и простоту вычисления расчетной траектории,
причем эта траектория по возможности должна приближаться
к прямолинейной.
В результате сравнения измеренных координат ракеты с ко-
ординатами рассчитанной и соответствующей методу наведения
траектории в устройстве выработки команд определяется отклоне-
ние ракеты от этой расчетной траектории.
Так как применяющиеся методы наведения ракет обеспечивают
непрерывное сближение ракеты с целью, то величину отклонения
ракеты от расчетной траектории можно определить путем сравне-
ния угловых координат ракеты и расчетной траектории, определен-
ных для текущего момента времени. Но при больших расстояниях
ракеты от станции наведения даже небольшим угловым отклоне-
ниям ракеты от расчетной траектории могут соответствовать боль-
шие линейные отклонения. • Если учесть, что в конечном счете
точность наведения ракеты на цель определяется тем минималь-
ным расстоянием между центром цели и ракеты, которое может
быть достигнуто в процессе наведения, то станет очевидным, что
за ошибку наведения, на основании которой формируется команда
управления, следует принять линейное отклонение ракеты от рас-
четной траектории. Это линейное отклонение равно произведению
углового отклонения на расстояние между ракетой и станцией
наведения. Поэтому в устройство выработки команд в случае
управления по линейному отклонению должно входить устройство
для пересчета угловых отклонений в линейные.
При наведении по лучу на борту ракеты на выходе бортового
приемника также формируется сигнал, пропорциональный угло-
вому отклонению ракеты от оси луча, измеряемому в полярной
системе с началом, совмещенным с местом расположения устрой-
ства, создающего луч (рис. 7.1). Поэтому и здесь при желании
управлять по линейному отклонению A/z = гДе должно использо-
ваться пересчетное устройство [5].
Для выполнения указанного преобразования необходимо из-
мерять расстояние от станции наведения до ракеты. В том случае,
когда закон изменения этого расстояния мало зависит от условий
наведения, величину г можно вводить с помощью программ-
ного механизма, рассматривая ее как заданную функцию вре-
мени.
§ 1. Введение
329
После определения в той или иной форме отклонения ракеты
от расчетной траектории, характеризующего ошибку системы теле-
наведения, в устройстве выработки команд формируется команда
управления. Для ее формирования используются различные зако-
ны управления, известные в теории автоматического регулирова-
ния. Так, например, в простейшем случае можно управлять движе-
нием ракеты по отклонению, формируя команду, пропорциональ-
ную отклонению ракеты от расчетной траектории. В более слож-
ных случаях можно управлять по отклонению и производным от
отклонения или вводить интегралы от отклонения в закон форми-
рования команды и т. д. Выбор закона формирования команды
или, другими словами, закона управления связан с анализом
качества и точности системы наведения и имеет своей конечной
целью улучшение динамических характеристик системы.
Рис. 7.1. к определению линейного отклонения
ракеты
Таким образом, систему теленаведения можно рассматривать
как систему автоматического управления положением ракеты от-
носительно некоторой расчетной траектории (или оси луча), со-
ответствующей принятому методу наведения.
В последующих разделах для определенности будут рассмат-
риваться системы теленаведения ракет класса «земля — воздух»,
т. е. зенитных, хотя эти системы наведения можно использовать
и применительно к ракетам класса «воздух — воздух» и «воздух —
земля» [3]. Этим последним вариантам соответствуют более слож-
ные кинематические уравнения движения, так как станция наве-
дения располагается на подвижном основании — на борту само-
лета-носителя, перемещающегося в пространстве.
При этом надо иметь в виду особенность системы теленаведе-
ния зенитных управляемых ракет, заключающуюся в том, что
ракета имеет два этапа наведения. Первый этап наведения связан
с выводом ракеты непосредственно к расчетной, кинематической
траектории (точка В на рис. 7.2). На этом этапе ракета может
управляться со станции наведения или по программе с помощью
автономной системы наведения. В некоторых случаях на первом
330
Глава VII. Динамика телеуправляемых ракет
этапе движением ракеты -совсем не управляют, но вычисляют
стартовые углы так, чтобы ракета в кратчайшее время к моменту
окончания работы стартового ускорителя вышла на кинематиче-
скую траекторию или попала в радиолуч [6], [10], [21]. На втором
этапе начинается наведение ракеты в соответствии с принятым
Рис. 7.2. Вывод и наведение
телеуправляемой ракеты
методом.
Наличие двух этапов связано с тем, что сразу же после старта
имеются очень большие отклонения ракеты от расчетной траекто7
рии и в то же время основной задачей на первом этапе является
быстрый разгон ракеты до большой
скорости. Этот разгон может быть
настолько интенсивным и быстрым,
что в этот период нормальное наве-
дение ракеты исключается.
Ввиду того, что эффективность
системы наведения существенно за-
висит от эффективности боевой ча
сти ракеты, а также и от летно-
технических характеристик- ракеты,
проектирование системы наведе-
ния производится не изолиро-
ванно, а в тесной связи с проек-
тированием ракеты и ее боевой ча-
сти [6].
Задача проектирования решает-
ся с помощью анализа нескольких различных вариантов системы,
причем одной из основных характеристик, которую определяют
при анализе, является точность системы. Аналитическое исследова-
ние точности системы можно провести только приближенно, причем
основным методом упрощения задачи является линеаризация урав-
нений и фиксация («замораживание») коэффициентов. Как будет
показано ниже, метод фиксации коэффициентов при анализе си-
стем теленаведения не дает таких больших погрешностей, которые
имеют место при анализе систем самонаведения, что связано с не-
которой особенностью кинематических уравнений. По этой причине
при анализе систем теленаведения можно широко применять мето-
ды линейной теории автоматического регулирования, в том числе и
частотные методы.
В последующих разделах настоящей главы будут последова-
тельно рассмотрены следующие вопросы.. Вначале будут рассмот-
рены упрощенные методы расчета возможных маневров самолета,
рассматриваемого как цель для ракеты класса «земля — воздух».
Необходимость этого связана с тем, что движение цели является
в системе теленаведения основным управляющим воздействием
и поэтому маневр цели может оказывать сильное влияние на
точность системы, так как известно, что точность любой автомати-
§ 2. Маневренные свойства воздушных целей
331
ческой системы управления зависит не только от характеристик
и параметров этой системы, но и от характера внешних воздей-
ствий, приложенных к ней.
Далее будут рассмотрены вопросы, связанные с кинематиче
ским анализом движения ракеты при теленаведении. Для примера
будет исследован метод наведения ракеты по «трехточечной»
траектории. Затем после краткой характеристики основных элемен-
тов систем теленаведения будет составлена расчетная структурная
схема и показано, как известные методы теории автоматического
регулирования можно использовать для исследования динамиче-
ских свойств системы теленаведения.
§ 2. МАНЕВРЕННЫЕ СВОЙСТВА ВОЗДУШНЫХ ЦЕЛЕЙ
Основным классом целей для зенитных управляемых ракет
являются самолеты, хотя в настоящее время такими целями могут
быть и боевые головки баллистических ракет. Из самолетов наи-
более важным классом целей для зенитных ракет являются бом-
бардировщики, особенно бомбардировщики дальнего действия.
Для того чтобы уйти от атаки, атакуемый бомбардировщик совер-
шает противозенитный маневр, заключающийся в изменении высо-
ты, курса и скорости через неравномерные интервалы времени.
Отсюда следует, что любая система теленаведения зенитной раке-
ты должна проектироваться с учетом возможных противозенитных
маневров самолетов-целей.
Если иметь в виду в качестве целей только бомбардировщики,
то такие самолеты могут выполнять только простой пилотаж:
разгон и торможение горизонтально и под углом к горизонту, раз-
ворот, вираж и спираль. Основными элементами этих маневров
являются горизонтальный разгон и торможение, вход в пикирова-
ние и пикирование с ограниченным углом к горизонту, выход на
горку и горка с ограниченным углом, правильные виражи. Основ-
ными параметрами маневра являются законы изменения скорости,
высоты, касательное и нормальное ускорение. Все маневры огра-
ничиваются диапазоном скорости от некоторой минимальной до
максимальной (или критической) и максимально допустимыми
перегрузками, ограниченными прочностью конструкции, возмож-
ностями экипажа или высотой.
Рассмотрим упрощенные методы расчета основных элементов
маневров. (Подробные исследования различных маневров само-
лета см. в [8], [25]). Для расчета прямолинейного разгона и тормо-
жения под углом к горизонту можно исходить из упрощенных
уравнений продольного движения
= Р — X — mg sin 0;
О = Y — mg cos 0.
332
Глава VII. Динамика телеуправляемых, ракет
Из этих уравнений можно определить продольное ускорение
самолета
V „ = —---g cos 0 —---g sin 0.
Если известна поляра самолета и кривая располагаемых тяг,
соответствующая максимальному режиму работы двигателя, то
можно рассчитать Уч, как функцию Уч и 0 для заданной высоты
в режиме разгона. Действительно, задаваясь различными значе-
ниями Уц в пределах от V4mln до V^max, можно определить для
2 mg cos 0
каждого значения скорости Уц величину су = „,,2 , затем по
Р
поляре сх и, имея кривую располагаемых тяг, рассчитать Уч.
Таким образом можно построить кривую Уц = f(Vy, 0). Имея
этот график, нетрудно рассчитать для заданной высоты Н и угла©
зависимость скорости от времени Vy(t). Аналогично рассчитывает-
ся и режим торможения, для чего используется кривая распола-
гаемых тяг, соответствующая минимальному режиму работы
двигателя.
Для расчета правильного виража, т. е. полета по кругу на по-
стоянной высоте и с постоянной скоростью, можно исходить из
следующих упрощенных соотношений:
Y cos у = mg;
V2
тУ,1'Ф' = т — = Y sin у,
ц R 1>
где R — радиус виража;
у — угол крена.
Если обозначить поперечную перегрузку самолета как
У 1
пу =---- =------,
а mg cos у
то тогда
sinY=!__^— и 1.
пу
Диапазон скоростей самолета при выполнении правильного
виража меньше, чем при горизонтальном полете. При одном и том
же значении угла атаки скорость самолета должна быть больше
скорости горизонтального полета в соответствии с соотношением
V
iz I/ -и 77 Ч-еоР
Vц.вир — Vц.гор V пу — —.
У cosy
Задаваясь различными углами крена у, можно определить диа-
пазон скоростей и величину радиуса виража.
§ 2. Маневренные свойства воздушных целей
333
Нетрудно рассмотреть и более общий случай горизонтального
маневра — вираж с переменной скоростью. Для этого следует вос-
пользоваться соотношением V4 = f(V4), определенным для задан-
ной высоты и угла © = 0, что было уже рассмотрено. Кроме того,
из найденного соотношения следует, что
vu
ПОЭТОМУ
dV4 __ V4f(V^
Если предположить, что для бомбардировщика угол крена утах
не превышает 60—70°, то поэтому «»max — 24-3 (при правильном
вираже).
При расчете входа в пикирование или на кабрирование необхо-
димо численно решать систему уравнений:
mVu — Р — X —mg sin 0;
mV fl) = Y — mg cos 0
или воспользоваться следующим приближенным способом. Так как
V2
m = У — mg cos 0, то отсюда
диус кривизны траектории выхода
ние значения переменных величин
V2
d — ц,ср _________________________
1\Ср
ё рср COS
Если в начале траектории 0 = 0, а конечное значение угла 0
равно 01, то
V2 1
R = —~ ~ где R — ра-
g п — cos О’ 1
на пикирование. Введем сред-
(7-1)
/ 1 Ч” cos th л t)^
(cos 0)ср = -X-—1 = cos2 -X .
Так как 0j задается, то требуется определить V4.cp и Rcp.
Составляя уравнение работы сил, получим (для пикирования)
mV2 mVY
----= Vfl — *fl S + mgy,
где у = Дср(1 —cos 01) — потеря высоты на участке входа в пи-
кирование;
5 = Rcptdi — длина дуги участка входа.
Если определить среднюю скорость Кср соотношением
(/2 _ ^1+^0
Vcp-------2 ’
334
Глава VII. Динамика телеуправляемых ракет
где V-цв — скорость в начале участка входа в пикирование, а
Vvl — скорость в конце этого участка, то тогда
V2 — V2
Г) __ ___________ср___ц 0________
'СР . р у
/ г ср ^ср \
g 1 — COS
\ - mg !
Из уравнений (7.1) и (7.2) можно определить VCP и Rcp как
функции Уц0 и 01. Продольное и нормальное ускорение самолета
можно определить из формул
V2 — V2,,
ср v ич
(7.2)
V2
и =
Rcp^i RcP
Скорость самолета в конце участка входа в пикирование будет
равна __________
у
у ср
той лишь
(7.2) на-
V«i = /2Vc2p-^0.
Вход на кабрирование можно
рассчитать аналогично,
разницей, что
до переписать
С
уравнение
так:
V2 — V2
ср ц:-
Vo
Рис. 7.3. Траектория входа
в пикирование
Rcp
Рср %ср \
g | ------- bj — 1 4- COS t)J
Указанные расчетные соотноше-
ния поясняет рис. 7.3.
характеристик маневра: скорости
Кроме расчетов основных
и ускорений, иногда рассчитывают и строят границы области воз-
можных местонахождений цели, характеризующие ее маневренные
возможности. Такая граница является геометрическим местом
точек, наиболее удаленных по всем возможным направлениям от
исходной точки маневра, которые может достигнуть маневрирую-
щая цель при заданном времени движения. Если исследуется
только горизонтальный маневр, то для оценки его эффективности
определяют сечение этой границы горизонтальной плоскостью.
Обычно строят семейство таких границ для различных значе-
ний времени движения [9], [10]. При всех указанных построениях
и расчетах учитывают предельные маневренные возможности само-
лета. В большинстве случаев они ограничиваются некоторой мак-
симально допустимой величиной перегрузки, которую в состоянии
выдержать экипаж самолета. Это предельное значение максималь-
ной поперечной перегрузки обычно лежит в пределах от 5 до 7
и зависит от типа самолета. Следует также иметь в виду, что
с приближением самолета к потолку (максимальной высоте поле-
та) значение перегрузки ограничивается уже маневренными воз-
можностями самолета и убывает.
§ 3. Методы теленаведения
335
§ 3. МЕТОДЫ ТЕЛЕНАВЕДЕНИЯ
Для решения основной задачи наведения необходимо управлять
движением ракеты так, чтобы в процессе наведения происходило
непрерывное сближение ракеты с целью и в конечном счете, чтобы
ракета пролетела около цели на возможно меньшем расстоянии
от нее, не превышающем некоторого максимально допустимого.
Решить эту задачу можно с помощью различных методов наведе-
ния, определяющих требуемый закон движения ракеты. От выбора
метода наведения зависит не только характер траекторий ракеты
и, следовательно, потребные перегрузки, но и функциональная схе-
ма системы наведения и состав аппаратуры, необходимый для ее
реализации. Таким образом, при формировании схемы системы
наведения необходимо знать, какой метод наведения требуется
реализовать. Поэтому прежде всего необходимо более подробно
рассмотреть понятие метода наведения и познакомиться с некото-
рыми методами теленаведения.
3.1. Понятие метода наведения
телеуправляемых ракет
Чтобы выяснить некоторые общие соотношения, рассмотрим
схему, поясняющую особенности кинематики движения телеуправ-
ляемой ракеты. Для уп-
рощения общей картины
движения будем рас-
сматривать плоское дви-
жение ракеты, предпола-
гая, что цель летит с по-
стоянной скоростью по
прямолинейной траекто-
рии. В этом случае тра-
ектория ракеты будет ле-
жать в плоскости, прохо-
дящей через прямоли-
нейную траекторию цели
и командный пункт. Эту
плоскость будем назы-
вать плоскостью сближе-
ния. В общем случае эта
плоскость может состав-
лять с вертикалью неко-
торый угол А,.
Основные геометрические соотношения, характеризующие дви-
жение ракеты, следуют из рис. 7.4. На этом рисунке точка Ц со-
ответствует центру масс цели, точка Р — центру масс ракеты, а
точка О соответствует положению командного пункта, или точнее.
336
Глава VII. Динамика телеуправляемых ракет
положению устройств, измеряющих координаты цели и ракеты.
Обозначения углов соответствуют случаю, когда плоскость сбли-
жения является вертикальной.
Запишем полную систему уравнений плоского движения ракеты,
включая в нее и упрощенные уравнения динамики продольного
движения:
1) & и1]Э' 4- 4” — О,
2) 0 -- а42а 4- ai38e,
3) & = 0 + а,
4) г = V cos (0 — ср),
5) r<f = V sin(0 — ср),
6) 7) = 0 ----<р,
7) ; = т] 4- а-
(7-3)
Последние четыре уравнения характеризуют геометрию движе-
ния и являются кинематическими уравнениями.
Для достижения конечной цели наведения, геометрическим
эквивалентом которой является совмещение точек Р и Ц, необхо-
димо управлять движением центра масс ракеты так, чтобы в про-
цессе наведения г-*-гч, а угол Дер = ср — <рч, который называют
углом упреждения, был равен нулю в тот момент, когда г = гч.
Для решения этой задачи необходимо на движение ракеты на-
ложить некоторые связи. Эти связи и формируются системой на-
ведения. Поэтому для исследования движения телеуправляемой
ракеты к системе уравнений (7.3) необходимо добавить уравнения,
характеризующие работу системы наведения.
Одним из этих уравнений является уравнение, определяющее
ошибку наведения в, на измерении и использовании которой
и строится вся работа системы наведения. В общем случае ошибку
наведения в можно определить с помощью уравнения
е = Ж, ?*. V*, 0*, ...) —/(г, <р, V, 0, ...) (7.4)
как разность функций от требуемых и фактических параметров
движения. Таким образом, ошибка наведения определяет отклоне-
ние характеристики действительного движения от характеристики
некоторого теоретического движения. Сигнал ошибки формируется
с помощью сигналов координаторов ракеты и цели (устройств, из-
меряющих координаты ракеты и цели относительно командного
пункта) и, возможно, других измерительных элементов, находя-
щихся на борту ракеты. На основании измерения сигнала ошибки
формируется сигнал наведения, который в конечном счете исполь-
зуется для приведения в действие органов управления ракеты
§ 3. Методы теленаведения
337
и управления нормальными перегрузками. В рассматриваемом
случае этими органами управления будут рули высоты, отклонение
которых характеризуется величиной <%.
В результате этих рассуждений и с учетом общего принципа
действия систем теленаведения можно составить укрупненную
блок-схему. На рис. 7.5 приведена такая схема для командной
системы теленаведения, на которой указаны связи между основны-
ми звеньями в самом общем виде. Как и должно быть у системы,
работающей по принципу измерения отклонений, на схеме появи-
лись цепи обратных связей.
Представленная на рис. 7.5 блок-схема является самой общей
схемой командной системы теленаведения, более детальное рас-
Рис. 7.5. Блок-схема командной системы теленаведения:
I — цель; II — кинематическое звено; III — станция наведения; IV — система
стабилизации; V — ракета; VI — кинематическое звеио
смотрение которой проводится в последующих разделах настоя-
щей главы.
Уравнение (7.4), задающее способ определения ошибки наве-
дения, определяет и метод наведения, так как заданием уравнения
ошибки определяется характер требуемого теоретического движе-
ния. Таким образом, метод наведения определяется заданием
уравнения, с помощью которого вводятся дополнительные связи,
накладываемые на движение ракеты.
Но уравнение ошибки (7.4) является не единственным уравне-
нием системы наведения. Таким уравнением в общем виде являет-
ся уравнение (см. рис. 7.5)
6g = f(V, 0, &, а, г, <р, (7.5)
которое в развернутой форме представляет сложную систему диф-
ференциальных уравнений, характеризующую динамические свой-
ства всех элементов системы наведения. Поэтому, строго говоря,
338 Глава VII. Динамика телеуправляемых ракет
метод наведения определяется и задается именно этим, полным,
уравнением системы наведения, включающим в себя и уравнение
ошибки, так как от способа задания этого уравнения зависят
и свойства траектории ракеты, и точность наведения, и многие
другие важные характеристики системы.
С учетом этого метод наведения можно определить как способ
задания динамических характеристик системы наведения. Задачу
формирования метода наведения можно рассматривать как задачу
динамической точности, используя для ее решения все известные
методы теории автоматического управления, в частности, методы
оптимизации динамических характеристик. Такой подход вполне
отвечает современному развитию теории автоматического управле-
ния и начинает находить все более широкое применение, хотя
и является весьма сложным.
Более простым способом задания метода наведения, имеющим
наиболее широкое распространение в настоящее время {6], [9],
является способ, основанный на использовании в качестве уравне-
ния, определяющего метод наведения, уравнения ошибки (7.4),
а не уравнения всей системы наведения. Уравнение метода наве-
дения получают из уравнения ошибки (7.4), предполагая, что
ошибка равна тождественно нулю. В этом случае движение ракеты
точно соответствует требуемому закону и поэтому можно не при-
нимать во внимание уравнений динамики системы наведения.
При исследовании свойств методов наведения в такой постанов-
ке в очень многих случаях можно отвлечься и от учета уравнений
динамики ракеты. Это в значительной степени упрощает исследо-
вание свойств метода наведения, так как для расчета соответ-
ствующих методу траекторий приходится решать только кинема-
тические уравнения движения ракеты с добавлением к ним
уравнения ошибки (7.4). По этой причине такой метод исследова-
ния называется кинематическим, а сам метод наведения при таком
подходе можно определить как способ задания кинематической
траектории ракеты.
Естественно, что при таком подходе к определению метода на-
ведения вопросы точности не принимаются во внимание, а сам
метод формируют исходя главным образом из стремления получить
возможно более примолинейную траекторию, требующую для своей
реализации возможно меньших потребных перегрузок.
При таком способе определения метода наведения формирова-
ние структуры и выбор параметров системы наведения как бы
распадается на два этапа. На первом этапе выбирают структуру
системы наведения исходя из принятого кинематического метода
наведения, обеспечивающего некоторый подходящий характер
траекторий, а на втором этапе рассчитывают параметры системы
так, чтобы удовлетворить требованиям точности. Естественно, что
при этом может возникнуть противоречие между методом наведе-
§ 3. Методы теленаведения
339
ния и требованиями точности, которая при кинематическом иссле-
довании метода наведения не может быть выявлена. Но в то же
время кинематический метод позволяет сравнительно просто, во
многих случаях в общем виде, исследовать свойства траекторий,
определить потребные перегрузки, произвести сравнительный
анализ различных методов наведения между собой.
3.2. Классификация методов теленаведения
Все методы теленаведения, определяющие взаимное расположе-
ние трех точек — цель, ракета и крмандный пункт, т. е. трехточеч-
ные методы, можно разделить на две группы. К первой группе отно-
сится метод наведения, для которого кинематическая траектория
определяется заданием условия Д<р = О (см. рис. 7.4) или эквива-
лентного ему условия ф = <рч. Так как в этом случае для точного
выполнения условия наведения ракета должна всегда находиться
на прямой ОЦ, на линии командный пункт — цель, то этот метод
называют методом совмещения, или методом накрытия цели.
Метод совмещения для своей реализации требует измерения
только угловых координат ракеты и цели <р и срч, так как для
определения ошибки наведения е = <рч — <р достаточно измерять
только эти координаты. Но исследование траекторий ракеты, ха-
рактерных для этого метода наведения, показывает, что эти траек-
тории сильно искривлены и для движения по ним ракета должна
обладать относительно большими располагаемыми перегрузками.
Кроме того, как будет видно из дальнейшего изложения, при на-
ведении'ракеты по траекториям -с большой кривизной могут иметь
место большие динамические ошибки наведения.
Для спрямления траекторий ракеты и уменьшения указанных
ошибок ракету можно наводить в упрежденную точку. Таким обра-
зом, кс второй группе методов теленаведения относятся так называ-
емые методы теленаведения с упреждением.
Для того чтобы пояснить понятие упрежденной точки, рас-
смотрим идеализированный случай. Предположим, что закон дви-
жения цели точно известен или, другими словами, известна траек-
тория цели и положение цели на траектории в любой момент вре-
мени.
Предположим также, что известен закон изменения скорости
ракеты по времени. Тогда, построив прямолинейную траекторию
ракеты, можно разметить на ней последовательные положения ра-
кеты в любой момент времени. Очевидно, в этом случае (рис. 7. 6)
на траектории цели всегда можно найти такую точку, время движе-
ния до которой у цели и ракеты будет одним и тем же. Эта точка и
будет упрежденной точкой встречи. На рис. 7. 6 указаны последова-
тельные положения ракеты и цели в одни и те же моменты времени,
причем точкой встречи является точка Р-,. Задача, связанная с оп-
340
Глава VII. Динамика телеуправляемых ракет
ределением упрежденной точки, может быть решена или аналити-
чески, или графически в зависимости от способа задания закона
движения цели и ракеты.
Но на самом деле закон движения цели никогда не бывает
известен и можно только строить более или менее обоснованные
предположения о ее будущем движении. Поэтому при определении
положения упрежденной точки задаются гипотезой о характере
движения цели. В простейшем случае можно предположить, что
цель
летит по прямой с постоянной скоростью. Более сложным
будет предположение о дви-
жении цели с постоянным нор-
мальным ускорением и т. д.
Конечно, нетрудно задаться
самой сложной гипотезой о
движении цели, но для вычис-
ления положения упрежден-
ной точки в соответствии с
принятой гипотезой необходи-
мо знать текущие и прошлые
значения параметров движе-
ния цели — ее координат и
производных от координат.
Причем, чем более сложной
гипотезой задаются, тем более
от координат цели необходимо
Рис. 7.6. Наведение в истинную
точку встречи
высоких порядков производные
знать. Но так как координаты цели всегда определяются с ошибка-
ми, носящими случайный характер, то с еще большими ошибками
будут определяться их производные — скорости, ускорения и т. д.
Исходя из этого на практике не идут дальше определения первых
производных от координат, поэтому положение упрежденной точ-
ки определяют исходя из простейших гипотез о движении цели.
Решение самой задачи определения местоположения упрежден-
ной точки производится аналогично тому, как это делается при
стрельбе обычной зенитной артиллерии с помощью специального
счетно-решающего прибора [111]. Существенное различие, которое
имеет здесь место, состоит в том, что при стрельбе артиллерийски-
ми снарядами упрежденная точка встречи рассчитывается только
один раз — непосредственно перед выстрелом, а при стрельбе
управляемыми ракетами положение упрежденной точки непрерыв-
но перерассчитывается с учетом параметров движения цели и ра-
кеты. В соответствии с этим движением ракеты управляют так,
чтобы она все время направлялась в эту текущую, «мгновенную»
упрежденную точку встречи.
В связи с тем, что истинный закон движения цели не известен
и измерения необходимых координат выполняются с ошибками,
положение упрежденной точки не остается постоянным и она пере-
§ 3. Методы теленаведения
341
мешается в пространстве. По этой причине и с учетом того, что
ракету всегда стремятся направить в упрежденную точку, опять
можно говорить о методе совмещения, но только теперь необходи-
мо удерживать ракету на прямой, проходящей через пункт управ-
ления и упрежденную точку. Так как упрежденная точка даже при
использовании простейших гипотез о движении цели перемещается
в большинстве случаев медленнее, чем цель, то траектория ракеты
спрямляется. Это в свою очередь приводит к уменьшению потреб-
ных перегрузок ракеты и динамических ошибок наведения.
Следует иметь в виду, что наведение ракеты в упрежденную
точку встречи усложняет станцию наведения. Это связано с тем,
что нужен более сложный счетно-решающий прибор, вырабаты-
вающий команды для управления нормальными перегрузками или
наведения луча. Кроме того, угловые координаты ракеты и цели
здесь не совпадают, как это имеет место при использовании метода
совмещения, а различаются на величину углового упреждения
Дф = Ф—фч (см. рис. 7.4). Угол упреждения Дф может быть осо-
бенно велик в начале наведения. Это требует применения на стан-
ции наведения двух устройств для измерения координат, например,
двух радиолокаторов, из которых один следит за целью, а другой за
ракетой [3], [12], [13].
Очевидно, что в процессе наведения при сближении ракеты
с целью угол упреждения Дф постепенно уменьшается и в момент
встречи ракеты с целью становится равным нулю, так как в этот
момент фч = ф. Такой метод теленаведения называют иногда мето-
дом «углового сближения» [13].
Можно задавать различные законы или программы изменения
угла упреждения, получая при этом различные методы наведения
с упреждением. Анализируя эти законы совместно с кинематиче-
скими уравнениями, можно выбирать параметры этих законов так,
чтобы получить траектории, удовлетворяющие каким-либо задан-
ным особым требованиям, например, требованию минимальных
потребных перегрузок, требованию минимального отклонения от
баллистической траектории свободного падения и т. д. [13].
Очень часто метод наведения определяют заданием закона из-
менения угла упреждения Дф в зависимости от координат ракеты
и цели г, ф, гц и (рц, а также их производных. Это связано с тем,
что характер сближения ракеты с целью зависит от изменения
именно этих координат.
Таким образом, уравнение метода наведения с упреждением
можно задать в следующей общей форме:
Д<Р = Д<р(г, <р, Гч, <рч, Г, <р, Г,(, <рч,...).
Единственное условие, которому обязательно должна удовле-
творять программа изменения угла упреждения, состоит в том,
чтобы при равенстве расстояний от станции наведения до ракеты
342
Глава VII. Динамика телеуправляемых ракет
и до цели угол упреждения обращался бы в нуль. Поэтому при
применении методов наведения с упреждением, кроме измерения
угловых координат цели и ракеты, необходимо измерять расстоя-
ния до цели и ракеты, что усложняет аппаратуру и уменьшает
помехоустойчивость системы наведения.
С учетом этого обстоятельства нельзя отдать абсолютное пред-
почтение методам наведения с упреждением, хотя при их примене-
нии обеспечивается более прямолинейная траектория ракеты по
сравнению со случаем применения метода совмещения и, следова-
тельно, меньшие динамические ошибки наведения.
По этой же причине иногда предусматривают применение
в системе теленаведения двух методов — основного и резервного,
на случай интенсивных активных помех. Так как для реализации
метода совмещения требуется измерять минимальное число ко-
ординат цели и ракеты, то этот метод может быть использован
как резервный.
Таким образом, выбор метода наведения может быть выполнен
только в результате тщательного анализа предполагаемых условий
работы системы управления, ее точности, помехозащищенности
и ряда других факторов.
Здесь также следует отметить те общие соображения относи-
тельно определения метода, которые были изложены выше, в § 3.1.
Как там указывалось, задачу формирования метода наведения
следует рассматривать как задачу динамической точности.
Действительно, стремление спрямить траекторию с помощью на-
ведения в упрежденную точку приводит к уменьшению динамиче-
ских ошибок и в то же время существенно увеличивает случайные
ошибки наведения. Это связано с тем, что для вычисления коорди-
нат упрежденной точки приходится определять производные от
входных, засоренных шумами, координат. Поэтому с точки зрения
точности наведения прямолинейная траектория не является наи-
лучшей, хотя при использовании кинематического подхода к фор-
мированию метода наведения такая траектория является идеалом.
В заключение можно отметить, что, используя теленаведение,
можно реализовать любой из методов самонаведения, например,
метод параллельного сближения, для чего необходимо специаль-
ным образом определять угол упреждения [21].
3.3. Кинематический метод исследования
основных свойств траекторий наведения
При анализе систем наведения на первом этапе проектирования
предпочтительнее использовать аналитические методы исследова-
ния, что позволяет во многих случаях получить общие результаты,
хотя имеющие приближенный и только качественный характер. На
первом этапе исследования и проектирования систем наведения
§ 3. Методы теленаведения
343
в первую очередь интересуются характером траекторий ракеты.
Это связано с тем, что от вида траекторий зависят потребные пере-
грузки, а это диктует определенные требования к конструкции
и аэродинамическим формам ракеты. В значительной степени от
потребных перегрузок зависят и динамические ошибки наведения.
Действительно, для того чтобы заставить ракету двигаться с по-
перечной перегрузкой, необходимо отклонить рули ракеты. Но
рули отклоняются от нейтрального положения только в том случае,
когда имеется ошибка наведения, так как в большинстве случаев
системы наведения являются статическими системами, если в ка-
честве выходной величины рассматривать перегрузку ракеты,
а в качестве входной — ошибку наведения. Поэтому чем более кри-
волинейной является траектория, чем больше потребные пере-
грузки, тем больше будет ошибка наведения. (Следует иметь
в виду, что такая оценка точности является односторонней, так как
здесь идет речь только о динамических ошибках, а точность зави-
сит еще и от ошибок случайных).
Для того чтобы можно было выполнить аналитическое исследова-
ние свойств траекторий наведения в общем виде, приходится
прибегать к ряду упрощений, в результате которых и приходят
к кинематическому методу исследования. Этот метод позволяет
получить основные, качественные сведения о траекториях за счет
изучения только геометрических особенностей движения без учета
динамических явлений.
Наиболее важными упрощениями, которые принимают при ки-
нематическом исследовании движения, являются следующие. Раке-
та и цель рассматриваются как геометрические точки, причем
скорость ракеты и цели считаются заданными функциями времени.
В большинстве случаев эти скорости считают постоянными. Пред-
полагают также, что система управления является идеальной,
в силу чего принятый метод наведения выполняется идеально
точно. Это позволяет, как уже упоминалось выше, не принимать
во внимание уравнения динамики системы наведения.
Основная цель кинематического исследования заключается
в определении формы траекторий, в определении потребных пере-
грузок, времени полета ракеты до цели и некоторых других харак-
теристик, которые необходимо знать как при проектировании раке-
ты, так и системы наведения.
Для решения поставленной задачи используют систему динами-
ческих и кинематических уравнений движения ракеты (7.3), к кото-
рой необходимо добавить уравнение метода наведения в его
кинематической форме. (Имеется в виду случай плоского движе-
ния).
Используя полную систему уравнений плоского движения, мож-
но более четко сформулировать основную идею кинематического
метода исследования.
344
Глава VII. Динамика телеуправляемых ракет
Первое упрощение, которое лежит в основе кинематического
метода, заключается в том, что скорость ракеты предполагается
известной функцией времени. Это позволяет при расчете траекто-
рий не учитывать уравнение динамики, которое определяет ско-
рость:
m = Р cos a cos р — X— mg sin 0.
dt
Во многих случаях это допущение не является грубым, так как
для крылатых, маневренных, ракет закон изменения скорости по
времени мало зависит от начальных условий движения и для за-
данной ракеты при типовых условиях ее применения может счи-
таться известным и неизменным.
Обычное предположение о том, что скорость ракеты является
постоянной, позволяет существенно упростить расчет траекторий,
однако грубость этого предположения можно оценить только
после анализа конкретного закона изменения скорости по времени.
Во всяком случае для сравнительного анализа различных методов
наведения такое допущение может быть принято.
Рассматривая систему уравнений (7.3) совместно с уравнением
метода наведения, нетрудно установить, что если связи наклады-
ваются на закон изменения угла упреждения Д<р и последний опре-
деляется как функция координат цели и ракеты, а также производ-
ных от них, т. е.
д? = Д<р(г, <р, гч, <рч, <р, <рч, . . .),
то в этом случае траекторию ракеты можно рассчитать, решая
только четвертое и пятое кинематические уравнения из систе-
мы (7.3). Действительно, эти два уравнения совместно с уравне-
нием метода наведения образуют замкнутую систему, так как
закон движения цели предполагается заданным, а
<Р = <РЧ + Д<Р-
Таким образом, для исследования траекторий наведения при
выполнении некоторых условий можно применять кинематический
метод исследования. Если бы в закон наведения, кроме указанных
величин, входили бы еще и некоторые другие, например а или g,
то указанных трех уравнений было бы недостаточно для определе-
ния всех неизвестных. В этом случае при расчете траекторий необ-
ходимо было бы учесть и уравнения динамики, в силу чего кинема-
тический метод стал бы неприменим.
Рассмотрим теперь применение кинематического метода анали-
за для определения свойств траекторий ракеты при наведении по
методу совмещения.
§ 3. Методы теленаведения
345
3.4. Кинематическое исследование траекторий
при наведении методом совмещения
Одна из основных задач, которую решают при помощи кинема-
тического метода, заключается в определении перегрузок, потреб-
ных для движения по этим траекториям, так как от величины этих
перегрузок зависят динамические ошибки наведения и требуемые
маневренные свойства ракеты.
В качестве примера применения кинематического метода анали
за рассмотрим исследование траекторий при наведении методом
совмещения. Напомним, что для
этого метода закон наведения за-
дается в виде Дф = ф — фч = О
или ф = фч.
Для упрощения задачи будем
предполагать, что цель летит с
постоянной скоростью по прямо-
линейной горизонтальной траек-
тории на заданной высоте. Будем
также , предполагать, что ско-
рость ракеты также является ве-
личной постоянной. Угол между
плоскостью сближения и верти-
калью обозначен X.
Так как общие свойства по-
Рис. 7.7. Геометрические соотно-
шения при наведении методом
совмещения
лучающихся при рассматривае-
мом методе наведения траекторий ракеты рассмотрены в [9], то ос-
новной нашей задачей будет более подробный анализ потребных
нормальных ускорений, которые должна развивать ракета при дви-
жении по этим траекториям.
Основные геометрические соотношения следуют из рис. 7.7.
Главными кинематическими уравнениями здесь будут сле-
дующие:
г = V cos (0 —- ф),
r<f> = V sin (0 — <f>).
(7.6'>
Так как в нашем случае закон изменения угла ф(/) зависит от
характера движения цели и является с учетом наших предположе-
ний известной функцией времени, то вывод формулы, определяю-
щей нормальные ускорения ракеты, не представляет труда. Повто-
ряя вывод, приведенный в [6] и [9], можно получить следующий
результат.
346
Глава VII. Динамика телеуправляемых ракет
Из двух уравнений (7. 6) можно определить угол 0 с помощью
следующего соотношения:
0 = ср + arc tg .
г
Дифференцируя второе уравнение (7. 6) и используя для упро-
щения полученного соотношения первое уравнение, легко получить
выражение'для производной
0= 2-^ U+-?
\ г J г
(7-7)
Если V = const, то
0 = 2ср —-ср
г
и нормальное ускорение при движении по траектории определится
уравнением
/И1 = Е0= Vf2cp+^’cp\
Если учесть влияние силы тяжести, то тогда суммарное ускоре-
ние в проекции на нормаль к траектории определится выражением
jH = V । 2ср — ср 'j 4- g cos л cos 0 =
\ r /
ср 4- g cos). cos
cp 4- arc tg
r
1.41 “b Ing'
Если V4 = const, то справедливы следующие соотношения:
ср = cpOT sin2 ср-,
ср = (c?m)2sin2cpsin2cp.
(7.8)
Очевидно, что величина <pm = V4fh определяет максимальную
угловую скорость линии визирования цели. Из соотношений (7.8)
видно, что закон изменения координаты ф(£) и, следовательно, ха-
рактер траектории ракеты зависят от параметра ср™. Поэтому
траектория ракеты не изменится, если скорость цели Vu и величи-
на h меняются так, что отношение этих величин, равное <рт, остает-
ся постоянным.
§ 3. Методы теленаведения
347
Из рис. 7. 7 следует, что
(7.9)
Используя соотношения (7.8) и (7.9), можно записать следую-
щие выражения для двух составляющих ускорения:
jHi = V?m sin2 ср [2 + rsin\ 1 , (7.10)
) ->2 — Г2 Sin4 ср J
где
Для упрощения и наглядности последующего анализа введем
безразмерное расстояние р = r/v. Тогда
• о /о । р sin 2<о \
М = Vcpm sin2 с? 2 + '> t = •
\ ) 1 — р2 Sin4 ср J
Для составляющей ускорения от силы тяжести найдем, что
jHg = g cos cos^cp -г. arc tg —
g cos /, ,' . .
—------(r COS cp — rep Sin cp) =
= g cos r (j/1 — p2 sin4 cp • cos cp — p sin3 cp).
Кроме того, введем обозначение
/н1
V<Pzw
sin2 ср I 2 + р
sin 2<р
У 1 — р2 sin4 <р
Наиболее наглядно можно представить себе уровень потребных
нормальных ускорений при наведении по методу совмещения, если
построить семейство линий равных нормальных ускорений. Для
удобства такого построения и вводятся безразмерные параметры р
и хь Полагая zj — const, можно построить линию равных нормаль-
ных ускорений, в любой точке которой
/«1 = V<pOT7-i = const.
Уравнение этой линии
Р =
sin2 ср
sin 2ср \2
— 2 sin2 ср )
Для второй составляющей можно поступить аналогично, введя
соотношение
= У 1—р2 sin4 ср.cos ср—р sin3 ср.
348
Глава VII. Динамика телеуправляемых ракет
Полагая xg = const, можно построить семейство линий равных
составляющих нормального ускорения от силы тяжести, для каж-
дой из которых jHg = Xgg’COsA, = const. Уравнение этих линий
— м-g sin <р + cos <р 1 — х|
Р =------------—------------•
Sin2 <р
Семейство этих линий строим для значений xg в преде-
лах — 1 Xg +1- ЕСЛИ ПОЛОЖИТЬ Xg = cos 0g, то
sin (0g — <p)
P =-----;------•
sin2 <f
Нормальное ускорение центра масс ракеты с учетом силы
тяжести можно теперь определить соотношением
L = + g-XgCosX.
Если X =# 0, то полное ускорение будет равно
1 = V 1н + g-2sin2/..
Если построены семейства кривых /И| и jHg, то, наложив на эти
кривые траекторию ракеты, можно в любой ее точке определить xi
и Xg и, следовательно, найти /К1 и jHg. Примерный характер кри-
вых Xg = const их] = const приведен на рис. 7.8 и 7.9.
Рис. 7.8. Семейство линий рав-
ных нормальных ускорений, выз-
ванных влиянием силы тяжести
Рис. 7.9. Семейство линий равных нор-
мальных ускорений, обусловленных кри-
визной траектории
Так как кривые равных ускорений построены для безразмер-
ного расстояния р = r/v, то указанные траектории ракеты также
следует строить в безразмерном виде. Здесь удобно поступить сле-
дующим образом. Если заданы У, V4 и h, то тогда безразмерная
§ 3. Методы теленаведения
349
высота h определится из уравнения
Так как всегда V V4, то Л 1. Задавшись отношением
Еч/Е = 1, когда h = 1, можно графически [9] или аналитически
построить семейство трехточечных траекторий для различных на-
чальных значений угла (ро. Примерный вид этих траекторий дан
на рис. 7.10. В том случае, когда отношение V4/V =# 1, можно по-
лучить нужное семейство траекторий, как бы предполагая, что
цель летит на высоте h = V4/V. Таким образом, для исследования
Рис. 7.10. Семейство траекторий совмещения
свойств траекторий необходимо построить их семейство только
один раз.
При использовании для исследования ускорений семейства ли-
ний равных ускорений (см. рис. 7.8 и 7.9) масштаб построения
траекторий должен быть выбран одинаковым с масштабом постро-
ения линий равных ускорений.
Если ввести новый параметр, то указанные два семейства кри-
вых равных ускорений можно объединить в одно семейство. Для
этого можно поступить так. Введем соотношение
х = хх B'/g.,
где В = g cos Х/V фт, и тогда /и = V фтХ. Если задаться некоторым
постоянным значением В, то можно построить семейство кривых
х = const, воспользовавшись для этого построения семействами
кривых Xi = const и zg = const. Для построения одной из линий
этого семейства полагаем х = хо = const и тогда для различных
значений Xi в пределах от 0 до 4 (из. рис. 7.9 следует, что при
V V4 значение х( не превышает числа 4) определяем значения
хг = —- (хо — Xi). Для полученных пар значений xi и хя ищем точ-
В
350
Глава VII. Динамика телеуправляемых ракет
ки пересечения соответствующих кривых, которые соединяем плав-
ной кривой. Это и будет линия х = xq = const.
Можно отметить, что чем меньше параметр В, тем меньше влия-
ние силы тяжести. Рассмотренное построение приходится повто-
рить для нескольких различных значений параметра В. Примерный
диапазон практических значений параметра В можно оценить
исходя из следующих соображений. В том случае, когда влияние
силы тяжести несущественно (VV4/h g), этот параметр равен
нулю. Его максимальное значение
Рис. 7.11. Семейство линий равных нор-
мальных ускорений, вызванных влиянием
тяжести И кривизны траекторий
зависит от минимального значе-
ния величины VV4/h. Так.
например, при h = 30 000 м,
Уч = 200 м/сек, V =
= 400 м/сек и % = 0
gh _ 10 • 30 000
VVlf ~ 200 • 400
Примерный вид кривых
х = const для В — 1 пока-
зан на рис. 7.11.
Рассмотренные нами се-
мейства кривых равных ус-
корений можно использо-
вать не только для исследо-
вания изменения перегрузок
вдоль траектории, но и для построения зон возможных атак.
Анализ кривых равных ускорений показывает, что основная со-
ставляющая нормального ускорения
/н! = 'Ч/! = —— *1
п
достигает максимального значения при стрельбе навстречу цели
с начальными углами <р0 = 30 60°, когда встреча с целью проис-
ходит при значении ср = 60 4- 90°. В этом случае функция Xi при-
нимает максимальное значение, равное 3,2 при У/Уц = 1 и равное
2,0 при У/Уч = 2. Этот 'вывод наглядно следует из рис. 7.9. В то
же время соответствующее исследование аналитического соотно-
шения (7.10) выполнить не так просто.
Метод графического исследования потребных нормальных уско-
рений, сводящийся к построению линий равных ускорений, был
рассмотрен для случая, когда скорость ракеты является постоян-
ной по величине. Так как обычно скорость ракеты является вели-
чиной переменной, то для использования рассмотренного метода
необходимо вводить среднюю скорость ракеты.
Анализ выражения (7.7), составленного для случая, когда ско-
рость ракеты У является произвольной функцией времени, показы-
§ 3. Методы теленаведения
351
вает, что рассмотренный способ графического исследования нор-
мальных ускорений можно обобщить на случай равноускоренного
движения ракеты, когда V = /г, где /г = const. При этом, чтобы по-
лучить уравнение линий равных перегрузок в конечной форме, на-
до сделать дополнительное предположение о малости угла упреж-
дения т] = 0 — ср, а чтобы построить семейство траекторий наведе-
ния,— учесть принятый закон изменения скорости.
3.5. Общий случай определения нормальных перегрузок
при теленаведении
Выше был рассмотрен один из возможных способов определения
нормальных перегрузок ракеты
щения. Это исследование имело
но с учетом ряда упрощающих
предположений. Однако мож-
но составить расчетные соот-
ношения общего характера,
пригодные для исследования
любых методов наведения при
произвольном характере дви-
жения цели и законе измене-
ния скорости ракеты.
Эти соотношения можно
составить, используя обыч-
ные приемы кинематического
анализа, разработанные в тео-
ретической механике. При вы-
воде необходимо учитывать
способ измерения координат
при наведении ее методом совме-
частный характер и было выполне-
Рис. 7.12. Координаты, определяю-
щие положение ракеты в пространстве
цели и ракеты, так как полу-
чающиеся кинематические соотношения наиболее удобны для ана-
лиза в том случае, когда их форма связана с системой координат-
ных осей, принятой при измерении координат ракеты и цели, а так-
же при формировании команд управления.
Рассмотрим случай, когда положение движущейся в простран-
стве точки определяется сферическими координатами г, ср и /
(рис. 7.12), измеренными относительно неподвижной земной систе-
мы координатных осей Ох0у0г0. Величина г определяет наклонную
дальность, угол % является азимутом, а угол ф— углом места.
(Измерение именно этих координат характерно для радиотехниче-
ских методов). Точкой А в нашем случае может быть ракета или
цель. В нужных случаях к обозначениям координат будут добав-
ляться индексы ракеты или цели.
352
Глава VII. Динамика телеуправляемых ракет
Рассмотрим теперь решение следующей кинематической задачи.
Пусть движение точки А в пространстве определено с помощью за-
дания закона изменения ее сферических координат г, ф и у по
времени. Требуется определить нормальную составляющую полно-
го ускорения, которое испытывает точка А при движении по про-
извольной траектории.
Наиболее простую и компактную форму будет иметь решение,
если воспользоваться векторной формой записи основных кинема-
тических уравнений. Удобство такой формы записи состоит еще в
том, что полученные результаты легко использовать для составле-
ния расчетных соотношений при задании движения точки А в лю-
бой системе координат — сферической, цилиндрической, прямо-
угольной и т. д.
Итак, определим положение точки А в пространстве относитель-
но неподвижной системы координатных осей Ox0y<yZ0 вектором
г = гг°, где г° — орт радиуса-вектора точки А. Последовательно
дифференцируя это векторное соотношение, получим
V = r = r7° + г7°;
j — V = г = гг° ф- 2гг° ф- г г°,
где V — вектор скорости точки А;
/ — вектор полного ускорения.
Если ввести орт вектора скорости V° и обозначить V = VV°,
то тогда
7= v = vv° + vv°,
где jH = W°— нормальное ускорение точки А;
]'т = VV° — касательное ускорение.
С учетом последних соотношений запишем уравнение, опреде-
ляющее нормальное ускорение точки А:
/« = /-
Для анализа полученного соотношения необходимо спроектиро-
вать его на оси какой-либо координатной системы, для чего следует
определить компоненты единичного вектора г° и его производные
по этим осям через координаты и их производные точки А. Так, на-
пример, можно определить проекции нормального ускорения /м
точки_А на земные оси (/нж; jHy; jHZ), определив компоненты век-
тора г° через прямоугольные координаты точки А (хо, Уо, г0). Учи-
§ 3. Методы теленаведения
353
тывая, что система координат Oxay0z0 является неподвижной,
можно определить проекции векторов г°, г° и г° на оси Охй, Оу0
и Ozo:
"о х ~ , У ~ , z Т
r° = — I + — j + — k;
г г г
г2х + 2г(гх — гх)—г г хг2у-\-2г(гу — гу)—г г'у -
р 14 ~я J +
r2z 4- 2г (гг — гг) —г гг
где Z; j; k— орты неподвижных осей Ох0, Оу0 и Oz0.
Исходя из этих соотношений нетрудно записать проекции нор-
мального ускорения точки А на неподвижные оси:
V
н,— X---------X,
>нх v ,
V •
1ну У у У, '
V •
/н, = Z-------Z.
IHZ у
(7.П)
При необходимости значения величин V и V можно также
выразить через значения координат и их производных (например,
V = х2 + у2 + z2), однако при анализе различных методов на-
ведения удобнее иметь дело с величиной скорости V, так как при
таком анализе обычно предполагается, что скорости ракеты и цели
являются известными, заданными функциями времени.
В том случае, когда в системе управления используются не
прямоугольные координаты ракеты или цели, а сферические, удоб-
нее выразить проекции единичного вектора г° и его производных
через эти сферические координаты. Рассмотрим этот случай и
определим теперь проекции нормального ускорения движущейся
точки А на оси Оху, Оуу и Ozy. Это удобно по той причине, что оси
Оуу и Ozy располагаются в плоскости, параллельной картинной
плоскости точки А. Поэтому если этой точкой является ракета, то
управление ее движением осуществляется с помощью команд, соот-
ветствующих изменению движения ракеты в направлениях, парал-
лельных осям Оуу и Ozy.
12 Заказ 1242
354
Глава VII. Динамика телеуправляемых ракет
В рассматриваемом случае при определении проекций производ-
ных от единичного вектора г° следует иметь в виду, что этот вектор
вращается относительно неподвижной системы координатных осей
ОхоУо^о с угловой скоростью, одна из компонент которой, рав-
ная х, направлена по оси Оу0, а другая, равная <р, направлена но
оси Ozy (см. рис. 7.12).
Итак, определим проекции векторов г°, г° и г° на оси Оху, Oyv
и Ozv, ^выразив их через угловые координаты х и <р. Единичный
вектор га в проекциях на подвижные оси можно записать так:
7° = Т + О J' + О*7,
где — орты осей Оху, Оуу к Ozy.
Так как модуль этого вектора постоянен, то производная от
него определяется соотношением
г°= со х г°,
где со — угловая скорость вращения подвижной системы Oxyyvzy
относительно неподвижной системы OxoyoZo.
Если учесть, что проекции вектора со на подвижные оси равны
со = X sin <fi' 4- х cos ср j' 4- <fk',
то, вспомнив правило перемножения векторов, нетрудно найти, что
г° = и х г° =0Г 4- «рj' — X cos №'•
Дифференцируя второй раз, следует иметь в виду, что вектор г°
уже не является единичным и его компоненты зависят от времени.
Поэтому
г° — и х г° 4- 0Z' 4- fj" — (х c<>s ? — X sin W) k' =
. = — (?2 + X2cos2 + (<P 4- X2 sin <p cos <p) J' — (xcoscp — 2<pxsin cp)k'.
С учетом полученных соотношений можно записать проекции
нормального ускорения движущейся точки А на подвижные оси:
!нХ = г — у г — г (ср2 4- х2 cos2 ср),
/«у = f 2г — г у) ср 4- /• (ср 4- X2 Sin ср cos ср),
!нг = — (2г — г -£ j х cos tp — г (х cos ср — 2срх sin ср).
(7-12)
§ 3. Методы теленаведения
355
Напомним, что эти выражения определяют нормальное ускоре-
ние любого тела, положение которого в пространстве описывается
координатами г, х, ф и которое имеет скорость V и летит с про-
дольным ускорением V.
Если таким телом является управляемая ракета, например зе-
нитная, то очень часто для нее можно рассматривать r(t), r(t),
V(t) и V(0 как заданные, известные функции времени, мало зави-
сящие от условий наведения. Во всяком случае, это справедливо,
когда влияние силы тяжести несущественно сказывается на движе-
нии ракеты, а сила лобового сопротивления слабо зависит от углов
атаки ракеты [5], [9].
Если эти условия выполняются, то для данной ракеты выраже-
ние ^2г— ry-j можно рассматривать как заданную функцию вре-
мени, которая вычисляется по результатам расчета небольшого
числа типовых траекторий. Это, конечно, заметно упрощает иссле-
дование выражений (7.12), определяющих нормальные ускорения
ракеты при различных методах наведения.
В том случае, когда выражения (7.12) используют для учета
движения цели, можно положить равным нулю продольное ускоре-
ние цели V4, так как это ускорение обычно невелико.
Таким образом, для исследования нормальных ускорений раке-
ты при заданном методе наведения можно записать две группы вы-
ражений, определяющих нормальные ускорения цели и ракеты
через их координаты. Эти выражения запишем в следующей форме,
несколько упростив систему индексов:
]\х (?ц + Х« c°s2 <рч),
/чу=2гч?ч+ гч ('<рч + /2 sin cos ?ч),
/чг=— ЧХч с OS <рч - (уч cos <Р,( — 2\<рц sin <рч).
/*• = Г — у Г — Г (<р2 + /2COS2 <р),
/у = ^(0? + /(? + X2 sin <Р cos ср),
h = — ЛОх cos <Р — г (х cos <Р — 2/<р sin <р).
(7.13)
(7Л4)
Здесь предполагается, что Уц = 0 и F(f) = 2г — г у является
заданной функцией времени для рассматриваемой ракеты.
12*
356
Глава VII. Динамика телеуправляемых ракет
С помощью выражений (7.13) и (7.14) можно исследовать лю-
бой метод наведения, для чего к указанным формулам необходимо
добавить уравнения связи, определяющие метод наведения. Для
того чтобы определить ошибку наведения как отклонение ракеты
от идеальной траектории, введем понятие кинематической траекто-
рии. Под последней будем понимать траекторию, по которой дви-
галась бы ракета при идеально точном выполнении условий метода
наведения.
Рассмотрим в качестве примера метод совмещения. Для этого
метода уравнения связи можно записать в следующей форме:
= <рц; X» = Хч.
где индекс «к» отвечает кинематической траектории.
Из равенства координат следует равенство производных, т. е.
<Рк = <рч;
Хк Хц'
Хк 7.Ц*
Учитывая эти соотношения и выражения (7.13), можно за-
писать, что
<Р I + X2 cos2 <РК = у- (гц — /ч J;
ГЦ
+ х^ sin срк COS <рк = -L (— 2гчсрч + /ЧУ);
Х« cos <РК — 2?^ sin (— 2гЛ cos <рч —
гц
Используя теперь формулы (7.14) и, учитывая, что ракета дви-
жется по кинематической траектории, получим
]Кх = г-^-г + ^-ацх-гц),
у гц
= Р + — (/цу — 2г;!<рч),
ги
(7.15)
1к2 = — Р 7ц cos Тч + 4“ + 2гЛ cos ?«)
ги
В точке встречи ракеты с целью г = гц и
" " V • , . .
]кх Г у Г “Ь ]цх*
§ 4. Расчет опорных траекторий и построение зон поражения
357
jKy = iw + [F(t) — 2рч]<рч;
/кг = Дг — (0 — 2гч] -Ц cos ср.
С помощью выражений (7.15) можно рассчитать потребное нор-
мальное ускорение ракеты при наведении методом совмещения и
определить составляющие этого ускорения по осям сферической си-
стемы координат.
Выражения (7.15) имеют свои преимущества по сравнению с
выражениями (7.11), составленными выше в декартовых осях.
Это преимущество состоит в том, что здесь в явной форме учиты-
вается влияние маневра цели на величину потребных нормальных
ускорений и что ускорения выражаются через те координаты цели,
которые обычно измеряются при использовании радиотехнических
средств.
Удобство выражений, записанных в форме (7.15), становится
особенно очевидным, если забегая вперед, отметить, что динамиче-
ские ошибки наведения телеуправляемой ракеты можно считать
пропорциональными нормальным ускорениям, а в выражениях
(7.15) эти ускорения определены непосредственно через координа-
ты цели, которые явно, в виде соответствующих сигналов присут-
ствуют в системе управления. (С вычислительной стороны, когда
ставится задача подсчитать величины нормальных ускорений, эти
выражения не очень удобны, так как даже при прямолинейном и
равномерном движении цели ее сферические координаты r4(f),
<p4(t) и Хч(О изменяются сложным образом).
Из выражений (7.15) следует, что потребные нормальные уско-
рения при наведении по методу совмещения существенно зависят
от скорости ракеты, так как в выражение функции F(t) входит
величина 2г, примерно равная удвоенной скорости ракеты. По этой
причине получающаяся при наведении методом совмещения траек-
тория ракеты может быть сильно искривлена, в результате чего
будут иметь место большие динамические ошибки наведения. Для
спрямления траекторий ракеты и уменьшения ошибок наведения
ракету можно наводить с упреждением.
§ 4. РАСЧЕТ ОПОРНЫХ ТРАЕКТОРИЙ И ПОСТРОЕНИЕ ЗОН
ПУСКА И ПОРАЖЕНИЯ
Расчет опорных траекторий
Для исследования динамических свойств систем телеуправления
требуется предварительно линеаризовать динамические и кинема-
тические уравнения движения ракеты. В свою очередь для линеа-
ризации необходимо рассчитать семейство опорных траекторий,
358
Глава VII. Динамика телеуправляемых ракет
отвечающих различным возможным режимам движения ракеты,
различным возможным начальным условиям.
При расчете опорных траекторий следует иметь в виду, что
если эти расчеты выполняются только для того, чтобы получить
необходимые исходные данные для линеаризации уравнений дви-
жения ракеты, то в этом случае очень часто эти расчеты можно
упростить. Это связано с тем, что для расчета численных значений
коэффициентов линеаризованных кинематических и динамических
уравнений движения ракеты достаточно знать закон изменения по
времени скорости ракеты V(7) и расстояния ее от пункта управле-
ния r(t). При линеаризации уравнений движения телеуправляемых
зенитных ракет необходимо знать дополнительно закон изменения
высоты ракеты Н(/) от времени, так как многие коэффициенты
линеаризованных уравнений существенно зависят от плотности воз-
духа. Но если закон изменения скорости ракеты по времени V(t)
известен, то можно подсчитать интересующую нас зависимость
высоты от времени по формуле
t
— V (/) sin 0 (t) dt,
b
использовав приемы приближенного интегрирования. Эта задача
не является сложной, особенно если учесть, что всегда стремятся
получить траекторию ракеты, по возможности мало отличающуюся
от прямолинейной, а в этих условиях угол наклона касательной
к траектории 0(^) можно считать величиной постоянной. Конечно,
можно подсчитать закон изменения высоты H(t), использовав из-
вестную зависимость r(t). Для этого достаточно воспользоваться
формулой
Я(£) = г (/) sin ср (/),
где <р(/)—угловая координата ракеты (см. рис. 7.4).
Достаточно подробно методы расчета опорных траекторий из-
ложены в [9] и (25]. Поэтому здесь вкратце будут отмечены только
некоторые особенности расчетов и те упрощающие предположения,
которые при выполнении этих расчетов принимают.
Обычно рассчитывают несколько опорных траекторий, соответ-
ствующих различным начальным условиям и различным законам
движения целей. В результате можно построить несколько графи-
ков, изображающих зависимость от времени скорости ракеты V(Z)
и расстояния от нее до пункта управления r(t). В том случае, когда
эти графики имеют небольшой разброс, можно установить некото-
рый единый для всех траекторий закон изменения величин V(/) и
г (Г) для данной ракеты, не зависящий от начальных условий и за-
кона движения цели [5].
§ 4. Расчет опорных траекторий и построение зон поражения
359
В другом, более сложном, случае может оказаться, что эти гра-
фики имеют большой разброс и тогда приходится для различных
траекторий или групп траекторий, определяемых различными на-
чальными условиями пуска и законами движения цели, принимать
различные законы V(t) и r(t).
Для расчета опорных траекторий телеуправляемых ракет ис-
пользуют упрощенные приемы численного интегрирования. Некото-
рая особенность этого расчета состоит в том, что приходится учи-
тывать изменение высоты полета ракеты, тогда как при расчете
траекторий ракет класса «воздух — воздух» высота полета обычно
считается неизменной.
Построение зон пуска и поражения
При разработке тактико-технических требований и проектиро-
вании управляемых зенитных ракет, так же как и при проектирова-
нии авиационных противосамолетных ракет класса «воздух —
воздух», обычно строят зоны возможных атак. В [9] и [10] подробно
разобрано построение этих зон для ракет класса «воздух—воз-
дух». Для зенитных ракет построение таких зон имеет свою специ-
фику.
Поясним вначале понятие зоны возможных атак. Для этого
рассмотрим всевозможные положения цели относительно станции
наведения в момент пуска ракеты. (Для простоты будем предпо-
лагать, что управление движением ракеты начинается сразу же
после ее пуска). Если пуск ракеты производится в тот момент, ког-
да цель находится в зоне возможных атак (ее иногда называют
зоной пуска), то обеспечивается поражение цели с определенной
вероятностью. Если же пуск ракеты производится в момент, когда
цель находится вне этой зоны, то заданная вероятность поражения
цели не может быть обеспечена. Таким образом, зоной возможных
атак, или зоной пуска, называется та область пространства в райо-
не станции наведения, при нахождении в которой цели должен
производиться пуск ракеты, обеспечивающий поражение цели.
В некоторых случаях, кроме зоны возможных атак, может пред-
ставлять интерес и зона возможных точек встречи ракеты с
целью — зона поражения. Последнюю можно определить как об-
ласть пространства, в которой может произойти встреча ракеты с
целью и обеспечивается определенная вероятность поражения ее.
Очевидно, что каждой точке в зоне поражения соответствует
определенная точка в зоне пуска. Эти точки располагаются на тра-
ектории цели и разделены расстоянием, которое пролетает цель за
время движения ракеты от момента пуска до момента встречи
с целью.
Построение границ зоны возможных атак на основании крите-
рия вероятности поражения цели является достаточно сложной
задачей, так как положение этих границ, помимо многих других
360
Глава VII. Динамика телеуправляемых ракет
факторов, зависит существенно и от точности системы наведения.
Поэтому это построение выполняют на основании анализа точно-
сти системы наведения с помощью средств вычислительной техни-
ки, так как такого рода расчеты очень трудоемки.
В связи с этим представляет интерес приближенное построение
границ зоны возможных атак, при котором учитываются только
летные данные ракеты и цели. Построение границ этих зон для ра-
кет класса «воздух — воздух» рассмотрено в литературе [9], [10].
Для решения этой задачи предварительно строятся зона действия
ракеты и зона возможных местонахождений цели. Далее совмест-
ное рассмотрение этих двух зон и несложные графические постро-
ения позволяют определить границы зоны возможных атак. Про-
стота построения в этом случае обусловлена тем, что мы предпола-
гаем, что атака цели происходит примерно в горизонтальной
плоскости. По этой причине располагаемые нормальные перегрузки
ракеты ограничиваются для рассматриваемой высоты некоторым
определенным предельным значением и сама зона является частью
плоскости.
Построение зон возможных атак для ракет класса «земля —
воздух» в значительной степени осложняется (главным образом за
счет значительного увеличения объема расчетной работы) по двум
причинам. Прежде всего приходится рассматривать зону возмож-
ных атак не в плоскости, а в пространстве. Поэтому границей зоны
здесь является некоторая поверхность и, чтобы очертить ее, прихо-
дится рассматривать ряд вертикальных и горизонтальных сечений
этой поверхности. Кроме того, построение зон наведения осложня-
ется и потому, что располагаемые перегрузки ракеты могут суще-
ственно зависеть от высоты. Из-за этого не имеется возможности
построить зону действия зенитной управляемой ракеты, так как те
ее границы, которые зависят от предельной нормальной перегруз-
ки, будут зависеть и от высоты полета. Всякое изменение началь-
ных условий движения ракеты будет приводить к деформации
границ зоны ее действия. По этой причине не представляется воз-
можным построить границы зоны возможных атак зенитной раке-
ты с помощью тех простых приемов, которые используются при
построении соответствующих зон для ракет класса «воздух —
воздух».
Для заданной высоты полета цели границы зоны возможных
атак зависят от скорости, курса и маневра цели. Поэтому прихо-
дится границы зоны определять, задаваясь определенными курсом,
скоростью и маневром цели, и повторять построение многократно
для всех возможных значений скорости, курса и маневра цели.
Это построение необходимо также повторять для различных высот
полета цели.
Для построения границ зон возможных атак необходимо знать
метод наведения, зависимость скорости ракеты V(Z) и дальности
§ 4. Расчет опорных траекторий и построение зон поражения
361
её г(0 от времени, максимальную дальность управляемого поле-
та, а также время вывода ракеты на кинематическую траекторию,
так как часто наведение зенитной ракеты на цель начинается не
сразу же после её пуска, а спустя некоторое время, в течение ко-
торого цель пролетит определенное расстояние.
Следует также иметь в виду, что зона возможных атак может
ограничиваться зонами станции наведения, которые зависят от
максимальной дальности обнаружения цели в различных направ-
лениях, и предельными значениями углов обзора в вертикальной
и наклонных плоскостях.
Для предварительной, приближенной, оценки положения гра-
ниц зон пуска и поражения в случае, когда для наведения ракеты
применяется метод совмещения, можно использовать кривые рав-
ных перегрузок, подобные приведенным на рис. 7.9.
Если в этом случае используются номограммы, построенные
исходя из предположения V = const, то необходимо в рассмотре-
ние ввести среднюю скорость и среднюю высоту полета ракеты.
Средняя скорость ракеты является важной тактической характери-
стикой и обычно определяется на этапе баллистического проекти-
рования. Эту величину можно оценить также по формуле
о
где Т — время боевого действия ракеты, a V(Z)—определяется
при расчете опорных траекторий или в простейшем случае для тра-
ектории вертикального движения.
Так как в общем случае плоскость сближения ракеты и цели
(плоскость, проходящая через траекторию цели и пункт управле-
ния) наклонена по отношению к вертикали на угол X, то среднюю
высоту полета ракеты можно определить по формуле
HrD= — hcosk,
ср 2
где h — минимальное расстояние между целью и пунктом управле-
ния при прямолинейном горизонтальном движении цели (см.
рис. 7.7).
Для того чтобы с помощью семейства линий равных перегрузок
определить область возможных точек встречи ракеты с целью (об-
ласть поражения), необходимо предварительно оценить располага-
емые нормальные перегрузки ракеты. Методика оценки располага-
емых перегрузок рассмотрена в [9]. В нашем случае необходимо
только вводить в расчетные формулы среднее значение скорости
и высоты.
Дальнейшее исследование сводится к тому, что, задаваясь раз-
личными значениями скорости цели V4, высоты ее полета Нц и
угла X, зависящими от высоты полета цели и расположения траек-
362
Глава VII. Динамика телеуправляемых ракет
тории цели относительно пункта управления, определяется макси-
мальное значение параметра и (см. разд. 3.4)
_____ /ншах П У
шах т/т/ л >
иУср COS
где /нтах — располагаемое нормальное ускорение ракеты, рассчи-
танное по средней скорости и средней высоте полета ее.
Таким образом, при заданных значениях параметров движения
цели V4, X и h = 774/cosX на соответствующей номограмме (см.
рис. 7.9) кривая и = хтах является границей, отделяющей зону
поражения от зоны, где встреча ракеты с целью невозможна из-за
ограниченных маневренных возможностей ракеты. В результате
анализа на каждой прямолинейной траектории цели, отвечающей
определенным значениям параметров Уч, Нч и X, можно нанести
точки, определяющие границы зоны поражения. Если эти построе-
ния повторить для различных комбинаций Нч и л, то можно полу-
чить совокупность таких точек в виде некоторой поверхности,
определяющей границу зоны поражения.
Если границы зоны поражения определены, то можно постро-
ить границы зоны пуцка. Для этого надо рассчитать время движе-
ния ракеты от момента пуска до точек встречи, соответствующих
границе зоны наведения. Так, время движения можно определить
из формулы
t = Ctgcpo —Ctg?8 Ctg ср0 — Ctg ,
где сро и <pe—углы, определяющие положение линии визирования
цели в момент пуска ракеты и в момент встречи ее с целью. Для
определения этих углов необходимо иметь семейство траекторий,
построенных для различных значений начального угла фо.
Если использовать для построения границ зон более общий слу-
чай, когда V(t) = jt, то и здесь для построения можно использо-
вать упомянутые выше номограммы равных нормальных ускорений
и семейства траекторий ракеты, построенные в безразмерной фор-
ме. Правда, в этом случае имеется возможность более тщательно
учесть располагаемые перегрузки ракеты, так как здесь их можно
рассчитывать не по средней скорости и высоте полета ракеты,
а с учетом точных их значений. Для построения границ зон удобно
предварительно построить семейство графиков, показывающих
зависимость максимального располагаемого нормального ускоре-
ния ракеты от времени для различных фиксированных высот.
Имея график Е(/) и предполагая, что ракета летит на постоян-
ной высоте Hi, можно определить зависимость максимальной рас-
полагаемой нормальной перегрузки ракеты от времени. Выполнив
расчет для нескольких высот, получают семейство графиков, по-
§ 4. Расчет опорных траекторий и построение зон поражения
363
добных приведенному на рис. 7.13. Если построено семейство тра-
екторий для различных значений начального угла <р0> то, используя
графики на рис. 7.13, можно нанести на траекториях точки с отмет-
ками максимального значения располагаемых перегрузок. Сравни-
вая затем эти значения с требуемыми перегрузками, которые
можно определить с помощью номограмм равных нормальных
ускорений, можно сделать заключение об осуществимости той или
другой траектории, а следовательно, и получить точки границы
зоны поражения.
Как уже отмечалось, все указанные
построить границы зон в предположении,
нейно, не маневрирует. Построе-
ние границ зон для случая, ког- прасП
да цель маневрирует, несомнен-
но, усложняется, так как в дан-
ном случае (особенно, если иметь
в виду некоторый произвольный
закон наведения) объем необхо-
димых вычислений резко возра-
стает. Для соответствующих рас-
четов можно использовать об-
щие соотношения, определяющие Рис.
номограммы позволяют
что цель летит прямоли-
7.13. Зависимость распо-
лагаемых нормальных перегрузок
от высоты и времени полета
ускорение центра масс ракеты;
они были получены в предыду-
щем параграфе.
Для заданного маневра цели ее
ускорений являются известными функциями времени. (Обычно при
координаты и составляющие
расчетах полагают, что величина скорости цели при маневре не
изменяется, т. е. считают, что V4 = const, но расчет повторяют для
нескольких возможных значений скорости цели). Для упрощения
расчетов обычно также предполагают, что для данной ракеты
величины скорости и наклонной дальности V(f) и r(t) являются
заданными, известными функциями времени и не зависят от закона
движения цели, т. е. и от характера траектории. Для того чтобы
при исследовании знать, какие возможные положения цели следует
рассматривать и какие нет, необходимо предварительно построить
границы зоны поражения и пуска ракеты для случая прямолиней-
ного полета цели, а затем при исследовании влияния маневра цели
на движение ракеты, рассматривать только те положения целей, ко-
торые отвечают этим зонам.
Таким образом, в общем случае построение границ зон пора-
жения и пуска зенитной ракеты связано с непосредственным рас-
четом семейств траекторий, отвечающих различным начальным
условиям и различным параметрам движения цели, с последующим
исследованием потребных перегрузок и их изменением вдоль тра-
ектории и сравнением их с располагаемыми перегрузками ракеты.
364
Глава VII. Динамика телеуправляемых ракет
Так как (подобные вычисления имеют очень большой объем, то
их выполняют с использованием аналоговых моделей и вычисли-
тельных машин. В таком случае можно одновременно исследовать
и точность наведения, и потребные перегрузки ракеты. Конечно,
в каждом конкретном случае возможны различные упрощения рас-
четов с помощью использования предварительно построенных но-
мограмм и семейств траекторий в «безразмерной» форме, как это
было указано в примере наведения ракеты по методу совмещения.
§ 5. ФОРМИРОВАНИЕ СИГНАЛА ОШИБКИ НАВЕДЕНИЯ
Чтобы составить структурную схему системы теленаведения, а
также провести исследование динамических свойств системы, не-
обходимо прежде всего рассмотреть способ формирования сигнала
ошибки наведения. Этот сигнал должен характеризовать отклоне-
ние параметров движения ракеты от параметров теоретического
движения, соответствующего принятому методу наведения.
Выбор способа формирования сигнала ошибки предопределяет
состав величин, которые необходимо измерять для реализации это-
го метода наведения и, следовательно, состав необходимых измери-
тельных устройств.
Рассмотрим несколько примеров, поясняющих способ форми-
рования сигнала ошибки для одного из каналов управления.
Простейшим методом теленаведения, как это было отмечено, яв-
ляется метод совмещения. Поскольку этот метод определяется усло-
вием срч = ср, то естественно за ошибку наведения принять величину
е = фч — <р. Для формирования сигнала этой ошибки необходимо
иметь устройства для измерения только угловых координат цели и
ракеты. Так как в конечном счете точность наведения характери-
зуется минимальным расстоянием ракеты от цели — промахом, то и
текущую ошибку наведения следует определять по линейному откло-
нению ракеты от требуемой кинематической траектории. Для рас-
сматриваемого примера это отклонение
h = —?).
где г — расстояние от ракеты до пункта управления.
Но такое выражение ошибки требует измерения дальности ра-
кеты, что существенно усложняет систему наведения. Поэтому
очень часто определяют линейную ошибку наведения по формуле
й = /?(0(<рч—?),
где R (0 — заранее заданная функция времени, приближенно соот-
ветствующая дальности до ракеты.
Таким образом, если используется командная система, форми-
ровать ошибку наведения для реализации метода совмещения
можно, выполняя операцию
h = R (/) («Фч — «Ф)
§ 5. Формирование сигнала ошибки наведения
365
в устройстве выработки команд станции наведения. В некоторых
случаях разность <рч — <р может непосредственно определяться уст-
ройством измерения координат, что обеспечивает более высокую
инструментальную точность по сравнению с вариантом, когда из-
меряются координаты <р и срц порознь, а затем результаты измере-
ния вычитаются.
При наведении с упреждением прежде всего необходимо вычис-
лить текущее значение угла упреждения Д<р и затем угловую коор-
динату кинематической траектории по формуле
Тк = <РЦ + ДТ-
В этом случае угловая ошибка наведения определится как
разность
е = ?к —? = —? + ДТ-
Таким образом, здесь для формирования угловой ошибки наве-
дения, кроме определения разности <рч — ср, требуется вычислять и
угол упреждения. Как отмечалось выше, угол упреждения зависит
обычно от координат цели и ракеты (г, ср, гч и <рч) и производных
от них, а сама зависимость определяется стремлением получить
траекторию наведения с некоторыми определенными свойствами.
Поэтому для формирования сигнала ошибки необходимо выпол-
нить ряд математических операций над измеренными величинами
координат ракеты и цели. Эти операции также выполняются в
устройстве выработки команд. Как и при наведении методом сов-
мещения, от угловой ошибки наведения переходят к линейной.
В отличие от предыдущего случая при наведении с упреждением
измерение расстояния от командного пункта до цели и ракеты
здесь принципиально необходимо, так как угол упреждения обя-
зательно должен обращаться в нуль при равенстве расстояний до
цели и ракеты. (Другими словами, обязательно должно выпол-
няться условие срк = срц при Дг = гц — г = 0).
При наведении по лучу угловая ошибка наведения е = фк — ср
непосредственно измеряется на борту ракеты и характеризует угло-
вое отклонение ракеты от оси луча (см. рис. 7.1). Для определения
линейного отклонения h = re сигнал угловой ошибки умножают на
расстояние от командного пункта до ракеты, вводя это расстоя-
ние как программную, известную функцию времени /?(/), чтобы из-
бежать необходимости измерять г(0- Таким образом, при наведе-
нии по лучу для формирования сигнала ошибки не требуется иных
измерительных устройств, кроме бортового радиоприемника, сиг-
нал на выходе которого характеризует угловое отклонение ракеты.
Здесь, конечно, не следует забывать, что для определения направ-
ления луча, задающего кинематическую траекторию ракеты, тре-
366
Глава VII. Динамика телеуправляемых ракет
буется измерять координаты цели, а в некоторых случаях и коорди-
наты ракеты. Однако результаты измерения этих координат непо-
средственно для определения ошибки наведения не используются.
Если теленаведение используется для реализации каких-либо
методов, характерных для самонаведения, то, кроме измерения
координат цели и ракеты относительно командного пункта, мо-
жет потребоваться и измерение каких-либо параметров движения
.ракеты с помощью измерительных устройств, расположенных на
ее борту.
§ 6. ОСНОВНЫЕ ЭЛЕМЕНТЫ СИСТЕМ ТЕЛЕНАВЕДЕНИЯ;
ИХ ПЕРЕДАТОЧНЫЕ ФУНКЦИИ И ДИНАМИЧЕСКИЕ СВОЙСТВА
В начале данной главы был кратко рассмотрен принцип дей-
ствия систем теленаведения, а на рис. 1.7 и 1.8 были приведены
блок-схемы таких систем. Было отмечено, что в состав системы в
общем случае может входить несколько блоков, каждый из кото-
рых представляет сложное автоматическое устройство. Основными
являются устройства для измерения координат ракеты и цели,
устройство выработки команд, устройства передачи и приема
команд, а также бортовая система стабилизации и управления нор-
мальными перегрузками.
Ниже будут рассмотрены основные динамические характеристи-
ки и особенности этих устройств, влияющие на свойства системы
теленаведения в целом.
В связи с тем, что устройства измерения координат, а также
передачи и приема команд в большинстве случаев являются слож-
ными радиотехническими устройствами, а устройство выработки
команд представляет собой сложный счетно-решающий прибор,
нет возможности ниже подробно останавливаться на разборе прин-
ципа действия, схем и выводе основных уравнений этих устройств.
Более подробные сведения о них читатель может найти в специ-
альной литературе.
6.1. Устройства измерения координат цели и ракеты
Устройства измерения координат цели ч ракеты являются ис-
точником основной информации, на дальнейшем преобразовании
и использовании которой строится работа всей системы теленаведе-
ния. Для измерения координат цели и ракеты можно использовать
различные принципы, например, оптический, тепловой, радиотех-
нический и т. д. Однако для измерения координат наиболее часто
используется радиотехнический принцип, так как по сравнению
с оптическим и тепловым способом измерения координат он обес-
печивает большую дальность действия. Поэтому здесь в качестве
примера будут рассмотрены только радиотехнические устройства
для измерения координат цели и ракеты.
§ 6. Основные элементы систем теленаведения
367
Для радиотехнических методов измерения обычно характерно
непосредственное определение сферических координат цели и раке-
ты. Такими координатами являются угол места <р, азимут % и на-
клонная дальность г (рис. 7.14). Если положение ракеты и цели
в пространстве должно быть установлено в прямоугольной системе
координат, то необходимо в этом случае решать уравнения пере-
хода.
Использование радиотехнических методов визирования позво-
ляет также измерять радиальную составляющую скорости цели
или ракеты Vr = г. Другие компо-
ненты скорости (перпендикулярные
линии визирования) можно опреде-
лить с помощью формул:
1Лр = г<р;
Vx = rcos<px,
что требует дифференцирования уг-
ловых координат q(t) и %(t).
При использовании различных
методов наведения ракеты не всег-
да требуется измерять полную со-
вокупность координат цели и раке-
ты. Так, например, при наведении
по методу совмещения достаточно
измерять только угловые координа-
ты цели и ракеты <р и %.
В соответствии с характером измеряемых координат в состав
радиотехнического измерительного комплекса входят угломерные
и дальномерные системы.
Не останавливаясь на описании принципа действия и типовых
схем угломерных и дальномерных систем, отметим только, что их
выходные устройства очень часто представляют собой электромеха-
нические следящие системы. В этих случаях динамические свой-
ства радиотехнических угломеров и дальномеров зависят главным
образом от динамических свойств этих следящих систем, являю-
щихся самой инерционной частью измерительного комплекса.
В угломерных системах часто используют антенны, следящие
за ракетой или целью. В этом случае сигналы, несущие сведения
об угловых координатах, снимаются с датчиков углового положе-
ния антенны.
В книге [15] подробно рассмотрены структурная схема, уравне-
ния, передаточные функции и частотный анализ системы автомати-
ческого сопровождения по углу для такой радиолокационной стан-
ции. Этот пример является типичным. Детальное исследование
следящей системы углового сопровождения приводит нас к уравне-
368
Глава VII. Динамика телеуправляемых ракет
ниям высокого порядка. Однако анализ частотных характеристик
замкнутой системы показывает, что с достаточной степенью точ-
ности динамические свойства этой системы можно описать переда-
точной функцией следующего типа:
К(т/> + 1)______
(7'2р2+2^7’1р + 1)(Т2р4-1)
если в качестве входной величины принять угловую координату це-
ли, а в качестве выходной величины — соответствующий угол пово-
рота антенны радиолокационной станции.
Так, например, частотным характеристикам замкнутой системы
автоматического сопровождения по углу, рассмотренной в [15], со-
ответствует передаточная функция такого типа с параметрами:
К = 1, т « 0,3 сек-, Л ~ 0,12 сек; g 0,70, Т2 0,07 сек.
В книге [16] можно найти описание структурной схемы, принци-
па действия и вывод уравнений системы автоматического сопро-
вождения цели по дальности. Эта система представляет собой элек-
трическую следящую систему, хотя и в этом случае на выходе авто-
дальномера могут применяться электромеханические следящие
системы.
Если для определения координат цели и ракеты используются
панорамные радиолокационные станции, измеряющие одновремен-
но координаты нескольких ракет и целей [12], то в этом случае
необходимо иметь в виду, что результаты измерения выдаются
периодически в дискретной форме с периодом, связанным с вре-
менем обзора заданного сектора пространства.
Характерной особенностью радиолокационных устройств изме-
рения координат цели и ракеты являются шумы в выходных
сигналах. Эти шумы могут весьма существенно влиять на точность
наведения ракеты и поэтому их влияние обязательно учитывается.
Источником этих шумов, не считая активных помех, является за-
мирание отраженного от цели сигнала, приводящее к дополни-
тельной, паразитной амплитудной модуляции этого сигнала.
Дополнительным источником случайных помех могут быть шумы
приемных устройств радиолокационной станции.
Для повышения точности определения координат ракеты на
её борту располагают специальный ответчик [12]. В этом случае
влиянием шумов на точность определения координат ракеты можно
пренебречь, так как сигнал ответчика имеет мощность, значитель-
но превышающую мощность сигнала, отраженного от цели.
Кроме случая, когда цель визируется непосредственно на пункте
управления, можно представить случай, когда координаты цели
определяются на ракете и соответствующие данные передаются
на пункт управления (наведение в координатах ракеты). Такой
способ позволяет организовать радиотеленаведение и в том случае,
§ 6. Основные элементы систем теленаведения
369
когда цель с пункта управления непосредственно не видна. Для
определения относительных координат цели можно использовать
радиолокационный или телевизионный принцип [6], [12], [13].
В такой системе появляется дополнительная линия связи для пе-
редачи данных с борта ракеты на пункт управления.
6.2. Устройство выработки команд
Устройство выработки команд является счетно-решающим при-
бором, который на основании входных данных — координат цели
и ракеты вычисляет команды, необходимые для управления дви-
жением или непосредственно ракеты, или луча, по которому
должна двигаться ракета. Для решения этой задачи счетно-
решающий прибор должен вычислить соответствующие методу на-
ведения координаты ракеты и сравнить их с фактическими коорди-
натами. Кроме основной задачи, связанной с выработкой команд
управления, счетно-решающий прибор может решать и другие за-
дачи, например, вычислять углы установки пускового устройства,
если старт управляемый [12], [13].
Решение всех этих задач связано с выполнением чисто матема-
тических операций над входными сигналами. По принципу действия
эти счетно-решающие приборы могут быть или непрерывного, или
дискретного действия. В обоих случаях приборы собираются из
стандартных элементов, выполняющих основные элементарные
математические операции. Число разновидностей таких элементов
обычно невелико. Описание и принцип действия таких элементов
непрерывного и дискретного действия можно найти в литературе
[17], [18].
Для того чтобы составить структурную схему устройства выра-
ботки команд, необходимо знать основные формульные соотноше-
ния для принятого метода наведения. Первая задача, которую
решает устройство выработки команд, состоит в определении ли-
нейного отклонения ракеты от вычисленной кинематической траек-
тории. Решение второй задачи связано с формированием команды
управления, которая вычисляется в связи с найденным откло-
нением ракеты. (При наведении по лучу определение отклонения
ракеты от оси луча происходит на борту ракеты, поэтому устройст-
во выработки команд вычисляет только команды для наведения
луча на основании измеренных координат ракеты и цели).
Кроме преобразований сигналов и выполнения вычислений,
связанных с этими двумя задачами, в счетно-решающем приборе
могут выполняться дополнительные преобразования сигналов,
необходимые, когда для формирования сигнала наведения вво-
дятся производные и интегралы от основной ошибки наведения,
а также другие виды коррекции, применяющиеся для увеличения
370
Глава VII. Динамика телеуправляемых ракет
запасов устойчивости и динамической точности системы наведения.
Так, например, при необходимости выполнить операцию дифферен-
цирования входного сигнала приходится одновременно выполнять
операцию сглаживания шумов, так как при дифференцировании
сигналов, засоренных высокочастотными шумами, ухудшается
соотношение между полезным сигналом и шумом [11].
В начале главы было отмечено, что для систем теленаведения
обычно характерно два этапа наведения ракеты. Первый этап
связан с выводом ракеты на расчетную, кинематическую траекто-
рию, второму этапу соответствует наведение ракеты по этой тра-
ектории. К тому моменту, когда становится возможным телеуправ-
ление ракетой, может быть большое отклонение ее от требуемой
кинематической траектории.
Поэтому желательно ликвидировать указанное отклонение в
кратчайшее время и вместе с тем достаточно плавно, что является
особенно важным при стрельбе по низколетящим целям.
В связи с этим представляется целесообразным предусмотреть
в устройстве выработки команд два режима работы: режим боль-
ших отклонений ракеты от кинематической траектории и режим
малых отклонений, отличающихся друг от друга законом формиро-
вания команд управления. Для определения закона управления
в режиме больших отклонений можно использовать разработан-
ные в теории автоматического управления методы синтеза систем,
оптимальных по быстродействию, или воспользоваться методами
реализации оптимальных по быстродействию процессов при по-
мощи нелинейных связей.
В качестве примера рассмотрим структуру счетно-решающего
прибора при наведении ракеты по методу совмещения, предпола-
гая, что основные элементы прибора можно рассматривать как ли-
нейные и поэтому характеризовать их динамические свойства пере-
даточными функциями.
Как было указано в § 5, ошибка наведения, т. е. линейное от-
клонение ракеты от требуемой траектории, определяется выра-
жением
h = R[t) (тч —?),
где R(f) —заранее заданная функция, приближенно равная даль-
ности ракеты г(^).
Обычно для улучшения динамических характеристик системы
наведения, для повышения ее запасов устойчивости в сигнал наве-
дения вводится первая производная от ошибки. В этом случае сиг-
нал команды наведения можно определить соотношением
«« = KK[h + Th].
§ б. Основные элементы систем теленаведения
371
Так как для формирования такого сигнала приходится диффе-
ренцировать сигнал ошибки засоренный шумами, то опера-
цию дифференцирования приходится сочетать с операцией сглажи-
вания. (Соответствующие блоки в счетно-решающих приборах не-
прерывного действия так и принято называть дифференцирующе-
сглаживающие устройства) [11].
С учетом этих замечаний устройство выработки команд непре-
рывного действия может иметь структурную схему (по одному из
каналов управления), подобную приведенной на рис. 7.15. Очевид-
но, на вход устройства подаются сигналы <р и <рч, равные прибор-
ным значениям координат цели и ракеты.
Эти сигналы поступают с выходов устройств измерения коор-
динат ракеты и цели.
Структурная схема устройства выработки команд усложняется,
когда для наведения ракеты используется метод наведения с уп-
реждением. В этом случае, как уже указывалось выше, кроме уг-
ловых координат цели и ракеты, необходимо вводить в прибор
расстояния до цели и ракеты, измеренные с пункта управления.
Кроме того, в счетно-решающем приборе может потребоваться
выполнение различного ряда нелинейных преобразований сигналов.
В работе [12] подробно рассмотрена структура устройства форми-
рования команд, когда для теленаведения зенитной ракеты исполь-
зуется метод параллельного сближения. В этом случае прихо-
дится выполнять нелинейные операции умножения, суммирования
векторов, решения треугольников. Для последующего исследова-
ния динамических свойств системы наведения все подобные нели-
нейные зависимости приходится линеаризовать относительно рас-
сматриваемого невозмущенного движения.
6.3 Устройства радиотелеуправления
Выше уже отмечалось, что в системах теленаведения наиболее
часто используются радиотехнические устройства и для определе-
ния координат целей и ракет, и для передачи команд управления
или формирования равносигнальных зон при наведении по лучу.
372
Глава VII. Динамика телеуправляемых ракет
В том случае, когда для наведения ракеты используется команд-
ная система, соответствующие радиоустройства (шифратор, пере-
датчик, приемник и дешифратор) входят в замкнутый контур наве-
дения. С учетом этого от устройств радиотелеуправления требуется,
чтобы они вносили минимальные фазовые искажения передаваемо-
го сигнала, имели бы стабильный передаточный коэффициент и до-
статочно линейные характеристики.
Во многих случаях динамические свойства устройств радиотеле-
управления можно характеризовать передаточной функцией, рас-
сматривая эти устройства как линейные. Достаточно точно эти
свойства выражаются передаточной функцией вида [12]
К ?~'р
Wp.T.y(p)=^-----.
р у ' Тр + 1
Аналогичную передаточную функцию можно использовать и
для характеристики бортового приемного устройства при наведе-
нии по лучу.
§ 7. КИНЕМАТИЧЕСКОЕ ЗВЕНО; УРАВНЕНИЯ И ПЕРЕДАТОЧНЫЕ
ФУНКЦИИ
Кинематическое звено в контуре наведения отвечает кинемати-
ческим уравнениям движения ракеты. В свою очередь эти уравне-
ния определяют зависимость координат ракеты (например, сфери-
ческих координат <р; %; г) от направления и величины её скорости.
Необходимые расчетные формулы легко могут быть получены с
помощью рис. 7.16 [см. также (2.7 а)]
Из рисунка следует, что
г = V cos т), (7.16)
где угол т] определяется из соотношения
cos т) = cos 0 cos Y cos ср cos у + sin 0 sin cp cos 0 sin Y cos cp sin / —
= cos cp cos 0 cos QF — /) 0- sin <p sin 0.
Из рисунка также вытекают следующие формулы:
ry cos ср = V cos 0 sin (4f — у) (7.17)
и
rcp = У [sin 0 cos ср — sin ср cos 0 cos (T — /)]. (7-18)
Кинематические уравнения (7.16), (7.17) и (7.18), записанные
в общем виде, неудобны для дальнейшего анализа. Во многих
случаях эти уравнения можно упростить. Так, например, если
измерять все углы не в земной, а в наклонной, но по-прежнему
§ 7. Кинематическое звено, уравнения и передаточные функции
373
жестко связанной с Землей системе координатных осей, направив
ось Ох этой системы в направлении движения ракеты, то кинема-
тические уравнения движения упрощаются. Это связано с тем, что
обычно стремятся получить траекторию ракеты, по возможности
приближающуюся к прямолинейной, и если это выполняется, то
угловые координаты ракеты % и ср, измеренные в наклонной системе
координат, оказываются малыми. Аналогичный вывод будет спра-
ведлив и по отношению к углам <Э и Т.
Предположение о малости углов %, ф, 0 и Т позволяет суще-
ственно упростить кинематические
специальные обозначения для уг-
лов, измеренных в наклонной
системе координат, то упрощен-
ные кинематические уравнения
могут быть записаны в следую-
щей форме:
г = V cos (Т — /) ~ V,
Й. + Vx = УТ,
гср V<p = VQ.
(7.19)
Последние два уравнения ха-
рактеризуют движение ракеты в
вертикальной и наклонной плос-
костях. Характерным является
то, что упрощенные кинематиче-
ские уравнения являются линей-
уравнения. Если не вводить
Рис. 7.16. Кинематические со-
отношения при теленаведении
ными уравнениями. В том случае, когда предположение о малости
углов не может быть принято, можно провести обычную линеари-
зацию кинематических уравнений относительно некоторого опор-
ного движения.
Так как упрощённые кинематические уравнения (7.19) яв-
ляются линейными уравнениями с переменными коэффициентами,
то определить соответствующую им передаточную функцию мож-
но лишь услов'но, воспользовавшись методом фиксации («замора-
живания») коэффициентов. Как известно, в этом случае опреде-
ляют передаточную функцию, отвечающую линейному уравнению
с переменными коэффициентами, так, как если бы коэффициенты
этого уравнения были постоянными. Естественно, что в этом
случае параметры передаточной функции — передаточный коэффи-
циент, постоянные времени и т. д. в различные моменты времени
будут иметь различные числовые значения. Поэтому для анализа
динамических свойств системы приходится строить и анализиро-
вать семейство частотных характеристик, соответствующих различ-
ным моментам времени в интересующем нас интервале.
374 Глава VII. Динамика телеуправляемых ракет
Обычно при анализе систем стабилизации и наведения ориенти-
ровочно известно время переходного процесса системы или полоса
пропускаемых частот. Поэтому не представляет труда оценить,
можно или нет в рассматриваемых конкретных условиях применять
метод фиксации коэффициентов. (См. гл. II, § 2.1).
Для систем теленаведения, как и для систем самонаведения,
основным существенно переменным параметром является расстоя-
ние r(t), которое входит в кинематические уравнения (7.19). Самое
быстрое относительное изменение этого параметра имеет место
при малых его значениях. Но для систем самонаведения расстоя-
ние измеряется от ракеты до цели, а для систем теленаведения —
от ракеты до командного пункта. Поэтому наиболее быстрое отно-
сительное изменение дальности г (Г) для систем самонаведения
имеет место в конце наведения, а для систем теленаведения — в
начале.
Таким образом, при исследовании систем теленаведения необ-
ходимо иметь в виду, что метод «замораживания» коэффициентов
менее всего точен и применение его может привести к неверным
результатам при относительно небольших расстояниях ракеты от
станции наведения.
Чтобы увеличить точность анализа в таких условиях, можно
преобразовать исходные уравнения с существенно переменными
коэффициентами путем введения новых переменных. Эти перемен-
ные иногда можно подобрать таким образом, что получающееся
после преобразования уравнение имеет коэффициенты, которые
меняются более медленно, чем коэффициенты исходного уравнения.
Кроме того, можно использовать отличающееся от обычного
определение передаточной функции, учитывающее переменность
коэффициентов. Эта обобщенная, или, как ее называют, парамет-
рическая передаточная функция в явном виде зависит от времени.
В общем случае определение параметрической передаточной функ-
ции является сложной задачей, однако в некоторых частных слу-
чаях она может быть определена сравнительно просто.
Рассмотрим вкратце способ определения параметрической пере-
даточной функции нестационарной системы [19].
Если исходное дифференциальное уравнение системы имеет вид
dnx , ... dn~lx . . ...
ао ~dt^ G1 ~dtn- \ + • ‘ (0х ~
=М)^ + М0^+-..+О)Л
, , d
то, вводя оператор дифференцирования s = — , можно записать
dt
его более компактно
L(s, f)x(0 = M(s, Of (О,
§ 7. Кинематическое звено; уравнения и передаточные функции
375
где
L (s, 0=со (0 s" + аг (0 sn~1 + ... + ап (t);
М(р, t) = &o(0s- + Ьг + ... +
Можно показать [19], что параметрическая передаточная функ-
ция W (р, t), отвечающая этому дифференциальному уравнению,
может быть определена как любое частное решение некоторого
другого линейного дифференциального уравнения, которое можно
записать в следующей символической форме:
L(p + s, t)W(.p, f) = M(p, f),
где s — оператор дифференцирования по времени;
р — комплексная переменная преобразования Лапласа.
Поясним это соотношение примером, который будет исполь-
зован ниже. Пусть исходное уравнение имеет вид
«О (0 ^ + <h(t)x = b0 (0 f,
или в операторной форме
[а9 (t) s + аг (0] х = Ьо (0 f.
Тогда для определения параметрической передаточной функции
W(р, t) необходимо решить уравнение
[а0 (0 (р + s) + аг (0] W (р, t) = b0 (0,
или
аи (0 —° + [а0 (О Р + «х (0] W(p, t) = b. (t),
at
в котором переменную р следует рассматривать как параметр.
Для данного примера решение можно записать в следующем
виде:
W (р, t)= е~р(е J a°(t> \ePte'’a,(f) dt. (7 20)
J °0 (/) v '
В некоторых случаях это решение может быть выражено через
элементарные функции. В случае высокого порядка дифференци-
ального уравнения приходится использовать различные' методы
приближённого решения.
Рассмотрим теперь определение передаточной функции кинема-
тического звена, отвечающей кинематическим уравнениям (7.19).
Так как кинематические уравнения относительно переменных х и'ср
имеют одинаковую форму, то достаточно определить передаточную
функцию только для одной из них.
378
Глава VII. Динамика телеуправляемых ракет
Если можно предположить, что r(t) = V = const, получим
Г
WK (р, = . (7.26)
Р р
Здесь передаточный коэффициент кинематического звена 7CK(Z) =
= г/г убывает с увеличением расстояния от ракеты до пункта
управления.
Если принять, что ракета движется равноускоренно, когда
= = +
где V = ]'т = const, то вычисления с помощью формулы (7.26)
дают следующий результат:
W (р л = = vp~>t = IL Л---------.
' 0(р) гр2 г р*
V V„
Если постоянная времени —= -у2- + t велика, то можно ис-
]т }т
пользовать приближённое выражение для передаточной функции
кинематического звена
JFK(p, — ,
’ r(t) р
отличающееся от выражения (7.26) только тем, что скорость V(t)
здесь не постоянна, а изменяется по времени.
Таким образом, для кинематического звена можно составить
несколько различных передаточных функций, вид которых зависит
от того, какие координаты рассматриваются в качестве входных и
выходных, а также от вида допущений, принятых при выводе.
Наиболее удобной для последующего исследования является фор-
ма (7.24) и (7.25).
В том случае, когда рассматривается система теленаведения
с подвижным пунктом управления (как, например, имеет место
при анализе системы теленаведения ракеты класса «воздух —
воздух»), то соответствующие кинематические уравнения стано-
вятся более громоздкими [см. уравнение (2.7б)]. Это связано с тем,
что положение ракеты (и цели) относительно пункта управления
существенно зависит от движения и координат пункта управления.
Если предположить, как и в предыдущем случае, что основные
угловые координаты являются величинами достаточно малыми, то
система кинематических уравнений распадается на взаимно неза-
висимые уравнения, каждое из которых характеризует некоторое
плоское движение.
§ 8. Динамические свойства и точность командной системы
379
Если исходить из рис. 7.18, где точка О определяет положение
ракеты, а точка Oi — положение пункта управления (носителя), то
для движения в плоскости можно записать следующие кинематиче-
ские уравнения:
г = V cos (9 — ср) — VH cos (вн — ср);
rep = У sin (0 — <р) — VH sin (0Я — ср).
Для определения соответст-
вующей передаточной функции
эти уравнения необходимо ли-
неаризовать. Здесь также по-
лезно заметить, что эти уравне-
ния совпадают по форме с кине-
матическими уравнениями само-
наведения с той лишь разницей,
что при самонаведении в качест-
ве двух основных точек высту-
пают цель и ракета.
Рис. 7.18. Геометрия теленаведе-
ния при подвижной станции наве-
дения
§ 8. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТВ И ТОЧНОСТИ
КОМАНДНОЙ СИСТЕМЫ ТЕЛЕНАВЕДЕНИЯ
8.1. Структурная схема системы наведения
В гл. I была приведена укрупненная блок-схема системы теле-
наведения, показывающая взаимодействие основных элементов
этой системы (см. рис. 1.7). На основании этой схемы с учетом
тех данных, которые были рассмотрены в предыдущем параграфе,
можно составить структурную схему командной системы наведе-
ния.
В качестве примера рассмотрим структурную схему системы
наведения зенитной управляемой ракеты, когда для наведения ис-
пользуется метод совмещения.
В этом случае ошибкой системы наведения является разность
соответствующих угловых координат ракеты и цели. Сигнал ошиб-
ки или формируется в устройстве выработки команд (счетно-
решающем приборе) при раздельном визировании ракеты и цели,
или поступает в устройство выработки команд в готовом виде,
если для определения разности угловых координат ракеты и цели
используется один визир (например, радиолокационная станция)
[12]. И в том и в другом случае можно в структурную схему ввести
элемент сравнения угловых координат ракеты и цели. В дальней-
шем для определенности рассмотрим случай, когда для измерения
координат цели и ракеты используются два различных измерения
координат.
380
Глава VII. Динамика телеуправляемых ракет
Соответствующая структурная схема приведена на рис. 7.19.
На этой схеме для того, чтобы отличать истинные значения угло-
вых координат цели и ракеты от измеренных значений (на выходе
устройства измерения координат), применяется индекс «п», обо-
значающий приборное значение координаты. В .качестве переда-
точной функции кинематического звена принята передаточная
функция (7.25), соответствующая случаю, когда в качестве вход-
ной величины кинематического звена рассматривается нормальное
ускорение снаряда jH, а в качестве выходной величины — длина
дуги s == Гф.
Рис. 7.19. Структурная схема командной системы теленаведения для метода
совмещения
Обратим внимание на то, что при наведении методом совмеще-
ния устройство выработки команд входит внутрь замкнутого кон-
тура наведения. При использовании более сложных методов на-
ведения, например, с упреждением, элемент сравнения разделяет
устройство выработки команд на две части, одна из которых
остается вне замкнутого контура наведения, а другая находится
внутри этого контура. Это связано с тем, что в этих более сложных
случаях угловая координата ракеты сравнивается не с соответ-
ствующей координатой цели, как это имеет место при использова-
нии метода совмещения, а с соответствующей координатой кинема-
тической (расчетной) траектории, которая предварительно
вычисляется в устройстве выработки команд. Таким образом, на
вход элемента сравнения будет подаваться координата <рк требуе-
мой кинематической траектории (рис. 7.20).
Основными воздействиями, вызывающими появление ошибок
наведения, являются изменение координаты цели фч(1)—управ-
ляющее воздействие, и возмущения в виде случайных шумов,
возникающие в устройствах измерения координат цели и ракеты.
Эти возмущения указаны на структурной схеме в виде случайных
сигналов П1(/) и n^t). Так как при определении координат ракеты
на ней располагают или автономное радиопередающее устройство,
или ответчик [12], то влияние случайных шумов на точность изме-
§ 8. Динамические свойства и точность командной системы
381
рения координат ракеты значительно слабее по сравнению с
влиянием шумов на точность измерения координат цели. Поэтому
при исследовании точности систем теленаведения можно учитывать
только влияние шумов, действующих на выходе устройства измере-
ния координат цели.
Рассмотрение структурной схемы командной системы наведения
(см. рис. 7.19) показывает, что сама система по принципу действия
напоминает следящую систему, для которой управляющим воздей-
ствием является изменение угловой координаты цели (или угловой
координаты требуемой кинематической траектории при произволь-
ном методе наведения), а выходной величиной — угловая коорди-
ната ракеты.
Рис. 7.20. Структурная схема устройства
выработки команд
Особенностью рассматриваемого контура наведения, иногда
оказывающей существенное влияние на свойства системы, является
его нестационарность. Выше было показано, что кинематическое
звено является звеном с переменными параметрами. Кроме того,
динамические характеристики ракеты в процессе полета могут
существенно изменяться и эти изменения зачастую полностью не
компенсируются системой стабилизации. Но так как изменения
параметров ракеты и кинематического звена являются относитель-
но медленными, то это позволяет применять метод «заморажива-
ния» коэффициентов, что в свою очередь дает возможность иссле-
довать систему наведения с помощью обычных методов теории
автоматического регулирования. Естественно, при этом приходится
рассматривать свойства системы для нескольких различных траек-
торий и точек на траектории. Характерными точками обычно
являются точки, соответствующие минимальному и максимальному
скоростному напору, моменту сброса стартовых ускорителей и вы-
ключения основного двигателя.
При проектировании системы наведения параметры основных
элементов системы и корректирующих цепей выбирают так, чтобы
для всех характерных точек траекторий обеспечить определенные
запасы устойчивости, что является условием работоспособности
проектируемой системы.
382
Глава VII. Динамика телеуправляемых ракет
Кроме решения этой задачи, связанной с анализом устойчиво-
сти, при проектировании необходимо исследовать точность наведе-
ния ракеты, так как выбор параметров элементов системы направ-
лен в конечном счете на решение основной задачи — обеспечить
заданную точность наведения в пределах заданной зоны пораже-
ния. При исследовании точности системы наведения, как и при
исследовании любых других систем автоматического управления,
легко обнаружить, что требование точности вступает в противоре-
чие с требованием устойчивости точно так же, как условия мини-
мизации динамических ошибок системы противоречат условиям
минимизации случайных ошибок. По этой причине решение задачи
выбора параметров основных элементов системы представляет со-
бой поиск такого компромиссного решения, которое наилучшим
образом удовлетворяет всем противоречивым требованиям.
При решении этой задачи можно широко использовать все
разнообразные методы теории автоматического регулирования,
в том числе и методы определения оптимальных характеристик,
позволяющие находить значения параметров элементов системы,
обеспечивающие при заданных условиях получение минимальных
ошибок. В частности, все методы линейной теории следящих си-
стем можно использовать при исследовании точности рассматри-
ваемой системы наведения, так как, по крайней мере на этапе
предварительного проектирования, эту систему можно рассматри-
вать приближенно как линейную и стационарную.
В последующих разделах настоящего параграфа будет рас-
смотрено применение методов теории автоматического регулирова-
ния к исследованию точности командной системы наведения.
8.2. Расчетная структурная схема и ее преобразования
Как уже отмечалось, применение метода «замораживания»
коэффициентов при исследовании систем теленаведения является
достаточно обоснованным, хотя и вносит определенные погрешно-
сти в расчеты. Анализируя структурную схему и ее преобразова-
ния, можно уменьшить эти погрешности, а также . оценить их
величину.
Поэтому для сравнения ниже будут составлены расчетные соот-
ношения для двух вариантов структурных схем, хотя для оценки
точности будет использован только один из них. Все расчетные
соотношения будут составлены с использованием понятия переда-
точной функции в предположении, что все уравнения элементов
системы линеаризованы.
Рассмотрим вначале результаты, которые можно получить,
применяя метод «замораживания» коэффициентов.
Для удобства исследования введем обозначение передаточной
функции разомкнутого контура системы наведения (см. рис. 7.19)
§ 8. Динамические свойства и точность командной системы
383
G (р) = (р) ^Р.т.у (р) Wc.c (р) Wx (р) WU.K.P (р). (7.27)
Д;р„ (р) г
Так как истинная (угловая) ошибка наведения определяется раз-
ностью координат цели и ракеты срц — <р, а не разностью их при-
борных значений фч.п— фп, то передаточная функция замкнутой
системы наведения, связывающая значения координат срц и ср,
будет иметь следующий вид:
Ф (р) = = -G-p'> - Wu±4 (р> (7.28)
’ ?«(P) 1 +G(p) Ти.Л.р(д) 1
Это соотношение следует из уравнений:
?ц.п(Р) = ^«.«.ч(р)?ч(р);
<РЛ (Р) = ^и.к.р (р) <Р (Р):
(Р) = . - <?Ч.П (Р)-
1 + О (р)
Из выражения (7.28) легко определить передаточную функцию
ошибки наведения Дф = фч — ф, если рассматривать в качестве
возмущения изменение угловой координаты цели
ФД;р (р) = А?(Р) = 1_ф(р) = 1------------£(р)_У_ц_«.ц(р)
’ ъЛр) 1 + G(p) Wa.K.p(P)
_ 1_______I G (p) Г 1 — Wg.K-Ц (p)
1+G(p) ‘Г 1+G(p) L ^u.K.P(p).'
(7.29)
Если угломерные устройства, измеряющие координаты цели
и ракеты, имеют одинаковые передаточные функции, т. е.
Wu.k.u- (Р) = Wu.k.p(p), то в этом случае передаточная функция
ошибки (7.29) упрощается и становится равной
ФДф (р) =
1
1+G(p)
как это имеет место для обычной следящей системы.
Так как точность наведения характеризуется линейным откло-
нением ракеты от требуемой траектории, равным h = гДф, то для
его определения можно составить следующее соотношение:
ф„ (п) = = г±1(р) = г
'Рц(р) ?ч(р) 14-G(p)
(7.30)
Это соотношение, как и все предыдущие, составлено с исполь-
зованием метода «замораживания» коэффициентов. На этом осно-
вании все преобразования выражений передаточных функций
выполнялись так, как если бы анализируемая система имела по-
стоянные параметры. Для того чтобы выяснить, какие погрешности
внесет этот метод, а также разработать метод расчета, позволяю-
384
Глава VII. Динамика телеуправляемых ракет
щий уменьшить эти погрешности, рассмотрим упрощенную струк-
турную схему системы (рис. 7.21).
На этой схеме не учитываются передаточные функции устройств
измерения координат ракеты и цели и в явном виде выделены
структурные элементы r(t) и l/r(t), являющиеся основными неста-
ционарными звеньями системы. Коэффициент г(/) вводится, как
было указано выше, для образования сигнала линейного отклоне-
ния ракеты Л(£) от требуемой, кинематической траектории. Второй
коэффициент 1/г(0 введен для перехода от линейной координаты
ракеты s = Гф к измеряемой угловой координате ф(/).
Рис. 7.21. Структурная схема системы теленаведения
Через Wi(p) обозначено произведение передаточных функций
Wie.K где передаточная функция №'увк(р)
соответствует той части устройства выработки команд, для которой
входом является линейное отклонение h. (см. рис. 7.15).
Если при анализе точности системы воспользоваться методом
«замораживания» коэффициентов, то переменные параметры r{t)
и 1/г (£) взаимно компенсируются и само исследование сводится
тогда к использованию известных методов теории автоматического
регулирования, разработанных для анализа стационарных систем.
Однако если учесть переменность параметров системы и исполь-
зовать теорию нестационарных линейных систем, то результат
получится более сложным. Чтобы убедиться в этом, рассмотрим
простой пример. На основании рис. 7.21 определим передаточную
функцию разомкнутого контура наведения, схема которого пред-
ставлена на рие. 7.22. Через W(р) обозначим передаточную функ-
цию стационарных элементов контура:
W(p) = -^.
Р2
Для упрощения задачи будем считать, что r(t) = rt, где
г — const. Введем импульсную переходную функцию стационарно-
го элемента с передаточной функцией W(р) и обозначим ее через
—т). Тогда импульсная переходная функция рассматриваемой
разомкнутой системы определится выражением
§ 8. Динамические свойства и точность командной системы
385
Исходя из этого соотношения нетрудно определить также экви-
валентную передаточную функцию разомкнутой системы. Для
этого необходимо воспользоваться уравнением [19], определяющим
связь передаточной и импульсной переходной функциями нестацио-
нарной линейной системы:
t оо
G(pt f) = j = j w0 (t, t — 7))e~pr‘d7).
—co 0
Рис. 7.22. Преобразование структурных схем
В нашем случае это дает
со со
G (р, I) = [ ~(ir^ w ft) е p'aft = J (1 — W e“PM7>-
b о
Так как
J w (•»]) e-P'idv] = W (/?),
о
то, учитывая основные свойства преобразования Лапласа, получим
G(p, t)~W(p) -j- . (7.31)
t dp r (t) dp
Таким образом, при использовании метода «замораживания»
коэффициентов передаточная функция разомкнутого контура на-
ведения была бы равна G(p) = IF(p), в то время как при исполь-
зовании точного метода исследования был получен результат
(7.31). Из соотношения (7.31) следует, что по мере увеличения
расстояния до ракеты г(() влияние второго, добавочного слагае-
мого будет непрерывно уменьшаться, что дополнительно подтвер-
ждает положение о том, что с увеличением г(() применение метода
«замораживания» коэффициентов становится более обоснованным.
Выражение (7.31) позволяет оценить погрешность, которая при-
вносится методом «замораживания» коэффициентов, и определить
те минимально допустимые значения дальности r{t), при которых
этот метод дает приемлемые ошибки.
13 Заказ 1242
386
Глава VII. Динамика телеуправляемых ракет
Для такой оценки достаточно сравнить частотные характери-
стики, отвечающие передаточным функциям G(p, I) и W(p)
[см. (7.31)].
При переходе к передаточной функции замкнутого контура
системы наведения вносится дополнительная погрешность, так как
эта передаточная функция Ф(р) определяется по обычной формуле
ф(р) = -^-1
1+G(p)
справедливой для стационарных систем и не имеющей силы для
систем нестационарных.
Рис. 7.23. Преобразование структурных схем системы
теленаведения
Для того чтобы уменьшить указанные погрешности метода
«замораживания» коэффициентов и в то же время избежать слож-
ного и громоздкого аппарата теории нестационарных линейных
систем, можно преобразовать структурную схему системы, приве-
денную на рис. 7.21. Предварительно необходимо отметить, что
структурная схема замкнутого контура наведения пригодна для
исследования системы не только при наведении ракеты по методу
совмещения, но и при наведении любым другим методом.
При использовании других методов наведения изменится толь-
ко входное, управляющее, воздействие. Вместо величины <рч на
входе будет действовать сигнал <рк, характеризующий требуемую
кинематическую траекторию. Поэтому все выводы и результаты,
которые будут получены ниже, имеют общий характер и имеют
силу по отношению к любым методам наведения.
Необходимое преобразование схемы указано на рис. 7.23.
В качестве выходной величины здесь рассматривается линейное
отклонение ракеты h(t) от требуемой кинематической траектории,
§ 8. Динамические свойства и точность командной системы
387
так как точность системы наведения характеризуется именно этой
величиной.
На рис. 7.23 введено также обозначение
= V (О,
где sK — длина дуги, соответствующая случаю точного движения
ракеты по кинематической траектории (в нашем примере — по
траектории совмещения). При произвольном методе наведения
аналогичная величина определится выражением
= <PZ (О-
Если учесть, что при точном движении по кинематической тра-
ектории ракета должна развивать некоторое нормальное ускорение
/и.к, определяемое соотношением
, . 1 .
sK (р) = —• /н к,
Л V / о J HtK'
р2
то тогда можно провести еще одно структурное преобразование,
приводящее нас к окончательному варианту расчетной структурной,
схемы' (рис. 7.24).
Рис. 7.24. Преобразованная структурная схема системы
теленаведения
Таким образом, когда в качестве входной величины замкнутого
контура командной системы теленаведения рассматривается нор-
мальное ускорение ракеты /м.к, соответствующее движению по
кинематической, т. е. опорной, расчетной траектории, а в качестве
выходной величины — линейное отклонение ракеты от этой траек-
тории Л(/), то тогда замкнутый контур системы может рассматри-
ваться как стационарный и для его исследования можно исполь-
зовать все методы теории стационарных линейных систем автома-
тического регулирования. (Этот вывод, конечно, справедлив лишь
при условии, что справедливо выражение передаточной функции
. S (р) 1
кинематического звена И/ге(р) = ------= — и что все остальные
]н(Р) Рг
элементы командной системы теленаведения можно рассматривать
как стационарные)..
388
Глава VII. Динамика телеуправляемых ракет
С формальной точки зрения этот вывод эквивалентен простому
сокращению двух нестационарных, обратных друг к другу звеньев
r(t) и 1/|Г (/) в передаточной функции разомкнутого контура наве-
дения. Однако здесь следует помнить, что такое сокращение не
всегда допустимо и возможность выполнить его зависит от выбора
входных и выходных координат замкнутого контура системы на-
ведения.
8.3. Расчет динамических ошибок
Используя преобразованную структурную схему на рис. 7.24 и
учитывая, что передаточная функция "Й71(р)/р2 является по суще-
ству передаточной функцией разомкнутого контура наведения
(7.27), в которой допустимо сокращение множителей r(f) и
можно записать, что
(7-32)
1 + о(р)
Это выражение связывает ошибку наведения h с нормальным
ускорением ракеты при движении ее по кинематической траекто-
рии и справедливо для любого метода наведения. Напомним, что
в свою очередь это ускорение определяется законом движения
цели фч(<) и принятым методом наведения (см. также рис. 7.24).
Дополнительное удобство соотношения (7.32) состоит в том, что
нормальное ускорение ракеты обычно рассчитывают на первом
этапе проектирования системы и поэтому при анализе точности
системы его величина бывает уже известна.
Конечно, можно было бы по формуле (7. 30) определить связь
ошибки наведения непосредственно с основным управляющим воз-
действием <рч(0> но в этом случае применение метода «заморажи-
вания» коэффициентов приводит к дополнительным погрешностям
расчета, которые необходимо оценивать, а использование аппарата
теории нестационарных систем излишне усложняет расчет.
Итак, при определении динамических ошибок командной систе-
мы наведения удобнее основываться на уравнении (7.32). Так как
рассматриваемое входное воздействие ]н.к(1) является медленно
изменяющейся функцией времени, то для расчета динамических
ошибок наведения удобно использовать понятие коэффициентов
ошибок, представив соотношение (7.32) в следующей форме:
h (Р) = (со + С1Р + р2 + • • J jHK (р),
или в эквивалентной форме в области времени
h (/) = С0/к к (t) + С\ 4- ...
V/ O/h.kWT 1 d( -Г 2(
§ 8. Динамические свойства и точность командной системы
389
Коэффициенты ошибок Со, С(, С2,... определяются по передаточ-
ной функции
-Wk(p}- = Ф (р)
1+0(р)
и связаны с ней соотношениями:
Со = Ф (р) 1р=о;
Сх =
С2 =
„ , |р=0,
ЛФ (р)
dp
d-Ф (р)
dp2
р=0
Р=0
и т. д.
(Если передаточная функция Ф(р) является дробно-рациональной
функцией, то представление ее в форме ряда можно легко найти
простым делением числителя этой передаточной функции на ее
знаменатель).
При расчете динамических ошибок наведения с помощью ко-
эффициентов ошибок следует помнить, что этот метод расчета
позволяет рассчитать установившееся значение динамических оши-
бок, имеющих место после затухания переходных процессов
в системе. Кроме того, получающиеся ряды сходятся быстро, если
входное воздействие не успевает заметно измениться (меняется на
10—20%) в течение интервала времени, равного времени переход-
ного процесса исследуемой системы. В нашем случае это условие
обычно выполняется, так как нормальное ускорение ракеты при
движении по траектории изменяется медленно. Во всяком случае
это справедливо, когда цель не маневрирует. Для этого последнего
случая при исследовании динамических ошибок наведения часто
бывает достаточным учесть только первый член ряда, когда
Л(0~со/я.Л0-
В нашем случае
WK(p) [
G(p) I
Со=Ф(О)
1+G(p)lp=o
Если использовать обозначение
. G(p) = Wv(pWM,
где передаточная функция IKj (р) включает в себя все последова-
тельно соединенные звенья контура наведения, кроме кинематиче-
ского, и учесть, что
Р2
390
Глава VII. Динамика телеуправляемых ракет
то тогда
ф (п) = ----EzdP)----=-------!--- . (7.33)
l+W^W^p) p? + ^i(p)
Поэтому
Со = —!— .
0 (0)
Когда в состав передаточной функции Wx{p) не входят инте-
грирующие звенья, то
Гх(О) = /<о,
где Ко — передаточный коэффициент разомкнутого контура наве-
дения (передаточный коэффициент кинематического звена равен
единице) с размерностью 1/се№. Поэтому
Со = — сек2
Ко
и
h (0 -/h k-(-Z) , (7.34)
Ко ’
т. е. система является статической по отношению к входному сиг-
налу /н.к(0-
Легко убедиться в том, что Со = 0, когда в состав.е замкнутого
контура системы наведения имеется интегрирующее звено. Это зве-
но войдет в устройство выработки команд, если в закон формиро-
вания команды ввести интеграл от сигнала ошибки. Тогда переда-
точную функцию Д'\(р) можно представить в следующем виде:
Wj (р)
Р
Такая система будет астатической с коэффициентом ошибки
Со, равным нулю, что легко проверить подстановкой развернутого
выражения для Wi(p) в формулу (7.33).
8.4. Формирование команды наведения
и способы уменьшения динамических ошибок
Как видно из вышеизложенного, повышение порядка астатизма
контура наведения может способствовать существенному уменьше-
нию динамических ошибок системы наведения. Однако этот прием
не находит практического применения. Это связано с тем, что при
повышении порядка астатизма контура наведения в значительной
степени осложняется выполнение условий устойчивости. Действи-
§ 8. Динамические свойства и точность командной системы
391
тельно, и без введения интеграла в закон формирования команды
контур наведения содержит двойное интегрирующее звено, соот-
ветствующее кинематическому звену, что уже усложняет выпол-
нение условий устойчивости. По этой же причине не всегда можно
выбрать достаточно большой передаточный коэффициент Ко
разомкнутого контура наведения, что было бы желательно для
уменьшения коэффициента ошибки Со.
Конечно, для уменьшения динамических ошибок наведения
можно применять методы наведения, обеспечивающие получение
траекторий с небольшой кривизной и, следовательно, с небольшим
уровнем потребных нормальных ускорений ракеты /н.к(/). Но при-
менение более сложных методов наведения требует усложнения
аппаратуры, входящей в состав комплекса управляемой ракеты.
Кроме того, следует иметь в виду соответствие общего характера,
согласно которому все мероприятия, связанные с изменением
структуры и параметров системы наведения и направленные на
уменьшение динамических ошибок, ведут к увеличению ошибок
флюктуационных. Поэтому окончательный выбор параметров
и структуры системы связан с поиском компромиссного решения,
когда определенным образом балансируется соотношение динами-
ческих и флюктуационных ошибок.
Итак, выше было получено простое приближенное расчетное
соотношение (7.34), согласно которому линейное отклонение теле-
управляемой ракеты от расчетной траектории прямо пропорцио-
нально нормальному кинематическому ускорению /«.к (О и обратно
пропорционально передаточному коэффициенту разомкнутого кон-
тура наведения Ко- Для определения величины нормального кине-
матического ускорения можно воспользоваться уравнениями, по-
лученными выше, в § 3.5, где для наведения методом совмещения
были получены соотношения (7.15).
Очевидно, при наведении ракеты по методу совмещения следует
ожидать больших динамических ошибок, так как при использова-
нии такого метода наведения кинематическая траектория сильно
искривлена и для движения по ней ракета должна располагать
большими перегрузками. Для уменьшения величины этих динами-
ческих ошибок можно принять дополнительные меры компенсации,
аналогичные тем, которые применяются в следящих системах повы-
шенной точности.
Идея компенсации динамической ошибки очень проста. Для
пояснения ее рассмотрим упрощенную структурную схему контура
наведения (рис. 7.25) и будем в качестве основной ошибки системы
рассматривать ее угловую ошибку
~ ?>
предполагая, что для наведения ракеты в системе используется
метод совмещения.
392
Глава VII. Динамика телеуправляемых ракет
Величина динамической ошибки определяется в операторной
форме соотношением
Дф (р) =----5---ф„ (р)
‘ v ' 1 4- G (р) “*
и зависит от входного сигнала срч и передаточной функции системы
в разомкнутом состоянии G(p). Если предположить, что переда-
точная функция системы G (р) нам известна, то в специальном
вычислителе можно определять текущее значение динамической
ошибки и вводить во входной сигнал системы корректирующее
воздействие, смещающее требуе-
мую кинематическую траекторию
на величину вычисленной дина-
мической ошибки [22].
Рис. 7.25. Структур,ная схема системы Рис. 7.26. Компенсация динамических
наведения ошибок
Пусть на рис. 7.26 кривая а изображает требуемую кинематиче-
скую траекторию, а кривая б является траекторией, по которой
движется ракета с учетом динамической ошибки наведения.
Кривая в представляет собой кинематическую траекторию, сме-
щенную на величину динамической ошибки. Если сформировать
команду управления, соответствующую исправленной кинематиче-
ской траектории, то с учетом динамических ошибок наведения ока-
жется, что ракета будет перемещаться как раз по требуемой траек-
тории а. Конечно, при таком способе формирования команд управ-
ления и компенсации ошибок наведения траектория ракеты оста-
нется сильно искривленной и ракета по-прежнему должна иметь
большие располагаемые перегрузки.
Для анализа рассматриваемого метода компенсации динамиче-
ских ошибок воспользуемся частью структурной схемы, представ-
ленной на рис. 7.24. Выше было показано, что при исследовании
динамических ошибок системы наведения удобно рассматривать
в качестве входного воздействия нормальное ускорение на кинема-
тической траектории а в качестве выходной величины — ли-
нейное отклонение ракеты от кинематической траектории h.
Последняя величина представляет собой основной сигнал ошибки
системы наведения. С помощью преобразования сигнала этой
ошибки и формируется команда наведения (См. § 6.2). Для
§ 8. Динамические свойства и точность командной системы
393
компенсации динамических ошибок добавим к сигналу /г(0 сигнал,
получающийся после преобразования сигнала /м,к(0 или эквива-
лентного ему сигнала фч(0. Пусть неизвестный пока закон преоб-
разования этого сигнала определяется передаточной функцией
Ц70(р). Это приводит нас к структурной схеме, показанной
на рис. 7.27.
В случае, когда 1Е0(р) = 0 (компенсация отсутствует):
h (р) = —— ------L к (р) •
Это соотношение позволило нам составить приближенную фор-
мулу, основанную на использовании понятия коэффициентов
ошибки:
где
Й (0 ~ ТЩ /н.к
Ло
Ко = Г1(р)|р=о.
Если учесть влияние цепи ком-
пенсации, то можно получить сле-
дующее соотношение:
Рис. 7.27. Схема компенсации
динамических ошибок
P- + W1. (р)
(7.35)
Теперь нетрудно установить, что для полной компенсации ди-
намических ошибок наведения необходимо удовлетворить соотно-
шению
Г0(р) =
1
Wi(p) ’
(7.36)
из которого 'видно, что теоретически точной компенсации дина-
мических ошибок добиться невозможно, так как передаточная
функция R70(p) физически не реализуема. Это следует из того, что
у передаточной функции Wi (р), отвечающей реальной динамиче-
ской системе, порядок числителя не превышает порядка знамена-
теля (соответствующая амплитудная частотная характеристика
стремится к нулю при неограниченном росте частоты). Поэтому
порядок числителя передаточной функции 1Е0(р) будет выше
порядка её знаменателя, если определить W0(p) из соотношения
(7.36).
Для того чтобы реализовать передаточную функцию W0(p)
с помощью сравнительно несложного узла в устройстве выработки
команд, можно не стремиться к возможно более полной компен-
сации динамической ошибки наведения, а компенсировать только
основную её составляющую. Выше уже отмечалось, что при отсут-
394
Глава VII. Динамика телеуправляемых ракет
ствии маневра цели основная составляющая динамической ошибки
наведения (при наведении по методу совмещения) определяется
первым членом соответствующего ряда и даётся выражением
(7.34)
Ко
Таким образом, если достаточно компенсировать для повыше-
ния точности наведения только эту составляющую полной динами-
ческой ошибки, то следует положить
А о
что может быть просто реализовано.
Для получения сигнала компенсации, очевидно, необходимо
в устройство выработки команд ввести узел, вычисляющий нор-
мальное ускорение /н.к(0- Это ускорение при наведении методом
совмещения определяется через координаты цели и ракеты соотно-
шением (7.15). Для нашего случая
1н.к = F (0 ?ч+т~ О'и-ч ~ 2г^ц),
где
F(0=2r-r^.
Выше отмечалось, что функция F(t) для данной ракеты часто
может рассматриваться как известная функция времени. С другой
стороны, в выражении для нормального ускорения (7. 15) наи-
больший вес имеет первое слагаемое (если не принимать во
внимание нормальное ускорение цели, характеризующее ее ма-
невр). Эти обстоятельства позволяют приближенно вычислять
нормальное ускорение jH.K(t) с помощью соотношения
/н.ЛО ~ Р W 74-
Таким образом, сигнал компенсации основной составляющей
динамической ошибки наведения можно вычислять, исходя из
приближённого соотношения
Для его реализации необходимо определять первую производ-
ную от угловой координаты цели <рч и вводить переменный коэф-
фициент F(t). Для более полной и точной компенсации динамиче-
ской ошибки наведения в общем случае потребуется определение
производных от угловой координаты цели более высоких порядков
и соответственное усложнение вычислителя сигнала компенсации.
§ 8. Динамические свойства и точность командной системы
395
Очень важно здесь обратить внимание на то, что рассматривае-
мый способ компенсации (уменьшения) динамической ошибки на-
ведения неизбежно приводит к увеличению случайных ошибок.
Действительно, для определения производных от угловых ко-
ординат цели потребуется дифференцировать сигнал, засоренный
шумами, что, естественно, увеличивает уровень шумов в цепях
формирования команды наведения и, следовательно, увеличивает
случайную ошибку наведения. Это лишний раз подтверждает пра-
вило, согласно которому в системах автоматического управления,
работающих в условиях помех, мероприятия, направленные на
уменьшение динамических ошибок, влекут за собой увеличение
ошибок случайных. Поэтому при проектировании таких систем
приходится искать компромиссное решение, обеспечивающее при-
емлемые значения динамических и случайных ошибок. Решение
этой задачи в настоящее время основывается на широком исполь-
зовании методов статистической динамики систем автоматического
управления, с которыми можно познакомиться в специальной ли-
тературе [23].
8.5. Влияние силы тяжести
на динамические ошибки наведения
В некоторых случаях при оценке точности наведения прихо-
дится учитывать влияние силы тяжести как дополнительного воз-
мущающего воздействия. Сила тяжести является одной из внеш-
них сил, стремящихся отклонить ракету от требуемой кинематиче-
ской траектории. Поэтому для компенсации ее влияния необходи-
ма некоторая дополнительная нормальная перегрузка Диу = cos 0
и соответствующее отклонение рулей высоты.
Выше было показано, что рассматриваемая система наведения
по отношению к входному воздействию в виде нормального уско-
рения и выходу в виде линейного отклонения от заданной траекто-
рии является статической. Поэтому ускорение силы тяжести, рас-
сматриваемое как дополнительное входное возмущающее
воздействие, будет вызывать появление дополнительного линейного
отклонения от заданной траектории. Другими словами, потребный
для компенсации силы тяжести дополнительный угол поворота
руля может возникнуть в системе только при появлении дополни-
тельного отклонения ракеты от заданной траектории.
Для учета влияния силы тяжести на точность наведения сле-
дует рассмотреть эту силу как дополнительное возмущение, дей-
ствующее на ракету. Исходя из этого можно определить переда-
точные функции ракеты, для которых за выходные величины при-
нимаются интересующие нас координаты ракеты, а за входную ве-
личину— составляющая веса ракеты, нормальная к траектории.
В качестве примера рассмотрим определение этих передаточных
396
Глава VII. Динамика телеуправляемых ракет
функций для продольного движения ракеты, предполагая, что
влияние вариаций скорости ракеты ДУ на ее движение несущест-
венно. В этом случае компонента силы тяжести входит только
в одно уравнение нормальных к траектории сил [9]
mV© = (Р -у Уа)а Д- У8б —mg cos ©.
Если обозначить через 0* == 0# (/) угол, отвечающий расчетной
невозмущенной траектории и ввести вариацию этого угла А0, то
при линеаризации этого уравнения последнее слагаемое преобра-'
зуется в следующее соотношение: '
mg cos (0* + Д0) mg cos 0* — mg sin ©*AG.
В линеаризованном уравнении слагаемое mg cos 0# выпадает,
так как предполагается, что при расчете невозмущенной траекто-
рии влияние силы тяжести было учтено. Остающийся линейный
член mg sin ©^Л© учитывается в передаточных функциях ракеты.
Но так как при расчете невозмущенной траектории динамика си-
стемы наведения не учитывается, то при анализе точности этой
системы составляющую веса mg cos0*(Z) следует рассматривать
как возмущающее воздействие.
Поэтому для определения соответствующих передаточных функ-
ций рассматриваемое уравнение после линеаризации следует за-
писать в такой форме:
mVA0 = (Р + Уа) Аа -|- У8Д6 + mg sin 0^А0<—mg cos 0*,
где последнее слагаемое является входным возмущающим воздей-
ствием.
Используя обозначения, принятые в гл. II, это уравнение
можно записать так:
Д0 — а42Да — а44Д0 = а43Аб-у- ,
где ,gH = g cos 0* — нормальная к траектории составляющая уско-
рения силы тяжести.
Если использовать теперь полную систему линеаризованных
уравнений продольного движения, то с помощью обычных приемов
можно определить искомые передаточные функции. Для часто
встречающегося случая, когда можно считать, что ai3 = а44 ~ О,
легко получить следующие соотношения:
«12
V
= w® (р) =
Sh (р) р [р2 + (оц + O42) Р + °иа42 ~г а'г)
1
-- У (р2 + «11Р + а12)
= = ------------ - ------------ --------,
ён (₽) р [р2 + (an + O42) Р + Оца42 + Я12]
§ 8. Динамические свойства и точность командной системы
397
или в обычной форме
Wl(p) =------;
р(Т2рг + 2'Тр + 1)
KfW + 2^+1)
Р (ТгРг + 2*Тр + 1)
Если в состав системы стабилизации входят датчик угловой
скорости, измеряющий угловую скорость -О’, и акселерометр, изме-
ряющий нормальное ускорение jH = V0, то при анализе влияния
силы тяжести на точность наведения с учетом динамики системы
стабилизацниудобно использовать структурную схему, приведен-
9н
Wg-W» w/
Рис. 7.28. Схема, поясняющая способ учета влияния силы
тяжести на точность наведения
Включив структурную схему ракеты в этом варианте в полную
структурную схему систем наведения и стабилизации, можно лег-
ко исследовать влияние силы тяжести на точность наведения.
В первом приближении это можно сделать, рассматривая стати-
ческие соотношения, вытекающие из структурной схемы, если по-
ложить во всех передаточных функциях, кроме интегрирующих
звеньев, р = 0.
8.6. Случайные ошибки наведения
При расчете случайных ошибок наведения, вызванных флюктуа-
ционными ошибками измерения координат цели, обычно рассмат-
ривают задачу в стационарной постановке. Это предположение не
всегда соответствует действительности, однако позволяет в зна-
чительной степени упростить необходимые расчеты. Поэтому ме-
тод расчета случайных ошибок наведения, основанный на теории
стационарных случайных процессов, следует рассматривать как
метод первого приближения. Необходимое уточнение расчетов
с учетом имеющей место нестационарности случайных процессов,
влияния нелинейностей, взаимного влияния каналов управления
398
Глава VII. Динамика телеуправляемых ракет
и т. п. ввиду сложности выполняют с помощью средств современ-
ной вычислительной техники.
Если воспользоваться выводами теории стационарных случай-
ных процессов, то на основании расчетной структурной схемы кон-
тура наведения (см. рис. 7.19) можно сравнительно просто вычис-
лить среднее квадратическое значение случайной составляющей
ошибки наведения. Из схемы следует, что передаточная функция,
связывающая ошибку наведения h(t) с входным случайным воз-
действием И] (0 (приложенным ко входу устройства измерения
угловых координат цели), будет равна [см. (7.28)]
(р) __ №а.к.ц (р) G (р) .у gу.
Щ(Р) Wu.KP(p) 1+G(p) ’ 1 ‘ '
где G(p) определяется выражением (7.27).
Если спектральная плотность входного случайного воздействия,
предполагаемого стационарной случайной функцией, есть S„(co),
то в этом случае спектральная плотность ошибки наведения h(t)
определится из соотношения
(со) = S,; (со) г2 \ (7.38)
И7и.к.р(усо) 1+С(/ш)
Если задан график спектральной плотности S„(co), то график
3\(со) получается из первого с помощью умножения его на квад-
рат амплитудной частотной характеристики, соответствующей пе-
редаточной функции (7.37).
Часто случайное воздействие на входе устройства измерения уг-
ловых координат цели можно считать «белым» шумом, характе-
ризующимся постоянным значением спектральной плотности
Sn(co) = с2 = const, [15], [23]. В этом случае выражение (7.38)
упрощается.
Зная аналитическое или графическое выражение функции спек-
тральной плотности 5/г(ю), можно легко рассчитать дисперсию или
среднее квадратическое значение линейной ошибки наведения
й(0- Как известно:
СО
® = J S/1 d®'
—со
Этот интеграл может быть вычислен или графически, или с по-
мощью специальных аналитических приемов, описание которых
можно найти в литературе [23].
8.7. Влияние ограничений на процесс наведения
Линейная ошибка наведения h(t) не является единственной
координатой, дисперсию флюктуаций которой приходится рассчи-
§ 8. Динамические свойства и точность командной системы
399
тывать при исследовании системы наведения. Очень многие эле-
менты системы наведения имеют статические характеристики
с насыщением. Например, угол поворота рулей ракеты является
величиной ограниченной; максимальная скорость поворота рулей
также ограничена некоторым предельным значением, зависящим
от характеристик рулевого привода; может быть ограничен сигнал
наведения для ограничения нормальной перегрузки, которую мо-
жет развивать ракета, и т. д. Обычно систему наведения и ее эле-
менты стараются рассчитать так, чтобы при типовых условиях
полета элементы работали в линейном режиме и не насыщались.
Однако выполнить это условие на практике оказывается затруд-
нительно. Это связано с тем, что сигнал, на входе любого элемента
системы, кроме полезной, управляющей составляющей, содержит
еще и помеху, имеющую случайный характер. (Источником этой
помехи являются флюктуационные ошибки измерения координат
цели и ракеты). Наличие помех приводит к появлению случайной
составляющей ошибки наведения, способ расчета которой был рас-
смотрен выше. Но эти помехи могут оказать и дополнительное,
косвенное влияние на все характеристики системы, включая и ее
точность. Это дополнительное влияние проявляется в том случае,
когда сигнал на входе элемента с характеристикой насыщения
представляет сумму полезной составляющей и случайной помехи,
по уровню превосходящую уровень насыщения. Рассмотрим яв-
ления, имеющие место при прохождении случайной помехи -через
элемент с насыщением. Пусть математическое ожидание (среднее
значение) случайной помехи равно нулю. В этом случае матема-
тическое ожидание суммы полезной составляющей и помехи будет
совпадать с полезной составляющей сигнала управления. Пред-
ставим, что этот суммарный сигнал проходит через усилитель,
имеющий характеристики с насыщением. Если при этом будет
иметь место ограничение суммарного сигнала, то можно подсчи-
тать, что математическое ожидание ограниченного сигнала будет
по уровню меньше по сравнению с тем случаем, когда ограничение
отсутствует [24].
Если среднее квадратическое значение помехи будет в не-
сколько раз превышать уровень насыщения усилителя, то матема-
тическое значение сигнала на выходе усилителя будет близко
к нулю. Это эквивалентно уменьшению коэффициента усиления
усилителя по отношению к полезной составляющей сигнала управ-
ления.
Когда случайная помеха является стационарным шумом с нор-
мальным законом распределения, можно построить график,
(рис. 2.9), показывающий изменение эквивалентной статической
характеристики для полезной составляющей сигнала управления
в зависимости от среднего квадратического значения случайной
помехи. Здесь предполагается, что суммарный сигнал на входе
400
Глава VII. Динамика телеуправляемых ракет
элемента с характеристикой насыщения может быть представлен
в виде суммы
х = тх + хСл,
где тх — математическое ожидание (среднее значение) суммар-
ного сигнала, являющееся сигналом управления;
хсл — случайная помеха с нулевым средним значением и сред-
ним квадратическим отклонением ож.
Если выходную величину элемента обозначить через у, то ту
является средним значением этой выходной величины и характери-
зует полезную составляющую сигнала управления на выходе эле-
мента. Из графиков следует, что с увеличением уровня шума
коэффициент усиления
| jV(u) элемента по отношению к
полезной составляющей
—уменьшается, Кроме того,
77 В Z)___________Щш) наблюдается линеариза-
/ ция исходной характери-
2 ^4 стики. Эффект подавле-
и ния полезного сигнала
3 случайной помехой при
Рис. 7.29. Амплитудно-фазовая харак- наличии элементов с на-
теристика астатической системы сыщением может оказать
2-го порядка существенное влияние на
поведение системы.
Уменьшение эквивалентного передаточного коэффициента си-
стемы приводит к увеличению динамических ошибок наведения.
Особенно опасным это явление становится в случае, когда система
имеет амплитудно-фазовые характеристики 2-го рода или, как
принято говорить, является «условно» устойчивой. У таких систем
при уменьшении передаточного коэффициента разомкнутого кон-
тура может наступить потеря устойчивости, что становится по-
нятным, если рассмотреть рис. 7.29, на котором изображена ам-
плитудно-фазовая характеристика 2-го рода. Такая система может
потерять устойчивость как при увеличении, так и при уменьшении
передаточного коэффициента.
Подробный анализ рассмотренного явления, относящийся
к области теории нелинейных систем, выходит за рамки настоя-
щей книги. Читатели, интересующиеся подробным описанием ин-
женерных методов исследования подобных задач, могут найти его
в книгах [24] и [26].
В заключение настоящего параграфа следует обратить внима-
ние на то, что при выборе параметров основных элементов системы
теленаведения приходится учитывать не только точность наведе-
ния. Весьма существенное влияние на выбор этих параметров ока-
§ 9. Динамические свойства и точность системы наведения по лучу 401
зывает учет ограничения нормальных ускорений ракеты. Из струк-
турной схемы на рис. 7.19 видно, что по отношению к линейному
отклонению ракеты h(t) система наведения имеет лучшие филь-
трующие свойства, чем по отношению к нормальному ускорению
/н(0, так как соответствующие выходы системы разделены двой-
ным интегрирующим звеном. Поэтому при приемлемой величине
среднего квадратического значения амплитуды случайных колеба-
ний линейного отклонения ракеты от требуемой траектории, вы-
званных действием входных шумов, среднее квадратическое значе-
ние амплитуды случайных колебаний нормального ускорения мо-
жет оказаться недопустимо большим.
В том случае, если уровень случайных колебаний нормального
ускорения будет соизмерим с уровнем ограничения этих ускорений,
нормальная работа системы может нарушиться из-за резкого
уменьшения передаточного коэффициента ракеты по отношению
к полезной составляющей сигнала управления. По этой причине
приходится назначать полосу частот, пропускаемых контуром на-
ведения, более узкой, чтобы ограничить уровень случайных колеба-
ний нормального ускорения некоторым допустимым пределом.
(Например, из рис. 7.29 следует, что если уменьшение передаточ-
ного коэффициента по отношению к полезной составляющей сиг-
нала не должно превышать 10 ч- 15%, то допустимая величина
среднего квадратического значения нормальной перегрузки не
должна превышать 0,3 Ь, где b — предельное нормальное ускоре-
ние). Но сужение полосы частот, пропускаемых контуром, приво-
дит к увеличению динамических ошибок наведения.
Таким образом, при выборе параметров контура наведения при-
ходится искать компромиссное решение, наилучшим образом
удовлетворяющее и условиям точности (содержащим противоречие
между случайными и динамическими ошибками), и условиям
ограничений нормальных ускорений. Эту сложную задачу на прак-
тике обычно решают методом проб, как и при проектировании си-
стем самонаведения.
§ 9. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТВ И ТОЧНОСТИ СИСТЕМЫ
НАВЕДЕНИЯ ПО ЛУЧУ
9.1. Расчетная структурная схема
Основное отличие системы наведения по лучу от командной
системы наведения связано с расположением места формирования
сигнала наведения, который воспринимается и исполняется систе-
мой управления нормальными перегрузками ракеты. В командных
системах формирование сигнала наведения осуществляется на
станции наведения. Этот сигнал с помощью устройств радиотеле-
управления передается на борт ракеты и исполняется системой
402
Глава VII. Динамика телеуправляемых ракет
управления нормальными перегрузками. В силу этого устройство
выработки команд входит в состав замкнутого контура наведения.
Все это отчетливо видно на структурной схеме командной системы,
которая в качестве примера была рассмотрена выше (см. рис. 7.19).
В том случае, когда используется система наведения по лучу,
устройство выработки команд выполняет только операцию вычис-
ления угловых координат кинематической траектории, соответст-
вующей принятому методу наведения и наблюдаемому изменению
координат цели. Результаты этого расчета используются для наве-
дения луча, по равносигнальной зоне которого и должна в идеаль-
ном случае двигаться ракета.
Рис. 7.30. Структурная схема системы наведения по лучу
В системе наведения по лучу сигнал ошибки формируется не-
посредственно на борту ракеты и характеризует угловое отклоне-
ние центра массы ракеты от оси радиолуча. Этот сигнал ошибки
затем преобразуется в сигнал наведения. Таким образом, те функ-
ции, которые в командной системе наведения выполнялись устрой-
ством выработки команд, в системе наведения по лучу выполняют-
ся бортовой аппаратурой ракеты. Поэтому устройство выработки
команд как элемент станции наведения не входит в состав замкну-
того контура наведения и остается вне его.
Указанная особенность систем наведения по лучу отчетливо
проявляется на расчетной структурной схеме. Примерный вид та-
кой схемы представлен на рис. 7.30. В отличие от схемы команд-
ной системы на рис. 7.19 здесь отсутствует устройство радиотеле-
управления, но имеется устройство наведения луча, которое в про-
стейшем случае может быть обычной следящей системой, преоб-
разующей сигналы устройства выработки команд в углы поворота
антенны, формирующей радиолуч. Передаточная функция этого
устройства обозначена на схеме №нл(р). Для определения углово-
го отклонения ракеты от оси радиолуча на борту ракеты имеется
специальный радиоблок с передаточной функцией С целью
§ 9. Динамические свойства и точность системы наведения по лучу 403
Рис. 7.31. Часть структурной схемы систе-
мы наведения по лучу методом совмещения
повышения точности наведения сигнал угловой ошибки преобра-
зуется в сигнал линейного отклонения от оси радиолуча. Для
такого преобразования необходимо выполнить операцию, опреде-
ляемую соотношением А = г(/)Дф. Эта операция может быть вы-
полнена с помощью простейшего счетно-решающего устройства,
в котором функция r\t) может быть задана программным меха-
низмом в виде более простой функции R(t), например, линейной.
Структурная схема на рис. 7.30 составлена для некоторого про-
извольного метода наведения, когда для расчета кинематической
траектории используются угловые координаты и наклонные даль-
ности цели и ракеты.
Поэтому на схеме указаны
соответствующие устройст-
ва измерения координат.
При наведении методом
совмещения без компенса-
ции динамических ошибок
устройство выработки
команд может отсутство-
вать, так как угловые коор-
динаты кинематической
траектории совпадают с координатами цели (рис. 7.31). В этом
случае в качестве радиолуча, вдоль оси которого движется ракета,
можно использовать луч радиолокационной станции, измеряющей
угловые координаты цели [3], [12], [13]. Получающаяся при этом си-
стема наведения называется однолучевой.
9.2. Коррекция динамических свойств
При наведении с помощью команд необходимую коррекцию
динамических характеристик замкнутого контура наведения мож-
но осуществить введением корректирующих цепей в устройство вы-
работки команд, которое входит в состав этого замкнутого кон-
тура, несмотря на то, что является одним из элементов станции
наведения. Однако в системах наведения по лучу элементы стан-
ции наведения и в том числе устройство выработки команд в замк-
нутый контур наведения не входят. Поэтому для коррекции дина-
мических свойств замкнутого контура наведения и, в частности,
для обеспечения запасов устойчивости, необходимые корректирую-
щие цепи могут быть введены только в бортовые устройства.
Основное назначение этих корректирующих устройств заклю-
чается в создании положительных фазовых сдвигов в необходимом
интервале частот. Как известно, простая система стабилизации
с дифференцирующим гироскопом в замкнутом состоянии имеет
отрицательные сдвиги фазы на всех частотах (если в качестве вы-
ходной величины рассматривать перегрузку). Радиозвенья также
дают фазовые запаздывания.
404
Глава VII. Динамика телеуправляемых ракет
В то же время в состав контура наведения входит кинематиче-
ское звено с передаточной функцией в виде двойного интегрирую-
щего звена. По этой причине контур наведения имеет астатизм
второго порядка и для обеспечения устойчивости этого контура
необходимо обязательно вводить дифференцирующие звенья, даю-
щие положительный фазовый сдвиг.
Можно было бы для исправления частотных характеристик ис-
пользовать последовательное корректирующее устройство, поста-
вив на выходе радиоблока дифференцирующий фильтр, но это
даст очень плохие результаты, так как выходной сигнал прием-
ника обычно засорен шумами. Операция дифференцирования су-
щественно увеличивает уровень шумов, что из-за наличия элемен-
тов с насыщением приводит к увеличению отношения уровня шума
к полезному сигналу.
Такое «подчеркивание» шумов может резко нарушить нормаль-
ную работу системы наведения и существенно ухудшить точность
наведения. Поэтому в данном случае предпочтительней использо-
вать параллельные корректирующие устройства, вводимые в цепи
обратной связи системы стабилизации.
Такие цепи можно включать на выходе дифференцирующего
гироскопа или датчика линейных нормальных ускорений. Для того
чтобы получить эффект фазового опережения в прямой цепи, при-
ходится в цепях обратной связи использовать интегрирующие
фильтры, вносящие фазовое запаздывание.
Примером такого корректирующего устройства может служить
фильтр после датчика ускорений с передаточной функцией
(см. рис. 5.16). Одним из возможных вариантов передаточной
функции этого фильтра является следующий:
Г*2 =----------—----------•
* (ГоР + 1)(Г1Р + 1)(Г2р+1)
Такой фильтр легко реализовать с помощью пассивной 7?С-це-
почки. Введением в цепь обратной связи инерционных звеньев для
замкнутой системы стабилизации получают эффект опережения,
так как звенья, находящиеся в знаменателе попадают в числи-
тель передаточной функции замкнутой системы.
Таким образом, в системах наведения по лучу необходимая кор-
рекция динамических характеристик контура наведения осущест-
вляется корректирующими фильтрами в цепях системы стабили-
зации.
Что касается точности наведения, то устройство выработки ко-
манд оказывает на нее косвенное влияние, так как от выбора ме-
тода наведения, который реализуется устройством выработки
команд, зависит характер кинематической траектории и, следова-
тельно, характер сигнала на входе замкнутого контура наведения.
При использовании методов наведения с упреждением умень-
§ 9. Динамические свойства и точность системы наведения по лучу
405
шаются динамические ошибки, так как при этом спрямляется ки-
нематическая траектория, но увеличиваются ошибки случайные,
в результате того, что для вычисления упреждения приходится
дифференцировать сигналы, засоренные шумами.
При выборе параметров основных элементов системы стабили-
зации и наведения необходимо избегать совпадения резонансных
частот отдельных устройств и приборов системы. Действительно,
амплитудная частотная характеристика замкнутого контура на-
ведения, отвечающая передаточной функции
G(p)
1 + <5 (р)
имеет резонансный пик той или другой интенсивности, так как кон-
тур является астатическим второго порядка [WK(p) = 1/р2]. В то
же время устройства измерения угловых координат и устройство
наведения луча, в состав которых могут входить следящие систе-
мы, также имеют резонансные пики на амплитудных частотных
характеристиках. Если расположение всех этих резонансных пиков
по частоте совпадает, то в целом система наведения может ока-
заться сильно колебательной. Она будет иметь плохую динамиче-
скую точность, когда во входном управляющем воздействии <рч(/)
окажутся гармонические составляющие с частотой, равной частоте
резонанса системы. Увеличится при этом и уровень случайных
ошибок. Поэтому при выборе параметров основных устройств си-
стемы необходимо следить за тем, чтобы возможные резонансные
пики отдельных элементов были бы разнесены по частоте.
9.3. Динамические и случайные ошибки наведения
Используя расчетную структурную схему, как и для командной
системы наведения, можно разработать методику расчета дина-
мических и случайных ошибок наведения.
В качестве управляющего и возмущающих воздействий следует
рассматривать изменение координат цели и флюктуационные, слу-
чайные ошибки измерения этих координат. Анализ точности наве-
дения при произвольном методе наведения, требующем измерения
расстояний до ракеты и цели, усложняется из-за того, что в каче-
стве дополнительной выходной координаты системы следует рас-
сматривать дальность до ракеты и цели. Это требует составления
передаточной функции кинематического звена по дальности и за-
мыкания системы по этой координате. В результате появится до-
полнительный замкнутый контур, что усложнит исследование си-
стемы. Учитывая, что изменение угловых координат ракеты слабо
влияет на закон изменения дальности r(f), для упрощения исследо-
вания можно рассматривать координату r(f) как некоторую за-
данную функцию времени. В этом случае единственным управляю-
406
Глава VII. Динамика телеуправляемых ракет
щим воздействием будет угловая координата цели (для од-
ного канала наведения).
Конечно, при учете случайных возмущающих воздействий сле-
дует иметь в виду, что эти возмущения действуют не только на
входе устройств измерения угловых координат цели, но и на входах
устройств измерения наклонных дальностей цели r4(t) и ракеты
г (/). (Это же справедливо и для командной системы при произ-
вольном методе наведения).
Наведение методом совмещен-и я
При наведении методом совмещения линейная ошибка наве-
дения определяется формулой
й = г (0 (?ч — <?)•
В момент пролета ракеты около цели, когда г = гч, эта форму-
ла определяет промах
Л = (?ч — ?)•
В то же время точность движения ракеты по радиолучу, т. е.
отклонение ракеты от равносигнальной зоны луча, характеризуется
величиной (см. рис. 7.31)
= г (/) (?ц.„ — <р) = г (I) Д<р„.
Для оценки точности наведения составим передаточную функ-
цию ошибки наведения. Пусть
G (Р) = WP.6 (Р) R (0 (Р) К (Р) -4г
г(/)
передаточная функция разомкнутого контура наведения. Тогда
с учетом структурной схемы на рис. 7.31 можно записать переда-
точную функцию замкнутого контура системы наведения
?(р) _ °(р)
(Р) 1 + ° (р)
и передаточную функцию ошибки наведения (для однолучевой си-
стемы)
2М = г (t) [1 — wUK, (р)-^— .
?Ч(Р) L а-К'Ц ^1+G(P)J
Если допустить, что устройство измерения координат цели яв-
ляется безынерционным, то тогда ошибка наведения опреде-
ляется передаточной функцией
h(p) = г (0 _
<?u (р) 1 + G (Р)
§ 9. Динамические свойства и точность системы наведения по лучу
407'
В данном случае остаются в силе все выводы о допустимости
применения метода «замораживания» коэффициентов, получен-
ные при анализе командных систем теленаведения. Так и в рас-
сматриваемом случае можно записать выражение для ошибки на-
ведения в другой форме:
/г (р) = J7* (р)
1 + <3 (р)
и использовать для расчета динамической ошибки наведения ме-
тод коэффициентов ошибок.
При расчете случайных ошибок наведения, если считать, что
случайная помеха «1(0 приложена к той же точке, что и управ-
ляющее воздействие <рч(/), следует использовать передаточную
функцию
= r(t)W ик „ (р) °(р^~ .
П1(Р) и.к.ц^) 1 + G(p)
С ее помощью можно определить спектральную плотность
ошибки наведения S^(m) и рассчитать среднее квадратическое зна-
чение этой ошибки.
Произвольный метод наведения
Здесь следует иметь в виду, что линейная ошибка наведения,
вычисленная по формуле
/г = г(0(?ч — <Р),
имеет смысл только для момента наибольшего сближения ракеты
с целью, когда гч = г.
В другие моменты времени эта величина определяет линейное
отклонение ракеты от линии визирования цели и не характеризует
точность наведения.
Текущее отклонение ракеты от равносигнальной зоны луча, ха-
рактеризующее точность движения ракеты по кинематической тра-
ектории, определяется из выражения
^ = r(0(?K.n —?)•
Для оценки величин h и Ил можно составить следующие пе-
редаточные функции (см. рис. 7.30):
= (Р) в к (р) WH л (р) — - (<) (7.39)
?ч(р) 1+G(p)
и
= г (/) Г1 _ W (р) W (р) W (р) _ °±Р) 1 =
?Ц (р) L 1 + G (р) ]
==ГГ^{1 + С^ Г1-^.к.ч(Р)^.-(Р)^н.л(Р)]}- (7.40)
408
Глава VII. Динамика телеуправляемых ракет
По своей структуре последнее выражение аналогично выраже-
нию (7.29), составленному для командной системы наведения.
Как и при анализе динамических ошибок командной системы
наведения, использовав соотношение
г(0 =
можно в составленных передаточных функциях (7.39) и (7.40) пе-
рейти от входной координаты к нормальному ускорению /и.к,
соответствующему движению по кинематической траектории. Од-
нако при наведении с упреждением эта операция имеет некоторые
особенности. Для выяснения их представим передаточную функцию
устройства выработки команд в виде произведения двух переда-
точных функций (см. рис. 7.20).
ч7,... «и=
Первый множитель отвечает операции вычисления
угловой координаты кинематической траектории <рк, а второй мно-
житель отвечает обычно выполняющейся операции сглаживания
шумов. В этом случае можно считать, что
Vx (р) = ^и.к.ц (р) (Р) 'Рд (Р).
и тогда можно использовать подстановку
р V) (р) (P)f. ю = «Д <Р) (Р).
где /н. к соответствует кинематической траектории, отвечающей
принятому методу наведения.
Учитывая это соотношение, передаточную функцию (7.39) мож-
но записать в форме
(Р) = (Р) Т. л (Р) ТТ7Ж
1 -f- О (р)
с помощью которой вычисляются коэффициенты ошибок и оцени-
ваются динамические ошибки ракеты при движении по лучу.
Аналогично можно преобразовать передаточную функцию
(7.40).
Для расчета случайных ошибок наведения следует исходить из
передаточной функции
ЩД = г (О (р) (Р) гя„(р) .
Таким образом, метод расчета динамических и случайных оши--
бок наведения по лучу не отличается от метода расчета точности
командной системы наведения. Различаются здесь только струк-
турные схемы и соответствующие передаточные функции.
§ 9. Динамические свойства и точность системы наведения по лучу
409
ЛИТЕРАТУРА
1. Г уткин Л. С,, Принципы радиоуправления беспилотными объектами,
«Советское радио», 1959.
2. Гончаренко М. Н., Ракеты и проблема антиракет, «ДОСААФ», 1962.
3. Марисов В. И., Кучеров И. К., Управляемые снаряды, Воениздат,
1960.
4. Импульсные радионавигационные устройства, Воениздат, 1955.
5. Швейцарский управляемый реактивный снаряд «Эрликон 54», «Вопросы
ракетной техники», 1957, № 1.
6. Локк А. С., Управление снарядами, Гостехтеоретиздат, 1957.
7. Б у р г е с с Э., Управляемое реактивное оружие, ИЛ, 1958.
8. Г о р о гц е н к о Б. Т., Динамика полета самолета, Оборонгиз, 1954.
9. Лебедев А. А., Чернобровкин Л. С., Динамика полета, Оборон-
гиз, 1962.
10. М е р и л л Г., Исследование операций, Серия «Основы проектирования
управляемых снарядов», ИЛ, 1959.
И. Пресну хин Л. Н., Серебровский Л. А., Юдин Д. П., Основы
теории и проектирования приборов управления. Оборонгиз, 1960.
12. Тип у г ин В. Н., Вейцель В. А., Радиоуправление, «Советское ра-
дио», 1962.
13. Крысенко Г. Д., Управление реактивными снарядами, Воениздат, 1960
14. Астафьев Г. Н., Шебша евич В. С., Юрков Ю. А., Радиотехни-
ческие средства навигации летательных аппаратов, «Советское радио», 1962.
15. Теория следящих систем, Под ред. X. Джеймса, Н. Никольса, Р. Фил-
липса, ИЛ, 1951.
16. Ламповые схемы для измерения времени, т. I и II, «Советское радио»,
1951.
17. Китов А. И., Криницкий Н. А., Электронные цифровые машины и
программирование, Физматгиз, 1959.
18. Коган Б. Я., Электронные моделирующие устройства и их применение
для исследования систем автоматического регулирования, Физматгиз, 1959.
19. Солодов А. В., Линейные системы автоматического управления с пе-
ременными параметрами, Физматгиз, 1962.
20. Питерсон И. Л., Статистический анализ и оптимизация систем авто-
матического управления, «Советское радио», 1964.
21. Доброленский Ю. П., Иванова В. И., Поспелов Г. С., Авто-
матика управляемых снарядов, Оборонгиз, 1963.
22. Щукин А. Н., Динамические и флюктуационные ошибки управляемых
объектов, «Советское радио», 1961.
23. Солодовников В. В., Статическая динамика линейных систем авто-
матического управления, Физматгиз, 1960.
24. Попов Е. П., П а л ь т о в И. П., Приближенные методы исследования
нелинейных автоматических систем, Физматгиз, 1960.
25. О с т о с л а в с к и й И. В., С т р а ж е в а И. В., Динамика полета, Оборон-
гиз, 1963.
26. Казаков И. Е., Доступов Б. Г., Статистическая динамика нели-
нейных автоматических систем Физматгиз, 1962.
Глава VIII :
ДИНАМИКА САМОНАВОДЯЩИХСЯ РАКЕТ
§ 1. ВВЕДЕНИЕ. КООРДИНАТОРЫ ЦЕЛИ
Системы самонаведения могут применяться для наведения ле-
тательных аппаратов различных классов. Наиболее часто само-
наведение используют при управлении полетом ракет класса «воз-
дух— воздух» и на конечном этапе наведения ракет класса
«воздух — земля». Самонаведение может применяться также на
конечном участке полета зенитных управляемых ракет класса
«земля — воздух» [1], [4].
При управлении полетом ракеты с помощью системы самона-
ведения нет необходимости посылать на ракету сигналы наведе-
ния извне, как это имеет место в системах теленаведения. В си-
стемах самонаведения основной поток информации, используе-
мой для наведения ракеты, идет к ней непосредственно от цели.
Другими словами, определение координат цели производится на
самой ракете, причем определяются координаты цели относитель-
но ракеты (т. е. относительные координаты, которые могут изме-
няться не только из-за движения цели, но и из-за движения ра-
кеты) .
Необходимая для наведения информация переносится энер-
гией, которую или излучает, или отражает цель. Для осуществле-
ния самонаведения могут быть использованы разнообразные виды
энергии. Поэтому в зависимости от вида используемой энергии
системы самонаведения разделяют на радиотехнические, тепло-
вые, оптические, акустические и т. д. Но так как классификация
систем по этому признаку для дальнейшего является совершенно
несущественной, то нет необходимости разбирать ее подробно.
Отметим только, что в радиотехнических, тепловых и оптических
системах самонаведения используется энергия электромагнит-
ного излучения, различающегося только частотой. В акустических
системах используется энергия звуковых колебаний, в частности,
ультразвуковых, если система самонаведения предназначена для
действия под водой.
В зависимости от места расположения первичного источника
$ 1. Введение. Координаторы цели
411
энергии самонаведение подразделяется на пассивное, активное и
полуактивное.
При пассивном самонаведении используется энергия, из-
лучаемая непосредственно целью. Источниками этой энергии
могут быть шум винтов корабля, тепловое излучение промышлен-
ных предприятий и реактивных двигателей самолетов, работающие
радиотехнические установки (радиолокационные станции, пере-
датчики и т. д.). Сюда же можно отнести случай, когда цель
отражает энергию таких естественных облучателей, как Луна и
Солнце. Пассивное самонаведение, очевидно, возможно только в
том случае, если цель контрастно выделяется на окружающем
фоне, т. е. энергия, излучаемая целью, количественно или качест-
венно отличается от энергии, излучаемой фоном.
Если цель на фоне окружающей среды выделяется не доста-
точно контрастно, то ее можно облучать («подсвечивать») с по-
мощью источника энергии, находящегося на ракете. Этот случай
отвечает активному самонаведению. Здесь для определения
координат цели используется отражаемая ею энергия, вид кото-
рой может быть самым разнообразным. Так, например, в качестве
активных излучающих устройств могут использоваться бортовые
радиолокационные станции, инфракрасные прожекторы, ультра-
звуковые излучатели и т. д.
В том случае, когда источник энергии для облучения цели на-
ходится не на борту управляемой ракеты, а в каком-либо другом
месте, например, на самолете-носителе, говорят о полуактив-
ном самонаведении.
Вид применяемой энергии и место расположения первичного
источника энергии существенно влияют на особенности тактиче-
ского применения системы самонаведения, на ее эксплуатацион-
ные характеристики, вес и габариты ракеты и т. д. Однако влия-
ние этих факторов на динамику системы самонаведения не суще-
ственно. Оно проявляется лишь косвенным образом, поскольку от
вида используемой энергии и места расположения первичного
источника энергии могут зависеть инструментальные ошибки
аппаратуры, характер и уровень шумов (помех). Поэтому не име-
ет смысла приводить здесь сравнительный анализ систем самона-
ведения по указанным выше признакам, тем более, что это доста-
точно подробно и полно освещено в литературе [1], [2], [3], [4], [19].
Из сказанного выше ясно, что для реализации самонаведения
на борту ракеты необходимо иметь автоматическое устройство,
воспринимающее энергию, идущую от цели, и измеряющее коор-
динаты цели относительно ракеты. Этот основной измерительный
элемент любой системы самонаведения называется координатором
цели.
Положение цели относительно ракеты может быть определено
лишь в системе осей координат, связанной с координатором цели
412
Глава VIII. Динамика самонаводящихся ракет
(рис. 8.1). Ось Охк называют осью координатора. Направление
осей Оук и OzK зависит от способа установки координатора на бор-
ту ракеты.
Положение цели относительно осей координатора OxKyKzK мож-
но определить тремя координатами, задав две угловые координаты
и расстояние г. В качестве угловых координат могут быть приняты
координаты е и и. Одна из них е является углом рассогласования
и определяется как угол между линией визирования цели ОЦ и
осью координатора. Вторая — угол фазирования р,— определяется
Рис. 8.1. Координаты, определяющие положение
цели относительно координатора
как угол между плоскостью рассогласования, проходящей через
ось координатора и линию визирования цели, и координатной
плоскостью хкОук (см. рис. 8.1).
Положение цели относительно осей координатора OxKyKzn мож-
но определить также с помощью двух углов еи и ez, измеренных в
плоскостях хкОук и xKOzK системы координат, связанной с коор-
динатором цели.
При наведении ракеты, имеющей одну плоскость симметрии,
наиболее удобной для формирования сигналов наведения является
система углов е и щ Второй способ оказывается более удобным
для динамически осесимметричных ракет. (Это обстоятельство
связано со способом образования нормальных перегрузок ракеты,
см. разд. 1.1 в гл. I). Поэтому если координатор цели, установ-
ленный на осесимметричной ракете, измеряет углы е и н, то их
затем преобразуют в углы &у и ez.
Результаты измерения координат цели получают на выходе ко-
ординатора в виде напряжений, пропорциональных измеряемым
величинам:
«1 = k±r; и2 — k2e; и3 = k:,u
или
«х = йхГ; и2 — k2zy; и3 = fe3ez.
§ 1. Введение. Координаторы цели
413
Способ образования этих сигналов U\, и2, и3 обусловлен прин-
ципом действия и устройством координатора цели. Для дальней-
шего изложения нет необходимости рассматривать этот вопрос,
так как он выходит за рамки настоящей книги и достаточно осве-
щен в литературе [1], [2], [4], (10], [19]. Здесь только следует отме-
тить, что не каждый координатор может измерять дальность це-
ли г. Так, тепловые координаторы не имеют дальномерного кана-
ла, в то время как радиолокационный координатор может изме-
рять не только дальность г, но и скорость сближения ракеты с
целью г. Из дальнейшего будет также видно, что для реализации
многих методов самонаведения измерять дальность г не требуется.
Отметим, что, кроме координатора цели, для реализации само-
наведения могут использоваться и другие источники информа-
ции: гироскопические измерительные элементы различных типов,
датчики нормальных перегрузок и др. Однако координатор цели
является безусловно необходимым измерительным элементом, пре-
доставляющим основную информацию для самонаведения ракеты.
Сигналы, получаемые на выходе координатора, используются для
формирования сигналов наведения, которые передаются в систему
стабилизации и управления нормальными перегрузками.
Например, в простейшем случае координатор цели может быть
жестко связан с корпусом ракеты так, что его ось совпадает с про-
дольной осью ракеты. Если эта ракета имеет осесимметричную
схему, то сигнал, пропорциональный измеренной угловой коорди-
нате в продольной плоскости Еу, используется для отклонения ру-
лей высоты, а сигнал, пропорциональный углу sz — для отклоне-
ния рулей направления.
В последующих разделах этой главы рассматривается, каким
образом информация о положении цели относительно осей, связан-
ных с координатором, преобразуется в сигнал наведения. Здесь
лишь отметим основной принцип формирования сигнала наве-
дения.
В системах самонаведения, как и в других системах автомати-
ческого наведения управляемых ракет, используется классический
принцип управления по отклонению. В соответствии с этим прин-
ципом определяется отклонение некоторых параметров истинного
движения ракеты от значений этих параметров, отвечающих тре-
буемому (теоретическому) движению.
Это отклонение определяется в виде сигнала ошибки системы
наведения, который преобразуется в сигнал наведения. Сигнал на-
ведения воздействует на систему управления нормальными пере-
грузками ракеты так, чтобы свести появившееся отклонение к
нулю. В том случае, когда отклонение отсутствует или, другими
словами, сигнал ошибки равен нулю, параметры движения ракеты
точно соответствуют требуемому (теоретическому) движению, ко-
торое определяется принятым методом наведения.
414
Глава VIII. Динамика самонаводящихся ракет
Таким образом, чтобы сформировать сигнал ошибки, надо
знать, какой метод наведения требуется реализовать. Учитывая
это, проведем сравнительный анализ различных методов самона-
ведения и рассмотрим основные свойства траекторий самонаво-
дящихся ракет.
§ 2. МЕТОДЫ САМОНАВЕДЕНИЯ
2.1. Понятие метода наведения самонаводящихся ракет
Общая характеристика понятия метода наведения для авто-
матически управляемых ракет была дана в разд. 3.1 гл. VII.
Поэтому здесь рассмотрим только те особенности методов наведе-
ния, которые характерны для самонаведения.
Для упрощения задачи ниже будем рассматривать только плос-
кое движение управляемой ракеты, предполагая, что и траектория
цели лежит в некоторой неизменной плоскости.
На рис. 8.2 точка Ц соответствует центру масс цели, а точка
О — центру масс ракеты. Обозначения углов соответствуют слу-
чаю, когда движение ракеты и цели происходит в вертикальной
плоскости. Основными углами здесь являются следующие:
•& — угол тангажа;
а — угол атаки;
0 — угол наклона касательной траектории к горизонту;
т) —угол упреждения (угол между вектором скорости ракеты
и линией визирования цели);
£ — угол пеленга цели (угол между продольной осью ракеты
и линией визирования цели);
<р — угол между линией визирования цели и горизонтом.
Запишем систему уравнений плоского движения ракеты (без
учета вариаций скорости AV):
1) Сц-Э- Д— а12а. а136е — О,
2) 0 = а12а + а4363,
3) Э- = 0 + а,
4) г = — Vcos (<р 0) + Уц cos (ср — 0Ч),
5) r<f> = V sin (<р — 0) — Уц sin (tp — 0Ч),
6) т] = С + а,
7) т; = <р — 0.
(8-1)
Этой системе уравнений соответствует структурная схема, при-
веденная на рис. 8.3. Из схемы видно, что движение ракеты будет
неопределенным, если не задать закон изменения поворота руля
§ 2. Методы самонаведения
415
высоты бе. (Здесь предполагается, что закон движения цели задан,
т. е. V4 и 0Ч являются известными функциями времени).
Как было показано в гл. VII, система наведения вводит допол-
нительные связи, накладываемые на движение ракеты, благодаря
которым при заданном законе движения цели однозначно опреде-
ляется движение ракеты. Эти связи в математической форме зада-
ются уравнением системы наведения
б„ = f(V, 0, а, г, ср, . . .).
Рис. 8.2. Геометрические
соотношения при самонаве-
дении
Рис. 8.3. Блок-схема управления ки-
нематическими параметрами движения:
I — ракета; II — кинематическое звено;
III — цель
С учетом этого уравнения можно составить структурную схему
комплекса самонаводящейся ракеты. Эта схема приведена на
рис. 8.4. Она является самой общей схемой системы самонаведе-
ния и детально рассматривается в последующих разделах настоя-
щей главы.
В дальнейшем при
проведении сравнительно-
го анализа методов само-
наведения будем исполь-
зовать определение мето-
да наведения, как способ
задания кинематической
траектории ракеты, когда
Рис. 8.4. Блок-схема системы самона-
ведения:
I — ракета; II — кинематическое звено; III —
цель; IV — система наведения
уравнение метода наведе-
ния определяется с помо-
щью уравнения ошибки
наведения.
2.2. Классификация методов самонаведения
Как уже отмечалось, основной информацией, на использова-
нии которой строится работа любой системы самонаведения, яв-
ляется информация о взаимном положении ракеты и цели. Это
положение определяется направлением в пространстве линии визи-
рования цели. Поэтому для задания метода самонаведения необ-
ходимо определить требуемое положение линии визирования цели
416
Глава VIII. Динамика самонаводящихся ракет
относительно какой-либо системы отсчета. В зависимости от выбо-
ра этой системы можно различать три группы методов наведения.
Для первой группы методов наведения требуется, чтобы при
движении ракеты по направлению к цели линия визирования цели
занимала вполне определенное положение относительно продоль-
ной оси ракеты. Другими словами, здесь накладывается связь на
изменение угла пеленга £. В простейшем случае, например, тре-
буется ? = 0, т. е. совпадение линии визирования цели с продоль-
ной осью ракеты (метод прямого наведения). В другом случае
можно использовать связь £ = const =т^0. В общем случае угол пе-
ленга может меняться по какому-либо сложному закону.
Ко второй группе относятся методы наведения, в которых тре-
буется, чтобы линия визирования цели в процессе движения раке-
ты занимала вполне определенное положение относительно векто-
ра скорости ракеты. В этом случае накладывается связь на изме-
нение угла упреждения т). Самым простым вариантом является
случай т] = 0, когда вектор скорости ракеты всегда направлен на
цель (метод погони). Угол упреждения, оставаясь постоянным, мо-
жет не быть равным нулю (метод погони с упреждением). В об-
щем случае угол упреждения может быть переменным, изменяясь
по вполне определенному закону по времени или в зависимости от
некоторых других кинематических параметров движения (напри-
мер, метод пропорционального наведения).
Наконец, к третьей группе методов наведения относятся те из
них, в которых требуется при управлении движением ракеты обес-
печить вполне определенное положение линии визирования цели
относительно некоторого фиксированного в пространстве направ-
ления. Очевидно, в этом случае необходимо потребовать, чтобы
угол ф менялся бы в соответствии с некоторым законом. Здесь
также самому простому случаю соответствует метод наведения с
Ф = const (метод параллельного сближения).
Указанные три группы методов наведения не исчерпывают всех
возможных случаев. Например, можно представить себе метод
наведения, когда одновременно накладываются связи на углы £
и ф и т. д. Однако приведенная классификация охватывает наи-
более интересные случаи и, кроме того, каждой из указанных
групп методов наведения соответствуют характерные особенности
траекторий движения ракет.
2.3. Основные свойства траекторий
при различных методах самонаведения
Для сравнительного анализа различных методов самонаведе-
ния и свойств соответствующих им траекторий воспользуемся ки-
нематическим методом исследования, основные черты которого
были рассмотрены в разд. 3.3 гл. VII.
§ 2. Методы самонаведения
41Z
Для решения этой задачи необходимо рассмотреть систему
уравнений самонаводящейся ракеты (8.1), к которой следует доба-
вить уравнение метода наведения.
Как уже было указано, для рассмотренных трех групп методов
наведения необходимо в форме уравнения определить закон изме-
нения угла пеленга t, угла упреждения т] или угла, определяющего
положение линии визирования цели ф. Простейшими законами,
например, могут быть £ = 0, т] = О или ф = const.
Рассматривая систему уравнений (8.1) совместно с уравнением
метода наведения, нетрудно установить, что если связи наклады-
ваются на закон изменения угла ц или ф, то траекторию ракеты
можно рассчитать, решая только четвертое, пятое и седьмое кине-
матические уравнения и оставляя без внимания первое — третье
уравнения динамики, так как в этом случае указанные уравнения
образуют замкнутую систему. Таким образом, по отношению ко
второй и третьей группе методов наведения применим чисто кине-
матический метод исследования.
Если обратиться к методам первой группы, когда связи накла-
дываются на угол пеленга £, например £ = 0, то присоединяя урав-
нения закона наведения к уравнениям (8.1), легко обнаружить, что
нельзя найти решение четвертого, пятого и шестого кинематиче-
ских уравнений, не добавив к ним второго уравнения динамики.
Это связано с тем, что угол пеленга £ зависит от угла атаки ракеты
а, изменение которого не может быть определено без учета урав-
нений динамики. По этой причине по отношению к первой группе
методов наведения кинематический метод анализа неприменим.
Рассмотрим теперь основные свойства траекторий для наиболее
исследованных методов наведения.
Наиболее подробно остановимся на методах самонаведения вто-
рой и третьей групп, по отношению к которым применим метод ки-
нематического анализа. Из методов первой группы рассмотрим
лишь кратко метод прямого наведения (с законом наведения
? = 0).
Метод прямого наведения
Система уравнений, которую приходится решать при расчете
траекторий, имеет следующий вид:
1) г = —Vcos(tp — 0) 4- Уц cos (ср — 0Ц);
2) гср = V sin (<f> — 0) — Уц sin (<р — 0Ч);
3) . ср— 0 = ' -4 а;
4) 0 = а42а= —а;
11
5) С = 0.
14 Заказ 1242
418
Глава VIII. Динамика самонаводящихся ракет
Предполагая, что V = const и цель не маневрирует, т. е.
0Ч = const, Уц = const, и замечая, что угол атаки обычно не пре-
вышает 14—16°, можно эти уравнения упростить:
1) г = — У + Уц cos ср;
2) гср = Уа. — У,( sin ср;
3) 7\0-L0.= ср;
4) а = ср — 9.
Несмотря на заметное упрощение, эта система в общем виде не
решается. Общее решение можно ’Получить только для случая,
когда V4 = 0, т. е. цель неподвижна. Тогда
1) г = — У;
2) ср = — ;
г
3) а == ср — 0 = ср — 2_ «.
Одно из решений этой системы имеет вид
Га—г
<ХаГа TiV
а = —— е
г
Из решения следует, что при г—>-0 угол а—»оо. Таким обра-
зом, свойства траекторий таковы, что ракета, не долетев до цели,
сойдет с требуемой траектории и закон наведения не может быть
выполнен, так как угол атаки ракеты а является ограниченной
величиной.
Если задано предельное значение угла атаки а = ат, то мож-
но подсчитать то минимальное расстояние г = rmin, на которое ра-
кета может подойти к цели без нарушения закона наведения.
Если принять, ЧТО rmin <С Го, то тогда
roao TiV
rniin = — е
В рассматриваемом случае нельзя в общем виде записать и
уравнение траектории, так как
г«
__го _Г_
, TxV 1 1 T.V
ср = сро + a0r0e — е dr,
J f2
г
а последний интеграл через элементарные функции не выражает-'
г
ся. Однако при малых г, когда eTlV ~ 1, траектория по форме
§ 2. Методы самонаведения
419
приближается к гиперболической спирали
______________________________________Го.
TiV/ 1 1
<f>;—• <р0 -J- aoroe I
В случае, когда V4 0, траектории становятся еще более искрив-
ленными и rmin увеличивается.
Из этого приближенного анализа следует, что метод прямого
наведения, характеризующийся законом £ = О, удобно применять
при малых скоростях цели относительно малых скоростей ракеты
и при условии, что начальная дальность г0 достаточно велика.
Рассмотрим теперь основные свойства методов наведения, для
которых характерной чертой является вполне определенная
ориентация вектора скорости ракеты относительно линии визиро-
вания цели.
Метод погони
Наиболее простым методом наведения здесь является метод
погони, которому соответствует в идеальном случае движение
ракеты с нулевым углом упреждения (ц = 0). Очевидно, что здесь
требуется, чтобы вектор скорости ракеты был всегда направлен
на цель. Для случая, когда можно считать, что цель движется с
постоянной скоростью по прямолинейной траектории и скорость
ракеты постоянна, легко получить уравнение траекторий («кривых
погони») в конечной форме [6]. Если ось Охо направить параллель-
но направлению движения цели (см. рис. 8.2), когда Q4 = 0, то
уравнение траекторий получит следующий вид [6]:
р—1
г = д (1 — cos у) = А (sino)p~1
(l + cos?)p’
(1 + COS tp)
где А — произвольная постоянная, зависящая от начальных усло-
вий движения г0 и фо, а
V ,
р = — = const.
Прямолинейная траектория ракеты возможна только при дви-
жении ее точно навстречу цели или точно в хвост цели. В этом
случае <р = 0 или л и поэтому <р = 0, т. е. линия визирования цели
в процессе наведения не вращается, и траектория ракеты действи-
тельно будет прямой линией. Все остальные траектории сходятся
к точке «цель» только при <р—>-0 и то при условии, что р> 1
(рис. 8.5). Это означает, что для прямого попадания ракеты в
цель необходимо, чтобы скорость ракеты превышала скорость цели
14*
420
Глава УШ. Динамика самонаводящихся ракет
и, кроме того, такое попадание будет возможно только после того,
как ракета зайдёт в хвост цели.
Это свойство траекторий позволяет заключить, что одна из
двух возможных прямолинейных траекторий, а именно, распола-
гающаяся в передней полусфере, когда ф = л, будет неустойчи-
ва, т. е. при небольших отклонениях ракеты от неё угол ф начнёт
монотонно изменяться до тех пор, пока не примет значения, рав-
ного нулю.
При исследовании любого метода наведения значительный ин-
терес представляет оценка потребных нормальных перегрузок.
Нетрудно оценить перегрузки, по-
----------- требные для точного движения по
кривой погони, если сохранить
условия, принятые выше. Дейст-
\ \ \\ \ вительно,
Рис. 8.5. Кривые погони
Но так как 0 = <р по условию метода наведения, то
п УУцЬШ? _ (1-!-cos?)p
Sr SA (sin<p)₽-2
(8-2)
Так как при движении к цели по кривой погони ср—>0, то оче-
видно, что нормальная перегрузка останется в процессе движения
величиной ограниченной, если только р < 2.
В этом случае при движении по кривой погони потребная нор-
мальная перегрузка сначала возрастает, достигает максимума, а
затем при дальнейшем приближении к цели убывает до нуля. Если
же р > 2, т. е. V > 2Vч, то в этом случае по мере приближения к
цели перегрузка будет монотонно и неограниченно возрастать. По-
этому при некотором малом расстоянии между ракетой и целью
перегрузка достигнет предельного для данной ракеты значения и
дальнейшее движение по кривой погони станет невозможным.
В случае, когда р < 2, из выражения (8.2) нетрудно найти то зна-
чение угла ср*, при котором перегрузка достигает максимума, и
определить этот максимум. Решая обычную задачу на экстремум,
можно найти, что
cj>* = arc cos — ,
что дает
^кшах
§ 2. Методы самонаведения
421
Если р > 2, то прямое попадание ракеты в цель исключается,
гак как, не дойдя до цели, ракета сойдет с траектории. Но это
не значит, что метод погони нельзя применять при соотношении
р > 2, так как цель может быть поражена, лишь бы расстояние, на
котором прекращается наведение, было бы достаточно малым.
Из уравнения (8.2) следует, что нормальное ускорение пропор-
ционально произведению скоростей ракеты и цели. Поэтому для
уменьшения расстояния, на котором перегрузка достигает предель-
ного значения, необходимо, чтобы это произведение было бы до-
статочно малым. Таким образом, метод погони наиболее пригоден
в случае, когда скорость цели имеет небольшое значение. При
больших значениях произведения скоростей цели и ракеты этот
метод пригоден только для атак в задней полусфере цели, так как
в этом случае траектории характеризуются малыми значениями
угла ф.
Представляет интерес оценить условия, которым должен удов-
летворять параметр р, при выполнении которых остается ограни-
ченным в процессе наведения угол поворота рулей ракеты б. Из
уравнений динамики ракеты следует, что если известно, как из-
меняется при движении по кривой погони производная 0, можно
рассчитать требуемый угол отклонения рулей б. Легко проверить,
что соответствующее уравнение для расчета б имеет следующую
форму:
0 - а© + bQ = сб,
где коэффициенты а, b и с определяются через динамические
коэффициенты ракеты ац> «12, «1з и а42.
Как известно, по мере приближения ракеты к цели нормальная
перегрузка и, следовательно, производная 0 остается ограничен-
ной, если р < 2. Можно установить, что при ф->0 вторая произ-
• . з
водная 0 = ф остается ограниченной, если р <—; третья произ-
водная будет ограниченной при р
4
3
(Это исследование выпол-
4
нено в {5]). Поэтому, когда р по мере приближения ракеты к
цели угол отклонения рулей непрерывно возрастает (б->оо). Так
как в действительности угол б ограничен, то очевидно, что уже при
V >— V4 ракета, не дойдя до цели, сойдет с траектории погони.
Естественно, и в этом случае решающее значение имеет не сам
факт неограниченного возрастания угла б, а то расстояние до цели,
при достижении которого угол поворота рулей достигнет предель-
ного значения. Метод оценки этого расстояния можно найти в
работе {5].
422
Глава VIII. Динамика самонаводящихся ракет
Метод на ведени я с постоянным упреждением
Лучшие результаты можно получить при наведении ракеты на
подвижную цель, если ввести отличный от нуля угол упреждения
т) = const 5^ 0 (рис. 8.6). Сохранив принятые выше условия иссле-
дования (V = const, = const, 0Ч = 0), как и в предыдущем
случае, можно получить в общем виде уравнение семейства траек-
погони:
тории, которые иногда называют обобщенными кривыми
Рис. 8.6. Геометри-
ческие соотношения
при наведении с по- д
стоянным упреж-
дением
д [sin <Р! — sin у]1/1 Ь2
а 9
[1 + cos(? + ?1)JZ1-b2
а — pcosTj;
b = р sin Т|;
ср! = arc sin 6;
— произвольная постоянная,
легко найти, положив
Ф = Фо-
которую
г = Г0,
Это уравнение определяет семейство траекторий относительного
движения ракеты.
Выясним положение возможных прямолинейных траекторий ра-
кеты. Так как условие прямолинейного полета есть 0 = 0, а по за-
кону метода наведения 0 = <р, то из уравнения (5) системы (8.1)
следует, что траектория ракеты будет прямой линией, когда
Vl( sin <р = V sin т).
Для заданного угла упреждения т) имеем две прямолинейные
траектории, ориентированные под углами cpi и фг, причём
Ф1 = arc sin b, а фг = л — Фь если только | b | < 1. При | b | > 1
прямолинейных траекторий быть не может.
В случае, когда |й| <1, все криволинейные траектории подхо-
дят к цели при ф->-ф1, если только V > V4 (рис. 8.7). Таким обра-
зом, при наведении с постоянным углом упреждения ракета насти-
гает цель, заходя в её заднюю полусферу.
Очевидно, что за счёт подходящего выбора угла упреждения
можно получить траекторию, близкую к прямолинейной при
любых начальных значениях угла ф. Для этого достаточно опре-
делить угол упреждения из соотношения
1 .
Sin 7) = -Sin <f>0.
Р
§ 2. Методы самонаведения
423
Как и для метода погони, прямолинейная траектория, распола-
гающаяся в передней полусфере, неустойчива. Это означает, что
при отклонении ракеты от прямолинейной траектории, определяе-
мой углом фг, угол <р начнёт изменяться до тех пор, пока не примет
значения, равного фь что произойдёт при г = 0.
Как и для метода погони, нетрудно получить ' выражение для
оценки нормальных потребных перегрузок
а
п __ V0___УУЦ b — sin у _ VV1( [1 4- cos (cpi + ?)] V1^fc2
н g g r gA a _2 ‘
Г . ! V 1— b2
[sin (f! — Sin cp]
Для того чтобы выполнялось
димо выполнение неравен-
ства
2
Р< Г-
у 4 — 3 cos2 т]
Когда это неравенство
выполняется, нормальная
перегрузка ракеты при дви-
жении по траектории внача-
ле возрастает, достигает
максимума, а затем убывает
до нуля. Если это неравенст-
во не удовлетворяется, то
потребная нормальная пе-
Рис. 8.7. Обобщенные кривые погони
регрузка монотонно и неограниченно возрастает по мере приближе-
ния ракеты к цели.
Удобным способом анализа перегрузок является графический
метод, сводящийся к построению линий постоянных перегрузок
с помощью уравнения
_ УУц sin <f>! — sin ср
пн
g
г
Анализ перегрузок, потребных для осуществления наведения с
постоянным углом упреждения, показывает, что этот метод наве-
дения мало пригоден для осуществления атаки в передней полу-
сфере цели, если последняя имеет скорость того же порядка, что
и скорость ракеты. При этих условиях ракета может сойти с тре-
буемой траектории на относительно большом расстоянии от цели.
Если учесть уравнения динамики ракеты, то можно убедиться
в том, что по мере приближения ракеты к цели угол отклонения
рулей не возрастает неограниченно только при значении параметра
р, заключенном в очень узком интервале.
424
Г лава VIII. Динамика самонаводящихся ракет
Таким образом, наведение с постоянным углом упреждения
может дать хорошие результаты только при атаках в задней полу-
сфере, но по сравнению с наведением методом погони прямолиней-
ные траектории могут быть получены при любых начальных зна-
чениях угла <ро с помощью соответствующего выбора угла упреж-
дения Т].
Пропорциональное сближение
Для того чтобы можно было обеспечить благоприятные условия
наведения в передней полусфере цели, получив траектории, близ-
кие к прямолинейным и в непосредственной близости от цели, не-
обходимо вводить переменный угол упреждения.
Действительно, из кинематического уравнения
лр = V sin Т; — Vl( sin <р, (8.3)
характеризующего изменение направления линии визирования це-
ли в случае = 0, следует, что при отклонении ракеты от прямо-
линейной траектории в передней полусфере появляется угловая
скорость вращения линии визирования ф, совпадающая по знаку с
отклонением угла Аф. Это можно показать, записав уравне-
ние (8.3) в приращениях. Предполагая, что скорости V и V4, а
также дальность г не получают приращений, можно записать
гАо = V cos 7]0Ат( — V((cosp0Ap. (8-4)
Указанные приращения находим относительно прямолинейной
траектории, удовлетворяющей условию
V sin т]0 — 1Д sin р0 = 0, (8.5)
которое означает, что угол упреждения т]о выбран так, чтобы при
заданном значении фо получить прямолинейную траекторию.
При наведении с постоянным углом упреждения Ац = 0 и пото-
зт 3 •
му в передней полусфере, когда — < фо < ур л, отклонения Аф и
Аф имеют один и тот же знак. Другими словами, при отклонении
Аф > 0 появляется Аф > 0, что вызывает увеличение Аф и враще-
ние линии визирования цели до тех пор, пока угол ф не станет рав-
ным фь В задней полусфере, когда — рр<фо<рр величины Аф
и Аф имеют разные знаки, что и обусловливает кинематическую
устойчивость прямолинейной траектории.
Из уравнения (8.4) следует, что можно обеспечить устойчи-
вость прямолинейной траектории и в передней полусфере, если из-
менять угол упреждения т] в некотором соответствии с изменением
угла ф.
§ 2. Методы самонаведения
425
Простейшей формой связи между изменением угла упрежде-
ния ц и изменением угла ф будет пропорциональная зависимость,
когда, например,
Дт(=(1—А)Д?, (8.6)
где k—некоторая константа.
Так как углы ф, 8 иы) связаны соотношением ф = 0 + ц или
Дф = Д0 + Дт], то уравнение (8.6) можно записать в следующих
эквивалентных формах:
Д^ = —-AQ,
k
или
Д0 = £Д<р. (8.7)
Нетрудно убедиться в том, что подходящим выбором коэффи-
циента пропорциональности k можно обеспечить кинематическую
устойчивость прямолинейных траекторий при любых начальных
условиях. Действительно, подставляя в уравнение (8.4) выраже-
ние (8.6) для Дц, получим
гДу = [V cos7)0 (1 —k) —V4cos <р0] Дер.
Условие устойчивости прямолинейной траектории, заключаю-
щееся в том, чтобы Дф и Дф имели различные знаки, даёт возмож-
ность правильно назначить коэффициент пропорциональности k.
Потребуем, чтобы выполнялось неравенство
(1 — k) V COS 7]0 — Уц cos <Д О,
в котором Цо и фо связаны соотношением (8.5). Тогда, предполагая,
что | т)о | < — , получим -
На рис. 8.8 приведены графики, представляющие правую часть
неравенства как функцию фо для разных значений отношения
р = У/Уч.Из этих графиков следует, что при k > 2 неравенство
(8.8) удовлетворяется при любых начальных углах ф0 и отноше-
ниях V/V4, т. е. ив передней, и в задней полусфере можно получить
устойчивые прямолинейные траектории. Характерно также, что
для наведения в задней, полусфере ^0< IФо| < -у-) требуются
меньшие значения коэффициента k.
426
Глава УШ. Динамика самонаводящихся ракет
Записанные выше соотношения (8.6) и (8.7), связывающие
приращения углов, можно записать и в такой форме:
0 = @0 -j- k (ср — срР); (8.9)
^ = ^ + ^(0-00); (8.10)
k
-Г) = Чо + 0 — k) (? —?0), (8-И)
где индекс «0» соответствует некоторым начальным значениям
углов, имеющих место в первый момент наведения.
Из соотношения (8.9) следует, что рассматриваемый закон на-
ведения можно запи-
сать в другом виде, бо-
лее удобном для реали-
зации:
Рис. 8.8. Зависимость коэффициента пропор-
циональности k от условий наведения
0 = fy. (8. 12)
Это связано с тем, что
во многих случаях
удобнее измерять угло-
вые скорости, а не уг-
лы. Уравнение (8.12)
определяет метод наве-
дения, называемый
пропорциональным
сближением.
Очевидно, наведение с постоянным углом упреждения и в том
числе наведение по кривым погони можно рассматривать как
частный случай пропорционального сближения. Действительно, на-
ведению с постоянным углом упреждения соответствует k = 1, что
следует из уравнения (8.11).
Интересно заметить, что и параллельное сближение, характе-
ризующееся связью ср = const, можно рассматривать как частный
случай пропорционального сближения. Действительно, при
k = оо, Дг| = —Д0, т. е. в процессе наведения Дф = 0 и, следова-
тельно, ф = const. Поэтому метод пропорционального сближения
является довольно общим методом. Будучи реализован, он позво-
ляет получать за -счёт выбора коэффициента k траектории со свой-
ствами, промежуточными между свойствами кривых погони и свой-
ствами траекторий параллельного сближения.
Аналитическое исследование свойств траектории пропорцио-
нального сближения, аналогичное исследованию кривых погони,
не представляется возможным, так как система кинематических
уравнений движения совместно с уравнением связи (8.12) не име-
ет решения в общем виде, за исключением частного случая, когда
k — 2. Отсылая читателя к литературе [1], [5], где приведено иссле-
§ 2. Методы, самонаведения
427
дование этого случая, проведём качественный анализ траекторий
пропорционального сближения, предварительно упростив исход-
ные кинематические уравнения.
Прежде всего заметим, что и при пропорциональном сближе-
нии существуют устойчивые и неустойчивые прямолинейные
траектории. Все другие (криволинейные) траектории располага-
ются в секторах, заключённых между устойчивыми и неустойчивы-
ми прямолинейными траекториями, причём эти траектории стре-
мятся отойти от неустойчивых траекторий и слиться с устойчивы-
ми. По существу, здесь наблюдается та же качественная картина,
как и при наведении по кривым погони, с той лишь разницей, что
угол между соседними устойчивой и неустойчивой прямолинейны-
ми траекториями здесь меньше, чем в случае наведения по кривым
погони. Этот угол тем меньше, чем больше коэффициент пропор-
циональности k в уравнении связи. Поэтому траектории при про-
порциональном наведении имеют меньшую кривизну по сравнению
с кривыми погони. Все эти утверждения легко проверить. Дейст-
вительно, в нашем случае условие прямолинейности траектории
снаряда 0 = 0 в соответствии с уравнением связи (8.12) эквива-
лентно условию
V sin у; — Уц sin (<р — 0;() = 0.
Учитывая уравнение связи для метода пропорционального
сближения
''I = ''lo + (1 — k) (ср — ср0),
где цо и фо отвечают некоторому начальному моменту движения,
получим условие прямолинейности траектории в виде
V sin [т)0 J- (1 — k) ср — (1 — k) ср0] — Уц sin (ср — 0Ц) = 0.
Для упрощения анализа положим, как и прежде, что скорости
ракеты и цели постоянны и цель не маневрирует. Если начальное
значение угла определить из соотношения
V sin т)п — sin (ср0 — 0цО) = 0,
то получим устойчивую прямолинейную траекторию при условии,
что коэффициент k достаточно велик (8.8).
Представим теперь, что при неизменном начальном значении
угла упреждения (соответствующем данному начальному зна-
чению фо) наведение ракеты начинается с некоторого другого зна-
чения угла ф°, не равного фо. Для каждого значения угла ф° по-
лучим свою траекторию. Среди семейства всех возможных траек-
торий, отвечающих различным значениям ф°, получим и несколько
прямолинейных траекторий ф = ср° = const. Действительно, урав-
нение
V sin [т)0 + (1 - k) о ° 4- (k - 1) ср0] - Уц sin (ср° - 0ЦЙ) = 0 (8.13)
428
Глава VIII. Динамика самонаводящихся ракет
имеет несколько решений относительно величины ф°, среди кото-
рых будет и исходное начальное значение ф0.
Эти решения можно определить, например, графически. Так,
на рис. 8.9 приведено графическое построение, определяющее ре-
шение уравнения (8.13) для случая, когда k = 3, 0чо = 0 и г|о +
+ (ft—1)ф0 = const. Как видно, в данном случае имеется четыре
значения угла <р°, равные <Pi , Фг ’ 'Рз и ?4> которым соответст-
вует движение по прямолинейной траектории. При этом углам ср°
и ф4° соответствуют устойчивые траектории, а углам ф° иу3° —
неустойчивые. Действительно, легко убедиться в том, что при от-
Рис. 8.9. Графическое определение коор-
динат прямолинейных траекторий при про-
порциональном сближении
клонении от ф2° в сторону увеличения угла получим ф<0и по-
явившееся отклонение будет стремиться исчезнуть. При отклоне-
нии от углов cpj° и ф°3 получается обратная картина — знаки
отклонения Аф и появляющейся при этом угловой скорости <р
совпадают, поэтому появившееся отклонение Аф будет увеличи-
ваться до тех пор, пока траектория ракеты не сольётся с устойчи-
вой прямолинейной траекторией.
На рис. 8.10 приведена схема траекторий пропорционального
сближения, соответствующая рис. 8.9. На рис. 8.10 неустойчивые
прямолинейные траектории обозначены пунктирными прямыми.
Из рассмотренного выше примера графического решения урав-
нения (8.13) следует, что, когда k — п/2, где п 2— целое число,
имеется (п— 2) прямолинейных траекторий. При целом k полови-
на этих траекторий будет устойчивыми, другая половина — неус-
тойчивыми. При увеличении k секторы между устойчивыми и не-
устойчивыми траекториями будут сужаться, сами траектории бу-
дут спрямляться и в пределе при переходе к методу параллельного
сближения (й->оо) получим одни прямолинейные траектории
(если V и V4 постоянны).
§ 2. Методы самонаведения
429
Таким образом, при пропорциональном сближении, если коэф-
фициент k достаточно велик, в процессе наведения угол <р может
изменяться незначительно. Это позволяет исследовать свойства
траекторий более детально, воспользовавшись линеаризацией ки-
нематических уравнений. Будем исходить из естественного предпо-
ложения о том, что опорной траекторией является прямолинейная
устойчивая траектория, при движении по которой <р = 0.
Линеаризуем теперь кинематическое уравнение
= V sin (ср — 0) — Уц sin (ср — 0Ц)
относительно этой траектории, параметры которой обозначим
индексом «*». После линеаризации получим
Г*Дер + <р*Дг = v cos (ср* — 0*) (Дер — Д0) — уц cos (ср* — 0/(*) (Дер — Д0Ц)
Учитывая, что
?* = 0
и
V cos (ср* — 0*) — Уц cos (ср* — 0Ч*) = — г*,
вводя обозначения
V = V cos (ср* —0*);
= Уц cos (ср* — 0,(*)
и опуская индекс « * », получим
гДср /-Дер = —УД0 УчД0ц, (8.14)
причём
Здесь, как и выше, рассмотрен для простоты случай, когда V и
V4 постоянны. Так как для опорной траектории <р*,0* и 0Ч* —
известные постоянные величины, то и V и Уц будут известными
постоянными величинами. В этом случае расстояние г линейно
убывает по времени, т. е.
г = го + rt,
где г—известная постоянная величина.
К линеаризованному уравнению (8.14) необходимо добавить
уравнение связи
Д0 = Мср. (8.15)
Совместное решение эти^ двух уравнений позволяет исследо-
вать основные качественные свойства траекторий пропорциональ-
430
Глава VIII. Динамика самонаводящихся ракет
кого сближения. Для решения к уравнениям необходимо добавить
начальные условия:
при t = 0 имеем Дер = Д<р0; Д0 = Д0О; г — га.
Исключая из уравнений (8.14) и (8.15) величину Д0, получим
гД<р 4- (kV + 2г) Дер = 17ЦД0Ц (8.16)
с начальными условиями при t = 0
г = г0; -'» = Д<р0; Д<р = Д<р0 =-— Д©0-— Дср0.
го г0
Последнее соотношение следует из уравнения (8.14), если в
нём значения переменных и коэффициентов заменить их началь-
ными значениями.
Если обозначить Д<р = у, то уравнение (8.16) сведётся к линей-
ному дифференциальному уравнению первого порядка, решение
которого записывается в квадратурах:
t t i
I f kV + 2r ,, 1 Г f J f kV-Г- 2r ,, } VUMU ,
j/ = expj—I—-—dii exp<—“—dt ——-М+Уо ,
0 0 0
где ya = Дфо.
Предполагая, что Д0Ч — величина постоянная и выполнив вы-
числения, получим
. / \2-W - • 2-W_ 2-W
у = Д? = дсро ( (8.17)
\г J (2 — N)r г
где
N = — s - . (8.18)
г
Формула (8.17) получена в предположении, что маневр цели,
характеризующийся величиной Д0Ч, начинается в момент времени
t = 0. Нетрудно составить соответствующее выражение для слу-
чая, когда маневр цели начинается в произвольный момент вре-
мени t = /0.
Первое слагаемое в этой формуле характеризует возмущённое
движение ракеты, вызванное начальной ошибкой прицеливания
Д0О (т. е. неправильным заданием начального значения угла
упреждения т]0). Второе слагаемое характеризует отклонение раке-
ты от прямолинейной траектории из-за маневра цели. (Напомним,
что опорной траектории соответствует прямолинейное движение
цели).
§ 2. Методы, самонаведения
431
Из выражения (8.17) видно, что первое слагаемое стремится к
нулю при г->0, если N > 2, т. е.
2(У-УЦ),
V
При выполнении этого неравенства второе слагаемое стремится
к некоторой постоянной величине, равной
(Уц-?)(2-Л1) ’
Используя соотношение
„ 1/0 kV Л-
пн = ---~ ---А?,
н g g Y’
можно оценить нормальные перегрузки, которые должна разви-
вать ракета при пропорциональном сближении.
Если проинтегрировать уравнение (8.17), то можно найти изме-
нение углов Аф и А0 в процессе наведения и тем самым оценить
допустимость линеаризации кинематических уравнений.
Из уравнения (8.17) следует, что чем больше параметр N (или
пропорциональный ему коэффициент k), тем меньше угловые ско-
рости линии визирования цели в процессе наведения, тем ближе к
прямолинейным получаются траектории. Однако более полный
анализ свойств траекторий, проведённый с учётом динамики сис-
темы наведения, показывает,, что при чрезмерном увеличении это-
го параметра траектории вблизи цели приобретают неблагоприят-
ный характер. (Это рассматривается ниже, в разд. 9.1).
Весьма важным свойством метода пропорционального сближе-
ния является то, что характер траектории зависит не от параметра
k, входящего в уравнение связи (8.15), а от параметра N [см.
(8.18)]. Поэтому если желательно сохранить неизменным
характер траектории при наведении как в передней, так и в задней
полусфере, необходимо изменять коэффициент пропорционально-
сти k таким образом, чтобы величина параметра N оставалась
неизменной. Отсюда следует [см. (8.18)], что при атаках в перед-
ней полусфере коэффициент k должен иметь большее значение, по
сравнению со случаем атаки в задней полусфере. Пусть, например,
N = 3; V = 1000 м/сек-, V4 = 500 м/сек. В этом случае при атаке
точно навстречу цели
= = 3 1000+.500 = 4 5,
V юоо ’ ’
а при атаке в хвост
, п 1-000 — 500
к = 3--------------
1000
= 1,5.
432
Глава VIII. Динамика самонаводящихся ракет
С учетом этого обстоятельства желательно в системе наведе-
ния предусмотреть в зависимости от условий атаки переключение
величины коэффициента пропорциональности k. Можно осущест-
вить это и автоматически, если учесть, что закон пропорциональ-
ного сближения можно записать и в такой форме:
0 = fey = W Vii у,
V
или
У0 =- N | 'г | у.
Очевидно, в этом случае необходимо поддерживать пропорцио-
нальную связь между величиной У0, близкой к нормальному
ускорению ракеты, и величиной | г| <р. По сравнению с исходным
вариантом закона наведения координатор цели, кроме величины
Ф, должен измерять и скорость сближения |г|.
Параллельное сближение
Рассмотрим теперь основные черты метода параллельного
сближения.
Уравнение связи для этого случая можно записать в виде
ф = Фо = const или ф = 0. Таким образом, при идеальном наведе-
нии надо управлять ракетой так, чтобы при любом движении цели
линия визирования цели оставалась параллельной самой себе. Так
как здесь ф = const, то очевидно, что Лц = —А0. Как было пока-
зано выше, это соотношение обеспечивает и метод пропорциональ-
ного наведения при k = оо. Поэтому метод пропорционального
сближения при конечном значении коэффициента fe можно рас-
сматривать как возможный способ приближенной реализации па-
раллельного сближения.
Из уравнения
у = У sin (у — 0) — Уц sin (у — 0Ц) = 0
следует, что в случае, когда V и Уч постоянны и цель не маневри-
рует, т. е. 0,} = const, метод параллельного сближения обеспечи-
вает прямолинейные траектории (0 = const). При этом необхо-
димый угол упреждения ц0 = ф — 0 определяется известным со-
отношением
sin7)u =2iLsin(y0 — 0Ч). (8.19)
Таким образом, когда V и Уц постоянны и цель не маневриру-
ет, этот метод наведения по существу не отличается от метода по-
§ 2. Методы самонаведения
433
гони с постоянным углом упреждения, если только в последнем
случае правильно выбран угол упреждения. Конечно, в произ-
вольном случае, когда скорости ракеты и цели переменны и цель
маневрирует, при параллельном сближении и наведении с посто-
янным углом упреждения получаются различные траектории.
Из уравнения связи метода параллельного сближения следует,
что в любой момент времени вектор относительной скорости раке-
ты должен быть направлен по линии визирования цели, так как
только в этом случае она не будет вращаться.
Рис. 8.11. к определе-
нию мгновенной точки
встречи
Часто метод параллельного сближения называют методом на-
ведения в мгновенную точку встречи, понимая под мгновенной
точкой встречи ту точку, в которой долж-
ны встретиться ракета и цель, если бы,
начиная с данного момента времени, они
двигались прямолинейно и равномерно.
На рис. 8.11 точка А является мгно-
венной точкой встречи. Если в рассматри-
ваемый момент времени выполняется ус-
ловие параллельного сближения (8.19),
то линии ОЦ и BD параллельны и отрез-
ки ЦА и ОА пропорциональны V4 и V.
Следовательно, времена движения раке-
ты и цели до точки А будут равны друг
другу, если, начиная с данного момента
времени, ракета и цель будут лететь с по-
стоянными скоростями. Поэтому встреча действительно произойдет
в точке А. Эту точку называют мгновенной точкой встречи, так как
она соответствует мгновенным значениям скоростей ракеты и цели,
т. е. их значениям в данный момент времени. В том случае, когда
цель маневрирует и скорость ракеты переменна, мгновенная точка
встречи перемещается в пространстве, и задача системы наведения
заключается в том, чтобы все время направлять вектор скорости
ракеты в эту перемещающуюся мгновенную точку встречи.
Характерной особенностью метода параллельного сближения
по сравнению с другими методами является то, что потребные
нормальные перегрузки ракеты в случае маневрирующей цели не
превышают нормальных перегрузок цели [6]. (Этот вывод справед-
лив и при пространственном движении цели). Поэтому траектории
параллельного сближения наиболее приближаются к прямолиней-
ным. Рассчитать потребные нормальные перегрузки ракеты при на-
ведении в мгновенную точку встречи не представляет труда. Дейст-
вительно
п
К.
1/т]
434
Глава VIII. Динамика самонаводящихся ракет
так как но условию метода ср = const, а 0 + ц = ф. Дифференци-
руя равенство
V sin т) = sin (<р — 0,(), (8.20)
являющееся уравнением связи, получим
n = c°s(?o-etij---------fg7) (8 21)
4 cost] cost;
Здесь nr — тангенциальные перегрузки цели и ракеты, равные
Vu V
Пт Ц-----, Нт — .
g g
Соотношение (8.21) можно записать и в другой форме, если с
помощью уравнения (8.20) исключить или угол ц, или разность
фо — 0Ч. Например, если скорости ракеты и цели постоянны и
цель совершает маневр с постоянной перегрузкой, то
„ „ _ „ ________cos (уо — 0Ч)___
гсн '‘'н-ц_______________________•
1/ 1 - (-y^sin2 (?о - ©ч)
Если V4/V < 1, то очевидно, что пн < пн ц.
Возможные обобщения методов наведения
Итак, метод параллельного сближения позволяет получать
прямолинейные траектории ракеты в случае, когда скорость ее
постоянна, а цель не маневрирует, двигаясь также с постоянной
скоростью. При нарушении этих условий траектория ракеты ста-
новится криволинейной. Но это обстоятельство является вполне
естественным, так как сущность метода параллельного сближения
заключается в движении в мгновенную точку встречи ракеты и
цели, определенную на основании гипотезы прямолинейного рав-
номерного движения цели и равномерного движения ракеты.
Однако, как и при решении задачи о встрече с целью неуправ-
ляемой ракеты (например, обычного снаряда зенитной артилле-
рии), можно задаваться различными гипотезами о характере дви-
жения цели и законе изменения скорости ракеты. Этим различным
гипотезам будут соответствовать различные методы наведения и
различные способы определения положения точки встречи. Чем
более сложной гипотезой задаются, тем более сложным будет
закон наведения и тем труднее его реализовать.
Возникающие здесь трудности носят не только технический
характер, что связано с необходимостью размещать на борту раке-
ты дополнительные измерительные элементы. В случае усложне-
ния гипотезы о характере движения цели возникают и- принци-
§ 2. Методы самонаведения
435
пиальные затруднения. Действительно, решение задачи встречи
ракеты с целью (или, другими словами, формирование метода на-
ведения) является по существу экстраполяционной задачей. Опре-
деление положения в пространстве точки встречи ракеты и цели,
в которую необходимо наводить ракету, требует знания закона
движения цели за время полета ракеты. Так как невозможно точ-
но предсказать траекторию движения цели, приходится прибегать
к некоторым гипотезам о наиболее вероятном движении цели за
время полета ракеты. (Так же, как и при решении аналогичной за-
дачи для систем теленаведения).
Для предсказания будущего движения цели необходимо в те-
чение некоторого предшествующего интервала времени определять
координаты цели и их производные. Чем более высокого порядка
производные известны, тем с большей достоверностью и на более
длительном интервале времени можно предсказать движение цели.
Поскольку результаты измерения координат цели всегда быва-
ют искажены шумами, то определение производных высокого по-
рядка (практически выше первого) становится невозможным. По
этой причине возможности экстраполяции движения цели оста-
ются ограниченными. Следует иметь в виду, что при разработке
методов наведения управляемых ракет нет, конечно, принципиаль-
ной необходимости задаваться гипотезой о движении цели, тогда
как для неуправляемых ракет это совершенно необходимо. Однако
неудачный выбор метода наведения может привести к сильно ис-
кривленным траекториям ракет, причем движение по некоторым
из них может оказаться неосуществимым. Имея в виду, что метод
наведения, кроме простоты технической реализации, должен обес-
печивать некоторые желаемые свойства траекторий, целесообраз-
но говорить о решении задачи встречи ракеты с целью и по отно-
шению к управляемым ракетам.
Рассмотрим пример. Как уже отмечалось, если скорость ракеты
переменна и используется метод параллельного сближения, то
траектория ракеты будет криволинейной даже при равномерном
прямолинейном движении цели. Поэтому ракета или должна будет
иметь дополнительные располагаемые перегрузки, или придется
уменьшить долю перегрузок, которая затрачивается на компенса-
цию возможного маневра цели и случайных возмущений.
Рассмотрим, как можно сформировать метод наведения, в ос-
нову которого положена гипотеза о прямолинейном равномерном
движении цели и равноускоренном (или равнозамедленном) дви-
жении ракеты. Будем считать, что изменение скорости ракеты,, на-
чиная с данного момента, подчиняется простейшему закону
V (/) = Ко + Vt,
где
V = const.
436
Глава VIII. Динамика самонаводящихся ракет
На рис. 8.12 точка А— мгновенная точка встречи, т. е. точка,
где встретились бы ракета и цель, если, начиная с данного момента,
ракета двигалась с постоянной скоростью. Если скорость ракеты
увеличивается (Е>0), то мгновенная точка встречи перемещает-
ся навстречу цели по мере движения ракеты. Поэтому при исполь-
зовании метода параллельного сближения необходимо угол упреж-
дения все время уменьшать в соот-
ветствии с уравнением связи
sin vj = -^Lsincpo.
При этом траектория ракеты будет
искривленной.
Определим теперь положение
точки встречи ракеты с целью (точ-
ка В) исходя из гипотезы равноус-
коренного движения ракеты, так,
чтобы получить прямолинейную тра-
екторию ракеты. Очевидно, начиная
Рис. 8.12. К определению
фактической точки встречи
с данного положения до точки встречи, цель должна пролететь рас-
стояние ЦВ = D4, а ракета соответственно OB = D. Время движе-
ния ракеты и цели до точки встречи одинаково и равно Т. Из тре-
угольника ОЦВ имеем
Рц _ D
sin т) sin tp ’
но
D = V Т:
Ц У И ’
„ Ц2
D = V0T + V— ,
0 2
поэтому
„ . . VT .
V,t sin cp — Vo sin 7) = -y- sin 7j.
Если рассматривать время T как текущее время, оставшееся
до момента встречи с целью, то в этом случае величина скорости
характеризует текущее, «мгновенное» значение скорости ракеты.
Поэтому, воспользовавшись уравнением
V sin 7) — Уц sin ср = rcp,
получим
rcP + - sin 71 = 0.
2
(8.22)
§ 2. Методы самонаведения
437
Таким образом, при равноускоренном движении ракеты и точ-
ном соблюдении соотношения (8.22) в течение всего времени наве-
дения траектория ракеты будет прямолинейной.
Для реализации метода необходимо измерять г, <р, V, ц, вы-
числять Г и в соответствии с соотношением (8.22) назначать,
например, угол упреждения. Из примера видно, что реализация ме-
тода представляет значительные технические трудности. Можно-
упростить закон наведения, если, например, допуская погрешность,
предположить, что Т г»—г/г. Тогда закон наведения может-
быть записан в такой форме:
V • п
ср----Sin 4 = 0.
2r
В отличие от метода параллельного сближения здесь требуется
равенство нулю не угловой скорости <р (т. е. постоянство угла <р),
а суммы ф и некоторой величины, пропорциональной продольно-
му ускорению ракеты.
Аналогично можно составить уравнение метода наведения, ес-
ли задаться, например, гипотезой о равномерном маневре цели,
определив положение точки встречи исходя из предположения, что-
V = const, V4 = const, 0,f = 0ЧО + @4t, где 0,} = const. В этом слу-
чае получаются очень громоздкие соотношения, для использования
которых на борту ракеты потребуется иметь, кроме измерительных
элементов, специальное вычислительное устройство. Кроме того,
следует иметь в виду, что непосредственно измерять углы 0Ч и 0!}
невозможно. Можно только вычислить эти значения по результатам,
измерения других величин, таких, как г, г., ср, ср, <р, V, 0 и т. д.
В частности, для вычисления 0,} понадобится измерять или вы-
числять вторую производную <р, что практически невозможно, так
как исходный сигнал <р или ср обычно засорен шумами.
Из приведенного краткого обзора следует, что существует мно-
го методов наведения, обеспечивающих непрерывное сближение
ракеты с целью, и еще большее число их можно разработать. Од-
нако, как это уже было указано выше, в разд. 3.1 гл. VII, нецеле-
сообразно формировать метод наведения исходя только из стрем-
ления обеспечить прямолинейность траекторий ракеты без учета
анализа динамической точности наведения, т. е. использовать толь-
ко кинематический подход. Кроме того, при выборе метода наве-
дения для проектируемой системы приходится решать сложные во-
просы, связанные с практической реализацией метода.
В связи с этим рассмотрим некоторые возможные способы реа-
лизации методов наведения.
438
Глава VIII. Динамика самонаводящихся ракет
§ 3. СПОСОБЫ ФОРМИРОВАНИЯ СИГНАЛА ОШИБКИ НАВЕДЕНИЯ
Чтобы составить структурную схему системы самонаведения,
на основании которой можно разработать подробную функцио-
нальную схему, а также провести исследования динамических
свойств системы, необходимо прежде всего выбрать способ фор-
мирования сигнала ошибки. Этот сигнал должен характеризовать
отклонение движения ракеты от теоретического движения, соот-
ветствующего принятому методу наведения.
Затем необходимо выбрать способ преобразования сигнала
ошибки в сигнал наведения, т. е. сигнал, который через систему
управления нормальными перегрузками в конечном счете воздей-
ствует на органы управления ракеты. Решение этой задачи осно-
вывается на исследовании динамических свойств системы наведе-
ния и ее точности.
В настоящем параграфе будут рассмотрены некоторые типо-
вые способы решения первой части задачи, связанной с выбором
способа формирования сигнала ошибки наведения.
Чтобы сформировать сигнал ошибки, необходимо прежде всего
решить, какие величины следует измерять для того, чтобы реали-
зовать требуемый метод наведения. Далее необходимо выбрать
комплекс измерительных устройств, с помощью которых можно
измерить эти величины. В некоторых случаях оказывается, что од-
ну и ту же величину можно измерить с помощью различных из-
мерительных устройств и тогда окончательный выбор может зави-
сеть от дополнительных условий, таких, как точность измерений,
простота, надежность и т. п. Иногда для формирования сигнала
ошибки по данным измерений различных параметров движения
ракеты может потребоваться вычислительное устройство, схема
которого должна быть разработана.
Рассмотрим некоторые наиболее типичные способы формирова-
ния сигнала ошибки применительно к различным методам наведе-
ния. Как уже отмечалось выше, основной информацией, на исполь-
зовании которой строится работа любой системы самонаведения,
является информация о взаимном положении ракеты и цели. Та-
кую информацию предоставляет координатор цели в виде сигна-
лов, пропорциональных угловым координатам, определяющим
положение в пространстве линии визирования цели относительно
системы осей, связанной с координатором. Кроме того, на выходе
координатора иногда получают сигналы, пропорциональные даль-
ности и скорости сближения.
Следовательно, путь формирования сигнала ошибки зависит от
того, как используются сигналы координатора цели и как ориен-
тируются в пространстве оси, связанные с координатором цели.
Различают четыре основных способа ориентирования системы
осей, связанных с координатором цели:
§ 3. Способы формирования сигнала ошибки наведения
439-
1) система осей, жестко связанная с корпусом ракеты;
2) система осей, ориентированная по набегающему потоку;
3) система осей с неизменной ориентацией в пространстве;
4) система осей, ориентированная по линии визирования цели
(по вектору дальности).
3.1. Основные способы ориентирования
чувствительных элементов координаторов цели
и использования их сигналов
Рассмотрим основные особенности каждого из указанных спо-
собов ориентирования координаторов цели на борту ракеты.
Неподвижная относительно ракеты установка координатора це-
ли с конструктивной точки зрения является простейшей. В этом
случае чувствительный элемент координатора
(антенна радиолокационной головки, оптическая
система тепловой головки и т. д.) жестко связы-
вается с корпусом ракеты. Установка чувстви-
тельного элемента координатора может быть вы-
полнена, например, так, чтобы ось координатора
Охк совпадала с продольной осью снаряда Ох}
(рис. 8.13). В этом случае угловое отклонение
цели от оси Охк, которое измеряет координатор,
совпадает с углом пеленга цели £. Поэтому на
выходе координатора непосредственно получают
сигнал, пропорциональный пеленгу цели ик =
= keK= При таком способе установки коорди-
натора недостатком является то, что он должен
иметь сравнительно большой угол зрения. Это не-
обходимо для уменьшения опасности потери це-
ли при больших углах пеленга, которые могут
Рис. 8.13. Гео-
метрические соот-
ношения при ори-
ентации координа-
тора по продоль-
ной оси ракеты
возникать из-за
колебаний ракеты около центра тяжести, а также при маневрах
подвижной цели. Однако расширение поля зрения координатора
снижает его дальность действия и уменьшает угловую разрешаю-
щую способность, т. е. способность раздельно воспринимать два
близких объекта.
При ориентировке координатора по набегающему потоку ось
чувствительного элемента должна следить за направлением век-
тора скорости ракеты. Для реализации такого варианта можно
использовать силовой флюгер, с которым непосредственно связы-
вается чувствительный элемент координатора. При точной работе
флюгера ось координатора Охк окажется направленной по векто-
ру воздушной скорости ракеты. Так как флюгер в общем случае
работает неточно, то между вектором скорости и осью координато-
ра может быть некоторый угол &ф, являющийся ошибкой флюгер-
440
Глава VIII. Динамика самонаводящихся ракет
ностью до
Геомет-
8.14.
Рис.
рические соотношения
при ориентации коор-
динатора цели по век-
тору скорости
ного устройства (рис. 8.14). С учетом этой ошибки получается
следующее соотношение:
ик — kEK = k (vj — еф) ~ k-ri,
т. е. угловое отклонение цели е«, измеряемое координатором, с точ-
флюгерного устройства совпадает с углом уп-
реждения г]. Таким образом, в рассматривае-
мом варианте установки координатора на его
выходе получают сигнал, пропорциональный
углу упреждения.
При ориентировании координатора по век-
тору скорости ракеты можно представить себе
и другой вариант реализации, когда чувстви-
тельный элемент координатора поворачивается
по потоку с помощью следящей системы,
управляемой специальным измерительным
флюгером.
Основной недостаток установки координа-
тора по вектору скорости связан с тем, что ре-
ализовать точное флюгерное устройство техни-
чески сложно, а при сверхзвуковых скоростях
практически невозможно. Кроме того, как и в предыдущем случае,
при наведении на подвижную цель нужен координатор цели с ши-
роким полем зрения, что отрицательно влияет на такие характери-
стики координатора, как максимальная
дальность действия, чувствительность и т. д.
В третьем варианте ориентирования ко-
ординатора его оси стабилизируются в про-
странстве. Для реализации этого способа
чувствительный элемент координатора дол-
жен быть .механически связан с силовым
гиростабилизатором или иметь следящий
привод, управляемый сигналами от свобод-
ных гироскопов, фиксирующих заданное
направление в пространстве. Основные гео-
метрические соотношения для этого случая
следуют из рис. 8.15. На этом рисунке на-
правление, которое фиксирует гиростаби-
лизатор, изображается осью Охс, составля-
ющей заданный угол <р* с некоторым направлением в пространстве,
выбранным за начало отсчета. Из-за неточности работы гироста-
билизатора или следящей системы может иметь место ошибка ста-
билизации ес. Если эту ошибку не принимать во внимание, то изме-
ряемый координатором угол рассогласования ек равен углу между
линией визирования и некоторым фиксированным в начальный мо-
мент направлением. Таким образом, сигнал на выходе координато-
Рис. 8.15. Геомет-
рические соотношения
при неизменной ори-
ентации координатора
цели в пространстве
§ 3. Способы формирования сигнала ошибки наведения
441
а
иметь
иметь
должен
ракеты и
8.16.
Геомет-
Рис.
рическив соотношения
при ориентации коор-
динатора цели по век-
тору дальности
ра цели в этом случае пропорционален углуф—ф*, определяюще-
му положение в пространстве линии визирования
ик = keK = k (ср — ср* — k (ср — ср*).
Наконец, последний вариант установки координатора на борту
сводится к тому, что ось координатора направляется по линии ви-
зирования цели или, другими словами, по вектору дальности. Оче-
видно, что чувствительный элемент коорд!
возможность поворачиваться относительно к
привод для автоматического слежения за
целью. Такой привод может быть реализо-
ван в виде следящей системы любого типа.
В этом случае сигналы рассогласования «2
и и3, характеризующие отклонение оси коор-
динатора от направления вектора дально-
сти, используются для приведения в дейст-
вие следящей системы, поворачивающей ко-
ординатор так, чтобы углы рассогласования
Еу и ez (или е и ц) стали равными нулю.
Точно так же работает, например, следящая
система в любой радиолокационной стан-
ции, осуществляющей автоматическое со-
провождение цели по угловым координатам.
Так как основные сигналы на входе коорди-
натора «2 и «з используются теперь для автоматического ориентиро-
вания координатора по линии визирования цели, то для получения
информации, необходимой для формирования сигнала наведения,
требуется использовать дополнительные измерители. Если для ори-
ентирования координатора по линии визирования цели использует-
ся обычная следящая система, то с помощью любых датчиков
углового положения, например, потенциометров, можно измерить
угол между продольной осью ракеты и осью координатора £« (рис.
8.16). Этот угол, если считать, что следящая система работает иде-
ально точно (ек = 0), равен углу пеленга цели. Поэтому на выходе
датчика углового положения будет получен сигнал, пропорциональ-
ный углу пеленга цели:
'ид = k^K = й (С — ej К.
В отличие от первого способа ориентирования координатора,
когда координатор, жестко связанный с корпусом ракеты, также
измеряет угол пеленга цели, здесь чувствительный элемент коор-
динатора может иметь небольшой угол зрения.
Для ориентирования координатора цели по вектору дальности
можно использовать также следящий силовой гиростабилизатор,
одновременно совмещающий функции гиростабилизатора и сле-
442
Глава VIII. Динамика самонаводящихся ракет
дящей системы, отслеживающей изменение угла <р между линией
визирования цели и некоторым фиксированным направлением.
Естественно, что в процессе работы следящий гиростабилизатор в
отличие от обычного не сохраняет первоначально • установленное
положение в пространстве.
Как и в предыдущем случае, сигналы и2 и м3, пропорциональ-
ные угловым координатам цели, используются для автоматическо-
го ориентирования чувствительного элемента координатора цели
по вектору дальности. Для получения информации, необходимой
для наведения ракеты, можно, как и в предыдущем случае, изме-
рять угол пеленга цели. Однако теперь имеется возможность без
каких-либо дополнительных измерителей определять угловую ско-
рость вращения <рк оси координатора Охк. С точностью до ошибки
гиростабилизатора ек эта угловая скорость равна угловой скоро-
сти линии визирования цели ср. Следовательно, на выходе гироста-
билизатора можно получить сигнал, пропорциональный угловой
скорости линии визирования:
иг.ст = = k (? — eJ ~ fecP-
Указанная возможность основывается на использовании
свойств прецессионного движения свободного гироскопа. Более
подробно свойства координаторов, ориентированных по линии ви-
зирования цели, рассматриваются ниже, в § 4.
3.2. Возможные варианты формирования сигнала ошибки
для различных методов самонаведения
Выясним, каким образом можно получить сигнал ошибки для
различных методов самонаведения, имея в виду, что чувствитель-
ный элемент координатора можно ориентировать различными спо-
собами.
Для реализации метода прямого наведения требуется ограни-
чивающие связи наложить на угол пеленга цели, а именно, необ-
ходимо, чтобы выполнялось условие £ = 0. Следовательно, ошибка
должна быть определена соотношением е = £. Поэтому для форми-
рования сигнала ошибки нужен координатор, измеряющий угол пе-
ленга, т. е. координатор, жестко связанный с корпусом ракеты или
следящий за целью. Ниже будет показано, что с помощью доволь-
но сложного координатора, следящего за целью, можно реализо-
вать более совершенные методы наведения, например, пропорцио-
нальное сближение. Естественно, что метод прямого наведения
может использоваться лишь в тех случаях, когда его существенные
недостатки не проявляются, например, при наведении на непод-
вижную цель. При этом одним из решающих условий является про-
§ 3. Способы формирования сигнала ошибки наведения
443
стота реализации метода посредством координатора, ориентиро-
ванного по оси ракеты.
При наведении с постоянным углом упреждения (в частном
случае равным нулю) требуется, чтобы угол упреждения ц равнял-
ся в течение всего полета заданному значению ц*. Поэтому
естественно ошибку наведения определить как разность
е = vj* — -/j.
Для реализации этого метода можно предложить несколько
вариантов формирования сигнала ошибки. Можно использовать,
например, координатор, ориентированный по потоку с помощью
силового флюгера. В этом случае сигнал на выходе координатора
пропорционален углу упреждения ц, и для получения сигнала
ошибки остается только сравнить сигнал координатора с неко-
торым фиксированным уровнем и*, соответствующим заданному
значению угла упреждения ц*:
— ЛЭ).
Как уже отмечалось, такой способ установки координатора не
всегда применим. Поэтому измерение угла упреждения т] можно
построить на использовании соотношения т] = £ + а. Измерить угол
пеленга цели может координатор, жестко связанный с корпусом
ракеты, или координатор, следящий за целью. Как и в предыду-
щем случае, использование следящего координатора здесь нецеле-
сообразно. Для измерения угла атаки ракеты нужен специальный
измерительный элемент. Это может быть или датчик угла атаки
флюгерного типа, или акселерометр, измеряющий поперечную пе-
регрузку ракеты пу{. В последнем варианте измерение угла атаки
основывается на приближенном выражении проекции перегрузки
на связанную ось ракеты Оуд
У cos а + X sin а У“а+У86 + Ха У“ + X
пЛ=---------!------!-----------------------а.
и G G G
Неудобство применения акселерометра для косвенного изме-
рения угла атаки заключается в том, что коэффициент пропорцио-
нальности между а и n»i зависит от скорости и высоты полета раке-
ты. Поэтому для получения сигнала, пропорционального углу ата-
ки, необходимо сигнал с акселерометра преобразовывать хотя бы
с помощью простейшего программного или переключающего уст-
ройства.
Рассмотрим теперь некоторые возможные способы реализации
метода параллельного сближения. Первый способ основан на ис-
пользовании сигнала ошибки с учетом уравнения связи
? := °,
где ср* = const — требуемое значение угла <р, определяющего по-
ложение в пространстве линии визирования цели.
444
Глава VIII. Динамика самонаведящихся ракет
Здесь в качестве ошибки наведения следует принять разность
е = — ?•
Очевидно, • что при неизменной ориентации чувствительного эле-
мента координатора цели в пространстве (например, с помощью
гиростабилизатора) можно получить сигнал ошибки непосредст-
венно на выходе координатора:
мЕ = ик = £(?* — ?).
Другой способ измерения угла <р, необходимого для формиро-
вания сигнала ошибки, основан на использовании равенства
<р = £ + Действительно, координатор цели, установленный не-
подвижно на борту ракеты или следящий за целью, позволяет из-
мерить угол пеленга цели £. В этом случае необходимо еще изме-
рить угол тангажа ракеты $ с помощью свободного гироскопа.
Тогда на выходе координатора цели можно получить сигнал
uK=kt, = k{^ — О), а на выходе свободного гироскопа — сигнал
us = k('& — <рД, где —некоторое фиксированное начальной
установкой гироскопа направление в пространстве. Тогда ие =
= Мк + «г = &(ф — <р*), что и дает при надлежащем выборе кон-
станты ф* сигнал ошибки.
Метод параллельного сближения можно реализовать и по-дру-
гому. Как известно, при идеальной реализации метода угол уп-
реждения ц должен в любой момент наведения удовлетворять ус-
ловию
r<2 = V sin 7] — Уц sin (ср0 — 0Ц) = 0.
Поэтому ошибку наведения можно определить как отклонение
угла упреждения т] от его требуемого значения
е = TQ* — TQ.
Согласно этому выражению следует измерять угол упреждения
т] одним из способов, рассмотренных выше, и для получения сиг-
нала ошибки вычислять требуемый угол упреждения из формулы
sin = -р sin (то ~ 0Ц)-
Такой способ реализации, очевидно, очень сложен.
Если ошибка е невелика, то имеет место соотношение
= V sin (т)„ — е) — sin (<р0 — ©ч) =
= V sin tj* cos е — V sin е cos — Vц sin (»0 — ©ц) ш — V cos т^е,
§ 3. Способы формирования сигнала ошибки наведения
445
которое позволяет определить ошибку е по выражению
Так как угол упреждения обычно не бывает очень большим, то
последнее соотношение можно заменить еще более простым:
е = (8.23)
Для формирования сигнала ошибки в соответствии с этим со-
отношением координатор цели должен измерять как расстояние до
цели, так и угловую скорость <р вращения линии визирования отно-
сительно неподвижной системы координат. Кроме того, необходи-
мо измерять скорость ракеты и иметь на борту вычислитель,
реализующий операцию, входящую в правую часть уравнения
(8.23). Для получения сигнала, пропорционального угловой скоро-
сти линии визирования, можно использовать координатор, осуще-
ствляющий слежение за целью с помощью силового следящего ги-
ростабилизатора.
Возможны и другие варианты. Например, для получения сиг-
нала, пропорционального ф = £ + Ф, можно использовать диффе-
ренцирующий гироскоп, измеряющий угловую скорость тангажа
•&, и координатор цели, измеряющий угол пеленга t. (Сигнал, про-
порциональный пеленгу, необходимо еще продифференцировать).
Если использовать координатор, ориентированный по линии визи-
рования цели с помощью следящей системы, то, связав дифферен-
цирующий гироскоп с осью вращения чувствительного элемента
координатора, можно непосредственно измерить абсолютную угло-
вую скорость линии визирования ср. (Варианты измерения угловой
скорости ср подробнее рассматриваются в § 4).
В связи с рассмотрением способа формирования сигнала
ошибки, используемого для реализации метода параллельного
сближения, следует сделать некоторую оговорку. Если система на-
ведения стремится обратить в нуль ошибку, определяемую соотно-
шением (8.23), то отсюда не следует, что в процессе наведения
угол ср будет сохранять неизменное заданное значение ф* . Это свя-
зано с тем, что в процессе наведения ошибка е не равна нулю, а
угол ф непосредственно не контролируется. (Такой контроль был
бы возможен, если при формировании сигнала наведения вводился
интеграл от сигнала ошибки.) Поэтому этот вариант следует рас-
сматривать как приближенную реализацию метода параллельного
сближения, при которой направление линии визирования цели ме-
дленно изменяется в процессе наведения.
446
Глава УШ. Динамика самонаводящихся ракет
Наиболее простой способ приближенной .реализации параллель-
ного сближения будет, очевидно, в том случае, когда ошибка наве-
дения пропорциональна угловой скорости линии визирования цели
е = £ф. Этот вариант можно рассматривать и как приближенный
способ реализации метода пропорционального сближения. Дейст-
вительно, система управления угловыми движениями ракеты обыч-
но обеспечивает в установившемся режиме пропорциональность
между сигналом наведения и угловой скоростью 0 касательной к
траектории (или нормальным ускорением V0). Если принять, что
сигнал наведения пропорционален ошибке наведения, то тем самым
устанавливается пропорциональная связь между угловой ско-
ростью линии визирования <р и угловой скоростью 0, что и является
характерным для метода пропорционального сближения.
Если исходить непосредственно из уравнения связи для метода
пропорционального сближения
0 =
то наиболее естественно ошибку наведения определить как раз-
ность
8 — k<f — ©.
Следовательно, для формирования сигнала ошибки, кроме угло-
вой скорости линии визирования, необходимо измерять угловую
скорость 0. В этом случае в качестве основных измерителей можно
использовать координатор со следящим гиростабилизатором и
датчик линейных ускорений, измеряющий нормальное ускорение
V0, пропорциональное 0.
В гл. V уже отмечалось, что для улучшения динамических ха-
рактеристик системы стабилизации в её состав вводят датчик нор-
мальных ускорений. В этом случае оказывается, что сигнал с этого
датчика непосредственно сравнивается с сигналом наведения.
Если этим сигналом является сигнал, пропорциональный <р, то дат-
чик нормальных ускорений можно рассматривать как измеритель,
с помощью которого формируется сигнал ошибки наведения в точ-
ном соответствии с методом пропорционального сближения.
Если воспользоваться усовершенствованным уравнением связи
пропорционального сближения, то для формирования сигнала
ошибки
е = Л/|г|ср — V0
необходимо иметь координатор цели, измеряющий угловую ско-
рость линии визирования цели ср и скорость сближения г, а также
датчик нормальных ускорений, измеряющий V6.
§ 3. Способы формирования сигнала ошибки наведения
447
Рассмотрев некоторые возможные способы реализации различ-
ных методов самонаведения, можно заметить, что имеется большое
число вариантов, различающихся друг от друга как набором не-
обходимых измерительных устройств, так и различными способами
установки координаторов цели на борту ракеты. Поэтому при раз-
работке систем самонаведения приходится выбирать не только
метод наведения, но и наиболее рациональный вариант его реали-
зации.
Выбор метода наведения и способа его реализации является
очень сложной задачей, при решении которой приходится учиты-
вать большое число противоречивых факторов. Решение этой задачи
во многом зависит и от накопленного опыта проектирования систем
самонаведения, и от технического совершенства и надежности
применяемой аппаратуры. В связи с этим не представляется
возможным сформулировать какие-либо твердые рекомендации от-
носительно выбора метода наведения и способа его реализации.
При разработке систем самонаведения всегда стремятся исполь-
зовать тот метод наведения, который допускает простейшую тех-
ническую реализацию, требует применения минимального числа
простейших измерительных устройств. И только в том случае, ког-
да тактические условия задачи таковы, что простейшие варианты
методов наведения не позволяют решить поставленную задачу (на-
пример, из-за чрезмерно больших потребных перегрузок), перехо-
дят к более сложным с точки зрения реализации методам наведе-
ния, применение которых в заданных условиях позволяет получить
менее искривленные траектории и повысить точность наведения.
На основании кинематического исследования, результаты кото-
рого были коротко изложены выше, можно только утверждать, что
для наведения на цели, скорости которых соизмеримы со скоростью
ракеты, целесообразно применять методы наведения с упреждени-
ем, причем метод пропорционального сближения или его частный
случай — метод параллельного сближения, обеспечивают траекто-
рии, близкие к прямолинейным. Для наведения на неподвижные
цели можно применять наведение по кривым погони или прямое
наведение.
Перейдем теперь к более подробному анализу структуры урав-
нений и динамики координаторов цели, как основных измеритель-
ных устройств систем самонаведения. В качестве примера рассмот-
рим координаторы цели, автоматически следящие за целью.
Снабженные специальным следящим приводом, с помощью кото-
рого осуществляется независимое ог движения ракеты слежение
за целью, такие координаторы имеют более сложную, структуру по
сравнению с координаторами, установленными на 'борту ракеты
другими способами.
448
Глава VIII. Динамика самонаводящихся ракет
§ 4. ДИНАМИЧЕСКИЕ СВОЙСТВА КООРДИНАТОРОВ ЦЕЛИ,
ОРИЕНТИРОВАННЫХ ПО ЛИНИИ ВИЗИРОВАНИЯ ЦЕЛИ
Как было отмечено выше, для осуществления автоматического
слежения координатора за целью можно использовать или обыч-
ные следящие системы, или силовой гироскопический стабилизатор,
выполняющий в данном случае одновременно слежение за целью
и освобождение чувствительного элемента координатора от коле-
баний ракеты. В случае применения радиолокационного координа-
тора рассматриваемые системы автоматического сопровождения
целей по угловым координатам не имеют принципиальных отличий
от аналогичных систем любых радиолокационных станций.
Основное требование, которое предъявляется к следящему при-
воду, сводится к тому, чтобы этот привод с заданной точностью
отрабатывал сигнал рассогласования, измеренный чувствительным
элементом координатора цели. Таким образом, здесь основной
сигнал, который получают на выходе чувствительного элемента
координатора, т. е. сигнал углового отклонения цели от оси чувст-
вительного элемента, используется не для формирования сигнала
наведения ракеты, а только для приведения в действие следящей
системы, стремящейся свести этот сигнал рассогласования к нулю.
4.1. Координатор цели со следящей системой
В качестве исполнительного элемента следящего привода мо-
гут использоваться двигатели любого типа — электрические,
пневматические, гидравлические и др. Выбор типа исполнительно-
го элемента зависит от условий работы привода, располагаемого
веса, габаритов и т. д. Структурная схема следящей системы ничем
принципиально не отличается от схем любых других следящих си-
стем. (Например, в работах [7], [8] подробно разбирается структура
и исследуется динамика следящих систем наземных радиолокаци-
онных станций с автоматическим сопровождением цели по угловым
координатам). Поэтому, опуская разбор структурной схемы таких
следящих систем, рассмотрим особенности их работы в качестве
следящего привода бортовых координаторов цели.
На рис. 8.17 приведена схема, из которой следуют основные
геометрические соотношения. Так как основание следящего приво-
да жестко связано с корпусом ракеты, то задача ориентирования
оси координатора по линии визирования цели сводится к слеже-
нию за угловым движением цели относительно корпуса ракеты,
определяемым изменением угла пеленга £. Следящий привод ко-
ординатора в общем случае работает с некоторой ошибкой gK, по-
этому ось координатора Охк не совпадает с линией визирования
цели и составляет с продольной осью ракеты угол £к. Для выявле-
ния требований, которые предъявляются к динамическим свой-
4. Динамические свойства координаторов цели
449
ствам следящего привода, рассмотрим его упрощенную структур-
ную схему (рис. 8.18). На этой схеме через G(p) обозначена
передаточная функция разомкнутого следящего привода; структур-
ный элемент с передаточным коэффициентом К соответствует дат-
чику угла поворота координатора цели относительно корпуса ра-
кеты,
Из рис. 8.17 и 8.18 видно, что £ = ф— •&. Это означает, что сле-
дящий привод должен отслеживать не только изменение угла <р,
определяющего направление
Риг. 8.17. Геометрические
соотношения, поясняющие
структурную схему при-
вода координатора цели
линии визирования цели, но и изме-
нение угла тангажа S', т. е. делжен от-
слеживать и колебания ракеты. В то
время как угол ф изменяется по време
ни сравнительно медленно, угол танга-
жа может изменяться с большой ско-
ростью (несколько десятков градусов в
секунду). Поэтому чем выше частота
колебаний ракеты, тем более широкой
Рис. 8.18. Структурная схема следящего
привода координатора цели
должна быть полоса частот, пропускаемых без искажений следя-
щей системой. Это обстоятельство может приводить к значительным
трудностям при разработке таких следящих систем, особенно для
ракет, предназначенных для действия в широком интервале высот.
Это связано с тем, что такие ракеты на малых высотах могут
иметь очень высокую частоту собственных колебаний, доходящую
до 3—5 гц у ракет малых калибров. Так как электрический привод
не может обеспечить такую широкую полосу пропускания, то при
высокой частоте колебаний ракеты приходится использовать тип
привода с большим быстродействием, например, пневматический
или гидравлический. Разработка широкополосных следящих систем
осложняется еще и тем, что конструктор системы обычно бывает
связан ограничениями габаритов и веса.
Необходимость иметь следящий привод координатора с широ-
кой полосой пропускания приводит не только к затруднениям при
разработке привода, но влечёт за собой и другие недостатки, для
выявления которых рассмотрим схему формирования сигнала, про-
порционального угловой скорости линии визирования цели ф. Этот
сигнал бывает необходим при реализации метода пропорциональ-
ного сближения.
15 Заказ 1242
450
Глава VIII. Динамика самонаводящихся ракет
Для получения сигнала <р, или, точнее, измеренного значения
Фк, можно использовать дифференцирующий гироскоп (датчик
угловых скоростей), измеряющий угловую скорость вращения ф«
оси чувствительного элемента координатора цели, для чего гиро-
скоп необходимо связать с этой осью. Такому варианту соответ-
ствует структурная схема на рис. 8.19. Анализ этой схемы позво-
ляет выявить некоторые недостатки использования обычного сле-
дящего привода на борту ракеты, имеющей высокую частоту
колебаний.
Рис. 8.19. Структурная схема формирования
сигнала угловой скорости линии визирования цели
Один из недостатков выявляется, если учесть, что сигнал ошиб-
ки следящей системы ек засорен различного рода шумами, источ-
никами которых могут являться как естественные флюктуации
отраженного или излучаемого целью сигнала, так и искусственные
помехи, создаваемые противником. Известно, что чем шире полоса
частот, пропускаемых системой, тем более интенсивным будет вли-
яние этих шумов на систему и тем с большей амплитудой и часто-
той будет совершать хаотические колебания чувствительный эле-
мент координатора цели. Если вспомнить, что после дифференци-
рования сигнала, засоренного шумами, уровень шума резко
возрастает, а при наличии нелинейностей типа насыщения ухуд-
шается отношение сигнал — шум, то ясно, что при широкополосной
следящей системе получают управляющий сигнал фк, в сильной
степени засоренный шумами.
Второй недостаток применения обычных следящих систем при
высокочастотных колебаниях ракеты выявляется из соотношений,
следующих из рис. 8.19:
Т,(Р)-С.(р) + »(Р)=Т^уТ(Р) + (8.24)
= T+rL ? + 1 .
1 + О (р) 1 + О (р)
1
§ 4. Динамические свойства координаторов цели
451
Чем ближе к единице передаточная функция замкнутой систе-
мы G/(l + G) и чем ближе к нулю соответственно передаточная
функция ошибки 1/(1 + G), тем точнее выходной сигнал <рк будет
воспроизводить сигнал ф. Обычно угловая скорость линии визиро-
вания цели <р на большей части траектории самонаведения являет-
ся медленно меняющейся функцией и поэтому не представляет
труда реализовать передаточную функцию замкнутой системы,
близкую к единице в интервале частот, определяемом характером
сигнала ср. Но если этот интервал взять достаточно узким исходя
только из условия неискаженной передачи сигнала <р, то на выхо-
де системы будет существовать сигнал, пропорциональный б1, так
как спектр этого сигнала более широкий по сравнению со спектром
сигнала ср.
Для того чтобы понять это, необходимо вспомнить соотношение
между амплитудными частотными характеристиками, отвечающи-
ми передаточной функции замкнутой системы и передаточной
функции ошибки
С(Н
Л(со) =
l+G(/<o) ’
As (со) = I-----5----
В том интервале частот, где выполняется неравенство
| G (/со) | 1, справедливы равенства Л (со) ~ 1 и Ав (со) ~ 0. В ин-
тервале высоких частот, где | G (/со) | <С1, справедливы в неко-
тором смысле «обратные» приближенные равенства А (со) ~ 0 и
As (со) « 1.
Поэтому в том интервале частот, в котором проходит полезный
сигнал ср, одновременно подавляется вредный сигнал &. Но для
полного подавления этого сигнала полоса пропускания следящей
системы должна соответствовать ширине спектра сигнала &. Таким
образом, на выходе узкополосной системы, рассчитанной на вос-
произведение только сигнала ср, будет присутствовать интенсивный
по уровню дополнительный сигнал б1.
Так как сигнал, пропорциональный <рк, подается на вход систе-
мы стабилизации ракеты, то вместе с полезной компонентой это-
го сигнала <р на вход системы стабилизации попадет и сигнал
причем с положительным знаком, что указывает на наличие поло-,
жительной обратной связи по угловой скорости <1. Если вспомнить,.
15*
452
Глава УШ. Динамика самонаводящихся ракет
что в системах стабилизации для улучшения демпфирования ко-
лебаний осуществляют отрицательную обратную связь по угловой
скорости &, то станет ясным, что управляющий сигнал фк, внося-
щий положительную обратную связь по Ф, будет ухудшать устой-
чивость системы стабилизации, а при некоторых условиях она мо-
жет стать неустойчивой.
Итак, при использовании в качестве привода координатора це-
ли обычной следящей системы и в случае высокой частоты коле-
баний ракеты конструктор оказывается перед дилеммой: или он
должен допустить высокий уровень шумов на выходе координато-
ра и предпринимать специальные меры, направленные на умень-
шение их влияния, или, ограничив полосу следящей системы и сни-
зив за счет этого уровень шумов, допустить возникновение
положительной обратной связи по угловой скорости тангажа О',
из-за чего затруднится выполнение условий устойчивости системы
стабилизации и придется усложнять схему последней. На первый
взгляд может показаться, что интенсивные шумы на выходе широ-
кополосной следящей системы можно подавить с помощью допол-
нительных узкополосных фильтров. Это было бы действительно
так, если бы следящую систему и дифференцирующее устройство
на ее выходе можно было бы считать линейным. Однако наличие
нелинейности типа насыщения делает это предложение лишь ча-
стично осуществимым.
Преодоление рассмотренного противоречия может быть в не-
которых случаях настолько сложным, что предпочитают иногда ид-
ти на техническое усложнение, связанное с заменой обычных сле-
дящих систем силовым гиростабилизатором, выполняющим одно-
временно и функции следящего привода [9], [11]. Применение
силовой гироскопической стабилизации позволяет освободить чув-
ствительный элемент координатора цели от колебаний ракеты и
осуществлять слежение только за сравнительно медленными изме-
нениями угла ф, определяющего направление линии визирования
цели.
4.2. Гиростабилизированный координатор цели
Основными элементами следящего силового гиростабилизатора
являются гироскопы, установленные в специальном подвесе. Рабо-
та такого гиростабилизатора основана на использовании за-
кона прецессии и гироскопического момента. На рис. 8.20 приведе-
на схема двухосного силового гироскопического стабилизатора
И, [11].
Чувствительный элемент координатора цели в зависимости от
его размеров может быть связан непосредственно с подвесом ги-
ростабилизатора, образуя с ним единый конструктивный элемент.
§ 4. Динамические свойства координаторов цели
453
или может иметь собственный подвес, связанный с подвесом ги-
ростабилизатора с помощью тяг.
Для работы следящего гиростабилизатора характерны два
режима: режим стабилизации и режим слежения. В режиме ста-
билизации работа протекает следующим образом. При колебаниях
корпуса ракеты около оси z на ось наружной рамы стабипизатора
через подшипники передается момент трения, который уравновеши-
вается реакцией гироскопа I — его гироскопическим моментом. Но
Рис. 8.20. Схема двухосного силового гироскопиче-
ского стабилизатора
этот момент может возникнуть только за счет прецессионного дви-
жения гироскопа I относительно оси Xj. Момент трения и гироско-
пический момент уравновешивают друг друга, благодаря чему
наружная рамка остается в пространстве неподвижной. Это будет
справедливо только до тех пор, пока гироскоп 1 не повернется от-
носительно оси xt настолько, что его главная ось совпадет по нап-
равлению с осью z. Аналогично при колебаниях объекта относи-
тельно оси у момент трения, действующий на внутреннюю рамку
стабилизатора, будет уравновешиваться гироскопическим момен-
том гироскопа II, но этот момент опять-таки может возникнуть
только при прецессионном движении этого гироскопа относительно
оси Xi и при условии, что его главная ось не совпадает по направ-
лению с осью у.
Для того чтобы компенсировать вредные моменты дебаланса и
трения, действующие по осям подвеса, и предотвратить совмеще-
ние оси гироскопа I с направлением оси z, а оси гироскопа II с на-
454
Глава VIII. Динамика самонаводящихся ракет
правлением оси у, в схему стабилизатора вводятся стабилизирую-
щие двигатели 1. На нашей схеме в качестве таких двигателей
использован пневматический привод с предварительным струйным
усилителем 2, хотя здесь могут быть использованы и любые другие
двигатели, в том числе и электрические. На схеме струйные уси-
лители получают сигналы от датчиков угла поворота (например,
потенциометрических), установленных на осях Xi гироскопов. Сиг-
налы этих датчиков равны нулю, когда главные оси гироскопов I
и 11 перпендикулярны осям подвеса z и у соответственно. В том
случае, когда под действием внешних возмущающих моментов
возникнет прецессия гироскопов I и II, на потенциометрических
датчиках возникают сигналы, пропорциональные повороту гиро-
скопов относительно осей хц Эти сигналы попадают непосредствен-
но или после предварительного усиления на струйные усилители,
которые в свою очередь вызывают появление перепадов давлений
в рабочих полостях пневматических двигателей. Струйные усили-
тели включены так, что двигатели развивают моменты, направлен-
ные противоположно внешним возмущающим моментам на осях
подвеса. В силу этого внешние моменты как бы компенсируются
стабилизирующими двигателями, а гироскопы освобождаются от
этой функции и по существу выполняют роль чувствительных эле-
ментов, измеряющих величину и знак этих внешних возмущающих
моментов. В результате совместной работы гироскопов и стабили-
зирующих двигателей направление оси х оказывается стабилизи-
рованным в пространстве.
Рассмотрим работу стабилизатора в режиме слежения. Пред-
положим, что ось чувствительного элемента координатора цели,
связанного с гиростабилизатором, параллельная оси х, направле-
на не на цель и поэтому имеет место угловое рассогласование ev.
Тогда на выходе приемника чувствительного элемента появится
сигнал, пропорциональный этому рассогласованию. После усиле-
ния сигнал подается на моментный датчик 3 гироскопа II. Момент-
ный датчик развивает момент, пропорциональный сигналу рассо-
гласования и действующий относительно оси хь Этот момент
вызывает прецессионное движение гироскопа и поворот внутрен-
ней рамы стабилизатора относительно оси у в направлении, соот
ветствующем уменьшению ошибки еу. Прецессионное движение
прекратится, когда указанная ошибка станет равной нулю.
Аналогично обстоит дело и при проявлении ошибки е? в плоскости
хОу. Здесь сигнал ошибки попадает на моментный датчик 3 гиро-
скопа 1. Это вызывает прецессию относительно оси z, которая бу-
дет продолжаться до тех пор, пока и ошибка не станет равной
нулю,
Надо заметить, что была рассмотрена упрощенная схема рабо-
ты гиростабилизатора. Более тщательный анализ явлений, проис-
ходящих при работе гироскопического стабилизатора, необходимый
§ 4. Динамические свойства координаторов цели
455
при его проектировании и исследовании сложных задач простран-
ственного движения самонаводящихся ракет, нам в дальнейшем не
понадобится.
Для анализа вопроса о формировании сигнала ошибки доста-
точно рассмотреть работу гиростабилизатора в общих чертах.
Предполагая, что взаимное влияние двух каналов гиростабилиза-
тора отсутствует и движение крена не влияет на работу гироста-
билизатора, рассмотрим упрощенную структурную схему контура
слежения гиростабилизатора (рис. 8.21). Эту схему можно пред-
Рис. 8.21. Структурная схема гиростабилиэатора-
/ — чувствительный элемент координатора цели; II —
датчик момента; III — силовой гиростабилизатор
ставить состоящей из трех основных структурных элементов. Пер-
вый из них — это чувствительный элемент координатора цели,
включая приемник, коммутатор, усилитель и т. д. На выходе этого
элемента получают напряжение и, в установившемся режиме про-
порциональное ошибке слежения е« = <р — <р«.
Второй элемент — это датчик момента, преобразующий напря-
жение и в момент М, действующий на гиростабилизатор. Третий
элемент — гиростабилизатор, поворачивающий в режиме слежения
чувствительный элемент координатора цели.
Запишем упрощенные передаточные функции этих основных
элементов. Как уже было отмечено (см. рис. 8.17), ошибка следя-
щей системы ЕК определяется величиной угла между линией визи-
рования цели и осью координатора Охк
= ? — ?« (8.25)
С достаточной степенью точности передаточную функцию чув-
ствительного элемента можно записать в виде передаточной функ-
ции апериодического звена
...-М =—------- (8.26)
ек(Р) Лр+1
где постоянная времени Тг определяется типом и конструкцией чув-
ствительного элемента [7], [Ю].
456
Глава VIII. Динамика самонаводящихся ракет
Передаточная функция датчика момента электромагнитного
типа имеет аналогичный вид
М(р) _
«(р) т\р+\
(8.27)
Постоянная времени Т2 зависит от конструкции датчика момента.
Уравнения гиростабилизатора, более или менее полно учиты-
вающие все явления, связанные с его работой, довольно сложны
и громоздки [11]. Для наших целей передаточную функцию гиро-
стабилизатора можно записать в предельно упрощенной форме,
рассматривая гиростабилизатор как прецессирующий гироскоп:
(р) ____[_
/И(р) Ир
Здесь Н — кинетический момент гироскопа гиростабилизатора,
равный Н = /со, где / — момент инерции ротора гироскопа, со —
угловая скорость его вращения. Исходя из упрощенных передаточ-
ных функций основных элементов гиростабилизатора можно запи-
сать передаточную функцию разомкнутой системы в виде
G (р) = , (8.28)
гк(р) р(7\р+ 1) (ЛрД 1)
где Ко = К\КДЕ1 \/сек—передаточный коэффициент (доброт-
ность) разомкнутой системы.
Составим передаточную функцию замкнутой системы для вы-
ходной величины — напряжения и (рис. рис. 8.21). Используя
обычные правила, найдем, что
и (р) __ Кк 2Р ~Ь 1) Р /g 29)
?(Р) ПД1Г2р3 + ТДТ1 + Т2)р2 + 7’кр+1
Здесь через Тк обозначена величина, обратная передаточному
коэффициенту разомкнутой системы
Т = — = —-— сек,
Ко KiKi
а через Кк — передаточный коэффициент замкнутой системы, рав-
ный выходному напряжению в установившемся режиме, когда
угловая скорость линии визирования цели равна 1 1/сек, т. е.
= v-==f-==7<^ в‘сек-
Ло Аг
Эту передаточную функцию можно переписать, приняв за вход-
ную величину угловую скорость <р:
и (р) _________Кк (Т2р 1)_______
<р (р) Тк Т2) р2 Ткр 1
§ 4. Динамические свойства координаторов цели
457
Отсюда следует, что при вращении линии визирования цели с
постоянной угловой скоростью <р установившееся напряжение и
(после затухания свободных колебаний в системе) прямо пропор-
ционально этой угловой скорости. Как видно, в случае использова-
ния гиростабилизированного координатора цели на его выходе
можно получить сигнал, пропорциональный угловой скорости ли-
нии визирования цели <р, без каких-либо специальных и дополни-
тельных преобразований сигналов.
Динамические ошибки измерения угловой скорости <р (в уста-
новившемся режиме) могут быть определены с помощью метода,
аналогичного методу коэффициентов ошибок. Разделив числитель
передаточной функции (8.29) на ее знаменатезь, получим ряд
и (р) = Кк[р + (Тг - Тк) р* - Тк (Г1 + 27'2 - Тк) рР + ... ] ? (р).
поэтому
«(i) = К+ (Т2 - Тк) ® - Тк (7\ + 2Т2 - + • • ].
Второе, третье и последующие слагаемые в этом выражении
характеризуют динамическую ошибку измерения угловой скоро-
сти ср в установившемся режиме.
Постоянные времени 7) и Т2 измеряются сотыми долями се-
кунды. Поэтому при исследовании динамики самонаведения ими
обычно пренебрегают. Тогда получают упрощенную передаточную
функцию 1гиростабилизирован:1ого координатора цели в виде
w КЛ,(р) = .
Л т(р) 7>+1
Если рассматривать гиростабилизатор как следящую систему,
то ее качественные показатели полностью определяются передаточ-
ной функцией разомкнутой системы (8.28) и соответствующей ей
передаточной функцией замкнутой системы:
=---------------5-------------. (8.30)
Следящая система является астатической системой первого по-
рядка и, следовательно, имеет нулевую статическую ошибку при
постоянном значении <р. Рассогласование е« после затухания сво-
бодных колебаний определяется выражением
8к(/) = С1?(/)+^(/)+...,
458
Глава VIII. Динамика самонаводящихся ракет
где Ci и Са — коэффициенты ошибок по скорости и ускорению,
равные:
С2 = - 7" (7----- Т' -
Ло '*о /
Основным параметром любой следящей системы, который при-
ходится выбирать при проектировании, является добротность, рав-
ная в нашем случае Ло = KiKz/H. Другие параметры системы,
например, постоянные времени Л и Т2, являются заданными вели-
чинами. Обычно для изменения передаточного коэффициента Ко
изменяют передаточный коэффициент чувствительного элемента
Кь тогда как величина Кк — Н/Кг остается неизменной и зависит
от конструктивных характеристик гиростабилизатора и датчика
момента.
От величины коэффициента Ко зависят динамические ошибки
слежения (по скорости и ускорению), а также полоса.пропускания
системы, с которой связан уровень случайных (флюктуационных)
ошибок слежения. Так как случайные и динамические ошибки сле-
жения меняются в противоположных направлениях при изменении
передаточного коэффициента разомкнутой системы Ко, то по этой
причине приходится искать компромиссное решение.
Преодолеть указанное противоречие, связанное с выбором пере-
даточного коэффициента Ко, частично может помочь установка на
выходе координатора цели узкополосного (сглаживающего)
фильтра, ослабляющего шумы, содержащиеся в выходном напря-
жении и. Используя такой фильтр, можно расширить полосу про-
пускания следящей системы координатора цели и тем самым
уменьшить ее динамические ошибки слежения, сохранив в то же
самое время не очень высокий уровень шумов в сигнале на выходе
фильтра. Если же для ограничения шумов предпринимать сужение
полосы пропускания следящей системы, то ее динамические ошиб-
ки могут увеличиться настолько, что потребуется расширение поля
зрения чувствительного элемента координатора, а это невыгодно,
так как приводит к уменьшению чувствительности и разрешающей
способности координатора.
Если учесть, что от выбора коэффициента Ко существенно за-
висят не только ошибки слежения, но и ошибки измерения угловой
скорости линии визирования цели <р, а последняя является сигна-
лом ошибки, используемым для наведения ракеты, то становится
ясным, что окончательный выбор этого параметра связан с ана-
лизом точности всей системы самонаведения. Из этих чисто ка-
чественных рассуждений следует, что задачи проектирования чув-
ствительного элемента координатора цели следящего привода ко-
§ 4. Динамические свойства координаторов цели
459
ординатора и системы самонаведения в целом являются
взаимосвязанными и наилучшие результаты могут быть получены
только при комплексном решении этих задач.
В заключение параграфа рассмотрим небольшой числовой при-
мер, поясняющий связь между параметрами контура пиростабили-
затора и его динамическими показателями. Оценим вначале влия-
ние флюктуационных шумов, содержащихся в сигнале ошибки
слежения е«, на выходное управляющее напряжение и и угловое
положение чувствительного элемента <рк. Для определенности бу-
дем предполагать, что имеем дело с радиолокационным координа-
тором цели. Для выполнения расчета воспользуемся данными,
приведенными в [7]. Если радиолокатор является импульсным с
коническим сканированием, то влияние флюктуаций отраженного
от цели сигнала эквивалентно действию на вход системы «белого»
шума, или, точнее, шума, спектральная плотность которого в пре-
делах полосы частот, пропускаемых системой, может считаться по-
стоянной. (Обычно предполагают, что этот шум является стацио-
нарным). Уровень флюктуационного шума зависит от многих при-
чин: от характера цели, расстояния до неё, частоты сканирования
и т. д. Для расчёта мы примем значение спектральной плотности
этого «белого» шума равным S (со) = с2 = 10~6 сек.
Рассчитаем вначале уровень флюктуаций напряжения сигна-
ла и, вызванных действием шума.
Зная передаточную функцию (8.29) и спектральную плотность
входного сигнала, легко определить спектральную плотность шу-
ма на выходе
su (®) = с2
__________Kxj"> (T2ju> + 1)___________
ЕДа . (Tj + Т2) 1 .
----- /(О3 —------------ (О2 + -/О) -4- 1
Ко Ко Ко
2
а дисперсия шума на выходе определится интегралом
f S. (»)<!».
ZJl J
—со
Используем для вычисления этого интеграла приведенную в [7],
[8] таблицу интегралов типа
1 С gn(u)d<i>
2л/ J hn (<о) hn (— <о)
где
gn (®) = ^о®2"-2 + М2"-4 + • • • +
hn («») = а0®« + О]®”-1 +-----\-ап.
460
Глава VIII. Динамика самонаводящихся ракет
Учитывая, что в нашем случае п = 3, а
£„(ю) = с27(2<о2 (Т|<о2 + 1);
, , к ТЛ\ • ч (Т\ + Г2) 2 , 1 • ,1
hn (®) ------/®d---------- Т -й2 + — /й + 1,
Ло АО Ао
можно записать
Т,Т„
а0 =-------
Ко
6о = АМ, б! = сЧ2;
,/; ai=_(a±2i);
/<0
а2 = 4-/; аз=1-
Ло
Из указанных таблиц найдём, что
— °2^0 4“ а0^1 —
J __ _______________дз
3 2а0(а0а3 — а±а2)
Если учесть, что = jh, получим окончательно
д2_ г1 + г2 в2
“ 27\ T’l + r2-K0r1r2
Из полученного выражения видно, что с увеличением переда-
точного коэффициента разомкнутой системы Ко уровень шумов на
выходе растёт. (Если + Т2 = КоТ\Т2, то о2 = оо, так как при
этом система теряет устойчивость).
Зададимся для примера следующими значениями параметров
контура слежения:
7\ — 0,02 сек; Кк = 150 в • сек;
Т2 = 0,08 сек; Ко = 5 1/сек.
Тогда для с2 = 10 й сек получим
2 10~6 - 225 • 102 -25 0,1
а2 =------------
“ 2-0,02
= 15,3 в2
0,1-0,0016-5
и соответствующее среднее квадратическое отклонение
о„ = 3,9 в.
Так как в примере масштабный коэффициент равен Кк =
= 150 в • сек, то этому значению сщ соответствует как бы сред-
нее квадратическое значение случайной ошибки измерения угло-
вой скорости линии визирования цели, равное
ад = = -3’9 = 0,026 //сек =1,5 град!сек.
’ Кк 150 , г -
§ 4. Динамические свойства координаторов цели
461
Аналогично можно определить среднее квадратическое значе-
ние амплитуды случайных колебаний антенны координатора, вы-
званное влиянием шумов. В этом случае за исходную возьмём пе-
редаточную функцию (8.30).
Спектральная плотность случайных колебаний антенны опреде-
ляется выражением
Используя для вычислений тот же табличный интеграл, что и
выше, и учитывая, что в этом случае
60 = 61 = 0; Ь2 = с2;
T’iT’a • Ti + T2 1 . ,
ап =------/; а, =-----------1--I—- ; а, = — /; а., = 1,
° Ао Ко 2 К» 3
получим
02 __ с2Кр ______________________________1\ Т2_____
2 т\ + Т2-К0Т1Т2 '
Для тех же числовых значений найдём
а
------------ = 2,72 Ю ~6
0,1-0,0016-5
И
= 1,65 • IO”3.
При необходимости не представляет большого труда подсчитать
и динамические ошибки следящего привода с помощью коэффици-
ентов ошибок, воспользовавшись тем, что входная координата <р
является медленно меняющейся функцией времени. Используя
выражения, приведенные выше, получим
= — = 0,2 сек.-,
Ко
=-----— — = ~ 0,02 сек2
2 Ко ' Ко /
и т, д.
Поэтому динамическая ошибка слежения в установившемся ре-
жиме может быть определена из выражения
Вер = С1<р <р • =0,2<р — 0,02<р -]-•••
462
Глава VIII. Динамика самонаводящихся ракет
§ 5. ФОРМИРОВАНИЕ СИГНАЛА НАВЕДЕНИЯ
Выше было рассмотрено несколько различных вариантов фор-
мирования сигнала ошибки для различных методов наведения.
Используя этот сигнал ошибки, формируют сигнал наведения, ко-
торый через систему управления нормальными перегрузками в ко-
нечном счете воздействует на движение центра масс ракеты. Таким
образом, сигнал наведения, поступающий на вход системы стабили-
зации, является функцией сигнала ошибки.
Способ формирования сигнала наведения выбирается с учетом
требований, предъявляемых к системе самонаведения на основании
исследования ее динамических свойств. Сигнал наведения должен
быть сформирован так, чтобы система удовлетворяла в первую оче-
редь требованиям точности. Поэтому окончательно вопрос о фор-
мировании сигнала наведения решается при анализе контура на-
ведения с использованием аналитических приемов, аналоговых
моделей, цифровых вычислительных машин, а также результатов
летных испытаний. Здесь мы ограничимся лишь самыми общими
соображениями.
Как известно, при выборе параметров автоматической системы
обычно требования устойчивости и качества переходных процессов
противоречат требованиям точности. Одним из эффективных
средств, часто применяемых для улучшения динамических свойств
автоматических систем с целью удовлетворения этих противоречи-
вых требований, является введение производных от сигнала ошиб-
ки в управляющий сигнал. В этом случае можно улучшить качество
переходных процессов и увеличить передаточный коэффициент
разомкнутой системы регулирования. Последнее дает, в свою оче-
редь, возможность повысить точность системы. Кроме того, введе-
ние производной от сигнала ошибки в управляющий сигнал позво-
ляет компенсировать инерционность регулятора.
Однако в системах самонаведения часто используют самый про-
стой способ формирования сигнала наведения: его принимают пря-
мо пропорциональным ошибке наведения. Это связано с тем, чти
выходной сигнал координатора цели, с использованием которого
формируется сигнал ошибки, обычно засорен шумами, из-за чего
при введении производной от сигнала ошибки в сигнал наведения
резко возрастает общий уровень шумов в последнем сигнале. Это
может привести к резкому ухудшению динамических свойств сис-
темы самонаведения, если учесть, что многие ее элементы имеют
статическую характеристику с насыщением.
Чтобы частично ослабить вредное влияние шумов в выходном
сигнале координатора цели, а также скорректировать динамичес-
кие свойства системы самонаведения в целом, на выходе коорди-
натора можно поставить фильтр нижних частот. Выбор параметров
§ 5. Формирование сигнала наведения
463
этого фильтра может быть проведен только на основании анализа
динамики самонаведения.
Так как применение фильтра нижних частот дает лишь ограни-
ченные возможности для коррекции динамических свойств системы
наведения, а введение производных в сигнал наведения из-за влия-
ния шумов нецелесообразно, то, очевидно, необходимая коррекция
динамических характеристик системы наведения в целом может
быть выполнена за счет коррекции характеристик системы стаби-
лизации. Выше, в гл. V, было показано, как с помощью различных
обратных связей можно в широких пределах изменять динамиче-
ские свойства систем стабилизации. При таком способе коррекции
динамических свойств системы самонаведения оказывается, что
выбор параметров системы стабилизации должен удовлетворять не
Рис. 8.22. Схема формирования сигнала наведения
только некоторым специфическим требованиям, предъявляемым к
системам стабилизации (см. гл. V), но и требованиям, предъявляе-
мым ко всей системе самонаведения в целом. Поэтому задача про-
ектирования системы стабилизации не может решаться изолиро-
ванно и независимо от задачи проектирования системы самонаве-
дения.
Рассмотрим теперь пример формирования сигнала наведения
для того, чтобы представить примерный вид структурной схемы со-
ответствующей части системы самонаведения.
Пусть ошибкой системы самонаведения, приближенно реали-
зующей метод пропорционального сближения, является величи-
на <р, причем измерение этой величины осуществляется координа-
тором цели, стабилизированным по линии визирования цели с по-
мощью следящего гиростабилизатора. Для ограничения уровня
шумов на выходе координатора располагается низкочастотный
фильтр, за которым следует усилитель. В некоторых случаях для
ограничения нормальных перегрузок ракеты (см. гл. V) сигнал на-
ведения проходит через нелинейный элемент с насыщением.
Учитывая сказанное, процесс формирования сигнала наведения
можно представить в виде упрощенной структурной схемы, приве-
денной на рис. 8.22. На этой схеме сигнал п(/) соответствует флюк-
туационному шуму, поступающему на вход координатора цели.
Основные параметры элементов цепи формирования сигнала на-
ведения, каковыми являются коэффициент усиления усилителя и
464
Глава VHI. Динамика самонаводящихся ракет
параметры фильтра, выбирают при анализе всей системы самона-
ведения, основываясь главным образом на требовании точности
наведения,
§ 6. КИНЕМАТИЧЕСКОЕ ЗВЕНО; УРАВНЕНИЯ И ПЕРЕДАТОЧНЫЕ
ФУНКЦИИ
Одним из характерных элементов системы самонаведения, оп-
ределяющим многие особенности динамических свойств этой сис-
темы, является кинематическое звено, характеризующее относи-
тельное движение ракеты и цели. Выше были записаны кинемати-
ческие уравнения для плоского движения (8.1). Эти уравнения,
являясь нелинейными, сильно усложняют задачу теоретического
исследования процессов самонаведения. Даже систему уравнений,
характеризующую идеальное наведение и состоящую из кинемати-
ческих уравнений и уравнения идеальной связи, можно решить в
общем виде лишь при существенных упрощениях, например, при
равномерном движении летательного аппарата, равномерном и
прямолинейном движении цели и др. {6]. Для исследования процес-
са самонаведения с достаточно полным учетом динамических
свойств системы самонаведения необходимо кинематические урав-
нения рациональным образом упростить. Это можно сделать по-
средством линеаризации уравнений.
Выше, в § 2.3, в связи с анализом метода пропорционального
сближения уже была проведена линеаризация кинематических
уравнений. Поэтому здесь, не повторяя вывода, воспользуемся
полученным результатом и запишем линеаризованное кинемати-
ческое уравнение в следующей форме;
гДср -ф гДср = —КД0 -f- К;(Д0;!, (8.31)
где
V = V cos (ср — 0);
Гч= V^COSJcp-0,3;
r = V4-V.
Кинематические параметры ф, 0, V и г здесь являются извест-
ными функциями времени, которые определяются при расчёте
опорных траекторий.
Вместо двух кинематических уравнений плоского движения те-
перь рассматривается только одно, определяющее изменение на-
правления вектора дальности. Это связано с тем, что вариации
относительной дальности Дг не существенно влияют на динамику
самонаведения. Кроме того, при методах наведения, обеспечиваю-
щих небольшую величину угловой скорости линии визирования
цели ф, линеаризованные кинематические уравнения становятся
§ 6. Кинематическое звено; уравнения и передаточные функции
465
независимыми и поэтому нет необходимости рассматривать их
совместно.
Итак, основное интересующее нас уравнение (8.31) является
уравнением с переменными коэффициентами.
Для того чтобы применить частотный метод для анализа дви-
жения самонаводящейся ракеты, можно воспользоваться поняти-
ем параметрической передаточной функции. Анализ характера
изменения коэффициентов уравнения (8.31) показывает, что метод
«замораживания» коэффициентов, применяющийся очень часто
для получения параметрических передаточных функций, в данном
случае имеет ограниченные возможности.
Действительно, метод «замораживания» коэффициентов дает
хорошие результаты только в том случае, когда за время, в тече-
ние которого исследуется нестационарная система, переменные
коэффициенты не успевают существенно измениться (т. е. практи-
чески изменяются не более чем на 10—20%).
В исследуемом кинематическом уравнении (8.31) наиболее
быстро меняющимся коэффициентом является r(Z). Пусть время
исследования системы составляет А/ секунд. Тогда изменение ко-
эффициента r(t) за это время примерно равно г А/, а относительное
его изменение составляет rAtlr. Отсюда следует, что на первых
этапах движения, когда расстояние r(t) между ракетой и целью ве-
лико, относительное изменение коэффициента может быть неболь-
шим и, следовательно, можно применить для анализа процесса са-
монаведения метод «замораживания» коэффициентов. Однако по
мере сближения ракеты с целью относительное изменение коэффи-
циента г(£) в течение того же времени At возрастает и применение
метода «замораживания» коэффициентов в этих условиях может
привести к грубым ошибкам. В то же время при исследовании
процесса самонаведения нас более всего интересует характер
движения ракеты именно на последнем участке, так как только в
последние моменты наведения определяется такая важная харак-
теристика системы, как ее точность.
Таким образом, при анализе самонаведения «замораживание»
коэффициентов при составлении параметрической передаточной
функции кинематического звена возможно только до тех пор, пока
расстояние между ракетой и целью еще достаточно велико.
Запишем параметрическую передаточную функцию кинемати-
ческого звена исходя вначале из предположения о применимости
метода «замораживания» коэффициентов. Тогда из уравнения
(8.31) следует, что у
W (р t) = ---=------— .
А0(р) ТЯ0Р4-1 г
— Р+ 1
г
466
Глава VIII. Динамика самонаводящихся ракет
Как видно, при «замораживании» получается передаточная
функция неустойчивого апериодического звена со слабо изменяю-
щимся передаточным коэффициентом и с отрицательной постоян-
ной времени TK(t), стремящейся к нулю при приближении ракеты
к цели. Эта постоянная времени примерно равна времени полета,
оставшемуся до полного сближения с целью.
Точно такую же структуру имеет передаточная функция кине-
матического звена, если в качестве входной величины рассматри-
вать координату Л0Ч, характеризующую маневр цели. В соответ-
ствующих выражениях необходимо только заменить величину
(—V) на Уц. Итак, если предположить, что величины г, г, V и Уц
являются медленно изменяющимися функциями времени, то тогда
параметрическим передаточным функциям кинематического звена
соответствует структурная схема, приведенная на рис. 8.23, а.
Рис. 8.23. Структурная схема кинематического звена:
а — соответствующая передаточной функции, определенной с помощью метода «за-
мораживания» коэффициентов; б — соответствующая точному значению параметри-
ческой передаточной функции
Использование параметрической передаточной функции, полу-
ченной путем «замораживания» коэффициентов, может привести к
грубым качественным ошибкам при исследовании последнего этапа
самонаведения. Чтобы для этого случая получить качественно бо-
лее правильные результаты, необходимо определить параметричес-
кую передаточную функцию, соответствующую кинематическому
уравнению (8.31), более точным методом. Как известно, для ана-
лиза нестационарных динамических систем принципиально воз-
можно определить передаточную функцию так же, как и для ли-
нейных систем с постоянными параметрами, т. е. как отношение
установившейся реакции системы на гармоническое воздействие
к этому воздействию. В результате для системы с постоянны-
ми параметрами получают обычную передаточную функцию, а для
нестационарной линейной системы так называемую параметричес-
кую передаточную функцию, зависящую не только от частоты, но и
от времени [12], [13], [14]. Введение понятия параметрической пере-
даточной функции позволяет распространить частотный метод ана-
лиза на нестационарные системы.
§ 6. Кинематическое звено; уравнения и передаточные функции 467
Используя результаты, полученные в гл. VII [см. (7.20)], можно
определить две параметрические передаточные функции по отно-
шению к входным сигналам Д0 и Д0Ч. Для рассматриваемого слу-
чая в выражение (7.20) следует подставить значения:
а0 (0 = г (/),
(0 = г (0,
&o(0 = ~V(0,
вытекающие из уравнения (8.31). В результате подстановки полу-
чим параметрическую передаточную функцию кинематического
звена
W(p, f) =---\V(t)e*dt.
r(f) J
Для вычисления этого интеграла необходимо задать какую-ли-
бо аппроксимацию функции
V(t) = V (0 cos [ср (0 — ©(ОК
Рассмотрим два случая, когда V = const и когда V = Уо + V(t),
где V = const.
Выполняя вычисления, получим в первом случае
Я?(р, 0 = . (8.32)
г(0 р
Таким образом, при V = const параметрическая передаточная
функция соответствует интегрирующему звену с переменным пере-
даточным коэффициентом, неограниченно возрастающим при
приближении ракеты к цели.
Во втором случае, когда V = Vq + Vt, после несложных вычис-
лений найдем, что
(8.33)
. ^-р-1
W(p, = - ----V-----
v r(/)p2 r(0 P2
Обычно отношение V/V достаточно велико и измеряется десят-
ками секунд, поэтому в состав параметрической передаточной
функции входит дифференцирующее звено с большой постоянной
времени. Это позволяет во многих случаях передаточную функцию
упрощать, так как при достаточно больших частотах со V/V
7 . V
— Р—1~ — Р-
v v
468
Глава VIII. Динамика самонаводящихся ракет
Поэтому и здесь
W(p, (8.34)
Г (О Р
с той лишь разницей, что теперь е выражении передаточного коэф-
фициента величина У(£) является переменной. Принимая во вни-
мание, что выражения (8.32) и (8.34) аналогичны, форму (8.32)
параметрической передаточной функции кинематического звена
можно считать довольно универсальной.
Передаточная функция кинематического звена по отношению
ко входу Л0Ч имеет аналогичную форму, но с заменой величины
К(0 на Уц. На рис. 8.23, б приведена структурная схема кинемати-
ческого звена, соответствующая полученному результату.
§ 7. ПРОМАХ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ
Минимальное расстояние между ракетой и целью, которое
имеет место в процессе наведения, называют промахом, или про-
летом. Эта величина характеризует точность самонаведения. Для
расчета промаха необходимо решать полную систему дифференци-
альных уравнений системы наведения, включающую в себя также
нелинейные кинематические уравнения. В состав последних входит
кинематическое уравнение, определяющее закон изменения рас-
стояния между ракетой и целью [см., например, четвертое уравне-
ние в системе уравнений (8.1)], минимальное значение которого и
определяет промах.
Но такой путь расчета промаха очень сложен и может быть ре-
ализован только с применением моделей и цифровых машин. Кро-
ме того, следует иметь в виду, что обычно система самонаведения
перестает действовать на некотором малом расстоянии до цели,
равном rmin.
Минимальное расстояние rmin, на котором система самонаведе-
ния перестает нормально функционировать, определяет мертвую
зону самонаведения. Величина мертвой зоны может быть различ-
ной: от 50—70 м до 300—500 м [2].
Мертвая зона самонаведения может вызываться следующими
основными причинами.
1. Нормальная работа координатора цели нарушается на не-
котором малом расстоянии до цели. Это явление можно назвать
«ослеплением» координатора цели. Физическая природа «ослепле-
ния» может быть разной для координаторов различного типа. При-
чины «ослепления» радиолокационных координаторов цели рас-
смотрены в книге [2]. Дистанция «ослепления» госл в зависимости
от причины «ослепления», т. е. от типа и конструкции координатора
цели, может быть различной и составлять 50 150 м и более [2].
§ 7. Промах самонаводящейся ракеты
469
2. При больших угловых скоростях линии визирования цели ф
и больших углах пеленга цели имеющих место при малых рас-
стояниях до цели, насыщаются элементы системы автоматического
слежения за целью, так как они имеют ограниченную максималь-
ную скорость слежения |ф| фтах и ограниченный угол пеленга
i | £к max-
Момент прекращения нормальной работы системы самонаведе-
ния является в некоторой степени неопределенным, так как зави-
сит от большого числа не всегда поддающихся точному учету при-
чин. Поэтому расчет движения ракеты на последнем участке наве-
дения, после того как система самонаведения перестает работать,
не может быть выполнен без использования тех или иных гипотез
о характере движения самонаводящейся ракеты в мертвой зоне.
Для определения промаха на стадии предварительных иссле-
дований системы самонаведения целесообразно составить соотно-
шение, позволяющее рассчитать приближенное значение прома-
ха на основании данных о движении ракеты и цели в момент, непо-
средственно предшествующий прекращению нормальной работы
системы самонаведения. По существу эта задача является задачей
экстраполяции, так как на основании текущих данных о движении
ракеты и цели необходимо предсказать будущее значение одного
из параметров движения. Задачу можно решить, если задаться
определенными предположениями о характере движения ракеты
и цели на интервале от рассматриваемого момента времени и до
момента наибольшего их сближения.
Простейший способ приближенного расчета промаха можно по-
лучить, если предположить, что на этом участке ракета и цель
движутся с постоянными скоростями по траекториям, мало отли-
чающимся от прямолинейных. Подобное предположение не будет
очень грубым, так как у современных целей и ракет, имеющих вы-
сокие скорости полета, минимальные радиусы кривизны траекторий
_. 1/2
Pmln ' >
gllmax
где nmax — максимальная нормальная перегрузка, составляют не-
сколько километров. Поэтому на расстояниях rmin, измеряющихся
сотнями метров, траектории маневрирующих ракет и целей мало
отличаются от прямолинейных, а их скорости не успевают заметно
измениться.
Для определения промаха рассмотрим движение ракеты отно-
сительно цели. Пусть положение ракеты и цели характеризуется
схемой, приведенной на рис. 8.24. В общем случае вектор относи-
тельной скорости VOTH не направлен на цель и составляет с линией
визирования цели угол ц. Очевидно, что при использовании метода
пропорционального или параллельного сближения этот угол
470
Глава VIII. Динамика самонаводящихся ракет
в какой-то мере характеризует ошибку наведения, так как при р=И=0
линия визирования цели будет вращаться с некоторой угловой ско-
ростью ср.
Так как промах определяется исходя из предположения, что на-
чиная с данного момента времени углы 0 и 0Ч, а также величины
скоростей V и Уц остаются постоянными, то траекторией ракеты
относительно цели будет прямая ОА. Тогда величина промаха,
т. е. минимальное расстояние между ра-
кетой и целью, определится отрезком
ЦА = Л, причем
h = г sinp.
Выразим теперь угол р через величи-
ну угловой скорости ср. ’Из схемы на
рис. 8.24 следует, что
ГТ = Vow„sinp,
Рис, 8,24. Определение поэтому
мгновенного промаха
при самонаведении
(8.35)
'-iA
k отн
Учитывая, что угол р при пропорциональном или параллельном
сближении обычно невелик, получим
Г = — yomft COS р — Vomii,
поэтому
h
(8.36)
Для определения промаха в формулы (8.35) и (8.36) следует
подставлять ср, г, г или СОти, соответствующие моменту, непосред-
ственно предшествующему нарушению нормальной работы систе-
мы самонаведения. Заметим, что в приближенном варианте фор-
мула промаха (8.36) достаточно точна до тех пор, пока угол р
настолько мал, что можно считать г « —Соги. (Погрешность не
будет превышать 5%, пока р < 18°). Очевидно, что с уменьшением
расстояния между ракетой и целью угол р приближается к 90°,
и формулой (8.36) при малых г пользоваться нельзя. С другой сто-
роны, использовать точное выражение для относительной скорости
УОтн неудобно, так как это выражение очень громоздко
vomn = Кг2 + V2 - 2УУЦ cos (0 - ©ч).
§ 7. Промах самонаводящейся ракеты
471
Поэтому для приближенного определения величины промаха
можно принять формулу (8.36), имея в виду, что ее нельзя исполь-
зовать, когда расстояние между ракетой и целью становится со-
измеримым с величиной промаха.
Так как в основу вывода формулы (8.36) положено предполо-
жение о прямолинейном и равномерном движении ракеты и цели,
то в случае, когда это предположение не выполняется, минималь-
ное расстояние между ракетой и целью может отличаться от рас-
считанного с помощью формулы (8.36). Поэтому, чтобы отличать
истинный промах от его приближенного, экстраполированного зна-
чения, определяемого формулой (8.36), будем последний называть
мгновенным промахом. Таким образом, мгновенный промах — это
минимальное значение расстояния между ракетой и целью, которое
получилось бы, если начиная с данного момента времени ракета
и цель летели равномерно и прямолинейно. (Нетрудно заметить,
что понятие о мгновенном значении промаха и о мгновенной точке
встречи близки).
Так как фактическое движение ракеты и цели может отличаться
от прямолинейного и равномерного, то истинное значение промаха
будет отличаться от его мгновенного значения. Это отличие будет
тем большим, чем большим принимается расстояние между раке-
той и целью, которое подставляется в формулу (8.36), другими сло-
вами, чем на большее время вперед экстраполируется движение
ракеты и цели. С учетом этого следует помнить, что формула (8.36)
для вычисления приближенного значения промаха дает большую
погрешность при больших значениях расстояния г(/).
Погрешность формулы (8.36) можно оценить, если рассмотреть
более точное решение исследуемой экстраполяционной задачи.
Действительно, более точный результат при приближенной оценке
промаха можно получить, предположив, что начиная с данного мо-
мента времени ракета и цель движутся с постоянной нормальной
перегрузкой, в то время как величины V и V,. остаются постоянны-
ми. Составим для этого случая расчетное соотношение.
Прежде всего заметим, что если г не очень велико, то отноше-
ние —г/г определяет время, оставшееся до встречи ракеты с целью.
Обозначим это время через Д/. Тогда формулу (8.36) можно запи-
сать в следующей эквивалентной форме:
h = — kt2 г ср.
Оценим скорость изменения мгновенного промаха h(t), полагая,
что скорость сближения г является величиной постоянной. Диффе-
ренцируя выражение (8.36), получим
Л =----г— (гср -|- 2гср).
г
472
Глава VIII. Динамика самонаводящихся ракет
Для оценки величины h воспользуемся кинематическим урав-
нением
r<? = V sin (ср — 0) — V4 sin (ср — 0Ц).
Предполагая, что V и Уц являются постоянными .величинами,
и дифференцируя это уравнение, найдём
г<р + 2г ср = — V cos (ср* — 0) 0 Vl( cos (ср — 0Ч) 0Ц,
так как
г = —V cos (ср —0) 4-V4cos (ср — 0Ц).
Если использовать введённые выше обозначения
Ё = 7 cos (ср — 0), Ёц = Ец cos (ср — 0Ц),
го можно записать, что
Л = ^(уО-уД^-А^уё-уД). (8.37)
г
Очевидно, что величины У0 и ЕЧ0Ч являются проекциями нор-
мальных ускорений ракеты и цели на нормаль к линии визирования
цели [15].
Нетрудно убедиться, что эта формула правильно характеризует
изучаемое явление. Как следует из формулы (8.37), при сближении
ракеты с целью производная промаха h стремится к нулю. Это
соответствует определению промаха, как наименьшего расстояния
между ракетой и целью.
Если Л/ не очень велико, то за это время мгновенный промах
h(t) при маневре ракеты и цели с постоянной перегрузкой изменит-
ся на величину
АЛ -----— (Ё0 —Ё А),
(предполагается, что У0—ЕЧ0Ч= const). Оценка скорости из-
менения промаха по формуле (8.37) позволяет записать более точ-
ное выражение промаха, учитывающее маневр ракеты и цели:
Л + АЛ = Г— г<р + у (КД — V0) А/2, (8.38)
где
А/2 =
2
С помощью этого соотношения можно найти такой интервал
времени А/, чтобы разница между мгновенным промахом, опреде-
§ 8. Общая характеристика системы самонаведения
473
ляемым формулой (8.36), и более точным его значением из форму-
лы (8.38) не превышала бы некоторой заданной величины Д/г. Так,
например, если требуется, чтобы погрешность определения мгно-
венного промаха при маневре ракеты и цели Д/г не превышала 5 м,
причем известно, что в рассматриваемой задаче [ VQ—УЦ<ЭЦ1 <
< 100 м/сек?, то формула (8.36) дает погрешность Ah < 5 м, если
Д/2<( ——2^-----= 0,1 сек? или At < 0,32 сек.
IV0- VA |
Аналогично можно было бы оценить и влияние переменности
скорости ракеты и цели, характеризующейся величинами V и
на точность формулы (8.36).
Из формулы (8.36) следует, что величина мгновенного прома-
ха пропорциональна угловой скорости линии визирования цели.
Поэтому метод параллельного сближения можно определить как
метод, при точном выполнении условий которого мгновенное зна-
чение промаха в каждый момент времени равно пулю. Аналогично
можно утверждать, что в методе пропорционального сближения
требуется пропорциональность между нормальным ускорением
ракеты и мгновенным промахом. Действительно, для наведения
методом пропорционального сближения требуется выполнение ус-
ловия
0 = ky>,
с учетом которого формулу (8.36) можно записать так:
0= — k — h. (8.39)
г2
Коэффициент, связывающий величины 0 и h, оказывается об-
ратно пропорциональным квадрату расстояния между ракетой и
целью. Поэтому по мере сближения ракеты с целью система более
интенсивно реагирует на ошибку наведения, если за эту ошибку
принять мгновенное значение промаха.
§ 8. ОБЩАЯ ХАРАКТЕРИСТИКА СИСТЕМЫ САМОНАВЕДЕНИЯ
8.1. Расчетная структурная схема
Выше были рассмотрены основные свойства и динамические
характеристики элементов, входящих в состав систем самонаве-
дения. Объединяя эти элементы так, чтобы можно было реализовать
выбранный метод наведения, получим расчетную структурную схе-
му системы самонаведения. На основании этой схемы можно вы-
полнить ряд расчетов, связанных с исследованием качественных
474
Глава VIII. Динамика самонаводящихся ракет
показателей системы самонаведения, включая исследование дина-
мической точности, а также составить схему моделирования си-
стемы.
Для примера рассмотрим структурную схему системы самонаве-
дения методом пропорционального сближения. Предположим, что
для реализации этого метода используется координатор, осуществ-
ляющий слежение за целью с помощью силового гироскопического
стабилизатора. В этом случае на выходе координатора можно по-
лучить сигнал, пропорциональный угловой скорости линии визи-
рования цели, без каких-либо дополнительных измерительных эле-
ментов.
Рис. 8.25. Расчетная структурная схема системы самонаведения
Структурная схема системы, отвечающая этим условиям, приве-
дена на рис. 8.25. На схеме после координатора цели указан кор-
ректирующий фильтр с передаточной функцией W$(p) и усилитель
с коэффициентом усиления Ку. Необходимость введения фильтра
и значения его параметров выявляются при исследовании динами-
ческих свойств системы самонаведения в целом. На этой схеме
структура системы стабилизации не детализируется, так как при
исследовании свойств контура системы наведения удобно рассмат
ривать систему стабилизации как элемент с известными динамиче-
скими свойствами (которые обычно характеризуются его переда-
точной функцией или логарифмическими частотными характеристи-
ками). За выходную величину системы стабилизации удобно при-
нять координату 0, так как входной величиной кинематического
звена является координата А0 и, кроме того, координата 0 харак-
теризует такой важный параметр движения, как нормальная пере-
грузка ракеты.
§ 8. Общая характеристика системы самонаведения
475
В качестве выходной величины системы самонаведения удобнее
всего принять мгновенный промах h, так как он просто связан с вы-
ходной величиной кинематического звена ср и в то же время харак-
теризует точность системы. (Следует только помнить, что мгно-
венный промах мало отличается от истинного значения промаха,
если его величину рассчитывать по формуле (8.36) за 0,34-0,5 сек
до момента максимального сближения с целью).
8.2. Управляющие и возмущающие воздействия
На структурной схеме рис. 8.25 отмечены основные управляю-
щие и возмущающие воздействия. Рассмотрим свойства и природу
этих воздействий.
На схеме позициями 1а, 16 и 1в обозначены управляющие воз-
действия. Воздействия 0*(t) и (t) соответствуют изменениям уг-
лов 0 и <р при движении ракеты по опорной траектории, относи-
тельно которой выполнена линеаризация всех исходных дифферен-
циальных уравнений системы самонаведения. Необходимость
введения этих воздействий связана с тем, что опорную траекторию
вычисляют обычно приближённо с помощью упрощенной системы
уравнений, в предположении идеальной работы системы наведения
для заданного закона движения цели V4(t) и 04(t). (Чаще всего
предполагают при этом расчёте, что V4 = const и 0Ч = const). Сле-
довательно, воздействия 0*(t) и ф*(0 учитывают заданный закон
движения цели и могут рассматриваться как управляющие воздей-
ствия.
Воздействие Л01} (/в на рис. 8.25) учитывает дополнительный
маневр цели, не принятый во внимание при расчёте опорной траек-
тории. Это воздействие можно рассматривать или как случайную
функцию времени, или как неслучайный сигнал, который чаще все-
го задают в виде полинома.
Рассмотрим несколько подробнее характер воздействий 0*(t) и
<р* (/), предполагая, что в исследуемой системе самонаведения ис-
пользуется пропорциональное сближение, когда сигнал ошибки на-
ведения пропорционален угловой скорости <р. В этом случае для
упрощения расчетов удобно предположить, что опорная траектория
соответствует условию ср* = О или ср* = <р0 = const, т. е. является
траекторией параллельного сближения. Тогда угол 0*(t) находится
из соотношения
= % —arc sin sin (<р0 —0Ц)1 . (8.40)
L (*) .1
Как известно, угол 0*(/) определяет направление в мгновенную
точку встречи. Так как система наведения не является идеальной,
то по этой причине вектор скорости ракеты не точно наводится в
476
Глава VIII. Динамика самонаводящихся ракет
мгновенную точку встречи и. фактическое значение угла 0(t) отли-
чается от значения 0*(/) на опорной (идеальной) траектории. Раз-
ность этих двух углов
Д0 = 0(О-©4О
представляет собой ошибку наведения, обусловленную влиянием ди-
намики системы и косвенно характеризующую точность системы,
так как составляющая мгновенного промаха тем меньше, чем мень-
ше ошибка Л0.
Нетрудно видеть, что систему самонаведения можно рассматри-
вать как своеобразную следящую систему, в которой вектор ско-
рости ракеты должен следить за требуемым направлением
определяющим положение мгновенной точки встречи.
С помощью воздействия 0* (t) легко можно учесть влияние на
работу системы начальной ошибки прицеливания, суть которой
сводится к тому, что в начальный момент работы системы самона-
ведения вектор скорости ракеты направлен под углом, отличающим-
ся от 0*(О). Другими словами, при t = О Д0 = Д0о О, а это
условие эквивалентно начальному скачку воздействия 0* (t)
на величину Л0О, если условиться считать, что в начальный момент
(t = —0) 0* и 0 равны друг другу.
Характер изменения воздействия 0*(О при заданных начальных
условиях и данном методе наведения зависит от закона изменения
скорости ракеты V(t) и маневра цели. В некоторых случаях при ис-
следовании точности системы удобно влияние этих двух факторов
разделять: опорную траекторию определять для прямолинейного
равномерного движения цели, а влияние маневра цели учитывать
в явной форме с помощью введения воздействия A04(t). Если учи-
тывать маневр цели таким способом, то воздействие 0*(0 будет
зависеть только от закона изменения V(f}. Так, например, при
?'* = (ро = const угол 0*(t) определяется выражением (8.40), в ко-
тором 0Ч = const.
Конечно, на рассматриваемой структурной схеме можно было бы
сравнивать не координаты ©* (t) и 0(0, а их производные 0*(О и
0(0- Для этого достаточно воздействие ©*(7) перенести на схеме
через интегрирующий элемент. Тогда при ср* = tp0 = const воздей-
ствие 0* можно определить из соотношения
А /Л _ V sin (?о —
У Уl/2_1/2sin2((f,o_eJ
полученного из (8.40) при условии, что цель не маневрирует.
Это выражение более отчетливо выявляет влияние переменности
скорости ракеты и начальных условий на управляющее воздействие
©*(t). (Из него, например, вытекает, что влияние переменной ско-
§ 8. Общая характеристика системы самонаведения
477
роста ракеты на воздействие @*(0 и, следовательно, на ошибку
наведения будет наиболее интенсивным при атаках на поперечных
курсах, когда курсовой угол цели ср0 — близок к 90°).
Воздействие ср*(О, приложенное ко входу 1а, как и воздействие
О* (t), обусловлено особенностями линеаризации кинематических
уравнений и расчета опорной траектории. Закон изменения угла
(0 отвечает движению по опорной траектории!. Если при расчете
опорной траектории предполагалось ср* (/) = ф0 = const, то в этом
случае воздействие ср* (0 можно не принимать во внимание, так что
оно не влияет на процесс и точность самонаведения.
При желании вход 1а можно использовать для учета начальной
ошибки Дф0 = фко — Фо ориентирования координатора цели. Если
при t = 0 величина фк =/= фо, то эту начальную ошибку легко учесть,
если на вход 1а подать в момент t = 0 скачкообразное воздействие,
равное этой начальной ошибке.
Если воздействия, приложенные ко входам 1а, 16 и 1в, рассмат-
ривать как известные функции времени, то им будут соответство-
вать некоторые динамические ошибки наведения. Наиболее важны-
ми возмущающими воздействиями, существенно влияющими на
точность наведения, являются шумы, действующие на входе коор-
динатора цели и эквивалентные случайным ошибкам измерения уг-
лового рассогласования координатора цели. На структурной схеме
рис. 8.25 точка приложения этих шумов обозначена позицией II.
Действие шумов на систему вызывает появление случайной со-
ставляющей ошибки наведения. Характер и уровень шумов сущест-
венно зависит от рода цели, её размеров, типа координатора цели
(тепловой, радиолокационный и т. п.), расстояния до цели и многих
других факторов.
Обычно уровень шумов увеличивается при уменьшении расстоя-
ния до цели, т. е. шум не является стационарным. Для определения
характера и уровня шумов требуется проведение сложных экспери-
ментов с последующей обработкой полученных записей. Поскольку
такие эксперименты являются громоздкими, трудоёмкими и доро-
гими, в литературе почти не имеется сведений о результатах таких
экспериментов.
При отсутствии каких-либо дополнительных данных обычно при
исследовании систем самонаведения шум на входе координатор?,
цели рассматривают как стационарный и «белый», т. е. считают, что
в пределах полосы пропускания координатора цели спектральная
плотность шума постоянна. Если иметь в виду только шумы, вызы-
ваемые естественными флюктуациями отраженного от цели сигна-
ла при использовании радиолокационного координатора цели, то
такое предположение не является грубым [7]. В том случае, когда
координатор работает в условиях активных помех, статистические
характеристики шума на входе координатора по существу могут
быть любыми.
478
Глава VIII. Динамика самонаводящихся ракет
Спектральная плотность «белого» шума, эквивалентного по
своему действию на систему фактическому шуму, при дальностях
от 1 до нескольких десятков километров, когда целью является са-
молёт и используется радиолокационный координатор цели, ориен-
тировочно определяется величиной [7]
S (со) = с2 = 10 5 н- 10—7 сек
(Следует помнить, что рассматриваемые флюктуационные шумы
эквивалентны случайным ошибкам измерения угловых координат.
Поэтому входной шум можно рассматривать как «белый», если
входом координатора цели является угловая величина, а не угловая
скорость, как это иногда принимают при составлении расчетной
структурной схемы).
Кроме указанных воздействий, при анализе системы самонаве-
дения необходимо также учитывать влияние ошибок аппаратуры,
приводящихся к различным ложным сигналам (уходы гироскопов,
дрейф нулей усилителей и т. п.), так как эти ошибки могут влиять
на точность наведения. Действие этих возмущений отмечено на
рис. 8.25 позицией III.
И, наконец, последние возмущения — это возмущающие силы и
моменты, действующие непосредственно на ракету (вход IV).
Как уже указывалось, возмущения начальных условий, от кото-
рых также зависит точность работы системы наведения, можно вве-
сти, придавая ступенчатое изменение входным сигналам 0*(О и
«р* (t) в начальный момент времени.
Итак, на основании приведенного краткого обзора внешних воз-
действий их можно подразделить на три группы. Одни из них мож-
но рассматривать как известные функции времени. Сюда относятся
воздействия 0* (7) и ср* (t), зависящие от начальных условий движе-
ния и закона изменения скорости ракеты V(t) по времени. Во мно-
гих случаях влияние маневра цели на точность наведения удобно
рассматривать, предполагая, что А0Ч является также заданной
функцией времени.
Ко второй группе относятся возмущения, имеющие характер слу-
чайных временных процессов. Сюда относятся флюктуационные
шумы, действующие на входе координатора цели, и во многих слу-
чаях ложные сигналы из-за погрешностей аппаратуры. Такой же
характер имеют и возмущения, непосредственно воздействующие на
ракету.
К третьей группе можно отнести возмущения начальных усло-
вий, такие, как начальные ошибки пуска ракеты и ориентирования
координатора цели. Эти возмущения можно рассматривать как
случайные величины с заданным средним квадратическим откло-
нением.
В последующих разделах будут изложены методы анализа оши-
бок наведения, вызываемых рассмотренными воздействиями.
§ 8. Общая характеристика системы самонаведения
479
8.3. Основные особенности процесса самонаведения
Ниже для определенности будет рассмотрен случай, когда для
наведения используется метод пропорционального сближения. По-
этому нас более всего будет интересовать характер изменения в
процессе маведеиия угловой скорости линии визирования цели ф.
Это тем более удобно по той причине, что мгновенный промах про-
порционален величине <р.
Рис. '8.26. График, иллюстрирующий про-
текание процесса самонаведения
I — этап отработки начальных возмущений:
II — этап наведения; III — этап неустойчивого
движения
Этапы самонаведения
Весь процесс самонаведения можно разделить на три этапа, хо-
тя границы между этапами, могут быть проведены весьма условно.
Для наглядности на рис.
8.26 представлен пример-
ный вид графика, пока-
зывающего характер из-
менения координаты <р по
времени.
В общем случае сиг-
нал с выхода координа-
тора цели включается в
систему не сразу после
пуска ракеты, а спустя
некоторое время в мо-
мент, обозначенный на
рисунке точкой 1вКл. К мо-
менту подачи сигнала с
выхода координатора це-
ли на вход системы стабилизации имеет место некоторая началь-
ная угловая скорость линии визирования цели фо, а это указывает
на то, что вектор скорости ракеты не направлен в мгновенную точ-
ку встречи. Величина этой начальной ошибки зависит от принятого
метода прицеливания и величины ошибки прицеливания. Так как
при методе пропорционального сближения система стремится обра-
тить в нуль угловую скорость линии визирования цели, то по про-
шествии некоторого времени Т — времени переходного процесса —
это начальное рассогласование исчезнет. На этом заканчивается
первый этап движения ракеты — этап компенсации начального рас-
согласования.
На втором этапе начинается слежение за мгновенной точкой
встречи, которая перемещается как из-за маневров цели, так и из-за
переменности скорости ракеты. Это «слежение», конечно, сопровож-
дается ошибкой е = ф, которая обусловливается динамическими
запаздываниями в системе и возмущающими воздействиями глав-
ным образом флюктуационных шумов.
480
Глава VIII. Динамика самонаводящихся ракет
Наконец, в некоторой точке траектории (положение которой
можно наметить только условно) система как бы теряет устойчи-
вость, что проявляется в виде интенсивного возрастания угловой
скорости линии визирования цели, носящего монотонный или коле-
бательный характер. Эта «неустойчивость» объясняется кинемати-
ческими особенностями самонаведения, которые были выявлены при
анализе передаточных функций кинематического звена. Там было
показано, что передаточный коэффициент функции (8.34) неогра-
ниченно возрастает по мере сближения с целью, поэтому небольшие
отклонения вектора скорости ракеты от направления в мгновенную
точку встречи вызывают большую и все возрастающую угловую
скорость линии визирования цели ср. С этого момента начинается
третий этап — этап «неустойчивого» движения, когда угловая ско-
рость линии цели неограниченно возрастает.
Третий этап заканчивается в момент нарушения процесса само-
наведения, обозначенный на рисунке точкой tMJl. (Причины этого
явления были рассмотрены выше, в § 7).
Особенности процесса
самонаведения
Анализируя особенности самонаведения на различных этапах,
можно сделать некоторые выводы общего характера.
Выше было установлено, что мгновенный промах можно рассчи-
тать по формуле
h = —AZ3rcp,
где А/ — время от рассматриваемого момента до момента наиболь-
шего сближения ракеты с целью. Поэтому при заданных условиях
наведения, когда скорость сближения г является известной величи-
ной, необходимо, чтобы в момент нарушения процесса самонаведе-
ния за А/ сек до встречи с целью угловая скорость линии визирова-
ния цели не превышала бы некоторой предельной величины <рт,
зависящей от допустимого значения промаха h.
Величина угловой скорости линии визирования цели в этот
момент зависит от того, насколько рано система «потеряла устой-
чивость». Чем раньше система «теряет устойчивость», тем больше
будет угловая скорость ср и промах.
На этом основании можно предложить практический прием про-
верки удовлетворительности выбранных параметров системы наве-
дения по моменту «потери устойчивости» системы или, точ-
нее, по интервалу времени от момента «потери устойчивости» до
сближения ракеты с целью. Естественно, что для формирования
такого правила необходим анализ точных решений, найденных, на-
пример, с помощью вычислительных машин.
§ 8. Общая характеристика системы самонаведения
481
Конечно, «раскачка» координаты ср зависит еще и от того значе-
ния ср, с которым система подошла к моменту «потери устойчиво-
сти». А величина этого значения ф зависит от точности работы си-
стемы наведения на предыдущем этапе. Поэтому для уменьшения
промаха необходимо повышать точность слежения за мгновенной
точкой встречи на этапе II.
Поскольку перемещение мгновенной точки встречи зависит от
маневра цели и изменения скорости ракеты, то, очевидно, можно
утверждать, что постоянство скорости ракеты будет способствовать
повышению точности наведения (если для наведения используется
метод пропорционального сближения).
Точность слежения за мгновенной точкой встречи на втором эта-
пе зависит, конечно, не только от уровня и характера возмущающих
воздействий, но и от параметров системы наведения и, в частности,
от выбора коэффициента пропорциональности, входящего в закон
пропорционального сближения.
Как уже отмечалось, при выборе параметров автоматической
системы приходится искать компромиссное решение, так как слу-
чайные и динамические ошибки обычно изменяются в противопо-
ложных направлениях при изменении параметров системы.
Кроме того, надо иметь в виду особенности систем самонаведе-
ния, связанные с их нестационарностью. Одна из таких особенно-
стей состоит в том, что с увеличением передаточного коэффициента
разомкнутого контура системы наведения система раньше теряет
устойчивость и поэтому при слишком больших значениях указанно-
го коэффициента динамические ошибки системы будут увеличи-
ваться, а не уменьшаться, как это бывает у обычных стационарных
систем.
Дополнительная особенность процесса самонаведения, обуслов-
ленная нестационарностью системы, заключается в том, что на-
чальная ошибка наведения ф0 не стремится асимптотически к нулю,
как это бывает у устойчивых стационарных систем. Несмотря на то,
что на этапе I наведения эта ошибка интенсивно убывает, она не
уменьшается до нуля. Если бы даже никаких других возмущений,
кроме начального ф0, не было, то и в этом случае получилось бы
некоторое отличное от нуля значение промаха.
Влияние начального возмущения на величину промаха будет тем
более сильным, чем меньше будет отличаться полное время наве-
дения от времени переходного процесса системы на начальном эта-
пе движения. При малых начальных дальностях и больших ско-
ростях сближения процесс самонаведения может быть очень корот-
ким и в этом случае даже условно нельзя указать границы
этапов — в системе ещё не закончится переходный процесс, вызван-
ный начальным возмущением, как она уже «теряет» устойчивость.
16 Заказ 1242
482
Глава VIII. Динамика самонаводящихся ракет
Для уменьшения влияния начальных ошибок наведения на величи-
ну промаха, очевидно, требуется уменьшать эти начальные ошибки,
измеряющиеся угловой скоростью линии визирования цели ср, а так-
же уменьшать время переходного процесса системы на начальном
этапе наведения. (Напомним, что важную роль играет соотноше-
ние времени переходного процесса и полного времени наведения).
Но уменьшение этого времени связано с расширением полосы ча-
стот, пропускаемых системой и, следовательно, с увеличением слу-
чайной составляющей ошибок наведения. Поэтому и здесь требует-
ся компромиссный выбор параметров системы.
Для уменьшения величины начальной ошибки наведения важ-
ную роль играет и правильный выбор метода прицеливания. Сущ-
ность прицеливания состоит в том, чтобы направить вектор скоро-
сти ракеты в ту точку пространства, где будет находиться мгновен-
ная точка встречи к моменту начала работы системы наведения,
имея в виду, что этот момент не совпадает с моментом пуска раке-
ты. Это связано с тем, что при запуске ракеты с помощью старто-
вого ускорителя, работающего в течение короткого интервала
времени, ракета движется с большими продольными ускорениями,
а система стабилизации загружена «отработкой» больших возму-
щений, возникающих в начале и конце работы стартового ускорите-
ля. Поэтому подача на вход системы стабилизации в этот период
времени еще и сигналов наведения нецелесообразна, так как это
может привести к перегрузке системы стабилизации, насыщению
ее элементов и, как следствие, к резкому ухудшению ее динамичес-
ких характеристик.
В связи с этим сигнал наведения обычно подается после окон-
чания переходных процессов, вызванных работой стартового уско-
рителя. Поэтому и положение мгновенной точки встречи, в которую
осуществляется прицеливание, необходимо вычислять с учетом топ
скорости, которую будет иметь ракета к началу наведения. Тогда
методическая ошибка прицеливания будет минимальной.
В том случае, когда на участке наведения скорость ракеты су-
щественно меняется, можно осуществлять прицеливание по ее
средней скорости. Из-за этого увеличивается ошибка прицеливания,
так как вначале ракета наводится в точку встречи, которая отвеча-
ет некоторой средней «будущей» скорости ракеты. Но в этом
случае переходный процесс в системе, вызванный движением точки
встречи из-за переменности скорости ракеты, частично компенсиру-
ет процесс, вызванный начальной ошибкой прицеливания.
Окончательный выбор метода прицеливания связан, конечно, с
тщательным анализом, для выполнения которого требуется привле-
чение вычислительной техники.
Рассмотрев основные черты процесса самонаведения, отметим
некоторые особенности систем самонаведения, которые могут влиять
на ее структуру, а также и на точность.
§ 8. Общая характеристика системы самонаведения
483
Ограничение угла пеленга
Одна из особенностей системы самонаведения состоит в том, что
иногда приходится принимать меры для ограничения угла пеленга
цели. Необходимость в этом возникает, когда имеет место атака на
поперечных курсах и скорость ракеты незначительно превышает
скорость цели. В этом случае требуется сравнительно большой угол
упреждения и соответственно большим будет угол пеленга цели.
Так как угол поворота чувстви-
тельного элемента координатора
цели относительно корпуса раке-
ты всегда ограничен, то по этой
причине может встретиться ситу-
ация, когда угол пеленга цели
окажется больше некоторого
максимально допустимого угла,
зависящего от конструкции коор-
динатора. Чтобы в этих условиях
координатор не потерял цель, не-
обходимо принять меры для ог-
Рис. 8.27. Схема ограничения угла
пеленга координатора цели
раничения угла пеленга.
Для решения этой задачи можно, например, в управляющий
сигнал ввести составляющую, пропорциональную углу пеленга
цели. Но для того чтобы не исказился закон наведения, этот допол-
нительный сигнал можно пропустить через нелинейный элемент
типа «зоны нечувствительности» (рис. 8.27). Тогда в случае, когда
пеленг цели, измеренный координатором, станет близок к своему
предельному максимальному значению, в сигнале наведения по-
явится добавок, заставляющий ракету изменить направление своего
движения так, чтобы угол пеленга цели уменьшился. Это, конечно,
произойдет за счет искажения принятого метода наведения. Заме-
тим также, что подобная схема ухудшает устойчивость системы и
может вызвать появление автоколебаний. В приведенной схеме при
больших углах пеленга получится наведение по закону +
+ ^2? = ©•
Если большие углы пеленга ожидаются только на начальном
участке наведения из-за того, что скорость ракеты на этом участке
недостаточно велика, но в дальнейшем она возрастает, можно ис-
пользовать комбинированный метод наведения, определив, напри-
мер, сигнал ошибки в виде
щ = ki<f + k£.
Тогда на начальном этапе наведения, когда угловая скорость
линии визирования цели ср мала, система будет стремиться обратить
16*
484
Глава VIII. Динамика самонаводящихся ракет
в нуль угол пеленга, что нам и требуется. Но в дальнейшем для
повышения точности наведения можно с помощью простейшего
программного устройства параметр k2 уменьшить до нуля и перейти
тем самым на закон пропорционального сближения.
Влияние ошибок обтекателя
В указанных двух способах ограничения угла пеленга предпола-
гается, что координатор цели
Рис. 8.28. Схема учета искаже-
ний, вносимых обтекателем
имеет датчики этого угла.
Еще одна особенность систем са-
монаведения связана с влиянием об-
текателя на динамику самонаведе-
ния. Чувствительный элемент коор-
динатора цели устанавливается в
головной части ракеты и прикрыва-
ется специальным колпаком — обте-
кателем. Форма обтекателя должна
быть такой, чтобы не ухудшать ни
аэродинамических характеристик
ракеты, ни характеристик координа-
тора цели [1], [18]. Так как обтека-
тель должен быть достаточно проч-
ным, то его не удается сделать в ви-
де тонкой оболочки, а это приводит
к искажениям и отклонениям диаг-
раммы направленности чувствительного элемента координатора.
В результате измеренная угловая координата цели, например, угол
пеленга, будет отличаться от ее истинного значения. Таким обра-
зом, эти искажения эквивалентны как бы некоторому ложному уг-
ловому смещению цели. Так как обтекателю для улучшения его
аэродинамических характеристик придается обычно вытянутая
форма, то по этой причине величина угловой ошибки, которую он
вносит, зависит от угла поворота чувствительного элемента коорди-
натора относительно оси симметрии обтекателя, т. е. от угла пелен-
га цели.
Для учета влияния этих ошибок на динамические свойства си-
стемы самонаведения можно использовать схему, приведенную на
рис. 8.28. Здесь величиной Д£ обозначено угловое искажение обте-
кателя. В общем случае оно является некоторой произвольной
функцией угла пеленга, т. е. = f(£), зависящей от формы обте-
кателя, материала, из которого он изготовлен, и т. д. Если эту функ-
цию можно линеаризовать, то дальнейшее исследование упрощает-
ся, так как тогда на структурной схеме обтекатель можно заменить
некоторым безынерционным линейным элементом с единственной
характеристикой в виде передаточного коэффициента. В зависимо-
сти от знака этого коэффициента в схеме появляется дополнитель-
§ 9. Методы исследования динамики самонаведения
485
ная отрицательная или (положительная обратная связь по углу
тангажа. Если эта связь будет положительной, то устойчивость си-
стемы и другие её динамические характеристики могут существен-
но ухудшиться [18]. Поэтому при проектировании систем самонаве-
дения и при их анализе приходится учитывать влияние искажений,
вносимых обтекателем. Кроме того, при проектировании, помимо
решения других задач, требуется назначить разумные допустимые
пределы этих искажений.
§ 9. МЕТОДЫ ИССЛЕДОВАНИЯ ДИНАМИКИ САМОНАВЕДЕНИЯ
Решение задачи исследования системы самонаведения в её пол-
ном объёме, т. е. для случая пространственного движения с учётом
взаимного влияния каналов, с учётом влияния основных нелинейно-
стей и переменности параметров, возможно только с использовани-
ем средств вычислительной техники — аналоговых и цифровых вы-
числительных машин. Такая задача настолько сложна, что получить
её решение в общем виде с помощью аналитических методов не
представляется возможным.
Но метод численного решения задачи, хотя бы и выполненный с
помощью вычислительных машин, не позволяет выявить общие за-
кономерности, присущие исследуемой системе, так как для этого
пришлось бы найти решения и проанализировать очень большое
число различных частных вариантов. А такие закономерности имеют
очень большое значение, так как знание их позволяет ускорить про-
цесс проектирования новых систем и получить решения, близкие к
оптимальным.
Действительно, задача проектирования системы самонаведения
сводится к выбору структуры системы и расчёту параметров её ос-
новных элементов таким образом, чтобы удовлетворить предъяв-
ляемым к системе тактико-техническим требованиям. Эта задача
является тем, что в теории автоматического управления называют
задачей синтеза.
В настоящее время решение задачи синтеза в теории автомати-
ческого управления разработано достаточно подробно и полно толь-
ко по отношению к линейным стационарным системам и то лишь в
той части, которая относится к расчёту параметров системы. Поэто-
му выбор структурной схемы системы проводят на основании на-
копленного опыта проектирования.
Так как системы самонаведения являются в общем случае си-
стемами нестационарными и нелинейными, то известные способы
решения задачи синтеза по отношению к ним находят пока ограни-
ченное применение. Поэтому основным методом проектирования
этих систем в настоящее время является метод, который в инженер-
ной практике называется методом проб. Сущность метода сводится
к просчёту некоторого числа вариантов задачи, отличающихся друг
486
Глава VIII. Динамика самонаводящихся ракет
от друга значениями параметров, которые проектировщик может
изменять. Расчёт заканчивается, когда удаётся подобрать парамет-
ры так, что выполняются условия проектного задания.
Метод проб при проектировании в некоторых случаях может
оказаться очень трудоёмким, так как число варьируемых парамет-
ров может быть большим. Кроме того, поиск наилучших значений
параметров осложняется вследствие того, что всякое изменение
какого-либо параметра, как правило, требует изменения уже най-
денной, «наилучшей» настройки других параметров. Поэтому при
синтезе системы методом проб всегда остаётся некоторая неуверен-
ность в том, что принятый вариант является наилучшим.
В силу этого большое значение при анализе систем имеют ана-
литические и графо-аналитические методы расчёта, позволяющие
или получить решение в общем виде, или найти его в численном
варианте, но в такой форме, что становятся наглядными изменения
свойств системы при изменении её параметров.
Вполне естественно, что получить общее решение или хотя бы
в достаточно наглядной форме численное решение можно только
после целого ряда иногда существенных упрощений, причем полу-
чающиеся решения, конечно, не могут дать точных количественных
данных и имеют лишь приближённый, качественный характер. Цен-
ность такого приближённого, но общего решения состоит в том, что,
зная его, можно выявить основные закономерности, характеризую-
щие зависимость свойств системы от её параметров, и поэтому с
меньшей затратой времени и более целеустремлённо применять
метод проб.
Обычным упрощением, которое принимают при разработке при-
ближённых методов исследования, является линеаризация уравне-
ний системы самонаведения. При этом влияние существенных нели-
нейностей на работу системы никак не учитывается. Некоторые дру-
гие упрощения будут рассмотрены в последующих параграфах
настоящей главы. В большинстве случаев сделать заключение о до-
пустимости тех или иных упрощений можно только с помощью
сравнения приближённого решения с более точным, найденным без
упрощений.
При анализе систем самонаведения приходится просматривать
и исследовать совокупность всех возможных режимов работы си-
стемы, отвечающих различным значениям высоты полёта, началь-
ным условиям и т. п. Особенно тщательно проверяют характерис-
тики системы в моменты времени, соответствующие резким измене-
ниям условий движения (момент старта, включение и выключение,
двигателей и т. д.). При анализе систем самонаведения приходится
учитывать возможность разброса её параметров и поэтому прихо-
дится в одних случаях проверять, как такой разброс может влиять
на характеристики системы, а в других случаях — назначать допус-
ки на эти параметры.
§ 9. Методы исследования динамики самонаведения
487
В последующих параграфах будут рассмотрены некоторые воз-
можные методы анализа систем самонаведения, главным образом
методы исследования точности. Одним из таких методов является
широко известный графо-аналитический частотный метод, обоб-
щённый для приближенного исследования нестационарных систем.
Другой метод — аналитический, основан на исследовании решений
существенно упрощённых дифференциальных уравнений системы
самонаведения.
9.1. Приближенные аналитические методы
Метод исследования динамики систем самонаведения, который
здесь рассматривается, основан на анализе точного решения упро-
щённой системы дифференциальных уравнений системы самонаве-
дения. Такой способ анализа динамики самонаведения не может
дать точных количественных результатов, однако по сравнению с
другими методами, которые будут рассмотрены ниже, он имеет
важное преимущество, заключающееся в том, что решение получает-
ся в общем виде, тогда как в других случаях требуется задание
числовых характеристик системы.
Выше уже использовался анализ линеаризованных кинематиче-
ских уравнений движения самонаводящейся ракеты для выявления
некоторых особенностей пропорционального наведения. Там предпо-
лагалось, что уравнение связи
Д0 = Мер
выполняется идеально точно, что соответствует как бы полностью
безынерционной системе управления (включая и ракету).
Излагаемый ниже метод учитывает динамические свойства си-
стемы наведения более точно, так как предполагается, что система
инерционна и ее поведение можно характеризовать дифференци-
альным уравнением первого порядка. Остальные допущения, при-
нятые в § 2, сохраняются в неизменном виде. В частности, скоро-
сти ракеты и цели принимаются постоянными.
Итак, предположим, что динамические свойства системы наве-
дения вместе с ракетой характеризуются передаточной функцией
апериодического звена с двумя параметрами: передаточным коэф-
фициентом и постоянной времени. Благодаря этому можно оценить,
хотя бы грубо и только качественно, влияние на динамику системы
самонаведения такой ее характеристики, как ширина полосы про-
пускаемых частот.
Для упрощения задачи удобно рассмотреть вариант, соответ-
ствующий случаю, когда
V = V cos (ср0 — 0О) = const;
Уц = v4 cos (?о — ©чо) = const;
488
Глава VIII. Динамика самонаводящихся ракет
Запишем исследуемую систему дифференциальных уравнений:
гДср + гДср = — УД0 4- УцА0ц;
Т&?к + &?к = &? + n(t\,
А0 = feAcpK.
(8.41)
Здесь переменные Аф, Афк, А0 и А0Ч характеризуют отклонения
координат от их значений, соответствующих опорной траектории.
Переменная Аср„ является выходной величиной координатора цели,
а сигнал n(t) является шумом на входе координатора.
Для большей наглядно-
сти на рис. 8. 29 представле-
на упрощенная структурная
схема, характеризующая
связи между уравнениями
системы (8.41). На схеме
указан координатор, изме-
ряющий угловую скорость
линии визирования цели.
Система стабилизации счи-
тается безынерционной (или
во всяком случае более ши-
рокополосной по сравнению
с координатором цели). По-
Рис. 8.29 Упрощенная структурная схе-
ма системы самонаведения
этому на структурной схеме она представлена одним интегрирую-
щим звеном.
В качестве возмущений, вызывающих отклонения ракеты от
опорной прямолинейной траектории, определяемой условием
V sin (ср* — 0*) = Уц sin (ср* — 0Ц*),
будем рассматривать маневр цели А0Ч(/), шум на входе координа-
тора цели п(/) и начальную ошибку наведения Д0О. Предполагая,
что цель совершает маневр с постоянной перегрузкой, будем счи-
тать, что
А0Ч(О = 0цО(^ —4); t>t0,
где to — момент начала маневра.
Шум n(t) будем рассматривать как стационарный и «белый».
Исключая из системы уравнения (8.41) все промежуточные пере-
менные, можно получить дифференциальное уравнение
гТАср 4- (г 4- 3/7) Аср 4- (kV 4- 2г) Аср =
= Уц(ТД0ц + Д0ц)-^/г(О,
(8.42)
§ 9. Методы исследования динамики самонаведения
489
решение которого необходимо искать для начальных условий: при
t = О
Дер = Д<р0; Дер = Д <р0; Дер = Д<р0.
Так как величина промаха определяется производной Дер, то бу-
дет удобно ввести новую переменную у = Дер, что одновременно по-
нижает порядок уравнения (8.42). Можно, конечно, в качестве
искомой координаты системы принять мгновенное значение промаха
(8.43>
г г
но эта переменная представляет интерес как мера точности систе-
мы лишь на заключительном этапе наведения, когда величина г до-
статочно мала и может рассматриваться как фиксированная вели-
чина. Это соответствует определению промаха в другой форме:
h = Д/2гД<р = Д/2гр,
когда Д/ = 0,3-т 0,5 сек. Поэтому замена у на h в соответствии
с последним уравнением не изменяет вида дифференциального-
уравнения, а изменяет только масштаб переменных. Кроме того^
при пропорциональном наведении, когда Д0 = Мер, по вычисленно-
му значению Дер можно судить о нормальном ускорении ракеты
ЕД0, что было бы затруднительно, если в качестве искомой пере-
менной принять мгновенное значение промаха h(t).
Таким образом, переходя к переменной у = Дер, вместо уравне-
ния (8. 42) получим следующее линейное дифференциальное урав-
нение с переменными коэффициентами:
гТу + (г + ЗгГ) у+ (kV +2г)у = (ТД0ц + Д0Ц) - kVn (/) (8.44>
с начальными условиями
t = 0; у = Уо = Дто; у = у0 = Д?о-
Так как при принятых предположениях
Г (0 = Го + rt,
где г = — К = const, то переменные коэффициенты уравнения-
(8. 44) линейно зависят от времени.
Чтобы в дальнейшем не возвращаться к вопросу о начальных
условиях уравнения (8. 44), рассмотрим их определение. Если исхо-
дить из системы дифференциальных уравнений (8.41), то следует
ввести и учитывать начальные значения углов Д<р0, Д<рк9, Д0о- Пер-
вый из них Дсро, характеризующий отклонение линии визирования»
490
Глава VIII. Динамика самонаведящихся ракет
цели от некоторого опорного направления (фо), можно в дальней-
шем не учитывать или, другими словами, положить равным нулю.
Это связано с тем, что изменение угла Дф нас не интересует. Кроме
того, влияние начального значения угла А<р0 на динамику системы
несущественно, так как в соответствии с методом пропорциональ-
ного наведения система реагирует не на изменение угла Дф, а на
угловую скорость Аср. Поэтому и можно считать Дф0 = 0.
Угол Афк0 характеризует начальное рассогласование координа-
тора цели и имеет определённое физическое значение для гироста-
билизированного следящего координато-
Рис. 8.30. Упрощенная
схема кородинатора це-
ли с силовым гиро-
стабилизатором
Учитывая уравнения
ра, упрощенная схема которого приведе-
на на рис. 8.30. Наконец, значение угла
А0О характеризует ошибку прицелива-
ния, в результате которой в начальный
момент наведения ракета летит не в мгно-
венную точку встречи, а отклоняется от
этого направления на величину А0О.
Предполагая, что в начальный момент
времени t = 0, А<ро = 0, А0Ч = 0 и Д0Ч =
= 0, можно начальные условия уравне-
ния (8.42) выразить через начальные
условия Афко и А0о.
(8. 31), получим
А?о=—-
А<р0 = —
(8.45)
Го
УДё0 + 2гД?0 _ УД«о , 2гУД0о
“Г 2
Го Го Го
где
д®о = — у АЪсо-
Таким образом, зная начальные условия системы Афк0, А0О, г0,
можно всегда вычислить начальные значения переменных у0 и у^
в уравнении (8.44).
Для того чтобы упростить уравнение (8. 44) и получить более
общую форму окончательного решения, введём безразмерное
время, отсчитываемое от момента встречи ракеты с целью в обрат-
ном направлении:
г
гТ
где Т — постоянная времени системы наведения.
§ 9. Методы исследования динамики самонаведения
491
Для удобства записи заменим отрицательное значение произ-
водной г положительной величиной v = V — V4, являющейся ско-
ростью сближения ракеты и цели.
Тогда
т ='_L = r«~vt = 21 — _L = A__L щ 461
’ vT vT vT T T T ' V ’
Здесь величина
является полным временем наведения ракеты. Очевидно, что без-
размерное время т изменяется так же, как и расстояние между
ракетой и целью, т. е. убывает от некоторого максимального зна-
чения то до нуля. Одна единица безразмерного времени т соответ-
ствует Т сек обычного времени. Обратный переход от т к t можно
выполнить с помощью выражения
t = t0 — Tv.
Выполним теперь замену независимой переменной в уравнении
(8. 44). Замечая, что
dx _ 1_
dt ~ Т
и обозначая производную от у по т штрихом, получим
• _ dy __ dy dx _ 1 dy _ 1 ,
V dt dx dt T dx т V '
У=
1 d2y _
П dx2 ~ T2
Отвлекаясь пока от влияния шумов на систему, т. е. считая, что
n(t) =0, и предполагая, что цель 'совершает маневр с постоянной
перегрузкой, можно правую часть уравнения (8. 44) рассматривать
как некоторую постоянную величину, равную ЕчА0ч (здесь А0Ч =
= const).
Если учесть эти замечания, то после введения новой независи-
мой переменной т от уравнения (8. 44) получим следующее уравне-
ние:
+ (3 —т) у’ + (-^-2} у =
(8.47)
[При преобразованиях переменную г, зависящую от времени, заме-
нили'выражением г = vTx, вытекающим из (8.46)].
492
Глава VIII. Динамика самонаводящихся ракет
Это уравнение надлежит решать при начальных условиях:
при
т = = y = yv-, у' — у'о— —Ту0,
1 VI
где у0 и у0 определяются из выражений (8. 45),
Соответствующее этим начальным условиям решение уравнения
(8.47) позволяет определить переходный процесс, который возбуж-
дается в системе самонаведения из-за ненулевых начальных усло-
вий и маневра цели, а также определить промах, вызываемый
этими причинами.
Для сокращения записи введем обозначение
/гУ „
-----2 = п.
v
Уравнение (8.47), когда параметр п является целым положи-
тельным числом, позволяет получить решение в общем виде *
У(т) = У1(т, т0)р0 4- У2(т, т0) у'о 4- [1 — Ух(т, т0)] у, (8.48)
где функции УДт, То) и У2(т, то) определяются, как показано в при-
ложении III, а у — частное решение уравнения (8.47):
р= = const. (8.49)
С помощью решения (8. 48) нетрудно построить графики пере-
ходных процессов и исследовать качественную картину влияния на
характер движения ракеты и точность системы таких параметров,
как постоянная времени Т и передаточный коэффициент k. На
рис. 8. 31, 8. 32, 8. 33 приведены подобные графики' функций У(т).
Параметром семейства принято значение постоянной времени Т,
выраженное в долях времени наведения t0:
Т
а, — —
Случай а = 0 соответствует безынерционной системе наведе-
ния, когда Т — 0. На прилагаемых рисунках построены семейства
функций У(т) для трех различных значений параметра п = 1; 2; 3.
Как следует из (8.46), кривые на каждом рисунке отвечают раз-
личным значениям параметра то
Т 1 vT
а = — = — = —,
^0 т0 г0
зависящего не только от постоянной времени системы наведения,
но и от начальной дальности г0 и скорости сближения v (или, что
одно и то же, от времени наведения t0).
* В том случае, когда параметр п не равен целому числу, соответствующее
решение может быть получено только в форме бесконечного ряда.
§ 9. Методы исследования динамики самонаведения
493
У,(т)
п=2
!
02
4 8 0,6 ' 4 . У
a=Z?2
Рис. 8.32. Переходные процессы в системе самонаведения
494
Глава УШ. Динамика самонаводящихся ракет
Из построенных кривых следует, что характер переходных про-
цессов в системе зависит не столько от постоянной времени Т,
сколько от отношения этой постоянной ко времени наведения раке-
ты t0. Точно так же характер кривых зависит не от передаточного
коэффициента системы наведения k, а от параметра
п =-------2.
v
Рис. 8.33. Переходные процессы з системе самонаведения
Аналогичный вывод был получен при анализе безынерционной
системы наведения (см. § 2). Однако при учете динамического за-
паздывания системы наведения, хотя бы в простейшей форме, при-
ходим к выводу, что с ростом значения параметра п увеличивается
колебательность переходных процессов.
Другой вывод, следующий из анализа кривых переходных про-
цессов, заключается в том, что при любых параметрах системы эти
процессы неустойчивы и при г->0 угловая скорость линий визиро-
вания цели неограниченно возрастает.
С помощью решения (8. 48) можно дать качественную оценку
зависимости точности наведения от основных параметров системы.
Если промах определить соотношением
h = А/21 г |ср = Л Асу,
где А/ — небольшой интервал времени от момента прекращения
нормальной работы системы наведения до встречи ракеты с целью.
§ 9. Методы исследования динамики самонаведения
495
то, очевидно, для расчета промаха необходимо вычислить угловую
скорость линии визирования цели за А/ сек до конца наведения.
При введении безразмерного времени интервал А/ переходит
в интервал
и для определения промаха угловую скорость ср необходимо опре-
делять в момент
А/ А/
’— — '— •
Т t0
Для примера рассмотрим способ оценки ошибки наведения,
вызванной маневром цели, предполагая, что другие возмущения —
ошибка прицеливания и шумы — отсутствуют. Для этого случая
т0)] = ^[1-У1(т, т0)].
Если предварительно построить достаточно подробные семейст-
ва графиков для функции УДт, т0), подобные приведенным на
рис. 8. 31 — 8. 33, то с их помощью без труда можно оценить зави-
симость промаха
h = №vy = [ 1 - Y. (т0, тк)],
где гк = То —, от двух безразмерных параметров т0 и тк (или их
to
отношения Тк/то).
В обозначении У1(т0, тк) в явной форме отмечено, что функция
У] зависит от двух аргументов; начального значения безразмерного
времени т0 и текущего времени т, равного тк при определении про-
маха.
Напомним, что при определении промаха величина интервала
А/ принимается равной некоторой малой постоянной, порядка не-
скольких десятых долей секунды. Поэтому параметр
Дц = —
То tfj
зависит только от t0. Таким образом, с помощью приведенной фор-
мулы можно найти зависимость промаха из-за маневра цели от ве-
личин
На рис. 8.34—8.36 в форме графиков указаны эти зависимости.
Аналогично можно определить зависимость промаха от ошибки
прицеливания.
496
Глава VIII. Динамика самонаводящихся ракет
Рис. 8.34. Зависимость промаха, вызванного маневром цели, от условий
наведения
Рис. 8.35. Зависимость промаха, вызванного маневром цели, от условий
наведения
§ 9. Методы исследования динамики самонаведения
497
Действительно, ошибке прицеливания А0О соответствуют на-
чальные условия (8.45):
Ио = Уо =
_ VA60 .
г»
Соответствующие начальные условия при переходе к новой не-
зависимой переменной т будут:
У = Уо! У' = Уо = — Ту0 = — Уо =---------- Уо при т = т0.
^0 то
Поэтому переходный процесс, возникающий в системе из-за ненуле-
вых начальных условий, определяется соотношением
У (Т) = УйУт Ьо, Т) + t/0K2 (^0, Т) = У0 [И (Т0, -~ ^2^0, *) .
I т0
Для расчета величины промаха, вызванного ошибкой прицели-
вания, достаточно определить значение у(т) в момент т = тк и вос-
пользоваться формулой промаха. Для облегчения расчетов можно
предварительно построить семейство графиков У2(т0, т), аналогич-
ных графикам функции УДто, т).
17 Заказ 1242
498
Глава VIII. Динамика самонаводящихся ракет
Рассмотрим теперь метод качественной оценки случайных оши-
бок наведения, вызываемых действием флюктуационных шумов
п(/). Напомним, что в основу исследования положено дифференци-
альное уравнение (8.44). Для анализа случайных ошибок наведе-
ния можно принять, что маневр цели отсутствует и начальные усло-
вия являются нулевыми. Так как система самонаведения является
существенно нестационарной, то для расчета случайных ошибок
наведения удобно воспользоваться понятием импульсной переход-
ной функции.
Поведение системы под действием шума характеризуется диф-
ференциальным уравнением
Оо - vt) Ту + (r0 - 3vT—vt) y + (kV-2v)y~ kV , (8.50)
где у = Лф; п(/) — «белый» шум.
Если определить импульсную переходную функцию w(t, р), со-
ответствующую уравнению (8.50), как решение уравнения
(r0 - vt) Т + (Го - 3vT - vt) +
ш2 at
+ (kV — 2v) w (t, т]) = — W (8.51)
dt
при нулевых начальных условиях, где б(/ — р) —единичная им-
пульсная функция (дельта-функция), действующая в момент t = р,
то искомая дисперсия угловой скорости линии визирования цели,
у = Дф может быть определена из выражения [8], [16]
t
°1 О = с2 / 0. *)) dri, (8 •52)
О
где с2 — уровень спектральной плотности входного «белого» шума
«(0-
С другой стороны, можно определить функцию w(t, ц), исполь-
зуя результаты, полученные выше. Воспользуемся тем обстоятель-
ством, что импульсную переходную функцию линейной системы
можно определить, решая однородное дифференциальное уравне-
ние, соответствующее уравнению (8. 51), но при ненулевых началь-
ных условиях, определённых специальным образом [16]. Так, если
исходное дифференциальное уравнение имеет вид
W =
dt2 at
= bld±SL^ + bo8(t-to),
dt
§ 9. Методы исследования динамики самонаведения
499
то эти начальные условия можно определить из соотношений:
w (t, 7)) |z=71+ = ;
«2 01)
[<72(71)—fll (7])J bj (7])
dw (/, т])
dt
где
dt t=rt
В нашем случае
«2 (0 = — vt) Т;
а1 (0 = (го — 3vT — vt);
а0 (t) = kV — 2v;
b. (t) = kV;
b0 (t) = 0.
Поэтому
,, . , feV
w$' т()[/=п- T>
dw (t, 7]) <2vT + 071 — r0) . . 2oT + 07) — r0
dt t=ri~ T*(r0-v^ ~w^>r^ T(r0-07])
(8.53)
Используя, как и выше, замену независимой переменной по
формуле
т_ г0-о^
vT ’
сведём дифференциальное уравнение (8. 51) к виду
w" (т, т0) + (3 — т) w' (т, т0) + nw (т0, т) = О,
где
=«-(7.7.) = ^^^;
-
0 vT ‘
(Здесь введено обозначение т0 для того, чтобы отличить второй ар-
гумент импульсной переходной функции от начального значения
17*
500
Глава VIII. Динамика самонаводящихся ракет
безразмерного времени то, которое использовалось выше). Решение
этого уравнения надлежит искать при начальных условиях (8.53):
kV
то) = "7^ ;
kV (т0 — г) __ т0 — г
-------------Wq —=---
То
W0 = W' (т, т0) = —
ш т0
при т = т0.
Используя результаты и обозначения, введённые выше, можно
записать выражение для импульсной переходной функции в следу-
ющей форме:
W (т, т0) = wnYt (т, т0) + (т, т0) =
Для вычисления дисперсии угловой скорости линии визирования
цели Дер под воздействием случайного входного возмущения n(t)
преобразуем интеграл (8. 52) следующим образом:
т = г°
° vT
(Т) = СТ J* W2 (т, т0) </т0.
т= Г°~ Vt
от
Так как для определения промаха нас интересует значение дис-
персии угловой скорости линии визирования цели в фиксированный
момент времени т = тк = At/T или t = /к = t0 — At, то последняя
формула может быть записана так:
То
= с2Т j w2 (т, т0) йт0.
тк i к.
Как видно, операцию интегрирования необходимо выполнять
по переменной т0. Поэтому семейства графиков функций УДт, т0)
и У2(т, то), которые были построены по переменной т с параметром
то, должны быть перестроены. Зафиксировав т = тк, следует пост-
роить графики функций У1(тк, то) и У2(тк, т0) по аргументу т0. Со-
ответствующие интегралы можно вычислить графически.
Как окончательный итог, результаты расчёта можно предста-
вить в виде графиков, показывающих зависимость случайной ошиб-
ки наведения от параметров тк, то и п, что позволяет выявить зави-
симость этих ошибок непосредственно от параметров системы К и Т
и условий наведения г0 и V. На рис. 8. 37 приведены графики, пока-
зывающие зависимость случайной компоненты промаха от Т, t0 =
= 'Гй/и и п.
§ 9. Методы исследования динамики самонаведения
501
Все расчёты, связанные с решением уравнения (8. 47), можно
ускорить, если для вычислений использовать цифровую вычисли-
тельную технику. Полученные в результате расчёта графики поз-
воляют выявить основные качественные зависимости ошибок наве-
дения от параметров си-
стемы наведения и усло-
вий наведения. Эти же ре-
зультаты можно исполь-
зовать и для ориентиро-
вочного выбора парамет-
ров системы, когда зада-
ны условия наведения и
требуется обеспечить оп-
ределенное соотношение
между случайными и ди-
намическими ошибками
наведения.
Аналогичные приемы
приближенного аналити-
ческого исследования ди-
намики самонаведения
для других методов наве-
дения можно найти в ра-
боте [19].
9.2. Частотный метод
исследования
Как известно, частот-
ный метод анализа и син-
теза систем автоматиче-
ского регулирования ши-
роко применяется на
практике.
В предыдущих главах,
было приведено несколь-
Рис. 8.37. Зависимость случайной состав-
ляющей' промаха от параметров системы
наведения
ко примеров применения
частотного метода для анализа систем стабилизации летательных
аппаратов.
Однако возможности применения частотного метода для анали-
за систем самонаведения довольно ограничены. Это связано в пер-
вую очередь с тем, что системы самонаведения являются существен-
но нестационарными, что определяется особенностями кинематиче-
ских уравнений движения (см. § 6 настоящей главы). Как известно,
для исследования линейных нестационарных систем с помощью
частотных методов приходится вводить новое определение переда-
502
Глава VIII. Динамика самонаводящихся ракет
точной функции (См. [12], а также [8], [13], [14]). Для того чтобы
выявить существенные свойства нестационарных систем, приходит-
ся рассматривать их передаточные функции и частотные характери-
стики не только как функции частоты, но и как явные функции вре-
мени. Это в значительной степени затрудняет определение переда-
точной функции непосредственно по заданному дифференциальному
уравнению. В общем виде такая задача может быть решена лишь
в отдельных, исключительных, частных случаях, например, при
отыскании передаточной функции кинематического звена. Обычно
же приходится отыскивать частотные характеристики нестационар-
ной системы с помощью различного рода приближённых методов
[12] или с помощью вычислительной техники [14].
Однако при попытке использовать частотный метод для анализа
нестационарных систем встречаются и более существенные трудно-
сти, кроме трудностей, связанных с определением частотных харак-
теристик по заданным дифференциальным уравнениям. Общеиз-
вестно, что очень важным свойством частотного метода (если иметь
в виду анализ стационарных систем) является то, что о свойствах
замкнутых систем автоматического регулирования можно судить
по частотным характеристикам разомкнутой системы. Именно этим
объясняется простота и наглядность многих приёмов частотного
метода анализа и синтеза. Во всяком случае по известным частот-
ным характеристикам разомкнутой системы, используя номограм-
мы для «замыкания», легко можно построить частотные характери-
стики замкнутой системы. Даже небольшой опыт работы с
номограммами для «замыкания» позволяет без построений уже по
одному виду частотных характеристик разомкнутой системы соста-
вить представление о частотных характеристиках замкнутой систе-
мы и, следовательно, о свойствах последней.
К сожалению, подобная простая связь частотных характеристик
разомкнутых и замкнутых нестационарных систем не имеет места.
Действительно, для стационарных систем (в случае единичной об-
ратной связи) справедлива следующая формула:
Ф(р) =
G(P)
1 + G(Py
где Ф(р) —передаточная функция замкнутой системы;
G(p) — передаточная функция разомкнутой системы.
Для систем нестационарных [14] аналогичное равенство не спра-
ведливо, т. е.
Ф(р, ОЛхг’Лг <8-54*
1 + G (р, t)
Поэтому, если так или иначе удалось определить частотные ха-
рактеристики разомкнутой нестационарной системы, то найти час-
§ 9. Методы исследования динамики самонаведения
503
тотные характеристики замкнутой системы 'представляет собой
достаточно трудную задачу. Только в том случае, когда допустимо
применение метода «замораживания» коэффициентов, в выраже-
нии (8.54) можно поставить знак приближенного равенства и при-
менять все обычные приемы частотного метода анализа. Именно
по этой причине при исследовании систем теленаведения частотный
метод дает хорошие результаты и в то же время нельзя ожидать
хорошей точности от частотного метода при исследовании систем
самонаведения.
Как было показано выше, к линеаризованным уравнениям кине-
матического звена в случае самонаведения метод «замораживания»
коэффициентов применять нельзя, особенно при малых расстояниях
между ракетой и целью. Поэтому, используя частотный метод для
Рис. 8.38. Структурная схема системы самона-
ведения
анализа систем самонаведения, нельзя рассчитывать на получение
хороших количественных результатов. Приходится удовлетворяться
лишь качественным анализом, выявляющим степень влияния от-
дельных параметров системы на ее точность и другие качественные
характеристики.
При анализе точности самонаведения будем исходить из упро-
щенной структурной схемы, приведенной на рис. 8. 38. На этой схе-
ме весь контур самонаведения представлен в виде двух структур-
ных элементов: кинематического звена и бортового контура (вместе
с ракетой и системой стабилизации).
Как было показано выше, передаточную функцию кинематиче-
ского звена с учетом его нестационарности можно записать в виде
WK (р, 0 =
Р
где
/А V(0 v (/) cos [<РО —0о(/)1
~~ 7(i) ~ r(t)
Бортовую систему с передаточной функцией W(p) можно во
многих случаях рассматривать как стационарную. Обычно пара-
метры ракеты изменяются по времени сравнительно медленно, а
при хорошей системе стабилизации характеристики последней мо-
гут оставаться почти постоянными. Поэтому характеристики бор-
товой системы или постоянны, или изменяются медленно и ника-
ких осложнений, связанных с определением передаточной функции
504
Глава VIII. Динамика самонаводящихся ракет
этой системы и построением ее частотных характеристик, не встре-
чается.
В качестве основных возмущений рассмотрим флюктуационный
шум n(t), характеристики которого будем предполагать стацио-
нарными, и воздействие учитывающее перемещение мгновен-
ной точки встречи, вызываемое переменностью скорости ракеты. Как
было показано выше, влияние маневра цели можно учесть, включив
дополнительное слагаемое в выражение ©Дф. Напомним, что воз-
действие ©ДО можно рассматривать как известную, медленно из-
меняющуюся функцию времени.
Для оценки динамических ошибок системы самонаведения,
которые вызываются возмущением удобнее всего использо-
вать метод коэффициентов ошибок, так как это возмущение являет-
ся медленно изменяющейся функцией времени. Но метод коэффи-
циентов ошибок, широко применяющийся при исследовании стацио-
нарных систем, необходимо надлежащим образом обобщить. Для
этого метод коэффициентов ошибок следует распространить на
нестационарные системы и приспособить для определения не только
установившихся, но и переходных ошибок. Последнее связано с тем,
что время работы систем самонаведения может быть очень корот-
ким и установившийся режим по этой причине может отсутствовать.
Кроме того, у нестационарных систем переходная составляющая
процесса управления, определяемая как решение однородного диф-
ференциального уравнения, с течением времени может и не стре-
миться к нулю, другими словами, понятие асимптотической устой-
чивости, характеризующее свойства стационарных систем, не при-
годно для характеристики систем нестационарных.
Для того чтобы ввести указанное обобщение, коротко остано-
вимся на определении понятия коэффициентов ошибки для стацио-
нарных систем. При этом более удобным будет определение этих
коэффициентов с помощью импульсной переходной функции.
Пусть импульсная переходная функция ошибки для стационар-
ной системы будет (t — ц). В этом обозначении t — текущее вре-
мя, а т] — момент приложения к системе импульсного воздействия
6(/— ц), вызывающего на выходе процесс wj(t— ц). Для стацио-
нарной системы импульсная переходная функция является функци-
ей разности своих аргументов (t — ц). Кроме этого, для реальных
физических систем справедливо соотношение
шг (t — V]) = 0; t < тр
Если на вход системы с момента времени t = tQ действует произ-
вольное входное воздействие /(/), а до момента t = t0 система на-
ходилась в покое, то ошибка системы определяется с помощью
интеграла свертки [17]
е (0 = J* f (Ф w, (t— v) drt.
*0
§ 9. Методы, исследования динамики самонаведения
505
В том случае, когда нас интересует установившийся процесс
в системе, следует предположить, что входной сигнал действует
неограниченно долго, в этом случае ta = —оо. Указанный интеграл
можно записать в другой, эквивалентной форме, если проделать
несложную замену переменных t — р = 0:
t—t*
е (/) == J f (t — Q)w (0) dQ. (8.55)
b
(Для оценки установившегося процесса верхний предел интеграла
с учетом того, что в таком случае t0 = —оо, следует заменить на
~г оо).
Если представить функцию f(t — 0) в форме степенного ряда
f (t - 0) = f (0 - 0f (0 + f (0 + . .. + (-=-^ f -> (f-oc0) (8.56)
a < 1
и подставить этот ряд в (8. 55), то можно определить ошибку систе-
мы e(t) в форме следующего ряда:
e(0 = cof(0 + c1f(0+ ^«0+ •••,
где коэффициенты
СО
Со = j (0)
о
оо
с\ = — j ©ще(0) de,
о
(8-57)
cm = J (— eymws (©) de,
> )
используемые для вычисления ошибки системы в установившемся
состоянии (на что указывает верхний предел интеграла), называют
коэффициентами ошибки.
Этот ряд быстро сходится, если входное воздействие является
медленно изменяющейся функцией времени, т. е. изменяется несу-
щественно в течение времени, равного времени затухания импульс-
ной переходной функции (времени переходного процесса рассматри
ваемой системы). Так как передаточная функция ошибки Фе (р)
связана с соответствующей импульсной переходной функцией
We (0) преобразованием Лапласа
оэ
Ф£ (р) = J w£e-p®d@t
о
508
Глава VIII. Динамика самонаводящихся ракет
тод коэффициентов ошибки. При этом для расчёта коэффициентов
ошибок необходимо знать импульсную переходную функцию си-
стемы.
Для расчёта случайных ошибок нестационарной системы так-
же удобнее исходить из импульсной переходной функции. Так, для
входного случайного воздействия, являющегося стационарным
«белым» шумом, случайную ошибку следует рассчитывать по фор-
муле [8], [17]
t
о2 (/) = с2 J W1 (t, V|) dv;, (8-61)
о
где с2 — уровень спектральной плотности «белого» шума.
Исходя из вышеизложенного при исследовании точности систем
самонаведения расчет следует вести в два этапа. На первом этапе
необходимо, используя приемы частотного метода анализа, опре-
делить импульсные переходные функции системы самонаведения
по отношению к входным воздействиям 0* (/) и n(t). На втором
этапе расчёта с помощью импульсных переходных функций можно
определить коэффициенты ошибок и затем динамические ошибки
системы, а также рассчитать дисперсию случайной ошибки.
В качестве выходной координаты системы естественно рассмат-
ривать угловую скорость линии визирования цели ф, так как вели-
чина промаха пропорциональна этой координате. В связи с тем,
что промах определяется по значению угловой скорости линии ви-
зирования цели за At сек до встречи с целью, в формулах (8.60)
и (8.61) следует положить t = tK = t0—-At, где to—полное время
наведения. При необходимости исследовать свойства переходных
процессов, конечно, следует рассматривать величину I как пере-
менную во всем возможном интервале её изменения 0 to-
Для приближённого определения импульсных переходных
функций с помощью частотного метода необходимо выполнить ряд
операций. При решении задачи анализа все характеристики систе-
мы известны, благодаря чему можно построить частотные харак-
теристики разомкнутого контура самонаведения (см. рис. 8.38),
представленного в виде двух структурных элементов: системы на-
ведения с ракетой и кинематического звена. При этом построении,
конечно, предполагается, что опорная траектория ракеты рассчита-
на и поэтому координаты V(Q, г (Г), r(t) являются известными
функциями времени.
При построении частотных характеристик переменность коэф-
фициентов кинематического уравнения учитывается использовани-
ем параметрической передаточной функции кинематического звена
с переменным коэффициентом усиления, а переменность характе-
ристик системы стабилизации, входящей как составное звено в
9. Методы исследования динамики самонаведения
509
систему наведения, может быть учтена «замораживанием» коэф-
фициентов.
Построение частотных характеристик выполняется для различ-
ных характерных траекторий полёта, отвечающих определённым
начальным условиям и маневру цели. Для каждой траектории не-
обходимо построить семейство частотных характеристик, отвечаю-
щих различным моментам времени, начиная с начала самонаведе-
ния, с тем чтобы это семейство содержало не менее четырех-ше-
сти характеристик для всего интервала времени от начала
наведения до встречи с целью. Следует также учитывать, что ос-
новная нестационарность связана с неограниченным ростом пере-
даточного коэффициента кинематического звена по мере прибли-
жения ракеты к цели. Поэтому выгоднее принять неравномерную
разбивку интервала времени 0 t tQ характерными точками.
В начале наведения эти точки следует брать реже и более часто
по мере приближения времени полёта к моменту to. Если, напри-
мер, полное время наведения составляет 16 сек, то моменты вре-
мени для построения частотных характеристик удобнее всего вы-
брать в соответствии с геометрической прогрессией: t0 — Л = 16 сек;
to — t2 = 8 сек-, t0 — t3 = 4 сек; tQ — Ц = 2 сек; tQ~t3=\ сек;
to — to = 0,5 сек.
После построения семейства частотных характеристик разомк-
нутой системы полезно определить момент потери устойчивости
замкнутой системы. Здесь имеется в виду формальное определение
устойчивости с помощью обычного частотного критерия в том его
виде, как он формулируется для анализа стационарных систем.
Такая оценка устойчивости имеет, конечно, условный характер,
так как определения устойчивости, принятые для стационарных си-
стем, не пригодны для характеристики устойчивости систем неста-
ционарных. Но, как уже отмечалось выше, чем раньше «теряет
устойчивость» система самонаведения (при обычном, формальном
применении критерия устойчивости, сформулированного для ста-
ционарных систем), тем больше будут ошибки наведения.
Если «потеря устойчивости» происходит за время до встречи с
целью заметно большее 1 сек, то можно ожидать, что точность са-
монаведения будет невысокой. (Более точную оценку допустимо-
го «момента потери устойчивости» можно получить из анализа
результатов многократного решения задачи анализа точности с
помощью вычислительной техники, например, моделирующих ус-
тройств). Такая проверка помогает, не проводя дальнейшего ана-
лиза, отбросить неудовлетворительные варианты, с неудачно наз-
наченными параметрами (например, передаточным коэффициентом
или полосой пропускания) системы наведения.
Второй этап анализа сводится к построению частотных харак-
теристик замкнутого контура самонаведения для интересующих
нас входного воздействия и выходной координаты. Как уже отме-
510
Глава VIII. Динамика самонаводящихся ракет
чалось, при анализе динамических и случайных ошибок наведения
следует принимать во внимание то обстоятельство, что соответст-
вующие возмущения приложены к различным точкам системы.
По этой причине требуется построить два семейства частотных ха-
рактеристик замкнутой системы самонаведения для исследуемых
входных воздействий.
Само построение выполняется так же, как и для стационар-
ных систем с использованием обычных номограмм. В результате
построения получается семейство частотных характеристик замк-
нутой системы для тех же моментов времени, что и для характери-
стик разомкнутой системы.
На этом этапе допускается основная погрешность, так как для
нестационарных систем, когда метод «замораживания» коэффици-
ентов применять нельзя, частотные характеристики замкнутой си-
стемы связаны с частотными характеристиками разомкнутой си-
стемы сложным образом и совсем не так, как для систем стацио-
нарных. Но с этой погрешностью приходится мириться, так как
достаточно простых графо-аналитических методов исследования
нестационарных систем в настоящее время еще не разработано.
Поэтому приходится предполагать, что, по крайней мере, гру-
бых качественных погрешностей рассматриваемая методика не
даёт, хотя очевидно, что количественные результаты могут замет-
но отличаться от истинных значений. Проверка этого предположе-
ния может быть выполнена только путём сравнения полученных
результатов с результатами расчёта, полученными, например, с
помощью моделирующих устройств.
После построения семейства частотных характеристик замкну-
той системы самонаведения следует аппроксимировать их по воз-
можности более простым выражением передаточной функции, что-
бы упростить дальнейшие расчёты.
Таким образом, третий этап расчёта сводится к подбору выра-
жения некоторой передаточной функции так, чтобы соответствую-
щие этой передаточной функции частотные характеристики воз-
можно менее отличались от построенных частотных характеристик
замкнутой системы самонаведения. Но так как последние были
построены для различных моментов времени, то аппроксимирую-
щая передаточная функция должна иметь параметры, зависящие
от времени. При этом необходимо, чтобы аппроксимирующая пе-
редаточная функция имела одну и ту же форму для всех частот-
ных характеристик семейства. Так, если для аппроксимации не-
скольких частотных характеристик из семейства выбрана переда-
точная функция
Ф (р, 0 =---g(0[Ti(/)p + 1]— (8 62)
n(0p2 + 2U0T(0p+i’
то и все другие частотные характеристики этого семейства долж-
§ 9. Методы исследования динамики самонаведения
511
ны аппроксимироваться этим же выражением за счёт надлежаще-
го -подбора параметров K(t), T^t), и T(t).
Если удалось подобрать сравнительно простое выражение ап-
проксимирующей передаточной функции, то тогда уже нетрудно
выполнить четвёртую операцию — определить аналитическое вы-
ражение искомой импульсной переходной функции. Эта операция,
являющаяся операцией обратного преобразования Лапласа, легко
может быть выполнена с помощью любых известных приёмов, в
том числе и с помощью таблиц преобразования Лапласа. При вы-
полнении обратного преобразования параметры, зависящие от вре-
мени, следует рассматривать как постоянные и лишь в оконча-
тельном результате учитывать их зависимость от времени.
Так, например, если аппроксимирующая передаточная функция
имеет вид (8.62), то можно найти, что соответствующая импульс-
ная переходная функция будет иметь вид
w (f, Yi) = Ki (0 е-а(/)(/~71) sin [3 (t) (t — у;) 4- X (/)],
где
„ ... К (I) Кт3 (0 - 2? (О Т (t) Ту (t) + T2pt)
Д.1 (t) —= -------r •
v У1—(0 7’2 (/)
и т (t) T(t) ’ (0 — arctg т (О — UO
Весь последующий анализ точности системы связан по сущест-
ву с использованием полученного выражения импульсной переход-
ной функции для вычисления коэффициентов динамической ошиб-
ки и значений интеграла, входящего в выражение дисперсии слу-
чайной ошибки наведения.
Так как для оценки величины промаха нас интересует только
один момент времени tK = t0 — Д7, то по существу необходимо оп-
ределить значения параметров аппроксимирующей передаточной
функции именно в этот момент. В соответствии с этим в выражение
импульсной переходной функции следует вместо t подставить зна-
чение t = tK = t0— Д/, заменив этим же значением и верхний пре-
дел соответствующих интегралов.
Может создаться впечатление, что при этом теряются сведения
о предыстории движения, так как рассматриваются как бы частот-
ные характеристики только в один фиксированный момент време-
ни. Это так и было бы, если при составлении передаточной функ-
ции, аппроксимирующей частотные характеристики, не выбиралась
бы её структура так, чтобы она достаточно точно аппроксимирова-
ла все частотные характеристики, построенные для любых момен-
тов времени в интервале от 0 до t0. Поэтому выше специально об-
ращалось внимание на это обстоятельство и подчёркивалось, что
все частотные характеристики рассматриваемого семейства долж-
512
Глава VIII. Динамика самонаводящихся ракет
ны одинаково хорошо аппроксимироваться одной и той же переда-
точной функцией. (Разумеется, параметры передаточной функции
могут быть различными для разных характеристик семейства, но
набор звеньев, входящих в передаточную функцию, должен быть
одним и тем же). Благодаря этому вся предыстория движения
системы учитывается косвенно формой импульсной переходной
функции (ибо интегрирование осуществляется по второй перемен-
ной т]). Вместе с тем следует ожидать больших ошибок расчёта,
если аппроксимирующая передаточная функция плохо отражает
особенности частотных характеристик хотя бы на каком-либо од-
ном участке движения системы.
При использовании частотного метода анализа следует иметь
в виду ещё одну особенность. Может оказаться, что в пределах
исследуемого интервала движения от 0 до /0 — система теряет
устойчивость (в том условном смысле, какой был указан выше).
Это должно найти отражение в аппроксимирующей передаточной
функции (обычно при этом параметр £(/) колебательного звена
становится отрицательным). Такое замечание приходится делать
потому, что обычно подбирают аппроксимирующее выражение пе-
редаточной функции, рассматривая только амплитудные частотные
характеристики системы, а их форма, как известно, не зависит от
того, устойчивые или неустойчивые звенья входят в передаточную
функцию. Поэтому, составляя аппроксимирующее выражение пе-
редаточной функции, нужно обращать внимание и на фазовые ча-
стотные характеристики или просто помнить о том, что частотные
характеристики, отвечающие моментам времени, близким к t0, мо-
гут соответствовать неустойчивой системе.
Метод приближённой, качественной оценки точности самона-
ведения, в том виде, как он был рассмотрен выше, основывается на
использовании приёма «замораживания» коэффициентов. Поэтому
некоторые из указанных операций могут показаться излишними.
Действительно, используя метод «замораживания» коэффициентов,
можно было бы сразу записать выражение для передаточной функ-
ции замкнутого контура самонаведения и определять необходимую
для дальнейших расчетов импульсную переходную функцию по
этой передаточной функции. Но такой путь оказывается очень гро-
моздким. Это связано с тем, что для облегчения последующих рас-
чётов желательно упростить выражение импульсной переходной
функции, сохранив вместе с тем все её основные и характерные
особенности. При построении частотных характеристик обычно лег-
ко бывает наметить область высоких частот, несущественных для
дальнейшего исследования, и область средних и низких частот, где
требуется более точная аппроксимация частотных характеристик.
Поэтому при построении частотных характеристик и подборе
упрощённого выражения передаточной функции имеется возмож-
ность косвенно оценивать влияние погрешности аппроксимации на
$ 9. Методы исследования динамики самонаведения
513
окончательный результат, тогда как при действиях с аналитичес-
кими выражениями передаточных функций такую оценку получить
трудно. Кроме того, для определения импульсной переходной функ-
ции по передаточной функции замкнутого контура приподится оп-
ределять корни знаменателя передаточной функции. Это необходи-
мо для представления передаточной функции в форме произведе-
ния элементарных сомножителей, чтобы внести необходимые
упрощения (отбросить звенья с малыми постоянными времени) и
выполнить операцию обратного преобразования Лапласа, опреде-
ляющего импульсную переходную функцию.
ЛИТЕРАТУРА
1. Локк А. С., Управление снарядами, Гостехтеоретиздат, 1957.
2. Гу тки н Л. С., Принципы радиоуправления беспилотными объектами,
«Советское радио», 1959.
3. Мюллер Ф., Телеуправление, ИЛ, 1957.
4. Марисов В. И., Кучеров И. К., Управляемые снаряды, Воениздат,
1959.
5. Кельз о н А. С., Динамические задачи кибернетики, Судпромгиз, 1959.
6. Лебедев А. А., Чернобровкин Л. С., Динамика полета, Оборон-
гиз, 1962.
7. Теория следящих систем, Под ред. X. Джеймса, И. Никольса,
Р. Филлипса, ИЛ, 1951.
8. Солодовников В. В., Статистическая динамика линейных систем ав-
томатического управления, Физматгиз, 1960.
9. Фридлендер Г. О., Козлов М. С., Авиационные гироскопические
приборы, Оборонгиз, 1961.
10. Типугин В. Н., В ей цель В. А., Радиоуправление, «Советское ра-
дио», 1962.
11. Кузовков Н. Т„ Теория автоматического регулирования, основанная
на частотных методах, Оборонгиз, 1957.
12. Солодов А. В., Линейные системы автоматического управления с пе-
ременными параметрами, Физматгиз, 1962.
13. Л энин г Дж. X., Бэт тин Р. Г., Случайные процессы в задачах авто-
матического управления, ИЛ, 1958.
14. Карабанов В. А., О некоторых возможностях применения час-
тотного метода к анализу линейных динамических систем с переменными па-
раметрами, Сб. «Некоторые вопросы теории систем автоматического управле-
ния», Оборонгиз, 1955.
15, Боднер В. А., Козлов М. С., Стабилизация летательных аппаратов
и автопилоты. Оборонгиз, 1961.
16. Б атков А. М., Некоторые вопросы теории линейных систем с перемен
ными параметрами, Об. «Автоматическое управление и вычислительная техника»,
вып. 3, Машгиз, 1960.
17. Основы автоматического управления, Под ред. В. С. Пугачева, Физ-
матгиз, 1963.
18. Питерсон И. Л., Статистический анализ и оптимизация систем авто-
матического управления, «Советское радио», 1964.
19. Д о б р о л е н с к и й Ю. П., И в а н о в а В. И., П о с п е л о в Г. С., Ав-
томатика управляемых снарядов, Оборонгиз, 1963.
Приложение I
ТАБЛИЦА ЕДИНИЦ ФИЗИЧЕСКИХ ВЕЛИЧИН В СИСТЕМАХ МКГСС
(ГОСТ 7664—61 и СИ (ГОСТ 9867—61)*
Наименование величины Система единиц Размерность Единица измерения Сокращенное обозначение Коэффициент для приведе- ния к единице СИ
Механические единицы
Длина МКГСС СИ L метр » м
Масса МКГСС СИ L~lFT2 М килограмм-сила-секунда в квадрате на метр килограмм кГ • сек?/м кг 1 кГ сек2/м = = 9,80665 кг
Время МКГСС СИ т т секунда сек
Плоский угол МКГСС СИ Внесистем- ная единица 1 1 радиан радиан градус рад рад О л 1° = —рад 180
Частота СИ т-1 герц гц
Угловая скорость МКГСС СИ Внесистем- наяедипица т~х т-\ радиан в секунду оборот в минуту рад/сек об/мин Л 1 об/мин — рад/сек □и
* Г. Д. Б У р д у и» Единицы физических величии, Стаидартгиз, 1962.
Продолжение
Наименование величины Система единиц Размерность Единица измерения Сокращенное обозначение Коэффициент для приведе- ния к единице СИ
Плотность (объемная масса) МКГСС СИ l~4ft2 L~3M килограмм-сила-секунда в квадрате на метр в чет- вертой степени килограмм на кубичес- кий метр кГ -сек? м1 кг/м? 1 кГ сек2/м* = = 9,80665 кг/я?
Сила МКГСС СИ F LMT~2 килограмм-сила ньютон (килограмм-метр на секунду в квадрате) кГ н 1 кГ = 9,80665 н
Удельный вес МКГСС СИ 1 Г” Ю I Ч "Ч килограмм-сила на куби- ческий метр ньютон на кубический метр кГ/м9 н/мв 1 кГ/м9 = 9,80665 н/м?
Момент инерции (ди- намический) МКГСС СИ LFT2 L2M килограмм-сила-метр-се- кунда в квадрате килограмм-метр в квад- рате кГ-м- сек2 кГ • м2 1 кГ-м- сек2 — = 9,80665 кг-л2
Работа и энергия МКГСС СИ LF L2MT~2 килограмм-сила-метр джоуль (ньютон-метр) кГ-м дж 1 кГ-м = 9,80665 дж
Продолжение
Наименование величины Система единиц Размерность Единица измерения Сокращенное обозначение Коэффициент для приведе- ния к единице СИ
Мощность мкгсс СИ Внесистем- ная единица LFT~l l2mt~3 килограмм-сила-метр в секунду ватт (джоуль в секунду) лошадиная сила кГ -м/сек вт л. с. 1 кГ-м/сек = 9,80665 вт 1 л. с. = 735,499 вт 1 л. с,— 75 кГ-м/сек
Давление мкгсс СИ Внесистем- ные единицы l~2f l-'mt-2 килограмм-сила на квад- ратный метр ньютон на квадратный метр миллиметр ртутного столба техническая атмосфера кГ/м1 н/м2 мм рт. ст. ат или кГ/см2 1 кГ/м2 = 9,80665 н/м2 1 мм рт. ст. = 133,322 н/м2 1 ат = 9,80665-104 н/м2
Тепловые единицы
Термодинамическая температура Температура СИ В градус Кельвина градус Цельсия °К, град ° С, град t = (7 — 273,15)
Количество теплоты СИ Внесистем- ная единица f2mt2 * джоуль килокалория дж ккал 1 ккал = 4,1868- 10s дж
Продолжение
Наименование величины Система единиц Размерность Единица измерения Сокращенное обозначение Коэффициент для приведе- ния к единице СИ
Удельная теплоемкость си Внесистем- ная единица L2r-20-i джоуль на килограмм- градус килокалория на кило- грамм-градус дж/кг- град ккал/кг-град 1 ккал/кг- град = = 4,1868-103 дж
Электрические единицы
Сила тока СИ / ампер а
Работа и энергия СИ L2MT-2 джоуль дж
Мощность СИ l2mt~~3 ватт (джоуль в секунду) вт
Количество электри- чества СИ TI кулон (ампер-секунда) к
Разность электричес- ких потенциалов, элек- трическое напряжение, электродвижущая сила СИ L2MT~3I~l вольт (ватт на ампер) в
Электрическое сопро- тивление СИ L2MT^/-2 ом (вольт на ампер) ом
Электрическая емкость СИ Ь~2М~1Т4!2 фарада (кулон на вольт) ф
518
Расчет дифференцирующего фильтра
Приложение II
РАСЧЕТ ДИФФЕРЕНЦИРУЮЩЕГО ФИЛЬТРА
Исходными данными для расчета схемы фильтра являются па-
раметры его передаточной функции Тдз, Тф, "1ф и gT. Будем также
предполагать, что коэффициент ослабления высоких частот К'ф
задан.
Для фильтра, схема которого приведена на рис. 6.17, парамет-
ры схемы связаны с параметрами передаточной функции следую-
щими соотношениями:
2 TiRiCiR2C2
= ~ , о
Г1~Г-Нг
(1)
OS _ Г1 (R1Cj+R2C2+ RlCt)
£^ф~ф — --------------- •
V V Гт + Ri
_R±C±R2C2 [Г1Г2 + Ro (ft 4- r2)] _ (2\
(fi — Ri) (r2 + Ri) + Ro (ri + r2 + Ri + Rg) ’
2C у __Ri^i [ri (Ro -J- R2) 4~ r2Ro -1- <i<2 RoRg] 4~ R2C2 [rir2 4-r2R0 4~ riRol 4~
m Ф~ (n + Ril^ + Rgl + Roln + ^ + Rx + R,)
,4~ Ri^-2 ki (Ro 4~ Rg) 4~ r2 (Ro 4~ Rg) + fi/g] /g\
(ri + Ri) (r2 + R2) + Ro (ri + r2 + Ri + R2)
д- _________________f2 (ri 4~ Ri)_______. /44
Ф (rl 4~ ^1) (r2 + Rg) 4- Ro (ri 4- r2 4- Ri 4- Rl)
к'ф =—. ?? 1 T- (5)
Г1Г2 -Г Ro El + r2)
Так как нам заданы 5 параметров, а схема имеет 7 элементов,
то, следовательно, два из них в пределах некоторого диапазона
можно задавать произвольно, но при этом будут получаться про-
извольные значения входного и выходного сопротивлений фильтра.
Если последними при расчете задаваться, то выбор величин R и С
будет однозначным.
Наиболее удобен следующий порядок расчета. Зададимся ве-
личинами сопротивлений г2 и Ro, соразмеряя их величины с выход-
ным сопротивлением потенциометрического датчика гироскопа и
входным сопротивлением модулятора. В этом случае величина п
определяется из соотношения (5). Очевидно, что при выборе г 2 и
Ro необходимо учитывать неравенство г2 — Кф (r2 + Ro) > 0. Из со-
отношений (1) — (5) можно получить следующую формулу:
1 (и 4- Ro । г1 + г2\ / 2^т 2^ \ 1
-~Г —7------1-—— = 7-----— тг- (6)
гц2 \ С 2 С1 / . 1 Ф ^ф /
Расчет дифференцирующего фильтра
519
Так как величины гь г2 и Ro нам уже известны, то эта формула
устанавливает связь между Ci и Сг, которую можно представить
в виде графика. Кроме того, ив двух уравнений (1), исключив R2„
можно определить Ri с помощью следующей формулы:
4
Ci .
--Г1 Pl + ^2)] R1 + ! —
т!
Ri-~-r1 = O.
01
Во многих случаях здесь может быть справедливым приближен-
ное решение
р —
когда
2^ > Н (Q + С2) и
Таким образом, для различных значений Ci [и соответствующих
значений С2, так как Ci и С2 связаны уравнением (6)]можно рас-
считать значения R\. Далее из формулы
#2 =
Г1 + К1 _2
---------Ъь
riRiCjC^
(7)
для различных значений 7?i, Ci и С2 можно определить R2. Таким
образом, Ri и R2 оказываются связанными определенным соотно-
шением, которое также можно представить в виде графика. Но эти
же две величины Ri и R2 должны удовлетворять условию
r2 -Kg ~Ь ^0 I Ro rZ Rz ХФ
Г2 ' Г2 Г1 + Я! КфТ2’
вытекающему из уравнений (1) — (5).
Эту связь величин Ri и R2 можно также представить в виде
графика. Пересечение двух указанных графиков и дает нам иско-
мые значения Ri и R2. После этого из уравнения (7) можно опре-
делить произведение CiC2 и с помощью графика, связывающего
величины Ci и С2, можно найти их значения.
При расчете может случиться, что задача не будет иметь реше-
ния. Это означает, что надо повторить расчет, изменив значения
исходных величин г2 и Ro- При выполнении расчета обычно бывает
ясно, в какую сторону следует изменить эти величины.
Рассмотренный способ расчета не является единственным и
возможна, конечно, какая-либо другая схема расчета.
520
Решение линейного дифференциального уравнения (8.49)
Приложение III
РЕШЕНИЕ ЛИНЕЙНОГО ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ (8.49)
Как и обычно, решение линейного обыкновенного уравнения
(8.49) найдем как сумму общего решения однородного уравнения
и частного решения уравнения с правой частью.
Одним из решений однородного уравнения
чу" + (« — т) у' + пу = 0 (1)
при п, целом и положительном, является полином Лагеррап-й
степени, который определяется из соотношения
(т) = т(!—(та+п— 1 е~~т).
В нашем случае а = 3 и полиномы Лагерра различных степеней
имеют следующий вид: v ~ i
M0=i;
(т) = 3 — т; ' :
L2 (т) = 12 — 8т + т2; t .
К3 (т) = 60 — 60т15т2 — т3, / 4 ' т ' ,
и т. д. (Индекс «а» в обозначении полинома опускаем). Таким, об-
разом, одно из решений однородного уравнения (при целом п)
•будет
Ш = (2)
где Ci — произвольная постоянная.
Второе независимое решение однородного уравнения второго
порядка можно определить с помощью формулы Лиувилля. Для
уравнения
у" + р(у)у' + я СО У = о,
одно из решений которого есть уДт), второе решение определяется
формулой
„ — J Р(Г)ЙТ
у2 (т) = С2уг (т) | ~— dt.
J У1 (т)
В нашем случае
/ \ 3 — т
р(т) =----.
т
Поэтому
f р (т) dr = С -—- dr — 31п т — т.
Решение линейного дифференциального уравнения (8.49)
52 J
Отсюда следует, что
y2(x) = C2Ln(x)^-^-
(3)
Используя соотношения (2) и (3), можно записать полное ре-
шение однородного уравнения соответствующего уравнению (1)
т
у(т)= Л„(т) С1 + сА^^- .
”о
Чтобы получить полное решение исходного уравнения (8.49),
необходимо определить частное решение этого уравнения. Так как
в нашем случае правая часть уравнения является константой, то
частное решение, как это нетрудно видеть, определяется выраже-
нием
, УцМа .
У (т) = —3—- = const.
U V ' Vtl
Полное решение уравнения (8.49) запишем в виде
У (т) = У W + У W = Ln (т)
Т»
exdx
т3^(т) .
vn
Используя начальные условия, при т = То
У = Уо’, У' = У'о,
найдем
тз ~
Ci = ~т~. ~; ^2 = ~ [Уь^п. (т0) (Уо у) Ln (т0)],
Ln (т0) ет"
где
г ' / \ dLin (т)
Ln (т0) = при т = т0.
ат
Итак, окончательное решение имеет следующую форму:
, , Ln (т) то [Уо^п (то) (то)] (т) f exdx
у<т> = гтГхУ° -----------------;------------ -----
Ln (то) ех° J (т)
То П
~ J _ Ln(x) t3l; (t0)L„ (т) р bxdx
(то) ет'' J Т31.2 (т)
Для выполнения расчётов удобно это решение представить в
виде суммы трёх составляющих. Первое слагаемое соответствует
522
Решение линейного дифференциального уравнения (8.49)
случаю, когда у — у’о = 0. В этом случае
У1(т) __ Ln(x) Ln (то) xoLn (т) Г ет^т _ у ..
Уо Ln (то) ет" J т3Д2 (т)
х0 п '
Второе слагаемое соответствует случаю, когда у = у0 = 0.
Тогда
У8(т) = тоДп (To)Zn(T) С exdx _ Ln (т) _Ln (т0) = у °
Уb ех° J *3Ц(т) L'n (т) £'(т0)
Третье слагаемое, учитывающее маневр цели, когда уо = у’о — 0,
будет иметь вид
Уз(.х)
—7- = У3(т)=1-У1(т). (5)
У
Интеграл, входящий во все эти выражения, можно свести к та-
булированным функциям. Можно показать, что справедливо сле-
дующее соотношение:
Г exdx 1 Г exdx , е Р"+1 (т)
J ~ Т J ~ Л„(т) ’ W
где А = const — постоянный коэффициент;
•Рп+1(т) —многочлен степени п + Г.
Рассмотрим способ определения этого многочлена. Дифферен-
цируя это соотношение, найдём
4“ (Т) + xLn СО Р«+1 (у) + xLn (О P'n+l (О —
/1
— СО Рп+\ Iх) — (О Р„+1 (т) = 1.
Используя основные свойства полиномов Лагерра, выражаю-
щиеся рекуррентными соотношениями:
Ln+\ СО = (2/г + 3 — т) Ln (т) — п (п + 2) (т);
Р'п СО = — [Т„ (т) — (П + 2) (т)].
т
(записанными в форме, отвечающей значению параметра а — 3),
•последнее уравнение можно упростить и записать в форме
А хЧЛ (т) + Рп+1 (Т) [(« + 1) Ln (т) - Ln+1 (т)] + xLn (т) Р'п+1 (т) = 1. (7)
С помощью метода неопределённых коэффициентов можно оп-
ределить полином Pn+i (т). Так, например, для п = 1 имеем
P„+i (г) ~ а + Ьх ст2; Z,j (т) = 3 — т; Т2(т)=12 — 8т-f-т2.
Решение линейного дифференциального уравнения (8.49)
523
Подставляя все это в уравнение (7), получим
— к2 (6а — 36) т — 6а = 1.
Отсюда следует, что
а =-----— ; Ь =--------— ; с — -А- — ; А = 6.
6 3 ’ 6
Поэтому
С exdx _ 1 С exdx (1 + 2т — т2)
J т3(3— т)2 “ 6 J тГ^ 6т2 (3 — т)
Интеграл
С eTdr
J т
через элементарные функции не выражается, но соответствующий
определённый интеграл
который называется интегральной показательной функцией, табу-
лирован и для него существуют достаточно подробные и полные
таблицы. Если использовать указанные преобразования и ввести в
рассмотрение интегральную показательную функцию Ег(т), то ре-
шения У1 (т); Уг(т) и У3(т) можно записать в общем виде. Так,
для п — 1 можем найти, что
то (3 - т)
6ет°
ет(1+2т—т2)
т2 (3 — Т)
Аналогичные выражения можно составить и для других значе-
ний параметра п.
Отметим, что функции Уо, У2 и У3 зависят от двух аргументов
т и т0, что удобно записывать в явном виде, как E^tiTo). Fj(tiTo),
Тз(т]То).
ОГЛАВЛЕНИЕ
Стр.
Предисловие.............................................................3
Основные обозначения....................................................5
Введение................................................................9
Глава I. Общие сведения о системах управления полетом и методах
их исследования......................................................11
§ 1. Основные принципы управления летательным аппаратом. . .11
1.4. Силы и моменты, действующие на летательный аппарат И
1.2. Использование обратной связи для управления полетом ... 16
1.3. Составные части автоматической системы управления полетом 20
§ 2. Классификация систем наведения............................... 26
2.1. Автономные системы................................. . 27
2.2. Системы самонаведения . . . ................ 28
2.3. Системы теленаведения . . 28
2.4. Комбинированные системы......................................32
2.5. Возможные методы наведения...................................33
§ 3. Вероятность поражения цели и точность наведения .... 34
§ 4. Некоторые сведения о проектировании систем управления полетом 39
4.1. Основные этапы процесса создания комплекса управляемого
снаряда.....................................................39
4.2. Тактико-технические требования...........................40
4.3. Предварительные исследования и эскизное проектирование . . 41
4.4. Особенности проектирования систем управления полетом . . 42
4.5. Методы исследования и проектирования систем управления 44
§ 5. Краткий обзор методов теоретического исследования систем уп-
равления .........................................................45
5.1. Исследование уравнений движения летательного аппарата . 47
5.2. Исследование уравнений системы управления....................48
§ 6. Основные динамические свойства и критерии качества систем
управления.......................................................50
6.1. Устойчивость.................................................50
6.2. Поведение системы в переходном процессе......................51
6.3. Реакция системы на гармоническое воздействие.................57
6.4. Системы управления при случайных воздействиях .... 64
6.5. Заключение...................................................70
Литература.................................................. ... 73
Г лава II. Динамические свойства летательного аппарата.................76
§ 1. Уравнения движения абсолютно жесткого летательного аппарата 76
1.1. Система нелинейных уравнений.................................76
1.2. Линеаризация уравнений.......................................81
§ 2. Продольное возмущенное движение...............................86
2.1. Уравнения движения и соответствующие им передаточные
функции........................................................86
2.2. Характеристическое уравнение.................................91
2.3. Реакция угла тангажа на отклонение органов управления' . 94
Оглавление
525
Стр.
2.4. Реакция угла наклона траектории и угла атаки на отклонение
органов управления.............................................96
2.5. Реакция угла тангажа на возмущающий момент................97
§ 3. Приближенные уравнения и передаточные функции для первого
этапа продольного возмущенного движения..........................99
3.1. Роль быстрой и медленной составляющих продольного возму-
щенного движения...............................................99
3.2. Неманевренньге летательные аппараты......................101
3.3. Маневренные летательные аппараты.........................104
3.4. Маневренные летательные аппараты с малой нормальной силой,
создаваемой органами управления...............................112
3.5. Частотные характеристики................................113
3.6. Оценка влияния силы тяжести и вариаций скорости . . .117
§ 4. Приближенные уравнения и передаточные функции для бокового
возмущенного движения динамически осесимметричного лета-
тельного аппарата...............................................119
4.1. Движение рыскания........................................119
4.2. Движение крена...........................................122
§ 5. Диапазон частот, в котором справедлива передаточная функция
летательного аппарата ... ..................124
§ 6. Передаточная функция летательного аппарата с учетом его
упругости.......................................................125
6.1. Основные допущения. Уравнение поперечных колебаний . . .126
6.2. Решение уравнения поперечных колебаний............128
6.3. Влияние сил внутреннего неупругого сопротивления .... 132
6.4. Передаточная функция упругого летательного аппарата. ". 132
§ 7. Основные требования к динамическим свойствам летательного
аппарата....................................................... 135
7.1. Демпфирование............................................136
7.2. Статическая устойчивость.................................137
7.3. Собственная частота......................................138
7.4. Эффективность органов управления креном..................141
7.5. Эффективность органов управления тангажом и рысканием . .142
7.6. Маневренность............................................146
7.7. Стабильность динамических свойств.....................147
7.8. Максимальные нормальные перегрузки....................148
7.9. Жесткость конструкции....................................151
Литература.........................................., . . . 152
Глава III. Пянамтескпе свойства элементов системы стабилизации . . . 154
- § 1. Измерительные элементы..................................... 155
1.1. Гироскопические измерители...............................155
1.2. Датчики ускорений........................................158
1.3. Упрощение передаточных функций измерителей...............160
§ 2. Усилительно-преобразовательные элементы ....... 161
2.1. Усилители сигналов ......................................161
2.2 Вычислительные элементы . . . . .......................161
2.3. Корректирующие устройства................................162
§ 3. Рулевые машинки..........................................163
* ЗЛ. Уравнение движения органов управления; нагрузка на руле-
вую машинку................................................164
• 3.2. Гидравлическая рулевая машинка.........................166
3.3. Пневматическая рулевая машинка.........................174
3.4. Влияние нагрузки на динамические свойства рулевой машинки 179
• § 4. Рулевой привод............................................183
« 4.1. Усилительно-преобразовательные элементы рулевого привода. 184
< 4.2. Рулевой привод без обратной связи.......................185
4.3. Рулевой привод с жесткой обратной связью.................189
526
Оглавление
V/
Стр.
4.4. Рулевой привод с изодромной обратной связью..............192
4.5. Основные требования, предъявляемые к динамическим свойствам
рулевого привода..............................................194
Литература................................................... . 199
Глава IV. Стабилизация движения крена..............................201
§ 1. Введение.................................................201
1.1. Принцип классификации систем стабилизации................201
1.2. Основные задачи, решаемые системой стабилизации крена . . 202
1.3. Возмущающий момент крена.................................206
§ 2. Стабилизация угловой скорости крена...................209
2.1. Роль обратной связи по угловой скорости крена............209
2.2. Стабилизация с помощью роллеронов........................212
2.3. Система стабилизации с дифференцирующим гироскопом . . 213
2.4. Астатические системы стабилизации........................216
§. 3. Стабилизация угла крена..................................218
3.1. Обратная связь по углу крена.............................218
3.2. Статические системы стабилизации........................229
3.3. Астатические системы стабилизации........................222
Литература.................................................. 223
Г лава V. Управление нормальными перегрузками и стабилизация летатель-
ного аппарата......................................................224
§ 1. Введение.................................................224
1.1. Основные требования, предъявляемые к системам стабилиза-
ции и управления нормальными перегрузками.....................225
1.2. Особенности управления нормальными перегрузками при про-
граммном наведении и наведении на цель...................227
§ 2. Система стабилизации со свободным гироскопом.............229
§ 3. Система стабилизации с дифференцирующим гироскопом . . . 237
3.1. Расчетная схема с безынерционными приводом и гироскопом 238
3.2. Расчетная схема, учитывающая инерционность привода . , 240
3.3. Расчетная схема, учитывающая инерционность привода и гиро-
скопа ........................................................247
§ 4. Система стабилизации с интегрирующим гироскопом . . . .251
§ 5. Система стабилизации с интегрирующим гироскопом и датчиком
нормальных ускорений............................................255
§ 6. Некоторые особенности систем стабилизации при теленаведении
по командам или по лучу........................................261*
§ 7. Ограничение нормальных перегрузок........................262
Литература ................................................... £64
Глава VI. Динамика баллистических ракет...........................265
§ 1. Введение.................................................265
1.1. Особенности траекторий...................................265
1.2. Задачи управления полетом баллистической ракеты .... 269
1.3. Характеристики возмущающих воздействий...................272
§ 2. Передаточные функции, частотные характеристики и динамиче-
ские особенности баллистической ракеты.......................275
2.1. Продольное движение......................................276
2.2. Боковое движение.........................................282
§ 3. Структурная схема канала продольного движения.............284
3.1. Пример структурной схемы.................................284
3.2. Основные задачи формирования канала продольного движения 286
3.3. Выбор типа коррекции.....................................287
§ 4. Выбор схемы и параметров двухзвенного дифференцирующего
фильтра.........................................................295
4.1. Общие свойства двухзвенных дифференцирующих фильтров 295
4.2. Выбор параметров передаточной функции фильтра .......... 300
Оглавление
527
Стр.
§ 5. Оценка качества переходных процессов.......................302
5.1. Построение переходных процессов..........................302
5.2. Влияние вариаций скорости................................307
§ 6. Структурная схема канала бокового движения.................309
6.1. Пример функциональной схемы..............................309
6.2. Расчетные структурные схемы............................ 310
6.3. Установившиеся ошибки стабилизации . 312
§ 7. Выбор типа коррекции и основных параметров канала бокового
движения . ..............................................314
§ 8. Управление скоростью ракеты................................317
§ 9. Рассеивание ракет...................................... ... 319
9.1. Коэффициенты промаха ....................................319
9.2. Оценка точности наведения методом последовательных прибли-
жений ........................................................320
9.3. Оценка точности стабилизации бокового сноса..............323
§ 10. Заключение. ... 323
' Литература........................................................324
Глава VII. Динамика телеуправляемых ракет........................325
§ 1. Введение...................................................325
§ 2. Маневренные свойства воздушных целей.......................331
§ 3. Методы теленаведения.......................................335
3.1. Понятие метода наведения телеуправляемых ракет .... 335
3.2. Классификация методов теленаведения......................339
3.3. Кинематический метод исследования основных свойств траекто-
рий наведения.................................................342
3.4. Кинематическое исследование траекторий при наведении мето-
дом совмещения ...............................................345
.3.5. Общий случай определения нормальных перегрузок при теле-
наведении .................................................351
§ 4. Расчет опорных траекторий и построение зон пуска и поражения. 357
§ 5. Формирование сигнала ошибки наведения......................364
§ 6. Основные элементы систем теленаведения; их передаточные
функции и динамические свойства..................................366
6.1. Устройства измерения координат цели и ракеты.............366
6.2. Устройство выработки команд..............................369
6.3. Устройства радиотелеуправления..........................• . 371
§ 7. Кинематическое звено; уравнения и передаточные функции . . 372
§ 8. Анализ динамических свойств и точности командной системы
теленаведения .................................................. 379
8.1. Структурная схема системы наведения .................... 379
8.2. Расчетная структурная схема и ее преобразования .... 382
8.3. Расчет динамических ошибок...............................388
8.4. Формирование команды наведения и способы уменьшения ди-
намических ошибок . .............................390
8.5 Влияние силы тяжести на динамические ошибки наведения . . 395
8.6. Случайные ошибки наведения .... 4........................397
8.7. Влияние ограничений на процесс наведения.................398
§ 9. Анализ динамических свойств н точности системы наведения
по лучу....................................................401
9.1. Расчетная структурная схема..............................401
9.2. Коррекция динамических свойств...........................403
9.3. Динамические и случайные ошибки наведения................405
Литература.................................................. 409
Глава УIII. Динамика самонаводящихся ракет..........................410
Введение. Координаторы цели.................................410
§2. Методы .самонаведения.......................................414
2.1. Понятие метода наведения самонаводящихся ракет .... 414