/








































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Автор: Кестер У.
Теги: мир электроники переводная литература издательство техносфера вспомогательные схемы преобразователи
ISBN: 978-5-94836-146-8
Год: 2007



Текст
Аналого-цифровое
преобразование
Аналого-цифровое
преобразование
□ ANALOG
DEVICES
www.analog.com
□ ANALOG
DEVICES
□ ANALOG
DEVICES
Представительство
Analog Devices Inc. в России
http://www.analog.com/ru
♦7 812 327-45-90, +7 812 336-25-00
Факс.: +7 812 327-45-91
I й
ар
Официальные Дистрибьюторы Analog Devices Inc. в России и Украине
analog is everywhere:
Аналого-
цифровое
преобразование
Редактор
оригинального
издания
Уолт Кестер
Перевод с английского
под редакцией Е. Б. Володина
ТЕХНОСФЕРА
Москва
2007
Под ред. Уолта Кестера
Аналого-цифровое преобразование
Москва:
Техносфера, 2007. - 1016 с. ISBN 978-5-94836-146-8
Книга написана для инженеров - конструкторов, которые используют
преобразователи данных и связанные с ними вспомогательные схемы.
Поэтому в тексте встречаются много практических советов. Большая часть
материала была взята — с необходимыми обновлениями — из предыдущих
популярных выпусков книг для семинаров Analog Devices. Много разделов
подверглись переработке для того, чтобы материал был изложен более
точно и ясно. Различные технические специалисты Analog Devices внесли
свой вклад в книгу и их имена упоминаются в начале каждой большой
секции.
Analog-Digital Conversion
© 2004, Analog Devices, Inc.
© 2007, ЗАО «РИЦ «Техносфера» перевод на русский язык,
оригинал-макет, оформление
ISBN 978-5-94836-146-8
ISBN 0-916550-27-3 (англ.)
СОДЕРЖАНИЕ
Глава 1. ИСТОРИЯ ПРЕОБРАЗОВАТЕЛЕЙ (Уолт Кестер)..........................11
Предисловие к главе................................................. 11
1.1. Ранняя история.................................................. 11
Ранние годы: от телеграфа до телефона............................ 13
Изобретение импульсно-кодовой модуляции (РСМ).................... 15
Математическое обоснование ИКМ .................................. 16
Патент Алекса Харли Ривза на ИКМ................................. 18
ИКМ и Bell System: Вторая мировая война, и до 1948 года...........20
ОУ и регенеративные импульсные ретрансляторы: от электронно-вакуумных
до полупроводниковых устройств....................................23
Список литературы к 1.1. Ранняя история..............................25
1.2. Преобразователи 1950-х и 1960-х годов (Уолт Кестер).............27
Коммерческие преобразователи: 1950-е годы.........................27
История развития преобразователей: 1960-е годы....................29
Архитектуры преобразователей......................................33
Список литературы к 1.2. Преобразователи 1950-х и 1960-х годов.......36
1.3. Развитие преобразователей в 1970-е годы.........................37
Монолитные преобразователи 1970-х годов...........................38
Модульные преобразователи 1970-х годов............................48
Список литературы к 1.3. Развитие преобразователей в 1970-е годы.....50
1.4. Преобразователи данных в 1980-е годы (Уолт Кестер)..............51
Введение..........................................................51
Монолитные ЦАП в 1980-е годы......................................52
Монолитные АЦП 1980-х годов.......................................53
Монолитные параллельные АЦП в 1980-е годы.........................54
Гибридные и модульные ЦАП и АЦП в 1980-е годы.................... 55
1.5. Преобразователи в 1990-е годы (Уолт Кестер) ....................56
Введение..........................................................56
Монолитные ЦАП в 1990-х годах.....................................58
Монолитные АЦП в 1990-е годы......................................60
Гибридные и модульные ЦАП и АЦП в 1990-е годы.....................65
1.6. Преобразователи в 2000-х годах (Уолт Кестер)....................66
Глава 2. ОСНОВЫ СЧИТЫВАНИЯ ДАННЫХ
В АНАЛОГОВО-ЦИФРОВЫХ СИСТЕМАХ............................................68
2.1. Кодирование и квантование (Уолт Кестер, Дэн Шайнголд,
Джеймс Брайант)......................................................68
Однополярные коды.................................................71
Код Грея..........................................................73
Биполярные коды...................................................75
Комплементарные коды..............................................80
Статические передаточные характеристики ЦАП и АЦП и погрешности
постоянного тока..................................................80
Список литературы к 2.1. Кодирование и квантование...................88
2.2. Теория отсчетов (Уолт Кестер)...................................89
Содержание
Необходимость в наличии функции выборки-хранения .....................90
Критерий Найквиста....................................................93
Фильтры для устранения эффекта наложения спектров (антиалайзинговые
фильтры)..............................................................95
Субдискретизация (Undersampling) (гармоническая дискретизация (Harmonic
Sampling), дискретизация модулированных сигналов (Bandpass Sampling),
дискретизация на промежуточной частоте (ПЧ) (IF Sampling), прямое
преобразование ПЧ в цифровую форму (Direct IF-to-Digital)) ...........97
Фильтры для устранения эффектов смещения и наложения спектров
в приложениях с субдискретизацией.....................................99
Список литературы к 2.2. Теория отсчетов............................... 100
2.3. Погрешности переменного тока преобразователей (Уолт Кестер,
Джеймс Брайант)....................................................... 101
Теория шума квантования идеального TV-разрядного преобразователя ... 101
Шум в реальных АЦП.................................................. 107
Динамические характеристики преобразователей........................ 110
Динамические характеристики ЦАП..................................... 143
Список литературы к 2.3. Погрешности переменного тока
преобразователей....................................................... 152
2.4. Общие технические характеристики преобразователей
(Джеймс Брайант)...................................................... 153
Общие положения..................................................... 153
Логический интерфейс................................................ 155
Логическая часть преобразователей: тактирование и другие показатели. 156
2.5. Определение технических характеристик (Дэн Шайнголд,
Уолт Кестер)........................................................ 157
Общая библиография по преоборазованию данных и сопутствующим вопросам.. 180
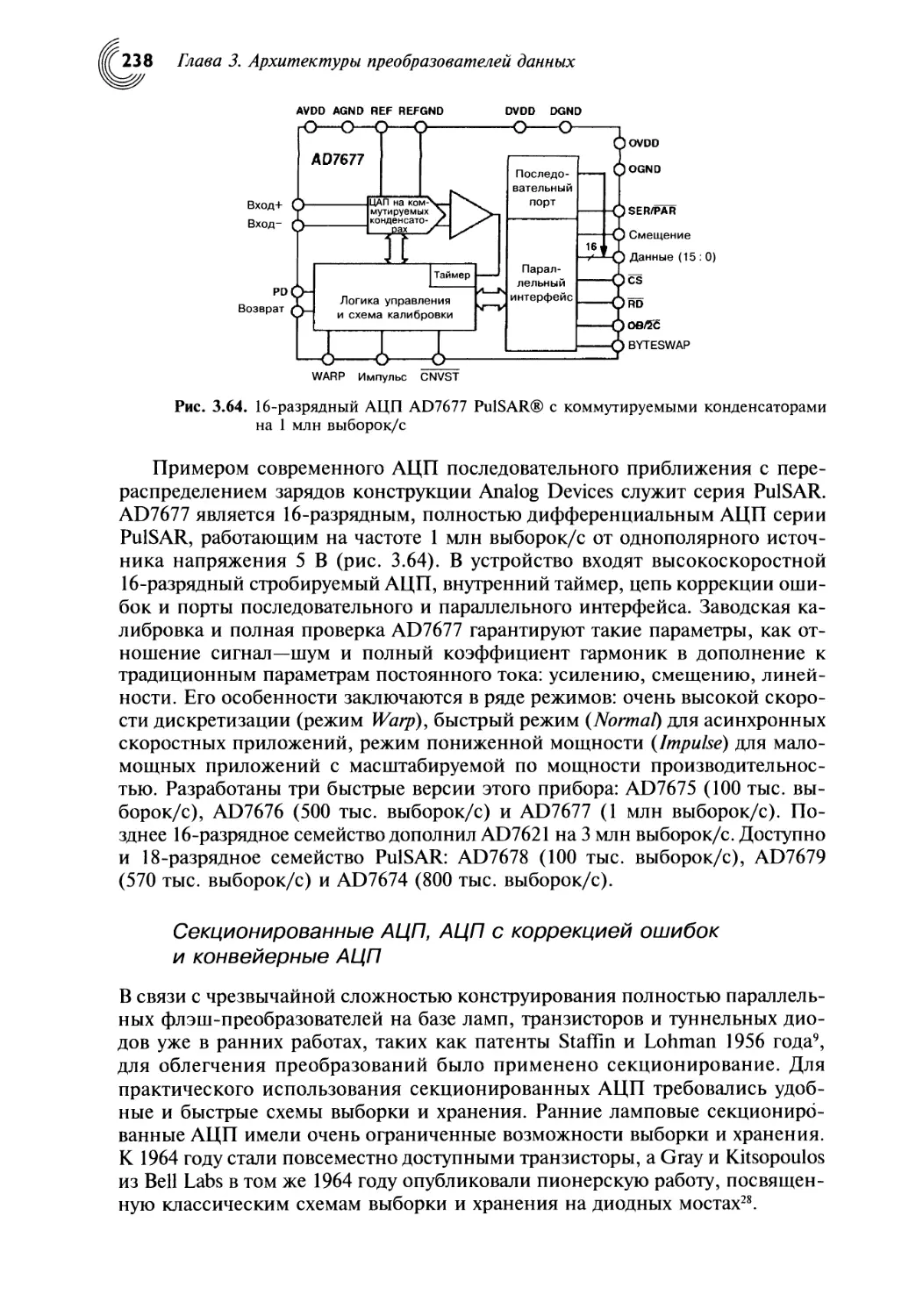
Глава 3. АРХИТЕКТУРЫ ПРЕОБРАЗОВАТЕЛЕЙ ДАННЫХ............................... 182
3.1. Архитектуры ЦАП (Джеймс Брайант, Уолт Кестер)..................... 182
Введение............................................................ 182
Обсуждение выходов ЦАП.............................................. 184
Базовые структуры ЦАП............................................... 185
Другие архитектуры с малыми искажениями..............................211
Обсуждение логики ЦАП............................................... 213
Список литературы к 3.1. Архитектуры ЦАП................................215
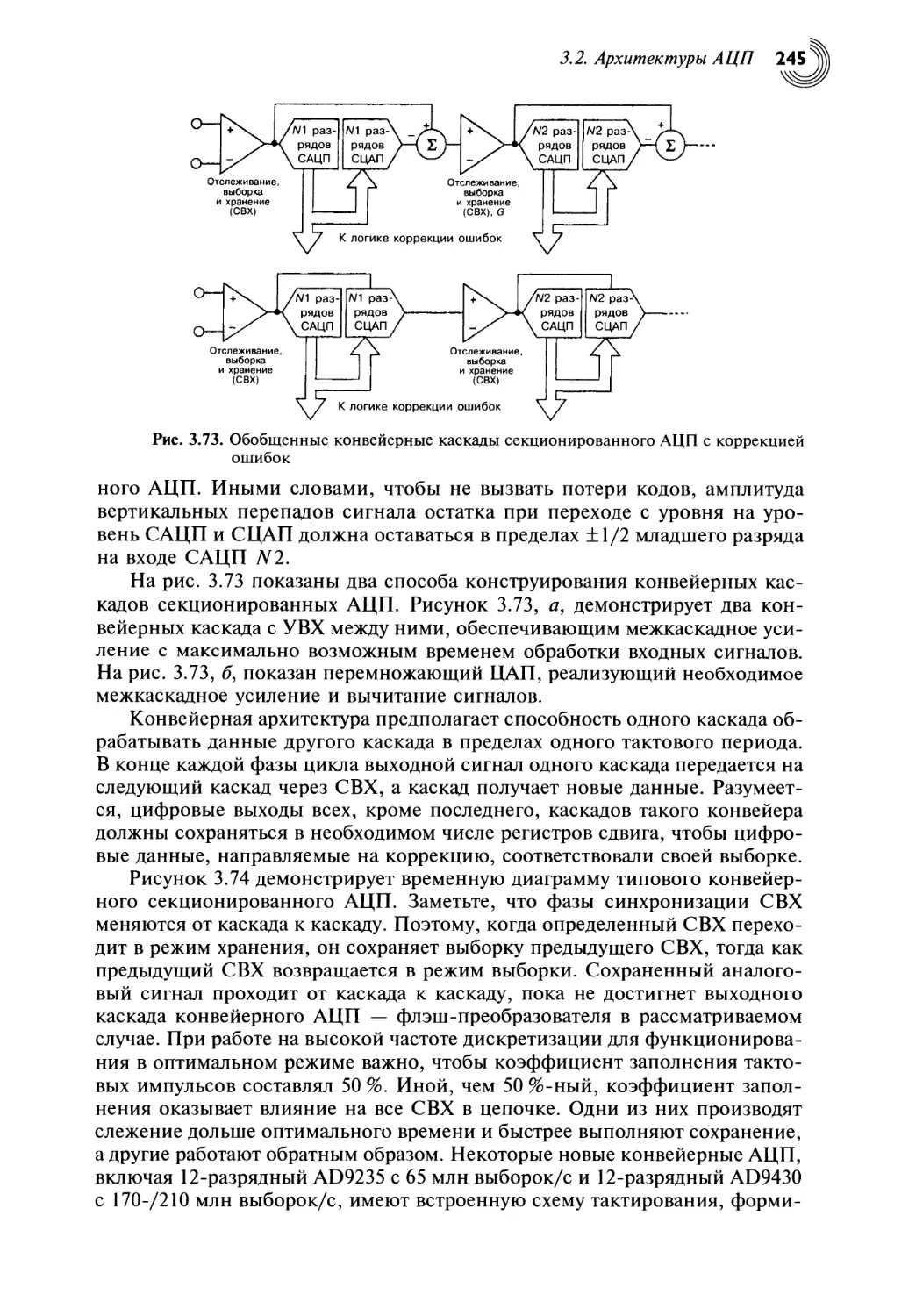
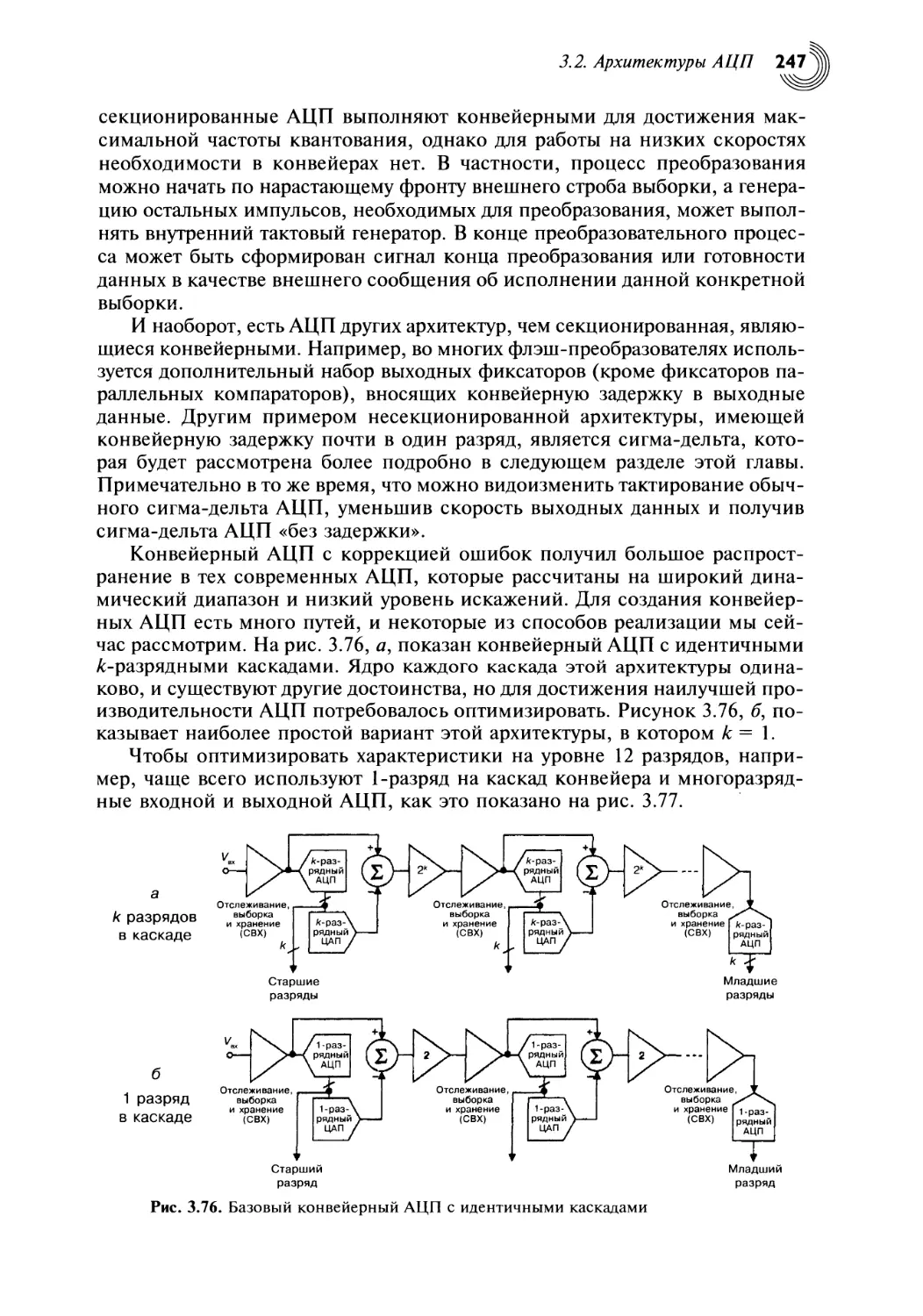
3.2. Архитектуры АЦП (Уолт Кестер, Джеймс Брайант)......................216
Введение............................................................ 216
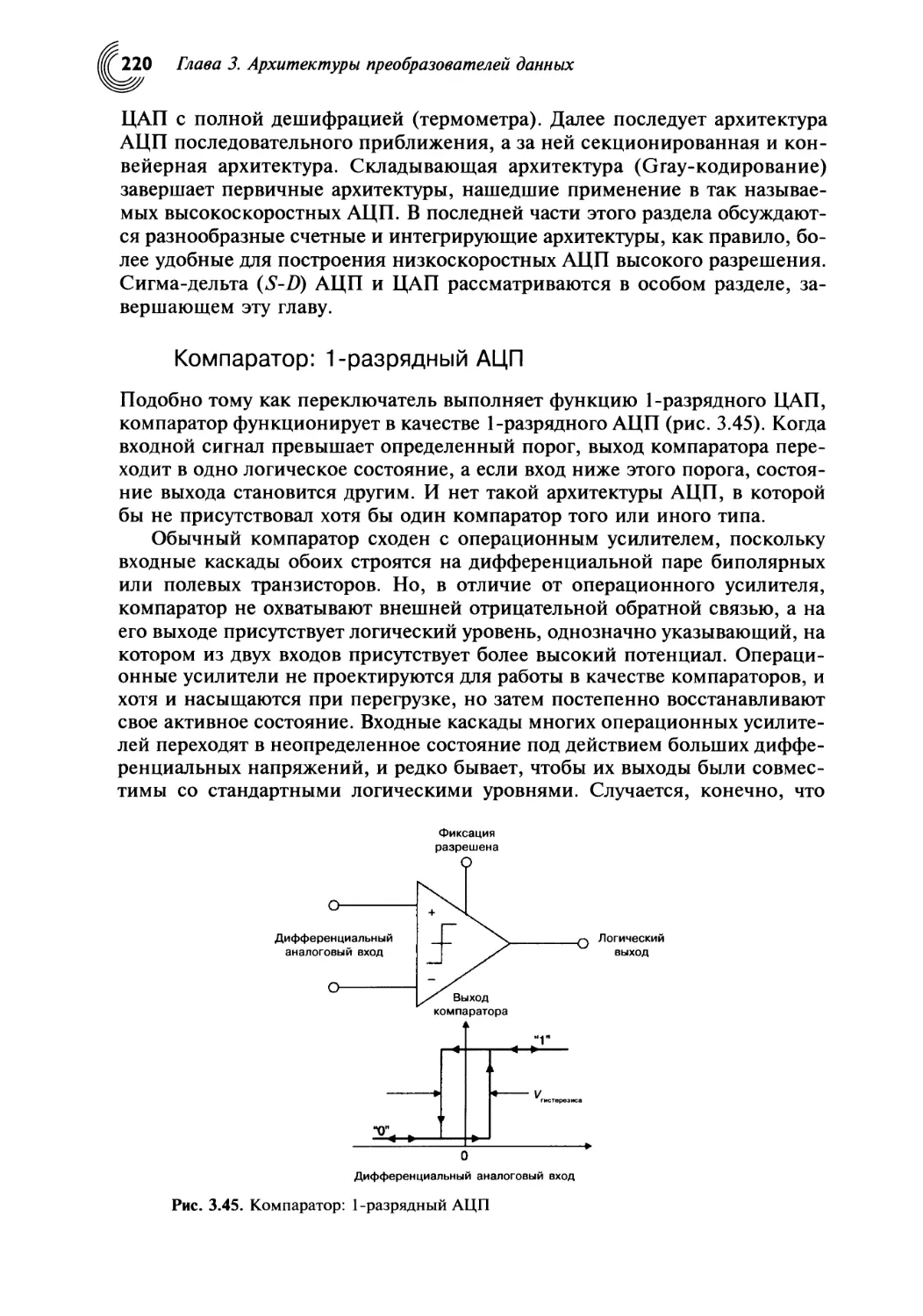
Компаратор: 1-разрядный АЦП..........................................220
Архитектуры высокоскоростных АЦП.....................................223
Архитектуры счетных и интегрирующих АЦП..............................262
Список литературы к 3.2. Архитектуры АЦП................................277
3.3. Сигма-дельта преобразователи (Уолт Кестер, Джеймс Брайант).........282
Историческая перспектива.............................................282
Основы сигма-дельта АЦП............................................. 286
Обсуждение систем более высокого порядка.............................294
Измерительные сигма-дельта АЦП высокого разрешения...................298
Полосовые сигма-дельта преобразователи ..............................303
Сигма-дельта ЦАП.................................................... 304
Выводы...............................................................305
Список литературы к 3.3. Сигма-дельта преобразователи...................306
Содержание 5
Глава 4. ТЕХНОЛОГИЯ ПРЕОБРАЗОВАТЕЛЕЙ...................................310
4.1. Ранние процессы (Уолт Кестер)..................................310
Электронно-вакуумные преобразователи........................... 310
Полупроводниковые модульные и гибридные преобразователи........ 312
Процесс калибровки............................................. 317
Список литературы к 4.1. Ранние процессы............................317
4.2. Современные процессы (Уолт Кестер. Джеймс Брайант).............318
Биполярные процессы............................................ 318
Технология тонкопленочных резисторов........................... 319
Комплементарные биполярные технологии ......................... 320
Технологии КМОП (CMOS)......................................... 321
Технологии и архитектура преобразователей...................... 323
Список литературы к 4.2. Современные процессы.......................327
4.3. Разумное разделение (Дэйв Робертсон, Мартин Кесслер)...........327
Когда полная интеграция не является оптимальным решением....... 327
Для чего необходимо разумное разделение?....................... 332
Что меняется? ................................................. 333
Глава 5. ТЕСТИРОВАНИЕ ПРЕОБРАЗОВАТЕЛЕЙ ДАННЫХ..........................337
5.1. Тестирование ЦАП (Уолт Кестер, Дэн Шейнголд)...................337
Тестирование статических характеристик ЦАП..................... 337
Тестирование динамических показателей ЦАП...................... 349
Список литературы к 5.1. Тестирование ЦАП...........................361
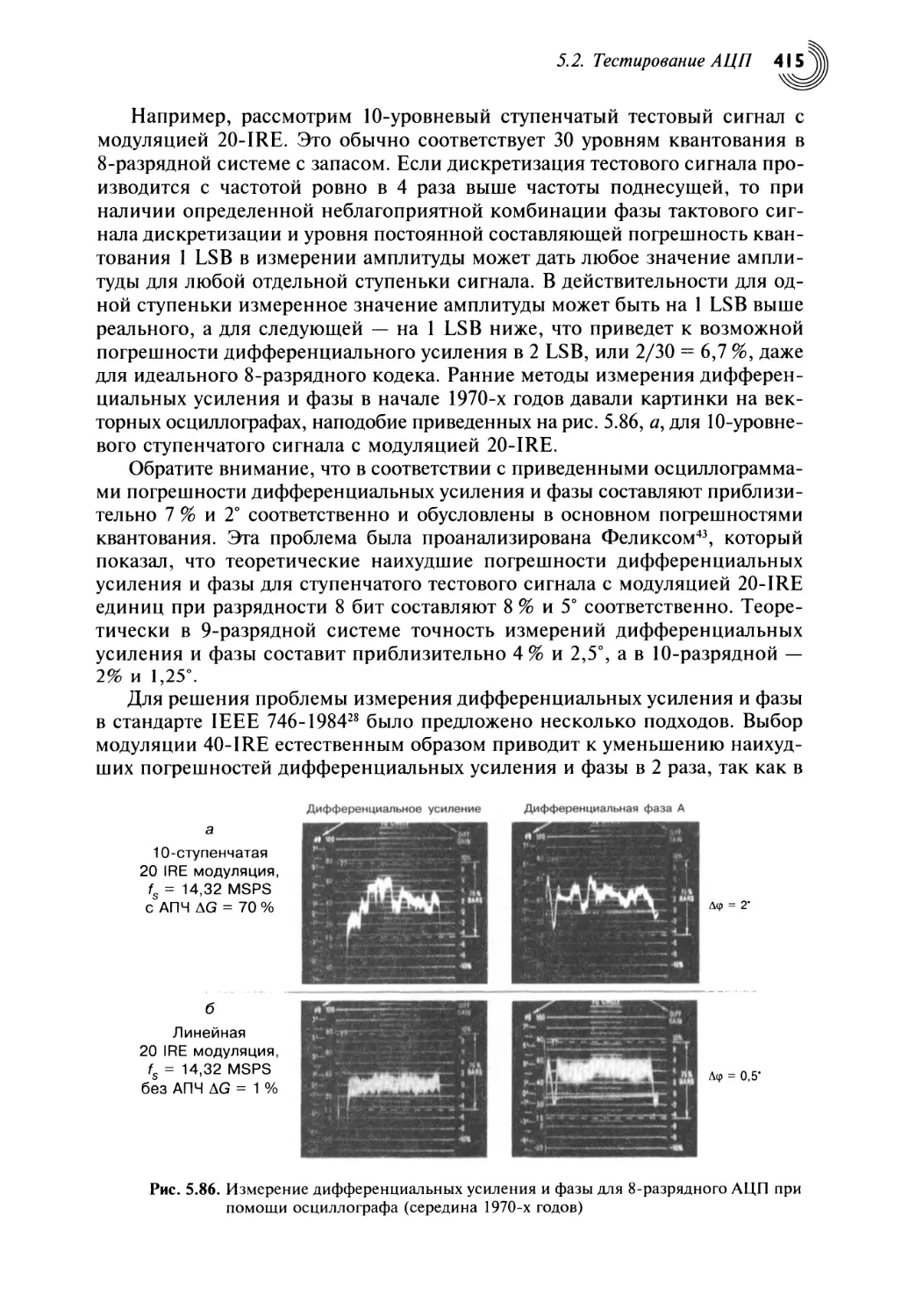
5.2. Тестирование АЦП (Уолт Кестер).................................362
Краткий исторический обзор спецификаций и методов тестирования
преобразователей данных.........................................362
Тестирование статических характеристик АЦП..................... 364
Тестирование динамических характеристик........................ 380
Список литературы к 5.2 .Тестирование АЦП...........................421
Дополнительная литература по БПФ и ЦОС .........................423
Программные пакеты для вычисления БПФ и анализа технических данных.423
Общая литература по преобразованию данных и смежным вопросам........423
Глава 6. ИНТЕРФЕЙСЫ ПРЕОБРАЗОВАТЕЛЕЙ ДАННЫХ............................425
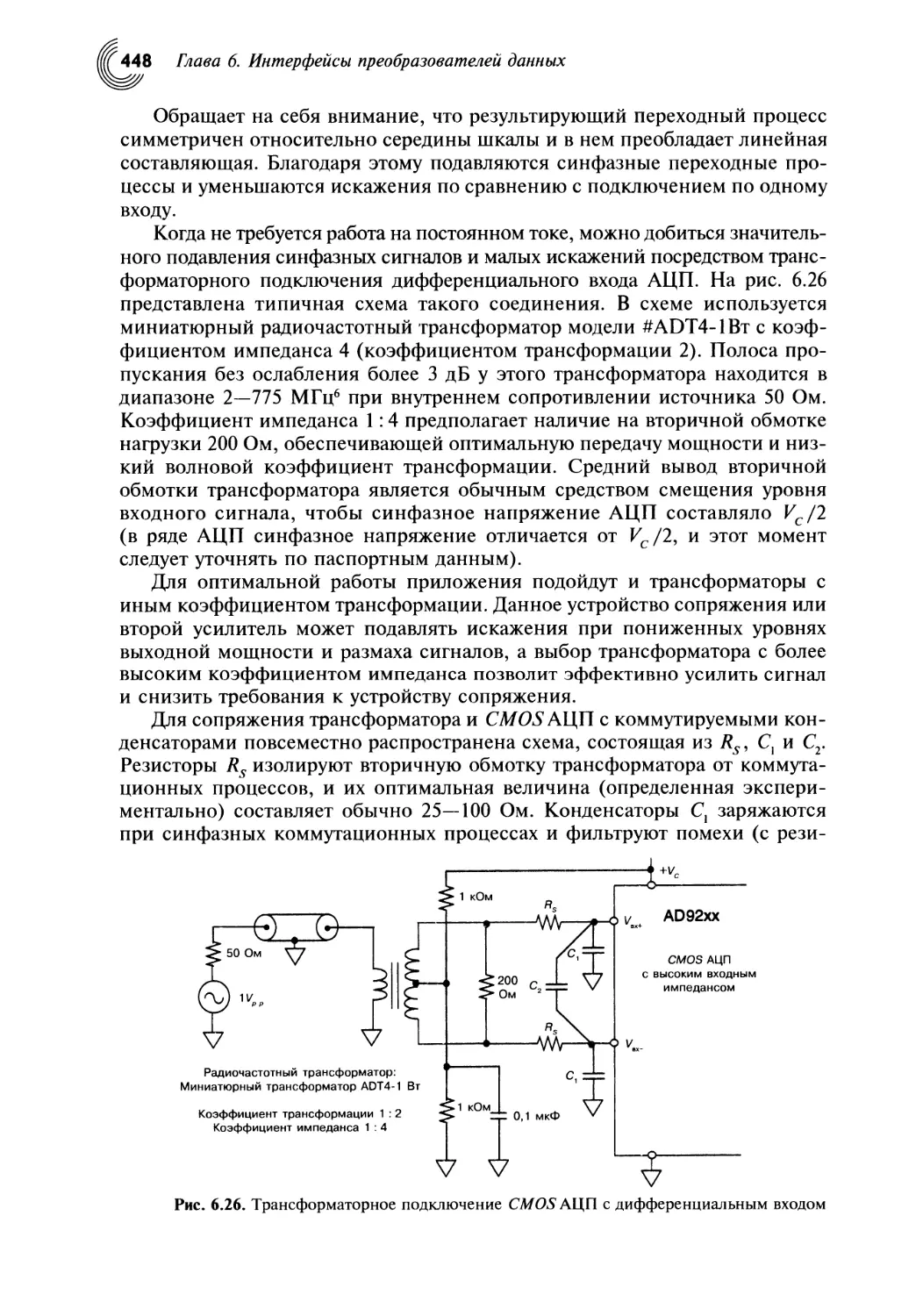
6.1. Сопряжение аналоговых входов АЦП (Уолт Кестер).................425
Введение........................................................425
Анализ работы усилителя на постоянном и переменном токе ........427
Сопряжение измерительных £-Д АЦП высокого разрешения ...........439
Сопряжение АЦП последовательного приближения с одним входом
и однополярным питанием 1,6—3,6 В...............................440
Сопряжение АЦП с однополярным питанием с масштабируемыми входами...442
Сопряжение CMOS АЦП с коммутируемыми конденсаторами
и дифференциальным входом.......................................443
Схемы подключения по одному входу CMOS АЦП с дифференциальным
входом ....................................................... 444
Драйверы АЦП с дифференциальным входом..........................447
Сопряжение АЦП с дифференциальными усилителями..................452
Список литературы к 6.1. Сопряжение аналоговых входов АЦП..........466
6.2. Цифровые интерфейсы АЦП И ЦАП (и связанные темы)
(Уолт Кестер)......................................................467
Введение........................................................467
Содержание
Инициализация преобразователей данных при включении..............467
Инициализация внутренних регистров управления преобразователя данных.468
Экономичный режим, спящий режим и режим готовности...............469
Ждущий режим, толчковый режим и режим дискретизации на минимальной
частоте..........................................................469
Цифровые выходные интерфейсы АЦП.................................471
Цифровые входные интерфейсы ЦАП .................................481
Список литературы к 6.2. Цифровые интерфейсы АЦП и ЦАП
(и связанные системы)...............................................485
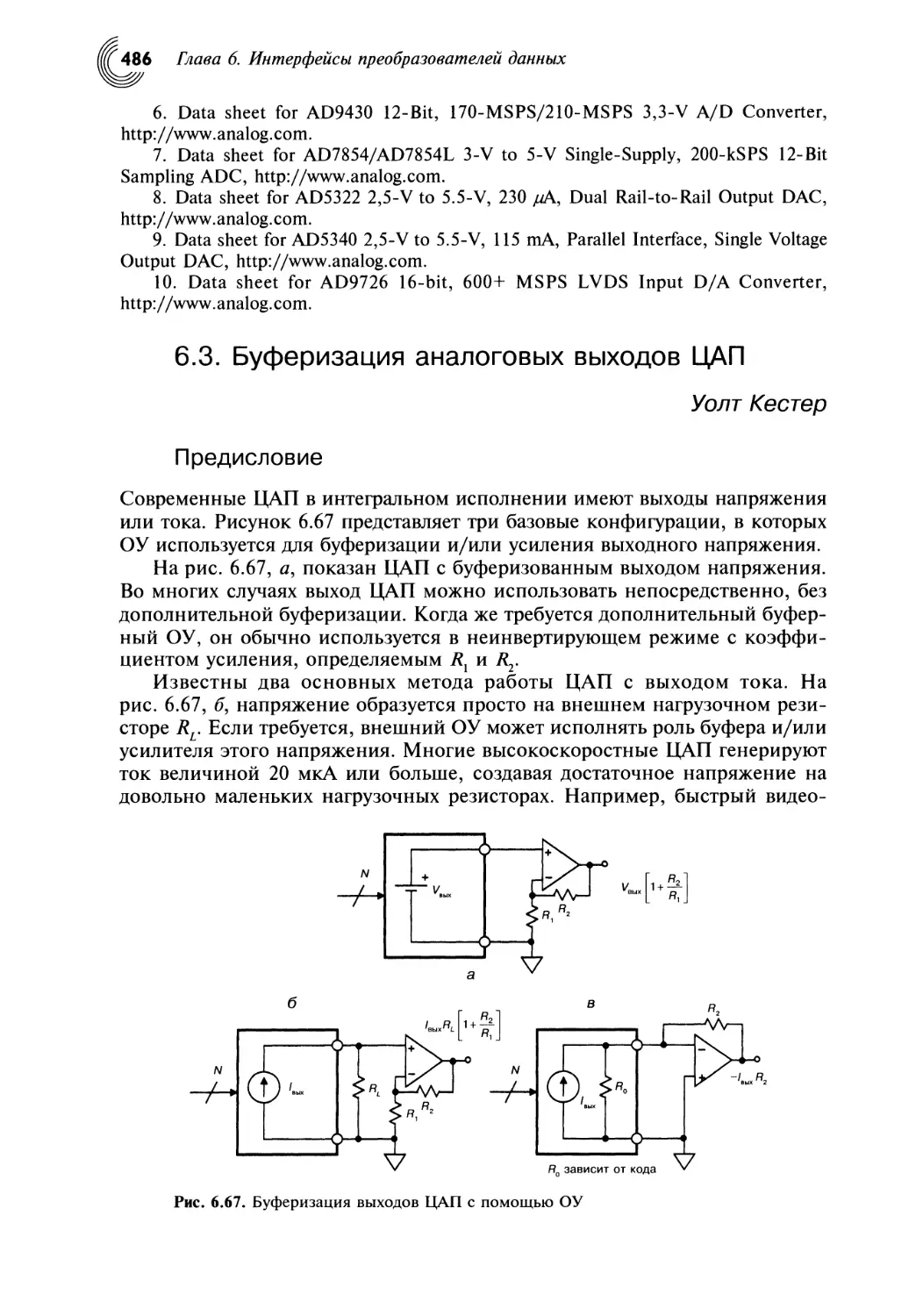
6.3. Буферизация аналоговых выходов ЦАП (Уолт Кестер)...............486
Предисловие .....................................................486
Техника преобразования дифференциального сигнала к одному выходу.....487
Преобразование ток-напряжение с одним выходом....................490
Преобразование дифференциального тока в дифференциальное напряжение..491
Активные фильтры НЧ для аудио ЦАП ...............................492
Список литературы к 6.3. Буферизация аналоговых выходов ЦАП.........493
6.4. Опорные напряжения преобразователей данных (Уолт Кестер)........493
Введение.........................................................493
6.5. Формирование синхроимпульсов дискретизации (Уолт Кестер)........496
Введение.........................................................496
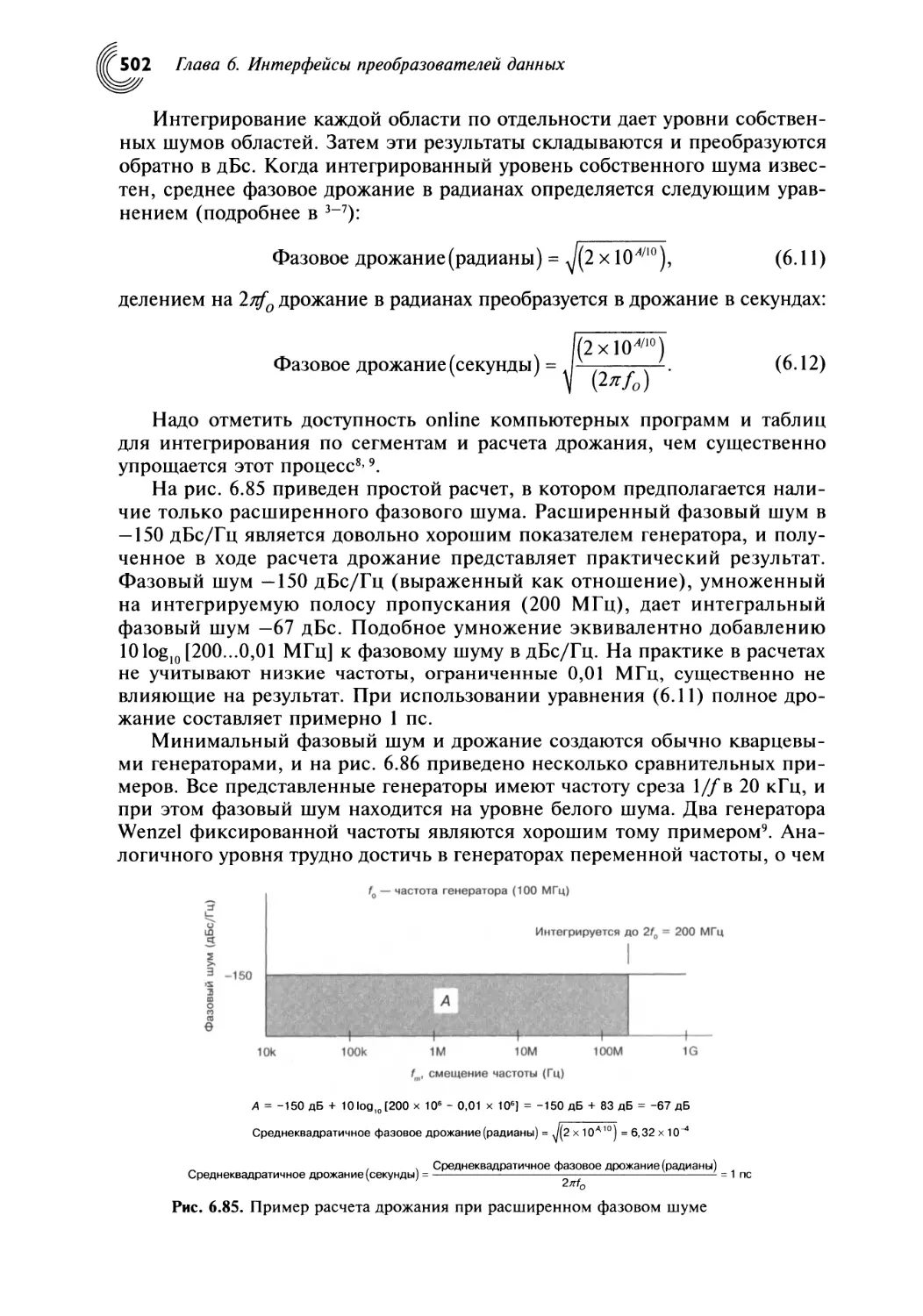
Фазовый шум и дрожание генератора................................499
«Гибридные» генераторы частоты.................................. 506
Подключение дифференциальных входов синхронизации............... 507
Выводы по тактированию выборок.................................. 509
Список литературы к 6.5. Формирование синхроимпульсов
дискретизации.......................................................509
Глава 7. СХЕМЫ ПОДДЕРЖКИ ПРЕОБРАЗОВАТЕЛЕЙ ДАННЫХ........................511
7.1. Источники опорного напряжения (Уолт Джанг, Уолт Кестер,
Джеймс Брайант).....................................................511
Прецизионные источники опорного напряжения...................... 511
Типы источников опорного напряжения............................. 512
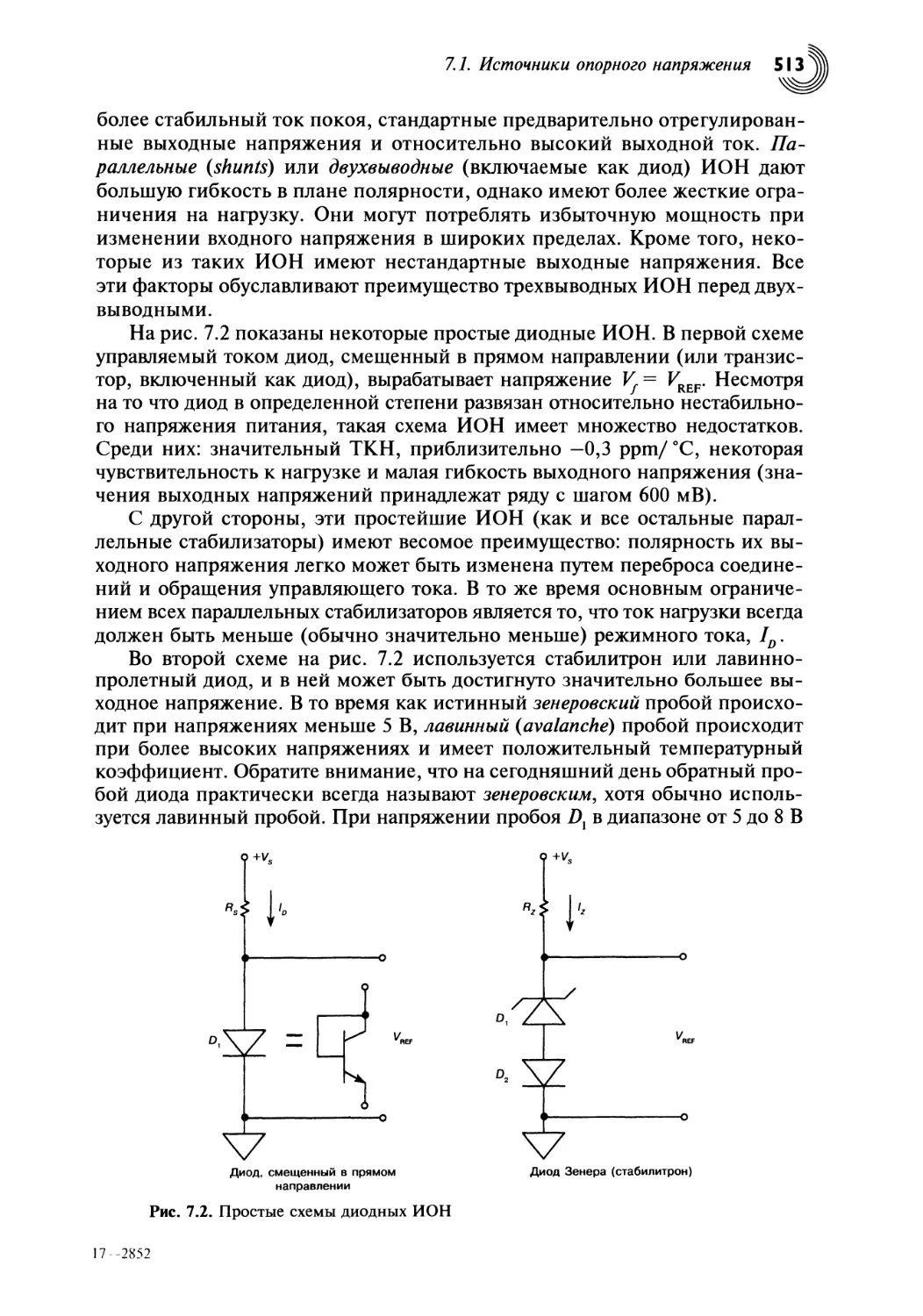
ИОН с напряжением запрещенной зоны.............................. 514
ИОН на заглубленных стабилитронах............................... 520
ИОН XFET® ...................................................... 521
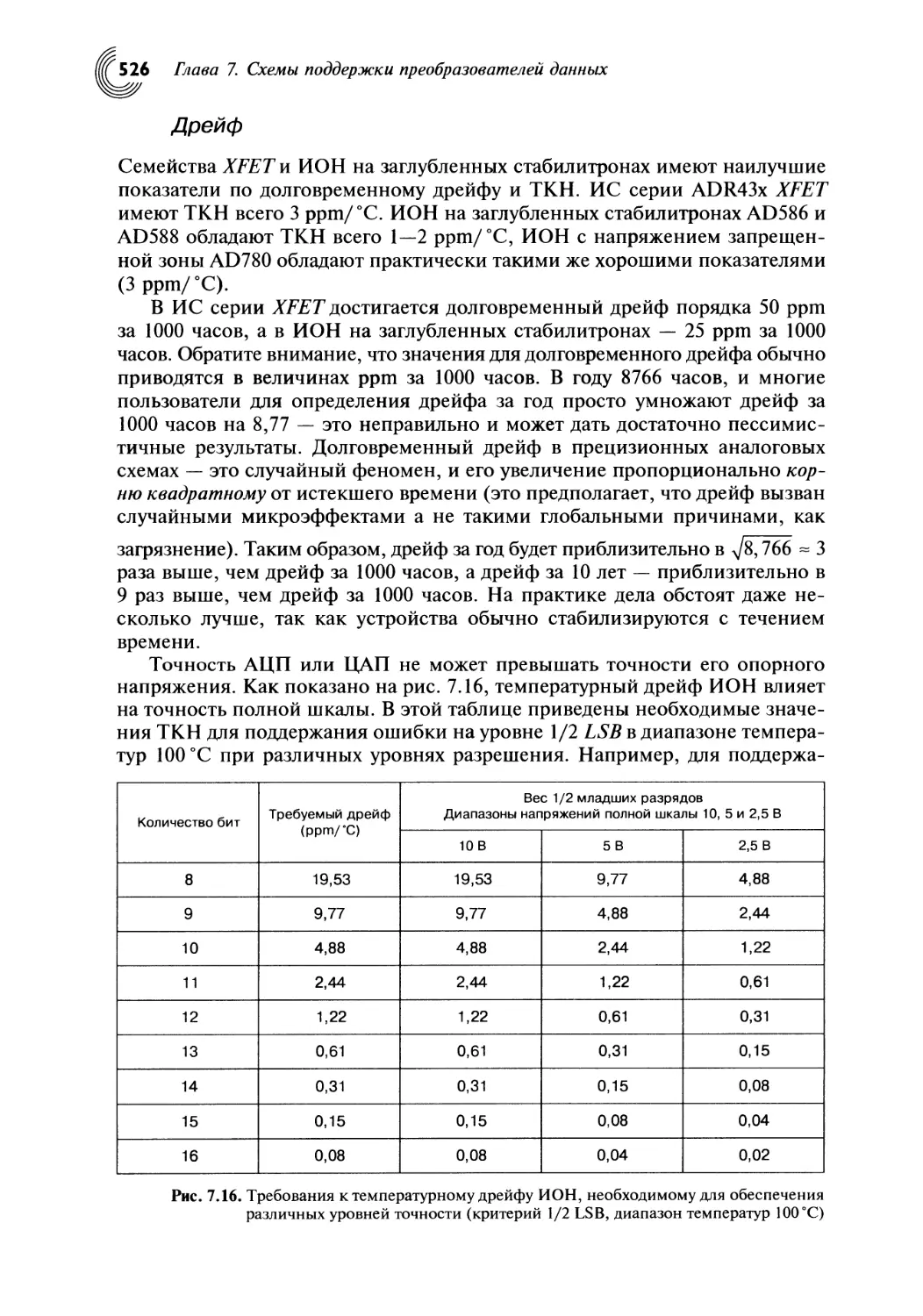
Характеристики ИОН...............................................525
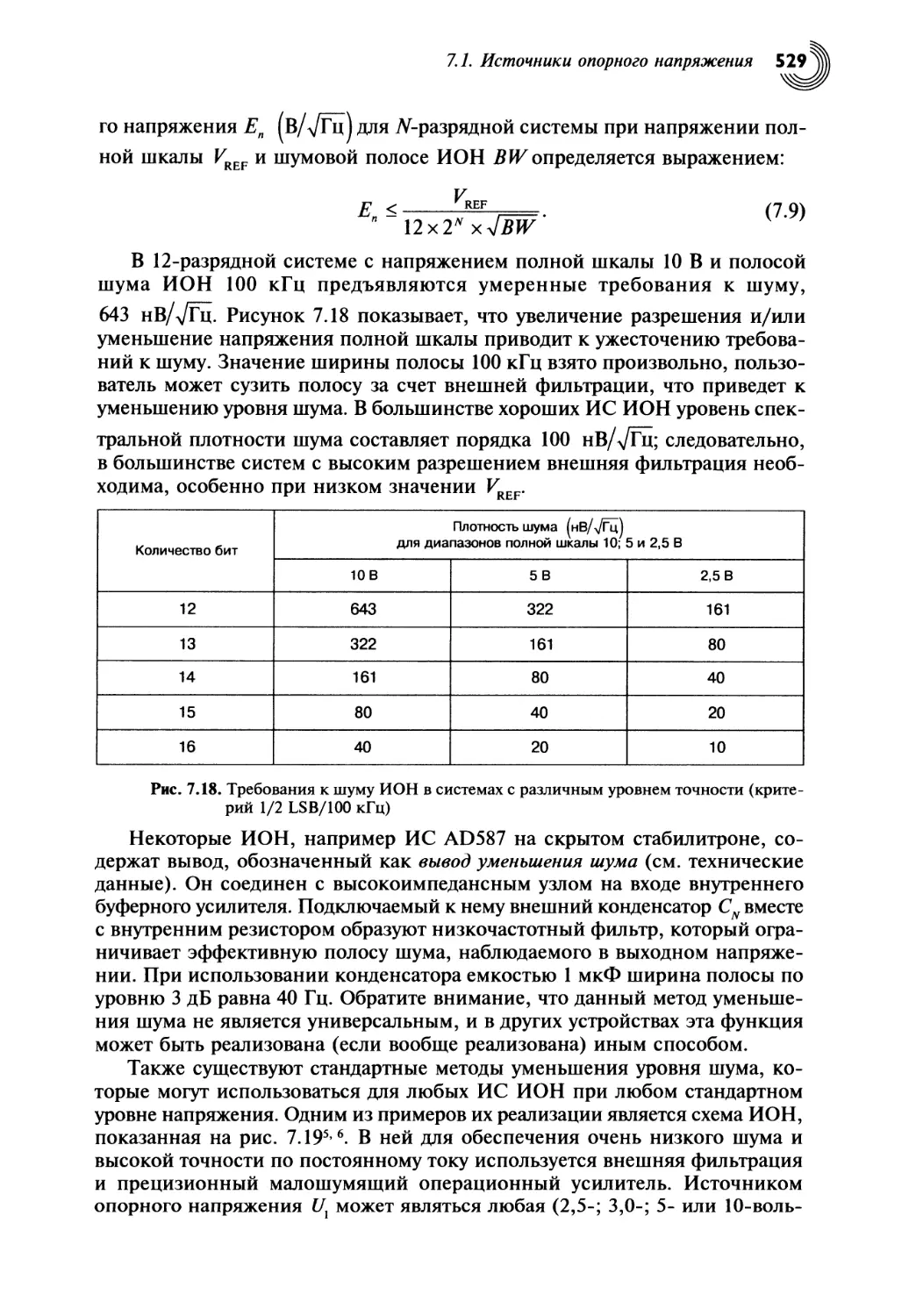
Список литературы к 7.1. Источники опорного напряжения..............536
7.2. Линейные стабилизаторы с малым падением напряжения
(Уолт Джанг)........................................................537
Введение........................................................ 537
Основы линейных стабилизаторов напряжения....................... 538
Проходные элементы, их преимущества и недостатки................ 540
Архитектуры стабилизаторов с малым падением напряжения.......... 545
Семейство стабилизаторов с малым падением напряжения апуСАР®.....549
Контроллеры LDO-стабилизаторов.................................. 560
Список литературы к 7.2. Линейные стабилизаторы с малым падением
напряжения..........................................................569
7.3. Аналоговые ключи и мультиплексоры (Уолт Кестер)................569
Введение........................................................ 569
Основы КМОП-ключей.............................................. 571
Источники ошибок в КМОП-ключах.................................. 573
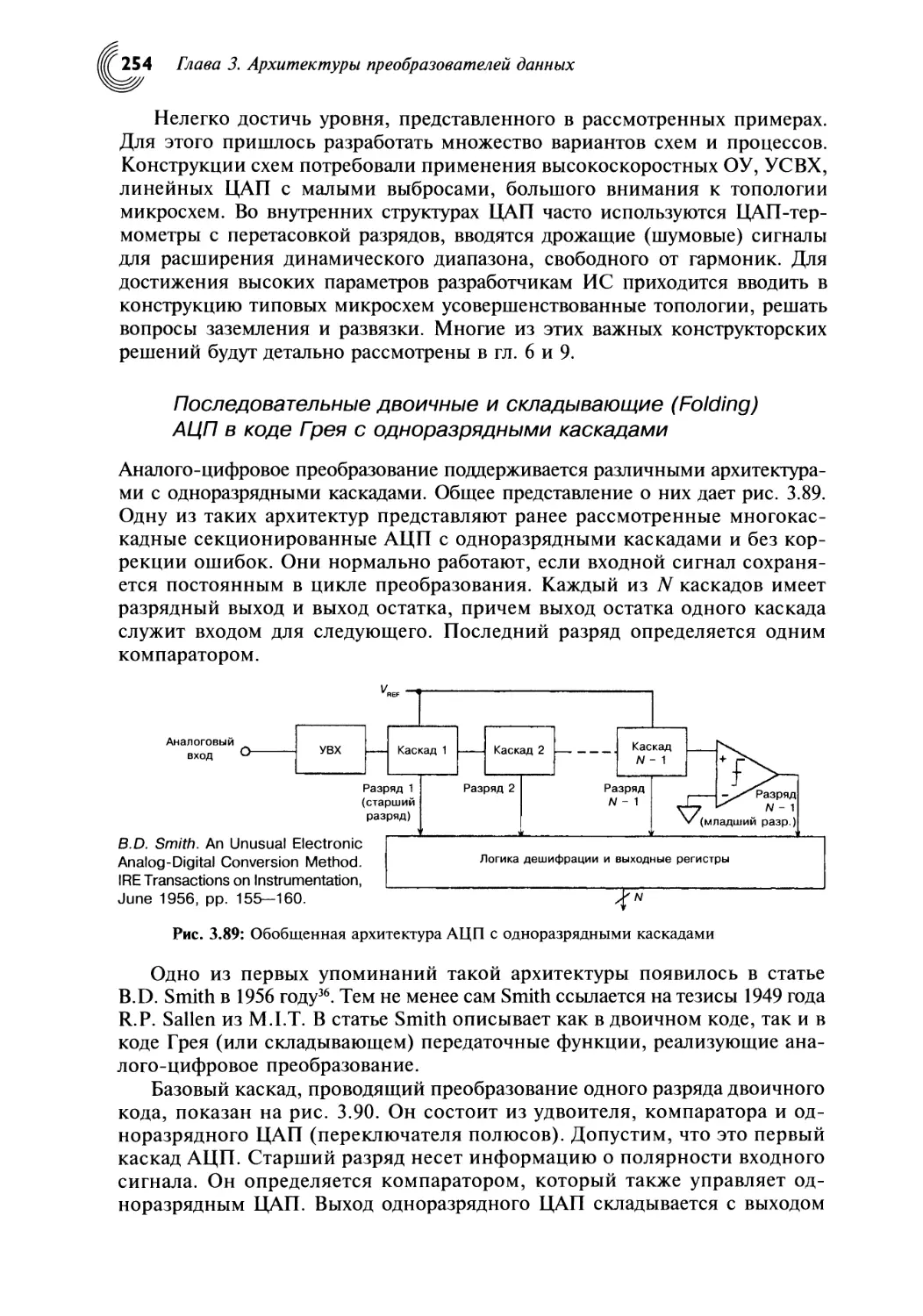
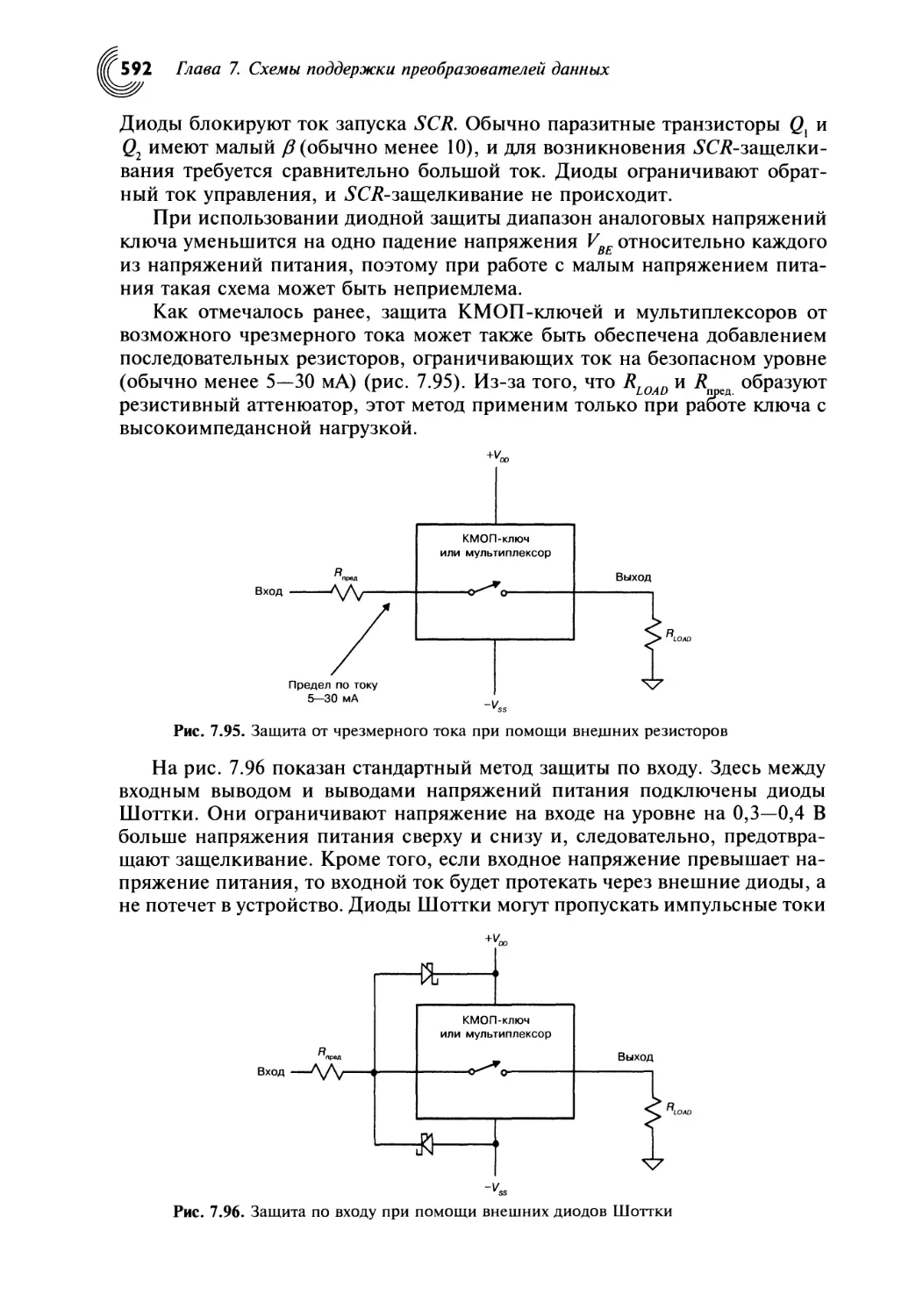
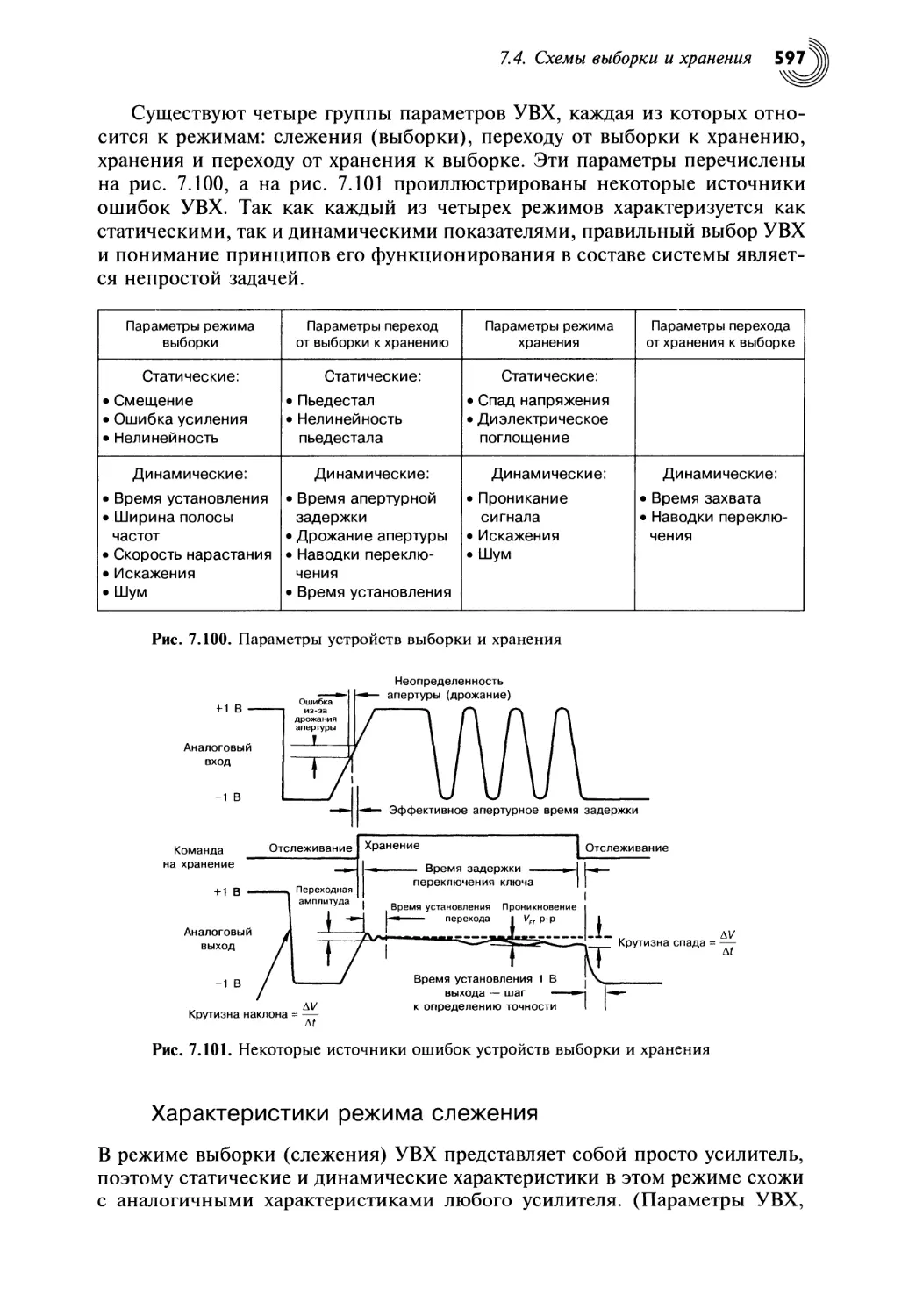
Применение аналоговых ключей.................................... 580
КМОП-ключи с полосой 1 ГГц...................................... 584
Содержание 7
Видеоключи и мультиплексоры.......................................585
Видео кросс-коммутаторы.......................................... 588
Цифровые коммутаторы............................................. 588
Семейства ключей и мультиплексоров производства Analog Devices....589
Паразитное защелкивание в КМОП-ключах и мультиплексорах.......... 590
7.4. Схемы выборки и хранения (Уолт Кестер)...........................594
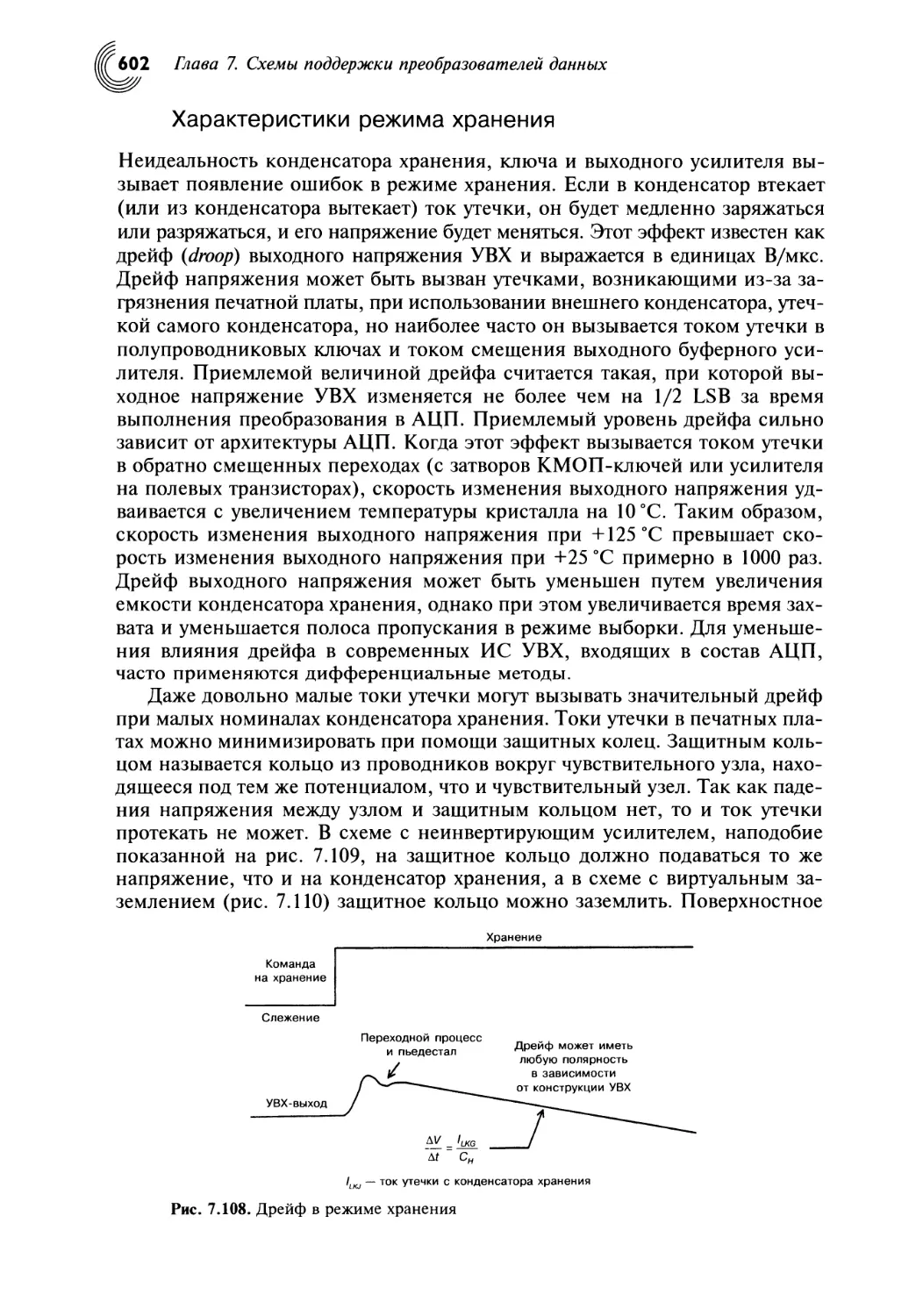
Введ ение и исторический обзор...................................594
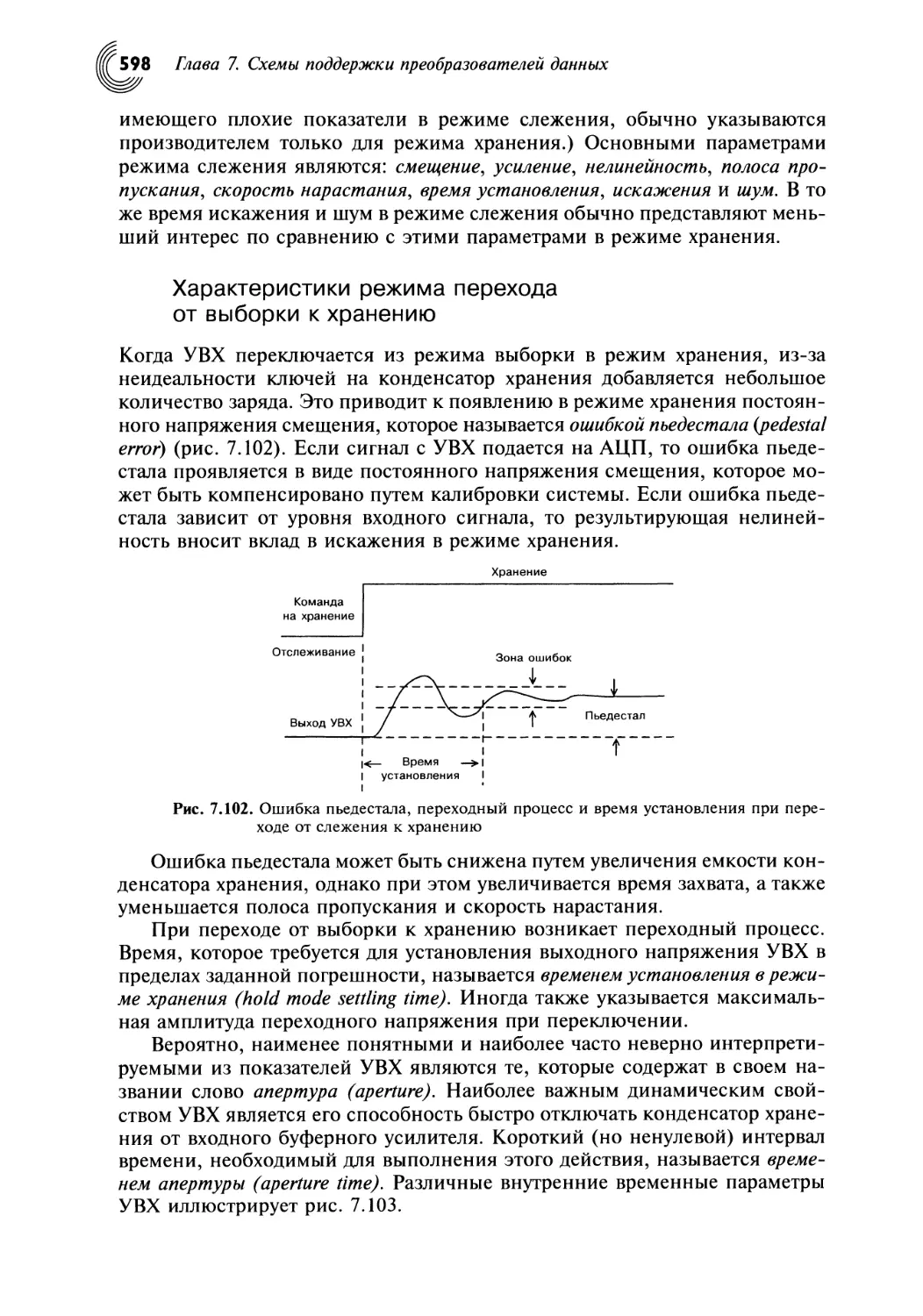
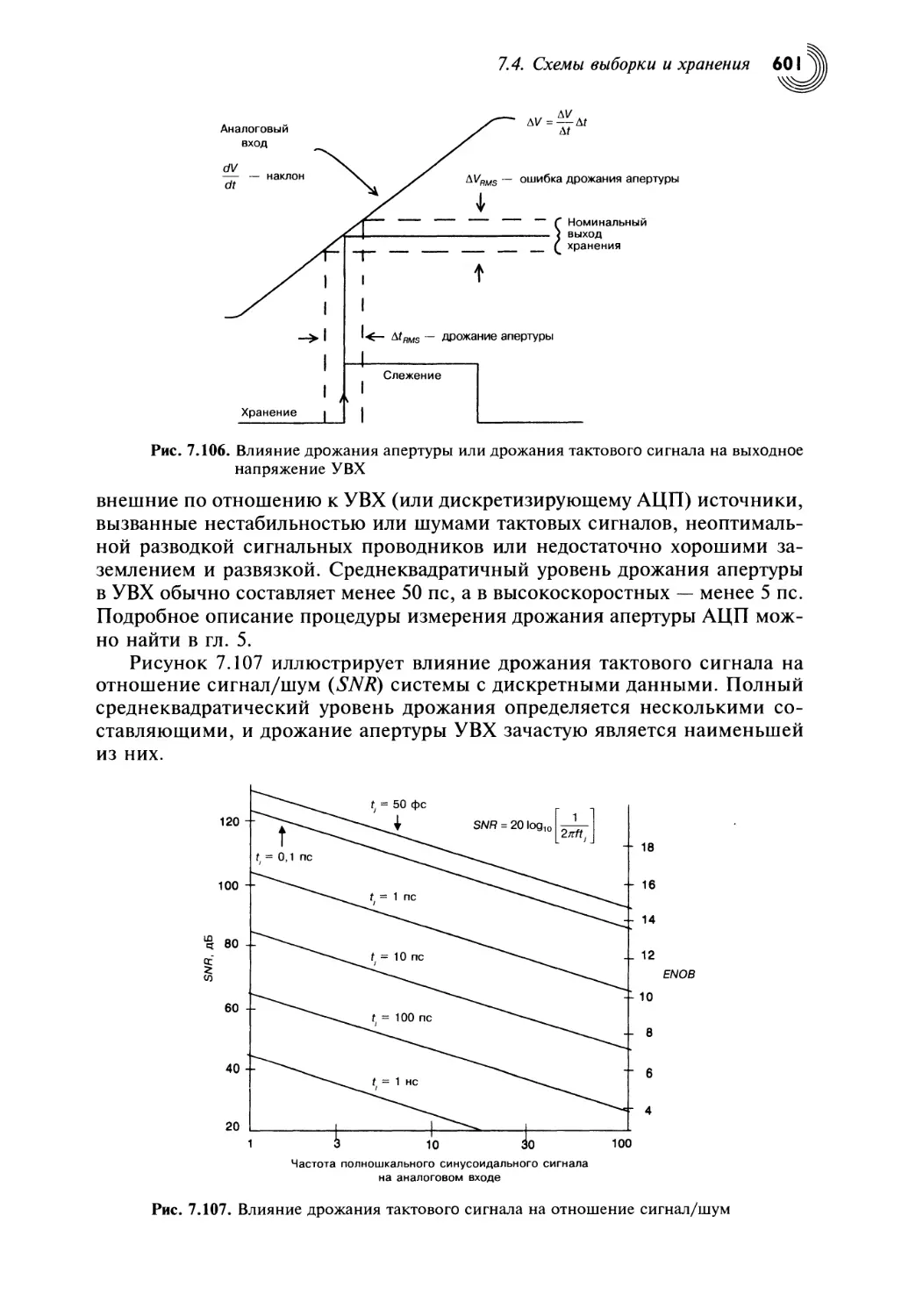
Основные принципы работы УВХ................................... 596
Характеристики режима слежения................................... 597
Характеристики режима перехода от выборки к хранению............. 598
Характеристики режима хранения ...................................602
Характеристики в режиме перехода от хранения к выборке............605
Архитектуры УВХ...................................................605
Внутренние УВХ ИС АЦП ........................................... 608
Применение УВХ....................................................611
Список литературы к 7.4. Схемы выборки и хранения.....................613
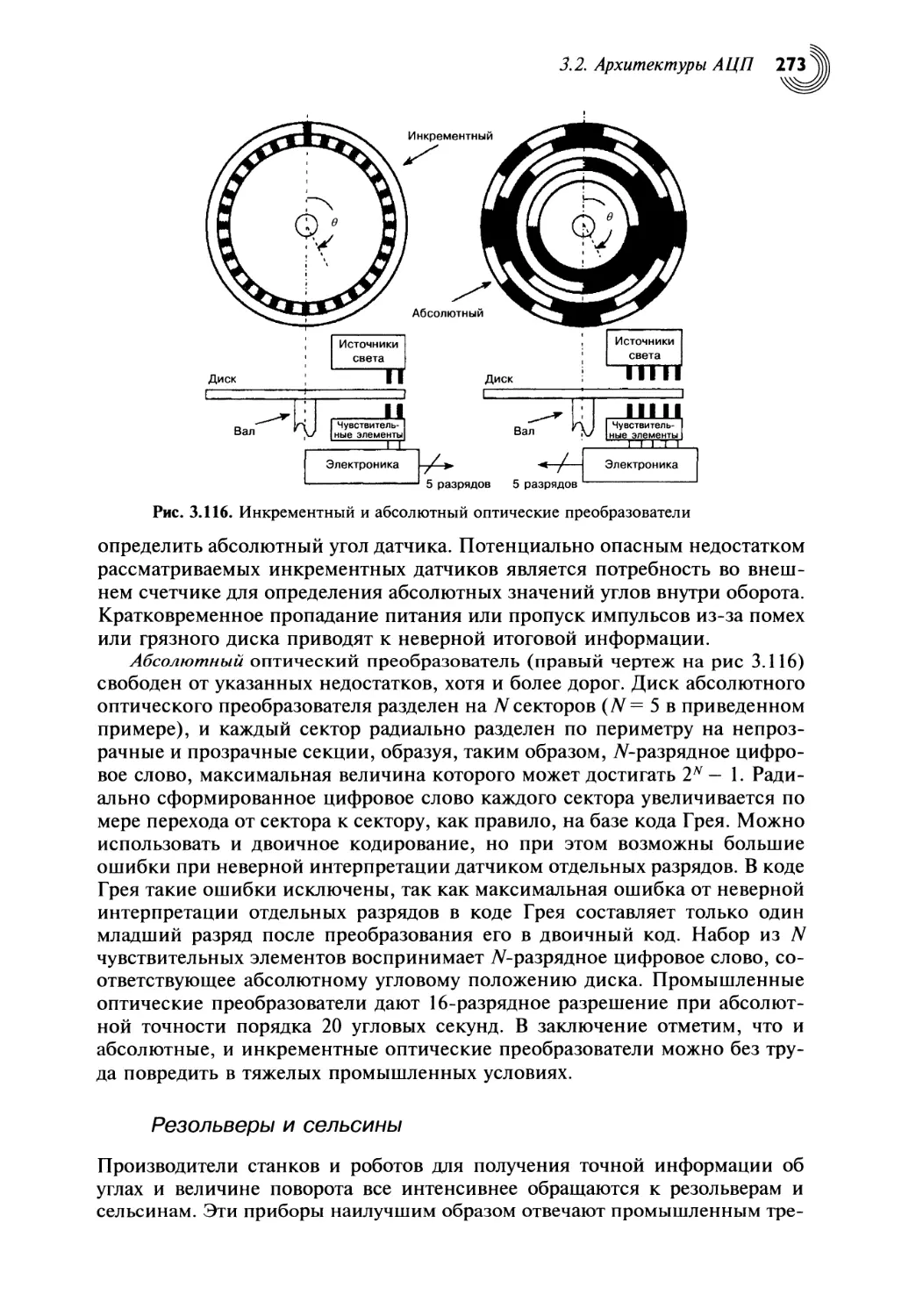
Глава 8. ПРИМЕНЕНИЕ ПРЕОБРАЗОВАТЕЛЕЙ ДАННЫХ..............................615
8.1. Прецизионные измерения и преобразование сигналов датчиков........615
Введение..........................................................615
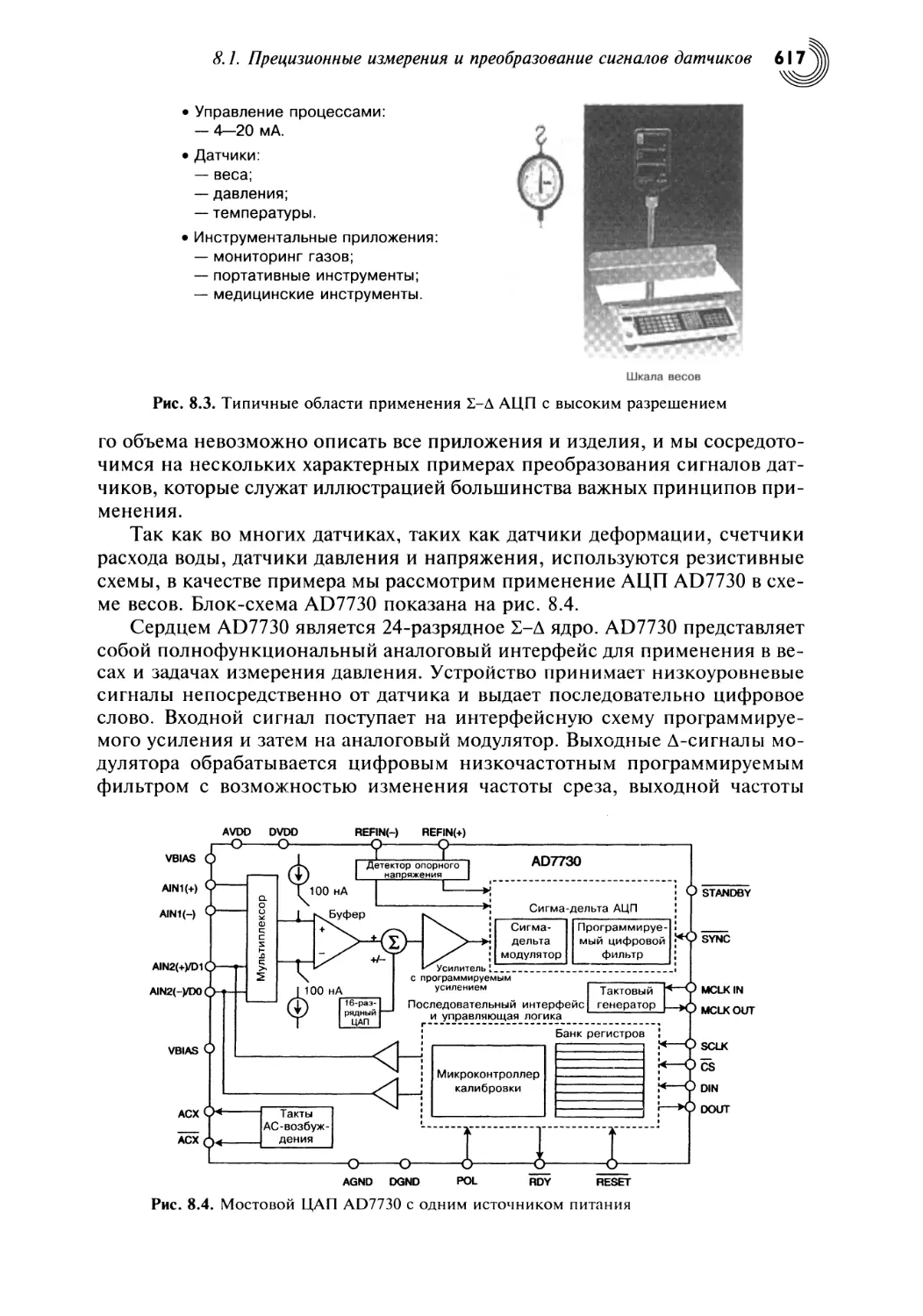
Применение прецизионных измерительных Е-Д АЦП.....................616
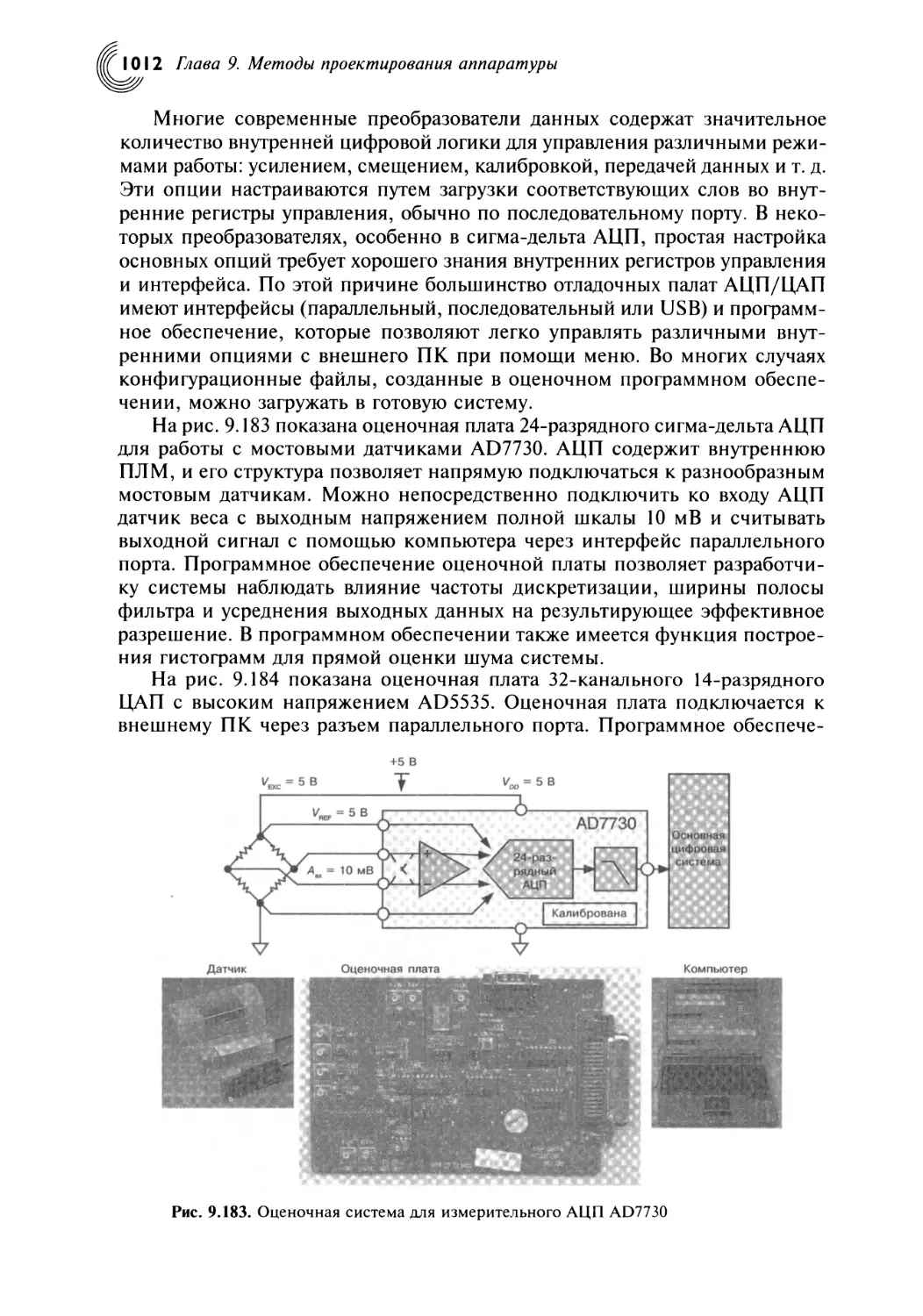
Анализ проекта весов на базе AD7730.............................. 620
Термопара с AD7793 .............................................. 626
Прямые цифровые измерения температуры.............................628
Датчики температуры микропроцессорных подложек....................633
Применение АЦП в ваттметрах.......................................636
Список литературы к 8.1. Прецизионные измерения и преобразование
сигналов датчиков.....................................................639
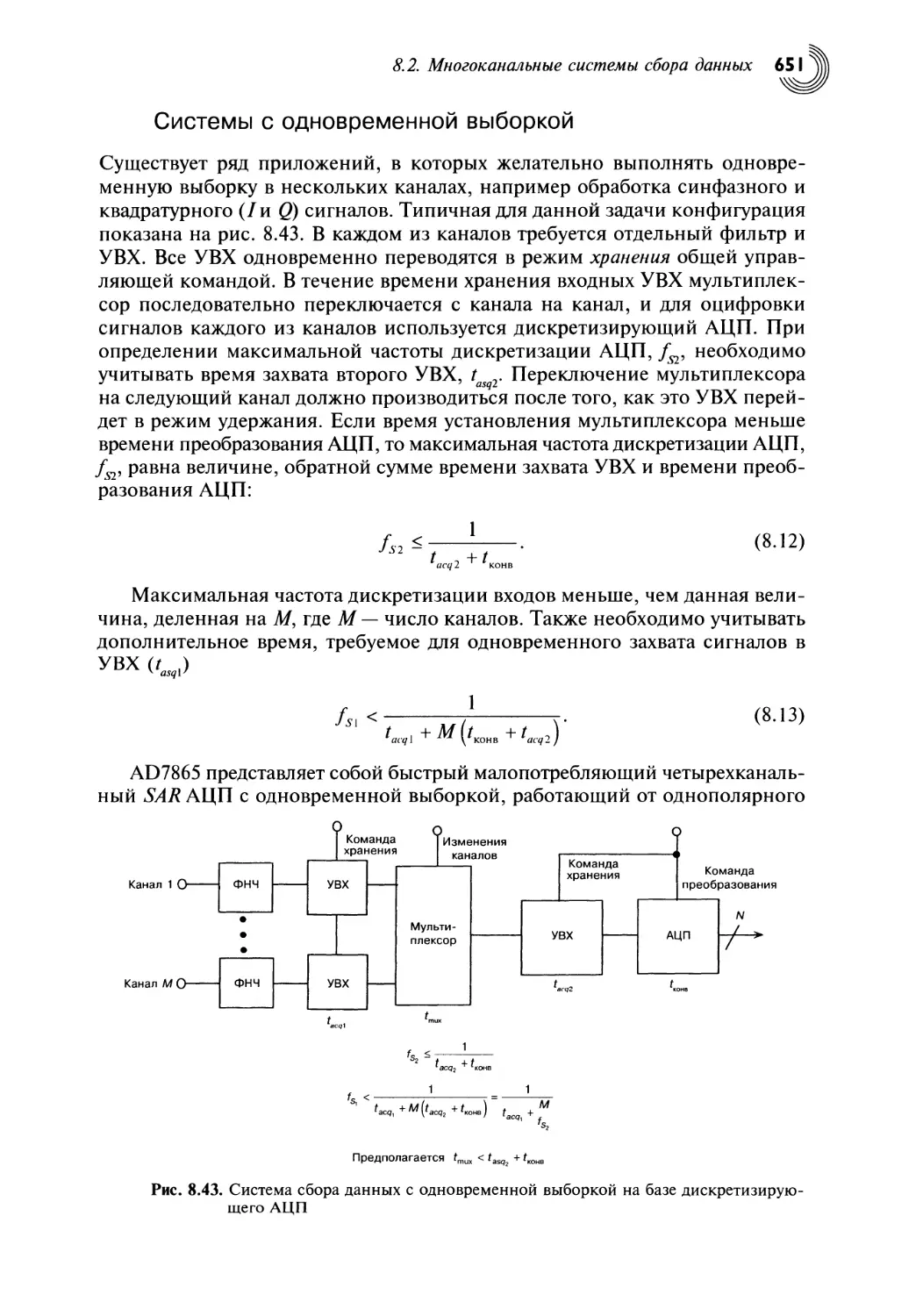
8.2. Многоканальные системы сбора данных (Уолт Кестер)................639
Конфигурации систем сбора данных................................. 639
Мультиплексирование.............................................. 640
Фильтрация в системах сбора данных................................643
Системы сбора данных на кристалле ............................... 646
Мультиплексирование входов Е-Д АЦП................................648
Системы с одновременной выборкой................................. 651
Системы распределения данных..................................... 653
Распределение данных при помощи схем с выборкой и бесконечным
хранением.........................................................658
Список литературы к 8.2. Многоканальные системы сбора данных......... 661
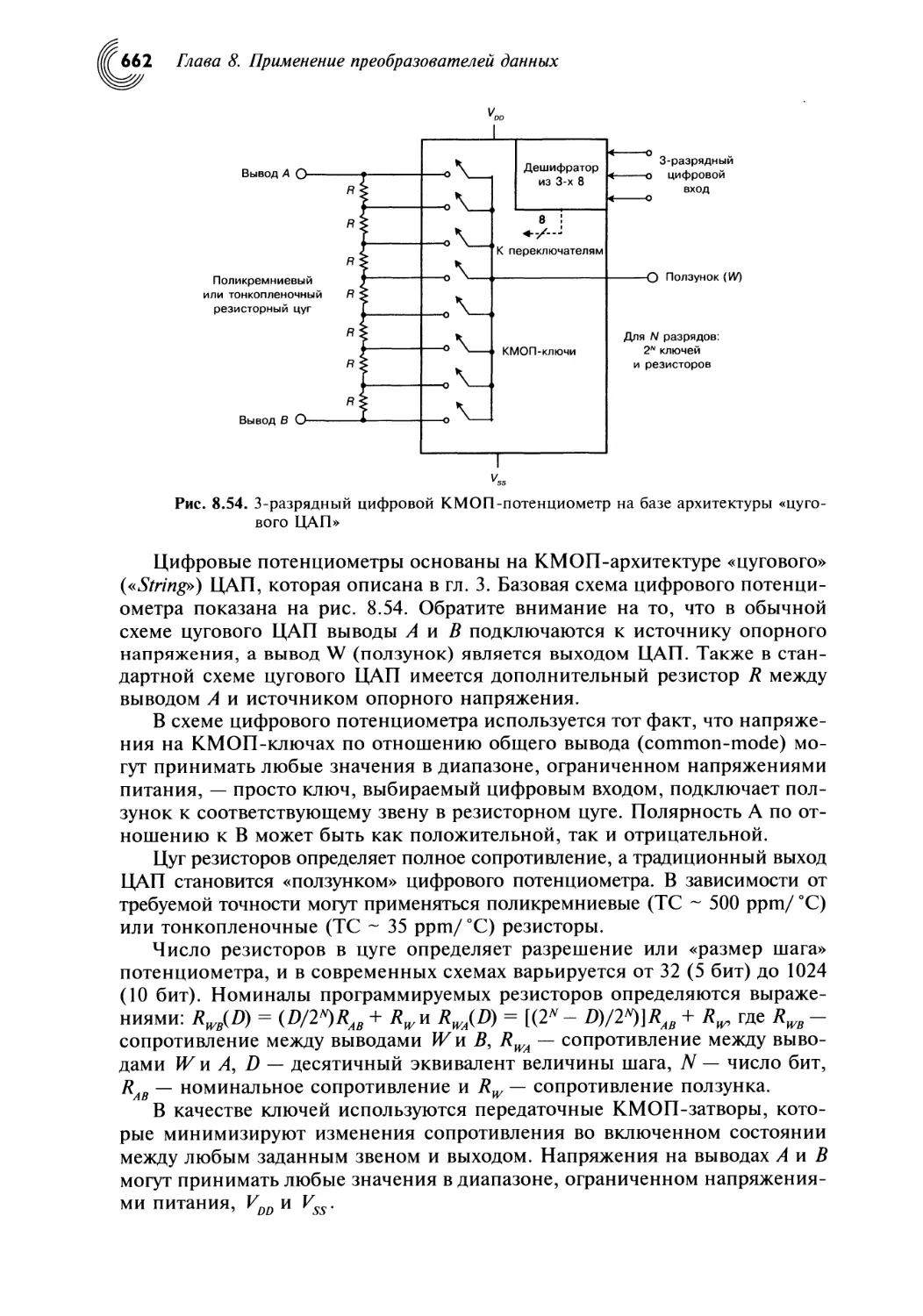
8.3. Цифровые потенциометры (Уолт Кестер, Уолт Хайнцер)...............661
Введение..........................................................661
Современные цифровые потенциометры в миниатюрных корпусах.........663
Цифровые потенциометры с энергонезависимой памятью................664
Однократно программируемые (ОТР) цифровые потенциометры.......... 665
Характеристики цифровых потенциометров по переменному току........667
Примеры применения .............................................. 668
Резюме............................................................669
Список литературы к 8.3. Цифровые потенциометры.......................670
8.4. Цифровой звук (Уолт Кестер)......................................671
Введение..........................................................671
Требования к частоте дискретизации и THD + N для цифрового звука..673
Общие тенденции в аудио АЦП и ЦАП.................................676
Речевые кодеки....................................................678
Высококачественные аудио АЦП и ЦАП в раздельных корпусах .........679
Содержание
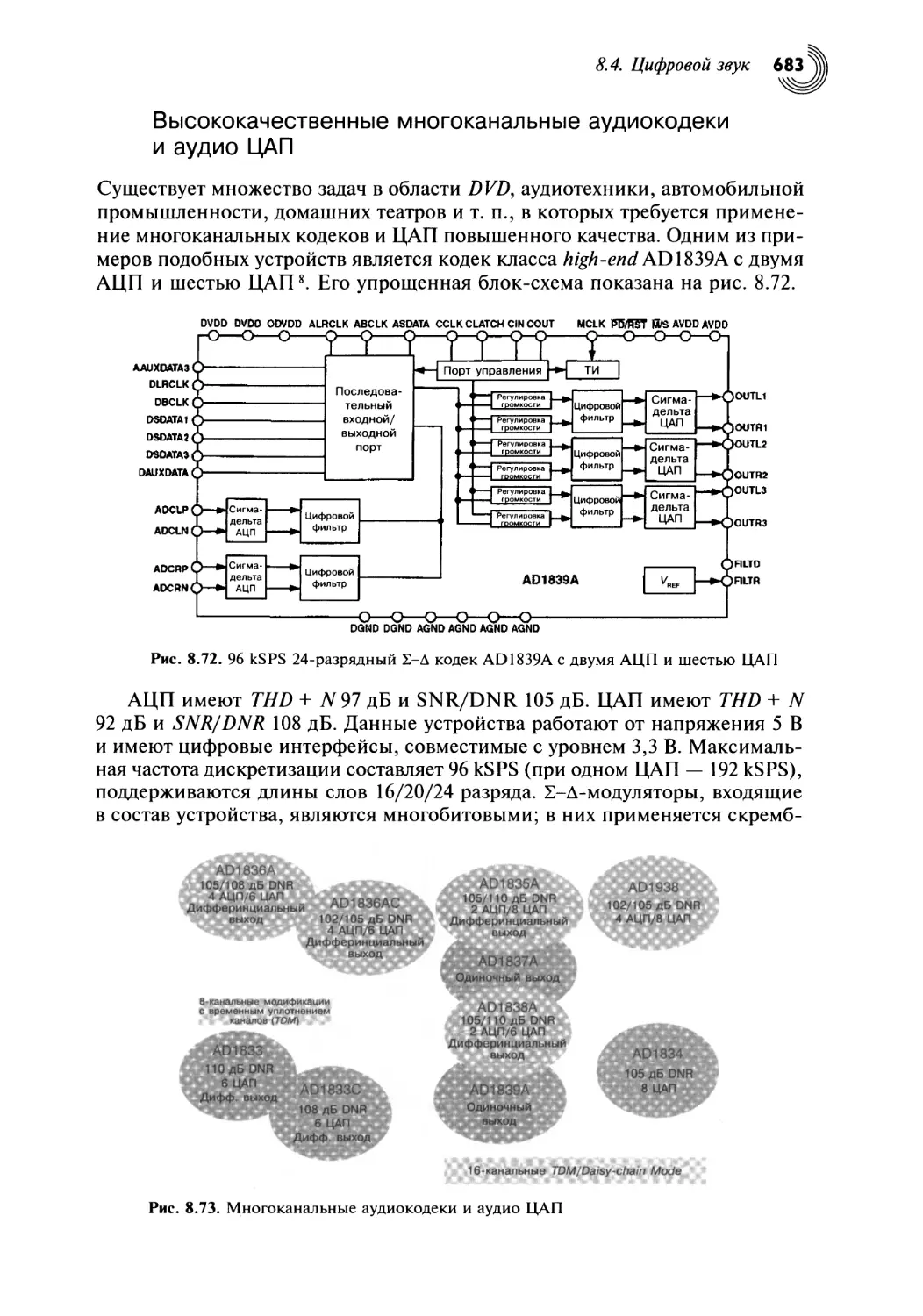
Высококачественные многоканальные аудиокодеки и аудио ЦАП.........683
Преобразователи частоты дискретизации.............................684
Список литературы к 8.4, Цифровой звук...............................687
8.5. Цифровое видео и цифровая электроника дисплеев (Уолт Кестер)....687
Цифровое видео....................................................687
Электронные компоненты дисплеев ..................................697
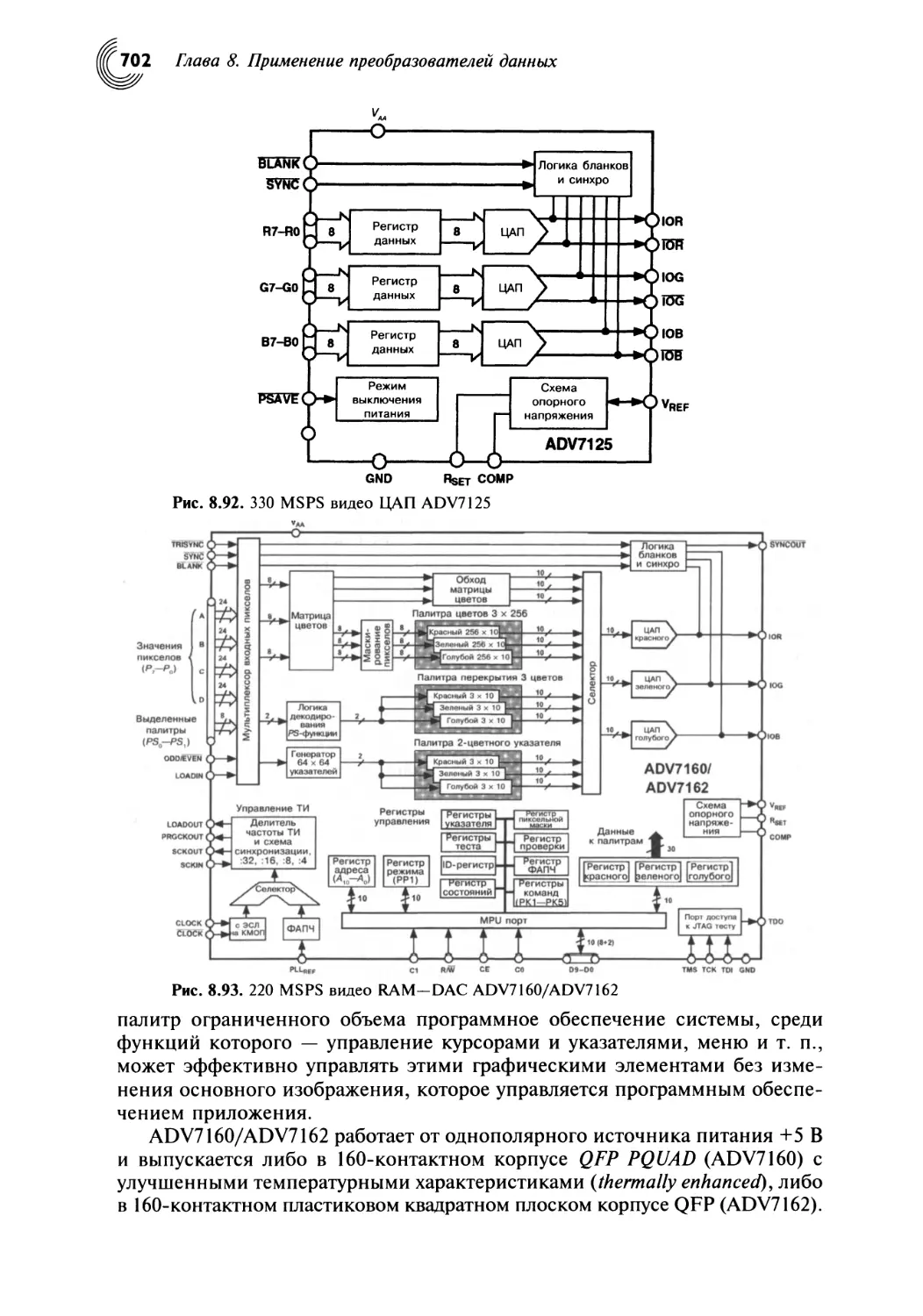
Электроника плоских дисплеев..................................... 703
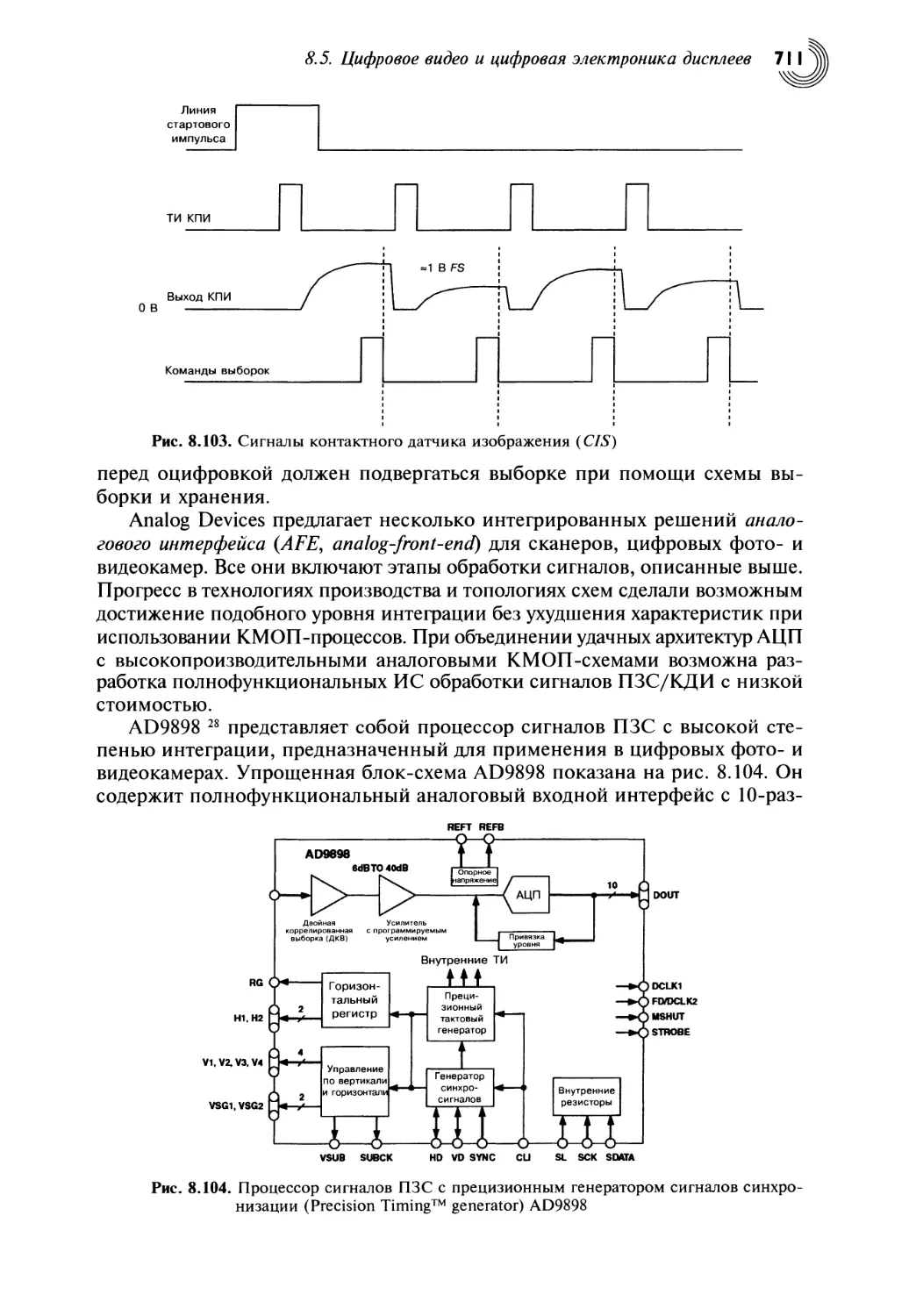
Электроника ПЗС...................................................706
Устройства оцифровки сенсорных экранов........................... 712
Список литературы к 8.5. Цифровое видео и цифровая электроника
дисплея..............................................................716
8.6. Программное радио и дискретизация на промежуточной частоте
(Уолт Кестер)........................................................717
Введение..........................................................717
Развитие беспроводного радио......................................718
АЦП с дискретизацией на ПЧ в режиме разделения во времени с цифровыми
пост-процессорами (Марк Луни).....................................758
Список литературы к 8.6. Программное радио и дискретизация
на промежуточной частоте.............................................767
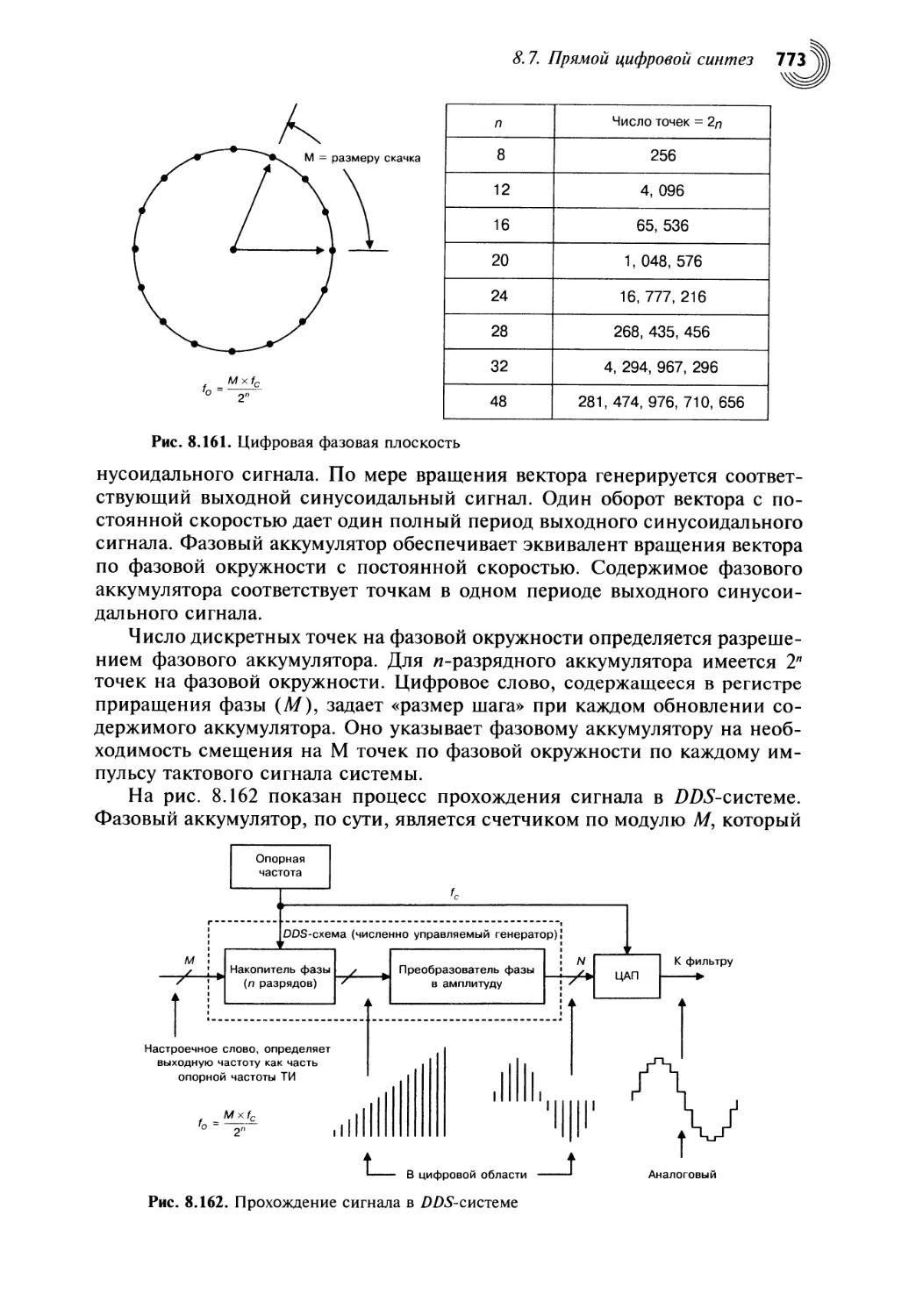
8.7. Прямой цифровой синтез (Уолт Кестер)............................769
Введение в технологию DDS........................................ 769
Наложение в /)£)5-системах........................................774
Частотное планирование в /)7)5-системах...........................775
Современные интегрированные Ш)5-системы...........................777
Список литературы к 8.7. Прямой цифровой синтез......................785
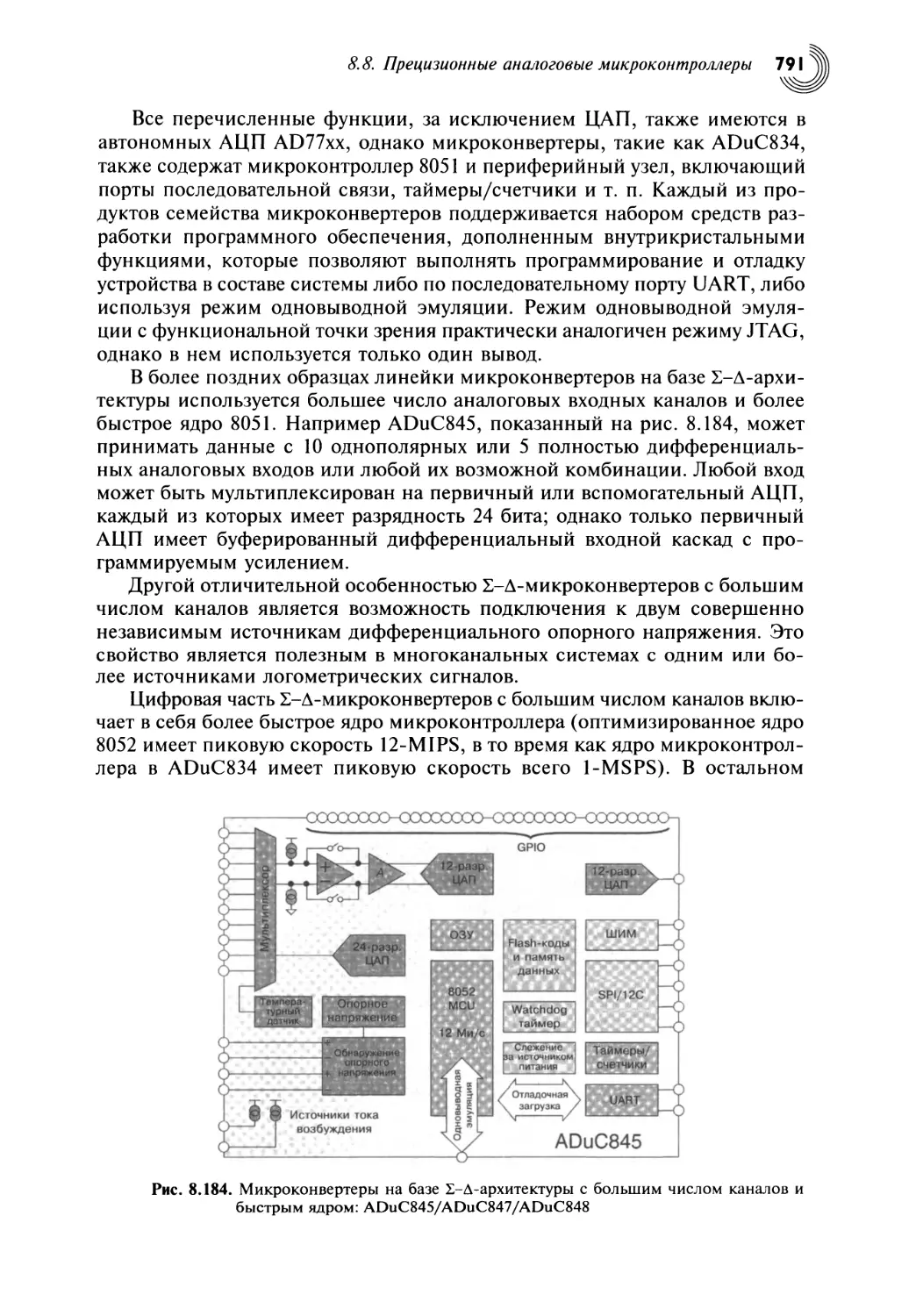
8.8. Прецизионные аналоговые микроконтроллеры (Грэйсон Кинг).........786
Введение......................................................... 786
Характеристики семейства микроконвертеров.........................787
Некоторые примеры применения Z-Д-микроконвертеров.................793
Микроконвертеры ADuC7xxx на базе ядра процессора ARM7T............797
Список литературы к 8.8. Прецизионные аналоговые микроконтроллеры....800
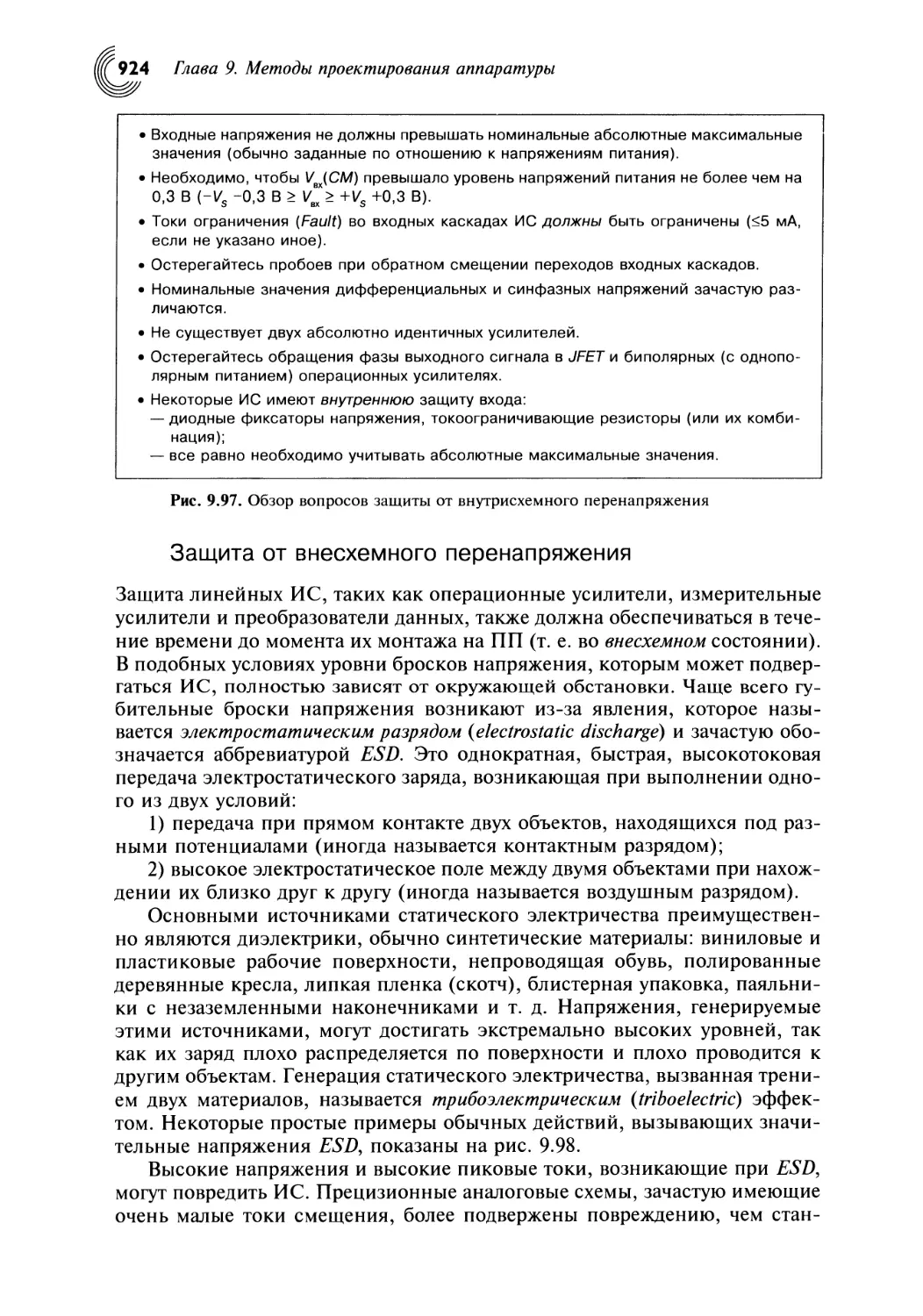
Глава 9. МЕТОДЫ ПРОЕКТИРОВАНИЯ АППАРАТУРЫ................................801
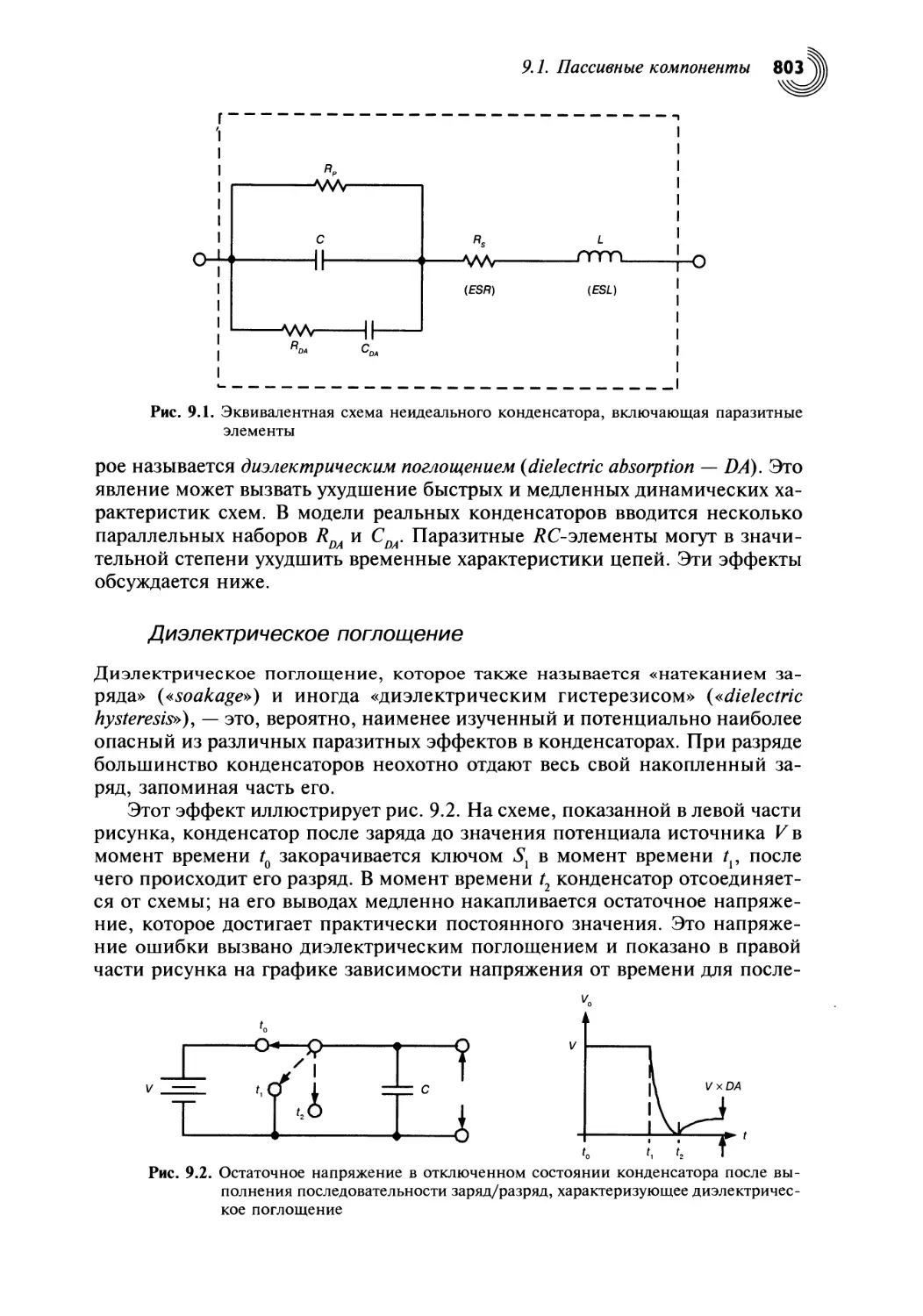
9.1. Пассивные компоненты
(Джеймс Брайант, Уолт Джанг, Уолт Кестер) ...........................801
Введение......................................................... 801
Конденсаторы......................................................802
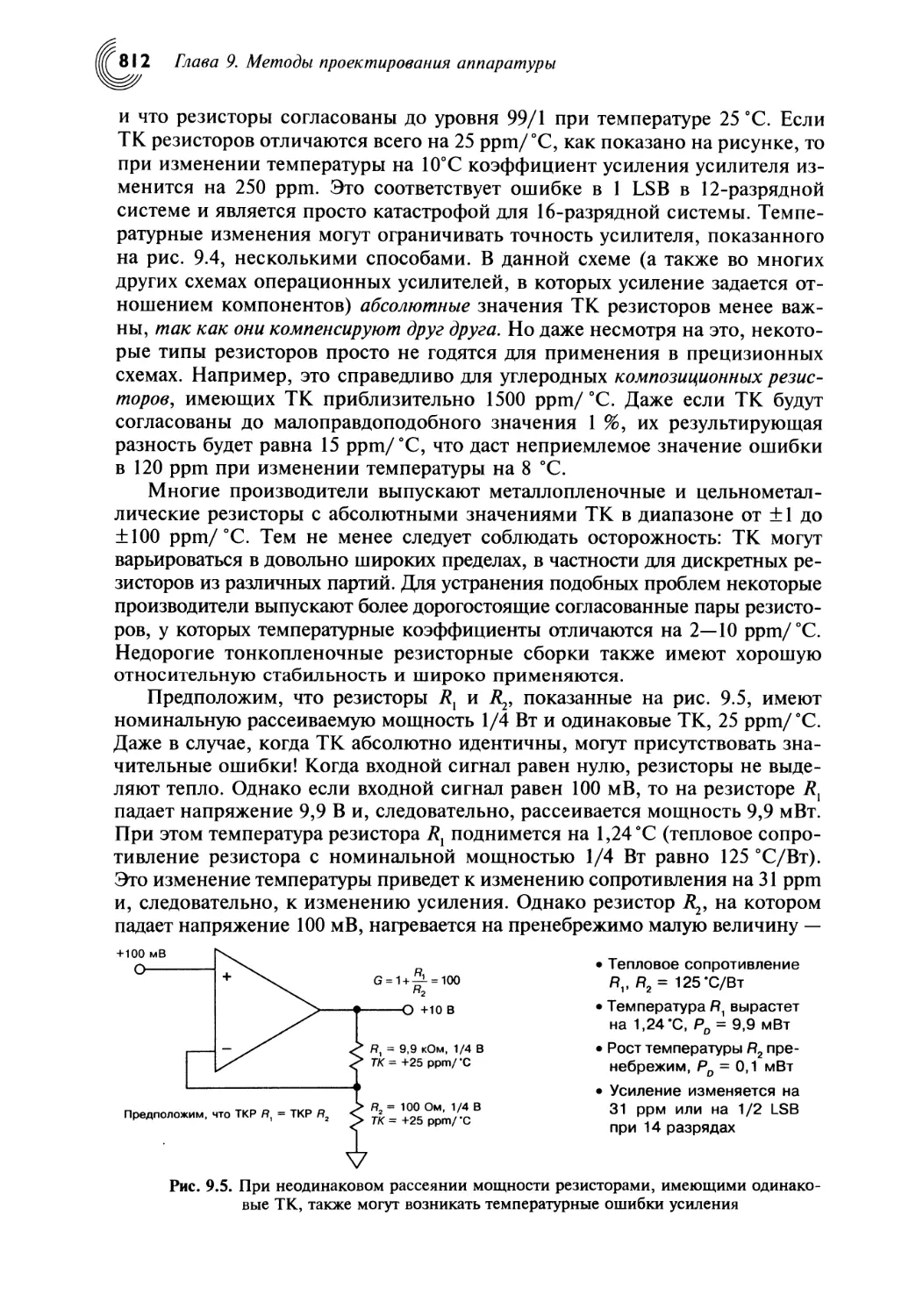
Резисторы и потенциометры........................................ 811
Индуктивность.................................................... 821
Список литературы к 9.1. Пассивные компоненты........................827
9.2. Вопросы конструирования печатных плат
(Джеймс Брайант, Уолт Кестер, Уолт Джанг) ...........................828
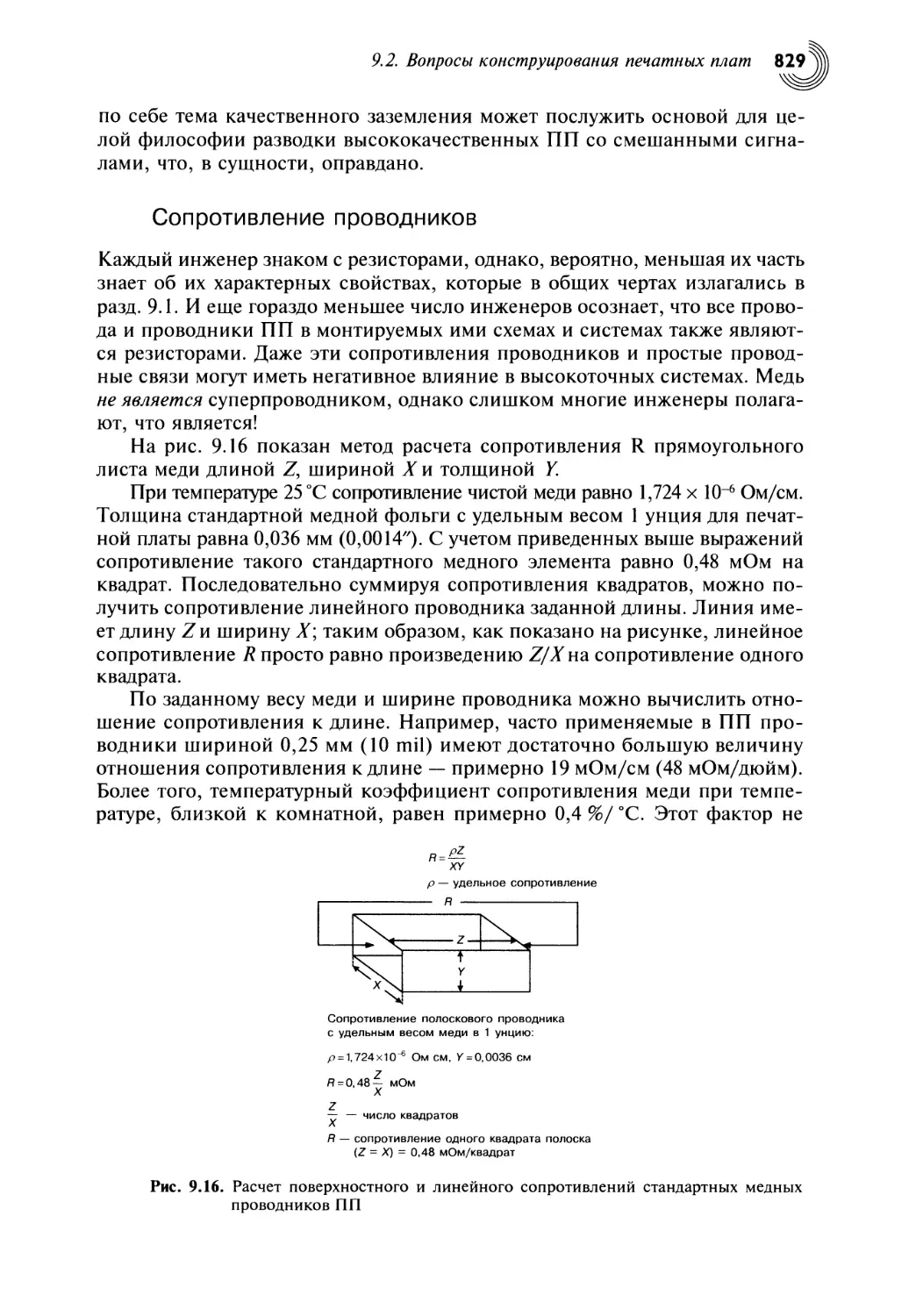
Сопротивление проводников........................................ 829
Падение напряжения на сигнальных проводниках — обратная связь
Кельвина......................................................... 830
Обратные сигнальные токи......................................... 831
Заземление в системах со смешанными аналого-цифровыми сигналами
(Уолт Кестер, Джеймс Брайант, Майк Бирн) ........................ 833
Некоторые общие правила разводки ПП для систем
со смешанными сигналами.......................................... 849
Скин-эффект...................................................... 851
Линии передачи (длинные линии)....................................852
Будьте внимательны к разрывам в заземляющих поверхностях......... 853
Методы изоляции заземления....................................... 854
Содержание 9
Статические эффекты ПП............................................ 857
Динамические эффекты ПП........................................... 862
Список литературы к 9.2. Вопросы контруирования печатных плат..........867
9.3. Системы «аналогового» питания (Уолт Джанг, Уолт Кестер)...........868
ИС линейных стабилизаторов........................................ 869
Некоторые основы линейных стабилизаторов напряжения .............. 870
Проходные элементы................................................ 872
±15 В стабилизатор на базе ИС с регулируемым напряжением.......... 873
Архитектуры стабилизаторов с низким падением напряжения............874
Преобразователи напряжения с подкачкой заряда..................... 879
Преобразователи напряжения на принципе подкачки зарядов
со стабилизированным выходом...................................... 881
Линейные постстабилизаторы для импульсных источников питания...... 882
Заземление линейных и импульсных стабилизаторов................... 884
Снижение шумов и фильтрация напряжения источника питания.......... 887
Список литературы к 9.3. Системы «аналогового» питания.................898
9.4. Защита от перенапряжения (Уолт Джанг, Уолт Кестер,
Джеймс Брайант, Джо Бакстон, Вес Фримэн)...........................899
Защита от внутрисхемного перенапряжения .......................... 899
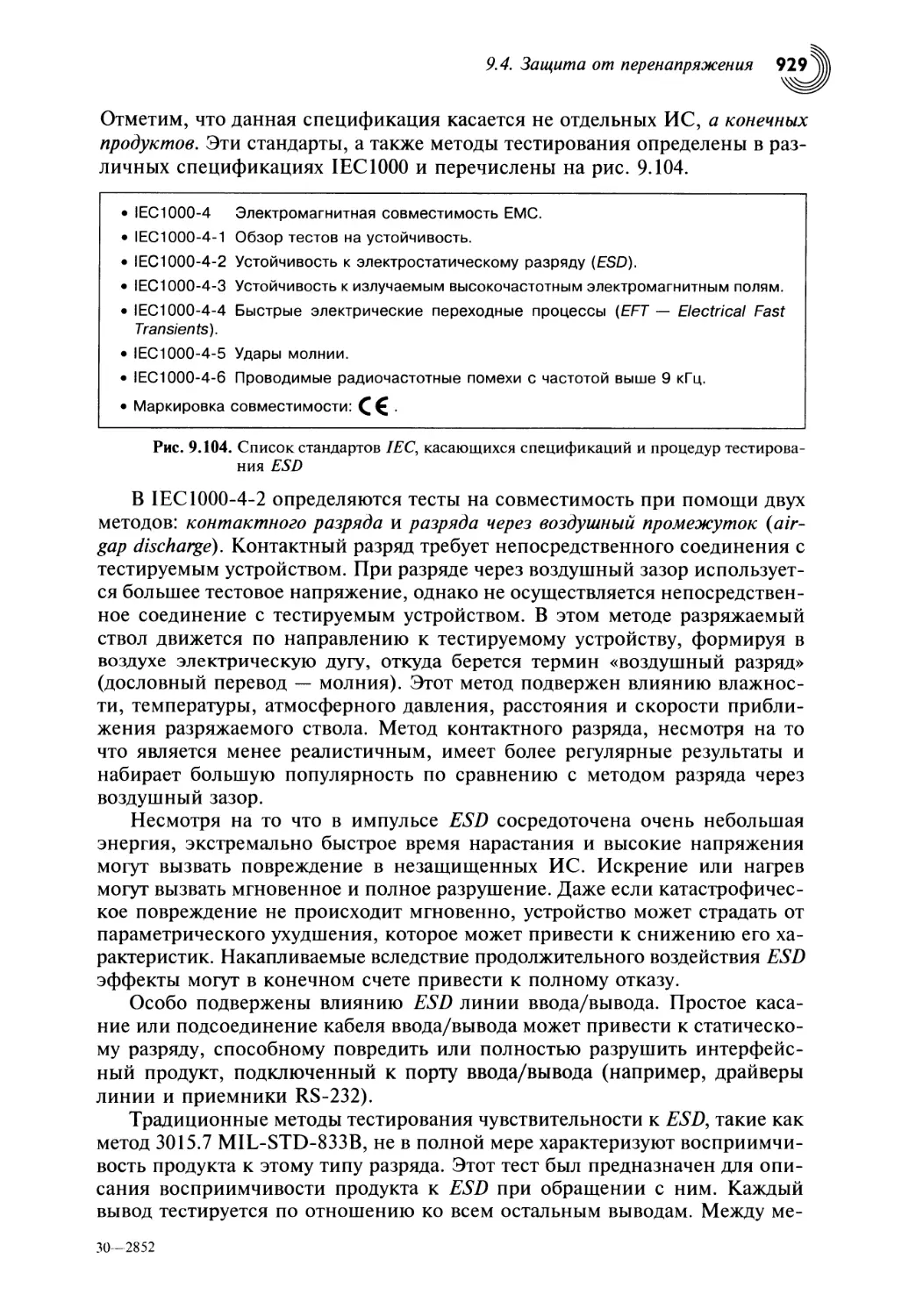
Защита от внесхемного перенапряжения...............................924
Список литературы к 9.4. Защита от перенапряжения......................931
9.5. Управление тепловым режимом (Уолт Джанг)..........................932
Основные тепловые характеристики...................................933
Отвод тепла........................................................934
Список литературы к 9.5. Управление тепловым режимом...................943
9.6. Вопросы электромагнитных/радиочастотных помех (Джеймс Брайант,
Уолт Джанг, Уолт Кестер)...........................................944
Механизмы электромагнитных/радиочастотных помех................... 945
Список литературы к 9.6. Вопросы электромагнитных/радиочастотных
помех..................................................................982
9.7. Интерфейс с низковольтной логикой (Уолт Кестер, Этан Бордо,
Йоханнес Хорват, Кэтрин Редмонд, Ева Мерфи)...........................984
Устойчивость к повышенному напряжению и совместимость по напряжению ... 988
Соединение 5-вольтовых и 3,3-вольтовых систем с помощью «шинных
переключателей» на л-МОП полевых транзисторах..................... 989
Интерфейс между логиками с питанием 3,3 и 2,5 В....................992
Интерфейсы 3,3 В/2,5 В; 3,3 В/1,8 В; 2,5 В/1,8 В...................994
Применение шинных переключателей для горячей замены и горячего
подключения........................................................997
Устойчивость и совместимость по напряжению, обеспечиваемая внутренними
средствами схемы...................................................998
Список литературы к 9.7. Интерфейс с низковольтной логикой............ 1 000
9.8. Макетирование и создание прототипов (Уолт Кестер,
Джеймс Брайант, Уолт Джанг)......................................... 1000
Создание прототипов — «мертвых жуков»............................ 1001
Макетирование на Solder-Mount.................................... 1004
Создание прототипов на фрезерованных ПП.......................... 1005
Остерегайтесь панелек!............................................ 1007
Некоторые дополнительные вопросы, касающиеся создания прототипов.. 1008
Оценочные платы.................................................. 1008
Оценочные платы общего назначения для операционных усилителей
в середине 1990-х годов.......................................... 1009
Резюме........................................................... 1014
Список литературы к 9.8. Макетирование и создание прототипов......... 1015
БЛАГОДАРНОСТИ
Огромное спасибо техническому персоналу Analog Devices из отделов
разработки, маркетинга и внедрения готовых устройств, который обеспе-
чил поддержку данного проекта. Особая благодарность отдельным авторам,
чьи имена появляются в книге в начале соответствующих глав.
Дэн Шеинголд предоставил свой классический труд 1986 года — спра-
вочник «Аналого-цифровое преобразование». С того времени книга Дэна
стала стандартом в технической литературе не только для журнала Analog
Dialogue, но и для многих книг, выпускаемых Analog Devices.
Я должен поблагодарить также Бреда Браннона, Уэз Фриман, Уолта
Джанга, Боба Марвина, Ханка Замбахлена и Скота Уэйна, который испра-
вил много неточностей в материале.
Джудит Доувилл подготовила алфавитный указатель, а также сделала
много полезных замечаний в рукописи.
Я должен поблагодарить ADI management, особенно Дейв Кресс, кото-
рая вдохновляла и поддерживала проект.
Уолт Кестер,
май 2004 года
Главный отдел внедрения
Analog Devices
Вопросы, замечания и комментарии можно направлять по адресу:
Linear.Apps@analog.com, указав в теме письма «Data Conversion Handbook».
ГЛАВА 1
ИСТОРИЯ
ПРЕОБРАЗОВАТЕЛЕЙ
УОЛТ КЕСТЕР
Предисловие к главе
На написание этой главы автора вдохновило исследование истории созда-
ния операционных усилителей Уолтом Юнгом в гл. 1 своей книги «Приме-
нение операционных усилителей»1. При раскрытии темы автор ссылается на
сотни интересных статей, патентов и т. п. Если рассматривать их все как
единое целое, они рисуют картину развития операционных усилителей —
начиная с очерка Гарольда Блэка о ранних усилителях с обратной связью и
заканчивая современными высокопроизводительными ОУ на ИС.
Мы старались достичь подобного при раскрытии истории создания пре-
образователей. Рассматривая масштабы этого намерения, мы столкнулись с
проблемой организации материала. Вместо того чтобы охватывать весь исто-
рический материал в одной главе, мы часть исторических сведений, относя-
щихся к архитектуре преобразователей, включили в гл. 3 (Архитектуры пре-
образователей данных) наряду с описанием отдельных архитектур. Подобно
этому, гл. 4 (Технология преобразователей) включает большинство значимых
событий, относящихся к технологическому процессу создания преобразо-
вателей. Глава 5 (Тестирование преобразователей данных) затрагивает основ-
ные исторические этапы, касающиеся их тестирования.
При раскрытии сущности каждой главы нам придется упоминать одни
и те же исторические данные несколько раз по ходу повествования, следо-
вательно, читатель должен осознавать, что эти повторы сделаны намеренно
и не являются результатом небрежного редактирования.
1.1. Ранняя история
Сейчас трудно определить, когда точно был создан первый преобразователь
и какую форму он имел. Самым первым бинарным ЦАП, известным авто-
рам этой книги и официально отраженным в документах, является гидрав-
лический ЦАП, а не электронный. В Турции, во времена господства Отто-
манской империи, существовала проблема в сфере общественного водо-
снабжения. Для измерения при раздаче воды использовались сложные
системы. Одна из этих систем показана на рис. 1.1 и датирована XVIII веком.
Примером реальной водораздачи, использующей эту измеряющую систему,
была дамба Махмуда II, построенная в начале XIX века вблизи Стамбула2.
Измерительная система использовала резервуар (на схеме помечен как вер-
Глава 1. История преобразователей
Уровень
Патрубок
Слив
Головная
цистерна
воды
Части отмеряющей системы
б
Главная система:
заметьте - слив и патрубок
на разных уровнях
а
Adapted from:
Kazim Qegen, «Sinan's Water
Supply System in Istanbul,»
Istanbul Technical University/
Istanbul Water and Sewage
Administration, Istanbul Turkey,
1992-1993, pp. 165-167.
Вид сверху на детали отмеряющей
системы, содержащие двоично
взвешенные патрубки
Рис. 1.1. Двоично-взвешенная система измерения воды, относящаяся к началу
XVIII века
хняя, головная, цистерна), в котором поддерживался постоянный уровень
(соответствующий опорному потенциалу) при помощи водослива. По этому
водосливу вода сочилась тонкой струйкой (критерием являлся поток, спо-
собный сдвинуть соломинку). Этот пример проиллюстрирован на рис. 1.1, а.
Выход воды из головной цистерны контролировался затворами двоично взве-
шенных отверстий патрубков, погруженных в воду на 96 мм ниже поверхно-
сти воды. Слив из отверстий поступал на выход, как показано на рис. 1.1, б.
Размеры отверстий патрубков соответствовали потоку двоично кратному
основной единице 1 liile (равной 36 л/мин или 52 м3/день). Патрубок, соот-
ветствующий 8 liile, назывался «sekizli liile», 4 liile — «dortlii liile», l/4 liile —
«kamus», l/8 liile называлась «masura», a 732 liile — «uvaldiz». Более детально
измеряющая система на основе двоично-взвешенных патрубков показана
на рис. 1.1, в. Функционально эта система представляет собой 8-разрядный
ЦАП, с ручным (без сомнения, не цифровым) вводом и «мокрым» выходом
и, вероятно, является самым древним ЦАП в мировой истории.
Возможно, существуют и другие примеры ранних преобразователей, но
сейчас мы обратим наше внимание на те, что базируются на электронных
технологиях.
Вероятно, единственной самой значительной движущей силой развития
электронных преобразователей на протяжении многих лет была система
коммуникаций. Телеграф привел к созданию телефона и формированию
Bell System. Распространение телеграфа и телефона и возросшее требова-
ние к емкости каналов связи привели к необходимости уплотнения более
чем одного канала в одну пару медных проводов. К этому времени времен-
ное уплотнение каналов (TDM) достигло определенной популярности, а
частотное уплотнение каналов (FDM), основанное на использовании раз-
личных несущих частот, получило уже широкое применение.
/. 1. Ранняя история
Импульсно-кодовая модуляция
ИКМ (РСМ) стала причиной пере-
ключения всеобщего внимания на преобразователи, и с этого момента на-
чалось их эволюционное развитие.
Материал для последующих разделов был взят из многих источников, но
наиболее известным и значимым является классическая работа К.В. Каттер-
моула «Принципы импульсно-кодовой модуляции» 1969 года3. В ней отражен
не только исторический материал по ИКМ, но и материал по истории со-
здания преобразователей. Кроме того, помимо исторического материала,
книга содержит прекрасный обучающий материал по теории дискретиза-
ции, по типам архитектур преобразователей и многим другим темам, отно-
сящимся к тематике повествования. Приведена обширная библиография,
содержащая важные публикации и патенты, определившие основные дос-
тижения. Кроме книги Каттермоула, внимание автора привлекла серия книг,
опубликованных Белл Системз под одним заголовком «А History of Engineering
and Science in the Bell System»4-8. Эти книги от Белл Системз являются
замечательным источником для получения дополнительного материала, от-
носящегося к сфере коммуникаций.
Ранние годы: от телеграфа до телефона
Согласно Каттермоулу3, ранние упоминания об электрическом телегра-
фе относятся к 1753 году, но реальное его развитие началось в период
1825—1875 годов. Были исследованы различные идеи о двоичных и троич-
ных числах, коды с длиной, обратно пропорциональной вероятности появ-
ления (Шиллинг, 1925), рефлексный двоичный код (Элиша Грей, 1878 —
сейчас носит название код Грея), цепные коды (Baudot, 1882). С распрост-
ранением телеграфа возникла необходимость в увеличении емкости и уп-
лотнении более одного канала в одной паре проводов. Рисунок 1.2 показы-
вает типичный телеграфный ключ и некоторые вехи истории телеграфа.
Изобретение телефона в 1875 году Александром Грехэмом Бэллом9’ 10
было, вероятно, самым значительным событием во всей истории системы
коммуникаций. Интересно отметить, что Бэлл в действительности экспе-
риментировал с системой уплотнения телеграфных линий (Бэлл называл
эту систему тональный телеграф), когда он обнаружил возможность пере-
дачи голоса в качестве аналогового сигнала.
• Предложение использования телеграфа: начало в 1753
• Основные достижения в развитии телеграфа: 1825—1875
• Изобретение различных двоичных кодов
• Эксперименты по уплотнению для увеличения емкости канала
• Изобретение телефона: в 1875 году А. Г. Бэлл, работая над проек-
том уплотнения телеграфной линии, изобрел телефон (всего на
два часа позже Бэлла подал заявку на изобретение телефона дру-
гой американец И. Грей. Патент выдали Бэллу.— Примеч. ред.)
• Эволюция:
— Телеграф: цифровой
— Телефон: аналоговый
— Частотное уплотнение канала (FDM): аналоговое
— Импульсно-кодовая модуляция (РСМ): назад к цифровой
Рис. 1.2. О телеграфе
Глава 1. История преобразователей
United States Patent Office.
Рис. 1.3. Телефон
Фрагмент патента США 174,465,
заявленного 14 февраля 1876 г.,
выданного 7 марта 1876 г.
На рис. 1.3 представлена схема из оригинала патента Бэлла, в которой
отражены его основные предложения относительно телефона. Вибрации
звука, воздействующие на передатчик А. заставляют вибрировать мембрану
а. Вибрация а вызывает вибрацию якоря с, которая создает ток в проводе е
при помощи электромагнита Ь. Ток в е создает соответствующие колебания
магнитного поля в электромагните/ таким образом заставляя вибрировать
мембрану приемного устройства /.
Распространение телефона вызвало острую необходимость в увеличе-
нии емкости канала путем его уплотнения. Необходимо отметить, что ис-
следования по возможности уплотнения в телеграфных линиях привели к
зарождению информационной теории. Теория временного уплотнения (TDM )
была предложена в начале 1853 года малоизвестным американским изобре-
тателем М.Б. Фармером, а реализована в 1875 году J.M.E. Baudot при помо-
щи вращающихся механических коммутаторов, использованных в качестве
мультиплексоров.
В 1903 году в патенте Уиларда М. Майнера11 были описаны эксперимен-
ты, использующие электромеханические вращающиеся коммутаторы этого
типа для уплотнения нескольких аналоговых телефонных разговоров в од-
ной паре проводов, как представлено на рис. 1.4. Процитируем его патент,
в котором он говорит, что каждый канал должен иметь отсчеты:
Фрагмент патента США 745,734
У.М. Майнера «Телефонная сис-
тема с уплотнением», заявлен-
ного 26 февраля 1903 г., выдан-
ного 1 декабря 1903 г.
Рис. 1.4. Мультиплексор и демультиплексор телефонных каналов. Одно из ранних
исследований критерия, определяющего темп отсчетов
1.1. Ранняя история
«...на частоте или периодичности, как приближения к частоте или на сред-
ней частоте чистых или более сложных вибраций, которые являются характе-
ристиками голоса или артикуляции речи... при таких высоких прерываниях,
как 4320 в секунду, я обнаружил, что при этом темпе весь действительный
тембр и индивидуальность могут быть успешно воспроизведены в приемном
инструменте. ...я также получил положительные результаты, которые можно
рассматривать как коммерческие, при использовании темпа прерываний, схо-
жего с говорением и составляющего 3500 в секунду, практически это темп
самой высокой ноты, которая характеризует гласные звуки».
При использовании более высокой частоты отсчетов Майнер не обна-
ружил значительного улучшения в качестве передаваемой речи, возможно,
это было вызвано ошибками в его достаточно несовершенной системе. После
Майнера никто не занимался дальнейшими исследованиями в сфере диск-
ретизации и временного уплотнения. Возможной причиной этого можно
назвать отсутствие адекватных электрических компонентов, позволяющих
провести практические эксперименты. Сфера частотного уплотнения была
достаточно изучена и имела необходимые компоненты.
Изобретение импульсно-кодовой модуляции (РСМ)
Импульсно-кодовая модуляция впервые была раскрыта в относительно не-
вразумительном патенте, опубликованном Полом М. Рейни (Paul М. Rainey)
из Western Electric в 1921 году12. В патенте описывается метод передачи
факсимильной информации в закодированной форме по телеграфной ли-
нии с применением 5-разрядной ИКМ. На рис. 1.5 представлена иллюс-
трация из патента (для большей ясности автором добавлены пояснения
к оригиналу).
Рейни предложил просвечивать сфокусированным лучом света прозрач-
ность материала, который необходимо передать. На другой стороне транспа-
Рис. 1.5. Открытие ИКМ: Пол Рейни. Факсимильная телеграфная система. Патент
США 1 608 527 от 20 июля 1921, опубликован 30 ноября 1926
Глава 1. История преобразователей
ранта нужно установить фотоэлемент для сбора света, который создаст ток,
пропорциональный интенсивности света. Ток в свою очередь отклоняет
гальванометр, что приводит в движение другой луч света, активирующий
один из 32 отдельных фотоэлементов, в зависимости от отклонения гальва-
нометра. Выход с каждого отдельного фотоэлемента замыкает соответству-
ющее реле. Выходы от 5 реле объединены таким образом, что вырабатыва-
ют определенный код, присущий местоположению фотоэлемента. Таким
образом, цифровой код генерируется как «М-hot out of 32», что напоминает
современный параллельный /Zas/z-преобразователь. Выходной сигнал с это-
го простого электро-оптико-механичесого параллельного преобразователя
передается последовательно с использованием вращающегося электромеха-
нического коммутатора, называемого распределителем.
Данные передаются последовательно, получаются и преобразуются в
параллельный формат при помощи второго распределителя и ряда реле.
Полученный код определяет комбинацию из реле, которые должны приво-
диться в действие. Выходы реле подсоединяются к соответствующим кон-
тактам резистора, который подключен последовательно с принимающей
лампой. Значение тока в принимающей лампе находится в зависимости от
полученного кода. Как мы видим, интенсивность тока прямо пропорцио-
нальна полученному коду, что является примером цифро-аналогового пре-
образования. Свет с принимающей лампы фокусируется на фоточувстви-
тельной пластине, таким образом исходное изображение воспроизводится,
пройдя квантованную форму.
Патент Рейни иллюстрирует несколько важных понятий: квантование с
использованием параллельного АЦП, передача последовательных данных,
восстановление квантованных данных при помощи ЦАП. Эти идеи явля-
ются основополагающими для ИКМ. Однако его изобретение не вызвало
особого интереса в то время и фактически было забыто инженерами ком-
пании Бэлл Систем. Его патент был обнаружен спустя много лет, когда
появились и другие патенты на изобретение ИКМ.
Математическое обоснование ИКМ
В середине 20-х годов XX века Гарри Найквист изучал телеграфные сигна-
лы. Его целью было определить максимальную частоту сигнала, которая
может проходить по каналу с определенной полосой пропускания. Резуль-
таты его исследований были обобщены в двух классических трудах, выпу-
щенных в 192413 и 1928 годах14 соответственно.
В своей модели телеграфной системы он определил свой сигнал как:
к
В уравнении f(t) — базисная форма импульса, ак — амплитуда &-го импуль-
са, Т — время между импульсами. Телеграф постоянного тока подходит под
эту модель при условии, что f(t) — это прямоугольный импульс с продол-
жительностью Г, а ак равняется 0 или 1.
Простая модель изображена на рис. 1.6. Частота сигнала ограничена
полосой частот (IT) передающего канала.
• До 2И/ импульсов в секунду
можно передать по каналу,
который имеет полосу И/.
• Если из сигнала непрерыв-
но через регулярные интер-
валы в темпе, по крайней
мере вдвое превышающем
максимальную частоту в
спектре сигнала, делаются
отсчеты, то они содержат
всю информацию о сигнале.
Ключ выборок
Рис. 1.6. Классическая теорема Гарри Найквиста
Его вывод заключался в следующем: частота импульсов 1/Т не может
быть увеличена за пределы 2 Wимпульсов в секунду. Другими словами, его
заключение звучит так: если сигнал дискретизирован мгновенными отсчета-
ми с постоянными интервалами, частота которых по крайней мере в 2 раза
превышает самое высокое значение частоты сигнала, то в результате вы-
борка содержит всю информацию об исходном сигнале. Это понятно из
рис. 1.6, где каждый из отфильтрованных прямоугольных сигналов пред-
ставлен в виде sin х/х характеристики. Временной отклик на импульс типа
sinx/x идеального ФНЧ с полосой пропускания РГимеет нули в интервалах,
равных 72И< Следовательно, не будут наблюдаться помехи от соседних
импульсов, если выходная волна дискретизирована в точках, указанных на
схеме, при условии Т> (или более привычно^ > 2PF), и амплитуда
индивидуальных импульсов может быть однозначно восстановлена.
За исключением обобщающей статьи, написанной Хартли в 1928 году15,
до 1948 года не было дополнительных значимых публикаций на тему диск-
ретизации. В 1948 году вышли в свет классические работы, написанные
Шенноном, Беннеттом, Оливером1619, в которых авторы окончательно обо-
сновали теорию ИКМ.
Библиография этих трудов приведена в ссылке рис. 1.7.
• Multiplexing experiments such as Williard Miner. Multiplex Telephony. U.S. Patent 745,
734, filed February 26, 1903, issued December 1, 1903.
• H. Nyquist. Certain Factors Affecting Telegraph Speed. Bell System Technical Journal, Vol. 3,
April 1924, pp. 324—346.
• H. Nyquist. Certain Topics in Telegraph Transmission Theory. A.I.E.E. Transactions, Vol. 47,
April 1928, pp. 617—644.
• P.V.L. Hartley. Transmission of Information. Bell System Technical Journal, Vol. 7, July
1928, pp. 535-563.
• Note: Shannon's classic paper was written in 1948, well after the invention of PCM:
• C.E. Shannon. A Mathematical Theory of Communication. Bell System Technical Journal,
Vol. 27, July 1948, pp. 379—423, and October 1948, pp. 623—656.
• W.R. Bennett. Spectra of Quantized Signals. Bell System Technical Journal, Vol. 27, July
1948, pp. 446—471.
• B.M. Oliver, J.R. Pierce, C.E. Shannon. The Philosophy of PCM. IRE Proceedings. Vol. 36,
November 1948, pp. 1324—1331.
• W.R. Bennett. Noise in PCM Systems. Bell Labs Record, Vol. 26, December. 1948,
pp. 495—499.
Рис. 1.7. Библиография трудов по математическому базису ИКМ
Глава 1. История преобразователей
Патенты Алекса Харли Ривза на ИКМ
До 1937 года частотное уплотнение (FDM), основанное на электронно-ва-
куумной технологии, широко использовалось в телефонной индустрии при
передаче на дальние расстояния. Однако шум и искажения были ограничи-
вающими факторами, влияющими на дальнейшее расширение возможнос-
тей этих систем. Несмотря на то что в микроволновых радиолиниях полосы
пропускания были шире, дополнительный шум и искажения затрудняли их
использование для передачи частотно-уплотненных сигналов.
В начале своей карьеры, в 1920-х годах, Алекс Харли Ривз изучал техно-
логию аналого-временного преобразования, основанного на использова-
нии время-импульсной модуляции (РТМ). Фактически он был первым, кто
начал использовать счетчики для точного определения временной разверт-
ки, используя бистабильные мультивибраторы, изобретенные за несколько
лет до этого Экклесом и Джорданом. Во время импульсной модуляции ам-
плитудой импульса является постоянная величина, а аналоговая информа-
ция содержится в определенном положении импульсов во времени. Эта
технология имела более высокую помехоустойчивость, чем строго аналого-
вая передача.
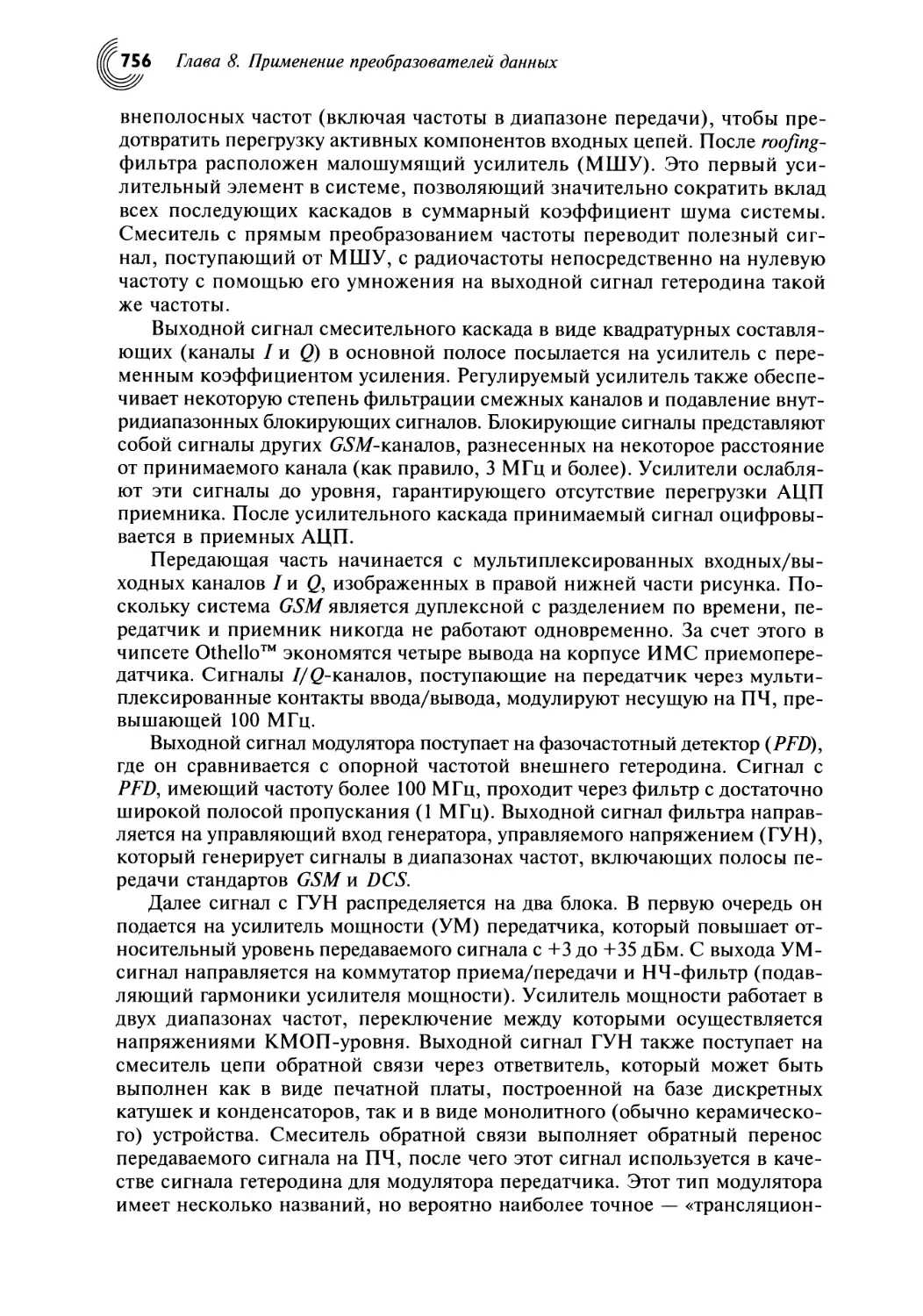
Ривз был близок к изобретению системы, которая произвела бы рево-
люционные изменения в системе коммуникации, но тогда он не пошел
дальше достигнутого им в этой области.
Существовала необходимость в системе, имеющей шумоустойчивую
характеристику подобно той, что существовала в телеграфе. Поэтому в
1937 году Ривз, работая в Парижской лаборатории Международной теле-
фонно-телеграфной корпорации, переосмыслил ИКМ. Самый первый па-
тент по ИКМ был получен Ривзом в Париже. Но сразу же после этого
последовали подобные патенты в Англии и США, в которых упоминался
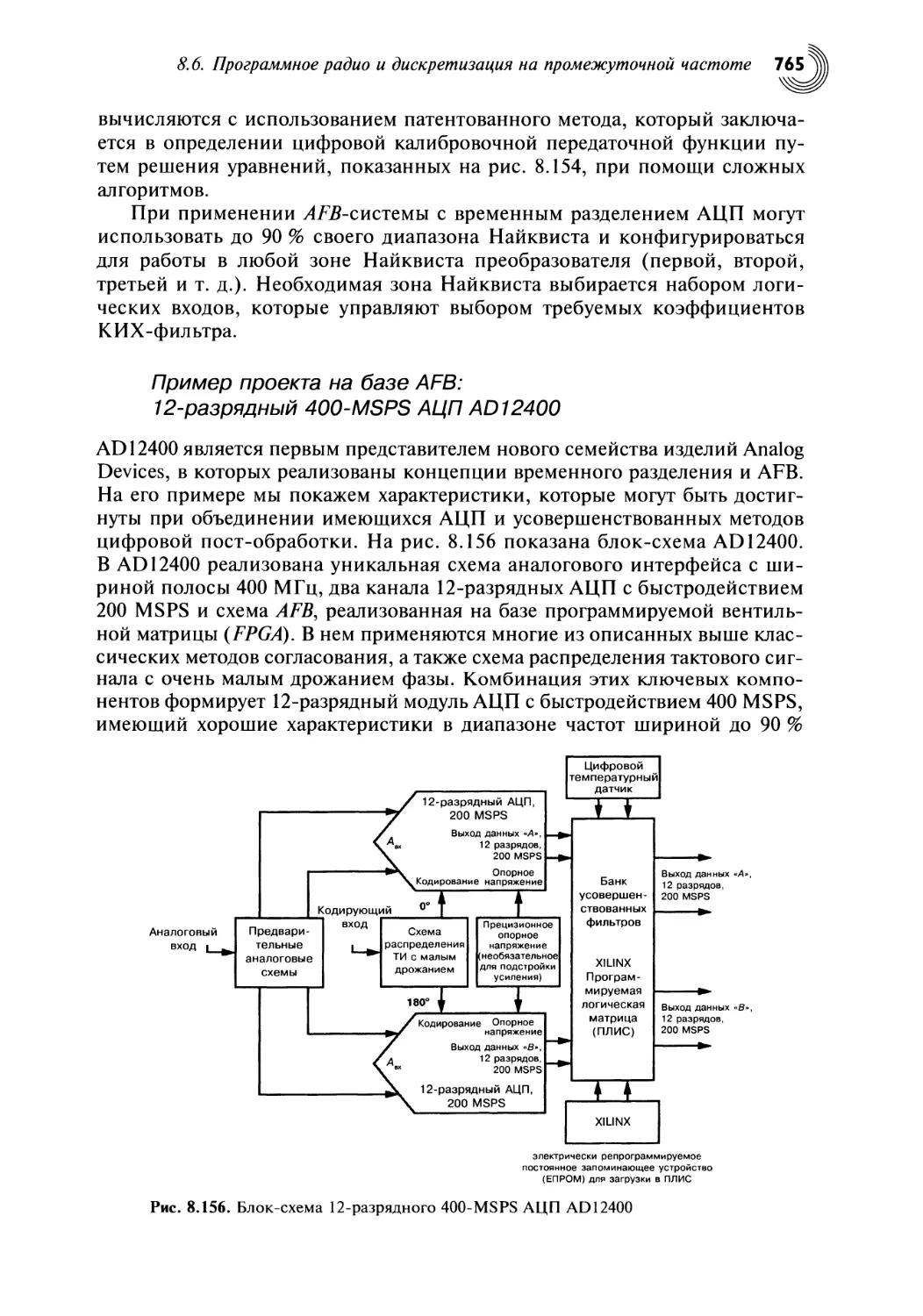
Ривз как изобретатель20. Эти патенты всесторонне раскрывали следующие
темы:
1) основные принципы квантования и кодировки;
2) выбор разрешения, соответствующего шуму и полосе пропускания
передающего канала;
3) передача сигналов в цифровой форме последовательно, параллельно
и как модуляция несущих;
4) базовая конструкция на основе счетчиков, необходимых для 5-раз-
рядных ЦАП и АЦП.
Отличие этого патента Ривза от его предыдущего патента (1926) состоит
в том, что он использовал в своих разработках все преимущества существу-
ющей электронно-вакуумной технологии ЦАП и АЦП. Эти изобретения Ривза
заслуживают более детального рассмотрения, так как они являются первыми
документально зафиксированными электронными преобразователями. Его
техника АЦП (рис. 1.8) использует дискретные импульсы для выборки от-
счетов из аналогового сигнала, установку 7?/5-триггера и одновременный
старт контролируемого пилообразного напряжения. Пилообразное напря-
жение сравнивается с входным сигналом, и в момент их совпадения выра-
батывается сигнал, который сбрасывает 7?/5-тригер. Выходной сигнал с триг-
гера является импульсом, ширина которого прямо пропорциональна ана-
1.1. Ранняя история
А.Х. Ривса «Электрическая система сиг-
налов», заявленного 22 ноября 1939 г.,
Импульсы разрешения выдачи
данных, 6 тысяч отсчетов в с
Выход
данных
выданного 3 февраля 1942 г.
Рис. 1.8. 5-разрядный АЦП Ривза с последовательным счетом
логовому сигналу в момент отсчета. Этот импульс с ШИМ управляет стро-
бируемым генератором. Число выходных импульсов со стробируемого ге-
нератора представляет собой квантованное значение аналогового сигнала.
Эту последовательность импульсов можно легко преобразовать в бинарное
слово путем активации счетчика. В системе Ривза использовался задающий
генератор с частотой 600 кГц и 100 : 1 делитель, вырабатывающий 6-кГц
импульсы отсчетов. Система использует 5-разрядный счетчик на 31 отсчет
(из 100 импульсов, приходящихся на каждый импульс отсчетов), таким об-
разом представляя сигнал полной шкалы.
ЦАП использует подобный счетчик и источник тактовых импульсов,
как представлено на рис. 1.9. Полученный бинарный код сначала загружа-
ется в счетчик, и 7?/5-триггер устанавливается в «1». Затем счетчик начина-
ет считать от низшего к высшему, используя тактовые импульсы. Когда
счетчик переполняется и достигает 00000, источник тактовых импульсов
отсоединяется, поскольку Я/5-триггер обнуляется. Число импульсов, по-
считанных кодирующим счетчиком, представляет собой дополнение входя-
щего слова. Выходным сигналом с триггера является ШИМ-сигнал, чье
аналоговое значение представляет собой дополнение входного бинарного
Приводится из патента США 2,272,070
Входные
данные
Рис. 1.9. 5-разрядный ЦАП Ривза с последовательным счетом
(TlO Глава 1. История преобразователей
слова. Ривз использовал простой ФНЧ для получения аналогового сигнала
от ШИМ-выхода. Фазовая инверсия в ЦАП с легкостью корректируется
или в логике, или в усилителе, расположенных далее.
Патенты Ривза раскрывают все основные составляющие ИКМ: отсчеты,
квантование, кодирование дискретных отсчетов для последовательной, па-
раллельной, фазо-модулированной и других методов передачи. Для восста-
новления исходного аналогового сигнала Ривз предложил декодер на при-
нимающем конце. Интересно отметить, что, несмотря на значимость своей
работы, после опубликования патентов Ривз направил свое внимание на
передачу речи в коротковолновом диапазоне с использованием импульсно-
амплитудной, широтно-импульсной, импульсно-позиционной модуляций,
вместо того чтобы более глубоко изучить возможности ИКМ.
ИКМ и Bell System: Вторая мировая война и до 1948 года
По договору о взаимном лицензировании с Международной телефонно-те-
леграфной корпорацией инженеры телефонной лаборатории Бэлла пересмот-
рели исследования Ривза в отношении описания цепей и начали свои разра-
ботки в сфере ИКМ-технологии. Начав свои исследования в 1940 году и
продолжая их в течение Второй мировой войны, главным образом посвяща-
ли их секретной передаче речи, что сделало изучение ИКМ обязательным.
В 1940 году разработчики лаборатории Бэлла начали работу по исследо-
ванию системы секретности речи, получившей название «Project-Х», более
детальное описание указано в 6 (с. 296—317). В этих исследованиях использу-
ется сложная техника, основанная на электронно-вакуумной технологии. При
этом использовался разработанный ранее вокодер, технология ИКМ и уни-
кальная техника скремблирования данных (защита от несанкционированно-
го доступа. — Примеч. ред.\ использующая грамзапись с содержанием элек-
тронного кодового «ключа» к кодам. Система была спроектирована в Бэлл
и запущена в производство компанией Вестерн Электрик в конце 1942 года.
К апрелю 1943 года несколько терминалов было закончено и установлено в
Вашингтоне, Лондоне и Северной Африке. Вскоре после этого дополни-
тельные терминалы были установлены в Париже, на Гавайях, в Австралии
и на Филиппинах.
К концу войны несколько групп инженеров в Бэлл занимались изуче-
нием ИКМ; однако большинство из разработок военного времени не было
опубликовано и долгое время в период послевоенного времени, так как они
имели гриф секретности. Труды Х.С. Блэка, Д.О. Эдсона и В.М. Гуддалла
были изданы в 1947—1948 годах.21”23. Они акцентировали свое внимание на
системе шифровки речи, основанной на технике ИКМ. В результате их
исследований родилось большое количество важных открытий, например
система ИКМ, которая оцифровывает полную ширину голосового спектра
в 5-разрядной системе, со скоростью дискретизации 8 kSPS (8 тысяч отсче-
тов в секунду), используя при этом АЦП последовательного приближения
(которые были описаны Эдсоном и Блэком2122).
Опытная система ИКМ В.М. Гудалла основана на схожей технике и
описана в его классическом груде. Среди наиболее важных разработок, явив-
шихся результатом этой работы, стали: ЦАП последовательного приближе-
• Секретная система шифровки голоса с использованием HKM-«Project-X», 1940—1943.
• 5-разрядный АЦП последовательного приближения с частотой дискретизации 8 kSPS.
• Логарифмическое квантование речи (компандирование).
• Кодирующая электронная трубка, 7-разрядная, с частотой дисктретизации 100 kSPS.
• Декодер «Шеннона—Рэка» (ЦАП).
• Удачная демонстрация опытных терминалов ИКМ.
• Теоретические положения ИКМ, расширенные и опубликованные Шенноном.
• Изобретение германиевого транзистора в 1947 году.
Рис. 1.10. Исследования лаборатории Белл в сфере ИКМ, проведенные в период Вто-
рой мировой войны (и до 1948 года)
ния, кодирующая электронная трубка, декодер Шэннона—Рэка, логариф-
мический отсчет уровней квантования (компандинг) и практическое дока-
зательство возможности использования ИКМ. Результаты исследований были
обобщены в 1948 году в статье, написанной Л.А. Мичамом и Е. Петерсо-
ном, где описывалась опытная система использования 24-канальной ИКМ24.
В ссылке рис. 1.10 обобщены результаты исследований ИКМ, проведенные
лабораторией Белл в 1948 году.
Важным достижением в области АЦП-технологии в этот период стало
изобретение кодирующей электронной трубки. Трубка, описанная Р.В. Сир-
зом в его работе25, дискретизировала со скоростью 96 kSPS, с разрешением
в 7-бит. Концепции электронно-лучевого кодера для 4-разрядного устрой-
ства отражены на рис. 1.11. Предшествующие аналоги использовали после-
довательный режим (рис. 1.11, а). Аналоговый сигнал сначала проходил
через устройство выборки—хранения и во время интервала «хранения» луч
разворачивался в трубке горизонтально. При этом Y-отклонение соответ-
ствует значению аналогового сигнала от устройства выборки—хранения.
Теневая маска закодирована для получения соответствующего бинарного
кода, зависящего от вертикального отклонения. Код регистрируется кол-
лектором, и биты вырабатываются в последовательном формате. Позже в
Последовательного типа
а
Параллельного типа
б
пушка
Рис. 1.11. Кодирующая электронная трубка
Глава 1. История преобразователей
трубках начали использовать ленточный луч (см. рис. 1.11, 0, создав пер-
вый электронный //^-преобразователь, выдающий параллельно выходное
слово.
Ранние электронно-вакуумные кодеры использовали бинарно-кодиру-
ющую теневую маску. Существовали большие погрешности, если луч рас-
пространялся на 2 соседних кода и освещал оба из них. Иллюстрация этого
явления приведена на рис. 1.12, а. Горизонтальная линия представляет раз-
вертку луча в точке перехода (перехода между кодом 0111 и кодом 1000).
Например, ошибка в самом старшем значащем разряде (MSB) составит 1/2
шкалы. Подобные ошибки были минимизированы путем установки гори-
зонтальных чувствительных проволочек по ширине границ каждого уровня
квантования. Если луч первоначально падает на одну из проволок, неболь-
шое напряжение добавляется к напряжению вертикального отклонения,
которое сдвигает луч от переходной зоны.
Ошибки бинарных теневых масок были устранены путем использова-
ния теневой маски с кодом Грея, пример которой приведен на рис. 1.12, б.
Настоящее его название звучит как «рефлексный бинарный код»; он был
изобретен в 1878 году Элишем Греем и впоследствии пересмотрен Фрэн-
ком Греем в 1949 году26. Достоинство кода Грея состоит в том, что соседние
уровни отличаются друг от друга на одну цифру в соответствующем слове,
кодируемом с помощью кода Грея. Следовательно, если есть ошибка в оп-
ределении разряда для определенного уровня, то соответствующая ошибка
после преобразования в бинарный код будет всегда соответствовать млад-
шему значащему биту (LSB). В случае попадания луча в середину шкалы
меняется старший значимый бит, но ошибка только 1 LSB. Интересно от-
метить, что подобный феномен может происходить в современных flash-
преобразователях, использующих компараторы, вследствие метастабильно-
сти компаратора. При небольшом перевозбуждении существует определен-
ная вероятность того, что компаратор будет вырабатывать неверное решение
а б
4-разрядный двоичный код 4-разрядный рефлексно-
двоичный код (код Грея)
1111
1110
110 1
110 0
10 11
10 10
10 0 1
Теневая маска 1 0 0 0
0 111
0 110
0 10 1
0 10 0
0 0 11
0 0 10
0 0 0 1
0 0 0 0
MSB LSB
Теневая маска
10 0 0
10 0 1
10 11
10 10
1110
1111
110 1
110 0
0 10 0
0 10 1
0 111
0 110
0 0 10
0 0 11
0 0 0 1
0 0 0 0
MSB LSB
Рис. 1.12. Теневая маска кодирующей электронной трубки для двоичного кода и кода
Грея
1.1. Ранняя история
на своем выходе с защелкой, создавая тот же самый эффект при использо-
вании техники прямого бинарного кодирования. Во многих случаях код
Грея или коды «псевдоГрея» используются для декодировки выходных дан-
ных компаратора перед окончательным преобразованием в бинарно-кодо-
вый выходной сигнал (см. гл. 3 с более детальным описанием архитектур-
ных конструкций).
Несмотря на множество механических и электрических проблем, отно-
сящихся к центрированию луча, технология кодирования на электронной
трубке достигла своего пика в середине 1960-х годов с использованием эк-
спериментального 9-разрядного кодера со скоростью дискретизации, рав-
ной 12 MSPS27. Только открытие в области технологий полупроводниковых
АЦП сделало существование преобразователей, основанных на технологии
электронной трубки, ненужным.
ОУ и регенеративные импульсные ретрансляторы:
от электронно-вакуумных до полупроводниковых устройств
За исключением ранних относительно малоэффективных электромехани-
ческих усилителей5, развитие электронных усилителей началось с изобре-
тения электронно-вакуумной технологии Ли де Форестом в 1906 году28 29.
Иллюстрация из патента де Фореста приведена на рис. 1.13.
К 1914 году электронно-вакуумные усилители были внедрены на теле-
фонном заводе. Развитие усилителей всегда было особенно важным для
разработки преобразователей данных, начиная с ранних электронно-ваку-
умных схем. Ключевым этапом развития этой технологии было изобрете-
ние усилителя с обратной связью Гарольдом С. Блэком в 1927 году30-32. На
протяжении Второй мировой войны продолжалась работа по исследова-
нию цепей усилителей; много важных разработок было сделано инжене-
рами лаборатории Бэлл (более полная история исследований ОУ дана в 1).
На рис. 1.14 дается схема усилителя с обратной связью, взятая из поздней
статьи Блэка.
Изобретение германиевого транзистора в 1947 году33-35 явилось толчком
для развития как ИКМ, так и других электронных систем. Для практичес-
Е'
Фрагмент патента США 841,387
Л.Д. Фореста «Прибор для усиле-
ния слабых электрических токов»,
заявленного 25 октября 1906 г.,
выданного 15 января 1907 г.
Рис. 1.13. Изобретение электронно-вакуумной лампы
Глава 1. История преобразователей
Harold S. Black. Stabilized Feedback
Amplifiers. Bell System Technical
Journal, Vol. 13, No. 1, January 1934
Выход = Д |вход - (3 x выход]
Выход _ 1
Вход (3
Рис. 1.14. Усилитель с обратной связью Гарольда Блэка, 1927
кого использования ИКМ необходимо было установить восстанавливаю-
щие ретрансляторы периодично на линиях передачи. До изобретения тран-
зистора удачно спроектированные вакуумные ретрансляторы несколько лет
применялись в телеграфе и телефонной связи, но возникали серьезные про-
блемы, касающиеся их надежности. Однако полупроводниковые восстанав-
ливающие ретрансляторы, разработанные Л.Р. Рэтхоллом в 1956 году, при-
вели фазу исследования ИКМ к впечатляющим результатам36. Этот ретран-
слятор демонстрировался на опытной кабельной системе с использованием
ретрансляционного интервала в 2,3 мили с кабелем 19 калибра, а также на
0,56 мили с кабелем 32 калибра. Схематический чертеж ретранслятора пред-
ставлен на рис. 1.15.
В ретрансляторе Рэтхолла использовался германиевый транзистор, раз-
работанный в Бэлл и внедренный Вестерн Электрик. Кремниевый транзи-
стор был изобретен в 1954 году Гордоном Тилом из Техас Инструменте. Он
получил широкое коммерческое применение, вызванное увеличенным тем-
пературным диапазоном эксплуатации и надежностью. В конечном счете
Из L.R.Wrathall, «Транзисторный
двоично-импульсный регенера-
тор», Bell System Technical
Journal, Vol. 35, September 1956.
pp.1059-1084
Вход
Рис. 1.15. Твердотельный И KM-ретранслятор Л.Р. Рэтхолла, 1956
• Изобретение в 1947 году германиевого транзистора инженерами лаборатории Белл:
Джон Бардин, Уолтер Браттейн, Вильям Шокли.
• Кремниевый транзистор: Гордон Тил, Тексэс Инструменте, 1954.
• Рождение интегральной схемы:
— Джек Килби, Тексэс Инструменте, 1958 (использовал соединяющие провода для
связи компонентов в ИС);
— Роберт Нойс, Фэйрчайлд Семикондактор, 1959 (использовал металлизацию для
межсоединений).
• The Planar Process: Jean Hoerni, Fairchild Semiconductor, 1959.
Рис. 1.16. Ключевые достижения в развитии твердотельной технологии
изобретение интегральных схем в 1958 году37 38 и последующий планарный
процесс в 1959 году39 установили новую эпоху дальнейшего развития ИКМ.
Эти базовые полупроводниковые исследования обобщены в ссылке рис. 1.16
и описаны более детально в гл. 4 данной книги.
С изобретением ретранслятора Рэтхолла в 1956 году стало очевидным,
что ИКМ может эффективно использоваться для увеличения количества
голосовых каналов на существующих медных кабельных парах. Это было
особенно заманчиво для крупных городов, где многие передающие каналы
были полностью заполнены. Многие из этих пар были оборудованы согла-
сующими катушками на расстоянии 1,8 км друг от друга для улучшения
чувствительности в голосовой полосе. Возникало естественное желание за-
менить согласующие катушки полупроводниковыми ретрансляторами и
увеличить таким образом емкость с 1 до 24 каналов, используя ИКМ.
По этой причине в лаборатории Белл было принято решение разра-
ботать высокочастотную систему связи, основанную на ИКМ. Прототип
24-канальной системы был спроектирован и проверен в 1958 и 1959 годах
на линии между Саммитом и Нью-Джерси и Саут-Ориндж и Нью-Джерси.
Эта система, названная высокочастотной системой связи Т-1, передавала
24 голосовых канала и использовала 1,544-МГц последовательность им-
пульсов в биполярном коде. Система использовала 7-разрядное логариф-
мическое кодирование с 26-дБ компандированием и позже начала использо-
вать 8-разрядное кодирование. Полупроводниковые ретрансляторы были рас-
положены на интервалах 1,8 км в соответствии с расположением существующих
согласующих катушек. Первая линия Т-1 была пущена в работу в 1962 году, а к
1984 году в США существовало более 200 млн км линий связи Т-1.
Список литературы
1.1. Ранняя история
1. Walter G. Jung. Op Amp Applications Handbook. Newnes (an imprint of Elsevier
Science and Technology Books), ISBN 0-7506-7844-5, 2005.
2. Kazim Cecen. Sinanys Water Supply System in Istanbul. Istanbul Technical University/
Istanbul Water and Sewage Administration, Istanbul Turkey, 1992—1993, pp. 165—167.
3. K. W. Cattermole. Principles of Pulse Code Modulation. American Elsevier Publishing
Company, Inc., 1969, New York NY, ISBN 444-19747-8. (Блестящий взгляд на истори-
ческие аспекты теории и практики не только Puise Code Modulation (кодово-импульс-
ной модуляции), но и вообще преобразования данных. Предназначена для всех, кто серь-
езно интересуется данной областью знаний.)
Глава 1. История преобразователей
4. Editors. Transmission Systems for Communications. Bell Telephone Laboratories,
1964. (Excellent discussion of Bell System transmission systems from a technical standpoint.)
5. M.D. Fagen. A History of Engineering and Science in the Bell System: The Early
Years (1875—1925), Bell Telephone Laboratories, 1975.
6. M.D. Fagen. A History of Engineering and Science in the Bell System: National
Service in War and Peace (1925—1975), Bell Telephone Laboratories, 1978, ISBN
0-932764-00-2.
7. S. Millman. A History of Engineering and Science in the Bell System: Communications
Sciences (1925-1980), AT&T Bell Laboratories, 1984, ISBN 0-932764-06-1.
8. E.F. OyNeill. A History of Engineering and Science in the Bell System: Transmission
Technology (1925—1975), AT&T Bell Telephone Laboratories, 1985.
9. Alexander Graham Bell. Improvement in Telegraphy. U.S. Patent 174, 465, filed
February 14, 1876, issued March 7, 1876. (This is the original classic patent on the telephone.)
10. Alexander Graham Bell. Improvement in Electric Telegraphy. U.S. Patent 186,
787, filed January 15, 1877, issued January 30, 1877. (This and the preceding patent formed
the basis of the Bell System patents.)
11. Willard M. Miner. Multiplex Telephony. U.S. Patent 745,734, filed February 26,
1903, issued December 1, 1903. (A relatively obscure patent on electro-mechanical multiplexing
of telephone channels in which experiments describing voice quality versus sampling frequency
are mentioned.)
12. Paul M. Rainey. Facimile Telegraph System. U.S. Patent 1,608,527, filed July 20,
1921, issued November 30, 1926. (Although A. H. Reeves is generally credited with the
invention of PCM, this patent discloses an electro-mechanical PCM system complete with A/D
and D/А converters. The patent was largely ignored and forgotten until many years after the
various Reevesy patents were issued in 1939—1942.)
13. H. Nyquist. Certain Factors Affecting Telegraph Speed. Bell System Technical
Journal, Vol. 3, April 1924, pp. 324—346.
14. H. Nyquist. Certain Topics in Telegraph Transmission Theory. A.I.E.E. Transactions,
Vol. 47, April 1928, pp. 617-644.
15. R. V.L. Hartley. Transmission of Information. Bell System Technical Journal, Vol.
7, July 1928, pp. 535-563.
16. C.E. Shannon. A Mathematical Theory of Communication. Bell System Technical
Journal, Vol. 27, July 1948, pp. 379-423 and October 1948, pp. 623-656.
17. W.R. Bennett. Spectra of Quantized Signals. Bell System Technical Journal, Vol.
27, July 1948, pp. 446-471.
18. B.M. Oliver, J.R. Pierce, and C.E. Shannon. The Philosophy of PCM. Proceedings
IRE, Vol. 36, November 1948, pp. 1324-1331.
19. W.R. Bennett. Noise in PCM Systems. Bell Labs Record, Vol. 26, December 1948,
pp. 495—499.
20. Alec Harley Reeves. Electric Signaling System. U.S. Patent 2, 272, 070, filed
November 22, 1939, issued February 3, 1942. Also French Patent 852, 183 issued 1938,
and British Patent 538, 860 issued 1939.
21. H.S. Black and J.O. Edson. Pulse Code Modulation. AIEE Transactions, Vol. 66,
1947, pp. 895-899.
22. H.S. Black. Pulse Code Modulation. Bell Labs Record, Vol. 25, July 1947, pp. 265—269.
23. W.M. Goodall. Telephony by Pulse Code Modulation. Bell System Technical Journal,
Vol. 26, pp. 395—409, July 1947. (Describes an experimental PCM system using a 5-bit, 8
kSPS successive approximation ADC based on the subtraction of binary weighted charges from
a capacitor to implement the internal DACfunction.)
24. L.A. Meacham and E. Peterson. An Experimental Multichannel Pulse Code
Modulation System of Toll Quality. Bell System Technical Journal, Vol 27, No. 1, January
1948, pp. 1—43. (Describes the culmination of much work leading to this 24-channel experimental
PCM system.)
1.2. Преобразователи 1950-х и 1960-х годов
25. R.W. Sears. Electron Beam Deflection Tube for Pulse Code Modulation. Bell
System Technical Journal, Vol. 27, pp. 44—57, Jan. 1948. (Describes an electon-beam
deflection tube 7-bit, 100 kSPS flash converter for early experimental PCM work.)
26. Frank Gray. Pulse Code Communication. U.S. Patent 2, 632, 058, filed November
13, 1947, issued March 17, 1953. (Detailedpatent on the Gray code and its application to
electron beam coders.)
27. J.O. Edson and H.H. Henning. Broadband Codecs for an Experimental 224Mb/s
PCM Terminal. Bell System Technical Journal, Vol. 44, pp. 1887—1940, Nov. 1965.
(Summarizes experiments on ADCs based on the electron tube coder as well as a bit-per-stage
Gray code 9-bit solid state ADC. The electron beam coder was 9-bits at 12 MS PS, and
represented the fastest of its type.)
28. Lee de Forest. Device for Amplifying Feeble Electrical Currents. U.S. Patent 841,
387, filed October 25, 1906, issued January 15, 1907.
29. Lee de Forest, Space Telegraphy. U.S. Patent 879, 532, filed January 29, 1907,
issued February 18, 1908.
30. H.S. Black. 'N&nq Translation System. U.S. Patent 2, 102, 671, filed August 8,
1928, issued December 21, 1937. (The basis of feedback amplifier systems.)
31. H.S. Black. Stabilized Feedback Amplifiers. Bell System Technical Journal, Vol.
13, No. 1, January 1934, pp. 1—18. (A practical summary of feedback amplifier systems.)
32. Harold S. Black. Inventing the Negative Feedback Amplifier. IEEE Spectrum,
December, 1977. (Inventory s 50th anniversary story on the invention of the feedback amplifier.)
33. C. Mark Melliar-Smith et al. Key Steps to the Integrated Circuit. Bell Labs Technical
Journal, Vol. 2, #4, Autumn 1997.
34. J. Bardeen, W.H. Brattain. The Transistor, a Semi-Conductor Triode. Physical
Review, Vol. 74, No. 2, July 15, 1947 pp. 230—231. (The invention of the germanium
transistor.)
35. W. Shockley. The Theory of p-n Junctions in Semiconductors and p-n Junction
Transistors. Bell System Technical Journal, Vol. 28, No. 4, July 1949, pp. 435—489. (Theory
behind the germanium transistor.)
36. L.R. Wrathall. Transistorized Binary Pulse Regenerator. Bell System Technical
Journal, Vol. 35, September 1956, pp. 1059—1084.
37. J. S. Kilby. Invention of the Integrated Circuit. IRE Transactions on Electron Devices,
Vol. ED-23, No. 7, July 1976, pp. 648-654. (Kilbyys IC invention at 11.)
38. Robert N. Noyce. Semiconductor Device-and-Lead Structure. U.S. Patent 2, 981,
877, filed July 30, 1959, issued April 25, 1961. (Noyceys IC invention at Fairchild.)
39. Jean Hoemi. Planar Silicon Diodes and Transistors. IRE Transactions on Electron
Devices, Vol. 8, March 1961, p. 168.
40. Jean A. Hoemi. Method of Manufacturing Semiconductor Devices. U.S. Patent 3,
025, 589, filed May 1, 1959, issued March 20, 1962. (The planar process— a manufacturing
means of protecting and stabilizing semiconductors.)
1.2. Преобразователи 1950-х и 1960-х годов
Уолт Кестер
Коммерческие преобразователи: 1950-е годы
До середины 1950-х годов преобразователи были уже основательно развиты
и использовались в специализированных сферах применения, например
таких, как ИКМ-лаборатории Белл и система шифрования сообщений, ис-
пользовавшаяся в период Второй мировой войны. Из-за применения тех-
Глава 1. История преобразователей
нологии вакуумных трубок преобразователи были очень дорогими, громоз-
дкими и имели высокое энергопотребление. Практически они не могли
иметь коммерческого использования.
Цифровой компьютер был важной движущей силой коммерческого раз-
вития АЦП. Проект по созданию компьютера ENIAC начался в 1942 году и
был представлен широкой публике в феврале 1946 года. Проект ENIAC
привел к созданию первого коммерческого цифрового компьютера UNIVAC,
разработанного Eckert и Mauchly. Первый UNIVAC был доставлен в United
States Census Burea в июне 1951 года.
Применение в военной сфере, например вычисление баллистической
траектории, стимулировало создание цифрового компьютера. Но время шло,
и интерес к цифровым вычислениям возрастал, так как их можно было
применить и в других областях — при анализе данных, в промышленных
процессах управления, а отсюда возросла необходимость в использовании
преобразователей. В 1953 году Бернард М. Гордон, пионер в области преоб-
разования данных, основал компанию под названием Эпско Инжениринг в
Конкорде, МА, где он сам проживал. Гордон раньше работал над создани-
ем компьютера UNIVAC и осознал необходимость создания коммерческих
преобразователей. В 1954 году Эпско представил 11-разрядный АЦП на
основе вакуумной трубки со скоростью дискретизации 50-kSPS. Этот пре-
образователь считается первым коммерческим устройством данного типа.
Преобразователь «Datrac», выпущенный Эпско, потреблял 500 Вт,
был спроектирован для стоечного монтажа (19" х 15" х 26") и продан за
8000—9000 долларов1. Фотография этого устройства приведена на рис. 1.17.
Datrac был первым коммерчески доступным АЦП, использовавшим сдви-
гово-программируемую архитектуру последовательного приближения. Гор-
дон получил патент на логику, необходимую для выполнения алгоритма
преобразования2. Из-за того, что в нем имелась функция выборки—хране-
ния, Datrac от Эпско был первым коммерческим АЦП, подходящим для
оцифровки сигналов переменного тока, таких как речь.
• 19" х 15" х 26"
• 500W
• 150 lbs
• $8 500 00
Courtesy,
Analogic Corporation
8 Centennial Drive Peabody,
MA 01960
www.analogic.com
Рис. 1.17. 11-разрядный 50-kSPS АЦП на электронной вакуумной трубке DATRAC,
1954
1.2. Преобразователи 1950-х и 1960-х годов
В этот же период несколько других компаний производили низкоско-
ростные АЦП, подходящие для применения при цифровых замерах вольт-
метром. Также существовали оптические преобразователи, основанные на
кодирующих дисках, для измерения дуговой координаты вала в авиацион-
ных приложениях1. С середины до конца 1950-х годов в преобразователях
использовались комбинации вакуумных трубок, полупроводниковых дио-
дов и транзисторов для осуществления процесса преобразования. Компа-
нии Эпско, Нон-Линеар Системз, J.B. Rea, Adage занимались разработкой
таких преобразователей. Для более глубокого рассмотрения истории раз-
вития преобразователей в 1950-х годах вы можете обратиться к трудам,
указанным в L 3~6.
История развития преобразователей: 1960-е годы
С середины 1950-х до начала 1960-х годов вакуумные трубки заменялись на
транзисторы при проектировании электронных схем, тем самым открывая
все новые возможности для создании электроники на основе технологии
преобразования данных. Как было указано выше, кремниевый транзистор
вызвал интерес к полупроводниковым разработкам. Постоянно возрастал
интерес к устройствам преобразования данных. Об этом можно судить на
основании двух обзорных статей, опубликованных в 1964 и 1967 годах5 6.
Так как эти товары были в основном неизвестны новым клиентам, были
предприняты усилия для определения технических характеристик и необ-
ходимых условий для их проверки7”16. Универсальный компьютер IBM-360
и компактные полупроводниковые компьютеры (серия DEC PDP, запу-
щенные в 1963 году) усилили интерес к приложениям анализа данных. Дру-
гими стимулами развития преобразователей в 1960-х годах стали: промыш-
ленный процесс управления, измерения, ИКМ, военные системы.
В 1960-х годах в Бэлл Лаб. продолжались разработки по проектирова-
нию высокоскоростных преобразователей (9-разрядный, со скоростью дис-
кретизации 5 MSPS) для ИКМ-применения17; военный отдел Бэлл Лаб. начал
работу над созданием «железа» и программного обеспечения для системы
антибаллистической ракеты {anti-ballistic missile. ABM).
В 1958 году армия США начала разработку системы противобаллисти-
ческой ракеты Найк-Зевс (Nike-Zeus), за проектирование «электронного
железа» отвечала Бэлл Лаб. Эта программа в 1963 году была заменена на
Найк-Х. Это была первая программа, предложившая цифровой управляе-
мый фазированный радар для отслеживания тактических и стратегических
ракет. Цель этой системы заключалась в перехвате и уничтожении прибли-
жающихся к США советских ядерных ракет и защите населения страны.
В 1967 году президент Линдон Джонсон и министр обороны Роберт
Мак-Намара пересмотрели ABM-программу и заменили название на Сен-
тинэл (часовой). В основном эта система использовала то же «железо», что
и Найк-Х, но определение цели с Советского Союза изменилось на Китай,
где была продемонстрирована ядерная мощь. Эта программа спровоциро-
вала большую волну всеобщего протеста, когда стало ясно, что размещение
ядерных ракет-перехватчиков будет сосредоточено рядом с городами, кото-
рые они и собираются защищать.
Глава 1. История преобразователей
Ричард Никсон стал президентом в 1969 году, и из-за политических
причин ему пришлось снова изменить цель и название АВМ-программы,
но система продолжала использовать то же «железо». Программа стала на-
зываться Сэйфгард (Safegard) и ее целью стало защитить Minuteman ICBM
поля, базу стратегического авиационного командования, Вашингтон. Сис-
тему, включающую тактические и стратегические ракеты, планировалось
разместить в 12 пунктах.
Программа Сейфгард была вовлечена в советско-американские перего-
воры об ограничении стратегических вооружений и значительно сократи-
лась. В конечном счете только один пункт базирования был построен в
Гранд-Форкс, Северная Дакота, а 1 октября 1975 года он стал рабочим. 2 ок-
тября 1975 года палата представителей проголосовала за отмену программы
Сейфгард.
Ключевым элементом систем Найк-Х/Сентинэл/Сейфгард было исполь-
зование цифровых технологий для управления фазированным радаром, для
выполнения команд и для управления другими заданиями. При этом исполь-
зовалась резисторно-транзисторная логика (RTL), вмонтированная в гибрид-
ный корпус. Для системы было важно использовать высокоскоростные АЦП,
необходимые для приемного устройства фазированного радара. Ранние про-
тотипы для необходимого 8-разрядного 10-MSPS АЦП были разработаны
инженерами Бэлл Лаб. Джоном М. Eubanks и Робертом К. Бедингфильдом в
период между 1963 и 1965 годами. В 1966 году эти два пионера высокоскоро-
стного преобразования ушли из Бэлл Лаб. и основали Компьютер Лаб. в
Greensboro, NC, и выпустили коммерческую версию этого АЦП.
8-разрядный 10-MSPS преобразователь был закреплен в стойке, содер-
жал свое собственное линейное питание, потреблял 150 Вт и продавался за
10 000 долларов (см. рис. 1.18). Такая же технология использовалась для
изготовления версий 9-разрядного с 5-MSPS и 10-разрядного с 3-MSPS.
Хотя в следующих поколениях разработок Компьютер Лаб. будет использо-
вать преимущественно модульные ОУ (Computer Labs ОА-125 and FS-125) и
ИС, такие как Fairchild //А710/711-компараторы, а также 7400 TTL (транзи-
сторно-транзисторную логику), в первых АЦП использовались в основном
дискретные компоненты.
19" Для стоечного монтажа, 150W, $10.000.00
Стойка с 12 АЦП в экспериментальном
цифровом приемнике радара
Рис. 1.18. HS-810, 8-разрядный 10-MSPS АЦП Ком-
пьютер Лаб. Инкорп., 1966
1.2. Преобразователи 1950-х и 1960-х годов
Ранние высокоскоростные АЦП, произведенные Компьютер Лаб., в ос-
новном использовались для исследований и разработок проектов, связан-
ных с радиолокационным приемником. Следующие компании занимались
такими разработками: Raytheon, Джэнерал Электрик, MIT Линкольн Лаб.
В середине 1960-х годов пионерами в разработке низкоскоростных, на
PC-печатных платах и модульных АЦП были такие компании, как: Аналод-
жик (основанная Бернардом М. Горданом), Пасториза Электронике (осно-
ванная Джеймсом Пасториза). В числе других компаний, занимающихся
преобразователями, были: Adage, Бэрр Браун, Дженерал Инструмент Корп,
Радиэйшн Инкорп, Рэдкор Корпорейшн, Бэкман Инструменте, Ривз Ин-
струменте, Тексэс Инструменте, Raytheon Computer, Престон Сайентифик
и Зелтекс Инкорп. Большинство преобразователей 1960-х годов имели фор-
мат цифровых вольтметров, использовали интегрирующую архитектуру, хотя
Adage представила в начале 1960-х годов 8-разрядный 1-MSPS стробируе-
мый АЦП, Voidicon VF75.
В дополнение к широкому распространению схем на дискретных транзи-
сторах в 1960-е годы стали доступными различные блоки с ИС, что привело
к уменьшению размеров и энергопотребления преобразователей. В 1964 и
1965 годах Fairchild представила 2 известных ИС-проекта Боба Вайдлара: ОУ
/zA709 и компаратор //A710//zA711. Вскоре за ними последовала серия линей-
ных ИС, выпущенных Fairchild и другими производителями. Этот период
также ознаменовался появлением 7400-серии с транзисторно-транзисторной
логикой (TTL), высокоскоростной эмиттерно-связанной логикой (ECL) и
также 4000-серии с логикой CMOS, разработанной RCA в 1968 г. Кроме того,
появились также диоды Шотки, опорные диоды Зенера, полевые транзисто-
ры, подходящие для переключателей, согласованные пары JFETs — все это
представляло своего рода строительный материал, необходимый для разра-
ботки преобразователей данных.
В 1965 году Рэй Стата и Матт Лорбер основали Analog Devices Inc (ADI)
в Кембридже, МА. Первыми продуктами производства стали высокопроиз-
водительные модульные ОУ, но в 1969 году ADI приобрела Pastoriza Electronics,
лидера в производстве преобразователей, и таким образом заложила солид-
ную базу для производства как устройств сбора данных, так и линейных
устройств.
Pastoriza имела достижения в производстве устройств сбора данных. На
рис 1.19 показана фотография 12-разрядного 10 мкс АЦП общего назначе-
ния последовательного приближения выпуска 1969 года, ADC-12U был
продан за 800 долларов. В нем использовалась архитектура последователь-
ного приближения, компаратор /zA710, модульный 12-разрядный «Minidac»
и 14 корпусов логики 7400-серии, необходимые для осуществления алго-
ритма преобразования последовательного приближения.
Модуль «Minidac» был построен на основе ИС «quad switch» (четырех-
позиционный ключ, подключающий к выходной цепи комбинацию из че-
тырех токов с значениями, кратными 2я, п = 0, 1, 2, 3. — Примеч. ред.)
(AD550) и тонкопленочной резистивной матрицы (AD850), как показано
на рис. 1.20. На рис 1.21 детально изображен знаменитый quad switch, запа-
тентованный Джеймсом Пасториза18. Глава 3 данной книги содержит более
детальное описание quad switch и других архитектур ЦАП.
Глава 1. История преобразователей
Рис. 1.19. АЦП -12U, 12-разрядный 10 мкс, последовательных приближений, разрабо-
танный отделением Pastoriza Division of Analog Devices, 1969
Рис. 1.20. 12-разрядный «MiniDAC», использующий четырехпозиционный переключа-
тель токов, тонкопленочную резистивную схему, источник опорного напря-
жения и операционный усилитель, 1969
Рис. 1.21. ЦАП «quad switch» с внешней тонкопленочной резистивной схемой
1.2. Преобразователи 1950-х и 1960-х годов 33
Следует отметить, что в ADC-12U для реализации алгоритма последова-
тельного приближения были необходимы 14 корпусов логики. В 1958 году
Бернард М. Гордон запатентовал логику реализации алгоритма последова-
тельного приближения19. В начале 1970-х годов Advanced Micro Devices и
National Semiconductor представили коммерческие ИС, использующие ре-
гисторную логику последовательного приближения: 2502 (8-разрядный, пос-
ледовательный, нерасширяемый), 2503 (8-разрядный, расширяемый) и 2504
(12-разрядный, последовательный, расширяемый). Они были специально
разработаны для выполнения регистровых функций и функций управления
для АЦП последовательного приближения. Они стали стандартными стро-
ительными элементами многих модульных и гибридных преобразователей.
В действительности акроним SAR расшифровывается как регистр последо-
вательного приближения (successive approximation register), и отсюда появля-
ется сочетание SAR ADC — АЦП последовательного приближения. Ранее
преобразователи, использовавшие архитектуру последовательного прибли-
жения, назывались sequential coders (последовательные кодеры), feedback coders
(кодеры с обратной связью), feedback subtractor coders (вычитающие кодеры
с обратной связью).
Архитектуры преобразователей
История развития различных архитектур преобразователей содержится в
гл. 3 данной книги, здесь мы обобщим главные достижения.
Основной алгоритм процесса преобразования с использованием АЦП
последовательного приближения (ранее называвшийся вычитанием с об-
ратной связью) уходит корнями в 1500-е годы к определенным математи-
ческим головоломкам относительно определения неизвестного веса путем
минимального числа последовательных взвешиваний20. Цель данной про-
блемы заключалась в определении наименьшего числа взвешиваний, ко-
торое будет необходимо для взвешивания на весах целого числа фунтов от
1 до 40 1b. Одно решение было найдено математиком Тартаглия (Tartaglia) в
1556 году, который предложил использовать серию взвешиваний с 1 1b, 2 1Ь,
4 1Ь, 8 1b, 16 lb, 32 1b. Этот алгоритм взвешивания аналогичен современному
алгоритму последовательного приближения для АЦП. Необходимо уточнить,
что это решение позволяет измерить неизвестный вес до 63 1b, а не 40 1Ь, как
предполагалось изобретателем. Данный алгоритм изображен на рис. 1.22, где
неизвестный вес составляет 45 lbs. Для демонстрации алгоритма использу-
ется аналог чашечных весов. Электронная реализация АЦП последователь-
ного приближения показана на рис. 1.23.
Интересно отметить, что все фундаментальные архитектуры АЦП, ис-
пользующиеся в настоящий момент, были открыты и опубликованы к сере-
дине 1960-х годов. На рис. 1.24 представлены временные этапы развития
АЦП последовательного приближения. На рис. 1.25 указаны этапы разви-
тия архитектур высокоскоростных АЦП и на рис. 1.26 — подсчитывающий
и интегрирующий АЦП. Даже архитектура £-Д АЦП была изучена к этому
периоду, этапы развития представлены на рис. 1.27. Более детальная ин-
формация по каждой архитектуре и этапы развития рассматриваются в гл.
3.
2 - 2К52
Глава 1. История преобразователей
Г~т~] IS X > (32 + 8 + 4 + 2)?
□ IS X > (32 + 8 + 4 + 2 4 1)?
Предполагаемый X = 45
Да -> Остается 32 -> 1
Нет -> Убирается 16 -> О
Да -э Остается 8 -> 1
Да -> Остается 4 -> 1
Нет -> Убирается 2 -> О
Да -> Остается 1 1
Всего: Х= 32 + 84441= 4510 = 1011012
Рис. 1.22. Алгоритм последовательных приближений АЦП, подобный двоичному взве-
шиванию
Последовательный
выход данных
Рис. 1.23. Базисная схема АЦП последовательного приближения (вычитающий АЦП с
обратной связью)
• Алгоритм регистрового последовательного приближения (SAR) берет свое начало в
1900-х годах.
• Ранние АЦП ПП в основном использовали переключаемые источники опорного на-
пряжения, а не внутренние ЦАП (Шеллинг: 1946, Гудолл: 1947).
• Использование внутренних ЦАП вместо переключаемых источников опорного напря-
жения для реализации процесса преобразования (Кайзер: 1953, Б.Д. Смит: 1953).
• Использование неравномерно взвешенных ЦАП для реализации передаточной функ-
ции компандирования (Б.Д. Смит: 1953).
• Первый коммерческий вакуумно-электронный 11-разрядный 50 kSPS АЦП ПП (Бер-
нард М. Гордон-Эпско: 1954).
Разработка специальной логической функции для реализации алгоритма последо-
вательного приближения (Гордон: 1958). Появление популярных логических ИС ПП:
2503, 2504, произведенных National Semiconductor и Advanced Micro Devices в нача-
ле 1970 -х годов.
Рис. 1.24. Обобщение этапов развития АЦП ПП (SAR)
1.2. Преобразователи 1950-х и 1960-х годов
• Счетные АЦП Ривза 1939
• Последовательное приближение 1946
• Flash (электровакуумные кодеры) 1948
• Bit-per-stage (двоичный и Грея) 1956
• Subranging (субдиапазонные) 1956
• Subranging с коррекцией ошибки 1964
• Pipeline (конвейерные) с коррекцией ошибки 1966
Даты относятся ко времени первых публикаций или выдачи патентов.
Рис. 1.25. Этапы становления архитектуры высокоскоростных АЦП
• Счетные АЦП Ривза 1939
• Charge run-down (со сбросом заряда) 1946
• Ramp run-up 1951
• Tracking (следящие) 1950
• Преобразователь напряжение — частота 1952
• Dual slope (с двойным наклоном) 1957
• Triple slope (с тройным наклоном), 1967
• Quad slope (с четверным наклоном) 1973
Даты относятся к времени первых публикаций или выдачи патентов.
Рис. 1.26. Этапы становления архитектуры счетных и интегрирующих АЦП
• Дельта-модуляция 1950
• Дифференциальная ИКМ 1950
• Одно- и многоразрядные отсчеты с избыточной частотой
с форматированием шума 1954
• Первое упоминание о Х-А «дельта-сигма» 1962
• Введение децимации и цифрового фильтра в АЦП,
удовлетворяющего критерию Найквиста 1969
• Полосовая сигма-дельта 1988
Даты относятся к времени первых публикаций или выдачи патентов.
Рис. 1.27. Этапы становления архитектуры сигма-дельта АЦП
К концу 1960-х годов уже существовали основные архитектуры и стро-
ительные блоки для модульных и гибридных преобразователей, и большая
часть работы на пути к созданию монолитного преобразователя, появивше-
гося в начале 1970-х годов, была проделана.
Глава 1. История преобразователей
Список литературы
1.2. Преобразователи 1950-х и 1960-х годов
1. G.G. Bowers. Analog to Digital Converters. Control Engineering, April 1957,
pp. 107-118.
2. Bernard M. Gordon and Robert P. Talambiras. Signal Conversion Apparatus. U.S.
Patent 3, 108, 266, filed July 22, 1955, issued October 22, 1963. (Classicpatent describing
Gordonys 11-bit, 50 kSPS vacuum tube successive approximation ADC done at Epsco. The
internal DAC represents the first known use of equal currents switched into an R/2R ladder
network.)
3. G.J. Herring. High Speed Analogue to Digital Conversion. Journal British IRE,
August 1957, pp. 407—420.
4. G.J. Herring. Electronic Digitizing Techniques. Journal British IRE, July 1960, pp.
513-517.
5. F.M. Young. Factors Limiting A/D Conversion State of the Art. Data Systems
Engineering, May 1964, pp. 35—39.
6. George Flynn. Analog to Digital Converters. Electronic Products, Vol. 10, No. 5,
October 1967, pp. 18—48.
7. Bernard M. Gordon. Definition of Accuracy of Voltage to Digital Converters.
Instruments and Control Systems, May 1959, p. 710.
8. W.M. Gaines. Terminology for Functional Characteristics of Analog to Digital
Converters. Control Engineering, February 1961.
9. Bernard M. Gordon. Designing Sampled Data Systems. Control Engineering, April
1961, pp. 127-132.
10. Bernard M. Gordon. How to Specify Analog-to-Digital Converters. Electronic Design,
May 10 1961, pp. 36—39.
11. Bernard M. Gordon. How Much Do Components Limit Converter Performance?
Electronic Design, June 21, 1961, pp. 52—53.
12. P. Barr. Influence of Aperture Time and Conversion Rate on the Accuracy of AID
Converters. Data Systems Engineering, May 1964, pp. 30—34.
13. A. Van Doren. Solving Error Problems in Digital Conversion Systems. Electromechanical
Design, April 1966, pp. 44—46.
14. J. Freeman. Specifying Analog to Digital Converters. The Electronic Engineer.
June 1968, pp. 44—48.
15. Bernard M. Gordon. Speaking Out on Analog to Digital Converters. EEE Magazine,
December 1968.
16. Bernard M. Gordon. Bernard Gordon of Analogic Speaks Out on Whatys Wrong
with A/D Converter Specs. EEE Magazine, February 1969, pp. 54—61.
17. J. O. Edson and H.H. Henning. Broadband Codecs for an Experimental 224 Mb/s
PCM Terminal. Bell System Technical Journal, Vol. 44, pp. 1887—1940, Nov. 1965.
18. James J. Pastoriza. Solid State Digital-to-Analog Converter. U.S. Patent 3, 747,
088, filed December 30, 1970, issued July 17, 1973. (The first patent on the quad switch
approach to building high resolution DACs.)
19. Bernard M. Gordon and Evan T. Colton. Signal Conversion Apparatus. U.S. Patent
2, 997, 704, filed February 24, 1958, issued August 22, 1961. (Classic patent describes the
logic to perform the successive approximation algorithm in a SARADC.)
20. H7. W. Rouse Ball and H.S.M. Coxeter. Mathematical Recreations and Essays.
Thirteenth Edition, Dover Publications, 1987, pp. 50, 51. (Describes a mathematical
puzzle for measuring unknown weights using the minimum number of weighing operations.
The solution proposed in the 1500ys is the same basic successive approximation algorithm
used today.)
1.3. Развитие преобразователей в 1970-е годы
Замечания по истории противоракетной системы (АВМ):
Хотя большая часть информации, касающейся различных противоракетных си-
стем, была классифицирована в свое время, сейчас она доступна. Имеется несколь-
ко превосходных вебсайтов, которые могут предоставить дополнительную инфор-
мацию и ссылки:
• www.ucsusa.oig является сайтом, поддерживаемым Союзом озабоченных ученых.
2 Brattle Square, Cambridge, МА 02238. Имеется секция на сайте при секции безопасно-
сти с названием «От Найк-Зевса к Сэйфгарду: US Defenses Against ICBMs», 1958—1976.
• www.paineless.id.au/missiles является сайтом, поддерживамым индивидуально
с превосходной коллекцией ссылок о программах ПРО. Отличная «Белая книга» на
сайте озаглавлена: «Антиядерная ПРО США».
В дополнение к вебсайтам следующая книга, опубликованная Бел Систем, дает
хорошее обсуждение развития системы ПРО:
• М.Д. Фэген (M.D. Fagen). История научных и инженерных разработок в Бел
Систем: Национальная служба (безопасности) в войне и мире (1925—1975), Bell
Telephone Laboratories, 1978, ISBN 0-932764-00-2.
1.3. Развитие преобразователей в 1970-е годы
В 1970 году началось одно из наиболее значимых десятилетий в истории
преобразователей. Движущей силой рынка АЦП/ЦАП был ряд сфер их при-
менения, например таких, как: цифровые вольтметры с высокой разреша-
ющей способностью, процесс управления промышленным производством,
военные фазированные радары, медицинское оборудование, индикаторы с
векторной разверткой, индикаторы с растровой разверткой. Большинство
этих систем раньше использовали обычную аналоговую технику обработки
сигналов, но возросшая доступность дешевых вычислительных технологий
вызвала желание использовать преимущество улучшенной производитель-
ности и гибкости, предлагаемое цифровой обработкой сигналов и их ана-
лиза, и, конечно, с применением совместимых преобразователей.
В результате большое количество компаний начали заниматься разра-
боткой преобразователей данных, к их числу можно отнести Analog Devices,
Analogic Corporation (первоначально Epsco, а позже Gordon Engineering),
Burr Brown, Computer Labs, Datel, Hybrid System, ILC/Data Device Corporation,
Micronetworks, National Semiconductor, Teledyne Philbrick и Zeltex.
Интегральные схемы блоков, так же как и полные ИС-преобразовате-
лей, в 1970-е годы выпускались следующими фирмами: Analog Devices,
Advanced Micro Devices, Fairchild, Signetics, Intersil, Micro Power Systems,
Motorola, National Semiconductor, TRW (LSI Division) и Precision Monolitics.
Преобразователи 1970-х годов использовали все доступные в то время
технологии: монолитную, модульную, гибридную. Модульные и гибридные
компоненты имели большую разрешающую способность и скорость по срав-
нению с существующими монолитными аналогами.
Непреложный факт: для того чтобы получить максимальную выгоду от
использования новой технологии, не нужно забывать об обучении покупате-
лей и о высококвалифицированной технической поддержке, это актуально и
для преобразования данных. Изначально Analog Devices осознавала важность
хорошего материала по применению и начала использовать ряд обучающих
статей по ОУ, написанных их разработчиком Реем Стата1. Эти статьи были
Глава 1. История преобразователей
опубликованы в год основания Analog Devices, 1965, и до сих пор являются
классическими по обучению основам теории ОУ и их применению.
ADI продолжала оказывать информационную поддержку покупателям
через инструкции по применению, которая усилилась с появлением журна-
ла Analog Devices в 1967 году2. Первоначально устав журнала звучал так:
«Журнал для обмена информацией по технологии ОУ», после он изменился
на «Журнал для обмена информацией по аналоговой технике».
Распространение техники аналоговых схем -- это то, чем занимался
журнал Analog Devices в начале своего существования, и это получалось
достаточно успешно.
Первый выпуск содержал статью Рея Стата об ОУ, и она все еще дос-
тупна в качестве инструкции по применению3. Похожее замечание можно
сделать и о последующей статье Рея Стата4.
Вехой в жизни молодого журнала в 1969 году стало появление Дэна
Шайнголда в качестве редактора5. Являясь опытным и высококвалифици-
рованным экспертом по ОУ и редактирующим писателем начиная со вре-
мен вакуумно-электронной технологии и раннего периода развития полу-
проводников, когда он работал на George A. Philbrick Researches (GAP/R),
Дэн Шайнголд принес уникальный ряд навыков, направляющих редакти-
рование Analog Devices в нужное русло. И по сей день Дэн продолжает
оставаться главным редактором журнала. На протяжении более 35 лет его
высокие технические стандарты в области коммуникаций продолжают ос-
таваться промышленным эталоном.
Осознавая необходимость в создании универсальной книги о новой по-
явившейся сфере — преобразование данных, Analog Devices в 1972 году
публикует первое издание руководства по аналого-цифровому преобразо-
ванию (Analog-Digital Conversion Handbook) под редакцией Дэна Шайн-
голда6. Исправленная версия руководства по аналого-цифровому преоб-
разованию (Analog-Digital Conversion Notes) была опубликована в 1977 году.
В 1986 году совместно с Prentice-Hall Шайнголд выпустил третье издание
этой книги под первоначальным названием Analog-Digital Conversion
Handbook8. Все эти книги детально описывали архитектуру преобразовате-
лей, их технические характеристики, конструкции и их использование и
помогали также в принятии универсальной терминологии и производствен-
ных метрик в процессе производства.
Монолитные преобразователи 1970-х годов
ЦАП с биполярной технологией ИС
Ранние монолитные ЦАП изготавливались с использованием биполярной
технологии. Они содержали основное ядро полного ЦАП — массу ключей и
резисторов для взвешивания каждого бита. Примером является 1408 и поз-
же более высокоскоростной производный от него DAC08, выпущенный в
1975 году и представленный на рис. 1.28.
Эти преобразователи выпускались различными производителями и были
доступны по низкой цене. Но требовалось большое количество дополни-
тельных внешних компонентов для реализации их работы. К числу таких
1.3. Развитие преобразователей в 1970-е годы
MSB LSB
COMP V-
Рис. 1.28. ИС DAC08, 8-разрядный 85 нс ЦАП, 1975
компонентов можно отнести несколько резисторов, источник опорного
напряжения, защелку, выходной ОУ, возможно, корректирующий конден-
сатор, и один или два подстроечных потенциометра.
Преобразователи, подобные 1408 и DAC08, имели ограниченную 8-раз-
рядную точность, достигаемую путем согласования и отслеживания огра-
ничений диффузионных резисторов. Когда требуется более высокая точ-
ность, используются резисторы с более низким температурным коэффици-
ентом, что предполагает послепроизводственную настройку.
Пленочные резисторы имеют низкий температурный коэффициент и
могут быть подрезаны с помощью лазера — они очень хорошо подходят для
преобразователей. К середине 1970-х годов Analog Devices достигла значи-
тельного опыта не только в осаждении тонкопленочных резисторов, но и в
их подгонке на пластине.
AD562, разработанный Бобом Крейвеном и произведенный Analog
Devices, был изготовлен в 1974 году и представлял собой монолитный эле-
мент {«compound monolithic») из 2 ИС-чипов, смонтированных в одном кор-
пусе, без традиционных гибридных подложек, применявшихся для монти-
рования и соединений. Вместо этого 2 чипа были спроектированы таким
образом, что имелся только один соединяющий пучок проводов между чи-
пами (в дополнение к обычным, соединяющим с выводами корпуса), и
больше ничего не требовалось для монтажа 12-разрядного DAC в корпус.
В прототипе AD562 один чип содержал тонкопленочную резисторную схе-
му (включая резисторы установки двоичного взвешивания и резисторы ус-
тановки выходного усиления), другой чип содержал усилитель управления
опорным напряжением и токовые ключи для 12 разрядов. При достижении
зрелости процесса стало более практичным производство больших по раз-
мерам чипов. Два чипа первоначального AD562 позже слились в однокри-
стальную версию. Это был первый 12-разрядный ЦАП, квалифицирован-
ный по стандарту министерства обороны США MIL-M-38510.
Хотя AD562 был первым интегральным 12-разрядным ЦАП и представ-
лял собой решение достаточно трудных конструкторских проблем, он про-
должал оставаться только строительным элементом, так как у него не было
буферной защелки, источника опорного напряжения и выходного усилите-
ля. Вскоре после появления двухкристального AD5629’10 появилась версия с
третьим кристаллом. Третий чип имел 2,5-В источник опорного напряже-
ния bandgap-типа (спроектированный Полом Brokow и детально описан-
ный в н’ 12). Это позволило сделать функционально ЦАП более полным.
Глава 1. История преобразователей
Выход
опорного Выключение
Рис. 1.29. AD565, 12-разрядный 200 нс ЦАП, 1978
Появившийся в результате продукт, известный как AD563, также завоевал
достаточную популярность и в конечном счете совершил переход к полно-
стью монолитному однокристальному устройству.
Другая проблема AD562 заключалась в том, что ему не хватало быстро-
действия для многих приложений — его время установления составляло
примерно 1 мкс. Дальнейшие успехи в разработке ключей и производстве
диодов Зенера привели к производству высокоскоростных ЦАП: AD565,
выпущенный в 1978 году и последовавший за ним в 1981 году AD565A.
Упрощенная схема AD565 показана на рис. 1.29.
Битовые ключи, используемые в этой конструкции, значительно мень-
ше тех, что применялись в AD562. Это позволило значительно сократить
площадь кристалла и увеличить выход годных кристаллов с полупроводни-
ковой пластины. Новые ключи привели к изменению установочного вре-
мени, которое составляло теперь 200 ns до уровня 72 LSB. В AD565 исполь-
зовался встроенный источник опорного напряжения Зенера, имевший мень-
ший шум по сравнению с источником йяиб/^яр-типа, применявшимся в
AD563.
AD565 сохранил ту же цоколевку, что и предшествующий AD563, наря-
ду с улучшенной производительностью и низкой ценой.
Необходимо отметить, что AD561 был первым монолитным одночипо-
вым 10-разрядным ЦАП с тонкопленочными резисторами, подгоняемыми
лазером на пластине (LWT\ и внутренним источником напряжения. Он
был спроектирован Петером Холовэйем и представлен фирмой Analog Devices
в 1976 году13. Этот ЦАП использовал метод компенсации ошибок, появив-
шихся в процессе работы транзисторов внутреннего источника тока при
разных плотностях тока. Эта идея была запатентована Р. Brokaw, и его па-
тент является одним из широко распространенных справочных патентов по
процессу преобразования данных14.
CMOS ИС ЦАП в 1970-х годах
Как мы видели, ранние коммерчески доступные монолитные ЦАП были
изготовлены с использованием обычной биполярной линейной техноло-
гии. До 1974 года, когда был представлен AD7520 CMOS ЦАП, было
трудно достичь 10-разрядного преобразования с хорошим выходом годных
(и при низкой цене) из-за конечности коэффициента усиления Ь переклю-
1.3. Развитие преобразователей в 1970-е годы
чателей и связанной с этим трудностью согласования с Vbe, сложности
выполнения необходимых диффузионных резисторных лесенок и ограни-
чений, вызванных температурными градиентами, создаваемыми высокой
внутренней рассеиваемой мощностью.
Большинство из этих проблем удалось решить или избежать при приме-
нении CMOS-устройств. Транзисторы с технологией CMOS имели беско-
нечное усиление тока, что позволяло избегать b проблем. Не существует
эквивалента в схеме CMOS, совпадающего с биполярным транзисторным
напряжением Vbe, вместо этого СЛ/05-ключ в состоянии ON почти идеаль-
ный резистор, с величиной сопротивления, управляемой геометрией устрой-
ства. Температурные проблемы диффузионных резисторов были устранены
путем использования тонкопленочных резисторов. Упрощенная схема
AD7520, 10-разрядного, 500-ns, СМО5-умножающего ЦАП, представлен-
ного в 1974 году, показана на рис 1.30.
Архитектура AD7520 представляет собой стандартную токовую R-2R (так-
же называемую «инверсная R-2R»), она описана в гл. 3. Выход подается на
инвертирующий вход внешнего ОУ, подключенного как 1/ V-преобразова-
тель. Ю-kW резистор обратной связи для ОУ является внутренним у AD7520
и благодаря этому обеспечивает хорошее согласование. Главным в дости-
жении линейности AD7520 является то, что геометрия ключей, соответ-
ствующих первым 6 разрядам, изменяется таким образом, чтобы достичь
необходимых OTV-сопротивлений в бинарном соотношении.
Архитектура AD7520 была расширена до 12-разрядного разрешения в
AD7541 путем добавления дополнительных ячеек ключей и резисторов.
Однако для достижения 12-разрядной линейности была необходима лазер-
ная подгонка на пластине. AD7541, выпущенный в 1978 году, был первым
12-разрядным CMOS, умножающим ЦАП. Время установления до У2 LSB
составляло 1 мкс.
AD7520 и AD7541 положили начало целой серии умножающих CMOS
ЦАП общего назначения от Analog Devices. Некоторые из них будут рас-
смотрены далее {см. разд. 1.4 «Преобразователи данных в 1980-е годы»).
Другим важным элементом ЦАП стало добавление защелки на кристал-
ле (обычно такие ЦАП называются буферированными — buffered). Наличие
защелки позволило подключать ЦАП к шине данных микропроцессора.
AD7524, изображенный на рис. 1.31, представлял собой 8-разрядный умно-
жающий CMOS ЦАП, имеющий защелку на кристалле. Данные загружают-
io 10 10
(MSB) (LSB)
Выход 2
Выход 1
Сопротивление
обратной связи
Земля
Рис. 1.30. AD7520, первый монолитный умножающий CMOS 10-разрядный ЦАП
Глава 1. История преобразователей
10 10 10
кОм кОм кОм
--- О Выход 2
О Выход 1
кОм Сопротивление
обратной связи
О Земля
DB7 DB6 DB5 DB0
(MSB)
(LSB)
< 20
«► кОм
Рис. 1.31. AD7524, 8-разрядный, буферированный, совместимый с микропроцессором
ЦАП, 1978
ся в ЦАП по команде Выбор чипа, затем данные записываются на защелку
командой Запись. Путем возвращения команды Запись в положение 0 мы
отсоединяем защелку от шины данных, и при желании к шине можно при-
соединить другое устройство.
Последующие ЦАП имели вторую защелку и назывались ЦАП с двой-
ным буфером (double-buffered). Входная защелка использовалась для заг-
рузки данных (последовательных, параллельных или в байтах), и, когда
вторая параллельная защелка ЦАП стробировалась, выходной сигнал с
ЦАП обновлялся.
Вскоре разработчики преобразователей осознали значимость упроще-
ний при связи с микропроцессорами и цифровыми сигнальными процес-
сорами, вследствие этого расширилась функциональность устройств, улуч-
шение которой продолжается и по сей день.
На рис. 1.32 представлены основные этапы развития монолитных ЦАП
в 1970-е годы.
Монолитные АЦП 1970-х годов
Большинство АЦП в начале 1970-х годов имели модульную или гибрид-
ную структуру, но были предприняты значительные усилия по разработке
полностью монолитных АЦП со стороны производителей преобразовате-
лей. Самая ранняя попытка реализовалась в создании в 1975 году AD7570,
10-разрядного, 20 мкс, CMOS SAR АЦП.
Однако из-за трудностей проектирования хороших компараторов, уси-
лителей и источников опорного напряжения в раннем СЛ/О5-процессе,
AD7570 нуждался во внешнем LM311-компараторе, так же как и в источни-
ке опорного напряжения.
Архитектура интегрирующих АЦП была подходящей для раннего CMOS-
процесса, поэтому в 1976 году Analog Devices представила 13-разрядный
AD7550, в котором применялась универсальная архитектура под названием
«quad slope» (учетверенный наклон). Эта архитектура была запатентована
Айвером Уолдом15.
1.3. Развитие преобразователей в 1970-е годы
Биполярные
• AD550 «//ЦАП» — строительный блок счетверенного переключателя (building block
quad switch), 1970.
• AD562 12-разрядный, 1,5 мкс (2 кристалла, в монолитном корпусе) ЦАП, 1974.
• 1408 8-разрядный, 250 нс ЦАП, 1975.
• DAC08 8-разрядный, 80 нс, 1976.
• AD561 10-разрядный, 250 нс, с лазерной подгонкой (LWT) резисторов, с токовым
выходом ЦАП с источником опорного напряжения, 1976.
• AD565, 12-разрядный, 200 нс, LWT, с токовым выходом ЦАП с источником опорного
напряжения, 1978.
CMOS:
• AD7520, 10-разрядный, 500 нс, умножающий ЦАП, 1974.
• AD7541, 12-разрядный, 1 мкс, LWT, умножающий ЦАП, 1978.
• AD7524, 8-разрядный, 150 нс, LWT, умножающий ЦАП с буферной защелкой, рР ин-
терфейс, 1978.
Рис. 1.32. Краткое изложение истории развития монолитных ЦАП в 1970-х годах
Первым полностью монолитным АЦП стал 10-разрядный, 25 мкс AD571
последовательного приближения, изобретенный Р. Brokaw и представлен-
ный в 1978 году16. AD571 был спроектирован на основе биполярного про-
цесса с использованием / ^/-тонкопленочных резисторов. Для того чтобы
реализовать логические функции, необходимые АЦП последовательного при-
ближения, к биполярному процессу добавили интегральную инжекцион-
ную логику (TL). Процесс позволил использовать уплотненную низковоль-
товую логику на том же кристалле, так же как и прецизионные линейные
высоковольтные схемы.
И2Л процесс был особенно полезен в производстве АЦП, так как была
необходима только одна диффузионная операция в дополнение к использу-
емым в стандартном линейном процессе. Кроме того, эта диффузия не вли-
яла на другие операции процесса. Таким образом, аналоговая часть схемы
относительно не изменялась из-за дополнительной логики.
10-разрядный AD571 (и 8-разрядный AD570) был полностью монолит-
ным АЦП со встроенным тактовым генератором и источником опорного
напряжения Зенера, с подгоняемым лазером ЦАП (на основе конструкции,
описанной в 14) и с выходным буфером с тремя состояниями. Упрощенная
схема AD571 приведена на рис. 1.33.
Возможно, что самым значительным из когда-либо представленных
SAR АЦП был 12-разрядный, 35 мкс AD574 1978 года выпуска. AD574
представлял собой решение всех проблем, включал встроенный источник
опорного напряжения Зенера и схему тактового генератора, выходные
буферы с тремя состояниями для прямого сопряжения с 8-, 12-, 16-разряд-
ными микропроцессорными шинами. В своей изначальной форме AD574
был изготовлен на основе составной монолитной конструкции с использо-
ванием 2 кристаллов — один AD565 12-разрядный ЦАП с токовым выхо-
Глава 1. История преобразователей
Бланк
Аналоговый
вход
Аналоговый
общий
Управление
биполярным
смещением
Цифровой и управление
I/ + V- общий преобразованием
Биты цифрового
выхода
Чтение
данных
Рис. 1.33. AD571, полностью интегральный 10-разрядный, 25 мкс АЦП, 1978
дом, включающий источник опорного напряжения и тонкопленочные
масштабные резисторы, другой содержал регистр последовательного при-
ближения (£47?) и логические функции микропроцессорного интерфейса
и прецизионный компаратор с защелкой. AD574 вскоре стал выпускаться
в промышленном стандарте (по температурному диапазону. — Примеч. ред.)
12-разрядного АЦП начала 1980-х годов. Впервые в 1985 году он стал до-
ступным в монолитной однокристальной форме, что позволило использо-
вать дешевые коммерчески выгодные корпуса. Упрощенная блок-схема
AD574 показана на рис. 1.34.
+5 В источник
питания l/L0GIC
Выбор типа
данных 12/8
Выбор чипа
CS
Адрес байта/
короткий цикл Ао
Чтение/преоб^
разование R/C
Включение чипа
СЕ
+12\+15 В источ-
ник питания Vcc
+ 10 В опорное
напряжение
Общий
аналоговый АС
Вход опорного
напряжения
12\-15 В источник
питания VEE
Биполярное
смещение
Вход 10 В
размаха 101/вх
Вход 20 В
размаха 201/вх
Рис. 1.34. AD574, 12-разрядный, 35 мкс, интегральный АЦП промышленного стандар-
та, 1978
• AD7570, 10-разрядный, 20 мкс CMOS АЦП последовательного приближения (нуждал-
ся в наличии внешнего компаратора и опорного напряжения), 1975.
• AD7550, 13-разрядный интегрирующий АЦП на основе техники «quad slope», 1976.
• AD571, составной 10-разрядный, 25 мкс монолитный SAR АЦП, с источником опор-
ного напряжения, использующий И2Л схему и LWT тонкопленочные резисторы, раз-
работанный Р. Brokaw, 1978.
• AD574, 12-разрядный, 35 мкс 2 кристалльный, монолитный АЦП последовательного
приближения, 1978; однокристальная версия 1985.
• Flash (параллельные) АЦП:
— TRW TDC-1007J/TDC-1016J, 8-разрядный/6-разрядный 30 MSPS АЦП, 1979;
- АМ6688 4-разрядный, 100 MSPS АЦП, 1979.
Рис. 1.35. Краткое изложение: монолитные АЦП в 1970-х годах
С наступлением 1970-х годов появились первые высокоскоростные ви-
део Flash (параллельные) АЦП, начиная с TDC-1007J 8-разрядного, 30-MSPS
от LSI отделения 77?ИИв 1979 году17. TRW также представила низкомощную
6-разрядную версию TDC-1014J. Также в 1979 году Advanced Micro Devices
представила АМ6688 4-разрядный, 100-MSPS flash АЦП, разработанный Джи-
мом Гайлсом, автором ранее спроектированных АМ685 и АМ687 — быстрых
/TCZ-компараторов. Более подробно эволюция параллельных преобразова-
телей приведена в разд. 1.4 «Преобразователи данных в 1980-х годах»).
Развитие монолитных АЦП в 1970-е годы кратко изложено на рис. 1.35.
Гибридные преобразователи в 1970-е годы
Несмотря на то что в начале 1970-х годов было разработано несколько ин-
струментальных стоечных преобразователей (таких как ИЯ5-серии и 7000-
серии от Computer Labs Inc), возросшие требования к более дешевым ком-
пактным и высокопроизводительным преобразователям вынудили произ-
водителей заняться дополнительной разработкой гибридных и модульных
устройств — монолитная технология того времени была еще не в состоянии
поддерживать высокопроизводительные функции преобразователей, исполь-
зуя лишь один кристалл.
В 1970 году разработчики гибридных и модульных преобразователей име-
ли массу компонентов, из которых можно было выбирать, включая ИС ОУ,
ИС ЦАП, компараторы, дискретные транзисторы, различные логические
кристаллы и т. п. На рис. 1.36 приведены некоторые наиболее популярные
в 1970-е годы гибридные и модульные строительные блоки.
В гибридах обычно использовались керамические подложки с тонко-
или толстопленочными проводниками. Индивидуальные кристаллы закреп-
лены на подложке (обычно с помощью эпоксидного клея). Провода соеди-
няют контактные площадки кристаллов и проводники подложки. Гибриды
обычно герметично упакованы в керамические или металлические корпуса.
Точность была достигнута подгонкой тонко- или толстопленочных резис-
торов после их установки или при отсоединении, но перед герметизацией.
Производители использовали тонкопленочные схемы, дискретные тонко-
пленочные резисторы, осажденные толсто- или их тонкопленочные резис-
торы или их комбинации.
Глава 1. История преобразователей
• «Quad switches» (AD550//DAC).
• Прецизионные тонкопленочные резисторные схемы (AD850).
• ИС ЦАП: AD562, AD563, AD565, 1408, DAC08.
• ИС компараторы: дА710, //А711, NE521, LM311, LM361, МС1650, АМ685, АМ687.
• Регистры последовательного приближения (SARs): 2502, 2503, 2504.
• ИС и гибридные ОУ.
• ИС источников опорного напряжения и напряжения Зенера.
• Быстрые PNP и быстрые NPN дискретные транзисторы.
• Монолитные согласованные пары FETs.
• Монолитные транзисторные матрицы (RCA CA-series).
• Диоды Шотки.
• CMOS и DMOS-ключи.
• Логика TTL, CMOS, ECL.
• 4-, 6-, 8-разрядные монолитные параллельные АЦП (начиная с 1979 года).
Рис. 1.36. Компоненты для гибридных и модульных преобразователей 1970-х годов
Хотя производство кристалло-проводникового гибрида было значительно
дороже, чем производство ИС, но это позволяло достигнуть таких уровней
параметров, которые были недостижимы при использовании существую-
щей монолитной технологии того периода. Доступные гибридные схемы в
процессе своей эволюции привели к созданию монолитных форм. Для
разных устройств этот период составлял от 5 до 10 лет. Самым популярным
12-разрядным ЦАП 1970-х годов был DAC80. Представленный в середине
1970-х годов, он состоял из 11 кристаллов: 3 quad 5>г/7сЛ-матрицы, 2 ОУ,
2 резисторные схемы, диод Зенера, 2 диода-стабилитрона, бескорпусной
конденсатор (см. рис. 1.37, а). В 1978 году, когда монолитная технология
достигла того уровня, при котором создалась возможность сочетать ключи и
резисторные схемы на одном кристалле, был создан трехкристальный DAC80
(рис. 1.37, б). Эти 3 кристалла содержали источник опорного напряжения,
выходной ОУ и схему с ключами, резисторами и управлением усилителями.
Новая конструкция предлагала параметры, идентичные первоначально-
му DAC80, но при значительном улучшении надежности и уменьшении
Ранняя версия
из 11 чипов,
промышленный
стандарт
3-кристальная
версия
Единый кристалл,
керамический
корпус
Единый кристалл,
пластиковый
корпус
Рис. 1.37. DAC80 — эволюция 12-разрядного ЦАП
1.3. Развитие преобразователей в 1970-е годы
Рис. 1.38. AD572, 12-разрядный, 25 мкс, гибридный АЦП для MIL-применений, 1977
стоимости. В 1983 году появился однокристальный DAC80 (рис. 1.37, в).
Это повлекло за собой дальнейшее уменьшение цены и повышение надеж-
ности по сравнению с 3- и 11-кристальными версиями. В конечном счете,
в 1984 году это популярное устройство было предложено в недорогом пла-
стиковом DIP-корпусе. Таким образом, в течение 10 лет DAC80 развился из
достаточно дорогого гибрида в болыпеобъемную удобную ИС.
Другим прекрасным примером гибридной технологии можно назвать
AD572, 12-разрядный, 25 мкс SAR АЦП, выпущенный в 1977 году. AD572
включал в себя внутренний тактовый генератор, опорное напряжение, ком-
паратор, входной буферный усилитель. В качестве регистра последователь-
ного приближения использовался популярный 2504. Внутренний ЦАП со-
стоял из 12-разрядного кристалла ключей и тонкопленочной схемы с под-
гонкой, который корпусировался в виде двухкристального AD562 ЦАП.
AD572 был первым одобренным военными структурами 12-разрядным АЦП,
удовлетворяющим стандарту MIL-STD883B для использования в полном
рабочем температурном диапазоне от —55 до 4-125 °C. Фотография AD572
приведена на рис 1.38.
В 1970-е годы было разработано много гибридных схем, самые основ-
ные приведены на рис. 1.39. К концу 1970-х годов Компьютер Лаб. предста-
вила несколько очень быстрых гибридных преобразователей, основанных
на технологии подгонки толстопленочных резисторов (в 1978 году Комрью-
тер Лаб. вошла в состав Analog Devices). Технология толстопленочных рези-
сторов, разработанная в Компьютер Лаб. в 1970-е годы, давала возмож-
• DAC80, 12-разрядный ЦАП, 1975.
• ADC80, 12-разрядный, 25 мкс SAR АЦП, 1975.
• AD572, 12-разрядный, 25 мкс, для военного применения АЦП, 1977.
• HDS -1250, 12-разрядный, 35 нс ЦАП (также 8-, 10-разрядные версии), 1979.
• HAS-1202, 12-разрядный, 2,2 мкс SAR АЦП (также 8-, 10-разрядные версии), 1979.
• НТС-0300, 300 нс SHA; HTS-0025, 25 нс SHA, 1979.
Рис. 1.39. Вехи в гибридной технике АЦП и ЦАП в 1970-е годы
Глава 1. История преобразователей
ность использовать 12-разрядную точность. Это было значительным дости-
жением, так как большинство производителей гибридов использовали бо-
лее дорогие тонкопленочные резисторы для 12-разрядных устройств.
ЦАП Я7)5-серии и ЦАП ЯАУ-серии использовали толстопленочные ре-
зисторы с активной подгонкой и ключи на дискретных РАР-транзисторах
для внутренних ЦАП.
Необходимо отметить, что на данном этапе ни один из монолитных или
гибридных АЦП 1970-х годов не являлся АЦП с отсчетами, имеющий внут-
реннюю систему выборки и хранения (SHAs).
Для того чтобы обрабатывать сигналы переменного тока, с АЦП долж-
на быть соединена отдельная система выборки и хранения (при помощи
подходящего интерфейса и схемы синхронизации). Это вызвало необхо-
димость использования гибридных SHAs, таких как НТС-0300 и более бы-
стрых HTS-0025.
Модульные преобразователи 1970-х годов
Разработчики модульных преобразователей 1970-х годов имели большие воз-
можности, чем разработчики гибридных систем. Фактически модульная тех-
нология зародилась в конце 1960-х годов, до того момента, когда гибридные
технологии стали столь популярными. Модульные технологии и по сей день
применяются в некоторых элементах. На рис. 1.40 показаны 2 ранних наибо-
лее популярных модульных АЦП: ADC-12QZ и MAS-1202. Модульная тех-
нология являлась хорошо отработанной — компоненты монтировались на
печатной плате, капсулированные в герметизированный модуль после под-
гонки (обычно с помощью резисторов, отобранных вручную).
Заливочный компаунд использовался для распределения тепла по моду-
лю, обеспечивая тепловое согласование наиболее важных компонентов, и
затруднял конкурентам доступ к схемам.
ADC-12QZ и MAS-1202 потребляли примерно 2 Вт и продавались за 130
и 270 долларов соответственно.
Первый из полностью модульных стробируемых АЦП 1970-х годов ис-
пользовал open-card конструкцию с комбинацией гибридных, ИС и диск-
mas-1202, 12-разрядный 2 мкс
SAR АЦП 1975 г. выпуска
ADC-12QZ, общего пользования
12-разрядный 40 мкс
SAR АЦП 1972 г. выпуска
2"х4"х 0,4". 1.8W, $130.00
2" х 4" х 0,4", 2.4W, $270.00
Внутренний ЦАП
с 4-разрядным ключом
и тонкопленочной схемой
Внутренний ЦАП
с дискретными рлр-транзисторами
и вручную отобранными резисторами
Рис. 1.40. Ранние модули АЦП 1970-х годов
1.3. Развитие преобразователей в 1970-е годы
0,5*, 21W, $3,500.00
Рис. 1.41. MOD-1020, 10-разрядный, 20 MSPS стробируемый АЦП, 1979
ретных строительных блоков на печатной плате. MOD-815 8-разрядный,
15-MSPS АЦП был изготовлен в 1976 году Комрьютер Лаб. В конструкции
использовались два 4-разрядных параллельных преобразователя в субдиа-
пазонной архитектуре (subranging architecture, см. гл. 3). Каждый из 4-раз-
рядных параллельных преобразователей состоял из 8 двойных АМ687 ECL-
компараторов. MOD-815 был одним из первых коммерческих АЦП, ис-
пользованных в быстроразвивающейся сфере цифрового телевидения.
Другие популярные модули, собранные на печатной плате, MOD-1205
12-разрядный, 5-MSPS АЦП и MOD-1020 10-разрядный, 20-MSPS АЦП, были
представлены Analog Devices/Computer Labs в 1979 году. Эта технология сде-
лала возможным появление на рынке первых параллельных преобразовате-
лей: Advanced Micro Devices АМ6688 (4-разрядный), 100 MSPS flash, TRW
TDC-1007J (8-разрядный) и TDC-1014J (6-разрядный). На рис. 1.41 показа-
на фотография MOD-1020 с указанием названия основных элементов. В
данном преобразователе использовалась субдиапазонная архитектура с дву-
мя АМ6688, осуществляющими первое 5-разрядное преобразование, и 6-раз-
рядный TDC-1014J, осуществляющий второе шестиразрядное преобразова-
• DAC-12QZ, 12-разрядный ЦАП, 1970.
• ADC-12QZ, 12-разрядный 40 мкс SAR АЦП, 1972.
• MAS-1202, 12-разрядный 2 мкс SAR АЦП (а также 8- и 10-разрядные версии), 1975.
• ADC1130, 12-разрядный 12 мкс SAR АЦП, 1975.
• MDS-1250, 12-разрядный 50 нс ЦАП (а также 8- и 10-разрядные версии), 1975.
• THS-0300, 300ns SHA; THS-0025, 25ns SHA, 1975.
• MOD-815, 8-разрядный 15MSPS видео, стробируемый АЦП, 1976.
• SDC1700, синхроцифровой преобразователь, 1977.
• DAC1138, 18-разрядный ЦАП (самый точный на протяжении 10 лет), 1977.
• MOD-1205, 12-разрядный 5 MSPS, стробируемый АЦП, 1979.
• MOD-1020, 10-разрядный 20 MPSP, стробируемый АЦП, 1979.
Рис. 1.42. Достижения модульной технологии АЦП и ЦАП в 1970-х годах
Глава 1. История преобразователей
ние. Дополнительный разряд использовался для корректировки ошибок. MOD-
1020 имел немного £С£-логики и рассеивал 21 Вт. Из-за высокого уровня
производительности и большого количества дорогих гибридных и ИС строи-
тельных блоков MOD-1020 стоил 3500 долларов.
Начиная с середины 1970-х годов большинство модульных дискретных
преобразователей был протестирован с использованием FFT-техники (бы-
строе преобразование Фурье — БПФ) для измерения отношения сигнал-
шум (SNR), эффективной разрядности (ENOB) и искажения (см. гл. 5 «Те-
стирование преобразователей данных»).
Обобщенные данные по популярным модульным АЦП и ЦАП 1970-х го-
дов приведены на рис. 1.42.
Список литературы
1.3. Развитие преобразователей в 1970-е годы
1. Ray Stata. Operational Amplifiers — Parts I and II. Electromechanical Design,
September, November, 1965.
2. Analog Dialogue, Vol. 1, No. 1, April 1967. (The premier issue of Analog Dialogue —
«А Journal for the Exchange of Operational Amplifier Technology».)
3. Ray Stata. Operational Integrators. Analog Dialogue, Vol. 1, No. 1, April, 1967.
(Reprinted as ADI AN357.)
4. Ray Stata. Userys Guide to Applying and Measuring Operational Amplifier
Specifications. Analog Dialogue, Vol. 1, No. 3. (Reprinted as ADI AN3 56).
5. Analog Dialogue, Vol. 3, No. 1, March 1969. (The first issue of Analog Dialogue under
the editorial guidance of Dan Sheingold.)
6. Dan Sheingold. Analog-Digital Conversion Handbook. First Edition, Analog Devices,
1972.
7. Dan Sheingold. Analog-Digital Conversion Notes, Analog Devices, 1977.
8. Dan Sheingold. Analog-Digital Conversion Handbook, Analog Devices/Prentice-Hall,
1986, ISBN-0-13-032848-0.
9. Robert B. Craven. An Integrated Circuit 12-bit D/А Converter, IEEE International
Solid-State Circuits Conference Digest of Technical Papers, February 1975, pp. 40—41.
10. Robert B. Craven. Solid-State Digital-to-Analog Converter. U.S. Patent 3, 961,
326, filed September 12, 1974, issued June 1, 1976.
11. Paul Brokaw. A Simple Three-Terminal IC Bandgap Voltage Reference. IEEE
Journal of Solid State Circuits, Vol. SC-9, December, 1974.
12. Paul Brokaw. More About the /AD580 Monolithic IC Voltage Regulator. Analog
Dialogue, 9—1, 1975
13. Peter Holloway and Mark Norton. A High-Yield Second-Generation 10-Bit
Monolithic DAC. ISSCC Digest of Technical Papers, February 1976, pp. 106—107.
14. Adrian Paul Brokaw. Digital-to-Analog Converter with Current Source Transistors
Operated Accurately at Different Current Densities. U.S. Patent 3, 940, 760, filed March
21, 1975, issued February 24, 1976.
15. Ivar Wold. Integrating Analog-to-Digital Converter Having Digitally Derived Offset
Error Compensation and Bipolar Operation without Zero Discontinuity. U.S. Patent 3,
872, 466, filed July 19, 1973, issued March 18, 1975.
16. A. Paul Brokaw. A Monolithic 10-Bit A/D Using PL and LWT Thin-Film Resistors.
IEEE Journal of Solid-State Circuits, Vol. SC-13, pp. 736—745, December 1978.
17. J. Peterson. A Monolithic Video A/D Converter. IEEE Journal of Solid-State
Circuits, Vol. SC-14, No. 6, December 1979, pp. 932—937.
1.4. Преобразователи данных в 1980-е годы 5 I
1.4. Преобразователи данных в 1980-е годы
Уолт Кестер
Введение
1980-е годы являются высокопродуктивными годами развития ИС, гибрид-
ных и модульных преобразователей. Движущей силой рынка были совер-
шенствование инструментов, сбор данных, медицинское оборудование, про-
фессиональная и бытовая аудио/видео техника, компьютерная графика и масса
других применений. Возросшая доступность дешевых микропроцессоров, вы-
сокоскоростной памяти, цифровых сигнальных процессоров (ЦСП) и появ-
ление IBM-совместимых PC увеличило интерес ко всем сферам обработки
сигналов. Усилия разработчиков АЦП были сосредоточены на резком улуч-
шении параметров по переменному току, расширении динамического диапа-
зона, т. е. на создании стробируемых АЦП для всех частот. Технические
характеристики, такие как отношение сигнал—шум (SNR), отношение сиг-
нал-шум + искажение (SINAD), эффективная разрядность (ENOB), отно-
шение мощности шума (NPR), истинный — spurious free — динамический
диапазон (SFDR), временное дрожание апертуры и т. д., стали появляться в
большинстве спецификаций АЦП, а в спецификациях ЦАП — площадь
выброса glitch, SFDR и др. В 1980-е годы достигли значительного распрос-
транения высокоскоростные биполярные и CMOS flash (параллельные) АЦП,
4-, 6-, 8-, 9-, 10-разрядные со скоростью дискретизации от 20 до 100 MSPS.
Цифровое видео являлось движущей силой для развития 8-, 9-, 10-разряд -
ных устройств. Для области графики изображений появились ЦАП с РАМ
(с оперативной памятью). CMOS представляла идеальный процесс для этих
интенсивно оснащаемых памятью приборов.
Обработка голосового канала с аудиосигналами привела к созданию 16-
и 18-разрядных АЦП и ЦАП, а появление CD-проигрывателей вызвало
необходимость создания дешевых аудио ЦАП.
В 1980-е годы основной целью АЦП и ЦАП стало предоставление боль-
шего разрешения, функциональности и более полное решение проблем в
отношении сбора данных и распределения, включая многоканальные АЦП
и ЦАП. Развитие аналогово-совместимых СЛ/05-процессов (таких как Analog
Devices LC2MOS и BiCMOS II, представленных в середине 1980-х годов)
позволило разработчикам преобразователей предоставить больше функци-
ональных возможностей, например путем добавления таких функций, как
опорное напряжение, буферное усиление на одном кристалле.
Другим важным достижением в середине 1980-х годов было освоение
биполярной комплиментарной (КП) технологии первого поколения в Analog
Devices, которая предлагала высокоскоростные, высококачественные со-
пряженные PNP- и ЛТА-транзисторы. Высокоскоростные ОУ, произведен-
ные на основе КБ-технологии, являлись отличными драйверами для мно-
гих новых АЦП. КБ-технология в конечном счете позволила получить до-
статочно высокопроизводительные ВЧ (IF), стробируемые АЦП, в 1990-х годах.
Более детально данные технологии можно изучить в гл. 4 «Технология преоб-
разователей».
Глава 1. История преобразователей
Монолитные ЦАП в 1980-е годы
На рис. 1.43 приведен список основных ИС ЦАП, предложенных в 1980-е годы.
Вместо того чтобы изучать каждый из продуктов индивидуально, мы рас-
смотрим несколько примеров, иллюстрирующих основные направления этой
серии изделий.
AD558, 8-разрядный, 1 мкс CMOS ЦАП, представленный в 1980 году,
иллюстрирует тенденцию развития интерфейсов, совместимых с микропро-
цессорами, которые в настоящее время являются универсальными для АЦП
и ЦАП общего назначения. Последующие продукты использовали цифро-
вые входы с двойной буферизацией, когда входной регистр принимал па-
раллельную, последовательную, широкобайтную информацию, а вторая
параллельная защелка использовалась для фактической корректировки пе-
реключателей ЦАП.
AD7546, хотя и требовал наличия двух внешних ОУ для полного выпол-
нения всех функций 16-разрядного ЦАП, являлся примером успешного
увеличения разрешения. Сегментная архитектура, использовавшаяся в
AD7546, позже была применена в 16-разрядном AD569, у которого все фун-
кции интегрировались на одном кристалле.
Появление сложноструктурного ЦАП в одном корпусе представлено
двойным AD7528, счетверенным AD390 (компаунд-монолитные), счетве-
ренным AD7226 (однокристальный).
Первоначальные СЛ/05ЦАП имели выходной ток (current-output), нуж-
дались во внешних ОУ для реализации процесса преобразования ток—на-
пряжение, но с изобретением технологий LC2MOS и BiCMOS появились
• AD558, 8-разрядный, 1 мкс, //P-совместимый, с выходным напряжением, биполяр-
ный/И2Л ЦАП, 1980.
• D7528, сдвоенный, 8-разрядный, с буферизацией, CMOS MDAC, 1981.
• AD7546, 16-разрядный, сегментный, CMOS ЦАП с режимом напряжения (требуются
дополнительные внешние усилители), 1982.
• AD7545, с буферизацией, 12-разрядный CMOS MDAC, 1982.
• AD390, счетверенный, 12-разрядный с выходным напряжением ЦАП (компаунд-моно-
литный), 1982.
• AD7240, 72-разрядный, с режимом напряжения, CMOS ЦАП, 1983.
• AD7226, счетверенный, 8-разрядный, с двойной буферизацией, с выходным напря-
жением, LC2MOS ЦАП, 1986.
• AD9700 125MSPS, 8-разрядный видео ECL ЦАП, 1984.
• AD7535, 14-разрядный с двойной буферизацией, LC2MOS MDAC, 1985.
• AD569, 16-разрядный, сегментный, с выходным напряжением, с двойной буфериза-
цией, BiCMOS ЦАП, 1986.
• AD7245, 12-разрядный, с двойной буферизацией, с выходным напряжением, LC2MOS
ЦАП, с внутренним опорным напряжением, 1987.
• AD1856/AD1860, 16-/18-разрядный аудио BiCMOS ЦАП для CD-проигрывателей, 1988.
• ADV453/ADV471/ADV476/ADV478 CMOS Video RAM-ЦАПы, 1988.
• AD7840, 14-разрядный, с двойной буферизацией, с выходным напряжением, LC2MOS
ЦАП, с внутренним опорным напряжением, 1989.
• AD7846, 16-разрядный, сегментный, с выходным напряжением, LC2MOS ЦАП, 1989.
Рис. 1.43. Монолитные ЦАП 1980-х годов
ЦАП, имеющие на выходе напряжение. Эти же технологии позволили ин-
тегрировать опорное напряжение на кристалле и тем самым обеспечили
более полное решение.
В середине 1980-х годов начали появляться аудио- и видеомонолитные
ЦАП. Создание AD1856/AD1860 16-/18-разрядных аудиоЦАП было вызва-
но появлением на рынке CD-проигрывателей. AD9700 ЦАП, представлен-
ный в 1984 году, был первым монолитным ЦАП на ИС, разработанный для
приложений с графической растровой разверткой, который обеспечивал
синхронизацию, бланки, 10% белого, опорные уровни белого при установке спе-
циальных внутренних переключателей. Это позволяет использовать пол-
ный 8-разрядный диапазон, предназначенный для активной видеообласти.
AD9700 был из Я/)(7-серии гибридных ЦАП, появившихся в 1980 году.
Позднее AD9700 был заменен на серию ADV CMOS видео RAM ЦАП, кото-
рый содержал на кристалле память цветовой палитры и имел все основные
функции ЦАП.
Монолитные АЦП 1980-х годов
Двухкристальный AD574, изготовленный в 1978 году, мог бы служить стан-
дартом для промышленных преобразователей ко времени появления (1985
год) однокристального SAR АЦП AD574, 12-разрядного, 35 мкс. С того
момента этот преобразователь соответствует промышленному стандарту и
продолжает использоваться и в наши дни.
На рис. 1.44 приведен список наиболее значимых монолитных АЦП,
созданных в 1980-е годы. Следует отметить, что появление монолитных
стробируемых АЦП началось в середине 1980-х годов. Использование до-
полнительных устройств выборки и хранения, опорного напряжения, буфер-
ных усилителей стало намного проще при добавлении биполярных возможно-
стей к технологии CMOS (LC2MOS и BiCMOS). Еще одним нововведением
стало использование входных (front-end) мультиплексоров в дополнение к
• AD574, 12-разрядный, 35 мкс, промышленного стандарта, однокристальный АЦП, 1985.
• AD673, 8-разрядный, complete АЦП, 1983.
• AD7582, 4-канальный с входным мультиплексором, 12-разрядный CMOS АЦП, 1984.
• AD670, 8-разрядный, 10 мкс ADCPORT, 1984.
• AD7820, 8-разрядный, 1,36 мкс, half flash, стробируемый АЦП, 1985.
• AD7572, 12-разрядный, 5 мкс, SAR LC2MOS АЦП с опорным напряжением, 1986.
• AD7575, 8-разрядный, 5 мкс, SAR LC2MOS, стробируемый АЦП, 1986.
• AD7579, 10-разрядный, 50 kSPS, LC2MOS SAR, стробируемый АЦП с АС-специализа-
цией, 1987.
• AD7821, 8-разрядный, 1 MSPS half-flash, стробируемый АЦП с АС-специализацией, 1988.
• AD674, 12-разрядный, 15 мкс АЦП, 1988.
• AD7870, 12-разрядный, 100 kSPS LC2MOS SAR, стробируемый АЦП с АС-специализа-
цией, 1989.
• AD7871, 14-разрядный, 83 kSPS LC2MOS SAR, стробируемый АЦП с АС-специализа-
цией, 1989.
• Первый коммерческий 16-разрядный сигма-дельта АЦП, Crystal Semiconductor, 1988.
Рис. 1.44. Монолитные АЦП в 1980-е годы
Глава 1. История преобразователей
основным АЦП, как в 4-канальном AD7582 1984 года, позволившее более
полное решение при сборе данных.
Несмотря на то что архитектура £-А была известна в 1950—1960-е годы,
первое коммерческое предложение монолитного Х-А АЦП было сделано в
1988 году фирмой Crystal Semiconductor (CSZ5316). Это устройство имело
16-разрядную разрешающую способность и 20 kSPS эффективную пропуск-
ную способность, что делало его приемлемым для оцифровки голосового
спектра. Голосовой аудиорынок (как профессиональный, так и потребитель-
ский) вызвал создание £-А АЦП с более высоким темпом отсчетов и боль-
шим разрешением; рынок прецизионных измерений требовал большего (20+)
разрешения при меньших частотах. Оба эти направления были реализованы
в 1990-е годы при бурном освоении Е-А архитектур в АЦП и ЦАП.
Монолитные параллельные АЦП в 1980-е годы
Как было отмечено ранее, быстрое развитие цифрового видеорынка, со-
впавшее с появлением в 1979 году ГАИ^ТВС-ЮО?! 8-разрядного, 30-MSPS
параллельного АЦП, спровоцировало других производителей ИС начать
разработки подобных параллельных АЦП, но имеющих более низкую по-
требляемую мощность, разрешение в диапазоне от 4 до 10 разрядов, частоту
дискретизации, равную 500 MSPS. Большинство из этих АЦП, но, конеч-
но, не все, перечислены на рис. 1.45, который охватывает период пика раз-
вития параллельных преобразователей — 1979—1990 годы.
Биполярная технология и технология CMOS использовались для произ-
водства таких устройств. Преобразователи на основе СМ 05-технологии об-
ладали меньшей мощностью, но имели худшие характеристики (особенно
это было характерно для ранних версий). Главными проблемами, возник-
• TDC1007J, 8-разрядный, 30 MSPS (TRW LSI), 1979.
• TDC1016J, 6-разрядный, 30 MSPS (TRW LSI), 1979.
• AM6688, 4-разрядный, 100 MSPS (AMD), 1979.
• SDA6020, 6-разрядный, 50 MSPS (Siemens), 1980.
• TLM1070, 7-разрядный, 20 MSPS CMOS (Telmos), 1982.
• MP7684, 8-разрядный, 20 MSPS CMOS (Micro Power), 1983.
• TDC1048, 8-разрядный, 30 MSPS (TRW LSI), 1983.
• AD9000, 6-разрядный, 75 MSPS, 1984.
• AD9002, 8-разрядный, 150 MSPS, 1987.
• AD770, 8-разрядный, 200 MSPS, 1988.
• AD9048, 8-разрядный, 35 MSPS, 1988.
• AD9006/AD9016, 6-разрядный, 500 MSPS, 1989.
• AD9012, 8-разрядный, 100 MSPS, TTL, 1988.
• AD9028/AD9038, 8-разрядный, 300 MSPS, 1989.
• AD9020, 10-разрядный, 60 MSPS, 1990.
• AD9058, dual, 8-разрядный, 50 MSPS, 1990.
• AD9060, 10-разрядный, 75 MSPS, 1990.
Рис. 1.45. Монолитные параллельные АЦП в 1980-х годах
1.4. Преобразователи данных в 1980-е годы
шими у ранних CMOS параллельных преобразователей, были ошибочные
коды, известные как «всплески» — sparkle codes, вызванные метастабиль-
ностью компаратора (более детально с этой темой можно ознакомиться в гл. 3
«Архитектуры преобразователей данных»). Конструкции компараторов на
основе биполярной технологии были более стабильны, так как обычно они
имели более высокое регенеративное усиление. На сегодняшний день про-
блему метастабильности в устройствах на основе CMOS удалось преодолеть
при использовании субмикронного процесса, хотя эти проблемы могут снова
возникнуть в случае неверного проектирования.
Несмотря на то что конструкции параллельных преобразователей на ос-
нове биполярной и СЛ/05-технологий широко использовались в 1980-е годы,
в большинстве 6- и 10-разрядных видеоАЦП 1990-х годов больше начали
доминировать маломощные АЦП с субдиапазонной и конвейерной архи-
тектурой, так как разработчики получили доступ к более быстрым CMOS- и
й/СЛ/05-технологиям. Сегодня архитектуры параллельных преобразовате-
лей используются в качестве строительных блоков внутри конвейерных АЦП.
Однако существует несколько параллельных преобразователей на GaAs для
6- или 8-разрядного разрешения, которые заняли ту нишу на рынке, где
требовалась скорость дискретизации в 1 GSPS или больше.
Гибридные и модульные ЦАП и АЦП в 1980-е годы
Потребность в гибридных и модульных АЦП и ЦАП достигла своего пика в
1980-е годы, в основном из-за задержек в процессе создания однокристаль-
ных преобразователей, обладающих теми же характеристиками, растяги-
вавшемся на 3—5 лет. Кроме того, большое количество параллельных пре-
образователей использовалось в качестве строительных блоков для субдиа-
пазонных АЦП с более высокой разрешающей способностью.
Несколько значимых гибридных и модульных преобразователей 1980-х го-
дов указаны на рис. 1.46.
Гибридные:
• HDS-1240E, 12-разрядный, 40 нс ECL ЦАП, 1980.
• HDG-серия, 4-, 6-, 8-разрядный, 5 нс ECL видео ЦАП, 1980.
• HAS-1409, 14-разрядный, 1,25 MSPS, стробируемый АЦП, 1983.
• HAS-1201, 12-разрядный, 1 MSPS, стробируемый АЦП, 1984.
• AD376, 16-разрядный, 20 нс SAR АЦП, 1985.
• AD1332, 12-разрядный, 125 kSPS, стробируемый АЦП с 32 word FIFO, 1988.
• AD9003, 12-разрядный, 1 MSPS, стробируемый АЦП, 1988.
• AD1377, 16-разрядный, 10 мкс SAR АЦП, 1989.
Модульные:
• ADC1140, 16-разрядный, 35 мкс SAR АЦП, 1982.
• CAV-1220, 12-разрядный, 20 MSPS, стробируемый АЦП, 1986.
• CAV-1040, 10-разрядный, 40 MSPS, стробируемый АЦП, 1986.
• AD1175, 22-разрядный интегрирующий АЦП, 1987.
Рис. 1.46. Гибридные и модульные АЦП и ЦАП с высокими характеристиками 1980-х годов
Глава 1. История преобразователей
В 1980 году Analog Devices выпустила семейство тол сто пленочных гиб-
ридов, представленных HDG-серией 4-, 6-, 8-разрядных видео ECL ЦАП.
Разработанные для растровой сканирующей 7?б$-графики, эти ЦАП имели
время установления приблизительно 5 нс. В дополнение к быстрой уста-
новке они обладали еще другими полезными характеристиками — обеспе-
чивали синхронизацию, бланки, 10% белого, опорные уровни белого при уста-
новке специальных внутренних переключателей. Это позволяет использо-
вать полный 8-разрядный диапазон, предназначенный для активной
видеообласти. HDG-серня была предшественницей полностью монолитных
CMOS видео ЦАП и ЛЛЛ/-ЦАП, которые были представлены позже {ADV-
серия, 1980, рис. 1.43).
В 1980-е годы появились высокопроизводительные гибридные субдиа-
пазонные АЦП, большинство из которых использовали в качестве строи-
тельных блоков высокоскоростные параллельные преобразователи. Боль-
шая часть из них представляла собой дискретные устройства, дополненные
ас техническими характеристиками, все это реализовалось в 1988 году при
выпуске 12-разрядного 10-MSPS AD9005.
Гибридные АЦП в 1980-е годы достигли такой разрешающей способно-
сти (как например, AD1377, 16-разрядный, 10 мкс SAR АЦП, 1989), которая
была еще недостижима при монолитной технологии.
Также необходимо отметить, что в 80-е годы было выпущено несколько
модулей, которые также вызвали улучшение скорости и разрешающей спо-
собности. CAV-1220, 12-разрядный, 20-MSPS АЦП и CAV-1040 10-разряд-
ный, 40-MSPS АЦП, представленные в 1986 году, установили новые стан-
дарты по динамическому диапазону и быстродействию, в то время как
AD1175 22-разрядный интегрирующий АЦП (1987) установил стандарт вы-
сокой разрешающей способности.
1.5. Преобразователи в 1990-е годы
Уолт Кестер
Введение
По сравнению с 1980-ми годами рынок 90-х годов, влияющий на распрос-
транение преобразователей, был более обширный и требовательный. Ос-
новными сферами использования являлись управление промышленными
технологическими процессами, выполнение измерений, совершенствование
инструментов, медицинское оборудование, аудио-, видеотехника и компью-
терная графика. Кроме того, системы связи были самой большой движущей
силой на пути создания дешевых, низкомощных, высокопроизводительных
преобразователей для модемов, мобильных телефонов и беспроводной ин-
фраструктуры {basestations).
Другим направлением было акцентирование на низкой мощности и од-
нополярном напряжении, необходимых при переносном батарейном при-
менении. Низковольтное питание совмещалось с высокоскоростными, низ-
ковольтными технологиями при уменьшенных габаритах, однако из-за со-
1.5. Преобразователи в 1990-е годы
кращенния сигнального диапазона делало конструкции преобразователей
более чувствительными к помехам. В 1990-е годы конструкция корпуса так-
же подверглась изменению. Традиционные D/P-корпусы были заменены на
меныпие по размерам корпусы поверхностного, которые подходили для ав-
томатического высокообъемного монтажа. Они включали в себя как конст-
рукции с выводами, так и безвыводные типы, такие как big grid array (BGA)
и корпусы с размерами кристалла chip scale package (CSP).
Даже на рынке преобразователей общего назначения существовала по-
требность в дополнительных аналоговых и цифровых функциональных ха-
рактеристиках, например, таких, как установка на одном кристалле полной
системы сбора данных, включая входной мультиплексор, программируе-
мый усилитель, устройство выборки-хранения и АЦП. Многие приложе-
ния нуждались как в функциях АЦП, так и в функциях ЦАП, что привело
к интеграции этих двух элементов на одном кристалле, получившем назва-
ние кодер-декодер, или CODEC. Специально разработанные оконечные уст-
ройства: аналоговое — analog front ends (AFEs) и для смешанных сигналов —
mixed-signal front ends (MxFE™) были добавлены к основным функциям
АЦП в CCD-процессорах изображений и IF цифровых приемниках.
В семействе TxDACT цифровые функции, такие как интерполирующие
фильтры и цифровые модуляторы, были скомбинированы с высокоскорос-
тным, с малой дисторцией CMOS ЦАП-ядром. Разработчики преобразова-
телей попытались использовать большие преимущества «ядерных» конст-
рукций для создания нескольких продуктов с различными опциями, на-
пример такими, как наличие последовательных или параллельных выходных
портов и т. д. ГхДЛС-серии являются хорошей иллюстрацией этой концеп-
ции, где разные разрешающие способности, скорости обновления, внут-
ренняя дискретизация в сочетании дают большое количество отдельных
типов, но все они используют одно и то же ядро ЦАП.
Из-за увеличения потребности в обработке сигналов на высоких часто-
тах больший акцент делался на динамическом диапазоне и ас производи-
тельности практически всех преобразователей. Было выпущено большое
количество монолитных стробирущих АЦП, удовлетворяющих эту потреб-
ность. Конвейерная субдиапазонная архитектура виртуально заменяла вы-
сокомощные параллельные АЦП 1980-х годов, и наиболее важными ас ха-
рактеристиками были SNR, SINAD, ENOB и SFDR.
В 1990-е годы СЛ/05-технология стала избранной технологией для пре-
образователей общего назначения, в то время как BiCMOS осталась для
высокопроизводительных устройств. В некоторых случаях высокоскорост-
ные комплементарные биполярные технологии использовались для ультра-
высокопроизводительных преобразователей. Технология CMOS является
идеальной для Е-Д архитектуры, которая стала основной для АЦП и ЦАП,
использующихся как в голосовых и аудиоприложениях, так и в низкочас-
тотных измеряющих преобразователях с более высоким разрешением.
Значительный сдвиг в технологическом процессе произошел в 1990-е годы,
когда паразитные параметры стали являться фактором, ограничивающим
производительность у высокоскоростных, состоящих только из кристаллов
и соединительных проводов chip-and-wire гибридных преобразователей.
Новые ИС с их малыми размерами элементов и уменьшенными паразит-
(Г58 Глава 1. История преобразователей
ними параметрами позволяли достигать более высоких уровней произво-
дительности по сравнению с гибридными chip-and-wire или модульными
преобразователями. Мы видим контрпример ситуации, существовавшей в
1970—1980-е годы.
В последующих частях мы изучим основные направления развития пре-
образователей в 1990—2000-х годах, используя несколько представителей в
качестве примеров. Было бы достаточно сложно рассмотреть подробно каж-
дый из продуктов, как это было сделано для 1970—1980-х годов, из-за ог-
ромного количества преобразователей, выпущенных в 1990-е годы. Боль-
шинство из них рассмотрено в гл. 8 «Применение преобразователей данных».
Монолитные ЦАП в 1990-х годах
Наиболее значимым направлением развития ЦАП общего назначения в
1990-е годы было расширение функциональных возможностей для всех сфер
применения, особенно в отношении структуры входа. ЦАП были специ-
ально спроектированы для параллельной, последовательной, широкобайт-
ной загрузки и обычно имели входы с двойной буферизацией. Последова-
тельный интерфейс стал популярным для сопряжения с микропроцессора-
ми и ЦСП. Во многих случаях одна и та же схема ядра ЦАП использовалась
для реализации различных опций в виде отдельных изделий в подходящих
корпусах. Очевидно, что это было связано с потребностью в большом коли-
честве типов ЦАП для удовлетворения необходимых задач.
Существовали также и опции, связанные со структурой выхода. Аудио-
и видеоЦАП использовали токовые выходы, в то время как некоторые ЦАП
более общего направления могли иметь выходной ток или выходное напря-
жение.
Тенденция в направлении умножающих ЦАП проиллюстрирована приме-
ром раннего увосьмеренного ЦАП, AD7568, 12-разрядного LC2MOS ЦАП,
1991 год, представленного на рис. 1.47. Этот ЦАП использовал популярную
умножающую архитектуру и обеспечивал выходной ток, т. е. был спроекти-
рован для работы с ОУ, подсоединяемым в качестве I/V преобразователя.
Отметим, что ЦАП имеет двойную буферизацию — входной регистр сдвига
принимает последовательные данные и загружает их в соответствующую
входную защелку, которая позволяет LDA С одновременно отсылать инфор-
мацию в восемь параллельных отдельных ЦАП-защелок.
Потребительские аудио CD-проигрыватели вызвали появление в конце
1980-х годов на рынке 16+-разрядных ЦАП, обладающих незначительной
дисторцией. Первые аудиоЦАП представляли собой линейные ЦАП, име-
ющие увеличенную скорость избыточной дискретизации в 8 или 16 раз по
сравнению с базовой скоростью обновления CD (44,1 kSPS). Диапазон раз-
решающей способности соответствовал 16-разрядным для ранних аудиоЦАП
и увеличивался до 18—20-разрядных у более поздних версий. Например,
AD1865, сдвоенный 18-разрядный стерео-ЦАП был представлен в 1991 году
и имел увеличение избыточной дискретизации в 16 раз.
К середине 1990-х годов Е-Д архитектура стала вытеснять параллельные
ЦАП из аудиоприложений. Сигма-дельта ЦАП могли предложить более
высокие уровни избыточной дискретизации, тем самым снижая требования
1.5. Преобразователи в 1990-е годы
Рис. 1.47. AD7568, увосьмеренный 12-разрядный LC2MOS, умножающий ЦАП, 1991
к выходному фильтру и предоставляя более высокий динамический диапа-
зон с низкой дисторцией. В 1996 году были созданы следующие первые
ЦАП: AD1857, AD1858 и AD1859. Эти ЦАП имели разрешение в пределах
от 16 до 20 разрядов, использовали несколько интерфейсов и однополяр-
ный источник питания.
Также в начале 90-х годов было представлено несколько высокоскоро-
стных ECL ЦАП, созданных на основе биполярной технологии: AD9712
12-разрядный, 100-MSPS ЦАП и AD9720, 10-разрядный, 400-MSPS ЦАП.
Большинство видео- и связных ЦАП были созданы на основе технологии
CMOS и являлись низкомощными, имели незначительную дисторцию
и всплески (low-glitch). Л/Ж-серии видео CMOS /ЫЛ/-ЦАП продолжа-
ли свое развитие и в 1990-х годах. В 1996 году появилось семейство 8-, 10-
, 12-, 14- и 16-разрядных передающих ЦАП (TxDACT), предназначенных
для системы связи, которое продолжает свое развитие и сегодня (AD976x,
AD977x и АЭ978х-серии).
Система прямого цифрового синтеза (Direct Digital Synthesis) на одном
кристалле появилась в 1990-е годы, в большей степени из-за того, что су-
ществовала определенная простота, с которой цифровая логика добавлялась
к высокопроизводительному ядру CMOS ЦАП. Первым из ЦАП такого вида
был AD7008, 10-разрядный, 50-MSPS DDS 1993 года выпуска (рис. 1.48).
Вскоре после его появления были предложены и другие версии, например
10-разрядный, 125-MSPS AD9850 (1996). Позже к системе прямого цифро-
вого синтеза добавили возможность фазовой и частотной модуляции, ум-
ножители тактовой частоты на кристалле, имеющие большую разрешаю-
щую способность и обеспечивающие скорость обновления до 1 ГГц.
Глава 1. История преобразователей
Рис. 1.48. AD7008, 10-разрядный, 50-MSPS, целиком CMOS DDS, 1993
Цифровой потенциометр, являющийся популярным компонентом в на-
стоящее время, зародился в 1989 году с выпуском первого в серии AD8800
TrimDACL Подстроечные ЦАП (TrimDACs) в основном были 8-разряд-
ными ЦАП с выходным напряжением и были разработаны для замены ме-
ханических потенциометров. Семейство TrimDAC стало популярным, по-
этому в 1995 году был выпущен первый DigiPOTsL Основой концепции,
стоящей за созданием цифрового потенциометра, было применение CMOS
string DA С (цугового ЦАП) в качестве переменного резистора. AD8402
2-канальный (8-разрядный), AD8403 4-канальный (8-разрядный) — были пер-
выми в 1995 году. С того времени серия была расширена и включала много
других изделий с долговременной памятью (AD51xx, AD52xx серии).
На рис. 1.49 обобщены ключевые этапы развития ЦАП в 1990-е годы.
• Умножающий ДАК: AD7568, 12-разрядный увосьмеренный, с однополярным +5 В
питанием CMOS MDAC, 1991.
• Аудио ЦАП:
— параллельные с 8х, 16х избыточной дискретизацией, начало 1990-х годов;
— сигма-дельта, начиная с AD1857, AD1858, AD1859, 1996.
• Видео RAM ЦАП — расширение номенклатуры изделий.
• Передающие ЦАП (TxDACs) для систем связи, 1996.
• Система прямого цифрового синтеза (DDS), AD9008, 1993.
• Подстроечные ЦАП (TrimDACs), 1989.
• Цифровые потенциометры, 1995.
Рис. 1.49. Краткий обзор: монолитные ЦАП в 1990-е годы
Монолитные АЦП в 1990-е годы
Во время декады 1990-х годов производство монолитных АЦП превалиро-
вало над модульными и гибридными преобразователями по большому сче-
ту из-за того, что удалось значительно сократить паразитные влияния в
новых ИС-технологиях. AD1674 12-разрядный, ЮО-kSPS стробирующий SAR
1.5. Преобразователи в 1990-е годы
12/8
CS
4
СЕ
R/C
REF
выход
AGND
REF
вход
Bip OFF
20
STS
DB11 (MSB)
DBO (LSB)
Рис. 1.50. AD1674, 12-разрядный, 100-kSPS стробирующий SAR АЦП (совместим по
выводам с промышленно стандартизированным AD574), 1990
АЦП, представленный в 1990 году, был совместим по выводам с промыш-
ленно стандартизированным AD574, созданным за 10 лет до этого. Упро-
щенная блок-схема AD1674 приведена на рис. 1.50. Этот преобразователь
представлял собой новое направление стробирующих АЦП, разработка ко-
торого продолжалась в течение 1990-х годов, чему также способствовал воз-
росший интерес к цифровой обработке ас сигналов.
Прогресс, достигнутый в разработке стробирующих АЦП, проиллюст-
рирован выпуском AD7880 12-разрядного 66-kSPS АЦП, 1990. Несмотря на
то что AD7880 требовал внешний источник опорного напряжения, он и в
наши дни является актуальным из-за своей низкой мощности (25 мВт) и
+5 В однополярным питанием (рис. 1.51).
В 1992 году был представлен 12-разрядный 1,25 MSPS AD1671 BiCMOS,
стробирующий АЦП. Основная субдиапазонная конвейерная архитектура,
применяемая в AD1671, была основана на предыдущей нестробирующей
версии — AD671, 2-MSPS, 1990. Упрощенная блок-схема AD1671 показана
на рис. 1.52.
и
оо
^REF
AGND
CS
CLKIN
CONVST
RD
BUSY -
Рис. 1.51. AD7880, 12-разрядный 66-kSPS стробирующий SAR АЦП с одним +5 В
источником питания, LC2MOS, 1990
Глава 1. История преобразователей
SHA UPO/
выход ВРО ENCOD Усс АСОМ VEE l/LOQ|C DCOM
REF OTR MSB 1-12 DAV
COM разряд
Рис. 1.52. AD1671, BiCMOS, 12-разрядный 1,25-MSPS, стробирующий ЛЦП, 1992
С выпуском AD872 12-разрядного, 10-MSPS BiCMOS в 1992 году был
сделан значительный прорыв в улучшении скорости и других характерис-
тик (рис. 1.53). АЦП использовал конвейерную архитектуру с коррекцией
ошибок.
В 1996 году было выпущено 3 CMOS АЦП с однополярным питанием
(+5 В) на основе архитектуры, близкой к 12-разрядному AD872: AD9220
(10 MSPS), AD9221 (1 MSPS) и AD9223 (3 MSPS). Все 3 изделия использо-
вали одинаковую конструкцию, со шкалой рабочих токов, необходимой
трем опциям скорости дискретизации. Рассеивание мощности было следу-
ющим: 250 мВт (AD9220), 60 мВт (AD9221), 100 мВт (AD9223).
Настоящим открытием в 1995 году стало появление IF-стробирующего
АЦП с широким динамическим диапазоном: AD9042, 12-разрядный, 41 MSPS.
Функциональная схема AD9042 приведена на рис. 1.54. Это был первый
преобразователь, который смог достичь больше 80 дБ SFDR для сигналов с
большей частотой, чем 20-MHz полоса пропускания Найквиста. Он был
изготовлен на основе высокоскоростной XFCB комплиментарной биполяр-
ной технологии от Analog Devices.
Рис. 1.53. AD872, 12-разрядный, 10-MSPS, BiCMOS, стробирующий АЦП, 1992
1.5. Преобразователи в 1990-е годы
Рис. 1.54. AD9042, 12-разрядный, 41 MSPS, XFCB, стробирующий АЦП, 1995
Концепция полной системы сбора данных на одном кристалле осуще-
ствилась при появлении в 1993 году AD789x серии LC2MOS SAR АЦП с
однополярным (+5 В) питанием. Они имели до 8 каналов мультиплексиро-
ванных входов и скорость дискретизации в пределах 100—600 kSPS. Для
предоставления более традиционных промышленно стандартизированных
биполярных входов ±10 и ±5 В серия предлагала тонкопленочные резис-
торные аттенюаторы/схемы сдвига уровня для сопряжения с входным диа-
пазоном внутреннего SAR АЦП.
Значительное изменение технологии, достигнутое в 1990-е годы, по-
зволило высокомощные 8-, 9-, 10-разрядные параллельные преобразова-
тели 80-х годов заменить на низкомощные с конвейерной и складываю-
щей (Folding — из-за формы передаточной характеристики. — Примеч. ред.)
архитектурой. Типичным представителем был AD9054, 8-разрядный, 200-
MSPS АЦП (1997). В AD9054 использована уникальная архитектура, состо-
ящая из 5 складывающих ступеней с последующим 3-разрядным парал-
лельным каскадом.
I/ смещения
А вход (+)
А вход (-)
А вход 2 (Ч-)/О1
А вход 2 (- )/D0
АСХ
АСХ
REF REF
вход (-) вход (+)
DV
DD
AV
DD
STANDBI
MCLK вход
MCLK выход
DIN
DOUT
SCLK
CS
AGND DGND POL RDY RESET
Рис. 1.55. AD7730, 24-разрядный Х-Д АЦП малых сигналов, 1997
Глава 1. История преобразователей
• AD1674, 12-разрядный, 100 kSPS, стробирующий АЦП, совместимый с AD574A по
выводам, 1990.
• AD7880, 12-разрядный, 66 kSPS LC2MOS, стробирующий АЦП, 1990.
• AD7001, CMOS GSM преобразователь группового сигнала, 1990.
• АО771х-серия 24-разрядных e-D измерительных АЦП, 1992.
• AD1671, 12-разрядный, 1,25 MSPS BiCMOS, стробирующий АЦП, 1992.
• AD872, 12-разрядный, 10 MSPS BiCMOS, стробирующий АЦП, 1992.
• AD9220/AD9221/AD9223, 12-разрядные, 10/1/3MSPS CMOS, стробирующие АЦП, 1996.
• AD9042, 12-разрядный, 41 MSPS, стробирующий АЦП, 80 дБ SFDR, 1995.
• AD7730, 24-разрядный, для мостовых измерений АЦП, 1997.
• AD9054, 8-разрядный, 200MSPS, стробирующий АЦП, 1997.
• ADuC812 MicroConverterT (прецизионные АЦП, ЦАП, 8051-ядро, flash memory, 1999).
Рис. 1.56. Итог 1990-х годов: монолитные АЦП
CMOS Х-А стала избранной архитектурой АЦП для измерений, голосо-
вого канала и аудио начала 1990-х годов. В 1990 году был выпущен первый
GSM преобразователь — AD7001. Сигма-дельта также использовались во
многих других голосовых и аудиопреобразователях, так же как и в измеря-
ющих АЦП с высоким разрешением. В 1992 году были выпущены 24-раз-
рядные измерительные преобразователи семейства AD771X.
Эти преобразователи включают в себя мультиплексоры и PGA и раз-
работаны для прямого сопряжения со многими датчиками, такими как
термопары, мосты, RTD и т. д. В 1997 году был выпущен AD7730 — до-
статочно значимый продукт этого семейства, который позволял оцифро-
вывать сигналы на выходах ячеек с 10-мВ полношкальным напряжением
более чем 80000-ми кодами, свободными от помех (16,5 разрядов). Упро-
щенная блок-схема AD7730 приведена на рис. 1.55.
Другое применение £-А технологии реализовалось в конце 1990-х годов
с выпуском ADE775x серии энергоизмеряющих ИС. Эти АЦП мгновенно
измеряют ток и напряжение в силовых линиях и вычисляют потребление
мощности, тем самым заменяя механические устройства.
Краткое изложение основных этапов развития монолитных АЦП в
1990-е годы указано на рис. 1.56.
Из-за простоты, с которой цифровые функции могут добавляться в ЦАП
и АЦП, созданные на основе BiCMOS- и СЛ/05-технологий, в 1990-х годах
возникло большое количество высокоинтегрированных приложений спе-
цифичных интегральных схем, которые продолжают развиваться и сегодня.
На рис. 1.57 приведены наиболее важные области применения этих чипов.
Большинство из них уже упоминались в этой главе и будут встречаться в
остальных главах книги, особенно в гл. 8.
В 1999 году фирма Analog Devices выпустила первый прецизионный ана-
логовый микроконтроллер, ADuC812 MicroConverterT. Микроконвертер вклю-
чал не только прецизионные схемы (АЦП, ЦАП, мультиплексоры и т. п.), но
также //яяЛ-память и 8051-микропроцессорное ядро. Последующие микро-
контроллеры стали включать в себя Х-А АЦП с более высокой разрешаю-
щей способностью (см. гл. 8). Такой уровень интеграции представляет со-
1.5. Преобразователи в 1990-е годы
• Кодеры/декодеры голосового канала (вокодеры).
• Аудио кодеры/декодеры.
• Компьютерные аудиокодеры/декодеры АС'97 SoundMAX7.
• Порты Вход/Выход.
• Терминалы смешанных сигналов: модемы, связь, CCD формирователи изображений,
дисплеи с плоским экраном.
• Передающие и принимающие сигнальные процессоры.
• Чипсеты для прямого преобразования (Othello1 radio).
• Прямой цифровой синтез.
• TxDACsT с интерполяцией, фильтрами, цифровой квадратурной модуляцией и т. д.
• Чипсеты для мобильных телефонов.
• Измерители энергии.
• Видео RAM ЦАП.
• Видеокодеры/декодеры, кодеки, дискретизаторы сенсорной панели (touchscreen
digitizers).
• Элементы микроконвертеров (высокопроизводительные АЦП, ЦАП + 8051 рР ядро и
flash-память).
Рис. 1.57. Итог 1990-х годов: интегрируемые функции
бой оптимальное решение для многих приложений общего назначения с
использованием сенсоров и устройств обработки сигналов.
Гибридные и модульные ЦАП и АЦП в 1990-е годы
Хотя монолитные преобразователи в значительной мере вытеснили гиб-
риды и модули, состоящие из кристаллов и проводников, в период
1970—1980-х годов, в начале 1990-х годов на этом направлении было сдела-
но несколько значительных открытий. AD9014 14-разрядный, 10-MSPS мо-
дульный АЦП, выпущенный в 1990 году, представляет значительный про-
рыв в сфере динамического диапазона. Этот АЦП достигал 90-dB SFDR в
полосе пропускания Найквиста и использовал собственные монолитные
строительные блоки, которые позже были применены при проектирова-
нии полностью интегрированной конструкции в AD9042, 12-разрядном,
41 MSPS АЦП, 1995.
AD1382 и AD1385, гибридные 16-разрядные, 500 kSPS, стробирующие
АЦП, 1992, представляли уровень того времени, a AD1385 был одним из
первых АЦП, в котором использовалась автокалибровка для поддержания
линейности.
Позднее в 1990-е годы технология многокристального модуля (МСМ)
стала прекрасной альтернативой дорогих модулей и кристально-провод-
ных гибридов. Технологии дешевых корпусов позволяли высокопроизво-
дительным монолитным АЦП, таким как AD9042, размещаться наряду с
оконечными схемами. К примеру, AD10242, представленный в 1996 году
(сдвоенный 12-разрядный, 41-MSPS AD9042), предлагал привлекательное
по цене решение в приложениях, требующих высоких характеристик от
сдвоенного 12-разрядного АЦП и большей функциональности на их ана-
логовом входе (front end).
3-2852
Глава 1. История преобразователей
1.6. Преобразователи в 2000-х годах
Уолт Кестер
Направления развития преобразователей, начавшиеся в 1990-х годах и пе-
речисленные на рис. 1.56 и 1.57, продолжали свое совершенствование и в
2000-х годах.
Понизилось рассеивание энергии и напряжение питания. Схемы с пи-
танием, равным 5; 3,3; 2,5 и 1,8 В, следовали за уменьшением субмикрон-
ных размеров в КМОП: 0,6; 0,25 и 0,18 мкм. Меньшие корпусы для повер-
хностного монтажа и chip-scale корпусы появились на замену почти уста-
ревших DIP-корпусов 1970—1980-х годов.
Несмотря на то что введение высокоинтегрированных функций про-
должалось, производители преобразователей осознавали, что «разумное раз-
деление» (smart partitioning) может предложить более высокую производи-
тельность и более эффективное ценовое решение, чем принятие концеп-
ции «система-на-кристалле». Эта тема более детально раскрыта в гл. 4
«Технология преобразователей».
Количество 16- и 18-разрядных стробирующих АЦП последовательного
приближения, выпущенных Analog Devices, достигло 30 моделей, включая
последние предложения с высоким разрешением серии Pulsar1. Например,
AD7664, 16-разрядный, 570-kSPS АЦП 2000 года; AD7677, 16-разрядный,
1-MSPS АЦП 2001 года; AD7674, 18-разрядный, 800-kSPS АЦП 2003 года и
AD7621, 18-разрядный, 3-MSPS АЦП 2003 года.
В 2000-х годах умножающие ЦАП общего назначения начали расши-
ряться до 16-канальных (AD5390, AD5391), 32-канальных (AD5382, AD5383)
и 40-канальных (AD5380, AD5381) ЦАП. Высокоскоростные ЦАП достига-
ли скорости обновления, равной 1-GSPS, например у AD9858, 10-разряд-
ного с системой прямого цифрового синтеза.
Возвратимся к /Г-стробирующим преобразователям: AD6645, 14-разряд-
ный, 80-/105-MSPS АЦП, 2000 года, AD9032 12-разрядный, 210-MSPS АЦП,
2002 года. Оба преобразователя представляют собой достижение относи-
тельно скорости дискретизации и динамического диапазона.
Важными представителями многокристальных модулей являются
AD10678, 16-разрядный, 65-/80-/105-MSPS АЦП, 2003 года и AD12400,
12-разрядный, 400-MSPS ЦАП, 2003 года. Оба устройства использовали
высокопроизводительные стробирующие АЦП с ИС в качестве строитель-
ных блоков для последующей цифровой обработки. В 2002 и 2003 годах
серия ADuC микроконвертеров (MicroConverterT products) стала включать в
кристалл 16- и 24-разрядные Х-А АЦП. Кроме того, была расширена мик-
роконвертерная линия изделий последовательного приближения. Некото-
рые последующие микроконвертерные изделия 2004 года будут использо-
вать широко популярное ARM-7-микроконтроллерное ядро.
На рис. 1.58 представлено краткое изложение основных этапов разви-
тия преобразователей в 2000-х годах.
Можно, конечно, привести массу другой информации, отражающей
историю развития преобразователей. Большинство других примеров совре-
7.6. Преобразователи в 2000-х годах
• Продолжают функционально расширяться аналоговые входы — Analog Front Ends (AFEs)
и мультиплексированные входы — Multiplexed Front Ends (MxFEsT).
• 16-, 18-разрядные стробирующие SAR АЦП с коммутируемыми конденсаторами се-
рии PulsarT:
— AD7674, 18-разрядный 800 kSPS АЦП, 2003;
- AD7621, 16-разрядный 3 MSPS АЦП, 2003.
• Умножающие ЦАП: 16-канальный (AD5390, AD5391), 32-канальный (AD5382/AD5383),
40-канальный (AD5380/AD5381).
• IF — стробирующий АЦП:
— AD6645 14-разрядный, 105 MSPS АЦП, 2000;
— AD9032 12-разрядный, 210 MSPS АЦП, 2002.
• Многокристальные модули (MCMs):
— AD 12400, 12-разрядный, 400 MSPS АЦП, 2003;
— AD10678, 16-разрядный, 65/80/105 MSPS АЦП, 2003.
• AD9858 10-разрядный, 1 GSPS, с системой прямого цифрового синтеза (DDS), 2003.
• 16-/24-разрядные £-А микроконвертеры, 2002, 2003.
• Микроконвертеры на основе ARM-7, 2004.
Рис. 1.58. Этапы развития преобразователей в 2000-х годах
менных ЦАП и АЦП дается по ходу повествования в других главах данной
книги. Заглядывая в будущее, мы можем ожидать множество новых откры-
тий и не только в производительности, но и в уровнях интеграции.
ГЛАВА 2
ОСНОВЫ СЧИТЫВАНИЯ ДАННЫХ
В АНАЛОГО-ЦИФРОВЫХ
СИСТЕМАХ
2.1. Кодирование и квантование
Уолт Кестер, Дэн Шайнголд,
Джеймс Брайант
Аналого-цифровые преобразователи (АЦП) переводят аналоговые величи-
ны, которые являются характеристиками большинства явлений «реального
мира», в цифровой язык, используемый при обработке информации, вы-
числениях, процессе передачи данных и системах управления. Цифро-ана-
логовые преобразователи (ЦАП) используются при преобразовании пере-
даваемых или хранящихся данных или результатов цифровой обработки
обратно к переменным «реального мира» для отображения параметров уп-
равления, для вывода на экран информации или дальнейшей аналоговой
обработки. Взаимоотношения между входами и выходами ЦАП и АЦП пред-
ставлены на рис. 2.1.
Аналоговые входные переменные при любом их происхождении обыч-
но преобразуются с помощью преобразователей в напряжение или ток. Эти
электрические величины могут проявляться:
1) в качестве быстрых или медленных de мер во времени;
2) в качестве модулированных форм сигнала переменного тока (при
использовании различных способов модуляции);
Рис. 2.1. ЦАП и АЦП. Определения входов и выходов
2,1. Кодирование и квантование
3) в комбинации с пространственной конфигурацией зависимых пере-
менных, представленнных относительно угловой оси.
Примерами первого являются выходы с термопар, потенциометров от-
носительно de источников опорного напряжения, а также аналоговых вы-
числительных схем, примером второго могут служить оптические измере-
ния прерываемого излучения, ас тензодатчики или цифровые сигналы, скры-
тые в шуме, и третьего — синхронизаторы и резольверы.
Аналоговые переменные, речь о которых пойдет в данной главе, пред-
ставлены напряжением и током, отражающими реальный аналоговый фе-
номен. Они могут быть широкополосными и узкополосными. Они могут
поступать напрямую от измеряющих датчиков или быть подвергнуты опре-
деленного рода предварительной аналоговой обработке (линеаризация, ком-
бинирование, демодуляция, фильтрация, выборка—хранение и т. п.).
Как часть процесса, напряжение и ток нормализуются к значениям,
совместимым с задаваемым входным диапазоном АЦП. Аналоговое выход-
ное напряжение с ЦАП или ток являются непосредственными и нормали-
зованными, но они могут подвергаться последующей обработке (масшта-
бированию, фильтрации, усилению и т. п.).
Информация в цифровой форме обычно задается произвольно опре-
деленными уровнями напряжения относительно «земли», возникающего на
выходах логических вентилей или приложенного к их входам. Цифровые
значения, используемые при этом, в основном являются двоичными. Та-
ким образом, каждый разряд (bit) или единица информации имеет одно из
двух возможных состояний. Этими состояниями являются off — выключено
(false — неверно, «О») и on — включено (true — верно, «1»). Также можно
представлять два логических состояния двумя разными уровнями тока, хотя
это не так часто используется, как напряжение. Не существует определен-
ной причины, по которой напряжение необходимо соотносить с «землей».
Этого нет, например, в случае эмиттерно-связанной логики (ECL), пози-
тивной эмиттерно-связанной логики (PECL) или низковольтной логики с
дифференциальными сигналами (LVDS).
Слова представляют собой группы уровней, имеющих цифровые значе-
ния. Уровни могут возникать одновременно параллельно, на шине или вхо-
дах/выходах группы вентилей, последовательно (во времени) на одной ли-
нии или в качестве последовательности параллельных байтов или полубай-
тов (nibbles). Например, 16-разрядное слово может занимать 16 битов или
16-разрядную шину или может быть разбито на два последовательных байта
для 8-разрядной шины или четыре 4-разрядных полубайта для 4-разрядной
шины.
Несмотря на то что существует несколько логических систем, наиболее
широкий выбор уровней используется в транзисторно-транзисторной ло-
гике (TTL). В ней положительное верно или 1 соответствует минимальному
выходному уровню +2,4 В (практически входящие значения определенно
соответствуют «1» для уровней, больших 2,0 В); а неверно или 0 соответству-
ет максимальному выходному уровню +0,4 В (практически входные значе-
ния соответствуют «0» для всех значений, меньших +0,8 В). Необходимо
отметить, что технология КМОП (CMOS) более популярна сегодня, чем
ТТЛ, но логические уровни КМОП (CMOS) обычно делаются совместимы-
Глава 2. Основы считывания данных в аналого-цифровых системах
ми со старым стандартом ТТЛ-логики (на входах и выходах, но не внутри
современных ИС. — Примеч. ред.).
Однозначная параллельная или последовательная группа цифровых уров-
ней, или число, или код. задается в соответствии с каждым аналоговым
уровнем, подвергшимся квантованию (представляющим однозначную часть
аналогового значения). Типичный цифровой код может быть представлен в
виде ряда:
а. а, а. аА а. а~ a. an = 1 0 1 1 10 0 1.
Он состоит из 8 битов. Самый крайний слева («1») называется «самым
старшим разрядом» (MSB. или разряд 1-й), а самый правый — «самый млад-
ший разряд» (LSB. или разряд 8-й). Значение кода может представлять со-
бой число, признак или отображение аналоговой переменной, оно может
быть неизвестным до тех пор, пока код или отношение преобразования не
определено. Важно не путать индексы (subscripts) определенного разряда
(бит 1, бит 2 и т. д.) со значениями (designation), ассоциируемыми с «а»
числового ряда. Индекс соответствует степени числа 2, определяющей вес
разряда в цепочке.
Хорошо известен так называемый натуральный или обычный двоичный
код (код по основанию 2). Двоичные коды привычны при представлении
целых чисел, т. е. обычный двоичный код имеет разрядов, LSB имеет вес 2°
(т. е. 1), следующий разряд имеет вес, равный 21 (т. е. 2), и т. д. до MSB.
который имеет вес 2N~ 1 (т. е. 2N/2). Значение двоичного числа достигается
путем добавления веса всем ненулевым разрядам. Когда взвешенные разря-
ды суммируются, они образуют число, имеющее любое значение от 0 до 2N
~ ’. Каждый дополнительный бит со стороны нулевого увеличивает размер
числа вдвое.
В технике преобразования полная шкала аналоговых величин (FS) не
зависит от числа разрядов (разрешающей способности), N. Более удобным
кодированием является дробное бинарное, которое всегда нормализовано к
полной шкале.
ЦЕЛЫЕ ЧИСЛА
Число10 = aN_,2N^ + aN22N~2 +... + ^21 + а02°
т т
MSB LSB
Пример: 10112 = (1х23) + (0х22) + (1х21) + (1x2°)
= 8 + 0 + 2+1=1110
ДРОБНЫЕ ЧИСЛА
Число10 = aN_^ + aN_22~2 +... + а,2~^ + a02~N
Т Т
MSB LSB
Пример: 0,10112 = (1x0,5) + (0x0,25) + (1x0,125) + (1x0,0625)
= 0,5 + 0 + 0,125 + 0,0625 = 0,687510
Рис. 2.2. Представление десятичных и двоичных чисел
21. Кодирование и квантование
Целочисленное бинарное кодирование можно интерпретировать как
дробное бинарное в случае, если все целые значения делятся на 2N. Напри-
мер, MSB имеет вес х/2 (т. е. 2{N~ }}/2N = 2-1), следующий разряд имеет вес ‘/4
(т. е. 2 2) и т. д. до LSB, который имеет вес (т. е. 2-Л). Когда взвешен-
ные разряды суммируются, они образуют число с любым значением из 2У,
от 0 до (1—2_/v) полной шкалы. Дополнительные разряды просто улучшают
тонкую структуру, не влияя на полномасштабный диапазон. Отношения
между числами (по основанию 10) и двоичными числами (по основанию 2)
представлены на рис. 2.2.
Однополярные коды
В системах преобразования данных кодовый метод должен соотноситься с
диапазоном аналоговых входных величин АЦП или диапазоном выходных
данных ЦАП. Самый простой случай, когда входные данные АЦП или вы-
ходные данные с ЦАП всегда представляют собой униполярное положи-
тельное напряжение (выходные токовые данные достаточно популярны для
выходов ЦАП, но менее популярны для входов АЦП). Самым распростра-
ненным кодом в этом случае является прямой бинарный. Пример для 4-раз-
рядного преобразователя представлен на рис. 2.3. Отметим, что существует
16 отдельно возможных уровней, начиная с кода, содержащего только нули,
0000, до кода, содержащего одни единицы, 1111. Необходимо отметить, что
аналоговые значения, представленные кодом с одними единицами, не со-
ответствуют полной шкале (F5), но соответствуют FS-1 LSB. Это правило
для обозначения процесса преобразования данных подходит как для АЦП,
так и для ЦАП. На рис. 2.3 представлены эквивалентные числа по основа-
нию 10 и по основанию 2, отнесенные к полной шкале, а также соответ-
Числа по основанию 10 Относительно шкалы Относительно полной шкалы в ±10 Двоичные В коде Г рея
+ 15 +FS- 1 LSB = +15/16 FS 9,375 1111 1000
+14 +7/8 FS 8,750 1110 1001
+13 +13/16 FS 8,125 1101 1011
+12 +3/4 FS 7,500 1100 1010
+11 +11/16 FS 6,875 1011 1110
+ 10 +5/8 FS 6,250 1010 1111
+9 +9/16 FS 5,625 1001 1101
+8 +1/2 FS 5,000 1000 1100
+7 +7/16 FS 4,375 0111 0100
+6 +3/8 FS 3,750 0110 0101
+5 +5/16 FS 3,125 0101 0111
+4 +1/4 FS 2,500 0100 0110
+3 +3/16 FS 1,875 0011 0010
+2 +1/8 FS 1,250 0010 0011
+1 1 LSB = +1/16 FS 0,625 0001 0001
0 0 0,000 0000 0000
Рис. 2.3. Униполярные двоичные коды 4-разрядного преобразователя
Глава 2. Основы считывания данных в аналого-цифровых системах
Рис. 2.4. Передаточная характеристика идеального униполярного 3-разрядного ЦАП
ствующие каждому коду значения напряжения (имеем в виду +10 В — пол-
ная шкала преобразователя). Также представлен эквивалент в коде Грея,
который будет вкратце рассмотрен дальше.
Рисунок 2.4 показывает передаточную функцию для идеального 3-раз-
рядного ЦАП с прямым бинарным входным кодом. Отметим, что аналого-
вый выход равен 0 для входного кода, имеющего одни нули. С возрастани-
ем цифрового входного кода аналоговый выход возрастает на 1 LSB для
каждого кода (на 78 шкалы в этом примере). Самое положительное значе-
ние выходного напряжения равно 7/8 полной шкалы (KS), соответствующее
значению, равному FS-1 LSB. Среднешкальное значение, равное l/2 FS,
вырабатывается, когда цифровой входной код равен 100.
Передаточная функция идеального 3-разрядного АЦП представлена на
рис. 2.5. Существует диапазон аналогового входного напряжения, в кото-
Рис. 2.5. Передаточная характеристика идеального униполярного 3-разрядного АЦП
2.1. Кодирование и квантование
ром АЦП будет вырабатывать заданный выходной код, этот диапазон явля-
ется неопределенностью квантования и равен 1 LSB. Заметим, что ширина
границы между переходными областями, т. е. между соседними кодами для
идеального АЦП, равна 0. Однако на практике с этими уровнями всегда
связан шум переходов, таким образом, ширина границы не равна нулю. Так
повелось, что аналоговая входная величина, соответствующая заданному
коду, определяется как центр кода, который расположен посередине между
двумя соседними переходными областями (отмечены на диаграмме черны-
ми точками). Поэтому необходимо, чтобы первый переход находился на
уровне 72 LSB. Соответствующее полной шкале аналоговое входное напря-
жение составляет 7/8 FS (FS-1 LSB).
Код Г рея
Другой код, заслуживающий внимания, — код Грея (или отраженно-бинар-
ный), который был вычислен Элишем Греем в 1878 году1 и позднее пере-
смотрен Фрэнком Греем в 1949 году2. Код Грея, показанный на рис. 2.3,
соответствует 4-разрядному бинарному коду. Хотя он редко используется в
компьютерной арифметике, он обладает некоторыми полезными свойства-
ми, удобными для аналогово-цифрового преобразования. Отметим, что в коде
Грея при изменении величины переходы от одного кода к другому изменяют
только один разряд за один переход. Это отличает его от бинарного, где все
разряды меняются при осуществлении, например, перехода между 0111 и
1000. Некоторые АЦП используют это качество кода Грея и затем преобразу-
ют его в бинарный код для дальнейшего внешнего использования.
Первым преобразователем, в котором использовался код Грея, был 7-
разрядный, 100 kSPS АЦП на электронно-лучевой трубке, разработанный в
Bell Labs в 1948 году3.
Концепции электронно-лучевого кодера для 4-разрядного устройства
отражены на рис. 2.6. Предшествующие аналоги использовали последова-
Последовательного типа
а
Параллельного типа
б
Рис. 2.6. АЦП (кодер) на электронно-лучевой трубке
Глава 2. Основы считывания данных в аналого-цифровых системах
тельный режим (рис. 2.6, а). Аналоговый сигнал сначала проходил через
устройство выборки—хранения, и во время интервала «хранения» луч раз-
ворачивался в трубке горизонтально. Отклонение Y для одного разворота
соответствует значению аналогового сигнала от устройства выборки—хра-
нения. Теневая маска закодирована для получения соответствующего би-
нарного кода в зависимости от вертикального отклонения. Код регистриру-
ется коллектором, и биты вырабатываются в последовательном формате.
Позже в трубках начали использовать ленточный луч (см. рис. 2.6, б), таким
образом создав первый электронный flash converter, выдающий параллель-
ное выходное слово.
Ранние электронно-вакуумные кодеры использовали бинарно-кодиру-
ющую теневую маску. Существовали большие погрешности, если луч рас-
тягивался на 2 соседних кода и освещал оба из них. Иллюстрация этого
явления приведена на рис. 2.7, а. Горизонтальная линия представляет ли-
нию развертки луча в середине шкалы, в точке перехода (переход между
кодом 0111 и кодом 1000). Возникающие при этом ошибки, например ошибка
в самом старшем значащем разряде (MSB), могут приводить к ошибке, рав-
ной 72 шкалы. Подобные ошибки были минимизированы путем установки
горизонтальных чувствительных проволочек по ширине границ каждого
уровня квантования. Если луч первоначально падает на одну из проволок,
небольшое напряжение добавляется к напряжению вертикального отклоне-
ния, которое сдвигает луч от переходной зоны.
Ошибки бинарных теневых масок были устранены путем использова-
ния теневой маски с кодом Грея, пример которой приведен на рис. 2.7, б.
Как было указано выше, преимущество кода Грея состоит в том, что сосед-
ние уровни, закодированные кодом Грея, отличаются друг от друга на одну
цифру. Следовательно, если есть ошибка в определении разряда для опре-
деленного уровня, соответствующая ошибка после преобразования в би-
нарный код будет соответствовать младшему значащему биту (LSB). В слу-
а б
4-разрядный двоичный код 4-разрядный рефлексно-
двоичный код (код Грея)
Теневая маска
1111
1110
110 1
110 0
10 11
10 10
10 0 1
10 0 0
0 111
0 110
0 10 1
0 10 0
0 0 11
0 0 10
0 0 0 1
0 0 0 0
MSB LSB
Теневая маска
10 0 0
10 0 1
10 11
10 10
1110
1111
110 1
110 0
0 10 0
0 10 1
0 111
0 110
0 0 10
0 0 11
0 0 0 1
0 0 0 0
MSB LSB
Рис. 2.7. Теневые маски для кодера на электронно-лучевой трубке:
а — с бинарными кодами; б — с кодами Грея
2.1. Кодирование и квантование
чае попадания луча в середину шкалы может измениться только старший
значимый бит, что не приводит к существенной ошибке в коде Грея. Инте-
ресно отметить, что подобный феномен может происходить в современных
//^//-преобразователях, использующих компараторы, вследствие метаста-
бильности компаратора. При небольшом перевозбуждении существует оп-
ределенная вероятность того, что выходной сигнал с компаратора будет
вырабатывать неверное решение на своем выходе с защелкой, создавая тот
же самый эффект при использовании техники прямого бинарного кодиро-
вания. Во многих случаях код Грея или коды «псевдоГрея» используются
для декодировки выходных данных компараторов. Выходной сигнал в коде
Грея фиксируется, преобразуется в бинарный и защелкивается еще раз на
конечном выходе.
В качестве исторической справки отметим, что, несмотря на наличие
множества механических и электрических проблем, связанных с центров-
кой луча, электронно-лучевая кодирующая технология достигла своего пика
в середине 1960-х годов выпуском экспериментального 9-разрядного коде-
ра, имеющего скорость дискретизации 12-MSPS4. Вскоре после этого дос-
тижения полупроводниковых технологий сделали ненужной электронно-
лучевую технологию.
В качестве других примеров, часто использующих код Грея, можно вы-
делить процесс преобразования с минимизацией ошибок в осевых кодиру-
ющих устройствах (угол-цифра) и оптических кодерах.
АЦП, использующие код Грея, обычно всегда преобразуют его в бинар-
ный для внешнего применения. Преобразование код Грея — бинарный и
бинарный — код Грея легко выполняется логической функцией Исключи-
тельное ИЛИ, как представлено на рис. 2.8.
Двоичный Грей
Рис. 2.8. Преобразование кода Грея в бинарный и обратно, выполняемое элементами
с логической функцией Исключительное ИЛИ
Биполярные коды
Для многих систем предпочтительнее представлять положительные и отри-
цательные аналоговые величины при помощи бинарных кодов. Смещен-
ный двоичный код, дважды дополненный (дополнительный), однократно
дополненный (инверсный) и код со знаковым разрядом — любой из этих
кодов может использоваться, но наиболее популярными являются смещен-
Глава 2. Основы считывания данных в аналого-цифровых системах
Числа по основа- нию 10 Относительно шкалы Относи- тельно полной шкалы в ±5 В Двоичный код со сме- щением Дополни- тельный код Инверсный код Код со знако- вым раз- рядом
+7 +FS - 1 LSB = +7/8 FS +4,375 1111 0111 0111 0111
+6 +3/4 FS +3,750 1110 0110 0110 0110
+5 +5/8 FS +3,125 1101 0101 0101 0101
+4 +1/2 FS +2,500 1100 0100 0100 0100
+3 +3/8 FS +1,875 1011 0011 0011 0011
+2 +1/4 FS + 1,250 1010 0010 0010 0010
+1 +1/8 FS +0,625 1001 0001 0001 0001
0 0 0,000 1000 0000 *0000 *1000
-1 - 1/8 FS -0,625 0111 1111 1110 1001
-2 - 1/4 FS -1,250 0110 1110 1101 1010
-3 - 3/8 FS -1,875 0101 1101 1100 1011
-4 - 1/2 FS -2,500 0100 1100 1011 1100
-5 - 5/8 FS -3,125 0011 1011 1010 1101
-6 - 3/4 FS -3,750 0010 1010 1001 1110
-7 -FS+ 1LSB = -7/8 FS -4,375 0001 1001 1000 1111
-8 -FS -5,000 0000 1000
Невозможно использовать Инверсный код Код со знаковым разрядом
при вычислениях (см. текст) 0+ 0000 0000
0- 1111 1000
Рис. 2.9. Биполярные коды 4-разрядного преобразователя
ный двоичный и дополнительный. Взаимосвязь между этими кодами для
4-разрядных систем приведена на рис. 2.9. Отметим, что значения приведе-
ны для полной шкалы ±5 В.
Для смещенного двоичного кода значение нулевого сигнала соответ-
ствует коду 1000. Последовательность кодов идентична последовательности
в прямом бинарном. Существует одна разница между прямым и смещен-
ным двоичными кодами, которая заключается в том, что аналоговый сиг-
нал ассоциируется со смещением в полшкалы. Крайнее отрицательное зна-
чение (—FS + 1 LSB) соответствует коду 0001, а крайнее положительное
(+FS — 1 LSB) — коду 1111. Необходимо отметить, что для поддержания
более точной симметрии в районе середины шкалы код, состоящий из од-
них нулей (0000), представляющий крайнее отрицательное значение пол-
ной шкалы (-FS), обычно не используется в вычислениях. Он может ис-
пользоваться для представления выключенного отрицательного состояния
или просто соответствовать значению, равному 0001 (—FS + 1 LSB).
Взаимосвязь между смещенным бинарным кодом и диапазоном анало-
гового выхода для 3-разрядного ЦАП представлена на рис. 2.10. Аналого-
вый выход с ЦАП равен нулю для входного нулевого значения (код 100).
Самое крайнее отрицательное выходное напряжение определяется кодом
2.1. Кодирование и квантование
Цифровой вход (двоичный код со смещением)
Рис. 2.10. Передаточная характеристика биполярного 3-разрядного ЦАП
001 (—FS + 1 LSB), а самое крайнее положительное 111 (+FS — 1 LSB).
Выходное напряжение для входного кода ООО может использоваться по же-
ланию, но это делает выходной сигнал несимметричным относительно 0 и
усложняет математические вычисления.
Смещенный бинарный выходной код для биполярного 3-разрядного АЦП
как функция его аналогового входа представлен на рис. 2.11. Отметим, что
нулевой аналоговый вход определяет код середины шкалы 100. В случае
биполярного ЦАП самое крайнее отрицательное входное напряжение опреде-
ляется кодом 001 (—FS + 1 LSB), а самое положительное 111 (+FS — 1 LSB).
Как обсуждалось ранее, код 000 может по желанию использоваться, но де-
лает выходной сигнал несимметричным относительно 0 и усложняет мате-
матические вычисления.
Рис. 2.11. Передаточная характеристика биполярного 3-разрядного АЦП
Глава 2. Основы считывания данных в аналого-цифровых системах
Дополнительный код идентичен смещенному двоичному коду с допол-
ненным (инвертированным) старшим значащим разрядом (MSB). Это лег-
ко достигается в преобразователе путем использования простого инвертера
или при использовании инверсного выхода с О-триггера. Популярность
дополнительного кода заключается в простоте выполнения математических
операций, возможных в компьютерах и ЦСП. Дополнительный код состоит
из бинарного кода для положительных величин (0 sign bit) и дополненного
до 2 положительного числа для представления его отрицательным. Допол-
нительный код образуется арифметически из инверсного двоичного кода
числа прибавлением 1 LSB. Например, —3/8 FS кодируется путем исполь-
зования дополнительного кода от +3/8 FS. Это получается инвертировани-
ем двоичного кода от +3/8 FS (ООН), получаем 1100. Добавляем 1 LSB и
получаем 1101.
Дополнительный код упрощает вычитание. Например, чтобы вычесть
3/8 FS из 4/8 FS, нужно добавить 4/8 к 3/8, или 0100 к 1101, в результате
получаем 0001 или 1/8, без учета переноса из старшего разряда.
Инверсный код также может использоваться для представления отрица-
тельных чисел, хотя он менее популярен, чем дополнительный, и в настоя-
щее время достаточно редко используется. Инверсный код получается
инвертированием всех разрядов положительного числа. К примеру, инверс-
ный код от 3/8 FS (ООП) равен 1100. Этот процесс включает и нули, которые
Преобразовать из в Код со знаковым * разрядом Комплементарный код Двоичный код со смещением Инверсный код
▼ Код со знаковым разрядом Без изменений Если MSB = 1, инвертируются другие биты, прибавляется 000...01 Инвертируется MSB, если новый MSB = 1, инвертируются другие биты, прибавляется 000...01 Если MSB = 1, инвертируются другие биты
Комплемен- тарный код Если MSB = 1, инвертируются другие биты, прибавляется 000...01 Без изменений Инвертируется MSB Если MSB = 1, прибавляется 000...01
Двоичный код со смещением Инвертируется MSB, если новый MSB=0, инвертируются другие биты, прибавляется 000...01 Инвертируется MSB Без изменений Инвертируется MSB, если новый MSB = 0, прибавляется 000...01
Инверсный код Если MSB = 1, инвертируются другие биты Если MSB = 1, прибавляется 111...11 Инвертируется MSB, если новый MSB = 1, прибавляется 111...11 Без изменений
Рис. 2.12. Соотношение биполярных кодов
2.1. Кодирование и квантование
могут быть представлены одним из двух кодов: 0000 (обозначаемый как 0+)
или 1111 (обозначаемый как 0—). Эта двусмысленность должна математи-
чески анализироваться, и это представляет определенные проблемы для АЦП
и ЦАП, для которых должен существовать лишь единственный код, обо-
значающий ноль. Код со знаковым разрядом является самым непосред-
ственным способом выражения цифровой полярности аналоговой величи-
ны. Просто определяем код, соответствующий величине, и добавляем зна-
ковый бит.
Коды со знаковым разрядом BCD (двоично-десятичное число) приме-
няются в биполярных цифровых вольтметрах, но имеют проблему соответ-
ствия двух кодов для нуля. Это является причиной его непопулярности для
большинства приложений, включая АЦП и ЦАП.
На рис. 2.12 в обобщенном виде представлена связь между различными
биполярными кодами: смещенным бинарным, дополнительным, инверс-
ным и со знаковым разрядом. Также указано, как преобразовывать один
код в другой.
Последний код, который будет рассмотрен в этом разделе, — это двоич-
но-десятичный {BCD), где каждая цифра по основанию 10 (0—9) в десятич-
ном числе представлена в виде соответствующего 4-разрядного прямого
бинарного слова, как показано на рис. 2.13. Минимальная цифра 0 кодиру-
ется 0000, а цифра 9 — 1001. Этот код относительно неэффективен, так как
только 10 из 16 комбинаций кодирования используются для десятичных
разрядов. Однако это очень удобный код для сопряжения с десятичными
дисплеями, например, цифровых вольтметров.
Числа по основа- нию 10 Относительно шкалы Относи- тельно полной шкалы в±10В Декада 1 Декада 2 Декада 3 Декада 4
+ 15 +FS- 1 LSB = +15/16 FS 9,375 1001 0011 0111 0101
+ 14 +7/8 FS 8,750 1000 0111 0101 0000
+ 13 +13/16 FS 8,125 1000 0001 0010 0101
+ 12 +3/4 FS 7,500 0111 0101 0000 0000
+ 11 +11/16 FS 6,875 0110 1000 0111 0101
+ 10 +5/8 FS 6,250 0110 0010 0101 0000
+9 +9/16 FS 5,625 0101 0110 0010 0101
+8 +1/2 FS 5,000 0101 0000 0000 0000
+7 +7/16 FS 4,375 0100 0011 0111 0101
+6 +3/8 FS 3,750 0011 1011 0101 0000
+5 +5/16 FS 3,125 0011 0001 0010 0101
+4 +1/4 FS 2,500 0010 0101 0000 0000
+3 +3/16 FS 1,875 0001 1000 0111 0101
+2 +1/8 FS 1,250 0001 0010 0101 1110
+1 1 LSB = +1/16 FS 0,625 0000 0110 0010 0101
0 0 0,000 0000 0000 0000 0000
Рис. 2.13. Двоично-десятичные коды (BCD)
Глава 2. Основы считывания данных в аналого-цифровых системах
Комплементарные коды
Некоторые типы преобразователей (например, ранние ЦАП, использовав-
шие монолитные NPN токовые переключатели) нуждались в стандартных
кодах, таких как натуральный бинарный или BCD, но все разряды были
представлены их дополнениями. Такие коды называются комплементарны-
ми. Все описанные к данному моменту коды включают комплементарные
коды. Комплементарный код не нужно путать с инверсным или дополни-
тельным кодами. В 4-разрядном комплементарно-бинарном преобразова-
теле 0 представлен как 1111, half-scale как 0111, FS-1 LSB как 0000. На
практике комплементарный код может быть получен путем использования
инверсного выхода с регистра, вместо прямого выхода, так как оба могут
быть доступны.
Иногда комплементарный код удобен при инвертировании аналогового
выхода с ЦАП. В настоящее время многие ЦАП имеют дифференциальные
выходы, которые позволяют производить инверсию полярности без моди-
фикации входящего кода. Подобно этому многие АЦП имеют дифферен-
циальные логические выходы, которые могут использоваться для осуществ-
ления инверсии полярности.
Статические передаточные характеристики ЦАП и АЦП
и погрешности постоянного тока
Важно всегда помнить, что для ЦАП и АЦП характерно наличие цифрового
входного или выходного сигнала, вследствие этого сигнал квантуется. То
есть A-разрядное слово представляется одним из 2N возможных состояний,
следовательно, A-разрядный ЦАП (с фиксированным опорным напряже-
нием) может иметь только 2N возможных аналоговых выходов, а А-разряд-
ный АЦП может иметь только 2N возможных цифровых выходов. Как было
отмечено выше, аналоговые сигналы представляются в виде напряжения
или тока.
Разрешение преобразователей может выражаться по-разному: в весах
самого младшего разряда, промили полной шкалы, милливольты (мВ) и т. д.
Разные устройства (даже от одного производителя) будут характеризоваться
различно. Поэтому пользователи преобразователей должны научиться пе-
реводить различные виды характеристик, что необходимо для более удач-
ной компоновки устройств. В таблице рис. 2.14 представлен размер самого
младшего разряда для различных разрешений.
Прежде чем рассматривать различные типы архитектур преобразовате-
лей, необходимо рассмотреть ожидаемые параметры и важные характерис-
тики. Следующие разделы будут посвящены описанию ошибок и техничес-
ких характеристик, используемых в преобразователях. Это важно для пони-
мания сильных и слабых сторон различных архитектур АЦП/ЦАП.
Первыми областями применения преобразователей были измерения и
управление, где не требовалось точное время преобразования, так как ско-
рость дискретизации была достаточно медленной. В таких приложениях
важны технические характеристики постоянного тока преобразователей,
но время и технические показатели переменного тока при этом не важны.
2.1. Кодирование и квантование
Разрешение N 2" Напряжение(10 В FS) ppm FS %, FS дБ, FS
2 бит 4 2,5 В 250,000 25 -12
4 бит 16 625 мВ 62,500 6,25 -24
6 бит 64 156 мВ 15,625 1,56 -36
8 бит 256 39,1 мВ 3,906 0,39 -48
10 бит 1,024 9,77 мВ (10 мВ) 977 0,098 -60
12 бит 4,096 2,44 мВ 244 0,024 -72
14 бит 16,384 610 мкВ 61 0,0061 -84
16 бит 65,536 153 мкВ 15 0,0015 -96
18 бит 262,144 38 мкВ 4 0,0004 -108
20 бит 1,048,576 9,54 мкВ (10 мкВ) 1 0,0001 -120
22 бит 4,194,304 2,38 мкВ 0,24 0,000024 -132
24 бит 16,777,216 596 nV 0,06 0,000006 -144
* Джонсовский шум резистора 2,2 кОм при 25 °C в полосе частот 10 кГц составляет 600 нВ.
Пример: при 10 В полной шкалы и 10 разрядах LSB равен 10 мВ, 1000 ррм или 0,1 %. Все другие значения
могут быть рассчитаны через степень 2.
Рис. 2.14. Квантование: величина младшего значащего разряда (LSB)
В настоящее время большинство преобразователей используются в строби-
рующих дискретных системах, где характеристики переменного тока явля-
ются важными (характеристики постоянного тока могут отсутствовать), —
данная тема будет освещена в разд. 2.3 этой главы (термин «дискретный»
здесь и далее означает дискретность времени, а дискретность величины
сигнала на входе или выходе обозначается термином «квантованный». —
Примеч. ред.).
На рис. 2.15 представлены идеальные передаточные характеристики
для 3-разрядного однополярного ЦАП и 3-разрядного однополярного АЦП.
В ЦАП вход и выход квантованы, график состоит из 8 точек. Возникает
вопрос: нужно ли проводить линию через эти 8 точек? Очень важно по-
мнить, что реальная передаточная характеристика не представляет собой
линии, а лишь ряд дискретных точек.
Рис. 2.15. Передаточная характеристика идеального 3-разрядного ЦАП и АЦП
Глава 2. Основы считывания данных в аналого-цифровых системах
Вход АЦП является аналоговой величиной и не квантован, но его выход
квантуется. Передаточная характеристика состоит из 8 горизонтальных ша-
гов. Когда мы говорим о смещении, усилении и линейности АЦП, мы пред-
ставляем линию, соединяющую средние точки этих шагов, часто называе-
мые «центры кодов».
Для ЦАП и АЦП цифровая полная шкала (все единицы) соответствует
величине на 1 LSB ниже аналоговой полной шкалы (FS).
Идеальные переходы АЦП имеются на 72 LSB выше нуля, после этого
через каждый LSB, до величины на 72 LSB ниже аналоговой полной шка-
лы. Так как аналоговый входной сигнал может принимать любое значение,
а цифровой выходной квантован, может существовать разница в 72 LSB
между реальным аналоговым входом и точным значением цифрового выхо-
да. Этот процесс известен как погрешность квантования или неопределен-
ность квантования, пример представлен на рис. 2.15. В яс-приложениях
(с отсчетами) эта погрешность квантования вызывается шумом квантова-
ния, который будет рассмотрен в разд. 2.3.
Как было сказано ранее, существует множество цифровых кодов для
преобразователей: прямой бинарный, смещенный бинарный, инверсный,
дополнительный, со знаковым разрядом, Грея, двоично-десятичный и дру-
гие. Этот раздел в основном посвящен аналоговым элементам, окружаю-
щим преобразователи. В примерах будут рассмотрены простой бинарный и
смещенный бинарный, мы не будем отмечать достоинства и недостатки
этих или каких-то других цифровых кодов.
На рис. 2.15 представлены характеристики однополярных преобразовате-
лей, чьи аналоговые порты имеют только одну полярность. Это самые про-
стые примеры, но биполярные преобразователи обычно более востребованы
в современных приложениях. Существует 2 вида биполярных преобразовате-
лей: самый простой является однополярным преобразователем с отрица-
тельным смещением, равным 1 MSB (многие преобразователи организова-
ны таким образом, что смещение может включаться или выключаться, и,
таким образом, преобразователи могут по желанию использоваться как од-
нополярные или биполярные); другой тип, известный как преобразователь
со «знаковым разрядом», является более сложным, он имеет A-разрядов ве-
личины и дополнительный разряд, соответствующие знаку аналогового сиг-
нала. ЦАП со «знаковым разрядом» используются достаточно редко, а АЦП
со «знаковым разрядом» используются в основном в цифровых вольтметрах
(DVMs). На рис. 2.16 представлены характеристики преобразователей: одно-
полярного, со смещением бинарного и со «знаковым разрядом».
Существует 4 погрешности постоянного тока в преобразователях: по-
грешность смещения, погрешность усиления и 2 вида ошибок линейности
(дифференциальная и интегральная). Погрешности смещения и усиления
аналогичны погрешностям смещения и усиления в усилителях для бипо-
лярного входного диапазона (рис. 2.17). (Несмотря на то что погрешность
смещения и ошибка в нулевой точке идентичны аналогам в усилителях и
однополярных преобразователях, они не идентичны в биполярных преоб-
разователях, и должны быть четко разделены.)
Передаточные характеристики для ЦАП и АЦП могут быть выраже-
ны прямой линией, определенной D = К + GA, где D — цифровой код,
2.1. Кодирование и квантование
Биполярный
Биполярный со знаковым
Рис. 2.16. Характеристики однополярного и двуполярного преобразователей
А — аналоговый сигнал, К и G — постоянные величины. В однополярном
преобразователе идеальное значение К равно нулю, в смещенном биполяр-
ном преобразователе Нравно 1 MSB. Погрешность смещения определяется
величиной, на которую реальное значение К отличается от его идеального
значения.
Погрешность усиления определяется величиной, на которую G отлича-
ется от его идеального значения, и обычно выражается процентной разни-
цей между ними, хотя она может определяться как вклад погрешности уси-
ления (в мВ или LSB) в общую ошибку полной шкалы. Эти погрешности
могут компенсироваться пользователями преобразователей. Однако следу-
ет отметить, что смещение усилителя настраивается при нулевом входе и
затем настраивается усиление в пределах полной шкалы. Однако алгоритм
подгонки для биполярного преобразователя гораздо сложнее.
Ошибка интегральной линейности преобразователя аналогична ошибке
линейности для усилителя и обычно определяется значением максималь-
ного отклонения реальной передаточной характеристики преобразователя
Ошибка
смещения
Рис. 2.17. Ошибки смещения и усиления биполярных преобразователей
Глава 2. Основы считывания данных в аналого-цифровых системах
от прямой линии. Она обычно выражается в процентах от полной шкалы
(но может даваться в LSB). Для АЦП самым популярным правилом являет-
ся проведение прямой линии через средние точки кодов (центры кодов).
Существует 2 способа выбора прямой линии: через конечные точки или как
лучшая (средняя) прямая линия, как показано на рис. 2.18.
При выборе системы конечной точки отклонение от прямой линии из-
меряется от начала координат до конечной точки шкалы (после настройки
усиления). Это очень удобный способ для измерения интегральной линей-
ности для приложений преобразователей, связанных с измерением и уп-
равлением (так как диапазон погрешности находится в зависимости от от-
клонений идеальной передаточной характеристики, а не от случайного «луч-
шего совпадения»). Этот способ обычно используется разработчиками Analog
Devices Inc.
Наилучшая прямая линия дает больше возможностей прогнозирования
искажений в яс-приложениях, а также представляет более низкое значение
«линейной погрешности» в спецификацию. Прямая линия наилучшего со-
гласования проводится через передаточную характеристику устройства. При
этом используется стандартная техника линиаризации кривой, и максималь-
ное отклонение измеряется относительно этой линии. В основном измере-
ние ошибки интегральной линейности проводится таким образом лишь в
50% случаев по сравнению с методом конечной точки. Этот метод хорош для
создания производящих впечатление спецификаций, но он менее пригоден
дня анализа погрешностей. Для приложений ас лучше определять отклоне-
ния, чем нелинейности de. Таким образом, метод лучшей прямой линии для
определения линейности преобразователя используется достаточно редко.
Другим типом нелинейности преобразователя можно назвать диффе-
ренциальную нелинейность (DNL). Она имеет отношение к линейности
кодовых переходов преобразователя. В идеальном случае изменение 1 LSB
в цифровом коде соответствует изменению точно 1 LSB в аналоговом сиг-
нале. В ЦАП изменение 1 LSB в цифровом коде вызывает изменение точно
1 LSB в аналоговом выходе, в то время как в АЦП должно быть изменение
в 1 LSB в аналоговом входе, для передвижения от одного цифрового пере-
хода к другому. Дифференциальная нелинейность определяется как макси-
мальная величина отклонения любого кванта (или изменения в LSB) на
всей передаточной функции от его идеального размера в 1 LSB.
Метод конечных точек
Рис. 2.18. Методы измерения интегральной ошибки линейности
2 7. Кодирование и квантование 85
Рис. 2.19. Передаточная характеристика неидеального 3-разрядного ЦАП и АЦП
Если изменение в аналоговом сигнале, соответствующем 1 LSB в циф-
ровом изменении, больше/меныпе 1 LSB, то мы говорим о погрешности
дифференциальной нелинейности (DNL). Погрешность DNL преобразова-
теля обычно определяется как максимальное значение DNL, найденное при
любом переходе в пределах диапазона преобразователя. На рис. 2.19 пока-
заны неидеальные передаточные функции для ЦАП и АЦП и отражен эф-
фект погрешности DNL.
DNL ЦАП более детально рассмотрена на рис. 2.20. Если дифференци-
альная нелинейность меньше —1 LSB при любом переходе, то ЦАП являет-
ся немонотонным, т. е. его переходная характеристика содержит один или
более локальных максимумов или минимумов. Дифференциальная нели-
нейность больше +1 LSB не вызывает немонотонность, но она все еще
нежелательна во многих ЦАП-приложениях (особенно в следящих систе-
Рис. 2.20. Детали дифференциальной нелинейности (DNL) ЦАП
Глава 2. Основы считывания данных в аналого-цифровых системах
Пропущенный код (DNL < -1 LSB)
•4—1 LSB, —►!
I DNL- 0 !
0.25 LSB,
DNL = -0.75 LSB
----- 1.5 LSB.----►!
J DNL = +0.5 LSB
к— 0.5 LSB,
DNL = -0.5 LSB
1 lsb, —
: DNL = о
Аналоговый вход
Рис. 2.21. Детали дифференциальной нелинейности АЦП
мах, где немонотонность может изменить отрицательную обратную связь
на положительную). Это особенно важно в случае подчеркнуто монотонно-
го ЦАП. Монотонность ЦАП часто детально представлена в специфика-
ции. Хотя в случае, когда дифференциальная нелинейность гарантирован-
но меньше 1 LSB (т. е. |DNL| < LSB), устройство будет монотонным, даже
без явной гарантии.
На рис. 2.21 дифференциальная нелинейность АЦП рассмотрена де-
тально на расширенной шкале. АЦП может быть немонотонным, но самый
обычный результат превышения дифференциальной нелинейности АЦП
представлен в виде пропущенных кодов. Отсутствующие коды в АЦП так-
же нежелательны, как немонотонность в ЦАП. Получаем тот же результат:
DNL < -1 LSB.
АЦП могут не только иметь отсутствующие коды, но могут быть немо-
нотонными, как показано на рис. 2.22. Как и в случае с ЦАП, это может
привести к серьезным проблемам, особенно для серво-приложений.
В ЦАП может не быть отсутствующих кодов. Каждое цифровое слово
входа будет вырабатывать соответствующий аналоговый выход. В прямом
Пропущенный код
Немонотонная
Аналоговый вход
Рис. 2.22. Немонотонность АЦП с пропущенным кодом
2.1. Кодирование и квантование 87
бинарном ЦАП местом образования условий для немонотонности является
середина шкалы между двумя кодами: 001...11 и 100...00. Если немонотон-
ное состояние возникнет здесь, то причина этого заключается в неправиль-
ной калибровке или настройке ЦАП. АЦП последовательного приближе-
ния с внутренним немонотонным ЦАП будет иметь отсутствующие коды,
но останется монотонным. Однако АЦП может быть немонотонным, все
зависит от определенной архитектуры преобразования. На рис. 2.22 пред-
ставлена передаточная функция АЦП, являющегося немонотонным и име-
ющего отсутствующие коды.
АЦП, использующие субдиапазонную (subranging) архитектуру, делят
входной диапазон на грубые сегменты. Каждый грубый сегмент в дальней-
шем делится на более мелкие сегменты, и таким образом извлекается окон-
чательный код. Этот процесс более детально описан в гл. 4. Плохо настро-
енный субдиапазонный АЦП может быть немонотонным, иметь широкие
коды или отсутствующие коды в субдиапазонных точках, как показано на
рис. 2.23, а. б и в, соответственно. Этот тип АЦП должен подгоняться та-
ким образом, чтобы дрейф, вызванный старением или температурой, со-
здавал широкие коды в чувствительных точках, но не являлся причиной
немонотонности или отсутствующих кодов.
Определение отсутствующих кодов более сложное по сравнению с оп-
ределением немонотонности. Все АЦП подвергаются неотъемлемому влия-
нию шума переходов (рис. 2.24). (Например, он вызывает мерцание между
соседними значениями последней цифры цифрового вольтметра.) При по-
вышении разрешения и полосы пропускания входной диапазон шума пере-
хода может достигать или превышать 1 LSB. Широкополосные АЦП с вы-
соким разрешением обычно содержат внутренние источники шума, кото-
рые могут быть приведены ко входу как входной шум, суммируемый с
сигналом. Результатом этого шума, особенно если он сопровождается отри-
цательной ошибкой DNL, будет наличие некоторых (или даже всех) кодов,
где шум перехода представлен на всем входном диапазоне. Таким образом,
а б в
Немонотонная Расширенный код Пропущенный код
Немонотонная
Немонотонная
Расширенный
код
Пропущенный
код
Расширенный
код
Пропущенный
код
Аналоговый вход
Рис. 2.23. Ошибки, связанные с неотрегулированностью субдиапазонного АЦП
Глава 2. Основы считывания данных в аналого-цифровых системах
Шум
кодовых переходов
ДНЛ
(дифференциальная
нелинейность)
Шум переходов
и ДНЛ
Вход АЦП Вход АЦП Вход АЦП
Рис. 2.24. Комбинированное действие шума переходов и DNL
существует несколько кодов, для которых нет соответствующего входа, ко-
торый бы гарантировал этот код как выходной, хотя может существовать
диапазон входов, которые имеют этот код.
Для АЦП с низкой разрешающей способностью целесообразно будет
определить отсутствующие коды как совокупность шума перехода и диф-
ференциальной нелинейности, которая гарантирует определенный уровень
(возможно 0,2 LSB) свободного от шума кода для всех кодов. Однако этого
невозможно достичь при очень высокой разрешающей способности, воз-
можной в современных сигма-дельта АЦП, или при низком разрешении в
широкополосных стробирующих АЦП. В этих случаях производитель дол-
жен определять уровни шума и разрешение каким-то другим путем. При
этом неважно, какой из методов используется, но в спецификации должны
содержаться ясное определение используемого метода и ожидаемые рабо-
чие характеристики. Детальное рассмотрение эффективного входного шума
представлено в разд. 2.3.
До данного момента обсуждались наиболее важные технические харак-
теристики постоянного тока, относящиеся к преобразователям. Для других
менее важных показателей требуются только определения. Те определения,
которые не были раскрыты в данном разделе, можно найти в разд. 2.5, где
представлен полный алфавитный список технических показателей преоб-
разователей, с детальным определением каждого из них.
Список литературы
2.1. Кодирование и квантование
1. К. Cattermole. Principles of Pulse Code Modulation. American Elsevier Publishing
Company. Inc., 1969, New York NY, ISBN 444-19747-8. (An excellent tutorial and historical
discussion of data conversion theory and practice, oriented towards PCM, but covers practically
all aspects. This one is a must for anyone serious about data conversion.)
2. Frank Gray. Pulse Code Communication. U.S. Patent 2, 632, 058, filed November
13, 1947, issued March 17, 1953. (Detailedpatent on the Gray code and its application to
electron beam coders.)
3. R. W. Sears. Electron Beam Deflection Tube for Pulse Code Modulation. Bell System
Technical Journal, Vol. 27, pp. 44-57, Jan. 1948. (Describes an electon-beam deflection tube
7-bit, 100 kSPS flash converter for early experimental PCM work.)
4. J. O. Edson and H.H. Henning. Broadband Codecs for an Experimental 224 Mb/s PCM
Terminal. Bell System Technical Journal, Vol. 44, pp. 1887—1940, Nov. 1965. (Summarizes
2.2. Теория отсчетов
experiments on ADCs based on the electron tube coder as well as a bit-per-stage Gray code 9-bit solid
state ADC. The electron beam coder was 9 bits at 12 MS PS, and represented the fastest of its
type.)
5. Dan Sheingold. Analog-Digital Conversion Handbook. 3rd Edition, Analog Devices
and Prentice-Hall, 1986, ISBN-0-13-032848-0. (The defining and classic book on data
conversion.)
2.2. Теория отсчетов
Уолт Кестер
В этом разделе будут обсуждаться основы теории отсчетов. Блок-схема ти-
пичной дискретной системы представлена на рис. 2.25. Обычно, прежде
чем подвергнуться реальному аналого-цифровому преобразованию, анало-
говый сигнал проходит через цепи нормализации, которые выполняют та-
кие функции, как усиление, аттенюация (ослабление) и фильтрация. Для
подавления нежелательных сигналов вне полосы пропускания и предотвра-
щения наложения спектров необходим фильтр низкой частоты (LPF) или
полосовой фильтр (BPF).
На рис. 2.25 представлена система, работающая в реальном масштабе
времени. В ней АЦП непрерывно считывает сигнал с частотой, равной^, и
выдает новые отсчеты (стробы) процессору ЦОС (DSP) с такой же часто-
той. Для обеспечения работы в реальном масштабе времени DSP должен
закончить все вычисления в пределах интервала дискретизации 1//у и пере-
дать выходной отсчет на ЦАП до поступления следующего отсчета с АЦП.
В качестве примера типичной функции DSP может выступать цифровая
фильтрация.
В случае использования алгоритма БПФ блок данных загружается в па-
мять DSP. Пока работает алгоритм БПФ, новый блок данных загружается в
память для обеспечения работы в реальном масштабе времени. DSP должен
вычислить БПФ в течение интервала передачи данных, чтобы быть гото-
вым к процессу обработки следующего блока данных.
Рис. 2.25. Структура дискретной системы
Глава 2. Основы считывания данных в аналого-цифровых системах
Обратите внимание, что ЦАП требуется только в том случае, когда дан-
ные необходимо преобразовать обратно в аналоговый сигнал (например, в
случае голосового или звукового приложения). Во многих приложениях после
первоначального аналого-цифрового преобразования сигнал остается в циф-
ровом формате. Кроме того, существуют устройства, подобные CD-проиг-
рывателю, в которых DSP отвечает исключительно за формирование сигна-
ла на ЦАП. В случае использования ЦАП на его выходе для подавления
нежелательных гармоник необходимо применять фильтр {anti-imagingfilter).
В конечном счете существуют промышленные системы управления, имею-
щие более низкую скорость, где скорость дискретизации намного ниже (при
этом неважно, какая система применяется), но основные положения тео-
рии отсчетов будут применимы.
В реальных процессах аналого-цифрового и цифро-аналогового преоб-
разования есть два ключевых этапа: отсчеты по времени и квантование по
амплитуде, которые определяют разрешающую способность данных опера-
ций. Понимание этих моментов является основополагающим фактором в
оценке приложений преобразователей.
Необходимость в наличии функции выборки-хранения
Обобщенная схема дискретной системы, показанная на рис. 2.25, предпола-
гает наличие определенного типа яс-сигнала на входе. Необходимо отметить,
что это не должно быть именно так в случае современных цифровых вольт-
метров или АЦП, применяемых для измерения de, но нужно предполагать,
что входной сигнал имеет определенную ограниченную верхнюю частоту/.
Большинство АЦП сегодня имеют встроенную функцию выборки-хра-
нения, что позволяет им обрабатывать яс-сигналы. Обычно этот тип АЦП
называется стробирующим (выполняющим отсчеты) АЦП. Однако многие
АЦП из существовавших ранее, например промышленно-стандартизован-
ный AD574 от Analog Devices, не были стробирующим типом АЦП, а лишь
являлись кодером (рис. 2.26). Если входной сигнал для стробирующего АЦП
(предполагаем, что отсутствует функция выборки хранения) изменяется более
чем на 1 LSB в период преобразования (в примере 8), выходные данные
могут иметь большие погрешности, зависящие от местоположения кода.
У большинства архитектур АЦП имеются ошибки этого типа в большей
или меньшей степени, за возможным исключением//яяй-преобразователей,
имеющих хорошо согласованные компараторы.
Предположим, что входной сигнал кодера представляет собой синусои-
дальную кривую с полношкальной амплитудой {q2N/2), где q — вес самого
младшего разряда:
V(t) = (272) sin (2л//). (2.1)
Берем производную:
dv/dt = q2nf(2N/2) cos (2л/Г). (2.2)
Получаем максимальную скорость изменения:
dv/dt\_ =q2nf(2N/2). (2.3)
2.2. Теория отсчетов
Аналоговый вход
Л/-разрядный регистровый АЦП
последовательных приближений
с временем преобразования
8 мкс
f = 100 kSPS
=д2(«-'>2^
л I™
dv\
f _ rtlmax
max ’ 2^2xq
dv
f
"ж дя2"
Пример:
dv = 1 LSB = q
dt = 8 мкс
N = 12, 2N = 4096
= 9.7 Гц
f2w 1
v(0 = q — sin (2^)
Рис. 2.26. Ограничения по входным частотам нестробирующих АЦП (кодеров)
Решаем для f:
/(Л"*|».)/(«>'2")- <2-4>
Если N= 12 и изменение в 1 LSB (dv = q) допускается за период преоб-
разования (dt = 8 мкс), уравнение может быть решено для fmm, максималь-
ной частоты полношкального сигнала, которая может обрабатываться без
погрешностей:
X™ = 9,7 Гц.
Это предполагает, что входная частота, превышающая 9,7 Гц, приводит к
ошибкам преобразования, даже если частота отсчетов составляет 100 kSPS
(АЦП использует дополнительный 2-мкс интервал к 8 мкс для приема вне-
шним устройством выборки—хранения сигнала после выхода из режима
хранения).
Для преобразования яс-сигналов добавляется функция выборки—хра-
нения, как представлено на рис. 2.27. В идеале устройство выборки—хране-
ния представляет собой выключатель, замыкаемый на конденсатор, за ко-
торым следует буфер с высоким входным импедансом. Входной импеданс
буфера должен быть достаточным для того, чтобы конденсатор мог разря-
жаться меньше чем на 1 LSB в период хранения. Устройство выборки-
хранения подвергает сигнал отсчету во время режима выборки и хранит
отсчет постоянным во время режима хранения. Время распределено так,
что кодер осуществляет преобразование во время режима хранения. Стро-
бирующий АЦП может обрабатывать быстрые сигналы — верхнее ограни-
чение по частоте определяется не преобразователем, а дрожанием апертуры
устройства выборки—хранения, полосой пропускания, искажением и т. п.
На приведенном примере хорошее устройство выборки—хранения может
получать сигнал за 2 мкс, что позволяет иметь частоту дискретизации, рав-
ную 100 kSPS, и способно обрабатывать входные частоты до 50 кГц. Более
детальное рассмотрение функции выборки—хранения, включая и эти тех-
нические характеристики, будет представлено дальше в данной главе.
Глава 2. Основы считывания данных в аналого-цифровых системах
Управление ключом
Рис. 2.27. Функция выборки и хранения, необходимая для отсчетов ас-сигналов
Очень важно понимать едва уловимую разницу между усилителем с вы-
боркой и хранением (SHA) и усилителем слежения и хранения (ТНА, Т/А).
Собственно говоря, выход с выборки—хранения не определен во время ре-
жима выборки, однако выход со слежения и хранения ТНА отслеживает
сигнал в процессе режима выборки или режима слежения. На практике эта
функция обычно осуществляется как слежение и хранение, и термины «сле-
жение-хранение» и «выборка—хранение» часто взаимозаменяемы. Кривые,
представленные на рис. 2.27, соответствуют слежению—хранению.
Для того чтобы лучше понять типы яс-погрешностей, рассмотрим АЦП,
не содержащий функцию выборки—хранения (рис. 2.28).
На фотографиях представлен восстановленный выход с 8-разрядного
АЦП (flash converter) с функцией выборки—хранения и без нее. В идеаль-
ном /Zas/z-преобразователе компараторы превосходно сопрягаются и не тре-
буется устройство выборки—хранения. Однако на практике между компа-
с УВХ
Без УВХ
fs = 20 MSPS, fe = 19,98 МГц, fs - fa = 20 кГц
Рис. 2.28. 8-разрядный 20 MSPS параллельный АЦП с выборкой—хранением и без нее
2.2. Теория отсчетов
раторами существует рассогласование по времени, вызванное высокой час-
тотой на входе, что выражается в наличии нелинейностей и отсутствующих
кодов, как показано на правых фотографиях. Информация была получена
при работе ЦАП на АЦП-выходе. Выход с ЦАП представляет собой сину-
соиду биений низкой частоты, соответствующую разнице между частотой
отсчетов (20 MSPS) и частотой на входе АЦП (19,98 мГц). В этом случае
частота биений равна 20 кГЦ. Биения (или смещение частоты) более де-
тально рассмотрены в следующем разделе.
Критерий Найквиста
Продолжительный аналоговый сигнал подвергается выборке через диск-
ретные интервалы / = 1/^, которые необходимо тщательным образом выби-
рать для того, чтобы получить наиболее точные данные о первоначальном
аналоговом сигнале. Совершенно ясно, что чем больше выборка (больше
частота отсчетов), тем точнее цифровые значения, но, если выборка мала
(низкая скорость отсчетов), можно достигнуть такого момента, при кото-
ром важная информация о сигнале будет полностью утеряна. Математичес-
кие основы дискретизации были изложены Гарри Найквистом из Bell
Telephone Laboratories в двух его работах 1924 и 1928 годов издания12 (смот-
рите гл. 1). Работы Найквиста были немного дополнены Р.В.Л. Хартли3.
Все эти труды формируют основу для развития исследований по ИКМ,
которые проводились в 1940-х годах. В 1948 году Клод Шеннон выпустил
свою классическую книгу по теории связи.
Проще говоря, критерий Найквиста требует, чтобы частота отсчетов была
по крайней мере вдвое больше наивысшей частоты спектра сигнала, в про-
тивном случае информация о сигнале будет потеряна. (В отечественной
литературе этот критерий часто формулируется как теорема Котельникова.
— Примеч. ред.). Если частота отсчетов меньше удвоенной максимальной
частоты аналогового сигнала, возникает эффект биений, известный как
смещение спектров (aliasing).
Для понимания смысла смещения спектров как во временной, так и в
частотной областях сначала рассмотрим во времени процесс выборки од-
ного тонального сигнала синусоидальной формы, показанный на рис. 2.30.
В этом примере частота дискретизации fs лишь немного больше частоты
аналогового входного сигнала^, что не удовлетворяет критерию Найквис-
та. Обратите внимание, что в действительности сделанная выборка соот-
• Частота дискретизации fs сигнала с шириной полосы fa должна удовлетворять усло-
вию fs > 2fa, в противном случае информация о сигнале будет искажена из-за эффек-
та смещения и наложения спектров.
• Эффект наложения спектров возникает, когда fs < 2fa.
• Эффект смещения спектров широко используется в таких задачах, как прямое преоб-
разование промежуточной частоты (ПЧ) в цифровую форму.
• Сигнал, компоненты которого имеют частоту между fa и fb, должен дискретизировать-
ся при fs > 2 (fb - fa) для предотвращения наложения компонентов из-за перекрытия
спектров сигнала.
Рис. 2.29. Критерий Найквиста
Глава 2. Основы считывания данных в аналого-цифровых системах
Замечание: fa несколько меньше fs
Рис. 2.30. Эффект смещения спектра во временной области
ветствует сигналу, частота которого равна разности частот дискретизации и
частоты исходного сигнала fs — fa. Соответствующее представление этого
примера в частотной области показано на рис. 2.31, б.
Далее рассмотрим случай выборки с частотой^ одночастотного сигнала
синусоидальной формы частоты fa. осуществленной идеальным импульс-
ным дискретизатором (см. рис. 2.31, а). Примем, что^ > 2fa. В частотном
спектре на выходе дискретизатора видны смещения — aliases (или отраже-
ния — images) исходного сигнала вокруг мультиплицированной частоты /,
т. е. на частотах, равных \+Kfs + /J, где К = 1, 2, 3, 4, ... .
Частотная полоса Найквиста определяется как полоса спектра от 0 &ofs/2.
Частотный спектр разделен на бесконечное число полос Найквиста, каждая
шириной по 0,5/\ На практике идеальный дискретизатор заменяется на АЦП,
используемый совместно с процессором БПФ. БПФ-процессор обеспечи-
вает на выходе только компоненты сигналов, частоты которых попадают в
первую зону Найквиста, т. е. в полосу от 0 до fs/2.
Теперь рассмотрим случай, когда частота сигнала выходит за пределы
первой зоны Найквиста (рис. 2.31, б). Частота сигнала немного меньше час-
тоты дискретизации, что соответствует случаю, представленному во времен-
ной области на рис. 2.30. Обратите внимание, что даже при том, что сигнал
находится вне первой зоны Найквиста, его составляющая^ — fa (отражение)
попадает внутрь зоны. Возвращаясь к рис. 2.31, я, поясним, что если не-
а
1-я зона
2-я зона
Найквиста
Найквиста
б
4-я зона
Найквиста |
Рис. 2.31. Аналоговый сигнал^, стробированный идеальным отсчетчиком, имеет сме-
щения и отражения спектра |±Х£ ±/J, где К = 1, 2, 3, ...
З-я зона
Найквиста
2.2. Теория отсчетов
желательный сигнал появляется в области любой из отраженных частот^,
он также возникает и на частоте fa, приводя таким образом к появлению
побочного частотного компонента в первой зоне Найквиста.
Такой процесс подобен работе смесителя, используемого для детекти-
рования аналоговых сигналов. При этом подразумевается, что перед диск-
ретизатором (или АЦП) осуществляется фильтрация, подавляющая компо-
ненты, частоты которых находятся вне полосы Найквиста и после дискре-
тизации попадающие в ее пределы. Рабочая характеристика фильтра будет
зависеть от того, как близко частота внеполосного сигнала отстоит а
также будет определяться величиной требуемого подавления.
Фильтры для устранения эффекта наложения спектров
(антиалайзинговые фильтры)
Подразумевается, что частотная полоса подлежащего дискретизации сигна-
ла лежит в первой зоне Найквиста. Важно обратить внимание на то, что без
фильтрации на входе идеального дискретизатора любой частотный компо-
нент (сигнал или шум), который находится за пределами полосы Найквис-
та, в любой из зон Найквиста будет создавать НЧ-составляющую в первой
зоне. По этой причине ФНЧ используется почти со всеми АЦП для подав-
ления нежелательных сигналов. Важно правильно определить характерис-
тики фильтра. Первым шагом является получение характеристик сигнала,
подлежащего дискретизации. В случае, когда наивысшая из интересующих
нас частот равна fa, фильтр пропускает сигналы, лежащие в полосе частот
от 0 тогда как сигналы с частотой выше/а ослабляются. Предположим,
что частота сопряжения фильтра равна fa. На рис. 2.32, а. показан эффект
конечности перехода от минимального до максимального ослабления филь-
тра в пределах динамического диапазона системы.
Возможно, что во входном сигнале присутствуют существенные компо-
ненты с частотой, большей максимальной частоты Диаграмма показыва-
ет, как компоненты с частотой выше/5 — fa дают НЧ-составляющие внутри
Затухание в полосе задержки = DR
Полоса пропускания: от fd до fs - fa
Частота точки перегиба АЧХ: fa
Рис. 2.32. Избыточная частота отсчетов снижает требования к крутизне спада частот-
ной характеристики антиалайсингового фильтра
Затухание в полосе задержки = DR
Полоса пропускания: от fa до Kfs - fa
Частота точки перегиба АЧХ: fa
Глава 2. Основы считывания данных в аналого-цифровых системах
полосы от 0 до fa. Эти НЧ-составляющие неотделимы от реальных сигналов
и поэтому ограничивают динамический диапазон значением, которое на
диаграмме показано как DR.
Некоторые авторы рекомендуют устанавливать параметры ФНЧ отно-
сительно частоты Найквиста/У 2, но это предполагает, что ширина полосы
сигнала находится от 0 до^/2, что случается редко. В примере на рис. 2.32, а,
НЧ-составляющие, которые попадают в диапазон между fa nfs/2, не пред-
ставляют для нас интереса и не ограничивают динамический диапазон.
Переходная зона ФНЧ определяется частотой сопряжения fa, частотой
окончания полосы спада — fa и требуемым затуханием в полосе спада, DR.
Динамический диапазон системы выбирается исходя из требований точно-
сти воспроизведения сигнала.
При всех прочих равных условиях фильтры становятся более сложными
по мере того, как увеличивается крутизна спада. Например, фильтр Бат-
терворта дает ослабление 6 дБ на октаву для каждого полюса частотной
характеристики (фильтр 1-го порядка). Для достижения ослабления 60 дБ
в диапазоне от 1 до 2 МГц (1 октава) требуется как минимум фильтр с
10 полюсами (фильтр 10-го порядка) — это нетривиальный фильтр, весьма
трудный в разработке.
Поэтому для высокоскоростных приложений, требующих более высо-
кой крутизны спада и меньшей неравномерности в рабочей полосе при
линейной фазовой характеристике, больше подходят фильтры других ти-
пов. В частности, этим критериям удовлетворяют часто применяемые эл-
липтические фильтры. Существуют компании, специализирующиеся на
поставках заказных аналоговых фильтров. В качестве примера можно при-
вести компанию 7ТЕ5.
Из этого обсуждения видно, как недостаточная крутизна спада ФНЧ мо-
жет компенсироваться более высокой частотой дискретизации АЦП. Выбрав
более высокую частоту дискретизации (избыточную дискретизацию), мы
уменьшаем требование к крутизне спада и, следовательно, сложность филь-
тра за счет использования более быстрого АЦП с более высокой скоростью
обработки данных. Это иллюстрирует рис. 2.32, б. на котором показан эф-
фект, возникающий при увеличении частоты дискретизации в К раз, в то
время как требования к частоте сопряжения^ и к динамическому диапазону
DR остаются на прежнем уровне. Более пологий спад делает этот фильтр
проще для проектирования, чем в случае, приведенном на рис. 2.32, а.
Процесс проектирования ФНЧ начинается с выбора начальной частоты
дискретизации от 2,5/^ до Afa. Определим характеристики фильтра, основан-
ные на требуемом динамическом диапазоне, и посмотрим, является ли та-
кой фильтр реализуемым с учетом ограничения стоимости системы и рабо-
ты. Если реализация окажется невозможной, полезно рассмотреть вариант
с более высокой частотой дискретизации, для которого, возможно, потре-
буется более быстрый АЦП. Следует отметить, что сигма-дельта-АЦП из-
начально являются преобразователями с избыточной дискретизацией, и дан-
ное обстоятельство существенно ослабляет требования к ФНЧ, что являет-
ся дополнительным плюсом данной архитектуры.
Требования к ФНЧ могут быть несколько ослаблены, когда вы уверены,
что сигнал с частотой, которая попадает в полосу спада fs — fa. никогда не
достигнет амплитуды основного сигнала. Во многих приложениях появле-
2.2. Теория отсчетов
Нормализованная
передаточная характеристика
Нормализованная полоса пропускания:
амплитуда и затухание в обратном
направлении
Нормализованная задержка и отклонение
от линейного изменения фазы 0
Приводится с разрешения ТТЕ, Inc., 11652 Olympic Blvd., Los Angeles CA 90064, www.tte.com
Рис. 2.33. Характеристики 11-полюсного эллиптического фильтра (ТТЕ, LE1182-серия)
ние таких сигналов на этих частотах действительно маловероятно. Если
максимум сигнала в полосе частот fs— fa никогда не превысит X дБ ниже
полной шкалы основного сигнала, то требования к затуханию в полосе спа-
да фильтра могут быть уменьшены на ту же самую величину. Новое тре-
бование к затуханию в полосе спада fs — fa основано на понимании того
факта, что в этом случае значение подавляемого сигнала составляет ДЛ-ЛГдБ.
В случае реализации этого варианта будьте внимательны при устранении
любых шумов, частоты которых могут быть выше частоты f, — это нежела-
тельные сигналы, которые будут отражены в полосу сигнала.
Существуют компании, которые специализируются в поставке потреби-
тельских аналоговых фильтров. Компания ТТЕ является одним из предста-
вителей такого рода поставщиков5. В качестве примера можно привести
LE1182, И-полюсный эллиптический фильтр от ТТЕ для устранения эф-
фектов наложения спектра, представленный на рис. 2.33. Отметим, что этот
фильтр используется для достижения как минимум 80 дБ затухания между
fc и 1,24. Соответствующие неравномерность в полосе пропускания, обрат-
ные потери, задержка, фазочастотная характеристика также представлены
на рис. 2.33. Такой фильтр является доступным для частот сопряжения до
100 мГЦ в опциях PC-печатных плат, BNC или SMA с совместимыми кор-
пусами.
Субдискретизация (Undersampling) (гармоническая
дискретизация (Harmonic Sampling), дискретизация
модулированных сигналов (Bandpass Sampling),
дискретизация на промежуточной частоте (ПЧ) (IFSampling),
прямое преобразование ПЧ в цифровую форму
(Direct IF-to-Digital))
К настоящему моменту мы рассмотрели случай дискретизации сигналов с
полосой частот, лежащей в первой зоне Найквиста. На рис. 2.34, а, пред-
ставлен случай, когда полоса подлежащих дискретизации сигналов ограни-
4 - 2852
Глава 2. Основы считывания данных в аналого-цифровых системах
Рис. 2.34. Субдискретизация и трансляция частот между зонами Найквиста
чена первой зоной Найквиста, а в остальных зонах имеются боковые (отра-
женные) частотные компоненты.
На рис. 2.34, б, представлен случай, когда полоса подлежащего дискре-
тизации сигнала полностью находится во второй зоне Найквиста. Часто
процесс дискретизации сигнала, находящегося вне первой зоны Найквис-
та, называется субдискретизацией (побочной дискретизацией) или дискре-
тизацией гармоник. Обратите внимание, что смещенная полоса в первую
зону Найквиста содержит всю информацию об исходном сигнале, только
ее местоположение изменено (порядок частотных компонентов в спектре
обратный, но это легко корректируется переупорядочиванием спектраль-
ных компонентов на выходе БПФ).
На рис. 2.34, в, показан вариант подлежащего дискретизации сигнала,
ограниченного третьей зоной Найквиста. Обратите внимание, что отра-
жение в первую зону происходит без обращения частот. Фактически час-
тоты подлежащих дискретизации сигналов могут лежать в любой зоне Най-
квиста, а отражения в первую зону являются точным представлением сиг-
нала (за исключением обращения частот, которое происходит, когда
сигналы расположены в четных зонах). Здесь мы можем вновь ясно сфор-
мулировать критерий Найквиста: для сохранения информации о сигнале ча-
стота дискретизации должна быть равной или большей, чем удвоенная ши-
рина его полосы.
Обратите внимание, что в этой формулировке нет никакого упомина-
ния об абсолютном местоположении полосы дискретизируемых сигналов в
частотном спектре относительно частоты дискретизации. Единственное ог-
раничение состоит в том, что полоса подлежащих дискретизации сигналов
ограничена одной зоной Найквиста, т. е. полосы сигналов не должны пере-
крывать частоту/у2 с любым целочисленным множителем (фактически это
и является функцией антиалайзингового фильтра).
Дискретизация сигналов, лежащих выше первой зоны Найквиста, стала
популярной задачей, связанной с телекоммуникациями, потому что этот
процесс эквивалентен аналоговой демодуляции. Обычной практикой ста-
новится дискретизация сигналов ПЧ с последующим использованием циф-
ровых методов для обработки сигнала с устранением таким способом по-
2.2. Теория отсчетов
требности в демодуляторе ПЧ. Ясно, что с ростом ПЧ растут и требования
к производительности АЦП. Ширина полосы входа АЦП и характеристи-
ки, связанные с допустимыми искажениями сигналов, должны быть адек-
ватны скорее ПЧ, чем основной низкочастотной полосе. Это является про-
блемой для большинства АЦП, предназначенных для обработки сигналов в
первой зоне Найквиста, поэтому для субдискретизации нужен АЦП, кото-
рый может обрабатывать сигналы в других (более высокочастотных) зонах
Найквиста.
Фильтры для устранения эффектов смещения
и наложения спектров в приложениях
с субдискретизацией
На рис. 2.35 представлен сигнал во второй зоне Найквиста, расположен-
ный между частотами Z? чьи низкая и высокая частоты соответствуют fx
Фильтр для устранения эффектов наложения спектров является полосо-
вым. Желаемый динамический диапазон DR определяет затухание в полосе
спада фильтра. Верхняя переходная полоса находится от /2 до 2/5 - /2, а
нижняя в пределах от fx до/? -/г Как в случае с выборкой в полосе частот,
требования к антиалайзинговому фильтру могут быть ослаблены путем про-
порционального увеличения частоты дискретизации, но при этом fc тоже
нужно увеличить таким образом, чтобы она всегда находилась во второй
зоне Найквиста.
Существует 2 формулы, которые могут использоваться для выбора час-
тоты дискретизации (^) при данной несущей частоте (^) и полосе пропус-
кания сигнала А/ Первое уравнение отражает критерий Найквиста:
Z > 2а/ (2.5)
Второе уравнение гарантирует наличие fc в центре зоны Найквиста:
Jc 2NZ -1
(2.6)
Характеристики полосового фильтра:
Затухание на уровне границ полосы пропускания = DR
Переходные зоны: от f2 к 2fs - f2
от к fs -
Частоты, соответствующие началу спада частотной
характеристики
Рис. 2.35. Фильтр для устранения эффектов наложения спектров при субдискретизации
4fr
• f= 2bf • fs =--, NZ = 1, 2, 3, ...
s s 2NZ-1
Рис. 2.36. Центрирование субдискретизируемого сигнала в полосе Найквиста
где NZ= 1, 2, 3, 4 ... и NZсоответствуют зоне Найквиста, в которую попа-
дают несущая и ее сигнал (рис. 2.36).
NZобычно выбирается наибольшим, но при этом соблюдается/ > 2Д/
Результатом этого является минимальная необходимая частота дискретиза-
ции. Если в качестве NZ выбрано нечетное число, то fc и ее сигнал будут
попадать в нечетную зону Найквиста и составляющие частот в первой зоне
Найквиста не будут реверсированы. Компромиссное решение может быть
найдено между частотой дискретизации и сложностью антиалайзингового
фильтра путем выбора меньших значений NZ (отсюда и более высокой ча-
стоты дискретизации).
В примере рассмотрен 4-мГц сигнал, сконцентрированный вокруг несу-
щей частоты 71 мГц. Минимальная необходимая частота дискретизации со-
ставляет 8 MSPS. Находим NZпутем решения уравнения (2.6) при fc = 71 мГц
и / = 8 MSPS, NZ= 18,25. NZ должно быть целым числом, следовательно,
мы округляем 18,25 до меньшего целого числа 18, решаем уравнение для
нахождения/, получаем/, = 8,1143 MSPS. Окончательные значения следу-
ющие:/ = 8,1143 MSPS, / = 71 мГц и NZ= 18.
Предположим, что мы желаем упростить фильтр, и мы выбираем/ = 10 MSPS.
Находим NZ по формуле (2.6), подставляя / = 71 МГц и / = 10 MSPS,
получаем NZ= 14,7. Округляем 14,7 до целого меньшего числа, получаем
NZ = 14, находим / по формуле (2.6),/ = 10,519 MSPS. Получаем оконча-
тельные значения: / = 10,519 MSPS, / = 71 МГц и NZ= 14.
Приведенный выше интерактивный процесс можно также выполнить,
задавая / и настраивая несущую частоту для получения целого числа для NZ.
Список литературы
2.2. Теория отсчетов
1. Н. Nyquist. Certain Factors Affecting Telegraph Speed. Bell System Technical Journal,
Vol. 3, April 1924, pp. 324-346.
2. H. Nyquist. Certain Topics in Telegraph Transmission Theory. AI.E.E. Transactions,
Vol. 47, April 1928, pp. 617-644.
3. R. VL. Hartley. Transmission of Information. Bell System Technical Journal, Vol. 7,
July 1928, pp. 535-563.
4. C.E. Shannon. A Mathematical Theory of Communication. Bell System Technical
Journal, Vol. 27, July 1948, pp. 379-423 and October 1948, pp. 623-656.
5. TTE, Inc., 11652 Olympic Blvd., Los Angeles, CA 90064, www.tte.com.
2.3. Погрешности переменного тока
преобразователей
Уолт Кестер, Джеймс Брайант
Этот раздел рассматривает погрешности переменного тока, связанные с
преобразователями. Многие из погрешностей и технических характеристик
подходят в равной степени как для АЦП, так и для ЦАП, в то же время
некоторые из них специфичны только для одних или других. Конечно же
будут затронуты не все характеристики, а только наиболее общие. Раздел 2.5
содержит полный список технических характеристик преобразователей,
включая их определения.
Теория шума квантования идеального
AZ-разрядного преобразователя
Идеальный TV-разрядный АЦП имеет погрешности (по постоянному или пе-
ременному току), связанные только с процессами отсчетов и квантования.
Максимальная погрешность, которую имеет идеальный АЦП при оцифро-
вывании входного сигнала, равна ±1/2 LSB. Передаточная функция идеаль-
ного ^-разрядного АЦП представлена на рис. 2.37. Погрешность квантова-
ния для любого сигнала переменного тока, который простирается на не-
сколько LSB, может быть аппроксимирована некореллированой с сигналом
пилообразной формой, имеющей амплитуду размаха q, равную 1 LSB. Хотя
этот анализ нельзя назвать точным, но он достаточен для многих приложе-
ний. В.Р. Беннетт из Bell Labs проанализировал реальный спектр шума кван-
тования в своей классической работе 1948 года1. С определенными упроща-
Рис. 2.37. Шум квантования идеального А-разрядного АЦП
Глава 2. Основы считывания данных в аналого-цифровых системах
• Ошибка = e(t) = st,
v ’ 2s 2s
—о S I 2 Cr
• Среднеквадратичная ошибка = ez (f) = — I (sf) dt = —;
QJ-q/2s 12
• Корень квадратный из среднеквадратичной ошибки = Je2 (t) = -Д=.
Рис. 2.38. Шум квантования как функция времени
ющими допущениями этот детальный математический анализ представлен
на рис. 2.37. Вскоре за классической публикацией Беннетта последовали и
другие значительные работы по описанию шума преобразователей2-5.
Погрешность квантования как функция времени представлена на
рис. 2.38. Как видим, простая пилообразная форма представляет достаточ-
но точную модель для анализа. Формула для нахождения пилообразной по-
грешности:
e(t) = st, —q/l-S < t < +q/2s. (2.7)
Среднеквадратичное значение от e(t) может быть записано так:
<2-8>
ч.
После интегрирования получаем:
(2.9)
Квадратный корень из среднеквадратичного значения погрешности кван-
тования составляет:
7^) = ^- (2.10)
Как было найдено Беннеттом1, этот шум аппроксимируется гауссовым
распределением и распространяется более или менее однородно в полосе
Найквиста от 0 Основополагающим при этом является то, что шум
квантования не коррелирован с входным сигналом. При определенных ус-
ловиях, когда стробы и сигнал гармонично связаны, шум квантования ста-
новится коррелированным, и энергия концентрируется на гармониках сиг-
нала. При этом среднеквадратичное значение остается приблизительно рав-
ным q/y/П.
Если предположить наличие полномасштабной входной синусоиды, то
можно вычислить теоретическое отношение сигнал—шум:
v(/) = ^|-sin(2fl7/).
Следовательно, среднеквадратичное значение входного сигнала будет:
(2.Н)
<?2"
2у/1'
(2.12)
Получаем среднеквадратичное значение отношения сигнал—шум для
идеального TV-разрядного преобразователя:
ПЛ7П Величина полношкального синуса
SNR = 20 log10 —--------------------------—;
Величина шума квантования
SNR = 20 log 10
q2N /2^2
= 6,02W + l,76 дБ.
(2.13)
(2.14)
Эти отношения обобщены на рис. 2.39
Работа Беннетта показывает, что, несмотря на достаточную сложность
анализа реального спектра шума квантования, упрощенный анализ, кото-
рый приводит к уравнению (2.14), достаточно точен для многих целей. Од-
нако важно акцентировать внимание на том, что среднеквадратичное зна-
чение шума квантования замеряется во всей полосе пропускания Найквис-
та, от 0 до ^/2. Во многих приложениях фактический сигнал занимает
значительно меньшую полосу пропускания. Если для фильтрования шумо-
вых компонентов за пределами полосы пропускания используется цифро-
• Вход на всю шкалу = v (t) =
sin(2;rft).
Величина полношкального синуса =
а
Величина шума квантования =
>/12
q2N
2Л
Отношение сигнала к шуму(5М?) = 201од10
= 201од102" + 201од10^|.
Величина полношкального синуса
Величина шума квантования
SNR = 6.02Л/ + 1,7 дБ
(Измерено в пределах полосы Найквиста: DC к fs/2)
Рис. 2.39. Теоретическое отношение сигнала к шуму квантования идеального TV-раз-
рядного преобразователя
\_______/
вклад обработки
Рис. 2.40. Спектр шума квантования
вая фильтрация, то необходимо включить в формулу для вычисления ито-
гового увеличения отношения сигнал—шум поправочный коэффициент
(называемый process gain). Дискретизация сигнала при частоте выборки,
превышающей полосу пропускания более чем в 2 раза, часто называется
избыточной дискретизацией. В действительности избыточная дискретиза-
ция в совокупности с ограничением шума квантования и цифровой филь-
трацией представляет собой основную концепцию сигма-дельта преобра-
зователей:
SNR = 6,O27V +1,76 дБ +10 log10 (2.15)
Значимость поправочного коэффициента обработки можно проиллюст-
рировать следующим примером. Во многих цифровых базовых станциях
или других широкополосных приемных устройствах полоса пропускания
сигнала состоит из многих индивидуальных каналов. При этом один АЦП
используется для оцифровки полной полосы пропускания. Например, ана-
логовая система радиосвязи с сотовой структурой {AMPS) в США состоит
из 416 30-кГц каналов, занимающих полосу пропускания, примерно рав-
ную 12,5 МГц. Предположим, что используется частота дискретизации, рав-
ная 65 MSPS, а цифровая фильтрация отделят индивидуальные 30-кГц ка-
налы. Принимая во внимание избыточную дискретизацию, получаем по-
правочный коэффициент:
l,,k^2,lwrl0k'? У^77Т-?’°-3лЬ' (2J6>
Поправочный коэффициент добавляется в спецификации АЦП для
представления фактического отношения сигнал—шум в полосе пропуска-
ния 30 кГц. В вышеприведенном примере характеристика отношения сиг-
нал-шум АЦП равна 65 дБ (в полосе 0 —^/2), но она возрастает до 95,3 дБ
в полосе пропускания 30-кГц канала (после соответствующей цифровой
фильтрации).
На рис. 2.41 представлено использование совмещения избыточной дис-
кретизации и субдискретизации. Интересующий нас сигнал имеет полосу
2.3. Погрешности переменного тока преобразователей
\________/
вклад обработки
Рис. 2.41. Совмещение избыточной дискретизации и субдискретизации приводит к
поправочному коэффициенту обработки в отношении сигнал—шум
пропускания BW, и он сконцентрирован вокруг несущей частоты^. Часто-
та дискретизации может быть намного меньше, чем^, и выбирается таким
образом, что сигнал центрирован в ее зоне Найквиста. Аналоговая и циф-
ровая фильтрация убирает шум за пределами полосы пропускания интере-
сующего сигнала и, следовательно, приводит к наличию поправочного ко-
эффициента (формула (2.16)).
Хотя среднеквадратичное значение шума довольно точно приближается
K^/V12, его частотная область может сильно коррелировать с входным ана-
логовым сигналом. Например, корреляция будет больше для периодичес-
кого сигнала малой амплитуды, чем для случайного сигнала большой амп-
литуды. Весьма часто в теории полагают, что шум квантования появляется
в виде белого шума, распределенного равномерно по всей ширине полосы
Найквиста от 0 до fjl. К сожалению, это не так. В случае сильной корреля-
ции шум квантования будет сконцентрирован около каких угодно гармо-
ник входного сигнала, но только не там, где бы вы хотели. Беннетт в своем
классическом труде 1948 года1 проводит тщательный анализ частотного со-
става спектра шума квантования.
В большинстве практических приложений входной сигнал АЦП (он всегда
смешан с неизбежным системным шумом) представляет собой полосу час-
тот, включающую и случайный шум квантования. Тем не менее в приложе-
ниях спектрального анализа (или при выполнении БПФ после АЦП), ис-
пользующих спектрально чистый синусоидальный сигнал (рис. 2.42 и 2.43),
корреляция между шумом квантования и сигналом зависит от отношения
частоты дискретизации к частоте входного сигнала. Это демонстрируется
на рис. 2.43, где выход 12-разрядного идеального АЦП представлен после
Рис. 2.42. Анализ динамических характеристик идеального N-разрядного АЦП
Глава 2. Основы считывания данных в аналого-цифровых системах
f./f, = 32
М = 4096
о
-10
-20
-30
-50
-00
-70
-00
-90
-100
-110
-120 И
О
500
1000
SFDR = 76 дБс
SFDR = 92 дБс
л .г’1 м'?। VМт чг"'н.
1000 1500
С/С = 4096/127
Рис. 2.43. Влияние отношения частоты дискретизации к входной частоте на динами-
ческий диапазон SFDR для 12-разрядного АЦП
БПФ с 4096 точками. На левом графике отношение частоты дискретизации
к входной частоте равно точно 32, и наихудшая гармоника на 76 дБ ниже
основной. Правый график показывает эффект некоторого смещения отно-
шения до 4096/127 = 32,25196850394, приводящего к относительно случай-
ному спектру шума. Благодаря этому динамический диапазон, свободный
от гармоник (SFDR), достигает 92 дБ. В обоих случаях среднеквадратичес-
кое значение всех шумовых компонентов равно q/y/Vl. Но в первом случае
шум сконцентрирован около гармоник основной частоты.
Обратите внимание, что это изменение нелинейных искажений АЦП
(появление гармоник в сигнале) является следствием процесса дискретиза-
ции и корреляции ошибки квантования с входной частотой. В практике
аналого-цифрового преобразования ошибка квантования вообще проявля-
ется как случайный шум из-за случайной природы широкополосного вход-
ного сигнала, а также из-за наличия небольшого шума системы, который
действует как подмешиваемый псевдослучайный сигнал, способствующий
дальнейшей рандомизации ошибки квантования.
Отмеченное очень важно, потому что для определения характеристик
(тестирования) АЦП часто используется быстрое преобразование Фурье
(БПФ) монотонного синусоидального сигнала. Для точного измерения не-
линейных искажений АЦП должны быть предприняты шаги, гарантирую-
щие, что испытательная установка верно измеряет искажения, идущие от
АЦП, с учетом эффекта корреляции шума квантования. Это достигается
соответствующим выбором соотношения испытательных частот и частот
дискретизации, а иногда добавлением к входному сигналу некоторого шума
(псевдослучайного сигнала). Такие же меры предосторожности принима-
ются при измерении искажения ЦАП с помощью аналогового спектраль-
ного анализатора.
На рис. 2.44 показан выход БПФ для идеального 12-разрядного АЦП.
Обратите внимание, что минимальный уровень шума, полученного с помо-
щью БПФ, приблизительно равен 100 дБ от полной шкалы АЦП, тогда как
теоретическое отношение сигнал/шум 12-разрядного АЦП равно 74 дБ.
Минимальный уровень шума от БПФ не равен отношению сигнал/шум
АЦП потому, что БПФ действует подобно аналоговому анализатору спектра
с полосой f /М, где М — число точек в БПФ. Теоретически шум БПФ на
Рис. 2.44. Уровень шума идеального 12-разрядного АЦП при использовании 4096-то-
чечного БПФ
101og10(M/2) дБ ниже шума квантования благодаря поправочному коэффициен-
ту БПФ. В случае идеального 12-разрядного АЦП с SNR в 74 дБ и 4096-точеч-
ным БПФ благодаря поправочному коэффициенту в 10 log10(4096/2) = 33 дБ,
общее превышение сигнала над шумом будет 74 + 33 = 107 дБ. Шум БПФ
может быть сделан еще меньше путем расширения выборки, точно так же,
как он будет снижаться в аналоговом спектроанализаторе при сужении его
полосы пропускания. При испытаниях АЦП с использованием БПФ важно
быть уверенным, что количество точек БПФ достаточно велико для того,
чтобы составляющие дисторции можно было отличить от шума БПФ.
Шум в реальных АЦП
На практике дискретизация сигнала в АЦП (со встроенным устройством
выборки—хранения УВХ), независимо от архитектуры, проходит при нали-
чии шумов и искажений сигнала, как это показано на рис. 2.45. Широкопо-
Аналоговый
вход
Шум
Искажения
Ограничение полосы
Дрожание апертуры
Шумы дискретизации
Дифференциальная нелинейность
Интегральная нелинейность
АЦП
• Шум
. • Искажения
Ограничение полосы
Тест-система
Спектральный
выход
М
—точечный
2
о чЛ1 (М}
Выигрыш в отношении сигнал—шум = Ю1од101 — I.
• Погрешность из-за округления (незначительная).
Рис. 2.45. Модель АЦП, показывающая источники шумов и искажений сигнала
Глава 2. Основы считывания данных в аналого-цифровых системах
лосному аналоговому входному буферу присущи широкополосный шум,
нелинейность и все-таки конечная ширина полосы. УВХ вносит дальней-
шую нелинейность, ограничение полосы и дрожание апертуры. Квантую-
щая часть АЦП вносит шум квантования, интегральную и дифференциаль-
ную нелинейности. В этом обсуждении предполагается, что сигналы с пос-
ледовательных выходов АЦП загружаются в буферную память длиной М и
что БПФ-процессор имеет спектральный выход. Также предполагается, что
арифметические операции БПФ не вносят никаких существенных погреш-
ностей в сигналы АЦП. Однако при проверке минимального выходного
уровня шума должен быть учтен выигрыш в отношении сигнал/шум БПФ
(зависящий от М).
Приведенный ко входу тепловой шум
Широкополосные внутренние цепи АЦП вносят некоторое среднеквадра-
тичное значение широкополосного шума из-за шума резисторов и шума
кТ/С. Этот шум присутствует даже для сигналов постоянного тока и объяс-
няет тот факт, что результатом работы большинства широкополосных (или
с высокой разрешающей способностью) АЦП является распределение ко-
дов, сконцентрированное вокруг номинального значения входного сигнала
(рис. 2.46). Чтобы измерить его значение, вход АЦП или заземляется, или
подсоединяется к хорошо развязанному источнику напряжения. Накапли-
вается большое количество выходных отсчетов и составляется график в виде
гистограммы (иногда упоминаемый как гистограмма с заземленным вхо-
дом). Так как шум имеет почти гауссово распределение, стандартное откло-
нение гистограммы легко рассчитывается6. Оно соответствует эффективно-
му среднеквадратичному значению входного шума. Обычной практикой для
выражения среднеквадратичного значения шума является его выражение в
терминах rms младших разрядов, хотя оно может быть выражено как сред-
неквадратичное значение напряжения, соотнесенное с полномасштабным
входным диапазоном АЦП.
Рис. 2.46. Влияние приведенного ко входу шума на гистограмму распределения кодов
АЦП с заземленным входом
2.3. Погрешности переменного тока преобразователей 109
Свободное от шума (в том числе и фликер-шума)
разрешение кодов
Свободное от шума разрешение кодов АЦП представляет собой количество
разрядов, за пределами которых невозможно отчетливо различить отдель-
ные коды. Причиной этого является эффективный входной (или приведен-
ный ко входу) шум, присущий всем АЦП и описанный выше. Этот шум
может выражаться как среднеквадратичная величина, обычно в единицах
LSB. Умноженное на коэффициент 6,6 среднеквадратичное значение шума
преобразуется в размах шума (выраженный в LSB). Полный диапазон А-раз-
рядного АЦП составляет 2N LSB. Свободное от шума разрешение может
быть найдено по формуле:
Разрешение кодов, свободное от шума = log2
(2.1/)
(2Л/размах шума).
Эта характеристика обычно присуща сигма-дельта АЦП с высокой раз-
решающей способностью, но может применяться для всех АЦП.
Отношение полномасштабного диапазона к среднеквадратичному зна-
чению входного шума иногда используется для вычисления разрешения.
В этом случае используется термин реальное разрешение. Отметим, что в
идентичных условиях реальное разрешение больше, чем свободное от шума
разрешение на log2 (6.6), или приблизительно на 2,7 бит.
Эффективное разрешение = log2
^/среднеквадратичный входной шум).
Эффективное разрешение = log2
^/среднеквадратичный входной шум).
(2.18)
(2.19)
Вычисления обобщены на рис. 2.47.
Эффективный входной шум = enRMS.
Размах входного шума = 6,6 enRMS.
, Г Диапазон входного размаха
Разрешение кодов, свободное от шума = 1од2 2=2--------------------
|_ Размах входного шума
Эффективное разрешение
= 1од2
= 1од2
_________2N__________
Размах входного шума
Диапазон входного размаха
Среднеквадратичный входной шум
Среднеквадратичный входной шум
= Разрешение кодов, свободное от шума + 2,7 бит.
Рис. 2.47. Вычисление свободного от шума (от фликер-шума) разрешения кодов по
приведенному ко входу шуму
Динамические характеристики преобразователей
Существуют различные способы описания характеристик аналогового тракта
АЦП. На ранней стадии технологии АЦП (более 30 лет назад) не существо-
вало серьезной стандартизации характеристик аналогового тракта, измери-
тельного оборудования и методов, и они не были хорошо изучены либо
были недоступны. Спустя почти 30 лет производители и заказчики узнали
больше об измерении динамических характеристик преобразователей. Наи-
более используемые сегодня характеристики представлены на рис. 2.48.
Фактически все спецификации имеют характеристики преобразователей в
частотной области. БПФ является основой практически всех измерений и
подробно обсуждается в гл. 6.
• Гармонические искажения.
• Наихудшая гармоника.
• Общие гармонические искажения (THD).
• Общие гармонические искажения и шум (THD + N).
• Отношение сигнал—шум и искажения (SINAD, or S/N + D).
• Эффективное количество разрядов (ENOB).
• Отношение сигнал—шум (SNR).
• Аналоговая полоса пропускания (для полного сигнала, для малого сигнала).
• Динамический диапазон, свободный от гармоник (SFDR).
• Двухтональные интермодуляционные искажения.
• Многотональные интермодуляционные искажения.
• Коэффициент шумовой мощности {NPR).
• Коэффициент утечки на соседний канал {ACLR).
• Шум-фактор.
• Время установления, время восстановления после перенапряжения.
Рис. 2.48. Определяющие динамические характеристики АЦП
Интегральные и дифференциальные нелинейные искажения
Важнейшим для понимания аспектов при определении нелинейности АЦП
и ЦАП является то, что передаточная функция преобразователя данных
имеет особенности, которые отсутствуют в обычных линейных устройствах
типа операционных усилителей (ОУ) или усилительных блоков. Полная
интегральная нелинейность АЦП обусловлена интегральной нелинейнос-
тью входного буфера, УВХ (SHA) и полной интегральной нелинейностью
передаточной функции АЦП. В то же время дифференциальная нелиней-
ность, которая присутствует исключительно вследствие цифрового кодиро-
вания, может значительно изменяться в зависимости от архитектуры АЦП.
Полная интегральная нелинейность дает составляющие искажений, у кото-
рых амплитуда изменяется в зависимости от амплитуды входного сигнала. В
частности, интермодуляционные составляющие второго порядка увеличива-
ются на 2 дБ при увеличении сигала на 1 дБ, а составляющие третьего
порядка увеличиваются на 3 дБ при повышении уровня сигнала на 1 дБ.
2.3. Погрешности переменного тока преобразователей
DNL в точках 1/4 и 3/4 полной шкалы
а б
Рис. 2.49. Типичные (утрированные) дифференциальные нелинейности АЦП/ЦАП
Дифференциальная нелинейность в передаточной функции АЦП порож-
дает искажения, которые зависят не только от амплитуды сигнала, но и от
положения ошибки, вызванной дифференциальной нелинейностью на пере-
даточной функции АЦП. На рис. 2.49 показаны две передаточные функции
АЦП, имеющие различную дифференциальную нелинейность. Левая диаг-
рамма показывает погрешность, которая имеет место при наличии нелиней-
ности в середине шкалы. Поэтому и большой, и малый сигналы, проходящие
через эту точку, подвергаются искажениям, не зависящим от амплитуды.
Правая диаграмма показывает другую передаточную функцию АЦП, которая
имеет погрешности дифференциальной нелинейности в точках, соответству-
ющих */4 и 3/4 полной шкалы. Сигналы, превышающие в своем размахе ’/2
шкалы АЦП, подвергнутся действию этих искажений, в то время как сигна-
лы, не превышающие ’/2 шкалы в размахе, не имеют искажений.
Большинство быстродействующих АЦП разработаны так, чтобы диф-
ференциальная нелинейность равномерно распределялась по всей ширине
динамического диапазона АЦП. Поэтому для сигналов, которые находятся
в пределах нескольких децибелл от полной шкалы АЦП, их искажения оп-
ределяет полная интегральная нелинейность передаточной функции. Для
сигналов более низких уровней содержание гармоник определяется диффе-
ренциальной нелинейностью и не уменьшается с уменьшением амплитуды
сигнала.
Гармонические искажения, наихудшая гармоника,
общие гармонические искажения (THD),
общие гармонические искажения плюс шум (THD + N)
Существует множество способов количественного описания искажений в
АЦП. Анализ БПФ может использоваться для измерения амплитуды раз-
личных гармоник сигнала. Гармоники входного сигнала могут отличаться
от других составляющих искажений положением в частотном спектре. На
рис. 2.50 показан 7-МГц входной сигнал, дискретизированный с частотой
20 MSPS, и положение его первых девяти гармоник. Гармоники частоты^
попадают на частоты, равные |±Х£ ± nfa |, где п — порядок гармоники и
К = 0, 1, 2, 3, .... В общем, только вторая и третья гармоники приводятся в
Глава 2. Основы считывания данных в аналого-цифровых системах
Рис. 2.50. Расположение составляющих искажений (входной сигнал 7 МГц, дискрети-
зация 20 MSPS)
технической документации, потому что они, как правило, наибольшие, хотя
в некоторых случаях может определяться значение наихудшей гармоники
(worst harmonic). Гармонические нелинейные искажения обычно выража-
ются в дБн (dBc) (децибелы относительно несущей), хотя на звуковых час-
тотах они могут быть выражены в процентах. Гармонические искажения,
как правило, определяются при входном сигнале с размахом, близким к
полной шкале преобразователя (от 0,5 до 1 дБ ниже полной шкалы для
предотвращения амплитудного ограничения), хотя возможно определение
их и на любом другом уровне. Для сигналов с размахом, существенно мень-
шим полной шкалы, из-за дифференциальной нелинейности преобразова-
теля другие составляющие (не прямые гармоники) могут ухудшать характе-
ристики прибора.
Величина полных нелинейных искажений (THD) определяется как от-
ношение среднеквадратичного значения сигнала на основной частоте к сред-
нему значению корня из суммы квадратов его гармоник (обычно суще-
ственны только первые пять). Полные нелинейные искажения АЦП также
определяются с входным сигналом, близким к полной шкале АЦП, но мо-
гут быть найдены и на любом ином уровне.
Полные нелинейные искажения плюс шум (THD + N) являются отно-
шением среднеквадратичного значения сигнала на основной частоте к сред-
нему значению корня из суммы квадратов его гармоник и всех шумовых
компонент (исключая постоянную составляющую). Ширина полосы, в ко-
торой измеряется шум, должна быть задана. В случае БПФ ширина полосы
занимает промежуток от 0 до fJ2. (Если ширина полосы измерений от 0 до
fjl, то THD + N = SINAD — см. ниже).
Отношение сигнала к шуму и искажениям (SINAD).
Отношение сигнала к шуму (SNR)
и эффективное число разрядов (ENOB)
Отношение сигнала к шуму и искажениям (SrNAD) и сигнала к шуму (SNR)
заслуживает особого внимания, потому что все еще имеются некоторые
разногласия между производителями АЦП относительно их точного опре-
2.3. Погрешности переменного тока преобразователей I 13
• SINAD (отношение сигнала к шуму и искажениям):
— Отношение среднеквадратичного значения амплитуды сигнала к среднему значе-
нию корня из суммы квадратов (RSS) всех остальных составляющих спектра, вклю-
чая гармоники, но исключая постоянную составляющую.
• ENOB (Эффективная разрядность):
PNOR- SINAD-U6 дБ
EN0B~ —6,02iB’ '
• SNR (Отношение сигнал/шум или отношение сигнал/шум без гармоник):
— Отношение среднеквадратичного значения амплитуды сигнала к среднему значе-
нию корня из суммы квадратов (RSS) всех остальных составляющих спектра, ис-
ключая первые пять гармоник и постоянную составляющую.
Рис. 2.51. Отношение сигнала к шуму и искажениям (SINAD), отношение сигнала к
шуму (SNR) и эффективное число разрядов (ENOB)
деления. Сигнал/шум + искажения (SINAD, или S/N + D) — это отношение
среднеквадратичного значения амплитуды сигнала к значению корня из
суммы квадратов всех других спектральных компонентов, включая
гармоники, но исключая постоянную составляющую (см. рис. 2.50). SINAD
является хорошим индикатором общих динамических характеристик АЦП
как функция входной частоты, потому что включает все компоненты, кото-
рые создают шум (включая тепловой шум) и искажения. Он часто пред-
ставляется в виде графика для различных амплитуд входного сигнала. Если
ширина полосы сигнала и шума одинакова, то SINAD = THD + N. Типичный
график для 12-разрядного АЦП AD9226 с частотой дискретизации 65 MSPS
представлен на рис. 2.52.
График SINAD показывает, где характеристики АЦП по переменному
току ухудшаются из-за искажений на высоких частотах, причем обычно
этот график строится для частот, значительно превышающих частоту Най-
квиста для оценки характеристик в приложениях, использующих субдиск-
ретизацию. SINAD часто преобразуется в эффективное число разрядов
Рис. 2.52. SINAD и ENOB 12-разрядного, 65 MSPS АЦП AD9226 для различных разма-
хов входного сигнала
Глава 2. Основы считывания данных в аналого-цифровых системах
(ENOB), используя выражение для теоретического отношения сигнал/шум
идеального TV-разрядного АЦП: SNR = 6,027V + 1,76 дБ. Уравнение решает-
ся для N, и значение отношения сигнал/шум заменяется на SINAD:
(2.20)
6,02
Отношение сигнал/шум (SNR или SNR без гармоник) рассчитывается
так же, как и SINAD, за исключением того, что из выражения для расчета
исключены гармоники сигнала и оставлены только шумовые составляю-
щие. Практически необходимо исключить только первые пять доминирую-
щих гармоник. Отношение сигнал/шум будет ухудшаться на высоких час-
тотах, но не так быстро, как SINAD, так как из него исключены компонен-
ты гармоник.
Во многих описаниях АЦП довольно свободно принимается, что SINAD
равно SNR, так что инженер должен быть внимательным при интерпрета-
ции этих характеристик.
Аналоговая ширина полосы частот
Аналоговая ширина полосы АЦП — это та частота, на которой выходной спектр
основной частоты (определенный при анализе БПФ) уменьшается на 3 дБ.
Она может быть определена как для малого сигнала (полоса пропускания ма-
лого сигнала SSBW), так и для сигнала на уровне полной шкалы (полоса
пропускания максимального сигнала FPBW). Поэтому между производителя-
ми могут встречаться различия в используемых характеристиках.
Как и для усилителя, спецификация аналоговой полосы пропускания
преобразователя не предполагает, что АЦП обеспечивает хорошие характе-
ристики гармонических искажений во всей полосе частот. В действитель-
ности SINAD (или ENOB) большинства АЦП начинает ухудшаться значи-
тельно раньше, чем частота входного сигнала приблизится к значению, со-
ответствующему ослаблению на 3 дБ. На рис. 2.53 представлены эффективное
Рис. 2.53. Зависимости от частоты коэффициента передачи (усиления) и эффективной
разрядности (ENOB), показывающие важность параметра ENOB
число разрядов (ENOB) и частотная характеристика входного сигнала, со-
ответствующего полной шкале АЦП с FPBW 1 МГц, но ENOB начинает
быстро понижаться на частотах, превышающих 100 кГц.
Динамический диапазон, свободный от гармоник (SFDR)
Вероятно, наиболее важной характеристикой АЦП, используемых в коммуни-
кационных приложениях, является их динамический диапазон, свободный от
гармоник (SFDR). SFDR АЦП определяется как отношение среднеквадратич-
ного значения амплитуды сигнала к среднеквадратичному значению пикового
побочного спектрального состава, измеренного в интересующей полосе ча-
стот. Под полосой частот обычно подразумевается полоса пропускания
Найквиста от 0 до ^/2.
Обычно частотный спектр разделен на область внутри полосы, включа-
ющую интересующие нас сигналы, и область вне полосы, где сигналы от-
фильтрованы. В этом случае может присутствовать характеристика внутри-
полосного и внеполосного SFDR.
На графике SFDR строится как функция амплитуды сигнала и может
быть выражен относительно амплитуды сигнала (в dBc) или относительно
полной шкалы АЦП (dBFS), как показано на рис. 2.54.
Для сигнала, имеющего амплитуду, близкую к полной шкале АЦП, пи-
ковая спектральная линия определяется среди нескольких первых гармо-
ник основной частоты. Но, когда сигнал опускается на несколько децибел
ниже полной шкалы, появляются другие спектральные линии, которые не
являются прямыми гармониками входного сигнала. Это, как обсуждалось
ранее, происходит из-за дифференциальной нелинейности передаточной
функции АЦП. Поэтому SFDR учитывает все источники искажения неза-
висимо от их происхождения.
Широкополосный 14-разрядный АЦП AD6645 с частотой дискретиза-
ции 80 MSPS разработан для коммуникационных приложений, где SFDR
является очень важной характеристикой. На рис. 2.55 представлены харак-
теристики однотонального SFDR для входного сигнала 69,1 МГц, дискрети-
2
Рис. 2.54. Свободный от гармоник динамический диапазон (SFDR)
Рис. 2.55. SFDR для входного сигнала 69,1 МГц 14-разрядного АЦП AD6645 с частотой
дискретизации 80/105 MSPS
зированного с частотой 80 MSPS. Обратите внимание, что минимум SFDR
в 80 дБс получен во всей первой зоне Найквиста (от 0 до 40 МГц).
Зависимость SFDR от амплитуды сигнала представлена на рис. 2.56 (для
AD6645).
Отметим, что во всем диапазоне амплитуд сигнала SFDR больше, чем 90 дБ
полной шкалы. Резкие изменения в диаграмме SFDR вызваны дифферен-
циальными нелинейностями передаточной функции АЦП. Нелинейности
соответствуют представленным на рис. 2.49, б. Они смещены от середины
шкалы таким образом, что входной сигнал меньше 65 дБ полной шкалы не
достигает ни одной из точек возросшей дифференциальной нелинейности.
Необходимо отметить, что SFDR может быть улучшен путем введения ма-
лого внеполосного возмущающего сигнала (за счет небольшого понижения
отношения сигнал—шум).
В общем случае SFDR существенно больше, чем теоретическое значе-
ние отношения сигнал/шум A-разрядного АЦП (6,027V + 1,76 дБ). Напри-
Рис. 2.56. SFDR для входного сигнала 69,1 МГц 14-разрядного АЦП AD6645 с частотой
дискретизации 80/105 MSPS в зависимости от амплитуды сигнала
2.3. Погрешности переменного тока преобразователей
мер, 14-разрядный АЦП AD6645 с SFDR 90 дБс имеет типичное отноше-
ние сигнал/шум 73,5 дБс (теоретическое 74 дБ). Это объясняется тем, что
есть существенное различие между измерениями искажений и шума. Вы-
игрыш в отношении сигнал/шум БПФ (33 дБ для БПФ с 4096 точками)
допускает выявление частотных линий значительно ниже наблюдаемого
минимального уровня шума. Увеличение разрешающей способности АЦП
может увеличивать отношение сигнал/шум АЦП, но не обязательно улуч-
шает его SFDR.
Двухтональные интермодуляционные искажения (IMD)
Двухтональные интермодуляционные искажения (IMD) измеряют, подавая
на АЦП два спектрально чистых синусоидальных сигнала с частотами j\ и
fv обычно довольно близкими друг к другу. Амплитуда каждой компоненты
устанавливается на 6 дБ ниже полной шкалы, для того чтобы АЦП не вхо-
дил в ограничение при совпадении сигналов по фазе. На рис. 2.57 показано
положение составляющих второго и третьего порядка. Обратите внимание,
что составляющие второго порядка приходятся на те частоты, которые мо-
гут быть удалены цифровыми фильтрами. Но составляющие третьего по-
рядка 2/2 — и 2/J — f2 располагаются близко к исходным сигналам, и их
более трудно фильтровать. Если не определено иное, IMD относятся к этим
составляющим третьего порядка. Значение интермодуляционных искаже-
ний выражается в dBc относительно уровня любой из двух первоначальных
частот, а не их суммарного уровня.
Обратите внимание, если частоты имеют значения, близкие к fs то
третьи гармоники основных частот могут затруднить идентификацию ком-
понент 2f2 — fx и 2fx — f2. Это происходит потому, что третья гармоника fs /4
равна 3fs /4, и она, соответственно, порождает компоненту fs — 3fs/A = fs /А.
Точно так же, если две частоты располагаются близко к/уЗ, то вторая гармо-
ника может мешать измерениям по той же причине: вторая гармоника fs /3
равна 2/уЗ, и она, соответственно, порождает компоненту fs — 2fs/3 = fs/3.
Рис. 2.57. Интермодуляционные составляющие второго и третьего порядка при воз-
действии двухтонального сигнала/ = 5 МГц и / = 6 МГц
Глава 2. Основы считывания данных в аналого-цифровых системах
Точки пересечения второго и третьего порядка,
1 дБ compression point
Компоненты интермодуляционного искажения третьего порядка обычно
проявляются в многоканальных коммуникационных системах, где отдель-
ный канал имеет постоянное значение в частотной полосе. Элементы ин-
термодуляционного искажения могут маскировать слабые сигналы при на-
личии более сильных.
В усилителях существует обычная практика определять элементы IMD
третьего порядка на основе точек пересечения третьего порядка (рис. 2.58).
Как видим из рисунка, два спектрально чистых тона приложены к системе.
Мощность выходного сигнала в одном тоне (dBm) и относительная ампли-
туда элементов третьего порядка (относительно одного тона) представлена
как функция мощности входного сигнала. Мощность основной частоты
представлена в виде единичного наклона (= 1) на схеме. Если системную
нелинейность разложить в степенной ряд, то можно показать, что амплиту-
ды IMD второго порядка увеличиваются на 2 дБ для каждого 1-дБ увеличе-
ния сигнала. Это представлено на рисунке наклоном, равным 2 кривой
IMD второго порядка.
Подобно этому амплитуды IMD третьего порядка увеличиваются на 3 дБ
для каждого 1-дБ сигнала. Как мы видим, наклон этой кривой = 3 IMD.
Прямые второго и третьего порядка можно провести при низком уровне
двухтонального входного сигнала и наличии двух информационных точек:
второго и третьего порядка (рис. 2.58). (Основываемся на положении, что
точка и величина наклона определяют прямую линию.)
Когда входной параметр достигает определенного уровня, выходной
сигнал начинает «мягко» ограничивать {soft-limit) или «сжимать» коэф-
фициент передачи {compress). Интересующий нас параметр представлен
1-кдБ точкой компрессии. Это точка, в которой входной сигнал сокра-
щается на 1 дБ от идеальной вход/выход передаточной функции. Она
Рис. 2.58. Определение точек пересечения и 1-дБ точки начала компрессии в усилителях
показана на рис. 2.58 в той области, где идеальный наклон линии = 1
переходит в штриховую линию, а действительная сплошная кривая вы-
ражает сжатие.
Точки перекрещивания называются точками пересечения второго (IP2)
и третьего порядка (IP3). Значения уровней мощности в этих точках обыч-
но соответствуют выходной мощности, отдаваемой устройством при согла-
сованной нагрузке (обычно, но не всегда, 50 Ом), выраженной в dBm.
Необходимо отметить, что IP2, IP3 и точка сжатия в 1 дБ представля-
ют собой функцию частоты, и, как можно ожидать, искажение будет сильнее
на высоких частотах. Для заданной частоты при известной точке пересе-
чения третьего порядка можно посчитать приблизительный уровень со-
ставляющих IMD третьего порядка как функцию от уровня выходного сиг-
нала.
Концепция точек пересечения кривых второго и третьего порядка, при-
меняемая для усилителей, неправильна для АЦП, потому что уровень со-
ставляющих искажений изменяется непредсказуемым образом (он не явля-
ется функцией амплитуды сигнала). АЦП начинает ограничивать сигналы,
приближающиеся к полной шкале, не постепенно (1-дБ точка ограниче-
ния отсутствует). Как только сигнал превышает диапазон изменения вход-
ных сигналов АЦП, АЦП действует в качестве жесткого ограничителя,
внезапно создавая критические искажения из-за амплитудного ограниче-
ния. С другой стороны, для сигналов, значительно меньших полной шка-
лы, уровень искажений остается относительно постоянным и независимым
от уровня сигнала. Это представлено графически на рис. 2.59.
Кривая интермодуляционных искажений (рис. 2.59) разделена на три
области. Для низкого уровня входных сигналов элементы IMD относитель-
но постоянны независимо от уровня сигнала. Это подразумевает, что при
увеличении входного сигнала на 1 дБ отношение сигнала к уровню IMD
также увеличится на 1 дБ. Если входной сигнал находится в пределах пол-
Рис. 2.59. Точки пересечения для преобразователей данных (не имеющие практичес-
кого значения)
Глава 2. Основы считывания данных в аналого-цифровых системах
номасштабного диапазона АЦП, интермодуляционные искажения начина-
ют расти (но еще могут отсутствовать в хорошо спроектированных АЦП).
Точный их уровень зависит от отдельных АЦП — в некоторых АЦП отсут-
ствует значительное увеличение IMD-элементов на всем входном диапазо-
не, но у большинства увеличение будет присутствовать. Если входной сиг-
нал будет продолжать увеличиваться за пределами полной шкалы, то, по-
скольку АЦП выполняет функцию идеального ограничителя, элементы IMD
становятся очень большими.
По этой причине точки пересечения элементов IMD второго и третьего
порядка не определены (не предусмотрены) для АЦП. То же относится и к
ЦАП. Для измерения искажений преобразователей используются одното-
нальные или многотональные характеристики SFDR.
Многотональный свободный от гармоник
динамический диапазон (SFDR)
Двухтональный и многотональный SFDR часто измеряется в коммуникаци-
онных приложениях. Большое количество тонов в достаточной степени ими-
тируют широкочастотный спектр сотовых телефонных систем, например та-
ких, как AMPS или GSM. На рис. 2.60 представлена двухтональная интермо-
дуляция в AD6645 14-разряд ном 80-/105-MSPS АЦП. Входные тоны находятся
во второй зоне Найквиста и соответствуют 55,25 и 56,25 МГц.
Рис. 2.60. Двухтональный SFDR АЦП AD6645 для двухтонального сигнала с частотами
55,25 и 56,25 МГц
Следовательно, паразитные тоны появляются на частоте 23,75 и 24,75 МГц
в первой зоне Найквиста. Высокий SFDR повышает способность приемно-
го устройства захватывать слабые сигналы при наличии сильных и предох-
раняет слабые сигналы от подавления их интермодуляционными составля-
ющими более сильных сигналов. На рис. 2.61 представлен двухтональный
SFDR для AD6645 как функция амплитуды входного сигнала для тех же
входных частот.
2.3. Погрешности переменного тока преобразователей
Уровень мощности аналогового входа
Рис. 2.61. Двухтональный SFDR АЦП AD6645 как функция амплитуды входного сигна-
ла для двухтонального сигнала с частотами 55,25 и 56,25 МГц
Отношение по мощности соседних каналов (ACPR)
и коэффициент утечки на соседний канал (ACLR)
широкополосной CDMA
Широкополосный CDMA-канал имеет ширину полосы, примерно равную
3,84 МГц при расстоянии между каналами 5 МГц. Отношение (в dBc) меж-
ду измеряемой мощностью внутри канала относительно его соседнего ка-
нала определяется как отношение по мощности соседних каналов {ACPR).
Отношение (в dBc) между замеренной мощностью внутри полосы кана-
ла к уровню шума в соседнем свободном от несущей канале определяется
как коэффициент утечки на соседний канал {ACLR).
На рис. 2.62 представлен один широкополосный CDMA-канал, центри-
рованный на 140 МГц и дискретизированный при 76,8 MSPS с использова-
нием AD6645. Это является хорошим примером субдискретизации (получе-
ние промежуточной частоты и ее цифровое преобразование). Сигнал рас-
Рис. 2.62. Коэффициент утечки на соседний канал (ACLR) широкополосной CDMA
Глава 2. Основы считывания данных в аналого-цифровых системах
положен внутри четвертой зоны Найквиста: 3^/2 — 2^(115,2 — 153,6 МГц).
Смещенный сигнал в первой зоне Найквиста центрируется вокруг 2fs — fa =
= 153,6 — 140 = 13,6 МГц. На диаграмме можно видеть расположение
смещенных гармоник. Например, вторая гармоника входного сигнала по-
является на 2 х 140 = 280 МГц, а смещенная ее составляющая появляется
на 4/5 - 2fa = 4 х 76,8 - 280 = 307,2 - 280 = 27,2 МГц.
Уровень мощности шума fNPR^
Измерение мощности шума широко применяется для аттестации линий
связи, использующих систему с многоканальным доступом с частотным
разделением каналов (FDMA)1. В типичной 77)МЛ-системе звуковые кана-
лы шириной 4 кГц загружаются в «частотный стек» для передачи через
коаксиальный кабель, радиорелейную станцию микроволнового диапазона
или спутниковое оборудование. На приемном конце системы FDMA дан-
ные демультиплексируются и возвращаются к 4-кГц-полосным индивиду-
альным каналам. В /ТЭМЛ-системе, имеющей более 100 каналов, сигнал
FDMA может быть аппроксимирован гауссовым шумом с соответствующей
шириной полосы. Индивидуальный 4-кГц канал может быть проверен на
«шумность» с помощью узкополосного режекторного фильтра и специаль-
но настроенного приемника, который измеряет мощность шума внутри 4-
кГц полосы подавления (рис. 2.63).
Измерения уровня мощности собственных шумов (NPR) производятся
весьма просто. Среднеквадратичное значение мощности внешнего шумового
сигнала внутри полосы подавления измеряется узкополосным приемником
при отключенном режекторном фильтре. Затем подключается режекторный
фильтр и измеряется остаточный шум внутри канала. Отношение этих двух
значений, выраженное в децибелах, является уровнем мощности собствен-
ных шумов (NPR). Для соответствующей характеристики системы проверя-
ется несколько интервалов частот в пределах шумовой полосы (в области
низких, средних и высоких частот). Измерение уровня мощности собствен-
ных шумов в АЦП осуществляется подобным же образом, за исключением
Частота
Рис. 2.63. Измерение уровня мощности собственных шумов (NPR)
2.3. Погрешности переменного тока преобразователей
использования аналогового приемника, который заменен буферной памя-
тью и процессором БПФ.
Обычно уровень мощности шумов (NPR) представляется на графике.
NPR отображается как функция от среднеквадратичного значения подавае-
мого уровня шумоподобного сигнала, отнесенного к пиковому диапазону
системы. Для очень низкого уровня подаваемого на вход шумоподобного
широкополосного сигнала нежелательным (в нецифровых системах) явля-
ется прежде всего тепловой шум, который независим от уровня входного
шумового сигнала. Выше этой части кривой увеличение на 1 дБ подаваемо-
го входного шумового сигнала вызывает увеличение уровня мощности на 1 дБ.
По мере увеличения уровня шумового входного сигнала усилители в систе-
ме начинают работать с перегрузкой, создавая интермодуляционные со-
ставляющие, которые увеличивают уровень шума системы. По мере того
как входной сигнал продолжает увеличиваться, усиливаются эффекты «шу-
мовой перегрузки», и NPR существенно уменьшается. 77)Л£4-системы обычно
работают в режиме, когда уровень подаваемого шумоподобного (широко-
полосного) сигнала на несколько децибел ниже точки максимума уровня
собственных шумов. В цифровой системе с АЦП прежде всего имеет место
шум квантования, если используются низкие уровни входного шумоподоб-
ного широкополосного сигнала. В этой части кривая NPR имеет линейную
зависимость. По мере того как уровень широкополосного входного сигнала
увеличивается, некоторое время сохраняется линейное соответствие между
уровнем входного шумоподобного сигнала и NPR. Но на некотором уровне
шум амплитудного ограничения, вызванный жестким ограничивающим дей-
ствием АЦП, начинает преобладать. Теоретические кривые для 10-, 11- и
12-разрядных АЦП представлены на рис. 2.648 21.
На рис. 2.65 представлен максимальный теоретический NPR и уровень
шумовой загрузки, на котором появляются эти максимальные значения для
8—16-разрядных АЦП. Входной диапазон АЦП составляет 2 Vo размаха (реак-
to-peak). Среднеквадратичное значение уровня шума представлено ст, а коэф-
фициент шумовой загрузки к (пик-фактор) определяется как Уо /а (к выра-
жено как число и в децибелах).
Уровень среднего значения подаваемого сигнала = -20 log (к) дБ
Рис. 2.64. Теоретическая относительная мощность шума (NPR) для 10-, 11- и 12-раз-
рядных АЦП
Глава 2. Основы считывания данных в аналого-цифровых системах
Разрядность Оптимальное значение к к, дБ Максимальное значение NPR, дБ
8 3,92 11,87 40,60
9 4,22 12,50 46,05
10 4,50 13,06 51,56
11 4,76 13,55 57,12
12 5,01 14,00 62,71
13 5,26 14,41 68,35
14 5,49 14,79 74,01
15 5,72 15,15 79,70
16 5,94 15,47 85,40
Диапазон АЦП = ±УО
к= Vo/a
су = RMS уровень шума
Рис. 2.65. Теоретическая максимальная относительная мощность шума (NPR) для
8—16-разрядных АЦП
В многоканальных высокочастотных коммуникационных системах, где
мала или отсутствует фазовая корреляция между каналами, NPR может так-
же использоваться для моделирования искажений, вызванных большим
количеством индивидуальных каналов, как и в FZW/1-системе. При этом
режекторный фильтр помещается между источником шума и АЦП, а расчет
БПФ используется вместо аналогового приемника. Для AD9430, 12-разряд-
ного, 170-/210-MSPS АЦП ширина полосы режекторного фильтра устанав-
ливается в несколько мегагерц (рис. 2.66). Отметка режекции находится на
частоте 19 МГц, уровень мощности шума (NPR) — это глубина режекции.
Идеальный АЦП генерирует только шум квантования внутри полосы ре-
жекции, но на практике существуют дополнительные шумовые компонен-
ты из-за интермодуляционных искажений, вызванных несовершенством
АЦП. Обратите внимание, что уровень мощности шума достигает 57 дБ по
сравнению с теоретическим 62,7 дБ.
Входная частота
Рис. 2.66. Измеренное значение 7VPAAD9430, 12-разрядного, 170/210-MSPS АЦП рав-
но 57 дБ (теоретическое 62,7дБ)
2.3. Погрешности переменного тока преобразователей I25J)
Шум-фактор (Noise Factor, F)
и коэффициент шума (Noise Figure, NF)
Коэффициент шума является достаточно популярной характеристикой в
среде Л/’-разработчиков. Он используется как характеристика AF-усилите-
лей, смесителей и т. п., а также широко применяется как критерий при
проектировании радиоприемников. Много прекрасных книг существует по
коммуникации и приемникам, где значительное место отводится коэффи-
циенту шума9. Мы не будем вникать во все подробности данного вопроса, а
лишь рассмотрим, какое отношение имеет данная характеристика к преоб-
разователям.
В настоящее время многие широкополосные операционные усилители
и АЦП используются в ЛТ^-приложениях, и коэффициент шума имеет важ-
ное значение в этих устройствах. Как отмечено в10, для правильного опре-
деления коэффициента шума важно знать не только шум напряжения и
тока в ОУ, но и точные характеристики — усиление с разомкнутой обрат-
ной связью, значение резисторов для установки усиления, сопротивление
источников, ширину полосы частот и т. п. Вычисление коэффициента шума
для АЦП представляет собой сложную задачу.
На рис. 2.67 представлена основная модель для определения коэффици-
ента шума АЦП. Шум-фактор определяется как отношение мощности все-
го эффективного входного шума АЦП к мощности шума, вызванного толь-
ко сопротивлением источника. Так как импедансы согласованы, то квадрат
шумового напряжения может использоваться вместо мощности шума. Ко-
эффициент шума представляет собой шум-фактор F, выраженный в деци-
белах, коэффициент шума равен lOlog^l7.
Модель предполагает, что на входе АЦП источник имеет сопротивление
R, и вход ограничен по полосе до fs /2 при помощи фильтра с шириной
полосы ^/2. Также возможно дальнейшее ограничение входной полосы в
результате избыточной дискретизации и поправочного коэффициента при
обработке сигнала. Далее будет описан вкратце этот процесс.
Также подразумевается, что входной импеданс АЦП равен сопротивле-
нию источника. Многие АЦП имеют высокий входной импеданс. Согласу-
ющее сопротивление может быть внешним для АЦП или использоваться
Источник
. . (Общий эффективный входной шум)2
Шум-фактор (F) =-----------------------------------------
(Общий входной шум от сопротивления источника Я)
. (Общий эффективный входной шум)2
Коэффициент шума (NF) =-----------------------------------------
(Общий входной шум от сопротивления источника R)
Замечание: шум должен быть измерен в пределах полосы В шумового фильтра.
Рис. 2.67. Модель для определения коэффициента шума АЦП (пользоваться с осто-
рожностью!)
Глава 2. Основы считывания данных в аналого-цифровых системах
параллельно с внутренним сопротивлением для получения эквивалента со-
гласующему сопротивлению R. Полномасштабная входная мощность соот-
ветствует мощности синусоиды, чей размах амплитуды (peak-to-peak) за-
полняет весь входной диапазон АЦП. Полномасштабная входная синусои-
да, заданная следующим уравнением, имеет размах амплитуды, равный 2КО:
v(t) = Kosin2Tt/Z. (2.21)
Полномасштабная мощность этой синусоиды:
R 2R
(2.22)
Обычно мощность выражается в dBm (относительно 1 мВт):
PrS (dBm) 10^10
Р
Г FS
1 мВ
(2.23)
Ширина полосы шумов фильтра с неидеальной П-образной (прямо-
угольной) характеристикой определяется как ширина полосы идеального
фильтра с идеальной прямоугольной характеристикой, через который будет
проходить та же самая мощность шума, что и через неидеальный фильтр.
Следовательно, ширина полосы шумов фильтра всегда больше 3-дБ шири-
на полосы фильтра на коэффициент, который зависит от крутизны области
отсечки фильтра. На рис. 2.68 представлено отношение между шириной
полосы шумов и 3-дБ шириной фильтров Баттерворта (до 5 полюсов). От-
метим, что для 2-полюсного фильтра ширина полосы шумов и 3-дБ
полоса отличаются на 11 %, а для фильтров с большим количеством полю-
сов обе полосы практически равны.
Первым шагом в вычислении коэффициента шума является вычисление
эффективного входного шума АЦП по его отношению сигнал—шум. Отно-
шение сигнал—шум АЦП имеется для различных входных частот, поэтому
дня любой интересующей частоты существует соответствующее значение. Не-
обходимо быть уверенным, что гармоники не включены в отношение сиг-
нал-шум. В некоторых спецификациях дня АЦП могут смешиваться два по-
нятия — SINAD и SNR. Если SNR известно, соответствующее шумовое сред-
неквадратичное входное напряжение можно вычислить, начиная с уравнения:
SNR = 20 log10 JfFSRMS . (2.24)
' шум RMS
Число полюсов Полоса частот шума/ 3-дБ полоса частот
1 1,57
2 1,11
3 1,05
4 1,03
5 1,02
Рис. 2.68. Соотношение между шириной полосы шумов и 3-дБ шириной фильтров
Баттерворта
2.3. Погрешности переменного тока преобразователей 127
Откуда:
V = ^Rm30"snr/2°- (2-25)
шум RMS FS RMS v 7
Это полное эффективное значение входного среднеквадратичного шумового
напряжения на несущей частоте, замеренное в полосе Найквиста от 0 до fjl.
Отметим, что этот шум включает шум источника напряжения. Результаты
обобщены на рис. 2.69.
• Начинаем с отношения сигнал/шум (SNR) АЦП, измеренного на несущей частоте
(замечание: величина SNR не включает гармоники основной частоты и измеряется в
пределах полосы Найквиста, от 0 до fs/2):
SNR = 20 log, о ypSRMS ;
• Это общий эффективный входной шум АЦП на несущей частоте, измеренный в поло-
се Найквиста, от 0 до fs/2.
Рис. 2.69. Расчет общего эффективного входного шума АЦП по SNR
Следующим шагом будет вычисление коэффициента шума. На рис. 2.70
величина входного шумового напряжения, вызванного источником напряже-
ния, представляет собой шумовое напряжение y](4kTBR), разделенное на 2,
или yl(4kTBR) из-за аттенюатора 2:1, сформированного на входе АЦП око-
нечным резистором.
Выражение для F (шум-фактора) можно записать:
К2
шум RMS
kTRB
|Q-.W«/IO J_
В
FS RMS
(2.26)
В — шумовая полоса
частот фильтра
V = I/ 1Q-SNR/2O
’шум RMS ’ FS RMS 1
1/2
’шум RMS
kTRB
NF = 10lo log F = PFS (dem) + 174 dBm - SNR - 10lo log B,
где SNR в дБ, В в Гц, Т = 300 К, к = 1,38 х 10 23 Дж/К.
Рис 2.70. Коэффициент шума АЦП в терминах SNR, частоты дискретизации и входной
мощности
Глава 2. Основы считывания данных в аналого-цифровых системах
Коэффициент шума получаем путем перевода шум-фактора в децибелы
и упрощения:
NF = Ю10 log F = PFS (dBm) + 174 dBm - SNR - 1010 log B, (2.27)
где SNR в дБ, В в Гц, Т = 300 К, к = 1,38 х 10 23 Дж/К.
Избыточная дискретизация и фильтрация могут использоваться для
уменьшения коэффициента шума как результат поправочного коэффици-
ента вследствие обработки сигнала (process gain). В этом случае полоса сиг-
нала В меньше ^/2.
На рис. 2.71 показано получение поправочного коэффициента, с учетом
которого имеем следующее уравнение:
NF^ 10,0logF = (2 28)
= + 174 dBm - SNR - 101°ёю 14/2В] - 101og10B.
R
В — шумовая полоса
частот фильтра
wf = pfs (dBm) +174 dBm-SNB-10lo0lo^]-10log,0B,
U \_________I
Измеряется Поправочный
от 0 до fs /2 коэффициент
обработки
где SNR в дБ, в в Гц.
Рис. 2.71. Влияние избыточной дискретизации и обработки сигнала (process gain) на
шум-фактор АЦП
На рис. 2.72 представлен пример вычисления коэффициента шума для
AD6645 14-разрядного, 80-MSPS АЦП. Резистор 52,3 Ом добавлен парал-
лельно к входному импедансу в 1 кОм AD6645 для получения чистого вход-
ного импеданса в 50 Ом. АЦП функционирует в условиях полосы Найкви-
ста. SNR в 74 дБ является исходной величиной для вычислений с использо-
ванием уравнения (2.28). Получаем коэффициент шума, равный 34,8 дБ.
На рис 2.73 показано, как с помощью радиочастотного (RF) трансфор-
матора с усилением напряжения можно улучшить коэффициент шума. На
рис. 2.73, а, показан 1:1 коэффициент трансформации, коэффициент шума
(см. рис. 2.72) равен 34,8. На рис. 2.73, б, представлен коэффициент транс-
формации 1 : 2. Резистор 249 Ом, подключенный параллельно с внутрен-
ним сопротивлением AD6645, приводит к входному импедансу 200 Ом.
Коэффициент шума улучшен на 6 дБ из-за «свободного от шума» усиле-
ния напряжения трансформатором. На рис. 2.73, в, представлен трансфор-
матор с коэффициентом трансформации 1:4. Ко входу AD6645 подключен
параллельный резистор 4,02 кОм, что приводит к получению входного им-
педанса 800 Ом. Коэффициент шума улучшен еще на 6 дБ. Трансформато-
ры с более высокими коэффициентами не имеют практического примене-
ния из-за их ограничений по полосе и искажений.
fs = 80 MSPS
• ^sp-p = 2,2
• Vfs = 80 MSPS
• SNR = 74 дБ
• Входящее 3 дБ BW = 250 МГц
VFsp.p = 2,2 В
Vpsrms = 0,778 В
(0.778)2
PFS = = 12,1 мВ
FS 50
^s(dBm> =+10,8 dBm
NF= PFS(dBm) + 174 dBm - SNR - 10logl0B =
= + 10,8 dBm + 174 dBm - 74 dB - 10log10(40 x 106) =
= 34,8 дБ.
Рис. 2.72. Пример вычисления коэффициента шума для AD6645 — 14-разрядного,
80 MSPS АЦП
• VFSP.P = 2,2 В
• fs = 80 MSPS
• SNR = 74 дБ
• Входящее 3 дБ BW = 250 МГц
NF = 34,8 дБ
NF = 28,8 дБ
NF= 22,8 дБ
Рис. 2.73. Использование радиочастотного (RF) трансформатора с усилением напря-
жения для улучшения коэффициента шума АЦП
Даже с коэффициентом 1:4 трансформатора общий коэффициент шума
для AD6645 равен 22,8 дБ, достаточно высокий по RF-стандартам. Общее
решение данной проблемы состоит в использовании перед АЦП малошу-
мящих каскадов с высоким усилением. На рис. 2.74 показано применение
уравнения Friis-a для вычисления коэффициента шума каскадных усилите-
лей. Отметим, что высокое усиление первой ступени сокращает вклад в
коэффициент шума второй ступени, т. к. коэффициент шума первой ступе-
ни доминирует в общем коэффициенте шума.
На рис. 2.75 представлен эффект высокого усиления (25 дБ) низко-
шумящего (коэффициент шумов равен 4 дБ) каскада, расположенного
перед относительно сильно шумящей ступенью с коэффициентом шума
5 - 2852
Глава 2. Основы считывания данных в аналого-цифровых системах
^2-1 , F3-1 , ____F4 -1__
G1 G1 x G2 G| x G2 x G3
NFT= 10log10Fr
Рис. 2.74. Использование уравнения Friis-a при вычислении коэффициента шума для
многокаскадных усилителей
Л/Fl = 4 дБ
G1 дБ = 25 дБ
G2 дБ = 0 дБ
NF2 = 30 дБ
G, = Ю25/1° = 1025 = 316, F, = 104/10 = 10°4 = 2,51
G2 = 1, F2 = 1030/10 = 103 = 1000
с c<F2-'1 1000-1 о и-. . o-.fi fifiv
1 G1 316
NFT= 10 log10 5,67 = 7,53 дБ
• Первый каскад доминирует в общем коэффициенте шума.
• Он должен иметь как можно больший коэффициент усиления с
наименьшим коэффициентом шума.
Рис. 2.75. Пример двухкаскадной схемы
(30 дБ). Коэффициент шума второй ступени является типичным для высо-
копроизводительного АЦП. Общий коэффициент шума составляет 7,53 дБ.
Это только на 3,53 дБ больше, чем коэффициент шума первой ступени
(4 дБ).
Применение концепции коэффициента шума для характеристики ши-
рокополосных АЦП должно проводиться с особой осторожностью, чтобы
предотвратить появление неправильных результатов. Простая попытка ми-
нимизировать коэффициент шума, используя уравнения, может в действи-
тельности увеличить шум в цепях. Например, коэффициент шума умень-
шается с увеличением сопротивления источника в соответствии с вычисле-
ниями, но увеличенное сопротивление источника, внося свой шум, само
приводит к увеличению шума цепи.
Также вычисленный коэффициент шума уменьшается с увеличением
входной полосы АЦП, если отсутствует входная фильтрация. В обоих слу-
чаях шум цепей увеличивается, а вычисленный коэффициент шума умень-
шается. Причина, по которой уменьшается коэффициент шума, состоит в
том, что шум источника вносит увеличивающуюся составляющую в общий
• Коэффициент шума уменьшается с увеличением сопротивления источника.
• Коэффициент шума уменьшается с увеличением входной полосы АЦП, если отсут-
ствует входная фильтрация.
• В обоих случаях шум цепи увеличивается, а коэффициент шума уменьшается.
• Причина, по которой коэффициент шума уменьшается, состоит в том, что компонен-
та шума источника возрастает в общем шуме (который остается относительно по-
стоянным, т. к. шум АЦП намного больше шума источника).
• На практике входная фильтрация используется для ограничения полосы входного
шума и сокращения общего системного шума.
• АЦП имеют относительно высокий коэффициент шума по сравнению с другими RF-
компонентами.
• В системе перед АЦП должны применяться низкошумящие усилительные блоки.
• Соблюдайте осторожность при применении коэффициента шума.
Рис. 2.76. Обобщающие выводы о коэффициенте шума для АЦП
шум (который остается относительно постоянным, т. к. шум АЦП намного
больше шума источника). Следовательно, по вычислениям коэффициент
шума уменьшается, но фактический шум цепи увеличивается.
Существует верное мнение, что автономный АЦП имеет относительно
высокий коэффициент шума по сравнению с другими RF-компонентами:
малошумящий усилитель (LNA) или смеситель. В системах перед АЦП дол-
жны применяться низкошумящие усиливающие блоки (как представлено
на рис. 2.75). Обобщающие выводы о коэффициенте шума для АЦП пред-
ставлены на рис. 2.76.
Временная апертура, время задержки апертуры
и дрожание апертуры
Вероятно, наиболее непонятные и неиспользуемые технические характери-
стики для АЦП и устройств выборки—хранения (или слежения—хранения)
являются те, в которых употребляется слово «апертура». Наиболее значи-
мым динамическим качеством устройства выборки—хранения (УВХ) явля-
ется его способность быстро отсоединять конденсатор хранения от входно-
го буферного усилителя (рис. 2.77). Короткий (но не нулевой) интервал,
необходимый для этого действия, называется временной апертурой (или
апертурой выборки или отсчета), ta. Реальное значение напряжения, кото-
рое удерживается в конце этого интервала, представляет собой функцию от
скорости нарастания напряжения входного сигнала и погрешности, выз-
ванной переключением.
На рис. 2.77 показано, что происходит, когда команда удерживания {hold
Command) применяется к входному сигналу с двумя произвольными накло-
нами под номерами 1 и 2. Для большей ясности пьедестал в УВХ и переход-
ные процессы при коммутации не учитываются. То значение, которое в ко-
нечном счете удерживается, представляет собой задержанную версию вход-
ного сигнала, среднюю за время апертуры переключателя (см. рис. 2.77).
Модель первого порядка предполагает, что конечное значение напряжения
на конденсаторе хранения приблизительно равно среднему значению сиг-
Глава 2. Основы считывания данных в аналого-цифровых системах
Выход управления Выборка
ключом ---------------------
tg — апертурное время
tdg — аналоговая задержка
tdd ~ Цифровая задержка
tg = tg /2 — задержка временной апертуры
U = *dd
Напряжение
на конденсаторе
хранения
t'e — задержка временной апертуры,
отнесенная ко входу
~ ^dd ~ Ida +
Хранение
Рис. 2.77. Переходной процесс УВХ и определения
нала, приложенному к переключателю в период времени, когда переключа-
тель меняется с низкого на высокий импеданс (ta).
Модель показывает, что определенное время, необходимое для включе-
ния выключателя (Q, эквивалентно вводимой небольшой задержке te в так-
тирующий строб, который запускает устройство выборки—хранения. Эта
задержка постоянная и может быть положительным или отрицательным
числом. На схеме показано, что одно и то же значение te подходит для двух
сигналов, хотя их наклоны разные. Эта задержка называется эффективным
временем задержки апертуры, временем задержки апертуры или просто за-
держкой апертуры te. В АЦП время задержки апертуры относится ко входу
преобразователя, но задержка аналогового распространения через входной
буфер tda и цифровая задержка через формирователь строба ключа tdd долж-
ны также приниматься во внимание. Отнесенное ко входу АЦП время апер-
туры /' определяется как разница во времени между задержкой аналогового
распространения буфера tda и цифровой задержкой tdd плюс половина вре-
мени апертуры tjl.
Эффективное время задержки апертуры обычно положительно, но мо-
жет быть отрицательным в случае, когда сумма половины времени аперту-
ры tjl и цифровой задержки формирователя строба ключа tdd будет меньше
задержки распространения входного буфера tda. Характеризуемая таким об-
разом задержка апертуры показывает время, начиная от края тактового строба
отсчетов до момента, когда входной сигнал действительно считывается.
Время задержки апертуры можно измерить, если подать биполярный
синусоидальный сигнал на АЦП и настроить задержку тактового строба
отсчетов таким образом, чтобы выход с АЦП находился в середине шкалы
(соответствующей пересечению синусоиды с нулем). Относительная задер-
жка между краем тактового строба отсчетов и реальным персечением с О
входной синусоиды представляет собой время задержки апертуры (рис. 2.78).
Задержка апертуры не вызывает никаких погрешностей (предполагаем,
что она достаточно коротка по отношению ко времени хранения), но выс-
тупает в качестве фиксированной задержки, либо тактового строба отсче-
тов, либо аналогового входа (в зависимости от знака). Однако в одновре-
2.3. Погрешности переменного тока преобразователей I
Рис. 2.78. Измерение времени задержки эффективной апертуры по отношению к вход-
ному сигналу
менно считывающих приложениях или при прямой I/Q демодуляции, где
два или более АЦП должны хорошо сопрягаться, различия в задержках апер-
туры между преобразователями могут вызывать погрешности при быстро
меняющихся сигналах. В этих приложениях несогласованность задержек
апертуры необходимо устранять путем корректировки фаз отдельных так-
товых стробов у отличающихся АЦП.
Если, однако, существует вариация от строба к стробу в задержке апер-
туры (дрожание апертуры), появляется соответствующая ошибка в напря-
жении (рис. 2.79). Эта вариация в момент, когда переключатель размыкает-
ся, называется неопределенностью апертуры или дрожанием апертуры и
обычно замеряется в rms пикосекундах. Амплитуда выходной погрешности
сравнивается со скоростью изменения аналогового входа. Для любого за-
данного значения дрожания апертуры погрешность дрожания апертуры воз-
растает с возрастанием скорости изменения входа dv/dt. Эффекты фазового
дрожания внешнего тактового строба отсчетов (или аналогового входа) вы-
зывает тот же тип погрешности.
Рис. 2.79. Дрожание эффективной апертуры и строба отсчета
134 Глава 2. Основы считывания данных в аналого-цифровых системах
Влияние дрожания апертуры и тактового строба отсчетов на идеальное
отношение сигнал/шум АЦП можно предсказать при помощи следующего
простого анализа. Предположим, что входной сигнал задан:
v(0 = Kosin2#Z. (2.29)
Скорость изменения сигнала задана:
dv/dt = 2я/ Ко cos 2nft. (2.30)
Среднеквадратичное значение dv/dt может быть получено делением ам-
плитуды 2я/И0 на л/2:
dv/dt^ =2^/K0/V2. (2.31)
Пусть известны среднеквадратичные значения ошибки напряжения и
дрожания апертуры
dv^/tj =2jtfVo/42. (2.32)
Решая для Av :
rms
Ьут=2я/Уо^&. (2.33)
Среднеквадратичное значение сигнала полной шкалы равно Vo/V2, по-
этому отношение RMS сигнала к RMS шума дается выражением:
57W? = 201og10
ГоД/2
= 201og10
201og10
(2.34)
1
Это уравнение предполагает наличие идеального разрешения у АЦП, и
дрожание апертуры является единственным фактором, определяющим отно-
шение сигнал/шум (SNR). Уравнение графически представлено на рис. 2.80.
Оно отражает важные эффекты влияния дрожания апертуры и тактового
строба отсчетов на отношение сигнал/шум (SNR), особенно на высоких
Частота полношкального синусоидального
аналогового входа (МГц)
Рис. 2.80. Теоретическое SNR и ENOB, обусловленные фазовым дрожанием в зависи-
мости от частоты полношкального синусоидального входного сигнала
2.3. Погрешности переменного тока
входных/выходных частотах. Поэтому с большой осторожностью нужно под-
ходить к минимизации фазового шума в стробах выборки и реконструкции
сигналов любой дискретной системы.
Эта осторожность должна охватывать все аспекты тактового сигнала: в
самом генераторе (например, 555 таймер является абсолютно недостаточ-
ным, но даже генератор с кварцевым резонатором может создавать пробле-
мы, если он используется в активном устройстве, которое совмещает его с
шумящей логикой); в тракте передачи (эти генераторы очень чувствитель-
ны к различного рода влияниям). Фазовый шум имеется и в АЦП, и в ЦАП.
Как упоминалось, обычным источником фазового шума в цепях преобра-
зователя является дрожание апертуры во внутренних цепях выборки—хра-
нения (SHA). Однако общее среднеквадратичное значение дрожания будет
состоять из нескольких компонентов. Реальное дрожание апертуры устрой-
ства выборки—хранения часто является самым меньшим из них.
Простое уравнение для общего отношения сигнал/шум АЦП
Относительно простое уравнение для SNR АЦП в терминах тактового стро-
ба отсчетов и дрожания его апертуры, дифференциальной нелинейности,
эффективного входного шума и количества битов разрешения представле-
но на рис. 2.81.
Уравнение комбинирует различные ошибки на среднеквадратичном ба-
зисе. Средняя погрешность дифференциальной нелинейности е вычислена
из данных гистограммы. Это уравнение используется, например, для про-
гнозирования характеристик отношения сигнал/шум AD6645 — 14-раз-
рядного, 80-MSPS АЦП как функция частоты тактов отсчетов и дрожания
апертуры (рис. 2.82).
Дрожание тактов
выборок
Шум
квантования,
DNL
Эффективный
входной шум
SNR - -20 log!0
fa — частота полношкального синуса на аналоговом входе
tjRMS ~ совокупное RMS дрожания как внутреннее — в АЦП,
так и извне — тактовых импульсов
е — среднее DNL АЦП (типично 0,41 LSB для AD6645)
N — число разрядов в АЦП
1/шум RMS — эффективный входной шум АЦП (типично 0,9 LSB RMS
для AD6645)
Если t = 0, е = 0и Цвумямз “ О» то вышеприведенное уравнение
упрощается:
SNR = 6,02Л/ + 1,76 дБ.
Рис. 2.81. Соотношения между отношением сигнал/шум, дрожанием тактовых стробов
отсчетов, шумом квантования, дифференциальной нелинейностью и вход-
ным шумом
Рис. 2.82. Отношение сигнал/шум AD6645 как функция дрожания апертуры
До 1980-х годов многие стробирующие АЦП не имели устройств выбор-
ки-хранения. Дизайн интерфейса был сложным, основным параметром
было дрожание апертуры в устройстве выборки—хранения. Сегодня почти
все стробирующие системы используют стробирующие АЦП, которые со-
держат внутреннюю выборку—хранение. Дрожание апертуры выборки-хра-
нения может и не входить в спефикацию. Но это не является причиной
озабоченности, так как если SNR или ENOB отражают ее влияние, то они
адекватно характеризуют дрожание апертуры. Однако использование до-
полнительного высокопроизводительного SHA может иногда улучшать вы-
сокочастотный ENOB даже самого лучшего стробирующего АЦП. Он мо-
жет быть отнесен к АЦП постоянного тока, и это сочетание может быть
более конкурентоспособным, чем замена его более дорогим аналогом.
Переходная характеристика АЦП
и устранение перенапряжения
Большинство высокоскоростных АЦП, разработанных для коммуникаци-
онных приложений, определены в спецификации в основном в частотной
области. Однако в приложениях сбора данных общего назначения переход-
ная характеристика (или время установления) АЦП имеет важное значе-
ние. Переходная характеристика представляет собой время, необходимое
АЦП для прихода к номинальной погрешности (обычно 1 LSB) после при-
ложения входного сигнала полной шкалы. Обычный ответный отклик для
АЦП общего назначения (12-разрядного, Ю-MSPS) представлен на рис. 2.83,
показывающий время установки в 1 LSB меньше 40 наносекунд. Харак-
теристика времени установления является важной в типичных систем-
ных приложениях сбора данных, где АЦП следует за аналоговым муль-
типлексором (рис. 2.84). Выход мультиплексора может предоставлять
полномасштабные от строба к стробу изменения на входе АЦП. Если муль-
типлексор и АЦП не установлены на заданную точность, то в результате
будет междуканальное взаимовлияние, даже если в мультиплексированном
входе присутствуют только сигналы постоянного тока или низкочастотные
сигналы.
Время, нс
Рис. 2.83. Переходная характеристика АЦП (время установления)
Аналоговые
входные
Вход АЦП
Замечание: показано переключение
постоянных уровней на каждом канале.
Рис. 2.84. Время установления критично в мультиплексных применениях
Большинство АЦП имеют время установления, которое меньше \/fs.
Однако сигма-дельта АЦП имеют внутренний цифровой фильтр, который
может занимать несколько тактов отсчетов для установки. Нужно помнить
об этом при использовании сигма-дельта АЦП в мультиплексорных прило-
жениях.
Важность установочного времени для мультиплексорных систем можно
видеть на рис. 2.85. Здесь вход АЦП смоделирован как однополюсный
фильтр, имеющий соответствующую временную постоянную, т= RC. При-
ведено необходимое значение постоянной времени для установки заданной
точности (1 LSB). Простой пример послужит иллюстрацией.
Предположим, что мультиплексированная 16-разрядная система сбора
данных использует АЦП с частотой дискретизации^ = 100 kSPS. АЦП дол-
жен установиться к 16-разрядной точности для полношкальной ступен-
чатой функции менее чем за \/fs = 10 мкс. Таблица показывает, что
постоянная времени 11,09 мкс необходима для установки 16-разрядной
точности. Постоянная времени входного фильтра должна быть меньше
т = 10 мкс/11,09 = 900 наносекунд. Соответствующее время нарастания
Разрешение, разрядов LSB, % FS Постоянные времени
6 1,563 4,16
8 0,391 5,55
10 0,0977 6,93
12 0,0244 8,32
14 0,0061 9,71
16 0,00153 11,09
18 0,00038 12,48
20 0,000095 13,86
22 0,000024 15,25
Рис. 2.85. Время установления как функция постоянной времени для различных раз-
решений АЦП
tr = 2,2г = 1,98 мкс. Необходимая максимальная входная полоса АЦП мо-
жет быть вычислена следующим образом: ширина полосы — 0,35//. = 177 кГц.
При этом были игнорированы время установки мультиплексоров и эффек-
ты второго порядка в АЦП.
Время восстановления после перенапряжения определяется как вре-
мя, необходимое АЦП для достижения указанной точности, замеренное с
момента прохождения сигнала с пренапряжением до момента возвраще-
ния в диапазон преобразователя (рис. 2.86). Это обычно характеризует
сигнал, который находится за пределами входного диапазона АЦП на оп-
ределенный процент. Нет необходимости повторять, что АЦП должен
выполнять функции идеального ограничителя для сигналов,„расположен-
ных за пределами диапазона, и в случае перенапряжения АЦП должен
вырабатывать или положительный полномасштабный код, или отрица-
тельный полномасштабный код. Некоторые преобразователи имеют вне-
диапазонные флажки (сверху и снизу). Они используются для создания
возможности активировать цепи для настройки усиления. Нужно всегда
стараться избегать сигналов с перенапряжением, которые могут повре-
дить вход АЦП.
Рис. 2.86. Время восстановления после перенапряжения
2.3. Погрешности переменного тока преобразователей
l3D
Коды выбросов, метастабильные состояния,
частота ошибок по битам (BER) в АЦП
Наиболее важной для разработки многих цифровых систем коммуникаций,
использующих АЦП, является частота ошибок по битам. К сожалению, вклад
АЦП в частоту ошибок по битам непредсказуем при помощи простого ана-
лиза. Этот раздел описывает механизмы внутри АЦП, которые содействуют
частоте появления ошибок, пути минимизации проблемы, а также методы
для измерения BER.
Случайные помехи, независимо от источника, создают определенную
возможность ошибок (отклонений от ожидаемого выхода). Перед описани-
ем источников кодовых ошибок необходимо определить, что мы понимаем
под ошибкой кода АЦП. Шум, образованный до АЦП или внутри АЦП,
можно проанализировать в традиционной манере. Таким образом, кодовая
ошибка АЦП представляет собой любое отклонение от ожидаемого выхода
и не свойственна эквиваленту входного шума АЦП. Рисунок 2.87 иллюст-
рирует непомерно большой выход низкоамплитудной синусоиды, прило-
женной к АЦП. Этот выходной сигнал имеет ошибочные коды. Отметим,
что шум АЦП создает неточность на выходе. Эти аномалии просто являют-
ся результатом обычного шума и квантования. Большие ошибки являются
более значимыми и неожиданными. Эти ошибки являются произвольными
и редкими. Таким образом, тест SNR для АЦП может очень редко их обна-
ружить. Эти типы ошибок беспокоили некоторые ранние АЦП для видео-
приложений. Они имели название «искровые коды», так как их вид на те-
леэкране при определенных тестовых условиях имел форму белых точек
или «искр». Эти ошибки также носили название «зайчики» или «мухи». В
цифровых коммуникационных приложениях эти типы ошибок увеличива-
ли общую системную частоту появления ошибок по битам.
Для того чтобы понимать причины кодовых ошибок, мы рассмотрим
сначала случай простого параллельного преобразователя. Компараторы в
параллельных преобразователях представляют собой компараторы с защел-
ками, расположенные в схеме «главный—подчиненный». Если входной сиг-
нал находится в центре порогового значения определенного компаратора,
этот компаратор неустойчив, и его выходной сигнал займет больший пери-
од времени для достижения эффективного логического уровня после пода-
чи строба защелки, чем у соседнего компаратора, на который воздейство-
Рис. 2.87. Выход АЦП с ошибочными кодами
Глава 2. Основы считывания данных в аналого-цифровых системах
вал сверхпороговый сигнал. Этот феномен известен как метастабильность.
Он появляется, когда сбалансированный компаратор не может достичь эф-
фективного логического уровня за время, необходимое для декодирования.
Если используется простая бинарная логика, например для декодирования
кода термометра, выход с метастабильного компаратора может вызвать боль-
шую погрешность выходного кода. Рассмотрим случай простого 3-разряд-
ного параллельного преобразователя (рис. 2.88). Предположим, что вход-
ной сигнал находится точно на пороге компаратора 4, и случайные помехи
заставляют компаратор переключаться между «1» и «О» каждый раз, когда
приложен строб защелки. Соответствующий бинарный выход может быть
011 или 100. Если выход с компаратора находится в метастабильном состо-
янии, представленная простая бинарная логика декодирования может вы-
рабатывать бинарные коды ООО, 011, 100 или 111. Коды 000 и 111 представ-
ляют отправные точки для половинок шкалы ожидаемых кодов.
Вероятность ошибок вследствие метастабильности возрастает с возрас-
танием частоты выборки, так как отводится меньше времени для установки
метастабильного компаратора.
Для минимизации проблемы метастабильного состояния в параллель-
ных преобразователях были приняты различные меры.
Схемы декодирования12-15 минимизируют величину этих ошибок. Оп-
тимизация компараторов с введением регенеративного усиления и неболь-
шие постоянные времени представляют собой еще один путь сокращения
этих проблем.
Ошибки метастабильного состояния могут проявляться в АЦП последо-
вательных приближений и субдиапазонных АЦП, применяющих компара-
Аналоговый
вход
Рис. 2.88. Метастабильные состояния компаратора могут приводить к ошибкам АЦП
Число ошибок на интервале Т
Рис. 2.89. Блок-схема установки для измерения частоты ошибочных битов АЦП
торы в качестве строительных элементов. Используются те же концепции,
хотя величины и расположение ошибок могут быть различными.
Тестовая система, представленная на рис. 2.89, может использоваться для
проверки BER в АЦП. К аналоговому входу АЦП подключен высокостабиль-
ный генератор синуса с низким шумом. Входная амплитуда устанавливается
немного больше, чем полномасштабная. При этом частота выборок несколь-
ко меньше, чем изменение в 1 LSB между выборками (рис. 2.90).
Испытательный комплект использует серии защелок для получения пос-
ледовательных кодов А и В. Логическая схема определяет абсолютную раз-
ницу между А и В. Эта разница затем сравнивается с предельной величиной
ошибки, выбранной исходя из случайных вспышек помех и ошибок кван-
тования АЦП. Ошибки, вызвавшие разницу, большую, чем установленная
предельная величина, будут подсчитаны. Количество ошибок Е подсчиты-
вается за период времени Т. Затем вычисляется частота появления ошибок
как BER = E/TTfs. Коэффициент 2 в знаменателе необходим потому, что
схема после появления первоначальной ошибки фиксирует вторую ошибку
в момент, когда выходной сигнал возвращается к правильному коду. Счет-
чик ошибок приращивается дважды для каждой ошибки. Необходимо от-
метить, что такая же функция может реализовываться в программном обес-
Рис. 2.90. Аналоговый сигнал на АЦП для низкочастотного 1?£7?-теста
Глава 2. Основы считывания данных в аналого-цифровых системах
печении, если результаты АЦП хранятся в памяти и анализируются компь-
ютерной программой.
Входная частота должна выбираться осторожно, таким образом, чтобы
хотя бы одна выборка делалась для каждого кода. Представим полномасш-
табную входную синусоиду с амплитудой 2ЛГ/2:
ЭЛ'
v (/) - — sin 2nft. (2.35)
Максимальная скорость изменения сигнала составляет:
dv
dt
<2.Nnf.
max
(2.36)
Положив dv = 1 LSB, dt = l/fs, получим:
f <^r~. (2.37)
Jm 2N 71
Если выбирать входную частоту меньше данного значения, то это по-
зволит быть уверенным, что существует хотя бы одна выборка на код.
Этот же тест можно выполнять на высоких частотах путем примене-
ния входной частоты, немного смещенной от fjl (рис. 2.91). Это позво-
ляет АЦП проходить полную шкалу между преобразованиями. Каждое
другое преобразование сравнивается с предыдущим, и частота биений
выбирается таким образом, что существует меньшее 1 LSB изменение
между альтернативными выборками. Уравнение для вычисления подхо-
дящей частоты для теста BER на высоких частотах выводится следую-
щим образом.
Предположим наличие полномасштабной входной синусоиды с ампли-
тудой 2^2, чья частота немного меньше^/2 с разницей, равной А/:
N
v(0 = ^-sin
(2.38)
Рис. 2.91. Аналоговый сигнал на входе АЦП для высокочастотного ЯЕЛ-теста
2.3. Погрешности переменного тока преобразователей
Максимальная крутизна изменения сигнала составляет:
(2.39)
Положив dv = 1 LSB, dt = 2/fs, получим:
г 1 i
(2x2NvJ
л/~4
(2.40)
Определить BER для корректных АЦП достаточно трудно. Это — трудо-
емкая задача, отдельные образцы могут иногда проверяться в течение дней
без ошибок. Например, тест на обычном 8-разрядном параллельном преоб-
разователе, имеющем частоту дискретизации 75 MSPS, дает BER. прибли-
зительно равный 3,7 х 10-12 (1 ошибка в час), с уровнем нечувствительности
к ошибкам, равным 4 LSB. Полные тесты для более долгого периода време-
ни требуют специального внимания на предмет ЕМ1/ЛГ/-эффектов (воз-
можно, потребуется помещение с защитным экраном, изолированное пи-
тание, изоляция от паяльников при помощи механических термостатов,
изоляция от другого оборудования). На рис. 2.92 показано среднее время
между ошибками как функция BER для частоты дискретизации, равной
75 MSPS. Это иллюстрирует трудность при замере низкого BER, так как
длинное время замера повышает возможность ошибки из-за переходных
помех в цепи питания, шума и т. п.
Темп битовых ошибок (BER) Среднее время между ошибками
1 х 10'8 1,3 секунды
1 х 10-9 13,3 секунды
1 х 10'10 2,2 минуты
1 х 10'11 22 минуты
1 х 10'12 3,7 часа
1 х 10'13 1,5 дня
1 х 10'14 15 дней
Рис. 2.92. Среднее время между ошибками для различных BER при частоте дискрети-
зации 75 MSPS
Динамические характеристики ЦАП
Очевидно, что для ЦАП важными являются такие характеристики сигнала,
как время установления, площадь всплеска сигнала вследствие перерегули-
рования при изменении сигнала на выходе ЦАП, называемого далее выбро-
сом (glitch), искажения и свободный от помех динамический диапазон сиг-
нала (SFDR).
Время установления ЦАП
Время установления от входа до выхода — это время от изменения цифро-
вого кода (t = 0) до момента, когда сигнал стабилизируется в пределах
Глава 2. Основы считывания данных в аналого-цифровых системах
некоторого диапазона ошибки, как показано на рис. 2.93. Сравнивать вре-
мя установления усилителей трудно, так как их диапазоны ошибки могут
отличаться от усилителя к усилителю, но диапазон ошибки ЦАП практи-
чески не меняется и равен ±1 или ±1/2 LSB. Необходимо отметить, что в
некоторых случаях выходное время установления может отсчитываться от
времени, когда выход впервые покидает полосу ошибок.
Время установления ЦАП состоит из четырех различных периодов: вре-
мя переключения, или мертвое время (в течение которого цифровое пере-
ключение осуществлено, но на выходе нет изменений), переходное время
нарастания или спада (slewing time) (в течение которого скорость изменения
выходного сигнала ограничена скоростью нарастания на выходе ЦАП), время
восстановления (recovery time) (когда ЦАП восстанавливает значение после
быстрого перехода и выброса на фронте) и линейное время установления
(linear settling time) (когда значение на выходе ЦАП приближается к его ко-
нечной величине экспоненциально или почти экспоненциально). Если пе-
реходное время мало по сравнению с тремя другими (как это обычно бывает
в случае с токовыми выходами ЦАП), то время установления не будет суще-
ственно зависеть от перепада уровня выходного сигнала. С другой стороны,
если переходное время занимает существенную часть общего времени, то
время установления будет тем больше, чем больше величина перепада.
Время установления особенно важно для видеоприложений. Например,
стандартный дисплей 1024 х 768, усовершенствованный на частоту регенерации
60 Гц, должен иметь частоту пикселей, равную 1024 х 768 х 60 Гц = 47,2 МГц
при отсутствии протокольных бланковых сигналов (overhead). Наличие 35 %
бланков приводит к росту частоты пикселей до 64 МГц. При этом продол-
жительность пиксела будет составлять 1/(64 х 106) = 15,6 нс. Для того чтобы
точно воспроизвести отдельный белый пиксель, расположенный между двумя
черными пикселями, время установления ЦАП должно быть меньше про-
должительности пиксела 15,6 нс.
Дисплеи с более высокой разрешающей способностью требуют более
высоких частот пикселей. Например, дисплей 2048 х 2048 требует частоты
пикселей, приблизительно равной 330 МГц при скорости регенерации 60 Гц.
2.3. Погрешности переменного тока преобразователей 145
Площадь выброса импульса (glitch impulse area)
В идеале изменения на выходе ЦАП от одной величины до другой должны
проходить монотонно. На практике возможно появление выброса после фрон-
та (overshoot), отрицательного выброса перед фронтом (undershoot) или то и
другое одновременно (см. рис. 2.94). Это неконтролируемое движение выхо-
да ЦАП в течение переходного процесса известно как выброс. Он может
являться результатом двух явлений: емкостной связи цифровых переходов с
аналоговым выходом и свойствами некоторых ключей в ЦАП, работающих
более быстро, чем другие, и создающих временные выбросы по уровню.
Идеальный
период
Период
с двумя выбросами
Период
с одним выбросом
Рис. 2.94. Переходной процесс в ЦАП (с выбросами — glitch)
Емкостная связь часто дает примерно равные положительные и отрица-
тельные выбросы (иногда называемые дуплетом выбросов), которые далее
в большей или меньшей степени удается компенсировать. Выброс, появля-
ющийся вследствие несинхронности переключения, в общем случае унипо-
лярен, имеет большую амплитуду и представляет собой гораздо большую
проблему.
Для оценки выбросов измеряют их площадь, иногда неточно называемую
энергией выброса. Употребление термина «энергия выброса» неправильно,
так как площадь его кривой измеряется вольт-секундами (или более вероят-
но //И-секунды или рИ-секунды). Пиковая площадь под или над кривой выб-
роса — это площадь под максимальным положительным или отрицательным
импульсом выброса. Площадь импульса выброса — это область вольт-секун-
дной кривой, которая может быть рассчитана после аппроксимации формы
сигнала треугольниками и вычисления их площади посредством вычитания
отрицательной площади из положительной (рис. 2.95).
Площадь пика импульсного выброса = =
Рис. 2.95. Расчет суммарной площади выбросов
Глава 2. Основы считывания данных в аналого-цифровых системах
2 мВ
на деление
----!---------।---------(----------р—
Время установления = 4,5 нс
Суммарная площадь выброса = 1,34 пВ- с
Пиковая площадь вброса = 1,36 пВ • с
1 LSB
Рис. 2.96. Среднешкальный выброс ЦАП с 1,34 пВ с суммарной площадью и време-
нем установления 4,5 нс
5 нс/деление
Величина выброса, порождаемого переходом между кодами 0111...111 и
1000...000, обычно является самой большой (среднешкальной). Выбросы в
других точках перехода кода (таких как */4 и 3/4 полной шкалы) обычно
имеют меньшую величину. На рис. 2.96 отмечен выброс быстрого ЦАП с
малым значением сигнала в середине его динамического диапазона. Пико-
вые и колебательные площади выброса рассчитываются с использованием
треугольников, как это было описано выше. Время установления измеряет-
ся с момента, когда сигнал покидает начальный диапазон ошибки 1 LSB, и
до момента, когда он входит и остается в пределах конечного диапазона
ошибки 1 LSB. Размер шага между уровнями перехода также равен 1 LSB.
SFDR и SNR ЦАП
Время установления ЦАП важно в таких приложениях, как драйвер развер-
тки Я(72?-сигнала в мониторах, а характеристики в частотной области типа
SFDR в общем случае более важны в телекоммуникациях.
Если мы рассмотрим спектр сигнала, реконструированного ЦАП из циф-
ровой формы, то обнаружим, что в дополнение к ожидаемому спектру (кото-
рый будет содержать одну или больше частот, в зависимости от формы вос-
становленного сигнала) в нем также будут присутствовать шум и составляю-
щие искажений. Искажения могут быть определены в терминах нелинейных
искажений, свободных от помех динамического диапазона (SFDR), интермо-
дуляционных искажений или всех вышеперечисленных вместе. Под нели-
нейными искажениями понимается отношение высших гармоник к гармо-
нике основной частоты, на которой восстановлен чистый (теоретически)
синусоидальный сигнал. Эти искажения являются наиболее общей харак-
теристикой искажений. Динамический диапазон, свободный от помех
(SFDR), это отношение наибольшей из гармоник (обычно это гармоника
основной частоты, но не обязательно) к основной составляющей.
При восстановлении с помощью ЦАП синусоидального сигнала, сгене-
рированного в системе прямого цифрового синтеза (DDS), зависимые от
кодов выбросы формируют гармоники как внутри полосы, так и за ее преде-
Рис. 2.97. Влияние выбросов при смене кодов на спектр выходного сигнала
лами. Среднешкальные выбросы появляются при проходе синусоиды через
уровень, соответствующий середине шкалы, дважды за один цикл и, следо-
вательно, будут порождать вторую гармонику, как показано на рис. 2.97.
Обратите внимание, что гармоники более высокого порядка, составляю-
щие которых попадают в основную полосу Найквиста (от 0 до fs/2), не
фильтруются.
Руководствуясь одной лишь характеристикой площади выбросов, труд-
но предсказать нелинейные искажения или SFDR. Другие факторы ЦАП
также способствуют возникновению искажений (рис. 2.98). Кроме этого,
определенные соотношения между выходной частотой ЦАП и частотой
опросов вызывают концентрацию шума квантования на гармониках основ-
ной частоты, таким образом повышая искажения в данных точках.
Поэтому общепринята проверка восстановительной способности ЦАП
в частотной области (с использованием анализатора спектра) на различ-
ных тактовых и сигнальных частотах, как показано на рис. 2.99. Типичное
значение SFDR для 16-разрядного ЦАП AD9777 Transmit TxDAC™ пред-
ставлено на рис. 2.100. Тактовая частота равна 160 MSPS, а сигнальная
частота изменяется до 50 МГц. Как и в случае с АЦП, шум квантования
будет проявляться в виде увеличенного нелинейного искажения, если от-
ношение между частотой синхронизации и выходной частотой ЦАП пред-
ставляется целым числом. Таких отношений нужно избегать при измере-
нии SFDR.
• Разрешающая способность ЦАП.
• Общая нелинейность.
• Дифференциальная нелинейность.
• Код-зависимые выбросы.
• Отношение тактовой частоты к выходной (даже для идеального ЦАП).
• Аналитический подход затруднен!
Рис. 2.98. Вклады в искажения ЦАП цифровых синтезаторов частоты
Глава 2. Основы считывания данных в аналого-цифровых системах
Параллельный
или последовательный
Рис. 2.99. Блок-схема тестовой установки для измерения SFDR ЦАП
Рис. 2.100. SFDR 16-разрядного ЦАП AD9777 TxDAC™ со специально установленной
частотой обновлений 160 MSPS
Существует бесконечная комбинация возможных частот тактового ге-
нератора и выходных частот для ЦАП с низким искажением. При этом
SFDR определяется для ограниченного количества отдельных комбинаций.
По этой причине Analog Devices предлагает тестовые векторы для семейства
Transmit TxDAC™, подстроенные под требования заказчика.
Тестовый вектор представляет собой комбинацию амплитуд, выходных
частот и частот смены кодов (обновлений), конкретизированных заказчи-
ком для SFDR, данных на определенный ЦАП.
Измерение отношения сигнал/шум для ЦАП
с помощью аналогового анализатора спектра
Аналоговые анализаторы спектра используются для замера искажения и
SFDR ЦАП с высококлассными характеристиками. Должна соблюдаться
осторожность, чтобы вход анализатора не перегружался основным сигна-
2.3. Погрешности переменного тока преобразователей 149
• BW — разрешение анализатора по шумовой полосе частот
[7 /21
• SNR — Шумовая дорожка - 101од10
Рис. 2.101. Измерение SNR ЦАП аналоговым спектроанализатором
лом. Если перегрузка представляет собой проблему, то можно использовать
режекторный фильтр для фильтрации основного сигнала. Это поможет
выявить паразитные составляющие.
Спектральные анализаторы также могут использоваться для измерения
SNR для ЦАП. SNR обычно определяется как отношение сигнал/шум, за-
меренное в полосе пропускания Найквиста (от 0 до fs/2). Однако спект-
ральные анализаторы имеют полосу разрешения меньше fs/2. Поэтому при
поправочном коэффициенте обработки, равном 10log10 [^/(2jBB^)], снижа-
ется уровень шума на выходе анализатора (здесь BW представляет собой
шумовую полосу разрешения анализатора, рис. 2.101).
Необходимо использовать при вычислениях ширину полосы шума (но
не 3-дБ полосу). Однако из рис. 2.68 видно, что ошибка не столь значитель-
на, если узкополосный фильтр анализатора имеет 2 полюса. Отношение поло-
сы шума к 3-дБ полосе однополярного фильтра Баттерворта составляет 1,57
(вызывая ошибку в 1,96 дБ при расчете поправочного коэффициента обра-
ботки). Для двухполярного фильтра Баттерворта отношение составляет 1,11
(вызывает ошибку в 0,45 дБ в поправочном коэффициенте).
Частотная характеристика ЦАП и ее спад как sin(x)/x
Выходной сигнал ЦАП может быть представлен в виде ряда прямоугольных
импульсов шириной, равной обратной величине тактовой частоты, как по-
казано на рис. 2.102. Отметим, что спектр восстановленного сигнала имеет
амплитуду на 3,92 дБ ниже на частоте Найквиста fc /2. Для компенсации
спада в большинстве случаев достаточно использовать инверсный фильтр к
sin (х)/х. Значения боковых составляющих основной частоты, возникаю-
щих в результате отсчетов, также ослабляются, как и функция sin (х)/х.
Интерполирующие ЦАП с избыточной дискретизацией
В системах на основе АЦП избыточная дискретизация может упростить
требования к антиалайзинговому фильтру. В системах на основе ЦАП (та-
ких как прямой цифровой синтез — DDS) концепция интерполяции может
Глава 2. Основы считывания данных в аналого-цифровых системах
Дискретизируемый
Рис. 2.102. Спад спектра выходного сигнала ЦАП с огибающей sin(x)/x (амплитуда
нормализована)
использоваться с той же целью. Эта концепция является обычной в цифро-
вых аудио-СО-проигрывателях, где основная скорость обновления данных
с CD составляет 44,1 kSPS. Ранние CD-проигрыватели использовали тра-
диционные бинарные ЦАП и вставляли «нули» для параллельных данных.
Тем самым увеличивалась фактическая скорость обновления в 4, 8, 16 раз.
Поток данных (4х, 8х или 16х) проходит через цифровой интерполирую-
щий фильтр, который вырабатывает дополнительные точки данных. Высо-
кая скорость избыточной дискретизации сдвигает зеркальные частоты даль-
ше, тем самым позволяя использовать менее сложные фильтры с более ши-
рокой переходной полосой. Сигма-дельта 1-разрядная архитектура ЦАП
использует более высокие скорости избыточной дискретизации и представ-
ляет собой альтернативу данной концепции. Такие ЦАП стали достаточно
популярны в современных CD-проигрывателях.
Та же концепция избыточной дискретизации может быть применена в
высокоскоростных ЦАП, используемых в коммуникационных приложени-
ях, ослабляя требования к выходным фильтрам и увеличивая SNR вслед-
ствие увеличения поправочного коэффициента обработки.
Представим традиционный ЦАП, который запускается входными сло-
вами с частотой 30 MSPS (см. рис. 2.103). Предполагаем, что частота вы-
ходного сигнала ЦАП равна 10 МГц. Компонент отраженной частоты, на-
ходящийся на 30 — 10 = 20 МГц, должен ослабляться аналоговым анти-
алайзинговым фильтром. Переходная полоса фильтра простирается от 10
до 20 МГц. Предполагаем, что зеркальная частота должна ослабляться на
60 дБ. Таким образом, фильтр должен пройти от пропускания на частоте
10 МГц до затухания в 60 дБ в переходной полосе, лежащей между 10 и
20 МГц (одна октава). Для каждого полюса фильтр дает ослабление в 6 дБ
на октаву. Следовательно, для желаемого ослабления необходимо наличие
как минимум 10 полюсов. Фильтры становятся более сложными при более
узкой переходной полосе.
Предположим, что мы увеличили скорость обновления ЦАП до 60 MSPS
и вставляем «ноль» между каждой фактической выборкой. Параллельный
2.3. Погрешности переменного тока преобразователей
Рис. 2.103. Требования к аналоговому фильтру при ширине выходного спектра ЦАП
10 МГц и частоте входных слов:
а - 30 MSPS; б - 60 MSPS
поток данных сейчас составляет 60 MSPS, но мы должны определять про-
пущенные значения. Это достигается путем прохождения 60 MSPS потока
данных с добавленными нулями через цифровой интерполирующий фильтр.
Этот фильтр и будет вычислять дополнительные точки. Ответ цифрового
фильтра близок к двукратной частоте избыточной дискретизации (рис. 2.103, б).
Переходная зона аналогового антиалайзингового фильтра простирается от
10 до 50 МГц (первая составляющая появляется на 2fc — fQ = 60 — 10 = 50 МГц).
Эта переходная зона немного больше 2 октав, поэтому возможно примене-
ние 5- или 6-полярных фильтров.
AD9773/AD9775/AD9777 (12/14/16-разрядные) серии Transmit DAC
(TxDACT) являются по выбору 2х, 4х, 8х интерполирующими сдвоенными
ЦАП. (Упрощенная блок-схема представлена на рис. 2.104.)
Зеркальная частота = 320 - 50 = 270 МГц
Рис. 2.104. Упрощенная блок-схема интерполяционного ЦАП TxDACT с избыточной
дискретизацией
Эти устройства разработаны для 12/14/16-разрядных входных слов, по-
ступающих с частотой до 160 MSPS. Частота выходных слов соответствует
400 MSPS (максимум). Для выходной частоты в 50 МГц, входной скорости
обновления 160 МГц и отношении избыточной дискретизации 2х боковая
частотная составляющая появляется на 320 МГц — 50 МГц = 270 МГц.
Переходная полоса для аналогового фильтра простирается от 50 до 270 МГц.
Без двойной (2х) избыточной дискретизации зеркальная частота появляет-
ся на 160 МГц — 50 МГц =110 МГц, а переходная полоса фильтра находит-
ся в пределах 50—110 МГц.
Отметим также, что интерполирующий ЦАП с избыточной дискретиза-
цией имеет более низкие входную тактовую частоту и входной темп приема
данных, которые вырабатывают меньше внутрисистемного шума.
Список литературы
2.3. Погрешности переменного тока преобразователей
1. W.R. Bennett. Spectra of Quantized Signals. Bell System Technical Journal, Vol. 27,
July 1948, pp. 446-471.
2. B.M. Oliver, J.R. Pierce, and C.E. Shannon. The Philosophy of PCM. Proceedings
IRE, Vol. 36, November 1948, pp. 1324-1331.
3. W.R. Bennett. Noise in PCM Systems. Bell Labs Record, Vol. 26, December 1948,
pp. 495—499.
4. H.S. Black and J.O. Edson. Pulse Code Modulation. AIEE Transactions, Vol. 66,
1947, pp. 895—899.
5. H.S. Black. Pulse Code Modulation. Bell Labs Record, Vol. 25, July 1947, pp. 265—269.
6. Steve Ruscak and Larry Singer. Using Histogram Techniques to Measure A/D Converter
Noise, Analog Dialogue, Vol. 29—2, 1995.
7. M.J. Tant. The White Noise Book, Marconi Instruments, July 1974.
8. G.A. Gray and G. W. Zeoli. Quantization and Saturation Noise due to A/D Conversion,
IEEE Trans. Aerospace and Electronic Systems, Jan. 1971, pp. 222—223.
9. Kevin McClaning and Tom Vito. Radio Receiver Design, Noble Publishing, 2000,
ISBN 1-88-4932-07-X.
10. Walter G. Jung, editor. Op Amp Applications, Analog Devices, Inc., 2002, ISBN 0-
916550-26-5, pp. 6.144-6.152.
11. Brad Brannon. Aperture Uncertainty and ADC System Performance, Application Note
AN-501, Analog Devices, Inc., January 1998. (available for download at www.analog.com)
12. Christopher W. Mangelsdorf. A 400 MHz Input Flash Converter with Error Correction,
IEEE Journal of Solid-State Circuits, Vol. 25, No. 1, February 1990, pp. 184—191.
13. Charles E. Woodward. A Monolithic Voltage-Comparator Array for A/D Converters,
IEEE Journal of Solid State Circuits, Vol. SC-10, No. 6, December 1975, pp. 392—399.
14. Yukio Akazawa et. al., A 400MSPS 8 Bit Flash A/D Converter, 1987ISSCC Digest
of Technical Papers, pp. 98—99.
15. A. Matsuzawa et al., An 8b 600 MHz Flash A/D Converter with Multistage Duplex-gray
Coding, Symposium VLSI Circuits, Digest of Technical Papers, May 1991, pp. 113—114.
16. Ron Waltman and David Duff. Reducing Error Rates in Systems Using ADCs, Electronics
Engineer, April 1993, pp. 98—104.
17. K. W. Cattermole. Principles of Pulse Code Modulation. American Elsevier Publishing
Company, Inc., 1969, New York NY, ISBN 444-19747-8. (Блестящий взгляд на истори-
ческие аспекты теории и практики не только Puise Code Modulation (кодово-импульс-
ной модуляции), но и вообще преобразования данных. Предназначена для всех, кто серь-
езно интересуется данной областью знаний.)
2.4. Общие технические характеристики преобразователей
18. Robert A. Witte. Distortion Measurements Using a Spectrum Analyzer, RF Design,
September, 1992, pp. 75—84.
19. Walt Kester. Confused About Amplifier Distortion Specsl. Analog Dialogue, 27-1,
1993, pp. 27-29.
20. Dan She ingo Id, editor. Analog-to-Digital Conversion Handbook. Third Edition,
Prentice-Hall, 1986.
21. Fred H. Irons. The Noise Power Ratio — Theory and ADC Testing. IEEE Transactions
on Instrumentation and Measurement, Vol. 49, No. 3, June 2000, pp. 659—665.
2.4. Общие технические характеристики
преобразователей
Джеймс Брайант
Общие положения
Преобразователи имеют цифровой и аналоговый порты. И как все интег-
ральные схемы, они требуют наличия источников питания. Следовательно,
к преобразователям можно будет отнести характеристики, общие для лю-
бой интегральной схемы: напряжение и ток питания, логические интер-
фейсы, время включения питания и нахождения в резерве, вопросы, каса-
ющиеся упаковки, температурные характеристики, защита от электроста-
тических зарядов (ESD).
Мы не будем рассматривать вышеперечисленные характеристики. Од-
нако существуют некоторые вопросы, требующие разъяснений.
Первым делом необходимо читать спецификацию. Никакие причины
не оправдывают незнание характеристик устройства, для которого она име-
ется. Достаточно часто предполагается, что элементарная информация, не
отраженная в ней, должна быть уже известна пользователю.
Традиционные прецизионные аналоговые интегральные схемы (кото-
рые включают усилители, преобразователи и другие устройства) были спро-
ектированы для работы от питания ±15 В. При этом многие (но не все —
это необходимо проверять по спецификации) будут работать в более широ-
ком диапазоне напряжения питания. Сегодня процессы, используемые для
изготовления многих (но не всех современных) преобразователей, имеют
низкое напряжение пробоя в несколько вольт. Преобразователи, основан-
ные на этих процессах, могут работать только в соответствии со специфи-
кацией в пределах узкого диапазона напряжения питания.
Следовательно, при выборе преобразователя важно проверять как мак-
симально допустимое напряжение питания, так и диапазон напряжений, в
которых могут реализовываться все корректные операции. Некоторые низ-
ковольтные устройства работают достаточно хорошо при напряжениях пи-
тания в 5 и 3,3 В. Другие, выпускаемые в 5-В и 3,3-В версиях с различными
дополнительными обозначениями, требуют правильного выбора.
Предельные максимальные паспортные данные на изделие представ-
ляют собой данные, которые никогда нельзя превышать без высокого риска
повреждения устройства, — это эксплуатационные ограничения безопас-
ности. Но они достаточно консервативны — производители интегральных
микросхем пытаются установить предельные максимальные характеристи-
ки так, что каждое устройство, которое они производят, будет выдерживать
короткие воздействия предельных максимальных условий. В результате
многие устройства в действительности будут работать безопасно и продол-
жительно за пределами ограничений. Хорошие инженеры не извлекают
выгоду из этого по трем причинам:
1) работа компонентов за пределами ограничений не проверяется, хотя,
возможно, они будут работать, а возможно, не будут с установленной точ-
ностью. К тому же повреждения, вызванные некорректной эксплуатацией,
могут привести к моментальному выходу из строя или могут вызвать незна-
чительные разрушения, которые в свою очередь;
2) могут сократить срок эксплуатации;
3) повлиять на точность устройства в диапазоне требуемых технических
характеристик даже при его работе.
Ни один из указанных эффектов нежелателен, и, соответственно, пре-
дельные максимальные характеристики должны строго учитываться.
Питающий ток в технических характеристиках преобразователей указы-
вается как ток холостого хода, т. е. потребление тока, когда выход с преобра-
зователя нагружен на импеданс или нагрузку холостого хода. КМОП-логика
и в меньшей степени другие типы имеют потребление тока, пропорциональ-
ное тактовой частоте. Таким образом, ток преобразователя с технологией
КМОП может указываться для определенной тактовой частоты и будет выше,
если генератор будет работать быстрее. Расход тока будет выше также, когда
выходной сигнал (или опорный выходной сигнал, при его наличии) нагружен.
Для тока в режиме ожидания может существовать другое значение — ток,
потребляемый преобразователем, если он подключен к источнику питания, но
остается в неработающем состоянии с низким потреблением мощности.
В случае, когда происходит переход на полную мощность, для некото-
рых преобразователей потребуется несколько десятков, сотен или даже ты-
сяч микросекунд, чтобы стабилизировать их опорные и усилительные схе-
мы, хотя некоторым преобразователям может потребоваться и гораздо больше
времени, для того чтобы «проснуться» от энергосберегающего режима.
Поэтому необходимо быть уверенным, что преобразователи с такими
задержками не используются в приложениях, где требуется полная функ-
циональность в течение короткого времени.
Все интегральные схемы чувствительны к электростатическим разря-
дам. Но прецизионные аналоговые цепи более чувствительны, чем какие-
либо другие. Это вызвано тем, что доступные технологии для минимизации
таких повреждений также имеют тенденцию понижать рабочие характери-
стики защиты прецизионных схем. Поэтому иногда необходимо найти ком-
промисс между рабочими характеристиками и надежностью. При работе с
усилителями, преобразователями и другими чувствительными цепями не-
обходимо соблюдать и применять меры предосторожности для предотвра-
щения появления электростатических разрядов.
Мы считаем, что нет необходимости рассматривать в данном разделе
другие не менее важные вопросы (характеристики корпусов, рабочие тем-
пературные диапазоны и т. п.).
2.4. Общие технические характеристики преобразователей
I55J
Логический интерфейс
Как говорилось выше, необходимо читать информацию о характеристи-
ках в спецификации и понимать их значение. Это относится как к источ-
никам питания, так и к логическим характеристикам. В прошлом боль-
шинство логических ИС (за исключением эмиттерно-связанной логики
или ЭСЛ) работало от напряжения питания в 5 В и имело совместимые
логические уровни. С некоторыми исключениями 5-В логика будет
сопрягаться с 5-В логикой. Сегодня с изобретением низковольтного ло-
гического процесса с питанием 3,3; 2,7 В или даже меньше важно осозна-
вать, что логические интерфейсы должны быть совместимы. Существует
несколько вопросов, которые необходимо принимать во внимание, — это
предельные максимальные характеристики, логические уровни наихудших
случаев, время. Логические входы ИС обычно имеют предельные макси-
мальные характеристики, равные 300 мВ, за пределами питания. Отме-
тим, что эти характеристики являются относительными. Если ИС имеет
такую характеристику и на нее постоянно подано питание +5 В, тогда
логические входы могут превышать его на +0,3 В, т. е. могут быть +5,3 В,
но если питание отсутствует, тогда входной сигнал должен быть между
+0,3 и —0,3 В, но не от —0,3 до +5,3 В, которые являются предельными
значениями при наличии питания.
Использование ограничений в 0,3 В позволяет быть уверенным, что
никакой паразитный диод на ИС не включится из-за напряжения, находя-
щегося за пределами предельных максимальных характеристик ИС. Для
защиты входного сигнала от подобного рода повышенного напряжения обыч-
но используют фиксаторы на диодах Шоттки. При низких температурах
напряжение фиксации диода Шоттки может быть немного больше 0,3 В и
таким образом, ИС может иметь напряжение, находящееся за пределами ее
абсолютных максимальных показателей. Хотя это подвергает ИС стрессам
и, следовательно, запрещается. Но это принятое исключение к основному
правилу при использовании диода Шоттки, находящегося при той же тем-
пературе, что и ИС, которую он защищает (скажем, в пределах +10 °C).
Однако некоторые низковольтные устройства имеют предельно макси-
мальные показатели по входным сигналам, которые значительно выше их
питающего напряжения. Это позволяет использовать такие цепи с высоко-
вольтной логикой без применения дополнительного интерфейса или схемы
фиксации. Но очень важно извлекать подобную информацию из специфи-
кации, чтобы быть уверенным, что логические уровни и предельное макси-
мальное напряжение совместимы для всех комбинаций с низким и высо-
ким напряжением.
Существует основное правило при сопряжении различных низковоль-
тных логических схем. Всегда необходимо проверять:
а) наименьшее значение питания;
б) что выходной сигнал от логики со значением 1 от запускающей
схемы при нагрузке наихудшего случая должен быть больше, чем задан-
ный минимальный входной логический сигнал со значением 1 для прини-
мающей схемы с максимально допустимым выходным вытекающим то-
ком, а выходной логический сигнал со значением 0 должен быть меньше
заданного входного сигнала приемного устройства. Если технические ха-
рактеристики логики для выбранного вами устройства не соответствуют
данным критериям, возможно, есть необходимость выбрать другие уст-
ройства, другие источники питания или использовать дополнительные ин-
терфейсные схемы для достижения необходимых уровней. Отметим, что
дополнительные схемы интерфейса вызовут дополнительные задержки по
времени.
Нет необходимости создавать экспериментальный комплект и прове-
рять его. Обычно пороговые значения логических схем определены, и логи-
ческие цепи работают корректно в пределах заданных ограничений. Но мы
не должны полагаться на эту вероятность при производственных разработ-
ках, т. к. иногда некоторые устройства из-за низкого выходного размаха на
пределе нагрузочной способности не смогут запустить некоторые другие
устройства.
Логическая часть преобразователей:
тактирование и другие показатели
Цель данного короткого раздела не состоит в описании логических архи-
тектур. Следовательно, мы не будем давать определения различным харак-
теристикам логических интерфейсов преобразователей и их временным
показателям. Отметим только, что их логические интерфейсы могут быть
намного сложнее, чем вы ожидаете. Читайте спецификацию! И не надейтесь
на то, что если есть вывод, имеющий одно и то же название у кристаллов
памяти и интерфейса, то он будет вести себя также и в преобразователе.
Многие преобразователи сразу же восстанавливаются к определенному со-
стоянию в режиме нормального энергопотребления, хотя некоторые не
обладают этим качеством. Рассмотрим далее основные временные характе-
ристики. Новые низковольтные процессы, применяемые для многих совре-
менных преобразователей, имеют некоторое количество улучшенных ха-
рактеристик. Более высокая логическая скорость часто не рассматривается
пользователями преобразователей (но не их разработчиками). ЦАП, пост-
роенные на более старых процессах, часто имеют логику на порядки более
медленную, чем микропроцессоры, с которыми они совмещаются. Поэто-
му иногда приходилось использовать отдельные буферы или многоадрес-
ные команды ожидания для совмещения двух схем. Сегодня в процессы
разработки ЦАП уже закладывается его совместимость с более быстрыми
логиками.
Несмотря на это, не все ЦАП совместимы по скорости с логическими
интерфейсами, и поэтому наблюдается необходимость в минимизации дли-
тельности импульсов записи при установке данных. Эксперименты могут
показать, что устройства работают с более быстрыми сигналами, чем требу-
ют их технические характеристики. Но при ограничениях по температуре
или напряжению питания некоторые из них не могут достичь таких показа-
телей. Следовательно, интерфейсы должны разрабатываться с учетом всех
заданных характеристик, а не опираться на замеренное время.
2.5. Определение технических характеристик 157
2.5. Определение технических характеристик
Дэн Шэйнголд, Уолт Кестер
Ниже приведен в алфавитном порядке перечень наиболее полезных техни-
ческих характеристик и их определений. Некоторые популярные характе-
ристики рассматриваются в других главах. Специфичным характеристикам,
характерным для узких применений, дается определение непосредственно
в тексте по мере их упоминания, и поэтому нецелесообразно повторять их
в данном разделе. Источником данных определений послужила гл. 11 клас-
сической книги Дэна Шайнгольда (Dan Sheingold, Analog-to-Digital Conversion
Handbook, Third Edition, Prentice-Hall, 1986).
Автоматический ноль. Для достижения устойчивости нуля во многих
преобразователях интегрирующего типа для каждого цикла преобразования
имеется временной интервал, используемый схемой для компенсации оши-
бок, вызванных дрейфом. Ошибка из-за дрейфа в таких преобразователях в
основном равна нулю. Подобная функция существует во многих сигма-
дельта АЦП с высоким разрешением.
Аналоговая полоса пропускания. Для АЦП это аналоговая входная часто-
та, при которой спектральная мощность основной частоты сокращается на
3 дБ (определяется БПФ — FFT анализом). Она может определяться как
полномощностная полоса или полоса малых сигналов. См. также Полоса
пропускания полной линейности и Полоса пропускания полной мощности —
Bandwidth FullLinear, Bandwidth Full Power.
Аналоговая полоса, 0,1 дБ. Для АЦП аналоговая входная частота, при кото-
рой спектральная мощность основной частоты сокращается на 0,1 дБ (опреде-
ляется анализом БПФ). Она представляет собой популярную видеотехничес-
кую характеристику. См. также Полоса пропускания полной линейности и Поло-
са пропускания полной мощности — Bandwidth FullLinear, Bandwidth Full Power.
Байт. Байт представляет собой бинарное цифровое слово, обычно с
шириной 8 разрядов. Байт часто является частью более длинного слова,
которое может уместиться на 8-разрядной шине в два уровня. Байт, со-
держащий MSB, называется старшим байтом, а содержащий LSB — млад-
шим байтом. 4-разрядный байт называется полубайтом (nibble) на 8-разряд-
ной или большей шине.
Биполярный режим см. Смещение, биполярное.
Биполярное смещение см. Смещение, биполярное.
Временная апертура (классическое определение). Временная апертура в
выборке—хранении определяется как время, необходимое для внутреннего
переключателя, для того чтобы переключиться из положения включено (ну-
левое сопротивление) в полностью выключенное положение (бесконечное
сопротивление). Анализ первого порядка, который не учитывает нелиней-
ные эффекты, предполагает, что входной сигнал является средним за этот
временной интервал, которое и служит для выработки окончательного вы-
ходного сигнала. Анализ показывает, что если переключатель периодичес-
ки включается, то это не вызывает ошибку до тех пор, пока время апертуры
незначительно по отношению ко времени хранения. Существует эффек-
тивная временная точка, которая соответствует идеальной характеристике
выборки—хранения для выработки того же считанного и хранимого напря-
жения. Разница между этой эффективной точкой и реальной точкой опре-
деляется как эффективное время задержки апертуры.
Время задержки апертуры или эффективное время задержки апертуры.
В выборке—хранении или слежении—хранении существует эффективная от-
счетная точка, которая вызывает идеальную выборку—хранение для получе-
ния хранимого напряжения. Разница между этой эффективной отсчетной
точкой и реальной (средней) отсчетной точкой определяется как время за-
держки апертуры или эффективное время задержки апертуры. В стробирую-
щих АЦП время задержки апертуры может измеряться путем подачи на АЦП
синусоидального сигнала и регулировки фазы строба отсчетов так, чтобы
ноль синусоиды соответствовал коду середины шкалы 100...00. Разница во
времени между передним фронтом строба и точки пересечения синусоиды с
нулем представляет собой эффективное время задержки апертуры. Для изме-
рений может также использоваться двухлучевой осциллограф.
Время восстановления после перенапряжения. Время восстановления после
перенапряжения определяется как время, необходимое АЦП для достиже-
ния заданной точности после перенапряжения (обычно на 50 % больше,
чем полномасштабный диапазон), замеренное от времени, когда сигнал пере-
напряжения вернется в диапазон преобразователя. АЦП должен выполнять
роль идеального ограничителя для внедиапазонных сигналов. Тем самым он
должен вырабатывать положительные или отрицательные полномасштабные
коды в период перенапряжения. Некоторые АЦП имеют внедиапазонные
флажковые индикаторы, которые позволяют приводить в действие регули-
ровки усиления.
Время отслеживания. Время отслеживания схемой слежения, считыва-
ния и хранения при ступенчатом изменении представляет собой время,
необходимое выходному сигналу, чтобы он достиг окончательного значе-
ния внутри определенной полосы ошибок, после того как была выдана ко-
манда на слежение. Оно должно включать время задержки ключа, интервал
нарастания и время установления для определенного изменения выходного
напряжения.
Время переключения. В ЦАП время переключения является временем,
необходимым аналоговому переключателю для перехода в новое состояние.
Оно включает время задержки распространения, время нарастания сигнала
от 10 до 90 %, но не включает время установки.
Время преобразования и темп (частота) преобразования. Для АЦП без ус-
тройства выборки—хранения время, необходимое для полного измерения,
называется временем преобразования. Для большинства преобразователей
(предполагаем, что не существует значительных дополнительных систем-
ных задержек) время преобразования идентично обратной величине от темпа
2.5. Определение технических характеристик 159
преобразования. Однако для простых стробирующих АЦП темп преобразо-
вания представляет собой инверсию от времени преобразования плюс вре-
мя считывания устройством выборки—хранения. В то же время для многих
высокоскоростных преобразователей из-за конвейерного режима новое пре-
образование начинается еще до момента получения результатов предыду-
щего преобразования, следовательно, может существовать один, два, три
или более тактовых циклов задержки преобразования (в некоторых случаях
добавляются еще фиксированные задержки). Когда такая цепочка преобра-
зования инициирована (как в приложениях с обработкой сигналов), темп
преобразования может быть намного быстрее, чем это следует из времени
преобразования.
Время установления АЦП. Время, необходимое для отслеживания ана-
логового входного ступенчатого изменения (обычно полномасштабного)
цифровым выходным сигналом АЦП для достижения и нахождения внутри
заданного диапазона (обычно ±72 LSB).
Время установления ЦАП. Время, необходимое для отслеживания уста-
новленного изменения информации выходным сигналом ЦАП, чтобы дос-
тичь и остаться внутри полосы ошибок (обычно ±72 LSB) окончательного
значения. Среди типичных установленных изменений можно выделить пол-
номасштабные, 1 MSB, 1 LSB. Время установления для ЦАП с выходным
током достаточно быстрое. Главную долю времени установления для ЦАП
с выходным напряжением составляет установочное время выходного опе-
рационного усилителя. Время установки ЦАП может определяться также
по отношению к выходному сигналу. Выходное время установления пред-
ставляет собой время, замеренное от точки, при которой выходной сигнал
покидает полосу ошибок, связанную с первоначальным выходным значе-
нием, до времени, когда сигнал войдет и останется внутри полосы ошибок,
связанной с окончательным выходным значением.
Выброс. Импульсные помехи, ассоциируемые с изменениями кода, обыч-
но появляются от нескольких источников. Некоторые представляют собой
пички, известные как цифро-аналоговая паразитная связь, или паразитный
перенос заряда, от цифрового сигнала (тактового или данных) к аналогово-
му выходу, определенные с нулевым опорным значением. Эти пички обыч-
но достаточно быстрые, в большей степени неизменны, не зависят от кода,
легко фильтруются. Однако имеются более коварные формы переходов,
кодозависимые и труднофильтруемые, известные как выброс.
Если выходной сигнал со счетчика приложен к входному сигналу ЦАП
для создания «ступенчатого» напряжения, количество разрядов, вовлечен-
ных в изменение кода между двумя соседними кодами, вызывает макси-
мальное {major) и минимальное (minor) паразитное прохождение. Самая
большая импульсная помеха наблюдается при 72 шкалы, когда ЦАП вклю-
чает все разряды, т. е. от 011... 111 до 100...000. Если для цифрового входно-
го сигнала отсутствует скос фронта, то переключатели быстрее выключают-
ся, чем включаются. Это означает, что на короткое время ЦАП будет стре-
миться к нулевому выходу, а затем вернется к необходимому превышению
в 1 LSB над предыдущим значением. Этот большой переходной импульс-
ный всплеск известен как выброс. Чем лучше сопрягаются переходные
процессы, входные и переключателей, тем быстрее будут работать пере-
ключатели и меньше будет область выброса. Из-за того, что размер выб-
роса не пропорционален изменению сигнала, линейная фильтрация мо-
жет быть неэффективна или даже усугубить положение. См. также Пода-
витель пичков.
Вредность выбросов определяется площадью импульса выброса, т. е.
произведением его продолжительности на его среднее значение (рабочая
площадь, ограниченная кривой). Это произведение подобно физической
величине импульса (электродвижущая сила х А времени). Однако этот про-
цесс также называют некорректным термином «энергия выброса» или «за-
ряд выброса». Площадь выброса обычно выражается для быстрых преобра-
зователей в единицах р V-s или т К-ns.
Выброс может быть минимизирован путем использования быстрой, не-
насыщенной логики, например ЭСЛ, LVDS, согласованностью защелок и
ненасыщенных КМОП-переключателей.
Выброс ЦАП. Выброс представляет собой переходной процесс (при ком-
мутации), появляющийся в выходном сигнале во время передачи кода. Наи-
худшие случаи проявления выброса ЦАП появляются, когда ЦАП пере-
ключается между 011...111 и 100...000 кодами. Площадь выброса измеряется
в милливольт-наносекундах, нановольт-секундах или пиковольт-секундах.
Иногда используется термин «энергия выброса» (glitch energy) — эта терми-
нология не является корректной, так как единица измерения не соответ-
ствует энергии.
Выход на пределы диапазона, перенапряжение. Входной сигнал, превы-
шающий полномасштабный входной диапазон АЦП, но меньший, чем пе-
регрузка.
Входной импеданс. Динамическая нагрузка АЦП, представленная в его
входном источнике. В небуферированных CMOS АЦП на коммутируемых
конденсаторах присутствие токовых переходных помех на тактовой частоте
преобразователя свидетельствует, что преобразователь запущен от низкого
импеданса (для частот, содержащихся в помехах) для более точного преоб-
разования. Для АЦП с буферированным входом входной импеданс обычно
представлен активной и емкостной составляющими.
Гармоника искажения, 2-я. Отношение среднеквадратичного значения
амплитуды сигнала к среднеквадратичному значению составляющей вто-
рой гармоники, выражается в dBc.
Гармоника искажения, 3-я. Отношение среднеквадратичного значения
амплитуды сигнала к среднеквадратичному значению составляющей тре-
тьей гармоники, выражается в dBc.
Данные готовы см. Преобразование завершено.
Данные, юстированные слева (Left-justified data). Когда 12-разрядное сло-
во располагается на 8-разрядной шине в виде двух байтов, верхний байт
содержит 4 или 8 самых старших разрядов. Если 8, то говорят, что слово
2.5. Определение технических характеристик
юстировано слева; если 4 (плюс пропуски в старших значащих разрядах)
слово юстировано справа.
Данные, юстированные справа. Когда 12-разрядное слово укладывается
на 8-разрядную шину в два уровня, верхний байт содержит 4 или 8 самых
старших разрядов. Если 8, то слово юстировано слева; если 4 (плюс пустые
старшие значащие разряды), тогда слово юстировано справа.
Двухтональный динамический диапазон, свободный от шума. Отношение
среднеквадратичного значения любого входящего тона к среднеквадратич-
ному значению пиковой паразитной составляющей. Пиковая паразитная
составляющая может являться, но может и не являться элементом интер-
модуляционного искажения. Может выражаться в dBc (т. е. снижаться со
снижением уровня сигнала) или в dB полной шкалы (всегда связан с пол-
ной шкалой преобразователя).
Диапазон напряжений на стабилизированном источнике тока. Для ЦАП с
токовым выходом максимальный диапазон напряжения на (выходном) вы-
воде, при котором устройство будет поддерживать определенные выходные
токовые характеристики.
Дифференциальное аналоговое входное сопротивление, дифференциальная
аналоговая входная емкость, дифференциальный аналоговый входной импе-
данс. Реальная и мнимая части импеданса, замеренные на каждом аналого-
вом порте АЦП. Сопротивление измеряется статически, а емкость и диф-
ференциальный входной импеданс рассчитываются при помощи анализа
схемы.
Дифференциальный аналоговый диапазон входных напряжений. Размах
дифференциального напряжения, которое необходимо приложить к преоб-
разователю для выработки полномасштабного ответного сигнала. Ампли-
тудное дифференциальное напряжение вычисляется путем вычитания на-
пряжения на одном входе из напряжения другого входа, который дает
180°-й сдвиг по фазе. Разность пиковых значений вычисляется вращением
входной фазы на 180° и повторным вычислением амплитудного значения.
Затем вычисляется разница между двумя амплитудными значениями.
Дифференциальное усиление (AG). Видеохарактеристика, которая изме-
ряется изменением, амплитуды (в процентах) при небольшой амплитуде
сигнала цветной поднесущей в процессе прохода видеодиапазона от черно-
го до белого.
Дифференциальная фаза (А#>). Видеохарактеристика, которая измеряется
изменением фазы (в градусах) при небольшой амплитуде сигнала цветной
поднесущей в процессе прохода видеодиапазона от черного до белого.
Длительность импульса отсчета, рабочий цикл (duty cycle). Длительность
импульса высокого уровня представляет собой минимальное количество
времени, которое отводится для отсчета и в котором импульс отсчета дол-
жен находиться в логическом состоянии 1 для достижения номинальных
рабочих характеристик. Длительность импульса низкого уровня представ-
ляет собой время кодировки, в котором он находится в логическом со-
6 -2852
стоянии 0. Смотрите временные характеристики изменения ширины им-
пульса в спецификации по высокоскоростным АЦП. При заданной такто-
вой частоте эти характеристики определяют допустимый рабочий цикл ко-
дирования.
Задержка выходного сигнала. Для АЦП, имеющего тактовый одновходо-
вой сигнал выборок (или кодирования), это задержка между 50 % точкой
тактового импульса и временем, когда все выходные информационные биты
находятся внутри допустимых логических уровней. Для АЦП, имеющего
дифференциальные входы тактовых импульсов выборок, задержка замеря-
ется по отношению к пересечению нулевого уровня дифференциальным
тактовым сигналом выборок.
Заряд, энергия, импульс, площадь импульса выброса см. Выброс.
Измеритель отношения (Ratiometric). Выходной сигнал АЦП является
цифровым числом, пропорциональным отношению (некоторой мерой) вход-
ного сигнала к опорному напряжению. Многие требования для преобразова-
ния предусматривают абсолютное измерение (т. е. по отношению к фикси-
рованному опорному сигналу). Но это предполагает, что сигнал, приложен-
ный к преобразователю, или не зависит от опорного сигнала, или каким-то
образом получен из другого фиксированного опорного сигнала. Однако
реальные опорные сигналы не являются на самом деле фиксированными.
Опорные значения для преобразователя и источника сигнала изменяются
от времени, температуры, нагрузки и т. п. Следовательно, если преобразо-
ватель используется с источниками сигнала, которые тоже опираются на
опорные значения (например, мост тензодатчика, RTD, терморезистор),
имеет смысл заменять это разнообразие опорных сигналов одним систем-
ным опорным значением. В этом случае ошибки, связанные с опорными
сигналами, сойдут на нет. Это может достигаться путем использования внут-
реннего опорного источника преобразователя (при его наличии) как сис-
темного опорного источника. В качестве другого способа решения данной
проблемы может послужить использование отдельного внешнего систем-
ного опорного источника, который также становится опорным для преоб-
разователя, измеряющего отношение. Например, если мост запитывается
напряжением опорного источника АЦП, достигается операция измерения
отношения, и выходной код с АЦП не является функцией опорного сигна-
ла. Это происходит потому, что выходной сигнал с моста пропорционален
тому же напряжению, которое определяет входной диапазон АЦП.
Интермодуляционное искажение. Входные синусоидальные сигналы с
частотами и /2 и любое устройство с нелинейными характеристиками бу-
дут создавать элементы искажений порядка (т + п) на суммарных и разно-
стных частотах ± nfv где т, п = 0, 1, 2, 3, ... Интермодуляционными
элементами являются те, для которых т или п не равны нулю. Например,
элементы второго порядка (/J + /2) и (f2 — fY), и элементы третьего порядка
— /2), (f{ + 2/2) и (fY — 2/2). Элементы интермодуляционного искажения
выражаются как отношение (в дБ) среднеквадратичного значения суммы
элементов искажения к среднеквадратичному значению суммы измерен-
ных входных сигналов.
2.5. Определение технических характеристик 163
Команда кодировки см. Кодировка, тактирование отсчетов — sampling clock.
Конвейерный режим. Конвейерный преобразователь — многокаскадный.
Он способен принимать новый сигнал перед окончанием преобразования
одного или более предыдущих сигналов. Новый сигнал появляется в то
время, когда другие все еще находятся «в конвейере». Эта техника исполь-
зуется там, где желательна большая скорость преобразования и не важна
задержка отдельных преобразований.
Коэффициент гармоник, суммарный. Отношение среднеквадратичного
значения амплитуды сигнала к среднеквадратичной сумме всех гармоник
(исключаем шумовые составляющие). В большинстве случаев только пер-
вые пять гармоник включаются в измерения, потому что остальные не име-
ют существенного влияния на результат. Суммарный коэффициент гармо-
ник может быть получен при использовании БПФ для выходного спектра
АЦП. Для гармоник, которые находятся за пределами частоты Найквиста,
используются смещенные составляющие.
Коэффициент гармоник, суммарный + шум. Суммарный коэффициент
гармоник 4- шум представляет собой отношение среднеквадратичного зна-
чения амплитуды сигнала к среднеквадратичной сумме всех гармоник и
составляющих шума. Полное гармоническое искажение + шум может быть
получено при использовании БПФ для выходного спектра АЦП. Это доста-
точно популярная техническая характеристика для аудиоприложений.
Коэффициент мощности шума (NPR). При его измерении широкополос-
ный нормальный (гауссов) шум (полоса < f /2) приложен к АЦП через
узкополосный режекторный фильтр. Режекторный фильтр убирает весь вход-
ной шум внутри своей полосы. Выходной сигнал с АЦП проверяется рас-
ширенным БПФ. Отношение среднеквадратичного значения уровня шума
к среднеквадратичному уровню шума в полосе режекторного фильтра (ко-
торый там есть из-за шума квантования, теплового шума, интермодуляци-
онного искажения в АЦП) определяется как коэффициент мощности шума.
Среднеквадратический шумовой уровень на входе АЦП обычно регулиру-
ется, чтобы получить наилучшее значение коэффициента мощности шума.
Коэффициент режекции питания (PSRR). Отношение изменения напряже-
ния питания постоянного тока к результирующему изменению определен-
ной ошибки устройства; выражается в процентах, промилях или долях от
1 LSB. Он может также выражаться логарифмически, в дБ, PSR= 201og10(P57?/?).
Коэффициент утечки соседнего канала (ACLR). Отношение (в dBc) между
замеренной мощностью внутри полосы несущей относительно шумового
уровня в соседнем пустом канале. Оба AC PR и ACL R являются характерис-
тиками широкополосных систем CDMA (WCDMA). Ширина канала сигнала
для WCDMA составляет приблизительно 3,84 МГц с 5-МГц расстоянием
между каналами.
Латентность (время ожидания) см. Конвейерная обработка.
Лестничные ступени (Staircase). Напряжение или ток, возрастающие в
равных инкрементах в функции времени и имеющие форму лестничных
ступеней (на временной диаграмме); они вырабатываются путем приложе-
ния последовательности импульсов к счетчику, выход которого соединен
со входом ЦАП.
Линейность (см. также Нелинейность или «нелинейность усиления»). Ошиб-
ка линеаризации преобразователя (также интегральная нелинейность —
см. Дифференциальная линейность) выражается в процентах или промилях
полномасштабного диапазона или, как кратная 1 LSB, представляет собой
отклонение аналоговых значений в графике замеренных результатов преоб-
разования от прямой линии. Прямая линия может быть сделана еще «луч-
шей прямой» эмпирически путем манипуляций с усилением и смещением
для баланса максимальных положительных и отрицательных отклонений ре-
альной передаточной характеристики от прямой линии; а также это может
быть прямая линия, проходящая через конечные точки передаточной харак-
теристики после их калибровки, иногда называемая «линейность, приве-
денная к конечной точке». Нелинейность, приведенная к конечной точке,
схожа с относительной ошибкой (см. Точность, относительная). Она пред-
полагает более простой способ калибровки устройства пользователем, и это
наиболее консервативный способ определения линейности.
В умножающем ЦАП аналоговая ошибка линейности при заданном (циф-
ровым кодом) аналоговом усилении определяется таким же образом, как и
для аналоговых умножитетелей (т. е. путем измерения отклонения от «наи-
лучшей прямой» через кривую аналогового вход-выходного отклика).
Линейность, дифференциальная. В ЦАП любые два соседних цифровых
кода должны иметь замеренные выходные значения, которые в точности
отстоят на 1 LSB (составляющий 2~N полной шкалы для A-разрядного пре-
образователя). Любое положительное или отрицательное отклонение от за-
меренного «шага», от идеальной разницы называется дифференциальной
нелинейностью, выраженной в кратных (субкратных) 1 LSB. Это очень важ-
ная характеристика, так как, если ошибка дифференциальной нелинейнос-
ти более отрицательна, чем —1 LSB, это может привести к появлению не-
монотонного отклика в ЦАП и образованию потерянных кодов в АЦП,
использующих этот ЦАП.
Подобно этому в АЦП средние точки между переходами должны со-
ставлять 1 LSB. Дифференциальная нелинейность является отклонением от
реальной разницы между средними точками в 1 LSB для соседних кодов.
Если отклонение равно или более отрицательно, чем —1 LSB, код будет
считаться потерянным. См. Потерянные коды.
Часто вместо характеристики максимальной дифференциальной нели-
нейности может встречаться характеристика «монотонность» или «отсут-
ствующие коды», которая подразумевает, что дифференциальная нелиней-
ность не может быть более отрицательной, чем —1 LSB для любых соседних
пар кодов. Однако погрешность дифференциальной нелинейности может
быть более положительной, чем +1 LSB.
Линейность, интегральная (см. Линейность). Когда дифференциальная
линейность имеет дело с ошибками в размер шага, интегральная линей-
ность применима к отклонениям всех форм отклика преобразования. Даже
2.5. Определение технических характеристик
в преобразователях, которые не имеют в принципе ошибки дифференци-
альной линейности (например, в интегрирующих), имеются ошибки интег-
ральной линейности.
Максимальная скорость преобразования. Максимальная скорость выбор-
ки (кодирования), при которой реализуются тестируемые параметры.
Межканальная изоляция. В умножающих ЦАП проникновение, пропор-
циональное входному сигналу, подаваемому в виде опорного напряжения
на один ЦАП, которое появляется на выходе другого ЦАП, выражается
логарифмически в децибелах. См. также Перекрестная помеха (crosstalk).
Минимальный темп выборок. Темп кодирования, при котором отноше-
ние сигнал—шум самой нижней частоты аналогового сигнала падает не более
чем на 3 дБ ниже гарантируемого предела.
Многочастотный динамический диапазон, свободный от помех. Отноше-
ние среднеквадратичного значения входного тона к среднеквадратичному
значению наибольшей паразитной составляющей. Наибольшая паразитная
составляющая может являться (а может не являться) элементом интермоду-
ляционного искажения. Может выражаться в dBc (децибелах относительно
несущей или в децибелах полной шкалы). Амплитуды отдельных тонов рав-
ны и выбираются таким образом, чтобы АЦП не перегружался при сложе-
нии тонов в фазе.
Монотонность. ЦАП считается монотонным, если его выходной сигнал
увеличивается или остается постоянным с увеличением цифрового входного
сигнала, в результате чего выходной сигнал всегда будет являться однознач-
ной функцией входного сигнала. Условие монотонности требует того, чтобы
производная передаточной функции никогда не меняла знак. Монотон-
ное поведение требует, чтобы дифференциальная нелинейность была бо-
лее положительна, чем —1 LSB. То же основное определение подходит и для
АЦП — цифровой выходной код увеличивается или остается постоянным с
увеличением аналогового входа. Однако на практике входной шум вызовет
колебание выходного кода АЦП между двумя переходными значениями кода
в небольшом диапазоне аналогового сигнала. Шумы, приведенные ко входу,
могут усугубить этот эффект, поэтому в подобных ситуациях для измерения
монотонности АЦП используют технику гистограммы.
Наихудшая паразитная составляющая (Worst other Spur). Отношение сред-
неквадратичного значения амплитуды сигнала к среднеквадратичному зна-
чению наихудшей паразитной составляющей (за исключением второй и
третьей гармоник) измеряется в dBc.
Нелинейность или «нелинейность усиления». Определяется как отклоне-
ние от прямой линии на зависимости выход от входа. Величина ошибки
линеаризации представляет собой максимальное отклонение от «наилуч-
шей прямой» при размахе выходного сигнала через весь полномасштабный
диапазон.
Неточность (uncertainty) апертуры или дрожание апертуры. Изменение
положений точек отсчетов из-за дрожания. Дрожание апертуры исчисляет-
166 Глава 2. Основы считывания данных в аналого-цифровых системах
ся в RMS и выражается как соответствующая среднеквадратичная ошибка
напряжения в выходном сигнале выборки-хранения. В АЦП она вызывает-
ся внутренним шумом и дрожанием, накладывающимися на строб выборки
на его пути от входного вывода к внутреннему переключателю. Дрожание
внешнего строба вызывает ошибку того же рода.
Неточность квантования (погрешность квантования). Для А-разрядного
преобразования и процесса обработки используется аналоговый контини-
ум, разделенный на 2N дискретных диапазонов. Все аналоговые значения
внутри заданного шага квантования представлены тем же самым цифровым
кодом, который определен для номинального значения середины шагового
диапазона. Следовательно, в дополнение к фактическим ошибкам преобра-
зования существует неточность квантования, равная ±*/2 LSB. В интегриру-
ющих АЦП эта ошибка часто выражается как «± 1 число». В зависимости
от системного контекста она может быть интерпретирована как ошибка
округления или как шум.
Нормальный режим. Для усилителя, используемого при измерении, сиг-
нал нормального режима представляет собой реальный замеренный раз-
ностный сигнал. Этот сигнал часто имеет шум. Системы формирования
сигнала и цифровые измерительные приборы обычно имеют входные филь-
тры для удаления высокочастотных и частотных составляющих шума ли-
нии. Нормальный режим режекции является логарифмической мерой ос-
лабления составляющих шума нормального режима при конкретных час-
тотах в децибелах.
Окончание преобразования. Выходной цифровой сигнал АЦП, указыва-
ющий на окончание преобразования. Когда этот сигнал находится в проти-
воположном состоянии, АЦП считается «занятым». В некоторых преобра-
зователях эта характеристика называется конец преобразования, данные го-
товы и др.
Отклонение выходного напряжения. При заданных опорном значении и
входном напряжении максимальное отклонение от нормального выходного
напряжения при 25 °C замеряется устройством, пригодным для контроля,
соответствия напряжения общепризнанным стандартным значениям.
Отношение мощностей соседних каналов (ACPR). Коэффициент измеря-
ется в dBc между замеренной мощностью внутри канала относительно мощ-
ности его соседнего канала. См. Коэффициент утечки соседнего канала (ACLR),
Отношение сигнал—шум, включая искажения. Отношение среднеквадра-
тичного значения амплитуды сигнала (установленой на 1 дБ ниже полной
шкалы, чтобы предотвратить перегрузку) к среднеквадратичному значению
суммы всех других спектральных составляющих, включая гармоники с ис-
ключением постоянного тока.
Отношение сигнал—шум (без гармоник). Отношение среднеквадратично-
го значения амплитуды сигнала (установленной на 1 дБ ниже полной шка-
лы, чтобы предотвратить перегрузки) к среднеквадратичному значению сум-
мы всех других спектральных составляющих, исключая первые пять гармо-
2.5. Определение технических характеристик
ник и постоянный ток. Теоретически все гармоники должны исключаться,
но на практике значимыми являются только первые пять.
Отсутствующие коды. В АЦП случаются отсутствующие коды, когда
переход от одного кванта аналогового диапазона к соседнему не приводит
к соседнему цифровому коду, но вызывает перемещение через один или
более кодов. Большая отрицательная погрешность дифференциальной ли-
нейности, шум или изменение входных сигналов во время преобразова-
ния могут привести к образованию отсутствующих кодов. Склонность пре-
образователя к пропуску кодов также является функцией архитектуры или
температуры.
Параллельный преобразователь. Преобразователь, в котором выбор всех
битов производится одновременно. Ему необходимо 2N — 1 звеньев дели-
теля напряжения и компараторов и сопоставимое количество логики при-
оритетного кодирования. Схема, которая дает чрезвычайно быстрое пре-
образование и требует большого количества почти идентичных компо-
нентов, поэтому она хорошо подходит для интегральных схем с разрешением
до 8 разрядов. Некоторые параллельные преобразователи часто использу-
ются в многоступенчатых субдиапазонных (subranging) преобразователях для
получения более высокой разрешающей способности при несколько мень-
шей скорости, чем при параллельном преобразовании.
Перегрузка. Входное напряжение, превышающее полномасштабный ди-
апазон входных сигналов АЦП, вызывает состояние перегрузки.
Перекрестная помеха (crosstalk). Проникновение сигналов, обычно че-
рез емкость между цепями или каналами, в многоканальной системе или
устройствах, таких как мультиплексоры, АЦП с многоканальным входом
или умножающий ЦАП. Перекрестная помеха обычно определяется импе-
дансными параметрами физической цепи, и реальные значения зависят от
частоты. (См. также Межканальная изоляция.) Многоканальные ЦАП име-
ют характеристику цифровой перекрестной помехи: острый импульс (иног-
да называемый выбросом), появляющийся на выходе одного преобразова-
теля, вызванный изменением в цифровом входном коде других преобразо-
вателей. Помеха определяется в нановольт- или пиковольт-секундах и
измеряется при VREF = О В.
Перемножающий ЦАП. Перемножающий ЦАП отличается от стандарт-
ных ЦАП с фиксированным опорным сигналом тем, что при его разработ-
ке закладывалась способность работать с различными опорными сигнала-
ми (в том числе переменного тока). Выходной сигнал такого ЦАП пропор-
ционален произведению «опорного» напряжения на дробный эквивалент
цифрового входного числа. См. также Четырехквадрантный.
Перенос заряда, инжекция заряда (offset step). Основной компонент сме-
щения выборки—хранения (или pedestal) представляет собой слабый заряд,
перенесенный к накопительной емкости через межэлектродную емкость
переключателя и паразитную емкость, при переключении в режим хране-
ния. The offset step прямо пропорционален этому заряду:
Погрешность смещения = дифференциальный заряд/емкость = Д0/ С.
Она может быть сокращена путем слабой связи сигнала хранения в со-
ответствующей полярности с конденсатором для компенсации первого по-
рядка. Ошибка может быть снижена путем увеличения емкости, но это в
свою очередь увеличит время установления.
Переходная характеристика см. Время установления АЦП.
Погрешность, абсолютная. Абсолютная погрешность ЦАП представляет
собой разницу между реальным аналоговым выходным сигналом и ожида-
емым при заданном цифровом коде на преобразователе. Погрешность обычно
соизмеряется с разрешением, например, меньше */2 LSB полной шкалы.
Однако в некоторых приложениях точность может быть намного больше
разрешающей способности; например, 4-разрядный ЦАП, имеющий толь-
ко 16 дискретных уровней, будет иметь разрешение !/16, а его точность мо-
жет соответствовать 0,01 % для каждого идеального значения.
Абсолютная погрешность АЦП для данного выходного кода соответ-
ствует разнице между реальным и теоретическим аналоговым входным напря-
жением, необходимым для выработки данного кода. Так как код может
вырабатываться любым аналоговым напряжением в конечном интервале
(см. Неточность квантования), входной сигнал, необходимый для создания
этого кода, обычно определяется как средняя точка интервала, которая и
создаст этот код. Например, если 5 В ±1,2 мВ теоретически произведет
12-разрядный полушкальный код, равный 1000 0000 0000, то преобразова-
тель, для которого любое напряжение от 4,997 до 4,999 В вызовет этот же
код, будет иметь абсолютную погрешность, равную (1/2)(4,997+4,999) — 5 В =
= +2 мВ.
Источники погрешностей включают в себя погрешность усиления (ка-
либровки), погрешность нуля, ошибки из-за нелинейности и шума. Изме-
рения абсолютной погрешности должны производиться при определенных
стандартных условиях с помощью проверенных измерительных приборов и
источников, соответствующих международным стандартам.
Погрешность, логарифмическая, ЦАП. Разница в децибелах между ре-
альной передаточной функцией и идеальной передаточной функцией, из-
меряемая после калибровки ошибки усиления к 0 дБ.
Погрешность, относительная. Относительная погрешность (выражаемая
в процентах, промилях, в долях от 1 LSB) представляет собой отклонение
аналогового значения в любом коде, отнесенного к полному аналоговому
диапазону передаточной характеристики устройства, от его теоретического
значения (отнесенного к тому же диапазону) после калибровки диапазона
полной шкалы. См. Диапазон полной шкалы.
Так как дискретные аналоговые значения, соответствующие цифровым
значениям, в идеале лежат на одной прямой, относительная ошибка точно
определенного наихудшего случая линейного АЦП или ЦАП может интер-
претироваться как мера нелинейности в конечной точке (см. Линейность).
Дискретные точки передаточной характеристики ЦАП замеряются ре-
альными аналоговыми выходами. Дискретные точки передаточной характе-
ристики АЦП представляют собой средние точки между уровнями кванто-
вания на каждом коде (см. Погрешность, абсолютная).
2.5. Определение технических характеристик
Подавитель пичков (см. Выброс). Устройство, которое убирает или со-
кращает эффекты рассогласования временной диаграммы в цифро-анало-
говом преобразовании. В качестве подавителя пичков обычно используется
цепь слежения—хранения, которая часто специально разрабатывается как
часть ЦАП. Когда ЦАП обновляется, схема подавителя пичков держит вы-
ходной сигнал с выходного усилителя ЦАП постоянным от предыдущего
значения до тех пор, пока переключатели не достигнут баланса, затем полу-
чает и хранит новое значение.
Полная неюстируемая ошибка. Комплексная техническая характеристи-
ка для некоторых устройств, которая включает в себя погрешность полной
шкалы, относительную точность и погрешность нулевого кода при опреде-
ленных условиях.
Полномасштабная входная мощность (у АЦП). Выражается в dBm (уро-
вень мощности по отношению к 1 мВт) и вычисляется с использованием
следующего уравнения, где VFullscalerrns выражается в В, a Zt в Ом:
PowerM5(,fe = 10 log,0
iz3
Full Scale rms
\z\,
I I Input
-,001
Полномасштабный диапазон (FSR). Для двоичных АЦП и ЦАП значение
напряжения, тока или (в умножающих ЦАП) усиления, от которого MSB
определен точно равным У2 или для которого любой разряд или комбина-
ция разрядов тестируется также равными его (их) долевому предписанному
идеальному значению. Полномасштабный диапазон не зависит от разреше-
ния; значение LSB (для напряжения, тока или усиления) равно 2~N полно-
масштабного диапазона. Существует еще несколько терминов с различны-
ми значениями, которые часто используются в контексте для описания эк-
сплуатации с использованием полномасштабного диапазона. Среди них
можем выделить:
Полная шкала (Full-scale) — то же, что полномасштабный диапазон, но
относящийся к одной полярности. Таким образом, полная шкала для одно-
полярного устройства вдвое больше предписанного значения MSB и имеет
ту же полярность. Для двуполярного устройства положительная и отрица-
тельная полные шкалы представляет собой то положительное или отрица-
тельное значение, при котором следующий после знакового разряд пред-
ставляет собой ’/2 от него.
Размах (Span) — скалярный диапазон напряжения или тока, соответ-
ствующий полномасштабному диапазону.
Все единицы — Все биты включены (All l's — all bits on) — состояние,
используемое так же, как и all-zeros, для настройки усиления АЦП или
ЦАП, в соответствии с инструкциями производителя. Его значение для би-
нарного устройства составляет (1 — 2-Л) полномасштабного диапазона. All-
i's представляет собой условно верное определение специфичного коли-
I 70 Глава 2. Основы считывания данных в аналого-цифровых системах
чественного отношения; для комплементарного кодирования all-1's будут
в действительности представлены всеми нулями. Во избежание путаницы
all-1's не нужно называть full-scale. Полномасштабный диапазон и full-scale не
зависят от числа разрядов, а all-1's зависят.
Все-0 — Все биты выключены (All-0's - all bits off) — состояние, исполь-
зуемое для настройки усиления и смещения в ЦАП и АЦП в соответствии
с инструкциями производителя.
All-0's соответствуют нулевому выходу в однополярном ЦАП и отрица-
тельному full-scale в смещенном биполярном ЦАП с опорным положитель-
ным сигналом. В устройстве со знаковым разрядом all-0 's относятся ко
всем разрядам после знакового разряда. Аналогично all-l's, all-0's является
условно правильным определением состояния все биты выключены} в уст-
ройстве с комплементарным кодированием оно выражается одними едини-
цами. Во избежание путаницы all-0 's не нужно называть zero до тех пор,
пока оно в точности не соответствует верному нулевому аналоговому вы-
ходному значению ЦАП.
Полоса пропускания, малого аналогового входного сигнала. Полоса малого
аналогового входного сигнала измеряется так же, как и полоса пропускания
полной мощности, при уменьшенной аналоговой входной амплитуде. Эта
характеристика схожа с полосой пропускания слабого сигнала операционно-
го усилителя. Амплитуда входного сигнала, при которой измеряется полоса
пропускания слабого сигнала, должна определяться в спецификации.
Полоса пропускания полной линейности. Полностью линейная полоса про-
пускания АЦП ограничивается частотой, при которой достигается предель-
ное значение скорости нарастания усилителя выборки-хранения. До этой
точки амплитуды спектра восстановленного основного сигнала ослабляют-
ся меньше чем на 0,1 дБ. За пределами этой частоты значительно повыша-
ется искажение дискритизированного входного сигнала.
Полоса пропускания полной мощности (FPBW). Полоса пропускания пол-
ной мощности представляет собой входную частоту, при которой амплиту-
да в спектре восстановленного основного сигнала (замеренная с использо -
ванием БПФ) сокращается на 3 дБ для полномасштабного входного сигна-
ла. Для того чтобы иметь какое-то значение, полоса пропускания полной
мощности должна проверяться вместе с отношением сигнал—шум (SNR),
отношением сигнал—шум + искажение (SINAD), эффективным числом раз-
рядов (ENOB), гармониками искажений для получения верной динамичес-
кой характеристики АЦП на частотах полномощностной полосы пропуска-
ния.
Полоса пропускания эффективного разрешения (ERB). Некоторые произ-
водители АЦП, определяя частоту, при которой отношение сигнал—шум +
искажение падает на 3 дБ, считают ее границей полосы пропускания эф-
фективного разрешения. Это та же частота, при которой эффективное чис-
ло разрядов падает на У2 разряда.
Однако эта характеристика употребляется не совсем правильно, так как
полоса пропускания ассоциируется с амплитудой сигнала.
2.5. Определение технических характеристик
Последовательный вывод. Побитовый последовательный вывод состоит
из последовательности разрядов, тактируемых на одной линии. Должны
существовать какие-то средства идентификации начала и конца слов; это
может осуществляться через дополнительную линию синхронизации, ис-
пользующую синхронизирующий генератор, и/или введения постоянной
идентификационной сигнатуры для начала слова. Байт-серия состоит из
серии байтов, передаваемых последовательно по шине. См. Байт.
Последовательное приближение. Метод последовательного приближения
является методом преобразования, при котором неизвестное сравнивается
с группой взвешенных опорных характеристик. Работа АЦП с последова-
тельным приближением в общем схожа со взвешиванием по порядку не-
известных величин к прецизионному балансу, использующему комплекс
весов, таких как 1 г, 72 г, ]/4 г и т. д. Взвешивания происходят по порядку
величин, начиная с самого большого. Любой вес, который перевешивает
при добавлении, убирается. В конце процесса сумма оставшихся весов бу-
дет находиться внутри погрешности в 1 LSB от реального веса (±‘/2 LSB,
если шкала правильно смещена — см. Ноль). АЦП последовательного при-
ближения обычно называются SAR АЦП, потому что логический блок, ко-
торый контролирует процесс преобразования, известен как регистр после-
довательного приближения (SAR).
Преобразование с одним наклоном. В преобразователе с одним наклоном
опорное напряжение интегрируется до того момента, когда выходной сиг-
нал с интегратора станет равным входному напряжению. Время, необходи-
мое для интегратора, чтобы пройти от нуля до уровня входного сигнала,
пропорционально значению входного напряжения и измеряется внутрен-
ним тактовым генератором. Мерой точности является чувствительность к
скорости тактового генератора и величине интегрирующей емкости, как и
к точности опорного напряжения.
Преобразование частота—напряжение (FVC). Входной сигнал устройства с
преобразованием частота—напряжение представляет собой волнообразную
кривую переменного тока — обычно цепочку импульсов; выходной сигнал
представляет собой аналоговое напряжение, пропорциональное количеству
импульсов, появившихся в заданное время. Преобразование частота—напря-
жение обычно выполняется преобразователем напряжение—частота в петле
обратной связи. Важные технические характеристики в дополнение к харак-
теристикам точности, типичным для преобразования напряжение—частота,
включают: пульсацию выходного сигнала (для определенных входных час-
тот), порог (для опознания, что был инициирован другой цикл, и для гибко-
сти при сопряжении нескольких типов датчиков напрямую), гистерезис, чтобы
обеспечить некоторую степень нечувствительности к наложенному шуму на
слабо изменяющуюся входную форму сигнала, и динамическая характерис-
тика (важная для управления двигателем).
Преобразователь с двумя наклонами интегрирования (Dual-slope converter).
Интегрирующий АЦП, в котором неизвестный сигнал преобразуется к про-
порциональному временному интервалу, который затем измеряется цифро-
вым способом. Это делается путем интегрирования неизвестного сигнала
на заданном промежутке времени. Затем опорный входной сигнал подклю-
чается к интегратору, который интегрирует в противоположном направле-
нии от уровня, заданного неизвестным напряжением, до момента достиже-
ния стартового уровня. Время для второго процесса интеграции (определя-
емое счетчиком) пропорционально среднему значению уровня неизвестного
сигнала за заданный интегрирующий период. Счетчик представляет циф-
ровой вывод данных.
Преобразователь с четырьмя наклонами. Это интегрирующий аналогово-
цифровой преобразователь, который проходит два цикла преобразования с
двумя наклонами: один с нулевым и один с аналоговым входами. Ошибки,
обусловленные первым циклом, удаляются цифровым способом из резуль-
тата второго цикла. Эта схема может привести к высокоточному преобразо-
ванию.
Приведенный ко входу шум (эффективный входной шум). Приведенный
ко входу шум может быть рассмотрен как результирующий эффект всех
внутренних источников шума, отнесенный к входному сигналу. Он обычно
выражается в LSB RMS, но может выражаться и как напряжение. Он может
преобразовываться в двойную амплитуду (размах) путем умножения на ко-
эффициент 6. Размах входного шума затем может использоваться для вы-
числения разрешения кода, свободного от шумов. См. Разрешение кода, сво-
бодного от шумов.
Пьедестал или шаговое смещение выборки—хранения. В стробирующих/со
слежением устройствах (усилителях) выборки—хранения сдвиг в уровне между
последним значением выборки и значением, установленным для хранения.
В устройствах с внутренними конденсаторами он включает перенос заряда
или шаговое смещение {offset step). Однако для устройств, которые могут ис-
пользовать внешние конденсаторы, он часто определяется как остаточная
шаговая погрешность после того, как перенос заряда учитывается для его
уменьшения. Так как он непредсказуем по величине и может являться фун-
кцией сигнала, то он также известен как нелинейность смещения.
Разрешение. TV-разрядный бинарный преобразователь имеет N цифро-
вых входов (ЦАП) или N цифровых выходов (АЦП). Преобразователь,
который удовлетворяет этим критериям, называется преобразователем с
A-разрядным разрешением.
Разрешение без отсутствующих кодов. Разрешение АЦП без отсутствую-
щих кодов представляет собой максимальное количество разрядов разре-
шения, за пределами которого АЦП будет иметь отсутствующие коды. На-
пример, если 18-разрядный АЦП имеет разрешение без отсутствующих ко-
дов в 16 разрядов, тогда отсутствующих кодов не будет, если используется
только 16 MSB; коды могут пропускаться при 17- и 18-разрядных уровнях.
Наименьшее выходное изменение, которое может реализовываться ли-
нейным ЦАП, составляет 2~N часть полномасштабного размаха. Таким об-
разом, например, разрешение 8-разрядного ЦАП будет 2~8, или 7256. С дру-
гой стороны, нелинейное устройство, такое как AD 7111 LOGDAC™, в
идеале может достичь динамического диапазона 89,625 дБ или 30,000:1 при
0,375-дБ шаге, используя только 8 разрядов цифрового разрешения.
2.5. Определение технических характеристик
Разрешение без пропущенных кодов (No missing code resolution) см. Разре-
шение без отсутствующих кодов.
Самый младший разряд. В системах, в которых цифровая величина
представлена сериями бинарных цифр, самый младший разряд представ-
ляет собой цифру (или разряд), который несет самое маленькое значе-
ние или вес. Например, в натуральном бинарном числе 1101 (десятичное
13, или (1 х 23) + (1 х 22) -Ь (0 Х21) + (1 х 2°)) самая крайняя справа цифра и
будет являться самым младшим разрядом. Ее аналоговый вес относитель-
но полномасштабного значения (см. Полномасштабный диапазон) составля-
ет 2~N, где N — число бинарных цифр. Он выражает самое малое аналого-
вое изменение, которое может разрешаться «-разрядным преобразовате-
лем. В спецификации по преобразователям LSB является разрядом 7V; в
терминологии для передачи данных (целые бинарные числа) он обознача-
ется разрядом 0.
Самый старший разряд (MSB). В системах, в которых цифровые величи-
ны представлены сериями бинарных цифр, самый старший разряд пред-
ставляет собой цифру (или разряд), который несет самое большое значение
или вес. Например, в натуральном бинарном числе 1101 (десятичное 13,
или (1 х 23) + (1 х 22) + (0 х 21) + (1 х 2°)) самая крайняя слева цифра и будет
являться самым старшим разрядом с весом в 72 номинального размаха пол-
ной шкалы (см. Полномасштабный диапазон). В биполярных устройствах
знаковый разряд представляет собой MSB. В спецификации по преобразо-
вателям MSB является разрядом 1; в терминологии для передачи данных он
представлен информационным разрядом (N — 1).
Свободный от помех динамический диапазон. Отношение среднеквадра-
тичного значения амплитуды сигнала к среднеквадратичному значению
наибольшей паразитной спектральной составляющей. Наибольшей пара-
зитной спектральной составляющей может быть (или не быть) гармоника.
Может выражаться в dBc (т. е. понижается со снижением уровня сигнала)
или в dB полной шкалы (отнесенный к полной шкале преобразователя).
Свободное от шума (от Фликер-шума) разрешение кода. Разрешение кода,
свободное от шума в АЦП, представляет собой число разрядов, за предела-
ми которых невозможно отчетливо разрешать отдельные коды. Причиной
этому у всех АЦП является наличие эффективного входного шума (или
шума, приведенного ко входу). Этот шум может выражаться в среднеквадра-
тичных значениях, обычно в LSB RMS. Если умножить на коэффициент 6,6,
преобразующий среднеквадратичное значение шума в шумовой размах, то
он будет выражаться в LSB размаха. Полный диапазон А-разрядного АЦП
составляет 2У. Используя следующую формулу, можно вычислить разреше-
ние, свободное от шума:
Разрешение кодов, свободное от шума = log2 (2Л/Размах шума).
Эта характеристика обычно ассоциируется с сигма-дельта АЦП с высоким
разрешением, но может применяться для всех АЦП.
Отношение полномасштабного диапазона к среднеквадратичному зна-
чению входного шума используется для вычисления разрешающей способ-
ности. В этом случае используется термин «эффективное разрешение». От-
метим, что эффективное разрешение больше, чем разрешение кода, сво-
бодное от шума, на log2(6,6) или приблизительно на 2,7 разряда.
Эффективное разрешение =
= log2 ^/Среднеквадратичный входной шум).
Синфазный диапазон. Ослабление синфазных сигналов обычно изменя-
ется от величины их размаха, зависящего от суммы синфазного и диффе-
ренциального напряжений. Синфазный диапазон представляет собой диа-
пазон входного напряжения, в котором поддерживается конкретное ослаб-
ление синфазных сигналов. Например, если синфазный сигнал равен ±5 В
и дифференциальный сигнал равен ±5 В, синфазный диапазон составляет
±10 В.
Синфазное напряжение (CMV). Напряжение, которое появляется на обо-
их входных терминалах устройства с дифференциальным входом, по отно-
шению к его выходному опорному значению (обычно «земля»). Для входов
V\ и И2, по отношению к земле, CMV= 1/2(К1 + И2). В идеальном устройстве
с дифференциальным входом CMV игнорируется. Синфазная ошибка (СME)
представляет собой ошибку на выходе из-за синфазного входного напряже-
ния. Ошибки, вызванные изменением напряжения питания, внутренним
синфазным эффектом, определяются отдельно.
Синфазное ослабление. Представляет собой меру изменений в выход-
ном напряжении, когда оба входных сигнала изменяются на равное зна-
чение ас и/или de напряжения. Синфазное ослабление обычно выража-
ется или как отношение (например, CMRR = 1 000 000: 1), или в децибе-
лах: CMR = 201og10CA/AJ?, CMRR = 106, CMR = 120 дБ. CMRR 106 значит,
что 1 В синфазного сигнала эквивалентен дифференциальному сигналу со
значением на входе 1 -тВ.
Синфазное ослабление обычно определяется для полнодиапазонного
синфазного изменения напряжения (CMV), при заданной частоте, при оп-
ределенном дисбалансе импеданса источника (например, дисбаланс в 1 кОм,
при 60 Гц). В усилителях коэффициент синфазного ослабления определя-
ется как отношение усиления сигнала G к синфазному усилению (отноше-
ние синфазного сигнала, появляющегося на выходе, к CMV на входе).
Сквозное прохождение. Нежелательная паразитная связь сигналов, дей-
ствующих рядом с переключателями или другими устройствами, которые
должны быть отключены и иметь изоляцию, например прохождение оши-
бок в устройства выборки—хранения, мультиплексоры или умножающие
ЦАП. Сквозное прохождение (feedthrough) может исчисляться в процентах,
децибелах, промилях, долях от 1 LSB или в долях от 1 В, с заданным коли-
чеством входов, при определенной частоте.
В перемножающих ЦАП проходная ошибка вызывается емкостной
связью от ас Vrefro выхода, со всеми выключенными переключателями.
В выборке—хранении feedthrough проявляется долей изменения входного
сигнала или формой входного сигнала переменного тока, которая появля-
ется на выходе в период хранения. Это вызывается паразитной емкостной
2.5. Определение технических характеристик 175
связью от входа до запоминающего конденсатора, в большинстве случаев
через разомкнутый переключатель.
Скорость нарастания выходного напряжения. Ограничение в скорости
изменения выходного напряжения обычно учитывается в некоторых базо-
вых схемах, например токовое ограничение для заряда конденсатора. Вы-
ходная скорость нарастания напряжения ЦАП с выходным напряжением
обычно ограничивается скоростью нарастания выходного напряжения у
усилителя, используемого на выходе.
Скорость разрядки запоминающего конденсатора. Цепи устройств выбор-
ки-хранения используют конденсатор для хранения напряжения в режиме
хранения, но он не будет бесконечно долго хранить информацию. Ско-
рость разряда запоминающего конденсатора представляет собой скорость,
с которой изменяется выходное напряжение (увеличивается или уменьша-
ется) и, следовательно, теряется информация. Изменение входного сигнала
появляется в результате утечки или токов смещения, протекающих через
запоминающий конденсатор. Полярность изменений зависит от источника
утечки внутри заданного устройства. В интегрирующих цепях с внешними
конденсаторами это явление называется дрейфом или спадом тока, в ин-
тегральных схемах с внутренними конденсаторами — скоростью измене-
ния. Заметим: dv/dt (вольт/секунды) = I/C (пикоамперы/пикофарады).
Смещение, биполярное. Для большинства биполярных преобразователей
(±10 В выход) отрицательный ток в действительности не вырабатывается
для соответствия отрицательным числам; вместо этого используется одно-
полярный ЦАП, и выход смещается на половину полной шкалы (1 MSB).
Для получения лучших результатов это смещенное напряжение или ток
выводятся из тех же опорных напряжений, которые определяют усиление
преобразователя.
Из-за нелинейности устройство с хорошо откалиброванными конечны-
ми точками может иметь ошибку смещения при аналоговом нуле.
Смещение выборки—хранения см. Пьедестал или шаговое смещение выбор-
ки-хранения.
Смещение и наложение спектров. Сигнал, находящийся внутри полосы
пропускания fa, должен дискретизироваться при частоте, равной fs > 2fa,
чтобы предотвратить потерю информации. Если^ < 2fa, то возникает нало-
жение спектров. Оно присуще спектру дискретизированного сигнала, со-
держащего смещенную частоту (равную fs -- fa)9 которая появляется в поло-
се пропускания Найквиста, 0 — //2. Например, если^ = 4 kSPS, afa = 3 кГц,
появится смещенная составляющая в 1 кГц. Отметим, что для fa = 1 кГц
(внутри полосы 0 — f/2) смещенная частота появится на 3 кГц (за предела-
ми 0 -fJ2.). Так как шум тоже смещается, необходимо использовать низко-
частотные (полосовые) фильтры до стадии выборки для предотвращения
смещения внеполосного шума на входном сигнале и его наложения на сиг-
нальный диапазон и, таким образом, снижения SNR.
Смещение тока {Bias Current). Представляет собой нулевой сигнал по-
стоянного тока, требуемый от источника сигнала, при сопряжении со входами
многих полупроводниковых схем. Напряжение, созданное на сопротивлении
источника током смещения, составляет (часто неучитываемую) погрешность
смещения. Когда измерительный усилитель измеряет источник, который рас-
положен достаточно далеко от питания усилителя, должна существовать до-
рожка для обратного движения токов смещения. Если ее нет, то эти токи будут
заряжать паразитную емкость, что приведет к бесконтрольному дрейфу выход-
ного сигнала или к насыщению. Следовательно, когда усиливаются выходные
сигналы «плавающих» источников, таких как трансформаторы, изолирован-
ные термопары, цепи, связанные по переменному току, необходимо наличие
высокоимпедансной утечки по постоянному току на общий вывод из каждого
входа или до входного защитного терминала (driven-guard terminal) (при его
наличии). Если использование путей прохода постоянного обратного тока яв-
ляется непрактичным, необходимо наличие изоляторов.
Смещение шага (Offset step) см. Pedestal.
Стробирующий АЦП. Стробирующий АЦП включает функцию выбор-
ки-хранения, которая запрашивает входное значение в заданный момент и
сохраняет его в процессе периода преобразования (или до момента его го-
товности работать со следующей точкой выборки). Параллельные АЦП и
сигма-дельта ЦАП представляют собой стробирующие устройства.
Субдиапазонные АЦП. В этом типе преобразователей быстрый преобра-
зователь вырабатывает более значимую часть выходного слова. Эта часть
хранится в регистре хранения и преобразуется обратно в аналоговый сиг-
нал при помощи быстрого высокоточного ЦАП. Аналоговый результат вы-
читается из входного сигнала, и результативный остаток усиливается, пре-
образуется в цифровой код при высокой скорости и объединяется с резуль-
татами более раннего преобразования для формирования выходного слова.
В АЦП с субдиапазонной цифровой корректировкой поддиапазонов два
преобразования объединяются таким образом, что корректируется ошибка
LSB самых старших разрядов. Например, используя 8-разрядное и 5-раз-
рядное преобразование с этой техникой, прошедшей много экспертиз сре-
ди видеоскоростных преобразователей, можно построить точный высоко-
скоростной 12-разрядный АЦП. Многие субдиапазонные АЦП используют
более двух ступеней с коррекцией ошибок между каждой ступенью.
Тактовые импульсы выборок см. Кодировка, тактирование отсчетов.
Температурный коэффициент. Вообще температурная нестабильность
выражается в %/°С, %о/°С, доли 1 LSB на °C или как изменение параметра
в заданном температурном диапазоне. Измерения обычно проводятся при
комнатной температуре (25 °C) и при крайних значениях температуры. Тем-
пературный коэффициент (ТС) определяется как изменение в параметре,
разделенное на соответствующее температурное изменение. Параметры,
особо контролируемые в диапазоне температур, включают усиление, ли-
нейность, смещение (биполярное) и ноль.
А. Температурный коэффициент усиления. Два фактора влияют на ста-
бильность усиления преобразователя от температуры. В преобразователях с
фиксированным опорным значением опорное напряжение будет зависеть
2.5. Определение технических характеристик 177
от температуры. Опорные цепи и переключатели (компаратор в АЦП) тоже
внесут свою часть в общий температурный коэффициент усиления.
Б. Температурный коэффициент линейности. Чувствительность линейно-
сти (интегральной и/или дифференциальной) к температуре, в % FSR/ °C
или в %о FSR/°C, в заданном диапазоне. Монотонное поведение ЦАП дос-
тигается, если дифференциальная нелинейность меньше 1 LSB при любой
температуре в интересующем диапазоне. Температурный коэффициент диф-
ференциальной нелинейности может выражаться как отношение, как мак-
симальное изменение в температурном диапазоне и/или как предполагае-
мое состояние, в котором устройство монотонно в заданном температур-
ном диапазоне. Во избежание отсутствующих кодов в бесшумном АЦП
важно, чтобы ошибка дифференциональной нелинейности была меньше
— 1 LSB при любой температуре в интересующем диапазоне. При определе-
нии температурного коэффициента дифференциальной нелинейности час-
то предполагается состояние, в котором не существует отсутствующих ко-
дов, когда идет работа внутри заданного диапазона. В ЦАП при определе-
нии температурного коэффициента дифференциальной нелинейности часто
предполагается состояние, в котором ЦАП монотонен в заданном темпера-
турном диапазоне.
В. Температурный коэффициент нуля (однополярные преобразователи).
Температурная стабильность однополярного ЦАП с фиксированным опор-
ным напряжением измеряется в % FSR/ °C или в %о FSR/ °C и обычно
подвержена влиянию утечек тока (в ЦАП с выходным током) и напряжения
смещения из-за тока смещения выходного операционного усилителя (в ЦАП
с выходным напряжением). Устойчивость нуля АЦП зависит от нулевой
устойчивости ЦАП или интегратора и /или входного буфера и компарато-
ра. Она обычно выражается в тВ/*С, или в %, или в %о полной шкалы на
градус Цельсия.
Д. Температурный коэффициент смещения. Температурный коэффициент
при всех выключенных переключателях, т. е. в точке минус полной шкалы
биполярного преобразователя (в % полномасштабного диапазона/ °C или
%о полномасштабного диапазона/°C), зависит от трех главных факторов —
температурного коэффициента опорного источника, устойчивости нулево-
го напряжения выходного усилителя, способности отслеживания резисто-
рами биполярного смещения и усиления. В АЦП соответствующий темпе-
ратурный коэффициент отрицательной полномасштабной точки зависит от
аналогичных величин — температурного коэффициента опорного источни-
ка, стабильности напряжения входного буфера и устройства выборки—хра-
нения, способности отслеживания резисторами биполярного смещения и
усиления.
Тепловой след. Медленный дрейф усилителя, имеющего термически на-
веденное смещение из-за самонагрева во время установки окончательного
электрически равновесного значения, соответствующего внутреннему тер-
мическому равновесию.
Ток утечки, выходной. Ток, который появляется на выходной клемме
ЦАП со всеми разрядами, находящимися в выключенном состоянии. Для
преобразователя с двумя комплементарными выходами (например, многие
быстрые ЦАП на основе КМОП-технологии) выходной ток утечки — это
ток, замеренный на ВЫХОДЕ 1 при всех цифровых входных сигналах низ-
кого уровня, и ток, замеренный на ВЫХОДЕ 2 при всех цифровых входных
сигналах высокого уровня.
Усиление. «Усиление» в преобразователе является аналоговым масштаб-
ным множителем, который определяет номинальный диапазон преобразо-
вания, например 10 В полной шкалы. В перемножающем ЦАП или лого-
метрическом АЦП оно в действительности представляет усиление. Но в
устройстве с фиксированным внутренним опорным значением оно выра-
жается как полномасштабное значение выходного параметра (например,
10 В или 2 мА). В преобразователе с фиксированным опорным значением,
в котором внутренний опорный источник необязателен, усиление преобра-
зователя и опорное значение могут определяться отдельно.
Устойчивость. Для хорошо спроектированного, разумно примененного
преобразователя динамическая устойчивость не является важным парамет-
ром. Термин «устойчивость» обычно относится к нечувствительности ха-
рактеристик преобразователя ко времени, к температуре и т. п. Все измере-
ния устойчивости достаточно трудны и требуют много времени, но устой-
чивость к температуре критична для большинства приложений, что
гарантирует включение ее в таблицу технических характеристик. См. Тем-
пературный коэффициент.
Частота отсчетов (выборок). Темп, в котором АЦП преобразует аналого-
вый входной сигнал в цифровой выходной (не путать с временем преобра-
зования).
Четырехквадрантный. В умножающих ЦАП «четырехквадрантный» от-
носится к факту, что опорный сигнал и число, представленное цифровым
входным сигналом, могут иметь либо отрицательную, либо положительную
полярность. Такой ЦАП может регулировать усиление для сигналов пере-
менного тока (подаваемых на «опорный» вход) с диапазоном положитель-
ных и отрицательных значений, контролируемых цифровым способом. Че-
тырехквадрантный множитель подчиняется правилам умножения с алгеб-
раическими знаками.
Шина. Шина представляет собой параллельные пути бинарных инфор-
мационных сигналов — шириной обычно 4, 8, 16, 32 или 64 разрядов. Три
типа информации обычно содержится на шине: данные, адреса, сигналы
управления. Существуют выходы с тремя положениями (отключенное, вы-
сокого и низкого уровней), что позволяет использовать много устройств,
например таких, как АЦП, подсоединенных к шине, в то время как только
один активен в определенное время.
Ширина кода. Она представляет собой основную величину среди харак-
теристик АЦП. В АЦП, где кодовый шум перехода составляет долю LSB,
она определяется как диапазон аналоговых входных значений, для которых
появляется заданный цифровой выходной код. Номинальное значение шири-
2.5. Определение технических характеристик 179
ны кода (для всех, за исключением первого и последнего кодов) представ-
ляет собой напряжение, равное 1 LSB полномасштабного диапазона, или
2,44 мВ из 10 В для 12-разрядного АЦП. Так как полномасштабный диапа-
зон является фиксированной величиной, наличие чрезмерно широких ко-
дов подразумевает существование узких или даже пропущенных кодов.
Кодовый шум переходов может затруднить или сделать невозможным из-
мерение ширины кода. В широкополосных АЦП с высоким разрешением
дополнительный шум модулирует эффективную ширину кода и появляется
в качестве шума, отнесенного ко входу. Многие АЦП имеют отнесенный ко
входу шум, который покрывает несколько ширин кода, поэтому для точно-
го измерения дифференциальной линейности используется техника гисто-
грамм.
Шум, пиковый, RMS. Внутренний случайный шум не является опре-
деляющим фактором для ЦАП, за исключением ЦАП с экстремальным
разрешением и динамическим диапазоном. Случайный шум характери-
зуется среднеквадратичными характеристиками в заданной полосе или
как спектральная плотность (ток или напряжение, деленное на корень из
герца). Если распределение гауссово, то вероятность появления значений
от пика до пика, превышающих 6,6 х среднеквадратичное значение, мень-
ше 0,1 %. Для ЦАП наиболее важной является интерференция в форме
высокоамплитудных, низкоэнергетических выбросов, появляющихся на
выходе ЦАП, вызванных связью с цифровыми сигналами в различных
вариациях: через паразитную емкость, питание, неподходящие системы
заземления, наводки, генерацию выбросов (см. Выброс). Их присутствие
подчеркивает необходимость максимального внимания разработчика к рас-
положению, экранированию, защите информации, заземлению, шунтиро-
ванию, чтобы защититься от выбросов. В сущности, шум в АЦП сокраща-
ет диапазон между переходами. Среди источников шума можно выделить:
входное устройство выборки—хранения, шум резистора, «КТ/С» шум, шумы
в опорном сигнале, в самом аналоговом сигнале, наводки в бесконечном
разнообразии.
Эффективный входной шум см. Приведенный ко входу шум (эффективный
выходной шум).
Эффективное разрешение см. Свободное от шума (от фликер-шума) кодо-
вое разрешение.
Эффективное число разрядов {ENOB). С помощью подачи на вход сину-
соиды отношение сигнал—шум + искажение {SINAD) может выражаться
числом разрядов. Перепишем теоретическую формулу отношения сигнал-
шум SNR ддя идеального TV-разрядного АЦП и вычислим N:
N= {SNR — 1,76 дБ)/6,02.
Реальное отношение сигнал—шум + искажение вычисляется с ис-
пользованием БПФ-техники, а эффективное число разрядов вычисляет-
ся из:
ENOB = {SINAD - 1,76 дБ)/6,02.
Глава 2. Основы считывания данных в аналогово-цифровых системах
Общая библиография
по преобразованию данных
и сопутствующим вопросам
1. Alfred К. Susskind. Notes on Analog-Digital Conversion Techniques. John Wiley, 1957.
2. David F. Hoeschele, Jr. Analog-to-Digital/Digital-to-Analog Conversion Techniques,
John Wiley and Sons, 1968.
3. K. W. Cattermole. Principles of Pulse Code Modulation. American Elsevier Publishing
Company, Inc., 1969, New York NY, ISBN 444-19747-8.
4. Hermann Schmid. Electronic Analog/Digital Conversions. Van Nostrand Reinhold
Co., 1970.
5. Dan Sheingold. Analog-Digital Conversion Handbook. First Edition, Analog Devices, 1972.
6. Donald B. Bruck. Data Conversion Handbook. Hybrid Systems Corporation, 1974.
7. Eugene R. Hnatek. A User’s Handbook of D/А and A/D Converters. John Wiley,
New York, 1976, ISBN 0-471-40109-9.
8. Nuggehally S. Jayant. Waveform Quantizing and Coding. John Wiley-IEEE Press,
1976, ISBN 0-87942-074-X.
9. Dan Sheingold. Analog-Digital Conversion Notes. Analog Devices, 1977.
10. C F. Kurth, editor. IEEE Transactions on Circuits and Systems Special Issue on
Analog/Digital Conversion. CAS-25, No. 7, July 1978.
11. Daniel J. Dooley. Data Conversion Integrated Circuits. John Wiley-IEEE Press,
1980, ISBN 0-471-08155-8.
12. Bernard M. Gordon. The Analogic Data-Conversion Systems Digest. Fourth Edition,
Analogic Corporation, 1981.
13. Eugene L. Zuch. Data Acquisition and Conversion Handbook. Datel-Intersil, 1982.
14. Frank F. E. Owen. PCM and Digital Transmission Systems. McGraw-Hill, 1982,
ISBN 0-07-047954-2.
15. Dan Sheingold. Analog-Digital Conversion Handbook. Analog Devices/Prentice-
Hall, 1986, ISBN 0-13-032848-0.
16. Matthew Mahoney. DSP-Based Testing of Analog and Mixed-Signal Circuits. IEEE
Computer Society Press, 1987, ISBN 0-8186-0785-8.
17. Michael J. Dernier. High-Speed Analog-to-Digital Conversion. Academic Press,
Inc., 1991, ISBN 0-12-209048-9.
18. J. C. Candy and Gabor C. Temes. Oversampling Delta-Sigma Data Converters.
IEEE Press, ISBN 0-87942-258-8, 1992.
19. David F. Hoeschele, Jr. Analog-to-Digital and Digital-to-Analog Conversion
Techniques. Second Edition, John Wiley and Sons, 1994, ISBN-0-471-57147-4.
20. Rudy van de Plassche. Integrated Analog-to-Digital and Digital-to-Analog Converters.
Kluwer Academic Publishers, 1994, ISBN 0-7923-9436-4.
21. David A. Johns and Ken Martin. Analog Integrated Circuit Design. John Wiley,
1997, ISBN 0-471-14448-7.
22. Mikael Gustavsson, J. Jacob Wikner, and Nianxiong Nick Tan. CMOS Data Converters
for Communications. Kluwer Academic Publishers, 2000, ISBN 0-7923-7780-X.
23. R. Jacob Baker. CMOS Circuit Design Volumes I and II. John Wiley-IEEE Computer
Society, 2002, ISBN 0-4712-7256-6.
24. Rudy van de Plassche. CMOS Integrated Analog-to-Digital and Digital-to-Analog
Converters. Second Edition, Kluwer Academic Publishers, 2003, ISBN 1-4020-7500-6.
Регулярный семинар Analog Devices
25. Walt Kester. Practical Analog Design Techniques. Analog Devices, 1995, ISBN
0-916550-16-8, available for download at www.analog.com.
Общая библиография по преобразованию данных и сопутствующим вопросам
26. Walt Kester. High Speed Design Techniques. Analog Devices, 1996, ISBN 0-916550-
17-6, available for download at www.analog.com.
27. Walt Kester. Practical Design Techniques for Power and Thermal Management.
Analog Devices, 1998, ISBN 0-916550-19-2, available for download at www.analog.com.
28. Walt Kester. Practical Design Techniques for Sensor Signal Conditioning. Analog
Devices, 1999, ISBN 0-916550-20-6, available for download at www.analog.com.
29. Walt Kester. Mixed-Signal and DSP Design Techniques. Analog Devices, 2000,
ISBN 0-916550-22-2, available for download at www.analog.com.
30. Walt Kester. Mixed-Signal and DSP Design Techniques. Analog Devices and Newnes
(An Imprint of Elsevier Science), ISBN 0-75067-611-6, 2003.
31. Walter G. Jung. Op Amp Applications. Analog Devices, 2002, ISBN 0-916550-26-5.
ГЛАВА 3
АРХИТЕКТУРЫ
ПРЕОБРАЗОВАТЕЛЕЙ
ДАННЫХ
3.1. Архитектуры ЦАП
Джеймс Брайнт, Уолт Кестер
Введение
Те, кто не знаком детально с ЦАП, считают, что это просто приборы с
цифровым входом и аналоговым выходом. Но сигнал на аналоговом выходе
зависит от наличия сигнала на другом (часто внутреннем) аналоговом вхо-
де, который принято называть опорным и точность которого почти всегда
является фактором, определяющим абсолютную точность ЦАП. Позднее в
этой главе мы рассмотрим различные архитектуры ЦАП и формы, которые
может принимать опорный сигнал.
Некоторые ЦАП используют внешнее опорное напряжение (рис. 3.1) и
имеют опорный вход, тогда как в других выходной сигнал определяется
внутренним опорным напряжением. Простейшие ЦАП, конечно, никакого
опорного сигнала на микросхему ЦАП не принимают и никакого внешнего
входа для него не имеют.
Если ЦАП имеет внутреннее опорное напряжение, общая точность ЦАП
определяется им. Когда на такой ЦАП подается внешнее опорное напряже-
(Аналоговый)
Аналоговый
выход
Рис. 3.1. Базовый ЦАП с внешним опорным напряжением
3.1. Архитектуры ЦАП
ние определенной точности, его абсолютная точность может оказаться ниже,
чем при наличии внутреннего напряжения. Это происходит потому, что
абсолютная точность ограничивается фактическим, а не номинальным опор-
ным напряжением. Двадцать лет назад считалась нормальной точность опор-
ного напряжения всего ±5 %, поскольку это опорное напряжение ограни-
чивалось низким температурным коэффициентом, а не абсолютной точно-
стью. Подобная неточность опорного напряжения ЦАП компенсировалась
подстройкой усиления. Сегодня проблема не столь сурова, но все же важно
оценивать возможные потери абсолютной точности от использования
внешнего опорного напряжения в ЦАП с внутренним опорным напряже-
нием. В паспорте ЦАП с опорным входом, конечно, должны быть опреде-
лены его параметры. В первую очередь должны быть указаны допустимые
значения: его абсолютный максимум и диапазон напряжений, в котором
ЦАП нормально работает.
У большинства ЦАП опорное напряжение находится внутри довольно
узкого диапазона с максимальной величиной, меньшей или равной VDD.
Но ЦАП, именуемые перемножающими (ПЦАП), способны работать в бо-
лее широком диапазоне напряжений, выходящем за пределы их питающего
напряжения. Перемножающий ЦАП AD7943, например, имеет абсолютное
максимальное напряжение на входе VDD +6 В, но по опорному входу до-
пускает ±15 В и исправно функционирует при положительных, отрица-
тельных и переменных опорных напряжениях. (В общем определении ПЦАП
указано, что диапазон его опорных напряжений включает нуль. Но некото-
рые авторитеты дают более узкое определение ПЦАП. Это ЦАП с диапазо-
ном опорных напряжений, большим 5 : 1. В данной главе мы используем
термин «полуперемножающий ЦАП» применительно к приборам подобно-
го типа.) ЦАП, работающие с переменным опорным напряжением, харак-
теризуются частотным диапазоном, определяющим максимальную практи-
ческую частоту на опорном входе.
Опорный вход ЦАП может буферизоваться, как это показано на рис. 3.2.
В случае буферизации он характеризуется входным импедансом (обычно
Любой, все или ни один из этих
контактов могут быть объединены
внутри или выведены из микросхемы
Рис. 3.2. ЦАП с опорным напряжением и буфером
184 Глава 3. Архитектуры преобразователей данных
высоким) и током смещения (обычно малым). Без буферизации опорное
напряжение поступает непосредственно в ЦАП, и входной импеданс оха-
рактеризовать гораздо сложнее, так как в некоторых структурах ЦАП вход-
ной импеданс существенно меняется в зависимости от цифрового кода,
поступающего в ЦАП. Для таких случаев структура ЦАП (обычно упрощен-
ная) указывается в паспортных данных микросхемы, где приводятся номи-
нальные значения сопротивлений. Для ЦАП, у которых входной импеданс
не меняется вместе с кодом, указывается его величина.
Удивительно, что в такой точной схеме импеданс резистивной цепи
опорного входа ЦАП редко бывает конкретно определен. Например, AD7943
имеет номинальный входной импеданс 9 кОм, но паспортный диапазон
составляет от 6 до 12 кОм, т. е. допустимые изменения равны ±33 %. Далее
в книге (в гл. 4) обсуждаются причины этого. Кроме того, опорный вход-
ной импеданс зависит от кода в архитектуре Л-27?-вольтового типа.
Когда ЦАП имеет опорный входной терминал, он с высокой точностью
характеризуется определенным входным напряжением. В паспортных дан-
ных могут быть указаны также температурный коэффициент и долговре-
менная стабильность.
При подаче на ЦАП внешнего опорного напряжения его следует под-
держивать с заданной в паспорте точностью. В тех же паспортных данных
обычно указываются температурный коэффициент и долговременная ста-
бильность ЦАП.
Если на опорном выходе используется буфер, в паспортных данных
приводится максимальный выходной ток. В общем случае такой буфер бу-
дет иметь однонаправленный выходной каскад. Он является источником
тока, но не позволяет току течь обратно в направлении выхода. При нали-
чии двунаправленного выходного каскада выходной ток указывается как
±(НЕКОТОРАЯ ВЕЛИЧИНА) mA. Если опорный выход не буферизован, в
паспортных данных может указываться выходной импеданс либо просто
рекомендуется использование внешнего буфера с высоким входным импе-
дансом.
Обсуждение выходов ЦАП
ЦАП может иметь выход тока или выход напряжения. В обоих случаях
важно знать выходной импеданс. Если выход напряжения буферизован,
выходной импеданс будет низким. Выход тока и небуферизованный выход
напряжения будут иметь более высокий импеданс и вполне могут иметь
такие параметры, как реактивная, так и чисто активная составляющие. Не-
которые архитектуры ЦАП имеют выходные структуры, в которых выход-
ной импеданс является функцией цифрового кода ЦАП, и это должно быть
ясно отмечено в паспортных данных.
Теоретически токовые выходы должны быть подключены к нулевой на-
грузке, имеющей потенциал земли. В действительности они работают при
ненулевых импедансах и напряжениях. Те вариации, которые они допуска-
ют, приводятся в разделе «Диапазон изменения напряжения», и этот пара-
метр должен быть указан у ЦАП с токовым выходом.
3.1. Архитектуры ЦАП 185
Базовые структуры ЦАП
Роль одноразрядного ЦАП может играть однополюсный двухпозиционный
переключатель (SPDTS), показанный на рис. 3.3. Такой переключатель со-
единяет выход с опорным напряжением или с «землей» или с равными опор-
ными напряжениями, положительным и отрицательным. Подобный простой
прибор является компонентом многих бо-
лее сложных структур ЦАП и применяет-
ся наряду с избыточной дискретизацией в
качестве базового аналогового элемента во
многих сигма-дельта ЦАП, которые будут
обсуждаться позднее. Тем не менее эта схе-
ма слишком проста для детального обсуж-
дения, и будет полезнее рассмотреть бо-
лее сложные структуры.
4,EFCH
-О Выход
Рис. 3.3. 1-разрядный ЦАП: переклю-
чатель (однополюсный двухпозицион-
ный переключатель-SPDTS)
Делитель Кельвина (цуговый ЦАП)
Простейшей из всех структур ЦАП после отмеченного выше двухпозици-
онного переключателя является делитель Кельвина, или цуг, показанный
на рис. 3.4. A-разрядная версия этого ЦАП состоит из 2N одинаковых пос-
ледовательно соединенных резисторов и 2N ключей (обычно КМОП), по
одному между каждым узлом цепи и выходом. Выход организуется замыка-
нием одного из ключей, подключенных к соответствующему ответвлению.
(Есть небольшое усложнение, состоящее в дешифрации 1 из 2;V ключей по
A-разрядному входному коду, введенное в чип.) Идея этого ЦАП восходит
к временам лорда Кельвина середины 1800-х годов. Затем он впервые был
реализован на резисторах и реле, а позднее, в 1920-х годах, — на лампах1-3.
Эта простая архитектура использует выход по напряжению (у которого
выходной импеданс зависит от кода) и отличается хорошей монотоннос-
Рис 3.4. Простейший ЦАП с выходом напряжения ддя термометра (делитель Кельвина —
цуговый ЦАП)
Глава 3. Архитектуры преобразователей данных
тью. Даже если резистор будет случайно закорочен, сигнал на выходе п не
превысит сигнала п + 1-го выхода. При равенстве всех резисторов этот
прибор имеет линейную шкалу. Однако он без труда может быть выпол-
нен нелинейным, если потребуется нелинейный ЦАП. В связи с тем, что
в момент переключения работают только два ключа, в такой архитектуре
редко происходят выбросы. Кроме того, поскольку выбросы не зависят от
кода, рассматриваемый ЦАП подходит для приложений, рассчитанных на
малые искажения сигналов. А так как выброс постоянен и независим от
сменяемых кодов, частотный состав выбросов определяется темпом и гар-
моническим составом обновления входных данных ЦАП, а не гармони-
ческим составом выходной частоты. Основной недостаток ЦАП термо-
метра состоит в большом числе резисторов и ключей, необходимых для
достижения высокого разрешения. По этой причине он не относился к
широко используемым ЦАП с простой архитектурой до прихода мини-
атюрных ИС, открывших его практичность для ЦАП низкой и средней
точности. Сегодня эта архитектура достаточно широко применяется в про-
стых ЦАП, таких как цифровые потенциометры, и, как мы позднее уви-
дим, является компонентом более сложных структур ЦАП высокого раз-
решения.
Как уже отмечалось, выход для кода со всеми единицами ЦАП всегда на
один младший бит меньше опорного напряжения. Поэтому в цепи, пред-
назначенной для использования в качестве ЦАП общего назначения, меж-
ду опорным входом и первым ключом помещают резистор, показанный на
рис. 3.4.
В идеальном потенциометре любой код из всех нулей или единиц дол-
жен подключать ответвление к тому или иному концу цепочки резисторов,
а цифровой потенциометр, использующий цуговой ЦАП, имеет один не-
большой резистор, подключенный к одному из концов цепочки. Пример
простого цифрового потенциометра дан на рис. 3.5.
Рис. 3.5. Небольшое изменение цугового ЦАП — и перед нами цифровой потенцио-
метр
3.1. Архитектуры ЦАП
Простейшие цифровые потенциометры сложнее этого, так как ни на
одном из входов обычного потенциометра не может быть напряжения, пре-
вышающего 5 или 3 В питания логических схем. Некоторые из цифровых
потенциометров оснащены более сложными дешифраторами со сдвигом
уровней и дополнительными входами, на которые подается питание более
высокого напряжения. Таким образом, несмотря на то что уровни логичес-
кого управления остаются низкими (3 или 5 В), выводы цифрового потен-
циометра имеют более высокий потенциал — в ряде случаев до ±15 В. Циф-
ровые потенциометры часто строятся на жесткой логике, поэтому их на-
стройки сохраняются при выключении питания.
Цуги, естественно, содержат множество резисторов (как мы уже видели,
2N для TV-разрядного ЦАП). Непрактично подстраивать каждый резистор
цуга для достижения приемлемых значений дифференциальной DNL и ин-
тегральной INL нелинейности, отчасти потому, что их много, и отчасти
потому, что они слишком малы для подстройки, а главное, потому что это
слишком дорого.
Однако в случае необходимости возможна подстройка INL цугового ЦАП.
Способ подстройки показан на рис. 3.6. Здесь параллельно главной цепоч-
ке резисторов подключена вторая цепочка из четырех одинаковых резисто-
ров. Эти резисторы имеют достаточную для подстройки величину. Три внут-
ренних узла цепочки подключены с помощью буферных усилителей к уз-
лам основной цепочки. Подстраивающая цепочка регулируется таким
образом, чтобы на этих узлах основной цепочки оказались требуемые по-
тенциалы. Обычно такой способ позволяет снизить INL до четырех раз при
довольно низких затратах. Тем не менее многие современные цуговые ЦАП
не требуют никакой подстройки, так как резисторы хорошо подогнаны, а
ток, отбираемый КМОП-ключами, ничтожно мал.
ЦАП без подстраиваемых компонентов
00000 01000 10000 11000 11111
Подстраиваемый ЦАП
Рис 3.6. При необходимости INL цугового ЦАП подстраивается
Глава 3. Архитектуры преобразователей данных
Термометровые ЦАП (с полной дешифрацией)
Имеются ЦАП с токовым выходом, аналогичные цуговому ЦАП. Они со-
стоят из 2N — 1 источников тока (в роли которых могут выступать резисторы,
питаемые опорным напряжением, или активные источники тока), переклю-
чаемых на выход, имеющий потенциал «земли» (или близкий к «земле»).
Рисунок 3.7 представляет термометровый ЦАП с резисторами, на которые
подается опорное напряжение, задающее требуемые токи.
З-разрядный
цифровой вход
Рис. 3.7. Простейший термометровый ЦАП с токовым выходом (с полной дешифрацией)
Если применяются активные источники тока, подобные показанному
на рис. 3.8, выход может работать в большом диапазоне изменений напря-
жения, и для формирования выходного напряжения организуется резис-
тивная нагрузка. Нагрузочный резистор должен выбираться таким образом,
чтобы при максимальном выходном токе изменение выходного напряже-
ние оставалось в пределах допустимого диапазона.
Как только вместе с увеличением цифрового кода в цепь подключается
очередной ток, последующее увеличение уже не вызывает его переключе-
ния. Таким образом, перед нами монотонная структура, не реагирующая на
Токовый выход
может иметь диапазон
изменения напряжений
1 или 2 В
З-разрядный
цифровой вход
Рис 3.8. Источники тока улучшают базовый термометровый ЦАП с токовым выходом
3.1. Архитектуры ЦАП
погрешности тока. И вновь, как и для делителя Кельвина, только благодаря
достижению высокой плотности в ИС эта архитектура получила практичес-
кое применение в типовых ЦАП среднего разрешения. Хотя несколько бо-
лее сложная ее версия, показанная на следующем рисунке, достаточно ши-
роко используется в высокоскоростных приложениях. В отличие от делите-
ля Кельвина, этот тип ЦАП с токовым выходом не имеет своего названия,
хотя оба типа могут быть отнесены к ЦАП с полной дешифрацией или термо-
метровым ЦАП. (Эта аналогия связана с равномерным изменением пере-
менных величин — резисторов или токов подобно термочувствительному
уровню в термометре в отличие от двоично взвешенных величин в других
типах ЦАП. — Примеч. ред.)
ЦАП с переключением тока между двумя линиями, одна из которых
часто заземлена, но в общем случае может использоваться и в качестве
инвертирующего выхода, более удобен для высокоскоростных приложений,
так как переключение тока между двумя выходами не прерывает его и по-
этому реже вызывает выбросы, чем простое включение и выключение тока.
Такая архитектура представлена на рис. 3.9.
Тем не менее время установления таких ЦАП сильно различается для
начального и конечного значений кодов, что является причиной межсим-
вольной интерференции. А это, в свою очередь, требует более сложной схемы
коммутации, при которой выходной ток, прежде чем принять новое значе-
ние, должен устанавливаться в ноль. Заметьте, что хотя выходной ток воз-
вращается в ноль, он не отключается. Ток снимается, когда он не нужен, а
не выключается и включается. Используемая техника довольно сложна для
детального обсуждения здесь, и с нею можно ознакомиться в 4.
В обычной (линейной) версии такого ЦАП все токи изначально одина-
ковы. Для использования в высокоскоростных модификациях линейность
может быть повышена за счет динамического изменения порядка переклю-
чения токов при нарастании кода. Вместо того чтобы код 001 всегда вклю-
чал ток А, код 010 всегда включал токи А и В, код 011 всегда включал токи
изменения напряжений
1 или 2 В
Рис. 3.9. Высокоскоростной термометровый ЦАП с комплементарными токовыми
выходами
Глава 3. Архитектуры преобразователей данных
А, В и С и т. д., порядок включения при нарастающем коде меняется с
каждой новой кодовой точкой. Этого несложно добиться с помощью неко-
торой дополнительной логики дешифратора. В простейшем случае исполь-
зуется счетчик с инкрементом в каждом периоде повторения тактовых им-
пульсов, чтобы порядок смещался: ABCDEFG. BCDEFGA, CDEFGAB и т. д.,
но этот алгоритм может вызвать ложные тональные компоненты на выходе
ЦАП. Лучший подход основан на задании нового псевдослучайного поряд-
ка в каждом периоде повторения тактовых импульсов. Это требует допол-
нительной логики, но, как уже отмечалось, даже сложная логика в настоя-
щее время обходится очень дешево и легко реализуется на основе КМОП.
Существуют и другие, более сложные методы, представляющие данные та-
ким образом, чтобы выбирать из них необходимые разряды, не вызывая
ошибочных шумов. Опять же, они довольно трудны для подобного рода
книги (детальное обсуждение см. в 4 5)«
ЦАП с двоичным взвешиванием
Одно из наиболее простых описаний электромеханических ЦАП с двоич-
ным взвешиванием можно найти в патенте P.M. Rainey 1921 года, посвя-
щенном системе факсимильной связи на основе импульсно-кодовой моду-
ляции (ИКМ)6. Эта система более подробно обсуждается в гл. 1, 5-разряд-
ная реализация такого ЦАП приведена на рис. 3.10.
Задача, решаемая Rainey при создании ЦАП, состояла в управлении
интенсивностью светового излучения лампы накаливания по получаемым
приемником дискретным данным. При различных комбинациях ключей,
параллельно замыкающих резисторы, может быть получено 32 варианта со-
противлений, от 0 до 31 R, и, следовательно, 32 возможных уровня интен-
сивности светового излучения. В факсимильном устройстве на основе ИКМ
световой поток фокусировался на фотопленку для записи изображения,
оцифрованного в передатчике.
Цифровые
входы
Лампа
накаливания
Воспроизводится по: Paul М. Rainey. Facsimile Telegraph System. U.S.
Patent 1, 608, 527, Filed July 20, 1921, Issued November 30, 1926.
Рис 3.10. 5-разрядный ЦАП с двоичным взвешиванием P.M. Rainey
3.1. Архитектуры ЦАП
Старший
разряд
Младший
разряд
Воспроизводится по: John С. Schelleng. Code Modulation Communication
System. U.S. Patent 2, 453, 461, Filed June 19, 1946, Issued November 9, 1948
Рис 3.11. Предложенный Schelleng 6-разрядный ЦАП с двоичным взвешиванием
Другой пример раннего лампового ЦАП можно обнаружить в патенте
J. Schelleng, заявленном в 1946 году и посвященном 6-разрядной системе
ИКМ7. Schelleng использует подключаемые переключателями двоично взве-
шенные источники напряжения, которые суммируются на резистивной цепи,
показанной на рис. 3.11.
В прекрасной статье8 1953 года, посвященной ЦАП последовательного
приближения, B.D. Smith из Melpar предложил две классические архитек-
туры ЦАП с двоичным взвешиванием с выходом по напряжению. Первая
из них, показанная на рис. 3.12, использует в качестве основы ЦАП цепь из
двоично-взвешенных резисторов, переключаемых между опорным напряже-
нием и «землей». Транзисторная реализация этого подхода позднее, в 1958 году,
была описана В.К. Smith9. Другая рализация B.D. Smith, показанная далее
на рис. 3.16, была описана им в 8, являющейся одной из первых публика-
ций, посвященных схеме лестничного ЦАП типа R-2R с выходом по на-
пряжению.
V
Воспроизводится по: B.D. Smith. Coding by Feedback Methods.
Proceedings of the I. R. E., Vol. 41, August 1953, pp. 1053—1058
Рис. 3.12. ЦАП с двоично-взвешенными резисторами и выходом по напряжению
Глава 3. Архитектуры преобразователей данных
ЦАП с двоично-взвешенными резисторами с выходом по напряжению,
показанный на рис. 3.12, обычно приводится в учебниках в качестве при-
мера простого ЦАП. Тем не менее этот ЦАП в основе своей немонотон-
ный, и трудно наладить его успешное производство при высоком разреше-
нии. К тому же выходной импеданс двоичного ЦАП с выходом по напря-
жению изменяется в зависимости от входного кода.
Двоичные ЦАП с токовым выходом представлены на рис. 3.13, а (на
резисторах) и 3.13, б (на источниках тока). A-разрядный ПДП этого типа
состоит из N источников взвешенных токов (в простейшем случае задавае-
мых резисторами, запитываемыми опорным напряжением), находящихся в
отношении 1 : 2 :4: 8 : ...2N - 1. Младший разряд управляет 2N - 1-м током,
а старший 1-м током. Теоретически он прост, но существуют практические
проблемы производства экономичных ИС с отношением токов или сопро-
тивлений хотя бы 128:1 для 8-разрядных ЦАП, особенно если требуются
нормированные температурные коэффициенты.
а б
Резистор
Токовые выходы
на виртуальную «землю»
• Сложно производить в виде ИС из-за больших отношений со-
противлений или токов при высоких разрешениях
Рис 3.13. ЦАП с двоичным взвешиванием и токовым выходом
Если ток старшего разряда несколько меньше по величине и не превос-
ходит суммы токов всех других разрядов, то ЦАП не будет монотонным
(дифференциальная нелинейность большинства типов ЦАП, вызванная
переключением разрядов, очень плоха). Подобная архитектура, вероятно,
никогда не будет использована в качестве завершенных ЦАП, хотя опять
же 3- или 4-разрядные версии нашли применение в роли компонентов бо-
лее сложных структур.
Тем не менее с недавних пор получила широкое распространение дру-
гая структура ЦАП с двоичным взвешиванием. В ней для двоичного взве-
шивания применяются конденсаторы, как показано на рис. 3.14. Проблема
использования конденсаторов в ЦАП состоит в том, что утечка в них вызы-
вает потерю точности по прошествии нескольких миллисекунд после изме-
рения. Это делает емкостные ЦАП непригодными для приложений общего
назначения, но не является помехой в ЦАП последовательного приближе-
ния, где преобразование завершается в течение несколько микросекунд,
т. е. задолго до того, как утечка окажет сколько-нибудь ощутимое влияние.
АЦП последовательного приближения имеет очень простую структуру,
низкую мощность и сравнительно быстрое время преобразования. Вероят-
3.1. Архитектуры ЦАП 193
Рис. 3.14. ЦАП с двоично-взвешенными конденсаторами в АЦП последовательного
приближения
но, это наиболее широко распространенная архитектура АЦП широкого
применения. Но в середине 1990-х годов началось производство субдиапа-
зонных АЦП, которые превзошли по популярности АЦП с последователь-
ной аппроксимацией. Тонкопленочный резистивный АЦП последователь-
ного приближения типа R-2R увеличивает размеры и стоимость микросхе-
мы по сравнению с АЦП субдиапазонным, хотя последний и расходует
больше мощности. Развитие субмикронных КМОП способствовало созда-
нию очень маленьких (и потому дешевых) точных ЦАП с коммутируемыми
конденсаторами. Благодаря им родилось новое поколение АЦП последова-
тельного приближения, отличающееся малыми размерами, ценой, мощно-
стью и высокой точностью, что вновь повысило популярность таких при-
боров (продолжение обсуждения см. в разд. 3.2).
Использование емкостного ЦАП с перераспределением зарядов дает
также другое преимущество. Такой ЦАП ведет себя как дискретная схема
выборки и хранения, поэтому не требует ни специальной схемы выборки и
хранения, ни резервирования места в микросхеме для ее интеграции.
ЦАП типа R-2R
Одним из наиболее распространенных стандартных блоков ЦАП служит
резистивная лестничная схема, показанная на рис. 3.15. В ней используют-
ся только две величины сопротивлений, находящихся в отношении 2:1.
/V-разрядный ЦАП строится на 2А-резисторах, которые достаточно просто
подстраивать. Количество подстраиваемых резисторов невелико.
R
• A/V-»
2R S >
6 6 6 6 6
Рис 3.15. 4-разрядная лестничная схема типа R-2R
7-2852
Глава 3. Архитектуры преобразователей данных
Лестничную схему типа R-2R можно использовать в качестве ЦАП дву-
мя способами, известными, соответственно, как режим напряжения и ре-
жим тока, (Иногда их называют «нормальным» и «инверсным» режимами,
однако нет единого мнения, который из режимов — режим напряжения
или режим тока — считать «нормальным» режимом работы лестничной схе-
мы, и это может внести определенную путаницу.) Каждый режим имеет
свои преимущества и недостатки.
В лестничной схеме типа Л-2Л, работающей в режиме напряжения
(рис. 3.16), ступени, или плечи, лестницы переключаются между VREF и
«землей», а выходом служит конец лестницы. С выхода можно снимать на-
пряжение, но, поскольку выходной импеданс не зависит от кода, с таким же
успехом в качестве выхода может рассматриваться и ток виртуальной «земли».
Как уже было сказано, такая архитектура предложена B.D. Smith в 1953 году.8
R
-Wr
О У ых
R
R
ЛЛЛг
Старший
разряд
Воспроизводится по: B.D. Smith. Coding by
Feedback Methods. Proceedings of the I. R. E.,
Vol. 41, August 1953, pp. 1053—1058
Рис 3.16. Лестничная схема ЦАП типа R-2R в режиме напряжения
Выход по напряжению является преимуществом этой схемы, основан-
ным на постоянном выходном импедансе. Кроме того, поскольку ключи
коммутируют плечи лестницы между входом с низким импедансом VREF м
«землей», тоже имеющей низкий импеданс, емкостные токи не попадают в
нагрузку. Ключам приходится работать в широком диапазоне напряжений
(от VREFдо «земли»). Это сложно с конструкторской и производственной
точек зрения, а опорный входной импеданс сильно зависит от кода, поэто-
му опорный источник должен иметь очень низкий импеданс. К тому же
нельзя использовать для регулирования усиления ЦАП резистор, включен-
ный последовательно с входом VREF.
В лестничной схеме ЦАП типа 7?-27?, работающей в токовом режиме
(рис. 3.17), усиление ЦАП можно регулировать последовательным резисто-
ром на входе VREF. Поэтому в токовом режиме конец лестницы с незави-
сящим от входа импедансом используется как выход VREF, а концы плеч
переключаются между «землей» (или инверсным выходом, находящимся
под потенциалом «земли») и выходной шиной, которая должна иметь по-
тенциал «земли». В нормальном состоянии выход лестничной схемы токо-
вого типа должен работать на операционный усилитель (ОУ), играющий
роль преобразователя тока в напряжение, но стабилизация этого ОУ ослож-
няется из-за зависимости выходного импеданса от кода.
3.1. Архитектуры ЦАП I
Рис 3.17. Лестничная схема ЦАП типа R-2R в токовом режиме
Токовый режим в большей степени, чем режим напряжения, подвержен
коммутационным выбросам, так как ключи коммутируют непосредственно
выходные шины. Тем не менее, поскольку ключи лестничной схемы токо-
вого типа всегда находятся под потенциалом «земли», их конструкция не
требует защиты от большого перепада напряжений, вплоть до опорного.
Если применяются ключи, рассчитанные на протекание тока в обоих на-
правлениях (в частности, КМОП-приборы), опорное напряжение может
менять полярность и даже быть сигналом переменного тока. Такая структу-
ра представляет один из наиболее общих типов структур перемножающих
ЦАП (ПЦАП). Она будет рассмотрена далее в этом разделе.
Поскольку ключи всегда находятся под потенциалом «земли» или вбли-
зи этого потенциала, максимальное опорное напряжение может значитель-
но превосходить логические уровни напряжения без опасности их пробоя
при периодическом замыкании и размыкании, характерном для этого типа
ЦАП. Для КМОП исполнения ПЦАП нет ничего необычного в работе с
опорным напряжением ±30 В (или 60 В размаха переменного тока) при
питании однополярным напряжением 5 В.
В другом распространенном ЦАП типа R-2R переключаются одинако-
вые токи в схеме, показанной на рис. 3.18. Эта архитектура впервые была
реализована В.М. Gordon в EPSCO (в настоящее время Analogic, Inc.) на
вакуумных электронных лампах в 11-разрядном АЦП последовательного
приближения, работавшем на частоте 50 kSPS (киловыборок в секунду).
В патенте Gordon 1955 года10 описывается АЦП, ставший первым коммер-
Воспроизводится по: Bernard М. Gordon and
Robert Р. Talambiras. Signal Conversion
Apparatus. U.S. Patent 3, 108, 266, filed July 22,
1955, issued October 22, 1963
Рис 3.18. Переключение одинаковых источни-
ков тока в лестничной схеме типа R-2R
Глава 3. Архитектуры преобразователей данных
ческим, вполне завершенным преобразователем (детали см. в разд. 3.2 и
в гл. 1). В этой архитектуре выходной импеданс ЦАП равен R. Подобная
схема часто применяется в высокоскоростных видеоЦАП. Ее отличитель-
ным преимуществом является фиксированное отношение сопротивлений 2
: 1, не зависящее от разрешающей способности. К сожалению, эта архитек-
тура не отвечает ряду приложений из-за относительно низкого выходного
импеданса.
Рисунок 3.19 представляет ЦАП, в котором в нагрузку поступают дво-
ично-взвешенные токи. Он имеет высокий выходной импеданс, и такие
схемы обычно работают в диапазоне выходных напряжений около 1 В. Глав-
ной проблемой этого и всех ранее рассмотренных ЦАП с двоичным взве-
шиванием остается тот факт, что высокое разрешение требует большого
диапазона сопротивлений, а это вызывает определенные трудности в про-
изводстве.
В 1970 году Analog Devices выпустила «//ЦАП» AD550 — монолитный 4-
разрядный токовый ключ, используемый в качестве компонента ИС (рис.
3.20). Обратите внимание, что двоично взвешенные токи задавались в нем
с помощью внешней тонкопленочной схемы, так как в то время еще не
применялась в интегральных микросхемах технология лазерной подстрой-
Старший
разряд
Рис 3.20. 4-разрядный ключ для ЦАП с двоичным взвешиванием «//ЦАП» AD550
3.1. Архитектуры ЦАП
Рис 3.21. 4-разрядный ЦАП с двоичным взвешиванием через резистивный формиро-
ватель тока лестничной схемы типа R-2R
ки тонкопленочных резисторов. Площади транзисторов такого ЦАП соот-
носятся между собой как 8 :4 : 2 :1, чем обеспечиваются одинаковые плот-
ности тока во всех транзисторах и оптимальное согласование по VBE (BE,
БАЗА-ЭМИТТЕР).
Другой способ получения двоично-взвешенных токов в четырехразряд-
ном переключателе представлен на рис. 3.21. Здесь лестничная схема типа
R-2R подключена к эмиттерам транзисторов, образуя двоичный делитель
тока.
Рисунок 3.22 демонстрирует 12-разрядный ЦАП с токовым выходом,
образованным тремя 4-разрядными переключателями с внутренними атте-
нюаторами с отношением 16:1. Заметьте, что отношение 16:1— это мак-
симально требуемое здесь соотношение сопротивлений. Этот монолитный
«квадропереключатель» (//ЦАП AD550) с тонкопленочной резистивной схе-
мой (AD850), блоком опорного напряжения и ОУ в начале 1970-х годов
Токовый выход
Рис 3.22. 12-разрядный ЦАП с токовым выходом, использующий каскадный двоич-
ный «квадропереключатель»
Глава 3. Архитектуры преобразователей данных
Логические входы
Воспроизводится по: James J. Pastoriza. Solid State Digital-to-
Analog Converter. U.S. Patent 3, 747, 088, filed December 30, 1970,
issued July 17, 1973.
Рис 3.23. 12-разрядный ЦАП 1970 года выпуска с токовыми «квадропереключателя-
ми», тонкопленочной резистивной цепочкой, ОУ и стабилизированным бло-
ком опорного напряжения
образовал популярный стандартный блок многих 12-разрядных ЦАП, а не-
сколько позднее появилась и соответствующая ИС. Идея 4-разрядного пе-
реключателя была сформулирована в патенте J.J. Pastoriza (197011).
Завершенный 12-разрядный ЦАП 1970 года выпуска, показанный на
рис. 3.23, состоит из трех монолитных «квадропереключателей», тонко-
пленочной резистивной цепочки, ОУ и блока опорного напряжения. Со-
гласование, выполняемое монолитными «квадропереключателями», наря-
ду с точностью внешней тонкопленочной схемы обеспечили 12-разряд -
ную обработку без дополнительной подстройки. Интересный и полный
анализ этого 12-разрядного ЦАП, построенного на «квадропереключате-
лях», можно найти в 12.
Одна из проблем реализации завершенных монолитных 12-разрядных
ЦАП на «квадропереключателях» состоит в том, что в 4-разрядном ЦАП
площади эмиттеров должны находиться в соотношении 8:4:2:1. Это тре-
бует в общей сложности 15 единиц площади эмиттеров, занимающих зна-
чительное пространство микросхемы. Через несколько лет после появле-
ния стандартных блоков на «квадропереключателях» Р. Brokaw из Analog
Devices изобрел способ, согласно которому только площади первых двух
источников тока должны соотноситься как 2:1. Последующие источники
тока имеют единичную площадь эмиттеров, но работают при других значе-
ниях плотности тока, сохраняющих стабильность тока в диапазоне темпе-
ратур. В классическом патенте Brokaw (заявка 1975 года) дается детальное
описание этого способа. Похоже, именно этот патент наиболее часто име-
ют в виду, когда говорят о преобразователях данных13.
Сегментированные ЦАП
До сих пор мы рассматривали базовые архитектуры ЦАП. Но, когда требу-
ется спроектировать конкретный ЦАП, вполне может оказаться, что ни
одна из этих архитектур не идеальна. В таких случаях приходится комбини-
ровать два и больше ЦАП в одном ЦАП высокого разрешения, чтобы полу-
3.1. Архитектуры ЦАП
чить необходимые характеристики. Комбинируемые ЦАП могут быть од-
ного или разных типов, из которых не все имеют одинаковое разрешение.
На практике один ЦАП работает со старшими разрядами, другой с млад-
шими, а их выходы приходится суммировать тем или иным способом. Та-
кой подход называют сегментацией, а получаемые сложные структуры —
сегментированными ЦАП. Разработано много разнообразных типов сег-
ментированных ЦАП, и некоторые, хотя и не все из них, мы проиллюстри-
руем на ряде схем.
Рисунок 3.24 представляет два резистивных сегментированных ЦАП с
выходом по напряжению. Архитектуру на рис. 3.24, а, иногда называют
делителем Kelvin-Varley или цуговым ЦАП. Так как первый и второй каска-
ды разделены буферами, второй цуг не подгружает первый ЦАП, и нет
необходимости в использовании одинаковых резисторов в разных цугах.
Тем не менее важно, чтобы резисторы каждого цуга были идентичными,
иначе ЦАП не будет линейным. В приведенных примерах первый и второй
каскады выполнены трехразрядными. Для общности допустим, что первый
(старший) каскад имеет разрешение М разрядов, а второй (младший) — К раз-
рядов, т. е. в сумме N= М + К. ЦАП старших разрядов построен в виде цуга
из 2м одинаковых резисторов, а ряд из 2К одинаковых резисторов образует
ЦАП младших разрядов.
Конечно, буферные усилители создают задержку, которая может при-
вести к немонотонности буферируемого сегментированного цугового ЦАП.
В простой конфигурации буферного делителя Kelvin-Varley (рис. 3.24, а)
буфер А всегда находится «ниже» (под более низким потенциалом), чем
буфер В, поэтому не требуется специального обозначения «А» на выводе
младших разрядов ЦАП. Дешифрация данных состоит в простом выборе
одного из двух вариантов. Немонотонность из-за буферной задержки явля-
ется главным недостатком этой конфигурации.
В то же время, если дешифрацию старших разрядов ЦАП выполнять
более сложным способом, подключая буфер А к выводу «А» старших разря-
а б
Делитель Kelvin-Varley
(«цуговый ЦАП»)
Делитель Кельвина
и лестничная схема типа R-2R
Рис 3.24. Сегментированные ЦАП с выходом по напряжению
(Г200 Глава 3. Архитектуры преобразователей данных
дов ЦАП, а буфер В к выводу «В», то немонотонности можно избежать.
Конечно, дешифрация младших разрядов ЦАП должна изменять направле-
ние каждый раз, «перепрыгивая» с одного буфера на другой, а выводы «А»
и «В» в ЦАП младших разрядов можно не использовать, но в любом случае
речь идет о повышении логической сложности ради улучшения характери-
стик.
Вместо того чтобы использовать второй цуг резисторов, можно приме-
нить двоичный ЦАП для формирования трех младших разрядов, как пока-
зано на рис. 3.24, б. Изготовить лестничную схему типа R-2R очень высо-
кого разрешения довольно трудно. Вернее, сложно обеспечить ее моно-
тонность. Поэтому принято добиваться высокого разрешения ЦАП с
помощью лестничной схемы в младших разрядах и с помощью других
структур в 3—5 старших разрядах. Подобного рода ЦАП с выходом по на-
пряжению (рис. 3.24, б) содержит цуговый З-разрядный ЦАП и 3-разряд-
ную буферированную лестничную схему.
Небуферированная версия сегментированного цугового ЦАП показана
на рис. 3.25. Эта версия воплощает более красивую идею (и может быть
реализована с применением дешевой КМОП-технологии, использующей
резисторы и ключи, а не усилители). Она полностью монотонна. Резисторы
обоих цугов должны быть одинаковыми, за исключением верхнего резисто-
ра цуга старших разрядов, который имеет меньший размер — (72)*от вели-
чины остальных сопротивлений. Цуг младших разрядов содержит 2К — 1
вместо 2К резисторов. Так как отсутствуют буферы, цуг младших разрядов
подключается к одному из резисторов цуга старших разрядов, нагружая его.
При этом напряжение на этом резисторе снижается ровно на один млад-
ший разряд ЦАП. Выходной импеданс ЦАП без буферизации зависит от
значения цифрового кода.
Чтобы прояснить эту красивую концепцию, мгновенные значения на-
пряжений на каждом отводе здесь определены и размечены применительно
J5
64
_4б
64
Выход
--о
Публикуется по: Dennis Dempsey and Christopher Gorman.
Digital-to-Analog Converter. U.S. Patent 5,969,657, filed July 27,
1997, issued October 19, 1999.
Рис 3.25. Патентованная архитектура сегментированного цугового ЦАП без буферизации
3.1. Архитектуры ЦАП
к 6-разрядному сегментированному ЦАП, состоящему из двух 3-разрядных
цугов, показанных на рис. 3.25. Читателю полезно провести простой ана-
лиз, двигаясь от второго цуга и подключаясь к любому резистору первого
цуга, чтобы проверить числовые значения. Детальный математический ана-
лиз сегментированного ЦАП на цугах без буферизации приведен в описа-
нии соответствующего патента, выданного D. Dempsey и С. Gorman из Analog
Devices в 1997 году14.
Быстродействующие ЦАП для видео, телекоммуникаций и других ВЧ-
приложений обычно строятся на базе матриц источников тока с полной
дешифрацией. Два-три младших разряда могут строиться на источниках
тока с двоичным взвешиванием. Очень важно, чтобы такие ЦАП обладали
минимальными искажениями на высоких частотах. Для этого в их конст-
рукции внесен ряд важных особенностей, требующих рассмотрения.
Во-первых, токи здесь никогда не включаются или выключаются, а пе-
ренаправляются в ту или иную позицию. Отключение тока на высокой ча-
стоте вызывает реактивные всплески и занимает больше времени, чем пе-
ренаправление, в основном из-за перезарядки конденсаторов.
Во-вторых, важно обеспечить минимальное изменение напряжения на
микросхеме при переключении тока. При изменении напряжений проис-
ходит заряд паразитных емкостей, вызывающий связанные с эти выбросы.
Наконец, перед тем как новые данные поступят в ЦАП, следует прове-
сти их дешифрацию, чтобы убедиться, что данные готовы к одновременно-
му приложению ко всем ключам ЦАП. Как правило, это выполняется с
помощью защелок при каждом ключе в матрице с полной дешифрацией.
Когда все ключи мгновенно и одновременно меняют состояние, отсутству-
ют сбои, вызванные переносом данных. Тщательным расчетом задержек
прохождения сигнала через микросхему, постоянных времени переключе-
а
Резистивный
КЫхО
З-разрядный термометровый ЦАП
старших разрядов
4-разрядный ЦАП
типа R-2R
б
На базе источников тока
-Q im
<7
Рис. 3.26. Сегментированные ЦАП с токовым выходом
Глава 3. Архитектуры преобразователей данных
З-разрядный термометровый ЦАП 3-разрядный термометровый ЦАП
старших разрядов младших разрядов
Рис. 3.27. 6-разрядный сегментированный ЦАП с токовым выходом, построенный на
основе двух 3-разрядных термометровых ЦАП
ния и паразитных емкостей можно достичь высокой степени синхрониза-
ции и свести к минимуму ошибки, вызванные сбоем ключей.
Два примера структур сегментированных ЦАП с токовым выходом по-
казаны на рис. 3.26. Рисунок 3.26, а, демонстрирует резистивный подход к
построению 7-разрядного ЦАП, в котором 3 старших разряда ЦАП проходят
полную дешифрацию, а 4 младших разряда получаются из схемы типа R-2R.
Рисунок 3.26, 6, представляет подобную реализацию с использованием ис-
точников тока. Применение источников тока, кстати, больше распростра-
нено в современных высокоскоростных ЦАП.
Часто при построении полного ЦАП удобнее использовать более одной
секции термометрового ЦАП с полной дешифрацией. Рисунок 3.27 пока-
зывает 6-разрядный ЦАП, собранный из двух 3-разрядных ЦАП с полной
дешифрацией. Как уже говорилось, сигналы управления на токовые ключи
должны поступать одновременно с параллельных защелок, чтобы свести к
минимуму сбои выходного сигнала.
14-разрядный AD9775 TxDACT со 160-MSPS (млн выборок/с) на входе и
400-MSPS на выходе имеет три секции сегментации, показанные на рис. 3.28.
Другие представители семейства AD977x имеют это же ядро.
Первые 5 старших разрядов проходят полную дешифрацию и управля-
ют 31 одинаковым токовым ключом, каждый из которых питает 512 LSB
Тактовые
импульсы
31 токовый
ключ
31
5
31
5-ТО-31
4
4-ТО-15
14-раз-
рядная
защелка
51-раз-
рядная
защелка
Дешиф-
рация
6—9 раз-
рядов
Дешиф-
рация
1—5 раз-
рядов
15 токовых
ключей
/ = 512
младших
разрядов
/ = 32
младших
разряда
5 двоичных
токовых
ключей
/ = 32
мл. разр.
14
Токовый
выход
---О
FS = 2 мА-20 мА
Замечание: дифференциальные выходы
не показаны.
Рис. 3.28. 14-разрядное КМОП-ядро ЦАП типа AD9775 TxDAC
Рис. 3.29. Токовые ключи на рМОП-транзисторах
(младших разрядов) тока. Следующие 4 разряда дешифруются в 15 линий,
управляющих 15 токовыми ключами, каждый из которых питает 32 LSB
тока. 5 младших разрядов фиксируются защелками для управления тради-
ционным ЦАП двоичного взвешивания, который питает по одному LSB
на уровне выхода. Все защелки вместе с 51 токовым ключом удовлетворя-
ют требованиям этой чрезвычайно устойчивой к возникновению выбро-
сов архитектуры.
Базовая ячейка токового ключа в семействе TxDAC образует дифферен-
циальную пару на рМОП-транзисторах, показанную на рис. 3.29. Дифферен-
циальные пары управляются низкоуровневой логикой с короткими коммута-
ционными процессами и малыми временными сдвигами. С выходов ЦАП
текут симметричные дифференциальные токи, благодаря которым сводятся
к минимуму составляющие искажений четного порядка (особенно при уп-
равлении от дифференциальных выходов таких звеньев, как трансформатор
или преобразователь тока в напряжение на дифференциальном ОУ).
Завершенная архитектура семейств AD977x TxDACT и AD985x-DDS яв-
ляется примером замечательного компромисса между мощностью и экс-
плуатационными характеристиками. В ней реализован полный спектр фун-
кций ЦАП на стадартных КМОП-приборах без тонкопленочных резисто-
ров. Однополярное питание +3,3 или +5 В делает это устройство чрезвычайно
привлекательным для портативных и маломощных приложений.
Интерполяционные ЦАП с избыточной дискретизацией
Базовую концепцию интерполяционных ЦАП с избыточной дискретизаци-
ей представляет рис. 3.30. Nразрядов входных данных поступают со скоро-
стью fs. Цифровой интерполяционный фильтр синхронизируется частотой
избыточной дискретизации Kfs, вставляя дополнительные метки данных.
На рис. 3.30 показан спектр выходной частоты. Критерий Найквиста (А)
предъявляет довольно строгие требования к аналоговому фильтру по по-
давлению смещенных частот. Благодаря избыточной дискретизации и ин-
терполяции требования к фильтрации существенно снижаются, как следует
из (В). Кроме того, поскольку шум квантования занимает более широкий
Глава 3. Архитектуры преобразователей данных
(от умножителя синхроимпульсов ФАПЧ)
Фильтр
от смещенных
(комбина-
ционных)
частот
Аналоговый
выход
-----О
а
По критерию
Найквиста
Рис. 3.30. Интерполяционный ЦАП с избыточной дискретизацией
диапазон, чем полоса пропускания сигнала, улучшается соотношение сиг-
нал-шум. Удвоение исходной частоты дискретизации (к = 2) повышает от-
ношение на 3 дБ, а при к = 4 — на 6 дБ. Это давало значительное преиму-
щество первым проигрывателям компакт-дисков, которые сегодня в боль-
шинстве своем строятся на сигма-дельта преобразователях.
Одна из самых ранних публикаций по ЦАП с интерполяцией и избы-
точной дискретизацией вышла в 1974 году и принадлежит Ritchie, Candy и
Ninke16. Вслед за ней, в 1981 году, появился патент Mussman и Korte17.
Интерполяционные фильтры используются не только в высокоскорост-
ных ЦАП. Они нашли применение в последних типах ЦАП, которые будут
обсуждаться позднее в разд. 3.3, в сигма-дельта ЦАП. Когда требуется вы-
сокое разрешение, а выходная полоса пропускания меньше нескольких со-
тен килогерц, сигма-дельта технология наиболее приемлема.
Во многих ЦАП есть встроенное опорное напряжение. В ряде случаев
опорное напряжение можно незначительно менять регулированием усиле-
ния, но часто нельзя. Другим ЦАП требуется внешний источник опорного
напряжения, но и оно может меняться в очень узком диапазоне. Во всех
ЦАП выходной сигнал является произведением задающего напряжения и
цифрового кода. В этом смысле все ЦАП относятся к категории перемно-
жающих ЦАП. Но есть ЦАП, у которых внешнее опорное напряжение мо-
жет изменяться в широком диапазоне. Это настоящие «перемножающие
ЦАП», или ПЦАП, и в них аналоговый выходной сигнал представляет со-
бой произведение аналогового входного сигнала и цифрового кода, как
показано на рис. 3.31. ПЦАП чрезвычайно полезны во многих приложени-
Вход опорного
напряжения
V», О—
Аналоговый выход =
= VREF х цифровой вход х константа
Цифровой
вход О
Перемножающие'
ЦАП /
Аналоговый
выход
-----О
Сложно поддерживать дифференциальную
линейность, когда UREF стремится к нулю
Рис. 3.31. Умножающий ЦАП (ПЦАП)
3.1. Архитектуры ЦАП 205
Рис. 3.32. Перемножающий ЦАП с лестничной схемой типа R-2R с токовым выходом
и КМОП-ключами
ях. Строго говоря, ПЦАП должен продолжать корректно работать, даже
если опорное напряжение уменьшить до нуля, но часто термин «ПЦАП»
используется в ограниченном смысле, т. к. допускается изменение опорно-
го напряжения в диапазоне 10 : 1 и даже 6:1. Было бы правильнее такие
приборы называть полуперемножающими ЦАП.
Некоторые типы ПЦАП работают только от опорного напряжения од-
ной полярности (в двух квадрантах), а другие управляются биполярным
(положительным и отрицательным) опорным напряжением и могут функ-
ционировать при опорных сигналах переменного тока. Биполярные ЦАП,
работающие от биполярного опорного напряжения, называют четырехквад-
рантными ПЦАП. Отдельные типы ПЦАП организованы таким образом,
что могут работать с опорными напряжениями, существенно превышаю-
щими напряжение питания.
Лестничные схемы с токовым выходом и КМОП-ключами рассчитаны
на положительные, отрицательные и переменные VREF, как показано на
рис. 3.32. Их можно рассматривать как простую реализацию ПЦАП, хотя
возможны и другие реализации.
Нелинейные ЦАП
До сих пор мы все внимание уделяли обеспечению хорошей дифференци-
альной и интегральной линейности. Но есть ситуации, когда требуется при-
менение существенно нелинейных АЦП и ЦАП (при наличии хорошей
дифференциальной линейности), особенно когда обрабатываются сигналы
широкого динамического диапазона. Одно из первых применений нели-
нейных преобразователей данных связано с оцифровыванием сигналов в
диапазоне тональных частот системами ИКМ. Основной вклад в решение
этой проблемы внесла Bell Labs в период развития систем ВЧ-связи Т1.
Поводом для создания нелинейных АЦП и ЦАП стала необходимость умень-
шения общего числа разрядов (с соответствующим повышением скорости
последовательной передачи данных), передаваемых по цифровым каналам
(Г206 Глава 3. Архитектуры преобразователей данных
тональных частот. Прямое линейное кодирование тональных сигналов тре-
бует использования 11—12 разрядов при частоте дискретизации 8 тыс. вы-
борок/с. В 1960-х годах в Bell Labs доказали достаточность 7-разрядного
нелинейного кодирования. Позднее, в 1970-х годах, пришли к 8-разрядно-
му нелинейному кодированию, обеспечивающему более качественное пре-
образование данных18-23.
Благодаря нелинейной передаточной характеристике часть уровней кван-
тования выносится за пределы диапазона, в котором большие уровни отво-
дятся для слабых сигналов, так чтобы уменьшающиеся уровни соответство-
вали сигналам большой амплитуды. Фактически этим снижается шум кван-
тования слабых сигналов (у которых он более заметен), но повышается
зашумленность больших сигналов (менее заметная). Для описания такого
способа преобразования используется термин «компандирование».
Стандартом «Bell //-255» или просто «//-законом» называют логарифми-
ческую переходную характеристику. Подобный стандарт, разработанный в
Европе, именуется «A-законом», //-закон от Bell ориентирован на дина-
мический диапазон 4000: 1 с использованием 8 разрядов, в то время как
8-разрядный линейный преобразователь данных обеспечивает работу толь-
ко в диапазоне 256 :1.
В первом поколении каналов передачи данных (D1) генерировались
логарифмические переходные характеристики на резистивно-диодных схе-
мах с температурной компенсацией для «компрессоров», ориентированных
на 7-разрядные линейные АЦП передатчика. Соответственно, перед 7-раз-
рядными ЦАП приемника устанавливались резистивно-диодные «расши-
рители», реализующие обратную переходную характеристику. В следующем
поколении (D2) использовались уже нелинейные АЦП и ЦАП с компрес-
сией и расширением, более надежные и дешевые, без диодных схем темпе-
ратурной компенсации.
В классической работе 1953 года B.D. Smith предложил для построения
АЦП последовательного приближения включить нелинейный ЦАП в цепь
обратной связи, формируя таким образом обратную передаточную характе-
ристику ЦАП8. Один и тот же базисный ЦАП мог таким образом быть
использован в АЦП и для реконструкции ЦАП. Позднее, в 1960-х годах и в
начале 1970-х годов, технология нелинейных АЦП и ЦАП, использующая
кусочносоответствующую аппроксимацию желаемой передаточной функ-
ции, привела к созданию многочисленных дешевых приложений18-23. Эти
нелинейные 8-разрядные преобразователи данных, работающие на скорос-
тях 8 тыс. выборок/с, стали популярными стандартными блоками телеком-
муникаций.
Нелинейная передаточная характеристика 8-разрядного ЦАП вначале
делится на 16 сегментов (хорд) различного наклона. Наклоны определяют-
ся требуемой нелинейной переходной характеристикой. 4 старших разряда
формируют сегмент, в который попадает определенная точка данных. Каж-
дый сегмент затем вновь подразделяется по 16 одинаковым уровням кван-
тования четырьмя младшими разрядами 8-разрядного слова. Этот процесс
показан на рис. 3.33 для 6-разрядного ЦАП, где первые 3 разряда иденти-
фицируют одну из 8 возможных хорд, и каждая хорда потом делится на
8 равных уровней тремя младшими разрядами. 3 старших разряда формиру-
3.1. Архитектуры ЦАП 207
Рис 3.33. Нелинейный 6-разрядный сегментированный ЦАП
ются с помощью нелинейного цугового ЦАП, а 3 младших разряда генери-
рует 3-разрядный ЦАП типа R-2R.
В 1982 году Analog Devices выпустила монолитный ПЦАП LOGDACT
AD7111, характеризуемый широким динамическим диапазоном с логариф-
мической переходной характеристикой. Базовый ЦАП в LOGDAC пред-
ставлен 17-разрядным ЦАП типа R-2R с выходом по напряжению и с пред-
шествующим 8-разрядным входным дешифратором (рис. 3.34). LOGDAC
может ослаблять аналоговый входной сигнал VIN в диапазоне ослабления
от 0 до 88,5 дБ с шагом 0,375 дБ. Величина ослабления в ЦАП задается
нелинейно кодированным 8-разрядным словом, выраженным на логичес-
ком языке дешифратора. Это 8-разрядное слово преобразуется таблично в
соответствующее 17-разрядное слово, которое поступает на 17-разрядную
лестницу типа R-2R. Функциональная схема LOGDAC приведена на рис.
3.34. К тому же, чтобы реализовать логарифмическую переходную характе-
ристику, LOGDAC построен как полный 4-квадрантный ПЦАП.
CS WR
D0—D7 Цифровая
«земля»
R
2R
Рис. 3.34. AD7111 LOGDAC® (выполнен в 1982 году)
Младши<
2R-.\ 2R
Аналоговая
«земля»
R
Глава 3. Архитектуры преобразователей данных
М > N
Нелинейные
кодируемые
данные низкого
разрешения
Логика дешифрации
может быть аппаратной,
программной или
в виде ПЗУ
Линейный ЦАП
Нелинейный
высокого разрешения аналоговый выход
Рис. 3.35. Обобщенный нелинейный ЦАП
С появлением линейных АЦП и ЦАП высокого разрешения метод,
используемый в LOGDACT, начал широко применяться при воспроизвод-
стве различных нелинейных переходных характеристик, компандирующих
по «//-закону» и «A-закону» в телекоммуникациях и других приложениях.
Рисунок 3.35 представляет обобщенную структурную схему, отражающую
современный подход. Входные данные, компандируемые по «//-закону» или
«A-закону», таблично преобразуются в точки данных передаточной харак-
теристики ЦАП высокого разрешения. Это преобразование выполняется на
основе простой таблицы, выполненной аппаратно, программно или в виде
ПЗУ. Подобный нелинейный АЦП можно сконструировать, оцифровывая
аналоговый входной сигнал в АЦП высокого разрешения и преобразуя таб-
лично точки данных в более короткие слова. Важное преимущество этого
метода состоит в том, что передаточную кривую не надо аппроксимировать
прямолинейными сегментами, как в предыдущем случае, что дает большую
точность.
Счетные ЦАП с широтно-импульсной модуляцией (ШИМ)
Гораздо менее популярны, чем выше описанные ЦАП с параллельным вхо-
дом, различные типы ЦАП со счетчиками, формирующие выходное напря-
жение, пропорциональное цифровой комбинации на входе. Классический
патент А.Н. Reeves 1939 года, посвященный ИКМ, описывает 5-разрядные
счетные АЦП и ЦАП. Схема его ЦАП приведена на рис. 3.36. Работа ее
проста. Строб выборок запускает счетчик, содержащий кодовую комбина-
цию, и одновременно устанавливает /?/5-триггер. Код счетчика быстро на-
растает, и, когда все его разряды устанавливаются в единицы, 7?/5-триггер
сбрасывается. На выходе 7?/5-триггера формируются импульсы ШИМ, дли-
тельность которых пропорциональна дополнению к кодовой комбинации.
В другой разновидности метода строб выборок запускает генератор ступен-
чатого напряжения, а импульс переполнения активизирует схему выборки
и хранения, которая отсчитывает и сохраняет соответствующий уровень
генератора ступенек.
Разрешающая способность должна соответствовать темпу обновления
данных счетного ЦАП, так как счетчику приходится просчитывать любые
допустимые выходные данные на интервале дискретизации. Преимуществом
счетных ЦАП является их монотонность.
3.1. Архитектуры ЦАП
Входные
данные
Циклические последовательные ЦАП
Циклические последовательные ЦАП сегодня используются редко, но на
заре ИКМ они обладали определенной привлекательностью благодаря дос-
тоинствам, связанным с последовательной природой импульсного потока
ИКМ. Пример 4-разрядной схемы, показанной на рис. 3.37, взят из патента
1948 года25. Корректность работы этого ЦАП зависит от правильного по-
рядка поступления данных: младший разряд должен идти первым, а стар-
ший — последним.
Допустим, что вначале заряд конденсатора равен нулю, и последова-
тельность данных представлена двоичным кодом 1011. Приход импульса в
позиции 1 (n = 1) замыкает 51 и подключает 52 к выходу усилителя cG= 0,5.
Напряжение VR/2 запоминается на конденсаторе, после чего 52 пере-
ключается на вход сумматора. Приход импульса в позицию 2 (п = 2)
Младший
разряд
1 1 !°: 1
п = 1 л=2л=3л=4
Последовательная ИКМ
Код = 1011
п = 0, Уо = 0
0=1,1/, = VR/2
n = 2,V2= VR/4 + Vr/2
n = 3, V3=VR/8 + VR/4
n = 4,V* = l/fl/16 + l/fl/8+ Vr/2 = 11 l/fl/16
Рис 3.37. 4-разрядный циклический последовательный ЦАП
210 Глава 3. Архитектуры преобразователей данных
замыкает 52 и подключает VR к сумматору, другой вход которого равен VR/2.
Затем S2 подключается к выходу усилителя, и заряд конденсатора стано-
вится КЛ/4 + VR/2. Отсутствие импульса в позиции 3 (п = 3) приводит к
делению пополам выходного сигнала конденсатора, оставляя на выходе
усилителя Vr/8 + Ру4. Это напряжение подается в конденсатор через 52.
В последнем цикле приход импульса в позиции 4 (п = 4) добавляет VR к
КЛ/8 + КЛ/4, и это напряжение затем делится пополам, оставляя в итоге на
конденсаторе КЛ/16 + VR/i + VR/2 = ПК^/16. Это выходное напряжение
затем подлежит отсчету в схеме выборки и хранения, которая сохраняет
выходное напряжение до окончания следующего цикла.
Следует отметить, что эта архитектура может использоваться и для уп-
равления данными ИКМ, когда первым поступает старший разряд, если
использовать усилитель с G = 2 и провести несколько других небольших
изменений, связанных с масштабированием сигнала.
Поистине элегантный для своего времени последовательный ЦАП типа
ИКМ был разработан С.Е. Shannon и A.J. Rack в 1948 году2627. Автором
оригинальной концепции был Shannon, но Rack добавил усовершенствова-
ние, которое сделало ЦАП менее чувствительным к дрожанию импульсов в
потоке ИКМ.
На рис. 3.38, а, импульсная последовательность ИКМ (впереди млад-
ший разряд, а в конце старший) управляет ключом, который кратковремен-
но замыкается при поступлении импульса (логическая «1»), тем самым за-
ряжая конденсатор фиксированным потенциалом. Если в данной импульс-
ной позиции нет импульса (логический «О»), ключ остается открытым, и
конденсатор не подзаряжается. Постоянная времени RC выбирается таким
образом, чтобы конденсатор разряжался точно до половины начального
значения во временном интервале Т между импульсами ИКМ. Соответ-
ствующее уравнение имеет вид: RC = Т/ In 2.
На диаграмме показано напряжение конденсатора для двоичного кода
1011. Вертикальная ось нормирована таким образом, что одна единица
Рис 3.38. Преобразователь Shannon и Shannon-Rack
3.1. Архитектуры ЦАП 21 I
представляет изменение напряжения, вызываемое одним замыканием ключа.
В конце четвертого импульса напряжение конденсатора, равное н/16, соот-
ветствует двоичному коду 1011 с весом младшего разряда 716. Тогда же, в
конце четвертого импульса, запускается схема выборки и хранения, кото-
рая воспринимает и запоминает напряжение конденсатора до следующего
цикла ИКМ.
Нетрудно заметить, что любое дрожание импульсной последовательно-
сти ИКМ или тактов выборок вызывает ошибку в выходном хранимом на-
пряжении. A.J. Rack придумал изящное решение этой проблемы, показан-
ное на рис. 3.38, б. Rack добавил второй конденсатор, шунтированный од-
новременно резистором и катушкой индуктивности, который включил в
цепь исходной цепочки Rl — С1. Значения второй емкости С 2 и индуктив-
ности L подбираются так, чтобы вызвать резонанс на частоте ИКМ 1/Т.
Второй резистор R 2 рассчитывается таким образом, чтобы колебания в
резонансной цепи затухали в каждом периоде ровно на пол-амплитуды.
Результирующая форма сигнала имеет области с нулевым наклоном протя-
женностью до одного периода Т. Это делает ток менее чувствительным к
дрожанию импульсов как в импульсной последовательности ИКМ, так и в
схеме выборки и хранения. Преобразователь Shannon-Rack был реализован
в экспериментальной системе Bell Labs в конце 1940-х годов, описанной в
27. Его разрешающая способность составляла 7 разрядов, частота дискрети-
зации составляла 8 тыс. выборок/с, а частота импульсов ИКМ 672 кГц.
Другие архитектуры с малыми искажениями
Современные сегментные с малой вероятностью выбросов ЦАП имеют очень
малую дисторцию. Тем не менее в ряде случаев можно достичь дальнейше-
го снижения уровня искажений с помощью техники, именуемой «деглит-
чинг». Подобное решение, выполненное на базе схемы слежения и хране-
ния, иллюстрируется рис. 3.39.
Рис. 3.39. Выходные сигналы устойчивого к выбросам ЦАП со схемой слежения и
хранения
212 Глава 3. Архитектуры преобразователей данных
Непосредственно перед фиксацией новых данных в ЦАП схема слеже-
ния и хранения переводится в режим хранения, благодаря чему коммутаци-
онные ошибки не проходят на выход. Переходные процессы при переклю-
чениях схемы слежения и хранения не зависят от кода и проявляются на
частоте дискретизации, поэтому без труда фильтруются. Тем не менее сле-
дует уделить особое внимание достижению оптимального временного соот-
ношения между тактами слежения и хранения и обновления данных. Кро-
ме того, дисторция схемы слежения и хранения должна быть, по крайней
мере, на 6—10 дБ лучше, чем у ЦАП, в противном случае не произойдет
улучшения динамического диапазона, свободного от искажений. Получить
хорошие результаты с помощью внешней устойчивой к выбросам схемы
слежения и хранения становится все труднее по мере приближения частот
отсчетов к 100 млн выборок/с. Во многих случаях разработчикам следует
попробовать приборы, специализированные на низкий уровень искажений,
без дополнительных внешних схем, хотя эта техника все же может оказать-
ся полезной для ряда приложений.
Цифровые аудиоприложения нуждаются в ЦАП с разрешающей способ-
ностью свыше 16 разрядов и с чрезвычайно низким общим коэффициентом
гармоник. Один из путей создания таких приборов предполагает использова-
ние рассмотренной раньше сегментированной архитектуры с несколькими
дешифрированными старшими разрядами. За такой архитектурой стоит срав-
нительно большая дифференциальная нелинейность при переходах в области
старших разрядов, в то время как для снижения уровня аудиоискажений нуж-
на низкая дифференциальная нелинейность. Эту проблему можно обойти с
помощью цифрового сумматора, создающего цифровое смещение кода ЦАП
такое, что переход старшего разряда входного кода будет смещен от среднего
уровня переходной характеристики ЦАП. Такое смещение компенсируется
аналоговым смещением на выходе ЦАП, чтобы восстановить прежний уро-
вень постоянного тока. Этот метод, конечно, выводит из использования часть
диапазона ЦАП, но снижает искажения в средней части диапазона.
От регистра
с последовательным
входом
Рис 3.40. Цифровое смещение минимизирует искажение слабых сигналов
в средней части шкалы
Токовый
выход
3.1. Архитектуры ЦАП
Рисунок 3.40 представляет 20-разрядный ЦАП AD1862 (1990 года вы-
пуска), в котором цифровое смещение в 716 полной шкалы добавляется к
входному 20-разрядному двоичному слову. ЦДП выполняет полную дешиф-
рацию 3 старших разрядов и обрабатывает 17 младших разрядов с помощью
двоичной секции типа R-2R. Для защиты от ограничения на положитель-
ном конце диапазона выход переноса сумматора управляет дополнитель-
ным токовым ключом с весовым коэффициентом, равным четвертому раз-
ряду. После этого ток смещения, равный 716 полной шкалы, вычитается из
выходного сигнала ЦАП для компенсации постоянного цифрового смеще-
ния. Следует отметить, что после появления AD1862 в 1990 году наиболее
современные устойчивые к искажениям аудиоЦАП почти исключительно
стали использовать сигма-дельта архитектуру.
Обсуждение логики ЦАП
В первых монолитных ЦАП если и использовалась какая-либо логическая
схемотехника, то очень простая. Поэтому, чтобы данные присутствовали на
выходе, их приходилось держать на цифровых входах. Сегодня почти все
ЦАП фиксируют данные, которые требуется только занести в них, не удер-
живая на входах. В некоторых ЦАП данные даже сохраняются до отключе-
ния питания.
Известно бесконечное множество входных структур ЦАП, которые мы
не будем здесь обсуждать, и почти все они имеют двойную буферизацию.
ЦАП с двойной буферизацией оснащены двумя уровнями защелок. Внача-
ле данные фиксируются в первом уровне, а затем поступают на второй
уровень, как показано на рис. 3.41. Такая организация полезна по двум
причинам.
Во-первых, она рассчитана на разнообразные пути поступления данных
в ЦАП. Действительно ЦАП без фиксации или с одним фиксатором дол-
жен заполняться параллельно, одновременно по всем разрядам. В против-
ном случае его выход будет изменяться по мере поступления данных. На-
против, ЦАП с двойной буферизацией может обрабатывать и параллель-
ные, и последовательные данные, 4- и 8-разрядные слова и т. п. При этом
выход не будет изменяться, пока не завершится поступление данных и ЦАП
не получит команду на обновление.
Выходной строб —
может поступать
на многие ЦАП
Рис 3.41. ЦАП с двойной буферизацией обрабатывает сложные структуры входных
данных и выполняет одновременное обновление данных
214 Глава 3. Архитектуры преобразователей данных
Другое удобство структуры с двойной буферизацией состоит в том, что она
позволяет одновременно обновлять сразу много ЦАП. Данные произвольно
заполняют первые уровни каждого ЦАП, а по всеобщей готовности выходные
буферы всех ЦАП одновременно обновляются. Существует много приложе-
ний, в которых выходы нескольких ЦАП должны одновременно изменяться, и
структура с двойной буферизацией позволяет легко решать эту задачу.
Большинство ранних монолитных ЦАП высокого разрешения снабжались
параллельным или побайтным портом данных и должны были подключаться к
параллельным шинам данных с адресными дешифраторами. Микропроцессо-
ры общались с ними как с элементами малой памяти, предназначенными ис-
ключительно для записи. (Иногда, правда довольно редко, параллельные ЦАП
рассчитаны не только на запись, но и на самостоятельное считывание дан-
ных.) ЦАП, подключенный к шине данных, подвержен логическому шуму от
емкостной коммутации, переходящему с входной шины на аналоговый выход,
поэтому многие ЦАП последних моделей обрабатывают последовательные
структуры данных. Они менее уязвимы для подобного рода шума (так как
имеют меньше контактов, несущих шум) и занимают меньше места на плате.
Поэтому они часто оказываются более удобными для работы с современными
микропроцессорами, в большинстве своем оснащенными последовательными
портами. Во многих, хотя и не во всех, таких последовательных ЦАП выходы
и входы данных согласуются для последовательного подключения к одному
последовательному порту с обеспечением синхронизации данных всех входов.
Эта организация часто именуется гирляндой.
Разумеется, последовательные ЦАП не годятся там, где требуется быстрое
обновление и где ожидается высокая тактовая скорость данных. Некоторые
высокоскоростные ЦАП оснащают двумя параллельными портами данных,
попеременно используемыми в мультиплексном режиме (иногда это называ-
ется входной «пинг-понг»), чтобы снизить требуемый темп обработки данных
каждого порта (рис. 3.42). ЦАП с попеременной загрузкой (пинг-понг), пока-
занный на схеме, попеременно загружается через порты А и В по нарастающе-
му и спадающему фронтам тактовых импульсов, которые должны иметь коэф-
фициент заполнения порядка 50 : 50. Внутренний тактируемый умножитель
тактов обеспечивает обновление ЦАП по А и В в темпе точно 50:50, даже если
внешний тактовый генератор не обладает необходимой точностью.
Рис 3.42. Высокоскоростной ЦАП с попеременной загрузкой (пинг-понг)
3.1. Архитектуры ЦАП
Список литературы
3.1. Архитектуры ЦАП
1. Peter I. Wold. Signal-Receiving System. U.S. Patent 1, 514, 753, filed November 19,
1920, issued November 11, 1924. (thermometer DAC using relays and vacuum tubes).
2. Clarence A. Sprague. Selective System. U.S. Patent 1, 593, 993, filed November 10,
1921, issued July 27, 1926. (thermometer DAC using relays and vacuum tubes).
3. Leland K. Swart. Gas-Filled Tube and Circuit Therefor. U.S. Patent 2, 032, 514, filed
June 1, 1935, issued March 3, 1936. (a thermometer DAC based on vacuum tube switches).
4. Robert Adams, Khiem Nguyen, and Karl Sweetland. A 113 dB SNR Oversampling
DAC with Segmented Noise-Shaped Scrambling. ISSCC Digest of Technical Papers, vol. 41,
1998, pp. 62, 63, 413. (describes a segmented audio DAC with data scrambling).
5. Robert W. Adams and Tom W. Kwan. Data-directed Scrambler for Multi-bit Noise-
shaping D/А. Converters. U.S. Patent 5, 404, 142, filed August 5, 1993, issued April 4,
1995. (describes a segmented audio DAC with data scrambling).
6. Paul M. Rainey. Facimile Telegraph System. U.S. Patent 1, 608, 527, filed July 20,
1921, issued November 30, 1926. (the first PCM patent. Also shows a relay-based 5-bit
electro-mechanicalflash converter and a binary DAC using relays and multiple resistors).
7. John C. Schelleng. Code Modulation Communication System. U.S. Patent 2, 453,
461, Filed June 19, 1946, Issued November 9, 1948. (vacuum tube binary DAC using binary
weighted voltages summed into load resistor with equal resistor weights).
8. B.D. Smith. Coding by Feedback Methods. Proceedings of the I. R. E., Vol. 41,
August 1953, pp. 1053—1058. (Smith uses an internal binary weighted DAC and also points
out that a non-linear transfer function can be achieved by using a DAC with non-uniform bit
weights, a technique which is widely used in todayys voiceband ADCs with built-in companding.
He was also one of the first to propose using an R/2R ladder network within the DAC core).
9. Bruce K. Smith. Digital Attenuator. U.S. Patent 1, 976, 527, filed July 17, 1958,
issued March 21, 1961. (describes a transistorized voltage output DAC similar to B. D. Smith
above).
10. Bernard M. Gordon and Robert P. Talambiras. Signal Conversion Apparatus. U.S.
Patent 3, 108, 266, filed July 22, 1955, issued October 22, 1963. (classic patent describing
Gordonys 11-bit, 50kSPS vacuum tube successive approximation ADC done at Epsco. The
internal DA C represents the first known use of equal currents switched into an R/2R ladder
network.)
11. James J. Pastoriza. Solid State Digital-to-Analog Converter. U.S. Patent 3, 747,
088, filed December 30, 1970, issued July 17, 1973. (the first patent on the quad switch
approach to building high resolution DACs).
12. Eugene R. Hnatek. A Userys Handbook of D/А and A/D Converters. John Wiley,
New York, 1976, ISBN 0-471-40109-9, pp. 282-295. (contains an excellent description of
the Analog Devicesy AD550 monolithic mDAC quad current switch, and AD850 thin film
network—building blocks for 12-bit DACs introduced in 1970).
13. Adrian Paul Brokaw. Digital-to-Analog Converter with Current Source Transistors
Operated Accurately at Different Current Densities. U.S. Patent 3, 940, 760, filed March
21, 1975, issued February 24, 1976. (the most referenced data converter patent ever issued).
14. Dennis Dempsey and Christopher Gorman. Digital-to-Analog Converter. U.S. Patent
5, 969, 657, filed July 27, 1997, issued October 19, 1999. (describes an elegant solution for
segmented unbuffered string DACs).
15. John A. Schoeff. An Inherently Monotonic 12 Bit DAC. IEEE Journal of Solid
State Circuits, Vol. SC-14, No. 6, December 1979, pp. 904—911. (describes one of the first
monolithic DACs to use segmentation).
16. G.R. Ritchie, J.C. Candy, and W.H. Ninke. Interpolative Digital-to-Analog
Converters. IEEE Transactions on Communications, Vol. COM-22, November 1974,
pp. 1797—1806. (one of the earliest papers written on oversampling interpolative DACs).
Глава 3. Архитектуры преобразователей данных
17. H.G. Musmann and JKJK Korte. Generalized Interpolate Method for Digital/
Analog Conversion of PCM Signals. U.S. Patent 4, 467, 316, filed June 3, 1981, issued
August 21, 1984. (a description of interpolating DACs).
18. B. Smith. Instantaneous Companding of Quantized Signals. Bell System Technical
Journal, Vol. 36, May 1957, pp. 653—709. (one of the first papers written about using
nonlinear coding techniques for speech signals in PCM).
19. H. Kaneko and T. Sekimoto. Logarithmic PCM Encoding Without Diode
Compandor. IEEE Transactions on Communications Systems, Vol. 11, No. 3, September
1963, pp. 296—307. (describes several methods for nonlinear encoding speech directly without
the need for diode compandors).
20. C.L. Dammann. An Approach to Logarithmic Coders and Decoders. NEREM
Record, Boston MA, November 2—4, 1966, pp. 196-197. (more discussions on nonlinear
coders and decoders for PCM).
21. H. Kaneko. A Unified Formulation of Segment Companding Laws and Synthesis
of Codecs and Digital Compandors. Bell System Technical Journal, Vol. 49, September
1970, pp. 1555—1558. (discusses the piecewise linear approximation to the logarithmic transfer
companding function).
22. M.R. Aaron and H. Kaneko. Synthesis of Digital Attenuators for Segment Companded
PCM Codes. Transactions on Communications Technology, COM-19, December 1971,
pp. 1076—1087. (more on nonlinear coding).
23. C.L. Dammann, L.D. McDaniel, and C.L. Maddox. D2 Channel Bank: Multiplexing
and Coding. Bell System Technical Journal, Vol. 51, October 1972, pp. 1675—1699. (still
more on nonlinear coding).
24. A.H. Reeves. Electric Signaling System. U.S. Patent 2, 272, 070, filed November 22,
1939, issued February 3, 1942. (Reevesy classic PCM patent which describes a 5-bit PWM
counting ADC and DAC).
25. R.L. Carbrey. Decoder for Pulse Code Modulation. U.S. Patent 2, 579, 302, filed
January 17, 1948, issued December 18, 1951. (describes cyclic or sequential attenuation DAC).
26. R.L. Carbrey. Decoding in PCM. Bell Labs Record, November 1948, pp. 451—456.
(describes the Shannon-Rack PCM DAC).
27. L.A. Meacham and E. Peterson. An Experimental Multichannel Pulse Code
Modulation System of Toll Quality. Bell System Technical Journal, Vol. 27, No. 1, January
1948, pp. 1—43. (further details of the Shannon-Rack decoder as part of the experimental
PCM system).
3.2. Архитектуры АЦП
Уолт Кестер, Джеймс Брайант
Введение
Как и в случае с ЦАП, соотношение между сигналами на цифровом и ана-
логовом входе зависит от опорного напряжения, и точность опорного на-
пряжения почти всегда служит фактором, ограничивающим абсолютную
точность АЦП. Позднее в этом разделе нам предстоит рассмотреть разно-
образные архитектуры АЦП и формы опорного напряжения.
Подобно ЦАП, многие АЦП получают внешнее опорное напряжение
(рис. 3.43) и имеют для этого соответствующий вход, тогда как выходной
сигнал других АЦП определяется внутренним опорным напряжением. Про-
стейшие АЦП, конечно, не оснащены опорным напряжением внутри кри-
сталла и внешними соединениями для него.
3.2. Архитектуры АЦП
«Земля»
(может быть внутри
соединена с Vss)
Рис. 3.43. Базовый АЦП с внешним опорным напряжением
Если АЦП имеет внутреннее опорное напряжение, его точность опреде-
ляется с учетом этого опорного напряжения. Когда на такой ЦАП подается
даже очень точное внешнее опорное напряжение, его абсолютная точность
может оказаться ниже, чем при наличии только внутреннего опорного на-
пряжения. Это происходит потому, что абсолютная точность ограничивает-
ся фактическим, а не номинальным задающим напряжением. Двадцать лет
назад считалась нормальной точность опорного напряжения всего ±5 %,
поскольку это опорное напряжение ограничивалось низким температур-
ным коэффициентом, а не абсолютной точностью. Подобная неточность
опорного напряжения в АЦП компенсировалась подстройкой усиления.
Сегодня проблема не столь сурова, но все же важно оценивать возможные
потери абсолютной точности от использования внешнего опорного напря-
жения в АЦП с внутренним опорным напряжением. В паспорте АЦП с
входом опорного напряжения, конечно, должны быть определены его осо-
бенности и параметры. В первую очередь должны быть указаны входное
опорное напряжение и, конечно, две величины: абсолютный максимум и
диапазон напряжений, в котором АЦП нормально работает.
У большинства АЦП опорное напряжение находится внугри довольно
узкого диапазона с максимальной величиной, меньшей или равной VDD.
Примечательно, что этим АЦП отличается от ЦАП, у которых опорное на-
пряжение иногда может изменяется в широком диапазоне (как у ПЦАП
или полуперемножающих ЦАП, рассмотренных в разд. 3.1).
Опорный вход АЦП может буферизоваться, как показано на рис. 3.44.
В случае буферизации он характеризуется входным импедансом (обычно
высоким) и током смещения (обычно малым). Без буферизации опорное
напряжение поступает непосредственно в АЦП. В любом случае требуется
хорошая емкостная развязка с малой индуктивностью опорного входа для
ограничения наводок от переходных процессов.
В паспортных данных большинства АЦП даны рекомендации по орга-
низации соответствующих схем.
При подаче на АЦП внешнего опорного напряжения его напряжение
следует поддерживать с заданной в паспорте точностью. В тех же паспорт-
Земля
(может быть внутри
соединена с Vss)
Рис. 3.44. АЦП с опорным напряжением и буфером
ных данных указывается обычно температурный коэффициент и стабиль-
ность АЦП во времени.
Если на опорном входе используется буфер, в паспортных данных
приводится максимальный выходной ток. В общем случае такой буфер
будет иметь однонаправленный выходной каскад. Он является источни-
ком тока, не позволяющим току течь обратно в направлении выхода.
При наличии двухтактного выходного каскада выходной ток рассчиты-
вается как ±(НЕКОТОРАЯ ВЕЛИЧИНА) mA. Если опорный выход не бу-
феризован, в паспортных данных может указываться выходной импеданс
либо просто рекомендуется использование внешнего буфера с высоким вход-
ным импедансом.
Вход тактовых импульсов выборок (часто именуемых началом преобра-
зования или командой кодирования) является критическим элементом АЦП
и может оказаться причиной рада ошибок. Многие ранние ИС АЦП (на-
пример, AD574 промышленного стандарта) не имели встроенной функции
выборки и хранения и использовались в качестве простых кодеров. Эти
преобразователи требовали внешних тактовых сигналов для запуска про-
цессов преобразования. В случае AD574 внешний синхросигнал запускает
внутренний высокочастотный генератор, который, в свою очередь, управ-
ляет процессом преобразования.
Большинство современных АЦП имеют встроенную схему выборки и
хранения и начинают преобразование по внешнему тактовому сигналу. Ряду
АЦП требуется одна тактовая последовательность выборок, другим, кроме
низкочастотных выборок, нужны еще высокочастотные выборки. Незави-
симо от типа АЦП очень важно строго следовать паспортным данным и
точно знать требования к внешней синхронизации выборок, которые суще-
ственно различаются у разных АЦП в связи с отсутствием стандарта.
Через некоторое время после прихода синхроимпульса выборки на выхо-
де формируются корректные данные. Эти данные могут иметь параллельный
или последовательный формат в зависимости от АЦП. Первые АЦП после-
3.2. Архитектуры АЦП 219
довательного приближения, такие как AD574, просто выставляли сигнал
ГОТОВ (STS), имевший высокий уровень во время преобразования, а по
готовности данных переходивший на низкий уровень. В АЦП выход этого
сигнала именуют по-разному: занято (busy), конец преобразований (ЕОС), го-
товность данных (data ready) и т. д. Независимо от АЦП должны быть неко-
торые способы определения, когда выходные данные станут корректными. И
опять же эту информацию следует искать среди паспортных данных.
Для понимания логики АЦП большое значение имеет еще пара практи-
ческих замечаний. Во многих АЦП не происходит предустановка логики в
момент подачи питания, поэтому схемы могут принимать неопределенные
логические состояния. Чтобы обеспечить работоспособность, надо провес-
ти один-два предварительных циклов преобразования. При этом:
а) первому и второму преобразованиям после подачи питания не следу-
ет доверять;
б) сигналы управления (ЕОС, data ready и т. п.) ведут себя в этот момент
непредсказуемо (при подаче питания в них еще нет нужды);
в) следует позаботиться, чтобы эти аномалии не влияли на систему. В
частности, сигналом ЕОС не следует инициализировать преобразование,
если сохраняется вероятность, что ЕОС поступил в первом цикле.
Некоторые слаботочные АЦП в настоящее время способны работать в
режимах сохранения энергии, именуемых standby, power-down, sleep и т. д.
При выходе АЦП из подобных режимов необходимо определенное время
восстановления перед началом нормального функционирования АЦП. По-
этому в случае использования этих режимов следует внимательно изучить
паспортные данные, чтобы выбрать определенный режим пониженного пи-
тания.
Другая деталь, способная вывести систему из строя, связана с различи-
ем сигналов ЕОС и DRDY(duA& ready). ЕОС указывает на завершение преоб-
разования, a DRDY — на готовность данных к передаче на выход. В некото-
рых АЦП ЕОС используется в роли DRDY, тогда как в других готовность
данных наступает через несколько десятков миллисекунд после поступле-
ния ЕОС, и использование ЕОС для стробирования данных может привес-
ти к нежелательным результатам.
Наконец, некоторые АЦП используют фронты сигнала CS (выбор мик-
росхемы) для предустановки внутренней логики и проведения других пре-
образований без учета или с учетом CS (например, для исключения двой-
ного чтения одних и тех же данных). Для уточнения этих возможностей
важно подробно изучить паспортные данные перед применением АЦП, так
как разные типы АЦП по-разному реализуют одни и те же функции. К
сожалению, во многих паспортах отсутствуют настолько ясные описания,
какие хотелось бы иметь. Остается только четко уяснить основные принци-
пы организации АЦП, чтобы правильно использовать приведенные сведе-
ния. В этом и состоят задачи настоящего раздела.
После таких предварительных замечаний можно перейти к обсужде-
нию различных архитектур АЦП. Первым делом мы обратимся к компа-
ратору (1-разрядному АЦП) как фундаментальному стандартному блоку
всех АЦП. Затем логично перейти к архитектуре флэш-преобразователя,
являющегося своеобразным аналогом ранее рассмотренной архитектуры
Глава 3. Архитектуры преобразователей данных
ЦАП с полной дешифрацией (термометра). Далее последует архитектура
АЦП последовательного приближения, а за ней секционированная и кон-
вейерная архитектура. Складывающая архитектура (Gray-кодирование)
завершает первичные архитектуры, нашедшие применение в так называе-
мых высокоскоростных АЦП. В последней части этого раздела обсуждают-
ся разнообразные счетные и интегрирующие архитектуры, как правило, бо-
лее удобные для построения низкоскоростных АЦП высокого разрешения.
Сигма-дельта (S-D) АЦП и ЦАП рассматриваются в особом разделе, за-
вершающем эту главу.
Компаратор: 1-разрядный АЦП
Подобно тому как переключатель выполняет функцию 1-разрядного ЦАП,
компаратор функционирует в качестве 1-разрядного АЦП (рис. 3.45). Когда
входной сигнал превышает определенный порог, выход компаратора пере-
ходит в одно логическое состояние, а если вход ниже этого порога, состоя-
ние выхода становится другим. И нет такой архитектуры АЦП, в которой
бы не присутствовал хотя бы один компаратор того или иного типа.
Обычный компаратор сходен с операционным усилителем, поскольку
входные каскады обоих строятся на дифференциальной паре биполярных
или полевых транзисторов. Но, в отличие от операционного усилителя,
компаратор не охватывают внешней отрицательной обратной связью, а на
его выходе присутствует логический уровень, однозначно указывающий, на
котором из двух входов присутствует более высокий потенциал. Операци-
онные усилители не проектируются для работы в качестве компараторов, и
хотя и насыщаются при перегрузке, но затем постепенно восстанавливают
свое активное состояние. Входные каскады многих операционных усилите-
лей переходят в неопределенное состояние под действием больших диффе-
ренциальных напряжений, и редко бывает, чтобы их выходы были совмес-
тимы со стандартными логическими уровнями. Случается, конечно, что
Логический
выход
о
Дифференциальный аналоговый вход
Рис. 3.45. Компаратор: 1-разрядный АЦП
3.2. Архитектуры АЦП
операционный усилитель проектируется для работы в качестве компарато-
ра, и замечательный пример того можно найти в !.
Компараторы, используемые в качестве стандартных блоков АЦП, дол-
жны иметь хорошее разрешение, что предполагает наличие большого уси-
ления. А это, в свою очередь, может привести к неуправляемым колебани-
ям при нулевом состоянии дифференциального входа. Для исключения та-
ких колебаний компараторную характеристику делают гистерезисной
введением слабой положительной обратной связи. Рисунок 3.45 демонст-
рирует влияние гистерезиса на результирующую переходную характеристи-
ку. Большинство компараторов имеют гистерезис величиной 1—2 мВ, дос-
таточный для совершения захвата и для оперативной защиты локальной
обратной связи от возникновения нестабильности при переключении. Так
как разрешающая способность компаратора не может выйти за пределы
гистерезиса, не принято использовать гистерезис большой величины.
Первые компараторы были ламповыми и часто использовались в радио-
приемниках, где они назывались не компараторами, а дискриминаторами. На
рис. 3.46 показана типичная структура более позднего компаратора с защелкой
и эмиттерной логикой АМ685 производства Advanced Micro Devices, Inc.,
1972 год. Его защелка переводит выход в логическое состояние, в котором он
оказался в момент подачи разрешающего сигнала. Такой фиксатор играет роль
схемы выборки и хранения, улавливая короткие входные сигналы и задержи-
вая их для последующей обработки. Установка защелки непосредственно на
входе не приводит к запаздыванию даже сигналов длительностью всего не-
сколько наносекунд. К тому же компаратор с фиксацией менее чувствителен к
нестабильности обратной связи, чем аналогичный прибор без нее.
При встраивании компараторов в АЦП интегрального исполнения их
конструкция должна учитывать разрешение, скорость, перегрузочную спо-
собность, рассеиваемую мощность, смещение напряжения и ток смеще-
ния, а также занимаемую в микросхеме площадь выбранной архитектуры.
Есть и другая малозаметная, но требующая внимания характеристика ком-
Рис. 3.46. Компаратор АМ685 ECL (1972)
Глава 3. Архитектуры преобразователей данных
параторов, которая может привести к большим ошибкам АЦП, если не
отнестись к ней достаточно серьезно. Речь идет об ошибках компаратора,
связанных с тем, что иногда он оказывается неспособным к корректному
преобразованию в логические сигналы малых входных воздействий. Это
явление известно как метастабилъностъ, т. е. неспособность компаратора к
правильной и быстрой балансировке на пороге чувствительности.
Проблему метастабильного состояния иллюстрирует рис. 3.47. Здесь
предствлены три напряжения на дифференциальном входе:
1) большое напряжение;
2) маленькое напряжение;
3) нулевое напряжение. Приближенное уравнение входного сигнала Ко(/)
имеет вид:
Ко(0 = ДИх.Ле-Л (3.1)
где А Ивх — напряжение дифференциального входа в момент фиксации, А —
коэффициент усиления предусилителя в момент фиксации, т — постоян-
ная времени регенерации защелки и t — время, прошедшее после фикса-
ции выходного сигнала компаратора3’4.
При малых напряжениях на дифференциальном входе выходному сиг-
налу требуется больше времени, чтобы выйти на достоверный логический
уровень. Если считывать выходные данные, когда напряжение оказывается
между областью правильных значений логической «1» и логического «О»,
можно получить ошибочный результат. Когда напряжение дифференци-
ального входа точно равно нулю и компаратор правильно сбалансирован в
момент фиксации, время достижения корректного логического значения
еще увеличивается (теоретически до бесконечности). Тем не менее наличие
гистерезиса и шума на входе делают такие явления маловероятными. Вли-
яние неверных логических уровней компаратора по-разному проявляется в
зависимости от его роли в составе реальных АЦП.
С конструктивной точки зрения метастабильность компаратора можно
минимизировать посредством увеличения коэффициента усиления А, ми-
нимизацией постоянной времени регенерации г, улучшением частотной
Выход
компаратора
данные 1 данные 2 данные 3
Режим защелки (хранение)
Фиксация
разрешена
<— Переходной режим (установление)
Рис. 3.47. Ошибки метастабильного состояния компаратора
3.2. Архитектуры АЦП
характеристики фиксатора. Все это приводит к достижению необходимого
времени (?) установления достоверного логического уровня. Цель нашего
обсуждения не предполагает анализ сложных зависимостей между скорос-
тью, мощностью и сложностью схемы в поиске оптимальной конструкции
компаратора, но желающие могут найти хорошее решение подобного рода
задач в 3-4.
С точки зрения пользователя, влияние метастабильности компаратора
на работу АЦП (если таковое присутствует) характеризуется коэффициен-
том ошибок, обычно не указываемым в паспортных данных АЦП. В гл. 2
можно найти рассмотрение этой характеристики. Подобные ошибки АЦП
часто называют «проблесковыми» кодами, беспорядочными помехами или
флайерсами.
Коэффициент ошибок не вызывает проблем в правильно спроектиро-
ванных АЦП большинства приложений, когда системные специалисты ос-
ведомлены об этом явлении. Проблемы возникают лишь в АЦП таких при-
боров, как цифровые осциллографы для регистрации слабых случайных оди-
ночных событий, где АЦП с не слишком низким коэффициентом ошибок
может стать причиной ложных показаний.
Архитектуры высокоскоростных АЦП
Флэш-преобразователи
Флэш-АЦП (иногда называемые параллельными АЦП) — это АЦП наибо-
лее быстрого типа, в которых используется множество компараторов.
A-разрядный флэш-АЦП содержит 2 V резисторов и 2N1 компараторов, объе-
диненных в соответствии со схемой рис. 3.48. На каждый компаратор по-
ступает опорное напряжение с цепочки резисторов, каждое из которых на
1 младший разряд больше, чем у его соседа снизу. При любом напряжении
Цифровой
выход
Рис. 3.48. З-разрядный полностью параллельный (флэш) преобразователь
224 Глава 3. Архитектуры преобразователей данных
на аналоговом входе все компараторы, находящиеся ниже определенной
точки, имеют более высокое входное напряжение, чем опорное напряже-
ние, и их логические выходы равны «1». В то же время все компараторы
выше этой точки получают более высокое опорное напряжение, чем вход-
ное, и их логические выходы устанавливаются в «О». Таким образом, выхо-
ды 2N~1 компараторов ведут себя аналогично аналоговому ртутному термо-
метру, поэтому их выходной код часто именуют термометрическим кодом.
Эти 2N ~ 1 выходов данных преобразуются дешифратором в TV-разрядный
двоичный выход.
Входной сигнал одновременно поступает на все компараторы, поэтому
сигнал на термометрическом выходе запаздывает на величину, равную за-
держке одного компаратора. Настолько же задерживается и дешифрован-
ный TV-разрядный выходной код, так что процесс преобразования можно
считать очень быстрым. Но в то же время в схеме присутствует большое
число резисторов и компараторов, ограничивающих разрешающую способ-
ность, и, чтобы достичь высокого быстродействия, каждый компаратор
приходится запускать при относительно высоком уровне мощности сигна-
лов. Поэтому проблемами флэш-АЦП является ограниченное разрешение,
большое рассеяние мощности в большом числе высокоскоростных компа-
раторов (особенно при скоростях дискретизации свыше 50 млн выборок/с)
при сравнительно больших размерах микросхем (и их стоимости). К тому
же сопротивления опорной резистивной цепочки приходится поддержи-
вать довольно низкими для получения необходимых токов смещения быс-
тродействующих компараторов, поэтому опорное напряжение должно слу-
жить источником достаточно больших токов (обычно >10 мА).
Первый из документально описанных флэш-преобразователей служил
частью электромеханической ИКМ-системы факсимильной связи, описан-
ной Р.М. Rainey в редко упоминаемом патенте 1921 года5 [см. подробности
в гл. 1]. В АЦП ток, пропорциональный интенсивности светового потока,
прошедшего через транспорант, отклоняет гальванометр, который, в свою
очередь, управляет другим световым лучом, активизирующим один из 32 от-
дельных фотоэлементов в зависимости от угла отклонения гальванометра
(рис. 3.49). Выход каждого фотоэлемента воздействует на цепь реле, фор-
мирующую 5-разрядный двоичный код.
Значительным развитием технологии АЦП стало появление электронно-
лучевой кодирующей трубки (ЭЛТ), разработанной в Bell Labs и представ-
ленной схематично на рис. 3.50. ЭЛТ, описанная R.W. Sears в6, обеспечивала
дискретизацию на скорости 96 тыс. выборок/с с 7-разрядным разрешением.
Базовая концепция электронно-лучевого шифратора иллюстрируется на
рис. 3.50 на примере 4-разрядного прибора. В качестве основы флэш-пре-
образователя использовалась ЭЛТ с веерообразным лучом, формирующим
параллельное выходное слово.
В ранних шифраторах на базе ЭЛТ использовалась теневая маска с дво-
ичным кодированием. В момент прохождения луча над двумя смежными
элементами шифратора, с освещением обоих одновременно, могут возни-
кать значительные ошибки. Такие ошибки двоичной теневой маски были
впоследствии устранены с помощью теневой маски, выполненной в кодах
Грея, показанной на рис. 3.50, б. Этот код, названный изначально «отра-
3.2. Архитектуры АЦП
Параллельные
двоичные выходные
данные
Релейная логика
дешифрации
Воспроизводится по: Paul М. Rainey. Facsimile Telegraph
System. U.S. Patent 1, 608, 527, Filed July 20, 1921, Issued
November 30, 1926
Рис 3.49. 5-разрядный флэш-ЦАП, предложенный Paul Rainey
женным двоичным», впервые изобрел Е. Gray в 1878 году, а впоследствии
повторно открыл F. Gray в 1949 году7. Особенность кода Грея заключается
в том, что соседние его значения отличаются друг от друга только одним
разрядом кодового слова. Поэтому в случае ошибки в любом разряде на
любом из уровней соответствующая ошибка после преобразования в дво-
ичный код составляет только один младший разряд. В случае середины
шкалы, кстати, измениться может старший разряд, но ошибкой является
младший. Интересно отметить, что этот же принцип используется в совре-
Теневая маска
в двоичном коде
Теневая маска
в коде Грея
Рис. 3.50. Электронно-лучевой шифратор Bell Labs (1948)
8 2852
7^226 Глава 3. Архитектуры преобразователей данных
менных флэш-преобразователях на компараторах с метастабильностью. При
небольшой перегрузке возможно получение неверного результата с компа-
раторов, вызванного аналогичным эффектом линейного двоичного коди-
рования. Поэтому код Грея и разного рода коды «псевдоГрея» применяют-
ся для дешифрации выходов компараторов перед окончательным преобра-
зованием их в двоичный код.
Несмотря на наличие множества проблем механического и электричес-
кого характера, связанных с управлением лучом, технология шифрации с
использованием ЭЛТ достигла своего совершенства к середине 1960-х го-
дов, когда был построен 9-разрядный шифратор на 12 млн выборок/с8. Но
уже некоторое время спустя достижения в области твердотельных АЦП
лишили технологию ЭЛТ всякой перспективы.
Достаточно быстро было установлено, что среди всех архитектур наи-
большую частоту дискретизации обеспечивает флэш-преобразователь. Одна-
ко проблема его использования заключалась в том, что компараторная схе-
ма, выполненная на транзисторах, столь же громоздка, как и схема на базе
электронных ламп. Конструкция одного компараторного элемента с фикса-
тором, выполненная по любой технологии, уже сама по себе очень сложна, а
расширение его даже до разрешения в 4 разряда (требующее 15 компарато-
ров) делает эту задачу немыслимо сложной. Тем не менее такая работа была
проведена в середине 1950-х — начале 1960-х годов, о чем свидетельствует
патент R. Staffin и R.D. Lohman, описывающий многокаскадную архитекту-
ру, использующую как электронно-вакуумную, так и транзисторную техно-
логию9. В патенте отвергается полностью параллельный подход и намечается
возможность экономии ресурсов посредством разделения преобразователь-
ного процесса на два этапа: грубое преобразование и точное преобразование.
В некоторых ранних флэш-преобразователях 1960-х годов в качестве компа-
раторов использовались туннельные (Esaki) диоды как альтернатива компарато-
ров с фиксацией на базе электронно-вакуумных ламп или транзисторов10-13.
В 1964 году Fairchild выпустила первый компаратор в интегральном ис-
полнении wA711/712, сконструированный В. Widlar. В том же году Fairchild
освоила и первый интегральный ОУ дпА709 конструкции того же Widlar. За
ними последовали другие компараторы на ИС, в том числе Signetics 521,
National LM361, Motorola МС1650 (1968), АМ685/687 (1972/1975). С появ-
лением этих стандартных блоков и ИС ТТЛ и эмиттерной логики появи-
лись 6-разрядные флэш-преобразователи Computer Labs, Inc. стоечного
исполнения на дискретных компонентах, в т. ч. VHS-630 (6-разрядный,
30 млн выборок/с в 1970 года) и VHS-675 (6-разрядный, 75 млн выборок/с
в 1975 году). В показанном на рис. 3.51 АЦП VHS-675 использованы ком-
параторы 63 АМ685 с эмиттерными связями и высокоскоростными схема-
ми выборки и хранения, с эмиттерной логикой дешифрации, с встроенным
линейным источником питания от сети переменного тока мощностью рассе-
яния 130 Вт (продажной ценой 1975 года около $10000). Приборы, подоб-
ные этим, применялись в ранних моделях высокоскоростных приложений
сбора данных, в том числе в военных приемниках РЛС.
Компаратор АМ685 тоже использовался в качестве стандартного блока
4-разрядного одноплатного флэш-АЦП MOD-4100 на 100 млн выборок/с,
выпущенного в 1975 году и представленного на рис. 3.52.
3.2. Архитектуры АЦП 227
19* х 17* х 7*
VHS-630
VHS-675
6 разрядов, 30 млн выборок/с
32 двойных компаратора МС1650
MECL III
100 Вт (с линейным источником
питания)
• 6 разрядов, 75 млн выборок/с
• 64 компаратора АМ685
• 130 Вт (с линейным источником
питания)
Рис. 3.51. АЦП серий VHS Computer Labs, Inc. VHS-630 (1970), VHS-675 (1975)
Первый 8-разрядный флэш-преобразователь TDC1007J с видеоскорос-
тью 30 млн выборок/с был выпущен компанией TRW LSI в 1979 году14’15.
А спустя короткое время последовала 6-разрядная версия того же проекта
TDC1014J. Кроме того, в 1979 году Advanced Micro Devices, Inc. выпустила
AM6688, 4-разрядный флэш-преобразователь в интегральном исполнении
для флэш-преобразователя на 100 млн выборок/с.
Флэш-преобразователи стали очень популярными в 1980-х годах, когда
получили развитие 8-разрядные видеоприложения, а также в качестве стан-
дартных блоков секционированных одноплатных, модульных и гибридных
АЦП высокого разрешения. Многие из них выполнялись на основе
МОП-структур с малой рассеиваемой мощностью. Но в последнее время в
8-разрядных АЦП стала популярной секционированная конвейерная архи-
тектура. Например, 8-разрядный АЦП AD9480 на 250 млн выборок/с выпол-
нен с применением высокоскоростной технологии BiCMOS и рассеивает ме-
Рис. 3.52.4-разрядный флэш-преобразователь MOD-4100, 100 млн выборок/с, Computer
Labs, 1975
228 Глава 3. Архитектуры преобразователей данных
нее 400 мВт, тогда как рассеиваемая мощность при использовании обычной
флэш-технологии выражается в ваттах.
Практически флэш-преобразователи интегрального исполнения могут
давать разрешение до 10 разрядов, хотя наибольшее распространение полу-
чили 8-разрядные приборы. Их максимальная частота дискретизации мо-
жет достигать 1 ГГц (в основном на основе арсенида галлия при рассеива-
емых мощностях в несколько ватт) с шириной полосы пропускания на уровне
полной мощности 300 МГц.
Как было ранее отмечено, ширина полосы пропускания на уровне пол-
ной мощности может не соответствовать ширине полосы пропускания при
полной разрешающей способности. В идеале компараторы флэш-преобра-
зователей имеют одинаково хорошие характеристики по постоянному и
переменному току. Так как все компараторы тактируются одновременно,
флэш-преобразователь является в то же время и преобразователем выбо-
рок. На практике разные компараторы вносят различные задержки и имеют
другие несоответствия, что выражается в уменьшении эффективного числа
разрядов на высоких входных частотах. Это происходит, когда входные воз-
действия изменяются со скоростью, соизмеримой с периодом преобразова-
ния компаратора. Поэтому на входе флэш-преобразователей часто устанав-
ливают схемы слежения и хранения, чтобы расширить динамический диа-
пазон, свободный от искажений, при высокочастотных входных сигналах.
Входной сигнал флэш-АЦП поступает одновременно на большое число
компараторов. Входная емкость зависит от напряжения, и из-за этой зави-
симости в большинстве флэш-АЦП на высоких входных частотах снижает-
ся эффективное число разрядов и растет уровень искажений. Поэтому боль-
шинство флэш-преобразователей имеют на входе широкополосные ОУ,
нормально работающие при емкостной нагрузке и быстрых перепадах вход-
ных сигналов.
Метастабильность отдельных разрядов флэш-преобразователей может
влиять на коэффициент ошибок (BER). На рис. 3.53 показан простой флэш-
преобразователь с одним каскадом двоично-дешифрирующей логики. Двух-
Аналоговый
вход &
Рис. 3.53. Метастабильные состоя-
ния выходов компаратора могут
стать причиной ошибок кодирова-
ния в преобразователях данных
разр. 2 разр. 3 разр.
Проводное ИЛИ
Двоичный выход:
ООО, 011, 100 или 111
3.2. Архитектуры АЦП
входовые логические элементы И преобразуют термометрический код на
выходе компараторов в «1 активированный из 7» код. Логика дешифрации
выполнена на матрице проводных ИЛИ, характерной для ЭСЛ-логики. До-
пустим, что копаратор «X» имеет метастабильные выходы «X». Его выход-
ной код должен быть ОН или 100. Но заметьте, что и код ООО (высокий
уровень на обоих выходах), и код 111 (низкий уровень на обоих выходах)
тоже возможны вследствие метастабильного состояния, а это уже вызывает
ошибку в половину полной шкалы.
Ошибки метастабильного состояния можно снижать различными спо-
собами. Один из них предполагает дешифрацию выходов компараторов в
код Грея с последующим преобразованием кода Грея в двоичный код, как
это было в ранее рассмотренном электронно-лучевом шифраторе Bell Labs.
Преимущество шифрации в коде Грея состоит в том, что метастабильное
состояние любого компаратора вызывает ошибку только в один младший
разряд кода Грея. Код Грея фиксируется и затем преобразуется в двоичный
код, который, в свою очередь, тоже имеет максимальную ошибку в один
младший разряд, как показано на рис. 3.54 (более детально это рассмотрено
в гл. 1, в разделе, посвященном кодированию).
а
б
4-разрядный код Г рея После преобразования в двоичный код
1 000 1111
100 1 1110
*1 0 -J В результате ошибки 110 1
1 П 1 О метастабильного состояния 4 4 л Л
у формируется только один 1 1 и и
1110 из двух возможных кодов Грея 10 11
1111 10 10
11 0 1 ► 110 0 \ 100 1
Два соседних кода » mi о о j k 1 000
различаются только . [о]1 о 0 л г 0 1 1 1
в одном разряде 0 10 1 * 0 1 0 0 0 110
0 111 0 10 1
0 110 0 100
00 10 00 1 1
00 11 00 10
0001 000 1
0000 0000
Рис. 3.54. Кодирование в коде Грея снижает величину ошибок метастабильного состояния
Этот же принцип применяется в ряде современных флэш-преобразова-
телей интегрального исполнения для минимизации влияния ошибок мета-
стабильного состояния. Они описаны, например, в3’16’17.
Рассеяние мощности во флэш-преобразователях всегда имеет большое
значение, особенно при разрешении свыше 8 разрядов. Интересный под-
ход в этом плане демонстрирует 10-разрядный АЦП AD9410, 210 млн выбо-
рок/с. Метод использует интерполяцию и направлен на минимизацию чис-
ла предусилителей на входах компараторов флэш-преобразователя и на сни-
жение мощности (до 2,1 Вт). Этот метод иллюстрирует рис. 3.5518.
Предусилители (обозначенные «А1», «А2» и т. д.) представлены каска-
дами низкого усиления gm, полоса пропускания которых определяется дли-
Глава 3. Архитектуры преобразователей данных
| фиксации
AD9410: 10 разрядов, 210 млн выборок/с
Рис. 3.55. Флэш-интерполяция вдвое снижает количество предусилителей
тельностью пульсаций тока дифференциальных пар. Рассмотрим случай
нарастания входного сигнала, изначально более низкого, чем опорное на-
пряжение V{ усилителя А{, По мере того как входной сигнал приближается
к Кр дифференциальный выход А{ приближается к нулю (т. е. выход
Д = НеА = А), определяя первую результирующую точку. Выходы А{ посту-
пают на дифференциальные входы ФИКСАТОРА 1. В то время как вход-
ной сигнал становится все более положительным, положительным стано-
вится и Л, а НеВ — отрицательным. Результирующая точка интерполяции
определяется в момент А = НеВ, Пока вход продолжает оставаться положи-
тельным, в момент В = НеВ достигается третья результирующая точка. Эта
новая архитектура отличается пониженной входной емкостью АЦП и ми-
нимальной зависимостью этой емкости от уровня сигнала и, соответствен-
но, более низкими искажениями. Для улучшения линейности AD9410 так-
же имеет на входе схему выборки и хранения.
АЦП последовательного приближения
АЦП последовательного приближения долгие годы служили опорой систем
сбора данных. Последние усовершенствования позволили расширить час-
тоту дискретизации этих АЦП до мегагерцевого диапазона. В семействе
PulSART АЦП последовательного приближения Analog Devices расширение
диапазона до 18 разрядов выполняется посредством внутренней коммута-
ции конденсаторов и автоматической калибровки средствами КМОП без
дорогостоящей тонкопленочной лазерной подгонки.
Базовая схема АЦП последовательного приближения показана на рис. 3.56.
Преобразование в нем осуществляется по командам. При поступлении ко-
манды НАЧАТЬ ПРЕОБРАЗОВАНИЕ (CONVST) усилитель выборки и хра-
нения (УВХ) переводится в режим хранения, и все разряды регистра после-
довательного приближения (РПП) сбрасываются в «О», за исключением стар-
3.2.
Аналоговый
вход
ЕОС, DRDY
или BUSY
Начать
преобразование
Выход
Рис. 3.56. Базовый АЦП последовательного приближения (АЦП с отрицательной об-
ратной связью)
шего разряда, который устанавливается в «1». Выход РПП подключен к
внутреннему ЦАП. Когда сигнал на выходе ЦАП превышает аналоговый
входной сигнал, старший разряд РПП сбрасывается (в противном случае он
остается установленным), а следующий за ним разряд устанавливается в «1».
Если сигнал на выходе ЦАП превышает аналоговый входной сигнал, этот
разряд РПП сбрасывается, в противном случае он остается установлен-
ным. И так процесс повторяется для каждого разряда. Преобразование
завершается, когда все разряды будут установлены, проверены и сброше-
ны или оставлены в нужном состоянии, и содержание РПП соответствует
аналоговой входной величине. Такая поразрядная проверка служит осно-
вой АЦП с РПП.
Временная диаграмма основных сигналов типового АЦП с РПП показа-
на на рис. 3.57. Завершение процесса обычно отмечается сигналами конец
преобразования (ЕОС), готовность данных (DRDY) или занято (BUSY) (фак-
тически преобразование завершается снятием сигнала BUSY). Полярность
и названия этих сигналов различны в разных АЦП с РПП, но базовые прин-
ципы аналогичны. В начале преобразования такой сигнал становится высо-
ким (или низким) и сохраняется до окончания преобразования, а затем
Выборка X
Выборка X + 1
Выборка X + 2
преобразования
Время
• преобразования
Отслежи- Время
вание/ ! преобразования
прием •
j Отслежи-
! вание/
; прием
ЕОС, BUSY
Выходные
данные
Данные X
Данные
Рис. 3.57. Типичная диаграмма тактирования АЦП с регистром последовательного
приближения
232 Глава 3. Архитектуры преобразователей данных
спадает (или нарастает). Задний фронт сигнала обычно свидетельствует о
готовности информации, однако следует тщательно изучать паспортные
данные. В ряде АЦП готовность наступает с некоторой задержкой.
Многоразрядное преобразование производится за несколько шагов. На
первый взгляд может показаться, что 16-разрядное преобразование должно
занять вдвое больше времени, чем 8-разрядное, но это не так. В 8-разряд-
ном преобразователе ЦАП должен достичь точности в 8 разрядов, прежде
чем установится сигнал готовности, тогда как в 16-разрядном АЦП после-
довательного приближения следует достигать 16-разрядной точности, что
намного дольше. Практически время преобразования 8-разрядного АЦП
последовательного приближения составляет несколько наносекунд, тогда
как 16-разрядный АЦП требует нескольких микросекунд.
Несмотря на некоторые различия, тактирование большинства АЦП с
РПП производится одинаково просто. Обычно преобразование начинается
по сигналу НАЧАТЬ ПРЕОБРАЗОВАНИЕ. Сигнал HeCONVST представ-
ляет импульс к логическому 0, передний фронт которого и запускает пре-
образование. Внутренний УВХ по этому сигналу устанавливается в режим
хранения, и в соответствии с алгоритмом работы РПП формируются разря-
ды. Передний фронт импульса HeCONVST изменяет уровень на шине
НеЕОС или BUSY к логической 1. Когда преобразование заканчивается,
уровень на шине BUSY становится низким, свидетельствуя о завершении
процесса. В большинстве случаев спадающий фронт шины BUSY можно
использовать в качестве индикатора готовности данных и применять для
стробирования передачи данных во внешний регистр. Но с учетом большо-
го разнообразия терминов и схем применение конкретного АЦП должно
сопровождаться изучением его паспортных данных.
Надо также заметить, что некоторые АЦП с РПП нуждаются во внеш-
нем высокочастотном тактировании дополнительно к команде НАЧАТЬ
ПРЕОБРАЗОВАНИЕ. Сама же эта команда обычно не синхронизируется с
тактами. Частота внешнего тактирования, когда она требуется, обычно на-
ходится в диапазоне 1—30 МГц в зависимости от времени преобразования
и разрешения АЦП. Другая группа АЦП с РПП содержит в своем составе
собственный генератор частоты, управляющий преобразовательным про-
цессом по команде НАЧАТЬ ПРЕОБРАЗОВАНИЕ. Архитектура АЦП с РПП
изначально ориентирована на одиночное преобразование, поэтому она под-
ходит для входных сигналов, поступающих в том или ином темпе, начиная
от сигналов постоянного тока до темпа преобразования.
Примечательно, что точность и линейность АЦП с РПП определяется в
первую очередь внутренним ЦАП. До последнего времени в большинстве
прецизионных АЦП с РПП для достижения необходимой точности и ли-
нейности применялись тонкопленочные ЦАП с лазерной подстройкой.
Необходимость подстройки тонкопленочных резисторов повышает сто-
имость, а сопротивление таких резисторов может меняться при механичес-
ких воздействиях в ходе сборки.
С учетом этого в новых АЦП с РПП все большее распространение по-
лучают ЦАП с коммутируемыми конденсаторами (с перераспределением
зарядов). Преимущество ЦАП с коммутируемыми конденсаторами состоит
в том, что их точность и линейность задаются главным образом посред-
3.2. Архитектуры АЦП
233J
ством высокоточной литографии, которая, в свою очередь, определяет точ-
ность площади и, соответственно, емкости конденсатора. К тому же ма-
ленькие конденсаторы можно устанавливать параллельно главным конден-
саторам. Их можно подключать и отключать в ходе автоматической калиб-
ровки, добиваясь высокой точности и линейности без тонкопленочной
лазерной подстройки. Вдобавок конденсаторы характеризуются высокой тер-
мостабильностью.
Простой 3-разрядный емкостной ЦАП показан на рис. 3.58. Ключи на-
ходятся в режиме выборки, в котором аналоговое входное напряжение Авх
периодически заряжает и разряжает параллельную комбинацию конденса-
торов. Режим хранения начинается в момент размыкания 5вх. При этом в
массиве конденсаторов сохраняется выбранный аналоговый уровень. Раз-
мыкается ключ Sc, и в узле А устанавливается напряжение, соответствующее
комбинации ключей. Когда S2, S3 и S4 заземлены, напряжение, равное — Авх,
подается в узел А. Подключение к KREF увеличивает напряжение —Авх на
величину KREF /2. После этого компаратор вычисляет старший разряд, и
РПП либо оставляет подключенным к KREF, либо заземляет его. Это зави-
сит от выходного сигнала компаратора (высокого или низкого в зависимо-
сти от того, положительное или отрицательное напряжение приложено к
узлу А). Аналогично ведут себя и остальные разряды. В конце преобразова-
ния Sv S3, S4 и 5х подключаются к Авх, Sc заземляется, и преобразователь
готов к следующему циклу.
Заметим, что для выполнения двоичного деления при поразрядном дей-
ствии с конденсаторами необходим дополнительный конденсатор младше-
го разряда (С/4 в случае 3-разрядного ЦАП), благодаря которому общая
емкость массива конденсаторов составляет ровно 2 С.
Работа емкостного ЦАП подобна работе резистивного ЦАП типа R-2R.
Когда конденсатор одного разряда подключается к ИКЕЕ, делитель напряже-
ния, образованный конденсатором и полным емкостным массивом (2С),
прибавляет в узел А напряжение, равное весу соответствующего разряда.
Когда конденсатор разряда подключается к «земле», такое же напряжение
вычитается из узла А.
Рис. 3.58. 3-разрядный ЦАП с коммутируемыми конденсаторами
Глава 3. Архитектуры преобразователей данных
Базовый алгоритм работы АЦП последовательного приближения (пер-
воначально именуемого АЦП с отрицательной обратной связью), вероятно,
зародился в 1500-х годах как решение математической задачи о нахождении
веса за минимальное число взвешиваний1. В задаче требуется найти, какое
наименьшее число взвешиваний надо провести для определения общего
веса грузов от 1 до 40 фунтов на весах с гирями. Одно из решений, найден-
ное математиком Tartaglia в 1556 году, состояло в использовании гирь в 1,
2, 4, 8, 16 и 32 фунта. Он предложил тот самый алгоритм, который исполь-
зуется сейчас в АЦП последовательного приближения. (Надо заметить, что
это решение дает возможность взвешивать до 63 фунтов, а не до 40, как
требовала задача.) Алгоритм представлен на рис. 3.59, где искомый вес при-
нят равным 45 фунтов. Для демонстрации алгоритма используется аналогия
весов с гирями.
Первые реализации АЦП последовательного приближения не включали
в себя ни ЦАП, ни РПП, а выполняли их функции другими способами.
Фактически ранние АЦП с РПП были последовательными шифраторами,
шифраторами с обратной связью или вычитающими шифраторами с обрат-
ной связью. Термин АЦП с РПП появился 1970-х годах, когда National
Semiconductor и Advanced Micro Devices выпустили коммерческие логичес-
кие ИС регистров последовательного приближения типов 2503 и 2504. Эти
приборы были специально сконструированы для реализации регистровых и
управляющих функций в АЦП последовательного приближения и служили
стандартными блоками типовых модульных и гибридных преобразователей
данных.
В качестве преобразователя данных архитектура АЦП последовательно-
го приближения послужила стандартным блоком ИКМ-системы высокоча-
стотной связи Т\ и до сих пор остается популярной архитектурой, но ис-
тинный источник ее неизвестен. Интересно, что ее нет во всеобъемлющем
патенте Reeves2. Хотя множество патентов были посвящены улучшениям и
изменениям архитектуры последовательного приближения, в них нет при-
Пусть X - 45
*7
тязаний на фундаментальный принцип.
Если Х> (32 + 8 + 4 + 2)?
Если X > (32 + 8 + 4)?
Если Х> (32 + 8 + 4 + 2 +1)?
Да -> Оставить 32 1
Нет —> Отнять 16 —> О
Да —> Оставить 8 1
Да -> Оставить 4 -> 1
Нет Отнять 2 -> О
Да -> Оставить 1 -> 1
Итого: Х= 32 + 8 + 4+1= 4510 = 1011012
Рис. 3.59. Алгоритм АЦП последовательного приближения
3.2. Архитектуры АЦП 235
Приемная
станция
Передающая Линия
станция передачи
Фрагмент из: John С. Schelleng. Code Modulation Communication System. U.S.
Patent 2, 453, 461, Filed June 19, 1946, Issued November 9, 1948
Рис. 3.60. АЦП последовательного приближения J.С. Schelleng'a, 1946 год
Впервые отметил архитектуру АЦП последовательного приближения в
контексте ИКМ J.C. Schelleng из Bell Telephone Labs в патенте 1946 года21.
На рис. 3.60 приведена структурная схема 6-разрядного АЦП, воспроизве-
денная из патента. Блок, названный селектором, служит ключом к понима-
нию ее действия. Когда сигнал дифференциального входа селектора превы-
шает определенное напряжение, дифференциальный выход селектора под-
ключается на определенное опорное напряжение, и соответствующая
двоичная цифра записывается как «1». Когда сигнал дифференциального
входа селектора меньше определенного напряжения, дифференциальный
выход селектора равен нулю, и соответствующая двоичная цифра записы-
вается как «0». Примечательно, что все селекторы, за исключением 32 В, не
заземлены, поэтому для выравнивания смещений селекторов и приведения
их к общей «земле» используются цифровые заземлители.
АЦП функционирует в соответствии с фундаментальным алгоритмом
последовательного приближения. Входной сигнал сначала проверяется се-
лектором 32 В, и, если он превышает 32 В, выход селектора устанавливает-
ся в 32 В, и в старший разряд заносится «1». Если же он меньше 32 В, выход
селектора устанавливается в 0 В, и старший разряд переписывается на «0».
Аналогичный процесс повторяется в оставшихся разрядах. Селекторы стыку-
ются каскадно таким образом, что выход одного подключается ко входу
следующего. Поэтому выход селектора младшего разряда представляет
5-разрядное аналоговое приближение входного сигнала.
На рис. 3.61, взятом из того же патента, показаны детали довольно гро-
моздкой и во многом непрактичной конструкции селекторов и цифровых
заземлителей на вакуумных лампах. Для проведения преобразования ис-
пользуется двоично-взвешенный набор источников напряжений: батарея
дает 32 В, батарея 130 — 16 В и т. д.
Гораздо более изящная реализация АЦП последовательного приближе-
ния описана в статье Goodall из Bell Telephone Labs в 1947 году22. Этот АЦП
Глава 3. Архитектуры преобразователей данных
Bember 9, 1948
Рис. 3.61. Детали селектора и схемы цифрового заземления
дает 5-разрядное разрешение и оцифровывает канал тональной частоты со
скоростью 8 тыс. выборок/с. Тональный сигнал вначале подлежит выборке,
и соответствующее напряжение сохраняется на конденсаторе. Затем оно
сравнивается с опорным напряжением, равным половине полной шкалы
напряжений. Если оно больше опорного напряжения, в старшем разряде
регистрируется «1», а заряд, равный половине шкалы, вычитается из напря-
жения конденсатора. Если напряжение конденсатора меньше половины
шкалы, заряд не уменьшается, и регистрируется «О». Когда старший разряд
определен, такой же цикл продолжается для второго разряда, но относи-
тельно напряжения в 1/4 шкалы.
В обоих АЦП, как у Schelleng, так и у Goodall, для реализации алгоритма
РПП используются операции сложения/вычитания двоично-взвешенных
опорных напряжений. И хотя в них работает функция ЦАП, это преобразо-
вание делается без использования двоично-взвешенных ЦАП в традицион-
ном понимании. А вот АЦП, описанные H.R. Kaiser и др.23 и B.D. Smith24 в
1953 году, действительно использовали двоично-взвешенный ЦАП при про-
ведении аналоговой аппроксимации входного сигнала аналогично тому, как
это делается в современных АЦП с РПП. Smith также отметил, что с помо-
щью неравномерно-взвешенного ЦАП можно получить АЦП с нелинейной
переходной характеристикой. Этот способ лег в основу современных ком-
пандирующих шифраторов тонального диапазона. А до того как была раз-
работана эта нелинейная технология, применялись линейные АЦП, а
сжатие и развертывание производились диодно-резистивными схемами с
индивидуальной калибровкой, которые следовало эксплуатировать при по-
стоянной температуре во избежание дрейфа25.
Ни одно обсуждение истории АЦП, конечно, не будет полным, если не
отдать дань уважения поистине переломной работе В.М. Gordon из EPSCO
(теперь Analogic, Incorporated). В патенте 1955 года26 Gordon описывает
11-разрядный АЦП последовательного приближения на 50 тыс. выборок/с,
полностью выполненный на лампах и представляющий первый завершен-
3.2. Архитектуры АЦП
• 19" х 15" х 26"
• 150 младших разрядов
• $8,500.00
Courtesy,
Analogic Corporation
8 Centennial Drive Peabody,
MA 01960
www.analogic.com
Рис. 3.62. 11-разрядный АЦП «DATRAC» 1954 года, 50 тыс. выборок/с с регистром
последовательного приближения конструкции В.М. Gordon из EPSCO
ный коммерческий преобразователь (рис. 3.62). DATRAC был помещен в
корпус размерами 19 х 26 х 15 дюймов, рассеивал несколько сотен ватт и
стоил около $8000.
В более позднем патенте27 Gordon детально описал логический блок,
реализующий алгоритм последовательного приближения. А в 1970-х годах
National Semiconductor и Advanced Micro Devices внедрили логическую фун-
кцию РПП в популярное семейство логических ИС 2502/2503/2504. Этим
микросхемам суждено было стать стандартными интегральными блоками
практически всех гибридных АЦП последовательного приближения 1970-х
и 1980-х годов.
Благодаря своей популярности АЦП последовательного приближения
находят применение в широком диапазоне разрешений, частот дискретиза-
ции, входных и выходных параметров, типов корпусов и стоимостей. Все
типы было бы невозможно перечислить, но рис. 3.63 представляет ряд пос-
ледних АЦП с РПП Analog Devices. Примечательно, что многие приборы
являются завершенными системами сбора данных с входными мультиплек-
сорами, позволяющими одному ядру АЦП обслуживать множество анало-
говых сигналов.
Тип АЦП Разрешение (разрядов) Скорость преобразования (млн выборок/с) Мощность (мВт) Число каналов
AD7482 12 3,0 80 1
AD7484 14 3,0 80 1
AD7490 12 1,0 6 16
AD7928 12 1,0 5,4 8
AD974 16 0,2 120 4
AD7677* 16 1,0 130 1
AD7621* 16 3,0 100 1
AD7674* 18 0,8 120 1
‘Серии PulSART
Рис. 3.63. Сравнительные данные по разрешению и времени преобразования типовых
АЦП однополярного питания с регистрами последовательного приближения
Глава 3. Архитектуры преобразователей данных
AVDD AGND REF REFGND
DVDD DGND
Вход+
Вход-
PD
Возврат
OVDD
OGND
SER/PAR
Смещение
Данные (15:0)
CS
RD
OB/5C
BYTESWAP
WARP Импульс CNVST
Рис. 3.64. 16-разрядный АЦП AD7677 PulSAR® с коммутируемыми конденсаторами
на 1 млн выборок/с
Примером современного АЦП последовательного приближения с пере-
распределением зарядов конструкции Analog Devices служит серия PulSAR.
AD7677 является 16-разрядным, полностью дифференциальным АЦП серии
PulSAR, работающим на частоте 1 млн выборок/с от однополярного источ-
ника напряжения 5 В (рис. 3.64). В устройство входят высокоскоростной
16-разрядный стробируемый АЦП, внутренний таймер, цепь коррекции оши-
бок и порты последовательного и параллельного интерфейса. Заводская ка-
либровка и полная проверка AD7677 гарантируют такие параметры, как от-
ношение сигнал—шум и полный коэффициент гармоник в дополнение к
традиционным параметрам постоянного тока: усилению, смещению, линей-
ности. Его особенности заключаются в ряде режимов: очень высокой скоро-
сти дискретизации (режим Warp), быстрый режим {Normal) для асинхронных
скоростных приложений, режим пониженной мощности {Impulse) для мало-
мощных приложений с масштабируемой по мощности производительнос-
тью. Разработаны три быстрые версии этого прибора: AD7675 (100 тыс. вы-
борок/с), AD7676 (500 тыс. выборок/с) и AD7677 (1 млн выборок/с). По-
зднее 16-разрядное семейство дополнил AD7621 на 3 млн выборок/с. Доступно
и 18-разрядное семейство PulSAR: AD7678 (100 тыс. выборок/с), AD7679
(570 тыс. выборок/с) и AD7674 (800 тыс. выборок/с).
Секционированные АЦП, АЦП с коррекцией ошибок
и конвейерные АЦП
В связи с чрезвычайной сложностью конструирования полностью параллель-
ных флэш-преобразователей на базе ламп, транзисторов и туннельных дио-
дов уже в ранних работах, таких как патенты Staffin и Lohman 1956 годаВ 9,
для облегчения преобразований было применено секционирование. Для
практического использования секционированных АЦП требовались удоб-
ные и быстрые схемы выборки и хранения. Ранние ламповые секциониро-
ванные АЦП имели очень ограниченные возможности выборки и хранения.
К 1964 году стали повсеместно доступными транзисторы, a Gray и Kitsopoulos
из Bell Labs в том же 1964 году опубликовали пионерскую работу, посвящен-
ную классическим схемам выборки и хранения на диодных мостах28.
3.2. Архитектуры АЦП
Аналоговый
вход
Такты
выборки
^Старшие разряды Л/1
Младшие разряды N2 у
Выход данных, Л/-разрядный - Л/1 + N2
См: Я. Staffin and R. Lohman. Signal Amplitude Quantizer. U.S. Patent 2,
869, 079, Filed December 19, 1956, Issued January 13, 1959
Рис. 3.65. /V-разрядный двухкаскадный секционированный АЦП
Базовый двухкаскадный секционированный TV-разрядный АЦП показан
на рис. 3.65. АЦП выполняет два отдельных преобразования: грубое преоб-
разование (N1 разрядов) в суб-АЦП (САЦП) старших разрядов, а затем
точное преобразование (А2 разрядов) в суб-АЦП младших разрядов. Ран-
ние секционированные АЦП всегда использовали в качестве стандартных
блоков флэш-преобразователи, однако во многих современных АЦП при-
меняются и другие архитектуры.
Процессу преобразования предшествует установка схемы выборки и хра-
нения в режим хранения, после чего начинается грубое преобразование NI
старших разрядов в соответствующем суб-АЦП. Цифровые выходы преобра-
зователя старших разрядов управляют А1 -разрядным суб-ЦАП, который ге-
нерирует грубое цифровое приближение аналогового входного сигнала. Вы-
ход А1-разрядного СЦАП вычитается из сохраненного аналогового сигнала,
усиливается и передается на А2-разрядный САЦП младших разрядов. Уси-
литель имеет коэффициент усиления G, достаточный для того, чтобы сигнал
«остатка» в точности соответствовал входному диапазону N 2-разрядного
САЦП. Выходные данные САЦП А1 и N2 фиксируются выходными регист-
рами, формируя на выходе A-разрядный цифровой код, где N — Al + N2.
Чтобы эта простая секционированная архитектура удовлетворительно
работала, САЦП и СЦАП (имеющие А1-разрядное разрешение) должны
иметь точность А разрядов. Смещение и усиление сигнала остатка следует
отрегулировать таким образом, чтобы остаток точно заполнял диапазон
САЦП А2, как показано на рис. 3.66, а. Если сигнал остатка сместится
более чем на один младший разряд (относительно САЦП А2), то появятся
пропуски кода, показанные на рис. 3.66, б, на котором сигнал остатка захо-
дит в сопредельные диапазоны «X» и «Y». Любая нелинейность или дрейф
САЦП А1, превышающие 1 младший разряд, также вызовет появление про-
пуска кода. На практике 8-разрядный секционированный АЦП с А1 = 4
разряда и А2 = 4 разряда представляет реально допустимый предел такой
архитектуры, достаточный для реализации безошибочного кодирования в
нормальном температурном диапазоне.
Если же межкаскадное выравнивание выполнено неправильно, в вы-
ходной переходной характеристике АЦП появляются пропуски кода, пока-
Рис. 3.66. Формы сигналов остатков на входе 7V2-разрядного САЦП.
Цифровой
выход
Рис. 3.67. Пропуск кода из-за нелинейности САЦП старших разрядов или нестыковки
каскадов секционированного АЦП
занные на рис. 3.67. Когда сигнал остатка попадает в положительный диа-
пазон (область «Л»), выходной сигнал «залипает» на определенном коде, а
затем «перепрыгивает» через область, оставляя пропуск кода. Когда же сиг-
нал остатка попадает в отрицательный диапазон, происходит обратный про-
цесс.
Рисунок 3.68 показывает распространенный 8-разрядный секциониро-
ванный АЦП на 15 млн выборок/с, выпущенный ComputerLabs, Inc. в сере-
дине 1970-х годов. Этот преобразователь послужил основой двухкаскадных
секционированных АЦП с 4-разрядными флэш-преобразователями, каж-
дый из которых объединял 8 пар высокоскоростных компараторов АМ687.
Для оптимизации переходной характеристики между каскадами помещался
потенциометр регулировки смещения. Этот АЦП был популярен в ранних
видеоприложениях, таких как кадровые запоминающие устройства и вре-
менные корректоры.
3.2. Архитектуры АЦП
Регулировка смещения
сигнала остатка
25 Вт
Сдвоенные компараторы АМ687
(всего 16)
7* X 6* X 2,5"
Рис. 3.68. 8-разрядный АЦП MOD-815
с 4 х 4 секциями, 15 млн выборок/с,
1976 г., Computer Labs, Inc.
Чтобы с уверенностью достигать более высокого, чем 8 разрядов, разре-
шения посредством секционирования, используется метод, обычно назы-
ваемый секционированием с цифровой коррекцией, цифровой коррекцией оши-
бок, перекрытием разрядов, сокращением разрядов и т. д. К этому методу
обратился Т.С. Verster еще в 1964 году29, и с тех пор он приобрел широкую
известность и распространение30 33. Основная идея метода иллюстрируется
на рис. 3.69.
Сигнал остатка показан для конкретного случая NX = 3 разряда. В стан-
дартном секционированном АЦП сигнал остатка должен точно заполнить
входной диапазон САЦП А2, разместившись в области R. Для исключения
пропуска кода производится дополнительное квантование в положитель-
ной подобласти Хи отрицательной подобласти Y. Эти дополнительные уров-
ни требуют и дополнительных компараторов для флэш-САЦП N2. Схема ра-
ботает следующим образом. Как только остаток войдет в область X, САЦП N2
должен установить все нули и заново начать счет. Кроме того, на выход
САЦП добавляется код 001, чтобы в старших разрядах сформировался пра-
вильный код. На рисунке некоррелированные старшие разряды отмечены
в нижней области сигнала, а скорректированные старшие разряды — в вер-
хней области. Аналогичная ситуация складывается и тогда, когда сигнал
Скорректированные старшие разряды
Нескорректированные старшие разряды
+001 в старшие
разряды А/1
-001 в старшие
разряды А/,
Рис. 3.69. Коррекция ошибок с дополнительными уровнями квантования при /VI = 3
242 Глава 3. Архитектуры преобразователей данных
остатка входит в отрицательный диапазон К При этом первый уровень кван-
тования в диапазоне Удолжен установить код всех единиц, а дополнитель-
ные компараторы начать вычитание. В диапазоне У код 001 вычитается из
старших разрядов, корректируя код этих разрядов. В этом заключается ключ
к пониманию того факта, что для правильной коррекции СЦАП N\ должен
иметь большую точность, чем полная точность АЦП. Нелинейности или
ошибки усиления СЦАП N1 искажают амплитуду вертикальной части сиг-
нала остатка, приводя к пропуску кодов на выходе.
В статье 1972 года32 Нота описывает экспериментальный 8-разрядный
АЦП на 15 млн выборок/с, в котором коррекция ошибок производится с
помощью компараторов с эмиттерными связями MCI650 Motorola, служа-
щих стандартными блоками преобразователя. Нота добавляет новые компа-
раторы во второй флэш-преобразователь, детально описывая эту процедуру.
Он отмечает, что логику коррекции можно сильно упростить добавлением к
остатку необходимого смещения, исключая тем самым попадание в отрица-
тельный диапазон. В результате отпадает необходимость в функции вычита-
ния, и остается только сложение. Старшие разряды либо остаются неизмен-
ными, либо к ним добавляется младший разряд (относительно САЦП М) в
зависимости от того, попал сигнал остатка в диапазон или превысил его.
В современных секционированных АЦП с цифровой коррекцией часто
организуется дополнительный уровень квантования с помощью внутренне-
го АЦП высокого разрешения в САЦП N2. Например, если в САЦП N2
добавить один разряд, то его диапазон удвоится, и сигнал остатка может
выйти за край диапазона на половину младшего разряда САЦП 7V1. Добав-
ление двух дополнительных разрядов в N2 приведет к выходу сигнала ос-
татка за край диапазона на полтора младших разряда САЦП /VI. Остаток
смещают по технологии Нота, причем логика коррекции реализуется с
помощью простого сумматора. Для детального объяснения этого процесса
полезно рассмотреть реальный пример коррекции одного разряда 6-разряд-
ного АЦП с 3-разрядным САЦП старших разрядов и 4-разрядным САЦП
младших разрядов (один разряд предназначен для коррекции ошибки).
Структурная схема этого примера приведена на рис. 3.70.
Аналоговый
вход
Смещение
I
Схема
выборки
и хранения
Такты
выборки
---р/правление^
См: Т.С. Verster. A Method to Increase
the Accuracy of Fast Serial-Parallel
Analog-to-Digital Converters. IEEE
Transactions on Electronic Computers,
Выход данных
EC-13, 1964, pp. 471—473
Рис. 3.70. 6-разрядный АЦП с коррекцией ошибок и секциями 7V1 = 3, 7V2 = 4
3.2. Архитектуры АЦП 243
Пройдя через входную схему выборки и хранения, сигнал оцифровыва-
ется 3-разрядным САЦП, восстанавливается 3-разрядным СЦАП, вычита-
ется из сохраненного аналогового сигнала, а затем усиливается и поступает
на второй 3-разрядный САЦП. Коэффициент усиления усилителя G выби-
рается таким образом, чтобы сигнал остатка заполнил половину входного
диапазона 4-разрядного САЦП. 3 младших разряда из 6 разрядов выходных
данных направляются непосредственно со второго САЦП в выходной ре-
гистр. Старший разряд 4-разрядного САЦП контролирует, было ли в сум-
маторе добавление 001 к трем старшим разрядам. Текущее состояние сум-
матора с помощью простой логики переполнения используется для предот-
вращения перехода выходных разрядов в нулевое состояние, когда входной
сигнал выходит за пределы положительного диапазона АЦП.
Теперь рассмотрим более детально сигнал остатка при полномасштаб-
ном нарастающем входном сигнале, чтобы объяснить функционирование
логики коррекции. Рисунок 3.71 представляет идеализированный сигнал
остатка в предположении безупречной линейности первого АЦП и точного
выравнивания обоих каскадов. Примечательно, что сигнал остатка запол-
няет ровно полдиапазона САЦП А 2. В левой части рисунка показан 4-
разрядный цифровой выход САЦП N2. По нижнему краю рисунка нанесе-
ны области 3-разрядного некорректированного САЦП М. Области 3-раз-
рядного скорректированного АЦП N1 представлены сверху.
Рассматривая сигнал остатка слева направо по мере входа в диапазон
АЦП (от нижней границы -FS), САЦП N2 увеличивает код, начиная с 0000.
Когда код САЦП N2 достигнет 1000, к выходу САЦП N1 добавится 001,
изменив его с 000 на 001. С увеличением сигнала остатка код САЦП N2
продолжает расти и достигает точки 1100, в которой САЦП N1 переходит
на следующий уровень, САЦП переключается, заставляя сигнал остатка
упасть до выходного значения 0100. При этом сумматор не работает, так
как старший разряд САЦП N2 находится в нуле, поэтому на выходе САЦП
Рис. 3.71. 6-разрядный АЦП с коррекцией ошибок и А, = 3, N2 = 4, с идеализирован-
ной секцией АЦП старших разрядов
(Г144 Глава 3. Архитектуры преобразователей данных
N\ остается 001. Далее сигнал остатка продолжает проходить через каждую
из оставшихся областей, пока не достигнет верхней границы полного диа-
пазона (±F5).
У этого метода есть ряд замечательных достоинств. Во-первых, резуль-
тирующая переходная характеристика запаздывает на половину младшего
разряда по отношению к старшему разряду САЦП (т. е. на 716 от полной
шкалы FS аналогового входа АЦП). Такое запаздывание легко корректиру-
ется обратным смещением входной схемы выборки и хранения. Понятно,
что переключения внутренних САЦП 7V1 и N2 являются источниками до-
полнительного шума и дифференциальной нелинейности всей переходной
характеристики АЦП. Поэтому их смещение на 716 полной шкалы способ-
ствует тому, что низкоуровневые сигналы (менее ±1/16 FS) около 0 В по
аналоговому входу не достигнут критических точек переключения секций.
Их малые показатели шума и дифференциальной нелинейности очень важ-
ны в коммуникационных приложениях. Наконец, поскольку идеализиро-
ванный сигнал остатка находится в центре диапазона САЦП N2, этот САЦП
обеспечивает дополнительное расширение диапазона входных сигналов на
±1/16 FS ошибки преобразования САЦП 7V1 без пропуска кодов.
Рисунок 3.72 показывает сигнал остатка с ошибками САЦП Nv Обра-
тите внимание на отсутствие влияния на линейность АЦП остатка, попав-
шего внутрь диапазона САЦП N2. Если это условие выполняется, опи-
санный метод коррекции ошибок корректирует следующие ошибки: ошибку
запаздывания выборки и хранения, ошибку времени установки выборки и хра-
нения, ошибку усиления САЦП N1, ошибку смещения САЦП N\, ошибку сме-
щения СЦАП 7V1, ошибку линейности САЦП N\, ошибку смещения усилителя
остатка. Но, несмотря на возможность коррекции этих ошибок, надо
обратить внимание, что метод некорректен для ошибок усиления и ли-
нейности СЦАП А1 и ошибки усиления усилителя остатка. Ошибки этих
параметров следует держать в пределах младшего разряда всего А-разряд-
Рис. 3.72. 6-разрядный секционированный АЦП с коррекцией ошибок, 3-разрядным не-
линейным АЦП 1 старших разрядов, 4-разрядным АЦП 2 младших разрядов
3.2. Архитектуры АЦП
Рис. 3.73. Обобщенные конвейерные каскады секционированного АЦП с коррекцией
ошибок
ного АЦП. Иными словами, чтобы не вызвать потери кодов, амплитуда
вертикальных перепадов сигнала остатка при переходе с уровня на уро-
вень САЦП и СЦАП должна оставаться в пределах ±1/2 младшего разряда
на входе САЦП N2.
На рис. 3.73 показаны два способа конструирования конвейерных кас-
кадов секционированных АЦП. Рисунок 3.73, а, демонстрирует два кон-
вейерных каскада с УВХ между ними, обеспечивающим межкаскадное уси-
ление с максимально возможным временем обработки входных сигналов.
На рис. 3.73, б, показан перемножающий ЦАП, реализующий необходимое
межкаскадное усиление и вычитание сигналов.
Конвейерная архитектура предполагает способность одного каскада об-
рабатывать данные другого каскада в пределах одного тактового периода.
В конце каждой фазы цикла выходной сигнал одного каскада передается на
следующий каскад через СВХ, а каскад получает новые данные. Разумеет-
ся, цифровые выходы всех, кроме последнего, каскадов такого конвейера
должны сохраняться в необходимом числе регистров сдвига, чтобы цифро-
вые данные, направляемые на коррекцию, соответствовали своей выборке.
Рисунок 3.74 демонстрирует временную диаграмму типового конвейер-
ного секционированного АЦП. Заметьте, что фазы синхронизации СВХ
меняются от каскада к каскаду. Поэтому, когда определенный СВХ перехо-
дит в режим хранения, он сохраняет выборку предыдущего СВХ, тогда как
предыдущий СВХ возвращается в режим выборки. Сохраненный аналого-
вый сигнал проходит от каскада к каскаду, пока не достигнет выходного
каскада конвейерного АЦП — флэш-преобразователя в рассматриваемом
случае. При работе на высокой частоте дискретизации для функционирова-
ния в оптимальном режиме важно, чтобы коэффициент заполнения такто-
вых импульсов составлял 50 %. Иной, чем 50 %-ный, коэффициент запол-
нения оказывает влияние на все СВХ в цепочке. Одни из них производят
слежение дольше оптимального времени и быстрее выполняют сохранение,
а другие работают обратным образом. Некоторые новые конвейерные АЦП,
включая 12-разрядный AD9235 с 65 млн выборок/с и 12-разрядный AD9430
с 170-/210 млн выборок/с, имеют встроенную схему тактирования, форми-
Глава 3. Архитектуры преобразователей данных
Тактирование о-
Тактирование о-
Каскад 1
отслежива-
ние, выбор-
ка и хране-
I ниеДСВХ),, I
Вход
отслежива-
чие, выбор-
ка и хране-
Каскад 2
отслежива-
ние, выбор-
ка и хране-
Каскад 3
отслежива-
• ние, выбор-
ка и хране-
1шеДСВХМ
Тактирование
Вход
отслеживание, выборка Т
и хранение (СВХ)
Каскад 1 Н
Каскад 2 Т
Каскад 3 Н
Флэш Т
Рис. 3.74. Тактирование в конвейерных АЦП
Флэш
Н
рующую требуемый коэффициент заполнения, несмотря на колебания вне-
шних тактов.
Влияние конвейерных задержек (иногда именуемых латентностью) на
выходные данные показано на рис. 3.75 для 12-разрядного АЦП AD9235 с
65 млн выборок/с и с задержкой синхронизации в 7 тактов.
Примечательно, что конвейерное запаздывание зависит от числа каска-
дов и собственной архитектуры рассматриваемого АЦП. Для детального
уточнения временных соотношений выходных данных и тактов выборок
следует обращаться к паспортным данным. Во многих приложениях кон-
вейерная задержка не вызывает проблем, но когда АЦП оказывается в кон-
туре обратной связи, конвейерная задержка может нарушить устойчивость
системы. Кроме того, конвейерная задержка может стать источником про-
блем в приложениях с уплотнением или когда АЦП работает в «коротком
разовом» режиме. Таким приложениям больше подходят другие архитекту-
ры АЦП, например АЦП последовательного приближения.
Часто ошибочно относят к конвейерным все секционированные АЦП, а
к секционированным все конвейерные АЦП. Действительно, новейшие
Рис. 3.75. Типичная диаграмма тактирования 12-разрядного конвейерного АЦП AD9235
с 65 млн выборок/с
3.2. Архитектуры АЦП
секционированные АЦП выполняют конвейерными для достижения мак-
симальной частоты квантования, однако для работы на низких скоростях
необходимости в конвейерах нет. В частности, процесс преобразования
можно начать по нарастающему фронту внешнего строба выборки, а генера-
цию остальных импульсов, необходимых для преобразования, может выпол-
нять внутренний тактовый генератор. В конце преобразовательного процес-
са может быть сформирован сигнал конца преобразования или готовности
данных в качестве внешнего сообщения об исполнении данной конкретной
выборки.
И наоборот, есть АЦП других архитектур, чем секционированная, являю-
щиеся конвейерными. Например, во многих флэш-преобразователях исполь-
зуется дополнительный набор выходных фиксаторов (кроме фиксаторов па-
раллельных компараторов), вносящих конвейерную задержку в выходные
данные. Другим примером несекционированной архитектуры, имеющей
конвейерную задержку почти в один разряд, является сигма-дельта, кото-
рая будет рассмотрена более подробно в следующем разделе этой главы.
Примечательно в то же время, что можно видоизменить тактирование обыч-
ного сигма-дельта АЦП, уменьшив скорость выходных данных и получив
сигма-дельта АЦП «без задержки».
Конвейерный АЦП с коррекцией ошибок получил большое распрост-
ранение в тех современных АЦП, которые рассчитаны на широкий дина-
мический диапазон и низкий уровень искажений. Для создания конвейер-
ных АЦП есть много путей, и некоторые из способов реализации мы сей-
час рассмотрим. На рис. 3.76, а, показан конвейерный АЦП с идентичными
Л-разрядными каскадами. Ядро каждого каскада этой архитектуры одина-
ково, и существуют другие достоинства, но для достижения наилучшей про-
изводительности АЦП потребовалось оптимизировать. Рисунок 3.76, б, по-
казывает наиболее простой вариант этой архитектуры, в котором k = 1.
Чтобы оптимизировать характеристики на уровне 12 разрядов, напри-
мер, чаще всего используют 1-разряд на каскад конвейера и многоразряд-
ные входной и выходной АЦП, как это показано на рис. 3.77.
а
к разрядов
в каскаде
Старшие
Младшие
разряды
разряды
б
1 разряд
в каскаде
Старший
Младший
разряд
разряд
Рис. 3.76. Базовый конвейерный АЦП с идентичными каскадами
Глава 3. Архитектуры преобразователей данных
1-разрядные конвейерные каскады
Рис. 3.77. Комбинация многоразрядное™ с одноразрядным конвейерным ядром
Коррекция ошибок производится практически во всех конвейерных АЦП,
включая простой 1-разрядный каскад. На рис. 3.78 показано, как в АЦП,
сконструированном из последовательно включенных 1-разрядных каскадов
без коррекции, появляются пропуски кода, даже если каскады почти иде-
альны.
Коррекцию ошибок можно добавить в простой 1-разрядный каскад с
помощью дополнительного компаратора. В результате получится так назы-
ваемый 1,5-разрядный каскад, показанный на рис. 3.79. Более подробное
разъяснение такой архитектуры можно найти в 34. На выходах обоих компа-
раторов возможны три значения кодов: 00, 01 и 10. Примечательно, что из
трех параллельных компараторов можно образовать полный 2-разрядный
каскад, используемый в качестве выходного каскада конвейерного 1,5-раз-
рядного АЦП, так как для формирования кода 11 нужен дополнительный
выходной уровень.
Отслеживание,
выборка
и хранение
Идеальный АЦП-1
Ошибка смещения в АЦП-1
Рис. 3.78. Конвейерный АЦП с 1 -разрядными каскадами
3.2. Архитектуры АЦП
Отслеживание, Отслеживание,
Рис. 3.79. Диапазон исправленных ошибок конвейера с 1,5-разрядными каскадами
На первый взгляд может показаться, что простого добавления компара-
тора недостаточно для такой же коррекции ошибок, как в ранее рассмот-
ренном многоразрядном случае. Но это не так и объясняется следующим
образом. Пороги срабатывания первого 1,5-разрядного каскада отметим как
М{ и М>, а пороги срабатывания второго 1,5-разрядного каскада — как и
Lr Сигнал остатка, обрабатываемый вторым 1,5-разрядным каскадом, по-
ступает с идеализированного первого каскада. «Скорректированные» коды
первого каскада получены простым добавлением выходного кода второго
каскада к коду первого каскада. Обратите внимание, что скорректирован-
ный выходной код сформирован в тот момент, когда сигнал остатка попал
внутрь пунктирного прямоугольника, и третий компаратор не потребовал-
ся (за исключением последнего каскада, которому необходимо иметь не
менее 2 разрядов). Решение относительно последнего разряда первого кас-
када принимается в зависимости от состояния корректируемых разрядов:
коды 00, 01 или 10 дают «0», а код 11 указывает на «1».
Рисунок 3.80 показывает эффекты ошибок, сделанных в первом каскаде
преобразователя. Рассмотренным методом можно скорректировать ошибки
первого каскада до ±1/2 младшего разряда. Рисунок 3.81 показывает ре-
зультаты коррекции другого набора ошибок первого каскада, которые еще
попадают в диапазон ±1/2 младшего разряда.
Другим, менее распространенным типом секционированной архитекту-
ры с коррекцией ошибок является рекурсивный секционированный АЦП.
Он был предложен в статье Kinniment и др. в 1966 году31 (см. рис. 3.82). Эта
концепция подобна предыдущей секционированной архитектуре с коррек-
цией ошибок, но здесь сигнал остатка повторно пропускается через отдель-
ный каскад АЦП с ЦАП с помощью ключей и усилителя с программируе-
мым усилением (РС4). На рис. 3.82 показаны дополнительные буферные
регистры, необходимые для хранения конвейерных данных, получаемых в
Некоррелированные разряды АЦП-1
Рис. 3.80. Сигнал остатка на входе 1,5-разрядного каскада АЦП-2 с нелинейным АЦП-1,
случай 1
Скорректированные разряды АЦП-1
Выходные
коды АЦП-2
Некорректированные разряды АЦП-1
Рис. 3.81. Сигнал остатка на входе 1,5-разрядного каскада АЦП-2 с нелинейным АЦП-1,
случай 2
Аналоговый
вход
программируемым
Схема
и хранения
Такты
выборки
Управление
Публикуется по: D. J. Kinniment, D. Aspinall,
and D.B.G. Edwards, High-Speed Analogue-
Digital Converter. IEEProceedings, Vol. 113,
pp. 2061-2069, Dec. 1966
Выходные
данные
З-раз-
рядный
ФЛЭШ-
АЦП
3-раз-
рядный
ЦАП
Выходной регистр
Рис. 3.82. Рекурсивная архитектура 7-разрядного конвейерного АЦП Kinniment и др.,
1966 год
Рис. 3.83. Архитектура 7-разрядного конвейерного АЦП, предложенная Kinniment и др.
в 1966 году
результате каждого преобразования, чтобы данные, используемые в логике
коррекции (в сумматоре), соответствовали своим выборкам. Отдадим дол-
жное исторической перспективе: рис. 3.83 из статьи Kinniment показывает
конвейерную секционированную архитектуру с коррекцией ошибок, соот-
ветствующую многим из популярных в настоящее время АЦП.
Обсуждение конвейерных АЦП с коррекцией ошибок завершает несколь-
ко примеров реализации популярных архитектур на современных интег-
ральных схемах. Эти примеры демонстрируют гибкость техники оптимиза-
ции работы АЦП с различными характеристиками разрешающей способно-
сти, частоты дискретизации, рассеяния мощности и проч.
Требование к расширению динамического диапазона высокоскоростных
АЦП для коммуникационных средств легло в основу разработки 12-разряд -
ного прибора, сделавшего переворот в АЦП в 1995 году35. Структурная схе-
ма этого преобразователя дана на рис. 3.84.
AD9042 представляет секционированную архитектуру с коррекцией
ошибок, состоящую из 6-разрядных АЦП/ЦАП старших разрядов на входе
Рис. 3.84. 12-разрядный АЦП AD9042, 41 млн выборок/с, 1995 год
Глава 3. Архитектуры преобразователей данных
OTR
1 разряд (старший разряд)
12 разряд (младший разряд)
Рис. 3.85. 12-разрядный КМОП АЦП AD9225 1998 года, 25 млн выборок/с
7-разрядного АЦП младших разрядов с одним разрядом коррекции оши-
бок. В AD9042 реализован свободный от ошибок динамический диапа-
зон 80 дБ в полосе пропускания Найквиста при частоте дискретизации
41 млн выборок/с. Прибор, изготовленный по высокоскоростной компле-
ментарной биполярной технологии, рассеивает 600 мВт и имеет однопо-
лярное питание +5 В.
Для удовлетворения требований рынка к дешевым маломощным прибо-
рам Analog Devices приступила к выпуску семейства высокопроизводитель-
ных КМОП АЦП, таких как 12-разрядный AD9225 на 25 млн выборок/с,
выпущенный в 1998 году AD9225 рассеивает 280 мВт, обеспечивает дина-
мический диапазон 85 дБ и имеет однополярное питание +5 В. Упрощен-
ная схема AD9225 показана на рис. 3.85.
12-разрядный КМОП АЦП AD9235 на 65 млн выборок/с, выпущенный в
2001 году, демонстрирует прогресс в развитии высокопроизводительных
КМОП-преобразователей. AD9235 имеет однополярное питание +3 В, рас-
сеивает 300 мВт (при 65 млн выборок/с) и обеспечивает динамический диапа-
Рис. 3.86. 12-разрядный КМОП АЦП AD9235 2001 года, 65 млн выборок/с
3.2.
Рис. 3.87. 12-разрядный АЦП AD9430 2002 года, 170/210 млн выборок/с
зон 90 дБ в полосе частот Найквиста. АЦП построен на 8 каскадах 1,5-раз-
рядных преобразователях (2 компаратора), о которых говорилось раньше в
этом разделе книги. Упрощенная схема AD9235 показана на рис. 3.86.
12-разрядный AD9430 на 210 млн выборок/с 2002 года выпуска показан
на рис. 3.87. Он производится по В/СЛ/05-технологии, обеспечивает дина-
мический диапазон, свободный от гармоник, 80 дБ при входных сигналах
до 70 МГц, имеет однополярное питание +3 В и при 210 млн выборок/с
рассеивает 1,3 Вт. Выходные данные рассчитаны на 2 порта по 105 млн
выборок/с каждый в режиме КМОП или 1 порт на 210 млн выборок/с в
режиме LVDS (цифровой сигнал низкого напряжения).
Последний пример (конечно, не завершающий полный список) посвя-
щен 14-разрядному АЦП AD6645 на 105 млн выборок/с, выпускаемому с
2003 года по высокоскоростной комплементарной биполярной технологии
(XFCB). Он реализует динамический диапазон без гармоник 90 дБ, имеет
однополярное питание +5 В и рассеивает мощность 1,5 Вт. В 2002 году
была реализована версия AD6645 на 80 млн выборок/с. Упрощенная схема
AD6645 представлена на рис 3.88.
АЦП-1, АЦП2 И АЦП3 МадАМР™ работают в коде ГРЕЯ
Рис. 3.88. 14-разрядный АЦП AD6645 2003 года, 105 млн выборок/с (80 млн выборок/с
в версии 2002 года)
Глава 3. Архитектуры преобразователей данных
Нелегко достичь уровня, представленного в рассмотренных примерах.
Для этого пришлось разработать множество вариантов схем и процессов.
Конструкции схем потребовали применения высокоскоростных ОУ, УСВХ,
линейных ЦАП с малыми выбросами, большого внимания к топологии
микросхем. Во внутренних структурах ЦАП часто используются ЦАП-тер-
мометры с перетасовкой разрядов, вводятся дрожащие (шумовые) сигналы
для расширения динамического диапазона, свободного от гармоник. Для
достижения высоких параметров разработчикам ИС приходится вводить в
конструкцию типовых микросхем усовершенствованные топологии, решать
вопросы заземления и развязки. Многие из этих важных конструкторских
решений будут детально рассмотрены в гл. 6 и 9.
Последовательные двоичные и складывающие (Folding)
АЦП в коде Гоея с одноразрядными каскадами
Аналого-цифровое преобразование поддерживается различными архитектура-
ми с одноразрядными каскадами. Общее представление о них дает рис. 3.89.
Одну из таких архитектур представляют ранее рассмотренные многокас-
кадные секционированные АЦП с одноразрядными каскадами и без кор-
рекции ошибок. Они нормально работают, если входной сигнал сохраня-
ется постоянным в цикле преобразования. Каждый из N каскадов имеет
разрядный выход и выход остатка, причем выход остатка одного каскада
служит входом для следующего. Последний разряд определяется одним
компаратором.
Рис. 3.89: Обобщенная архитектура АЦП с одноразрядными каскадами
Одно из первых упоминаний такой архитектуры появилось в статье
B.D. Smith в 1956 году36. Тем не менее сам Smith ссылается на тезисы 1949 года
R.P. Sallen из M.I.T. В статье Smith описывает как в двоичном коде, так и в
коде Грея (или складывающем) передаточные функции, реализующие ана-
лого-цифровое преобразование.
Базовый каскад, проводящий преобразование одного разряда двоичного
кода, показан на рис. 3.90. Он состоит из удвоителя, компаратора и од-
норазрядного ЦАП (переключателя полюсов). Допустим, что это первый
каскад АЦП. Старший разряд несет информацию о полярности входного
сигнала. Он определяется компаратором, который также управляет од-
норазрядным ЦАП. Выход одноразрядного ЦАП складывается с выходом
Остаток
Рис. 3.90. Переходная характеристика одного каскада двоичного АЦП
удвоителя. Результирующий остаток затем поступает на следующий каскад.
Для лучшего понимания работы схемы на диаграмме показан выход остатка
для случая линейно нарастающего входного напряжения, пересекающего
внутренний диапазон АЦП от — VR до + VR. Обратите внимание, что поляр-
ность остатка на выходе определяет выход двоичного разряда следующего
каскада.
Упрощенный З-разрядный последовательный двоичный АЦП показан
на рис. 3.91, а выходы его остатков приведены на рис. 3.92. И вновь рас-
смотрена ситуация входного напряжения, линейно нарастающего в диапа-
зоне от — VR до + VR. Каждый сигнал остатка имеет разрывы в точке пере-
ключения ЦАП, соответствующей смене состояния компаратора. Преры-
вистость выходного сигнала остатка является основной проблемой данной
архитектуры. Чтобы пройти все каскады и установиться на входе выходного
каскада, сигналы остатка должны устанавливаться в течение соответствую-
щего времени. И как следствие, такая архитектура имеет самые унылые
перспективы в плане работы на высоких скоростях. В то же время исполь-
зование ранее рассмотренной 1,5-разрядной конвейерной архитектуры го-
раздо более привлекательно для высокоскоростных приложений.
В статье наряду с двоичным методом B.D. Smith рассматривает также
гораздо более привлекательную архитектуру с одноразрядными каскадами,
построенную на усилителях абсолютных значений (/гш^ш’Щб/е-усилителях,
или просто MagAMPs™). Такую схему часто называют последовательным
Рис. 3.91. З-разрядный последовательный АЦП с двоичным выходом
Глава 3. Архитектуры преобразователей данных
Рис. 3.92: Входной и остаточный сигналы 3-разрядного двоичного пульсирующего АЦП
Грей-преобразователем (так как на ее выходе присутствует код Грея) либо
складывающим преобразователем из-за формы ее переходной характеристи-
ки. Выполнение преобразования с начальной переходной характеристикой
в коде Грея обладает тем преимуществом, что сводит к минимуму разрывы
сигнала остатка и раскрывает перспективу работы на более высоких скоро-
стях, чем в двоичном коде.
Базовый складывающий каскад функционально представлен на рис. 3.93
вместе с переходной характеристикой. Подразумевается, что на вход пода-
ется напряжение, линейно нарастающее в диапазоне от — VR до + VR. Компа-
ратор определяет полярность входного сигнала и формирует код Грея на
выходе каскада. Заодно он определяет, равен ли коэффициент усиления
каскада +2 или —2. Опорное напряжение VR складывается с переключае-
мым выходом, генерируя сигнал остатка, передаваемый в следующий кас-
кад. Полярность сигнала остатка определяет разряд Грея для следующего
каскада. Переходная характеристика складывающего каскада показана на
рис. 3.93.
Рис. 3.93. Эквивалентная функциональная схема складывающего каскада
3.2. Архитектуры АЦП
Рис. 3.94. Структурная схема 3-разрядного складывающего АЦП
З-разрядный складывающий АЦП MagAMP показан на рис. 3.94, а со-
ответствующие сигналы остатков — на рис. 3.95. Как и в случае двоичного
пульсирующего АЦП, полярность сигнала остатка каскада определяет зна-
чение разряда Грея следующего каскада. Полярность входа первого каскада
задает старший разряд кода Грея. Полярность выхода 7?1 определяет разряд
второго кода Грея, а полярность выхода R2 определяет разряд третьего кода
Грея. Примечательно, что в отличие от двоичного пульсирующего АЦП
здесь нет разрывов в переходных процессах ни при каких значениях скла-
дывающих остатков. Это очень удобно для работы на высоких скоростях.
Организация складывающего каскада является ключом к работе на вы-
соких скоростях.
Рис. 3.95. Входной и остаточный сигналы 3-разрядного складывающего АЦП
9 2852
Приводится по: N.E. Chasek. Pulse Code Modulation Encoder. U.S.
Patent 3, 035, 258, Filed November 14, 1960, Issued May 15, 1962.
Рис. 3.96. 3-разрядный складывающий АЦП конструкции N.E. Chasek
N.E. Chasek из Bell Telephone Labs в патенте 1960 года37 описывает схему
формирования складывающей переходной характеристики с использова-
нием вложенных диодных мостов. Конструкция этой схемы выполнена на
твердотельных приборах, но нуждается в различных опорных напряжениях
для каждого каскада (рис. 3.96). Схема Chasek страдает потерями динами-
ческого диапазона и усиления при последовательном включении каскадов
для увеличения разрешения, как это показано на рис. 3.97. А что действи-
тельно необходимо для работы складывающих АЦП высокого разрешения,
так это близкое к идеальному выпрямление напряжения или тока.
F.D. Waldhaur из Bell Telephone Labs в классическом патенте 1962 года38
устранил проблему «выводка» мостовых диодных схемы Chasek. Рисунок 3.98
Рис. 3.97. Сигналы одного из выходов каскадов складывающего АЦП конструкции Chasek
3.2. Архитектуры АЦП
Фрагмент из: F.D. Waldhauer. Analog-to-digital Converter. U.S.
Patent 3, 187, 325, Filed July 2, 1962, Issued June 1, 1965
Рис. 3.98. Классический складывающий каскад F.D. Waldhaur для выпрямительных
усилителей
демонстрирует красивую реализацию Waldhaur складывающей переходной
характеристики с использованием твердотельных ОУ с диодами в цепи об-
ратной связи. Удвоители на ОУ позволяют использовать во всех каскадах
одни и те же задающие напряжения и поддерживать сигналы одного и того
же уровня каждого остатка при почти идеальном выпрямлении.
J.O. Edson и Н.Н. Henning в деталях описывают принцип действия и
работу рассматриваемого типа АЦП в статье 1965 года в журнале Bell System
Technical Journal39. 9-разрядный АЦП, выполняющий 6 млн выборок/с, ис-
пользовался в экспериментальном исследовании ИКМ-терминалов, пере-
дающих 224 Мбит/с. Эти терминалы передавали и данные, и тональные
сигналы. Относительно тональных сигналов было необходимо оцифровы-
вать 600-канальный 2,4-МГц диапазон с частотным уплотнением, что тре-
бовало проведения дискретизации со скоростью, как минимум, 6 млн вы-
борок/с. Интересно отметить, что на этот же экспериментальный терминал
возлагалась и обработка видеосигналов, требующая еще более высокой ча-
стоты дискретизации в 12 млн выборок/с. Для удовлетворения АЦП этим
требованиям потребовался электронно-лучевой шифратор последнего по-
коления Bell Labs, поскольку твердотельный шифратор из патента Waldhaur
не давал необходимой точности на высоких частотах дискретизации.
Первым коммерческим АЦП, использовавшим архитектуру Waldhaur в
коде Грея, был 8-разрядный HS-810 на 10 млн выборок/с, разработанный
Computer Labs, Inc. в 1966 году (см. гл. 1). Этот прибор целиком состоял из
дискретных транзисторных схем (без ИС), а конструкция позволяла встро-
ить его в стойку размером 19" (дюймов).
Складывающая архитектура, работающая в коде Грея, использовалась в
ряде инструментальных и модульных АЦП в начале 1970 годов, но большая
их часть была вытеснена секционированной архитектурой с коррекцией
ошибок. После усовершенствования процессов создания ИС возобновил-
ся интерес к свертывающей архитектуре с конца 1970-х годов и на протя-
(Г260 Глава 3. Архитектуры преобразователей данных
жении 1980-х годов, в течение которых появился целый ряд проектов, опи-
санных в эти годы в различных журналах40-44.
Analog Devices разработала первый высокоскоростной полностью комп-
лементарный биполярный (СВ) процесс в середине 1980-х году, а в 1994 году
F. Murden и С. Moreland получили патенты на значительно усовершенство-
ванную MagAMP архитектуру АЦП с токовым управлением в коде Грея45-49.
Их способ был впервые внедрен в ядро стандартного блока 12-разрядного
АЦП AD9042 на 41 млн выборок/с, выпущенного в 1995 году. В 1999 году
усовершенствованные высокоскоростные СВ- и XFCB-процессы50’51 стали
базовыми технологиями для 14-разрядного АЦП AD6644 на 65 млн выбо-
рок/с — 1999 год, в 2001 году — AD6645 на 80 млн выборок/с и в 2003 году —
AD6645 на 105 млн выборок/с. Несмотря на то что в этих АЦП применяет-
ся секционированная архитектура с коррекцией ошибок, ядро их стандарт-
ного внутреннего блока построено в архитектурном стиле MagAMP.
Современные АЦП в интегральном исполнении реализуют переходные
характеристики посредством техники регулирования тока в разомкнутой
схеме усиления, от которой можно добиться очень высоких скоростей.
Полностью дифференциальные каскады (включая УВХ) также обеспечива-
ют высокое быстродействие и малые искажения на 8-разрядных точных
складывающих каскадах, не нуждающихся в тонкопленочных резисторах с
лазерной подстройкой.
На рис. 3.99 приведен пример полностью дифференциального склады-
вающего каскада типа MagAMP с усилением, равным двум45’46’48. Диффе-
ренциальный входной сигнал поступает на дифференциальную пару Qx, Q2
с эмиттерной связью и на компаратор. Дифференциальное входное напря-
жение преобразуется в дифференциальный ток коллекторов Qv Qr Если
+INбольше, чем —IN, объединенные каскадной связью транзисторы Q3, Q6
включены, a Q4, Q6 выключены. Поэтому дифференциальный сигнальный
Рис. 3.99. Современный каскад MagAMP™ с токовым управлением
3.2. Архитектуры АЦП
Рис. 3.100. Функциональная схема 8-разрядного AD9054A, 200 млн. выборок/с
ток течет через коллекторы Q3, Q6 в транзисторы смещения уровня 07, Qs и
в выходные нагрузочные резисторы, создавая дифференциальное выходное
напряжение +OUT и —OUT. Полный дифференциальный коэффициент
усиления напряжения схемы равен двум.
Если +IN меньше, чем —IN (отрицательное дифференциальное входное
напряжение), компаратор меняет состояние, включая 04, Qs и выключая
Q3, Q6. Дифференциальные сигнальные токи текут от 05 к 07 и от Q4 к Qv
поддерживая тем самым ту же относительную полярность дифференциаль-
ных выходов, которую имеет входное напряжение. Необходимое напряже-
ние смещения вырабатывается посредством добавления тока I к току
эмиттера £/ и вычитания его из тока эмиттера Q&.
Дифференциальное напряжение остатка на выходах каскада управляет
входами следующего каскада, а выход компаратора представляет в коде Грея
выход каскада.
Архитектура MagAMP рассчитана на невысокие мощности и может рас-
пространяться на системы с частотами дискретизации, в которых раньше
превалировали флэш-преобразователи. Например, на рис. 3.100 показан
8-разрядный АЦП AD9054A, работающий на частоте 200 млн выборок/с.
Первые пять разрядов (в коде Грея) построены на пяти дифференциальных
каскадах MagAMP. Дифференциальный остаток на выходе MagAMP пятого
каскада управляет не отдельным компаратором, а 3-разрядным флэш-пре-
образователем.
• Счетные АЦП конструкции Reeve 1939
• Последовательного приближения 1946
• Флэш (ламповые шифраторы) 1948
• 1-разрядные каскады (двоичные и складывающие по Грею) 1956
• Секционированные 1956
• Секционированные с коррекцией ошибок 1964
• Конвейерные с коррекцией ошибок 1966
Примечание: даты первых публикаций или подачи заявок.
Рис. 3.101. Этапы развития архитектур высокоскоростных АЦП
Глава 3. Архитектуры преобразователей данных
Выходы пяти MagAMP в коде Грея и двоичный выход трехразрядного
флэш-преобразователя фиксируются, все это преобразуется в двоичный код
и вновь фиксируется в выходном регистре данных. Из-за высокой скорости
передачи данных предусмотрена демультиплексированная выходная опция.
Рисунок 3.101 раскрывает поэтапную историческую перспективу разви-
тия архитектур популярных высокоскоростных АЦП, рассмотренных в этом
разделе.
Архитектуры счетных и интегрирующих АЦП
Хотя счетные АЦП не очень подходят для высокоскоростных приложений,
они идеальны для низкочастотных приложений с высоким уровнем разре-
шения, особенно в комбинации с интегральной техникой. На рис. 3.102
представлена эволюция счетных АЦП, отражающая примерные этапы их
развития. Примечательно, что развитие архитектур разного рода счетных/
интегрирующих АЦП развивается почти параллельно с развитием высоко-
скоростных архитектур (обратитесь вновь к рис. 3.101). К 1957 году все
фундаментальные архитектуры в той или иной форме были предложены.
• Счетные АЦП конструкции Reeve's 1939 |
• Зарядово-разрядные 1946 |
• Линейно нарастающие 1951 ।
• Следящие 1950 .
• Преобразователи напряжения в частоту 1952
• Двойного наклона 1957 1
• Тройного наклона 1967
• Четверного наклона 1973
Примечание: даты первых публикаций или подачи заявок.
Рис. 3.102. Этапы развития счетных и интегрирующих архитектур АЦП
5-разрядный счетный АЦП конструкции А.Н. Reeves
Как уже было сказано, первым АЦП, удовлетворяющим требованиям при-
ложений с ИКМ, было устройство, описанное во всеобъемлющем патенте
ИКМ А.Н. Reeves 1939 года24. Упрощенную схему этого АЦП мы повто-
рим на рис. 3.103. Первые АЦП для ИКМ обыкновенно имели разреше-
ние в 5—7 разрядов и частоту дискретизации 6—10 тыс. выборок/с. Доволь-
но интересно, что в АЦП Reeves использовалась техника счета, вероятно,
вследствие его повышенного интереса к счетчикам, поскольку всего несколько
лет назад был изобретен бистабильный мультивибратор Eccles—Jordan’a. Тем
не менее в последующих приложениях ИКМ шире применялись уже другие
архитектуры: последовательного приближения, флэш, секционированная и
конвейерная с одноразрядными каскадами.
В технике счетного АЦП (см. рис. 3.103) используется базовая концеп-
ция, по которой стробом отсчета формируется выборка из аналогового
сигнала, устанавливается 7?/5-триггер и одновременно запускается управ-
3.2. Архитектуры АЦП 263
Воспроизводится по: Alec Harley Reeves. Electric Signaling
System. U.S. Patent 2, 272, 070, Filed November 22, 1939, Issued
February 3, 1942
Рис. 3.103. 5-разрядный счетный АЦП конструкции А.Н. Reeves
ляемое линейно нарастающее напряжение. Линейно нарастающее напря-
жение сравнивается с входным сигналом, и в момент их равенства гене-
рируется импульс сброса 7?/5-триггера. Ширина импульса на выходе триг-
гера пропорциональна аналоговому сигналу выборки. Этот широтно-мо-
дулированный (ШИМ) импульс управляет стробирующим генератором, и
число импульсов генератора представляет величину аналогового сигнала.
Эту импульсную последовательность без труда можно преобразовать в
двоичное слово с помощью счетчика. В системе Reeves использовался
опорный генератор на 600 кГц, а делитель 100:1 генерировал 6-кГц строб-
импульсы. 5-разрядный счетчик для представления полномасштабного сиг-
нала требует 31 импульс (из 100 импульсов между строб-импульсами вы-
борок). Очевидно, этот подход можно распространить и на большие раз-
решения.
Зарядово-разрядный АЦП
АЦП с этой архитектурой52 представлен на рис. 3.104. Он сначала выполня-
ет выборку аналогового сигнала на запоминающий конденсатор (в виде
заряда). После этого конденсатор разряжается источником постоянного тока
и счетчиком измеряется время полной разрядки. Примечательно, что в этом
подходе результирующая точность зависит от качества и величины конден-
сатора, от величины тока и точности тактирования.
АЦП с генератором линейно нарастающего
эталонного сигнала
В линейно нарастающей архитектуре, иллюстрируемой рис. 3.10553, в нача-
ле цикла преобразования запускается генератор линейно нарастающего сиг-
нала. Затем счетчик измеряет время достижения нарастающим сигналом
преобразуемого входного напряжения. Полученный код счетчика пропор-
ционален аналоговому сигналу. В другой версии (показанной пунктиром на
рис. 3.105) вместо генератора линейно нарастающего напряжения установ-
лен ЦАП, управляемый кодом счетчика. Преимущество использования ли-
Глава 3. Архитектуры преобразователей данных
Цифровой
выход
Рис. 3.105. АЦП с генератором линейно нарастающего эталонного сигнала
нейно нарастающего сигнала состоит в полной монотонности АЦП, тогда
как при использовании ЦАП монотонность определяется им.
Точность линейно нарастающего АЦП определяется точностью генера-
тора линейно нарастающего сигнала (или ЦАП) и точностью генератора
тактов.
Следящий АЦП
В архитектуре следящего АЦП, показанной на рис. 3.10654 55, выполняется
непрерывное сравнение входного сигнала с его восстановленным представ-
лением. Выход компаратора управляет счетчиком сложения/вычитания. Пока
сигнал на аналоговом входе превышает сигнал на выходе ЦАП, счетчик
3.2. Архитектуры АЦП 265
Аналоговый
вход
Цифровой
выход
Рис. 3.106. Следящий АЦП
считает до момента их выравнивания. Очевидно, что при медленном изме-
нении аналогового входного сигнала счетчик без труда отслеживает его, и
цифровой код на выходе достаточно точно близок к правильному значе-
нию. Если же аналоговый вход быстро изменится, пройдет несколько со-
тен, а то и тысяч циклов, прежде чем на выходе установится верное значе-
ние. Таким образом, следящий АЦП точно реагирует на слабо изменяющи-
еся сигналы и грубо — на быстро и существенно меняющиеся сигналы.
В проведенном простом анализе не рассматривается поведение АЦП,
когда аналоговый вход и выход ЦАП практически равны. Этот режим опре-
деляется конкретной конструкцией компаратора и счетчика. При простом
компараторе выход ЦАП колеблется относительно младшего разряда, нахо-
дясь выше или ниже его уровня, и цифровой выход, естественно, даст тот
же результат, то есть Фликер-шум в единицу младшего разряда. Существенно,
что при этом выход изменяется в каждом цикле синхронизации независимо
от точного значения аналогового сигнала, поддерживая постоянный коэф-
фициент заполнения. Другими словами, здесь невозможно вычислить среднее
значение цифрового выхода и повысить разрешение посредством избыточ-
ной дискретизации. Лучшее, хотя и более сложное решение можно было бы
получить с помощью компаратора с эталонными уровнями окна шириной в
1—2 младших разрядов. Когда на выходе ЦАП присутствует высокий или
низкий сигнал, система ведет себя так, как было ранее описано, но, как
только выход ЦАП попадает внутрь окна эталонных уровней, счетчик оста-
навливается. Такая организация снижает шум, обеспечивает то, что диффе-
ренциальная нелинейность никогда не позволит выходу ЦАП перешагнуть
через окно эталонных уровней при изменении кода на один младший разряд.
Следящие АЦП не получили широкого распространения. Их замедлен-
ная переходная характеристика не удовлетворяет многим приложениям.
Однако у таких АЦП есть существенное достоинство: на их выходе непре-
рывно присутствует сигнал. Большинство АЦП выполняют преобразова-
ния последовательно: при поступлении команды «начать преобразование»
(которую АЦП может сам сгенерировать) они преобразуют сигнал и лишь
после некоторой задержки выдают результат. На выходе же следящего АЦП
при медленном изменении аналогового входного сигнала результат присут-
ствует непрерывно. Это ценно для преобразователей сельсин-код и резоль-
вер-код, и именно в таких приложениях следящие АЦП используются наи-
более часто. Другое достоинство следящих АЦП состоит в том, что любое
Глава 3. Архитектуры преобразователей данных
изменение аналогового входа вызывает изменение выходного сигнала толь-
ко на одну единицу, что существенно при наличии шумов. В этом плане
примечательно сходство следящих АЦП с АЦП последовательного прибли-
жения. Замена счетчика сложения/вычитания логикой РПП ведет к архи-
тектуре АЦП последовательного приближения.
Преобразователи напряжения в частоту (ПНЧ)
Преобразователь напряжения в частоту (ПНЧ) — это генератор частоты,
прямо пропорциональной управляющему напряжению. ПНЧ/счетный АЦП
отличается монотонностью, не допускает пропуска кодов, интегрирует шум
и очень экономичен. Он удобен для использования в системах телеметрии,
так как очень маленький, дешевый и экономичный. ПНЧ без труда уста-
навливается на субъекте эксперимента (пациенте, диком животном, артил-
лерийской гильзе и т. п.) и связывается с частотомером по телеметрическо-
му каналу, как показано на рис. 3.107.
Аналоговый
вход
Выход
• Нет необходимости в непосредственном соединении.
• Идеальная схема для телеметрии.
Рис. 3.107. ПНЧ и частотомер образуют дешевый универсальный АЦП высокого раз-
решения
Распространены две общие архитектуры ПНЧ: ПНЧ на мультивибрато-
ре, управляемом током, и ПНЧ с уравновешиванием заряда^. ПНЧ с баланси-
ровкой зарядов могут иметь асинхронное или синхронное исполнение. Суще-
ствует и множество других архитектур ПНЧ (генераторов переменной час-
тоты), включая пресловутый таймер 555 серии, но немногие из них
отличаются линейностью, которая является основной характеристикой ПНЧ.
ПНЧ на мультивибраторе, управляемом током, является скорее преоб-
разователем тока в частоту, чем ПНЧ, но, как показано на рис. 3.108, прак-
тические схемы неизменно имеют на входе преобразователь напряжения в
ток. Принцип действия достаточно очевиден: ток разряжает конденсатор
до достижения некоторой пороговой величины, а когда полярность на вы-
водах конденсатора меняется, полуцикл повторяется заново. Сигнал на кон-
денсаторе имеет линейную треугольную форму, но по отношению к земле
форма сигналов на выводах более сложна.
Практические ПНЧ этого типа сохраняют линейность в пределах 14 раз-
рядов при сравнительной стабильности, хотя их можно использовать и в
АЦП более высокой разрядности без пропуска кодов. Пределы здесь опре-
деляются пороговым шумом компаратора, пороговым температурным ко-
эффициентом, а также стабильностью и диэлектрическими потерями кон-
денсатора, являющегося дискретным компонентом схемы. Структура на базе
компаратора, сравнивающего напряжение конденсатора с опорным, пока-
3.2. Архитектуры АЦП
+1/
Рис. 3.108. ПНЧ с токовым управлением
занная на схеме, приведена скорее для наглядности, так как на практике
она более интегрирована с переключателями и сложнее с точки зрения
анализа.
Такой тип ПНЧ прост, недорог, экономичен и работает в широком ди-
апазоне питающих напряжений. Он идеально подходит для дешевых АЦП
средней точности и систем передачи телеметрической информации.
АЦП с уравновешиванием заряда, показанный на рис. 3.109, более сло-
жен, имеет более высокие требования к питающим напряжениям и токам,
но более точен. Его диапазон линейности составляет уже 16—18 разрядов.
Конденсатор интегратора заряжается при поступлении аналогового сиг-
нала, как показано на рис. 3.109. Когда напряжение достигает порога компа-
ратора, из напряжения конденсатора вычитается фиксированная величина,
но во время разряда продолжает протекать входной ток, поэтому потерь за-
ряда нет. Фиксированная вычитаемая величина задается прецизионным ис-
точником тока и шириной импульса прецизионного одновибратора. Таким
образом, частота выходных импульсов в точности пропорциональна частоте,
с которой интегратор заряжается при поступлении входного сигнала.
Аналоговый
вход
Цифровой
выход
Рис. 3.109. ПНЧ с уравновешиванием заряда
Глава 3. Архитектуры преобразователей данных
При низких частотах предельные возможности такого ПНЧ определя-
ются стабильностью источника тока и импульса одновибратора (которая,
кроме всего прочего, зависит от стабильности емкости одновибратора).
Абсолютное значение и температурная стабильность интегрирующего кон-
денсатора не влияют на точность, но влияют утечка и диэлектрические по-
тери. На высоких частотах свой вклад в снижение точности и линейности
вносят эффекты второго порядка, такие как переходные процессы пере-
ключения интегратора и точность одновибратора, когда он переключается
сразу же вслед за окончанием импульса.
Переключатель цепей протекания тока от источника влияет на пробле-
му переходных процессов в интеграторе. Применение переключателя на-
правления вместо простого выключателя, распространенного в устаревших
моделях ПНЧ, вызвано его преимуществами:
а) в прецизионном источнике тока отсутствуют переходные процессы,
вызванные включением и вы-ключением;
б) выходной каскад интегратора имеет постоянную токовую нагрузку.
Большую часть времени ток источника тока поступает прямо в выходной
каскад, а когда заряды уравновешены, он опять же течет в выходной кас-
кад, но уже через интегрирующий конденсатор.
Больше хлопот доставляют стабильность и динамика прецизионного од-
новибратора, но с ними можно справиться, заменив одновибратор тактируе-
мым бистабильным мультивибратором. Такое решение известно под назва-
нием синхронизированного ПНЧ, или СПНЧ; оно представлено на рис. 3.110.
Отличие от предыдущей схемы здесь довольно мало, но продолжитель-
ность импульса, уравновешивающего заряд, теперь определяется двумя пос-
ледовательными фронтами внешнего таймера. Если сигнал таймера мало за-
шумлен, заряд будет определен очень точно. С таймером будут также синх-
ронизированы и выходные импульсы. СПНЧ этого типа сохраняет линейность
в диапазоне 18 разрядов и замечательную температурную стабильность.
Подобная синхронная работа организуется во многих приложениях, так
как синхронную передачу данных обычно бывает проще выполнить, чем асин-
хронную. В связи с этим следует отметить, что на выходе СПНЧ присутству-
ет не чистый тон (с гармониками, разумеется), подобный обычному ПНЧ, а
Аналоговый
вход
Цифровой
выход
Рис. 3.110. Синхронизированный ПНЧ (СПНЧ)
3.2. Архитектуры АЦП 269
пнч
Т плавно меняется с входным сигналом
Синхронизация
СПНЧ
Относительная вероятность задержки или Т2 меняется с входным сигналом,
но обе задержки имеют место
Рис. 3.111. Сигналы ПНЧ И СПНЧ
некоторые компоненты, связанные гармониками с частотой таймера. Ото-
бражение выходного сигнала СПНЧ на осциллографе особенно вводит в заб-
луждение и служит источником распространенных ошибок. Изменение вход-
ного сигнала ПНЧ вызывает плавное изменение выходной частоты, тогда
как изменение сигнала на входе СНПЧ ведет к изменению вероятной плот-
ности выходных импульсов N п N+ 1 циклов синхронизации, следующих за
последним из выходных импульсов, который часто по ошибке принимают за
некоторое дрожание или признак неисправности (рис. 3.111).
Другая проблема СПНЧ — это нелинейная зависимость выходных час-
тот, связанная с частотой синхронизации. Внимательно изучая переходную
характеристику, мы обнаружим нелинейности на субгармониках частоты
синхронизации FC, показанные на рис. 3.112. Они присутствуют на часто-
тах FC/\ FC/4 и FC/6. Они вызываются паразитной емкостью микросхемы
(и схемной топологией!) и связью синхросигнала с компаратором СПНЧ,
побуждающей прибор вести себя подобно системе с фазовой автоподстрой-
кой частоты (ФАПЧ). Эта проблема свойственна всем СПНЧ, но часто не
вызывает серьезных последствий. При качественном монтаже и минималь-
• Нелинейность, вызванная поступлением
тактового сигнала при распределении
сигналов между каналами.
• Нелинейности в 6—8 младших разрядов
из 18 должны быть при правильной топо-
логии и развязке
• Нелинейность наблюдается на субгармо-
никах частоты синхронизации,
где FS = FcvnJ2
Рис. 3.112. Нелинейность СПНЧ
270 Глава 3. Архитектуры преобразователей данных
но возможных значениях амплитуды и крутизны нарастания импульсов
синхронизации прерывистость переходной характеристики не превышает
8 младших разрядов (при 18-разрядном разрешении) на частотах FC/3 и
FC/А и еще меньше на других субгармониках. Это вполне допустимо, тем
более что частоты, на которых это происходит, заранее известны. Конечно,
при плохой топологии схемы или развязке эффект может оказаться намно-
го хуже, но это уже недостаток конструкции, а не СПНЧ.
Очевидно, что СПНЧ формируют квантованные сигналы, чего нельзя
сказать об обычном ПНЧ. Из этого не следует, что счетные АЦП с ПНЧ
имеют более высокое разрешение (без учета нелинейностей), чем счетные
АЦП с СПНЧ, поскольку таймер тоже имеет ограниченную разрешающую
способность.
Когда на входе ПНЧ присутствует большой сигнал, устройство быстро
включается в работу и (через короткое время, занимаемое подсчетом) дос-
тигает хорошего разрешения. В то же время бывает трудно достичь хороше-
го разрешения за приемлемое время выборки, если ПНЧ медленно реаги-
рует на входные сигналы. В таких случаях удобнее измерять период выход-
ного сигнала ПНЧ (это не относится к СПНЧ), хотя с ростом входного
сигнала (и частоты) разрешение подобной системы ухудшается. Тем не ме-
нее, если счетно-временная схема выполнена качественно, можно изме-
рять примерную частоту ПНЧ, а затем точный период не одного, a N цик-
лов (где А определяется примерной частотой) и поддерживать высокое раз-
решение в широком диапазоне входных сигналов. Модульный АЦП AD1170,
выпущенный в 1986 году, представляет пример подобной архитектуры.
ПНЧ распространяются не только в качестве компонентов АЦП. Выход-
ной сигнал, представляющий поток импульсов, удобно использовать в ши-
роком диапазоне передающих сред (радио, оптических, инфракрасных, ульт-
развуковых и пр.). Для приема его может служить не счетчик, а другой
ПНЧ, сконфигурированный как преобразователь частота—напряжение (ПЧН).
При этом формируется аналоговый выходной сигнал, поэтому комбинация
ПНЧ—ПЧН представляет очень удобный способ передачи прецизионных ана-
логовых сигналов через изолированные переходы. Построению ПЧН из ПНЧ
посвящено большое число публикаций, частично представленных в 57-6°.
АЦП двойного и многократного наклона
Архитектура АЦП двойного наклона произвела настоящий переворот в при-
ложениях АЦП высокого разрешения, в частности в цифровых вольтметрах
и им подобных приборах61-64. Упрощенное представление о такой архитекту-
ре дает рис. 3.113, а на рис. 3.114 показан сигнал на выходе интегратора.
Входной сигнал подается на интегратор, одновременно запускается счет-
чик, считающий синхроимпульсы. Через некоторое предустановленное время
(Г) к интегратору подводится опорное напряжение противоположной по-
лярности. В этот момент заряд, накопленный интегрирующим конденсато-
ром, пропорционален средней величине входного сигнала на интервале Т.
Интеграл опорного напряжения представляет линейно спадающий сигнал с
наклоном KREF/RC. В это же время счетчик вновь начинает отсчет от нуля.
Когда на выходе интегратора устанавливается ноль, счет прекращается, и
3.2. Архитектуры АЦП
= Цы
Vref
Сильное подавление частот, кратных —
Рис. 3.114. Выходные сигналы интегратора АЦП двойного наклона
аналоговая схема сбрасывается. Поскольку нарастающий заряд пропорцио-
нален Их х Г, а спадающий — KREF х число импульсов относительно
полной шкалы счетчика равно tx/T или ^BX/KREF. Двоичный код счетчика
соответствует двоичному представлению входного напряжения.
Интегрирование с двойным наклоном имеет много достоинств. Точ-
ность преобразования здесь не зависит ни от емкости, ни от частоты кван-
тования, так как они одинаково влияют на оба наклона — нарастающий и
спадающий.
Благодаря фиксированному интервалу интегрирования входного сигнала
уменьшаются помехи на частотах, равных или кратных периоду интегриро-
вания Т. Правильный выбор Т может привести к значительному снижению
50- и 60-герцовых пульсаций питающей сети, как показано на рис. 3.115.
Можно избежать ошибок, вызванных токами смещения и напряжения-
ми смещения интегрирующего усилителя и компаратора, а также погреш-
ностями усиления введением дополнительных циклов заряда и разряда для
измерения «нуля» и «полной шкалы», используемых при цифровой коррек-
ции первоначальных измерений, как в архитектуре АЦП с четверным на-
клоном, рассмотренной в65.
Глава 3. Архитектуры преобразователей данных
Рис. 3.115. Частотная характеристика интегрирующего АЦП
В архитектуре АЦП тройного наклона66-68 сохраняются все преимуще-
ства двойного наклона, но значительно повышаются по сравнению с затра-
тами на сложность и скорость преобразования. Повышение скорости пре-
образования осуществляется за счет интегрирования опорного напряжения
спадающего участка на двух различных скоростях: высокой скорости и «вер-
ньерной» низкой скорости. Счетчик как бы делится на две секции: одну
для старших, а другую для младших разрядов. В правильно сконструиро-
ванном АЦП тройного наклона существенно повышается скорость при сохра-
нении линейности, дифференциальной линейности и стабильности харак-
теристик, присущих АЦП двойного наклона.
Оптические преобразователи
Для приложений, не требующих высокой надежности и разрешения, из всех
наиболее популярных измерительных датчиков положения больше всего
подходят оптические преобразователи. Инкрементный оптический датчик
(левый чертеж на рис. 3.116) представляет собой диск, разделенный череду-
ющимися прозрачными и непрозрачными секторами. По одну сторону дис-
ка располагается источник света, а по другую — чувствительный элемент.
При вращении диска включается или выключается сигнал на выходе детек-
тора в зависимости от того, прозрачный или непрозрачный сектор оказыва-
ется между источником и приемником света.
Таким образом, преобразователь формирует поток прямоугольных им-
пульсов, подсчетом которых определяется угловое положение вала. Дости-
жимое разрешение преобразователя (число непрозрачных и прозрачных
секторов диска) составляет от 100 до 65 000 при абсолютной точности поряд-
ка 30 угловых секунд (1/43200 на 1 оборот). В большинстве инкрементных пре-
образователей присутствует второй источник света и чувствительный эле-
мент, сдвинутые на некоторый угол по отношению к главному источнику и
детектору и предназначенные для определения направления вращения. Кроме
того, многие преобразователи имеют еще и третий источник и детектор для
формирования метки полного оборота. Без такой метки оборота трудно
3.2. Архитектуры АЦП 273
Рис. 3.116. Инкрементный и абсолютный оптические преобразователи
определить абсолютный угол датчика. Потенциально опасным недостатком
рассматриваемых инкрементных датчиков является потребность во внеш-
нем счетчике для определения абсолютных значений углов внутри оборота.
Кратковременное пропадание питания или пропуск импульсов из-за помех
или грязного диска приводят к неверной итоговой информации.
Абсолютный оптический преобразователь (правый чертеж на рис 3.116)
свободен от указанных недостатков, хотя и более дорог. Диск абсолютного
оптического преобразователя разделен на Nсекторов (N = 5 в приведенном
примере), и каждый сектор радиально разделен по периметру на непроз-
рачные и прозрачные секции, образуя, таким образом, TV-разрядное цифро-
вое слово, максимальная величина которого может достигать 2N — 1. Ради-
ально сформированное цифровое слово каждого сектора увеличивается по
мере перехода от сектора к сектору, как правило, на базе кода Грея. Можно
использовать и двоичное кодирование, но при этом возможны большие
ошибки при неверной интерпретации датчиком отдельных разрядов. В коде
Грея такие ошибки исключены, так как максимальная ошибка от неверной
интерпретации отдельных разрядов в коде Грея составляет только один
младший разряд после преобразования его в двоичный код. Набор из N
чувствительных элементов воспринимает TV-разрядное цифровое слово, со-
ответствующее абсолютному угловому положению диска. Промышленные
оптические преобразователи дают 16-разрядное разрешение при абсолют-
ной точности порядка 20 угловых секунд. В заключение отметим, что и
абсолютные, и инкрементные оптические преобразователи можно без тру-
да повредить в тяжелых промышленных условиях.
Резольверы и сельсины
Производители станков и роботов для получения точной информации об
углах и величине поворота все интенсивнее обращаются к резольверам и
сельсинам. Эти приборы наилучшим образом отвечают промышленным тре-
Глава 3. Архитектуры преобразователей данных
Рис. 3.117. Сельсины и резольверы
s2
СЕЛЬСИН
Между S, и S3 = l/sin cut sin в
Между S3 и S2 = l/sin cot sin (О 4- 120*)
Между S2 и S, = l/sin cot sin (в 4- 240*)
Между S, и S3 = I/ sin cut sin в
Между S4 и S2 - l/sin cot sin (0 + 90*) =
= l/sin cot cos 0
РЕЗОЛЬВЕР
бованиям в области малых размеров, длительной эксплуатации, абсолютного
измерения перемещений, высокой точности и помехоустойчивости.
Типовые схемы сельсина и резольвера показаны на рис. 3.117. И сель-
син, и резольвер оснащены однообмоточными роторами, вращающимися
относительно неподвижных статоров. Статор обычного сельсина имеет три
обмотки, ориентированные одна относительно другой на 120°, электричес-
ки соединенные звездой (Y). Статоры резольверов, в отличие от сельсинов,
имеют только две обмотки, сдвинутые на 90°.
Производство сельсинов с тремя статорными обмотками под 120° более
сложно, чем резольверов, и потому более дорого. Сегодня сельсины ис-
пользуются все реже, за исключением отдельных военных и авиационных
модификаций.
Напротив, резольверы без щеток используются как трансформаторы,
связывающие сигналы статора и ротора. Первичная обмотка такого транс-
форматора принадлежит статору, а вторичная ротору. В других резольверах
есть традиционные щетки или контактные кольца для передачи сигнала в
роторную обмотку. Резольверы без щеток отличаются большей стойкостью,
чем сельсины, ибо щетки можно повредить или сместить, тогда как жиз-
ненный цикл резольвера без щеток ограничен только стойкостью подшип-
ников. Большинство резольверов работают в диапазоне питания от 2 до 40 В
на оборот в секунду на частотах от 400 Гц до 10 кГц. Диапазон угловой
точности составляет от 5 до 0,5 угловых минут. (В одном градусе 60 угловых
минут, а в угловой минуте 60 угловых секунд. Соответственно, одна угловая
минута равна 0,0167°.)
Работа сельсинов и резольверов сходна с работой вращающегося транс-
форматора. Обмотка ротора возбуждается опорным напряжением перемен-
ного тока с частотой в несколько килогерц. Величина напряжения, индуци-
руемого в любой из статорных обмоток, пропорциональна синусу угла в
между осями ротора и статора. В сельсине напряжение между парой ста-
торных выводов представляет векторную сумму напряжений между этими
обмотками.
3.2. Архитектуры А ЦП 275
Например, если ротор сельсина возбудить опорным напряжением Ksin cot,
приложенным к выводам R{ и 7^, то на выводах статора появятся напряжения:
между и 53 = Ksin cot sin 0\ (3.2)
между S3 и S2 = Ksin cot sin (0 + 120°); (3.3)
между S2 и = Ksin cot sin (0 + 240°), (3.4)
где 0 — угол поворота вала.
В случае использования резольвера при опорном напряжении на роторе
Ksin cot напряжения на выводах статора составят:
между и S3 = Ksin cot sin 0\ (3.5)
между S4 и S2 = Ksin cot sin (0 + 90°) = Ksin cot cos 0. (3.6)
Надо заметить, что трехпроводный выход сельсина с помощью транс-
форматора Scott-T можно легко преобразовать в формат, эквивалентный
резольверу. С учетом этого в следующем примере обработки сигналов опи-
сывается только конфигурация с резольвером.
Функциональная схема типового резольверного преобразователя приве-
дена на рис. 3.118. Выходы резольвера подключены к косинусному и синус-
ному умножителям. Эти умножители содержат синусные и косинусные таб-
лицы подстановки и функционируют как перемножающие ЦАП. Вначале
допустим, что текущее состояние реверсивного счетчика отражает цифро-
вой код, представляющий пробный угол <р. Преобразователь должен непре-
рывно регулировать цифровой коду таким образом, чтобы обеспечивать его
равенство аналоговому измеряемому углу 0. Выходные напряжения на ста-
торе резольвера:
V\ = Ksin cot sin 0\ (3.7)
V2 = Ksin cot cos 0, (3.8)
где 0 — угол поворота ротора резольвера. Цифровой угол (р поступает на
косинусный умножитель, и его косинус умножается на Vx в соответствии с
выражением:
Ksin cot sin 0 cos ср. (3.9)
Цифровой угол ср также поступает на синусный умножитель и умножа-
ется на V2 в соответствии с выражением:
Ksin cot cos 0 sin ср. (3.10)
Усилитель ошибки находит разность двух полученных сигналов, фор-
мируя сигнал текущей ошибки в виде:
Ksin cot [sin 0cos<p — cos 0 sin^]. (3.11)
С помощью простого тригонометрического тождества упростим это вы-
ражение:
Ksin cot [sin (0 — <р)].
(3.12)
Глава 3. Архитектуры преобразователей данных
Детектор синхронно демодулирует этот сигнал ошибки, используя на-
пряжение на роторе резольвера в качестве опорного напряжения. В ре-
зультате получается сигнал ошибки постоянного тока, пропорциональ-
ный sin (0 — ф).
Сигнал ошибки постоянного тока поступает на интегратор, выход кото-
рого воздействует на осцилятор, управляемый напряжением (ОУН). В свою
очередь, ОУН заставляет реверсивный счетчик вести счет в требуемом на-
правлении:
По достижении
имеем
sin (0 — ф) -» 0.
в- (р -» 0
(р= О
(3.13)
(3.14)
(3.15)
внутри одного отсчета. В результате цифровой выход счетчика <р представ-
ляет угол в. Фиксаторы позволяют передавать эти данные, не прерывая
выборки.
Рассмотренная схема эквивалентна так называемой следящей системе
второго порядка, так как в нее фактически входят два интегратора. Одним
является счетчик, накапливающий импульсы, а другим — интегратор на
выходе детектора. В следящей системе второго порядка при постоянной
входной скорости вращения цифровой выход непрерывно отслеживает вход-
ной сигнал, не требуя внешних команд начала преобразования и без уста-
новившегося фазового запаздывания цифрового выхода от фактического
угла поворота вала. Сигнал ошибки появляется только в периоды ускоре-
ния и замедления.
В качестве дополнительного бонуса следящий резольверный преобразо-
ватель формирует аналоговое напряжение постоянного тока, прямо про-
Vsinatf Опорное напряжение с ротора
Рис. 3.118. АЦП с резольвера
Список литературы к 3.3. Сигма-дельта преобразователи
порциональное скорости вращения вала. Это существенно в тех установ-
ках, где требуется измерение скорости или сигнал скорости необходим для
стабилизации следящей системы, так как исключается потребность в до-
полнительных тахометрах.
Так как поведение резольверного преобразователя зависит только от
соотношения амплитуд входных напряжений, ослабление в линиях связи
сигналов с резольверами не оказывает существенного влияния на работу.
По той же причине эти преобразователи не очень восприимчивы и к иска-
жениям сигналов. Фактически они могут нормально функционировать при
10% гармонических искажениях входных сигналов. В некоторых приложе-
ниях используются прямоугольные задающие сигналы, не вызывая сколь-
ко-нибудь значительных ошибок.
Резольверным преобразователям идеально подходят АЦП со слежени-
ем. Они дают наилучшую точность и эффективность по сравнению с АЦП
других архитектур, в частности с АЦП последовательного приближения.
Двойное интегрирование сигнала ошибки следящим преобразователем
говорит о высокой степени его устойчивости к шуму (спад частотной ха-
рактеристики составляет 12 дБ на октаву). В схемах любые помеховые всплес-
ки ведут к ошибкам. Но индуктивные помеховые всплески имеют идентич-
ные положительные и отрицательные формы. В результате их интегрирова-
ния остается нулевая ошибка. Подобный иммунитет к шумам вместе с
нечувствительностью преобразователя к снижениям напряжения позволяет
пользователю размещать его на значительном расстоянии от резольвера.
Способность к уменьшению шумов повышается и за счет того, что детектор
снижает любой сигнал, не соответствующий частоте опорного сигнала, в
частности широкополосный шум.
Одним из множества резольверных преобразователей является
AD2S90 Analog Devices. Базовая архитектура его подобна представлен-
ной на рис. 3.118. Некоторые детали, касающиеся сельсинов и резольве-
ров, можно найти в 69’70.
Список литературы
3.2. Архитектуры АЦП
1. Reza Moghimi. Amplifiers as Comparators. Ask the Applications Engineer 31, Analog
Dialogue, Vol. 37—04, Analog Devices, April 2003, http://www.analog.com.
2. James N. Giles. High Speed Transistor Difference Amplifier. U.S. Patent 3, 843,
934, filed January 31 1973, issued October 22, 1974. (describes one of the first high-speed
ECL comparators, the AM685).
3. Christopher W. Mangelsdorf. A 400-MHz Input Flash Converter with Error Correction,
IEEE Journal of Solid-State Circuits, Vol. 25, No. 1, February 1990, pp. 184—191.
(a discussion of the AD770, an 8-bit 200 MSPS flash ADC. The paper describes the comparator
metastable state problem and how to optimize the ADC design to minimize its effects).
4. Charles E. Woodward. A Monolithic Voltage-Comparator Array for A/D Converters,
IEEE Journal of Solid State Circuits, Vol. SC-10, No. 6, December 1975, pp. 392—399.
(an early paper on a 3-bit flash converter optimized to minimize metastable state errors).
5. Paul M. Rainey. «Facimile Telegraph System. U.S. Patent 1,608,527, filed July 20,
1921, issued November 30, 1926. (although A. H. Reeves is generally credited with the
invention of PCM, this patent discloses an electro-mechanical PCM system complete with A/D
278 Глава 3. Архитектуры преобразователей данных
and D/А converters. The 5-bit electro-mechanical ADC described is probably the first documented
flash converter. The patent was largely ignored and forgotten until many years after the various
Reevesy patents were issued in 1939-1942).
6. R. W. Sears. «Electron Beam Deflection Tube for Pulse Code Modulation,» Bell
System Technical Journal, Vol. 27, pp. 44—57, Jan. 1948. (describes an electon-beam deflection
tube 7-bit, 100-kSPS flash converter for early experimental PCM work).
7. Frank Gray. Pulse Code Communication. U.S. Patent 2, 632, 058, filed November 13,
1947, issued March 17, 1953. (detailedpatent on the Gray code and its application to electron
beam coders).
8. J.O. Edson and H.H. Henning. Broadband Codecs for an Experimental 224 Mb/s
PCM Terminal. Bell System Technical Journal, Vol. 44, pp. 1887—1940, Nov. 1965.
(summarizes experiments on ADCs based on the electron tube coder as well as a bit-per-stage
Gray code 9-bit solid state ADC. The electron beam coder was 9-bits at 12 MSPS, and
represented the fastest of its type at the time).
9. R. Staffin and R. D. Lohman, «Signal Amplitude Quantizer,» U.S. Patent 2, 869,
079, filed December 19, 1956, issued January 13, 1959. (describes flash and subranging
conversion using tubes and transistors).
10. Goto, et. al. Esaki Diode High-Speed Logical Circuits. IRE Transactions on Electronic
Computers, Vol. EC-9, March 1960, pp. 25-29. (describes how to use tunnel diodes as logic
elements).
11. T. Kiyomo, K. Ikeda, and H. Ichiki. Analog-to-Digital Converter Using an Esaki
Diode Stack. IRE Transactions on Electronic Computers, Vol. EC-11, December 1962,
pp. 791—792. (description of a low resolution 3-bit flash ADC using a stack of tunnel diodes).
12. HR. Schindler. Using the Latest Semiconductor Circuits in a UHF Digital Converter.
Electronics, August 1963, pp. 37—40. (describes a 6-bit 50-MS PS subranging ADC using
three 2-bit tunnel diode flash converters).
13. J.B. Earnshaw. Design for a Tunnel Diode-Transistor Store with Nondestructive
Read-out of Information. IEEE Transactions on Electronic Computers, EC-13, 1964,
pp. 710—722. (use of tunnel diodes as memory elements).
14. Willard K. Bucklen, «А Monolithic Video A/D Converter,» Digital Video, Vol. 2,
Society of Motion Picture and Television Engineers, March 1979, pp. 34-42. (describes the
revolutionary TDC1007J 8-bit 20MSPS video flash converter. Originally introduced at the
February 3, 1979 SMPTE Winter Conference in San Francisco, Bucklen accepted an Emmy
award for this product in 1988 and was responsible for the initial marketing and applications
support for the device).
15. J. Peterson. «А Monolithic video A/D Converter,» IEEE Journal of Solid-State
Circuits, Vol. SC-14, No. 6, December 1979, pp. 932—937. (another detailed description of
the TRW TDC1007J 8-bit, 20-MSPSflash converter).
16. Yukio Akazawa et. al., A 400MSPS 8 Bit Flash A/D Converter, 1987 ISSCC Digest
of Technical Papers, pp. 98—99. (describes a monolithic flash converter using Gray decoding).
17. A. Matsuzawa et al., An 8b 600MHz Flash A/D Converter with Multi-stage Duplex-
gray Coding, Symposium VLSI Circuits, Digest of Technical Papers, May 1991, pp. 113—114.
(describes a monolithic flash converter using Gray decoding).
18. Chuck Lane. A 10-bit 60MSPS Flash ADC, Proceedings of the 1989 Bipolar Circuits
and Technology Meeting, IEEE Catalog No. 89CH2771-4, September 1989, pp. 44—47.
(describes an interpolating method for reducing the number of preamps required in a flash
converter).
19. W.W. Rouse Ball and H.S.M. Coxeter. Mathematical Recreations and Essays.
Thirteenth Edition, Dover Publications, 1987, pp. 50, 51. (describes a mathematical puzzle
for measuring unknown weights using the minimum number of weighing operations. The solution
proposed in the 1500's is the same basic successive approximation algorithm used today).
20. Alec Harley Reeves. Electric Signaling System. U.S. Patent 2, 272, 070, filed
November 22, 1939, issued February 3, 1942. Also French Patent 852, 183 issued 1938,
and British Patent 538, 860 issued 1939. (the ground-breaking patent on PCM. Interestingly
enough, the ADC and DAC proposed by Reeves are counting types, and not successive
approximation).
21. John C. Schelleng. Code Modulation Communication System. U.S. Patent 2, 453,
461, filed June 19, 1946, issued November 9, 1948. (an interesting description of a rather
cumbersome successive approximation ADC based on vacuum tube technology. This converter
was not very practical, but did illustrate the concept. Also in the patent is a description of a
corresponding binary DA C).
22. W.M. Goodall. Telephony by Pulse Code Modulation. Bell System Technical Journal,
Vol. 26, pp. 395—409, July 1947. (describes an experimental PCM system using a 5-bit,
8KSPS successive approximation ADC based on the subtraction of binary weighted charges
from a capacitor to implement the internal subtraction/DAC function. It required 5 internal
reference voltages).
23. Harold R. Kaiser, et al. High-Speed Electronic Analogue-to-Digital Converter
System. U.S. Patent 2, 784, 396, filed April 2, 1953, issued March 5, 1957. (one of the first
SAR ADCs to use an actual binary-weighted DAC internally).
24. B.D. Smith. Coding by Feedback Methods. Proceedings of the I. R. E., Vol. 41,
August 1953, pp. 1053—1058. (Smith uses an internal DAC and also points out that a non-
linear transfer function can be achieved by using a DAC with non-uniform bit weights, a
technique which is widely used in today's voiceband ADCs with built-in companding).
25. L.A. Meacham and E. Peterson. «An Experimental Multichannel Pulse Code
Modulation System of Toll Quality. Bell System Technical Journal, Vol. 27, No. 1, January
1948, pp. 1—43. (describes non-linear diode-based compressors and expanders for generating
a non-linear ADC/DAC transfer function).
26. Bernard M. Gordon and Robert P. Talambiras. Signal Conversion Apparatus,» U.S.
Patent 3, 108, 266, filed July 22, 1955, issued October 22, 1963. (classic patent describing
Gordonys 11-bit, 20kSPS vacuum tube successive approximation ADC done at Epsco. The
internal DAC represents the first known use of equal currents switched into an R/2R ladder
network.)
27. Bernard M. Gordon and Evan T. Colton. Signal Conversion Apparatus,» U.S. Patent
2, 997, 704, filed February 24, 1958, issued August 22, 1961. (classic patent describes the
logic to perform the successive approximation algorithm in a SAR ADC).
28. J.R. Gray and S.C. Kitsopoulos. A Precision Sample-and-Hold Circuit with
Subnanosecond Switching. IEEE Transactions on Circuit Theory, CT 11, September 1964,
pp. 389—396. (one of the first papers on the detailed analysis of a sample-and-hold circuit).
29. T. C. Verster. A Method to Increase the Accuracy of Fast Serial-Parallel Analog-to-
Digital Converters. IEEE Transactions on Electronic Computers, EC-13, 1964, pp. 471—473.
(one of the first references to the use of error correction in a subranging ADC).
30. G.G. Gorbatenko. High-Performance Parallel-Serial Analog to Digital Converter
with Error Correction, IEEE National Convention Record, New York, March 1966. (another
early reference to the use of error correction in a subranging ADC).
31. D.J. Kinniment, D. Aspinall, and D.B.G. Edwards. High-Speed Analogue-Digital
Converter. IEE Proceedings, Vol. 113, pp. 2061—2069, Dec. 1966. (a 7-bit 9MSPS three-
stage pipelined error corrected converter is described based on recircuilating through a 3-bit
stage three times. Tunnel (Esaki) diodes are used for the individual comparators. The article
also shows a proposed faster pipelined 7-bit architecture using three individual 3-bit stages with
error correction. The article also describes a fast bootstrapped diode-bridge sample-and-hold
circuit).
32. O.A. Homa. A 150 Mbps A/D and D/А Conversion System. Comsat Technical
Review, Vol. 2, No. 1, pp. 52—57, 1972. (a detailed description and analysis of a sub ranging
ADC with error correction).
33. J.L. Eraschilla, R.D. Caveney, and R.M. Harrison. High Speed Analog-to-Digital
Converter,» U.S. Patent 3, 597, 761, filed Nov. 14, 1969, issued Aug. 13, 1971. (Describes
an 8-bit, 5-MSPS sub ranging ADC with switched references to second comparator bank).
280 Глава 3. Архитектуры преобразователей данных
34. Stephen Н. Lewis, Scott Fetterman, George F. Gross, Jr., R. Ramachandran, and
T.R. Viswanathan. A 10-b 20-Msample/s Analog-Digital Converter. IEEE Journal of Solid-
State Circuits, Vol. 27, No. 3, March 1992, pp. 351-358. (a detailed description and analysis
of an error corrected subranging ADC using 1,5-bit pipelined stages).
35. Roy Gosser and Frank Murden. A 12-bit 50MSPS Two-Stage A/D Converter. 1995
ISSCC Digest of Technical Papers, p. 278. (a description of the AD9042 error corrected
subranging ADC using MagAMP stages for the internal ADCs).
36. B.D. Smith. An Unusual Electronic Analog-Digital Conversion Method. IRE
Transactions on Instrumentation, June 1956, pp. 155—160. (possibly the first published
description of the binary-coded and Gray-coded bit-per-stage ADC architectures. Smith mentions
similar work partially covered in R. P. Sallen's 1949 thesis at M.I. T.).
37. N.E. Chasek. Pulse Code Modulation Encoder. U.S. Patent 3, 035, 258, filed
November 14, 1960, issued May 15, 1962. (an early patent showing a diode-based circuit for
realizing the Gray code folding transfer function).
38. F. D. Waldhauer, «Analog-to-Digital Converter,» U.S. Patent 3, 187, 325, filed
July 2, 1962, issued June 1, 1965. (a classic patent using op amps with diode switches in the
feedback loops to implement the Gray code folding transfer function).
39. J. O. Edson and H.H. Henning. Broadband Codecs for an Experimental 224Mb/s
PCM Terminal. Bell System Technical Journal, Vol. 44, pp. 1887—1940, Nov. 1965.
(a further description of a 9-bit ADC based on WaldhauePs folding stage).
40. Udo Fiedler and Dieter Seitzer. A High-Speed 8 Bit A/D Converter Based on a
Gray-Code Multiple Folding Circuit. IEEE Journal of Solid-State Circuits, Vol. SC-14,
No. 3, June 1979, pp. 547—551. (an early monolithic folding ADC).
41. Rudy J. van de Plassche and Rob E.J. van de Grift. A High-Speed 7 Bit A/D
Converter. IEEE Journal of Solid-State Circuits, Vol. SC-14, No. 6, December 1979,
pp. 938—943. (a monolithic folding ADC).
42. Rob.E. J. van de Grift and Rudy J. van de Plassche. A Monolithic 8-bit Video A/D
Converter, IEEE Journal of Solid State Circuits, Vol. SC-19, No. 3, June 1984, pp. 374—378.
(a monolithic folding ADC).
43. Rob. E.J. van de Grift, Ivo W.J.M. Rutten and Martien van der Veen. «An 8-bit
Video ADC Incorporating Folding and Interpolation Techniques,» IEEE Journal of Solid
State Circuits, Vol. SC-22, No. 6, December 1987, pp. 944—953. (another monolithic
folding ADC).
44. Rudy van de Plassche. Integrated Analog-to-Digital and Digital-to-Analog Converters,
Kluwer Academic Publishers, 1994, pp. 148—187. (a good textbook on ADCs and DACs with
a section on folding ADCs indicated by the referenced page numbers).
45. Carl Moreland. An 8-bit 150 MSPS Serial ADC. 1995 ISSCC Digest of Technical
Papers, Vol. 38, p. 272. (a description of an 8-bit ADC with 5 folding stages followed by a
3-bit flash converter).
46. Carl Moreland. An Analog-to-Digital Converter Using Serial-Ripple Architecture,
Mastersy Thesis, Florida State University College of Engineering, Department of Electrical
Engineering, 1995. (Morelandys early work on folding ADCs).
47. Frank Murden. Analog to Digital Converter Using Complementary Differential
Emitter Pairs,» U.S. Patent 5, 550, 492, filed December 1, 1994, issued August 27, 1996.
(a description of an ADC based on the MagAMP folding stage).
48. Carl ИС Moreland. Analog to Digital Converter Having a Magnitude Amplifier
with an Improved Differential Input Amplifier. U.S. Patent 5, 554, 943, filed December 1,
1994, issued September 10, 1996. (a description of an 8-bit ADC with 5 folding stages
followed by a 3-bit flash converter).
49. Frank Murden and Carl Moreland. N-bit Analog-to-Digital Converter with N-l
Magnitude Amplifiers and N Comparators,» U.S. Patent 5, 684, 419, filed December 1,
1994, issued November 4, 1997. (anotherpatent on the MagAMP folding architecture applied
to an ADC).
50. Carl Moreland, Frank Murden, Michael Elliott, Joe Young, Mike Hensley, and Russell
Stop. A 14-bit 100-Msampleys Subranging ADC, IEEE Journal of Solid State Circuits.
Vol. 35, No. 12, December 2000, pp. 1791-1798. (describes the architecture used in the
14-bit AD6645 ADC).
51. Frank Murden and Michael R. Elliott. Linearizing Structures and Methods for
Adjustable-Gain Folding Amplifiers. U.S. Patent 6, 172, 636 Bl, filed July 13, 1999,
issued January 9, 2001. (describes methods for trimming the folding amplifiers in an ADC).
52. Bernard M. Oliver and Claude E. Shannon. Communication System Employing
Pulse Code Modulation. U.S. Patent 2, 801, 281, filed February 21, 1946, issued July 30,
1957. (charge run-down ADC and Shannon-Rack DAC).
53. Arthur H. Dickinson. Device to Manifest an Unknown Voltage as a Numerical
Quantity. U.S. Patent 2, 872, 670, filed May 26, 1951, issued February 3, 1959. (ramp
run-up ADC).
54. K. Howard Barney. Binary Quantizer. U.S. Patent 2, 715, 678, filed May 26, 1950,
issued August 16, 1955. (tracking ADC).
55. Bernard M. Gordon and Robert P. Talambiras. Information Translating Apparatus
and Method. U.S. Patent 2, 989, 741, filed July 22, 1955, issued June 20, 1961. (tracking
ADC).
56. John L. Lindesmith. Voltage-to-Digital Measuring Circuit. U.S. Patent 2, 835,
868, filed September 16, 1952, issued May 20, 1958. (voltage-to-frequency ADC).
57. Paul Klonowski. Analog-to-Digital Conversion Using Voltage-to-Frequency
Converters. Application Note AN-276, Analog Devices, Inc. (a good application note on
VFCs).
58. James M. Bryant. Voltage-to-Frequency Converters. Application Note AN-361,
Analog Devices, Inc. (a good overview of VFCs).
59. Walt Jung. Operation and Applications of the AD654 IC V-F Converter. Application
Note AN-278, Analog Devices, Inc. 60. Steve Martin, «Using the AD650 Voltage-to-
Frequency Converter as a Frequency-to-Voltage Converter,» Application Note AN-279,
Analog Devices, Inc. (a description of a frequency-to-voltage converter using the popular
AD650 VFC).
61. Robin N. Anderson and Howard A. Dorey. Digital Voltmeters. U.S. Patent 3, 267, 458,
filed August 20, 1962, issued August 16, 1966. (charge balance dual slope voltmeter ADC).
62. Richard Olshausen. Analog-to-Digital Converter. U.S. Patent 3, 281, 827, filed
June 27, 1963, issued October 25, 1966. (charge balance dual slope ADC).
63. Roswell W. Gilbert. Analog-to-Digital Converter. U.S. Patent 3, 051, 939, filed
May 8, 1957, issued August 28, 1962. (dual-slope ADC).
64. Stephan K. Ammann. Integrating Analog-to-Digital Converter. U.S. Patent 3,316,547,
filed July 15, 1964, issued April 25, 1967. (dual-slope ADC).
65. Ivar Wold. Integrating Analog-to-Digital Converter Having Digitally-Derived Offset
Error Compensation and Bipolar Operation without Zero Discontinuity,» U.S. Patent 3,
872, 466, filed July 19, 1973, issued March 18, 1975. (quad-slope ADC).
66. Hans Bent Aasnaes, «Triple Integrating Ramp Analog-to-Digital Converter,» U.S.
Patent 3, 577, 140, filed June 27, 1967, issued May 4, 1971. (triple-slope ADC).
67. Frederick Bondzeit, Lewis J. Neelands. Multiple Slope Analog-to-Digital Converter.
U.S. Patent 3, 564, 538, filed January 29, 1968, issued February 16, 1971. (triple-slope
ADC).
68. Desmond Wheable. Triple-Slope Analog-to-Digital Converters. U.S. Patent 3, 678,
506, filed October 2, 1968, issued July 18, 1972. (triple-slope ADC).
69. Dan Sheingold. Analog-Digital Conversion Handbook. Prentice-Hall, 1986, ISBN-
0-13-032848-0, pp. 441—471. (this chapter contains an excellent tutorial on optical, synchro,
and resolver-to-digital conversion).
70. Dennis Fu. Circuit Applications of the AD2S90 Resolver-to-Digital Converter,»
Application Note AN-230, Analog Devices, (applications of the AD2S90 RTD).
Глава 3. Архитектуры преобразователей данных
3.3. Сигма-дельта преобразователи
Уолт Кестер, Джеймс Брайант
Историческая перспектива
Сигма-дельта (Z-Д) архитектура АЦП появилась на ранних этапах станов-
ления систем импульсно-кодовой модуляции (ИКМ) — особенно тех, ко-
торые связаны с методами передачи данных, именуемыми делыпа-модуля-
цией и дифференциальной ИКМ. (Замечательное обсуждение истории и кон-
цепций сигма-дельта АЦП можно найти у М. Hauser в 1.) Дельта-модуляция
впервые была изобретена как классическая ИКМ в ITT Laboratories во Фран-
ции директором этой лаборатории Е.М. Deloraine в соавторстве с S. Van Mierlo и
В. Deijavitch в 1946 году2 3. Несколькими годами позднее, в 1952 и 1953 годах
ее принцип был открыт заново в Phillips Laboratories в Голландии. Инженеры
этой лаборатории опубликовали результаты первого пространного исследо-
вания одноразрядной и многоразрядной концепций4 5. В 1950 году С.С. Cutler
из Bell Telephone Labs в U.S. подал основополагающую заявку на патент по
дифференциальной ИКМ, использующий ту же базовую концепцию6.
Движущей силой, положившей основу дельта-модуляции и дифферен-
циальной ИКМ, послужило стремление повысить эффективность обмена
данными за счет передачи изменений величины последовательных выборок
вместо того, чтобы передавать сами выборки.
При дельта-модуляции аналоговый сигнал оцифровывается одноразряд-
ным АЦП (компаратором), как показано на рис. 3.119, а. Выходной сигнал
компаратора преобразуется обратно в аналоговую величину одноразрядным
ЦАП и, пройдя через интегратор, вычитается из входного сигнала. Значе-
ние аналогового сигнала передается следующим образом: «1» указывает на
положительное отклонение от значения последней выборки, а «0» — на
Рис. 3.119. Дельта-модуляция и дифференциальная ИКМ
3.3. Сигма-дельта преобразователи 283
Если аналоговый сигнал в течение
определенного временного периода не
меняет своего постоянного уровня, уста-
навливается стабильное чередование «О»
и «1». Следует заметить, что дифференци-
альная ИКМ (рис. 3.119, б) использует в
точности ту же концепцию за тем исклю-
чением, что вместо компаратора приме-
няется многоразрядный АЦП для обра-
ботки передаваемой информации.
Поскольку на число импульсов одно-
го знака не накладывается ограничений,
системы дельта-модуляции способны от-
слеживать сигналы любой амплитуды.
Теоретически амплитуда не ограничива-
Рис. 3.120. Квантование с использова-
нием дельта-модуляции
ется, а практическое ограничение связано с ограничением скорости изме-
нения аналогового сигнала. Проблему превышения крутизны иллюстриру-
ет рис. 3.120. Хотя здесь в каждом такте выборки задается положительное
приращение, темп роста аналогового сигнала оказывается слишком боль-
шим, и шаг квантования остается недостаточным.
Можно снизить влияние превышения крутизны посредством увеличе-
ния шага квантования или повышением скорости дискретизации. В диф-
ференциальной ИКМ применяется многоразрядный дискретизатор, эффек-
тивно повышающий шаг квантования, но и увеличивающий сложность ус-
тройства. Как показали тесты, чтобы достичь качества классической ИКМ,
надо проводить дельта-модуляцию с очень высокой частотой дискретиза-
ции, фактически в 20 раз превышающей наибольшую из обрабатываемых
частот, а не в 2 раза, как того требует критерий Найквиста.
По этой причине дельта-модуляция и дифференциальная ИКМ так и не
получили широкого распространения. Но некоторая модификация дельта-
модулятора приводит к базовой сигма-дельта архитектуре — наиболее по-
пулярной из современных архитектур АЦП высокого разрешения.
В 1954 году С.С. Cutler из Bell Labs запатентовал очень важный принцип
избыточной дискретизации и преобразования шума с достижением высокого
разрешения7. Принцип направлен не на реализацию АЦП по Найквисту, а
на передачу сигнала с избыточной дискретизацией и с преобразованием
шума без снижения скорости передачи данных. Таким образом, преобразо-
ватель Cutler отвечал всем концепциям сигма-дельта АЦП, кроме цифровой
фильтрации и прореживания, которые были слишком сложными и дороги-
ми во времена ламповых технологий.
Базовые архитектуры одиночных и многоразрядных сигма-дельта АЦП
первого порядка показаны на рис. 3.121, а и б соответственно. Заметьте, что
интегратор здесь обрабатывает сигнал ошибки, в то время как в дельта-
модуляторе интегратор находится в цепи обратной связи. Базовый сигма-
дельта АЦП с избыточной дискретизацией увеличивает полное отношение
сигнал-шум на низких частотах, профилируя шум квантования таким обра-
зом, что наибольшая его часть оказывается за пределами рабочего диапазо-
на частот. Впоследствии цифровой фильтр устраняет этот шум за границей
Глава 3. Архитектуры преобразователей данных
Аналоговый
вход
а
Одноразрядный
Аналоговый
вход
б
Многоразрядный
Такты выборок
Цифровой
выход
Цифровой
выход
Рис. 3.121. Одиночные и многоразрядные сигма-дельта АЦП
частотного диапазона, а прореживатель (дециматор) вновь преобразует вы-
ходную частоту передачи данных к частоте Найквиста.
Важное продолжение этой идеи через несколько лет, в 1961 году запа-
тентованное С.В. Brahm, посвящено организации аналогового фильтра ниж-
них частот многоразрядного АЦП второго порядка с преобразованием шума8.
Впоследствии лампы были вытеснены транзисторными схемами, открыв-
шими множество новых возможностей реализации такой архитектуры.
В 1962 году Inose, Yasuda и Murakami детально переработали однораз-
рядную архитектуру с избыточной дискретизацией и шумовым преобразо-
ванием, предложенную Cutler в 1954 году9. В их экспериментальных схемах
сигма-дельта модуляторы первого и второго порядков выполнены уже на
твердотельных приборах. За статьей 1962 года последовала вторая статья
1963 года, давшая замечательное теоретическое обоснование избыточной
дискретизации с шумовым преобразованием10. В этих статьях впервые про-
звучало название delta-sigma для описания архитектуры. Название delta-sigma
оставалось до 1970-х годов, пока инженеры AT&T не начали использовать
имя sigma-delta. Начиная с этого момента, были распространены оба назва-
ния, хотя sigma-delta можно считать более правильным вариантом (см. да-
лее в этом разделе мнение D. Sheingold по поводу терминологии).
Интересно заметить, что вся описанная деятельность была посвящена
непосредственно передаче цифрового сигнала с избыточной дискретизаци-
ей, а не реализации АЦП Найквиста. В 1969 году D.J. Goodman из Bell Labs
опубликовал статью с описанием полного сигма-дельта АЦП Найквиста с
цифровым фильтром и дециматором после модулятора11. Это стало первым
применением сигма-дельта архитектуры непосредственно в производстве
АЦП Найквиста. В 1974 году J.C. Candy, тоже из Bell Labs, дал описание
многоразрядного сигма-дельта АЦП с избыточной дискретизацией и шумо-
вым преобразованием, с цифровой фильтрацией и прореживанием, обес-
печившими высокое разрешение АЦП Найквиста12.
3.3. Сигма-дельта преобразователи 285
Сигма-дельта АЦП на ИС открывают новые преимущества по сравне-
нию с другими архитектурами, особенно когда речь идет о высоком разре-
шении на низких частотах. Первое и главное заключается в том, что одно-
разрядные сигма-дельта АЦП становятся полностью монолитными и боль-
ше не требуют лазерной подстройки. Кроме того, такие сигма-дельта АЦП
удовлетворяют требованиям СМО5-технологии благодаря их цифровой архи-
тектуре. Примеры первых монолитных сигма-дельта АЦП приведены в ,3-21.
Их появление послужило началом непрерывного потока технологических и
конструкционных усовершенствований базовой архитектуры, предложен-
ной в ранних работах. Итоговая таблица основных направлений развития
сигма-дельта архитектур приведена на рис. 3.122.
• Дельта-модуляция 1950
• Дифференциальная ИКМ 1950
• Одно- и многоразрядные АЦП с избыточной дискретизацией и преобразованием шума 1954
• Первое название Е-Д, «дельта-сигма» 1962
• Добавление цифровой фильтрации и прореживания в АЦП Найквиста 1969
• Полосовые сигма-дельта АЦП 1988
Примечание: указаны даты первых публикаций и патентования.
Рис. 3.122. Этапы развития сигма-дельта архитектуры
Сигма-дельта (Z-Д) или дельта-сигма (Д-Z)?
Примечания редактора из Analog Dialogue Vol. 24-2, 1990,
Dan Sheingold
Эта полемика не относится к разряду тех, что вызывают землетрясения, и
многих читателей может удивить то внимание, которое уделяется данному
вопросу. Предмет обсуждения важен для согласования мнений редактора
и читателей. Нам хотелось бы обозначать один и тот же объект одним
именем независимо от того, где этот объект присутствует. Но каким име-
нем? В случае с модуляцией, выполняемой с использованием нового меха-
низма аналого-цифрового преобразования с избыточной дискретизацией,
мы выбрали сигма-делыпа. И вот почему.
Обычно за новой концепцией сохраняется то имя, которое дает ее со-
здатель. Его нет смысла менять, пока оно не вводит в заблуждение или не
вызвано прецедентом. Статья на научном семинаре по рассматриваемой
теме появилась в 1962 году9’10, и ее авторы выбрали имя «дельта-сигма мо-
дуляция», так как в ее основе лежала дельяш-модуляция, но с включением
интегрирования (суммирования, следовательно, S).
Название дельта-сигма, по-видимому, не оспаривалось до 1970-х годов,
когда инженерами AT&T были опубликованы статьи с использованием тер-
мина сигма-дельта. Почему? Согласно Hauser1, появилась необходимость в
дополнении названия «дельта-модуляция» прилагательным, предшествую-
щим слову «дельта». Поскольку форма обсуждаемого процесса представля-
ет разновидность дельта-модуляции, то сигма как прилагательное — имен-
но о ней идет речь — должна была предшествовать дельте.
Глава 3. Архитектуры преобразователей данных
Многие инженеры впоследствии применяли тот термин, который счи-
тали нужным, при этом часто не задумываясь о причине. Иногда в одной и
той же статье появлялись одновременно оба термина, взаимно заменяя друг
друга. Фактически на сегодняшний день название «сигма-дельта» больше
распространено, вероятно, из-за преимущественного цитирования. Спра-
ведливо ли это по отношению к изобретателям метода?
Думается, что да. Мы относимся к числу тех, кто считает, что для замены
названия «дельта-сигма» был повод. Не в смысле грамматики, а как резуль-
тат описания последовательности операций. Сравните со структурной схе-
мой аналогового вычислителя среднеквадратической величины (нахождения
квадратного корня из среднего квадрата сигнала). Вначале сигнал возводится
в квадрат, затем интегрируется и в заключение извлекается корень (рис. 3.123).
Корень из среднего квадрата:
Иерархия математических операций: Корень [Среднее (Квадрат)]
Иерархия математических операций: Сигма (Дельта)
Рис. 3.123. Сигма-дельта (Х-Д) или дельта-сигма (Д-Х)?
Давая имя этой функции по порядку, обусловленному операциями, при-
шлось бы назвать функцию «квадратом среднего корня». Но, называя в
порядке иерархии ее математических операций, мы получаем знакомое — и
не вызывающее дискуссий — имя, корень из среднего квадрата. Сравните
теперь со структурной схемой нахождения разности (дельта) с последую-
щим ее интегрированием (сигма).
Ее причинно-следственный порядок дает дельта-сигма, но из функцио-
нальной иерархии следует сигма-дельта, так как вычисляется интеграл от
разности. Считая последний термин корректным, снимающим прецедент,
мы приняли его в качестве нашего стандарта.
Dan Sheingold. 1990.
Основы сигма-дельта АЦП
Сигма-дельта АЦП (Z-Д АЦП) известны уже тридцать лет, но лишь недав-
но появились технологии (цифровые СБИС высокой плотности), позво-
лившие производить их в виде монолитных недорогих интегральных схем.
3.3. Сигма-делыпа преобразователи 287
Теперь они применяются во множестве приложений, ориентированных на
АЦП низкой стоимости, узкой полосы пропускания, малой мощности, вы-
сокого разрешения.
Известны многочисленные описания архитектур и теорий Е-Д АЦП, но
большинство из них уводят в лабиринты интегралов и этим сильно проиг-
рывают. Многие инженеры, не понимающие теории работы Е-Д АЦП, убеж-
дены после прочтения подобных статей в излишней сложности этих АЦП.
Между тем нет ничего особенно сложного в понимании Е-Д АЦП, если
исключить подробную математику, и настоящий раздел представляет по-
пытку такого объяснения их сущности. Е-Д АЦП содержит простую анало-
говую электронику (компаратор, опорное напряжение, ключ и один или
несколько интеграторов и схем аналогового суммирования) при довольно
сложной цифровой вычислительной части. В цифровую схему входит циф-
ровой сигнальный процессор (ЦСП), выполняющий роль фильтра (обыч-
но, хотя и не всегда, фильтра низких частот). Нет необходимости точно
знать принцип действия фильтра, чтобы понять его работу. Для понимания
функционирования Е-Д АЦП придется познакомиться с концепциями из-
быточной дискретизации, преобразования шумов квантования, цифровой филь-
трации и прореживания (рис. 3.124).
Рассмотрим метод избыточной дискретизации с анализом в частотной
области. Когда преобразование постоянного сигнала вызывает ошибку кван-
тования в пределах 72 младшего разряда, говорят, что система дискретиза-
ции данных имеет шум квантования. Выполняющий дискретизацию иде-
альный классический А-разрядный АЦП характеризуется среднеквадратич-
ным шумом квантования q/V12, равномерно распределенным в диапазоне
Найквиста от 0 до fs/2 (где q — величина младшего разряда, &fs— частота
дискретизации), как показано на рис. 3.125, а. Следовательно, его отноше-
ние сигнал-шум (SNR) для полношкального синусоидального входного сиг-
нала составляет (6,02А + 1,76) дБ. У неидеального АЦП шум превышает
теоретический минимум величины шума квантования, поэтому его эффек-
тивное разрешение меньше N разрядов. Фактическое разрешение (часто
называемое эффективной разрядностью, ENOB) определяется как
СТОЙ=5Л,Д-''76ДБ.
6,02 дБ
• Низкая стоимость, высокое разрешение (до 24 разрядов).
• Незначительная дифференциальная нелинейность.
• Малая мощность, но ограниченная полоса пропускания (голосовой и аудиодиапазоны).
• Простые базовые концепции при сложной математике:
— избыточная дискретизация;
— преобразование шумов квантования;
— цифровая фильтрация;
— прореживание.
• Идеальна для сигналов датчиков:
— режимы внутренней, системной и автоматической калибровки.
• Широкое использование при обработке голосовых и аудиосигналов.
Рис. 3.124. Сигма-дельта АЦП
Глава 3. Архитектуры преобразователей данных
Преобразование
по Найквисту
б
Избыточная дискретизация
+ цифровой фильтр
+ прореживание
Избыточная дискретизация
+ шумовое преобразование
+ цифровой фильтр
+ прореживание
Рис. 3.125. Избыточная дискретизация, цифровая фильтрация, шумовое преобразова-
ние и прореживание
При значительном повышении частоты дискретизации (AJf на рис. 3.125, б)
среднеквадратичный шум квантования остается q/V12, но шум распростра-
няется на более широкую полосу от 0 до Kfs/2. Если на выходе установить
цифровой фильтр низких частот (ФНЧ), большая часть шума квантования
будет устранена без изменения основного сигнала, что свидетельствует об
улучшении ENOB. Таким образом, удается реализовать аналого-цифровое
преобразование высокого разрешения при низком разрешении АЦП. Ко-
эффициент К обычно называют коэффициентом избыточной дискретизации.
Надо заметить в связи со сказанным, что избыточная дискретизация обла-
дает дополнительным преимуществом, снижая требования к аналоговому
фильтру защиты от наложения спектров.
Поскольку цифровой фильтр на выходе снижает полосу пропускания,
общая скорость обработки данных снижается по сравнению с исходной
частотой дискретизации {Kfs). Для удовлетворения критерию Найквиста на
выход передается каждый М-й результат преобразования, а остальные иг-
норируются. Эта операция называется прореживанием {decimation) с коэф-
фициентом М. Несмотря на основу этого слова {decern по латыни десять),
М может принимать любое целое значение, поэтому выходная скорость
может более чем вдвое превысить полосу пропускания сигнала. Прорежи-
вание не вызывает потери информации (рис. 3.125, б).
Если избыточная дискретизация нужна для улучшения разрешения, то
для повышения разрешающей способности на N разрядов следует обеспе-
чить избыточность с коэффициентом 22N. На практике Z-A конвертеру не
требуется такой высокой степени избыточности, так как он не только обес-
печивает необходимую полосу пропускания сигнала, но и преобразует шум
квантования, чтобы большая его часть оказалась за пределами этой полосы,
как показано на рис. 3.125, в.
Взяв 1-разрядный АЦП (обычный компаратор), подключим его к выхо-
ду интегратора, а на вход интегратора подадим алгебраическую сумму вход-
ного сигнала и выходного сигнала 1-разрядного ЦАП, питаемого с выхода
Рис. 3.126. Сигма-дельта АЦП первого порядка
АЦП. В результате получится Е-Д модулятор первого порядка, представ-
ленный на рис. 3.126. После добавления цифрового ФНЧ с прореживате-
лем цифрового выхода будет построен Е-Д АЦП. Его Е-Д модулятор выво-
дит шум квантования за пределы полосы пропускания выходного фильтра,
а отношение сигнал-шум намного лучше, чем можно было бы ожидать от
избыточной дискретизации.
Е-Д АЦП работает так. Допустим, что на входе присутствует постоян-
ный сигнал VIN. Интегратор вырабатывает линейно нарастающий или спа-
дающий сигнал в узле А. Сигнал с выхода компаратора возвращается через
1-разрядный ЦАП на суммирующий вход в узле В. Контур отрицательной
обратной связи с выхода компаратора через 1-разрядный ЦАП и точку сум-
мирования обеспечивает равенство среднего напряжения в узле В входному
сигналу VIN. Среднее напряжение на выходе ЦАП определяется плотнос-
тью единиц в однозарядном битовом потоке данных с выхода компаратора.
Если входной сигнал растет, стремясь к + KREF, число единиц в потоке воз-
растает, а число нулей уменьшается. И наоборот, если сигнал стремится к
— Eref, число единиц в потоке снижается, а число нулей растет. Из простого
анализа следует, что битовый поток с выхода компаратора несет информа-
цию о средней величине входного напряжения. Цифровой фильтр и проре-
живатель обрабатывают последовательный битовый поток и производят
окончательный выходной сигнал.
В любом отдельном интервале дискретизации входного сигнала данные
1-разрядного ЦАП не несут никакой смысловой информации. Только пос-
ле усреднения большого числа выборок результат наполняется смыслом.
Сигма-дельта модулятор очень сложно анализировать во временном интер-
вале из-за явно случайного характера одноразрядных выходных данных. Если
входной сигнал находится в районе положительного максимума, то ясно,
что в битовом потоке будет больше единиц, чем нулей. И наоборот, для
сигналов, близких к отрицательному минимуму, в потоке будет больше ну-
лей, чем единиц. При средних сигналах количество единиц и нулей при-
мерно равное. Рисунок 3.127 показывает выход интегратора при двух вход-
10-2852
Глава 3. Архитектуры преобразователей данных
MWA
Выход
интегратора
010101 010101
Выход
компаратора
V = । ^REF = - = -
вх 2 4 8
Выход
интегратора
Выход
компаратора
Рис. 3.127. Сигналы сигма-дельта модулятора
ных условиях. В первом случае на входе ноль. Для дешифрации передадим
выходные выборки через простой цифровой ФНЧ, который усредняет сиг-
налы четырех выборок. На выходе фильтра будет 2/4. Эта величина соответ-
ствует биполярному нулю. Если усреднять больше выборок, удастся обес-
печить более широкий динамический диапазон. В частности, если усредне-
ние 4 выборок дает разрешение в 2 разряда, то усреднение 8 выборок ведет
к 4/8, т. е. к разрешению в 3 разряда. Нижний сигнал на рис 3.127 при
усреднении 4 выборок дает 3/4 и 6/8 — при усреднении 8 выборок.
Сигма-дельта АЦП можно еще представить в виде синхронного преоб-
разователя напряжения в частоту, предшествующего счетчику. Если число
единиц в выходном потоке данных подсчитывать на определенном числе
выборок, на выходе счетчика будет присутствовать цифровой код входного
сигнала. Очевидно, этот метод усреднения работает только на постоянных
или очень медленно меняющихся входных сигналах. К тому же, чтобы до-
биться эффективного разрешения в А разрядов, нужно обсчитывать 2N так-
товых циклов, что накладывает определенные ограничения на эффектив-
ную частоту дискретизации.
Проведение дальнейшего анализа во временной области непродуктивно,
поэтому концепцию шумового преобразования лучше объяснять в частотной
области на модели простого Е-Д модулятора, приведенной на рис. 3.128.
Решение для Y
Сигнальная составляющая
Шумовая составляющая
Рис. 3.128. Упрощенная линеаризованная модель сигма-дельта модулятора в частот-
ной области
3.3. Сигма-дельта
Интегратор модулятора представлен аналоговым ФНЧ с передаточной
функцией = l/f. Амплитудная характеристика, соответствующая этой
передаточной функции, обратно пропорциональна входной частоте. Одно-
разрядный квантователь является источником шума квантования Q, пере-
даваемого в выходной блок суммирования. Обозначив входной сигнал X, а
выходной У, получаем сигнал на выходе входного сумматора X — Y. Он
умножается на передаточную функцию фильтра 1//, и результат передается
на вход выходного сумматора. Теперь можно написать выражение для вы-
ходного напряжения Y как:
r = l(^-y) + Q. (3.17)
Это выражение без труда преобразуется и решается относительно Y в фун-
кции X,f,wQ'.
Qf
(3.18)
Примечательно, что, когда частота f стремится к нулю, выходное напря-
жение Y стремится к X без шумового компонента. При более высоких час-
тотах амплитуда сигнального компонента стремится к нулю, а шумовой
компонент стремится к Q. На высокой частоте на выходе присутствует в
основном шум квантования. По существу, аналоговый фильтр играет роль
фильтра низких частот для сигнала и фильтра высоких частот для шума
квантования. Таким образом, аналоговый фильтр реализует функцию пре-
образования шума в данной модели Е-Д модулятора.
Для заданной входной частоты аналоговый фильтр высокого порядка
более эффективно ослабляет шум. Это же относится и к Е-Д модуляторам,
правда с определенными ограничениями.
Включением в Е-модулятор более одного каскада интегрирования и сум-
мирования можно добиться более качественного преобразования шума
квантования и даже лучшего эффективного числа разрядов при заданном
коэффициенте избыточной дискретизации, как следует из кривых рис. 3.129
для Е-Д модуляторов первого и второго порядков.
Рис. 3.129. Формы шума квантования сигма-дельта модуляторов
Глава 3. Архитектуры преобразователей данных
Цифровой
фильтр
и прореживатель
N разрядов
Рис. 3.130. Сигма-дельта АЦП второго порядка
Структурная схема Z-Д модулятора второго порядка приведена на рис. 3.130.
Z-Д АЦП третьего и более высоких порядков могут оказаться потенциально
неустойчивыми при некоторых входных сигналах. Последние исследова-
ния, проведенные применительно к компараторам с конечным, а не беско-
нечным усилением, показали возможность избежания неустойчивости. Но
даже сохранение возможной неустойчивости не столь важно, так как ЦСП,
являющийся цифровым фильтром и прореживателем, может распознавать
появление неустойчивости и вовремя предотвращать ее.
Рисунок 3.131 показывает соотношение между порядком S-Д модулято-
ра и уровнем избыточности дискретизации, необходимым для достижения
определенного отношения сигнал-шум. Например, если коэффициент из-
быточной дискретизации равен 64, идеальная система второго порядка обес-
печит отношение сигнал-шум (SNR) около 80 дБ. Этому соответствует при-
мерно 13 эффективных разрядов (ENOB). Хотя фильтрация, выполняемая
цифровым фильтром с прореживателем, может предполагать любую точ-
ность, нет смысла выводить во внешнее слово более 13 двоичных разрядов.
Рис. 3.131. Зависимость отношения сигнал-шум от избыточности дискретизации сис-
тем первого, второго и третьего порядков
3.3. Сигма-делыпа преобразователи
Дополнительные разряды не принесут полезной сигнальной информации и
потеряются в шуме квантования, если не применять дополнительных средств
фильтрации. Для повышения разрешающей способности надо повышать
степень избыточности дискретизации и/или внедрять модулятор более вы-
сокого порядка.
Рассмотрение паузных (IDLE) тонов
До сих пор при рассмотрении сигма-дельта АЦП мы допускали, что шум
квантования, производимый сигма-дельта модулятором, является случай-
ным и не коррелирует с входным сигналом. К сожалению, это не всегда
так, особенно когда речь идет о модуляторах первого порядка. Рассмотрим
случай усреднения 16 выборок на выходе модулятора 4-разрядного сигма-
дельта АЦП.
Рисунок 3.132 демонстрирует битовые комбинации двух входных сигна-
лов: входного сигнала величиной 8/16 и входного сигнала величиной 9/16.
В случае сигнала 9/16 битовая комбинация на выходе модулятора содержит
дополнительную «1» в каждой 16-й выборке. При этом вырабатывается энер-
гия на частоте/у/16, дающая нежелательный тональный сигнал. Если коэф-
фициент избыточной дискретизации меньше 16, этот тон попадает в поло-
су пропускания. В аудиосистемах можно услышать такие паразитные тоны,
превышающие уровень шума, когда входной сигнал изменяется от отрица-
тельной до положительной величины полной шкалы.
16 выборок выходного потока Двоичный
данных сигма-дельта модулятора эквивалент
1010101010101010... S 1000
алю
101010101010101 1...
1001
Повторяется каждые
16 выборок
Рис. 3.132. Повторяющаяся битовая комбинация на выходе сигма-дельта модулятора
Рисунок 3.133 представляет коррелированную паузную (при неизмен-
ном сигнале) периодическую конфигурацию сигма-дельта модулятора пер-
вого порядка, а рис. 3.134 демонстрирует сравнительно мало коррелирован-
ную конфигурацию модулятора второго порядка. Поэтому все сигма-дельта
Паузное поведение, на входе 0 вольт
Паузное поведение при постоянном входном сигнале, демонстрирующее корре-
лированные комбинации
Рис 3.133. Паузные (IDLE) комбинации сигма-дельта модулятора первого порядка (выход
интегратора)
Рис. 3.134. Паузные {IDLE) комбинации сигма-дельта модулятора второго порядка
(выход интегратора)
аудиоАЦП содержат систему, как минимум, второго порядка, а в некото-
рых из них используются системы до пятого порядка.
Обсуждение систем более высокого порядка
Для работы в широком динамическом диапазоне нужны системы сигма-
дельта модуляторов более высокого, чем второй, порядка, хотя их реализа-
ция часто вызывает много вопросов. Главное, что рассмотренные до этого
простые модели не обладают необходимой точностью. Но системы более
высокого, чем второй, порядка могут не обеспечивать устойчивости при
всех входных воздействиях. Неустойчивость возрастает из-за того, что ком-
паратор является нелинейным элементом, эффективный «коэффициент
усиления» которого изменяется обратно пропорционально уровню входно-
го сигнала. Неустойчивость проявляется следующим образом. В нормально
работающей системе поступление на вход большого сигнала вызывает пе-
регрузку, поэтому средний коэффициент усиления компаратора уменьша-
ется. Уменьшение коэффициента усиления в линейной модели ведет к не-
устойчивости системы. Неустойчивость остается даже после того, как вызвав-
ший ее сигнал будет снят. На практике такая схема должна была бы колебаться
при включении питания, так как переходный процесс вызывается началь-
ным толчком включения. В частности, в сдвоеннном аудио АЦП AD1879,
выпущенном Analog Devices в 1994 году, используется система 5-го порядка,
и для этой и подобных ей системах высокого порядка потребовалась об-
ширная нелинейная стабилизирующая техника22-26.
Многоразрядные сигма-дельта преобразователи
До сих пор мы рассматривали только сигма-дельта преобразователи, содер-
жащие одноразрядный АЦП (компаратор) и одноразрядный ЦАП (пере-
ключатель). Структурная схема на рис. 3.135 представляет многоразрядный
сигма-дельта АЦП с «-разрядным флэш-АЦП и «-разрядным ЦАП. Оче-
видно, эта архитектура расширяет динамический диапазон при заданном
коэффициенте избыточной дискретизации и заданном порядке системного
фильтра. Со стабилизацией все обстоит достаточно просто, так как можно
использовать систему второго порядка. Паузные комбинации становятся
более равномерными, с минимальным уровнем тональных эффектов.
Реальный недостаток этой технологии заключается в том, что линей-
ность системы зависит от линейности ЦАП, и для достижения 16-разряд -
ного разрешения нужна лазерная подстройка. Это делает многоразрядную
3.3. Сигма-дельта преобразователи
Рис. 3.135. Многоразрядный сигма-дельта АЦП
архитектуру чрезвычайно неудобной для реализации на ИС со смешанны-
ми сигналами на основе традиционных двоичных ЦАП.
Тем не менее термометр с полной дешифрацией в сочетании с патенто-
ванной технологией шифрации используется во многих аудиоАЦП и ЦАП
Analog Devices, в том числе в 24-разрядном стерео AD187127 28, где с помо-
щью многоразрядной архитектуры обеспечиваются высокое отношение сиг-
нал-шум и малые искажения. Технология многоразрядного кодирования
минимизирует неактивные тона и дифференциальную нелинейность. Уп-
рощенная структурная схема АЦП AD1871 показана на рис. 3.136.
CAPLN CAPLP AVDO
DVDD ODVDD
CAPRN CAPRP AQND
DQND
СА9С
LRCLK
BCLK
DOUT
ОЖ
ЯИГГ
MCLK
CLATCH/(WS)
СС1КДО№12)
CIN^DFI}
COUTflDFO)
XCTRL
Рис. 3.136. 24-разрядный стерео/аудио сигма-дельта АЦП AD1871 на 96 тыс. выборок/с
Аналоговая секция S-Д модулятора AD1871 обеспечивает качественное
функционирование с использованием патентованной многоразрядной тех-
нологии Analog Device. Как показано на рис. 3.137, перед секцией флэш-
АЦП установлены два блока аналоговых интеграторов, формирующих мно-
горазрядные выборки.
Выход флэш-термометра подвергается шифрации для передачи в двоич-
ном коде в секции фильтра и шифрации (скремблированию) для организа-
ции обратной связи к двум каскадам интеграторов. Модулятор оптимизи-
Глава 3. Архитектуры преобразователей данных
Из аналоговой
входной секции
обратной связи
Рис. 3.137. Детали модулятора второго порядка и скремблера данных AD1871
рован для работы на частоте дискретизации 6,144 МГц (т. е. 128 х fs при
дискретизации на 48 кГц и 64 xfs при дискретизации на 96 кГц). Динами-
ческий А-взвешенный диапазон AD1871 обычно составляет 105 дБ. Основ-
ные характеристики AD1871 сведены в таблицу на рис. 3.138.
• Однополярное питание +5 В.
• Дифференциальные двухканальные аналоговые входы.
• Поддержка слов длиной 16/20/24 разряда.
• Динамический А-взвешенный диапазон 105 дБ (тип.).
• Полный коэффициент гармоник и шума (-20 дБ на входе от полной шкалы) 103 дБ
(тип.).
• Неравномерность в полосе пропускания фильтра прореживателя 0,01 дБ.
• Многоразрядный модулятор второго порядка со скремблированием данных с
128-/64-кратной избыточной дискретизацией менее 350 мВт (тип.).
• Переключение на экономичный режим по потребляемой мощности.
• Внутреннее опорное напряжение.
• Гибкий последовательный интерфейс.
• Корпус с 28 выводами типа SSOP.
Рис. 3.138. Основные параметры 24-разрядного стерео сигма-дельта АЦП AD1871 на
96 тыс. выборок/с
Назначение цифрового фильтра
Цифровой фильтр является неотъемлемой частью всех сигма-дельта АЦП —
его нельзя удалить. Время установления этого фильтра влияет на качество
приложений, особенно при использовании сигма-дельта АЦП в мульти-
плексных системах. На входах мультиплексора присутствуют напряжения
нескольких каналов, поэтому выход представляет ступенчатую функцию
для АЦП от различных входов. Фактически выход мультиплексора может
представлять полношкальное ступенчатое напряжение, подаваемое на сиг-
ма-дельта АЦП в момент переключения каналов. Фильтр должен обладать
временем установления, необходимым для такого рода приложений. Это не
означает, что сигма-дельта АЦП не следует использовать в мультиплексо-
рах, но время установления цифрового фильтра приходится особо огова-
ривать. Некоторые новые модели сигма-дельта АЦП оптимизированы спе-
циально для использования в мультиплексорах. Например, групповая
задержка цифрового фильтра AD1871 составляет 910 мкс (при дискретиза-
ции 48 тыс. выборок/с) и 460 мкс (при дискретизации 96 тыс. выборок/с).
3.3. Сигма-дельта преобразователи
Рис. 1.139. Характеристики цифрового фильтра 24-разрядного сигма-дельта АЦП AD1871
на 96 тыс. выборок/с
Это время, необходимое для прохождения через половину числа звеньев
(taps) цифрового фильтра при ступенчатой функции на входе. Следователь-
но, полное время установления примерно вдвое превышает период группо-
вой задержки. В обоих условиях частота избыточной дискретизации состав-
ляет 6,144 млн выборок/с. Частотная характеристика цифрового фильтра,
входящего в АЦП AD1871, приведена на рис. 1.139.
В других приложениях, таких как низкочастотные 24-разрядные изме-
рительные сигма-дельта АЦП высокого разрешения (например, серий
AD77xx), могут применяться другие типы цифровых фильтров. Например,
популярна характеристика SINC3, так как имеет нули на гармониках, крат-
ных предельной пропускной способности. В частности, при пропускной
способности 10 Гц формируются нули на 50 и 60 Гц, способствуя сниже-
нию помех от питающей сети.
Многокаскадные сигма-дельта преобразователи
с шумовым преобразованием (MASH,)
Как уже отмечалось, технология нелинейной стабилизации осложняется в
системах третьего порядка и выше. Во многих случаях предпочтителен пе-
реход к многоразрядной архитектуре. Другой подход, именуемый много-
каскадным шумовым преобразованием (MASH), основывается на построе-
нии устойчивых каскадов первого порядка29 30. Рисунок 3.140 представляет
структурную схему трехкаскадного АЦП типа MASH. Сигнал с выхода пер-
вого интегратора вычитается из сигнала с выхода первого ЦАП, в результа-
те чего возникает шум квантования первого каскада Qr Затем происходит
квантование Qx во втором каскаде. Сигнал с выхода второго интегратора
вычитается из сигнала с выхода второго ЦАП, в результате чего возникает
шум квантования второго каскада, который, в свою очередь, передается в
третий каскад.
Сигнал с выхода первого каскада складывается с первой цифровой про-
изводной второго каскада и второй производной третьего каскада, образуя
выходной сигнал. В результате шум квантования Qx подавляется вторым
Рис. 3.140. Многокаскадный сигма-дельта АЦП с шумовым преобразованием (MASH)
каскадом, а шум квантования Q2 подавляется третьим каскадом, т. е. произ-
водится то же подавление, что и в системе третьего порядка. Поскольку
такой результат получается с помощью трех контуров первого порядка, можно
уверенно говорить об устойчивой работе.
Измерительные сигма-дельта АЦП
высокого разрешения
Чтобы лучше понять возможности измерительных сигма-дельта АЦП и осо-
бенности этой технологии, детально рассмотрим современный пример
AD7730. Показанный на рис. 3.141 AD7730 является представителем семей-
ства AD77XX. Этот АЦП был специально сконструирован для подключе-
AIN1(+)
100 нА
AIN1(—)
Буфер
AIN2(+yDlO—f-
AVDD DVDD
REFJN(-) REFIN(+)
(Определение опорногЦ
I напряжения^ |
Сигма-
дельта
модулятор
6-раз-
рядный
ЦАП
1100 нА
3)
AD7730
Сигма-дельта АЦП
QSTANDBY
X/ SYNC
VBIAS О
АСХ
АСХ
Генератор АС
сигналов для
тактирования
Банк регистров
Калибровочный
микроконтроллер
Генератор
тактов
Программируе-
мый цифровой
фильтр
П оследовательн ы й
интерфейс и логика
управления
MCLK Вход
MCLK Выход
SCLK
CS
-о-
<>
AGND DGND POL RDY Сброс
О
О
Рис. 3.141. Сигма-дельта АЦП AD7730 с одним источником питания для измеритель-
ния непосредственно к выходу моста взвешивающих устройств. Прибор
принимает низкоуровневые сигналы с моста и формирует на выходе после-
довательное цифровое слово. Имеется два буферизованных дифференци-
альных входа с мультиплексором, буфером и усилителем с программируе-
мым усилением (УПУ). УПУ можно программировать на четыре диффе-
ренциальных униполярных аналоговых входных диапазона: от 0 до +10 мВ,
от 0 до +20 мВ, от 0 до +40 мВ и от 0 до +80 мВ и на четыре дифференци-
альных биполярных входных диапазона: ±10, ±20, ±40 и ±80 мВ.
Свободное от помех разрешение с максимальным размахом составляет
1 на 230 000 градаций или примерно 18 разрядов. Следует заметить, что
свободное от помех разрешение зависит от диапазона входных напряже-
ний, частоты среза фильтра и темпа формирования выходных слов. Шум
возрастает на малых входных диапазонах, где повышается коэффициент
усиления УПУ. Повышение скорости формирования выходных слов и со-
ответствующее увеличение частоты среза фильтра тоже ведет к возраста-
нию уровня шума.
Аналоговые входы имеют внутреннюю буферизацию, обеспечивающую
относительно высокий входной импеданс. Оба аналоговых канала являют-
ся дифференциальными, рассчитанными на режим синфазного сигнала до
1,2 В относительно AGND и 0,95 В относительно AVDD. Опорный вход
тоже дифференциальный, и его синфазный сигнал может изменяться от
AGND до AVDD.
6-разрядный ЦАП управляется внутренним регистром и может вычи-
тать сигнал TARE (вес тары) до ±80 мВ из аналоговых входных сигналов.
Разрешение функции TARE составляет 1,25 мВ при опорном напряжении
+2,5 В и 2,5 мВ при опорном напряжении +5 В.
Выход УПУ подключен к S-D модулятору и программируемому цифро-
вому фильтру. Последовательный интерфейс допускает трехпроводную ра-
боту и обеспечивает совместимость с микроконтроллерами и цифровыми
сигнальными процессорами. AD7730 реализует функции автокалибровки и
внешней калибровки с дрейфом смещения менее 5 нВ/ °C и дрейфом уси-
ления менее 2 ррт/°С. Столь низкий дрейф достигается благодаря исполь-
зованию коммутации, подобной той, на базе которой строятся стабилизи-
рованные усилители с прерыванием и автоподстройкой нуля (chopper).
Частота избыточной дискретизации AD7730 составляет 4,9152 МГц, а
темп формирования выходных данных можно изменять от 50 до 1200 Гц.
Тактирование можно выполнять от внешнего таймера или подключением
кварцевого генератора на выводы MCLK IN и MCLK OUT.
AD7730 может воспринимать входные сигналы с моста постоянного тока.
Кроме того, можно принимать входные сигналы и от моста переменного
тока по сигналам генератора АС-сигналов (АСХ). Эти неперекрывающиеся
тактовые сигналы используются для синхронизации внешних ключей, уп-
равляющих питанием моста. На входе AD7730 производится демодуляция
импульсов АСХ.
AD7730 содержит два генератора постоянного тока на 100 нА, один из
которых является источником токов от AVDD до Л/А(+), а другой служит
стоком тока от AIN(—) до AGND. Токи подключаются к требуемой аналого-
вой входной паре битовыми командами регистра режима. Эти токи можно
300 Глава 3. Архитектуры преобразователей данных
использовать для проверки работы сенсоров непосредственно перед прове-
дением измерений в каналах. Если токи присутствуют и измеряются их
полные значения, значит, сенсор имеет разомкнутую цепь. Если измерение
дает 0 В, значит, сенсор имеет короткозамкнутую цепь. При нормальной
работе тестовые токи отключаются установкой в 0 соответствующего разря-
да регистра режима.
В AD7730 есть внутренний программируемый цифровой фильтр. Фильтр
состоит из двух секций: фильтра первого каскада и фильтра второго каска-
да. Первый каскад представляет ФНЧ SINC3. Частота среза и выходной
темп фильтра первого каскада программируются. Фильтр второго каскада
работает в трех режимах. В нормальном режиме этот фильтр с импульсной
характеристикой конечной длительности (КИХ) с 22 звеньями (tap) обра-
батывает выходные данные фильтра первого каскада. Когда на аналоговый
вход поступает ступенчатый сигнал, второй каскад переводится во второй
режим (FASTStep™) и производит ряд операций усреднения после прекра-
щения ступенчатого воздействия, и затем фильтр второго каскада возвра-
щается в режим КИХ-фильтра. В третьем режиме (SKIP) фильтр второго
каскада полностью отключается, и всю фильтрацию AD7730 выполняет
первый каскад. Режимы FASTStep и SKIP можно разрешать или запрещать
соответствующими разрядами управляющего регистра.
На рис. 3.142 приведена полная частотная характеристика AD7730 при
нормальной работе второго каскада в режиме КИХ-фильтра. Эта характе-
ристика соответствует: разрешенной коммутации режимов, выходной час-
тоте слов 200 Гц, тактовой частоте 4,9152 МГц. Характеристика представле-
на в диапазоне от 0 до 100 Гц. Ослабление на частотах 50 ± 1и60± 1Гц
превышает 88 дБ.
На рис. 3.143 показаны переходные характеристики AD7730 с разреше-
нием и без разрешения режима FASTStep. Вертикальная ось показывает
величину кода и указывает установившееся значение выхода при измене-
нии входной ступени. Горизонтальная ось отображает число выходных вы-
Рис. 3.142. Частотная характеристика цифрового фильтра AD7730
3.3. Сигма-дельта преобразователи
Число выходных выборок
Рис. 3.143. Время установления цифрового фильтра AD7730 с демонстрацией режима
FASTStep™
борок, необходимое для установления. Положительное ступенчатое вход-
ное воздействие поступает на пятой выходной выборке. В нормальном ре-
жиме (FASTStep запрещен) на выходе не устанавливается окончательного
значения до 23-го слова. Когда разрешен режим переключения в FASTStep,
выходной сигнал достигает установившейся величины к седьмому слову.
Между 7-й и 23-й выходными выборками в режиме FASTStep поддержива-
ется установившийся результат, но с дополнительным шумом по сравне-
нию с нормальным режимом. Начальный уровень шума сравним с режи-
мом SKIP, и по мере того, как усреднение близится к концу, он достигает
определенного значения. Полное время установления уровня шума одина-
ково для режима FASTStep и нормального режима.
Режим FASTStep гораздо более быстро реагирует на изменение входно-
го сигнала и дает новую величину. Эта особенность очень важна для уст-
ройств взвешивания, так как позволяет быстрее узнать вес, а также для
установок сканирования мультиплицируемых каналов, в которых пользо-
вателю некогда дожидаться полного времени установления, чтобы убедить-
ся в смене канала.
Заметим, тем не менее, что режим FASTStep не подходит для мульти-
плексоров из-за чрезмерного шума во время установления сигнала. В муль-
типлексорах надо задействовать полный 23-тактный интервал для подключе-
ния нового канала. На это указывается в подробном руководстве по исполь-
зованию S-Д АЦП в мультиплексорах. Независимо от причин использования
результата цифровой фильтрации здесь возможно только после переключе-
ния каналов и полного установления.
Калибровочные режимы AD7730 перечислены на рис. 3.144. Калибро-
вочный цикл можно начать в любое время включением соответствующего
разряда регистра режима. В результате калибровки устраняются ошибки
смещения и усиления прибора.
В AD7730 разрешен доступ пользователей к внутренним калибровоч-
ным регистрам. Внешний микропроцессор может производить чтение ка-
либровочных коэффициентов прибора и запись новых коэффициентов че-
(Г302 Глава 3. Архитектуры преобразователей данных
• Внутренняя калибровка нуля шкалы:
— 22 выходных цикла выборок (СНР = 0);
— 24 выходных цикла выборок (СНР = 1).
• Внутренняя калибровка полной шкалы:
— 44 выходных цикла выборок (СНР = 0);
— 48 выходных циклов выборок (СНР = 1).
• Калибровки программируются через регистр режима.
• Коэффициенты калибровки сохраняются в регистрах калибровки.
• Внешний микропроцессор может обращаться к регистрам калибровки для чтения или
записи.
Рис 3.144. Разновидности калибровок AD7730
рез внешний E2PROM. При этом обеспечивается эффективное управление
процедурой калибровки AD7730 со стороны микропроцессора. Это означа-
ет также, что пользователь может проверять корректность калибровки, срав-
нивая коэффициенты, занесенные в ходе калибровки, с предустановленны-
ми в E2PROM коэффициентами. Поскольку коэффициенты калибровки
рассчитываются в ходе преобразования входного напряжения, точность ка-
либровки определяется уровнем шума в нормальном режиме. Чтобы опти-
мизировать точностные характеристики, рекомендуется выполнять калиб-
ровку на минимальной выходной скорости, при которой уровень шума тоже
минимальный. Коэффициенты, полученные на любой скорости, будут кор-
ректными на всех скоростях обработки данных. Непринципиально, что при
калибровке на низкой скорости продолжительность калибровки увеличи-
вается.
AD7730 требуется внешний источник опорного напряжения, а в радио-
метрическом мосте, показанном на рис. 3.145, в качестве опорного может
использоваться напряжение питания. В этой конфигурации напряжение на
выходе моста прямо пропорционально напряжению, питающему мост, ко-
торое одновременно используется для формирования опорного напряже-
ния AD7730. Колебания напряжения питания не влияют на точность. Вы-
ходы моста SENSE были использованы в качестве опорного напряжения
AD7730, чтобы исключить ошибки от падения напряжений на сопротивле-
Рис. 3.145. Мостовые измерения на базе AD7730 (упрощенная схема)
3.3. Сигма-дельта преобразователи
Полосовые сигма-дельта преобразователи
Рассмотренные нами S-Д АЦП содержат интеграторы, играющие роль ФНЧ,
полоса пропускания которых начинается от 0. Шум квантования их про-
двигается вместе с частотой. В настоящее время большинство коммерчес-
ких S-А АЦП относятся к этому типу (хотя некоторые из них, предназна-
ченные для аудио- и телекоммуникационных приложений, содержат по-
лосовые, а не низкочастотные цифровые фильтры для исключения смещений
на постоянном токе). Трудно назвать конкретную причину, по которой в 2-Д
модуляторах устанавливаются ФНЧ, исключая разве что традиционный
взгляд на АЦП как прибор базового спектра частот, в которых проще скон-
струировать интеграторы, чем полосовые фильтры. Если заменить интегра-
торы S-Д АЦП полосовыми фильтрами (ПФ), как показано на рис. 3.146,
шум квантования сместится вверх и вниз по частоте, оставив потенциально
свободный от шума диапазон полосы пропускания31-33. Если еще запрог-
раммировать цифровой фильтр на работу в этой полосе пропускания, полу-
чится S-А АЦП с полосовой, а не низкочастотной характеристикой. Такие
приборы полезны для систем прямого преобразования промежуточной ча-
стоты в цифровой сигнал, для цифрового радио, ультразвуковых и прочих
субдискретных приложений. В то же время модулятор и цифровой ПФ при-
ходится рассчитывать на фиксированный диапазон частот, определяемый
системным приложением, и этим в какой-то степени ограничивается гиб-
кость такого подхода.
В приложениях полосового S-А АЦП с субдискретизацией минималь-
ная частота дискретизации должна хотя бы вдвое превосходить полосу про-
пускания сигнала. Сигнал центрируется относительно несущей частоты fc.
В 32 описывается типичная цифровая радиосистема со средней частотой
несущей 455 кГц и полосой пропускания сигнала 10 кГц. Избыточная
дискретизация Kfs = 2 млн выборок/с и выходная частота fs = 20 тыс. выбо-
рок/с обеспечивают динамический диапазон 70 дБ в полосе пропускания
сигнала.
Рис. 3.146. Замена интеграторов резонаторами дает полосовой сигма-дельта АЦП
Глава 3. Архитектуры преобразователей данных
Другим примером полосового преобразователя служит цифровая под-
система промежуточной частоты AD9870 с номинальной частотой избыточ-
ной дискретизации 18 млн выборок/с, средней частотой несущей 2,25 МГц
и полосой пропускания от 10 до 150 кГц33.
Сигма-дельта ЦАП
Сигма-дельта ЦАП имеет много общего с сигма-дельта АЦП, однако в сиг-
ма-дельта ЦАП функция шумового профилирования связана с цифровым,
а не аналоговым модулятором.
Е-Д ЦАП, в отличие от Е-Д АЦП, является преимущественно цифровым
прибором (рис. 3.147, а). В него входит «интерполяционный фильтр» (цифро-
вая схема, которая на низкой скорости принимает данные, на высокой скоро-
сти вставляет нули, полученный код обрабатывает по алгоритму цифровой
фильтрации и на высокой скорости выдает данные), Е-Д модулятор (обраба-
тывающий сигналы как ФНЧ, а шум квантования — как ФВЧ и преобразую-
щий данные в высокоскоростной двоичный поток) и 1-разрядный ЦАП, пере-
ключаемый между равными положительным и отрицательным опорными на-
пряжениями. Выходной сигнал фильтруется внешним аналоговым ФНЧ.
Благодаря высокой частоте избыточной дискретизации сложность ФНЧ го-
раздо ниже, чем в случае с традиционным найквистовым преобразованием.
В Е-Д ЦАП можно задействовать более одного разряда, что приведет к
многоразрядной архитектуре, показанной на рис. 3.147, б. Эта концепция
подобна интерполяционным ЦАП, ранее рассмотренным в гл. 2, дополнен-
ным цифровым сигма-дельта модулятором. В прошлом многоразрядные ЦАП
были сложны в реализации из-за требуемой точности «-разрядного внут-
реннего ЦАП (этот ЦАП, хотя бы только «-разрядный, должен обладать
линейностью общего числа разрядов N). Но в серии аудио-АЦП AD185x
используется патентованная технология скремблинга данных (именуемая пря-
мым скремблингом), благодаря которой решается эта проблема и достигается
лучшее из всех аудиосистем качество27 28. Например, сдвоенный 24-разряд-
ный ЦАП AD1853 на 192 тыс. выборок/с обеспечивает полный коэффициент
Одноразрядный
N разрядов N разрядов 1 разряд Аналоговый сигнал:
Аналоговый
выход
Многоразрядный
Рис. 3.147. Сигма-дельта ЦАП
3.3. Сигма-дельта преобразователи
16/20/24 разряды
Аудиоданные
Вход от внешнего
цифрового фильтра
Главный Управляющий Вход цифрового
тактовый вход вход потока данных
L-CH R-CH
Дифференциальный
токовый выход
Рис. 3.148. Многоразрядный сигма-дельта аудио-ЦАП AD1955
гармоник и шума более чем в 104 дБ при частоте дискретизации 48 тыс. вы-
борок/с.
Один из новейших представителей этого семейства — многоразрядный
сигма-дельта аудио-ЦАП AD1955, представленный на рис. 3.148. В AD1955
тоже используется прямой скремблинг данных, поддержка множества DVD
аудио-форматов и очень гибкий последовательный порт. Полный коэффи-
циент гармоник и шума ЦАП составляет НО дБ.
Выводы
Сигма-дельта АЦП и ЦАП распространились на многие современные при-
ложения, в том числе на измерения, средства голосового диапазона, аудио и
пр. Преимущество технологии заключается в низкой стоимости КМОС-про-
цессов, способствующей их интеграции в практические ЦСП. Реально дос-
тупное разрешение составляет 24 разряда, а требования к аналоговой фильт-
рации наложенных и отраженных спектров без труда удовлетворяются с по-
мощью избыточной дискретизации. Современные технологии, такие как
многоразрядное скремблирование данных, до минимума снижают проблему
паузных комбинаций, бывшую бедствием ранних сигма-дельта устройств.
Многие сигма-дельта преобразователи предполагают высокую степень
программирования выходного темпа, характеристик цифрового фильтра и
режимов автоматической калибровки. Многоканальные сигма-дельта АЦП
сегодня доступны в системах сбора данных, и большинство пользователей
хорошо осведомлены о требованиях к времени установления цифровых
фильтров таких приложений. Рисунок 3.149 подводит некоторые итоги зна-
комства с сигма-дельта преобразователями.
Глава 3. Архитектуры преобразователей данных
• В основе замечательная линейность.
• Возможность высокого разрешения (24 разряда).
• Избыточная дискретизация ослабляет требования к аналоговой фильтрации наложе-
ния спектров.
• Идеальны для КМОП-процессов, без ограничений.
• Не требуется УВХ.
• Дополнительные возможности: встроенные УПУ, аналоговые фильтры, автоматичес-
кая калибровка.
• Встроенные программируемые цифровые фильтры (AD7725: ФНЧ, ФВЧ, ПФ, ЗФ).
• Предельные частоты дискретизации для измерений, средств голосового диапазона,
аудио, исключая полосовые сигма-дельта АЦП.
• Темп коммутации аналогового мультиплексора ограничен внутренним временем ус-
тановления фильтра.
Рис. 3.149. Выводы по сигма-дельта преобразователям
Список литературы
3.3. Сигма-дельта преобразователи
1. Max W. Hauser. Principles of Oversampling A/D Conversion. Journal Audio
Engineering Society, Vol. 39, No. 1/2, January/February 1991, pp. 3—26. (one of the best
tutorials and practical discussions of the sigma-delta ADC architecture and its history).
2. E.M. Deloraine, S. Van Mierlo, and B. Derjavitch. Methode et systeme de transmission
par impulsions. French Patent 932, 140, issued August, 1946. Also British Patent 627, 262,
issued 1949.
3. E.M. Deloraine, S. Van Mierlo, and B. Derjavitch. Communication System Utilizing
Constant Amplitude Pulses of Opposite Polarities. U.S. Patent 2, 629, 857, filed October 8,
1947, issued February 24, 1953.
4. F. de Jager. Delta Modulation: A Method of PCM Transmission Using the One
Unit Code. Phillips Research Reports, Vol. 7, 1952, pp. 542—546. (additional work done on
delta modulation during the same time period).
5. H. Van de Weg. Quantizing Noise of a Single Integration Delta Modulation System
with an N-Digit Code. Phillips Research Reports, Vol. 8, 1953, pp. 367—385. (additional
work done on delta modulation during the same time period).
6. C.C. Cutler. Differential Quantization of Communication Signals. U.S. Patent 2,
605, 361, filed June 29, 1950, issued July 29, 1952. (recognized as the first patent on
differential PCM or delta modulation, although actually first invented in the Paris labs of the
International Telephone and Telegraph Corporation by E. M. Deloraine, S. Mierlo, and B.
Derjavitch a few years earlier)
7. C.C. Cutler. Transmission Systems Employing Quantization. U.S. Patent 2, 927,
962, filed April 26, 1954, issued March 8, 1960. (a ground-breaking patent describing
oversampling and noise shaping using first and second-order loops to increase effective resolution.
The goal was transmission of oversampled noise shaped PCM data without decimation, not a
Nyquist-type ADC).
8. C.B. Brahm. Feedback Integrating System. U.S. Patent 3,192,371, filed September
14, 1961, issued June 29, 1965. (describes a second-order multibit oversampling noise shaping
ADC).
9. H. Inose, Y. Yasuda, and J. Murakami. A Telemetering System by Code Modulation:
S-Д Modulation. IRE Transactions on Space Electronics Telemetry, Vol. SET-8, September
1962, pp. 204—209. Reprinted in N. S. Jayant, Waveform Quantization and Coding, IEEE
Список литературы к 3.3. Сигмам
Press and John Wiley, 1976, ISBN 0-471-01970-4. (an elaboration on the 1-bit form of
Cutlery s noise-shaping oversampling concept. This work coined the description of the architecture
as у delta-sigma modulation').
10. H. Inose and Y. Yasuda. A Unity Bit Coding Method by Negative Feedback. IEEE
Proceedings, Vol. 51, November 1963, pp. 1524-1535. (further discussions on their 1-bit
ydelta-sigmay concept).
11. D.J. Goodman. The Application of Delta Modulation of Analog-to-PCM Encoding.
Bell System Technical Journal, Vol. 48, February 1969, pp. 321—343. Reprinted in
N.S. Jayant, Waveform Quantization and Coding, IEEE Press and John Wiley, 1976, ISBN
0-471 -01970-4. (the first description of using oversampling and noise shaping techniques followed
by digital filtering and decimation to produce a true Nyquist-rate ADC).
12. J. C. Candy. A Use of Limit Cycle Oscillations to Obtain Robust Analog-to-Digital
Converters. IEEE Transactions on Communications, Vol. COM-22, December 1974,
pp. 298—305. (describes a multibit oversampling noise shaping ADC with output digital filtering
and decimation to interpolate between the quantization levels).
13. R.J. van de Plassche. A Sigma-Delta Modulator as an A/D Converter. IEEE
Transactions on Circuits and Systems, Vol. CAS-25, July 1978, pp. 510—514.
14. B.A. Wooley and J. L. Henry. An Integrated Per-Channel PCM Encoder Based on
Interpolation. IEEE Journal of Solid State Circuits, Vol. SC-14, February 1979, pp. 14—20.
(one of the first allintegrated CMOS sigma-delta ADCs).
15. B.A. Wooley et al. An Integrated Interpolative PCM Decoder. IEEE Journal of
Solid State Circuits, Vol. SC-14, February 1979, pp. 20—25.
16. J.C. Candy, B.A. Wooley, and O.J. Benjamin. A Voiceband Codec with Digital
Filtering. IEEE Transactions on Communications, Vol. COM-29, June 1981, pp. 815—830.
17. J.C. Candy and Gabor C. Temes. Oversampling Delta-Sigma Data Converters,
IEEE Press, ISBN 0-87942-258-8, 1992.
18. R. Koch, B. Heise, F. Eckbauer, E. Engelhardt, J. Fisher, and F. Parzefall. A 12-bit
Sigma-Delta Analog-to-Digital Converter with a 15 MHz Clock Rate. IEEE Journal of
Solid-State Circuits, Vol. SC-21, No. 6, December 1986.
19. D.R. Welland, B.P. Del Signore and E.J. Swanson. A Stereo 16-Bit Delta-Sigma A/D
Converter for Digital Audio. J. Audio Engineering Society, Vol. 37, No. 6, June 1989,
pp. 476-485.
20. B. Boser and Bruce Wooley. The Design of Sigma-Delta Modulation Analog-to-
Digital Converters IEEE Journal of Solid-State Circuits, Vol. 23, No. 6, December 1988,
pp. 1298-1308.
21. J. Dattorro, A. Charpentier, D. Andreas. The Implementation of a One-Stage Multirate
64:1 FIR Decimator for use in One-Bit Sigma-Delta A/D Applications,» AES 7th
International Conference, May 1989.
22. W.L. Lee and C.G. Sodini. A Topology for Higher-Order Interpolative Coders.
ISCAS PROC. 1987.
23. P.F. Ferguson, Jr., A. Ganesan and R.W. Adams. One-Bit Higher Order Sigma-
Delta A/D Converters. ISCAS PROC. 1990, Vol. 2, pp. 890-893.
24. Wai Laing Lee, A Novel Higher Order Interpolative Modulator Topology for High
Resolution Oversampling A/D Converters, MIT Masters Thesis, June 1987.
25. R. W. Adams. Design and Implementation of an Audio 18-Bit Analog-to-Digital
Converter Using Oversampling Techniques. J. Audio Engineering Society, Vol. 34, March
1986, pp. 153-166.
26. P. Ferguson, Jr., A. Ganesan, R. Adams, et. al. An 18-Bit 20-kHz Dual Sigma-
Delta A/D Converter. ISSCC Digest of Technical Papers, February 1991.
27. Robert Adams, Khiem Nguyen, and Karl Sweetland. A 113 dB SNR Oversampling
DAC with Segmented Noise-Shaped Scrambling. ISSCC Digest of Technical Papers, vol. 41,
1998, pp. 62, 63, 413. (describes a segmented audio DAC with data scrambling).
Глава 3. Архитектуры преобразователей данных
28. Robert W. Adams and Тот W. Kwan. Data-directed Scrambler for Multi-bit Noise-
shaping D/А Converters. U.S. Patent 5, 404, 142, filed August 5, 1993, issued April 4,
1995. (describes a segmented audio DAC with data scrambling).
29. Y. Matsuya, et. al. A 16-Bit Oversampling A/D Conversion Technology Using
Triple-Integration Noise Shaping. IEEE Journal of Solid-State Circuits, Vol. SC-22, No.
6, December 1987, pp. 921—929.
30. Y. Matsuya, et. al. A 17-Bit Oversampling D/А Conversion Technology Using
Multistage Noise Shaping. IEEE Journal of Solid-State Circuits, Vol. 24, No. 4, August
1989, pp. 969-975.
31. Paul H. Gailus, William J. Tumey, and Francis R. Yester, Jr. Method and Arrangement
for a Sigma Delta Converter for Bandpass Signals. U.S. Patent 4, 857, 928, filed January
28, 1988, issued August 15, 1989.
32. S.A. Jantzi, M. Snelgrove, and P.F. Ferguson Jr. A 4th-Order Bandpass Sigma-
Delta Modulator. IEEE Journal of Solid State Circuits, Vol. 38, No. 3, March 1993,
pp. 282-291.
33. Paul Hendriks, Richard Schreier, Joe DiPilato. High Performance Narrowband
Receiver Design Simplified by IF Digitizing Subsystem in LQFP. Analog Dialogue,
Vol. 35-3, June-July 2001.
available at http://www.analog.com (describes an IF subsystem with a bandpass sigma-
delta ADC having a nominal oversampling frequency of 18MSPS, a center frequency of 2.25MHz,
and a bandwidth of 10kHz— 150kHz)-
Основные публикации по преобразованию данных
и связанной тематике
1. Alfred К. Susskind. Notes on Analog-Digital Conversion Techniques, John Wiley,
1957.
2. David F. Hoeschele, Jr. Analog-to-Digital/Digital-to-Analog Conversion Techniques,
John Wiley and Sons, 1968.
3. K. W. Cattermole. Principles of Pulse Code Modulation, American Elsevier Publishing
Company, Inc., 1969, New York NY, ISBN 444-19747-8.
4. Hermann Schmid. Electronic Analog/Digital Conversions, Van Nostrand Reinhold
Co., 1970.
5. Dan Sheingold. Analog-Digital Conversion Handbook, First Edition, Analog Devices,
1972.
6. Donald B. Bruck, Data Conversion Handbook, Hybrid Systems Corporation, 1974.
7. Eugene R. Hnatek. A Userys Handbook of D/А and A/D Converters, John Wiley,
New York, 1976, ISBN 0-471-40109-9.
8. Nuggehally S. Jayant. Waveform Quantizing and Coding, John Wiley-IEEE Press,
1976, ISBN 0-87942-074-X.
9. Dan Sheingold. Analog-Digital Conversion Notes, Analog Devices, 1977.
10. C.F. Kurth, editor. IEEE Transactions on Circuits and Systems Special Issue on
Analog/Digital Conversion, CAS-25, No. 7, July 1978.
11. Daniel J. Dooley. Data Conversion Integrated Circuits, John Wiley-IEEE Press,
1980, ISBN 0-471-08155-8.
12. Bernard M. Gordon. The Analogic Data-Conversion Systems Digest, Fourth Edition,
Analogic Corporation, 1981.
13. Eugene L. Zuch, Data Acquisition and Conversion Handbook, Datel-Intersil, 1982.
14. Frank F.E. Owen. PCM and Digital Transmission Systems, McGraw-Hill, 1982,
ISBN 0-07-047954-2.
15. Dan Sheingold. Analog-Digital Conversion Handbook, Analog Devices/Prentice-
Hall, 1986, ISBN 0-13-032848-0.
Список литературы к 3.3. Сигма-дельта преобразователи
16. Matthew Mahoney. DSP-Based Testing of Analog and Mixed-Signal Circuits, IEEE
Computer Society Press, 1987, ISBN 0-8186-0785-8.
17. Michael J. Dernier, High-Speed Analog-to-Digital Conversion, Academic Press,
Inc., 1991, ISBN 0-12-209048-9.
18. J. C. Candy and Gabor C. Temes. Oversampling Delta-Sigma Data Converters,
IEEE Press, ISBN 0-87942-258-8, 1992.
19. David F. Hoeschele, Jr. Analog-to-Digital and Digital-to-Analog Conversion
Techniques, Second Edition, John Wiley and Sons, 1994, ISBN-0-471-57147-4.
20. Rudy van de Plassche. Integrated Analog-to-Digital and Digital-to-Analog Converters,
Kluwer Academic Publishers, 1994, ISBN 0-7923-9436-4.
21. David A. Johns and Ken Martin, Analog Integrated Circuit Design, John Wiley,
1997, ISBN 0-471-14448-7.
22. Mikael Gustavsson, J. Jacob Wikner, and Nianxiong Nick Tan. CMOS Data Converters
for Communications, Kluwer Academic Publishers, 2000, ISBN 0-7923-7780-X.
23. R. Jacob Baker. CMOS Circuit Design Volumes I and II, John Wiley-IEEE Computer
Society, 2002, ISBN 0-4712-7256-6.
24. Rudy van de Plassche. CMOS Integrated Analog-to-Digital and Digital-to-Analog
Converters, Second Edition, Kluwer Academic Publishers, 2003, ISBN 1-4020-7500-6.
Серии семинаров Analog Devices:
25. Walt Kester, Practical Analog Design Techniques, Analog Devices, 1995, ISBN
0-916550-16-8, available for download at http://www.analog.com.
26. Walt Kester. High Speed Design Techniques, Analog Devices, 1996, ISBN 0-916550-17-6,
available for download at http://www.analog.com.
27. Walt Kester. Practical Design Techniques for Power and Thermal Management,
Analog Devices, 1998, ISBN 0-916550-19-2, available for download at http://
www.analog.com.
28. Walt Kester. Practical Design Techniques for Sensor Signal Conditioning, Analog
Devices, 1999, ISBN 0-916550-20-6, available for download at http://www.analog.com.
29. Walt Kester. Mixed-Signal and DSP Design Techniques, Analog Devices, 2000,
ISBN 0-916550-22-2, available for download at http://www.analog.com.
30. Walt Kester, Mixed-Signal and DSP Design Techniques, Analog Devices and Newnes
(An Imprint of Elsevier Science), ISBN 0-75067-611-6, 2003.
31. Walter G. Jung, Op Amp Applications, Analog Devices, 2002, ISBN 0-916550-26-5.
ГЛАВА 4
ТЕХНОЛОГИЯ
ПРЕОБРАЗОВАТЕЛЕЙ
4.1. Ранние процессы
Уолт Кестер
Электронно-вакуумные преобразователи
Электронно-вакуумное устройство стало первым технологическим реше-
нием, на основе которого базировалось развитие преобразователей, начи-
ная с 1920-х и заканчивая концом 1950-х годов. Как уже упоминалось в
первой главе данной книги, электронно-вакуумная лампа была изобретена в
1906 году Ли де Форестом1. На рис. 4.1 представлена иллюстрация из его
патента. Электронно-вакуумные устройства быстро нашли широкое при-
менение при создании различного электронного оборудовании. Инженеры
Bell Telephone Systems начали применять электронно-вакуумные усилители
на телефонных заводах в 1914 году.
Работа по совершенствованию усилителей всегда была очень важной
для развития преобразователей. Значительным вкладом было создание опе-
рационного усилителя с обратной связью в 1927 году Гарольдом С. Блэ-
Фрагмент патента США 841,387 Л.Д. Фореста «Прибор
для усиления слабых электрических токов», заявленного
25 октября 1906 года, выданного 15 января 1907 года
Рис. 4.1. Изобретение электронно-вакуумной лампы, 1906 год
4.1. Ранние процессы
Рис. 4.2. K2-W операционный усилитель 1953
года (любезность Дэна Шейнгольда)
ком2-4. Улучшение технических характеристик электронно-вакуумных схем
продолжалось в период Второй мировой войны. Много значительных от-
крытий было сделано инженерами Bell Labs. Если вы хотите ознакомиться
с историей развития ОУ, я рекомендую вам обратиться к книге Уолта Юнга
«Применение ОУ»5.
В период 1920—1950-х годов электронные лампы являлись своего рода дви-
жущей силой создания электронных схем. В 1953 году George A. Philbrick
Researches, Inc. представила первый в мире коммерческий ОУ6, известный под
маркировкой K2-W. Фото и схема данного усилителя приведены на рис. 4.2.
На процесс становления преобразователей существенное влияние ока-
зало открытие Аликом Хартли Ривзом7 импульсно-кодовой модуляции (РСМ)
в 1937 году. В своем патенте он описывает «счетные» АЦП и ЦАП, создан-
ные на основе электронно-вакуумной технологии (см. гл. 3). Инженеры из
Bell Labs продолжали совершенствование преобразователей в 1940-е годы,
при этом они использовали не только достижения систем с ИКМ, но также
системы шифрования военного периода.
Создание цифрового компьютера в период с конца 1940-х — начала
1950-х годов вызвало интерес к анализу данных, к управлению дискретны-
ми процессами и т. п., что в свою очередь вызвало большой коммерческий
интерес к разного рода преобразователям. В 1953 году Бернард М. Гордон,
первооткрыватель процесса преобразования данных, основал компанию,
названную Epsco Engineering (сейчас Analogic, Inc), в г. Конкорде, штат
Массачусетс. Ранее Гордон работал над созданием компьютера UNIVAC и
осознавал необходимость производства коммерческих преобразователей.
В 1954 году Epsco представила ll-разрядный, 50-kSPS электронно-вакуум-
ный АЦП последовательного приближения, получивший название
DATRAC. Этот преобразователь, показанный на рис. 4.3, является пер-
вым коммерческим устройством данного типа. DATRAC имел корпус
размерами 19" х 26" х 15", потреблял несколько сотен ватт и был продан
приблизительно за 8000 долларов.
Хотя электронно-вакуумный DATRAC производил глубокое впечатле-
ние, в 1950-х годах начали появляться полупроводниковые устройства, ко-
торые в конечном счете смогли революционно изменить всю сферу преоб-
разования данных и электроники в целом.
Глава 4. Технология преобразователей
• 19" х 15" х 26"
• 500W
• 150 lbs
• $8 500 00
Courtesy,
Analogic Corporation
8 Centennial Drive Peabody,
MA 01960
www.analogic.com
Рис. 4.3. DATRAC, 11-разрядный, 50-kSPS электронно-вакуумный АЦП последова-
тельного приближения Бернарда М. Гордона из Epsco Engineering, 1954 год
Полупроводниковые модульные
и гибридные преобразователи
Хотя транзистор был изобретен инженерами Bell Labs Джоном Бардином,
Уолтером Браттеном и Уильямом Шокли811 еще в 1947 году, потребовалось
почти 10 лет для реализации коммерческого применения данной техноло-
гии. Общая надежность этих приборов была частично причиной для этого,
поскольку первые транзисторы были германиевыми и были неудовлетво-
рительными в отношении тока утечки, стабильности, максимальной допу-
стимой температуры /?-л-перехода и частотной характеристики.
В мае 1954 года Гордон Тил из Texas Instruments разработал плоско-
стной кремниевый транзистор (grown-junction silicon transistor). Эти тран-
зисторы могут работать при температуре до 150 °C, что значительно выше
рабочей температуры германиевых аналогов. Дальнейшие работы были на-
правлены на улучшение характеристик ранних кремниевых транзисторов.
Это в конечном итоге привело к изобретению в 1958 году интегральной
схемы инженером компании Texas Instruments Джэком Килби12.
Килби проводил свою работу параллельно с исследованиями Роберта
Нойса (Noyce) из Fairchild, который также разработал концепцию интег-
ральной схемы13 в 1959 году. Нойс расположил между транзисторами и ре-
зисторами проводники, соединяющие их между собой, в то время как Кил-
би использовал соединительные провода. Принимая во внимание, что эти
два важных открытия были сделаны почти одновременно и, в сущности,
они не сильно отличались друг от друга, очень трудно решить, кто же из
этих двух инженеров является истинным «изобретателем ИС». Последую-
щая борьба за патентование между двумя компаниями-изобретателями про-
должалась и в 1960-е годы. Сегодня оба этих человека воспринимаются как
изобретатели ИС.
Параллельно с работой Нойса по созданию ИС Jean Hoerni (Fairchild
Semiconductor) работал над средствами защиты и стабилизации характери-
4.1. Ранние процессы
стик кремниевых диодов и транзисторов. До этого времени р-л-переходы в
мезапроцессорных устройствах (mesa process devices) были почти не изуче-
ны. Этот факт являлся серьезным ограничением улучшения мезапроцесса.
Мезапроцесс назван так потому, что площадь вокруг центральной области
база-эмиттер полностью вытравливается, оставляя таким образом эту об-
ласть открытой плоской возвышенностью — меза (mesa — столовая гора).
На практике этот фактор делает полупроводниковый прибор такой конст-
рукции восприимчивым к загрязнению и в результате менее стабильным.
Это было фатальным упущением изобретения Hoerni. В качестве решения
данной проблемы Hoerni предложил преобразовать транзисторную геомет-
рию в плоскую или планарную поверхность, и в связи с этим новый про-
цесс получил название планарного14’15. Важной отличительной особеннос-
тью является то, что при планарной технологии ранее открытые незащи-
щенные области покрыты диоксидом кремния. Это покрытие устраняет
чувствительность устройств к загрязняющим веществам и способствует
получению лучших и более устойчивых транзисторов и ИС. Расположение
выводов приборов в одной плоскости сделало изобретение Hoerni непос-
редственно причастным к плоскому расположению металлических соеди-
нительных проводников, введенных в изобретении ИС Нойса. Кроме того,
планарная технология не требовала при своем освоении дополнительных
технологических операций, тем самым более высокие характеристики со-
четались с экономической выгодой. Как показало время, планарная техно-
логия стала еще одним ключевым изобретением в области полупроводни-
ковых технологий. В данный момент она широко применяется при произ-
водстве транзисторов и ИС.
В начале 1960-х годов, вскоре после создания планарной технологии,
были сделаны три значимых открытия, которые обобщены на рис. 4.4.
Среди них можно выделить следующие: создание кремниевого транзисто-
ра, ИС и планарной технологии. С этого периода начались важные разра-
ботки преобразователей на основе полупроводников. Их развитие можно
разделить на три этапа. Первый этап включал создание преобразователей
из дискретных транзисторов и модулей, второй был посвящен гибридным
преобразователям, а третий — созданию преобразователей на основе ин-
тегральных микросхем. Конечно, в процессе этих исследований значи-
тельно были улучшены характеристики устройств. При этом каждый из
этапов разработки частично перекликался с предшествующим или отра-
жал идеи будущего.
Изобретение германиевого транзистора инженерами Bell Labs: Джон Бардин, Уолтер
Браттен, Уильям Шокли, 1947.
Кремниевый транзистор: Гордон Тил, Texas Instruments, 1954.
Рождение ИС:
— Джэк Килби, Texas Instruments, 1958 (использовал провода для внутреннего соеди-
нения);
— Роберт Нойс, Fairchild Semiconductor, 1959 (использовал металлизацию для внут-
ренних соединений);
Планарная технология: Jean Hoerni, Fairchild Semiconductor, 1959.
Рис. 4.4. Ключевые моменты в развитии твердотельных приборов
Глава 4. Технология преобразователей
Рис. 4.5. HS-810, 8-разрядный, 10-MSPS, АЦП Computer Labs, 1966
Первые полупроводниковые преобразователи использовали дискрет-
ные транзисторы, некоторое количество ИС, нуждались в нескольких пе-
чатных платах для расположения аналоговых и цифровых элементов, не-
обходимых для процесса преобразования. Типичным примером является
HS-810, 8-разрядный АЦП со скоростью дискретизации 10-MSPS, выпу-
щенный в 1966 году компанией Computer Labs (рис. 4.5), одна из печат-
ных плат HS-810 представлена на рис. 4.6 (в 1978 году Computer Labs была
присоединена к Analog Devices). Преобразователь состоял из дискретных
транзисторов, резисторов и конденсаторов, без единой ИС. Он был спро-
ектирован для установки в 191 стойке, содержал все необходимые ис-
точники питания, потреблял около 100 Вт и стоил около 10 000 долла-
ров. Преобразователи, подобные HS-810, в основном использовались в
исследовательских приложениях и в ранних версиях приемных устройств
радаров.
В конце 1960-х и начале 1970-х годов начали появляться различные стро-
ительные блоки с ИС ОУ и компараторы. Появление цифровой логики
позволило значительно сократить некоторые элементы в АЦП и ЦАП. Это
привело к созданию модульных преобразователей — главным образом они
Рис. 4.6. Двухсторонняя печатная плата к АЦП HS-810
Рис 4.7. ADC12QZ, 12-разрядный АЦП
последовательного приближения с SAR,
40 мкс, 1972
19 х 15 х 26", 1,8 В
представляли собой комбинацию из ИС, транзисторов, резисторов, кон-
денсаторов и т. п., смонтированных на маленькой печатной плате с вывода-
ми и инкапсулированные в герметичный пластиковый корпус. Заливочный
компаунд помогает распределять тепло по модулю, имеет определенную
степень выравнивания температуры между важными компонентами, а так-
же затрудняет разборку конструкции элемента конкурентами.
Хорошим примером раннего модульного преобразователя был промыш-
ленно стандартизованный ADC12QZ от Analog Devices (12-разрядный АЦП
последовательного приближения, 40 мкс, 1972). Его фотография изображе-
на на рис. 4.7. ADC12QZ был первым дешевым 12-разрядным АЦП общего
назначения, выпущенным на рынок. В преобразователе использовались ИС
с четырехразрядным ключом (quad-switch) наряду с прецизионными тонко-
пленочными резисторными матрицами для внутренних ЦАП (quad switch
AD550 mDAC описан более детально в гл. 3).
В начале 1970-х годов также зародились популярные гибридные преоб-
разователи. Гибридные схемы обычно строились из некапсулированных
кристаллов или «чипов» ИС, резисторов, конденсаторов и т. п., которые
были присоединены к керамической подложке при помощи эпоксидной
смолы. Контактные площадки различных кристаллов соединялись с пло-
щадками подложки при помощи соединяющих проводов, а внутренние со-
единения между чипами производились с использованием металлических
дорожек на подложке, подобно печатной плате. Металлические проводнико-
вые дорожки могли быть тонкопленочными или толстопленочными, в зави-
симости от процесса изготовления. По очевидным причинам гибридная тех-
нология часто называется «кристаллы и проводники» (chip-and-wire). Пос-
ле установки матрица герметизируется в инертной среде, что предотвращает
загрязнение.
Для создания гибридных схем используются различные технологии, вклю-
чающие толстопленочные и тонкопленочные проводники и резисторы. Но
по сравнению с устройствами на основе ИС гибридные устройства значи-
тельно дороже. В 1977 году Analog devices выпустила AD572 12-разрядный,
25 мкс АЦП, фотография которого приведена на рис. 4.8. Следует отме-
тить, что AD572 был первым гибридным АЦП, получившим военную мар-
кировку MIL-883B.
Главной мотивацией создания модульных и гибридных преобразовате-
лей было желание достичь такой скорости дискретизации и разрешающей
способности, которые были недостижимы при использовании ранних ИС.
Разработчики гибридных схем имели широкий выбор из PNP, NPN и FET
Глава 4. Технология преобразователей
Рис. 4.8. AD572 12-разрядный, 25 мкс АЦП, 1977
транзисторов, ОУ и компараторов на ИС, ИС опорных напряжений, ИС
ЦАП, логических ИС и т. д. Способные активно функционировать в схе-
мах с резисторами с лазерной подгонкой гибридные схемы могут дости-
гать относительно высоких уровней характеристик по сравнению с теми,
которые использовали только ИС. Заказчики были готовы платить двой-
ную цену за гибридные схемы потому, что только с их помощью можно
было достичь желаемых параметров. Прошло несколько лет, прежде чем
подобные характеристики стали доступны полностью монолитным эле-
ментам.
В настоящий момент ситуация резко изменилась — скорость и разреше-
ние современных преобразователей на основе ИС в основном ограничены
внутренними паразитными элементами и сигналами, и эти паразитные ком-
поненты значительно меньше своих аналогов, присущих гибридным схе-
мам. Другими словами, можно сказать, что невозможно дублировать харак-
теристики современных ИС-преобразователей, используя гибридную тех-
нологию. По этим причинам гибриды занимают незначительную нишу на
рынке, включающую в себя преобразователи постоянного тока (dc-to-dc) и
преобразователи угла поворота ротора сельсина в цифровой код (synchro-
to-digital converter).
Разница между гибридными и современными многокристальными мо-
дулями состоит в том, что последние в основном имеют ИС с поверхност-
ным монтажом и другие компоненты, расположенные на многоуровневых
печатных платах, для использования высоких уровней функциональности,
присущих однокристальным ИС.
Важно также отличать гибриды и многокристальные модули от других
технологий упаковки ИС, обычно называемых компаундными монолита-
ми, где, например, 2 кристалла (аналоговая ИС и цифровая ИС) располо-
жены в пределах одной выводной рамки, электрически соединены прово-
дами и инкапсулированы в пластиковый корпус.
4.1. Ранние процессы 31 7
Процесс калибровки
Почти все преобразователи нуждаются в некоторой калибровке для приве-
дения отдельных характеристик: интегральной и дифференциальной нели-
нейности, усиления, погрешности смещения и др. — к определенному ди-
апазону. Для преобразователей с низкой разрешающей способностью точ-
ность и сопряжение различных компонентов схемы могут удовлетворять
вышеперечисленным требованиям. Для преобразователей с более высоким
разрешением (больше 10-разрядов) обычно существуют методы для выпол-
нения подстроек различных видов. В ранних стоечных преобразователях и
преобразователях на печатных платах для подстройки обычно использова-
лись потенциометры и/или отобранные прецизионные резисторы. Во мно-
гих случаях прецизионный резистор в схеме был соединен параллельно с
более грубым резистором для достижения необходимого значения.
Модульные преобразователи достигали определенной точности при ис-
пользовании в качестве строительных блоков предварительно подстроен-
ных ИС и прецизионных резисторов. Существовал также метод ручного под-
бора резисторов до момента их заливки. Интересный метод подстройки ис-
пользовался в популярном DAC-12QZ (первом модульном ЦАП, 1970 года
выпуска). При его производстве применялись толстопленочные резисторы
которые подстраивались до нужного значения пескоструйной очисткой
(sandblasting).
Модульные преобразователи обычно калибровались до момента залив-
ки, поэтому во время калибровки необходимо было учитывать в процессе
настройки тот эффект, который возникает от термических сдвигов во вре-
мя процесса заливки.
В зависимости от технологии исполнения и производителя гибридные
модули обычно пользовались разными методами подстроечного процесса.
Использование неподстроенных строительных блоков на ИС, таких как
AD562 или AD565 ИС ЦАП, минимизирует необходимость в подстройке на
подложке, например как в упомянутом выше AD572. К другим распростра-
ненным методам можно отнести функциональную лазерную подгонку толсто
или тонкопленочных резисторов на подложке. Эти подстраиваемые сопро-
тивления могут напыляться на подложку или представлять собой резистив-
ную схему, установленную на нее. При этом применялись как толстопле-
ночные, так и тонкопленочные технологии, хотя тонкопленочные сопро-
тивления имели более высокую устойчивость.
Список литературы
4.1. Ранние процессы
1. Lee De Forest. Device for Amplifying Feeble Electrical Currents. U.S. Patent 841,
387, filed October 25, 1906, issued January 15, 1907. (The triode vacuum tube, or«Audion»,
the first amplifying device.)
2. H.S. Black. Translation System. U.S. Patent 2, 102, 671, filed August 8, 1928,
issued December 21, 1937. (The basis of feedback amplifier systems.)
3. H.S. Black. Stabilized Feedback Amplifiers. Bell System Technical Journal, Vol. 13,
No. 1, January 1934, pp. 1—18. (A practical summary of feedback amplifier systems.)
Глава 4. Технология преобразователей
4. Harold S. Black. Inventing the Negative Feedback Amplifier. IEEE Spectrum,
December, 1977. (Inventory s 50th anniversary story on the invention of the feedback amplifier.)
5. Walter G. Jung. Op Amp Applications. Analog Devices, 2002, ISBN 0-916550-26-5.
6. Data Sheet For Model K2-W Operational Amplifier, George A. Philbrick Researches,
Inc., Boston, MA, January 1953. See also «40 Years Ago. Electronic Design, December 16,
1995, p. 8. (The George A. Philbrick Research dual triode K2- W, the first commercial vacuum
tube op amp.)
7. Alec Harley Reeves. Electric Signaling System. U.S. Patent 2, 272, 070, filed November
22, 1939, issued February 3, 1942. Also French Patent 852, 183 issued 1938, and British
Patent 538, 860 issued 1939. (The ground-breaking patent on PCM. Interestingly enough, the
ADC and DACproposed by Reeves are counting types, and not successive approximation.)
8. Ian M. Ross. The Foundation of the Silicon Age. Bell Labs Technical Journal, Vol. 2,
No. 4, Autumn 1997.
9. C. Mark Melliar-Smith et al. Key Steps to the Integrated Circuit. Bell Labs Technical
Journal, Vol. 2, No. 4, Autumn 1997.
10. J. Bardeen, W.H. Brattain. The Transistor, a Semi-Conductor Triode. Physical
Review, Vol. 74, No. 2, July 15, 1947 pp. 230—231. (The invention of the germanium
transistor.)
11. W. Shockley. The Theory of p-n Junctions in Semiconductors and p-n Junction
Transistors. Bell System Technical Journal, Vol. 28, No. 4, July 1949, pp. 435—489. (Theory
behind the germanium transistor.)
12. J.S. Kilby. Invention of the Integrated Circuit. IRE Transactions on Electron Devices,
Vol. ED- 23, No. 7, July 1976, pp. 648—654. (Kilbyys IC invention at TI.)
13. Robert N. Noyce. Semiconductor Device-and-Lead Structure. U.S. Patent 2, 981,
877, filed July 30, 1959, issued April 25, 1961. (Noyceys IC invention at Fairchild.)
14. Jean A. Hoerni. Method of Manufacturing Semiconductor Devices. U.S. Patent 3,
025, 589, filed May 1, 1959, issued March 20, 1962. (The planar process—a manufacturing
rrcans of protecting and stabilizing semiconductors.)
15. Jean Hoerni. Planar Silicon Diodes and Transistors. IRE Transactions on Electron
Devices, Vol. 8, March 1961, p. 168. (Technical discussion of planar processed devices.)
4.2. Современные процессы
Уолт Кестер, Джеймс Брайант
Биполярные процессы
Основной биполярный процесс изготовления ИС был оптимизирован вы-
пуском хороших TVTW-транзисторов. Хотя низкочастотные PNP-транзисто-
ры с низким коэффициентом усиления были доступны в то время, это
были латеральные (с продольной конструкцией в отличие от вертикльных
УРУ-транзисторов. — Примеч. ред.) и субтратные (с подложкой в качестве
коллектора) PNP. Некоторые разработчики нашли возможность использо-
вать такие PNP для определенных функций, например сдвига уровней и
формирования напряжений смещения. Боб Уадлар из Fairchild Semiconductor
Corporation был одним из пионеров в этой области и спроектировал пер-
вый монолитный ОУ //А702 в 1963 году. Вскоре за ним последовали //А709
и промышленно стандартизованный //А741. Среди других разработок Уад-
лара можно отметить компаратор /zA710//zA711, выпущенный в 1965 году.
Эти типы линейных устройств наряду с 7400-серией ТТЛ представляли со-
бой важные строительные элементы для модульных и гибридных преобра-
4.2. Современные процессы 319
зователей в 1970-е годы. Если вы хотите более детально изучить историю
создания ОУ, то вы можете обратиться к книге Уолтера Юнга «Применение
операционных усилителей»'.
Analog Devices была основана в 1965 году Рейем Стата и Мэттом Лорбе-
ром. Компания занималась созданием прецизионных модульных усилите-
лей. В 1969 году Analog Devices приобрела Pastoriza Electronics, лидера в
сфере производства компонентов для процесса преобразования. Таким об-
разом, компания Analog Devices могла выпускать компоненты для линей-
ных устройств и систем сбора данных. В 1971 году Analog Devices купила
маленькую компанию, производящую ИС, — Nova Devices of Wilmington, MA.
На этой основе в дальнейшем начался выпуск ИС линейных компонентов
и преобразователей.
Технология тонкопленочных резисторов
Еще один технологический процесс заслуживает особого внимания. Он ва-
жен для производителей многих линейных схем и преобразователей, там
где требуются прецизионные устойчивые резисторы и возможность их ка-
либровки. В основном это технология тонкопленочных резисторов.
Компания Analog Devices начала разрабатывать технологию тонкопле-
ночных резисторов в начале 1970-х годов. Потребовались значительные уси-
лия при размещении этих устойчивых тонкопленочных сопротивлений на
ИС-кристалле, и гораздо большие усилия были потрачены на их лазерную
подгонку. Они имели температурные коэффициенты <20 ррт/°С и сопря-
гались на уровне 0,005 %. Однако можно было создать такие резисторы,
которые бы сопрягались с точностью до 0,01 % или более, при этом лазер-
ная подгонка не потребовалась. Но, чтобы этого достичь, они должны быть
относительно большие. Практически резисторы могут совпадать на 0,1 или
0,05 %. Но делать лазерную подгонку экономически более выгодно, чем
создавать такие резисторы, которые будут соответствовать определенным
характеристикам без применения лазерной калибровки.
Интересно отметить, что существует возможность сделать такие резис-
торы достаточно точными, даже если они обладают относительно широким
допуском. За всем этим стоит экономическая причина: большинству при-
ложений необходимы прецизионное сопряжение и низкие температурные
коэффициенты, но им в действительности не нужна очень высокая абсо-
лютная точность. Можно оптимизировать все три условия. Но наиболее
выгодный способ состоит в оптимизации двух из трех. Многие из прецизи-
онных резисторов, использующихся в различных преобразователях, пред-
ставляют собой тонкопленочные SiCr-резисторы с лазерной подгонкой.
Новые субмикронные технологии и технологии с энергонезависимыми ЗУ
сделали ненужным процесс лазерной подгонки для многих современных
преобразователей.
В заключение можно сказать, что биполярная технология, совмещенная
с тонкопленочными резисторами и технологией лазерной подгонки, приве-
ла к распространению преобразователей на основе ИС (1970—1990-е годы).
Например, AD571 (1978 год) был первым полностью монолитным 10-раз-
рядным АЦП последовательного приближения. Его разработчиком был
Р. Brokaw. В AD571 использовалась биполярная технология с интегрально-
инжекционной логикой (И2Л) и с тонкопленочными резисторами, с лазер-
ной подстройкой. Конструкция И2Л совместима по диффузионным техно-
логическим процессам с высокочастотными и высоковольтными транзис-
торами линейных схем2. За AD571 последовали и другие преобразователи,
например промышленно стандартизованный 12-разрядный АЦП AD574, 1980
года. Кроме того, в этот период преобразователи с ИС являлись строитель-
ными компонентами для высокопроизводительных модульных и гибрид-
ных преобразователей.
Комплементарные биполярные технологии
В 1970—1980-е годы разработчики ИС-схем старались максимально исполь-
зовать возможности низкокачественных вертикальных и горизонтальных
/WP-транзисторов, доступных в NPN биполярной технологии в этот пери-
од. Невозможность иметь в ИС PWP-транзисторы с высокой пропускной
способностью значительно ограничивала возможности проектирования ли-
нейных ИС, особенно высокоскоростных ОУ.
В середине 1980-х годов Analog Devices разработала первую в мире p-epi
комплементарную биполярную технологию. С 1988 года начали выпускать-
ся ОУ серии AD840. Граничная частота ft для PNP- и АРА-транзисторов
первого поколения 36В-Й комплементарной биполярной (КБ) технологии
примерно равнялась 700 и 900 МГц соответственно. Со времен создания
первой комплементарной технологии было предложено несколько поколе-
ний более быстрых КБ-технологий, также разработанных в Analog Devices.
Их характеризовало сочетание более высоких скоростей с более низкими
пробивными напряжениями. Описание КБ-технологии первого поколения
можно найти в3’4.
КБ-технологии от Analog Devices имеют JFETs, позволяющие использо-
вать ОУ с высоким входным импедансом и устройства выборки-хранения
для преобразователей. XFCB-технология с диэлектрической изоляцией пред-
ставляла собой прорыв в области повышения скорости и снижения иска-
жений. Задействованная в 1992 году эта технология реализовалась в 3-ГГц
PNPn 5-ГГц сопряженных АРА-транзисторах. Технология XFCB 1.5 име-
ла 5-ГГц PNP и 9-ГГц АРА-транзисторы, a XFCB2 (5В) — 9-ГГц РАР и
16-ГГц АРА.
Технология XFCB (как и более поздние поколения) использовалась для
производства высококачественных по выходным данным преобразователей.
Например, AD9042 (1995), спроектированный Роем Госсером и Фрэнком
Мэрденом, был первым 12-разрядным АЦП с низким уровнем искажений,
со скоростью дискретизации 41-MSPS и имел SFDR более 80 dBc в полосе
пропускания Найквиста. За AD9042 последовало несколько дополнительных
преобразователей на основе технологии XFCB, включая AD6645, 14-разряд -
ный 80/105 MSPS АЦП (2001) с динамическим диапазоном, свободным от
гармоник (SFDR), равным 90-dBc, и отношением сигнал/шум (SNR), рав-
ным 75 dB. В обоих АЦП (AD9042, AD6645) для улучшения разрешения
использовалась лазерная подгонка.
4.2. Современные процессы
Технологии КМОП (CMOS)
Транзисторы со структурой металл—окисел—кремний (metal-on-silicon, MOS)
или иначе металл—окисел—полупроводник появились в конце 1950-х —
начале 1960-х годов как результат разработки технологии, предназначен-
ной для цифровых устройств. В середине 1960-х годов начали появляться
устройства с комплементарной МОП-структурой (CMOS) и включали в
себя МОП-транзисторы как с P-каналом, так и с УУ-каналом. Технология
КМОП обеспечивала более высокую плотность компоновки и более низ-
кое энергопотребление, чем устройства (на основе биполярной техноло-
гии) с ТТЛ. Вскоре на основе КМОП-технологии были созданы ИС для
сложных цифровых устройств со сверхвысокой степенью интеграции. Эти
технологические усовершенствования привели к созданию дешевых вы-
сокопроизводительных процессоров с низким энергопотреблением и с
большим объемом памяти. Это существенно изменило сферу мобильной
телефонии, портативных компьютеров и многих других сфер примене-
ния, что, в свою очередь, спровоцировало революционное развитие пре-
образователей.
Разработчики преобразователей быстро осознали преимущества исполь-
зования КМОП для АЦП и ЦАП. В гл. 7 описано, что переключатели на
основе КМОП являются идеальными строительными элементами для сис-
тем сбора данных. Кроме того, технология КМОП предоставляет возмож-
ность добавлять цифровую функциональность к преобразователям, избегая
повышения стоимости, энергопотребления и увеличения размеров.
В 1974 году при разработке перемножающего ЦАП на основе техноло-
гии КМОП (AD7520) инженеры компании Analog Devices Джим Сэсил и
Хэнк Краббэ скомбинировали тонкопленочную технологию с технологией
КМОП. В 1976 году в г. Лимерик (Ирландия) компания Analog Devices
основала отделение по разработке и производству ИС на основе КМОП-
технологии. Это повлекло за собой значительный всплеск в производстве
ЦАП и АЦП общего назначения на основе КМОП-технологии. Этот бур-
ный процесс продолжается и в настоящее время.
Несмотря на то что КМОП-технологии позволяют создавать эконо-
мичные логические схемы с высокой плотностью и хорошие аналоговые
переключатели, но для производства усилителей и источников опорного
напряжения больше подходит биполярная технология. Это привело к тому,
что технологи начали совмещать биполярную и КМОП-технологии для
достижения как экономичной логики с высокой плотностью, так и высо-
кой точности аналоговых малошумящих однокристальных схем. Техноло-
гии, образовавшиеся в результате слияния биполярной и КМОП, являют-
ся более сложными и дорогими, чем отдельно взятые биполярная и КМОП-
технологии, но значительно превосходят их по характеристикам смешанных
аналогово-цифровых устройств. К числу этих новых технологий можно
отнести Р/СЛ/05-технологию, являющуюся, в сущности, биполярной тех-
нологией, к которой добавлены элементы CMOS} а также линейно совме-
стимую СЛ/05-технологию (LC2MOS или LCCMOS), которая представля-
ет собой базовую CMOS (КМОП)-технологию с добавленными биполяр-
ными возможностями.
11 -2852
^322 Глава 4. Технология преобразователей
Отделение Analog Devices в г. Лимерик (Ирландия) в середине 1980-х годов
начало производить преобразователи, переключатели и мультиплексоры на
основе своей запатентованной £С2Л/О5-технологии.
Однако компромисс состоял в том, что такие комбинированные техно-
логии, как BiCMOS и LC2MOS, не могли обеспечить такие же характерис-
тики, как и их прародители (каждая в своей области). Именно поэтому
BiCMOS и LC2MOS не могли полностью заменить биполярную, компле-
ментарную биполярную и КМОП-технологии. Но сейчас у разработчиков
преобразователей появилось четыре технологии, на основе которых можно
создавать преобразователи.
Современная субмикронная КМОП-технология создает чрезвычайно
дешевые, быстрые и низкоэнергоемкие устройства. Та же самая техника,
позволившая получить уникальные характеристики в логических ИС и
памяти, дает возможность выпускать более согласованные резисторы и
конденсаторы, которые обладают меньшими размерами, значительно де-
шевле и более точно сопрягаются без последующей подгонки, а также
переключатели с низкими утечками, с более низким сопротивлением вклю-
чения, с меньшей паразитной емкостью. Эти достижения сами по себе
позволяют производить АЦП и ЦАП меньших размеров, более быстрые,
дешевые, с низким энергопотреблением. Появилась возможность интег-
рировать сложные устройства, которые несколько лет назад были слиш-
ком большими для размещения на одном кристалле. Эта технология име-
ет дополнительный плюс — логика, созданная на основе этих процессов,
компактна, дешева, имеет низкое электропотребление, обеспечивает авто-
калибровку и другие вычислительные функции, необходимые для улучше-
ния рабочих характеристик преобразователей. Другим новшеством можно
назвать дешевое, надежное, энергонезависимое ПЗУ, значительно улучшив-
шее рабочие характеристики преобразователей нового поколения. Усиле-
ние, смещение и даже линейность могут настраиваться после упаковки
кристалла (стрессы при упаковке не повлияют на точность). При этом
стоимость такой настройки будет намного дешевле лазерной подгонки.
Большое количество преобразователей настраиваются таким образом пе-
ред отправкой с завода-производителя. После поставки настройка не из-
меняется, так как пользователь не имеет возможности перенастроить их
сам под свои требования. Однако эта технология позволяет пользователям
сохранять калибровочные коэффициенты и подобную информацию. Дру-
гие преобразователи периодично производят самокалибровку усиления,
смещений и даже ошибок линейности. Такие виды техник, как подгонка с
использованием плавких перемычек («fuse blowing») и подгонка вводом
соединений («link trimming»), используются чаще в калибровочном про-
цессе, чем более дорогая тонкопленочная лазерная подгонка на пластине
(thin film laser wafer trimming).
Новые субмикронные СЛ/О5-технологии обладают одной характерной
чертой, которую можно считать и достоинством, и недостатком. Она про-
является в низком напряжении пробоя и вследствие этого в низком напря-
жении питания: при 0,6 мкм CMOS еще 5 В, а для процессов с меньшей
геометрией при 0,35 мкм ~3,3 В; 0,25 мкм ~2,5 В; 0,18 мкм ~2 В; 0,15 мкм
~1,5 В и 0,13 мкм ~1 В.
4.2. Современные процессы
xnj
Это делает их практически непригодными при использовании с тради-
ционными прецизионными аналоговыми источниками питания на ±15 В.
Однако они будут работать точно и на высокой скорости с более низким
напряжением источника питания. Это также позволяет совмещать их с низ-
комощными цепями, но одновременно сокращает динамический диапазон,
так как их полношкальный выход снижается по отношению к уровню шума
(в случае однополярного 3 В источника на 20 дБ).
Для высокоскоростных преобразователей уменьшенная амплитуда сиг-
нала является преимуществом потому, что гораздо проще поддерживать
сигналы с низкой амплитудой и с низкими искажениями на нагрузке 50
или 75 Ом, чем сигналы с более высокой амплитудой. Оптимальная ампли-
туда для лучшего компромисса между шумом и искажениями лежит в пре-
делах от 1- до 2-В размаха (peak-to-peak) в преобразователях систем комму-
никаций, хотя существуют и исключения.
Краткое описание развития технологических процессов преобразовате-
лей представлено на рис. 4.9
• Биполярная базовая для транзисторов типа NPN.
• Биполярная базовая для NPN и полевых транзисторов с управляющими р-л-перехо-
дами (JFET), с тонкопленочными резисторами с лазерной подгонкой (LWT).
• Биполярная типа NPN со схемами интегральной инжекционной логики и с тонкопле-
ночными резисторами типа LWT.
• Комплементарная биполярная с JFET, тонкопленочными резисторами типа LWT.
• Комплементарная биполярная с JFET, с диэлектрической изоляцией и с тонкопленоч-
ными резисторами типа LWT.
• КМОП.
• КМОП с тонкопленочными резисторами.
• LC2MOS и BiCMOS с тонкопленочными резисторами LWT.
• Гибридная (chip-and-wire).
• Многокристальных модулей (МСМ).
• GaAs, SiGe.
Рис. 4.9. Развитие технологий создания преобразователей
Технологии и архитектура преобразователей
В последнее десятилетие КМОП-технология стала доминирующей при про-
изводстве преобразователей, вытесняя более дорогие устройства на основе
биполярной технологии с лазерной подстройкой. Субмикронная КМОП-
технология дает чрезвычайно малые паразитные параметры: сопротивле-
ния, емкости и индуктивности. Тем самым эта технология является идеаль-
ной для некоторых архитектур преобразователей, включая архитектуру пос-
ледовательного приближения, Е-Д и конвейерную. Литография очень тонких
линий, свойственная субмикронной технологии, позволяет осуществлять
сопряжение между конденсаторами в конденсаторном ЦАП (основном стро-
ительном блоке для SAR АЦП последовательного приближения). Внутрен-
ние конденсаторы ЦАП затем подстраиваются путем добавления или вычи-
тания небольших параллельных конденсаторов, используя при этом либо
Дата ввода
Рис. 4.10. Тенденция в увеличении скорости обновления данных в ЦАП
плавкие перемычки, либо подгоночные связи, либо автокалибровку с энер-
гонезависимым ЗУ. Добавление аналоговых мультиплексоров на входе для
создания завершенного сбора данных также осуществляется гораздо легче
при наличии переключателей и мультиплексоров высокого качества, при-
сущих КМОП-технологии.
КМОП-технология также подходит для всех типов Е-Д ЦАП и АЦП,
которые также основаны на схемах с коммутируемыми конденсаторами.
Кроме того, S-Д архитектура является чрезвычайно насыщенной цифровы-
ми схемами. Это является еще одной причиной использования преиму-
ществ по плотности упаковки и низкой мощности КМОП. Техника статис-
тического согласования, популярная в многоразрядных Е-Д преобразовате-
лях, реализуется как средство для достижения более высокой разрешающей
способности и динамического диапазона без необходимости в подстройке.
Для высокоскоростных конвейерных АЦП цифровая направленность
КМОП является идеальной для осуществления процесса коррекции оши-
бок. Техника полностью дифференциальных цепей, соединенная с высоко-
скоростными возможностями коммутируемых конденсаторов, свойствен-
ная КМОП, дает прекрасные рабочие характеристики.
КМОП-технология является идеальной для скоростных коммуникацион-
ных ЦАП, реализованных в TxDAC семействе от Analog Devices (с разрешени-
ем до 16 разрядов и скоростью до нескольких сотен мегагерц). На рис. 4.10
показано увеличение скорости обновления за последнее десятилетие
(от менее 30 MSPS в 1994 году и до почти 1 GSPS в 2004 году). В основном
это было вызвано сокращением паразитных емкостей, индуктивностей и
сопротивлений, присущего субмикронным технологиям. На рис. 4.11 пред-
ставлен подобный график для SFDR (при 10-МГц выходном сигнале), кото-
рый увеличился с 50 dBc в 1994 году до 90 dBc в 2004 году.
Современные преобразователи обладают цифровыми функциональны-
ми возможностями. Среди них можно перечислить следующие: цифровая
фильтрация, мультиплексирование, декодирование, модуляция. КМОП-тех-
нология помогает реализовать вышеуказанные характеристики.
4.2. Современные процессы
Рис. 4.11. Тенденция в увеличении динамического диапазона, свободного от гармо-
ник, в скоростных ЦАП
Как было уже отмечено, аналоговые строительные блоки, такие как уси-
лители, смесители, источники опорного напряжения, разработанные для
КМОП, не могут достигнуть того уровня характеристик, который реализу-
ется в биполярной технологии, поэтому требуется комбинировать КМОП-
технологию с биполярной {BiCMOS). BiCMOS-техштотмм достаточно до-
роги, но они используются там, где необходимы АЦП с очень высокими
интерфейсными рабочими характеристиками. В аналоговых устройствах —
смесителях, устройствах выборки-хранения, входных буферных усилите-
лях, точных источниках опорного напряжения могут использоваться воз-
можности биполярной технологии, а для цифровой части преобразователей
могут использоваться преимущества КМОП-технологии.
Многокристальные модули позволяют совмещать ИС различных техно-
логий для реализации функций, недоступных полностью монолитным уст-
ройствам. Например, высокочастотный аналоговый интерфейс с высокими
характеристиками может быть настроен для сопряжения с входным импе-
дансом ИС ЦАП и таким образом дать возможность увеличить пропуск-
ную способность. В качестве другого примера можно привести использо-
вание последующей обработки с применением FPGA для эффективного
увеличения частоты дискретизации при помощи временного уплотнения
нескольких АЦП (см. гл. 8 для более детального анализа этой темы). Совре-
менные многокристальные модули обычно построены на небольших деше-
вых печатных платах с использованием поверхностно монтируемых компо-
нентов, обеспечивающих улучшенные рабочие характеристики при малом
количестве деталей, что было бы недостижимо в случае компоновки из
дискретных элементов.
Роль арсенида галлия в современных преобразователях ограничивается
6—8-разрядными /У^Л-преобразователями и 6— 10-разрядными ЦАП с час-
тотой выборок > 1 GSPS. Эти устройства являются достаточно дорогими,
потребляют много энергии и занимают достаточно небольшую нишу на
рынке.
Кремниево-германиевые преобразователи предполагают технологию
автономных преобразователей, но в случае совмещения с КМОП-техноло-
гией позволяют интегрировать высокочастотный интерфейс с функцией пре-
образователя. Однако конечное изделие будет весьма специфичным по сво-
ему применению, так как большая гибкость достигается с устройствами в
отдельных корпусах (предлагаем обратиться к следующему разделу для об-
щего обсуждения темы «разумное разделение»).
Краткий перечень технологий создания преобразователей и их связь с
основными архитектурами представлены на рис. 4.12.
• CMOS:
— идеальна для SAR, e-D и конвейерной архитектур с коммутируемыми конденсаторами;
— дополнительная цифровая функциональность;
— испаряемые и неиспаряемые подстройки на корпусном уровне.
• BiCMOS:
— полезна при необходимости достижения очень высоких рабочих характеристик для
аналогового интерфейса;
— усилители, смесители, устройства выборки—хранения, высокоточные источники
опорного напряжения.
• Процессы калибровки:
— Лазерная подгонка на пластине (LWT), возгоняемые перемычки (fuse blowing), со-
единительная подгонка (link trimming), энергозависимые и энергонезависимые ЗУ,
автокалибровка.
• Многокристальные модули:
— многокристальные АЦП и ЦАП, аналоговый интерфейс, цифровая постобработка.
• GaAs:
— 6,8-разрядные flash АЦП гигагерцового диапазона, высокие мощность и стоимость.
• SiGe:
— может использоваться с технологией CMOS.
Рис. 4.12. Технологические процессы и архитектура преобразователей
В конечном счете обсуждение технологий создания преобразователей
не будет законченным без затрагивания темы их корпусирования. На про-
тяжении последних 10 лет возрос спрос на компактные дешевые корпусы с
высокими характеристиками для поверхностного монтажа, пригодные для
массового производства с использованием технологий автоматизированной
сборки. Сегодня это легче реализовать с использованием субмикронных
технологий, для которых характерны низкое потребление мощности и чипы
малых размеров. Для многих устройств подходят корпусы, представленные
на рис. 4.13, которые представляют собой современные направления созда-
ния корпусов. Также доступны меньшие по размерам корпусы с размерами
кристалла (chip-scale-package, CSP) и корпуса с матрицей шариковых выво-
дов (ball-grid-array, BGA), которые используются для высокоскоростных
устройств с большим количеством выводов.
Когда потребление мощности становится значительным, большие кор-
пусы оборудуются теплоотводами, теплопроводами и радиаторами, кото-
рые припаиваются к «земляному» слою печатной платы для эффективного
распределения и отвода тепла. Использование последовательных высоко-
скоростных интерфейсов является эффективным направлением в сокраще-
нии общего количества выводов и поддержании малых форм корпусов.
4.3. Разумное разделение
(все корпуса в одном и том же масштабе)
SOT-23
Не показаны корпуса:
• с матрицей шариковых выводов (BGA);
• с размерами кристалла (CSP).
Рис. 4.13. Образцы современных корпусов преобразователей данных
Список литературы
4.2. Современные процессы
1. Walter G. Jung. Op Amp Applications, Analog Devices, 2003, ISBN 0-916550-26-5.
(The first chapter on op amp history is complete with numerous references to patents, articles, etc.).
2. A. Paul Brokaw. A Monolithic 10-Bit A/D Using PL and LWT Thin-Film Resistors.
IEEE Journal of Solid State Circuits, Vol. SC-13, December 1978, pp. 736—745.
3. Op Amps Combine Superb DC Precision and Fast Settling. Analog Dialogue,
Vol. 22, No. 2, 1988. (The AD8461C op amp, the AD840 series, and the high speed CB
process used.)
4. Jerome F. Lapham, Brad W. Scharf. Integrated Circuit with Complementary Junction-
Isolated Transistors and Method of Making Same. U.S. Patent 4, 969, 823, filed May 5,
1988, issued Nov. 13, 1990. (Design of the ADI CB ICprocess.)
4.3. Разумное разделение
Дэйв Робертсон, Мартин Кесслер
Когда полная интеграция
не является оптимальным решением
На протяжении 30 лет главной тенденцией получения «более компактных,
быстрых, лучших и дешевых» электронных устройств было интегрирование
на одном кристалле все большего количества необходимых систем. Наи-
большего успеха добились те компании, которые смогли преодолеть раз-
личные технологические барьеры на пути интеграции. В результате они
получали большее число функциональных возможностей, реализуемых с
помощью одного кристалла. В данный момент мы являемся свидетелями
бурного развития субмикронных технологий. Мы подходим к ограничени-
328 Глава 4. Технология преобразователей
ям практического сокращения размеров компонентов в ИС. Вскоре может
получиться так, что двухкристальная конструкция будет более компактной,
быстрой, дешевой, иметь более высокие характеристики по сравнению с
однокристальным интегрированным решением. Основной проблемой в этих
случаях будет выбор соединений между кристаллами. Высокая степень ин-
теграции в будущем будет являться неотъемлемой характеристикой боль-
шинства передовых систем. Но снижение стоимости и улучшение рабочих
характеристик больше не будут определяться постоянно возрастающей ин-
теграцией. Более того, прогресс в этой сфере будет состоять в правильном
разделении для дальнейшего усовершенствования системы.
В наши дни существует уже несколько примеров такого разделения.
Например, большой объем памяти обычно дешевле применять в виде от-
дельных кристаллов DRAM, чем встраивать в микропроцессор. Важно отме-
тить, что с появлением барьеров в интеграции мы не повернем назад в те
времена, когда конструкторская модель представляла собой совокупность
«аналоговое — на одном кристалле, цифровое — на другом, ЗУ — на тре-
тьем». Разделение на кристаллы будет производиться в соответствии с оп-
тимизацией потока информации наряду с фактором интеллектуальной соб-
ственности поставщиков кристаллов. Это не будет являться простым случа-
ем «дезинтеграции». Напротив, лучшие системы будут отражать тщательно
обдуманную интеграцию, облегчающую «разумное разделение».
Что делает один тип разделения «разумнее» другого? Необходимо рас-
смотреть несколько важных факторов.
• Напряжение питания — каждое совершенствование литографии сопро-
вождается уменьшением напряжения питания. В то время как это помога-
ет понизить мощность в цифровых цепях, более низкое напряжение мо-
жет вызвать ее увеличение для аналоговых цепей с высокими характерис-
тиками. Более низкое напряжение питания вызывает понижение размаха
амплитуды, что затрудняет поддержание хорошего отношения сигнал-шум.
Многие системы будут стремиться к получению важных аналоговых фун-
кций на основе технологий, поддерживающих высокое напряжение пита-
ния, как это делается, например, сегодня в драйверах современных ка-
бельных линий.
• Число выводов — все еще определяет стоимость корпусирования и монта-
жа, так же как и пространство на печатной плате. Таким образом, возни-
кает желание разделить систему таким образом, чтобы минимизировать
количество соединений кристалл-кристалл. Например, лучше съинтегри-
ровать простую функцию ЦАП на цифровом кристалле только для того,
чтобы получить один выходной аналоговый вывод вместо полной 12-ли-
нейной цифровой шины.
• Пропускная способность интерфейса — цифровая шина, работающая на
частоте 500 МГц рассеивает больше мощности и вырабатывает больше
радиопомех (EMI), чем цифровая шина, работающая на 5 МГц. Где это
возможно, система должна разбиваться между шинами, работающими на
умеренных скоростях, в других случаях информационный поток должен
уплотняться на последовательной шине, тем самым сокращая число вы-
водов. Часто это означает сосредоточение большей части цифровой обра-
ботки на «аналоговом» кристалле. В качестве примера можно упомянуть
фильтры децимации в АЦП, интерполирующие фильтры в ЦАП и прямой
цифровой синтез, интегрированный с ЦАП. Дифференциальные сигналы
низкого напряжения (LVDS) могут использоваться для высокоскорост-
ных интерфейсов (>200 МГц). LVDS обеспечивает лучшую целостность
сигналов и более низкое рассеивание мощности на более высоких часто-
тах, чем стандартный КМОП-интерфейс, но увеличивает количество вы-
водов в два раза вследствие своей дифференциальной природы.
Тестируемость и выход годных кристаллов — некоторые уровни интег-
рации являются технически возможными, но отсутствуют необходимые
для этого производственные возможности. Интегрирование на одном
большом кристалле имеет определенный экономический минус: каж-
дый раз приходится выбрасывать большой кристалл в случае его несо-
ответствия показателям тестирования. Более выгодным является разде-
ление функций.
Внешние компоненты — вопрос интеграции важен не только для ИС, но
также и для внешних пассивных компонентов (конденсаторов, индуктив-
ностей, ПАВ-фильтров и т. п.). Во многих случаях инновационная архи-
тектура, используемая с разумным разделением, может значительно сокра-
тить наличие внешних компонентов. Это может уменьшить форм-фактор и
затраты производства. Один из примеров проиллюстрирован на рис. 4.14.
На нем представлена плата с набором микросхем для прямого преобразо-
вания (OTHELLOT) от компании Analog Devices. В многорежимном на-
боре микросхем для сотовых телефонов совмещаются схемные новинки и
разумное разделение, тем самым создавая прорыв в форм-факторе, рабо-
чих характеристиках и энергосбережении.
Гибкость — для массовых приложений полностью оптимизированным
решением обычно являются заказные специализированные интегральные
схемы (ASIC). Однако большинство приложений никогда не достигают
такой массовости, которая оправдывала бы полностью фиксированное
решение ИС. В этом случае разработчик будет делать упор на более высо-
кую степень интеграции и доступный уровень характеристик, при этом
часто улучшая соседние массовые приложения. Разработчик будет запол-
Рис. 4.14. OTHELLO® — радио с прямым преобразованием
Глава 4. Технология преобразователей
Топологическая норма
• С уменьшением в КМОП-процессе топо-
логической нормы:
— цифровые схемы уменьшаются стре-
мительно;
— больше компонентов можно размес-
тить на том же кристалле;
— стоимость единицы площади на крем-
ниевой пластине растет.
• В целом стоимость функции падает, так
как размеры схемы уменьшаются быст-
рее, чем растет стоимость площади пла-
стины.
Рис. 4.15. Влияние топологических изменений в технологическом процессе на сто-
имость цифровых ИС
нять их программируемыми вентильными матрицами (FPGA) или други-
ми программируемыми решениями, обеспечивая перенастройку для дру-
гих приложений. Примером этого может служить использование TV-тю-
неров в блоках кабельных модемов и наборов микросхем для сотовых
телефонов в некоторых простых базовых станциях.
Стоимость — по мере того как КМОП производственный процесс дви-
жется к геометрии ИС с элементами наименьшего размера, цифровые
цепи уменьшаются со впечатляющей быстротой и становятся более де-
шевыми, несмотря на высокую цену кремниевой пластины (рис. 4.15).
Однако аналоговые схемы (рис. 4.16) не уменьшаются столь значительно
в процессе продвижения геометрии ИС к элементам наименьшего раз-
мера. В действительности они могут даже увеличиваться в размерах для
поддержания рабочих характеристик. При уменьшении топологической
нормы цена цифровых функций уменьшается, в то время как стоимость
аналоговой функции растет. Кроме того, кристаллы, которые интегриру-
ют цифровые функции наряду с аналоговыми, могут испытывать значи-
тельно более высокие потери в виде негодных кристаллов, чем полностью
цифровые кристаллы.
Разумное деление отделяет аналоговые цепи и цепи со смешанными сиг-
налами от чисто цифровых схем в связи с ценовой оптимизацией (рис. 4.17).
Пример такого разделения представлен на рис. 4.18 (набор схем к компь-
ютерной приставке, который может выполнять функции кабельного мо-
• С уменьшением в КМОП процессе тополо-
гической нормы ниже 0,25 мкм:
— аналоговые схемы не уменьшаются зна-
чительно;
— они могут даже увеличиваться для сохра-
нения характеристик;
— с уменьшением напряжения питания па-
дает динамический диапазон сигнала.
• Проектирование аналоговых схем с высо-
кими параметрами становится более слож-
ным и длительным.
• В целом стоимость функции возрастает!
Р ис. 4.16. Влияние топологических изменений в технологическом процессе на сто-
имость аналоговых ИС имеет другую закономерность
4.3. Разумное разделение
Традиционное деление — цифровой
кристалл, интегрированный интерфейс
со смешанными сигналами (MxFE):
Новая тенденция в делении — цифровая
заказная ИС, отдельный интерфейс
со смешанными сигналами (MxFE):
Рис. 4.17. Разумное деление аналог/цифра
Цифровая заказная ИС
кабельного модема
Рис. 4.18. AD9877\AD9879 — интерфейс со смешанными сигналами (MxFE) в компь-
ютерной приставке
дема). Цифровая специализированная ИС с высокой плотностью компо-
нентов отсоединена от аналоговых или смешанных частей. Все АЦП и
ЦАП интегрируются на выходе с такими цифровыми функциями, как ин-
терполяция, прямой цифровой синтез и модуляция, в единый интерфейс
смешанных сигналов AD9877/AD9879.
Характеристики — семейство ADIs TxDAC, выпущенное несколько лет
назад, является новым поколением КМОП ЦАП с великолепными дина-
мическими характеристиками для коммуникационных применений. Так
как они были третьим поколением преобразователей, то некоторые из
них получили преимущество от использования субмикронного КМОП-
процесса, интегрировав цифровой интерполяционный фильтр. Этот
фильтр, получая входной поток слов данных, вводит в него дополнитель-
Глава 4. Технология преобразователей
AD8346
Рис. 4.19. AD9777 TxDAC и AD8346 — квадратурный модулятор
ные выборки слов, которые вырабатываются расположенным на кристал-
ле цифровым FIR-фильтром. AD9777 (рис. 4.19) демонстрирует несколь-
ко интересных размеров разумного деления.
Например, расположение обоих ЦАП на одном и том же кремниевом
кристалле значительно улучшает рабочие характеристики согласования,
которые являются достаточно важными для баланса квадратуры во многих
коммуникационных приложениях. Кроме того, оно позволяет осуществ-
лять полное цифровое преобразование с повышенных частот. Интегриро-
вание интерполирующего фильтра означает, что высокоскоростная шина
данных к ЦАП (которая может работать при 400 МГц или более) не вводит-
ся внутрь чипа, что дает значительное улучшение в области рассеивания
мощности и радиопомех. AD9777 разработан для сочетания с кристаллом
квадратурного модулятора AD8346 в виде двухкристального компонента,
при этом значительно сокращается количество необходимых внешних де-
талей. Почему не интегрирован аналоговый смеситель? Это вызвано харак-
теристиками и тестируемостью. Смеситель реализован на основе биполяр-
ного процесса. Его технические характеристики значительно превышают
возможности КМОП-технологии.
Основное достоинство разумного разделения заключается в способнос-
ти интегрировать высокую цифровую функциональность в аналоговые цепи
с высокими характеристиками и наоборот. Это склоняет разработчиков раз-
делять, а не изобретать способы преодоления внутренних ограничений фун-
кциональных возможностей кристалла.
Комбинируя функциональность в аналоговых схемах с высокими пара-
метрами с высокопроизводительными цифровыми процессорами, можно
обеспечить значительную свободу выбора возможностей разделения. Для
того чтобы сделать правильный выбор, необходимо глубокое понимание
системы.
Для чего необходимо разумное разделение?
Тенденция появления более высоких уровней интеграции определила раз-
витие полупроводниковой сферы на протяжении последних 25 лет. Гордон
Мур из Intel, эффективно экстраполируя кривую этого процесса (тенден-
цию), заявил, что степень интеграции ИС будет удваиваться каждые 18 меся-
4.3. Разумное разделение
цев.
Эта теория,
известная как закон
Мура,
явилась достаточно точным
предвестником внедрения интеграции в полупроводниковые схемы.
Существовало большое количество важных технологических достиже-
ний в промышленности для того, чтобы не отставать от предсказания Мура.
Эти достижения включали в себя все более тонкую литографию, способ-
ность обрабатывать все большие и большие пластины, улучшение химичес-
кой чистоты и сокращение плотности вероятности дефектов. Победный
марш интеграции был значительным: экспоненциальное улучшение спо-
собности обработки, повышение ее скорости, уменьшение стоимости, умень-
шение размеров и энергопотребления.
Наиболее заметный пример тенденции интеграции был в схемах ЗУ (та-
ких как DRAM) или в микропроцессорах. Более высокая степень интегра-
ции виртуально проникает в каждый уголок полупроводникового мира.
Аналоговая сфера также не осталась в стороне. За последние 30 лет мастер-
ство в аналоговой сфере продвинулось от операционных усилителей, рас-
положенных на одном кристалле, к однокристальным полным преобразо-
вателям, к системам со смешанными сигналами, которые заменили от 30 до
50 дискретных кристаллов.
Первоначально аналоговые ИС использовали технологический процесс,
который в значительной степени отличался от процесса, используемого для
цифровах схем. В период 1980—1990-х годов делался значительный упор на
совмещение аналогового и цифрового процессов, позволяющее интегриро-
вать аналоговые и цифровые схемы на одной ИС «со смешанными сигнала-
ми». Эта технология была достаточно эффективна. Сегодня ИС со смешан-
ными сигналами распространены во многих современных устройствах, на-
чиная от сотовых телефонов и заканчивая цифровыми фотокамерами. Однако
сложности, свойственные аналоговым схемам, приводили к тому, что ИС со
смешанными сигналами отставали от своих полностью цифровых аналогов
как минимум на одно литографическое поколение. В то время как сегодня
самые современные цифровые схемы создаются по 0,13-мкм технологии,
схемы со смешанными сигналами изготавливаются с использованием про-
цессов с 0,18-мкм или 0,25-мкм.
Что меняется?
Мы вступили в новое тысячелетие и наблюдаем некоторые изменения, ко-
торые могут значительно повлиять на неизменное стремление к более вы-
сокой степени интеграции. Фундаментальные законы физики могут в
корне ограничить способность к уменьшению элементов литографии.
В данный момент мы наблюдаем значительное увеличение цены (вернитесь
к рис. 4.15 и 4.16). Спустя несколько поколений мы можем достигнуть той
стадии, на которой дальнейшие уменьшение размеров не будет экономи-
чески выгодным.
Большую часть 1990-х годов разработчики аналоговых элементов гна-
лись за литографической нормой, которую взвинчивали цифровые схемы.
Однако в конце декады произошел значительный скачок: с каждой новой
литографией ниже 0,5 мкм максимально допустимое напряжение источни-
ка начало падать. Это было менее существенным для разработчиков цифро-
вых схем (и в действительности помогло снизить мощность рассеивания),
но это было достаточно важно для создателей аналоговых систем. Сниже-
ние напряжения питания привело к использованию меньших напряжений
сигналов, тем самым затрудняя сохранение качества аналогового сигнала в
присутствии неизбежного шума.
Вместо того чтобы иметь возможность переносить схемные блоки от
одного литографического поколения в другое, каждая новая литография
заставляет разработчика аналоговых элементов заниматься новым проекти-
рованием. Аналоговые схемы со смешанными сигналами отстают от циф-
ровых не на одно литографическое поколение, а на 2—3 поколения. Неко-
торые схемы с высокими характеристиками на прецизионных геометриях,
очевидно, не смогут быть реализованы (хотя и не всегда).
Напряжение питания самых современных цифровых ИС продолжает па-
дать. Специализированные процессы могут стать более популярными для
схем с высокими характеристиками со смешанными сигналами. На рис. 4.20
показано, что существуют другие технологические процессы, которые со-
вершенствуются параллельно с цифровой технологией CMOS. Эти техно-
логии были оптимизированы для аналоговых схем, давая возможность раз-
личным компромиссным решениям удовлетворять потребности разработ-
чиков аналоговых устройств.
В дополнение к трудностям при разработке схем с меньшей геометрией
возникает еще одна проблема, определяемая как «будущее интеграции» и
являющаяся моделью будущего электронного проектирования: технологи-
ческий процесс во многих случаях опережает возможности конструкторов в
проектировании и моделировании. В настоящее время нам проще компил-
лировать более крупные системы, чем эффективно моделировать, анализи-
ровать или проверять.
В свете данных проблем некоторые эксперты прогнозировали возврат
ситуации к той, что существовала в середине—конце 1980-х годов: цифровая
схема на одном кристалле, аналоговая схема — на другом, разные технологи-
ческие процессы, инструменты моделирования, разные разработчики. Это
Рис. 4.20. Диапазон полупроводниковых технологических процессов
4.3. Разумное разделение
можно определить как «дезинтеграцию» аналогового от цифрового. В то вре-
мя как одни системы на этом пути могут прекратить свое существование, во
многих случаях действительный ответ будет более тонким (и более интерес-
ным).
Много лет назад на одной из главных конференций по ИС (тема ее
была «Однокристальный сотовый телефон») обсуждалась проблема техни-
ческих трудностей, связанных с сочетанием различных кристаллов в сото-
вых телефонах. Один из участников дискуссии представил картинку со схе-
мой элементов сотового телефона. Он выделил 6 ИС и 300 пассивных ком-
понентов. «Давайте прекратим объединять эти 6 ИС и что-нибудь сделаем
с пассивными компонентами!» — заявил он. Урок этой истории заключает-
ся в том, что к интеграции нужно подходить разумно, сокращая стоимость,
размеры и мощностные параметры целой системы, а не как упражнение в
сокращении количества ИС.
Так как мы достигли практических ограничений интеграции и литогра-
фии, необходимо приложить особые умственные усилия для определения,
где и что интегрировать. Главной особенностью является нахождение опти-
мальных путей разбивки системы на функциональные блоки. Обычно это
будут места, где необходим минимальный поток информации между частя-
ми, позволяя уменьшать количество вводов ИС (и тем самым снижать сто-
имость и размеры). Также необходимо понимать, как система и ИС будут
моделироваться и анализироваться.
Разделение, обусловленное этими факторами, может не соответствовать
границам разделения между аналоговым и цифровым компонентами.
Компания Analog Devices несколько лет занимается проблемой разделе-
ния на кристаллы, и понятие «разумное разделение» появилось как один из
значимых факторов в оптимизации стоимости, размеров, энергопотребле-
ния и рабочих характеристик для систем, сочетающих в себе аналоговые и
цифровые характеристики.
На рис. 4.21 представлен пример из реальной жизни, когда 3 кристалла
дешевле одного или двух. Максимальная степень интеграции используется
Антенна
Линейная схема
.Л*__Цифровой модем
AD986O/62
РНУ
МАС
I Г 8<м<т>
HF If'HiQb IF tow
ВЧ/ПЧ,преобра-
зование полосы
сигнала вверх/вниз,
к/из ВЧ
( AD9860/AD9862
Интерфейс сме-
шанных сигналов
в стандартах АЦП
< и ЦАП J
^Модулятор, карта тонов, >
квадратурная амплитудная
модуляция (QAM), ортого-
нальное мультиплексирова-
ние с разделением частот
(OFDM), многоканальный
доступ в системах с кодо-
вым разделением каналов ,
х.______дшсошх.________s
Разнесенный
прием, комбиниро-
ванная антенна в
случае разнесения
Управление
медиадоступом,
разделение кана-
лов, фильтрация
адресов, защита/
Рис. 4.21. AD9860/AD9862: широкополосный беспроводной модем с ортогональным
мультиплексированием разделенных частот (OFDM)
Глава 4. Технология преобразователей
MJK.DAQ |
AUX_DAC_B О—^ |
MTERMCi
0«С1
овса
CLK0UT1
CLKOUT2
ТжОАГА
(0:13]
• Сдвоенный 12-разрядный,
64 MSPS АЦП
• Сдвоенный 14-разрядный,
128 MSPS ЦАП
• Программируемые фильт-
ры и усилители с програм-
мируемым коэффициен-
том усиления
• Разнообразные схемы мо-
дуляции и генерации так-
товых импульсов
Рис. 4.22. AD9860/AD9862 MxFE™ для широкополосных коммуникаций
для более эффективной реализации цифровых характеристик (для сниже-
ния существующего отставания от чисто цифровых схем на 1—3 поколе-
ния). Использование высокопроизводительных оптимизированных процес-
сов для аналоговых функций и смешанных функций позволяет избежать
использования большого количества внешних пассивных дискретных ком-
понентов и тем самым в значительной мере сократить стоимость и размеры
систем. AD9860/AD9862 со смешанным интерфейсом представляют собой
замечательный пример интеграции нескольких высокоскоростных преоб-
разователей на одном КМОП-кристалле (рис. 4.22).
В этом устройстве расположение сдвоенных ЦАП и АЦП на одном и
том же кристалле гарантирует согласование рабочих характеристик, кото-
рое является важным для приложений, использующих IQ-модуляцию и де-
модуляцию. При разумном проекте кристалла может достигаться достаточ-
ная изоляция между передающим и принимающим проводниками. Усили-
тели с различными коэффициентами усиления, так же как и вспомогательные
АЦП и ЦАП, подвергаются процессу интеграции. Технология CMOS по-
зволяет встраивать сложные цифровые обработки на повышенных часто-
тах, в частности интерполяцию и децимацию. Это значительно упрощает
цифровой интерфейс вследствие сокращения темпа выдачи данных между
цифровым кристаллом и кристаллом со смешанными сигналами. Более
медленный интерфейс требует меньшей мощности и уменьшает радиопо-
мехи. Радиокомпоненты, такие как смесители, усилители мощности, низ-
кошумящие усилители, не интегрируются на КМОП-кристалле, так как они
имеют лучшие характеристики при разработке с использованием биполяр-
ного процесса.
Другие сферы промышленности, столкнувшись с подобными техноло-
гическими ограничениями, продолжают бурно развиваться.
ГЛАВА 5
ТЕСТИРОВАНИЕ
ПРЕОБРАЗОВАТЕЛЕЙ
ДАННЫХ
5.1. Тестирование ЦАП
Уолт Кестер, Дэн Шейнголд
Тестирование статических характеристик ЦАП
Разрешением ЦАП называется число отдельных уровней выходного на-
пряжения, которые он может формировать. Например, ЦАП с разреше-
нием 12 бит способен формировать на выходе 212, или 4096, различных
уровней напряжения. Аналогичным образом ЦАП с разрешением 16 бит
может формировать на выходе 216, или 65536, уровней.
Неотъемлемым требованием при задании разрешения, особенно в зада-
чах управления, является требование монотонности. Выходной сигнал мо-
нотонного ЦАП с увеличением цифрового кода всегда увеличивается или
остается на прежнем уровне. Численной мерой монотонности является зна-
чение дифференциальной нелинейности (размер шага).
Абсолютная точность ЦАП в статическом режиме может быть описана
через три основных типа погрешностей: погрешность смещения, погрешность
усиления (коэффициента передачи) и интегральную нелинейность.
Наиболее важными из трех типов погрешностей являются погрешности
линейности. Это вызвано тем, что во многих приложениях пользователь
может устранить погрешности смещения и усиления путем регулировки
или компенсировать их, введя в систему автоматическую калибровку по
выходным данным, в то время как удобного и недорогого способа обнуле-
ния погрешностей линейности не существует. Однако, перед тем как пе-
рейти к изучению погрешностей линейности и методов их тестирования,
следует рассмотреть конечные погрешности.
Существует много способов измерения статических погрешностей ЦАП,
и выбор подходящего способа зависит от конкретных целей тестирования.
Например, производитель ИС обычно выполняет контроль ЦАП в процес-
се изготовления при помощи специализированного автоматического тесто-
вого оборудования. С другой стороны, пользователю, оценивающему раз-
личные ЦАП на предмет пригодности в системе, сложное автоматическое
тестовое оборудование обычно недоступно, и он должен разрабатывать под-
ходящий лабораторный тестовый стенд. На рис. 5.1 показана базовая кон-
фигурация для тестирования статических характеристик ЦАП. Эта гибкая
Глава 5. Тестирование преобразователей данных
Параллельный или
последовательный
Рис. 5.1. Базовая конфигурация тестера для измерения статических передаточных ха-
рактеристик ЦАП
конфигурация позволяет подавать на вход ЦАП различные цифровые коды,
и для измерения выходного уровня ЦАП в ней используется точный циф-
ровой вольтметр. Для автоматизации тестирования в схеме можно исполь-
зовать компьютерное управление, однако во многих случаях тестирование
ЦАП в статическом режиме реализуется простым заданием различных вход-
ных кодов с помощью механических переключателей и регистрацией вход-
ных уровней с помощью вольтметра.
На сегодняшний день существует множество приложений, в которых
потребителя, даже на этапе оценки, редко напрямую беспокоят статичес-
кие характеристики ЦАП, и гораздо более важными для него являются ди-
намические показатели. Достаточно часто в технических данных на ЦАП
для аудио- и связных приложений традиционные статические характерис-
тики не указываются вообще; гораздо больший интерес для таких ЦАП
представляют различные характеристики шума и искажений. Однако тради-
ционные статические характеристики, такие как дифференциальная нели-
нейность (DNL) и интегральная нелинейность (INL), несомненно, сказыва-
ются на динамических показателях. Например, малый уровень искажений,
являющийся ключевым требованием в аудио- и связных приложениях, на-
прямую связан с малой INL. Большие погрешности INL и DNL вызывают
увеличение и уровня шума, и уровня искажений, делая ЦАП неподходя-
щим для этих требовательных приложений. В действительности зачастую
такие ЦАП, характеризуемые динамическими показателями, имеют доста-
точно хорошие статические показатели, несмотря на то что они не указыва-
ются производителем напрямую.
Последующие разделы, посвященные тестированию статических харак-
теристик ЦАП, в большей степени ориентированы на ЦАП, используемые
в традиционных задачах промышленного управления и измерения, где важ-
ны монотонность, DNL, INL, усиление и смещение.
Конечные погрешности
Наиболее часто приводимыми в спецификации конечными погрешностя-
ми ЦАП являются погрешность смещения, погрешность усиления и биполяр-
ная погрешность нуля. Обратите внимание, что биполярная погрешность
5.1. Тестирование ЦАП
нуля встречается только в ЦАП с биполярным выходом, в то время как
погрешности смещения и усиления характерны и для однополярных, и для
биполярных ЦАП.
Рисунок 5.2 иллюстрирует эффекты погрешностей усиления и смеще-
ния в однополярном ЦАП. Обратите внимание, что на рис. 5.2, я, все точки
выходного сигнала смещены от идеального выходного сигнала (показанно-
го пунктирной линией) на одинаковую величину. Любая подобная ошибка,
положительная или отрицательная, которая одинаково влияет на все точки
выходного сигнала, называется погрешностью смещения.
Погрешность смещения можно измерить, подав на ЦАП код, состоя-
щий из одних нулей, и измерив отклонение выходного уровня от О В.
На рис. 5.2, d, показано влияние погрешности усиления в отсутствие
других погрешностей. Крутизна идеальной передаточной функции опреде-
ляется по прямой линии, проведенной через две конечные точки, и отража-
ет усиление передаточной функции. В неидеальных ЦАП эта крутизна мо-
жет отличаться от идеальной, что приводит к возникновению погрешности
усиления. Погрешность усиления обычно выражается в процентах, так как
ее влияние на все коды в процентном соотношении одинаково.
В отсутствие погрешности смещения погрешность усиления можно
легко найти, подав на ЦАП код, содержащий все единицы, и измерив
его выходной уровень, обозначаемый как (предполагается, что ЦАП —
З-разрядный). Для идеального ЦАП измеренное значение должно быть равно
VFS — 1 LSB; при этом погрешность усиления вычисляется по формуле:
погрешность усиления (%) = 100
VFS -1 мл. разр.
(5.1)
На рис. 5.2, в, показана ситуация, когда присутствуют и погрешность
усиления, и погрешность смещения. Первый шаг заключается в измерении
погрешности смещения, Vos, путем подачи кода, состоящего из одних ну-
лей, и измерения выходного уровня. Затем подается код, состоящий из
a б в
Ошибка смещения Ошибка усиления Ошибки смещения
Погрешность смещения = = Vos Погрешность смещения = 0 Погрешность смещения = l/000 = Vos
Погрешность усиления = 0 Погрешность усиления (%) = Погрешность усиления (%) =
= 1ооГ-----------------1] =юоГ 1/111 ~u°s-------------------1]
[V/ts - 1 мл. разр. J l^fs “1 мл- разр. J
Рис. 5.2. Измерение погрешностей усиления и смещения в однополярном ЦАП
Глава 5. Тестирование преобразователей данных
одних единиц, и измеряется выходной уровень Кп . После этого погреш-
ность усиления вычисляется при помощи выражения:
погрешность усиления (%) = 100
V -V
r in г os
VFS -1 мл. разр.
(5.2)
На рис. 5.3 показано, как погрешности усиления и смещения влияют на
идеальную передаточную функцию ЦАП с биполярным выходом. Погреш-
ность смещения на рис. 5.3, я, Vos, находится путем подачи на вход ЦАП
кода, состоящего из одних нулей, и измерения выходного уровня. В идеале,
если на входе ЦАП все биты равны «0», выходной уровень должен быть
равен — FS. Разница между реальным выходным уровнем и — FS представля-
ет собой смещение, Vos. Для биполярных ЦАП также зачастую указывают и
измеряют погрешность биполярного нуля (или погрешность нуля), которая важна
во многих приложениях. Она определяется путем подачи на ЦАП кода 100,
соответствующего середине шкалы, и измерения его выходного уровня. Если
погрешность усиления отсутствует, то, как показано на рис. 5.3, а, погреш-
ность нуля равна погрешности смещения.
Рисунок 5.3, б, иллюстрирует ситуацию, когда присутствует погрешность
усиления, а погрешность смещения отсутствует. Обратите внимание, что
погрешность усиления влияет на погрешность нуля. Подав на ЦАП код,
состоящий из одних единиц, измерим выходной уровень К1П и вычислим
погрешность усиления по формуле:
погрешность усиления (%) = 100
v^+vFS
2Vfs -1 мл. разр.
(5.3)
Погрешность нуля определяется путем подачи на ЦАП кода 100 и измере-
ния его выходного уровня.
a б
Ошибка смещения Ошибка усиления
в
Ошибки смещения
и усиления
Погрешность смещения = Vos = + VFS
Биполярная ошибка нуля = l/100 = Vos
Погрешность усиления = 0
Погрешность смещения = 0
Биполярная ошибка нуля = У100
Погрешность усиления (%) =
= юоГ—--------------------1].
|_2VFS - 1 мл. разр. J
Погрешность смещения = Vos = + VFS
Биполярная ошибка нуля = V100
Погрешность усиления (%) =
= ЮоГ
L2Vfs - 1 мл. разр. J
Рис. 5.3. Измерение погрешностей смещения, нуля и усиления в биполярном ЦАП
5.1. Тестирование ЦАП
На рис. 5.3, в, показана ситуация, когда биполярный ЦАП имеет и по-
грешность усиления, и погрешность смещения. Для нахождения погрешно-
сти усиления, как и в предыдущем случае, необходимо подать на ЦАП код,
состоящий из одних нулей, измерить выходной уровень ЦАП и вычесть его
из идеального значения VFS. Затем на ЦАП подается код, состоящий из
одних единиц, и измеряется выходной уровень К1Н. Погрешность усиления
вычисляется при помощи выражения:
у + у _ у
r \\\ ' r FS * OS
погрешность усиления (%) = 100
2Vfs -1 мл. разр.
-1
(5.4)
Погрешность нуля определяется путем подачи на ЦАП кода 100 и измере-
ния выходного уровня.
Погрешность нуля в ЦАП, в котором используется кодирование со сме-
щением, является скорее производной, чем фундаментальной величиной,
так как на самом деле она представляет собой сумму погрешности смеще-
ния, погрешности усиления и погрешности линейности MSB. По этой при-
чине важно указывать, было ли измерение сделано до подстройки или уче-
та смещения и усиления или после. Из-за подобной чувствительности к
ошибкам критичными к погрешностям в нуле обычно являются однопо-
лярные ЦАП со знаковым кодированием (signed-magnitude) и выходными
усилителями с коммутируемой полярностью.
Погрешности линейности
При рассмотрении ЦАП мы имеем дело с двумя мерами линейности его
передаточной функции: интегральной нелинейностью INL (или относитель-
ной погрешностью) и дифференциальной нелинейностью DNL.
Интегральная нелинейность — это максимальное отклонение в любой
точке передаточной функции уровня выходного напряжения от его идеаль-
ного значения, определяемого по прямой линии, проведенной через дей-
ствительные значения нуля и полной шкалы ЦАП.
Дифференциальная нелинейность — это максимальное отклонение шага
между соседними значениями входного кода в реальном выходном анало-
говом сигнале от идеальной величины шага в +1 LSB, полученного путем
калибровки по усилению отдельно взятого ЦАП. Если дифференциальная
нелинейность более отрицательна, чем —1 LSB, то передаточная функция
ЦАП является немонотонной.
Суперпозиция и погрешности ЦАП
Перед тем как продолжить описание примеров передаточных функций ЦАП,
иллюстрирующих ошибки линейности, будет полезно рассмотреть свой-
ство суперпозиции и понять, как оно проявляется. Математически суперпо-
зиция — свойство линейных систем — подразумевает следующее: если ре-
акции на каждое воздействие измерены по отдельности в отсутствие других
воздействий, то результирующая полная реакция при любом числе воздей-
ствий всегда равна арифметической сумме реакций на отдельные воздей-
ствия.
Глава 5. Тестирование преобразователей данных
Например, предположим, что простой ЦАП с двоичным взвешиванием
является идеальным, за исключением того, что каждому биту соответствует
небольшая погрешность линейности. Если погрешность для каждого из битов
не зависит от состояния других битов, то погрешность линейности при
любом коде просто равна алгебраической сумме погрешностей для каждого
из битов в этом коде (т. е. действует принцип суперпозиции). Кроме того,
используя линейность между конечными точками, мы задаем погрешности
линейности в нуле и в точке полной шкалы, равными нулю. Таким обра-
зом, сумма погрешностей всех битов должна быть равна нулю, так как сум-
мирование всех бит дает значение, состоящее из одних единиц, для которо-
го погрешность, как отмечено выше, равна нулю.
Погрешности битов могут быть положительными или отрицательными;
если их сумма равна нулю, то сумма положительных погрешностей (поло-
жительная сумма) должна быть равна сумме отрицательных погрешностей
(отрицательная сумма). Эти две суммы представляют собой наихудшие ин-
тегральные нелинейности ЦАП.
Разумное использование принципа суперпозиции при хорошем понима-
нии архитектуры тестируемого ЦАП обычно позволяет уменьшить число из-
мерений, необходимых для адекватного определения DNL и 1NL. Это важ-
но, если принять во внимание, что 16-битный ЦАП имеет 216 = 65536 воз-
можных выходных уровней. Для проведения измерений по каждому уровню
в отдельности потребуется значительное время.
Измерение INL и DNL ЦАП при помощи принципа
суперпозиции
Определить, выполняется принцип суперпозиции или нет, зачастую можно
просто по архитектуре ЦАП, и этот вопрос был подробно описан в гл. 3
(см. разд. 3.1). Принцип суперпозиции обычно выполняется для ЦАП с
двоичным взвешиванием, поэтому мы сначала изучим этот класс. Вопросы,
касающиеся измерения линейности в полнокодируемых ЦАП (цуговых
ЦАП), сегментированных ЦАП и сигма-дельта ЦАП, будут рассмотрены
позже в этом разделе, так как они обычно не подчиняются принципу су-
перпозиции.
На рис. 5.4 показана передаточная функция 3-разрядного ЦАП, для ко-
торого принцип суперпозиции выполняется. Погрешности смещения и уси-
ления устранены, и погрешности в нуле и точке полной шкалы при этом
равны нулю. Этот ЦАП имеет погрешности в весах первого и второго би-
тов. Погрешность бита 1 составляет —1,5 LSB, а бита 2 — +1,5 LSB. Вели-
чина DNL вычисляется для каждого из восьми возможных выходных на-
пряжений. Передаточная функция имеет немонотонность в коде 100, и его
DNL составляет —3 LSB. INL для любого выходного уровня равна алгебра-
ической сумме DNL всех предшествующих кодов и ZWZ-кода, соответству-
ющего этому уровню. Например, INL для кода 101 равна
DNL00l + DNLaia + DNLail + DNLl00 + DNLl0l =
= 0+1,5 + 0 — 3 + 0 = -1,5 LSB.
5.1. Тестирование ЦАП 343
Рис. 5.4. Передаточная функция неидеального 3-разрядного ЦАП, для которого вы-
полняется принцип суперпозиции
Графики DNL и INL 3-разрядного ЦАП приведены на рис. 5.5. INL
обладает нечетной симметрией относительно средней точки передаточной
функции, т. е. INL любого конкретного кода равна INL инверсного кода,
взятой с противоположным знаком. Например, INL кода 010 равна +1,5, а
INL инверсного кода 101 равна —1,5. Кроме того, алгебраическая сумма
всех INL должна равняться нулю, т. е. сумма положительных INL должна
быть равна сумме отрицательных INL.
В целях дополнительной иллюстрации взаимосвязи между 1NL и DNL
на рис. 5.6 показаны графики для 4-разрядного ЦАП, в котором выполня-
ется принцип суперпозиции. Из-за суперпозиции необходимости в измере-
нии погрешностей линейности для всех кодовых комбинаций нет. Измеря-
ф
-е-
-е-
S
с[
0
+1.5 +1.5
F •
о о ; о о : о
-+-----f------1----f-------1-----Ф------1----1-------------►
ООО 001 010 011 100 101 110 111 Входной код
п
INL„ = ^DNLr
1=0
▼ f'---- Интегральные нелинейности
+15 +15 инверсных кодов равны,
р • но противоположны по знаку
о о : ; I I о о
-4------1-----1-----1------1-----1------♦-----♦-----------►
000 001 010 011 100 101 110 111 Входной код
• •
-1.5 -1.5
Рис. 5.5. Дифференциальная и интегральная нелинейности в неидеальном 3-разряд-
ном двоично-кодируемом ЦАП, для которого выполняется принцип супер-
позиции
Глава 5. Тестирование преобразователей данных
Рис. 5.6. DNL и INL в 4-разрядном ЦАП, для которого выполняется принцип суперпо-
зиции
ется только INL для каждого из 4 битов, соответствующая кодам 0001, 0010,
0100 и 1000. Коды 0001 и 0100 имеют положительные погрешности, таким
образом, наихудшая положительная INL соответствует коду 0101 и равна
сумме двух погрешностей INL, 0,25 + 0,5 = 0,75 LSB. Наихудшая отрица-
тельная INL соответствует инверсному коду 1010 и равна по модулю наи-
худшей положительной INL.
На рис. 5.7 перечислены измерения, необходимые для определения ли-
нейности для 4-разрядного ЦАП с двоичным взвешиванием, в котором
выполняется принцип суперпозиции. Сначала необходимо устранить по-
грешности усиления и смещения. Смещение соответствует выходному уров-
ню при коде, состоящем из одних нулей, Vos = Затем измеряется вы-
?
Контрольная сумма разрядов Уц !! = Vqqqq + Vbooт + Vqoi 0 + ^0100 + V1000
1 LSB = ^1111 -Урооо
Ошибки в разрядах
1111 = ^,,,
1000 = Иппл1
01ч = ^|ОМ4 = ^-^1-1ЬЗВ
0100 = vo,o° 1DNL3 = Voi(x) _ Уо°11 _1 LSB
001 1 = Vqq-i -I J
k 0010 = Vnn-io]
. nnn, ,/ DNLZ = V'°010 - V'o<X>1 - 1 LSB
0001 - Vqqqi J
оооо = ^0№,^-^“-,ь5в
vos = voooo
Рис. 5.7. Тесты главных битовых переходов для 4-разрядного двоично-кодируемого
ЦАП, в котором выполняется принцип суперпозиции
5.1. Тестирование ЦАП
ходной уровень при коде, состоящем из одних единиц, И1Н1. Теоретическое
значение одного LSB (без погрешностей смещения и усиления) может быть
вычислено при помощи выражения:
1 LSB = К1'“ Кооо°. (5.5)
15
После этого определяются теоретические значения тестируемых точек.
Для этого вес LSB, полученный из уравнения (5.5), умножается на десятич-
ный эквивалент двоичного кода и складывается с напряжением смещения.
Затем измеряются напряжения, соответствующие кодам 0000, 0001, 0010,
0100, 1000, и вычисляются погрешности линейности каждого бита. Ранее
измеренное напряжение для кода, состоящего из всех единиц, должно рав-
няться сумме напряжений отдельных битов: 0000, 0001, 0010, 0100 и 1000.
Это хороший тест на проверку выполнения принципа суперпозиции. Если
отклонение алгебраической суммы реальных напряжений битов от напряже-
ния, измеренного для кода из одних единиц, превышает ±0,5 LSB, то биты в
значительной степени влияют друг на друга, и требуется более полная про-
верка всех кодов. Затем измеряется DNL во всех точках главных переходов:
из 0000 в 0001, из 0001 в 0010, из ООН в 0100 и из 0111 в 1000. В хорошем
ЦАП, для которого выполняется принцип суперпозиции, этих тестов доста-
точно для проверки статических показателей. На рис 5.7 показан пример для
4-разрядного ЦАП. В нем требуется произвести 8 измерений плюс вычисле-
ние отдельных погрешностей; при этом основную часть времени теста
занимают измерения. В общем случае для TV-разрядного ЦАП описанная
процедура потребует 2N измерений плюс вычисление погрешностей.
Существует метод снижения числа требуемых измерений до N ± 2, од-
нако он в большей степени зависит от выполнения принципа суперпози-
ции. В этом методе измеряются только значения для отдельных битов и
кода, состоящего из одних единиц. Для описанного выше 4-разрядного случая
потребуется измерить выходные уровни для кодов 0000, 0001, 0010, 0100,
1000 и 1111. Для проверки выполнения принципа суперпозиции И1Ш необ-
ходимо сравнить с + Г0001 + + И0100 + К1000. Величина LSB вычисли-
ется при помощи выражения (5.5). Теоретические величины вкладов от-
дельных битов вычисляются путем умножения десятичного эквивалента веса
на величину LSB и сложения с напряжением смещения. Затем вычисляют-
ся значения INL для каждого бита. И наконец, значения DNL косвенно
вычисляются по значениям битов следующим образом:
DNLV = F0001 - Коооо - 1 LSB; (5.6)
DNL2 = И0010 - К0001 - 1 LSB; (5.7)
DNL, = И0100 - (И0010 + - Коооо) - 1 LSB; (5.8)
DNL. = И1000 - (И0100 + И0010 + И0001 - 2 И0000) - 1 LSB. (5.9)
В этом случае напряжения, соответствующие кодам ООП и 0111, вычисля-
ются при помощи принципа суперпозиции, а не измеряются напрямую.
Погрешности линейности в ЦАП, для которых выполняется принцип
суперпозиции, могут принимать различные формы. На рис. 5.8 показаны
Глава 5. Тестирование преобразователей данных
Разряд 2 выше, разряд 1 ниже
Входной цифровой код
Разряды 2, 3 выше, разряд 1 ниже
Рис. 5.8. Погрешности линейности в двоично-кодируемых 3-разрядных ЦАП, для ко-
торых выполняется принцип суперпозиции
всего лишь два примера для 3-разрядного двоично-кодируемого ЦАП.
В обоих примерах погрешность линейности обладает нечетной симметрией
относительно средней точки передаточной функции. Обратите внимание,
что на рис. 5.8, я, INL = ±1 LSB и ЦАП является немонотонным, так как
DNL для кода 100 равна —2 LSB. Для ЦАП, показанного на рис. 5.8, б,
INL = ±0,5 LSB и DNL для кода 100 равна —1 LSB, т. е. находится на
границе немонотонности.
На данном этапе можно сделать два общих утверждения относительно
INL и DNL, их взаимосвязи друг с другом и монотонностью ЦАП. Во-
первых, если INL ЦАП составляет менее ±0,5 LSB, то это гарантирует, что
его DNL не превышает ±1 LSB, и выходной сигнал является монотонным.
С другой стороны, на основании одного того, что погрешность DNL менее
±1 LSB и ЦАП является монотонным, нельзя полагать, что его INL менее
±0,5 LSB. Второй момент иллюстрирует рис. 5.9, где худшее значение по-
грешности DNL равно —1 LSB, но 1NL = ±0,75 LSB.
Рис. 5.9. DNL < ±1 LSB не гарантиру-
ет, что INL < ±0,5 LSB
5.1. Тестирование ЦАП
Измерение INL и DNL в ЦАП, для которых
принцип суперпозиции не выполняется
Существует несколько архитектур ЦАП, в которых принцип суперпозиции
не выполняется, и методы, описанные в предыдущем разделе, могут не
давать четкого представления о показателях INL и DNL. Точная методика
выбора точек данных зависит от архитектуры тестируемого ЦАП, поэтому
исследовать все методы невозможно, и мы просто отметим некоторые об-
щие концепции.
Хорошим примером архитектуры, в которой веса отдельных битов варь-
ируются в зависимости от значения других битов, является простая архи-
тектура с полным декодированием (цуговый ЦАП). Принцип суперпози-
ции в данном случае не выполняется, и веса битов не являются независи-
мыми, в отличие от обсуждавшегося ранее ЦАП с двоичным взвешиванием.
В цуговом ЦАП (делителе Кельвина) DNL в первую очередь определя-
ется согласованием соседних резисторов «цуга», которое обычно достаточ-
но хорошее. В свою очередь, из-за плавных изменений абсолютных номи-
налов резисторов при перемещении из одного конца строки в другой зави-
симость INL может иметь вид лука или буквы S. Рисунок 5.10 иллюстрирует
две возможные передаточные функции. На рис. 5.10, а, изображена функ-
ция INL в форме лука без подстройки, а на рис. 5.10, б, показаны эффекты
подстройки MSB (описанной в гл. 3), где выходной сигнал, соответствую-
щий середине шкалы, принудительно установлен в правильное значение.
В настоящее время автономными цуговыми ЦАП с наибольшим разреше-
нием являются 10-разрядные цифровые потенциометры (типа AD5231/AD5235).
Однако, как обсуждалось в гл. 3, полно-декодирующие ЦАП являются рас-
пространенными составными блоками в сегментированных ЦАП, облада-
ющих высоким разрешением и низкими искажениями. На практике в со-
временных ЦАП широко применяются 4-, 5- или 6-разрядные полно-
декодирующие сегменты.
Единственный способ полностью охарактеризовать сегментированный
ЦАП заключается в выполнении проверки по всем кодам — мягко говоря,
а б
ЦАП с полным декодированием, ЦАП с полным декодированием,
Рис. 5.10. INL полно-декодирующих 3-разрядных ЦАП (цуговых ЦАП)
Глава 5. Тестирование преобразователей данных
это длительный процесс. Однако, правильно используя знания о конкрет-
ной архитектуре ЦАП, можно получить приемлемое представление о сег-
ментированном ЦАП. В качестве примера на рис. 5.11 показан упрощен-
ный сегментированный ЦАП, состоящий из полно-декодирующего 3-раз-
рядного MSB ЦАП и 4-разрядного LSB ЦАП с двоичным взвешиванием.
Логика выбора измерений, приведенных в левой части рисунка, заключает-
ся в следующем.
Сначала измеряются значения для кодов, состоящих из одних нулей и
из одних единиц, на основании которых можно определить вес LSB и сме-
щение. Затем тестируется каждый из битов LSB ЦАП для определения его
DNL и INL (предполагается, что для LSB ЦАП выполняется принцип су-
перпозиции, так как он построен по архитектуре с двоичным взвешивани-
ем). Для удобства при проведении этих измерений все биты MSB ЦАП
устанавливаются в «О». Далее следует измерить DNL в каждом из переходов
MSB ЦАП. Кроме того, измеряется DNL в кодах, следующих за точками
переходов MSB ЦАП, при которых код LSB ЦАП равен 0001. Этим гаран-
тируется, что для каждого из сегментов MSB ЦАП будут протестированы
нижний и верхний диапазоны LSB ЦАП. И наконец, для каждого из семи
сегментов MSB, соответствующих выходным уровням при коде LSB ЦАП,
равном 0000, делается по одному замеру INL.
Этот метод выбора тестовых кодов может быть очевидным образом рас-
пространен на сегментированные ЦАП, обладающие более высоким разре-
шением, с использованием тех же принципов, что и в приведенном про-
стом примере.
О тестировании статической линейности можно сказать гораздо боль-
ше, однако, поскольку в большинстве современных задач делается упор на
динамические показатели, в данном разделе обсуждались только основные
моменты, адекватно иллюстрирующие общие принципы. Как мы видели,
наиболее важно хорошо понимать архитектуру конкретного ЦАП, что по-
Младший
разряд
Старший
разряд
111
111
111
110
110
110
101
101
101
100
100
100
011
011
011
010
010
010
001
001
001
000
000
1111
0001
0000 —
1111
0001
0000 —
1111
0001
0000 —
1111
0001
0000 —-
1111
0001
0000 —
1111
0001
0000 —
1111
0001
0000 —J
1111
1000—
000 0100—
000 оою—
000 0001 —
000 0000—J
Младшие
и разряды
ЦАП
Рис. 5.11. Тестовые коды для 3x4 бита сегментированного 7-разрядного ЦАП
5.1. Тестирование ЦАП 349
зволяет разработать приемлемый план оценки/тестирования, минимизиру-
ющий реальное количество тестируемых кодов. Он в значительной степени
зависит от того, является ли ЦАП двоично-взвешивающим (для них обыч-
но выполняется принцип суперпозиции), полно-декодирующим или сег-
ментированным. В общем случае адекватная информация для выбора теста
приводится в технических данных на тестируемый ЦАП.
Заинтересованные читатели могут обратиться к h 2, где дается более под-
робное описание тестирования статической линейности ЦАП, включая
методы автоматического и полуавтоматического тестирования, например
основанные на использовании в качестве части тестовой схемы «опорных»
ЦАП. Спектр вопросов ATE-тестирования (тестирования при помощи ав-
томатического тестового оборудования) слишком широк для того, чтобы
обсуждать его в рамках этой книги, и представляет гораздо больший инте-
рес для производителя ИС, чем для пользователя.
И наконец, существует несколько типов ЦАП, для которых обычно от-
сутствуют спецификации на статическую линейность, и даже если они при-
водятся, то их сложно сравнивать с более традиционными ЦАП, предназ-
наченными для низкочастотных приложений. Первым типом являются ЦАП,
предназначенные для речевых и аудиоприложений. Для ЦАП этого типа
даются полные спецификации на такие динамические параметры, как THD,
THD + А и т. д., но их статические характеристики (за исключением, веро-
ятно, усиления и смещения) описываются слабо, и такие ЦАП не следует
использовать в традиционных задачах промышленного управления или из-
мерительных приложениях, где INL и DNL являются критическими пара-
метрами. Однако в них почти всегда используется сигма-дельта архитекту-
ра (однобитовая или многобитовая со скрэмблированием данных), кото-
рая, по своей природе, гарантирует хорошие показатели DNL.
ЦАП, специально разработанные для связных приложений, такие как
представители семейства TxDAC™, имеют обширные спецификации на
параметры в частотной области, однако их статические характеристики де-
лают их менее привлекательными для низкочастотных приложений, чем
другие более традиционные ЦАП. Для 14- и 16-разрядных ЦАП этого се-
мейства часто можно встретить INL и DNL порядка нескольких LSB при
гарантированной монотонности на уровне 12 бит. Это ни в коем случае не
означает, что данные ЦАП являются плохими, а просто свидетельствует о
том, что для этих приложений требуются схемы, в которых оптимизируют-
ся показатели в частотной области, а не статические показатели.
Тестирование динамических показателей ЦАП
Время установления
Точное значение времени установления ЦАП может представлять или не
представлять интерес в зависимости от приложения. Оно особенно важно
для высокоскоростных ЦАП, используемых в видеодисплеях, из-за высо-
ких частот пикселей в мониторах с высоким разрешением. ЦАП должен
быть способен выполнять переход от всех нулей (уровень черного) во все
единицы (уровень белого) за время от 5 до 10 % интервала пикселей, кото-
350 Глава 5. Тестирование преобразователей данных
рый может быть достаточно коротким. Например, даже относительно стан-
дартный монитор с разрешением 1024 х 768 и частотой обновления 60 Гц
имеет интервал пиксела всего лишь примерно 16 нс. При этом требуемое
время установления до точности, по меньшей мере, 8 бит (для 8-разрядной
системы) должно составлять единицы наносекунд и менее.
Фундаментальные определения времени установления полной шкалы
повторяются на рис. 5.12. Определение достаточно схоже с аналогичным
определением для операционного усилителя. Отметьте, что время станов-
ления может задаваться двумя допустимыми способами. Более традицион-
ное определение времени установления — это количество времени, необхо-
димое для стабилизации выходного сигнала в пределах заданного диапазо-
на ошибки и измеренное по отношению к точке 50 % от строба данных
ЦАП (если он содержит параллельный регистр, данные с которого подают-
ся на ключи) или от времени изменения входных данных на ключах (если
внутренний регистр отсутствует).
При другом, в равной степени достоверном, определении время уста-
новления задается по отношению к времени, когда выходной сигнал выхо-
дит за пределы начального диапазона ошибки. При этом из измерения ус-
траняется «мертвое время». В приложениях, где используются видео-ЦАП,
например, время установления по отношению к выходу является ключевой
спецификацией, а фиксированная задержка (мертвое время) представляет
малый интерес.
Диапазон ошибки обычно задается в единицах LSB или % полной шка-
лы. Он может быть задан равным 1 LSB, хотя это значение не является
обязательным. Измерение времени установления полной шкалы до 1 LSB
при 12-разрядном уровне (0,025 % FS) возможно только при соблюдении
специальных мер, а его измерение до 1 LSB при 16-разрядном уровне
(0,0015 % FS) представляет собой серьезную измерительную задачу. По этой
причине для 14- и 16-разрядных высокоскоростных ЦАП, таких как пред-
входного сигнала
Рис. 5.12. Измерение времени установления полной шкалы ЦАП
5.1. Тестирование ЦАП
Рис. 5.13. Измерение времени установления середины шкалы ЦАП
ставители семейства TxDAC, в спецификации указывается время установ-
ления до 12-разрядного уровня, 0,025 % FS (обычно менее 11 нс).
Интерес также представляет время установления середины шкалы, так
как в ЦАП с двоичным взвешиванием наибольший переходный процесс
связан с переходом от кода 0111...1 к коду 1000...0. В действительности при
значительном изменении битов амплитуда переходного процесса может
приближаться к полной шкале. На рис. 5.13 показаны форма сигнала и два
возможных определения времени установления. Как и в случае времени
установления полной шкалы, время установления середины шкалы может
отсчитываться либо относительно выхода, либо относительно фиксирую-
щего строба (или момента изменения битов, если внутренний регистр-за-
щелка отсутствует).
Площадь импульсного выброса
Площадь импульсного выброса (иногда неверно называемая энергией выб-
роса) легко оценить по форме сигнала для времени установления середины
шкалы, показанной на рис. 5.14. Для вычисления суммарной площади выб-
роса используются площади четырех треугольников. Вспомним, что пло-
(Г352 Глава 5. Тестирование преобразователей данных
щадь треугольника равна половине произведения его основания на высоту.
Если полная площадь положительных участков равна полной площади от-
рицательных участков выброса, то суммарная площадь равна нулю. В боль-
шинстве технических данных приводится суммарная площадь выброса, од-
нако в некоторых случаях вместо нее может указываться пиковая площадь
выброса.
Измерение времени установления и площади
импульсного выброса при помощи осциллографа
Для измерения времени установления необходим широкополосный осцил-
лограф с быстрым откликом. Существует несколько моментов, связанных с
выбором подходящего осциллографа. Требуемую ширину полосы можно
определить по времени нарастания/спада выходного сигнала ЦАП; напри-
мер, время нарастания и спада выходного сигнала, равное 1 нс, соответ-
ствует ширине полосы 0,35/7 = 350 МГц. Таким образом, потребуется ос-
циллограф с шириной полосы, по меньшей мере, 500 МГц.
Современные цифровые запоминающие осциллографы (DSO, digital
storage scopes) и цифровые осциллографы с послесвечением (DPO, digital
phosphor scopes) пользуются популярностью и являются превосходным ре-
шением для проведения измерений времени установления, а также выпол-
нения многих других функций анализа сигналов3.
Эти осциллографы обладают частотами дискретизации в реальном вре-
мени порядка нескольких гигагерц и гораздо менее чувствительны к пере-
грузке, чем более старые аналоговые осциллографы или традиционные стро-
боскопические осциллографы. Серьезной проблемой при измерении вре-
мени установления является перегрузка, так как при этом выходной сигнал
ЦАП будет изменяться на величину полной шкалы, а осциллограф обычно
устанавливается на максимальную чувствительность. Например, для изме-
рения времени установления до 12 бит при выходном напряжении 1 В (20
мА на нагрузке 50 Ом) требуется разрешение сигнала в пределах диапазона
ошибки 0,25 мВ, центрированного относительно 1 В.
Старые аналоговые осциллографы были чувствительны к перегрузке, и
их нельзя было применять для точного измерения времени установления при
ступенчатом воздействии без добавления дополнительных схем. В 1980-х го-
дах была проделана большая работа по созданию схем подавления избыточной
части ступенчатой функции на базе диодов Шоттки, источников тока и т. д.
Хорошие примеры различных схем, использовавшихся для устранения про-
блем перегрузки осциллографов в этот период времени, приведены в 4’5’6.
Даже при работе с современными DSO и DPO нужно выполнять провер-
ку на перегрузку. Для этого необходимо изменить чувствительность осцил-
лографа в определенное число раз и убедиться, что все части осциллограм-
мы сигнала изменяются пропорционально. При наличии большого выбро-
са измерение времени установления середины шкалы также может вызывать
значительную перегрузку. Чувствительность осциллографа должна быть
достаточной для измерения желаемого диапазона ошибки. При выполне-
нии определенных мер чувствительность 1 мВ/деление позволяет измерять
диапазон ошибки 0,25 мВ (одно основное вертикальное деление обычно
5.1. Тестирование ЦАП 353J)
разделено на пять меньших делений, соответствующих 0,2 мВ/деление).
Если ЦАП содержит внутренний операционный усилитель, выходное на-
пряжение полной шкалы может превышать 10 В, при этом требования к
чувствительности осциллографа смягчаются пропорционально.
Несмотря на то что существует общеизвестная взаимосвязь между вре-
менем нарастания и временем установления однополюсной системы, экст-
раполировать время установления ЦАП с помощью только времени нарас-
тания не рекомендуется. В ЦАП присутствует множество нелинейных эф-
фектов высших порядков, которые вносят доминирующий вклад в реальное
время установления, особенно в ЦАП с разрешением 12 бит и выше.
На рис. 5.15 показана конфигурация тестера для измерения времени
установления. В общем случае лучше напрямую соединить выход ЦАП и
50-омный вход осциллографа и избежать использования щупов. Хорошо
известно, что щупы на полевых транзисторах могут давать неправильные
измерения времени установления. Если использования щупов не избежать,
предпочтительнее использовать компенсированные пассивные щупы, со-
блюдая при этом осторожность. Скин-эффект, имеющий место даже при
коротких длинах надлежащим образом нагруженного коаксиального кабе-
ля, может приводить к ошибкам измерения времени установления. При
соединении ЦАП с осциллографом необходимо поддержание хорошего
низкоимпедансного заземления. Этого можно достигнуть, припаяв землю
разъема BNC к земляному слою на тестовой плате ЦАП и используя этот
разъем для подключения к 50-омному входу осциллографа. Огромную по-
мощь при организации интерфейса с ЦАП может оказать отладочная плата
от производителя, и при наличии ее следует использовать.
И наконец, если выход ЦАП специально спроектирован для работы на
виртуальную землю внешнего преобразователя ток-напряжение и не имеет
достаточных возможностей для формирования подлежащего измерению
падения напряжения на нагрузочном резисторе, то необходим внешний
операционный усилитель; тестовая схема при этом будет измерять время
* Может быть частью отладочной платы ЦАП
Рис. 5.15. Конфигурация тестера для измерения времени установления и площади
импульсного выброса
12—2852
Глава 5. Тестирование преобразователей данных
установления комбинации ЦАП/операционный усилитель. В этом случае
следует выбрать операционный усилитель, время установления которого,
по меньшей мере, в 3—5 раз меньше времени установления тестируемого
ЦАП. Если время установления операционного усилителя сравнимо с вре-
менем установления ЦАП, то последнее можно определить на основании
того, что полное время установления равно корню из суммы квадратов вре-
мени установления ЦАП и времени установления операционного усилите-
ля. Решение уравнения относительно времени установления ЦАП дает:
Время установления ЦАП = (5 10)
= ^(Полное время установления)2 - (Время установления ОУ)“.
Измерение искажений
Из-за широкого применения ЦАП в системах связи и устройствах частотно-
го анализа практически для всех современных ЦАП задаются спецификации
в частотной области. Основные динамические спецификации обсуждались
ранее в гл. 3 и включают нелинейные искажения, полные нелинейные иска-
жения (THD), отношение сигнал/шум (SNR), полные нелинейные искаже-
ния плюс шум (THD + 7V), динамический диапазон, свободный от паразит-
ных составляющих (SFDR), и т. д. Для тестирования этих параметров ЦАП
необходимо подать на него сгенерированный правильным образом сигнал,
синтезированный в цифровом виде (например, одно- или многотональную
синусоиду).
В начале 1970-х годов, когда показатели ЦАП и АЦП в частотной обла-
сти стали важными, популярным было «встречное» (back-to-back) тестиро-
вание, при котором АЦП и ЦАП соединялись вместе, и на АЦП подавался
требуемый аналоговый сигнал. Затем для измерения искажений и шума в
выходном сигнале ЦАП использовался аналоговый спектроанализатор. Этот
подход был логичен, так как АЦП и ЦАП обычно использовались совмес-
тно с цифровым сигнальным процессором, размещавшимся между ними
для выполнения различных функций. Очевидно, что точно определить, как
полные динамические погрешности разделялись между АЦП и ЦАП при
этом, было невозможно. На сегодняшний день АЦП и ЦАП используются
достаточно независимо друг от друга, поэтому тестировать их нужно по
отдельности.
На рис. 5.16 показана типичная конфигурация тестера для измерения
искажений и шума ЦАП. Первый момент, связанный с ней, естественно,
заключается в генерации цифрового сигнала, подаваемого на ЦАП. Для
этих целей можно использовать современные генераторы произвольных
сигналов (например, Tektronix AWG2021 с опцией 4) или генераторы слов
(Tektronix DG2020), позволяющие программно синтезировать в цифровом
виде практически любой сигнал и являющиеся обязательными для серьез-
ного тестирования параметров ЦАП в частотной области3. В большинстве
случаев эти генераторы имеют предварительно запрограммированные стан-
дартные сигналы, например, синусоидальные или треугольные. Однако во
многих связных приложениях требуются более сложные цифровые сигна-
5.1. Тестирование ЦАП 355
* Может быть частью отладочной платы ЦАП
Рис. 5.16. Конфигурация тестера для измерения искажений и шума ЦАП
лы, такие как двухтональные или многотональные синусоиды, тестовые
сигналы QAM, GSM и CDMA и др. Во многих случаях для генерации этих
типов сигналов существует специальное программное и аппаратное обес-
печение, позволяющее значительно ускорить процесс оценки.
Analog Devices и другие производители высококачественных ЦАП по-
ставляют измерительные платы, которые значительно упрощают интерфейс
с тестовым оборудованием. Так как многие ЦАП для связных приложений
(такие как представители семейства TxDACT) содержат много встроенной
управляющей логики, их измерительные платы имеют интерфейсы с ПК
через SPI, USB, последовательный или параллельный порт, а также
WindowsT-coBMecTHMoe программное обеспечение для упрощения настрой-
ки различных опций и режимов работы ЦАП.
Тестирование ЦАП, входящих в состав систем прямого цифрового син-
теза (DDS), несколько проще, так как часть ИС, выполняющая функции
DDS, играет роль цифрового генератора сигнала для ЦАП. Для тестирова-
ния этих ЦАП зачастую требуется только измерительная плата от произво-
дителя, ПК, стабильный генератор тактового сигнала и спектроанализатор.
Подробное обсуждение DDS приводится в гл. 8 и здесь повторяться не
будет.
Спектроанализатор, выбранный для измерения показателей искажений
и шума ЦАП, должен иметь динамический диапазон, по меньшей мере на
10 дБ превышающий динамический диапазон тестируемого ЦАП. Прекрас-
ным индикатором уровня искажений спектроанализатора является харак-
теристика «максимальный диапазон, свободный от интермодуляционных
составляющих» (maximum intermodulation-free rangp)1. Однако производители
спектроанализаторов могут указывать показатели искажений и другими
способами. Тестирование современных ЦАП для связных приложений, та-
ких как представители семейства TxDACT, требует высококачественных
спектроанализаторов, таких как Rhode and Shwartz FSEA307. Как и в случае
с осциллографами, спектроанализатор должен быть нечувствительным к
перегрузке. Это можно легко проверить следующим образом. Необходимо
Глава 5. Тестирование преобразователей данных
подать сигнал, соответствующий выходному сигналу полной шкалы ЦАП,
измерить уровень продуктов нелинейных искажений, затем ослабить сиг-
нал на 6 дБ или около того и убедиться, что и сигнал, и гармоники умень-
шаются на одинаковую величину. Если уменьшение гармоник превышает
уменьшение основной составляющей сигнала, то анализатор вносит иска-
жения в сигнал.
В некоторых случаях все еще можно использовать анализатор с неопти-
мальными показателями перегрузки, включив последовательно с его вхо-
дом режекторный фильтр для подавления частоты основной составляющей
измеряемого сигнала. При этом на анализатор будут поступать только остав-
шиеся продукты искажений. Этот метод обычно работает удовлетворительно
при условии, что при измерении искажений будет учитываться ослабление из-
за режекторного фильтра. Очевидно, что для каждой тестируемой выходной
частоты необходим отдельный режекторный фильтр, поэтому реализовать
многоканальное тестирование таким способом затруднительно.
И наконец, существует множество специализированных анализаторов
для связных видео- и аудиоприложений. Для видеоприложений широко
применяются анализаторы серий VM-700 и VM-5000 производства Tektronix3.
При измерении производительности ЦАП, предназначенных для аудиопри-
ложений, предпочтительнее использовать специальные анализаторы сигна-
лов для аудио. Промышленным стандартом для аудиоанализаторов является
Audio Precision, System Two8. Существует, естественно, много других специ-
ализированных анализаторов, которые могут быть в конкретном приложе-
нии предпочтительнее, чем анализаторы общего назначения. Кроме того,
обычно имеется программное обеспечение для генерации различных тесто-
вых цифровых сигналов, необходимых в конкретных приложениях.
После выбора подходящего анализатора измерить различные парамет-
ры, связанные с искажениями и шумами, такие как SFDR, THD, SNR, SINAD
и т. п., относительно несложно. Определения данных параметров при необ-
ходимости можно найти в гл. 2. Полоса пропускания анализатора должна
быть установлена достаточно узкой, чтобы гармоники могли быть обнару-
жены над шумовым порогом. На рис. 5.17 показана типичная картинка
спектра, по которой измеряется SFDR.
Полная шкала
Уровень
шума
2
Рис. 5.17. Измерение динамического диапазона ЦАП, свободного от побочных гармо-
ник (SFDR)
5.1. Тестирование ЦАП 357
• BW — разрешение спектроанализатора по частоте.
Г f /21
• SNR — размах сигнал/уровень шума: 10log10l -^^-1
Рис. 5.18. Измерение искажений и SNR ЦАП при помощи аналогового спектроанали-
затора
Рисунок 5.18 иллюстрирует измерение различных составляющих не-
линейных искажений при помощи спектроанализатора. Показаны пер-
вые девять гармоник. Обратите внимание, что из-за смещения 6, 7, 8, 9
и 10-я гармоники попадают в полосу Найквиста fs/2.
При учете необходимых корректирующих множителей спектроанализа-
тор также может применяться для измерения SNR. На рис. 5.18 символом
BW обозначена полоса пропускания анализатора, которая в большинстве
случаев будет значительно меньше fs/2. Сначала необходимо измерить уро-
вень шума по отношению к уровню сигнала на участке частотного спектра,
относительно свободного от гармоник. На рисунке ему соответствует зна-
чение «СИГНАЛ/УРОВЕНЬ ШУМА». Истинное значение SNR в полосе от
0 до fs/2 получается, если вычесть поправочный коэффициент обработки,
101og10(4/2 BW).
SNR = Сигнал/Уровень шума — 101og10(/y/2 • BW). (5.11)
Для того чтобы рассчитанное таким образом значение SNR было досто-
верным, необходимо точно знать полосу пропускания анализатора. Характе-
ристики полосы пропускания анализатора должны быть приведены в доку-
ментации. Также если в анализаторе применяется усреднение сигнала како-
го-либо рода, оно может повлиять на суммарный корректирующий множитель.
Чтобы убедиться в правильности значения коэффициента обработки,
можно отключить несколько LSB; при этом показатели SNR ЦАП должны
приближаться к идеальным. Например, измерение 8-разрядного SNR для
малошумящего 12-, 14- или 16-разрядного ЦАП с малыми искажениями
должно давать результаты, близкие к теоретическим. Теоретическое 8-раз-
рядное SNR вычисляется по формуле SNR = 6,027V + 1,76 дБ и равно 50 дБ.
После этого можно вычислить коэффициент обработки по формуле:
Коэффициент обработки = Сигнал/Уровень шума — SNR. (5.12)
Точность этого измерения следует проверить, включив 9-й бит ЦАП и
убедившись, что уровень шума анализатора уменьшился на 6 дБ. Если уро-
Глава 5. Тестирование преобразователей данных
Г fc '21
• SNR = S/Уровень шума - 10log10 .
|_ BW J
• THD = 20log10^[lO-U2/20]2 +[ю’из/'20]2 + ... + [ю'иб/20]2.
. SINAD = 20log10^10-s/vfl/20]2 + [ю^20]2.
Примечание: единицы измерения уровня шума, SNR, THD, SINAD, У2, У3. 1/6,
-dBc.
Рис. 5.19. Вычисление S/(N + D) (SINAD) по SNR и THD
вень шума не уменьшается на 6 дБ, измерения следует повторить, исполь-
зуя только 6 первых битов ЦАП. Если на 6-разрядном уровне SNR, близкий
к теоретическому, не достигается, то тестируемый ЦАП, возможно, не под-
ходит для динамических приложений, где важны шум и искажения.
Взаимосвязь между SINAD. SNR и THD показана на рис. 5.19. THD
определяется как отношение сигнала к корню из суммы квадратов rss
(root-sum-square) определенного числа гармоник основной частоты сигнала.
В стандарте IEEE 1241-20009 предполагается использовать первые 10 гармо-
ник. Различные производители могут использовать при вычислении THD
меньшее число гармоник. Например, компания Analog Devices при задании
THD использует корень из суммы квадратов первых пяти гармоник (2, 3, 4, 5
и 6-й). На практике, если нет огромных искажений, разница между THD,
измеренным с помощью 10, и THD. измеренным с помощью 5 гармоник,
составляет менее нескольких десятых децибелл. Уровни различных гармо-
ник, от У2 до V6, измеряются по отношению к уровню сигнала S в dBc.
Затем для получения THD они преобразуются в линейные единицы, вы-
числяется корень из суммы их квадратов, и он переводится в децибелы:
Усиление вследствие обработки = Сигнал/Уровень шума.
Отношение сигнала к шуму и искажениям (SINAD) может быть вычис-
лено как корень из суммы квадратов SNR и THD\
SINAD = 20 logl0 J(10-^r/2o)2+(10-™c/2°)2. (5.13)
Одно из наиболее важных требований для точного измерения искаже-
ний заключается в том, что частота выходного сигнала ЦАП,/0, не должна
являться субгармоникой частоты обновления fc. Если fc /f0 является целым
числом, то ошибка квантования имеет неслучайный характер и коррелиро-
вана с частотой выходного сигнала. Это вызывает концентрацию энергии
шума квантования в области гармоник основной частоты выходного сигна-
ла, в результате чего искажения будут в большей степени обусловлены про-
цессом дискретизации, а не нелинейностью ЦАП. Следует отметить, что
такие же явления возникают и при тестировании АЦП, как обсуждалось
ранее в гл. 2.
Этот момент иллюстрирует рис. 5.20. На левом графике показаны ре-
зультаты моделирования спектра выходного сигнала идеального 12-раз-
рядного ЦАП при fc/f0 = 32. Отметьте, что SFDR приблизительно равен 76 дБ.
5.1. Тестирование ЦАП 359
Динамический диапазон,
свободный от гармоник = 76 дБс
Динамический диапазон,
свободный от гармоник = 92 дБс
Рис. 5.20. Влияние отношения частоты дискретизации fc к частоте выходного сигнала
/о, на SFDR для идеального 12-разрядного ЦАП
На правом графике показан спектр для случая, когда fc/f0 является дроб-
ным числом. При этом шум квантования носит случайный характер и
SFDR = 92 дБ.
Таким образом, точность спецификации и измерение загрязненности
спектра ЦАП, используемых в задачах синтеза частот, представляет значи-
тельные трудности для производителя из-за большого числа возможных
комбинаций частот тактового и выходного сигналов, а также амплитуд выход-
ного сигнала. Данные традиционно представляются в нескольких форматах.
На рис. 5.21 показаны два возможных спектра выходного сигнала 10-разряд -
ного DDS ЦАП AD9581 при частоте обновления 180 MSPS. Обратите вни-
мание, что два значения частоты выходного сигнала (1,1 и 40,1 МГц) вы-
браны таким образом, чтобы они не являлись субгармониками тактовой
частоты 180 MSPS.
ЦАП семейства TxDACT специально были оптимизированы в плане
низких искажений и шумов, что является необходимым в системах связи.
Примером представителей этого семейства является 14-разрядный ЦАП
AD9744; его однотональные и двухтональные характеристики при частоте
Частота, МГц
7,2 МГц/деление
Частота, МГц
7,2 МГц/деление
Рис. 5.21. Спектры выходного сигнала 10-разрядного Z>Z>5’AD9851 с частотой выборок
180 MSPS
Глава 5. Тестирование преобразователей данных
Одиночный тон
Двойной тон
Частота, МГц
5 МГц/деление
Частота, МГц
5 МГц/деление
Рис. 5.22. Спектры выходного сигнала 14-разрядного TxDACT AD9744 с частотой вы-
борок 165 MSPS
Из-за широкого диапазона возможных частот тактового и выходного
сигналов Analog Devices предлагает специальные быстрые измерения (обычно
48 часов) характеристик TxDAC по тестовым векторам конкретного пользо-
вателя. Эта услуга позволяет разработчикам систем заранее производить
планирование частот, гарантируя оптимальные показатели искажений в своих
приложениях.
Вместо проведения измерений на конкретных частотах существует дру-
гой полезный метод тестирования, дающий хороший общий показатель
качества ЦАП при различных комбинациях частот тактового и выходного
сигналов. Он заключается в тестировании искажений для частот выходного
сигнала /0, равных /с /3 и fQ /^. На практике частота выходного сигнала
слегка смещается на небольшую величину А/, которая является нецелой
дробью/с, т. е. Д/с = kfc, где к 1. Как показано на рис. 5.23, для частоты
выходного сигнала, равной /с/3 — А/, гармоники четных порядков распола-
гаются относительно основной частоты выходного сигнала^ на интерва-
лах, кратных f. Наихудшая гармоника четного порядка измеряется при раз-
личных тактовых частотах вплоть до максимально возможной, при этом
отношение тактовой частоты к частоте выходного сигнала поддерживается
неизменным. Ту же процедуру следует повторить для частоты выходного
Рис. 5.23. Расположение четных гармоник при = fc№ — &f
5.1. Тестирование ЦАП
4
Рис. 5.24. Расположение нечетных гармоник при fo = fc/^ — bf
Рис. 5.25. Зависимость наихудшей гармоники от тактовой частоты для fo = fc/3 — А/и
4 =/с/4-А/
сигнала, равной/с/4 ... Д/, относительно которой, как показано на рис. 5.24,
равномерно располагаются гармоники нечетных порядков.
Провести такие измерения сравнительно нетрудно, если стабилизиро-
вано отношение f0Kfcn DDS или цифровом генераторе формы сигнала и
если оно будет сохраняться с изменением тактовой частоты. На рис. 5.25
показана типичная зависимость SFDR от тактовой частоты для ЦАП с низки-
ми искажениями при двух частотах выходного сигнала,/с/3 и В боль-
шинстве ситуаций искажения на /с/3 представляют собой наихудший слу-
чай и хорошо подходят для сравнения различных ЦАП.
Список литературы
5. /. Тестирование ЦАП
1. Jim R. Naylor. Testing Digital/Analog and Analog/Digital Converters. IEEE
Transactions on Circuits and Systems, Vol. CAS-25, July 1978, pp. 526—538.
2. Dan Sheingold. Analog-Digital Conversion Handbook, 3rd Edition. Analog Devices
and Prentice-Hall, 1986, ISBN-0-13-032848-0, (классическая книга no аналого-цифро-
вому преобразованию).
362 Глава 5. Тестирование преобразователей данных
3. Tektronix, Inc., 14200 SW Karl Braun Drive, P. O. Box 500, Beaverton, OR 97077,
Phone: (800) 835-9433, http://www.tek.com. (веб-сайт содержит массу информации по
осциллографам, измерительной технике, щупам и т. д., а также полные спецификации
по продуктам).
4. Howard К. Schoenwetter. High Accuracy Settling Time Measurements. IEEE
Transactions on Instrumentation and Measurement, Vol. IM-32, No. 1, March 1983,
pp. 22-27.
5. James R. Andrews, Barry A. Bell, Norris S. Nahman, and Eugene E. Baldwin. Reference
Waveform Flat Pulse Generator. IEEE Transactions on Instrumentation and Measurement,
Vol. IM-32, No. 1, March 1983, pp. 27-32.
6. Barry Harvey. Take the Guesswork out of Settling-Time Measurements. EDN,
September 19 1985, pp. 177—189.
7. Rohde & Schwarz, Inc., 8661A Robert Fulton Dr.,Columbia, MD 21046—2265,
Phone: (410) 910—7800, http://www.rohde-schwarz.com. (ведущий производитель спек-
троанализаторов; веб-сайт содержит руководства по частотному анализу, а также
спецификации на продукты).
8. Audio Precision, 5750 S.W. Arctic Drive, Beaverton, Oregon 97005, http://
www.audioprecision.com. (признанный промышленный стандарт на профессиональное
измерительное оборудование для аудиотехники).
9. IEEE Std. 1241—2000, IEEE Standard for Terminology and Test Methods for Analog-
to-Digital Converters (Стандарт IEEE на технологию и методы тестирования для
аналого-цифровых преобразователей), IEEE, 2001, ISBN 0-7381-2724-8.
5.2. Тестирование АЦП
Уолт Кестер
Краткий исторический обзор спецификаций
и методов тестирования преобразователей данных
Несмотря на то что в гл. 1 этой книги был дан общий обзор истории преоб-
разователей данных, эволюция их спецификаций и соответствующих мето-
дов тестирования требует дополнительных комментариев. Интересно отме-
тить, в частности, как тесты на базе цифровой обработки сигналов (ЦОС)
стали практически универсальными промышленными стандартами для со-
временных АЦП.
Развитие преобразователей данных, начавшееся в 1940-х годах и про-
должающееся по сей день, можно грубо разделить в зависимости от часто-
ты дискретизации на два направления: низкоскоростные (обычно обладаю-
щие высоким разрешением — до 24 бит) и высокоскоростные (в общем
случае обладают более низким разрешением). В последние годы, однако,
появляются высокоскоростные преобразователи с разрешением 14 и 16 бит,
так что граница между двумя типами становится менее явной. Такое разде-
ление полностью соответствовало действительности в 1940-х и 1950-х го-
дах, когда для АЦП и ЦАП, применявшихся при построении ИКМ-систем
в Bell System, обычно требовалась частота дискретизации в диапазоне до
100 kSPS при разрешении 5—9 бит. Эти преобразователи обычно тестиро-
вались с помощью комбинации АЦП и согласующего ЦАП, соединенных
«встречно» (формируя кодер-декодер, или кодек), так как именно показа-
тели такой комбинации определяли показатели всей системы в целом. На
5.2. Тестирование АЦП 363
АЦП подавались аналоговые сигналы с генераторов аналоговых тестовых
сигналов, а для измерения сигнала, формируемого ЦАП, использовалось
аналоговое тестовое оборудование. Как будет отмечено позднее в этом раз-
деле, «встречное» тестирование по-прежнему играет важную роль при раз-
решениях приблизительно до 12 бит, в особенности в задаче предваритель-
ной оценки качества АЦП.
Первые высококачественные коммерческие преобразователи данных обще-
го назначения стали доступны в середине 1950-х годов, и пионером среди них
был 11-разрядный преобразователь на электровакуумных лампах DATRAC, раз-
работанный Бернардом М. Гордоном в компании Epsco в 1954 году. Сам Гордон
был одним из первых, кто дал определения характеристикам преобразователей
данных, в особенности предназначенным для прецизионных приложений, и
написал множество статей по спецификациям преобразователей1’3’4- 5’9'10’20.
В 1960-х годах по мере появления полупроводниковых преобразовате-
лей данных и ЭВМ интерес к АЦП и ЦАП стал возрастать быстрыми тем-
пами. Ранними движущими силами развития являлись задачи анализа дан-
ных, измерительные, радиолокационные приложения и ИКМ.
В динамических приложениях по-прежнему было невозможно напрямую
измерить характеристики так называемых сэмплирующих АЦП в частотной
области из-за отсутствия дешевой памяти и доступных цифровых компьюте-
ров. Для измерения любых характеристик в частотной области необходимо
было использовать «встречный» метод, и опорный ЦАП должен был иметь
лучшие статические и динамические показатели, чем тестируемый АЦП.
К середине 1970-х годов появление мини-компьютеров (таких как ком-
пьютеры серии DEC PDP) сделало тестирование в частотной области при
помощи быстрого преобразования Фурье (БПФ) практичным для произво-
дителей АЦП (см., например,13). Удобным способом передачи данных из
буферной памяти, содержащей отсчеты АЦП, в компьютер для анализа ста-
ла шина IEEE-488 (первоначальное название HP-IB).
Также в 1970-х годов применение АЦП и ЦАП в новых приложениях,
таких как цифровое видео17’18, привело к тому, что тестирование под конк-
ретное приложение стало общим требованием.
В 1980-х годах наблюдалось значительное развитие методов тестирова-
ния динамических характеристик АЦП19’21-25 27. Производители начали стан-
дартизировать динамические показатели, такие как SNR, SINAD, ENOB,
THD и т. д., которые стали неотъемлемой частью технических данных на
все дискретизирующие АЦП. Эти показатели являлись жизненно необхо-
димыми для развивающихся приложений в области связи, где наибольшую
важность представлял широкий динамический диапазон.
В 1980-х годах различными комитетами IEEE были проведены первые
работы по динамическим показателям и их тестированию, завершившиеся
подготовкой стандартов на АЦП/ЦАП для цифрового видео28 и устройств
записи сигналов22’36. Позднее стандарт на устройства записи сигналов (IEEE
Std. 1057-1994, R2001) был расширен, и в него вошла терминология и мето-
ды тестирования для АЦП общего назначения37.
Также в этот период появились гистограммные тесты для измерения
статических INL и DNL АЦП, практически вытеснившие более старые ме-
тоды21’22’ 24’25’27.
364 Глава 5. Тестирование преобразователей данных
К 1990-м годам тестирование АЦП и ЦАП в частотной области стало
нормой, а наличие программного обеспечения для выполнения БПФ на
ПК и стыковочных плат от производителей сделали его доступным для боль-
шинства потребителей. На сегодняшний день (2004) практически все выпус-
каемые дискретизирующие АЦП (за исключением АЦП с высоким разреше-
нием, предназначенных для измерительных задач) полностью характеризу-
ются в плане динамических показателей. Несмотря на наличие некоторых
разногласий, большинство производителей АЦП адаптировали в основном,
тот же набор спецификаций и соответствующей терминологии, который
приведен во гл. 2.
Тестирование статических характеристик АЦП
Как мы увидели в разд. 5.1, в основе тестирования статических характери-
стик ЦАП лежит ряд измерений выходного напряжения для различных циф-
ровых входных кодов. Знание архитектуры конкретного ЦАП и соответ-
ствующей характеристики погрешности позволяет снизить реальное число
измерений отдельных напряжений, однако этим обеспечивается только
уменьшение времени теста, а фундаментальные методы и концепции теста
остаются прежними.
В ЦАП каждому входному цифровому коду соответствует уникальный
уровень выходного напряжения, независимо от погрешностей DNL и INL.
В свою очередь в АЦП каждому выходному цифровому коду нельзя поста-
вить в соответствие однозначный уровень входного напряжения. Один и
тот же цифровой код формируется входными напряжениями, принадлежа-
щими небольшому диапазону шириной 1 LSB (для идеального АЦП, в ко-
тором отсутствуют шумы). Это явление называется неопределенностью кван-
тования и может являться источником путаницы при описании и измере-
нии статических передаточных характеристик АЦП. На рис. 5.26 показаны
а
Кодовые центры
(измерены косвенно)
б
Кодовые переходы
(измерены непосредственно)
Рис. 5.26. Измерение кодовых переходов АЦП для определения центров кодов
5.2. Тестирование АЦП 365
два возможных метода описания взаимосвязи между аналоговым входным
сигналом и выходным цифровым кодом АЦП. В методе А статическая пе-
редаточная характеристика задается через центры кодов, однако прямого
способа измерения этих точек из-за неопределенности квантования не су-
ществует. В методе В статическая передаточная характеристика задается
через кодовые переходы, которые могут быть измерены напрямую. Все, что
необходимо для измерения кодовых переходов, — это источник аналогово-
го напряжения и цифровой вольтметр (DVM), подключенные ко входу АЦП,
и средство наблюдения за выходными цифровыми кодами, такое как свето-
диодный индикатор. Аналоговое входное напряжение изменяется до тех
пор, пока светодиоды не начнут «прыгать» между двумя кодами, после чего
записывается значение входного напряжения. Следует отметить, что этот
метод хорошо работает только в том случае, когда эффективный размах
шумов АЦП (и источника входного напряжения), приведенных к входу,
не превышает 1 LSB. Большие уровни приведенного ко входу шума будут
маскировать переходы и значительно усложнят измерения.
Предположим, что АЦП сравнительно свободен от шумов и что моменты
переходов могут быть легко измерены. После определения точек кодовых пе-
реходов центры кодов могут быть найдены как напряжение, находящееся по-
середине между соответствующими кодовыми переходами. Однако в действи-
тельности, как показано на рис. 5.26, б, передаточная функция АЦП может
быть целиком описана с помощью кодовых переходов. Обратите внимание,
что точки кодовых переходов для идеального АЦП сдвинуты на 1/2 LSB отно-
сительно центров кодов. Преимущество непосредственного применения ме-
тода кодовых переходов заключается в том, что DNL для отдельного кода
просто равна разнице между соответствующими кодовыми переходами.
Метод центров кодов может давать ошибочные результаты, как показано
на рис. 5.27. Обратите внимание, что передаточная функция АЦП имеет чере-
дующиеся широкие и узкие коды, но линия, проведенная через центры кодов,
дает идеальную INL. С другой стороны, линия, проведенная через граничные
кодовые переходы, дает истинную INL, которая составляет 1/2 LSB.
Рис. 5.27. Кодовые переходы пред-
почтительнее использовать при из-
мерении INL и DNL АЦП, чем цен-
тры кодов
Аналоговый вход
Глава 5. Тестирование преобразователей данных
Генератор
ТИ-выборок
Источник
прецизионного
напряжения
Л/-разрядный
\ АЦП
Цифровой
вольтметр
Старший
разряд
Логика
и драйверы
Светодиод
Младший
разряд
Младший
разряд
Старший
разряд
Переходы между
10101111 и 10110000
N
Рис. 5.28. Простая схема для измерения кодовых переходов АЦП
На рис. 5.28 показана простая схема для измерения точек кодовых пере-
ходов АЦП. Сигнал на аналоговый вход подается с прецизионного малошу-
мящего источника напряжения, а выходные коды АЦП наблюдаются при
помощи светодиодного индикатора. Отображение истинного и инверсного
значения для каждого бита АЦП облегчает определение точных центров
точек кодовых переходов, так как при этом нужно просто подстраивать
аналоговое входное напряжение до достижения равной яркости светодио-
дов, на которые выводятся истинное и инверсное значения «дрожащего»
бита. Если АЦП выдает данные в последовательном формате, то, очевидно,
требуется использовать дополнительную логику.
Несмотря на простоту, этот неавтоматический тестер очень полезен для
работы с АЦП, имеющими низкий уровень шума, особенно если необходи-
мо измерить несколько кодовых переходов, например при определении
погрешностей усиления и смещения. На рис. 5.29 подробно объясняется
a б в
Ошибка смещения
Ошибка усиления
Ошибки смещения
Погрешность смещения =
= Уоо, - 0,5 мл. разр.
Погрешность усиления = 0
Погрешность смещения = 0
Погрешность усиления (%) =
Погрешность смещения =
= У001 - 0,5 мл. разр.
Погрешность усиления (%) -
Г ^111 ~ Ур01
[VFS- 2 LSB
Замечание: У001 = кодовому переходу
между 000 и 001
10>111-°;5 LSB
[ VFS - 2 LSB
= 100
Рис. 5.29. Измерение погрешностей смещения и усиления АЦП
5.2. Тестирование АЦП 367
процесс измерения погрешностей усиления и смещения АЦП при помощи
кодовых переходов. Приведен пример для 3-разрядного АЦП, однако прин-
ципы применимы к любой величине разрешения.
Обратите внимание, что, следуя условным обозначениям, приведенным
ранее на рис. 5.26, б. для идеального АЦП первый кодовый переход между
ООО и 001 (обозначенный И001) происходит при аналоговом входном напря-
жении 0,5 LSB, а последний кодовый переход между ПО и 111 (обозна-
ченный Ии1) — при напряжении FS —1,5 LSB. Определения, данные на
рис. 5.29, применимы к однополярному АЦП, однако могут быть легко
модифицированы для биполярного АЦП. В биполярном АЦП (как обсуж-
далось в гл. 2) уровень входного сигнала 0 В, по определению, должен
попадать в центр кода 100...0, а смежные кодовые переходы должны возни-
кать в уровнях на 0,5 LSB выше и ниже 0 В. Как и для ЦАП, интерес также
может представлять смещение нуля АЦП, которое легко вычисляется через
значения соответствующих кодовых переходов.
Встречное тестирование статических характеристик АЦП
Другой полезный метод тестирования статических характеристик АЦП,
появившийся на заре развития преобразователей данных, заключается в
подключении ЦАП к выходу АЦП и измерении показателей АЦП при по-
мощи стандартных аналоговых методов. Успех «встречного» метода зависит
от наличия подходящего ЦАП, который должен иметь точность, значитель-
но превышающую точность тестируемого АЦП. Например, для 12-разряд-
ного АЦП необходим ЦАП с точностью, по меньшей мере, 14 бит, хотя в
действительности задействуются только 12 разрядов ЦАП.
На рис. 5.30 показана конфигурация встречного тестера для измерения
статических показателей АЦП, в которой формируется сигнал ошибки, со-
Рис. 5.30. Тестирование статических характеристик при помощи схемы со встречным
включением АЦП/ЦАП
368 Глава 5. Тестирование преобразователей данных
ответствующей реальной передаточной функции АЦП. Выходной код АЦП
подается на точный ЦАП, а выходной сигнал ЦАП вычитается из аналого-
вого входного сигнала АЦП, усиливается (при необходимости) и фильтру-
ется для наблюдения на осциллографе. Функция вычитания реализуется
инверсией выходного кода АЦП перед подачей его на ЦАП; таким образом,
выходной сигнал ЦАП представляет собой инвертированное квантованное
представление входного сигнала АЦП. Для суммирования сигналов (поло-
жительного и отрицательного) может быть использован простой резистив-
ный потенциометр. На вход АЦП подается линейно изменяющийся сигнал
очень низкой частоты, и потенциометр подстраивается таким образом, что-
бы устранить эффекты различий в усилении АЦП и ЦАП. Использование
входного линейно изменяющегося сигнала облегчает интерпретацию сиг-
нала ошибки, так как горизонтальная ось (время) может быть откалиброва-
на непосредственно в единицах LSB. При желании для ослабления требо-
ваний к времени установления ЦАП и простоты наблюдения сигнала ошибки
частота сигнала обновления данных ЦАП может быть взята равной субгар-
монике частоты сигнала дискретизации АЦП. Низкочастотный фильтр на
входе осциллографа устраняет высокочастотные составляющие, которые
могут искажать реальный сигнал ошибки.
На рис. 5.31, я, б и в, показаны некоторые типичные формы сигнала
ошибки, возникающие в результате влияния различных погрешностей АЦП.
Заметим, что пилообразный сигнал ошибки состоит из последовательности
«зубцов». Ширина зубца соответствует ширине кода и может использовать-
ся, как показано на рис. 5.31, а, для проведения непосредственных измере-
ний DNL. Пунктирные вертикальные линии на протяжении всей горизон-
тальной оси показывают, где должны в идеале возникать кодовые перехо-
ды. На рисунке показано влияние положительных и отрицательных DNL, а
также пропущенных кодов.
Высота каждого зубца зависит от ЦАП, и при наличии пропущенного кода
высота будет равна не одному, а двум LSB. На рис. 5.31, б, показан сигнал
б
Рис. 5.31. Сигналы ошибки АЦП, получаемые при помощи «встречной» конфигурации
5.2. Тестирование АЦП 369
ошибки для немонотонного АЦП, где немонотонность проявляется в виде
временного обращения направления сигнала ошибки, показанного стрелками.
При использовании «встречного» метода для измерений статической DNL
лучшие результаты достигаются применением треугольного сигнала с ма-
лой амплитудой и прецизионной подстройкой смещения постоянной со-
ставляющей. Смещение постоянной составляющей может медленно регу-
лироваться, при этом сигнал ошибки DNL будет «прогоняться» через весь
диапазон АЦП. Если частота сигнала ошибки слишком велика, наблюде-
ние его составляющих невозможно. С другой стороны, измерение INL
следует производить с использованием треугольного сигнала, размах ко-
торого равен полной шкале. При этом для вычисления INL, как показано
на рис. 5.31, в, может использоваться максимальное отклонение сигнала
ошибки от линии, соединяющей граничные точки. В этом случае нет необ-
ходимости наблюдать каждый из отдельных зубцов, составляющих полный
сигнал ошибки. Для измерения INL балансный потенциометр необходимо
подстроить таким образом, чтобы конечные точки имели одинаковый уро-
вень. Наихудшая INL на рис. 5.31, в, составляет примерно +1 LSB.
В целом «встречный» метод является полезным инструментом для про-
ведения измерений статической линейности АЦП. Он прост в реализации.
По мере увеличения разрешения АЦП следует понижать частоту входного
сигнала, при этом амплитуда сигнала ошибки уменьшается, и влияние шу-
мов АЦП и погрешностей ЦАП становится более выраженным.
Этот метод лучше всего подходит для АЦП с разрешением 12 бит и
менее, у которых шум кодовых переходов (т. е. приведенный к входу шум)
меньше нескольких десятых LSB. Измерения для 12-разрядных АЦП тре-
буют повышенной внимательности, а распространение этого метода на
14-разрядные АЦП довольно затруднительно. Для измерения параметров
16-разрядных АЦП требуются ЦАП с точностью, по меньшей мере, 18 бит,
для которых редко указываются традиционные статические спецификации.
Crossplot-измерения линейности АЦП
Crossplot-метол измерения линейности АЦП был разработан на раннем эта-
пе развития преобразователей данных как легкий метод определения интег-
ральной и дифференциальной линейности. Этот тест годится для быстрой
оценки, когда не требуется высокая точность. Его концепция практически
совпадает с описанным ранее «встречным» методом, за исключением того,
что в аналоговый формат преобразуются только два или три LSB АЦП.
Базовая конфигурация crossp lot-теста показана на рис. 5.32.
В качестве простого ЦАП, преобразующего два LSB выходного кода
АЦП, используются два резистора. На вход АЦП поступает постоянное вход-
ное напряжение от прецизионного ЦАП, а для модуляции его уровня ис-
пользуется треугольный сигнал малой амплитуды. Как и во «встречном»
методе тестирования, горизонтальная ось осциллографа может быть отка-
либрована в единицах LSB. Выход 2-разрядного ЦАП, как показано на ри-
сунке, представляет собой 4-уровневый ступенчатый сигнал. Изначально
crossplo/-метод был разработан для тестирования АЦП последовательного
приближения, содержащих внутренние ЦАП с двоичным взвешиванием.
Глава 5. Тестирование преобразователей данных
Рис. 5.32. Crossplot-'Ttc'T АЦП
Как обсуждалось ранее в этой главе, для ЦАП этого типа выполняется
принцип суперпозиции, а следовательно, он выполняется и в SAR АЦП,
построенных на их основе. Таким образом, проверять все коды не требует-
ся — необходимо проверить только коды главных переносов. При проведе-
нии теста прецизионный ЦАП вырабатывает постоянный уровень, соответ-
ствующий проверяемому кодовому переходу для конкретного главного пе-
реноса. Три сигнала, показанные на рис. 5.33, иллюстрируют эффекты
погрешностей DNL и пропущенных кодов. Заметьте, что этот метод не по-
зволяет обнаруживать более двух пропусков кодов над и под проверяемым
главным переносом. Кроме того, при тестировании АЦП, отличных от АЦП
последовательного приближения (основанных на внутренних ЦАП с дво-
ичным взвешиванием), простота и эффективность crossp lot-метояя утрачи-
вается, так как необходимо проверять большее количество кодов.
Кодовый переход
основного переноса
при тестировании
Рис. 5.33. Crossp/о/-сигналы, иллюстрирующие статические погрешности АЦП в обла-
сти главных кодовых переходов
5.2. Тестирование АЦП 371
Тестирование кодовых переходов
при помощи следящей обратной связи
Тестирование кодовых переходов со следящей обратной связью (servo-loop),
показаное на рис 5.34, естественным образом подходит для автоматизиро-
ванных измерений либо в составе систем АТЕ, либо в контроллерах на
базе ПК. Замкнутый контур начинается с операционного усилителя, вклю-
ченного как интегратор. Ключи (обычно КМОП) на входе интегратора
используются для выбора источников положительного или отрицательно-
го напряжения. При постоянном напряжении смещения на входе интег-
ратор будет формировать линейно изменяющийся сигнал, оцифровывае-
мый при помощи АЦП. Выходной код АЦП поступает на вход «А» цифро-
вого компаратора. На вход «В» цифрового компаратора подается значение
измеряемого кодового перехода. Если выходной код АЦП меньше выб-
ранного кода, выход А < В компаратора подключает к резистору R источ-
ник отрицательного напряжения, и выходной сигнал интегратора линей-
но растет. В момент, когда А > В, к резистору R подключается источник
положительного напряжения, и выходной сигнал интегратора линейно
уменьшается.
Обратная связь вызывает продолжение колебаний, формируя тре-
угольный сигнал, который центрирован относительно постоянного уров-
ня, соответствующего кодовому переходу. Вольтметр на выходе интег-
ратора обеспечивает точное измерение напряжения кодового перехода.
Когда постоянная времени контура правильно отрегулирована, ампли-
туда треугольного сигнала должна в идеале равняться дробной части
LSB.
Этот метод может использоваться для измерения граничных точек пе-
редаточной функции, т. е. первого и последнего кодовых переходов, V} и
Рис. 5.34. Интегрирующая схема тестирования АЦП со следящей обратной связью
Глава 5. Тестирование преобразователей данных
VN_ г Затем, на основании этих значений, можно вычислить номиналь-
ную величину LSB:
(5.14)
Граничные кодовые переходы и номинальный вес LSB дают информа-
цию, необходимую для вычисления DNL и INL для любого требуемого ко-
дового перехода. На основании значений граничных кодовых переходов
также могут быть вычислены погрешности усиления и смещения.
Гистерезис и/или шум АЦП могут порождать проблемы при проведе-
нии теста с помощью схемы со следящей обратной связью. В некоторых
случаях предпочтительнее иметь возможность управления постоянной време-
ни интегратора. Сначала можно задать небольшое значение постоянной вре-
мени интегратора для получения быстрого начального отклика, а потом —
большее значение, дающее более высокую точность.
Тестирование АЦП со следящей обратной связью
на базе компьютера
Рис. 5.35. Обобщенная схема тестиро-
вания АЦП со следящей обратной свя-
зью при помощи компьютера
На рис. 5.35 показана обобщенная схема
тестирования АЦП со следящей обратной
связью на базе компьютера, подходящая для
АТЕ и систем на базе ПК. Эта конфигура-
ция дает максимальную гибкость за счет
полной программируемости. Она также по-
зволяет использовать усреднение для умень-
шения влияния приведенного к входу шума
АЦП. Она подходит для более специализи-
рованных задач, когда требуется тестирова-
ние больших объемов продукции, но, веро-
ятно, неприменима для простой оценки по-
казателей АЦП в лабораторных условиях.
Все методы определения кодовых пе-
реходов, описанные до настоящего момен-
та, работают наилучшим образом, когда тестируемый АЦП имеет размах при-
веденного ко входу шума менее нескольких десятых LSB, как показано на
рис. 5.36. Схема тестирования на базе компьютера, показанная на рис. 5.35,
является исключением, так как позволяет усреднять данные для устранения
влияния избыточного шума. Некоторые алгоритмы тестирования, прекрас-
но работающие для АЦП с малым уровнем шума, могут попросту не схо-
диться при высоких уровнях входного шума, как показано на рис. 5.37.
Шум кодовых переходов редко представлял проблемы для 6-, 8- или
10-разрядных преобразователей. Даже при 12- или 14-разрядном разреше-
нии эффективная входная полоса ранних АЦП в 1970-х годах была доста-
точно мала, и уровень шума, приведенного к входу, еще позволял обеспе-
чивать удовлетворительные результаты при использовании «встречного» те-
ста, crossp lot-теста и ИС со следящей обратной связью для большинства
преобразователей.
Тестируемый код +1 мл. разр.
Тестируемый код
Тестируемый код -1 мл. разр. —►
Цифровой
выход
Аналоговый вход . ' ►
Рис. 5.36. Передаточная функция АЦП при сравнительно низком приведенном к входу
шуме
Цифровой
выход
Аналоговый вход - - - — — - -»
Рис. 5.37. Передаточная функция АЦП при сравнительно высоком приведенном к входу
шуме
Однако в 1980—1990-х годах требования к постоянному увеличению ча-
стот дискретизации АЦП при большей входной ширине полосы привели к
росту уровня приведенного к входу шума, что обусловлено фундаменталь-
ными физическими законами работы схем, такими как шум резистора и
КТ/С шум. Несмотря на то что сегодня доступны 12-, 14-, 16- и 18-разряд-
ные АЦП с низким приведенным к входу шумом, предназначенные для
приложений с низкой частотой дискретизации и малой шириной полосы,
многие широкополосные АЦП для связных приложений имеют размах при-
веденного к входу шума, зачастую превышающий 1,2 или более LSB. Такие
АЦП применяются в приложениях, где основным показателем качества
является SFDR. а для устранения влияния стохастического шума использу-
ется усиление отношения сигнал/шум, достигаемое обработкой, которая
обеспечивается избыточной дискретизацией и усреднением.
Из-за потребности в высокоскоростном автоматизированном методе те-
стирования, подходящем для измерения INL и DNL любых АЦП, независи-
мо от уровня шума, наиболее популярным на сегодняшний день методом
тестирования стал гистограммный метод (метод плотности кодов).
374 Глава 5. Тестирование преобразователей данных
Гистограммный тест (тест плотности кодов)
с линейно изменяющимся входным сигналом
Гистограммный метод тестирования АЦП заключается в накоплении боль-
шого количества оцифрованных отсчетов входного сигнала с известной
плотностью вероятности за определенный период времени. Передаточная
функция АЦП определяется при помощи статистического анализа отсче-
тов. Например, популярным сигналом для гистограммного тестирования
является линейно изменяющийся (на практике используется треугольный)
сигнал, слегка выходящий за пределы входного диапазона АЦП. Для тре-
угольного входного сигнала собирается большое количество отсчетов и под-
считывается количество выпадений каждого кода. Если АЦП не имеет по-
грешностей INL и DNL, то все коды имеют равную вероятность появления
(за исключением граничных кодов, состоящих из одних нулей и из одних
единиц), и в каждом кодовом интервале должно быть одинаковое число
отсчетов.
На рис. 5.38 показана типичная конфигурация гистограммного тестера.
На вход АЦП подается линейный треугольный сигнал, слегка перегружаю-
щий его. Частота сигнала должна быть достаточно низкой, чтобы АЦП не
вносил динамических ошибок, и не должна быть субгармоникой частоты
дискретизации. Для кодов от 1 до 2N — 2 собирается Мт отсчетов. Обратите
внимание, что число отсчетов «переполнения», соответствующих попада-
ниям в интервалы кодов из одних нулей (код 0) и одних единиц (код 2Л ’),
не включается в Мт, но прибавляется к полному требуемому числу отсче-
тов. Поэтому сигнал нужно отрегулировать таким образом, чтобы число
переполнений было не больше, чем необходимо для гарантии того, что АЦП
достаточно перегружен и что часть сигнала, попадающая в диапазон АЦП,
линейна с требуемой точностью (для большинства АЦП разумно работать с
10 %-ной перегрузкой).
+FS - — ------• Накопление Мт выборок для кодов 1 до 2N -2.
/ \ / • Подсчет количества выпадов (попаданий) каждого кода
~FS -/....../?(П)реальное> ГДв П ~ ЧИСЛО КОДОВ.
• Для полношкального треугольника на входе теоретическое
число попаданий
= 4/(2“ ' 2).
• Вычисление DNL каждого кода для п = 1 до п = 2N - 2:
DNL(n) = ----1.
^(^Oieopei ическое
• Интегрирование DNL для получения INL.
Рис. 5.38. Конфигурация гистограммного тестера (тестера плотности кодов)
5.2. Тестирование АЦП
Затем для п от 1 до 2N — 2 записывается число «попаданий», h(n), в
каждый кодовый интервал, соответствующий п. Теоретическое число попа-
даний в каждый интервал (в предположении об идеальных INL и DNL)
составляет А(и)пе ч = Mr/(2N — 2). Если Мп) — это реальное число
х 'теоретическое Т' v 7 v 7реальное *
попаданий в интервал, то DNL для данного конкретного кода определяется
выражением:
DNL(n) = -1.
Vтеоретическое
(5-15)
На рис. 5.39 показан типичный вид гистограммы, на котором нетрудно
увидеть широкие, узкие и пропущенные коды. На основании данных гис-
тограммы при помощи выражения (5.15) можно легко определить реальную
DNL для каждого кода. После нахождения DNL INL может быть получена
путем простого ее интегрирования, как показано на рис. 5.40.
(+) Избыточные
случаи
(-) Избыточные
случаи
Мт общая сумма выборок
сверх 2N - 2 кодовых
Все нулевые
коды
Все единичные
коды
Рис. 5.39. Гистограмма для теста с линейно изменяющимся сигналом
Рис. 5.40. Интегрирование DNL дает INL
376 Глава 5. Тестирование преобразователей данных
Очевидно, что гистограммный тест устраняет влияние приведенного к
входу шума путем усреднения его по всем кодовым интервалам. Шум и
гистерезис, соответствующие каждому отдельному кодовому переходу, так-
же усредняются. Поэтому гистограммный тест идеально подходит для со-
временных высокоточных АЦП с широкой полосой и является универсаль-
но принятым, особенно в свете распространения стандартного программ-
ного обеспечения ПК и оценочных плат производителей АЦП.
Следует отметить, что сам по себе гистограммный тест не дает пред-
ставления о монотонности АЦП, т. е. порядок появления кодов по отноше-
нию к входному сигналу с помощью этого теста напрямую определить нельзя.
Однако немонотонный АЦП, как правило, будет иметь больший уровень
искажений, что можно легко обнаружить путем анализа результатов взятия
БПФ от выходных данных. Так как гистограммный тест и тесты на базе
БПФ реализуются фактически на одних и тех же аппаратных средствах, оба
они обычно являются составной частью более объемлющего комплекса
средств для тестирования АЦП.
При проведении гистограммных тестов следует учитывать несколько
важных факторов. Одним из наиболее важных является количество отсче-
тов, необходимое для точного измерения DNL и INL. Предположим, что
имеется 12-разрядный АЦП с быстродействием 1 MSPS и требуется полу-
чить в среднем 20 попаданий в каждый кодовый интервал, что позволит
обеспечить разрешение по DNL, равное 1/20 = 0,05 LSB. Для этого необхо-
димо, чтобы входной линейно изменяющийся сигнал проходил через все
212 = 4096 уровней, задерживаясь на каждом коде в течение времени, доста-
точного для обеспечения 20 попаданий на уровень. Поэтому полное необ-
ходимое число отсчетов МТ = 20 х 4096 = 81920. Так как частота дискрети-
зации равна 1 MSPS, для обеспечения 20 попаданий на кодовый интервал
входной сигнал должен совершать проход диапазона полной шкалы за 82 мс.
При этом предполагается, что отсчеты «переполнения» не учитываются.
Теперь предположим, что линейно изменяющийся сигнал формируется
идеальным 16-разрядным ЦАП. Это означает, что ЦАП делит каждый из
12-разрядных интервалов на 16 уровней, или 1/16 = 0,06 LSB. Таким обра-
зом, полная неопределенность измерения DNL составит 0,05 LSB (20 попа-
даний на интервал) плюс 0,06 LSB (16-разрядный ЦАП, формирующий
линейно изменяющееся напряжение), т. е. 0,11 LSB.
Формирование линейно изменяющегося сигнала с помощью ЦАП ста-
новится непрактичным для тестирования АЦП с разрешением более 12 бит
из-за сложности проектирования высокоточных ЦАП со сравнительно бы-
стрым установлением и разрешением более 16 бит. Кроме того, отсчеты,
поступающие в течение времени установления ЦАП, должны игнориро-
ваться, что еще более усложняет тест. Намного более практичный метод
заключается в использовании генератора треугольных сигналов; при этом
выходная частота генератора не должна являться субгармоникой частоты
дискретизации АЦП. В этом случае определение требуемого числа отсчетов
представляет собой довольно сложную статистическую задачу, требующую
использования уровней достоверности, вероятностей и т. п. Подробное
описание теории статистики выходит за рамки данного обсуждения, и
заинтересованному читателю можно порекомендовать источники 2Л 37’38.
5.2. Тестирование АЦП 377
К счастью, точность теста может быть проверена эмпирически. Для этого
необходимо просто исследовать несколько записей данных на предмет по-
вторяемости измерений и затем произвести соответствующую регулировку.
Ранее было отмечено, что частота треугольного входного сигнала не
должна являться субгармоникой частоты дискретизации АЦП, в противном
случае кодовые комбинации в каждом периоде входного сигнала будут по-
вторяться, что приведет к искажению результатов измерения DNL и сделает
их бессмысленными. Это явление идентично обсуждавшемуся в гл. 2 при
рассмотрении шума квантования. Для того чтобы гистограммный тест да-
вал точные результаты, шум квантования должен быть случайным. Если
частота входного сигнала является субгармоникой частоты дискретизации,
сигнал ошибки шума квантования может иметь периодический характер,
что будет проявляться в появлении ложных пропущенных кодов и больших
погрешностей DNL. В большинстве случаев дрожание фазы и шум тактово-
го сигнала дискретизации, аналогового входного сигнала и АЦП в практи-
ческой тестовой схеме смягчают этот эффект, однако в чистоте измерений
гистограммы следует удостовериться. Для этого необходимо слегка изме-
нить либо частоту тактового сигнала дискретизации, либо частоту входного
сигнала и убедиться, что результаты измерения DNL практически не изме-
няются.
И наконец, гистограмма может накладывать ограничения на скорость
буферной памяти, необходимую для ввода выходных данных быстрых АЦП,
а также ее размер, необходимый для хранения большого числа отсчетов
(возможно, несколько сотен тысяч). Требования к скорости могут быть сни-
жены, если брать с АЦП каждый к-й отсчет, так как непрерывности следо-
вания отсчетов не требуется. Однако это не приведет к уменьшению требу-
емого полного числа отсчетов, а просто смягчит требования к скорости
памяти за счет увеличения времени теста.
Гистограммный тест с треугольным сигналом будет давать хорошие ре-
зультаты измерений DNL при разрешениях 16 бит и более, если предпринять
надлежащие меры, описанные выше. С другой стороны, точность измерений
INL АЦП не может превышать INL треугольного входного сигнала. Поддер-
жание необходимого уровня INL сигнала может представлять проблему при
разрешениях 12 бит и более. Кроме того, любой высокочастотный шум, ко-
торый может присутствовать в треугольном сигнале, нельзя устранять филь-
трацией, поскольку она также повлияет на линейность сигнала.
По этим причинам при измерении INL и DNL гистограммным методом
в качестве входного сигнала АЦП чаще используется синусоидальный, а не
треугольный сигнал. При соответствующей фильтрации можно формиро-
вать синусоидальные сигналы с крайне высокой линейностью и низким
шумом. Однако, в отличие от треугольного сигнала, вероятность кодов
при синусоидальном входном сигнале не одинакова. Может быть показа-
но21’ 24,27,32, зб, 37,38, что ддЯ N-разрядного АЦП с входным диапазоном полной
шкалы, равным ±И£5, и входной синусоиды с амплитудой А вероятность
появления кода п определяется выражением:
р<п) = -
Л
sin“'
A-2N Sm
A -2N
(5.16)
Глава 5. Тестирование преобразователей данных
Р(п) = -
л
sin
Рис. 5.41. Плотность вероятности при синусоидальном сигнале
График этой функции показан на рис. 5.41. Обратите внимание, что
вероятность выпадения кода возрастает в пиках синусоиды вблизи ±К£Л,,
так как dv/dt в этих точках мало (больше попаданий в интервал), чем в
районе пересечения нуля, где dv/dt максимально (меньше попаданий в ин-
тервал).
При синусоидальном входном сигнале теоретическое число выпадений
для и-го кода определяется выражением:
^Теоретическое = /TW7" (5.17)
Соответствующая погрешность DNL для этого кода определяется выра-
жением:
£)#£(Л) = ^2^2! _ 1 /5 18)
Р(п)МТ
Для того чтобы гистограммный тест с синусоидальным сигналом давал
точные результаты, необходимо предпринять некоторые меры предосто-
рожности. Как и для обсуждавшегося ранее треугольного тестового сигна-
ла, частота синусоиды не должна быть субгармоникой частоты дискретиза-
ции. Амплитуду синусоидального входного сигнала А следует выбирать та-
кой, чтобы АЦП был слегка перегружен с обеих границ диапазона входных
напряжений. Затем следует устранить влияние постоянного смещения. Для
этого необходимо отрегулировать смещение синусоиды таким образом, чтобы
количество попаданий в интервалы сверху и снизу относительно точки се-
редины шкалы было равным, т. е. число попаданий в интервал от кода 0 до
кода 2N~ 1 — 1 должно равняться числу попаданий в интервал от кода 2N~1 до
кода 2N — 1:
2ЛГ-1-1 2N_y
X h(n)= X h(n). (5.19)
«-0 «~2jV-1
5.2. Тестирование АЦП
31S
И наконец, необходимо оценить величину А на основании реальной
гистограммы при помощи выражения:
V
Y FS
МТ я
+А(0) + А(2Л' -1)1
(5.20)
Оцененную с помощью выражения (5.20) величину А следует подста-
вить в выражение (5.16) для вычисления значений р(п) для каждого кода.
Очень важно выполнить эти шаги при проведении реального теста, что
позволит учесть усиление и смещение АЦП и получить точные значения
/?(и), используемые при окончательном вычислении DNL по формуле (5.18).
На рис. 5.42 показаны типичные результаты измерения DNL и /А£, по-
лученные при использовании гистограммного метода с синусоидальным
сигналом для 12-разрядного АЦП AD9236 с быстродействием 80 MSPS. Такая
форма представления является характерной для технических описаний боль-
шинства ЦАП.
DNL. +0,25 младших разрядов,
-0,3 младших разрядов
INL: +0,35 младших разрядов,
-0,3 младших разрядов
Рис. 5.42. Типичные графики статических INL и DNL, полученные гистограммным
методом для 12-разрядного АЦП AD9236 с быстродействием 80 MSPS
Другим полезным приложением гистограммного метода тестирования
является измерение приведенного к входу шума АЦП. Для этого нужно
подключить ко входу АЦП согласующий резистор определенного номина-
ла, подать на вход постоянное напряжение (конкретное значение не кри-
тично, однако для удобства можно использовать напряжение, близкое к
середине шкалы) и накопить выборку выходных отсчетов. Если размах при-
веденного ко входу шума АЦП меньше 1 LSB, то все выходные отсчеты
должны соответствовать одной кодовой комбинации. Если постоянный
уровень на входе АЦП попадает точно на кодовый переход, то отсчеты
будут распределяться поровну между двумя смежными кодами. Для того
чтобы на выходе был только один код, постоянное входное напряжение
можно сместить на 1/2 LSB. Влияние приведенного ко входу шума прояв-
ляется, как показано на рис. 5.43, в распределении выходных отсчетов по
нескольким кодовым интервалам. Предположим, что приведенный ко вхо-
ду шум является гауссовым. Тогда его среднеквадратичный уровень равен
380 Глава 5. Тестирование преобразователей данных
Рис. 5.43. Измерение приведенного ко входу шума гистограммным методом с «зазем-
ленным входом»
просто стандартному отклонению (сг) гистограммы. Обычно среднеквадра-
тичный уровень шума выражается в единицах LSB.
Тестирование динамических характеристик
Подавляющее большинство современных ИС АЦП — это АЦП выборок,
которые содержат внутреннее устройство выборки и хранения того или иного
типа. Помимо традиционных статических характеристик для АЦП выборок
обычно полностью указываются динамические показатели, такие как SINAD,
ENOB, SNR, SFDR и т. д. В начале 1970-х годов основным методом тестиро-
вания динамических характеристик был «встречный» метод, в котором для
воссоздания выходного сигнала АЦП использовался высококачественный
ЦАП, что позволяло использовать традиционное аналоговое тестовое обо-
рудование. В середине 1970-х годов стало развиваться тестирование АЦП
методами ЦОС, и сегодня практически все тесты АЦП проводятся с помо-
щью цифрового анализа выходных данных АЦП тем или иным способом.
Несмотря на то что наличие оценочных плат, поставляемых производите-
лями, и программных пакетов для ПК сделало эти цифровые методы дос-
тупными для большинства серьезных пользователей, исследование некото-
рых более старых методов по-прежнему представляет интерес.
В этом разделе обсуждаются некоторые из традиционных «встречных»
методов тестирования, которые по-прежнему находят применение в лабо-
раторных тестах, а также более новые методы на базе ЦОС. Также там, где
это необходимо, обсуждаются вопросы, связанные с формированием сиг-
налов.
Неавтоматизированное «встречное» тестирование
динамических характеристик АЦП
Типичная конфигурация «встречного» теста динамических характеристик
АЦП показана на рис. 5.44. Как и в случае применения этого метода для
тестирования статических характеристик, ключом к получению хороших
5.2. Тестирование АЦП
импульсы;
• звуковые тестовые сигналы;
• видеотестовые сигналы;
• специфичные коммуникационные тестовые
сигналы;
и др.
• анализатор спектра;
• анализатор цепей;
• оборудование для измерения звука;
• оборудование для видеоизмерений;
• специфичное коммуникационное измерительное
оборудование;
• и др.
Рис. 5.44. «Встречная» конфигурация дня тестирования динамических характеристик АЦП
результатов является наличие ЦАП, имеющего лучшие статические и дина-
мические показатели, чем у тестируемого АЦП, с разрешением, по мень-
шей мере, на 2 бита выше. В 1970—1980-х годах это не было проблемой, так
как АЦП были малоразрядными, а 12-разрядные ЦАП с быстрым установ-
лением и сравнительно низкими искажениями были доступны. Иногда для
достижения достаточно низких уровней искажений использовался внешний
подавитель «выбросов» {deglitcher).
Встречный метод широко применялся для 8- и 10-разрядных высоко-
скоростных АЦП. Большинство оценочных плат, выпускавшихся произво-
дителями АЦП в этот период времени, содержало воссоздающий ЦАП, ко-
торого в большинстве случаев было достаточно для выполнения базовых
тестов динамических характеристик. На сегодняшний день если воссозда-
ющий ЦАП и включается в оценочную плату АЦП, то он обычно предназ-
начен для упрощения простых тестов функционального контроля, а реаль-
ную оценку динамических показателей АЦП следует производить при по-
мощи методов ЦОС.
Встречное тестирование по-прежнему сохраняет актуальность в задачах,
где сигнал оцифровывается, обрабатывается и преобразовывается обратно
в аналоговый вид, например в аудиокодеках. В этих случаях общая произ-
водительность системы определяется именно совместными показателями
комбинации АЦП/ЦАП, и не важно, каким образом динамические погреш-
ности распределяются между АЦП и ЦАП. В этих приложениях для изме-
рения SNR, SINAD, THD, SFDR могут использоваться описанные ранее ана-
логовые методы.
На сегодняшний день существует множество высококачественных вы-
сокоскоростных АЦП, для тестирования которых крайне сложно подобрать
совместимый по динамическим показателям ЦАП. Это особенно характер-
но в связных приложениях при разрешениях 12, 14 и 16 бит. Во многих
382 Глава 5. Тестирование преобразователей данных
случаях наиболее подходящим будет ЦАП с полной спецификацией на ди-
намические параметры, годящийся для использования в ШХУ-системах,
например представитель семейства TxDAC7.
Вернемся к рис. 5.44. Выходной сигнал воссоздающего ЦАП представ-
ляет собой последовательность прямоугольных импульсов, длительность
которых обратна частоте дискретизации. Как обсуждалось ранее в гл. 2,
частотная характеристика такого сигнала имеет вид функции sin (х)/х, по-
этому измерения, зависящие от частотной характеристики, должны прово-
диться с учетом теоретического спада АЧХ или с использованием компен-
сирующего фильтра, как показано на рисунке.
Во многих случаях для смягчения требований к времени установления
ЦАП полезно тактировать воссоздающий ЦАП с частотой, равной четной
субгармонике (К = 2, 4, 8 и т. д.) частоты дискретизации АЦП. Частота
среза выходного низкочастотного фильтра выбирается равной приблизи-
тельно fjl^lК для ослабления побочных составляющих цифро-аналогового
преобразования {images), попадающих в рабочую полосу.
Как отмечалось ранее, преимущество «встречного» метода тестирова-
ния заключается в возможности использования традиционного аналогово-
го тестового оборудования (см. перечень на рис. 5.44) и отсутствии требо-
ваний к наличию дополнительных аппаратных компьютерных средств или
программного обеспечения ЦОС.
Два наиболее эффективных теста динамической линейности АЦП, ко-
торые позволяет проводить «встречная» конфигурация, — это тест огибаю-
щей {envelope test) и тест частоты биений {beat frequency test). В тесте огиба-
ющей динамические показатели АЦП измеряются при частоте входного
сигнала, близкой к fs/2^ а в тесте на частоту биений используется сигнал с
частотой, близкой к fs, и для обоих тестов используется конфигурация,
показанная на рис. 5.45.
На рис. 5.46 показан дискретизированный сигнал при проведении теста
огибающей, когда частота входного сигнала слегка смещена относительно
fs/2 на небольшую величину, Л/ Заметьте, что низкочастотный сигнал с
fa
(Тестирование огибающей)
fs - М (Тестирование биений)
Рис. 5.45. Конфигурация теста огибающей и частоты биений
5.2.
Берем каждый второй отсчет, чтобы получить одинарную синусоиду с частотой Af.
Рис. 5.46. Тест огибающей при частоте входного сигнала, близкой Kfs/'l
частотой Л/ проявляется в двух огибающих дискретизированного сигнала.
Если множитель К на рис. 5.45 равен двум, то на воссоздающий ЦАП от-
счеты с АЦП поступают через один, и в результате одна из огибающих
устранится, а на выходе будет низкочастотный сигнал с частотой Л/ Этим
уменьшаются эффекты выбросов ЦАП, возникающих в течение времени
установления. Низкочастотный сигнал с частотой Л/ можно легко наблю-
дать на осциллографе на предмет нелинейностей и пропусков кодов или с
помощью спектроанализатора для измерения искажений. Значение часто-
ты Л/, равное нескольким сотням килогерц, как правило, дает удовлетвори-
тельные результаты. Во избежание фазовых шумов в низкочастотном сиг-
нале с частотой Л/входной сигнал и тактовый сигнал дискретизации должны
формироваться с использованием стабильных синтезаторов частот или квар-
цевых резонаторов.
Тест частоты биений, по сути, идентичен тесту огибающей, за исключе-
нием того, что частота входного сигнала в нем берется близкой к частоте
дискретизации fs (рис. 5.47). В этом случае низкочастотные «биения» полу-
чаются напрямую без необходимости деления частоты тактового сигнала
ЦАП. Однако, как и в тесте огибающей, деление частоты тактового сигнала
ЦАП уменьшает чувствительность к выбросам, возникающим в течение
времени установления.
Рис. 5.47. Тест частоты биений при частоте входного сигнала, близкой к/?
Глава 5. Тестирование преобразователей данных
Следует отметить, что если частота тактового сигнала ЦАП делится на 2
(К = 2), то низкочастотный сигнал с частотой Л/ может наблюдаться при
частотах входных сигналов, близких к любой гармонике fs/2. Это позволяет
оценивать АЦП с точки зрения использования в задачах, где требуется суб-
дискретизация. Для исключения дуальных огибающих при частотах вход-
ных сигналов, близких к гармоникам fs/2, множитель К должен быть ра-
вен, по меньшей мере, двум. Если для формирования чистой картинки низ-
кочастотного сигнала с частотой А/требуется большее время установления
ЦАП, множитель К может быть взят равным 4 или 8.
Явные динамические нелинейности и пропущенные коды можно наблю-
дать на осциллографе (рис. 5.48). Эти тесты были сделаны для 8-разрядного
параллельного АЦП при частоте дискретизации 20 MSPS и частоте входного
сигнала, близкой к 20 МГц. Растянутая картинка справа иллюстрирует влия-
ние неадекватного согласования компараторов в параллельном АЦП.
Вид сигнала полной шкалы Вид растянутого сигнала
Данные для 8-разрядного с 20 М выборок/с параллельного АЦП
fs = 20 MSPS, = 19,98 МГц, bf = 20 кГц
Рис. 5.48. Тесты огибающей и частоты биений иллюстрируют АС нелинейности АЦП
И наконец, «встречная» конфигурация может использоваться для упро-
щенного измерения входной полосы АЦП при большом сигнале. Для про-
ведения такого теста осциллограф подключается непосредственно к выходу
ЦАП до компенсации и фильтрации и синхронизируется по тактовому сиг-
налу дискретизации. Частота входного синусоидального сигнала устанав-
ливается низкой, и его уровень изменяется до тех пор, пока ЦАП не пока-
жет, что АЦП слегка ограничивает максимумы и минимумы входной сину-
соиды. Затем частоту входной синусоиды можно изменить и повторить
измерения. Увеличение уровня входного сигнала, необходимое для возник-
новения ограничения, соответствует уменьшению усиления АЦП; уменьше-
ние входного уровня соответствует увеличению усиления. Этот тест может
быть распространен далеко за пределы частоты Найквиста, так как отклик
ЦАП некритичен, а используется только для обнаружения точек ограниче-
ния АЦП. Также возможно измерение ширины полосы при малом сигнале.
Для этого уровень входной синусоиды устанавливается таким, чтобы иметь
одинаковое заданное число выходных уровней ЦАП при каждой тестируе-
мой частоте.
5.2. Тестирование АЦП
Подведем итог. «Встречный» метод тестирования АЦП может служить
для быстрой оценки совокупности динамических показателей АЦП при
разрешении приблизительно до 10 бит. Он также полезен при тестирова-
нии общей производительности в системах, где совместно с АЦП исполь-
зуется воссоздающий ЦАП. Для серьезной оценки высококачественных АЦП
с разрешением 12 бит и более требуется использование цифровых методов,
описываемых в следующих нескольких разделах. Для таких АЦП «встреч-
ный» тест может быть полезен, однако только с точки зрения быстрой про-
верки функциональных возможностей.
Измерение эффективной разрядности (ENOB)
методом аппроксимации синусоидой
Первым из обсуждаемых тестов на базе ЦОС является тест ENOB с помо-
щью метода аппроксимации синусоидой. Для получения достоверных ре-
зультатов частота входного сигнала при проведении этого теста не должна
являться субгармоникой частоты дискретизации. Это требование уже об-
суждалось в гл. 2, а также в разделе данной главы, посвященном тестирова-
нию ЦАП. Сначала в буферной памяти накапливается М отсчетов (М — длина
выборки). Хорошее эмпирическое правило заключается в том, чтобы взять
М достаточно большим (для хранения, по меньшей мере, 5 полных перио-
дов входной синусоиды)36. Затем данные считываются в компьютере, и по
ним вычисляется наиболее близкая синусоида. Для нахождения ENOB ис-
пользуется среднеквадратичное значение ошибки между аппроксимацией и
реальными отсчетами. Требования к буферной памяти могут быть смягче-
ны за счет увеличения времени теста, если тактировать память с частотой fs
/К. Конфигурация этого теста показана на рис. 5.49.
Алгоритм должен вычислять амплитуду, фазу, частоту и смещение наи-
более близкой синусоиды (алгоритм с четырьмя параметрами). В литерату-
ре описаны различные алгоритмы нахождения этих параметров27’36’ 37. Если
частота входного сигнала и частота дискретизации точно известны, следует
(можно использовать
логический анализатор)
• Накопление М выборок синусоиды;
• вычисление наилучшей кривой синусоиды по точкам данных;
• вычисление ОА, равной действительной СКВ-ошибке от наилучшей кривой синусоиды;
• QT равна теоретической Л/-разрядной СКВ ошибке квантования = q/121/2;
• ENOB = N -log2
Рис. 5.49. Конфигурация теста ENOB АЦП методом аппроксимации синусоидой
3—2852
Глава 5. Тестирование преобразователей данных
использовать алгоритм с тремя параметрами36’ 37 (алгоритм с четырьмя па-
раметрами не всегда сходится). После нахождения наиболее близкой ап-
проксимации, используя данные выборки сигнала, рассчитывается реаль-
ная среднеквадратичная ошибка квантования QA. Эта величина включает в
себя ошибки, вызванные JNL, DNL, пропущенными кодами, дрожанием
апертуры, шумом и т. п. Теоретическое значение среднеквадратичной ошибки
квантования известно и составляет
& =<?М2,
где q — вес LSB. Эффективную разрядность (ENOB — effective number of bits)
можно вычислить по формуле:
ENOB = N- log.
Qt.
(5.21)
Обратите внимание, что метод аппроксимации синусоидой не дает ин-
формации относительно составляющих нелинейных искажений, из кото-
рых складывается ошибка. Для измерения частотных показателей, таких
как SFDR, THD и т. д., необходимо использовать методы спектрального
анализа на базе БПФ, которые будут описаны в следующем разделе.
Следует отметить, что на сегодняшний день наиболее популярный ме-
тод вычисления ENOB заключается в использовании отношения сигнала к
шуму и дисторции (SINAD), обсуждавшегося в гл. 2. SINAD можно легко
определить по БПФ сигнала. Для вычисления ENOB по известному SINAD
полной шкалы используется выражение:
ENOB =
SINAD -1,76 дБ
6,02 дБ
(5.22)
Если размах входной синусоиды равен полной шкале, то при одинако-
вых условиях и одном и том же АЦП два метода вычисления ENOB должны
давать приблизительно равные результаты. Если размах входного сигнала
меньше полной шкалы, то для сравнения со значением ENOB, предсказан-
ным с помощью метода аппроксимации синусоиды (5.21), выражение (5.22)
необходимо скорректировать следующим образом:
SINAD - 1,76 дБ + уровень сигнала относительно FS
EN0B‘-------------------------' <5'23)
Основы БПФ
Этот раздел посвящен основам БПФ, необходимым для лучшего понима-
ния применения БПФ в задачах тестирования АЦП. Основной упор здесь
делается на концепции, а не на математику. Существует ряд прекрасных
источников по данному вопросу, и для начала заинтересованному читателю
рекомендуется обратиться к 39’40. В конце раздела приведены дополнитель-
ные ссылки по БПФ и ЦОС в целом45-52.
Базисом для большинства методов цифровой обработки сигналов явля-
ется анализ Фурье (рис. 5.50). Говоря простым языком, преобразование
5.2. Тестирование АЦП
Дискретное преобразование Фурье
Выборки по времени
Инверсное преобразование Фурье
Выборки по частоте
• Цифровой спектральный анализ:
— спектроанализаторы;
— обработка речи;
— обработка изображений;
— распознавание образов;
— тестирование АЦП.
• Проектирование фильтров:
— Нахождение импульсной характеристики по частотной характеристике;
— Нахождение частотной характеристики по импульсной характеристике.
• Быстрое преобразование Фурье (БПФ, FFT) — это просто эффективный алгоритм
вычисления ДПФ.
Рис. 5.50. Применение дискретного преобразования Фурье (ДПФ, DFT)
Фурье (фактически существует несколько разновидностей таких преобразо-
ваний) позволяет преобразовать сигнал, описанный во временной области, в
его эквивалентное представление в частотной области. И наоборот, если из-
вестен частотный спектр сигнала, то обратное преобразование Фурье по-
зволяет восстановить соответствующий сигнал во временной области.
Помимо частотного анализа эти преобразования полезны при проекти-
ровании фильтров, так как частотная характеристика фильтра может быть
найдена путем взятия преобразования Фурье от его импульсной характери-
стики. И наоборот, если задана частотная характеристика, то требуемая
импульсная характеристика может быть получена взятием обратного пре-
образования Фурье от частотной характеристики. Знание импульсной ха-
рактеристики позволяет проектировать цифровой фильтр, так как коэффи-
циенты КИХ-фильтра идентичны отсчетам его дискретной импульсной ха-
рактеристики.
Семейство преобразований Фурье {преобразование Фурье, ряды Фурье,
дискретно-временные ряды Фурье и дискретное преобразование Фурье) пред-
ставлено на рис. 5.51. Эти общепринятые определения формировались (не
обязательно логично) в течение многих лет и зависят от того, является ли
сигнал непрерывным апериодическим {continuous-aperiodic), непрерывным пе-
риодическим {continuous-periodic), апериодической выборкой {sampled-aperiodic)
или периодической выборкой {sampled-periodic). В этом контексте термин
sampled обозначает то же самое, что и термин discrete (т. е., дискретный во
времени набор отсчетов).
Единственным представителем этого семейства, имеющим отношение
к цифровой обработке сигналов, является дискретное преобразование Фурье,
ДПФ {Discrete Fourier Transform, DFT), которое оперирует с дискретным пе-
риодическим сигналом во временной области. Для того чтобы сигнал можно
было разложить в виде суммы гармоник, он должен быть периодическим.
Однако входные данные для ДПФ ограничены конечным числом отсче-
тов {М). Эту дилемму можно преодолеть, если мысленно состыковать друг
с другом бесконечное число групп из одинаковых М отсчетов, обеспечив
Глава 5. Тестирование преобразователей данных
• Преобразование Фурье:
сигнал непрерывен и апериодичен
• Ряд Фурье:
сигнал непрерывен и периодичен
• Ряд Фурье с дискретным временем:
выборки из апериодического сигнала
• Дискретное преобразование Фурье:
(дискретный ряд Фурье), выборки из периодичес-
кого сигнала
Выборка 0 Выборка М - 1
Рис. 5.51. Семейство преобразований Фурье
таким образом математическую (но не реальную) периодичность, как пока-
зано на рис. 5.51.
Фундаментальное выражение для нахождения Л/-точечного ДПФ выг-
лядит следующим образом:
Х(к) = — У x(n)e~J2,,"k/M =
М "
1 М-1
= — У x(n)[cos(2nnk/М) - у sin
М n=Q
(5.24)
Раскроем некоторые обозначения, относящиеся к данному выраже-
нию (также см. рис. 5.52). Х(к) (заглавная X) обозначает результат ДПФ в
k-Й спектральной точке, где к принимает значения от 0 до М— 1. Величина М
представляет число отсчетов в выборке ДПФ и должна равняться степени
двойки (необходимо для процедур вычисления БПФ).
• Периодический сигнал может быть представлен в виде суммы выбранных должным
образом синусных и косинусных функций (Жан Батист Жозеф Фурье, 1807)
• ДПФ работает с конечным числом (Л4) оцифрованных отсчетов во временной облас-
ти, х(л). Когда набор этих отсчетов повторяется бесконечное число раз, с точки зре-
ния преобразования сигнал становится периодическим
• Комплексный спектр ДПФ Х(к) представляет собой результат корреляции входных
отсчетов с базисными синусными и косинусными функциями:
-| М-1 -j2nnk
Х(к) =—Ух(п)е м =
м£о
1 V / >Г 2лпк . . 2япк1
77 L х(п) cos " 1 s,n
М [ м м \
п-0 L ->
0<к<М- 1.
Рис. 5.52. ДПФ
5.2. Тестирование АЦП
Величина х (п) (строчная х) обозначает n-Й временной отсчет, где п так-
же принимает значения от 0 до М — 1. В общем случае х{п) может быть
реальным или комплексным, однако для простого АЦП временные отсчеты
имеют только вещественную составляющую, а мнимая составляющая при-
равнивается к нулю.
Обратите внимание, что синусные и косинусные составляющие в урав-
нении могут быть выражены в полярных или декартовых координатах, связь
между которыми осуществляется с помощью формулы Эйлера:
eje = cos в + 7 sin в.
(5.25)
• X(k) = ReX(k) + /lmX(k).
• MAG [X(k)] = 7ReX(k)2 +lmX(k)2.
riU A )
Рис. 5.53. Преобразование вещественной
и мнимой частей результата ДПФ в мо-
дуль и фазу
Поэтому выходной спектр ДПФ, как
показано на рис. 5.53, может быть пред-
ставлен в полярной (модуль и фаза) или
декартовой (вещественная и мнимая ча-
сти) системе координат. Преобразова-
ние между этими двумя формами оче-
видно.
На практике для вычисления ДПФ
используется БПФ {Fast Fourier
Transform, FFT). БПФ — это просто ал-
горитм, позволяющий уменьшить требу-
емое число математических вычислений.
Существует много различных алгорит-
мов БПФ, однако наиболее популярным
является алгоритм по основанию 2
(Radix-2). При вычислении ДПФ по
формуле (5.24) для получения одного
члена последовательности Х(к) требуется М операций комплексного ум-
ножения и М — 1 операций комплексного сложения. Для вычисления все-
го преобразования требуется М2 комплексных умножений и М (М — 1)
комплексных сложений, т. е. 2М2 — Мкомплексных операций. Алгоритм
БПФ был разработан для снижения числа вычислений и для исключения
избыточных операций. В нем используются свойства симметричности ДПФ.
Например, алгоритм по основанию 2 требует всего Af log2 М комплексных
операций. Для 1024-точечного преобразования БПФ требуется всего 10240
комплексными операциями по сравнению с 2096128 комплексных опера-
ций ДПФ. Для применения алгоритмов БПФ М должно быть целой сте-
пенью двойки.
Независимо от типа алгоритма БПФ формирует для каждого отсчета во
временной области комплексно-сопряженную пару Re У(£) + jlmX(fc).
Например, если размер выборки во временной области М = 16384 (214),
результирующий массив БПФ будет содержать 16384 комплексных отсчета.
Для формирования по этим данным графика в частотной области необхо-
димо вычислить модуль каждого комплексного отсчета при помощи выра-
жения:
MAGX(fc) = VReXOt)2 +Im X()t)2.
(5.26)
Глава 5. Тестирование преобразователей данных
При необходимости можно вычислить также соответствующую фазу
каждой точки при помощи выражения:
срХ(к) = tan
ImJT(fc)
ReJTOt)’
(5.27)
Большинство программ БПФ написаны с расчетом на комплексные вход-
ные данные, и для них результат БПФ будет содержать 16384 значения
модуля (и фазы), соответствующие частотам в диапазоне между +fs/2 и
—fs/2. Если используется выражение (5.24), то «положительные» частоты
соответствуют точкам в спектре БПФ от к = 0 до к = М/2 (диапазон частот
от 0 до fs/2\ а «отрицательные» частоты — точкам от к = М/2 до к = М — 1
(диапазон частот от fs/2 до fs). Несмотря на то что «комплексных» АЦП не
существует, во многих задачах часто используют два АЦП, синхронно оциф-
ровывающих потоки данных I и Q, которые поступают с квадратурного
демодулятора. При этом входные данные БПФ являются комплексными,
однако эта ситуация является особенной.
При тестировании одиночного АЦП входные данные БПФ являются
вещественными, и мнимая часть каждого входного комплексного отсчета
должна быть приравнена к нулю. Для вещественных входных данных от-
счеты в спектре БПФ от к = М/2 до к = М — 1 («отрицательные» частоты)
являются зеркальной копией отсчетов от к = 0 до к = М/2 и должны игно-
рироваться.
Результат типичного Л/-точечного БПФ показан на рис. 5.54. Разреше-
ние БПФ определяется величиной М, и ширина элемента разрешения по
частоте равна fs /М. Чем больше М, тем выше разрешение по частоте. На
рис. 5.54 также показана взаимосвязь между средним шумовым порогом
БПФ и уровнем широкополосного шума квантования (шум квантования имеет
приблизительно равномерное распределение в полосе частот от 0 до fs/2).
При каждом удвоении М средний шум в элементе разрешения по частоте
Л/ = fs /М уменьшается на 3 дБ. Однако следует отметить, что усреднение
результатов нескольких отдельных БПФ не приводит к изменению шумо-
вого порога, а только уменьшает разброс шумовых составляющих.
Рис. 5.54. Выход БПФ, показывающий эффект усиления вследствие обработки
5.2. Тестирование АЦП 391
Как и для описанных ранее тестов, требования к скорости буферной
памяти могут быть смягчены, если тактировать ее с пониженной частотой,
равной fs/K. Однако, так как БПФ выполняется над реальными дискретны-
ми данными, частота дискретизации при этом будет равной fs/K, а не fs, и
в результате наложения в спектре БПФ проявятся составляющие с частота-
ми, превышающими fs/2K. Это следует иметь в виду при анализе результа-
тов БПФ.
Для получения спектрально чистых результатов в окне данных БПФ
(входной выборке) должно укладываться целое число периодов синусоиды,
в противном случае будет происходить явление размывания, или просачи-
вания, спектра (spectral leakage). Размывание спектра сигнала при БПФ-
обработке наиболее наглядно иллюстрирует пример выполнения Л/-то-
чечного БПФ над синусоидальным входным сигналом. Будут рассмотре-
ны две ситуации. На рис. 5.55 отношение частоты дискретизации к частоте
входного сигнала таково, что в окне данных (кадре или выборке) содержит-
ся в точности целое число периодов. Вспомним, что вычисление ДПФ пред-
полагает, что бесконечное число таких выборок следует друг за другом,
формируя периодический сигнал, как показано на рисунке. При этих усло-
виях сигнал является периодическим, и результатом ДПФ или БПФ будет
одна гармоника, расположенная на частоте входного сигнала.
Окно
данных
Периодическое
расширение
Периодическое
” расширение
М — регистрируемая длина
Мс — число циклов в окне данных
Рис. 5.55. БПФ-синусоиды с целым числом периодов в выборке
На рис. 5.56 показана ситуация, когда в выборке не укладывается целое
число периодов синусоиды. Разрывы, возникающие в граничных точках
выборки, вызывают размывание спектра, проявляющееся в появлении бо-
ковых лепестков. В дополнение к возникновению боковых лепестков ос-
новной лепесток синусоиды расширяется и занимает несколько элементов
разрешения по частоте. Этот процесс эквивалентен умножению входной
синусоиды на прямоугольный импульс, спектр которого имеет известный
вид sin (х)/х и связанные с этим широкий основной лепесток и боковые
лепестки.
Глава 5. Тестирование преобразователей данных
' Д /ПД АД /О
h \ \ I. \ \ / \ \ \ I \ \ Г\ \\ / i i /
f I I I I \ / I I I /• 1 1 ' \ ' 1 ' \ / ' ' I /
iiii \^y • । i ’ • । • • \ж/ • • । '। । । । \*/ । । । '
iiii iii iiii v । । । । । i । ж । । ।
0 M - 1 о
Периодическое_____ _______ Окно
расширение данных
М - 1
Периодическое
расширение
Рис. 5.56. БПФ-синусоиды с дробным числом периодов в выборке
Обратите внимание, что уровень первого бокового лепестка всего на 12 дБ
ниже уровня основного лепестка, и спад боковых лепестков составляет лишь
6 дБ на октаву. Эта ситуация неприемлема для большинства задач спект-
рального анализа. Поскольку в практических приложениях БПФ точные
значения частот входных сигналов неизвестны, для минимизации боковых
лепестков следует предпринимать определенные шаги. Это — выбор окна,
отличного от прямоугольного. Входные временные отсчеты умножаются на
соответствующую функцию окна, что приводит к обнулению сигнала на
границах выборки, как показано на рис. 5.57. Процедура выбора окна зак-
лючается в первую очередь в поиске компромисса между расширением ос-
Рис. 5.57. Умножение на функцию окна для уменьшения эффекта размывания спектра
новного лепестка и спадом боковых лепестков. Для углубленного изучения
вопросов, связанных с применением оконных функций, крайне рекомен-
дуется обратиться к 50.
На рис. 5.58 представлены математические функции, описывающие 4 по-
пулярных окна (Хэмминга, Блэкмана, Хэннинга и минимальное 4-элемен-
тное Блэкмана—Харриса). Рассчитать эти функции сравнительно неслож-
но, и для снижения влияния на время вычисления БПФ коэффициенты
окна обычно вычисляются заранее и хранятся в памяти DSP. На рис. 5.59
показаны частотные характеристики прямоугольного окна, окон Хэмминга
и Блэкмана. При тестировании АЦП часто используются окно Хэннинга и
Рис. 5.59. Частотные характеристики прямоугольного окна, окон Блэкмана и Хэммин-
га при М = 256
Глава 5. Тестирование преобразователей данных
дБ о
Минимальное 4-элементное
окно Блэкмана—Харриса
М = 1024
Частотные отсчеты
Рис. 5.60. Сравнение двух популярных функций окна, применяемых при тестировании АЦП
Окно Ханнинга
М = 1024
256
минимальное 4-элементное окно Блэкмана—Харриса, частотные характе-
ристики которых показаны на рис. 5.60.
Рисунок 5.61 иллюстрирует компромисс между расширением основного
лепестка и амплитудой и спадом боковых лепестков для популярных функ-
ций окна.
Окно Ширина по уровню 3 дБ (в элементах разрешения по частоте, Bins) Ширина по уровню 6 дБ (в элементах разрешения по частоте, Bins) Наибольший боковой лепесток (дБ) Спад боковых лепестков (дБ на октаву)
Прямоугольное 0,89 1,21 -12 6
Хэмминга 1,3 1,81 -43 6
Блэкмана 1,68 2,35 -58 18
Хэннинга 1,44 2,00 -32 18
Минимальное 4-элементное Блэкмана— Харриса 1,90 2,72 -92 6
Рис. 5.61. Популярные окна и их характеристики
Конфигурация теста на базе БПФ
и измерения с его помощью
Типичная конфигурация теста на базе БПФ, показанная на рис. 5.62, может
быть реализована несколькими способами. Применение прежде всего оце-
ночных плат от производителей сильно упрощает тест и гарантирует пра-
вильное подсоединение критичных компонентов, окружающих АЦП. Хо-
рошо спроектированная оценочная плата должна содержать входные бу-
ферные усилители и/или трансформаторы для подачи сигнала на АЦП, схемы
5.2. Тестирование АЦП 395
(можно использовать логический анализатор)
Рис. 5.62. Конфигурация теста на базе БПФ
формирования тактового сигнала дискретизации (возможно, даже стабиль-
ный кварцевый генератор), источники опорного напряжения (при необхо-
димости), регистры выходных данных и необходимые входные/выходные
разъемы. На этом этапе нельзя недооценивать важность источника такто-
вого сигнала дискретизации с малым дрожанием фазы. Влияние дрожания
фазы тактового сигнала дискретизации на SNR АЦП описывалось ранее в
гл. 2, а в гл. 6 приводятся дополнительные соображения относительно ис-
точников тактового сигнала с малым дрожанием фазы. Также важно быть
внимательным к разводке, заземлению и развязкам, поскольку наводки
выходных цифровых сигналов на тактовый сигнал дискретизации или на
вход АЦП могут ухудшать его SNR, SINAD и SFDR. По этим причинам
рекомендуется использовать оценочные платы, выпускаемые производите-
лями АЦП.
Следует отметить, что на сегодняшний день существуют разнообразные
популярные коммерческие программные пакеты, включающие в себя про-
цедуры БПФ53’54’55, поэтому необходимость в самостоятельном написании
программ вычисления БПФ возникает редко.
Для того чтобы еще более упростить процесс оценки, компания Analog
Devices предлагает оценочный комплект FIFO для высокоскоростных АЦП
(High Speed ADC FIFO Evaluation Kit), который подключается непосред-
Рис. 5.63. Оценочный комплект FIFO для высокоскоростных АЦП производства Analog
Devices
Глава 5. Тестирование преобразователей данных
ственно к разъему на оценочной плате АЦП (рис. 5.63). Оценочный комп-
лект FIFO включает плату памяти для сбора блока данных от АЦП, а также
WindowsT-coBMecTHMoe (95, 98, 2000, NT) программное обеспечение ADC
Analyzer™. Плата FIFO может подключаться к параллельному порту ПК
через стандартный принтерный кабель и использоваться совместно с про-
граммным обеспечением ADC Analyzer для быстрой оценки характеристик
высокоскоростного АЦП.
Плата FIFO содержит два 16-разрядных FIFO-канала объемом 32 К, и
сбор данных может осуществляться со скоростью 133 MSPS в каждом кана-
ле. Возможна модернизация памяти для увеличения объема FIFO до 64, 132
или 256 К. Имеются две версии FIFO: одна версия используется со сдвоен-
ными АЦП или ЦАП, имеющими демультиплексированные цифровые вы-
ходы, а другая — с одноканальными АЦП. Пользователи могут просматри-
вать БПФ и анализировать информацию об отношении сигнал/шум, SINAD,
SFDR, THD и гармонических искажениях.
После вычисления БПФ в программном обеспечении ADC Analyzer воз-
можны два способа оценки качества АЦП: графический и вычислитель-
ный. Для того чтобы построить график в удобной форме, значения модуля
спектра должны быть преобразованы в децибелы по формуле:
дБ = 10 log10
Модуль1 ^„ Модуль
Модуль2МАХ J [ МодульМАХ
(5.28)
где Модуль — это отдельные элементы массива, вычисляемого в процессе
выполнения БПФ, а МодульМАХ — это максимальный элемент массива.
На рис. 5.64 показан типичный график, полученный с помощью отла-
дочного комплекта FIFO и пакета ADC Analyzer для 12-разрядного АЦП
AD9430 с быстродействием 170/210 MSPS. При проведении теста частота
дискретизации была взята равной 170 MSPS, частота входного сигнала —
10,314 МГц, а размер БПФ — 16384 точки.
Рис. 5.64. Типичный вид результата БПФ для 12-разрядного АЦП AD9430 с быстро-
действием 170/210 MSPS, полученный с помощью комплекта FIFO
5.2. Тестирование АЦП
• Устройство, номер устройства, разрядность, температура, директория по умолчанию.
• Число отсчетов БПФ (до 32 К, по умолчанию 16384); при модернизации FIFO — до
256 К.
• Дополнительный или прямой двоичный код.
• Число усреднений БПФ (по умолчанию 5).
• Частота дискретизации.
• Расширение (размытие) спектра основной составляющей (по умолчанию ±10 эле-
ментов разрешения по частоте для минимального 4-элементного окна Блэкмана-
Харриса, ±25элементов — для окна Хэннинга).
• Расширение спектра гармоник (по умолчанию ±3 элемента разрешения по частоте).
• Расширение спектра постоянной составляющей (по умолчанию 6 элементов разре-
шения по частоте).
• Максимальное число гармоник (по умолчанию 2, 3, 4, 5, 6-я).
• Взвешивание с помощью окна (окно Хеннинга, минимальное 4-элементное окно Блэк-
мана-Харриса; по умолчанию без взвешивания).
• Использование калькулятора когерентной частоты дискретизации при обработке без
взвешивания.
• Потребляемая мощность.
Рис. 5.65. Входные параметры для конфигурационного файла пакета ADC Analyzer
Ключевые входные параметры для конфигурационного файла пакета ADC
Analyzer перечислены на рис. 5.65. Обратите внимание, что усреднение ре-
зультатов нескольких БПФ не приводит к изменению шумового порога, а
только уменьшает разброс шумовых составляющих. Большинство входных
параметров файла говорит само за себя, однако выбор между когерентной и
некогерентной дискретизацией заслуживает дополнительного обсуждения.
Если используется когерентная дискретизация, то, как показано на
рис. 5.66, основная частота и ее гармоники попадают в один интервал час-
тотного разрешения. Между частотой входного сигнала,/^, и частотой дис-
кретизации, fs, необходимо соблюдать строгое соотношение:
Рис. 5.66. Сигнал и гармоники в спектре БПФ при когерентной дискретизации
(Г398 Глава 5. Тестирование преобразователей данных
где Мс — целое число периодов входной синусоиды, содержащееся в вы-
борке длиной М. При вычислении SINAD энергия шума и искажений опре-
деляется как корень из суммы квадратов значений во всех элементах разре-
шения по частоте (за исключением соответствующего нулевой частоте).
Во избежание появления в выборке повторяющихся наборов данных и
для гарантии случайного спектра шума квантования Мс должно быть про-
стым числом. Для поддержания точного соотношения входной сигнал и
тактовый сигнал дискретизации должны генерироваться синтезаторами ча-
стот с ФАПЧ. В состав пакета ADC Analyzer входит калькулятор когерент-
ной дискретизации (Coherent Sampling Calculator), упрощающий вычисле-
ние частоты входного сигнала. Для использования калькулятора когерент-
ной дискретизации сначала необходимо задать в конфигурационном файле
корректное значение частоты дискретизации. Затем вводится либо прибли-
зительное значение частоты аналогового входного сигнала, либо число пе-
риодов синусоиды. На основании входных данных калькулятор выносит
рекомендации по значению когерентной частоты входного сигнала или числу
периодов.
Если используется некогерентная дискретизация, то, как показано на
рис. 5.67, энергия основной частоты и ее гармоник просачивается в сосед-
ние элементы частотного разрешения. Как обсуждалось ранее, расширение
спектра зависит от конкретного применяемого окна. При вычислении энер-
гии основной частоты сигнала и ее гармоник необходимо брать корень из
суммы квадратов значений в нескольких соседних элементах разрешения,
как показано на рис. 5.67. Важно, чтобы эти элементы разрешения не учи-
тывались для подсчета уровня шума, так как это приведет к ошибкам вы-
числения SNR.
Постоянная составляющая при некогерентной дискретизации тоже рас-
ширяется, и во избежание ошибочных результатов соответствующие эле-
менты разрешения по частоте при вычислении уровня шума также следует
исключить. В пакете ADC Analyzer по умолчанию для минимального 4-эле-
ментного окна Блэкмана—Харриса принимается, что расширение спект-
ра основной частоты составляет ±10, а для окна Хэннинга — ±25 элементов
Рис. 5.67. Расширение спектра сигнала и гармоник при некогерентной дискретизации
5.2. Тестирование АЦП 399
разрешения по частоте. Расширение спектра гармоник по умолчанию зада-
ется равным ±3 элемента, а постоянной составляющей — 6 элементов раз-
решения.
При необходимости все эти величины могут быть изменены, хотя уста-
навливаемые по умолчанию значения в большинстве случаев дают хорошие
результаты.
Если эффект размывания спектра сигнала не учесть, то это может в
значительной степени повлиять на результаты измерения SNR и SINAD.
Значение шума, используемое при вычислении SNR, получается путем взя-
тия корня из суммы квадратов значений во всех шумовых элементах раз-
решения, за исключением элементов, которые в результате размывания
спектра будут занимать постоянная составляющая, основная частота сиг-
нала, 2, 3, 4, 5 и 6-я гармоники.
Уровень шума и искажений при вычислении SINAD получается путем
взятия корня из суммы квадратов значений всех шумовых элементов разре-
шения и элементов разрешения, в которые попадают гармоники, за исклю-
чением элементов, которые в результате размывания спектра будут зани-
мать основная частота и постоянная составляющая. Поэтому при задей-
ствовании элементов разрешения, в которые просачивается сигнал или
постоянная составляющая и амплитуда в которых превышает шумовой по-
рог, рассчитанное значение SINAD будет меньше реального.
Принятие решения об использовании когерентного или некогерент-
ного тестирования в большой степени зависит от личных предпочтений
пользователя. В то время как при когерентном тестировании не требует-
ся взвешивание, набор подходящих частот и их соотношений может быть
утомительным, особенно при необходимости проведения многотональ-
ных тестов. Кроме того, для поддержания точных соотношений частот
потребуются синтезаторы частоты с ФАПЧ. Можно возразить, что коге-
рентное тестирование больше подходит для лабораторных исследований,
а некогерентное тестирование в большей степени соответствует реаль-
ным условиям, когда точные частоты входных сигналов неизвестны. Од-
• Воссоздание сигнала во временной области по собранным данным.
• График БПФ.
• Вычисляемые и отображаемые величины:
— напряжения аналогового и цифрового питания;
— частота дискретизации;
— частота аналогового входного сигнала;
— SNR (относительно сигнала);
— SNRFS (относительно полной шкалы);
— SINAD;
— уровень основной частоты сигнала (дБ FS);
— гармоники: 2, 3, 4, 5, 6-я (дБ);
— WoSpur: наихудшая побочная составляющая (дБ), не являющаяся гармоникой;
— THD (корень из суммы квадратов 2, 3, 4, 5 и 6-й гармоник), дБс;
— SFDR (дБс);
— шумовой порог (дБ FS).
Рис. 5.68. Результаты работы пакета ADC Analyzer для однотонального входного сигнала
Глава 5. Тестирование преобразователей данных
• Воссоздание сигнала во временной области по собранным данным.
• График БПФ.
• Вычисляемые и отображаемые величины:
— напряжения аналогового и цифрового питания;
— частота дискретизации;
— Analog 1: частота первого входного аналогового сигнала;
— Analog2: частота второго входного аналогового сигнала;
— Fundamentail: уровень первого основного тона (дБ FS);
— Fundamental: уровень второго основного тона (дБ FS);
— F} + F2: сумма основных тонов (дБ FS);
— F2 - F^ разность основных тонов (дБ FS);
— Уровни интермодуляционных продуктов на 2Fy - F2, 2F} + F2, 2F2 - Fv 2F2 + F, (дБ FS);
— WoIMD: наихудшая составляющая интермодуляционных IMD-искажений (дБс);
— SFDR (дБс);
— шумовой порог (дБ FS).
Рис. 5.69. Результаты работы пакета ADC Analyzer для двухтонального входного сигнала
нако если тесты проведены правильно, оба они дают примерно одинако-
вые результаты.
Пакет ADC Analyzer позволяет не только строить график БПФ, но так-
же вычислять различные показатели качества. На рис. 5.68 приведен их
перечень для однотонального тестового сигнала, а на рис. 5.69 — для двух-
тонального.
Проверка точности БПФ
Во многих случаях желательно выполнить проверку самой программы БПФ,
независимо от реального тестируемого АЦП. Это можно сделать несколь-
кими способами. Простой метод заключается в том, чтобы отключить не-
сколько младших разрядов АЦП и посмотреть, будут ли при пониженном
разрешении вычисленные значения SINAD и SNR близки к теоретическим.
Этот метод основан на предположении о том, что показатели высококаче-
ственного 12- или 14-разрядного АЦП при разрешении 8 бит должны при-
ближаться к теоретическим. Усечение младших разрядов может быть реа-
лизовано аппаратно или программно.
Другой метод заключается в формировании идеальной А-разрядной
цифровой синусоиды, выполнении над ней БПФ и сравнении результатов
с теоретическими. Временной и-й отсчет для идеального A-разрядного АЦП
может быть записан в виде:
v(n) = INT
(5.30)
где функция INT просто реализует усечение дробной части v(n).
Значения SNR и SINAD, полученные по результатам БПФ, можно срав-
нить с теоретическими, а для определения полного динамического диапа-
зона процедуры БПФ нужно просто увеличивать Адо тех пор, пока SNR и
SINAD не перестанут увеличиваться на 6,02 дБ с каждым дополнительным
битом разрешения.
5.2. Тестирование АЦП 401
Формирование синусоидальных входных сигналов
с малыми искажениями
Формирование тестовых сигналов со спектральной чистотой, необходимой
для проведения высокочастотных измерений с малыми искажениями, яв-
ляется непростой задачей. Генераторы сигналов с низкими искажениями
существуют, однако они обычно достаточно дороги. Если подобное обору-
дование недоступно, то пригодные для быстрой оценки тестовые сигналы
могут формироваться с использованием более дешевых генераторов и под-
ходящих схем фильтрации.
Схема формирования однотонального сигнала с малыми искажениями
показана на рис. 5.70. Для предотвращения увеличения шумового порога
АЦП генератор гармонических колебаний должен иметь низкий фазовый
шум. Выходной сигнал генератора пропускается через полосовой (или низ-
кочастотный) фильтр, который устраняет любые гармоники, присутствую-
щие в нем. Если генератор имеет достаточно низкие искажения, то фильтр
может и не понадобиться. Искажения генератора должны быть на 10 дБ
ниже требуемой точности измерения. Тестируемое устройство (АЦП) изо-
лируется от выхода фильтра при помощи 6-децибельного аттенюатора. Для
достижения наилучших показателей импеданс каждого из портов следует
поддерживать на уровне 50 Ом (могут использоваться и 75-омные компо-
ненты, однако 50-омные аттенюаторы и фильтры более широко распрост-
ранены). Согласующий резистор, Rr выбирается таким образом, чтобы эк-
вивалентное сопротивление параллельного соединения RT и входного со-
противления тестируемого устройства равнялось 50 Ом.
Перед проведением измерения искажений необходимо установить кор-
ректные значения частоты и амплитуды выходного сигнала генератора.
Измерьте искажения на выходе аттенюатора, заменив тестируемое устрой-
ство 50-омным согласующим резистором (обычно 50-омным входом спект-
роанализатора). Затем замените 50-омную нагрузку на RT и тестируемое
устройство. Снова измерьте искажения на входе тестируемого устройства.
Эта процедура позволяет обнаруживать ситуации, когда тестируемое уст-
ройство представляет собой нелинейную нагрузку. Такие устройства (на-
пример, параллельные АЦП с входной емкостью, зависящей от уровня сиг-
нала, или КМОП АЦП на переключаемых конденсаторах) могут вносить
искажения во входной сигнал.
Рис. 5.70. Генератор однотонального сигнала с низкими искажениями
Глава 5. Тестирование преобразователей данных
Рис. 5.71. Генератор двухтонального сигнала с
малыми искажениями
Формирование двух тонов, пригодных для измерения IMD (интермоду-
ляционных искажений), может быть очень сложной задачей. Генератор двух-
тонального сигнала с малыми искажениями показан на рис. 5.71. Как видно
из рисунка, требуется два полосовых (или низкочастотных) фильтра. Подав-
ление гармоник каждым фильтром должно быть лучше требуемой точности
измерений, по меньшей мере, на 6 дБ. 6-децибельные аттенюаторы на выхо-
дах каждого из фильтров служат для их изоляции друг от друга и предотвра-
щения возможной перекрестной модуляции. Сигналы с выходов аттенюато-
ров объединяются в пассивном 50-омном сумматоре, и суммарный сигнал
подается на тестируемое устройство. Устанавливается требуемый уровень
выходных сигналов генераторов и измеряется IMD сигнала с выхода сумма-
тора. Для обнаружения нелинейности нагрузки, как и в предыдущем случае,
измерения следует проводить дважды: с использованием только согласующе-
го резистора и с подключенным тестируемым устройством.
При измерениях с такими сигналами аналоговые спектроанализаторы
следует независимо проверять на предмет искажений. Большинство спект-
роанализаторов имеет 50-омные входы, поэтому для моделирования тестиру-
емых устройств, которые дают нагрузку более 50 Ом, между тестируемым
устройством и анализатором необходимо подключить развязывающий рези-
стор. После регулировки ширины полосы, частоты развертки (качания) и
чувствительности спектроанализатор следует проверить на предмет перегрузки
по входу, как показано на рис. 5.72. Наиболее простой способ проверки зак-
лючается в использовании переменного аттенюатора для внесения во вход-
ной тракт анализатора фиксированного значения ослабления. И сигнал, и
любые гармоники на экране спектроанализатора должны быть ослаблены на
одинаковую величину (например, на 10 дБ), определяемую аттенюатором.
Если гармоники ослаблены более чем на 10 дБ, то входной усилитель анали-
затора вносит искажения, и чувствительность необходимо уменьшить. Мно-
гие анализаторы имеют на передней панели аттенюатор для внесения извес-
тного ослабления при проверке на перегрузку. Следует отметить, что боль-
шинство высококачественных современных спектроанализаторов не столь
чувствительны к перегрузке по входу, как их более старые аналоги. Однако
эти простые проверки не займут много времени, и для гарантии точных из-
мерений искажений стоит предпринять эти дополнительные шаги.
5.2. Тестирование АЦП
50 Ом
50 Ом
Генератор
синуса
Переменное
ослабление
Анализатор
спектра
Испытуемая нагрузка = 50 Ом + Rs
Х1 > Х2 указывает на перегрузку
Рис. 5.72. Проверка чувствительности спектроанализатора к входной перегрузке
От 50 Ом-ного
измеряемого
источника
Рис. 5.73. Режекгорный фильтр подавляет основную частоту сигнала, минимизируя пере-
грузку анализатора
Если обнаруживается, что спектроанализатор чувствителен к перегруз-
ке, то можно применить метод минимизации этой проблемы, показанный
на рис. 5.73. Сначала при выключенном узкополосном режекторном филь-
тре измеряется амплитуда основной частоты сигнала. Затем измеряется уро-
вень гармоник при включенном режекторном фильтре. К измеренному уров-
ню гармоник необходимо прибавить вносимое режекторным фильтром ос-
лабление, X дБ.
Тестирование уровня мощности шумов (NPR)
Как обсуждалось в гл. 2, задача измерения уровня мощности шумов (NPR,
Noise Power Ratio) появилась на раннем этапе развития мультиплексированных
телефонных систем с частотным разделением (FDM, frequency-division-
multiplexed). Совокупность FDM-каналов при измерении моделируется в виде
гауссовского шума, и из входного сигнала «вырезается» канал шириной
4 кГц. После прохождения через систему передачи остаточный сигнал в обла-
стях подавления представляет собой комбинацию проникающего шума (clipping
noise), теплового шума и продуктов интермодуляционных искажений. NPR
определяется просто как отношение средней мощности за пределами полосы
подавления к средней мощности шума в полосе подавления, т. е. как «глуби-
Глава 5. Тестирование преобразователей данных
Необходимо иметь 25—50 элементов
СКВ уровень
шума, дБ
Рис. 5.74. Конфигурация теста уровня мощности шумов (NPR)
на» области подавления. Так как NPR зависит от амплитуды сигнала, ее изме-
няют до тех пор, пока не будет достигнута точка максимального NPR. Упро-
щенная конфигурация теста для измерения NPR АЦП показана на рис. 5.74.
Концептуально этот тест легко реализовать путем взятия БПФ от выход-
ных данных АЦП и анализа спектра. Однако на практике для измерения NPR
в речевом канале с полосой 4 кГц необходима крайне большая буферная па-
мять и крайне большая размерность БПФ. Например, при частоте дискретиза-
ции 170 MSPS БПФ длиной 256 К точек имеет частотное разрешение (ширину
элемента разрешения по частоте), равное 170 MSPS/256 ООО = 664 Гц. При
этом внутрь полосы подавления попадает всего 6 отсчетов БПФ, что недоста-
точно для получения повторяющихся измерений уровня шума. Решение про-
блемы заключается в использовании вместо непрактичного с большой размер-
ностью БПФ широкого режекторного фильтра. Ширину полосы режекторно-
го фильтра необходимо увеличить настолько, чтобы в нее попадало, по меньшей
мере, 25—50 отсчетов. Даже при более широкой полосе подавления для стаби-
лизации значения NPR следует усреднить результаты нескольких БПФ. Ис-
пользование более широких полос подавления ни в коей мере не искажает
результаты, а приводит к более достоверному моделированию более широких
каналов, используемых в современных системах связи. В действительности,
тест NPR является хорошей альтернативой многотональному тесту при усло-
вии, что входные тональные сигналы не коррелированы по фазе. Как и при
любом другом тесте высококачественных АЦП, основанном на БПФ, уровень
дрожания фазы тактового сигнала дискретизации должен быть приемлемо
низким, чтобы не влиять на шумовой порог АЦП.
На рис. 5.75 показан типичный график NPR для 12-разрядного АЦП
AD9430 с быстродействием 170 MSPS. Число точек БПФ равно 16384, и,
следовательно, разрешение по частоте составляет 170 MSPS/16384 = 10,4 кГц.
Ширина полосы режекторного фильтра составляет приблизительно 500 кГц,
и в нее попадает примерно 48 отсчетов. Из-за варьирующихся требований к
центральной частоте, ширине полосы и ослаблению в полосе подавления
режекторные фильтры для тестирования NPR АЦП обычно нужно изготав-
ливать на заказ.
5.2. Тестирование АЦП 405
Рис. 5.75. Измеренное значение NPR 12-разрядного АЦП AD9430 с быстродействием
170 MSPS составляет 57 дБ (теоретическое —62,7 дБ)
Измерения дрожания апертуры АЦП
синхронизированным гистограммным методом
Конфигурация теста для измерения дрожания апертуры АЦП «синхронизи-
рованным гистограммным» (locked-histogram) методом показана на рис. 5.76.
Для минимизации взаимного дрожания фазы входного сигнала и тактового
сигнала дискретизации АЦП они формируются одним тактовым генерато-
ром с малым дрожанием фазы. Напомним, что, как обсуждалось в гл. 2,
эффекты дрожания фазы тактового сигнала дискретизации неотличимы от
внутреннего дрожания апертуры АЦП. В идеале тест проводится при мак-
симальной частоте дискретизации АЦП. Однако, если входная полоса АЦП
недостаточно велика, тест можно проводить на половине максимальной
частоты дискретизации.
Сигнал от тактового генератора подается непосредственно на вход так-
тового сигнала дискретизации АЦП через аттенюатор. Он также подается
Рис. 5.76. Конфигурация синхронизированного гистограммного теста дрожания апер-
туры АЦП
406 Глава 5. Тестирование преобразователей данных
на полосовой фильтр (для преобразования меандра в синусоиду). Сигнал с
выхода полосового фильтра пропускается через пассивный переменный
фазовращатель, аттенюатор и затем через разделительный конденсатор по-
дается на вход АЦП. При калибровке схемы задается минимальное ос-
лабление аттенюатора 1 и устанавливается такой уровень выходного сигна-
ла тактового генератора, чтобы размах входного сигнала АЦП был равен
полной шкале (полный размах 2VFS). Затем путем регулировки постоянной
составляющей входной синусоидальный сигнал АЦП центрируется отно-
сительно середины шкалы. Далее регулировкой аттенюатора 2 устанавлива-
ется надлежащий уровень тактового сигнала дискретизации АЦП.
Затем ослабление аттенюатора 1 увеличивается до тех пор, пока размах
входного сигнала не станет таким, что выходной сигнал будет изменяться
всего на несколько кодов относительно середины шкалы. Переменный фа-
зовращатель регулируется таким образом, чтобы большую часть времени
выпадал код середины шкалы. Приведенный к входу шум может вызывать
случайное распределение кодов. Если это происходит, то программное обес-
печение ПК должно вычислить стандартное отклонение распределения cjl в
единицах LSB, которое соответствует уровню приведенного к входу шума,
выраженному в единицах LSB. Затем задается такое ослабление аттенюато-
ра 1, чтобы на входе АЦП был сигнал, соответствующий полной шкале.
Переменный фазовращатель регулируется таким образом, чтобы наиболь-
шая вероятность выпадения соответствовала коду середины шкалы. Стан-
дартное отклонение нового распределения кодов, <тн, будет включать в
себя эффекты приведенного к входу шума, а также дрожания апертуры.
При этом ан определяется как корень из суммы квадратов отдельных со-
ставляющих:
(5-31)
где аА — среднеквадратичное значение шума (в единицах LSB), обусловлен-
ного дрожанием апертуры.
Уравнение (5.31) может быть решено относительно <тА:
(5-32)
Выражение для входного синусоидального сигнала полной шкалы име-
ет вид vbx(/) = KF<ssin2^4x/, где диапазон входных сигналов АЦП составляет
± VFS. Скорость изменения синусоиды полной шкалы в точке пересечения
нуля определяется выражением:
dv
dt
= VFSlnfm.
max
(5.33)
При заданном —
среднеквадратичное апертурное время, ta, связано с
соответствующей среднеквадратической погрешностью напряжения, Av^v,
выражением:
+ _ ^VRMS
а dv
(5.34)
5.2. Тестирование АЦП 407
Среднеквадратический шум, обусловленный дрожанием апертуры, в
единицах LSB, аА, связан с &vRMS выражением:
&VRMS ~ 2^-1
(5.35)
Подставляя выражения (5.32), (5.35) и (5.33) в (5.34), получаем:
~^L
(5.36)
Измерение дрожания апертуры по этим формулам иллюстрирует рис. 5.77.
Рис. 5.77. Вычисление дрожания апертуры при помощи синхронизированного гисто-
граммного теста
Следует отметить, что при проведении этого теста входной сигнал АЦП
может формироваться генератором синусоидальных сигналов с малым дро-
жанием, а для подачи сигнала на вход тактового сигнала дискретизации
АЦП можно использовать выход импульса синхронизации того же генера-
тора. Однако при измерении таким способом среднеквадратичного дрожа-
ния апертуры менее 100 пс возможны ошибки, так как взаимное дрожание
фазы выходного сигнала генератора и выходных импульсов синхронизации
может быть того же порядка.
Измерение времени апертурной задержки
Время апертурной задержки может быть измерено с помощью конфигура-
ции, используемой при проведении синхронизированного гистограммного
теста дрожания апертуры или более простой конфигурации, показанной на
рис. 5.78. На вход АЦП подается синусоидальный сигнал полной шкалы,
частота которого синхронизирована с частотой тактового сигнала дискре-
тизации. Задержка тактового сигнала дискретизации изменяется до тех пор,
пока гистограмма распределения кодов, выводимая на ПК, не покажет, что
Глава 5. Тестирование преобразователей данных
Рис. 5.78. Измерение времени апертурной задержки
АЦП осуществляет дискретизацию в точке пересечения синусоидой нуля,
которая соответствует коду середины шкалы. Апертурная задержка — это
просто разница между 50 %-ным уровнем переднего фронта тактового сиг-
нала дискретизации и точкой пересечения синусоидой нуля, которая изме-
ряется при помощи двухлучевого осциллографа.
Как показано на рис. 5.78, апертурная задержка может быть положи-
тельной или отрицательной. Значение частоты входного синусоидального
сигнала некритично, однако она должна быть достаточно большой для точ-
ного измерения малых величин времен апертурной задержки. С другой сто-
роны, частота не должна выходить за пределы аналоговой входной полосы
пропускания АЦП. Для удобства в качестве отправной точки можно взять
частоту, равную половине максимальной частоты дискретизации АЦП. Это
значение представляет собой разумный верхний предел.
Измерения дрожания апертуры АЦП при помощи БПФ
Прекрасным косвенным методом измерения дрожания апертуры является
БПФ-тест, предназначенный для измерения SNR АЦП. Проблема этого те-
ста заключается в том, что результат измерения включает в себя эффекты
дрожания тактового сигнала дискретизации и внутреннего дрожания апер-
туры АЦП. Поэтому необходимо выбрать такой генератор сигнала дискре-
тизации, чтобы его среднеквадратичное дрожание фазы было в несколько
раз меньше уровня дрожания фазы, указанного в спецификации на тести-
руемый АЦП. Базовая конфигурация теста дрожания апертуры и основные
используемые формулы приведены на рис. 5.79.
Требуется выполнить два измерения, каждое из которых проводится при
входном синусоидальном сигнале полной шкалы. Первое измерение, SNRL,
проводится на сравнительно низкой частоте, где шум в основном обуслов-
лен приведенным к входу шумом АЦП. Частота входного низкочастотного
сигнала может варьироваться в небольших пределах, и при этом измерен-
5.2. Тестирование АЦП
• Отношение сигнал/шум для низкочастотного полношкального
входа = SNRL.
• Отношение сигнал/шум для высокочастотного полношкального
входа = SNRH (частота - f).
• t 1 ^[1O~SWW/20]2 i [lQ-SNflt/20]2.
• Включает эффекты дрожания генератора тактового сигнала.
Рис. 5.79. Измерение дрожания апертуры по ухудшению SNR на высоких частотах
ное значение SNR будет сохраняться на постоянном уровне. Частота диск-
ретизации обычно устанавливается максимально возможной. Второе изме-
рение, SNRH, проводится при высокочастотном входном сигнале, и в этом
случае влияние дрожания апертуры на SNR АЦП более существенно. В за-
висимости от АЦП входная частота может достигать fs/2. Напомним,
что, как отмечалось в гл. 2, отношение сигнал/шум при влиянии только
дрожания апертуры определяется выражением:
5MM = 201og|0
1
2яfta
(5.37)
где SNRA — это SNR (дБ), обусловленное дрожанием апертуры, a f— часто-
та входного сигнала. Решая уравнение относительно ta, имеем:
, =_L. 10
° 2лf
(5.38)
Следующий этап состоит в вычислении SNR на основании SNRHn SNRL.
Так как эти значения выражены в децибелах, их сначала нужно преобразо-
вать в линейные единицы, а затем взять корень из суммы квадратов вели-
чин, обратных им:
1 Y - ( 1 Y ( 1
|д5АЛЯ/20 I — I JQSTV/tL/20 I “И |q5MU/20
(5.39)
Перепишем выражение (5.39) в виде:
1
|д5АЛ4/20
(5.40)
Подставляя выражение (5.40) в (5.38), получаем:
t =-Ь- Г 1
° 2л/у(10ты/2<>
1 Y
jqSA&L/20 I
(5.41)
Глава 5. Тестирование преобразователей данных
Следует особо отметить, что при проведении этого теста требуется из-
мерить только SNR, но не SINAD. Крайне важно, чтобы при вычислении
SNR по спектру БПФ игнорировались 2, 3, 4, 5 и 6-я гармоники (а также
постоянная составляющая). В противном случае полученный результат не
даст точной оценки дрожания апертуры.
И последнее замечание: измерить среднеквадратическое дрожание апер-
туры величиной менее 10 пс крайне сложно из-за нежелательного дрожа-
ния фазы, которое может присутствовать во входном сигнале АЦП или
тактовом сигнале дискретизации, или из-за дрожания фазы и шума, выз-
ванных дефектами разводки. Для достижения такого уровня точности тре-
буется применять синтезаторы частот с крайне малым дрожанием фазы, а
также уделять повышенное внимание вопросам разводки, трассировки, за-
земления и развязки.
Измерение аналоговой полосы пропускания АЦП
при помощи БПФ
Аналоговую входную полосу пропускания легко измерить, просто наблю-
дая график БПФ при изменении частоты от низкой до высокой. По мере
увеличения частоты амплитуда входного сигнала должна удерживаться на
постоянном уровне. При этом в спектре БПФ наблюдается относительная
амплитуда основной частоты входного сигнала. Значение частоты, при ко-
торой амплитуда падает на 3 дБ относительно исходного значения, опреде-
ляет ширину полосы по уровню 3 дБ. Измерения могут проводиться при
входном сигнале полной шкалы, что дает полосу пропускания при полной
мощности (FPBW, full-power bandwidth), или при низкой амплитуде для по-
лучения полосы пропускания малого сигнала. Обратите внимание, что в
этом определении FPBW ничего не говорится о количестве искажений,
присутствующих в спектре БПФ на частоте FPBW\ которое может быть
значительным для некоторых АЦП.
Для учета влияния искажений на измерение ширины полосы иногда
используется параметр, носящий название эффективной полосы пропускания
(ERB, effective resolution bandwidth). Он определяется как частота входного
сигнала, на которой SINAD при полной шкале падает на 3 дБ, что соответ-
ствует потерям в 0,5 ENOB. ERB можно легко измерить при помощи выше-
описанного метода, если в качестве критерия ширины полосы использо-
вать не амплитуду основной частоты сигнала, а вычисленное значение SINAD.
Время установления
Время установления можно измерить при помощи конфигурации, показан-
ной на рис. 5.80. Она основана на использовании генератора импульсов с
плоской вершиной и синхронизированного тактового сигнала с перемен-
ной задержкой, подаваемого на вход тактового сигнала дискретизации АЦП.
Генератор импульсов с плоской вершиной регулируется таким образом,
чтобы перепад входного сигнала АЦП был чуть меньше полной шкалы, а
задержка тактового сигнала перестраивается, пока уровень выходного сиг-
нала не установится в пределах 1 LSB от окончательного значения. Задерж-
5.2. Тестирование АЦП
Короткое соединение
Рис. 5.80. Конфигурация теста времени установления
ку между 50 %-ным уровнем входного импульса и передним фронтом такто-
вого сигнала дискретизации можно измерить при помощи двухканального
осциллографа. Если размах приведенного ко входу шума АЦП составляет
менее 1 LSB, то для наблюдения выходного сигнала АЦП может использо-
ваться простой светодиодный индикатор. В противном случае для опреде-
ления наиболее часто выпадающего кода может потребоваться построение
гистограммы. Частота дискретизации не обязательно должна устанавливаться
максимальной и при необходимости может быть понижена. Обратите вни-
мание, что из измеренного значения времени установления необходимо
вычесть время апертурной задержки.
Характеристики генератора импульсов с плоской вершиной должны
быть точно известны, а расстояние от его выхода до входа АЦП должно
быть сведено к минимуму. На рис. 5.81 показан простой генератор им-
пульсов с плоской вершиной на базе диодов Шоттки с малой емкостью.
Плоская область
«А»
Напряжение
«В»
Напряжение
Рис. 5.81. Простой генератор импульсов с плоской вершиной
412 Глава 5. Тестирование преобразователей данных
Входной сигнал цепи в точке «А» регулируется таким образом, чтобы на-
пряжение начала импульса в точке «В» было чуть выше отрицательного
значения полной шкалы АЦП. Когда напряжение «А» положительно, диод
D2 смещен в обратном направлении, и напряжение в точке «В» имеет
плоскую вершину, за исключением короткого переходного процесса, выз-
ванного емкостью обратно-смещенного диода и малым обратным током
утечки, который протекает через эквивалентное 100-омное согласующее
сопротивление. Уровень положительного участка напряжения «А» должен
быть не больше требуемого для обратного смещения диода D2. Диод D1
обеспечивает согласование генератора сигнала с суммарным 50-омным
импедансом при положительном напряжении в точке «А». Последователь-
но с D2 может быть включен еще один диод для уменьшения эквивален-
тной емкостной связи, при этом уровень отрицательного участка напря-
жения «А» подстраивается с учетом необходимого падения напряжения на
дополнительном диоде. Показанная схема формирует импульс с размахом
72 шкалы для биполярного АЦП. Для того чтобы она хорошо работала,
элементы диодно-резистивной цепи должны располагаться как можно
ближе ко входу АЦП, и соединения между ними должны быть как можно
короче.
Время восстановления после перенапряжения
Метод и схема тестирования восстановления после перенапряжения иден-
тичны методу и схеме тестирования времени установления, однако, как
показано на рис. 5.82, напряжение в точке «А» регулируется таким образом,
чтобы уровень начала импульса выходил за границы входного диапазона
АЦП. Величина перенапряжения обычно задается в спецификации в про-
центах диапазона АЦП. Для преобразователя с входным диапазоном 2 В
50 %-ное перенапряжение будет соответствовать напряжению на 1 В ниже
нижней границы или на 1 В выше верхней границы номинального диапа-
зона.
Как и при тестировании переходной характеристики, при проведении
этих измерений необходимо учитывать время апертурной задержки.
Реконструированный
выход АЦП
Плоская область
Время перекрытия перенапряжения
+ апертурная задержка
ТИ выборки
Рис. 5.82. Вид сигнала, формируемого генератором импульсов с плоской вершиной,
при проведении теста на восстановление после перенапряжения
5.2. Тестирование АЦП
4I2j
Тест на восстановление после перенапряжения позволяет удостоверить-
ся в том, что при выходе сигнала за пределы номинального диапазона АЦП
действует как идеальный ограничитель. Когда сигнал выходит за пределы
диапазона, АЦП должен выдавать либо одни нули, либо одни единицы (при
двоичном кодировании со смещением).
Тестирование видеосигнала, дифференциальное усиление
и дифференциальная фаза
Развитие 8-разрядных высокоскоростных АЦП, выпускавшихся в виде плат
или модулей, в начале 1970-х годов привело к возникновению широкого
интереса к использованию цифровых методов в традиционно аналоговом
видеооборудовании, таких как коррекция развертки, синхронизация и хра-
нение кадров, преобразование стандартов, on-line мониторинг телевизион-
ных сигналов, цифровые спецэффекты и улучшение картинки (см. обшир-
ную библиографию в 18). Большинство таких «черных ящиков» содержало
АЦП, цифровую обработку того или иного рода и воссоздающий ЦАП.
Поэтому для проверки качества встречно включенных АЦП и ЦАП, выпол-
няющих роль кодека (кодера-декодера), могло быть использовано традици-
онное тестовое оборудование для видеосигналов (рис. 5.83).
Рис. 5.83. Конфигурация теста полного видеосигнала с использованием аналоговых
методов
В полном видеосигнале (рис. 5.84) информация о цвете содержится в
сигнале цветности, который наложен на сигнал яркости (черно-белый).
Частота цветовой поднесущей в системе NTSC составляет приблизительно
3,58 МГц, а в PAL — приблизительно 4,43 МГц. Амплитуда сигнала цветно-
сти определяет насыщенность цвета, а его фаза (по отношению к сигналу
цветовой синхронизации) — конкретный цвет.
Двумя важными параметрами в приложениях, где используется полный
видеосигнал, являются дифференциальное усиление и дифференциальная
фаза. Дифференциальное усиление — это изменение в амплитуде (выра-
женное в процентах) сигнала поднесущей во всем видеодиапазоне от чер-
ного до белого. Дифференциальная фаза — это изменение фазы (в граду-
сах) сигнала поднесущей во всем видеодиапазоне от черного до белого. Эти
параметры важны, поскольку погрешности дифференциального усиления
приводят к искажению степени насыщенности цвета, а погрешности диф-
ференциальной фазы вызывают изменение оттенков цвета в картинке.
На рис. 5.85 показаны некоторые популярные тестовые сигналы для
тестирования дифференциального усиления и дифференциальной фазы.
В них используется ступенчатый или пилообразный сигнал, промодулиро-
Глава 5. Тестирование преобразователей данных
IRE единицы
(1 IRE единица = 7,14 мВ)
+100
Уровень
белого
52,66 мкс
-- 10,9 мкс -----
!-Синхроинтервал
I Эйч-стандарта
63,56 мкс
fH = 15,734 кГц
1 NTSC видеосигнал
Рис. 5.84. Строка полного цветного видеосигнала формата NTSC
Рис. 5.85. Примеры тестовых видеосигналов для измерения дифференциальных усиле-
ния и фазы
ванный цветовой поднесущей. Любой из этих сигналов прекрасно подхо-
дит для тестирования чисто аналоговых видеосистем, однако получение
точных результатов при проведении теста в системе, содержащей видеоко-
дек, представляет особую сложность. Это вызвано тем, что такие тестовые
сигналы по своей природе вызывают неверные результаты из-за шума кван-
тования. Данная ситуация осложняется тем, что в системах с полным ви-
деосигналом обычно работают с частотой дискретизации, ровно в 4 раза
большей частоты поднесущей (что приводит, как обсуждалось ранее, к по-
вторяющемуся характеру ошибок квантования).
5.2. Тестирование АЦП 415
Например, рассмотрим 10-уровневый ступенчатый тестовый сигнал с
модуляцией 20-IRE. Это обычно соответствует 30 уровням квантования в
8-разрядной системе с запасом. Если дискретизация тестового сигнала про-
изводится с частотой ровно в 4 раза выше частоты поднесущей, то при
наличии определенной неблагоприятной комбинации фазы тактового сиг-
нала дискретизации и уровня постоянной составляющей погрешность кван-
тования 1 LSB в измерении амплитуды может дать любое значение ампли-
туды для любой отдельной ступеньки сигнала. В действительности для од-
ной ступеньки измеренное значение амплитуды может быть на 1 LSB выше
реального, а для следующей — на 1 LSB ниже, что приведет к возможной
погрешности дифференциального усиления в 2 LSB, или 2/30 = 6,7 %, даже
для идеального 8-разрядного кодека. Ранние методы измерения дифферен-
циальных усиления и фазы в начале 1970-х годов давали картинки на век-
торных осциллографах, наподобие приведенных на рис. 5.86, я, для 10-уровне-
вого ступенчатого сигнала с модуляцией 20-IRE.
Обратите внимание, что в соответствии с приведенными осциллограмма-
ми погрешности дифференциальных усиления и фазы составляют приблизи-
тельно 7 % и 2° соответственно и обусловлены в основном погрешностями
квантования. Эта проблема была проанализирована Феликсом43, который
показал, что теоретические наихудшие погрешности дифференциальных
усиления и фазы для ступенчатого тестового сигнала с модуляцией 20-IRE
единиц при разрядности 8 бит составляют 8 % и 5° соответственно. Теоре-
тически в 9-разрядной системе точность измерений дифференциальных
усиления и фазы составит приблизительно 4% и 2,5°, а в 10-разрядной —
2% и 1,25°.
Для решения проблемы измерения дифференциальных усиления и фазы
в стандарте IEEE 746-198428 было предложено несколько подходов. Выбор
модуляции 40-IRE естественным образом приводит к уменьшению наихуд-
ших погрешностей дифференциальных усиления и фазы в 2 раза, так как в
a
10-ступенчатая
20 IRE модуляция,
fs = 14,32 MSPS
с АПЧ AG = 70 %
Дифференциальное усиление
Дифференциальная фаза А
б
Линейная
20 IRE модуляция,
fs = 14,32 MSPS
без АПЧ AG = 1 %
Рис. 5.86. Измерение дифференциальных усиления и фазы для 8-разрядного АЦП при
помощи осциллографа (середина 1970-х годов)
Глава 5. Тестирование преобразователей данных
этом случае отношение погрешности квантования к уровню модуляции бу-
дет меньше в процентном отношении. Предпочтительнее вместо модули-
рованного ступенчатого использовать модулированный линейно изменяю-
щийся тестовый сигнал, так как непрерывное изменение уровня сигнала
помогает интегрировать разрывы между уровнями квантования. И наконец,
рассинхронизация частоты дискретизации и частоты цветовой поднесущей
помогает сделать уровни квантования более случайными. На рис. 5.86, б,
показаны результаты использования линейно изменяющегося сигнала с мо-
дуляцией 40-IRE при рассинхронизированном тактовом сигнале дискрети-
зации. «Истинные» измеренные дифференциальные усиление и фаза в дан-
ном случае составляют приблизительно 1 % и 0,5° соответственно.
В рекомендации ITU44 также было предложено добавлять к входному
тестовому сигналу АЦП синусоиду с размахом 30 мВ и частотой 5,162 МГц
для NTSC и 6,145 МГц для PAL. Эти частоты превышают стандартные ча-
стоты среза для данных систем (4,2 МГц в NTSC и 5,0 МГц в PAL). Частоты
дополнительной синусоиды приходятся на вторые нули АЧХ соответствую-
щих низкочастотных фильтров. В большинстве измерительных приборов
для видеосигналов имеются фильтры различного типа, облегчающие изме-
рения и увеличивающие их точность. Они обычно эффективно устраняют
дополнительные синусоидальные сигналы, однако, если их подавления не-
достаточно, необходимо добавить внешние фильтры.
В стандарте IEEE 1241-200037 для тестирования дифференциальных уси-
ления и фазы АЦП рекомендован полностью цифровой метод. Конфигура-
ция данного теста показана на рис. 5.87, а рекомендованный тестовый сиг-
нал — на рис. 5.88.
Полный входной сигнал АЦП формируется путем объединения выход-
ных сигналов генератора синусоидальных сигналов и генератора ступенча-
тых сигналов. Частота дискретизации,/5, частота входного сигнала, Дх, дли-
на выборки, М, и число периодов внутри выборки, Мс, выбираются с уче-
том удовлетворения условию когерентной дискретизации:
4 = ^- (542)
А м
В течение длительности тестового сигнала берется 11 выборок длиной
М = 1024; таким образом, объем буферной памяти должен быть достаточ-
«15 MSPS-20 MSPS
Рис. 5.87. Цифровое измерение дифференциальных усиления и фазы
Рис. 5.88. Тестовый сигнал для цифрового теста дифференциальных усиления и фазы
ным для хранения 11264 отсчетов. Вычисляется 6 БПФ — только для выбо-
рок, соответствующих стабильным участкам сигнала. Остальные выборки
игнорируются, так как данные, взятые в эти интервалы времени, соответ-
ствуют изменениям ступенчатого сигнала и периоду установления и, следо-
вательно, недостоверны. Выбор /вх, fs, М и Мс произволен, однако числа,
показанные на рис. 5.88, приближены к реальным условиям в видеосисте-
мах. Для начала следует задать фиксированное значение частоты дискрети-
зации, fs = 20 MSPS, и длины выборки, М = 1024 (М должна быть равна
степени двойки). Мс должно быть простым числом. Если выбрать Мс рав-
ным 183, то частота входного сигнала составит 3,57421875 МГц, что близко
к частоте цветовой поднесущей NTSC (3,5795445 МГц). Ширина каждого
шага ступенчатого сигнала должна соответствовать 2048 отсчетам, взятым с
частотой 20 MSPS, или 102,4 мкс.
Буферная память заполняется 11264 отсчетами показанного сигнала.
Берется 11 выборок по 1024 точки в каждой, но на самом деле вычисляется
только 6 БПФ, так как 5 выборок, соответствующих интервалам изменения
ступенчатого сигнала и времени установления, игнорируются. Погрешнос-
ти дифференциальных усиления и фазы можно определить, сравнив амп-
литуды и фазы сигналов в отдельных БПФ. В идеале фазы сигналов в каж-
дом из 6 БПФ должны быть равны, поскольку выборки игнорируются через
одну из используемых при вычислении БПФ выборок, и начало каждой
используемой выборки соответствует одной и той же точке входной сину-
соиды.
Тестирование частоты появления ошибочных битов (BER)
Ошибки, вызываемые метастабильностью в АЦП, подробно обсуждались в
гл. 2. Этот раздел сосредоточен на аспектах тестирования результирующей
частоты появления ошибочных битов (BER — bit error rate). Для тестирования
BER в АЦП может использоваться конфигурация, показанная на рис. 5.89.
Глава 5. Тестирование преобразователей данных
Е — количество ошибок за период времени Т
Рис. 5.89. Конфигурация теста частоты появления ошибочных битов АЦП
Входной аналоговый сигнал АЦП формируется высокостабильным мало-
шумящим генератором синусоидальных сигналов. Уровень аналогового вход-
ного сигнала устанавливается чуть больше полной шкалы, а частота такой,
что разница между двумя соседними отсчетами всегда чуть меньше 1 LSB,
как показано на рис. 5.90.
В приведенной схеме для получения смежных кодов А и В используются
последовательно соединенные регистры-защелки. Логическая схема вычис-
ляет модуль разности между А и В и сравнивает его с пределом ошибки,
выбранным с учетом ожидаемых случайных шумовых выбросов и погреш-
ностей квантования АЦП. Ошибки, вызывающие превышение разностью А
и В заданного предела, инкрементируют счетчик. За период времени, /,
подсчитывается количество ошибок, Е. Частота ошибок вычисляется по
формуле BER = E/2Tfs. Множитель 2 в знаменателе необходим, поскольку
счетчик еще раз инкрементируется при возврате к правильному коду после
возникновения ошибки, т. е., при каждой ошибке счетчик ошибок инкре-
ментируется дважды. Следует отметить, что та же функция может быть реа-
лизована программно, если записывать выходные отсчеты АЦП в буферную
память и анализировать их при помощи компьютерной программы.
Медленный
аналоговый
сигнал
ТИ выборок
Рис. 5.90. Аналоговый входной сигнал АЦП для низкочастотного теста BER
5.2. Тестирование АЦП
Частота входного сигнала должна быть тщательно подобрана таким об-
разом, чтобы на каждый код приходился, по меньшей мере, один отсчет.
Предположим, что на вход АЦП подается синусоидальный сигнал полной
шкалы с амплитудой 2N/2\
2^
v(0 = —sin 2л ft.
(5.43)
Максимальная скорость изменения этого сигнала:
dv
dt\
<Гл/.
(5.44)
Положим dv = 1 LSB, dt = l/fs и решим неравенство относительно час-
тоты входного сигнала:
(5.45)
Если выбрать частоту входного сигнала меньше этого значения, то на каж-
дый код будет гарантировано приходиться, по меньшей мере, один отсчет.
Тот же самый тест можно провести на высоких частотах, подав на вход
сигнал с частотой, незначительно отстроенной от Д/2 (рис. 2.91). В этом
случае между моментами преобразования входной сигнал АЦП успевает
измениться на величину полной шкалы. Результаты преобразований, взя-
тых через одно, сравниваются; при этом частота «биений» выбирается та-
кой, чтобы между каждыми вторыми отсчетами была разница чуть меньше
1 LSB. Выражение для нахождения частоты, подходящей для высокочастот-
ного теста BER, выводится следующим образом.
Предположим, что на вход АЦП подается синусоидальный сигнал пол-
ной шкалы с амплитудой 2^/2, частота которого чуть меньше fs/2 (на вели-
чину А/):
2 v
v(t) = —sin
(5.46)
Рис. 5.91. Аналоговый входной сигнал АЦП для высокочастотного теста на BER
Глава 5. Тестирование преобразователей данных
Максимальная скорость изменения такого сигнала:
(5.47)
Положим dv = 1 LSB и dt = 2/fs и решим неравенство относительно А/:
1
2.2^
(5.48)
Оценка BER хорошего АЦП является сложной, занимающей длитель-
ное время задачей. Иногда один АЦП может тестироваться в течение
нескольких дней, и не произойдет ни одной ошибки. Например, тесты
для типичного 8-разрядного параллельного преобразователя, работаю-
щего с частотой дискретизации 75 MSPS, при пределе ошибки в 4 LSB
дают значение BER, приблизительно равное 3,7 х 10-12 (1 ошибка в час).
В связи с этим для измерения низкой BER требуется большее время
измерения, что увеличивает вероятность возникновения бросков пита-
ния, помех и т. п., вызывающих ложную ошибку. Для проведения надеж-
ных тестов в течение длительного времени необходимо уделять особое
внимание эффектам электромагнитных/радиочастотных помех (возмож-
но, потребуется экранирование помещения), изолированным источни-
кам питания и т. д.
В идеале для проведения теста на BER необходимо анализировать
каждый выходной отсчет АЦП без пропусков, поэтому его сложно реа-
лизовать с помощью буферной памяти и ПК, как в типичной конфигу-
рации теста АЦП на базе БПФ. При таком подходе ошибки, возникаю-
щие в моменты считывания компьютером содержимого буферной памя-
ти, будут теряться. Однако этот метод все же может применяться при
условии, что память имеет большой объем (предпочтительнее, 256 К) и
берется большое количество выборок, как показано на рис. 5.92. «Мерт-
вое время», используемое для считывания данных из памяти в ПК и их
анализа, будет добавляться к полному времени теста, особенно если BER
очень мала.
Минимум 256 К
ПО анализатора
данных
и определения
количества
ошибок
«Мёртвое» время добавляется к общему времени теста
Рис. 5.92. Альтернативная конфигурация теста BER на базе ПК
Список литературы: 5.2. Тестирование АЦП
Список литературы
5.2. Тестирование АЦП
Перечисленные ниже источники приведены в приблизительном хронологичес-
ком порядке их появления, поэтому читатель может получить хорошее представле-
ние об истории развития спецификаций и методов тестирования АЦП. На боль-
шинство источников в тексте имеются ссылки, однако некоторые включены в спи-
сок просто в качестве дополнительного материала.
1. Bernard М. Gordon. Definition of Accuracy of Voltage to Digital Converters.
Instruments and Control Systems, May 1959, pp. 710.
2. W.M. Gaines. Terminology for Functional Characteristics of Analog to Digital
Converters. Control Engineering, February 1961.
3. Bernard M. Gordon. Designing Sampled Data Systems. Control Engineering, April
1961, pp. 127 -132.
4. Bernard M. Gordon. How to Specify Analog-to-Digital Converters. Electronic Design,
May 10, 1961, pp. 36-39.
5. Bernard M. Gordon. How Much Do Components Limit Converter Performance?
Electronic Design, June 21, 1961, pp.52—53.
6. P. Barr. Influence of Aperture Time and Conversion Rate on the Accuracy of A/D
Converters. Data Systems Engineering, May 1964, pp. 30—34.
7. Van Doren. Solving Error Problems in Digital Conversion Systems. Electromechanical
Design, April 1966, pp.44—46.
8. J. Freeman. Specifying Analog to Digital Converters. The Electronic Engineer, June
1968, pp. 44-48.
9. Bernard M. Gordon. Speaking Out on Analog to Digital Converters. EEE Magazine,
December 1968.
10. Bernard M. Gordon. Bernard Gordon of Analogic Speaks Out on Whatys Wrong
with A/D Converter Specs. EEE Magazine, February 1969, pp. 54—61.
11. Dan Sheingold. Analog-Digital Conversion Handbook. Analog Devices, 1972.
12. Donald B. Bruck. Data Conversion Handbook. Hybrid Systems Corporation,
1974.
13. Bill Pratt. Test A/D Converters Digitally. Electronic Design, December 6, 1975.
14. Stuart K. Tewksbury, F.C. Meyer, D.C. Rollenhagen, H.K. Schownwetter, and Thomas
Souders. Terminology Related to the Performance of S/H, A/D, and D/А Circuits. IEEE
Transactions on Circuits and Systems, Vol. CAS-25, July 1978, pp. 419—426.
15. Eugene L. Zuch. Data Acquisition and Conversion Handbook. Datel-Intersil, Inc.,
1979, ISBN 0-9602946-0-0.
16. Jim R. Naylor. Testing Digital/Analog and Analog/Digital Converters. IEEE
Transactions on Circuits and Systems, Vol. CAS-25, July 1978, pp. 526—538.
17. Walter A. Kester. Characterizing and Testing A/D and D/А Converters for Color
Video Applications. IEEE Transactions on Circuits and Systems, Vol. CAS-25, July 1978,
pp. 539 -550.
18. W.A. Kester. PCM Signal Codecs for Video Applications. SMPTE Journal, Number
88, November 1979, pp. 770-778.
19. Tim Wilhelm. Test A/D Converters Quickly and Efficiently. Electronic Design,
October 15, 1981, pp. 193-198.
20. Bernard M. Gordon. The Analogic Data-Conversion Systems Digest, Fourth Edition.
Analogic Corporation, 1981.
21. Martin Neil and Art Muto. Tests Unearth A/D Converter's Real-World Performance.
Electronics, February 24 1982, pp. 127—132.
22. Bruce E. Peetz. Arthur S. Muto, and Martin Neil, «Measuring Waveform Recorder
Performance. Hewlett-Packard Journal, Vol. 33, No. 11, November 1982, pp. 21—29.
Глава 5. Тестирование преобразователей данных
23. Walter Kester. Test Video A/D Converters Under Dynamic Conditions. EDN,
August 18, 1982.
24. Joey Doemberg, Hae-Seung Lee, and David A. Hodges. Full-Speed Testing of A/D
Converters. IEEE Journal of Solid State Circuits, Vol. SC-19, No. 6, December 1984,
pp. 820-827.
25. T. Michael Souders, Donald R. Flach, and Thick C. Wong. An Automatic Test Set
for the Dynamic Characterization of A/D Converters. IEEE Transactions on Instrumentation
and Measurement, Vol. IM-32, No. 1, March 1983, pp. 180—186.
26. Dan Sheingold. Analog-Digital Conversion Handbook, 3rd Edition. Analog Devices
and Prentice-Hall, 1986, ISBN-0-13-032848-0, (классическая книга no аналого-цифро-
вому преобразованию).
27. Matthew Mahoney. DSP-Based Testing of Analog and Mixed-Signal Circuits. IEEE
Computer Society Press, 1987, ISBN 0-8186-0785-8.
28. IEEE Std. 746-1984, IEEE Standard for Performance Measurements of A/D and
D/А Converters for PCM Television Video Circuits, IEEE, 1984.
29. Walt Kester. Designer's Guide to Flash ADC Testing Part 1: Flash ADCs Provide
the Basis for High-Speed Conversion. EDN, January 4, 1990, pp. 101 — 110.
30. Walt Kester. Designer's Guide to Flash ADC Testing Part 2: DSP Test Techniques
Keep Flash ADCs in Check. EDN, January 18, 1990, pp. 133—142.
31. Walt Kester. Designer's Guide to Flash ADC Testing Part 3: Measure Flash ADC
Performance for Trouble-Free Operation. EDN, February 1, 1990, pp. 103—114.
32. Michael J. Dernier. High-Speed Analog-to-Digital Conversion. Academic Press,
Inc., 1991, Chapter 6.
33. Walt Kester. Designer's Guide to Sampling A/D Converters Part 1: Basic
Characteristics Distinguish Sampling A/D Converters. EDN, September 3, 1992,
pp. 135-144.
34. Walt Kester. Designer's Guide to Sampling A/D Converters Part 2: Peripheral
Circuits can Make or Break Sampling-ADC Systems. EDN, October 1, 1992,
pp. 97-105.
35. Walt Kester. Designer's Guide to Sampling A/D Converters Part 3: Layout,
Grounding, and Filtering Complete Sampling ADC System. EDN, October 15, 1992,
pp. 127-134.
36. IEEE Std. 1057—1994 (R2001), IEEE Standard for Digitizing Waveform Recorders.
IEEE, 1994, ISBN 1-55937-488-8. P. 28.
37. IEEE Std. 1241—2000, IEEE Standard for Terminology and Test Methods for
Analog-to-Digital Converters. IEEE, 2001, ISBN 0-7381-2724-8.
38. Jerome Blair. Histogram Measurement of ADC Nonlinearities Using Sine Waves.
IEEE Transactions on Instrumentation and Measurement, Vol. 43, No. 3, June 1994,
pp. 373-383.
39. Walt Kester. Mixed-Signal and DSP Design Techniques. Analog Devices and Newnes
(An Imprint of Elsevier Science), ISBN 0-75067-611-6, 2003.
40. Steven W. Smith. Digital Signal Processing: A Practical Guide for Engineers and
Scientists. Newnes (An Imprint of Elsevier Science), 2002, ISBN 0-75067-444-X.
41. R. Jacob Baker, Harry W. Li, and David E. Boyce. CMOS Circuit Design, Layout,
and Simulation. Wiley-IEEE Press, 1997, ISBN 0-78033-416-7, Chapter 28, 29.
42. R. Jacob Baker. CMOS Mixed-Signal Circuit Design, John Wiley and Sons, 2002,
ISBN 0-4712-2754-4.
43. Micheal O. Felix. Differential Phase and Gain Measurements in Digital Video
Signals. SMPTE Journal, Vol. 85, February 1976, pp. 76—79.
44. «Measuring Methods for Digital Video Equipment with Analogue Input/
Output,» ITU Recommendation ITU-R ВТ. 1204, 1995, http://www.itu.int/publications/
bookshop.
Дополнительная литература по БПФ и ЦОС
45. С. Britton Rorabaugh. DSP Primer. McGraw-Hill, 1999.
46. Richard J. Higgins. Digital Signal Processing in VLSI, Prentice-Hall, 1990.
47. V. Oppenheim and R.W. Schafer. Digital Signal Processing. Prentice-Hall, 1975.
48. L.R. Rabiner and B. Gold. Theory and Application of Digital Signal Processing.
Prentice-Hall, 1975.
49. John G. Proakis and Dimitris G. Manolakis. Introduction to Digital Signal Processing.
MacMillian, 1988.
50. Fredrick J. Harris. On the Use of Windows for Harmonic Analysis with the Discrete
Fourier Transform. Proc. IEEE, Vol. 66, No. 1, 1978 pp. 51—83.
51. R.W. Ramirez. The FFT: Fundamentals and Concepts. Prentice-Hall, 1985.
52. J. W. Cooley and J. W. Tukey. An Algorithm for the Machine Computation of
Complex Fourier Series. Mathematics Computation, Vol. 19, pp. 297—301, April
1965.
Программные пакеты для вычисления БПФ
и анализа технических данных
53. MATLABT, The MathWorks, Inc., 3 Apple Hill Drive, Natick, MA 01760-2098,
Phone: 508-647-7000, http://www.mathworks.com.
54. LabVIEW™, National Instruments Corporation, 11500 N. Mopac Expressway,
Austin, Texas 78759-3504, Phone: 512-683-0100, http://www.ni.com.
55. Mathcad, Mathsoft Engineering & Education, Inc., 101 Main Street, Cambridge,
MA 02142-1521, Phone: 617-444-8000, http://www.mathsoft.com.
Общая литература по преобразованию данных
и смежным вопросам
56. Alfred К. Susskind. Notes on Analog-Digital Conversion Techniques. John Wiley,
1957.
57. David F. Hoeschele. Jr., Analog-to-Digital/Digital-to-Analog Conversion Techniques.
John Wiley and Sons, 1968.
58. K. W. Cattermole. Principles of Pulse Code Modulation. American Elsevier Publishing
Company, Inc., 1969, New York NY, ISBN 444-19747-8.
59. Hermann Schmid. Electronic Analog/Digital Conversions. Van Nostrand Reinhold
Co., 1970.
60. Dan Sheingold. Analog-Digital Conversion Handbook. First Edition, Analog Devices,
1972.
61. Donald B. Bruck. Data Conversion Handbook. Hybrid Systems Corporation, 1974.
62. Eugene R. Hnatek. A User's Handbook of D/А and A/D Converters. John Wiley,
New York, 1976, ISBN 0-471-40109-9.
63. Nuggehally S. Jayant. Waveform Quantizing and Coding, John Wiley-IEEE Press,
1976, ISBN 0-87942-074-X.
64. Dan Sheingold. Analog-Digital Conversion Notes. Analog Devices, 1977.
65. C.F. Kurth, editor. IEEE Transactions on Circuits and Systems Special Issue on
Analog/Digital Conversion. CAS-25, No. 7, July 1978.
66. Daniel J. Dooley. Data Conversion Integrated Circuits, John Wiley-IEEE Press,
1980, ISBN 0-471-08155-8.
67. Bernard M. Gordon. The Analogic Data-Conversion Systems Digest. Fourth Edition,
Analogic Corporation, 1981.
68. Eugene L. Zuch. Data Acquisition and Conversion Handbook. Datel-Intersil, 1982.
Глава 5. Тестирование преобразователей данных
69. Frank F.E. Owen. PCM and Digital Transmission Systems. McGraw-Hill, 1982,
ISBN 0-07-047954-2.
70. Dan Sheingold. Analog-Digital Conversion Handbook. Analog Devices/Prentice-
Hall, 1986, ISBN 0-13-032848-0.
71. Matthew Mahoney. DSP-Based Testing of Analog and Mixed-Signal Circuits. IEEE
Computer Society Press, 1987, ISBN 0-8186-0785-8.
72. Michael J. Dernier. High-Speed Analog-to-Digital Conversion. Academic Press,
Inc., 1991, ISBN 0-12-209048-9.
73. J.C. Candy and Gabor C. Temes. Oversampling Delta-Sigma Data Converters.
IEEE Press, ISBN 0-87942-258-8, 1992.
74. David F. Hoeschele, Jr.. Analog-to-Digital and Digital-to-Analog Conversion
Techniques. Second Edition, John Wiley and Sons, 1994, ISBN-0-471-57147-4.
75. Rudy van de Plassche. Integrated Analog-to-Digital and Digital-to-Analog Converters.
Kluwer Academic Publishers, 1994, ISBN 0-7923-9436-4.
76. David A. Johns and Ken Martin. Analog Integrated Circuit Design. John Wiley,
1997, ISBN 0-471-14448-7.
77. Mikael Gustavsson, J. Jacob Wikner, and Nianxiong Nick Tan, CMOS Data Converters
for Communications. Kluwer Academic Publishers, 2000, ISBN 0-7923-7780-X.
78. R. Jacob Baker. CMOS Circuit Design Volumes I and IL John Wiley-IEEE Computer
Society, 2002, ISBN 0-4712-7256-6.
79. Rudy van de Plassche. CMOS Integrated Analog-to-Digital and Digital-to-Analog
Converters. Second Edition, Kluwer Academic Publishers, 2003, ISBN 1-4020-7500-6.
Серии семинаров Analog Devices
80. Walt Kester. Practical Analog Design Techniques. Analog Devices, 1995, ISBN
0-916550-16-8, available for download at http://www.analog.com.
81. Walt Kester. High Speed Design Techniques. Analog Devices, 1996, ISBN 0-916550-17-6,
available for download at http://www.analog.com.
82. Walt Kester. Practical Design Techniques for Power and Thermal Management.
Analog Devices, 1998, ISBN 0-916550-19-2, available for download at http://
www.analog.com.
83. Walt Kester. Practical Design Techniques for Sensor Signal Conditioning. Analog
Devices, 1999, ISBN 0-916550-20-6, available for download at http://www.analog.com.
84. Walt Kester. Mixed-Signal and DSP Design Techniques. Analog Devices, 2000,
ISBN 0-916550-22-2, available for download at http://www.analog.com.
85. Walt Kester. Mixed-Signal and DSP Design Techniques. Analog Devices and Newnes
(An Imprint of Elsevier Science), ISBN 0-75067-611-6, 2003.
86. Walter G. Jung. Op Amp Applications. Analog Devices, 2002, ISBN 0-916550-26-5.
ГЛАВА 6
ИНТЕРФЕЙСЫ
ПРЕОБРАЗОВАТЕЛЕЙ
ДАННЫХ
6.1. Сопряжение аналоговых входов АЦП
Уолт Кестер
Введение
Прежде чем приступить к детальному введению в проблему сопряжения
АЦП, сделаем несколько общих замечаний относительно особенностей со-
временных преобразователей данных. Основным в технике преобразовате-
лей данных является обеспечение высоких характеристик в системных при-
ложениях. В низкочастотных измерительных системах (при сигналах в по-
лосе частот 10 Гц и ниже) наиболее распространены Е-Д АЦП с разрешением
до 24 разрядов. Реализация требуемого усиления и смещения сигналов в
таких преобразователях, как правило, осуществляется посредством автома-
тической или заводской калибровки. Для обработки сигналов более высо-
кой частоты АЦП должны обладать широким динамическим диапазоном
(малыми искажениями и шумом), высокими частотами дискретизации и
хорошими характеристиками работы на переменном токе.
Кроме безупречной работы, на рынке преобразователей данных ценятся
такие характеристики, как малая потребляемая мощность, однополярное
питание, низкая стоимость и малые установочные размеры. Удовлетворе-
ние этих требований связано с решением огромного числа проблем, выз-
ванных снижением размаха биполярного сигнала, повышением чувстви-
тельности к помехам и т. п. Ранее в гл. 3 уже отмечалось, что аналоговый
вход CMOS АЦП обычно подключается через схему выборки и хранения
(СВХ) на коммутируемых конденсаторах, но СВХ генерирует коммутаци-
онные токи, которые приходится отделять от источника сигнала. Это об-
стоятельство довольно сильно осложняет проблему выбора согласующего
усилителя. С другой стороны, для высокопроизводительных преобразова-
телей данных на базе BiCMOS (комплементарных биполярных технологий)
характерна внутренняя буферизация, но они обычно отличаются большей
стоимостью и энергопотреблением по сравнению с СЛ/05-аналогами. Ос-
новные особенности современных преобразователей данных приведены на
рис. 6.1.
Выбор схемы сопряжения преобразователя данных того или иного при-
ложения в значительной степени зависит от конкретного преобразователя.
Глава 6. Интерфейсы преобразователей данных
• Повышенные частоты дискретизации, улучшенная разрешающая способность, хоро-
шая работа на переменном токе.
• Однополярное питание (т. е. +5 В, +3 В, +2,5 В, +1,8 В).
• Пониженное энергопотребление, режимы выключения или «засыпания».
• Уменьшенный размах биполярных сигналов входа/выхода.
• Дифференциальные входы/выходы.
• Расширенное применение дешевых CMOS фаундри-технологий (изготовление ИС на
заводах со стандартизированной технологией по представляемой КД, выполненной
по установленным правилам. — Примеч. ред.).
• Малые установочные размеры.
Рис. 6.1. Некоторые основные особенности современных преобразователей данных
Здесь сложно делать обобщения, однако можно выделить некоторые ос-
новные направления.
Во-первых, было бы неверным считать устройство сопряжения бе-
зусловно необходимым компонентом. Некоторые преобразователи име-
ют относительно «дружественные» входы для непосредственного приема
входных сигналов. В других преобразователях предпочтительно транс-
форматорное подключение. Поскольку на организацию входов АЦП прак-
тически отсутствуют стандарты, перед проектированием схемы сопряже-
ния для каждого АЦП следует тщательно проанализировать его индивиду-
альные особенности.
Если все-таки требуется согласующий усилитель, то первое требование,
которое к нему предъявляется, состоит в том, чтобы он не снижал произво-
дительность преобразователя на постоянном и переменном токе. Можно
предположить, что внимательного ознакомления с паспортными данными
операционного усилителя (ОУ) достаточно для выбора необходимого уст-
ройства — достаточно сравнить данные преобразователя и усилителя. Дей-
ствительно, такой подход обеспечивает значительную долю успеха. В то же
время проведение точного сравнения возможно лишь в том случае, когда
ОУ рассчитан именно на те условия эксплуатации, в которых должна рабо-
тать проектируемая система. На характеристики ОУ влияют такие факторы,
как коэффициент усиления, сопротивление резистора регулировки усиле-
ния, амплитуды входного и выходного сигналов, входной и выходной син-
фазные уровни, напряжение питания и т. д.
Крайне маловероятно, что даже при хорошо составленных паспортных
данных ОУ удастся добиться его точного соответствия условиям работы
приложения. Экстраполяция этих данных на конкретные условия работы
может привести к ложным результатам. Кроме того, на ОУ могут воздей-
ствовать динамические процессы в преобразователе, а подобное воздей-
ствие крайне редко учитывается в паспортных данных.
Рекомендации в паспортных данных самого преобразователя могут по-
служить хорошим источником для выбора ОУ и других схемных элементов
приложения. Однако эта информация устаревает по мере того, как уже пос-
ле выпуска преобразователей появляются новые модели ОУ.
Analog Devices располагает параметрической поисковой системой, об-
легчающей выбор компонентов (см. http://www.analog.com). В частности,
6.1. Сопряжение аналоговых входов АЦП
можно начать выбор с элементов с минимальным питающим напряжени-
ем, т. е. +3 В. Следующим этапом поиска может стать диапазон рабочих
частот, после чего можно перейти к отысканию параметров в еще более
узкой области. Далее поисковую область можно продолжать сужать до ог-
раниченного числа усилителей, чьи паспортные данные составят основу
окончательного выбора. Полный процесс выбора иллюстрирует рис. 6.2.
• Ряд АЦП (ЦАП) не нуждается в специальных устройствах сопряжения.
• Согласующий усилитель/трансформатор не должен ухудшать работу АЦП (ЦАП).
• Обычно наиболее важные характеристики по переменному току:
— помехи;
— полоса пропускания;
— искажения;
— время переходного процесса.
• Выбор на основе паспортных данных ОУ осложнен из-за нестационарных условий
работы конкретного приложения АЦП (ЦАП):
— напряжение питания;
— диапазон сигналов (дифференциальных и синфазных);
— нагрузка (статическая и динамическая).
• Коэффициент усиления и сопротивление резистора настройки усиления.
• Полезно использование системы параметрического поиска.
• ОУ, рекомендуемые в паспортных данных АЦП (ЦАП), могут не учитывать новых моделей.
Рис. 6.2. Критерии выбора устройства сопряжения с АЦП (буфера для ЦАП)
Анализ работы усилителя на постоянном
и переменном токе
Как только что отмечено, усилитель (если таковой требуется) не должен
ухудшать рабочие характеристики преобразователя данных. Обычно пер-
востепенную роль играют показатели работы на переменном токе, осо-
бенно у высокоскоростных преобразователей. В гл. 2 детально обсужда-
лись эти характеристики АЦП и ЦАП, поэтому на рис. 6.3 приведена
лишь сводка динамических показателей, характеризующих популярные
преобразователи.
• Отношение сигнала к шуму и искажениям (SINAD или S/N + D).
• Эффективное число разрядов (ENOB).
• Отношение сигнал—шум (SNR).
• Полоса аналоговых сигналов (малых и полного размаха).
• Гармонические искажения.
• Наихудшая гармоника.
• Полный коэффициент гармоник (THD).
• Полный коэффициент гармоник и шума (THD + N).
• Динамический диапазон, свободный от искажений (SFDR).
• Двухтональные интермодуляционные искажения.
• Многотональные интермодуляционные искажения.
Рис. 6.3. Динамические показатели популярных преобразователей
Глава 6. Интерфейсы преобразователей данных
Для сравнения на рис. 6.4 собраны основные характеристики ОУ по
постоянному и переменному току. Не все ОУ характеризуются такими по-
казателями, но большинство из них должно быть указано в паспортных
данных, если ОУ претендует на использование в высокопроизводительных
приложениях.
• Постоянный ток:
— диапазон входных/выходных сигналов;
— смещение и дрейф смещения;
— входной ток смещения;
— коэффициент усиления с разомкнутой обратной связью;
— интегральная линейность;
— 1/f шум (по напряжению и току).
• Переменный ток (сильно зависит от приложения!):
— широкополосный шум (по напряжению и частоте);
— полоса пропускания больших и малых сигналов;
— гармонические искажения;
— полный коэффициент гармоник (THD)',
— полный коэффициент гармоник и шума (THD + Л/);
— динамический диапазон, свободный от искажений (SFDR);
— интермодуляционные искажения третьего порядка.
Рис. 6.4. Основные характеристики ОУ по постоянному и переменному току для ис-
пользования с АЦП и ЦАП
Несмотря на важность характеристик по переменному току, основные
показатели по постоянному току нельзя игнорировать, особенно в сфере
столь популярных сегодня однополярных низковольтных приложений. До-
пустимый входной и выходной диапазон сигналов становится критически
важным в приложениях с однополярным питанием. Это иллюстрируется на
примере типовой схемы приложения, приведенной на рис. 6.5.
Схема на рис. 6.5 представляет ОУ в виде простого драйвера постоянно-
го тока на входе АЦП с однополярным питанием, обеспечивающего необ-
ходимое усиление и смещение уровня биполярного (относительно «земли»)
входного сигнала в соответствии с входным диапазоном АЦП. Эта упро-
щенная схема демонстрирует несколько важных моментов. Вначале пока-
зан входной диапазон АЦП, который, в свою очередь, определяет требова-
и смещение уровня
Рис. 6.5. Биполярный и синфазный диапазоны входных и выходных сигналов критич-
ны для сопряжения АЦП
ния к выходному биполярному напряжению ОУ. Известен ряд CMOS АЦП
с однополярным питанием, у которых входной сигнал может изменяться от
О В до положительного напряжения питания. Как вскоре будет показано,
ОУ нс в состоянии обеспечить передачу такого максимального сигнала.
Тем не менее если входной диапазон АЦП задать таким образом, чтобы
сигнал на входе изменялся в пределах нескольких сотен милливольт, тогда
можно использовать однополярный АЦП с «почти» полномасштабным вы-
ходом.
С другой стороны, АЦП, выполненные по BiCMOS (комплементарной
биполярной) технологии, обычно характеризуются фиксированным вход-
ным диапазоном, предусматривающим отклонение сигнала от каждого из
крайних значений питающего напряжения на сотни милливольт, хотя часто
и несимметричное относительно среднего питания Vs/1.
Столь же важно и входное синфазное напряжение ОУ. В схеме на рис. 6.5
входное синфазное напряжение VY смещает выходной сигнал усилителя на
необходимую величину. Очевидно, что для нормальной работы схемы ве-
личина V{ должна находиться в диапазоне допустимых входных синфаз-
ных напряжений.
Эти ограничения становятся довольно строгими для усилителей, рабо-
тающих в схеме однополярного низковольтного питания. Поэтому далее
дается краткое описание полномасштабных ОУ, которое поможет лучше
понять, как правильно выбрать согласующий усилитель. При этом отдель-
но рассматриваются входные и выходные каскады.
Полномасштабные входные каскады
К современным ОУ предъявляется общее требование — их входное синфаз-
ное напряжение должно охватывать диапазон напряжений между обоими
входами питания, т. е. они должны обеспечивать полномасштабную синфаз-
ную работу. Хотя это свойство, несомненно, полезно для ряда приложений,
инженерам следует понимать, что только в небольшом числе приложений
выполнение этого требования абсолютно необходимо. Такие приложения
надо отличать от множества других приложений, где синфазный входной
диапазон близок к напряжению питания или где он включает только одно
питающее напряжение, но не предусматривает полномасштабной работы.
Во многих приложениях с однополярным питанием требуется, чтобы
диапазон входных синфазных напряжений простирался до одного из пита-
ющих напряжений (обычно, «земли»). Типичными примерами таких при-
ложений являются сильноточные и слаботочные сенсоры. Многие усилите-
ли могут возбуждаться синфазными сигналами О В, и их легко проектиро-
вать на основе дифференциальных пар типа р-п-р (или л-канальных пар
JFET, или пар PMOS). показанных на рис. 6.6. Входной синфазный диапа-
зон таких ОУ обычно распространяется от уровня примерно на 200 мВ
меньше отрицательного напряжения питания (— или «земли») до уровня
ниже на 1...2 В положительного питания (+И5).
Входной каскад можно также строить на транзисторах типа п-р-п (или
/^-канальных парах JFET, или парах типа NMOS), и в этом случае входной
синфазный диапазон включает положительное напряжение питания, про-
Рис. 6.6. Каскады на базе р-п-р, PMOS или w-канальных JFET позволяют подавать на
сигнальные входы напряжение отрицательного питания
стираясь до 1—2 В относительно отрицательного питания. Это требование
типично для сильноточных сенсоров.
Упрощенная схема устройства, которое обычно называют истинно пол-
номасштабным входным каскадом, показана на рис. 6.7. Примечательно,
что она рассчитана на применение двух дифференциальных усилителей с
питанием через общий резистор: одного — на биполярных транзисторах типа
р-п-р Q — Qv а другого — на биполярных транзисторах типа п-р-п Q—Q^
Аналогичные входные каскады можно выполнять на парах транзисторов
CMOS или JFET.
Следует отметить, что эти две транзисторные пары имеют разные на-
пряжения и токи смещения. Поэтому при изменении приложенного син-
фазного напряжения одновременно изменяется и напряжение, и ток сме-
щения. Фактически пока оба источника тока остаются активными на всем
синфазном входном диапазоне, входное напряжение смещения усилителя
равно среднему напряжению смещения обеих пар, а в тех конструкциях,
где источники токов поочередно выключаются при определенном входном
синфазном напряжении, преобладает напряжение смещения пары р-п-р для
Рис. 6.7. Истинно полномасштабный входной каскад
сигналов, близких к отрицательному напряжению питания, и напряжение
смещения пары п-р-п для сигналов, близких к положительному напряже-
нию питания. Как уже отмечалось, полномасштабный входной каскад мож-
но также сконструировать на СЛЛЛУ-транзисторах, например на ОУ семей-
ства CMO5AD8531/8532/8534.
Входной ток смещения усилителя, зависящий от коэффициента усиле-
ния транзистора по току, является одновременно и функцией приложенно-
го входного синфазного напряжения (для схем на биполярных транзисто-
рах). В результате получается меньшее ослабление синфазного сигнала (CMR)
и менее стабильное сопротивление входному синфазному сигналу по срав-
нению с известными устройствами биполярного питания. Эти особенно-
сти надо учитывать при выборе полномасштабного ОУ, особенно для не-
инвертирующих схем. Дело в том, что входное напряжение смещения,
входной ток смещения и даже CMR могут быть довольно хорошими в
отдельной области синфазного диапазона, но плохими в зоне переключе-
ния п-р-п- и р-л-/?-транзисторов.
В истинно полномасштабных входных усилительных каскадах произво-
дится переключение с одной дифференциальной пары на другую на грани-
це входного синфазного диапазона напряжений. Некоторые приборы, по-
добные семействам ОР191/291/491 и ОР279, имеют синфазный переходной
порог примерно на 1 В ниже положительного напряжения питания (где
нечасто появляются сигналы). Дифференциальный входной каскад типа
р-п-р активен примерно от 200 мВ ниже отрицательного напряжения пита-
ния до 1 В от положительного напряжения питания. В этом синфазном
диапазоне по характеристикам дифференциальной пары типа р-п-р в пер-
вую очередь определяются входное напряжение усилителя, входной ток
смещения, CMR и приведенный ко входу шум напряжения/тока. Тем не
менее при пересечении переходного порога входное напряжение смещения
становится равным среднему напряжению смещения пар типов п-р-п и р-п-р и
может быстро меняться.
Кроме того, как было отмечено выше, токи смещения усилителя в диф-
ференциальной паре типа р-п-р выходят за пределы входного синфазного
диапазона, а когда дифференциальная пара типа п-р-п становится актив-
ной, меняют полярность и величину при пересечении переходного порога.
ОУ, подобные семейству ОР 184/284/484, построены с использованием
полномасштабного входного каскада, в котором транзисторные пары как
типа п-р-п. так и типа р-п-р активны в большей части синфазного диапазо-
на напряжений. При таком подходе и организации смещения отсутствует
синфазный переходной порог. Входное напряжение смещения усилителя
равно среднему напряжению смещения каскадов типа п-р-п и р-п-р. и на-
пряжение смещения плавно изменяется в пределах внутреннего входного
синфазного диапазона благодаря тщательной лазерной подгонке резисто-
ров входного каскада.
Аналогичным образом, благодаря тщательной балансировке тока вход-
ного каскада в его транзисторном исполнении, входные токи смещения
семейства ОР184 также плавно изменяются во входном синфазном диапа-
зоне. Исключение составляют границы входного диапазона, где резко воз-
растают напряжения и токи смещения усилителя вследствие незначитель-
432 Глава 6. Интерфейсы преобразователей данных
ного прямого смещения паразитных р-п -переходов. Это справедливо для
входных напряжений, отстоящих примерно на 1 В от каждого из питающих
напряжений.
Когда обе дифференциальные пары активны во внутреннем входном
синфазном диапазоне, переходная характеристика усилителя в средней ча-
сти синфазного диапазона становится в 2 раза более быстрой при биполяр-
ных входных каскадах и в V2 раз более быстрой при JFET как следствие
большей крутизны, обеспечиваемой двумя входными каскадами.
ОУ семейства AD8027/80281 имеют вывод настройки порога, позволяю-
щий пользователю выбирать точку перехода между входами дифференци-
альных пар р-п-р/п-р-п. В зависимости от состояния вывода select порог
можно установить в 1,2 В от положительного напряжения питания (вывод
select разомкнут) или в 1,2 В от отрицательного напряжения питания (вывод
select подключен к положительному напряжению питания).
Величина gm входного каскада определяет максимальную скорость на-
растания выходного напряжения и граничную частоту коэффициента пере-
дачи усилителя. Правда, быстродействие несколько ухудшается в экстре-
мальных точках входного синфазного диапазона, где либо каскад р-п-р (сиг-
налы достигают положительного напряжения питания), либо каскад п-р-п
(сигналы достигают отрицательного напряжения питания) входит в отсеч-
ку. Пороги резкого изменения крутизны находятся примерно в 1 В от край-
них значений питающего напряжения, и поведение системы на этих поро-
гах аналогично поведению входных токов смещения.
В связи с наличием множества вариантов организации истинно полно-
масштабных входных каскадов следует тщательно оценивать любое прило-
жение, требующее полномасштабных входов, чтобы убедиться, что выбран-
ный усилитель обладает необходимым входным напряжением и током сме-
щения, синфазным подавлением и помехоустойчивостью (по напряжению
и току).
Выходные каскады
Выходные каскады первых ОУ на интегральных схемах (ИС) исполнялись в
виде эмиттерных повторителей типа п-р-п с источниками тока типа п-р-п
или резистивным уравновешиванием, как показано на рис. 6.8, а и б. Есте-
ственно, что скорости нарастания выходного напряжения достигают здесь
больших величин у сигналов, нарастающих в положительном направлении,
чем у спадающих сигналов.
Несмотря на то, что все современные ОУ имеют двухтактные выходные
каскады того или иного типа, многие из них сохраняют асимметрию и име-
ют большие скорости нарастания выходного напряжения в одном направ-
лении, чем в другом. Асимметрия приводит к искажениям сигналов пере-
менного тока и обычно происходит из-за применения в ИС более быстрых
транзисторов типа п-р-п. чем типа р-п-р. Другая причина асимметрии мо-
жет заключаться в том, что выходной сигнал раньше достигает насыщения
по одной из границ питающего напряжения, чем по другой.
Во многих приложениях требуется выходной сигнал, достигающий только
одного из крайних значений напряжения питания («земли» в системах од-
6.1. Сопряжение аналоговых входов АЦП 433
Рис. 6.8. Некоторые традиционные выходные каскады ОУ
нополярного питания). Уравновешивающий резистор, подключенный к от-
рицательной шине, хотя и медленно, но позволяет этого достичь (при дос-
таточно высоком импедансе нагрузки и заземленной шине). Применяя вместо
резисторов источники тока типа FET\ удается повысить скорость ценой
усложнения схемы, как следует из рис. 6.8, б.
Современные комплементарные биполярные технологии позволяют
выпускать хорошо согласованные быстрые транзисторы типов р-п-р и п-р-п.
Выходной каскад на комплементарном эмиттерном повторителе, показан-
ный на рис. 6.8, в, обладает рядом достоинств, наиболее существенным из
которых является низкий выходной импеданс. Однако выходное напряже-
ние такого каскада отличается от каждого из крайних значений питающего
напряжения на величину падения напряжения УВЕ. Поэтому на практике
типичным для такого каскада при однополярном питании +5 В является
диапазон напряжений от +1 до +4 В.
Комплементарные выходные каскады с общим эмиттером и общим ис-
током, представленные на рис. 6.9, а и б. существенно приближают выход-
ное напряжение ОУ к напряжениям питания, но такие ОУ без обратной
связи имеют более высокий выходной импеданс, чем эмиттерные повтори-
тели на рис. 6.8, в.
Тем не менее на практике в системе на базе разомкнутого усилителя с
высоким коэффициентом усиления, охваченного обратной связью, удается
достичь низкого выходного импеданса (в частности, на частотах ниже 10 Гц).
При проектировании таких выходных каскадов необходимо тщательно оце-
нивать коэффициент усиления замкнутой системы с учетом нагрузки. Обыч-
но ОУ рассчитывается на минимальный коэффициент усиления при со-
противлении нагрузки 10 кОм (или больше). Поэтому следует позаботить-
ся, чтобы усилитель не был нагружен ниже номинала, в противном случае
можно лишиться точности усиления.
Глава 6. Интерфейсы преобразователей данных
о 4VS
р-п-р
PMOS
п-р-п
1/вых
о"
.....J NMOS
О -|/
Размах ограничен
напряжением насыщения
и уровнем выходного тока
а
О
........*4
V
Размах ограничен
сопротивлением включенного
полевого транзистора
и уровнем выходного тока
б
Рис. 6.9. «Почти» полномасштабные выходные каскады
Кроме того, ОУ с рассматриваемыми выходными каскадами обладают
большей чувствительностью к емкостной нагрузке, чем с эмиттерными по-
вторителями. Опять же это отмечается в паспортных данных, где должна
быть указана максимально допустимая емкостная нагрузка, вызывающая
перерегулирования или неустойчивые режимы.
Комплементарный выходной каскад с общим эмиттером на базе BJT
(рис. 6.9, а) не дает полного размаха выходного напряжения, соответствую-
щего напряжению питания, и ограничивается уровнем насыщения транзи-
стора (VCESAT). При небольших токах нагрузки (менее 100 мкА) насыще-
ние может наступать при 5—10 мВ, но с ростом нагрузочных токов это
напряжение может повышаться до нескольких сотен милливольт (напри-
мер, 500 мВ при 50 мА).
Напротив, выходной каскад, построенный на базе CMOS FET (рис. 6.9, б),
может обеспечить почти настоящую полномасштабную работу, но только в
режиме холостого хода. Если же на выходе ОУ появится существенный ток,
размах выходного напряжения уменьшится на величину падения напряже-
ния I х R на сопротивлении включенного FET. Обычно это сопротивление
порядка 100 Ом в прецизионных усилителях, но в сильноточных CMOS
усилителях может оказаться и меньше 10 Ом.
Отсюда следует, что не существует истинно полномасштабных выходных
каскадов, чем и объясняется подпись к рис. 6.9 («почти» полномасштабные
выходные каскады). Лучшие из выходных каскадов ОУ могут обеспечить «по-
чти» полномасштабный размах при условии, что они не очень нагружены.
Схемы усиления и смещения уровня на базе ОУ
В приложениях, реализующих связь по постоянному току, согласующий уси-
литель должен обеспечивать усиление и напряжение смещения, необходи-
мые для приведения входного сигнала к диапазону входных напряжений АЦП.
6.1. Сопряжение аналоговых входов АЦП 435
Рис. 6.10. Схемы усиления и смещения уровня на базе ОУ
р
Коэффициент усиления шума = 1 + —
Коэффициент усиления шума
1 +----
||R3
Коэффициент усиления шума = 1 +
На рис. 6.10 приведены параметры, характеризующие усиление и смещение
уровня ОУ. Схема на рис. 6.10, я, работает в неинвертирующем режиме и
использует задающее напряжение низкого импеданса KREF для смещения
выходного сигнала. Взаимосвязь усиления и смещения характеризуется урав-
нением:
V
вых
Кх
REF*
(6.1)
Схема на рис. 6.10, б, работает в инвертирующем режиме, и коэффици-
ент усиления ее сигнала не зависит от смещения. Недостаток этой схемы
состоит в том, что добавление резистора R3 увеличивает усиление шума и,
следовательно, чувствительность ОУ к напряжению смещения ишуму. Урав-
нение вход/выход такой схемы:
у = _Вку
г вых г вх I J REF ’
(6.2)
Схема на рис 6.10, в, также работает в инвертирующем режиме, но напря-
жение смещения KREF приложено к неинвертирующему входу и не влияет на
коэффициент усиления шума. Эта схема привлекательна для приложений с
однополярным питанием (KREF > 0). Уравнение вход/выход имеет вид:
__Ly + th 1+—1 \у
(6.3)
Примечательно, что схема на рис. 6.10, а, чувствительна к импедансу по
входу KREF в отличие от схем на рис. 6.10, б и в, и поскольку ток сигнала
течет через KREF, то Кх должно выводить ОУ за пределы его синфазного
диапазона. В двух других схемах синфазное напряжение фиксировано, и
через ИКЕЕ не течет ток сигнала.
Схема на рис. 6.10, в, идеально подходит для смещения уровня при одно-
полярном питании и идентична схеме, ранее представленной на рис. 6.5.
• Д, выполняет буферизацию, уси-
ление (по level shifting требова-
нию) и смещение уровня
• В качестве Д, могут использовать-
ся неполномасштабные ОУ с од-
нополярным питанием
Рис. 6.11. Схема смещения уровня со связью на постоянном токе с одним выходом и
однополярным питанием
Теперь рассмотрим ее с точки зрения однополярного питания и синфазной
работы. Рисунок 6.11 описывает этот способ смещения уровня при согласо-
вании АЦП с диапазоном входных напряжений +1,5...+3,5 В при однопо-
лярном питании +5 В.
Входной диапазон АЦП (+1,5...+3,5 В) определяет выходной диапазон
ОУ Аг Поскольку большинство каскадов на комплементарных эмиттерных
повторителях (см. рис. 6.8, в) имеют размах, на 1 В отличающийся от край-
них значений напряжения питания, нет необходимости в подключении
выходного каскада с диапазоном источника питания.
Входное синфазное напряжение А{ устанавливается на уровне +1,25 В,
для которого генерируется необходимое напряжение смещения +2,5 В
(середина полной шкалы). Примечательно, что многие неполномасштаб-
ные ОУ с однополярным питанием (такие как AD8057) могут принять это
входное синфазное напряжение при однополярном питании +5 В. Данная
схема служит хорошим примером того, как следует выбирать усилитель на
Рис. 6.12. Схема смещения уровня и усиления с одним входом, требующая примене-
ния ОУ с диапазоном источника питания
6.1. Сопряжение аналоговых входов
основе тщательного анализа напряжений на постоянном токе. В то же вре-
мя после незначительного изменения схемы, показанной на рис. 6.12, по-
является новый набор требований ко входам и выходам ОУ.
Входной диапазон АЦП на рис. 6.12 теперь составляет +0,5...+2,5 В, а
сама схема должна работать при питании +3 В. Поэтому для Л1 требуется
полномасштабный выходной ОУ, обеспечивающий необходимый размах
выходного сигнала. Дополнительно входное синфазное напряжение Л1 те-
перь должно быть +0,3 В, чтобы обеспечить выходное синфазное напряже-
ние + 1,5 В (коэффициент усиления шума равен +5, коэффициент усиления
сигнала равен —4). Для приема входного синфазного напряжения +0,3 В
А{ должен иметь входной каскад типа либо р-п-р, либо PMOS либо полно-
масштабный входной каскад, ранее показанный на рис. 6.7.
На этом простом примере демонстрируется значение тщательной оцен-
ки требований к уровням входных и выходных сигналов ОУ в зависимости
от условий работы схемы и интерфейса АЦП. Только после формирования
требований к уровням сигналов рассматривается работа на переменном токе.
Условия работы ОУ на переменном токе
и требования к преобразователю данных
Современные ОУ отвечают самым разнообразным требованиям к работе на
постоянном и переменном токе, хотя, конечно, учесть все допустимые усло-
вия функционирования схем практически невозможно. Например, рис. 6.13
представляет некоторые ключевые характеристики, взятые из паспортных
данных высокоскоростного ОУ AD8057/AD8058 с низким уровнем искаже-
ний2. Несомненно, эти характеристики зависят от напряжения питания,
уровня сигнала, нагрузки и т. п. Надо обратить внимание и на то, что тра-
диционно в документации большинства ОУ представляются только ши-
повые характеристики работы на переменном токе (а не максимальные или
минимальные значения). В дополнение ко всему мы видим, что ограничены
входные и выходные синфазные диапазоны, что особенно важно при низ-
ковольтном биполярном (или однополярном) питании.
В паспортных данных большинства ОУ есть раздел, содержащий допол-
нительные данные по работе в условиях, отличающихся от тех, что сформу-
лированы в базовых таблицах. Например, на рис. 6.14 показаны искажения
AD8057/AD8058 как функция частоты при G = +1 и Vs = ±5 В. Если особо
не указано, данные, представленные этими кривыми, следует считать ти-
пичными (они обычно так и помечены).
Заметим, что данные рис. 6.14 (и, соответственно, рис. 6.15) приведены
для нагрузки постоянного тока 150 Ом. Эта нагрузка характерна для по-
пулярных приложений, в которых ОУ работает на кабель 75 Ом. Искажения
меньше при небольших нагрузках постоянного тока, обычно от 500 до 1000 Ом
(наиболее типичных для входов АЦП). Такие сведения могут присутство-
вать, но могут и отсутствовать в паспортных данных.
С другой стороны, рис. 6.15 представляет искажения в функции уровня
выходного сигнала на частотах от 5 до 20 МГц.
От того, достаточно или нет приведенных выше характеристик для вы-
бора ОУ АЦП, зависит возможность согласования параметров ОУ с требу-
Глава 6. Интерфейсы преобразователей данных
Характеристики l/s = ±5 В Vs = +5 В
Диапазон входных синфазных напряжений -4,0 В...+4,0 В +0,9 В...+3,4 В
Диапазон выходных синфазных напряжений -4,0 В...+4,0 В +0,9 В...+4,1 В
Напряжение шума, приведенное ко входу TnV/jHz 7nV/jHz
Ширина спектра малых сигналов 325 МГц 300 МГц
THD при 5 МГц, Vo= 2 В р-р,Я£ = 1 кОм -85 дБс -75 дБс
THD при 20 МГц, Vo = 2 В р-р RL = 1 кОм -62 дБс -54 дБс
Рис. 6.13. Ключевые характеристики работы ОУ AD8057/AD8058, <7=4-1
Рис. 6.14. Зависимость искажений от частоты ОУ AD8057/AD8058, G= +1, RL = 150 Ом,
Vs = ±5 В
Рис. 6.15. Зависимость искажений от выходного напряжения ОУ AD8057/AD8058, G= +1
RL = 150 Ом, Vs= ±5 В
6.1. Сопряжение аналоговых входов АЦП
емыми условиями работы приложения. Во многих случаях подобное согла-
сование значительно сужает диапазон выбора. В последующих разделах бу-
дет представлен ряд специальных схем сопряжения АЦП различных типов,
сначала для измерительных приложений высокого разрешения, а затем для
высокоскоростных приложений с малым уровнем искажений.
Сопряжение измерительных £-Л АЦП
высокого разрешения
Семейство АЦП AD77xx оптимизировано для приложений, построенных на
базе низкочастотных измерительных преобразователей высокого (16—24 разря-
дов) разрешения. Подробное описание работы этого семейства можно най-
ти в \ а основные его характеристики перечислены на рис. 6.16.
• Разрешение: 16—24 разрядов.
• Частотный спектр сигналов: < 60 Гц.
• Эффективная частота дискретизации: < 100 Гц.
• Спроектированы для прямого подключения к сенсорам (< 1 кОм) мостового типа без
внешнего буферного усилителя (серия AD77xx):
— встроенный программируемый усилитель (УПУ) и АЦП высокого разрешения ис-
ключают потребность во внешнем усилителе.
• В случае использования буфера он должен быть прецизионного помехоустойчивого
типа (особенно устойчив к 1/f шуму):
— ОР1177;
— ОР177;
— AD797.
Рис. 6.16. Характеристики измерительных £-Д АЦП высокого разрешения семейства
AD77xx
Некоторые члены этого семейства, такие как AD7730, имеют входной
буфер с высоким импедансом и с программируемым усилением (УПУ),
изолирующий аналоговые входы от коммутационных процессов £-А-моду-
лятора. Поэтому для сопряжения аналоговых входов не требуется каких бы
то ни было специальных средств защиты. Тем не менее другие члены се-
мейства AD77xx либо не имеют входного буфера, либо, при наличии тако-
вого, его приходится подключать или отключать с помощью программы.
Обход буфера несколько снижает шум.
Ниже, на рис. 6.17 приведена эквивалентная схема семейства AD77xx
без входного буфера. Входной ключ поочередно соединяет вход с 10-пФ
конденсатором выборки и «землей». Встроенный резистор /?INT на 7 кОм
задает сопротивление входного мультиплексора. Частота коммутации зада-
ется входным тактовым генератором и коэффициентом усиления УПУ. Если
преобразователь работает с разрешением 20 разрядов, 10-пФ встроенный
конденсатор CINT должен заряжаться до 20-разрядной точности за время,
пока он подключен ко входу. Этот временной интервал составляет полпе-
риода коммутируемого сигнала (при коэффициенте заполнения 50%). По-
стоянная времени входной RC-цепи с резистором 7 кОм и конденсатором
10 пФ составляет 70 нс. Если заряд конденсатора рассчитывается на 20-раз-
рядную точность, конденсатор надо заряжать, по крайней мере, в течение
Глава 6. Интерфейсы преобразователей данных
• R^ увеличивает продолжительность заряда C|NT и может вызвать ошибку уси-
ления.
• Время заряда зависит от входной частоты дискретизации и регулировки уси-
ления УПУ.
• В паспортных данных отдельно указываются значения R^, допустимые для
обеспечения требуемой точности.
• Некоторые серии АЦП AD77xx имеют внутренний буфер для изоляции входа от
коммутируемых цепей.
Рис. 6.17. Сопряжение входов £-Д АЦП серий AD77xx без буферизации
14 постоянных времени, т. е. 980 нс. Любое внешнее сопротивление, вклю-
ченное последовательно входу, увеличивает эту постоянную времени.
В паспортных данных различных АЦП AD77xx приводятся таблицы мак-
симальных величин 7?ехт, рекомендуемых для поддержания требуемого уровня
точности. Этими таблицами следует руководствоваться, когда сопротивле-
ние внешнего источника превышает несколько килоом.
Отметим, что в тех случаях, когда возникает потребность во внешнем
буфере для ОУ, надо ориентироваться на паспортные данные, дающие ре-
комендации по достижению наилучшей производительности. В любом слу-
чае усилитель должен принадлежать к помехоустойчивому прецизионному
типу с биполярным входом, такому как ОР1177, ОР177 или AD797.
Сопряжение АЦП последовательного приближения
с одним входом и однополярным питанием 1,6—3,6 В
Потребность в АЦП с малой потребляемой мощностью, низким напря-
жением питания и небольшими размерами привела к развитию семейств
12-/10- и 8-разрядных АЦП AD7466/AD7467/AD74684. Эти приборы ис-
пользуют напряжения питания от 1,6 до 3,6 В и выполнены на базе архитек-
туры последовательного приближения с частотой дискретизации до 200 тыс.
выборок/с. Преобразователи выпускаются в корпусе SOT-23 с 6 выводами,
потребляя только 0,62 мВт при питании 3 В и 0,12 мВт при питании 1,6 В.
Автоматический режим выключения питания снижает потребляемый ток
до 8 нА. Данные передаются по простому последовательному интерфейсу.
Такой тип преобразователей есть смысл рассмотреть более подробно, так
как он представляет хорошую иллюстрацию определенных компромиссов,
на которые приходится идти при разработке интерфейсных схем.
Упрощенная структурная схема рассматриваемых серий показана на
рис. 6.18. Как было отмечено, АЦП построен в стандартном архитектурном
стиле последовательного приближения на основе CMOS ЦАП с коммути-
руемыми конденсаторами для перераспределения зарядов. Входные CMOS
ключи SH/ и SWV управляющие процессом выборки и хранения, показаны
на схеме в режиме выборки. Конденсатор С{ представляет на схеме вход-
Рис. 6.18. Входная цепь 12-разрядного АЦП AD7466 при 1,6...3,6-В источнике, испол-
нение SOT-23-6, 200 тыс. выборок/с
ную эквивалентную паразитную емкость. Конденсатор Сн является конден-
сатором хранения сигнала, a Rs — это эквивалентное сопротивление замк-
нутого ключа В режиме выборки 5^ подключен ко входу, a S1V2 зам-
кнут. При этом компаратор сбалансирован, и конденсатор хранения Сн за-
ряжается до величины входного сигнала. С поступлением сигнала NCS
(начать преобразование) начинается процесс преобразования: SW2 откры-
вается, a SW\ замыкается на «землю», выводя компаратор из равновесия.
Логическая схема управления и ЦАП перераспределения зарядов управля-
ют добавлением и вычитанием фиксированных порций заряда с конденса-
тора хранения, стремясь вернуть компаратор в равновесие. После опреде-
ленного числа циклов преобразование заканчивается.
Коммутация CMOS-ключей SM^ и SW, накладывает определенные ог-
раничения на входную схему сопряжения, связанные с влиянием коммута-
ционных токов. В режиме выборки входной сигнал должен заряжать и раз-
ряжать Cff. В большинстве случаев внутреннее сопротивление источника
не превышает 1 кОм, и потому нет необходимости во входном согласую-
щем усилителе (хотя при этом, конечно, наблюдается некоторое ухудшение
коэффициента гармоник в области частот порядка 100 кГц).
Входной диапазон напряжений АЦП AD746x — от 0 В до напряжения
питания, и питающее напряжение одновременно играет роль опорного сиг-
нала. Для повышения точности и стабильности напряжение питания следу-
ет брать от источника опорного напряжения или от бесперебойного источ-
ника питания (LDO).
Распространенные сегодня полномасштабные ОУ с однополярным пи-
танием 1,8 В (типов AD8515, AD8517 и AD8631) не обеспечивают обработ-
ки сигналов с полным размахом, достигающим каждого из уровней пита-
ния, из-за насыщения выходных транзисторов (об этом подробно говори-
лось выше). Когда в качестве согласующего усилителя используется AD746x,
входной диапазон АЦП уменьшается на величину, определяемую не только
этим насыщением, но и некоторым запасом, требуемым выходному усили-
телю для противостояния высокочастотным искажениям.
Глава 6. Интерфейсы преобразователей данных
Общий вывод из сказанного состоит в том, что низковольтные АЦП с
однополярным питанием, подобные AD746x, лучше всего подключать не-
посредственно к источникам сигналов с низким импедансом (<1 кОм). Если
же требуется согласующий усилитель, он должен работать при повышен-
ном питающем напряжении, чтобы использовать полный входной диапа-
зон АЦП.
Сопряжение АЦП с однополярным питанием
с масштабируемыми входами
Хотя системы с однополярным питанием пользуются повсеместной попу-
лярностью, в ряде приложений на вход АЦП приходится подавать биполяр-
ные сигналы. Такую работу можно организовать разными путями, но про-
стейший способ состоит в использовании тонкопленочного резистивного
делителя-сдвигателя входного уровня АЦП. Семейство однополярных АЦП
последовательного приближения AD789x и AD76xx (так же, как AD974,
AD976 и AD977) включает с этой целью тонкопленочные резистивные атте-
нюаторы и схемы смещения уровня аналогового входного сигнала, позво-
ляющие регулировать параметры входного диапазона, как биполярного, так
и однополярного.
Упрощенная схема входной цепи 12-разрядного 8-канального АЦП
AD7890-10 приведена на рис. 6.195. С помощью этого устройства преобра-
зователь оцифровывает входной сигнал ±10 В при питании однополярным
напряжением +5 В.
Входящая в состав АЦП цепочка тонкопленочных резисторов RJR2/R3
выполняет снижение и смещение уровня при преобразовании входного
сигнала ±10 В в сигнал величиной от 0 до +2,5 В, который подлежит преоб-
разованию в цифровой код. Этот тип входного сигнала не требует специ-
альной схемы сопряжения, так как Rx изолирует вход от схемы преобразо-
вателя, в которой в ходе преобразования могут возникать коммутационные
Рис. 6.19. Сопряжение АЦП сбора данных с масштабируемыми входами и однополяр-
ным питанием
6.1. Сопряжение аналоговых
переходные токи. Несмотря на присутствие Rv нужно поддерживать внеш-
нее сопротивление источника Rs достаточно низким, чтобы исключить
ошибки усиления на делителе Rs/Rv
Сопряжение CMOS АЦП с коммутируемыми
конденсаторами и дифференциальным входом
Широкому распространению CMOS АЦП способствует их малая потребляе-
мая мощность, высокая производительность и низкая стоимость. На рис. 6.20
приведена эквивалентная схема входной цепи типичного CMOS АЦП с
дифференциальной СВХ. Состояние ключей соответствует режиму выбор-
ки, а их коммутация выполняется с частотой дискретизации. Конденсато-
рами 16 пФ представлены эффективные емкости ключей и 52 и входные
паразитные емкости. На конденсаторах NCS (4 пФ) организована выборка,
а конденсаторы Сн предназначены для хранения сигналов. Хотя входные
цепи являются полностью дифференциальными, АЦП такой структуры
можно подключать как с одним входом, так и по дифференциальной схеме.
Все же оптимальным решением является применение дифференциального
трансформатора или дифференциального согласующего усилителя.
В режиме выборки к конденсаторам NCS прикладывается дифференци-
альное входное напряжение. При переходе в режим хранения напряжение с
конденсаторов выборки передается на конденсаторы хранения и буфериру-
ется усилителем А (ключами управляют соответствующие фазы генератора
синхроимпульсов). Когда СВХ возвращается в режим выборки, конденсато-
ры NCS перезаряжаются до нового входного напряжения. Эта переменная
перезарядка NCS, усредненная на интервале дискретизации при заданной
частоте f, позволяет считать входной импеданс полноценным резистив-
ным компонентом. Однако внутри периода дискретизации (1//у) входной
импеданс динамично изменяется, поэтому следует предусмотреть опреде-
ленные меры предосторожности по входу.
Резистивную составляющую входного импеданса можно рассчитать че-
рез средний заряд Сн. Видно, что если NCSзаряжается до уровня входного
напряжения до того, как разомкнутся и S2, то средний входной ток будет
Рис. 6.20. Упрощенная входная цепь типичного устройства выборки и хранения на
CMOS-коммутируемых конденсаторах
444 Глава 6. Интерфейсы преобразователей данных
таким же, как если бы между входами был подключен резистор с сопро-
тивлением \/(fsNCS). Поскольку NCS имеет лишь несколько пикофарад,
этот резистивный компонент обычно превышает несколько килоом на
частоте fs = 10 млн выборок/с.
Внутри периода дискретизации входной импеданс СВХ представляет
динамическую нагрузку. Когда СВХ возвращается в режим выборки, заряд-
ный ток, протекающий через сопротивление RON включенных и Sv дол-
жен изменяться по экспоненциальному закону. Требование экспоненци-
альной зарядки означает, что импеданс источника на частоте дискретиза-
ции должен быть одновременно достаточно низким и резистивным.
CMOS АЦП с дифференциальным входом можно подключать и по од-
ному входу, правда, с некоторым ухудшением работы на переменном токе.
При этом надо учитывать ранее рассмотренные коммутационные процес-
сы. Типичный переходный процесс СЛ/05АЦП, подключаемого по одному
входу, показан на рис. 6.21 для 12-разрядного АЦП AD9225 на 25 млн выбо-
рок/с. Эти данные были получены при подключении АЦП с эквивалент-
ным внутренним сопротивлением источника 50 Ом. При переходе от вы-
борки к хранению входной сигнал выбирается, когда NCS отключается от
источника. При переходе от хранения к выборке NCS подключается к ис-
точнику для перезарядки. Переходная кривая на частоте дискретизации
содержит линейную, нелинейную и синфазную составляющие.
• При переходе от хранения к выборке NCS переключается на источник для «переза-
рядки». Переходная кривая на частоте дискретизации имеет линейную, нелинейную
и синфазную составляющие.
• Переход от выборки к хранению - входной сигнал выбирается, когда NCS отключает-
ся от источника.
Рис. 6.21. Переходный процесс по одному входу типичного CMOS АЦП на частоте
дискретизации 25 млн выборок/с
Схемы подключения по одному входу CMOS АЦП
с дифференциальным входом
Теперь рассмотрим несколько простых схем подключения CMOS АЦП по
одному входу. Хотя для наилучшей работы предпочтительно дифференци-
альное подключение, в приложениях, к которым не предъявляется высоких
требований, часто применяется подключение по одному входу.
На рис. 6.22 дана обобщенная схема сопряжения СЛ/05АЦП с подклю-
чением ОУ по одному входу. В этой схеме последовательный резистор Rs
6.1. Сопряжение аналоговых входов АЦП 445
Рис. 6.22. Оптимизированная схема подключения по одному входу АЦП с коммутиру-
емым конденсатором
играет двоякую роль. Выбираемый обычно из диапазона 25—100 Ом, он
ограничивает пиковый переходный ток ОУ. Более того, он развязывает схе-
му сопряжения и входную емкость АЦП (препятствуя снижению запаса по
фазе).
Другая особенность этой схемы состоит в двойственности функций,
выполняемых Т?5и Сг Настройка сопротивления источника по входам АЦП
Ивх А и Их в на постоянном и переменном токе обеспечивает идентичное
время установления синфазных процессов и хорошее подавление шума и
искажений. Шунтирующий конденсатор CF также действует как средство
сохранения заряда по обоим входам и заземляет синфазные переходные
процессы.
Кроме буферизации переходных процессов, Rs и CF также образуют
фильтр НЧ для Кх, который ограничивает шум усилителя на входе Ивх Л
АЦП. Окончательные величины Rs и CF оптимизируются применительно к
конкретной схеме, а рекомендуемые значения приведены в паспортных
данных АЦП.
При выборе согласующего усилителя следует учитывать многие факто-
ры. Как уже отмечалось, напряжения синфазных входов и выходов надо
сопоставлять с входным диапазоном и напряжением питания. Уровни шума
и искажений ОУ должны соответствовать ожидаемой производительности
АЦП. Кроме того, важно добиваться достаточно короткого времени уста-
новления ОУ, чтобы в выходном сигнале завершились переходные процес-
сы, генерируемые АЦП. При этом полезно придерживаться следующей ре-
комендации: 0,1 % времени установления ОУ должно составлять не более
полупериода максимальной частоты дискретизации. Рекомендуемые типы
согласующих ОУ и соответствующих схем привязки обычно указаны в пас-
портных данных АЦП.
На рис. 6.23 показана обобщенная схема сопряжения и смещения уров-
ня ОУ с одним входом и связью на постоянном токе для АЦП серий AD922x.
Параметры схемы подобраны для частот дискретизации порядка 25 млн
выборок/с. Схема подключает входной сигнал ±2 В относительно «земли» к
АЦП с однополярным питанием и изолирует переходные токи. Диапазон
Глава 6. Интерфейсы преобразователей данных
Рис. 6.23. Схема сопряжения
и смещения уровня АЦП
AD922x с одним входом и свя-
зью на постоянном токе
входных напряжений АЦП составляет 0...+4 В, но для минимального вход-
ного сигнала О В требуется ОУ с биполярным питанием.
Неинвертирующий вход AD8057 имеет смещение +1 В, благодаря чему
выходное синфазное напряжение на входе VINA составляет +2 В, т. е. сере-
дину размаха при биполярном входном сигнале. Входные сопротивления
по входам Кх А и Кх в подбираются такими, чтобы наилучшим образом демп-
фировать переходные процессы. Конденсаторы 100 пФ выполняют функ-
ции небольших накопителей заряда входных переходных токов и ограничи-
вают шум фильтрами НЧ с последовательными резисторами 33,2 Ом.
Аналогичная схема сопряжения и смещения уровня с одним входом,
рассчитанная на питание однополярным напряжением +5 В, приведена на
рис. 6.24. Биполярный входной сигнал ±1 В поступает на вход АЦП в диа-
пазоне 2 В при синфазном напряжении +2,5 В. В схеме используется ОУ
AD8061 с полномасштабным входом, хотя возможны и другие ОУ в зависи-
мости от требуемого спектрального диапазона и допустимых искажений
(например, AD8027, AD8031 или AD8091). Входное синфазное напряжение
+ 1,25 В на AD8061 снимается с делителя напряжения внешнего источника
опорного сигнала AD780, составляющего 2,5 В.
Рис. 6.24. Схема смещения уровня для согласования с АЦП AD922x с одним входом и
со связью на постоянном токе и однополярным питанием
6.1. Сопряжение аналоговых входов АЦП
Драйверы АЦП с дифференциальным входом
Как уже отмечалось, большинство высокопроизводительных АЦП сегодня
конструируются с дифференциальными входами. Преимущество дифферен-
циальных АЦП заключается в хорошем ослаблении синфазных сигналов, в
уменьшении составляющих искажений второго порядка и в простоте алго-
ритма заводской настройки. Хотя большинство АЦП с дифференциальным
входом можно подключать по одному входу, как это было показано выше,
однако дифференциальный драйвер обычно обеспечивает наилучшую про-
изводительность.
В ходе последующего обсуждения полезно различать две популярные
технологии изготовления ИС, применяемые в высокопроизводительных АЦП
и предназначенные для разных приложений. Многие АЦП средней и высо-
кой производительности изготавливаются по СЛ/05-технологии высокой
плотности способом «фаундри», и в них обычно применяются СВХ с ком-
мутируемыми конденсаторами (ранее рассмотренные), которые создают
переходные токи на входах АЦП. В то же время часто высокопроизводи-
тельные АЦП проектируют на базе технологии BiCMOS (биполярных и
СЛ/05-приборов на одном кристалле) или СВ (комплементарных биполяр-
ных) АЦП, обычно снабжаемых входными буферами, являющимися час-
тью более распррстраненных диодных СВХ с минимальным влиянием вход-
ных переходных токов. Их входной диапазон значительно менее гибок, чем
у конструкций CMOS.
Для пояснения преимуществ синфазного подавления входных переход-
ных токов рассмотрим два представленных на рис. 6.25, а, входных сигнала
12-разрядного СЛ/О5АЦП AD9225, обозначенных как VbxA и Кх5. Сбалан-
сированное внутреннее сопротивление источника составляет 50 Ом, а час-
тота дискретизации равна 25 млн выборок/с. На графиках отчетливо видны
коммутационные процессы, вызванные переключениями в цепи выборки и
хранения. Рисунок 6.25, б, показывает разность двух сигналов УхА— УхВ-
• Дифференциальный переходный процесс заряда конденсатора симметричен относи-
тельно середины шкалы и характеризуется преобладанием линейной составляющей.
• Синфазные переходные процессы отсутствуют при равных внутренних сопротивлени-
ях источника.
Примечание: Данные получены при сопротивлении источника 50 Ом.
Рис. 6.25. Типичные переходные процессы СЛЮ5АЦП с коммутируемым конденсато-
ром при одиночном (а) и дифференциальном (6) подключении на частоте
дискретизации 25 млн выборок/с
Глава 6. Интерфейсы преобразователей данных
Обращает на себя внимание, что результирующий переходный процесс
симметричен относительно середины шкалы и в нем преобладает линейная
составляющая. Благодаря этому подавляются синфазные переходные про-
цессы и уменьшаются искажения по сравнению с подключением по одному
входу.
Когда не требуется работа на постоянном токе, можно добиться значитель-
ного подавления синфазных сигналов и малых искажений посредством транс-
форматорного подключения дифференциального входа АЦП. На рис. 6.26
представлена типичная схема такого соединения. В схеме используется
миниатюрный радиочастотный трансформатор модели #ADT4-1Bt с коэф-
фициентом импеданса 4 (коэффициентом трансформации 2). Полоса про-
пускания без ослабления более 3 дБ у этого трансформатора находится в
диапазоне 2—775 МГц6 при внутреннем сопротивлении источника 50 Ом.
Коэффициент импеданса 1:4 предполагает наличие на вторичной обмотке
нагрузки 200 Ом, обеспечивающей оптимальную передачу мощности и низ-
кий волновой коэффициент трансформации. Средний вывод вторичной
обмотки трансформатора является обычным средством смещения уровня
входного сигнала, чтобы синфазное напряжение АЦП составляло Vc/2
(в ряде АЦП синфазное напряжение отличается от Кс/2, и этот момент
следует уточнять по паспортным данным).
Для оптимальной работы приложения подойдут и трансформаторы с
иным коэффициентом трансформации. Данное устройство сопряжения или
второй усилитель может подавлять искажения при пониженных уровнях
выходной мощности и размаха сигналов, а выбор трансформатора с более
высоким коэффициентом импеданса позволит эффективно усилить сигнал
и снизить требования к устройству сопряжения.
Для сопряжения трансформатора и CMOS АЦП с коммутируемыми кон-
денсаторами повсеместно распространена схема, состоящая из Rs, С{ и С2.
Резисторы Rs изолируют вторичную обмотку трансформатора от коммута-
ционных процессов, и их оптимальная величина (определенная экспери-
ментально) составляет обычно 25—100 Ом. Конденсаторы заряжаются
при синфазных коммутационных процессах и фильтруют помехи (с рези-
Радиочастотный трансформатор:
Миниатюрный трансформатор ADT4-1 Вт
Коэффициент трансформации 1 : 2
Коэффициент импеданса 1 : 4
АI/ AD92XX
CMOS АЦП
с высоким входным
импедансом
Т
Рис. 6.26. Трансформаторное подключение CMOS АЦП с дифференциальным входом
• Входные буферы типичны для BiCMOS и биполярных процессов.
• Для CMOS их использование проблематично.
• Упрощают входной интерфейс, уменьшая переходные токи.
• Фиксация синфазного уровня может ограничить гибкость.
Рис. 6.27. АЦП с буферизацией дифференциальных входов (BiCMOS или комплемен-
тарные биполярные процессы)
сторами Rs). Дрейф конденсаторов С{ не должен превышать 5 %, чтобы син-
фазный сигнал не превращался в дифференциальный. Для лучшей фильтра-
ции можно добавить С2. Во всех случаях надо сверяться с паспортными дан-
ными, где приводятся рекомендуемые оптимальные величины Rs, С{ и С2.
Как уже отмечалось, BiCMOS и комплементарные биполярные АЦП
одинаково реализуют буферизацию, генерируя при этом более слабые ком-
мутационные токи, чем СЛ/05-преобразователи. На рис. 6.27 показаны две
типичные конфигурации входных цепей для BiCMOS или комплементарных
биполярных АЦП. Хотя они и упрощают интерфейс, но могут лишить схему
гибкости вследствие фиксации входного синфазного уровня. На рис. 6.27, а,
синфазное напряжение формируется с помощью резистивного делителя,
подключаемого между «землей» и положительным аналоговым входом пи-
тания. На рис. 6.27, б, для формирования синфазного напряжения исполь-
зуется внешний опорный сигнал.
На рис 6.28 представлена трансформаторная схема сопряжения 12-раз-
рядного BiCMOS АЦП AD9430 с 170/210 млн выборок/с7. Для лучшей рабо-
ты на высоких входных частотах два трансформатора соединяют последова-
тельно, сводя к минимуму искажения от четных гармоник. Первый транс-
форматор преобразует сигнал одного входа в дифференциальный сигнал.
При этом заземление входа на первичной стороне ухудшает амплитудный
баланс вторичной обмотки из-за паразитной емкости обмоток. Наоборот,
второй трансформатор улучшает амплитудный баланс, снижая гармоничес-
кие искажения. В таких приложениях рекомендуется использование широ-
кополосных трансформаторов, например миниатюрного ADT1-1 Вт. Поло-
са пропускания без искажений свыше 3 дБ у ADT1-1 Вт составляет от 0,4 до
800 МГц. Напомним, что полоса пропускания двух трансформаторов равна
полосе одного трансформатора, деленной на V2.
Импеданс цепи на выходе вторичной обмотки второго трансформатора
равен сумме входного импеданса АЦП (6 кОм) и двух последовательных
резисторов 24,9 Ом, т. е. примерно 6050 Ом. Подключение согласующего
резистора 51,1 Ом параллельно к резистору 6050 Ом ведет к расчетному
импедансу около 50 Ом.
15—2852
Глава 6. Интерфейсы преобразователей данных
3,3 в
3 кОм
51,1 Ом
Миниатюрный
трансформатор
ADT1-1 Вт
±0,768 В
О—
[+2,8 В ± 0,384 В |
24,9 Ом
-AW-
ZZZ 0,1 мкФ
Рис. 6.28. Трансформаторное подклю-
чение 12-разрядного АЦП AD9430 на
170/210 млн выборок/с
| +2,8 В ± 0,384 В |
у 3 кОм
24,9 Ом -
3,5
кОм
20
кОм
3,5
кОм
20
кОм
AD9430
Поскольку входная буферная цепь BiCMOS генерирует очень маленькие
переходные токи, входной фильтрации не требуется. Последовательные
резисторы 24,9 Ом являются простыми развязками трансформатора от ма-
лой входной емкости АЦП (~5 пФ). Резистивные делители 3,5 кОм/20 кОм
задают входное синфазное напряжение +2,8 В (при питании +3,3 В). Этим
иллюстрируется отмеченная ранее особенность BiCMOS и комплементар-
ных биполярных АЦП, состоящая в том, что синфазное напряжение не
обязательно должно быть точно выравнено к середине питающего напря-
жения. В рассматриваемой схеме наибольшее положительное входное на-
пряжение равно 2,8 В + 0,384 В = 3,184 В, что на 116 мВ ниже питания +3,3 В.
А это значит, что в системе с питанием 3,3 В для снижения искажений
АЦП AD9430 надо питать либо через трансформатор, либо через диффе-
ренциальный усилитель переменного тока.
Когда же требуется связь на постоянном токе, согласующий усилитель
надо включать на повышенное питающее напряжение, так как даже полно-
масштабные выходные каскады имеют большие искажения на высокой ча-
стоте в краевых областях, составляющих 116 мВ.
Примечательно, что для сбалансированного согласования центральный
вывод вторичной обмотки трансформатора развязывают от «земли».
На рис. 6.298 представлена аналогичная трансформаторная схема согла-
сования 14-разрядного АЦП AD6645 с 80/105 млн выборок/с (биполярный
процесс). Входные синфазные напряжения создаются здесь двумя резисто-
рами по 500 Ом, соединяющими каждый вход с внешним опорным напря-
жением 2,4 В. При этом дифференциальное входное сопротивление АЦП
составляет 1 кОм. Как и в предыдущей схеме, последовательные резисторы
24,9 Ом изолируют вторичную обмотку трансформатора от малой входной
емкости АЦП. Дифференциальный импеданс вторичной обмотки транс-
форматора оказывается равным 1050 Ом.
В этой цепи используется миниатюрный трансформатор ADT4-1 Вт с
коэффициентом импеданса 1 : 4 (коэффициентом трансформации 1 : 2),
который согласует дифференциальное сопротивление 1050 Ом с источни-
6.1. Сопряжение аналоговых входов АЦП
5 В
| +2,4 В ± 0,55 В |
AD6645
±0,58 В Q
61,9 Ом
Миниатюрный
трансформатор
ADT4-1 Вт
трансформации |
24,9 Ом
500 Ом
500 Ом
^ = 2,4 В
Z±Z 0,1 мкФ
у 500 Ом
24,9 Ом
500 Ом
Коэффициент ।---------------1
импеданса 1 : 4 | +2,4 В ± 0,55 В |
Рис. 6.29. Трансформаторное подключение 14-разрядного АЦП AD6645 комплемен-
тарной биполярной архитектуры на 80/105 млн выборок/с
ком 50 Ом. Сопротивление 1050 Ом соответствует 262,5 Ом относительно
первичной обмотки, а шунтирующий резистор 61,9 Ом, включенный па-
раллельно 262,5 Ом, дает примерно 50 Ом. Полоса пропускания транс-
форматора с ослаблением не больше 3 дБ находится в диапазоне от 2 до
775 МГц.
Теоретически для АЦП AD6645 с 1000 Ом по входу и сопротивлением
50 Ом вполне подошел бы трансформатор с коэффициентом импеданса 1:20
(соответствующим коэффициенту трансформации 1 : 4,47), который обес-
печивает «бесшумный» коэффициент усиления напряжения 4,47 (+13 дБ).
Однако большой коэффициент трансформации может отрицательно отра-
зиться на полосе пропускания и уровне искажений.
б
• !/„„ = 2,2 В
FSp Р ’
• fs = 80 MSPS
• SNR = 74 дБ
• Входная полоса пропускания с
ослаблением до 3 дБ = 250 МГц
• Коэффициент шума — 34,8 дБ
Коэффициент шума — 28,8 дБ
Коэффициент шума — 22,8 дБ
Рис. 6.30. Применение радиочастотных трансформаторов для улучшения общего ко-
эффициента шума АЦП
452 Глава 6. Интерфейсы преобразователей данных
Для иллюстрации влияния на коэффициент шума трансформаторов,
используемых для повышения напряжения, на рис. 6.30 показаны АЦП
AD6645 в режиме дискретизации в полосе 40 МГц на частоте 80 млн выбо-
рок/с при коэффициентах трансформации 1:1 (рис. 6.30, а), 1:2 (рис. 6.30, б)
и 1 : 4 (рис. 6.30, в). (Основные сведения по расчету коэффициента шума
были даны в гл. 2.)
Всякий раз, когда коэффициент трансформации удваивается, коэффи-
циент шума снижается на 6 дБ. На практике же наилучший компромисс
между полосой пропускания и искажениями достигается при подключении
AD6645 с коэффициентом трансформации, превышающим 1 :2.
Сопряжение АЦП с дифференциальными
усилителями
Несомненно, в большинстве приложений, работающих на радиочастотах
и промежуточных частотах, трансформаторное устройство сопряжения АЦП
обеспечивает наименьшие искажения и помехи, особенно если трансфор-
матор позволяет реализовать «бесшумное» усиление напряжения. Но есть
множество приложений, в которых дифференциальный входной АЦП
нельзя подключать через трансформатор, так как их частотная характери-
стика распространяется вплоть до постоянного тока. В этих случаях син-
фазные входные и выходные напряжения ОУ, усиление, искажения и шум
должны быть рассмотрены применительно к схемам, работающим на по-
стоянном токе. В двух следующих подразделах обсуждаются два типа драй-
веров на дифференциальных ОУ, первый из которых представляет ОУ с
биполярным входом, а второй — полностью интегральный дифференци-
альный усилитель.
Драйверы на ОУ с биполярным входом
Рисунок 6.31 демонстрирует возможность подключения ОУ AD8058 с би-
полярным входом, преобразующего биполярный сигнал одного входа в диф-
ференциальный сигнал, подходящий для сопряжения с семейством CMOS
АЦП AD92xx. Использование ОУ с биполярным входом обеспечивает луч-
шее согласование по амплитуде и фазе, чем применение двух одиночных
ОУ. Размах входного диапазона АЦП соответствует дифференциальному
входному сигналу 2 В (1 В по каждому входу) и синфазному напряжению
+2 В. Как было сказано выше, конденсаторы 100 пФ с резисторами 33,2 Ом
служат накопителями зарядов переходных токов и фильтрами НЧ для за-
щиты от помех CMOS АЦП.
Усилитель А{ включен как неинвертирующий усилитель. Схема сме-
щения уровня на резисторах 1 кОм сдвигает входной сигнал ±0,5 В на
±1 ± 0,25 В на неинвертирующем входе Аг На выходе А1 при этом присут-
ствует +2 ± 0,5 В, так как неинвертирующий коэффициент усиления А^
равен 2.
ОУ А2 инвертирует входной сигнал, а резисторы делителя 1 кОм подают
синфазное напряжение +1 В на его неинвертирующий вход, поэтому на
выходе А2 присутствует +2 ± 0,5 В.
6.1. Сопряжение аналоговых входов АЦП 453
*AD8062, AD8028, AD8032, AD8092, допусти-
мо однополярное питание (см. текст)
Рис. 6.31. Подключение ОУ одним входом к дифференциальному драйверу со связью
на постоянном токе и смещением уровня
Два ОУ в схеме хорошо согласованы, т. к. их биполярность реали-
зована в одном кристалле, и оба работают с коэффициентом усиления
шума, равным 2. В то же время приведенный ко входу шум AD8058 со-
ставляет 20 нВ/Гц, а на выходах Д и А2 он представляется как 40 нВ/Гц,
ухудшая отношение сигнал-шум в ряде приложений. В схеме на рис. 6.31
этот эффект частично ослабляется входной RC-цепочкой, которая не
только уменьшает входной шум, но и поглощает некоторые переходные
токи.
ОУ AD8058 не имеет полномасштабных входов и выходов, и последую-
щий несложный анализ показывает, что схема на рис. 6.31 должна иметь
биполярное питание. Выходное синфазное напряжение AD8058 при работе
с однополярным питанием +5 В составляет от +0,9 до +3,4 В. Это напряже-
ние должно быть принято схемой, у которой диапазон размаха сигнала ра-
вен + 1,5...+2,5 В. Однако входное синфазное напряжение AD8058 с одно-
полярным питанием +5 В установлено в диапазоне +0,9...+4,1 В, тогда как
схема требует до +0,75 В, что выходит за пределы разрешенного диапазона.
Поэтому ОУ нуждается в биполярном питании.
Когда же требуется однополярное питание, следует рассматривать пол-
номасштабные ОУ, такие как AD8062, AD8028, AD8032 и AD8092.
Драйверы на комплементарных
дифференциальных усилителях
На рис. 6.32 приведена структурная схема комплементарных дифферен-
циальных усилителей семейства AD813x, предназначенного для подклю-
чения к АЦП9. На рис. 6.32, а, детально представлены внутренние цепи, а
на рис. 6.32, б, приведена эквивалентная схема. Коэффициент усиления
задается внешними резисторами Т^и RG, а синфазное напряжение опреде-
ляется сигналом на выводе V0CM. Внутренняя синфазная обратная связь
Рис. 6.32. Функциональная и эквивалентная схемы дифференциальных драйверов АЦП
AD813x
уравновешивает выходы Кых+ и Квых_, поддерживая на них равные по амп-
литуде и сдвинутые на 180° по фазе сигналы в соответствии с уравнением:
Vn = (V + + v )/2- (6.4)
ОСМ v вых+ вых-7' V 7
Семейство AD813x имеет два контура обратной связи для раздельного
управления дифференциальными и синфазными выходными напряжения-
ми. Дифференциальная обратная связь, формируемая с помощью внешних
резисторов, управляет только дифференциальным выходным напряжени-
ем. Синфазная обратная связь управляет только синфазным выходным на-
пряжением. Такая архитектура позволяет без труда выполнять независимое
регулирование синфазного уровня в приложениях, где требуется такое ре-
гулирование. С помощью внутренней обратной связи этот уровень под-
держивается равным напряжению на входе Косм независимо от диффе-
ренциального выходного напряжения. В результате удается получить по-
чти полностью сбалансированные дифференциальные выходы одинаковой
амплитуды, сдвинутые по фазе точно на 180° и работающие в широком
частотном диапазоне. Схема может быть выполнена с дифференциальным
или одним входом, а коэффициент усиления по напряжению равен отно-
шению Rf и Rg .
Используя ряд допущений и выражения, приведенные на рис. 6.33, можно
проанализировать схему. При анализе работы ОУ на постоянном токе вна-
чале допускается равенство нулю токов инвертирующего и неинвертирую-
щего входов (высокий входной импеданс по отношению к резисторам об-
ратной связи). Второе допущение состоит в равенстве сигналов обратной
связи, поступающих на инвертирующие и неинвертирующие входы. Со-
гласно третьему допущению выходные напряжения сдвинуты по фазе на
180° и симметричны относительно V0CM-
Даже если внешние цепи обратной связи (RF/RG) не согласованы, вне-
шний синфазный контур все же до некоторой степени уравновешивает
6.1. Сопряжение аналоговых входов АЦП
• + и - входные токи равны нулю.
• + и - входные токи равны.
• Выходные напряжения сдвинуты по фазе на 180° и симметричны относительно VOCM.
• Коэффициент усиления равен RF/RG.
Рис. 6.33. Анализ уровней напряжения дифференциальных усилителей
выходные сигналы. Амплитуды сигналов на каждом выходе остаются рав-
ными и сдвинутыми по фазе на 180°. Коэффициент усиления дифференци-
ального режима изменяется пропорционально степени несогласованности
обратной связи, а вот полностью сбалансировать выходы не удается. Ошиб-
ки, вызванные неидентичностью внешних резисторов, снижают способность
схемы к подавлению входных синфазных сигналов, столь характерную для
дифференциальных усилителей с четырьмя резисторами и не свойствен-
ную обычным усилителям.
Кроме того, при различии в уровнях постоянного тока входных и вы-
ходных синфазных сигналов появляются ошибки согласования, которые
проявляются в некотором смещении напряжений дифференциальных вы-
ходов. В случае когда (7=1, опорный сигнал выставлен относительно «зем-
ли», выходной синфазный уровень установлен в 2,5 В, а смещение выхода в
25 мВ (1 % от разности синфазных уровней) вызывается погрешностью ре-
зисторов в 1 %. Погрешность резисторов в 1 % ухудшает коэффициент ос-
лабления входного синфазного сигнала примерно на 40 дБ, смещает выход-
ной сигнал до 25 мВ на уровне 2,5 В, хотя и не вызывает существенной
ошибки балансировки выхода.
Эффективный входной импеданс схемы, показанной на рис. 6.33, в точ-
ках Их+ и Их зависит от того, включен ли усилитель по одному входу или
по дифференциальным входам. Для сбалансированных дифференциальных
входных сигналов входной импеданс (Явх dm) между входами (Ивх+ и Ивх_)
выражается просто:
R d = 2 х R (6.5)
вх, dm G х 7
В случае подключения по одному входу (например, Ивх заземлен, а вход-
ной сигнал прикладывается к Ивх+) входной импеданс становится равным:
D _ ______________G_______
7Vbx, dm О
1_________________
2 х + Rf)
(6.6)
Входной импеданс такой схемы значительно выше, чем у обычного ин-
вертирующего ОУ, так как часть дифференциального выходного напряже-
Глава 6. Интерфейсы преобразователей данных
a
Рис. 6.34. Некоторые конфигурации дифференциальных усилителей
ния передается на вход в качестве синфазного сигнала, компенсируя на-
пряжение на входном резисторе RG.
Рисунок 6.34 представляет ряд возможных конфигураций дифференци-
ального усилителя AD813x. На рис. 6.34, а, дана стандартная конфигурация
с двумя контурами обратной связи, характеризуемыми соответствующими
коэффициентами обратной связи Д и Д. Здесь каждый коэффициент об-
ратной связи может изменяться в пределах от 0 до 1.
В конфигурации на рис. 6.34, б, нет обратной связи от Ивых_ к К+, т. е.
Д = 0. В этом случае Д определяет часть Ивых+, возвращаемую на И-, и
схема совпадала бы с конфигурацией неинвертирующего ОУ, если бы не
дополнительный комплементарный выход. Следовательно, полный коэф-
фициент усиления вдвое превышает усиление неинвертирующего ОУ, т. е.
2 х
или 2 х| 1 + — I.
I aJ
Рисунок 6.34, в, представляет схему, в которой Д = 0 и Д = 1. Эта схема
без резисторов обеспечивает коэффициент усиления 2.
На рис. 6.34, г, показана схема, в которой Д = 1, а Д зависит от Д и Д..
Коэффициент усиления этой схемы всегда меньше 2.
И наконец, схема на рис. 6.34, д, имеет Д = 0 и очень похожа на обыч-
ный инвертирующий ОУ, за исключением комплементарного выхода Квых+.
Серии AD813x хорошо подходят и для управления симметричными диф-
ференциальными линиями, как это показано на рис. 6.35, где с помощью
AD8132 подключена витая пара сопротивлением 100 Ом. AD8132 здесь иг-
рает роль драйвера с коэффициентом усиления 2, компенсирующего поте-
ри в кабеле, которым подводится сигнал и подключается нагрузка. В этой
конфигурации полоса пропускания AD8132 составляет около 160 МГц.
Роль линейного приемника играет дифференциальный приемник
AD8130, выполненный по уникальной архитектуре «активной обратной свя-
зи», обеспечивающей синфазное подавление около 70 дБ на частоте 10 МГц10.
6.1. Сопряжение аналоговых входов АЦП 457
Рис. 6.35. Высокоскоростной дифференциальный линейный драйвер и линейный при-
емник
При коэффициенте усиления 1 AD8130 имеет полосу пропускания около
270 МГц при ослаблении не более 3 дБ.
AD8130 имеет два каскада с одинаковой входной крутизной (gj, выход-
ные токи которых складываются в узле с высоким импедансом и буферизу-
ются перед выходом. Выходные токи обоих каскадов с gm должны быть
равными, но противоположными по знаку, поэтому соответствующие вход-
ные напряжения тоже должны быть равными и противоположными по зна-
ку. Дифференциальный входной сигнал подается на один из каскадов GM[, а
отрицательная обратная связь прикладывается к другому как в обыч-
yj
ном ОУ. Коэффициент усиления равен 1 + —. Таким образом, на каскаде
Л
GM[ реализован полностью сбалансированный вход витой пары с наилуч-
шим синфазным подавлением. Более подробное описание AD8130 можно
найти в ,0.
Сопряжение АЦП с дифференциальным входом
с комплементарными дифференциальными драйверами
Когда нужно организовать связь на постоянном токе, идеальной заменой
трансформаторным драйверам служат дифференциальные драйверы AD8131,
AD8132, AD8137, AD8138 и AD8139. Они же обеспечивают и требуемое
усиление, и смещение уровня биполярного сигнала на входе высокопроиз-
водительного АЦП. Более того, AD8137 имеет полномасштабные выходы,
облегчающие подключение низковольтных дифференциальных входов АЦП,
a AD8139 (тоже с полномасштабным выходом) оптимизирован для 14- и
16-разрядных приложений с низкими уровнями шума и искажений.
На рис. 6.36 показана схема, в которой дифференциальный усилитель
AD8137 используется в качестве средства смещения уровня и драйвера
12-разрядного АЦП AD7450A с 1 млн выборок/с и питанием ЗВ11. AD7450A
Глава 6. Интерфейсы преобразователей данных
От
0,1 мкФ
Рис. 6.36. AD8137 на входе 12-разрядного АЦП AD7450A с 1 млн выборок/с и пита-
нием 3 В
имеет полностью дифференциальные входы и дифференциальный входной
диапазон 4 В при приложении внешнего опорного сигнала 2 В (ADR390).
Это значит, что сигналы на каждом выходе драйвера AD8137 могут изме-
няться от +0,5 до +2,5 В (в противофазе) при питании 3 В. Полномасштаб-
ная структура выходов AD8137 обеспечивает такой размах напряжения даже
с некоторым запасом. Синфазное напряжение +1,5 В AD8137 задается ре-
зистивным делителем, подключенным к питанию +3 В.
Входы AD8137 допускают размах сигнала от +0,25 до +1,25 В. Это не
составляет проблемы, так как на входе AD8137 установлена дифференци-
альная пара р-п-р. Резистор 523 Ом между инвертирующим входом и «зем-
лей» несколько выравнивает входное сопротивление неинвертирующего вхо-
да (499 + 25 - 524).
Для приложений, ориентированных на более высокую частоту, диффе-
ренциальный усилитель AD8138 обеспечивает полосу пропускания 320 МГц
с ослаблением малых сигналов не более 3 дБ (G = +1) и как драйвер АЦП
является источником малых гармонических искажений. Такая схема дает
очень хорошее усиление и фазовое согласование по выходу, а сбалансиро-
ванная структура способствует подавлению четных гармоник.
Рисунок 6.37 иллюстрирует подключение через AD8138 12-разрядного
CMOS АЦП AD9235 на 20/40/65 млн выборок/с12. Эта схема использует
однополярное питание +3 В. Биполярный сигнал 1 В по одному входу вы-
рабатывает такой же сигнал 1 В на выходе AD8138, уравновешенный отно-
сительно синфазного напряжения +1,5 В (средняя точка). Обратная связь
настроена на коэффициент усиления 1, а резистор 523 Ом между инверти-
рующим входом и «землей» несколько выравнивает входное сопротивление
неинвертирующего входа, как в предыдущем примере.
Сигнал каждого из дифференциальных входов AD8138 может изменять-
ся от +0,625 до +0,875 В, а каждый выход — от +1,25 до +1,75 В. Эти
напряжения соответствуют допустимому диапазону входных и выходных
синфазных напряжений AD8138 с однополярным питанием +3 В. Выход-
6.1. Сопряжение аналоговых входов АЦП 459
]|
AD9235
12-разрядный
< S АЦП
^вх- Настройка
для диффе-
ренциального
X входа
"Чд с размахом
вх+ 1 в
fs = 20/40/65
млн. выборок/с
Рис. 6.37. AD8138 на входе 12-разрядного АЦП AD9235 с 20/40/65 млн. выборок/с
ной каскад AD8138 представляет собой комплементарный эмиттерный по-
вторитель с выходным напряжением, на 1 В отстоящим от границ диапазо-
на напряжения питания.
Важно понять влияние драйвера АЦП на общий шум системы. Для это-
го используем схему рис. 6.37 в качестве примера и проведем необходимые
расчеты в соответствии с рис. 6.38. Спектральная плотность шума выходно-
го напряжения при коэффициенте усиления 1 составляет 11,6 нВ/^Гц (сле-
дует непосредственно из паспортных данных). В эту величину входят со-
ставляющие входного шума по напряжению, шума по току и резистивного
+3 в
------°-------
AD9235
12-разрядный
- <5д АЦП
вх-
Настройка
для дифферен-
циального
- О входа с раз-
АвхЧ махом
1 В
fs = 20/40/65
млн. выборок/с
Параметры дифференциального
усилителя AD8038
• Выходное напряжение шума — 11,6нВ//Гц
• Полоса пропускания с замкнутой ОС равна 300 МГц
• Полоса пропускания шума с замкнутой
ОС равна 1,57 х 300 МГц = 471 МГц
Параметры АЦП AD9235
• Эффективный входной среднеквадратичный шум
равен 132 мкВ
• Полоса пропускания малых входных сигналов
равна 500 МГц
• Полоса пропускания входного шума равна
1,57 х 500 МГц = 785 МГц
Спектральная плотность выходного шума AD8038 — 11,6нВ//Гц
Vnl = 11,6 nV/^Гц х /50 МГц = 78,2 мкВ RMS **---
Рис. 6.38. Расчет шума дифференциального ОУ AD8138 на входе 12-разрядного АЦП
AD9235 с 20/40/65 млн выборок/с
(^460 Глава 6. Интерфейсы преобразователей данных
шума. Для расчета полного шума на выходе AD8138 спектральная плот-
ность выходного шума умножается на корень из эквивалентной полосы
пропускания 50 МГц, создаваемой однополюсными фильтрами НЧ, ус-
тановленными между дифференциальными выходами усилителя и вхо-
дами АЦП.
Заметьте, что частотный спектр замкнутого AD8138 составляет 300 МГц,
а входная полоса пропускания AD9235 равна 500 МГц. При отсутствии
фильтров выходной шум AD8138 заполнял бы полный 300-МГц диапазон
замкнутого усилителя. (В общем случае без фильтрации шум усилителя
должен рассчитываться или по полосе пропускания замкнутого усилителя,
или по входной полосе пропускания АЦП в зависимости от того, которая
из них меньше, либо как их среднее геометрическое, если частоты близки
друг к другу.)
В нашем случае частота дискретизации АЦП составляет 65 млн выбо-
рок/с, поэтому с учетом теоремы Nyquist сигналы частотой свыше 32,5 МГц
не представляют интереса (в отличие от субдискретных приложений, в
которых входной сигнал может превышать частоту Nyquist fs/2). Как сейчас
увидим, добавление этих простых фильтров существенно снижает шум.
Расчетный шум на выходе фильтра НЧ Vni составляет примерно 78,2 мкВ,
что несколько выше половины эффективного входного шума AD9235, рав-
ного 132 мкВ. Эффективный входной шум AD9235 составляет 0,54 едини-
цы младшего разряда, т. е. (1 В/4096) х (0,54) = 132 мкВ. Без фильтра шум
ОУ пришлось бы интегрировать на полной 471-МГц полосе замкнутого AD8138
(1,57 х 300 МГц — 471 МГц). Это составило бы 252 мкВ вместо 78,2 мкВ при
наличии фильтра.
Рисунок 6.39 иллюстрирует эту концепцию. Большинству высокоскоро-
стных системных приложений требуется пассивный фильтр для защиты от
наложения спектров (или фильтр НЧ при дискретизации модулирующих
сигналов, или ПФ при субдискретизации). Поместив этот фильтр между
согласующим усилителем и АЦП, можно существенно снизить шум усили-
теля. Следовательно, фильтр не только защищает от наложения спектров,
Рис. 6.39. Правильная установка фильтра защитит от наложения спектров и уменьшит
влияние шума ОУ
Шум усилителя обычно интег-
рируется в полосе частот
фильтра ^фильгра
Шум усилителя интегрируется
по той из частотных полос fCL
или fAqn, которая уже
Но в ряде случаев Гфильтра < -^ « fAun < fCL
^CL < ^АЦГГ
6.1. Сопряжение аналоговых входов АЦП
но и подавляет шум усилителя. При этом, конечно, следует учитывать, что,
если фильтр помещен между усилителем и АЦП, усилитель должен рабо-
тать на импеданс фильтра без существенных искажений.
Высокоскоростным АЦП с широким динамическим диапазоном, по-
добным 12-разрядному АЦП AD6645 на 80/105 млн выборок/с, нужны драй-
веры с очень малым шумом и искажениями, поэтому здесь хороший эф-
фект дают радиочастотные трансформаторы, о которых говорилось раньше.
А вот приложения со связью на постоянном токе оказываются тяжелой
«ношей» для дифференциальных драйверов. На рис. 6.40 показан диффе-
ренциальный драйвер AD8139 в роли устройства смещения уровня на по -
стоянном токе, аналогичного предыдущим примерам. AD8139 имеет пол-
номасштабный выходной каскад, полосу пропускания 370 МГц и шум по
напряжению 2 нВД/Гц. Его динамический диапазон превышает 88 дБс при
20 МГц и выходном размахе 2 В.
Входное синфазное напряжение AD6645 устанавливается внутренним
опорным напряжением +2,4 В, и это напряжение, в свою очередь, прикла-
дывается ко входу Косм AD8139. Выходной сигнал AD8139 изменяется от
+ 1,85 до +2,95 В, что соответствует диапазону синфазных выходных напря-
жений усилителя.
Другим примером дифференциального усилителя радиочастоты и про-
межуточной частоты, удобного для АЦП со связью на постоянном токе,
такого как AD6645, служит AD8351 на 2,2 ГГц13. На рис. 6.41 приведена
схема его типичного применения.
AD8351 является стандартным драйвером дифференциальных АЦП вы-
сокой производительности с малыми искажениями. Он идеален, когда на
входе АЦП требуется «бесшумное» усиление. Коэффициент усиления про-
граммируется с помощью резистора в диапазоне от 0 до 26 дБ. Выходное
синфазное напряжение задается по входу Иосм. Входной каскад AD8351 ра-
ботает при синфазном напряжении около +2,5 В и не рассчитан на связь на
постоянном токе.
Рис. 6.40. Применение AD8139 в качестве драйвера 14-разрядного АЦП AD6645 со
связью на постоянном токе и с 80/105 млн выборок/с
• Полоса пропускания 2,2 ГГц при усилении 12 дБ.
• Скорость нарастания напряжения 13000 В/мкс.
• Программируемое усиление от 0 до 26 дБ с помощью одного резистора.
• Входной шум 2,7нВД/ГЦ-
• Однополярное питание 3—5,5 В.
• Регулируемое синфазное выходное напряжение.
Рис. 6.41. Применение дифференциального усилителя радиочастоты и промежуточной
частоты AD8351 с малыми искажениями
Типичные рабочие характеристики AD6645 при работе с драйвером при-
ведены на рис. 6.42. Данные соответствуют частоте дискретизации 80 млн
выборок/с при входном сигнале 65 МГц. Сигнал субдискретизации на часто-
те 65 МГц формируется в выходном спектре БПФ на 15 МГц (80 - 65 МГц =
= 15 МГц). Коэффициент усиления AD8351 установлен равным 10 дБ, а
динамический диапазон составляет 78,2 дБс.
AD8351 может использоваться также в качестве работающего на посто-
янном токе преобразователя сигнала одного входа в дифференциальный
сигнал, если подавать сигнал только на один вход, как показано в схеме на
рис. 6.43. Внешние резисторы RF и RG выбираются в соответствии с реко-
мендациями, приведенными в паспортных данных. Даже когда не удается
достичь точного дифференциального баланса, динамический диапазон вход-
ного сигнала на частоте 65 МГц уменьшается всего на несколько децибел
по сравнению с полным диапазоном, приведенным на рис. 6.42.
Частота дискретизации 80 млн выборок/с
Входная частота 65 МГц
Отношение сигнал/шум 69,1 дБ
HD2 -78,5 dBc
HD3 -80,7 dBc
Полный коэффициент гармоник -75,9 дБ
Неискажаемый динамический
диапазон 78,2 дБ
о 10 20 30 40
Входная частота (МГц)
Рис. 6.42. Работа дифференциального драйвера AD8351 на АЦП AD6645 ((7=10 дБ)
Рис. 6.43. Применение AD8351 в качестве преобразователя сигнала одного входа в
дифференциальный сигнал
Для дифференциальных драйверов 12-разрядных АЦП с низким уровнем
искажений и программируемым усилением может оказаться удачным выбо-
ром усилитель AD8370 с цифровой регулировкой усиления14. На рис. 6.44
показан AD8370 в роли преобразователя сигнала одного входа в диффе-
ренциальный сигнал 12-разрядного BiCMOS АЦП AD9433 с 105/125 млн
выборок/с. Полоса пропускания AD8370 при ослаблении не более 3 дБ
составляет 700 МГц, а коэффициент усиления программируется в двух
диапазонах (-11...+ 17 дБ и +6...+34 дБ) по 3-проводному последователь-
ному каналу. AD8370 сконструирован для применения на промежуточных
частотах до 380 МГц.
Для подключения 16-разрядных АЦП с малыми искажениями и высо-
кой производительностью, таких как AD7677 на 1 млн выборок/с, нуж-
ны специальные средства, особенно когда идет речь о шуме и линейности.
В частности, AD7677 обладает интегральной нелинейностью ±1 младшего
разряда, полным коэффициентом гармоник —110 дБ и отношением «сиг-
нал—шум—искажения» 94 дБ на 45 кГц.
AD7677 представляет CMOS АЦП последовательного приближения с
перераспределением зарядов на коммутируемых конденсаторах и однопо-
Рис. 6.44. Усилитель с переменным коэффициентом усиления AD8370 в качестве драй-
вера АЦП с малыми искажениями
Глава 6. Интерфейсы преобразователей данных
лярным питанием +5 В15. В нормальном режиме он рассеивает не более
115 мВт, работая на частоте 1 млн выборок/с. Преобразователь оптимизи-
рован для работы с дифференциальным входным драйвером. Входной шум
не превышает 0,35 единицы младшего разряда, поэтому требуется согласу-
ющий усилитель с низким уровнем шума. ОУ AD8021 на 200 МГц сконст-
руирован специально для 16-разрядных систем16. Его шум по напряжению
составляет 2,1 нВД/Гц, а искажения меньше 90 дБс на 1 МГц. AD8021 об-
ладает точностью на постоянном токе порядка 1 мВ и дрейфом 0,5 мкВ/°С.
Статический ток равен 7 мА.
Драйвер с низким уровнем шума, показанный на рис. 6.45, является
преобразователем сигнала одного входа в дифференциальный сигнал, пост-
роенный на паре ОУ AD8021. Выходное синфазное напряжение задается на
уровне +1,25 В подачей +1,25 В на неинвертирующий вход нижнего AD8021.
Без фильтрации по входу шум на выходе дифференциального драйвера ин-
тегрируется в частотном диапазоне AD7677, равном 16 МГц. Этот дополни-
тельный шум можно уменьшить примерно до 0,13 единицы младшего раз-
ряда с помощью простого однополюсного фильтра НЧ на 4 МГц.
5 В
+5 В
49,9 Ом
10 пФ
AD8021
15 Ом
-Q вх+
0,1 мкФ
AD8021
Vn =2,1 нВЛ/Гц
1,25 В СМ
590 Ом
/J
2,7 нФ
2,5 В REF
590 Ом
Частота среза
ФНЧ — 4 МГц
: 0,
мкФ
-5
луЛ590 Ом
. 590 Ом
ЛА-------
А А 590 Ом
ЛА-------
+5 В
\ I 2,5 В-0 В I
15 0mL L I
-ЛА
0,1 мкФ
Шум драйверов
около 0,13 единиц
младшего разряда
AD8021
10 пФ
AD7677
16-разрядный
АЦП
1 млн. выборок/с
АЦП
Входная полоса
пропускания —
16 МГц
вх-
REF
,1 мкФ
ADR 431
2,5 В REF
Эквивалентный входной шум AD7677
равен 0,35 единицы младшего разряда
О
5 В
Рис. 6.45. Полному 16-разрядному АЦП нужен полный 16-разрядный драйвер
Схема, представленная на рис. 6.45, обеспечивает хорошее согласова-
ние на частотах до нескольких мегагерц. Но согласование выходов можно
расширить более чем до 100 МГц с помощью индивидуально скомпенсиро-
ванных ОУ AD8021, показанных на рис. 6.46. Таким способом полосы про-
пускания по инвертирующему и неинвертирующему входам можно сделать
очень близкими и снизить искажения. Эта схема иллюстрирует драйвер с
функциями инвертора-повторителя с коэффициентом усиления 2 и с ин-
дивидуально скомпенсированными AD8021.
Резисторы обратной связи и нагрузки подбираются таким образом, чтобы
общая нагрузка не превышала 1 кОм, а эквивалентное сопротивление на входе
каждого ОУ обеспечивало минимальное смещение и дрейф. На рис. 6.46 по-
6.1. Сопряжение аналоговых входов АЦП
Рис. 6.46. Сбалансированный драйвер AD8021: компенсация для согласования коэф-
фициентов усиления на частотах >100 МГц
казаны также частотные характеристики обеих половин дифференциально-
го драйвера.
Вместо применения сбалансированной схемы AD8021 (требующей двух ОУ)
дифференциальный усилитель AD8139 предлагает иную альтернативу под-
ключения 14-/16-/18-разрядных АЦП. Рисунок 6.47 показывает согласова-
ние через AD8139 18-разрядных АЦП последовательного приближения
AD7674 на 800 млн выборок/с с коммутируемыми конденсаторами.
При подаче опорного сигнала +2,5 В на вход REFBUFIN AD7674 фор-
мирует внутреннее опорное напряжение +4,096 В. Входной диапазон АЦП
равен дифференциальному напряжению 8,192 В от пика до пика.
Схема масштабирует и смещает уровень однополярного напряжения 0 В
до входного уровня +5,12 В, соответствующего диапазону AD7674. Требуе-
мый коэффициент усиления 1,6 задается через отношение сопротивлений
5 В
2,5 В
124 Ом
200 Ом
AD8139
124 Ом
15 Ом
2,7 нФ
200 Ом
+2,5 В ± 2,048 В |
V
осм
0,1 мкФ
20 Ом
0,1 мкФ
-6-------
AVdd DVdd
AD7674
18-разрядный
)двх АЦП
8,192 В р-р
Входное диффе-
ренциальное
15 Ом
—-ДД/ t О напряжение
2,7 нФ Т
5 В
0,1 qr-
мкФу-Ly
|+2,5 В ± 1,024 в|
Характеристики схемы: [ +2.5 В ± 2,048 В |
Динамический диапазон без искажений (SFDR),
полный коэффициент гармоник — 105 дБ (THD),
отношение дифференциальной нелинейности —
100 дБ (DNR)
fs = 800 тыс.
выборок/с
REF
—о-
47 мкФ
ADR431
2,5 В REF
2,5 В
—0,1 мкФ
Рис. 6.47. Дифференциальный драйвер AD8139 с низким уровнем шума с 18-разряд -
ным АЦП
Глава 6. Интерфейсы преобразователей данных
резисторов обратной связи и прямого канала: 200/124 = 1,6. Необходимое
синфазное напряжение +2,5 В задается внешним источником опорного на-
пряжения ADR431, и оно же подается на вход REFBUFIN AD7674. Это
напряжение буферирует широкополосный ОУ AD803, так как требуемый
ток стока/истока составляет примерно ±8,2 мА. Сигналы на выходе AD8139
должны изменяться в пределах +0,5...+4,5 В (в противофазе), определяе-
мых диапазоном AD8139 при работе с однополярным питанием +5 В. Сиг-
налы на входах AD8139 изменяются от +1,476 до +3,524 В, что соответству-
ет допустимому входному синфазному диапазону при однополярном пита-
нии +5 В.
Как и во входной цепи, ранее представленной на рис. 6.45, резисторы
15 Ом вместе с конденсаторами 2,7 пФ образуют фильтр НЧ на 400 МГц
для подавления выходного шума AD8139.
Список литературы
6.1. Сопряжение аналоговых входов АЦП
1. Data sheet for AD8027 Low Distortion, High Speed, Rail-to-Rail Input/Output
Amplifier, Data sheet for AD8028 Low Distortion, Dual, High Speed, Rail-to-Rail Input/
Output Amplifier, http://www.analog.com.
2. Data sheet for AD8057/AD8058 Low Cost, High Performance Voltage Feedback,
325 MHz Amplifiers, http://www.analog.com.
3. Chapter 8 of Walt Kester, Editor, Practical Design Techniques for Sensor
Signal Conditioning, Analog Devices, 1999, ISBN: 0-916550-20-6. (Also available at
http://www.analog.com).
4. Data Sheet for AD7466/AD7467/AD7468 1.6 V, Micropower 12-/10-/8-Bit ADNCS
in 6-Lead SOT-23, http://www.analog.com.
5. Data Sheet for AD7890 8-Channel, 12-Bit Serial, Data Acquisition System,
http://www.analog.com.
6. Mini-Circuits, P.O. Box 350166, Brooklyn, NY, 11235, 718-934-4500,
http://www.minicircuits.com.
7. Data Sheet for AD9430 12-Bit, 170 MSPS/210 MSPS 3,3 V A/D Converter,
http://www.analog.com.
8. Data Sheet for AD6645 14-Bit, 80/105 MSPS A/D Converter,
http://www.analog.com.
9. Data Sheets for AD8131, AD8132, AD8137, AD8138, AD8139 Differential Amplifiers,
http://www.analog.com.
10. Data Sheets for AD830, AD8129, AD8130 Differential Receiver Amplifiers,
http: //www.analog.com.
11. Data Sheet for AD7450A/AD7440 Differential Input, 1 MSPS, 12- and 10-Bit
ADNCS in 8-Lead SOT-23, http://www.analog.com.
12. Data Sheet for AD9235 12-Bit, 20/40/65 MSPS 3 V A/D Converter,
http://www.analog.com.
13. Data Sheet for AD8351 Low Distortion Differential RF/1F Amplifier,
http://www.analog.com.
14. Data Sheet for AD8370 Digital Control VGA 700MHz Differential Amplifier,
http://www.analog.com.
15. Data Sheet for AD7677 16-Bit, 1 LSB INL, 1 MSPS Differential ADC,
http://www.analog.com.
16. Data Sheet for AD8021 Low Noise, High Speed Amplifier for 16-Bit Systems,
http://www.analog.com.
6.2. Цифровые интерфейсы АЦП И ЦАП (и связанные темы)
6.2. Цифровые интерфейсы АЦП И ЦАП
(и связанные темы)
Уолт Кестер
Введение
Обсуждение широкой области, связанной с цифровыми интерфейсами пре-
образователей данных, синхронизацией и т. п., может быстро свестись к
рассмотрению частных вопросов и наскучить множеством подробностей,
касающихся конкретных продуктов. Поэтому в этом разделе мы постараем-
ся отметить только наиболее существенные вопросы. Проводимое здесь
обобщение ни в коей мере не заменяет изучение паспортных данных конк-
ретных преобразователей для прояснения основных моментов их работы.
Современные преобразователи данных являются гораздо в большей сте-
пени цифровыми, чем их предшественники, выпускавшиеся несколько лет
назад. Например, измерительные £-Д АЦП высокого разрешения обычно
имеют ряд регистров управления, которые используются для выбора кана-
лов, задания полосы пропускания фильтров, скорости передачи данных,
программируемого коэффициента усиления и т. п. Эти регистры должны
быть правильно заполнены данными по последовательному каналу. Этот
же последовательный порт часто используется для чтения данных из АЦП в
конце цикла преобразования. В значительной степени цифровыми стали и
современные высокочастотные передатчики. Например, ИС прямого циф-
рового синтеза имеют внутренние регистры, которые управляют выходной
частотой, амплитудой, фазой, типом модуляции и т. п.
Другие вопросы касаются нормирования цифровых и временных ин-
тервалов преобразователей данных. В частности, это вопросы состояния
логики непосредственно после включения, влияние конвейерных задержек,
импульсные режимы (или их отсутствие), минимальная частота дискрети-
зации, режимы «засыпания» и выключения и т. п.
Многие из названных тем похожи на те вопросы, которые решаются при
разработке микропроцессоров, микроконтроллеров и ЦСП. Однако для ус-
пешного конструирования преобразователей данных требуется не только
понимание цифровых и временных тонкостей, но и тщательное внимание к
аналоговой части — топологии, заземлению, развязке и пр. Эти темы, каса-
ющиеся аппаратного проектирования, подробно рассматриваются в гл. 9.
Инициализация преобразователей данных
при включении
Когда на обычный триггер — базовый цифровой элемент хранения — впер-
вые подается питание, как правило, невозможно точно предсказать, в ка-
ком состоянии окажутся его выходы. Без дополнительных схем управления
включением или процедур инициализации это же относится ко многим
регистрам микропроцессоров, микроконтроллеров, ЦСП и, конечно, к та-
ким сложным сигнальным приборам, как АЦП и ЦАП.
468 Глава 6. Интерфейсы преобразователей данных
Поскольку операция начальной установки при включении является об-
щей операцией для микропроцессоров, микроконтроллеров и ЦСП, она
сейчас включена во многие преобразователи данных, особенно в те, что
насыщены цифровой электроникой, или где необходимо, чтобы при вклю-
чении сигналы занимали определенные уровни.
Хорошим примером служит ЦАП, используемый в промышленных си-
стемах управления. Если ЦАП управляет исполнительным элементом, на-
пример вибрационным столом, сразу становится очевидной потенциальная
проблема, связанная с тем, что на аналоговом выходе ЦАП в момент вклю-
чения появится полное напряжение. Поэтому многие ИС ЦАП, предназна-
ченные для промышленных приложений, имеют встроенную схему управ-
ления включением, подающую в регистр ЦАП (регистр, управляющий со-
стоянием ключей ЦАП) начальные цифровые данные требуемой величины
(обычно нули или код половины полной шкалы).
Другим примером прибора, для которого важно состояние при включе-
нии, является цифровой потенциометр. Поэтому некоторые цифровые ре-
зисторы имеют внутреннюю энергонезависимую память, в которой сохра-
няются требуемые настройки. Другие цифровые резисторы без энергонеза-
висимой памяти обычно оснащены встроенной схемой, при включении
устанавливающей ЦАП в нулевое или среднее состояние (в ряде случаев
предусмотрен специальный вход для выбора).
Реже речь идет о начальном состоянии выходов после включения АЦП,
поскольку выход АЦП мало кого интересует до поступления той или иной
команды, завершающей преобразование. Тем не менее конвейерным и Е-Д
АЦП обычно требуется определенное число циклов выборки перед тем, как
цифровой «конвейер» заполнится, и его выходные данные станут достовер-
ными. Как правило, на это есть указание в паспортных данных прибора.
Инициализация внутренних регистров управления
преобразователя данных
В современных преобразователях данных, особенно в тех, которые предпо-
лагают высокую степень функциональности, часто инициализируются внут-
ренние регистры управления для установки определенных рабочих парамет-
ров. Например, в семействе Е--Д АЦП AD77xx программируются скорость
передачи данных, частота среза фильтра, коэффициент усиления усилите-
ля, выбор канала и т. п. Эти параметры следует загружать в АЦП по после-
довательному каналу после подачи питания. Для нормальной работы по-
добные АЦП содержат схему начальной установки и инициализации, кото-
рая при включении программирует заданные по умолчанию значения
необходимых регистров. Это позволяет начать инициализацию системы с
перевода АЦП в надлежащее состояние, необходимое для отладки на уров-
не системной платы компьютера.
Кроме начальной установки при включении, эти типы АЦП обычно
имеют отдельный вход сброса, позволяющий перевести преобразователь
в требуемое состояние в любой момент после того, как питание подано.
В ряде случаев АЦП также можно установить в начальное состояние с по-
мощью управляющей программы.
В ЦАП высокой степени интеграции, в системах прямого цифрового
синтеза и во многих других ИС с комбинированными сигналами тоже про-
водится начальная инициализация, в частности начальная установка, пере-
ход в предустановленный режим и т. п. Как и раньше, часть этих приборов
имеет встроенную энергонезависимую память для хранения требуемых на-
строек. В связи с ростом степени интеграции и внедрением программных
средств в дальнейшем энергозависимой и энергонезависимой памятью бу-
дут оснащаться все большее число приборов.
Экономичный режим, спящий режим
и режим готовности
Для экономии мощности, особенно в приложениях с питанием от батарей,
большинство современных преобразователей данных имеют режим эконо-
мии энергии, спящий режим и режим готовности, в которых основная часть
схемы остается без питания. Обычно такие режимы вызываются сигналом,
подаваемым на один из входов, но иногда инициируются программой через
внутренние регистры управления. Во многих приложениях, где нет необхо-
димости в непрерывной работе преобразователей, подобные режимы могут
способствовать существенной экономии энергии. Некоторые преобразова-
тели имеют несколько режимов пониженной мощности, зависящих от ко-
личества цепей, требующих отключения. В ряде случаев можно достичь
дополнительной экономии остановкой некоторых или всех внешних такто-
вых генераторов.
Ток спящего режима сильно различается у разных приборов и может
составлять от нескольких микроампер до десятков миллиампер в зависимо-
сти от мощности, рассеиваемой в нормальном режиме. Время восстановле-
ния после спящего режима, или время включения, относится к числу кри-
тических параметров, которые сильно зависят от прибора, но обычно оно
находится в диапазоне от нескольких микросекунд до 100 мкс.
В спящем режиме остается питание на критически важных регистрах
управления, а процесс преобразования обычно прекращается. Если преоб-
разователь относится к конвейерному типу или содержит цифровые филь-
тры (типа £-Д АЦП или отдельных ЦАП с встроенными цифровыми филь-
трами), после включения резервируется определенное число циклов для
освобождения конвейеров перед тем, как выходные данные станут досто-
верными.
Ждущий режим, толчковый режим
и режим дискретизации на минимальной частоте
Особые моменты формирования временных интервалов связаны с конвей-
ерными АЦП, которые не относятся к цифровым интерфейсам в прямом
смысле, но напрямую влияют на работу приложения, делая возможным
(или невозможным) работу на очень низкой частоте дискретизации, в тол-
чковом или в ждущем режиме.
Многие из ранних АЦП последовательного приближения, например
промышленный стандарт AD574, имеют внутренний генератор частоты, за-
470 Глава 6. Интерфейсы преобразователей данных
пускаемый внешним сигналом convert-start. По окончании цикла преобра-
зования устанавливается выходной сигнал (называемый busy, conversion
complete, data ready и пр.), указывающий на достоверность данных и завер-
шение преобразования. Этот тип АЦП может работать в ждущем и толчко-
вом режиме либо функционировать продолжительно, причем нет существен-
ного влияния режима на результат преобразования. Многие из современ-
ных АЦП последовательного приближения нуждаются как в высокочастотном
генераторе непрерывного типа (управляющем отдельными шагами преоб-
разования), так и в традиционном импульсе convert-start, запускающем фак-
тический процесс преобразования. Импульс convert-start может поступать
синхронно или асинхронно по отношению к высокочастотным импульсам
последовательностей сразу многих преобразователей. В условиях непрерыв-
ного потока высокочастотных импульсов АЦП могут работать и в ждущем,
и в толчковом режиме.
Здесь кроется одна из основных причин высокой популярности АЦП
последовательного приближения в системах сбора данных, особенно в мно-
гоканальных системах, в которых АЦП подключаются через аналоговые муль-
типлексоры. Отдельная команда convert-start загружает соответствующие дан-
ные без конвейерной задержки, запуская процесс идентификации выходных
данных, соответствующих определенному каналу или такту преобразования.
С другой стороны, конвейерные АЦП (см. гл. 3 с подробным описанием)
пропускают несколько циклов выборки после включения, прежде чем кон-
вейер очистится, и достоверные данные появятся на выходе. Кроме того,
каскад внутренних УВХ действует как аналоговые линии задержки, кото-
рые обыкновенно управляются одной или обеими фазами тактовой пос-
ледовательности. То есть в состоянии «1» тактовой последовательности
один из УВХ переводится в режим выборки, а другие — в режим хранения.
В состоянии «0» выходы инвертируются. Прямо или косвенно инициализи-
руя тактовый генератор в ходе управления преобразователем, можно сокра-
тить площадь и стоимость ИС и улучшить ее работу за счет исключения
дополнительных внутренних процессов синхронизации, вызывающих шум
и искажения от паразитных связей отдельных частей схемы.
• Начальная установка и инициализация при включении:
— ЦАП и цифровые резисторы;
— АЦП с собственными регистрами управления;
— условия по умолчанию;
— конвейерные АЦП.
• Экономичный режим, спящий режим и режим готовности:
— экономия энергии;
— восстановление, или время включения.
• Ждущий режим, толчковый режим и режим дискретизации на минимальной частоте:
— АЦП последовательного приближения;
— конвейерные АЦП.
• Лучше познакомьтесь с паспортными данными!
— «Чем лучше я знаю вас, тем больше я о вас узнаю...»
(«Анна,» из Rogers и Hammerstein, Король и я).
Рис. 6.48. Некоторые основные проблемы цифрового и временного согласования пре-
образователей данных
6.2. Цифровые интерфейсы АЦП И ЦАП (и связанные темы)
47JJ
Нетрудно, конечно, заметить, что по мере снижения частоты дискрети-
зации пропорционально увеличивается время хранения УВХ и ошибки (выз-
ванные токами утечки конденсаторов), связанные с длительным хранени-
ем, становятся ошибками преобразования, снижающими его достоверность.
Кроме того, за время хранения и внутренние цепи могут войти в насыще-
ние. Поэтому в паспортных данных конвейерных АЦП, наряду с традици-
онной максимально допустимой частотой дискретизации, указывается и
минимально допустимая частота.
Хотя большинство конвейерных АЦП не в состоянии напрямую рабо-
тать в ждущем или толчковом режиме, их можно заставить функциониро-
вать в продолжительном режиме, а их выходные данные задерживать на
требуемые временные интервалы.
На эти темы можно говорить очень долго, однако теперь читатель уже
осведомлен хотя бы об основных моментах, которые следует уточнять по
паспортным данным. Это же можно сказать и о следующих далее разделах,
посвященных собственно цифровому интерфейсу.
Цифровые выходные интерфейсы АЦП
Ранние АЦП обычно снабжались параллельными выходными интерфейса-
ми данных. По мере роста разрешающей способности повсеместно распро-
странились микропроцессоры, микроконтроллеры, ЦСП и стали популяр-
ными последовательные интерфейсы. Сегодня большинство 12- и более
разрядных АЦП, работающих на частотах 10 млн выборок/с и выше, обыч-
но имеет параллельный выходной интерфейс, тогда как низкочастотные
измерительные Е-Д АЦП высокого разрешения почти исключительно ис-
пользуют последовательный интерфейс. А между указанными частотными
диапазонами можно встретить самое широкое множество АЦП и с парал-
лельными, и с последовательными, и с последовательно-параллельными
интерфейсами данных.
Последовательные выходные интерфейсы АЦП
Последовательные интерфейсы обыкновенно являются 3-проводными (реже
2-проводными), и потому они более экономичны с точки зрения числа
выводов и стоимости, чем параллельные интерфейсы, особенно в АЦП
высокого разрешения. Последовательными выходами принято снабжать АЦП
последовательного приближения и £-Д АЦП, поскольку их архитектура
преобразования, по существу, является последовательной. Если АЦП рабо-
тает в непрерывном режиме, его период дискретизации должен быть доста-
точно продолжительным, чтобы через интерфейс можно было передавать
все последовательные данные со скоростью, на которую этот интер-
фейс рассчитан, с определенным запасом. Например, 16-разрядный АЦП
на 1 млн выборок/с требует скорости последовательной передачи данных
не менее 16 МГц, которую могут без проблем развить большинство совре-
менных микропроцессоров, микроконтроллеров и ЦСП.
Большинство 3-проводных последовательных интерфейсов, ассоцииру-
емых с АЦП и ЦАП, совместимы со стандартными последовательными
Глава 6. Интерфейсы преобразователей данных
Рис 6.49. Временная диаграмма 12-разрядного последовательного интерфейса AD7466
на 200 тыс. выборок/с
интерфейсами, подобными SPIT, QSPI™, MICROWIRE™ и DSP. Рису-
нок 6.49 представляет временную диаграмму типичного последовательного
выхода преобразователя на базе 12-разрядного AD7466 на 200 тыс. выбо-
рок/с в корпусе SOT-23 с 6 выводами.
При высоком уровне сигнала NCS питание AD7466 снято. Питание фун-
кциональных узлов включается по спадающему фронту NCS. Этот фронт
NCS переводит УВХ в режим выборки и выводит шину из нейтрального
состояния. В этот же момент начинается преобразование. К третьему им-
пульсу SCLK после начала спада NCS узлы должны получить полное пита-
ние, как показано на рис. 6.49 в точке «А», и СВХ вернется в режим хране-
ния. В ИС AD7466 шина SDATA вернется в нейтральное состояние, и пи-
тание вновь будет снято на 16-м импульсе SCLK. Если нарастающий фронт
NCS появится до 16-го импульса SCLK, то преобразование будет прервано,
шина SDATA перейдет в нейтральное состояние, и питание с узлов будет
снято, в противном случае SDATA перейдет в нейтральное состояние при
16-м спадающем фронте SCLK, как показано на рис. 6.49. Таким образом,
проведение процесса преобразования и получение данных от AD7466 вы-
полняется за 16 тактов.
Перевод сигнала NCS на низкий уровень ведет к считыванию первого
ведущего нуля микроконтроллером или ЦСП. Чтение остальных данных
тактируется последующими спадающими фронтами SCLK, начиная со второ-
го ведущего нуля. Таким образом, первый такт в последовательности со-
провождается первым ведущим нулем и тактирует второй ведущий ноль.
У AD7466 последний разряд передаваемых данных становится достоверным
на 160-м импульсе SCLK тактируемым предыдущим (15-м) спадающим
фронтом SCLK. В приложениях с замедленным циклом SCLK можно счи-
тывать данные по каждому нарастающему фронту SCLK В таких приложе-
ниях первый спадающий фронт SCLK после спадающего фронта NCS будет
тактировать второй ведущий ноль и может быть считан по следующему
нарастающему фронту. Если первый из фронтов SCLK после спадающего
6.2. Цифровые интерфейсы АЦП И ЦАП (и связанные темы) 473
фронта NCS будет иметь спадающий фронт, то первый ведущий ноль, выз-
ванный, когда NCS перейдет на низкий уровень, будет пропущен как не-
прочитанный по первому спадающему фронту SCLK. 15-й спадающий фронт
SCLK будет тактировать последний разряд, который можно прочитать сле-
дующим же нарастающим фронтом SCLK. Если первый фронт SCLKпосле
спадающего фронта NCS является нарастающим фронтом, NCS будет так-
тировать первый ведущий ноль, как и раньше, и его можно будет считать
по нарастающему фронту SCLK Следующий спадающий фронт SCLK бу-
дет тактировать второй ведущий ноль, который можно считывать по следу-
ющему нарастающему фронту.
Среди более скоростных интерфейсов скорости до Мбит/с могут разви-
вать интерфейсы с дифференциальными сигналами низкого напряжения
(JLVDS), поэтому последовательную передачу данных можно использовать
даже в некоторых высокоскоростных АЦП. Например, в четырехканальном
12-разрядном АЦП AD9229 на 65 млн выборок/с организованы последо-
вательные выходы LVDS, каждый из которых работает на скорости 780 Мбит/с.
На рис. 6.50 приведена функциональная блок-схема такого четырехканаль-
ном АЦП (см. также 2).
Четырехканальный 12-разрядный АЦП AD9229 на 65 млн выборок/с с
встроенной СВХ сконструирован как дешевый маломощный преобразова-
тель малых размеров и удобный в использовании. Преобразователь работа-
ет на скоростях преобразования до 65 млн выборок/с и обладает замеча-
тельными для столь малых размеров динамическими характеристиками. АЦП
использует однополярное питание +3 В и CMOS/TTL тактовые импульсы
выборок при работе с максимальными характеристиками. Большинство
посгроенных на нем приложений не требует внешних опорных сигналов
или дополнительных драйверов. Отдельный вывод питания поддерживает
совместимые с L VDS последовательные цифровые уровни. АЦП автомати-
чески умножает тактовые импульсы для получения требуемой скорости
Рис. 6.50. Четырехканальный 12-разрядный АЦП AD9229 на 65 млн выборок/с с пос-
ледовательными выходами LVDS
Глава 6. Интерфейсы преобразователей данных
Рис. 6.51. Временная диаграмма четырехканального 12-разрядного АЦП AD9229 на
65 млн выборок/с с последовательными выходами LVDS
последовательной передачи данных LVDS. Предусмотрен триггер старшего
разряда для сигнализации о каждом очередном выходном байте. Поддержи-
вается отключение питания, и, когда оно включено, АЦП потребляет менее
3 мВт. Временная диаграмма приведена на рис. 6.51.
Данные каждого АЦП группируются в отдельный канал. Скорость
передачи данных каждого последовательного потока равна 12 разрядам,
умноженным на частоту синхронизации, достигая максимума 780 МГц
(12 разрядов 65 млн выборок/с = 780 МГц). Типичная минимально до-
пустимая скорость преобразования составляет 10 млн выборок/с (напом-
ним, что минимальная частота квантования является характеристикой
конвейерного CMOS АЦП). Предусмотрены две выходные импульсные
последовательности, тактирующие прием данных от AD9289. Частота син-
хронизации выходных данных (DCO) в 6 раз превышает частоту дискре-
тизации (CLK).
Выходные данные AD9229 синхронизируются по нарастающим и спада-
ющим фронтам DCO. Старшие разряды сопровождаются отдельными им-
пульсами (FCO), сигнализирующими о новых байтах с частотой дискрети-
зации.
В результате применения на выходе AD9229 последовательного высоко-
скоростного интерфейса LVDS резко уменьшается число выходных контак-
тов по сравнению с параллельным интерфейсом. Для организации четырех
отдельных параллельных 12-разрядных СЛ/О5-выходов потребовалось бы
48 контактов. Благодаря последовательному интерфейсу LVDS в AD9289
используется только 4 дифференциальных выхода данных LVDS, т. е.
8 контактов, создавая экономию в 40 контактов. Вдобавок применение LVDS
вместо обычных CMOS ведет к уменьшению переходных токов на цифро-
вых выходах и общего шума АЦП. Типичный выходной драйвер L VDS, спро-
ектированный на базе CMOS, представлен на рис. 6.52. Более детальное
описание параметров LVDS можно найти в гл. 9.
6.2. Цифровые интерфейсы АЦП И ЦАП (и связанные темы) 475
Рис. 6.52. CMOS драйвер LVDS
Последовательный интерфейс АЦП для ЦСП
Благодаря простоте и эффективности последовательный интерфейс стал
очень популярным средством сопряжения АЦП и ЦАП с ЦСП, многие из
которых работают в реальном времени. Рассмотрим типичный пример та-
кого интерфейса между АЦП общего назначения и ЦСП с фиксированной
запятой.
AD7853/AD7853L является 12-разрядным АЦП на 200/100 тыс. выбо-
рок/с с однополярным питанием от +3 до +5,5 В и рассеиваемой мощнос-
тью 4,5 мВт (при питании +3 В, AD7853L). После каждого цикла преобра-
зования прибор автоматически снижает потребление мощности до 25 мкВт.
AD7853/AD7853L построен на базе ЦАП последовательного приближения
AIN(+)
AIN(-)
REF|N/
REFOUT
CREF1
CREF2
CAL
SM1 SM2 SYNC DIN DOUT SCLK POLARITY
Рис. 6.53. 12-разрядный с последовательным выходом АЦП AD7853/AD7853L с одно-
полярным питанием +3 В на 200/100 тыс. выборок/с
Глава 6. Интерфейсы преобразователей данных
SYNC (О/P) Y
Нейтральное
состояние
DOUT (О/Р)
Нейтральное
состояние
К
Рис. 6.54. Временная диаграмма последовательного выхода АЦП AD7853L с питани-
ем +3 В, SCLK= 1,8 МГц
с перераспределением зарядов (коммутируемых конденсаторов). Калиб-
ровочные характеристики исключают ошибки усиления и смещения.
Структурная схема прибора приведена на рис. 6.53 (остальные подроб-
ности см. в 3).
AD7853 работает на максимальной частоте внешней синхронизации
4 МГц, a AD7853L -- на 1,8 МГц. Временная диаграмма AD7853L показана
на рис. 6.54. AD7853/AD7853L имеют режимы, в которых NSYNC и SCLK
конфигурируются как входные или выходные сигналы. В представленном
здесь примере это выходные сигналы, генерируемые AD7853L. При макси-
мальной частоте синхронизации AD7853L, равной 1,8 МГц (период 556 нс),
разряды данных принимают достоверные значения через 330 нс после при-
хода положительных фронтов SCLK. При этом минимальное время уста-
новки достигается примерно за 330 нс до наступления отрицательных фрон-
тов SCLK, без труда удовлетворяя требованиям ADSP-2189M к запасу tSCS
в 4 нс. Время задержки после прихода отрицательного фронта SCLK со-
ставляет примерно 226 нс, что опять же вполне удовлетворяет временным
требованиям ADSP-2189M к tSCH в 7 нс. Эти несложные вычисления по-
казывают, что требования ADSP-2189M по данным, начальным установкам
Рис. 6.55. Подключение АЦП AD7853/AD7853L с последовательными выходами к ЦСП
ADSP-2189M
6.2. Цифровые интерфейсы АЦП И ЦАП (и связанные темы)
и задержкам выполняются с большим запасом. Более подробное обсужде-
ние временных характеристик последовательного интерфейса между АЦП,
ЦАП и ЦСП приведено в 5.
Рисунок 6.55 представляет сопряжение AD7853L с ADSP-2189M в ре-
жиме передачи данных от АЦП к ЦСП (режимы попеременного доступа/
основной). AD7853/AD7853L имеет внутренние регистры, доступные для
связи между ЦСП и АЦП через последовательный порт. Через данные реги-
стры задаются различные режимы работы AD7853/AD7853L и инициализи-
руются процедуры калибровки. На диаграмме эти соединения не показаны.
Параллельные выходные интерфейсы АЦП
Параллельные выходные интерфейсы АЦП популярны благодаря прямому
формированию результата и должны использоваться, когда произведение
частоты дискретизации и разрешающей способности превышает возмож-
ности последовательных каналов. Например, вместо применения после-
довательного канала LVDS с максимальной скоростью 600 Мбит/с можно
использовать при разрешающей способности 8 разрядов передачу параллель-
ных данных со скоростью 75 млн выборок/с, при 10 разрядах — 60 млн
выборок/с, 12 разрядах — 50 млн выборок/с, 14 разрядах — 43 млн выбо-
рок/с, 16 разрядах — 38 млн выборок/с и т. д.
Синхронизация параллельных интерфейсов АЦП достаточно проста.
Спустя некоторое фиксированное время после установления определенно-
го фронта синхронизирующего импульса выходные данные считаются дос-
товерными. Это время указывается в паспортных данных и может быть
отмечено (или не отмечено) как выход АЦП data ready или data valid. Соот-
ветственно, выходные данные могут следовать за предварительно согласо-
ванным фронтом сигнала синхронизации из-за конвейерной задержки АЦП.
В большинстве случаев достоверность выходных данных сохраняется в те-
чение некоторого периода времени (в пренебрежении временем нараста-
ния и спада сигнала). Некоторые из параллельных выходных АЦП имеют
функцию chip enable, разрешающую передачу выходных данных на шину
данных, и их выходы остаются в нейтральном состоянии, пока сигнал chip
enable не поступит от внешнего ЦСП, микроконтроллера или микропро-
цессора. Поэтому существует ряд мер, которые должны быть предприняты
при подключении таких выходов к шине данных. Согласно наиболее важ-
ной из них требуется убедиться, что на интервале преобразования АЦП
шина не активна, так как эта активность может повлиять на АЦП через
паразитные емкости соединений и нарушить ход преобразования. Вдоба-
вок ко всему при существенной емкостной нагрузке шины могут удлинить-
ся переходные процессы на цифровом выходе АЦП, также способные ис-
портить преобразование.
Для иллюстрации выбора временных интервалов при обслуживании со-
временного высокоскоростного прибора используем 12-разрядный АЦП
AD9430 на 170/210 млн выборок/с6. Общая структурная схема AD9430 пред-
ставлена на рис. 6.56. Обратите внимание, что этот АЦП имеет два пред-
ставления выходных данных: демультиплексированные выходы CMOS на
двух портах (каждый работает на половине частоты дискретизации) или
Глава 6. Интерфейсы преобразователей данных
SENSE VREF AGND DRGND DRVDD AVDD
Выход данных
за пределы LVDS
или 2-канального
CMOS
DCO+
DCO-
Рис. 6.56. Выходные данные 12-разрядного АЦП AD9430 на 170/210 млн выборок/с
с LVDS или с CMOS демультиплексора
дифференциальные выходы LVDS, работающие на полной частоте дискре-
тизации. Число контактов при этом не меняется, так как выходы обоих
портов требуют одинакового числа контактов, будучи дифференциальными
выходами L VDS одного порта.
Рисунок 6.57 иллюстрирует синхронизацию AD9430 с использованием
выходного режима L VDS.
AD9430 работает от совместимых с L VDS дифференциальных тактовых
импульсов выборок, которые проходят через внутреннюю цепь управления
синхронизацией. Она стабилизирует продолжительности заполнения цикла,
лишая схему чувствительности к обычным процессам изменения этого па-
раметра.
Когда частота дискретизации известна, можно использовать временную
диаграмму с соответствующими характеристиками tPD и tCPD, чтобы пред-
сказать достоверность выходных данных относительно положительного
фронта синхроимпульсов дискретизации (CLK+) либо положительного или
отрицательного фронтов импульсов синхронизации выходных данных
(DCO+).
CPD
Рис. 6.57. Временная диаграмма AD9430 данных на выходе в режиме L VDS
6.2. Цифровые интерфейсы АЦП И ЦАП (и связанные темы)
В связи с высокой частотой дискретизации 210 млн выборок/с (период
равен 4,76 нс) критически важным является такое согласование циклов об-
работки выхода АЦП и входа приемника, при котором регистр или память
приемника заполняется при стабильном состоянии данных. Это «окно»
невелико, и в случае AD9430 гарантированная минимальная длительность
сигнала data valid составляет 2 нс. Тактирование выхода АЦП, задержка
сигнала на печатной плате и параметры времени начальной установки и
хранения в входном регистре (обычно FPGA) — все эти факторы следует
учитывать при проектировании системы синхронизации, уделяя особое
внимание готовности данных.
Хотя наименьшим шумом и искажениями характеризуется режим LVDS,
AD9430 может также работать и в CM OS демультиплексированном режиме.
В этом случае открывается доступ к выходным данным через два выходных
порта с частотой, вдвое более низкой, чем частота дискретизации АЦП.
Временная диаграмма этого режима приведена на рис. 6.58. Примечатель-
но, что данные доступны в чередующемся или параллельном формате в
зависимости от выбранной настройки.
Рис. 6.58. Временная диаграмма демультиплексированных CMOS выходных данных
AD9430
Высокоскоростные АЦП, такие как AD9430, обыкновенно сопрягаются
с FPGA или буферной памятью. Параллельный выход АЦП, обладающий
более низкой скоростью, можно подключать непосредственно к микрокон-
троллерам или ЦСП через стандартную параллельную шину данных. Хоро-
шим примером служит 12-разрядный АЦП AD7854/AD7854L с параллель-
ным выходом на 3 В и 200/100 тыс. выборок/с7. Данный прибор имеет
архитектуру последовательного приближения на основе ЦАП с перераспре-
делением заряда (коммутируемые конденсаторы). Благодаря режиму калиб-
ровки в нем исключены ошибки смещения и усиления. Структурная схема
этого преобразователя общего назначения приведена на рис. 6.59.
Упрощенная схема сопряжения AD7854/AD7854L с ЦСП ADSP-2189 на
75 МГц показана на рис. 6.60. В такой конфигурации ЦСП может заносить
Глава 6. Интерфейсы преобразователей данных
Рис. 6.59. 12-разрядный АЦП AD7854/AD7854L с параллельным выходом, однополяр-
ным питанием +3 В, 200/100 тыс. выборок/с
Примечание: Для записи в АЦП требуется 5 программных состояний ожидания HBEN
и NWR такты выборок могут поступать от ЦСП
Рис. 6.60. Параллельный интерфейс АЦП AD7854/AD7854L с ADSP-2189M
данные в регистр управления параллельного интерфейса АЦП и читать дан-
ные из АЦП. При поступлении сигнала NCONVST начинается процесс
преобразования. По завершении преобразования устанавливаемый на АЦП
уровень BUSY служит в качестве сигнала прерывания ЦСП (прикладывае-
мого к входу NIRQ ЦСП). По нему ЦСП считывает выходные данные АЦП
с использованием сигналов на выходах NCS и NRD AD7854.
Сигнал NRD от АЦП расширяется пятью программными состояниями
ожидания в соответствии с требованиями АЦП AD7854. Этот стандартный
способ считывания данных с периферийных запоминающих устройств бо-
лее подробно описан в 5.
6.2. Цифровые интерфейсы АЦП И ЦАП (и связанные темы) 481
Цифровые входные интерфейсы ЦАП
Самые ранние интегральные ЦАП если и содержали логические схемы, то
в очень малом количестве, и на цифровом входе приходилось держать па-
раллельные данные, пока они требовались для преобразования. Сегодня
почти все ЦАП оснащены входными фиксаторами, и данные приходится
только считывать, не удерживая на входе.
Существует бесчисленное множество входных структур ЦАП, которые
мы здесь не будем обсуждать, но преобладают среди них «двойные буфе-
ры». ЦАП с двойной буферизацией содержит два ряда фиксаторов. Вначале
данные фиксируются первым уровнем, а затем передаются на второй, как
показано на рис. 6.61. Такая организация вызвана тремя причинами.
Во-первых, это позволяет передавать в ЦАП данные множеством спосо-
бов. В ЦАП без фиксации или с одним фиксатором надо загружать все
разряды данных одновременно, параллельно, иначе в процессе загрузки на
его выходе будет меняться состояние. Напротив, ЦАП с двумя буферами
можно загружать параллельными данными, последовательными данными,
4- и 8-разрядными словами и т. п., и его выход не изменится, пока новые
данные не будут полностью загружены и не поступит команда на обновле-
ние результата.
Вторая особенность этого типа входной структуры заключается в том,
что выходная синхронизация может осуществляться на постоянной частоте
(частоте обновления ЦАП), тогда как входные фиксаторы могут заполнять-
ся асинхронно. Это полезно для систем воспроизводства сигналов реально-
го времени.
Третье удобство структуры с двойной буферизацией состоит в возмож-
ности одновременного обновления сразу многих ЦАП: данные загружают-
ся в первый ряд каждого ЦАП в индивидуальном темпе, а когда все будут
готовы, выходные буферы всех ЦАП одновременно обновляются. Известно
много приложений, в которых выходы нескольких ЦАП нуждаются в син-
хронном обновлении, и структуры с двойной буферизацией позволяют до-
статочно легко выполнить эту операцию.
Большинство первых интегральных ЦАП высокого разрешения имели
параллельные или побайтовые порты, рассчитанные на подключение к па-
раллельным шинам данных и дешифраторам адреса с микропроцессорной
Выходной строб-импульс
может подаваться
на многие ЦАП
Рис. 6.61. ЦАП с двойной буферизацией рассчитан на сложные входные структуры и
одновременное обновление
16 -2852
Глава 6. Интерфейсы преобразователей данных
адресацией, как если бы они были их памятью для записи. (Некоторые
ЦАП не только рассчитаны на запись, но и позволяют считывать содержа-
ние — это в некоторой степени распространено в перепрограммируемой
аппаратуре автоматического контроля.) ЦАП, подключенный к шине дан-
ных, уязвим для логического шума вследствие емкостной связи между ши-
ной и аналоговым выходом. Сегодня многие ЦАП имеют последовательные
порты данных, менее уязвимые для такого шума (так как меньше контактов
для проникновения помех), занимают меньше места и потому обычно бо-
лее удобны для работы с современными микропроцессорами, многие из
которых оснащены последовательными портами данных. Некоторые из
подобных последовательных ЦАП имеют выходы и входы данных, позволя-
ющие соединять их последовательно и синхронизировать с одним из пор-
тов. Такую организацию называют «гирлянда».
Подключение ЦСП к ЦАП с последовательными входами
Согласование ЦАП, имеющих последовательные входы, с последователь-
ными портами ЦСП, таких как семейство ADSP-21xx, выполняется доволь-
но просто и во многом подобно согласованию АЦП с последовательным
выходом. Эти особенности мы не будем здесь повторять, а рассмотрим при-
мер простого интерфейса.
AD5322 является 12-разрядным двухканальным ЦАП на 100 тыс. выбо-
рок/с с последовательным входным интерфейсом8. Он имеет однополярное
питание от +2,5 до +5,5 В, и его структурная схема приведена на рис. 6.62.
Рассеяние мощности при питании +3 В составляет 690 мкВт. В режиме
пониженного энергопотребления эта величина уменьшается до 0,15 мкВт.
Полный коэффициент гармоник превышает 70 дБ от полной шкалы при
выходной частоте 10 кГц. Опорные сигналы обоих ЦАП поступают на два
Рис. 6.62. 12-разрядный двухканальный последовательный ЦАП AD5322 на 100 тыс.
выборок/с
соответствующих входа (по одному у каждого ЦАП). Входы опорных сигна-
лов могут быть буферируемыми или оставаться без буферизации. Выходы
обоих ЦАП можно одновременно обновлять по асинхронному входному
сигналу LDAC. Прибор оснащен схемой начальной установки при подаче
питания, формирующей на выходах ЦАП О В и поддерживающей этот уро-
вень до завершения записи данных в прибор.
Данные обыкновенно поступают в AD5322 через контакты SCLK, DIN
и NSYNC из последовательного порта DSP. Когда сигнал NSYNC стано-
вится низким, активизируется входной регистр сдвига. Данные передаются
в AD5322 по спадающим фронтам 16 последовательных импульсов. Типич-
ный интерфейс между ADSP-2189M и AD5322 представлен на рис. 6.63.
Примечательно, что тактовые импульсы на AD5322 формируются из такто-
вых импульсов ADSP-2189M. Кроме того, возможна подача внешних сиг-
налов SCLK и NSYNC на AD5322 и использование их для управления ADSP-
2189М. Последовательный интерфейс AD5322 не обладает необходимым
быстродействием для подачи на ADSP-2189M максимальной задающей ча-
стоты. Но сигналы синхронизации последовательного интерфейса програм-
мируются и могут быть установлены такими, чтобы по ним можно было
управлять и быстрыми, и медленными ЦАП.
Рис. 6.63. Последовательный интерфейс между ЦАП AD5322 и ADSP-2189M
Входной регистр сдвига AD5322 имеет 16 разрядов. 16-разрядное слово
содержит 4 контрольных бита, предшествующих 12 разрядам данных ЦАП.
Первый бит указывает ЦАП А или В, данные которого подлежат обработке.
Второй бит определяет потребность в буферизации опорного сигнала. Пос-
ледующие два бита управляют режимами работы ЦАП (нормальный, с по-
ниженным энергопотреблением с заземлением 1 кОм, 100 кОм или с выхо-
дом высокого импеданса).
Подключение ЦСП к ЦАП с параллельными входами
AD5340 является 12-разрядным ЦАП на 100 тыс. выборок/с с параллель-
ным интерфейсом данных. Он работает с питанием от +2,5 до +5,5 В и
рассеивает мощность 345 мкВт (при питании +3 В). В режиме пониженно-
Глава 6. Интерфейсы преобразователей данных
PD GND
Рис. 6.64. 12-разрядный ЦАП AD5340 с параллельными входами на 100 тыс. выборок/с
го энергопотребления эта мощность снижается до 0,24 мкВт. В кристалл
входит встроенный выходной буфер, формирующий выходные напряже-
ния, близкие к напряжениям на обеих шинах питания. В AD5340 можно
буферировать опорные сигналы или оставлять их без буферизации. Прибор
оснащен схемой начальной установки при подаче питания, устанавливаю-
щей и поддерживающей 0 В на выходе ЦАП до завершения записи данных.
Структурная схема устройства приведена на рис. 6.64. Вход его имеет двой-
ную буферизацию.
Сопряжение AD5340 с DSP показано на рис. 6.65. По сигналам синхро-
низации выборок, поступающим в DAC, по входу NLDAC обновляется
внутренний регистр ЦАП. Кроме того, эти синхроимпульсы формируют
сигналы прерывания на входах NIRQ DSP, запрашивая тем самым новые
порции данных. После вычисления очередного слова данных ЦСП поме-
щает его на шину данных и передает в ЦАП через входы NCS и NWR.
Примечания: требуются 2 программных состояния ожидания.
Синхроимпульсы дискретизации могут поступать от DSP
Рис. 6.65. Параллельный интерфейс между ЦАП AD5340 и ADSP-2189M
6.2. Цифровые интерфейсы АЦП И ЦАП (и связанные темы) 485
DB15:0,DB15:0
DDR
DATACLKJN.DATACLKJN
REXT
DATACLKOUT.DATACLKOUT
CLK+
CLK-
FSADJ
REFIO
>OUTA
’OUTB
SPI.DIS
SDIO
SDO/SYNC_ALRM
CSB
SCLK/SYNC_UPD
RESET
Рис. 6.66. 16-разрядный ЦАП AD9726 на 600+ млн выборок/с с входами LVDS
Заметьте, что в этой конфигурации поддерживается работа в реальном вре-
мени, при которой новые данные на выходах ЦСП появляются до прихода
очередного синхроимпульса дискретизации. Сигнал NWR от ЦСП расши-
ряется на 2 программных состояния ожидания в соответствии с требовани-
ями ЦАП AD5340.
В заключение познакомимся с высокоскоростным ЦАП с параллель-
ным входом TxDACT. AD9726 представляет 16-разрядный ЦАП на 600 млн
выборок/с с интерфейсом LVDS, развивающий скорость преобразования
до 600+ млн выборок/с10. Его упрощенная структурная схема приведена на
рис. 6.66.
Добавим, что данный прибор обладает беспрецедентными шумовыми
характеристиками —161 дБм/Гц на выходных частотах от 100 до 300 МГц и
— 169 дБм/Гц на выходной частоте 20 МГц. Такое сочетание быстродей-
ствия и низкого шума идеально подходит для коммуникационных систем с
несколькими несущими частотами, а также для инструментальных и испы-
тательных приложений.
Список литературы
6.2. Цифровые интерфейсы АЦП и ЦАП
1. Data sheet for AD7466/AD7467/AD7468 1.6-V, Micropower 12-/10-/8-Bit ADNCS
in 6-Lead SOT-23, http://www.analog.com.
2. Data sheet for AD9289 Quad 8-Bit, 65-MSPS Serial LVDS 3-V A/D Converter,
http://www.analog.com.
3. Data sheet for AD7853/AD7853L 3-V to 5-V, Single-Supply, 200kSPS 12-Bit
Sampling ADC, http://www.analog.com.
4. Data sheet for ADSP-2189M DSP Microcomputer, http://www.analog.com.
5. Walt Kester, Mixed Signal and DSP Design Techniques, Newnes, an Imprint of
Elsevier Science, 2003, ISBN-0-75067-611-6, Section 8.
Глава 6. Интерфейсы преобразователей данных
6. Data sheet for AD9430 12-Bit, 170-MSPS/210-MSPS 3,3-V A/D Converter,
http://www.analog.com.
7. Data sheet for AD7854/AD7854L 3-V to 5-V Single-Supply, 200-kSPS 12-Bit
Sampling ADC, http://www.analog.com.
8. Data sheet for AD5322 2,5-V to 5.5-V, 230 /zA, Dual Rail-to-Rail Output DAC,
http://www.analog.com.
9. Data sheet for AD5340 2,5-V to 5.5-V, 115 mA, Parallel Interface, Single Voltage
Output DAC, http://www.analog.com.
10. Data sheet for AD9726 16-bit, 600+ MSPS LVDS Input D/А Converter,
http://www.analog.com.
6.3. Буферизация аналоговых выходов ЦАП
Уолт Кестер
Предисловие
Современные ЦАП в интегральном исполнении имеют выходы напряжения
или тока. Рисунок 6.67 представляет три базовые конфигурации, в которых
ОУ используется для буферизации и/или усиления выходного напряжения.
На рис. 6.67, а, показан ЦАП с буферизованным выходом напряжения.
Во многих случаях выход ЦАП можно использовать непосредственно, без
дополнительной буферизации. Когда же требуется дополнительный буфер-
ный ОУ, он обычно используется в неинвертирующем режиме с коэффи-
циентом усиления, определяемым 7?1 и 7^.
Известны два основных метода работы ЦАП с выходом тока. На
рис. 6.67, б, напряжение образуется просто на внешнем нагрузочном рези-
сторе Rl. Если требуется, внешний ОУ может исполнять роль буфера и/или
усилителя этого напряжения. Многие высокоскоростные ЦАП генерируют
ток величиной 20 мкА или больше, создавая достаточное напряжение на
довольно маленьких нагрузочных резисторах. Например, быстрый видео-
Рис. 6.67. Буферизация выходов ЦАП с помощью ОУ
6.3. Буферизация аналоговых выходов ЦАП
ЦАП обычно выдерживает токи размахом около 30 мА, развивая до 1 В на
источнике и в нагрузке в виде коаксиального кабеля 75 Ом (на выходе ЦАП
при этом включена нагрузка постоянного тока 37,5 Ом).
Прямой метод преобразования выходного тока в напряжение показан
на рис. 6.67, б. Эту схему обычно называют преобразователем тока в напря-
жение, или I/V. В ней выходной сигнал ЦАП подается на инвертирующий
вход ОУ, а выходное напряжение создается на резисторе обратной связи Rr
При таком подходе выход ЦАП всегда находится на виртуальной «земле»
(что ведет к улучшению линейности по сравнению с рис. 6.67, б). Примеча-
тельно, что в CMOS ЦАП типа R-2R с токовым выходом следует использо-
вать именно эту конфигурацию, так как их выходное сопротивление RO за-
висит от кода (см. гл. 3, подробнее рассматривающую эту архитектуру ЦАП).
Общая процедура выбора ОУ для буферов ЦАП подобна выбору буфе-
ров АЦП. Поэтому здесь мы не будем повторять такие параметры, как точ-
ность на постоянном токе, шум, время установления, полоса пропускания,
искажения и т. п., относящиеся как к ЦАП, так и к АЦП. Вместо этого
здесь будут приведены некоторые примеры соответствующих приложений.
Техника преобразования дифференциального сигнала
к одному выходу
Общая модель современного ЦАП с токовым выходом показана на рис. 6.68.
Эта модель типична для серий TxDACT, AD976x и AD977X1. Токовый выход
пользуется большей популярностью, чем выход по напряжению, особенно
на звуковых и более высоких частотах. Если ЦАП выполнен на основе би-
полярной или BiСЛЛЛУ-технологии, желательно, чтобы его выход был по-
требителем тока и чтобы выходной импеданс не превышал 500 Ом (внут-
ренней резистивной лестничной цепи типа R-2R). Напротив, для CMOS
ЦАП более желательно, чтобы он был источником тока и имел высокий
выходной импеданс, как правило, больше 100 кОм.
• Bipolar или BiCMOS ЦАП потребляют ток.
• CMOS ЦАП — источники тока.
• Наилучший диапазон изменения выходного напряжения <±1 В.
Рис. 6.68. Обобщенная модель выходной цепи высокоскоростного ЦАП серий AD976x
и AD977x
Глава 6. Интерфейсы преобразователей данных
Другим важным параметром является диапазон изменения выходного на-
пряжения — максимально допустимый размах выходного напряжения, при
котором сохраняется линейность ЦАП. Его величина ообычно составляет
от 1 до 1,5 В в зависимости от типа ЦАП. Наилучшая линейность достига-
ется при включении ЦАП на виртуальную «землю», подобно тому как это
делается в ОУ преобразователей типа I/V, а наименьших искажений часто
удается достичь, когда ЦАП создает небольшое напряжение на резистив-
ной нагрузке.
Современные АЦП с токовым выходом обычно имеют дифференциаль-
ные выходы, благодаря которым удается достичь значительного подавления
и уменьшения четных гармонических составляющих. Обычными являются
полношкальные выходные токи в диапазоне от 2 до 20 мА.
Во многих приложениях приходится преобразовывать дифференциаль-
ный выход ЦАП к одному выходу, принятому, в частности, в коаксиальных
линиях. Если не требуется работа на низких частотах, это можно сделать с
помощью радиочастотного трансформатора. Рисунок 6.69 является типич-
ным примером такого подхода. Токовый выход ЦАП с высоким импедан-
сом подключается дифференциально к нагрузке 50 Ом, на работу с которой
рассчитан трансформатор.
Рис. 6.69. Дифференциальное трансформаторное соединение
Дифференциальное напряжение ЦАП поступает на первичную обмотку
радиочастотного трансформатора с коэффициентом трансформации 1:1,
который преобразует его в напряжение единственного выхода вторичной
обмотки. Выход LC-фильтра 50 Ом согласован с нагрузочным резистором RL
50 Ом, в результате чего формируется выходное напряжение размахом 1 В.
Трансформатор не только служит для преобразования дифференциаль-
ного сигнала к одному выходу, но и изолирует выход ЦАП от реактивной
нагрузки, создаваемой ZC-фильтром, улучшая тем самым общий показа-
тель искажений.
В тех случаях, когда требуется частотная характеристика, распространя-
ющаяся до области постоянного тока, можно использовать ОУ, выполнен-
ный по схеме преобразователя дифференциального сигнала к одному выхо-
ду. На рис. 6.70 показан ОУ AD8055, обеспечивающий широкую полосу
пропускания и малые искажения2. Токовый выход ЦАП подключен на сим-
метричную резистивную нагрузку 25 Ом, создавая тем самым напряжения
от 0 до +0,5 В в противофазе на каждом из выходов.
Рис. 6.70. Дифференциальный выход по постоянному току с использованием двупо-
лярного ОУ
AD8055 имеет коэффициент усиления 2 и создает выходное напряжение
размахом 2 В относительно «земли». Заметим, что, поскольку выходной сиг-
нал биполярен относительно «земли», требуется ОУ с биполярным питанием.
На конденсаторе CFILTER построен дифференциальный фильтр с эквива-
лентным дифференциальным выходным импедансом 50 Ом. Этот фильтр
снижает всевозможные наводимые в ОУ быстрыми перепадами искажения.
Оптимальная частота среза фильтра эмпирически подбирается таким обра-
зом, чтобы обеспечить наилучший показатель искажений.
Модифицированный вариант схемы рис. 6.70 может работать с однополяр-
ным питанием, при котором синфазное напряжение ОУ устанавливается рав-
ным половине напряжения питания (+2,5 В). Это демонстрирует рис. 6.71, где
используется ОУ AD80613. Выходное напряжение с размахом 2 В здесь сим-
метрично относительно синфазного напряжения +2,5 В. Это синфазное
напряжение можно получить из напряжения питания +5 В либо с помо-
1 кОм
Рис. 6.71. Преобразование дифференциального выхода в одиночный по постоянному
току с использованием ОУ с однополярным питанием
Глава 6. Интерфейсы преобразователей данных
щью резистивного делителя, либо напрямую с источника опорного напря-
жения +2,5 В. Когда в качестве синфазного напряжения используется пи-
тание +5 В, его следует тщательно развязывать, чтобы исключить шум из
цепи питания.
Преобразование ток-напряжение с одним выходом
Преобразование тока в напряжение с одним выходом без труда выполняет-
ся с использованием в качестве преобразователя I/V единственного ОУ,
как это показано на рис. 6.72. Ток ЦАП максимальной величины 10 мА,
поступающий с AD7684, создает выходное напряжение 0...+2 В на резисто-
ре Rf величиной 200 Ом.
Рис. 6.72. Интерфейс преобразователя I/V на ОУ для прецизионного 16-разрядного
ЦАП AD768
Подключение виртуальной «земли» к ОУ AD8055 минимизирует любые
искажения, вызываемые нелинейным выходным импедансом ЦАП. Факти-
чески большинство ЦАП высокого разрешения подобного типа строятся на
//И-преобразователе с заводской подгонкой.
В то же время полезно напомнить, что такое применение ЦАП с одним
выходом по сравнению с дифференциальным режимом приводит к ухудше-
нию синфазного подавления и соответствующему увеличению искажений
из-за четных гармонических составляющих.
Емкость конденсатора обратной связи CF следует оптимизировать та-
ким образом, чтобы получить схему с наилучшей импульсной характерис-
тикой. Представленные на рисунке уравнения следует рассматривать как
рекомендуемые. Более подробный анализ этого типа схем проведен в 6.
У ЦАП с токовым выходом типа R-2R (см. гл. 3, где подробно описана
эта архитектура) выходной импеданс зависит от кода, поэтому для обеспе-
чения линейности выход должен быть подключен к виртуальной «земле»
ОУ. 16/14-разрядный ЦАП AD5545/AD5555 служит прекрасным примером
подобной архитектуры6. На рис. 6.73, я, показана схема соответствующего
интерфейса, в котором ADR03 используется в качестве источника опорно-
го напряжения 2,5 В7, а ОУ AD8628 со стабилизацией нуля прерывающим
модулятором8 играет роль выходного I/V-преобразователя.
6.3. Буферизация аналоговых выходов ЦАП
Рис. 6.73. Двухканальный 16/14-разрядный интерфейс AD5545/AD5555 с токовым вы-
ходным ЦАП типа R-2R
Внешний источник опорного напряжения 2,5 В определяет максималь-
но допустимый выходной ток 0,5 мА. Заметьте, в ЦАП включен резистор
обратной связи 5 кОм, благодаря которому улучшается температурная ста-
бильность без использования внешних резисторов. Максимально допусти-
мое выходное напряжение ОУ составляет -2,5 В. Конденсатор в обратной
связи CF компенсирует выходную емкость ЦАП и должен подбираться,
начиная с 20 пФ таким образом, чтобы получить схему с наилучшей им-
пульсной характеристикой.
Преобразование дифференциального тока
в дифференциальное напряжение
На рис. 6.74 показано, как можно использовать серию дифференциальных
усилителей AD813x для получения буферизованного выходного дифферен-
циального напряжения из ЦАП с токовым выходом.
Вначале на резисторах 25 Ом выходной ток ЦАП преобразуется в на-
пряжение. Это напряжение пятикратно усиливается с помощью AD813x.
Подобная техника используется вместо прямого 1/V-преобразования для
Дифференциальный
выход размахом 5 В
Рис. 6.74. Буферизованные высокоскоростные ЦАП на базе дифференциальных уси-
лителей AD813X
Глава 6. Интерфейсы преобразователей данных
предотвращения перегрузки и искажений усилителя при быстро изменяю-
щихся токах ЦАП. Следует следить при этом, чтобы напряжение на выходе
ЦАП не выходило за пределы номинального диапазона его изменения.
Вход V0CM AD813x можно использовать для задания выходного синфаз-
ного напряжения в пределах диапазона AD813x. Если добавить еще пару
резисторов по 75 Ом, то с помощью такой схемы можно управлять канала-
ми передачи данных.
Активные фильтры НЧ для аудио ЦАП
На рис. 6.75 показан активный фильтр НЧ, который также можно использо-
вать в качестве преобразователя ток-напряжение для £-Д аудиоЦАП AD185310.
Это фильтр четвертого порядка с частотой среза примерно 75 кГц. Благодаря
высокой частоте избыточной дискретизации (24,576 млн. выборок/с при
работе на ЦАП с пропускной способностью 48 тыс. выборок/с) этого не-
сложного фильтра достаточно для защиты от наложения составляющих спек-
тра, имеющих частоты свыше 12 МГц.
На схеме представлен выход одного канала двухканального ЦАП. //И-каска-
ды UXA м UlB образуют дифференциальный фильтр первого порядка, a U2 —
фильтр второго порядка с многоконтурной обратной связью, который од-
новременно выполняет и преобразование дифференциального сигнала к
одному выходу.
Выходной четвертый пассивный полюс формируется резистором на
604 Ом и конденсатором на 2,2 нФ на выходе. ОУ ОР275 выбран для фун-
кционирования в качестве С7 и U2 за его высококачественные аудиохарак-
теристики11.
Более подробная информация о конструировании фильтров приведена в 12.
Рис. 6.75. Активный Gauss-фильтр четвертого порядка на 75 кГц для буферизации
выхода стереоЦАП AD1853
2,74 кОм
2,74 кОм
220 пФ
2,94 кОм
6.4. Опорные напряжения преобразователей данных
Список литературы
6.3. Буферизация аналоговых выходов ЦАП
1. Data sheet for AD9772A 14-Bit, 160 MSPS TxDAC+T with 2x Interpolation Filter,
http://www.analog.com, for example. Also, see other members of the AD976x and AD977x
family of communications DANCS.
2. Data sheet for AD8055/AD8056 Low Cost, 300 MHz Voltage Feedback Amplifiers,
http://www.analog.com.
3. Data sheet for AD8061 Low Cost, 300-MHz Rail-to-Rail Amplifier,
http://www.analog.com.
4. Data sheet for AD768 16-Bit, 30 MSPS D/А Converter, http://www.analog.com.
5. Walt Kester. Practical Design Techniques for Sensor Signal Conditioning, Analog
Devices, 1999, ISBN-0-916550-20-6, Chapter 5, available for free download at
http://www.analog.com.
6. Data sheet for AD5545/AD5555 Dual, Current-Output, Serial-Input, 16-/14-Bit
DAC, http://www.analog.com.
7. Data sheet for AD RO 1/AD RO 2/AD RO 3 Precision 10-V/5-V/2,5-V Voltage
References, http://www.analog.com.
8. Data sheet for AD8628 Zero-Drift, Chopper-Stabilized, Single-Supply, Rail-to-
Rail Input/Output Low Noise Operational Amplifier, http://www.analog.com.
9. Data sheets for AD813x-Series Differential Amplifiers (AD8131, AD8132, AD8137,
AD8138, AD8139), http://www.analog.com.
10. Data sheet for AD1853 Stereo, 24-Bit, 192 kHz, Multibit ©-DAC,
http://www.analog.com.
11. Data sheet for OP275 Dual Bipolar/JFET, Audio Operational Amplifier,
http://www.analog.com.
12. Walter G. Jung. Op Amp Applications. Analog Devices, 2002, ISBN 0-916550-26-5,
Chapter 5.
6.4. Опорные напряжения
преобразователей данных
Уолт Кестер
Введение
В большинстве случаев точность преобразователя данных задается разного
рода опорными напряжениями. Исключение составляют АЦП, работаю-
щие в пропорциональном режиме, где входной сигнал и масштаб входного
диапазона пропорциональны опорному сигналу. В этом особом случае к
точности опорного напряжения не предъявляют особых требований, и ей
вполне удовлетворяет точность источника питания. О подробностях про-
порционального режима рассказывается в описании £-Д АЦП в гл. 3.
Многие АЦП и ЦАП оснащены собственными источниками опорного
напряжения, тогда как другие их не имеют. Некоторые АЦП используют в
качестве опорного источник питания. К сожалению, требования к опорно-
му напряжению очень мало стандартизированы. В ряде случаев точность
работы преобразователя на постоянном токе удается улучшить добавлени-
ем или заменой собственного источника опорного напряжения более точ-
Глава 6. Интерфейсы преобразователей данных
ным и стабильным внешним источником. В других случаях применение
внешнего малошумящего опорного сигнала ведет к повышению у АЦП с
высоким разрешением разрешающей способности, свободной от шума.
Различные АЦП и ЦАП позволяют по-разному включать внешние ис-
точники опорного напряжения взамен встроенных. Рисунок 6.76 предла-
гает ряд наиболее распространенных конфигураций (но не все, конечно).
На рис. 6.76, а, дан преобразователь, требующий внешнего опорного ис-
точника. Как правило, рекомендуется в непосредственной близости от вы-
вода REFbx АЦП/ЦАП помещать развязывающий конденсатор. Его величи-
ну обычно указывают в паспортных данных источника опорного напряже-
ния. Важно также, чтобы опорный сигнал оставался стабильным при
емкостной нагрузке (максимально возможной).
На рис. 6.76, б, показан преобразователь с внутренним опорным напря-
жением, которое присутствует и на соответствующем выводе прибора. Это
позволяет использовать данное напряжение на других участках схемы в
предположении, что нагрузка не превысит номинальной величины. Опять
же важно разместить вплотную к этому выводу конденсатор. Когда внут-
реннее опорное напряжение делается доступным для внешнего использова-
ния, в паспортных данных АЦП или ЦАП обычно указывают его точность,
стабильность и температурный коэффициент.
Если вывод опорного напряжения предполагается подключать к другим
участкам цепи, в паспортных данных должны быть строго ограничены ко-
эффициент разветвления по выходу и величина нагрузки. К тому же следу-
ет позаботиться о таком подключении опорного сигнала, при котором со-
здаются минимальные перекрестные помехи. Во многих случаях, прежде
чем распределять сигнал по другим частям схемы, непосредственно на вы-
ходе REFBbix полезно организовать буфер на базе ОУ.
Рисунок 6.76, в, представляет преобразователь, который может исполь-
зовать как внутренний, так и внешний опорный сигнал, для чего на его
корпусе имеется дополнительный вывод. При использовании внутреннего
Внеш-
сигнал
Рис. 6.76. Некоторые распространенные варианты подачи опорного сигнала на АЦП/ЦАП
6.4. Опорные напряжения преобразователей данных
49У
опорного напряжения, согласно рис. 6.76, в, вывод REFbmx просто соединя-
ется снаружи с выводом REFbx и при необходимости развязывается от него.
При использовании внешнего опорного напряжения, как показано на рис.
6.76, г, REFBbix оставляется свободным, а внешний сигнал развязывается и
подключается к выводу REFbx. Такая организация отличается достаточной
гибкостью, так как идентична в плане подключения АЦП и ЦАП к одному
и тому же источнику опорного напряжения с хорошим согласованием ха-
рактеристик обоих приборов.
Рисунок 6.76, д, демонстрирует такую организацию, при которой внеш-
нее опорное напряжение может блокировать внутреннее напряжение, ког-
да оба поступают на один и тот же вывод корпуса. Сопротивление рези-
стора R составляет обычно несколько килоом, поэтому опорное напря-
жение с внешнего источника блокирует внутреннее напряжение на выводе
REFBx/Bbix. Рисунок 6.76, е, показывает, как следует подключать внешний
источник опорного напряжения для блокировки внутреннего напряжения.
Структуры, показанные на рис. 6.76, это не единственно возможные
конфигурации подключения опорного напряжения к АЦП и ЦАП, поэтому
по всем вопросам надо ориентироваться на паспортные данные, описыва-
ющие конкретные параметры, разветвления, развязки и т. п.
Источник опорного напряжения может быть выполнен на базе элемен-
тов bandgap (основанных на стабильности ширины запрещенной зоны), заглуб-
ленного диода Зенера, или XFET™ (см. подробное обсуждение источников
опорного напряжения в гл. 7), но в любом случае он имеет выходной бу-
ферный ОУ того или иного типа. ОУ изолирует опорный элемент от выхода
и обеспечивает необходимую точность сопряжения. Этот ОУ должен отве-
чать основным требованиям к устойчивой работе, поэтому в данном мате-
риале так остро стоит вопрос о его развязке.
Примечательно, что вход опорного напряжения в АЦП и ЦАП органи-
зуется аналогично аналоговому входу АЦП, поэтому непосредственный
процесс преобразования может сопровождаться проникновением переход-
ных токов на этот вывод. Это требует соответствующей развязки, стабили-
зирующей опорное напряжение. Добавление подобной развязки может при-
вести в свою очередь к неустойчивости некоторых типов опорных сигна-
лов, характер которой зависит от исполнения выходного ОУ. Разумеется, в
паспортных данных источника опорного сигнала невозможно предусмот-
реть все режимы работы ОУ, что ставит перед конструктором определен-
ную проблему относительно компромисса между устойчивостью и подавле-
нием ошибок из-за переходных токов. Во многих случаях в паспортных
данных приводятся рекомендации по организации внешних опорных сиг-
налов и схем развязки.
К счастью, оценить ошибки из-за переходных процессов и определить
устойчивость при работе на емкостную нагрузку можно с помощью не-
сложных лабораторных испытаний (см. подробности в разд. 7.1).
Хорошо спроектированный источник опорного напряжения сохраняет
устойчивость при подключении любой емкостной развязки. К сожалению,
некоторые источники не отвечают этому условию, и конденсаторы боль-
шой емкости часто повышают их неустойчивость. Такие источники опор-
ного напряжения не находят практического применения в преобразовате-
Глава 6. Интерфейсы преобразователей данных
лях данных, так как любой преобразователь почти всегда имеет некоторое
количество развязок.
Между источником опорного напряжения и преобразователем данных
можно добавить подходящий буфер на базе ОУ. Однако известно много
хороших источников (опять же описанных в разд. 7.1), которые сохраняют
устойчивость при конденсаторной нагрузке. Источники этих типов и сле-
дует выбирать для преобразователей данных, а не идти по пути повышения
сложности и стоимости ОУ.
Некоторые основные итоги, касающиеся источников опорного напря-
жения преобразователей данных, подведены на рис. 6.77.
• Точность преобразователя данных определяется опорным напряжением, задавае-
мым от встроенного или внешнего источника, и только масштабируемый АЦП может
избавить от необходимости иметь точный опорный сигнал.
• Внешние источники могут дать более высокую точность и более низкий уровень шума,
чем встроенные источники.
• Элементы типа bandgap (основанные на стабильности ширины запрещенной зоны),
заглубленного диода Зенера, XFETT обычно снабжаются встроенным буферным ОУ.
• Шунтирование наводок из-за переходных процессов может привести к неустойчиво-
сти и ошибкам.
• Внешние развязывающие конденсаторы могут вызвать колебания.
• На выходе может понадобиться внешний буфер для вытекающего и поступающего
токов.
• Шум опррного напряжения может ограничивать разрешающую способность системы.
Рис. 6.77. Основные проблемы формирования опорного напряжения преобразовате-
лей данных
6.5. Формирование синхроимпульсов
дискретизации
Уолт Кестер
Введение
В гл. 2 этой книги мы получили важное выражение, связывающее апертур-
ное дрожание в полосе частот А, отношение сигнал-шум (SNR) преобразо-
вателя и частоту полного синусоидального аналогового сигнала f:
57VK = 201og10
1
2л-/Гу
(6.7)
При этом предполагалось, что АЦП (или ЦАП) идеален, и рассматрива-
емое дрожание служит единственном источником ошибок. Полоса пропус-
кания при измерении SNR является Найквистовским диапазоном от посто-
янного тока до/у/2, где fs представляет частоту дискретизации. Выражение
(6.7) подразумевает полношкальный синусоидальный входной сигнал. Ошиб-
ка дрожания пропорциональна скорости изменения входного сигнала, по-
6.5. Формирование синхроимпульсов дискретизации 497
этому синусоидальные сигналы с меньшими амплитудами и, соответствен-
но, пониженным темпом изменения выходного напряжения имеют боль-
ший SNR (по сравнению с полношкальным сигналом).
Другим показателем, представляющим интерес, является теоретический
SNR, вызванный дрожанием несинусоидальных сигналов, в частности при
гауссовом распределении частот в его спектре. Поскольку средний темп
изменения выходных сигналов этого типа меньше полного размаха шкалы,
ошибки дрожания здесь меньше. Математическое объяснение этого явле-
ния требует дополнительного рассмотрения.
Следует заметить, что t в выражении (6.7) представляет комбинацию
дрожания от дискретизации t и собственного апертурного дрожания АЦП
t. Эти понятия находятся во взаимосвязи, выражаемой среднеквадратич-
ным отношением:
(6.8)
Во многих случаях дрожание от дискретизации в несколько раз превы-
шает апертурное дрожание АЦП, являясь доминирующей причиной ухуд-
шения SNR. Например, 14-разрядный АЦП AD6645 на 80/105 млн выбо-
рок/с имеет апертурное дрожание 0,1 пкс. Для достижения такого показа-
теля служит малошумящий кварцевый генератор.
Если нет прока от внешних воздействий на апертурное дрожание
АЦП, можно принять ряд мер для поддержания дрожания от дискрети-
зации на достаточно низком уровне, чтобы добиться наилучших харак-
теристик АЦП.
На рис. 6.78 построены диаграммы по выражению (6.7), иллюстрирую-
щие ухудшение SNR из-за дрожания на разных входных частотах полнош-
кального аналогового сигнала (здесь подразумевается, что t. включает все
источники дрожания, даже собственное апертурное дрожание АЦП).
Частота полношкального аналогового входного
синусоидального сигнала (МГц)
Рис. 6.78. Теоретические зависимости SNR и ENOB при дрожании как функции часто-
ты полношкального аналогового входного синусоидального сигнала
(^498 Глава 6. Интерфейсы преобразователей данных
Напомним приведенное в гл. 2 полезное соотношение эффективного
числа разрядов (ENOB) и отношения сигнал-шум-искажения (SINAD)-.
EN0B
6,02 дБ ' ’
Для продолжения обсуждения предположим, что АЦП не создает иска-
жений, поэтому SINAD = SNR, и выражение (6.8) принимает вид:
ENOB = SNR~X’lh^. (6.10)
6,02 дБ
Значения SNR вдоль левой вертикальной оси на рис. 6.78 преобразуются в
значения ENOB правой вертикальной оси в соответствии с выражением (6.9).
Рисунок 6.79 представляет другую серию графиков (6.7), соответствую-
щую зависимости максимально допустимого дрожания / от входной частоты
полного аналогового сигнала при разных значениях EpIOB. Эти диаграммы
нужны для определения требований к частоте дискретизации (когда доми-
нирует t.) при различных входных частотах и разрешающей способности.
Например, оцифровывание полношкального входного сигнала 30 МГц воз-
можно при дрожании, меньшем 0,3 пкс, чтобы обеспечить SNR 14 разрядов.
Рисунок 6.79 может использоваться при необходимости в качестве кри-
терия для определения дрожания, вызванного дискретизацией, когда SNR
из-за этого дрожания равен теоретическому SNR АЦП под действием шума
квантования.
Для иллюстрации рассмотрим обычное дрожание, определяемое неко-
торыми логическими схемами (рис. 6.80). Значения для 74LS00, 74НСТ00 и
74АСТ00 были измерены высокопроизводительным АЦП (апертурное дро-
жание меньше 0,2) с использованием метода, описанного в гл. 5, причем t
рассчитывалось на базе БПФ по степени ухудшения SNR, когда несколько
Частота полношкального аналогового входного
сигнала (МГц)
Рис. 6.79. Зависимость максимально допустимого дрожания от частоты полношкаль-
ного аналогового входного сигнала при различных разрешениях (ENOB)
• 74LS00 4,94 пс*
• 74НСТ00 2,20 пс*
• 74АСТ00 0,99 пс*
• MC100EL16PECL 0,7 пс**
• ЭСЛ с уменьшенным размахом (0,4 В) 0,2 пс**
* Рассчитанные величины базируются на ухудшении SNR АЦП. ** Данные производителя.
Рис. 6.80. Среднеквадратические значения дрожания типичных логических элементов
идентичных логических схем соединялись последовательно. Дрожание, вы-
зываемое одним логическим элементом, рассчитывалось посредством деле-
ния на квадратный корень из общего числа последовательно соединенных
элементов. Дрожание MC100EL16 и NBSG16 было указано в паспортных
данных.
Другие вопросы, связанные с апертурным дрожанием в системах вы-
борки данных, рассмотрены в 1)2 и в гл. 2.
Фазовый шум и дрожание генератора
Предыдущий анализ был посвящен дрожанию в полосе частот. Но работа
генераторов чаще характеризуется величиной фазового шума. Поэтому да-
лее мы покажем, как аппроксимировать среднеквадратическую величину
дрожания через фазовый шум.
Сначала дадим несколько определений. Рисунок 6.81 показывает ти-
пичный частотный спектр на выходе неидеального генератора (т. е. спектр
дрожания во временной области, соответствующий фазовому шуму в час-
тотной области). Спектр показывает мощность шума в полосе 1 Гц в функ-
ции частоты. Фазовый шум определяется как отношение шума в полосе 1 Гц
на частоте смещения fm относительно частоты генератора fQ к амплитуде
сигнала генератора на частоте fQ.
В процессе дискретизации тактовые импульсы умножается на аналого-
вый входной сигнал. Это умножение, выполняемое во временной области,
эквивалентно свертке в частотной области. Поэтому спектр генератора час-
Рис. 6.81. Энергетический спектр генератора, связанный с фазовым шумом
Глава 6. Интерфейсы преобразователей данных
fa
Идеальный
синусоидальный
входной сигнал
дискретизации
с фазовым шумом Для идеального АЦП
С Л/ —> оо
Рис. 6.82. Влияние фазового шума на дискретизацию идеального синусоидального сигнала
тоты дискретизации выполняет свертку с входным сигналом, давая в резуль-
тате БПФ (FFT) на выходе чисто синусоидальный входной сигнал (рис. 6.82).
Основной фазовый шум будет «размывать» первоначальный сигнал на ряд
частотных компонент, уменьшая тем самым общее спектральное разреше-
ние. «Расширенный» фазовый шум вызовет ухудшение общего SNR, как
предсказывает аппроксимация (6.7).
Поведение генератора удобно характеризовать в терминах одностороннего
(относительно несущей частоты) фазового шума, как показано на рис. 6.83,
где фазовый шум в дБс/Гц представлен как функция смещения частоты^ с
частотной осью в логарифмическом масштабе. Здесь фактическая кривая
аппроксимирована рядом областей, каждая из которых имеет наклон l/fx,
где х = 0 соответствует области «белого» фазового шума (наклон = 0 дБ/дек.),
а х = 1 соответствует области фазового «фликер-шума» (наклон — —20 дБ/дек.).
Есть также области с х = 2, 3, 4, и эти области находятся значительно ближе
к несущей частоте.
Заметьте, что кривая фазового шума в какой-то степени аналогична ха-
рактеристике спектральной плотности приведенного ко входу напряжения
шума усилителя. Как и в шуме напряжения усилителя, низкие частоты среза
1//являются объектом особого внимания при проектировании генератора.
Рис. 6.83. Фазовый шум генератора (дБс/Гц) как функция смещения частоты
6.5. Формирование синхроимпульсов дискретизации
Мы убедились, что генераторы удобно описывать фазовым шумом, но
чтобы связать фазовый шум с работой АЦП, его надо выразить через дро-
жание. Чтобы привести график в соответствие с требованиями современ-
ных приложений АЦП, рассмотрим для примера частоту тактового генера-
тора (частоту дискретизации) в районе 100 МГц и получим типовую диа-
грамму, представленную на рис. 6.84. При этом кривая фазового шума
аппроксимируется рядом отдельных линейных сегментов и конечная точка
каждого сегмента соответствует определенной точке данных.
Первый шаг расчета эквивалентного среднеквадратичного дрожания
состоит в получении интегрального фазового шума в интересующем час-
тотном диапазоне, т. е. в области А, охваченной кривой. Область разбита на
ряд подобластей (Д, Л2, Л3, Л4), каждая из которых определяется двумя точ-
ками данных. В общем случае верхний частотный диапазон интегрирова-
ния должен вдвое превышать частоту дискретизации, если нет фильтра между
генератором и входом АЦП. Таким образом аппроксимируется полоса про-
пускания по входу АЦП.
При выборе нижней частоты интегрирования также требуется сделать
ряд допущений. Теоретически она должна быть настолько низкой, насколько
допускает дрожание. Практически же характеристики генератора не позво-
ляют смещать частоту ниже 10 Гц или около того, и это надо учесть при
расчете. В большинстве случаев нижняя частота интегрирования задается
100 Гц, если это допускают характеристики генератора. Иногда выбирают-
ся точки 1 или 10 кГц.
Следует принять во внимание, что «основной» фазовый шум влияет на
спектральное разрешение системы, тогда как расширенный фазовый шум
влияет на общий SNR системы. Вероятно, благоразумно было бы проинтег-
рировать каждую область отдельно, как это будет объяснено ниже, и оце-
нить ее вклад в общее дрожание. Низкочастотными составляющими можно
пренебречь по сравнению с расширенной областью, если речь идет о квар-
цевом генераторе. Другие типы генераторов могут иметь существенные со-
ставляющие дрожания в низкочастотной области, и приходится принимать
решение об их важности в полном частотном разрешении системы.
Рис. 6.84. Расчет дрожания по фазовому шуму
Глава 6. Интерфейсы преобразователей данных
Интегрирование каждой области по отдельности дает уровни собствен-
ных шумов областей. Затем эти результаты складываются и преобразуются
обратно в дБс. Когда интегрированный уровень собственного шума извес-
тен, среднее фазовое дрожание в радианах определяется следующим урав-
нением (подробнее в 3-7):
Фазовое дрожание (радианы) = ^(2 х КИ10), (6.11)
делением на 2rf0 дрожание в радианах преобразуется в дрожание в секундах:
Фазовое дрожание (секунды) =
(2 х 10'4/|°)
(2*4)
(6.12)
Надо отметить доступность online компьютерных программ и таблиц
для интегрирования по сегментам и расчета дрожания, чем существенно
упрощается этот процесс8’9.
На рис. 6.85 приведен простой расчет, в котором предполагается нали-
чие только расширенного фазового шума. Расширенный фазовый шум в
— 150 дБс/Гц является довольно хорошим показателем генератора, и полу-
ченное в ходе расчета дрожание представляет практический результат.
Фазовый шум —150 дБс/Гц (выраженный как отношение), умноженный
на интегрируемую полосу пропускания (200 МГц), дает интегральный
фазовый шум -67 дБс. Подобное умножение эквивалентно добавлению
10 log10 [200...0,01 МГц] к фазовому шуму в дБс/Гц. На практике в расчетах
не учитывают низкие частоты, ограниченные 0,01 МГц, существенно не
влияющие на результат. При использовании уравнения (6.11) полное дро-
жание составляет примерно 1 пс.
Минимальный фазовый шум и дрожание создаются обычно кварцевы-
ми генераторами, и на рис. 6.86 приведено несколько сравнительных при-
меров. Все представленные генераторы имеют частоту среза 1//в 20 кГц, и
при этом фазовый шум находится на уровне белого шума. Два генератора
Wenzel фиксированной частоты являются хорошим тому примером9. Ана-
логичного уровня трудно достичь в генераторах переменной частоты, о чем
f0 — частота генератора (100 МГц)
=г
L.
а
д
3 -150
>х
Интегрируется до 2f0 — 200 МГц
10k 100k 1М
ЮМ 100М 1G
смещение частоты (Гц)
А = -150 дБ + 101од10 [200 х 106 - 0,01 х 106] = -150 дБ + 83 дБ = -67 дБ
Среднеквадратичное фазовое дрожание (радианы) = ^(2 х 10А1°) = 6,32 х 10 4
. . Среднеквадратичное фазовое дрожание (радианы)
Среднеквадратичное дрожание (секунды) =------------------------------------------- - 1 пс
2*4
Рис. 6.85. Пример расчета дрожания при расширенном фазовом шуме
• Серии Wenzel ULN* -174 дБс/Гц @ 10 кГц+ $1 500
• Серии Wenzel Sprinter -165 дБс/Гц @ 10 кГц+ $350
• Высококачественный генератор сигналов -150 дБс/Гц @ 10кГц+ $10 000
— Минимальный уровень температурного шума резистивного источника в такой же
системе @ +25 °C = -174 дБм/Гц
— 0 дБм = 1 мВт = 632 мВ от пика до пика в 50 Ом
— Генератор с выходом +13 дБм (2,82 В от пика до пика) в 50 Ом с фазовым шумом
-174 дБс/Гц имеет минимальный уровень шума +13 дБм... 174 дБс = -161 дБм, на
13 дБ выше предельного температурного шума
(Wenzel ULN and Sprinter Series Specifications and Pricing с разрешения Wenzel Associates)
Рис. 6.86. Сравнение широкополосного фазового шума генераторов на 100 МГц (Wenzel
ULN and Sprinter Series Specifications and Pricing с разрешения Wenzel
Associates)
свидетельствует показатель —150 дБс относительно высококачественного
генератора.
Здесь уместно заметить, что существует теоретический предел мини-
мального уровня шума, который определяется температурным шумом ис-
точника: — 174 дБм/Гц при +25°С. Поэтому генератор с выходом +13 дБм
на 50 Ом (2,82 В в размахе) с фазовым шумом —174 дБс/Гц имеет мини-
мальный уровень шума —174 дБс + 13 дБм = —161 дБм. Это касается серии
Wenzel ULN, показанной на рис. 6.87.
На рис 6.87 приведен расчет дрожания, вызванного двумя кварцевыми
Wenzel-генераторами. В каждом случае точки данных взяты непосредствен-
но из таблиц производителя. Вследствие низкой частоты среза 1//большая
часть дрожания приходится на область белого фазового шума. Расчетные
Стандартный 100 МГц
со сверхнизким шумом (ULN)
кварцевый генератор
Полное среднеквадратичное
дрожание, равное 0,064 пкс
0,063 пс
~1------Г
-174 дБс/Гц,
200 МГц
100 1k 10k 100k 1М ЮМ 100М
Частотное смещение (Гц)
•170“
180--
0,003
пс
Стандартный 100 МГц
со сверхнизким шумом (ULN)
кварцевый генератор
Полное среднеквадратичное
дрожание, равное 0,18 пкс
0,18 пс
-165 дБс/Гц,
200 МГц
100 1k 10k 100k 1М ЮМ Ю0М
Частотное смещение (Гц)
Рис. 6.87. Расчет дрожания малошумящих кварцевых генераторов на 100 МГц. (Дан-
ные по фазовому шуму приведены с разрешения Wenzel Associates)
Глава 6. Интерфейсы преобразователей данных
Рис. 6.88. Применение контура ФАПЧ и полосового фильтра в условиях зашумленно-
го источника импульсов
значения 63 фемтосекунд (серии ULN) и 180 фемтосекунд говорят об очень
низком уровне дрожания. Для информации отдельно показаны составляю-
щие дрожания каждой области. Полное дрожание представляет среднеквад-
ратическое значение отдельных составляющих дрожания.
В системах, требующих синхронизации с малым дрожанием, стоимость
малошумящих кварцевых генераторов занимает значительную долю. В ка-
честве альтернативного решения применяются схемы фазовой автомати-
ческой подстройки частоты (ФАПЧ), которые вместе с регулируемым по
напряжению генератором «приводят в порядок» синхронизацию шумящей
системы, как показано на рис. 6.88. По ФАПЧ есть много хорошей литера-
туры (10-13, например), и мы не будем на ней останавливаться. Но отметим,
что применение узкополосных фильтров вместе с кварцевыми генератора-
ми, регулируемыми по напряжению (VCXO), обычно дает наиболее низкий
фазовый шум. Как показано на рис. 6.88, ФАПЧ снижает основной фазо-
вый шум и в то же время уменьшает общий минимальный уровень шума.
Рис. 6.89. Фазовый шум VCO со свободным запуском и VCO с ФАПЧ
6.5. Формирование синхроимпульсов дискретизации 505
Рис. 6.90. Фазовый шум ФАПЧ ADF4360 на 2,25 ГГц с фильтром НЧ с полосой 10 кГц
Дальнейшего снижения минимального уровня белого шума можно добить-
ся включением на выходе ФАПЧ соответствующего полосового фильтра.
Влияние встроенного в ФАПЧ генератора, управляемого напряжением
(ИСО), показано на рис. 6.89. Заметно, насколько существенно уменьшает-
ся основной фазовый шум под действием ФАПЧ.
Analog Devices предлагает большой набор изделий частотного синтеза,
включая DDS системы, N и частично — N ФАПЧ. Например, ADF4360 —
это полностью интегральный ФАПЧ с внутренним VCO. На рис. 6.90 де-
монстрируется фазовый шум такой системы с фильтром на 10 кГц, а на
рис. 6.91 — его линейная аппроксимация и полученный из нее результат
расчета дрожания. Примечательно, что среднеквадратичное дрожание со-
ставляет только 1,57 пс даже с внешним VCO.
Обычно конструирование ФАПЧ проводилось по учебникам и методи-
ческим рекомендациям, помогающим конструировать фильтр НЧ и т. п.
Сегодня проектирование значительно упростилось благодаря свободно рас-
пространяемому через Интернет программному обеспечению Analog Devices
ADIsimPLL. Вначале выбирается схема в требуемом частотном диапазоне и
Рис. 6.91. Линейная аппроксимация фазового дрожания шума ФАПЧ ADF4360 на ча-
стоте 2,25 ГГц
Частота полношкального аналогового входного
сигнала (МГц)
Рис. 6.92. Требования к генератору в зависимости от разрешения и частоты аналогово-
го входного сигнала
подбираются ФАПЧ, VCO и кварцевый источник опорного напряжения.
После выбора конфигурации фильтра НЧ схему можно анализировать и
оптимизировать по фазовому шуму, запасу по фазе, усилению, линейным
уровням, времени запирания и т. п. в частотном и временном диапазонах.
Программа также проводит расчет среднеквадратичного дрожания для фа-
зового шума ФАПЧ, позволяя оценить качество тактовых импульсов на
выходе ФАПЧ.
Рисунок 6.92 подводит итог описанию и может служить ориентировоч-
ным пособием по выбору типа генератора синхроимпульсов на основе мак-
симальной входной частоты и требуемой разрешающей способности, выра-
женной в ENOB. Подход, использующий ФАПЧ со стандартным VCO, удо-
бен для проектирования генератора тактовых импульсов, когда требования
к дрожанию составляют примерно 1 пс или больше. Для субпикосекундно-
го дрожания требуется ФАПЧ на базе VCXO {кварцевый генератор с под-
стройкой частоты управляющим напряжением) или малошумящий кварце-
вый генератор.
«Гибридные» генераторы частоты
Системы прямого цифрового синтеза {DDS), миксеры, делители и удвоители
частоты можно использовать вместе с ФАПЧ-системами при создании так
называемых «гибридных» синтезаторов частоты. Замечательным учебником
по этому вопросу является14. Простейший пример приведен на рис. 6.93, где
£Ш5-система управляет ФАПЧ-системой. Верхняя выходная частота ЛДУ-систе-
мы, конечно, ограничена максимальной скоростью обновления данных.
Верхняя частота ФАПЧ, напротив, в первую очередь ограничена VCO, ко-
торый при необходимости может работать в гигагерцевом диапазоне.
Как говорилось раньше, фазовый шум ФАПЧ можно регулировать пет-
левым фильтром, VCXO и выходным фильтром. £Ш5-система характеризу-
Рис. 6.93. Простой «гибридный» генератор импульсов дискретизации
ется фазовым шумом, который появляется в первую очередь из-за ограни-
ченного разрешения внутреннего ЦАП. Система на рис. 6.93 использует
ФАПЧ для «подчистки» фазового шума 0/)5-системы, формируя выходные
тактовые импульсы, подходящие для синхронизации высокопроизводитель-
ных АЦП/ЦАП. Известно множество возможных комбинаций таких сис-
тем, некоторые из которых предложены в 14.
В менее требовательных приложениях выходы DDS могут использовать-
ся непосредственно в качестве источника тактовых импульсов. Многие DDS
оснащены встроенными компараторами, облегчающими формирование
прямоугольных импульсов на выходе.
Независимо от способа генерирования предельные требования к синх-
ронизации в конечном итоге диктуются принципами, рассмотренными в
этом разделе относительно влияния фазового шума и дрожания на SNR.
Подключение дифференциальных входов
синхронизации
Преобразователи данных, рассчитанные на тактовые импульсы с дрожани-
ем в десятки и более пикосекунд, могут подключаться через большинство
из известных логических схем с одним выходом. Но для требований по
дрожанию менее 10 пкс следует более внимательно отнестись к выбору
подходящего драйвера. Высокопроизводительные высокоскоростные пре-
образователи данных почти всегда проектируются с расчетом на дифферен-
циальный вход синхронизации, как показано на рис. 6.94.
Входы дифференциальной синхронизации, распространенные в высо-
коскоростных преобразователях, обеспечивают хорошее синфазное подав-
ление с минимальными искажениями. Обычно рекомендуется, чтобы на
дифференциальные входы подключались низкоуровневые сигналы типа
ECL (эмиттерная логика), RSECL (уменьшенный сигнал ECL) или LVDS
(низковольтный дифференциальный сигнал). Синхроимпульсы, имеющие
полный размах от «земли» до питающего напряжения, обычно создают
больше шума, снижая тем самым общие динамические показатели систе-
мы. Паспортные данные высокопроизводительных АЦП должны содер-
жать соответствующие рекомендации по оптимальным уровням подклю-
чаемых сигналов.
Глава 6. Интерфейсы преобразователей данных
Полупроводниковый
Рис. 6.94. Драйверы с малым дрожанием и одним выходом для дифференциальной
синхронизации
Большинство генераторов и ФАПЧ имеют один выход, и для преобра-
зования этого выхода к дифференциальным входам синхронизации хорошо
подойдут PECL приемники/драйверы со слабым дрожанием, такие как
MC100EL16 или NBSG1614. Среднеквадратичные показатели дрожания со-
ставляют 0,7 пкс у MC100EL16 и 0,2 пкс у NBSG16 (кремниево-германие-
вый прибор). Эти устройства обычно имеют архитектуру ECL (эмиттерная
логика), работающую от положительного однополярного питания, — отсю-
да и акроним PECL (Positive Emitter Coupled Logic). Почти во всех случаях
дифференциальные входы синхронизации АЦП имеют внутреннее смеще-
ние на необходимый синфазный уровень постоянного тока, и выходы диф-
ференциального драйвера можно прямо подключать к тактовым входам
переменного тока АЦП. Когда же АЦП не имеет внутреннего смещения,
требуется внешняя резистивная цепочка для создания требуемого напряже-
ния смещения.
Размах выходного напряжения приборов MC100EL16 PECL составляет
около 1 В на одном выходе (2 В дифференциальных) или 0,4 В на выходе
(0,8 В дифференциальных) для PECL с пониженным размахом (RSPECL)
NBSG16.
В приложениях со сверхнизким дрожанием надо применять радиочас-
тотный трансформатор для преобразования сигнала на выходе генератора в
дифференциальный сигнал, как показано на рис. 6.95. Встречно включен-
ные диоды Шоттки ограничивают размах дифференциального напряжения
примерно на уровне 0,8 В, конденсатор 0,1 мкФ защищает трансформатор
от насыщения составляющими постоянного тока, а резистор 100 Ом огра-
ничивает выходной ток управляющего генератора. AD6645, 14-разрядный
АЦП на 105 млн выборок/с, характеризуется апертурным дрожанием 0,1 пкс,
и трансформаторная схема сопряжения с малошумящим генератором обес-
печивает оптимальную работу этого типа АЦП со слабым дрожанием. Что-
бы найти амплитуду входного синусоидального сигнала, дающего наилуч-
ший полный SNR, могут потребоваться некоторые эксперименты.
Список литературы: 6.5. Формирование синхроимпульсов дискретизации
О-
Слаботочный
°-1 мкф ЮО Ом
-|R^-
трансформатор
с коэффициентом
Рис. 6.95. Преобразование одного выхода к дифференциальному сигналу с помощью
радиочастотного трансформатора
Как и в случае с АЦП с аналоговыми входами и ЦАП с аналоговыми
выходами, существуют и другие возможности, поэтому всегда следует све-
ряться с паспортными данными прибора по поводу оптимально рекоменду-
емого согласования при синхронизации.
Выводы по тактированию выборок
В начале этой главы мы обсуждали значение схем согласования аналоговых
входов АЦП и аналоговых выходных буферов ЦАП. Не меньшую важность
имеют вопросы синхронизации АЦП и ЦАП. Отношение к синхроимпуль-
сам как к «просто другим цифровым» сигналам может привести к ухудше-
нию параметров системы.
В этом разделе обсуждалось влияние дрожания на SNR в предполо-
жении, что дрожание представляет простую комбинацию собственного
апертурного дрожания АЦП и внешнего дрожания синхроимпульсов. Тем
не менее неудачная разводка, заземление или развязка может создать
дополнительное дрожание, существенно ухудшающее динамические ха-
рактеристики, независимо от характеристик АЦП или генератора такто-
вой частоты.
Трассировка синхросигналов параллельно шумящим цифровым сигна-
лам, несомненно, ведет к ухудшению характеристик схемы вследствие воз-
никновения паразитных связей. Фактически попадание высокоскоростных
данных с параллельного выхода АЦП в сигнал синхронизации не только
повышает шум, но и создает дополнительные гармонические искажения,
так как энергия цифровых переходных наводок зависит от сигнала. Для
более детального обсуждения этих и других критически важных проблем
конструирования аппаратуры рекомендуется обратиться к гл. 9.
Список литературы
6.5. Формирование синхроимпульсов дискретизации
1. Brad Brannon. Aperture Uncertainty and ADC System Performance. Application
Note AN-501, Analog Devices, download at http://www.analog.com.
2. Bar-Giora Goldberg. The Effects of Clock Jitter on Data Conversion Devices. RF
Design, August 2002, pp. 26—32, http://www.rfdesign.com.
Глава 6. Интерфейсы преобразователей данных
3. Ulrich L. Rohde. Digital PLL Frequency Synthesizers, Theory and Design, Prentice-
Hall, 1983, ISBN 0-13-214239-2, all of Chapter 2 and pp. 411-418 for computer analysis.
4. Joseph V. Adler. Clock-Source Jitter: A Clear Understanding Aids Oscillator Selection,»
EDN, February 18, 1999, pp. 79—86, http://www.ednmag.com.
5. Neil Roberts. Phase Noise and Jitter — A Primer for Digital Designers. EEdesign,
July 14, 2003, http://www.eedesign.com.
6. Boris Drakhlis. Calculate Oscillator Jitter by using Phase-Noise Analysis Part 1.
Microwaves and RF, January 2001, p. 82, http://www.mwrf.com.
7. Boris Drakhlis. Calculate Oscillator Jitter by using Phase-Noise Analysis Part 2.
Microwaves and RF, February 2001, p. 109, http://www.mwrf.com.
8. Raltron Electroni NCS Corporation, 10651 Northwest 19th Street, Miami, Florida
33172, Tel: (305) 593-6033, http://www.raltron.com. (see «Convert SSB Phase Noise to
Jitter» under «Engineering Design Tools»).
9. Wenzel Associates, Inc., 2215 Kramer Lane, Austin, Texas 78758, Tel: (512) 835-2038,
http://www.wenzel.com (see «Allan Variance from Phase Noise» under «Spreadsheets»).
10. Mike Curtin and Paul O'Brien. Phase-Locked Loops for High-Frequency Receivers
and Transmitters, Part 1, Analog Dialogue 33-3, 1999, http://www.analog.com.
11. Mike Curtin and Paul O'Brien. Phase-Locked Loops for High-Frequency Receivers
and Transmitters, Part 2, Analog Dialogue 33-5, 1999, http://www.analog.com.
12. R.E. Best. Phase-Locked Loops: Theory, Design and Applications. Fourth Edition,
McGraw-Hill, 1999, ISBN 0-07-134903-0.
13. F.M. Gardner. Phaselock Techniques. Second Edition, John Wiley, 1979, ISBN
0-47-104294-3.
14. David Crook. Hybrid Synthesizer Tutorial. Microwave Journal, February 2003.
15. ON Semiconductor, 5005 East McDowell Road, Phoenix, AZ 85008, USA, Tel:
(602) 244-6600, http://www.onsemi.com.
Глава 7
СХЕМЫ ПОДДЕРЖКИ
ПРЕОБРАЗОВАТЕЛЕЙ
ДАННЫХ
7.1. Источники опорного напряжения
Уолт Джанг, Уолт Кестер, Джеймс Брайэнт
Источники опорного напряжения и линейные стабилизаторы имеют много
общего. В действительности последние могут рассматриваться как источ-
ники опорного напряжения, имеющие больший выход тока (или мощно-
сти). Соответственно, почти все спецификации этих двух типов схем очень
похожи (даже несмотря на то, что к источникам опорного напряжения
предъявляются более жесткие требования по дрейфу, точности и т. п.).
В этом разделе обсуждаются источники опорного напряжения, а следую-
щий раздел посвящен линейным стабилизаторам с упором на стабилизато-
ры с низким собственным падением напряжения, обеспечивающие макси-
мальный КПД.
Прецизионные источники опорного напряжения
Источники опорного напряжения (ИОН) сильно влияют на производитель-
ность и точность аналоговых систем. Погрешность ±5 мВ ИОН 5 В соот-
ветствует абсолютной точности ±0,1 %, т. е. всего 10 битам. В 12-разрядных
системах выбор ИОН с допуском ±1 мВ будет гораздо эффективнее в плане
стоимости, чем ручная калибровка, а в системах с абсолютными 16-разряд -
ными измерениями потребуется как высокая начальная точность, так и ка-
либровка. Заметьте, что во многих системах производятся относительные
измерения, а не абсолютные, и в таких случаях абсолютная точность ИОН
не важна, хотя шум и кратковременная стабильность могут быть важными.
На рис. 7.1 приведен обзор некоторых ключевых моментов, касающихся
выбора ИОН.
Температурный дрейф или дрейф, вызванный старением, могут пред-
ставлять даже большую проблему, чем абсолютная точность. Отклонение
выходного напряжения всегда можно подрегулировать, в то время как дрейф
сложно компенсировать. По возможности, необходимо выбирать ИОН с
такими показателями температурного коэффициента и старения, которые
обеспечивают адекватную точность в диапазоне рабочих температур систе-
мы на всем ожидаемом сроке ее эксплуатации.
• Жесткий допуск выходного напряжения увеличивает точность и снижает стоимость
системы.
• Температурный дрейф влияет на точность.
• Долговременная стабильность, малый гистерезис гарантирует повторяемость.
• Шум ограничивает разрешение системы.
• Динамическая нагрузка может вызывать ошибки.
• Потребляемая мощность является критичным параметром для систем с батарейным
питанием.
• Миниатюрные дешевые корпуса позволяют увеличить плотность компоновки.
Рис. 7.1. Выбор ИОН для высокопроизводительных систем
Шум ИОН зачастую недооценивают, хотя он может быть очень важен
при проектировании системы. Уровень шума ИОН обычно указывается в
технических данных, но разработчики часто игнорируют спецификацию и
полагают, что ИОН не вносят вклад в шум системы.
С точки зрения динамических характеристик ИОН необходимо учиты-
вать два вопроса: их поведение при включении и их поведение при дина-
мической нагрузке. Относительно первого всегда следует иметь в виду, что
ИОН включаются не мгновенно (это справедливо и для ИОН, входящих в
состав АЦП и ЦАП, и для отдельных ИОН). Таким образом, редко имеется
возможность включить АЦП и ИОН (внутренний или внешний), выпол-
нить считывание и снова выключить их за несколько микросекунд, хотя
такая процедура и привлекательна с точки зрения снижения энергопотреб-
ления.
Относительно второго вопроса, в зависимости от конкретной архитекту-
ры, отдельные ИС ИОН могут хорошо подходить для работы с импульсной
нагрузкой, а другие не могут. Во многих ИОН используются маломощные и,
следовательно, имеющие малую полосу выходные буферные усилители. По-
этому они плохо ведут себя в условиях быстро изменяющейся нагрузки, что
может негативно сказаться на характеристиках быстрых АЦП (особенно
параллельных АЦП и АЦП последовательного приближения). Облегчить
проблему помогает подходящая развязка (однако для некоторых ИОН при
емкостной нагрузке возможно возникновение паразитной генерации) или
применение дополнительного широкополосного буферного усилителя.
ИОН, как почти все современные ИС, быстро переводятся на такие
малые корпуса, как SO-8 и MSOP, и даже еще более миниатюрные SOT-23
и SC-70, что позволяет достичь большей плотности компоновки при имею-
щейся площади. Помимо уменьшения размеров системы применение более
дешевых ИС меньших габаритов также приводит к ощутимому уменьше-
нию стоимости и мощности, потребляемой в режиме ожидания.
Типы источников опорного напряжения
Большинство стандартных ИС ИОН выпускаются в последовательной, или
трехвыводной (Квх, Common, Кых), форме и только положительной поляр-
ности. Последовательные источники обладают следующими потенциаль-
ными преимуществами: без потери точности они имеют более низкий и
более стабильный ток покоя, стандартные предварительно отрегулирован-
ные выходные напряжения и относительно высокий выходной ток. Па-
раллельные (shunts) или двухвыводные (включаемые как диод) ИОН дают
большую гибкость в плане полярности, однако имеют более жесткие огра-
ничения на нагрузку. Они могут потреблять избыточную мощность при
изменении входного напряжения в широких пределах. Кроме того, неко-
торые из таких ИОН имеют нестандартные выходные напряжения. Все
эти факторы обуславливают преимущество трехвыводных ИОН перед двух-
выводными.
На рис. 7.2 показаны некоторые простые диодные ИОН. В первой схеме
управляемый током диод, смещенный в прямом направлении (или транзис-
тор, включенный как диод), вырабатывает напряжение Vf = KREF. Несмотря
на то что диод в определенной степени развязан относительно нестабильно-
го напряжения питания, такая схема ИОН имеет множество недостатков.
Среди них: значительный ТКН, приблизительно —0,3 ррт/ °C, некоторая
чувствительность к нагрузке и малая гибкость выходного напряжения (зна-
чения выходных напряжений принадлежат ряду с шагом 600 мВ).
С другой стороны, эти простейшие ИОН (как и все остальные парал-
лельные стабилизаторы) имеют весомое преимущество: полярность их вы-
ходного напряжения легко может быть изменена путем переброса соедине-
ний и обращения управляющего тока. В то же время основным ограниче-
нием всех параллельных стабилизаторов является то, что ток нагрузки всегда
должен быть меньше (обычно значительно меньше) режимного тока, ID.
Во второй схеме на рис. 7.2 используется стабилитрон или лавинно-
пролетный диод, и в ней может быть достигнуто значительно большее вы-
ходное напряжение. В то время как истинный зенеровский пробой происхо-
дит при напряжениях меньше 5 В, лавинный (avalanche) пробой происходит
при более высоких напряжениях и имеет положительный температурный
коэффициент. Обратите внимание, что на сегодняшний день обратный про-
бой диода практически всегда называют зенеровским, хотя обычно исполь-
зуется лавинный пробой. При напряжении пробоя Dx в диапазоне от 5 до 8 В
Диод, смещенный в прямом
направлении
Рис. 7.2. Простые схемы диодных ИОН
17-2852
его суммарный положительный ТКН примерно равен отрицательному ТКН
диода Dv смещенного в прямом направлении. В результате при определен-
ном токе смещения достигается суммарный ТКН порядка 100 ррш/°С или
менее. Комбинация таких тщательно подобранных диодов являлась бази-
сом ранних однокорпусных «температурно-компенсированных стабилит-
ронных» ИОН, таких как ИС серии 1N821-1N829.
Точность выходного напряжения температурно-компенсированного ста-
билитронного ИОН ограничена, так как наилучшие комбинации ТКН при-
ходятся на нестандартные напряжения (например, 6,2 В для 1N829). Эта
схема также имеет ограничения на нагрузку, так как для достижения наи-
лучшего ТКН необходимо определенное значение тока диода. В отличие от
ИОН с меньшими номинальными напряжениями (< 2 В) стабилитронные
ИОН должны работать от источника напряжения, существенно превышаю-
щего 6 В, что препятствует их применению в системах с напряжениями
питания 5 В. Кроме того, ИОН, основанные на стабилитронах (лавинно-
пробойных диодах) с малым ТКН, также обладают значительным уровнем
шума, что вызвано естественным шумом механизма пробоя. Как описыва-
ется ниже, шум значительно снижается при использовании монолитных ста-
билитронов.
На данном этапе мы знаем, что ИОН можно разделить по схеме вклю-
чения на последовательные и параллельные и по внутреннему устрой-
ству — на источники с напряжением запрещенной зоны и стабилитронные
источники. На практике встречаются все комбинации этих типов, а также
третья базовая категория. Эти три основных класса далее обсуждаются бо-
лее подробно.
ИОН с напряжением запрещенной зоны
Развитие источников низкого (< 5 В) опорного напряжения, основанных на
напряжении запрещенной зоны кремния, привело к появлению разнооб-
разных ИС, которые обеспечивают хороший ТКН при низких напряжениях
питания. Первой из подобных ИС была LM1091. Базовая схема ИОН с на-
пряжением запрещенной зоны показана на рис. 7.3.
Эта схема также называется ИОН ЛУВЕ, так как разница в плотностях
токов согласованных транзисторов Q—Q2 приводит к возникновению на 7?3
напряжения t±VBE. В данной схеме напряжение VBE транзистора Q3 склады-
вается с усиленным напряжением VBE парой транзисторов Q— Q2 на R2.
Напряжения АУВЕ и VBE имеют ТНК разной полярности: &VBE пропорцио-
нально абсолютной температуре (РТАТ, proportional-to-absolute-temperature),
a VBE — комплементарно абсолютной температуре (СТАТ, complementary-to-
absolute-temperature). Сумма этих напряжений дает выходное напряжение,
VR, и, когда оно равно 1,205 В (напряжение запрещенной зоны кремния),
ТКН минимален.
Метод формирования опорного напряжения запрещенной зоны при-
влекателен для реализации в ИС по нескольким причинам, среди которых
сравнительная простота, а также отсутствие стабилитронов и связанных с
ними шумов. И, что очень важно в эту эпоху постоянного уменьшения
потребляемых мощностей, ИОН с напряжением запрещенной зоны работа-
7.1. Источники опорного напряжения
Рис. 7.3. Базовая схема ИОН с напряжением запрещенной зоны
ют при низких напряжениях питания (менее 5 В). Они могут использовать-
ся не только в автономных ИС ИОН, но и в составе других ИС, например
АЦП и ЦАП.
Буферизированные формы двухвыводных параллельных ИОН с напря-
жением запрещенной зоны на 1,2 В, такие как ИС AD589, сохраняют ста-
бильность при изменяющихся токах нагрузки. ИОН AD589 на 1,235 В (по-
явился на рынке в 1980 году) выдает ток от 50 мкА до 5 мА при выходном
импедансе 0,6 Ом и имеет ТКН в диапазоне от 10 до 100 ррт/ °C. Более
поздний, функционально схожий параллельный ИОН AD1580 на 1,225 В
выпускается в миниатюрном корпусе SOT-23 и обеспечивает такие же токи,
как и AD589, имеет ТКН от 50 до 100 ррт/°С. Параллельный ИОН ADR510
выдает напряжение 1,000 В, a ADR512—1,200 В.
Однако базовая схема, показанная на рис. 7.3, чувствительна к нагрузке
и управляющему току; кроме того, для получения более стандартных уров-
ней (2,5 В, 5 В) необходимо масштабирование выходного напряжения. Чув-
ствительность к нагрузке лучше всего устраняется за счет использования
буферного усилителя, который также обеспечивает масштабирование вы-
ходного напряжения до стандартных уровней.
На рис. 7.4 показан улучшенный трехвыводный ИОН с напряжением
запрещенной зоны AD580 (выпущен на рынк в 1974 году). Эта схема, обыч-
но называемая «элементом Брокау» (см. 2’3), обеспечивает внутреннюю
буферизацию выхода, что дает хорошую нагрузочную способность и воз-
можность масштабирования выходного напряжения для получения стан-
дартных уровней. AD580 был первой ИС прецизионного ИОН на принци-
пе запрещенной зоны. Ее топология повлияла на последующие поколения
как ИОН промышленного стандарта, таких как серии REF01, REF02,
REF03, так и более поздних ИС производства ADI, таких как серии REF19x,
AD680, AD780, AD1582-85, AD38x, AD39x и улучшенные версии REF01,
REF02 и REF03 в корпусах SC-70 и SOT-23 (ADR01, ADR02 и ADR03
соответственно).
Рис. 7.4. Прецизионный ИОН с напряжением запрещенной зоны на базе элемента
Брокау AD580 (1974)
В состав ИС AD580 входят два транзистора Q— Q2 с масштабами эмит-
теров 8:1, работающие с идентичными токами коллекторов (т. е., их плот-
ности токов отличаются в 8 раз), что обеспечивается равными номиналами
нагрузочных резисторов и наличием контура обратной связи буферного
операционного усилителя. Из-за того, что транзистор Q2 большей площади
обладает меньшим напряжением VBE, на последовательном соединении Т?2
и Q2 падает напряжение A VBE, а на Rx (из-за соотношений токов) падает
напряжение пропорциональное абсолютной температуре:
Г, =2хАхДГй£. (7.1)
^2
Опорное напряжение запрещенной зоны Vz появляется на базе транзи-
стора Qx и равно сумме VBE транзистора Qx и V\\
= ‘'.ад + = <7-2»
= Кч1>|1 + 2х4х4''“ = (73)
TZ -I Д кТ . J, z_
= k^.)+2x^-xYx пл= (7,4)
= r«™ + 2xTrxVxl"8 = |75>
= 1,205 В. (7.6)
В приведенном выражении Jx и J2 — плотность тока в Qx и Q2 соответствен-
но и Jx/J2 = 8.
Наличие тонкопленочного делителя (с лазерной подгонкой) RJR5 и опе-
рационного усилителя позволяет масштабировать напряжение, появляю-
7.1. Источники опорного напряжения
щееся на выходе Квых. В AD580 оно равно 2,5 В. Следуя этому общему прин-
ципу, Кых можно увеличить до любого другого необходимого уровня. На-
пример, в AD584 имеется возможность формирования точного напряжения
2,5; 5; 7,5 и 10 В. ИС AD580 обеспечивает выходной ток до 10 мА при
работе от напряжения в диапазоне от 4,5 до 30 В. Допуск выходного напря-
жения устройства составляет всего 0,4 %, а ТКН — всего 10 ррт/ °C.
При разработке многих более поздних ИОН с напряжением запрещен-
ной зоны упор делался на уменьшение размера корпуса, снижение потреб-
ляемой мощности и стоимости. Рассмотрим несколько новейших ИС ИОН
на принципе запрещенной зоны.
AD1580 (представлена на рынке в 1996 году) — это ИС параллельного
ИОН, которая близка по функциональным возможностям к описанной выше
классической ИС параллельного ИОН AD589 (представлена на рынке в
1980 году). Ключевое различие между ними заключается в том, что при
производстве AD1580 используется новейшая технология с малыми техно-
логическими нормами. Это позволяет реализовать устройство в миниатюр-
ном корпусе SOT-23. Очень малый размер этого корпуса дает возможность
использовать данное устройство в задачах с ограниченной доступной пло-
щадью, а малый рабочий ток подразумевает возможность применения в
портативных системах с батарейным питанием. Упрощенная схема внут-
реннего устройства AD1580 показана на рис. 7.5.
В данной схеме транзисторы Qx и Q2 образуют ядро источника с напря-
жением опорной зоны; отношение токов транзисторов определяется отно-
шением 7^ к 7^ и равно 5. Дифференциальная пара транзисторов Q3— Q4,
токовое зеркало Q5 и каскад выходного драйвера Q3— Q9 образуют операци-
онный усилитель. В установившемся состоянии контура обратной связи
этот усилитель поддерживает нижние выводы резисторов 7^ и под оди-
наковым потенциалом.
В результате работы цепи обратной связи на резисторе 7?3 падает напря-
жение АК5£, а также формируется масштабированное напряжение, пропор-
циональное абсолютной температуре, Vv Номинальное опорное напряже-
ние. 7.5. Параллельный ИОН AD1580 с напряжением запрещенной зоны на 1,2 В в
миниатюрном корпусе SOT-23
ние запрещенной зоны 1,225 В равно сумме напряжений VBE транзистора 0,
и К]. ИС AD1580 работает с токами от 50 мкА до 10 мА, выпускается в
версиях с допусками выходного напряжения ±1 или ±10 мВ и соответству-
ющими ТКН 50 или 100 ррт/ °C. Более новыми представителями семей-
ства параллельных стабилизаторов производства Analog Devices являются
ADR510 (1,000 В) и ADR512 (1,200 В).
Новейшие представители семейства параллельных стабилизаторов — это
ADR520 (2,048 В), ADR525 (2,500 В), ADR530 (3.000 В), ADR540 (4,096 В),
ADR545 (4,5 В) и ADR550 (5,0 В). Они имеют точность 0,2 % и выпускают-
ся в корпусах SC-70 и SOT-23.
Серия AD1582-AD1585 включает в себя последовательные ИС ИОН с
выходными напряжениями 2,5; 3,0; 4,096 и 5,0 В. Как и при производстве
AD1580, при производстве этих ИС используется технология с малыми тех-
нологическими нормами, что позволяет реализовать их в корпусе SOT-23.
Характеристики устройств серии AD1582 перечислены на рис. 7.6.
• Увых: 2,500; 3,000; 4,096 и 5,000 В.
• Диапазон напряжений питания: от 2,7 до 12 В (запас по напряжению 200 мВ).
• Потребляемый ток: 65 мкА максимум.
• Точность выходного напряжения: ±0,1 % максимум.
• Температурный коэффициент: 50 ррт/°C максимум.
• Шум: 70 мкВ р-р (0,1—10 Гц).
• Шум (среднеквадратичное значение): 50 мкВ (10 Гц—10 кГц).
• Долговременный дрейф: 100 ррт за 1000 часов.
• Высокий выходной ток: ±5 мА минимум.
• Температурный диапазон: от -40 до +85 °C.
• Недорогой корпус SOT-23.
Р ис. 7.6. Характеристики последовательных ИОН с напряжением запрещенной зоны
AD1582-AD1585
Внутренняя схема ИС этой серии, показанная на рис. 7.7, может рас-
сматриваться как вариант базового элемента Брокау (см. рис. 7.4). В дан-
ном случае транзисторы Qx—Q2 формируют ядро, а остальная часть, обра-
зуя контур обратной связи, вырабатывает стабильное опорное напряжение
VBG на базах Qv Qr Значительным отличием этой схемы является то, что
выходной каскад операционного усилителя построен на двухтактном кас-
каде с общим эмиттером. Такой подход требует наличия выходного кон-
денсатора для стабильности, однако позволяет реализовать сравнительно
малое падение напряжения на ИС.
Низкое падение напряжения в данном случае означает, что Их может
быть понижено без ухудшения характеристик до уровня, на несколько сотен
милливольт превышающего Увых. Двухтактный режим работы подразумевает,
что устройства этой серии могут и принимать, и отдавать ток на выходе, в
отличие от классических ИОН, которые только отдают ток. Подстройка дели-
теля R5—Re позволяет задавать различные уровни выходного напряжения.
Устройства серии AD1582 работают с токами покоя всего 65 мкА (макси-
мум), что позволяет достичь высокого КПД при работе в составе малопо-
7.1, Источники опорного напряжения
Рис. 7.7. ИОН с напряжением запрещенной зоны на 2,5—5 В в корпусе SOT-23
AD1582—AD1585
требляющих систем с изменяющимися входными напряжениями. Устрой-
ства серии имеют номинальный выходной ток 5 мА и выпускаются в вариан-
тах с допусками напряжения ±0,1 % или ±1 % от Кых и ТКН 50 и 100 ррт/°С
соответственно.
По соображениям стабильности и на входе, и на выходе устройств се-
рии AD1582 должны присутствовать развязывающие конденсаторы. Реко-
мендуемые оптимальные номиналы конденсаторов показаны на схеме вклю-
чения, приведенной на рис. 7.8. При таких номиналах наименьшими раз-
мерами, вероятно, будут обладать «чиповые» танталовые конденсаторы.
ADR38x и ADR39x — это семейства ИОН с напряжением запрещен-
ной зоны, обладающих малым падением напряжения (300 мВ) и выпус-
каемых в корпусах SOT-23. Типичный уровень шума этих устройств
составляет 5 мкВ р-р в полосе от 0,1 до 10 Гц. Типичный ток покоя равен
100 мкА. Устройства серии ADR39x также имеют вывод отключения (ток в
AD1582-1585: Свых требуется для стабильности
ADR380, ADR381: Свых рекомендуется для поглощения переходных процессов
Рис. 7.8. Схема включения устройств серии AD 1582—AD1585
Рис. 7.9. Схема включения ADR390, ADR391, ADR392, ADR395
• иВых: 2’048> 2’5°°; 4«096 и 5>°00 в-
• Диапазон напряжений питания: от 2,3 до 15 В (запас по напряжению 300 мВ).
• Потребляемый ток: 120 мкА максимум.
• Точность выходного напряжения: ±6 мВ максимум.
• Температурный коэффициент: 25 ррт/°С максимум.
• Шум: 5 мкВ р-р (0,1—10 Гц).
• Долговременный дрейф: 50 ррт за 1000 часов.
• Высокий выходной ток: +5 мА минимум.
• Температурный диапазон: от -40 до +85 °C.
• Функция отключения: ток в отключенном состоянии менее 3 мкА.
• Кельвин-чувствительность (выводы форсированного и чувствительного выходов).
• Недорогой корпус SOT-23 (5 выводов).
Рис. 7.10. Характеристики семейства ИОН с напряжением запрещенной зоны на
2,048-5 В ADR390-ADR395
отключенном состоянии менее 3 мкА) и вывод «чувствительность» для ре-
ализации Кельвин-чувствительности. На рис. 7.9 показана схема включе-
ния, а на рис. 7.10 — ключевые характеристики устройств серии ADR39x.
Для стабильности ИС семейств ADR38x и ADR39x, независимо от тока
нагрузки, не требуется наличие выходного конденсатора. Однако все же
рекомендуется подключить конденсатор емкостью, по меньшей мере, 1 мкФ
для фильтрации шума. Для запаса энергии при работе с импульсной на-
грузкой желательно использовать конденсатор большей емкости.
ИОН на заглубленных стабилитронах
С точки зрения архитектуры ядра двумя наиболее популярными типами
ИС ИОН являются источники с напряжением запрещенной зоны и источ-
ники на заглубленных стабилитронах. Источники с напряжением запре-
7.1. Источники опорного напряжения
щенной зоны обсуждались выше, а стабилитронные ИОН требуют даль-
нейшего обсуждения.
Пробой р-л-перехода диода, расположенного на поверхности кристалла
ИС, может вызываться дефектами или загрязнением кристалла. Поэтому
стабилитроны, сформированные на поверхности, имеют больший уровень
шума и менее стабильны, чем заглубленные (buried) или подповерхностные
(sub-surface). ИС стабилитронных ИОН производства ADI строятся на базе
заглубленных стабилитронов. Это приводит к значительному улучшению
уровня шума и дрейфа по сравнению с ИОН на поверхностных стабилит-
ронах (см. 4). ИОН на заглубленных стабилитронах обладают очень малым
температурным дрейфом, достигающим уровня 1—2 ррт/ °C (AD588 и
AD586), и наименьшим шумом, выраженным в процентах от полной шка-
лы (100 нВ/ТГц или менее). К их недостаткам относится то, что рабочий
ток стабилитронных ИОН обычно имеет сравнительно высокий уровень
(порядка нескольких миллиампер).
Важным моментом является сравнение шумовых характеристик различ-
ных ИОН. Лучший способ сделать это заключается в сравнении отношения
шума (в заданной полосе) к постоянному выходному напряжению. Напри-
мер, ИОН на 10 В с плотностью шума 100 нВД/Гц является на 6 дБ более
тихим в относительных единицах по сравнению с ИОН на 5 В, имеющим
аналогичный уровень шума.
ИОН XFET®
Третий, сравнительно новый тип ядра ИС ИОН основан на свойствах по-
левых транзисторов с управляющим р-л-переходом (JFET, junction field effect
transistors). Принцип работы ИОН на базе JFET в определенной степени
аналогичен принципу работы ИОН с напряжением запрещенной зоны, по-
строенным на биполярных транзисторах. В них используется пара полевых
транзисторов с управляющим р-л-переходом, имеющих разные напряже-
ния отсечки, дифференциальное выходное напряжение которых усиливает-
ся для формирования стабильного опорного напряжения. В одном из JFET
используется дополнительная ионная имплантация, что дало название дан-
ной архитектуре ядра — XFETJ (extra implantation junction Field Effect Transistor).
Базовая схема ИОН XFET показана на рис. 7.11. JY и J2 — это два JFET
транзистора, образующие ядро ИОН. Они запитываются одинаковыми то-
ками, формируемыми согласованными источниками тока 1Х и /2, транзис-
тор Jv расположенный справа, — это JFET с дополнительной ионной имп-
лантацией, за счет которой напряжения отсечки транзисторов Jx и J2 разли-
чаются на 500 мВ. Преднамеренная асимметрия напряжений отсечки этих
полевых транзисторов при идентичных токах и равных напряжениях на
истоках и стоках приводит к появлению между затворами транзисторов
дифференциального напряжения, A Vp, равного:
^VP = VPi-VPi, (7.7)
где VPi и — напряжения отсечки полевых транзисторов и J2 соответ-
ственно.
522 Глава 7. Схемы поддержки преобразователей данных
Рис. 7.11. ИОН XFET® ADR290—ADR293 обладают высокой стабильностью напряже-
ний 2,048—5 В и малой потребляемой мощностью
Обратите внимание, что в такой схеме напряжение AVp появляется меж-
ду затворами двух полевых транзисторов. Известно, что при замкнутом кон-
туре обратной связи операционный усилитель будет стремиться к нулевому
дифференциальному напряжению на входе и, следовательно, будет удержи-
вать истоки двух JFETпод равными потенциалами. Эти напряжения истоков
подаются на входы операционного усилителя, к выходу которого подключен
делитель обратной связи R— Rr В стационарном состоянии контура на звене
R—R^ появится выходное напряжение, которое приводит к появлению тре-
буемого напряжения Wp между затворами транзисторов Jx и J2. В сущнос-
ти, операционный усилитель усиливает A Vp для получения напряжения Иых,
равного:
ивых + + (7.8)
Как можно заметить, это выражение включает в себя слагаемое, отвеча-
ющее за масштабирование выходного сигнала (слева), и слагаемое, завися-
щее от температуры, в которое входит 1рТАТ (справа). Второе слагаемое ком-
пенсирует отрицательный ТКН ядра XFET, за счет чего суммарный темпе-
ратурный дрейф ИОН обычно имеет уровень от 3 до 8 ррт/ °C.
В процессе производства номиналы масштабирующих резисторов R— R3
подгоняются для получения различных уровней выходного напряжения:
2,048; 2,5; 4,096 и 5 В для ADR290, ADR291, ADR292 и ADR293 соответ-
ственно. ИС семейства последовательных ИОН ADR29x выпускаются в стан-
дартных 8-контактных корпусах. Они работают от напряжений питания в
диапазоне от К + 500 мВ до 15 В, имеют максимальный ток покоя 12 мкА
и выходной ток до 5 мА. Характеристики этого семейства перечислены на
рис. 7.12.
Серия ADR43x включает в себя ИОН XFET второго поколения, облада-
ющие малым шумом и малым дрейфом. Они обеспечивают стандартные
• иых: 2,048; 2,500; 4,096 и 5,000 В.
• Диапазон напряжений питания: от 2,7 до 15 В (запас по напряжению 0,5 В).
• Потребляемый ток: 12 мкА максимум.
• Точность выходного напряжения: ±0,1 %.
• Температурный коэффициент: 8 ррт/°С максимум.
• Малый уровень шума: 6 мкВ р-р (0,1—10 Гц).
• Широкополосный шум: 420 нВД/Гц в полосе 1 кГц.
• Долговременный дрейф: 50 ррт за 1000 часов.
• Высокий выходной ток: 5 мА минимум.
• Температурный диапазон: от -40 до +125 °C.
• Стандартное расположение выводов, как у REF02.
• Корпуса: 8-контактный узкий (Narrow Body) SOIC, 8-контактный TSSOP.
Рис. 7.12. Характеристики ИОН серии XFET® ADR290—ADR293
выходные напряжения 2,048; 2,500; 3,000; 4,096 и 5,000 В. Эти устройства
работают с напряжениями питания в диапазоне от Кых +1 В до 18 В при
максимальном токе покоя 0,5 мА и выходных токах ±10 мА. Макси-
мальный температурный дрейф составляет 3 ррт/°С. Устройства серии
ADR43x обладают поразительно низким уровнем шума в полосе от 0,1 до
10 Гц — 1,5 мкВ р-р. Эти последовательные ИОН выпускаются в стандар-
тных 8-контактных корпусах. Ключевые характеристики семейства пере-
числены на рис. 7.13.
Архитектура XFETпозволяет достичь улучшенных характеристик по срав-
нению с ИОН с напряжением запрещенной зоны и ИОН на заглубленных
стабилитронах, в особенности в системах, где одновременно предъявляют-
ся высокие требования и к уровню рабочего тока, и к дрейфу и шумовым
характеристикам. При одинаковых токах XFETимеет меньший уровень шума,
чем ИОН с напряжением запрещенной зоны на базе биполярных транзис-
торов. Они обладают низким и линейным температурным дрейфом, дости-
гающим 3—8 ррт/°C (при необходимости может быть легко добавлена ком-
пенсация), и меньшим гистерезисом по сравнению с ИОН с напряжением
• иых: 2,048; 2,500; 3,000; 4,096 и 5,000 В.
• Диапазон напряжений питания: от 3 до 18 В (запас по напряжению 1 В).
• Потребляемый ток: 500 мкА.
• Точность выходного напряжения: ±0,05%.
• Температурный коэффициент: 3 ррт/°C максимум.
• Малый уровень шума: 1,75 мкВ р-р (0,1—10 Гц).
• Широкополосный шум: 60 нВ/\/Гц в полосе 1 кГц.
• Долговременный дрейф: 50 ррт за 1000 часов.
• Высокий выходной ток: ±10 мА минимум.
• Температурный диапазон: от -40 до +125 °C.
• Корпуса: 8-контактный MSOP, 8-контактный TSSOP.
Рис. 7.13. Характеристики ИОН серии XFET® ADR430—ADR439
(Г524 Глава 7. Схемы поддержки преобразователей данных
запрещенной зоны. Тепловой гистерезис составляет всего 50 ррт в диапа-
зоне температур от —40 до +125 °C, что более чем в два раза ниже этого
показателя в типичных ИОН с напряжением запрещенной зоны. И нако-
нец, они имеют превосходную долговременную стабильность: типичный
уровень всего 50 ррт за 1000 часов.
На рис. 7.14 приведен обзор достоинств и недостатков трех архитектур
ИОН: на запрещенной зоне, на заглубленных стабилитронах и XFET.
ИОН с напряжением запрещенной зоны ИОН на заглубленных стабилитронах XFET®
Напряжение питания < 5В Напряжение питания > 5В Напряжение питания < 5В
Высокий шум, высокая мощность Низкий шум, высокая мощность Низкий шум, низкая мощность
Средний уровень дрейфа и долговременной стабильности Хороший уровень дрейф и долговременной стабильности Превосходный уровень дрейфа и долговременной стабильности
Значительный гистерезис Значительный гистерезис Низкий гистерезис
Рис. 7.14. Характеристики типов ИОН
На сегодняшний день выпускается много типов ИС ИОН, однако до-
минируют среди них последовательные источники с фиксированным поло-
жительным выходным напряжением. Ядром таких устройств могут являть-
ся источники с напряжением запрещенной зоны на биполярных транзисто-
рах, источники на JFETили на заглубленных стабилитронах; тип ядра влияет
на предельные показатели устройства и возможность его применения в кон-
кретном приложении. Кроме того, все эти устройства могут быть или не
быть малопотребляющими, иметь низкий шум и падение напряжения и
выпускаться в конкретном корпусе. В отдельном приложении любой из
этих факторов может явиться решающим при выборе, таким образом, от
пользователя требуется быть осведомленным обо всех различных доступ-
ных ИС ИОН.
На рис. 7.15 показана схема включения ИС последовательного источни-
ка опорного положительного напряжения в 8-контакгном корпусе со стан-
дартным расположением выводов. Следует отметить несколько важных
моментов, касающихся данной схемы. Во многих ИОН имеется возмож-
ность подстройки, которая обеспечивается подключением внешней под-
строечной цепи к входному выводу подстройки {trim) (вывод 5). Некоторые
ИОН с напряжением запрещенной зоны также имеют высокоимпедансный
выход РТАТ(VTEM^ для измерения температуры (вывод 3). Через этот вывод
не может выдаваться большой ток, однако он может быть полезен для под-
ключения к таким ненагружающим узлам, как входы компараторов, для
сравнения температуры с пороговым значением и т. п.
Для всех ИОН на входном выводе (вывод 2) должен присутствовать
развязывающий конденсатор, а номинал развязывающего конденсатора (если
он необходим) на выходе (вывод 6) зависит от стабильности выходного
операционного усилителя в составе ИОН при емкостной нагрузке. Просто
7.1. Источники опорного напряжения 525
Рис. 7.15. Схема включения стандартного трехвыводного ИОН с положительным вы-
ходным напряжением (номера контактов приведены для 8-контактного кор-
пуса DIP)
примем, что жесткого правила относительно емкостной нагрузки здесь не
существует. Например, некоторые трехвыводные ИОН требуют наличия
выходного конденсатора по соображениям стабильности (например, серии
REF19x и AD1582-85), в то время как для других он не обязателен, но
может использоваться для улучшения показателей (AD780, REF43, ADR29x,
ADR43x, ADR38x, ADR39x, ADR01, ADR02, ADR03). Даже если примене-
ние выходного конденсатора не обязательно, он все равно может понадо-
биться как источник энергии при импульсных токах нагрузки, например на
входах опорного напряжения некоторых АЦП. Поэтому следует ознако-
миться с техническими данными, чтобы убедиться в том, как ИОН, кото-
рый вы собираетесь применять, поведет себя при имеющейся в вашей схе-
ме нагрузке.
Характеристики ИОН
Допуски выходного напряжения
Обычно предпочтительнее выбирать ИОН с тем уровнем выходного напря-
жения и точности, который необходим в вашей схеме, чтобы, по возмож-
ности, избежать внешней подстройки и масштабирования. Это позволяет
реализовать наилучший ТКН, так как жесткий допуск и низкий уровень
ТКН обычно взаимосвязаны. ИС AD586, AD780, REF195 и ИС серии
ADR43x могут обеспечить отклонение выходного напряжения всего 0,04 %,
a AD588 — 0,01 %. При необходимости внешней подстройки следует при-
менять только рекомендованную подстроечную схему, дающую диапазон
подстройки не больше, чем нужно в реальности. При необходимости до-
полнительного внешнего масштабирования следует использовать прецизи-
онный операционный усилитель и тонкопленочные резисторы с малым вза-
имным разбросом ТК.
Дрейф
Семейства XFET и ИОН на заглубленных стабилитронах имеют наилучшие
показатели по долговременному дрейфу и ТКН. ИС серии ADR43x XFET
имеют ТКН всего 3 ррт/°C. ИОН на заглубленных стабилитронах AD586 и
AD588 обладают ТКН всего 1—2 ррт/°C, ИОН с напряжением запрещен-
ной зоны AD780 обладают практически такими же хорошими показателями
(3 ррт/ °C).
В ИС серии XFET достигается долговременный дрейф порядка 50 ррт
за 1000 часов, а в ИОН на заглубленных стабилитронах — 25 ррт за 1000
часов. Обратите внимание, что значения для долговременного дрейфа обычно
приводятся в величинах ррт за 1000 часов. В году 8766 часов, и многие
пользователи для определения дрейфа за год просто умножают дрейф за
1000 часов на 8,77 — это неправильно и может дать достаточно пессимис-
тичные результаты. Долговременный дрейф в прецизионных аналоговых
схемах — это случайный феномен, и его увеличение пропорционально кор-
ню квадратному от истекшего времени (это предполагает, что дрейф вызван
случайными микроэффектами а не такими глобальными причинами, как
загрязнение). Таким образом, дрейф за год будет приблизительно в 7^,766 == 3
раза выше, чем дрейф за 1000 часов, а дрейф за 10 лет — приблизительно в
9 раз выше, чем дрейф за 1000 часов. На практике дела обстоят даже не-
сколько лучше, так как устройства обычно стабилизируются с течением
времени.
Точность АЦП или ЦАП не может превышать точности его опорного
напряжения. Как показано на рис. 7.16, температурный дрейф ИОН влияет
на точность полной шкалы. В этой таблице приведены необходимые значе-
ния ТКН для поддержания ошибки на уровне 1/2 LSB в диапазоне темпера-
тур 100 °C при различных уровнях разрешения. Например, для поддержа-
Количество бит Требуемый дрейф (ррт/°C) Вес 1/2 младших разрядов Диапазоны напряжений полной шкалы 10, 5 и 2,5 В
10 В 5 В 2,5 В
8 19,53 19,53 9,77 4,88
9 9,77 9,77 4,88 2,44
10 4,88 4,88 2,44 1,22
11 2,44 2,44 1,22 0,61
12 1,22 1,22 0,61 0,31
13 0,61 0,61 0,31 0,15
14 0,31 0,31 0,15 0,08
15 0,15 0,15 0,08 0,04
16 0,08 0,08 0,04 0,02
Рис. 7.16. Требования к температурному дрейфу ИОН, необходимому для обеспечения
различных уровней точности (критерий 1/2 LSB, диапазон температур 100 °C)
7.1. Источники опорного напряжения
ния ошибки на уровне 1/2 LSB при разрядности 12 бит необходимо иметь
ТКН приблизительно 1 ррт/°C. Для меньших диапазонов температур тре-
бования к дрейфу снижаются. В последних трех столбцах таблицы показа-
ны значения напряжений, соответствующих 1/2 LSB, при некоторых попу-
лярных значениях диапазонов полной шкалы.
Диапазон напряжений питания
Диапазоны напряжений питания ИС ИОН варьируются от значения при-
мерно на 3 В (или менее) выше номинального выходного напряжения до
значения на 30 В (или более) выше номинального выходного напряжения.
Исключение составляют устройства с малым падением напряжения, такие
как ИС серий REF19x, AD1582-AD1585, ADR38x и ADR39x. При низких
токах REF195 может вырабатывать напряжение 5 В при входном напряже-
нии всего 5,1 В (падение напряжения 100 мВ). Обратите внимание, что
вследствие ограничений, вызванных технологией производства, некоторые
ИОН имеют более сдержанные требования к максимальному диапазону
входных напряжений. К ним относятся устройства серий AD1582-AD1585
(12 В), ADR29x (15 В) и ADR43x (18 В).
Чувствительность к нагрузке
Чувствительность к нагрузке (или выходной импеданс) обычно задается в
единицах мкВ на мА тока нагрузки, мОм или ppm/мА. Несмотря на то что
уровень чувствительности к нагрузке 70 ppm/мА или менее является доста-
точно неплохим (AD780, REF43, REF195, ADR29x, ADR43x), следует отме-
тить, что, если не соблюдать осторожность при разводке, при высоких то-
ках падение напряжения на внешних проводниках может вызывать сравни-
мые или даже большие ошибки. Ошибки, вызванные током нагрузки, можно
минимизировать за счет использования коротких толстых проводников в
выходном (+) и обратном земляном трактах. Для обеспечения наибольшей
точности напряжений на нагрузке применяются буферные усилители и
Кельвин-чувствительные схемы (AD588, AD688, ADR39x).
Выход буферизированного ИОН — это выход операционного усилите-
ля, и, следовательно, импеданс источника зависит от частоты. Выходной
импеданс типичного ИОН увеличивается на 6 дБ на октаву относительно
значения по постоянному току и составляет примерно 10 Ом на частотах
порядка нескольких сотен килогерц. Этот импеданс может быть уменьшен
с помощью внешнего конденсатора при условии, что при такой нагрузке
операционный усилитель, входящий в состав ИОН, остается стабильным.
Чувствительность к входному напряжению
Чувствительность к входному напряжению (или стабилизация относитель-
но входа) обычно задается в единицах мкВ на В (или ррт на В) изменения
входного напряжения. Типичное значение чувствительности к входному
напряжению в ИС REF43, REF195, AD680, AD780, ADR29x, ADR39x и
ADR46x составляет 25 ppm/B (-92 дБ). По постоянному току и на низких
частотах такие ошибки маскируются шумом.
Как и для операционных усилителей, чувствительность к входному на-
пряжению (подавление напряжения питания) ИОН ухудшается с ростом
частоты, и на частотах порядка нескольких сотен килогерц обычно состав-
ляет от 30 до 50 дБ. По этой причине следует обеспечить хорошую развязку
(по НЧ и ВЧ) входа ИОН. Подавление влияния входного напряжения так-
же может быть увеличено при помощи предстабилизатора с низким паде-
нием напряжения, например одного из устройств серии ADP3300.
На рис. 7.17 приведен обзор основных характеристик ИОН и даны их
типичные значения.
• Допуск выходного напряжения: — AD588 — ADR43x, AD780, REF195 0,01 %; 0,04 %.
• Дрейф (ТКН): — AD586, AD588 — AD780, ADR42x, ADR43x, ADR01, ADR02, ADR03 1—2 ррт/’С; 3 ррт/’С.
• Дрейф (долговременный) — ADR29x, ADR42x, ADR43x — AD588 50 ррт за 1000 часов; 25 ррт за 1000 часов.
• Диапазон напряжений питания: — REF19x, ADR38x, ADR39x, AD158x, AD780 иых + (0,3 В-15 В).
• Чувствительность к нагрузке 70 ррт/мА (350 мОм при 5 В).
• Чувствительность к входному напряжению 25 ррт/В (-92 дБ при 5 В).
Рис. 7.17. Характеристики ИОН по постоянному току (типичные значения)
Шум
Шум ИОН не всегда указывается производителем, и даже для тех случаев,
когда он указывается, методы его измерения не всегда абсолютно одинако-
вы. Например, некоторые устройства характеризуются размахом шума в
полосе от 0,1 до 10 Гц, в то время как для других указывается среднеквадра-
тичный уровень шума в широкой полосе или размах шума в определённой
полосе частот. Наиболее удобным способом задания шума (как и для опе-
рационных усилителей) является график зависимости спектральной плот-
ности шумового напряжения (нВ/^Гц) от частоты.
Во избежание потери точности в системах с высоким разрешением очень
важно применять малошумящие ИОН. Так как белый шум является стати-
стической характеристикой, заданная плотность шума должна быть одно-
значно связана с эквивалентным размахом шума в соответствующей поло-
се. Строго говоря, размах шума в гауссовой системе бесконечен (однако
вероятность появления такого значения бесконечно мала). Обычно для за-
дания реального пикового значения среднеквадратичное значение умножа-
ется на 6,6 — вероятность появления такого уровня составляет менее 0,1 %.
Для поддержания требуемой точности это значение должно быть меньше
1/2 LSB. В предположении о том, что размах шума в 6 раз превышает его
среднеквадратичное значение, требуемая спектральная плотность шумово-
7.1. Источники опорного напряжения
го напряжения Е„ (в/>/Гц) для TV-разрядной системы при напряжении пол-
ной шкалы KREF и шумовой полосе ИОН определяется выражением:
REF
(7.9)
" 12x2N x^/BW
В 12-разрядной системе с напряжением полной шкалы 10 В и полосой
шума ИОН 100 кГц предъявляются умеренные требования к шуму,
643 нВ/л/Тц. Рисунок 7.18 показывает, что увеличение разрешения и/или
уменьшение напряжения полной шкалы приводит к ужесточению требова-
ний к шуму. Значение ширины полосы 100 кГц взято произвольно, пользо-
ватель может сузить полосу за счет внешней фильтрации, что приведет к
уменьшению уровня шума. В большинстве хороших ИС ИОН уровень спек-
тральной плотности шума составляет порядка 100 нВ/7Гц; следовательно,
в большинстве систем с высоким разрешением внешняя фильтрация необ-
ходима, особенно при низком значении KREF.
Количество бит Плотность шума (нВ/>/Гц) для диапазонов полной шкалы 10; 5 и 2,5 В
10В 5В 2,5 В
12 643 322 161
13 322 161 80
14 161 80 40
15 80 40 20
16 40 20 10
Рис. 7.18. Требования к шуму ИОН в системах с различным уровнем точности (крите-
рий 1/2 LSB/100 кГц)
Некоторые ИОН, например ИС AD587 на скрытом стабилитроне, со-
держат вывод, обозначенный как вывод уменьшения шума (см. технические
данные). Он соединен с высокоимпедансным узлом на входе внутреннего
буферного усилителя. Подключаемый к нему внешний конденсатор CN вместе
с внутренним резистором образуют низкочастотный фильтр, который огра-
ничивает эффективную полосу шума, наблюдаемого в выходном напряже-
нии. При использовании конденсатора емкостью 1 мкФ ширина полосы по
уровню 3 дБ равна 40 Гц. Обратите внимание, что данный метод уменьше-
ния шума не является универсальным, и в других устройствах эта функция
может быть реализована (если вообще реализована) иным способом.
Также существуют стандартные методы уменьшения уровня шума, ко-
торые могут использоваться для любых ИС ИОН при любом стандартном
уровне напряжения. Одним из примеров их реализации является схема ИОН,
показанная на рис. 7.195 6. В ней для обеспечения очень низкого шума и
высокой точности по постоянному току используется внешняя фильтрация
и прецизионный малошумящий операционный усилитель. Источником
опорного напряжения Ut может являться любая (2,5-; 3,0-; 5- или 10-воль-
15 В
AD43x, AD29x
Рис. 7.19. Использование малошумящего усилителя и внешней фильтрации позволяет
достичь приемлемых шумовых показателей ИОН: (1,5 — 5)//Гц в полосе 1 кГц
товая) ИС ИОН с малошумящим буферированным выходом. Выходное на-
пряжение Ц подается на шумовой фильтр R—C2 с частотой среза, равной
примерно 1,7 Гц. Электролитические конденсаторы обычно обладают утеч-
кой по постоянному току, однако используемая схема включения конденсато-
ра приводит к тому, что приложенное к нему напряжение смещения
равно лишь сравнительно малому падению напряжения на Rr За счет этого
ток утечки, протекающий через Rv уменьшается до приемлемых уровней.
Поскольку фильтр обеспечивает не очень хорошее ослабление на частотах,
равных нескольким герцам, на этих частотах шум ИОН по-прежнему вли-
яет на характеристики схемы.
Выходное напряжение фильтра буферируется прецизионным малошу-
мящим повторителем с единичным коэффициентом усиления, например
ОР113ЕР. Статические характеристики буферного усилителя (ошибка сме-
щения менее ±150 мкВ, дрейф менее 1 мкВ/°C) практически не повлияют
на точность/дрейф большинства ИОН. Например, при использовании ИОН
(в Ц) ИС ADR292E типичный уровень дрейфа составит 3 ррт/ °C (эквива-
лентно 7,5 мкВ/°C), что превышает уровень дрейфа буферного усилителя.
Предельный ток практически любого операционного усилителя превы-
шает уровень тока типичной ИС ИОН. Более того, для опорных напряже-
ний от 5 до 10 В имеются малошумящие операционные усилители. Напри-
мер, в данной схеме может использоваться операционный усилитель AD797,
имеющий уровень шума в полосе 1 кГц менее 2 нВ/7Гц (для сравнения,
уровень шума ОР113 — 5 нВД/Гц). С любым операционным усилителем
можно использовать Кельвин-чувствительное подключение, которое исклю-
чает ошибки, вызванные падением напряжения I х R.
Масштабированные ИОН
Для получения нестандартного опорного напряжения может использовать-
ся подход, заключающийся в буферизации и масштабировании малого на-
пряжения, формируемого стабилитроном. Потенциальная проблема данно-
7.1. Источники опорного напряжения
Рис. 7.20. Применение выходных операционных усилителей с размахом источника
питания добавляет значительную гибкость в схему ИОН с малым падением
напряжения
го подхода заключается в том, чтобы заставить усилитель хорошо работать
при таких низких напряжениях, как 3 В. Она может быть решена при помо-
щи схемы, показанной на рис. 7.20, с маломощным ИОН и масштабирую-
щим буфером. Здесь в качестве диода используется одна из двухвывод-
ных ИС ИОН на 1,2 В с малым выходным током: ADR512 (1,200 В), AD589
(1,235 В) или AD1580 (1,225 В). При использовании любой из перечислен-
ных ИС резистор Rv задает ток диода. Его сопротивление выбирается исхо-
дя из требований к минимальному току диода при минимальном напряже-
нии питания 2,7 В. Очевидно, что нагрузка небуферированного диода в
узле Eref должна быть минимальна.
Усилитель Ц осуществляет буферизацию (и необязательную функцию
масштабирования номинального опорного напряжения 1,0 или 1,2 В), позво-
ляя увеличить уровень втекающего/вытекающего выходного тока. Естествен-
но, здесь возникает проблема высокого тока покоя операционного усилителя.
Уровень тока покоя зависит от типа усилителя и может варьироваться от 45 мкА
на канал для серий ОР196/296/496 до 1—2 мА/канал для ОР284 и ОР279.
Старые серии наиболее подходят для очень малых нагрузок (< 2 мА), а более
поздние обеспечивают выходной ток до 50 мА (в зависимости от конкретно-
го устройства). В показанной схеме могут использоваться различные усили-
тели. Их ключевые параметры перечислены в таблице на рис. 7.21.
Если убрать задающие усиление резисторы, то напряжение Квых в схеме
на рис. 7.20 просто равно KREF. Масштабирующие резисторы позволяют за-
давать уровень Квых в любой точке диапазона от нижнего предела KREF до
верхнего предела положительного напряжения питания, так как размах
выходного напряжения операционного усилителя может достигать уровней
напряжения питания. Также обратите внимание, что подобный буферизи-
рованный ИОН обладает малым падением напряжения, что позволяет иметь,
например, выходное опорное напряжение +4,5 В (или даже более) при на-
пряжении питания +5 В. Общая формула для определения Квых приведена
на рисунке, в ней К — это опорное напряжение.
Устройство* Iq, мА на канал Чмт (+). в (мин. при токе в мА) (-). в (макс, при токе в мА) /sc , мА минимум
ОР281/481 0,003 4,93 ± 0,05 0,075 ± 0,05 ±3,5
ОР193/293 0,017 4,20 ± 1 0,280 ± 1 ±8
ОР196/296/496 0,045 4,30 ± 1 0,400 ± 1 ±4
AD8541/42/44 0,045 4,97 ± 1 0,025 ± 1 ±60
ОР777 0,220 4,91 ± 1 0,126 ± 1 ±10
AD820/822 0,620 4,89 ± 2 0,055 ± 2 ±15
ОР184/284/484 1,250** 4,85 ± 2,5 0,125 ± 2,5 ±7.5
AD8531/32/34 1,400 4,90 ± 10 0,100 ± 10 ±250
* Типичные показатели устройства при l/s=+5B и температуре окружающей среды 25‘С (если не указано иное). ** Максимальный.
Рис. 7.21. Операционные усилители, подходящие для применения в низковольтных
rail-to-rail (обеспечивающих выходные напряжения вплоть до уровня на-
пряжения питания) ИОН и стабилизаторах
Ток усилителя в режиме ожидания может быть снижен (до уровня ниже
20 мкА) при использовании усилителя из семейств ОР181/281/481 или
ОР193/293/493. При этом несколько возрастет входной ток усилителя, зато
будет обеспечен очень низкий ток покоя. Все перечисленные устройства
могут работать с напряжениями питания от 3 В (за исключением ОР279,
который работает с напряжением питания 5 В).
Отклик ИОН при импульсном токе
Отклик ИОН при динамической нагрузке часто является проблемой, осо-
бенно в случаях, когда опорное напряжение подается на некоторые ЦАП
и АЦП. Быстрые изменения тока нагрузки неизбежно повлияют на выход-
ное напряжение, и зачастую искажения будут превышать номинальный уро-
вень ошибки ИОН. Например, во входном каскаде опорного напряжения
сигма-дельта АЦП может использоваться схема на переключаемых кон-
денсаторах, показанная на рис. 7.22. Динамическая нагрузка вызывает
появление «пичков» тока на ИОН в моменты заряда и разряда конденса-
тора Свх. В результате в цепи опорного напряжения АЦП может наводить-
ся шум.
Несмотря на то что сигма-дельта АЦП содержат внутренний цифро-
вой фильтр, переходные процессы в опорном напряжении способны выз-
вать значительную ошибку преобразования. Поэтому на входе опорного
напряжения АЦП важно поддерживать свободный от переходных процес-
сов потенциал с малым уровнем шума. Учтите, что, если источник опор-
ного напряжения имеет слишком высокий импеданс, динамическая на-
грузка может вызвать сдвиг уровня входного опорного напряжения более
чем на 5 мВ.
7.1. Источники опорного напряжения
Рис. 7.22. Входной каскад сигма-дельта АЦП с переключаемым конденсатором пред-
ставляет собой динамическую нагрузку для ИОН
Справиться с импульсной нагрузкой может развязывающий конденсатор
на выходе ИОН, однако многие ИОН становятся нестабильными при боль-
шой емкостной нагрузке. В связи с этим важно удостовериться, что выбран-
ное устройство способно работать с требуемой выходной емкостью. В любом
случае всегда необходимо обеспечивать развязку входов опорного напряже-
ния преобразователя с помощью, как минимум, конденсатора емкостью
0,1 мкФ и дополнительного конденсатора емкостью от 5 до 50 мкФ (если в
напряжении питания имеются низкочастотные пульсации, см. рис. 7.15).
Так как некоторые ИОН плохо ведут себя при импульсной нагрузке, что
выражается в возбуждении или потере точности в течение длительного пери-
ода, желательно протестировать импульсный отклик ИОН для работы на
импульсную нагрузку. Подходящая тестовая схема показана на рис. 7.23.
В типичном ИОН скачкообразное изменение тока на 1 мА приводит к воз-
никновению переходных процессов в его выходном напряжении. При под-
ключении к выходу ИОН конденсатора номиналом 0,01 мкФ возрастает
как длительность переходного процесса, так и его амплитуда.
По возможности ИОН следует проектировать таким образом, чтобы он
был способен работать с большими емкостными нагрузками. Структура
Рис. 7.23. Убедитесь в стабильности ИОН при емкостной нагрузке
Верхняя осциллограмма:
нет нагрузки (CL = О)
50 мВ/дел
Нижняя осциллограмма:
CL = 0,01 мкФ
200 мВ/дел
Обе осциллограммы: 5 мс/дел
AD780 позволяет работать на неограниченную емкостную нагрузку без воз-
буждения. Эта ИС имеет очень малый дрейф и отличную точность выход-
ного напряжения, а также потребляет очень малую мощность. К ИОН, ко-
торые способны работать на емкостную нагрузку, также относятся ИС се-
рий REF19x, AD1582-AD1585, ADR29x и ADR43x.
Как отмечалось выше, если ИОН используется для формирования опор-
ного напряжения АЦП последовательного приближения, к выходу ИОН
полезно подключить развязывающие конденсаторы. На рис. 7.24 показан
характер установления опорного напряжения после поступления команды
«Начало преобразования». Конденсатор малой емкости (0,01 мкФ) не спо-
собен запасать достаточную энергию для поддержания стабильного опор-
ного напряжения во время преобразования, что может привести к ошиб-
кам. Как свидетельствует нижняя кривая, стабильность опорного напряже-
ния во время преобразования обеспечивается развязывающим конденсатором
номиналом 1 мкФ или более.
Для верхней кривой вертикальная шкала: 5 В/дел.
Для всех других: 5 мВ/дел.
Горизонтальная шкала: 1мкс/дел.
Рис. 7.24. АЦП последовательного приближения могут представлять собой динамичес-
кую импульсную нагрузку для ИОН
Очень важно осознавать, что при работе ИОН на очень большую емко-
стную нагрузку время его включения также возрастает. Для определения
задержки, которая потребуется для достижения опорным напряжением тре-
буемой точности, может понадобиться провести эксперимент; однако с уве-
ренностью можно сказать, что она будет намного больше времени, указан-
ного в технических данных на ИОН для случая работы с малой емкостной
нагрузкой.
Малошумящие ИОН для преобразователей
с высоким разрешением
Показатели преобразователей с высоким разрешением (как сигма-дельта,
так и высокоскоростных) могут быть улучшены за счет последних достиже-
ний в ИС ИОН, таких как более низкий уровень шума и возможность рабо-
ты на емкостную нагрузку. Несмотря на то что многие преобразователи
данных содержат внутренний ИОН, качеством последнего зачастую жерт-
вуют из-за ограничений в технологических процессах производства преоб-
разователей. В таких случаях использование внешнего ИОН вместо внут-
7.1. Источники опорного напряжения
реннего часто приводит к улучшению общей производительности. Напри-
мер, 22-разрядные АЦП серии AD7710 содержат внутренний ИОН на 2,5 В
с среднеквадратичным уровнем шума 8,3 мкВ в полосе от 0,1 до 10 Гц
(2600нВ/ТГц), в то время как среднеквадратичный уровень шума ИОН
AD780 составляет всего 0,67 мкВ (200нВД/Гц). Внутренний шум АЦП се-
рии AD7710 в этой полосе составляет около 1,7 мкВ. Применение AD780
приводит к увеличению эффективного разрешения AD7710 от около 20,5 бит
до 21,5 бит.
На рис. 7.25 показана схема, в которой в качестве источника опорного
напряжения +2,5 В для АЦП серии AD77xx используется малошумящий
ИОН ADR431. Оптимальным вариантом является применение ADR433 (вы-
ходное напряжение 3 В), что позволяет увеличить динамический диапазон
АЦП при уменьшении уровня шума системы. Кроме того, ИС серии ADR43x
допускают подключение на выходе развязывающего конденсатора большой
емкости, что приводит к уменьшению переходных напряжений и, следова-
тельно, минимизации ошибок преобразования.
При замене внутреннего ИОН преобразователя на прецизионный вне-
шний может возникнуть одна достаточно реальная проблема. Некоторые
преобразователи могут быть подогнаны в процессе изготовления для обес-
печения заданных характеристик при сравнительно неточном внутреннем
ИОН. В таком случае применение более точного внешнего ИОН может в
действительности внести дополнительную ошибку усиления. Например,
ранняя ИС AD574 имела гарантированную погрешность усиления без ка-
либровки 0,125 % при работе с внутренним 10-Вт ИОН (который имел но-
минальную точность всего ±1 %). Очевидно, что если в подобном устрой-
стве напряжение внутреннего источника соответствует одной из границ
диапазона, то применение внешнего ИОН с выходным уровнем, равным
точно 10 В, приведет к ошибке усиления примерно 1 %.
Замечание: показаны соединения только с источником опорного
напряжения.
Рис. 7.25. XFET ИОН AD431 идеально подходит для прецизионных сигма-дельта АЦП
Глава 7. Схемы поддержки преобразователей данных
Список литературы
7.1. Источники опорного напряжения
1. Bob Widlar. New Developments in IC Voltage Regulators. IEEE Journal of Solid
State Circuits, Vol. SC-6, February, 1971.
2. Paul Brokaw. A Simple Three-Terminal IC Bandgap Voltage Reference. IEEE Journal
of Solid State Circuits, Vol. SC-9, December, 1974.
3. Paul Brokaw. More About the AD580 Monolithic IC Voltage Regulator. Analog
Dialogue, 9-1, 1975.
4. Dan Sheingold. Section 20.2 within Analog-Digital Conversion Handbook, 3d. Edition,
Prentice-Hall, 1986.
5. Walt Jung. Build an Ultralow Noise Voltage Reference. Electronic Design Analog
Applications Issue, June 24, 1993.
6. Walt Jung. Getting the Most from IC Voltage References. Analog Dialogue, 28-1,
1994, pp. 13-21.
7.2. Линейные стабилизаторы
с малым падением напряжения
Уолт Джанг
Введение
В течение длительного времени ИС линейных стабилизаторов напряжения
являются стандартными составными блоками систем питания. Со времени
появления первого линейного стабилизатора напряжения для 5-вольтовой
логики данный класс устройств значительно расширился и на сегодняш-
ний день включает устройства, работающие с другими стандартными уров-
нями напряжения в диапазоне от 1,5 до 24 В с выходными токами от 10 мА
(и ниже) до 5 А (и выше). По нескольким причинам ИС линейных стаби-
лизаторов напряжения стали ценными компонентами систем. Одной из
причин являются хорошие по сравнению с импульсными стабилизаторами
шумовые характеристики. Другой причиной является малое число необхо-
димых дополнительных компонентов и большая простота по сравнению с
дискретными решениями. Однако эффективность линейных стабилизато-
ров невысока из-за больших потерь мощности. Для устройств раннего по-
коления (многие из которых выпускаются по сей день) требовалось, чтобы
нестабилизированное входное напряжение на 2 В или более превышало
выходное стабилизированное напряжение, поэтому они обладали значи-
тельными потерями мощности.
Однако в последние годы появился ряд ИС линейных стабилизаторов,
имеющих меньшие ограничения на минимальную разницу между входным
и выходным напряжениями. Эта разница в напряжении, которая более из-
вестна как падение напряжения, дала название классу стабилизаторов с ма-
лым падением напряжения (Low Drop Out), или ZDO-стабилизаторов. Паде-
ние напряжения (К^) определяется как минимальная разница между вход-
ным и выходным напряжением, при котором выходное напряжение
стабилизатора уменьшается на 2 %. Например, если при разнице между
входным и выходным напряжением 0,5 В выходное напряжение 5-Вт LDO
падает до 4,9 В (-2 %), то падение напряжения ZDO-стабилизатора
составляет 0,5 В.
Как будет показано в данной главе, падение напряжения является край-
не критичным параметром с точки зрения КПД линейного стабилизатора.
Чем меньше допустимое падение напряжения на стабилизаторе, при кото-
ром поддерживается стабилизируемое напряжение, тем меньшую мощность
он рассеивает. Ключом к повышению КПД являются стабилизаторы с ма-
лым падением напряжения, так как они требуют меньшего падения на-
пряжения для поддержания стабилизации при уменьшении входного на-
пряжения. В плане производительности основным моментом архитектуры
ZDO-стабилизаторов является то, что они отдают больше полезной мощно-
сти в нагрузку и генерируют меньше тепла. ZDO-стабилизаторы являются
ключевыми элементами систем питания, обеспечивающих стабильные на-
пряжения из напряжения батарей и используемых, например, в портатив-
ных компьютерах, сотовых телефонах и т. д. Это вызвано тем, что они
поддерживают стабилизированное напряжение вплоть до нижних точек
кривых разряда батарей. Применение LDO в классических источниках по-
стоянного тока, питающихся от сети, позволяет понизить уровень напря-
жения вторичной обмотки трансформатора, снижая вероятность отключе-
ния системы при понижении напряжения в сети, а также количество рассе-
иваемого тепла.
Основы линейных стабилизаторов
напряжения
Для того чтобы разобраться во всем многообразии ZDO-стабилизаторов,
необходимо провести краткий обзор фундаментальных основ трехвывод-
ных ИС линейных стабилизаторов. Как оказывается, почти все выпускае-
мые на сегодняшний день ZDO-стабилизаторы, равно как и большинство
устройств из более широкого класса трехвыводных стабилизаторов, — это
последовательные стабилизаторы положительного напряжения (positive leg).
Это название просто означает, что они управляют стабилизированным вы-
ходным напряжением при помощи проходного (регулирующего) элемента,
включенного последовательно с положительным нестабилизированным
входом. Это понятие становится более понятным при взгляде на схему
включения гипотетического трехвыводного стабилизатора, показанную
на рис. 7.26. Как и ИС источников опорного напряжения, описанные в
предыдущем разделе, многие стандартные ИС стабилизаторов напряжения
имеют, как показано на рисунке, последовательный трехвыводный тип (Квх,
GND или общий вывод (Common), Кых).
Эта схема также позволяет сделать несколько утверждений относитель-
но потерь мощности в стабилизаторе. Рассеиваемая стабилизатором мощ-
ность определяется суммой двух компонентов: первый является функцией
от V — V и а второй — функцией V и I . Таким образом, полная
рассеиваемая мощность, PD:
P=(V-V)I + VI
D вх вых*'е£ г вк земли*
(7.Ю)
Рис. 7.26. Базовый трехвыводной стабилизатор напряжения
Очевидно, что и величина тока нагрузки, и падение напряжения на ста-
билизаторе сильно влияют на рассеиваемую мощность. Также нетрудно за-
метить, что при заданном IL по мере уменьшения падения напряжения пер-
вый член в выражении для PD уменьшается. При среднем уровне падения
напряжения 1 В ток нагрузки 1 А вызовет рассеивание на стабилизаторе
мощности 1 Вт, и для непрерывной работы потребуется использовать тепло-
отвод. Основной вклад в мощность, рассеиваемую стабилизатором, вносит
первое слагаемое, по меньшей мере, в нагруженном состоянии. Второе сла-
гаемое, пропорциональное току /земли (типичный уровень которого составля-
ет всего 1—2 мА, а иногда даже меньше), становится значительным, только
когда стабилизатор не нагружен; при этом потребляемая стабилизатором мощ-
ность в режиме ожидания вызывает постоянную утечку в источнике Квх.
Однако следует отметить, что в некоторых типах стабилизаторов (осо-
бенно в тех, которые работают с проходными элементами, имеющими
очень малый ^(коэффициент усиления по току), такими как горизонталь-
ные р-и-р-транзисторы), ток /земли в нагруженном состоянии может быть
достаточно большим. Этот эффект наиболее заметен в начальной фазе ста-
билизации или когда проходной транзистор находится в насыщении и про-
является в виде неожиданных «пиков» в токе /земли. Он может присут-
ствовать во всех ZDO-стабилизаторах с биполярными проходными транзи-
сторами, которые могут насыщаться (такие как р-п-р). Этот эффект не так
сильно проявляется в стабилизаторах с вертикальными р-и-р-транзистора-
ми (так как они имеют более высокий 0) и отсутствует в ZDO-стабилизато-
рах на p-МОП транзисторах (так как p-МОП транзисторы управляются уров-
нем напряжения, а не током).
В показанном примере стабилизатор выдает 5Вх1А = 5Втв нагрузку.
При падении напряжения 1 В мощность на входе равна 6 В х 1 А = 6 Вт.
КПД по мощности может быть определен как:
P3<w(%) = 100x^, (7.11)
2 вх
где Р и Р -— полная выходная и входная мощности соответственно.
ВЫХ вх
7.2. Линейные стабилизаторы с малым падением напряжения
В этом примере для простоты вычислений не учитывалась сравнитель-
но малая часть мощности, вызванная /земли. В реальном проекте такие упро-
щения делать не следует.
В рассмотренном примере КПД равен 100 х 5/6, или приблизительно 83 %.
Однако если использовать ££Ю-стабилизатор с падением напряжения 0,1В
вместо 1 В, то входное напряжение можно понизить до 5,1 В. При этом
КПД станет равным 100 х 5/5,1 = 98 %. Очевидно, что применение
££)О-стабилизаторов может привести к значительному увеличению КПД
линейных стабилизаторов напряжения.
При более подробном взгляде на блок-схему типичного стабилизатора
становятся видны разнообразные элементы (рис. 7.27).
Практически все показанные на данной схеме элементы могут рассмат-
риваться как фундаментально необходимые. Исключение составляют бло-
ки управления отключением и датчика насыщения (соединения с этими
блоками показаны штриховыми линиями). Эти функции присутствуют во
многих современных стабилизаторах, однако функция отключения сравни-
тельно недавно стала стандартной и не входит в состав традиционных фун-
кций трехвыводных стабилизаторов. Управление режимом отключения (если
оно реализовано в стабилизаторе) осуществляется внешним цифровым сиг-
налом, и логический ВЫСОКИЙ (или НИЗКИЙ) уровень задает активное
состояние стабилизатора (или наоборот).
Выход ошибки, ERR, может использоваться для обнаружения условий
перегрузки стабилизатора, таких как насыщение проходного транзистора,
тепловая перегрузка и т. д. Остальные показанные функции входят в состав
всех ИС стабилизаторов.
Схема работает следующим образом. Блок источника опорного напряже-
ния вырабатывает стабильное напряжение KREF, которое практически всегда
формируется из напряжения запрещенной зоны кремния, обычно ~1,2 В. Это
позволяет получать выходные напряжения 3 В и более из напряжения пита-
Рис. 7.27. Блок-схема стабилизатора напряжения
ния всего 5 В. Это напряжение подается на один из входов усилителя ошибки,
второй вход которого подключен к делителю Rt~Rr Выходное напряжение
усилителя ошибки поступает на проходной элемент, который в свою оче-
редь управляет выходным напряжением. При этом результирующее ста-
билизированное напряжение определяется простой зависимостью:
При типичном опорном напряжении запрещенной зоны 1,2 В и выходном
напряжении 5 В отношение /?,/Л2 должно равняться приблизительно 3/1.
Когда важна малая мощность в режиме ожидания, предпринимается не-
сколько шагов. Необходимо использовать в делителе резисторы с большим
сопротивлением, использовать маломощные усилитель ошибки и драйвер
переходного элемента, а также низкий опорный ток JREF. При этом ток
ненагруженного стабилизатора в состоянии ожидания может быть умень-
шен до уровня миллиампер и менее при использовании биполярной техно-
логии и до нескольких микроампер в КМОП-стабилизаторах. В стабилиза-
торах, имеющих функцию отключения, ток в режиме ожидания снижается
до микроампер и менее.
Почти во всех стабилизаторах имеются средства ограничения тока и
измерения перегрева, предназначенные для защиты проходного элемента
от повреждения. Ограничение тока в стабилизаторах с высоким током обычно
обеспечивается последовательным резистором или еще проще — установ-
кой предела тока, поступающего на проходной элемент. Для высоковольт-
ных стабилизаторов функция ограничения тока может дополняться функ-
цией ограничения напряжения, за счет чего обеспечивается полное управ-
ление линией нагрузки проходного устройства.
Все стабилизаторы мощности также имеют средства измерения пере-
грева, которые обычно обеспечиваются при помощи фиксированного опор-
ного напряжения и датчика на принципе VBP измеряющего температуру
кристалла. Эти средства могут использоваться для отключения микросхемы
путем отключения проходного элемента от входной цепи, когда температу-
ра превышает опасный уровень (выше -150 °C). В некоторых случаях для
предупреждения о таком отключении (а также потере стабилизации, выз-
ванной другими причинами) может выдаваться флаг ошибки.
Проходные элементы, их преимущества и недостатки
До данного момента проходные элементы подробно не обсуждались. На
практике этот основной компонент стабилизатора может принимать не-
сколько форм. Тип выбранного проходного элемента оказывает наиболь-
шее влияние практически на все основные показатели стабилизатора, наи-
более значимым из которых является падение напряжения,
На рис. 7.28 в простой схематической форме показан ряд проходных
элементов, которые могут применяться в схемах стабилизаторов напря-
жения. На рисунках также приведены характерные значения Kmin для каж-
дого из типов, на основании которых можно легко определить, подходит
Одинарный п-р-п
Дарлингтон на п-р-п
Рис. 7.28. Проходные элементы, которые могут применяться в стабилизаторах напря-
жения
ли данный проходной элемент для использования в составе ZDO-стаби-
лизатора. Остальные компоненты схемы стабилизатора на рисунках не
показаны.
На основании этих упрощенных схем сложно провести полное сравне-
ние всех проходных элементов, так как помимо падения напряжения они
имеют еще много различий. Помогает сравнить различные типы проходных
элементов таблица на рис. 7.29.
В этой таблице перечислены различные параметры проходных элемен-
тов, что позволяет легко сравнивать их в зависимости от того, какой Крите -
А В С D Е
Одиночный п-р-п п-р-п Дарлингтона Одиночный р-п-р п-р-п/р-п-р р-МОП
V , - 1 В mln V. ~ 2 в min У- 0.1 в min ’ ~ 1.5 В min ’ 1/ _ О v / mln DS(O/V) 'l
lL < 1 А lL > 1 А lL < 1 А lL > 1 А lL > 1 A
Повторитель Повторитель Инвертер Инвертер Инвертер
Низкий ZBbix Низкий ZBbix Высокий ZBb)x Высокий ZBbix
Широкополосный Ши рокопол осный Узкополосный Узкополосный Узкополосный
Нечувствителен KCt Нечувствителен KCt Чувствителен KCt Чувствителен KCt Чувствителен KCt
Рис. 7.29. Преимущества и недостатки различных проходных элементов стабилизато-
ров напряжения
рий является наиболее важным. Обратите внимание, что столбцы А—Е со-
ответствуют схемам на рис. 7.28. Преимущества и недостатки выражены в
относительных уровнях, а не в конкретных числах.
Например, все проходные л-р-л-транзисторы являются повторителями,
что обеспечивает широкую полосу пропускания и относительную нечув-
ствительность к емкостной нагрузке из-за низкого Zbhx. Однако ни одиноч-
ный п-р-п, ни п-р-п Дарлингтона не позволяет достичь низкого падения
напряжения ни при каком токе нагрузки. Это обусловлено тем, что напря-
жение (напряжения) VBE, предотвращающее насыщение проходного эле-
мента, суммируется с входным напряжением, что ограничивает Vmin на уровне
приблизительно 1—2 В.
В отличие от л-р-л-транзисторов включение в инвертирующем режиме
позволяет проходным элементам, перечисленным в столбцах С и Е, рабо-
тать в режиме насыщения, что снижает потери напряжения до минимума.
Данный фактор делает эти два типа проходных элементов оптимальными
для использования в ZDO-стабилизаторах, по крайней мере с точки зрения
кпд.
При токах менее 1 А одиночный р-п-р или p-МОП проходной транзис-
тор наиболее подходит для применения в ZDO-стабилизаторах, так как оба
они позволяют достигать равного 0,1 В или менее, при токах порядка
100 мА. Падение напряжения на проходном р-и-р-транзисторе сильно зави-
сит от конкретного используемого устройства и рабочего тока: применение
вертикальных р-п-р-транзисторов обеспечивает наименьшие потери насы-
щения, а также минимизирует пиковые выбросы в токе /земли в режиме на-
сыщения. Проходные p-МОП транзисторы позволяют достичь наименьше-
го возможного Kmin, так как для данных элементов оно равно произведению
их Т?р5(вкл) на IL. Таким образом, для минимизации Kmin при заданном уровне
IL всегда можно выбрать p-МОП транзистор с малым Т?Л5(вкл). Проходные
p-МОП транзисторы обычно являются внешними по отношению к ИС
LDO-стабилизаторов, поэтому ИС, работающие с внешними проходными
транзисторами, в действительности, представляют собой контроллеры
(в отличие от полнофункциональных интегральных ZDO-стабилизаторов).
Проходные p-МОП транзисторы могут работать с токами в несколько А и
более при очень малых падениях напряжения. Схема р-п-р/п-р-п, парамет-
ры которой приведены в столбце D, в действительности является гибрид-
ной и предназначена для увеличения тока одиночного р-п-р-проходного
транзистора. При таком включении действительно возрастает ток, но также
последовательно добавляется напряжение VBE и-р-и-транзистора (который
не может работать в насыщении), за счет чего суммарное напряжение Kmin
такой схемы становится равным приблизительно 1,5 В.
Все три схемы С, D, Е имеют высокий выходной импеданс, и для их
стабильности необходим выходной конденсатор. Тот факт, что выходной
конденсатор является составной частью схемы частотной компенсации ста-
билизатора, должен отчетливо осознаваться пользователями. Этот фактор,
обозначенный в таблице как «чувствительность к С£», приводит к тому, что
стабилизаторы, в которых используются эти типы проходных элементов,
становятся критичными как к номиналу CL, так и к его ESR (эквивалентно-
му последовательному сопротивлению). Обычно для полной гарантии ста-
7.2. Линейные стабилизаторы с малым падением напряжения
бильности такие типы стабилизаторов должны работать только с выходными
конденсаторами определенного типа и размера, ESR которых не выходит за
заданные границы со временем и в диапазоне температур. К счастью, дости-
жения в некоторых последних ИС ZDO-стабилизаторов производства Analog
Devices позволили значительно облегчить проблемы пользователя. Эти до-
стижения описываются ниже.
Некоторые примеры архитектур стандартных ИС стабилизаторов иллю-
стрируют отмеченные выше моменты относительно проходных устройств и
позволяют оценить достижения, которые привели к появлению новейших
технологий в ZDO-стабилизаторах.
Первой ИС стабилизатора являлся классический трехвыводной стаби-
лизатор LM309 на 5 В/1 А. На рис. 7.30 показана ее упрощенная внутренняя
схема без функций ограничения тока и обнаружения перегрева. Этот тип
ИС производится до сих пор не только в изначальном варианте, но и в виде
семейства его производных, таких как 7805, 7815 и т. д., и различных их
аналогов с низкими и средними токами. Так как в этой ИС в качестве
проходного используется составной транзистор Дарлингтона, (?18— (?19, она
не обладает ни низким падением напряжения (обычно порядка 1,5 В), ни
низким током покоя (~5 мА). Однако она сравнительно нечувствительна к
нестабильности из-за наличия компенсационного конденсатора Сх и буфе-
ризации выхода повторителем. Это упрощает ее применение.
Схема ИОН с запрещенной зоной, используемая в составе LM109/309,
более сложна, чем базовая схема, показанная на рис. 7.3. На резисторе Т?8
падает напряжение, пропорциональное абсолютной температуре (РТАТ),
которое подается на усилитель ошибки, включенный по схеме Дарлингто-
на, Q9— 01о. Напряжения VBE с отрицательным ТКН пар транзисторов
Q9— £?10 и Ql2— 013 складываются с напряжением РТАТ, формируя термо-
стабильное выходное напряжение 5 В. Буферизация тока усилителя ошиб-
ки £?10 обеспечивается р-и-р-транзистором Qxl, который управляет проход-
ными и-и-транзисторами.
Рис. 7.30. Упрощенная схема трехвыводного стабилизатора LM309 с фиксированным
выходным напряжением на 5 В/1 А
Рис. 7.31. Упрощенная схема трехвыводного стабилизатора LM317 с регулируемым
выходным напряжением на 5 В/1 А
Последующие достижения в схемах ИОН и трехвыводных стабилизато-
ров привели к появлению стабилизатора с регулируемым напряжением. Первой
ИС, в которой была реализована эта концепция, являлась LM317 (см. 2),
упрощенная схема которой показана на рис. 7.31. Обратите внимание, что в
ней транзисторы (?|7—(?19 и другие компоненты формируют ИОН Брокау
(см. рис. 7.4 и 3), в отличие от LM309, где используется ИОН на ДИЙ£.
В схеме регулируемого стабилизатора обеспечивается регулирование
транзисторов ИОН (?17, (?19 и усилителя ошибки Q16, £>18. Выход усилителя
ошибки подключен через буфер 0|2 к проходному транзистору Дарлингто-
на, образованного транзисторами 025 и 026. Базовая схема ИОН формирует
фиксированное напряжение 1,25 В, которое появляется, как показано на
рисунке, между выводами Иых и ADJ ИС. Внешние масштабирующие рези-
сторы Rt и задают желаемый уровень выходного напряжения:
Иых = KREF 1 + — + 50 мкА х J?,.
ВЫХ Ktr I I 2
(7.13)
Как можно заметить, выходное напряжение равно масштабированному
при помощи резисторов Ri и напряжению KREF плюс небольшое напря-
жение, зависящее от тока ИОН, равного 50 мкА. Обычно номиналы R{ и Т?2
выбирают таким образом, чтобы через них протекал ток более 5 мА; при
этом правый член становится относительно малым. Схема имеет внутрен-
нюю компенсацию, и во многих приложениях выходной развязывающий
конденсатор может и не потребоваться.
Как и стабилизатор фиксированного напряжения LM309, ИС LM317
имеет сравнительно высокое падение напряжения, так как в качестве
проходного транзистора в ней используется транзистор Дарлингтона.
Данная ИС также не является малопотребляющей (типичное значение
тока покоя — 3,5 мА). Однако преимуществом этого стабилизатора являет-
ся широкий диапазон задаваемых пользователем напряжений.
7.2. Линейные стабилизаторы с малым падением напряжения
Последующие модификации топологии LM317 заключались в замене
проходного и-р-и-транзистора Дарлингтона на каскад р-п-р/п-р-п. Это позво-
ляет достичь меньшего уровня (1,5 В или менее)4. Данные модификации
также обеспечивают все возможности программирования напряжения, кото-
рыми обладала базовая ИС LM317, однако в них несколько возрастает чув-
ствительность к выходной емкости. Это проявляется в необходимости на-
личия выходного конденсатора для частотной компенсации, что не требо-
валось в оригинальном варианте LM317.
Архитектуры стабилизаторов
с малым падением напряжения
Как уже отмечалось ранее, все проходные элементы, применяемые в LDO-
стабилизаторах, имеют одну общую фундаментальную характеристику —
они работают в инвертирующем режиме. Это позволяет достигать насы-
щения проходного элемента и, следовательно, обеспечивать малое паде-
ние напряжения. Побочным эффектом этого режима работы является то,
что этот тип топологии в большей степени подвержен нестабильности.
Эти свойства влияют и на разработку схемы с ZDO-стабилизатором, и на
ее применение и определяют различие между схемами в плане производи-
тельности.
Традиционная архитектура ZDO-стабилизатора показана на рис. 7.32.
Она характерна для современных ИС с р-п-р (как показано на рисунке) или
p-МОП проходным транзистором. При проектировании и применении схем
на базе этой архитектуры возникают проблемы, связанные как со статичес-
кими, так и с динамическими характеристиками, обсуждаемые в данном
разделе.
Вероятно, основным вопросом с точки зрения статических характери-
стик является тип проходного элемента, который влияет на падение на-
пряжения и ток «земли». Если в качестве Q{ используется горизонтальный
р-и-р-транзистор, то ft будет низким (иногда всего лишь порядка 10 или
около того). Так как Ql управляется коллектором Qv требование к высоко-
Рис. 7.32. Традиционная архитектура LDО-стабилизатора
18 - 2852
му току базы горизонтального р-и-р-транзистора приводит к сравнительно
высокому току эмиттера Q2 или высокому току /земли. Для типичного стаби-
лизатора на базе горизонтального р-и-р-транзистора, работающего с выход-
ным напряжением 5 Ви током 150 мА, /земли имеет типичное значение при-
мерно 18 мА и может достигать 40 мА. Для того чтобы завершить описание
проблем, связанных с высоким /земли в ZDO-стабилизаторах на р-и-р-тран-
зисторах, отметим, что при работе стабилизатора в области ниже мини-
мального падения напряжения на нем в токе /земли появляется «пиковый
выброс» (spike). В таких условиях напряжение выходит за пределы допусти-
мого диапазона, и для поддержания стабилизации стабилизирующий кон-
тур подает больший ток на проходной транзистор. Это приводит к появле-
нию значительного выброса в /земли, который обычно ограничивается внут-
ренними схемами управления насыщением стабилизатора.
Для проходных p-МОП транзисторов выброс в /земли нехарактерен, так
как они управляются напряжением. Однако для них характерны некоторые
свои проблемы. Проблема номер один: многие технологические процессы
производства ИС не позволяют создавать p-МОП транзисторы высокого
качества с низким /?вкл и низким порогом. Поэтому наилучшее техническое
решение заключается в использовании внешнего проходного p-МОП тран-
зистора, управляемого коллектором транзистора Qr Подобная схема называ-
ется ZDO-контроллер, так как полнофункциональный ££Ю-стабилизатор по-
лучается добавлением внешнего проходного транзистора. Несмотря на то
что в теории «-МОП проходные транзисторы дали бы меньшее 7?вкл, они
также требуют повышенного напряжения питания для включения, и поэто-
му не подходят для применения в простых Z/Ю-стабилизаторах. Проход-
ные p-МОП транзисторы с малым /?вкл и низким порогом, работающие с
токами до нескольких ампер, широко доступны. Их использование позво-
ляет реализовать наименьшее возможное падение напряжения, так как все-
гда можно выбрать транзистор с меньшим 1?вкл.
Горизонтальные проходные р-и-р-транзисторы имеют достаточно не-
плохое падение напряжения: типичный уровень при 150 мА—300 мВ, мак-
симальный — 600 мВ. Но эти показатели еще более улучшаются при ис-
пользовании вертикальных р-л-р-транзисторов, которые имеют типичный ft
порядка 150 при уровнях тока 200 мА. Из этого следует, что при выход-
ном токе 200 мА ток /земли равен 1,5 мА. Падение напряжения на верти-
кальном р-и-р-транзисторе также лучше по сравнению с горизонтальны-
ми р-и-р-транзисторами: типичный уровень при токе 200 мА—180 мВ, мак-
симальный — 400 мВ.
Для архитектуры ZDO-стабилизатора, показанной на рис. 7.32, также
характерны проблемы, связанные с динамическими характеристиками. Дан-
ная схема имеет высокий выходной импеданс, так как проходной р-п-р-
или p-МОП транзистор работает в режиме с общим эмиттером или общим
истоком соответственно. Это приводит к тому, что для нагрузки стабилиза-
тор является высокоимпедансным источником.
Внутренний компенсирующий конденсатор стабилизатора Скомп вместе
с gm усилителя ошибки образуют полюс на фиксированной частоте. Кроме
того, емкость нагрузки CL вместе с RL формируют полюс в выходной цепи.
Именно этот полюс, являющийся вторым (и иногда переменным) полюсом
7.2. Линейные стабилизаторы с малым падением напряжения
двухполюсной системы, служит источником основной проблемы, возника-
ющей при применении ££Ю-стабилизаторов. Полюс, вызванный емкостью
нагрузки, может значительно влиять на общий частотный отклик стаби-
лизатора, причем это влияние может быть как полезным, так и вредным.
В зависимости от относительного расположения двух полюсов в частотной
области, а также относительной величины ESR конденсатора CL весьма ве-
роятно, что при определенных комбинациях CL и ESR стабильность сис-
темы может ухудшаться. Обратите внимание, что CL на рисунке показан
как реальный конденсатор, имеющий чистую емкость и паразитное после-
довательное сопротивление ESR.
Не вдаваясь в подробности анализа стабильности замкнутых контуров,
можно сказать, что ££Ю-стабилизаторы, как и другие системы с обратной
связью, должны удовлетворять определенным базовым критериям стабиль-
ности. Одним из этих критериев является крутизна изменения зависимости
усиления от частоты в области вблизи точки единичного усиления контура
системы. Для того чтобы замкнутый контур был стабилен, фазовый сдвиг в
точке единичного усиления должен быть меньше 180°. На практике в хоро-
шей схеме с обратной связью необходимо иметь некоторый запас по фазе
(обычно 45° или более) для учета различных паразитных эффектов. В то
время как однополюсные системы по природе стабильны, двухполюсные не
обязательно являются стабильными. Стабильна двухполюсная система или
нет, в каждом конкретном случае зависит от ее характеристики усиление-
фаза.
Если два полюса такой системы значительно удалены друг от друга по
частоте, вопрос стабильности может быть не таким серьезным. Примером
системы с полюсами, разделенными значительно по частоте, является клас-
сический стабилизатор с выходным каскадом в виде эмиттерного повтори-
теля, такой как LM309. Это обусловлено тем, что очень малый ZBbix повто-
рителя на и-р-и-транзисторе смещает вызванный емкостью нагрузки вы-
ходной полюс по частоте туда, где он практически не причиняет вреда.
Внутренняя компенсирующая емкость (Ст на рис 7.30) формирует часть
доминирующего полюса, который уменьшает усиление контура до значений
меньше единицы на высоких частотах, где появляется выходной полюс.
Таким образом, для данного типа стабилизатора емкость нагрузки не обяза-
тельно негативно влияет на стабильность.
На рис. 7.33 перечислены различные моменты, связанные со статичес-
кими и динамическими характеристиками ££)О-стабилизаторов.
Тем не менее использование выходных каскадов на эмиттерных повто-
рителях в ££>О-стабилизаторах является непозволительной роскошью. Вместо
этого в них должны применяться проходные элементы, которые могут на-
сыщаться. Таким образом, при наличии двух или более полюсов (одного
или более внутренних полюсов и полюса, возникающего из-за внешней
нагрузки) возможно накопление добавачного сдвига фазы, приводящее к
нежелательным последствиям. Возможность возникновения нестабильнос-
ти при определенной выходной нагрузке является жизненно важным фак-
тором для большинства конфигураций LDО-стабилизаторов.
Однако выходной конденсатор, из-за которого возникают проблемы
нестабильности, может при определенных обстоятельствах являться реше-
Статические
• Горизонтальный р-л-р-проходной транзистор:
— высокий/
земли
• Вертикальный р-л-р-проходной транзистор:
— низкий / •
земли’
— низкое I/,.
min
• p-МОП проходной транзистор:
— наименьшее изменение / ;
земли*
— низкое V ,.
min
• Выходные токи порядка нескольких ампер.
Динамические
• Двухполюсная система.
• ESR CL является критичным параметром с точки зрения стабильности.
• Необходимо иметь большую CL.
• Необходимо иметь диапазон ESR CL (изменение ESR со временем и в диапазоне
температур должно быть ограничено сверху и снизу).
Рис. 7.33. Основные моменты, связанные со статическими и динамическими характе-
ристиками стабилизаторов с малым падением напряжения
нием этих же проблем. Эта кажущаяся парадоксальной ситуация становит-
ся понятной, если осознать, что практически все реальные конденсаторы,
как показано на рис. 7.32, представляют собой последовательное соедине-
ние емкости CL и паразитного эквивалентного последовательного сопро-
тивления. В то время как сопротивление нагрузки RL и CL формируют по-
люс, CL и его эквивалентное последовательное сопротивление формируют
ноль, который при определенных условиях уменьшает дестабилизирующий
эффект CL.
Например, если эти полюс и ноль соответствующим образом располо-
жены по частоте относительно внутренних полюсов стабилизатора, то не-
которые вредные эффекты могут быть компенсированы, за счет чего неста-
бильность уменьшится или будет исключена полностью (см. 5). Основная
проблема здесь заключается в том, что ESR конденсатора является паразит-
ным эффектом, и его не всегда можно контролировать. В результате ESR
конденсатора, который используется в схеме с ZDO-стабилизатором, чув-
ствительным к выходной схеме компенсации, должно принадлежать опре-
деленной зоне, как показано на рис. 7.34.
Пользователь ZDO-стабилизатора должен выбирать такой выходной кон-
денсатор, ESR которого принадлежит стабильной области (т. е. централь-
ной зоне) при любых рабочих условиях. Обратите внимание, что этот гра-
фик не описывает какое-то конкретное устройство, а приведен в качестве
общего примера. К сожалению, не любой конденсатор удовлетворяет таким
требованиям. Например, алюминиевые электролитические конденсаторы
общего назначения нельзя применять в этой задаче, так как их ESR ухудша-
ется при низких температурах. Конденсаторы, такие как OS-CON и много-
слойные керамические, обладают слишком малым ESR и также не могут
использоваться. В теории их можно поместить в стабильную зону при по-
7.2. Линейные стабилизаторы с малым падением напряжения 549
Рис. 7.34. Требования к по-
паданию ESR конденсатора
нагрузки в стабильную зону
могут превратить примене-
ние ZDO-стабилизатора в
кошмар
мощи внешнего сопротивления, однако на практике сделать это практичес-
ки невозможно. Таким образом, наилучшим типом выходных конденсато-
ров для ££Ю-стабилизаторов являются танталовые. И наконец, так как по
соображениям максимальной стабильности будет использоваться конден-
сатор с большой емкостью, то для LDО-стабилизатора наподобие показан-
ного на рис. 7.32 потребуется дорогостоящий танталовый конденсатор боль-
ших размеров. Это нежелательно, так как основным критерием любого про-
екта является малый размер.
Семейство стабилизаторов
с малым падением напряжения апуСАР®
Некоторые из последних модификаций базовой архитектуры ZDO-стаби-
лизатора, показанной на рис.7.32, позволили добиться значительных улуч-
шений в статических и динамических характеристиках. Они иллюстриру-
ются на рис. 7.35, где приведена упрощенная схема семейства ZDO-стаби-
лизаторов ADP330x и ADP333x производства Analog Devices. Это семейство
Рис. 7.35. Схемы серий ADP330x и ADP333x апуСАР® обладают улучшенными стати-
ческими и динамическими характеристиками по сравнению с традицион-
ными ТЛО-стабилизаторами
Глава 7. Схемы поддержки преобразователей данных
стабилизаторов также носит название апуСАР® из-за их относительной не-
чувствительности к размерам и ESR выходного конденсатора. Они выпус-
каются в эффективно рассеивающих мощность корпусах, таких как Thermal
Coastline (обсуждается ниже), в виде автономных ZDO-стабилизаторов и
контроллеров ZDO-стабилизаторов, и имеют широкий диапазон фиксиро-
ванных выходных напряжений.
Особенности схем относительно статических характеристик
Одним из ключевых отличий устройств серий ADP330x/ADP333x является
использование вертикального проходного р-л-р-транзистора с большим уси-
лением со всеми вытекающими из этого преимуществами, описанными выше
на рис. 7.32 и 7.33 (см. также 6). Это позволяет достигать типичных падений
напряжения в устройствах этой серии порядка 1 мВ/мА при токах 200 мА
или менее.
Важно отметить, что схема подобного £2)О-стабилизатора в корне отли-
чается от традиционной архитектуры, показанной на рис. 7.32, так как в
ней отсутствует очевидный блок KREF. Причина этого заключается в том,
что в устройствах серий ADP330x/ADP333x используется так называемый
«объединенный» усилитель-ИОН. Работа схемы ИОН и интегрального уси-
лителя иллюстрируется на рис. 7.35. Схема работает следующим образом.
Kref — это опорное напряжение, присутствующее на выходе делителя с
коэффициентом 7?//^ с нулевым импедансом. На рисунке эта цепь симво-
лически обозначена в виде буферного усилителя с единичным коэффици-
ентом усиления и выходным напряжением KREF (выделена пунктиром), ко-
торый запитывается от Это опорное напряжение подается на после-
довательное соединение (выделено пунктиром) с реальными
компонентами 2?3, Т?4 и т. д.
Усилитель ошибки, показанный на схеме как каскад gm, в действи-
тельности представляет собой дифференциальный каскад с входными
-и-/^-транзисторами. Два транзистора работают с различными плотностя-
ми токов, формируя напряжение смещения, пропорциональное абсолют-
ной температуре (РТАТ). Несмотря на то что на схеме напряжение смеще-
ния показано в виде отдельного блока И05, оно на самом деле является про-
дуктом работы пары биполярных транзисторов. Это напряжение (РТАТ Vos)
вызывает протекание через Т?4 тока /р^,
ЛгАТ=^- (7-14)
А4
Обратите внимание, что этот ток также протекает через последователь-
ное соединение 2?3, Т?4 и делитель Таким образом:
И™ = 4™ (К, + л. + W <715>
Полное напряжение, KREF, является суммой двух напряжений:
^Ер=^лт+^,, (7-16)
где масштабированные при помощи напряжения на 7?3, Т?4 и фор-
мируют суммарное напряжение КрТАТ, пропорциональное абсолютной тем-
7.2. Линейные стабилизаторы с малым падением напряжения
пературе, а напряжение на диоде VD комплементарно абсолютной темпера-
туре (СТАТ). Как и в стандартном ИОН с напряжением запрещенной зоны,
РТАТ- и СТАТ-составляющие складываются и формируют термостабиль-
ное опорное напряжение 1,25 В. В данном случае, однако, опорное напря-
жение недоступно напрямую, а существует в виртуальной форме, как опи-
сано выше. Оно появляется на выходе делителя с коэффициентом RJR2 с
нулевым импедансом и подается через (выделено пунктиром) на пос-
ледовательное соединение Dx и Ry
Когда замкнутый контур стабилизатора находится в установившемся
состоянии, напряжение на виртуальном узле ИОН равно:
(7.17)
V = V \_________
^[r^r,
Проведя небольшие преобразования, получаем стандартное выражение
для выходного напряжения стабилизатора:
V К 1 +—L
г вых r REF
(7.18)
В различных устройствах серии ADP33xx делитель R— R2 подстроен та-
ким образом, чтобы обеспечивать стандартные выходные напряжения от
1,5 до 5,0 В.
Как можно заметить из описанного выше, в данной схеме отсутствует
опорный ток (/REF на рис. 7.27), который характерен для стандартной кон-
фигурации ИОН и который вызывает дополнительное рассеивание мощно-
сти. В действительности стабилизатор на рис. 7.35 работает так, словно
усилитель ошибки имеет напряжение смещения KREF, снимаемое с выхода
стандартного делителя Rl—R2.
Схемные особенности, относящиеся
к динамическим характеристикам
В то время как описанные выше улучшения характеристик по постоянному
потоку в серии ADP33xx сами по себе заслуживают внимания, более впе-
чатляющие улучшения имеются в области показателей по переменному току.
Именно они обуславливают название серии апуСАР®.
Основным фактором, сдерживающим применение ZDO-стабилизаторов,
является емкостная нагрузка и вызываемая ею потенциальная нестабиль-
ность. Несмотря на то что по соображениям низкого падения напряжения в
/7)О-стабилизаторах не используются выходные каскады на эмиттерных
повторителях, обеспечивающие буферизацию от емкостной нагрузки, су-
ществует альтернативный способ устранения чувствительности к нагрузке.
Один из способов достижения определенной степени устойчивости к изме-
нениям положения полюса отклика усилителя заключается в использова-
нии метода частотной компенсации, который называется расщеплением по-
люса (pole splitting)8. Это метод компенсации усилителя, в котором два по-
люса сдвигаются таким образом, что один из них помещается в область
низких частот и становится доминирующим. При этом второй полюс (воз-
никающий из-за С£) будет давать меньший вклад в суммарный динамичес-
кий отклик схемы. В результате чувствительность усилителя к изменениям
частоты выходного полюса уменьшается.
Базовая схема расщепления полюса
Базовая схема ZDO-стабилизатора с модифицированной для расщепления
полюса частотной компенсацией показана на рис. 7.36. Здесь внутренний
компенсирующий конденсатор Скомп включен между базой и коллектором
проходного транзистора и играет роль интегратора (Ц — это входная ем-
кость проходного транзистора). Несмотря на то что этот шаг действительно
приводит к уменьшению чувствительности стабилизатора к полюсу, выз-
ванному С£, это также приводит к серьезной ошибке. Если Скомп, как пока-
зано на схеме, подключается непосредственно к базе Qv характеристики
подавления пульсаций входного напряжения сильно ухудшаются. В резуль-
тате одна проблема (чувствительность к CL) просто заменяется другой (плохое
подавление пульсаций входного напряжения).
Рис. 7.36. Решение проблемы чувствительности к CL\ компенсация расщеплением по-
люса (плохой пример!)
Расщепление полюса в апуСАР®
Вернемся вновь к схеме серии апуСАР (см. рис. 7.35). Можно заметить, что
в данном случае Скомп изолирован от базы проходного транзистора (и, следо-
вательно, от пульсаций входного напряжения) при помощи широкополосно-
го не инвертирующего драйвера. Однако из-за наличия изолирующего буфе-
ра Скомп по-прежнему выполняет функцию конденсатора, расщепляющего
полюс (см. 9), и обеспечивает выигрыш в виде буферизированного, незави-
сящего от С£ однополюсного отклика. В результате частотный отклик в боль-
шей степени определяется внутренней схемой компенсации, и стабилизатор
становится относительно нечувствительным к номиналу и ESR конденсатора
нагрузки CL. Поэтому устройства серии апуСАР оправдывают свое название
и могут работать практически с любым типом выходного конденсатора.
На рис. 7.37 приведен обзор преимуществ конфигурации апуСАР. Как
можно заметить, CL может иметь достаточно маленький номинал (вплоть
до 0,47 мкФ) и может быть многослойным керамическим (MLCC, multi-
layer ceramic capacitor). Это позволяет обеспечить функцию стабилизации
при очень малых физических размерах, например при использовании LDO-
стабилизатора апуСАР в корпусе SOT-23, такого как ADP3300. Из-за нечув-
ствительности к СL разработчик может не беспокоиться о таких вещах, как
зоны ESR, и сосредоточиться на системных аспектах применения стабили-
затора.
• Спад АЧХ в большей степени определяется внутренним конденсатором Скомп.
• Емкость CL может изменяться от 0,47 мкФ (минимум) до бесконечности.
• CL с низким и ультранизким ESR необходимы для применения.
• В качестве CL могут использоваться MLСС-конденсаторы (решение с наименьшими
физическими размерами).
• Не требуется принадлежность ESR определенной зоне.
• Возможность работы с быстрой динамической нагрузкой, хорошее подавление пуль-
саций входного напряжения.
Рис. 7.37. Достоинства LDО-стабилизаторов апуСАР®
Устройства серии LDO-стабилизаторов апуСАР
Основные характеристики £7)О-стабилизаторов серии ADP330x апуСАР
перечислены на рис. 7.38. Это семейство включает в себя устройства с оди-
ночным и сдвоенным выходом и выходными токами от 50 до 200 мА. Вме-
сто задания отдельных спецификаций на допустимое отклонение выходно-
го напряжения, стабилизацию по нагрузке и по входу и температурную
нестабильность для устройств семейства апуСАР указывается коэффициент
общей точности, характеризующий влияние всех этих параметров. Для
ADP3300, ADP3301, ADP3302, ADP3303 и ADP3307 этот коэффициент ра-
Обозначение Ут|п при lL (тип.) (мА) Точность (полная в рабо- чем диапазоне температур, %) Корпус (все корпуса, SO-8 — это Thermal Coastline) Примечания (в одиночных имеются функции NR, SD, ERR; в сдвоенном отсутствует функция NR)
ADP3300 0,08 50 1.4 SOT-23-6 Одиночный
ADP3301 0,10 100 1.4 SO-8 Одиночный
ADP3302 0,10 100 1.4 SO-8 Сдвоенный
ADP3303 0,18 200 1,4 SO-8 Одиночный
ADP3307 0,13 100 1.4 SOT-23-6 Одиночный
ADP3308 0,08 50 2,2 SOT-23-5 Одиночный
ADP3309 0,12 100 2,2 SOT-23-5 Одиночный
Рис. 7.38. £/)О-стабилизаторы серии апуСАР(
fe4
Глава 7. Схемы поддержки преобразователей данных
вен либо 0,8 % при 25 °C, либо 1,4 % во всем температурном диапазоне при
работе с входными напряжениями в диапазоне от Кых + 0,3 В (или 0,5 В) до
12 В. Для ADP3308 и ADP3309 полная точность при 25°С составляет 1,1 %,
а в диапазоне рабочих температур — 2,2 %. Важно отметить, что при таком
задании параметров учитывается работа в пределах всего диапазона паде-
ния напряжения на стабилизаторе (в отличие от некоторых LDO-стабили-
заторов, для которых указываются параметры для больших разностей меж-
ду входным и выходным напряжениями).
Серия ADP333x — это новейшее семейство LDO-стабилизаторов апуСАР,
которые обеспечивают выходные токи 200 мА и выше и имеют очень малый
ток покоя IQ. Например, типичный уровень тока холостого хода ADP333O
составляет всего 35 мкА. Имеются устройства серии ADP333x в корпусах с
улучшенными тепловыми характеристиками. На рис. 7.39 перечислены клю-
чевые характеристики семейства.
Обозначение К™, при !l (тип.) 4 (мА) Точность (полная в рабочем диапазоне температур, %) Корпус (все корпуса, SOT-23-6 — это Chip on Lead) Примечания
ADP3300 0,14 200 1,4 SOT-23-6 Одиночный
ADP3331 0,14 200 1,4 SOT-23-6 Одиночный
ADP3333 0,14 300 1,8 MSOP-8 Одиночный
ADP3334 0,20 500 1,8 SO-8 Одиночный
ADP3335 0,20 500 1,8 MSOP-8 Одиночный
ADP3336 0,20 500 1,8 MSOP-8 Одиночный
ADP3338 0,19 1000 1,4 SOT-223 Одиночный
ADP3339 0,23 1500 1,5 SOT-23-5 Одиночный
Рис. 7.39. ZDO-стабилизаторы серии апуСАР® с малым IQ
Функциональная схема
и базовый LDO-стабилизатор на 50 мА
На рис. 7.40 показана функциональная схема, общая для различных LDO-cm-
билизаторов серии апуСАР. Ниже обсуждается назначение различных вы-
водов и внутренних функциональных блоков.
LDO-стабилизаторы просты в использовании, что иллюстрируется схе-
мой базового стабилизатора на 50 мА ADP3300, показанной на рис. 7.41.
Эта схема является общей для всех устройств серии. Например, ADP3300 —
это базовый LDO-стабилизатор с фиксированным выходным напряжени-
ем, работающий от входных напряжений в диапазоне от 3 до 12 В и в
диапазоне температур от —40 до +85 °C. Реальное устройство ADP33OO име-
ет обозначение ADP3300ART-YY, где YY — суффикс, обозначающий вы-
ходное напряжение 2,7; 3; 3,2; 3,3 или 5 В. Символы «ART» в маркировке
1.2. Линейные стабилизаторы с малым падением напряжения 555
Рис. 7.41. Схема базового ZPO-стабилизатора на 50 мА ADP3300
ИС обозначают корпус (6-выводный SOT23). В ADP3300-5 показанная схе-
ма формирует напряжение 5 В.
Приведенная схема вырабатывает номинальное выходное напряжение
при токах нагрузки 50 мА или менее и входных напряжениях выше 5,3 В
(Иых + 0,3 В), когда на входе отключения (SD) присутствует ВЫСОКИЙ
уровень, обеспечиваемый либо подачей логического ВЫСОКОГО уровня
на управляющий вывод SD, либо просто привязкой этого вывода к Кх.
Когда вывод SD заземлен или на него подается сигнал НИЗКОГО логичес-
кого уровня, стабилизатор отключается. Минимальный ток покоя в этом
состоянии равен 1 мкА или менее.
ADP33OO и другие ИС серии апуСАР обеспечивают стабилизацию в
широком диапазоне нагрузок, температур и входных напряжений. При пе-
регрузке устройства или входе в диапазон собственного падения напряже-
ния (например, при понижении входного напряжения) вывод с открытым
коллектором ERR переходит в активное состояние (состояние НИЗКОГО
уровня или состояние проводимости). После того как этот вывод становит-
ся активен, внутренний гистерезис поддерживает его в таком состоянии до
восстановления рабочих условий. Резистор R{ на рис. 7.41 — это «подтяги-
вающий» к £ых резистор для выхода ERR. Этот резистор можно исклю-
чить, если «подтягивающий» ток обеспечивается нагрузкой.
Функция ERR также может активизироваться внутренней схемой за-
щиты стабилизатора от перегрева, которая срабатывает при 165 °C. Эта схе-
ма задает предельные уровни тока и температуры для защиты устройства от
непреднамеренной перегрузки. В нормальном рабочем режиме рассеивае-
мая устройством мощность ограничивается внешне при помощи теплоот-
вода, охлаждения воздушным потоком и т. п. таким образом, чтобы темпе-
ратура внутренних ^-«-переходов не превышала 125 °C.
Конденсатор С3, подключаемый между выводами 2 и 4, может исполь-
зоваться для обеспечения необязательной функции снижения шума (NR,
noise reduction). Она достигается шунтированием по переменному току час-
ти внутреннего масштабирующего делителя, за счет чего выходной шум
снижается приблизительно на 10 дБ. При реализации данной функции сле-
дует использовать только конденсаторы с малой утечкой номиналом от 10
до 100 нФ. Для достижения наилучших суммарных характеристик и мини-
мального шума номиналы входного и выходного конденсаторов следует
изменить на 1 и 4,7 мкФ соответственно. Обратите внимание, что вывод
NR подключен внутри устройства к высокоимпедансному узлу, поэтому
внешние соединения должны выполняться внимательно во избежание шу-
мов. Контактные площадки и печатные проводники, соединяющиеся с этим
выводом, должны быть как можно меньших размеров.
Вопросы теплового режима LDO-стабилизаторов
Рассеиваемая стабилизатором мощность может быть определена при помо-
щи выражения:
Р= (V - V )L + V I , (7.19)
D х вх вых7 L вх земли’ х 7
где IL и /земли — токи нагрузки и «земли», а Их и Кых — входное и выходное
напряжения соответственно. Предположим, что IL = 50 мА, /земли = 0,5 мА,
Их = 8 В и Иых = 5 В. Тогда рассеиваемая мощность равна:
PD = (8 - 5) х 0,05 -Ь 8 х 0,0005 = 0,150 +0,004 = 0,154 Вт. (7.20)
Увеличение температуры стабилизатора, А/, можно рассчитать по сле-
дующей формуле (предположим, что О.А стабилизатора равно 165°С/Вт):
\Т = Т}- ТА = PDx 0JA = 0,154 Вт х 165°С/Вт = 25,4°C. (7.21)
При максимальной температуре р-л-перехода, равной 125 °C, максималь-
ная безопасная рабочая температура окружающей среды равна 125—25,4 °C,
т. е. чуть ниже 100 °C. Так как это значение превышает номинальный верх-
ний предел диапазона температур устройства (85 °C), оно будет надежно
работать во всем диапазоне рабочих температур.
Эта общая процедура расчета может использоваться и для остальных
устройств серии с учетом 0JA конкретного корпуса и рабочих условий. Под-
робное описание вопросов теплового режима приведено в гл. 9.
7.2. Линейные стабилизаторы с малым падением напряжения 557
Разводка и конструкция печатной платы также могут в значительной
степени влиять на допустимую рассеиваемую ИС стабилизатора мощность.
Причина этого заключается в том, что основным способом передачи тепла
корпусами для поверхностного монтажа, используемыми для подобных ус-
тройств, являются проводящие дорожки и контактные площадки. Поэтому
для обеспечения отвода тепла, вызванного рассеиванием мощности стаби-
лизатором, необходимо применять определенные методы разводки печат-
ных плат. Следующие правила разводки помогают достигать наименьшего
теплового сопротивления корпусов SOT-23 и SO-8.
1. Печатные проводники с большими площадями поперечного сечения отво-
дят большее количество тепла. Для достижения оптимальных результатов
используйте широкие проводники из меди с большим удельным весом (2 унции)
на верхней стороне печатной платы.
2. Электрически соедините дублирующиеся выводы Их и Квых параллельно и
подключите их к соответствующим проводникам V и V с большой площа-
J I Г вх вых 1
дъю поперечного сечения.
3. Если требуется рассеивать максимальную мощность, используйте двух-
сторонние медные полигоны, соединенные множеством переходных отверстий.
4. По возможности увеличьте площадь проводящей тепло поверхности (по-
верхностей), открытой для воздушного потока, чтобы обеспечить отвод теп-
ла за счет конвекции (или принудительного охлаждения).
5. Не используйте трафарет для нанесения припоя или шелкографию по-
верх проводников, рассеивающих тепло, так как при этом возрастает сум-
марное тепловое сопротивление монтированного корпуса.
Реальный пример, показанный на рис. 7.42 (фотография отладочной
платы ADP3300 площадью 1,5 кв. дюйма), иллюстрирует перечисленные
правила в большей степени, чем слова. Площадь на плате, выделенная квад-
ратом, — это действительная площадь активной схемы.
Как видно из этого рисунка, вывод 4 и вывод Ивых соединены с провод-
ником с большой площадью поперечного сечения, имеющего форму буквы
«U» и расположенного в нижней части внутри квадрата.
Общие размеры платы:
1,5 х 1,5 дюйма
□ ANALOG
DEVICES ADP3300
SANTA CLARA DIVISION
EOUT
ANALOG POWER
10 мкФ/16 В
Танталовый конденсатор
(КЕМЕТ Т491С Series)
Рис. 7.42. Оценочная плата ADP3300. Размер конденсатора может иметь значение!
Этот рисунок позволяет оценить влияние архитектуры апуСАР® на раз-
меры входного и выходного конденсаторов Сх и С2 емкостью 0,47 мкФ (рас-
положены вблизи от левого верхнего угла квадрата). Для сравнения за пре-
делами квадрата помещен танталовый конденсатор на 10 мкФ/16 В (Kemet
Т491С), который может использоваться с более стандартными LDO-стаби-
лизаторами. Его размеры в несколько раз превышают размеры выходного
конденсатора С2.
Последние достижения в области корпусирования привели к значитель-
ному улучшению тепловых характеристик ИС стабилизаторов. Они эф-
фективно применяются в семействе LDО-стабилизаторов апуСАР®. Во всех
8-контактных устройствах семейства в качестве базисной используется вы-
водная рамка с улучшенными тепловыми характеристиками. Корпус с такой
выводной рамкой называется «Thermal Coastline» и показан на рис. 7.43. Улуч-
шение теплопередачи в нем основано на изменении двух ключевых пара-
метров конструкции выводной рамки — расстояния и ширины. Выигрыш
при использовании технологии «Thermal Coastline» заключается в пони-
женном тепловом сопротивлении выводной рамки: всего 90 °С/Вт по срав-
нению с 160°С/Вт для стандартного корпуса SO-8. Это позволяет стаби-
лизаторам серии апуСАР® в данном варианте корпуса SO-8 рассеивать более
1 Вт при температуре 25 °C.
Стандартный SOIC
0JA = 160’С/Вт
Рис. 7.43. В стабилизаторах серии апуСАР® в корпусах SO-8 используется технология
«Thermal Coastline»
На рис. 7.44 поясняется, каким образом новая конструкция выводной
рамки увеличивает теплопередачу. При взгляде на него можно отметить,
что расстояние между выводами и основанием в корпусе «Thermal Coastline»
(справа) уменьшено, а ширина окончаний выводов увеличена по сравне-
нию со стандартной выводной рамкой (слева).
ADP3330 и ADP3331 представляют собой LDO-стабилизаторы апуСАР®
на 200 мА в 6-выводном корпусе SOT-23, в котором для улучшения тепло-
вых характеристик применен патентованный метод корпусирования Chip-
on-Lead™ (кристалл на кристаллоносителе). В стандартном корпусе SOT-23
основная часть тепла отводится через земляной вывод. В новом корпусе
используется электрически изолированное крепление кристалла (die attach).
что позволяет всем выводам участвовать в отводе тепла. За счет этого теп-
ловое сопротивление уменьшается до 165°С/Вт на четырехслойной плате
по сравнению с более чем 230 °С/Вт для стандартной выводной рамки кор-
7.2. Линейные стабилизаторы с малым падением напряжения
Стандартная форма
Расстояние
между выводом
и посадочной площадкой
уменьшается
в 1,5—2 раза
Центр корпуса
увеличивается
в 2—2,5 раза
Форма
«Thermal Cjastline»
Рис. 7.44. Детали корпуса «Thermal Coastline»
Кремниевый
кристалл
Кремниевый кристалл
с электрически
изолированной
посадкой
165’С/Вт по сравнению с >230’С/Вт для стандартного корпуса SOT-23
Рис. 7.45. Корпус SOT-23-6 Chip-on-Lead™ с улучшенными тепловыми характеристиками
110“С/Вт по сравнению с >160’С/Вт
для стандартного корпуса MSOP-8
Рис. 7.46. 8-выводный корпус MSOP
«Paddle-Under-Lead» с улучшенными теп-
ловыми характеристиками
пуса SOT-23. Различие между вывод-
ными рамками стандартного корпуса
SOT-23 и корпуса Chip-on-Lead™ ил-
люстрирует рис. 7.45.
В L ДО-стабилизаторах серии апуСАР®
ADP3333 (300 мА), ADP3335 (500 мА)
и ADP3336 (500 мА) для гарантии наи-
лучших характеристик корпуса MSOP-
8 применяется технология «paddle-
under-lead». Для того чтобы все выводы
участвовали в отводе тепла, в данном
корпусе используется изолированное
крепление кристалла. Этот метод по-
зволяет понизить тепловое сопротив-
ление до 110 °С/Вт на 4-слойной пе-
чатной плате по сравнению с более чем 160°С/Вт для корпуса MSOP-8 со
стандартной выводной рамкой. Физическая конструкция выводной рамки
«paddle-under-lead» показана на рис. 7.46.
£/)О-стабилизаторы апуСАР® ADP3338 (1 А) и ADP3339 выпускаются в
корпусе SOT223 с улучшенными тепловыми характеристиками (рис. 7.47).
Тепловое сопротивление 0JA корпуса SOT-223 определяется как сумма теп-
ловых сопротивлений ^-«-переход—корпус и корпус—среда. Тепловое со-
противление переход—корпус 0JC определяется конструкцией корпуса и равно
а б
ejA = 126,6 °С/Вт 0JA = 102,9 °С/Вт
в
ejA = 58,8°С/Вт
26,8 °С/Вт, а тепловое сопротивление корпус—среда определяется конст-
рукцией печатной платы. Как показано на рис. 7.47, площадь медного по-
крытия, на которое монтируется ADP3338/ADP3339, влияет на тепловые
характеристики. Если устройство монтируется на контактные площадки
минимального размера из меди с удельным весом 2 унции (рис. 7.47, а), 0JA
равно 126,6 °С/Вт. При добавлении небольшой медной площадки под кор-
пусом ADP3338 (рис. 7.47, б) ^уменьшается до 102°С/Вт. Увеличение площа-
ди медного покрытия до 1 кв. дюйма (рис. 7.47, в) приводит к дальнейшему
уменьшению 0JA до 52,8 °С/Вт. Обратите внимание, что и вывод 2, и вывод 4
являются выходом LDO-стабилизатора и соединены внутри корпуса.
Контроллеры LDO-стабилизаторов
В дополнение к автономным LDO-стабилизаторам в серии апуСАР® также
имеется ИС контроллера LDO-стабилизатора. За счет использования внеш-
него проходного полевого /?-МОП транзистора ИС контроллера стабилиза-
тора помогает там, где автономный стабилизатор не справляется из-за тре-
бований к току нагрузки или рассеиваемой мощности. ADP3310 — это ба-
зовый контроллер LDO-стабилизатора с фиксированным выходным
напряжением, работающий при входных напряжениях от 3,8 до 15 В в ди-
апазоне температур от —40 до +85 °C. Реальное устройство ADP3310 имеет
• Контроллер управляет внешними мощными полевыми p-МОП транзисторами:
—- lL и Umin определяются выбранным транзистором;
— небольшая схема стабилизатора на двух кристаллах может обеспечивать до 10 А.
• Преимущества по сравнению с интегрированными решениями:
— фиксированные напряжения с высокой точностью (1,5%): 2,8; 3; 3,3 и 5 В;
— гибкость применения (характеристики определяются выбранным транзистором);
— малая площадь стабилизатора при использовании контроллера апуСАР™ и SMD
полевого транзистора;
— возможен выход с кельвин-чувствительностью;
— экономичная интегральная схема ограничения тока.
Рис. 7.48. Особенности контроллера Л/Ю-стабилизатора ADP331O апуСАРс
7.2. Линейные стабилизаторы с малым падением напряжения
обозначение ADP3310ART-YY, где YY — суффикс, обозначающий выход-
ное напряжение 2,8; 3; 3,3 или 5 В. Символ «ART» в маркировке ИС указы-
вает тип корпуса (SO-8 Thermal Coastline). На рис. 7.48 перечислены основ-
ные особенности ИС ADP3310.
Отличия контроллера стабилизатора
Основное очевидное отличие контроллера стабилизатора от автономного
стабилизатора заключается в удалении проходного элемента за пределы
кристалла. Это решение имеет как преимущества, так и недостатки. Поло-
жительной стороной является то, что имеется возможность выбора внеш-
него проходного />-МОП транзистора в таком корпусе и с такими размера-
ми, номинальным током и мощностью, которые наиболее подходят для
каждой конкретной задачи. Этот подход позволяет применять одну и ту же
базовую ИС контроллера для обеспечения токов от сотен миллиампер до 10 А
и более, просто подбирая нужный транзистор. Кроме того, так как /земли ИС
контроллера стабилизатора равен всего 800 мкА, то она рассеивает очень
небольшую мощность и, следовательно, имеет меньший температурный
дрейф. Недостатком является то, что при использовании данного подхода
для создания полнофункционального стабилизатора необходимо два кор-
пуса. Помимо этого, функция ограничения тока (которая в автономной ИС
£/)О-стабилизатора может быть полностью интегрирована) в данном слу-
чае должна распределяться между ИС контроллера стабилизатора и вне-
шним резистором. Это также приводит к некоторому увеличению падения
напряжения контроллера ££Ю-стабилизатора примерно на 50 мВ.
Функциональная схема контроллера стабилизатора AD3310 показана на
рис. 7.49. Усилитель ошибки, ИОН и масштабирующий делитель этой схе-
мы похожи на аналогичные блоки автономного стабилизатора апуСАР и
подробно обсуждаться не будут. Контроллер стабилизатора, как и автоном-
ные стабилизаторы этой серии, нечувствителен к конденсатору нагрузки и
также имеет функцию отключения, управляемую выводом EN (enable).
Рис. 7.49. Функциональная блок-схема контроллера ZDO-стабилизатора серии апуСАР®
Основным отличием архитектуры ИС контроллера стабилизатора явля-
ется буферированный выход усилителя, выведенный наружу через вывод
СЛГЕдля управления внешним />-МОП полевым транзистором. Кроме того,
в ней присутствует чувствительный усилитель, предназначенный для ограни-
чения тока, который имеет пороговое напряжение 50 мВ и сравнивает напря-
жение между выводами Кх и Is. Когда это напряжение превышает 50 мВ,
усилитель берет на себя управление замкнутым контуром, отключая усили-
тель ошибки и ограничивая выходной ток на заранее заданном уровне.
Базовый контроллер LDO-стабилизатора на 5 В/1 А
Контроллер Л7)О-стабилизатора прост в использовании, так как все, что
необходимо для формирования ZDO-стабилизатора, — это />-МОП полевой
транзистор, резистор и два относительно небольших конденсатора (по од-
ному на входе и выходе). На рис. 7.50 показана общая конфигурация стаби-
лизатора на 5 В/1 А, работающего от Кх = 6 В, построенного на ИС кон-
троллера ADP3310-5.
Такой стабилизатор (как и любой другой представитель семейства
апуСАР) стабилен практически при любом качественном выходном кон-
денсаторе CL, Требуемые номинал и ESR конденсатора CL зависят от gm и
емкости внешнего />-МОП транзистора. В общем случае для гарантии ста-
бильности при токах нагрузки до 10 А достаточно выходного конденсатора
емкостью 10 мкФ. Если возможны большие выходные токи перегрузки,
могут использоваться конденсаторы большей емкости. В таких случаях пред-
почтительнее применять конденсаторы с малым ESR, такие как электроли-
тические OS-CON, так как они дают наименьшие пульсации на выходе.
При менее высоких требованиях могут подойти стандартные танталовые
или алюминиевые электролитические конденсаторы. Если используется
конденсатор второго типа, то он должен обладать приемлемыми характери-
стиками во всем рабочем диапазоне температур. Входной конденсатор СВХ
необходим, только если стабилизатор расположен на расстоянии несколь-
ких дюймов или более от фильтрующего конденсатора источника нестаби-
лизированного постоянного напряжения. Однако так как Свх имеет неболь-
шой размер, то в большинстве случаев не будет лишним добавить его вбли-
зи от вывода Ех стабилизатора.
NDP6020P
Рис. 7.50. Базовая схема включения контроллера ZDO-стабилизатора ADP3310 на 1 А
с внешним p-МОП полевым транзистором
7.2. Линейные стабилизаторы с малым падением напряжения
563J
Выбор проходного транзистора
Тип и размер проходного транзистора определяются требованиями к поро-
говому напряжению, разности между входным и выходным напряжениями,
току нагрузки, рассеиваемой мощности и тепловому сопротивлению. Выб-
ранный проходной />-МОП транзистор должен удовлетворять всем этим
электрическим, а также физическим и тепловым параметрам. Ряд произво-
дителей выпускает подходящие устройства в различных корпусах от SO-8
до ТО-220.
Максимально возможное управляющее напряжение контроллера долж-
но быть адекватным для управления полевым транзистором при наихудших
значениях температурного диапазона и производственных допусков. Уп-
равляющее напряжение, подаваемое контроллером на проходной транзис-
тор, может быть определено по формуле:
у = у _ у _ т r (7 22)
GS (DRIVE) вх BE l (max)2\$" v 7
Здесь Квх — минимальное входное напряжение, /£(тах) — максимальный ток
нагрузки, Rs — считывающий резистор и VBE — внутреннее напряжение в
ADP3310 (~0,5 В при высокой температуре, 0,9 В при низкой температу-
ре и 0,7 В при комнатной температуре). Обратите внимание, что, так как
4 (max) х *s не превысит 75 мВ, a VBE при низкой температуре приблизитель-
но равно 0,9 В, это выражение можно еще более упростить:
^.-1 в- <7-23)
Для схемы, показанной на рис. 7.50, V = 6 В и V =5 В, следователь-
А вх вых 7
НО’ ^GS (DRIVE) — 6 — 1 — 5 В.
Следует отметить, что приведенные выше выражения относятся к слу-
чаю, когда управляющее напряжение полевого транзистора ниже типично-
го фиксированного напряжения затвор-исток, равного 8 В (задано в ADP3310
в целях защиты транзистора).
Задача проекта, таким образом, сводится к выбору полевого транзис-
тора, который имеет Лр5(вкл), достаточно низкое для того, чтобы резуль-
тирующее падение напряжения было меньше Их — Кых (в рассматривае-
мом случае —1 В). Максимальное значение Яр?(вкл) транзистора NDP6020P
(см. |0), показанного на рис. 7.50, составляет 70 мОм при KGV, равном 2,7 В,
что значительно ниже VGS(DRIVE} ИС ADP3310, равного 5 В. Падение напря-
жения Ип.п в такой конфигурации стабилизатора равно сумме двух паде-
ний напряжения — падения напряжения на транзисторе и падения напря-
жения на Rs\
V . - IJ( <R^( , + 7L). (7.24)
min L (max)v DS (вкл) S' x '
В рассматриваемой схеме два сопротивления примерно сравнимы друг
с другом, и суммарное Kmin равно 1 А х (50 + 70) мОм = 120 мВ.
Для того чтобы проект имел запас прочности, следует выбрать транзис-
тор, для которого указан уровень VGS при требуемом значении RDS, и обес-
печить достаточную разницу между возможным {DRIVE} ADP3310 и номи-
нальным VGS транзистора. В рассматриваемой схеме имеется значительный
запас прочности, так как управляющее напряжение равно 5 В, a VGS равно
2,7 В. Следует иметь в виду, что VGS и ЛП5( транзистора изменяются с
температурой, однако при использовании NDP6020P схема будет работать
с учетом этих изменений и при VGS = 4,5 В. При номинальном постоян-
ном входном напряжении 6 В это означает, что схема удовлетворяет всем
консервативным требованиям для выходного напряжения 5 В. На практи-
ке данная схема обычно будет работать с минимальным входным напря-
жением порядка Квых плюс падение напряжения (120 мВ), т. е. приблизи-
тельно 5,12 В. Так как NDP6020P имеет достаточно низкий порог, он
обычно будет работать и при более низких выходных напряжениях (при-
близительно до 3 В).
В ситуации, когда выход закорачивается на «землю», выбранный про-
ходной транзистор должен быть способен проводить максимальный ток ко-
роткого замыкания, как мгновенный, так и длительный.
Расчет теплового режима
При определении типа корпуса транзистора и теплоотвода (если он пона-
добится) необходимо учитывать максимально допустимое тепловое сопро-
тивление между его />-л-переходом и окружающей средой.
В случаях, когда это возможно, необходимо монтировать проходной
полевой транзистор непосредственно на печатную плату и в качестве теп-
лоотвода использовать медные контактные площадки. Такой тип теплоот-
вода вероятно будет достаточным при рассеиваемой транзистором мощ-
ности порядка 1—2 Вт или менее. Обратите внимание, что сама природа
LDO-стабилизатора сильно способствует реализации такого подхода, так
как чем меньше падение напряжения на проходном элементе, тем меньше
рассеиваемая мощность. В нормальных условиях, например, транзистор Qr
показанный на рис. 7.52, рассеивает менее 1 Вт при токе 1 А, так как паде-
ние напряжения на нем составляет менее 1 В.
Для того чтобы эффективно использовать площадки на печатной плате
под теплоотвод при работе с SO-8 и другими корпусами для поверхностно-
го монтажа, необходимо следовать рекомендациям по способу монтажа,
обеспечивающему наименьшее 0JA. приводимым производителями транзис-
торов (см. п’12). В целом эти рекомендации будут соответствовать пяти пра-
вилам, приведенным в разделе «Вопросы теплового режима LDO-стабили-
заторов» для LDO-стабилизаторов апуСАР в корпусах SO-8 и SOT-23. Для
достижения наименьшего возможного теплового сопротивления также сле-
дует соединить дублирующие выводы транзистора вместе.
Электрически соедините дублирующие выводы стока и истока полевого
транзистора и подключите их к соответствующим площадкам под Rs и Кых,
имеющим большую площадь.
При использовании в качестве теплоотвода контактной площадки пло-
щадью 1 кв. дюйм из меди с удельным весом 2 унции можно добиться для
устройств в корпусе SO-8 суммарного теплового сопротивления, 0JA, поряд-
ка 60 °С/Вт или менее (см. и). Также существуют разнообразные корпуса
больших габаритов с меньшим тепловым сопротивлением, чем у SO-8, ко-
торые подходят для поверхностного монтажа. Примерами таких корпусов
являются DPAK, D2PAK и т. д.
7.2. Линейные стабилизаторы с малым падением напряжения
Для задач,
где должна рассеиваться большая мощность и необходимо
иметь тепловое сопротивление 50 °С/Вт или менее, требуется применение
внешнего теплоотвода с креплением на болт. Они могут использоваться,
например, с корпусом ТО-220, в котором выпускается показанный на схе-
ме на рис. 7.52 транзистор NDP6020P.
Тепловое сопротивление можно определить по формуле:
Т -Т
п _ J Л(тах) Z-7
“ja ~ V Г ’ (7.25)
AS'(max)'* L
где Tj — предельная температура перехода проходного транзистора, ТА —
максимальная температура окружающей среды, KD5(max) — максимальное
напряжение сток—исток проходного транзистора и /£(тах) — максимальный
ток нагрузки.
Подставив для примера следующие цифры: максимальная температу-
ра перехода NDP6020P — 125 °C, ожидаемая температура окружающей
среды — 75 °C, KD5(max) - 1,7 В, /L(max) = 1 А, получаем требуемое
0JA = (125 °C—75 °С)/1,7 = 29,4°С/Вт.
Такое значение может быть обеспечено очень простым теплоотводом.
Транзистор NDP6020P в корпусе ТО-220 имеет тепловое сопротивление
переход—корпус, 0JC, равное 2 °С/Вт. Требуемое тепловое сопротивление
внешнего теплоотвода, 0СА, определяется выражением:
^СА ~ ®JA ~ &JC' (7.26)
где 0СА — требуемое тепловое сопротивление корпус—окружающая среда
теплоотвода, 0JA — вычисленное суммарное тепловое сопротивление пере-
ход-окружающая среда и 0JC — тепловое сопротивление переход—корпус
проходного транзистора (для устройств в корпусе ТО-220 и NDP6020P, в
частности, типичное значение 2°С/Вт).
0СА = 29,4 °С/Вт - 2 °С/Вт = 27,4 °С/Вт. (7.27)
Для обеспечения запаса прочности следует выбирать теплоотвод, 0СА
которого меньше, чем рассчитанное по этой формуле. Например, 0СА тепло-
отвода #576802 на корпус ТО-220 производства Aavid равно 18,8 °С/Вт.
Многие другие теплоотводы также обладают 0СА меньшим либо равным
25 °С/Вт. В качестве альтернативы в том же самом проекте может использо-
ваться проходной транзистор NDB6020P в корпусе D2PAK с 5Л/2)-теплоот-
водом, таким как Advid573300, используемым совместно с теплоотводом в
виде проводящих площадок печатной платы.
Обратите внимание, что во многих схемах на базе ££Ю-стабилизаторов
наподобие описанной выше предъявляются скромные требования к тепло-
отводу. Все это прекрасно до тех пор, пока выход не закорачивается! При
закороченном выходе ток возрастает до предельного уровня (до 1,5 А в
данном случае), а напряжение, падающее на проходном транзисторе, дос-
тигает Ивх (которое может быть равно максимальному номинальному значе-
нию). В этом случае рассеиваемая проходным транзистором мощность со-
ставит 1,5 А х 6,7 В или приблизительно 10 Вт. Для обеспечения непрерыв-
Глава 7. Схемы поддержки преобразователей данных
ного рассеивания такой мощности необходимо полностью пересмотреть
требования к теплоотводу, так как то, что является адекватным для 1,7 Вт,
неадекватно для 10 Вт. В действительности для поддержки непрерывного
рассеивания мощности 10 Вт потребуется теплоотвод, обладающий 0JA по-
рядка 3 °С/Вт и, следовательно, имеющий большие габариты.
Считывающие резисторы
для контроллеров LDO-стабилизаторов
Ограничение тока в контроллере ADP3310 достигается выбором подходя-
щего внешнего считывающего резистора Rs, подключаемого между выво-
дами Их и Is (исток) контроллера. Порог для ограничения тока задается
внутренне формируемым пороговым напряжением 50 мВ, появляющимся
между этими выводами. Это значение определяет точку, при которой начи-
нается ограничение тока. Для непрерывного ограничения тока организует-
ся режим «защиты с падающей характеристикой» (foldback), когда рассеи-
ваемая мощность управляется уменьшением напряжения затвора. В результа-
те работы схемы защиты предельный уровень тока становится равным 2/3
максимального. Такое ограничение значительно уменьшает рассеиваемую
проходным элементом мощность.
Номинал считывающего резистора, Rs, для максимального выходного
тока определяется по формуле:
в °’05
(7.28)
В числителе этого выражения присутствует номинальное пороговое напря-
жение токоограничения 50 мВ. Знаменатель содержит масштабирующий
множитель Кг принимающий значения 1,0 или 1,5, и максимальный ток
нагрузки IL. Например, при масштабирующем множителе 1,0 и IL. равным
1 A, Rs очень просто определяется и составляет 50 мОм.
Однако для учета погрешностей установки порогового напряжения и
обеспечения большего запаса по выходному току следует использовать мас-
штабирующий множитель Кр = 1,5. При этом для того же тока нагрузки 7Л,
равного 1 А, требуемое сопротивление Rs составит 33 мОм. В сущности,
использование масштабирующего множителя 1,5 учитывает уменьшение
выходного тока за счет работы схемы защиты, что позволяет обеспечить
больший ток в режиме ограничения.
Простейшим и самым дешевым резистором для схем с большими тока-
ми наподобие приведенной на рис. 7.50 является медный печатный провод-
ник определенной толщины и ширины. При проектировании такого рези-
стора следует принимать во внимание и температурную зависимость меди,
и относительный размер проводника. ТКС меди является положительным
и равен +0,39 %/°С. Этот естественный ТКС меди в совокупности с поро-
говым напряжением токоограничения, получаемым из РТАТ (пропорцио-
нального абсолютной температуре) напряжения, может обеспечить простую
и имеющую хорошие температурные показатели характеристику токоогра-
ничения.
7.2. Линейные стабилизаторы с малым падением напряжения
В таблице на рис. 7.51 приведены значения сопротивлений для медных
печатных проводников с различной толщиной (удельным весом) в унциях
меди на квадратный фут площади. В центральном столбце приведены зна-
чения коэффициента сопротивления, который равен отношению сопро-
тивления проводника в миллиомах на дюйм к ширине проводника W. На-
пример, в первом элементе столбца приведен коэффициент сопротивления
для меди с удельным весом 1/2 унции, который равен 0,9893 мОм/дюйм/Вт.
Таким образом, для ширины проводника 0,1" сопротивление составит
9,83 мОм/дюйм. Так как эти величины линейно взаимосвязаны, они могут
масштабироваться для более толстых/узких проводников и различных тол-
щин меди. Например, для получения ^номиналом 50 мОм из меди с удель-
ным весом 1/2 унции может использоваться печатный проводник шириной
0,05" и длиной 2,54".
Толщина меди Коэффициент сопротивления, мОм/дюйм/Вт (ширина проводника и/ в дюймах) Коэффициент сопротивления для проводника шириной 0,1", мОм/дюйм
1/2 0,983 9,83
1 0,491 4,91
2 0,246 2,46
3 0,163 1,63
Рис. 7.51. Сопротивление медных печатных проводников
Для минимизации ошибок при считывании напряжения подключение к
резистору Rs, как показано на рис. 7.50, следует выполнять по четырехто-
чечной схеме. В действительности абсолютной необходимости в использо-
вании четырехвыводных резисторов нет, за исключением случаев, когда
требуются максимальные уровни тока. Однако, как минимум, большие токи,
протекающие в цепи истока проходного транзистора, не должны проникать
на проводники считывающего вывода ADP3310. Для минимизации таких
ошибок проводник, по которому Кх подводится к ADP3310, должен прохо-
дить вблизи от резистора (или его выходного считывающего вывода). Важ-
ность четырехвыводного включения возрастает при работе с выходными
токами 1 А или более.
Кроме того, в качестве считывающего резистора также могут использо-
ваться резисторы для поверхностного монтажа, выпускаемые рядом произ-
водителей (см. 13). Считывающий резистор может и не понадобиться, если
функция токоограничения обеспечивается схемой, от которой поступает
входное напряжение. В таких случаях выводы Is и Их ИС ADP3310 необхо-
димо соединить друг с другом.
Вопросы разводки печатной платы
Для наилучшей стабилизации напряжения нагрузку необходимо разместить
как можно ближе к выводам Ивых и GND контроллера. Там, где требуется
наилучшая стабилизация, вывод Иь[х ИС ADP3310 и сток проходного тран-
зистора следует соединять с положительным выводом нагрузки раздельны-
Глава 7. Схемы поддержки преобразователей данных
ми проводниками. Этот шаг (кельвин-чувствительность) предотвратит про-
никновение больших токов из стока проходного прибора в цепь чувстви-
тельной обратной связи и приведет к увеличению точности выходного на-
пряжения. Аналогичным образом вывод GND ИС ADP3310 и общий вывод
нестабилизированного источника входного напряжения также следует со-
единять с общим выводом нагрузки раздельными проводниками.
Контроллер LDO-стабилизатора на 2,8 В/8 А
При внесении небольших изменений базовая схема ZDO-стабилизатора на
1 А, показанная на рис. 7.50, может быть преобразована в ZDO-стабилиза-
тор на 8 А, показанный на рис. 7.52. В этой схеме для формирования вы-
ходного напряжения 2,8 В используется ADP3310-2.8. Номинал считыва-
ющего резистора уменьшен до 5 мОм, что позволяет работать с токами до 10 А
(или приблизительно 6,7 А при активной функции токоограничения). Для
минимизации ошибок необходимо организовать четырехпроводное вклю-
чение считывающего резистора.
Наиболее значимое отличие этой конфигурации от более общей схемы,
приведенной на рис. 7.50, заключается в использовании нескольких вход-
ных и выходных развязывающих конденсаторов с низким ESR. Конденса-
тор С2 на выходе схемы представляет собой набор из четырех конденсато-
ров OS-CON емкостью по 220 мкФ, соединенных параллельно с двумя «чи-
повыми» MLCC конденсаторами емкостью по 10 мкФ. Они расположены
вблизи от нагрузки и должны соединяться с ней проводниками, обладаю-
щими минимальной индуктивностью. Кроме того, соединение набора кон-
денсаторов с выводом Ивых ADP3310 и стоком проходного элемента должно
осуществляться раздельными проводниками. Использование такой развод-
ки обеспечивает максимальную точность выходного напряжения по посто-
янному току, а использование нескольких конденсаторов минимизирует
ошибки на выводе нагрузки, вызванные переходными процессами. Поми-
мо этого, за счет использования нескольких развязывающих конденсаторов
на входе стабилизатора, показанных на схеме как Ср минимизируются
ошибки, вызываемые импульсами во входном напряжении на выводе Их
стабилизатора.
Рис. 7.52. Контроллер стабилизатора на 2,8 В/8 А
7.3. Аналоговые ключи и мультиплексоры
Требования к теплоотводу для проходного элемента в этой схеме дикту-
ются нагрузкой и выходным напряжением и определяются при помощи
процедур, описанных выше.
Список литературы
7.2. Линейные стабилизаторы
с малым падением напряжения
1. Bob Widlar. New Developments in IC Voltage Regulators. IEEE Journal of Solid
State Circuits, Vol. SC-6, February, 1971.
2. Robert C. Dobkin. 3-Terminal Regulator is Adjustable. National Semiconductor AN-
181, March, 1977.
3. Paul Brokaw. A Simple Three-Terminal IC Bandgap Voltage Reference. IEEE
Journal of Solid State Circuits, Vol. SC-9, December, 1974.
4. Frank Goodenough. Linear Regulator Cuts Dropout Voltage. Electronic Design, April
16, 1987.
5. Chester Simpson. LDO Regulators Require Proper Compensation. Electronic Design,
November 4, 1996.
6. Frank Goodenough. Vertical-PNP-Based Monolithic LDO Regulator Sports Advanced
Features. Electronic Design, May 13, 1996.
7. Frank Goodenough. Low Dropout Regulators Get Application Specific. Electronic
Design, May 13, 1996.
8. Jim Solomon. The Monolithic Op Amp: A Tutorial Study. IEEE Journal of Solid
State Circuits, Vol. SC-9, No.6, December 1974.
9. Richard J. Reay, Gregory T.A. Kovacs. An Unconditionally Stable Two-Stage CMOS
Amplifier. IEEE Journal of Solid State Circuits, Vol. SC-30, No. 5, May 1995.
10. NDP6020P/NDB6020P Р-Channel Logic Level Enhancement Mode Field Effect
Transistor, Fairchild Semiconductor data sheet, September 1997, www.fairchildsemi.com.
11. Alan Li, etall. Maximum Power Enhancement Techniques for SO-8 Power MOSFETs.
Fairchild Semiconductor application note AN1029, April 1996, www.fairchildsemi.com.
12. Rob Blattner, Wharton McDaniel. Thermal Management in On-Board DC-to-DC
Power Conversion. Temic application note, www.temic.com.
13. «S» series surface-mount current sensing resistors, KRL/Bantry Components, 160
Bouchard Street, Manchester, NH, 03103-3399, 603-668-3210.
7.3. Аналоговые ключи и мультиплексоры
Уолт Кестер
Введение
Полупроводниковые аналоговые ключи и мультиплексоры являются важ-
ными компонентами электронных систем, в которых необходимое управ-
ление или выбор определенного пути прохождения аналогового сигнала.
Эти устройства используются в разнообразных приложениях, включая мно-
гоканальные системы сбора данных, управление процессами, измеритель-
ное оборудование, видеосистемы и т. п.
Одним из первых коммерческих аналоговых мультиплексоров являлся
MOSES-8, выпущенный подразделением Pastoriza Division компании Analog
Глава 7. Схемы поддержки преобразователей данных
Сегодня:
ADG725.ADG726,
ADG731, ADG732:
• 8 каналов
• Время переключения 100 нс
• Сопротивление во включенном
состоянии 500 Ом
• Сопротивление в выключенном
состоянии >100 МОм
• $320
• 32 канала
• Время переключения 30 нс
• Сопротивление во включенном
состоянии 4 Ом
• Сопротивление в выключенном
состоянии 7 мм2 CSP или TQFP
• <$5
Рис. 7.53. Аналоговый MOSFET мультиплексор «MOSES-8» производства подразделе-
ния Pastoriza компании Analog Devices, 1969 год
Devices в 1969 году; он показан на рис. 7.53. Эта плата мультиплексора
состояла из восьми ключей на МОП полевых транзисторах (MOSFET) и
восьми драйверов ключей, имела время переключения 100 нс и сопротив-
ление во включенном состоянии 500 Ом. Ее цена в 1969 году составляла 320
долларов. Для работы с входными напряжениями ±5 В этот мультиплексор
требовал напряжение питания ±15 В, а для работы с входными напряжени-
ями ±15 В — напряжение питания +15 и —28 В. На сегодняшний день
компанией Analog Devices выпускаются 32-канальные мультиплексоры
ADG725/ADG726/ADG731/ADG732 в корпусах CSP (chip scale package)
размером 7x7 мм и TQFP (Thin Quad Flat Pack), имеющие сопротивление
во включенном состоянии 4 Ом и ток покоя 20 мкА. Цена такого устрой-
ства менее 5 долларов.
С развитием КМОП-технологий (позволяющих создавать хорошие
/г-МОП и л-МОП транзисторы на одной подложке) в середине 1970-х годов
ключи и мультиплексоры были быстро переведены на интегральные мик-
росхемы, например такие, как популярная серия AD7500 производства Analog
Devices (выпущена в 1973 году). Аналогичное семейство с диэлектрической
изоляцией было представлено в 1976 году. Устройства этого семейства об-
ладали защитой от перенапряжения на входе на уровнях ±25 В (выше на-
пряжений питания) и были нечувствительны к защелкиванию.
Эти ранние КМОП-ключи и мультиплексоры обычно работали с уров-
нями сигналов до ±10 В при напряжении питания ±15 В. В 1979 году ком-
пания Analog Devices представила популярное семейство ключей и мульти-
плексоров ADG200, а в 1988 году — серию ADG201, которая производилась
с использованием патентованной КМОП-технологии, совместимой с ли-
нейными устройствами (LC2MOS, Linear Compatible CMOS). Эти ИС позво-
ляли работать с входными сигналами ±15 В при напряжении питания ±15 В.
7.3. Аналоговые ключи и мультиплексоры 571
В 1980—1990-х годах было выпущено большое количество ключей и
мультиплексоров, и общая тенденция в эти годы заключалась в уменьше-
нии сопротивления во включенном состоянии, времени переключения,
напряжения питания, стоимости, рассеиваемой мощности и переходе на
корпуса для поверхностного монтажа с меньшими габаритами.
На сегодняшний день выпускаются аналоговые ключи и мультиплексо-
ры в разнообразных конфигурациях и с различными опциями и практичес-
ки для любого приложения можно найти подходящее устройство. При ис-
пользовании современных КМОП-технологий возможно реализовать со-
противление во включенном состоянии менее 0,5 Ом, токи утечки порядка
пикоампер, полосу пропускания более 1 ГГц и работу от однополярного
питания 1,8 В.
Несмотря на то что сегодня большинство ключей и мультиплексоров
производятся с использованием КМОП-технологий, в специальных прило-
жениях коммутации и мультиплексирования они не обеспечивают требуе-
мую производительность и здесь используются биполярные (с JFET) и ком-
плементарные биполярные (также с возможностью реализации JFET) тех-
нологии. Традиционные КМОП-ключи и мультиплексоры обладают рядом
недостатков при работе на видеочастотах. Они обычно недостаточно быст-
ро переключаются и требуют внешней буферизации для работы с типичной
видеонагрузкой. Кроме того, небольшие изменения сопротивления КМОП-
ключа во включенном состоянии (модуляция 7?вкл) могут привести к неже-
лательным искажениям дифференциального усиления и дифференциаль-
ной фазы. Наилучшим решением на видеочастотах являются мультиплек-
соры на базе комплементарной биполярной технологии, несмотря на то что
они более дорогостоящие и рассеивают большую мощность, чем КМОП-
устройства.
Основы КМОП-ключей
Идеальный аналоговый ключ не имеет сопротивления во включенном со-
стоянии, обладает бесконечным импедансом в выключенном состоянии и
нулевой задержкой и устойчив к большим сигнальным и синфазным на-
пряжениям. Реальные аналоговые КМОП-ключи не удовлетворяют ни од-
ному из этих критериев, однако большинство недостатков аналоговых клю-
чей может быть преодолено, если понять причины их возникновения.
КМОП-ключи обладают превосходной комбинацией свойств. Стандар-
тный полевой МОП-транзистор представляет собой резистор, управляемый
напряжением. Во «включенном» состоянии его сопротивление может со-
ставлять менее 1 Ом, а в «выключенном» оно возрастает до нескольких
мегом при пикоамперных токах утечки. КМОП-технология совместима с
логическими схемами и позволяет достигать большой плотности компо-
новки в ИС. КМОП-ключи обладают малыми временами переключения
при минимальных паразитных эффектах.
Полевые МОП-транзисторы являются двунаправленными. Это означа-
ет, что они могут в равной степени переключать положительные и отрица-
тельные напряжения и проводить положительные и отрицательные токи.
Сопротивление полевого МОП-транзистора управляется напряжением и,
Напряжение сигнала
p-МОП л-МОП
Рис. 7.54. Зависимость сопротивления ключа на МОП-транзисторе во включенном
состоянии от напряжения сигнала
как показано на рис. 7.54, нелинейно изменяется в зависимости от прило-
женного напряжения
Комплементарная МОП-технология (КМОП) позволяет реализовывать
хорошие полевые МОП-транзисторы с и- и p-каналами. Базовая схема дву-
направленного КМОП-ключа, показанная на рис. 7.55, образуется парал-
лельным соединением /?-МОП и и-МОП транзисторов. Такая комбинация
уменьшает сопротивление во включенном состоянии и приводит к гораздо
меньшему изменению сопротивления в зависимости от напряжения прило-
женного сигнала.
Рисунок 7.56 иллюстрирует изменение сопротивления в зависимости от
управляющего напряжения для транзисторов с п- и ^-каналом. Такой нели-
нейный характер сопротивления может вызвать ошибки как по постоянно-
му, так и по переменному току. Двунаправленный КМОП-ключ миними-
зирует эту проблему. Нижняя кривая на рис. 7.56 иллюстрирует улучшение
характеристики сопротивления во включенном состоянии при использова-
нии двунаправленного ключа.
7.3. Аналоговые ключи и мультиплексоры
Рис. 7.56. Зависимость сопротивления КМОП-ключа во включенном состоянии от
напряжения сигнала
Устройства серии КМОП-ключей ADG8xx специально разработаны для
обеспечения сопротивления во включенном состоянии менее 0,5 Ом и про-
изводятся с использованием субмикронных технологий. Эти устройства могут
пропускать токи до 400 мА, работают от однополярного питания в диапазо-
не от 1,8 до 5,5 В, и его характеристики поддерживаются в расширенном
температурном диапазоне от —40 до + 125 °C. На рис. 7.57 показана зависи-
мость сопротивления этих устройств во включенном состоянии от темпе-
ратуры и уровня входного сигнала.
Рис. 7.57. Зависимость сопротивления
во включенном состоянии от уровня
входного сигнала для КМОП-ключа
ADG801/ADG802 (VDD = +5 В)
Уровень входного сигнала, В
Источники ошибок в КМОП-ключах
Важно понимать источники возникновения ошибок в КМОП-ключах. Мно-
гие из них влияют и на статические, и на динамические показатели ключа,
в то время как некоторые влияют только на динамические. На рис. 7.58
показана эквивалентная схема двух смежных КМОП-ключей на одном кри-
сталле. Эта модель учитывает токи утечки и емкости переходов.
На рис. 7.59 показаны статические ошибки при нахождении одиночного
КМОП-ключа во включенном состоянии. Когда ключ включен, на статичес-
кие показатели в основном влияют сопротивление ключа во включенном
состоянии (Я ) и ток утечки ULKC')- Комбинация RO—R.—RLOAD образует
Рис. 7.58. Эквивалентная схема двух КМОП-ключей на одном кристалле
Ключ
у =v [____________________
вых VBX о о □
[_nG + Лвкл -г nLOAD
RlOAD (^вкл + )
Rg + Дзкл + ^LOAD
Если Rg -> О
RlOAD L I LOAD вы
. Дзкл + RlOAD J L Дзкл + RlOAD
Рис. 7.59. Факторы, влияющие на статические характеристики ключа во включенном
состоянии: R , Яг„лп и
резистивный аттенюатор, что приводит к появлению ошибки передачи. Ток
утечки протекает через эквивалентное сопротивление параллельного соеди-
нения Rload с /?би 7?вкл. Сопротивление 7?вкл может вызывать не только ошиб-
ки передачи (которые могут быть откалиброваны путем подстройки усиле-
ния системы); его изменение в зависимости от напряжения приложенного
сигнала (модуляция 7?вкл) может вносить искажения, которые не могут быть
откалиброваны. Схемы с низким сопротивлением нагрузки более подвер-
жены ошибкам, вызываемым /?вкл, а схемы с высоким сопротивлением нагруз-
ки — ошибкам, вызываемым током утечки. На рис. 7.59 также приведены
формулы, описывающие влияние этих параметров на статические показатели.
Когда ключ находится в выключенном состоянии, ток утечки, как пока-
зано на рис. 7.60, может вызывать появление ошибок. Ток утечки, протека-
ющий через сопротивление нагрузки, приводит к появлению соответствую-
щего напряжения ошибки на выходе.
7.3. Аналоговые ключи и мультиплексоры
Ток утечки создает ошибку выходного напряжения, равную:
V = I х R
вых LKG LOAD
Рис. 7.60. Факторы, влияющие на статические характеристики ключа в выключенном
состоянии: R.„.n и
LOAD LKG
Рисунок 7.61 иллюстрирует паразитные компоненты, которые влияют
на динамические показатели КМОП-ключей. Добавление дополнительных
внешних емкостей приведет к еще большему ухудшению характеристик.
Эти емкости влияют на сквозное прохождение сигнала, уровень перекрес-
тных помех и ширину полосы системы. Суммарная передаточная функция
формируется емкостями CDS (исток—сток), CD (сток—земля) и CL0AD совме-
стно с сопротивлениями 7?вкл и RL0AD-
^LOAD
. ЯLOAD + ^ВЮ1
___________SRbkhC DS + 1_______
4?°^ 1(Cto«RG+CD+CDS) + l
V "LOAD + ^вкл )
Д(дБ) = 20 log f I + 10 log p (ЯВ,ЛСО5Г + ll- 10log®2 I (Ct0„D + CD + CDS)2 +1
k "LOAD + **вкл / J \ "LOAD + Мвкл J
Рис. 7.61. Динамические показатели: частотная передаточная характеристика
Емкость CDS эквивалентной схемы создает ноль в числителе передаточ-
ной функции A(s). Обычно он появляется на высоких частотах, так как
сопротивление ключа во включенном состоянии мало. Ширина полосы
пропускания также зависит от комбинации выходной емкости ключа, CDS и
емкости нагрузки. Частотный полюс, определяемый этими емкостями, по-
является в знаменателе выражения.
Выражение для полной передаточной функции в частотной области может
быть переписано в виде, приведенном на рис. 7.62, где показан общий гра-
фик Боде для ключа во включенном состоянии. В общем случае частота
полюса ниже частоты нуля из-за доминирующего эффекта выходной емко-
сти CD. Таким образом, для достижения максимальной полосы пропуска-
ния ключ должен обладать низкими входной и выходной емкостями и низ-
ким сопротивлением во включенном состоянии.
Последовательная проходная емкость, CDS, не только приводит к появ-
лению нуля в отклике ключа во включенном состоянии, но и ухудшает
Глава 7. Схемы поддержки преобразователей данных
Полоса частот и точность
d(S)4 Rl°*d—
I RlOAD + ^вкл
j (sRbkjTdS +
[ ДЮЛРДвкл |/p , p , p \,1
S p p l\ULO4D + UD + UDS J + 1
V "LOAD + "вкл )
np _ ^LOAD^BKjy f _ O' 59 f _____________O' 1 59_____
LJ'^'усиления — p rj ’ ’0 ~ rj s' ’ 'полюса — / p p \
"LOAD + "вил Г'вкл0DS HLOADHBKJ} r r \
p , p KUL04D + UD + UDS
k "LOAD + ''вкл J
Рис. 7.62. График Боде передаточной функции КМОП-ключа, находящегося во вклю-
ченном состоянии
характеристики сквозного прохождения сигнала ключа в выключенном со-
стоянии. Как показано на рис. 7.63, когда ключ выключен, входной сигнал
проникает на нагрузку через CDS.
Уровень сквозного прохождения возрастает с увеличением C[)S и про-
порционален частоте входного сигнала. Рисунок 7.64 иллюстрирует ухуд-
шение изоляции в выключенном состоянии с увеличением частоты. Про-
стейшим способом обеспечения максимальной изоляции в выключенном
состоянии является выбор ключа, имеющего наименьшую возможную CDS.
На рис. 7.65 показана типичная зависимость изоляции аналогового
КМОП-ключа в выключенном состоянии от частоты на примере 8-каналь-
ного мультиплексора ADG708. На частотах от нуля до нескольких килогерц
мультиплексор обладает изоляцией почти 90 дБ. По мере увеличения час-
тоты увеличивается величина сигнала, проникающего на выход. Но даже на
частоте 10 МГц данный ключ обеспечивает уровень изоляции почти 60 дБ.
Другим динамическим эффектом, который влияет на показатели систе-
мы, является инжекция заряда, которая происходит в момент переключения.
Эквивалентная схема механизма инжекции заряда показана на рис. 7.66.
При подаче сигнала активного уровня на управляющий вход управляю-
щая схема изменяет напряжение, прикладываемое к затвору КМОП-ключа,
Изоляция в выключенном
состоянии определяется
................ — внешними R и С нагрузки
д (s) =___s (rload ) (С ds )_
S (RlOAD ) (CLOAD + CD + CDS ) + 1
Рис. 7.63. Динамические показатели: изоляция в выключенном состоянии
7.3. Аналоговые ключи и мультиплексоры
Изоляция в выключенном
состоянии, дБ
Рис. 7.64. Зависимость изоляции в выключенном состоянии от частоты
Рис. 7.65. Зависимость изоляции в выключенном состоянии от частоты для 8-каналь-
ного мультиплексора ADG708
Напряжение ступенчатой формы ±(VDD - Vss) прикладывается к емкости Со
затвора выходного ключа
Рис. 7.66. Динамические показатели: модель инжекции заряда
на достаточно большую величину (например, из VDD в Vss, или наоборот).
Это быстрое изменение напряжения вызывает инжекцию заряда на выход
ключа через емкость затвор—сток CQ. Количество переносимого заряда за-
висит от величины этой емкости.
19-2852
Глава 7. Схемы поддержки преобразователей данных
з в
Рис. 7.67. Влияние инжекции заряда на выходной сигнал
Инжекция заряда приводит, как показано на рис. 7.67, к появлению
скачкообразного изменения в выходном напряжении при переключении.
Изменение выходного напряжения ДКых зависит от количества инжектиро-
ванного заряда Qinj (которое, в свою очередь, зависит от емкости затвор-
сток CQ) и емкости нагрузки CL.
Другой проблемой, вызванной емкостью ключа, является остаточный
заряд {retained charge) после переключения каналов. Этот заряд может вы-
зывать переходные процессы в выходном сигнале ключа. Данный феномен
иллюстрируется рис. 7.68.
Предположим, что в исходном состоянии S2 замкнут, а — разомкнут.
Емкости С5 и Cs заряжены до —5 В. Когда S2 размыкается и 5^ замыкается,
на С5 и С5 сохраняется напряжение —5 В. Таким образом, в выходном
Рис. 7.68. Зарядовая связь вызывает появление переходных процессов при мульти-
плексировании сигналов
7.3. Аналоговые ключи и
напряжении усилителя А появится переходный процесс от воздействия —5 В.
Выходное напряжение не стабилизируется до тех пор, пока выходы усили-
телей А не разрядят полностью С5 и Cs^ и установятся на уровне О В. Этот
переходный процесс запечатлен на фотографии, сделанной с экрана осцил-
лографа (на рис. 7.69). В связи с этим при выборе подходящего входного
буфера важно учитывать характеристики установления сигнала усилителя
при динамической нагрузке.
Выход усилителя
500 мВ/дел
Рис. 7.69. В выходном напряжении усилите-
ля присутствует переходный процесс из-за
зарядовой связи
Управление ключом
5 В/дел
швмямв
UCM»E3
Горизонтальная шкала:
200 нс/дел
С взаимной емкостью двух ключей связано понятие перекрестных помех.
Этот эффект моделируется в виде емкости Css, показанной на рис. 7.70.
Рис. 7.70. Эквивалентная схема
межканальных перекрестных по-
мех в ключах, расположенных на
одном кристалле
На рис. 7.71 показана типичная характеристика перекрестных помех для
8-канального КМОП-мультиплексора ADG708.
Рис. 7.71. Зависимость уровня перекрестных помех от частоты для 8-канального муль-
типлексора ADG708
л f FLKnRLnAD ~ \( , % Ошибки
От «Выкл.» к «вкл.»: tSEn = Г8КЛ + -— 04 (CLO4D + CD) ~ln----------------^7-----
к Нвкл + '’LOAD ) V 1 vv
От «Выкл.» к «вкл.»: tSErT = Гвыкл + (Rload)(Cload + CD)p„ % ^qq6^]•
Рис. 7.62. График Боде передаточной функции КМОП-ключа, находящегося во вклю-
ченном состоянии
И наконец, сам ключ имеет время установления, которое необходимо
учитывать. На рис. 7.72 показана динамическая передаточная функция. Время
установления можно вычислить на основании того, что отклик зависит от
сопротивлений и емкостей ключа и внешней схемы. Можно предположить,
что эта система является однополюсной, и вычислить число постоянных
времени, которое необходимо для установления сигнала до уровня, обеспе-
чивающего требуемую точность системы (рис. 7.73).
Разрешение, число бит Младший разряд (% FS) Число постоянных времени
6 1,563 4,16
8 0,391 5,55
10 0,0977 6,93
12 0,0244 8,32
14 0,0061 9,70
16 0,00153 11,09
18 0,00038 12,48
20 0,000095 13,86
22 0,000024 15,25
Рис. 7.73. Число постоянных времени, которое необходимо для установления сигнала
до точности 1 LSB в однополюсной системе
Применение аналоговых ключей
Время переключения является важным вопросом в применении аналого-
вых ключей, однако его не следует путать с временем установления. Время
включения (ON time) и выключения (OFF time) является просто мерой за-
держки распространения от момента изменения сигнала на управляющем
входе до переключения ключа и в значительной степени определяется вре-
7.3. Аналоговые ключи и мультиплексоры 581
• и ^выкл не Должны отождествляться с
временем установления;
• ^вкл и ^выкл являются мерой задержек сра-
батывания ключа относительно входного
сигнала. Они вызваны временными задер-
жками в логических цепях драйвера и
сдвига уровня;
• гвкл и ^выкл измеряются от 50 %-ного уров-
ня входного сигнала до 90 %-ного уровня
выходного сигнала.
Рис. 7.74. Применение аналоговых ключей: динамические показатели
менными задержками в цепях драйверов и сдвига уровня (рис. 7.74). Значе-
ния /вкл и /выкл обычно измеряются от точки 50 % переднего фронта сигнала
на управляющем входа до точки 90 % уровня выходного сигнала.
Далее мы рассмотрим вопросы, связанные с буферизацией выхода
КМОП-ключа или мультиплексора при помощи операционного усилителя.
Следует отметить, что, когда КМОП-мультиплексор подключает входные
сигналы к инвертирующему суммирующему усилителю, сопротивление во
включенном состоянии и его нелинейное изменение в зависимости от вход-
ного напряжения вызовут искажения и ошибки усиления (рис. 7.75). Если
резисторы имеют большое сопротивление, ошибку также может вызывать
ток утечки ключа. Применение резисторов небольшого номинала миними-
зирует ошибку, вызванную током утечки, однако увеличивает ошибку, выз-
ванную
±10 в
±10 в
±10 в
±10 в
вкл
Рис. 7.75. Применение аналоговых ключей: инвертирующий усилитель с единичным
усилением и коммутируемым входом
ДЯвкл, вызывая Д 1/х, ухудшает
линейность 1/вых от Vbx;
ДЯвкл вызывает ошибку уси-
ления Увых от Увх.
Для уменьшения влияния изменения Явкл, вызванного изменением вход-
ного напряжения, целесообразно подключить мультиплексирующие ключи
к суммирующему узлу операционного усилителя, как показано на рис. 7.76.
Этим гарантируется, что ключи будут модулироваться напряжением всего
±100 мВ, а не полным ±10 В, однако в данном случае потребуется подклю-
чить к каждому входу ключа отдельный резистор.
Важно знать, какая паразитная емкость добавляется к суммирующему
узлу в результате подключения мультиплексора, так как любая дополни-
тельная емкость в этом узле вносит фазовый сдвиг в отклик усилителя при
замкнутом контуре обратной связи. Если емкость слишком велика, усили-
тель может стать нестабильным и осциллировать. Для стабилизации схемы
Глава 7. Схемы поддержки преобразователей данных
• Ключ действует на вирту-
альную «землю».
• На ключ подается ±100 мВ
вместо ±10 В, что миними-
зирует ДЯ кл.
Рис. 7.76. Применение аналоговых ключей: минимизация влияния ДАвкл
может потребоваться подключение параллельно резистору обратной связи
небольшой емкости Сг
Ненулевое значение 7?вкл может являться источником значительной ошиб-
ки в схеме, показанной на рис. 7.77. Для обеспечения точности усиления
0,01 % необходимо, чтобы сопротивление резисторов, задающих усиление,
по меньшей мере в 1000 раз превышало сопротивление ключа во включен-
ном состоянии. Большие значения дадут большую точность, однако приве-
дут к уменьшению полосы пропускания и повышению чувствительности к
токам утечки и смещения.
• ДЯвкл мало по сравнению с нагруз-
кой ключа 1 мОм.
• Влияние на точность передачи ми-
нимизировано.
• Влияние токов смещения и утечки
является здесь особенно важным.
• Полоса частот цепи уменьшается.
Рис. 7.77. Применение аналоговых ключей: минимизация влияния Д/?вкл при помощи
резисторов больших номиналов
Более хороший метод компенсации 7?вкл заключается в помещении до-
полнительного включенного ключа последовательно с резистором обрат-
ной связи инвертирующего усилителя, как показано на рис. 7.78. Можно с
достаточной уверенностью предположить, что ключи, расположенные на
одном кристалле, имеют хорошо согласованные абсолютные характеристи-
ки и изменение характеристик с температурой. Поэтому при единичном
усилении контур обратной связи усилителя стабилен, так как суммарные
резисторы прямой и обратной связи согласованы.
Наилучшим вариантом является подключение мультиплексора к не-
инвертирующему входу усилителя, как показано на рис. 7.79. Высокий
входной импеданс неинвертирующего входа исключает ошибки, вызывае-
мые Я
7.3. Аналоговые ключи и мультиплексоры
SW,
—оЛМ-о
SHZ
sw2
Ry 10 кОм
±1 о в о~—
R2 10 кОм
±10 в
Я3 10 кОм
± 10 В О"
Rf = 10 кОм
.. —------------ ~Wv "' —" —
Всегда включен Фазовая компенсация,
чтобы исключить влияние С
КМОП-ключи
ключей
siy,
—o-Wro
Рис. 7.78. Применение аналоговых ключей: использование «холостого» ключа в обрат-
ной связи для минимизации ошибок усиления, вызванных ДАвкл
Рис. 7.79. Применение аналоговых ключей: минимизация влияния Д/?вкл за счет ис-
пользования неинвертирующей конфигурации
КМОП-ключи и мультиплексоры часто используются совместно с опера-
ционными усилителями для создания усилителей с программируемым уси-
лением (PGA, programmable gain amplifier). Чтобы понять влияние /?вкл на их
показатели, рассмотрим пример плохой схемы PGA, показанный на рис. 7.80.
Неинвертирующий операционный усилитель имеет 4 различных задающих
усиление резистора, каждый из которых заземляется ключом, имеющим
/?вкл порядка 100—500 Ом. Даже если /?вкл равно всего 25 Ом, ошибка для
коэффициента усиления 16 составит 2,4 %, что превышает требуемую точ-
ность при разрядности 8 бит! /?вк1 также изменяется с температурой; кроме
того, разные ключи имеют разное 7?вкл.
Можно попытаться «исправить» этот проект, увеличив сопротивление
резисторов, но тогда возникнут проблемы, связанные с шумом и смещени-
ем. Единственным способом повысить точность этой схемы является ис-
пользование реле, которые практически не имеют 7?вкл. Реле имеет 7?вкл по-
рядка нескольких миллиом, что даст очень малую ошибку.
Предпочтительнее использовать схему, которая нечувствительна к 7?вкл!
На рис. 7.81 ключ помещен последовательно с инвертирующим входом опе-
рационного усилителя. Так как операционный усилитель имеет очень вы-
сокий входной импеданс, /?вкл ключа не имеет значения, и усиление будет
• Точность усиления ограничивается сопротивлением R включенного ключа и моду-
ляцией Явы1.
• Типичные Явкл от 1 до 500 Ом для ключей на КМОП или ПТ с управляющим р-п-
переходом.
• При Явкл = 25 Ом имеется ошибка усиления 2,4% для G = 16.
• Дрейф Явкл превышает температурные пределы точности.
• Наиболее используемые ключи с очень малым Явкл.
Рис. 7.80. Плохо спроектированный PGA на базе КМОП-ключей
• не включено последовательно с резистором
установки усиления.
• Явкл много меньше входного импеданса.
• Только малая ошибка смещения появляется из-за
тока смещения, протекающего через ключи.
Рис. 7.81. В альтернативной конфигурации PGA эф-
фекты Авкл минимизированы
определяться исключительно внешними резисторами. Заметьте: если опе-
рационный усилитель имеет большой ток смещения, 7?вкл может вызвать не-
большой дополнительный сдвиг выходного уровня. В таком случае он может
быть легко компенсирован эквивалентным сопротивлением в узле Кх.
КМОП-ключи с полосой 1 ГГц
ADG918/ADG919 — это первые ключи на базе КМОП-технологий, обес-
печивающие высокую изоляцию и малое вносимое затухание на частотах
до 1 ГГц и выше. Эти ключи обладают низким вносимым затуханием (0,8 дБ)
и сравнительно высокой изоляцией в выключенном состоянии (37 дБ) при
передаче сигнала частотой 1 ГГц. Они являются менее дорогостоящей аль-
тернативой арсенид-галиевым (GaAs) ключам в высокочастотных схемах
при мощностях сигналов +18 дБм или менее, при температуре 25 °C. Блок-
схема этих устройств показана на рис. 7.82, а на рис. 7.83 приведены графи-
ки зависимостей изоляции и вносимого затухания от частоты.
7.3. Аналоговые ключи и мультиплексоры
Поглощающий
Отражающий
ключ ключ
Рис. 7.83. Изоляция и частотный отклик ключей AD918/AD919 с полосой 1 ГГц
Рис. 7.82. КМОП 2:1 мультиплексоры/ЛРЛТ ключи с полосой 1 ГГц и напряжениями
питания от 1,65 до 2,75 В
ADG918 представляет собой поглощающий ключ с нагруженными на
50 Ом параллельными плечами для согласования импеданса в схеме, а
ADG919 — отражающий ключ, предназначенный для использования с вне-
шними согласующими цепями. Оба устройства обладают малой потребляе-
мой мощностью (потребляемый ток менее 1 мкА), выпускаются в мини-
атюрных корпусах (8-контактный MSOP и 3 мм х 3 мм LFCSP) и имеют
LVTTL/CMOS-совместимые уровни управляющего напряжения, что делает
их идеальными для применения в задачах коммутации ВЧ-сигналов, в час-
тности в беспроводной связи.
Видеоключи и мультиплексоры
Высокоскоростные комплементарные биполярные технологии более под-
ходят для создания видеоключей и видеомультиплексоров, удовлетворяю-
щих жестким спецификациям по неравномерности АЧХ, дифференциаль-
ным усилению и фазе и способности работать с нагрузкой 75 Ом, чем КМОП-
технологии. Традиционные КМОП-ключи и мультиплексоры обладают рядом
недостатков при работе на видеочастотах. Они обычно имеют недостаточ-
ное для современных приложений время переключения (типичное значе-
ние — 50 нс или около того) и требуют внешней буферизации для работы с
4: 1
мультиплексор
2: 1
мультиплексор
Сдвоенный
2: 1
мультиплексор
2: 1
мультиплексор
Рис. 7.84. Биполярные видеомультиплексоры AD8170, AD8174, AD8180 и AD8182
типичной видеонагрузкой. (Субмикронные КМОП преодолели эти недо-
статки. — Примеч. ред.) Кроме того, небольшие изменения сопротивления
КМОП-ключа во включенном состоянии в зависимости от уровня сигнала
(модуляция 7?вкл) могут привести к нежелательным искажениям дифферен-
циального усиления и дифференциальной фазы. Наилучшим решением на
видеочастотах являются мультиплексоры на базе комплементарной бипо-
лярной технологии, несмотря на то что они более дорогостоящие и рассеи-
вают большую мощность, чем КМОП-устройства.
На рис. 7.84 показаны функциональные блок-схемы биполярных видео-
мультиплексоров AD8170, AD8174, AD8180 и AD8182, а на рис. 7.85 — муль-
типлексоров AD8183 и AD8185. Эти устройства дают высокую степень гиб-
кости и идеально подходят для видеоприложений за счет их превосходных
показателей по дифференциальному усилению и дифференциальной фазе.
Время переключения всех устройств семейства составляет 10 нс до точнос-
ти 0,1 %. ИС AD8186/8187 представляют собой версии AD8183/8185 с одно-
полярным питанием. Обратите внимание, что эти биполярные мультиплек-
соры не являются двунаправленными.
Строенный
2: 1
мультиплексор
inoa[T-
dgnd[T
inia[T
gnd|T
VccU
IN2B|T
gnd[T
IN1B[io
gnd|ji
INOB [« -
AD8183/AD8185
Выбор
24] VCC
— 23]OE
— 22] SEL Д/В
- 20] OUTO
i^vEE
Te] outi
izlvcc
ie]0UT2
I^Vee
mJdvcc
AD8183: G = +1
(AD8186)
AD8185: G = +2
(AD8187)
AD8186/AD8187:
вариант с одним
источником
питания +5 В
Рис. 7.85. Встроенные в ИС 2: 1 видеомультиплексоры AD8183/AD8185
7.3. Аналоговые ключи и мультиплексоры 587
Рис. 7.86. Мультиплексор для двух источников АбЯ-видеосигналов на базе трех 2 : 1
мультиплексоров
В состав устройств серии мультиплексоров AD8170/AD8184 входит внут-
ренний выходной буфер на операционном усилителе с обратной связью по
току, усиление которого может задаваться внешне. Типичный уровень изо-
ляции канала в выключенном состоянии и перекрестных помех на частоте
5 МГц превышает 80 дБ.
На рис. 7.86 показан пример схемы с тремя 2 : 1 мультиплексорами AD8170,
в которой на один монитор подключается Л(7в-видеосигнал от одного из
двух компьютеров.
Показанная схема представляет собой трехполюсный ключ на два на-
правления (three-pole double-throw). Три полюса — это три составляющие ви-
деосигнала, а два направления — это верхний и нижний источники. Отме-
тим, что эта схема может быть упрощена при использовании одного встроен-
ного мультиплексора на два положения AD8183, AD8185, AD8185 или AD8187.
На рис. 7.87 показана схема, позволяющая оцифровывать ЛСВ-выходы
сканера при помощи высокоскоростного АЦП, в которой используется 4 : 1
мультиплексор AD8174 или AD8184.
ЛСД-видеосигналы подаются на АЦП последовательно, что позволяет
использовать для оцифровки сигнала сканера один АЦП.
Рис. 7.87. Оцифровка R^-сигналов при помощи одного АЦП и мультиплексора 4: 1
Глава 7. Схемы поддержки преобразователей данных
Видео кросс-коммутаторы
Концепция мультиплексоров расширена в ИС AD8116, представляющей
собой полностью интегрированный матричный 16 х 16 видеокоммутатор
(рис. 7.88). Устройство имеет следующие характеристики: AD8116 содер-
жит выходные буферы, которые могут переводиться в высокоимпедансное
состояние. При этом отключенные каналы не нагружают выходную шину,
что позволяет соединять несколько каскадов коммутации параллельно (по
схеме «монтажного ИЛИ»). Управление коммутацией каналов осуществ-
ляется при помощи последовательного цифрового интерфейса, который допус-
кает подключение нескольких устройств по схеме с последовательным
опросом. AD8116 выпускается в 128-выводном корпусе LQFP, имею-
щем размеры 14 х 14 мм. Семейство коммутаторов также включает в
себя 8x8 коммутатор AD8108/AD9109, 16x8 буферированный коммутатор
с полосой 260 МГц AD8113, 16 х 16 аудио/видео коммутатор AD8113 и
недорогие 16 х 16 коммутаторы с полосой 255 МГц AD8114/AD8115.
Рис. 7.88. 16 х 16 буферированный видеокоммутатор с полосой 200 МГц AD8116
Цифровые коммутаторы
AD8152 — это 34 х 34 асинхронный цифровой коммутатор на 3,2 Гбит/с,
предназначенный для применения в высокоскоростных сетях (рис. 7.89).
Устройство работает со скоростями данных до 3,2 Гбит/с на порт, что дела-
ет его подходящим для сетей Sonet/SDH ОС-48 с прямым исправлением
ошибок (FEC, Forward Error Correction). AD8152 имеет выходы с цифровым
программированием уровня тока, сигналы с которых могут подаваться на
разнообразные согласующие схемы с различными импедансами при сохра-
нении правильного уровня напряжения и минимизации потребляемой мощ-
ности. Устройство работает с напряжением питания всего +2,5 В и имеет
превосходную входную чувствительность. Управляющий интерфейс совме-
стим с уровнями LVTTL и CMOS/TTL.
7.3. Аналоговые ключи и мультиплексоры
Рис. 7.89. Асинхронный цифровой
коммутатор на 3,2 Гбит/с AD8152
AD8152 обладает самым низким потреблением среди всех коммутато-
ров, имеющих сравнимые характеристики: он рассеивает менее 2 Вт при
напряжении питания 2,5 В при активности всех линий ввода/вывода и не
требует внешнего теплоотвода. Малый уровень дрожания фазы (менее 45 пс)
делает AD8152 идеальным для применения в высокоскоростных сетях. Ис-
пользование в AD8152 полностью дифференциального сигнального тракта
уменьшает дрожание фазы и перекрестные помехи и, одновременно, по-
зволяет работать с малым размахом, соответствующим однополярному низ-
ковольтовому источнику напряжения. Устройство выпускается в 256-кон-
тактном шариковом корпусе SBGA и работает в промышленном темпера-
турном диапазоне от 0 до +85 °C.
Семейства ключей и мультиплексоров производства
Analog Devices
Выбор подходящего ключа или мультиплексора для конкретного приложе-
ния может являться сложной задачей по причине того, что на настоящий
момент имеется большое количество подобных устройств. В этом процессе
неоценимую помощь могут оказать руководства по выбору (Selection Guides),
выпускаемые Analog Devices. На рис. 7.90 перечислены основные семейства
КМОП-ключей и мультиплексоров в порядке уменьшения напряжения пи-
тания. Несмотря на то что этот перечень не претендует на полноту, он дает
основное представление о доступных устройствах. На рис. 7.91 перечисле-
ны семейства биполярных ключей и мультиплексоров. Семейство шинных
переключателей ADG32xx более подробно описывается в гл. 9.
Паразитное защелкивание в КМОП-ключах
и мультиплексорах
Так как мультиплексоры часто используются на входе системы сбора дан-
ных, сигналы на их входы, в общем случае, поступают от удаленных источ-
ников. Поэтому данные устройства часто могут подвергаться перенапряже-
• ADG2xx, ADG4xx, ADG5xx: ±15 В.
• ADG508F, ADG509F, ADG528F, ADG438F, ADG439F: ±15 В, с защитой от повреждения.
• ADG12xx: ±15 В, малое Явкл (2 Ом).
• ADG14xx: ±15 В, малая Свкл (2 пФ).
• ADG6xx: однополярное +5 В (для некоторых ниже 5 В) или ±5 В:
“ *вкл = 3 Ом=
— инжектируемый заряд 1 пикокулон;
— 125'С.
• ADG7xx: однополярное +5 В (для некоторых всего +1,8 В):
— некоторые в корпусах CSP;
— инжектируемый заряд 3—5 пикокулонов;
— для некоторых Явкл всего 2,5 Ом.
• ADG8xx: однополярное от +1,8 В до +5,5 В:
— R < 0,5 Ом.
вкл ’
• ADG9xx: однополярное от +1,65 В до +2,75 В:
— ВЧ ключи с полосой более 1 ГГц.
• ADG3xxx: шинные переключатели и преобразователи логических уровней.
Рис. 7.90. Семейства КМОП-ключей и мультиплексоров производства Analog Devices
• Видеоключи и мультиплексоры:
— AD8074, AD8075, AD8170, AD8174, AD8180, AD8182, AD8184, AD8185, AD8186,
AD8187.
• Видеокоммутаторы:
-AD8108, AD8109, AD8110, AD8111, AD8114, AD8115, AD8116.
• Аудио/видео коммутатор:
- AD8113.
• Цифровые коммутаторы:
— AD8150, AD8151, AD8152, ADSX34.
Рис. 7.91. Высокоскоростные биполярные ключи и мультиплексоры производства AD
нию. Несмотря на то что эта тема подробно обсуждается в гл. 9, понимание
того, как перенапряжение влияет на КМОП-схемы, особенно важно. Хотя
в этом разделе обсуждаются мультиплексоры, те же принципы применимы
почти ко всем КМОП ИС.
Большинство аналоговых КМОП-ключей построено на базе КМОП-тех-
нологии с изоляцией р-л-переходами. На рис. 7.92 показан вид одиночного
ключа в разрезе. Паразитная SCR (silicon controlled rectifier) фиксация состо-
Рис. 7.92. Вид КМОП-ключа с изоляцией р-л-переходами в разрезе
7.3. Аналоговые ключи и мультиплексоры
Рис. 7.93. Эквивалентная схема на биполярных транзисто-
рах для КМОП-ключа, иллюстрирующая эффект паразит-
ного Л'СЛ-защелкивания
яния («защелкивание») может произойти, если
на выводе ключа присутствует напряжение, ко-
торое выше VDD или ниже Vss. Она может про-
изойти даже при воздействии переходного на-
пряжения, возникающего, например, когда в
момент включения питания на входе присутствует
напряжение. Если ток проводимости при защел-
кивании имеет слишком высокий уровень (не-
сколько сотен миллиампер или более), он может
повредить ключ.
Рисунок 7.93 иллюстрирует механизм паразитного SCR-защелкивания. Это
явление происходит, когда на любом из выводов ключа (истоке или стоке)
присутствует напряжение, которое на величину одного диодного падения на-
пряжения выше VDD или ниже Vss. В первом случае вывод VDD становится
запускающим входом 5С7?-триггера и обеспечивает ток, который вызывает
защелкивание. Во втором случае входом SCR, обеспечивающим запускающий
ток, становится вывод Vss. В любом из случаев между выводами питания по-
течет большой ток. Величина этого тока зависит от сопротивлений коллекто-
ров двух биполярных транзисторов, которые могут быть достаточно малыми.
В общем случае для предотвращения защелкивания нельзя допускать
подачу на входы КМОП-схем напряжения на 0,3 В выше положительно-
го или ниже отрицательного напряжений питания. Обратите внимание,
что это ограничение также касается ситуаций, когда питание отключено
(Ирр = Vss = 0 В). Поэтому устройства могут подвергаться защёлкиванию,
если в момент подачи питания на их входах присутствует напряжение. Про-
изводители КМОП-схем всегда приводят эти границы в технических дан-
ных в разделе абсолютных максимальных значений. Кроме того, также сле-
дует ограничить входной ток при перенапряжении на уровне от 5 до 30 мА,
в зависимости от конкретного устройства.
Для того чтобы предотвратить этот тип 5С7?-защелкивания, можно доба-
вить последовательно диоды к выводам VDD и Evv, как показано на рис. 7.94.
Диоды CR, и СЯ2 блокируют базовые токи,
питающие транзисторы 01 и О2, в случае
предельных напряжений на S и D
Рис. 7.94. Диодная схема защиты КМОП-
ключа
Глава 7. Схемы поддержки преобразователей данных
Диоды блокируют ток запуска SCR. Обычно паразитные транзисторы Q{ и
Q2 имеют малый /3 (обычно менее 10), и для возникновения 5С7?-защелки-
вания требуется сравнительно большой ток. Диоды ограничивают обрат-
ный ток управления, и 5С7?-защелкивание не происходит.
При использовании диодной защиты диапазон аналоговых напряжений
ключа уменьшится на одно падение напряжения VBE относительно каждого
из напряжений питания, поэтому при работе с малым напряжением пита-
ния такая схема может быть неприемлема.
Как отмечалось ранее, защита КМОП-ключей и мультиплексоров от
возможного чрезмерного тока может также быть обеспечена добавлением
последовательных резисторов, ограничивающих ток на безопасном уровне
(обычно менее 5—30 мА) (рис. 7.95). Из-за того, что RL0AD и 7?п ед образуют
резистивный аттенюатор, этот метод применим только при работе ключа с
высокоимпедансной нагрузкой.
Рис. 7.95. Защита от чрезмерного тока при помощи внещних резисторов
На рис. 7.96 показан стандартный метод защиты по входу. Здесь между
входным выводом и выводами напряжений питания подключены диоды
Шоттки. Они ограничивают напряжение на входе на уровне на 0,3—0,4 В
больше напряжения питания сверху и снизу и, следовательно, предотвра-
щают защелкивание. Кроме того, если входное напряжение превышает на-
пряжение питания, то входной ток будет протекать через внешние диоды, а
не потечет в устройство. Диоды Шоттки могут пропускать импульсные токи
Рис. 7.96. Защита по входу при помощи внешних диодов Шоттки
7.3. Аналоговые ключи и мультиплексоры
50—100 мА, поэтому может использоваться резистор R
J J г г пред.
ким сопротивлением.
с достаточно низ-
Большинство КМОП-схем содержат внутренние диоды, защищающие от
ESD (электростатическая защита), которые подключаются между входами и
шинами питания, что делает устройство менее восприимчивым к защелкива-
нию. Однако внутренние диоды начинают проводить при напряжении 0,6 В
и имеют ограниченные возможности по пропусканию тока, поэтому добав-
ление внешних диодов Шоттки увеличивает степень защиты. При использо-
вании внешних диодов следует учитывать влияние их утечки и емкости.
Обратите внимание, что защита от защелкивания не обеспечивает за-
щиты от перенапряжения и наоборот. Если в системе могут присутствовать
оба варианта повреждения, следует использовать и защитные диоды, и за-
щитные резисторы.
При производстве LC2MOS аналоговых ключей компания Analog Devices
применяет технологию с «изоляцией глубокими канавками» (trench-isolation).
При использовании этой технологии снижается возможность защелкива-
ния устройства, уменьшаются емкости переходов, увеличивается время пе-
реключения и ток утечки, и диапазон аналоговых напряжений расширяется
до уровней напряжений питания.
На рис. 7.97 показан вид КМОП-структуры с «изоляцией глубокими
канавками» в разрезе. Скрытый оксидный слой и боковые стенки полнос-
тью изолируют подложку от />-«-переходов каждого транзистора. Этим ис-
ключается прямое смещение ^-«-переходов и, следовательно, значительно
снижается вероятность SCR фиксации, а также уменьшаются емкости, ухуд-
шающие полосу пропускания.
ADG508F, ADG509F, ADG438F и ADG439F — это мультиплексоры на
базе технологии с «изоляцией глубокими канавками», работающие с напря-
жениями питания ±15 В и обеспечивающие «защиту от повреждения» («fault
protection») при повышенном напряжении на входе или выходе в диапазоне
от —40 до +55 В. В этих устройствах используется последовательная струк-
тура из трех полевых МОП-транзисторов в сигнальном тракте: с «-каналом,
р-каналом и снова «-каналом. Из-за этого при отключении питания импе-
данс сигнального тракта резко возрастает. Такая структура дает большую
степень защиты от защелкивания и перенапряжения, но с одновременным
увеличением /?вкл (~300 Ом) и уровня модуляции /?вкл. Более подробную ин-
формацию об этом методе защиты смотрите в технических данных на ин-
дивидуальное изделие.
Рис. 7.97. LC2MOS структура с изоляцией глубокими канавками
7.4. Схемы выборки и хранения
Уолт Кестер
Введение и исторический обзор
Устройство выборки и хранения (sample-and-hold amplifier), или УВХ, явля-
ется критической частью большинства систем сбора данных. Оно захваты-
вает аналоговый сигнал и удерживает его в течение выполнения некоторой
операции (обычно аналого-цифрового преобразования). Внутренние схемы
УВХ весьма чувствительны, и непредвиденные эффекты в таких стандарт-
ных компонентах, как конденсаторы и печатные платы, могут ухудшить
показатели УВХ.
Когда УВХ используется совместно с АЦП (либо внутри, либо вне его),
качество первого влияет на суммарные динамические показатели всей ком-
бинации и играет основную роль в определении SFDR, отношения сигнал/
шум и других характеристик системы.
Несмотря на то что функция УВХ на сегодняшний день интегрирована
в дискретизирующих АЦП, знание фундаментальных принципов работы важ-
но для понимания динамических показателей АЦП.
Когда схема выборки и хранения находится в режиме выборки (слеже-
ния), выходной сигнал повторяет входной с небольшим смещением напря-
жения. Существуют УВХ, выходной сигнал которых в режиме выборки не
повторяет в точности входной сигнал, и выходные значения точны только в
период хранения (например, AD684, AD781 и AD783). Здесь они рассматри-
ваться не будут. Строго говоря, схемы выборки и хранения, которые хоро-
шо повторяют форму входного сигнала в режиме слежения, следует назы-
вать схемами слежения и хранения (track-and hold), однако на практике эти
понятия взаимозаменяемы.
Наиболее распространенным применением УВХ является поддержание
входного сигнала АЦП на постоянном уровне во время выполнения пре-
образования. Для многих, но не для всех типов АЦП необходимо, чтобы
во время преобразования входной сигнал изменялся не более чем на 1 LSB.
В связи с этим требуется либо иметь очень низкую частоту входного сигна-
ла АЦП, либо применять УВХ для удержания входного сигнала на постоян-
ном уровне при выполнении каждого преобразования.
С исторической точки зрения представляет интерес, что АЦП, описан-
ный Ривзом в его знаменитом патенте на ИКМ в 1939 году1, представлял
собой 5-разрядный счетный (counting) АЦП с быстродействием 6 kSPS, где
аналоговый входной сигнал напрямую подавался на электровакуумный при-
бор широтно-импульсного модулятора (ШИМ). Функция выборки в нем
была реализована внутри ШИМ. В ходе последующих работ в области ИКМ,
проводимых в Bell Labs, были созданы электронно-лучевые кодеры и АЦП
последовательного приближения. В 2 (1948) описывается схема выборки и
хранения на электровакуумном приборе с быстродействием 50 kSPS, вход-
ной сигнал на которую подавался от импульсного трансформатора.
В связи с переходом от ламп к транзисторам в конце 1950-х — начале
1960-х годов интерес к схемам выборки и хранения для АЦП возрос. В 1964
году Греем и Китсополосом из Bell Labs3 было опубликовано одно из пер-
вых исследований ошибок, вносимых полупроводниковыми устройствами
выборки и хранения. В тот же период времени Эдсон и Хеннинг из Bell
Labs представили результаты работы по созданию системы ИКМ со скоро-
стью 224 Мбит/с, в состав которой входили 9-разрядный АЦП и схема вы-
борки и хранения с быстродействием 12 MSPS. Источники 4 5 6 позволяют
получить представление о работе, проделанной в области схем выборки и
хранения, в течение 1960-х — начале 1970-х годов.
В 1969 году только что созданное подразделение Pastoriza компании Analog
Devices представило первые коммерческие схемы выборки и хранения —
SHAX и SHA2 (рис. 7.98). Эти схемы выпускались в виде компьютерных плат,
и SHAX имела время захвата до точности 0,01 %, равное 2 мкс, рассеивала
0,9 Вт и стоила примерно 225 долларов. Более быстрая SHA2 обладала вре-
менем захвата до точности 0,01 %, равным 200 нс, рассеивала 1,7 Вт и сто-
ила приблизительно 400 долларов. Они были предназначены для работы с
12-разрядными АЦП последовательного приближения, также выпускавши-
мися в виде компьютерных плат.
Развитие модульной и гибридной технологий привело к моральному
старению схем выборки и хранения на компьютерных платах, и с появле-
нием на рынке ИС АЦП, таких как АЦП промышленного стандарта AD574,
потребность в схемах выборки и хранения возросла. В 1970—1980-х годах
для работы с такими АЦП разработчики обычно приобретали отдельные
ИС выборки и хранения, так как уровень технологических процессов не
позволял интегрировать их на одном кристалле. В эти годы сектор низко-
скоростных приложений обслуживали ИС УВХ, такие как AD582 (время
захвата до 0,01 % — 4 мкс), AD583 (время захвата до 0,01 % — 6 мкс) и
AD585 (время захвата до точности 14 бит — 3 мкс).
Рынок высокоскоростных приложений обслуживали гибридные УВХ,
такие как HTS-0025 (время захвата до 0,1 % — 25 нс), НТС-0300 (время захвата
до 0,01 % — 200 нс) и AD386 (время захвата до точности 16 бит — 25 мкс).
К 1995 году компания Analog Devices предлагала около 20 УВХ для различных
предложений, включая следующие высокоскоростные ИС: AD9100/AD9101
(время захвата до 0,01 % — 10 нс), AD684 (четыре в одном корпусе, время
захвата до 0,01 % — 1 мкс) и AD783 (время захвата до 0,01 % — 250 нс).
Но в то же время технология АЦП быстро изменялась, и многие АЦП
стали выпускаться с внутренними УВХ (дискретизирующие АЦП). Это по-
• Время установления: 2 мкс до 0,01 %
(SHA,), 200 нс до 0,01 % (SHA2).
• Потребляемая мощность: 900 мВт
(SHAJ, 1,7 Вт (SHA2).
• $225 (SNA,), $400 (SHA2).
Рис. 7.98. Схемы выборки и хранения —
SHA, и SHA2, разработанные в отделе-
нии Pastoriza Analog Devices
(Г596 Глава 7. Схемы поддержки преобразователей данных
зволило упростить задание характеристик для таких АЦП и значительно
упростить их применение. Интеграция функции УВХ стала возможной бла-
годаря развитию новых технологий, таких как высокоскоростные компле-
ментарные биполярные и улучшенные КМОП-технологии. В действитель-
ности на сегодняшний день (2003 год) дискретизирующие АЦП настолько
широко распространены и популярны, что потребность в использовании
отдельных УВХ возникает крайне редко.
Помимо таких очевидных преимуществ дискретизирующих АЦП, как
меньший размер, меньшая стоимость и меньшее количество внешних ком-
понентов, для них задаются суммарные параметры по постоянному и пере-
менному току, и разработчику не надо тратить время на проверку совмес-
тимости интерфейсов, временных, электрических и иных параметров, как
при использовании раздельных АЦП и УВХ. Особенно это касается дина-
мических характеристик, таких как SFDR и отношение сигнал/шум.
Несмотря на то что по большей части УВХ используются совместно с
АЦП, они также иногда применяются в схемах подавления «пичков»
(deglitchers) ЦАП, пиковых детекторах, аналоговых линиях задержки, систе-
мах с синхронной выборкой и системах распределения данных.
Основные принципы работы УВХ
Независимо от конкретной архитектуры УВХ все подобные устройства вклю-
чают в себя четыре основных компонента: входной усилитель, устройство
запасания энергии (конденсатор), выходной буфер и схемы коммутации
(рис. 7.99).
Сердцем УВХ является накопитель энергии, конденсатор. Входной уси-
литель буферирует входной сигнал. Он представляет собой высокоимпе-
дансную нагрузку для источника сигнала и обеспечивает усиление тока для
заряда конденсатора хранения (hold capacitor). В режиме слежения (track mode)
напряжение на конденсаторе хранения повторяет (отслеживает) входной
сигнал (с учетом небольшой задержки и ограничения ширины полосы).
В режиме хранения (hold mode) ключ размыкается, и на конденсаторе остается
напряжение, присутствовавшее на нем до отключения от входного буфера.
Выходной буфер обладает высоким входным импедансом и предотвращает
преждевременный разряд хранимого напряжения. Схема коммутации и ее
драйвер образуют механизм, при помощи которого УВХ попеременно пе-
реключается между режимами слежения и хранения.
Рис.7.99. Базовая схема выборки и хранения
7.4. Схемы выборки и хранения
Существуют четыре группы параметров УВХ, каждая из которых отно-
сится к режимам: слежения (выборки), переходу от выборки к хранению,
хранения и переходу от хранения к выборке. Эти параметры перечислены
на рис. 7.100, а на рис. 7.101 проиллюстрированы некоторые источники
ошибок УВХ. Так как каждый из четырех режимов характеризуется как
статическими, так и динамическими показателями, правильный выбор УВХ
и понимание принципов его функционирования в составе системы являет-
ся непростой задачей.
Параметры режима выборки Параметры переход от выборки к хранению Параметры режима хранения Параметры перехода от хранения к выборке
Статические: • Смещение • Ошибка усиления • Нелинейность Статические: • Пьедестал • Нелинейность пьедестала Статические: • Спад напряжения • Диэлектрическое поглощение
Динамические: • Время установления • Ширина полосы частот • Скорость нарастания • Искажения • Шум Динамические: • Время апертурной задержки • Дрожание апертуры • Наводки переклю- чения • Время установления Динамические: • Проникание сигнала • Искажения • Шум Динамические: • Время захвата • Наводки переклю- чения
Рис. 7.100. Параметры устройств выборки и хранения
+1 в -----
Аналоговый
вход
-1 В
Неопределенность
апертуры (дрожание)
Эффективное апертурное время задержки
Команда Отслеживание Хранение
Отслеживание
Рис. 7.101. Некоторые источники ошибок устройств выборки и хранения
Характеристики режима слежения
В режиме выборки (слежения) УВХ представляет собой просто усилитель,
поэтому статические и динамические характеристики в этом режиме схожи
с аналогичными характеристиками любого усилителя. (Параметры УВХ,
имеющего плохие показатели в режиме слежения, обычно указываются
производителем только для режима хранения.) Основными параметрами
режима слежения являются: смещение, усиление, нелинейность, полоса про-
пускания. скорость нарастания, время установления, искажения и шум. В то
же время искажения и шум в режиме слежения обычно представляют мень-
ший интерес по сравнению с этими параметрами в режиме хранения.
Характеристики режима перехода
от выборки к хранению
Когда УВХ переключается из режима выборки в режим хранения, из-за
неидеальности ключей на конденсатор хранения добавляется небольшое
количество заряда. Это приводит к появлению в режиме хранения постоян-
ного напряжения смещения, которое называется ошибкой пьедестала (pedestal
error) (рис. 7.102). Если сигнал с УВХ подается на АЦП, то ошибка пьеде-
стала проявляется в виде постоянного напряжения смещения, которое мо-
жет быть компенсировано путем калибровки системы. Если ошибка пьеде-
стала зависит от уровня входного сигнала, то результирующая нелиней-
ность вносит вклад в искажения в режиме хранения.
Хранение
Команда
на хранение
Рис. 7.102. Ошибка пьедестала, переходный процесс и время установления при пере-
ходе от слежения к хранению
Ошибка пьедестала может быть снижена путем увеличения емкости кон-
денсатора хранения, однако при этом увеличивается время захвата, а также
уменьшается полоса пропускания и скорость нарастания.
При переходе от выборки к хранению возникает переходный процесс.
Время, которое требуется для установления выходного напряжения УВХ в
пределах заданной погрешности, называется временем установления в режи-
ме хранения (hold mode settling time). Иногда также указывается максималь-
ная амплитуда переходного напряжения при переключении.
Вероятно, наименее понятными и наиболее часто неверно интерпрети-
руемыми из показателей УВХ являются те, которые содержат в своем на-
звании слово апертура (aperture). Наиболее важным динамическим свой-
ством УВХ является его способность быстро отключать конденсатор хране-
ния от входного буферного усилителя. Короткий (но ненулевой) интервал
времени, необходимый для выполнения этого действия, называется време-
нем апертуры (aperture time). Различные внутренние временные параметры
УВХ иллюстрирует рис. 7.103.
7.4. Схемы выборки и хранения 599
Апертурное
время, ta Задержка
Рис. 7.103. Схема УВХ, иллюстрирующая внутренние временные параметры
Действительное значение напряжения, которое хранится на конденса-
торе в конце этого интервала, зависит как от входного сигнала, так и от
ошибок, вносимых операцией коммутации. На рис. 7.104 показано, что
происходит, когда при подаче входного сигнала произвольной формы дает-
ся команда хранения (для простоты ошибка пьедестала и переходные про-
цессы не показаны). Как видно из рис. 7.104, окончательное хранимое на-
пряжение является задержанной версией входного сигнала, усредненного
на интервале времени апертуры ключа. Окончательное значение напряже-
ния на конденсаторе хранения в первом приближении равно среднему зна-
чению сигнала, приложенного к ключу в течение интервала времени (Z),
когда импеданс ключа изменяется от низкого значения к высокому.
На основании этой модели можно сделать вывод, что конечное время,
требуемое для размыкания ключа (/J, эквивалентно добавлению неболь-
шой задержки к тактовому сигналу выборки на УВХ. Эта задержка посто-
янна и может быть как положительной, так и отрицательной. Она называ-
ется эффективным временем апертурной задержки (effective aperture delay time).
Рис. 7.104. Формы сигналов в УВХ
временем апертурной задержки (aperture delay time) или просто апертурной
задержкой (aperture delay) te и определяется как разность между временем
аналоговой задержки во входном буфере (/^) и цифровой задержки ключа
(/^) плюс половина времени апертуры (/д/2). Эффективное время апертур-
ной задержки обычно имеет положительное значение, однако оно может
быть и отрицательным, если сумма половины времени апертуры (/д/2) и
цифровой задержки ключа (/^) меньше задержки прохождения через вход-
ной буфер (/^). Таким образом, этот параметр определяет, в какой момент
времени по отношению к фронту тактового сигнала берется отсчет входно-
го сигнала.
Время апертурной задержки можно измерить, подав на УВХ биполяр-
ный синусоидальный сигнал и подстроив задержку синхронного с ним так-
тового сигнала выборки таким образом, чтобы в режиме хранения на выхо-
де УВХ было нулевое напряжение. Относительная задержка между фрон-
том тактового сигнала и реальным моментом перехода входной синусоиды
через ноль дает время апертурной задержки (рис. 7.105).
Рис. 7.105. Эффективное время апертурной задержки
Апертурная задержка не вызывает ошибок и проявляется в виде фикси-
рованной задержки, либо тактового сигнала дискретизации, либо аналого-
вого входного сигнала (в зависимости от ее знака). Если апертурная задер-
жка изменяется от отсчета к отсчету (дрожание апертуры), то, как показано
на рис. 7.106, возникает соответствующее напряжение ошибки. Это изме-
нение момента открытия ключа от отсчета к отсчету называется неопреде-
ленностью апертуры (aperture uncertainty) или дрожанием апертуры (aperture
jitter) и обычно задается через среднеквадратичный уровень в пикосекун-
дах. Амплитуда соответствующей выходной ошибки зависит от скорости
изменения аналогового входного сигнала. При любой заданной величине
дрожания апертуры ошибка, вызываемая им, возрастает по мере роста ско-
рости изменения напряжения (dV/dt) входного сигнала.
Для измерения ошибки в УВХ, вызванной дрожанием апертуры, необ-
ходимо, чтобы тактовый и входной аналоговый сигналы не имели фазовых
шумов (дрожания фазы), так как фазовый шум любого из сигналов невоз-
можно отличить от дрожания апертуры самого УВХ — они проявляются
одинаково. В действительности, наибольший вклад в такие ошибки вносят
7.4. Схемы выборки и хранения
Рис. 7.106. Влияние дрожания апертуры или дрожания тактового сигнала на выходное
напряжение УВХ
внешние по отношению к УВХ (или дискретизирующему АЦП) источники,
вызванные нестабильностью или шумами тактовых сигналов, неоптималь-
ной разводкой сигнальных проводников или недостаточно хорошими за-
землением и развязкой. Среднеквадратичный уровень дрожания апертуры
в УВХ обычно составляет менее 50 пс, а в высокоскоростных — менее 5 пс.
Подробное описание процедуры измерения дрожания апертуры АЦП мож-
но найти в гл. 5.
Рисунок 7.107 иллюстрирует влияние дрожания тактового сигнала на
отношение сигнал/шум (SNR) системы с дискретными данными. Полный
среднеквадратический уровень дрожания определяется несколькими со-
ставляющими, и дрожание апертуры УВХ зачастую является наименьшей
из них.
Частота полношкального синусоидального сигнала
на аналоговом входе
Рис. 7.107. Влияние дрожания тактового сигнала на отношение сигнал/шум
Характеристики режима хранения
Неидеальность конденсатора хранения, ключа и выходного усилителя вы-
зывает появление ошибок в режиме хранения. Если в конденсатор втекает
(или из конденсатора вытекает) ток утечки, он будет медленно заряжаться
или разряжаться, и его напряжение будет меняться. Этот эффект известен как
дрейф (droop) выходного напряжения УВХ и выражается в единицах В/мкс.
Дрейф напряжения может быть вызван утечками, возникающими из-за за-
грязнения печатной платы, при использовании внешнего конденсатора, утеч-
кой самого конденсатора, но наиболее часто он вызывается током утечки в
полупроводниковых ключах и током смещения выходного буферного уси-
лителя. Приемлемой величиной дрейфа считается такая, при которой вы-
ходное напряжение УВХ изменяется не более чем на 1/2 LSB за время
выполнения преобразования в АЦП. Приемлемый уровень дрейфа сильно
зависит от архитектуры АЦП. Когда этот эффект вызывается током утечки
в обратно смещенных переходах (с затворов КМОП-ключей или усилителя
на полевых транзисторах), скорость изменения выходного напряжения уд-
ваивается с увеличением температуры кристалла на 10 °C. Таким образом,
скорость изменения выходного напряжения при +125 °C превышает ско-
рость изменения выходного напряжения при +25 °C примерно в 1000 раз.
Дрейф выходного напряжения может быть уменьшен путем увеличения
емкости конденсатора хранения, однако при этом увеличивается время зах-
вата и уменьшается полоса пропускания в режиме выборки. Для уменьше-
ния влияния дрейфа в современных ИС УВХ, входящих в состав АЦП,
часто применяются дифференциальные методы.
Даже довольно малые токи утечки могут вызывать значительный дрейф
при малых номиналах конденсатора хранения. Токи утечки в печатных пла-
тах можно минимизировать при помощи защитных колец. Защитным коль-
цом называется кольцо из проводников вокруг чувствительного узла, нахо-
дящееся под тем же потенциалом, что и чувствительный узел. Так как паде-
ния напряжения между узлом и защитным кольцом нет, то и ток утечки
протекать не может. В схеме с неинвертирующим усилителем, наподобие
показанной на рис. 7.109, на защитное кольцо должно подаваться то же
напряжение, что и на конденсатор хранения, а в схеме с виртуальным за-
землением (рис. 7.110) защитное кольцо можно заземлить. Поверхностное
Хранение
Команда
на хранение
Слежение
УВХ-выход
/;KJ — ток утечки с конденсатора хранения
Рис. 7.108. Дрейф в режиме хранения
7.4. Схемы выборки и хранения
Замечание: защитное кольцо следует формировать во всех слоях печатной платы
Рис. 7.109. Для уменьшения утечки, вызванной загрязнением платы, поддерживайте
защитное кольцо под тем же напряжением, что и конденсатор хранения
Рис. 7.110. Применение защитного кольца в схеме УВХ с виртуальным заземлением
сопротивление материала печатной платы намного ниже его объемного со-
противления, поэтому защитные кольца необходимо располагать с обеих
сторон печатной платы, а в многослойных платах — во всех слоях.
Конденсаторы хранения, применяемые в УВХ, должны обладать малой
утечкой. Еще одной, в равной степени важной характеристикой конденса-
тора является низкое диэлектрическое поглощение (dielectric absorption). Как
показано на рис. 7.111, если конденсатор зарядить, затем разрядить и оста-
вить его отключенным от входной цепи, на нем восстановится часть пре-
дыдущего заряда. Это явление называется диэлектрическим поглощением. Оно
может серьезно сказаться на показателях УВХ; так как остаток заряда от
предыдущего отсчета повлияет на новый отсчет, в результате могут возни-
кать случайные ошибки величиной в десятки или даже сотни милливольт.
В зависимости от типа диэлектрика конденсаторы обладают различ-
ными значениями коэффициента диэлектрического поглощения: элект-
ролитические конденсаторы — ужасным (они также обладают большой
утечкой), некоторые керамические с высокой диэлектрической проница-
емостью — плохим, а слюдяные, полистирольные и полипропиленовые —
хорошим. К сожалению, уровень диэлектрического поглощения изменяет-
ся от партии к партии, и даже отдельные партии полистирольных и поли-
пропиленовых конденсаторов могут обладать высоким диэлектрическим
поглощением. Поэтому имеет смысл заплатить на 30—50 % больше и взять
Глава 7. Схемы поддержки преобразователей данных
Рис. 7.111. Диэлектрическое поглощение
конденсатор для схемы УВХ с гарантированным низким диэлектрическим
поглощением.
В режиме хранения из-за паразитной емкости в УВХ небольшая часть
переменного входного сигнала может проникать на выход. Это явление
называется прониканием сигнала (feedthrough) и зависит от частоты и ампли-
туды входного сигнала. Если амплитуда сигнала, прошедшего на выход УВХ,
превышает 1/2 LSB, АЦП будет обладать ошибками преобразования.
Во многих УВХ уровень искажений указывается только для режима вы-
борки. Искажения в режиме выборки (track mode distortion) обычно намного
меньше искажений в режиме хранения (hold mode distortion). Искажения в
режиме выборки обычно не включают в себя нелинейность, вносимую схе-
мой коммутации, и могут не давать полного представления о качестве УВХ
в случаях, когда УВХ используется в составе АЦП. Для современных УВХ,
особенно высокоскоростных, искажения задаются для обоих режимов. В то
время как искажения в режиме выборки можно измерить при помощи ана-
логового спектроанализатора, для измерения искажений в режиме хране-
ния должны применяться цифровые методы (рис. 7.112). В этой схеме на
УВХ подается спектрально чистая синусоида, и в момент, близкий к окон-
чанию времени хранения, выходной сигнал УВХ оцифровывается высоко-
скоростным АЦП, имеющим низкий уровень искажений. Составляющие
искажений измеряются на основании БПФ выходного сигнала АЦП.
Рис. 7.112. Измерение искажений в режиме хранения
Характеристики шума УВХ в режиме хранения задаются и измеряются
аналогично шуму усилителя. Размах шумов в режиме хранения {hold mode
noise) измеряется на осциллографе и переводится в среднеквадратичный
уровень путем деления на 6,6. Уровень шума в режиме хранения может
задаваться через спектральную плотность в единицах нВ^/Гц или через
среднеквадратичное значение в определенной полосе частот. Для расчета
полного выходного шума, если не указано иное, следует сложить шум в
режиме хранения с шумом в режиме выборки. Для некоторых УВХ произ-
водители указывают именно этот суммарный шум.
Характеристики в режиме перехода
от хранения к выборке
Когда УВХ переключается из режима хранения в режим выборки, он дол-
жен заново выполнить захват входного сигнала (значение которого за вре-
мя хранения могло измениться на величину полной шкалы). Время захвата
(acquisition time) — это интервал времени, который необходим для повтор-
ного захвата сигнала схемой выборки и хранения с требуемой точностью
при переходе от хранения к выборке. Этот интервал начинается от точки,
соответствующей 50 % фронта тактового сигнала, и заканчивается, когда
выходное напряжение УВХ достигает указанной погрешности (обычно 0,1
или 0,01 %). Для некоторых УВХ также задается время захвата по отноше-
нию к напряжению на конденсаторе хранения, без учета задержки и време-
ни установления выходного буфера. Эта характеристика может быть полез-
на в высокоскоростных приложениях, где на режим хранения необходимо
отвести максимально возможное время. Время установления выходного
буфера, естественно, должно быть значительно меньше времени хранения.
Время захвата можно непосредственно измерить при помощи современ-
ных цифровых запоминающих осциллографов {digital sampling oscilloscope. DSO)
или осциллографов с технологией «цифрового послесвечения» {digitalphosphor
oscilloscope. DPO). которые нечувствительны к большим перегрузкам.
Архитектуры УВХ
Как и в случае с операционными усилителями, имеется большое количе-
ство архитектур УВХ, и мы рассмотрим здесь лишь некоторые наиболее
популярные. Простейшая структура УВХ показана на рис. 7.113. Входной
сигнал буферируется усилителем и подается на ключ. Входной буфер может
иметь или не иметь обратную связь и усиление. В качестве ключа могут
использоваться КМОП-ключи, ключи на полевых транзисторах или бипо-
лярные (на транзисторах или диодах). Управление ключом осуществляет
драйвер ключа. Сигнал, содержащийся на конденсаторе хранения, буфери-
руется выходным усилителем. Такая архитектура иногда называется архи-
тектурой без обратной связи {open-loop), поскольку ключ не входит в цепь
обратной связи. Обратите внимание, что к ключу прикладывается полное
сигнальное напряжение, поэтому он должен обладать превосходными
{common-mode) характеристиками.
Рис. 7.113. Архитектура УВХ без обратной связи
На рис. 7.114 показана реализация этой архитектуры, где в качестве
ключа используется простой диодный мост. В режиме выборки ток проте-
кает через диоды моста Dv Dv D3 и D4. При входных сигналах с высокой
скоростью нарастания конденсатор хранения заряжается и разряжается то-
ком I, Поэтому максимальная скорость нарастания напряжения на конден-
саторе хранения равна I/Сw При реверсе токов диодного моста к мосту
прикладывается обратное напряжение, и схема переводится в режим хране-
ния. Регулировка импульсов отключения с использованием компенсацион-
ной обратной связи (обеспечивающей изменение потенциала входного сигнала
по отношению к «земле» на величину, равную выходному сигналу) минимизи-
рует искажения напряжения относительно «земли» (common-mode) и явля-
ется ключевой особенностью этой схемы. Напряжение обратного смеще-
ния моста равно падению напряжения на диодах D5 и De и резисторах и
Rr Эта схема является очень быстродействующей, особенно если входной и
выходной буферы представляют собой повторители без обратной связи и
используются диоды Шоттки. Импульсы отключения могут генерироваться
высокочастотными импульсными трансформаторами или токовыми клю-
чами, как показано на рис. 7.115. Эта схема может использоваться при лю-
бой частоте дискретизации, так как импульсы переключения диодов пода-
ются непосредственно на мост. Различные варианты этой схемы применя-
ются в высокоскоростных печатных платах УВХ, модульных, гибридных и
интегральных УВХ начиная с середины 1960-х годов.
Рис. 7.114. УВХ без обратной связи с ключом на базе диодного моста
7.4. Схемы выборки и хранения
Рис. 7.115. Реализация УВХ без обратной связи
Схема УВХ, показанная на рис. 7.116, — это классическая схема с об-
ратной связью (closed-loop), которая используется во многих дискретизиру-
ющих КМОП АЦП. Так как ключи в ней работают с виртуальной «землей»,
на них нет (common-mode) сигналов относительно «земли».
Ключ S2 необходим для поддержания постоянного входного импеданса
и предотвращения прохождения входного сигнала на выход в режиме хра-
нения. В режиме выборки передаточная характеристика УВХ определяется
операционным усилителем, а ключи не вносят статических ошибок, так
как они находятся в цепи обратной связи. Влияние инжекции заряда может
быть минимизировано при помощи метода дифференциальной коммута-
ции, показанного на рис. 7.117.
Рис. 7.116. Схема УВХ с обратной связью на базе инвертирующего интегратора с ком-
мутацией в суммирующем узле
Рис. 7.117. Дифференциальная коммутация уменьшает инжекцию заряда
Внутренние УВХ ИС АЦП
КМОП АЦП довольно популярны по причине низкой стоимости и малой
потребляемой мощности. На рис. 7.118 показана эквивалентная схема вход-
ного каскада типичного КМОП АЦП с дифференциальным УВХ. Ключи на
схеме показаны в режиме выборки', они открываются/закрываются с часто-
той дискретизации. Конденсаторы Ср емкостью 16 пФ включают эквива-
лентную емкость ключей и 52 и паразитную входную емкость. Конденса-
торы Cs (4 пФ) — это конденсаторы выборки {sampling capacitor), использу-
емые в процессе выборки, а Сн — это конденсаторы хранения. Несмотря на
то что входной каскад является полностью дифференциальным, на него
может подаваться как дифференциальный, так и несимметричный сигнал.
Однако оптимальные показатели обеспечиваются при подаче сигнала через
дифференциальный трансформатор или дифференциальный усилитель.
В режиме выборки к конденсаторам Cs прикладывается дифференци-
альное входное напряжение. Когда схема входит в режим хранения, напря-
жение, присутствующее на конденсаторах выборки, передается на кон-
Рис. 7.118. Упрощенная входная схема типичного КМОП УВХ на переключаемых кон-
денсаторах
денсаторы хранения и буферируется усилителем А (ключи управляются
тактовым сигналом дискретизации с определенными соотношениями фаз).
Когда УВХ возвращается в режим выборки, источник входного сигнала
должен зарядить или разрядить Cs. устанавливая новое значение напря-
жения. Такой процесс заряда и разряда конденсатора, усредненный за
определенный период времени при конкретном значении частоты диск-
ретизации fs. приводит к тому, что входной импеданс устройства является
резистивным. Но если проанализировать этот процесс за один период
дискретизации (1/Д), то входной импеданс имеет динамический характер
и следует соблюдать определенную осторожность при выборе источника
входного сигнала.
Резистивную составляющую входного импеданса можно найти, вычис-
лив средний заряд, взятый конденсатором Сн от источника. Можно пока-
зать, что если до момента открытия ключей и S2 конденсатор Cs может
полностью заряжаться до уровня входного напряжения, то средний вход-
ной ток равен току, который протекал бы, если между входами был бы
включен резистор с сопротивлением \/(Csfs). Так как емкость Cs равна
всего нескольким пикофарадам, то при fs = 10 МГц этот резистивный им-
педанс обычно превышает несколько килоом.
На рис. 7.119 показана упрощенная схема входного УВХ в 12-разрядном
АЦП с производительностью 14 MSPS AD9042, представленного на рынок
в 1995 году7. ИС AD9042 производится с использованием высокоскорост-
ной комплементарной биполярной технологии (XFCB, high speed
complementary bipolar process). Схема состоит из двух независимых УВХ,
включенных параллельно для обеспечения дифференциальной работы. На
рисунке показана только половина схемы. Полностью дифференциальная
работа уменьшает ошибки, вызываемые дрейфом выходного напряжения, и
искажения второго порядка. В режиме выборки транзисторы и Q2 обес-
печивают буферизацию с единичным усилением. Когда схема переводится
в режим хранения, напряжение на базе Q2 уменьшается до тех пор, пока
оно не будет фиксировано диодом D{. Номинальная емкость внутреннего
Рис. 7.119 УВХ, используемое в составе 12-разрядного АЦП с быстродействием
41 MSPS AD9042, 1995
20---2852
конденсатора хранения Cs равна 6 пФ. Транзистор Q3 и конденсатор CF
обеспечивают регулировку выходного тока и уменьшают изменения ^тран-
зистора Qv за счет чего снижаются искажения сигнала третьего порядка.
Типичное значение THD в режиме выборки равно -93 дБ при 20 МГц. Вре-
мя захвата сигнала полной шкалы до точности 12 бит составляет 8 нс. Изме-
нения ошибки пьедестала в зависимости от уровня сигнала в режиме хране-
ния минимизированы за счет регулировки напряжения, осуществляемой тран-
зистором Q3 и буфером А = 1, а также малого паразитного прохождения
сигнала через транзистор Qr Время установления до точности 12 бит в режи-
ме хранения составляет 5 нс. Уровень THD в режиме хранения при тактовой
частоте 50 MSPS и частоте входного сигнала 20 МГц равен -90 дБ.
На рис. 7.120 показана упрощенная схема половины дифференциально-
го УВХ, входящего в состав нового 14-разрядного АЦП с производительно-
стью 105 MSPS AD6645. В 9 дано его исчерпывающее описание, включая
схему выборки и хранения. В режиме выборки транзисторы Ql9 Q2, Q3 и Q4
образуют комплементарный буферный каскад эмиттерного повторителя,
сигнал с которого подается на конденсатор хранения Cfr В режиме хране-
ния полярность баз транзисторов Q3 и Q4 изменяется на противоположную
и фиксируется (clamped to) низким импедансом. Это приводит к отключе-
нию Q2, Q3 и Q4 и обеспечению двойной изоляции между сигналом на
входе и конденсатором хранения. Как обсуждалось ранее, фиксирующие
напряжения компенсируются выходным напряжением, что минимизирует
нелинейные эффекты.
Линейность в режиме выборки в значительной степени определяется
модуляцией VBE транзисторов Q3 и Q4 при зарядке Сн. Линейность в режиме
хранения зависит от линейности в режиме выборки и от нелинейных оши-
бок в режиме перехода от выборки к хранению, вызванных несогласован-
ностью процесса переключения напряжений на базах транзисторов Q3 и Q4
и вытекающего из этого несоответствия зарядов, инжектируемых через пе-
реходы база-эмиттер при их выключении.
Рис. 7.120. УВХ, используемое в составе 14-разрядного АЦП с быстродействием 105 MSPS
AD6645
7.4. Схемы выборки и хранения 61 I
Применение УВХ
Чаще всего УВХ применяются для подачи сигнала на АЦП. Большинство
современных АЦП, предназначенных для обработки сигналов, являются
дискретизирующими и содержат внутреннее УВХ, оптимизированное для
конкретного преобразователя. Для дискретизирующих АЦП полностью зада-
ются статические и динамические показатели, и такие АЦП следует ис-
пользовать вместо комбинации из дискретных УВХ/АЦП, когда это воз-
можно. Использование раздельных УВХ и АЦП может давать преимуще-
ства в очень малом числе случаев, в основном где требуется широкий
динамический диапазон и низкий уровень искажений.
Рисунок 7.121 иллюстрирует применение УВХ с низким уровнем искаже-
ний для минимизации «пичков» в выходном сигнале ЦАП, зависящих от
цифрового кода. Перед фиксацией новых данных в ЦАП УВХ переводится в
режим хранения, и «пички», вызванные переключениями в ЦАП, изолиру-
ются от выхода. Переходные напряжения, вызванные переключением в УВХ,
не зависят от цифрового кода; частота их появления равна частоте обновле-
ния, и их нетрудно отфильтровать. Этот метод может быть полезен для улуч-
шения характеристик искажений ЦАП на низких частотах, но от него мало
пользы в схемах с высокоскоростными ЦАП с низким уровнем искажений и
низким уровнем «пичков», предназначенных для задач прямого цифрового
синтеза и имеющих частоту обновления несколько сотен мегагерц.
С экономической точки зрения в системах с синхронной выборкой час-
то вместо отдельного АЦП в каждом канале выгоднее иметь несколько УВХ,
подключаемых к одному АЦП через аналоговый мультиплексор (рис. 7.122).
Аналогичным образом в системах распределения данных для разводки вы-
ходных сигналов одного ЦАП по нескольким каналам можно использовать
несколько УВХ, как показано на рис. 7.123. Однако такая конфигурация
встречается нечасто, так как схема с несколькими ЦАП обычно является
более хорошим решением.
Цифровой
вход
Управление
режимами
Цифровой
вход ЦАП
Аналоговый
выход ЦАП
Управление Хранение
режимами УВХ Слежение
Выход УВХ
Рис. 7.121. Применение УВХ в качестве подавителя «пичков» ЦАП
Глава 7. Схемы поддержки преобразователей данных
Входные аналоговые
Рис. 7.122. Синхронная выбор-
Аналоговые выходы
Рис. 7.123. Система распреде-
ления данных с несколькими
УВХ и одним ЦАП
Команда на хранение Команда на хранение
Аналоговый
выход
Аналоговый
вход
задержка
Рис. 7.124. Использова-
ние УВХ для реализации
конвейерной аналоговой
задержки
Список литературы: 7.4. Схемы выборки и хранения 613
И наконец, на рис. 7.124 показан последний пример применения УВХ.
Здесь несколько УВХ каскадируются для формирования аналоговой задер-
жки в системе с дискретизируемыми данными. УВХ2 переводится в режим
хранения незадолго до завершения интервала хранения УВХ,. Это дает пол-
ную конвейерную задержку, превышающую период дискретизации Т. Этот
метод часто используется в многокаскадных конвейерных субдиапазонных
АЦП для реализации задержек преобразования в последовательно соеди-
ненных каскадах. В конвейерных АЦП обычно используется тактовый сиг-
нал дискретизации со скважностью 50 %, и соседние УВХ конвейера пере-
водятся в режим хранения по разным фронтам тактового сигнала (подроб-
ное описание архитектуры конвейерных АЦП и использования УВХ для
реализации аналоговой задержки см. в гл. 3).
Список литературы
7.4. Схемы выборки и хранения
1. Alec Harley Reeves. Electric Signaling System. U.S. Patent 2, 272, 070, filed November 22,
1939, issued February 3, 1942. Also French Patent 852, 183 issued 1938, and British Patent
538, 860 issued 1939. (Классические патенты на ИКМ, включающие описание 5-разряд-
ных АЦП и ЦАП быстродействием 6 kSPS на электровакуумном приборе).
2. L.A. Meacham and Е. Peterson. An Experimental Multichannel Pulse Code
Modulation System of Toll Quality. Bell System Technical Journal, Vol 27, No. 1, January
1948, pp. 1—43. (Описывается кульминация работы no созданию 24-канальной систе-
мы ИКМ. Кроме того, в статье описывается УВХ с быстродействием 50 kSPS на
электровакуумном приборе с драйвером на импульсном трансформаторе).
3. J.R. Gray and S.C. Kitsopoulos. A Precision Sample-and-Hold Circuit with
Subnanosecond Switching. IEEE Transactions on Circuit Theory, CT11, September 1964,
pp. 389—396. (Прекрасное описание полупроводникового УВХна диодном мосте с пода-
чей сигнала через трансформатор. Также дается подробный математический анализ
схемы и ошибок).
4. J. О. Edson and Н.Н. Henning. Broadband Codecs for an Experimental 224 Mb/s
PCM Terminal. Bell System Technical Journal, Vol. 44, pp. 1887—1940, Nov. 1965. (Ито-
говое описание экспериментов no созданию АЦП с кодером на электроннолучевой труб-
ке и 9-разрядного твердотельного АЦП с кодом Грея. Электроннолучевой кодер обладал
разрядностью 9 бит при быстродействии 12 MSPS и был самым быстрым среди данно-
го типа кодеров).
5. D.J. Kinniment, D. Aspinall, and D.B.G. Edwards. High-Speed Analogue-Digital
Converter. IEE Proceedings, Vol. 113, pp. 2061—2069, Dec. 1966. (Описывается 7-раз-
рядный трехкаскадный конвейерный преобразователь с коррекцией ошибок с быстро-
действием 9 MSPS, основанный на трехкратном прохождении 3-разрядного каскада.
В качестве отдельных компараторов использовались туннельные диоды (диоды Есаки).
В статье также предложена более быстрая конвейерная 7-разрядная архитектура с
отдельными 3-разрядными каскадами с коррекцией ошибок. Кроме того, в статье опи-
сывается схема выборки и хранения с регулировкой на базе диодного моста с драйвером
на трансформаторе).
6. О.А. Нота. А 150 Mbps A/D and D/А Conversion System. Comsat Technical
Review, Vol. 2, No. 1, pp. 39—72, 1972. (Описание субдиапазонного АЦП, включающее
подробный анализ схемы выборки и задержки).
7. Roy Gosser and Frank Murden. A 12-Bit 50 MSPS Two-Stage A/D Converter. 1995
ISSCC Digest of Technical Papers, p. 278. (Описание субдиапазонного АЦП с коррекци-
ей ошибок AD9042 на базе технологии Mag АМР).
Глава 7. Схемы поддержки преобразователей данных
8. Carl Moreland. An 8-Bit 150 MSPS Serial ADC. 1995 ISSCC Digest of Technical
Papers, Vol. 38, p. 272. (Описание 8-разрядного АЦП с 5 поворачивающими (folding)
каскадами и последующим 3-разрядным параллельным преобразователем, включающее
обсуждение схемы выборки и хранения).
9. Carl Moreland, Frank Murden, Michael Elliott, Joe Young, Mike Hensley, and Russell
Stop. A 14-Bit 100 Msample's Subranging ADC. IEEE Journal of Solid State Circuits,
Vol. 35 No. 12, December 2000, pp. 1791—1798. (Описывается архитектура, использо-
ванная в 14-разрядном АЦП AD6645 с быстродействием 105 MSPS, а также схема
выборки и хранения).
ГЛАВА 8
ПРИМЕНЕНИЕ
ПРЕОБРАЗОВАТЕЛЕЙ
ДАННЫХ
8.1. Прецизионные измерения
и преобразование сигналов датчиков
Введение
Измерительные S-А АЦП с высоким разрешением произвели революцию в
области сбора данных и преобразования сигналов прецизионных датчиков.
Современные Z-A АЦП обладают разрешением без пропуска кодов до 24 бит
и разрешением кода, свободного от шумов, более 19 бит. Применение внут-
ренних усилителей с программируемым коэффициентом усиления в ком-
бинации с высоким разрешением фактически исключает необходимость в
схемах согласования сигналов — в большинстве случаев прецизионный дат-
чик может быть напрямую подключен к АЦП.
Как было подробно описано в гл. 3, S-А архитектура содержит большое
число цифровых блоков. Поэтому можно с относительной легкостью до-
бавлять в нее программируемые функции, что придает схемам, в которых
она применяется, большую гибкость. Пропускная способность, частота среза
цифрового фильтра, коэффициент усиления, выбор канала, стабилизация
модулированием (chopping) и режимы калибровки — вот лишь некоторые из
возможных примеров программируемых функций. Одним из достоинств
внутреннего цифрового фильтра является возможность программирования
его передаточной функции, что позволяет обеспечить превосходное подав-
ления частоты напряжения сети питания 50/60 Гц. Кроме того, так как
входной сигнал Z-A АЦП подвергается значительной избыточной дискре-
тизации, требования к антиалайзинговому фильтру смягчаются по сравне-
нию с традиционными АЦП, работающими с частотой, близкой к частоте
Найквиста. Результатом применения дифференциальных аналоговых вхо-
дов и входов опорного напряжения является превосходное подавление син-
фазной помехи. Важным преимуществом Z-A АЦП является то, что они
обычно производятся по КМОП-технологии и, следовательно, имеют от-
носительно низкую стоимость.
При применении Z-A АЦП пользователь должен учитывать тот факт,
что из-за высокого числа цифровых блоков в устройстве и большого коли-
чества программируемых функций цифровые интерфейсы становятся бо-
лее сложными по сравнению с традиционными архитектурами АЦП, на-
Глава 8. Применение преобразователей данных
пример такими, как АЦП последовательного приближения. Однако отла-
дочные платы и соответствующие программные средства проектирования в
комбинации с исчерпывающими техническими описаниями {data sheet) могут
значительно упростить общий процесс разработки.
Некоторые из преимуществ S-Д архитектуры и особенностей измери-
тельных S-Д АЦП перечислены на рис. 8.1 и 8.2.
• Высокое разрешение:
— 24 бита без пропуска кодов;
— эффективное разрешение (среднеквадратичное) — 22 бита;
— полный диапазон разрешения кода, свободного от шумов, — 19 бит;
— внутренний усилитель с программируемым усилением.
• Высокая точность:
— интегральная нелинейность — 2 ррт от значения полной шкалы (приблизительно
1 LSB при 19 битах);
— дрейф усиления 0,5 ррт/°C.
• Больше цифровых, меньше аналоговых блоков:
— программируемый баланс между скоростью и разрешением.
• Избыточная дискретизация и цифровая фильтрация:
— подавление частоты 50/60 Гц;
— высокий коэффициент избыточной дискретизации смягчает требования к анти-
алайзинговому фильтру.
• Широкий динамический диапазон.
• Низкая стоимость.
Рис. 8.1. Преимущества архитектуры Z-A АЦП
• Буфер аналогового входного сигнала:
— формирует входной сигнал Z-A модулятора, снижает динамический входной ток.
• Дифференциальные входы Авх, REFBx:
— конфигурация «по отношению» исключает необходимость использования точного
источника опорного напряжения.
• Мультиплексор.
• Усилитель с программируемым усилением.
• Режимы калибровки:
— самокалибровка, системная калибровка, автоматическая калибровка.
• Стабилизация прерыванием (chopping):
— исключает смещение и дрейф смещения;
— минимизирует влияние паразитных термопар.
Рис. 8.2. Особенности Z-A системы на кристалле
Применение прецизионных измерительных S-Д АЦП
Как показано на рис. 8.3, измерительные Е-Д АЦП с высоким разрешением
находят применение во многих областях, включая управление процессами,
преобразование сигналов датчиков, измерительное оборудование и т. п. Из-
за различия в требованиях для разных приложений эти АЦП выпускаются в
различных конфигурациях и с различными функциями. Например, на се-
годняшний день (2004) Analog Devices предлагает более 24 различных Е-Д
АЦП с высоким разрешением. По этой причине в рамках раздела разумно-
8.1. Прецизионные измерения и преобразование сигналов датчиков
• Управление процессами:
— 4—20 мА.
• Датчики:
— веса;
— давления;
— температуры.
• Инструментальные приложения:
— мониторинг газов;
— портативные инструменты;
— медицинские инструменты.
Шкала весов
Рис. 8.3. Типичные области применения Z-A АЦП с высоким разрешением
го объема невозможно описать все приложения и изделия, и мы сосредото-
чимся на нескольких характерных примерах преобразования сигналов дат-
чиков, которые служат иллюстрацией большинства важных принципов при-
менения.
Так как во многих датчиках, таких как датчики деформации, счетчики
расхода воды, датчики давления и напряжения, используются резистивные
схемы, в качестве примера мы рассмотрим применение АЦП AD7730 в схе-
ме весов. Блок-схема AD7730 показана на рис. 8.4.
Сердцем AD7730 является 24-разрядное 2-Д ядро. AD7730 представляет
собой полнофункциональный аналоговый интерфейс для применения в ве-
сах и задачах измерения давления. Устройство принимает низкоуровневые
сигналы непосредственно от датчика и выдает последовательно цифровое
слово. Входной сигнал поступает на интерфейсную схему программируе-
мого усиления и затем на аналоговый модулятор. Выходные Д-сигналы мо-
дулятора обрабатывается цифровым низкочастотным программируемым
фильтром с возможностью изменения частоты среза, выходной частоты
DVDD
REFIN(-) REFIN(+)
Детектор опорного
напряжения
VBIAS
AIN2(+)/DlQ---1-
VBIAS Q
AD7730
SYNC
MCLKIN
STANDBY
ACX
ACX
Такты
АС-возбуж-
дения
Сигма-дельта АЦП
Буфер
Банк регистров
Сигма-
дельта
модулятор
Микроконтроллер
калибровки
Программируе-
мый цифровой
фильтр
Тактовый
Последовательный интерфейс генератор
и управляющая логика
Усилитель_____
с программируемым
усилением
100 нА________
\ 16-раз-
/ рядный —
ЦАП
MCLK OUT
SCLK
CS
DIN
DOUT
RESET
-о
POL
-о-
AGND DGND
Рис. 8.4. Мостовой ЦАП AD7730 с одним источником питания
Частота, Гц
Рис. 8.5. Частотный отклик цифрового фильтра AD7730
данных и времени установления. Отклик внутреннего цифрового фильтра
показан на рис. 8.5.
В устройстве имеются два буферированных дифференциальных анало-
говых входа с программируемым коэффициентом усиления и дифферен-
циальный вход опорного напряжения. Устройство работает от однополяр-
ного источника напряжения питания +5 В. Имеется четыре возможных
диапазона напряжений униполярного входного сигнала (от 0 до +10, +20,
+40 или +80 мВ) и четыре диапазона напряжений биполярного входного
сигнала (±10, ±20, ±40 или ±80 мВ). Разрешение кода, свободного от
шумов, которое может быть достигнуто непосредственно при помощи ус-
тройства, равно 1 на 230 000 отсчетов. Внутренний 6-разрядный ЦАП по-
зволяет компенсировать постоянное напряжение (соответствующее весу
тары (TARE)).
Также обеспечиваются тактовые сигналы для синхронизации возбужде-
ния моста переменным током. Последовательный интерфейс устройства
может конфигурироваться для работы в трехпроводном режиме и совмес-
тим с микроконтроллерами и цифровыми сигнальными процессорами.
AD7730 имеет функции самокалибровки и калибровки системы, имеет дрейф
смещения менее 5 нВ/°C и дрейф усиления менее 2 ррт/°C.
AD7730 выпускается в 24-контактном корпусе DIP, 24-контактном корпу-
се SOIC и 24-контактном корпусе TSSOP. AD7730L выпускается в 24-кон-
тактном корпусе SOIC и 24-контактном корпусе TSSOP. Ключевые пара-
метры AD7730 приведены на рис. 8.6. Более подробную информацию о
работе AD7730 можно найти в ь 2.
На рис. 8.7 показано применение высокоэффективного метода лого-
метрических измерений (измерения отношений), в котором для миними-
зации ошибок, возникающих из-за сопротивления проводов, использует-
ся измерительная схема Кельвина (мост Кельвина) и исключена необхо-
димость использования точного напряжения возбуждения. Питание
измерительного АЦП AD7730 может осуществляться от однополярного
источника, который также используется в случае удаленного моста. И ана-
8.1. Прецизионные измерения и преобразование сигналов датчиков
• Полный диапазон разрешения: 80 000 точек (16,5 бит) при диапазоне полной шкалы
±10 мВ.
• Режим стабилизации прерыванием для достижения малых значений смещения и дрейфа.
• Дрейф смещения: 5 нВ/°C (при активном режиме стабилизации прерыванием).
• Дрейф усиления: 2 ррт/’С.
• Подавление синфазной частоты в линии: >150 дБ.
• Двухканальный аналоговый интерфейс с программируемым усилением.
• Внутренний ЦАП для компенсации смещения/напряжения тары.
• Режим FASTStep.
• Выход возбуждения переменным током.
• Внутренняя калибровка и калибровка системы.
• Один источник питания +5 В.
• Рассеиваемая мощность: 65 мВт (125 мВт при диапазоне полной шкалы 10 мВ).
• 24-контактный корпус SOIC и 24-контактный корпус TSSOP.
Рис. 8.6. Ключевые параметры AD7730
Рис. 8.7. Схема интерфейса AD7730 с мостовым датчиком на базе моста Кельвина в
логометрической конфигурации
логовый вход, и вход опорного напряжения АЦП являются дифференци-
альными и имеют высокий импеданс. Выходы «+» и «—» SENSE-моста
используются в качестве дифференциального опорного напряжения АЦП,
которое в данном случае пропорционально напряжению возбуждения,
которое в свою очередь пропорционально выходному напряжению моста.
При изменении напряжения возбуждения моста не происходит потери
точности измерений.
Следует отметить, что логометрический метод измерения может ис-
пользоваться во многих задачах, в которых выходной сигнал датчика про-
порционален току или напряжению возбуждения (например, при интер-
фейсе с термисторами или резистивными температурными датчиками
(RTD)).
Глава 8. Применение преобразователей данных
Анализ проекта весов на базе AD7730
Мы продолжим обсуждение на примере простого применения в весах АЦП
AD7730 и стандартного датчика груза. На рис. 8.8 приведены цели проекта.
Ключевыми параметрами являются нагрузка полной шкалы (2 кг) и разре-
шение (0,1 г). Основные требования к АЦП и датчику нагрузки определя-
ются в первую очередь именно этими параметрами.
Рис. 8.8. Пример проекта — весы
• Другие параметры:
— точность: 0,1 %
— отклонение от линейности: ±0,1 г
— температурный дрейф: ±20 ррм
при температурах 10—30 °C
— быстродействие: считывание за сек.
— питание: 120 В переменного тока
— размеры: 7,5 х 8,6 х 2,6 дюймов
• Квалификация: для торговли
— цена: 400 долларов
На рис. 8.9 показаны характеристики датчика нагрузки, удовлетворяю-
щего общим требованиям к системе. Обратите внимание, что датчик на-
грузки состоит из четырех отдельных датчиков механического напряжения,
соединенных в стандартной мостовой конфигурации. При нагружении бал-
ки значения R{ и Т?2 уменьшаются, а /?3 и Я4 — увеличиваются. Эта схема
носит название четырехэлементная изменяющаяся (four-element-varying) мос-
товая конфигурация и подробно описана в 1 из списка литературы к гл. 2.
Выбранный датчик имеет максимальную нагрузку (нагрузку полной
шкалы) 2 кг и выходную чувствительность 2 мВ/B. Это означает, что при
напряжении возбуждения 10 В выходное напряжение полной шкалы равно
20 мВ. В этом заключается основная трудность, связанная с обработкой
сигналов датчиков нагрузки: необходимость точного усиления и оцифровки
низкоуровневого выходного сигнала без добавления к нему шумов. Расчет
• Предельный вес:
• Чувствительность:
• Предельное возбуждение:
• Другие параметры:
— импеданс:
— суммарная ошибка:
— гистерезис:
— повторяемость:
— температурный дрейф:
— допустимая перегрузка:
— цена:
2 кг
2 мВ/В
10 В
350 Ом
0,025 %
0,025 %
0,01 %
±10 ррм
150%
200 долл.
Типовые
нагрузочные
ячейки
Рис. 8.9. Характеристики датчика нагрузкг
8.1. Прецизионные измерения и преобразование сигналов датчиков
• Предельный вес: 2 кг
• Чувствительность: 2 мВ/В
• Предельное возбуждение: 5 В
VFS = Ц1реД х чувствительность
VFS = 5 В х 2 мВ/В = 10 мВ
VCM = 2>5 в
• Выходное напряжение полной шкалы: 10 мВ
• Пропорциональность возбуждающему напряжению
— измерение отношений
Р ис. 8.10. Определение выходного напряжения полной шкалы для датчика нагрузки
при напряжении возбуждения 5 В
выходного напряжения датчика нагрузки продемонстрирован на рис. 8.10.
При выбранном напряжении возбуждения 5 В выходное напряжение пол-
ной шкалы моста составляет всего 10 мВ. Обратите внимание, что выход-
ное напряжение также пропорционально, т. е. является логометрическим,
по отношению к напряжению возбуждения.
Следующим шагом является определение требований к разрешению АЦП,
он подробно описан на рис. 8.11. Необходимое полное число отдельных
уровней квантования (отсчетов) равно отношению веса полной шкалы
(2 кг) к требуемому разрешению (0,1 г), т. е. 20 000. При напряжении воз-
буждения 5 В выходное напряжение полной шкалы датчика нагрузки равно
10 мВ для нагрузки 2 кг.
Таким образом, требуемое разрешение кода, свободного от шумов, Vp р,
определяется как Vp р = 10 мВ/20 000 = 0,5 мкВ. Это выражение определяет
разрядность кода, и, следовательно, полный размах шумов не должен превы-
шать 0,5 мкВ. Соответствующее допустимое среднеквадратичное значение
Рис. 8.11. Определение требований к
разрешению
• Требования: от 0,1 г до 2 кг
X число уровней квантования равно полной шкале/раз-
решение
X число уровней квантования — 2000 г/0,1 г = 20 000
— 20 000 уровней
Е = 10 мВ @ возбуждение
Е VP.P = VJ# Уровней
I Vp_p = 10 мВ/20000 = 0,0005 мВ
— 0,5 мкВ р-р шум
X VRMS = Vpp/6,6
X VRMS = 0,5 мкВ/6,6 = 0,075 мкВ
— 75 нВ среднеквадратичный шум
X р-р разрядов равно log10(р)/1од10(2)
X р-р разрядов равно log( 10 мВ/0,0005 мВ)/0,3
— 14,3 разрядов р-р в 10 мВ диапазоне
(свободных от шума разрядов)
X RMS разрядов равно log,0(Уге/УЯМ5)/1од10(2)
X RMS разрядов равно !од10( 10 мВ/0,000075)/0,3
— 17,0 среднеквадратичных разрядов в 10 мВ
диапазоне (эффективное разрешение)
Глава 8. Применение преобразователей данных
шума определяется выражением VRMS = Vpр/6,6 = 0,5 мкВ/6,6 = 0,075 мВ =
= 75 нВ (множитель 6,6 для перевода полного размаха шумов в среднеквад-
ратичное значение шума используется в предположении о гауссовом шуме).
Разрешение кода АЦП, свободного от шумов, определяется следующим
образом:
Разрешение кода, свободного от шумов, бит =
f 10 мВ
\ 0,5 мкВ
logio (2)
log10 (2)
= 14,3 бит.
(8.1)
Эффективное разрешение АЦП определяется следующим образом:
Эффективное разрешение, бит =
log10
( 10 мВ
1^0,5 мкВ/6,6J
logl0 (2)
= 17 бит.
(8.2)
На рис. 8.12 показано традиционное решение проблемы преобразова-
ния сигнала датчика, где для усиления выходного сигнала моста с напря-
жением полной шкалы 10 мВ до уровня 2,5 В, который совместим со
входом АЦП с разрядностью 14 бит и более, используется измерительный
усилитель. Данный подход требует использования малошумящего входно-
го усилителя с низким дрейфом, такого как прецизионный входной уси-
литель AD620 [4], имеющий полный размах шумов 280 нВ, и среднеквад-
ратичное значение шума приблизительно 280 нВ/6,6 = 42 нВ в полосе от
0,1 до 10 Гц.
Другим критическим требованием в системе является наличие фильтра
низких частот для удаления шума и помехи с частотой 50/60 Гц. Предпо-
ложим, что ширина полосы сигнала по уровню 3 дБ равна 10 Гц и что
• Сложная конструкция.
• Требуется ФНЧ, чтобы обеспечить низкий шум (например: -3 дБ при 10 Гц, -60 дБ
при 50 Гц, сложная конструкция фильтра).
• Критичные параметры усилителя (низкий шум, низкое напряжение смещения, малые
ошибки усиления: у AD620 0,28 мкВ р-р шум в полосе частот от 0,1 до 10 Гц , т. е. 42
нВ среднеквадратичное значение).
Рис. 8.12. Традиционная схема интерфейса с датчиком нагрузки
8.1. Прецизионные измерения и преобразование сигналов датчиков 423^
фильтр должен обеспечивать на частоте 50 Гц подавление, по меньшей
мере, на 60 дБ. Разработка такого фильтра является, мягко говоря, трудной
задачей. Существует также много других аспектов, которые необходимо
принимать во внимание при данном подходе: стабильность двух источни-
ков опорного напряжения, характеристики буферного операционного уси-
лителя напряжения KREF1 и т. д.
Наконец, выбор необходимого АЦП также является серьезной задачей:
требование к разрешению кода, свободного от шумов, 14,3 бит при вход-
ном сигнале полной шкалы 2,5 В подразумевает применение 16-разрядного
АЦП с полным размахом шума, приведенного ко входу, приблизительно
равным 3 LSB (среднеквадратичное значение — 0,45 LSB).
Для того чтобы избежать проблем, связанных с традиционным подхо-
дом к схеме обработки, можно применить схему на базе AD7730, которая
показана на рис. 8.13. Она является очень элегантным решением, так как
не требует наличия инструментального усилителя, источника опорного на-
пряжения и фильтра. Заметьте, что мост подключается непосредственно к
AD7730, аналогично схеме, приведенной на рис. 8.7. Наличие в составе
AD7730 входного усилителя с программируемым коэффициентом усиления
исключает необходимость использования внешнего входного усилителя, так
как среди программируемых значений диапазонов входных напряжений
имеется значение, соответствующее входному сигналу полной шкалы 10 мВ.
Для исключения ошибок, вызванных сопротивлением проводов линий воз-
буждения моста, используется схема Кельвина. Питание на мост подается
непосредственно от источника питания +5 В, и напряжения на линиях
SENSE служат опорными напряжениями АЦП. Таким образом, обеспечи-
вается полностью логометрический режим измерений. Также исключается
необходимость использования сложного фильтра; достаточно добавить по
одному керамическому конденсатору (на схеме не показаны) на каждый из
аналоговых входов и входов опорного напряжения.
AD7730 спроектирован для работы с мостом (прерывание, буфер, PGA, цифровой
фильтр, ЦАП компенсации тары, калибровка и т. п.).
Полный измеритель отношений, влияние изменений напряжения — возбуждения, рав-
ного опорному напряжению, исключено:
- нагрузка: UBblx/UxoHlaxl;
- данные AD7730: 1/вх/УВ£В, l/B£f = VOHTa„.
Рис. 8.13. Реализация устройства на базе AD7730
Таблица I
Выходной шум в зависимости от входного диапазона и частоты обновления (СНР = 1)
С^Гипичный выходной среднеквадратичный шум в н
Темп выходных данных, Гц Частота по уровню -3 дБ, Гц Число уровней полной шкалы Время установления в нормальном режиме, мс Время установления в быстром режиме, мс Входной диапазон ±80 В Входной диапазон ±40 В Входной диапазон ±20 В ЗходноиЧ [ диапазон ] \±10 В/
50 1,97 2048 460 60 115 75 55 40
100 3,95 1024 230 30 155 105 75 60
150 5,92 683 153 20 200 135 95 70
| 200*| 7,9 512 115 15 225 145 100 I 80 I
400 15,8 256 57,5 7,5 335 225 160 110
Таблица II
Разрешение от пика до пика в зависимости от входного диапазона и частоты обновления (СНР = 1)
^Разрешение от пика до пика в количестве уровней (разрядов^}
624 Глава 8. Применение преобразователей данных
Темп выходных данных, Гц Частота по уровню -3 дБ, Гц Число уровней полной шкалы Время установления в нормальном режиме, мс Время установления в быстром режиме, мс Входной диапазон ±80 В Входной диапазон ±40 В Входной диапазон ±20 В ХВходноиЧ ( диапазон ] \±10В 7
50 1,97 2048 460 60 230(18) 175(17,5) 120(17) 80(10,5)
100 3,95 1024 230 30 170(17,5) 125(17) 90(16,5) 55 (16)
150 5,92 683 153 20 130(17) 100(16,5) 70(16) 45 (15,5)
| 200*| 7,9 512 115 15 120(17) 90(16,5) 65(16) | 40(15,5)1 30(15)
400 15,8 256 57,5 7,5 80(16,5) 55(15,5) 40(15,5)
* Мощность — в режиме дефолт.
Рис. 8.14. Определение разрешения по техническому описанию AD7730
8.1. Прецизионные измерения и преобразование сигналов датчиков
Как показано на рис. 8.14, характеристики реализованного устройства
могут быть определены при детальном анализе таблиц I и II технического
описания AD7730. В таблице I приведены среднеквадратичные значения
выходного шума в зависимости от частоты выходных данных, ширины по-
лосы цифрового фильтра по уровню 3 дБ и диапазона входных напряжений
(для всех случаев даны значения при включенном режиме стабилизации
прерыванием). При частоте выходных данных 200 Гц частота среза фильтра
равна 7,9 Гц, что является достаточным для реализуемого проекта. При
диапазоне входных напряжений ±10 мВ среднеквадратичное значение вы-
ходного шума равно 80 нВ. Это значение соответствует полному размаху
шумов V = 80 нВ х 6,6 = 528 нВ. Число отсчетов, свободных от шумов,
равно VFS/V = 10 мВ/528 нВ = 18940. Таким образом, при нагрузке 2 кг
разрешение системы равно 2 кг/18940 = 0,105 г, что приблизительно соот-
ветствует требуемому значению разрешения 0,1 г.
Для определения разрешения кода, свободного от шумов, также может
использоваться таблица II. При диапазоне входных напряжений ±10 мВ из
таблицы получаем значение 40000 отсчетов (15,5 бит без шума). Это значе-
ние необходимо разделить на 2, так как используется только половина вход-
ного диапазона. Таким образом, действительное значение приблизительно
равно 20000 отсчетам (14,5 бит без шума), что близко согласуется с приве-
денными выше вычислениями. Вычисление различных параметров систе-
мы иллюстрирует рис. 8.15.
• 80 нВ среднеквадратичный шум при 200 Гц:
- Vp.p = 6,6 х
— I/ = 6,6 х 80 нВ = 528 нВ;
Р-Р
— VFS = 10 мВ;
— # уровней: VFS/Vpp,
— # уровней: 10 мВ/0,000528 = 18,94 С;
— разрешение: полная шкала/число уровней;
— разрешение: 2,000 г/18,940 = 0,105 г.
• 0,105 г разрешение.
• 15,5 разрядов от пика до пика при ±10 мВ (сво-
бодные от шума разряды):
— VFS = 10 мВ -1/2 от 20 мВ;
— используется только 1 /2 входного диапазона АЦП;
— проигран 1 разряд.
• 14,5 разрядов от пика до пика в 10 мВ.
• 40 000 уровней в ±10 мВ:
— VFS = 10 мВ -1/2 от 20 мВ;
— используется только 1 /2 входного диапазона АЦП;
— 20 000 уровней в 10 мВ.
Рис. 8.15. Разрешение AD7730 при
частоте данных 200 Гц
Обратите внимание, что общее разрешение системы может быть увели-
чено путем работы при более низких частотах выходных данных и, следо-
вательно, более низких частотах начала спада цифрового фильтра.
Оценка проекта упрощается при использовании отладочной платы
AD7730 и программного обеспечения, показанных на рис. 8.16. Отладочная
плата может подключаться непосредственно к датчику нагрузки и ПК. Про-
граммное обеспечение позволяет изменять опции AD7730 для оценки раз-
личных комбинаций значений частоты данных, частоты среза фильтра, ди-
Глава 8. Применение преобразователей данных
+5 в
Нагрузочная
ячейка
Рис. 8.16. Оценка проекта с использованием отладочной платы и программного обес-
печения
Персональный
компьютер
апазона входных напряжений и функции стабилизации прерыванием. Для
других АЦП семейства AD77xx имеются аналогичные отладочные платы и
программное обеспечение.
На рис. 8.17 приведен итоговый обзор параметров проекта весов.
Требования Чувствительность нагрузочной ячейки Блок AD7730 Весовая шкала системы
Предельная нагрузка 2 кг 2 кг AIN Range ±10 мВ 2 кг
Чувстви- тельность ^0,1 кг^) (^ТмВ/еГ) Среднеквадратичный шум ( 80 нВ RMS ) К Частота выходных данных J 200 Гц ^QJoTr)
Рис. 8.17. Характеристики реализованной системы
Термопара с AD7793
Термопары обеспечивают точное измерение температур в очень широком
диапазоне, однако их относительно малое выходное напряжение усложняет
устройство схемы преобразования сигнала. Например, термопара типа К
имеет номинальный температурный коэффициент 39 мкВ/°C; таким обра-
зом, при изменении температуры на 1000 °C выходное напряжение изменя-
ется всего на 39 мВ. Термопара не измеряет температуру напрямую: ее вы-
ходное напряжение пропорционально разности температур на рабочем спае
и на «холодном» спае, когда провода термопары подключаются к измери-
8.1. Прецизионные измерения и преобразование сигналов датчиков
тельной электронике. (Принцип работы термопары подробно описан в '.)
Следовательно, для проведения точных измерений с помощью термопары
необходимо таким образом измерить температуру «холодного спая», чтобы
компенсировать изменения температуры окружающей среды.
Двухканальный 24-разрядный S-Д АЦП AD7793 идеально подходит для
прямых измерений с помощью термопары. Его упрощенная блок-схема5
показана на рис. 8.18.
Ток потребления: не более 350 мкА.
Опорное напряжение: 1,2 В ± 10 ррм/'С.
Возбуждение/выключение при коротком
замыкании.
Рис. 8.18. 24-разрядный Е-А АЦП AD7793
• Генератор напряжения смещения.
• Внутреннее/внешнее тактирование.
• 16-выводный корпус TSSOP.
AD7793 имеет два дифференциальных входа, внутренние входной уси-
литель, источник опорного напряжения, источник напряжения смещения
и токов возбуждения/перегорания. Максимальное значение потребляемого
тока составляет 350 мкА при однополярном источнике питания +5 В.
На рис. 8.19 показано законченное решение схемы измерения с помо-
щью термопары. Обратите внимание, что для измерения температуры «хо-
лодного» спая ко входу Лвх2 подключен термистор, а термопара подсоединя-
ется непосредственно к дифференциальному входу Лвх1. Также следует от-
метить, что для установления напряжения термопары относительно общего
вывода используется внутреннее напряжение KBIAS. 7?С-фильтры миними-
зируют шумовые наводки на провода, подключаемые к контактам термопа-
ры (типичные значения номиналов компонентов — 100 Ом и 0,1 мкФ).
Сначала AD7793 программируется на измерение напряжения термопа-
ры Лвх1 с использованием внутреннего источника опорного напряжения зап-
рещенной зоны 1,2 В. Измеренное значение посылается в микроконтрол-
лер, подключенный к АЦП по последовательному интерфейсу. Напряже-
ние, падающее на термисторе, устанавливается током возбуждения 7вых1,
который также протекает через опорный резистор ??REF. Напряжение, пада-
ющее на T?REF, подается на вспомогательный опорный вход REFbx. При из-
мерении напряжения термистора на входе Лвх2 AD7793 программируется на
использование опорного напряжения REFbx. Напряжение термистора по-
сылается на микроконтроллер, который выполняет необходимые вычисле-
Глава 8. Применение преобразователей данных
• Генератор напряжения смещения используется для создания обще-
го напряжения (на входе Двх1).
• Источник тока питает термистор, обеспечивающий компенсацию хо-
лодного перехода термопары и измерение отношений с использо-
ванием опорного входа.
Рис. 8.19. Схема измерений при помощи термопары с компенсацией холодного спая
на базе AD7793
ния, включая компенсацию температуры холодного спая Тг Таким обра-
зом, термистор подключается в логометрической конфигурации, и измене-
ния тока /ых1 не влияют на точность измерения напряжения термистора.
Заметьте, что эффективный метод логометрического измерения работает с
любыми резистивными датчиками, включая термисторы, мосты, датчики
деформации и резистивные температурные датчики (RTD).
Прямые цифровые измерения температуры
Температурные датчики, имеющие цифровые выходы, обладают рядом пре-
имуществ по сравнению с датчиками с аналоговыми выходами, особенно в
задачах дистанционного измерения. Для обеспечения гальванической раз-
вязки между удаленным датчиком и измерительной системой могут приме-
няться оптроны. Эту функцию также может выполнять преобразователь
напряжения в частоту, на вход которого подается выходное напряжение
температурного датчика, однако на сегодняшний день имеются более слож-
ные ИС, которые являются более эффективными и имеют несколько пре-
имуществ в качестве.
В состав датчиков с цифровым выходом семейства ТМР05/ТМР06 вхо-
дят: источник опорного напряжения, Р/,7ИГ-генератор, Е-Д АЦП и источник
тактового сигнала (рис. 8.20). Выходной сигнал датчика оцифровывается Е-Д
модулятором первого порядка. В этом преобразователе применяется метод
избыточной дискретизации во временной области и высокоточный компа-
ратор, что позволяет достичь эффективной точности 12 разрядов при очень
компактных размерах схемы.
Выход Е-Д модулятора кодируется при помощи патентованного метода,
в результате чего формируется последовательный цифровой выходной сиг-
нал в формате отношения метка-пауза (рис. 8.21), который передается по
8.1. Прецизионные измерения и преобразование сигналов датчиков
+US = 2,7 до 5,5 В
FUNK
CONV/IN
6 Выход
GND
Рис. 8.20. Температурные датчики с цифровым выходом: ТМР05/06
[731х 7 I
—-—для 7, + Т2 = 30 мс или 120 мс.
[91 х Т 1
---1 для Tj + Т2 = 100 мс.
Л J
• ±0,5 °C точность от 0 до 70 °C.
• 0,025 °C разрешение.
• + Т2 = 120 мс, 100 мс или 30 мс (зависит от состояния входа CONV/IN).
• Специфицирован от -40 до +150 °C.
• Напряжение питания от +2,7 до +5,5 В.
• Потребляемая мощность 759 мкВт при 3,3 В в непрерывном режиме.
• Потребляемая мощность 70 мкВт при +3,3 В в периодическом режиме (1 Гц).
• 5-выводные корпуса SC-70 или SOT-23.
Рис. 8.21. Выходной формат ТМР05/ТМР06
одному проводу. Выходной сигнал легко декодируется любым микропро-
цессором либо в градусы шкалы Цельсия, либо в градусы шкалы Фаренгей-
та. Наиболее важным свойством этого метода кодирования является то, что
он позволяет исключить основные источники ошибок, характерные для
других схем модуляции, так как не зависит от тактовой частоты.
Выходной сигнал ТМР05/ТМР06 представляет собой поток цифровых
импульсов. Информация о температуре определяется отношением длитель-
ности метки (логической единицы) к длительности паузы (логического нуля)
в соответствии с формулами, приведенными на рис. 8.21. ТМР05/ТМР06
имеют три режима работы: непрерывное преобразование, работа в схеме с
последовательным опросом и однократное преобразование. Рабочий режим
выбирается при помощи входа с тремя состояниями FUNC. В режиме
однократного измерения значение потребляемой мощности снижается до
70 мкВ при скорости один отсчет в секунду.
Вход CONV/IN используется для определения частоты, с которой ТМР05/
ТМР06 измеряет температуру в режимах непрерывного или однократного
f630 Глава 8. Применение преобразователей данных
преобразования. В режиме последовательного опроса вывод CONV/IN яв-
ляется входом последовательного опроса. Режим последовательного опроса
позволяет соединять вместе несколько ТМР05/ТМР06 и использовать для
приема всех температурных измерений одну линию микроконтроллера (бо-
лее подробную информацию см. в 6).
Популярные микроконтроллеры, такие как 80С52 и 68НС11, имеют внут-
ренние таймеры, которые могут использоваться для декодирования выход-
ных сигналов ТМР05/ТМР06 в виде отношения метка-пробел. Типичная
схема интерфейса температурного датчика с 80С51 показана на рис. 8.22.
Два таймера, обозначенные Таймер 0 и Таймер 1, имеют разрядность 16 бит.
Источником тактового сигнала таймеров является тактовый сигнал систе-
мы, деленный на 12. Системный тактовый сигнал обычно обеспечивается
кварцевым генератором, поэтому измерения временных соотношений яв-
ляются достаточно точными. Так как выходной сигнал датчика является
логометрическим, конкретное значение тактовой частоты не имеет значе-
ния. Это свойство является важным, так как тактовая частота микроконт-
роллера обычно определяется внешними временными ограничениями, на-
пример скоростью передачи последовательных данных.
Программное обеспечение интерфейса с датчиком является достаточно
простым. Микроконтроллер отслеживает состояние порта ввода/вывода Р1.0
и запускает Таймер 0 по переднему фронту выходного сигнала датчика. Да-
лее микроконтроллер продолжает отслеживать состояние Р1.0 и при изме-
нении уровня сигнала с высокого на низкий останавливает Таймер 0 и за-
пускает Таймер 1. Когда выходной сигнал датчика опять принимает высо-
кий уровень, в регистрах Таймера Ои Таймера 1 хранятся длительности Тх и
Т2 соответственно. Далее в программе можно вычислить температуру на
основании уравнений, приведенных выше.
ТМР05/ТМР06 являются идеальными устройствами для применения в
задачах мониторинга температурных условий в электронном оборудовании.
Например, корпус для поверхностного монтажа точно отражает темпера-
Рис. 8.22. Интерфейс ТМР06 с микроконтроллером
8.1. Прецизионные измерения и преобразование сигналов датчиков 631
турные условия, воздействующие на расположенные рядом с датчиком ин-
тегральные схемы.
Датчики ТМР05 и ТМР06 измеряют температуру на поверхности соб-
ственного полупроводникового кристалла преобразователя. Когда они ис-
пользуются для измерения близко расположенных источников тепла, необ-
ходимо учитывать температурный импеданс между источником тепла и дат-
чиком. Зачастую для измерения температуры источника тепла используют
термопары или другие температурные датчики. Температура ТМР05/ТМР06
определяется путем измерения длительностей импульсов 7’ и 1\ в микро-
контроллере. После определения температурного импеданса на основании
выходного сигнала ТМР05/ТМР06 может быть определена температура ис-
точника тепла.
Далее мы перейдем к устройствам с более высокой степенью интегра-
ции и рассмотрим совершенные преобразователи температуры в цифровую
форму. Источники опорного напряжения на запрещенной зоне (подробно
обсуждены в гл. 6) в течение многих лет являются составными блоками
АЦП и ЦАП, и во многих преобразователях они интегрированы внутри
кристалла. Внутри подобных источников присутствует напряжение или ток,
пропорциональный абсолютной температуре (РТАТ). Нет веских причин,
по которым это напряжение или ток не могли бы использоваться для изме-
рения температуры подложки ИС АЦП. Также нет веских причин, по кото-
рым АЦП не мог бы выполнять преобразование этого напряжения в циф-
ровое выходное слово, соответствующее температуре кристалла. На ранних
этапах развития ИС преобразователей данных их внутренняя рассеиваемая
мощность была значительной, и внутренний температурный датчик изме-
рял бы температуру, превышающую температуру окружающей среды. В со-
временных ИС с низким напряжением питания и низкой потребляемой
мощностью использование данной концепции для построения истинного
преобразователя температуры в цифровую форму, точно отражающего тем-
пературу окружающей среды или компьютерной платы, оправдано с прак-
тической точки зрения.
Эта концепция была реализована в целом семействе преобразователей
температуры в цифровую форму, а также в АЦП с мультиплексированными
входами, где к одному из входов подключается внутренний температурный
датчик. Это очень полезная функция, так как современные кристаллы мик-
ропроцессоров, DSP и FPGA рассеивают большую мощность, и большин-
ство из них требует охлаждения воздушным потоком. Наличие простых
средств мониторинга температуры компьютерных плат является ценным с
точки зрения защиты этих критических схем от чрезмерного перегрева.
ADT7301 представляет собой 13-разрядный цифровой температурный
датчик со знаковым 14-м битом7. Устройство содержит внутреннюю схему
источника опорного напряжения на запрещенной зоне, температурный дат-
чик, 13-разрядный АЦП и логику последовательного интерфейса и выпус-
кается в корпусах SOT-23 и MSOP. Блок АЦП состоит из стандартного
преобразователя последовательного приближения на базе архитектуры ЦАП
с коммутируемыми конденсаторами. ADT7301 может работать от источни-
ка питания с напряжением от +2,7 до +5,5 В. Внутренний температур-
ный датчик позволяет выполнять точное измерение температуры окру-
Глава 8. Применение преобразователей данных
жающей среды. Гарантируемый диапазон измеряемых ADT7301 темпера-
тур от —40 до +150 °C. Не рекомендуется применять устройство для измере-
ния температур свыше +125 °C дольше 5 % проектируемого времени работы
устройства. Любое превышение этого порога повлияет на надежность уст-
ройства. Упрощенная блок-схема и обзор ключевых параметров ADT7301
приведены на рис. 8.23 и 8.24 соответственно.
ADT7301 может применяться в задачах измерения температуры воздуха
или поверхности. Если устройство прикреплено к поверхности теплопро-
водящим связующим веществом, то, так как потребляемая им мощность
мала, температура кристалла будет отличаться от температуры поверхности
не более чем на 0,1 °C. Если температура окружающей среды отличается от
измеряемой температуры поверхности, необходимо тщательно изолировать
обратную сторону корпуса и выводы устройства от воздушного потока.
Наибольшее прохождение тепла на кристалл обеспечивается земляным вы-
водом. Таким образом, температура кристалла будет близка к температуре
земляного проводника печатной платы. Необходимо предпринять тщатель-
ные меры по обеспечению его хорошего теплового контакта с поверхнос-
тью, температура которой измеряется.
Как и многие другие ИС, ADT7301 и связанные с ним проводники и
схемы должны изолироваться от влаги для предотвращения утечки и кор-
Рис. 8.23. 13-разрядный цифровой температурный датчик с точностью ±0,5 °C и малым
потреблением мощности ADT7301
• 13-разрядное преобразование температуры в цифровую форму.
• Диапазон рабочих температур: от -40 до +150 °C.
• Точность ±0,5 °C.
• Разрешение по температуре 0,03125 °C.
• Напряжение питания от +2,7 до +5,5 В.
• Рассеиваемая мощность 4,88 мкВт при скорости преобразования 1 отсчет в секунду.
• Последовательный интерфейс.
• 6-контактный корпус SOT-23 или 8-контактный корпус SOIC.
Рис. 8.24. Ключевые параметры ADT7301
розии, в частности при пониженных температурах, при которых наиболее
вероятно возникновение конденсата. Для защиты от влаги могут приме-
няться водостойкие лаки и конформные покрытия. Малые размеры корпу-
са позволяют монтировать ADT7301 внутрь запечатанных металлических
пробников, обеспечивающих защиту устройства.
Датчики температуры микропроцессорных подложек
Для современных компьютеров требуется надежное функционирование
аппаратного и программного обеспечения, несмотря на многие факторы,
которые могут вызвать неисправность или зависание системы. Целью аппа-
ратного мониторинга является отслеживание состояния критических пара-
метров вычислительной системы и принятие действий по исправлению
возникающих проблем.
Двумя критическими параметрами являются напряжение питания и
температура микропроцессора. Если напряжение питания падает ниже за-
данного минимального уровня, дальнейшую работу следует приостано-
вить до восстановления приемлемого уровня напряжения. В некоторых
случаях при возникновении условий пониженного напряжения желатель-
но выполнять сброс микропроцессора. Также стандартной практикой яв-
ляется сброс микропроцессора при включении и отключении питания.
При понижении напряжения питания может потребоваться переключе-
ние на резервную батарею.
При низком напряжении обязательным требованием является запрет
выполнения микропроцессором записи во внешнюю КМОП-память. Это
достигается запретом подачи на внешнюю память сигнала выбора микро-
схемы (Chip Enable).
Многие микропроцессоры могут быть запрограммированы на периоди-
ческую генерацию выходного сигнала «сторожевого таймера». Наличие этого
сигнала указывает на то, что процессор и его программное обеспечение
функционируют надлежащим образом и что он не завис в бесконечном
цикле.
Необходимость аппаратного мониторинга привела к появлению ряда
ИС, традиционно именуемых микропроцессорными супервизорами, кото-
рые выполняют все или некоторые из описанных выше функций. По слож-
ности эти устройства варьируют от простых генераторов ручного сброса (с
подавлением дребезга) до полнофункциональных подсистем мониторинга
на базе микроконтроллеров с внутренними температурными датчиками и
АЦП. В частности, семейство изделий ADM производства Analog Devices
выполняет различные функции контроля состояния микропроцессоров,
необходимые в различных системах.
Температура CPU является критически важным параметром микропро-
цессоров семейства Pentium. По этой причине все новые процессоры Pentium
содержат внутренний ^-и-^-транзистор, который предназначен для измере-
ния реальной температуры кристалла. Его коллектор соединен с подложкой,
а база и эмиттер выведены на два внешних вывода корпуса процессора.
Монитор температуры микропроцессора ADM1023 предназначен для
обработки этих выходных сигналов процессора и преобразования напряже-
Рис. 8.25. Входные цепи аналоговой обработки сигнала измерителя температуры
ADM1023 микропроцессора
ния в цифровое слово, содержащее информацию о температуре кристалла.
Он оптимизирован для использования совместно с микропроцессорами
семейства PentiumTIIL Упрощенная схема блока аналоговой обработки сиг-
нала ADM1023 показана на рис. 8.25.
Метод, применяемый для измерения температуры, идентичен принци-
пу «ЛИ/Я», обсуждавшемуся в гл. 7. К транзистору прикладываются два раз-
личных тока (/и 7V7), и измеряются соответствующие им напряжения. Из-
менение напряжения база-эмиттер, представляет собой напряжение
РТАТ и определяется выражением:
кТ
^VBE -(8.3)
q
На рис 8.25 показан внешний датчик в виде ^-«-^-транзистора на под-
ложке микропроцессора, предназначенного для мониторинга его темпера-
туры, однако с равной степенью датчиком может являться дискретный тран-
зистор (например, 2N3904 или 2N3906). При использовании дискретного
транзистора коллектор должен подключаться к базе, а не к «земле». Чтобы
предотвратить влияние шума «земли» на измерение, средний уровень на-
пряжения на выводе D смещается относительно «земли» при помощи внут-
реннего диода. Если датчик работает в среде с высоким уровнем шумов,
для фильтрации шума может быть добавлен конденсатор С. Его типичная
емкость — 2200 пФ, максимальная — 3000 пФ.
Для измерения WBE измерительный транзистор попеременно подклю-
чается к источникам рабочих токов / и NI. Результирующий сигнал пропус-
кается через фильтр нижних частот с полосой 65 кГц, подавляющий шумы,
и подается на усилитель со стабилизацией прерыванием, выполняющий
функции усиления и синхронного ограничения. Результирующее постоян-
ное напряжение, пропорциональное &VBE, оцифровывается АЦП и записы-
вается в виде 11-разрядного слова. Для дальнейшего снижения влияния
8.1. Прецизионные измерения и преобразование сигналов датчиков
шумов выполняется цифровая фильтрация путем усреднения результатов
16 циклов измерения.
ADM1023 также содержит внутренний датчик температуры, обработка и
измерение сигналов которого выполняется аналогичным образом.
Один LSB ADM1023 соответствует 0,125 °C, и АЦП теоретически может
измерять значения температуры от 0 до +127,875 °C. Результаты измерений
температуры при помощи локального и удаленного датчиков сохраняются в
регистрах значений локальной и удаленной температуры и сравниваются с
граничными значениями, запрограммированными в регистрах верхнего и
нижнего пределов локальной и удаленной температуры, как показано на
рис. 8.26. При выходе значения внутренней температуры или температуры
удаленного кристалла за пределы заданного диапазона выдается сигнал на
вывод ALERT. Этот сигнал может использоваться в качестве прерывания
или в качестве сигнала тревоги шины SMBus.
NC Vqo NC QND QND NC NC NC SDATA SCLK ADDO ADD1
Рис. 8.26. Упрощенная блок-схема ADM 1023
• Измерение внутренней температуры или температуры удаленного микропроцессора.
• Регистры напряжения смещения для калибровки системы.
• Точность и разрешение в локальном канале -1 °C.
• Разрешение -0,125 °C, точность -1 °C в удаленном канале.
• Программируемый верхний/нижний пределы температуры.
• Программируемая частота преобразования.
• Поддержка сигнала тревоги системной управляющей шины (SMBus).
• 2-проводной последовательный интерфейс SMBus.
• Максимальный рабочий ток 200 мкА (при частоте 0,25 преобразований в секунду).
• Ток в режиме ожидания — 1 мкА.
• Напряжение питания — от +3 до +5,5 В.
• 16-контактный корпус QSOP.
Рис. 8.27. Ключевые параметры ADM1023
Глава 8. Применение преобразователей данных
Программирование регистров пределов, конфигурирование и управле-
ние устройством осуществляются по последовательной системной управля-
ющей шине (SMBus, System Management Bus). Содержимое любого регист-
ра также может быть считано по шине SMBus. К функциям управления и
конфигурации относятся: переключение устройства между нормальным
режимом работы и режимом ожидания, маскирование или разрешение вы-
ходного сигнала ALERT и выбор частоты преобразования, которая может
задаваться в диапазоне от 0,0625 до 8 Гц. Ключевые параметры ADM1023
приведены на рис. 8.27.
Применение АЦП в ваттметрах
Несмотря на то что на протяжении 50 лет популярностью пользуются элек-
тромеханические счетчики электроэнергии, твердотельные счетчики обла-
дают гораздо большей точностью и гибкостью. Практически настолько же
важным является то, что хорошо спроектированный твердотельный счет-
чик имеет больший срок полезного использования. Для реализации этого
типа счетчиков предназначены устройства семейства ИС измерения элект-
роэнергии ADE775x % 10’ и.
Сначала рассмотрим фундаментальные принципы измерения мощ-
ности (рис. 8.28). Мгновенное значение переменного напряжения оп-
ределяется выражением v(t) = Vx cos (cot), а мгновенное значение пере-
менного тока (в предположении, что он в фазе с напряжением) — выражени-
ем /(/) = /х cos (a)t). Мгновенная мощность равна произведению v(t) на /(/):
P(t) = Ух /х cos2(^/). (8.4)
Воспользовавшись тригонометрическим тождеством
2cos2(69/) = 1 4- cos(269/), (8-5)
получаем
Я') =
Vxl
2
+ cos(269/)] = Мгновенная мощность.
(8.6)
Мгновенная активная мощность является просто средним значением p(t).
Можно показать, что вычисление мгновенной активной мощности по этим
формулам дает точные результаты, даже если ток не в фазе с напряжением
(т. е., когда коэффициент мощности не равен единице; коэффициент мощ-
• v(t) = V х cos(fttf) (мгновенное напряжение).
• /(f) = / х cos(a>t) (мгновенный ток).
• P(t) = V х / cos2 (cut) (мгновенная мощность).
• р(0 = + cos(2<tft)].
Среднее значение p(t) = Мгновенная активная мощность, учитывает коэффициент мощ-
ности и искажения формы.
Рис. 8.28. Основы измерения мощности
8.1. Прецизионные измерения и преобразование сигналов датчиков
ности по определению равен cos 0, где 0 — фазовый угол между напряжени-
ем и током). Этот метод также дает точное значение активной мощности,
если напряжение и ток имеют несинусоидальную форму.
Эти измерения реализуются в ИС ADE7755, блок-схема которой пока-
зана на рис. 8.29. Два АЦП оцифровывают сигналы напряжения, поступаю-
щие от преобразователей тока и напряжения. Эти АЦП являются 16-раз-
рядными Z-Д АЦП второго порядка с входной частотой дискретизации
900 kSPS. Данная структура аналогового входа значительно упрощает ин-
терфейс с преобразователями за счет широкого динамического диапазона,
позволяющего обеспечить непосредственное подключение к преобразова-
телю, и упрощения требований к антиалайзинговому фильтру. Дальнейшее
упрощение интерфейса с преобразователем достигается за счет примене-
ния в токовом канале каскаде программируемого усиления. Фильтр верх-
них частот в токовом канале удаляет любые постоянные составляющие из
сигнала тока. Этим устраняются любые неточности в вычислении активной
мощности, вызываемые смещением сигналов напряжения или тока.
Активная мощность измеряется на основании сигнала мгновенной мощ-
ности, который формируется путем непосредственного перемножения сиг-
налов тока и напряжения. Для извлечения составляющей активной мощно-
сти (постоянной составляющей) сигнал мгновенной мощности фильтрует-
ся в фильтре нижних частот. На рис. 8.29 показаны сигнал мгновенной
мощности и метод извлечения из него информации об активной мощности
путем низкочастотной фильтрации. Этот метод позволяет правильно вы-
числять активную мощность для несинусоидальных токов и напряжений
при любых коэффициентах мощности. Вся обработка сигналов выполняет-
ся в цифровой форме, что позволяет добиться превосходной температур-
ной и временной стабильности.
Низкочастотный выходной сигнал ADE7755 формируется путем накоп-
ления информации об активной мощности (рис. 8.30). Низкая частота сиг-
нала подразумевает большое время накопления между выдачей выходных
импульсов. Таким образом, частота выходных импульсов пропорциональна
средней активной мощности. Полученная информация о средней активной
Усилитель
с программируемым
коэффициентом
усиления
АЦП
Фильтр
верхних
частот
Умножитель
Канал 2 О-
-► F1
Фильтр
нижних
частот
Цифра
в частоту
-►CF
Цифра
в частоту
Мгновенная мощность
сигнала р(0
p(t) = i(t) х v(t),
где:
v(t) = V х cos(atf)
7(0 = I x cos(atf)
P(0 = ^{1 + cos(2tyt)}
Время
Мгновенная действительная
мощность сигнала
Рис. 8.29. Обработка сигнала в ИС измерения электроэнергии ADE7755
Глава 8. Применение преобразователей данных
V1P
V1N
V2P
V2N
GO G1
ADE7755
Монитор
потребляемой
мощности
АСЛ5С DVdo DGND
-о—о—о-
AVqo AGND
CLKIN CLKOUT SCF
Опорное
напряжение
2,5 В
F2
I ;
0005 1 47
Счетчик киловатт-часов
Рис. 8.30. ИС измерения электроэнергии ADE7755 с импульсным выходом
мощности может в свою очередь накапливаться (например, счетчиком) для
формирования информации об активной энергии. Выходной сигнал CF имеет
высокую выходную частоту и меньшее время накопления; таким образом,
он пропорционален мгновенной активной мощности. Этот сигнал полезен
для задач системной калибровки, которая проводится при стабильной на-
грузке.
На рис. 8.31 показана типичная схема включения для каналов V\ и И2.
В канале измерения тока V используется преобразователь СТ (токовый транс-
форматор). Обратите внимание, что напряжения канала Vx изменяются от-
носительно (common-mode) AGND, так как центральная точка нагрузочно-
го резистора трансформатора подключена к AGND. Следовательно, анало-
говые сигналы на входах VlN и ViP являются комплементарными.
Коэффициент трансформации СТ и номинал нагрузочного резистора Rb
выбираются таким образом, чтобы обеспечить пиковое дифференциаль-
Рис. 8.31. Типовые соединения с каналом 1 (токовым) и с каналом 2 (напряжения)
8.2. Многоканальные системы сбора данных 639
ное напряжение, равное ±470 мВ/K усиления, при максимальной на-
грузке. В канале измерения напряжения V2 используется РТ (трансформа-
тор напряжения), за счет чего обеспечивается полная изоляция от линии
сети питания.
Список литературы
8.1. Прецизионные измерения
и преобразование сигналов датчиков
1. Walt Kester. Practical Design Techniques for Sensor Signal Conditioning. Analog
Devices, 1999, Chapter 8. Available for download at www.analog.com.
2. Data sheet for AD7730/AD7730L Bridge Transducer ADC, www.analog.com.
3. Walter G. Jung. Op Amp Applications. Analog Devices, 2002, ISBN 0-916550-26-5,
Chapter 4.
4. Data sheet for AD620 Precision Instrumentation Amplifier, www.analog.com.
5. Data sheet for AD7793 24-bit Dual Sigma-Delta ADC, www.analog.com.
6. Data sheet for TMP05/TMP06 ±0,5°C Accurate PWM Temperature Sensor in
5-Lead SC-70, www.analog.com.
7. Data sheet for ADT7301 13-bit, ±0,5 °C Accurate, MicroPower Digital Temperature
Sensor, www.analog.com.
8. Data sheet for ADM 1023 ACPI Compliant High Accuracy Microprocessor System
Temperature Monitor, www.analog.com.
9. Data sheet for ADE7755 Energy Metering IC with Pulse Output, www.analog.com.
10. Paul Daigle. All-Electronic Power and Energy Meters. Analog Dialogue, Volume 33,
Number 2, February, 1999, www.analog.com.
11. John Markow. Microcontroller-Based Energy Metering using the AD7755. Analog
Dialogue, Volume 33, Number 9, October, 1999, www.analog.com.
8.2. Многоканальные системы сбора данных
Уолт Кестер
Конфигурации систем сбора данных
Существует множество областей применения систем сбора данных в зада-
чах измерения параметров и управления процессами. Все приложения сбо-
ра данных включают этап дискретизации аналоговых сигналов в АЦП в
целях последующего анализа. В измерительных задачах сигнал с выхода
АЦП поступает на цифровой процессор, выполняющий анализ данных.
В задачах управления процессами контроллер процесса генерирует сигналы
обратной связи, которые обычно должны быть преобразованы в аналого-
вый вид при помощи ЦАП.
Несмотря на то что одиночный АЦП, выполняющий оцифровку одного
канала аналоговых данных, по сути, представляет собой систему сбора дан-
ных, термин сбор данных (data acquisition) обычно относится к многоканаль-
ным системам. Если цифровой процессор формирует сигналы обратной
связи, то для преобразования цифровых откликов в аналоговую форму мо-
жет потребоваться ЦАП. Этот процесс обычно называется распределением
данных (data distribution).
Глава 8. Применение преобразователей данных
Рис. 8.32. Два подхода к построению многоканальной системы сбора данных
На рис. 8.32, а, показана система управления процессом сбора/распре-
деления данных, в котором каждому каналу соответствует отдельный ЦАП
и АЦП. Альтернативная конфигурация показана на рис. 8.32, б; здесь ис-
пользуется один ЦАП и один АЦП совместно с аналоговыми мультиплек-
сорами и демультиплексорами. В большинстве случаев, особенно при боль-
шом числе каналов, вторая конфигурация является более экономичной.
При проектировании системы сбора данных следует обеспечить вы-
бор оптимальной комбинации многих параметров. Необходимо решить
такие задачи, как фильтрация, усиление, мультиплексирование, демуль-
типлексирование, выбор частоты дискретизации и разбиение системы
на модули.
Мультиплексирование
Как следует из рис. 8.32, мультиплексирование является фундаментальной
частью системы сбора данных. Более подробное исследование мультиплек-
соров и ключей представлено в *, однако для проектирования систем сбора
данных требуется понимание фундаментальных принципов их работы, даже
если мультиплексор расположен на одном кристалле с АЦП, что на сего-
дняшний день не редкость.
На рис. 8.33 показана упрощенная схема аналогового мультиплексора.
Число входных каналов лежит в диапазоне от 2 до 32; мультиплексоры обычно
производятся по КМОП-технологии. Большинство мультиплексоров содер-
жат внутренние регистры и логику дешифрации адресов каналов, однако
при использовании некоторых микросхем эти функции должны выполняться
внешними устройствами. Незадействованные входы мультиплексора долж-
ны быть заземлены; невыполнение этого требования может привести к ощу-
тимым потерям точности системы. Ключевыми характеристиками мульти-
плексора являются: время переключения, сопротивление во включенном со-
стоянии, модуляция сопротивления во включенном состоянии и изоляция канала
в выключенном состоянии (перекрестные помехи). Более подробное обсуж-
дение аналоговых мультиплексоров см. в гл. 7.
8.2. Многоканальные системы сбора данных 641
Рис. 8.33. Упрощенная схема типичного аналогового мультиплексора
Сопротивление мультиплексора во включенном состоянии обычно имеет
незначительную зависимость от уровня сигнала (часто называемую модуля-
цией Лвкл). Эта зависимость вызывает искажение сигнала при работе муль-
типлексора на резистивную нагрузку, поэтому выход мультиплексора дол-
жен быть изолирован от нагрузки с помощью подходящего буферного уси-
лителя. Если сигнал с выхода мультиплексора подается на устройство с
высоким входным импедансом, например PGA, УВХ или АЦП, то исполь-
зования буфера не требуется, однако при этом следует быть внимательным.
Некоторые УВХ и АЦП выдают высокочастотные импульсы тока с часто-
той дискретизации и не допускают подачи на свои входы небуферирован-
ных сигналов с выхода мультиплексора.
На рис. 8.34 показана Л/-канальная мультиплексированная система сбо-
ра данных. Сигнал с выхода мультиплексора поступает на PGA (усилитель с
программируемым коэффициентом усиления), усиление которого может
изменяться для каждого канала в зависимости от уровня сигнала в данном
канале. При этом гарантируется, что всеми каналами используется полный
Пример: если N = 12 и Гконв = 20 мкс, то tBx < 4 Гц.
Рис. 8.34. Мультиплексированная система сбора данных с PGA и АЦП последователь-
ного приближения
21 —2852
Глава 8. Применение преобразователей данных
динамический диапазон АЦП. Усиление PGA изменяется одновременно с
переключением мультиплексора на новый канал. Команда преобразования
подается на АЦП только после того, как значение выходных сигналов муль-
типлексора и PGA установятся на уровне 1 LSB. Максимальная частота
дискретизации (при переключении каналов) ограничена временем пере-
ключения мультиплексора Гтих, временем установления PGA tpGA и временем
преобразования АЦП /конв в соответствии с приведенной ниже формулой.
В мультиплексированной системе допускается наличие максимального
положительного сигнала в одном канале и максимального отрицательного
сигнала в другом. При переключении мультиплексора между этими канала-
ми изменение сигнала на его выходе соответствует полной шкале. До нача-
ла преобразования значения выходных сигналов всех элементов сигнально-
го тракта должны установиться в пределах требуемой точности (1 LSB).
При невыполнении этого требования возникают перекрестные помехи по-
стоянного тока между каналами.
АЦП последовательного приближения, приведенный в данном приме-
ре, не имеет внутреннего УВХ (аналогично АЦП промышленного стандар-
та серии AD574x). Таким образом, в течение времени преобразования вы-
ходной сигнал должен сохранять постоянный уровень (в пределах 1 LSB) во
избежание ошибок кодирования. Это условие определяет максимальную
скорость изменения входного сигнала:
dv
dt
(8.7)
< 1 LSB
max ^конв
Амплитуда входного синусоидального сигнала полной шкалы равна 2N/2
или (2N~ ’), и, таким образом, максимальная скорость его изменения со-
ставляет:
dv
dt
(8.8)
(8.9)
= 2я-/ • 2N[ = л f -2N.
J max J max
max
Приравняв два выражения и решив их относительно /тах, получаем:
f < ——--------
J max ~ ~ +
Л'1 ZKOHB
Например, если время преобразования АЦП равно 20 мкс (соответству-
ет максимальной частоте дискретизации немного менее (из-за непроизво-
дительных издержек) 50 KSPS) и разрешение равно 12 битам, то макси-
мальная частота входного сигнала канала ограничена значением 4 Гц. Это
условие может являться адекватным при измерении постоянных сигналов,
однако возможности обработки динамических сигналов при отсутствии УВХ
сильно ограничены.
Как показано на рис. 8.35, добавление к АЦП функции УВХ позволяет
обрабатывать намного более быстрые сигналы практически без усложнения
системы, так как на сегодняшний день имеется большое количество АЦП
со встроенной функцией УВХ.
Времена подбираются таким образом, чтобы переключение мультиплек-
сора и PGA происходило сразу после завершения времени захвата УВХ
8.2. Многоканальные системы сбора данных
Вообще, 7^ux + бы « tacq + tKOHB
Таким образом, ts <------
?acq + ^конв
Пример: Если tasq = 1 мкс, tKOHB = 9 мкс, и fs < 100 kSPS. Тогда, fBx < fs/2M.
Рис. 8.35. Добавление к АЦП функции УВХ позволяет обрабатывать динамичные вход-
ные сигналы
УВХ
АЦП
Выборка/
захват
Хранение
Выборка/
захват
Значение
данных
Преобразование
Значение
данных
---------S
Хранение
----------$
----------1
Преобразование
I
Изменение Изменение
канала/усиления канала/усиления
Мультиплексор/
программируемый
усилитель
Установление мультиплексора/
программируемого усилителя
Рис. 8.36. Типичная временная диаграмма мультиплексированной системы сбора дан-
ных с УВХ
(рис. 8.36). Если суммарное время установления мультиплексора и PGA
меньше времени преобразования АЦП, то максимальная частота дискрети-
зации системы определяется условием:
1
t t
aeq кон в
(8.10)
Частота дискретизации на один канал получается делением частоты дис-
кретизации АЦП, определяемой выражением (8.10), на М.
Фильтрация в системах сбора данных
Фильтрация в системах сбора данных не только предотвращает смещение
спектров нежелательных сигналов с наложениеем на полезные, но и сни-
жает шум за счет ограничения полосы. В мультиплексированных системах
имеются две стандартные точки для включения фильтров: в каждом канале
и на выходе мультиплексора (рис. 8.37).
Глава 8. Применение преобразователей данных
С1
Для последовательных выборок, fc1 <
Рис. 8.37. Фильтрация в системе сбора данных
Фильтр на входе каждого из каналов используется для устранения нало-
жения сигналов, имеющихся вне полосы Найквиста. Частота дискретиза-
ции на один канал (при условии, что во всех каналах используется одна
частота дискретизации) равна fs/M, и соответствующая частота Найквиста
равна fs/2M. Фильтр должен обеспечить достаточное ослабление на частоте
fs/2M, чтобы избежать ограничений динамического диапазона, вызванных
наложением.
Второй фильтр может быть добавлен в сигнальный тракт между выхо-
дом мультиплексора и АЦП (обычно между PGA и УВХ). Частота среза
данного фильтра должна выбираться с особой осторожностью, так как она
влияет на время установления. В мультиплексированной системе, такой,
как показано на рис. 8.37, при переключении между каналами может воз-
никать скачок в напряжении, соответствующий полной шкале. Это проис-
ходит, когда сигнал в одном канале имеет максимальный положительный
уровень, а в соседнем канале — максимальный отрицательный уровень.
Как следует из временной диаграммы, показанной на рис. 8.36, после скач-
кообразного изменения напряжения сигнал на выходе фильтра должен ус-
тановиться в течение времени, равного полному периоду преобразования
(1//^). Во избежание значительных ошибок уровень сигнала должен устано-
виться в пределах 1 LSB от окончательного значения. Таким образом, тре-
бование ко времени установления ограничивает минимальную частоту сре-
за фильтра. На рис. 8.38 показаны времена установления однополюсного
фильтра, необходимые для поддержания заданной точности, а также отно-
шение частоты среза фильтра/С2 к частоте дискретизации АЦП/J. Требова-
ния ко времени установления выражены через значения постоянной време-
ни фильтра.
В качестве примера предположим, что разрядность АЦП равна 12 бит, а
частота дискретизации — 100 kSPS. Из таблицы, приведенной на рис. 8.38,
следует, что для установления выходного сигнала фильтра в пределах необ-
ходимой точности требуется 8.32 его постоянных времени, и
^>1,32; /С2 >132 kSPS.
(8.И)
Этот фильтр помогает устранить широкополосный шум, поступающий на
УВХ, однако, в отличие от антиалайзинговых фильтров на входе каждого из
каналов, он не выполняет функцию устранения эффектов наложения.
Разрешение в битах Младший разряд, %FS Постоянные времени
6 1,563 4,16 0,67
8 0,391 5,55 0,89
10 0,0977 6,93 1,11
12 0,0244 8,32 1,32
14 0,0061 9,70 1,55
16 0,00153 11,09 1,77
18 0,00038 12,48 2,00
20 0,000095 13,86 2,22
22 0,000024 15,25 2,44
Рис. 8.38. Время установления однополюсного фильтра, требуемое для достижения
заданной точности
При проведении анализа предполагалось, что суммарное время уста-
новления мультиплексора/РбЛ значительно меньше времени установления
фильтра. Если это не так, то частота среза фильтра должна быть выше, и в
большинстве подобных случаев от его использования следует отказаться.
Выше мы обсудили важность времени установления сигнала полной
шкалы в комбинации мультиплексор/РбЛ/фильтр, однако в равной степе-
ни важным является возможность обеспечения требуемой точности при
захвате преобразователем окончательного значения в случае скачкообраз-
ного изменения входного сигнала. Если выходной сигнал любого из компо-
нентов сигнального тракта не успевает установиться, возникают перекрес-
тные помехи по постоянному току между соседними каналами и ухудшает-
ся точность. Если используемые в системе сбора данных АЦП и УВХ
являются отдельными устройствами, то ключевой характеристикой УВХ
является время захвата. Оно обычно определяется как время, требуемое для
захвата входного сигнала полной шкалы с точностью 0,1 (10 бит) или 0,01 %
(13 бит). Для большинства устройств указываются времена, соответствую-
щие и 0,1 и 0,01 %. Если для УВХ не указано время захвата, требуемое для
достижения точности 0,01 % или выше, то его не следует применять в 12-
разрядных мультиплексированных схемах.
Если используется дискретизирующий АЦП (с внутренним УВХ), то
время захвата УВХ, необходимое для достижения определенного уровня
точности, может не указываться производителем. Так как для некоторых
дискретизирующих АЦП точность и время захвата УВХ напрямую не ука-
зываются, следует обратить внимание на характеристику переходного от-
клика. Переходный отклик АЦП (время установления выходного сигнала в
пределах 1 LSB при скачкообразном изменении входного сигнала, соответ-
ствующем полной шкале) должен быть меньше 1//^, где fs — частота диск-
ретизации АЦП. Эта зачастую игнорируемая характеристика может стать
слабым звеном в цепи прохождения сигнала. Иногда для отдельных АЦП в
техническом описании не указываются ни время захвата УВХ, требуемое
646 Глава 8. Применение преобразователей данных
для достижения заданной точности, ни время переходного отклика. В таких
случаях, возможно, применение данного АЦП в мультиплексированных
приложениях неприемлемо. При использовании дискретных компонентов
трудно измерить и достичь времен установления с точностью, превышаю-
щей 12 бит, поэтому точность большинства мультиплексированных сис-
тем сбора данных, построенных на дискретных компонентах, не превы-
шает 14 бит. Проектирование мультиплексированных систем с большей
точностью является весьма сложной задачей, и при необходимости получе-
ния более высокого разрешения настоятельно рекомендуется рассмотреть
вариант использования отдельного АЦП в каждом из каналов. На сего-
дняшний день альтернативой является применение АЦП с внутрикристаль-
ными мультиплексорами, для которых указываются общие показатели всей
комбинации компонентов сигнального тракта.
Системы сбора данных на кристалле
Уровень технологии аналого-цифровых КМОП СБИС позволяет интегри-
ровать большие и сложные схемы сбора данных на одном кристалле. На
сегодняшний день большая часть схем преобразования сигнала, включая
мультиплексоры, PGA и УВХ интегрируются в одной микросхеме с АЦП.
Такой высокий уровень интеграции позволяет задавать параметры для сис-
тем сбора данных и производить их тестирование как для единой сложной
функции. Это избавляет разработчика от большинства задач, связанных с
тестированием и определением вклада отдельных компонентов в суммар-
ную ошибку. Характеристики всей системы сбора данных по постоянному
и переменному току задаются для завершенной функции; таким образом,
исключается необходимость вычисления показателей качества на основа-
нии характеристик отдельных устройств, указываемых для наихудшего слу-
чая. Применение полнофункциональной монолитной системы позволяет
обеспечить лучшие показатели при гораздо более низкой стоимости, чем
при использовании системы, построенной на дискретных компонентах. Более
того, калибровка интегрированной системы более проста, и многие моно-
литные системы являются самокалибрующимися.
При таком высоком уровне интеграции многие из параметров устрой-
ства можно легко и без удорожания сделать программируемыми. К ним
относятся усиление, частота среза фильтра и даже разрешение и время пре-
образования АЦП, а также такие очевидные функции, как выбор входного
канала, формат выходных данных и выбор диапазона.
Концепция системы сбора данных на кристалле привела к появлению
такого большого числа ИС, что подробное обсуждение их всех невозможно.
Поэтому мы обсудим некоторые из наиболее новых устройств, которые
являются характерными представителями всего семейства. Для каждого из
них полностью заданы характеристики по постоянному и переменному току.
Многие из устройств выпускаются в 8-, 10- и 12-разрядных версиях.
AD7908/AD7918/AD7928 являются 8-, 10- и 12-разрядными высокоско-
ростными малопотребляющими 8-канальными АЦП последовательного
приближения. Данные устройства работают от однополярного источника
питания с напряжением от 2,7 до 5,25 В и обладают пропускной способное-
Рис. 8.39. AD7908/AD7918/AD7928, 8-канальный 1 MSPS 8-, 10-, 12-разрядный АЦП
последовательного приближения с блоком управления последовательнос-
тью переключения каналов
тью до 1 MSPS. Каждое из устройств содержит малошумящую широкополос-
ную схему УВХ (track-and-hold amplifier), способную работать со входными
сигналами с частотой свыше 8 МГц. Блок-схема AD7908/AD7918/AD7928
показана на рис. 8.39.
В AD7908/AD7918/AD7928 используется улучшенная технология, по-
зволяющая достигать очень низкого рассеивания мощности при макси-
мальных пропускных способностях (максимальный потребляемый ток со-
ставляет 2 мА при напряжении питания 3 В и 2,7 мА при напряжении
питания 5 В).
При помощи конфигурирования регистра управления может задаваться
один из двух диапазонов напряжений входных аналоговых сигналов (от О В
до REFbx или от 0 до 2 х REF^ и форма кодирования выходного сигнала
(прямой двоичный код или дополнительный код). Каждое из устройств
AD7908/AD7918/AD7928 имеет восемь несимметричных аналоговых входов
и блок управления последовательностью переключения, который позволяет
производить преобразование данных в каналах в соответствии с предвари-
тельно запрограммированной последовательностью. Время преобразования
AD7908/AD7918/AD7928 определяется частотой сигнала SCLK. который так-
же используется в качестве задающего тактового сигнала для управления
преобразованием. Максимальная пропускная способность составляет 1 MSPS
при частоте последовательного тактового сигнала 20 МГц. Устройства вы-
пускаются в 20-контактном корпусе TSSOP.
AD7938/AD7939 представляют собой 12- и 10-разрядный высокоскорост-
ной АЦП последовательного приближения (SAR) с параллельным выходом и
низкой потребляемой мощностью. Их упрощенная блок-схема показана на
рис. 8.40. Устройства работают от однополярного источника питания с на-
пряжением от 2,7 до 5,25 В и имеют пропускную способность до 1,5 MSPS.
Каждое из устройств содержит малошумящую широкополосную схему УВХ,
способную работать с входными сигналами с частотой до 20 МГц.
Глава 8. Применение преобразователей данных
Рис. 8.40. 8-канальный 1,5 MSPS 12-/10-раз-
рядный АЦП с параллельным выходом и
блоком управления последовательностью пе-
реключения каналов, AD7938/AD7939
AD7938/AD7939 имеют 8 анало-
говых входных каналов и блок уп-
равления последовательностью пе-
реключения, который позволяет
производить преобразование в ка-
налах в соответствии с предвари-
тельно запрограммированной пос-
ледовательностью. Эти устройства
могут работать с несимметричны-
ми, полностью дифференциальны-
ми или псевдодифференциальными аналоговыми входными сигналами. Кон-
фигурация аналогового входа задается установкой определенных битов внут-
реннего регистра управления.
Управление процессом преобразования и сбором данных производится
при помощи стандартных управляющих входов, что позволяет обеспечить
простой интерфейс устройства с микропроцессорами и DSP. Выборка вход-
ного сигнала и начало преобразования происходят по заднему фронту сиг-
нала CONVST.
AD7938/AD7939 имеют точный внутренний источник опорного напря-
жения 2,5 В, который может использоваться в качестве источника опорного
напряжения для процесса аналого-цифрового преобразования. На данный
вывод может быть также подан сигнал от внешнего источника опорного на-
пряжения номиналом от 100 мВ до 3,5 В. Характеристики AD7938/7939 при
различных уровнях внешнего опорного напряжения см. в техническом опи-
сании.
В данных устройствах реализованы улучшенные технологии, позволяю-
щие достигать очень низких значений рассеиваемой мощности при высо-
кой пропускной способности. Они также обладают гибкими возможностя-
ми управления потребляемой мощностью. При помощи внутреннего реги-
стра управления пользователь может задавать различные рабочие условия,
включая диапазон напряжений аналоговых сигналов и их конфигурацию,
форму выходного кода, осуществлять управление потреблением мощности
и задавать последовательность переключения каналов. Устройства выпус-
каются в 32-контактном корпусе LFCSP.
Мультиплексирование входов Z-A АЦП
Как уже обсуждалось в гл. 3, составной частью Z-A АЦП является цифро-
вой фильтр. Для получения достоверных данных на выходе Z-A АЦП при
ступенчатом изменении уровня входного сигнала на большую величину
необходимо, чтобы весь цифровой фильтр заполнился новыми данными.
Этот процесс занимает длительное время. По этой причине иногда утверж-
дают, что Z-A АЦП не подходят для применения в многоканальных мульти-
8.2. Многоканальные системы сбора данных
ь-£).
плексированных системах, так как время, необходимое для переключения
канала, может оказаться слишком большим. В общем случае время уста-
новления выходного сигнала составляет около нескольких тактов выходной
частоты дискретизации.
Однако существует возможность оптимизации цифрового фильтра и
остальных компонентов Z-A АЦП, позволяющая достигать высоких значе-
ний пропускной способности. Примером является 8-канальный Z-A АЦП с
высокой точностью и высокой пропускной способностью AD77393, кото-
рый оптимизирован для применения в мультиплексированных системах.
Его упрощенная схема показана на рис. 8.41.
Истинный диапазон кода, свободного от шумов, AD7739 составляет 16 бит
при полном времени преобразования 250 мкс (частота переключения кана-
лов — 4 кГц), что делает его идеальным для применения в системах с муль-
типлексированием, где требуется высокое разрешение.
Пользователь может конфигурировать устройство при помощи простого
последовательного интерфейса, достигая компромисса между шумовыми ха-
рактеристиками и пропускной способностью, которая может составлять до
15 кГц. Аналоговый интерфейс представляет собой восемь несимметричных
или четыре полностью дифференциальных входных каналов с диапазонами
однополярных или биполярных напряжений 625 мВ, 1,25 и 2,5 В. Напряже-
ние входного сигнала относительно общего вывода может принимать зна-
чения от AGND (+200 мВ) до A VDD (—300 мВ). По входу дифференциально-
го опорного напряжения имеется функция обнаружения «отсутствия опор-
ного напряжения» («No-Reference»). АЦП также поддерживает функцию
калибровки любого канала системы.
Цифровой последовательный интерфейс может быть сконфигурирован
для работы в трехпроводном режиме и совместим с микроконтроллерами и
цифровыми сигнальными процессорами. На всех входах интерфейса име-
ются триггеры Шмидта. Устройство работает в расширенном промышлен-
REFIN(-) REFIN(*)
AINCOWPOQ-f—
—9-9—
[Определитель I
опорного I
надвмеыия I
Буфер
AD7739
SYNC/P1
AGND AVdd
Схема
калибровки
Генератор
ТИ
MCLKOUT MCLKIN DGND DV^
Рис. 8.41. 8 -канальный 24-разрядный S-D АЦП AD7739 с высокой пропускной спо-
собностью
Глава 8. Применение преобразователей данных
ном диапазоне температур от —40 до +105 °C. К одному семейству с AD7739
также относятся микросхемы AD7738, AD7734 и AD7732. AD7738 похож на
AD7739, но имеет более высокую скорость (частота переключения каналов
8,5 кГц при разрядности 16 бит) и более высокое значение тока утечки AIN.
Выход мультиплексора AD7738 выведен на контактную площадку, что
позволяет пользователю вводить программируемое усиление или выпол-
нять дополнительную обработку сигнала до его подачи на АЦП. АЦП AD7734
имеет четыре недифференциальных входных канала с диапазоном напря-
жений однополярных или биполярных входных сигналов до ±10 В при ра-
боте от однополярного источника аналогового напряжения питания +5 В.
Аналоговые входы AD7734 способны воспринимать сигналы с повышен-
ным уровнем напряжения до ±16,5 В без искажения характеристик сосед-
них каналов. AD7732 похож на AD7734, за исключением аналогового ин-
терфейса, который состоит из двух полностью дифференциальных входных
каналов.
Как показано на рис. 8.42, указываемое время преобразования состоит
из одного или двух периодов установления и периодов выборки, а также
времени масштабирования. При активном режиме стабилизации прерыва-
нием цикл преобразования начинается с времени установления, занимаю-
щего 43 или 44 такта MCLK (-7,1 мкс при частоте MCLK 6,144 МГц), в
течение которого происходит установление сигнала в схемах на выходе муль-
типлексора. S-Д модулятор непрерывно производит выборку аналоговых
сигналов, а цифровой фильтр обрабатывает поток цифровых данных. Вре-
мя выборки зависит от содержимого регистра, задающего время преобразо-
вания канала. В приводимом примере время выборки составляет 105,3 мкс.
После второго периода установления, занимающего 42 такта MCLK
(-6,8 мкс), снова следует период выборки уже для прерванного {chopped)
аналогового входного сигнала. Затем в течение времени масштабирования,
занимающего 163 такта MCLK (-26,5 мкс), два результата от цифрового
фильтра усредняются, масштабируются при помощи регистров калибровки
и записываются в регистр данных канала.
Мультиплексор Буфер
Прерывание
(3 МГц)
Выходные
данные
результат доступен
результат доступен
Рис. 8.42. Временная диаграмма AD7739, иллюстрирующая процесс переключения
каналов
8.2. Многоканальные системы сбора данных
Системы с одновременной выборкой
Существует ряд приложений, в которых желательно выполнять одновре-
менную выборку в нескольких каналах, например обработка синфазного и
квадратурного (/и Q) сигналов. Типичная для данной задачи конфигурация
показана на рис. 8.43. В каждом из каналов требуется отдельный фильтр и
УВХ. Все УВХ одновременно переводятся в режим хранения общей управ-
ляющей командой. В течение времени хранения входных УВХ мультиплек-
сор последовательно переключается с канала на канал, и для оцифровки
сигналов каждого из каналов используется дискретизирующий АЦП. При
определении максимальной частоты дискретизации АЦП, необходимо
учитывать время захвата второго УВХ, t . Переключение мультиплексора
на следующий канал должно производиться после того, как это УВХ перей-
дет в режим удержания. Если время установления мультиплексора меньше
времени преобразования АЦП, то максимальная частота дискретизации АЦП,
равна величине, обратной сумме времени захвата УВХ и времени преоб-
разования АЦП:
1
t э +1
acq2 конв
(8.12)
Максимальная частота дискретизации входов меньше, чем данная вели-
чина, деленная на М, где М — число каналов. Также необходимо учитывать
дополнительное время, требуемое для одновременного захвата сигналов в
УВХ Ц ,)
v asq\7
tacql + (Zkohb + ^з)
(8.13)
AD7865 представляет собой быстрый малопотребляющий четырехканаль-
ный SAR АЦП с одновременной выборкой, работающий от однополярного
Предполагается fmux < fasQ2 + fKOH8
Рис. 8.43. Система сбора данных с одновременной выборкой на базе дискретизирую-
щего АЦП
Глава 8. Применение преобразователей данных
avdd vref vrefagnd dvdd vdrwe
SEL /SL1 CLK/SL2
Рис. 8.44. 4-канальный 14-разрядный SAR АЦП AD7865 с одновременной выборкой
источника питания 5 В4. Устройство содержит АЦП последовательного при-
ближения с временем преобразования 2,4 мкс, четыре УВХ входных уров-
ней, источник опорного напряжения 2,5 В, внутренний тактовый генера-
тор, схему аналоговой обработки сигналов и высокоскоростной параллель-
ный интерфейс. Упрощенная блок-схема AD7865 показана на рис. 8.44.
Выборка входных сигналов происходит одновременно во всех четырех
каналах, таким образом, сохраняется относительная фазовая информация о
сигналах на аналоговых входах. Рассогласование апертурной задержки между
устройствами выборки и хранения не превышает 4 нс. На вход AD7865
могут подаваться аналоговые сигналы с диапазонами напряжений ±10, ±5,
±2,5 В, от 0 до +2,5 В и от 0 до +5 В. Возможно выполнение преобразова-
ния для любой последовательности из четырех каналов. За счет подходяще-
го выбора каналов максимизируется пропускная способность. Выбор кана-
лов, в которых должно производиться преобразование, выполняется либо
аппаратно (при помощи входов выбора канала), либо программно (путем
программирования регистра выбора каналов).
Один сигнал начала преобразования CONVST одновременно переводит
все схемы УВХ в режим хранения и инициирует последовательность преоб-
разований в выбранных каналах. Сигнал ЕОС указывает на окончание каж-
дого отдельного преобразования в выбранной последовательности преоб-
разований. Сигнал BUSY сигнализирует об окончании последовательности
преобразований. Данные считываются из устройства по 14-разрядной па-
раллельной шине данных с использованием стандартных сигналов CS и RD.
Максимальная пропускная способность в отдельном канале составляет
350 kSPS. Максимальная пропускная способность для всех четырех кана-
лов равна 100 kSPS. AD7865 выпускается в 44-контактном корпусе PQFP.
В схемах с одновременной выборкой, в которых в каждом канале исполь-
зуется отдельный Z-Д АЦП, необходимо обеспечить синхронизацию выхо-
дов в соответствии с рис. 8.45. Несмотря на то, что выборка входных сигна-
лов производится в один момент времени с частотой Kfs, пониженная вы-
8.2. Многоканальные системы сбора данных 653
Аналоговые
входы
Последовательный
выход данных
Последовательный
выход данных
Рис. 8.45. Синхронизация Е-Д АЦП в схемах с одновременной выборкой
ходная частота fs, обычно формируется внутренне в каждом из АЦП путем
деления входного тактового сигнала на К (коэффициент избыточной дискре-
тизации). Поэтому выходные данные должны быть синхронизированы с тем
же тактовым сигналом, по которому производится выборка входных сигна-
лов, однако его частота должна быть понижена в К раз. Для выполнения
подобной синхронизации в большинстве Z-Д АЦП имеется вход SYNC.
Системы распределения данных
Во многих промышленных задачах и задачах управления процессами требу-
ется использовать несколько программируемых источников напряжения.
Традиционно подобные задачи требовали применения большого числа ком-
понентов, однако появление новой элементной базы позволило значитель-
но снизить количество элементов без ухудшения характеристик системы.
Несколько каналов выходного напряжения может быть получено либо
путем демультиплексирования выхода одиночного ЦАП, либо путем при-
менения нескольких ЦАП. Эти два подхода показаны на рис. 8.46. В схеме
с демультиплексированием (А) сигнал от одного ЦАП поступает на не-
сколько схем выборки и хранения (УВХ). Для получения аналогового сиг-
нала на ЦАП подается эквивалентное цифровое значение и подключается
необходимый УВХ. По завершении времени установления ЦАП и време-
ни захвата УВХ можно снять сигнал выборки с данного УВХ и обновить
значение уровня напряжения в УВХ следующего канала. После снятия
сигнала выборки уровень выходного напряжения начинает уменьшаться
со скоростью, которая указывается в техническом описании применяемо-
го УВХ. Таким образом, необходимо обеспечить регенерацию выходного
напряжения УВХ до того, как его уменьшение превысит требуемую точ-
ность (обычно 1/2 LSB).
Системы с комбинацией ЦАП и УВХ получили широкое распростране-
ние, так как в прошлом ЦАП были более дорогими, чем УВХ. Эта ситуация
была особенно характерна для ЦАП с разрешением свыше 8 бит. Кроме того,
применение ИС с демультиплексированием выхода ЦАП, содержащих не-
сколько УВХ с внутренними емкостями хранения, позволяло снизить коли-
чество корпусов, площадь печатной платы и стоимость систем. И наконец,
Глава 8. Применение преобразователей данных
б
Одиночный ЦАП Ряд ЦАП
с демультиплексором
Рис. 8.46. Варианты распределения аналоговых данных
для подобных систем требовался только один шаг калибровки, так как вы-
ходное напряжение для каждого из каналов формировалось одним ЦАП.
Необходимо отметить, что одношаговая калибровка является достоверной
только при условии, что УВХ не вносят неприемлемых ошибок.
На сегодняшний день подход с использованием комбинации ЦАП и
УВХ, очевидно, устарел в связи с появлением доступных недорогих ИС с
двумя, четырьмя, шестью ЦАП в одном корпусе. Реализация схемы с не-
сколькими ЦАП, показанная на рис. 8.46, б, является очевидной. В каждом
канале имеется отдельный ЦАП, и дешифратор адреса просто выбирает
необходимый ЦАП. Регенерации сигнала в такой системе не требуется.
При построении многоканальных систем существует потребность как в
нескольких ЦАП в одном корпусе, так и в недорогих одиночных ЦАП с
малым потреблением мощности в миниатюрных корпусах. На рис. 8.47
а
Хуже
б
Лучше
Расширены аналоговые сигналы
Расширены цифровые сигналы
Рис. 8.47. Распределение данных в многоканальной системе с удаленными приемниками
8.2. Многоканальные системы сбора данных 655
показаны два метода распределения данных по нескольким удаленным при-
емникам. В методе, показанном на рис. 8.47, а, для распределения аналого-
вых данных используется несколько ЦАП. В этой схеме требуется обеспе-
чить защиту аналоговых сигналов от наводок и, следовательно, необходимо
применять экранированные кабели. Если приемники удалены от источни-
ка на значительное расстояние, предпочтительным является второй под-
ход, в котором по кабельной связи передаются цифровые данные, и каж-
дый из удаленных приемников содержит свой ЦАП.
Прекрасным примером недорогого одиночного ЦАП является 12-раз-
рядный ЦАП с буферированным выходом по напряжению AD5320 5. Его
упрощенная блок-схема показана на рис. 8.48. AD5320 является одним из
представителей семейства ЦАП, совместимых по выводам. AD5300 и AD5310
являются 8- и 10-разрядной версиями данного устройства соответственно.
AD5300/AD5310/AD5320 выпускаются в 6-контактном корпусе SOT-23 и
8-контактном корпусе //SOIC.
AD5320 работает от однополярного источника питания с напряжением
от +2,7 до +5,5 В, потребляя 115 мкА при 3 В. Внутренний прецизионный
выходной усилитель позволяет достигать размаха выходного сигнала, рав-
ного напряжению питания (rail-to-rail). AD5320 имеет гибкий трехпровод-
ный последовательный интерфейс, работающий с тактовой частотой до 30
МГц и совместимый со стандартами SPIT, QSPIT, MICROWIRE7 и стандар-
тными интерфейсами ЦСП. Опорное напряжение AD5320 формируется из
напряжения питания, за счет чего достигается широкий динамический ди-
апазон выходных напряжений.
Устройство содержит схему сброса при включении питания, которая
гарантирует, что уровень выходного напряжения ЦАП после включения
питания будет равен 0 В и сохранит это значение до записи достоверных
данных. Также имеется режим отключения, в котором потребляемый уст-
ройством ток уменьшается до 200 нА при 5 В. В этом режиме обеспечивает-
ся программный выбор выходной нагрузки. Перевод устройства в режим
отключения питания выполняется по последовательному интерфейсу. Ма-
лое потребление мощности в обычном режиме работы делает AD5320 иде-
Рис. 8.48. 12-разрядный ЦАП с последовательным входом в 6-контактном корпусе
SOT-23 AD5320
656 Глава 8. Применение преобразователей данных
альным для применения в портативных устройствах, работающих от бата-
рей. Потребляемая мощность составляет 0,7 мВт при напряжении 5 В и
снижается до 1 мкВт в режиме отключения питания.
Существует много других одиночных ЦАП в миниатюрных корпусах с
внутренним источником опорного напряжения и без него. Диапазон разре-
шающих способностей варьирует от 8 до 16 бит. При выборе подходящего
ЦАП для конкретного приложения могут помочь руководства по выбору
(selection guides). Одним из наиболее новых устройств данного класса явля-
ется 16-разрядный ЦАП с последовательным входом AD56606, содержащий
внутренний источник опорного напряжения с температурным коэффици-
ентом 10 ррт/°C. Он выпускается в 8-контактном корпусе SOT-23 и рабо-
тает с напряжением питания от +2,7 до +5,5 В.
Для работы с более высоким напряжением питания предназначен оди-
ночный 16-разрядный ЦАП с последовательным цифровым входом и выхо-
дом по напряжению AD55707, который работает с напряжениями питания
от ±12 до ±15 В и имеет значение интегральной и дифференциальной не-
линейности в пределах 1 LSB (максимальное значение) во всем темпера-
турном диапазоне от —40 до +125 °C. В AD5570 реализован гибкий трехпро-
водный интерфейс. Устройство выпускается в 16-контактном корпусе SSOP.
При локальном распределении аналоговых сигналов предпочтительнее
вместо одиночных ЦАП использовать микросхемы, содержащие два, четы-
ре, шесть и более ЦАП в одном корпусе. Микросхемы с несколькими ЦАП
в одном корпусе находят применение в измерительном оборудовании, за-
дачах управления процессами, автоматическом тестовом оборудовании и
многих других приложениях. В подобных ЦАП обычно используется двой-
ная буферизация, при которой данные загружаются по последовательному
порту, после чего содержимое параллельных внутренних регистров ЦАП
может обновляться либо одновременно, либо в индивидуальном порядке.
Данные устройства имеют различные разрешения, диапазоны токов/напря-
жений, номиналы напряжения питания, выпускаются в разнообразных кор-
пусах, поэтому полное обсуждение всех возможных вариантов в данной
главе невозможно. В качестве примера мы рассмотрим пару наиболее но-
вых устройств.
AD5516 состоит из шестнадцати 12-разрядных ЦАП в одном корпусе8.
Его функциональная блок-схема показана на рис. 8.49. Для подачи опор-
ного напряжения номиналом 3 В на все 16 ЦАП используется один вход
опорного напряжения (REF^. Адресация ЦАП, значение выходного на-
пряжения которого необходимо обновить, выполняется по 3-проводному
последовательному интерфейсу. После завершения записи по последова-
тельному порту выбранный ЦАП выполняет преобразование кода в вы-
ходное напряжение. Выходные усилители преобразовывают диапазон вы-
ходных напряжений ЦАП в соответствующий диапазон напряжений на
выходных выводах Иых0 - Иых15 (±2,5, ±5 или ±10 В). Для достижения
разрешения 12 бит в AD5516 применяется самокалибрующаяся (self-
calibrating) архитектура. Процедура калибровки применяется для выбора
уровня напряжения, соответствующего внутреннему 14-битному разреше-
нию. AD5516 помещен в 74-выводной CSPBGA корпус, имеющий разме-
ры 12 х 12 мм.
Рис. 8.49. 16-канальный 12-разрядный ЦАП с выходом по напряжению AD5516
На сегодняшний день максимальное количество каналов имеет микро-
схема AD5739, которая содержит сорок 14-разрядных ЦАП в 108-контакт-
ном корпусе LFBGA размерами 13x13 мм и идеально подходит для задач
высокоточной установки уровней в автоматическом тестовом оборудова-
нии и в сетях оптической связи9. Данное устройство имеет как параллель-
ный, так и 3-проводный последовательный интерфейс. Упрощенная блок-
схема AD5739 показана на рис. 8.50.
Максимальный размах выходного напряжения AD5379 составляет 17,5 В,
что соответствует выходному диапазону от —8,75 до +8,75 В при опорных
напряжениях —3,5 и +5 В. В AD5379 реализован параллельный интерфейс с
VCC
AD5379
REFGND Bl
REFGND B2
REFGND DI
REFGND 02
REFGND Cl
REFGND C2
Восстановлена
при включении
питания
8ER/PAR
DIN
SCLK
SDO
F1F0EN
AGND DGND
-OCLR
A VOUT 0
Avouri
VOUT 3
VOUT
VOUT 5
VOUT в
VOUT 7
VOUT 10
VOUT Зв
Vf»E₽2W *RE₽2H REFGND A2
*BIAS VREF1(>)VREF1( ) REFGND Al
-V——
(апряжения
смещения I
• VOUT 8
VOUT в
Рис. 8.50. 40-канальный 14-разрядный ЦАП AD5379 с последовательным и параллель-
ным входами и выходом по напряжению
DCEN/WRQ—p
5YHOAC&6-
REGO Q-
REG1 A-
0В1зД и
SCUC/DB12
DIN/DB11
DBO
Глава 8. Применение преобразователей данных
двойной буферизацией, в котором 14 бит данных загружаются в один из
входных регистров в соответствии с сигналами на выводах WR, CS и выво-
дах адреса канала ЦАП, Ло—А7. Устройство также имеет 3-проводный пос-
ледовательный интерфейс, совместимый с интерфейсами SPI®, QSPI®,
MICROWIRE® и стандартными интерфейсами DSP. Последовательный
интерфейс может работать с частотой тактового сигнала до 50 МГц. Обнов-
ление состояния выходов ЦАП выполняется при загрузке новых данных в
регистры ЦАП. Можно одновременно обновлять состояние всех выходов,
подавая сигнал низкого уровня на вход LDAC. В каждом канале имеется
программируемый регистр коррекции усиления и смещения. Усиление и
буферизация каждого из выходных сигналов ЦАП выполняется внутри кри-
сталла по отношению к внешнему входу REFGND. Выходы ЦАП также
могут быть подключены к REFGND путем подачи сигнала на вывод CLR.
Распределение данных при помощи схем
с выборкой и бесконечным хранением
Функция выборки и бесконечного (без понижения напряжения) хранения
(«infinite» или «droopless» sample-and-hold) может быть реализована при по-
мощи АЦП и ЦАП. Например, 32-канальную схему выборки и бесконечного
хранения AD5533B можно рассматривать как комбинацию АЦП и 32 ЦАП в
одном корпусе. Функциональная схема AD5533B показана на рис. 8.51. В
устройстве происходит выборка входного напряжения Кх и его преобразо-
вание в цифровое слово. Цифровой результат загружается в один из регис-
тров ЦАП и преобразуется (с добавлением усиления и смещения) в анало-
говое выходное напряжение (Fbix0— Кых31). Так как выходное напряжение в
каждом из каналов является, по сути, выходным напряжением соответству-
ющего ЦАП, то падения уровня напряжения от времени не происходит.
При включенном питании выходное напряжение в канале будет сохранять
постоянный уровень до тех пор, пока не произойдет повторная адресация
данного канала.
Рис. 8.51. 32-канальная прецизионная схема выборки и бесконечного хранения
8.2. Многоканальные системы сбора данных
Для обновления уровня выходного напряжения в отдельном канале
напряжение требуемого нового уровня подается на общий входной вывод
Их, после чего производится адресация необходимого канала по последо-
вательному или параллельному порту. По завершении загрузки адреса ка-
нала, при условии что сигнал TRACK имеет высокий уровень, схема на-
чинает захват кода, требуемого для установки на выходе ЦАП уровня,
равного напряжению на входе Квх. При этом сигнал на выводе BUSY при-
нимает низкий уровень, который сохраняется до завершения процесса
захвата. На время выполнения захвата кода ЦАП неинвертирующий вход
выходного буфера подключается к Их для предотвращения спонтанных
изменений выходного уровня. Максимальное время выполнения захвата
равно 16 мкс.
По завершении захвата сигнал BUSY переходит в состояние высокого
уровня, выход ЦАП подключается к неинвертирующему входу выходного
буфера, и с этого момента выходное напряжение определяется обновлен-
ным значением выходного сигнала ЦАП. Так как внутренние ЦАП имеют
смещение на 70 мВ (максимум) относительно GND, минимальное значе-
ние Ивх в режиме выборки и бесконечного хранения равно 70 мВ. Макси-
мальное значение Их равно 2,96 В в связи с наличием верхней мертвой
зоны 40 мВ (максимум). При включении питания во все ЦАП, включая
канал смещения, загружаются нулевые значения. Каждый из 32 ЦАП внут-
ренне смещен на 50 мВ (типичное значение) относительно GND; таким
образом, если сигнал на вывод OFFSbx поступает напрямую с внутреннего
канала смещения (OFFSBbix), то выходные напряжения Кых0— Кых31 после
включения питания равны 50 мВ (типичное значение).
Другими словами, если OFFS = OFFS = 50 мВ, то
^вь.х = (Усиление х ИЦАП) - (Усиление -1) х KOFFSb = 50 мВ.
Диапазон выходных напряжений определяется напряжением смещения
на выводе OFFSbx и усилением выходного усилителя. Он ограничен значе-
ниями Vss + 2 В и VDD — 2 В, которые определяются выходным усилителем.
AD5533B работает с напряжениями питания AVCC = +5 В ± 5 %,
DVCC = +2,7 В X+5,25 В, Vss = -4,75 В X-16,5 В и VDD = +8 В X+16,5 В и
требует подачи стабильного опорного напряжения ЗВ на вывод REFbx, а
также напряжения смещения на вывод OFFSbx.
Устройство выборки и бесконечного хранения AD5533B идеально под-
ходит для применения в автоматическом тестовом оборудовании. Как по-
казано на рис. 8.52, для управления формирователями, компараторами, ак-
тивными нагрузками и таймерами требуется несколько схем выборки и бес-
конечного хранения. Традиционно в подобных задачах применялись простые
УВХ, которые требуют регенерации во избежание дрейфа напряжения. По
сравнению с ними AD5533B имеет несколько преимуществ: отсутствует
снижение напряжения, ошибка «пьедестала», не требуется регенерация, а
также фильтрация кратковременных выбросов. В целом при использова-
нии AD5533B достигается больший уровень интеграции при меньшей зани-
маемой площади.
Глава 8. Применение преобразователей данных
Рис. 8.52. Устройства выборки и бесконечного хранения, используемые в системах
автоматического тестового оборудования
Как показано на рис. 8.53, AD5533B может применяться для задания
уровней напряжения в 32 каналах. Опорное напряжение 3 В для AD5533B и
16-разрядного ЦАП AD5541 обеспечивается микросхемой AD780. Для за-
писи данных в AD5541 используется простой 3-проводный последователь-
ный интерфейс. Так как типичное значение выходного сопротивления
AD5541 равно 6,25 кОм, для заряда и разряда емкости на выводе Ивх требу-
ется значительное время. Поэтому для буферизации выхода ЦАП использу-
ется микросхема AD820. Следует отметить, что при разводке данной схемы
важно минимизировать шумы на входах Ивх и REFbx.
DIN
SCLK
AVcc DVCC vss
Дополнительные выводы опущены для ясности
Рис. 8.53. Типичная схема включения устройства выборки и бесконечного хранения
AD5533B
8.3. Цифровые потенциометры 661
Список литературы
8.2. Многоканальные системы сбора данных
1. Data sheet for AD7908/AD7918/AD7928 8-Channel, 1 MS PS 8-/10-/12-Bit ADCs
with Sequencer in 20-Lead TSSOP, www.analog.com.
2. Data sheet for AD7938/AD7939 8-Channel, 1.5MSPS, J 2- and J О-Bit Parallel
Output ADCs with a Sequencer, www.analog.com.
3. Data sheet for AD7739 8-Channel, High Throughput, 24-Bit L-A ADC,
www.analog.com.
4. Data sheet for AD7865 AD7865 4-Channel Simultaneous Sampling 14-Bit SAR
ADC, www.analog.com.
5. Data sheet for AD5320 2.7 V to 5,5 V, 140 mA, Rail-to-Rail Output 12-Bit DAC in
a SOT-23, www.analog.com.
6. Data sheet for AD5660 16-Bit DAC with JGppm/°C Max Gii-Chip Reference,
www.analog.com.
7. Data sheet for AD5570 12 V/15 V, Serial Input, Voltage Output, 16-Bit DAC,
www.analog.com.
8. Data sheet for AD5516 16-Channel, 12-Bit Voltage-Output DAC with 14-Bit
Increment Mode, www.analog.com.
9. Data sheet for AD5379 40-Channel, 14-Bit, Parallel and Serial Input, Voltage-
Output DAC, www.analog.com.
10. Data sheet for AD5533B 32-Channel Precision Infinite Sample-and-Hold,
www.analog.com.
8.3. Цифровые потенциометры
Уолт Кестер, Уолт Хайнцер
Введение
Механические потенциометры применяются начиная с ранних дней разви-
тия электроники. Они обеспечивают удобный метод регулировки выходных
сигналов различных датчиков, источников питания или практически любо-
го устройства, требующего калибровки. Временные характеристики, часто-
та, яркость, контраст, усиление и смещение — вот лишь некоторые приме-
ры регулируемых параметров. Однако с применением механических потен-
циометров связан ряд проблем: физические размеры, механический износ,
загрязнение «ползунка» (wiper), дрейф сопротивления, чувствительность к
вибрации, температуре, влажности, необходимость использования отверт-
ки для регулировки, негибкая разводка и т. д.
Цифровые потенциометры позволяют избежать проблем, связанных с
применением механических аналогов. Они идеально подходят для новых
проектов, в которых имеется микроконтроллер или иное цифровое устрой-
ство, формирующее необходимые управляющие сигналы. Для схем, в кото-
рых отсутствуют микроконтроллеры, выпускаются цифровые потенциометры
с «ручным» управлением. В отличие от механических потенциометров в
задачах активного управления возможно динамичное управление цифро-
выми потенциометрами.
Рис. 8.54. 3-разрядный цифровой КМОП-потенциометр на базе архитектуры «цуго-
вого ЦАП»
Цифровые потенциометры основаны на КМОП-архитектуре «цугового»
(«String») ЦАП, которая описана в гл. 3. Базовая схема цифрового потенци-
ометра показана на рис. 8.54. Обратите внимание на то, что в обычной
схеме цугового ЦАП выводы А и В подключаются к источнику опорного
напряжения, а вывод W (ползунок) является выходом ЦАП. Также в стан-
дартной схеме цугового ЦАП имеется дополнительный резистор R между
выводом А и источником опорного напряжения.
В схеме цифрового потенциометра используется тот факт, что напряже-
ния на КМОП-ключах по отношению общего вывода (common-mode) мо-
гут принимать любые значения в диапазоне, ограниченном напряжениями
питания, — просто ключ, выбираемый цифровым входом, подключает пол-
зунок к соответствующему звену в резисторном цуге. Полярность А по от-
ношению к В может быть как положительной, так и отрицательной.
Цуг резисторов определяет полное сопротивление, а традиционный выход
ЦАП становится «ползунком» цифрового потенциометра. В зависимости от
требуемой точности могут применяться поликремниевые (ТС ~ 500 ррт/ °C)
или тонкопленочные (ТС ~ 35 ррт/ °C) резисторы.
Число резисторов в цуге определяет разрешение или «размер шага»
потенциометра, и в современных схемах варьируется от 32 (5 бит) до 1024
(10 бит). Номиналы программируемых резисторов определяются выраже-
ниями: R„B(D) = (D/2")RAB + R„h Rwa(D) = [(2"- D)/2^]RAB + R^ где RWB -
сопротивление между выводами W и В, RWA — сопротивление между выво-
дами W и Л, D — десятичный эквивалент величины шага, N — число бит,
Rab — номинальное сопротивление и Rw — сопротивление ползунка.
В качестве ключей используются передаточные КМОП-затворы, кото-
рые минимизируют изменения сопротивления во включенном состоянии
между любым заданным звеном и выходом. Напряжения на выводах А и В
могут принимать любые значения в диапазоне, ограниченном напряжения-
ми питания, VDD и Vss.
8.3. Цифровые потенциометры
Современные цифровые потенциометры
в миниатюрных корпусах
На рис. 8.55 показаны три примера цифровых потенциометров, каждый из
которых выпускается в миниатюрном корпусе. Популярным интерфейсом
цифровых потенциометров является интерфейс /2СТ, однако также имеются
цифровые потенциометры с интерфейсами 5РП, счетчика прямого/обратно-
го счета и «ручного» инкремента/декремента.
Цифровой потенциометр AD5245, показанный на рис. 8.55, а, выпус-
кается в 8-выводном корпусе SOT-23 и имеет 256 положений (8 бит). Вывод Ло
может применяться для идентификации устройства; при его использова-
нии на одну шину могут быть подключены два устройства. Сопротивление
цуга тонкопленочных резисторов (RAB) составляет 5, 10, 50 или 100 кОм,
температурный коэффициент RAB равен 35 ррт/°C. Пользователю доступ-
ны все три вывода потенциометра. Рабочее напряжение питания может
принимать значения в диапазоне от +2,7 до +5,5 В. Максимальный потреб-
ляемый ток равен 8 мкА; также имеется внутренний командный бит, пере-
водящий устройство в состояние нулевого потребления. Шумовое напря-
жение приблизительно равно температурному шуму RAB. (Напомним, что
величина температурного шума резистора с сопротивлением 1 кОм при
комнатной температуре приблизительно равна 4 нВуТц.)
Цифровой потенциометр AD5247, показанный на рис. 8.55, б, похож на
AD5245, за исключением того, что он выпускается в 6-выводном корпусе
SC70, имеет 128 положений (7 бит) и вывод В заземлен. В нем также отсут-
ствует функция идентификации (вывод Ло). Наконец, AD5246, показанный
на рис. 8.55, в, похож на AD5245, но включается как реостат, и пользовате-
лю доступны только два вывода — W и В.
a
б
Потенциометр,
все выводы доступны
SCL
SDA
АО
SOT-23-8
Корпус
GND
Потенциометр,
один вывод заземлен
А
W
GND
В
Реостат
Номинанальные сопротивления
5 кОм, 10 кОм, 50 кОм
или 100 кОм, ТКС = 35 ррм/’С
VDD =2,7 В- 5,5
Рис. 8.55. Типичные примеры цифровых потенциометров в миниатюрных корпусах
• Разрешение (число положений ползунка): от 32 (5 бит) до 1024 (10 бит).
• Номинальное полное сопротивление: от 1 кОм до 1 МОм.
• Температурный коэффициент полного сопротивления: 35 ррт/°C (цуг тонкопленоч-
ных резисторов), 500 ррт/°C (цуг поликремниевых резисторов).
• Число каналов: 1, 2, 3, 4, 6.
• Управляющий интерфейс: SPI, 12С, вход счетчика прямого/обратного счета, вход ин-
кремента/декремента.
• Диапазон напряжений на выводах: +15, ±15, +30, +3, ±3, +5, ±5 В.
• Тип памяти:
— память отсутствует (энергозависимый);
— энергонезависимая РМЕМ]
— однократно программируемая (OTP, One-Time Programmable) — массив одиночных
перемычек;
— двукратно программируемая — массив двойных перемычек.
Рис. 8.56. Характеристики цифровых КМОП-потенциометров
Помимо одиночных потенциометров, таких как AD5245, AD5246 и
AD5247, также выпускаются микросхемы, содержащие по два, три, четыре
и шесть цифровых потенциометров в одном корпусе. На рис. 8.56 приведе-
ны некоторые характеристики и свойства современных цифровых потен-
циометров.
Цифровые потенциометры
с энергонезависимой памятью
Цифровые потенциометры, такие как AD5245, AD5246 HAD5247, использу-
ются в основном в системах активного управления, так как у них отсутству-
ет энергонезависимая память. Поэтому при отключении питания их на-
стройки сбрасываются. Однако большинство энергозависимых цифровых
потенциометров имеет функцию предварительной установки, которая зак-
лючается в переводе устройства в состояние, соответствующее половине
шкалы, при подаче на него питания.
Очевидно, что существует потребность в цифровых потенциометрах с
возможностью сохранения настроек при отключении и повторном включе-
нии питания. Чтобы обеспечить такую способность, необходимо наличие
энергонезависимой внутренней памяти хранения настроек. Примером энер-
гонезависимого цифрового потенциометра является AD5235 — сдвоенный
10-разрядный цифровой потенциометр, содержащий внутреннюю память
типа Е2МЕМ для хранения настроек4. Функциональная блок-схема AD5235
показана на рис. 8.57.
Данные устройства выполняют ту же функцию электронной регулиров-
ки, что и механические потенциометры, и обладают повышенным разреше-
нием, надежностью твердотельного состояния и крайне низким темпера-
турным коэффициентом. Гибкие возможности программирования AD5235
по стандартному последовательному интерфейсу обеспечивают 16 режимов
работы и регулировки, включающие возвратно-поступательное программи-
рование {scratch pad), сохранение данных в памяти и извлечение данных из
памяти, инкремент/декремент, подстройку логарифмической характерис-
8.3. Цифровые потенциометры 665
Рис. 8.57. Сдвоенный цифровой потенциометр на 1024 положения с энергонезависи-
мой памятью AD5235
тики (log taper), считывание настроек ползунка и доступ к дополнительной,
определяемой пользователем Е2МЕМ. Другой ключевой особенностью
AD5235 является то, что в Е2МЕМ хранится величина отклонения от ис-
тинного сопротивления с точностью 0,1 %, что позволяет вычислить реаль-
ное значение полного сопротивления. Это свойство является ценным с точки
зрения калибровки и согласования допусков в прецизионных приложени-
ях. Оно также поддерживается новым семейством Е2МЕМ цифровых по-
тенциометров (AD5251/AD5252/AD5253/AD5254). В режиме scratch pad про-
граммирования определенные настройки можно напрямую записать в ре-
гистр Я задающий сопротивление между выводами W-А и IV-B. В регистр
RDAC также может быть записано значение, ранее сохраненное в регистре
Е2МЕМ. Значение, содержащееся в Е2МЕМ, может быть изменено или за-
щищено от перезаписи.
При изменении содержимого регистра ЯЦАП новая величина может быть
сохранена в Е2МЕМ. Впоследствии при включении питания системы она
будет автоматически пересылаться в регистр ЯЦАП. Команды линейного ин-
кремента и декремента шага вызывают уменьшение или увеличение значе-
ния содержимого регистра ЯЦАП на один шаг. При необходимости логариф-
мического изменения настройки ползунка (w/per-a) используется команда
сдвига бита влево/вправо, регулирующая уровень с шагом ±6 дБ. AD5235
выпускается в миниатюрном корпусе TSSOP-16. Все микросхемы работают в
расширенном индустриальном температурном диапазоне (от —40 до +85 °C).
Однократно программируемые (ОТР)
цифровые потенциометры
AD5172/AD5173 представляют собой двухканальные однократно програм-
мируемые (ОТР) цифровые потенциометры на 256 положений, в которых
реализована технология пережигаемых перемычек, позволяющая сохранять
настройки сопротивления5. Функциональные блок-схемы этих устройств
Глава 8. Применение преобразователей данных
А1 W1 В1 А2 W2 В2
W1 В1 W2 В2
Рис. 8.58. Двухканальные однократно программируемые цифровые потенциометры
AD5172/AD5173 на 256 положений с интерфейсом ГС
показаны на рис. 8.58. Следует отметить, что AD5172 имеет конфигурацию
трехвыводного потенциометра, a AD5173 — конфигурацию реостата. Име-
ются версии AD5172/AD5173 с сопротивлениями 2,5, 10, 50 и 100 кОм. Тем-
пературный коэффициент цуга резисторов равен 35 ррт/ °C. Напряжение
питания может принимать значения в диапазоне от 2,7 до 5,5 В.
Технология ОТР является более дешевой альтернативой технологии
Е2МЕМ и ориентирована на пользователей, которым не требуется выпол-
нять многократное сохранение настроек цифрового потенциометра в памя-
ти, т. е. действующим по принципу «настроил и забыл». Эти устройства
выполняют те же функции электронной регулировки, что и большинство
подстроечных или переменных резисторов, однако обладают большим раз-
решением, стабильностью твердотельного состояния и лучшим темпера-
турным коэффициентом.
AD5172/AD5173 программируются при помощи двухпроводного Р С со-
вместимого интерфейса. Возможности их настройки до установки оконча-
тельного значения сопротивления не ограничены. После того как опреде-
лено окончательное значение, во время активации процесса ОТР посылает-
ся команда перманентного пережигания перемычки, по которой положение
wiper-a. фиксируется в соответствии с заданными настройками (аналогич-
но заливанию механического подстроечного резистора эпоксидной смолой).
В отличие от остальных ОТР цифровых потенциометров того же семейства
AD5172/AD5173 имеют уникальную функцию временной перезаписи ОТР
настроек, которая позволяет выполнять новую регулировку, но при следу-
ющем включении питания ОТР настройки восстанавливаются. Эта особен-
ность позволяет применять AD5172/AD5173 в задачах активного управле-
ния с начальными параметрами, определяемыми пользователем.
Компания Analog Devices запатентовала процедуру проверки процесса
ОТР, позволяющую подтверждать успешное выполнение программирова-
ния. Она заключается в возможности распознавания состояния перемычки
в режиме чтения на основе двух битов достоверности. Analog Devices по-
ставляет программное обеспечение для программирования AD5172/AD5173
в фабричных условиях, функционирующее под управлением операцион-
8.3. Цифровые потенциометры
ных систем, начиная с Windows7 95 и закан-
чивая ХРТ, включая Windows7 NT. Примене-
ние данного программного обеспечения из-
бавляет от необходимости использования
внешних I2С контроллеров или хост-процес-
соров и за счет этого значительно снижает
время, затрачиваемое пользователем на раз-
работку. Имеется оценочный набор AD5172/
AD5173, включающий программное обеспе-
чение, разъем и кабель, который может быть
преобразован для задач фабричного програм-
мирования. AD5172/AD5173 выпускаются в
корпусе MSOP-10. Все микросхемы работа-
ют в автомобильном температурном диапа-
зоне от —40 до +125 °C. Если не принимать
во внимание уникальные свойства ОТР,
AD5172/AD5173 хорошо подходят для при-
менения в задачах общего назначения, тре-
бующих использования цифровых потенциометров, вследствие возможно-
сти программируемой предварительной установки, превосходной темпера-
турной стабильности и малого форм-фактора.
AD5170 6 представляет собой двукратно программируемый 8-разрядный
цифровой потенциометр. Его функциональная схема показана на рис. 8.59.
Обратите внимание, что в схеме имеется второй массив перемычек, пред-
назначенный для реализации возможности вторичного программирования.
Данная микросхема, как и AD5172/AD5173, имеет неограниченные воз-
можности программирования до установки окончательного значения. AD5170
обладает схожими с AD5172/AD5173 электрическими характеристиками.
Рис. 8.59. Двукратно программи-
руемый цифровой потенциометр
AD5170 на 256 положений с интер-
фейсом PC
Характеристики цифровых потенциометров
по переменному току
Цифровые потенциометры могут использоваться в схемах с переменным
током при условии выполнения ограничений на полосу сигнала, наклады-
ваемых внутренними емкостями. На рис. 8.60 показана модель цифрового
потенциометра по переменному току, внутренние емкости обозначены как
СА, Св и Полоса пропускания цифрового потенциометра зависит от
конфигурации. Она также является динамической величиной вследствие
переменного сопротивления. Например, если вывод А является входом, вывод
В заземлен, а вывод W — выходом, то ширина полосы приблизительно
выражается соотношением BW = 1/[2h(7?^J|/?^)CJ. Ширина полосы ми-
нимальна в точке, соответствующей половине шкалы, где эквивалентное
сопротивление для данной конфигурации максимально. На рисунке пока-
заны типичные значения емкостей и соответствующие значения ширины
полосы для различных номиналов сопротивления, измеренные при значе-
нии, соответствующем половине шкалы. Эта простая модель может исполь-
зоваться в среде SPICE для моделирования поведения схемы (например,
при использовании цифрового потенциометра в цепи обратной связи one-
Глава 8. Применение преобразователей данных
Измерение полосы пропускаемых частот от Д до И/ с заземленным В,
код середины шкалы, возбуждение А низкоимпедансным источником
Рис. 8.60. Модель для определения полосы пропускания цифрового потенциометра
рационного усилителя). Другой особенностью, которую необходимо учи-
тывать при включении цифрового потенциометра напрямую в тракт про-
хождения сигнала, является слабая нелинейная зависимость номинального
сопротивления от прикладываемого напряжения. Этот эффект вызывает
незначительные искажения. Например, для описанной выше конфигура-
ции в точке, соответствующей половине шкалы, THD AD5245 составляет
0,05 % для сигнала со среднеквадратичным значением напряжения 1 В и
частотой 1 кГц. Прекрасные примеры применения цифровых потенцио-
метров в схемах с переменным током приведены в ,0’ ,4’,5’17.
Примеры применения
Как и операционные усилители, цифровые потенциометры являются со-
ставными блоками многих электронных схем. Цифровые потенциометры в
силу их цифрового управления помимо стандартных задач регулировки и
калибровки могут использоваться в задачах активного управления. Напри-
мер, как показано на рис. 8.61, а, цифровые потенциометры могут исполь-
зоваться в программируемых источниках питания. Типичные перестраива-
емые стабилизаторы с малым падением напряжения (например, любой из
представителей серии апуСАР) имеют вывод FB, при подключении к кото-
рому резисторного делителя реализуется возможность изменения выходно-
го напряжения. На рисунке R{ и R2 являются резистором обратной связи и
входным резистором соответственно. В цепи обратной связи имеется внут-
ренний неинвертирующий усилитель, усиливающий опорное напряжение
1,2 В до требуемого значения выходного напряжения.
Производители электронного оборудования аналогичным образом ис-
пользуют цифровые потенциометры в источниках питания, регулируя но-
минал напряжения питания к заданной погрешности, удовлетворяющей
любым условиям тестирования надежности. Такой подход ускоряет про-
цесс выхода системы на рынок.
Оптимальная комбинация цены и характеристик цифровых потенцио-
метров приводит к тому, что во многих приложениях они вытесняют тради-
8.3. Цифровые потенциометры
Постоянное смещение
в.-ч. усилителя
Программируемый
источник напряжения питания
= ^в[1 + я,/я2]
Рис. 8.61. Два примера схем с цифровыми потенциометрами
ционные ЦАП. Например, в базовых станциях систем беспроводной связи
оптимальные значения пороговых напряжений ВЧ-усилителей мощности
могут изменяться в широких пределах. Подобное изменение влияет на ли-
нейность передаваемого сигнала и коэффициент полезного действия по мощ-
ности. Плохо отрегулированный усилитель, излучающий слишком боль-
шую мощность, также может вносить помехи в работу соседних сот в сети.
Несмотря на то что для задания смещения ВЧ-усилителей мощности широ-
ко используются ЦАП, многие пользователи находят цифровые потенцио-
метры более приемлемыми в подобных задачах, так как они обладают энер-
гонезависимой памятью, что упрощает разработку. Как показано на рис.
8.61, б, для калибровки точки смещения ВЧ усилителя мощности по посто-
янному току используется однократно программируемый цифровой потен-
циометр. Процесс калибровки может выполняться при помощи фабрично-
го программного обеспечения без использования внешних контроллеров.
Следует отметить, что для компенсации температурного коэффициента уси-
лителя в схему добавлен диод.
Резюме
Цифровые потенциометры обладают значительными преимуществами перед
механическими потенциометрами и триммерами (trimpotT) и в связи с этим
получают все большее применение в современных системах. Надежность,
гибкость и простота применения цифровых потенциометров приводят к тому,
что во многих задачах они вытесняют традиционные потенциометры. Циф-
ровые потенциометры также могут использоваться в качестве программиру-
емых составных блоков во многих задачах активного управления.
Очевидно, что в современных электронных системах существует беско-
нечное множество областей применения цифровых потенциометров; для
670 Глава 8. Применение преобразователей данных
начала достаточно лишь упомянуть традиционные задачи, в которых при-
меняются механические потенциометры и триммеры. Дополнительные при-
меры улучшения схем за счет использования цифровых потенциометров
можно найти в 7-18. Ниже перечислены некоторые возможные области при-
менения цифровых потенциометров:
• Задачи общего назначения: калибровка датчиков, регулировка усиления и
смещения системы, усилители с программируемым коэффициентом уси-
ления, программируемые фильтры, задание программируемых начальных
установок, традиционные ЦАП, преобразователи напряжения в ток, со-
гласование импеданса линий.
• Компьютерное и сетевое оборудование: программируемые источники пита-
ния, регулировка диапазона напряжений питания, мониторинг темпера-
туры, мониторинг напряжения батарей.
• LCD дисплеи: регулировка подсветки, контраста и яркости, регулировка
общего напряжения ЖК-панели, программируемая гамма-коррекция, ге-
нераторы опорного напряжения ЖК-проекторов.
• Бытовая электроника: регулировка подсветки карманных компьютеров,
электронное управление громкостью.
• ВЧ-связь: смещение ВЧ-усилителей мощности, регулировка амплитуды
/)/)5/ФАПЧ, настройка частоты VCXO, смещение варакторов, регулиров-
ка точки отсечки и передаточной характеристики логарифмических уси-
лителей, регулировка фазы и усиления квадратурных демодуляторов, ка-
либровка устройств считывания RFID.
• Автомобильная промышленность: начальные установки параметров в бло-
ках управления двигателем, управление приводными элементами, управ-
ление контрольно-измерительными приборами, регулировка дисплеев
навигационных приборов/развлекательных устройств.
• Промышленные применения и измерительная техника: калибровка систем,
ЦАП с регулируемым опорным напряжением, программируемые токовые
генераторы с диапазоном от 4 до 20 мА.
• Оптическая связь: регулировка тока смещения лазера, регулировка тока
модуляции лазера, преобразование сигнала оптических приемников, оп-
тические аттенюаторы, контроллеры длины волны.
Список литературы
8.3. Цифровые потенциометры
1. Data sheet for AD5245 256-Position PC Compatible Digital Potentiometer,
www.analog.com.
2. Data sheet for AD5247 128-Position PC CompatibleDigital Potentiometer,
www.analog.com.
3. Data sheet for AD5246 128-Position PC CompatibleDigital Resistor,
www.analog.com.
4. Data sheet for AD5235 Nonvolatile Memory, Dual 1024-Position Digital
Potentiometers, www.analog.com.
5. Data sheet for AD5172 256-Position One-Time Programmable Dual-Channel PC
Digital Potentiometer, www.analog.com.
6. Data sheet for AD5170 256-Position Two-Time Programmable PC Digital
Potentiometer, www.analog.com.
8.4. Цифровой звук
67JJ
7. Walt Heinzer. Design Circuits with Digitally Controllable Variable Resistors. Analog
Dialogue, Vol. 29, No. 1, 1995, www.analog.com.
8. Hank Zumbahlen. Tack a Log Taper onto a Digital Potentiometer. EDN, January 20,
2000.
9. Mary McCarthy. Digital Potentiometers Vary Amplitude In DDS Devices. Electronic
Design, Ideas for Design, May 29, 2000.
10. Alan Li. Versatile Programmable Amplifiers Use Digital Potentiometers with
Nonvolatile Memory. Analog Dialogue, Vol. 35, No. 3, June-July, 2001.
11. Reza Moghimi. Difference Amplifier Uses Digital Potentiometers. EDN, May 30,
2002.
12. Mark Malaeb. Single-Chip Digitally Controlled Data-Acquisition as Core of Reliable
DWDM Communication Systems. Analog Dialogue, Vol. 36, No. 5, September-October,
2002, www.analog.com.
13. Peter Khairolomour. Rotary Encoder Mates with Digital Potentiometer. EDN, Design
Idea, March 6, 2003.
14. Alan Li. Versatile Programmable Amplifiers Using Digital Potentiometers with
Nonvolatile Memory. Application Note AN-579, www.analog.com.
15. Alan Li. Programmable Oscillator Uses Digital Potentiometers. Application Note
AN-580, www.analog.com.
16. Alan Li. Resolution Enhancements of Digital Potentiometers with Multiple Devices.
Application Note AN-582, www.analog.com.
17. Alan Li. AD5232 Programmable Oscillator Using Digital Potentiometers. Application
Note AN-585, www.analog.com.
18. Alan Li. ADN2850 Evaluation Kit User Manual. Application Note AN-628, Analog
Devices, www.analog.com.
8.4. Цифровой звук
Уолт Кестер
Введение
Цифровая обработка речи берет свое начало с ранних дней развития ИКМ-
систем, инициированного выдачей патента А.Г. Ривзу из Международной
телеграфной и телефонной корпорации (International Telephone and Telegraph
Corporation) в 1937 году1. В начале 1940-х годов в телефонных лабораториях
Белла (Bell Telephone Laboratories) была продолжена работа по ИКМ при-
менительно к системам кодирования речи, а после окончания войны раз-
вернуты работы по коммерческой передаче речи с использованием ИКМ.
Л.А. Мичем и Е. Петерсен разработали экспериментальную 24-канальную
ИКМ-систему и опубликовали итоговые результаты в 2 в 1948 году. Значи-
тельным достижением данной работы была разработка архитектуры АЦП
последовательного приближения, декодера (ЦАП) Шэннона—Рэка и метода
логарифмического компандирования/экспандирования речевых сигналов.
Для минимизации количества передаваемых в секунду бит при сохране-
нии требуемого динамического диапазона в ранних системах использова-
лись 7-разрядные ЦАП и АЦП с логарифмическим компрессором до АЦП
и логарифмическим экспандером после ЦАП.
В середине 1950-х годов в лабораториях Белла с использованием дос-
тупных на тот момент твердотельных устройств была разработана система
672 Глава 8. Применение преобразователей данных
передачи Гр прототип которой был произведен в конце 1950-х и запущен в
эксплуатацию в 1960-х годах. Стандартная частота дискретизации речевых
сигналов в системе была принята равной 8 кГц, и в первоначальном вари-
анте использовались 7-разрядные логарифмически кодированные АЦП и
ЦАП. В более поздних системах применялись 8-разрядные «сегментные»
АЦП и ЦАП (описание данной архитектуры см. в гл. 3).
В современных системах беспроводной связи, например в сотовой теле-
фонии, используются линейные Е-Д ЦАП и АЦП с высоким разрешением, а
не логарифмические, применявшиеся в ранних системах. На рис. 8.62 для
сравнения приведены упрощенные схемы стандартной 8-разрядной сис-
темы с компандированием и современного сотового телефонного аппарата.
В современных сотовых системах передачи используются сложные алго-
ритмы сжатия речи с использованием ЦСП для понижения общей скорос-
ти данных до приемлемого уровня, а не для ограничения разрешения пре-
образователей. В большинстве случаев АЦП и ЦАП (кодек) интегрированы
на одном кристалле, выполняющем в телефонном аппарате также многие
другие функции. Также следует отметить, что при необходимости совре-
менные линейные кодеки можно сделать совместимыми с 8-разрядными
системами с логарифмическим кодированием при использовании внутрен-
них таблиц преобразования, которые обеспечивают соответствие линейных
данных с высоким разрешением логарифмически кодированным 8-разряд-
ным данным.
В 70—80-х годах XX века область цифровой обработки звука значитель-
но расширилась, и на сегодняшний день она включает в себя гораздо боль-
ше, чем цифровая передача речи в ИКМ-системах. Движущей силой яви-
лось увеличение числа доступных АЦП и ЦАП с высоким разрешением,
малой стоимостью и достаточными динамическим диапазоном и частотами
дискретизации.
В индустрии бытовой электроники проигрыватели компакт дисков (CD)
проникли практически в каждый дом. На сегодняшний день DVD аудио-
а
б
Цифровая
Телекоммуникационный с голосовой полосой кодек,
интегрированный в телефонную трубку (SNR, THD + N ~ 60—70 дБ)
Рис. 8.62. Упрощенные схемы телекоммуникационных систем цифровой передачи речи
8.4. Цифровой звук
проигрыватели класса high-end повысили качество звука в домашних кино-
театрах.
С начала 80-х годов XX века цифровое аудиооборудование вытесняет
аналоговое оборудование в системах вещания и записи. Некоторые по-
добные цифровые устройства имеют аналоговые входы и выходы, пред-
назначены для замены аналоговых устройств и работают в аналоговой среде
(т. е. представляют собой цифровой «черный ящик»). Однако тенденции в
развитии систем вещания и воспроизведения ведут к созданию полностью
цифровой (all digital) студии, в которой все аспекты записи, обработки и
передачи имеют место в цифровой области. На сегодняшний день AES (Audio
Engineering Society, Общество аудиотехники) и EBU (European Broadcast
Union, Европейское вещательное сообщество) разработали стандарты, уп-
рощающие переход к созданию подобных систем.
Требования к частоте дискретизации и THD + N
для цифрового звука
Ключевыми параметрами аудиосигналов являются суммарное значение ко-
эффициента нелинейных искажений плюс шум (total harmonic distortion
plus noise, THD + А), динамический диапазон (dynamic range, DNR) и от-
ношение сигнал—шум (signal-to-noise ratio, SNR). Более корректно вместо
THD + N использовать параметр (THD + N)/S — отношение средне-
квадратичного значения суммы всех спектральных компонентов в поло-
се (20 Гц —20 кГц), исключая основную частоту, к среднеквадратичному
значению сигнала основной частоты. Это отношение может выражаться в
процентах или в децибелах. При записи в децибелах THD + N является
отрицательным числом, однако зачастую оно указывается в виде положи-
тельного числа, подразумевая знак «минус».
Динамический диапазон (DNR) — это отношение входного сигнала пол-
ной шкалы к интегральному шуму в полосе (20 Гц — 20 кГц), выраженное в
децибелах. Оно измеряется при уровне входного сигнала, равном —60 дБ, и
равняется [S/(THD + TV)] + 60 дБ. Таким образом, динамический диапазон
в основном определяется уровнем шума. Динамический диапазон измеря-
ется с взвешивающим А-фильтром и без него.
Отношение сигнал/шум (SNR) — это отношение входного сигнала пол-
ной шкалы к интегральному шуму в полосе (20 Гц — 20 кГц) в отсутствие
входного сигнала, выраженное в децибелах (положительное число). Во мно-
гих случаях отношение сигнал/шум и динамический диапазон приблизи-
тельно равны. Следует отметить, что определение отношения сигнал/шум
для звуковых сигналов несколько отличается от определения отношения
сигнал/шум для стандартных ЦАП и АЦП, данном в гл. 2 как отношение
среднеквадратичного значения сигнала к среднеквадратичному значению
всех остальных спектральных компонентов, исключая основную частоту.
Указанные выше определения показаны на рис. 8.63.
На рис. 8.64 перечислены несколько популярных задач, в которых осу-
ществляется оцифровка звука, и типичные требования к THD + N и частоте
дискретизации. Значения THD + А выражены в виде положительных чисел
в децибелах ниже уровня сигнала. В действительности, как было отмечено
22-2852
Глава 8. Применение преобразователей данных
• Суммарное значение коэффициента нелинейных искажений плюс шум (THD + Л/):
— Более корректное определение: S/(THD + Л/), отношение среднеквадратичного зна-
чения входного сигнала основной частоты к среднеквадратичному значению сум-
мы всех остальных спектральных компонентов в полосе (20 Гц —20 кГц), выража-
емое в процентах или в децибелах. При записи в децибелах является отрицатель-
ным числом, однако зачастую указывается в виде положительного числа,
подразумевая знак «минус».
• Динамический диапазон (DNR):
— Отношение входного сигнала полной шкалы к интегральному шуму в полосе
(20 Гц — 20 кГц), выраженное в децибелах. Оно измеряется при уровне входного
сигнала, равном -60 дБ, и равняется [S/(THD + Л/)] + 60 дБ. Таким образом, дина-
мический диапазон в основном определяется уровнем шума. Динамический диа-
пазон измеряется с взвешивающим Д-фильтром и без него.
• Отношение сигнал—шум (SNR)-.
— Отношение входного сигнала полной шкалы к интегральному шуму в полосе
(20 Гц —20 кГц) в отсутствие входного сигнала, выраженное в децибелах. (Во
многих случаях приблизительно равно динамическому диапазону.)
Рис. 8.63. Ключевые параметры аудиосигналов
THD + N (дБ) Стандартный темп выборок (kSPS)
Телекоммуникации 60-70 8
FM-стерео 60-70 32
Анализ речи и т. п. 70-80 8—48
Компьютерный звук 80-90 48
Стерео CD, DAT и т. п. Более 100 44,1; 48; 88,2; 96
DVD-аудио Более 100 48, 96, 192
Рис. 8.64. Требования к THD + N и частоте дискретизации для цифрового звука
выше, при малом процентном соотношении (например, при преобразова-
нии значения 0,001 % в децибелах) они являются отрицательными числами.
В большинстве случаев значение частоты дискретизации выбирается
несколько выше удвоенного значения наивысшей частоты в спектре сигна-
ла. Однако действительные значения частот дискретизации заслуживают
отдельного обсуждения.
Выше уже обсуждалось требование к частоте дискретизации в ранних
системах ИКМ связи с Т-каналами, составляющее 8 kSPS. Речевой сигнал
занимает полосу приблизительно 3,5 кГц, и для его обработки необходимо
иметь отношение сигнал/шум всего 60—70 дБ. Несмотря на то что для удоб-
ства обработки в DSPb современных системах применяются 16-разрядные
S-А кодеки, в действительности достаточно использовать приблизительно
11-разрядный динамический диапазон.
Сигнал системы ЧМ-стереовещания занимает большую полосу (обычно
15 кГц), поэтому для цифровой передачи по наземным линиям связи, со-
единяющим студию с ЧМ-передатчиком, была выбрана частота дискрети-
зации 32 kSPS. Минимальное достаточное значение THD + N для данного
приложения — от 60 до 70 дБ.
В системах анализа и обработки речи требуется значение THD + N не
менее 70—80 дБ, и используются частоты дискретизации до 48 kSPS (частота
дискретизации может варьировать в зависимости от конкретной задачи).
При профессиональной обработке звука используется полоса 20 Гц —20 кГц.
Поэтому для данных задач минимальное требуемое значение частоты диск-
ретизации составляет 40 kSPS; наименьшее применяемое на практике зна-
чение — 44,1 kSPS (стандартная частота дискретизации аудио CD).
В высококачественных компьютерных звуковых платах необходимое
значение THD + А составляет 80—90 дБ, в качестве стандартной частоты
дискретизации принято значение 48 kSPS.
Для стерео CD-проигрывателей, DKD-аудиопроигрывателей и студий-
ных звукозаписывающих систем класса high end необходимо иметь THD +
N и динамический диапазон более 100 дБ. Таким образом, в данных уст-
ройствах предъявляются наиболее строгие требования к АЦП и ЦАП. В
качестве наименьшей стандартной частоты дискретизации принято значе-
ние 44,1 kSPS. Оно было выбрано в целях использования кассетных («U-Matic»)
видеомагнитофонов (КГ/?, videotape recorder) формата NTSC или PAL, осна-
щенных ИКМ-адаптером, для записи и воспроизведения цифровых аудиосиг-
налов, преобразованных в «псевдовидео» сигналы. Позже такие видеомагни-
тофоны стали применяться для записи мастер-дисков, и значение 44,1 kSPS
стало «де-факто» стандартом. Оно также используется в некоторых систе-
мах воспроизведения цифровых аудиокассет (DAT, digital audio tape).
В области звукового вещания и студийной обработки звука частота 48 kSPS
стала промышленным стандартом цифровой звукозаписи. Эта частота была
принята по следующей причине. В системах цифрового телевидения опор-
ный сигнал цифрового звука должен быть синхронизирован с опорным
сигналом видео во избежание дрейфа звука по отношению к видеосигналу
и для обеспечения бесшумного («click-free») переключения между звуком и
видео. Частота дискретизации 48 kSPS была выбрана и для PAL, и для NTSC
для упрощения преобразования между двумя стандартами и поддержания
соответствующих фазовых соотношений между видео и звуком в обеих си-
стемах (более подробное объяснение можно найти в !). В таких задачах
требуемое значение THD + N обычно составляет более 100 дБ.
При записи на цифровой видеодиск (DVD, digital video disk) комбинации
звука и видео для звука используется частота дискретизации 48 kSPS. Не-
смотря на то что большинство людей не слышат частоты выше 20 кГц,
исследования показали, что гармоники и акустические эффекты помеще-
ния позволяют услышать или, по меньшей мере, почувствовать, некоторые
звуковые частоты свыше 20 кГц. Поэтому в high-end системах DVD для за-
писи и воспроизведения звука могут использоваться частоты дискретиза-
ции 96 и 192 kSPS. Более высокие значения частоты дискретизации и разреше-
ния для DVD (96 kSPS/24 бита) по сравнению с CD (44,1 kSPS/16 бит) повы-
шают качество звучания. Требуемые для записи и воспроизведения звука
на DVD значения THD + А и DNR обычно превышают 100 дБ.
Основной формой оцифрованного звука, используемой в большинстве
CD, а также для создания мастер-записей при практически любых видах
цифровой записи, является импульсно-кодовая модуляция (ИКМ). При
И КМ-кодировании на DKD-видео может использоваться частота дискрети-
676 Глава 8. Применение преобразователей данных
зации до 96 kSPS и длина слова до 24 бит на один отсчет. Производители
DKD-продукции зачастую используют сжатие звука и видео для того, чтобы
исходный материал мог поместиться на DKD-диске. За счет незначительно-
го сжатия звука производители DVD могут высвободить пространство для
видео и других дополнительных материалов при сохранении приемлемого
качества. Форматы сжатия звука используются только для удаления избы-
точных данных. Пользователь не обнаруживает разницы, так как удаленные
данные маскируются другими звуками. Так как входящий звуковой поток
при сжатии изменяется, исходные ИКМ-данные не могут быть восстанов-
лены при воспроизведении, поэтому такие форматы называются сжатием с
потерями {lossy compression). За счет сжатия размер звуковой дорожки в
формате Dolby Digital может достигать 1/15 размера несжатой ИКМ-мастер-
записи.
Общие тенденции в аудио АЦП и ЦАП
Из-за требований к широкому динамическому диапазону цифровых аудио-
систем, применяемые в них АЦП и АЦП должны обладать высокими ха-
рактеристиками. В 1970-х годах ранние АЦП для оцифровки звука строи-
лись на базе архитектуры последовательного приближения или субдиапа-
зонной архитектуре (описание данных архитектур смотри в гл. 3). Они
обычно имели разрешение 16 бит и максимальную частоту дискретизации
около 50 kSPS. АЦП представляли собой модули или гибридные микросхе-
мы, а ЦАП — интегральные микросхемы, состоявшие из входного преобра-
зователя последовательного кода в параллельный и традиционного парал-
лельного ЦАП с бинарным взвешиванием. Для достижения требуемой точ-
ности в ЦАП обычно использовались тонкопленочные резисторы с лазерной
подстройкой. АЦП были относительно дорогими и обычно использовались
в звукозаписывающих студиях, а ЦАП использовались в больших объемах в
бытовых CD-проигрывателях.
В ранних CD-проигрывателях использовались технологии, схожие с уп-
рощенной схемой на рис. 8.65, а. Основной проблемой данного подхода
являлась реализация выходного фильтра подавления побочных составляю-
щих процесса цифро-аналогового преобразования {anti-imaging filter), осо-
бенно если принимать во внимание требования к качеству звука. Теорети-
чески, на выходе мог использоваться 16-разрядный параллельный ЦАП с
частотой обновления 44,1 kSPS , однако, так как частоты звукового сигнала
достигают 20 кГц, переходная область фильтра при этом должна быть очень
узкой. Например, при частоте обновления 44,1 kSPS область перехода за-
нимает частоты от 20 до 24 кГц, т. е. log2 (24/20) = log2 (1,2) = 0,263 октавы.
Для достижения ослабления 60 дБ на 0,263 октавы требуемый спад АЧХ
фильтра в переходной области должен равняться 60/0,263 = 228 дБ на окта-
ву. Предположив, что один полюс дает 6 дБ на октаву, потребуется исполь-
зование фильтра с 38 полюсами! Очевидно, что подобный фильтр будет
дорогим и труднореализуемым, в особенности если требуется линейность
фазы (что имеет место в звуковых приложениях). Другой проблемой явля-
ется спад АЧХ по закону «sin(x)/x», вызываемый процессом воссоздания
сигнала в ЦАП.
a
Ранние системы
16 разрядов, Параллельные
44,1 kSPS 18-, 20-разрядные данные
б
Современные системы
4,3218 Мб/с fs = 44,1 kSPS Kfs К = 4, 8, 16
16 разрядов, Одиночные
44,1 kSPS или многоразрядные
аналоговые данные с Kfs
Рис. 8.65. Упрощенная схема цифровой обработки звука в стерео CD (показан один
канал)
Если не используется компенсация, то выходной сигнал на частоте Най-
квиста, составляющей 22,05 МГц, ослабляется приблизительно на 4 дБ.
Таким образом, как показано на рисунке, для упрощения требований к
выходному фильтру используется метод избыточной дискретизации. 16-раз-
рядные данные, поступающие с частотой 44,1 kSPS, пропускаются через
цифровой интерполирующий фильтр, создающий дополнительные отсчеты
и формирующий выходные данные со скоростью в К раз выше исходной
частоты дискретизации. Дополнительным выигрышем при избыточной дис-
кретизации является увеличение отношения сигнал/шум на 3 дБ при каж-
дом удвоении выходной частоты следования символов. В ранних CZ)-npo-
игрывателях популярными были коэффициенты избыточной дискретиза-
ции 4, 8 и 16. Например, при К = 16 эффективная частота обновления
выходного сигнала составляет 16 х 44,1 = 705,6 kSPS. При этом переходная
область фильтра занимает от 20 до 685,6 кГц, т. е. log2 (685,6/20) =
= log2 (34,4) = 5,1 октавы. Требуемая скорость спада АЧХ в переходной
области при этом составляет 60/5,1 = 12 дБ на октаву. Для реализации
такой АЧХ достаточно использовать фильтр с двумя или тремя полюсами.
Высокое значение коэффициента избыточной дискретизации также мини-
мизирует ослабление сигнала, вызываемое упомянутым выше спадом АЧХ
по закону «sin(x)/x».
Как было подробно описано в гл. 3, в Е-Д АЦП используется входной
аналоговый модулятор с высоким коэффициентом избыточной дискретиза-
ции, сигнал с выхода которого поступает на цифровой фильтр и дециматор.
В Е-Д ЦАП используется цифровой модулятор, формирующий однобито-
вый (или многобитовый) аналоговый выходной сигнал с высоким коэффи-
циентом избыточной дискретизации. Применение избыточной дискретиза-
Глава 8. Применение преобразователей данных
ции значительно смягчает требования и к антиалайзинговому фильтру на
входе АЦП, и к фильтру подавления побочных составляющих на выходе
ЦАП. Существует много других преимуществ Z-A архитектуры, которые
делают ее идеальным выбором для АЦП и ЦАП в звуковых приложениях.
На рис. 8.65, б, показан современный CD-проигрыватель, в котором ис-
пользуется S-А ЦАП. Обычно применяются коэффициенты избыточной
дискретизации 64, 128 и 256.
На сегодняшний день Z-A АЦП и ЦАП доминируют на рынке цифрово-
го аудио вследствие их высокого динамического диапазона, применения
архитектуры с избыточной дискретизацией, низкого потребления мощнос-
ти и относительно низкой стоимости. Так как данные устройства обычно
производятся по КМОП-технологии, в них легко могут быть добавлены
многие цифровые функции, характерные для задач обработки звука. В пос-
ледующих разделах описываются некоторые из многих цифровых аудио-
устройств производства Analog Devices.
Речевые кодеки
Существует множество задач, в которых требуется использование и АЦП, и
совместимого с ним ЦАП, например речевые и аудиопроцессоры, цифро-
вые портативные видеокамеры (camcorder), сотовые телефоны, компьютер-
ные звуковые карты и т. д. Когда АЦП и ЦАП расположены на одном
кристалле, их комбинация называется кодером-декодером (или кодеком).
Типичным примером речевого/звукового стереокодека общего назначения
с низкой стоимостью и низким потреблением мощности является AD74122 4.
Его упрощенная блок-схема показана на рис. 8.66.
AD74122 представляет собой S-А стереоаудиокодек с напряжением пи-
тания 2,5 В и цифровым интерфейсом, воспринимающим сигналы с уров-
нем 3,3 В. Он поддерживает частоты дискретизации от 8 до 40 kSPS и дли-
ны слов 16, 20 и 24 бита. Для снижения уровня гармоник в режиме ожида-
ем
DOUT
DFS
DCLK
RESET MCLK DVDO1 DVDD2 AVDD
refcap dond agno
Рис. 8.66. 16-/20-/24-разрядный речевой стереокодек AD74122 с частотой дискретиза-
ции 48 kSPS
8.4. Цифровой звук
ния и шумового порога в архитектуре данного устройства применяются
многобитовые модуляторы и ЦАП с управляемым скремблированием дан-
ных (см. гл. 3).
АЦП имеет THD + N 67 дБ в полосе от 20 Гц до 20 кГц и динамический
диапазон 85 дБ. ЦАП имеет THD + А 88 дБ (при частоте выборки 48 kSPS)
и динамический диапазон 93 дБ. Кодек имеет функции цифрового про-
граммирования входного/выходного усиления, внутреннего управления уров-
нем громкости в отдельном выходном канале, программного управления
бесшумным подавлением сигнала {clickless mute) и содержит внутренний
источник опорного напряжения. Последовательный интерфейс устройства
совместим с популярными ЦСП. AD74122 выпускается в 20-контактном
корпусе TSSOP.
Высококачественные аудио АЦП и ЦАП
в раздельных корпусах
Для цифровой записи звука со студийным качеством АЦП должен иметь
значения THD + N и отношение сигнал/шум выше 100 дБ. Ранние АЦП,
предназначенные для оцифровки звука, представляли собой дорогостоя-
щие модули или гибридные микросхемы. На сегодняшний день подобные
устройства реализуются в виде ИС с использованием 2-А архитектуры.
Прекрасным примером АЦП, удовлетворяющего строгим требованиям, ко-
торые предъявляются при профессиональной звукозаписи, является 24-раз-
рядный S-А стерео АЦП AD1871 с частотой дискретизации 96 kSPS5. В нем
используются многобитовые модуляторы и методы скремблирования дан-
ных, что позволяет достичь THD + N 103 дБ и SNR/DNR 105 дБ. Устрой-
ство работает со входными данными с избыточной частотой дискретиза-
ции 6,144 MSPS и выходной частотой дискретизации 48 kSPS (К = 128).
Оно содержит A/V-совместимый последовательный порт, внутренний ис-
точник опорного напряжения и выпускается в 28-контактном корпусе SSOP.
Функциональная схема AD1871 показана на рис. 8.67.
CAPLN CAPLP AVDD
DVDD ODVDD
CAPRN CAPRP AGND
DGND
CASC
LRCLK
BCLK
DOUT
DIN
RESCT
MCLK
CLATCHA(WS)
CCLK/(55&512)
CIN/(DF1)
COUT/(DFO)
XCTRL
Рис. 8.67. 24-разрядный стерео аудио многобитовый Е-Д АЦП AD1871 с частотой дис-
кретизации 96 kSPS
Глава 8. Применение преобразователей данных
Среди аудио ЦАП характеристиками класса high-end обладает AD19556.
Он работает от источника питания 5 В с 16-/18-/20-/24-разрядными данны-
ми при частотах выборки до 192 kSPS. Он поддерживает формат битового
потока DSD (direct stream digital) SACD (super audio compact dick, a Philips
standard) и обширный диапазон частот дискретизации ИКМ, включая
32 kSPS, 44,1 kSPS, 48 kSPS, 88.2 kSPS, 96 kSPS и 192 kSPS. В AD1955
используется многобитовый S-Д модулятор с «точным восстановлением диф-
ференциальной линейности» (Perfect Differential Linearity Restoration) и скрем-
блирование, управляемое данными, для снижения шумового порога и уров-
ня гармоник в режиме ожидания. Устройство имеет дифференциальный
токовый выход с размахом 64 мА р-р.
Уровень SNR/DNR АВ1955П равен 120 дБ при частоте выборки 48 kSPS
(стереозвук с применением взвешивающего А-фильтра) и THD ± N — 110 дБ.
Ослабление цифрового фильтра в полосе подавления составляет НО дБ,
неравномерность в полосе пропускания — ±0,0002 дБ. Устройство имеет
функцию аппаратного и программного управления бесшумным подавлени-
ем переключений, последовательный (SPI) интерфейс и выпускается в
28-контактном пластиковом корпусе SSOP. Функциональная схема AD1955
показана на рис. 8.68.
На рис. 8.69 показаны предлагаемые компанией Analog Devices на се-
годняшний день (2004 год) стерео аудио ЦАП класса high-end в отдельных
корпусах.
Вход
Вход Вход данных прямого потока
основных ТИ управления цифровых данных
16-, 20-, 24-разрядные
аудиоданные/вход
внешнего цифрового
фильтра
L-CH R-CH
Выход
дифференциального тока
Рис. 8.68. Высокопроизводительный многобитовый Е-А ЦАП AD1955
8.4. Цифровой звук
• Плееры с аудио суперкомпактных дисков (SACD)
• Высококачественные DVD-аудиоплееры
• Профессиональные аудиосистемы
• Высококачественные DVD-аудиоплееры
• Профессиональные аудиосистемы
AD1955
• DVD-плееры
• А/В-измерители (A/V Amps)
• Высококачественное телевидение
AD1855 X
AD1854K,
U7 дБ SNR/DNR
107 дБ THD + N
Текущий выход
115 дБ SNR/DNR
104 дБ THD + N
AD1852
• 123 дБ SNR/DNR-moho
• 120 дБ SNR/DNR-стерео
• 110 дБ THD + N
• Текущий выход
рдуж • 113 дБ SNR/DNR
AD1854J> ’ 97/101 дБ THD + N
**
• Ю8 дБ SNR/DNR *
• 97 дБ THD + N ' Характеристики
Рис. 8.69. Семейство аудио ЦАП
Применяемые при производстве Е-Д АЦП и ЦАП КМОП-технологии
идеально подходят для добавления дополнительных цифровых функций при
незначительном увеличении площади кристалла и потребляемой мощнос-
ти. В состав аудио ЦАП семейства SigmaDSP™ входит DSP, позволяющий
выполнять балансировку динамиков, двухдиапазонную компрессию/огра-
ничение, компенсацию задержки и подавление побочных спектральных
составляющих. Эти алгоритмы могут использоваться для компенсации ог-
раничений, вызываемых реальными характеристиками динамиков, усили-
телей и акустики помещения, и позволяют добиться значительного улуч-
шения качества восприятия звука.
Трехканальный 26-разрядный ЦАП с цифровой обработкой сигналов
AD1953 SigmaDSP7 способен принимать данные с частотой до 48 kSPS.
Алгоритмы обработки, используемые в AD1953, сравнимы с алгоритмами,
применяемыми в студийном оборудовании класса high-end. Большая часть
обработки выполняется в режиме полной 48-разрядной двойной точности,
что приводит к очень хорошим показателям по слабым сигналам, от-
сутствию предельных циклов и гармоник в режиме ожидания {idle tones).
В компрессоре/ограничителе используется сложный двухдиапазонный ал-
горитм, который часто применяется в вещательных компрессорах класса
high-end. Упрощенная блок-схема AD1953 показана на рис. 8.70.
AD1953 имеет динамический диапазон 112 дБ и THD+ А 100 дБ. Следу-
ет отметить, что в данном ЦАП помимо правого и левого каналов имеется
выходной канал низкочастотного динамика {subwoofer). Устройство работа-
ет от однополярного питания 5 В и выпускается в 48-контактном корпусе
LQFP. Для оценки AD1953 имеется графический интерфейс пользователя
{GUI, graphical user interface), показанный на рис. 8.71. Данный GUI управ-
ляет всеми функциями микросхемы через простой и удобный для пользо-
вателя интерфейс. Для управления устройством при помощи GUI не требу-
ется написания дополнительных программ. Также имеются средства разра-
ботки программного обеспечения.
Последовательный
выход данных
Последовательные
входы данных
Выход основных ТИ
Входы основных ТИ
Дополнительный
последовательный
аудиовход (AUX)
SPZ-выход данных
SPI-вход
Аналоговые
выходы
Цифровой выход
Рис. 8.70. Трехканальный 26-разрядный ЦАП с цифро-
вой обработкой сигналов AD1953 SigmaDSP
682 Глава 8. Применение преобразователей данных
Рис. 8.71. Трехканальный 26-разрядный
ЦАП с цифровой обработкой сигналов
AD1953 SigmaDSP
8.4. Цифровой звук
Высококачественные многоканальные аудиокодеки
и аудио ЦАП
Существует множество задач в области DVD, аудиотехники, автомобильной
промышленности, домашних театров и т. п., в которых требуется примене-
ние многоканальных кодеков и ЦАП повышенного качества. Одним из при-
меров подобных устройств является кодек класса high-end AD1839A с двумя
АЦП и шестью ЦАП8. Его упрощенная блок-схема показана на рис. 8.72.
DBCLK
DSDATA1
DSDATA2
DS0ATA3
DAUXDATA
ADCLP
ADCLN
ADCRP
ADCRN
AAUXDATA3
DLRCLK
DVDD DVDD ODVDD ALRCLK ABCLK ASDATA CCLK CLATCH CIN COOT MCLK FD?RST fl/S AVDD AVDD
OUTL1
OUTR1
OUTL2
OUTR3
FILTO
FILTR
DGND DGND AGND AGND AGND AGND
OUTR2
OUTL3
Рис. 8.72. 96 kSPS 24-разрядный Z-A кодек AD1839A с двумя АЦП и шестью ЦАП
АЦП имеют THD + N 97 дБ и SNR/DNR 105 дБ. ЦАП имеют THD + N
92 дБ и SNR/DNR 108 дБ. Данные устройства работают от напряжения 5 В
и имеют цифровые интерфейсы, совместимые с уровнем 3,3 В. Максималь-
ная частота дискретизации составляет 96 kSPS (при одном ЦАП — 192 kSPS),
поддерживаются длины слов 16/20/24 разряда. Z-Д-модуляторы, входящие
в состав устройства, являются многобитовыми; в них применяется скремб-
AD1836A Хж
105/108 дБ DNR , rfWWW*
4 АЦП/6 ЦАП AD1RRAAP
Дифферинциальный 1
выход 102/105 дБ DNR
4 АЦП/6 ЦАП
* Дифферинциальный
Sr * выход
AD1835A
105/110 дБ DNR
2 АЦП/8 ЦАП
Дифферинциальный
выход
AD1938
102/105 дБ DNR
4 АЦП/8 ЦАП
8-канальные модификации
с временным уплотнением
каналов (ТОМ)
£ Ad:1833 Ik
110 дБ DNR Sgt
Дифф^выход AD1833C
108 дБ DNR
Wg 6 ЦАП й
Дифф, выход
AD1837A
Одиночный выход
AD1838A
105/110 дБ DNR
2 АЦП/6 ЦАП
Дифферинциальный
выход
К AD1839A
Одиночный
выход
AD1834
105 дБ DNR
8 ЦАП
16-канальные TDM/Daisy-cbain Mode
Рис. 8.73. Многоканальные аудиокодеки и аудио ЦАП
Глава 8. Применение преобразователей данных
лирование, управляемое данными. AD1839A выпускается в 52-контактном
корпусе MQFP.
На рис. 8.73 представлен обзор семейства многоканальных звуковых
кодеков и ЦАП.
Аудиокодеки находят обширное применение в компьютерных звуковых
картах. Для таких устройств требуется совместимость со спецификацией
АС'97. Хорошим примером кодека, совместимого с последней версией АС'97,
является кодек AD1985 SoundMAXT производства Analog Devices [9].
Преобразователи частоты дискретизации
С самого начала главы мы видели, что существует большое количество стан-
дартных частот дискретизации, применяемых в цифровой обработке звуко-
вых сигналов: 8 kSPS, 32 kSPS, 44,1 kSPS, 48 kSPS, 88,32 kSPS, 96 kSPS и
192 kSPS и т. д. В типичной звуковой студии обычно имеется микшерный
пульт, через который должны проходить все аудиосигналы: и цифровые, и
аналоговые. Эти сигналы должны быть синхронизированы, и наиболее об-
щим способом синхронизации является их привязка к задающему генера-
тору с частотой 48 кГц (рис. 8.74). Следует отметить, что существует мно-
жество других задач, где может потребоваться преобразование частоты дис-
кретизации; при этом входные и выходные частоты дискретизации могут
принимать значения в диапазоне от 8 до 192 kSPS.
Для того чтобы данный подход мог быть реализован на практике, дол-
жен существовать легкий способ неразрывного преобразования цифровых
сигналов с одной частотой дискретизации в цифровые сигналы с другой
частотой дискретизации. Например, для подачи на микшерный пульт вы-
ходной сигнал CD-проигрывателя с частотой дискретизации 44,1 kSPS дол-
жен быть преобразован в сигнал с частотой дискретизации 48 kSPS. Для
Опорная частота, 48 kSPS
Рис. 8.74. Потребность в преобразователях частоты дискретизации (SRC)
8.4. Цифровой звук
• Преобразователь частоты выборок является полностью цифровым устройством.
Однако необходимо учитывать, что:
— он реконструирует сигнал подобно тому, как это делает ЦАП;
— он восстанавливает выборки сигнала подобно тому, как это делает АЦП.
Вход fs
Цифровой аудиосигнал
и выходной темп выборок
Реконструированный
аудиосигнал
Цифровой аудиосигнал
и входной темп выборок
Рис. 8.75. Концепция преобразователя частоты дискретизации
этого требуется не просто изменение частоты дискретизации, а формирова-
ние совершенно нового набора отсчетов данных. На рис. 8.75 показан один
из способов, иллюстрирующий концепцию преобразователя частоты диск-
ретизации {sample rate converter. SRC).
Сначала цифровые входные данные пропускаются через ЦАП, частота
обновления которого равна частоте дискретизации входного сигнала. Ана-
логовый выходной сигнал ЦАП подвергается повторной дискретизации в
АЦП, который работает с выходной частотой дискретизации. Однако на
практике SRC представляет собой полностью цифровое устройство. Кон-
цептуально процесс заключается в повышении частоты дискретизации вход-
ных данных с последующим добавлением нулей, формировании новой
дискретной последовательности при помощи цифровой интерполяции,
цифровой фильтрации и, наконец, понижении частоты дискретизации до
требуемого значения. На рис. 8.76 показано преобразование синусоиды с
частотой 5 Гц и частотой дискретизации 44,1 kSPS в синусоиду с частотой
5 Гц и частотой дискретизации 48 kSPS при помощи описанного подхода.
Синусоида с частотой 5 кГц,
стробированная
с частотой 44,1 кГц
Синусоида с частотой 5 кГц,
стробированная SRC
с повышенной частотой
Рис. 8.76. Преобразование синусоиды с частотой 5 Гц и частотой дискретизации
44,1 kSPS в синусоиду с частотой 5 Гц и частотой дискретизации 48 kSPS
Синусоида с частотой 5 кГц,
стробированная
с частотой 48 кГц
Глава 8. Применение преобразователей данных
AD1896 10 представляет собой 24-разрядный высококачественный одно-
кристальный асинхронный преобразователь частоты дискретизации. С уче-
том опыта применения первого асинхронного преобразователя частоты дис-
кретизации производства Analog Devices, AD 1890, в AD 1896 были реализо-
ваны лучшие характеристики и добавлены дополнительные свойства.
Улучшенные характеристики включают: диапазон значений THD + N от
117 до 133 дБ в зависимости от частоты дискретизации и частоты входного
сигнала, динамический диапазон (с взвешиванием по А-закону) 142 дБ,
значения входных и выходных частот дискретизации до 192 kSPS, улучшен-
ное подавление дрожания фазы, коэффициенты повышения частоты 1: 8 и
понижения частоты 7,75 : 1.
К дополнительным свойствам относятся: дополнительные последова-
тельные форматы данных, режим обхода (работы без преобразования), улуч-
шенный интерфейс с цифровыми сигнальными процессорами и режим со-
гласования фазы. Последовательные входные и выходные порты AD1896
имеют 3-проводной интерфейс, поддерживающий режимы с выравнивани-
ем данных по левой и правой границам слова и режим PS при длинах слов
16, 18, 20 и 24 разряда. Кроме того, выходной последовательный порт под-
держивает режим TDM для подключения нескольких AD1896 к цифровому
сигнальному процессору по схеме с последовательным опросом (daisy-
chaining). При выборе разрядности 16, 18 или 20 бит выходные данные рас-
тягиваются или ужимаются до соответствующей разрядности. Частота дис-
кретизации входного последовательного порта может быть асинхронной по
отношению в частоте дискретизации выходного последовательного порта.
Сигнал задающего генератора тактовых импульсов AD1896, MCLK, может
быть асинхронным по отношению к обоим портам.
AD1896 работает с напряжением питания периферии от 3,3 до 5 В и
напряжением питания ядра 3,3 В и выпускается в 28-контактном корпусе
SSOP. Блок-схема устройства показана на рис. 8.77.
GRPDLYS RESET VDDJO VDD.CORE
MCLKO MSMODEJ
Рис. 8.77. 192 кГц стерео-асинхронный преобразователь частоты дискретизации AD1896
8.5. Цифровое видео и цифровая электроника дисплеев
Список литературы
8.4. Цифровой звук
1. Alec Harley Reeves. Electric Signaling System. U.S. Patent 2, 272, 070, filed November
22, 1939, issued February 3, 1942. Also French Patent 852, 183 filed 1937, issued 1938,
and British Patent 538, 860 issued 1939.
2. L.A. Meacham and E. Peterson. An Experimental Multichannel Pulse Code
Modulation System of Toll Quality. Bell System Technical Journal, Vol 27, No. 1, January
1948, pp. 1-43.
3. Michael Robin and Michel Poulin. Digital Television Fundamentals. Second Edition,
McGraw-Hill, 2000, ISBN 0-07-135581-2, Chapter 6.
4. Data sheet for AD74122 16-/20-/24-Bit, 48-kSPS Stereo Voiceband/Audio Codec,
www.analog.com.
5. Data sheet for AD 1871 Stereo Audio, 24-Bit, 96 kSPS, Multibit S-Д ADC,
www.analog.com.
6. Data sheet for AD 1955 High Performance Multibit S-A DAC, www.analog.com.
7. Data sheet for AD 1953 SigmaDSP 3-Channel, 26-Bit Signal Processing DAC,
www.analog.com.
8. Data sheet for AD 1839A Two ADC, Six DAC, 96 kSPS 24-Bit I-A Codecs,
www.analog.com.
9. Data sheet for AD 1985 ACy97 SoundMAX Codec, www.analog.com.
10. Data sheet for AD 1896 192 kSPS Stereo Asynchronous Sample Rate Converter,
www.analog.com.
11. Ken C. Pohlmann. Principles of Digital Audio. Fourth Edition, McGraw Hill, 2000,
ISBN 0-07-134819-0.
8.5. Цифровое видео и цифровая
электроника дисплеев
Уолт Кестер
Цифровое видео
Введение
Перед обсуждением видеоприложений, в которых используются преобра-
зователи данных, мы выполним обзор некоторых основных положений,
касающихся видеосигналов и их спецификаций. Стандартный видеофор-
мат определяет, как выглядит видеосигнал с электрической точки зрения.
Свет, взаимодействуя с поверхностью фотоприемного устройства, находя-
щегося в составе видеокамеры, формирует уровень напряжения, соответ-
ствующий его количеству, падающего на отдельную пространственную об-
ласть поверхности (пиксел). Эта информация затем преобразовывается в
сигнал стандартного формата и последовательно выдается на выход каме-
ры. К сигналу, содержащему информацию о цвете и яркости, добавляются
импульсы синхронизации, которые позволяют приемному устройству (на-
пример, монитору телевизора) идентифицировать последовательность дан-
ных внутри кадра.
Изображение в стандартном видеоформате считывается построчно сле-
ва направо и сверху вниз. Метод, называемый чересстрочной разверткой
Глава 8. Применение преобразователей данных
Рис. 8.78. Стандартный формат вещательно-
го телевидения с чересстрочной разверткой
(interlacing), заключается в считывании сначала всех четных строк, а затем
всех нечетных строк, как показано на рис. 8.78.
Таким образом, кадр (frame) стандартной телевизионной картинки раз-
делен на четный и нечетный полукадры или поля (fields). Чередование строк
используется для выполнения кажущегося обновления всего кадра за вре-
мя, соответствующее половине времени полного обновления изображения.
За счет этого достигается меньшее мерцание телевизионного изображения.
Типичные значения частоты обновления кадра в вещательном телевидении
30 и 25 Гц в зависимости от частоты следования строк. Следует отметить,
что в графических дисплеях чередование строк обычно не используется,
так как в таких системах применяется более высокая частота обновления
(типичное значение — 60 Гц).
Первоначальной спецификацией черно-белого, или монохромного
(monochrome), телевидения в США являлась спецификация EIA RS-170 (поз-
же замененная на SMPTE 170М), в которой определялись все требования к
временным характеристикам и уровням напряжения для видеосигналов стан-
дартного коммерческого вещательного телевидения. Стандартная американ-
ская спецификация на цветные сигналы, NTSC, является модификацией
RS-170, позволяющей работать с цветом за счет добавления информации о
цветности к сигналу, содержащему в исходном варианте только информа-
цию о яркости.
Видеосигнал состоит из последовательности строк аналогового телеви-
дения. Каждая строка отделена от последующей импульсом синхрониза-
ции, который называется строчной синхронизацией (horizontal sync). Кадры
картинки отделяются друг от друга более продолжительным импульсом
синхронизации, который называется кадровой синхронизацией (verticalsync).
На рис. 8.79 показана одна строка цветного видеосигнала формата NTSC.
В мониторе, принимающем сигнал, электронный луч сканирует лицевую
поверхность индикаторной трубки, при этом яркость луча определяется ам-
плитудой видеосигнала.
При обнаружении импульса строчной синхронизации луч перемещает-
ся в левый край экрана и сдвигается вниз в позицию, соответствующую
8.5. Цифровое видео и цифровая электроника дисплеев
IRE единицы
(1 IRE единица = 7,14 мВ)
+100
Уровень
белого
to---- 10,9 мкс ——
! Синхроинтервал
I Эйч-стандарта
63,56 мкс
fH = 15,734 кГц
1 NTSC видео сигнал
Рис. 8.79. Строка полного цветного видеосигнала формата NTSC
следующей строке. По импульсу кадровой синхронизации (импульс строч-
ной синхронизации большей длительности) луч перемещается в левый вер-
хний угол экрана в точку, соответствующую началу строки, расположенной
между первыми двумя строками предыдущего сканирования. Таким обра-
зом, строки текущего полукадра выводятся на экран в позициях между стро-
ками предыдущего полукадра.
В системе NTSC (используемой в США и Японии) частота цветовой
поднесущей равна 3,58 МГц. В системе PAL (используемой в Великобрита-
нии и Германии) и SECAM (используемой во Франции) применяется час-
тота цветовой поднесущей 4,43 МГц.
На рис. 8.80 приводится сравнение различных частот в системах NTSC
и PAL.
NTSC PAL
Число строк 525 625
Частота цветовой поднесущей 3,58 МГц 4,43 МГц
Частота обновления кадров 30 Гц 25 Гц
Частота обновления полей 60 Гц 50 Гц
Частота строчной синхронизации 15,734 кГц 15,625 кГц
Рис. 8.80. Характеристики сигналов NTSC и PAL
Форматы цифрового видео
Цифровое видео зародилось в начале 1970-х годов, когда на рынке появи-
лись 8-разрядные АЦП с частотами дискретизации от 15 до 20 MSPS. Экс-
пертные оценки, наподобие проведенных А.А. Голдбергом *, показали, что
(Гб90 Глава 8. Применение преобразователей данных
для оцифровки полного видеосигнала с частотами дискретизации в 3 или
4 раза выше частоты цветовой поднесущей NTSC (3,58 Мгц) достаточно
8-разрядного разрешения.
На начальном этапе цифровые технологии применялись для создания
«черных видеоящиков», заменявших функции, которые до этого выполня-
лись аналоговыми методами. Подобные цифровые черные ящики имели
аналоговый видеовход и аналоговый видеовыход и заменяли аналоговое
оборудование, такое как корректоры временных искажений, память на кадр,
преобразователи форматов и т. пЛ3’4. Типичный черный ящик показан на
рис. 8.81.
Как уже было отмечено выше, в начале 1970-х годов было определено,
что требуемое для оцифровки видеосигнала разрешение составляет 8 бит,
однако с появлением АЦП и ЦАП с низкой стоимостью и более высоким
разрешением популярными стали значения разрешения 9 и 10 бит. В неко-
торых ранних черных ящиках применялись частоты дискретизации в 3 раза
выше частоты поднесущей (просто из-за отсутствия более быстрых АЦП),
однако на сегодняшний день промышленным стандартом является частота
дискретизации в 4 раза выше частоты поднесущей.
Ранние АЦП, применявшиеся в цифровых черных ящиках, представля-
ли собой модульные устройства, однако в 1979 году появился первый ком-
мерческий 8-разрядный монолитный флэш-преобразователь5, а в течение
следующих нескольких лет появилось много других подобных устройств,
выпускавшихся разнообразными производителями ИС. Доступность ИС
АЦП с низкой стоимостью сыграла большую роль в развитии области циф-
рового видео.
В начале 1980-х годов появились цифровые видеомагнитофоны (VTRs,
videotape recorders), основанные на рекомендациях МККР (CCIR). Также
появилось большое число разнообразных цифровых черных ящиков, таких
как генераторы видеоэффектов, графические системы, устройства хране-
ния видеокадров. Эти устройства работали с большим числом некоррели-
рованных и несовместимых стандартов. Цифровое соединение между чер-
ными ящиками было сложным или невыполнимым, и большинство из них
подключалось к другому оборудованию с использованием аналоговых вход-
ных и выходных портов. Фактически это явилось причиной роста популяр-
Характеристики полного видеосигнала
Полоса частот Поднесущая fsc fs = 3fsc fs = 4fsc
NTSC 4,2 МГц 3,58 МГц 10,74 MSPS 14,32 MSPS
PAL 5,0 МГц 4,43 МГц 13,29 MSPS 17,72 MSPS
Рис. 8.81. «Черный ящик» цифрового видео
8.5. Цифровое видео и цифровая электроника дисплеев
ности 9- и 10-разрядных АЦП, так как дополнительное увеличение разре-
шения снижало накопленные за счет каскадирования устройств эффекты
шумов квантования.
В 1980-х годах общество кино- и телеинженеров (SMTPE. Society of Motion
Picture and Television Engineers) разработало цифровой стандарт (SMTPE
244M6), в котором были определены характеристики цифровых полных ви-
деосигналов формата NTSC с частотой дискретизации 4/5С, а также харак-
теристики параллельного интерфейса с разрядностью до 10 бит. Цифровой
интерфейс включал в себя 10 ЭСЛ-совместимых дифференциальных сиг-
налов данных, 1 ЭСЛ-совместимый дифференциальный цифровой такто-
вый сигнал, 2 системные «земли» и 1 заземление на массу, т. е. 25 выводов.
Также в 1980-х годах был разработан стандарт 1ЕЕЕ\ в котором были опи-
саны методики измерения характеристик ЦАП и АЦП, использовавшихся в
системах цифрового телевидения с полным видеосигналом. Позднее для
цифровых систем с полными цифровыми видеосигналами формата NTSC с
частотой дискретизации 4fsc был принят высокоскоростной последователь-
ный интерфейс со скоростью передачи данных 143 Мб/с (определенной в
SMTPE 259М10).
Еще до завершения работы над стандартом полного цифрового видео-
сигнала с частотой дискретизации 4fsc начались работы по созданию систем
с компонентными (component) видеосигналами, которые обладают много-
численными преимуществами. На рис. 8.82 показана упрощенная блок-схема
процесса формирования полного вещательного видеосигнала, которая по-
могает понять разницу между полными и компонентными сигналами и
преимущества использования компонентных сигналов.
Исходные RGB-сигналы с выхода цифровой камеры поступают на нели-
нейное устройство гамма-коррекции (gamma unit), в котором компенсируются
нелинейные искажения, характерные для приемных ЭЛТ. Затем выходные
сигналы R'G'B'-устройства гамма-коррекции пропускаются через резистив-
Рис. 8.82. Модель формирования полного видеосигнала из RGB-составляющих
(Гб92 Глава 8. Применение преобразователей данных
ную матрицу (matrix), которая формирует широкополосный сигнал яркости
(luma) (в западной терминологии часто неправильно именуемый luminance) и
два цветоразностных сигнала с более узкой полосой. Сигнал яркости форми-
руется при помощи соотношения Y' = 0,578G' + 0,229R' + 0,114В'. Также
формируются два цветоразностных (color difference) сигнала, R'—Y' и В'—Y'.
Цветовая поднесущая используется для модуляции цветоразностных сигна-
лов в квадратуре (сдвинутых на 90°), после чего полученные сигналы сум-
мируются, формируя сигнал цветности (chroma) (в западной терминологии
часто неправильно именуемый chrominance). Сигналы цветности и яркости
объединяются с сигналом цветовой синхронизации и полным синхросиг-
налом, формируя композитный или полный (composite) видеосигнал, обозна-
чаемый CVBS (composite video with burst and sync, полный видеосигнал с цве-
товой и полной синхронизацией). Этот сигнал посылается в эфир.
В телевизионном приемнике происходит обратный процесс: полный
сигнал раскладывается на компоненты и формируется RGB-сигнал, посту-
пающий на три цветовых входа ЭЛТ.
Заметьте, что каждый шаг в формировании полного видеосигнала после
выхода с резистивной матрицы является потенциальным источником иска-
жений. По этой причине инженеры, работающие в области цифрового ви-
део, в скором времени осознали преимущество сохранения вида сигнала
как можно более близким к исходному R'G'B'-формату. Первый формат
так называемого компонентного (component) аналогового видеосигнала по-
лучил название Y'PbPr (следует отметить, что первоначальное название в
настоящее время не используется). Соответствующий цифровой формат
называется Y'CbCr. Формат цифрового компонентного видеосигнала Y'CbCr
определен в 8’% 10.
Другой формат аналогового компонентного сигнала называется Y'UV.
Он похож на Y'PbPr, но в нем используются другие масштабирующие мно-
жители цветоразностных сигналов.
Последним из популярных форматов аналогового компонентного сиг-
нала, которые мы рассмотрим, является S-Video или просто Y'/C. Это двух-
компонентная аналоговая система, которая часто используется в видеомаг-
нитофонах, DVD, телевизионных приемниках и мониторах класса high-end.
Обзор различных форматов аналоговых и цифровых компонентных ви-
деосигналов приведен на рис. 8.83. На рис. 8.84 показаны соответствую-
щие разъемы на задней панели типичного приемника видеосигналов класса
high-end.
В стандартах на цифровые компонентные видеосигналы 8’ % 10 предус-
матривается частота дискретизации 13,5 MSPS для сигнала яркости Y' и
6,25 MSPS для каждого из двух цветоразностных сигналов, РЬ и Рг. Это
соотношение часто называют дискретизацией 4:2:2. Частота дискретиза-
ции яркостного сигнала была выбрана равной 13,5 MSPS для того, чтобы и
в стандарте PAL, и в стандарте NTSC на интервал строки приходилось це-
лое число отсчетов.
Значение 13,5 MSPS является достаточным для яркостного сигнала,
ширина полосы которого достигает 5,75 МГц. Ширина полосы цветоразно-
стных сигналов достигает 2,75 МГц; таким образом, значение частоты дис-
кретизации 6,25 MSPS также является достаточным.
8.5. Цифровое видео и цифровая электроника дисплеев
• Y'PbPr:
— применяется в аналоговых видеосистемах с компонентными сигналами. Сигналы
В—Y' и В —Y' масштабируются, формируя цветоразностные сигналы РЬ и Рг.
• Y'CbCr:
— применяется в цифровых видеосистемах с компонентными сигналами. Сигналы
В —Y' и В—Y' масштабируются, формируя составляющие СЬ и Сг.
• Y'llV:
— применяется в системах NTSC и PAL. Сигналы В—Y' и В'—Y' масштабируются,
формируя аналоговые составляющие U и V. Составляющие U и V фильтруются в
фильтре нижних частот, и их комбинация дает модулированную составляющую
цветности С. Составляющая яркости (Y) суммируется с составляющей цветности,
формируя полный сигнал системы NTSC или PAL.
• S-Video или Y'/C:
— аналоговая двухкомпонентная система, основанная на сигналах яркости (Y') и цвет-
ности (С).
• Полный сигнал или CVBS:
— полный видеосигнал с цветовой и полной синхронизацией.
Рис. 8.83. Форматы полных и компонентных цифровых и аналоговых видеосигналов
CVBS
Полный видео
со вспышкой поднесущей
и синхронизацией
2 выхода
S-Video
или Y'/C
Компонентное видео
Y'PbPr или Y'CbCr 1
2 выхода
1 выход
Рис. 8.84. Аналоговые разъемы приемника класса high-end
Следует отметить, что при непосредственной дискретизации сигналов
R'G'B' для каждого из них потребовалась бы частота дискретизации 13,5
MSPS (дискретизация 4:4:4).
Последовательные интерфейсы
Последовательный цифровой интерфейс (SDI, serial digital interface) практи-
чески вытеснил более ранние параллельные интерфейсы, применение ко-
торых требовало использования большого числа цифровых линий. На се-
годняшний день применяется стандарт последовательного интерфейса
SMPTE 259М 10. В нем определены 10-разрядные последовательные интер-
фейсы со скоростью передачи данных около 143 Мб/с для систем NTSC с
частотой дискретизации 4/vc, около 177 Мб/с для систем PAL с частотой
дискретизации 4/^., 270 Мб/с для компонентного видеосигнала 4:2:2 стан-
дарта ITU-R ВТ601 и 360 Мб/с для компонентного сигнала 4:4:2 стандарта
ITU-R ВТ601 с частотой дискретизации 18 MSPS (позволяющей реализо-
вать форматное соотношение 16:9).
Глава 8. Применение преобразователей данных
Стандарты телевидения высокой четкости (HDTV, high definition TV) с
форматным соотношением 16 : 9 определены в ITU-R ВТ70912 и SMPTE
292М13. При дискретизации составляющих с соотношением 4:2:2 исполь-
зуется частота дискретизации 74,25 MSPS, при этом скорость последова-
тельной передачи данных составляет 1,485 Гб/с. Также существует много
других стандартов развертки HDTV, которые описаны в SMPTE 296М и
SMPTE 274М.
Высокие скорости передачи данных в цифровом телевидении требуют
применения алгоритмов сжатия данных (например, MPEG) для широкове-
щательной передачи, однако в пределах студии сигналы обычно передают-
ся в виде последовательного несжатого потока данных по коаксиальному
или волоконно-оптическому кабелю.
Область цифрового телевидения кажется сложной вследствие большого
числа акронимов и стандартов. Дополнительную информацию пользова-
тель может почерпнуть в 14’15.
Цифровые видео АЦП и ЦАП: декодеры и кодеры
Определения, встречающиеся в мире цифрового видео, слабо упорядочены.
Аббревиатура SDTV обозначает просто телевидение стандартной четкости
(в противоположность HDTV).
Декодер SDTV преобразует аналоговый полный видеосигнал (CVBS),
S-Video (Y'/C), Y'UV или Y'PbPr сигналы в цифровой видеопоток Y'CbCr
компонентного видеосигнала стандарта ITU-R ВТ.656 4:2:2, совмести-
мого с NTSC, PAL B/D/G/H/I, PAL А/или PAL N. Из определения видео-
декодера подразумевается, что он выполняет функцию АЦП, однако в
традиционной терминологии термин «декодер» используется для описа-
ния функции ЦАП.
Цифровой кодер видеосигнала преобразует цифровой компонентный
видеосигнал (например, ITU-R BT.6QX 4:2:4) в стандартный полный ана-
логовый сигнал, совместимый с NTSC, PAL B/D/G/H/I, PAL Мили PAL N.
Зачастую имеется возможность выдавать на выход помимо полного видео-
сигнала также компонентные аналоговые видеосигналы формата S-Video
(Y'/C), RGB, Y'PbPr или Y'UV.
В отличие от терминологии, применяемой в области цифрового видео,
в терминологии ЦАП и АЦП термины кодер и декодер используются для
обозначения функции ЦАП и АЦП соответственно, а для обозначения их
комбинации используется термин кодек (кодер-декодер).
Причина этого заключается в том, что видеоинженеры рассматривают
полный цветной сигнал как сигнал цветности, кодированный поверх сигна-
ла яркости. Декодер видеосигнала (содержащий АЦП) декодирует (разделя-
ет) сигналы цветности и яркости. Кодер видеосигнала, в свою очередь, ко-
дирует сигналы яркости и цветности, формируя полный видеосигнал.
Первые АЦП и ЦАП, применявшиеся в цифровом телевидении в
1970-х годах, представляли собой модульные устройства. Они обычно име-
ли 8-разрядное разрешение и работали с частотой дискретизации 4fsc (для
PAL требовалось значение частоты дискретизации 17,2 MSPS). С появлени-
ем ИС АЦП в 1980-х годах в большинстве цифровых черных ящиков стали
8.5. Цифровое видео и цифровая электроника дисплеев
применяться 9- и даже 10-разрядные АЦП. Схемы аналоговой обработки
сигнала, выполнявшие такие функции, как фиксация уровня, восстановле-
ние постоянной составляющей и фильтрация, обычно отделялись от уст-
ройства, выполнявшего непосредственно функцию АЦП.
В 1990-х годах появилось большое количество недорогих КМОП АЦП и
ЦАП с разрешающей способностью до 12 бит и частотами дискретизации
свыше 20 MSPS; таким образом, была решена основная проблема преобра-
зования данных и наметилась тенденция к более высокоуровневой интег-
рации аналоговых и цифровых функций. В связи с этим современные коде-
ры и декодеры видеосигналов являются высокоинтегрированными устрой-
ствами с внутренними схемами аналоговой обработки сигналов и функциями
цифровой обработки. Кодеры и декодеры видеосигналов могут работать с
типичными значениями частот дискретизации 4ДС, 13,5 MSPS, 27 MSPS,
54 MSPS, 108 MSPS, 216 MSPS или 74,25 MSPS.
Хорошим примером современного высокоинтегрированного процессо-
ра видеосигналов является 10-разрядный видеодекодер ADV7183A 16, упро-
щенная блок-схема которого показана на рис. 8.85.
ADV7183A представляет собой интегрированный декодер видеосигна-
ла, который автоматически обнаруживает и выполняет преобразование ана-
логового телевизионного сигнала стандартной четкости (SDTV), совмес-
тимого с мировыми стандартами NTSC, PAL или SECAM, в данные в фор-
мате 4:2:2 компонентного видеосигнала, совестимого с 16-/8-разрядными
спецификациями ITU-R BT.601/ITU-R ВТ.656. Усовершенствованный циф-
ровой выходной интерфейс, обладающий высокой гибкостью, позволяет
выполнять декодирование и преобразование с высоким качеством и в си-
стемах с буферизацией кадров (frame-buffer-based), и в системах, синхрон-
ных с частотой строк (line-locked clock-based). Поэтому AD7183A идеально
подходит для применения в широком диапазоне приложений с различны-
ми характеристиками аналоговых видеосигналов, включая работу с источ-
никами, записанными на магнитной ленте, источниками вещательных сиг-
Аналоговые входы
компонентного
или полного видео
Цифровые выходы
видеокомпонент
ADV7183A
ISO (%------
REFOUT (*)♦
AIN1
AJN2
A1N3
АМ4
A1N5
АРУ
Аналоговый
1/Р мульти-
плексор
привязка
и восстанов-
ление
постоянной
A1N6 (5—> составляющей '
Форми-
рующий ____Коррекция
и подавля-
ющий ФНЧ
54 МГц
Анти-
альязинговый
ФНЧ
яркостного
сигнала
Восста-
новление
DTO под-
несущей
ФВЧ/ФНЧ
Преобразова-
ние частоты
выборок
Детекти-
рование
синхро
Йреоб^азова-
ние частоты
выборок
и горизон-
тальное
Блок
задержки
сигнала
яркости
Память
2Н линий
Фильтр
комбина-
ции цветов
пикселов
О/Р-порт
HFFTOCLK
AEF
Блок FIFO
управления
и формати-
рование
выходных
пикселов
LLC-синтез
с линейно-
образным
выходным
тактирова-
нием
Qguclkjn
Блок управления
Антиалья-
зинговый
ФНЧ цвета
Форми-
рующий
ФНЧ
Пере-
ключатель
Блок
генератора
Порт
интерфейса,
совместимый
10-раз-1
рядный
PWRDH HSYNC HELD VSYNC HREF VREF CLOCK Ш5СК RESET SDATA SCLOCK ALSB
Рис. 8.85. 10-разрядный видеодекодер ADV7183A
Глава 8. Применение преобразователей данных
налов, охранными/наблюдательными видеокамерами и профессиональны-
ми системами.
Внутреннее с точностью в 10-разрядов аналого-цифровое преобразова-
ние обеспечивает характеристики сигнал/шум с профессиональным каче-
ством. При этом в режиме 8-разрядного выхода обеспечивается истинное
8-разрядное разрешение. На аналоговые входы могут подаваться стандарт-
ный полный видеосигнал S-video и компонентный Y'PbPr видеосигналы в
различных сочетаниях. Применение схем АРУ и восстановления привязки
позволяет работать с входными сигналами с максимальным размахом на-
пряжения от 0,5 до 2 В. Если применение этих схем не требуется, они могут
быть отключены для ручной настройки.
Применение фиксированной тактовой частоты 54 МГц (4 х 13,5 MSPS)
в АЦП и тракте прохождения сигнала во всех режимах позволяет добиться
высокой точности процесса дискретизации и цифровой фильтрации. Ис-
пользование выходного тактового сигнала, синхронного с частотой строк,
позволяет обеспечить синхронность, асинхронность или синхронность с
частотой строк для выходных данных, сигналов синхронизации и выход-
ных тактовых сигналов даже при изменении длины строки на ±5 %. Выход-
ные управляющие сигналы дозволяют реализовать интерфейс с другими
устройствами без применения дополнительных схем практически в любых
приложениях. Рабочие режимы ADV7183A настраиваются по двухпровод-
ному последовательному двунаправленному порту (совместимому с 12С).
ADV7183A производится по +3,3 В КМОП, технологии, что позволяет реа-
лизовать повышенные функциональные возможности при низкой рассеи-
ваемой мощности. ADV7183 выпускается в 80-контактном корпусе LQFP.
ADV731017 представляет собой 12-разрядный видеокодер второго поко-
ления, в котором для достижения повышенных характеристик качества в
бытовой электронике и профессиональных видеоустройствах применяются
высококачественные ЦАП с технологией шумоподобного видеосигнала с
избыточной дискретизацией (Noise Shaped Video — NSV™). Максимальная
частота дискретизации ADV7310 равна 216 MSPS, что позволяет обеспе-
чить избыточную дискретизацию с коэффициентами до 16 и, следователь-
но, лучшие показатели дифференциального усиления, фазовых характерис-
тик и отношения сигнал/шум. Упрощенная блок-схема ADV7310 показана
на рис. 8.86.
ADV7310 может работать с входными цифровыми компонентными
сигналами в различных форматах, включая HDTV и SDTV. Выходной сиг-
нал может выдаваться в формате HDTV, компонентного и полного SDTV,
S-video и т. д. Применение шести прецизионных 12-разрядных видео ЦАП
с технологией NSV позволяет реализовать несколько видеовыходов и обес-
печить избыточную дискретизацию видеосигналов стандартной, высокой
четкости и сигналов с прогрессивной разверткой с коэффициентами 2х, 4х,
8х и 16х. Функция коррекции ЦАП позволяет выполнять точную настройку
выходных уровней в аналоговых интерфейсах, входящих в состав различно-
го оборудования, особенно в телевизионных системах, где необходимо точ-
ное соответствие требованиям электромагнитной совместимости.
ADV7310 имеет стандартный двухпроводный последовательный РС-со-
вместимый интерфейс и выпускается в 64-контактном корпусе LQFP.
8.5. Цифровое видео и цифровая электроника дисплеев
Входы
цифровых
видеокомпонент
Блок контроля
стандарта четкости
Контроль яркости цвета,
DNR, гамма, программи-
руемые фильтры,
тестовый образец
стандартной четкости
H5YRC
VSYNC —►
BLANK
CLK1N_A
CLKIN_B
Y9-Y0
Сд-СО —>
S9-S0
Программируемая
RGB-матрица
Генератор
тактирования
ФАПЧ
Блок контроля
высокой четкости
Тестовый образец
высокой четкости,
управление цветом,
адаптивный фильтр
остроты CTRL фильтра
ADV7310/
ADV7311
интерфейс
Аналоговые выходы
компонентного
или композитного
видео
Рис. 8.86. 216MSPS многоформатный видеокодер ADV731O
Параметры видеокодеров и видеодекодеров
Помимо традиционных параметров АЦП/ЦАП для видеокодеров и видео-
декодеров дополнительно задаются специфические видеохарактеристики.
На рис. 8.87 перечислены типичные видеохарактеристики, их определения
можно найти в 7’ к 15.
Заметьте, что характеристики дифференциального усиления и диффе-
ренциальной фазы (введенные в гл. 2 и 5) применимы только к полному
видеосигналу и не применимы к компонентным видеосигналам.
• Разрешение, частота дискретизации, линейность, ширина полосы.
• Дифференциальное усиление (CVBS).
• Дифференциальная фаза (CVBS).
• SNR.
• Характеристики сигнала цветности (компонентный видеосигнал):
— точность цветового тона;
— точность цветонасыщенности;
— диапазон регулировки усиления цветности;
— диапазон аналогового усиления цветности;
— диапазон цифрового усиления цветности;
— ошибка амплитуды сигнала цветности;
— ошибка фазы сигнала цветности;
— интермодуляция сигналов яркости и цветности.
• Характеристики сигнала яркости (компонентный видеосигнал):
— точность яркости;
— точность контраста.
Рис. 8.87. Характеристики видеокодеров и видеодекодеров
Электронные компоненты дисплеев
Производители компьютерных графических дисплеев осознали, что разре-
шение, которое обеспечивали стандартные видеомониторы NTSC и PAL,
было недостаточным для серьезных пользователей из-за различий по даль-
698 Глава 8. Применение преобразователей данных
ности обзора. Они также осознали, что наилучшее качество может быть
получено при использовании RGB компонентного видеосигнала, а не пол-
ных видеосигналов.
По этим причинам появилось большое число форматов для стандартов
развертки/разрешения, большинство из которых описывается в некоторой
степени устаревшим стандартом EIA RS-343A. В отличие от вещательных
видеосистем, в графических дисплеях разрешение по горизонтали и вер-
тикали, равно как и частота регенерации, может изменяться в широких
пределах в зависимости от требуемого качества. Разрешение в подобных
системах обычно задается в пикселах на основании числа горизонтальных
строк и числа пикселов в каждой строке. Например, монитор с разреше-
нием 640 х 480 имеет 480 горизонтальных строк, и каждая горизонтальная
строка разделена на 640 пикселов. Таким образом, один кадр содержит
307 200 пикселов. В цветной системе для каждого пиксела требуется ин-
формация об интенсивности сигналов RGB, которая обычно хранится в
виде 8- или 10-разрядных слов в памяти. Частота регенерации обычно при-
нимает значения от 60 до 85 Гц. Большинство современных компьютерных
графических мониторов с растровой разверткой являются мультичастотны-
ми («multisync»), т. е. могут автоматически синхронизироваться с различны-
ми значениями частот регенерации и разрешения.
На рис. 8.88 показаны некоторые типичные значения разрешений и
частот следования пикселов для стандартных систем отображения при
частоте регенерации 75 Гц и построчной развертке. В стандартных ком-
пьютерных графических мониторах, как и телевизионных мониторах, при-
меняется метод отображения, который называется растровой разверткой
(raster scan). Как было описано выше, при использовании этого метода
информация выводится на экран строка за строкой, сверху вниз и слева
направо. Для отображения полной картинки монитор должен принять
огромное количество информации. В сигнале должна присутствовать не
только информация об интенсивности каждого пиксела, но и информа-
ция, указывающая на начало новой строки (HSYNC) и начало нового
кадра (VSYNC).
Обозначение Разрешение Частота регенерации Частота пикселов
VGA 640 х 480 75 Гц 30 МГц
SVGA 800 х 600 75 Гц 47 МГц
XGA 1024x768 75 Гц 83 МГц
SXGA 1280х1024 75 Гц 138 МГц
UXGA 1600х 1200 75 Гц 202 МГц
QXGA 2048х1536 75 Гц 330 МГц
Частота пикселов = Вертикальное разрешение х горизонтальное разрешение х частота регенерации х 1,4 Частота регенерации может принимать значения от 60 до 100 Гц
Рис. 8.88. Типичные значения разрешений и частот пикселов для графических систем
при частоте регенерации 75 Гц и построчной развертке
8.5. Цифровое видео и цифровая электроника дисплеев
Тактовая частота пикселов дает хорошее представление о требованиях
ко времени установления и ширине полосы любого аналогового компонен-
та, такого как ЦАП, который включается в тракт прохождения RGB-сигна-
лов. Тактовую частоту пикселов можно оценить, последовательно умножив
частоту регенерации на горизонтальное и вертикальное разрешение. К по-
лученному значению необходимо добавить 40 % (множитель обратного хода,
учитывающий непроизводительные издержки).
Существует несколько архитектур, которые могут использоваться для
построения графической системы отображения. Наиболее общий подход
показан на рис. 8.89. Данная архитектура состоит из хост-микропроцессо-
ра, графического контроллера, буфера видеокадров и трех банков памяти
цветов (таблицы преобразования), по одному для каждого из основных
цветов — зеленого, красного и синего (для монохромных систем необхо-
дим только один банк). От микропроцессора информация об изображении
поступает на графический контроллер, буфер видеокадров и таблицы пре-
образования цветов. Эта информация обычно состоит из информации о
цвете и информации о положении. Графический контроллер интерпрети-
рует эту информацию и добавляет необходимые выходные сигналы, такие
как сигналы синхронизации, гашения обратного хода и управления памя-
тью. Высокоскоростной буфер кадров выдает информацию об адресе пик-
села на таблицы преобразования в частоту пикселов.
Блоки памяти R, G и В представляют собой таблицы преобразования, в
которых содержится информация об интенсивности каждого пиксела от-
дельного кадра. ЦАП используют слова из памяти и информацию от кон-
троллера памяти для вывода информации о пикселе на экран. При исполь-
зовании 8-разрядных ЦАП подобная система называется 24-разрядной си-
стемой с «истинным цветовоспроизведением» («true color»). В такой системе
одновременно может отображаться 16,8 миллиона адресуемых цветов. Таб-
лицы преобразования и ЦАП обычно интегрированы в составе ИС, назы-
ваемой видео «ОЗУ—ЦАП» («RAM—DAC»); при этом минимизируются тре-
бования к памяти графического контроллера. После того как данные для
Общее число одновременно отображаемых цветов = 28х 28х28= 16,8 миллионов
Рис. 8.89. Упрощенная графическая система для генерации RGB-сигналов
Глава 8. Применение преобразователей данных
Общее число одновременно отображаемых цветов = 28 = 256
Рис. 8.90. «Псевдоцветная» 8-разрядная графическая RGB-система
одного кадра загружены в RAM—DAC, дополнительных данных от кон-
троллера не требуется, если не требуется изменять содержимое пиксела.
Для того чтобы снизить стоимость системы при сохранении гибкости,
была разработана альтернативная конфигурация, называемая 8-разрядной
«псевдоцветной» («pseudo-color») системой (рис. 8.90). В этой конфигура-
ции возможен одновременный вывод на экран только 256 из полного набо-
ра 16,8 миллиона цветов, что обычно является приемлемым для систем не
очень высокого уровня. На сегодняшний день большинство графических
контроллеров способно обеспечивать выходные сигналы: 8-разрядные
(«256-цветные»), 16-разрядные («высококачественного цветовоспроизведе-
ния») и 24-разрядные («истинного цветовоспроизведения»).
Видео ЦАП имеют ряд свойств, которые отличают их от традиционных
высокоскоростных ЦАП. На рис. 8.91 показана форма и уровни выход-
ного сигнала зеленого цвета, содержащего информацию синхронизации.
Заметьте, что видео ЦАП с токовым выходом соединен с «землей» при
помощи 75-омного резистора (согласование источника) и конец 75-омно-
го кабеля также соединяется с «землей» при помощи 75-омного резистора
(согласование нагрузки). Таким образом, значение полной нагрузки по по-
стоянному току на выходе ЦАП равно 37,5 Ом. Для формирования выход-
ного сигнала полной шкалы (1 В) необходим выходной ток зеленого ЦАП
26,67 мА. В графических системах одна единица IRE соответствует прибли-
зительно 7 мВ. Заметьте, что все 8 разрядов ЦАП принадлежат области
активного изображения между уровнем сигнала гашения обратного хода и
уровнем белого цвета. Уровень синхронизации, 300 мВ, формируется от-
дельным токовым ключом, входящим в состав зеленого ЦАП. Видео ЦАП
также имеют отдельный вход для сигнала гашения обратного хода. В неко-
торых системах сигналы синхронизации и гашения обратного хода добав-
ляются ко всем трем сигналам цветов, но обычно на практике сигнал син-
хронизации добавляется только к сигналу зеленого цвета (синхронизация
по зеленому цвету — SOG, sync-on-green).
8.5. Цифровое видео и цифровая электроника дисплеев
1 IRE = 7 мВ
Zo = 75 Ом
(кабель)
Zs = 75 Ом
(сторона источника)
Zs = 75 Ом
(монитор)
Рис. 8.91. Уровни видеосигналов в графических RGB-дисплеях
В качестве примера видео ЦАП высокого класса (high-end) рассмотрим
трехканальный 330 MSPS ЦАП на одном монолитном кристалле, ADV7125 ,8.
Он состоит из трех высокоскоростных 8-разрядных видео ЦАП с компле-
ментарными (прямым и инверсным) высокоимпедансными аналоговыми
токовыми выходами, стандартным входным TTL-интерфейсом. ADV7125
имеет три раздельных 8-разрядных входных порта. Все, что необходимо для
функционирования устройства, это однополярный источник питания +5
или +3,3 В и тактовый сигнал. ADV7125 имеет дополнительные входы для
управляющих сигналов SYNC и BLANK и также обладает возможностью
работы в экономичном режиме питания. ADV7125 производится с исполь-
зованием 5-В КМОП-процесса. Монолитная КМОП-конструкция позво-
ляет реализовать многообразие функциональных возможностей при низ-
кой рассеиваемой мощности (250 мВт при напряжении питания 3,3 В и
частоте обновления 330 MSPS). AD7125 выпускается в 48-контактном кор-
пусе LQFP. Упрощенная блок-схема устройства показана на рис. 8.92.
На сегодняшний день существует большое количество видео RAM—DAC,
содержащих кроме таблиц преобразования цветов и ЦАП также дополни-
тельные функции, такие как оверлейные палитры (overlaypalettes) и различные
функции управления режимами. Эти цифровые функции интегрированы в
ЦАП для обеспечения высокой степени функциональности. На рис. 8.93 по-
казан 220 MSPS видео RAM—DAC истинного цветовоспроизведения
ADV7160/ADV7162 ,9.
ADV7160/ADV7162 имеет 96-разрядный полностью программируемый
порт ввода пикселов, обеспечивающий прием данных со скоростями до
220 MSPS для поддержки разрешения 1600 х 1280 при частоте регенерации
85 Гц. Таблицы преобразования имеют разрядность 10 бит, что позволяет
обеспечить внутреннюю гамма-коррекцию. Устройство содержит внутрен-
нюю полностью программируемую схему ФАПЧ и стандартный микропро-
цессорный интерфейс ввода/вывода. Оверлейные палитры позволяют до-
бавлять курсоры, выпадающие меню, сетки, указатели и т. д. без дополни-
тельных аппаратных или программных издержек. С помощью оверлейных
Глава 8. Применение преобразователей данных
Рис. 8.92. 330 MSPS видео ЦАП ADV7125
Рис. 8.93. 220 MSPS видео RAM-DAC ADV7160/ADV7162
палитр ограниченного объема программное обеспечение системы, среди
функций которого — управление курсорами и указателями, меню и т. п.,
может эффективно управлять этими графическими элементами без изме-
нения основного изображения, которое управляется программным обеспе-
чением приложения.
ADV7160/ADV7162 работает от однополярного источника питания +5 В
и выпускается либо в 160-контактном корпусе QFP PQUAD (ADV7160) с
улучшенными температурными характеристиками (thermally enhanced), либо
в 160-контактном пластиковом квадратном плоском корпусе QFP (ADV7162).
8.5. Цифровое видео и цифровая электроника дисплеев 703
Электроника плоских дисплеев
Популярность плоских ЖК-дисплеев стабильно растет в последние несколько
лет, и они быстро заменяют ЭЛТ-мониторы в настольных компьютерных
системах. Кроме того, ЖК-проекторы практически вытеснили 35-мм диа-
проекторы в задачах представления презентационных материалов.
Графическая карта типичной настольной компьютерной системы выпол-
няет преобразование цифровых данных пикселов в аналоговый RGB-сигнал,
подаваемый на внешний монитор. В ноутбуках цифровые данные обычно
напрямую подаются на встроенный ЖК-дисплей и также преобразовывают-
ся с помощью видео ЦАП в аналоговый RGB-видеосигнал, который выво-
дится на выходной разъем для подачи на внешний монитор или проектор.
На аналоговый RGB-интерфейс с ЭЛТ приходится пока основная на-
грузка в задаче отображения графических данных, генерируемых компью-
тером. В настоящее время существует большое число графических адаптеров
ПК предыдущего поколения, в которых для преобразования цифровых графи-
ческих данных в аналоговые RGB-сигналы используются схемы RAM—DAC.
Поэтому для завоевания рынка и быстрого признания новые плоские дис-
плеи должны поддерживать эту стандартную технологию 20 21.
В целях выработки промышленного стандарта для плоских дисплеев сле-
дующего поколения Рабочая группа по цифровым дисплеям (DDWG, Digital
Display Working Group) предложила спецификацию Цифрового видеоинтер-
фейса {DV1 1,0; Digital Video Interface). Эта спецификация описывает, чему
дизайнеры должны следовать при реализации аналоговых и цифровых ин-
терфейсов. Временные параметры аналоговых видеосигналов описываются
стандартом Ассоциации по стандартам в области видеоэлектроники (VESA,
Video Electronics Standards Association) для мониторов, а в цифровом интер-
фейсе используется формат дифференциальной передачи сигналов с мини-
мизированным переходами (TMDS, Transition Minimized Differential Signalling).
Обобщенная схема аналогового интерфейса между графической картой
ПК и плоским дисплеем показана на рис. 8.94.
Рис. 8.94. Аналоговый и цифровой интерфейсы плоского дисплея
704 Глава 8. Применение преобразователей данных
Для применения в современных плоских дисплеях предназначены ИС
типа AD9888 23, которые выполняют оцифровку аналоговых RGB-данных,
формируют тактовый сигнал для пикселей из сигнала HSYNC и обеспечи-
вают другие функции, необходимые для форматирования пикселов, пода-
ваемых на столбцы дисплея. Функциональная схема AD9888 показана на
рис. 8.95.
AD9888 представляет собой полнофункциональный 8-разрядный 205 MSPS
монолитный аналоговый интерфейс, оптимизированный для ввода графи-
ческих RGB-сигналов от персональных компьютеров и рабочих станций.
Его высокая скорость кодирования (до 205 MSPS) и аналоговая ширина
полосы (до 500 МГц) позволяют поддерживать разрешения вплоть до UXGA
(1600 х 1200 при 75 Гц). AD9888 является полностью интегрированным
решением интерфейса для плоских дисплеев, что снижает стоимость и уп-
рощает разработку системы. AD9888 содержит аналоговый интерфейс с тремя
205 MSPS АЦП с внутренним источником опорного напряжения 1,25 В,
схему ФАПЧ, формирующую тактовый сигнал пикселов из сигналов SYNC
и COAST, схему привязки к середине шкалы и программируемые схемы
управления привязкой, смещением и усилением. Пользователь подает на
ИС только напряжение питания 3,3 В, аналоговый входной сигнал и сигна-
лы HSYNC и COAST. КМОП-выходы с тремя состояниями могут питаться
от источника с напряжением от 2,5 до 3,3 В.
Внутренняя схема ФАПЧ AD9888 формирует тактовый сигнал пикселов
из входных сигналов HSYNC и COAST. Значения частоты выходного такто-
вого сигнала пикселов могут изменяться в диапазоне от 10 до 205 МГц.
Дрожание* тактового сигнала ФАПЧ обычно не превышает 450 пс р-р при
205 MSPS. Схема ФАПЧ сохраняет значение выходной частоты в отсут-
Rin
Rin
Gin
Gin
Bin
Bin
HSYNC
HSYNC
VSYNC
VSYNC
SOGIN
SOGIN
COAST
CLAMP
CKINV
CKEXT
FILT
SCL
SDA
AO
BOUTA
Routb
Gouta
GoUTB
Bo UTA
Bout в
DATACK
HSOUT
VSOUT
SOGOUT
REF
BYPASS
Рис. 8.95. 100-/140-/170-/205-MSPS аналоговый интерфейс плоских дисплеев AD9888
8.5. Цифровое видео и цифровая электроника дисплеев
ствие сигнала HSYNC, если поступает сигнал COAST. Также обеспечивает-
ся возможность подстройки фазы сигнала дискретизации и поддерживают-
ся фазовые соотношения между сигналами данных, HSYNC и выходным
сигналом тактовой синхронизации. Имеется возможность отключения схе-
мы ФАПЧ и использования входа внешнего тактового сигнала в качестве
источника тактового сигнала пикселов.
AD9888 также выполняет функцию обработки сигналов синхронизации
в системах с полным видеосигналом и синхронизацией по зеленому цвету.
Сигнал привязки формируется внутренне или подается пользователем на
входной вывод CLAMP. Все функции этой интерфейсной схемы могут про-
граммироваться по 2-проводному последовательному интерфейсу. AD9888
производится с использованием улучшенных КМОП-технологий и выпус-
кается в 128-контактном пластиковом корпусе MQFP для поверхностного
монтажа. Устройство работает в диапазоне температур от 0 до 70 °C.
AD9887A24 обеспечивает гибкие функции аналогового интерфейса и при-
емника DVI, интегрированные на одном кристалле. Устройство также обес-
печивает поддержку функции защиты цифровой широкополосной информа-
ции (HDCP, High Bandwidth Digital Content Protection). AD9887A представляет
собой полнофункциональный 8-разрядный 170 MSPS монолитный аналого-
вый интерфейс, оптимизированный для ввода графических RGB-сигналов
от персональных компьютеров и рабочих станций. Его высокая частота дис-
кретизации (170 MSPS) и аналоговая ширина полосы (330 МГц) позволяют
поддерживать разрешения вплоть до UXGA (1600 х 1200 при 60 Гц). Аналого-
вый интерфейс состоит из трех 170-МГц АЦП с внутренним источником
опорного напряжения 1,25 В, схемы ФАПЧ и программируемой схемы уп-
равления привязкой, смещением и усилением. Пользователь подает на ИС
только напряжение питания 3,3 В, аналоговый входной сигнал и сигнал
HSYNC. Питание КМОП-выходов с тремя состояниями может осуществ-
ляться от источника питания с напряжением от 2,5 до 3,3 В. Внутренняя
схема ФАПЧ AD9887A формирует сигнал тактовой синхронизации пикселов
из входного сигнала HSYNC. Значения частоты выходного сигнала тактовой
синхронизации пикселов могут изменяться в диапазоне от 12 до 170 МГц.
Дрожание тактового сигнала ФАПЧ обычно не превышает 500 пс р-р при 170
MSPS. AD9887A также выполняет функцию обработки сигналов синхрони-
зации в системах с полным видеосигналом и синхронизацией по зеленому
цвету (SOG). Функциональная схема AD9887A показана на рис. 8.96.
AD9887A содержит приемник, совместимый со спецификацией DVI 1,0,
и поддерживает разрешения вплоть до UXGA (1600 х 1200 при 60 Гц). При-
емник работает с дисплеями истинного цветовоспроизведения (24 бита) в
режимах с одним или двумя пикселами на период тактовой синхронизации
и имеет погрешность искажения внутри пар до одного полного цикла син-
хронизации. За счет применения в AD9887A встроенной функции HDCPrmc-
плеи могут принимать закодированный видеосигнал. AD9887A позволяет
выполнять идентификацию приемника видеосигнала, кодирование и деко-
дирование данных в приемнике и повторную идентификацию во время пе-
редачи в соответствии с протоколом HDCP VI,0. AD9887A производится с
использованием улучшенных КМОП-технологий и выпускается в 160-кон-
тактном пластиковом корпусе MQFP для поверхностного монтажа. Устрой-
ство работает в диапазоне температур от 0 до 70°С.
23 -2852
Глава 8. Применение преобразователей данных
REANI
rain<
Gain I
Bain i
HSYNCI
VSYNCI
COAST!
CLAMP!
CKINVI
CKEXT!
ALT!
SOGIN!
SCL!
SDAI
AqI
Аналоговый интерфейс |дпорно4 J
Привяз
| уровня
। Routb
жение 1
8 | ЯриТА
IПривяз
I уровня
в, Qquta
8X I Gqutb
Привязка
I уровня
Bqutb
i DATACK
Генерация ТИ
и обработка
синхросигналов
t-------
Последовательный
регистр
и управление
питанием
Цифровой интерфейс
RxC-
RTERM
Rx2-
RxC+
RxO+
RxO-
Rx1+
Rx1-
Rx2+
DV7-npn-
емник
i HSOUT
1 VSOUT
1 SOGOUT
! Scot
8y } Rquta
j в ; Яоитв
8 । Gqutb
8 । GOUTA
8 ! BpUIA
! DATACK.
J BpUTA
—
। DE
! HSOUT
' VSOUT
<|)REFOUT
DDCSCL
DDCSDA
MCL
MDA
HDCP
AD9887A
Рис. 8.96. Сдвоенный интерфейс для плоских дисплеев AD9887A
Электроника ПЗС
Приборы с зарядовой связью (ПЗС) и контактные датчики изображения (КДИ)
широко применяются в бытовых системах формирования изображения, та-
ких как цифровые камеры и сканеры. Общая блок-схема системы форми-
рования изображения показана на рис. 8.97. На датчик изображения (ПЗС,
КМОП или КДИ) экспонируется изображение или картинка, во многом
аналогичные экспонированию пленки в фотоаппарате. После экспониро-
вания выходной сигнал датчика подвергается аналоговой обработке и затем
оцифровывается при помощи АЦП. Основная часть обработки изображе-
ния выполняется высокопроизводительными цифровыми сигнальными про-
цессорами. На данном этапе возможна манипуляция изображением в циф-
ровой области для выполнения таких функций, как улучшение/коррекция
контраста и цветности и т. п.
Составными блоками ПЗС являются отдельные светочувствительные эле-
менты, которые называются пикселами (рис. 8.98). Каждый пиксел состоит
из фоточувствительного элемента (фотодиода или фотоемкости), выходом
которого является заряд (электроны), пропорциональный количеству падаю-
8.5. Цифровое видео и цифровая электроника дисплеев
Оцифрованное
изображение
Линза
Рис. 8.97. Обобщенная схема системы формирования изображения в сканерах или
цифровых камерах
Свет (фотоны)
---- Фоточувствительный
элемент
е в в в е *
а е % в е е
v <? Потенциальная яма
Накопленный заряд (электроны)
Одна фотоячейка или «пиксел»
Рис. 8.98. Светочувствительный элемент
щего света (фотонов). Заряд накапливается в течение времени экспонирова-
ния или интеграции и подается на сдвиговый регистр для передачи на выход
устройства. Количество накопленного заряда зависит от уровня освещенно-
сти, времени интеграции и квантовой эффективности фоточувствительного
элемента. Небольшое количество заряда накапливается даже в отсутствие
падающего света; этот эффект называется темновым сигналом, или темно-
вым током, и должен быть скомпенсирован при обработке сигнала.
Пикселы могут быть упорядочены в линейную или матричную структу-
ру (рис. 8.99). По сигналу тактовой синхронизации заряд передается от
пикселов в аналоговый сдвиговый регистр, и затем подаются дополнитель-
ные тактовые сигналы для сдвига зарядов отдельных пикселов в выходной
каскад ПЗС. В сканерах обычно применяется линейная, а в камерах — мат-
ричная конфигурация пикселов. Аналоговый сдвиговый регистр обычно
работает с частотами поступления пикселов от 1 до 10 МГц для линейных
датчиков и от 5 до 25 МГц для матричных датчиков.
Типичный выходной каскад ПЗС и соответствующая форма выходного
напряжения показаны на рис. 8.100. Выходной каскад ПЗС преобразует
заряд каждого пиксела в напряжение при помощи конденсатора Cs. В нача-
Глава 8. Применение преобразователей данных
Линейная
Фотоячейки (пикселы) ПЗС-КОНфигурЭЦИЯ
Рис. 8.99. Линейные и матричные конфигурации ПЗС
Ключ
восстановления
Восстановление Q-
Заряд пиксела О
от горизонтального О-
сдвигового регистра
Буфер
-о
Выходное напряжение ПЗС
/\1/ = 1—4 В FS
Постоянный уровень
от 3 до 7 В
Период пиксела
Рис. 8.100. Выходной каскад и форма выходного сигнала
ле каждого периода пиксела напряжение на Cs сбрасывается до уровня опор-
ного напряжения KREF; при этом возникает выброс напряжения (reset glitch).
Количество света, воспринимаемого каждым пикселем, измеряется разно-
стью между опорным и видеоуровнем А V. Минимальный заряд ПЗС может
составлять 10 электронов, и чувствительность типичного выхода ПЗС рав-
на 0,6 мкВ/электрон. Большинство ПЗС имеют выходное напряжение на-
сыщения от 500 мВ до 1 В для матричных датчиков и от 2 до 4 В для
линейных датчиков. Постоянная составляющая выходного сигнала имеет
уровень от 3 до 7 В.
8.5. Цифровое видео и цифровая электроника дисплеев 709
Технология производства ПЗС обычно позволяет реализовать внутрен-
нее преобразование сигнала лишь с ограниченными возможностями. По-
этому выходной сигнал ПЗС обычно подвергается обработке во внешних
цепях преобразования. Природа выходного сигнала ПЗС требует его при-
вязки перед выполнением оцифровки в АЦП. Кроме того, процессор ана-
логовой обработки сигнала обычно выполняет функции усиления и сме-
щения.
Выходные напряжения ПЗС имеют маленький уровень и зачастую скры-
ты в шумах. Наибольшим источником шума является тепловой шум со-
противления полевого транзистора, выполняющего функцию ключа сбро-
са. Этот шум может иметь типичное среднеквадратичное значение от 100
до 300 электронов (приблизительно от 60 до 180 мВ). Он называется кТ/С
шумом и показан на рис. 8.101. В течение интервала сброса запоминающий
конденсатор Cs подключается к KREF через КМОП-ключ. Сопротивление
ключа во включенном состоянии (7?вкл) является источником теплового шума,
определяемого известным выражением:
Тепловой шум = ^АкТ • BW • 7?вкл.
(8.14)
Тепловой шум проявляется в ограниченной полосе, ширина которой
определяется постоянной времени Т?вклС5. Эта полоса преобразовывается
в эквивалентную полосу шума путем умножения однополюсной полосы
на л/2 (1,57):
Шумовая полоса частот = —
2 2л R С. 4R Со ’
L вкл 5 J вкл 5
(8.15)
При подстановке полученного выражения в формулу (8.14) множи-
тель Явкл сокращается, и окончательное выражение для теплового шума при-
нимает вид:
Тепловой шум =
(8.16)
Это соотношение является очевидным, так как при уменьшении величины
Явю1 тепловой шум должен уменьшаться, однако при этом также увеличива-
Тепловой шум = yj4kT BW Явкл.
Шумовая полоса частот - — --------— =--------—
2 |_2яЯвкл Cs J 4ЯВКЛС3
Ключ
восстановления
Тепловой шум =
Та же самая величина присутствует на опорном
уровне и видеоуровне, когда ключ восстановле-
ния разомкнут
Рис. 8.101. кТ/С шум
Глава 8. Применение преобразователей данных
ется полоса шума; таким образом, величина теплового шума определяется
только значением емкости конденсатора.
Заметьте, что после выключенияии ключа величина шума кТ/С сохра-
няется на Cs и остается постоянной до наступления следующего интервала
сброса. Этот эффект проявляется в изменении уровня выходного сигнала
ПЗС от отсчета к отсчету и влияет и на уровень сброса, и на видеоуро-
вень в течение заданного периода пиксела.
Для снижения влияния этого шума часто применяется метод двойной
коррелированной выборки (ДКВ). На рис. 8.102 показан пример одной из
многих возможных реализаций схемы ДКВ. Выходной сигнал ПЗС посту-
пает на оба УВХ. В конце интервала сброса YBXj хранит значение, равное
уровню напряжения сброса плюс шум кТ/С. В конце интервала видео УВХ2
хранит значение, равное видеоуровню плюс шум кТ/С. Выходные напряже-
ния УВХ подаются на усилитель разности, который вычитает одно напря-
жение из другого. В данной схеме имеется только один интервал времени,
в течение которого выходные уровни обоих УВХ стабильны, и их разность
равна А И, поэтому усилитель разности должен иметь малое время установ-
ления. Заметьте, что окончательный выходной сигнал является просто раз-
ностью между уровнем опорного напряжения и видеоуровнем, А И, и шум
кТ/С в нем отсутствует.
Контактные датчики изображения (КДИ) — это линейные датчики, ко-
торые часто применяются в факсимильных аппаратах и сканерах для доку-
ментов со средним качеством вместо ПЗС. Потенциальное качество изоб-
ражения, получаемое при помощи КДИ, ниже, чем у ПЗС, однако они
обладают более низкой стоимостью и более простым трактом прохождения
оптического сигнала. Выходной сигнал КДИ похож на выходной сигнал
ПЗС, однако его опорное напряжение имеет уровень, близкий к «земле»
(рис. 8.103), за счет чего исключается необходимость привязки. Более того,
в выходном сигнале КДИ отсутствует коррелированный шум сброса, кото-
рый возникает в ПЗС на каждом периоде пиксела, и, следовательно, ис-
ключается необходимость использования ДКВ. Типичные выходные напря-
жения КДИ имеют значение полной шкалы в диапазоне от нескольких со-
тен милливольт до приблизительно 1 В. Обратите внимание, что, несмотря
на отсутствие необходимости в привязке и ДКВ, выходной сигнал КДИ
Рис. 8.102. Двойная коррелированная выборка (ДКВ)
8.5. Цифровое видео и цифровая электроника дисплеев
Линия
стартового
импульса
ТИ КПИ
Рис. 8.103. Сигналы контактного датчика изображения (CIS)
перед оцифровкой должен подвергаться выборке при помощи схемы вы-
борки и хранения.
Analog Devices предлагает несколько интегрированных решений анало-
гового интерфейса (AFE. analog-front-end) для сканеров, цифровых фото- и
видеокамер. Все они включают этапы обработки сигналов, описанные выше.
Прогресс в технологиях производства и топологиях схем сделали возможным
достижение подобного уровня интеграции без ухудшения характеристик при
использовании КМОП-процессов. При объединении удачных архитектур АЦП
с высокопроизводительными аналоговыми КМОП-схемами возможна раз-
работка полнофункциональных ИС обработки сигналов ПЗС/КДИ с низкой
стоимостью.
AD9898 28 представляет собой процессор сигналов ПЗС с высокой сте-
пенью интеграции, предназначенный для применения в цифровых фото- и
видеокамерах. Упрощенная блок-схема AD9898 показана на рис. 8.104. Он
содержит полнофункциональный аналоговый входной интерфейс с 10-раз-
VSUB SUBCK HD VD SYNC CD SL SCK SDATA
Рис. 8.104. Процессор сигналов ПЗС с прецизионным генератором сигналов синхро-
низации (Precision Timing™ generator) AD9898
712 Глава 8. Применение преобразователей данных
рядным АЦП и программируемый генератор сигналов синхронизации.
Прецизионное ядро синхронизации позволяет выполнять коррекцию вы-
сокоскоростных тактовых сигналов с разрешением 1 нс при работе со ско-
ростью 20 MSPS. AD9898 может работать с частотой вывода пикселов до
20 МГц. Аналоговый интерфейс включает: схему привязки уровня черного,
схему ДКВ, усилитель с переменным коэффициентом усиления и 10-раз-
рядный АЦП. Генератор сигналов синхронизации обеспечивает все необ-
ходимые сигналы синхронизации ПЗС: RG, сигналы строчной синхрониза-
ции {Н-clock), сигналы кадровой синхронизации (V-clock), импульсы для
затворов ПЗС-датчика, тактовый сигнал подложки и импульс смещения
подложки. Рабочие параметры программируются по 3-проводному после-
довательному интерфейсу. AD9898 выпускается в 48-контактном корпусе
LFCSP, занимающем малую площадь, и работает в диапазоне температур
от -20 до +85°С.
Analog Devices выпускает ряд трехканальных схем аналогового интер-
фейса ПЗС: процессоры AD9816 (12-разрядный), AD9822 (14-разрядный),
AD9814 (14-разрядный) и AD9826 (16-разрядный).
Устройства оцифровки сенсорных экранов
Сенсорные экраны получили широкое распространение в портативных кар-
манных компьютерах (КПК) и других компьютерных продуктах. Большин-
ство производителей КПК в качестве сенсорного экрана используют про-
стой и имеющий низкую стоимость четырехпроводный резистивный эле-
мент. Для того чтобы организовать интерфейс сенсорного экрана с
хост-процессором, необходимо преобразовать аналоговые сигналы, посту-
пающие от экрана, в цифровую форму29’30.
Пользователь вводит данные на экран при помощи пера {stylus). АЦП
преобразует аналоговую информацию в цифровые данные, которые исполь-
зуются хостом для определения положения пера на экране. В подобных
задачах имеется ряд характерных проблем, которые должны быть преодоле-
ны в АЦП.
Сенсорный экран обычно состоит из двух слоев прозрачного резистив-
ного материала (в большинстве случаев — оксида индия и олова или друго-
го полиэстерного материала) с серебряным покрытием на краях, которое
выполняет роль электродов. Различными производителями могут приме-
няться слои с различными величинами сопротивления, однако обычно они
имеют значения от 100 до 900 Ом. Два слоя наложены друг на друга и
помещены над изоляционным слоем стекла (рис. 8.105).
При измерении координат на одну из резистивных плоскостей через
внутренние ключи контроллера АЦП подается питание. При измерении
координаты X питание подается на плоскость X. Плоскость Yиспользуется
для считывания положения пера относительно плоскости, на которую по-
дается питание (X). При касании экрана пером в определенной точке в ней
закорачиваются плоскости (на рисунке показано штриховой линией). На-
пряжение, падающее на считывающей плоскости, пропорционально поло-
жению точки прикосновения относительно плоскости, на которую подает-
ся питание. Измерение координаты Y можно произвести, подавая питание
8.5. Цифровое видео и цифровая электроника дисплеев 713
Рис. 8.105. Интерфейс АЦП с 4-проводным резистивным сенсорным экраном
на плоскость Ки используя для считывания положения плоскость X. Таким
образом выполняется оцифровка координат экрана. Цифровой код переда-
ется на хост, где может быть выполнено распознавание символов или опре-
деление положения. На рис. 8.106 показаны две схемы практической реали-
зации измерения координат.
На рис. 8.106, а, показан метод прямого или абсолютного измерения.
Этот метод имеет несколько недостатков. Так как полное сопротивление
экрана может равняться 100 Ом и менее, необходимо с особенной осторож-
ностью проектировать внутренние ключи. Например, предположим, что
напряжение питания системы равно 3,3 В, а импеданс экрана равен 100 Ом.
Для такой схемы ключи должны быть способны пропускать ток до 33 мА
при подаче питания на экран.
а
Абсолютные измерения
б
Измерения отношений
АЦП-ядро = УВХ + SAR АЦП последовательного приближения (10 или 12 разрядов)
Рис. 8.106. Абсолютное и относительное измерение напряжений сенсорного экрана
Глава 8. Применение преобразователей данных
Другая проблема вызвана внутренней структурой ключей. Они имеют
собственное сопротивление во включенном состоянии, которое при подаче
питания на экран приводит к падению напряжения на ключе. Например,
при 100-омном экране, если внутренние ключи имеют сопротивление во
включенном состоянии около 10 Ом, при подключении одного ключа к
источнику питания, а второго к «земле» теряется 20 % динамического диа-
пазона АЦП. Таким образом, на экране никогда не может падать полное
напряжение питания. Кроме того, температурные коэффициенты сопро-
тивления сенсорного экрана и сопротивления ключа во включенном состо-
янии могут вносить дополнительные ошибки.
На рис. 8.106, 6, показан относительный метод измерения, который ис-
ключает большинство ошибок, присущих абсолютному измерению. В этом
методе напряжения REF+ и REF— снимаются напрямую с выводов резис-
тора сенсорного экрана. Поэтому напряжение Vx+ — VY_ пропорционально
опорному напряжению, и изменения в сопротивлении ключа во включен-
ном состоянии или полном сопротивлении сенсорного экрана не влияют
на цифровой код. Недостатком этого метода является необходимость пода-
чи напряжения питания на резистивную плоскость во время выполнения
преобразования в АЦП, так как это напряжение является опорным напря-
жением АЦП. Требуемая мощность может быть значительной, так как для
питания 100-омного сенсорного экрана при напряжении питания +3,3 В
требуется 33 мА, т. е. 109 мВт.
Реальное время, затрачиваемое на опрос входного сигнала, составляет
около 25 % полного времени, затрачиваемого на взятие отсчета (1,5 мкс для
AD7873) и его преобразование (6 мс для AD7873) АЦП последовательного
приближения. Таким образом, при использовании абсолютного метода по-
дача питания на экран во время выполнения преобразователем аналого-циф-
рового преобразования не требуется. Подача питания должна осуществлять-
ся только в течение времени захвата УВХ. При использовании относитель-
ного метода подача напряжения питания на экран должна осуществляться в
течение всего процесса преобразования, так как это напряжение является
опорным напряжением АЦП.
Устройство оцифровки сенсорного экрана (touchscreen digitizer) AD7873 31
содержит 12-разрядный АЦП последовательного приближения с синхрон-
ным последовательным интерфейсом и ключи с низким сопротивлением
во включенном состоянии для подачи питания на экран (рис. 8.107). AD7873
работает от однополярного источника питания с напряжением от 2,2 до
5,25 В и имеет производительность более 125 kSPS. В AD7873 реализованы
функции прямого измерения напряжения батареи, измерения температуры
и измерения напряжения нажатия. AD7873 также имеет внутренний источ-
ник опорного напряжения 2,5 В, который может использоваться в режимах
измерения напряжения на вспомогательном входе, напряжения батареи и
температуры. Когда он не задействован, его можно отключить для сниже-
ния потребляемой мощности. Также возможна работа с внешним источни-
ком опорного напряжения от 1 В до Vcc, при этом диапазон аналоговых
входных напряжений составляет от 0 В до KREF.
Устройство имеет режим отключения питания, в котором потребляе-
мый ток уменьшается до значения менее 1 мкА. Ключи интегрированы
DIN DOUT DCLK BUSY
Рис. 8.107. Устройство оцифровки сенсорного экрана AD7873
внутри устройства. Эти факторы в комбинации с низкой потребляемой
мощностью и высокой производительностью делают AD7873 идеальным для
применения в системах с батарейным питанием, таких как КПК с резис-
тивным сенсорным экраном и другое портативное оборудование. Устрой-
ство выпускается в 16-контактном 0,151 корпусе QSОР (Quarter Size Outline
package), 16-контактном корпусе TSSOP (Thin Shrink Small Outline package) и
16-контактном корпусе LFCSP (Lead Frame Chip Scale package).
Аналоговый входной сигнал подается на АЦП через внутренний муль-
типлексор. Входным сигналом может быть сигнал любой из координат па-
нелей Л, Y и Z, напряжение батареи или температура кристалла. Мульти-
От 2,2 В до 5 В
От 1 мкФ
до 10 мкФ
(опция)
9 AD7873
+Vcc
DCLK
lef
Сенсорный
экран
{з Y+
К батарее
Вспомогательный
вход О-
DIN
BUSY
DOUTttJ-
{s]y-
gnd FEHIH6 ii}
vbat +vcc jo)
AUX VREF
1 мкФ
/ ТИ преобразования/
последовательного вх.-вых.
——< Выбор кристалла
' Последовательный вход данных
..Состояние преобразователя
.... Последовательный выход данных
# < Прерывание пера
« : 50 кОм
9
Регулятор
напряжения
Рис. 8.108. Типичная схема включения устройства оцифровки сенсорного экрана AD7873
Глава 8. Применение преобразователей данных
плексор связан с ключами таким образом, что любой незадействованный
входной канал АЦП обеспечивает питание, а соответствующий вывод —
«землю» для внешнего устройства. При некоторых измерениях сопротивле-
ние ключей во включенном состоянии может являться источником ошиб-
ки. Однако, как описано выше, при использовании логометрического ме-
тода измерения этой ошибкой можно пренебречь. Типичная схема включе-
ния AD7873 показана на рис. 8.108.
Список литературы
8.5. Цифровое видео и цифровая электроника дисплея
1. A. Goldberg. PCM-Encoded NTSC Color Television Subjective Tests. SMPTE
Journal, Vol. 82, pp. 649-654, Aug. 1973.
2. David E. Acker and Richard H. McLean. Digital Time-Base Correction for Video
Signal Processing. SMPTE Journal, Vol. 85, pp. 146—150, March 1976.
3. Walter A. Kester. Characterizing and Testing A/D and D/А Converters for Color
Video Applications. IEEE Transactions on Circuits and Systems, Vol. CAS-25, July 1978,
pp. 539-550.
4. W.A. Kester. PCM Signal Codecs for Video Applications. SMPTE Journal, Number 88,
November 1979, pp. 770—778.
5. W.K. Bucklen. A Monolithic Video A/D Converter. Digital Video, Vol. 2, Society of
Motion Picture and Television Engineers, pp. 34—42, March 1979. (Describes the
revolutionary TDC1007J. Originally introduced at the 3 Feb. 1979 SMPTE Winter
Conference in San Francisco). Bill Bucklen actually accepted an Emmy award in 1988 for
this product and was responsible for marketing it to the world).
6. SMPTE 244M. System M/NTSC Composite Video Signals-Bit Parallel Digital
Interface, www.smpte.org.
7. IEEE Std. 746—1984. IEEE Standard for Performance Measurements of A/D and
D/А Converters for PCM Television Video Circuits. IEEE, 1984.
8. ITU-Recommendation BT.601. Universal Sampling Specification for SDTV and
HDTV Broadcast Video, www.itu.int.
9. SMPTE 125M. Component Video Signal 4:2:2 Bit-Parallel Digital Interface.
www.smpte.org.
10. SMPTE 259M. 10-Bit, 4:2:2 Component and 4fc Composite Digital Signals—
Serial Digital Interface, www.smpte.org.
11. ITU-Recommendation BT.656-4. Interfaces for Digital Component Video signals
in 525-Line and 625-Line Television Systems Operating at the 4:2:2 Level of
Recommendation ITU-R BT.601 (Part A), www.itu.int.
12. ITU-Recommendation BT.709-5. Parameter Values for the HDTV Standards for
Production and International Programme Exchange, www.itu.int. Also, see SMPTE 296M,
SMPTE 274M, www.smpte.org.
13. SMPTE 292M. Bit-Serial Digital Interface for High-Definition Television Systems.
www.smpte.org.
14. Charles Poynton. Digital Video and HDTV Algorithms and Interfaces, Morgan
Kaufmann Publishers. 2003, ISBN 1-55860-792-7.
15. Michael Robin and Michel Poulin. Digital Television Fundamentals. Second Edition,
McGraw-Hill, 2000, ISBN 0-07-135581-2, Chapter 6.
16. Data sheet for ADV7183A 10-Bit NTSC/PAL/SECAM Video Decoder,
www.analog.com.
17. Data sheet for ADV7310 Multiformat 216 MHz Video Encoder with Six NST™
12-Bit DACs, www.analog.com.
8.6. Программное радио и дискретизация на промежуточной частоте 717
18. Data sheet for ADV7125 CMOS, 330 MHz Triple 8-Bit High Speed Video DAC,
www.analog.com.
19. Data sheet for ADV7160/ADV7162 96-Bit, 220 MHz True-Color Video RAM-DAC,
www.analog.com.
20. George Diniz and Tim Stroud. Bringing Displays into the Digital Future. EDN,
April 26, 2001, pp. 105-114.
21. Doug Bartow. Smart Integration in Flat Panel Displays. Information Display, Vol. 15,
October 1999.
22. Digital Display Working Group, Digital Video Interface Specification, DVI 1.0,
www.ddwg.org.
23. Data sheet for AD9888 100/140/170/205 MSPS Analog Flat Panel Interface,
www.analog.com.
24. Data sheet for AD9887A Dual Interface for Flat Panel Displays, www.analog.com.
25. Erik Barnes. High Integration Simplifies Signal Processing for CCDs. Electronic
Design, February 23, 1998, pp. 81—88.
26. Erik Barnes. Integrated Front Ends for CCD Signal Processing. Analog Dialogue,
32-1, Analog Devices, 1998, www.analog.com.
27. Kevin Buckley. Selecting an Analog Front End for Imaging Applications. Analog
Dialogue, 34-6, Analog Devices, October, 2000, www.analog.com.
28. Data sheet for AD9898 CCD Signal Processor with Precision Timing™ Generator,
www.analog.com.
29. Paul Kearney. Configure Your ADC Correctly to Interface with the Display. Portable
Design, July, 2003.
30. Paul Kearney. The PDA Challenge-Met by the AD7873 Resistive-Touch-Screen
Controller ADC. Analog Dialogue, Analog Dialogue, 35-04, Analog Devices, 2001,
www.analog.com.
31. Data sheet for AD7873 Touchscreen Digitizer, www.analog.com.
8.6. Программное радио и дискретизация
на промежуточной частоте
Уолт Кестер
Введение
Термин программное радио (software radio) возник в конце 1980-х — начале
1990-х годов применительно к приемникам военного назначения12. По-
зднее данная концепция стала широко использоваться в коммерческой об-
ласти, особенно в задачах сотовой связи3-18.
В программном радиоприемнике используется АЦП для оцифровки
аналогового сигнала. Он располагается как можно ближе к антенне, на-
сколько это осуществимо на практике, обычно в тракте промежуточной
частоты (ПЧ). В связи с этим получил распространение термин дискретиза-
ция на ПЧ (IF sampling). После оцифровки сигналы фильтруются, демодули-
руются и разделяются на отдельные каналы при помощи специализирован-
ных DSP, которые называются процессорами приема сигналов (RSP, receive
signal processors). Аналогичным образом программный радиопередатчик вы-
полняет кодирование, модуляцию и т. д. в цифровом виде, а для преоб-
разования сигналов в аналоговый формат для передачи используется ЦАП,
располагающийся близко к выходному каскаду ПЧ. Цифровой сигнальный
Глава 8. Применение преобразователей данных
вч
Каналы
Каналы
Рис. 8.109. Общая схема программного радиоприемника и радиопередатчика с дискре-
тизацией на ПЧ
процессор, предшествующий ЦАП, называется процессором передачи сиг-
налов {TSP, transmit signal processor). На рис. 8.109 показана очень упрощен-
ная общая схема программного радиоприемника и радиопередатчика.
В идеале применение концепции программного радио позволяет ис-
ключить часть достаточно дорогостоящих схем аналоговой обработки сиг-
налов и выполнять их функции при помощи недорогих DSP. Эта концеп-
ция также позволяет использовать одни и те же аппаратные средства для
обработки сигналов различных стандартов беспроводной связи, внося из-
менения в программы DSP.
Как уже отмечалось ранее в гл. 2, при дискретизации широкополосных
сигналов на ПЧ к отношению сигнал/шум и SFDR АЦП и ЦАП предъявля-
ются повышенные требования. Однако прогресс технологии производства
преобразователей достиг той точки, когда реализация программного радио
возможна на практике для большинства популярных стандартов беспро-
водной связи.
Развитие беспроводного радио
Для того чтобы понять, как развивалась концепция программного радио, рас-
смотрим аналоговый супергетеродинный приемник, изобретенный в 1917 году
Эдвином Армстронгом (рис. 8.110). Эта архитектура представляет собой
существенный шаг вперед по сравнению с однокаскадными приемниками
прямого преобразования (гомодинными приемниками), которые строились
с использованием перестраиваемых усилителей высокой частоты, детекто-
ра и каскада усиления сигнала звуковой частоты. Основное преимущество
супергетеродинного приемника заключается в том, что в нем намного про-
ще и экономичнее обеспечить усиление и избирательность на фиксирован-
ной промежуточной частоте, чем в перестраиваемом диапазоне частот.
Частоты, показанные на рис. 8.110, соответствуют аналоговой сотовой
телефонной системе AMPS {Advanced Mobile Phone Service), используемой в
настоящее время в США, однако быстро вытесняемой цифровыми стан-
дартами. Приемник предназначен для приема сигналов AMPS на частоте
8.6. Программное радио и дискретизация на промежуточной частоте 7
Рис. 8.110. Супергетеродинный аналоговый приемник системы AMPS (U.S. Advanced
Mobile Phone Service)
900 МГц. Полоса частот несущих «А» и «В», обслуживающих локальную
географическую область, равна 12,5 МГц (416 каналов по 30 кГц каждый).
В приемнике, который показан на рис. 8.110, используется трехкратное
преобразование частоты с первой ПЧ 70 МГц, второй ПЧ 10,7 МГц и тре-
тьей ПЧ 455 кГц. Частота зеркального канала на входе приемника отстоит
от частоты ВЧ несущей на величину, примерно равную удвоенной первой
ПЧ (использование относительно высоких значений первой ПЧ упрощает
создание фильтра подавления зеркального канала).
Выходной сигнал третьего каскада ПЧ демодулируется аналоговыми
методами (с использованием дискриминаторов, детекторов огибающей,
синхронных детекторов и т. п.). В системе AMPS используется ЧМ. Важ-
ным свойством приведенной схемы является то, что для каждого канала
требуется отдельный приемник, и общими могут быть лишь антенна, каскад
предварительной фильтрации и малошумящий усилитель (МШУ).
Следует отметить, что для упрощения схемы на ней не показаны меж-
каскадные усилители. Однако необходимо учитывать, что они являются
важной частью приемника и обязательно должны присутствовать в схеме.
Разработка приемника является сложным процессом, и существует много
параметров, которые необходимо учитывать при выборе ПЧ, количества
преобразований, фильтров в каждом из каскадов приемника, схем демоду-
ляции и т. п. Существует много превосходной литературы по данной теме,
и целью этого раздела является лишь ознакомление разработчика с некото-
рыми развивающимися архитектурами, особенно в части применения АЦП
и ЦАП при разработке усовершенствованных связных приемников.
Приемник с цифровой обработкой в основной полосе
Вследствие доступности высокоскоростных ЦАП и АЦП с превосходными
характеристиками в общую практику на сегодняшний день входит использо-
вание цифровых методов, по меньшей мере в части тракта приема и пере-
Глава 8. Применение преобразователей данных
дачи. Компания Analog Devices выпускает различные наборы микросхем
(чипсеты) для стандарта GSMи других стандартов сотовой телефонии. Дан-
ный подход проиллюстрирован на рис. 8.111, где выход последнего каскада
ПЧ преобразуется в синфазный (7) и квадратурный (0) сигналы при помо-
щи квадратурного демодулятора. Затем сигналы /и С оцифровываются двух-
канальным АЦП. RSP/DSP выполняют дополнительную обработку сигнала.
Далее сигнал может быть преобразован в аналоговую форму при помощи
ЦАП или обработан, смешан с другими сигналами, перенесен на высокую
частоту и повторно передан.
На данном этапе необходимо пояснить, что цифровой приемник и цифро-
вая модуляция это не одно и то же. На самом деле цифровой приемник
прекрасно справляется с задачей приема аналоговых сигналов, таких как
AM или ЧМ. Цифровые приемники могут использоваться для приема сиг-
налов с любым типом модуляции, аналоговой (AM, ЧМ) и цифровой (QPSK,
QAM, FSK, GMSK и т. д.). Более того, так как ядром цифровой радиосисте-
мы является цифровой сигнальный процессор (RSP/DSP), один и тот же
приемник может использоваться для приема сигналов и с цифровой, и с
аналоговой модуляцией (при необходимости одновременно) при условии,
что аппаратная часть ВЧ- и ПЧ-трактов, предшествующих RSP/DSP, спро-
ектирована надлежащим образом. Так как характеристики радиосистемы
определяются программным обеспечением, цифровые приемники часто на-
зывают программным радио.
Из возможности программирования радиосистемы следует ряд преиму-
ществ. Производитель устройства может реализовывать общие функции на
аппаратном уровне и при изменении стандарта беспроводного интерфейса
(например, с AMPS на IS-136 или IS-95) оперативно вносить изменения в
разработку путем перепрограммирования RSP/TSP/DSP. С точки зрения
пользователя или провайдера услуг возможна модернизация программного
радио путем загрузки нового программного обеспечения по небольшой цене
при сохранении капитальных вложений в оборудование. Кроме того, при-
емник может быть приспособлен с малыми денежными затратами для ис-
Рис. 8.111. Цифровой приемник с дискретизацией и цифровой обработкой в основной
полосе
8.6. Программное радио и дискретизация на промежуточной частоте
пользования в произвольных задачах, так как стоимость изменений опре-
деляется только программным обеспечением.
Цифровой приемник выполняет ту же функцию, что и аналоговый, с
одной лишь разницей: некоторые аналоговые функции в нем заменены их
цифровыми эквивалентами. Основным отличием между рис. 8.110 и 8.111
является то, что ЧМ-дискриминатор в цифровой системе заменен на два
АЦП и RSP/DSP. Несмотря на то что рассмотренный пример является очень
упрощенным, он отображает некоторые фундаментальные основы цифро-
вого, или программного, радио.
Дополнительным преимуществом применения цифровых методов явля-
ется возможность выйолнения фильтрации в цифровом виде. При этом
исключается необходимость учета погрешностей и согласования частотно-
избирательных компонентов, таких как индуктивности и конденсаторы.
Кроме того, так как фильтрация выполняется в RSP/DSP, необходимые
характеристики фильтра могут быть реализованы программно без примене-
ния дорогостоящих и чувствительных фильтров на ПАВ, керамических или
кварцевых фильтров. В цифровом виде могут быть синтезированы многие
фильтры, которые невозможно реализовать чисто аналоговыми методами.
Этот простой пример является лишь началом. С использованием совре-
менных технологий в цифровой форме может быть реализовано гораздо
большее количество типов приемников и передатчиков. Перемещение циф-
ровой части радиосистемы как можно ближе к антенне имеет ряд преиму-
ществ. Но, несмотря на то что перспектива использования АЦП непосред-
ственно на выходе ВЧ-тракта и выполнения дискретизации на ВЧ может
казаться привлекательной, в действительности она имеет серьезные недо-
статки, в частности в плане избирательности и подавления внеполосных
составляющих (зеркального канала). Однако можно отметить одно ключе-
вое преимущество концепции программного радио: подобные системы яв-
ляются программируемыми и совсем не требуют либо требуют в малой сте-
пени выбора и подстройки компонентов для обеспечения требуемых харак-
теристик приемника.
Узкополосные цифровые приемники с дискретизацией на ПЧ
Во многих цифровых системах преобразование сигнала в цифровую форму
предпочтительно выполнять на выходе первого или второго каскада преоб-
разования частоты. Это позволяет обеспечить фильтрацию внеполосных сиг-
налов до их поступления на АЦП. Также в аналоговой части схемы может
быть реализована автоматическая регулировка усиления (АРУ), которая по-
зволяет уменьшить вероятность превышения внеполосными сигналами уровня,
соответствующего полному диапазону АЦП, и обеспечить максимальное уси-
ление сигнала перед выполнением аналого-цифрового преобразования. При
использовании АРУ смягчаются требования к динамическому диапазону АЦП.
Кроме того, применение дискретизации на ПЧ и цифровых приемников сни-
жает стоимость системы за счет исключения последующих каскадов ПЧ (сме-
сителей, фильтров и усилителей) и повышает ее гибкость за счет замены
аналоговых фильтров с компонентами, имеющими фиксированные парамет-
ры, на программируемые цифровые фильтры.
Глава 8. Применение преобразователей данных
Большая часть усиления в аналоговом приемнике вносится после пер-
вого преобразования частоты. Это предотвращает перегрузку входных це-
пей внеполосными сигналами или сигналами в рабочей полосе, имеющими
большую мощность. В цифровом приемнике с дискретизацией на ПЧ все
усиление осуществляется входными каскадами, и, следовательно, необхо-
димо принимать тщательные меры во избежание насыщения АЦП внепо-
лосными сигналами и сигналами в рабочей полосе, которое может привес-
ти к излишним искажениям. Таким образом, сильные сигналы в рабочей
полосе должны быть ослаблены. Дополнительное усиление сигнала может
быть обеспечено цифровыми методами после АЦП, однако этот подход
имеет определенные ограничения. При выполнении усиления в аналоговой
области улучшается отношение сигнал/шум, и ухудшение характеристик
обусловлено только коэффициентом шума (7VF, noise figure) приемника.
На рис. 8.112 показана подробная схема цифрового приемника с диск-
ретизацией на ПЧ для системы GSM/EDGE (900 МГц). В состав приемника
входят: ВЧ-усилитель, схема автоматической регулировки усиления (АРУ),
цифровой процессор принимаемых сигналов (RSP) и DSP.
Сердцем системы является 12-разрядный АЦП с частотой дискретиза-
ции 26-MSPS, включающий в себя АРУ, индикатор мощности принимае-
мого сигнала (RSSI, Received Signal Strength Indicator) и RSP. Существуют
различные чипсеты, выполняющие данные функции для систем GSM/EDGE
(например, ИС AD6600, AD6650, AD6620, AD6624 и AD6634) и WCDMA
(например, ИС AD6634 и AD6652).
GSM/EDGE (Европа) и IS-136 (США) представляют собой схожие сис-
темы множественного доступа с временным разделением каналов (TDMA,
time-division-multiplexed-access), a IS-95, IS-95B, WCDMA и CDMA2000 —
системы множественного доступа с кодовым разделением каналов (CDMA,
Динамический диапазон = 30 + 65 + 18 = 113 дБ
Рис. 8.112. Узкополосный цифровой приемник системы GSM/EDGE с дискретизацией
на ПЧ
8.6. Программное радио и дискретизация на промежуточной частоте
code-division-multiple-access} с расширением спектра. Ширина полосы кана-
ла в системах CDMA составляет либо 1,25 МГц (IS-95, IS-95B и CDMA2000),
либо 5 МГц (WCDMA). Более подробно эти стандарты будут обсуждаться
далее в этом разделе.
Стандарт беспроводной связи GSM/EDGE 900 МГц является одним из
наиболее строгих с точки зрения требований к динамическому диапазону
АЦП, поэтому в системах этого стандарта чаще применяются узкополос-
ные приемники. В системе, показанной на рис. 8.112, полный динамичес-
кий диапазон равен ИЗ дБ и распределяется между схемой АРУ (30 дБ),
отношением сигнал/шум АЦП (65 дБ) и усилением в результате обработки
(18,1 дБ).
Ширина полосы одного канала GSM равна 200 кГц, и в каждом канале
могут одновременно передаваться сигналы восьми абонентов. Типичная
базовая станция может обрабатывать сигналы от 50 до 60 абонентов, что
требует использования 8 отдельных каналов обработки сигналов.
На рис. 8.113 показан процесс дискретизации сигнала ПЧ 71,5 МГц,
расположенного в шестой зоне Найквиста. Частота дискретизации равна
26 MSPS. Как показано на рисунке, при переносе сигнала в первую зону
Найквиста происходит реверсирование (зеркальное отображение) спектра
сигнала.
Рис. 8.113. Дискретизация канала шириной 200 кГц на ПЧ со скоростью 26 MSPS в
узкополосном GSM- приемнике
После АЦП имеем выборку сигнала с шириной полосы 200 кГц в первой
зоне Найквиста (вследствие дискретизации с пониженной частотой), взятую
с частотой 26 MSPS (см. рис. 8.114, а). Затем, как показано на рис. 8.114, б,
RSP переносит сигнал в низкую полосу частот.
Далее, как показано на рис. 8.114, в, сигнал пропускается через цифро-
вой фильтр, входящий в состав RSP, который фильтрует все частотные со-
ставляющие выше 200 кГц, включая шумы квантования, попадающие в
область от 200 кГц до 13 МГц (частота Найквиста). Результирующее увели-
чение отношения сигнал/шум (усиление обработки) при этом составляет
Глава 8. Применение преобразователей данных
13 МГц
После преобразования частоты
о 13 МГц
Рис. 8.114. Цифровая фильтрация и децимация канала системы GSM шириной 200 кГц
18,1 дБ. Так как сигнал не содержит информации на частотах выше 200 кГц,
можно понизить (путем прореживания — децимации) частоту выходных
данных с 26 MSPS до 541,7 kSPS (скорость данных, при которой возможна
дальнейшая обработка в DSP), как показано на рис. 8.114, г. Данные, со-
ответствующие каналу шириной 200 кГц, передаются в DSP по простому
3-проводному последовательному интерфейсу. DSP выполняет такие функ-
ции, как компенсация отклонений характеристик канала связи, декодиро-
вание и изменение формы спектра.
Концепция усиления обработки является общей для всех связных сис-
тем, аналоговых и цифровых. Она рассматривалась в гл. 2. В системах с
дискретизацией шум квантования, вносимый АЦП, распределен во всей
полосе Найквиста от 0 до Если ширина полосы сигнала, BW. меньше
то при цифровой фильтрации составляющие шума, попадающие вне
полосы сигнала, подавляются, за счет чего повышается эффективное отно-
шение SNR. Усиление обработки для системы с дискретизацией может быть
вычислено по формуле:
Усиление обработки = 10 log
Л
2BW )'
(8.17)
Для вычисления реального отношения сигнал/шум для узкополосно-
го сигнала необходимо прибавить усиление обработки к отношению сиг-
нал/шум АЦП (которое задается для шума, распределенного в полосе fs/2).
Для идеального A-разрядного АЦП отношение сигнал/шум (измеренное в
полосе Найквиста) равно 6,02А + 1,76 дБ.
Обратите внимание, что, как показано в рассмотренном выше примере
узкополосного приемника, усиление обработки может иметь место даже
при субдискретизации. Для этого необходимо, чтобы ширина полосы сиг-
нала была меньше fs/2 и шум, попадающий вне полосы сигнала, подавлял-
ся цифровым фильтром.
8.6. Программное радио и дискретизация на промежуточной частоте
Широкополосные цифровые приемники
с дискретизацией на ПЧ
До данного момента мы избегали подробного сравнения узкополосных и
широкополосных цифровых приемников. Цифровые приемники могут быть
любого из двух типов, и на этом этапе требуется ввести более четкие опре-
деления. Термин узкополосный подразумевает, что все помехи исключены
на этапе предварительной фильтрации, а на входе АЦП присутствует толь-
ко полезный сигнал. Примером узкополосного приемника является прием-
ник базовой станции GSM/EDGE, описанный выше.
Термин широкополосный просто обозначает, что на входе АЦП присут-
ствуют сигналы нескольких каналов, и дальнейшая фильтрация, настройка
и обработка выполняются в цифровой форме. Обычно широкополосный
приемник обеспечивает прием сигналов во всем диапазоне работы сотовой
или другой аналогичной системы. Фактически один широкополосный при-
емник может использоваться для одновременного приема всех каналов в
диапазоне; при этом практически вся аналоговая часть приемника (вклю-
чая АЦП) является общей для всех каналов. На рис. 8.115 приведено срав-
нение архитектур широкополосного и узкополосного приемников.
Следует отметить, что в узкополосном цифровом приемнике во вход-
ной части каждого из каналов должны присутствовать свои гетеродин и
смеситель, которые обеспечивают настройку на отдельный канал. В широ-
кополосном цифровом приемнике частота первого гетеродина фиксирова-
на, а «настройка» выполняется цифровыми методами в RSP.
Типичный широкополосный цифровой приемник может одновременно
обрабатывать диапазон частот шириной от 5 до 30 МГц. Этот подход обыч-
но называется блочным преобразованием {block conversion). В широкополос-
ном цифровом приемнике гетеродин с переменной частотой, характерной
для узкополосного приемника, заменяется гетеродином с фиксированной
Перестра-
иваемый
Узкополосный радиочастотный вход
Полоса канала: 30—200 кГц
Канал 1
Канал п
Рис. 8.115. Сравнение широкополосного и узкополосного цифровых приемников
726 Глава 8. Применение преобразователей данных
частотой; таким образом, настройка должна выполняться цифровыми ме-
тодами. Настройка выполняется с помощью цифрового преобразователя с
понижением частоты (DDC, digital down converter) и цифрового фильтра,
который называется селектором каналов (channelizer). Этот термин означает,
что задачей таких устройств является выбор одного из многих каналов, при-
сутствующих в широкополосном сигнале на выходе АЦП.
На рис. 8.116 показан типичный RSP. Он состоит из перестраиваемого
цифрового генератора (NCO, Numerically Controlled Oscillator), двухканаль-
ного смесителя и согласованных цифровых фильтров. Компоненты RSP
выполняют те же функции, что и аналогичные узлы аналоговых приемни-
ков, однако реализованы в цифровом виде. Цифровым выходом селектора
каналов является демодулированный полезный сигнал в виде I- и ^-со-
ставляющих; все остальные сигналы отфильтровываются. Так как выход
селектора каналов представляет собой сигнал одного выбранного ВЧ кана-
ла, для каждого из каналов требуется отдельный селектор. Селектор кана-
лов также выполняет понижение скорости выходных данных (децимацию)
до значения, при котором возможна их обработка в DSP. DSP извлекает
информацию о сигнале из I- и 0-составляющих и выполняет последующую
обработку. Фильтрация, выполняемая селектором каналов, также приводит
к увеличению отношения сигнал/шум (за счет усиления обработки).
Рис. 8.116. Процессор приема сигналов (RSP) в широкополосном приемнике (упро-
щенная схема)
Разработка полнофункционального широкополосного приемника явля-
ется серьезным проектом и сильно зависит от конкретного стандарта бес-
проводной связи. На рис. 8.117 показан приблизительный процесс разви-
тия стандартов беспроводной связи, начиная с аналоговых систем первого
поколения (1G), на смену которым пришли различные цифровые системы
второго поколения (2G) с TDMA/FDM (множественный доступ с времен-
ным разделением каналов/мультиплексированием с частотным разделени-
ем) и CDMA (множественный доступ с кодовым разделением каналов) и
промежуточное поколение систем, называемое 2,5G, и заканчивая проек-
тами систем третьего поколения (3G), которые предполагается развернуть в
будущем. Более подробную информацию о развитии систем беспроводной
связи можно найти в 16.
Со спектральной точки зрения существуют два основных типа стандар-
тов цифровой беспроводной связи. В стандартах TDMA/FDM для мульти-
8.6. Программное радио и дискретизация на промежуточной частоте
Рис. 8.117. Развитие систем беспроводной связи
плексирования данных отдельных каналов используются различные вре-
менные слоты, а результирующие несущие мультиплексируются по частоте
(FDM) с разделением между каналами либо на 30, либо на 200 кГц, в зави-
симости от конкретного стандарта. Полная ширина полосы, выделяемая
провайдеру в данных системах, варьируется от 5 до 15 МГц.
Ко второму классу относятся стандарты, в которых используется метод
множественного доступа с кодовым разделением каналов (CDMA, code-
division-multiple-access), который иногда называется расширением спектра
(spread-spectrum). В таких системах данные отдельного канала модулируют-
ся псевдослучайной последовательностью, а в приемнике для их восстанов-
ления используется идентичная последовательность. Комбинация несколь-
ких каналов имеет вид, подобный случайному шуму, распределенному в
полосе либо 1,25, либо 5 МГц, в зависимости от конкретного стандарта.
Полная ширина полосы, выделяемая провайдеру в данных системах, варь-
ируется от 5 до 20 МГц.
Область спектра, в которой работают системы беспроводной связи, гус-
то заполнена и содержит много мощных сигналов, которые вызывают ин-
терференцию сигналов в интересующей полосе с «блокирующими» внепо-
лосными сигналами. Независимо от стандарта беспроводной связи суще-
ствует много сигналов, которые могут создавать помехи представляющим
интерес каналам. На рис. 8.118 показан типичный ВЧ-спектр, где в центре
диапазона расположены два канала CDMA2000, окруженные рядом узкопо-
лосных сигналов. Приемник должен воспринимать все узкополосные сиг-
налы, сохраняя требуемую чувствительность, определяемую конкретным
стандартом беспроводной связи.
Мы начнем краткий обзор приемников различных стандартов беспро-
водной связи с аналоговой системы AMPS. Эта система идеально подхо-
дит для применения широкополосных цифровых приемников. Упрощен-
ная схема широкополосного цифрового приемника показана на рис. 8.119.
Глава 8. Применение преобразователей данных
CDMA2000 каналы, полоса каждого 1,25 МГц, темп выборок 61,44 MSPS
Рис. 8.118. Типичный ВЧ-спектр многоканального приемника CDMA2000
пвседошума
Рис. 8.119. Широкополосный цифровой приемник системы AMPS
Частота дискретизации AD6645 выбрана равной 61,44 MSPS, так как это
значение равно ширине полосы канала, умноженной на два в целой сте-
пени (30 кГц х 2024 = 61,44 MSPS). Выбор ПЧ является гибким; при выбо-
ре более низких значений ПЧ может потребоваться второе преобразование
частоты.
При дискретизации с частой 61,44 MSPS сигнал, имеющий ширину по-
лосы 12,5 МГц, может быть помещен в первую зону Найквиста (от 0 до
30,72 МГц) при ПЧ 15,36 МГц или во вторую зону Найквиста (от 30,72 до
61,44 МГц) при ПЧ 46,08 МГц.
Процессоры приема сигналов (RSP) обеспечивают настройку приемни-
ка и разложение сигнала на / и Q составляющие. Скорость выходных дан-
ных, поступающих на DSP после децимации, приблизительно равна 60 kSPS.
8.6. Программное радио и дискретизация на промежуточной частоте
Усиление обработки при
следующим образом:
частоте дискретизации 61,44 MSPS
вычисляется
Усиление обработки = 10 log --------- =30,1 дБ. (8.18)
1^2 х 0,03)
Отношение сигнал/шум AD6645 в полосе Найквиста равно 75 дБ.
Прибавляя к этому значению усиление обработки, получаем отношение
сигнал/шум в полосе 30 кГц, равное 75 -Ь 30,1 = 105,1 дБ. SFDR AD6645
превышает 96 dBc для сигналов с уровнем на несколько децибел меньше
полной шкалы (при добавлении псевдослучайного сигнала). Расчеты, при-
веденные ниже, показывают, что эти величины более чем достаточны для
выполнения требований стандарта AMPS к минимальной чувствительно-
сти (—116 дБм) при блокирующем уровне —26 дБм.
Упрощенный расчет требований к побочным составляющим для прием-
ника системы AMPS иллюстрируется диаграммой на рис. 8.120.
Максимальный уровень блокирующего сигнала равен —26 дБм (конк-
ретное значение этого параметра в стандарте не задано, оно было определе-
но путем опытных измерений, проведенных компанией Analog Devices).
Минимальный уровень детектируемого сигнала (чувствительность) равен
— 116 дБм. Для того чтобы полезный сигнал не был погашен интерференци-
ей, требуется отношение несущей к интерференции (С/, carrier-to-interferer) при-
близительно 6 дБ. Таким образом, для входного сигнала с уровнем —26 дБм
наибольший допустимый уровень внеполосных составляющих равен —122 дБм.
Минимальное значение SFDR равно —26 дБм — (—122 дБм) = 96 dBc.
14-разрядный АЦП AD6645 удовлетворяет этим требованиям при добавле-
нии псевдослучайного сигнала к сигналу, уровень которого на 5 дБ ниже
входного уровня полной шкалы АЦП (+5 дБм) (метод добавления псевдо-
случайного сигнала подробно описывается ниже в данном разделе). На прак-
(Основывается
на действительном антенном обзоре,
и нет в спецификации)
Максимальный
уровень сигнала
-26 дБм
Блокировка
Чувствительность
системы
-116 дБм
V АЦП SFDR
>96 дБс
AD6645 - 96 дБс
с подмешиванием
пвсевдошума
С/1 - 6 дБ
Помехи
Наихудшие помехи
-122 дБм
Рис. 8.120. Требования к побочным составляющим в системе AMPS
Глава 8. Применение преобразователей данных
тике псевдослучайный сигнал обычно не используется, так как при расчете
был задан дополнительный запас по уровню блокирующего сигнала. Бло-
кирующий уровень, равный —26 дБм (измеренный практически, но не за-
данный в стандарте), весьма консервативное число, и на практике оно мо-
жет быть понижено на несколько децибел без воздействия на характерис-
тики всей системы в целом.
Упрощенный расчет требований по чувствительности (применительно
к отношению сигнал/шум АЦП) для приемника системы AMPS показан на
рис. 8.121.
Предполагаемое усиление преобразования = 26 дБ
(допускает для АЦП 5 дБ),
^0 Таким образом, отношение сигнал/шум АЦП SNR > (+5 дБм + 67,1 дБ) = 72,1 дБ FS
Рис. 8.121. Требования к чувствительности приемника системы AMPS
Уровень сигнала, соответствующего полной шкале АЦП, равен +5 дБм
(размах напряжения 2,2 В при входном сопротивлении 200 Ом, которое
согласовано с 50 Ом при помощи ВЧ-трансформатора с коэффициентом
преобразования 1:4). Предусмотрим запас по уровню входного сигнала
АЦП 5 дБ, тогда сигнал, поступающий с антенны, перед подачей на АЦП
должен быть усилен на 26 дБ (усиление преобразования). При этом если
сигнал на входе приемника имеет уровень —26 дБм, то на входе АЦП он
будет иметь уровень 0 дБм. Предположим, что общий коэффициент шума
(AF, noise figure) приемника равен 6 дБ (очень хороший показатель). Темпе-
ратурный шум на входе антенны равен —174 дБм/Гц (см. гл. 2). Следова-
тельно, уровень шума, приведенный ко входу АЦП:
Шум на входе АЦП =
= —174 дБм/Гц + 26 дБ (усиление преобразования) +
+ 6 дБ (коэффициент шума) = —142 дБм/Гц. (8.19)
Теперь предположим, что входной шум, вызванный АЦП, приблизи-
тельно равен тому же значению. При этом полный шум на входе АЦП
равен —139 дБм/Гц (увеличивается на 3 дБ).
8.6. Программное радио и дискретизация на промежуточной частоте
После интегрирования в полосе канала (30 кГц) значение шума:
Шум в канале с полосой 30 кГц =
= -139 дБм/Гц +10 log (30 х 103) =
= -139 дБм + 45 дБм = -94 дБм. (8.20)
После обратного приведения этой величины к входу антенны с уче-
том усиления преобразования 26 дБ получаем значение чувствительнос-
ти —94 дБм — 26 дБ = —120 дБм. Это на 4 дБ превышает требуемое значение
чувствительности (—116 дБм).
При проведении анализа предполагалось, что уровень шума АЦП не
превышает —142 дБм/Гц. Для сравнения со значением, указанным в техни-
ческом описании, этот шум должен быть проинтегрирован в полосе Найк-
виста (30,72 МГц):
Шум АЦП в полосе Найквиста =
= -142 дБм/Гц +10 log (30,72 х 106) =
= -142 дБм + 74,9 дБ = -67,1 дБм. (8.21)
Так как уровень входного сигнала АЦП, соответствующий полной шка-
ле, равен +5 дБм, минимальное необходимое значение отношения сиг-
нал/шум АЦП:
Сигнал/шум АЦП в полосе Найквиста =
= +5 дБм - (-67,1 дБм) = 72,1 dBFS. (8.22)
Значение отношения сигнал/шум, указанное в техническом описа-
нии AD6645, составляет 75 dBFS при частоте входного сигнала 15 МГц.
Таким образом, требования к чувствительности выполняются с запасом
почти 3 дБ.
Излишне упоминать, что существует ряд других подходов к расчету ха-
рактеристик приемника, и при анализе необходимо находить компромисс-
ные значения различных параметров. Однако простой метод и конкретные
числа, приведенные выше, служат для иллюстрации процесса, особенно по
отношению к приблизительным требованиям к АЦП.
На рис. 8.122 показаны системные требования для GSM-900 МГц. В этом
стандарте предъявляются наиболее строгие требования к приемнику, осо-
бенно с точки зрения АЦП. Для определения приблизительных требований
к SFDR АЦП может использоваться методика расчета, аналогичная приве-
денной выше. Для системы GSM-900 требуется отношение несущая/интер-
ференция 15 дБ. Как показано на рис. 8.122, SFDR АЦП должен быть не
меньше 106 dBc, что недостижимо при использовании имеющихся на се-
годняшний день АЦП. Поэтому именно в этих системах наиболее часто
применяются узкополосные приемники.
На рис. 8.123 показан расчет чувствительности для системы GSM900 МГц.
Расчет выполняется аналогично процедуре, описанной ранее для системы
AMPS, и дает необходимое отношение сигнал/шум приблизительно 85 dBFS.
Оно не может быть реализовано при помощи имеющихся на сегодняшний
день АЦП, поэтому необходимо использовать узкополосные приемники.
Глава 8. Применение преобразователей данных
* Максимальный
уровень сигнала
-13 дБм
Блокировка
V АЦП SFDR
У >106 дБс
Чувствительность
системы
-104 дБм
AD6645 - 96 дБс
с подмешиванием
пвсевдошума
С/1 - 15 дБ
Помехи
Наихудшие помехи
-119 дБм
* Замечание: максимальный уровень сигнала для GSM 1800 МГц/1900 МГц и PCS SPEC = -23 дБм
Рис. 8.122. Требования к побочным составляющим в системе GSM 900 МГц
Максимальный
сигнал -13 дБм
Предполагаемое усиление преобразования = 15 дБ
(допускает для АЦП 3 дБ),
коэффициент шума = 3 дБ
FS - +5 дБм
L = 78 MSPS
(б)|-115 дБм
® -104 дБм
(SPEC)
-174 дБм/Гц
НЧ
Малошумящий
усилитель
олоса свыше 200 кГц, шум =
153 дБм/Гц + 10 log (200 х 103) =
-174 дБм/Гц + 15 дБ + 3 дБ = -156 дБм/Гц _ /г _ [—-|
' ' » = 153 дБм/Гц + 53 дБ =| -100 дБм|
Чувствительность
15 дБ усиление преобразования
(з) АЦП должен иметь около того же самого: -156 дБм/Гц
Интегрированный за частотой Найквиста, шум АЦП = -156 дБм/Гц + 10 log (39 х 106) =
= -156 дБм/Гц + 76 дБ = -80 дБм
Таким образом, отношение сигнал/шум АЦП SNR > 85 дБ FS
Рис. 8.123. Требования к чувствительности (отношению сигнал/шум АЦП) для систе-
мы GSM 900 МГц
Из-за жестких требований, предъявляемых к АЦП для широкополос-
ных приемников, в настоящее время в системах G5M900 МГц обычно при-
меняются одноканальные узкополосные приемники, которые обсуждались
ранее (см. рис. 8.112—8.114).
Однако следует отметить, что в системе GSM — 1800/1900 МГц (а также
в системе PCS, эксплуатируемой в США) требования к максимальному уров-
ню сигнала снижены с —13 до —23 дБм (требования по чувствительности
остаются прежними —104 дБм), и аналогичные расчеты дают требуемые
значения SFDR 93 dBc и отношения сигнал/шум 75 дБ, которые достига-
ются при использовании современных АЦП, таких как AD6645.
8.6. Программное радио и дискретизация на промежуточной частоте
FS
= 100 дБс
Помехи
> 106 дБс
Замечание: максимальный уровень сигнала для GSM 1800 МГц/1900 МГц и SPEC = -23 дБм
Рис. 8.124. Двухтональные интермодуляционные искажения в многоканальной систе-
ме (показаны требования к системе GSM 900 МГц)
Помимо однотонального SFDR важными характеристиками АЦП, при-
меняемых в широкополосных приемниках, также являются двухтональные
и многотональные интермодуляционные искажения. На рис. 8.124 показа-
ны два сильных сигнала в соседних каналах с частотами / и/. Если АЦП
имеет интермодуляционные искажения третьего порядка, то их продукты
находятся на частотах 2/ — / и 2/ —/2, и их невозможно отличить от полез-
ных сигналов, которые могут присутствовать в этих каналах. Это одна из
причин, по которой широкополосный подход трудно реализовать на прак-
тике в GSM 900 МГц, так как требуемый динамический диапазон превыша-
ет 100 dBc.
Как показано на рис. 8.125, двухтональный SFDR AD6645 превышает
103 dBFS при частотах входных гармоник 55,25 и 56,25 МГц. Гармоники
подвергаются субдискретизации и проявляются в полосе Найквиста на часто-
тах 80 МГц - 55,25 МГц = 24,75 МГц и 80 МГц - 56,25 МГц = 23,75 МГц. Во
избежание перегрузки АЦП амплитуда каждой из гармоник должна быть на
Частота (МГц)
Рис. 8.125. Характеристики двухтональной интермодуляции AD6645
Глава 8. Применение преобразователей данных
6 дБ ниже значения полной шкалы. Следует отметить, что в стандарте GSM
требования к двухтональным интермодуляционным искажениям даны для
уровней гармоник -43 дБм. Однако это значение задавалось с учетом одно-
канальных систем; таким образом, тест с уровнем гармоник на 6 дБ ниже
уровня полной шкалы в большей степени отображает требования к широ-
кополосной системе.
Требования к характеристикам в многоканальных системах CDMA не-
сколько отличаются от аналогичных требований в TDMA//7)Л/-системах
вследствие различий в архитектурах. В передатчике системы CDMA пере-
даваемая информация объединяется с псевдослучайной (P7V, pseudorandom
number) последовательностью, имеющей значительно большую ширину поло-
сы. Это приводит к расширению спектра передаваемого сообщения до разме-
ров полосы псевдослучайной последовательности (рис. 8.126, а и б).
В приемнике принимаемый сигнал коррелируется с той же псевдослу-
чайной последовательностью. Процесс корреляции приводит к «свертке»
энергии передаваемого сигнала в полосу исходного сообщения, что дает воз-
можность произвести обнаружение и выполнить последующую обработку
сигнала. В то же время, как показано на рис. 8.126, в и г, любая другая
энергия (в том числе энергия помех, некоррелированных с используемой
псевдослучайной последовательностью) распределяется в более широкой
полосе, которая равна полосе псевдослучайной последовательности.
Ширина полосы, в которой содержится информативный сигнал, после
свертки становится много меньше ширины полосы помех. Следовательно,
энергия помех, за исключением малой ее части, попадающей в полосу ин-
формативного сигнала, может быть подавлена фильтром нижних частот.
Спектр помех после свертки обычно имеет вид, характерный для гауссова
шума.
Тепловой шум
(-174 дБм/Гц)
Помеха
Принимаемый
В
Принимаемый сигнал
+ помеха
Принимаемая
г
Сигнал в приемнике
после сжатия
(помеха расширена)
Д
Отфильтрованный
принятый сигнал
Рис. 8.126. Сигнал системы CDMA
8.6. Программное радио и дискретизация на промежуточной частоте 735
На рис. 8.126, г и д, показаны две составляющие шума. Первая состав-
ляющая — это температурный шум приемника. Его источником являются
атмосферные шумы и активный шум приемника и передатчика. Вторая со-
ставляющая — это ограниченный по полосе шум, возникающий после свер-
тки полезного сигнала за счет расширения спектра помехи. Так как для
приемника не имеет значения природа шума, то величина эффективного
шума равна корню из суммы квадратов двух составляющих.
Эта информация может использоваться для определения требований к
характеристикам приемников систем 3G или любых других приемников
систем с расширением спектра. В отличие от GSM и других узкополосных
стандартов, в стандарте CDMA эффекты побочных составляющих, вызван-
ных «внутриканальной» интерференцией, обычно напрямую не указывают-
ся, однако они могут быть определены путем тщательного изучения пове-
дения схемы, спроектированной в соответствии с заданными в стандарте
требованиями.
Исходя из приведенных выше соображений, можно определить требуе-
мые характеристики АЦП и остальной части сигнального тракта (подроб-
ный расчет требований для системы IS-95 CDMA можно найти в 18).
На рис. 8.127 показан БПФ субдискретизированного сигнала 4 каналов
системы WCDMA. Отдельный канал занимает полосу 5 МГц, и полная
ширина полосы, занимаемая четырьмя каналами, равна приблизительно
20 МГц. Для оцифровки сигнала используется АЦП AD6645 с частотой
дискретизации 61,44 MSPS. За счет субдискретизации каналы WCDMA пе-
реносятся с центральной частоты 46,08 МГц (вторая зона Найквиста) на
частоту 15,36 МГц.
Рис. 8.127. Дискретизация сигнала 4 каналов WCDMA при помощи AD6645
На рис. 8.128 показан полный многоканальный сигнал с шириной по-
лосы 25 МГц, центрированный относительно ПЧ 48,75 МГц и оцифрован-
ный с частотой дискретизации 65 MSPS. Характеристики динамического
диапазона AD6645 при оцифровке сигналов в первой и второй зонах Най-
квиста практически не отличаются.
На рис. 8.129 представлен обзор большинства из используемых на на-
стоящий момент (2004 год) стандартов беспроводной связи и приблизи-
Зеркальная частота = 48,75 МГц,
полоса сигнала - 25 МГц
Рис. 8.128. Дискретизация сигнала с шириной полосы 25 МГц при помощи AD6645:
ПЧ = 48,75 МГц, fs = 65 MSPS
Метод многократного доступа Полоса канала Типовая общая полоса Темп выборок АЦП (тип.) Динамический диапазон, свободный от гармоник (SFDR) Отношение сигнал/шум (SNR)
AMPS FDMA 30 кГц 12,5 мГц 61,44 MSPS 96 дБс 72 дБ FS
IS-36 TDMA/FDM 30 кГц 5—15 мГц 61—92 MSPS 88 дБс 68 дБ FS
GSM 900 мГц TDMA/FDM 200 кГц 5—15 мГц 61—92 MSPS 106 дБс 85 дБ FS
GSM 1800/1900 Гц PCS TDMA/FDM 200 кГц 5—15 мГц 61—92 MSPS 93 дБс 75 дБ FS
IS-95 CDMA 1,25 мГц 5—15 мГц 61—92 MSPS 83 дБс 74 дБ FS
CDMA2000 CDMA 1,25 мГц 5—15 мГц 61—92 MSPS 79 дБс 74 дБ FS
WCDMA (UMTS) CDMA 5 мГц 5—20 мГц 61—92 MSPS 79 дБс 69 дБ FS
Рис. 8.129. Приблизительные требования к АЦП для широкополосных приемников
популярных стандартов беспроводной связи
тельные требования к АЦП, определенные на основании требований конк-
ретного стандарта к максимальному уровню сигнала, минимальному уров-
ню сигнала и т. д. Следует отметить, что доступные на сегодняшний день
АЦП удовлетворяют требованиям всех стандартов, за исключением обсуж-
давшейся выше системы GSM 900 МГц.
Повышение динамического диапазона АЦП
за счет добавления псевдослучайного сигнала
Существуют два фундаментальных фактора, ограничивающих максималь-
ное значение SFDR в высокоскоростных АЦП. Первый фактор — это иска-
жения, вносимые входным усилителем и схемой выборки и хранения. Вто-
рой фактор — это нелинейность реальной передаточной функции кодиру-
8.6. Программное радио и дискретизация на промежуточной частоте 737
ющей части АЦП. Достижение высоких значений SFDR требует минимиза-
ции каждого из двух типов нелинейных искажений.
Добиться значительного снижения искажений, вызванных аналоговым
интерфейсом АЦП, путем внешних воздействий невозможно. Однако не-
линейность передаточной функции кодера АЦП можно уменьшить при
надлежащем использовании псевдослучайного сигнала (внешнего шума,
суммируемого с аналоговым входным сигналом АЦП).
При определенных условиях (см. 20-3°) размывание (добавление псевдо-
случайного сигнала) увеличивает SFDR АЦП. Например, даже в идеальном
АЦП присутствует некоторая степень коррелированности между шумом
квантования и входным сигналом, приводящая к уменьшению уровня SFDR,
особенно если частота дискретизации кратна частоте входного сигнала.
Добавление к входному сигналу широкополосного шума (со среднеквад-
ратичним значением амплитуды примерно 1/2 LSB) уравнивает вероятность
шумов квантования и минимизирует описанный выше эффект (рис. 8.130, а).
В большинстве систем, однако, верхушка сигнала достаточно зашумлена, и,
следовательно, добавление псевдослучайного сигнала не требуется. Увеличе-
ние среднеквадратичного уровня широкополосного шума свыше 1 LSB при-
ведет к пропорциональному уменьшению отношения сигнал/шум АЦП.
Существуют также схемы, в которых для уравнивания вероятности ис-
кажений передаточной функции АЦП применяется псевдослучайный шум
с большей амплитудой. На рис. 8.130, б, показан источник шума в виде
генератора псевдослучайных чисел, сигнал с которого поступает на ЦАП.
Данный сигнал вычитается из входного сигнала АЦП, оцифровывается и
затем прибавляется к выходному сигналу АЦП, что позволяет избежать зна-
чительного ухудшения отношения сигнал/шум. Явным недостатком данно-
го метода является уменьшение допустимого размаха входного сигнала при
увеличении амплитуды псевдослучайного сигнала. Это необходимо для пре-
дотвращения перегрузки АЦП. Следует отметить, что применение псевдо-
случайного сигнала не приводит к значительному снижению искажений,
а
Малая амплитуда
б
Большая амплитуда
Рис. 8.130. Применение псевдослучайного сигнала для устранения корреляции между
шумом квантования и входным сигналом и снижения коэффициента гар-
моник АЦП
24—2852
Глава 8. Применение преобразователей данных
Рис. 8.131. Внесение внеполосного псевдослучайного сигнала для повышения SFDR АЦП
вносимых входной частью АЦП; он понижает только уровень искажений,
вызванных нелинейностью передаточной характеристики АЦП.
Другой метод, который более легко реализуется на практике, особенно
в широкополосных приемниках, заключается во внесении узкополосного
псевдослучайного сигнала вне полосы полезного сигнала, как показано на
рис. 8.131. Для внесения псевдослучайного сигнала часто используется ди-
апазон частот, близких к нулевой частоте, так как в нем обычно не при-
сутствуют составляющие полезного сигнала. Другой возможной областью для
внесения псевдослучайного сигнала является область частот, близких к fs/2.
Так как псевдослучайный сигнал занимает лишь малую часть полосы по
сравнению с полосой полезного сигнала, применение этого подхода не при-
водит к значительному ухудшению отношения сигнал/шум, которое харак-
терно при использовании широкополосного псевдослучайного сигнала.
Субдиапазонные конвейерные АЦП, такие как AD6645 (рис. 8.132),
имеют малые ошибки дифференциальной нелинейности, возникающие
в определенной области диапазона АЦП. В AD6645 используется 5-раз-
рядный АЦП (АЦП 1), сигнал с выхода которого поступает на 5-разрядый
АЦП 2 и 6-разрядный АЦП 3. Значительные ошибки нелинейности воз-
никают только в точках перехода АЦП 1; ошибки нелинейности, вноси-
Рис. 8.132. Субдиапазонный конвейерный АЦП AD6645 с малыми ошибками диффе-
ренциальной нелинейности (DNL)
8.6, Программное радио и дискретизация на промежуточной частоте
Выходной
код
Рис. 8.133. Ошибки динамической нелинейности в субдиапазонном АЦП AD6645 (уве-
личенный масштаб)
мые вторым и третьим АЦП, минимальны. Существует 25 = 32 точки пе-
рехода АЦП 1, следующие с интервалом 68,75 мВ (29 = 512 LSB) при
диапазоне полной шкалы 2,2 В. На рис. 8.133 показаны ошибки нелиней-
ности в увеличенном масштабе.
Искажения, вносимые входной частью AD6645 при частотах входного
аналогового сигнала примерно до 200 МГц, пренебрежимо малы по сравне-
нию с ошибками, вносимыми кодером. Следовательно, основным факто-
ром, ограничивающим SFDR, является статическая нелинейность переда-
точной функции AD6645.
Таким образом, задача заключается в выборе такого количества внепо-
лосного псевдослучайного сигнала, которое необходимо для уравнивания
влияния этих редких ошибок нелинейности во всем диапазоне входных
напряжений АЦП и, следовательно, снижения среднего уровня ошибок
динамической нелинейности. Экспериментально установлено, что наиболь-
шее улучшение дифференциальной нелинейности АЦП достигается при
размахе псевдослучайного сигнала, приблизительно равном величине двух
переходов АЦП 1. При более высоких уровнях шума улучшение нелиней-
ности незначительно. Два перехода АЦП 1 соответствуют максимальному
размаху шума 1024 LSB, или среднеквадратичному уровню, приблизитель-
но 155 LSB (среднеквадратичное значение гауссова шума получается деле-
нием максимального размаха на 6,6).
В левой части рис. 8.134 показана динамическая нелинейность АЦП без
использования псевдослучайного сигнала. Масштаб горизонтальной оси
увеличен таким образом, чтобы показать две точки поддиапазона, отстоя-
щие друг от друга на 68,75 мВ (512 LSB). На втором графике показана
динамическая нелинейность после добавления псевдослучайного сигнала
со среднеквадратичным значением 155 LSB (примерно —20,6 дБм).
Псевдослучайный шум может генерироваться несколькими способами.
Для его генерации могут использоваться шумовые диоды, однако более эко-
номичным решением является простое усиление шума входного напряже-
ния широкополосного биполярного операционного усилителя. Подробное
описание этого подхода дано в 21-23 и здесь повторяться не будет.
Глава 8. Применение преобразователей данных
Без подмешивания псевдошума
Рис. 8.134. Динамическая нелинейность AD6654 без добавления и с добавлением псев-
дослучайного сигнала
155 значений младшего разряда
среднеквадратичное подмешивание
псевдошума
Без подмешивания псевдошума
С подмешиванием псевдошума
Частота (МГц) Частота (МГц)
1 048 576 - точечная БПФ,
усиление обработки = 60 дБ
Рис. 8.135. График БПФ, характеризующий SFDR AD6645 без использования и с ис-
пользованием псевдослучайного сигнала
Значительное улучшение SFDR, получаемое при использовании внепо-
лосного псевдослучайного сигнала, иллюстрируется рис. 8.135, где показан
результат БПФ-сигнала с частотой 30,5 МГц и уровнем —35 дБм, взятый с
большим количеством выборок (1048576 точек). Дискретизация сигнала осу-
ществлялась при помощи AD6645 с частотой 80 MSPS. Обратите внимание,
что значение SFDR без использования псевдослучайного сигнала составляет
примерно 92 dBFS, а с использованием псевдослучайного сигнала 108 dBFS;
улучшение составляет 16 дБ! На рис. 8.136 показаны зависимости SFDR как
функции от уровня входного сигнала без использования и со значительным
улучшением при использовании псевдослучайного сигнала.
Мы завершим обсуждение одноканальных и многоканальных программ-
ных приемников рядом диаграмм, на которых показаны ИС для цифровых
приемников, выпускаемые компанией Analog Devices. На рис. 8.137 показа-
но семейство изделий для одноканальных приемников, на рис. 8.138 — для
многоканальных приемников.
8.6. Программное радио и дискретизация на промежуточной частоте
Без подмешивания псевдошума
С подмешиванием псевдошума
Аналоговый входной уровень (дБ полной шкалы)
Аналоговый входной уровень (дБ полной шкалы)
Рис. 8.136. SFDR AD6645 без использования и с использованием псевдослучайного
сигнала
Биполярные 65-80 MSPS
КМОП, БиКМОП 65-105 MSPS
« Цифровые
14-разр. 80 MSPS
АЦП для дома,
GSM/WCDMA
двух/четырех-
{|роцессорны<1
12-разр. АЦП
2-канальный
12-разр.
IF АЦП
GSM четырех-
процессорный
* w 80_MSPS л '
лоемб А
14-разр. IF АЦП
л 80/105 MSPS Г
’ Разнообразие
WCDMA-приемников,
/ ADMM
, GSM/WCDMA
ъ четырех/двух-
4 {процессорный
А* • • - * *\
Сигнальный
процессор
% 65 MSPS, «
14-разр. 80 MSPS
АЦП с расширен-
ным диапазонов *
WCDMA 125 MSP^f
6-канальный t
\ сигнальный >
* ^процессдц, *
14-разр 80 MSPS ||
АЦП/сигнальный t I
б *
'12-разр. IF АЦП
* 65 MSPS <
> АМ644 V
(18-разрядный АЦП»
малом»',
12-разр. IF АЦП
65/105 MSPS J
Рис. 8.138. ИС для много
канальных приемников
От макро до пико АЦП, больше сигнальных
процессоров на кристалле
WCDMA-приемники
Л * со многими несущими
Глава 8. Применение преобразователей данных
Широкополосные радиопередатчики
Многие из концепций, которые обсуждались в разделах, посвященных
широкополосным приемникам, также применимы к широкополосным пе-
редатчикам. На рис. 8.139 показаны две основные архитектуры передатчи-
ков. В схемах с квадратурной модуляцией, таких как QPSK или QAM, для
формирования полного однополосного передаваемого сигнала из синфаз-
ной (/) и квадратурной (0, сдвинутой по фазе на 90°) составляющих ис-
пользуются смесители. На рис. 8.139, а, показана архитектура передатчика
с аналоговым формированием модулированного сигнала. В этом примере
на каждый канал требуются 2 ЦАП. Эта традиционная архитектура применя-
ется в одноканальных системах. Даже при низких выходных частотах, ис-
пользуемых во многих задачах передачи данных в основной полосе, наилуч-
шим выбором является семейство TxDAC, так как все его представители:
1) имеют высокий SFDR при низких выходных частотах;
2) имеют низкое потребление мощности и работают от однополярного
источника питания, за счет чего увеличивается КПД системы;
3) используют технологию избыточной дискретизации (интерполяции)
сигнала, за счет чего снижается уровень побочных составляющих процесса
цифро-аналогового преобразования и, следовательно, упрощается аналого-
вый полосовой фильтр и уменьшается суммарная стоимость системы;
4) выпускаются в одинаковых корпусах с совпадающими позициями
аналогичных выводов, что позволяет варьировать ценовые и качественные
характеристики систем за счет изменения разрешения. Например, в про-
цессе создания многих опытных образцов пользователи могут изменять раз-
решение в большую или меньшую сторону, в зависимости от реальных ха-
рактеристик системы.
Более подробное описание семейства TxDAC можно найти в 24’25.
а
Прямое аналоговое ВЧ-преобразование
Рис. 8.139. Упрощенные схемы архитектур беспроводных передатчиков
В архитектуре, показанной на рис. 8.139, 6, применяется цифровое сме-
шивание I- и 2-сигналов в процессоре передачи сигналов (TSP, transmit
signal processor), и модулированный сигнал подается непосредственно на
одноканальный ЦАП. В этом случае к ширине полосы ЦАП предъявляются
более жесткие требования. Данная архитектура наилучшим образом подхо-
дит для систем с несколькими несущими. Современные представители се-
мейства TxDAC могут принимать данные со скоростью до 160 MSPS. При
цифровой модуляции ИС семейства TxDAC позволяют генерировать сиг-
налы на промежуточной частоте (ПЧ) до 70 МГц. Для данной архитектуры
желательными (требуемыми) параметрами также являются высокий SFDR,
низкая цена, малое потребление мощности и совместимость представите-
лей семейства по выводам. Если в один ЦАП, показанный на рис. 8.139, б,
поступают сигналы от нескольких цифровых //Q-модуляторов, то система
превращается в широкополосную передающую систему с несколькими не-
сущими, для которой главным показателем качества являются превосход-
ные многотональные характеристики семейства продуктов TxDAC.
С точки зрения DSP процессор передачи сигналов является цифровым
пост-процессором. Он выполняет функции первого гетеродина, квадра-
турного модулятора, канального фильтра и интерполятора данных. Как и
в /?5Р-приемнике, TSP вносит изменения в традиционную концепцию по-
строения передатчиков, так как все характеристики канала становятся про-
граммируемыми. К этим характеристикам относятся: скорость передачи
данных, ширина полосы канала и форма спектра. Так как модуляция, ка-
нальная фильтрация и другие аспекты модуляции выполняются цифровы-
ми методами, фильтры всегда имеют одинаковые характеристики для всех
плат в отличие от аналоговых решений, при которых всегда имеются по-
грешности.
Существует несколько важных характеристик, от которых зависит вы-
бор TSP. Во-первых, устройство должно быть способно генерировать дан-
ные со скоростью, требуемой для выполнения соотношения Найквиста для
всех частот в спектре передаваемого сигнала. Аналогично частоте дискре-
тизации АЦП частота дискретизации ЦАП определяет диапазон частот,
которые могут генерироваться устройством. Поэтому TSP должен быть спо-
собен генерировать данные со скоростью, по меньшей мере, в два раза
выше верхней частоты в спектре сигнала. С точки зрения простоты анти-
алайзингового фильтра предпочтительнее иметь скорость генерации дан-
ных в 3 раза выше верхней частоты в спектре сигнала.
Аналогично RSP, но по другим причинам, важным фактором является
разрядность. Если TSP используется в одноканальном режиме, то причи-
ной является шум квантования и температурный шум. Обычно излучение
излишнего количества внутриполосного или внеполосного шума является
нежелательным, так как при этом тратится КПД передатчика, и возникают
помехи для других систем. В системах с несколькими несущими причина
несколько отличается. В данном случае перед формированием сигнала в
ЦАП необходимо выполнить суммирование сигналов нескольких несущих
в цифровой форме. Поэтому каждый раз при удвоении числа каналов необ-
ходимо увеличивать разрядность на 1 бит, чтобы при добавлении нового
канала в каналах не уменьшался динамический диапазон.
Глава 8. Применение преобразователей данных
Наконец, жизненно важной является возможность быстрой перестрой-
ки частоты. Так как в TSP управление частотой реализовано с помощью
NCO и смесителя, перестройка частоты может выполняться очень быстро,
что позволяет применять их в приложениях с наиболее критичными требо-
ваниями к этому параметру, таких как передатчики системы GSM.
В целом с точки зрения показателей качества ЦАП аналогичны АЦП.
Поэтому первым показателем, представляющим интерес, является отноше-
ние сигнал/шум. Как и для АЦП, отношение сигнал/шум в первую очередь
определяется тепловым шумом и шумом квантования. Если любой из шу-
мов имеет слишком большое значение, то коэффициент шума ЦАП начи-
нает влиять на суммарный шум сигнального тракта. Хотя спектральная форма
шума не всегда имеет значение, она становится важна, когда ЦАП ис-
пользуется для воссоздания комбинации сигналов. В этом случае размах
(«мощность») выходного сигнала ЦАП распределяется среди нескольких
несущих. Теоретическое выражение для отношения сигнал/шум ЦАП
определяется тем же набором выражений, что и для АЦП, и для конкрет-
ной величины отношения сигнал/шум может быть получено значение ко-
эффициента шума.
Одним из наиболее новых представителей семейства TxDAC, который
подходит для применения в различных системах беспроводной связи, явля-
ется AD9786. Его упрощенная блок-схема показана на рис. 8.140. Устройство
принимает входные данные I- и Q-составляющих со скоростью до 160 MSPS
и обеспечивает внутреннюю интерполяцию с коэффициентом 2, 4 или 8.
//0-модуляция выполняется внутри устройства цифровым способом. Час-
тота дискретизации интерполированного сигнала может достигать 400 MSPS.
Возможна прямая генерация сигналов на ПЧ до 70 МГц.
Как объяснено в гл. 2, избыточная дискретизация при интерполяции
смягчает требования к аналоговому фильтру на выходе ЦАП, а также сни-
жает эффект спада АЧХ по закону «sinx/x».
AD9786 имеет шумовой порог —163 дБм/Гц в диапазоне частот до 100 МГц.
Уровень интерполяционных искажений на частотах до 300 МГц не превы-
Рис. 8.140. 16-разрядный 160 MSPS ЦАП семейства TxDAC+T с 2-/4-/8-кратной ин-
терполяцией и обработкой сигналов AD9786
8.6. Программное радио и дискретизация на промежуточной частоте
шает —80 дБс, значение SFDR при частоте 10 МГц составляет 90 дБс. Эти и
другие ключевые характеристики AD9786 приведены на рис. 8.141. Общее
качество устройства удовлетворяет требованиям к передатчикам всех стан-
дартов многоканальной беспроводной связи, включая GSM и WCDMA. На
рис. 8.142 представлен обзор семейства TxDAC. На рис. 8.143 представлен
обзор всего семейства программных передатчиков и приемников («Softcell»)
производства Analog Devices.
• Нацелены на применение в многоканальных базовых станциях макроуровня систем
GSM/WCDMA.
• 16-/14-/12-разрядное разрешение при частотах обновления ЦАП до 400 MSPS.
• Высококачественные интерполирующие фильтры со скоростью данных 160 MSPS и
выбираемым коэффициентом интерполяции (2х, 4х, 8х).
• Непосредственная передача сигналов ПЧ 70 МГц и выше.
• Возможность выбора формата данных (прямой двоичный/дополнительный код).
• LVTTL/КМОП-совместимые входы.
• Программирование по SPI-порту.
• Шумовой порог: -163 дБм/Гц на частотах до 100 МГц.
• Интермодуляционные искажения на частотах до 300 МГц: < -80 дБс.
• SFDR при 10 МГц: 90 дБс.
• Гибкий интерфейс тактового сигнала.
• Рассеиваемая мощность: -800 мВт. Работа от однополярного источника питания
(+2,5 В/+3 В).
• 80-выводный корпус LQFP.
Рис. 8.141. Ключевые характеристики 16-разрядного интерполирующегох ЦАП AD978x
и семейства TxDAC+
^-^=7+-^ AD9777 ________
/У AD9772A \\ (114-разр. TxDAC+ J '---
TXDAC+ П V00 МЗР8^^АО9784/86^Ч
AD9772 300 MSPS '/ ^^=-=^4; 14/16-разр. TxDAC+ •)
( 14-разр. TxDAC+ -- 400 MSPS
300 MSPS </ ---
AD9744
14-разр. TxDAC
165 MSPS
AD6633
' AD6622
Четырех-
процессорный
< „ 65 MSPS „
' AD6623 '
Четырех -
процессорный
80 MSPS х-
WCDMA
TSP w/PPR
125 MSPS
। Цифровые
Смешанные
сигналы
Рис. 8.142. Многоканальные передатчики
746 Глава 8. Применение преобразователей данных
Рис. 8.143. Обзор многоканальных приемопередатчиков
Для применения в схемах с аналоговой 7/Q-модуляцией предназначена
монолитная кремниевая ВЧ ИС квадратурного модулятора AD8349, работа-
ющего в диапазоне от 0,8 до 2,7 ГГц. Его превосходные показатели фазовой
точности и баланса амплитуд позволяют с повышенным качеством выпол-
нять непосредственную модуляцию на ВЧ. Функциональная блок-схема
AD8349 показана на рис. 8.144. Дифференциальный сигнал гетеродина (LO)
сначала поступает на фазовращатель. Выходные сигналы I- и 0-каналов фа-
зовращателя буферируются и подаются на входы £ О двух преобразователей
Гильберта. Два дифференциальных преобразователя напряжения в ток, под-
ключенные к низкочастотным входам I- и 0-каналов, обеспечивают tail-
ток для смесителей. Выходы двух смесителей суммируются в дифференци-
альном буфере для подачи на 50-омную нагрузку. Устройство также имеет
функцию запрещения выходного сигнала. AD8349 может использоваться в
качестве прямого ВЧ-модулятора передатчика в системах цифровой связи,
таких как базовые станции GSM, CDMA, WCDMA и широкополосные бес-
проводные передатчики QPSK- или 0ЛЛ7-сигналов. Он также может ис-
пользоваться в качестве модулятора ПЧ в £ЛШ5-передатчиках. Кроме того,
квадратурный модулятор может применяться в синтезаторах прямого циф-
рового синтеза в составе гибридных схем фазовой автоподстройки частоты
для генерации сигналов в широком диапазоне частот с разрешением поряд-
ка миллигерц. AD8349 поставляется в 16-выводном корпусе TSSOP с от-
крытым основанием (exposed-paddle). Устройство работает в диапазоне тем-
ператур от —40 до +85 °C и производится с использованием усовершенство-
ванного комплементарного кремниевого биполярного процесса компании
Analog Devices.
Рис. 8.144. Квадратурный модулятор
AD8349 с диапазоном выходных час-
тот от 800 МГц до 2,7 ГГц
8.6. Программное радио и дискретизация на промежуточной частоте
Сотовые телефонные аппараты
Одна из наиболее быстро развивающихся и изменяющихся областей при-
менения концепции цифрового радио — это сотовые телефонные аппара-
ты. Каждое новое поколение сотовых телефонов содержит меньшее число
компонентов, имеет меньшую потребляемую мощность и обладает боль-
шим набором функций по сравнению с предыдущими моделями. Из-за раз-
личия стандартов беспроводной связи должна обеспечиваться работа в раз-
личных режимах и диапазонах. При обзоре сотовых телефонных аппаратов
мы ограничим обсуждение стандартом GSM. Также следует обметить, что
описываемые примеры не обязательно отражают наиболее новые продукты
компании Analog Devices в связи с соблюдением авторских прав.
На рис. 8.145 показана упрощенная блок-схема цифровой сотовой теле-
фонной системы GSM. Речевой кодер/декодер и функция прерывистой пере-
дачи будут обсуждаться подробно. Блоки преобразования с повышением и
понижением частоты включают смешанные аналого-цифровые функции и
будут описаны позже. Схожие функции, такие как компенсация характери-
стик канала связи, сверточное кодирование, декодирование Витерби, моду-
ляция и демодуляция, выполняются цифровыми методами.
Стандарт кодирования речевых сигналов был введен в цифровой системе
передачи с Т-каналами. В этой системе речь подвергается 8-разрядному ло-
гарифмическому кодированию с частотой дискретизации 8 KSPS. 8-разряд-
ное логарифмическое кодирование и декодирование эквивалентно линейно-
му кодированию/декодированию с разрешением 13 бит и скоростью переда-
чи 104 Кбит/с. В большинстве телефонов применяются 16-разрядные Е-Д
АЦП; таким образом, эффективная скорость передачи равна 128 Кбит/с.
Речевой кодер системы GSM сжимает речевой сигнал до 13 Кбит/с, а деко-
дер восстанавливает сжатый сигнал в приемнике. Речевой кодер основан
Рис. 8.145. Блок-схема телефона стандарта GSM
748 Глава 8. Применение преобразователей данных
на усовершенствованном алгоритме кодирования с линейным предсказа-
нием (LPC. Linear Predictive Coding). В алгоритме LPC используется модель
человеческого речевого тракта, в которой гортань представляется в виде
ряда концентрических цилиндров различного диаметра. Цилиндры приво-
дятся в действие возбуждающим сигналом (выдохом). Эта модель может
быть математически представлена в виде системы уравнений, описываю-
щих цилиндры.
Возбуждающий сигнал проходит через цилиндры, формируя выходной
сигнал. В человеческом организме сигналом возбуждения являются воз-
душные колебания в голосовых связках или сокращения речевого тракта.
В цифровой системе сигналом возбуждения является последовательность
импульсов (аналог колебаний в голосовых связках) или шум (аналог сокра-
щений в речевом тракте). Возбуждающий сигнал подается на цифровой
решетчатый фильтр. Каждый коэффициент фильтра отображает размер
цилиндра.
Система LPC характеризуется числом цилиндров, используемых в мо-
дели. В системе GSM используется восемь цилиндров, и, следовательно,
должны генерироваться восемь коэффициентов отражения.
В ранних £РС-системах обеспечивалось качество, достаточное для по-
нимания кодированной речи, но зачастую недостаточное для распознава-
ния голоса. В £РС-системе стандарта GSM реализованы два усовершен-
ствованных метода, которые повышают качество кодированной речи: регу-
лярное импульсное возбуждение (RPE, regular pulse excitation) и долговременное
предсказание (LTP, long term prediction). При использовании этих методов
результирующее качество кодированной речи примерно равно качеству при
логарифмической импульсно-кодовой модуляции (ИКМ с компандирова-
нием, применяемой в системах с Т-каналами).
На вход речевого кодера поступает последовательность 16-разрядных
отсчетов речевых данных в виде ИКМ-сигнала с равномерным кодирова-
нием. Речевой кодер работает с окном длительностью 20 мс (160 отсчетов)
и формирует 76 коэффициентов (в сумме 260 бит), за счет чего скорость
кодированных данных уменьшается до 13 Кбит/с.
Функция прерывистой передачи (DTX, discontinuous transmission) позво-
ляет прекращать передачу данных в паузах между словами. За счет этого
снижается потребление мощности передатчиком и повышается общая ем-
кость системы GSM.
Низкое потребление мощности продлевает срок работы батарей в теле-
фоне и является важной характеристикой для портативных мобильных те-
лефонов. Она способствует увеличению максимально возможного числа
вызовов за счет снижения межканальных интерференционных помех, ко-
торое приводит к повышению спектральной эффективности. В обычном
разговоре каждый абонент говорит менее 40 % времени, и было оценено,
что DTX может приблизительно удвоить максимальное количество вызовов
в системе мобильной связи.
В передатчике размещается детектор речевой активности (VAD, voice
activity detector). Его задачей является различение между смесью речевого
сигнала с фоновым шумом и шумом в отсутствие речевого сигнала. Вход-
ными данными детектора речевой активности являются параметры, вы-
8.6. Программное радио и дискретизация на промежуточной частоте
численные речевым кодером. VAD использует эту информацию для приня-
тия решения о наличии или отсутствии речевого сигнала в каждом из кад-
ров длительностью 20 мс.
В приемнике выполняется добавление комфортного шума (CNI, comfort
noise insertion). Комфортный шум генерируется в момент времени, когда
DTX отключает передатчик. Его амплитуда и форма спектра подобны ана-
логичным характеристикам фонового шума в передатчике. Целью CNI яв-
ляется подавление неприятных эффектов, вызванных переключением меж-
ду речью на фоне шума и тишиной. Если сигнал принимается без добавле-
ния комфортного шума, то слышно частое чередование речи с высоким
уровнем фонового шума (например, если разговор ведется из автомобиля)
и тишины. Этот эффект значительно уменьшает разборчивость речи.
При работе DTXкаждый передаваемый перед отключением передатчика
речевой пакет сопровождается дескриптором тишины (SID, silence descriptor),
который служит для приемной стороны маркером окончания речи. Он со-
держит характерные параметры фонового шума в передатчике, такие как
информация о спектре, полученная с помощью кодирования с линейным
предсказанием.
Кадр SID используется генератором комфортного шума приемника для
синтеза цифрового фильтра, который при возбуждении псевдослучайным
шумом формирует сигнал, подобный фоновому шуму в передатчике. Ком-
фортный шум вставляется в паузы между принимаемыми речевыми пакета-
ми. Параметры комфортного шума обновляются с регулярным интервалом
времени с помощью передачи кадров SID во время пауз.
Для обнаружения и исправления ошибок в приемнике процессор до-
бавляет к потоку кодированной речи избыточные биты. За счет этого
окончательное значение скорости кодированного сигнала увеличивается
до 22,8 Кбит/с. Биты в пределах одного окна перемежаются с избыточными
битами и распределяются по нескольким окнам, повышая тем самым поме-
хоустойчивость системы.
Роль АЦП и ЦАП в сотовых телефонах
Дуг Грант
Технология аналого-цифрового и цифро-аналогового преобразований об-
ширно используется в сотовых телефонах. В тракте звуковой частоты рас-
положен высококачественный речевой кодек. В отличие от речевых коде-
ков с компандированием, применяемых в коммутируемой телефонной сети
общего пользования, в речевых кодеках, применяемых в сотовых телефо-
нах, используется линейное кодирование и более высокое разрешение
(обычно 16 бит). Во всех сотовых системах для снижения битовой скоро-
сти передаваемого потока применяются цифровые алгоритмы сжатия.
Поэтому линейное кодирование является предпочтительным, так как при
его использовании уменьшаются потери информации, возникающие при
выполнении математических операций, и, следовательно, повышается от-
ношение сигнал/шум по сравнению с обычными речевыми кодеками с ком-
пандированием.
750 Глава 8. Применение преобразователей данных
Все речевые АЦП, применяемые в сотовых телефонах, строятся по сиг-
ма-дельта (Е-Д) архитектуре и содержат цифровые фильтры, ширина поло-
сы и внеполосное подавление которых определяется конкретным стандар-
том. В системах GSM такие преобразователи обеспечивают 16-разрядное
разрешение, частоту дискретизации 8 KSPS и отношение сигнал/шум в ре-
чевой полосе от 60 до 70 дБ. Блок АЦП также включает аналоговые интер-
фейсы, позволяющие работать с различными типами микрофонов, а также
другими источниками, такими как встроенные ЧМ-радиоприемники или
МРЗ-декодеры. В них могут быть реализованы такие функции, как смеще-
ние по постоянному току для электретных микрофонов, несимметричный
и дифференциальный выходы, программируемое усиление, обнаружение
«снятия трубки» (switch-hook) и т. д. Блок ЦАП включает усилители-драйве-
ры выходного звукового сигнала, применимые для имеющих разные типы
и импедансы динамиков и микрофонов, а также функции микширования
нескольких источников звука на выходное устройство. И конечно, они оп-
тимизированы для работы с пониженным напряжением питания и пони-
женным потреблением мощности, и в них применяется эффективная про-
цедура включения и выключения питания, что продлевает срок действия
батарей.
В некоторых современных телефонах применяются высококачествен-
ные ЦАП, позволяющие воспроизводить мелодии звонков и игр, записи в
формате MP3 и даже полноскоростные потоковые звукозаписи. Эти ЦАП
обладают всеми характерными свойствами многостандартных преобразова-
телей для воспроизведения звука, такими как преобразование частоты дис-
кретизации (с ограничением на низкое напряжение), низкий ток утечки и
эффективная процедура включения/выключения питания.
Преобразователи также играют важную роль в трактах радиосигналов и
сигналов в основной полосе. В большинстве сотовых телефонов использу-
ется преобразование модулированного ВЧ-сигнала в квадратурные (//Q)
составляющие. Для обработки таких сигналов обычно применяются сдво-
енные Е-Д АЦП с интегрированными цифровыми фильтрами выбора ка-
налов, согласованных с формой передаваемого сигнала для достижения
максимальной передачи его энергии. В передатчиках большинства систем
вычисляются квадратурные компоненты передаваемого цифрового сигна-
ла, которые загружаются в пакетное ОЗУ (burst RAM). В назначенное время
содержимое ОЗУ последовательно передается в пару ЦАП, модулирующих
сигнал промежуточной частоты, которая затем преобразуется в соответству-
ющую частоту ВЧ-несущей. В некоторых схемах ЦАП непосредственно
модулируют несущую. Требования к преобразователям в таких системах
диктуются необходимостью компромисса между применяемой аналоговой
и цифровой фильтрацией, полосой сигнала, смещением по постоянному
току в тракте сигнала до АЦП и отношением сигнал/шум, необходимым
для обеспечения заданной частоты ошибок (bit-error-rate). В типичных
телефонах стандарта GSM/ GPRS/EDGE АЦП имеют разрешение порядка
16 бит, динамический диапазон от 65 до 70 дБ и частоту дискретизации,
равную скорости следования символов (170 833 KSPS). И конечно, эти спе-
цифические для конкретной системы параметры сочетаются с общими
для любых телефонов требованиями по работе с пониженным током и
8.6. Программное радио и дискретизация на промежуточной частоте
напряжением и эффективным управлением процедурой включения/вык-
лючения питания.
Сотовые телефоны также содержат несколько дополнительных преоб-
разователей с различным разрешением и скоростями, предназначенных для
мониторинга и управления функциями телефона. Среди этих функций:
управление зарядом и состоянием батарей, мониторинг температуры бата-
рей и усилителя мощности (УМ), управление смещением и усилением при-
емного тракта, управление линейностью УМ, автоматическое управление
частотой и управление яркостью дисплея. Для большинства из этих функ-
ций достаточно применения преобразователей с относительно низкой ши-
риной полосы и разрешением от 10 до 14 бит.
Чипсеты SoftTone и Othello производства Analog Devices
(Приводимое описание чипсетов Othello Radio не отражает продукцию Analog
Devices последнего поколения. Подробности, касающиеся изделий последнего
поколения, могут быть получены при заключении с Analog Devices договора о
неразглашении.)
Компания Analog Devices выпускает чипсет, выполняющий большин-
ство функций телефона стандарта GSM. Как показано на рис. 8.146, чипсет
SoftTone® выполняет функции ЦОС и обработки в основной полосе, а ра-
диочипсет Othello® — ВЧ-функции.
Из-за различий в распределении частот в разных странах, где эксплуа-
тируется система GSM(за пределами США), большинство телефонов стан-
дарта GSM должны быть двухдиапазонными (способными работать с часто-
тами GSM и DCS). Чипсеты SoftTone® и Othello® обеспечивают основные
функции, необходимые для реализации двух- и трехдиапазонных сотовых
телефонов стандарта GSM. Чипсет AD20msp430SoftTone® включает в себя
часть функций сотового телефона стандарта GSM, отвечающего за обработ-
ку сигнала в основной полосе. В этом чипсете используется комбинация
знаний системы GSM и усовершенствованной технологии аналоговой и
Рис. 8.146. Сотовый телефон стандарта GSM/DCS на чипсетах SoftTone® и Othello®
Глава 8. Применение преобразователей данных
цифровой обработки сигналов, что позволяет установить новые стандарты
проектирования б’5Л//СР7?5-терминалов. Архитектура SoftTone полностью
основана на использовании ОЗУ. Программное обеспечение загружается из
флэш-памяти и выполняется из внутреннего ОЗУ. Это позволяет ускорить
цикл изготовления вариантов, так как не требует замены жесткой логики.
Кроме того, программное обеспечение телефона легко обновляется, что
позволяет добавлять в него новые функции. При использовании этого чип-
сета в комбинации с ВЧ-чипсетом Othello производства Analog Devices схе-
ма полнофункционального многодиапазонного телефона содержит менее
200 компонентов, занимает площадь 20 см2 на односторонней печатной
плате и имеет полную стоимость комплектующих на 20—30 % ниже преды-
дущих решений.
Чипсет AD20msp430 состоит из двух кристаллов: AD6522 — процессора
обработки в основной полосе на базе DSP и AD6521 — речевого кодека.
Применение AD20msp430 в комбинации с чипсетом Othello позволяет су-
щественно сократить число компонентов и стоимость комплектующих те-
лефонов и терминалов данных стандарта GSM. Программное обеспечение
и аппаратные средства чипсета AD20msp430 уже достаточно давно успешно
интегрируются в телефоны стандарта GSM. Это уже четвертое поколение
чипсетов GSM, разработанных Analog Devices, каждое из которых было
одобрено для применения многочисленными сетевыми операторами и про-
изводителями телефонов. Каждое новое поколение обладало новыми фун-
кциональными возможностями, в то время как их стоимость и энерго-
потребление неуклонно снижались. В чипсет AD20msp430 был включен
ряд энергосберегающих функций, способствующих снижению суммарной
потребляемой мощности. Программируемый цифровой автомат позволяет
управлять событиями с разрешением, равным одной четверти битового пе-
риода. В архитектуре SoftTone®, на которой основан чипсет AD20msp430,
все программное обеспечение находится во флэш-памяти или ОЗУ. По-
скольку не используется ПЗУ, сокращается время, затрачиваемое на разра-
ботку, и имеется возможность добавления дополнительных функций в про-
цессе эксплуатации.
Чипсет AD20msp430 включает в себя два процессора. Процессор циф-
ровой обработки сигналов выполнен на базе ядра ADSP-218X, успешно
применявшегося в предыдущих поколениях (?5М-чипсетов, и имеет произ-
водительность 65 MIPS. Этот DSP выполняет функции речевого и каналь-
ного кодирования, которые были рассмотрены выше. Кодек AD6521 содер-
жит в себе все цепи аналоговой и смешанной обработки. Он содержит АЦП
и ЦАП I/Q-каналов, высококачественный многоканальный речевой кодек
и несколько вспомогательных АЦП и ЦАП для систем АРУ (автоматичес-
кой регулировки усиления), АПЧ (автоматической подстройки частоты) и
управления линейностью усилителя мощности. В качестве микроконтрол-
лера используется ARM7 TDMI, имеющий производительность 39 MIPS.
ARM7® отвечает за реализацию стека протоколов и функций человеко-ма-
шинного интерфейса. Оба процессора успешно используются в области
цифровых беспроводных приложений. Упрощенная блок-схема кодека
AD6521 показана на рис. 8.147.
8.6. Программное радио и дискретизация на промежуточной частоте
Кодек
основной полосы
Вспомогательная
секция
Кодек
голосовой полосы
Рис. 8.147. Упрощенная блок-схема кодека AD6521
Чипсет AD20msp430 полностью поддерживается набором средств разра-
ботки и программным обеспечением. Средства разработки позволяют лег-
ко модифицировать программы DSP и/или микроконтроллера ARM®, что
дает возможность производителям телефонов и терминалов стандарта GSM
оптимизировать функциональные возможности и пользовательский интер-
фейс под конкретное оборудование. Имеется программное обеспечение для
всех уровней, включая задачи обработки голоса и речи. Оно постоянно
обновляется по мере появления новых функциональных возможностей.
Система DMA и контроллеров прерываний разработана с учетом возможно-
сти легкой модернизации при переходе к последующим поколениям сиг-
нальных процессоров и ядер микроконтроллеров. Интерфейс дисплея мо-
жет применяться для подключения к дисплеям, имеющим последователь-
ный или параллельный интерфейс. Время разработки системы можно
значительно сократить при использовании функциональных возможностей
отладки AD20msp430. Наиболее критичные сигналы могут быть выведены
на универсальный системный разъем (Universal System Connector) при помо-
щи управляющего программного обеспечения. Это позволяет проводить
отладку системы на заключительном этапе ее создания. Кроме того, схем-
ная архитектура включает в себя высокоскоростное регистрирующее уст-
ройство и функции отслеживания адреса в DSP, а также однопроводную
диагностику/отладку в ARM-контроллере.
Применение чипсета радиосистемы прямого преобразования Othello®
производства Analog Devices исключает необходимость использования кас-
кадов промежуточной частоты (ПЧ), что позволяет производителям мобиль-
ной электроники снизить размеры и стоимость модулей радиоканала и по-
Глава 8. Применение преобразователей данных
высить гибкость за счет многостандартного, многорежимного функциони-
рования. Радиосистема включает в себя трансивер с «нулевой ПЧ» (Zero-IF
Transceiver) и многодиапазонный синтезатор частот.
Чипсет Othello реализует все основные функции приемника прямого пре-
образования и прямого КСО-передатчика (Virtual-IF™ передатчика). Он так-
же содержит блок генерации сигнала гетеродина и полнофункциональный
внутренний стабилизатор напряжения, который подает питание на все ак-
тивные цепи радиосистемы. Также в состав чипсета входит синтезатор с дроб-
ным коэффициентом деления, имеющий чрезвычайно малое время захвата,
что позволяет реализовать расширенные возможности передачи данных с
помощью сотовых телефонов, в частности функции высокоскоростной пере-
дачи данных с мультиплексированием (HSCSD, high-speed circuit-switched data)
и службы передачи радиопакетов (GPRS, general packet radio services).
В большинстве современных цифровых сотовых телефонов в сигналь-
ном тракте имеется, по крайней мере, один каскад преобразования с пони-
жением частоты. Это преобразование частоты позволяет перенести прини-
маемый сигнал из частотного диапазона, в котором работает конкретная
система (скажем, 900 МГц), на более низкую ПЧ, где функция селекции
канала выполняется с помощью узкополосного фильтра (как правило, на
поверхностно-акустических волнах (SAW) или керамике). Далее отфильт-
рованный сигнал подвергается дальнейшему переносу либо на вторую ПЧ,
либо сразу в основную полосу, где он оцифровывается и демодулируется в
цифровом сигнальном процессоре. На рис. 8.148 показано сравнение этой
обычной супергетеродинной архитектуры с супергомодинной™ архитектурой
приемника Othello.
б
Прямого преобразования
волнах
Рис. 8.148. Архитектура прямого преобразования позволяет уменьшить число компо-
нентов в приемнике
8.6. Программное радио и дискретизация на промежуточной частоте 755^)
Идея использования непосредственного преобразования частоты в при-
емниках достаточно давно привлекает внимание разработчиков высокочас-
тотных схем. Причина очевидна: каскады преобразования увеличивают сто-
имость, размеры и вес пользовательского оборудования. Каждый каскад
требует наличия гетеродина (часто включающего синтезатор частот для точ-
ной настройки гетеродина на заданную частоту), смесителя, фильтра и,
возможно, усилителя. Учитывая все это, привлекательность приемников
прямого преобразования не удивляет. Отсутствие каскадов ПЧ позволяет
сократить стоимость, габариты и вес приемника.
Применение чипсета Othello® также позволяет дополнительно сокра-
тить число компонентов за счет интеграции входного малошумящего уси-
лителя (МШУ) GSM. Такое решение дает возможность обойтись без ВЧ-
фильтра зеркальной частоты («зеркального» фильтра), который необходим
для подавления зеркального канала или нежелательных продуктов интер-
ференции сигналов смесителя и внешнего МШУ. Этот каскад обычно вы-
полняется на дискретном транзисторе с цепями смещения и согласования,
что в сумме выражается приблизительно в 12 компонентах. Интеграция
МШУ сокращает количество внешних компонентов в среднем приблизи-
тельно на 15—17 единиц, в зависимости от степени согласования, необхо-
димого для фильтра (исключаемого из приемника при использовании
Othello®).
Функциональная блок-схема двухдиапазонного 6ЖИ-модуля радиока-
нала Othello® показана на рис. 8.149. Приемная часть расположена в верх-
ней части рисунка. От антенного разъема принимаемый сигнал поступает
на переключатель режима «прием/передача» и направляется, в зависимости
от диапазона, на один из двух фильтров: 925—960 МГц для (75Л/-диапазона
или 1805—1880 МГц для DCS-диапазона. Сигнал проходит через полосовой
радиочастотный фильтр (так называемый гоо//и#-фильтр), который служит
для выделения необходимой полосы частот и подавления всех остальных
Рис. 8.149. Двухдиапазонный супергомодинный™ приемопередатчик прямого преоб-
разования на чипсете Othello
Глава 8. Применение преобразователей данных
внеполосных частот (включая частоты в диапазоне передачи), чтобы пре-
дотвратить перегрузку активных компонентов входных цепей. После roofing-
фильтра расположен малошумящий усилитель (МШУ). Это первый уси-
лительный элемент в системе, позволяющий значительно сократить вклад
всех последующих каскадов в суммарный коэффициент шума системы.
Смеситель с прямым преобразованием частоты переводит полезный сиг-
нал, поступающий от МШУ, с радиочастоты непосредственно на нулевую
частоту с помощью его умножения на выходной сигнал гетеродина такой
же частоты.
Выходной сигнал смесительного каскада в виде квадратурных составля-
ющих (каналы I и Q) в основной полосе посылается на усилитель с пере-
менным коэффициентом усиления. Регулируемый усилитель также обеспе-
чивает некоторую степень фильтрации смежных каналов и подавление внут-
ридиапазонных блокирующих сигналов. Блокирующие сигналы представляют
собой сигналы других С5Л/-каналов, разнесенных на некоторое расстояние
от принимаемого канала (как правило, 3 МГц и более). Усилители ослабля-
ют эти сигналы до уровня, гарантирующего отсутствие перегрузки АЦП
приемника. После усилительного каскада принимаемый сигнал оцифровы-
вается в приемных АЦП.
Передающая часть начинается с мультиплексированных входных/вы-
ходных каналов I и Q, изображенных в правой нижней части рисунка. По-
скольку система GSM является дуплексной с разделением по времени, пе-
редатчик и приемник никогда не работают одновременно. За счет этого в
чипсете Othello™ экономятся четыре вывода на корпусе ИМС приемопере-
датчика. Сигналы //0-каналов, поступающие на передатчик через мульти-
плексированные контакты ввода/вывода, модулируют несущую на ПЧ, пре-
вышающей 100 МГц.
Выходной сигнал модулятора поступает на фазочастотный детектор (PFD\
где он сравнивается с опорной частотой внешнего гетеродина. Сигнал с
PFD, имеющий частоту более 100 МГц, проходит через фильтр с достаточно
широкой полосой пропускания (1 МГц). Выходной сигнал фильтра направ-
ляется на управляющий вход генератора, управляемого напряжением (ГУН),
который генерирует сигналы в диапазонах частот, включающих полосы пе-
редачи стандартов GSM и DCS.
Далее сигнал с ГУН распределяется на два блока. В первую очередь он
подается на усилитель мощности (УМ) передатчика, который повышает от-
носительный уровень передаваемого сигнала с +3 до +35 дБм. С выхода УМ-
сигнал направляется на коммутатор приема/передачи и НЧ-фильтр (подав-
ляющий гармоники усилителя мощности). Усилитель мощности работает в
двух диапазонах частот, переключение между которыми осуществляется
напряжениями КМОП-уровня. Выходной сигнал ГУН также поступает на
смеситель цепи обратной связи через ответвитель, который может быть
выполнен как в виде печатной платы, построенной на базе дискретных
катушек и конденсаторов, так и в виде монолитного (обычно керамическо-
го) устройства. Смеситель обратной связи выполняет обратный перенос
передаваемого сигнала на ПЧ, после чего этот сигнал используется в каче-
стве сигнала гетеродина для модулятора передатчика. Этот тип модулятора
имеет несколько названий, но вероятно наиболее точное — «трансляцией-
8.6. Программное радио и дискретизация на промежуточной частоте 757
ная петля». Одно из преимуществ модулятора обусловлено тем, что в стан-
дарте GSM применяется гауссова частотная модуляция с минимальным ча-
стотным сдвигом (GMSK). При GMSK амплитуда модулированного сиг-
нала является постоянной; таким образом, усилитель мощности может вхо-
дить в режим насыщения без искажения 6Л/5Х-сигнала.
Схема модуляции GMSK может быть реализована несколькими различ-
ными способами. В еще одном европейском стандарте (для беспроводных
телефонов) СМ5Х-сигнал формируется путем непосредственной модуля-
ции автономного ГУН потоком данных, предварительно пропущенным че-
рез гауссов фильтр. В стандарте GSM для формирования СЛ/ЗХ-сигнала
был выбран метод квадратурной модуляции. Квадратурная модуляция по-
зволяет получить точные характеристики фазы GMSAf-сигнала, однако
при несовершенстве схемы модулятора (или каскадов преобразования с
повышением частоты) могут возникать флуктуации огибающей. Эти флук-
туации могут, в свою очередь, привести к фазовым искажениям при усиле-
нии в УМ, работающем в режиме насыщения. Чтобы избежать подобных
искажений, производители телефонов стандарта GSM были вынуждены
использовать усилители с более высокой линейностью за счет уменьшения
эффективности и сокращения времени разговора за один цикл зарядки
аккумуляторов.
Модулятор с транслирующей петлей объединяет преимущества непос-
редственной модуляции ГУН и более точной квадратурной модуляции.
Фактически в нем реализована схема фазовой автоподстройки частоты (PLL),
в которую включены модулятор, сигнал гетеродина, выходной сигнал ГУН
и смеситель цепи обратной связи. В конечном счете получается непосред-
ственно модулированный сигнал на выходе ГУН с абсолютно постоянной
огибающей и прекрасными фазовыми характеристиками. Фазовые искаже-
ния GMS/f-сигнала при использовании чипсета Othello не превышают 1,5°
(при измерении этого параметра в качестве гетеродина для смесителя цепи
обратной связи использовался генератор сигналов).
Компактность чипсета Othello™ позволяет использовать С5М-техноло-
гии во многих устройствах, в которых ранее это было невозможно (напри-
мер, в очень компактных телефонах или РСЛ/С/Л-картах). Однако основ-
ные преимущества прямого преобразования станут очевидными с появле-
нием универсальных мультистандартных телефонов третьего поколения.
С использованием прямого преобразования исключается потребность в
аппаратном фильтре основной селекции, поскольку эта операция выпол-
няется в блоке цифровой сигнальной обработки, который может быть пе-
репрограммирован для работы с множеством стандартов. Сравните этот
подход с супергетеродинной архитектурой, где для работы с различными
стандартами требуется несколько каналов приема/передачи радиосигнала
(поскольку в каждом из стандартов используются разные фильтры основ-
ной селекции) и все схемы должны иметь минимальные размеры. При
выполнении прямого преобразования один и тот же канал может исполь-
зоваться для нескольких различных стандартов, значений ширины поло-
сы и типов модуляции. Таким образом, интернет-навигация и голосовая
связь могут быть в принципе реализованы на базе одного и того же теле-
фона стандарта GSM.
758 Глава 8. Применение преобразователей данных
АЦП с дискретизацией на ПЧ в режиме разделения
во времени с цифровыми пост-процессорами
Марк Луни
(Материал этого раздела был взят из статьи Марка Луни в журнале Analog
Dialogue*5.)
Концепция работы нескольких АЦП с временным разделением путем
мультиплексирования их выходных сигналов с частотой, превышающей час-
тоту дискретизации (например, мультиплексирование выходных сигналов пары
преобразователей с частотой в 2 раза выше частоты дискретизации), появи-
лась достаточно давно. Она впервые была предложена в 1980 году Блэком и
Ходжесом26’27. При разработке 7-разрядного АЦП с частотой дискретизации
4 МГц они установили, что схема с временным разделением занимает мень-
шую площадь на кристалле, чем схема флэш-преобразователя с 2N компара-
торами, имеющая аналогичные характеристики. Эта концепция имела боль-
шую ценность для данного проекта, однако уменьшение площади являлось
не единственным ее преимуществом. Временное разделение АЦП — это кон-
цептуально простой метод умножения частоты дискретизации существую-
щих высокопроизводительных АЦП, таких как 14-разрядный AD6645 с час-
тотой дискретизации 105 MSPS и 12-разрядный AD9430 с частотой дискре-
тизации 210 MSPS. Эта концепция была применена во многих приложениях
для реализации систем, в которых требуется выполнение аналого-цифрового
преобразования с очень высокой частотой дискретизации.
В то время как скорость и разрешение современных стандартных АЦП
значительно превышают значения 4 MSPS и 7 бит, в системах с временным
разделением АЦП (по резонным причинам) редко применяется разреше-
ние выше 8 бит. Тем не менее данная концепция широко применяется в
тестовом и измерительном оборудовании, в частности в широкополосных
цифровых осциллографах. Это подтверждается 8-разрядным АЦП с часто-
той дискретизации 20 GSPS, который был недавно разработан компанией
Agilent Labs28 и применен в семействе осциллографов Infinium™ производ-
ства Agilent Technologies29. Показатели систем с временным разделением
АЦП являются более чем достаточными при разрядности 8 бит, но недоста-
точными для приложений, в которых требуется комбинация высокого раз-
решения, широкой полосы и широкого динамического диапазона.
Первичным фактором, сдерживающим применение 12- и 14-разрядных
систем с временным разделением АЦП, является требование к согласова-
нию каналов. Для 8-разрядной системы, обеспечивающей динамический
диапазон 50 дБ, приемлемыми являются уровни рассогласования усиления
0,25 % и расфазировки тактовых импульсов 5 пс. Этот уровень точности
может быть обеспечен традиционными методами, такими как согласование
разводки физических каналов, использование общих источников опорного
напряжения АЦП, отбор устройств путем тестирования и активная анало-
говая подстройка, однако при более высоких разрешениях предъявляются
намного более жесткие требования к согласованию. На сегодняшний день
устройства, в которых реализованы более передовые методы согласования,
серийно не выпускаются.
8.6. Программное радио и дискретизация на промежуточной частоте
Далее мы подробно рассмотрим требования к согласованию в 12- и
14-разрядных системах с временным разделением АЦП, обсудим передо-
вые методы цифровой пост-обработки и представим устройство, в котором
реализовано наиболее перспективное на сегодняшний день решение —
Advanced Filter Bank (AFB™) производства V Corp Technologies3132.
В системах с временным разделением АЦП в количестве М работают с
частотой дискретизации, равной 1/М суммарной частоты дискретизации
системы. Фаза тактового сигнала для каждого из каналов выбрана таким
образом, что вся система работает как единый АЦП, который осуществляет
выборку сигнала с равными интервалами времени. На рис. 8.150 показана
блок-схема и временные диаграммы типичной четырехканальной системы
с временным разделением АЦП.
Каждый из четырех каналов АЦП работает с частотой дискретизации,
равной 1/4 частоты дискретизации системы. Тактовые сигналы в каналах
сдвинуты относительно друг друга по фазе на 90°. Выходной поток данных
формируется путем чередования выходных данных отдельных каналов в
необходимой последовательности (например 1, 2, 3, 4, 1, 2 и т. д.). В систе-
ме с двумя преобразователями частота тактовых сигналов в каждом из ка-
налов равна половине тактовой частоты системы, и они сдвинуты по фазе
относительно друг друга на 180°.
Для простоты изложения мы будем обсуждать в основном двухканаль-
ные системы, однако концепции могут быть распространены и на четырех-
канальные системы35. На рис. 8.151 показана система с двумя преобразова-
телями, работающими с разделением во времени. В ней для достижения
частоты дискретизации 400 MSPS применяется разделение во времени двух
12-разрядных АЦП с частотой дискретизации 200 MSPS.
Рис. 8.150. Временное разделение АЦП
Глава 8. Применение преобразователей данных
Рис. 8.151. 12-разрядный 400-MSPS АЦП с временным разделением двух преобразователей
Как уже отмечалось, межканальное согласование напрямую влияет на
динамический диапазон систем с временным разделением АЦП. Рассогла-
сование каналов АЦП приводит к ухудшению динамического диапазона,
которое проявляется (на графике БПФ) в виде побочных частотных состав-
ляющих, которые называются зеркальными побочными составляющими, и
побочных составляющих смещения. Зеркальные побочные составляющие воз-
никают из-за рассогласования усиления и фазы между каналами. Функции
фазовых ошибок и ошибок усиления ортогональны по отношению друг к
другу. Побочные составляющие, вызванные каждой из этих ошибок, про-
являются на одинаковой частоте (частотах). Побочные составляющие сме-
щения вызваны разницей в смещении каналов АЦП. В отличие от зеркаль-
ных побочных составляющих побочные составляющие смещения не зави-
сят от входного сигнала. При заданном уровне рассогласования смещения
побочная составляющая (составляющие) смещения всегда имеет (имеют)
одинаковый уровень. В результате обширных исследований характера по-
бочных составляющих было разработано несколько методов математичес-
кого описания взаимосвязи между ошибками согласования каналов и ди-
намическим диапазоном32’ 33.
Эти методы являются строгими и очень полезны, однако более простой
метод «напряжения ошибки», который будет использоваться при дальней-
шем обсуждении, позволяет понять взаимосвязь без глубокого изучения
сложных математических выводов. Этот подход основан на концепции,
использованной в Application Note AN-50138 для описания взаимосвязи между
дрожанием апертуры и ухудшением отношения сигнал/шум (SNR) АЦП.
Напряжение ошибки определяется как разница между ожидаемым и дей-
ствительным напряжениями отсчета. Она вызвана комбинацией трех типов
ошибок: рассогласования фазы, усиления и смещения.
В системе с временным разделением с двумя преобразователями напря-
жения ошибок, вызванных рассогласованием фазы и усиления, приводят к
возникновению зеркальной побочной составляющей на частоте, равной раз-
ности частоты Найквиста и частоты входного аналогового сигнала. Напря-
8.6. Программное радио и дискретизация на промежуточной частоте
О 25 50 75 100 125 150 175 200
Частота (МГц)
Рис. 8.152.
жение ошибки, вызванное рассогласованием смещения, приводит к появле-
нию побочной составляющей смещения на частоте Найквиста. Так как по-
бочная составляющая смещения расположена на границе полосы Найквис-
та, разработчики двухканальных систем могут соответствующим образом выб-
рать системную частоту и сосредоточить дальнейшие усилия на согласовании
фазы и частоты. На рис. 8.152 приведен типичный график БПФ для двухка-
нальной системы, на котором показаны описанные ошибки.
В системе с временным разделением с четырьмя преобразователями
имеются три зеркальные побочные составляющие и две побочные состав-
ляющие смещения. Зеркальные побочные составляющие расположены на
частотах, равных: разности (1) частоты Найквиста и частоты аналогового
входного сигнала и сумме и разности (2) половины частоты Найквиста и
частоты аналогового входного сигнала. Побочные составляющие смещения
расположены на частоте Найквиста и 1/2 частоты Найквиста (середина
диапазона).
Если известны напряжения ошибок для каждой из трех групп рассогла-
сования, для нахождения уровня зеркальных побочных составляющих и
побочной составляющей смещения (ASC„, IS^, IS^, 05смещения) в одно-
тональном режиме в системе с двумя преобразователями могут использо-
ваться следующие выражения:
IS,— (ДБ) = 201og(/5y_) = log (8.23)
где
Ge
= коэффициент ошибки усиления =
у
] — FSA
у
Y FSB
(8.24)
М1 - 201о8(/5„и) - 20log[^ j, (8.25)
Глава 8. Применение преобразователей данных
где в = &аМе (радиан), о)а — частота входного аналогового сигнала, Л/е —
ошибка расфазировки тактового сигнала.
/5о6щ(дб) = 201оё^(/5усиления)' +(/5фазы
смещения
, ( Смещение
= 20 log ----------------
<2 х Полное число кодов
(8.26)
(8.27)
где «Смещение» — смещение между каналами, выраженное в числе кодов
АЦП.
Как уже отмечалось, функции ошибок фазы и усиления ортогональны32,
следовательно, суммарный уровень зеркальной побочной составляющей
равен корню из суммы квадратов отдельных составляющих. При помощи
приведенных выражений может быть найден уровень ошибок и определен
соответствующий уровень согласования, необходимый для выполнения
требований к заданному динамическому диапазону. Например, если требу-
ется динамический диапазон 12 бит (74 дБс) при частоте входного сигнала
180 МГц, то необходимо обеспечить согласование усиления выше 0,02 % и
согласование задержки апертуры выше 300 фс! Если возможно обеспечить
идеальное согласование усиления, то требование к согласованию задержки
апертуры может быть «снижено» приблизительно до 350 фс. В целях демон-
страции того, насколько высокая точность необходима для реализации клас-
сической системы с разделением во времени, имеющей разрядность 12 или
14 бит и широкий диапазон входных частот, на рис. 8.153 показаны требо-
вания к согласованию для нескольких различных случаев.
Первый уровень согласования в традиционной двухканальной системе
с разделением АЦП во времени достигается путем уменьшения физических
и электрических различий между каналами. Например, согласование уси-
ления обычно обеспечивается использованием общего источника опорного
напряжения и идентичностью разводки. Согласование фазы достигается
ручной настройкой электрической длины цепей тактовых (или аналоговых
входных) сигналов и/или применением специальных методов подстройки,
контролирующих электрические характеристики схемы распределения так-
тового сигнала (времен нарастания/спада, уровней смещения, уровня пере-
Разрешение при частоте входного сигнала 180 МГц SFDR (дБс) Согласование усиления (%) Согласование времени апертуры (фс)
12 бит 74 0,04 0
12 бит 74 0 350
12 бит 74 0,02 300
14 бит 86 0,01 0
14 бит 86 0 88
14 бит 86 0,005 77
Рис. 8.153. Требования к согласованию при временном разделении АЦП
8.6. Программное радио и дискретизация на промежуточной частоте
ключения и т. п.). Согласование смещения зависит от характеристик от-
дельных АЦП.
Многие из перечисленных способов согласования основаны на тща-
тельном проектировании аналоговой схемы и использовании методов под-
стройки. Несмотря на множество превосходных идей относительно ре-
шения проблемы согласования, для реализации многих из них требуется
применение дополнительных схем, которые сами по себе могут являться
источниками ошибок. Эти ошибки, в свою очередь, не позволяют достичь
точного согласования фазы и усиления. Примером подобной идеи является
настройка времени нарастания и спада двух различных тактовых сигналов.
В любой схеме, которая может обеспечить необходимый уровень управле-
ния этими параметрами, фазовые характеристики каждого из каналов будут
в значительной степени зависеть от напряжения источника питания и тем-
пературы.
Усовершенствованная цифровая пост-обработка
Разработка новых методов цифровой обработки сигналов и появление не-
дорогих высокоскоростных конфигурируемых цифровых аппаратных плат-
форм (DSP, FPGA, CPLD, ASIC и т. п.) позволяет значительно улучшить
характеристики систем с временным разделением АЦП. По сравнению с
классическими аналоговыми методами согласования методы цифровой пост-
обработки имеют несколько преимуществ. Они являются гибкими с точки
зрения реализации, и с их помощью может быть достигнута степень точно-
сти даже большая, чем необходимо для требуемого разрешения АЦП. Кон-
цептуальная схема системы с разделением АЦП по времени и цифровой
пост-обработкой показана на рис. 8.154.
В приведенной схеме для обработки выходных данных АЦП использу-
ется набор цифровых калибровочных передаточных функций, в результате
чего формируется новый набор «калиброванных выходных сигналов». Эти
цифровые калибровочные передаточные функции могут быть реализованы
Yra(f, Т) = X(f) х Ha(f, Т) х HJf, Т) = идеальный выход «А»
Ycb(f, Л = х Л х Hcb(f’ Л = идеальный выход «В»
Рис. 8.154. Пример архитектуры цифровой пост-обработки
Глава 8. Применение преобразователей данных
с помощью различных схем цифровых фильтров (БИХ — рекурсивных с
неограниченным количеством отсчетов , КИХ — трансверсальных с конеч-
ным количеством отсчетов и т. д.). Они могут быть достаточно простыми
(например, подстройка усиления в одном канале) или очень сложными (на-
пример, подстройка усиления, фазы и смещения каждого из каналов в
широкой полосе частот и широком диапазоне температур).
С учетом необходимости согласования в широкой полосе частот и ши-
роком диапазоне температур для улучшения характеристик систем с вре-
менным разделением АЦП методы цифровой пост-обработки являются во-
стребованными. На настоящий момент не существует строгого математи-
ческого вывода зависимостей, необходимых при проектировании цифровых
калибровочных передаточных функций для нескольких каналов АЦП для
широкой полосы частот и широкого диапазона температур. В данной обла-
сти были проведены обширные академические исследования, в результате
чего появился ряд интересных решений. Среди них выделяется технология
Advanced Filter Bank™ (AFB, усовершенствованный банк фильтров), кото-
рая может являться платформой для значительного улучшения показателей
систем с временным разделением.
Усовершенствованный банк фильтров (AFB)
AFB — это одна из первых коммерческих технологий цифровой пост-обра-
ботки, которая дает возможность значительно повысить характеристики си-
стем с временным разделением АЦП за счет обеспечения точного согласова-
ния усиления, фазы и смещения каналов в широком диапазоне частот и
температур. Получаемые с помощью AFB характеристики позволяют приме-
нять данные системы в высокоскоростных 12-/14-разрядных приложениях.
Кроме выполнения функций согласования AFB также обеспечивает линеа-
ризацию фазы и компенсацию неравномерности АЧХ-систем. На рис. 8.155
показана базовая блок-схема системы на базе AFB.
В используется уникальная структура многоскоростного КИХ-филь-
тра, и она может быть легко реализована на доступных цифровых аппарат-
ных платформах, таких как FPGA или CPLD. Коэффициенты КИХ-фильтра
Банк совершенных фильтров аналогово-цифрового
преобразователя
Рис. 8.155. Базовая блок-схема AFB
8.6. Программное радио и дискретизация на промежуточной частоте 1ЬЗ
вычисляются с использованием патентованного метода, который заключа-
ется в определении цифровой калибровочной передаточной функции пу-
тем решения уравнений, показанных на рис. 8.154, при помощи сложных
алгоритмов.
При применении ЛТ^В-системы с временным разделением АЦП могут
использовать до 90 % своего диапазона Найквиста и конфигурироваться
для работы в любой зоне Найквиста преобразователя (первой, второй,
третьей и т. д.). Необходимая зона Найквиста выбирается набором логи-
ческих входов, которые управляют выбором требуемых коэффициентов
КИХ-фильтра.
Пример проекта на базе AFB:
12-разрядный 400-MSPS АЦП AD12400
AD12400 является первым представителем нового семейства изделий Analog
Devices, в которых реализованы концепции временного разделения и AFB.
На его примере мы покажем характеристики, которые могут быть достиг-
нуты при объединении имеющихся АЦП и усовершенствованных методов
цифровой пост-обработки. На рис. 8.156 показана блок-схема AD12400.
В AD12400 реализована уникальная схема аналогового интерфейса с ши-
риной полосы 400 МГц, два канала 12-разрядных АЦП с быстродействием
200 MSPS и схема AFB, реализованная на базе программируемой вентиль-
ной матрицы (FPGA). В нем применяются многие из описанных выше клас-
сических методов согласования, а также схема распределения тактового сиг-
нала с очень малым дрожанием фазы. Комбинация этих ключевых компо-
нентов формирует 12-разрядный модуль АЦП с быстродействием 400 MSPS,
имеющий хорошие характеристики в диапазоне частот шириной до 90 %
2-разрядный АЦП,
200 MSPS
Цифровой
температурный
датчик
Выход данных «Д»,
12 разрядов,
200 MSPS
Аналоговый
Кодирующий
Предвари-
тельные
аналоговые
схемы
Опорное
Кодирование напряжение
Схема
распределения
ТИ с малым
дрожанием
Прецизионное
опорное
напряжение
(необязательное
для подстройки
усиления)
Банк
усовершен-
ствованных
фильтров
Выход данных «Д»,
12 разрядов,
200 MSPS
Кодирование Опорное
напряжение
XILINX
Програм-
мируемая
логическая
матрица
(ПЛИС)
Выход данных «б»,
12 разрядов,
200 MSPS
Выход данных «б»,
12 разрядов,
200 MSPS
12-разрядный АЦП,
200 MSPS
электрически репрограммируемое
постоянное запоминающее устройство
(ЕПРОМ) для загрузки в ПЛИС
Рис. 8.156. Блок-схема 12-разрядного 400-MSPS АЦП AD12400
Глава 8. Применение преобразователей данных
полосы Найквиста и диапазоне температур более 85 °C. Полоса пропуска-
ния аналоговой входной части равна 400 МГц.
Передаточные функции АЦП ищутся путем измерения характеристик в
широком диапазоне частот и температур на этапе производства устройства.
Измеренные таким образом передаточные функции АЦП используются в
процедуре вычисления коэффициентов AFB. После измерения параметров
АЦП и вычисления коэффициентов КИХ-фильтра выполняется програм-
мирование FPGA, после чего устройство готово к работе. Согласование в
широком диапазоне частот достигается за счет использования в AFB специ-
альной структуры КИХ-фильтра и усовершенствованного метода вычисле-
ния коэффициентов. Хорошие показатели в широком диапазоне темпера-
тур достигаются путем выбора одного из нескольких наборов коэффициен-
тов КИХ-фильтра при помощи встроенного цифрового датчика температуры.
Реальный эффект применения этой технологии можно увидеть на
рис. 8.157. На рис. 8.157, а. показано распределение зеркальных побочных
составляющих в первой зоне Найквиста системы. Верхняя кривая на ри-
сунке — это характеристика двухканальной системы с временным разделе-
нием с тщательным согласованием разводки каналов. Вид кривой явно сви-
детельствует о том, что система была вручную подстроена под частоту ана-
логового входного сигнала 128 МГц. Аналогичным способом по виду кривой
на рис. 8.157, б. можно определить, что система вручную подстроена под
температуру 40 °C.
Несмотря на тщательную разводку печатной платы, строгое согласова-
ние входной цепи, строгое согласование схемы распределения тактового
сигнала и использование общих источников опорного напряжения в АЦП
AD12400, при отклонении частоты и/или температуры от значений, при
которых производилась ручная подстройка, динамический диапазон силь-
но уменьшается. Причина этого становится очевидна для любой двухка-
нальной системы с временным разделением, если проанализировать неко-
а б
Зеркальная составляющая
в зависимости от частоты:
влияние усовершенствованного
банка фильтров (AFB), подстройка
на входную частоту 128 МГц
Рис. 8.157. Характеристики системы с ручной подстройкой в диапазоне частот и тем-
ператур «до и после» компенсации с помощью AFB
Зеркальная составляющая
в зависимости от температуры:
влияние усовершенствованного
банка фильтров (AFB), подстройка
на входную частоту 128 МГц
Список литературы: 8.6. Программное радио и дискретизация 767
торые из факторов, воздействующих на схему. Например, температурный
коэффициент усиления типичного высококачественного 12-разрядного АЦП
равен 0,02 %/°С. В этом случае изменение температуры на 10 °C вызовет
изменение усиления на 0,2 % и даст уровень зеркальной побочной состав-
ляющей 60 дБс (см. выражение (8.23)). С учетом одной только этой тем-
пературной характеристики предсказанное значение зеркальной побочной со-
ставляющей на 3 дБ хуже, чем значение на рис. 8.157, б, для температуры 30 °C.
Для сравнения — характеристики динамического диапазона, приведенные
на рис. 8.157, имеют примерно постоянный уровень при использовании
компенсации с помощью AFB. В действительности показатели динамичес-
кого диапазона превышают уровень 12-разрядного разрешения в полосе при-
мерно 190 МГц и диапазоне температур 40 °C. Другим значительным пре-
имуществом данного подхода является то, что при использовании допол-
нительного набора коэффициентов КИХ-фильтра диапазон температур
может составлять не от 20 до 60 °C, как на рисунке, а от 0 до 85 °C.
За счет применения временного разделения с последующей цифровой
пост-обработкой в AD12400 реализованы впечатляющие характеристики:
диапазон частот входных сигналов с полной мощностью равен 300 МГц,
отношение сигнал/шум для входного сигнала с частотой 180 МГц при час-
тоте дискретизации 400 MSPS равно 64 дБ FS, a SFDR при тех же парамет-
рах — 75 дБ FS.
Применение концепции временного разделения для улучшения характе-
ристик высокоскоростных АЦП становится общей тенденцией. Усовершен-
ствованные методы цифровой пост-обработки, такие как AFB, обеспечива-
ют решение задачи жесткого согласования каналов при разрешениях, кото-
рые раньше невозможно было достичь в системах с временным разделением.
Они позволяют повысить уровень эффективности современных высокоско-
ростных АЦП и упрощают создание систем и устройств для наиболее требо-
вательных приложений, таких как формирование медицинских изображе-
ний, точные дозаторы лекарственных препаратов, радары с синтезированной
апертурой, системы связи с цифровым формированием диаграммы направ-
ленности, усовершенствованные системы тестирования, измерительные си-
стемы и т. д. Эта технология приведет к значительному прогрессу, который
позволит в ближайшем будущем реализовать 14-разрядные/400-М8Р8 и
12-разрядные/800-М8Р8 АЦП.
Список литературы
8.6. Программное радио и дискретизация
на промежуточной частоте
1. Richard Groshong and Stephen Ruscak. Undersampling Techniques Simplify Digital
Radio. Electronic Design, May 23 1991, pp. 67—78.
2. Lackey and Upmall. SPEAKeasy: The Military Software Radio. IEEE Communications
Magazine, May 1995, pp. 56—61.
3. Brad Brannon. Using Wide Dynamic Range Converters for Wideband Radios. RF
Design, May 1995, pp. 50—65.
4. Jim Mitola. The Software Radio Architecture. IEEE Communications Magazine,
Vol. 33, No. 5, May 1995, pp. 26-38.
768 Глава 8. Применение преобразователей данных
5. Jeffery Wepman. Analog-to-Digital Converters and Their Applications in Radio
Receivers. IEEE Communications Magazine, Vol. 33, No. 5, May 1995, pp. 39—45.
6. Brad Brannon. Wide Dynamic Range A/D Converters Pave the way for Wideband
Digital Radio Receivers. EDN, November 7, 1996, pp. 187—205.
7. Dave Robertson. Selecting Mixed-Signal Components for Digital Communication
Systems I: An Introduction. Analog Dialogue, 30-3, 1996, www.analog.com.
8. Dave Robertson. Selecting Mixed-Signal Components for Digital Communication
Systems II: Digital Modulation Schemes. Analog Dialogue, 30-4, 1996, www.analog.com.
9. Dave Robertson. Selecting Mixed-Signal Components for Digital Communication
Systems III: Sharing the Channel. Analog Dialogue, 31-1, 1997, www.analog.com.
10. Dave Robertson. Selecting Mixed-Signal Component for Digital Communications
Systems IV: Receiver Architecture Considerations. Analog Dialogue, 31-2, 1997,
www.analog.com.
11. Dave Robertson. Selecting Mixed-Signal Components for Digital Communications
Systems V: Aliases, Images, and Spurs. Analog Dialogue, 31-3, 1997, www.analog.com.
12. Brad Brannon. Digital Radio Receiver Design Requires Re-Evaluation of Parameters.
EDN, November 6, 1998, pp. 163-170.
13. Brad Brannon, Dimitrios Efstathiou, and Tom Gratzek. A Look at Software Radios:
Are they Fact or Fiction? Electronic Design, December 1, 1998.
14. Brad Brannon. Designing a Superheterodyne Receiver Using an IF Sampling
Diversity Chipset. Application Note AN-502, Analog Devices, 1998, www.analog.com.
15. Patrick Mannion. Direct Conversion Prepares for Cellular Prime Time. Electronic
Design, November 22, 1999, pp. 85—95.
16. Louis E. Frenzel. Designers Face Tough Challenges in 3G Cellular/PCS Phone
Specs. Electronic Design, October 2, 2000, pp. 107—122.
17. Brad Brannon and Chris Cloninger. Redefining the Role of ADCs in Wireless.
Applied Microwave and Wireless, March 2001, pp. 94—105.
18. Brad Brannon. Correlating High Speed ADC Performance to Multicarrier 3G
Requirements. RF Design, June 2003, pp. 22—28.
19. Brad Brannon. Brad's Radio Page, www.converter-radio.com.
20. Brad Brannon. Overcoming Converter Nonlinearities with Dither. Application Note
AN-410, Analog Devices, 1995, www.analog.com.
21. Walt Jung. Simple Wideband Noise Generator. Ideas for Design, Electronic Design,
October 1, 1996.
22. Walt Jung. Op Amp Applications. Analog Devices, 2002, ISBN 0-916550-26-5,
p. 6—165.
23. Walt Kester. Add Noise Dither to Blow Out ADCs' Dynamic Range. Electronic
Design, Analog Applications Supplement, November 22, 1999, pp. 20—26.
24. Doug Mercer and Joe DiPilato. DACs are Optimized for Communication Transmit
Path. Analog Dialogue, 30-3, 1996, www.analog.com.
25. Editor, «New TxDAC Generation,» Analog Dialogue, Volume 33- 4, April 1999,
www.analog.com.
26. W.C Black Jr. and D.A. Hodges. Time Interleaved Converter Arrays. IEEE
International Conference on Solid State Circuits, February 1980, pp. 14—15.
27. W. C Black Jr. and D.A. Hodges. Time Interleaved Converter Arrays. IEEE Journal
of Solid State Circuits, December 1980, Volume 15, pp. 1022—1029.
28. K. Poulton, et al. A 20GS/s 8-b ADC with a 1MB Memory in 0.18 micron CMOS.
IEEE International Conference on Solid State Circuits, February 2003, pp. 318—319, 496.
29. Press Release. Agilent Technologies Introduces Industry First 6 GHz, 20 GSample/
s-Per-Channel Oscilloscope and Probing Measurement System, Agilent Technologies Web
Page, November 1, 2002, www.agilent.com/about/newsroom/presrel/archive.html.
30. S. Velazquez. High-Performance Advanced Filter Bank Analog-to-Digital Converter
for Universal RF Receivers. IEEE SP International Symposium on Time-Frequency and
Time-Scale Analysis, 1998, pp. 229—232.
8.7. Прямой цифровой синтез
31. Technical Description. Advanced Filter Bank (AFB) Analog-to-Digital Converter
Technical Description. V Corp Technologies, www.v-corp.com/analogfilterbank.htm.
32. N. Kurosawa, et al. Explicit Analysis of Channel Mismatch Effects in Time
Interleaved ADC Systems. IEEE Transactions on Circuits and Systems I - Fundamental
Theory and Applications, Volume 48, Number 3, March 2003.
33. M. Gustavsson, J.J. Wikner and N.N. Tan. CMOS Data Converters for
Communications, Boston: Kluwer Academic Publishers, 2000, pp. 257—267.
34. Brad Brannon. Aperture Uncertainty and ADC System Performance. Application
Note, AN-501, Analog Devices, Inc., www.analog.com.
35. Mark Looney. Advanced Digital Post-Processing Techniques Enhance Performance
in Time-Interleaved ADC Systems. Analog Dialogue, 37-8, August 2003, www.analog.com.
8.7. Прямой цифровой синтез
Уолт Кестер
Введение в технологию DDS
Синтезатор частот используется для генерации некоторого множества час-
тот из одной или большего числа опорных частот. Эти устройства применя-
ются в течение десятилетий, особенно в системах связи. Многие схемы
синтезаторов основаны на коммутации и смешивании частот выходных
сигналов набора кварцевых генераторов. В основе других схем лежат изве-
стные методы фазовой автоподстройки частоты (ФАПЧ, PLL). Эта тради-
ционная технология представлена на рис. 8.158. Опорный сигнал фиксиро-
ванной частоты подается на один из входов компаратора фазы. Другой вход
компаратора фазы подключается к делителю частоты на N, на который, в
свою очередь, подается сигнал от генератора, управляемого напряжением
(ГУН, VCO). Наличие отрицательной обратной связи приводит к тому, что
сигнал на выходе включенного в контур обратной связи фильтра принима-
Банк генераторов
Петля ФАПЧ
Рис. 8.158. Частотный синтез с использованием кварцевых генераторов и схем ФАПЧ
25—2852
770 Глава 8. Применение преобразователей данных
ет такое значение, при котором выходная частота ГУН становится равна
частоте опорного сигнала, умноженной на N. Постоянная времени контура
обратной связи зависит от характеристик фильтра в контуре. При проекти-
ровании ФАПЧ часто приходится идти на компромиссы между фазовым
шумом, скоростью подстройки, разрешающей способностью по частоте и т. д.
По данной тематике существует немало хорошей литературы, например 1-5.
Analog Devices выпускает полный набор ФАПЧ с целочисленным и дроб-
ным коэффициентом деления N, а также программное обеспечение для
моделирования.
В связи с широким распространением цифровых методов в измерительной
технике и системах связи появился цифровой метод генерации набора частот
от источника опорной частоты, который называется прямым цифровым син-
тезом (DDS, Direct Digital Synthesis). Базовая архитектура ЛЛ5-системы пред-
ставлена на рис. 8.159. В этой упрощенной модели стабильный генератор так-
тового сигнала управляет программируемым ПЗУ (PROM), в котором хранят-
ся значения для одного или нескольких полных периодов синусоидального
сигнала (или другого сигнала произвольной формы). По мере того как счетчик
адреса проходит через каждую ячейку памяти, содержащееся в ней значение
цифровой амплитуды сигнала подается на ЦАП, который, в свою очередь,
воспроизводит аналоговый выходной сигнал. Спектральная чистота конечно-
го аналогового выходного сигнала определяется прежде всего ЦАП. Фазовый
шум, по существу, равен шуму опорного тактового сигнала.
Система прямого цифрового синтеза (DDS) отличается от систем с ФАПЧ
(PLL) несколькими моментами. В связи с тем что DDS является системой с
дискретными данными, должны быть рассмотрены все проблемы, возника-
ющие вследствие дискретизации: шум квантования, наложение спектров,
фильтрация и т. д. Например, гармоники высокого порядка выходных ча-
стот ЦАП отображаются в полосу Найквиста и не могут быть отфильтро-
ваны, тогда как гармоники высокого порядка в выходном сигнале ФАПЧ-
синтезаторов могут быть отфильтрованы. Существуют и другие аспекты,
которые будут обсуждаться в дальнейшем.
Рис. 8.159. Фундаментальная система прямого цифрового синтеза
Основная проблема описанной выше простой ДР5-системы состоит в
том, что выходная частота может быть изменена только путем изменения
частоты опорного тактового сигнала или посредством перепрограммиро-
вания ПЗУ, за счет чего в значительной степени снижается ее гибкость.
В реальных £Ш5-системах изменение выходной частоты реализуется более
гибким и эффективным способом — за счет применения цифровой схемы,
называемой генератором с цифровым управлением (Numerically Controlled
Oscillator, NCO). Блок-схема подобной системы представлена на рис. 8.160.
Сердцем системы является фазовый аккумулятор (сумматор с накопле-
нием), содержимое которого обновляется один раз в каждом тактовом цик-
ле. Каждый раз при обновлении фазового аккумулятора цифровое число Л/,
хранящееся в регистре приращения фазы (delta phase register), добавляется к
числу, содержащемуся в регистре фазового аккумулятора. Предположим,
что число в регистре приращения фазы равно 00...01 и что начальное содер-
жимое фазового аккумулятора равно 00...00. На каждом тактовом цикле
содержимое фазового аккумулятора обновляется на 00...01. Если аккумуля-
тор является 32-разрядным, для возврата его значения в состояние 00...00
требуется 232 тактовых циклов (более 4 миллиардов), после чего цикл по-
вторяется.
Усеченное значение выходного сигнала фазового аккумулятора служит
адресом для таблицы преобразования синуса (или косинуса). Каждый адрес
в таблице соответствует точке синусоидального сигнала с фазой от 0° до 360°.
Таблица преобразования содержит информацию, соответствующую цифро-
вой амплитуде для одного полного периода синусоидального сигнала. Та-
ким образом, с помощью таблицы преобразования выполняется отображе-
ние информации, поступающей от фазового аккумулятора в значение циф-
ровой амплитуды, подаваемое на ЦАП. На практике необходимо хранить
данные только для сектора до 90°, потому что данные об остальных квад-
рантах содержатся в двух MSB. Для дальнейшего уменьшения размера таб-
Накопление фазы
Рис. 8.160. Гибкая система DDS
Глава 8. Применение преобразователей данных
лиц преобразования были предложены различные методы вычисления зна-
чений синуса, однако фундаментальная концепция схемы при этом не ме-
няется.
Рассмотрим случай для п = 32 и М = 1. До наступления переполнения
фазовый аккумулятор проходит через каждое из 232 возможных выходных
значений. Соответствующая частота выходного синусоидального сигнала
равна частоте тактового сигнала, деленной на 232. Если М = 2, то перепол-
нение фазового аккумулятора происходит в два раза чаще, и выходная час-
тота удваивается. Это можно обобщить следующим образом.
Для и-разрядного сумматора фазы (в большинстве Л/)5-систем значе-
ние п лежит в диапазоне от 24 до 32) существует 2п возможных значений
фазы. Число М в регистре приращения фазы представляет собой величину,
на которую текущее содержимое фазового аккумулятора увеличивается в
каждом тактовом цикле. Если fc — тактовая частота, то частота выходного
синусоидального сигнала равна:
М • f
(8.28)
Это уравнение известно как уравнение настройки DDS. Обратите внимание,
что разрешающая способность системы по частоте равна fc /2п, Для п = 32
разрешающая способность больше, чем одна четырехмиллиардная fc\ В реаль-
ной РЛУ-системе не все разряды от фазового аккумулятора поступают на
таблицу преобразования: выходное значение фазы усекается, за счет чего
уменьшается размер таблицы при сохранении разрешения по частоте. Коли-
чество отбрасываемых битов зависит от разрешающей способности и
характеристик ЦАП. Как правило, разрядность адреса фазы должна на
2—4 бита превышать разрядность ЦАП, однако действительное значение
варьируется для разных устройств. Разрядность адреса таблицы преобра-
зования должна быть достаточной для того, чтобы общий шум и искаже-
ния аналогового выходного сигнала ограничивались только ЦАП, а не
усечением фазы.
Описанная выше базовая Д05-система представляет собой чрезвычай-
но гибкое решение с весьма высокой разрешающей способностью. Частота
может быть мгновенно изменена без разрыва фазы простым изменением
содержимого Af-регистра. В реальных Д05-системах требуется, чтобы но-
вое значение частоты сначала было загружено по последовательному или
параллельному порту во внутренний буферный регистр, который предше-
ствует Л/-регистру с параллельным выходом. Это необходимо для миними-
зации числа выводов корпуса. После того как новое слово будет загружено
в буферный регистр, оно синхронно переносится в регистр приращения
фазы, благодаря чему все разряды регистра приращения фазы изменяются
одновременно. Число тактовых циклов, требуемых для загрузки регистра
приращения фазы, определяет максимальную скорость изменения значе-
ния выходной частоты.
На рис. 8.161 показан другой способ описания принципа работы фазо-
вого аккумулятора. Синусоидальное колебание представляется в виде век-
тора, вращающегося по фазовой окружности. Каждая обозначенная точка
на фазовой окружности соответствует эквивалентной точке на периоде си-
8.7. Прямой цифровой синтез 773
п Число точек = 2п
8 256
12 4, 096
16 65, 536
20 1, 048, 576
24 16, 777, 216
28 268, 435, 456
32 4, 294, 967, 296
48 281, 474, 976, 710, 656
Рис. 8.161. Цифровая фазовая плоскость
нусоидального сигнала. По мере вращения вектора генерируется соответ-
ствующий выходной синусоидальный сигнал. Один оборот вектора с по-
стоянной скоростью дает один полный период выходного синусоидального
сигнала. Фазовый аккумулятор обеспечивает эквивалент вращения вектора
по фазовой окружности с постоянной скоростью. Содержимое фазового
аккумулятора соответствует точкам в одном периоде выходного синусои-
дального сигнала.
Число дискретных точек на фазовой окружности определяется разреше-
нием фазового аккумулятора. Для «-разрядного аккумулятора имеется 2п
точек на фазовой окружности. Цифровое слово, содержащееся в регистре
приращения фазы (Л/), задает «размер шага» при каждом обновлении со-
держимого аккумулятора. Оно указывает фазовому аккумулятору на необ-
ходимость смещения на М точек по фазовой окружности по каждому им-
пульсу тактового сигнала системы.
На рис. 8.162 показан процесс прохождения сигнала в Д05-системе.
Фазовый аккумулятор, по сути, является счетчиком по модулю М, который
I--- В цифровой области
Рис. 8.162. Прохождение сигнала в ЛЛУ-системе
Аналоговый
Глава 8. Применение преобразователей данных
инкрементирует свое содержимое по каждому тактовому импульсу. Вели-
чина инкремента определяется двоичным входным числом или словом (Л/),
которое содержится в регистре приращения фазы. Цифровая фазовая ин-
формация, формируемая фазовым аккумулятором, преобразуется в соот-
ветствующее цифровое значение амплитуды процедурой преобразования
фазы в амплитуду. Наконец, ЦАП выполняет преобразование цифровой
амплитуды в соответствующий аналоговый сигнал.
В середине 1980-х годов, когда ИС DDS приобрели популярность, циф-
ровой NCO обычно производился по КМОП-технологии, а ЦАП — по би-
полярной, поэтому система DDS размещалась на двух кристаллах. Однако
современный уровень КМОП-технологии позволяет реализовывать не только
цифровые схемы, но также и высококачественные ЦАП (что подтверждает-
ся многими изделиями семейства TxDAC производства Analog Devices).
Поэтому современные £Ш5-системы являются полностью интегрирован-
ными, а также включают в себя много дополнительных функций.
Наложение в DDS-системах
Существует одно важное ограничение, накладываемое на диапазон выход-
ных частот, которые могут генерироваться простой 1)1)5-системой. Крите-
рий Найквиста гласит, что минимальное значение тактовой частоты (часто-
ты дискретизации) должно равняться удвоенной частоте выходного сигнала.
В действительности, в силу ограничений практического характера, макси-
мальная частота выходного сигнала составляет примерно 40 % тактовой ча-
стоты. На рис. 8.163 показан выходной сигнал ЦАП в ЛЛ5-системе с
выходной частотой 30 МГц и тактовой частотой 100 MSPS. Как показано на
рисунке, после ЦАП сигнал должен подаваться на антиалайзинговый фильтр
для подавления наименьшей зеркальной частоты (100 — 30 = 70 МГц).
Заметьте, что амплитудная характеристика выхода ЦАП (до фильтра-
ции) подчиняется закону sin(x)/x и имеет нули на тактовой частоте и часто-
Рис. 8.163. Наложение в ЛЛ5-системе с выходной частотой 30 МГц и тактовой часто-
той 100 MSPS
8. 7. Прямой цифровой синтез
тах, кратных ей. Точное выражение для нормированной выходной ампли-
туды, A(f0), имеет вид:
• ( Л fо "1
sin —
<8-29>
Л
где f0 — частота выходного сигнала, fc — тактовая частота.
Этот спад в АЧХ возникает из-за того, что выходной сигнал ЦАП явля-
ется не последовательностью импульсов нулевой длительности (как в слу-
чае идеального импульсного дискретизатора), а последовательностью пря-
моугольных импульсов, длительность которых равна величине, обратной
частоте обновления. Значение функции sin (х)/х на частоте Найквиста (рав-
ной 1/2 частоты обновления ЦАП) уменьшается на 3,92 дБ. На практике
передаточная функция антиалайзингового фильтра проектируется таким
образом, чтобы компенсировать зависимость sin(x)/x и сделать общий час-
тотный отклик относительно плоским на частотах до максимальной часто-
ты выходного сигнала ЦАП (как правило, 40% частоты обновления).
Другим важным аспектом является то, что в отличие от систем с ФАПЧ
гармоники частоты выходного сигнала в Д05-системе проявляются в ос-
новной полосе вследствие эффекта наложения. Эти гармоники невозмож-
но подавить антиалайзинговым фильтром. Например, если тактовая часто-
та равна 100 MSPS, а частота выходного сигнала равна 30 МГц, то вторая
гармоника выходного сигнала появится не только на 60 МГц (вне полосы
Найквиста), но и на 100 — 60 = 40 МГц (внутриполосная составляющая,
возникающая за счет наложения). Аналогичным образом третья гармоника
(90 МГц) проявится внутри полосы Найквиста на 100 — 90 = 10 МГц, а
четвертая — на 120 — 100 = 20 МГц. Гармоники более высоких порядков
также попадут в полосу Найквиста (от 0 до fc/T). Положение первых четы-
рех показано на рисунке.
Частотное планирование в DDS-системах
Во многих областях применения схем DDS основное внимание уделяется
спектральной чистоте выходного сигнала ЦАП. К сожалению, измерение,
прогнозирование и анализ этой характеристики усложняются рядом взаи-
мосвязанных факторов.
Разумным решением является тщательный подбор значений частот вы-
ходного и тактового сигналов таким образом, чтобы гармоники, возникаю-
щие за счет эффекта наложения, не были близки к частоте выходного сиг-
нала и, следовательно, могли быть подавлены полосовым фильтром.
Даже идеальный А-разрядный ЦАП в составе £)/)5-системы может да-
вать нежелательные гармоники, амплитуда которых сильно зависит от от-
ношения частоты выходного сигнала к частоте тактового сигнала. Это выз-
вано тем, что спектральный характер шума квантования ЦАП изменяется с
изменением этого отношения, несмотря на то что теоретическое средне-
квадратичное значение шума остается равным q/V2 (где q — вес LSB). Пред-
Глава 8. Применение преобразователей данных
положение о том, что шум квантования проявляется как белый шум и име-
ет равномерное распределение в полосе Найквиста для ДЛУ-системы, не
является истинным (это предположение в большей мере соответствует ис-
тине в системах на базе АЦП, так как АЦП добавляет к сигналу определен-
ное количество шума, что приводит к выравниванию вероятностей ошибок
квантования. Однако определенная степень корреляции при этом все рав-
но существует). Например, если частота выходного сигнала ЦАП выбрана
равной целому частному тактовой частоты, то шум квантования будет со-
средоточен на частотах, кратных частоте выходного сигнала, т. е. он будет
сильно зависеть от сигнала. Если значение частоты выходного сигнала не-
много сместить, то шум квантования будет иметь более случайный харак-
тер, что приведет к улучшению эффективного SFDR.
Это иллюстрирует рис. 8.164, на котором показан БПФ длиной 4096 то-
чек для выходного сигнала идеального 12-разрядного ЦАП. Для левого гра-
фика отношение тактовой частоты к частоте выходного сигнала было взято
равным 32 (на длину выборки, для которой выполняется БПФ, приходится
128 периодов синусоиды), и результирующий SFDR равен примерно 78 дБс.
Для правого графика величина отношения взята равной 32,25196850394 (на
длину выборки, для которой выполняется БПФ, приходится 127 периодов
синусоиды), и эффективный SFDR увеличивается до 92 дБс. Для данного
идеального случая мы наблюдаем изменение SFDR на 16 дБ при незначи-
тельном изменении отношения частот.
SFDR = 76 дБс
SFDR = 92 дБс
Рис. 8.164. Влияние отношения тактовой частоты к частоте выходного сигнала на SFDR
для идеального 12-разрядного ЦАП
Таким образом, наилучшее значение SFDR может быть получено путем
тщательного выбора частот тактового и выходного сигналов. Однако это
может быть невозможно в некоторых приложениях. В системах с АЦП до-
бавление ко входному сигналу случайного шума с небольшим уровнем при-
водит к уравниванию вероятностей ошибок квантования и снижает опи-
санный выше эффект. Как показано на рис. 8.165, то же самое возможно и
в /Ж^-системах16. Перед тем как цифровое слово амплитуды синусоидаль-
ного сигнала DDS загружается в ЦАП, к нему добавляется выходное значе-
ние генератора псевдослучайного цифрового шума. Амплитуда цифрового
шума примерно равна 1/2 LSB. При этом достигается выравнивание веро-
ятностей ошибок квантования за счет незначительного увеличения суммар-
8.7. Прямой цифровой синтез 777
Рис. 8.165. Уравнивание вероятностей ошибок квантования и повышение SFDR в
/ШУ-системе за счет добавления цифрового псевдослучайного шума
ного выходного шумового порога. Однако в большинстве задач, в которых
применяется DDS, имеется достаточная гибкость при выборе различных
отношений частот и не требуется применение псевдослучайного шума.
Современные интегрированные DDS-системы
За последние несколько лет появилось большое количество интегрирован-
ных микросхем DDS. В этом разделе мы отметим некоторые типичные DDS,
обладающие высокой степенью интеграции и гибкости.
AD9834 является представителем семейства /ШУ-устройств с низкой
потребляемой мощностью производства Analog Devices. Оно работает с ча-
стотой дискретизации до 50 MSPS и имеет рассеиваемую мощность всего
20 мВт. Упрощенная функциональная схема и ключевые характеристики
AD9834 показаны на рис. 8.166 и 8.167 соответственно.
AVDD AGND DGND DVDD САР/2ЛУ
REFOUT FS ADJUST
FSYNC SCLK SDATA
РSELECT
SLEEP RESET
Рис. 8.166. 50-MSPS DDSсинтезатор AD9834 с малым потреблением мощности (20 мВт)
778 Глава 8. Применение преобразователей данных
• Синусоидальная/треугольная форма выходного сигнала ЦАП.
• Программируемая фаза и частота.
• SFDR в узкой полосе >72 дБ.
• 10-разрядный ЦАП, 28-разрядный фазовый аккумулятор.
• Рабочее напряжение от 2,3 В до 5,5 В.
• Низкая потребляемая мощность (20—35 мВт).
• Функция пониженного энергопотребления.
• Два регистра частоты и два регистра фазы.
• Малое дрожание фазы выходного сигнала.
• Последовательный интерфейс SPI с тактовой частотой до 40 МГц.
• Скорость 25 МГц (AD9833)/50 МГц (AD9834).
• Последовательная загрузка.
• Расширенный температурный диапазон: от -40 до +105 °C.
• Корпус: 10-контактный цБО1С (AD9833) или 20-контактный TSSOP (AD9834).
Рис. 8.167. Ключевые характеристики AD9833/AD9834
AD9834 содержит 10-разрядное ядро TxDAC, имеющее SFDR в узкой
полосе, превышающий 72 дБ. Возможен режим работы без использования
ПЗУ значений синуса (SIN ROM); при этом выходной сигнал имеет тре-
угольную форму. Фазовый аккумулятор имеет разрядность 28 бит; перед
подачей на адресный вход ПЗУ таблицы преобразования выходное значе-
ние фазового аккумулятора усекается до 12 бит. Внутренний компаратор
позволяет формировать прямоугольный выходной сигнал, который может
использоваться в качестве тактового сигнала другими устройствами. Запись
данных в AD9834 выполняется по трехпроводному последовательному ин-
терфейсу, который работает с частотой тактовой синхронизации до 40 МГц
и совместим со стандартными интерфейсами DSP и микроконтроллеров.
AD9834 имеет вывод, который позволяет реализовать внешнее управле-
ние режимом отключения питания. Незадействованные блоки устройства
могут отключаться от питания в целях снижения потребляемого тока.
В устройстве имеются функции фазовой и частотной модуляции. Реги-
стры частоты имеют разрядность 28 бит, а регистры фазы — 12 бит. Так как
AD9834 имеет различные варианты формы выходного сигнала, его можно
конфигурировать для использования в различных приложениях. Одной из
возможных областей применения AD9834 являются системы с модулиро-
ванными сигналами. Устройство может использоваться для реализации как
простых схем модуляции, таких как частотная манипуляция (FSK), так и
более сложных (например, GMSK и QPSK)- В схемах с FSK в два регистра
частоты загружаются разные значения: значение частоты метки (двоичной
единицы) и значение частоты паузы (двоичного нуля). Поток цифровых
данных, модулирующих частоту несущей, подается на вывод FSELECT. Для
выполнения фазовой манипуляции (PSK) в AD9834 имеется два регистра
фазы. При фазовой манипуляции происходит изменение фазы сигнала не-
сущей частоты под воздействием битового потока, поступающего на вход
модулятора. AD9834 также может применяться в схемах генераторов сигна-
лов. Вследствие низкой потребляемой мощности устройство может исполь-
зоваться в качестве гетеродина.
8.7. Прямой цифровой синтез
Параметр AD9830 AD9831 AD9832 AD9833 AD9834 AD9835
Частота тактового сигнала 50 МГц 25 МГц 25 МГц 25 МГц 50 МГц 50 МГц
Разрешение ЦАП 10 бит 10 бит 10 бит 10 бит 10 бит 10 бит
Интерфейс Паралл. Паралл. Послед. Послед. Послед. Послед.
Регистры фазы/частоты 4 per. фазы 2 per. частоты 4 per. фазы 2 per. частоты 4 per. фазы 2 per. частоты 2 per. фазы 2 per. частоты 2 per. фазы 2 per. частоты 4 per. фазы 2 per. частоты
Напряжение питания 5В±5% От 2,97 до 5,5 В От 2,97 до 5,5 В От 2,5 до 5,5 В От 2,5 до 5,5 В 5 В ± 5%
Мощность 275 мВт max 45 мВт max 45 мВт 21 мВт 24 мВт 200 мВт max
Корпус 48-TQFP 48-TQFP 16-TSSOP 10-|iSOIC 20-TSSOP 16- TSSOP
Выход компаратора Да
Рис. 8.168. Синтезаторы DDSc низким потреблением мощности AD983x
На рис. 8.168 представлен обзор современных DDS с низким потребле-
нием мощности производства Analog Devices.
AD9858 представляет собой синтезатор прямого цифрового синтеза (DDS)
с 10-разрядным ЦАП, работающим со скоростью до 1 GSPS. AD9858 явля-
ется полностью программируемым полнофункциональным синтезатором
частот, способным генерировать выходной синусоидальный сигнал часто-
той до 400+ МГц с возможностью быстрой перестройки. Эти функцио-
нальные возможности достигаются за счет применения улучшенной DDS-
технологии и внутреннего высокоскоростного высококачественного ЦАП.
AD9858 обеспечивает возможность быстрой перестройки частоты и точной
подстройки частоты с высоким разрешением (цифровое слово, задающее
частоту, имеет разрядность 32 бита). Управляющие слова и слова частот-
ной настройки загружаются в AD9858 в последовательном или параллельном
(8 бит) формате. AD9858 содержит интегрированный генератор подкачки
зарядов (СР, charge pump) и фазочастотный детектор (PFD. phase frequency
detector), предназначенные для применения в задачах, в которых использу-
ется комбинация высокоскоростного ЛОУ-синтезатора и схемы ФАПЧ. Также
внутри кристалла имеется аналоговый смеситель, предназначенный для
применения в задачах, в которых используется комбинация DDS, ФАПЧ и
смесителя (например, в схемах переноса частоты, тюнерах и т. п.). Смеси-
тель может работать на частотах до 2 ГГц.
AD9858 также имеет функцию деления частоты входного тактового сиг-
нала на 2, что позволяет использовать внешний тактовый сигнал с частотой
до 2 ГГц. AD9858 работает в расширенном промышленном диапазоне тем-
ператур от —40 до +85 °C. Функциональная блок-схема устройства и его
ключевые характеристики приведены на рис. 8.169 и 8.170 соответственно.
Глава 8. Применение преобразователей данных
Рис. 8.169. 1 GSPS DDS с фазовым детектором и аналоговым умножителем AD9858
• Частота внутреннего тактового сигнала 1 GSPS.
• Интегрированный 10-разрядный ЦАП.
• Фазовый шум менее 130 дБс/Гц при отстройке на 1 кГц (на выходе ЦАП).
• 32-разрядный программируемый регистр частоты.
• Упрощенный 8-разрядный параллельный и последовательный SP! управляющий ин-
терфейс.
• Возможность автоматической развертки по частоте.
• Напряжение питания 3,3 В.
• Рассеиваемая мощность менее 2 Вт при 1 ГГц.
• 100-контактный корпус для поверхностного монтажа LQFP.
• Интегрированный программируемый генератор подкачки зарядов и фазовый/частот-
ный детектор со схемой быстрого захвата.
• Интегрированный 2 ГГц смеситель.
Рис. 8.170. Основные характеристики 1-GSPS DDS AD9858
AD9858 легко конфигурируется путем записи данных во внутренние
цифровые регистры, управляющие всеми операциями устройства, по пос-
ледовательному или параллельному порту. Имеется четыре пользовательс-
ких профиля, которые могут быть выбраны парой внешних выводов. Эти
профили позволяют выполнять независимое задание слова настройки час-
тоты и слова регулировки смещения фазы для каждой из четырех выбирае-
мых конфигураций. AD9858 может быть запрограммирован для работы в
однотональном режиме и в режиме с разверткой по частоте (frequency-
sweeping). Для минимизации энергопотребления также имеется программи-
руемый режим «полного сна» (full-sleep), в котором прекращается подача
питания на большую часть устройства и снижается потребляемый ток.
8.7. Прямой цифровой синтез
Рис. 8.171. Преобразование с повышением частоты с одной петлей обратной связи на
базе AD9858
На рис. 8.171 показана схема AD9858 в конфигурации преобразователя
с повышением частоты, где внутренний фазовый детектор и внутренняя
схема подкачки заряда в комбинации с внешним фильтром и ГУН форми-
руют высокоскоростную схему ФАПЧ. В стандартной конфигурации DDS
AD9858 может генерировать сигналы с частотой до 400 МГц. При создании
на его основе схемы PLL с высокочастотным ГУН и делителем возможно
умножение опорной частоты для получения выходного сигнала в гигагер-
цовом диапазоне. Более подробную информацию о применении устройств
DDS для построения преобразователей с повышением частоты можно най-
ти В 1О’И’ 15.
На рис. 8.172 представлен обзор высокоскоростных DDS, выпускаемых
Analog Devices.
AD9954 представляет собой 14-разрядный DDSc быстродействием 400 MSPS
и напряжением питания 1,8 В, обладающий расширенными возможностя-
ми внутренней /З’Л-модуляции. Он является полнофункциональным про-
граммируемым высокочастотным синтезатором и способен генерировать
аналоговые синусоидальные сигналы с частотой до 200 МГц с возможнос-
тью быстрой перестройки частоты и высоким разрешением настройки (раз-
рядность слова настройки частоты — 32 бита). Управляющие слова и слово
настройки частоты загружаются в AD9954 по последовательному порту вво-
да/вывода.
AD9954 содержит внутреннее интегрированное статическое ОЗУ объе-
мом 1024 х 32 бит для поддержки гибкой развертки по частоте в различных
режимах. Также поддерживается режим линейной развертки по частоте,
параметры которого задаются пользователем. Устройство содержит внутрен-
ний высокоскоростной компаратор для генерации прямоугольного сигнала.
AD9954 работает в расширенном индустриальном диапазоне температур от
—40 до +85 °C. Упрощенная функциональная схема и основные характерис-
тики AD9954 показаны на рис. 8.173 и 8.174 соответственно. На рис. 8.175
приведен обзор семейства DDS с быстродействием 400 MSPS производства
Analog Devices.
00
М
Параметр AD9850 AD9851 AD9852 AD9854 AD9857 AD9858
Частота тактового сигнала 125 МГц 180 МГц 300 МГц 300 МГц 200 МГц 1 ГГц
Разрешение ЦАП 10 бит 10 бит 12 бит 12 бит 14 бит 14 бит
Управляющий интерфейс Пар./послед. Пар./послед. Пар./послед. Пар./послед. Послед. Пар./послед.
SFDR >50 дБс А 'вых 40 МГц >43 дБс при частоте Авых 70 МГц 80дБс 100 МГц (±1 МГц) 80 дБс при частоте Авых 100 МГц(±1 МГц) 80 дБс при частоте Авых 65 МГц (±100 кГц) >50 дБс при частоте Авых 360 МГц
Напряжение питания +3,3 В или +5,25 В От +2,7 до +5,25 В 3,3 в 3,3 В 3,3 В 3,3 В
Мощность 155 мВт при 110 МГц (+3,3 В) 555 мВт при 180 МГц От 1,9 до 2,7 Вт От 1,9 до 3,4 Вт От 1 до 2 Вт 1,9 при 1 ГГц
Корпус 28-SSOP 28-SSOP 80-LQFP 80-LQFP 80-LQFP 100-EPAD TQFP
Внутренний компаратор Есть Есть Есть Есть Нет Нет
Примечания Умножитель тактового сигнала (6х) Автоматическая развертка по частоте. Умножитель тактового сигнала (4—20х) Квадратурные выходы Режим модулятора или однотональный режим Автоматическая развертка по частоте, ФАПЧ, смеситель, входной тактовый сигнал 2 ГГц
Рис. 8.172. Высокоскоростные 7)/)5-синтезаторы AD985x
Глава 8. Применение преобразователей данных
8.7. Прямой цифровой синтез 783
Рис. 8.173. AD9954, 400-MSPS малопотребляющий 14-разрядный FSK-модулятор с
компаратором
• Частота внутреннего тактового сигнала 400 МГц.
• Напряжение питания 1,8 В.
• Интегрированный 14-разрядный ЦАП.
• ОЗУ на 1024 32-разрядных слов.
• 14-разрядная амплитудная модуляция.
• 32-разрядный программируемый регистр частоты.
• Внутренний генератор/буфер.
• Программируемый умножитель опорного тактового сигнала с коэффициентом умно-
жения 4х—20х.
• Высокоскоростной компаратор.
• Последовательный управляющий интерфейс SPL
• Автоматическая развертка по частоте.
• Рассеиваемая мощность менее 250 мВт при быстродействии 400 MSPS.
• Миниатюрный 48-контактный корпус TQFP.
Рис. 8.174. Основные характеристики 14-разрядного FSK-модулятора с быстродействием
400 MSPS, AD9954
По мере появления доступных высокопроизводительных КМОП ИС с
малым потреблением мощности появилась возможность добавления к основ-
ной функции Д05-функций цифровой квадратурной модуляции. На рис. 8.176
показана упрощенная блок-схема 14-разрядного квадратурного преобразо-
вателя с повышением частоты AD9857, имеющего быстродействие 200 MSPS.
AD9857 предназначен для применения в связных приложениях в качестве
Глава 8. Применение преобразователей данных
Параметр AD9859 AD9951 AD9952 AD9953 AD9954
Частота тактового сигнала (max) 400 МГц 400 МГц 400 МГц 400 МГц 400 МГц
Разрешение ЦАП 10 бит 14 бит Мбит Мбит 14 бит
Интерфейс Послед. Послед. Послед. Послед. Послед.
Напряжение питания 1,8 В 1,8 В 1,8 В 1,8 В 1,8 В
Мощность <250 мВт <250 мВт <250 мВт <250 мВт <250 мВт
ОЗУ фазы, частоты + +
Автоматическая развертка по частоте +
Компаратор + +
Рис. 8.175. Семейство 400-MSPS DDS с малым потреблением мощности
универсального //Q-модулятора/перестраиваемого преобразователя часто-
ты, однотонального DDS или интерполирующего ЦАП. Он имеет превос-
ходные динамические характеристики: SFDR в узкой полосе 80 дБ при ча-
стоте выходного сигнала 65 МГц. На рис. 8.177 приведен обзор DDS про-
изводства Analog Devices, которые оптимизированы для применения в
качестве //Q-модуляторов.
Рис. 8.176. 200-MSPS 14-разрядный цифровой преобразователь с повышением часто-
ты AD9857
Параметр AD9853 AD9856 AD9857
Частота тактового сигнала 165 МГц 200 МГц 200 МГц
Разрешение ЦАП 10 бит 12 бит 14 бит
Управляющий интерфейс Последовательный Последовательный Последовательный
SFDR >50 дБ на частоте 42 МГц (в однотональном режиме) >80 дБ в узкой полосе на частоте 70 МГц 80 дБ при частоте Авых 65 МГц (±100 кГц)
Напряжение питания От +3,3 до + 5 В +3 В +3,3 В
Мощность 750 мВт при 3,3 В От 1 до 1,5 Вт в зависимости от конфигурации От 1 до 2 Вт в зависимости от конфигурации
Корпус 44-MQFP 48-TQFP 80-LQFP
Примечания Полнофункцио- нальный QPSK и 16QAM - модулятор Работа в однотональном режиме или в режиме модулятора Работа в однотональном режиме или в режиме модулятора
Рис. 8.177. DDS I/Q квадратурные модуляторы
Список литературы
8.7. Прямой цифровой синтез
1. E.M. Gardner. Phaselock Techniques. Second Edition, John Wiley, 1979, ISBN
0-47-104294-3.
2. Ulrich L. Rohde, Digital PLL Frequency Synthesizers. Theory and Design, Prentice-
Hall, 1983, ISBN 0-13-214239-2.
3. Mike Curtin and Paul O' Brien. Phase-Locked Loops for High-Frequency Receivers
and Transmitters, Part 1. Analog Dialogue 33-3, 1999, www.analog.com.
4. Mike Curtin and Paul O'Brien. Phase-Locked Loops for High-Frequency Receivers
and Transmitters, Part 2. Analog Dialogue 33-5, 1999, www.analog.com.
5. R.E. Best. Phase-Locked Loops: Theory, Design and Applications. Fourth Edition,
McGraw-Hill, 1999, ISBN 0-07-134903-0.
6. Richard Cushing. A Technical Tutorial on Digital Signal Synthesis. Analog Devices,
1999, www.analog.com/dds.
7. David Buchanan. Choosing DACs for Direct Digital Synthesis. Application Note
AN-237, Analog Devices, www.analog.com.
8. Richard Cushing. Amplitude Modulation of the AD9850 Direct Digital Synthesizer.
Application Note AN-423, Analog Devices, www.analog.com.
9. Cohn Slattery. Programming the AD9832/DA9835. Application Note AN-621, Analog
Devices, www.analog.com.
10. Richard Cushing. Single-Sideband Upconversion of Quadrature DDS Signals to
the 800-to-2500-MHz Band. Analog Dialogue, 34-3, 2000, www.analog.com.
11. Ken Gentile. Digital Upconverter 1C Tames Complex Modulation. Microwaves
and RF, August, 2000.
Глава 8. Применение преобразователей данных
12. Jon Baird. 400 Msamples DDSs Run on Only +1.8 VDC. Microwaves and RF,
December 2002.
13. Colm Slattery. DDS and Converter for Signal Generator. Design Idea, EDN, February
20, 2003, pp. 80-82.
14. Niamh Collins. DDS Device Produces Sawtooth Waveform. Design Idea, EDN,
July 10, 2003, pp. 77-78.
15. David Crook. Hybrid Synthesizer Tutorial. Microwave Journal, February 2003.
16. Richard J. Kerr and Lindsay A. Weaver. Pseudorandom Dither for Frequency
Synthesis Noise. U.S. Patent 4, 901, 265, filed December 14, 1987, issued February 13,
1990.
17. Henry T. Nicholas, III and Henry Samueli. An Analysis of the Output Spectrum of
Direct Digital Frequency Synthesizers in the Presence of Phase-Accumulator Truncation.
IEEE 41st Annual Frequency Control Symposium Digest of Papers, 1987, pp. 495—502,
IEEE Publication No. CH2427-3/87/0000-495.
18. Henry T. Nicholas, III and Henry Samueli. The Optimization of Direct Digital
Frequency Synthesizer Performance in the Presence of Finite Word Length Effects. IEEE
42nd Annual Frequency Control Symposium Digest of Papers, 1988, pp. 357-363, IEEE
Publication No. CH2588-2/88/0000-357.
8.8. Прецизионные аналоговые
микроконтроллеры
гоэйсон Кинг
Введение
Во многих современных схемах интерфейсов с датчиками требуется выпол-
нение не только прецизионной аналоговой обработки сигналов и аналого-
цифрового преобразования, но также определенной локальной обработки
данных для управления АЦП и манипулирования сигналами в цифровой
области. Для выполнения этой функции идеально подходят микроконтрол-
леры, а добавление энергонезависимой памяти позволяет хранить калибро-
вочные коэффициенты и упрощает перепрограммирование системы. Ком-
бинация АЦП, энергонезависимой памяти и микроконтроллера может ока-
заться полезной и во многих других областях, например в связи, медицинском
и портативном измерительном оборудовании и т. д.
Кроме того, проводятся обширные работы по созданию концепции «ум-
ных датчиков» {«smart sensors»), имеющих стандартизованные цифровые
интерфейсы для подключения к различным шинам1-4. Основу умных датчи-
ков составляют узлы аналогового преобразования сигнала, аналого-цифро-
вого преобразования и цифровой обработки на базе микроконтроллера.
Компания Analog Devices интегрировала эти три основных ингредиента
в одном кристалле, носящем название «микроконвертер» («MicroConverterT»).
Как показано на рис. 8.178, каждое изделие семейства MicroConverter содер-
жит высокопроизводительную схему аналогового ввода/вывода, энергонеза-
висимую флэш ££Р7?ОМ-память и ядро микроконтроллера промышленного
стандарта. Помимо трех основных функциональных блоков в состав микро-
конвертера входит много дополнительных внутренних периферийных уст-
ройств.
8.8. Прецизионные аналоговые микроконтроллеры
Высококачественные аналоговые вход/выход
Неизменяющаяся Flash ЕЕРЯОМ-память
Микроконтроллер промышленного стандарта
MicroConverter
Рис. 8.178. Микроконвертер
Подобная интеграция имеет много преимуществ, включая меньший сум-
марный размер, снижение стоимости производства (за счет снижения числа
микросхем), снижение излучений (так как шины данных проходят внутри
кристалла) и упрощение разработки программного обеспечения (так как ин-
терфейсы с внутренними периферийными устройствами уже реализованы).
Характеристики семейства микроконвертеров
Из приблизительно 15 отдельных микроконвертеров на базе ядра 8051, вы-
пускаемых Analog Devices на сегодняшний день, примерно в половине при-
меняется стандартная архитектура АЦП последовательного приближения
(5Л7?) с коммутируемыми конденсаторами с разрешением 12 бит и частотой
дискретизации до 400 kSPS. Устройства работают с напряжениями питания
+3 и 4-5 В. На рис. 8.179 показан ADuC842, который является характерным
представителем семейства микроконвертеров, построенных на базе архи-
Рис. 8.179. Стандартные изделия семейства микроконвертеров на базе архитектуры
последовательного приближения ADuC812/831/832/841/842/843
788 Глава 8. Применение преобразователей данных
тектуры последовательного приближения. Помимо АЦП в нем также име-
ются два 12-разрядных внутренних ЦАП и другие периферийные узлы.
Все представители семейства микроконвертеров на базе архитектуры
последовательного приближения имеют 8-канальный входной мультиплек-
сор. Кроме того, они содержат внутренний монитор температуры, кото-
рый может использоваться для измерения температуры кристалла. Флэш-
память разделена на память программ (от 8 до 62 Кбайт) и память данных
(от 640 байт до 4 Кбайт). Внутреннее ОЗУ имеет объем либо 256 байт, либо
256 байт + 2 Кбайта.
В качестве ядра микроконтроллера используется ядро промышленного
стандарта 8051. Скорость работы процессора варьируется от 1 до 20 MIPS,
в зависимости от конкретного устройства.
На рис. 8.180 показан ADuC814 — самый недорогой представитель се-
мейства микроконвертеров, выпускаемый в 28-контактном корпусе TSSOP.
При работе от источника питания с напряжением 3 В его рассеиваемая
мощность составляет менее 10 мВт.
Рис. 8.180. Микроконвертер на базе архитектуры последовательного приближения с
малым числом выводов и низкой стоимостью ADuC814
Нормальный режим
(иС активен)
Рис. 8.181. Характеристики АЦП последовательного приближения в составе микро-
конвертера
Тестовый режим
(иС выключен)
1
ADUC812 8 каналов 12-разр. Два 12-разр. 1,3 MIPS 8052 8 6 640 6 256 6 52-PQFP 56-CSP He рекомендуется к применению в новых проектах
ADUC814 6 каналов 12-разр. Два 12-разр. + два ШИМ 1,3 MIPS 8052 8 6 640 6 256 б + 2 Кб 28-TSSOP Миниатюрный корпус, низкая стоимость
ADUC831 8 каналов 12-разр. Два 12-разр. 1,3 MIPS 8052 62 6 4 Кб 256 б + 2 Кб 52-PQFP 56-CSP Замена ADuC812 с «большой памятью»
ADUC832 8 каналов 12-разр. Два 12-разр. + два ШИМ 1,3 MIPS 8052 62 6 4 Кб 256 б + 2 Кб 52-PQFP 56-CSP Аналог ADuC831 со схемой ФАПЧ тактового сигнала
ADUC841 8 каналов 12-разр. Два 12-разр.+ два ШИМ 20 MIPS 8052 8, 32, 62 Кб 4 Кб 256 б + 2 Кб 52-PQFP 56-CSP Замена ADu831C с «быстрым ядром»
ADUC842 8 каналов 12-разр. 12-разр. + два ШИМ 16 MIPS 8052 8, 32, 62 Кб 4 Кб 256 б + 2 Кб 52-PQFP 56-CSP Замена ADu832C с «быстрым ядром»
ADUC843 8 каналов 12-разр. Два ШИМ 16 MIPS 8052 8, 32, 62 Кб 4 Кб 256 б + 2 Кб 52-PQFP 56-CSP «Урезанная» версия ADuC842
Рис. 8.182. Обзор микроконвертеров на базе 12-разрядных АЦП последовательного приближения
8.8. Прецизионные аналоговые микроконтроллеры 789
790 Глава 8. Применение преобразователей данных
В ИС микроконвертеров прецизионная схема сбора данных интегриро-
вана на одном кристалле с микроконтроллером без ухудшения характерис-
тик аналоговых функций. На рис. 8.181 показан график БПФ выходного
сигнала АЦП последовательного приближения при входном сигнале с час-
тотой 10 кГц. Обратите внимание на то, что ухудшения в характеристиках
по переменному току при активном микроконтроллере практически не на-
блюдается. И при активном, и при отключенном микроконтроллере отно-
шение сигнал/шум превышает 70 дБ, a SFDR превышает 80 дБс.
На рис. 8.182 представлен обзор микроконвертеров на базе 12-разряд-
ных АЦП последовательного приближения.
Остальные представители семейства микроконвертеров основаны на
архитектуре Z-A АЦП, которая обладает низкой скоростью при очень высо-
кой точности. Изделия из этой половины семейства имеют много функций,
предназначенных в основном для интерфейса с датчиками с низким уров-
нем выходного напряжения. Блок-схема ADuC834, показанная на рис. 8.183,
дает хорошее представление об образцах семейства микроконвертеров на
базе Z-A-архитектуры. Ключевыми особенностями его аналоговой части
являются:
• первичный 24-разрядный АЦП с буферированным однополярным входом
и программируемым усилением;
• вспомогательный 16-разрядный АЦП с однополярным входом без буфе-
ризации;
• гибкая конфигурация входных мультиплексоров;
• внутренний датчик температуры с точностью порядка ±2 °C;
• внутренний источник опорного напряжения с возможностью его отклю-
чения при использовании внешнего дифференциального источника;
• пара источников тока 200 мкА для возбуждения резистивных датчиков;
• источники меньшего тока возбуждения на входах первичного АЦП, кото-
рые могут использоваться для обнаружения разрыва цепи датчика;
• 12-разрядный полнодиапазонный (rail-to-rail) ЦАП с выходом напряжения.
Рис. 8.183. Стандартные Х-А-микроконвертеры: ADuC816/ADuC824/ADuC836/ADuC834
8.8. Прецизионные аналоговые микроконтроллеры 791
Все перечисленные функции, за исключением ЦАП, также имеются в
автономных АЦП AD77xx, однако микроконвертеры, такие как ADuC834,
также содержат микроконтроллер 8051 и периферийный узел, включающий
порты последовательной связи, таймеры/счетчики и т. п. Каждый из про-
дуктов семейства микроконвертеров поддерживается набором средств раз-
работки программного обеспечения, дополненным внутрикристальными
функциями, которые позволяют выполнять программирование и отладку
устройства в составе системы либо по последовательному порту UART, либо
используя режим одновыводной эмуляции. Режим одновыводной эмуля-
ции с функциональной точки зрения практически аналогичен режиму JTAG,
однако в нем используется только один вывод.
В более поздних образцах линейки микроконвертеров на базе Z-Л-архи-
тектуры используется большее число аналоговых входных каналов и более
быстрое ядро 8051. Например ADuC845, показанный на рис. 8.184, может
принимать данные с 10 однополярных или 5 полностью дифференциаль-
ных аналоговых входов или любой их возможной комбинации. Любой вход
может быть мультиплексирован на первичный или вспомогательный АЦП,
каждый из которых имеет разрядность 24 бита; однако только первичный
АЦП имеет буферированный дифференциальный входной каскад с про-
граммируемым усилением.
Другой отличительной особенностью Z-A-микроконвертеров с большим
числом каналов является возможность подключения к двум совершенно
независимым источникам дифференциального опорного напряжения. Это
свойство является полезным в многоканальных системах с одним или бо-
лее источниками логометрических сигналов.
Цифровая часть Z-Д-микроконвертеров с большим числом каналов вклю-
чает в себя более быстрое ядро микроконтроллера (оптимизированное ядро
8052 имеет пиковую скорость 12-MIPS, в то время как ядро микроконтрол-
лера в ADuC834 имеет пиковую скорость всего 1-MSPS). В остальном
Рис. 8.184. Микроконвертеры на базе L-A-архитектуры с большим числом каналов и
быстрым ядром: ADuC845/ADuC847/ADuC848
Глава 8. Применение преобразователей данных
ADuC845 обладает всеми свойствами ADuC834. Однако, если не требуется
использование дополнительных свойств, которыми обладает ADuC845, ре-
шение на базе ADuC834 или других микроконвертеров зачастую является
более эффективным с точки зрения стоимости.
Как и большинство Z-Д-преобразователей с высоким разрешением про-
изводства Analog Devices, Z-Д-преобразователи в составе микроконверте-
ров имеют программируемую скорость преобразования (частоту следова-
ния выходных слов) и программируемое усиление. На рис. 8.185 показана
зависимость эффективного разрешения от частоты выходных слов при раз-
личных значениях усиления. Частота выходных слов может изменяться в
диапазоне примерно от 5 до 105 Гц. Характеристики уровня свободного от
шума кода (максимального разрешения), показанные на рис. 8.185, соот-
ветствуют любому из микроконвертеров с 24-разрядным Z-Д-АЦП.
— ±2,56 В
— ±1,28 В
— ±640 мВ
— ±320 мВ
— ±160 мВ
— ±80 мВ
__ ±40 мВ
±20 мВ
Выходной темп слов (Гц)
Рис. 8.185. Характеристики Z-Д-АЦП — нормальный режим
Обратите внимание на то, что при наименьших значениях усиления и
пропускной способности полное разрешение превышает 19 бит. При этом
среднеквадратичное значение эффективного разрешения превышает 21,7 бит,
и, следовательно, все интегрированные в микроконвертере цифровые бло-
ки не влияют на характеристики точности его аналоговой части.
Более того, в нормальном режиме работы в этих АЦП применяется за-
патентованный ADI метод стабилизации, аналогичный методу, применяе-
мому в усилителях со стабилизацией прерыванием, который позволяет до-
стичь беспрецедентных показателей температурного дрейфа. Кроме того,
использование функций встроенной самокалибровки может существенно
снизить итоговые ошибки смещения и усиления.
В Z-Д-микроконвертерах с большим числом каналов имеется возможность
отключения режима стабилизации прерыванием для АЦП. При этом достига-
ются значительно большие значения частоты выходных слов (до 1,3 кГц), од-
нако, как показано на рис. 8.186, ухудшается эффективное разрешение и
8.8. Прецизионные аналоговые микроконтроллеры 793
— ±2,56 В
— ±1,28 В
— ±640 мВ
— ±320 мВ
— ±160 мВ
— ±80 мВ
— ±40 мВ
— ±20 мВ
Рис. 8.186. Характеристики Z-Д-АЦП — режим стабилизации прерыванием отключен
значительно ухудшаются показатели температурного дрейфа. Эта опция
управляется программно, и в большинстве задач желательно работать с вклю-
ченным режимом стабилизации прерыванием, при котором, как показано
выше на рис. 8.185, достигаются превосходные характеристики по шумам и
температурному дрейфу.
На рис. 8.187 представлен обзор семейства Х-Д-микроконвертеров, про-
изводимых Analog Devices.
Некоторые примеры применения S-A-микроконвертеров
В приводимых ниже примерах используется ADuC834. Однако в любой из
схем он может быть заменен любым другим представителем семейства Х-Д-
MicroConverter с учетом требований к системе.
На рис. 8.188 показан проект мостового датчика с использованием
ADuC834. В ADuC834 реализован логометрический метод, описанный ра-
нее в этой главе, и поэтому в схеме не требуется источник опорного напря-
жения. Обратите внимание на то, что линии считывания информации с
датчика (подключаемые к входам опорного напряжения) разводятся отдельно
от линий возбуждения (подключаемых к VDD и «земле»). Таким образом,
всего на мост приходит шесть проводов. Подобная шестипроводная схема
включения характерна для большинства стандартных мостовых датчиков
(например, таких, как датчики нагрузки) и позволяет минимизировать ошиб-
ки, возникающие из-за сопротивления проводов.
Приведенная схема является полнофункциональным проектом; в ней
не реализован только блок последовательной связи с остальной частью си-
стемы. Дополнительные компоненты в схеме не требуются; единственное
возможное исключение составляют диоды, защищающие от перенапряже-
ния, которые могут подключаться на входах клеммной колодки. Эта схема
является демонстрацией того, за что микроконвертеры получили ярлык «си-
Название АЦП ЦАП мси Flash/EE память программ Flash/EE память данных ОЗУ Корпус Примечания
ADUC816 Два 16-разр. Один 12-разр. 1 MIPS 8052 8 Кб 640 6 256 6 52-PQFP 56-CSP Z-Д- MicroConverter с наименьшей стоимостью
ADUC824 24-разр. + 16-разр. Один 12-разр. 1 MIPS 8052 8 Кб 640 6 256 6 52-PQFP 56-CSP Совместимая по выводам замена ADuC816
ADUC834 24-разр.+ 16-разр. Два 12-разр. + два ШИМ 1 MIPS 8052 62 Кб 4 Кб 256 б + 2 Кб 52-PQFP 56-CSP Замена ADuC824 с «большой памятью»
ADuC836 Два 16-разр. Два 12-разр. + два ШИМ 1 MIPS 8052 62 Кб 4 Кб 256 б + 2 Кб 52-PQFP 56-CSP Замена ADuC816 с «большой памятью»
ADuC845 10 каналов 24-разр. Два 12-разр. + два ШИМ 12 MIPS 8052 8,32,62 Кб 4 Кб 256 б + 2 Кб 52-PQFP 56-CSP Х-Д- MicroConverter с «быстрым ядром» и многоканальным входом
ADUC847 10 каналов 24-разр. Два ШИМ 12 MIPS 8052 8,32,62 Кб 4 Кб 256 б + 2 Кб 52-PQFP 56-CSP «Урезанная» версия ADuC845
ADuC848 10 каналов 16-разр. Два ШИМ 12 MIPS 8052 8,32,62 Кб 4 Кб 256 б 4- 2 Кб 52-PQFP 56-CSP 16-разрядная версия ADuC847
Рис. 8.187. Обзор изделий семейства микроконвертеров на базе Z-Д-архитектуры
Глава 8. Применение преобразователей данных
8.8. Прецизионные аналоговые микроконтроллеры
Рис. 8.188. Интерфейс с мостовым датчиком при помощи микроконвертера
стема на кристалле». Разработка программного обеспечения упрощается за
счет применения превосходного набора средств проектирования.
На рис. 8.189 показана типичная схема применения устройств семей-
ства MicroConverter для интерфейса с термопарами. Эта схема аналогична
схеме интерфейса термопары со стандартным L-Д-АЦП. Для измерения
температуры «холодного спая» используется AD592. Калибровочные коэф-
фициенты и коэффициенты линеаризации термопары хранятся в памяти
микроконтроллера. Так как сигналы в этой схеме не являются логометри-
ческими, в отличие от описанной выше схемы мостового датчика, необ-
ходимо использовать прецизионный источник опорного напряжения.
Можно было бы задействовать внутренний источник опорного напряже-
ния ADuC834, однако для того, чтобы полностью использовать все преиму-
щества АЦП с высоким разрешением, предпочтительнее применить преци-
зионный малошумящий внешний источник опорного напряжения, напри-
мер AD780.
На рис. 8.190 показан интерфейс микроконвертера с RTD по 4-провод-
ной связи. Стандартные RTD обычно имеют 2-, 3- или 4-проводную кон-
фигурации, однако при использовании четырехпроводной связи миними-
зируются ошибки, вызываемые сопротивлением выводов, которые могут
быть значительными в других конфигурациях. Обратите внимание на то,
Рис. 8.189. Интерфейс с термопарой (RTD), использующий микроконвертер
Глава 8. Применение преобразователей данных
Датчик
температуры
Рис. 8.190. Интерфейс с RTD, использующий микроконвертер
что в данной конфигурации информация определяется отношением сигна-
лов и, следовательно, не требуется использование опорного напряжения.
Ток возбуждения, генерируемый микроконвертером (IEXC1), протекает через
RTD и резистор T?REF. Напряжение, падающее на резисторе T?REF, использу-
ется для установки опорного напряжения микроконвертера, и, следовательно,
схема работает в логометрическом режиме. Для коррекции нелинейностей
передаточной функции RTD используется программное обеспечение мик-
роконвертера.
На рис. 8.191 приведена итоговая обзорная таблица параметров микро-
конвертеров на базе ядра 8051, выпускаемых Analog Devices.
Analog Devices предлагает полный набор средств разработки для семей-
ства микроконвертеров, которые упрощают создание программного обеспе-
чения и системную интеграцию (рис. 8.192). Набор разработчика QuickStart™
включает отладочную плату, источник питания, загрузочный/отладочный ка-
бель и средства разработки программного обеспечения. В набор QuickStartPlus™
входят средства поддержки неагрессивной (non-intrusive) эмуляции (исход-
ные тексты на С/ассемблер).
12 разрядов
до 400 выборок/с
16 разрядов/24 разряда
5,35—1,36 кГц
Стандартные
С большой
памятью
С быстрым
ядром
SAR SAR с уменьшенным количеством выводов Х-Д Е-Д с большим количеством каналов
ADUC812 ADuC814‘ ADuC824* ADuC816*
ADuC831* ADuC832* ADuC834‘ ADuC836*
ADuC841* ADuC842* ADuC843* ADuC845‘ ADuC847* ADuC848*
Совместимые
по выводам
Совместимые Совместимые
по выводам по выводам
* Рекомендуются для новых разработок.
Рис. 8.191. Обзор семейства ADuC8xx
8.8. Прецизионные аналоговые микроконтроллеры
□
QuickStart
ANALOG
DEVICES
QuickStart Plus
<($75~
доработан
последовательный
порт
(только комплект)
_____________fi)
Особенности:
<($299
• Оценочная плата
• Загрузочный/debug кабель
• Интернациональный источник питания
• ПО и документация
• Оценочная плата
• Одновыводный эмулятор
• Последовательный кабель
• Интернациональный источник питания
• ПО и документация
Рис. 8.192. Средства проектирования для семейства микроконвертеров
Микроконвертеры ADuC7xxx
на базе ядра процессора ARM7T
Несмотря на то что 8051/8052 является популярным 8-разрядным ядром,
существуют задачи, где требуется применение более мощного ядра. Для
семейства ADuC7xxx компания Analog Devices выбрала ядро ARM7TDMIT.
Это популярное ядро имеет 16/32-разрядную RISC (reduced instruction computer
set, с ограниченным набором команд) архитектуру, и для него имеется про-
граммное обеспечение промышленного стандарта. Концепция семейства
ADuC7xxx схожа с концепцией стандартного семейства ADuC8xx, однако в
ней добавлены некоторые важные дополнительные особенности, включая
ядро ARM7 (рис. 8.193).
Рис. 8.193. Семейство микроконвертеров на базе ядра ARM7 ADuC7xxx
Глава 8. Применение преобразователей данных
Первой группой продуктов семейства ADuC7xxx является ADuC702x.
Упрощенная схема устройств серии ADuC702x показана на рис. 8.194. Ана-
логовая часть содержит мультиплексор с гибкой конфигурацией, имеющий
до 12 стандартных входов. Входы могут конфигурироваться как однополяр-
ные, псевдодифференциальные или полностью дифференциальные. АЦП
последовательного приближения имеет разрешение 12 бит и частоту дис-
кретизации 1 MSPS. Кроме того, имеются компаратор с нефиксирован-
ным входом, источник опорного напряжения с малым дрейфом и несколько
12-разрядных ЦАП с выходом напряжения. В качестве ядра процессора ис-
пользуется ARM7TDMIT, система памяти состоит из 62 Кбайт флэш-памя-
ти и 8 Кбайт SRAM. К дополнительным периферийным устройствам отно-
сятся: внутренняя программируемая логическая матрица (ПЛМ), монитор
напряжения питания (PSM, power supply monitor), порт ввода/вывода общего
назначения (GPIO, general purpose I/O), порт последовательного ввода/вы-
вода, таймеры общего назначения и трехфазный широтно-импульсный мо-
дулятор (ШИМ).
о
GPIO
ОЗУ
^REF
(12-разр. ЦАгГ
112-разр. ЦАП
|12-разр'цАП
[12-разр. ЦАГ1'
Watchdog
таймер
Слежение
источником
питания
ARM7TDMI
MCU.
45 Ми/с
Распарал-
леленные
Flash-коды
и память
данных
ADuC702x
Рис. 8.194. Семейство микроконвертеров ADuC702x на базе ядра ARM7
На рис. 8.195 приведен обзор семейства ADuC702x. Как показано на
рис. 8.196, его представители имеют поддержку внутрисистемного програм-
мирования по портам UARTи JTAG. На рис. 8.197 представлен обзор систе-
мы разработки.
Дополнительные примеры применения изделий семейства MicroConverter
можно найти в 5-13. Общую информацию по архитектуре и программирова-
нию ядра 8051/8052 можно найти в 14-18. Первичным источником информа-
ции по ARM7 является вебсайт ARM, http://www.arm.com ,9.
Заинтересовавшиеся читатели также могут найти дополнительные тех-
нические заметки, статьи, примеры схем и программ и т. п. на вебсайте
Analog Devices, посвященном микроконвертерам, http://www.analog.com/
microconverter.
Список литературы: 8.8. Прецизионные аналоговые микроконтроллеры
Название Число каналов АЦП Число каналов ЦАП* Флэш- память SRAM Число выводов GPIO (max) Компа- ратор ШИМ Корпус
ADUC7020 5 4 62 Кб 8 Кб 14 Да Нет 40LFCSP
ADUC7021 8 2 62 Кб 8 Кб 13 Да Нет 40LFCSP
ADUC7022 10 0 62 Кб 8 Кб 13 Да Нет 40LFCSP
ADuC7024 10 2 62 Кб 8 Кб 30 Да Да 64LFCSP
ADuC7026 12 4 62 Кб + (внешняя память) 8 Кб 40 Да Да 80LQFP
* Незадействованные выходные каналы ЦАП могут использоваться в качестве дополнительных входных каналов АЦП.
Рис. 8.195. Семейство микроконвертеров ADuC702x на базе ядра ARM7
Рис. 8.196. Внутрикристальные отла-
дочные ресурсы
ADuC70xx
Программное обеспечение:
— легко использовать интегрированное
обеспечение.
Оборудование:
— вам необходимо всего лишь
стартовать с семейства
ADuC70xx.
•w.
Рис. 8.197. Система разработки ADuC70xx
(ГвОО Глава 8. Применение преобразователей данных
Список литературы
8.8. Прецизионные аналоговые микроконтроллеры
1. Alex Mendelsohn. A Real System-On-A-Chip Needs Data Converters. Portable Design,
June 1998.
2. Brian О Mara and Paul Conway. Designing an IEEE 1451.2-Compliant Transducer.
Sensors, August 2000.
3. Brian O'Mara. From Sensors to Networks: Microcontrollers Are Common
Components In Sensor Measurement Signal Paths. ECN, April 2001.
4. Bill Travis. Sensors Smarten Up. EDN, March 4, 1999.
5. Darragh Maxwell and Russell Williamson. Wireless Temperature Monitoring in Remote
Systems. Sensors, October 2002.
6. Mark Malaeb. Single-Chip Digitally Controlled Data-Acquisition as Core of Reliable
DWDM Communication Systems. Analog Dialogue, Volume 36, Number 5, September-
October, 2002, www.analog.com.
7. Mark Malaeb. Closed-Loop Control Circuit Implementation of the ADuC832
MicroConverter IC and the AD8305 Logarithmic Converter in a Digital Variable Optical
Attenuator. Application Note AN-643, Analog Devices, www.analog.com.
8. Eamon Neary. Frequency Measurement Using Timer 2 on a MicroConverter.
Application Note AN-644, Analog Devices, www.analog.com.
9. Eamon Neary. Interfacing an HD44780 Character LCD to a MicroConverter.
Application Note AN-645, Analog Devices, www.analog.com.
10. Luca Vassalli and Mark Malaeb. Optical Module Development Platform 2.5 Gbps
Transmitter with Digital Diagnostics. Application Note AN-654, Analog Devices,
www.analog.com.
11. Nobuhiro Matsuzoe. Tunable Laser Reference Design for Designers with the
ADuC832/ADN8830/ ADN2830. Application Note AN-655, Analog Devices,
www.analog.com.
12. Brian Moss. XY-Matrix Keypad Interface to MicroConverter. Application Note
AN-660, Analog Devices, www.analog.com.
13. Brian Moss. ADuC814 to ADM 1032 via PCT Interface. Application Note AN-661,
Analog Devices, www.analog.com.
14. Thomas W. Shultz. C and the 8051 Vol.l: Hardware, Modular Programming &
Multitasking. Second Edition, Prentice-Hall, 1998.
15. Thomas W. Shultz. C and the 8051 Vol. II: Building Efficient Applications. Prentice
Hall, 1999.
16. I. Scott MacKenzie. The 8051 Microcontroller. Third Edition, Prentice-Hall, 1999.
17. James W. Stewart and Kai Miao. The 8051 Microcontroller: Hardware, Software,
and Interfacing. Second Edition, Prentice Hall, 1999.
18. www.8052.com. (A general reference site on the 8051, 8052 microcontrollers.)
19. www.arm.com. (A general reference site for the ARM-family of microcontrollers.)
20. Sensor Interfacing Seminar, NetSeminar, www.analog.com/mcvNetSeminar.
ГЛАВА 9
МЕТОДЫ
ПРОЕКТИРОВАНИЯ
АППАРАТУРЫ
Эта глава — одна из наиболее обширных во всей книге — посвящена вопро-
сам, которые не менее важны, чем приведенные ранее конкретные сведения
о базовых схемах, входящих в непосредственное окружение преобразовате-
лей данных. В ней описываются различные технические приемы, которые
относятся к технике проектирования систем. В данном контексте к мето-
дам проектирования аппаратуры мы можем отнести все, что касается эле-
ментов, окружающих преобразователи данных, но не самих преобразовате-
лей. Это — пассивные компоненты, конструкция печатной платы, системы
питания, защита линейных устройств от перенапряжений и тепловых эф-
фектов, вопросы электромагнитных/радиочастотных помех, вопросы, каса-
ющиеся высокоскоростной логики, и, наконец, моделирование, макетиро-
вание и создание прототипов. Некоторые из этих вопросов не возникают
непосредственно при проектировании сигнального тракта, однако они не
менее важны, чем выбор подходящего преобразователя и элементов вспо-
могательных схем.
Формирование и преобразование сигналов, поступающих от удаленных
датчиков, является жизненно важной частью процесса преобразования дан-
ных. Поэтому значительная часть последующего материала посвящена воп-
росам, которые часто возникают при организации удаленного интерфейса с
операционными и измерительными усилителями: защита от перенапряже-
ния, передача и прием сигналов с помощью кабелей, экранирование кабе-
лей. Большая часть материала этой главы взята из совместной публикации
с Уолтером Дж. Джангом Op Amp Applications. Analog Devices, 2002.
9.1. Пассивные компоненты
Джеймс Брайант, Уолт Джанг, Уолт Кестер
Введение
При проектировании схем, содержащих преобразователи данных, опера-
ционные усилители и другие прецизионные аналоговые устройства, пользо-
ватели должны очень осторожно подходить к выбору пассивных компо-
нентов. Неподходящий пассивный элемент может испортить даже самую
лучшую схему с операционным усилителем или преобразователем данных.
В этом разделе обсуждаются некоторые «подводные камни», возникающие
26--2852
Глава 9. Методы проектирования аппаратуры
при выборе пассивных компонентов для схем с операционными усилителя-
ми или преобразователями данных.
Итак, вы потратили немалые деньги на прецизионный операционный
усилитель или преобразователь данных только для того, чтобы после уста-
новки его на плату выяснить, что он не соответствует спецификациям. Воз-
можно, что в схеме присутствует дрейф, она обладает плохим частотным
откликом, возбуждается или просто неспособна обеспечить требуемую точ-
ность. Однако, прежде чем обвинить во всем устройство, следует присталь-
но исследовать пассивные компоненты: конденсаторы, резисторы, потен-
циометры и даже печатные платы. Едва уловимое влияние их тепловых и
паразитных эффектов, эффектов старения и дефектов монтажа может ухуд-
шить характеристики вашей схемы. И наконец, зачастую все эти эффекты
не указываются (или указываются неполностью) производителями пассив-
ных компонентов.
Как правило, если вы применяете преобразователи данных с разреше-
нием выше 12 бит или дорогие операционные усилители, обращайте особое
внимание на пассивные компоненты.
Рассмотрим 12-разрядный ЦАП, для которого 1/2 LSB соответствует
0,012% полной шкалы или всего 122 ррт. Множество явлений, свойствен-
ных пассивным компонентам, могут в сумме давать ошибку, которая зна-
чительно превышает это значение. Однако покупка более дорогих пассив-
ных компонентов необязательно решит ваши проблемы. Зачастую подходя-
щий конденсатор за 25 центов даст более хорошее и менее дорогое решение,
чем дорогой высококачественный конденсатор. Понимание и анализ иног-
да очень сложных эффектов, возникающих в пассивных компонентах, мо-
гут оказать неоценимую помощь.
Конденсаторы
Большинство разработчиков имеют весьма общее представление о доступ-
ных конденсаторах. Механизмы возникновения статических и динамичес-
ких ошибок в прецизионных схемах, в которых используются конденсато-
ры, трудно учесть в связи с огромным количеством их типов — стеклянных,
алюминиевых, танталовых, серебряно-слюдяных, керамических, тефлоно-
вых, пленочных, включающих в себя полиэстерные, поликарбонатные, по-
листирольные и полипропиленовые. Кроме того, многие из этих типов кон-
денсаторов помимо традиционных выводных корпусов монтируются также
в корпусы для поверхностного монтажа.
На рис. 9.1 показана эквивалентная схема неидеального конденсатора.
Номинальная емкость шунтирована сопротивлением Rp, учитывающим со-
противление изоляции или утечку. Второе сопротивление, Rs {эквивалентное
последовательное сопротивление — ESR), последовательно включенное с
конденсатором, учитывает сопротивление его выводов и обкладок.
Заметим, что явления в конденсаторах не так просто изолировать. Со-
ответствие между явлениями и моделями проводится для облегчения пони-
мания. Индуктивность L (эквивалентная последовательная индуктивность —
ESL) моделирует индуктивность выводов и обкладок. И наконец, сопро-
тивление Rda и емкость CDA формируют упрощенную модель явления, кото-
9.1. Пассивные компоненты 803
Рис. 9.1. Эквивалентная схема неидеального конденсатора, включающая паразитные
элементы
рое называется диэлектрическим поглощением (dielectric absorption — DA). Это
явление может вызвать ухудшение быстрых и медленных динамических ха-
рактеристик схем. В модели реальных конденсаторов вводится несколько
параллельных наборов RDA и CDA. Паразитные RC-элементы могут в значи-
тельной степени ухудшить временные характеристики цепей. Эти эффекты
обсуждается ниже.
Диэлектрическое поглощение
Диэлектрическое поглощение, которое также называется «натеканием за-
ряда» («soakage») и иногда «диэлектрическим гистерезисом» («dielectric
hysteresis»), — это, вероятно, наименее изученный и потенциально наиболее
опасный из различных паразитных эффектов в конденсаторах. При разряде
большинство конденсаторов неохотно отдают весь свой накопленный за-
ряд, запоминая часть его.
Этот эффект иллюстрирует рис. 9.2. На схеме, показанной в левой части
рисунка, конденсатор после заряда до значения потенциала источника V в
момент времени /0 закорачивается ключом в момент времени /1? после
чего происходит его разряд. В момент времени t2 конденсатор отсоединяет-
ся от схемы; на его выводах медленно накапливается остаточное напряже-
ние, которое достигает практически постоянного значения. Это напряже-
ние ошибки вызвано диэлектрическим поглощением и показано в правой
части рисунка на графике зависимости напряжения от времени для после-
Рис. 9.2. Остаточное напряжение в отключенном состоянии конденсатора после вы-
полнения последовательности заряд/разряд, характеризующее диэлектричес-
кое поглощение
Глава 9. Методы проектирования аппаратуры
довательности заряд/разряд/восстановление. Обратите внимание, что ошибка
восстановленного напряжения пропорциональна исходному заряжающему
напряжению, И, и номинальному коэффициенту диэлектрического погло-
щения используемого конденсатора.
Существует всего несколько стандартных методов определения и изме-
рения коэффициента диэлектрического поглощения, и все они сильно от-
личаются друг от друга. Измеренные результаты обычно выражаются в виде
процентного соотношения остаточного напряжения к исходному заряжаю-
щему напряжению. Как правило, коэффициент диэлектрического погло-
щения измеряется следующим образом. Конденсатор заряжается в течение
длительного времени, а затем закорачивается на более короткое время. После
этого дается определенное время на восстановление конденсатора, и изме-
ряется остаточное напряжение на нем (подробнее см. 8). Важно отметить,
что реальные конденсаторы сильно различаются по величине этой ошибки
(номинальное значение коэффициента диэлектрического поглощения ва-
рьируется от малых долей процента до значений, намного превышающих 1 %;
конкретное значение зависит от используемого диэлектрика).
На практике диэлектрическое поглощение проявляется по-разному, на-
пример как невозможность сброса интегратора в ноль, нежелательная не-
линейность преобразователя напряжение—частота, изменяющиеся ошибки
устройства выборки и хранения. Последнее из перечисленных проявлений
может быть особенно пагубным в системах сбора данных, где, как показано
ниже, напряжения в соседних каналах могут отличаться на величину по-
рядка полной шкалы.
Рисунок 9.3 иллюстрирует возникновение ошибки, вызванной диэлект-
рическим поглощением, в простом УВХ. Ключи и S2 в левой части рисун-
ка — это входной мультиплексор и ключ УВХ соответственно. Выходное
напряжение мультиплексора равно Vx, а выбранное напряжение, хранящееся
на конденсаторе С, равно VY. Это напряжение буферизуется операционным
усилителем и подается на АЦП. Как видно из временной диаграммы в пра-
вой части рисунка, напряжение ошибки, вызванной диэлектрическим по-
глощением, е, появляется в режиме хранения, когда конденсатор отключен
от источника входного напряжения. Эта ошибка пропорциональна разно-
сти напряжений V{ и И2; если V\ и V2 значительно отличаются друг от друга,
она также значительна. С практической точки зрения для достижения хо-
роших показателей по диэлектрическому поглощению в УВХ следует ис-
пользовать только наилучшие конденсаторы.
Рис. 9.3. Диэлектрическое поглощение приводит к ошибкам в схемах с УВХ
9.1. Пассивные компоненты 805
Диэлектрическое поглощение является собственно характеристикой
материала диэлектрика, хотя оно также может зависеть от технологическо-
го процесса изготовления конденсатора и материала электродов. Коэффи-
циент диэлектрического поглощения задается в процентах от заряжающего
напряжения. Он может варьироваться от 0,02 % для тефлоновых, полисти-
роловых и полипропиленовых конденсаторов до 10 % и более для некото-
рых электролитических конденсаторов. При некоторых временных интер-
валах коэффициент диэлектрического поглощения полистирола может до-
стигать 0,002 %.
Для стандартных керамических конденсаторов с высокой диэлектричес-
кой проницаемостью и поликарбонатных конденсаторов типичное значение
коэффициента диэлектрического поглощения составляет порядка 0,2 % —
это соответствует 1/2 LSB при разрешении всего 8 бит! Слюдяные, стеклян-
ные и танталовые конденсаторы обычно имеют даже больший коэффици-
ент диэлектрического поглощения — от 1,0 до 5,0 %. Коэффициент диэлек-
трического поглощения полиэстерных конденсаторов составляет порядка
0,5 %. Как правило, если в спецификации на конденсатор не указан коэф-
фициент диэлектрического поглощения для временных интервалов и диапа-
зонов напряжений, которые используются в вашей схеме, соблюдайте осто-
рожность! Вероятно, лучше выбрать конденсатор другого типа с указанным
и малым значением коэффициента диэлектрического поглощения.
Диэлектрическое поглощение приводит к затягиванию фронтов сигна-
лов в схемах с быстрым установлением, например в активных высокочас-
тотных полосовых фильтрах или усилителях переменного тока. Для некото-
рых таких схем RDA—CDA модель диэлектрического поглощения может иметь
постоянную времени в несколько миллисекунд. Также нередко встречают-
ся и намного большие значения постоянной времени. В действительности,
эффект диэлектрического поглощения в некоторых устройствах может мо-
делироваться несколькими параллельными секциями RDA— CDA с широким
диапазоном постоянных времени. В схемах с быстрым разрядом/зарядом
эффект диэлектрического поглощения напоминает «аналоговую память»:
конденсатор пытается восстановить напряжение предыдущего заряда.
В некоторых проектах эффекты диэлектрического поглощения могут быть
компенсированы при условии, что они легко и просто описываются экви-
валентной моделью и у вас есть желание заниматься точной регулировкой
вручную. Например, в интеграторе выходной сигнал может быть подан на
схему компенсации, в которой схемный эквивалент диэлектрического по-
глощения устраняется за счет параллельного включения отрицательного
импеданса. Было показано, что этот метод компенсации позволяет улуч-
шить показатели УВХ в 10 и более раз6.
Паразитные эффекты конденсаторов
и тангенс угла диэлектрических потерь
Сопротивление утечки Rp, эквивалентное последовательное сопротивление Rs,
и эквивалентная последовательная индуктивность Z, показанные на рис. 9.1,
являются паразитными элементами, которые могут ухудшить показатели
схемы, в состав которой входит конденсатор. Эффекты этих паразитных
(Г806 Глава 9. Методы проектирования аппаратуры
элементов обычно характеризуются единой величиной, которая называется
тангенсом угла диэлектрических потерь (dissipation factor, DF).
Утечка конденсатора — это небольшой ток, протекающий через диэлек-
трик при приложенном напряжении. Несмотря на то что утечка моделиру-
ется простым сопротивлением изоляции (7?р), включенным параллельно с
конденсатором, на самом деле она имеет нелинейную зависимость от на-
пряжения. Производители обычно указывают утечку в единицах произве-
дения мегом на микрофарады, которое соответствует постоянной времени
саморазряда диэлектрика в секундах. Эта величина варьируется от 1 секун-
ды и менее для конденсаторов с высокой утечкой, таких как электролити-
ческие конденсаторы, до сотен секунд для керамических конденсаторов.
Стеклянные конденсаторы имеют постоянные времени саморазряда 1000 се-
кунд и более, а наилучшими показателями по утечке обладают тефлоновые
и пленочные (полистирольные, полипропиленовые) конденсаторы — их
постоянные времени превышают 1 000 000 мегом-микрофарад. Для таких
устройств внутренняя утечка, вызванная эффектами диэлектрика, может
быть скрыта внешними факторами утечки, возникающими вследствие заг-
рязнения корпуса устройства или дефектов монтажа и разводки.
Эквивалентная последовательная индуктивность ESL характеризует ин-
дуктивность выводов и обкладок конденсатора, которая может привести
к тому, что реактивное сопротивление конденсатора, которое в обычном
состоянии является емкостным, станет индуктивным. В частности, это ха-
рактерно для высоких частот. Величина ESL сильно зависит от внутреннего
устройства конденсатора. Конденсаторы, получаемые из скрученной в трубку
фольги, имеют большую эквивалентную последовательную индуктивность,
чем опрессованные конденсаторы с радиальными выводами. Наименьшей
последовательной индуктивностью обычно обладают пленочные и много-
слойные керамические (multilayer ceramic, MLC), а наибольшей — обычные
танталовые и алюминиевые электролитические конденсаторы. Следователь-
но, стандартных электролитических конденсаторов (если они используются
в одиночку) недостаточно для обеспечения локальной развязки в высоко-
скоростных схемах. Однако существуют также специализированные алюми-
ниевые и танталовые электролитические конденсаторы, которые могут по-
дойти для применения в высокоскоростных схемах, но, тем не менее, все
равно рекомендуется обеспечивать локальную развязку. Они в основном
предназначены для применения в импульсных источниках питания, кото-
рые подробно описываются в следующем разделе.
Производители конденсаторов обычно указывают эквивалентный пос-
ледовательный импеданс посредством графика зависимости импеданса от
частоты. Неудивительно, что на этих графиках реактивное сопротивление
на низких частотах является преимущественно емкостным, а на высоких
частотах оно возрастает из-за влияния последовательной индуктивности.
Эквивалентное последовательное сопротивление ESR (резистор Rs на
рис. 9.1) состоит из сопротивления выводов и обкладок конденсатора. Как
уже отмечалось, многие производители объединяют эффекты, вызванные
ESR, ESL и утечкой, в единый параметр, который называется тангенсом
угла диэлектрических потерь. Он определяет основные потери конденсатора
и задается производителями как отношение потерянной энергии к энер-
9.1. Пассивные компоненты 807
гии, сохраняемой конденсатором в одном цикле. Тангенс угла диэлектри-
ческих потерь может быть аппроксимирован на конкретной частоте отно-
шением ESR к полному емкостному реактивному сопротивлению, т. е. ве-
личиной, обратной добротности Q. Таким образом, в качестве аппрокси-
мации можно использовать выражение Q ~ 1/DF (где тангенс угла
диэлектрических потерь DF выражен в числовом эквиваленте). Например,
если DF равен 0,1 % (0,001 в числовом эквиваленте), то обратная величина
(2) равна 1000.
DF часто является функцией и частоты, и температуры. Конденсаторы
со стеклянным или слюдяным диэлектриком обычно имеют DF от 0,03 до
1,0%. Для керамических конденсаторов при комнатной температуре DF
варьируется от 0,1 до 2,5 %. DF электролитических конденсаторов обычно
превышает даже этот уровень. Наилучшим DF обладают пленочные кон-
денсаторы — менее 0,1 %. Керамические конденсаторы со стабильным ди-
электриком NP0 (другое обозначение — COG) имеют DF, сравнимый с
пленочными конденсаторами (более подробно см. ниже).
Погрешность, температура и другие эффекты
В целом прецизионные конденсаторы являются дорогими, и, даже несмотря
на это, их не всегда легко купить. На самом деле выбор емкости ограничен
как диапазоном имеющихся номиналов, так и погрешностями. Номиналы
наилучших с точки зрения размера представителей семейства пленочных
конденсаторов ограничены по практическим соображениям (комбинация
размера и цены) значениями 10 мкФ и менее. Наилучшая погрешность
(±1 %) может достигаться в керамических конденсаторах с диэлектриком
NP0 и некоторых пленочных конденсаторах, однако время их поставки мо-
жет оказаться неприемлемо большим. Многие пленочные конденсаторы мо-
гут изготавливаться с погрешностью менее ±1 %, но только по специальному
заказу. Большинство конденсаторов являются чувствительными к измене-
нию температуры. И коэффициент потерь, и диэлектрическое поглощение,
и номинальная емкость являются функциями температуры. Для некоторых
конденсаторов эти параметры имеют приблизительно линейную зависимость
от температуры, для других зависимость имеет сильно выраженный нели-
нейный характер. Температурный коэффициент (ТК, измеряемый в ррт/°C)
обычно не важен в схемах с УВХ, а для прецизионных интеграторов, преоб-
разователей напряжения в частоту и генераторов чрезмерно большое значе-
ние этого параметра может привести к ухудшению характеристик.
Наилучшей стабильностью обладают керамические конденсаторы NP0,
имеющие ТК 30 ррт/ °C, за ними следуют полистирольные и полипропи-
леновые конденсаторы, имеющие ТК от 100 до 200 ррт/°C. Если стабиль-
ность емкости имеет значение, следует избегать применения типов конден-
саторов с ТК порядка нескольких сотен ррт/°C или любых типов с нели-
нейным ТК.
Также необходимо учитывать максимальную рабочую температуру кон-
денсатора в свете ожидаемых условий окружающей среды. Например, по-
листирольные конденсаторы плавятся при температуре, близкой к 85 °C, в
то время как тефлоновые способны выдерживать температуры до 200 °C.
На поведение конденсатора в составе схемы также может негативно ска-
зываться чувствительность емкости и диэлектрического поглощения к при-
ложенному напряжению, выраженная в виде коэффициента напряжения
(voltage coefficient). Пользователи должны учитывать возможное влияние
коэффициента напряжения, несмотря на то что производители конденса-
торов не всегда четко указывают его. Например, емкость некоторых кера-
мических конденсаторов с высокой диэлектрической проницаемостью при
прикладывании к ним максимального напряжения может уменьшаться на
50 % и более. Это вызывает неизбежные искажения, из-за чего данные типы
конденсаторов не подходят для фильтрации в сигнальном тракте и, наобо-
рот, более подходят для развязки по питанию. Интересно, что самые ста-
бильные конденсаторы из широкого диапазона керамических конденсато-
ров с диэлектриком NP0 обладают хорошими показателями по коэффици-
енту напряжения.
Аналогичным образом емкость и тангенс угла диэлектрических потерь
многих типов конденсаторов существенно зависят от частоты. Это вызвано
в основном изменением диэлектрической проницаемости. С этой точки
зрения наилучшими диэлектриками являются полистирол, полипропилен
и тефлон.
Выполняйте монтаж критичных компонентов
в последнюю очередь
Проблемы разработчика не заканчиваются на стадии проектирования. Не-
которые стандартные методы сборки печатных плат могут оказаться губи-
тельными даже для самых лучших проектов. Например, некоторые часто
применяемые чистящие растворители могут просачиваться в отдельные элек-
тролитические конденсаторы. В частности, этому подвержены конденсато-
ры с резиновыми уплотнениями выводов. Еще хуже то, что некоторые из
пленочных конденсаторов (в частности, полистирольные) могут растворяться
при контакте с отдельными растворителями. Неправильное обращение с
выводами может привести к повреждению и других типов конденсаторов,
вызывая появление случайных или даже периодических проблем. В частно-
сти, это характерно для конденсаторов из травленой фольги. Во избежание
подобных трудностей рекомендуется по возможности монтировать особо
критичные компоненты на последнем этапе процесса сборки платы.
В табл. 9.1 приведен обзор критериев выбора для различных типов кон-
денсаторов, которые упорядочены в порядке ухудшения характеристик
диэлектрического поглощения. При выборе типа конденсатора общая ин-
формация, содержащаяся в этой таблице, должна дополняться информаци-
ей, приводимой в каталогах производителей (см. список литературы в кон-
це раздела).
Разработчики также должны принимать во внимание естественные ме-
ханизмы разрушения конденсаторов. Например, металлизированные пле-
ночные конденсаторы зачастую самовосстанавливаются. Они выходят из
строя из-за возникновения в небольших отверстиях в диэлектрической плен-
ке проводящих мостов. Однако протекающие в результате этого токи могут
генерировать тепловую энергию, достаточную для разрушения моста и воз-
Таблица 9.1. Сравнение типов конденсаторов
Тип Типичный уровень диэлектрического поглощения Преимущества Недостатки
Полистирольные От 0,001 до 0,02 % Недорогие Низкое диэлектрическое поглощение Хорошая стабильность (~120 ррт/°C) Повреждаются при температуре >+85 °C Большие размеры Высокая индуктивность Ограниченный набор производителей
Полипропиленовые От 0,001 до 0,02 % Недорогие Низкое диэлектрическое поглощение Стабильные (-200 ррт/°C) Широкий диапазон номиналов Повреждаются при температуре >+105 °C Большие размеры Высокая индуктивность
Тефлоновые От 0,003 до 0,02 % Имеются варианты с низким диэлектрическим поглощением Хорошая стабильность Могут работать при температуре свыше + 125 °C Широкий диапазон номиналов Высокая стоимость Большие размеры Высокая индуктивность
Поликарбонатные 0,1 % Хороша стабильность Низкая стоимость Широкий диапазон температур Широкий диапазон номиналов Большие размеры Уровень диэлектрического поглощения не позволяет применять их в схемах с разрешением более 8 бит Высокая индуктивность
Полиэстерные От 0,3 до 0,5 % Умеренная стабильность Низкая стоимость Широкий диапазон температур Низкая индуктивность (для многослойной пленки) Малый размер корпуса Большие размеры Уровень диэлектрического поглощения не позволяет применять их в схемах с разрешением более 8 бит Высокая индуктивность (как правило) Обычно высокое диэлектрическое поглощение (может не указываться производителем)
9.1. Пассивные компоненты 809
Окончание табл. 9.1
Тип Типичный уровень диэлектрического поглощения Преимущества Недостатки
Керамические NPO <0,1 % Недорогие, выпускаются многими производителями Хорошая стабильность (30 ррт/°C) Имеются варианты с погрешностью ±1 % Низкая индуктивность (для «чиповых» (chip) элементов) Низкие максимальные номиналы (<10нФ)
Монолитные керамические (с высокой диэлектрической проницаемостью) >0,2% Низкая индуктивность (для «чиповых» элементов) Широкий диапазон номиналов Низкая стабильность Средний уровень диэлектрического поглощения Высокий коэффициент напряжения
Слюдяные >0,003 % Малые потери на ВЧ Низкая индуктивность Хорошая стабильность Имеются варианты с погрешностью ±1 % Достаточно большие размеры Низкие максимальные номиналы (<10 нФ) Высокая стоимость
Электролитические алюминиевые Очень высокий Большие номиналы Высокие токи Высокие напряжения Малый размер Высокая утечка Обычно полярные Низкая стабильность и точность Высокая индуктивность
Электролитические танталовые Очень высокий Малый размер Большие номиналы Умеренная индуктивность Высокая утечка Обычно полярные Низкая стабильность и точность Высокая стоимость
810 Глава 9. Методы проектирования аппаратуры
9,1. Пассивные компоненты
вращения конденсатора в нормальный рабочий режим (при этом емкость
незначительно падает). Очевидно, что в высокоимпедансных схемах могут
не развиться токи, достаточные для разрушения моста, поэтому разработ-
чики в данном случае должны соблюдать осторожность.
Танталовые конденсаторы также обладают определенной степенью са-
мовосстановления, однако, в отличие от пленочных конденсаторов, это
явление зависит от скорости изменения температуры в точке повреждения.
Поэтому лучше всего танталовые конденсаторы самовосстанавливаются в
высокоимпедансных схемах, где броски тока в точках дефектов в конденса-
торе ограничены. При использовании танталовых конденсаторов в сильно-
точных схемах следует соблюдать осторожность.
Срок службы электролитических конденсаторов зависит от скорости, с
которой жидкость электролита просачивается через уплотнения выводов.
Эпоксидные уплотнения надежнее резиновых, но конденсаторы с эпоксид-
ной герметизацией могут взрываться при перенапряжении или приклады-
вании большого обратного напряжения. И наконец, все полярные конденса-
торы должны быть защищены от воздействия напряжений, превышающих
их номинальное рабочее напряжение.
Резисторы и потенциометры
Разработчики имеют возможность выбора из широкого диапазона резисто-
ров, производимых по разным технологиям: углеродистые композицион-
ные, углеродистые пленочные, цельнометаллические, металлопленочные, с
индуктивностью и безиндуктивные проволочные. Так как резисторы явля-
ются наиболее часто используемыми и, по-видимому, наиболее надежны-
ми компонентами, их часто недооценивают при анализе источников оши-
бок в высококачественных схемах.
Неправильно подобранный резистор может ухудшить точность 12-раз-
рядной схемы, внося ошибку свыше 122 ррт (1/2 LSB). Когда вы в после-
дний раз читали техническое описание на резистор? Вы будете удивлены
тем, что можно почерпнуть из него.
Рассмотрим простую схему неинвертирующего операционного усилите-
ля с усилением 100х, которое задается резисторами и (рис. 9.4). ТК
этих двух резисторов являются очевидными источниками ошибок. Предпо-
ложим, что ошибки усиления операционного усилителя пренебрежимо малы
• Изменение температуры на
10°С вызывает изменение уси-
ления на 250 ррт
• То есть на 1 LSB в 12-разряд-
ной системе и катастрофичес-
кое в 16-разрядной
Р ис. 9.4. Рассогласование ТК резисторов может привести к температурным ошибкам
усиления
Глава 9. Методы проектирования аппаратуры
и что резисторы согласованы до уровня 99/1 при температуре 25 °C. Если
ТК резисторов отличаются всего на 25 ррт/°C, как показано на рисунке, то
при изменении температуры на 10°С коэффициент усиления усилителя из-
менится на 250 ррт. Это соответствует ошибке в 1 LSB в 12-разрядной
системе и является просто катастрофой для 16-разрядной системы. Темпе-
ратурные изменения могут ограничивать точность усилителя, показанного
на рис. 9.4, несколькими способами. В данной схеме (а также во многих
других схемах операционных усилителей, в которых усиление задается от-
ношением компонентов) абсолютные значения ТК резисторов менее важ-
ны, так как они компенсируют друг друга. Но даже несмотря на это, некото-
рые типы резисторов просто не годятся для применения в прецизионных
схемах. Например, это справедливо для углеродных композиционных резис-
торов, имеющих ТК приблизительно 1500 ррт/°C. Даже если ТК будут
согласованы до малоправдоподобного значения 1 %, их результирующая
разность будет равна 15 ррт/°C, что даст неприемлемое значение ошибки
в 120 ррт при изменении температуры на 8 °C.
Многие производители выпускают металлопленочные и цельнометал-
лические резисторы с абсолютными значениями ТК в диапазоне от ± 1 до
±100 ррт/°C. Тем не менее следует соблюдать осторожность: ТК могут
варьироваться в довольно широких пределах, в частности для дискретных ре-
зисторов из различных партий. Для устранения подобных проблем некоторые
производители выпускают более дорогостоящие согласованные пары резисто-
ров, у которых температурные коэффициенты отличаются на 2—10 ррт/°C.
Недорогие тонкопленочные резисторные сборки также имеют хорошую
относительную стабильность и широко применяются.
Предположим, что резисторы Ri и 7^, показанные на рис. 9.5, имеют
номинальную рассеиваемую мощность 1/4 Вт и одинаковые ТК, 25 ррт/°C.
Даже в случае, когда ТК абсолютно идентичны, могут присутствовать зна-
чительные ошибки! Когда входной сигнал равен нулю, резисторы не выде-
ляют тепло. Однако если входной сигнал равен 100 мВ, то на резисторе R{
падает напряжение 9,9 В и, следовательно, рассеивается мощность 9,9 мВт.
При этом температура резистора поднимется на 1,24 °C (тепловое сопро-
тивление резистора с номинальной мощностью 1/4 Вт равно 125 °С/Вт).
Это изменение температуры приведет к изменению сопротивления на 31 ррт
и, следовательно, к изменению усиления. Однако резистор 7^, на котором
падает напряжение 100 мВ, нагревается на пренебрежимо малую величину —
+ 100 мВ
Предположим, что ТКР R, = ТКР Я
Я, = 9,9 кОм, 1/4 В
ТК = +25 ррт/ ’С
Я2 = 100 Ом, 1/4 В
ТК= +25 ррт/’С
G = 1 + -^- = 1(X)
Я2
—О +ю в
• Тепловое сопротивление
Rv R2 = 125’С/Вт
• Температура Я1 вырастет
на 1,24’С, PD = 9,9 мВт
• Рост температуры Я2 пре-
небрежим, PD = 0,1 мВт
• Усиление изменяется на
31 ррм или на 1/2 LSB
при 14 разрядах
Рис. 9.5. При неодинаковом рассеянии мощности резисторами, имеющими одинако-
вые ТК, также могут возникать температурные ошибки усиления
9.1. Пассивные компоненты 813
всего 0,0125 °C. Результирующая суммарная ошибка усиления 31 ррш соот-
ветствует 1/2 В при разрядности 14 бит и является катастрофической для
16-разрядных систем.
Значительно хуже то, что подобный самонагрев резистора также приво-
дит к ошибкам нелинейности, которые можно легко вычислить. Для приме-
ра, показанного на рис. 9.5, при напряжении на входе, равном 1/2 полной
шкалы, результирующая ошибка, вызванная самонагревом, равна всего 15 ррш.
Другими словами, если температуры резисторов, задающих усиление, не со-
впадают, то значения усиления каскада в точках полной шкалы и 1/2 полной
шкалы не равны друг другу (то же самое можно сказать для любых других
точек). Приведенный пример отнюдь не является наихудшим случаем: ре-
зисторы, имеющие меньшие физические размеры, дадут большую ошибку,
так как они имеют большее тепловое сопротивление.
Эти и аналогичные ошибки могут быть устранены путем использования
резисторов, которые имеют точно согласованные номиналы и ТК, рассеи-
вают небольшую мощность и имеют хорошую тепловую связь. Лучше всего
это достигается при использовании резисторных сборок на единой подлож-
ке; такая сборка может быть реализована либо внутри ИС, либо в виде
тонкопленочной сборки в отдельном корпусе.
Если в схеме используются очень малые сопротивления (<10 Ом), важ-
ным фактором также становится стабильность межсоединений {interconnection
stability). Например, температурные коэффициенты сопротивления типич-
ного медного провода или печатного проводника, которые при анализе ис-
точников часто недооценивают, могут вносить дополнительные ошибки.
ТК меди обычно равен приблизительно 3900 ррш/°C. Таким образом, пре-
цизионный проволочный резистор с номиналом 10 Ом и ТК 10 ррш/ °C,
соединенный с медным проводником с сопротивлением 0,1 Ом, превращается
в резистор с номиналом 10,1 Ом, имеющий ТК приблизительно 50 ррш/°C.
Последнее замечание касается систем, работающих при температуре
окружающей среды, изменяющейся в широких пределах. Для них характер-
но явление, известное как температурное втягивание {temperature retrace) и
проявляющееся в изменении сопротивления, которое возникает после оп-
ределенного числа циклов воздействия высокой и низкой температуры при
постоянном внутреннем рассеянии. Даже для некоторых из лучших тонко-
пленочных резисторов коэффициент температурного втягивания может
превышать 10 ррш/°C.
• Обеспечьте близкое согласование температурных коэффициентов сопротивления.
• Используйте резисторы с малыми абсолютными значениями температурных коэф-
фициентов.
• Используйте резисторы с низким тепловым сопротивлением (с большей номиналь-
ной мощностью, в больших корпусах).
• Обеспечьте хорошую тепловую связь между согласуемыми резисторами (используй-
те стандартные сборки на общей подложке).
• При больших отношениях номиналов рассмотрите возможность применения аттеню-
аторов с пошаговой перестройкой.
Рис. 9.6. Ряд важных моментов с точки зрения минимизации температурных ошибок в
резистивных схемах
Глава 9. Методы проектирования аппаратуры
В заключение на рис. 9.6 приведен ряд замечаний, которые следует учи-
тывать (помимо стоимости) для разработки резистивных схем с минималь-
ными температурными ошибками.
Паразитные эффекты резисторов
Резисторы могут обладать значительными паразитной емкостью и индук-
тивностью, особенно на высоких частотах. Производители обычно указы-
вают эти паразитные эффекты в виде ошибки реактивного сопротивления
(в % или ррт), определяемой как отношение разности между модулем им-
педанса и сопротивлением по постоянному току к сопротивлению, на од-
ной или нескольких частотах.
Подобные эффекты особенно характерны для проволочных резисторов.
Несмотря на то что производители резисторов обычно выпускают прово-
лочные компоненты и в нормальной, и в безындуктивной форме, даже пос-
ледние создают «головную боль» для разработчиков. Эти резисторы все равно
имеют слабовыраженный индуктивный характер (порядка 20 мкГн) при
номиналах ниже 10 кОм. При номиналах выше 10 кОм те же резисторы
обычно обладают шунтирующей емкостью 5 пФ.
Эти паразитные эффекты могут оказывать катастрофическое воздействие на
динамические свойства схем. Особую опасность они представляют в схемах, где
применяются проволочные резисторы с номиналами более 10 кОм. В таких
схемах нередко возникают пиковые выбросы или даже паразитная генерация.
Это становится более очевидным в низкочастотном, килогерцовом диапазоне.
Даже в низкочастотных схемах паразитные эффекты проволочных рези-
сторов могут создавать трудности. Установление сигнала по экспоненци-
альному закону до точности 1 ррт может занимать 20 постоянных времени
и более. Паразитные эффекты проволочных резисторов могут значительно
увеличить суммарное время установления схемы.
Зачастую даже резисторы других типов могут обладать неприемлемым
паразитным реактивным сопротивлением. Например, некоторые металло-
пленочные резисторы имеют значительную межвыводную емкость, которая
проявляется на высоких частотах. Наименьшей паразитной межвыводной
емкостью на высоких частотах обладают углеродистые резисторы.
Термоэлектрические эффекты
Другой тонкой проблемой, связанной с резисторами, является эффект тер-
мопары, который также иногда ассоциируется с термоэдс (thermal EMF).
Любой контакт между двумя различными металлическими проводниками
приводит к возникновению термоэдс. Эффект термопары широко приме-
няется для измерения температуры. Однако в любой схеме прецизионного
операционного усилителя, работающей со слабыми сигналами, он также
является потенциальным источником погрешностей, так как в каждой точ-
ке соединения двух различных проводников образуется термопара (незави-
симо от того, нравится нам это или нет). В действительности во многих
случаях эффект термопары может явиться источником доминирующей ошиб-
ки в проекте прецизионной схемы.
9.1. Пассивные компоненты 815
Эффект термопары вызовет ошибки, если различные соприкасающиеся
элементы, которые формируют паразитную термопару, имеют различные
температуры. Каждый элемент схемы, через который проходит сигнал, имеет,
как минимум, по одному соединению с каждой стороны; таким образом,
формируется, по меньшей мере, одна пара термопар. Если два спая этой
пары термопар имеют разные температуры, то возникнет напряжение ошиб-
ки, которое зависит от суммарной температуры. И напротив, если два спая
пары паразитных термопар имеют одинаковую температуру, суммарная
ошибка будет равна нулю, так как напряжения двух термопар скомпенси-
руют друг друга.
Это критически важный момент, так как на практике при построении
электронной схемы мы не можем избежать соединения неоднородных ме-
таллов. Однако мы можем внимательно контролировать температурные
дифференциалы в пределах схемы таким образом, что ошибки, вызванные
паразитными термопарами, будут компенсировать друг друга.
Влияния подобных паразитных эффектов очень трудно избежать. Для
того чтобы понять это, рассмотрим случай соединений, выполненных только
из медных проводов. В этом случае даже спай, формируемый различными
сплавами медной проволоки, может создавать термоэдс, являющейся ма-
лой долей 1 мкВ/°C. Перейдем к более сложному случаю: даже такие про-
стые компоненты, как резисторы, содержат паразитные термопары, кото-
рые могут привести к еще более серьезным последствиям. Например, рас-
смотрим модель резистора, показанную на рис. 9.7. Два соединения между
материалом резистора и его выводами формируют спаи термопары и Тг
Для некоторых углеродистых композиционных резисторов э.д.с. этих тер-
мопар может достигать 400 мкВ/°C, но для резисторов со специальной кон-
струкцией она может составлять всего 0,05 мкВ/°C (см. 15). Для обычных
металлопленочных резисторов (типа RN) типичное значение э.д.с. состав-
ляет порядка 20 мкВ/°С.
Отметим, что подобные эффекты термопар сравнительно неважны для
переменных сигналов. Даже для постоянных сигналов они будут компенси-
ровать друг друга, если, как отмечалось ранее, температура резистора имеет
Материал
резистора
о
о
Выводы резистора
Типичные ЭДС термопар резистора:
• углеродного состава = 400 мкВ/°С;
• металлической пленки = 20 мкВ/°С;
• витка резистивной или манганиновой проволоки = 2 мкВ/°С;
• RCD состава HP-серии = 0,05 мкВ/°С.
Рис. 9.7. Каждый резистор содержит две термопары между выводами и резистивным
элементом
равномерно распределение. Однако если резистор рассеивает значитель-
ную мощность или имеет несимметричную ориентацию относительно ис-
точника тепла, один его конец может быть теплее другого, за счет чего
возникнет суммарное напряжение ошибки термопары. Для обычных ме-
таллопленочных резисторов разность температур между двумя выводами
ГС вызовет появление напряжения термопары приблизительно 20 мкВ. Эта
ошибка достаточно велика по сравнению с дрейфом напряжения смещения
прецизионного операционного усилителя наподобие ОР177 и намного пре-
вышает уровень дрейфа операционных усилителей со стабилизацией пре-
рыванием (<1 мкВ/°C).
На рис. 9.8 показано, каким образом ориентация резистора может по-
влиять на суммарное напряжение термопары. В левой части рисунка в це-
лях уменьшения занимаемого на плате места резистор поставлен на торец;
при этом неизбежно возникает температурный градиент вдоль резистора,
особенно если он рассеивает значительную мощность. И наоборот, как
показано в правой части рисунка, если резистор размещается параллельно
печатной плате, градиент, в общем случае, устраняется. Исключение воз-
можно, если резистор подвергается охлаждению воздушным потоком. В таких
случаях источник ошибки минимизируется при ориентации резистора пер-
пендикулярно воздушному потоку, так как при этом концы резистора будут
иметь одинаковую температуру.
Следует отметить, что все сказанное выше следует отнести и к ориента-
ции резисторов на печатных платах, монтируемых вертикально. В таких
случаях естественные конвективные потоки обычно поднимаются вверх вдоль
платы. Таким образом, для минимизации эффектов термопар тепловая ось
резистора вновь должна быть перпендикулярна направлению конвекции.
При использовании миниатюрных резисторов для поверхностного монтажа
эффекты термопар представляют меньшую проблему, так как концы таких
резисторов имеют более жесткую тепловую связь.
В целом разработчики должны прилагать усилия по избежанию темпе-
ратурных градиентов на платах, где расположены критические схемы, или
рядом с ними. Зачастую это подразумевает тепловую изоляцию компо-
нентов, рассеивающих значительную мощность. Тепловая турбулентность,
порождаемая большими температурными градиентами, также может при-
вести к возникновению динамических шумоподобных низкочастотных
ошибок.
Плохо
Правильно
Рис. 9.8. Ориентация резисторов, при которой выравнивается температура его концов,
может минимизировать эффекты э.д.с. паразитных термопар
9.1. Пассивные компоненты
Чувствительность к напряжению,
механизмы разрушения и старение
Резисторы также подвержены изменению номинала в зависимости от при-
ложенного напряжения. Особенно чувствительными являются высокоом-
ные компоненты с оксидным проводящим слоем, коэффициенты напряже-
ния которых изменяются в диапазоне от 1 до более 200 рргп/В. На это также
следует обращать внимание в таких прецизионных схемах, как делители
высоковольтного напряжения.
Стандартные механизмы разрушения резистора, если их не спрогнози-
ровать заранее, также могут создавать определенные трудности. Например,
углеродистые композиционные резисторы безопасным образом выходят из
строя, превращаясь в разомкнутую цепь. Следовательно, в некоторых при-
ложениях эти компоненты могут играть полезную второстепенную роль,
выполняя функцию плавкого предохранителя. Замена такого резистора на
углеродистый пленочный резистор может повлечь за собой неприятности,
так как при выходе из строя углеродистые пленки могут вызвать короткое
замыкание. Металлопленочные компоненты обычно при выходе из строя
превращаются в разомкнутую цепь.
Все резисторы имеют тенденцию к незначительному уменьшению но-
минала с возрастом. Производители задают долговременную стабильность
в единицах ppm/год. Для металлопленочных резисторов нередки значения
50 или 75 ppm/год. Для применения в критических приложениях металло-
пленочные устройства необходимо заранее подвергнуть тренировке номи-
нальной мощностью, по меньшей мере, в течение недели. Во время трени-
ровки величина сопротивления может измениться на 100—200 ррт. Для
полной стабилизации металлопленочных резисторов может потребоваться
4000—5000 рабочих часов, в особенности если они не подвергались элект-
ротермотренировке.
Дробовой шум резисторов
Большинство разработчиков имеют определенное представление о харак-
терном для резисторов тепловом шуме (или шуме Джонсона). Однако для
резисторов также характерен менее известный вторичный шумовой фено-
мен, который называется избыточным шумом (excess noise). Он может, в ча-
стности, вызывать проблемы в схемах с прецизионными операционными
усилителями и преобразователями, так как становится очевиден, только
когда через резистор проходит ток.
Тепловой шум является следствием случайных колебаний переносчиков
зарядов внутри резистора, которые вызваны температурой. Несмотря на то
что средний ток, вызываемый колебаниями, равен нулю, мгновенное дви-
жение зарядов приводит к возникновению на выводах резистора шумового
напряжения. С другой стороны, избыточный шум возникает в первую оче-
редь при протекании постоянного тока в дискретной среде например в про-
водящих частицах углеродистого композиционного резистора. Ток проте-
кает через сжатые углеродные гранулы неравномерно, при этом вызывая
образование «электрических разрядов» («arcing») между частицами. Вслед-
ствие этого в дополнение к температурному шуму возникает шум со спек-
тральной плотностью мощности вида 1// Другими словами, избыточное
шумовое напряжение увеличивается обратно пропорционально корню квад-
ратному частоты.
Избыточный шум часто застает неподготовленного разработчика врас-
плох. В типичных схемах с операционными усилителями шумовой порог
определяется тепловым шумом резистора и входным шумом операционно-
го усилителя. Избыточный шум становится значительным и зачастую до-
минирующим фактором, только когда к входному резистору прикладывает-
ся напряжение и через него начинает протекать ток. В общем случае наи-
больший избыточный шум генерируют углеродистые композиционные
резисторы. По мере того как проводящая среда становится более равномер-
ной, этот шум становится менее значительным. Углеродистые пленочные
резисторы имеют меньший, а металлопленочные, проволочные и цельно-
металлические резисторы — еще меньший уровень избыточного шума.
Производители задают избыточный шум через шумовой индекс — чис-
ло микровольт среднеквадратического шума на каждую декаду частоты при
падении на резисторе 1 В постоянного напряжения. Величина индекса мо-
жет достигать 10 дБ (3 мкВ на декаду полосы при падении 1 В постоянного
напряжения). Избыточный шум является наиболее значительным на низ-
ких частотах, в то время как на частотах выше 100 кГц преобладает тепло-
вой шум.
Потенциометры
Для потенциометров точной настройки (trimming potentiometers — trimpots)
характерно большинство негативных явлений, которые свойственны по-
стоянным резисторам. Кроме того, пользователи также должны сохранять
бдительность по отношению к некоторым источникам опасностей, уни-
кальных для данных компонентов.
Например, многие потенциометры точной настройки не герметизиро-
ваны и могут быть серьезно повреждены моющими растворителями и даже
чрезмерной влажностью. Вибрация или просто частое длительное исполь-
зование может повредить резистивный элемент и контакты ползунка. Кон-
тактный шум (треск), ТК, паразитные эффекты и ограничения регулируе-
мого диапазона могут также затруднить работу схемы, содержащей потен-
циометры точной настройки. Кроме того, ограниченное разрешение
проволочных потенциометров, а также скрытые ограничения разрешения
металлокерамических и пластиковых потенциометров (гистерезис, несов-
местимые ТК материалов, люфт) делают получение и поддержание точных
настроек в схеме практически невозможным. С учетом этого потенциаль-
ному пользователю потенциометров точной настройки предлагается вос-
пользоваться двумя правилами. Правило 1: При применении потенциомет-
ров точной настройки с ручным управлением будьте бесконечно осторож-
ны и используйте бесконечно малый диапазон регулировки во избежание
бесконечного разочарования. Правило 2: Рассмотрите возможность исклю-
чения всех потенциометров точной настройки с ручным управлением! На се-
годняшний день доступен ряд потенциометров с цифровой адресацией
Таблица 9.2. Сравнение резисторов
Тип Преимущества Недостатки
Дискретные
Углеродистые композиционные Наименьшая стоимость Высокая мощность/Малые размеры корпуса Широкий диапазон номиналов Плохая погрешность (5 %) Плохой температурный коэффициент (1500 ррт/°C)
Проволочные Превосходная погрешность (0,01 %) Превосходный ТК (1 ррт/°C) Высокая мощность Значительное реактивное сопротивление Большие размеры корпуса Наибольшая стоимость
Металло- пленочные Хорошая погрешность (0,1 %) Хороший ТК (от менее 1 до 100 ррт/ °C) Умеренная стоимость Широкий диапазон номиналов Низкий коэффициент напряжения Необходима стабилизация при помощи элекгротермотренировки Низкая мощность
Цельно- металлические Превосходная погрешность (до 0,005 %) Превосходный ТК (ниже 1 ррт/ °C) Низкое реактивное сопротивление Низкий коэффициент напряжения Низкая мощность Очень высокая стоимость
Высокоомные Очень высокие номиналы (от 108 до 1014 Ом) Единственно возможный вариант для некоторых схем Высокий коэффициент напряжения (200 рргп/В) Хрупкий стеклянный корпус (требует бережного обращения)
9.1. Пассивные компоненты 819
00
м
о
Окончание табл. 9.2
Тип Преимущества Недостатки
Сборки
Толсто- пленочные Наименьшая стоимость Высокая мощность Лазерная подстройка Легко достать Слабое согласование (0,1 %) Плохой ТК (>100 ррт/ °C) Плохой взаимный ТК (10 ррт/°C)
Т онкопл еночные Хорошее согласование (<0,01 %) Хороший ТК (<100 ррт/ °C) Хороший взаимный ТК (2 ррт/ °C) Умеренная стоимость Лазерная подстройка Низкая емкость Годятся для подложек гибридных ИС Зачастую большие размеры Ограниченный диапазон номиналов и конфигураций
9.1. Пассивные компоненты 821
(RDAC или TrimDACT), предназначенных непосредственно для реализа-
ции функций, аналогичных функциям потенциометров точной настройки
(см. 17). Также существует множество недорогих многоканальных ЦАП с
выходом напряжения, специально разработанных для задач точной настройки
напряжений в системах.
В табл. 9.2 представлен итоговый обзор критериев выбора различных
типов постоянных резисторов в дискретном виде и в составе сборок. При
выборе общая информация, приведенная в таблице, должна дополняться
информацией из каталогов производителей (см. список литературы в конце
раздела).
Индуктивность
Паразитная индуктивность
Все проводники являются индуктивными, и на высоких частотах важной
может быть даже индуктивность достаточно короткого отрезка провода или
печатного проводника. Индуктивность прямого провода длиной L мм и
радиусом поперечного сечения R мм в свободном пространстве определя-
ется первым выражением на рис. 9.9.
Индуктивность полоскового проводника (аппроксимация проводника
печатной платы) шириной W мм и толщиной Н мм определяется вторым
выражением на рис. 9.9.
В реальных системах обе эти формулы являются приближенными, од-
нако дают определенное представление о порядке величины индуктивнос-
ти. Они говорят нам о том, что 1 см провода с наружным диаметром 0,5 мм
имеет индуктивность 7,26 нГн, а 1 см проводника печатной платы шири-
ной 0,25 мм имеет индуктивность 9,59 нГн. Эти числа достаточно близки к
реальным измеренным значениям.
Индуктивность 7,26 нГн на 10 МГц имеет импеданс 0,46 Ом; таким
образом, она может вызвать ошибку величиной 1 % в 50-омной системе.
2R L, R в мм
Индуктивность провода = 0,0002L In — -0,75 МГц
Пример: 1 см 0,5 мм провода имеет индуктивность 7,26 нГн
(2R = 0,5 мм, L = 1 см)
Пример: 1 см 0,25 мм печатного проводника имеет индуктивность 9,59нГн
{Н = 0,038 мм, W = 0,25 мм, L = 1 см)
Рис. 9.9. Расчет индуктивности провода и полоскового проводника
Взаимная индуктивность
Другим аспектом, касающимся индуктивности, является разделение выте-
кающего и обратного токов. Закон Кирхгофа гласит, что ток протекает в
замкнутых контурах: всегда существуют прямой и обратный пути. Весь контур
представляет собой одновитковую катушку индуктивности.
Этот принцип проиллюстрирован рис. 9.10, где сравниваются схемы раз-
водки сигнальных проводников. Если площадь внутри контура является
сравнительно большой, как показано на верхнем «неидеальном» рисунке,
то индуктивность и, соответственно, импеданс по переменному току также
будут большими. С другой стороны, если прямой и обратный пути находят-
ся близко друг к другу, как показано на нижнем «улучшенном» рисунке,
индуктивность будет намного меньше.
Неидеальное распоожение
сигнальной разводки
Рис. 9.10. Неидеальный и улучшенный варианты разводки сигнальных проводников
Обратите внимание, что случай неидеальной разводки сигналов, пока-
занный на рис. 9.10, также имеет другие недостатки: при большой площа-
ди, заключенной внутри проводников, возникают сильные электромагнит-
ные поля, которые могут взаимодействовать с другими цепями, вызывая
нежелательное взаимодействие. Аналогичным образом вариант с большей
площадью внутри контура в большей степени подвержен взаимодействию с
внешними магнитными полями, которые могут вызывать наводку нежела-
тельных сигналов.
Как и в случае большинства других источников шума, после определе-
ния принципа его воздействия можно найти способы снижения его влия-
ния. В данном случае связь уменьшается при уменьшении любого из чле-
нов уравнения, приведенного на рис. 9.11. Помеха может быть снижена за
счет уменьшения частоты или амплитуды тока. Однако зачастую имеется
возможность снизить взаимную индуктивность между цепями за счет умень-
шения площади одного или обоих контуров и, возможно, увеличения рас-
стояния между ними.
Пример разводки показан на рис. 9.12. На нем связь между двумя схе-
мами, обозначенными Zx и Z2, минимизируется за счет максимально воз-
можного уменьшения площади контуров.
Так же, как показано на рис. 9.13, взаимная индуктивность может яв-
ляться проблемой при передаче сигналов по кабелям. Она является значи-
9.7. Пассивные компоненты
Наведенное
напряжение
М — взаимоиндуктивность
В — плотность магнитной индукции
А — площадь сигнального контура
coN = 2nfN — круговая частота источника шума
V — наведенное напряжение = coNMIN = шАВ
Рис. 9.11. Основные принципы индуктивной связи
Рис. 9.12. Надлежащие разводка и размещение сигнальных проводников могут сни-
зить взаимную индуктивность
Плоский резиновый кабель с единствен-
ной возвратной линией имеет большую
взаимоиндуктивность между цепями
Сигнальная линия 1
Сигнальная линия 2
_____Сигнальная линия 3____
Сигнальная линия 4
Возвратная сигнальная линия
Отдельные и рядом расположенные сиг-
нально-возвратные линии для каждой
цепи уменьшают их взаимоиндуктив-
ность
Витые пары уменьшают взаимоиндуктив-
ность еще больше
Сигнал 1
+
Возврат 1
Сигнал 2
+
Возврат 2
Сигнал 3
+
Возврат 3
Сигнал 4
+
Возврат 4
Сигнал 1
Возврат 1
Сигнал 2
Возврат 2
Рис. 9.13. Взаимная индуктивность при передаче сигналов по кабелям
Глава 9. Методы проектирования аппаратуры
тельной в плоских кабелях, особенно если путь прохождения обратного
сигнала является общим для нескольких сигнальных цепей (верхний рису-
нок). Применение отдельных выделенных сигнальной и земляной линий
для каждой сигнальной цепи уменьшает проблему (средний рисунок). Еще
более хорошим способом является применение кабеля со скрученными па-
рами для каждой сигнальной цепи.
Иногда уменьшить взаимную индуктивность позволяет экранирование
магнитных полей, однако осуществить это не легче, чем экранировать элек-
трическое поле при помощи электростатического экрана (см. следующий
раздел). ВЧ магнитные поля блокируются проводящим материалом при ус-
ловии, что глубина скин-слоя проводника на экранируемой частоте намно-
го меньше толщины проводника и в экране нет отверстий (в электростати-
ческих экранах могут присутствовать небольшие отверстия, в магнитных
экранах их быть не должно). Низкочастотные и постоянные поля могут
быть экранированы при помощи экрана, представляющего собой лист мю-
металла. Мю-металл — это сплав, имеющий очень высокую магнитную
проницаемость. Он очень дорог, его магнитные свойства ухудшаются при
механических нагрузках, и он может входить в насыщение при воздействии
слишком сильного поля. Поэтому по возможности его применения следует
избегать.
«Звон»
Последовательное или параллельное соединение катушки индуктивности с
конденсатором формирует резонансный контур, ключевым свойством ко-
торого является значительное изменение импеданса в небольшом диапазо-
не частот. То, насколько выражен этот эффект, зависит от относительной
добротности, Q, резонансного контура. Этот эффект широко применяется
для задания частотного отклика узкополосных схем, однако он также мо-
жет являться потенциальным источником проблем.
Если паразитная индуктивность и емкость (которая может быть, а мо-
жет и не быть паразитной) схемы формируют резонансный контур, то он
может возбуждаться сигналами, присутствующими в схеме, и «звенеть» на
резонансной частоте.
Пример показан на рис. 9.14, где резонансный контур, образованный
индуктивным проводником питания и развязывающим конденсатором,
может возбуждаться быстрыми импульсными токами, выдаваемыми запи-
танной ИС.
ис 3
L,
7YYVI___О
1 мкГц
С,
0,1 мкФ
ИС
Небольшой последовательный резистор
у самой ИС уменьшает добротность
Эквивалентная цепочка развязки
линии питания имеет резонанс при:
f-'
2xjLC
Рис. 9.14. Резонансный контур, образованный схемой развязки цепи питания
9.1. Пассивные компоненты
В то время как стандартная полосковая индуктивность и типичные развя-
зывающие емкости номиналом 0,01—0,1 мкФ дают резонанс на частотах выше
нескольких мегагерц, схема, показанная в примере с конденсатором 0,1 мкФ
и индуктивностью 1 мкГн, резонирует на частоте 500 кГц. Если схему оста-
вить без изменений (как показано в левой части рисунка), то она может
представлять проблему. Эффект нежелательного резонанса в цепи питания
может быть уменьшен путем снижения добротности индуктивности. Наи-
более простым способом осуществить это является добавление небольшого
сопротивления (~10 Ом) в цепь питания близко к ИС, как показано на
правом рисунке.
Паразитные эффекты катушек индуктивности
Несмотря на то что индуктивность является одним из фундаментальных свойств
электронных схем, катушки индуктивности применяются намного реже рези-
сторов и конденсаторов. В качестве прецизионных компонентов они приме-
няются еще реже. Это связано с тем, что они сложнее в производстве, менее
стабильны и физически прочны, чем резисторы и конденсаторы. Стабильные
прецизионные катушки индуктивности сравнительно легко производить с
номиналами от наногенри до десятков и сотен микрогенри, устройства с боль-
шими номиналами менее стабильны и имеют большие габариты.
Как и следует ожидать при таких обстоятельствах, по возможности при
разработке схем стараются избегать применения прецизионных катушек
индуктивности. Стабильные прецизионные катушки индуктивности редко
используются в прецизионных аналоговых схемах, за исключением резо-
нансных контуров в высокочастотных узкополосных схемах.
Однако они широко применяются в фильтрах питания, импульсных ис-
точниках питания и других задачах, где не требуется высокая точность (до-
полнительную информацию см. в следующем разделе). Важными свойства-
ми катушек индуктивности, используемых в таких применениях, являются
характеристики пропускаемого тока, насыщения, а также добротность. Если
катушка состоит из витка проволоки без сердечника, то ее индуктивность
практически не зависит от пропускаемого тока. С другой стороны, если ка-
тушка намотана на сердечник из магнитного материала (магнитный сплав
или феррит), то ее индуктивность будет нелинейной, так как при больших
токах начнется насыщение сердечника. В результате подобного насыщения
уменьшится эффективность схемы, в которой используется индуктивность,
и, вероятно, увеличатся наводки и будут генерироваться гармоники.
Как отмечалось выше, катушки индуктивности и конденсаторы образу-
ют резонансные контуры. Так как все катушки индуктивности имеют неко-
торую паразитную емкость, то они имеют резонансную частоту (которая
обычно указывается в справочных данных). Таким образом, катушки ин-
дуктивности должны применяться в прецизионных схемах на частотах зна-
чительно ниже резонансной.
Q, или добротность
Другой характеристикой катушек индуктивности является их добротность Q —
отношение реактивного импеданса к сопротивлению (рис. 9.15).
Глава 9. Методы проектирования аппаратуры
• Q = 2nfL/R.
• Q катушки индуктивности в резонансном контуре является мерой отношения ее реак-
тивного сопротивления к сопротивлению.
• Сопротивление берется на ВЧ, а не на постоянном токе.
• Ширина полосы одиночного резонансного контура по уровню 3 дБ равна Fc/Q, где
Fc — центральная частота.
Рис. 9.15. Добротность катушки индуктивности
Редко имеется возможность вычислить Q катушки индуктивности на
основании ее сопротивления по постоянному току. Это вызвано тем, что Q
на высоких частотах всегда ниже, чем предсказанное на основании сопро-
тивления по постоянному току из-за скин-эффекта (и потерь в сердечнике,
если катушка имеет магнитный сердечник).
Добротность также является характеристикой резонансных контуров
(и конденсаторов, однако конденсаторы на практике имеют столь большое
значение Q, что его можно не учитывать). Q резонансного контура, значе-
ние которой близко к Q индуктивности (если сознательно не занижено при
помощи дополнительного резистора), является мерой ширины полосы от-
носительно резонансной частоты. Резонансные £С-контуры редко имеют
Q намного выше 100 (ширина полосы 1 % по уровню 3 дБ), однако керами-
ческие резонаторы могут иметь Q порядка тысяч, а кварцевые кристаллы —
порядка десятков тысяч.
Не упустите что-нибудь
Запомните, если ваш проект на базе прецизионного операционного усили-
теля или преобразователя данных не удовлетворяет спецификации, про-
верьте, не упустили ли вы что-нибудь при попытках найти источники оши-
бок. Проанализируйте и активные, и пассивные компоненты, стараясь иден-
тифицировать любые предположения и предвзятые мнения, которые могут
затмевать факты.
Например, движение жил кабеля относительно окружающего диэлект-
рика может вызывать возникновение значительных накопленных статичес-
кие зарядов, которые приводят к ошибкам, особенно при подключении к
высокоимпедансным схемам. В этом случае могут помочь жесткие кабели
или дорогостоящие кабели с тефлоновым покрытием с низким уровнем
шума.
По мере появления большего числа высокоточных операционных уси-
лителей и повышения требований к точности и быстродействию в проекте
все более важным становится хорошее понимание источников ошибок,
описанных в данном разделе (а также в последующих).
Этот раздел дополняется обсуждением пассивных компонентов, приве-
денным в следующем разделе, который посвящен фильтрации питания.
Кроме того, разделы, посвященные проектированию печатной платы и элек-
тромагнитным/радиочастотным помехам, также во многом дополняют ма-
териал данного раздела.
Список литературы к 9.1. Пассивные компоненты
Список литературы
9.1. Пассивные компоненты
1. James Е. Buchanan. Dielectric Absorption — It Can Be a Real Problem In Timing
Circuits. EDN, January 20, 1977, p. 83.
2. Lew Counts and Scott Wurcer. Instrumentation Amplifier Nears Input Noise Floor.
Electronic Design, June 10, 1982.
3. W. Doeling, W. Mark, T. Tadewald, and P. Reichenbacher. Getting Rid of Hook:
The Hidden PC-Board Capacitance. Electronics, October 12, 1978, p 111-117.
4. Tarlton Fleming. Data-Acquisition System (DAS) Design Considerations. WESCON'81
Professional Program Session Record No. 23.
5. Walter G. Jung and Richard Marsh. Picking Capacitors, Parts I and II. Audio, February
and March, 1980.
6. Robert A. Pease. Understand Capacitor Soakage to Optimize Analog Systems. EDN,
October 13, 1982, p. 125.
7. Andy Rappaport. Capacitors. EDN, October 13, 1982, p. 105.
8. Specification MIL-PRF-19978G, Capacitors, Fixed, Plastic (or Paper-Plastic)
Dielectric (Hermetically Sealed in Metal, Ceramic or Glass Cases), Established and
Nonestablished Reliability General Specification for, May 27, 1999.
9. Specification MIL-PRF-123B, Capacitors, Fixed, Ceramic Dielectric, (Temperature
Stable and General-Purpose), High Reliability, General Specification for, August 6, 1990.
10. Tantalum and Ceramic Surface Mount Capacitor Catalog, Kemet Electronics
Corporation, P.O. Box 5928, Greenville, SC, 29606, 864-963-6300.
11. A general capacitor information resource: www.faradnet.com.
12. Southern and F-Dyne film capacitors, Southern Electronics, 215 Research Drive,
Milford, CT, 06460, 203-876-7488.
13. Wesco film capacitors, Wesco Electrical Company, 201 Munson Street, Greenfield,
MA, 01301, 413-774-4358.
14. Doug Grant and Scott Wurcer. Avoiding Passive Component Pitfalls. The Best of
Analog Dialogue, Analog Devices, 1991, p. 143-148.
15. RCD Components, Inc., 520 E. Industrial Park Drive, Manchester NH, 03109,
603-669-0054, www.rcd-comp.com.
16. Steve Sockolov and James Wong. High Accuracy Analog Needs More Than Op
Amps. Electronic Design, October 1, 1992, p. 53.
17. Selection guide for digital potentiometers: www.analog.com/digitalpots.
18. Precision Resistor Co., Inc., 10601 75th St. N., Largo, FL, 33777-1427, 727-541-
5771, www.precisionresistor.com.
19. Ohmite Victoreen MAXI-MOX Resistors, 3601 Howard Street, Skokie, IL 60076,
847-675-2600, www.ohmite.com/victoreen/.
20. Vishay/Dale Resistors, 2300 Riverside Blvd., Norfolk, NE, 68701-2242, 402-371 -
0800, www.vishay.com.
21. Beyschlag Resistor Products, PO Box 1220, D-25732 Heide, Germany,
www.beyschlag.com.
22. B.I. & B. Bleaney. Electricity & Magnetism, Oxford at the Clarendon Press, 1957,
pp. 23, 24, and 52.
23. Henry W. Ott. Noise Reduction Techniques in Electronic Systems. 2nd Edition, John
Wiley, Inc., 1988, ISBN: 0-471-85068-3.
24. G. W.A. Dummer. Materials for Conductive and Resistive Functions, Hay den, 1970.
Благодарности:
Часть этого и следующий раздел заимствованы из статьи Дуга Гранта и Скотта Вёрсера
«Avoiding Passive Component Pitfalls», опубликованной в Analog Dialogue 17-2, 1983.
Глава 9. Методы проектирования аппаратуры
9.2. Вопросы конструирования печатных плат
Джеймс Брайант, Уолт Кестер, Уолт Джанг
Печатные платы (ПП), безусловно, являются наиболее стандартным мето-
дом сборки современных электронных схем. Они имеют вид сэндвича, со-
стоящего из изоляционного слоя (слоев) и одного или нескольких слоев
медных проводников, и могут вносить ошибки различного рода в схему, в
частности если схема является высокоскоростной или высокоточной. Та-
ким образом, в прецизионных схемах ПП играют роль «невидимых» ком-
понентов. Так как разработчики не всегда рассматривают электрические
характеристики ПП как дополнительные компоненты схемы, можно лег-
ко получить общие показатели хуже намеченных. Эти общие соображе-
ния, выраженные в различных формах, являются основной темой данного
раздела.
К эффектам ПП, которые негативно влияют на показатели прецизион-
ных схем, относятся: сопротивления утечки, паразитные падения напряже-
ний в печатных проводниках, переходных отверстиях и заземляющих по-
верхностях, влияние паразитной емкости, диэлектрического поглощения и
связанных с ними «подводных камней». Кроме того, ПП обладают свой-
ством поглощения атмосферной влаги, гигроскопичностью, поэтому зачас-
тую изменения влажности вызывают изменение вклада некоторых паразит-
ных эффектов.
В целом эффекты ПП могут быть разделены на две обширные катего-
рии: те, которые наиболее значимо влияют на работу схемы в статическом
режиме или по постоянному току, и те, которые наиболее значимо влияют
на работу схемы в динамическом режиме или по переменному току.
Другой обширной темой при конструировании ПП является заземле-
ние. Заземление само по себе является проблемной областью при проекти-
ровании любых аналоговых схем, и можно было бы сказать, что реализация
схемы на базе ПП ничего не меняет. Однако, к счастью, определенные
принципы качественного заземления (а именно, использование земляных
слоев) естественны для ПП. Этот фактор является одним из наиболее зна-
чительных преимуществ проектирования аналоговых схем на базе ПП, и
данному вопросу посвящена значительная часть раздела.
К некоторым другим важным аспектам заземления относятся управле-
ние паразитными параметрами заземления и напряжениями на путях про-
хождения обратных сигналов, которые могут ухудшать показатели схемы.
Эти напряжения могут быть вызваны действием внешних сигналов, об-
щими токами или просто чрезмерным падением напряжения на земляных
проводниках. Выбор подходящих размеров и схем разводки проводников,
а также использование дифференциальных сигналов и применение мето-
дов изоляции «земли» позволяет управлять этими паразитными напряже-
ниями.
Последним из обсуждаемых вопросов заземления является правильное
заземление в смешанных аналого-цифровых схемах. Эта проблема возни-
кает во многих приложениях, и, так как основной частью системы действи-
тельно является интерфейс с АЦП (ЦАП), ее нельзя недооценивать. Сама
9.2. Вопросы конструирования печатных плат 829
по себе тема качественного заземления может послужить основой для це-
лой философии разводки высококачественных ПП со смешанными сигна-
лами, что, в сущности, оправдано.
Сопротивление проводников
Каждый инженер знаком с резисторами, однако, вероятно, меньшая их часть
знает об их характерных свойствах, которые в общих чертах излагались в
разд. 9.1. И еще гораздо меньшее число инженеров осознает, что все прово-
да и проводники ПП в монтируемых ими схемах и системах также являют-
ся резисторами. Даже эти сопротивления проводников и простые провод-
ные связи могут иметь негативное влияние в высокоточных системах. Медь
не является суперпроводником, однако слишком многие инженеры полага-
ют, что является!
На рис. 9.16 показан метод расчета сопротивления R прямоугольного
листа меди длиной Z, шириной X и толщиной Y.
При температуре 25 °C сопротивление чистой меди равно 1,724 х 106 Ом/см.
Толщина стандартной медной фольги с удельным весом 1 унция для печат-
ной платы равна 0,036 мм (0,0014"). С учетом приведенных выше выражений
сопротивление такого стандартного медного элемента равно 0,48 мОм на
квадрат. Последовательно суммируя сопротивления квадратов, можно по-
лучить сопротивление линейного проводника заданной длины. Линия име-
ет длину Zи ширину Х\ таким образом, как показано на рисунке, линейное
сопротивление R просто равно произведению Z/Х на сопротивление одного
квадрата.
По заданному весу меди и ширине проводника можно вычислить отно-
шение сопротивления к длине. Например, часто применяемые в ПП про-
водники шириной 0,25 мм (10 mil) имеют достаточно большую величину
отношения сопротивления к длине — примерно 19 мОм/см (48 мОм/дюйм).
Более того, температурный коэффициент сопротивления меди при темпе-
ратуре, близкой к комнатной, равен примерно 0,4 %/ °C. Этот фактор не
Сопротивление полоскового проводника
с удельным весом меди в 1 унцию:
р = 1,724х10“6 Ом см, У = 0,0036 см
Я = 0,48 — мОм
X
Z
— — число квадратов
R — сопротивление одного квадрата полоска
(Z = X) = 0,48 мОм/квадрат
Рис. 9.16. Расчет поверхностного и линейного сопротивлений стандартных медных
проводников ПП
Глава 9. Методы проектирования аппаратуры
Рис. 9.17. Предсказанное на основании закона Ома значение ошибки, вызванной па-
дением напряжения в проводнике ПП, превышает 1 LSB
следует игнорировать, в особенности в прецизионных низкоимпедансных
схемах, где ТК может вызывать изменения полного импеданса в зависимо-
сти от температуры.
Как показано на рис. 9.17, при не самых благоприятных условиях со-
противление проводника ПП может являться источником больших оши-
бок. Рассмотрим 16-разрядный АЦП с входным сопротивлением 5 кОм,
сигнал на который поступает от источника по медному (с удельным весом
1 унция) печатному проводнику длиной 5 см и шириной 0,25 мм. Сопро-
тивление проводника, равное приблизительно 0,1 Ом, образует вместе с
5-кОм нагрузкой делитель, что приводит к ошибке. Результирующее падение
напряжения составляет ошибку усиления 0,1/5000 (~0,0019 %), что превы-
шает 1 LSB (0,0015 % для 16 бит).
Таким образом, при работе с прецизионными схемами даже к таким
простым элементам проекта, как сопротивление проводников ПП, нельзя
подходить снисходительно. Существуют различные решения этой пробле-
мы, например использование более широких проводников (которые могут
занимать большее пространство), более тяжелой меди (которая может ока-
заться слишком дорогой) или просто выбор преобразователя с более высо-
ким входным сопротивлением. Однако более важно досконально обдумы-
вать все аспекты и избегать недооценки явлений, которые при поверхнос-
тном взгляде кажутся безобидными.
Падение напряжения на сигнальных проводниках —
обратная связь Кельвина
Ошибка усиления, вызываемая резистивным падением напряжения на сиг-
нальных проводниках ПП, важна только при высокой точности и/или при
высоком разрешении (см. пример на рис. 9.17), а также в схемах, где проте-
кают большие сигнальные токи. Когда сопротивление нагрузки является
резистивным и постоянным, ошибка может быть компенсирована путем
регулировки общего усиления системы. При других обстоятельствах она
зачастую может быть устранена при помощи обратной связи Кельвина, также
носящей название обратной связи, «чувствующей напряжение» («voltage
sensing» feedback), как показано на рис. 9.18.
В этой модификации показанной на рис. 9.17 схемы сигнал на вход
АЦП, имеющего высокое разрешение и низкий входной импеданс, по-пре-
9.2. Вопросы конструирования печатных плат
«Чувствительный» вывод
Рис. 9.18. Использование обратной связи, «чувствующей напряжение», обеспечивает
точность на нагрузке
жнему подается по длинному резистивному печатному проводнику. Но в
этом случае падение напряжения на сигнальном проводнике не приводит к
ошибке, так как непосредственно с входного вывода АЦП на источник
сигнала подается сигнал обратной связи. Эта схема позволяет достичь пол-
ной точности в сигнале, поступающем на АЦП, несмотря на падение на-
пряжения на сигнальном проводнике.
Использование раздельных линий возбуждения (F) и считывания (5)
при подключении к нагрузке устраняет любые ошибки, вызванные падени-
ем напряжения на сигнальном проводнике, однако эта схема, естественно,
может применяться только в системах с отрицательной обратной связью.
Кроме того, она неприменима в случаях, когда сигнал должен с равной
точностью подаваться на две нагрузки и более, так как сигнал обратной
связи может быть взят только из одной точки. Кроме того, в этой сильно
упрощенной системе игнорируются ошибки в общем тракте источник/на-
грузка вследствие предположения о том, что падения напряжения на зазем-
лении пренебрежимо малы.
Обратные сигнальные токи
Закон Кирхгофа гласит, что алгебраическая сумма токов в любой точке
цепи равна нулю. Из этого следует, что все токи протекают по контуру, как
показано на рис. 9.19 (см. 7 8)> и что, в частности, при анализе схемы всегда
необходимо учитывать обратный ток.
При рассмотрении проблем заземления необходимо интуитивно пред-
ставлять, как работает схема. Большинство инженеров легко представляют
себе обратный ток на заземлении I при рассмотрении полностью диффе-
ренциальных схем.
Однако при рассмотрении более стандартной схемы с несимметричным
сигналом, опорным уровнем для которого является «земля», обычно подра-
зумевают, что все точки на схеме цепи, где изображен символ «земли»,
имеют равные потенциалы. К сожалению, это благоприятное обстоятель-
ство не всегда бывает на практике!
Этот излишне оптимистичный подход проиллюстрирован на рис. 9.20,
где «бесконечная проводимость земли», если бы она могла существовать,
дала бы нулевую разность напряжений между точками заземления источ-
В любой точке цепи алгебраическая сумма токов равна нулю
Что заставляет их вернуться назад?
Приходим к заключению, что все напряжения всех точек различны
(даже в заземленных точках)
Рис. 9.19. Закон Кирхгофа помогает анализировать падение напряжения в полном
контуре источник/нагрузка
потенциалов между G, и G2
Рис. 9.20. В отличие от этой оптимистичной схемы в реальной системе проводимость
между точками заземления и нагрузки не бесконечна
ника G{ и нагрузки G2. К сожалению, этот подход нежелательно применять
на практике, а при работе с высокоточными схемами он может привести к
катастрофическим последствиям.
Более реалистичный подход к проблеме интегрированности земляных
проводников заключается в анализе соответствующего импеданса (импе-
дансов) и оказании особого внимания минимизации паразитных шумовых
напряжений.
Рис. 9.21. Более реалистичный взгляд на схему заземления контура источник—нагруз-
ка включает в себя влияние импеданса между б,—G2 и некоторых токов, не
связанных с сигналом
9.2. Вопросы конструирования печатных плат 833
На рис. 9.21 показана более реалистичная модель заземления. Как пока-
зано на рисунке, через комплексный импеданс между точками заземления
Gj и G2 протекает обратный сигнальный ток, который вызывает в этой цепи
падение напряжения А И Однако более важным фактом, на который следу-
ет обратить внимание, является то, что в том же самом тракте могут проте-
кать дополнительные внешние токи, например /ЕХТ. Очень важно понимать,
что подобные токи могут порождать некоррелированные шумовые падения
напряжения между точками G{ и G2 (зависящие от величины тока и относи-
тельного импеданса «земли»).
Часть этих побочных напряжений может проявляться на сигнальной
нагрузке, искажая передаваемый сигнал.
Заземление в системах со смешанными
аналого-цифровыми сигналами
Уолт Кестер, Джеймс Брайант, Майк Бирн
Современные системы обработки сигналов обычно содержат в себе устрой-
ства со смешанными сигналами (mixed-signal devices), такие как аналого-
цифровые преобразователи (АЦП), цифро-аналоговые преобразователи
(ЦАП), а также быстродействующие цифровые сигнальные процессоры (DSP).
Обработка аналоговых сигналов требует большого динамического диапазо-
на, поэтому возрастает роль высокопроизводительных ЦАП и АЦП. Обес-
печение широкого динамического диапазона с низкими шумами во «враж-
дебном» цифровом окружении возможно только при использовании эф-
фективных приемов проектирования высокоскоростных схем, включающих
в себя технически грамотную трассировку сигнала, развязку и заземление.
В прошлом «высокоточные низкоскоростные» схемы обычно рассмат-
ривались отдельно от так называемых «высокоскоростных» схем. В том что
касается АЦП и ЦАП, частота дискретизации (или обновления) обычно
рассматривалась как критерий скорости работы схемы. Однако следующие
два примера показывают, что на практике большинство современных ИС
обработки сигналов являются «высокоскоростными» и поэтому должны
рассматриваться как таковые для достижения хороших результатов. Это
касается цифровых сигнальных процессоров (DSP), а также АЦП и ЦАП.
Все дискретизирующие АЦП (АЦП с внутренней схемой выборки и
хранения), подходящие для задач обработки сигналов, работают с достаточ-
но высокоскоростными тактовыми сигналами с малым временем нараста-
ния и спада (обычно несколько наносекунд) и должны рассматриваться как
высокоскоростные устройства, даже если их производительность (частота
дискретизации) представляется невысокой. Например, среднескоростной
12-разрядный АЦП последовательного приближения (SAR) может работать
с внутренней тактовой частотой 10 МГц, тогда как его частота дискретиза-
ции составляет всего 500 kSPS.
Для сигма-дельта (Z-A) АЦП также требуется высокочастотный такто-
вый генератор, т. к. такие АЦП имеют высокий коэффициент избыточной
дискретизации. Даже так называемые низкочастотные промышленные из-
мерительные Z-A АЦП с высоким разрешением (имеющие производитель-
27- -2X52
Глава 9. Методы проектирования аппаратуры
ность от 10 Гц до 7,5 кГц) работают с тактовой частотой 5 МГц или выше и
обеспечивают разрешение до 24 бит (например, ИС серии AD77xx произ-
водства Analog Devices).
Еще более осложняет вопрос то, что ИС со смешанными сигналами
содержат как аналоговые, так и цифровые порты, и поэтому многие возни-
кающие проблемы связаны с неправильным заземлением. К тому же неко-
торые ИС со смешанными сигналами имеют относительно низкие цифро-
вые токи, в то время как у других они велики. Во многих случаях с точки
зрения оптимального заземления эти два варианта должны рассматривать-
ся отдельно.
Разработчики цифровых и аналоговых устройств склонны рассматри-
вать устройства со смешанными сигналами с различных позиций, и цель
этой главы — разработать общую философию заземления, которая будет
работать в большинстве устройств со смешанными сигналами, без необхо-
димости изучения специфических деталей их внутренних схем.
Заземляющие поверхности и поверхности питания
Наличие низкоимпедансных заземляющих поверхностей большой площади
очень важно для всех современных аналоговых схем. Заземляющая поверх-
ность действует не только как низкоимпедансный обратный тракт для развяз-
ки высокочастотных токов (вызванных работой скоростных цифровых схем),
но также минимизирует электромагнитные и радиочастотные (EMI/RFI) из-
лучения. Благодаря экранирующему действию заземляющей поверхности
также уменьшается чувствительность устройства ко внешним электромаг-
нитным и радиочастотным помехам.
Заземляющие поверхности также позволяют передавать высокоскорост-
ные цифровые и аналоговые сигналы с использованием технологий длин-
ных линий (полосковых или микрополосковых) там, где требуется полу-
чить определенное характеристическое сопротивление линии.
Использование шины-проводника в качестве заземления категорически не-
приемлемо из-за ее импеданса на частоте, соответствующей скорости пере-
ключения большинства логических схем. Например, провод калибра 22 стан-
дарта AWG (American Wire Gauge), что соответствует диаметру 0,64 мм,
обладает индуктивностью около 20 нГн/дюйм. Проходящий по этому про-
воду ток, вызванный логическим сигналом и имеющий скорость нараста-
ния 10 мА/нс, вызовет нежелательное падение напряжения величиной в
200 мВ на 1 дюйм провода:
Ду = £— = 20 нГн х 10 = 200 мВ. (9.1)
Д/ нс
Для сигналов, имеющих размах 2 В, это означает ошибку около 200 мВ
или 10 % (точность приблизительно 3,5 разряда). Даже в полностью цифро-
вых схемах эта ошибка будет означать значительное уменьшение запаса
помехоустойчивости.
Рисунок 9.22 иллюстрирует ситуацию, когда цифровой обратный ток
модулирует аналоговый обратный ток (верхний рисунок). Индуктивность и
сопротивление земляного провода, по которому течет обратный ток, явля-
9.2. Вопросы конструирования печатных плат
Рис. 9.22. Цифровые токи, протекающие в аналоговом обратном тракте, создают на-
пряжение ошибки
ются общими для аналоговой и цифровой схем. Именно это и есть причина
взаимодействия и возникновения ошибки. Одно из возможных решений —
заставить цифровой обратный ток идти непосредственно к точке GND REF,
как показано на нижнем рисунке. Это иллюстрация фундаментальной кон-
цепции заземления «звездой» или заземления с общей точкой. Реализовать
истинное заземление с общей точкой в системе, которая содержит большое
количество трактов прохождения высокочастотных обратных токов, слож-
но, т. к. физическая длина каждого провода, по которому течет обратный
ток, будет вносить паразитное сопротивление и индуктивность, которые
могут сделать затруднительным обеспечение низкоимпедансного заземле-
ния для токов высокой частоты. На практике тракт обратного тока должен
включать в себя заземляющие поверхности большой площади, для того чтобы
обеспечить низкое сопротивление для высокочастотных токов. Таким об-
разом, без применения низкоимпедансных заземляющих поверхностей прак-
тически невозможно избежать появления общего для аналоговой и цифро-
вой схем импеданса, особенно на высоких частотах.
Для минимизации последовательных индуктивности и сопротивления
все выводы заземления микросхем должны припаиваться непосредственно
к низкоимпедансной заземляющей поверхности. Использование традицион-
ных панелек (разъемов) для ИС в высокоскоростных устройствах не рекомен-
дуется. Дополнительная индуктивность и емкость даже «низкопрофильных»
панелек может привести к ухудшению характеристик устройства из-за по-
явления нежелательных общих трактов. Если панельки все же должны быть
использованы для микросхем в D/P-корпусах, например при макетирова-
нии, то имеет смысл использовать наборные панельки из гнезд под от-
дельные выводы {«pin sockets», другое название — «cage jacks»). Такие гнез-
да под отдельные выводы выпускаются в вариантах с наконечником и без
него (№ по каталогу АМР 5-330808-3 и 5-330808-6). Они имеют позолочен-
ные подпружиненные контакты, которые обеспечивают хорошее электри-
ческое и механическое соединение с выводами ИС. Однако многократное
использование может ухудшить их параметры.
Глава 9. Методы проектирования аппаратуры
Выводы питания должны быть развязаны непосредственно на заземля-
ющую поверхность с помощью низкоиндуктивных керамических конден-
саторов для поверхностного монтажа. Если используется конденсатор для
монтажа в сквозные отверстия, то его выводы должны иметь длину не бо-
лее 1 мм. Керамические конденсаторы должны быть расположены как можно
ближе к выводам питания ИС. Для дополнительной развязки могут также
потребоваться ферритовые шайбы.
Двусторонние и многослойные ПП
Желательно, чтобы каждая ПП в системе имела хотя бы один слой, полнос-
тью отведенный под заземляющую поверхность. В идеале одна сторона дву-
сторонней платы должна полностью быть отведена под заземление, а вто-
рая — под различные соединения. На практике это невозможно, т. к. часть
заземляющей поверхности, разумеется, должна быть удалена для отведения
места под дорожки питания и сигналов, межслойные переходы и сквозные
монтажные отверстия. Тем не менее необходимо сохранить как можно боль-
шую площадь заземляющей поверхности (хотя бы 75 %). После окончания
предварительной разводки платы необходимо тщательно исследовать за-
земляющую поверхность, чтобы убедиться в отсутствии изолированных «ос-
тровков» заземления, т. к. выводы заземления микросхем, расположенные
на таких островках, не будут иметь связи с заземляющей поверхностью. Так-
же заземляющая поверхность должна быть проверена на предмет слишком
тоненьких соединений между соседними большими площадями, которые могут
значительно уменьшить эффективность заземляющей поверхности. Излиш-
не упоминать, что при автоматической разводке платы в работе устройства
со смешанными сигналами обычно возникают неполадки, поэтому настоя-
тельно рекомендуется довершать разводку платы вручную.
Системы с плотной компоновкой ИС для поверхностного монтажа бу-
дут иметь большое число межсоединений, поэтому здесь необходимо ис-
пользовать многослойные платы. Это позволит хотя бы один слой полнос-
тью отвести под заземление. В простой 4-слойной плате два внутренних
слоя обычно отводятся под заземление и питание, а два внешних слоя —
• Используйте для заземления (и питания) поверхности большой площади, чтобы обес-
печить низкий импеданс трактов обратного тока (необходимо использовать, по мень-
шей мере, двустороннюю плату!).
• Двусторонние платы:
— избегайте большой плотности межслойных соединений и сквозных отверстий, ко-
торые уменьшают площадь заземляющей поверхности;
— отведите под заземление не менее 75 % площади на одной стороне платы.
• Многослойные платы: должны использоваться в системах с плотной компоновкой:
— выделите, по меньшей мере, один слой под заземляющую поверхность;
— выделите, по меньшей мере, один слой под поверхность питания.
• Используйте, по меньшей мере, 30—40% выводов соединительного разъема ПП под
заземление.
• Продолжите заземляющую поверхность на объединительную (материнскую) плату до
источника питания.
Рис. 9.23. Без заземляющих поверхностей не обойтись!
9.2. Вопросы конструирования печатных плат
для выполнения соединений между установленными компонентами. Рас-
положение питающей и заземляющей поверхностей в соседних слоях обес-
печивает между ними дополнительную емкость, которая способствует вы-
сокочастотной развязке питания. В большинстве систем четырех слоев не-
достаточно, и требуются дополнительные слои для разводки сигнальных
проводников, а также питания. На рис. 9.23 представлен итоговый обзор
вопросов, связанных с заземляющими поверхностями.
Многоплатные системы со смешанными сигналами
Лучший способ минимизировать импеданс заземления в многоплатной си-
стеме — использовать материнскую ПП в качестве объединительной для
организации соединения между платами и, кроме того, обеспечить продол-
жение заземляющих поверхностей на объединительную плату. В соедини-
тельном разъеме ПП хотя бы 30—40 % выводов должно быть отведено под
заземление, и эти выводы должны быть связаны с заземляющей поверхно-
стью на материнской объединительной плате. Для окончательного завер-
шения схемы заземления существуют два способа.
1. Заземляющая поверхность на объединяющей плате может быть со-
единена с «землей» монтажной панели (шасси) во многих точках, таким
образом равномерно распределяя различные пути обратного тока. Этот спо-
соб обычно называется «многоточечным» заземлением, и его схема показа-
на на рис. 9.24.
2. Заземляющая поверхность может быть подключена по схеме «звезды»
к единственной в системе точке заземления (обычно вблизи источника
питания).
Первый подход чаще всего используется в чисто цифровых системах, но
может быть использован и в системах со смешанными сигналами, если токи,
проходящие по «земле» вследствие работы цифровых схем, достаточно малы
Рис. 9.24. Концепция многоточечного заземления
Глава 9. Методы проектирования аппаратуры
и распределены на больших площадях. Низкий импеданс заземления обес-
печивается на всем пути по платам, объединяющей плате и далее по монтаж-
ной панели (шасси). Однако очень важно поддерживать хороший электри-
ческий контакт в местах, где «земли» соединяются с металлической монтаж-
ной панелью. Для этого необходимы металлические винты-«саморезы» или
шайбы с насечками. Особое внимание соединению должно быть уделено
там, где в качестве материала монтажной панели используется анодирован-
ный алюминий, т. к. его поверхность проявляет себя как изолятор.
Второй подход (заземление «звездой») часто используется в высокоско-
ростных системах со смешанными сигналами, имеющих отдельные аналого-
вую и цифровую системы заземления, и ниже обсуждается более подробно.
Разделение аналогового и цифрового заземления
В системах со смешанными сигналами с большим числом цифровых схем
весьма желательно физически отделить чувствительные аналоговые компо-
ненты от шумящих цифровых компонентов. Также может быть полезным
использование раздельных заземляющих поверхностей для аналоговых и
цифровых схем. Для того чтобы уменьшить емкостную связь между этими
поверхностями, они не должны перекрываться. Раздельные аналоговая и
цифровая заземляющие поверхности продолжаются на объединительной
плате с использованием или заземляющей поверхности материнской пла-
ты, или «экранного заземления», которое выполняется при помощи не-
скольких проводных соединений между земляными контактами разъема.
На схеме, показанной на рис. 9.25, видно, что две заземляющие поверхно-
сти на всем своем протяжении идут отдельно до точки заземления «звез-
дой», которая обычно располагается около источника питания. Соедине-
ние заземляющих поверхностей, источника питания и общей точки зазем-
ления («звезды») должно быть выполнено с помощью многочисленных шин
Рис. 9.25. Разделение цифровой и аналоговой заземляющих поверхностей
9.2. Вопросы конструирования печатных плат 839
или толстой медной оплетки для минимизации сопротивления и индуктив-
ности. Для предотвращения случайного появления постоянного напряже-
ния между двумя системами заземления в момент, когда платы вставляются
или вынимаются, на каждой ПП имеется пара диодов Шоттки, включен-
ных встречно-параллельно. Для того чтобы избежать выхода из строя ИС,
которая подключена как к аналоговой, так и к цифровой заземляющим
поверхностям, это напряжение не должно превышать 300 мВ. Предпочти-
тельнее использовать диоды Шоттки, так как они имеют малую емкость и
малое падение прямого напряжения. Низкая емкость позволяет избежать
связи по переменному току между аналоговой и цифровой заземляющими
поверхностями. Диоды Шоттки начинают проводить при прямом напряже-
нии около 300 мВ, и, если ожидаются большие токи, может понадобиться
несколько параллельно соединенных диодов. В некоторых случаях вместо
диодов Шоттки могут быть использованы ферритовые «шайбы», однако они
вызывают появление паразитных контуров с замыканием через «землю» по
постоянному току, которые могут вызвать проблемы в прецизионных сис-
темах.
Также необходимо, чтобы сопротивление заземляющих поверхностей
было как можно меньшим на всем пути к точке заземления «звездой». Пе-
ременное или постоянное напряжение более 300 мВ между двумя заземля-
ющими поверхностями может не только вывести из строя ИС, но и вызвать
ошибочное переключение логических вентилей и, возможно, их переход в
фиксированное состояние.
Заземление и развязка ИС со смешанными сигналами
и малыми цифровыми токами
Чувствительные аналоговые компоненты, такие как усилители и источни-
ки опорного напряжения, всегда подключаются и развязываются относи-
тельно аналоговой заземляющей поверхности. АЦП и ЦАП (и другие ИС со
смешанными сигналами) с малыми цифровыми токами обычно должны рас-
сматриваться как аналоговые компоненты и также заземляться и развязы-
ваться относительно аналоговой заземляющей поверхности. На первый взгляд
это может показаться несколько противоречивым, т. к. преобразователь имеет
и аналоговый, и цифровой интерфейс и обычно имеет выводы, обозначен-
ные как аналоговое заземление (AGND) и цифровое заземление (DGND). Схе-
ма, показанная на рис. 9.26, поможет разобраться с этим кажущимся за-
труднением.
Внутри микросхем, которые имеют как аналоговую, так и цифровую
схему, например АЦП или ЦАП, «земли» обычно разделяются для предот-
вращения влияния цифровых сигналов на аналоговую часть. На рис. 9.26
показана упрощенная модель преобразователя. Разработчик ИС ничего не
может поделать с индуктивностью и сопротивлением соединений, идущих
от контактов на кристалле к выводам корпуса ИС, только оставить их как
есть. Быстро изменяющиеся цифровые токи создают напряжение в точке В,
которое неизбежно передается в точку А аналоговой схемы через паразит-
ную емкость CSTRAY. К тому же неизбежно присутствует паразитная емкость
между каждым выводом корпуса ИС, равная приблизительно 0,2 пФ. И зада-
A — плоскость (слой) аналоговой земли
D — цифровая плоскость (слой) земли
Рис. 9.26. Правильное заземление ИС со смешанными сигналами и малыми внутрен-
ними цифровыми токами
ча разработчика ИС — заставить микросхему работать, несмотря на это.
Однако для того, чтобы предотвратить дальнейшее влияние, выводы AGND
и DGND должны быть соединены с аналоговой заземляющей поверхностью
кратчайшим путем. Любой дополнительный импеданс в соединении DGND
с «землей» приведет к образованию дополнительного цифрового шума в
точке В, что, в свою очередь, наведет дополнительный цифровой шум в
аналоговой схеме за счет паразитной емкости. Обратите внимание, что при
соединении DGND с цифровой заземляющей поверхностью напряжение шума
VN0ISE бУдет прикладываться между выводами AGND и DGND, что приведет к
катастрофическим последствиям!
Обозначение вывода ИС как «DGND» говорит о том, что этот вывод
соединен с цепью заземления ее цифровой части. Но это не подразумевает,
что данный вывод должен быть соединен с цифровым заземлением системы.
Конечно, такая схема заземления может привести к появлению неболь-
шого цифрового шума в аналоговой заземляющей поверхности. Но эти токи
обычно достаточно малы и могут быть минимизированы, если гарантиро-
вать минимальную нагрузку на выходе преобразователя (обычно преобра-
зователь и проектируется с маломощными выходами). Уменьшение нагруз-
ки на цифровых выходах преобразователя, кроме того, сделает логические
переходы сигнала на выходе преобразователя свободными от «звона» и ми-
нимизирует цифровые токи переключения и, таким образом, уменьшит
любое возможное влияние на аналоговый порт преобразователя. Вывод
питания цифровой части (И/;) может быть дополнительно изолирован от
источника аналогового питания при помощи ферритовой «шайбы» с малы-
ми потерями, как показано на рис. 9.26. Внутренние импульсные цифро-
вые токи преобразователя будут идти по небольшому контуру от VD через раз-
вязывающий конденсатор к DGND (этот путь.показан на схеме толстой лини-
ей). Таким образом, импульсные цифровые токи не появятся вне контура
9.2. Вопросы конструирования печатных плат
на аналоговой заземляющей поверхности, а будут циркулировать внутри
него. Развязывающий конденсатор на выводе VD должен быть установлен
как можно ближе к преобразователю, чтобы минимизировать паразитную
индуктивность. В качестве данных конденсаторов следует применять низ-
коиндуктивные керамические конденсаторы, обычно с номиналом от 0,01
до 0,1 мкФ.
Внимательно отнеситесь к цифровым выходам АЦП
Всегда полезно подключать буферный регистр к выходу преобразователя
(как показано на рис. 9.26) для изоляции цифровых цепей преобразователя
от шумов, присутствующих на шине данных. Данный регистр также служит
для минимизации нагрузки на цифровых выходах преобразователя и дей-
ствует как электростатический экран между цифровыми выходами и ши-
ной данных. Даже несмотря на то, что многие преобразователи имеют вхо-
ды/выходы с тремя состояниями, применение подобного изолирующего
регистра остается оправданным. В некоторых случаях для обеспечения боль-
шей развязки может быть желательным добавление еще одного буферного
регистра на аналоговой заземляющей поверхности после выхода преобра-
зователя.
Последовательные резисторы (обозначенные символом R на рис. 9.26),
включенные между выходом АЦП и входом буферного регистра, помогают
минимизировать цифровые импульсные токи, которые могут повлиять на
качество работы преобразователя. Эти резисторы изолируют формировате-
ли цифровых выходов преобразователя от входной емкости буферного ре-
гистра. Кроме того, ЛС-цепочка, образованная резистором R и входной
емкостью буферного регистра, действует как фильтр нижних частот и, та-
ким образом, сглаживает резкие фронты.
Типичный логический КМОП-вентиль в сочетании с проводником
ПП и сквозным переходом образует емкостную нагрузку величиной око-
ло 10 пФ. В отсутствие изолирующего резистора скорость переключения
логического выхода 1 В/нс вызовет импульс тока в 10 мА:
М=С— = 10 пФ X — = 10 мА. (9.2)
А/ нс
Последовательно включенные резисторы сопротивлением 500 Ом умень-
шат данный выходной ток, в результате чего при входной емкости регист-
ра, равной 10 пФ, время нарастания и спада импульса увеличится прибли-
зительно до 11 нс:
tr = 2,2 хт = 2,2 х RC= 2,2 х 500 Ом х 10 пФ = 11 нс. (9.3)
Следует избегать применения ТТЛ-регистров, так как они могут замет-
но увеличить динамические токи переключения из-за большой входной
емкости.
Заземление и развязка буферного регистра и других цифровых схем дол-
жны выполняться относительно цифровой заземляющей поверхности ПП.
Обратите внимание, что любой шумовой сигнал между аналоговой и циф-
ровой заземляющими поверхностями уменьшает запас помехоустойчивое-
842 Глава 9. Методы проектирования аппаратуры
ти цифрового интерфейса преобразователя. Так как запас помехоустойчи-
вости цифровой схемы составляет порядка сотен или тысяч милливольт,
это едва ли будет иметь значение. Аналоговая заземляющая поверхность
обычно не бывает слишком «шумной», но если шум на цифровой заземляю-
щей поверхности (относительно аналоговой заземляющей поверхности) пре-
вышает несколько сотен милливольт, то необходимо предпринять шаги для
уменьшения импеданса цифровой заземляющей поверхности, таким образом
обеспечивая приемлемый уровень запаса помехоустойчивости цифровой
схемы. Ни при каких условиях напряжение между двумя заземляющими
поверхностями не должно превышать 300 мВ, иначе ИС может выйти из
строя.
Также весьма желательно наличие отдельных источников питания для
аналоговой и цифровой схем, даже при одинаковых напряжениях питания.
Для питания преобразователя необходим «аналоговый» источник питания.
Если преобразователь имеет вывод, обозначенный как вывод питания циф-
ровой части схемы (Ир), он должен быть подключен или к отдельному «ана-
логовому» источнику питания, или через фильтр, как показано на схеме.
Все выводы питания преобразователя должны быть развязаны по отноше-
нию к аналоговой заземляющей поверхности, а все выводы питания циф-
ровых схем должны быть развязаны по отношению к цифровой заземляю-
щей поверхности, как показано на рис. 9.27.
В некоторых случаях не представляется возможным подключить вывод VD
к источнику питания аналоговой части. Некоторые из новейших высоко-
скоростных ИС могут быть рассчитаны на работу аналоговой части при
напряжении питания 5 В, в то время как цифровая часть питается от источ-
ника +3 В для совместимости с 3-В логикой. В этом случае вывод питания
+3 В микросхемы должен быть развязан непосредственно на аналоговую
заземляющую поверхность. Также разумно включить ферритовую шайбу
последовательно с линией питания, соединяющей вывод с источником пи-
тания +3 В цифровой логики.
Рис. 9.27. Точки заземления и развязки
9.2. Вопросы конструирования печатных плат
843J
Схема генератора тактового сигнала дискретизации должна рассматри-
ваться как аналоговая схема’, она также должна быть заземлена и тщательно
развязана по отношению к аналоговой заземляющей поверхности. Фазо-
вый шум генератора тактовых импульсов приводит к ухудшению отноше-
ния сигнал/шум (SNR) системы, как будет вкратце рассмотрено ниже.
О тактовых сигналах дискретизации
В высокопроизводительных системах с дискретными данными для форми-
рования тактового сигнала дискретизации АЦП (или ЦАП) следует исполь-
зовать кварцевый генератор с низким фазовым шумом, т. к. фазовый шум
(jitter) тактового сигнала дискретизации модулирует аналоговый входной/
выходной сигнал и увеличивает уровень шума и искажений. Генератор так-
тового сигнала дискретизации должен быть изолирован от шумящих циф-
ровых цепей и заземлен и развязан относительно аналоговой заземляющей
поверхности точно так же, как операционные усилители и АЦП.
Влияние фазового шума тактового сигнала дискретизации на отношение
сигнал/шум (SNR) АЦП приближенно описывается следующей формулой:
5Л7? = 20 log10
1
(9.4)
где SNR — это отношение сигнал/шум идеального АЦП с бесконечным
разрешением, в котором единственным источником шума является шум,
вызванный фазовым шумом тактового сигнала дискретизации со средне-
квадратичным значением Обратите внимание, что/в приведенном урав-
нении означает частоту аналогового входного сигнала. Приведем простой
пример. Пусть среднеквадратичное значение t = 50 пс,/= 100 кГц, тогда
отношение сигнал/шум SNR = 90 дБ, что соответствует 15-разрядному ди-
намическому диапазону.
Необходимо отметить, что t в приведенном уравнении — это корень из
суммы квадратов величин фазового шума внешнего тактового сигнала и
фазового шума внутреннего тактового сигнала АЦП (называемого апертур-
ным фазовым шумом). Однако в большинстве высокопроизводительных
АЦП внутренний апертурный фазовый шум пренебрежимо мал по сравне-
нию с фазовым шумом генератора тактового сигнала дискретизации.
Так как ухудшение отношения сигнал/шум в первую очередь связано с
фазовым шумом внешнего тактового генератора, необходимо принять меры
для того, чтобы он имел насколько возможно малый шум и наименьший из
возможных фазовый шум. Это требует применения кварцевого генератора.
Существует ряд производителей миниатюрных кварцевых генераторов с низ-
ким уровнем фазового шума (со среднеквадратичным значением менее 5 пс) и
с КМОП-совместимым выходом. Например, MF Electronics, 10 Commerce
Dr., New Rochelle, NY 10801, Tel. 914-576-6570 и Wenzel Associates, Inc.,
2215 Kramer Lane, Austin, Texas 78758 Tel. 512-835-2038.
В идеале в системе с раздельным заземлением кварцевый генератор так-
тового сигнала дискретизации должен находиться на аналоговой заземляющей
поверхности. Однако это не всегда возможно по причинам системного ха-
844 Глава 9. Методы проектирования аппаратуры
рактера. Во многих случаях тактовый сигнал дискретизации должен фор-
мироваться из более высокочастотного системного тактового сигнала, ко-
торый генерируется относительно цифровой заземляющей поверхности.
Затем эти импульсы должны пройти от источника, расположенного на циф-
ровой заземляющей поверхности, к АЦП, находящемуся на аналоговой за-
земляющей поверхности. Шум между двумя «землями» добавляется непосред-
ственно к тактовому сигналу и приводит к увеличению фазового шума.
Этот фазовый шум может ухудшить соотношение сигнал/шум преобразова-
теля, а также вызвать появление нежелательных гармоник.
Данное явление иногда можно устранить, если передавать тактовый
сигнал дискретизации как дифференциальный сигнал с помощью либо неболь-
шого ВЧ-трансформатора (как показано на рис. 9.28), либо с помощью
быстродействующих ИС дифференциального формирователя и приемника.
Если используются активные дифференциальные формирователь и прием-
ник, то они должны быть выполнены по технологии ЭСЛ, чтобы миними-
зировать фазовый шум. В системе с однополярным питанием +5 В микро-
схема ЭСЛ-логики может быть включена между «землей» и питанием +5 В
(ПЭСЛ), а сигнал с дифференциальных выходов преобразован для подачи
на вход тактового сигнала дискретизации АЦП. В любом случае исходный
задающий тактовый сигнал должен генерироваться с помощью кварцевого
генератора с низким уровнем фазового шума, а не подаваться с выхода
тактового сигнала DSP, микроконтроллера или микропроцессора.
t — дрожание ТИ выборок
f — частота аналогового входа
Рис. 9.28. Передача тактового сигнала дискретизации от цифровой к аналоговой за-
земляющей поверхности
Причины неудач при заземлении в системах
со смешанными сигналами: применение одноплатных
концепций заземления в многоплатных системах
В большинстве технических описаний АЦП, ЦАП и других устройств со
смешанными сигналами речь идет о заземлении на единственной ПП,
обычно оценочной, разработанной тем же производителем, что и данная
9.2. Вопросы конструирования печатных плат
микросхема. Использование этого подхода к многоплатным системам или
к системам с несколькими АЦП/ЦАП часто является источником неудач.
Обычно рекомендуется разделять заземляющую поверхность ПП на ана-
логовую и цифровую. Далее рекомендуется выводы AGND и DGND пре-
образователя соединить вместе и соединить аналоговую заземляющую
поверхность с цифровой в этой же точке, как показано на рис. 9.29. Это,
в сущности, создает в устройстве со смешанными сигналами систему за-
земления «звезда».
Системная
звезда
заземления
Рис. 9.29. Заземление ИС со смешанными сигналами: одна ПП (обычно оценочная/
тестовая)
Все шумные цифровые токи протекают от источника цифрового пита-
ния к цифровой заземляющей поверхности и обратно к цифровому источ-
нику; они изолированы от чувствительной аналоговой части платы. Систе-
ма заземления «звезда» образуется, когда аналоговая и цифровая заземляю-
щие поверхности соединены вместе в той точке, где находится устройство
со смешанными сигналами. Хотя этот подход обычно работает в простой
системе с одной ПП и одним АЦП/ЦАП, он не является оптимальным для
многоплатных систем со смешанными сигналами. В системе, имеющей
несколько АЦП или ЦАП на различных ПП (или на одной, если хотите),
аналоговая и цифровая заземляющие поверхности становятся соединенны-
ми в нескольких точках, при этом вероятно появление контуров заземле-
ния, что делает систему заземления в одной точке «звездой» невозможной.
По этим причинам такой подход к заземлению не рекомендуется приме-
нять в многоплатных системах; в них следует применять подход, описан-
ный ранее, при обсуждении заземления в ИС со смешанными сигналами и
малыми цифровыми токами.
Итог: заземление устройств со смешанными сигналами
и малыми цифровыми токами в многоплатных системах
Схема на рис. 9.30 обобщает ранее описанный подход к заземлению в устрой-
ствах со смешанными сигналами и малыми цифровыми токами. На аналою-
Глава 9. Методы проектирования аппаратуры
Рис. 9.30. Заземление ИС со смешанными сигналами и малыми внутренними цифро-
выми токами: несколько ПП
вую заземляющую поверхность помехи не проникают, т. к. малые импульсные
цифровые токи протекают по небольшому контуру между VD, развязывающим
конденсатором и DGND (показано жирной линией). Устройство со сме-
шанными сигналами любого назначения рассматривается как аналоговый
компонент. Шум VN между заземляющими поверхностями уменьшает запас
помехоустойчивости в цифровом интерфейсе, но обычно не причиняет вреда,
если поддерживать его на уровне менее 300 мВ за счет использования низ-
коимпедансной цифровой заземляющей поверхности на всем пути к точке
заземления системы «звездой».
Однако устройства со смешанными сигналами, такие как сигма-дельта
АЦП, кодеки и DSP со встроенными аналоговыми функциями, становят-
ся все более и более насыщенными цифровыми схемами. Добавление до-
полнительных цифровых схем приводит к увеличению цифровых токов и
шумов. Например, сигма-дельта АЦП или ЦАП содержат сложный циф-
ровой фильтр, который существенно увеличивает цифровой ток в устрой-
стве. Метод, который был обсужден ранее, заключался в помещении раз-
вязывающего конденсатора между VD и DGND с целью удерживать циф-
ровые токи замкнутыми и изолированными в небольшом контуре. Однако,
если цифровые токи достаточно велики и имеют постоянную или низко-
частотную составляющую, развязывающий конденсатор, возможно, дол-
жен будет иметь неприемлемо большой номинал. Любой цифровой ток,
который протекает вне контура между VD и DGND, вынужден будет про-
ходить через аналоговую заземляющую поверхность. Это может отрица-
тельно повлиять на показатели системы, особенно в системах с высоким
разрешением.
Трудно заранее сказать, какая величина цифрового тока, текущего по
аналоговой заземляющей поверхности, будет неприемлема для системы. Все,
что мы можем сделать в связи с этим, — это предложить альтернативный
метод заземления, который, возможно, обеспечит лучшие характеристики.
9.2. Вопросы конструирования печатных плат 847
Итог: заземление устройств со смешанными сигналами
и большими цифровыми токами в многоплатной системе
Альтернативный метод заземления для устройств со смешанными сигнала-
ми и большими цифровыми токами показан на рис. 9.31. Вывод AGND
устройства со смешанными сигналами соединен с аналоговой заземляю-
щей поверхностью, а вывод DGND этого устройства соединен с цифровой
заземляющей поверхностью. Цифровые токи изолированы от аналоговой
заземляющей поверхности, но шум между двумя заземляющими поверхно-
стями прикладывается непосредственно между выводами AGND и DGND
устройства. Чтобы этот метод успешно работал, аналоговые и цифровые
схемы в устройстве со смешанными сигналами должны быть хорошо изо-
лированы. Шум между выводами AGND и DGND не должен быть настоль-
ко большим, чтобы уменьшить запас помехоустойчивости или вызвать на-
рушение работы внутренних аналоговых цепей.
На рис. 9.31 показано место возможного включения диодов Шоттки
(встречно-параллельного) или ферритовой шайбы для соединения аналого-
вой и цифровой заземляющих поверхностей. Диоды Шоттки'предотвраща-
ют появление больших постоянных напряжений или низкочастотных выб-
росов напряжения между двумя поверхностями. Эти напряжения, если они
превысят 300 мВ, могут даже вывести ИС со смешанными сигналами из
строя, потому что они прикладываются непосредственно между выводами
AGND и DGND. Как альтернатива диодам Шоттки ферритовая шайба обес-
печивает связь по постоянному току между этими двумя поверхностями, но
изолирует их друг от друга на частотах выше нескольких мегагерц, на кото-
рых ферритовая шайба становится резистивной. Это защищает ИС от появ-
ления постоянного напряжения между выводами AGND и DGND, однако
связь по постоянному току, обеспечиваемая ферритовой шайбой, может
Рис. 9.31. Альтернативная схема заземления ИС со смешанными сигналами и больши-
ми цифровыми токами: несколько печатных плат
Глава 9. Методы проектирования аппаратуры
привести к появлению нежелательных контуров заземления по постоянно-
му току, что может быть неприемлемо для систем с высоким разрешением.
Заземление DSP с внутренними схемами ФАПЧ
Как и при рассмотрении ИС со смешанными сигналами, где просто зазем-
ления AGND и DGND было недостаточно, в DSP, таких как ADSP-21160
SHARC со встроенной схемой ФАПЧ, также возникают вопросы относи-
тельно проектирования заземления. Схема ФАПЧ ADSP-21160 позволяет
работать с частотой внутреннего тактового сигнала ядра (определяющей
время выполнения команд), в 2, 3 или 4 раза (по выбору пользователя) пре-
вышающей частоту внешнего тактового сигнала CLKIN. Частота CLKIN —
это частота, с которой работают синхронные внешние порты. Хотя это по-
зволяет использовать внешний тактовый сигнал более низкой частоты, нужно
быть внимательным при соединении питания и заземления с внутренней
схемой ФАПЧ, как показано на рис. 9.32.
Рис. 9.32. Заземление DSPc внутренними схемами фазовой автоподстройки частоты (ФАПЧ)
Для предотвращения внутреннего влияния цифровых токов на систему
ФАПЧ соединения ФАПЧ с питанием и «землей» производятся отдельно на
выводах, отмеченных AVdd и AGND соответственно. Питание AVDD + 2,5 В
должно формироваться из питания KDDINT +2,5 В при помощи фильтрую-
щей цепи (см. рис. 9.32). Это обеспечивает сравнительно бесшумное пита-
ние внутренней схемы ФАПЧ. Вывод AGND схемы ФАПЧ должен быть
соединен с цифровой заземляющей поверхностью печатной платы кратчай-
шим путем. Развязывающие конденсаторы также должны соединяться с вы-
водами AVdd и AGND при помощи коротких проводников.
Выводы по заземлению
Не существует единого метода заземления, который бы стопроцентно га-
рантировал оптимальную работу в любом случае! В этом разделе было пред-
ставлено несколько возможных вариантов в зависимости от требуемых ха-
9.2. Вопросы конструирования печатных плат
рактеристик отдельных устройств со смешанными сигналами. Однако на
этапе предварительной разводки ПП, полезно предусмотреть, по возмож-
ности несколько вариантов заземления.
Обязательно хотя бы один слой платы должен быть отведен под зазем-
ляющую поверхность. Предварительную разводку платы нужно делать так,
чтобы обеспечивать непересекающиеся аналоговую и цифровую поверхности, а
в нескольких местах должны быть предусмотрены контактные площадки и
межслойные переходы для установки встречно-параллельных диодов Шот-
тки или ферритовых шайб, если потребуется. Также следует предусмотреть
контактные площадки и межслойные переходы, чтобы при необходимости
аналоговая и цифровая поверхности могли быть связаны перемычками.
Выводы AGND устройств со смешанными сигналами, как правило, дол-
жны подключаться к аналоговой заземляющей поверхности. Исключением
являются DSP с внутренними схемами фазовой автоподстройки частоты
(ФАПЧ), такие как ADSP-21160 SHARC. Вывод заземления ФАПЧ отмечен
как AGND, но должен быть соединен непосредственно с цифровой зазем-
ляющей поверхностью для DSP. На рис. 9.33 приведен итоговый обзор по-
ложений философии заземления.
• Не существует единого метода заземления, который бы стопроцентно гарантировал
оптимальные результаты в любом случае!
• Различные методы могут давать, а могут и не давать одинаковых результатов.
• По меньшей мере, один слой на каждой ПП должен быть отведен под заземляющую
поверхность!
• На этапе начальной разводки обеспечьте раздельные цифровую и аналоговую зазем-
ляющие поверхности.
• Предусмотрите на плате контактные площадки и межслойные переходы под встреч-
но-параллельные диоды Шоттки или, возможно, ферритовые шайбы для соединения
заземляющих поверхностей друг с другом.
• Предусмотрите перемычки, которые позволят соединять выводы DGND устройств со
смешанными сигналами с выводами AGND (аналоговой заземляющей поверхнос-
тью) или цифровой заземляющей поверхностью. (Выводы AGND схем ФАПЧ цифро-
вых сигнальных процессоров следует подключать к цифровой заземляющей повер-
хности.)
• Предусмотрите контактные площадки и межслойные переходы для перемычек, кото-
рые позволят соединять цифровую и аналоговую заземляющие поверхности в не-
скольких точках на каждой ПП.
• Следуйте рекомендациям, приведенным в техническом описании на устройство со
смешанными сигналами.
Рис. 9.33. Обзор философии заземления
Некоторые общие правила разводки ПП
для систем со смешанными сигналами
Очевидно, что шум может быть минимизирован при тщательной разводке и
исключении влияния различных сигналов друг на друга. Аналоговые сигналы
высокого и низкого уровней должны быть разделены, и оба типа должны раз-
мещаться отдельно от цифровых сигналов. Часто бывает, что в системах с
преобразованием сигнала в цифровую форму и обратно тактовый сигнал
850 Глава 9. Методы проектирования аппаратуры
дискретизации (являющийся цифровым сигналом) так же чувствителен к
шуму, как любой аналоговый сигнал, но он в то же время способен созда-
вать шум, как и любой цифровой сигнал, поэтому должен быть изолирован
как от аналоговых, так и от цифровых систем. Если для формирования
тактовых сигналов применяется ИС, то одной ИС должна вырабатываться
только одна частота. Совмещение тактовых сигналов различных частот в
одном корпусе ИС приведет к появлению дополнительного фазового шума
и взаимных помех и ухудшит качество.
Заземляющая поверхность может работать как экран в местах пересече-
ния чувствительных сигналов. На рис. 9.34 показан хороший вариант раз-
водки платы сбора данных, где все чувствительные области изолированы
друг от друга и пути сигналов укорочены насколько возможно. Несмотря на
то что в реальной жизни такая идеальная картина встречается редко, этот
принцип действует во всех случаях.
Существует ряд важных моментов, на которые надо обратить внимание
при выполнении соединений питания и сигналов. Во-первых, разъем — это
одно из немногих мест в системе, где все сигнальные проводники должны
идти параллельно, следовательно, их обязательно необходимо чередовать с
выводами заземления (создавая электростатический экран), чтобы уменьшить
взаимные связи.
Использование множества контактов заземления важно по еще одной
причине: они обеспечивают низкое сопротивление заземления в точке со-
единения платы разрабатываемого устройства с монтажной платой. Когда
плата новая, отдельный вывод соединителя ПП имеет достаточно низкое
контактное сопротивление (порядка 10 мОм). По мере «старения» платы
сопротивление контактов может увеличиться, и ее работа может быть нару-
шена. Поэтому очень рекомендуется использовать дополнительные кон-
такты разъема ПП так, чтобы было достаточно много соединений заземле-
ния (хотя бы 30—40 % всех контактов разъема ПП должны быть контактами
заземления). По тем же причинам должно быть несколько контактов для
Аналоговый заземление Шина шина заземление
вход данных
Рис. 9.34. Аналоговые и цифровые схемы следует располагать на ПП раздельно
9.2. Вопросы конструирования печатных плат
каждого соединения питания, хотя, конечно, не так много, как контактов
заземления.
Для того чтобы помочь заказчикам при предварительной оценке и раз-
водке проекта, Analog Devices и другие производители высококачественных
ИС со смешанными сигналами предлагают оценочные платы. Оценочные
платы АЦП обычно содержат генератор тактового сигнала дискретизации с
низким фазовым шумом, выходные регистры, необходимые сигнальные
разъемы и разъемы питания. Они также могут содержать дополнительные
вспомогательные схемы, такие как входной буферный усилитель АЦП и
внешний источник опорного напряжения.
Разводка оценочной платы оптимизирована в плане заземления, развяз-
ки и разводки сигналов и может служить образцом при разводке платы
АЦП в системе. Обычно получить разводку такой оценочной платы можно
у производителя АЦП в файлах формата САПР (Gerber). Во многих случаях
разводка различных слоев приводится в технической документации на уст-
ройство.
Скин-эффект
На высоких частотах также следует учитывать скин-эффект, который за-
ключается в том, что из-за индуктивных эффектов токи протекают только
по внешней поверхности проводников. Обратите внимание на отличие это-
го эффекта от описанного ранее в данном разделе сопротивления провод-
ников по постоянному току.
Скин-эффект приводит к увеличению сопротивления проводника на
высоких частотах. Также обратите внимание, что скин-эффект проявляется
независимо от увеличения импеданса с ростом частоты, вызванного эф-
фектами собственной индуктивности проводников.
Скин-эффект является довольно сложным явлением, и подробный вы-
вод зависимостей выходит за рамки данного раздела. Отметим лишь, что
для меди глубина скин-слоя в сантиметрах может быть достаточно близко
аппроксимирована как 6,617/, где /имеет размерность герц.
На рис. 9.35 приведен обзор скин-эффекта в типичном фольгиро-
ванном проводнике ПП. Обратите внимание, что приведенный попе-
речный разрез медного проводника является видом на проводящую до-
рожку сбоку.
• ВЧ-ток течет только в тонких
поверхностных слоях
\ Верх
—Z Медный проводник
Низ
• Глубина скин-слоя: 6,61\/7 см в Гц
• Сопротивление скин-слоя: 2,6x10 7V? в Ом на квадрат, f в Гц
• Поскольку скин-ток течет по обеим сторонам печатного проводника,
величина скин-сопротивления должна учитывать этот факт
Рис. 9.35. Глубина скин-слоя в печатном проводнике
Глава 9. Методы проектирования аппаратуры
Микрополосковый проводник
(ток течет нормально
к плоскости чертежа)
ВЧ-ток течет только по одной
стороне проводника
Плоскость (слой) земли
Область протекания
обратного тока
Рис. 9.36. Скин-эффект в печатном проводнике и заземляющей поверхности
Положим, что скин-эффект становится важен, когда глубина скин-слоя
составляет менее 50 % толщины проводника. Таким образом, для типичной
фольги, применяемой в ПП, скин-эффект необходимо учитывать на часто-
тах выше приблизительно 12 МГц.
На частотах, где начинает сказываться скин-эффект, сопротивление меди
равно 2,6х10-7\[f на квадрат, где f имеет размерность герц. Эта формула не
работает в случаях, когда глубина скин-слоя превышает толщину провод-
ника (т. е., на низких частотах или по постоянному току).
На рис. 9.36 показан случай протекания тока в проводнике ПП, распо-
ложенном над заземляющей поверхностью. Штриховыми линиями на ри-
сунке обозначены области протекания тока на высоких частотах, которые
обусловлены скин-эффектом. При расчете скин-эффекта в ПП важно по-
мнить, что ток обычно протекает с обеих сторон фольги (это не обязатель-
но так в микрополосковых линиях, см. ниже), и сопротивление на квадрат
фольги может равняться половине указанного выше значения.
Линии передачи (длинные линии)
Ранее в данном разделе мы отмечали преимущество близкого расположе-
ния путей прохождения прямого и обратного сигналов, которое позволяет
минимизировать индуктивность. Как показано выше на рис. 9.36, при про-
хождении высокочастотного сигнала в печатном проводнике, расположен-
ном над земляным слоем, формируется микрополосковая линия. В такой
конфигурации большая часть обратного тока протекает в заземляющей по-
верхности.
На рис. 9.37 показана общая структура микрополосковой линии переда-
чи с шириной проводника w, толщиной диэлектрика h и диэлектрической
проницаемостью Е.
Характеристическое (волновое) сопротивление такой микрополосковой
линии будет зависеть от ширины проводника, толщины и диэлектрической
проницаемости материала ПП. Проектирование микрополосковых линий
более подробно обсуждается далее в данной главе.
Для большинства схем, работающих с низкочастотными сигналами или
постоянными токами, характеристическое сопротивление проводников ПП
9.2. Вопросы конструирования печатных плат 853
Рис. 9.37. Микрополосковая линия пере-
дачи является примером пары проводни-
ков с нормированным импедансом
практически не имеет значения. Даже на частотах, на которых проводник,
расположенный над заземляющей поверхностью, ведет себя как линия
передачи, можно не беспокоиться о ее волновом сопротивлении или со-
гласовании, пока длина волны в свободном пространстве, соответствую-
щая рабочей частоте, более чем в 10 раз превышает длину линии.
Однако на ОВЧ (VHF) и более высоких частотах проводники ПП могут
использоваться в качестве микрополосковых линий в согласованных систе-
мах передачи. Обычно в целях упрощения интерфейса микрополосковая
линия проектируется таким образом, чтобы ее волновое сопротивление со-
впадало со стандартными импедансами коаксиальных кабелей (например,
50, 75 или 100 Ом).
Обратите внимание, что при необходимости минимизации потерь в по-
добных системах следует использовать материал для ПП, имеющий низкие
потери на высоких частотах (обычно тефлон или любой другой материал
для ПП, имеющий сравнимый уровень потерь). Однако зачастую потери в
коротких линиях на дешевых стеклопластиковых платах достаточно малы и
являются приемлемыми.
Будьте внимательны к разрывам
в заземляющих поверхностях
В местах, где под проводником имеется разрыв в заземляющей поверхнос-
ти, обратный ток неизбежно будет протекать вокруг точки разрыва. В ре-
зультате возрастает и индуктивность, и чувствительность схемы к внешним
полям. Эта ситуация показана на рис. 9.38, где проводники А и В должны
пересекаться.
В случаях, когда подобный разрыв делается для того, чтобы обеспечить
пересечение двух перпендикулярных проводников, гораздо лучше провести
второй сигнал и над первым сигналом, и над заземляющей поверхностью
при помощи резистора или куска провода. При этом слой заземляющей
поверхности выполняет роль экрана между двумя сигнальными проводни-
ками, и два обратных тока, протекающие вследствие скин-эффекта с двух
противоположных сторон заземляющей поверхности, не влияют друг на
друга. В многослойных ПП непрерывность заземляющей поверхности в
местах пересечения проводников можно обеспечить без использования про-
водных связей. Многослойные ПП являются дорогими, и в них гораздо
сложнее отыскать неисправности, чем в двухслойных печатных платах, од-
Рис. 9.38. Разрыв в заземляющей поверхности приводит к увеличению индуктивности
и чувствительности схемы к внешним полям
нако они имеют лучшие возможности по экранированию и разводке сигна-
лов. Для таких плат основные принципы остаются неизменными, однако
увеличивается диапазон возможностей разводки.
Без сомнения, использование двусторонних или многослойных ПП, име-
ющих, по меньшей мере, одну непрерывную заземляющую поверхность,
является одним из наиболее удачных подходов к конструированию высоко-
качественных схем со смешанными сигналами. Зачастую такая заземляю-
щая поверхность имеет достаточно низкий импеданс, для того чтобы ис-
пользовать ее и для аналоговой, и для цифровой части системы. Однако
возможность или невозможность использования общей заземляющей по-
верхности зависит от требуемого разрешения и полосы частот, а также от
уровня цифрового шума в системе.
Методы изоляции заземления
Несмотря на то что применение заземляющих поверхностей позволяет умень-
шить импеданс и шумы на заземлении, все равно возможны ситуации, ког-
да уровень шума слишком велик. В таких случаях могут помочь методы
изоляции заземления.
На рис. 9.39 представлена еще одна иллюстрация связи за счет импе-
данса общего заземления. В этой схеме малый сигнал Их усиливается пре-
цизионным предусилителем с коэффициентом усиления 100; для достиже-
ния максимальной точности по постоянному току применяется усилитель
со стабилизацией прерыванием AD8851. На нагрузке сигнал Ивых измеряет-
ся по отношению к локальной «земле» Gr Из-за того что между точками G
и G2 протекает небольшой ток питания AD8551 /SUPPLY величиной 700 мкА,
возникает ошибка в 7 мкВ. Это значение примерно в 7 раз превышает ти-
пичное напряжение смещения операционного усилителя!
Этого можно избежать, если подключить вывод отрицательного пита-
ния операционного усилителя при помощи отдельного проводника к точке
9.2. Вопросы конструирования печатных плат
G1 ————— Д1/ = 7 мкВ-► Go
Рис. 9.39. Если не предпринять мер, даже небольшие токи, протекающие по общей
«земле», могут ухудшить точность прецизионного усилителя
Gv а не к Gv При этом в тракте G— G2 ток источника питания не протекает,
и, следовательно, минимизируется ошибка, вызванная падением напряже-
ния на заземлении. Заметьте, что на «горячем» проводнике Ивых будет при-
сутствовать небольшая ошибка, поскольку ток нагрузки на нем мал.
В некоторых случаях разность потенциалов между точкой заземления
источника сигнала и точкой заземления нагрузки, где происходит измере-
ние сигнала, неустранима. В случае нахождения источника и нагрузки на
одной плате величина напряжения ошибки, вызванной разностью потен-
циалов точек заземления, может составлять порядка десятков милливольт.
Если источник сигнала находится «вне платы», то величина напряжения
относительно «земли», которое необходимо подавить, легко может возрас-
ти до нескольких вольт (или даже десятков вольт).
К счастью, при использовании описанного ранее принципа сигнал мо-
жет быть передан с полной точностью даже при таких высоких напряжени-
ях шума. Этот принцип заключается в использовании изолирующего от «земли»
(ground isolating) усилителя с дифференциальным входом. Изолирующий
усилитель минимизирует ошибки, вызванные разностью потенциалов зе-
мель, за счет дифференциальной обработки сигнала и обеспечивает суще-
ственное подавление синфазных напряжений (обычно на 60 дБ и более).
Обратите внимание, что этот подход эффективен только для очень низко-
частотных сигналов.
На рис. 9.40 показано решение на базе изолирующего две «земли» уси-
лителя. В этой схеме может применяться как AD629, выдерживающий син-
фазные (СМ) напряжения до ±270 В, так и АМР03, применяемый при син-
фазных напряжениях до ±20 В.
В приведенной схеме входное напряжение Кх прикладывается относи-
тельно G{, а измеряться должно по отношению к Gr При использовании
дифференциального усилителя с единичным коэффициентом усиления и
высоким ослаблением синфазного напряжения (CMR) шумовое напряже-
ние ЛИ, существующее между двумя точками заземления, легко подавляет-
ся. Типичный уровень ослабления синфазного напряжения AD629 равен
88 дБ, в то время как для AM РОЗ этот показатель достигает 100 дБ. Широ-
кий диапазон синфазных напряжений (CMV) в AD629 достигается за счет
комбинации высокого ослабления синфазного напряжения и последующе-
го дифференциального усиления, дающего единичный итоговый коэффи-
Глава 9. Методы проектирования аппаратуры
21,1 кОм
(AD629)
Рис. 9.40. Изолирующий от «земли» усилитель с дифференциальным входом обеспе-
чивает передачу сигнала с высокой точностью за счет подавления шумового
напряжения, вызванного разностью потенциалов между заземлением в точ-
ке источника (Gj) и заземлением в точке измерения (<72)
циент усиления. В схеме с AD629 используются первые из указанных но-
миналов резисторов R—R5. АМР03 работает как прецизионный четырехре-
зисторный дифференциальный усилитель с номиналами резисторов R— R4
25 кОм. Оба устройства являются полнофункциональными изолирующими
земли усилителями и не требуют применения дополнительных микросхем.
Эта схема позволяет несколько ослабить требования к жесткому регули-
рованию падения напряжений на заземлении или избежать применения
дополнительных и/или более длинных проводников, минимизирующих
ошибки подобного рода. Обратите внимание, что она может быть реализо-
вана как при помощи дифференциальных усилителей с постоянным усиле-
нием (как показано в примере), так и при помощи стандартных для ИС
усилителей, конфигурированных на единичное усиление. Применение
AD623, например, позволяет работать от одного источника. При использо-
вании любого подхода можно также управлять полярностью сигнала, про-
сто меняя местами входы дифференциального усилителя.
В общих словах передача сигнала из одной точки ПП в другую для из-
мерения или выполнения последующей обработки может быть оптимизи-
рована при помощи двух ключевых взаимосвязанных методов. Они основа-
ны на использовании высокого импеданса и дифференциальных сигналов.
За счет применения усилителя с высоким входным сопротивлением мини-
мизируются падения напряжения, а дифференциальный прием сигна-
ла минимизирует чувствительность к шумам на заземлении.
Если последующая обработка заключается в выполнении аналого-циф-
рового преобразования, то этот метод передачи может быть реализован
без добавления каскада дифференциального изолирующего «земли» уси-
лителя. Просто необходимо выбрать АЦП с дифференциальным входом.
9.2. Вопросы конструирования печатных плат
Высокий входной импеданс АЦП минимизирует чувствительность на-
грузки к сопротивлению проводников ПП. Наличие дифференциально-
го входа позволяет снимать выходной сигнал непосредственно с выход-
ных выводов источника (даже если выход источника является несиммет-
ричным). Величина уровня подавления синфазного напряжения АЦП
исключает чувствительность к разности потенциалов между «землями»
АЦП и источника.
Концепцию использования АЦП с высокоимпедансными дифференци-
альными входами иллюстрирует рис. 9.41. Обратите внимание, что эта об-
щая концепция может быть распространена практически на любой источ-
ник с любой нагрузкой. Любую нагрузку, даже несимметричную, можно
сделать дифференциальной, добавив соответствующий дифференциальный
входной каскад.
Рис. 9.41. АЦП с высокоимпедансным дифференциальным входом также позволяет
обеспечить передачу сигнала между источником и нагрузкой с высокой точ-
ностью
Дифференциальный вход может быть реализован либо с помощью из-
мерительного усилителя с высоким входным импедансом, либо, во многих
случаях, с помощью простого вычитающего каскада на операционном уси-
лителе наподобие показанного на рис. 9.40.
Статические эффекты ПП
Доминирующим статическим эффектом ПП является сопротивление утеч-
ки. Загрязнение поверхности ПП остатками флюса, наплавленными соля-
ми и другим «мусором», может приводить к появлению путей утечки между
узлами схемы. Даже на хорошо очищенной плате нередко можно встре-
тить ток утечки величиной 10 нА и более, поступающий от выводов пита-
ния 15 В к близлежащим узлам. Токи утечки величиной в наноамперы,
попадающие не туда, куда надо, часто приводят к ошибкам на выходе схе-
мы величиной в вольты; например, ток утечки 10 нА, протекающий через
сопротивление 10 МОм, вызывает ошибку в 0,1 В. К сожалению, в стандар-
тной конфигурации выводов операционного усилителя вывод питания — Vs
расположен рядом с неинвертирующим входом (который, как правило, имеет
высокий импеданс)! Для того чтобы идентифицировать узлы, чувствитель-
ные к влиянию токов утечки, задайте себе простой вопрос: что произойдет,
если на этот узел попадет побочный ток величиной несколько наноампер
или более?
Если схема уже сконструирована, вы можете локализовать чувствитель-
ность подозрительного узла к влаге при помощи классического теста. При
наблюдении работы схемы подуйте на источник потенциальной опасности
через простую соломинку для коктейля. Соломинка фокусирует влагу, вы-
деляемую при дыхании, которая при взаимодействии с солями на плате в
чувствительных частях проекта нарушает работу схемы. Есть несколько спо-
собов решения простых проблем поверхностной утечки. Удалить остатки
мусора хорошо помогает тщательная промывка ПП. Простая процедура про-
мывки платы заключается в усиленной протирке платы изопропиловым
спиртом, последующем тщательном мытье в деионизированной воде и про-
сушке в течение нескольких часов при температуре 85 °C. При выборе мо-
ющих растворителей для ПП следует соблюдать осторожность. При очист-
ке с помощью определенных растворителей некоторые флюсы, раствори-
мые в воде, превращаются в солевые отложения, которые усиливают
проблему утечки.
К сожалению, если схема чувствительна к утечкам, то даже самая тща-
тельная очистка может обеспечить лишь временное решение. Проблема снова
проявится по мере работы с платой под воздействием окружающей среды и
высокой влажности. Для стабилизации поведения схем необходимо пре-
дусмотреть дополнительные меры, например применение конформного
покрытия поверхности.
К счастью, существует метод, обеспечивающий достаточно надежное и
постоянное решение проблемы поверхностной утечки, — охранные области
(guarding). Хорошо спроектированная охранная область может исключить
проблему утечки даже в схемах, работающих в жестких промышленных ус-
ловиях. Принцип использования охранных областей иллюстрируется двумя
схемами для типичных инвертирующего и неинвертирующего операцион-
ных усилителей.
Рисунок 9.42 иллюстрирует применение охранной области к инвертиру-
ющему усилителю. В этом случае опорный вход ОУ заземлен, поэтому ох-
ранная область, окружающая все вводы к инвертирующему входу ОУ, так-
же заземляется, как показано пунктиром.
Рис. 9.42. В схеме защиты инвертирующего режима все связи инвертирующего входа
операционного усилителя заключаются в заземленное охранное кольцо
9.2. Вопросы конструирования печатных плат
Основной принцип создания охранных областей прост: полностью ок-
ружите чувствительные узлы проводниками, которые могут обеспечить от-
вод паразитных токов, и поддерживайте защитные проводники под тем же
потенциалом, что и чувствительные узлы (иначе защита будет служить не
приемником, а источником тока утечки). Например, чтобы удерживать ток
утечки в узле на уровне ниже 1 пА (при сопротивлении утечки 1000 МОм),
разность потенциалов между охранной областью и защищаемым узлом
не должна превышать 1 мВ. В целом современные операционные усили-
тели имеют достаточно малое смещение, которое удовлетворяет этому
требованию.
Необходимо сделать ряд важных замечаний относительно реализации
высококачественной защиты. Для наибольшей эффективности, если соеди-
нения выполняются через сквозные отверстия, защитный рисунок должен
присутствовать на обеих сторонах ПП. Кроме того, части защитного рисунка,
расположенные на противоположных сторонах платы, следует соединить на
всем его протяжении несколькими переходными отверстиями. И наконец,
постарайтесь предусмотреть охранные области на начальном этапе констру-
ирования ПП, так как вероятность того, что их можно будет без потери эф-
фективности добавить позднее, очень мала.
На рис. 9.43 показана охранная область для неинвертирующего усили-
теля. В этом случае сигнал на опорный вход операционного усилителя по-
дается непосредственно от источника, что значительно усложняет задачу.
Вновь, как и ранее, охранное кольцо полностью окружает все связи вход-
ного узла. Но в этом случае на него подается сигнал от низкоимпедансного
делителя в цепи обратной связи, который подключен к инвертирующему
входу.
Обычно стык охранной области с делителем выполняется непосредствен-
ным соединением, однако в некоторых случаях в точке «X» может исполь-
зоваться буфер с единичным усилением для подключения к экрану кабеля
Защита при прямом включении:
кольцо окружает все концы выводов
от «горячего узла», включая входной
Рис. 9.43. В схеме защиты неинвертирующего режима ОУ все связи к его неинвертиру-
ющему входу заключаются в охранное кольцо, подключенное к низкоимпе-
дансному источнику напряжения
Глава 9. Методы проектирования аппаратуры
или для поддержания наименьшего возможного импеданса охранного кольца
на источник напряжения.
Другим полезным шагом, как показано на рисунке, является использо-
вание вместо буфера дополнительного непосредственно заземленного эк-
ранирующего кольца «У», которое окружает внутреннее охранное кольцо и
узлы цепи обратной связи. Единственной платой за этот шаг является не-
которое увеличение времени, затрачиваемого на разводку; при этом он очень
помогает буферизировать эффекты утечки во внутреннем охранном коль-
це, имеющем более высокий импеданс.
До этого момента мы не рассматривали то, как сам операционный уси-
литель подключить в эти охранные островки без ухудшения характеристик.
Традиционный метод при использовании устройств в металлическом кор-
пусе ТО-99 заключается в организации охранного кольца на двухсторонней
ПП, внутри которого содержатся оба входа операционного усилителя.
Описанный выше метод используется во многих высокоимпедансных
датчиках. В следующем разделе описываются методы монтажа на ПП более
современных корпусов ИС, обеспечивающие защиту и малую утечку.
Пример защитной разводки ПП
для операционных усилителей
в корпусах MINIDIP и SOIC
В современных схемах большее предпочтение отдается пластиковым кор-
пусам с меньшими габаритами, таким как 8-контактные корпусы MINIDIP
и SOIC. На следующих двух рисунках частично показаны предлагаемые
варианты защитной разводки для данных корпусов. Хотя защитные про-
водники могут применяться и с более миниатюрными корпусами операци-
онных усилителей, такими как SOT23, SC70 и т. д., требуемый зазор между
проводниками становится еще более узким, что представляет трудности как
для разводки, так и для производственных процессов.
На рис. 9.44 показаны возможные схемы реализации охранной области
в инвертирующем (левый рисунок) и неинвертирующем (правый рисунок)
рабочих режимах для корпуса MINIDIP «№-типа производства ADI. Эта
разводка может быть применена и для операционных усилителей в других
корпусах с относительно высокими напряжениями на выводах 1 или 4.
Можно отметить, что при использовании одиночного операционного уси-
лителя в стандартном 8-выводном корпусе DIP с расстоянием между выво-
Защитная конфигурация
в инвертирующем режиме
Защитная конфигурация
в прямом режиме
Рис. 9.44. Защитная разводка ПП для операционных усилителей в 8-контактном кор-
пусе MINIDIP (TV-тип) в инвертирующем и неинвертирующем режимах
9.2. Вопросы конструирования печатных плат
дами 0,11 между смежными выводами можно пропустить печатный провод-
ник (в данном случае защитный). Это позволяет реализовать эффективную
защиту для корпуса DIP, так как адекватно предотвращается путь утечки от
напряжения питания — на выводе 4 или аналогичных высоких потенци-
алов на выводе 1.
Обратите внимание, что в инвертирующем режиме (левый рисунок) за-
земленные защитные проводники подключены к выводу 3 вокруг инвертиру-
ющего входа операционного усилителя (вывод 2) и проходят параллельно
входному проводнику. Охранное кольцо продолжается до и вокруг источни-
ка и точек соединения обратной связи, показанных на рис. 9.42 (или в любой
другой аналогичной схеме), включая входную контактную площадку в случае
кабеля. В неинвертирующем режиме (правый рисунок) защитным напряже-
нием является напряжение делителя обратной связи, подключенного к вы-
воду 2 (инвертирующему входу усилителя, показанного на рис. 9.43).
Заметьте, что в обоих случаях, приведенных на рис. 9.44, физические
соединения охранной области показаны лишь частично; реальная защитная
разводка должна включать все чувствительные узлы схемы. При использо-
вании корпуса MINIDIP или другого корпуса для сквозного монтажа и в
инвертирующем, и в неинвертирующем режиме защитные дорожки долж-
ны проходить с обеих сторон платы, и верхняя дорожка должна быть соеди-
нена с нижней несколькими переходными отверстиями.
Методы защиты несколько усложняются при использовании корпуса
для поверхностного монтажа SOIC («7?»-тип), поскольку малое расстояние
между выводами (0,051) затрудняет разводку проводников между выводами.
На рис. 9.45 показаны варианты разводки охранных областей для корпусов
SOIC «Л»-типа.
Отметим, что во многих одиночных операционных усилителях в корпу-
се SOIC «Л»-типа выводы 1, 5 и 8 не задействованы («по connect»). В
таких случаях они могут использоваться для разводки защитных провод-
ников. В инвертирующем режиме (левый рисунок) защита является полно-
стью эффективной, так как заземленный защитный проводник проходит
через вывод 3 и незадействованный вывод 1. Такая разводка не ухудшает
параметры схемы. Кроме того, при использовании операционных усилите-
лей в корпусах SOIC большинство расположенных рядом компонентов также
являются компонентами для поверхностного монтажа. Таким образом, ох-
Замечание: выводы 1,5 и 6 отключены
у многих приборов в корпусах типа «Я»
Защита
Вход
Защита
Защитная конфигурация
в инвертирующем режиме
Защитная конфигурация
в прямом режиме
Рис. 9.45. Защитная разводка ПП для операционных усилителей в 8-контактном корпу-
се SOIC (>?-тип) в инвертирующем и неинвертирующем режимах
Глава 9. Методы проектирования аппаратуры
ранное кольцо может понадобиться только на той стороне ПП, на которой
располагается усилитель.
В случае каскада повторителя (правый рисунок) защитный проводник
должен проходить вокруг вывода отрицательного напряжения питания (вы-
вод 4), таким образом, защита от утечки с вывода 4 к выводу 3 гарантирует-
ся не полностью. По этой причине, в общем случае, реализация прецизи-
онных каскадов высокоимпедансных повторителей на операционных уси-
лителях в корпусе SOIC не рекомендуется, так как защита для устройств с
двухполярным питанием не столь эффективна.
Однако исключением является применение в качестве неинвертирую-
щего каскада операционного усилителя с однополярным питанием. Напри-
мер, при использовании AD8551 вывод 4 заземляется, и, следовательно, по
умолчанию обеспечивается определенная степень защиты.
Динамические эффекты ПП
В отличие от статических эффектов ПП, которые могут появляться и исче-
зать с изменением влажности или степени загрязнения платы, проблемы,
наиболее значимо влияющие на динамические характеристики схемы, обыч-
но сохраняют относительно постоянный уровень. За исключением новых
разработок, промывка и другие простые методы не могут исправить этих
проблем. По существу, они могут постоянно и неблагоприятно влиять на
спецификации и показатели проекта. Большинство разработчиков хоро-
шо знакомы с проблемой паразитной емкости, связанной с выводами и
размещением компонентов. В то время как проблемы, связанные с разме-
щением выводов, могут быть устранены правильной разводкой, любые
остающиеся трудности могут быть разрешены путем обучения выполняю-
щего монтаж персонала оптимально размещать компоненты и загибать
выводы.
Другим наиболее проблемным и малоизученным явлением, характер-
ным для ПП, является диэлектрическое поглощение. Как и диэлектричес-
кое поглощение в дискретных конденсаторах, эффект диэлектрического по-
глощения в ПП может быть представлен моделью, состоящей из последо-
вательно включенных резистора и конденсатора между двумя близко
расположенными узлами. Эффект диэлектрического поглощения обратно
пропорционален зазору и линейно зависит от длины.
Как показано на рис. 9.46, величина эк-
вивалентной емкости в такой /?С-модели
варьируется от 0,1 до 2,0 пФ, а сопротивле-
ния — от 50 до 500 МОм. Наиболее часто
встречаются величины 0,5 пФ и 100 МОм.
Следовательно, наиболее сильно диэлектри-
ческое поглощение в ПП влияет на высоко-
импедансные схемы.
Рис. 9.46. Диэлектрическое поглощение негативно вли-
яет на динамические характеристики схем, выполнен-
ных на ПП
9.2. Вопросы конструирования печатных плат
Наиболее значительно диэлектрическое поглощение в ПП влияет на
динамические характеристики схемы, например на время установления. В
отличие от утечек этот эффект обычно не связан с влажностью или иными
условиями окружающей среды, а зависит от свойств диэлектрика платы.
Химические процессы, используемые при создании металлизированных от-
верстий, обычно увеличивают проблему. Если ваша схема не удовлетворяет
ожидаемым показателям переходных характеристик, в качестве возможной
причины следует рассмотреть диэлектрическое поглощение в ПП.
К счастью, существуют пути решения этой проблемы. Как и в случае с
диэлектрическим поглощением в конденсаторе, для компенсации этого
эффекта могут использоваться внешние компоненты. Что более важно,
зачастую эта проблема может быть устранена при помощи защитных по-
крытий, полностью изолирующих чувствительные узлы от паразитных
связей (обратите внимание, что при использовании компонентов, мон-
тируемых в сквозные отверстия, эти защитные покрытия должны дуб-
лироваться на обеих сторонах ПП). Как отмечалось ранее, также имеются
более дорогостоящие диэлектрические материалы для ПП, обладающие
малыми потерями.
Еще одно похожее, если не идентичное диэлектрическому поглощению
явление в ПП характеризуется изменением эффективной емкости платы с
частотой (см. '). В общем случае оно влияет на переходные характеристики
высокоимпедансных схем, в которых емкость платы составляет значитель-
ную часть от общей емкости в схеме. Наиболее подвержены влиянию этого
явления схемы, работающие на частотах ниже 10 кГц. Как и в случае с
диэлектрическим поглощением в плате, оно очень сильно зависит от хими-
ческого состава платы.
Паразитная емкость
Когда два проводника не закорочены друг с другом или не изолированы
полностью друг от друга проводящим (электростатическим) экраном, меж-
ду ними существует емкость. Таким образом, в любой схеме на любой ПП
будет присутствовать большое количество конденсаторов (которые могут
быть, а могут и не быть учтены в модели схемы). Когда имеют значение
высокочастотные характеристики (даже схемы, работающие с постоянны-
ми токами, и ОНЧ-схемы могут строиться с использованием устройств с
высокой частотой единичного усиления F( и, следовательно, быть чувстви-
тельными к нестабильности высокой частоты), очень важно учитывать вли-
яние этой паразитной емкости.
В любом фундаментальном учебнике приводятся формулы для емкости
параллельных проводов и других геометрических конфигураций (см. 9’ ,0).
Пример, который мы должны рассмотреть, это конденсатор с параллель-
ными пластинами, который часто формируется проводниками, располо-
женными на противоположных сторонах ПП. Базовая схема подобного кон-
денсатора приведена на рис. 9.47.
Если пренебречь краевыми эффектами, емкость двух параллельных пла-
стин площадью А мм2 в среде с диэлектрической проницаемостью по отно-
шению к воздуху £, разделенных зазором d мм, равна 0,00885 EA/d пФ.
Глава 9. Методы проектирования аппаратуры
„ 0,00885Е..Д
С =---------г— пФ
а
А — площадь пластины в мм2
d — расстояние между пластинами
Ег — диэлектрическая постоянная
• Большинство типов ПП используют стеклотексталит с
эпоксидной смолой, имеющий Ег = 4,7
• Емкость проводников по отношению к плоскости земли
составляет приблизительно 2,8 пФ/см2
Рис. 9.47. Емкость двух параллельных пластин
На основании этой формулы для стандартного материала ПП (Е = 4,7,
d = 1,5 мм) емкость между проводниками, расположенными на противопо-
ложных сторонах ПП, не превышает 3 пФ/см2. В общем случае такая ем-
кость будет иметь паразитный эффект, и схема должна разрабатываться
таким образом, чтобы эта емкость не влияла на ее характеристики.
В случаях, когда вместо дискретных конденсаторов малого номинала
возможно использование емкости ПП, диэлектрические свойства стандар-
тных материалов подложек ПП приводят к тому, что подобные конденсато-
ры имеют плохие характеристики. Они имеют достаточно высокий темпе-
ратурный коэффициент и плохую добротность на высоких частотах, что
делает их неподходящими для многих задач. Исключением из этого прави-
ла являются дорогостоящие платы, сделанные с применением диэлектри-
ков с малыми потерями, таких как тефлон.
Емкостной шум и электростатические экраны
Между любыми двумя проводниками, разделенными диэлектриком (воздух
и вакуум являются диэлектриками), существует емкость. Если на одном из
проводников изменяется напряжение, то в другом будет происходить дви-
жение заряда. Базовая модель этого эффекта показана на рис. 9.48.
Очевидно, что шумовое напряжение, Ecoupled, появляющееся на Zp мо-
жет быть уменьшено несколькими способами, каждый из которых понижа-
ет шумовой ток, протекающий через Zr К ним относятся понижение на-
пряжения сигнала VN, частоты, емкости или самого Zr Однако, к сожале-
Рис. 9.48. Модель эквивалентной схемы емкостной связи
Z, — импеданс цепи
Z2 = l/Ja)C
9.2. Вопросы конструирования печатных плат
нию, зачастую невозможно свободное изменение любого из этих парамет-
ров схемы, и для минимизации помех необходимо применение альтерна-
тивного метода. Наилучшим решением проблемы снижения шумовых эф-
фектов, вызванных емкостью С, является добавление заземленного провод-
ника, также называемого электростатическим экраном (Faraday shield), между
источником шума и схемой, на которую он влияет. Этим достигается жела-
емый эффект снижения шумового тока, протекающего через Zp и, следова-
тельно, уменьшение KCOUPLED.
Модель электростатического экрана показана на рис. 9.49. На левой
картинке показано, как экран эффективно делит емкость связи С. На пра-
вом рисунке показано влияние экрана на наводимое напряжение на Zr
Несмотря на то что шумовой ток IN по-прежнему протекает сквозь экран,
большая его часть направляется в обход Zr В результате вносимое шумовое
напряжение ^соирЬЕО на Zx уменьшается.
Емкостной экран
Рис. 9.49. Рабочая модель электростатического экрана
Электростатический экран легко реализуется и почти всегда приносит
пользу. Таким образом, наводимый за счет емкостной связи шум редко
является труднорешаемой проблемой. Однако для того, чтобы электроста-
тический экран был максимально эффективен, он должен полностью бло-
кировать электрическое поле между источником шума и экранируемой це-
пью. Кроме того, экран должен подключаться таким образом, чтобы ток
смещения (displacement current) возвращался к источнику и не протекал в
любой другой части схемы, в которой он мог бы вызвать наводимый шум.
Проблема плавающего экрана
На данном этапе очень важно отметить один момент — проводник, который
должен играть роль электростатического экрана, никогда не должен оста-
ваться неподсоединенным, так как при этом почти всегда возрастает ем-
кость и увеличиваются шумы.
Подобная проблема плавающего экрана встречается в керамических кор-
пусах с напайкой выводов на боковой поверхности. Подобные керамические
ZVP-корпусы имеют небольшую квадратную проводящую крышку из ковара
(кобальто-никелевого сплава), которая припаивается к металлизированному
ободу в верхней части корпуса. Производители корпусов предлагают только
две альтернативы: металлизированный обод может быть соединен с одним
из угловых выводов корпуса или оставлен неподключенным.
В большинстве корпусов логических схем один из угловых выводов явля-
ется выводом заземления, следовательно, их крышка заземлена. Увы, но во
многих аналоговых схемах в углу корпуса нет вывода заземления, и крышка
28—2852
Глава 9. Методы проектирования аппаратуры
остается неподключенной, играя роль антенны для шумов. Такие схемы в
большей степени подвержены шумам электрических полей, чем схемы в пла-
стиковых керамических корпусах, где кристалл полностью не экранирован.
Там, где это практически оправдано, пользователь может заземлить крыш-
ку корпуса ИС с напайкой выводов на боковой поверхности, если она не
заземлена производителем. Это можно сделать, припаяв к крышке провод
(при этом устройство не будет повреждено, так как кристалл температурно
и электрически изолирован от крышки). Если осуществление пайки к крыш-
ке недопустимо, для ее подключения к выводу заземления ИС может ис-
пользоваться заземленный зажим типа «крокодил» из фосфористой бронзы
или проводящая краска.
Здесь необходимо привести некоторые соображения относительно бе-
зопасности. Никогда не пытайтесь заземлить такую крышку, не убедив-
шись сперва, что она не подключена. Иногда встречаются устройства, в
которых крышка подключена не к «земле», а к питанию!
Не стоит помещать электростатический экран между соединительными
проводами (bondwires) кристалла ИС. Это может сильно сказаться на харак-
теристиках, так как паразитная емкость между соединительными провода-
ми кристалла и соответствующей выводной рамкой изменяется в диапазоне
от 0,05 до 0,6 пФ и обычно равна примерно всего лишь 0,2 пФ.
Буферизация АЦП для защиты их от шума логических схем
Если преобразователь данных (АЦП или ЦАП) с высоким разрешением
подключается к высокоскоростной шине данных, по которой распростра-
няется логический шум со скоростью изменения фронтов 2,5 В/нс, то этот
шум легко проникает в аналоговый порт преобразователя через паразитную
емкость, имеющуюся в устройстве. Когда шина данных активна, в аналого-
вый порт через емкостные связи может наводиться недопустимое количе-
ство шума, что вызывает серьезное ухудшение характеристик.
Этот эффект иллюстрируется схемой на рис. 9.50, где по нескольким
паразитным конденсаторам корпуса на аналоговый вход АЦП проникают
сигналы с шины данных.
Порт(ы)
аналогового
входа
Зашумленная
шина данных
Рис. 9.50. В аналоговый порт высокоскоростной ИС АЦП, соединенной со скорост-
ной шиной данных, проникает цифровой шум, который ухудшает характе-
ристики
АЦП КМОП
ИС буфер/защелка
• Выходной буфер/защелка действует как Фарадеев экран между N быстрыми линиями:
зашумленной шиной данных и прецизионным АЦП.
• Это влечет за собой дополнительные: стоимость, площадь на ПП, птребляемую мощность,
уменьшение надежности, сложность конструкции, но самое главное — улучшение характе-
ристик!
Рис. 9.51. Высокоскоростная ИС АЦП с КМОП буфером-защелкой на выходе облада-
ет повышенной защитой от шума шины цифровых данных
Современные технологии не имеют средств исправления этой пробле-
мы непосредственно внутри самой ИС. Этот эффект также ограничивает
показатели, которые могут достигаться в других широкополосных моно-
литных ИС со смешанными сигналами, содержащих на одном кристалле и
аналоговые, и цифровые схемы. К счастью, проблема шума, проникающего
через емкостные связи, может быть легко устранена. Для этого шина дан-
ных не должна непосредственно подключаться к преобразователю.
Вместо этого, как показано на рис. 9.51, для интерфейса преобразователя
с шиной следует использовать КМОП-буферы на регистрах-защелках. Обра-
тите внимание, что ИС КМОП-буфера играет роль электростатического
экрана и значительно снижает количество шума, проникающего с цифро-
вой шины. Это решение требует денег, дополнительной площади на плате
и усложняет проект, но при этом увеличивается отношение сигнал—шум
преобразователя! Разработчик должен решать, стоит ли использовать этот
подход в каждом индивидуальном случае, однако в целом это крайне реко-
мендуется.
Для изоляции линий данных от шин, как описывается позже в данной
главе, также могут использоваться шинные переключатели.
Список литературы
9.2. Вопросы контруирования печатных плат
1. И< Doeling, W. Mark, Т. Tadewald, and Р. Reichenbacher. Getting Rid of Hook:
The Hidden PC-Board Capacitance. Electronics, October 12, 1978, p. 111 — 117.
2. Alan Rich. Shielding and Guarding. Analog Dialogue, Vol. 17, No. 1, 1983, p. 8.
3. Ralph Morrison. Grounding and Shielding Techniques, 4th Edition, John Wiley, Inc.,
1998, ISBN: 0471245186.
4. Henry И< Ott. Noise Reduction Techniques in Electronic Systems, 2nd Edition, John
Wiley, Inc., 1988, ISBN: 0-471-85068-3.
5. Paul Brokaw. An IC Amplifier User's Guide to Decoupling, Grounding and Making
Things Go Right for a Change. Analog Devices AN202.
6. Paul Brokaw. Analog Signal-Handling for High Speed and Accuracy. Analog Devices
AN342.
7. Paul Brokaw and Jeff Barrow. Grounding for Low- and High-Frequency Circuits.
Analog Devices AN345.
8. Jejf Barrow. Avoiding Ground Problems in High Speed Circuits. RF Design, July
1989.
9. B.I. & B. Bleaney. Electricity & Magnetism. Oxford at the Clarendon Press, 1957,
pp. 23, 24, and 52.
10. G.W.A. Dummer, H. Nordenberg. Fixed and Variable Capacitors, McGraw-Hill,
1960, pp. 11-13.
11. William C Rempfer. Get All the Fast ADC Bits You Pay For, Electronic Design,
Special Analog Issue, June 24, 1996, p. 44.
12. Mark Sauerwald. Keeping Analog Signals Pure in a Hostile Digital World, Electronic
Design, Special Analog Issue, June 24, 1996, p. 57.
13. Jerald Grame and Bonnie Baker. Design Equations Help Optimize Supply Bypassing
for Op Amps. Electronic Design, Special Analog Issue, June 24, 1996, p. 9.
14. Jerald Grame and Bonnie Baker. Fast Op Amps Demand More Than a Single-
Capacitor Bypass, Electronic Design, Special Analog Issue, November 18, 1996, p. 9.
15. Walt Kester and James Bryant. Grounding in High Speed Systems, High Speed
Design Techniques, Analog Devices, 1996, Chapter 7, p. 1—Tl.
16. Jeffrey S. Pattavina. Bypassing PC Boards: Thumb Your Nose at Rules of Thumb,
EDN, Oct. 22, 1998, p. 149.
17. Howard W. Johnson and Martin Graham. High-Speed Digital Design. PTR Prentice
Hall, 1993, ISBN: 0133957241.
18. Walt Kester. A Grounding Philosophy for Mixed-Signal Systems. Electronic Design
Analog Applications Issue, June 23, 1997, p. 29.
19. Ralph Morrison. Solving Interference Problems in Electronics. John Wiley, 1995.
20. C.D. Motchenbacher and J.A. Connelly. Low Noise Electronic System Design. John
Wiley, 1993.
21. Crystal Oscillators: MF Electronics, 10 Commerce Drive, New Rochelle, NY,
10801, 914-576-6570.
22. Crystal Oscillators: Wenzel Associates, Inc., 2215 Kramer Lane, Austin, Texas
USA 78758, 512-835-2038, www.wenzel.com.
23. Mark Montrose. EMC and the Printed Circuit Board. IEEE Press, 1999 (IEEE
Order Number PC5756).
Благодарности:
Этот раздел заимствованы из статьи Дуга Гранта и Скотта Вёрсера «Avoiding Passive
Component Pitfalls», опубликованной в Analog Dialogue 17-2, 1983.
9.3. Системы «аналогового» питания
Уолт Джанг, Уолт Кестер
Традиционно для питания аналоговых схем используются хорошо стабили-
зированные малошумящие линейные источники питания. Такие источники
обычно имеют низкий или средний уровень коэффициента преобразования
напряжения. Подобные линейные стабилизаторы значительно превосходят
любые другие типы стабилизаторов по показателям внутренне генерируе-
мых и излучаемых шумовых составляющих. Если бы жизнь разработчика на
9.3. Системы «аналогового» питания
самом деле была легкой, то эти устройства применялись бы повсеместно,
давая хорошие показатели и минимальные побочные эффекты.
Однако жизнь разработчика вовсе не так проста. В современных сис-
темах могут применяться линейные стабилизаторы, но зачастую в них зак-
ладываются требования по наличию множества выходных уровней напря-
жений и/или полярностей. Также может предъявляться дополнительный
набор требований к эффективности преобразования, которые, в свою оче-
редь, могут потребовать использования методов преобразования постоян-
ного тока (de—de conversion), обладающих, к сожалению, повышенным вы-
ходным шумом.
Этот раздел посвящен проблемам проектирования источников питания для
аналоговых систем (включая операционные усилители, аналоговые мульти-
плексоры, АЦП, ЦАП и т. д.) с учетом тех типов стабилизаторов, которые
наиболее вероятно будут применяться. Предполагается, что первичным источ-
ником постоянного напряжения является выпрямленный и сглаженный сиг-
нал переменного напряжения (т. е. полученный из сетевого напряжения), ком-
плект батарей или выходной сигнал импульсного стабилизатора. Последний
из источников может, в свою очередь, формироваться из напряжения батарей
или постоянного напряжения, полученного из напряжения сети.
В общем случае, как отмечено на рис. 9.52, в любых приложениях реко-
мендуется по возможности использовать линейный режим стабилизации
(первый пункт). Однако в некоторых случаях может потребоваться некото-
рый промежуточный вариант между полностью линейным и импульсным
режимами стабилизации (второй пункт). Это может быть вызвано различ-
ными причинами, например требованиями к КПД.
• В высококачественных аналоговых системах используются линейные стабилизаторы,
источником первичного сигнала которых является:
— сеть переменного тока;
— аккумуляторный источник питания;
— системы преобразования постоянного тока.
• По возможности следует избегать использования импульсных стабилизаторов, одна-
ко если это невозможно:
— применяйте методы управления шумом;
— обеспечьте качественную разводку и заземление;
— будьте внимательны к электромагнитным излучениям.
Рис. 9.52. Основные требования к системам питания аналоговых схем
При использовании импульсных стабилизаторов для питания прецизи-
онных аналоговых схем весьма вероятно, что основной проблемой при про-
ектировании станет уровень шума. Поэтому определенная часть этого раз-
дела посвящена минимизации шума при использовании импульсных ста-
билизаторов.
ИС линейных стабилизаторов
В течение длительного времени ИС линейных стабилизаторов напряжения
являются стандартными составными блоками систем питания. Со времени
появления первого линейного стабилизатора напряжения для 5-вольтовой
логики данный класс устройств значительно расширился, и на сегодняш-
ний день включает устройства, работающие с другими стандартными уров-
нями напряжения в диапазоне от 3 до 24 В с выходными токами от 10 мА
(и ниже) до 5 А (и выше). По нескольким причинам ИС линейных стаби-
лизаторов напряжения стали ценными компонентами систем. Как отмеча-
лось ранее, основной причиной являются хорошие по сравнению с им-
пульсными стабилизаторами шумовые характеристики. Другими причина-
ми являются малое число необходимых дополнительных компонентов и
большая простота по сравнению с дискретными решениями. Однако эф-
фективность линейных стабилизаторов невысока из-за больших потерь
мощности. Для устройств раннего поколения (многие из которых выпуска-
ются по сей день) требовалось, чтобы нестабилизированное входное напря-
жение на 2 В или более превышало выходное стабилизированное напряже-
ние, поэтому они обладали значительными потерями мощности.
Однако в последние годы появился ряд ИС линейных стабилизаторов,
имеющих более либеральные ограничения на минимальную разницу между
входным и выходным напряжениями. Эта разница в напряжении, кото-
рая более известна как падение напряжения (dropout voltage), дала назва-
ние классу стабилизаторов с малым падением напряжения (Low Drop Out).
или LDO-стабилизаторов. Падение напряжения (Kmin) определяется как
минимальная разница между входным и выходным напряжением, при ко-
тором выходное напряжение стабилизатора уменьшается на 2 %. Например,
если при разнице между входным и выходным напряжением 0,5 В выход-
ное напряжение 5-вольтового LDO падает до 4,9 В, то падение напряжения
на LDO-стабилизаторе составляет 0,5 В.
Падение напряжения является крайне критичным параметром с точки
зрения КПД линейного стабилизатора. Чем меньше допустимое падение на-
пряжения на стабилизаторе, при котором поддерживается стабилизируемое
напряжение, тем меньшую мощность он рассеивает. Ключом к повышению
КПД при уменьшении входного напряжения являются стабилизаторы с ма-
лым падением напряжения, так как они требуют меньшего падения для под-
держания стабилизации. В плане характеристик основным направлением в
архитектуре LDO-стабилизаторов является то, что они отдают большую по-
лезную мощность в нагрузку и генерируют меньше тепла. LDO-стабилизато-
ры являются ключевыми элементами систем питания, обеспечивающих ста-
бильные напряжения из напряжения батарей в портативных компьютерах,
сотовых телефонах и т. д. Это вызвано тем, что они поддерживают стабили-
зированное напряжение вплоть до нижних точек кривых разряда батарей.
Применение LDO в классических источниках постоянного тока, питающих-
ся от сети, позволяет понизить уровень напряжения вторичной обмотки транс-
форматора, снижая вероятность отключения системы при понижении на-
пряжения в сети, а также количество рассеиваемого тепла.
Некоторые основы
линейных стабилизаторов напряжения
Для того чтобы разобраться во всем многообразии LDO-стабилизаторов,
необходимо провести краткий обзор фундаментальных основ трехвывод-
ных ИС линейных стабилизаторов. Большинство выпускаемых на сего-
9.3. Системы «аналогового» питания
дняшний день ИС линейных стабилизаторов (но не все) — это последова-
тельные стабилизаторы положительного напряжения {positive leg). Это назва-
ние просто означает, что они управляют стабилизированным выходным на-
пряжением при помощи проходного (регулирующего) элемента, включен-
ного последовательно с положительным нестабилизированным входом.
Также существуют (хотя и в меньшем количестве) последовательные стаби-
лизаторы отрицательного напряжения {negative leg), принцип работы кото-
рых дуален принципу работы стабилизаторов положительного напряжения.
Базовая схема включения трехвыводного стабилизатора показана на
рис. 9.53. Многие стандартные стабилизаторы напряжения работают в пос-
ледовательном режиме с трехвыводным подключением аналогично приве-
денной схеме. Как можно видеть на рисунке, три входных/выходных выво-
да — это Кх, GND (или общий вывод (Common)) и К . Заметьте, что
показанный стабилизаторный блок в принципе может являться как стаби-
лизатором положительного напряжения, так и стабилизатором отрицатель-
ного напряжения, но в обоих типах используется один и тот же принцип:
общий вывод, а также входной и выходной выводы.
Рис. 9.53. Базовая схема включения трехвыводного стабилизатора (положительного
или отрицательного напряжения)
В рабочем режиме в стабилизаторе имеются два компонента, рассеива-
ющие мощность: первый является функцией от Их— Кых и IL, второй —
функцией от Их и /GROUND (тока «земли»). Доминирует первый. При анализе
становится очевидным, что по мере уменьшения падения напряжения ста-
билизатор способен отдавать в нагрузку больший процент входной мощно-
сти и, следовательно, является более эффективным, потребляет меньшую
мощность и меньше нагревается. Это ключевые требования, предъявляе-
мые к современным £ЛО-стабилизаторам (см. гл. 7 и ’).
При более подробном взгляде на блок-схему типичного стабилизатора
видны разнообразные элементы (рис. 9.54). Обратите внимание, что все
стабилизаторы обязательно содержат функциональные компоненты, соеди-
ненные сплошными линиями. Штриховыми связями соединены компонен-
Глава 9. Методы проектирования аппаратуры
Рис. 9.54. Блок-схема стабилизатора напряжения
ты, которые являются необязательными и могут присутствовать в ИС, ко-
торые имеют более трех выводов.
Схема работает следующим образом. Блок источника опорного напря-
жения вырабатывает стабильное напряжение KREF, которое практически
всегда формируется из напряжения запрещенной зоны кремния, обычно
~1,2 В (см.2). Это позволяет получать выходные напряжения 3 В и более из
напряжения питания всего 5 В. Это напряжение подается на один из входов
усилителя ошибки, второй вход которого подключен к делителю, R— Rr
Выходное напряжение усилителя ошибки поступает на проходной элемент,
который в свою очередь управляет выходным напряжением. При этом ре-
зультирующее стабилизированное напряжение определяется простой зави-
симостью:
\ )
(9.5)
Проходные элементы
Проходной элемент является основным компонентом стабилизатора, и тип
выбранного проходного элемента в наибольшей степени влияет практичес-
ки на все показатели стабилизатора, наиболее значимым из которых явля-
ется падение напряжения, Kmin. Анализ показывает, что инвертирующий про-
ходной транзистор позволяет обеспечить эффективное насыщение, что
минимизирует потери напряжения. Поэтому двумя наиболее подходящими
проходными элементами для LDO-стабилизаторов являются биполярный
р-п-р- и ^-МОП-транзисторы. Эти два типа устройств обеспечивают наи-
меньшие уровни Их— Иых, необходимые для работы LDO-стабилизаторов.
В отличие от них биполярные п-р-«-транзисторы плохо подходят для ис-
пользования в качестве проходных элементов с точки зрения падения на-
пряжения, особенно когда они включены по схеме Дарлингтона.
9.3. Системы «аналогового» питания
Сказанное выше иллюстрируется стандартными архитектурами ИС ста-
билизаторов с фиксированным выходным напряжением. Например, 5-воль-
товые стабилизаторы с фиксированным напряжением LM309 и семейство
их производных, таких как 7805, 7815 и др. (а также их различные аналоги
с малыми и средними токами), недостаточно хороши с точки зрения паде-
ния напряжения. В этих ИС в качестве проходного элемента используются
составные транзисторы Дарлингтона, не обладающие ни низким падением
напряжения (типичное значение ~ 1,5 В), ни низким током в состоянии
покоя (~5 мА).
±15 В стабилизатор на базе ИС
с регулируемым напряжением
Последующее развитие архитектур источников опорного напряжения и
методов трехвыводной стабилизации привело к созданию стабилизатора с
регулируемым напряжением (voltage-adjustable regulator). Первой ИС, в кото-
рой была реализована данная концепция, являлась LM317, стабилизатор
положительного напряжения. Устройство вырабатывает фиксированное
опорное напряжение 1,25 В между выводами Кых и ADJ ИС. Требуемый
уровень выходного напряжения, перестраиваемый в диапазоне 1,25—30 В,
задается внешними масштабирующими резисторами. Комплементарная
схема LM337 работает аналогичным образом, стабилизируя отрицатель-
ные напряжения.
На рис. 9.55 показан пример схемы линейного источника напряжения
питания ±15 В на базе стандартных регулируемых трехвыводных стабилиза-
торов. Подобная схема может использоваться для подачи питания на тра-
диционный операционный усилитель. Она обладает лучшей стабильностью
выходного напряжения по сравнению с другими похожими схемами, в ко-
торых используются стандартные стабилизаторы с фиксированным напря-
жением (например, ИС 7815 и 7915). Однако из-за того, что для работы
выбранных ИС требуется запас по напряжению 2 В или более, эта схема не
является выдающейся с точки зрения КПД.
В верхней части данной схемы используется регулируемый стабилиза-
тор LM317, a R2 и выбраны таким образом, чтобы обеспечить на верхнем
выходном зажиме напряжение 15 В. При желании номинал /?2 можно изме-
нить для обеспечения других уровней выходного напряжения в соответ-
ствии с выражением для Кых. Резистор должен иметь постоянное значе-
ние, так как он задает минимальный ток стабилизатора 10 мА или более.
В данной схеме в качестве конденсаторов С{ и С2 следует использовать
танталовые конденсаторы, а в качестве резисторов R{ и R2 — металлопле-
ночные резисторы. Использование С3 необязательно, но крайне желатель-
но, так как позволяет достигать наименьших уровней шума выходного на-
пряжения. Обратно смещенный диод Д обеспечивает защитную фиксацию
выходного напряжения в системах, где полярность выходного напряжения
может изменяться при выходе из строя одного из каналов питания. Схема
работает от выпрямленного и отфильтрованного переменного напряжения
питания на входе И с указанной полярностью. Выходной ток определяется
выбранной ИС стабилизатора. Для реализации канала отрицательного на-
Глава 9. Методы проектирования аппаратуры
Ц
LM317
Ч,ых = ^(1 +
LM337
+ «4/«з)
Рис. 9.55. Классический линейный стабилизатор напряжения питания ±15 В с выход-
ным током 1 А на базе ИС регулируемых стабилизаторов напряжения
пряжения питания используется комплементарная ИС LM337. Таким обра-
зом, нижняя часть схемы работает как зеркальное отражение верхней час-
ти, обеспечивая на нижнем выходном зажиме отрицательное напряжение
15 В. Принцип программирования выходного напряжения LM337 похож на
принцип программирования LM317 и основан на использовании резисто-
ров /?4 и R3. R4 используется для регулировки напряжения, a R3 сохраняет
постоянное значение. Вновь, как и ранее, применение С6 не является обя-
зательным, но рекомендуется для достижения наименьшего шума.
Архитектуры стабилизаторов
с низким падением напряжения
В отличие от традиционных трехвыводных стабилизаторов, где в качестве
проходного элемента используются составные транзисторы Дарлингтона или
одиночные и-/>-л-транзисторы, в стабилизаторах с малым падением напря-
жения используются проходные элементы с меньшими порогами напряже-
ния. Это основное отличие позволяет им эффективно работать с диапазо-
ном Ит.п вплоть до 100—200 мВ. С точки зрения применения в составе сис-
темы этот фактор дает довольно значительные преимущества.
В серии Л/)О-стабилизаторов апуСАР® производства Analog Devices эф-
фективно реализован ряд ключевых свойств LDO. Это название устройств
серии ADP33xx обусловлено их относительной нечувствительностью к вы-
ходному конденсатору как в плане его размера, так и в плане его эффектив-
ного последовательного сопротивления. Они выпускаются в эффективных
9.3. Системы «аналогового» питания 875
с точки зрения рассеваемой мощности корпусах типа ADI Thermal Coastline
(ив других корпусах с улучшенными тепловыми характеристиками). Среди
ИС данной серии имеются как автономные ZDO-стабилизаторы, так и ком-
бинированные устройства ZDO-стабилизатор/контроллер (используются с
внешним полевым />-МОП-транзистором). Они имеют широкий диапазон
фиксированных выходных напряжений от 1,5 до 5 В с номинальными вы-
ходными токами до 1500 мА. Также выпускаются версии с выходным на-
пряжением, регулируемым пользователем. Упрощенная базовая схема ИС
семейства схематически показана на рис. 9.56.
Рис. 9.56. Архитектура Л/ХЭ-стабилизаторов ADP33xx апуСАР® обладает преимуще-
ствами с точки зрения характеристик и по постоянному, и по переменному
току
Одной из ключевых отличительных особенностей ZPO-стабилизато-
ров серии ADP33xx является использование вертикального проходного
/>-л-/>-транзистора Ql с высоким коэффициентом усиления, что позволяет
обеспечить типичные значения падения напряжения порядка 1 мВ/мА для
токов 200 мА и менее.
Схема работает следующим образом. KREF — это опорное напряжение,
присутствующее на выходе делителя с коэффициентом RJR2 и нулевым
импедансом. На рисунке оно обозначено в виде буферного усилителя с
единичным коэффициентом усиления и выходным напряжением KREF (вы-
делен штриховой линией) на выходе делителя R}/Rr Это опорное напряже-
ние подается на последовательное соединение (выделено штриховой
линией), а затем на реальные компоненты /?3, /?4 и т. д. Выходное напря-
жение стабилизатора определяется выражением:
у _i/ fi+^L
у вых - у REF 1 + D
I ^2
(9.6)
В различных устройствах серии ADP33xx делитель R— R2 подстроен та-
ким образом, чтобы обеспечивать стандартные выходные напряжения 1,5;
1,8; 2,5; 2,75; 2,77; 2,85; 2,9; 3,0; 3,15; 3,2; 3,3; 3,6 и 5,0 В. Стабилизатор
работает как усилитель ошибки с напряжением смещения KREF В по отноше-
нию к напряжению с выхода, поделенному стандартным делителем R— Rr
Глава 9. Методы проектирования аппаратуры
В то время как описанные выше улучшения характеристик по постоян-
ному току в серии ADP33xx сами по себе заслуживают внимания, более
впечатляющие улучшения имеются в области показателей по переменному
току. Основным фактором, сдерживающим применение LDO, является ем-
костная нагрузка и вызываемая ею потенциальная нестабильность. Один из
способов обеспечения определенной степени устойчивости к изменениям
полюса в характеристике отклика усилителя заключается в использовании
метода частотной компенсации, который называется расщеплением полюса
(pole splitting). В схеме, приведенной на рис. 9.56, Скомп играет роль конден-
сатора, расщепляющего полюс, за счет которого обеспечивается выигрыш в
виде буферизованного однополюсного отклика, не зависящего от Сг В ре-
зультате частотный отклик в большей степени определяется внутренней
компенсацией стабилизатора и становится сравнительно нечувствительным
к номиналу и эффективному последовательному сопротивлению конденса-
тора нагрузки CL.
Эта особенность делает схему устойчивой практически к любому типу
выходного конденсатора. Конденсатор нагрузки CL может иметь достаточ-
но малый номинал (вплоть до 0,47 мкФ) и может быть многослойным кера-
мическим (MLCC, multi-layer ceramic capacitor), что позволяет обеспечить
всю функцию стабилизации с очень малыми физическими размерами.
LDO-стабилизаторы с фиксированным напряжением
и выходными токами 50/100/200/500/1000/1500 мА
На рис. 9.57 показана базовая схема включения стабилизатора для различ-
ных устройств серии ADP33xx с фиксированным напряжением. Ниже об-
суждаются назначение различных выводов и внутренние функции. Обрати-
те внимание, что не все выводы и не все функции имеются во всех устрой-
величины из спецификации ADP3308
прибора ADP33O9
Замечание: несколько входных/выходных
выводов, NR, SD, ERR, имеются не во всей
группе приборов
ADP3330
ADP3331
ADP3333
ADP3334
ADP3335
ADP3336
ADP3338
ADP3339
Таблица выходов
Прибор /вых (мА) »/вых (В)
ADP3300 50 2.7, 3, 3.2, 3.3, 5
ADP3301 100 2.7, 3, 3.2, 3.3, 5
ADP3303 200 2.7, 3, 3.2, 3.3, 5
ADP3303A 200 ADJ. 2.2-10
Lx (мА) Увых (В)
100 2.7, 3, 3.2, 3.3
50 2.7, 2.85, 2.9, 3, 3.3, 3.6
100 2.7, 2.85, 2.9, 3, 3.3, 3.6
200 2.5, 2.75, 2.85, 3, 3.3, 3.6, 5
200 ADJ. 1.5-10
300 1.5,1.8,2.5,2.77,3,3.15,3.3,5
500 ADJ. 1.5-10
500 1.8,2.5,2.85,3.3,5
500 ADJ. 1.5-10
1000 1.8,2.5,2.85,3.3,5
1500 1.8,2.5,2.85,3.3,5
Рис. 9.57. Базовая схема включения ££Ю-стабилизатора и таблица выбора устройств с
фиксированными или регулируемыми напряжениями и выходными токами
от 50 до 1500 мА
9.3. Системы «аналогового» питания 877
ствах, и за дополнительной информацией следует обращаться к техничес-
ким данным на отдельные устройства.
Эта схема является общей и иллюстрирует общие принципы. Напри-
мер, ADP3300 — это базовый ££Ю-стабилизатор с выходным током 50 мА,
который вырабатывает указанные в таблице фиксированные уровни выход-
ного напряжения. Реальное устройство ADP3300 имеет обозначение
ADP3300ART-YY, где YY -- суффикс, обозначающий напряжение 2,7; 3;
3,2; 3,3 или 5 В из таблицы соответствующих напряжений. Символы «ART»
в маркировке ИС обозначают корпус (6-выводный SOT23). При необходи-
мости обеспечения выходного напряжения 5 В используйте ADP3300ART-5.
Аналогичные комментарии распространяются и на остальные устройства
серии. Например ADP3301AR-5 — это стабилизатор в корпусе SO-8 с вы-
ходным током 100 мА и выходным напряжением 5 В.
Приведенная схема формирует номинальное выходное напряжение для
нагрузки, удовлетворяющей максимальному значению выходного тока, при
входных напряжениях выше Кых + Kmin (где Kmin — падение напряжения для
конкретного устройства при номинальном токе). Схема ВКЛЮЧЕНА, ког-
да на входе отключения (shutdown) (если он имеется в выбранном устрой-
стве) присутствует ВЫСОКИЙ уровень, формируемый либо подачей логи-
ческого ВЫСОКОГО уровня на управляющий вывод SD, либо просто при-
вязкой этого вывода к Их (показано штриховой линией). Когда вывод SD
заземлен или на него подается сигнал НИЗКОГО логического уровня, ста-
билизатор отключается и потребляет минимальный ток покоя.
Стабилизаторы апуСАР® обеспечивают стабилизацию в широком диа-
пазоне нагрузок, температур и входных напряжений. Большинство устройств
имеют ошибку во всем диапазоне ±1,4% (или менее). При обнаружении
условия перегрузки открытый коллектор ERR (если он имеется в конкрет-
ном выбранном устройстве) переходит в состояние НИЗКОГО уровня.
Rx — это «подтягивающий» резистор для выхода ERR. Он может быть ис-
ключен, если «подтягивающий» ток обеспечивается нагрузкой.
Конденсатор С3, подключаемый между выводами выхода и NR, может
использоваться для обеспечения необязательной функции снижения шума
(NR, noise reduction) (если она имеется в конкретном выбранном устройстве).
Она достигается шунтированием части внутреннего резистивного делителя,
за счет чего выходной шум снижается приблизительно на 10 дБ. При реали-
зации данной функции следует использовать только конденсаторы с малой
утечкой, рекомендованные к применению с конкретным устройством.
Номиналы входного Сх и выходного С2 конденсаторов выбираются рав-
ными либо 0,47, либо 1 мкФ, в зависимости от конкретного устройства.
Для большинства устройств серии достаточно 0,47 мкФ, однако с ADP3335
используются конденсаторы номиналом 1 мкФ. Также могут использовать-
ся конденсаторы большего номинала, при этом обеспечиваются лучшие
переходные характеристики.
Отвод тепла от корпусов, имеющих более 5 выводов, улучшен за счет
применения нескольких выводов входа и выхода. Поэтому, для минимиза-
ции теплового сопротивления при разводке ПП следует задействовать все име-
ющиеся выводы.
Глава 9. Методы проектирования аппаратуры
LDO-стабилизатор на 200 мА
с регулируемым напряжением
В дополнение к обсуждавшимся выше LDO-стабилизаторам с фиксирован-
ным выходным напряжением также выпускаются их регулируемые версии,
предназначенные для формирования нестандартных напряжений. Одним
из таких устройств является ADP3331 с выходным током 200 мА, который
показан на рис. 9.58, в конфигурации с выходным напряжением 2,8 В.
Рис. 9.58. Регулируемый ££Ю-стабилизатор на 200 мА в конфигурации с выходным
напряжением 2,8 В
ADP3331 в целом похож на любой другой LDO-стабилизатор серии
апуСАР®, за исключением двух значительных отличий. Он имеет более низ-
кий ток покоя (~34 мкА при небольшой нагрузке) и, что более важно, регу-
лируемое пользователем выходное напряжение. Резисторы R{ и /?2, пока-
занные на схеме, — это внешние прецизионные резисторы, используемые
для задания рабочего напряжения стабилизатора.
Выходное напряжение стабилизатора Квых связано с напряжением И[в на
выводе FB следующей зависимостью:
И ,x=KFB| 1+^-
I
(9.7)
где KFB = 1,204 В. Резисторы и Я2 задают уровень Иых, и для наибольшей
стабильности их параллельное эквивалентное сопротивление должно быть
близким к 230 кОм. Для выбора и R2 необходимо сначала вычислить их
идеальные величины в соответствии со следующими двумя выражениями:
R} = 23о| кОм;
I ^FB )
п 230
R^=-------т- кОм.
( кА
V
\ г вых J
(9.8)
(9.9)
В схеме, приведенной в примере, Иых равно 2,8 В, что дает Rx = 534,9 кОм
и R2 = 403,5 кОм. Как отмечено на рисунке, используются наиболее близ-
9.3. Системы «аналогового» питания
кие значения со стандартным допуском 1 %, за счет чего обеспечивается
выходное напряжение 2,8093 В (в предположении об идеальных резисторах).
На практике для оценки общей ошибки к погрешности ADP3331 (±1,4%)
следует прибавить погрешности резисторов.
В дополнение к описанным выше автономным Л/) 69-стабилизаторам
серии апуСАР® также выпускается LDO стабилизатор/контроллер (regulator
controller). За счет использования внешнего проходного полевого р-МОП-
транзистора ИС стабилизатора/контроллера спасает там, где автономный
стабилизатор не справляется из-за тока нагрузки или рассеиваемой мощно-
сти. Применение LDO стабилизатора/контроллера будет обсуждено позднее.
Приведенные выше примеры иллюстрируют применение некоторых
представителей семейства ZDO-стабилизаторов серии апуСАРт. Более под-
робную информацию об автономных LDО-стабилизаторах и стабилизато-
рах/контроллерах можно найти в источниках, указанных в конце раздела.
Преобразователи напряжения с подкачкой заряда
Другой метод формирования напряжения питания для систем на базе опе-
рационных усилителей основан на применении так называемой схемы под-
качки заряда (charge-pump) (другое название метода — преобразование на-
пряжения с помощью переключаемых конденсаторов). Преобразователи
напряжения, работающие по принципу подкачки заряда, осуществляют пе-
редачу энергии и преобразование напряжения при помощи зарядов, храня-
щихся на конденсаторах, откуда и пошло название «подкачка заряда».
Используя метод переключения конденсаторов, преобразователи с под-
качкой заряда преобразуют напряжение питания одной полярности в на-
пряжение большего или меньшего уровня или напряжение другой поляр-
ности (большего или меньшего уровня). Это достигается применением мас-
сива ключей с малым сопротивлением, тактового сигнала синхронизации и
нескольких внешних запоминающих конденсаторов, хранящих заряды, ко-
торые передаются в процессе преобразования напряжения. В данной схеме
не используются индуктивные компоненты, поэтому уровень генерируе-
мых электромагнитных помех минимален. Несмотря на то что внутри схе-
мы происходит переключение сравнительно больших токов, этот процесс
локализован, и, следовательно, уровень генерируемого шума меньше, чем
при использовании индуктивных ключей. При правильном подборе компо-
нентов могут быть реализованы преобразователи с подкачкой зарядов, име-
ющие неплохие шумовые характеристики.
Две наиболее распространенные схемы преобразователей напряжения с
подкачкой зарядов — это инвертор напряжения (voltage inverter) и дублер
напряжения (voltage doubler). В схеме инвертора напряжения конденсатор
подкачки заряда заряжается до входного напряжения в течение первой по-
ловины цикла переключения. В течение второй половины цикла переклю-
чения входное напряжение, хранящееся на конденсаторе подкачки заряда,
инвертируется и прикладывается к выходному конденсатору и нагрузке.
Таким образом, выходное напряжение равно инвертированному входному
напряжению, и средний входной ток приблизительно равен выходному.
Частота переключения влияет на размер внешних конденсаторов, и более
высокая частота переключения позволяет использовать конденсаторы мень-
ших размеров. Скважность, определяемая как отношение времени заряда к
полному циклу переключения, обычно равна 50 %, за счет чего обеспечива-
ется оптимальная эффективность передачи.
Принцип работы дублера напряжения похож на принцип работы инвер-
тора. В этой схеме конденсатор подкачки выполняет функцию удвоения
напряжения. В первой фазе он заряжается от входного напряжения, а во
второй фазе он подключается последовательно выходному конденсатору.
Это имеет эффект удвоения значения входного напряжения на выходном
конденсаторе и нагрузке. И схема инвертора, и схема дублера в базовой
форме не обеспечивают стабилизацию напряжения. Однако существуют
методы, позволяющие добавить стабилизацию (обсуждаются ниже).
Использование методов подкачки зарядов имеет достоинства и недо-
статки по сравнению с использованием индуктивных импульсных стабили-
заторов. Очевидным ключевым достоинством является исключение катуш-
ки индуктивности и связанных с ней проблем магнитной совместимости.
Кроме того, преобразователи с подкачкой зарядов обычно имеют сравни-
тельно малый шум и минимальный уровень излучаемых электромагнитных
помех. Схема включения преобразователя проста и обычно требует приме-
нения всего двух или трех внешних конденсаторов. Так как катушки индук-
тивности не используются, высота окончательной ПП может быть меньше,
чем высота платы индуктивного импульсного стабилизатора с аналогичны-
ми характеристиками. Инвертеры на принципе подкачки заряда также не-
дороги, компактны и способны обеспечивать КПД более 90 %. Выходной
ток очевидным образом ограничен размером конденсатора и переключае-
мой емкостью. Типичные ИС инвертеров на принципе подкачки заряда
имеют максимальный выходной ток 150 мА.
Недостатком преобразователей с подкачкой зарядов является то, что
они в отличие от индуктивных импульсных стабилизаторов не способны
обеспечить высокий КПД в широком диапазоне напряжений. Несмотря на
это, они все равно часто годятся для нагрузок с малым потребляемым то-
ком в ситуациях, когда потери такого преобразователя малы по сравнению
с допустимым уровнем потерь в системе. На рис. 9.59 перечислены основ-
ные рабочие характеристики преобразователей с подкачкой заряда.
Примером применения преобразователя с подкачкой зарядов является
функция инвертора напряжения. Инверторы часто бывают полезны там,
• Отсутствие катушек индуктивности.
• Минимальные излучаемые электромагнитные помехи.
• Простота реализации: два внешних конденсатора, 1 диод (в схеме дублера), входной
конденсатор.
• Достижимый КПД > 90 %.
• Имеют малую стоимость, компактные, низкопрофильные (имеют малую высоту).
• Оптимизированы для инвертирования или дублирования напряжения питания (с дру-
гим номиналом) с функцией выходной стабилизации: ADP3605, ADP3607.
• Инверторы/утроители с тремя выходами от входного напряжения +3 В: ADM8830,
ADM8839, ADM8840.
Рис. 9.59. Некоторые основные характеристики преобразователей с подкачкой заряда
9.3. Системы «аналогового» питания
где помимо первичного положительного напряжения (например, 5 В) тре-
буется отрицательное напряжение (т. е., —3 В) со сравнительно малым то-
ком. Эта ситуация может возникать в системах с одним источником, где
лишь несколько высококачественных компонентов требуют отрицательно-
го напряжения питания. Аналогичным образом удвоители (и утроители)
напряжения полезны в схемах с малыми токами, где требуется напряжение,
превышающее первичное напряжение питания. Выпускаются как стабили-
зированные, так и нестабилизированные инверторы напряжения на прин-
ципе подкачки зарядов.
Преобразователи напряжения на принципе
подкачки зарядов со стабилизированным выходом
Добавление к преобразователям напряжения с подкачкой зарядов возмож-
ности стабилизации выходного напряжения увеличивает их полезность в
большинстве задач. Существует несколько методов добавления стабилиза-
ции к преобразователю с подкачкой зарядов. Наиболее очевидным являет-
ся включение на выходе инвертора/удвоителя с подкачкой зарядов LDO-
стабилизатора. ZDO-стабилизатор обеспечивает стабилизированное выход-
ное напряжение и, кроме того, может уменьшать уровень пульсаций
преобразователя с подкачкой зарядов. Однако при этом подходе возрастает
сложность и уменьшается выходное напряжение на величину падения на-
пряжения LDO (~200 мВ). Эти факторы могут являться, а могут и не яв-
ляться недостатками.
Намного более простым и эффективным методом стабилизации преоб-
разователя напряжения с подкачкой зарядов является использование схемы
подкачки заряда с внутренним усилителем сигнала ошибки, управляющим
сопротивлением во включенном состоянии одного из ключей.
Этот метод используется в инверторе напряжения ADP3605 и дублере
напряжения ADP3607 — устройствах, которые формируют стабилизирован-
ное напряжение из диапазона входных положительных напряжений. Выход-
ное напряжение считывается и подается обратно в устройство через вывод
^sense- Ключевыми свойствами этих серий является хорошая стабилизация
выходного напряжения (5 % в ADP3605), высокая частота переключения
(250 кГц), а также высокий КПД и малый размер компонентов обеих серий.
Упрощенная функциональная схема ИС дублера напряжения ADP3607
показана на рис. 9.60. На рис. 9.61 показана схема включения дублера с 3 В
на 5 В с выходным напряжением, стабилизированным в пределах ±5 % при
выходных токах до 50 мА. В нормальном рабочем режиме вывод SHUTDOWN
подключен к «земле». Если на этот вывод подать напряжение ВЫСОКОГО
уровня, то устройство будет переведено в режим ожидания, в котором ток
покоя равен 150 мкА.
Конденсаторы Свх, Ср и Со должны иметь номинал 10 мкФ и эквивален-
тное последовательное сопротивление менее 150 мОм. Также могут исполь-
зоваться конденсаторы номиналом 4,7 мкФ, при этом несколько возраста-
ют пульсации выходного напряжения. Для получения наименьшего уровня
пульсаций выходного напряжения рекомендуется использовать перечислен-
ные на рисунке типы танталовых конденсаторов.
Глава 9. Методы проектирования аппаратуры
Рис. 9.60. Дублер напряжения на принципе подкачки зарядов ADP3607 со стабилизи-
рованным выходным напряжением 5 В и током 50 мА
Для лучших характеристик рекомендуются
по 10 мкФ:
Ср. 293D475X0010B2W
Свх> Со 1 E475ZY5UC205F
Рис. 9.61. Схема включения преобразо-
вателя с подкачкой зарядов ADP3607-5
При указанных номиналах типичные пульсации выходного напряжения
не превышают примерно 30 мВ в диапазоне выходных токов 50 мА.
Приведенные примеры иллюстрируют применение некоторых предста-
вителей семейства ИС-преобразователей с подкачкой заряда. Также име-
ются другие преобразователи, включая стабилизированные преобразовате-
ли с подкачкой зарядов, предназначенные для TFT-дисплеев, с тремя вы-
ходными напряжениями (+5, +15 и —15 В). Дополнительную информацию
об этих и других устройствах можно найти на сайте http://www.analog.com.
Линейные постстабилизаторы
для импульсных источников питания
Другой эффективный способ уменьшения шума, который может приме-
няться совместно с импульсными источниками питания, заключается в
использовании каскада линейного постстабилизатора {linear post regulator).
В качестве постстабилизатора лучше всего использовать £ЛО-стабилиза-
тор, подобранный с учетом требуемых уровней тока и «чистого» напряже-
9.3. Системы «аналогового» питания
ния питания. Ему предшествует каскад импульсного источника, который
может представлять собой понижающий или повышающий индуктивный
импульсный стабилизатор либо преобразователь с подкачкой зарядов. Им-
пульсный источник обеспечивает более высокую эффективность по мощ-
ности на уровне всего проекта, а линейный постстабилизатор обеспечивает
чистое стабилизированное напряжение на нагрузке, понижая шум импуль-
сного стабилизатора. Этот тип стабилизации также называется гибридной
стабилизацией, так как объединяет в себе концепции и импульсной, и ли-
нейной стабилизации.
На рис. 9.62 показан пример схемы малошумящего стабилизатора на
3,3 В/1 А, подходящего для питания аналоговых устройств. Он работает от
номинального напряжения питания 9 В, и первый каскад, показанный в
левой части, — это повышающий или понижающий импульсный стабили-
затор. Выходное напряжение импульсного стабилизатора задается на не-
сколько сотен милливольт выше требуемого окончательного значения вы-
ходного напряжения, за счет чего минимизируется мощность, которая рас-
сеивается в каскаде LDO-стабилизатора, показанном в правой части схемы.
Этим исключается необходимость использования теплоотвода для проход-
ного транзистора LDO-стабилизатора.
В этом примере при помощи R— Т?2 выходное напряжение ИС импуль-
сного стабилизатора 1148 задается равным 3,75 В, однако в принципе это
напряжение может быть любым, удовлетворяющим требованию по запасу
напряжения используемого LDO-стабилизатора (естественно, в рамках пре-
делов, указанных в спецификации). Помимо этого, данный принцип рас-
пространяется на любые другие LDO-стабилизаторы, другие уровни токов
и другие импульсные стабилизаторы. ADP3310-3,3 — это LDO-стабилиза-
тор/контроллер с фиксированным напряжением, работающий с внешним
проходным полевым ^-МОП-транзистором, обеспечивая выходное напря-
жение 3,3 В.
Импульсный стабилизатор на 3,75 В Линейный стабилизатор
Рис. 9.62. Линейный постстабилизатор, включенный после импульсного/линейного
стабилизатора, может обеспечить низкий уровень шума и высокий КПД по
постоянному току
Глава 9. Методы проектирования аппаратуры
Каскад линейной постстабилизации обеспечивает как снижение уровня
шума (в данном примере примерно на 14 дБ), так и хорошую стабилизацию
по постоянному току. Для достижения наилучших показателей необходимо
руководствоваться правилами хорошего заземления. При проведении тес-
тов выходное напряжение 3,3 В имело размах пульсаций на частоте им-
пульсного стабилизатора 150 кГц порядка 5 мВ. Обратите внимание, что
подавление шума, обеспечиваемое ££Ю-стабилизатором на таких сравни-
тельно высоких частотах, намного выше, чем на частоте 100/120 Гц. Также
заметьте, что эквивалентное последовательное сопротивление конденсато-
ра С2 косвенно влияет на шум в окончательном выходном напряжении.
Приведенные показатели пульсаций даны для С2 общего применения и могут
быть улучшены.
Заземление линейных и импульсных стабилизаторов
Наличие заземляющей поверхности, имеющей большую площадь и малый
импеданс, является критически важным требованием практически для всех
современных аналоговых схем, особенно для линейных ZDO-стабилизато-
ров с большим выходным током. Заземляющая поверхность не только иг-
рает роль низкоимпедансного обратного пути для высокочастотных импуль-
сных токов, но и минимизирует излучение электромагнитных/радиочастот-
ных помех. Кроме того, она минимизирует нежелательные падения
напряжения при больших токах нагрузки. Так как заземляющая поверх-
ность обладает свойством экранирования, также уменьшается восприимчи-
вость схемы к внешним электромагнитным/радиочастотным помехам. При
использовании многослойных печатных плат разумно выделить отдельный
слой под питание. При этом может быть обеспечен низкий импеданс обоих
критичных слоев (слоя питания и земляного слоя).
На рис. 9.63 показана схема заземления для линейного стабилизатора с
низким падением напряжения, такого как ADP3310. Важно минимизиро-
Короткое мощное
соединение
Рис. 9.63. Способы заземления и разводки сигналов для стабилизаторов с малым паде-
нием напряжения. Метод 1
Короткое соединение
с плоскостью (слоем)
земли
9.3. Системы «аналогового» питания
вать полное падение напряжения между входом и нагрузкой, так как оно
вычитается из напряжения, падающего на проходном транзисторе, и умень-
шает его запас по напряжению. По этой причине проводники, показанные
на схеме жирными линиями, должны быть широкими и толстыми. Выводы
Иых (считывания) и слаботочной «земли» (GND) ADP3310 подключаются
непосредственно к нагрузке, и поэтому стабилизатор стабилизирует напря-
жение на нагрузке в большей степени, чем на своем собственном выходе.
Выводы резистора Rs должны подключаться непосредственно к выводам
IS и Их ИС для минимизации паразитного сопротивления, так как токо-
ограничивающий резистор обычно имеет очень малый номинал (милли-
омы). В действительности при очень низких номиналах он может быть ре-
ализован в виде печатного проводника соответствующей длины, ширины и
толщины, обладающего требуемым сопротивлением.
Входной развязывающий конденсатор (Ct) должен иметь короткие вы-
воды и подключаться ко входу стабилизатора, поглощая любые импульсы,
которые могут приходить по линии входного напряжения. Аналогичным
образом конденсатор нагрузки (С2) должен иметь максимально короткие
выводы и поглощать импульсы в точке его включения, предотвращая их
проникновение обратно в стабилизатор. Соединение с низкоимпедансной
заземляющей поверхностью осуществляется в единственной точке — точке
нагрузки.
На рис. 9.64 показана схема заземления, которая похожа на схему рис. 9.63.
Она отличается тем, что все заземляющие точки соединяются непосред-
ственно с заземляющей поверхностью. Этот метод дает отличные результа-
ты, когда стабилизатор и нагрузка находятся на одной ПП, и нагрузка не
сосредоточена в одной конкретной точке, а распределена по плате. Если
нагрузка является распределенной, вывод Квых следует соединить непосред-
ственно с нагрузкой, как показано на схеме штриховой линией. Этим га-
рантируется, что стабилизатор обеспечит требуемое напряжение на нагруз-
ке независимо от падения напряжения на проводнике, который соединяет
выход проходного транзистора с нагрузкой.
Рис. 9.64. Способы заземления и разводки сигналов для стабилизаторов с малым паде-
нием напряжения. Метод 2
^886 Глава 9. Методы проектирования аппаратуры
Основные сложности возникают при разводке, заземлении и фильтра-
ции в схемах с импульсными стабилизаторами. Обсуждавшиеся выше под-
ходы в равной степени применимы и к импульсным стабилизаторам, но
для них может быть не столь важно падение постоянного напряжения.
Высокочастотные токи переключения в импульсном стабилизаторе ис-
ключить невозможно, так как они необходимы для правильной работы ста-
билизатора. Однако необходимо определить пути прохождения больших
токов переключения и предпринять необходимые меры для того, чтобы они
не ухудшали работу схем, находящихся в других частях платы или системы.
На рис. 9.65 показаны стандартная ИС контроллера синхронного импульс-
ного стабилизатора и внешние переключающие полевые МОП-транзисто-
ры. Жирными линиями обозначены пути, по которым протекают большие
токи переключения и/или постоянные токи. Обратите внимание, что все
эти пути соединяются в единой точке заземления, которая, в свою очередь,
соединяется с заземляющей поверхностью большой площади.
Для того чтобы минимизировать паразитные емкость и сопротивление,
каждый из путей прохождения должен быть как можно короче. Конденса-
торы Cj и С2А должны поглощать большую часть входных и выходных то-
ков переключения и шунтировать их на одноточечное заземление. Любые
дополнительные сопротивление и емкость, проявляющиеся последователь-
но с этими конденсаторами, ухудшают их эффективность. Минимизация
всех контуров, в которых протекают токи переключения, исключает их
значительное влияние на другие части схемы. В действительности реализо-
вать одноточечную концепцию заземления, показанную на рис. 9.65, весь-
ма сложно без использования дополнительных длинных проводников. Та-
кие проводники, последовательно соединенные с различными компонен-
тами, ослабляют эффект от применения одноточечного заземления.
Более практическое решение показано на рис. 9.66. Здесь каждое кри-
тичное соединение с «землей» производится непосредственно к заземляю-
щей поверхности проводником минимально возможной длины. Физичес-
питания
Рис. 9.65. Способы заземления и разводки сигналов для импульсных стабилизаторов.
Метод 1
9.3. Системы «аналогового» питания 887
Рис. 9.66. Способы заземления и разводки сигналов для импульсных стабилизаторов.
Метод 2
кое размещение всех критичных компонентов, относящихся к стабилизато-
ру, вблизи друг от друга и малая длина проводников, соединяющих с зазем-
лением, минимизирует паразитные последовательные индуктивность и со-
противление. При использовании этого подхода возможно возникновение
небольших паразитных контуров заземления, однако так как они имеют
малую площадь по сравнению с общей площадью заземляющей поверхнос-
ти, это не вызовет значительных проблем.
Снижение шумов и фильтрация напряжения
источника питания
В течение последних 10 лет или около того в электронных схемах стали
гораздо чаще использоваться импульсные источники, и, как следствие, они
стали применяться также для питания аналоговых схем. Причины их попу-
лярности — высокий КПД, малое повышение температуры, небольшой раз-
мер и вес по сравнению с линейными стабилизаторами равной мощности.
Несмотря на эти преимущества, импульсные источники питания имеют
отрицательные стороны и самое главное — большой уровень помех на вы-
ходе. Эти помехи обычно занимают широкую полосу частот, проявляются в
проводимых и излучаемых шумах, а также в нежелательных электрических
и магнитных полях. Напряжение выходного шума импульсного источника
питания представляет собой короткие импульсы или пики напряжения. Хотя
значение частоты переключения лежит в пределах 20 кГц — 1 МГц, выбро-
сы могут содержать частотные компоненты, достигающие 100 МГц и выше.
В спецификации на импульсные источники питания обычно указано зна-
чение среднеквадратичного напряжения шума, но как потребитель вы дол-
жны также знать амплитуду выбросов при определенной нагрузке, соответ-
ствующей вашей системе.
В данном разделе рассматриваются приемы фильтрации постоянного
напряжения со сравнительно небольшими потерями для доведения каче-
Глава 9. Методы проектирования аппаратуры
ства напряжения на выходе импульсного источника питания до уровня,
пригодного для аналоговых устройств, т. е. достаточно «тихого» для прецизи-
онных аналоговых схем. Рассмотренные схемные решения фильтров обыч-
но подходят для всех типов источников питания, использующих импульс-
ные элементы в тракте питания. Это относится и к преобразователям на
принципе подкачки зарядов, и к другим импульсным преобразователям и
источникам питания. Этот раздел посвящен вопросам снижения проводи-
мых {conducted) шумов импульсных источников питания при помощи вне-
шних фильтров. В нем не затрагиваются проблемы уменьшения излучае-
мых шумов.
Средства, применяемые для борьбы с высокочастотными шумами им-
пульсных источников питания, перечислены на рис. 9.67. Они различаются
по электрическим характеристикам, а также по их эффективности по части
уменьшения шума и перечислены приблизительно в порядке предпочте-
ния. Из этих средств катушки индуктивности и конденсаторы являются
наиболее действенными фильтрующими элементами, они наиболее выгод-
ны по соотношению цена/эффективность, а также невелики по размеру.
• Конденсаторы.
• Катушки индуктивности.
• Ферритовые шайбы.
• Резисторы.
• Линейная постстабилизация.
• Надлежащая разводка и заземление.
• Физическая изоляция от чувствительных схем.
Рис. 9.67. Средства уменьшения шума источника питания
Конденсаторы
Конденсаторы являются, пожалуй, самыми важными компонентами филь-
тра для источника импульсного питания. Как отмечалось в первом разделе
данной главы, существует много различных типов конденсаторов, и совер-
шенно необходимо разбираться во всех их характеристиках, для того чтобы
проектировать эффективные и практичные фильтры источников питания.
Существует три больших класса конденсаторов, используемых в фильтрах
на частотах 10 кГц — 100 МГц, различающихся по типу диэлектрика: элект-
ролитические, пленочные и керамические. Вопросы, обсуждаемые в данном
разделе, дополняют ранее обсуждавшиеся и касаются фильтрации источни-
ков питания.
Какой бы диэлектрик ни применялся, основная составляющая потерь в
конденсаторе выражается через эквивалентное последовательное сопротив-
ление (ESR), это — суммарное паразитное сопротивление конденсатора.
Эквивалентное последовательное сопротивление ограничивает эффективность
фильтра и требует особого внимания, т. к. в некоторых типах конденсаторов
оно может изменяться в зависимости и от частоты, и от температуры. Другая
составляющая, понижающая качество конденсатора, — эквивалентная пос-
ледовательная индуктивность {ESL). Эквивалентная последовательная ин-
9.3. Системы «аналогового» питания
дуктивность определяет частоту, на которой характер импеданса конден-
сатора изменяется от емкостного к индуктивному. Эта частота изменяется в
пределах от 10 кГц в некоторых электролитических конденсаторах до 100 МГц
или даже больше в «чиповых» керамических конденсаторах. И эквивалент-
ная последовательная индуктивность, и эквивалентное последовательное
сопротивление минимизированы в безвыводных компонентах. Все упомя-
нутые типы конденсаторов доступны в исполнении для поверхностного
монтажа, которое предпочтительно для высокоскоростных устройств.
Конденсаторы из семейства электролитических являются прекрасным,
эффективным по стоимости низкочастотным компонентом фильтра по при-
чине широкого диапазона номиналов, большого отношения емкости к объему
и широкого диапазона рабочих напряжений. В состав семейства входят алю-
миниевые электролитические конденсаторы общего применения, имеющие рабо-
чие напряжения от 10 до 500 В и емкость от 1 мкФ до нескольких тысяч
(размер корпуса пропорционален номинальной емкости). Все конденсато-
ры этого типа полярные и не могут выдерживать без повреждения более 1 В
обратного напряжения.
Еще одной разновидностью электролитических конденсаторов являют-
ся танталовые конденсаторы, обычно рассчитанные на напряжение 100 В
и ниже и имеющие емкость до 500 мкФ (см. 7). Танталовые конденсаторы
имеют большее значение отношения емкости к объему, чем электролити-
ческие конденсаторы общего назначения, а также более высокий диапазон
частот и низкое значение эквивалентного последовательного сопротивле-
ния. Обычно они дороже, чем стандартные электролитические конденсато-
ры, и должны использоваться с осторожностью, с учетом скорости нараста-
ния и пульсаций тока.
Алюминиевые электролитические конденсаторы имеют подвид импуль-
сных конденсаторов, которые предназначены для работы с большими им-
пульсными токами на частотах до нескольких сотен килогерц и имеют не-
большие потери (см. 8). Конденсаторы этого типа конкурируют с тантало-
выми в высокочастотных фильтрах, имея преимущество в виде более
широкого диапазона емкостей.
В более специализированных высокоэффективных алюминиевых элек-
тролитических конденсаторах типа OS-CON применяется органический
полупроводниковый (organic semiconductor) электролит (см. 9). Такие кон-
денсаторы имеют значительно меньшее эквивалентное последовательное
сопротивление и более широкий диапазон частот, чем другие электролити-
ческие конденсаторы, Кроме того, их эквивалентное последовательное со-
противление мало ухудшается при низких температурах.
Пленочные конденсаторы имеют очень широкий диапазон номиналов
емкостей и разновидностей диэлектриков, в том числе полиэстер, поликар-
бонат, полипропилен и полистирол. Из-за малой диэлектрической проница-
емости этих материалов размеры данных конденсаторов довольно велики;
так, например, конденсатор с полиэстеровым диэлектриком на 10 мкФ/50 В
имеет размер с ладонь. Металлизированные электроды (по сравнению с
электродами из фольги) способствуют уменьшению размеров, но даже кон-
денсаторы с самой высокой диэлектрической постоянной среди кон-
денсаторов этого типа (полиэстер, поликарбонат) все же больше по разме-
ру, чем любой электролитический, даже при использовании самой тонкой
пленки с наименьшим номинальным напряжением (50 В). Хотя пленочные
конденсаторы имеют очень низкие диэлектрические потери, этот фактор
не обязательно является преимуществом на практике в задаче фильтрации
напряжения импульсного источника питания. Например, эквивалентное
последовательное сопротивление в пленочных конденсаторах может быть
даже менее 10 мОм, и их свойства в том, что касается добротности, очень
хорошие. Но на практике это может вызвать нежелательные резонансные
явления в фильтрах и потребовать применения дополнительных демпфиру-
ющих компонентов.
Пленочные конденсаторы, обычно имеющие конструкцию в виде мно-
гослойного рулона, могут обладать индуктивностью. Это может уменьшить
их эффективность в задаче высокочастотной фильтрации. Разумеется, только
неиндуктивные пленочные конденсаторы могут быть использованы в филь-
трах импульсных источников питания. Один из специфических неиндук-
тивных типов конденсатора — это пакетный пленочный (stacked-film), где
пластины конденсатора вырезаны как небольшие слоистые прямые кусочки
из большого намотанного барабана, состоящего из слоев диэлектрика/про-
водника. Эта технология привлекательна низкой индуктивностью конден-
саторов (см. 8’10). Очевидно, что для наибольшей эффективности на высо-
кой частоте длина выводов должна быть минимальной. Также выпускаются
конденсаторы с поликарбонатной пленкой, рассчитанные на очень высо-
кие токи и предназначенные специально для импульсных источников пи-
тания, в вариантах с различными низкоиндуктивными выводами для умень-
шения эквивалентной последовательной индуктивности (см. н). В зави-
симости от электрических параметров и физических размеров пленочные
конденсаторы могут применяться на частотах до 10 МГц и даже выше. На
самых высоких частотах могут применяться только пакетные пленочные
конденсаторы. Некоторые производители в настоящий момент выпускают
безвыводные пленочные конденсаторы с поверхностным монтажом, что
минимизирует проблему индуктивности выводов.
На частоте выше нескольких мегагерц обычно используют керамичес-
кие конденсаторы. Это обусловлено их компактными размерами, низкими
потерями и наличием номиналов до нескольких микрофарад при исполь-
зовании диэлектрика с высокой диэлектрической проницаемостью (X7R
и Z5U), с номинальным напряжением до 200 В (см. серию керамических
конденсаторов в 7).
Многослойные керамические «чиповые» конденсаторы очень популяр-
ны для развязки и/или фильтрации на частотах 10 МГц и выше, т. к. их
очень низкая индуктивность обеспечивает почти оптимальное прохожде-
ние радиочастотных сигналов. Керамические «чиповые» конденсаторы с
меньшими значениями емкости имеют рабочий диапазон частот до 1 ГГц.
Для применения на высоких частотах следует выбирать конденсаторы, соб-
ственная резонансная частота которых превышает максимальную рабочую
частоту схемы.
Показанные на рис. 9.68 модель конденсатора и формы сигналов иллю-
стрируют вклад различных паразитных составляющих модели в зависимос-
ти от рабочей частоты. Предположим, что, как показано на рисунке, вход-
9.3. Системы «аналогового» питания
Рис. 9.68. Эквивалентная схема конденсатора и его отклик на входной импульс тока
ной ток имеет форму импульса, изменяющегося от 0 до 1 А за 100 нс, и
определим напряжение, появляющееся на конденсаторе.
Высокая скорость нарастания тока приводит к появлению начального
пика в напряжении на конденсаторе, величина которого пропорциональна
эквивалентной последовательной индуктивности. После завершения пере-
ходного процесса напряжение на конденсаторе устанавливается и сохраня-
ет значение в течение длительного периода времени. Величина установив-
шегося напряжения пропорциональна эквивалентному последовательному
сопротивлению конденсатора. Таким образом, эквивалентная последова-
тельная индуктивность определяет эффективность фильтра, в котором при-
меняется конденсатор, с точки зрения более быстрых составляющих тока, а
величина эквивалентного последовательного сопротивления важна для бо-
лее низкочастотных составляющих. Обратите внимание, что для данного
анализа важны суммарные временные интервалы длительностью несколько
микросекунд (или даже менее), т. е. частоты импульсного источника в ди-
апазоне от 100 кГц до 1 МГц. К сожалению, именно в этой области частот
большинство электролитических конденсаторов имеют плохие характерис-
тики.
Вид зависимости импеданса от частоты для всех электролитических кон-
денсаторов аналогичен показанному на рис. 9.69. Импеданс реального кон-
денсатора на частотах ниже 10 кГц является практически чисто емкостным
(область 0. На промежуточных частотах полный импеданс определяется
величиной эквивалентного последовательного сопротивления, которая для
некоторых типов составляет от 0,1 до 0,5 Ом на частотах порядка 125 кГц
(область ESR). На частотах от нескольких сотен килоегрц до 1 МГц эти
типы конденсаторов становятся индуктивными, и их полный импеданс воз-
растает (область ESL).
Минимальный импеданс в диапазоне частот от 10 кГц до 1 МГц зависит
от величины эквивалентного последовательного сопротивления конденса-
тора. Это основная причина, по которой эквивалентное последовательное
сопротивление является наиболее критическим элементом с точки зрения
Глава 9. Методы проектирования аппаратуры
Рис. 9.69. Зависимость импеданса конденсатора от частоты
эффективности конкретного конденсатора в составе фильтра импульсного
источника питания. На более высоких частотах характер индуктивной об-
ласти будет зависеть от эквивалентной последовательной индуктивности
(которая в значительной степени определяется размерами корпуса). Кривая
импеданса в широком диапазоне частот очень полезна для определения
потенциального номинала конденсатора, который планируется применить
в схеме фильтра, а также в целях сравнения различных типов.
Необходимо осознавать, что все реальные конденсаторы обладают не-
которым определенным значением эквивалентного последовательного со-
противления. Обычно желательно, чтобы конденсаторы фильтра обладали
низким ESR, но это не всегда так. В некоторых случаях ESR может даже
способствовать подавлению резонансных пиков в фильтрах, обеспечивая
некоторое затухание. Например, для большинства электролитических кон-
денсаторов область последовательного резонанса можно найти на графике
зависимости импеданса от частоты. Это происходит там, где \Z | падает до
минимального уровня, почти равного ESR конденсатора на этой частоте.
Данный низкодобротный резонанс может обычно покрывать относительно
большой диапазон частот в несколько октав. По сравнению с очень высо-
кодобротными острыми резонансными пиками пленочных и керамических
конденсаторов поведение электролитических конденсаторов может быть
полезно при подавлении резонансных явлений.
Ферриты
Вторым важным элементом фильтра являются катушки индуктивности,
которые выпускаются в различных формах. В катушках, наиболее подходя-
щих для фильтров напряжения питания, чаще всего используются ферри-
товые сердечники.
Что касается катушек индуктивности, в фильтрах источников питания
очень часто применяются ферриты — непроводящая керамика, производи-
мая из оксидов никеля, цинка, марганца и других соединений (см. 12). Фер-
9.3. Системы «аналогового» питания 893
ритовые изделия, в зависимости от их конструкции и диапазона рабочих
частот, могут играть роль катушек индуктивности или резисторов. На низ-
ких частотах (меньше 100 кГц) ферриты имеют индуктивный характер, по-
этому они полезны в низкочастотных ZC-фильтрах. На более высоких час-
тотах ферриты становятся резистивными, что важно для разработки высо-
кочастотных фильтров. Еще раз отметим, что импеданс ферритов зависит
от конкретных параметров: материала, диапазона рабочих частот, постоян-
ного тока смещения, числа витков, размера, формы и температуры. На рис.
9.70 перечислен ряд характеристик ферритов.
• Ферриты эффективны на частотах выше 25 кГц.
• Существуют ферритовые изделия различных типов и форм, в том числе в виде рези-
стора с выводами.
• Импеданс ферритов на высоких частотах преимущественно резистивный, что иде-
ально подходит для задач ВЧ-фильтрации.
• Небольшие потери на постоянном токе: сопротивление провода, проходящего через
феррит, очень невелико.
• Существуют варианты с большим током насыщения.
• Выбор зависит от:
— частоты и источника помехи;
— требуемого импеданса на частоте помехи;
— характеристик окружающей среды: температуры, напряженности постоянного и
переменного поля, имеющегося свободного места.
• Всегда тестируйте проектируемую схему.
Рис. 9.70. Обзор характеристик ферритов
Несколько производителей ферритов предлагают большой выбор фер-
ритовых изделий из различных материалов и с различными типами корпу-
сов (см. 13’ 14). Простейшей формой ферритовых изделий является шайба
(bead) из ферритового материала — ферритовый цилиндр, который просто
надевается на вывод питания ИС для развязки. Другой формой такой шай-
бы является ферритовая шайба с выводами (leadedferrite bead), которая мон-
тируется на провод и может использоваться в качестве отдельного компо-
нента схемы (см. 14). В более сложных шайбах имеется множество отвер-
стий в цилиндре, которые обеспечивают улучшение развязки, и некоторые
другие особенности. Также выпускаются шайбы в исполнении для поверх-
ностного монтажа. Для материалов Fair-Rite для расчетов имеются модели
PSpice, которые позволяют оценить импеданс феррита (см. 15). Эти модели
разработаны в соответствии с реально измеренным, а не теоретическим
импедансом.
Полное сопротивление ферритов зависит от нескольких взаимосвязан-
ных переменных и с трудом поддается аналитическому определению, по-
этому выбрать подходящий феррит не так просто. Однако знание следую-
щих характеристик облегчает выбор. Во-первых, определите диапазон час-
тот шума, который должен фильтроваться. Во-вторых, должен быть известен
ожидаемый диапазон температур фильтра, т. к. импеданс ферритов изменя-
ется в зависимости от температуры. В-третьих, должен быть известен мак-
симальный постоянный ток, протекающий через дроссель, чтобы удостове-
риться, что феррит не войдет в насыщение. Хотя модели и другие аналити-
Глава 9. Методы проектирования аппаратуры
ческие средства могут подтвердить правильность предпосылок, приведен-
ная выше общая последовательность выбора, подкрепленная несколькими
экспериментами с реальным фильтром, с подключенной нагрузкой, соот-
ветствующей реальным условиям, должна привести к правильному выбору
феррита.
Фильтр в точке подключения питания к плате
При правильном выборе компонентов можно проектировать высокочас-
тотные и низкочастотные фильтры для формирования напряжения пита-
ния аналоговых схем из выходного напряжения шумного импульсного ис-
точника. На практике лучше иметь два (или более) каскадов фильтрации.
каждый из которых оптимален для определенного диапазона частот.
Базовый каскад может использоваться для передачи всего тока нагрузки
и фильтрации шума на 60 дБ и более в диапазоне частот до 1 — 10 МГц. Этот
тип фильтра показан на рис. 9.71. Он используется в точке подключения
питания к плате и обеспечивает широкополосную фильтрацию всего пита-
ния, подаваемого на плату.
В этом фильтре Lx и С1 выполняют первичную фильтрацию, обеспечи-
вая частоту среза примерно 1,6 кГц. Так как частота среза значительно
ниже стандартных частот импульсных источников питания, эта схема мо-
жет обеспечивать хорошее подавление на частотах до 1 МГц (обычно по-
рядка 60 дБ). На более высоких частотах качество фильтра ограничивается
паразитными эффектами, и большую пользу приносит второй каскад филь-
трации.
Характеристики фильтра во многом зависят от применяемых в нем
компонентов. Дроссель должен быть способен пропускать рабочий ток
(т. е. при токе нагрузки 350 мА следует использовать дроссель на 1 А).
Указанный дроссель имеет типичное сопротивление по постоянному току
0,65 Ом, за счет чего обеспечивается малое падение напряжения в фильтре
(см. 16). Конденсатор С может быть либо танталовым, либо алюминиевым
Рис. 9.71. Фильтр в точке подключения питания к плате может использоваться для
фильтрации шума источника питания с низкой или средней частотой в ана-
логовых системах
9.3. Системы «аналогового» питания 895
электролитическим и должен иметь относительно низкое эквивалентное
последовательное сопротивление. При уровнях тока менее 300 мА можно
использовать Lx пропорционально меньшего размера. Резистор R} обеспе-
чивает демпфирующую функцию для ZC-фильтра, предотвращая возмож-
ный «звон». Номинал можно уменьшить или его вообще можно исклю-
чить, если эквивалентное последовательное сопротивление Ц обеспечива-
ет сравнимый импеданс.
Несмотря на то что фильтр, показанный в примере, предназначен для
однополярного источника, те же концепции, очевидно, применимы и к
двухполярным источникам.
Проходной фильтр развязки
для шин питания
или распределенный фильтр
Совместно с фильтром в точке подключения питания к плате может исполь-
зоваться схема фильтра развязки для шин питания, показанная на рис. 9.72.
При работе от относительно «чистого» источника питания фильтр в точке
подключения питания может и не понадобиться. Однако определенная низ-
кочастотная развязка при помощи накапливающего конденсатора значи-
тельной емкости почти всегда бывает полезна, в особенности если запиты-
ваемый каскад потребляет большой ток.
В таких случаях в плате следует обеспечить определенную степень низ-
кочастотной развязки. Несмотря на то что накапливающие конденсаторы
не обязательно должны размещаться вблизи от защищаемых ими ИС, их
следует располагать в пределах нескольких дюймов. Подобная схема раз-
вязки является минимально необходимой для фильтрации питания любой
аналоговой схемы. Точные значения номиналов конденсаторов не являют-
ся критическими и могут изменяться в значительных пределах. Главное —
не забыть о том, что они необходимы! В показанной схеме для фильтра-
ции шин питания в системе с двухполярным питанием используются кон-
Рис. 9.72. Низкочастотный фильтр развязки для шины питания в системе с двухполяр-
ным питанием
Глава 9. Методы проектирования аппаратуры
денсаторы Сх и С2. Обратите внимание, что на разъеме платы рекоменду-
ется отводить по несколько контактов под питание и особенно под зазем-
ление. После точки включения конденсатора проводники шин питания
разводятся по отдельным каскадам по схеме «звезда». Здесь следует сде-
лать замечание. Этот метод является оптимальным с точки зрения мини-
мизации перекрестных межкаскадных помех, но на практике зачастую
бывает трудно полностью избежать последовательной разводки питания
по каскадам. Поэтому разработчик должен учитывать эффекты общих то-
ков питания при разработке схемы распределения питания по ПП.
Ширина проводников шин питания должна быть больше, чем ширина
обычных проводников, особенно если по ним будет протекать значитель-
ный ток. Если уровни тока составляют порядка ампера, то схема разводки
питания «звездой» с использованием очень широких проводников должна
рассматриваться как обязательная. Импеданс пути прохождения обратного
тока должен быть минимизирован за счет применения заземляющей поверх-
ности.
Локальный высокочастотный
проходной/развязывающий фильтр
напряжения питания
В каждом отдельном аналоговом каскаде требуется только высокочастотная
фильтрация питания, в дальнейшем — локальная. При использовании со-
вместно с фильтром в точке подключения питания к плате или цепью низ-
кочастотной развязки более простые локальные фильтры, имеющие мень-
шие размеры, обеспечивают оптимальную высокочастотную развязку. По-
добные фильтры должны присутствовать в каждом отдельном аналоговом
каскаде, в непосредственной близости от выводов питания.
На рис. 9.73 показаны правильный (слева) и неправильный (справа)
варианты реализации этого метода. В левой части рисунка типичный «чи-
Правильно
Неправильно
Рис. 9.73. Локализованный фильтр (фильтры) питания обеспечивает оптимальную
фильтрацию и развязку по короткому низкоиндуктивному пути (через за-
земляющую поверхность)
Список литературы к 9.3. Системы «аналогового» питания
89ZJ
повый» керамический конденсатор с номиналом 0,1 мкФ соединяется не-
посредственно с заземляющей поверхностью на противоположной стороне
ПП через переходное отверстие и далее через второе переходное отверстие
с выводом GND ИС. Для сравнения, в более плохой схеме, показанной в
правой части рисунка, между развязывающим конденсатором и заземляю-
щей поверхностью присутствует дополнительная индуктивность печатного
проводника, уменьшающая эффективность.
Общий метод показан здесь для случая однополярного питания, одна-
ко данная концепция очевидным образом распространяется и на системы
с двухполярным питанием. Обратите внимание, если ИС, для которой
осуществляется развязка, является операционным усилителем, то вывод
GND, показанный в примере, превращается в вывод — Vs. В операцион-
ных усилителях с двухполярным питанием вывод GND отсутствует, и по-
этому две цепи развязки должны соединяться непосредственно с заземля-
ющей поверхностью, если она имеется, или другим локальным заземле-
нием.
В целях достижения наилучших характеристик для всех высокочастот-
ных (т. е., >10 МГц) ИС следует использовать схему развязки, аналогичную
показанной на рис. 9.73. Попытка использования операционных усилите-
лей и других высококачественных ИС без локальной развязки почти всегда
является безрассудством. Использование таких ИС без развязки по пита-
нию может быть возможным в нескольких случаях: если схема является
крайне маломощной и ее усиление и полоса пропускания ограничиваются
килогерцовым диапазоном. Однако для того, чтобы расставить все по мес-
там, отметьте для себя, что пара керамических развязывающих конденсато-
ров номиналом 0,1 мкФ стоит менее 25 центов. Вряд ли выгода будет сто-
ить всех потенциальных бед и потерь времени на отладку системы, работа-
ющей без фильтрации питания!
В отличие от конденсаторов ферритовые шайбы не стопроцентно не-
обходимы, однако они могут добавить дополнительную степень изоля-
• Применяйте подходящие методы разводки и заземления.
• Локальная ВЧ-фильтрация на выводах питания ИС необходима.
• При работе на ВЧ заземляющие поверхности необходимы.
• Внешние LC-фильтры очень эффективны в уменьшении пульсаций.
• Конденсаторы с малым эквивалентным сопротивлением/индуктивностью дают луч-
ший результат.
• Параллельное включение конденсаторов уменьшает эквивалентное сопротивление/
индуктивность и увеличивает емкость.
• Для снижения шума и улучшения стабилизации эффективна линейная постстабили-
зация.
• Полностью аналитический расчет затруднен.
• Для достижения оптимальных результатов необходимо макетирование.
• По завершении проекта не заменяйте компоненты без предварительной проверки их
характеристик в составе схемы.
Рис. 9.74. Обзор методов преобразования напряжения питания для высококачествен-
ных аналоговых схем
29--2852
Глава 9. Методы проектирования аппаратуры
ции и развязки высокочастотных шумов, что зачастую желательно. При
использовании ферритовых шайб следует удостовериться, что они не
начнут насыщаться при работе операционных усилителей с большими
токами.
Обратите внимание, что шайбы из отдельных ферритовых материалов
могут быть нелинейными даже до наступления полного насыщения. Это
необходимо проверить лабораторным путем, если требуются малые иска-
жения напряжения питания.
На рис. 9.74 приведен обзор обсуждавшихся ранее моментов, касаю-
щихся методов преобразования напряжения питания для высококачествен-
ных аналоговых схем.
Список литературы
9.3. Системы «аналогового» питания
1. Walt Jung. References and Low Dropout Linear Regulators. Section 2 within Walt
Kester, Ed., Practical Design Techniques for Power and Thermal Management, Analog
Devices, Inc., 1998, ISBN 0-916550-19-2.
2. Paul Brokaw. A Simple Three-Terminal IC Bandgap Voltage Reference. IEEE
Journal of Solid State Circuits, Vol. SC-9, December, 1974.
3. Frank Goodenough. Vertical-PNP-Based Monolithic LDO Regulator Sports Advanced
Features. Electronic Design, May 13, 1996.
4. Frank Goodenough. Low Dropout Regulators Get Application Specific. Electronic
Design, May 13, 1996.
5. Walt Kester, Brian Erisman, Gurgit Thandi. Switched Capacitor Voltage Converters.
Section 4 within Walt Kester, Editor, Practical Design Techniques for Power and Thermal
Management, Analog Devices, Inc., 1998, ISBN 0-916550-19-2.
6. Walt Jung, Walt Kester, Bill Chesnut. Power Supply Noise Reduction and Filtering.
Portion of Section 8 within Walt Kester, Editor, Practical Design Techniques for Power
and Thermal Management, Analog Devices, Inc., 1998, ISBN 0-916550-19-2.
7. Tantalum Electrolytic and Ceramic Capacitor Families, Kemet Electronics, Box
5928, Greenville, SC, 29606, 803-963-6300.
8. Type HFQ Aluminum Electrolytic Capacitor and Type V Stacked Polyester Film
Capacitor, Panasonic, 2 Panasonic Way, Secaucus, NJ, 07094, 201-348-7000.
9. OS-CON Aluminum Electrolytic Capacitor Technical Book, Sanyo, 3333 Sanyo Road,
Forrest City, AK, 72335, 501-633-6634.
10. Ian Clelland. Metallized Polyester Film Capacitor Fills High Frequency Switcher
Needs. PCIM, June 1992.
11. Type 5MC Metallized Polycarbonate Capacitor, Electronic Concepts, Inc., Box
1278, Eatontown, NJ, 07724, 908-542-7880.
12. Henry W. Ott. Noise Reduction Techniques in Electronic Systems. 2nd Edition, John
Wiley, Inc., 1988, ISBN: 0-471-85068-3.
13. Fair-Rite Linear Ferrites Catalog, Fair-Rite Products, Box J, Wallkill, NY, 12886,
914-895-2055.
14. Type EXCEL leaded ferrite bead EMI filter, and Type EXC L leadless ferrite bead,
Panasonic, 2 Panasonic Way, Secaucus, NJ, 07094, 201-348-7000.
15. Steve Hageman. Use Ferrite Bead Models to Analyze EMI Suppression. The Design
Center Source, MicroSim Newsletter, January, 1995.
16. MESC series RFI suppression chokes. FASTRON GmbH, Zum Kaiserblick 25,
83620 Feldkirchen-Westerham, Germany, www.fastron.de.
9.4. Защита от перенапряжения 899
9.4. Защита от перенапряжения
Уолт Джанг, Уолт Кестер, Джеймс Брайант,
Джо Бакстон, Вес Фримэн
Преобразователи данных, операционные усилители и другие аналоговые
ИС зачастую требуют защиты от деструктивных потенциалов по входу и
выходу. Это обусловлено в основном тем, что эти компоненты по своей
природе являются относительно чувствительными. Они проектируются мак-
симально устойчивыми к нормальным сигналам, однако в определенных за-
дачах и/или условиях они могут подвергаться переходным напряжениям,
значительно превышающим номинальные уровни. Подобные ситуации мо-
гут возникать в двух случаях. Первый — это внутрисхемное (in-circuit) пере-
напряжение, которое возникает при работе компонента в составе схемы.
Второй — внесхемное (out-of-circuit) перенапряжение, которое может возни-
кать после получения ИС от поставщика, но до ее монтажа на плату. Для
любого из типов перенапряжений жизненно важным фактом является то,
что если разработчик не ограничит токи повреждения на входе (или воз-
можно выходе) ИС, она может быть повреждена или выведена из строя.
Таким образом, разработчик, очевидно, должен осознавать все внутрен-
ние механизмы повреждения ИС и где может потребоваться защита. Это
позволит проектировать цепи, обеспечивающие внутрисхемную защиту ИС
в течение всего срока ее действия, без ухудшения скорости, точности и т. д.
Для ИС, находящейся вне схемы, это поможет обозначить необходимые
процедуры обращения с ней до тех пор, пока она не будет монтирована в
систему. В этом разделе главы исследуются разнообразные методы защиты,
обеспечивающие адекватную защиту операционных усилителей и других
аналоговых ИС как в составе схемы, так и вне ее.
Защита от внутрисхемного перенапряжения
Существует много ситуаций, в которых операционные усилители и анало-
говые ИС при работе в составе схемы подвергаются негативному воздей-
ствию. Так как такие ИС зачастую должны взаимодействовать с внешним
миром, они могут подвергаться напряжениям, значительно превышающим
номинальные уровни. Например, датчики часто размещаются в среде, где
при определенных условиях могут возникать опасно высокие напряжения.
Если такой датчик подключается к усилителю обработки сигналов, на вхо-
де последнего при таких условиях будут присутствовать чрезмерные уровни
напряжения.
Общие ограничения на входы
при включении с общим выводом
Каждый раз, когда входное относительно общего вывода (common-mode —
СМ) напряжение операционного усилителя или преобразователя данных
выходит за пределы его напряжений питания, возможно повреждение уст-
ройства, даже если питание отключено. В соответствии с этим абсолютное
максимальное входное напряжение почти всех линейных ИС ограничено
уровнем примерно на 0,3 В выше положительного и отрицательного напря-
жения питания (т. е. + Ks, + 0,3 В или — Vs — 0,3 В). Несмотря на то что могут
существовать некоторые исключения из этого общего правила, важно отме-
тить следующее: большинство линейных ИС требуют защиты по входу, если
входное напряжение превышает напряжение питания более чем на 0,3 В,
Правило безопасной работы заключается в том, чтобы всегда удержи-
вать приложенное относительно общего вывода напряжение ниже преде-
лов, заданных напряжением питания. «Безопасная» здесь подразумевает
предотвращение необратимого разрушения ИС. Как будет показано ниже,
в отдельных устройствах также имеется область промежуточных напряже-
ний внутри диапазона, определенного напряжениями питания, являющая-
ся «опасной зоной». Воздействие напряжений, принадлежащих «опасной
зоне», может привести к опасному (но необязательно деструктивному) по-
ведению.
Важно отметить, что почти любой вход операционного усилителя или
преобразователя данных будет выведен из строя (произойдет пробой) при
значительном превышении входным напряжением отрицательного или по-
ложительного напряжения питания. В таких ситуациях могут протекать
большие неконтролируемые токи, очевидным образом представляющие
опасность. Конкретный уровень напряжения пробоя полностью зависит от
типа входного каскада конкретного операционного усилителя. Это может
быть падение на диоде 0,6 В или напряжение пробоя, вызванное техноло-
гическими процессами, величиной 50 В и более. Во многих случаях при
перенапряжении могут возникать токи, превышающие 100 мА, которые
практически мгновенно разрушают устройство.
Поэтому во избежание разрушения, если в техническом описании не
оговорено иное, входной ток повреждения не должен превышать 5 мА.
Это требование является весьма консервативным и обусловлено шириной
металлических проводников во входном каскаде типичного операционно-
го усилителя или преобразователя данных. Более высокие уровни тока
могут вызвать миграцию в металле {metal migration) — накапливаемый эф-
фект, который со временем может привести к разрыву проводника. В слу-
чае, если миграция все же имеет место, повреждение проявится только
лишь спустя длительное время после многократных перенапряжений, и
его очень сложно обнаружить. Поэтому, даже несмотря на кажущуюся
способность усилителя выдерживать кратковременные токи, значительно
превышающие 5 мА, для обеспечения долговременной надежности следу-
ет ограничить токи значением 5 мА (или меньшим значением, что являет-
ся предпочтительным).
На рис. 9.75 показана внешняя схема защиты операционного усилителя
общего назначения от перенапряжений. Ключевой особенностью этой схе-
мы является применение диодов Шоттки Dx и Dv а также внешнего токоог-
раничивающего резистора, 7?ЫМ1Т. При правильном выборе этих компонен-
тов может быть обеспечена защита по входу для большинства операцион-
ных усилителей. Обратите внимание, что операционный усилитель также
может содержать внутренние защитные диоды, подключенные к выводам
9.4. Защита от перенапряжения
Рис. 9.75. Схема защиты операционного усилителя общего назначения от повышенно-
го СМ-напряжения (относительно общего вывода) на базе фиксирующих
диодов Шоттки и токоограничивающего резистора
питания (см. рисунок), которые начинают проводить при прямом падении
напряжения на 0,6 В выше или ниже соответствующего напряжения пита-
ния. Однако в этом случае внешние диоды Шоттки включены параллельно
с внутренними, и напряжения на последних никогда не достигают порого-
вого значения. Внешний отвод тока исключает потенциальные стрессовые
ситуации, защищая операционный усилитель.
Внешние диоды также обеспечивают и другие степени свободы, некото-
рые из которых не столь очевидны. Например, если протекание тока в опе-
рационный усилитель допускается, то /?ЫМ1Т должен выбираться таким об-
разом, чтобы максимальный ток при наихудшем значении Ивх не превышал
5 мА. Для этого может потребоваться довольно большое значение 7?ЫМ1Т,
что приведет к неприемлемому увеличению шума и напряжения смещения.
Например, для защиты от входного напряжения 100 В при токе 5 мА номи-
нал RLIMIT должен быть не меньше 20 кОм. Однако при использовании вне-
шних фиксирующих диодов Шоттки значение RLIMIT определяется макси-
мальным допустимым током D—Dv который может превышать 5 мА. В дан-
ном случае следует соблюдать осторожность, так как при очень больших
токах падение напряжения на диодах Шоттки может превысить 0,6 В, что
может повлечь активацию внутренних диодов операционного усилителя.
С точки зрения минимизации шумов и ошибок смещения очень полез-
но иметь как можно меньшее значение 7?ЫМ1Т. На последовательном соеди-
нении /?ЫМ1Т и входа операционного усилителя возникает падение напряже-
ния, пропорциональное току смещения. Если это падение напряжения не
скорректировать, то оно приведет к увеличению напряжения смещения схе-
мы. Таким образом, в операционных усилителях с умеренными и прибли-
зительно равными значениями токов смещения (большинство биполярных
усилителей) компенсационный резистор RFB устраняет постоянную состав-
ляющую и минимизирует ошибку. В операционных усилителях с малым
Глава 9. Методы проектирования аппаратуры
током смещения (1Ь < 10 нА или в операционных усилителях на полевых
транзисторах) необходимость в использовании RFB, вероятно, не возник-
нет. Для минимизации шума, вызванного RFB, его следует шунтировать кон-
денсатором CF.
Утечка фиксирующих диодов
По очевидным причинам особенно важно, чтобы диоды, используемые
для защитной фиксации на входе операционного усилителя, имели дос-
таточно низкую утечку, не влияющую на уровень смещения в схеме. На
рис. 9.76 показаны зависимости токов утечки от обратного напряжения
смещения Hbias для некоторых распространенных диодов.
Из этой диаграммы, которая получена моделированием поведения дио-
дов при температуре 25 °C, нетрудно заметить, что важен не только тип
диода, но и обратное смещение. Например, диод Шоттки 1N5711 обычно
используется с операционными усилителями с напряжением питания ±15 В
и при обратном смещении 15 В имеет ток утечки приблизительно 100 нА.
При таком уровне утечки подобные диоды могут быть полезны только в
схемах с операционными усилителями, имеющими токи смещения порядка
нескольких микроампер. Для защиты операционных усилителей со значи-
тельно меньшими токами смещения (в частности, большинства устройств с
входными каскадами на полевых транзисторах) необходимо иметь намного
меньшее значение тока утечки.
Как видно из данных, приведенных на рис. 9.76, значительное умень-
шение утечки достигается не только выбором более хорошего диода, но и
использованием меньшего напряжения смещения. Например, обычный диод
1N914 или 1N4148 может иметь ток утечки 200 пА при 15 В, однако при
смещении 1 мВ он уменьшается до значения немного выше 1 пА. Здесь
необходимо сделать важное замечание! Стеклянные диоды (например, се-
Рис. 9.76. Характеристики токов обратного смещения для диодов, которые могут при-
меняться в цепях фиксации (получены моделированием в PSpice)
9.4. Защита от перенапряжения
мейства 1N914/1N4148) при использовании в высокоимпедансных схемах
фиксации должны либо экранироваться от воздействия света, либо иметь
светонепроницаемый корпус. Это необходимо для минимизации паразит-
ного фототока, возникающего под воздействием окружающего света и про-
являющегося обычно в виде тока утечки диода.
Также выпускаются специальные диоды с намного меньшей утечкой,
например полевые транзисторы, включенные как диоды и выполняющие
функции защитных диодов (см. серию DPAD в 2). На рис. 9.76 2N5457 — это
JFET общего назначения, а семейство 2N4117/PN4117 включает в себя ус-
тройства, имеющие низкий ток утечки. Другие специальные диоды и диоды
с низким током утечки описаны в 3 4.
Гибкая схема защиты повторителя напряжения
Обеспечить эффективную защитную фиксацию на входе операционного
усилителя при уровнях смещения входного напряжения ниже 1 мВ не так
просто.
На рис. 9.77 показан операционный усилитель на полевых транзисто-
рах, включенный по схеме повторителя, с защитой по входу и выходу при
включенном и выключенном питании, которая обеспечивается входной
фиксацией и другими средствами.
Если временно не обращать внимания на диоды, то эта схема представ-
ляет собой повторитель напряжения с ограниченным выходным током.
Добавление диодов D— D2 и D3—D4 привносит в схему возможности огра-
ничения выходного напряжения и защиты от перенапряжения на входе.
При работе ниже порогового напряжения выходных последовательно вклю-
ченных стабилитронов D3—D4 схема ведет себя как прецизионный повтори-
тель напряжения. В обычном режиме работы повторителя, т. е. при вход-
Рис. 9.77. Использование D— D2 в компенсационной ОС (bootstrapping) защитной цепи
снижает утечку диодов до пренебрежимо малых уровней и позволяет про-
граммировать напряжение уровней фиксации (заменой Z)3—D4)
ных/выходных напряжениях менее \VZ + 0,61 В (где Vz — напряжение про-
боя Д или Д), напряжение смещения диодов D— D2 равно лишь сумме
ошибок напряжения смешения и СМ-напряжения усилителя Uv При этом
ток утечки D—D2 уменьшается до очень низкого уровня, совместимого с
уровнем тока смещения операционного усилителя с входным каскадом на
полевых транзисторах, который имеет величину порядка пикоампер. Обра-
тите внимание, что необходимо предотвратить фотопроводимость D—Dr Для
этого, например, можно использовать диоды в светонепроницаемых кор-
пусах, такие как переходы ЭБ 2N3906, описанные Пизом (см. 3 4). Если
применяются диоды 1N914, то они должны быть экранированы от воздей-
ствия света. В любом случае такое включение значительно снижает эффек-
тивную утечку D—Dr
При входном/выходном напряжении более Vz ± 0,6 В наступает зене-
ровский пробой диодов D3—Dr При этом фиксируется выходное напряже-
ние как на выводе Иых, так и на выводе KCLAMP диодов D—Dr Как показано
на рисунке, входное напряжение операционного усилителя ограничивается
напряжением KCLAMP любой из полярностей. В режиме фиксации напряже-
ние на входе схемы Ивх может без вреда превышать напряжения питания, а
излишний ток ограничивается резистором Д1М1Т. При сохраняющихся дли-
тельное время высоких уровнях входного напряжения (-100 В) резистор
Д1М1Т Д°лжен иметь номинальную рассеиваемую мощность 1—2 Вт (или
действовать как плавкий предохранитель).
Эта схема имеет очень хорошие показатели по постоянному току, что
обуславливается компенсационной ОС (bootstrapping) схемы фиксации. За
счет этого при работе с напряжениями ниже порога J^LAMP (если оно не
выходит за пределы, указанные в спецификации на операционный усили-
тель) достигаются очень низкие входные/выходные ошибки. Обратите вни-
мание, что такая обратная связь также положительно влияет на характери-
стики по переменному току, так как снижается емкость диодов D—D2. Для
некоторых операционных усилителей емкость Д—Д, равная приблизительно
100 пФ, может вызвать нагрузочные проблемы, которые смягчаются изоли-
рующим эффектом резистора 7?вых1 и компенсирующей емкостью в цепи
обратной связи CF. Резисторы 7?вых1 и Т?вых2 защищают выход операционного
усилителя.
Уровень фиксации входного напряжения может программироваться пу-
тем выбора стабилитронов с требуемым уровнем напряжения Vz. Как отме-
чено на рисунке, это напряжение плюс 1,2 В должно быть выше макси-
мального входного напряжения, но ниже напряжения питания. В дан-
ном примере используются стабилитроны на 10 В ± 5 %; таким образом,
фиксация входного напряжения обычно происходит на уровне ±11,2 В
(т. е., линейный размах входного напряжения составляет ±10 В).
Следует отметить, что приведенное выше описание принципов работы
схемы касается случая включения питания. При выключении питания D—D4
по-прежнему выполняют фиксацию на заданных уровнях, однако в данной
ситуации возможно превышение входным и выходным напряжением уси-
лителя Д напряжений питания.
Обратите внимание, что для определенных микросхем это может пред-
ставлять опасность. Для таких случаев существует простой способ обеспе-
9.4. Защита от перенапряжения 905
чения более низкого, безопасного уровня фиксации при выключении пита-
ния. Он заключается в использовании реле в узле VCLAMp. При подаче пита-
ния контакты реле разомкнуты, а в его отсутствие — замкнуты. При внима-
тельной разводке всей ПП это позволяет сохранить ток смещения на уров-
не пикоампер в схемах, где в качестве Ц используются операционные
усилители на полевых транзисторах.
Защита от синфазного перенапряжения
при помощи КМОП-протекторов канала
Гораздо более простой способ защиты от перенапряжения заключается в
использовании КМОП-протекторов канала (channel protectors). Протектор
канала — это устройство, включенное последовательно в цепь прохожде-
ния сигнала, например перед входом операционного усилителя. Оно обес-
печивает защиту от перенапряжения за счет динамического изменения соб-
ственного сопротивления в условиях повреждения. Протекторы каналов
обладают одним отличительным функциональным преимуществом: они
позволяют обеспечить защиту чувствительных компонентов от переходных
напряжений независимо от того, подается питание или нет. Характерными
представителями этих устройств являются ADG465/ADG466/ADG467 —
протекторы канала с одним, тремя и восемью каналами. Так как эти уст-
ройства обеспечивают защиту независимо от наличия питания, они идеаль-
но подходят для задач, где часто возможно перенапряжение или не всегда
гарантируется корректное включение/выключение питания. Одним из по-
добных примеров являются устройства, монтируемые в стойку с возможно-
стью ее «горячего включения».
Рисунок 9.78 иллюстрирует применение протектора канала для защиты
прецизионного буфера от перенапряжения. Здесь на входе прецизионного
буферного операционного усилителя Ц, ОР777, используется одноканаль-
ный протектор Ц, ADG465.
В нормальном режиме работы протектор канала ведет себя просто как
последовательный резистор номиналом от 60 до 80 Ом. Он состоит из не-
Рис. 9.78. Применение ИС-протектора канала ADG465 в схеме прецизионного буфера
позволяет обеспечить очень простую защиту и безопасную работу даже при
выключении питания
скольких последовательно соединенных р- и л-полевых МОП-транзисто-
ров (MOSFET) и динамически регулирует сопротивление канала в соответ-
ствии с напряжением на выводе VD. Нормальная проводимость обеспечи-
вается, когда напряжение VD находится в диапазоне, ограниченном порого-
выми уровнями Vss +2 В и VDD —1,5 В. В условиях угрозы повреждения
аналоговое входное напряжение выходит за границы этого диапазона, что
вызывает выключение одного из последовательных MOSFET и, следователь-
но, возрастание сопротивления канала. При этом, как показано на рис. 9.78,
выходное напряжение фиксируется на одном из предельных уровней,
И^+2 В или Грр-1,5 В.
Основное преимущество протектора канала заключается в том, что в слу-
чае перенапряжения или снижения напряжения питания обеспечивается за-
щита и схемы, и источника сигнала. Несмотря на то что в приведенной схеме
протекторы канала работают от напряжения питания операционного усилите-
ля ±15 В, они могут работать и с напряжениями питания до 40 В. Они также
могут выдерживать перенапряжение на входах от Fss —20 В до VDD +20 В
(для показанной схемы ±35 В). При выключенном питании (VDD = Fss= 0 В)
максимальное входное напряжение равно ±35 В. Максимальная утечка в
канале при комнатной температуре равна 1 нА, что делает эти устройства
подходящими для операционных и измерительных усилителей с токами
смещения несколько наноампер и выше.
В дополнение к семейству протекторов канала ADG46x выпускается
несколько мультиплексоров с защитой от повреждения (fault-protected
multiplexers), например семейства ADG508F/509F и ADG438F/439F. И про-
текторы канала, и мультиплексоры с защитой от повреждения являются
малопотребляющими устройствами, и даже в условиях предотвращения
повреждения их ток питания ограничен субмикроамперными уровнями.
Дополнительным преимуществом мультиплексоров с защитой от повреж-
дения является то, что они сохраняют необходимый уровень изоляции ка-
налов, даже если на входе одного из них присутствует повышенное напря-
жение, т. е., остальные каналы продолжают функционировать.
Защита от синфазного перенапряжения
при помощи измерительных усилителей
с высоким синфазным напряжением
Простейшая защита аналогового канала от перенапряжения достигается
использованием резистивного аттенюатора на входе прецизионного опера-
ционного усилителя. Такая комбинация дает измерительный усилитель,
способный воспринимать высокие напряжения. Одним из таких усилите-
лей является AD629, способный линейно обрабатывать дифференциальные
сигналы при синфазных напряжениях до ±270 В. Кроме того, что гораздо
важнее с точки зрения защиты от перенапряжения, внутренние резисторы
могут обеспечивать защиту как от синфазных, так и от дифференциальных
напряжений, достигающих ±500 В. Все это обеспечивается, как показано
на рис. 9.79, при помощи прецизионной схемы на тонкопленочных резис-
торах с лазерной подстройкой и операционного усилителя.
9.4. Защита от
Рис. 9.79. ИС высоковольтного измерительного усилителя AD629 обеспечивает защи-
ту от перенапряжения по входу ±500 В, безопасное отключение питания и
не требует дополнительных компонентов
Анализ топологии показывает, что резистивная схема, которая окружает
операционный усилитель, входящий в AD629, делит прикладываемое ко
входу Кх синфазное напряжение на 20. AD629 преобразует с единичным
коэффициентом усиления входной дифференциальный сигнал Их в выход-
ной несимметричный сигнал относительно локальной «земли». Ошибки уси-
ления не превышают ±0,03 или 0,05 %, а напряжение смещения не превы-
шает 0,5 или 1 мВ (зависит от класса устройства). AD629 работает в диапа-
зоне напряжений питания от ±2,5 до ±18 В.
Совокупность этих факторов приводит к тому, что AD629 является про-
стым однокомпонентным решением для защиты аналоговых входов, на ко-
торых могут присутствовать опасные переходные напряжения. Сравнитель-
но высокое сопротивление используемых резисторов позволяет обеспечи-
вать защиту устройства в отсутствие питания, так как входные резисторы
ограничивают токи в опасных диапазонах входных напряжений до безопас-
ных значений. Кроме того, устройство обладает такими преимуществами,
характерными для измерительных усилителей, как хорошее подавление син-
фазных напряжений (минимум 86 дБ при 500 Гц), превосходная суммарная
точность по постоянному току и простота изменения полярности.
С другой стороны, несколько факторов, а именно тепловой шум резис-
торов с высоким номиналом и высокий коэффициент усиления шумов в
конфигурации (21х), приводят к тому, что AD629 имеет относительно вы-
сокий уровень выходного шума и дрейфа по сравнению с измерительными
усилителями, обладающими меньшим усилением (например, АМР03). Ре-
шение о том, существенно это или нет, должно приниматься для каждой
конкретной задачи в индивидуальном порядке.
Схемы защиты инвертирующих операционных усилителей
Существуют ряд задач, в которых предъявляются особые требования к защи-
те от перенапряжения, не вписывающиеся в более общие схемы защиты от
повышенного синфазного напряжения, обсуждавшиеся выше. На рис. 9.80
Рис. 9.80. Операционный усилитель/преобразователь ток—напряжение с входным кас-
кадом на полевых транзисторах, имеющий малый ток смещения, со схемой
защиты от перенапряжения на базе 7?ЫМ1Т и
показан один из подобных примеров — операционный усилитель/преобра-
зователь ток—напряжение с входным каскадом на полевых транзисторах,
имеющий малый ток смещения.
В этой схеме в качестве прецизионного инвертора используется опера-
ционный усилитель AD795 с током смещения 1 пА. Сигналы некоторых
источников тока могут формироваться из высокого напряжения (напри-
мер, из напряжения Vss с уровнем 100 В, как показано на рисунке). Таким
образом, они способны вызывать напряжения повреждения, намного пре-
вышающие уровни напряжения питания операционного усилителя. При них
в операционный усилитель могут втекать токи повреждения, значительно
превышающие безопасные уровни. Чтобы этого не происходило, в петлю
обратной связи, как показано на рисунке, включается защитный резистор
Kimit и фиксирующий диод Dx (Z>2).
В нормальных условиях (т. е. при Is < 10 мкА) напряжение на инверти-
рующем узле операционного усилителя очень близко к «земле» и равно
небольшому напряжению, падающему на /?ЫМ1Г При этом выполняется нор-
мальное преобразование ток—напряжение с усилением, задаваемым резис-
тором Rf. Специальный диод с малой утечкой Dx обеспечивает защиту опе-
рационного усилителя, фиксируя любое избыточное напряжение на ин-
вертирующем входе на уровне ~0,6 В. Номинал ЯЫМ1Т выбирается таким образом,
чтобы максимальный ток в условиях угрозы повреждения не превышал 1 мА.
Компенсирующая ОС с фиксирующим диодом Dx (и/или Z)2) минимизиру-
ет нормальное рабочее напряжение, падающее на инвертирующем узле, и
удерживает низкий уровень тока утечки диода (см. рис. 9.76). Обратите
внимание, что при положительном напряжении источника (ситуация, по-
казанная на рисунке) требуется фиксация только положительного уровня,
следовательно, достаточно одного диода.
В этой схеме должны применяться только диоды с наименьшей утеч-
кой, такие как PAD{ (или сдвоенный DPADX). Как отмечалось ранее, для
минимизации фототока, вызываемого внешним освещением, любые фик-
9.4. Защита от перенапряжения 909
сирующие диоды в такой схеме должны быть экранированы от света или
иметь светонепроницаемый корпус. Но даже при выполнении этих требо-
ваний диод (диоды) вызывает увеличение полного входного тока и шунти-
рующей емкости, и для ВЧ-коррекции может потребоваться включение в
цепь обратной связи компенсирующего конденсатора CF. Этот конденса-
тор также должен обладать очень малой утечкой. Кроме того, устройства с
очень малым входным током смещения, такие как AD795, не имеют того
уровня внутренней защиты, как другие операционные усилители производ-
ства ADI. Этот фактор делает AD795 более чувствительным в обращении,
поэтому необходимо принимать особые меры по предотвращению электро-
статического разряда.
Обращение фазы выходного напряжения усилителя
Как отмечалось ранее, существует группа операционных усилителей,
которые имеют «серую область» — аномальную область синфазных напря-
жений внутри диапазона, ограниченного напряжениями питания. Простое
обеспечение входного напряжения, не превышающего уровней напряже-
ния питания, еще не гарантирует защиту таких устройств. Для правильной
работы входные напряжения также не должны выходить за границы номи-
нального диапазона синфазных напряжений устройства.
Специфической особенностью некоторых операционных усилителей
является негативное явление, которое называется обращением (изменением
на 180°) фазы выходного напряжения {output voltage phase—reversal). Оно на-
блюдается, когда входные сигналы на одном или обоих входах операцион-
ного усилителя превышают допустимый диапазон входных синфазных на-
пряжений. Обратите внимание, что при этом входные сигналы могут не
выходить за границы напряжений питания. Для возникновения этого эф-
фекта достаточно превышения сигналом одного из пределов синфазного
напряжения, обычно отрицательного. Наиболее часто обращение фазы встре-
чается в JFETи/или BiFETусилителях, однако некоторые биполярные уси-
лители с однополярным питанием также подвержены этому эффекту.
Это явление иллюстрируется колебаниями, показанными на рис. 9.81.
На левом графике показан перегружающий входной сигнал повторителя
Рис. 9.81. Перегружающий входной сигнал (слева) и результирующий выходной сиг-
нал с обращением фазы (справа) в операционном усилителе с входным кас-
кадом на JFET
напряжения, правый иллюстрирует возникающее при этом обращение фазы
выходного сигнала.
Так как специфические детали внутреннего механизма могут варьиро-
ваться в различных операционных усилителях, достаточно отметить, что
обращение фазы выходного сигнала происходит при насыщении критичес-
кой части входного интерфейса усилителя, которое вызывает временное
изменение полярности выходного сигнала. В случае выхода за границы ди-
апазона синфазных напряжений при убывании входного сигнала в левой
части рис. 9.81 выходной сигнал в правой части рис. 9.81 не становится
более отрицательным, а вместо этого происходит обращение фазы выходно-
го сигнала по отношению к входному, и выходной сигнал внезапно стано-
вится положительным (в нем появляется выброс). Важно отметить, что этот
тип обращения фазы не является фиксирующимся, так как при возвраще-
нии входного сигнала в диапазон допустимых синфазных напряжений вы-
ходной сигнал вновь станет отслеживать его форму. Это можно наблюдать
на рис. 9.81 по форме выходной синусоиды после завершения положитель-
ного выброса, вызванного обращением фазы.
В большинстве приложений подобное обращение фазы выходного на-
пряжения не причиняет вреда ни операционному усилителю, ни схеме, в
состав которой он входит. Так как этот эффект происходит при превыше-
нии предела синфазного напряжения, он, естественно, никогда не про-
явится в неинвертирующих каскадах с существенным усилением сигнала,
потому что в них прикладываемое синфазное напряжение слишком мало.
Обратите внимание, что в инвертирующих схемах проблемы обращения
фазы выходного сигнала не существует, так как в них диапазон синфазных
напряжений отсутствует. Таким образом, несмотря на то что ряду (по боль-
шей части старых) операционных усилителей свойственно обращение фазы,
этот эффект редко представляет серьезные проблемы.
Однако, когда усилитель, подверженный обращению фазы, использует-
ся в контуре сервосистемы и на него подается избыточное синфазное на-
пряжение, эффект может быть катастрофическим! В связи с этим лучше
всего перестраховаться.
Тест на обращение фазы выходного сигнала
в лабораторных условиях
Так как характеристики обращения фазы выходного сигнала не всегда пол-
ностью описываются в технических данных, крайне полезно протестиро-
вать устройство на наличие этого эффекта. Такой тест легко провести в
лаборатории, подавая на подозрительный операционный усилитель, вклю-
ченный по схеме повторителя с единичным усилением, сигнал от источни-
ка с импедансом (^LIMIT), равным приблизительно 1 кОм. Также полезно
обеспечить возможность перестройки этого сопротивления в диапазоне от
1 до 100 кОм.
Пронаблюдайте форму выходного сигнала усилителя при низком со-
противлении источника (1 кОм), медленно изменяя уровень входного сиг-
нала до границ напряжения питания. Если механизм обращения фазы при-
сутствует, то при выходе за пределы диапазона синфазных напряжений
9.4. Защита от перенапряжения 91 I
операционного усилителя выходной сигнал внезапно изменяет полярность
(см. рис. 9.81). Если усилитель не подвержен обращению фазы, то амплиту-
да выходного сигнала просто будет ограничиваться на уровне границ диа-
пазона. Бывает полезным иметь для данного теста в качестве образца опе-
рационный усилитель без обращения фазы, например AD8610.
Обратите внимание, что в общем случае при проведении такого теста
следует соблюдать осторожность. В отсутствие последовательного токоог-
раничивающего резистора генератор, имеющий слишком малый импеданс
(или слишком высокий уровень сигнала), может повредить внутренний
/>-и-переход в тестируемом операционном усилителе.
После того как будет найдена подходящая величина сопротивления /?LIMIT,
«хорошие» операционные усилители при перегрузке входным сигналом бу-
дут выдавать сглаженный ограниченный по амплитуде биполярный сигнал.
Это ограничение будет в большей степени похоже на верхнюю (положи-
тельную) часть сигнала в правой части рис. 9.81.
Методы предотвращения обращения фазы
выходного сигнала
Производители операционных усилителей не всегда указывают значение
сопротивления Яымгг, позволяющее избежать обращения фазы выходного
сигнала. Однако его величина может быть определена эмпирически с по-
мощью метода, описанного выше. В большинстве случаев та же величина
сопротивления 7?ЫМ1Т, которая обеспечивает защиту от обращения фазы,
также обеспечивает ограничение токов повреждения, протекающих через
любые диоды фиксации входных синфазных напряжений, на безопасном
уровне. Если имеются сомнения на этот счет, тест лучше начать с номинала
1 кОм.
Обычно для защиты операционных усилителей с входными каскадами
на полевых транзисторах требуется только токоограничивающий последо-
вательный резистор, а наилучшая защита устройств с входными каскадами
на биполярных транзисторах обеспечивается комбинацией того же ограни-
чивающего резистора и диода Шоттки (т. е. ЛЫМ1Т и Dv как на рис. 9.75).
Более подробно явление обращения фазы выходного напряжения опи-
сано в 7’8. На рис. 9.82 перечислен ряд ключевых моментов, касающихся
обращения фазы выходного сигнала.
Кроме того, любая из описанных ранее схем фиксации синфазного на-
пряжения также может быть использована для предотвращения обращения
фазы выходного сигнала. Для этого необходимо задать напряжение фикса-
ции на уровне ниже границы диапазона синфазных напряжений усилителя,
где происходит обращение фазы. Например, схема на рис. 9.77 позволит
избежать обращения фазы в усилителях на полевых транзисторах, если ус-
тановить отрицательный уровень фиксации таким образом, что ^LAMP(_) ни-
когда не превысит типичный диапазон отрицательных синфазных напряже-
ний -11В при напряжении питания —15 В.
Для проверки работоспособности этой или любой другой из описанных
схем защиты от перенапряжения ее необходимо проверить в условиях, близ-
ких к рабочим, на нескольких операционных усилителях.
Глава 9. Методы проектирования аппаратуры
• Нефиксирующаяся инверсия передаточной функции, вызываемая превышением пре-
дела синфазного напряжения.
• Иногда встречается в полевых и биполярных (с однополярным питанием) операцион-
ных усилителях.
• Не наносит вреда усилителю, но имеет катастрофические последствия в сервосис-
темах.
• Обычно не описывается в технических данных, поэтому требуется проверка усилителя.
• Легко предотвращается:
— все операционные усилители: ограничьте прикладываемое синфазное напряжение
путем фиксации или другими способами;
— BiFET: добавьте последовательное входное сопротивление ЯиМ)Т;
— биполярные: Яим|Т и фиксирующий диод Шоттки, подключенный к напряжению пи-
тания.
Рис. 9.82. Обзор ключевых моментов, касающихся обращения фазы выходного сигна-
ла в операционных усилителях с входными каскадами на биполярных и по-
левых транзисторах
Защита от входных дифференциальных напряжений
До этого момента обсуждение касалось только перенапряжения, вызванно-
го повышенными синфазными напряжениями, которое обычно связано с
прямым смещением р-и-переходов во входном каскаде. Не менее важным
аспектом является защита от перенапряжения, вызванного повышенными
дифференциальными напряжениями. Подача на некоторые операционные
усилители повышенного дифференциального напряжения может привести
к ухудшению их рабочих характеристик.
Это ухудшение вызвано обратным пробоем перехода (reverse junction
breakdown) — вторым случаем нежелательной проводимости входного кас-
када, который возникает в условиях дифференциального перенапряжения.
В случае обратного пробоя р-л-перехода проблема может быть менее замет-
ной. Это иллюстрирует рис. 9.83, на котором показана часть входного кас-
када операционного усилителя.
Эта схема, которая может использоваться в малошумящем операционном
усилителе, таком как ОР27, также является типичной дня многих других опера-
ционных усилителей, в которых в качестве дифференциальной пары Q— Q2
используются малошумящие биполярные транзисторы. Можно показать, что
Рис. 9.83. Входной каскад операционного усилителя со схемой защиты от входного
дифференциального перенапряжения диодами D — D2
9.4. Защита от перенапряжения
в отсутствие
какой-либо защиты уровни
напряжения между двумя входами,
превышающие примерно 7 В, вызовут обратный пробой перехода либо Qv
либо Q{ (в зависимости от относительной полярности). Обратите внимание,
что в случае пробоя перехода эмиттер—база даже малые обратные токи могут
вызвать ухудшение коэффициента усиления и шумовых характеристик обоих
транзисторов (см.6). После возникновения пробоя перехода эмиттер—база за
пределы спецификаций также могут выйти такие параметры операционного
усилителя, как токи смещения и шум. Это ухудшение обычно является не-
обратимым и может происходить постепенно и достаточно незаметно, в осо-
бенности если оно вызывается переходными напряжениями. По этим при-
чинам практически все малошумящие операционные усилители, независимо
от типа транзисторов {п-р-п или р-п-р), содержат на входах защитные диоды
наподобие D—D2. Эти диоды начинают проводить, когда приложенное к
ним напряжение превышает ±0,6 В, защищая транзисторы.
Показанные пунктиром последовательные резисторы играют роль огра-
ничителей тока (для защитных диодов), однако они применяются не все-
гда. Например, AD797 не содержит резисторов просто потому, что они ухуд-
шили бы шумовые характеристики устройства нВД/Гц). Обратите вни-
мание, что в случае отсутствия внутренних резисторов иногда необходимо
обеспечить определенное внешнее ограничение тока при вероятном воз-
никновении дифференциального перенапряжения. Очевидно, что в данной
ситуации имеется компромисс между полнотой защиты и ухудшением шу-
мовых характеристик. Обратите внимание, что внешняя схема сама по себе
может обеспечить достаточное сопротивление на входах операционного
усилителя, и при этом дополнительные резисторы не потребуются.
При использовании малошумящего операционного усилителя с вход-
ным каскадом на биполярных транзисторах предварительно проверьте тех-
нические данные выбранного компонента на наличие внутренней защиты.
При необходимости следует добавить защитные диоды D—Dv если они
отсутствуют внутри операционного усилителя, чтобы гарантированно пре-
дотвратить пробой переходов эмиттер—база Q—Qr Если в проектируемой
схеме на операционный усилитель могут поступать переходные дифферен-
циальные напряжения свыше 5 В, то диоды необходимы. Будет достаточно
обычных диодов с малой емкостью, таких как 1N4148. При необходимости
для ограничения тока диодов до безопасных уровней следует добавить то-
коограничивающие резисторы.
Для других типов переходов в ИС, таких как переход база—коллектор
или переход затвор—исток в JFET, подобное ухудшение характеристик при
пробое не характерно. Для этих типов входных каскадов ток следует огра-
ничить на уровне 5 мА, если в технических данных не указано иное.
Защита измерительных усилителей от перенапряжения
С точки зрения защиты измерительные усилители во многом похожи на
операционные усилители. Для них, как и для операционных усилителей,
необходимо соблюдать абсолютные максимальные значения и синфазных,
и дифференциальных входных напряжений.
Рис. 9.84. Для защиты во входном каскаде измерительного усилителя AD620 использу-
ются внутренние диоды D— D2 и последовательные резисторы Rs (дополни-
тельная защита может быть обеспечена добавлением внешних компонентов)
На рис. 9.84 приведена сильно упрощенная схема измерительного уси-
лителя AD620, где показаны входные дифференциальные транзисторы и
соответствующие элементы защиты.
Важный момент, уникальный для AD620, заключается в том, что внут-
ренние защитные резисторы Rs номиналом 400 Ом являются тонкопленоч-
ными. Поэтому для них не характерна проводимость на подложку ИС (как
для диффузионных резисторов). На практике это означает, что напряжения
на концах этих резисторов, соединенных с входными выводами ИС (выво-
ды 3 и 2), могут выходить за границы напряжений питания.
Рассмотрим схему подробнее. Для предотвращения обратного пробоя
параллельно переходам база—эмиттер входных транзисторов и Q2 вклю-
чены защитные диоды D{ и D2. Анализ для дифференциальных напряжений
показывает, что ток повреждения /вх протекает через внешние резисторы
/?limit (если они присутствуют), внутренние резисторы Rs, задающий усиле-
ние резистор Rg и два диода (переход транзистора Qv D}). В топологии
AD620 Rg изменяется обратно пропорционально усилению, и наихудшая
ситуация (наименьшее сопротивление) возникает при максимальном уси-
лении 1000, когда Rg = 49,9 Ом. Поэтому минимальное полное последова-
тельное сопротивление во внутренней цепи прохождения сигнала равно
приблизительно 850 Ом.
При работе с AD620 любую комбинацию синфазных и дифференциаль-
ных входных напряжений необходимо ограничить до уровней, при которых
входной ток угрозы повреждения не превышает 20 мА. В случае наимень-
шего сопротивления такая величина тока может быть вызвана чисто диф-
ференциальным напряжением 17 В. При синфазных напряжениях, которые
могут значительно превышать напряжения питания, внутренний диод,
не показанный на рис. 9.84, начинает проводить, эффективно фиксируя
входной сигнал на внутреннем конце резистора Rs на уровне + Vs или — Vs.
В этой ситуации уровень тока определяется номиналом Rs (400 Ом) и вели-
чиной, на которую приложенное напряжение превышает напряжение пита-
9.4. Защита от перенапряжения
ния. Если, например, Кх = 23 В при + И5 = 15 В, на Rs падает 8 В и дости-
гается номинальный уровень тока 20 мА. В случае более высоких допусти-
мых напряжений необходимо добавить сопротивление 7?LIMIT для поддержа-
ния тока на уровне 20 мА или менее.
На рис. 8.95 показана более общая схема внешней защиты от перенап-
ряжения для измерительных усилителей типа AD620.
В этой схеме для фиксации синфазных напряжений используются дио-
ды с малой утечкой D3—D6. Так как ток смещения измерительного усилите-
ля может иметь уровень всего 1 нА или около того (для AD620), диоды
обязательно должны иметь малую утечку. Как можно заметить, взглянув на
схему, в этой конфигурации корректирующая ОС диодов невозможна.
Следует отметить, что диоды не просто должны иметь малую утечку,
они должны иметь малую утечку при наивысшей ожидаемой температуре.
Это предполагает применение либо ТТГТ-диодов (см. рис. 9.76), либо пере-
ходов транзисторов типа С—В (коллектор—база), показанных на рис. 9.85.
Резисторы ЯиМ1Т ограничивают максимальный ток диодов в условиях допу-
стимого повреждения. Для дополнительной защиты от дифференциальных
напряжений могут использоваться либо встречно включенные стабилитро-
ны, либо фиксирующие Transzorb-диоды, которые обозначены на схеме как
D—Dr В этом случае необходимо обратить особое внимание на утечку и
емкость этих диодов.
Несмотря на то что схема защиты, показанная на рис. 9.85, при пра-
вильном выборе компонентов является эффективной, она имеет недоста-
ток, который заключается в большом числе компонентов. На рис. 9.86 по-
казана гораздо более простая схема защиты измерительного усилителя на
базе устройств с защитой от повреждения. Несмотря на то что на рис. 9.85
она показана с AD620, эта схема может применяться для защиты многих
других измерительных усилителей с двухполярным питанием, имеющих токи
смещения порядка 1 нА и более. В ней для защиты дифференциальных
о
о
-vs
Рис. 9.85. Обобщенная диодная схема защиты AD620 и других измерительных усили-
телей с использованием Z>3—Z>6 для ограничения синфазных напряжений и
последовательных резисторов )?LIMIT для защиты
Рис. 9.86. Протектор канала (или мультиплексор с защитой от повреждения) обеспе-
чивает защиту измерительных усилителей с двухполярным питанием при
минимальном числе внешних компонентов
входов измерительного усилителя используется две трети строенного про-
тектора канала ADG466.
Из-за того что устройства защиты канала выключаются, когда Кх дости-
гает любого из напряжений питания, схема, показанная на рис. 9.86, не
годится для измерительных усилителей с однополярным питанием, кото-
рые могут работать с входным напряжением, равным напряжению пита-
ния. Если в схеме с измерительным усилителем требуется обеспечить и
работу в области напряжений, близких к напряжению питания, и защиту,
необходимо применение альтернативного метода. Многие измерительные
усилители с однополярным питанием имеют топологию, похожую на схему
измерительного усилителя на двух операционных усилителях, которая вы-
делена на рис. 9.87 штриховой линией.
Рис. 9.87. Измерительные усилители с однополярным питанием могут требовать внешней
защиты в виде резисторов и фиксирующих диодов. Если защита требуется,
они могут быть добавлены в соответствии с показанной схемой
9.4. Защита от перенапряжения 91
Для конкретного измерительного усилителя может требоваться (но мо-
жет и не требоваться) добавление внешних защитных компонентов. Напри-
мер, некоторые измерительные усилители имеют показанные на рисунке
фиксирующие диоды, однако они расположены внутри устройства. К та-
ким компонентам относится AD623; при этом в нем отсутствуют последо-
вательные резисторы, которые могут при необходимости быть добавлены
внешне. Обратите внимание, что такой подход позволяет оптимизировать
номинал /?ЫМ1Т для защиты при пренебрежимо малом влиянии на шум по
сравнению с теми приложениями, в которых не требуется обеспечение за-
щиты.
Некоторые измерительные усилители содержат и внутренние защитные
резисторы, и внутренние фиксирующие диоды. Примером такого устрой-
ства является AD627. В нем реализована внутренняя защита, адекватная
для переходных напряжений, превышающих напряжение питания на вели-
чину до 40 В (допустимый ток 20 мА на внутренних резисторах). Для защи-
ты от уровней, превышающих этот, можно добавить внешние резисторы
п
Использование показанных на рисунке диодов Шоттки для защиты из-
мерительных усилителей не является обязательным. Они, как правило, при-
меняются при отсутствии внутренней схемы фиксации. Их применение в
целом похоже на случай защиты операционного усилителя, показанный на
рис. 9.75, и для них характерны аналогичные проблемы, связанные с утеч-
кой. Обратите внимание, что многие современные измерительные усилите-
ли содержат внутренние схемы защиты, и необходимости в этих диодах нет.
Однако жестких правил относительно наличия внутренней защиты не су-
ществует, поэтому перед окончательной реализацией проекта всегда прове-
ряйте технические данные на устройство.
В общем случае защита АЦП, диапазон входных напряжений которых
не выходит за границы напряжений питания, может осуществляться при
помощи внешних диодов Шоттки и токоограничивающего резистора, как
показано на рис. 9.88. Даже при наличии внутренних диодов, защищающих
р
'’limit
• Подберите Ним(Т, чтобы ограничить /вх 5мА
• Дополнительные диоды Шоттки позволяют снизить величину A?L|M|T
Рис. 9.88. Входная защита для АЦП с диапазоном входных напряжений, не превыша-
ющих напряжения питания
Глава 9. Методы проектирования аппаратуры
Рис. 9.89. Входная защита для АЦП с входными аттенюаторами на тонкопленочных
резисторах и однополярным питанием
от электростатического разряда, использование внешних диодов позволяет
уменьшить номинал Rlimith обеспечить меньшие уровни шума и ошибки
смещения. Для защиты АЦП с входными тонкопленочными аттенюатора-
ми, таких как AD7890-10 (рис. 9.89), могут применяться стабилитроны либо
подавители переходных напряжений {TVS — transient voltage suppressors) и
резистор ограничивающий ток, который протекает через них.
Защита от перенапряжения
при помощи КМОП-протекторов канала
ADG465/ADG466/ADG467 — это КМОП-протекторы канала, которые вклю-
чаются последовательно в цепь прохождения сигнала. Протектор канала
обеспечивает защиту чувствительных компонентов от выбросов напряже-
ния независимо от наличия напряжения питания. В связи с этим они иде-
ально подходят для защиты аналоговых входов в схемах, где не всегда мо-
жет гарантироваться корректное включение/выключение питания (напри-
мер, в стойках с горячим включением).
Каждый из протекторов канала (рис. 9.90) является самостоятельным
устройством, которое состоит из четырех МОП-транзисторов, двух л-МОП
и двух /г-МОП. Один из ^-МОП-транзисторов не включен непосредственно
в цепь прохождения сигнала, а используется для подключения истока вто-
рого р-МОП-транзистора к его подложке.
В нормальном режиме работы (т. е., при (Vss + 2 В) < VD < (VDD — 1,5 В))
протектор канала ведет себя просто как последовательный резистор номи-
налом от 60 до 80 Ом. Когда аналоговое входное напряжение в канале вы-
ходит за пределы этого диапазона, один из МОП-транзисторов выключает-
ся, фиксируя выходной сигнал протектора на уровне либо (Vss + 2 В), либо
(VDD — 1,5 В). Защита схемы и источника сигнала обеспечивается при пе-
ренапряжении или отключении питания. Протекторы канала выдержива-
ют перенапряжения на входе от Vss (—20 В) до VDD (+20 В) при включен-
ном питании (VDD - Vss = 44 В, максимум). При отключенном питании
(Крр = Vss = 0 В) максимальное входное напряжение равно ±35 В. Про-
9.4. Защита от перенапряжения 919
Рис. 9.90. ADG465, ADG466 и ADG467 — одно-, трех- и четырехканальные схемы
защиты
текторы каналов потребляют крайне малую мощность, и даже в условиях
выше предельных потребляемый ток ограничен субмикроамперным уров-
нем. Все транзисторы диэлектрически изолированы друг от друга при по-
мощи метода изоляции с глубокими канавками (trench isolation), что гаран-
тирует невозможность паразитной фиксации состояния протектора канала.
На рис. 9.91 показана типичная схема, требующая защиты от перенап-
ряжения и некорректного включения/отключения питания. Показанная
схема входит в состав системы стоек с горячим подключением, где плата
или модуль втыкается в работающий стеллаж при помощи торцевого разъе-
ма. В таких системах невозможно гарантировать корректное включение/
отключение питания. Под корректным включением питания подразумева-
Штыревой
разъем
Рис. 9.91. Защита от перенапряжения и некорректного включения/отключения пита-
ния при помощи ADG466
Глава 9. Методы проектирования аппаратуры
ется, что питание должно подключаться до подачи любых внешних сигна-
лов. Некорректное включение питания может вызвать фиксацию состоя-
ния (защелкивание) КМОП-устройства. Это истинно для большинства
КМОП-устройств, независимо от выполняемых ими функций. Для того
чтобы обеспечить подачу питания на оставшуюся часть схемы раньше,
чем на протекторы канала, на входах питания протектора используются
7?С-цепочки. При этом до того момента, когда конденсаторы зарядятся,
выходные сигналы протекторов каналов фиксируются на уровнях значи-
тельно ниже VDD и Vss. Применение диодов гарантирует, что напряжение
питания, подаваемое на протекторы канала, никогда не превысит номи-
нальных уровней в момент отсоединения платы. Этим также гарантирует-
ся, что сигналы на входах КМОП-устройств никогда не превысят уровни
напряжений питания.
Цифровые изоляторы
Одним из средств размыкания паразитных контуров заземления является
использование цифровых изолирующих методов. .Аналоговые изолирующие
усилители часто находят применение там, где требуется высокая степень
изоляции, например в медицинском оборудовании. Методы цифровой изо-
ляции обеспечивают надежный способ передачи цифрового сигнала через
интерфейсы с высокими синфазными напряжениями, не вызывающий по-
мех на заземлении.
Оптопары (также называемые оптронами) используются весьма широко
и выпускаются различных видов и в различных корпусах. Типичная опто-
пара, содержащая светодиод {LED) и фототранзистор, показана на рис. 9.92.
Ток величиной приблизительно 10 мА течет через светодиодный излуча-
тель; излучаемый свет принимается фототранзистором. Света, произво-
димого светодиодом, достаточно, чтобы привести фототранзистор в со-
стояние насыщения. Обычно обеспечивается изоляция на напряжение до
5000—7000 В. Хотя оптопары прекрасно подходят к цифровым сигналам,
они слишком нелинейны для большинства аналоговых применений. Кро-
ме того, необходимо понимать, что, так как фототранзистор работает в
• Используйте свет для передачи через высоковольтный барьер
• Светодиод является передатчиком, а фототранзистор — приемником
• Высоковольтная изоляция: 5000 В—7000 В СКВ (RMS)
• Из-за нелинейности — для цифровой или частотной информации
• Время нарастания или спада может быть от 10 до 20 нс в медленных приборах
• Пример: Siemens ILQ-1 Quad (www.siemens.com)
Рис. 9.92. Изоляция цифрового сигнала с помощью светодиодной/фототранзисторной
оптопары
• Частота логического сигнала: 12,5 МГц максимум
• 25 Мбит/с максимальный темп данных
• 40 нс максимальная задержка распространения
• 9 нс типичное время нарастания/спада
• Пример: Agilent HCPL-7720 (www.siemens.com)
Рис. 9.93. Изоляция цифрового сигнала с помощью светодиодной/фотодиодной оптопары
режиме насыщения, время нарастания и спада может составлять порядка
10—20 мкс в медленных оптопарах, таким образом, их применение на вы-
соких скоростях ограничено.
Более быстродействующая архитектура показана на рис. 9.93. Она осно-
вана на применении светодиода {LED) и фотодиода. LED и здесь управляет-
ся током величиной приблизительно 10 мА. Это обеспечивает выход света,
генерирующий ток в фотодиоде, достаточный для образования достоверного
высокого логического уровня на выходе усилителя напряжения, управляе-
мого током. Скорость может сильно отличаться у различных оптопар, самые
быстрые обычно имеют типичную задержку распространения 20 нс (макси-
мум 40 нс) и могут обеспечивать скорость данных до 25 Мбит/с для кода
NRZ(без возврата к нулю). Это соответствует максимальной рабочей часто-
те 12,5 МГц для прямоугольных колебаний и длительности минимально
возможного проходящего импульса 40 нс.
Микросхемы ADuMllOOA и ADuMllOOB — это цифровые изоляторы,
работа которых основана на технологии Analog Devices /Coupler®. Сочетая в
себе высокоскоростную КМОП-схему и монолитный трансформатор без
сердечника, эти изолирующие компоненты обеспечивают более высокие
рабочие характеристики, чем обычные оптопары, описанные выше.
ИС ADuMllOOA и ADuMllOOB, выпускающиеся совместимыми по выво-
дам с существующими высокоскоростными оптопарами для обеспечения воз-
можной замены, поддерживают скорость данных 25 и 100 Мбит/с соответ-
ственно. Функциональная схема этих устройств показана на рис. 9.94.
ADuMl 100А и ADuMl 100В работают при напряжении питания либо 3,3 В,
либо 5 В, имеют задержку распространения меньше 18 нс, асимметрию
фронта импульса меньше 2 нс, время нарастания/спада меньше 3 нс. Они
работают при очень низком энергопотреблении: ток покоя составляет ме-
нее 900 мкА (сумма с передающей и приемной сторон), а динамический
ток — менее 160 мкА на 1 Мбит/с скорости передачи данных. В отличие от
обычного трансформатора эти устройства обеспечивают корректную пере-
дачу постоянного тока с помощью патентованной схемы обновления, кото-
рая постоянно корректирует выходной сигнал.
Цифровые изоляторы ADuM1300/ADuM1301 имеют 3 канала изоляции, а
ADuM1400/ADuM1401 — 4 канала. Эти устройства работают с напряжения-
Глава 9. Методы проектирования аппаратуры
ADuM1100
• Напряжение питания +5/+3.3 В
• Выдерживает СКВ (RMS) 2500 В между входом и
выходом
• 100 Мбит/с максимальный темп данных (ADuM1100В)
• 18 нс максимальная задержка распространения
• 3 нс типичное время нарастания/спада
• Совместимость по выводам с типовыми оптопарами
ADuM1300/ADuM1400
• Напряжение питания от +2,7 до +5,5 В
• Способность передавать логические уровни
• Выдерживает СКВ (RMS) 2500 В между входом и
выходом
• 100 Мбит/с максимальный темп данных
(ADu М13ООС/ADu М1400С)
• 32 нс максимальная задержка распространения
(ADuM 13ООС/ADuM 1400С)
• 3 нс типичное время нарастания/спада
Рис. 9.94. Цифровые изоляторы ADuMl 100A/ADuMl 100В
ми питания в диапазоне от +2,7 до +5,5 В и имеют независимые входы пита-
ния входной и выходной части, что позволяет использовать их не только в
качестве изоляторов, но и в качестве преобразователей логических уровней.
Микросхемы цифровых изоляторов семейства AD260/AD261 могут про-
пускать пять цифровых управляющих сигналов к высокоскоростным про-
цессорам обработки сигналов (DSP), микроконтроллерам или микропро-
цессорам. Микросхема AD260, кроме того, содержит 1,5-Вт трансформатор
для внешней схемы преобразования постоянного тока; изоляция трансфор-
матора рассчитана на 3,5 кВ.
В каждом канале AD260 могут передаваться цифровые сигналы с часто-
той до 20 МГц (40 Мбит/с) с задержкой распространения всего 14 нс, что
обеспечивает очень высокую скорость передачи данных. Симметрия вы-
ходных импульсов обеспечивается в пределах +1 нс относительно входных,
так что ИС AD260 может быть использована для изоляции сигнала широт-
но-импульсного модулятора (ШИМ).
Упрощенная схема одного канала ИС AD260/AD261 показана на рис. 9.95.
Входные данные проходят через триггер Шмитта, D-триггер («защелку») и
специальную схему передатчика, которая дифференцирует фронты цифро-
вого входного сигнала и управляет первичной обмоткой соответствующего
трансформатора сигналом «установить высокий/установить низкий». Вто-
ричная обмотка изолирующего трансформатора управляет приемником с
помощью того же сигнала «установить высокий/установить низкий», а при-
емник восстанавливает исходную форму логического сигнала. Внутренняя
схема опрашивает все входы приблизительно каждые 5 мкс и при отсут-
ствии изменений логических уровней передает соответствующие сигналы
«установить высокий/установить низкий» через интерфейс. Таким обра-
зом, время восстановления из состояния ограничения или при включении
питания составляет 5—10 мкс.
Трансформатор питания (присутствующий в ИС AD260) спроектирован
для работы на частотах 150—250 кГц и без труда обеспечивает изолирован-
ное питание мощностью более 1 Вт при подключении к двухтактной схеме
9.4. Защита от перенапряжения 923
Замечание: показан один канал данных
Изоляционный барьер 3500 В
СКВ (AD260B/AD261B)
Рис. 9.95. Цифровые изоляторы AD260/AD261
(работающей при напряжении питания 5 В) на стороне передатчика. Раз-
личные отводы трансформатора, выпрямитель и схемы стабилизаторов обес-
печивают комбинацию напряжений ±5, 15, 24 В или даже 30 В и выше.
Если трансформатор управляется 5-В двухтактной схемой с низким паде-
нием напряжения, то на всей вторичной обмотке полный размах напряже-
ния будет составлять 37 В. Ключевые характеристики устройства перечис-
лены на рис. 9.96.
• Изоляция испытана на среднеквадратичный уровень напряжения до 3500 В
(AD260B/AD261B).
• 5 изолированных цифровых линий в 6 конфигурациях входов/выходов.
• Частота логического сигнала: 20 МГц макс.
• Скорость передачи данных: 40 Мбит/с макс.
• Изолированный трансформатор питания: 37 В р-р, 1,5 Вт (AD260).
• Симметрия фронтов при передаче сигнала: ±1 нс.
• Задержка распространения: 14 нс.
• Времена нарастания/спада: менее 5 нс.
Рис. 9.96. Ключевые характеристики цифровых изоляторов AD260/AD261
На рис. 9.97 приведен итоговый обзор основных вопросов защиты от
внутрисхемного перенапряжения, обсуждавшихся в данном разделе.
Перечисленные предостережения, касающиеся перенапряжения опе-
рационных и измерительных усилителей, могут показаться весьма слож-
ными, какими они в действительности и являются! Всякий раз, когда входы
(и выходы) операционного усилителя (или измерительного усилителя или
преобразователя данных) выносятся вне оборудования, с ними могут про-
изойти опасные и деструктивные вещи. Очевидно, что для большей надеж-
ности необходимо предвидеть эти потенциально опасные ситуации.
К счастью, в большинстве приложений все схемы сосредоточены внут-
ри единого оборудования, и входные/выходные сигналы поступают к дру-
гим ИС, имеющим те же уровни напряжения питания. Поэтому в таких
случаях фиксации и применения защитных схем обычно не требуется.
Глава 9. Методы проектирования аппаратуры
• Входные напряжения не должны превышать номинальные абсолютные максимальные
значения (обычно заданные по отношению к напряжениям питания).
• Необходимо, чтобы 1/вх(СМ) превышало уровень напряжений питания не более чем на
0,3 В (-Ц. -0,3 В > 1/хХ> +l/s +0,3 В).
• Токи ограничения (Fault) во входных каскадах ИС должны быть ограничены (<5 мА,
если не указано иное).
• Остерегайтесь пробоев при обратном смещении переходов входных каскадов.
• Номинальные значения дифференциальных и синфазных напряжений зачастую раз-
личаются.
• Не существует двух абсолютно идентичных усилителей.
• Остерегайтесь обращения фазы выходного сигнала в JFET и биполярных (с однопо-
лярным питанием) операционных усилителях.
• Некоторые ИС имеют внутреннюю защиту входа:
— диодные фиксаторы напряжения, токоограничивающие резисторы (или их комби-
нация);
— все равно необходимо учитывать абсолютные максимальные значения.
Рис. 9.97. Обзор вопросов защиты от внутрисхемного перенапряжения
Защита от внесхемного перенапряжения
Защита линейных ИС, таких как операционные усилители, измерительные
усилители и преобразователи данных, также должна обеспечиваться в тече-
ние времени до момента их монтажа на ПП (т. е. во внесхемном состоянии).
В подобных условиях уровни бросков напряжения, которым может подвер-
гаться ИС, полностью зависят от окружающей обстановки. Чаще всего гу-
бительные броски напряжения возникают из-за явления, которое назы-
вается электростатическим разрядом (electrostatic discharge) и зачастую обо-
значается аббревиатурой ESD. Это однократная, быстрая, высокотоковая
передача электростатического заряда, возникающая при выполнении одно-
го из двух условий:
1) передача при прямом контакте двух объектов, находящихся под раз-
ными потенциалами (иногда называется контактным разрядом);
2) высокое электростатическое поле между двумя объектами при нахож-
дении их близко друг к другу (иногда называется воздушным разрядом).
Основными источниками статического электричества преимуществен-
но являются диэлектрики, обычно синтетические материалы: виниловые и
пластиковые рабочие поверхности, непроводящая обувь, полированные
деревянные кресла, липкая пленка (скотч), блистерная упаковка, паяльни-
ки с незаземленными наконечниками и т. д. Напряжения, генерируемые
этими источниками, могут достигать экстремально высоких уровней, так
как их заряд плохо распределяется по поверхности и плохо проводится к
другим объектам. Генерация статического электричества, вызванная трени-
ем двух материалов, называется трибоэлектрическим (triboelectric) эффек-
том. Некоторые простые примеры обычных действий, вызывающих значи-
тельные напряжения ESD, показаны на рис. 9.98.
Высокие напряжения и высокие пиковые токи, возникающие при ESD,
могут повредить ИС. Прецизионные аналоговые схемы, зачастую имеющие
очень малые токи смещения, более подвержены повреждению, чем стан-
9.4. Защита от перенапряжения
• Ходьба по ковру 1000—1500 В
• Ходьба по виниловому полу 150—250 В
• Работа с материалами, защищенными пластмассовыми чехлами 400—600 В
• Работа с полиэтиленовыми пакетами 1000—2000 В
• Работа с пенополиуретаном 1200—1500 В
Примечание: указанные цифры приведены для относительной влажности 60% RH.
При низкой относительной влажности (30%) напряжения могут быть в 10 и более раз
выше.
Рис. 9.98. Напряжения ESD, генерируемые при выполнении различных действий
дартные цифровые схемы, так как традиционные приемы входной защиты
от ESD увеличивают входную утечку и, следовательно, не могут в них при-
меняться.
Наиболее существенным проявлением повреждения при ESD с точки
зрения инженера или техника является катастрофический (внезапный и
полный) отказ ИС. Но ESD также может вызывать повышенную утечку или
ухудшение других параметров. Если на этапе оценки устройство не удов-
летворяет параметрам, указанным в технических данных, в качестве воз-
можной причины следует рассмотреть повреждение из-за ESD. На рис. 9.99
перечислены основные проявления сбоев, вызванных ESD.
• Механизмы повреждения при ESD\
— повреждение диэлектрика или перехода;
— накапливание поверхностного заряда;
— оплавление проводника.
• ESD может вызывать:
— увеличение утечки;
— ухудшение характеристик;
— функциональные сбои ИС.
• Повреждения, вызываемые ESD, обычно имеют накапливаемый характер:
— например, каждый случай ESD может увеличивать повреждение перехода до тех
пор, пока устройство не выйдет из строя окончательно.
Рис. 9.99. Повреждения при ESD
Все чувствительные к ESD устройства поставляются в защитной упа-
ковке. ИС обычно помещаются либо в проводящий пенопласт, либо в ан-
тистатические трубки, после чего контейнер запечатывается в пластиковый
пакет, рассеивающий статическое электричество. Запечатанный пакет по-
мечается отличительной наклейкой наподобие показанных на рис. 9.100, на
которой приводятся рекомендации по обращению.
Присутствие на внешней стороне упаковки замечаний, подобных тем,
которые показаны на рис. 9.100, предупреждает пользователя о необходи-
мости соблюдения при работе с устройством процедур по защите от ESD.
Кроме того, в технических данных на устройства, которые чувствитель-
ны к ESD, обычно имеется указание об этом, выделенное жирным шриф-
том, как показано на рис. 9.101.
Когда вы выясните, что устройство является чувствительным к ESD, его
можно будет сравнительно легко защитить. Очевидно, что первый шаг зак-
лючается в максимально долгом хранении ИС в их защитной упаковке.
Глава 9. Методы проектирования аппаратуры
Все приборы, чувствительные к статическому электричеству,
упаковываются в защитную упаковку и помечаются специальной инструкцией
ОСТОРОЖНО
Чувствительные
электронные приборы
ОСТОРОЖНО
Чувствительные
электронные приборы
Не загружать и не хранить вблизи
сильных электростатических,
электромагнитных
или радиоактивных полей
Не вскрывать за исключением
защищенных от полей рабочих
станций
Рис. 9.100. Распознавание устройств, чувствительных к ESD, по упаковке и меткам на ней
Предупреждение!
Чувствительный к ESD прибор
ОСТОРОЖНО
Чувствительный к ESD (электростатическому разряду)
прибор. Электростатический заряд более чем 4000 В на-
капливается на теле человека и тестовом оборудовании и
может разрядиться без обнаружения. Хотя изделия АД име-
ют защиту от электростатики, однако постоянное накапли-
вание заряда может привести к высокоэнергетичному раз-
ряду. Таким образом, предосторожности от ESD позволят
избежать деградации и потерю функциональности.
Рис. 9.101. Предостережение о чувствительности к ESD в технических данных на ли-
нейные ИС
Второй шаг заключается в разряде потенциальных источников ESD до того,
как произойдет повреждение ИС. Разряд таких напряжений можно быстро
и безопасно произвести через высокий импеданс.
Ключевым моментом, необходимым для безопасной с точки зрения ESD
работы с ИС, является наличие рабочего места с поглощающей статическое
электричество поверхностью, которое показано на рис. 9.102. Поверхность
стола подключена к «земле» через резистор с сопротивлением 1 МОм, ко-
торый поглощает любой статический заряд и защищает пользователя от
Замечание: сопротивление проводящего покрытия стола должно быть
больше 1 МОм.
Рис. 9.102. Рабочий стол, подходящий для работы с ИС, чувствительными к ESD
9.4. Защита от перенапряжения
927J
электрического удара при коротком замыкании на «землю». Если поверх-
ность вашего стола является непроводящей, то помимо разрядного резис-
тора следует использовать антистатический коврик.
Обратите внимание, что поверхность рабочего стола имеет умеренно
высокое поверхностное сопротивление. Нежелательно использовать для
поверхности стола материал с низким сопротивлением (например, лист
плакированной медью ПП). Помните, что при разряде заряженной ИС че-
рез низкое сопротивление может протекать высокий пиковый ток. Именно
это и происходит при контакте заряженной ИС с заземленной плакирован-
ной медью платой. Однако, когда та же заряженная ИС помещается на
высокоимпедансную поверхность, пиковый ток не настолько высок, чтобы
повредить устройство.
Существует несколько правил, выполнение которых позволяет мини-
мизировать повреждения, вызываемые ESD. При работе за рабочим сто-
лом с устройствами, чувствительными к ESD, рекомендуется использо-
вать проводящие повязки на запястьях. Они необходимы для того, чтобы
не повредить ИС при выполнении таких стандартных действий, как сня-
тие пленки с упаковки. Опять же для безопасности необходимо соединить
проводящие полоски с «землей» через резистор с сопротивлением 1 МОм.
При создании прототипов или сборке ПП, которые содержат ИС, чув-
ствительные к ESI), все пассивные компоненты должны устанавливаться
и припаиваться до монтажа ИС. Этим минимизируется воздействие ESD
на чувствительные устройства. И естественно, наконечник паяльника дол-
жен быть заземлен.
Защита ИС от ESD требует участия и производителя ИС, и потребителя.
Производители ИС имеют законный интерес к обеспечению максимально
возможного уровня защиты от ЕЛ7)для своих продуктов. Разработчики ИС,
инженеры-технологи, специалисты по упаковке и другой персонал посто-
янно ищут новые и улучшенные схемные решения, процессы и методы
упаковки для устойчивости к энергии ESD или ее отвода от ИС.
Полный план по защите от ESI), тем не менее, требует большего, чем
встраивание защиты от ESD в ИС. Пользователи ИС также должны обучать
свой персонал необходимым навыкам по работе с ИС, чувствительными к
ESD. На рис. 9.103 приведены все этапы защиты от ESD при производстве
и использовании ИС.
Особую осторожность следует соблюдать при оценке ИС и макетиро-
вании. Эффекты от воздействия ESD могут накапливаться, поэтому по-
вторяющееся несоблюдение правил эксплуатации устройства может со
временем вызвать его повреждение. Вставка ИС в тестовую панельку, в
которой устройство находится при оценке, и удаление из нее, добавле-
ние дополнительных элементов в макет или их удаление из макета долж-
но производиться при соблюдении необходимых мер по предотвраще-
нию ESD. Опять же, если устройство выходит из строя при создании
прототипа системы, возможной причиной может являться повторяюще-
еся воздействие ESD.
Ключевое слово, которое необходимо запомнить по отношению к ESD, —
это предотвращение. Невозможно обратить повреждение, вызванное ESD,
или компенсировать его воздействие.
ANALOG DEVICES:
• Конструирование и производство схемы:
— разрабатывает и производит продукты с максимальным уровнем защиты от ESD,
который не противоречит требуемым аналоговым и цифровым характеристикам.
• Упаковка и поставка:
— упаковывает ИС в упаковку из материала, рассеивающего статическое электриче-
ство. Маркирует упаковку предупреждением об опасности ESD.
ПОЛЬЗОВАТЕЛИ:
• Осмотр при получении:
— исследуют ИС на заземленном рабочем столе. Минимизируют контакт с ИС.
• Инвентарный контроль:
— хранят ИС в оригинальной упаковке, защищающей от ESD.
• Производство:
— передают ИС на монтаж в оригинальной упаковке, защищающей от ESD. Упаковку
раскрывают только на заземленном рабочем столе. Сборочные узлы упаковывают
в упаковку, рассеивающую статическое электричество.
• Упаковка и поставка:
— при необходимости готовое изделие упаковывают в антистатический материал.
Замена и добавление дополнительных узлов может потребовать особого внимания.
Рис. 9.103. Защита от ESD требует партнерских отношений между ADI и конечным
пользователем с контролем ключевых моментов
Модели и тестирование ESD
В некоторых случаях чувствительность к ESD может быть выше, чем в
других. ИС, расположенные на ПП и окруженные другими схемами, обыч-
но менее подвержены повреждению от ESD, чем схемы, которые должны
взаимодействовать с другими ПП. Для таких ИС обычно не гарантирует-
ся соответствие каким-либо конкретным спецификациям на ESD (за ис-
ключением устройств, классифицированных по методике 3015 стандарта
MIL-STD-833). Хорошим примером интерфейса, чувствительного к ESD.
являются ИС компьютерного интерфейса RS-232, на которые зачастую
могут воздействовать избыточные напряжения. Для проверки устойчивос-
ти подобных устройств к ESD необходимо обозначить методы тестирова-
ния и граничные условия.
Для оценки чувствительности к ESD было разработано большое количе-
ство тестовых сигналов и спецификаций. Тремя наиболее известными тес-
товыми сигналами, которые в настоящее время используются для проверки
полупроводниковых и дискретных устройств, являются: модель человечес-
кого тела (НВМ — Human Body Model), машинная модель (ММ — Machine
Model) и модель заряженного устройства (CDM — Charged Device Model).
Каждая из этих моделей описывает фундаментально различные типы ESD.
следовательно, корреляция между результатами тестов для данных моделей
минимальна.
Начиная с 1996 года все электронное оборудование, экспортируемое или
производимое в Европейском Сообществе для внутреннего потребления,
должно удовлетворять уровням Электромагнитной Совместимости {ЕМС —
Electromagnetic Compatibility), определенным в спецификации IEC 1000-4-х.
Отметим, что данная спецификация касается не отдельных ИС, а конечных
продуктов. Эти стандарты, а также методы тестирования определены в раз-
личных спецификациях IEC1000 и перечислены на рис. 9.104.
• IEC1000-4 Электромагнитная совместимость ЕМС.
• IEC1000-4-1 Обзор тестов на устойчивость.
• IEC1000-4-2 Устойчивость к электростатическому разряду (ESD).
• IEC1000-4-3 Устойчивость к излучаемым высокочастотным электромагнитным полям.
• IEC1000-4-4 Быстрые электрические переходные процессы (EFT — Electrical Fast
Transients).
• IEC1000-4-5 Удары молнии.
• IEC1000-4-6 Проводимые радиочастотные помехи с частотой выше 9 кГц.
• Маркировка совместимости: £ £ .
Рис. 9.104. Список стандартов IEC, касающихся спецификаций и процедур тестирова-
ния ESD
В IEC1000-4-2 определяются тесты на совместимость при помощи двух
методов: контактного разряда и разряда через воздушный промежуток (air-
gap discharge). Контактный разряд требует непосредственного соединения с
тестируемым устройством. При разряде через воздушный зазор использует-
ся большее тестовое напряжение, однако не осуществляется непосредствен-
ное соединение с тестируемым устройством. В этом методе разряжаемый
ствол движется по направлению к тестируемому устройству, формируя в
воздухе электрическую дугу, откуда берется термин «воздушный разряд»
(дословный перевод — молния). Этот метод подвержен влиянию влажнос-
ти, температуры, атмосферного давления, расстояния и скорости прибли-
жения разряжаемого ствола. Метод контактного разряда, несмотря на то
что является менее реалистичным, имеет более регулярные результаты и
набирает большую популярность по сравнению с методом разряда через
воздушный зазор.
Несмотря на то что в импульсе ESD сосредоточена очень небольшая
энергия, экстремально быстрое время нарастания и высокие напряжения
могут вызвать повреждение в незащищенных ИС. Искрение или нагрев
могут вызвать мгновенное и полное разрушение. Даже если катастрофичес-
кое повреждение не происходит мгновенно, устройство может страдать от
параметрического ухудшения, которое может привести к снижению его ха-
рактеристик. Накапливаемые вследствие продолжительного воздействия ESD
эффекты могут в конечном счете привести к полному отказу.
Особо подвержены влиянию ESD линии ввода/вывода. Простое каса-
ние или подсоединение кабеля ввода/вывода может привести к статическо-
му разряду, способному повредить или полностью разрушить интерфейс-
ный продукт, подключенный к порту ввода/вывода (например, драйверы
линии и приемники RS-232).
Традиционные методы тестирования чувствительности к ESD, такие как
метод 3015.7 MIL-STD-833B, не в полной мере характеризуют восприимчи-
вость продукта к этому типу разряда. Этот тест был предназначен для опи-
сания восприимчивости продукта к ESD при обращении с ним. Каждый
вывод тестируется по отношению ко всем остальным выводам. Между ме-
зо—2852
Глава 9. Методы проектирования аппаратуры
годом 3015.7 MIL-STD-883B и тестом IEC имеется несколько важных раз-
личий.
1. В тесте IEC применяется намного большая энергия разряда. Уровень
вносимого пикового тока более чем в четыре раза выше.
2. Время нарастания тока значительно выше в тесте IEC.
3. Тест IEC проводится при подаче питания на устройство.
Электростатический разряд способен вызывать защелкнутое состояние
в тестируемом устройстве. Таким образом, тест IEC в большей степени
описывает реальный разряд на линиях ввода/вывода, который может про-
изойти в нормальном режиме работы оборудования при включенном пита-
нии. Однако для максимальной уверенности следует тестировать интер-
фейсные устройства при помощи обоих тестов, так как при этом гаранти-
руется максимальная защита и до включения в систему, и позднее, при
работе в ее составе.
На рис. 9.105 приведено сравнение номиналов элементов в тестовых
схемах для модели IEC1000-4-2 и модели человеческого тела в 3015.7
MIL-STD-883B.
Формы сигналов для моделей ESD в тестах по методу 3015.7 MIL-STD-883B
и IEC1000-4-2 приведены на левом и правом графиках рис. 9.106 соответ-
ственно.
Замечание: напряжение для контактного разряда определяется из IEC 1000-4-2 IS ±8 кВ.
Рис. 9.105. Схема теста на чувствительность к ESD и номиналы элементов
• Напряжение: 8 кВ.
• Пиковый ток:
- MIL STD 883В Method 3015.7 НВМ: 5 А; РИС. 9.106. ФорМЫ СИГНЭЛОВ ДЛЯ
— IEC 1000-4-2: 25 А; тестирования ESD
Список литературы к 9.4. Защита от перенапряжения
Необходимые меры защиты от ESD сравнительно легко могут быть вклю-
чены в схему на этапе проектирования. Полезными могут оказаться боль-
шинство из обсуждавшихся ранее методов защиты от перенапряжения. Также
возможно обеспечение дополнительной защиты. Для драйверов и прием-
ников RS-232 и RS-845 выпускается серия ADMXXX-E с гарантированным
выдерживаемым значением ESD 15 кВ (модель человеческого тела). В более
общих ситуациях защиту от ESD может обеспечить добавление диодов
TransZorb в соответствующие места схемы (см. список литературы).
На рис. 9.107 приведен итоговый обзор ключевых положений, касаю-
щихся предотвращения ESD как с внесхемной, так и с внутрисхемной точ-
ки зрения.
• Соблюдайте все номинальные абсолютные максимальные значения, указанные в тех-
нических данных.
• Прочтите ADI AN-397 (см. 16).
• Приобретайте цифровые интерфейсные устройства с гарантированными выдержива-
емыми уровнями ESD:
— серии ADMXXX-E драйверов/приемников RS-232/RS-485 (см. 18).
• Следуйте общим рекомендациям по защите от перенапряжения:
— для ограничения токов добавьте последовательное сопротивление;
— для дополнительной защиты добавьте стабилитроны или подавители переходных
напряжений (TVS) (см. 19).
Рис. 9.107. Ключевые положения, касающиеся ESD
Список литературы
9.4. Защита от перенапряжения
1. Walt Kester, Wes Freeman, Joe Buxton. Overvoltage Protection. Portion of Section
10 within Walt Kester, Editor, Practical Design Techniques for Sensor Signal Conditioning,
Analog Devices, Inc., 1999, ISBN 0-916550-20-6.
2. Siliconix PAD/JPAD/SSTPAD series Low leakage Pico-Amp Diodes, Vishay/
Siliconix, www.vishay. com/brands/siliconix/SSFsglld.html.
3. Bob Pease. Bounding, Clamping Techniques Improve Circuit Performance. EDN,
November 10, 1983, p. 277.
4. Bob Pease. Understanding Diodes and Their Problems. Chapter 6 within
Troubleshooting Analog Circuits, Butterworth-Heinemann, 1991, ISBN 0-7506-9184-0.
5. Dov Kurz, Avner Cohen. Bootstrapping Reduces Amplifier Input Capacitance. EDN,
March 20, 1978.
6. C.D. Motchenbacher, J.A. Connelly. Chapter 5, within Low Noise Electronic System
Design, John Wiley, 1993.
7. Adolfo Garcia. Operational Amplifier Output Voltage Phase Reversal. Section 11,
pp. 1—10 within Walt Kester, Editor, 1992 Amplifier Applications Guide, Analog Devices,
Inc., Norwood, MA, 1992, ISBN 0-916550-10-9.
8. Adolfo Garcia, Wes Freeman. Overvoltage Effects On Analog Integrated Circuits.
Section 7 within Walt Kester, Editor, Practical Analog Design Techniques, Analog Devices,
Inc., Norwood, MA, 1995, ISBN 0-916550-16-8.
9. Charles Kitchin, Lew Counts. A Designerys Guide to Instrumentation Amplifiers,
Analog Devices, Inc., 2000.
10. Walt Kester, Wes Freeman, James Bryant. Electrostatic Discharge, portion of Section
10 within Walt Kester, Editor, Practical Design Techniques for Sensor Signal Conditioning,
Analog Devices, Inc., 1999, ISBN 0-916550-20-6.
Глава 9. Методы проектирования аппаратуры
11. MIL-STD-883 Method 3015, «Electrostatic Discharge Sensitivity Classification.»
Available from Standardization Document Order Desk, 700 Robbins Ave., Building #4,
Section D, Philadelphia, PA, 19111-5094.
12. EIAJ ED-4701 Test Method C-l 11, «Electrostatic Discharges.» Available from the
Japan Electronics Bureau, 250 W 34th St., New York NY 10119, Attn.: Tomoko.
13. ESD Association Standard S5.2 for «Electrostatic Discharge (ESD) Sensitivity
Testing — Machine Model (MM) Component Level.» Available from the ESD Association,
Inc., 200 Liberty Plaza, Rome, NY 13440.
14. ESD Association Draft Standard DS5.3 for «Electrostatic Discharge (ESD) Sensitivity
Testing — Charged Device Model (CDM) Component Testing.» Available from the ESD
Association, Inc., 200 Liberty Plaza, Rome, NY 13440.
15. ESD Prevention Manual, Analog Devices, Inc.
16. Niall Lyne. Electrically Induced Damage to Standard Linear Integrated Circuits:
The Most Common Causes and the Associated Fixes to Prevent Reoccurrence. Analog
Devices AN397.
17. Mike Bryne. How to Reliably Protect CMOS Circuits Against Power Supply
Overvoltaging. Analog Devices AN311.
9.5. Управление тепловым режимом
Уолт Джанг
По соображениям надежности в системах с преобразователями данных, в
которых рассеивается значительная мощность, требуется соблюдение теп-
лового режима. Все полупроводники имеют определенный верхний предел
температуры перехода (Tj —junction temperature), обычно порядка 150 °C
(иногда 175 °C). Как и максимальные напряжения питания, максимальная
температура перехода является предельным значением при наиболее небла-
гоприятных условиях. В консервативных проектах температура приближа-
ется к этому пределу не более чем на достаточно безопасное значение. Об-
ратите внимание, что это требование является критическим, так как срок
жизни полупроводника связан с рабочей температурой перехода обратной
зависимостью. Просто положим, что чем холоднее ИС, тем больше ее срок
жизни приближается к максимальному.
Это ограничение на мощность и температуру является базовым и иллю-
стрируется типичным упоминанием в технических данных (в данном слу-
чае для устройства AD8017AR в 8-контактном корпусе SOIC), приведен-
ным на рис. 9.108.
От этих требований зависят определенные условия работы, такие как
мощность, рассеиваемая устройством и способ монтажа корпуса на ПП.
Максимальная мощность, которая может безопасно рассеиваться AD8017, огра-
ничена соответствующим ростом температуры переходов. Максимальная безопас-
ная температура перехода для устройств в пластиковом корпусе приблизительно
равна +150 °C. Временное превышение этого предела может повлечь изменение па-
раметрических характеристик вследствие изменения воздействия механических напря-
жений корпуса на кристалл. Превышение значения температуры перехода +175 °C в
течение длительного времени может привести к повреждению устройства.
Рис. 9.108. Замечание о максимальной рассеиваемой мощности в технических данных
на AD8017AR, размещенного в корпусе SOIC с улучшенными температур-
ными характеристиками производства ADI
9.5. Управление тепловым режимом
Так, AD8017AR рассеивает мощность 1,3 Вт при температуре окружающей
среды 25 °C. Таким образом, при работе этого устройства в 8-контактном
корпусе SOIC на двухслойной ПП необходимо иметь примерно 4 кв. дюй-
ма (~2500 мм2) медного покрытия с удельным весом 2 унции для отвода
тепла. Ниже обсуждаются вопросы обеспечения безопасной работы уст-
ройства при других условиях.
Основные тепловые характеристики
Символ 0 обычно используется для обозначения теплового сопротивления
(thermal resistance). Оно выражается в единицах °С/Ватт (°С/Вт) и определя-
ет, если не оговорено иное, тепловое сопротивление при передаче тепла от
нагретого перехода ИС в окружающий воздух. Оно также может задаваться
более конкретно как 0JA. тепловое сопротивление переход—среда (thermal
resistance, junction-to-ambient). Двумя дополнительными формами задания 0
являются 0JC и 0СА, которые более подробно обсуждаются ниже.
В общем случае устройство с тепловым сопротивлением 0. равным
100°С/Вт, испытывает изменение температуры на 100°С при рассеивании
мощности 1 Вт. Обратите внимание, что эта зависимость является линей-
ной и может быть распространена на другие значения мощности. Для
AD8017AR 0 примерно равно 95 °С/Вт. Таким образом, рассеивание мощ-
ности 1,3 Вт приведет к изменению температуры переход—среда приблизи-
тельно на 124 °C. Именно эта величина изменения температуры использу-
ется для предсказания внутренней температуры при определении тепло-
вой надежности устройства. При температуре 25 °C температура внутреннего
перехода примерно равна 150 °C. На практике в большинстве случаев ок-
ружающая температура превышает 25 °C; следовательно, должна рассеи-
ваться меньшая мощность.
Для любой рассеиваемой мощности Р (в ваттах) можно вычислить эф-
фективный температурный дифференциал (Л Г) в °C:
ДГ=Рх0, (9.10)
где 0 — полное тепловое сопротивление.
На рис. 9.109 перечислен ряд основных соотношений между тепловыми
величинами.
0 — тепловое сопротивление (°С/Вт) ambient—среда
Р — общая рассеиваемая прибором мощность (Вт)
case—корпус
Т — температура (°C) junction—переход
АГ — температурный дифференциал = Р х в
0JA — тепловое сопротивление переход—среда
0JC — тепловое сопротивление переход—корпус
0СА — тепловое сопротивление корпус—среда
+ 3СА
Jr\ JU иЛ
Т, = Г + Р01А
J A JA
Замечание: TJmax =150 °C (иногда 175 °C).
Рис. 9.109. Основные соотношения между тепловыми величинами
31- 2852
Обратите внимание, что полное тепловое сопротивление устройства
может быть представлено в виде модели из последовательно соединенных
тепловых сопротивлений (например, двух сопротивлений, показанных в
правой части рисунка). Таким образом, полная величина Сможет быть вы-
числена как сумма 0iC и 0СА. По заданным температуре окружающей среды
ТА, Ри Сможет быть определена 7}. Как видно из приведенных соотноше-
ний, для поддержания низкого значения необходимо иметь либо низкое
0, либо низкую рассеиваемую мощность (либо оба параметра одновремен-
но). Низкое значение ДТ является ключом к продлению срока жизни полу-
проводников, так как при нем достигаются меньшие уровни максимальных
температур перехода.
Одной из точек отсчета температуры в ИС всегда является переход уст-
ройства — самая горячая точка внутри кристалла, работающего в данном
корпусе. Другой важной точкой отсчета является либо Тс (температура кор-
пуса устройства), либо ТА (температура окружающего воздуха). Отсюда воз-
никают указанные выше отдельные тепловые сопротивления 0JC и 0JA.
Для начала рассмотрим более простой случай 0JA — теплового сопротив-
ления устройства, измеренного между его переходом и окружающим возду-
хом. Это тепловое сопротивление наиболее часто используется для малень-
ких, относительно маломощных ИС, таких как операционные усилители,
которые обычно рассеивают 1 Вт или менее. В общем случае типичные
значения 0JA операционных усилителей и других миниатюрных устройств
составляют порядка 90— 100°С/Вт для пластикового 8-контактного корпуса
DIP, а также для более хороших корпусов SOIC.
Следует четко понимать, что данные тепловые сопротивления сильно
зависят от типа корпуса, так как различные материалы обладают различной
степенью тепловой проводимости. Общее правило: тепловое сопротивле-
ние проводников аналогично электрическому сопротивлению, т. е. лучшие
параметры имеет медь, затем алюминий, сталь и т. д. Таким образом, наи-
лучшими характеристиками (наименьшим 0) обладают корпусы с медными
выводами.
Отвод тепла
Теплоотвод (heat sink), по определению, это устройство с малым тепловым
сопротивлением, которое присоединяется к ИС для улучшения отвода теп-
ла. Теплоотвод имеет дополнительное собственное тепловое сопротивле-
ние, 0СА, которое измеряется в °С/Вт. Однако большинство корпусов со-
временных операционных усилителей мало приспособлено к присоедине-
нию теплоотводов (за исключением более старых металлических корпусов
ТО-99). Устройства, к которым может присоединяться теплоотвод, зачас-
тую имеют 0JC, намного меньшее 0JA . В этом случае 0 включает в себя
более одного компонента. Тепловые сопротивления складываются, поэто-
му вычислить суммарное тепловое сопротивление сравнительно легко.
Например, для вычисления суммарного 0JA по заданному 0JC необходимо
прибавить тепловое сопротивление теплоотвода 0СА (сопротивление кор-
пус-среда) к 0JC\
eJA=oJC+oCA- (9.П)
9.5. Управление тепловым режимом
Однако в общем случае современные ИС не предназначены для подсо-
единения готовых теплоотводов. Вместо этого в случаях, когда должна рас-
сеиваться значительная мощность (>1 Вт), в качестве теплоотвода исполь-
зуются медные проводники ПП с низким тепловым сопротивлением. Наи-
более полезными данными, которые могут указываться производителем для
подобного теплоотвода, являются граничные условия для примерной раз-
водки ПП и результирующее значение 0JA при этих условиях. Пример дан-
ных, иллюстрирующих тепловые характеристики при использовании по-
добного подхода, показан на рис. 9.110. Эти данные приведены для
AD8017AR, монтированного на теплоотвод с площадью приблизительно
4 кв. дюйма на двухслойной ПП с медным покрытием с удельным весом
2 унции.
Рис. 9.110. Кривые тепловых характеристик для операционного усилителя AD8017AR
Эти кривые показывают зависимость максимальной рассеиваемой мощ-
ности от температуры для AD8017 при максимальных температурах перехо-
да 150 и 125 °C. Подобные кривые часто называются кривыми ухудшения
параметров прибора {derating)^ так как допустимая мощность уменьшается
с увеличением окружающей температуры.
AD8017AR выпускается в патентованном ADI корпусе типа Thermal
Coastline («тепловая береговая линия»), который позволяет рассеивать до-
полнительную мощность без увеличения размера корпуса S0-8. Верхняя
кривая соответствует допустимой рассеиваемой мощности для данного кор-
пуса при Т7(тах) = 150 °C, и для окружающей температуры 25 °C она состав-
ляет 1,3 Вт. Более консервативному значению Т7(тах) = 125 °C соответствует
нижняя кривая.
На рис. 9.111 приведено сравнение характеристик для стандартного
8-контактного корпуса SOIC и версии ADI Thermal Coastline. Обратите вни-
мание, что Thermal Coastline при 25 °C обеспечивает допустимую рассеива-
емую мощность 1,3 Вт, в то время как стандартный корпус — лишь 0,8 Вт.
Теплопередача в корпусе Thermal Coastline увеличена за счет более низкого
значения 0,Л.
JA
Температура окружающей среды (°C)
Рис. 9.111. Кривые тепловых характеристик для стандартного (нижняя) и ADI Thermal
Coastline (верхняя) 8-контактных корпусов SOIC
За счет использования корпусов ИС, лучше проводящих тепло от крис-
талла к ПП, возможно достижение даже большей рассеиваемой мощности.
Примером этого является устройство AD8016, которое выпускается в двух
вариантах корпусов, имеющих рассеиваемую при 25 °C мощность 5,5 и 3,5 Вт
соответственно (рис. 9.112).
Как показано на верхней кривой, AD8016ARP в корпусе PSOP3 с более
высокой номинальной рассеиваемой мощностью при использовании теп-
лоотводящей поверхности площадью 10 кв. дюймов с удельным весом 1 ун-
ция позволяет рассеивать до 3 Вт при температуре окружающей среды 70 °C.
Это соответствует 0JA, равному 18 °С/Вт, при максимальной температуре
перехода 125 °C.
Причина, по которой вариант AD8016 в корпусе PSOP3 позволяет рас-
сеивать более высокую мощность, заключается в использовании медной
пластины большой площади. Внутри корпуса ИС кристалл располагается
Рис. 9.112. Кривые тепловых характеристик для AD8016 в корпусах BATWING (ниж-
няя) и PSOP3 (верхняя) при Г7(тах), равной 125 °C
9.5. Управление тепловым режимом
0,5118(13,00) _____ ।
0,3453 (9,00)
ДШШШ
ifi I
~г
0,2441 (6,20)
0,2283 (5,80)
Рис. 9.113. Вид снизу на 20-контактный корпус PSOP3 ИС AD8016 с медной пласти-
ной, улучшающей теплопередачу (заштрихованная область в центре)
непосредственно на этой пластине, нижняя поверхность которой выведе-
на наружу корпуса, как показано на рис. 9.113. Это сделано для того,
чтобы поверхность пластины можно было непосредственно припаять к
поверхности с медной металлизацией на ПП, за счет чего увеличивается
отвод тепла.
Обе версии AD8016 специфицированы для использования и с охлажде-
нием воздушным потоком, и без него, однако информация о тепловых ха-
рактеристиках, приведенная выше, касается случая, когда охлаждение на-
правленным воздушным потоком не используется. Таким образом, допол-
нительное охлаждение воздушным потоком приводит к еще большему
снижению теплового сопротивления (см. 2).
Ниже перечислены некоторые правила, которые помогают создавать
надежные проекты с малым температурным сопротивлением на базе опера-
ционных усилителей. Рассмотрите все пункты, которые могут быть реали-
зованы на практике.
1. Используйте как можно большую площадь медного покрытия на ПП
под теплоотвод, пока это не сказывается негативно на характеристиках
проекта.
2. В дополнение к п. 1 используйте несколько слоев на ПП (или оба слоя на
двухсторонней плате), соединенных вместе множеством переходных отвер-
стий.
3. Используйте как можно более тяжелую медь (предпочтительнее медь с
удельным весом 2 унции или выше).
4. Предусмотрите в системе достаточное количество входных и выходных
отверстий для естественной вентиляции, чтобы обеспечить свободный отток
тепла от горячих поверхностей ПП.
5. Ориентируйте поверхности ПП, рассеивающие мощность, в вертикаль-
ной плоскости для обеспечения охлаждения теплоотводящих поверхностей за
счет конвекции.
6. Рассмотрите возможность использования в схемах с прецизионными опе-
рационными усилителями внешних мощных каскадов буферов.
7. В ситуациях, когда в замкнутом пространстве необходимо рассеивать
несколько ватт, рассмотрите возможность использования принудительного
охлаждения воздушным потоком.
Глава 9. Методы проектирования аппаратуры
8. Не используйте трафарет для нанесения припоя поверх площадок, игра-
ющих роль теплоотвода.
9. Не используйте избыточное напряжение питания для ИС, являющихся
источником мощности.
По большей части перечисленные пункты являются очевидными. Одна-
ко п. 9 требует определенного разъяснения. В приложениях, в которых требу-
ется лишь ограниченный размах напряжения сигнала (например, 2 В р-р в
стандартных видеоприложениях), уровни напряжения питания зачастую
могут изменяться в широком диапазоне. Однако, как следует из рис. 9.114,
использование для драйвера на операционном усилителе более высоких
напряжений питания приводит к большему рассеиванию им мощности, даже
несмотря на то что мощность нагрузки постоянна.
В таких случаях работа ИС с более низкими напряжениями питания
(например, ±5 В вместо ±15 В) может быть предпочтительнее при усло-
вии, что это не сказывается отрицательно на характеристике искажений.
В приведенном выше примере данные были вычислены по постоянному
току, который в большей степени характеризует драйвер в плане мощно-
сти, а не формы синусоидального или шумоподобного сигнала, такого как
DMT (сигнал тонального вызова) (см. 2). Общие принципы также приме-
нимы и к указанным переменным сигналам: т. е. операционный усили-
тель рассеивает высокую мощность при большом токе нагрузки и низком
напряжении.
В то время как корпусы с улучшенными тепловыми характеристиками,
подобные описанным выше для AD8016 и AD8017, позволяют рассеивать
большую мощность, более миниатюрные корпусы ИС, набирающие попу-
лярность, двигаются в противоположном направлении. Действительно, при
использовании современных небольших корпусов в жертву приносятся теп-
ловые характеристики. Однако необходимо понимать, что это делается в
интересах уменьшения размера корпуса ИС и, следовательно, увеличения
плотности компоновки элементов на ПП.
Рис. 9.114. Мощность, рассеиваемая драйвером видеосигнала на операционном уси-
лителе при различных напряжениях питания и малом размахе выходного
напряжения
9.5. Управление тепловым режимом
Рис. 9.115. Сравнительные тепловые характеристики для нескольких вариантов корпу-
сов операционных усилителей AD8057/58
Отмеченные выше моменты иллюстрируются тепловыми характеристи-
ками семейства одиночных и сдвоенных операционных усилителей AD8057
и AD8058, которые показаны на рис. 9.115. Эти устройства выпускаются в
трех типах корпусов: SOT-23-5, 8-контактный pSOIC и стандартный SOIC.
Как видно из приведенных данных, по мере уменьшения размеров кор-
пуса значительно уменьшается количество отводимого тепла. Так как для
столь миниатюрных корпусов единственным возможным путем отвода теп-
ла является рамка с внешними выводами, их тепловые характеристики хуже.
Для указанных корпусов 0JA равно 240, 200 и 160 °С/Вт соответственно.
Обратите внимание, что это обусловлено в большей степени параметрами
корпусов, чем устройством. Другие ИС в таких же корпусах имеют схожие
характеристики.
Вопросы тепловых режимов преобразователей данных
На первый взгляд можно предположить, что рассеиваемая АЦП или ЦАП
мощность является постоянной величиной при заданном напряжении пи-
тания. Однако рассеиваемая многими преобразователями данных, в осо-
бенности КМОП-преобразователями, мощность сильно зависит не только
от нагрузки на цифровых выходах, но и от частоты тактового сигнала дис-
кретизации. Так как большинство новейших высокоскоростных преобразо-
вателей при наихудших рабочих условиях могут рассеивать максимальную
мощность от 1,5 до 2 Вт, этот момент необходимо четко понимать для того,
чтобы обеспечить такой способ монтажа корпуса, который позволит под-
держивать температуру перехода в приемлемых пределах при наивысшей
ожидаемой рабочей частоте.
Ранее в этой главе при обсуждении заземления было отмечено, что циф-
ровые выходы высокопроизводительных АЦП, в особенности имеющих
параллельный выход, должны иметь небольшую нагрузку (5—10 пФ), чтобы
цифровые импульсные токи не ухудшали отношение сигнал/шум и SFDR.
Рис. 9.116. Зависимость рассеиваемой мощности от частоты дискретизации для 14-разряд-
ного 3-вольтового КМОП АЦП AD9245 с быстродействием 80 MSPS при
частоте аналогового входного сигнала 2,5 МГц и нагрузке на выходных ли-
ниях данных 5 пФ
Однако даже при небольшой нагрузке рассеиваемая мощность в большин-
стве КМОП и Bi-КМОП АЦП является функцией частоты тактового сигна-
ла дискретизации и, в некоторых случаях, частоты и амплитуды аналогово-
го входного сигнала.
Например, на рис. 9.116 приведена зависимость рассеиваемой мощнос-
ти от частоты дискретизации для 14-разрядного 3-вольтового КМОП АЦП
AD9245 с быстродействием 80 MSPS при частоте аналогового входного сиг-
нала 2,5 МГц и нагрузке на выходных линиях данных 5 пФ. На графике
отдельно показаны токи аналогового и цифрового питания, а также полная
рассеиваемая мощность. Обратите внимание, что при изменении тактовой
частоты от 10 до 80 MSPS полная рассеиваемая мощность может изменять-
ся в пределах приблизительно от 310 до 380 мВт.
Припаять основание
к ПП, если возможно
0JA = 32,5‘C/Вт, PER EIA/DESD51-1, с учетом воздуха
Рис. 9.117. AD9245 в корпусе CP-32 LFCSP (Lead-Frame Chip-Scale), вид снизу
9.5. Управление тепловым режимом
Как показано на рис. 9.117, AD9245 выпускается в 32-контактном без-
выводном корпусе LFCSP (Lead-Frame Chip-Scale). На виде корпуса снизу
показано открытое основание, которое следует припаять к заземляющей
поверхности ПП для обеспечения наилучшей теплопередачи. Сопротивление
переход—среда, 0JA, корпуса для наихудшего случая составляет 32,5 °С/Вт; при
этом температура перехода на 32,5 °C х 0,38 = 12,3 °C выше температуры
окружающей среды при рассеиваемой мощности 380 мВт. При максималь-
ной рабочей температуре +85 °C температура перехода имеет умеренный
уровень 85 °C + 12,3 °C - 97,3 °C.
AD9430 представляет собой высокопроизводительный 12-разрядный
Bi-КМОП АЦП с производительностью 170/210 MSPS и напряжением пита-
ния 3,3 В. Он имеет два выходных режима: сдвоенные демультиплексиро-
ванные КМОП-выходы с частотой 105 MSPS и LVDS выходы с частотой
210 MSPS. Рисунок 9.118 иллюстрирует зависимость рассеиваемой мощно-
сти от частоты дискретизации. На нем показаны токи аналогового и циф-
рового питания в режимах КМОП и £ ИЛА при частоте аналогового входно-
го сигнала 10,3 МГц. Обратите внимание, что в режиме LVDS при частоте
дискретизации 210 MSPS полный ток питания равен приблизительно 455 мА,
что дает полную рассеиваемую мощность 1,5 Вт.
Общий ток при 210 MSPS и LVDS-уровнях = 55 мА + 400 мА = 455 мА
Общая рассеиваемая мощность = 3,3 В х 455 мА =1,5 Вт
Рис. 9.118. Зависимость тока питания 12-разрядного АЦП AD9430 с производительно-
стью 170/210 MSPS от частоты дискретизации при частоте входного сигна-
ла 10,3 МГц
AD9430 выпускается в 100-контактном тонком пластиковом квадратном
плоском корпусе с открытым основанием (TQFP/EP, thin plastic quadflat package
with an exposed pad), который показан на рис. 9.119. Проводящее основание
соединено с «землей» кристалла и должно припаиваться к заземляющей
поверхности ПП. В случае, когда основание припаяно к ПП, 0JA корпуса
без охлаждения воздушным потоком равно 25 °С/Вт. При этом температура
перехода на 25 °C х 1,5 = 37,5 °C выше температуры окружающей среды при
рассеиваемой мощности 1,5 Вт. При максимальной рабочей температуре
+85 °C температура перехода равна 85 °C + 37,5 °C = 122,5 °C.
942 Глава 9. Методы проектирования аппаратуры
U---------------- 16,00 SQ -----------------U
Рис. 9.119. 100-контактный корпус AD9430 e-PAD TQFP
AD6645 представляет собой высокопроизводительный 14-разрядный АЦП
с производительностью 80/105 MSPS, производимый по высокоскоростной
комплементарной биполярной технологии (XFCB, high-speed complementary
bipolar process) и обладающий наивысшим SFDR (89 dBc) и отношением
сигнал/шум (75 дБ) среди выпускаемых изделий. Максимальная мощность,
рассеиваемая устройством, равна 1,75 Вт. Устройство выпускается в 52-
контактном корпусе с улучшенными тепловыми характеристиками
PowerQuad 4® с открытым основанием, который показан на рис 9.120.
Рекомендуется припаивать открытый центральный теплоотвод к заземляю-
щей поверхности ПП для понижения 0JA корпуса до 23°С/Вт без охлаждения
воздушным потоком. При этом температура перехода на 23 °C х 1,75 = 40,3 °C
2,35 (0,093)
2,65 (0,104)
2,50 (0,098) (4 PLCS)
2,20 (0,087) (4 PLCS)
2,05 (0,081)
Рассеиваемая AD6645 мощность
= 1,5 Вт максимум
6,00 (0,236)
<—5,90 (0,232)—»
5,80 (0,228)
Рис. 9.120. 52-контактный корпус AD6645 с улучшенными тепловыми характеристика-
ми Power-Quad 4 (LQFP-ED) (SQ-52), вид снизу
Список литературы к 9.5. Управление тепловым режимом 943
выше температуры окружающей среды при рассеиваемой мощности 1,75 Вт.
При максимальной рабочей температуре +85 °C температура перехода равна
85 °C + 40,3 °C = 125,3 °C. При использовании воздушного потока 200 LFPM
тепловое сопротивление корпуса может быть уменьшено до 17 °С/Вт, при
этом температура перехода понижается до уровня на 30 °C выше температу-
ры окружающей среды (115 °C при рабочей температуре окружающей среды
+85 °C).
Рассеиваемая мощность высокоскоростных КМОП ЦАП (таких как пред-
ставители серии TxDAC®) и ИС DDS (таких как представители серии AD985x)
также зависит от тактовой частоты. Например, для 16-разрядного сдво-
енного интерполирующего ЦАП AD9777 с производительностью 160 MSPS
рассеиваемая мощность зависит от тактовой частоты, частоты выход-
ного сигнала и активности функций PLL и модуляции. Рассеиваемая
мощность при напряжении питания 3,3 В может варьироваться от 380 мВт
(Уцап = ЮО MSPS, Д1х = 1 МГц, без интерполяции и модуляции) до 1,75 Вт
(/цап = 400 MSPS,/DATA = 50 МГц, модуляция при активной PLL).
Это устройство и аналогичные представители семейства также выпус-
каются в корпусах с улучшенными тепловыми характеристиками, име-
ющих открытое основание для припаивания к заземляющей поверхно-
сти ПП.
При обсуждении вопросов теплового режима работы операционных уси-
лителей и преобразователей данных здесь не затрагивались классические
методы с применением теплоотводов, прикрепляемых при помощи скоб
(болтов). Также не затрагивались вопросы использования принудительного
воздушного охлаждения, которое может понадобиться при необходимости
рассеивания десятков ватт. Эти моменты были опущены в основном пото-
му, что применение данных подходов редко является возможным или целе-
сообразным для современных корпусов операционных усилителей и преоб-
разователей данных.
Более общее обсуждение этой и другой дополнительной информации
может быть найдено в 4~7.
Список литературы
9.5. Управление тепловым режимом
1. Data sheet for AD8017 Dual High Output Current, High Speed Amplifier, Analog
Devices, Inc., www.analog.com.
2. Data sheet for AD8016 Low Power, High Output Current, xDSL Line Driver,
Analog Devices, Inc., www.analog.com.
3. «Power Consideration Discussions», data sheet for AD815 High Output Current
Differential Driver, Analog Devices, Inc., www.analog.com.
4. Walt Jung, Walt Kester. Thermal Management. Portion of Section 8 within Walt
Kester, Editor, Practical Design Techniques for Power and Thermal Management, Analog
Devices, Inc., 1998, ISBN 0-916550-19-2.
5. General Catalog, A AVID Thermal Technologies, Inc., One Kool Path, Laconia,
NH, 03246, 603-528-3400.
6. Seri Lee. How to Select a Heat Sink. Aavid Thermal Technologies, www.aavid.com.
7. Seri Lee. Optimum Design and Selection of Heat Sinks. 11th IEEE SEMI-THERM™
Symposium, 1995, www.aavid.com.
Глава 9. Методы проектирования аппаратуры
9.6. Вопросы электромагнитных/радиочастотных
помех
Джеймс Брайант, Уолт Джанг, Уолт Кестер
На характеристики аналоговых схем часто негативно влияют высокочас-
тотные сигналы, вызванные работой близко расположенных электричес-
ких цепей. Оборудование, в состав которого входят ваши аналоговые схе-
мы, также может негативно влиять на внешние по отношению к нему
системы. В 1 (с 4) дано определение этой побочной передачи нежелатель-
ных высокочастотных сигналов в локальное оборудование или из него.
В соответствии с ним эти аспекты относятся к более широкому понятию
электромагнитной совместимости {electromagnetic compatibility), или ЭМС.
Она подразумевает:
• возможность электрических и электронных систем работать, не создавая
помех другим системам;
• возможность таких систем работать в соответствии с заданными пара-
метрами в заданной электромагнитной среде.
Таким образом, полная ЭМС означает, что разрабатываемое оборудова-
ние не должно являться источником помех и не должно быть подвержено
влиянию внешних внеполосных сигналов (т. е. сигналов вне рабочего диа-
пазона частот). Именно второй из этих аспектов ЭМС наиболее пагубно
сказывается на аналоговом оборудовании. И в данном разделе упор делает-
ся на вопросы защиты от внешних помех.
Внешние электрические устройства в процессе работы могут генери-
ровать шум, который называется электромагнитной {EMI, electromagnetic
interference) или радиочастотной (RFf radio frequency interference) помехой.
В этом разделе мы будем использовать термин «электромагнитная помеха»
применительно и к электромагнитным, и к радиочастотным помехам. Од-
ной из наиболее важных задач для разработчика аналоговых схем является
защита оборудования от нежелательного поведения, вызванного влиянием
электромагнитных помех. Важно отметить, что в данном контексте элект-
ромагнитные (ЭМ) и/или радиочастотные (РЧ) помехи почти всегда являют-
ся вредными. При проникновении в ваше оборудование они могут ухудшить
и обязательно ухудшат его работу, зачастую значительно.
Этот раздел в большей степени ориентирован на вопросы минимизации
нежелательного поведения аналоговой схемы, вызванного приемом элект-
ромагнитных/радиочастотных помех. Тенденция к аномальному поведению
схемы при воздействии ЭМ/РЧ помех также называется восприимчивостью
{susceptibility) к электромагнитным или радиочастотным помехам. Кроме того,
существует параллельный вопрос ЭМС, а именно вопрос побочных излуче-
ний. Однако, так как в аналоговых схемах обычно меньше импульсных,
высокоскоростных сигнальных фронтов с большими токами, которые вы-
зывают побочные излучения (например, по сравнению с высокоскорост-
ной логикой), этот аспект ЭМС здесь обсуждается не так подробно. Не-
смотря на это, читатель должен иметь в виду, что он может быть важным, в
особенности если аналоговая схема наряду с высокоскоростной логикой
входит в состав системы со смешанными сигналами.
9.6. Вопросы электромагнитных/радиочастотных помех
Так как все эти вопросы по ЭМС могут являться критическими, то для
дополнительного изучения крайне рекомендуются источники, перечисленные в
конце главы. Для тщательного, полностью компетентного с точки зрения
ЭМС, электромагнитных и радиочастотных помех проектирования разра-
ботчику потребуется близко ознакомиться с одним или более из этих ис-
точников (см. 1-6). Что касается последующего материала, то его лучше
рассматривать в качестве введения в эту крайне обширную тему, которая
приобретает все большую важность.
Механизмы электромагнитных/радиочастотных помех
Для понимания и надлежащего контролирования ЭМ/РЧ помех полезно
сначала разделить их на типы. По месту возникновения они могут быть
фундаментально разделены на помехи, возникающие в Источнике, Тракте
и Приемнике. Вы, как разработчик системы, непосредственно контролируе-
те приемную часть и, вероятно, некоторые части тракта. Разработчик редко
имеет возможность контролировать источник.
Источники электромагнитных помех
Существует бесчисленное множество способов, которыми нежелательные
шумы могут проникать в аналоговую систему, разрушая ее точность. Неко-
торые примеры подобных источников шума перечислены на рис. 9.121.
• Источником ЭМ/РЧ помех может быть что угодно.
• Вот некоторые распространенные источники внешне генерируемого шума:
— радио- и телевизионное вещание;
— подвижная радиосвязь;
— зажигание двигателей;
— молнии;
— линии электропитания;
— электрические моторы;
— компьютеры;
— устройства открывания дверей в гаражах;
— телеметрическое оборудование.
Рис. 9.121. Некоторые распространенные источники шумов электромагнитных помех
Так как повлиять на эти источники электромагнитных помех практи-
чески невозможно, следующим полезным шагом с точки зрения их изуче-
ния является определение и понимание возможных путей, по которым по-
мехи проникают в разрабатываемое оборудование.
Пути проникновения электромагнитных помех
Существует немного основных путей проникновения электромагнитных
помех:
1) помехи за счет проводимости (общего импеданса)',
2) помехи за счет емкостных или индуктивных связей (помехи из ближней
зоны)',
3) электромагнитное излучение (помехи из дальней зоны).
Механизмы проникновения шумов
Энергия электромагнитных помех может проникать в систему в местах, где
имеется рассогласование импеданса или разрыв в линии прохождения сиг-
нала (например, в точке разъема). Обычно это происходит через интер-
фейс, где кабели, по которым передаются чувствительные аналоговые сиг-
налы, подключаются к ПП, и через контакты питания. Ненадлежащим об-
разом подключенные кабели или плохо спроектированные схемы фильтрации
питания являются прекрасными проводниками помех.
Проводимый шум также может возникать, когда два или более тока
имеют общий путь прохождения (общий импеданс). Таким общим путем
обычно является высокоимпедансная «земля». Если этот путь является об-
щим для двух схем, то шумовые токи из одной схемы приведут к возникно-
вению шумовых напряжений в другой. Для определения потенциальных
источников такой помехи можно предпринять определенные шаги (см. 12,
а также подразд. 9.2).
На рис. 9.122 показаны некоторые из общих способов проникновения в
схему шумов от внешних источников.
• Рассогласование импеданса и разрыв в линии прохождения сигнала.
• Рассогласование синфазных импедансов, приводящее к возникновению дифферен-
циальных сигналов.
• Емкостные связи (помехи, вызванные электрическим полем):
— dV/dt -э Взаимная емкость Шумовой ток
(Пример: 1 В/нс вызывает 1 мА/пФ).
• Индуктивные связи (помехи, вызванные магнитным полем):
— di/dt -э Взаимная индуктивность Шумовое напряжение
(Пример: 1 мА/нс вызывает 1 мВ/нГн).
Рис. 9.122. Так электромагнитная помеха проникает в оборудование
Между любыми двумя проводниками, разделенными диэлектриком (воз-
дух и вакуум являются диэлектриками, равно как все твердые и жидкие
изоляторы), изменение напряжения в одном из проводников вызовет изме-
нение заряда в другом, и в диэлектрике потечет ток смещения. При высо-
кой емкости или высоком ЛуЛшум легко может проникнуть в схему. На-
пример, скорость изменения 1 В/нс вызывает ток смещения 1 мА/пФ.
Если изменяющийся магнитный поток, вызванный протеканием тока в
одной схеме, проникает в другую схему, он наводит в ней э.д.с. Подобная
взаимная индуктивность может являться путем проникновения шумов из
схем с высокими значениями dl/dT. Например, при взаимной индуктивно-
сти 1 нГн изменение тока 1 А/нс наводит э.д.с. 1 В.
Снижение шума общего импеданса
Шаги, которые необходимо предпринять для исключения или снижения
шума, вызванного путями прохождения сигнала с общим импедансом, или
шума общего импеданса (common-impedance noise), перечислены на рис. 9.123.
Эти методы должны применяться совместно со всеми относящимися к
данному вопросу методами, которые обсуждались ранее в подразд. 9.2.
9.6. Вопросы электромагнитных/радиочастотных помех
• Шум общего импеданса:
— обеспечьте развязку выводов питания операционного усилителя по НЧ и ВЧ;
— уменьшите общий импеданс;
— исключите общие пути прохождения.
• Методы:
— низкоимпедансные электролитические (НЧ) и локальные низкоиндуктивные (ВЧ) —
развязывающие конденсаторы;
— используйте земляные слои и слои питания;
— оптимизируйте конструкцию системы.
Рис. 9.123. Некоторые пути решения проблемы шума общего импеданса
Хорошими примером проблемы общего импеданса является примене-
ние шин питания для распределения мощности по нескольким схемам.
Реальные источники питания могут обладать низким выходным сопротив-
лением, а могут и не обладать — это особенно сильно зависит от частоты.
Более того, проводники ПП, используемые для распределения питания,
являются и индуктивными, и резистивными и также могут образовывать
паразитные контуры на заземление. Применение земляных слоев и слоев
питания уменьшает импеданс цепи распределения питания. Эти выделен-
ные проводящие слои ПП являются непрерывными (в идеале) и, следова-
тельно, обладают наименьшими возможными сопротивлением и индуктив-
ностью.
В некоторых задачах, где малые сигналы передаются на фоне высоких
шумов общего импеданса, предотвращение помех является невозможным,
и может понадобиться изменить архитектуру системы. Возможные измене-
ния включают в себя:
1) передачу сигналов в дифференциальном виде;
2) усиление сигналов до более высоких уровней для улучшения отношения
сигнал/шум;
3) преобразование сигналов в токи для передачи;
4) преобразование сигналов непосредственно в цифровой вид.
Шум, наводимый помехой в ближней зоне
Вторым наиболее распространенным видом помех являются перекрестные
помехи (crosstalk). Вблизи от источника шума, т. е. в ближней зоне, помеха
распространяется не как электромагнитная волна, и к сигналам, передава-
емым через индуктивную или емкостную связь, может применяться термин
«перекрестные помехи».
Уменьшение шума,
вызванного емкостными связями
Шум, вызванный емкостной связью, может быть уменьшен за счет умень-
шения взаимной емкости (увеличения расстояния между проводниками),
однако наиболее просто он устраняется экранированием. Проводящий за-
земленный экран (электростатический экран) между источником сигнала и
узлом, подверженным его влиянию, устраняет данный шум, направляя ток
смещения непосредственно на «землю».
Глава 9. Методы проектирования аппаратуры
Необходимо отметить, что электростатический экран всегда необходи-
мо заземлять. Неподключенный или разомкнутый экран почти всегда уве-
личивает шум, вызванный емкостными связями. Краткий обзор этого ме-
тода экранирования см. в подразд. 9.2 ив2,3.
На рис. 9.124 приведен обзор методов, позволяющих исключить поме-
ху, вызванную емкостными связями.
• Уменьшите уровень сигнала в источнике шума с высоким dV/dt.
• Используйте подходящие схемы заземления экранов кабелей.
• Уменьшайте паразитную емкость:
— балансируйте длины входных контактов;
— используйте короткие проводники;
— используйте схемы разводки сигналов: «сигнал над землей», «сигнал рядом с об-
ратным сигналом»;
— для защиты от электрических полей используйте заземленные проводящие элект-
ростатические экраны.
Рис. 9.124. Методы уменьшения шума, вызванного емкостными связями
Снижение шума,
вызванного магнитными связями
На рис. 9.125 приведен обзор методов, позволяющих исключить помеху,
вызванную магнитными полями.
Чтобы проиллюстрировать эффект шума, вызванного магнитной свя-
зью, рассмотрим схему с площадью замкнутого контура А см2, работающую
в магнитном поле со среднеквадратичным значением магнитной индукции,
равным В гауссов. Шумовое напряжение И, наводимое в этой схеме, может
быть описано следующим выражением:
К = 2nfBA cos В х 10-8 В. (9.12)
В этом выражении f — это частота магнитного поля, а в — угол магнитного
поля В по отношению к схеме с площадью контура А. Магнитная связь
может быть уменьшена путем уменьшения площади контура схемы, напря-
женности магнитного поля или увеличением угла падения. Уменьшение
площади контура схемы требует взаимного сближения проводников схемы.
Скручивание проводников уменьшает суммарную площадь контура. При
• Внимательно выполняйте разводку проводных межсоединений.
• Для экранирования ВЧ магнитных полей используйте проводящие экраны.
• Для экранирования НЧ магнитных полей используйте экраны из материала с высокой
магнитной проницаемостью (мю-металла).
• Уменьшайте площадь контуров в приемнике:
— выполняйте проводные межсоединения витыми парами;
— оптимизируйте физическое размещение проводов;
— оптимизируйте ориентацию схемы по отношению к помехе.
• Уменьшайте источники шума:
— выполняйте проводные межсоединения витыми парами;
— используйте возбуждаемые экраны.
Рис. 9.125. Методы уменьшения шумов, вызванных магнитными связями
9.6. Вопросы электромагнитных/радиочастотных помех 949
этом подавляются наводки магнитного поля, так как сумма положительно-
го и отрицательного приращений площадей контура в идеале равна нулю.
Непосредственное уменьшение напряженности магнитного поля может быть
сложной задачей. Однако, так как напряженность магнитного поля обратно
пропорциональна расстоянию от источника в третьей степени, физическое
удаление схемы от источника магнитного поля может привести к значи-
тельному уменьшению напряжения наводимого шума. И наконец, разме-
щение схемы перпендикулярно магнитному полю минимизирует наводки.
Если проводники в схеме расположены параллельно магнитному полю,
наводимый шум максимален, так как угол падения равен нулю.
Также существуют методы, которые могут использоваться для умень-
шения количества помех, вызванных магнитным полем, в его источнике.
В предыдущем параграфе отмечалось, что скручивание проводников в схе-
ме приемника подавляет наводимое в проводах магнитное поле. Тот же
способ может использоваться и при выполнении проводных межсоедине-
ний в источнике. Если источником магнитного поля являются большие
токи, протекающие в близкорасположенных проводниках, эти провода мо-
гут быть скручены в целях снижения суммарного магнитного поля.
Экраны и металлические крышки не столь эффективны против магнит-
ных полей, как против электрических, однако они могут быть полезны в
ряде случаев. На низких частотах магнитные экраны из материала с высо-
кой магнитной проницаемостью, такого как мю-металл, могут обеспечить
умеренное ослабление магнитных полей. На высоких частотах достаточно
эффективными являются простые проводящие экраны, при условии что
толщина экрана больше глубины скин-слоя используемого проводника
(на рабочей частоте). Обратите внимание — глубина скин-слоя меди равна
6,6/77 см, где f имеет размерность герц.
Пассивные компоненты — ваш арсенал
против электромагнитных помех
Пассивные компоненты, такие как резисторы, конденсаторы и катушки
индуктивности, при правильном их применении являются эффективными
средствами уменьшения наводимых внешними источниками помех.
Простые ЛС-цепочки являются эффективными и недорогими однопо-
люсными низкочастотными фильтрами. Поступающий шум преобразуется
в тепло и рассеивается резистором. Однако отметим, что постоянные рези-
сторы сами являются источниками теплового шума. Также такой резистор
(резисторы), при использовании во входной цепи операционного или из-
мерительного усилителя, может вызывать напряжение смещения, наводи-
мое входным током смещения. Несмотря на то что согласование двух рези-
сторов минимизирует смещение по постоянному току, шум все равно оста-
ется. На рис. 9.126 приведен обзор некоторых популярных низкочастотных
фильтров для минимизации электромагнитных помех.
В приложениях, где сигнальные и возвратные проводники имеют сла-
бую магнитную связь, для увеличения их взаимной индуктивности могут
Глава 9. Методы проектирования аппаратуры
Тип НЧ-фильтра Преимущества Недостатки
ЯС-цепочка Простой Недорогой Тепловой шум резистора Падения напряжения lBR -э смещение Однополюсный
LC-цепочка Очень малый шум на НЧ Очень малое падение напряжения IR Недорогой Двухполюсный Средняя сложность Возможны нелинейные явления в сердечнике
лг-цепочка (C-L-C) Очень малый шум на НЧ Очень малое падение напряжения IR Выпускаются в виде готового изделия Многополюсный Наиболее сложный Возможны нелинейные эффекты в сердечнике Дорогой
Рис. 9.126. Использование фильтров на пассивных компонентах для борьбы с электро-
магнитными помехами
использоваться синфазные {СМ) дроссели. Заметьте, что это замечание в
большей степени касается измерительных усилителей, на которые обычно
подаются симметричные сигналы (в отличие от операционных усилителей,
входные сигналы которых несимметричны, за исключением ситуаций, ког-
да на их базе строятся измерительные усилители). Синфазный дроссель
может быть легко получен путем намотки дифференциальных сигнальных
проводников вокруг ферритовой шайбы с высокой магнитной проницае-
мостью (>2000) в несколько оборотов. Магнитные свойства феррита позво-
ляют пропускать дифференциальные токи без ослабления, подавляя при
этом синфазные токи.
Также до дросселя и после него могут использоваться конденсаторы,
которые обеспечивают дополнительную фильтрацию синфазных и диффе-
ренциальных токов соответственно. Подобные синфазные дроссели явля-
ются недорогими и за счет низкого сопротивления проводов по постоянно-
му току имеют низкий тепловой шум и малый сдвиг, вызванный током
смещения. Однако вокруг сердечника присутствует поле, и для предотвра-
щения наводок на другие схемы может потребоваться экранировать его
металлическим экраном. Также отметим, что следует не допускать протека-
ния через дроссель больших токов во избежание насыщения феррита.
Третий метод пассивной фильтрации заключается в применении гото-
вых р-цепочек (C-Z-C). Такие готовые фильтры полностью самодостаточ-
ны и содержат проходные {feedthrough) конденсаторы на входе и выходе, а
также экран, предотвращающий излучение помех магнитным полем про-
водника. Они являются более дорогостоящими, обладают высокими уров-
нями ослабления и широкими диапазонами рабочих частот, однако фильт-
ры должны выбираться таким образом, чтобы рабочие токи не вызывали
насыщение феррита.
9.6. Вопросы электромагнитных/радиочастотных помех 951
Снижение чувствительности системы
к электромагнитным помехам
Ранее в данном разделе при обсуждении общих примеров и методов были
выявлены процедуры, которые могут применяться для снижения или ис-
ключения электромагнитных/радиочастотных помех. Перечень возможных
мер, которые могут рассматриваться как базисные, приведен на рис. 9.127.
• Всегда полагайте, что помеха существует!
• Для защиты от электрических и ВЧ магнитных полей используйте проводящие корпуса.
• Для защиты от НЧ магнитных полей используйте экраны из ц-металла.
• Эффективно экранируйте кабели.
• Используйте проходные конденсаторы и готовые л-фильтры.
Рис. 9.127. Уменьшение восприимчивости системы к электромагнитным/радиочастот-
ным помехам
Другие примеры методов фильтрации, помогающих бороться с электро-
магнитными помехами, будут приведены позже в разделе «Уменьшение
выпрямления высокочастотной помехи в схемах операционных и измери-
тельных усилителей».
В следующем разделе более подробно описываются принципы экрани-
рования.
Обзор концепций заземления
Материал, касающийся концепций заземления, который представлен ниже,
носит обзорный характер. Для получения более подробной информации
заинтересованным читателям следует обратиться к источникам 4-9, приве-
денным в списке литературы в конце главы.
Для эффективного применения концепций заземления необходимо иметь
представление об источнике помехи, среде, окружающей источник, и рас-
стоянии от источника до точки наблюдения (приемника). Если схема рабо-
тает вблизи от источника (в ближней зоне или индукционном поле), то ха-
рактеристики поля определяются источником. Если схема расположена на
удалении (в дальней зоне или излучаемом поле), то характеристики поля
определяются средой распространения.
Схема работает в ближней зоне, если расстояние от нее до источника
помехи меньше Л/2/r, где А — длина волны помехи. Если расстояние меж-
ду схемой и источником помехи больше этого значения, то схема работает
в дальней зоне. Например помеха, вызванная фронтом импульса длитель-
ностью 1 нс, имеет верхнюю частоту приблизительно 350 МГц. Длина
волны сигнала с частотой 350 МГц приблизительно равна 32 дюймам (ско-
рость света приблизительно равна 121/нс). Разделив длину волны на 2 я,
имеем границу между ближней и дальней зонами на расстоянии пример-
но 5 дюймов. Если схема находится на расстоянии ближе 5 дюймов от
источника помехи с частотой 350 МГц, то она работает в ближней зоне
помехи. Если расстояние превышает 5 дюймов, то схема работает в даль-
ней зоне помехи.
Независимо от типа помехи ей соответствует характеристическое (вол-
новое) сопротивление. Характеристическое, или волновое, сопротивление
поля определяется отношением электрической составляющей поля (£) к
магнитной (Я). В дальней зоне отношение электрического поля к магнит-
ному равно характеристическому (волновому) сопротивлению свободного
пространства, Zo = 377 Ом. В ближней зоне волновое сопротивление опре-
деляется природой помехи и расстоянием от ее источника. Если источник
помехи имеет большой ток и низкое напряжение (например, рамочная ан-
тенна или трансформатор сети питания), то доминирует магнитная состав-
ляющая поля, и волновое сопротивление меньше 377 Ом. Если источник
имеет малый ток и высокое напряжение (например, штыревая антенна или
высокоскоростная цифровая схема), то доминирует электрическая состав-
ляющая поля, и волновое сопротивление больше 377 Ом.
Для экранирования чувствительных схем от влияния этих помех могут
применяться проводящие корпуса. Их материалы вносят рассогласование
импеданса (impedance mismatch) по отношению к помехе, так как импеданс
экрана меньше волнового сопротивления падающего поля. Эффективность
проводящего экрана зависит от двух вещей:
1) потерь, вызванных отражением падающей волны от экранирующего
материала;
2) потерь, вызванных поглощением падающей волны в экранирующем
материале.
Величина потерь на отражение зависит от типа помехи и ее волнового
сопротивления. Величина потерь на поглощение не зависит от типа поме-
хи. Она одинакова для излучения в ближней и дальней зонах, равно как для
электрического, так и магнитного поля.
Потери на отражение на стыке двух сред зависят от разницы их характе-
ристических сопротивлений. Для электрических полей потери на отраже-
ние зависят от частоты помехи и от экранирующего материала. Эти потери
могут быть выражены в децибелах и определяются как:
Re (дБ) = 322 + 10 log10
(9.13)
где аг — относительная удельная проводимость экранирующего материала в
сименсах на метр; jur — относительная магнитная проницаемость экраниру-
ющего материала в генри на метр; f — частота помехи; г — расстояние от
источника помехи в метрах.
Для магнитных полей потери также зависят от экранирующего матери-
ала и частоты помехи. Потери на отражение для магнитных полей опреде-
ляются выражением:
Rm (дБ) = 14,6+10 log10
Аг
(9.14)
и для плоских волн (г > /1/2 я) потери на отражение определяются как:
7?пв (дБ) = 168 + 10 log10
(9.15)
9.6. Вопросы электромагнитных/радиочастотных помех 953J)
Вторым механизмом потерь в экранирующих материалах является погло-
щение. Ослабление волны вследствие поглощения определяется выражением:
А (дБ) = 3,34/7^7, (9.16)
где t — толщина экранирующего материала в дюймах. Это выражение го-
дится для плоских волн, электрических и магнитных полей. Так как интен-
сивность излучаемого поля экспоненциально уменьшается с толщиной эк-
ранирующего материала, потери на поглощение на толщине, равной глуби-
не скин-слоя (J), составляют 9 дБ. Потери в децибелах пропорциональны
толщине и обратно пропорциональны глубине скин-слоя, поэтому увели-
чение толщины экранирующего материала повышает эффективность экра-
нирования на высоких частотах.
Потери на отражение для плоских волн в дальней зоне убывают с рос-
том частоты, так как при этом увеличивается импеданс экрана. С другой
стороны, потери на поглощение увеличиваются с ростом частоты, так как
уменьшается глубина скин-слоя. Первичным механизмом экранирования
для электрических полей и плоских волн являются потери на отражение, а
на высоких частотах — потери на поглощение.
Таким образом, адекватное экранирование от высокочастотных помех
могут обеспечить легкие, простые в обращении материалы с высокой про-
водимостью, такие как медь или алюминий. На низких частотах, в свою
очередь, и потери на отражение, и потери на поглощение магнитных полей
малы. Поэтому экранировать схемы от низкочастотных магнитных полей
очень сложно. В таких ситуациях наилучшую защиту обеспечивают матери-
алы с высокой магнитной проницаемостью, обладающие малым магнит-
ным сопротивлением. Они образуют цепь шунтирования магнитного поля,
отводя его от защищаемой схемы.
Подведем итог обзора характеристик металлических материалов, тради-
ционно применяемых для экранирования. Используйте металлы с высокой
проводимостью для экранирования от ВЧ-помех и металлы с высокой про-
ницаемостью для экранирования от НЧ-помех.
Надлежащим образом экранированный корпус очень эффективен с точки
зрения предотвращения негативного влияния внешних помех на его со-
держимое, а также излучения внутренне генерируемых помех. Однако в
реальности в экране зачастую необходимо иметь отверстия для размеще-
ния ручек регулировки, переключателей, разъемов, а также для обеспече-
ния вентиляции. К сожалению, эти отверстия могут ухудшать эффектив-
ность экранирования, образуя пути проникновения высокочастотной
мехи в оборудование.
Для оценки возможности проникновения внешних полей в корпус
пользуется наибольший размер отверстия (а не полная площадь), так
отверстия ведут себя как щелевые антенны. Для расчета эффективности
экранирования (от утечки или проникновения электромагнитных помех через
отверстия в корпусе) может использоваться выражение:
Эффективность экранирования (дБ) = 20 log101 |,
где Я — длина волны помехи, L — максимальный размер отверстия.
по-
ис-
кан
(9.17)
32—2852
954 Глава 9. Методы проектирования аппаратуры
Максимальное излучение электромагнитной помехи через отверстие
имеет место, когда его наибольшее измерение равно половине длины вол-
ны частоты помехи (эффективность экранирования 0 дБ). Эмпирическое
правило заключается в том, что наибольшее измерение не должно превы-
шать 1/20 длины волны сигнала помехи, так как при этом обеспечивается
эффективность экранирования 20 дБ. Более того, предпочтительнее иметь
несколько маленьких отверстий с каждой стороны корпуса, чем много отвер-
стий с одной стороны. Причина этого заключается в том, что энергия через
отверстия, расположенные с разных сторон, излучается в разных направле-
ниях, и в результате эффективность экранирования не ухудшается. Если
швов и отверстий не избежать, то должны использоваться проводящие уп-
лотнители, экраны и краски по отдельности или в комбинации таким обра-
зом, чтобы ограничить наибольшее измерение любого отверстия на уровне
не более 1/20 длины волны. Любые кабели, провода, разъемы, индикаторы
или элементы управления, проходящие сквозь корпус, должны иметь коль-
цевые металлические экраны, физически привязанные к корпусу в точке
входа. В схемах, в которых применяются неэкранированные кабели/прово-
да, в точке входа в экран рекомендуется использовать фильтр.
Общие вопросы, касающиеся кабелей и экранов
Несмотря на то что это подробно описано во многих источниках, еще раз
заметим, что неправильное использование кабелей и их экранов может вно-
сить значительный вклад и в излучаемую, и в принимаемую помеху. Чтобы
не проводить полного исследования этих вопросов, порекомендуем заинте-
ресованному читателю изучить основы в 2’3’5’6.
Как показано на рис. 9.128, при правильном экранировании кабеля/
корпуса чувствительные схемы и сигналы полностью заключаются в экран
без ухудшения эффективности экранирования.
Как можно видеть на этой схеме, оба корпуса и экран должны быть
соответствующим образом заземлены, в противном случае они могут дей-
ствовать как антенны, ухудшая проблемы, вызванные излучаемой или про-
водимой помехой (а не улучшая).
Экранирующая оболочка А Экранированный Экранирующая оболочка В
сохраняют все внутренние схемы и сигнальные линии
внутри экрана
• Области переходов: 1/20 от длины волны
Рис. 9.128. Экранированные кабели межсоединений являются либо электрически ко-
роткими, либо электрически длинными в зависимости от рабочей частоты
9.6. Вопросы электромагнитных/радиочастотных помех
В зависимости от типа помехи (наводимая/излучаемая, высокочастот-
ная/низкочастотная) правильное экранирование кабеля реализуется по-раз-
ному и очень сильно зависит от его длины. На первом шаге необходимо
определить, является ли кабель электрически длинным или электрически ко-
ротким на интересующей частоте. Кабель считается электрически корот-
ким, если его длина меньше 1/20 длины волны наибольшей частоты поме-
хи. В противном случае он считается электрически длинным. Например, на
частоте 50/60 Гц электрически коротким является любой кабель, длина ко-
торого меньше 150 миль, где первичными механизмами паразитных связей
для низкочастотных электрических полей являются емкостные связи. По
существу, для любого кабеля длиной менее 150 миль амплитуда помехи
будет одинакова по всей длине кабеля.
В задачах, где кабель является электрически длинным или требуется
защита от высокочастотной помехи, предпочтительным методом является
подключение экрана кабеля с обоих концов к низкоимпедансным точкам.
Как мы вскоре увидим, это может быть непосредственное соединение на
передающем конце и емкостное соединение — на приемном. Если оставить
кабель незаземленным, то линия передачи будет не согласована, что может
вызвать в нем отражения и стоячие волны. На частотах 10 МГц и выше для
выполнения низкоимпедансных связей с заземлением требуется использова-
ние кольцевых (360°) экранирующих соединителей и металлических разъемов.
Подведем итог. Для защиты от низкочастотной (<1 МГц) помехи, выз-
ванной электрическим полем, достаточно заземления кабеля с одного кон-
ца. Для высокочастотной помехи (>1 МГц) предпочтительным является за-
земление экрана с обоих концов с использованием 360° кольцевых соеди-
нителей между экраном и разъемом при сохранении неразрывной цепочки
металл-металл между разъемами и корпусом.
Однако на практике непосредственное заземление экрана с обоих кон-
цов имеет один недостаток — при использовании этого метода возникает
низкочастотный контур заземления, как показано на рис. 9.129.
• VN вызывает ток в экране (обычно 50/60 Гц).
• Ошибка дифференциального напряжения возникает на
входе А2, несмотря на то, что:
— выход Д1 точно сбалансирован;
— вход А2 точно сбалансирован и
— кабель точно сбалансирован.
Рис. 9.129. Контуры заземления в экранированном кабеле на витой паре могут вызвать
ошибки
Когда две системы удалены друг от друга, между потенциалами их точек
заземления обычно имеется разностное напряжение, В общем случае,
частота разностного напряжения равна частоте сети питания (50 или 60 Гц)
и ее гармоникам. Однако если экран непосредственно заземлен с обоих
концов, как показано на рисунке, в нем протекает шумовой ток IN. В иде-
ально симметричной системе подавление синфазной помехи бесконечно, и
протекающий ток не вызывает дифференциальную ошибку в приемнике Аг
Однако в реальности достичь идеальной симметрии драйвера, его импедан-
са, кабеля или приемника невозможно, поэтому определенная часть тока
экрана проявится на входе Л2 в виде дифференциального шумового сигна-
ла. Ниже иллюстрируются подходящие схемы заземления экранов для раз-
личных ситуаций.
Как отмечено выше, экраны кабелей подвержены как низкочастотным,
так и высокочастотным помехам. Для получения хороших характеристик
необходимо, чтобы экран был заземлен с обоих концов, если кабель явля-
ется электрически длинным по отношению к частоте помехи (что обычно
имеет место при ВЧ-помехах).
На рис. 9.130 показан удаленный пассивный резистивный температур-
ный датчик, соединенный с мостом и схемой преобразования экраниро-
ванным кабелем. В верхней части рисунка показан надлежащий метод эк-
ранирования, заключающийся в заземлении экрана на приемном конце.
Однако по соображениям безопасности может потребоваться, чтобы
удаленный конец кабеля также был заземлен. Если это так, то приемный
конец может быть заземлен через керамический конденсатор (от 0,01 до
0,1 мкФ) с низкой индуктивностью, который будет обеспечивать высокоча-
стотное заземление. Конденсатор пропускает ВЧ-сигналы от экрана на «зем-
лю», но блокирует низкочастотный ток сети, который при этом протекает
только в экране. Этот метод обычно называется гибридным заземлением (hybrid
ground).
Рис. 9.130. Гибридное заземление экранированного кабеля при соединении с пассив-
ным датчиком
9.6. Вопросы электромагнитных/радиочастотных помех
Рис. 9.131. Подача сигнала в симметричный экранированный кабель через симметрич-
ное сопротивление повышает помехоустойчивость при использовании сим-
метричного или несимметричного источника
На рис. 9.131 показан случай активного удаленного датчика и/или дру-
гой электроники. И для балансного (симметричного) драйвера (вверху), и
для несимметричного драйвера (внизу) также подходит схема гибридного
заземления. В обеих ситуациях конденсатор С размыкает низкочастотный
контур заземления, обеспечивая эффективное ВЧ-заземление экранирован-
ного кабеля на приемном конце А2 в правой части рисунка.
Также существует несколько дополнительных моментов, которые необ-
ходимо учесть по отношению к используемым согласующим сопротивле-
ниям источника, Rs. И в случае балансного, и в случае несимметричного
драйвера сигнал, который поступает на симметричную линию, исходит от
суммарного импеданса Rs, который поровну (Rs/2) распределен между дву-
мя плечами витой пары. Для полностью дифференциального драйвера (вер-
хний рисунок) это очевидно, так как к двум комплементарным выходам А{
последовательно подключены резисторы номиналом Rs/2.
Обратите внимание, что с несимметричным драйвером (нижний рису-
нок) по-прежнему используются два резистора Rs/2, последовательно под-
ключенные к каждому из плеч. Здесь резистор заземленного искусственно-
го обратного плеча обеспечивает симметричное подключение к кабелю, за
счет чего увеличивается общая помехоустойчивость системы. Обратите вни-
мание, что эта схема может быть полезна только при использовании в точ-
ке А2 симметричного приемника.
Коаксиальные кабели отличаются от кабелей на витых парах тем, что в
них обратный ток сигнала протекает через экран. По этой причине в идеале
следует заземлить экран на конце источника и оставить его неподключен-
ным в точке дифференциального приемника (А2), как показано в верхней
части рис. 9.132. Но для того, чтобы этот метод работал, необходимо ис-
пользование дифференциального приемника с хорошим подавлением вы-
сокочастотной синфазной помехи.
Глава 9. Методы проектирования аппаратуры
Рис. 9.132. С коаксиальными кабелями могут использоваться как симметричные, так и
несимметричные приемники
Однако приемник может быть и несимметричным (например, стандар-
тный одиночный операционный усилитель). Этот случай показан в нижней
части рис. 9.132, и в данной ситуации единственным выходом является
заземление экрана коаксиального кабеля на обоих концах.
Чувствительность входных каскадов
к выпрямлению радиочастотных помех
Широко известным, но малоизученным явлением в аналоговых ИС являет-
ся выпрямление радиочастотной помехи (RFI rectification), в особенности по
отношению к его проявлениям в операционных и измерительных усилите-
лях. При усилении очень слабых сигналов эти устройства могут детектиро-
вать (выпрямлять) внеполосные ВЧ-сигналы, имеющие большую амплиту-
ду (т. е. радиочастотные помехи). В результате на выходе к полезному сиг-
налу добавляется постоянная составляющая. ВЧ-помехи могут проникать в
чувствительные аналоговые схемы разными способами. Путями проникно-
вения помехи могут являться проводники, входящие в схему и выходящие
из нее. Как обсуждалось ранее, шум на эти проводники может наводиться
по емкостным, индуктивным связям и связям через излучение (радиацион-
ным связям). При этом на входе усилителя наряду с полезным появляются
паразитные сигналы. Их амплитуда может составлять несколько десятков
милливольт, что является проблемой. Поэтому нельзя полагать, что чув-
ствительный усилитель постоянного тока с малой полосой пропускания
всегда подавляет внеполосные паразитные сигналы. В то время как простой
линейный однополюсный фильтр обеспечивает такое подавление, опера-
ционные и измерительные усилители в действительности выпрямляют вы-
сокоуровневые ВЧ-сигналы, что приводит к появлению нелинейностей и
аномальных смещений. В данном разделе обсуждаются методы анализа и
предотвращения выпрямления радиочастотных помех.
Фундаментальные основы: тесты на чувствительность операционных и
измерительных усилителей к выпрямлению высокочастотных помех.
9.6. Вопросы электромагнитных/радиочастотных помех
Почти все входные каскады измерительных и операционных усилите-
лей построены на дифференциальных парах биполярных транзисторов с
эмиттерными связями или полевых транзисторов с истоковыми связями.
В зависимости от рабочего тока устройства, частоты помехи и ее относи-
тельной амплитуды эти дифференциальные пары могут вести себя как вы-
сокочастотные детекторы. Как будет показано, в результате процесса детек-
тирования возникают спектральные составляющие на гармониках частоты
помехи, а также на нулевой частоте. Именно эта детектированная постоян-
ная составляющая помехи сдвигает уровни смещения усилителя, что при-
водит к погрешностям.
Эффект выпрямления высокочастотной помехи в операционных и изме-
рительных усилителях может быть оценен при помощи простых тестовых
схем, как описано в RFI Rectification Test Configuration (Конфигурация теста на
выпрямление радиочастотной помехи) (см. с. 1—38 в 10). В этих тестовых схе-
мах операционный или измерительный усилитель конфигурируется на уси-
ление -100 (операционный усилитель) или 100 (измерительный усилитель),
и постоянная составляющая выходного сигнала измеряется на выходе низко-
частотного фильтра с полосой 100 Гц, за счет чего исключается влияние
других сигналов. В качестве задающего воздействия используется сигнал с
частотой 100 МГц и размахом напряжения 20 мВ. Частота тестового сигнала
выбрана таким образом, чтобы она значительно превышала граничные рабо-
чие частоты тестируемых устройств. При проведении теста оценивается сдвиг
постоянной составляющей выходного сигнала в присутствии задающего воз-
действия. В то время как идеальное значение сдвига постоянной составляю-
щей в данном тесте должно равняться нулю, реальное значение для конкрет-
ного устройства будет отражать его относительную чувствительность к вып-
рямлению радиочастотной помехи. При помощи этого метода могут
тестироваться как устройства на базе полевых, так и устройства на базе би-
полярных транзисторов. Он также работает как для устройств с низкими, так
и для устройств с высокими уровнями тока питания.
При проведении оригинального теста операционных усилителей, пара-
метры которого заданы в 10, в выходном напряжении некоторых устройств с
входными каскадами на полевых транзисторах (ОР80, ОР42, ОР249 и AD845)
не наблюдалось сдвига, для ряда других сдвиг по отношению к входному
напряжению составлял менее 10 мкВ. Для операционных усилителей с вход-
ными каскадами на биполярных транзисторах величина сдвига уменьшалась
с увеличением тока питания устройства. Только в двух устройствах не на-
блюдалось сдвига выходного напряжения (AD797 и AD827), в то время как
в остальных сдвиг по отношению к входному напряжению составлял менее
10 мкВ (ОР200 и ОР297). Можно ожидать, что для других операционных
усилителей при таком тестировании будут получены схожие результаты.
На основании результатов этих тестов можно сделать несколько обоб-
щений относительно выпрямления радиочастотной помехи. Во-первых,
чувствительность устройств обратно пропорциональна току питания; т. е.
устройства, смещенные при низких токах, потребляемых в состоянии по-
коя, обладают большим сдвигом выходного напряжения. Во-вторых, ИС с
входными каскадами на полевых транзисторах менее подвержены вып-
рямлению, чем ИС с входными каскадами на биполярных транзисторах.
Обратите внимание, что эти эффекты не зависят от типа устройства (опе-
рационный или измерительный усилитель). На практике это означает, что
операционные или измерительные усилители с меньшей потребляемой мощ-
ностью более подвержены эффектам выпрямления радиочастотной помехи.
Кроме того, операционные (или измерительные) усилители с входными
каскадами на полевых транзисторах менее подвержены выпрямлению ра-
диочастотной помехи, в особенности те, которые работают с большими
токами питания.
На основании этих данных и исходя из фундаментальных различий между
биполярными и полевыми транзисторами мы можем подвести итог. Рабо-
той биполярного транзистора управляет ^-«-переход с прямым смещением
(переход база—эмиттер), I— К-характеристика которого является экспонен-
циальной и достаточно нелинейной. Полевой транзистор, с другой сторо-
ны, управляется напряжениями, прикладываемыми к обратносмещенному
диоду ^-«-перехода (переход затвор—исток). I— И-характеристика полевого
транзистора подчиняется квадратичному закону и, следовательно, более
линейна, чем аналогичная характеристика биполярного транзистора.
В устройствах с меньшими токами питания токи смещения транзисто-
ров в схеме значительно меньше токов коллекторов при максимальных fr
Несмотря на то что ИС могут производиться по технологиям, при которых
значения fT могут достигать сотен мегагерц, времена переноса зарядов воз-
растают, когда транзисторы работают с низкими уровнями токов. Приме-
няемые в таких ИС величины импедансов еще более ухудшают эффекты
выпрямления радиочастотной помехи. В маломощных операционных уси-
лителях полные сопротивления имеют порядок от сотен до тысяч килоом, в
то время как в устройствах с умеренным током питания полное сопротив-
ление не превышает нескольких килоом. Вместе эти факторы приводят к
увеличению чувствительности малопотребляющих устройств к выпрямле-
нию высокочастотной помехи.
На рис. 9.133 приведен обзор общих наблюдений относительно чув-
ствительности к выпрямлению радиочастотной помехи, которые касаются
и операционных, и измерительных усилителей.
• Устройства с входными каскадами на биполярных транзисторах «охотно» выпрямля-
ют радиочастотные помехи.
— переход Б—Э с прямым смещением;
— экспоненциальная /—^-характеристика.
• Устройства с входными каскадами на полевых транзисторах менее чувствительны к
выпрямлению:
— обратносмещенный р-л-переход;
— квадратичная I— ^-характеристика.
• Устройства с низким и высоким / питания:
— малый /питания => высокая чувствительность к выпрямлению;
— большой /питания => низкая чувствительность к выпрямлению.
Рис. 9.133. Некоторые общие наблюдения относительно чувствительности входных
каскадов операционных и измерительных усилителей к выпрямлению ра-
диочастотной помехи
9.6. Вопросы электромагнитных/радиочастотных помех
96JJ
Аналитический подход:
выпрямление радиочастотных помех
в биполярном транзисторе
Лабораторные эксперименты могут показать, что устройства с входными
каскадами на биполярных транзисторах обладают большей чувствительно-
стью к выпрямлению радиочастотной помехи, чем устройства с входными
каскадами на полевых транзисторах. Для объяснения этого явления можно
воспользоваться более аналитическим подходом.
Разработчикам ВЧ-схем давно известно, что диоды р-л-переходов явля-
ются эффективными выпрямителями вследствие их нелинейных /—И-ха-
рактеристик. Спектральный анализ выходного тока биполярного транзис-
тора при ВЧ-входном сигнале показывает, что по мере того, как смещение
устройства приближается к точке излома I— И-характеристики, нелиней-
ность возрастает. Это, в свою очередь, повышает эффективность детектора.
Это особенно характерно для малопотребляющих операционных усилите-
лей, в которых входные транзисторы смещены при очень малых токах кол-
лекторов.
Анализ выпрямления для тока коллектора полевого транзистора был
дан в 10 и здесь повторяться не будет, за исключением важных выводов. Из
этих результатов следует, что исходный квадратичный член второго поряд-
ка может быть упрощенно записан в виде члена, зависящего от частоты, Dic
(АС), на удвоенной входной частоте и постоянного члена, Dic(DC). Второй
компонент может быть выражен в виде выражения (9.18), окончательной
форме выпрямленной постоянной составляющей:
Az'c(/)c)=[^j (9.18)
Это выражение показывает, что постоянная составляющая члена второго
порядка прямо пропорциональна квадрату амплитуды ВЧ-шума И, а так-
же току коллектора транзистора в состоянии покоя 1С. Для иллюстрации
этого момента отметим, что изменение постоянной составляющей тока
коллектора транзистора, работающего с /с = 1 мА, за счет паразитного
высокочастотного сигнала с размахом напряжения 10 мВ составляет при-
мерно 38 мкА.
Уменьшение количества выпрямленного тока коллектора достигается
уменьшением тока покоя или уровня помехи. Так как в операционных и
измерительных усилителях редко имеется возможность регулировки токов
коллектора в состоянии покоя, лучшим (и почти всегда единственным) ре-
шением является уменьшение уровня помехи, К. Например, при уменьше-
нии уровня помехи в 2 раза (до 5 мВ) выпрямленный ток коллектора умень-
шается в 4 раза. Это наглядно иллюстрирует необходимость держать пара-
зитные ВЧ-сигналы подальше от входов усилителей, чувствительных к
радиочастотным помехам.
Глава 9. Методы проектирования аппаратуры
Аналитический подход:
выпрямление радиочастотных помех
в полевом транзисторе
Анализ выпрямления тока стока в JFETтакже был представлен в 10 и здесь
повторно даваться не будет. Для анализа тока стока полевого транзисто-
ра как функции малого напряжения И, приложенного к его затвору, был
использован схожий подход. Результаты оценки выпрямленного члена
второго порядка для тока стока полевого транзистора даны в виде выра-
жения (9.19). Как и для биполярного транзистора, в случае полевого тран-
зистора член второго порядка имеет переменную и постоянную составляю-
щие. Здесь приводится упрощенное выражение для постоянной составля-
ющей выпрямленного тока стока, где она прямо пропорциональна квадрату
амплитуды сигнала помехи, И. Выражение (9.19) также раскрывает важ-
ное различие между степенями выпрямления в биполярных и полевых тран-
зисторах:
А/’р(2)С)
I Dss
2
(9.19)
В то время как в биполярном транзисторе изменение тока коллектора
непосредственно связано с уровнем тока коллектора в состоянии покоя,
изменение тока стока в JFET пропорционально току стока при нулевом
напряжении затвор—исток, IDss и обратно пропорционально квадрату на-
пряжения отсечки канала, И, — параметрам, которые зависят от геометрии
и технологии. Обычно JFET, которые используются в входных каскадах
измерительных или операционных усилителей, смещены при токе покоя
порядка 0,5 х IDss. Поэтому изменение тока стока JFET не зависит от тока
стока в состоянии покоя и, следовательно, не зависит от рабочей точки.
На рис. 9.134 приведено количественное сравнение выпрямленных по-
стоянных членов второго порядка для биполярных и полевых транзисторов.
В этом примере биполярный транзистор с единичной площадью эмиттера
576 мкм2 сравнивается с JFETединичной площади, работающим с IDss = 20 мкА
и напряжением отсечки 2 В. Каждое из устройств смещено током 10 мкА и
работает при ТА = 25 °C.
• BJT (БТ):
Площадь эмиттера = 576 мкм2
1С = 10 мкА
VT = 25,68 мВ, 25 °C
f vx f lc V2
A/r = — x—= ——
c ) 4 264
• JFET (ПТ):
lDSS = 20 mkA(Z//_ = 1)
Vp = 2 В
lD = 10 мкА
/pss. /pssVx2
D (vj 2 400X103
• Заключение: БТ приблизительно в 1500 раз более чувствителен чем ПТ
Рис. 9.134. Сравнение относительной чувствительности биполярных транзисторов и
JFET и полевых с управляющим р-и-переходом
9.6. Вопросы электромагнитных/радиочастотных помех 963
Важным результатом является то, что при идентичных уровнях тока по-
коя изменение тока коллектора в биполярных транзисторах примерно в
1500 раз больше, чем изменение тока стока JFET. Этим объясняется, почему
усилители с входными каскадами на полевых транзисторах менее чувстви-
тельны к возбуждающим ВЧ-воздействиям с большой амплитудой. В резуль-
тате они обладают большей устойчивостью к выпрямлению радиочастотной
помехи.
Из всего этого можно сделать следующий вывод. Так как пользователь
очевидным образом не имеет доступа к внутренним цепям усилителя, зада-
ча защиты ИС от негативного воздействия радиочастотной помехи возлага-
ется в основном на внешние средства.
Проведенный выше анализ показал, что независимо от типа усилителя
выпрямление радиочастотной помехи прямо пропорционально квадрату ампли-
туды сигнала помехи. Поэтому для минимизации выпрямления высокочас-
тотной помехи в прецизионных усилителях необходимо понизить уровень
помехи или исключить ее полностью до ее проникновения в входной каскад.
Наиболее прямым методом ослабления или исключения помех является
использование подходящей схемы фильтрации.
Эта тема обсуждается в следующем разделе.
Уменьшение эффекта выпрямления
радиочастотной помехи в схемах
на операционных и измерительных
усилителях
Электромагнитные и радиочастотные помехи могут серьезно влиять на ста-
тические характеристики аналоговых схем с высокой точностью. Из-за срав-
нительно малой полосы пропускания прецизионные операционные и изме-
рительные усилители просто неспособны точно усиливать ВЧ-сигналы в ме-
гагерцовом диапазоне. Однако при проникновении таких внеполосных
сигналов в прецизионный усилитель через его входные, выходные выводы
или выводы питания они могут внутренне детектироваться (выпрямляться)
различными ^-«-переходами усилителя, что вызывает нежелательное смеще-
ние постоянной составляющей выходного сигнала. В приведенном ранее те-
оретическом обсуждении этого явления были показаны его основные меха-
низмы. Следующим шагом является рассмотрение вопросов минимизации
или исключения подобных ошибок за счет подходящей схемы фильтрации.
На протяжении всей данной главы мы обсуждали, как правильная раз-
вязка по питанию минимизирует радиочастотные помехи на выводах пита-
ния ИС. По отношению к входам и выходам усилителя требуется более под-
робное обсуждение на уровне устройства. На данном этапе предполагается,
что методы снижения электромагнитных/радиочастотных помех системного
уровня, такие как использование корпусов, непроницаемых для радиочас-
тотной помехи, правильно заземленные экраны, фильтрация шин питания и
т. д., уже реализованы. Дальнейшие шаги могут рассматриваться как предот-
вращение элекгромагнитных/высокочастотных помех на уровне схемы.
Глава 9. Методы проектирования аппаратуры
Входы операционных усилителей
Лучшим способом предотвращения выпрямления во входном каскаде, как
показано на рис. 9.135, является применение низкочастотного фильтра,
расположенного близко к входу операционного усилителя. В случае инвер-
тирующего операционного усилителя, показанного слева, конденсатор филь-
тра С помещен между двумя резисторами с равными номиналами 7?,—Rr
При этом граничная частота фильтра определяется простым выражением,
приведенным в нижней части рисунка. Усиление замкнутого контура схемы
на очень низких частотах или по постоянному току равно — RJtR' + /?2).
Обратите внимание, что конденсатор С не может непосредственно подклю-
чаться к инвертирующему входу операционного усилителя, так как это вызо-
вет нестабильность. Для минимизации ослабления сигнала ширина полосы
фильтра может быть выбрана в 100 раз больше ширины полосы сигнала.
Рис. 9.135. Простые фильтры электромагнитных/радиочастотных помех для операци-
онных усилителей
В случае неинвертирующего усилителя, показанного справа, конденса-
тор С может быть непосредственно подключен к входу операционного уси-
лителя, и входной резистор с номиналом R дает то же значение граничной
частоты, что и в случае инвертирующего усилителя. В обоих случаях следу-
ет использовать «чиповые» конденсаторы с малой индуктивностью, напри-
мер, керамические типа NP0. В любом случае конденсатор не должен вно-
сить потери или иметь большой коэффициент напряжения, поэтому воз-
можные типы конденсаторов ограничиваются уже упомянутым NP0 и
пленочными.
Следует отметить, что вместо может использоваться ферритовая шайба,
однако она имеет слабоконтролируемый импеданс, который обычно не
превышает 100 Ом на частотах от 10 до 100 МГц. При этом для ослабления
низких частот потребуется конденсатор большого номинала.
Входы измерительных усилителей
Прецизионные измерительные усилители особенно чувствительны к ошиб-
кам смещения постоянной составляющей, вызванным присутствием син-
фазной электромагнитной/радиочастотной помехи. Эта проблема во мно-
гом похожа на аналогичную проблему в операционных усилителях. И, как
и в случае операционных усилителей, большей чувствительностью к элект-
9.6. Вопросы электромагнитных/радиочастотных помех
ромагнитным/радиочастотным помехам обладают измерительные усилите-
ли, потребляющие меньшую мощность.
На рис. 9.136 показан общий подход к фильтрации на уровне устрой-
ства в схемах измерительными усилителями. Показанный в схеме измери-
тельный усилитель может в принципе быть любым из многих измеритель-
ных усилителей. Предшествующий измерительному усилителю сравнительно
сложный симметричный 7?С-фильтр выполняет всю высокочастотную филь-
трацию. Измерительный усилитель может быть запрограммирован на тре-
буемое значение коэффициента усиления при помощи резистора, задаю-
щего усиление (на схеме не показан).
rDIFF Гсм
r,*c,=r2*c2
R} = R2 должны быть 1 %-ные резисторы
С, = С2 должны быть не более чем 5 %-ные конденсаторы
Полоса дифференциального фильтра =-J--=,
Рис. 9.136. Стандартный 7?С-фильтр подавления синфазных/дифференциальных элек-
тромагнитных/радиочастотных помех в измерительных усилителях
Обратите внимание, что фильтр обеспечивает полностью симметрич-
ную фильтрацию как для синфазных (Rl—Cl и R2— С2), так и для дифферен-
циальных сигналов (R— R^ и С3 параллельно последовательному соедине-
нию Сх и С2). Если R— R2 и С-С2 не очень хорошо согласованы, часть
входного синфазного сигнала, присутствующего на Их, будет преобразова-
на в дифференциальный сигнал на входах измерительного усилителя. По
этой причине номиналы €\ и С2 должны быть согласованы в пределах 5 %.
Также для улучшения согласования в качестве и R2 следует использовать
металлопленочные 1 %-ные резисторы. Предполагается, что сопротивления
источников со стороны зажимов Ивх малы по сравнению с 7^—R2 и согласо-
ваны. Для подавления паразитных дифференциальных сигналов, возника-
ющих из-за преобразования синфазного напряжения в дифференциальное,
которое вызвано рассогласованием временных констант Rl—Cl и R2—Cv
номинал С3 должен быть больше номиналов Сх или С2 (С3 > Ср С2).
Полная ширина полосы фильтра должна, по меньшей мере, в 100 раз
превышать ширину полосы входного сигнала. Для оптимальной работы
компоненты фильтра следует симметрично монтировать на ПП с заземля-
ющей поверхностью большой площади и размещать близко к входам изме-
рительного усилителя.
На рис. 9.137 показано семейство подобных фильтров, которые подхо-
дят для различных измерительных усилителей. Номиналы компонентов
Глава 9. Методы проектирования аппаратуры
AD620/621/622 4,02 кОм 1 нФ 47 нФ
AD623 10 кОм 1 нФ 22 нФ
AD627 20 кОм 1 нФ 22 нФ
Рис. 9.137. Гибкие /?С-фильтры подавления синфазных и дифференциальных электро-
магнитных/радиочастотных помех могут использоваться с серией AD620,
AD623, AD627 и другими измерительными усилителями
7?С-фильтра для различных ИС показаны в таблице. Указанные значения
компонентов фильтра выбраны с учетом обеспечения разумного баланса
низкой чувствительности к электромагнитным/радиочастотным помехам и
малого увеличения шума (по сравнению с уровнем шума измерительного
усилителя без фильтра).
Для проверки чувствительности данной схемы к электромагнитным/ра-
диочастотным помехам на входные резисторы можно подать синфазный
сигнал с размахом 1 В, как показано на рисунке. Для типичного измери-
тельного усилителя, такого как AD620, работающего с коэффициентом уси-
ления 100, максимальный наблюдаемый в диапазоне 20 МГц сдвиг входно-
го напряжения смещения RTI составил 1,5 мкВ. В примере для AD620 по-
лоса пропускания дифференциальных сигналов равна примерно 400 Гц.
Как показано на рис. 9.138, в качестве более простой однокомпонент-
ной альтернативы пассивным RC-фильтрам для защиты от электромагнит-
ных/радиочастотных помех могут использоваться синфазные дроссели.
Рис. 9.138. Простота и наименьший уровень шума фильтра подавления электромаг-
нитных/радиочастотных помех для измерительных усилителей серии AD620
могут обеспечиваться синфазным дросселем
9.6. Вопросы электромагнитных/радиочастотных помех
Помимо того что фильтры на базе дросселей требуют меньшего числа
компонентов, они также обладают меньшим шумом, так как в них не ис-
пользуются резисторы. Однако очень важно подобрать подходящий син-
фазный дроссель. В схеме на рис. 9.138 используется дроссель В4001 про-
изводства Pulse Engineering. Максимальный сдвиг смещения, измеренный
в диапазоне от нулевой частоты до 20 МГц при G = 1000, в показанной
схеме составил 4,5 мкФ. В данном фильтре может использоваться либо
готовый дроссель, наподобие В4001, либо созданный вручную. Так как
важно обеспечить баланс обмотки, рекомендуется использовать бифиляр-
ный провод. И естественно, материал сердечника должен работать во всем
ожидаемом диапазоне частот. Обратите внимание, что в отличие от се-
мейства 7?С-фильтров, показанных на рис. 9.137, фильтр с использовани-
ем только дросселя не обеспечивает фильтрации дифференциальных сигна-
лов. Она может быть дополнительно реализована, если добавить после дрос-
селя второй каскад фильтрации, состоящий из соединения R{ — С3— С2,
показанного на рис. 9.137.
Дополнительную информацию о фильтрации электромагнитных/радио-
частотных помех в измерительных усилителях см. в 10’12-15.
Выходы усилителя
и электромагнитные/радиочастотные помехи
В дополнение к фильтрации входных выводов и выводов питания также
необходимо защитить от электромагнитных/радиочастотных помех выходы
усилителя, особенно если сигнал с них поступает на длинные кабели, кото-
рые могут действовать как антенны. ВЧ-сигналы, принятые на выходной
линии, могут проникать обратно в усилитель, где они ограничиваются и
снова проявляются на выходе в виде сдвига смещения.
Как показано на рис. 9.139 (верхняя схема), простейшим и наименее
дорогим выходным фильтром является резистор и/или ферритовая шайба,
соединенные последовательно с выходом.
Добавление «Т»-цепочки резистор—конденсатор—резистор, как пока-
зано на рис. 9.139 (нижняя схема), улучшает характеристики фильтра при
небольшом его усложнении. Выходной резистор и конденсатор отводят боль-
Резистор
или ферритовое кольцо
или оба вместе
Т-образный ЯС-фильтр
Рис. 9.139. Выходы операционных и измерительных усилителей должны быть защище-
ны от электромагнитных/радиочастотных помех, в особенности если сиг-
нал с них подается на длинные кабели
шую часть высокочастотной энергии от усилителя, что делает данную кон-
фигурацию полезной для маломощных активных устройств. Естественно,
необходимо осторожно подбирать временные константы частей фильтра,
чтобы минимизировать любое ухудшение полезного выходного сигнала.
В этом случае 7?С-компоненты выбираются с расчетом на приблизительную
ширину полосы 3 МГц, что подходит для измерительных усилителей или
других каскадов с малой полосой пропускания.
Конструирование ПП с учетом защиты
от электромагнитных/радиочастотных помех
В этом разделе приводится итоговый обзор общих моментов, касающихся
электромагнитных/высокочастотных помех по отношению к разводке ПП.
Он дополняет описание общих методов конструирования печатных плат,
приведенное ранее в данной главе.
Если ПП не оптимизирована в плане электромагнитных/высокочастот-
ных помех, возможно ухудшение характеристик системы. Это справедливо
не только для характеристик сигнального тракта, но и с точки зрения вос-
приимчивости системы к электромагнитным помехам, а также степени из-
лучаемых системой электромагнитных помех. Некачественная разводка ПП
с большой степенью вероятности приводит к возникновению проблем ЭМС
системы/прибора.
Подытожим ранее отмеченные в этом разделе моменты: в реальной
разводке ПП может существовать много путей, через которые высокочас-
тотный шум может проникать в схему и/или излучаться ею. Это особенно
справедливо для цифровых схем, работающих с высокими скоростями
изменения фронтов (edge rates). Именно быстрое изменение логического
состояния (1 => 0 или 0 => 1), или скорость изменения фронтов, содержит
ВЧ-энергию, которая с легкостью излучается в виде электромагнитных
помех. Несмотря на то что аналогичные утверждения распространяются и
на прецизионные высокоскоростные аналоговые или смешанные анало-
го-цифровые схемы, логические устройства являются самым серьезным
потенциальным источником электромагнитных помех. Определение кри-
тических схем и трактов помогает конструировать ПП, обладающие как
низким уровнем излучений, так и малой восприимчивостью к источникам
излучаемых и проводимых внешних и внутренних шумов.
Осторожно выбирайте логическое устройство!
Говоря о логических семействах, ключевым моментом для минимизации
проблем с шумами в системе является выбор устройства, не более быстро-
го, чем в действительности необходимо в схеме. Многие разработчики по-
лагают, что более быстрые устройства всегда лучше — быстрая логика
всегда лучше медленной, усилители с большой полосой лучше усилителей
с малой полосой и быстрые АЦП и ЦАП лучше, даже если скорость в
системе не требуется. К сожалению, быстрый не значит лучший, и, в дей-
ствительности, быстрое устройство может быть хуже с точки зрения элек-
тромагнитных помех.
9.6. Вопросы электромагнитных/радиочастотных помех 969
Многие быстрые АЦП и ЦАП имеют цифровые входы и выходы со
скоростями изменения фронтов в районе 1 В/нс. Из-за столь широкой
полосы цифровые входы и выходы тактового сигнала дискретизации мо-
гут реагировать на высокочастотный шум любой формы, даже на пиковые
выбросы длительностью всего 1—3 нс. Поэтому подобные высокоскорос-
тные преобразователи данных и усилители легко становятся жертвой вы-
сокочастотных шумов микропроцессоров, цифровых сигнальных процес-
соров, двигателей, импульсных стабилизаторов, карманных радиоприем-
ников, электрических отбойных молотков и т. п. Для некоторых таких
устройств может потребоваться некоторая входная/выходная фильтрация,
чтобы уменьшить чувствительность схемы к электромагнитным/радиоча-
стотным помехам. Очень эффективная фильтрация высокочастотного шума
на линиях питания обеспечивается включением ферритовой шайбы не-
посредственно перед локальным развязывающим конденсатором. И есте-
ственно, в схемах с двухполярным питанием этот метод должен использо-
ваться для линий как положительного, так и отрицательного напряжения
питания.
В целях снижения уровня излучений, генерируемых крайне быстро пе-
ремещающимися цифровыми сигналами на входах ЦАП или выходах АЦП,
может потребоваться использование на каждом цифровом входе/выходе
небольшого резистора или ферритовой шайбы.
Проектируйте ПП с умом
Следующим шагом при разработке качественной разводки ПП после выяв-
ления критичных трактов и схем в системе является разбиение ПП на со-
ставные части в соответствии с функциями, выполняемыми схемами. Это
требует правильного использования земляных, сигнальных слоев и слоев
питания. Также в хорошо разведенной ПП критические аналоговые тракты
изолируются от источников сильных помех (например, линий ввода/выво-
да и разъемов). Высокочастотные схемы (аналоговые и цифровые) следует
отделить от низкочастотных. Более того, следует с большой осторожностью
применять программные CAD-средства автоматической разводки сигналов.
Критические сигнальные цепи следует разводить вручную во избежание
нежелательных связей и/или излучений.
Правильно спроектированная многослойная плата позволяет снизить
уровень излучаемых электромагнитных помех и повысить устойчивость к
ВЧ-полям в 10 раз и более по сравнению с двухслойными платами. Приме-
нение многослойных ПП дает возможность использовать под заземляю-
щую поверхность отдельный слой, в то время как на двухслойных ПП за-
земляющая поверхность зачастую имеет разрывы в точках пересечения сиг-
нальных проводников и т. д. Если в системе имеются раздельные поверхности
аналогового и цифрового питания и заземления, поверхность аналогового
заземления должна размещаться под поверхностью аналогового питания, и
аналогичным образом поверхность цифрового заземления должна разме-
щаться под поверхностью цифрового питания. Аналоговые и цифровые за-
земляющие поверхности, а также поверхности аналогового и цифрового
питания не должны перекрываться.
Глава 9. Методы проектирования аппаратуры
Проектирование проводников
с нормированным импедансом на ПП
Существует множество возможных геометрий проводников с нормирован-
ным импедансом, которые могут быть интегрированы в ПП или тесно свя-
заны с ней. Основные геометрии, обсуждаемые ниже, подчиняются стан-
дарту IPC2141 (см.16).
Обратите внимание, что на приводимых ниже рисунках используется
обозначение «заземляющая поверхность». Необходимо понимать, что эта
поверхность в действительности является низкоимпедансной опорной
(reference) поверхностью большой площади. На практике это может быть
либо заземляющая поверхность, либо поверхность питания, и предполага-
ется, что обе они имеют нулевой потенциал по переменному току.
Первой из этих геометрий является простая длинная линия типа провод
над поверхностью (wire-over-a-plane), которая также называется проводным
микрополоском (wire microstrip). На рис. 9.140 показан ее вид в разрезе. Этот
тип линии передачи характерен, например, для сигнального провода, ис-
пользуемого в макете. Она состоит из дискретного провода в изоляции,
находящегося на фиксированном расстоянии от заземляющей поверхнос-
ти. Диэлектриком может быть либо изоляционная оболочка провода, либо
комбинация изоляционной оболочки и воздуха.
ZZZZZZZZZZZZZZZZZZZZZa
Плоскость заземления
Рис. 9.140. Проводная микрополосковая линия передачи с заданным импедансом фор-
мируется изолированным проводом, расположенным на некотором рассто-
янии от заземляющей поверхности
Импеданс такой линии в омах может быть оценен с помощью выраже-
ния:
Z0(Q) = -^=ln
А
47/
D
(9.20)
где D — диаметр проводника; Н — расстояние от провода до поверхности;
£г — диэлектрическая постоянная.
Существует большое количество геометрий линий передачи, интегри-
рованных в ПП, как несимметричных, так и дифференциальных. Они дос-
таточно подробно описаны в стандарте IPC2141 (см. 16). Ниже приводится
описание двух популярных примеров.
Перед тем как начать проектировать любую линию передачи на ПП,
следует осознать, что существует большое количество уравнений, каждое
из которых может использоваться при расчете. В этом контексте очень уме-
стен вопрос: какое из них является точным?. К сожалению, ответ — ни одно
9.6. Вопросы электромагнитных/радиочастотных помех
из них! Все существующие выражения являются аппроксимациями и точны
лишь до определенной степени в зависимости от конкретной ситуации.
Наиболее известными и широко распространенными являются выражения,
приведенные в 16, но даже они имеют ограничения.
В 17 было проведено сравнение результатов выражений из 16 для различ-
ных геометрий с реальными тестовыми ПП и выяснено, что прогнозируе-
мая точность варьируется в зависимости от требуемого импеданса. В 18 так-
же была выполнена оценка выражений из 16 и предложен альтернативный,
и даже более сложный, набор выражений (см. 19). Приводимые ниже урав-
нения взяты из 16. Они предлагаются в качестве отправной точки для расче-
та и требуют дальнейшего анализа, тестирования и верификации результа-
тов. Отсюда вывод: внимательно изучите уравнения для импеданса провод-
ников на ПП и применяйте с определенной долей иронии.
Микрополосковые линии передачи на ПП
В простых двусторонних ПП, где одна сторона представляет собой земля-
ной слой, сигнальный проводник, расположенный на другой стороне, мож-
но спроектировать таким образом, что он будет иметь нормированный им-
педанс. Эта геометрия носит название поверхностного микрополоска (surface
microstrip) или, более просто, микрополоска (microstrip).
Иллюстрация геометрии микрополоска приведена на рис. 9.141, где по-
казан вид двухслойной ПП в разрезе.
Обратите внимание, что при заданном весе меди и типе ламината ПП
все параметры этой геометрии являются фиксированными, за исключени-
ем ширины сигнального проводника W. Для проектирования проводника
ПП, согласованного с необходимым импедансом, можно воспользоваться
выражением (9.21). Для сигнального проводника шириной W и толщиной
Г, отделенного от земляного слоя (или слоя питания) на расстояние Н диэ-
лектриком с диэлектрической проницаемостью ег, характеристический им-
педанс равен:
<9-21)
Обратите внимание, что в этих выражениях все измерения имеют одинако-
вые размерности (mils).
Плоскость заземления
Рис. 9.141. Микрополосковая линия передачи с нормированным импедансом форми-
руется проводником ПП соответствующей геометрии, расположенным на
определенном расстоянии от земляного слоя
Глава 9. Методы проектирования аппаратуры
Подобные линии передачи обладают не только характеристическим им-
педансом, но и емкостью. Она может быть вычислена в единицах пФ/дюйм
по следующей формуле:
Со (пФ/дюйм) = 0,67 +1,41) . (9.22)
0V ’ In [5,9877/(0,8^+Г)]
В качестве примера с использованием приведенных формул рассмот-
рим двухслойную ПП с проводниками шириной (Ж) 20 mil из меди с удель-
ным весом 1 унция (Т= 1,4), отделенными от земляного слоя диэлектричес-
ким материалом /7?-4 (ег = 4,0) на 10 mil (Я) (mil = 0,001 дюйма (~25 мкм). —
Примеч. ред.). Такой микрополосок имеет импеданс 50 W. Для получения
других стандартных импедансов, например 75 Ом (видеостандарт), следует
изменить W(в данном конкретном случае она должна равняться примерно
8,3 mils).
Некоторые общие правила проектирования микрополосков
Данный пример затрагивает один интересный и довольно удобный момент.
В 17 обсуждаются полезные правила относительно импеданса микрополос-
ковых линий на ПП. Для диэлектрической проницаемости 4,0 (F/?-4) ока-
зывается, что, когда W/H = 2, результирующий импеданс близок к 50 Ом
(как в первом примере, где W= 20 mils).
Внимательные читатели отметят, что получаемое на основании выраже-
ния (9.21) значение ZQ составляет примерно 46 Ом, что в общем случае
согласуется с точностью, указанной в 17 (>5 %). Уравнения для микропо-
лосков, приведенные в стандарте IPC, наиболее точны в интервале от 50
до 100 Ом, однако значительно менее точны для более низких (или более
высоких) импедансов. В 20 приводятся табулированные результаты расчетов
для различных стандартных импедансов.
Выражение (9.23) также позволяет определить задержку распростране-
ния микрополосковой линии. Она равна времени прохождения сигнала в
одну сторону по микрополосковому сигнальному проводнику. Интересным
фактом является то, что при заданной модели геометрии постоянная задер-
жки, выраженная в нс/дюйм, является функцией только диэлектрической про-
ницаемости, но не измерений проводника (см.21). Обратите внимание, что это
свойство является весьма удобным. Оно означает, что при конкретном типе
ламината ПП (и конкретном е/ задержка распространения для линий с
различными импедансами постоянна
tpd (нс/дюйм) = 1, 017^/0,475^ +0,67. (9.23)
Эта постоянная задержки также может быть выражена в пс/дюйм, форме,
более полезной для ПП меньших размеров:
tpd (пс/дюйм) = 85^/0,475^ +0,67. (9.24)
Таким образом, для ПП с диэлектрической проницаемостью 4,0 по-
стоянная задержки равна примерно 1,63 нс/дюйм или 136 пс/дюйм.
Эти два дополнительные азбучные правила могут быть полезны при
расчете временных параметров распространения сигналов по провод-
никам ПП.
9.6. Вопросы электромагнитных/радиочастотных помех
Симметричные полосковые линии передачи
на ПП
С многих точек зрения предпочтительным является использование много-
слойных ПП. В таких платах сигнальные проводники заключены между зем-
ляным слоем и слоем питания, как показывает вид в разрезе, приведенный
на рис. 9.142. Низкоимпедансные слои заземления и питания формируют
вместе с сигнальным проводником симметричную полосковую (symmetric
stripline) линию передачи.
Рис. 9.142. Симметричная полосковая линия передачи с нормированным импедансом
формируется проводником ПП соответствующей геометрии, заключенным
между равноудаленными слоями заземления и/или питания
Как видно из рисунка, путь прохождения обратного тока проводника
высокочастотного сигнала пролегает непосредственно над сигнальным про-
водником и под ним в земляном слое/слое питания. Таким образом, высо-
кочастотный сигнал полностью сосредоточен внутри ПП, за счет чего ми-
нимизируются излучения и обеспечивается естественное экранирование от
поступающих паразитных сигналов.
Характеристический импеданс такой конструкции опять-таки зависит
от геометрии и ег диэлектрика ПП. Выражение для расчета Zo полосковой
линии передачи выглядит следующим образом:
7 х 60
Zo (Ом)--п=
4£г
1,95
(0,8 W + Т)
(9.25)
Здесь, как и ранее, все измерения имеют размерность mils (mil = 0,001 дюй-
ма), а В — это расстояние между двумя слоями. Обратите внимание, что для
такой симметричной геометрии В равно 2Н + Т. В 17 указано, что точность
этого выражения, взятого из 16, обычно составляет 6 %.
Другим полезным правилом для микрополосковой линии в случае 8г = 4,0
является то, что для получения импеданса полоска приблизительно 50 Ом
необходимо, чтобы В было в 2—2,2 раза больше W. Это правило получено
дальнейшей аппроксимацией за счет пренебрежения значением Т. Несмот-
ря на это, данное правило полезно для приблизительной оценки.
Симметричный полосок также обладает характеристической емкостью,
которая может быть вычислена в единицах пФ/дюйм с помощью выражения:
1 416^ )
Со (пФ/дюйм) = —F---- ./ г-----. (9.26)
0V 7 ’ 1п[3,81Я/(0,8РГ+Т)]
Глава 9. Методы проектирования аппаратуры
Задержка распространения симметричной полосковой линии равна:
tpd (нс/дюйм) = 1,017^
(9.27)
или, в единицах пс/дюйм:
tpd (пс/дюйм) = 85^. (9.28)
Можно заметить, что для ПП с диэлектрической проницаемостью 4,0
постоянная задержки симметричного полоска почти точно равна 2 нс/дюйм
или 170 пс/дюйм.
Некоторые преимущества и недостатки проводников
во внутренних слоях
Выше обсуждались методы проектирования проводников ПП с нормирован-
ным импедансом, которые расположены в поверхностном слое либо заклю-
чены между слоями. Существует, естественно, много других вопросов, свя-
занных с проектированием проводников с заданным импедансом.
Заключение сигнальных проводников между слоями имеет один основ-
ной и очевидный недостаток: отладка при скрытых проводниках схемы слож-
на до невозможности. Некоторые преимущества и недостатки использова-
ния проводников, заключенных внутри слоев, перечислены на рис. 9.143.
Как показано на левом виде в разрезе, многослойные ПП могут про-
ектироваться без использования сигнальных проводников во внутренних
слоях. Этот случай может рассматриваться как сдвоенная двухслойная ПП
(т. е. содержащая 4 слоя меди). Проводники, разведенные в верхнем слое,
формируют микрополосок со слоем питания, а проводники в нижнем слое —
с земляным слоем. В приведенном примере сигнальные проводники в обо-
их внешних слоях доступны для измерения параметров и поиска неисправ-
ностей. Однако в такой конструкции никак не используются экранирую-
щие свойства слоев заземления и питания.
Дорожки
Заключенные
Не заключенные
Дорожки
Питание
Земля
Питание
Дорожки
Дорожки
Земля
• Преимущества:
— сигнальные проводники экранированы и защищены;
— меньший импеданс и, следовательно, меньший уровень
излучений и перекрестных помех;
— значительное улучшение при частотах выше 50 МГц.
• Недостатки:
— сложность создания прототипов и поиска неисправностей;
— возможны трудности с обеспечением развязки;
— импеданс может быть слишком мал с точки зрения просто-
ты согласования.
Рис. 9.143. Преимущества и недостатки заключения сигнальных проводников между
слоями в многослойных ПП
9.6. Вопросы электромагнитных/радиочастотных помех
Подобная конструкция будет иметь больший уровень излучений и будет
более восприимчива к внешним сигналам по сравнению с конструкцией,
приведенной справа, где проводники заключены внутрь платы и в полной
мере используются все преимущества наличия слоев питания и заземления.
Как и во многих других инженерных задачах, при выборе того, заключать
проводники внутрь ПП или нет, возникает проблема поиска компромисс-
ного варианта; в данном случае — между пониженным уровнем излучений
и простотой тестирования.
Работа с высокоскоростной логикой
Уже много было написано о согласовании нагрузки проводников ПП с их
характеристическим импедансом во избежание отражения. Хорошее пра-
вило относительно необходимости согласования заключается в следующем:
нагружайте линию на ее характеристический импеданс в случае, если задерж-
ка на прохождение сигнала по проводнику ПП в одну сторону больше либо
равна половине времени нарастания/спада (того из них, которое меньше) пе-
редаваемого сигнала. Например, задержка распространения по микрополос-
ковой линии длиной 2 дюйма с диэлектриком, имеющим диэлектрическую
проницаемость Ег = 4,0, равна приблизительно 270 пс. С учетом приведенно-
го выше правила согласование потребуется в случае, если время нарастания
сигнала составляет менее 500 пс. Более консервативный метод заключается
в использовании критерия 2 дюймов (длины проводника ПП) на наносе-
кунду (времени нарастания/спада). Если длина проводника превышает ве-
личину, определенную на основании этого критерия, согласование необхо-
димо.
Например, проводник платы для высокоскоростной логики со време-
нем нарастания/спада в 5 нс должен быть нагружен на свое характеристи-
ческое сопротивление, если его длина больше либо равна 10 дюймам (вклю-
чая все изгибы).
На рис. 9.144 показаны типичные времена нарастания/спада для не-
скольких логических семейств, включая DSP семейства SHARC, работаю-
• GaAs: 0,1 нс
• ESL: 0,75 нс
• ADI SHARC DSPs: от 0,5 нс до 1нс
(работает при питании +3,ЗВ)
Рис. 9.144. Времена нарастания и спада выходных сигналов типичного DSP
Глава 9. Методы проектирования аппаратуры
щие от напряжения питания 3,3 В. Как и следовало ожидать, время нарас-
тания/спада является функцией емкости нагрузки.
Важно отметить, что при работе с аналоговыми схемами (операционны-
ми усилителями и пр.) для определения того, когда необходимо использо-
вать методы длинных линий, также следует руководствоваться правилом
двух дюймов на наносекунду. Например, для максимальной частоты выход-
ного сигнала усилителя, Дах, эквивалентное время нарастания, может
быть найдено по формуле:
К = 0’35//тах. (9.29)
Максимальная длина проводника ПП получается умножением tr на
2 дюйма/нс. Например, максимальная частота 100 МГц соответствует вре-
мени нарастания 3,5 нс; таким образом, проводник, по которому проходит
такой сигнал, длиной 7 дюймов или более должен рассматриваться как длин-
ная линия.
Наилучшим способом уберечь чувствительные аналоговые схемы от вли-
яния быстрой логики является их физическое разделение при разводке ПП
и использование не более быстрых семейств логики, чем требуется в систе-
ме. В некоторых случаях может потребоваться использование в системе
нескольких логических семейств. Альтернативный метод заключается в ис-
пользовании последовательно включенных резисторов или ферритовых шайб
для замедления переходов между логическими уровнями там, где скорость
не требуется. На рис. 9.145 показаны два метода.
В первом варианте последовательный резистор и входная емкость логи-
ческого вентиля образуют НЧ-фильтр. Типичная входная емкость КМОП-
схемы составляет от 5 до 10 пФ. Располагайте последовательные резисторы
как можно ближе к выходу передающего вентиля. Резистор минимизирует
импульсные токи и может избавить от необходимости использования мето-
дов длинных линий. Сопротивление резистора должно выбираться таким
образом, чтобы скорость нарастания/спада на приемном вентиле была до-
статочной, чтобы отвечать требованиям системы, но не больше. Также убе-
дитесь, что сопротивление резистора не настолько велико, чтобы логичес-
Рис. 9.145. Демпфирующие резисторы замедляют быстрые логические переходы, спо-
собствуя уменьшению электромагнитных/радиочастотных помех
9.6. Вопросы электромагнипгных/радиочастотных помех
кие уровни на приемнике могли выходить за рамки спецификаций из-за
падения напряжения, вызванного протеканием через резистор тока от ис-
точника к приемнику. Второй метод подходит при больших расстояниях
(больше 2 дюймов); здесь дополнительная емкость предназначена для за-
медления скорости изменения фронтов. Обратите внимание, что оба мето-
да увеличивают задержку и время нарастания/спада сигнала. Это нужно
учитывать в связи с общим временным бюджетом, где дополнительная за-
держка может быть неприемлема.
На рис. 9.146 показана ситуация, где несколько DSP должны соединять-
ся в одной точке. В данном случае DSP соединены между собой двунаправ-
ленными линиями стробов записи и чтения. Небольшие демпфирующие
резисторы, показанные на рис. 9.146, а, могут минимизировать «звон» при
условии, что расстояние между процессорами не превышает 2 дюймов. Этот
метод также увеличивает время нарастания/спада и задержку на прохожде-
ние. Если необходимо соединить между собой две группы процессоров, то
для подавления звона может использоваться один резистор между парами
процессоров (рис. 9.146, б).
a
Соединение звездой
демпфируется резисторами
Используется для RD, WR стробов
Замечание: эта техника увеличивает
время нарастания/спада и задержку
распространения
б
Одиночный резистор между
прцессорными группами
Рис. 9.146. Соединение высокоскоростных DSPc помощью последовательно включен-
ных демпфирующих резисторов
Единственным способом сохранения времени нарастания/спада, рав-
ного 1 нс или меньше, на расстоянии, превышающем 2 дюйма, без «звона»
является применение методов длинных линий. Рисунок 9.145 иллюстриру-
ет два распространенных метода согласования нагрузки: конечная нагрузка
и нагрузка источника. В методе конечной нагрузки (рис. 9.147, а) кабель
нагружается в точке нагрузки на сопротивление, равное характеристичес-
кому сопротивлению микрополосковой линии. Хотя можно использовать и
более высокое сопротивление, чаще используется 50 Ом, так как при такой
величине уменьшается эффект рассогласования импеданса, вызванный вход-
ной емкостью логического вентиля (обычно 5—10 пФ).
На рис. 9.147, а. кабель нагружен на делитель, представляющий 50-ом-
ную нагрузку для переменного тока и обеспечивающий напряжение +1,4 В
Глава 9. Методы проектирования аппаратуры
(середина между входными логическими порогами 0,8 и 2 В). Такая схема
согласования требует двух резисторов (91 и 120 Ом), что добавляет около
50 мВт к общей рассеиваемой мощности в схеме. На рис. 9.147, а, также
показаны номиналы резисторов нагрузки при напряжении питания +5 В
(68 и 180 Ом). Обратите внимание, что в качестве драйвера линии предпоч-
тительнее использовать 3,3-В логику из-за симметричного размаха напря-
жения, большей скорости и меньшей потребляемой мощности. Имеются
драйверы линий с несимметричностью импульсов менее 0,5 нс, втекаю-
щим/вытекающим током более 25 мА и временем нарастания/спада около
1 нс. Шум переключения от 3,3-В логики обычно меньше, чем от 5-В, из-за
уменьшения размаха сигнала и меньших импульсных токов.
Метод нагрузки источника, показанный на рис. 9.147, 5, обеспечивает
поглощение отраженных волн при помощи сопротивления, равного ха-
рактеристическому сопротивлению линии передачи. Для этого необходи-
мо включить последовательно с внутренним выходным сопротивлением
драйвера, которое обычно составляет около 10 Ом, резистор сопротивле-
нием около 39 Ом. В этом методе требуется, чтобы конец линии был не
нагружен, поэтому дополнительное разветвление по выходу не допускает-
ся. Метод нагрузки источника не увеличивает суммарную рассеиваемую
мощность.
5,0 В
180 Ом
72 мВ
1,4 В
68 Ом
29 мВ
Правило: рассчитывайте как линию передачи, если расстояние
больше 2 дюйма/нс времени нарастания/спада логики
50-омная линия передачи на печатной плате имеет задержку
1 нс/ 7 дюймов
Рис. 9.147. Методы согласования микрополосковых линий передачи с нормирован-
ным импедансом
На рис. 9.148 показан метод распределения высокоскоростных тактовых
импульсов по нескольким устройствам. Проблема здесь заключается в том,
что появляется небольшая расфазировка между импульсами из-за задержки
на прохождение микрополосковой линии (около 1 нс/71). В некоторых случа-
ях время сдвига может быть критичным. Для предотвращения рассогласо-
вания в линии важно, чтобы длина отвода от линии к каждому устройству
не превышала 0,5 дюйма.
9.6. Вопросы электромагнитных/радиочастотных помех
3,3 в
120 Ом
30 мВ
91 Ом
22 мВ
50-омная линия передачи на печатной плате имеет задержку 1 нс/ 7 дюймов
Замечание: поддерживайте длину шлейфа меньше 0,5 дюйма.
Не рекомендуется для синхронных операций в Share ЦСП!
Рис. 9.148. Распределение тактовых сигналов с использованием согласующей нагрузки
на конце линии
В методе, показанном на рис. 9.149, расфазировка тактовых импульсов
между приемными устройствами минимизируется за счет использования
нагрузки источника и обеспечения одинаковой длины каждой микрополос-
ковой линии. Здесь нет дополнительного рассеивания мощности, как в случае
с согласующими резисторами на конце линии.
Рис. 9.149. Предпочтительный метод распределения тактовых сигналов с помощью
согласованных линий
На рис. 9.150 показывается, как метод нагрузки источника может ис-
пользоваться при связи между DSP семейства SHARC по двунаправленным
линк-портам. Выходное сопротивление драйвера DSP семейства SHARC
составляет примерно 17 Ом, и, следовательно, для хорошего согласования
на каждый конец линии передачи требуется включить последовательный
резистор номиналом 33 Ом.
Метод, показанный на рис. 9.151, может использоваться при двунаправ-
ленной передаче сигналов от нескольких источников по сравнительно длин-
ной линии передачи. В этом случае линия нагружается с обоих концов, и
результирующее сопротивление нагрузки по постоянному току составляет
25 Ом. Драйверы DSP семейства SHARC способны обеспечивать коррект-
ные логические уровни на такой нагрузке.
Рис. 9.150. Согласование импеданса источника при двунаправленной передаче данных
между DSP семейства SHARC
Замечание: поддерживайте длину шлейфа меньше 0,5 дюйма.
Не рекомендуется для ТИ синхронных операций в Share ЦСП!
Рис. 9.151. Линия передачи с согласованием с обоих концов
Эмиттерно-связанная логика {ECL, emitter-coupled-logic) получила боль-
шую известность по причине низкого шума и передачи по длинным лини-
ям сигналов с временами нарастания/спада менее 2 нс. Это семейство обес-
печивает постоянную нагрузку для источника питания, а низкоуровневые
дифференциальные выходы обеспечивают высокую степень подавления
синфазной помехи. Однако ЭСЛ-микросхемы рассеивают большую мощ-
ность.
В последнее время широкую популярность завоевал £ИЛ5-формат (tow-
voltage-differential-signaling, передачи дифференциальных низкоуровневых
напряжений). Это вызвано тем, что £Р7)5-логика имеет схожие с ЭСЛ ха-
рактеристики при меньших амплитудах и меньшей рассеиваемой мощнос-
ти. Спецификация LVDS задана в 23; также полезными источниками ин-
формации о L VDS являются 24’25. Логические сигналы стандарта L VDS цен-
трированы относительно синфазного напряжения +1,2 В и имеют типичный
размах 350 мВ. На рис. 9.152 показана типичная конфигурация драйвера и
приемника £И05-сигналов. В 12-разрядном АЦП AD9340 с быстродей-
9.6. Вопросы электромагнитных/радиочастотных помех 981
AD9430 выходной драйвер
V4-
Рис. 9.152. Драйвер и приемник LVDS
ствием 170-/210-MSPS драйвер состоит из источника тока 3,5 мА и />-МОП-
и и-МОП-транзисторов, обеспечивающих переключение полярности. Напря-
жение на каждом из выходов драйвера имеет номинальный размах 350 мВ и
может варьироваться от 247 до 454 мВ. Выходной ток может варьироваться
в диапазоне от 2,47 до 4,54 мА. L И05-приемник нагружается на 100 Ом.
В соответствии со спецификацией L Р7)5-приемник должен реагировать
на сигналы от 100 мВ в диапазоне синфазных напряжений от 50 мВ до
+2,35 В. Широкий диапазон синфазных напряжений приемника допускает
разницу потенциалов между точками заземления приемника и драйвера до
±1 В.
Скорость фронта L Р7)5-сигнала определяется как время нарастания/спада
от 20 до 90 % (в отличие от скорости фронтов КМОП-логики, которая зада-
ется как время нарастания/спада от 10 до 90 %) и должна быть меньше, чем
0,3/w., где tui — величина, обратная скорости передачи сигнала. При частоте
дискретизации 210 MSPS, tui = 4,76 нс и время нарастания/спада от 20 до
80 % должно быть менее 0,3 х 4,76 = 1,43 нс. Номинальное время нараста-
ния/спада AD9430 равно 0,5 нс.
£И05-выходы высококачественных АЦП требуют обращения, отлич-
ного от обращения со стандартными L И05-выходами цифровых логичес-
ких схем. В то время как стандартные выходы L VDS в высокоскоростных
цифровых приложениях позволяют передавать данные на расстояние от 1
до 10 м (в зависимости от скорости передачи данных), для выходов АЦП
это не рекомендуется. Рекомендуется использовать выходные проводники
малой длины (менее 2 дюймов) для минимизации возможности наводки
на выходы АЦП любого шума от внешних схем, который может прони-
кать на его входы. Дифференциальные выходные проводники следует раз-
мещать на близком расстоянии друг от друга (для обеспечения макси-
мального подавления синфазного напряжения) и использовать нагрузоч-
ные резисторы номиналом 100 Ом вблизи от приемника. Длины печатных
проводников должны выбираться с учетом минимизации разброса задер-
жки. На рис. 9.153 показан вид в разрезе ПП с типичными дифференци-
• Поддерживайте Tw, Tsv\ D постоянными по всей линии.
• Поддерживайте Ts меньше 2TW.
• Избегайте использования межслойных переходов, если возможно.
• Поддерживайте D больше 2TS.
• Избегайте 90° изгибов, если возможно.
• Подбирайте Tw и Гедля 50 Ом.
Рис. 9.153. Разводка микрополосков для передачи двух пар L ИМ-сигналов
альными микрополосковыми проводниками и приводятся некоторые ре-
комендации по разводке.
Использование L И05-сигналов также дает определенные преимущества
с точки зрения минимизации электромагнитных помех. Электромагнитные
поля, генерируемые токами соседних £Р7)5-сигналов, компенсируют друг
друга (при согласованных скоростях нарастания/спада). Использование
L К05-сигналов в высокоскоростных АЦП снижает временные ограниче-
ния по сравнению с использованием демультиплексированных КМОП-вы-
ходов, работающих с аналогичными скоростями передачи. Для тактирова-
ния демультиплексированных КМОП-шин необходим тактовый сигнал с
частотой, равной половине частоте дискретизации АЦП, что увеличивает
стоимость и сложность. При передаче данных с помощью LVDS-сигналов
этого не требуется.
Список литературы
9.6. Вопросы электромагнитных/радиочастотных помех
1. Tim Williams. EMC for Product Designers, 2nd Ed. Newnes, Oxford, 1996, ISBN
0-7506-2466-3.
2. Henry Ott. Noise Reduction Techniques In Electronic Systems. 2nd Ed., John Wiley
& Sons, New York, 1988, ISBN 0-471-85068-3.
3. Mark Montrose. EMC and the Printed Circuit Board. IEEE Press, 1999, ISBN
0-7803-4703-X.
4. Ralph Morrison. Grounding And Shielding Techniques in Instrumentation. 3rd Ed.,
John Wiley & Sons, New York, 1986, ISBN 0-471-83805-5.
5. Daryl Gerke and William Kimmel. Designerys Guide to Electromagnetic Compatibility.
EDN, January 20, 1994.
6. Designing for EMC (Workshop Notes), Kimmel Gerke Associates, Ltd., 1994.
7. Daryl Gerke and William Kimmel. EMI and Circuit Components. EDN, September 1,
2000.
8. Alan Rich. Understanding Interference-Type Noise. Analog Dialogue, Vol. 16, No. 3,
1982, pp. 16—19. (Also available as application note AN346.)
Список литературы к 9.6. Вопросы электромагнитных/радиочастотных помех 983
9. Alan Rich. Shielding and Guarding. Analog Dialogue, Vol. 17, No. 1, 1983, pp. 8—13.
(Also available as application note AN347.)
10. James Wong, Joe Buxton, Adolfo Garcia, James Bryant. «Filtering and Protection Against
EMI/RFI» and «Input Stage RFI Rectification Sensitivity,» Chapter 1, pp. 21—55 of Systems
Application Guide, 1993, Analog Devices, Inc., Norwood, MA, ISBN 0-916550-13-3.
11. Adolfo Garcia. EMI/RFI Considerations. Chapter 7, pp. 69-88 of High Speed Design
Techniques, 1996, Analog Devices, Inc., Norwood, MA, 1993, ISBN 0-916550-17-6.
12. Walt Kester, Walt Jung, Chuck Kitchin. Preventing RFI Rectification. Chapter 10,
pp. 10.39-10.43 of Practical Design Techniques for Sensor Signal Conditioning, Analog
Devices, Inc., Norwood, MA, 1999, ISBN 0-916550-20-6.
13. Charles Kitchin, Lew Counts. A Designerys Guide to Instrumentation Amplifiers.
Analog Devices, Inc., 2000.
14. B4001 and B4003 Common-Mode chokes, Pulse Engineering, Inc., 12220 World
Trade Drive, San Diego, CA, 92128, 619-674-8100, www.pulseeng.com.
15. Understanding Common-Mode Noise, Pulse Engineering, Inc., 12220 World Trade
Drive, San Diego, CA, 92128, 619-674-8100, www.pulseeng.com.
16. Standard IPC-2141, «Controlled Impedanc| Circuit Boards and High Speed Logic
Design,» 1996, Institute for Interconnection and Packaging Electronic Circuits, 2215 Sanders
Road, Northbrook, IL, 60062-6135, 847-509-9700, www.ipc.org.
17. Eric Bogatin. Verifying the Accuracy of 2D Held Solvers for Characteristic Impedance
Calculation. Ansoft Seminar, October 11, 2000, www.bogatinenterprises.com.
18. Andrew Burkhardt, Christopher Gregg, Alan Staniforth. «Calculation of PC В Track
Impedance,» Technical Paper S-19-5, presented at the IPC Printed Circuits Expo '99
Conference, March 14—18, 1999.
19. Brian C. Wadell. Transmission Line Design Handbook, Artech House, Norwood,
MA, 1991, ISBN: 0-89006-436-9.
20. Eric Bogatin. «No Myths Allowed, «Impedance Calculations,» a Chip Center column,
November 1, 1999, www.chipcenter.com/signalintegrity.
21. William R. Blood, Jr. MECL System Design Handbook (HB205/D, Rev. 1A May
1988), ON Semiconductor, August, 2000.
22. Paul Brokaw. An IC Amplifier User Guide To Decoupling, Grounding, and Making
Things Go Right For A Change. Analog Devices AN202.
23. TIA/EIA-644-A Standard, Electrical Characteristics of Low Voltage Differential
Signaling (LVDS) Interface Circuits, January 30, 2001.
24. IEEE Std. 1596.3-1996, IEEE Standard for Low Voltage Differential Signals (LVDS)
for Scalable Coherent Interface, IEEE, 1996.
25. Cindy Bloomingdale and Gary Hendrickson. LVDS Data Outputs for High Speed
Analog-to-Digital Converter. Application Note AN-586, Analog Devices, 2002.
Некоторые полезные EMC и URLs:
Eric Bogatin website, www.bogatinenterprises.com.
Chip Centerys «Signal Integrity» page, www.chipcenter.com/signalintegrity.
Kimmel Gerke Associates website, www.emiguru.com.
Henry Ott website, www.hottconsultants.com.
IEEE EMC website, www.ewh.ieee.org/soc/emcs.
Mark Montrose website, www.montrosecompliance.com/index.html.
Tim Williams website, www.elmac.co.uk.
Благодарности:
Эрик Богатин сделал весьма ценные и полезные комментарии к этому разделу.
9.7. Интерфейс с низковольтной логикой
Уолт Кестер, Этан Бордо, Йоханнес Хорват,
Кэтрин Редмонд, Ева Мерфи
В течение почти 20 лет стандартным напряжением питания цифровых схем
(VDD) являлось напряжение 5 В. Такое значение напряжения необходимо
для обеспечения нормальной работы схем на биполярных транзисторах.
Однако в конце 80-х годов стандартной технологией при проектировании
ИС стала технология КМОП. Для КМОП-микросхем необязательно ис-
пользование тех же уровней напряжения, что и для ТТЛ-микросхем, но для
обеспечения совместимости со старыми системами промышленность адап-
тировала уровни логических сигналов к уровням сигналов ТТЛ1.
Современная революция в снижении напряжения питания микросхем
происходит по причине роста требований к скорости и компактности ин-
тегральных микросхем при минимизации стоимости. Это привело к
уменьшению технологических норм с 2 мкм (в начале 1980-х годов) до 0,18 мкм
(к 2004 году). Такие и меньшие технологические нормы используются при
разработке современных микропроцессоров и ИС. Благодаря тому что раз-
меры стали значительно меньше, напряжение, необходимое для оптималь-
ной работы устройства, также упало ниже уровня 5 В. Это видно на приме-
ре микропроцессоров, используемых в ПК: для них оптимальное значение
напряжения питания ядра процессора программируется извне с помощью
выводов идентификации напряжения (VID) и может составлять всего 1,3 В.
Большой интерес к низковольтным DSP отчетливо наблюдается в изме-
нении процента продаж между 5-вольтовыми и 3,3-вольтовыми микросхе-
мами. Объем продаж 3,3-вольтовых DSP вырос более чем вдвое по сравне-
нию с остальными DSP (на 30 % для всех DSP, на 70 % — для устройств с
напряжением питания 3,3 В). Эта тенденция будет сохраняться, так как
низковольтные DSP широко востребованы на развивающемся быстрыми
темпами рынке портативных устройств.
С одной стороны, низковольтные ИС имеют малую потребляемую мощ-
ность, меньшие размеры и более высокие скорости. С другой стороны, они
зачастую должны работать совместно с ИС, имеющими большее напряже-
ние питания V[)D, что приводит к возникновению проблем совместимости.
Хотя низкое рабочее напряжение означает уменьшение размаха сигнала и
следовательно, уменьшение шумов переключения, для микросхем с низким
напряжением питания также уменьшается запас помехоустойчивости. Ос-
новные положения по низковольтной логике приведены на рис. 9.154.
Популярность устройств с напряжением питания 2,5 В может быть от-
части объяснена их способностью работать от двух алкалиновых элементов
типа АА. На рис. 9.155 показаны типичные характеристики разрядки такого
элемента при различных величинах нагрузки2. Обратите внимание, что при
токе нагрузки 15 мА напряжение остается на уровне выше 1,25 В (от 2,5 В
для двух последовательно соединенных элементов) в течение приблизи-
тельно 100 часов. Поэтому ИС, которые могут успешно работать при низ-
ком потребляемом токе и напряжении питания 2,5 В ± 10% (2,25—2,75 В),
особенно подходят для применения в портативной аппаратуре.
• Низкая потребляемая мощность, что необходимо при применении в портативной
аппаратуре.
• ИС с напряжением питания 2,5 В могут работать от двух алкалиновых элементов
питания «АА».
• Более быстрые КМОП-процессы, меньшие размеры, меньшее напряжение пробоя.
• Несколько напряжений питания в системе: +5 В; +3,3 В; +2,5 В; +1,8 для цифровых
и аналоговых частей (напряжение питания ядра (VID) DSP = +1,8 В).
• Между логиками различного типа требуется включение интерфейсов.
• Меньший размах напряжения приводит к уменьшению шума переключения.
• Меньший запас помехоустойчивости.
• Меньшее напряжение питания в аналоговых схемах приводит к уменьшению размаха
сигнала и увеличивает чувствительность к шумам (предмет целого семинара!).
Срок службы, часы
С любезного согласия: Duracell, Inc., Berkshire Corporate Park, Bethel, CT 06801
www.duracell.com
Рис. 9.155. Характеристики разряда алкалиновых батареек типа «АА» MN1500 произ-
водства Duracell
Для того чтобы разобраться в вопросах совместимости и взаимодей-
ствия друг с другом микросхем с различными напряжениями питания V[)D,
полезно для начала взглянуть на структуру типичной логической КМОП
ИС, которая показана на рис. 9.156.
Обратите внимание, что выходной драйвер состоит из p-МОП- и и-МОП-
транзисторов. Когда на выходе высокий логический уровень, р-МОП-тран-
зистор соединяет выход каскада с напряжением питания + VDD через свое
небольшое внутреннее сопротивление (7?вкл), л-МОП-транзистор в это вре-
мя выключен. Когда на выходе низкий логический уровень, и-МОП-тран-
зистор соединяет выход с «землей» через свое внутреннее сопротивление,
а р-МОП-транзистор в это время выключен. Сопротивление 7?вкл имеет ве-
личину от 5 до 50 Ом в зависимости от размеров транзисторов, применяе-
мых в выходном каскаде; эти размеры, в свою очередь, также определяют
величину допустимого выходного тока.
33—2852
Глава 9. Методы проектирования аппаратуры
max ~ максимально допустимый низкий логический уровень на входе
Чнтш = минимально допустимый высокий логический уровень на входе
VOL max = максимально допустимый низкий логический уровень на выходе
VOH mm = минимально допустимый высокий логический уровень на выходе
Рис. 9.156. Типичная конфигурация выходного драйвера КМОП ИС
В типичной логической ИС цепи питания и «земли» выходного драйвера
отделены от цепей питания и «земли» остальной части схемы (включая пре-
драйвер). Это делается для того, чтобы обеспечить «чистое» напряжение пита-
ния и таким образом уменьшить влияние шума и помех по шине «земли» на
входные и выходные уровни. Это особенно важно, т. к. дополнительная устой-
чивость и совместимость микросхем является критической в характеристиках
драйверов ввода/вывода, особенно при низких напряжениях питания.
На рис. 9.156 также изображены шкалы, на которых показаны мини-
мальные и максимальные уровни входного и выходного напряжения, тре-
буемые для обеспечения достоверных высокого или низкого логических
уровней. Обратите внимание, что для КМОП-логики реальные выходные
логические уровни определяются током нагрузки и сопротивлением /?вкл
транзисторов. При небольшой нагрузке выходные логические уровни очень
близки к О В и + VDD. Логические пороги на входе, в свою очередь, опреде-
ляются структурой входной цепи ИС.
На шкале, соответствующей входу, имеется три части. В нижней части
показан диапазон входных напряжений, который интерпретируется как
низкий логический уровень. В случае с ТТЛ-логикой с напряжением пита-
ния 5 В этот диапазон будет соответствовать значению напряжения от 0 до
0,8 В. В средней части показан диапазон входных напряжений, в котором
уровень сигнала не воспринимается гарантированно как низкий или высокий.
Верхняя часть соответствует входным напряжениям, которые воспринимают-
ся как высокий логический уровень. В случае 5-вольтовой ТТЛ-логики этот
диапазон соответствует напряжениям от 2 до 5 В.
На шкале, соответствующей выходу, также имеется три части. В ниж-
ней части показан диапазон возможных напряжений низкого логического
уровня на выходе. Для микросхем ТТЛ с напряжением питания 5 В это
напряжение составляет от 0 до 0,4 В. В средней части диаграммы показан
некорректный уровень выходного напряжения — устройство не должно
выдавать сигнал такого уровня, за исключением моментов перехода с одно-
го логического уровня на другой. В верхней части показан допустимый
9.7. Интерфейс с низковольтной логикой
диапазон напряжения для высокого логического уровня на выходе. Для
5-В ТТЛ-логики он составляет от 2,4 до 5 В. Диаграммы не отражают 10 %-ные
выбросы или провалы, которые также допустимы на входах в соответствии
со стандартом.
На рис. 9.157 приведен обзор существующих логических стандартов.
Обратите внимание, что входные пороги классической КМОП-логики (на-
пример, серии 4000) определяются как 0,3 VDD и 0,7 VDD. Но большинство
применяемых на сегодняшний день логических КМОП ИС совместимы с
уровнями ТТЛ и LVTTL. которые преимущественно используются в каче-
стве стандартов для цифровых сигнальных процессоров, работающих при
напряжении питания 3,3 и 5 В. Заметьте, что для 5-вольтовой ТТЛ-логики
и 3,3-В £И7Т£-логики пороги входного и выходного напряжений одинако-
вы. Разница только в верхней границе допустимого диапазона для сигнала
высокого уровня.
Международное бюро стандартов JEDEC {Joint Electron Device Engineering
Council) разработало стандарт для напряжений питания 2,5 В (JEDEC стан-
дарт 8-5) и 1,8 В3. Кроме того, существует большое число других низко-
вольтных стандартов, таких как GTL {Gunning Transceiver Logic). BTL
{Backplane Transceiver Logic). ЭСЛ (эмиттерно-связная логика, ECL). ПЭСЛ
(положительная ЭСЛ, PECL) и LVDS. Однако большинство из этих стан-
дартов созданы для применения в специализированных областях, а не в
полупроводниковых системах общего назначения.
С помощью приведенной диаграммы (рис. 9.157) можно проиллюстри-
ровать некоторые возможные проблемы, возникающие при соединении двух
ИС, работающих в различных стандартах. Например, рассмотрим подклю-
чение 5-вольтовой ТТЛ-схемы к ИС LVTTL с напряжением питания 3,3 В.
Высокий логический уровень 5-вольтовой ТТЛ-логики слишком высок
(>3,3 В), чтобы подавать этот сигнал на вход ИС LVTTL. Это может приве-
сти к необратимому повреждению микросхемы £ VTTL. Другой пример: пусть
ИС с напряжением питания 2,5 В управляет 5-вольтовым КМОП-устрой-
ством. Высокий логический уровень на выходе 2,5-вольтового устройства не-
TTL
1/сс = 4,5-5,5 В
5 В КМОП
Vcc = 4,5-5,5 В
Современные 5-В или 3,3-В КМОП логические
ИС являются ТТЛ- или НВТТЛ-совместимыми
НВТТЛ
Усс = 2,7-3,6 В
EIA/JEDEC 8-5
2,5 В
1/сс = 2,3-2,7 В
EIA/JEDEC 8-5
Рис. 9.157. Стандартные логические уровни
988 Глава 9. Методы проектирования аппаратуры
достаточно высок для того, чтобы восприниматься как «высокий» входом мик-
росхемы КМОП с напряжением питания 5 В (VIH min = 3,5 В). Эти примеры
иллюстрируют два возможных типа несовместимости логических уровней:
1) на устройство поступает слишком высокое напряжение;
2) устройство не обеспечивает достаточно высокого напряжения, кото-
рое достоверно распознавалось бы принимающей ИС как сигнал высокого
логического уровня.
Эти проблемы совместимости подводят нас к двум понятиям: устойчи-
вость к повышенному напряжению и совместимость по напряжению.
Устойчивость к повышенному напряжению
и совместимость по напряжению
Устройство, устойчивое к повышенному напряжению, может выдержать на
входе или выходе напряжение более высокое, чем его собственное напря-
жение питания VDD. Например, если устройство работает при VDD = 2,5 В,
может выдержать на входе напряжение в 3,3 В и может выдержать 3,3 В на
выходе, то такое 2,5-вольтовое устройство является устойчивым к напряже-
нию 3,3 В. Значение понятия «устойчивость к напряжению на входе» доста-
точно очевидно, в то время как понятие «устойчивости к напряжению на
выходе» требует некоторого объяснения. Выход драйвера микросхемы КМОП
с VDD = 2,5 В в состоянии высокого логического уровня представляет собой
резистор с небольшим сопротивлением (1?вкл полевого ^-МОП-транзисто-
ра), подключенный к напряжению питания VDD 2,5 В. Очевидно, что соеди-
нение выхода напрямую с шиной 3,3 В приведет к разрушению устройства
избыточным током. Значение термина «устойчивость к напряжению на вы-
ходе» становится понятнее, если рассмотреть случай подключения 2,5-воль-
тового устройства, имеющего выход с тремя состояниями, к шине, к кото-
рой подключены также 3,3-вольтовые ИС. Даже если 2,5-вольтовая ИС
находится в выключенном состоянии (третье состояние), 3,3-вольтовые ИС
могут подавать на шину напряжение, превышающее 2,5 В, что, в свою оче-
редь, может привести к повреждению выходного каскада 2,5-вольтовой ИС.
Устройство, совместимое по напряжению, может принять сигнал и пере-
дать сигнал устройству, имеющему напряжение питания более высокое,
чем его собственное. Например, если устройство работает при VDD = 2,5 В и
может передавать или принимать сигналы от 3,3-вольтового устройства,
тогда говорят, что данное 2,5-вольтовое устройство совместимо по напря-
жению с 3,3-вольтовыми.
Интерфейс между микросхемой КМОП с напряжением питания 5 В и
микросхемой LVTTL с напряжением питания 3,3 В — это случай, когда
устойчивость к повышенному напряжению отсутствует; вход микросхемы
LVTTL перегружен выходным сигналом КМОП микросхемы с напряжени-
ем питания VDD = 5 В. Интерфейс между 2,5-вольтовой JEDEC и 5-вольто-
вой КМОП-микросхемами иллюстрирует случай несовместимости по на-
пряжению; выходной сигнал высокого уровня на выходе ИС JEDEC не
соответствует требованиям к уровню входного сигнала 5-вольтовой КМОП-
микросхемы. Определения совместимости по напряжению и устойчивости
к повышенному напряжению повторены на рис. 9.158.
9.7. Интерфейс с низковольтной логикой
• Устойчивость к повышенному напряжению:
— микросхема, устойчивая к повышенному напряжению, может выдержать на своих
входных и выходных выводах напряжение более высокое, чем ее собственное на-
пряжение питания VDD. Если ИС имеет напряжение питания VDD = 2,5 В и может
выдержать напряжение 3,3 В ± 10% на входе, то эта 2,5-вольтовая микросхема
является устойчивой к напряжению 3,3 В на входе. Устойчивость на входе и на
выходе должна тестироваться и оговариваться в спецификации отдельно.
• Совместимость по напряжению:
— микросхема, совместимая по напряжению, может передавать или принимать сиг-
налы от логики, имеющей напряжение питания более высокое, чем ее собствен-
ное напряжение питания VDD. Если устройство работает с VDD = 2,5 В и может
нормально передавать или принимать сигналы от 3,3-вольтовой логики, то данная
2,5-вольтовая микросхема является совместимой с логикой, работающей с напря-
жением питания 3,3 В. Совместимость по входу и по выходу должна тестироваться
и оговариваться в спецификации отдельно.
Рис. 9.158. Определения устойчивости к повышенному напряжению и совместимости
по напряжению для логических микросхем
Соединение 5-вольтовых и 3,3-вольтовых систем
с помощью «шинных переключателей»
на n-МОП полевых транзисторах
При соединении между собой микросхем, работающих при разных напря-
жениях питания, часто возникает необходимость в дополнительных диск-
ретных компонентах для того, чтобы обеспечить устойчивость к повышен-
ному напряжению и совместимость по напряжению. Например, для того
чтобы получить устойчивость к напряжению между 5-вольтовой и 3,3-воль-
товой логикой, может использоваться шинный переключатель/преобразо-
ватель напряжения (bus switch voltage translator) ADG3257 (также см. 4’5)-
Шинный переключатель ограничивает напряжение, прикладываемое к ИС.
Это делается для того, чтобы входное напряжение не превысило допусти-
мое, к которому приемное устройство устойчиво.
Например, как показано на рис. 9.159, шинный переключатель можно
поместить между 5-вольтовой КМОП-логикой и 3,3-вольтовой LVTTL-ло-
гикой, после чего устройства смогут нормально обмениваться данными.
Этот шинный переключатель представляет собой полевой и-МОП-транзи-
стор (NMOS FET). Если на затвор транзистора подано напряжение 4,3 В,
то максимальная величина напряжения проходящего через него сигнала
составит 3,3 В (примерно на 1 В меньше, чем напряжение на затворе
МОП-транзистора). Если напряжение на входе и на выходе не превышает
3,3 В, МОП-транзистор представляет собой небольшое сопротивление
(7?вкл = 2 Ом). Когда входной сигнал достигает величины 3,3 В, сопротивле-
ние транзистора во включенном состоянии возрастает, ограничивая таким
образом уровень сигнала на выходе. ADG3257 представляет собой шинный
переключатель с четырьмя мультиплексорами/демультиплексорами 2 : 1 и
сигналом разрешения (см. нижнюю часть рис. 9.159). Величина сигнала
высокого уровня, управляющего затвором, определяется напряжением пи-
тания ADG3257 (Vcc).
Глава 9. Методы проектирования аппаратуры
О
О-
«1» — включено О
«О» — выключено
ADG3257 Счетверенный двунаправленный
2 : 1/1 : 2 шинный переключатель, типичный
• Работает с Vcc = 4,3 В для 5 В/3,3 В
и Vcc = 3,3 В для 3,3 В/2,5 В
Рис. 9.159. Двунаправленный интерфейс с использованием л-МОП-транзистора меж-
ду 3,3 В и 5 В логикой обеспечивает устойчивость по напряжению
Один из способов получения напряжения питания 4,3 В на системной
плате, где имеются напряжения 5 и 3,3 В, заключается во включении крем-
ниевого диода между шиной питания 5 В и выводом Vcc шинного переклю-
чателя, как показано на рис. 9.159. В схемах, работающих с напряжениями
питания 3,3/2,5 В, вывод Vcc может быть подключен непосредственно к
напряжению питания +3,3 В. Некоторые шинные переключатели спроек-
тированы для подключения непосредственно либо к шине 3,3 В, либо к 5 В,
и напряжение смещения на затворе генерируется внутри данных ИС.
Применение шинных переключателей избавляет от беспокойства по
поводу устойчивости микросхем при проектировании устройств с разными
типами логики. Одним из полезных свойств шинных переключателей явля-
ется их двунаправленность; это позволяет разработчику поместить шинный
преобразователь между двумя ИС и обойтись без дополнительной обвязки
для входных и выходных сигналов.
Шинный переключатель увеличивает суммарную рассеиваемую мощ-
ность, а также общую площадь, занимаемую компонентами системы. Так
как шинные преобразователи напряжения обычно являются КМОП-схема-
ми, они имеют очень низкое значение потребляемой мощности. Величина
рассеиваемой мощности, усредненная за продолжительный период, состав-
ляет 5 мВт на один корпус (10 переключателей), и она не зависит от часто-
ты сигналов, проходящих через схему. Шинные переключатели обычно
имеют от 8 до 20 контактов ввода/вывода в одном корпусе и занимают
площадь примерно от 25 до 50 мм2.
Одной из проблем при добавлении интерфейсной логики в схему явля-
ется возможное увеличение задержки распространения сигнала, т. к. это
могло бы привести к появлению множества проблем, связанных с синхро-
низацией. Шинные переключатели обладают очень малыми временами за-
держки распространения сигнала.
9.7. Интерфейс с низковольтной логикой
Рис. 9.160. Зависимость сопротивления во включенном состоянии от входного напря-
жения для шинного переключателя ADG3257
Рис. 9.161. Зависимость максимального пропускаемого напряжения от входного на-
пряжения для шинного переключателя ADG3257
Рис. 9.162. Осциллограммы для скоростей передачи данных 622 и 933 Мбит/с
Глава 9. Методы проектирования аппаратуры
Шинный переключатель при подаче на него сигнала от идеального ис-
точника напряжения практически не вносит задержек распространения (ти-
пичное значение для ADG3257 — 0,1 нс), за исключением задержки на RC-
цепочке, формируемой сопротивлением 1?вкл ключа и емкостью нагрузки.
Так как постоянная времени намного меньше времени нарастания/спада
типичных пропускаемых сигналов, задержка распространения, добавляе-
мая шинными переключателями к общей задержке в системе, очень мала.
Так как сопротивление ключа во включенном состоянии 1?вкл совместно с
емкостью шины образует однополюсный фильтр, который может добавлять
задержку и уменьшать максимальную скорость передачи данных, то оно
является критичным параметром для шинного переключателя. Типичная
емкость портов ADG3257 во включенном состоянии Свкл составляет 10 пФ
и совместно с /?вкл, равным 4 Ом, дает время нарастания/спада приблизи-
тельно 90 пс. На рис. 9.160 показана зависимость сопротивления во вклю-
ченном состоянии ADG3257 от входного напряжения при напряжениях
питания 5,5; 5,0; 4,5; 3,3; 3,0 и 2,7 В. Зависимость максимального пропус-
каемого напряжения от входного напряжения показана на рис. 9.161.
На рис. 9.162 показаны осциллограммы для ADG3257, работающего со
скоростями передачи данных 622 и 933 Мбит/с.
Интерфейс между логиками с питанием
3,3 и 2,5 В
На рис. 9.163 показаны два возможных варианта интерфейса между 3,3-вольт-
ной и 2,5-вольтной логикой. В верхней части рисунка показана схема пря-
мого соединения. Она будет работать при условии, что 2,5-вольтная ИС
устойчива к напряжению на входе 3,3 В. В противном случае можно при-
менить шинный переключатель на малое напряжение, наподобие ADG3231.
В большинстве случаев соединение между системами с напряжением пита-
ния 3,3 В и 2,5 В может быть двунаправленным, даже несмотря на то, что
3,3 В шина 2,5 В шина
Рис. 9.163. Интерфейс между +3,3 и +2,5 В
9.7. Интерфейс с низковольтной логикой
номинальный уровень V0H для 2,5-вольтной логики (+2,0 В) совпадает с но-
минальным уровнем для 3,3-вольтной логики (см. рис. 9.157). Этот мо-
мент заслуживает более подробного обсуждения.
На рис. 9.164, а. показано прямое соединение между логическими
устройствами с напряжениями питания 2,5 и 3,3 В. Для того чтобы эта
схема работала, в соответствии со спецификацией JEDEC выходной сиг-
нал 2,5-вольтной ИС должен иметь уровень, по меньшей мере, 2 В. Вход
3,3-вольтной ИС подключается непосредственно к напряжению питания
+2,5 В через сопротивление во включенном состоянии формирователя на
р-МОП-транзисторе, не нагружая выход 2,5-вольтной ИС. Этим обеспечи-
вается запас помехоустойчивости 0,5 В для номинального напряжения пи-
тания 2,5 В. Однако ввиду допустимого разброса напряжение питания на
шине 2,5 В может уменьшаться до уровня 2,3 В, следовательно, запас поме-
хоустойчивости снижается до 0,3 В. Этот уровень позволяет схеме работать
в сравнительно «тихом» окружении, однако при наличии шума в напряже-
нии питания схема может работать на пределе.
Добавление подтягивающего резистора сопротивлением 1,6 кОм, как
показано на рис. 9.164, 5, гарантирует, что выходное напряжение 2,5-вольт-
ной ИС не упадет ниже 2,5 В вследствие входного тока 3,3-вольтного уст-
ройства, но запас помехоустойчивости при уровне напряжения питания 2,3 В
все равно будет мал. При скважности 50 % резистор добавляет примерно
3,4 мВт рассеиваемой мощности на каждый выход.
Более надежный интерфейс между 2,5-вольтной и 3,3-вольтной логи-
кой показан на рис. 9.164, в; здесь используется преобразователь логичес-
ких уровней наподобие ADG3231. С его помощью решаются все проблемы,
связанные с запасом помехоустойчивости, имеющиеся в схемах а и б, и он
потребляет около 2 мкА на каждый выход.
б
2,5 В шина 3,3 В шина
Рис. 9.164. Интерфейсы между системами с напряжениями питания +2,5 и +3,3 В
Интерфейсы 3,3 В/2,5 В; 3,3 В/1,8 В; 2,5 В/1,8 В
ИС ADG3241, ADG3242, ADG3243, ADG3245, ADG3246, ADG3247,
ADG3248 и ADG3249 представляют собой шинные переключатели на ма-
лое напряжение, оптимизированные для работы с напряжениями питания
3,3 или 2,5 В. Это семейство включает в себя 1-, 2-, 8-, 10-разрядные, а
также сдвоенные 8-разрядные переключатели, каждый из которых является
двухпортовым. ИС ADG3241, ADG3242, ADG3245, ADG3246, ADG3247 и
ADG3249 имеют функцию выбора уровня между 2,5 В и 1,8 В. Эти быстрые
малопотребляющие устройства предназначены для организации однонап-
равленного интерфейса между 3,3-вольтными и 2,5-вольтными, 3,3-вольт-
ными и 1,8-вольтными, 2,5-вольтными и 1,8-вольтными устройствами.
Рисунок 9.165 иллюстрирует применение ИС семейства ADG32xx в каче-
стве преобразователей уровней из 3,3 в 1,8 В и из 2,5 в 1,8 В.
3,3 В шина AD324x серия 1,8 В шина
2,5 В шина AD324x серия 1,8 В шина
Рис. 9.165. Однонаправленные интерфейсы 3,3 В/1,8 В и 2,5 В/1,8 В
Преобразование из 1,8 В в 2,5 В, из 1,8 В в 3,3 В (и иногда, как обсуж-
далось ранее, из 2,5 В в 3,3 В) требует применения преобразователя логи-
ческих уровней, например ADG3231, показанного на рис. 9.166. Напряже-
ния на двух шинах питания могут принимать любые значения в диапазоне
от 1,65 до 3,6 В. ADG3231 представляет собой одноканальный преобразова-
тель, a ADG3232 — мультиплексор 2: 1/преобразователь уровня. Оба уст-
ройства выпускаются в корпусе SOT-23.
ADG3233 представляет собой обходной переключатель. Он производит-
ся с применением субмикронных технологий и работает с напряжениями
питания в диапазоне от 1,65 до 3,6 В. ADG3233 использует два источника
питания и позволяет обеспечить двунаправленное преобразование логичес-
ких уровней, т. е. преобразование низких напряжений в высокие и наобо-
рот. Сигнальный тракт является однонаправленным; это означает, что дан-
ные могут проходить только от Л к Y. Этот тип устройств может применять-
ся в задачах, где требуется функция передачи данных в обход устройства,
например в цепочке JTAG или схеме с лепестковообразной петлей {daisy-
9.7. Интерфейс с низковольтной логикой
Шина V , от +1,65 до +3,6 В Шина 1/СС2, от +1,65 до +3,6 В
• Малый ток: 2 мкА макс.
• Корпус SOT-23.
• Задержка распространения 4 нс при 3,3 В.
Рис. 9.166. Преобразователь логических уровней низкого напряжения ADG3231
chain loop). Один переключатель может использоваться для одного или для
нескольких устройств, что позволяет передавать данные в обход одного или
нескольких устройств цепочки. Это свойство, в частности, может быть по-
лезно для снижения временных издержек на тестирование устройств в це-
почке JTAG или в схеме с daisy-chain loop, где не требуется изменения на-
строек какого-либо отдельного устройства.
Обходной переключатель выпускается в двух корпусах, которые имеют
наименьшие возможные при требуемом количестве выводов размеры: 8-кон-
тактный корпус SOT-23 занимает на плате площадь всего 8,26 х 8,26 мм, а
корпус MSOP — приблизительно 15 х 15 мм. Функциональная блок-схема
ADG3233 показана на рис. 9.167.
Рис. 9.167. Преобразователь логических уровней/обходной переключатель ADG3233 с
диапазоном напряжений от 1,65 до 3,6 В
Глава 9. Методы проектирования аппаратуры
На рис. 9.168 показано применение обходного ключа в нормальном ре-
жиме. Здесь сигналы проходят от к Yx и от А2 к Y2. ADG3233 выполняет
преобразование уровня сигнала, подаваемого на вход в логический уро-
вень, соответствующий напряжению питания Vccx (возможно преобразова-
ние как в сторону повышения, так и в сторону понижения уровня), и пере-
дает сигнал на выход Ур подключенный к логическому устройству со стан-
дартными для напряжения питания VCC{ уровнями V0L/V0H. Затем сигнал
проходит через устройство 1 и поступает на вход А2 обходного ключа. Логи-
ческие уровни на входе А2 соответствуют напряжению питания Ксср после
этого происходит преобразование логических уровней, соответствующих
напряжению VCCI, в логические уровни, соответствующие напряжению VCC2,
и сигнал подается на выход К2. Логические уровни на выходе Y2 соответ-
ствуют напряжению питания VCC2.
^ССО ^СС1 ^СС2
Обходной ключ ном режиме
Рисунок 9.169 иллюстрирует применение переключателя в режиме об-
хода. В данном случае сигнал проходит напрямую от А{ к К2 в обход устрой-
ства 1. Переключатель выполняет преобразование уровней сигнала в логи-
ческие уровни, соответствующие напряжению питания ИСС2, и передает пре-
образованный сигнал на выход У2 для подачи на вход устройства 2. В режиме
обхода Yx подогнан к напряжению Vccv Показанные на рис. 9.168 и 9.169
напряжения питания Кса), УСС[ и VCC2 могут быть любой комбинацией на-
пряжений источников питания, например 1,8, 2,5 и 3,3В.
обхода
Обходной ключ
9.7. Интерфейс с низковольтной логикой
Применение шинных переключателей
для горячей замены и горячего подключения
Горячей заменой называется добавление в систему и/или удаление из нее
подключаемой схемы при включенном питании8. Примерами систем, в ко-
торых необходима горячая замена, являются док-станции (стационарные
устройства для портативного компьютера, обеспечивающие подключение к
нему всевозможного внешнего оборудования, и платы подключения к ли-
нии связи в телекоммуникационных коммутаторах). В случае горячей заме-
ны соединители объединительной платы «оживают», и плата расширения
должна уловить это. При возможности изоляции шины перед моментом
введения осуществляется больший контроль над процедурой горячей заме-
ны. Изоляция может обеспечиваться при помощи цифрового ключа, кото-
рый в идеале должен располагаться на плате расширения между устрой-
ством и соединительным разъемом (рис. 9.170). Важно, чтобы земляной
контакт на плате расширения был подключен к земляному контакту на
объединительной плате до подключения других сигнальных контактов или
контактов питания. Он также должен отсоединяться в последнюю очередь
при удалении платы.
Рис. 9.170. Горячая замена при помощи шинного переключателя ADG3246
Вход/выход
платы
Вход/выход
платы
Шина Переключтель
Рис. 9.171. Использование ADG3247 для горячей замены
Глава 9. Методы проектирования аппаратуры
В критичных системах, таких как ADSL (асимметричная цифровая або-
нентская линия, Asynchronous Digital Subscriber Line), системы производствен-
ного управления, серверы и системы заказа авиабилетов, питание не долж-
но отключаться. Если в систему необходимо добавить новое устройство,
например съемный модем, система должна продолжать работать. Процесс
добавления аппаратных средств в систему, которая должна непрерывно
функционировать, называется горячим подключением9. Для того чтобы этот
процесс прошел гладко, цифровой ключ должен быть помещен между со-
единительным разъемом и внутренней шиной (см. рис. 9.171). В течение
горячего включения ключ отключается для обеспечения изоляции опреде-
ленного участка схемы.
Устойчивость и совместимость по напряжению,
обеспечиваемая внутренними средствами схемы
Современные высокопроизводительные КМОП DSP и микропроцессоры
обычно работают с напряжениями ядра в диапазоне от 1 до 2 В. Такие
низкие напряжения обеспечивают оптимальное соотношение скорости и
мощности. Однако логические уровни внутри ядра несовместимы с логи-
ческими уровнями стандартных интерфейсов ввода/вывода, работающих с
напряжениями питания 2,5 или 3,3 В. Обычно эта проблема решается при
помощи конфигурации, показанной на рис. 9.172, где логическое ядро ра-
ботает с пониженным напряжением, а выходные драйверы работают со
стандартными уровнями напряжения питания 2,5 или 3,3 В.
Этот метод, которому следуют многие производители ИС, заключается в
обеспечении вторичного кольца ввода/вывода, т. е., драйверы ввода/вывода
работают от напряжения питания 2,5 или 3,3 В, за счет чего устройство
является совместимым и устойчивым к логическим уровням, соответству-
ющим этим напряжениям питания. Обратите внимание, что входы обяза-
Внешнее VDD = +2,5 В или +3,3 В
Для ядра VDD = +0,9 В или +1,8 В (в зависимости от процессора)
Вход устойчив к +2,5 В или +3,3 В
Рис. 9.172. Внутренняя устойчивость и совместимость по напряжению в КМОП ИС с
вторичным кольцом ввода/вывода
9.8. Макетирование и создание прототипов
тельно должны быть совместимыми и устойчивыми к напряжению питания
ввода/вывода. Существует ряд важных аспектов, которые необходимо учи-
тывать при разработке устройств с двумя напряжениями питания подобно-
го рода:
• последовательность включения питания', если для обеспечения дополни-
тельной устойчивости/совместимости требуется два источника пита-
ния, то какой должна быть последовательность включения питания?
Необходимо ли включать оба источника питания одновременно или
устройство может работать при подаче питания только на ядро или
только на кольцо ввода/вывода? Эта проблема может быть легко реше-
на при формировании напряжения ядра из напряжения питания ввода/
вывода с помощью линейного стабилизатора с малым падением напря-
жения;
• технология производства микросхем и защита от электростатического
разряда (ESD): транзисторы, создаваемые в процессе производства ИС,
должны не только выдерживать, но и управлять сигналами высокого на-
пряжения. Создание высоковольтных транзисторов увеличивает себес-
тоимость продукции, т. к. для обеспечения устойчивости к высокому
напряжению требуются дополнительные меры. Разработка же устрой-
ства со стандартными транзисторами потребует дополнительного схемо-
технического усложнения. Кроме того, драйверы ввода/вывода должны
обеспечивать защиту устройства от электростатического разряда. В боль-
шинстве современных разработок допустимое напряжение на входе ог-
раничено величиной напряжения питания плюс прямое падение напря-
жения на одном диоде (0,7 В). Защита от более высокого напряжения
требует применения большего количества последовательно соединенных
диодов;
• встроенные средства генерации высокого напряжения'. ^-МОП-транзисторы
должны помещаться в область на кристалле, которая подключена к само-
му высокому имеющемуся на кристалле напряжению, чтобы предотвра-
тить открывание диодного перехода и протекание избыточных токов. Это
высокое напряжение может быть или генерировано на кристалле при по-
мощи генератора на принципе подкачки заряда, или поступать от внеш-
него источника. Это требование может усложнить проект, т. к. невозмож-
но эффективно использовать генераторы на принципе подкачки заряда
для генерирования высокого напряжения и в то же время обеспечить ма-
лый ток потребления в режиме ожидания. В большинстве случаев напря-
жение формируется внешним источником;
• площадь кристалла', размер кристалла играет решающую роль при умень-
шении себестоимости и повышении эффективности. Обеспечение устой-
чивости и совместимости схемы может потребовать большего количества
драйверов ввода/вывода или увеличения их размеров для достижения тре-
буемого уровня характеристик;
• тестирование', так как ядро и драйверы ввода/вывода могут работать с
разным напряжением питания, тестирование устройства по всем возмож-
ным комбинациям напряжений может быть затруднительным, что отра-
жается на общей стоимости ИС.
Список литературы
9.7. Интерфейс с низковольтной логикой
1. Р. Alfke. Low-Voltage FPGAs Allow 3.3V/5V System Design. Electronic Design,
pp. 70—76, August 18, 1997.
2. AA Alkaline Battery Discharge Characteristics, Duracell Inc., Berkshire Corporate
Park, Bethel, CT 06801, www.duracell.com.
3. Joint Electron Device Engineering Council (JEDEC), www.jedec.org, Standard
J£5Z)8-5, October 1995, and Standard J£57)8-7, February, 1997.
4. QS3384 Data Sheet, Integrated Device Technology (IDT), Inc., 2975 Stender Way,
Santa Clara, CA 95054, www.idt.com.
5. Pericom Semiconductor Corporation, 2380 Bering Drive, San Jose, CA 95131,
www.pericom.com.
6. H. Johnson, M. Graham. High Speed Digital Design. Prentice Hall, 1993.
7. Eva Murphy and Catherine Redmond. Bus Switches for Speed, Safety, and Efficiency:
What They Are and What You Should Know about Them. Analog Dialogue 36-06, Analog
Devices, Inc., 2002.
8. Compact PCI Hot Swap Specification R1.0.
9. PCI Hot-Plug Specification R1.0, October 6, 1997.
9.8. Макетирование и создание прототипов
Уолт Кестер, Джеймс Брайант, Уолт Джанг
Основной принцип в создании структуры макета или прототипа заключает-
ся в том, что она является временной и разрабатывается для тестирования
характеристик электронной схемы или системы. Поэтому она по определе-
нию должна быть легко модифицируемой, в особенности это важно для
макетов.
Существует много коммерческих систем макетирования, однако, к со-
жалению разработчика аналоговых схем, почти все они предназначены для
создания прототипов цифровых систем, для которых характерна устойчи-
вость к шуму в сотни милливольт и более. К наиболее часто используемым
методам макетирования относятся макетные системы на непокрытых ме-
дью матричных платах, векторных платах, платах для монтажа накруткой и
сменных платах. Все перечисленные методы не годятся для создания про-
тотипов высококачественных или высокочастотных аналоговых схем из-за
высоких уровней паразитных сопротивления, индуктивности и емкости. Даже
использование стандартных панелек для ИС нежелательно во многих зада-
чах макетирования (подробнее об этом см. ниже).
На рис. 9.173 приведен обзор ключевых моментов, касающихся выбора
подходящей системы макетирования и/или создания прототипа аналого-
вых схем, которые обсуждаются ниже.
Одним из наиболее важных вопросов при выборе метода макетирова-
ния является требование к наличию заземляющей поверхности большой
площади. Она необходима в высокочастотных, а также в низкоскоростных
прецизионных схемах, особенно когда макетируемая схема включает в себя
АЦП или ЦАП. Сложно провести разграничение между высокоскоростны-
• В прецизионных или высокочастотных схемах всегда используйте заземляющую по-
верхность большой площади.
• Минимизируйте паразитные сопротивление, емкость и индуктивность.
• Если требуется применение панелек, используйте «гнезда для отдельных выводов»
(«pin sockets» или «саде jacks»).
• В равной степени внимательно относитесь к трассировке сигналов, размещению
компонентов, заземлению и развязкам как при создании прототипа, так и в оконча-
тельном проекте.
• Популярные методы макетирования:
— эскизный макет — «мертвый жук» с навесным монтажом;
— «Solder Mount»-,
— фрезерованные ПП, изготавливаемые по разводке, сделанной в САПР;
— многослойные платы: двухсторонние с дополнительным навесным монтажом.
• Современные ИС для поверхностного монтажа в миниатюрных корпусах требуют
специальных методов — обычно предварительной разводки многослойной ПП.
Рис. 9.173. Обзор ключевых моментов систем макетирования аналоговых схем
ми и высокоточными схемами со смешанными сигналами. Например, АЦП
и ЦАП с разрядностью 16 бит и выше могут работать с высокоскоростными
тактовыми сигналами (> 10 МГц), имеющими время нарастания/спада не-
сколько наносекунд и менее, в то время как эффективная производитель-
ность таких преобразователей может составлять менее 100 kSPS. Для ус-
пешного создания прототипов необходимо, чтобы равное внимание уде-
лялось методам макетирования высокоскоростных и высокоточных схем.
Несколько лет назад многие ИС выпускались как в D/P-корпусах, так и
в корпусах для поверхностного монтажа; таким образом, макетирование и
создание прототипа могло выполняться с использованием «дружественного
пользователю» Л/Р-корпуса. Однако на сегодняшний день большинство
высококачественных преобразователей данных в D/P-корпусах не выпуска-
ются, а если бы и выпускались, то дополнительные паразитные эффекты
корпуса ограничивали бы во многих случаях их характеристики.
В сегодняшних условиях макетирование и создание прототипов являет-
ся особенно трудным, так как современные ИС для поверхностного монта-
жа в миниатюрных корпусах крайне сложно паять на любой тип ПП руч-
ными методами. Шариковые (BGL4, ball grid array) корпуса практически не-
возможно паять вручную. Панельки (которые, если есть, то являются очень
дорогими) обычно не следует применять из-за дополнительных паразитных
эффектов. Таким образом, во многих случаях необходимо проектировать и
изготавливать многослойную ПП. Эта тенденция требует от производителя
ИС еще большей ответственности по изготовлению высококачественных
хорошо документированных оценочных плат, которые призваны помочь на
начальных этапах проектирования.
Создание прототипов — «мертвых жуков»
Простой метод создания прототипа аналоговой схемы с ИС в DIP-корпусах
заключается в использовании платы со сплошным плакированием медью в
качестве заземляющей поверхности (см. 12). В данном методе выводы за-
1002 Глава 9. Методы проектирования аппаратуры
земления ИС паяются непосредственно к поверхности, а остальные компо-
ненты монтируются поверх нее путем навесного монтажа. Это позволяет
обеспечить очень короткие цепи, развязанные по ВЧ. Все выводы должны
иметь как можно меньшую длину, и при трассировке сигналов необходимо
отделить высокоуровневые сигналы от низкоуровневых. Соединительные
провода должны быть расположены близко к поверхности платы для мини-
мизации возможных паразитных индуктивных связей. В большинстве слу-
чаев следует использовать изолированный провод 18-го или более калибра.
Параллельные провода не следует группировать в жгуты из-за возможных
паразитных связей. В идеале разводка (по меньшей мере, относительное
расположение компонентов на плате) должна быть похожа на разводку в
окончательном варианте ПП. Подобные макеты обычно называются «мер-
твыми жуками» (deadbug), потому что ИС часто монтируются вверх ногами
и их выводы торчат вверх (за исключением заземляющего вывода, который
загибается и паяется непосредственно к заземляющей поверхности). Мон-
тированные таким образом ИС сверху выглядят, как мертвые насекомые,
откуда и название.
На рис. 9.174 показан макет — «мертвый жук» аналоговой схемы. Схема
состоит из двух операционных усилителей и, несмотря на недостаточно
эстетичный внешний вид, обладает превосходными характеристиками. ИС
операционных усилителей монтированы на плакированную медью плату
вверх ногами, их выводы заземления загнуты в обратную сторону. Сигналь-
ные соединения выполнены короткими проводами по схеме точка—точка.
Характеристическое сопротивление провода, проходящего над заземляющей
поверхностью, составляет примерно 120 Ом, однако это значение может из-
меняться в пределах ±40 % в зависимости от расстояния до заземляющей
поверхности. Развязывающие конденсаторы непосредственно соединяются
с выводами питания операционных усилителей и медной заземляющей по-
верхностью. При работе на частотах несколько сотен мегагерц разумно ис-
пользовать под заземление только одну сторону платы. Многие разработчи-
ки сверлят в плате отверстия и соединяют стороны платы вместе, припаи-
Рис. 9.174. Макет — «мертвый жук» аналоговой схемы
9.8. Макетирование и создание прототипов I003J)
вая короткие куски проводов. Если не соблюдать осторожность, это может
привести к появлению непредвиденных контуров заземления между двумя
сторонами платы, особенно на ВЧ.
Для обеспечения экранирования к основной заземляющей поверхности
можно припаять под прямыми углами дополнительные куски плакирован-
ной медью платы или расположить элементы схемы с двух сторон платы
(соединяя их сквозными отверстиями). Во втором случае экранирование
обеспечивается самой платой. При этом для защиты компонентов на ниж-
ней стороне платы от повреждения потребуется использование угловых стоек.
Когда компоненты на таком макете соединяются в воздухе по схеме
точка—точка (этот тип конструкции усиленно пропагандируется Бобом Пи-
зом (см.2) и иногда называется «птичьим гнездом»), всегда существует риск
повреждения схемы и возникновения коротких замыканий. Также, если
элементы схемы высоко подняты над заземляющей поверхностью, экрани-
рующий эффект заземляющей поверхности уменьшается и взаимное влия-
ние между различными частями схемы становится более вероятным. Не-
смотря на это, данный метод очень практичен и широко применяется, так
как позволяет легко модифицировать схему (при этом, естественно, пред-
полагается, что тот, кто вносит модификации, умеет паять).
На рис. 9.175 показан другой вариант макета схемы. В данном случае в
односторонней плакированной медью ПП имеются предварительно просвер-
ленные отверстия с расстоянием между центрами 0,1" (см.3). Вверху и внизу
на плате проходят шины питания. К выводам питания каждой ИС подклю-
чены развязывающие конденсаторы. Будьте осторожны, так как из-за умень-
шения площади меди за счет предварительно просверленных отверстий этот
метод не обеспечивает такой же низкий импеданс «земли», как в случае
платы со сплошным медным покрытием, показанной на рис. 9.174.
В этом варианте данного метода ИС и другие компоненты монтируются
на неплакированную медью сторону платы. Отверстия в плате используют-
ся в качестве переходных отверстий, а межсоединения точка—точка произ-
водятся на плакированной медью стороне платы. Обратите внимание, что
медь, окружающая каждое используемое в качестве переходного отверстие,
должна быть удалена во избежание закорачивания. Этот подход требует,
Рис. 9.175. Прототип — «мертвый жук» на плате с односторонним медным покрытием
и предварительно просверленными с шагом 0,1" отверстиями
чтобы расстояние между центрами выводов всех ИС равнялось 0,1". В низ-
кочастотных схемах могут использоваться низкопрофильные панельки,
выводы которых можно легко соединять по схеме точка—точка.
Макетирование на Solder-Mount
Существует коммерческая система макетирования, которая обладает боль-
шинством достоинств описанных выше методов (устойчивое заземление,
экранирование, простота изменения схемы, малые емкость и индуктивность)
и некоторыми дополнительными преимуществами: они устойчивы, компо-
ненты располагаются близко к заземляющей поверхности, и, при необхо-
димости, емкости в узлах и импедансы линий могут быть легко определе-
ны. Эта система производится компанией Wainwright Instruments и реализу-
ется в Европе под маркой «Mini-Mount», а в США (где торговая марка
«Mini-Mount» является собственностью другой компании) под маркой
«Solder-Mount» (см. 4 5).
Solder-Mount состоит из небольших кусков ПП с вытравленным рисун-
ком с одной стороны и контактным клеем с другой. Эти куски приклеива-
ются к заземляющей поверхности, и на них припаиваются компоненты.
Они выпускаются с различными рисунками, включая готовые контактные
площадки для корпусов ИС всех размеров от 8-контактных SOIC до 64-
контактных DIL, полоски с площадками под пайку с регулярным интерва-
лом (значения интервала варьируются от 0,040" до 0,25", включая полоски с
интервалом между площадками 0,1", которые могут использоваться для
монтажа устройств в £>/£-корпусах), полоски с проводниками шириной,
необходимой для формирования микрополосковых линий (50 Ом, 60 Ом,
75 Ом и 100 Ом), и разнообразные контактные площадки для монтажа раз-
личных других компонентов. Также имеются самоклеящиеся тонкие луже-
ные медные полоски и прямоугольники (LO-PADS), которые играют роль
точек привязки для межсоединений. Они имеют сравнительно высокую
емкость по отношению к «земле» и, следовательно, служат в качестве раз-
вязывающих конденсаторов с малой индуктивностью. Они выпускаются в
листовой форме и могут быть нарезаны при помощи ножа или ножниц.
Основное преимущество конструкции Solder-Mount перед «птичьим гнез-
дом» или «мертвым жуком» заключается в том, что результирующая схема
является более устойчивой и, при желании, может быть сделана меньших
размеров (последние Solder-Mounts предназначены для устройств с поверх-
ностным монтажом и позволяют создавать макеты размером немного боль-
ше окончательной ПП, хотя обычно более удобно иметь прототип больших
размеров). Solder-Mount является достаточно стойким и может применяться
для создания прототипов, а также малых партий.
На рис. 9.176 показан прототип схемы ФАПЧ с частотой 2,5 ГГц, пост-
роенный по технологии Solder-Mount. Несмотря на то что показанная схема
является высокоскоростной, данный метод в равной степени подходит для
создания низкочастотных аналоговых схем с высоким разрешением.
Особенно удобным свойством Solder-Mount на ОВЧ является сравни-
тельная простота формирования линий передачи. Как отмечалось ранее,
если проводники проходят над заземляющей поверхностью, их комбина-
9.8. Макетирование и создание прототипов 1005
Рис. 9.176. Прототипная плата на базе «Solder-Mount»
ция формирует микрополосковую линию. Среди компонентов Solder-
Mount имеются полоски, которые при монтаже на заземляющую поверх-
ность формируют микрополосковые линии с нормированным импедан-
сом (имеются варианты с импедансами 50 Ом, 60 Ом, 75 Ом и 100 Ом).
Эти полоски могут использоваться в качестве линий передачи для согла-
сования импеданса или просто в качестве шин питания. Обратите вни-
мание, что ПП из стекловолокна, пропитанного эпоксидной смолой,
имеют потери на ОВЧ/УВЧ, однако при малой длине микрополосков они,
возможно, будут приемлемыми.
Создание прототипов
на фрезерованных ПП
Прототипы сложных аналоговых схем, создаваемые по технологии «мерт-
вого жука» и «Solder-Mount», получаются громоздкими, поэтому прототипы
для больших схем лучше получаются при использовании более формаль-
ных методов разводки.
Существует подход к макетированию, который всего на один шаг отли-
чается от стандартного создания ПП. Он основан на разводке двухсторон-
ней платы при помощи обычных средств САПР. Программные пакеты раз-
водки позволяют легко выполнять разводку ПП при вводе принципиаль-
ной схемы в ПК для проверки соединений (см.6 7). Несмотря на то что в
большинстве подобных программных пакетов имеются определенные воз-
можности автоматической разводки, это свойство лучше оставить для
цифровых проектов. Размещение аналоговых проводников и компонентов
следует выполнять вручную, следуя правилам, описанным в других разде-
лах этой главы. После завершения разводки платы программное обеспече-
ние сверяет соединения со списком соединений (net list) принципиальной
схемы.
Многие разработчики могут использовать методы САПР при разводке
простых плат. Результатом работы САПР является лента формирования шаб-
лона (или файл в формате Gerber), которая в обычном случае посылается на
завод по производству ПП, где делается окончательная плата.
Глава 9. Методы проектирования аппаратуры
Рис. 9.177. Прототипная плата, полученная методом фрезерования (вид сверху)
Однако существуют автоматические сверлильные и фрезеровальные ав-
томаты, которые непосредственно воспринимают ленты формирования
шаблона (см. 8’9), что позволяет не обращаться к производителям ПП.
Пример прототипной ПП, созданной по такой технологии, показан на
рис. 9.177 (вид сверху).
В таких системах одно- или двусторонние ПП производятся путем свер-
ления всех отверстий и удаления проводящего покрытия (для создания не-
обходимой изоляции проводников) путем фрезеровки. Результатом работы
системы может быть плата, которая достаточно близка по функциональ-
ным возможностям к двусторонней плате, изготовленной в фабричных ус-
ловиях.
Следует отметить, что основной недостаток этого метода заключается в
том, он не позволяет создавать металлизированные сквозные отверстия.
Поэтому любые проводящие «переходные отверстия» между двумя слоями
на такой плате должны быть вручную соединены проводом, припаиваемым
с двух сторон отверстия.
Стандартными значениями является минимальная ширина проводника
25 mils (1 mil = 0,0011) и расстояние между проводниками 12 mils, однако
Рис. 9.178. Прототипная плата, полученная методом фрезерования (вид снизу)
9.8. Макетирование и создание прототипов 1007
при соблюдении осторожности можно достичь меньших значений ширины
проводника. Минимальное расстояние между линиями определяется раз-
мером используемой фрезы (обычно от 10 до 12 mils).
На рис. 9.178 показан вид снизу на ту же фрезерованную прототипную
ПП. Характер медного рисунка позволяет вносить модификации.
Вероятно, наибольшим достоинством фрезерованных прототипных плат
является то, что они наиболее соответствуют формату окончательного ва-
рианта ПП. Однако по своей природе этот метод ограничен одно- или дву-
сторонними платами, и его использование, очевидно, бесполезно для раз-
работок с поверхностным монтажом.
Остерегайтесь панелек!
Панельки для ИС могут отрицательно повлиять на характеристики вы-
сокоскоростных или высокоточных аналоговых ИС. Несмотря на то что
они облегчают создание прототипов, даже низкопрофильные панельки
часто вносят паразитные емкости и индуктивности, достаточные для ухуд-
шения характеристик высокоскоростной схемы. Если без панелек никак
не обойтись, то приемлемым может оказаться применение панельки, ко-
торая состоит из гнезд для отдельных выводов (pin sockets, также иногда
называются cage jacks), монтируемых в плату с заземляющей поверхнос-
тью (рис. 9.179).
При использовании этого метода необходимо зачистить медь (на обеих
сторонах платы) вокруг каждого из гнезд незаземляемых выводов прибли-
зительно на 0,5 мм. Гнезда заземляемых выводов припаиваются к «земле» с
обеих сторон платы.
Гнезда для отдельных выводов выпускаются в вариантах с наконечни-
ком и без него (номера по каталогу АМР 5-330808-3 и 5-330808-6 соответ-
ственно). Они выступают из платы достаточно для того, чтобы их можно
было соединять между собой проводами.
За счет подпружиненных позолоченных контактов внутри гнезда обес-
печивается хорошее электрическое и механическое соединение с выводами
ИС. Однако многократное использование может повлечь ухудшение их ха-
рактеристик, и этот фактор необходимо учитывать.
Припой
Припой
К\\ЧЧ\ХХ\\\\\\1
Х\\\УХ.ХХХХХХХХ
Диэлектрик печатной платы
Диэлектрик печатной платы
XWWWWWXXM БЗ
БА) X\\XX\\XXXXXXS
Припой
Припой
С колпачком
или без него
Рис. 9.179. При необходимости используйте гнезда для отдельных выводов, обеспечи-
вающие минимальные паразитные эффекты
Также обратите внимание, что в варианте без наконечника выводы ИС
могут выступать за нижнюю границу гнезда. За счет этого появляется до-
полнительная полезная функция. Когда прототип, в котором используются
гнезда для отдельных выводов, доведен до рабочего состояния и не требует
дальнейших изменений, выводы ИС могут быть припаяны непосредствен-
но к нижнему концу гнезда. Этим обеспечивается жесткое перманентное
соединение.
Некоторые дополнительные вопросы,
касающиеся создания прототипов
Методы макетирования, обсуждавшиеся до настоящего момента, были ог-
раничены одно- или двусторонними ПП. Многослойные ПП не слишком
годятся для стандартных методов макетирования. Если требуется создание
прототипа на многослойной плате, то его можно получить на основе дву-
сторонней платы, где одна сторона используется под «землю», а другая —
под питание и сигналы. Дополнительные дорожки, которые в обычной си-
туации размещались бы на дополнительных слоях многослойной платы,
могут быть реализованы навесным монтажом. Однако импеданс проводных
межсоединений сложно контролировать, и показатели макетируемой по-
добным образом схемы на высоких частотах могут значительно отличаться
от окончательного варианта многослойной платы.
Другие сложности при создании прототипов могут возникать из-за опе-
рационных усилителей или других линейных устройств, имеющих полосу
пропускания несколько сотен мегагерц и более. Небольшие изменения па-
разитной емкости (<1 пФ) в прототипе по сравнению с окончательной пла-
той могут вызвать значительные различия в ширине полосы и времени ус-
тановления.
Иногда прототип создается с использованием Л/Р-корпусов (если они
имеются), а в окончательном продукте используется корпус SOIC. Этого
делать не рекомендуется! На высоких частотах небольшие различия в пара-
зитных эффектах, вызванных корпусом, могут привести к различию в ха-
рактеристиках прототипа и окончательного варианта платы. Для миними-
зации этих эффектов при создании прототипа всегда используйте тот же
тип корпуса, который будет в окончательной версии.
Оценочные платы
Большинство производителей аналоговых ИС поставляют оценочные платы
{evaluation boards), обычно по номинальной цене. Эти платы позволяют по-
требителю оценивать ИС без создания собственных прототипов. Независи-
мо от продукта производитель принимает соответствующие меры по зазем-
лению, разводке и развязке для обеспечения оптимальных характеристик
устройства. По возможности оригинал топологии оценочной ПП обычно
предоставляется бесплатно, независимо от того, желает ли потребитель не-
посредственно скопировать разводку или внести в нее модификации под
свое приложение.
9.8. Макетирование и создание прототипов
Оценочные платы общего назначения
для операционных усилителей в середине 1990-х годов
Существуют оценочные платы для конкретных ИС и оценочные платы об-
щего назначения. Для операционных усилителей, наиболее универсальных
линейных ИС, логично иметь оценочные платы, помогающие облегчить
создание приложения. Также важно, чтобы оценочная плата имела высокое
качество и была свободна от паразитных эффектов, обсуждавшихся выше.
Пример оценочной платы общего назначения для сдвоенного операцион-
ного усилителя показан на рис. 9.180 (см. 10).
Рис. 9.180. Оценочные платы общего назначения середины 1990-х годов для операци-
онных усилителей позволяли легко и быстро конфигурировать низкочас-
тотные операционные усилители в /)/Л-корпусах
На этой плате присутствуют гнезда под отдельные выводы для любых
сдвоенных операционных усилителей со стандартным расположением вы-
водов и гибкий набор перемычек, которые позволяют настраивать усили-
тель для работы в инвертирующем и неинвертирующем режимах. Различ-
ные коэффициенты усиления в конфигурациях со связью по постоянному
или переменному току могут задаваться выбором номиналов компонентов.
Конструкция платы обеспечивает связь с сигналами через Я/УС-разъе-
мы на входе и выходе. Для питания платы используются внешние лабора-
торные источники питания, которые подключаются проводами к выступа-
ющим контактам в ее верхней части. При этом на плате имеются компо-
ненты для локальной развязки по питанию.
Эти оценочные платы общего назначения предназначены для схем со
средней и высокой точностью, работающих на частотах до 10 МГц при
умеренных значениях входных токов операционного усилителя. При более
высоких рабочих скоростях лучше использовать специальные оценочные
платы для отдельных устройств.
Оценочные платы для отдельных устройств
При работе с высокоскоростными/высокоточными ИС особое внимание
следует уделять развязке по питанию. Например, сигналы с высокой скоро-
стью нарастания, поступающие на нагрузку с относительно низким импе-
дансом, приводят к появлению высокоскоростных импульсных токов на
выводах питания операционного усилителя. Импульсные токи вызывают
соответствующее падение напряжения на любом паразитном сопротивле-
нии, которое может присутствовать в проводниках питания. Эти напряже-
ния, в свою очередь, могут проникать на выход усилителя из-за ограничен-
ных возможностей подавления операционным усилителем высоких частот
по цепи напряжения питания.
Конкретным примером является операционный усилитель с обратной
связью по току AD8001, для которого имеется отдельная оценочная плата.
На рис. 9.181 показан вид снизу на оценочную плату для AD8001 в корпусе
SOIC. Для обеспечения низкоимпедансного заземления на всех частотах пе-
реходных процессов была выбрана тройная схема развязки. Импульсы наи-
высшей частоты шунтируются на «землю» двумя керамическими бескорпус-
ными конденсаторами 1000 пФ/0,01 мФ, расположенными максимально близ-
ко к выводам питания для минимизации паразитных последовательных
индуктивности и сопротивления. При использовании этих компонентов с
поверхностным монтажом паразитная индуктивность и емкость в заземляю-
щей поверхности минимальна. Низкочастотные импульсные токи шунтиру-
ются танталовым конденсатором больших размеров емкостью 10 мкФ.
Рис. 9.181. Для высокоскоростного операционного усилителя, такого как AD8001, тре-
буется специальная оценочная плата с подходящими заземлением и схемой
развязки (вид снизу)
Входные и выходные сигнальные проводники выполнены в виде 50-ом-
ных микрополосковых линий передачи, которые можно видеть в левой и
правой частях платы. В качестве задающих усиление резисторов использу-
ются бескорпусные («чиповые») пленочные резисторы, обладающие малой
паразитной индуктивностью. Их можно увидеть на фотографии в центре
монтированными слегка по диагонали.
Также обратите внимание, что с обеих сторон платы расположены за-
земляющие поверхности большой площади. Для обеспечения наименьшего
возможного импеданса и наилучшей электропроводности «земли» на высо-
ких частотах заземляющие поверхности, расположенные на верхней и ниж-
ней сторонах платы, соединены металлизированными сквозными отвер-
стиями в нескольких точках.
Как показано на рисунке, входное и выходное соединение с платой обес-
печивается при помощи разъемов SMA на концах входных/выходных ли-
9.8. Макетирование и создание прототипов
Рис. 9.182. Оценочная плата AD8001 имеет заземляющую поверхность большой пло-
щади и обеспечивает минимальную паразитную емкость (вид сверху)
ний передачи сигнала. Внешний лабораторный источник питания подклю-
чается к плате через контакты для пайки, которые можно увидеть на концах
широких проводников питания.
Некоторые из этих моментов становятся более наглядными при взгляде
на вид сверху той же платы, который показан на рис. 9.182. Эта оценочная
плата AD8001 представляет собой неинвертирующий каскад усиления сиг-
нала с низкой паразитной емкостью, что обеспечивается площадкой, сво-
бодной от меди под корпусом SOIC AD8001.
На рис. 9.182 также можно увидеть практически непрерывную заземля-
ющую поверхность и множество переходных отверстий, соединяющих вер-
хнюю и нижнюю заземляющие поверхности.
Оценочные платы преобразователей данных
Хорошо спроектированная оценочная плата, поставляемая производителем,
является мощным средством, которое может значительно упростить интег-
рацию АЦП или ЦАП в систему. Возможно, наилучшим свойством оце-
ночной платы является то, что ее разводка спроектирована с учетом опти-
мизации характеристик преобразователя данных. В справочных данных на
большинство своих АЦП и ЦАП Analog Devices приводит полную принци-
пиальную электрическую схему и перечень элементов, а также разводку
соответствующих оценочных плат. Если плата является многослойной, то
показан каждый ее слой. При необходимости Analog Devices поставляет
файлы разводки в САПР (в формате Gerber). Многих проблем системного
уровня, связанных с разводкой, можно избежать, просто изучив разводку
оценочной платы и используя ее в качестве ориентира при разводке сис-
темной платы, возможно даже непосредственно копируя ее критические
части.
Оценочные платы обычно имеют входные/выходные разъемы для ана-
логовых, цифровых интерфейсов и интерфейсов питания, которые упро-
щают подключение к внешнему тестовому оборудованию. Любые необхо-
димые вспомогательные схемы, такие как источники опорного напряже-
ния, кварцевые резонаторы для генерации тактовых сигналов и т. д., обычно
включены в состав платы.
Глава 9. Методы проектирования аппаратуры
Многие современные преобразователи данных содержат значительное
количество внутренней цифровой логики для управления различными режи-
мами работы: усилением, смещением, калибровкой, передачей данных и т. д.
Эти опции настраиваются путем загрузки соответствующих слов во внут-
ренние регистры управления, обычно по последовательному порту. В неко-
торых преобразователях, особенно в сигма-дельта АЦП, простая настройка
основных опций требует хорошего знания внутренних регистров управления
и интерфейса. По этой причине большинство отладочных палат АЦП/ЦАП
имеют интерфейсы (параллельный, последовательный или USB) и программ-
ное обеспечение, которые позволяют легко управлять различными внут-
ренними опциями с внешнего ПК при помощи меню. Во многих случаях
конфигурационные файлы, созданные в оценочном программном обеспе-
чении, можно загружать в готовую систему.
На рис. 9.183 показана оценочная плата 24-разрядного сигма-дельта АЦП
для работы с мостовыми датчиками AD7730. АЦП содержит внутреннюю
ПЛМ, и его структура позволяет напрямую подключаться к разнообразным
мостовым датчикам. Можно непосредственно подключить ко входу АЦП
датчик веса с выходным напряжением полной шкалы 10 мВ и считывать
выходной сигнал с помощью компьютера через интерфейс параллельного
порта. Программное обеспечение оценочной платы позволяет разработчи-
ку системы наблюдать влияние частоты дискретизации, ширины полосы
фильтра и усреднения выходных данных на результирующее эффективное
разрешение. В программном обеспечении также имеется функция построе-
ния гистограмм для прямой оценки шума системы.
На рис. 9.184 показана оценочная плата 32-канального 14-разрядного
ЦАП с высоким напряжением AD5535. Оценочная плата подключается к
внешнему ПК через разъем параллельного порта. Программное обеспече-
Датчик
Рис. 9.183. Оценочная система для измерительного АЦП AD7730
9.8. Макетирование и создание прототипов 1013
Интерфейс
с параллельным
портом к ПК
Аналоговые
выходы
AD5535
Рис. 9.184. Оценочная плата 32-канального 14-разрядного ЦАП AD5535 с выходным
напряжением 200 В
ние, поставляемое с платой, позволяет легко загружать данные в отдельные
регистры DAC по трехпроводному последовательному интерфейсу.
На рис. 9.185 показана оценочная плата АЦП для AD7450, 12-разряд-
ного АЦП с быстродействием 1 MSPS, подключенная к оценочной/управ-
ляющей плате. Оценочная плата АЦП (в правой части рисунка) предназ-
начена для конкретного продукта, а оценочная/управляющая плата может
подключаться к различным оценочным платам АЦП и содержит внутрен-
нюю 16-разрядную буферную память и управляющую логику для интер-
фейса с ПК через последовательный порт. В состав поставляемого про-
граммного обеспечения входит программа БПФ, которая позволяет оце-
нивать работу АЦП в динамических условиях. Оценочная/управляющая
плата может работать с АЦП, имеющими частоты дискретизации вплоть
до нескольких мегагерц.
Рис. 9.185. Оценочная/управляющая плата и оценочная плата АЦП
Глава 9. Методы проектирования аппаратуры
Рис. 9.186. Оценочный комплект FIFO для высокоскоростных АЦП производства Analog
Devices
На рис. 9.186 показан оценочный комплект FIFO для высокоскорост-
ных АЦП производства Analog Devices, который может работать с разнооб-
разными оценочными платами высокоскоростных АЦП, таких как 12-раз-
рядный АЦП AD9430 с быстродействием 210 MSPS. В состав отладочного
комплекта входит плата памяти для сбора блоков данных, поступающих от
АЦП, и программное обеспечение ADC Analyzer (анализатор АЦП). Плата
FIFO может подключаться к параллельному порту ПК через стандартный
принтерный кабель и использоваться совместно с программным обеспече-
нием ADC Analyzer для быстрой оценки характеристик высокоскоростного
АЦП. Она содержит два 16-разрядных FIFO объемом 32 К, и сбор данных
может производиться со скоростью до 133 MSPS в каждом канале. Возмож-
на модернизация памяти для увеличения объема FIFO до 64 К, 132 К или
256 К. Имеются две версии FIFO: одна версия используется со сдвоенными
АЦП или ЦАП, имеющими демультиплексированные цифровые выходы, а
другая — с одноканальными АЦП. Пользователи могут просматривать БПФ
и анализировать информацию об отношении сигнал/шум, SINAD, SFDR,
THD и гармонических искажениях.
Резюме
Методы макетирования, рассмотренные в этом разделе, весьма полезны
для ИС в ZVP-корпусах и заслуживают внимания при создании прототи-
пов, по меньшей мере, некоторых критических аналоговых частей схемы
перед выполнением окончательной разводки платы. Однако современные
высококачественные АЦП и ЦАП часто выпускаются в миниатюрных кор-
пусах для поверхностного монтажа, которые не слишком годятся для про-
стых методов макетирования. На уровне системы требуется использование
многослойных ПП, что еще в большей степени усложняет процесс макети-
рования.
Список литературы: 9.8. Макетирование и создание прототипов
Во многих случаях единственным эффективным прототипом для высо-
копроизводительной аналоговой системы является прототип, созданный по
реальной разводке, особенно если в окончательном проекте требуется ис-
пользование многослойной платы. Оценочные платы полезны не только на
начальных этапах оценки; их разводка может использоваться в качестве
ориентира для разводки платы в реальной системе.
Таким образом, для успешной интеграции высокопроизводительного
преобразователя данных в систему требуется превосходная поддержка со
стороны производителя, а также внимание и осторожность по отношению
к деталям со стороны пользователя.
Список литературы
9.8. Макетирование и создание прототипов
1. Jim Williams. High Speed Amplifier Techniques. Linear Technology AN-47, August,
1991.
2. Robert A. Pease. Troubleshooting Analog Circuits. Butterworth-Heinemann, 1991,
ISBN 0-7506-9184-0.
3. Vector Electronic Company, 12460 Gladstone Ave., Sylmar, CA 91342, Tel.
818-365-9661.
4. Wainwright Instruments Inc., 69 Madison Ave., Telford, PA, 18969-1829, 215-723-4333,
www.rdi-wainwright.com.
5. Wainwright Instruments GmbH, Widdersberger Strasse 14, DW-8138 Andechs-
Frieding, Germany. +49-8152-3162.
6. PADS Software, Advanced CAM Technologies, Inc., 16450 Los Gatos Blvd., Suite
110, Los Gatos, CA 95032, www.ecam.com.
7. ACCEL Technologies, Inc., 17140 Bernardo Center Drive, Suite 100, San Diego,
CA 92128, www.acceltech.com.
8. LPKF Laser & Electronics, 28220 SW Boberg Rd., Wilsonville, OR 97020, 800-
345-LPKF or 503-454-4200, www.lpkfcadcam.com.
9. T-Tech, Inc., 5591-B New Peachtree Road, Atlanta, GA, 34341, 800-370-1530 or
770-455-0676, www.T-Tech.com.
10. Adolfo Garcia. Evaluation Boards for Single, Dual and Quad Operational Amplifiers.
Analog Devices AN398, January 1996.
Заявки на книги присылайте по адресу:
125319, Москва, а/я 594
Издательство «Техносфера»
e-mail: knigi@technosphera.ru
sales@technosphera.ru
факс: (495) 956 33 46
В заявке обязательно указывайте
свой почтовый адрес!
Подробная информация о книгах на сайте
http://www.technosphera.ru
Аналого-цифровое преобразование
под ред. Уолта Кестера
Компьютерная верстка — Н.А. Попова
Дизайн — И.А. Куколева
Корректор — А. Г. Орловская
Ответственный за выпуск — С.В. Зинюк
Формат 70x100/16. Печать офсетная.
Гарнитура Ньютон
Печ.л. 63,5. Тираж 5000 экз. (1-й завод 1500 экз.) Зак. № 2852.
Бумага офсет №1, плотность 65г/м2.
Издательство «Техносфера»
125319, Москва, ул. Краснопролетарская, д. 16, стр. 2
Диапозитивы изготовлены ООО «Европолиграфик»
Отпечатано с готового оригинал-макета
в ООО ПФ «Полиграф-Книга», г. Вологда, ул. Челюскинцев, 3.
Тел.: (8172) 72-55-31, 72-61-75.
AVCC DVCC
AD6645—14-BIT, 80/105 MSPS ADC
GND DMID OVR DRY D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 DO
MSB LSB
INTERPOLATING TxDAC ARCHITECTURE
Worldwide
Headquarters
One Technology Way
P0 Box 9106
Norwood MA
02062-9106 USA
Tel 781 329 4700
(1 800 262 5643
USA only)
Fax 781 326 8703
Analog Devices. Inc
Europe
c/o Analog Devices S
17 19 rue Georges Be<
Parc de Haute
Technologic d Antony
F-92182
Antony Cedex, France
Tel 33 1 46 74 45 00
Fax 33 1 46 74 45 01
Analog Devices. Inc
Japan Headquarters
New Pier Takeshiba
South Tower Building
1-16-1 Kaigan
Mmato-ku Tokyo
105-6891 Japan
Tel 813 5402 8210
Fax 813 5402 1063
Analog Devices. Inc
Southeast Asia
Headquarters
RBS Tower Rm 4501
Times Square
1 Matheson Street
Causeway Bay
Hong Kong. PRC
Tel 852 2.506 9336
Fax 852 2 506 4755
f0= 50MHz
K = 2
Image Frequency = 320MHz - 50MHz = 270MHz
www. technosphera. ru
□ ANALOG
DEVICES