/








































































Автор: Варакин Л.Е.
Теги: электротехника общая радиотехника обработка сигналов сигналы передача информации системы связи
Год: 1985




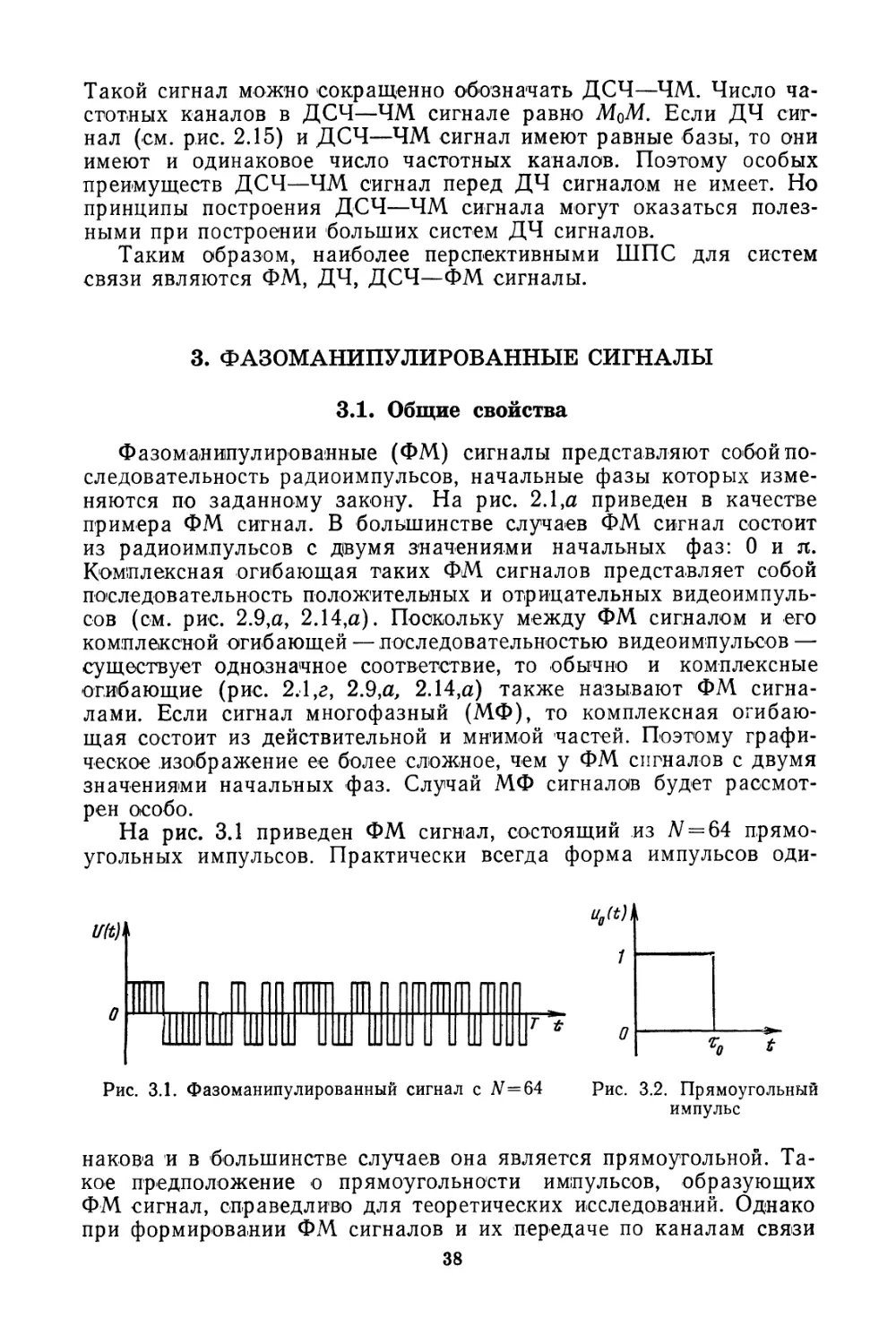
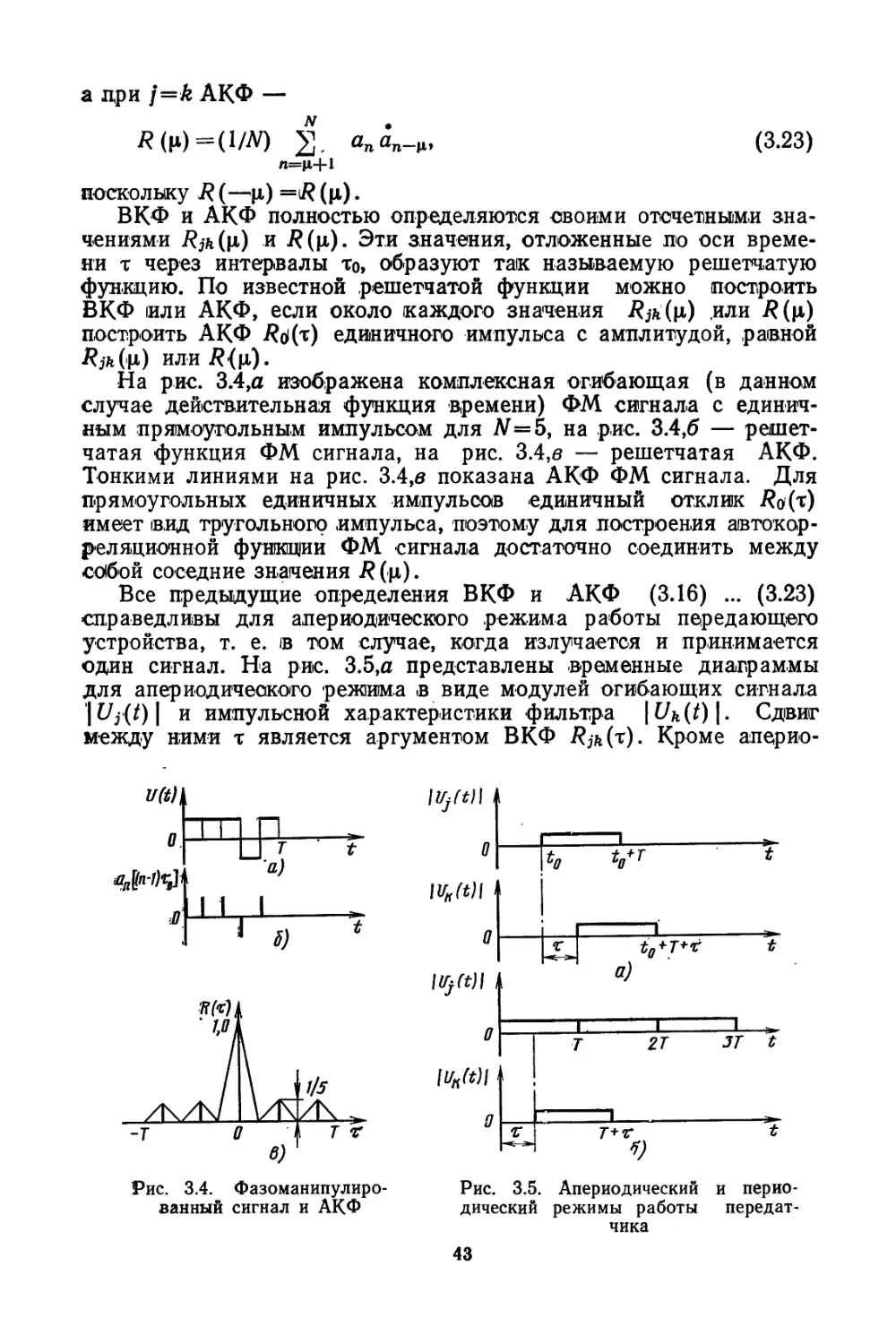
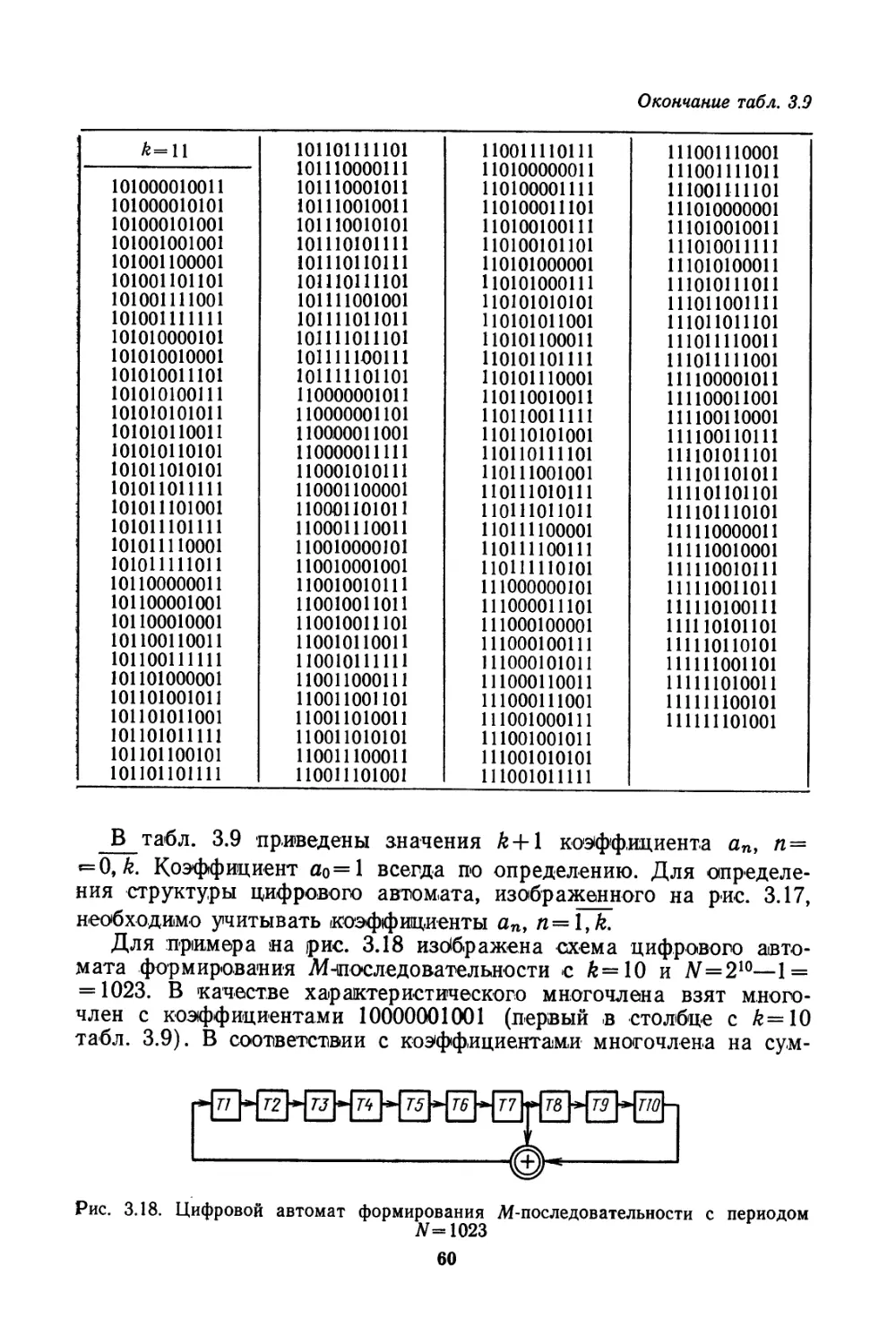
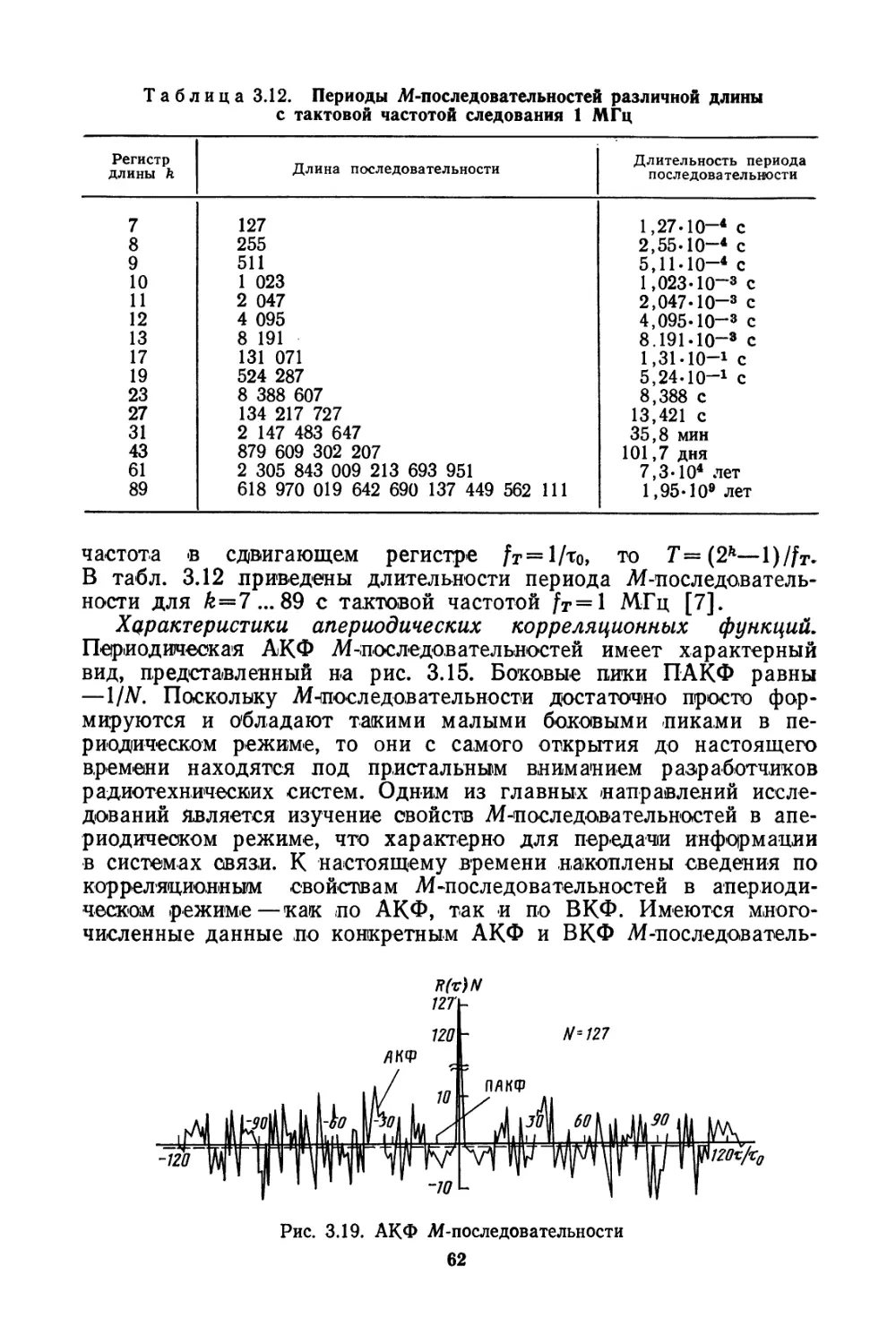
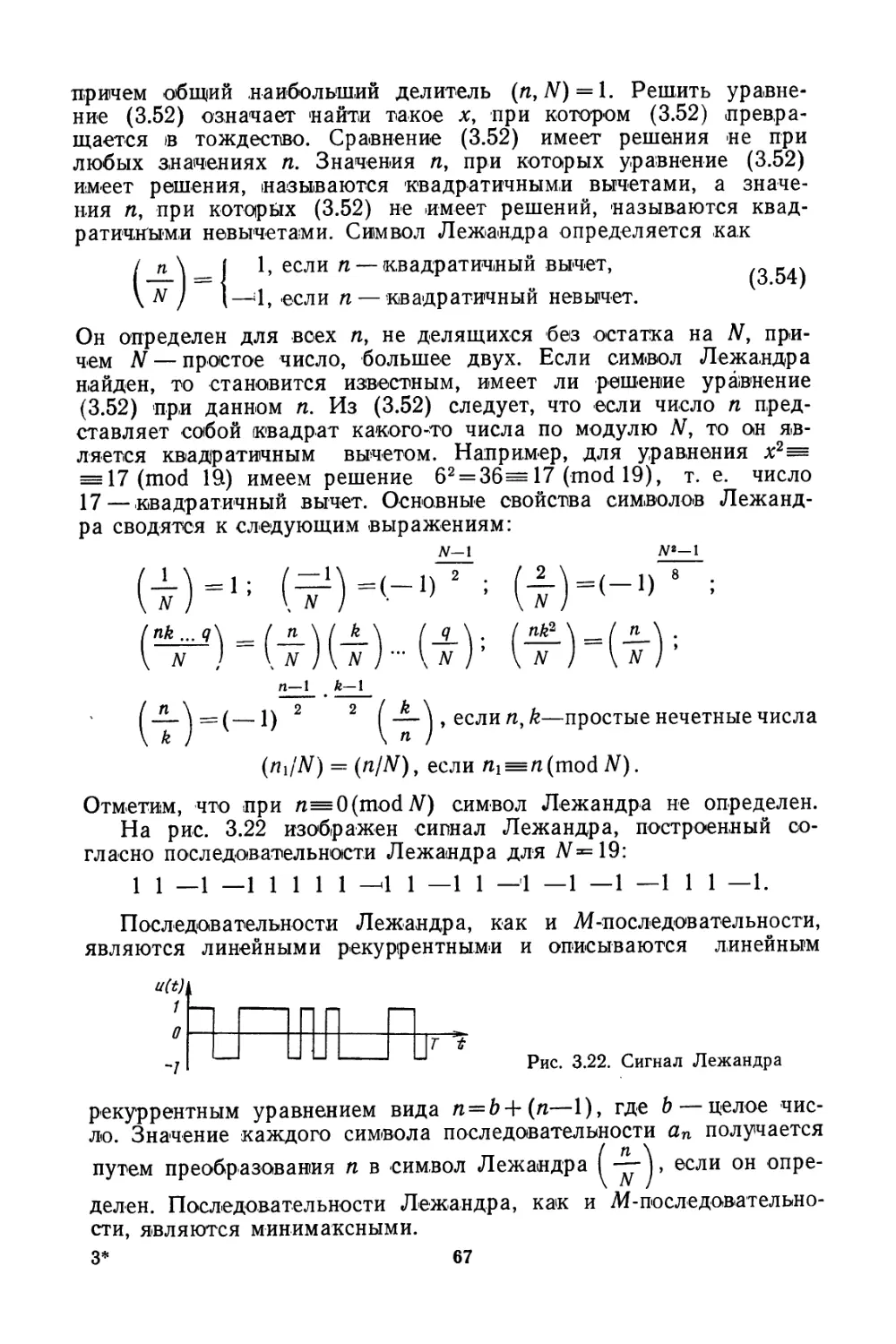
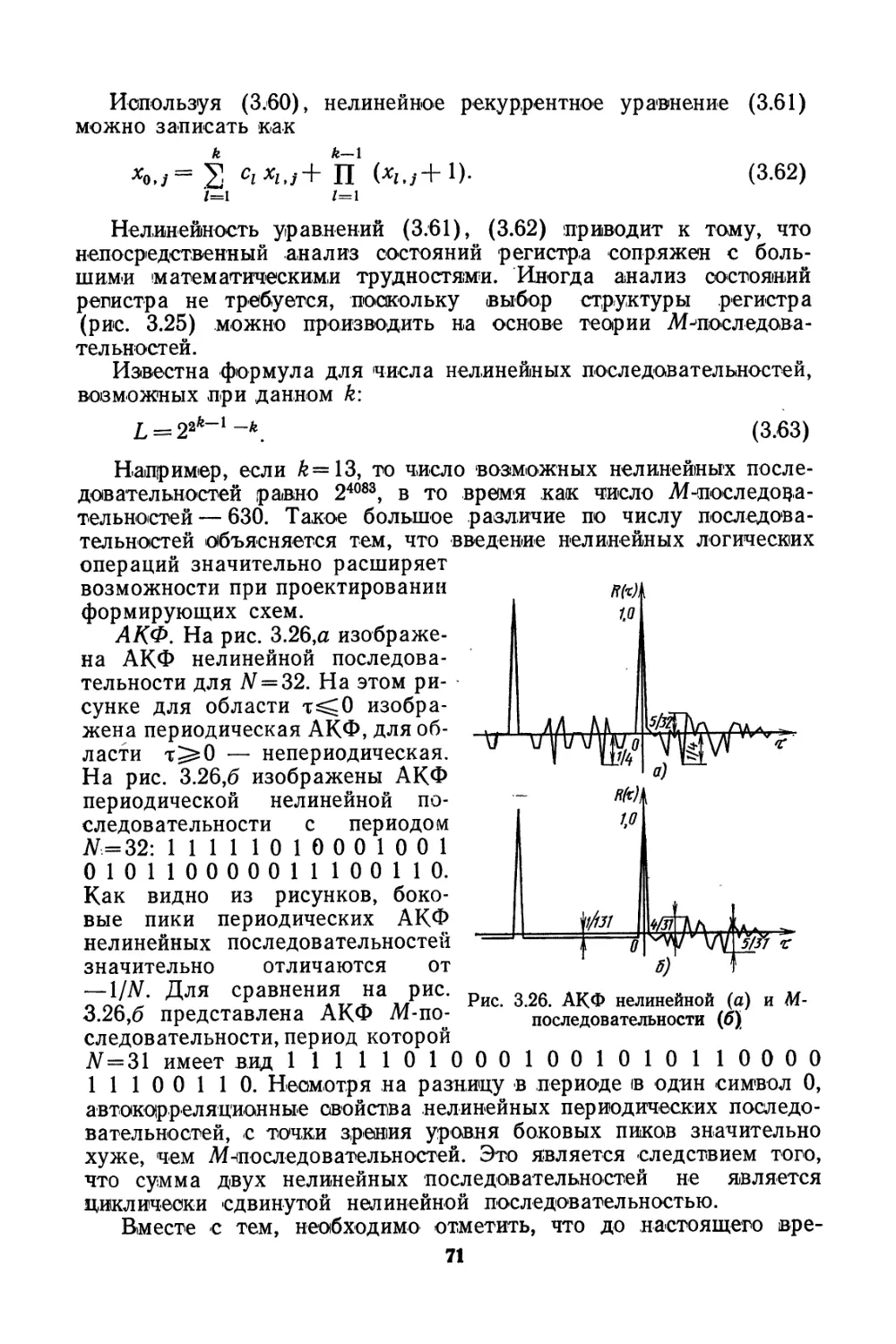
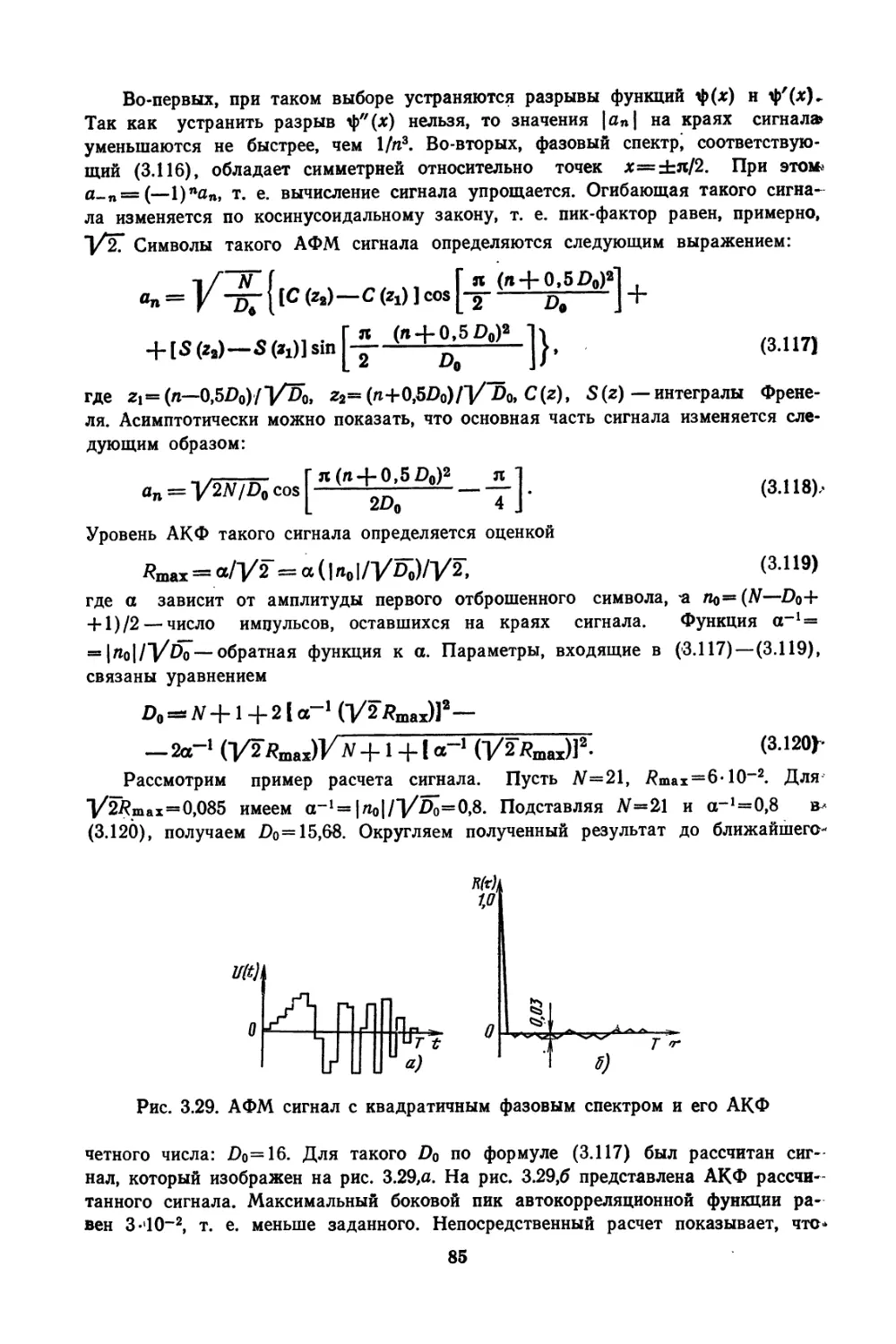
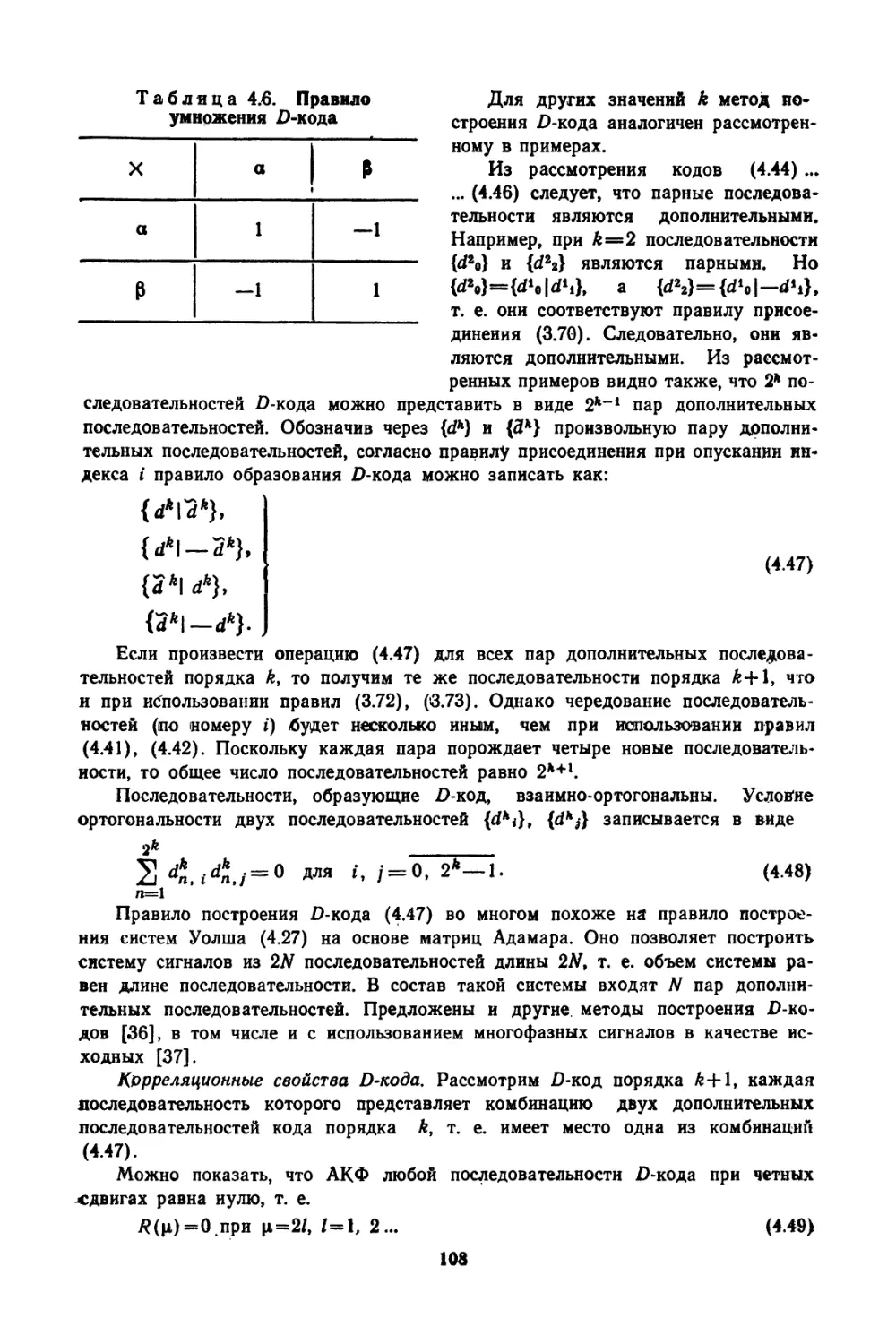
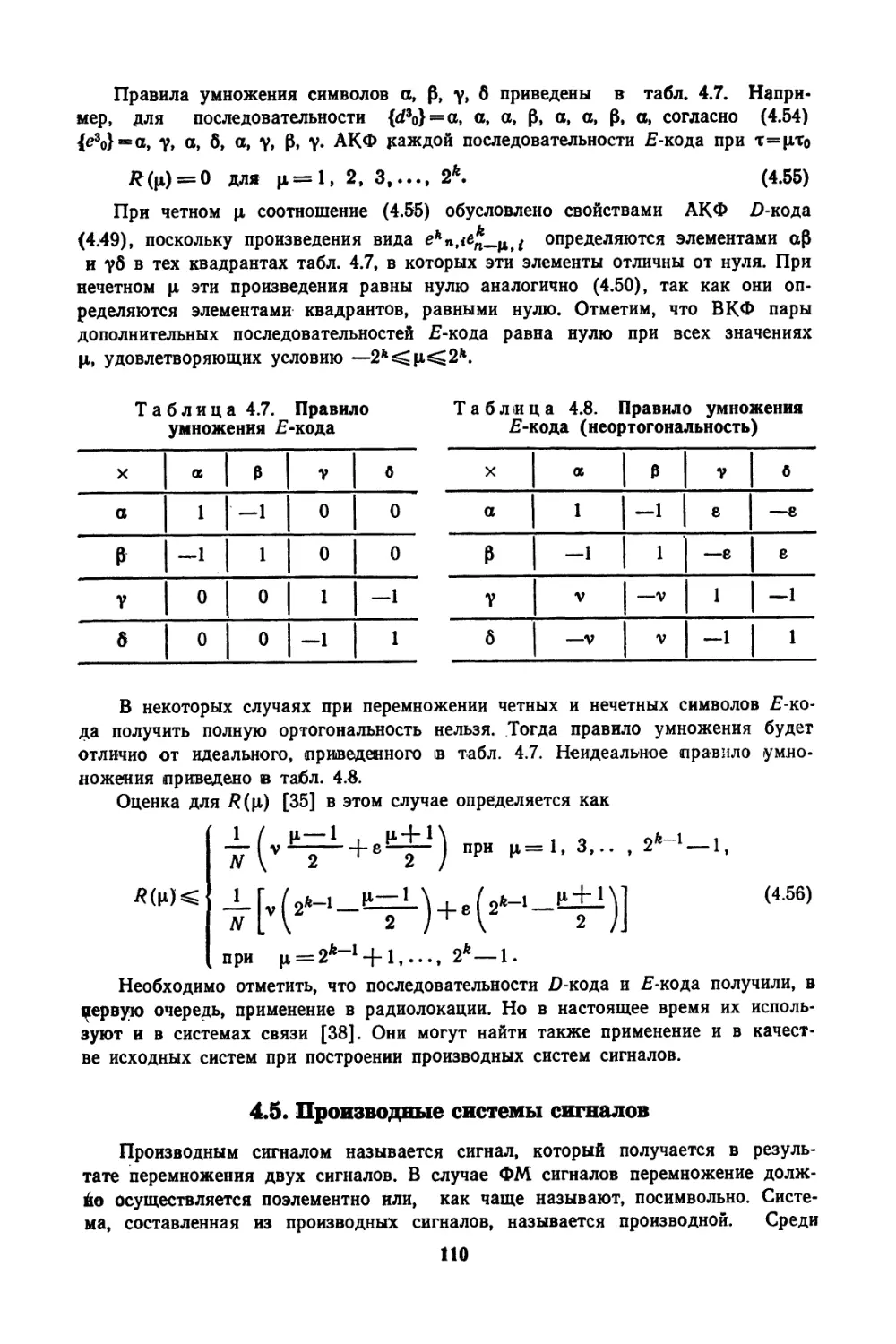
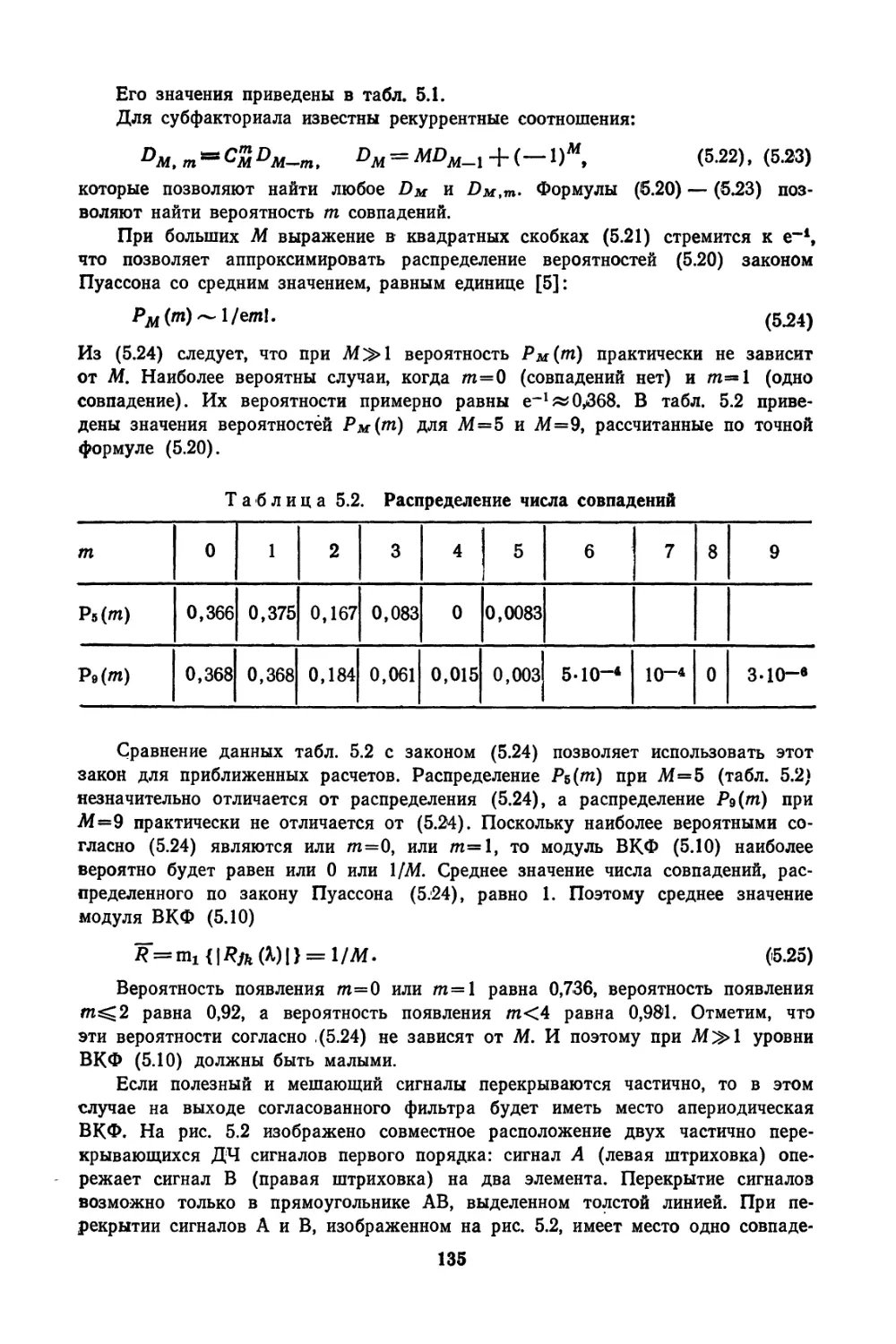
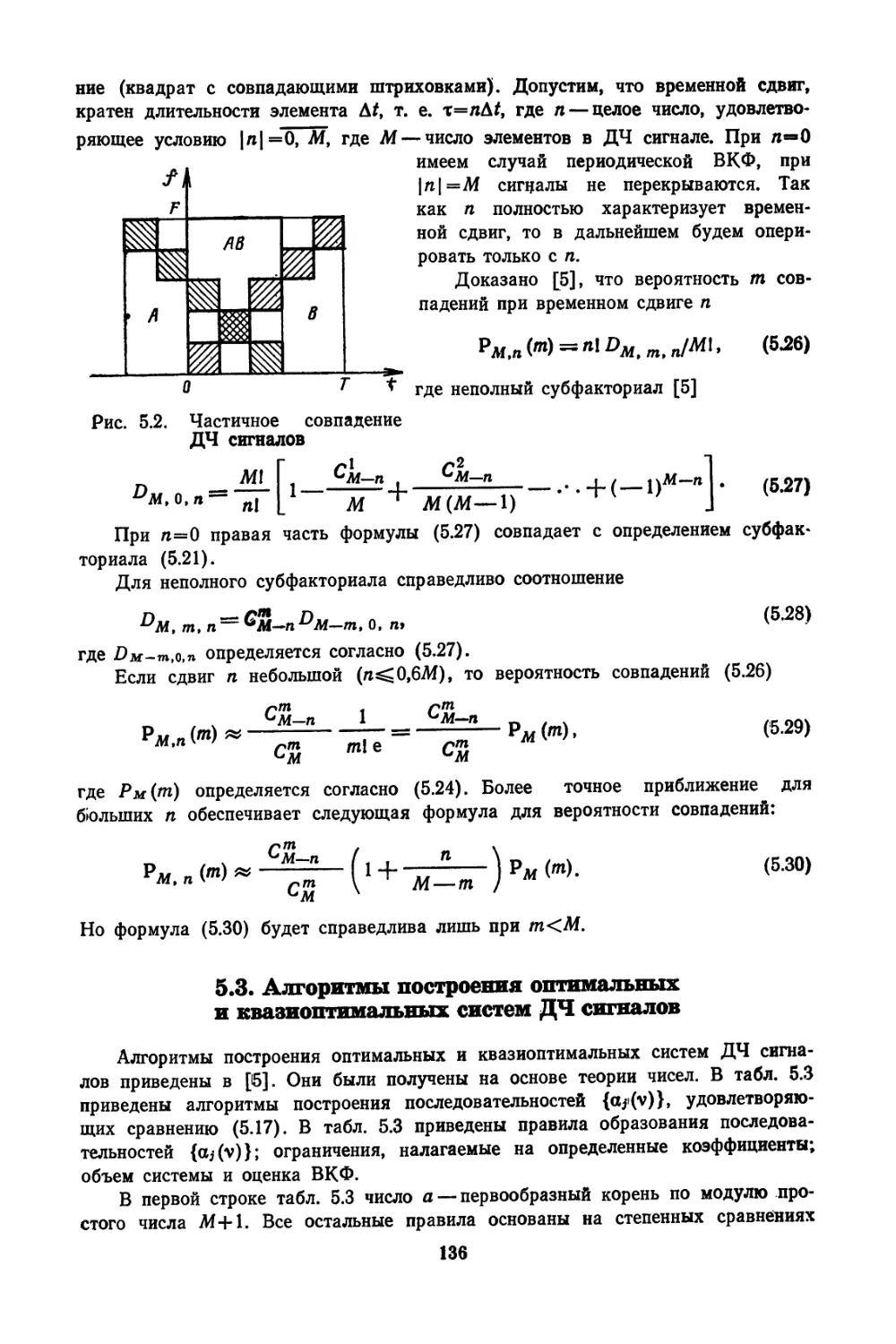
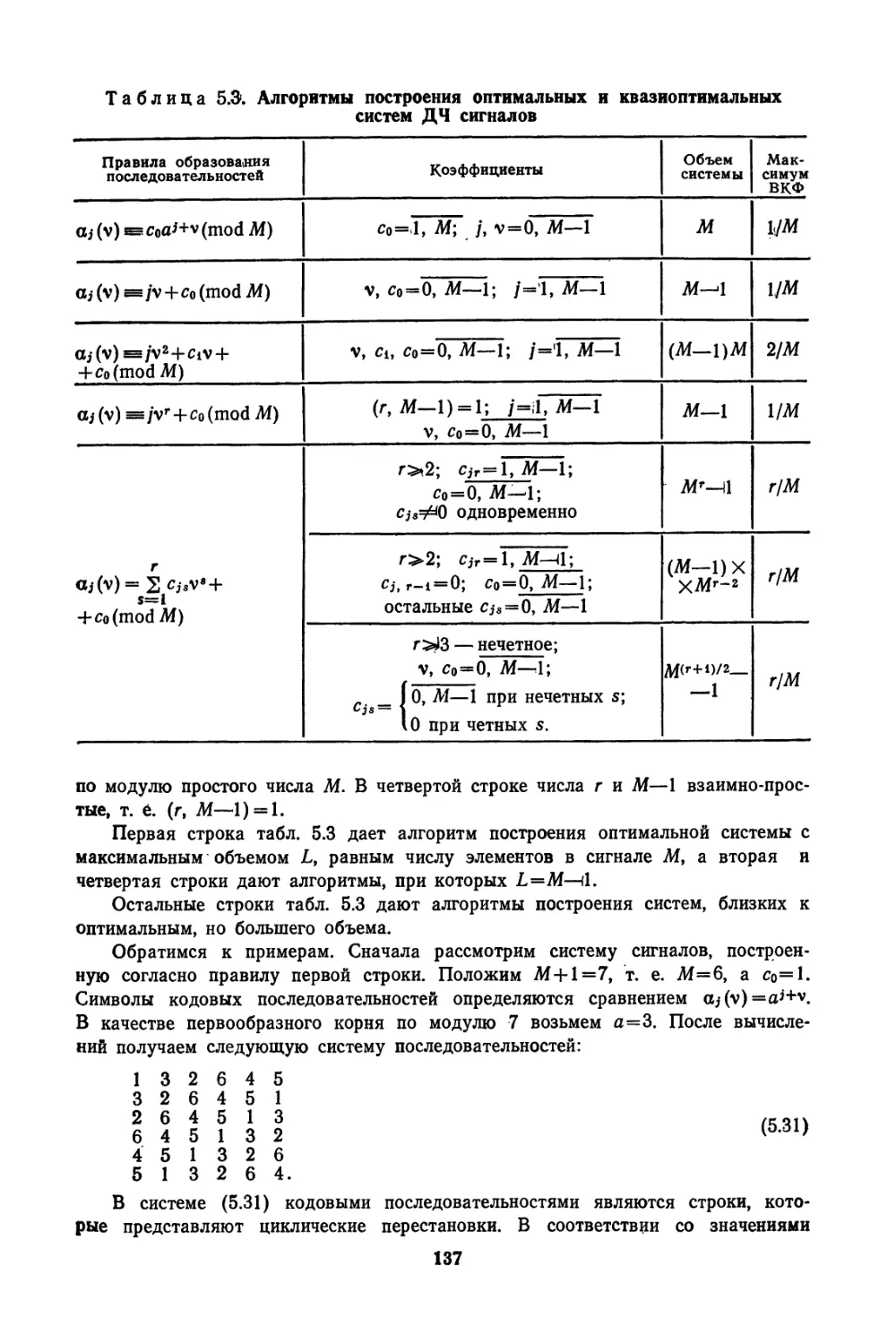
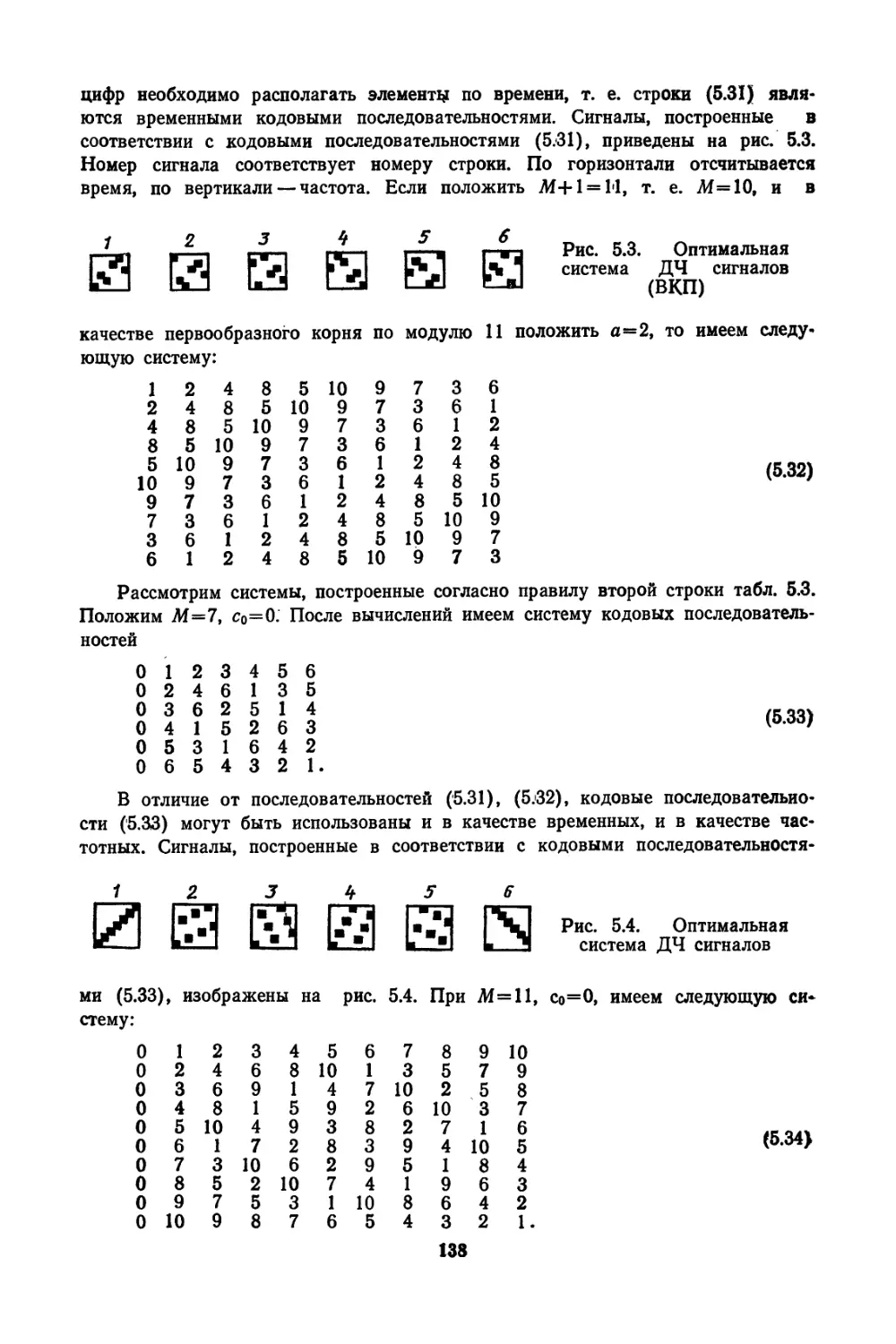
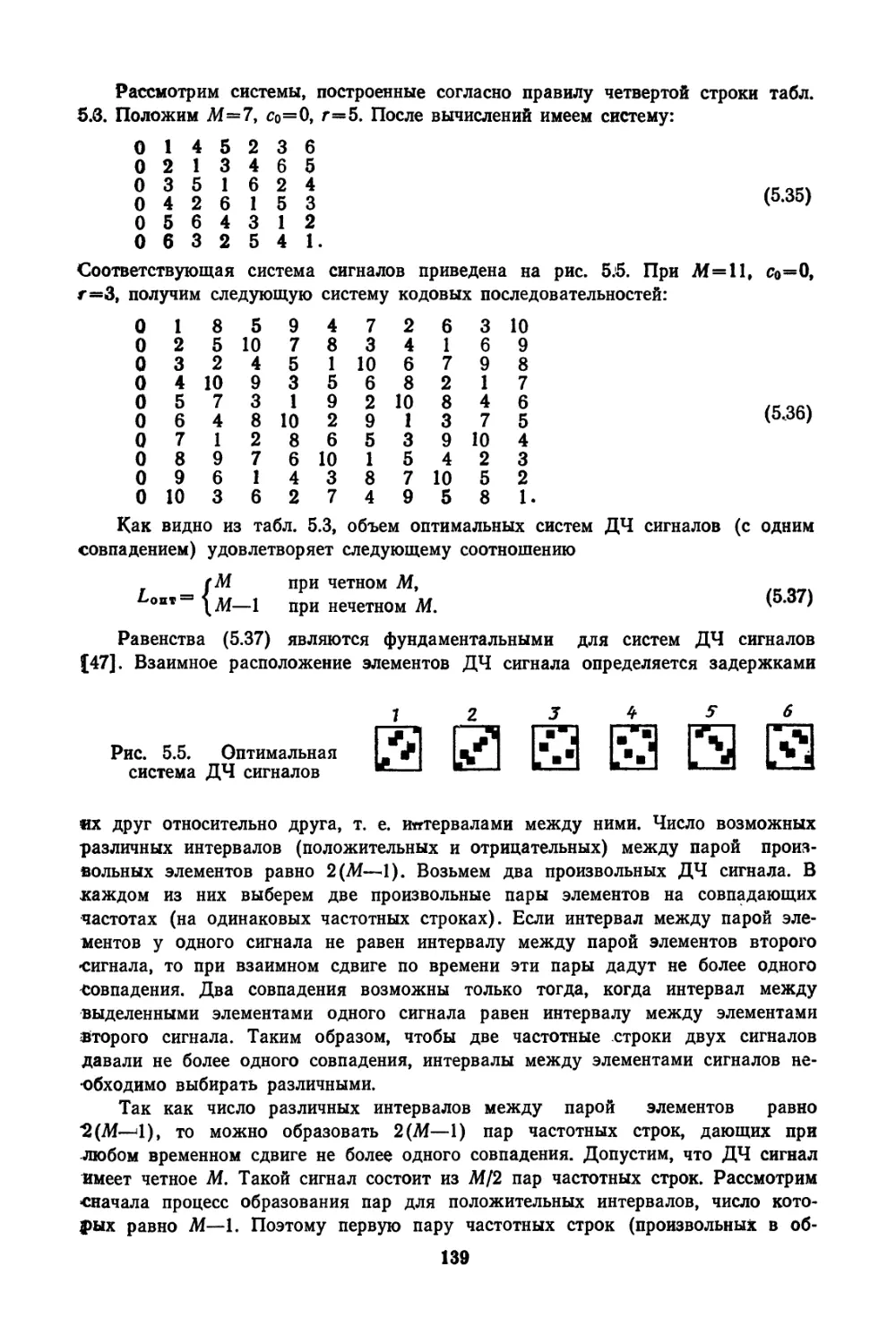
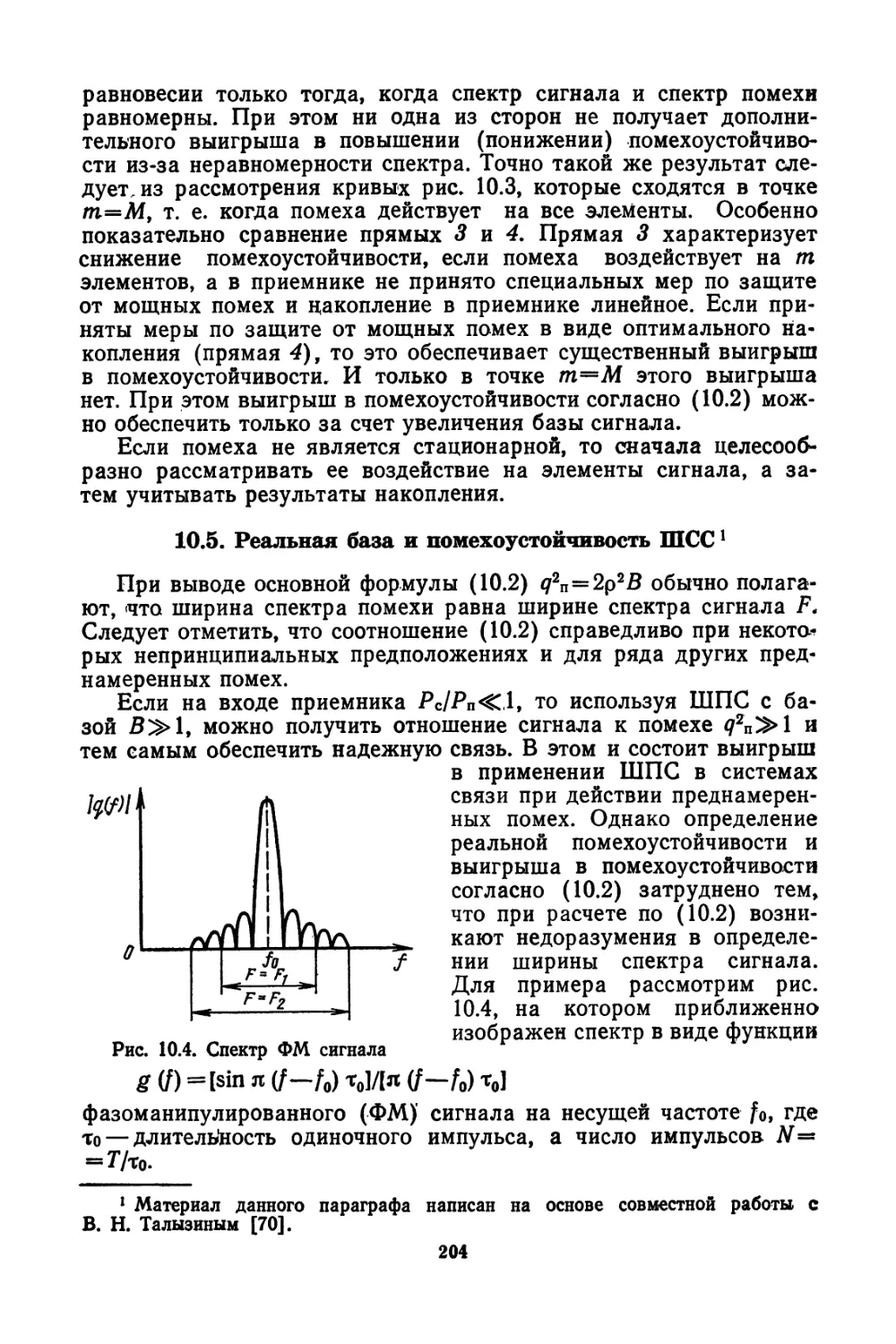
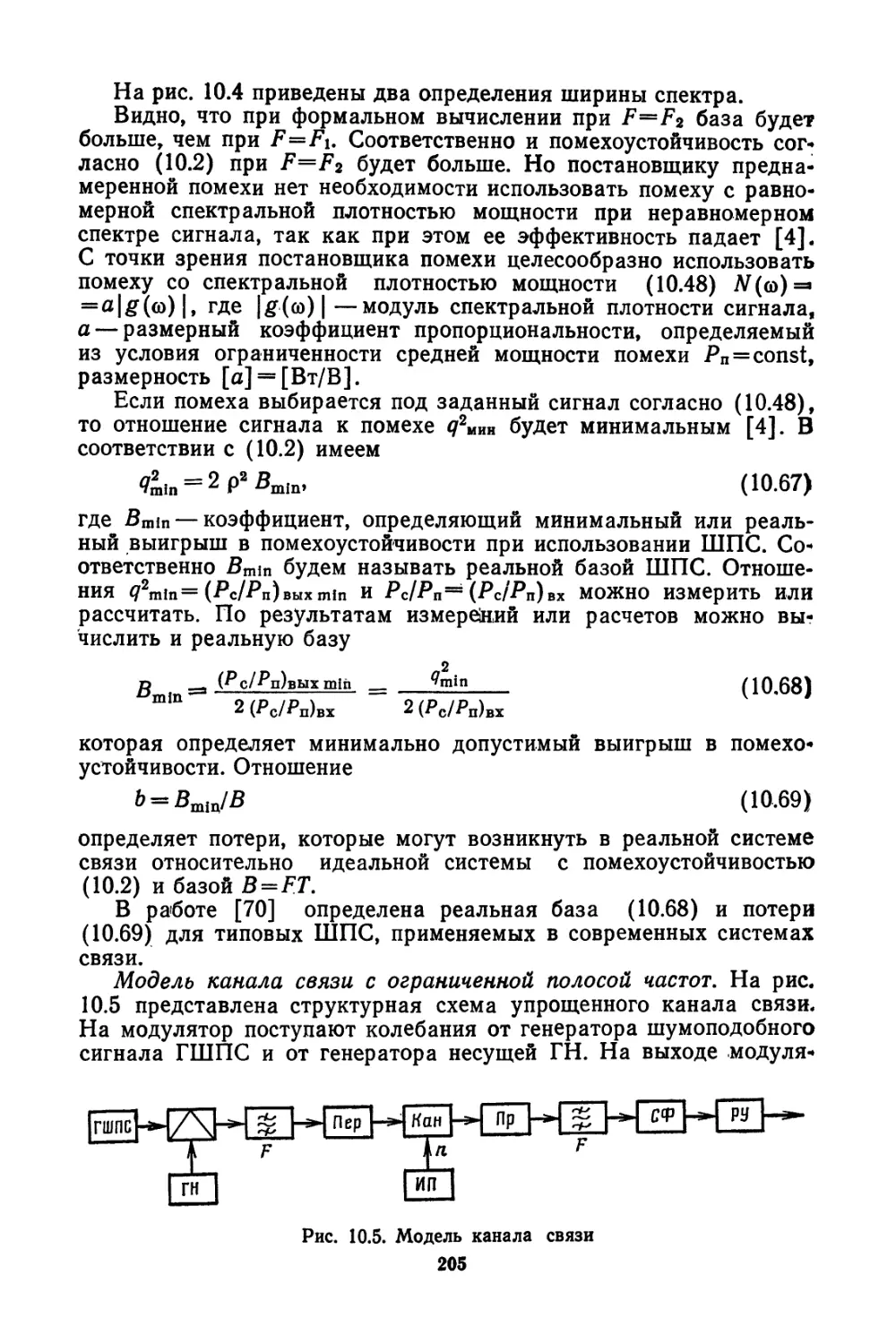
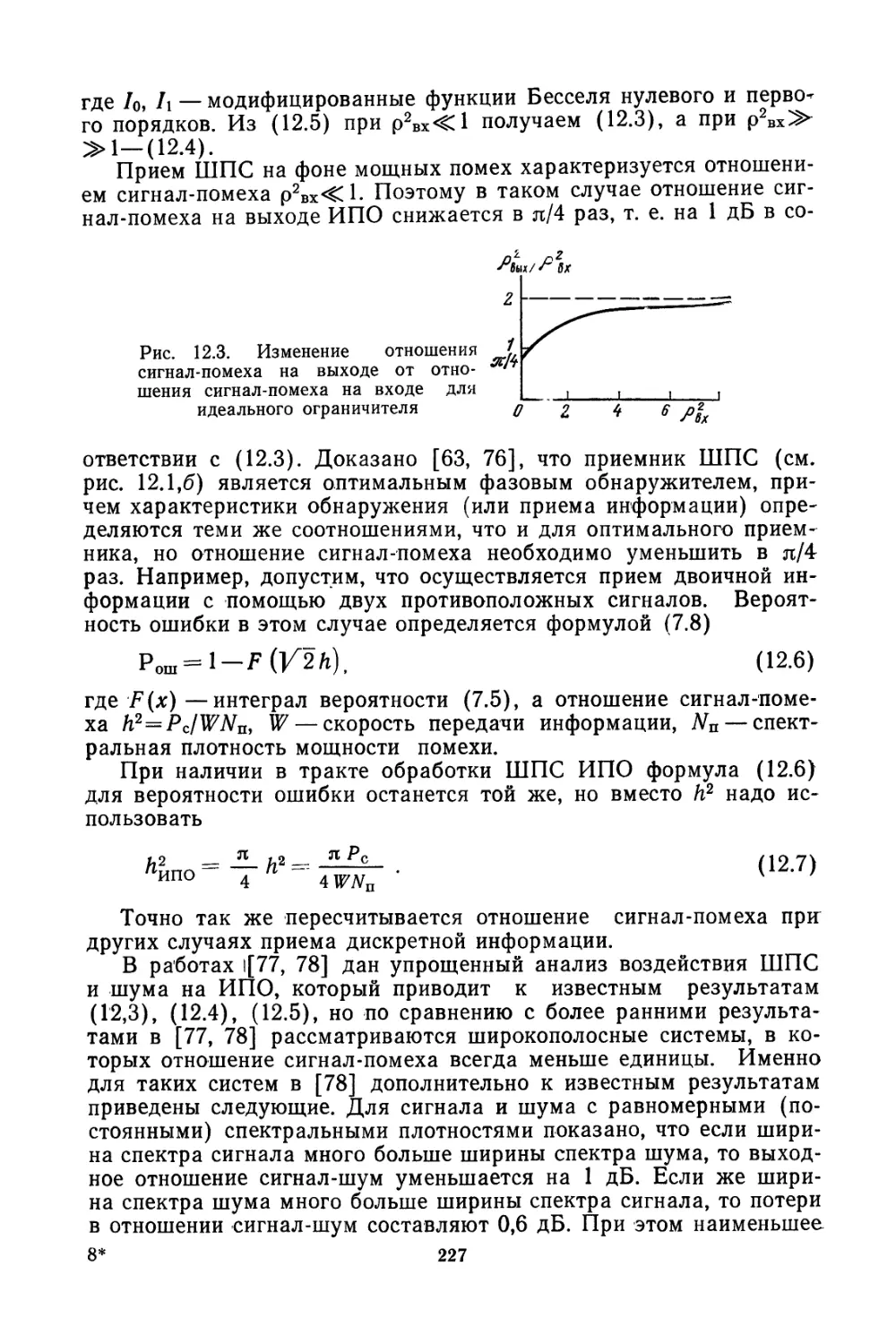
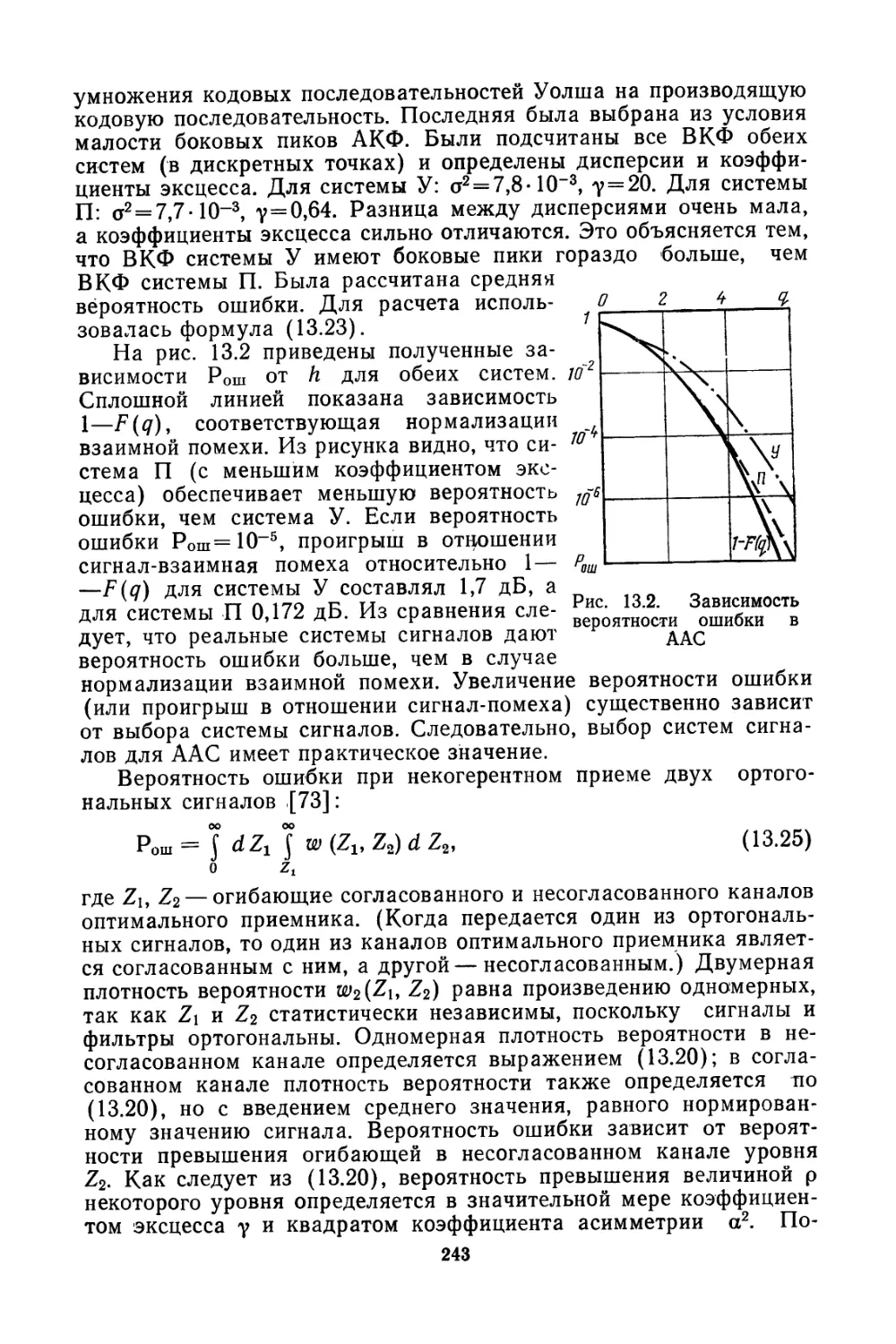
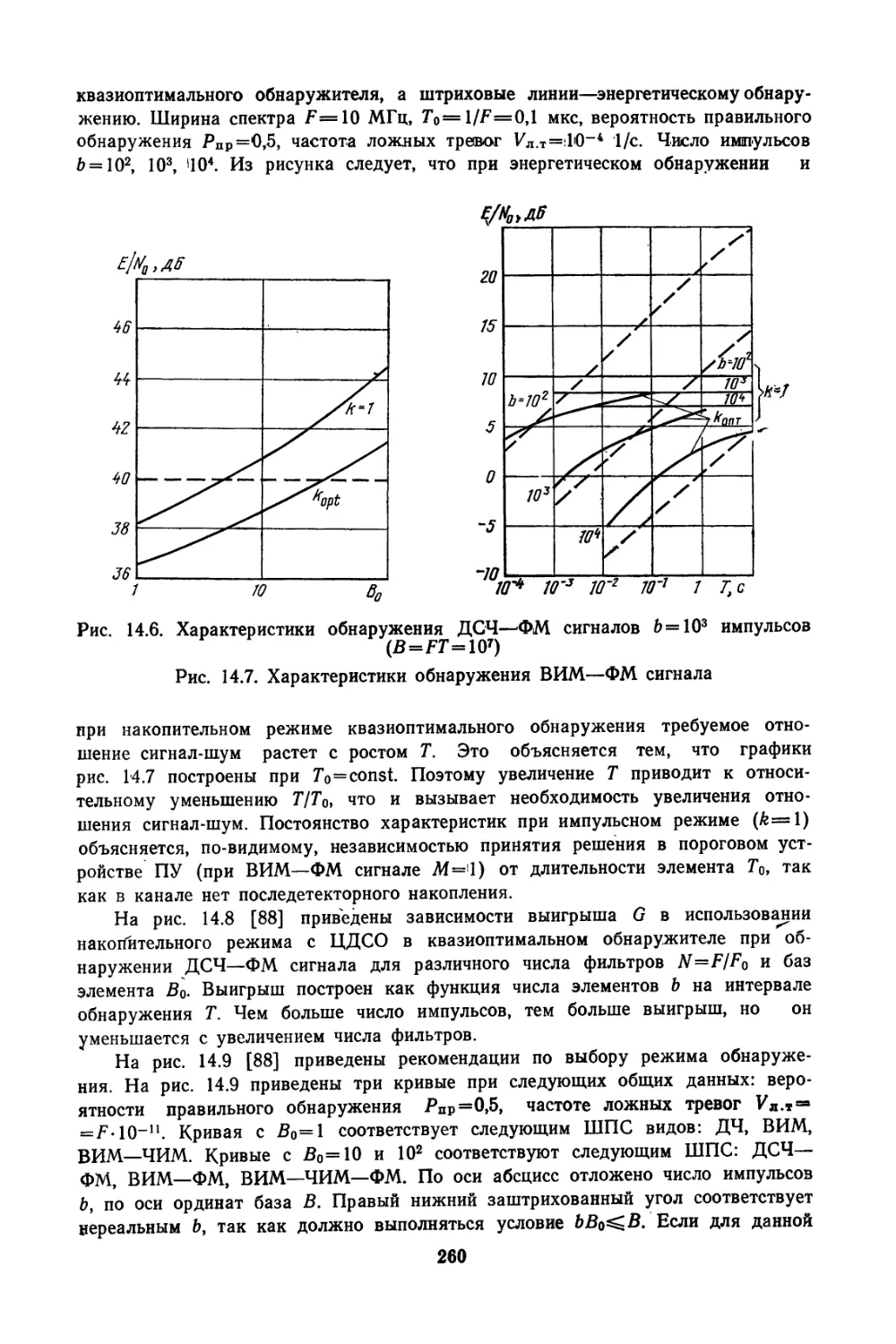
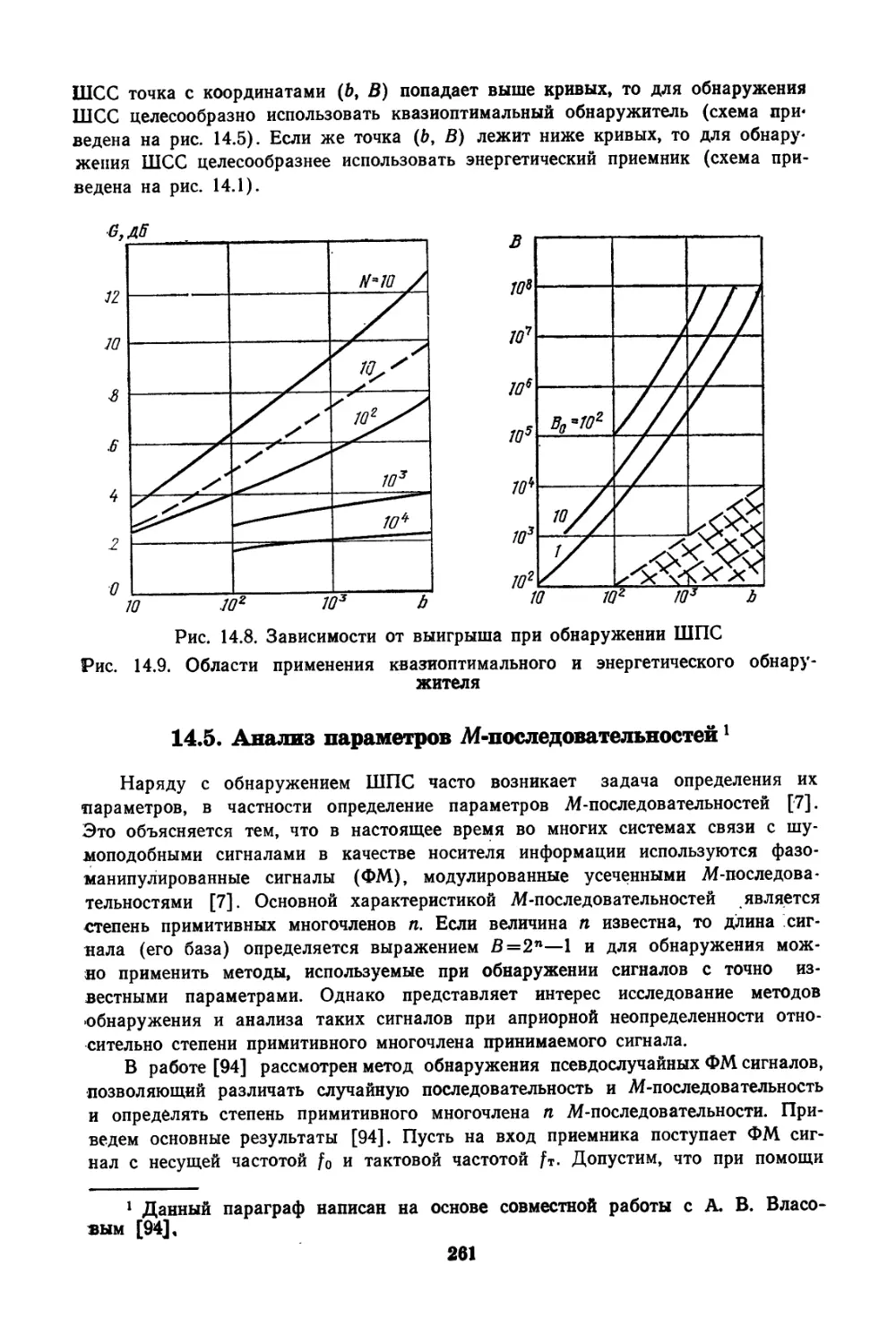
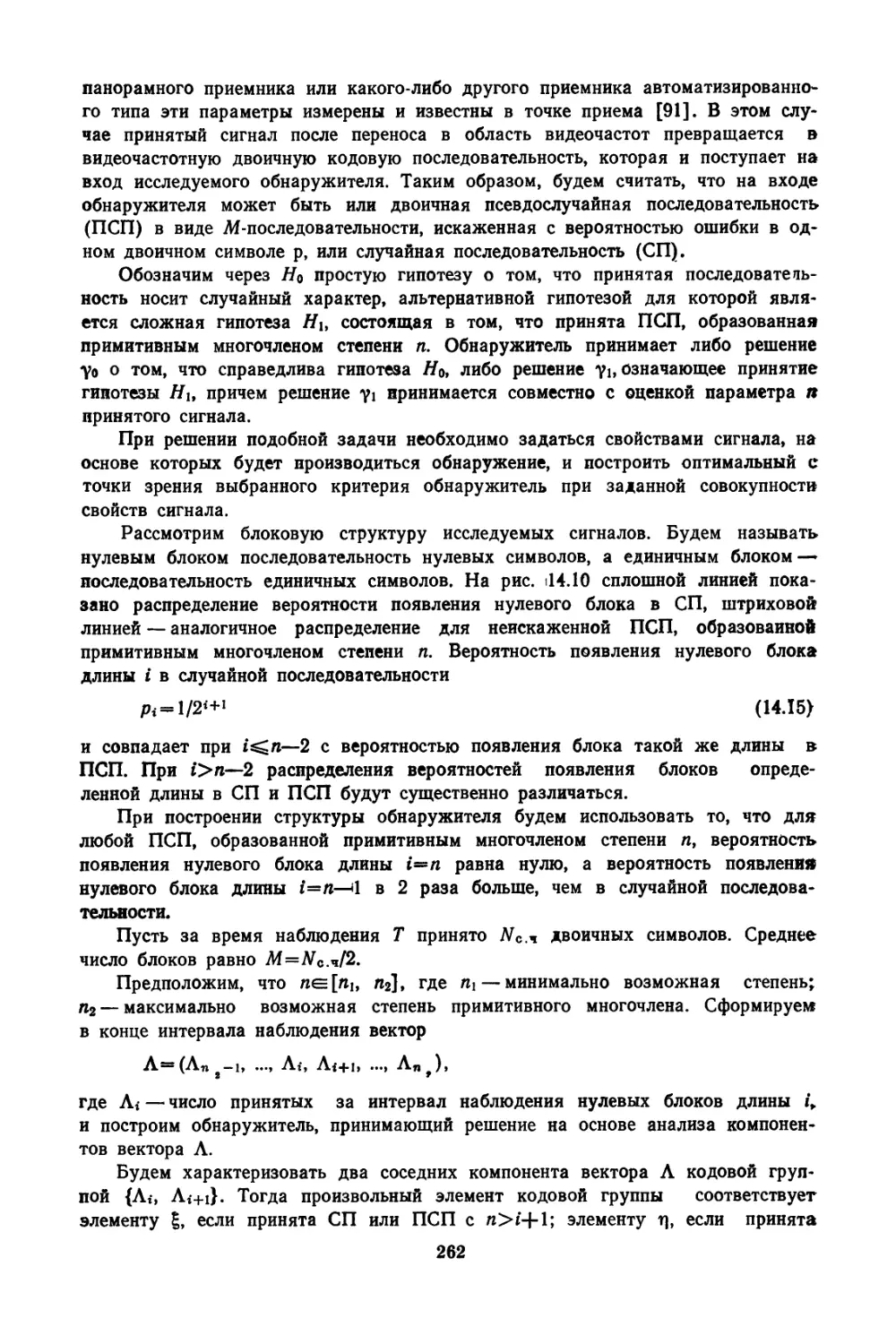
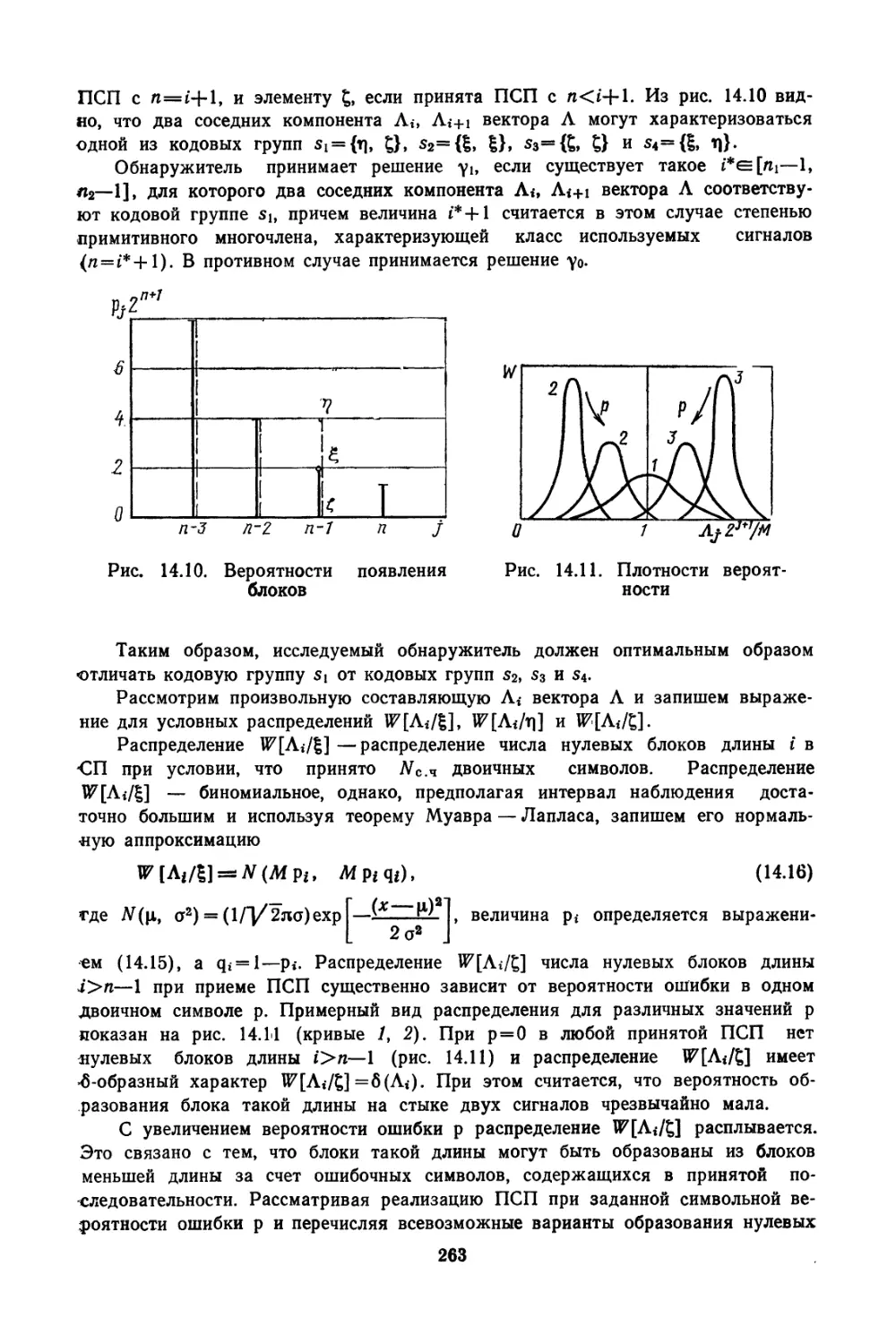
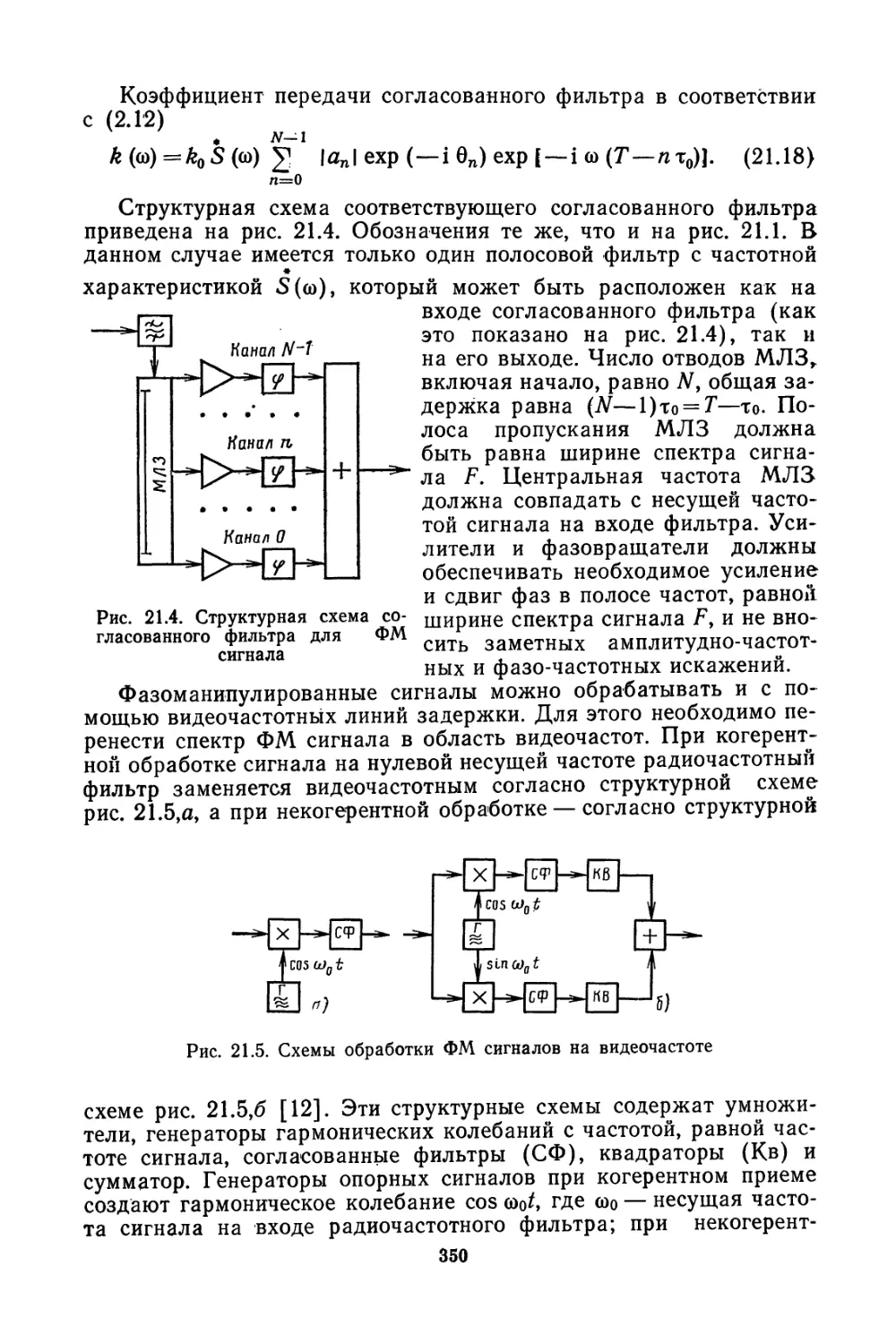
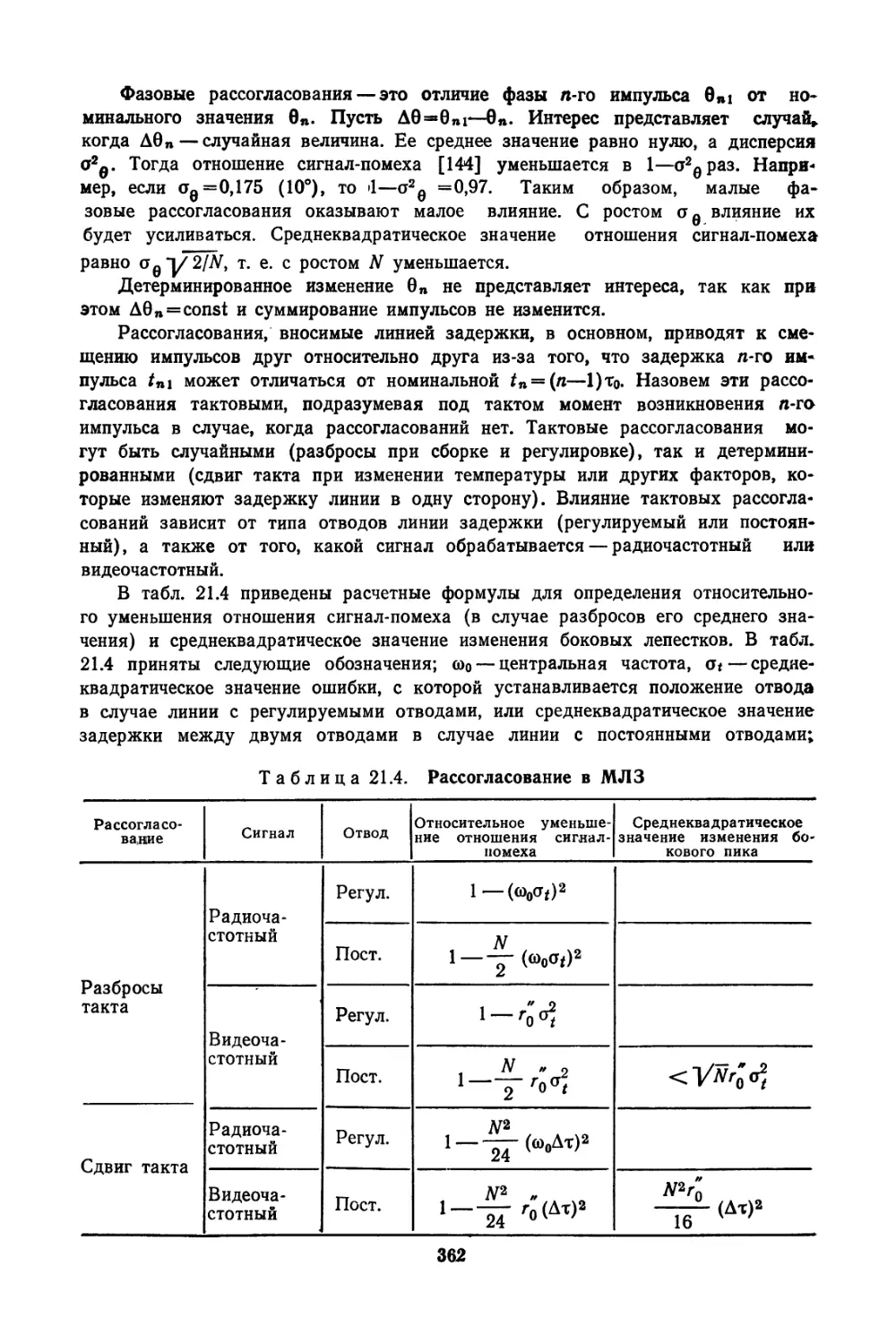
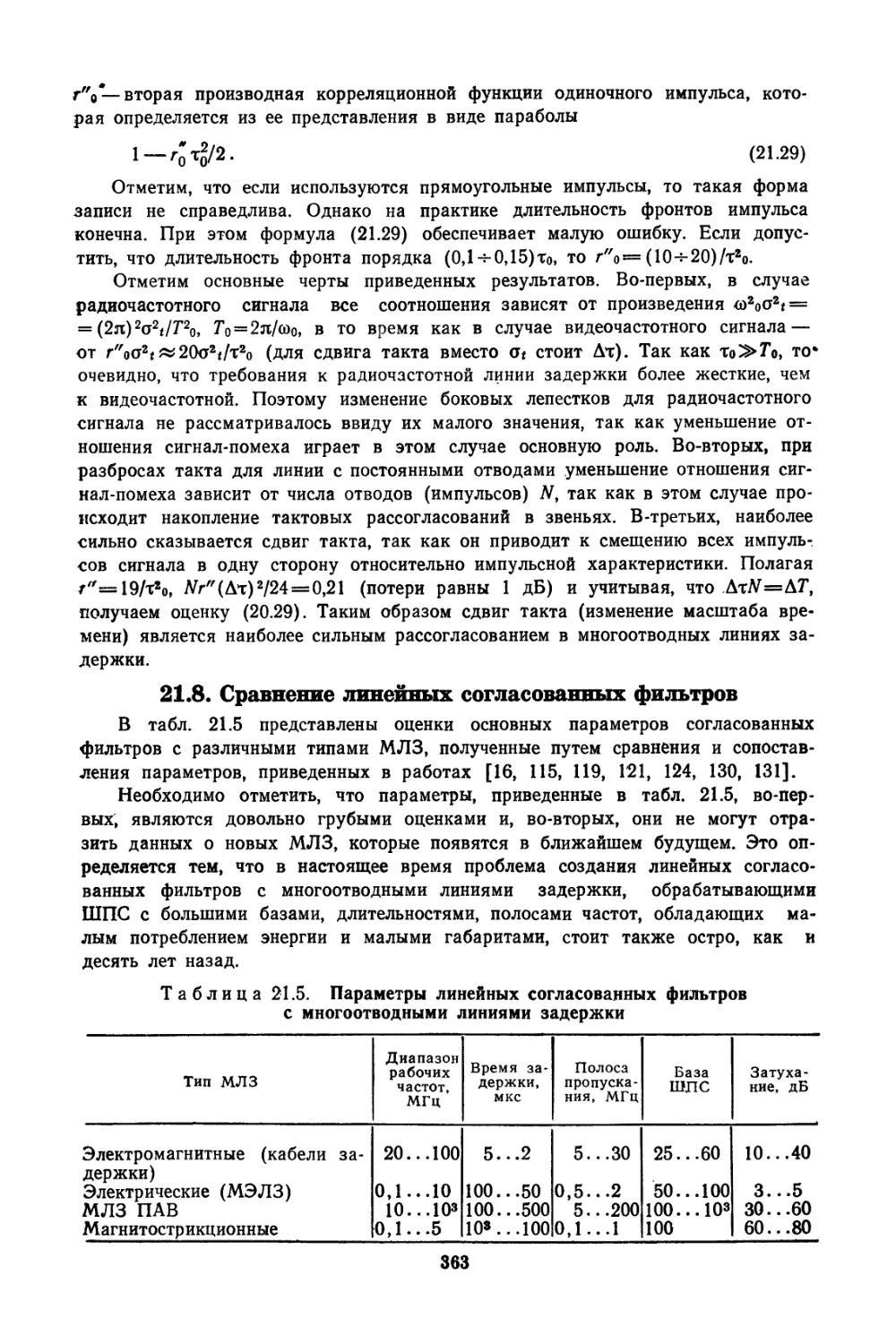
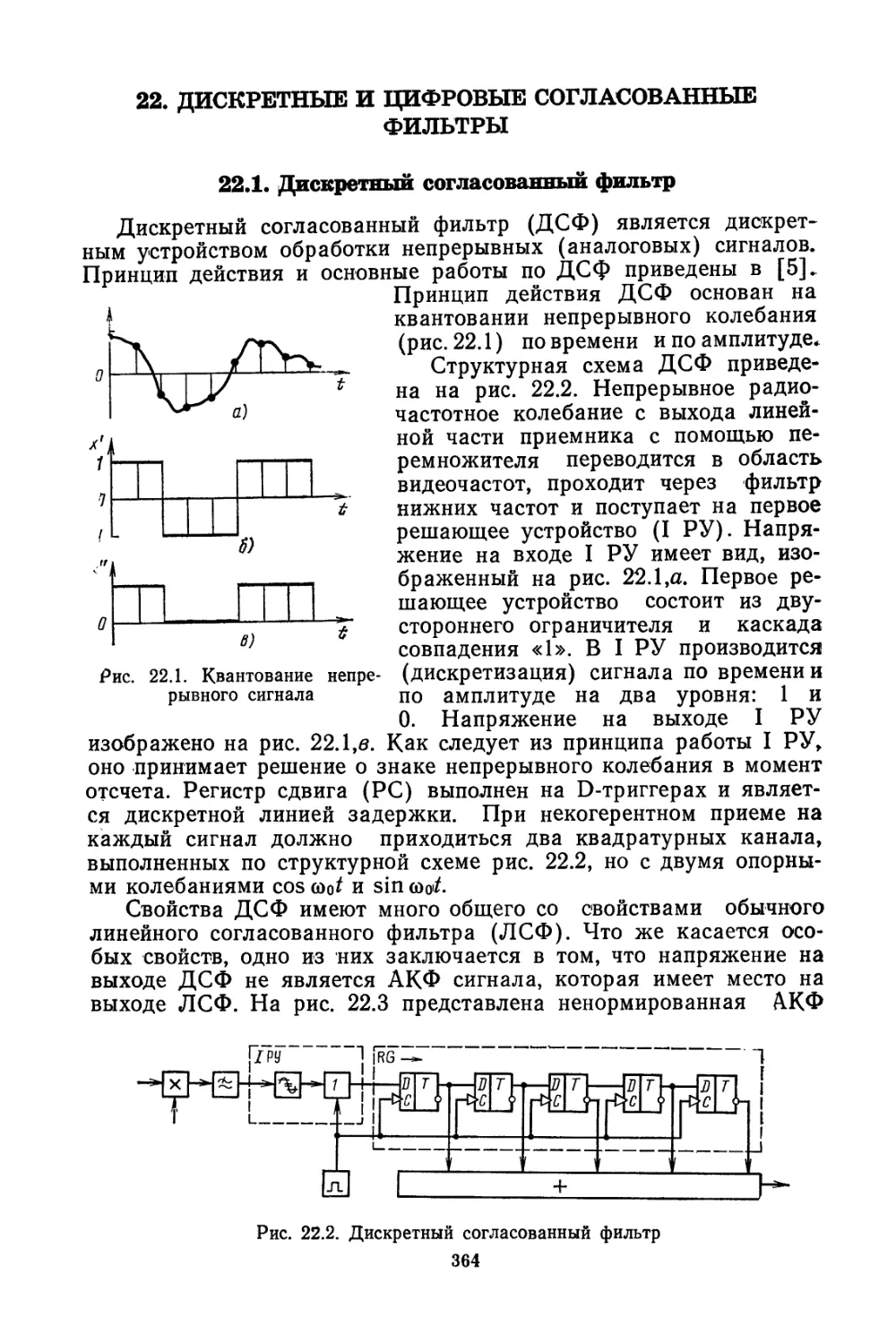
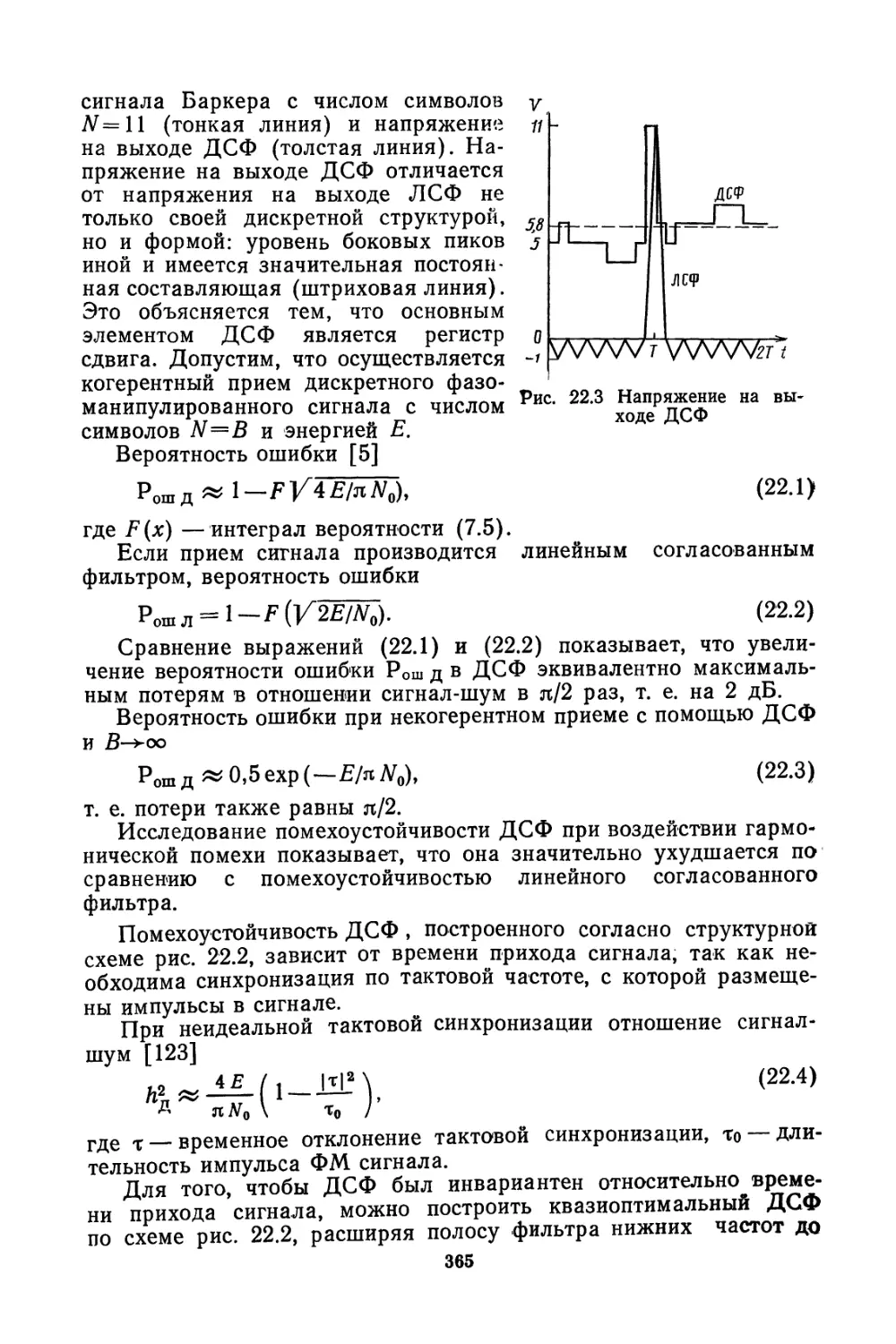
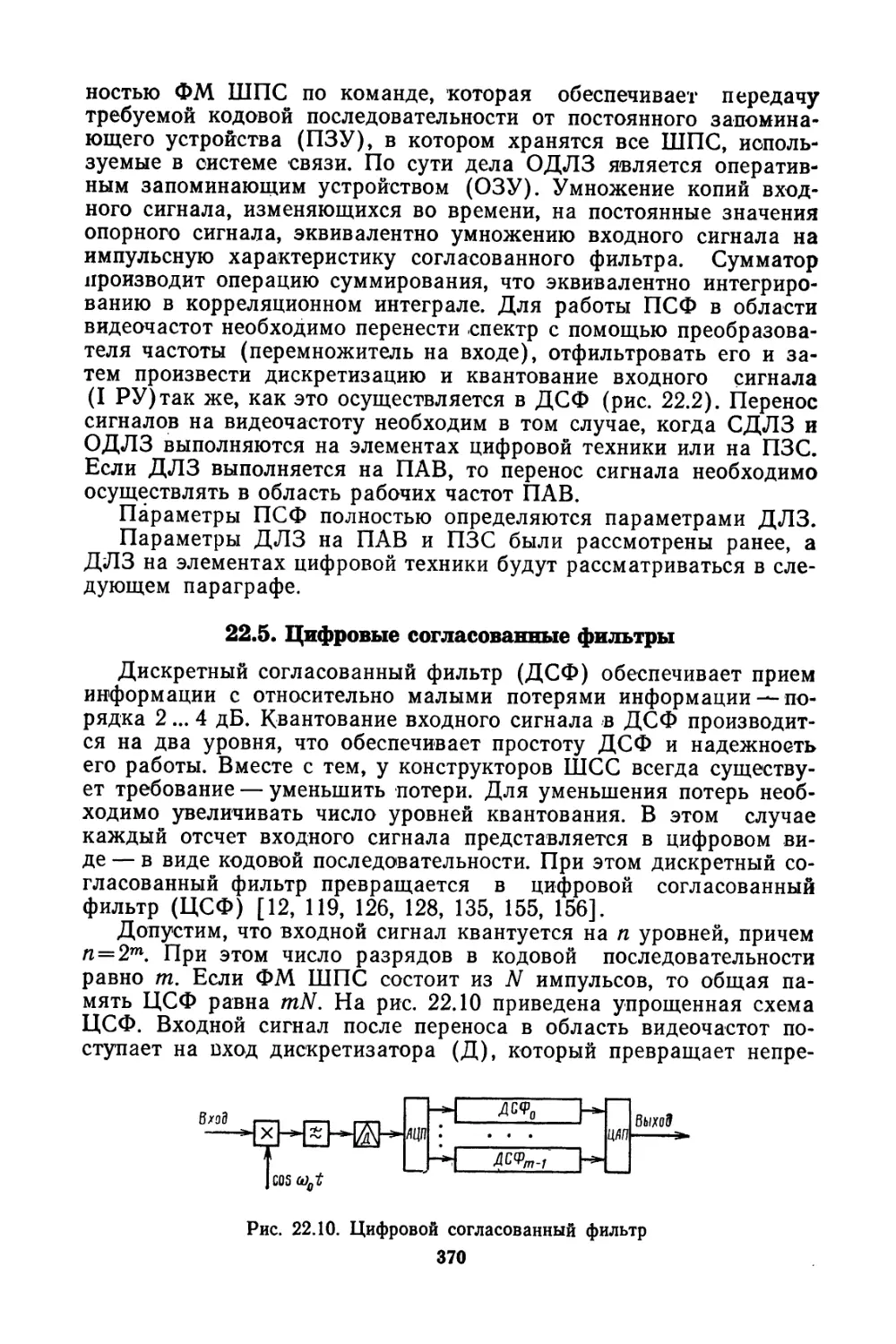
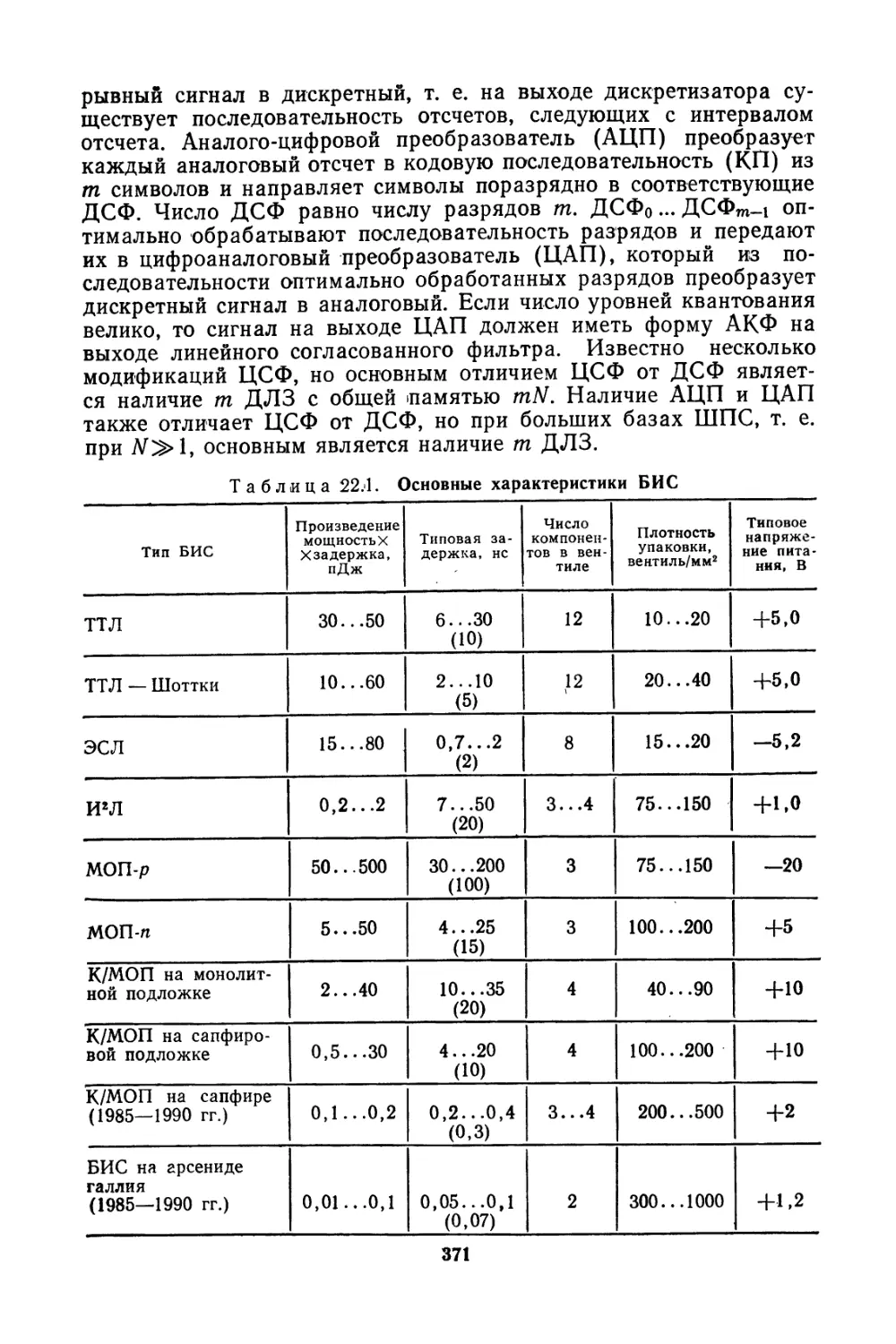
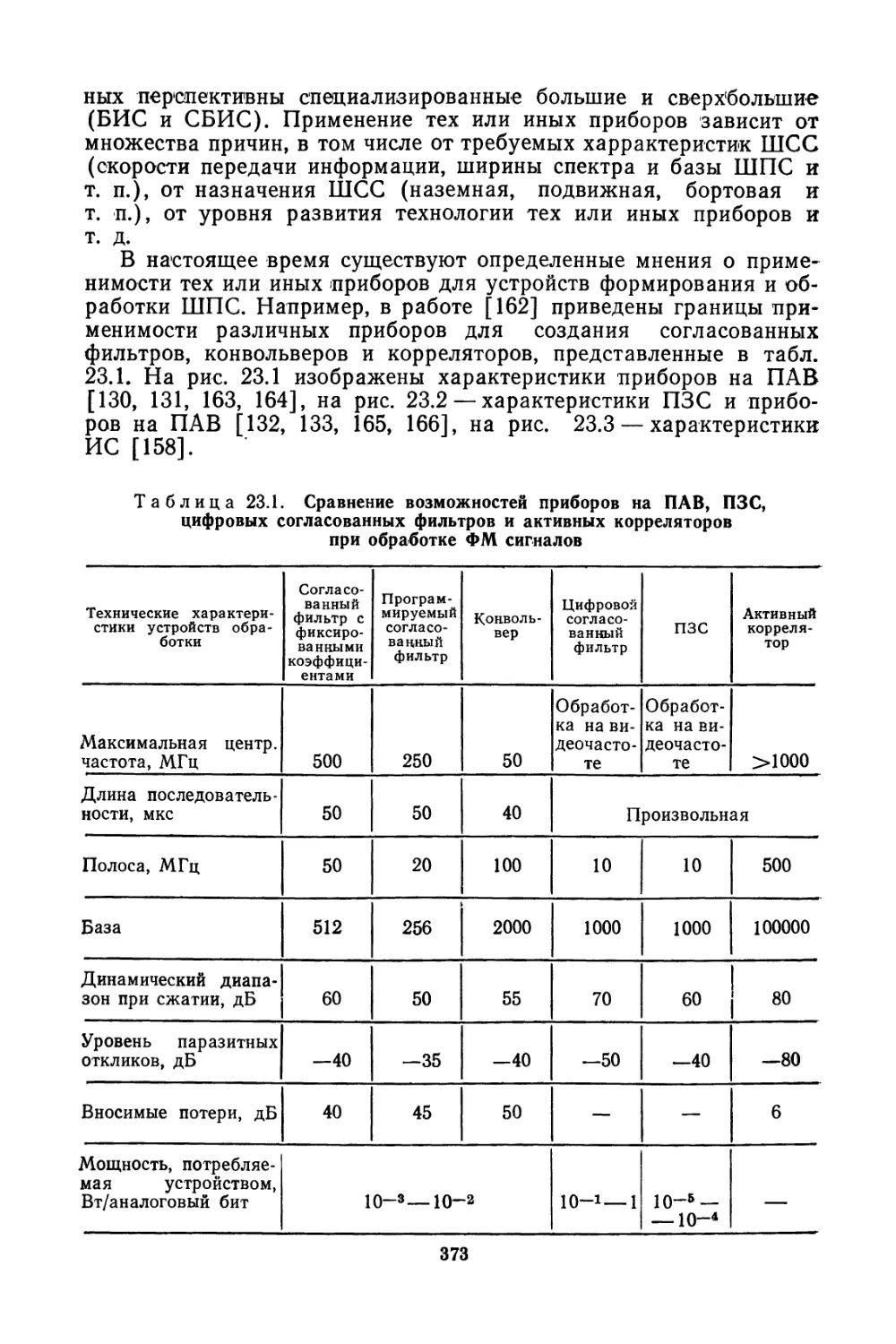
Текст
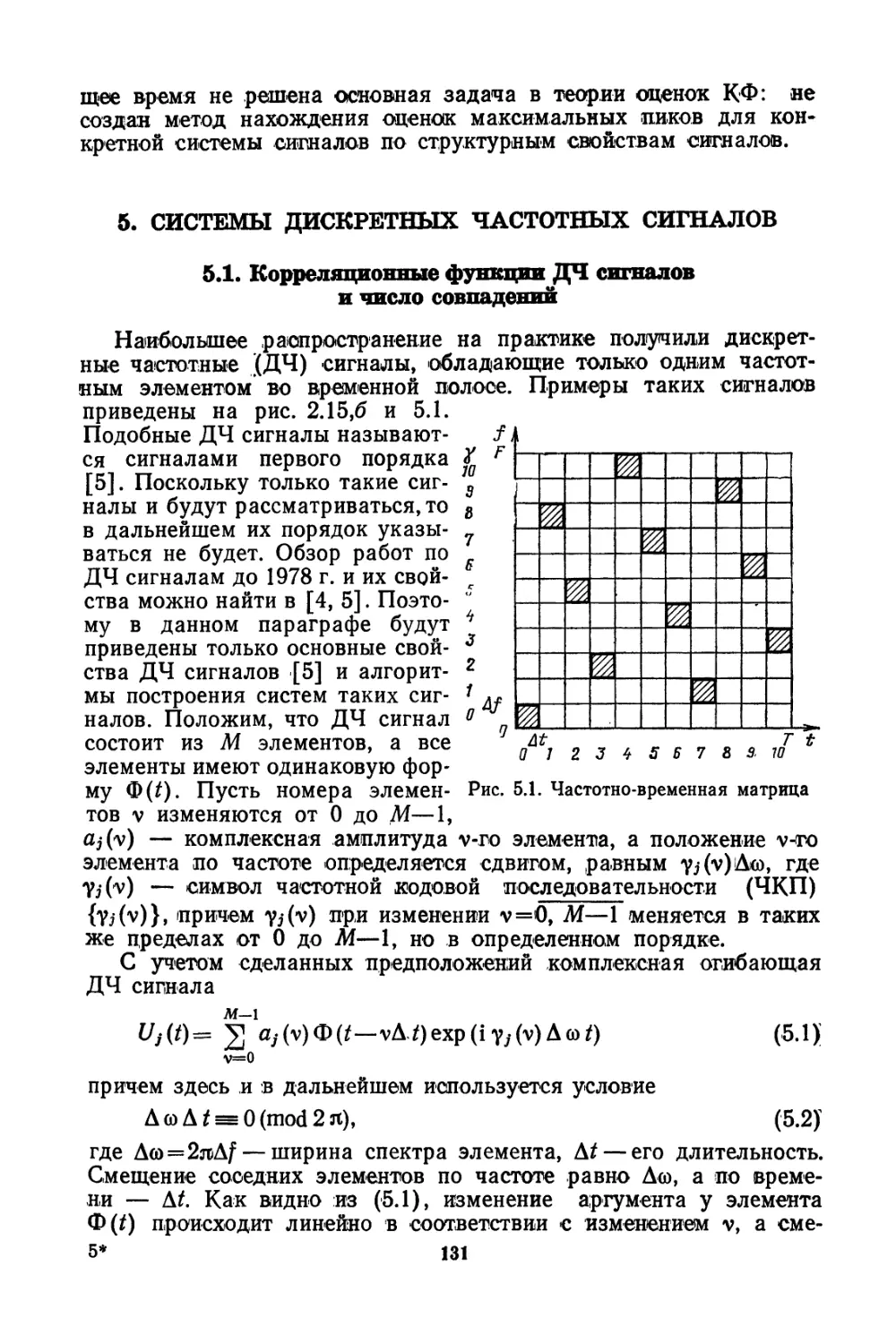
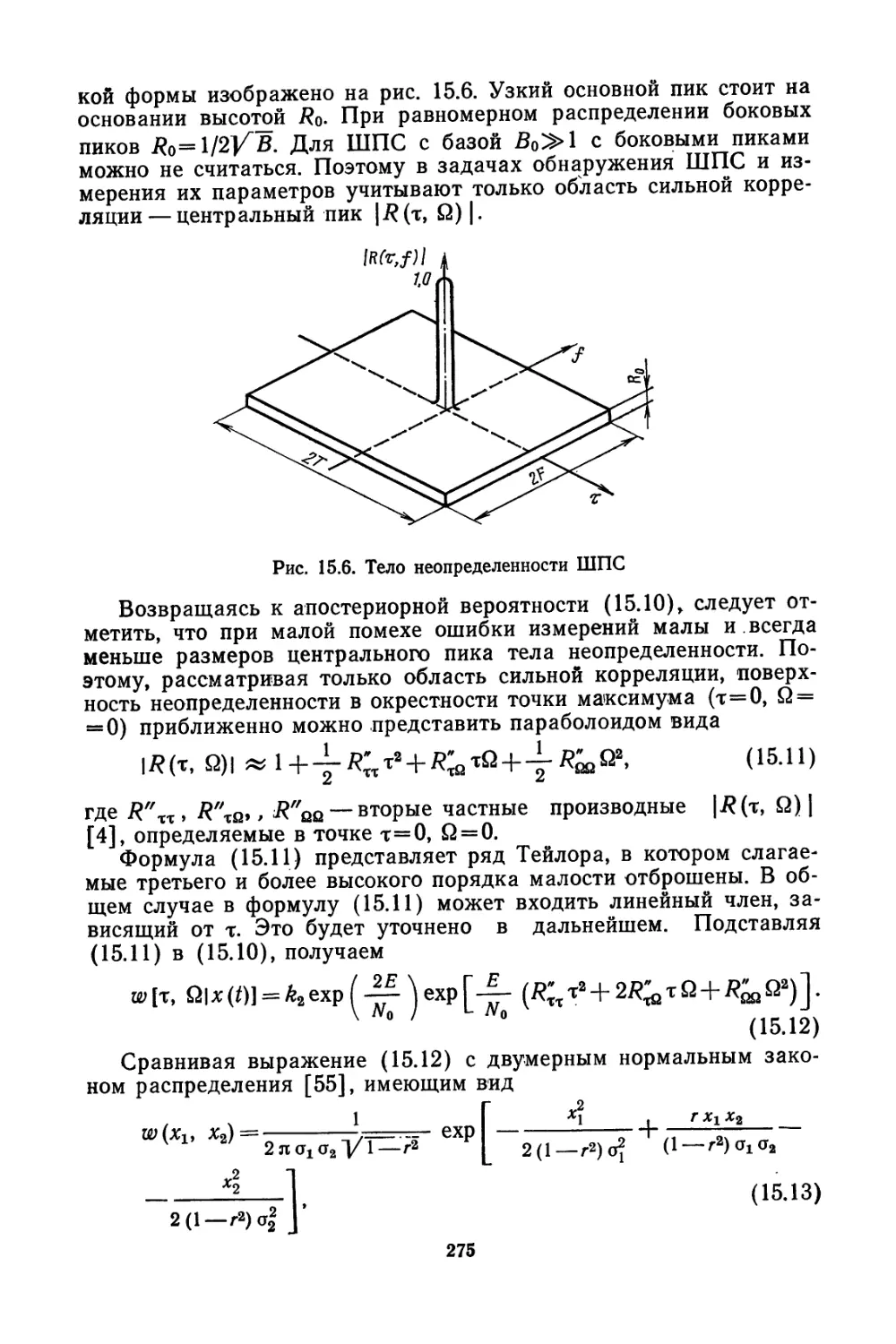
ЯЕ.Варакин
СИСТЕМЫ
СВЯЗИ
С ШУМОПОДОБНЫМИ
СИГНАЛАМИ
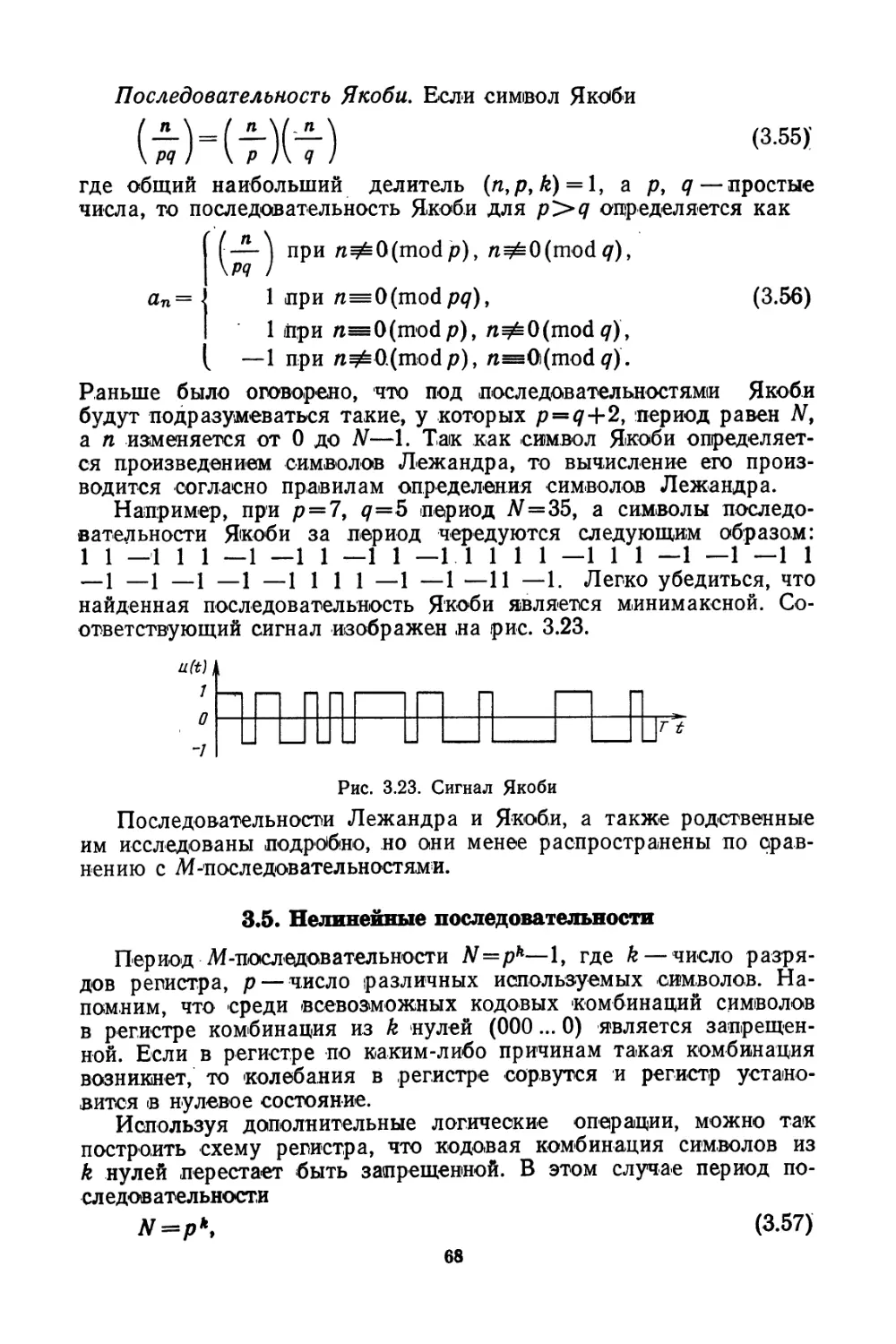
Москва
«Радио и связь»
1985
ББК 32.841
В18
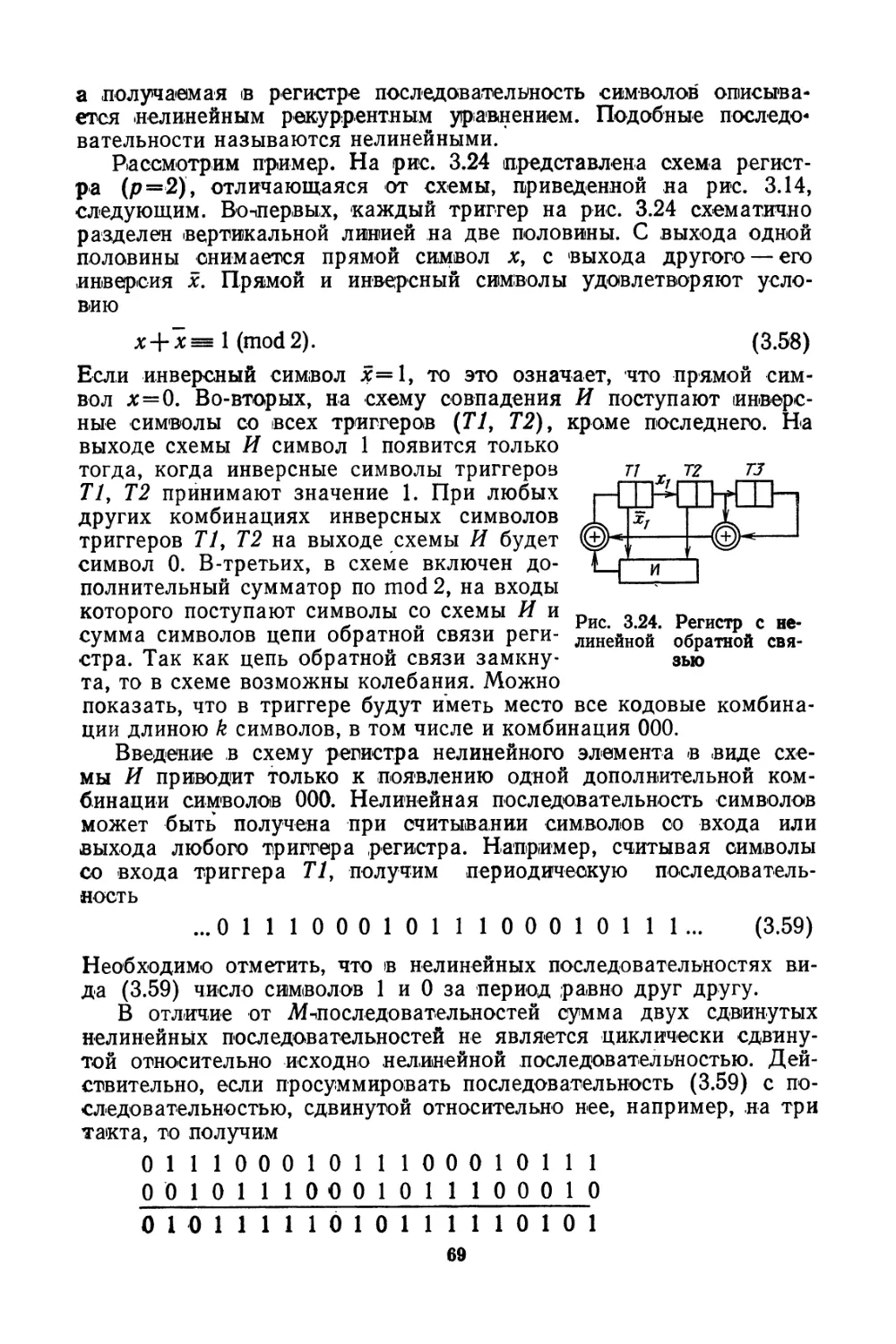
УДК 621.39:621.391.82
Варакин Л. Е.
В18 Системы связи с шумоподобными сигналами. — М.:
Радио и связь, 1985. — 384 с, ил.
В пер.: 1 р. 60 к. 10 000 экз.
Рассматриваются общие характеристики систем связи с шумоподобными
сигналами, передача и прием дискретных и непрерывных сообщений.
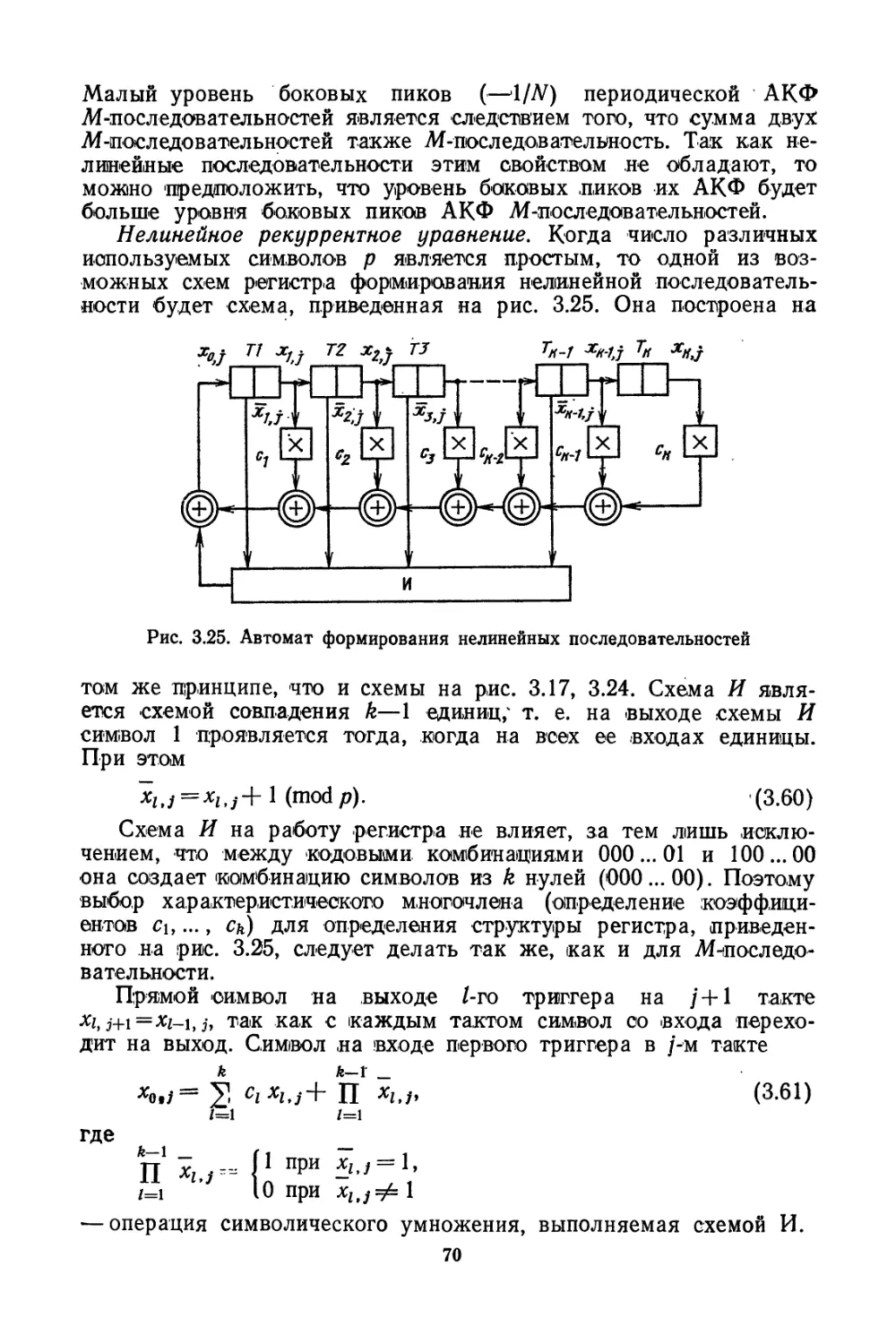
Излагаются вопросы применения корректирующих кодов, помехоустойчивости
приема при различных мощных помехах, формирования и обработки таких
сигналов, последние достижения в теории и практике систем связи с
шумоподобными сигналами.
Для инженерно-технических работников, занимающихся проектированием
систем передачи информации.
2402020000-075 ББК 32.841
о *tZ—оо
046(01)^-85 6Ф1
РЕЦЕНЗЕНТ докт. техн. наук А. А. СИКАРЕВ
Редакция литературы по радиотехнике
Леонид Егорович Варакин
СИСТЕМЫ СВЯЗИ С ЩУМОПОДОБНЫМИ СИГНАЛАМИ
Заведующий редакцией В. Я. Стерлигов
Редактор Л. И. Венгренюк
Художественный редактор Т. В. Б у с а р о в а
Переплет художника Л. Г. Бакушевой
Технический редактор 3. Н. Ратникова
Корректор Т. В. Дземидович
ИБ № 1087
Сдано в набор 26.10.84 Подписано в печать 28.01.85 Т-03039
Формат 60X90Vi6 Бумага типогр. .№ 2 Гарнитура литературная
Печать высокая Усл. печ. л. 24,0 Усл. кр.-отт. 24,0 Уч.-изд. л. 25,67
Тираж 10 000 экз. Изд. № 19131 Зак. № 111 Цена 1 р. 60 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Московская типография № 5 В ГО «Союзучетиздат»
101000 Москва, ул. Кирова, д. 40
© Издательство «Радио и связь», 1985
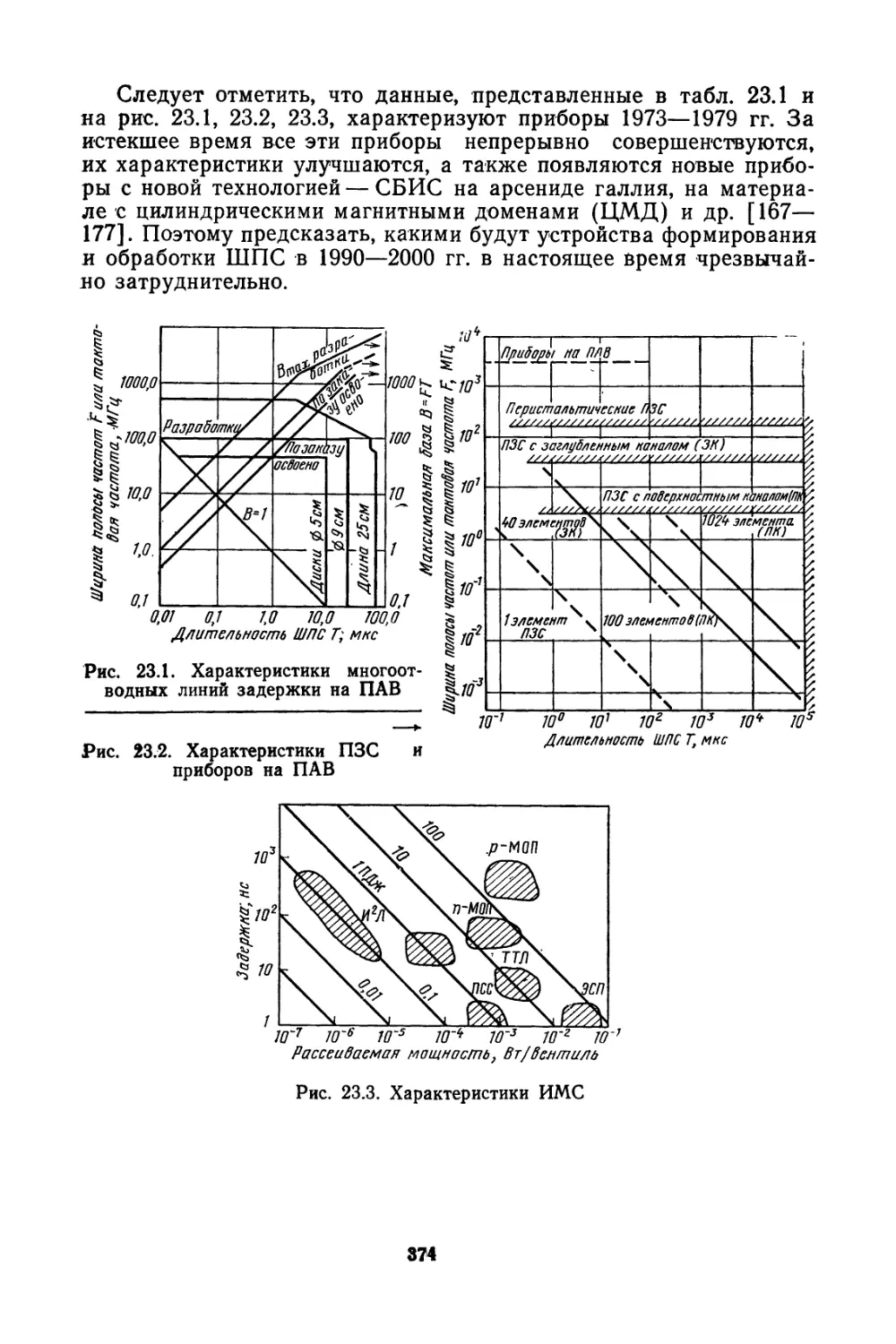
Предисловие
Системы связи с шумоподобными сигналами (ШПС) известны
четверть века. За это время их преимущества стали очевидными,
а их многие недостатки устранены. В настоящее время системы
связи с ШПС получают все более широкое распространение.
Процесс расширения областей использования систем связи с ШПС
необратим и в ближайшем будущем внимание к ним будет
усиливаться.
Основу теории систем связи с ШПС заложили работы
В. А. Котелышкова [1] и К. Шеннона [2], а основы кодового
разделения — работа Д. В. Агеева [3]. По теории и технике систем
связи с ШПС написано много книг, статей, обзоров, сведения о
которых до 1981 г. можно найти в книгах [4—9].
Системы связи с ШПС занимают особое место среди
различных систем связи, что объясняется их свойствами. Во-лервых, они
обладают высокой помехозащищенностью при действии мощных
'помех. Во-вторых, обеспечивают кодовую адресацию большого
числа абонентов и их кодовое разделение при работе в общей
полосе частот. В-третьих, они обеспечивают совместимость приема
информации с высокой достоверностью (и измерения (параметров
движения объекта с высокими точностями и разрешающими
способностями. Все эти свойства систем связи с ШПС были
известны давно, но, поскольку мощности помех были относительно
невысоки, а элементная база не позволяла реализовать устройства
формирования и обработки в приемлемых габаритах, то долгое
время системы связи с ШПС широкого развития не получали. К
настоящему моменту положение резко изменилось. Мощность
помехи на входе приемника может на несколько порядков
превышать мощность полезного сигнала. Для обеспечения высокой
помехозащищенности при подобных помехах необходимо использовать
ШПС со сверхбольшими базами (десятки-сотни тысяч), ансамбли
(системы) сигналов должны состоять из десятков — сотен
миллионов ШПС со сверхбольшими базами. Следует отметить, что
основы теории ШПС со сверхбольшими базами сформировались
только в последнее время. В свою очередь реализация устройств
формирования и обработки таких сигналов становится возможной
в ближайшем будущем благодаря бурному развитию
сверхбольших .интегральных схем (СБИС), специализированных
микропроцессоров (СМП), приборов с поверхностным.и акустическими
волнами (ПАВ), приборов с зарядовой связью (ПЗС). Все эти
причины и вызвали новый период расцвета систем связи с ШПС, в
результате которого через некоторое время появятся такие
системы второго .поколения.
Пом'имо применения в условиях воздействия мощных помех,
системы связи с ШПС начинают успешно конкурировать с широко
распространенными системами связи с частотной модуляцией и
частотным разделением каналов, применяемых для связи с
подвижными объектами. Создание малогабаритных устройств форми-
3
рования и обработки ШПС с базами Ю^.ЛО8 позволит широко
внедрить ШПС в системы связи и управления подвижными
объектами в крупных городах.
По этим причинам к системам связи с ШПС привлечено
серьёзное внимание большого круга научно-технических работников,
разработчиков помехозащищенных систем связи, о чем
свидетельствует рост публикаций в периодической печати по системам
связи с ШПС и по смежным вопросам. По системам связи с ШПС
ранее было издано несколько хороших книг, однако уже в
настоящее время они не могут служить основой для изучения проблем
перспективных систем связи с ШПС и решения теоретических и
практических задач. Необходимо отметить также, что
большинство изданных ранее книг написаны авторами на основе
проведенной ими большой научно-исследовательской работы. Поэтому
некоторые из книг содержат как общие интересные результаты, так
и результаты частные, не имеющие принципиального значения.
Именно по этой причине и возникла идея составить книгу
тт системам связи с ШПС, которая должна содержать только
принципиальные вопросы теории и техники ломехозащищенных
систем связи с ШПС. Из многочисленных теоретических
результатов приведены только фундаментальные результаты, причем
доказательства опущены, так как их можно найти в
опубликованных книгах и статьях. При изложении технических вопросов
приведены только те технические решения, которые основаны на
перспективной элементной базе. В системных вопросах уделено
внимание только основным характеристикам систем связи с ШПС.
Книга написана как по результатам многочисленных работ,
опубликованных исследователями в различных странах, так и на
основе работ автора и является логическим продолжением его книг
ло ШПС [4, 5].
Все замечания и предложения по книге следует направлять по
.адресу: 101000 Москва, Почтамт, а/я 693, издательство «Радио и
<связь».
РАЗДЕЛ I.
ОСНОВНЫЕ СВЕДЕНИЯ О ШУМОПОДОБНЫХ
СИГНАЛАХ
1. ОСНОВЫ ПРИМЕНЕНИЯ ШУМОПОДОБНЫХ СИГНАЛОВ
В СИСТЕМАХ СВЯЗИ
1.1. Определение шумоподобных сигналов
и широкополосных систем связи
Шумоподобными сигналами (ШПС) называют такие сигналы,
у которых произведение ширины спектра F на длительность Т
много больше единицы. Это произведение называется базой
сигнала л обозначается В, т. е.
B=-FT. (1.1)
У ШПС В^А. Шумоподобные сигналы иногда называют
сложными в отличие от простых сигналов с 5 = 1. Поскольку у
сигналов с ограниченной длительностью спектр ммеет неограниченную
протяженность, то для определения ширины спектра используют
различные методы и приемы. Для реальных ШПС, состоящих из
конечного числа элементов, всегда можно однозначно определить
и F, и В.
В системах связи с ШПС ширина спектра ШПС F всегда
много больше ширины спектра передаваемого сообщения. В
цифровых системах связи, передающих информацию в виде двоичных
символов, длительность ШПС и скорость передачи информации 52
связаны соотношением T=l/3Z. Поэтому база ШПС
S=FA& (1.2)
Характеризует расширение спектра ШПС относительно спектра
сообщения. В аналоговых системах связи, у которых верхняя
частота сообщения равна W и частота отсчета равна 2W,
B=F/2W. (1.3)
И если 5>1, то F>5Z и F^2W. Именно поэтому системы
связи с ШПС в зарубежной литературе получили название системы
связи с расширенным (или распределенным) спектром, а в
отечественной литературе — широкополосные системы связи. В
дальнейшем термин «широкополосные системы связи (ШСС)» будет
относиться только <к системам связи с ШПС.
Шумоподобные сигналы получили .применение в широкополос-
5
ных системах связи, так как: обеспечивают высокую
помехозащищенность систем связи; позволяют организовать одновременную
работу многих абонентов в общей полосе частот при асинхронно —
адресном принципе работы системы связи, основанном на
кодовом разделении абонентов; позволяют успешно бороться с
многолучевым распространением радиоволн путем разделения лучей;
обеспечивают совместимость передачи информации с измерением
параметров движения объекта в системах подвижной связи;
обеспечивают электромагнитную совместимость (ЭМС) ШСС с
узкополосными системами радиосвязи .и радиовещания, системами
телевизионного вещания, обеспечивают лучшее использование
спектра частот на ограниченной территории по сравнению с
узкополосными системами связи.
1.2. Помехозащищенность
Это способность системы связи противостоять воздействию
мощных помех. Помехозащищенность включает в себя скрытность
системы связи и ее помехоустойчивость, так как для создания
мощных помех надо сначала обнаружить систему связи и
измерить основные параметры её сигналов, а затем организовать
мощную, наиболее сильнодействующую помеху. Чем выше скрытность
и помехоустойчивость, тем выше помехозащищенность системы
связи.
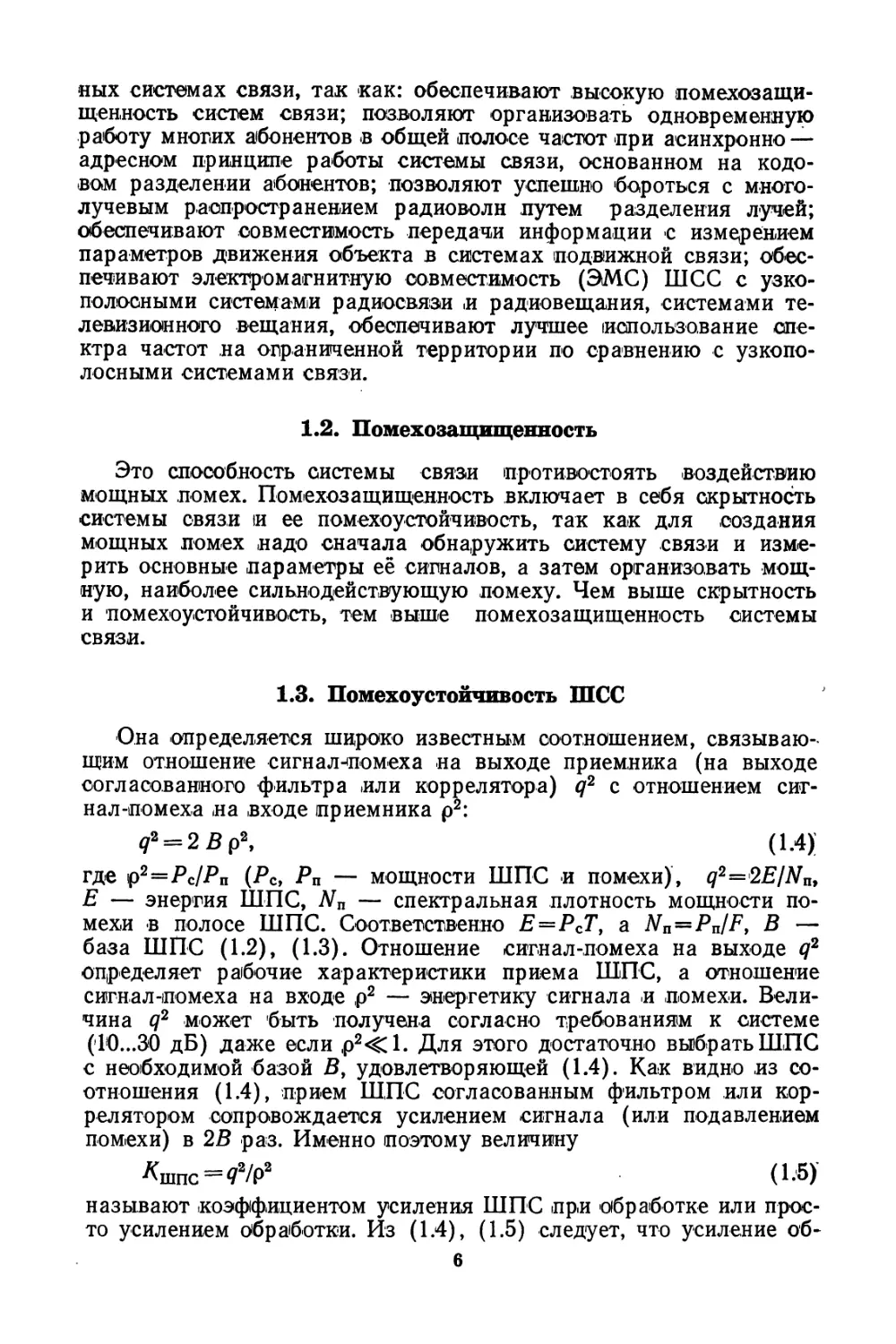
1.3. Помехоустойчивость ШСС
Она определяется широко известным соотношением,
связывающим отношение сигнал-помеха на выходе приемника (на выходе
согласованного фильтра или коррелятора) q2 с отношением
сигнал-помеха на входе приемника р2:
<72 = 2Яр2, (1.4);
где р2=Рс/Рп (Рс, Рп — мощности ШПС и помехи), q2=2E/Nnf
Е — энергия ШПС, Nn — спектральная плотность мощности
помехи в полосе ШПС. Соответственно Е=РСТ, a Nn=PnlFf В —
база ШПС (1.2), (1.3). Отношение сигнал-помеха на выходе q2
определяет рабочие характеристики приема ШПС, а отношение
сигнал-помеха на входе р2 — энергетику сигнала и помехи.
Величина q2 может быть получена согласно требованиям к системе
(10...30 дБ) даже если ,р2<1. Для этого достаточно выбрать ШПС
с необходимой базой 5, удовлетворяющей (1.4). Как видно из
соотношения (1.4), прием ШПС согласованным фильтром или
коррелятором сопровождается усилением сигнала (или подавлением
помехи) в 25 раз. Именно поэтому величину
*шпс = <72/р2 (1:5)
называют .коэффициентом усиления ШПС при обработке или
просто усилением обработки. Из (1.4), (1.5) следует, что усиление об-
6
работки Кщпс^ЯВ- В ШСС прием информации характеризуется
отношением сигнал-помеха h2=q2/2t т. е.
Л2 = Вр2. (1.6)
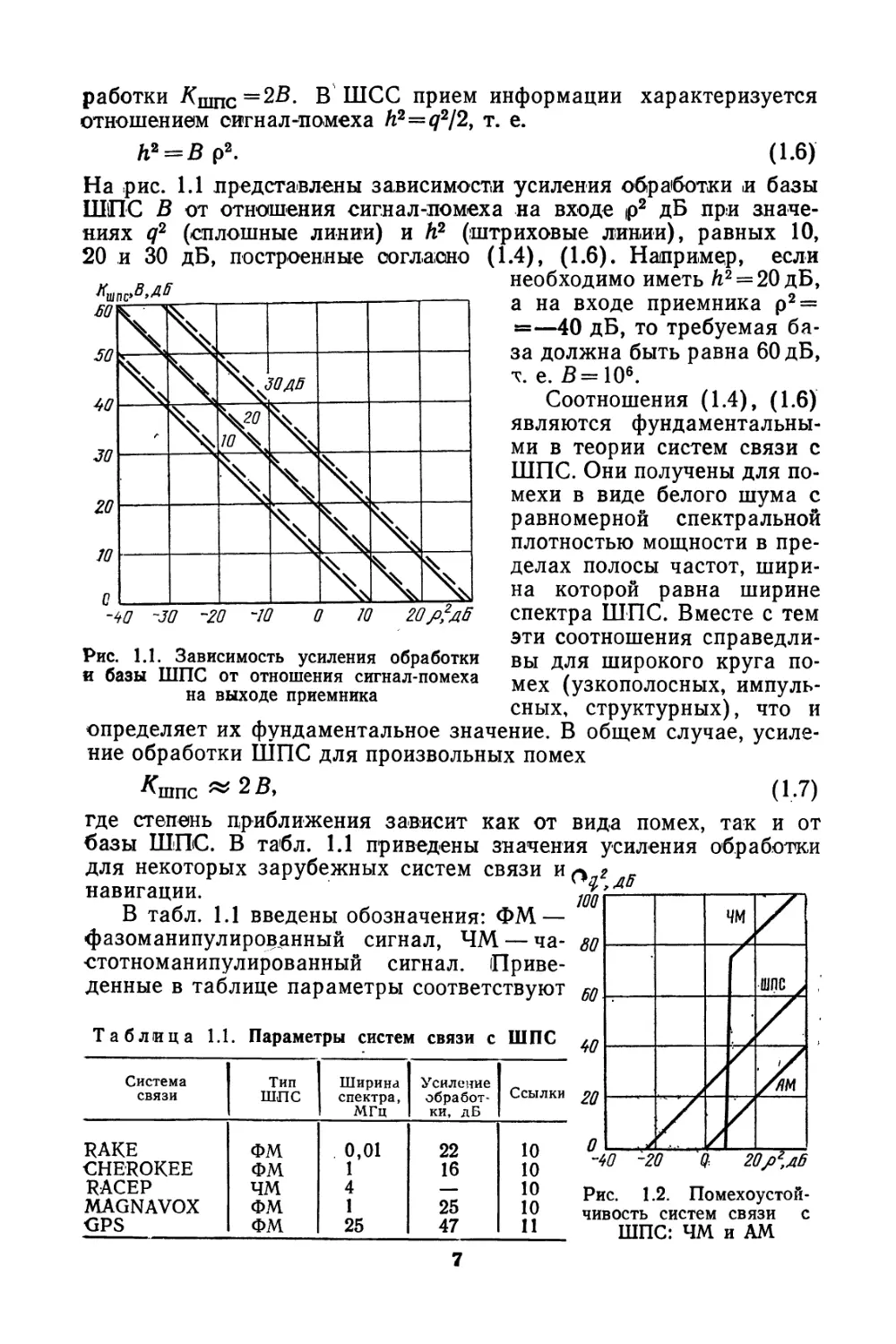
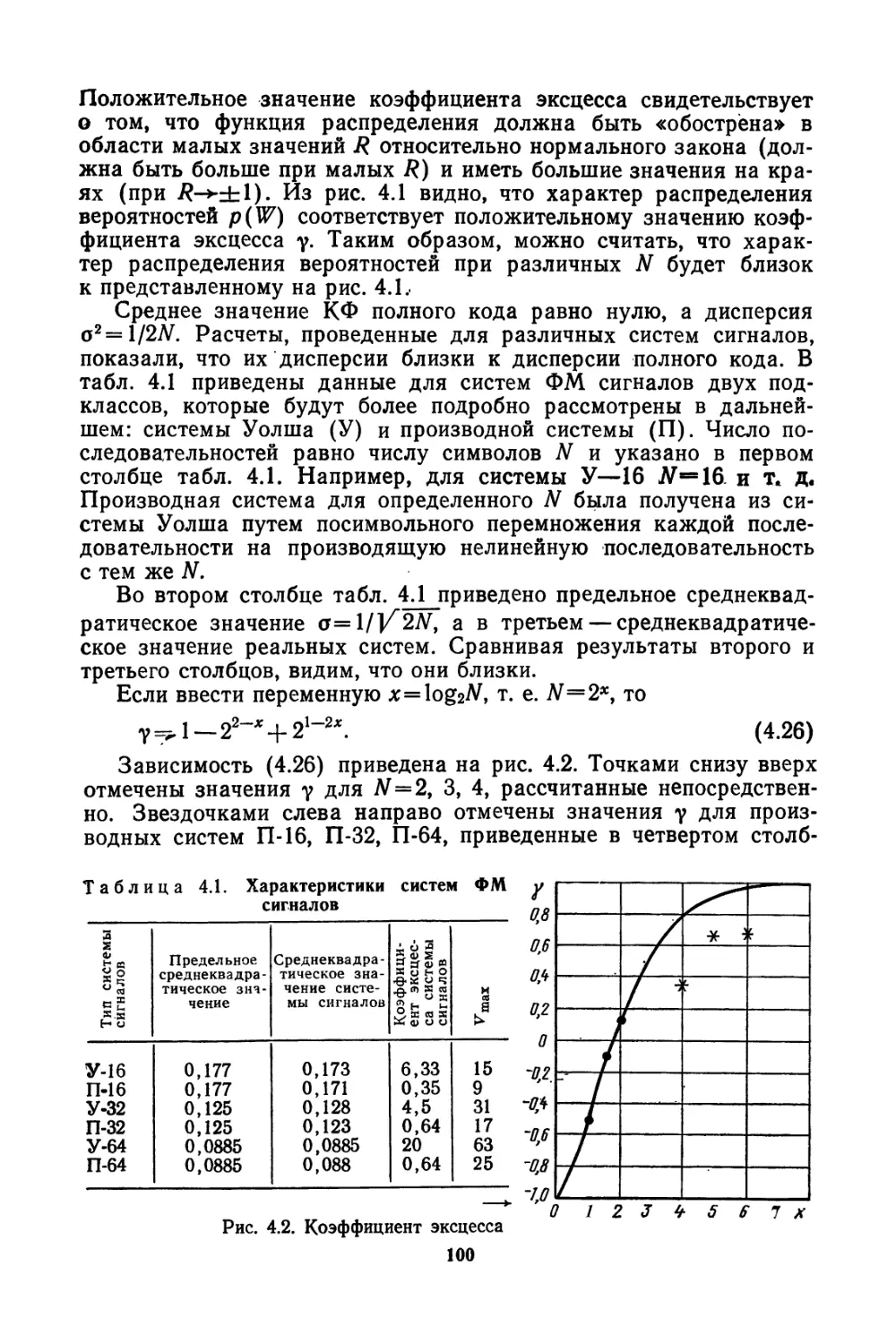
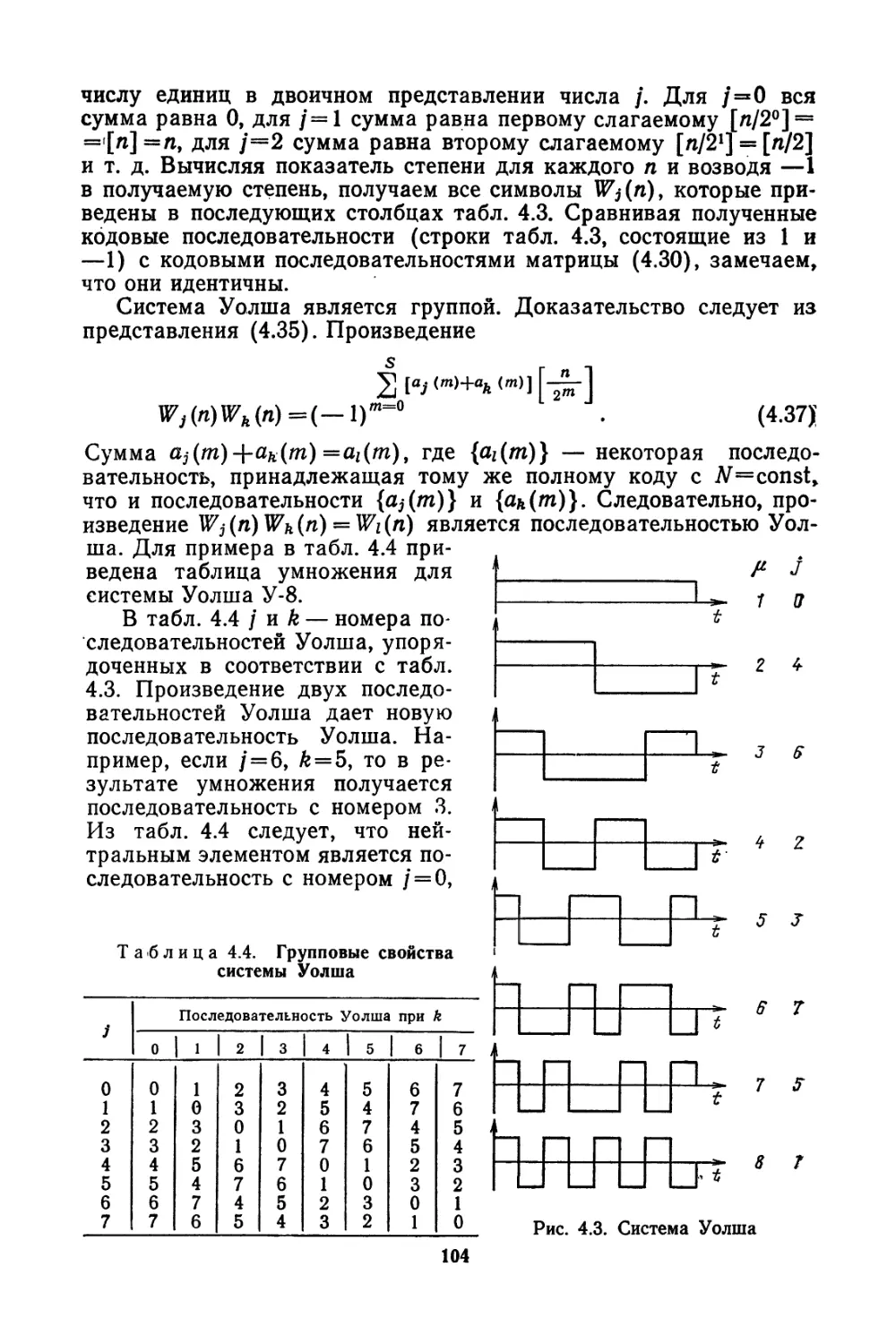
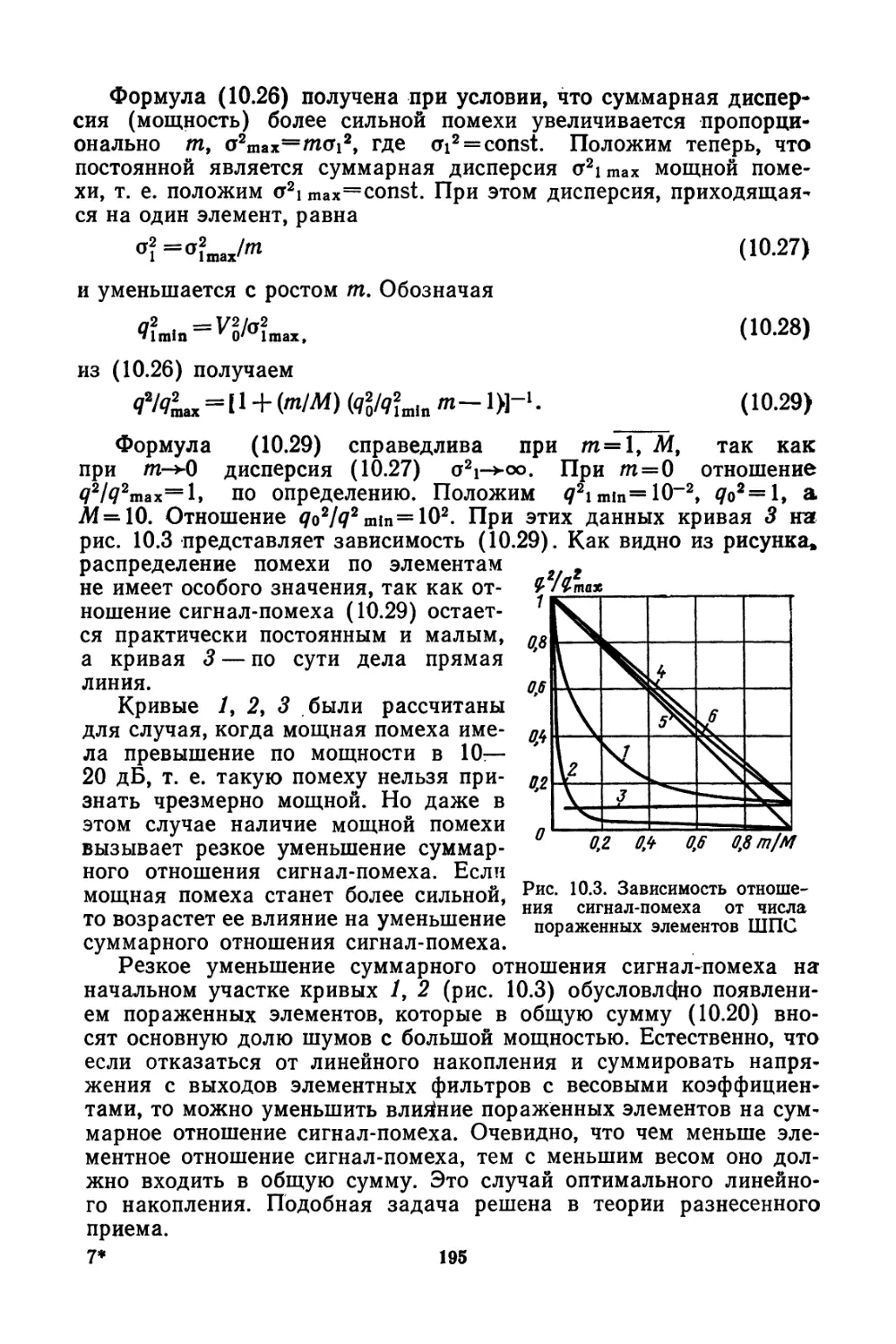
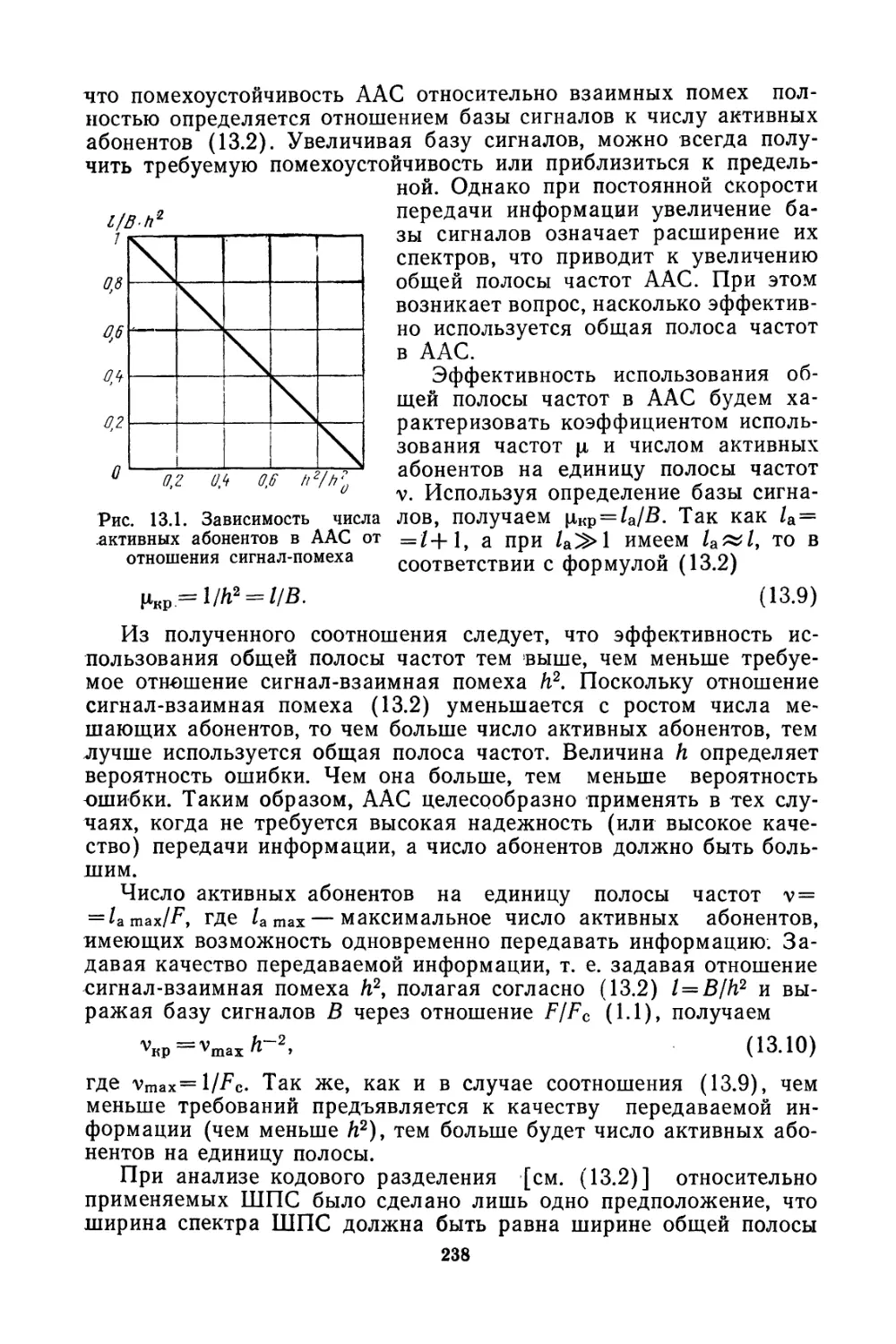
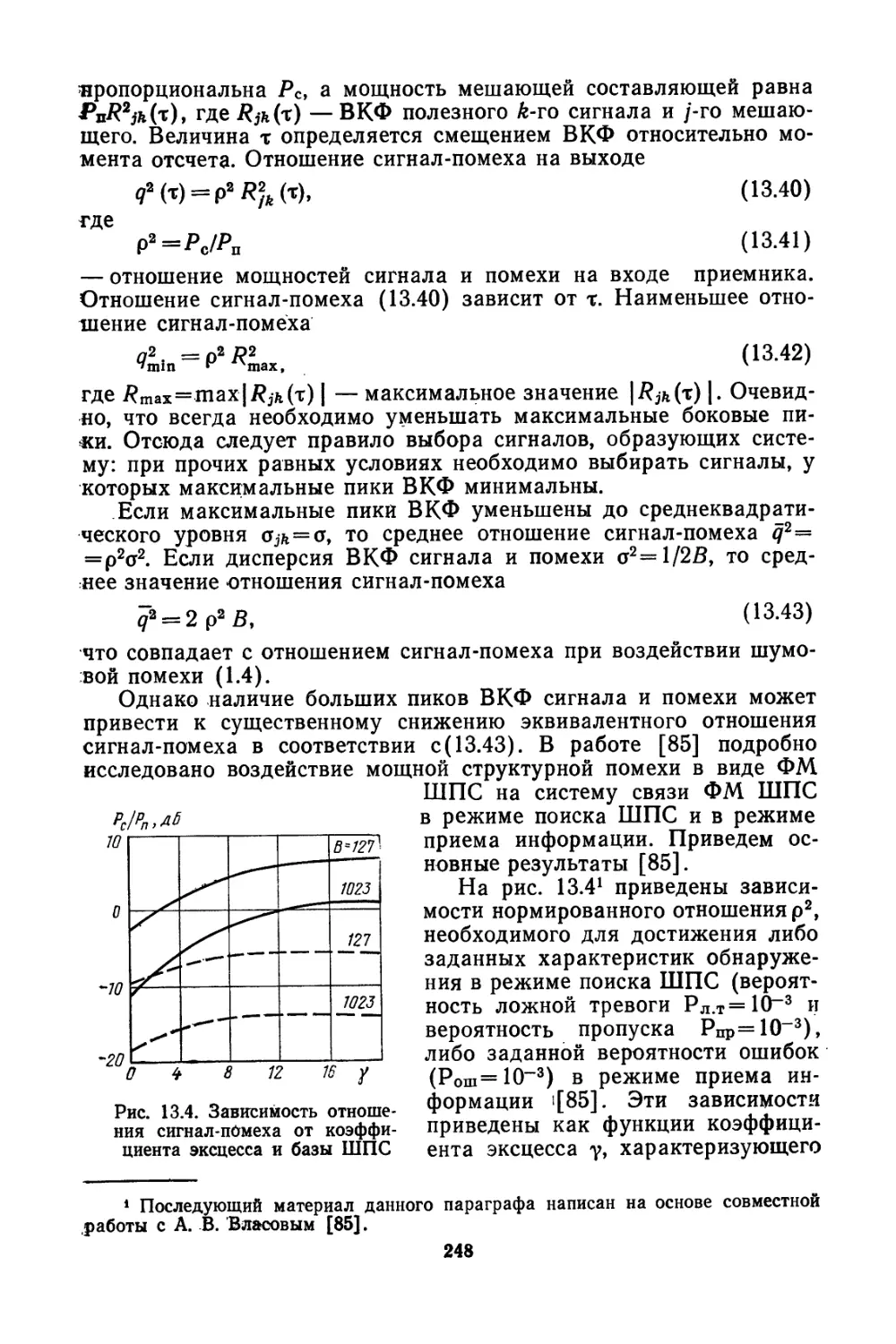
На рис. 1.1 представлены зависимости усиления обработки .и базы
ШПС В от отношения сигнал-помеха на входе р2 дБ при
значениях q2 (сплошные линии) и h2 (штриховые линии), равных 10,
20 и 30 дБ, построенные согласно (1.4), (1.6). Например, если
необходимо иметь й2 = 20дБ,
а на входе приемника р2 =
*=—40 дБ, то требуемая
база должна быть равна 60 дБ,
т. е. В=106.
Соотношения (1.4), (1.6)
являются
фундаментальными в теории систем связи с
ШПС. Они получены для
помехи в виде белого шума с
равномерной спектральной
плотностью мощности в
пределах полосы частот,
ширина которой равна ширине
спектра ШПС. Вместе с тем
эти соотношения
справедливы для широкого круга
помех (узкополосных,
импульсных, структурных), что и
определяет их фундаментальное значение. В общем случае,
усиление обработки ШПС для произвольных помех
*шпс «25, (1.7)
где степень приближения зависит как от вида помех, так и от
базы ШПС. В табл. 1.1 приведены значения усиления обработки
для некоторых зарубежных систем связи и^ * .
навигации. т^~~
В табл. 1.1 введены обозначения: ФМ —
фазоманипулированный сигнал, ЧМ — ча- #о\
стотноманипулированный сигнал.
Приведенные в таблице параметры соответствуют 6д\
го/>?дб
Рис. 1.1. Зависимость усиления обработки
я базы ШПС от отношения сигнал-помеха
на выходе приемника
Таблица 1.1. Параметры систем связи с ШПС
40
Система
связи
RAKE
CHEROKEE
RACEP
MAGNAVOX
<}PS
Тип
ШПС
ФМ
ФМ
ЧМ
ФМ
ФМ
Ширина
спектра,
МГц
0,01
1
4
1
25
Усиление
обработки, дБ
22
16
—
25
47
Ссылки
10
10
10
10
11
ЧМ
А
1
ШПС J
/т \
-40 -20 Q-. 20/>UB
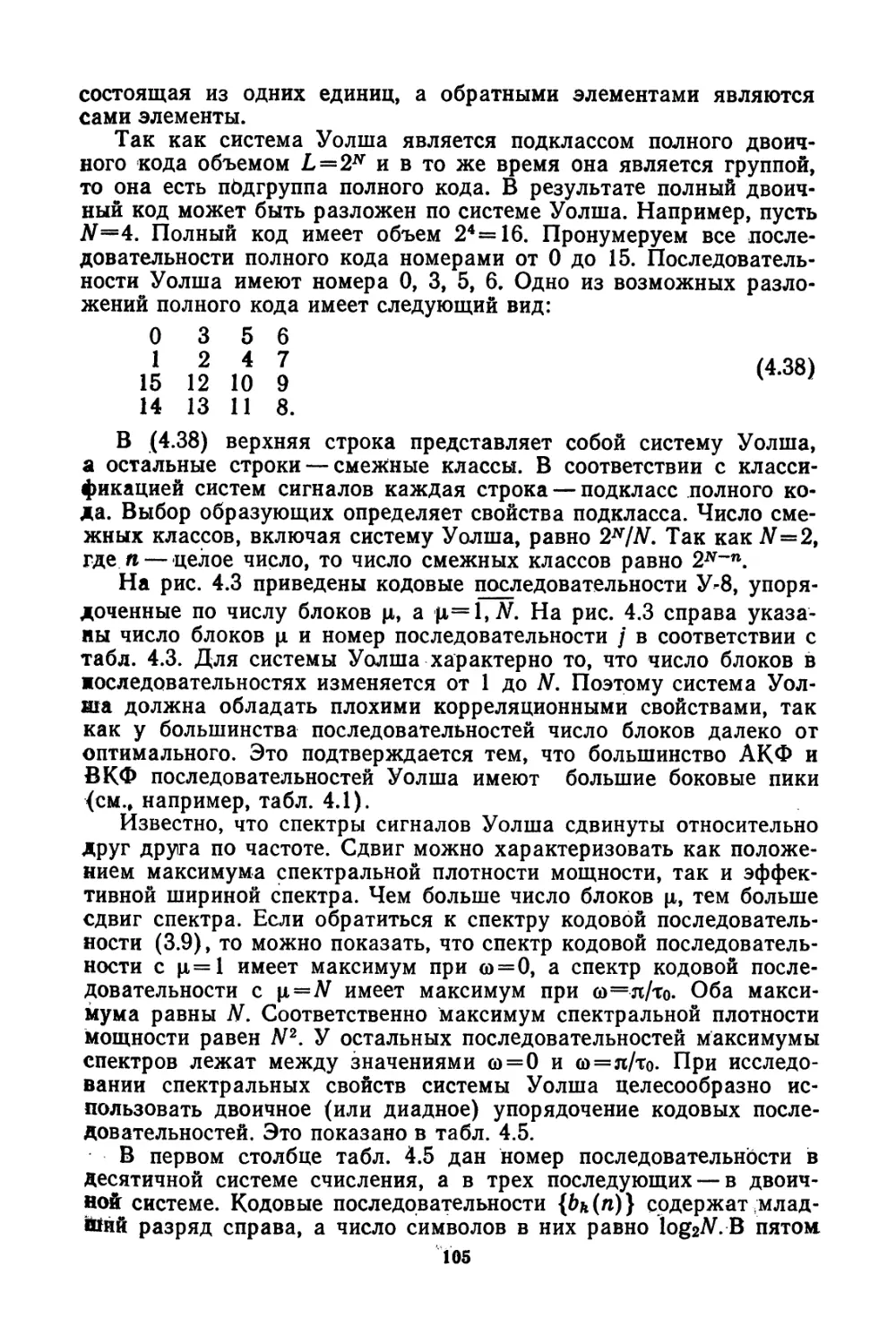
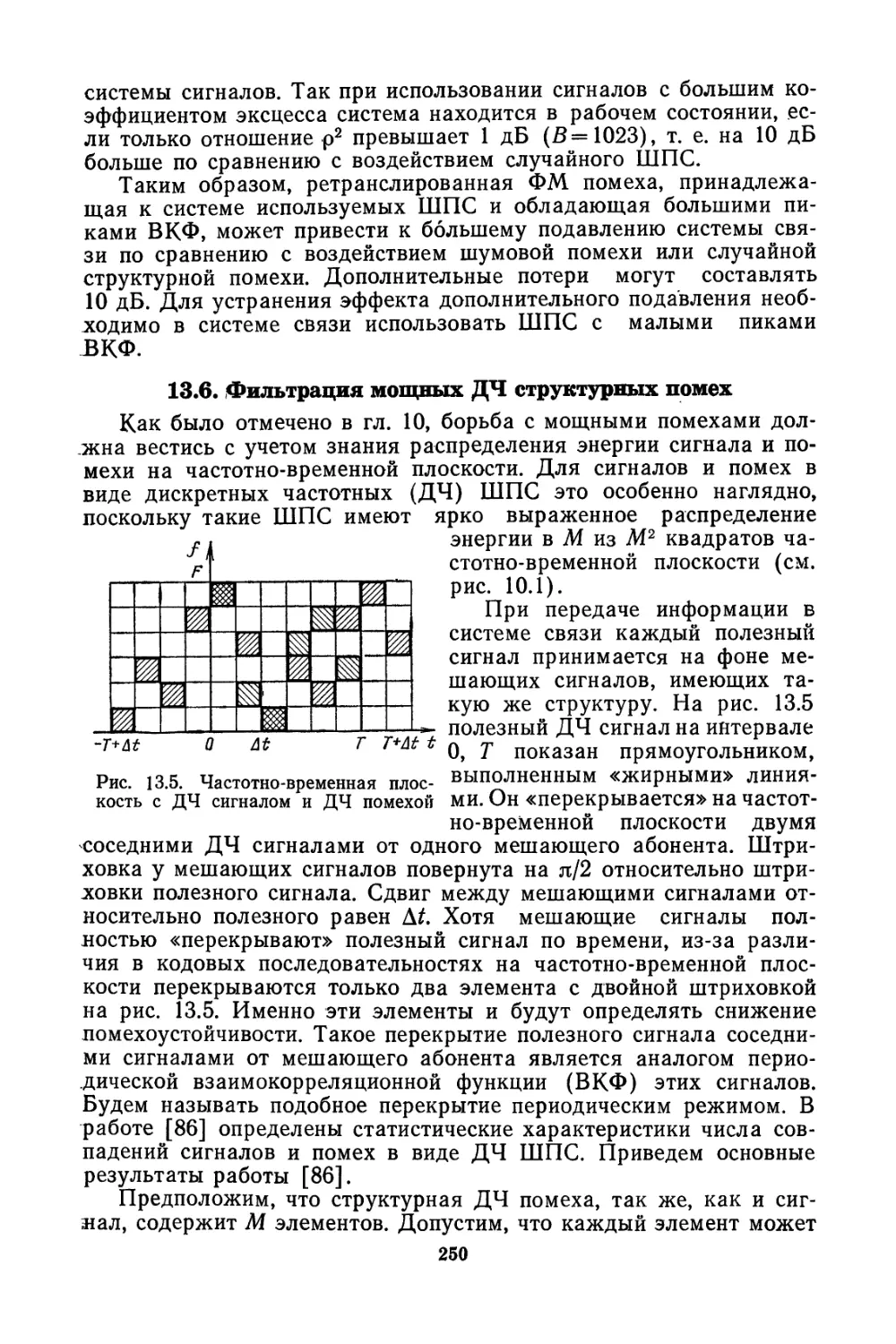
Рис. 1.2.
Помехоустойчивость систем связи с
ШПС: ЧМ и AM
7
в основном системам связи шестидесятых годов (первые четыре
строки) и только в пятой строке приведены параметры
современной системы GPS (Global Position System) — многоспутниковой
радионавигационной системы [11].
На рис. 1.2 приведены граф.ики помехоустойчивости систем
связи с ШПС, с частотной модуляцией (ЧМ) и с амплитудной
модуляцией (AM). Для сравнения ЧМ и ШПС взяты одинаковые
полосы частот, что соответствует 5=100. Помехоустойчивость
системы связи с ШПС рассчитана согласно (1.4), причем положено,
что информация передается с помощью широтно — .'импульсной
модуляции (ШИМ). Известно, ЧМ обладает высокой
помехоустойчивостью и обеспечивает высокое качество воспроизведения
информации при условии, что отношение сигнал^помеха на входе выше
порогового значения р2пор=Ю...15 дБ. При уменьшении р2 ниже
порогового значения помехоустойчивость системы связ)и с ЧМ
резко падает (см. рис. 1.2). Система с AM л эквивалентной базой В =
= 1 работает лишь при р2>0 дБ, зависимость q2 от р2 линейная.
Система связи с ШПС обеспечивает надежный прием информации
и при р2<0 дБ. Например, если положить q2=l0 дБ, то система
связи будет работать при отношении сигнал-помеха на входе
—13 дБ, т. е. р2=0,05. Таким образом, одним из основных
(назначений систем -связи с ШПС является обеспечение надежного
приема -информации при воздействии мощных помех, когда
отношение сигнал-помеха на входе приемника р2 может быть много
меньше единицы.
Необходимо еще раз отметить, что приведенные соотношения
строго справедливы для помехи в виде гаусоовского случайного
процесса с равномерной спектральной плотностью мощности
(«белый» шум). Совместное воздействие комплекса помех будет
рассмотрено более подробно в гл. 10. Вопросу фильтрации комплекса
помех посвящено большое число работ.
1.4. Скрытность системы связи
Это способность противостоять обнаружению и измерению
параметров. Скрытность — понятие очень емкое, так как включает
в себя большое множество особенностей обнаружения ШПС и
измерения их параметров. Поскольку обнаружение ШПС и
измерение параметров возможны пр.и различной первоначальной
осведомленности (априорной неопределенности) о системе связи, то
можно указать только основные соотношения, характеризующие
скрытность. Когда известно, что в данном диапазоне частот
может работать система связи, но параметры ее неизвестны, то в
этом случае можно говорить об энергетической скрытности
системы связи, так как ее обнаружение возможно с помощью анализа
спектра (энергетическое обнаружение). Характеристика
обнаружения (вероятности ложной тревоги и пропуска сигнала)
полностью определяется отношением сигнал-помеха на входе
приемника-анализатора р2=Рс/Рп, где помеха представляет собой собст-
8
венный шум приемника Pn=kTo(Nui—l)F, a k — постоянная
Больцмана, Го — температура окружающей среды, Nm —
коэффициент шума приемника. Время обнаружения ШПС при
условии р2<С1 приближенно определяется соотношением Г0бн»
«^-Чр2)"22<74 или
To6KttaF, (1.8)
где размерная постоянная a—^q2kTo(Nm—1)/Рс]2 зависит как от
шумовых свойств приемника, (Мощности сигнала на входе, так и
от требуемого отношения сигнал-помеха на выходе q2. Таким
образом, чем шире ширина спектра ШПС, тем больше время
обнаружения, тем выше энергетическая скрытность системы связи.
Если ШПС системы связи воспроизводятся приемпиком-анали-
затором уверенно, то время анализа приближенно определяется
соотношением, аналогичным по виду соотношению (1.8), но а =
=bT\kTo(Nm—1)/Рс], Ъ — постоянная величина. Чем шире спектр
ШПС, тем больше база, тем больше время анализа, тем выше
параметрическая скрытность системы связи.
Таким образом, чем шире спектр ШПС и чем больше его
база, тем выше как энергетическая, так и параметрическая
скрытность. Для борьбы с радиоразведкой в помехозащищенных
системах связи применяют также смену ШПС. Частота смены ШПС,
их -выбор из некоторого ансамбля (системы сигналов)
определяется многими требованиями к системе связи и не может быть
однозначно определен. Однако полагают, что число сигналов в
системе (или объем системы сигналов) должно быть много больше
базы ШПС. Можно предположить, что для помехозащищенных
систем связи объем системы сигналов L определяется степенным
законом:
L~Bm, (1.9)
где т — некоторое число, по крайней мере удовлетворяющее
условию /п^2, хотя для работы может использоваться гораздо
меньшее число ШПС.
Следовательно, использование ШПС повышает
помехоустойчивость и скрытность системы связи, т. е. её помехозащищенность.
Как следует из материалов зарубежной печати, ШПС используют
в спутниковых системах связи, в авиационных системах связи, в
радиорелейных линиях, в спутниковых навигационных системах.
По-видимому, применение ШПС в помехозащищенных системах
связи будет расширяться.
1.5. Кодовое разделение абонентов
Помехозащищенные системы связи являются специальными, а
«е коммерческими. Поэтому на раннем этапе развития систем
связи с ШПС полагали, что ШПС не найдут широкого применения
в коммерческих системах связи. Однако с развитием асинхронных
.адресных систем связи внедрение ШПС в системы массовой радио-
9
связи стало возможным. Основу для этого представляет кодовое
ра;зделен!ие абонентов за счет ШПС, отличающихся по форме.
При больших базах можно построить большое число различных
ШПС. Например, пусть ШПС представляет сабой фазоманипули-
рованный сигнал, состоящий из радиоимпульсов, фазы которых О
■или я, а число их равно В. Можно построить множество сигналов
(так .называемый полный код), число сигналов в котором равна
2В, а сигналы между собой отличаются хотя бы в одном
импульсе. Если положить В =100, то имеем 2100~1030 различных
сигналов. Из такого большого множества можно отобрать систему
сигналов так, чтобы каждому абоненту в системе связи выделить
свои собственные сигналы. При этом все абоненты могут работать
в общей полосе частот, а разделение их возможно за счет
различия ШПС по форме. Такое разделение абонентов называется
кодовым. При этом ШПС является по сути дела адресом абонента и
в этом случае принципиально нет
необходимости в принудительной временной
синхронизации абонентов. Поэтому подобные
системы связи получили название
асинхронных адресных систем связи (ААСС). Они
основаны на применении ШПС и кодовом
разделении абонентов.
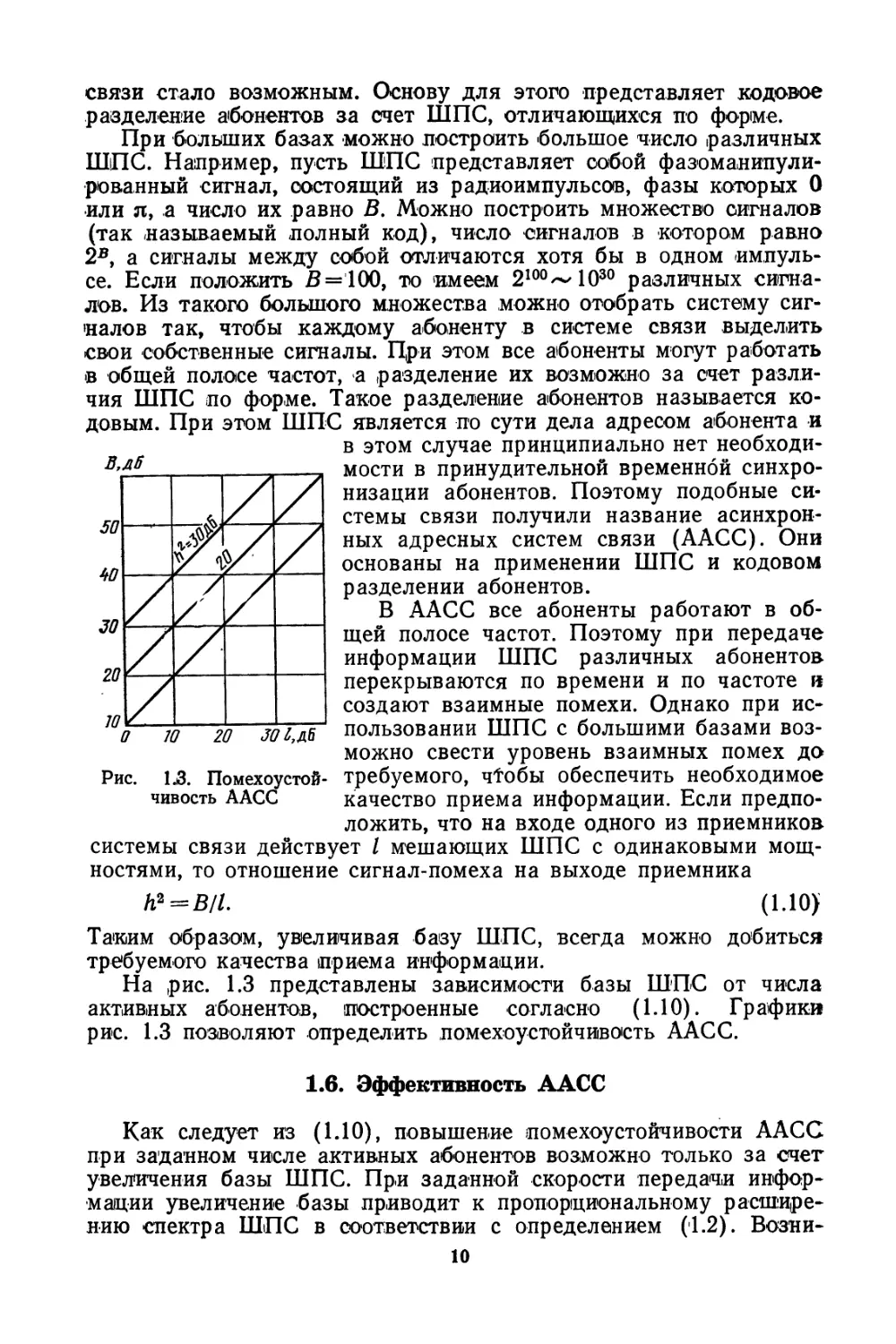
В ААСС все абоненты работают в
общей полосе частот. Поэтому при передаче
информации ШПС различных абонентов
перекрываются по времени и по частоте ю
создают взаимные помехи. Однако при ис-
о w 20 joi,a6 пользовании ШПС с большими базами
возможно свести уровень взаимных помех да
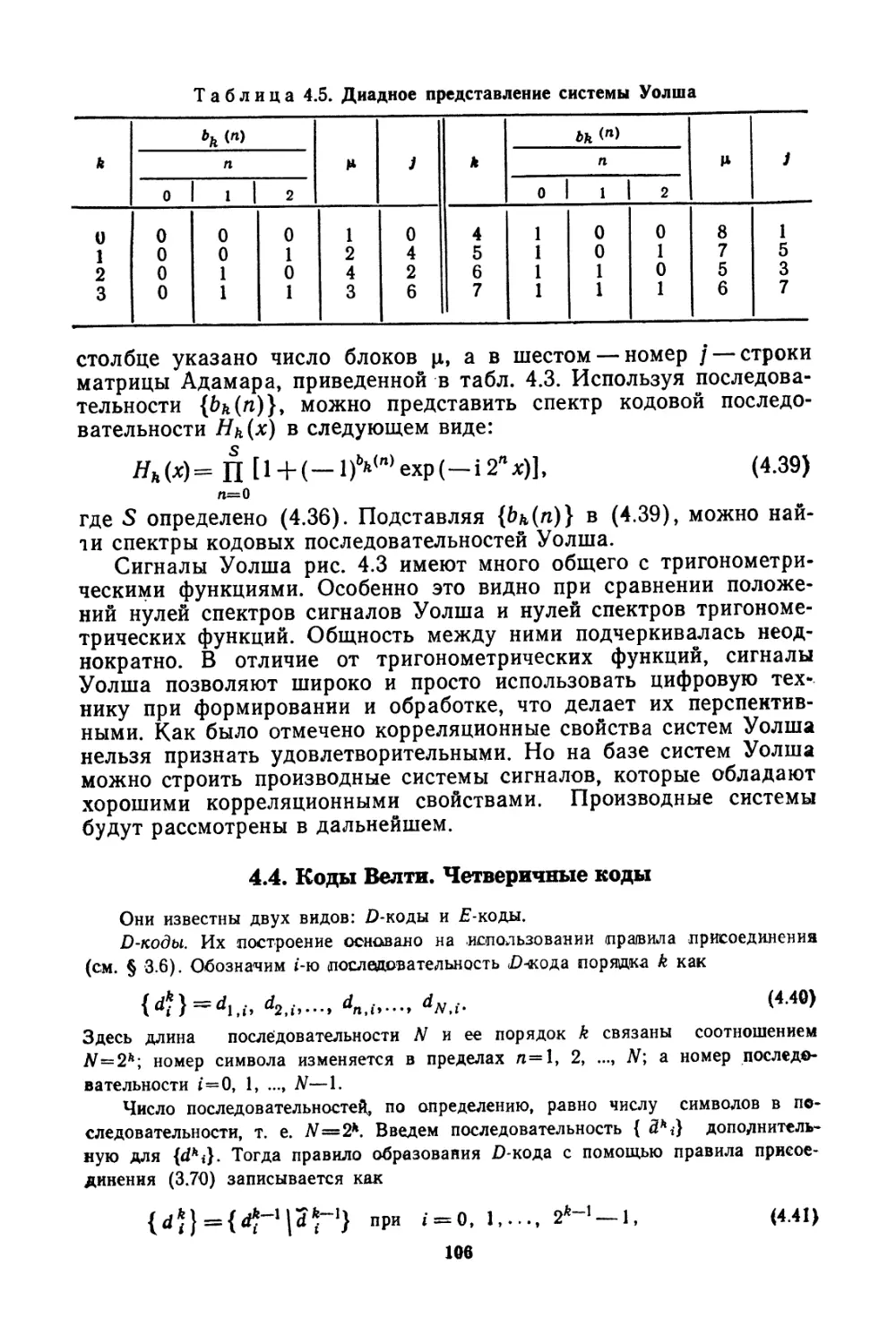
Рис. 1.3. Помехоустой- требуемого, ч1обы обеспечить необходимое
чивость ААСС качество приема информации. Если
предположить, что на входе одного из приемников
системы связи действует / мешающих ШПС с одинаковыми
мощностями, то отношение сигнал-помеха на выходе приемника
h^B/L (1.10)
Та'ким образом, увеличивая базу ШПС, всегда можно добиться
требуемого качества приема информации.
На рис. 1.3 представлены зависимости базы ШПС от числа
активных абонентов, построенные согласно (1.10). График»
рис. 1.3 позволяют определить помехоустойчивость ААСС.
1.6. Эффективность ААСС
Как следует из (1.10), повышение помехоустойчивости ААСС
при заданном числе активных абонентов возможно только за счет
увеличения базы ШПС. При заданной скорости передачи
информации увеличение базы приводит к пропорциональному
расширению спектра ШПС в соответствии с определением (1.2). Возни-
ю
50
J0
20
70
[/
у
\А
h
у \
/
/
У
кает вопрос об эффективности использования радиоспектра в
системах связи с ШПС.
В системах связи эффективность использования радиоспектра
характеризуется удельной плотностью активных абонентов у,
равной числу активных абонентов, приходящихся на 1 МГц
полосы частот, т. е.
y = UF, (1.11)
где / — число активных абонентов, одновременно работающих в
■полосе частот шириной F. Заменяя / ,в (1.11) согласно (1.10),
имеем
y=T/h2. (1.12)
Часто удельная плотность активных абонентов называется просто
эффективностью системы связи. Из (1.12) следует, что
эффективность ААСС тем меньше, чем больше требуемое отношение
сигнал-помеха на выходе приемника. Таким образом, AAGC более
перспективны в тех случаях, 'когда не требуется высокое качество
передачи информации, что характерно для систем массовой
радиосвязи. Для примера, в радиотелефонной системе подвижной связи
с частотным разделением каналов максимальная эффективлость
7таж=250 аб/МГц, так как минимальная ширина каждого канала
равна 4 кГц ;и в 1 МГц можно разместить 250 частотных каналов,
т. е. активных абонентов. Однако, для повышения
помехоустойчивости используется частотная модуляция (ЧМ) ,и соседние
частотные каналы разнесены на 25 кГц. При этом в 1 МГц можно
разместить 40 частотных каналов, т. е. YqM^O аб/МГц. Ранние
системы связи с >ШПС («RADA», «RACEP»HAp.) имели низкую
эффективность, у них 7шпс^7...9 аб/МГц. Из (1.12) следует, что
высокую эффективность систем связи с ШПС непосредственно получить
трудно. Например, если положить Г=1/4 кГц=250 мс, a /i2='10,
то 7шпс=25 аб/МГц, т. е. ниже эффективности систем связи с
ЧМ.
В последние годы .предложен иной принцип построения
радиотелефонных систем подвижной связи. Вся обслуживаемая
территория разбивается на большое число зон в виде сот. В .каждой
зоне радиосвязь ведется на частотах, специально выделенных этой
зоне. За счет территориального разнесения зон с одинаковыми
частотными каналами возможно многократное использование одних
и тех же частотных каналов. Такие системы связи получили
название сотовых систем подвижной связи (ССПС). Прием сигналов в
таких системах принципиально сопровождается взаимными
помехами так же, как и в ААСС. Поэтому применение ШПС в ССПС
перспективно, поскольку позволяет успешно бороться с взаимными
помехами. Эффективность ССПС
Тсспс> 3,63 (R0/D)VFKJ (1.13)
где R0 — радиус зоны обслуживания, D — защитный интервал,
&к — ширина частотного канала. Если положить /?о=30 км, D»
11
«4,4 км, радиус зоны /?=0,85 км, а FK=50 кГц, то усспс &
^3333 аб/МГц, т. е. гораздо выше эффективности обычных
систем подвижной связи. Если ширину частотного канала увеличить
до 100...200 кГц, то эффективность ССПС станет равной 1666 и
833 аб/МГц соответственно, что все равно будет гораздо больше
эффективности систем с ЧМ. Но при этом возможно применение
ШПС с относительно небольшими базами (25...250), что в свою
очередь позволит использовать простую аппаратуру
формирования и обработки ШПС с невысокой стабильностью частоты. В
свою очередь применение ШПС позволит успешно решить
проблему адресации большого числа абонентов. Сотовые системы
подвижной связи с ШПС позволят обеспечить связью 60... 240 тыс
подвижных абонентов в крупных городах. Кроме того, в таких
системах можно совместить передачу телефонных сообщений с
определением местоположения подвижных объектов и их охрану.
1.7. Борьба с многолучевостью
Применение ШПС в системах связи позволяет бороться с
многолучевостью распространения радиоволн. Многолучевость
возникает в том случае, если радиоволны приходят в точку приема,
отразившись от различных препятствий на пути распространения
(слои ионосферы, здавия, холмы и т. п.). Из-за различия в длине
пути эти радиоволны приходят с различным запаздыванием. В
результате, если сигналы, .пришедшие по разным путям,
перекрываются во времени, то между ними возникает интерференция, ко-
О
а)
K/WW
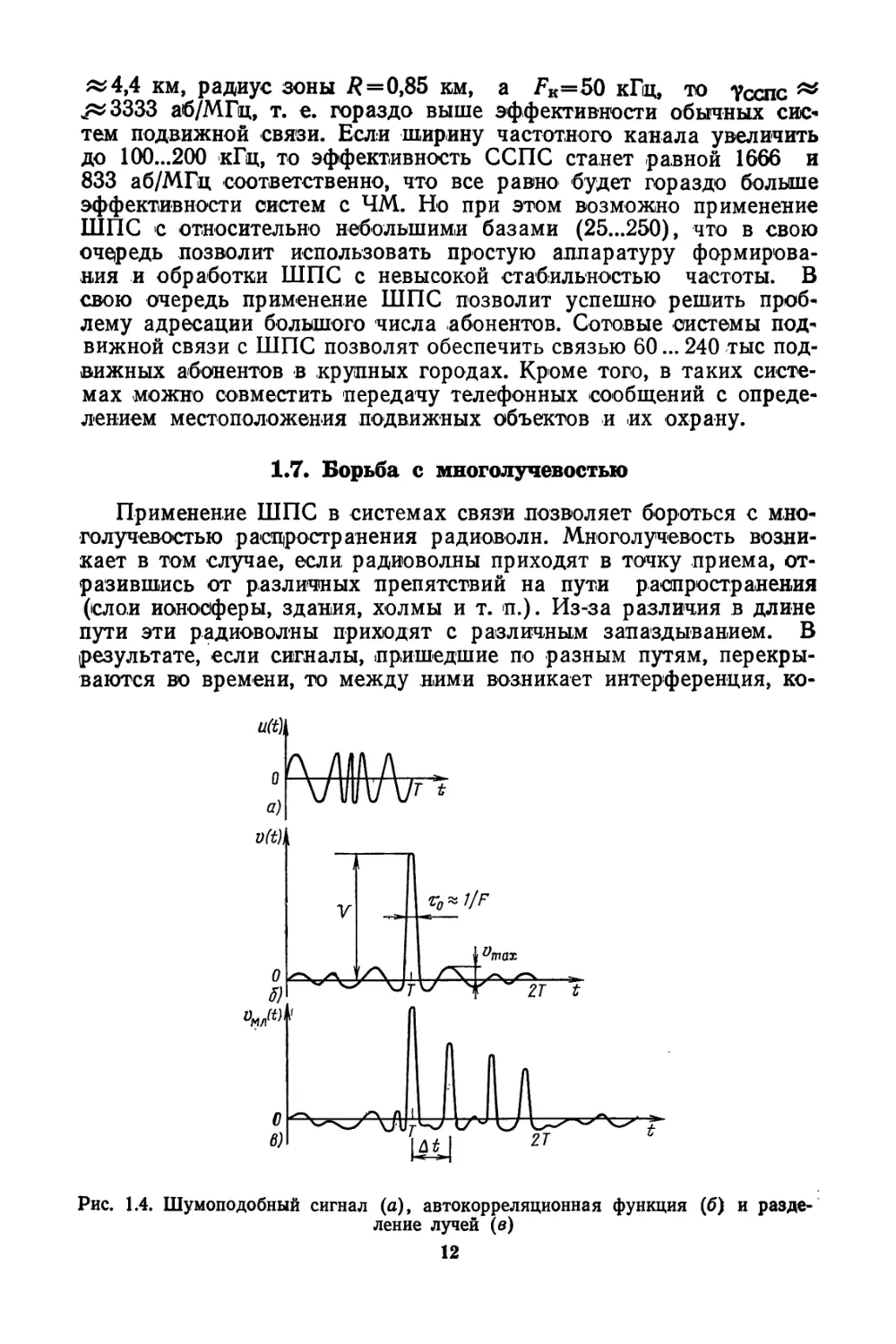
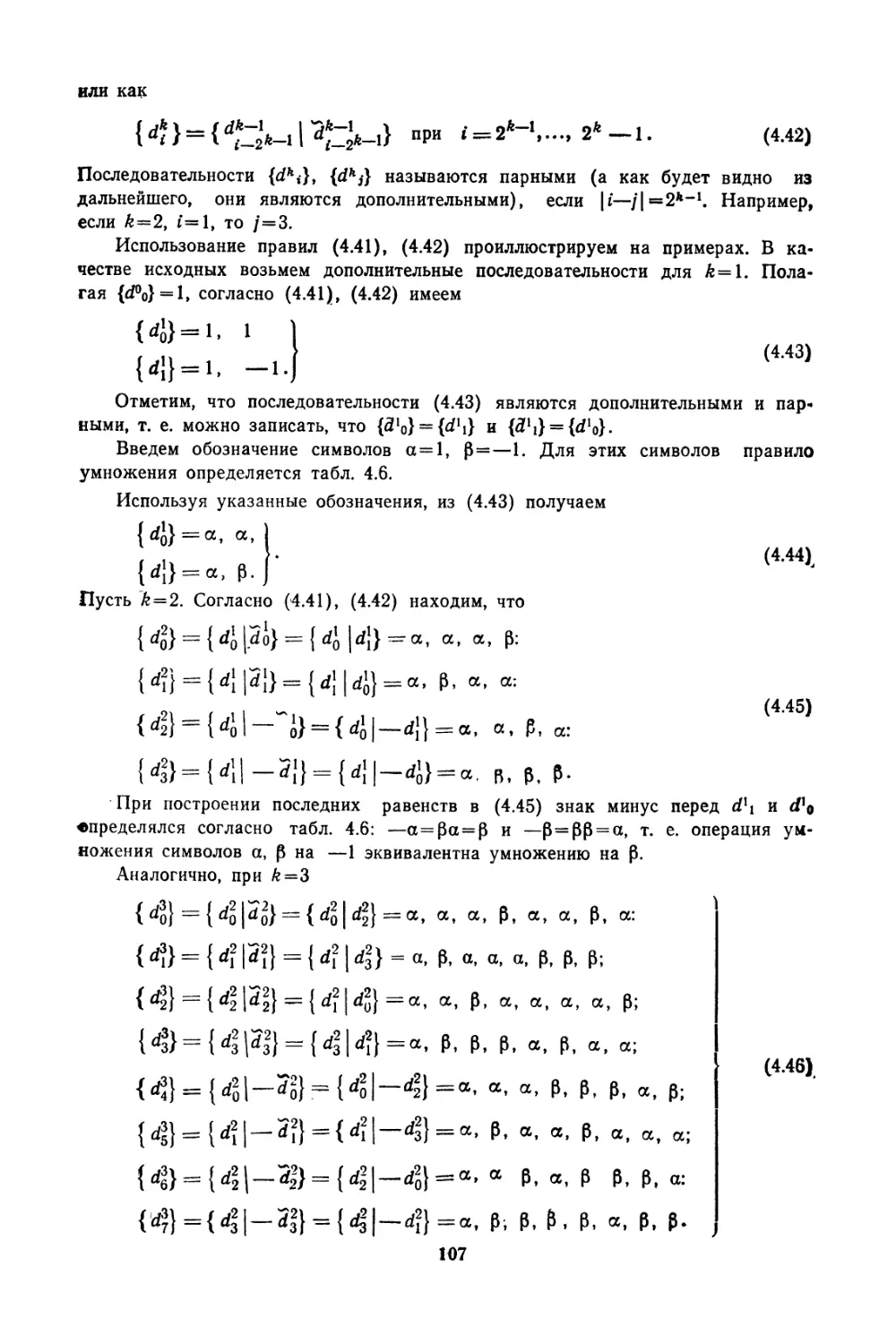
Рис. 1.4. Шумоподобный сигнал (а), автокорреляционная функция (б) и
разделение лучей (в)
12
торая в свою очередь вызывает глубокие замирания
результирующего сигнала. Обычно для компенсации замираний
предусматривают увеличение мощности сигнала на 20 дБ. Иначе обстоит дело
при использовании ШПС, поскольку при обработке ШПС
согласованным фильтром происходит сжатие ШПС по времени, что
иллюстрируется рис. 1.4. На рис. 1.4,а изображен ШПС с частотной
модуляцией длительностью Г. На рис. 1.4,6 изображено
напряжение на выходе согласованного фильтра — отклик фильтра на
ШПС. Этот отклик называется автокорреляционной функцией
(АКФ) ШПС. Хотя АКФ имеет длительность 2Г, то в ней можно
выделить две резко отличающиеся структуры. В центре АКФ
резкий выброс в виде узкого импульса, называемого центральным
пиком. Его амплитуда равна V, а длительность
т0 * 1/F. (1.14|
Чем шире спектр ШПС, тем короче центральный пик. Вторую
область составляют боковые пики с максимальным значением vmax~
Шумоподобные сигналы с большими базами обладают
свойствами, которые записываются двумя соотношениями:
77т0 ж В, V/t>max » V^B, (1.15), (1.16)
где а — некоторая постоянная, в общем случае зависящая от
базы В.
Соотношение (1.15) определяет сжатие ШПС — отношение
длительности ШПС Т к длительности центрального пика.
Сжатие ШПС равно, примерно, базе. Поэтому лри Т = const
увеличение F приводит к уменьшению длительности центрального пика то
и к увеличению сжатия.
Соотношение (1.16) характеризует подавление боковых пиков*
Оно равно отношению амплитуды центрального пика V к
амплитуде максимального бокового пика vmaLX. Чем больше база, тем
больше подавление боковых пиков. И в пределе АКФ ШПС с
ростом базы стремится к узкому дельта-импульсу. Такую АКФ
имеет широкополосный шум,- что и послужило причиной
названия — «шумоподобные сигналы».
На рис. 1.4,в изображен отклик согласованного ф,ильтра на
несколько ШПС, пришедших по различным путям. Если задержка
между лучами At больше длительности центрального пика to, та
лучи разделяются и центральные пики различных лучей можно
разделить один от другого, а затем и объединить, устранив
задержку между ними. Такой принцип борьбы с многолучевостью был
использован в одной из первых систем связи с ШПС «RAKE». Таким
образом, условие At>xo обеспечивает разделение лучей. Поскольку
то и F связаны соотношением (1.14), то условие разделения лучей
записывается следующим образом:
FA*>1. (1.17);
Например, если пр.и распространении радиоволн существуют два
луча — прямой и отраженный от некоторого объекта, то задерж-
13
ка Attt2d2/\Rc, где с — скорость света, R — расстояние между
.передатчиком iH приемником, d — расстояние между отражающим
объектом <и прямым лучом. В этом случае необходимо
использовать ШПС с шириной спектра
F>'Jfy/2d*. (1.18)
Чем больше d, тем меньше F. Может оказаться, что при малых d
могут потребоваться ШПС с очень широкими спектрами, что не
всегда можно реализовать на практике.
1.8. Измерение координат подвижных объектов
Применение ШПС позволяет совместить системы передачи
информации и системы траекторных измерений. При измерении
параметров движения объекта наибольший .интерес представляют
расстояние между .приемником .и передатчиком и их
относительная скорость. Расстояние измеряется по задержке во времени, а
скорость — по доплеровскому смещению частоты. Точность
измерения .и разрешающая способность по задержке определяются
отношением сигнал-помеха q2 (1.4) и шириной спектра сигнала и
характеризуются ошибкой
at « 1/qF. (1.19)
Чем больше q и F, тем меньше ошибка в измерении задержки,
тем выше точность измерения и разрешающая способность по
расстоянию. Точность измерения доплеровского смещения частоты
определяется отношением сигнал-помеха q2 (1.4) и длительностью
сигнала и характеризуется ошибкой
af ttl/qT. (1.20)
Чем больше q и Г, тем меньше ошибка в измерении
доплеровского сдвига частоты, тем выше точность измерения и разрешающая
способность по скорости. Из (1.19), ('1.20) следует, что при
совместном .измерении расстояния и скорости необходимо
использовать ШПС, так как только для ШПС можно независимо изменять
и ширину спектра F и длительность Т. В системах связи
длительность Т обычно определяется скоростью передачи информации.
Поэтому повышения точности измерения расстояния можно
достигнуть расширением спектра Ff т. е. используя ШПС.
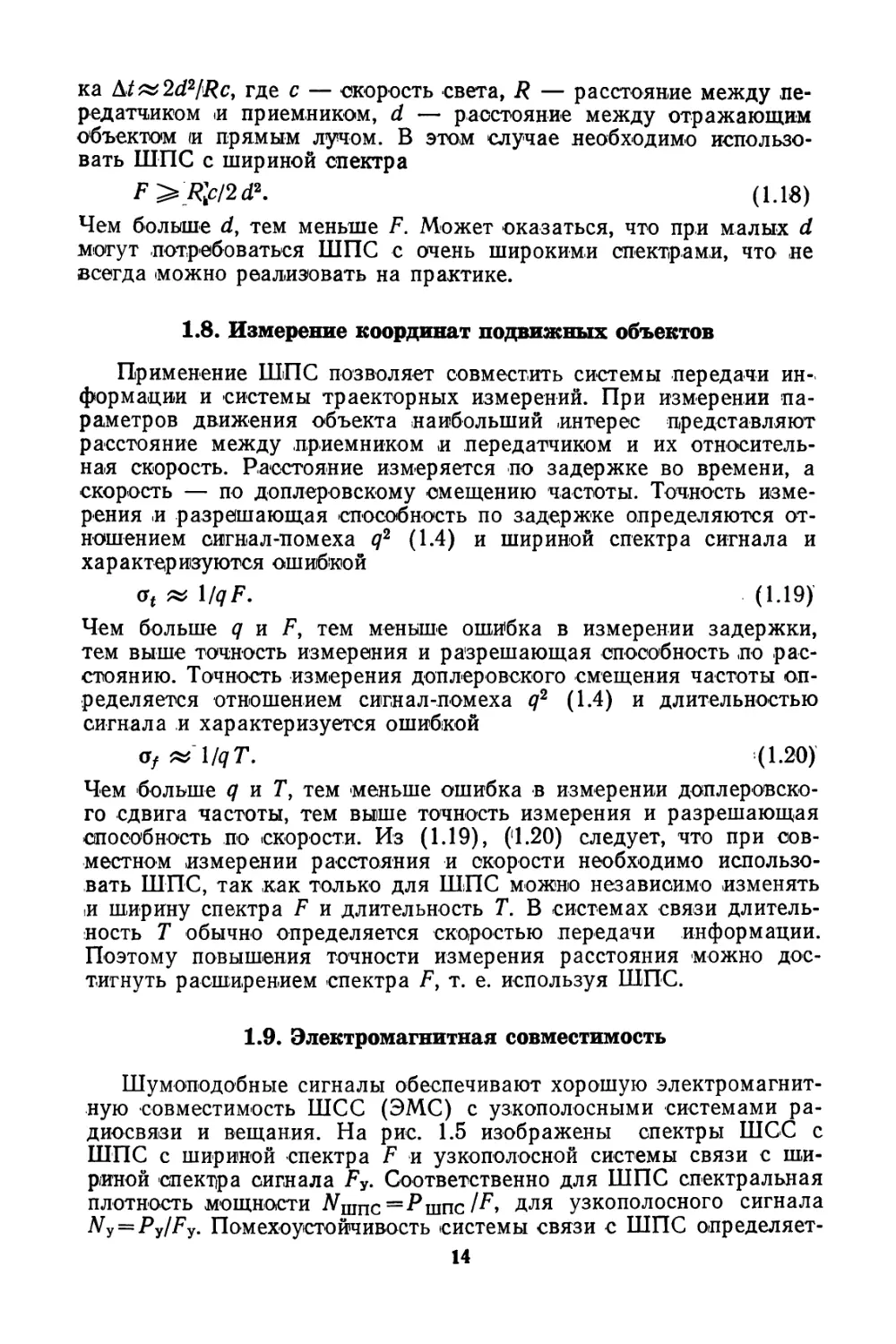
1.9. Электромагнитная совместимость
Шумоподобные сигналы обеспечивают хорошую
электромагнитную совместимость ШСС (ЭМС) с узкополосными системами
радиосвязи и вещания. На рис. 1.5 изображены спектры ШСС с
ШПС с шириной спектра F и узкополосной системы связи с
шириной спектра сигнала Fy. Соответственно для ШПС спектральная
плотность мощности Nmnc=Pmnc/F, для узкополосного сигнала
Ny = PY/Fy. Помехоустойчивость системы связи с ШПС олределяет-
14
ся -фундаментальным соотношением (1.4), в котором р2=Ртпс/ру
Усиление обработки равно 25. Если узкополосная система связи
постоянно занимает определенный интервал, то можно её спектр
полностью подавить, используя режекторный фильтр, настроенный
на частоту узкополосной системы связи. Таким образом,
воздействие узкополосной системы связи на широкополосную
незначительно. В свою очередь, широкополосная система связи также
слабо влияет на узкополосную систему связи. Мощность ШПС,
проходящего на выход приемника, N mncFy=PmncFY/F. Поэтому
отношение сигналнпомеха на выходе узкополосного приемника будет
определяться соотношением (1.4), в котором р2=Ру/Ршпс> а 5=*
=F/iFy. Поэтому чем больше отношение F/Fy, тем лучше
фильтрация ШПС в узкополосной системе связи. Следовательно, чем
больше база ШПС, тем выше ЭМС широкополосной и
узкополосной систем связи.
f),
0
1
-А
"шпе \
Г |
■*
F
Щ
Ь-
1 ч
.р.
k ^
/
N(f)i
Рис. 1.5. Спектры широкополосной и Рис. 1.6. Спектры телевизионного сиг-
узкополосной систем связи нала и ШПС
Системы связи с ШПС можно совмещать и с
радиотелевизионными системами. На рис. 1.6 .изображен спектр телевизионного
сигнала NTB. Программы телевидения в одной территориальной
зоне передаются по нескольким каналам с большими защитными
частотными интервалами. Обычно в этих частотных защитных
интервалах не допускается работа каких-либо радиотехнических
систем, чтобы не создавать помех телевизионным передачам. Однако
можно в этих частотных интервалах разместить системы связи с
ШПС так, как это показано на рис. 1.6. Спектр ШПС расположен
вблизи спектра телевизионного сигнала, там где спектральная
плотность последнего резко уменьшается. При этом взаимные
помехи и той, и другой системе будут малыми. Следует отметить,
что если вместо ШПС использовать сигналы с частотной
модуляцией, то уровень взаимных помех возрастает, так как сигналы
системы связи и телевидения относятся к одинаковому классу и де-
модулируются частотным детектором.
Таким образом, системы связи с ШПС обладают хорошей
ЭМС с системами радиосвязи, вещания и телевидения. Ранее
было упомянуто, что ШПС обеспечивают высокую эффективность
использования радиоспектра в ССПС. Если рассматривать действие
систем связи в некотором замкнутом пространстве, то
оказывается, что наилучшую ЭМС при ограниченном диапазоне частот обес-
15
печивают ШПС, хотя сами по себе они требуют более широкой
полосы, чем традиционные узкополосные системы. В то же время
общая полоса частот при использовании ШПС будет меньше.
Из рассмотрения основных свойств ШПС следует, что
применение ШПС в системах связи позволяет обеспечивать высокую
помехоустойчивость относительно мощных помех, скрытность,
адресность, работоспособность в общей полосе частот, борьбу с много-
.лучевостью, высокие точности измерений и разрешающие
способности, хорошую ЭМС со многими радиотехническими системами.
Эти преимущества получаются за счет применения ШПС с
большими базами, что приводит jk резкому усложнению устройств
формирования ,и обработки, увеличению их массы, объема,
потребляемой мощности. В «большинстве случаев переход к ШПС с
большими базами требует резкого расширения полосы частот, что
приводит к определенным трудностям в создании широкополосной
элементной базы. Однако эти трудности преодолимы. И поэтому
ШПС находят уже сейчас применение в различных системах
связи, а в будущем получат еще более широкое применение,
особенно в системах массовой радиосвязи.
1.10. Основные структурные схемы ШСС
Широкополосные системы связи с ШПС в зависимости от
назначения, тактико-технических характеристик, базы ШПС,
элементной базы могут быть построены по различным схемам,
перечислить которые в настоящее .время невозможно из-за
многочисленных вариантов. Для качественного представления о том, из каких
основных устройств -состоят ШСС, на рис. 1.7, 1.9, 1.11, 1.12
приведены структурные схемы некоторых систем связи.
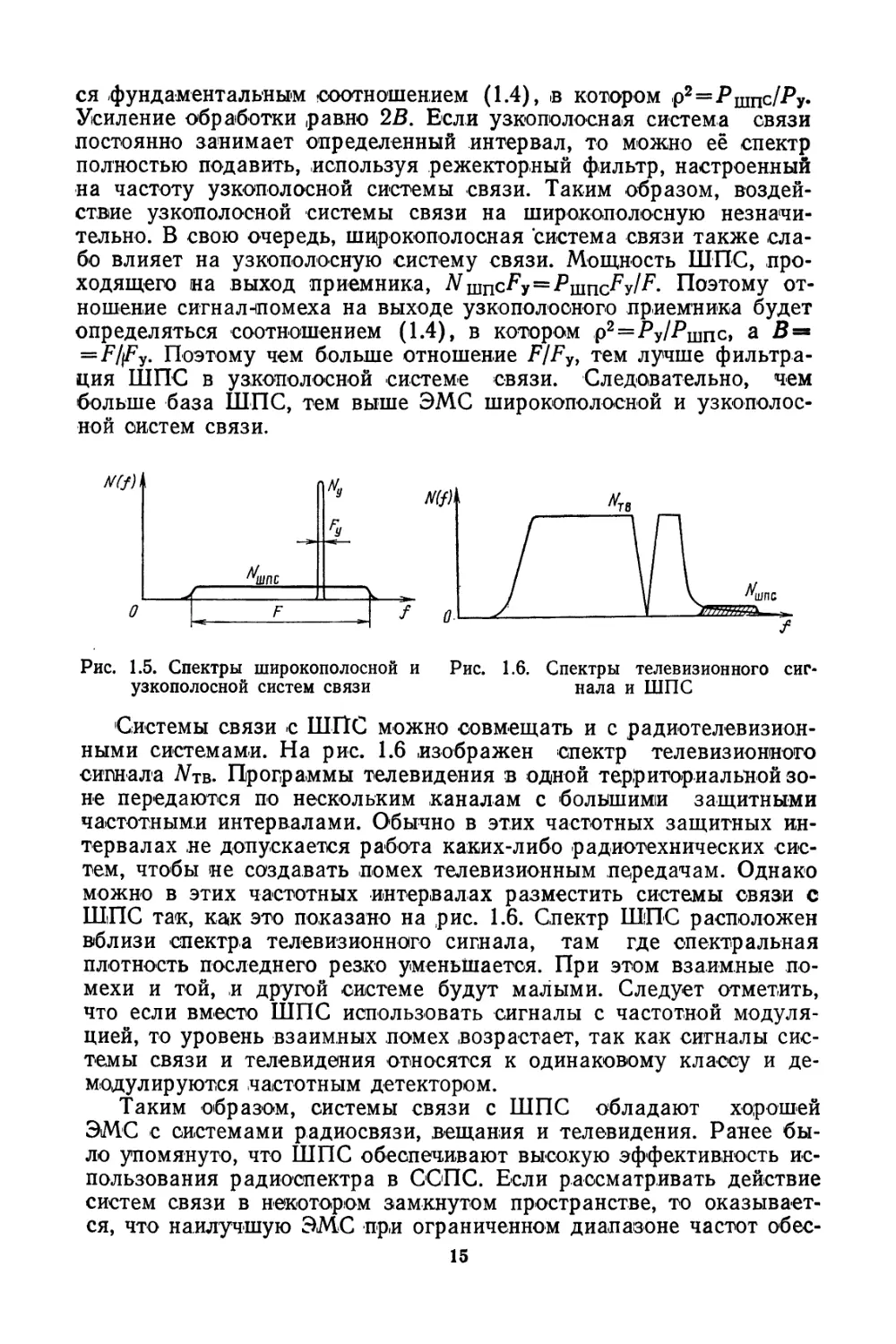
На рис. 1.7 представлены структурные схемы передатчика и
приемника цифровой системы связи с фазоманипулированным
IZl3~4
ФМ
1
1
ГФМ
Л
[с
МоЭ
t
гнч
~^"
УМ
1 а)
1—I L=J см h4№iТ-Н сф
СМ
1
1
Г г
УЛЧ
^^
СФ
ггп.
-ц
с
РЯ
ли
S)
Рис. 1.7. Структурные схемы передатчика и приемника цифровой системы связи
с фазоманипулированным ШПС
(ФМ) сигналом, предназначенные для передачи дискретных
сообщений. В передатчике (рис. 1.7,а) от-источника информации ИИ
последовательность двоичных единиц 1 и 0 со скоростью 52=1/Г
(рис. 1.8,а) поступает па вход фазового модулятора ФМ. На вто-
16
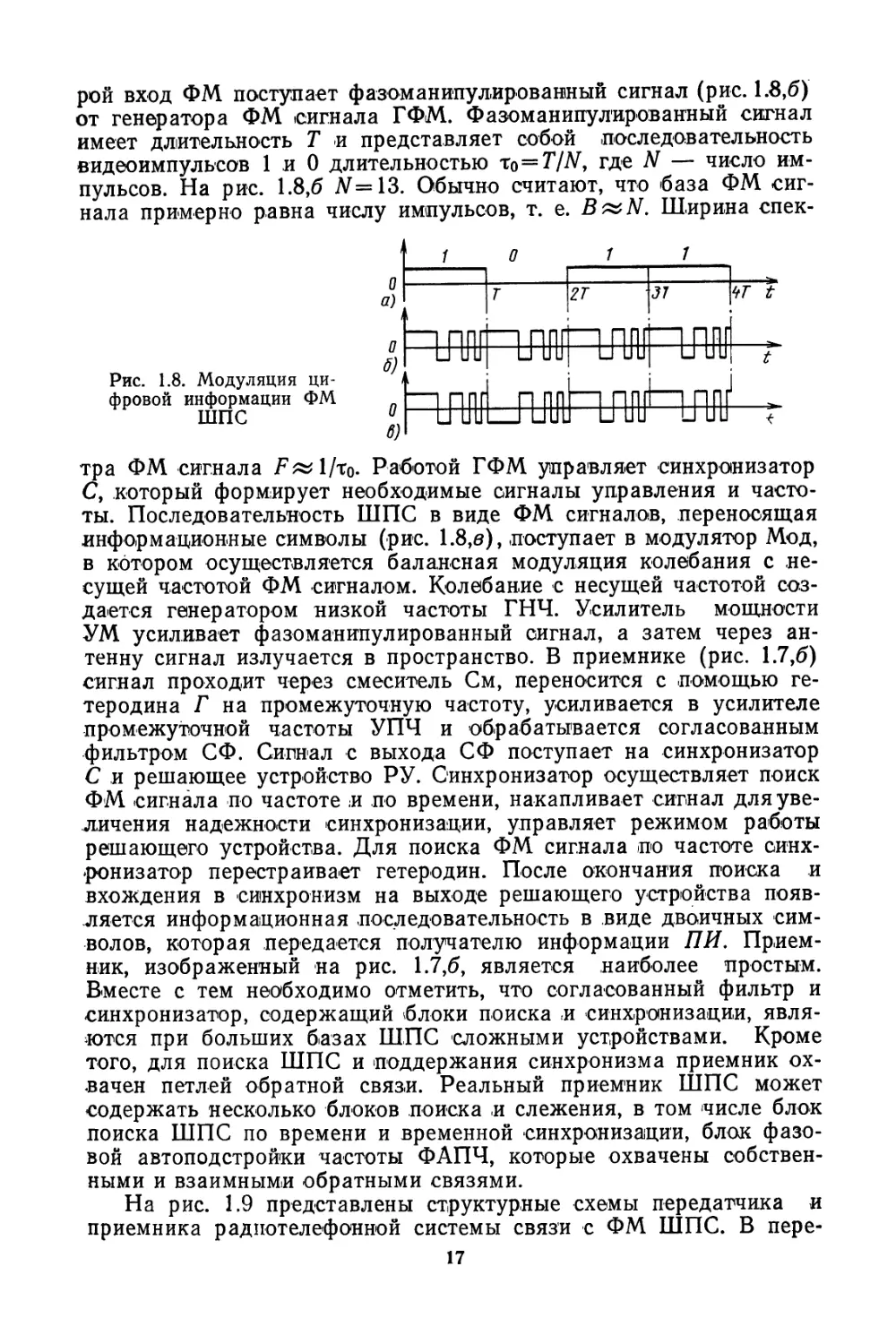
рой вход ФМ поступает фазоманипулироваиный сигнал (рис. 1.8,6)
от генератора ФМ сигнала ГФМ. Фазоманипулированный сигнал
имеет длительность Т и представляет собой последовательность
видеоимпульсов 1 и 0 длительностью хо=Т/Ы, где N — число
импульсов. На рис. 1.8,6 N=13. Обычно считают, что база ФМ
сигнала примерно равна числу импульсов, т. е. B&N. Ширина спек-
Рис. 1.8. Модуляция
цифровой информации ФМ
шпс
о
а)
О
6)
О
6)
\2Т
J7
WT t
пшпшЫлнлл!
hjiiijUiMhrnniKrui/
тра ФМ сигнала jF«1/to. Работой ГФМ управляет синхронизатор
С, который формирует необходимые сигналы управления и
частоты. Последовательность ШПС в виде ФМ сигналов, переносящая
информационные символы (рис. 1.8,в), .поступает в модулятор Мод,
в котором осуществляется балансная модуляция колебания с
несущей частотой ФМ сигналом. Колебание с несущей частотой
создастся генератором низкой частоты ГНЧ. Усилитель мощности
УМ усиливает фазоманипулироваиный сигнал, а затем через
антенну сигнал излучается в пространство. В приемнике (рис. 1.7,6)
сигнал проходит через смеситель См, переносится с помощью
гетеродина Г на промежуточную частоту, усиливается в усилителе
промежуточной частоты УПЧ и обрабатывается согласованным
фильтром СФ. Сигнал с выхода СФ поступает на синхронизатор
С и решающее устройство РУ. Синхронизатор осуществляет поиск
ФМ сигнала по частоте я по времени, накапливает сигнал для
увеличения надежности синхронизации, управляет режимом работы
решающего устройства. Для поиска ФМ сигнала по частоте
синхронизатор перестраивает гетеродин. После окончания поиска и
вхождения в синхронизм на выходе решающего устройства
появляется информационная .последовательность в виде двоичных
символов, которая передается получателю информации ПИ.
Приемник, изображенный на рис. 1.7,6, является наиболее простым.
Вместе с тем необходимо отметить, что согласованный фильтр и
синхронизатор, содержащий блоки поиска и синхронизации,
являются при больших базах ШПС сложными устройствами. Кроме
того, для поиска ШПС и поддержания синхронизма приемник
охвачен петлей обратной связи. Реальный приемник ШПС может
содержать несколько блоков поиска и слежения, в том числе блок
поиска ШПС по времени и временной синхронизации, блок
фазовой автоподстройки частоты ФАПЧ, которые охвачены
собственными и взаимными обратными связями.
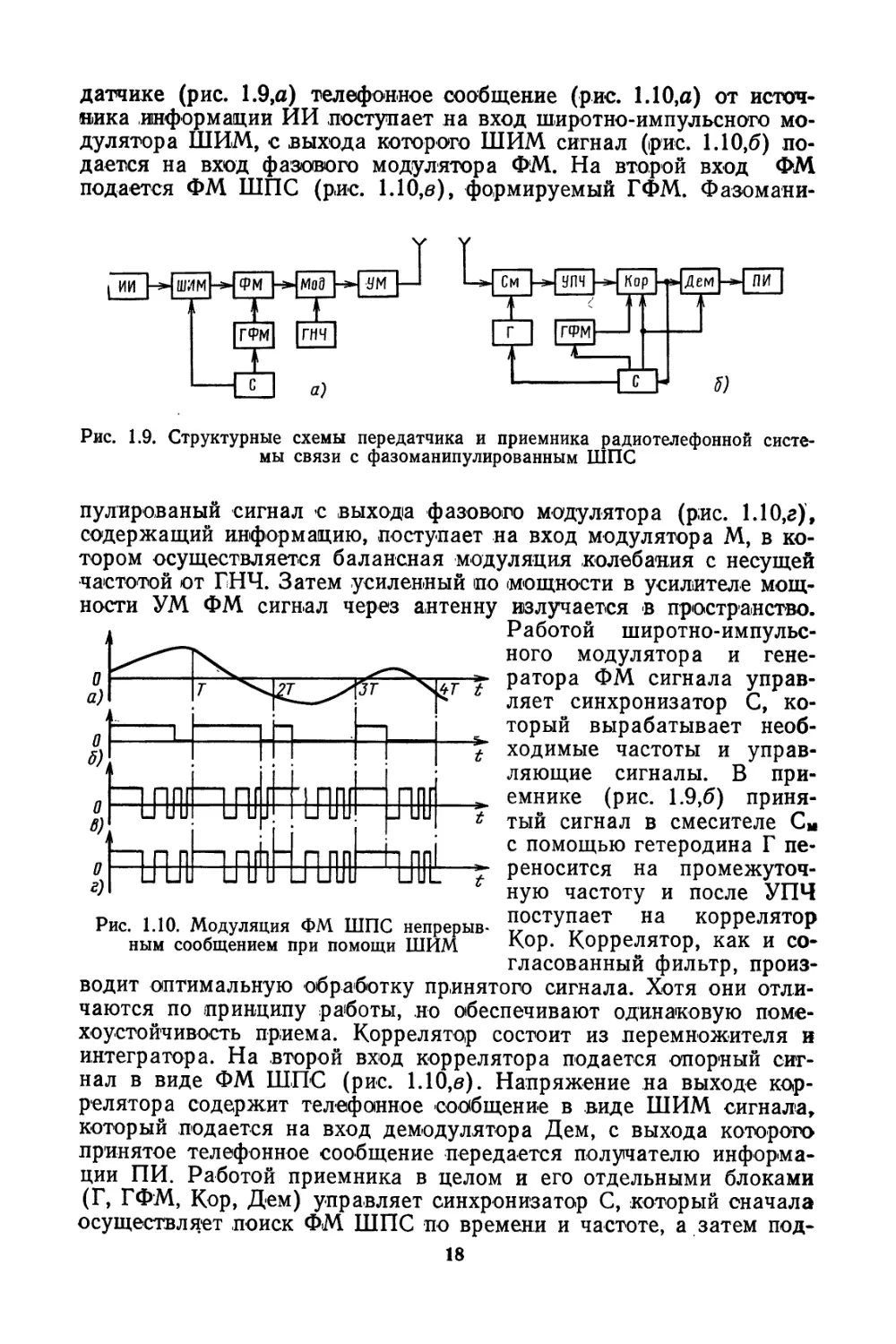
На рис. 1.9 представлены структурные схемы передатчика и
приемника радиотелефонной системы связи с ФМ ШПС. В пере-
17
датчике (рис. 1.9,а) телефонное сообщение (рис. 1.10,а) от
источника информации ИИ поступает на вход широтно-импульсного
модулятора ШИМ, с выхода которого ШИМ сигнал (рис. 1.10,6)
подается на вход фазового модулятора ФМ. На второй вход ФМ
подается ФМ ШПС (рис. 1.10,в), формируемый ГФМ. Фазомани-
|гфм| |гнч|
UJ См
УЛЧ
а)
ГФМ
ПУ
Кор иидемк-Н ПИ
5)
Рис. 1.9. Структурные схемы передатчика и приемника радиотелеф<
мы связи с фазоманипулированным ШПС
оннои систе-
?.КшИл||Й1Л11|Кпм1
ПШПЛ)™1Г1Й
пулированый сигнал с выхода фазового модулятора (рис. 1.10,2),
содержащий информацию, поступает на вход модулятора М, в
котором осуществляется балансная модуляция колебания с несущей
частотой от ГНЧ. Затем усиленный то мощности в усилителе
мощности УМ ФМ сигнал через антенну излучается в пространство.
Работой
широтно-импульсного модулятора и
генератора ФМ сигнала
управляет синхронизатор С,
который вырабатывает
необходимые частоты и
управляющие сигналы. В
приемнике (рис. 1.9,6)
принятый сигнал в смесителе Си
с помощью гетеродина Г
переносится на
промежуточную частоту и после УПЧ
Рис. 1.10. Модуляция ФМ ШПС непрерыв- поступает на коррелятор
ным сообщением при помощи ШИМ Кор. Коррелятор, как и
согласованный фильтр,
производит оптимальную обработку принятого сигнала. Хотя они
отличаются по (принципу работы, но обеспечивают одинаковую
помехоустойчивость приема. Коррелятор состоит из перемножителя и
интегратора. На второй вход коррелятора подается опорный
сигнал в виде ФМ ШПС (рис. 1.10,в). Напряжение на выходе
коррелятора содержит телефонное сообщение в виде ШИМ сигнала,
который подается на вход демодулятора Дем, с выхода которого
принятое телефонное сообщение передается получателю
информации ПИ. Работой приемника в целом и его отдельными блоками
(Г, ГФМ, Кор, Дем) управляет синхронизатор С, который сначала
осуществляет поиск ФМ ШПС по времени и частоте, а затем под-
18
держивает синхронизм. Все, что было ранее отмечено
относительно синхронизатора приемника, изображенною на рис. 1.7,6,
полностью относится как к синхронизатору данного приемника, так и
приемников, изображенных на рис. 1.11,6 1.12,6.
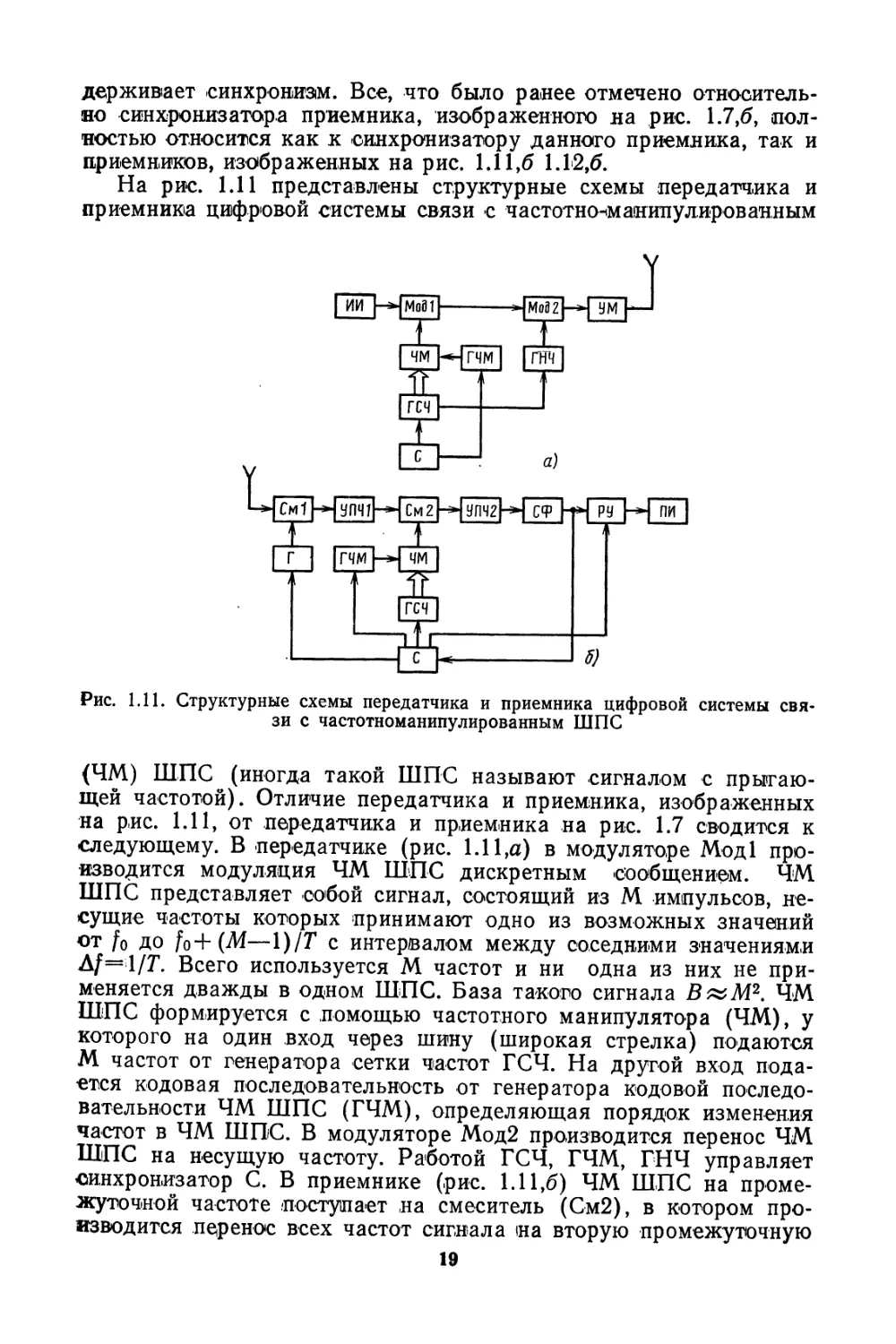
На рис. 1.11 представлены структурные схемы передатчика и
приемника цифровой системы связи с частотно-манипулированным
Рис. 1.11. Структурные схемы передатчика и приемника цифровой системы
связи с частотноманипулированным ШПС
{ЧМ) ШПС (иногда такой ШПС называют сигналом с
прыгающей частотой). Отличие передатчика и приемника, изображенных
на рис. 1.11, от передатчика и приемника на рис. 1.7 сводится к
следующему. В передатчике (рис. 1.11,а) в модуляторе Мод1
производится модуляция ЧМ ШПС дискретным сообщением. ЧМ
ШПС представляет собой сигнал, состоящий из М импульсов,
несущие частоты которых принимают одно из возможных значений
от /о до fo+(M—1)/Г с интервалом между соседними значениями
А/—1/Г. Всего используется М частот и ни одна из них не
применяется дважды в одном ШПС. База такого сигнала ВжМ2. ЧМ
ШПС формируется с помощью частотного манипулятора (ЧМ), у
которого на один вход через шину (широкая стрелка) подаются
М частот от генератора сетки частот ГСЧ. На другой вход
подается кодовая последовательность от генератора кодовой
последовательности ЧМ ШПС (ГЧМ), определяющая порядок изменения
частот в ЧМ ШПС. В модуляторе Мод2 производится перенос ЧМ
ШПС на несущую частоту. Работой ГСЧ, ГЧМ, ГНЧ управляет
синхронизатор С. В приемнике (рис. 1.11,6) ЧМ ШПС на
промежуточной частоте поступает на смеситель (См2), в котором
производится перенос всех частот сигнала иа вторую промежуточную
19
частоту с помощью опорного ЧМ ШПС, поступающего от
частотного манипулятора ЧМ. Назначение ГСЧ и ГЧМ такое же, как и
в передатчике>(рис. 1.11,а). С выхода УПЧ2 сигнал длительностью
Г, не имеющий частотной манипуляции, поступает на СФ, а затем
на РУ и С. Последний производит поиск ЧМ ШПС по времени и
частоте, затем поддерживает синхронизм и управляет работой Г,
ГСЧ, ГЧМ и РУ.
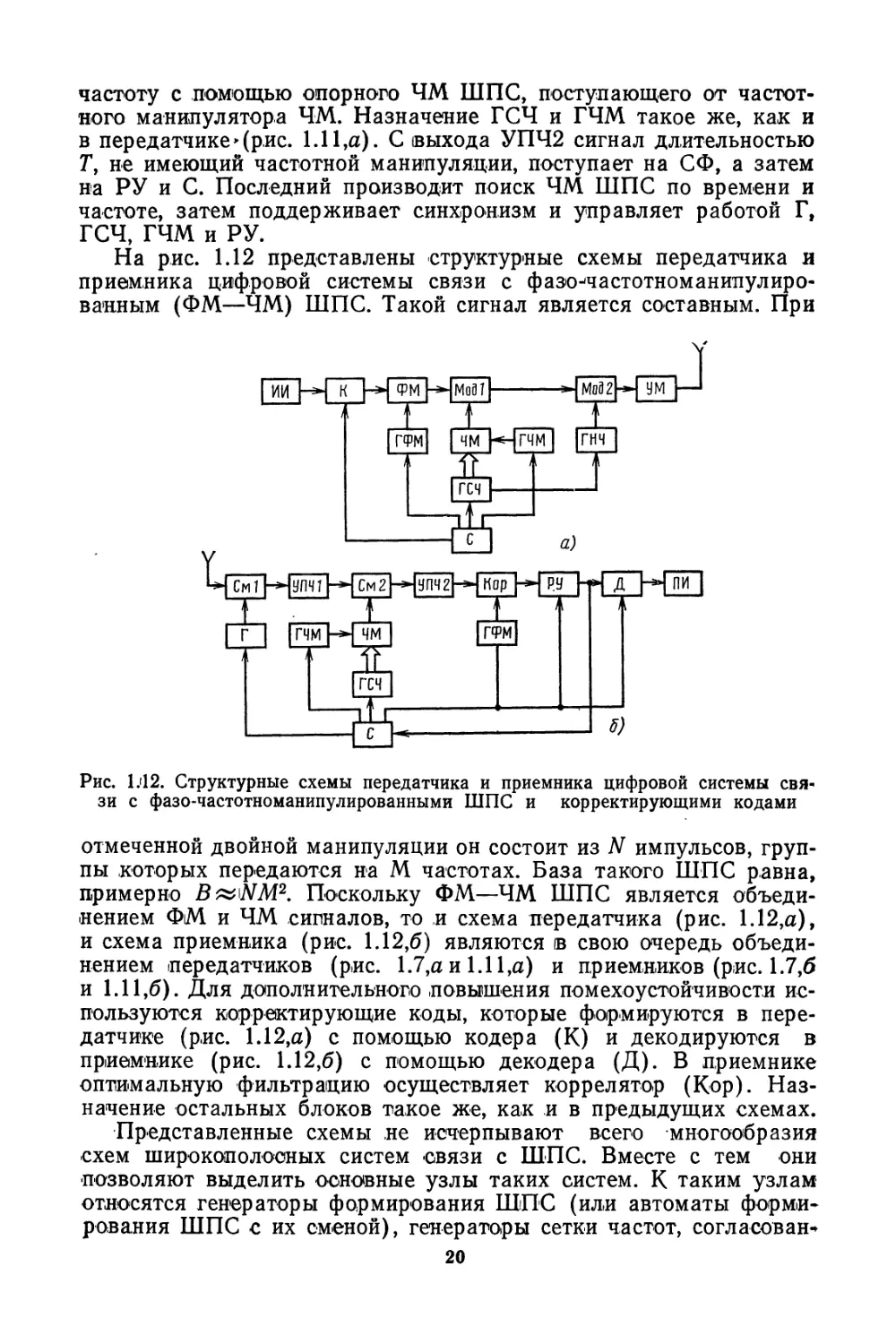
На рис. 1.12 представлены структурные схемы передатчика и
приемника цифровой системы связи с фаэо-'частотноманипулиро-
ваиным (ФМ—ЧМ) ШПС. Такой сигнал является составным. При
Рис. 1.12. Структурные схемы передатчика и приемника цифровой системы
связи с фазо-частотноманипулированными ШПС и корректирующими кодами
отмеченной двойной манипуляции он состоит из N импульсов,
группы которых передаются на М частотах. База такого ШПС равна,
примерно Btt\NM2. Поскольку ФМ—ЧМ ШПС является
объединением ФМ и ЧМ сигналов, то и схема передатчика (рис. 1.12,а),
и схема приемника (рис. 1.12,6) являются в свою очередь
объединением передатчиков (рис. 1.7,аи1.11,а) и приемников (рис. 1.7,6
и 1.11,6). Для дополнительного повышения помехоустойчивости
используются корректирующие коды, которые формируются в
передатчике (р.ис. 1.12,а) с помощью кодера (К) и декодируются в
приемнике (рис. 1.12,6) с помощью декодера (Д). В приемнике
оптимальную фильтрацию осуществляет коррелятор (Кор).
Назначение остальных блоков такое же, как и в предыдущих схемах.
Представленные схемы не исчерпывают всего многообразия
схем широкополосных систем связи с ШПС. Вместе с тем они
позволяют выделить основные узлы таких систем. К таким узлам
относятся генераторы формирования ШПС (или автоматы фор ми-
рования ШПС с их сменой), генераторы сетки частот, согласован-
20
ные фильтры, корреляторы, блоки поиска ШПС и синхронизации
по времени и по частоте. Из представленного материала следует,,
что разработчик широкополосной системы связи должен уметь
выбрать тип ШПС и его базу, метод обработки, определить время
поиска и синхронизации, найти помехоустойчивость приемника
ШПС при действии различного рода помех, выбрать элементную
базу и разработать на ней необходимые генераторы ШПС,
согласованные фильтры и корреляторы, блоки поиска и синхронизации.
Кроме этого, разработчик должен уметь проектировать остальные
узлы передатчика и приемника, знать, как проходит ШПС через-
узлы передатчика и приемника и какие потери при этом имеют
место. На все вопросы, которые возникают в процессе
проектирования ШСС, нельзя в большинстве случаев дать однозначные
ответы. Поэтому .проектирование ШСС в настоящее время является
инженерным искусством, которое основывается на глубоком
знании теории и техники ШПС и на интуиции разработчика. Но тем,
не менее, по всем вопросам проектирования систем связи с ШПС
в настоящее время имеются основные (и во многих случаях
фундаментальные) результаты. Они и приведены в дальнейших
разделах данного справочника.
2. ШУМОПОДОБНЫЕ СИГНАЛЫ
2.1. Сигналы и спектры
Сигналом называется изменяющаяся физическая величина,
отображающая сообщение. Сигнал и, являющийся функцией времен»
t> записывается в виде u=u(t).
Множество сигналов Uj(t), определяемое единым правилом
построения, называется системой сигналов. Таким образом, система
сигналов определена, если известно правило построения сигналов.
Номер сигнала указан в виде индекса /. Бели число сигналов в
системе L, то можно пронумеровать сигналы натуральными числами*
от 1 до L и обозначить /=1, L. Число L называется объемом
системы сигналов.
В дальнейшем рассматриваются сигналы, которые можно
представить в следующем виде:
и (t) = A (t) cos [co0* + e (t)- (2ЛУ
где A(t) — огибающая, ©о — несущая частота, Q(t) — медленно-
меняющаяся часть фазы сигнала.
Представлению (2.1) соответствует радирчастотный сигнал.-
Так как рассматриваются реальные сигналы (которые можно
сформировать и обработать), то все функции времени и
параметры правой части (2.1) известны.
Когда сигнал задан в общем виде u(t) и правая часть (2.1)
не известна, то необходимо воспользоваться преобразованием
21
Гильберта и найти сопряженный сигнал u(t). В этом случае
огибающая A (t) = Vu2(t)+U*(t)t (фаза 6(rf) =©<>*+«(*) =arctgX
X[U(t)/u(t)].
Если функция Q\(t) непрерывная и имеет непрерывную первую
производную, то мгновенная частота сигнала a>(t) по определению
равна первой производной фазы Q(t), т. е. a»(t)=(oo+Q/(t).
Преобразование Гильберта:
и(0 =
и(х)
d*.
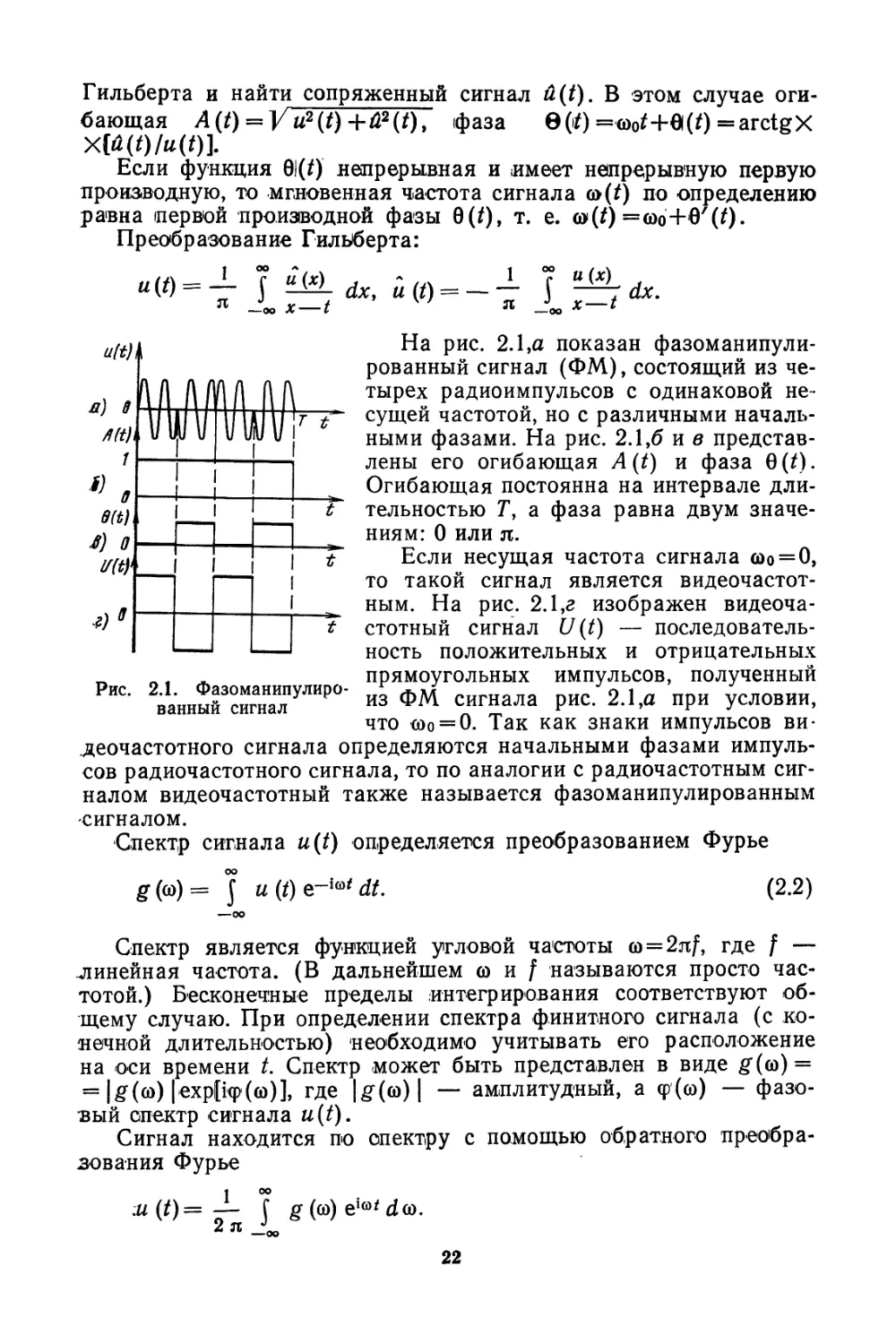
На рис. 2.1,а показан фазоманипули-
рованный сигнал (ФМ), состоящий из
четырех радиоимпульсов с одинаковой
несущей частотой, но с различными
начальными фазами. На рис. 2.1,6 и в
представлены его огибающая A (t) и фаза Q(t).
Огибающая постоянна на интервале
длительностью Ту а фаза равна двум
значениям: 0 или я.
Если несущая частота сигнала соо = 0,
то такой сигнал является
видеочастотным. На рис. 2.1,г изображен
видеочастотный сигнал U(t) —
последовательность положительных и отрицательных
л f _ прямоугольных импульсов, полученный
РИС- 2^н„гГсигналПУЛИР0' из ФМ сигнала рис. 2Л,а при условии,
что соо = 0. Так как знаки импульсов
видеочастотного сигнала определяются начальными фазами
импульсов радиочастотного сигнала, то по аналогии с радиочастотным
сигналом видеочастотный также называется фазоманипулированным
сигналом.
Спектр сигнала u(t) определяется преобразованием Фурье
g(co)= j и{{)ъ-ш<И.
(2.2)
Спектр является функцией угловой частоты ю = 2я/\ где / —
линейная частота. (В дальнейшем ю и / называются просто
частотой.) Бесконечные пределы интегрирования соответствуют
общему случаю. При определении спектра финитного сигнала (с
конечной длительностью) необходимо учитывать его расположение
на оси времени /. Спектр может быть представлен в виде £(©) =
= |gr(co) |exp[iq>(u))], где \g{(o)\ — амплитудный, а ф(со) —
фазовый спектр сигнала u(t).
Сигнал находится по спектру с помощью обратного
преобразования Фурье
:u(t)= — 7 g-(co) e^'dco.
9 тт. J
22
Ширина спектра. Спектр финитных сигналов имеет
бесконечную протяженность, поэтому единою определения ширины спектра
не существует. В зависимости от целей исследования ширину
спектра-сигнала находят по-разному. В дальнейшем ширина
спектра определяется так, чтобы правильно отображать суть
решаемой задачи. Такой подход оправдан тем, что для сигналов,
входящих в одну систему, любое достаточно разумное определение
ширины спектра будет правильно отображать спектральные
свойства каждого сигнала и системы сигналов в целом. Ширина
спектра сигнала обозначается F.
Комплексная огибающая сигнала и её спектр. Радиосигнал
(2.1) содержит быстроменяющийся множитель в виде
косинусоиды, в аргумент которой входит несущая частота соо=2я/0.
Соответственно спектр (2.2) этого сигнала состоит из двух частотных.
полос, сосредоточенных около частот соо и —©о. При теоретических
исследованиях целесообразно для упрощения промежуточных
математических операций «освободить» сигнал и его спектр от
несущей частоты ©о- Это можно осуществить при введении
комплексной огибающей сигнала.
Комплексная огибающая радиосигнала (2.1) определяется как.
t/(0 = lf/Wlexp[i9(0], (2.3)
где модуль \U(t)\=A(t) является огибающей сигнала u{t).
Переход от комплексной огибающей к сигналу осуществляется с
помощью следующей формулы:
и (0 = Re U (t) exp [i co0 /], (2.4)<
где Re — действительная часть.
На рис. 2.1,г была изображена комплексная огибающая ФМ
сигнала рис. 2.1,а. Она представляет собой последовательность
прямоугольных видеоимпульсов и является действительной
функцией времени. Это обусловлено тем, что начальные фазы
импульсов ФМ сигнала принимают одно из двух значений: 0 или я. В-
общем случае комплексная огибающая содержит и
действительную, и мнимую составляющие, но всегда является видеосигналом,.,
чем и объясняется переход к ней от радиосигнала.
Спектр «комплексной огибающей
G(co)= ] U(t)e-{^dt. (2.5)
—оо
Комплексная огибающая сигнала находится согласно
обратному преобразованию Фурье
U(t) = -L j G (со) eto d со. (2.6)
Спектр комплексной огибающей можно представить в виде-
G(cd) = |G((o) | exp[iO (ю)], где |G(co)| — амплитудный, а Ф(ю) —
фазовый спектры.
23
Спектр сигнала g{&) и спектр его комплексной огибающей
G((o) связаны соотношением g(a>) =0,5G(<d—(Do)+0,5G*(<d+<do),
где * — знак комплексной сопряженности.
Так как комплексная огибающая U\(t) —видеосигнал, то спектр
G(cd) расположен в области видеочастот.
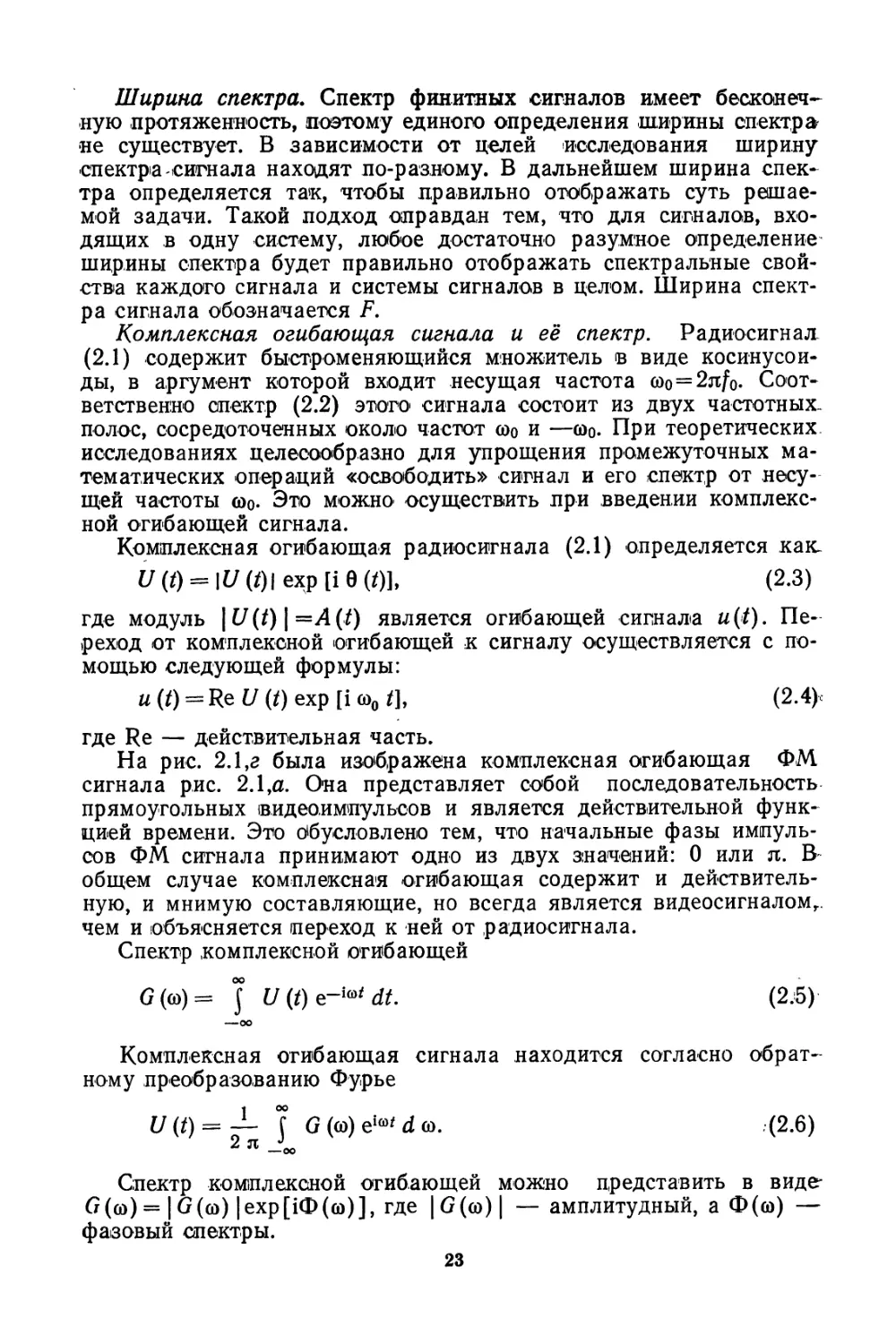
На рис. 2.2 изображен спектр G(a) комплексной огибающей
U(t) произвольного сигнала (рис. 2.2,а — амплитудный спектр
|G(co) |, рис. 2.2,6 — фазовый спектр Ф(ю)) и спектр g(a))
сигнала u(t) (рис. 2.2,в — амплитудный спектр, рис. 2.2,г — фазовый
спектр).
База сигнала — произведение ширины спектра на
длительность сигнала, т. е. B=FT. Сигналы с базой В=1 называются
простыми, а с базой В>1 — шумоподобными или сложными.
Особое значение имеют шумоподобные сигналы, у которых база
5>1.
Энергия сигнала и частотно-временная плоскость. По
определению, энергия сигнала
Е =
j U*(t)dt=± j |£(C0)|2dC0 .
(2.7)
Для сигналов, у которых |6'(0 |тах<(Оо, энергия сигнала
выражается через модули комплексной огибающей и её спектра
следующим образом:
Е =
Г \U(f)\*dt=— f |G(co)|2dco .
J 4 тт. J
(2.8)
lG(w)l
'Ci)n-(i)fj
Рис. 2.2. Спектр комплексной
огибающей сигнала и спектр сигнала
24
Обычно большая часть
энергии сигнала сосредоточена в
некоторой полосе частот. Пусть
F— ширина такой полосы
частот, внутри которой
сосредоточена большая часть
заданной энергии, а вне этой
полосы— меньшая, которой можно
пренебречь. Определенная
таким образом ширина полосы
частот F считается шириной
спектра сигнала. В этом случае
энергия сигнала сосредоточена
в частотно-временном
прямоугольнике со сторонами Т по
оси времени t и F по оси частот
/. Для передачи сигнала с
допустимой точностью
необходимо иметь канал с полосой
частот шириной F и время
передачи Т.
На рис. 2.3 приведен пример распределения энергии сигнала
на частотнонвремеиной плоскости (/, /). Спектр сигнала
сосредоточен около несущей частоты /0 и располагается от f0—«F/2 до
fo+F/2. Рисунок имеет качественный характер, поскольку для
финитных сигналов энергия распределена в полосе 0^/^Г, |/|<
<оо. Поскольку комплексная огибающая является
видеосигналом, то частотно-временной прямоугольник, на котором
распределена основная часть энергии сигнала, будет расположен так,
как это показано на рис. 2.4. Частотно-временной прямоугольник
рис. 2.4 получается из базисного прямоугольника рис. 2.3 при
смещении последнего вниз по
частоте на /о, чему и соответствует
переход от радиосигнала с несущей
частотой /о к его комплексной
огибающей.
Рис. 2.3. Частотно-временная
плоскость на радиочастоте
Рис. 2.4. Частотно-временная
плоскость на видеочастоте
2.2. Основы оптимальной обработки сигналов
Если на входе приемника действует сигнал x(\t)9 равный сумме
полезного сигнала u{t) и помехи n(t) или только помехе, то
оптимальный шриемник в случае сигнала с полностью известными
параметрами (Вычисляет так называемый корреляционный
интеграл, а затем сравнивает его величину с порогом z0. Если помеха
является гауссовским случайным процессом, спектральная
плотность которого равномерна ('белый шум), то корреляционный
интеграл имеет вид
z = J х (t) и (t) dt. (2.9)
о
Значение корреляционного интеграла (2.9) находится с
помощью коррелятора (рис. 2.5) или согласованного фильтра
(рис. 2.6). Основными элементами коррелятора, как следует из
выражения (2.9), являются леремножитель, генератор сигнала и
интегратор. На перемножитель поступают входной сигнал x(t) и
25
^сигнал u(i) от генератора сигнала. Произведение rt(t)u(t)
интегрируется с момента прихода (/=0) и до момента окончания
обнаруживаемого сигнала (t=T). Отметим, что коррелятор является
устройством с переменными параметрами, так как режим его
работы зависит от изменения u[t) во времени. Поскольку операции
zft)
—^
хШ | 1 oft)
x(t)
X
roc
-471
ft)
-GE>
Рис. 2,5. Коррелятор Рис. 2.6. Согласованный
фильтр
умножения и интегрирования линейны, то коррелятор является
.линейным устройством. Имея в виду, что он отфильтровывает
сигнал от помех и является линейным устройством с переменными
параметрами, его иногда называют активным фильтром ,в отличие
-от пассивных фильтров, параметры которых постоянны во
времени.
Согласованный фильтр является пассивным фильтром.
Напряжение на выходе согласованного фильтра в момент окончания
сигнала (t=T) с точностью до постоянного множителя а равно
напряжению на выходе коррелятора
U(T)=az. (2.10)
Импульсная характеристика согласованного фильтра
h(t)=au(T—t), (2.11)
которая по форме является зеркально отображенным сигналом с
запаздыванием Т.
Общим между коррелятором и согласованным фильтром
является равенство (с точностью до постоянной) выходных
напряжений в момент времени t=T. Это и определяет их взаимную
эквивалентность с точки зрения обнаружения сигнала. Различие
заключается в следующем. Коррелятор является устройством с
переменными во времени параметрами, а согласованный фильтр —
устройством с постоянными параметрами. Следствием этого
является то, что* согласованный фильтр инвариантен относительно
задержки сигнала и его начальной фазы (насколько эти величины
изменятся в сигнале на входе фильтра, настолько они изменятся
и в сигнале на выходе), а коррелятор не инвариантен.
Если сигнал имеет несколько неизмеряемых или измеряемых
случайных параметров, то структура оптимального приемника
изменяется, но его основная часть остается прежней, так как
всегда должен быть согласованный фильтр или коррелятор.
Например, при случайной начальной фазе сигнала в приемнике с
согласованным фильтром за фильтром должен следовать детектор
26
для выделения огибающей. В приемнике корреляционного типа
должны быть второй (квадратурный) канал и схема выделения
огибающей. ПоэтЬму в оптим-альном приемнике всегда есть
согласованный фильтр или коррелятор.
Коэффициент передачи согласованного фильтра с импульсной
характеристикой (2.11)
к (со) =ag (ю) ехр (—i ©Г), (2.12)
где £(«о) — спектр сигнала, * — знак комплексной
сопряженности. Из (2.12) следует .выражение для амплитудно-частотной
характеристики (АЧХ)
lK(a>)|=a|g(cD)| <(2ЛЗ)
и для фазо-частотной характеристики (ФЧХ) согласованного
фильтра
1|> (со) = —ф (со)— ш Т. (2.14)
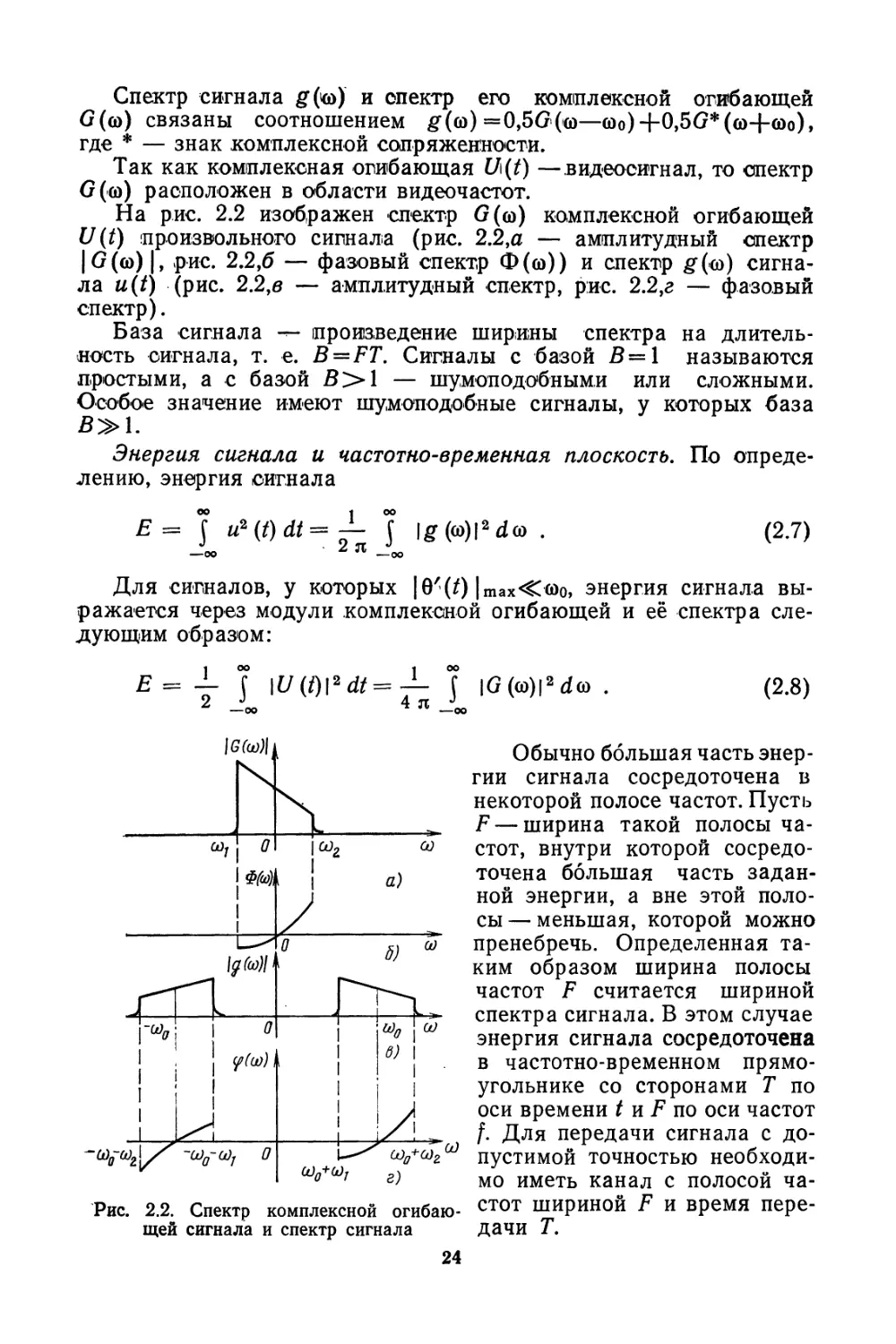
Из (2.13) следует, что АЧХ согласованного фильтра тем
больше, чем больше спектральная плотность сигнала. На рис. 2.7,а
Рис. 2.7. Амплитудно-
частотная и фазо-частот-
ная характеристики
согласованного фильтра
изображены амплитудный спектр сигнала a|g(>a>)|, спектральная
плотность помехи N0 и АЧХ фильтра |/е(ю)|, построенная в
соответствии с (2.13).
Фазовый спектр сигнала <р(<о) и ФЧХ фильтра ij? (со),
описываемые уравнением (2.14), показаны на рис. 2.7,6. Штриховой
линией изображены составляющие правой части уравнения (2.14).
ФЧХ фильтра компенсирует фазовый спектр сигнала, в
результате чего на выходе фильтра в какой-то момент времени все
частотные составляющие отклика оказываются в ф<азе и, складываясь,
дают максимум отклика.
Исключительная роль согласованного фильтра (или
коррелятора) © оптимальном приемнике объясняется тем, что он
максимизирует отношение сигнал-помеха на своем выходе. Это
отношение при действии на входе фильтра белого шума со спектральной
плотностью No и сигнала с энергией Е не зависит от формы
сигнала
q0 = V2E/N0. (2.15)
При этом максимальное значение сигнала на выходе фильтра
равно аЕ, а среднеквадратическое значение помехи — а У EN0/2.
27
Результаты, приведенные в данном параграфе, строго
справедливы для помехи в виде гауосовского случайного процесса с
равномерной спектральной плотностью мощности («белый» шум).
Вместе с тем коррелятор или согласованный фильтр (или их
набор, или -модификация) всегда входят в оптимальный приемник.
2.3* Корреляционные функции сигналов
Оптимальный прием сигналов осуществляется с помощью
согласованных фильтров или корреляторов. Нормированный отклик
согласованного фильтра, определяемого с помощью интеграла
свертки,
Пи (т) - ± ] щ (0 ик (t-т) dt , (2.16У
С —во
где tij(t) — сигнал на входе фильтра, согласованного с сигналом
uk(t). Энергии сигналов с номерами / и k равны Е, а т — сдвиг
сигнала Uj(t) относительно отклика Uh(t). При j=k и т=0 из
(2.16), отбр(асывая индексы, имеем
'(0) = rmax=-^- J u*(z)dt=l, (2.17)
—во
что и определяет нормированность отклика согласованного
фильтра.
Выражение в правой части (2.16) определяет интегральную
взаимосвязь между сигналами tij(t) и Uk(t) при некотором сдвиге
т. Если т — переменная величина, то г#(т) — фуцкционал,
зависящий как от функций щ(£) и Uk(t)y так и от сдвига т. Именно
поэтому Tjfe(r) называется корреляционной функцией (КФ)
сигналов Uj(t) и Uk(t). В зависимости от того, согласован или не
согласован сигнал с фильтром, имеется ли дополнительное допле-
ровское смещение несущей частоты сигнала, корреляционные
функции имеют различные представления.
Взаимная функция неопределенности (ВФН) двух сигналов с
номерами / и ky по определению, выражается через комплексные
огибающие сигналов и через их спектры следующим образом:
#yft(r,Q)-2-L J Uj(t)Uk(t-T)e™rdt =
—оо
= — Т G, (©—Q)Gk(<o)el™d<*, (2.18)
4 п Е J^
где т — сдвиг по времени между сигналами, Q — доплеровский
сдвиг частоты. С точностью до малых более высокого порядка
нормированный отклик согласованного фильтра связан с ВФН
(2.18) соотношением
Пн (*> &) =Re Rjk (т, Q) ехр (1 со0 т). (2.19)
28
Взаимокорреляционная функция (ВКФ) является сечением
ВФН при £2=0. Полагая Й=0, из (2.18) получаем
*лЮ = Л I U,(t)Uk(t-r)dt =
2Е
1
АпЕ
I GJ И Gk И elet d ю. (2.20)
Функция неопределенности (ФН). Если фильтр согласован с
сигналом, т. е. / = &, то из (2.18), опуская индекс /, получаем
определение ФН
R (т, Q) = — J U (t) U (t—x) eiQ> dt =
J G(o)-Q)6(Q)e,ffl4(fl. /(2.21);
—во
1
4я£_оо
Автокорреляционная функция (АКФ) — сечение ФН дри Q=0.
Полагая Q = 0, из (2.21) находим
/?(t)=-L ? U(t)U(t—r)dt=— 7 |G(co)|2e^dco.
2 £-00 4я£-оо
(2.22)
Из равенства (2.22) видно, что АКФ является преобразованием
Фурье энергетического спектра комплексной огибающей сигнала.
Согласно обратному преобразованию Фурье энергетический спектр
|G(co)|2 = 2£ J R (т) е-1** d т . (2.23)
—оо
Рассмотрим пример, иллюстрирующий свойства
автокорреляционной функции. На рис. 2.8,а, б изображены простой сигнал в ви-
i де прямоугольного импульса и его автокорреляционная функция.
Максимум R(x) приходится на момент окончания сигнала £=7\
Это объясняется тем, что R(x) является нормированным
напряжением на выходе фильтра, согласованного с входным сигналом,
максимум которого совпадает с моментом окончания сигнала, т. е.
при х=Т максимум R(0) = 1 ,в соответствии с (2.17).
Для автокорреляционной функции ш виде треугольного
импульса, изо'браженной на рис. 2.8,6, энергетический спектр (квадрат
модуля .амплитудного спектра) в соответствии с (2.23)
описывается функцией
\G (со)|2 = (sin со 772)2/(<о Г/2)2. (2.24)
На рис. 2.9,а изображен фазоманипулированный шумотюдоб-
ный сигнал (ФМ ШПС) длительностью Г, а на рис. 2.9,6 — его
АКФ. Элементарный импульс имеет длительность xo=T/Ny где
N — число импульсов. Для ФМ ШПС, изображенного на рис.2.9,а
/V= 15. Автокорреляционная функция ФМ ШПС (рис. 2.9,6) состо-
29
ит из центрального пика с амплитудой 1, размещенного на
интервале (—то, то), и боковых ликов, распределенных на интервалах
(—Т, —то) и (т0, Т). Амплитуды боковых пиков принимают
различные значения, но у сигналов с «хорошими» корреляционными
свойствами они малы, т. е. существенно меньше амплитуды
центрального пика, равной 1. Существуют различные оценки боковых
Рис. 2.8. Прямоугольный импульс и
его автокорреляционная функция
Рис. 2.9. Фазоманипулированный шумо-
подобный сигнал и его
автокорреляционная функция
пиков как АКФ, так и ВКФ, ВФН, ФН. Но все они описываются
одинаковым по форме соотношением. Для ФМ ШПС оценка
боковых пиков имеет вид
#=а/1/Х
(2.25)
где а — некоторая величина, аависящая от вида оценки, класса
сигнала и, в общем случае, от N. Для произвольных ШПС с
базой В оценка боковых пиков
Я=Р/У^В,
(2.26)
где р, как и а в (2.25), — некоторая постоянная величина.
Соотношения (2.25), (2.26) определяют одну и ту же зависимость
оценок величины боковых пиков от базы ШПС, поскольку N у ФМ
ШПС пропорционально базе В. Чем больше база, тем меньше
боковые пики. В пределе, когда В-^оо, АКФ имеет вид
треугольного импульса, изображенного на рис. 2.10. Боковые пики на
рис. 2.10 не изображены, поскольку при 5->оо они стремятся к
нулю в соответствии с (2.25), (2.26). Длительность центрального
пика АКФ также стремится к нулю, поскольку t0=T/N, с ростом
базы В (числа импулыоов N) tq->0. АКФ, изображенная на
рис. 2.10, называется идеальной, так как она не имеет боковых
пиков. Именно такую АКФ имеют длительные реализации шума,
что и объясняет название «шумоподобные» сигналы.
30
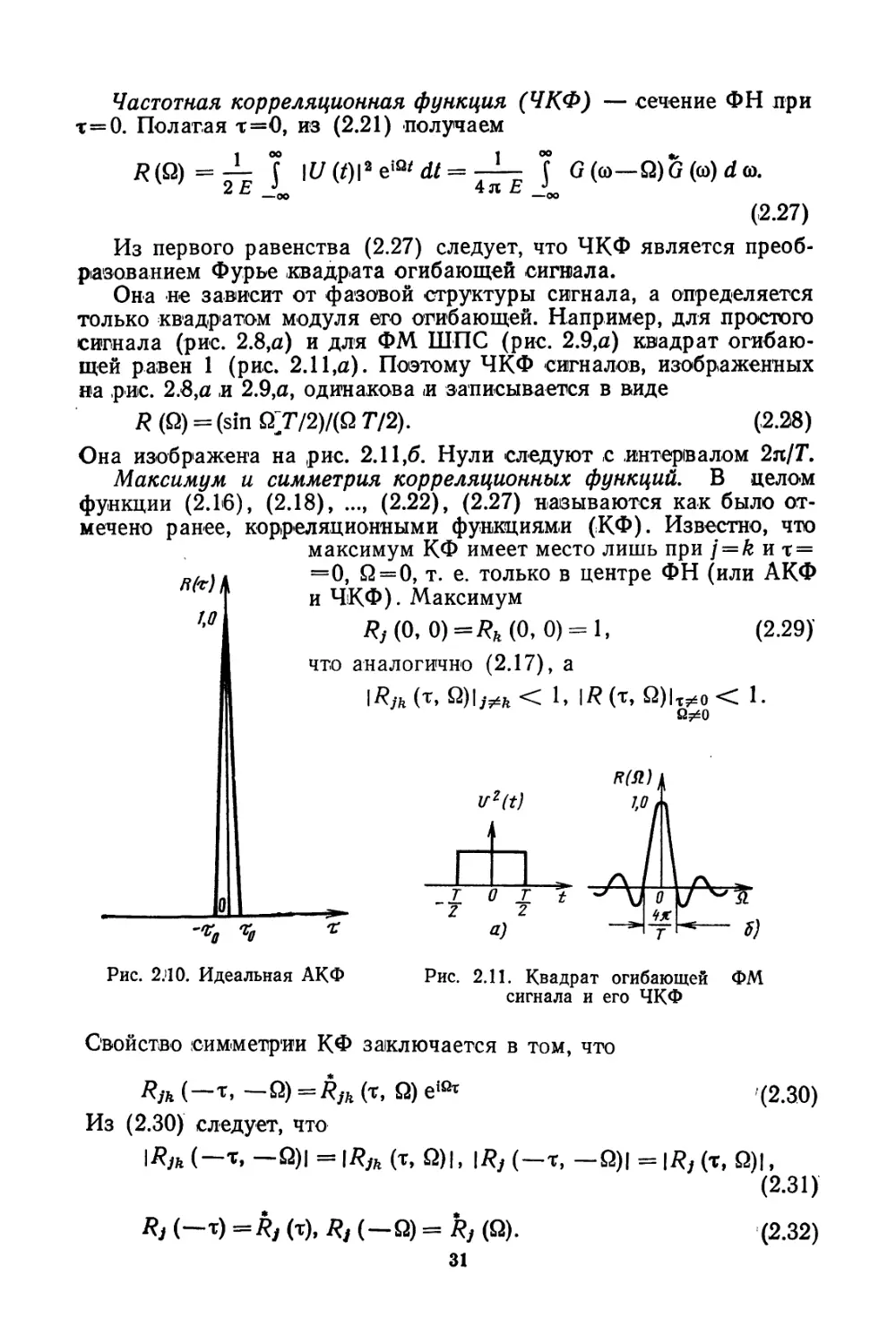
Частотная корреляционная функция (ЧКФ) — сечение ФН при
т=0. Полагая т=0, из (2.21) получаем
Д(0)=57 I \U®\**P>dt = -±- ] G((o-Q)G((o)d
4я Е
(О.
(2.27)
Из первого равенства (2.27) следует, что ЧКФ является
преобразованием Фурье квадрата огибающей сигнала.
Она не зависит от фазовой структуры сигнала, а определяется
только квадратом модуля его огибающей. Например, для простого
сигнала (рис. 2.8,а) и для ФМ ШПС (рис. 2.9,а) квадрат
огибающей равен 1 (рис. 2.11,а). Поэтому ЧКФ сигналов, изображенных
на ,рис. 2.8,а ,и 2.9,а, одинакова л записывается в виде
R (Q) = (sin QT/2)/(Q Т/2). (2.28)
Она изображена на рис. 2.11,6. Нули следуют с интервалом 2я/7\
Максимум и симметрия корреляционных функций. В целом
функции (2.16), (2.18), ..., (2.22), (2.27) называются как было
отмечено ранее, корреляционными функциями (КФ). Известно, что
максимум КФ имеет место лишь при j=k ит =
яМ к =^ ^"О, т. е- только в Центре ФН (или АКФ
| и ЧКФ). Максимум
/,/7' /?,(0.0)=/?ft(0,0) = l, (2.29)"
что аналогично (2.17), а
lfyft(T, Q)|,^ft< 1, 1/?(т, Q)|T7,o< 1.
Л
-*, Чг
Рис. 2.10. Идеальная АКФ
и
i
Т 0 1
" Z 2
а)
Рис
2.
11.
си
hr
X
1.
трс
Квадрат огиба]
гнала и его Ч¥
ющей
:ф
- s)
ФМ
Свойство симметрии КФ заключается в том, что
Rjh (-т, -Q) = RJk (т, Q) е<<* .(2.30)
Из (2.30) следует, что
1*л (—т. —Й)| = |ЯЛ (т, Q)|, |fy (—т, —Q)| = \R} (т, Q)|,
(2.31)
Ъ (—«О = Яу (т), /?у (-Q) = Я, (Q). (2.32)
31
Объем и среднеквадратические значения ВФН и ФН. Известно,
что объем, заключенный между поверхностью, описываемой
квадратом модуля ВФН, и плоскостью неопределенности (или просто
объем ВФН), равен единице, т. е.
7- И \Rjk(t>&)\2dxdQ=l (2.33)
* П — оо
и не зависит от формы и номеров сигналов. Полагая j=k и
отбрасывая индексы, имеем результат: объем ФН также не зависит от
формы сигнала и равен единице, т. е.
^fj |/?(T,Q)|adTdQ=l. (2.34)
—OP
Формулы (2.33), (2.34) позволяют найти эффективные
значения ВФН и ФН. Обозначим эти значения через Rjk эф и #Эф.
Полагая, что ВФН и ФН приближенно распределены на
прямоугольнике со сторонами 2Г и 4л/7, согласно (2.33), (2.34) можем
записать, что ^2^эф4/77,=/?2Эф4/,Г=1. Отсюда находим
ЯэФ = Rjk эф = Rj эф = 1/2 VFT =1/2 УЖ (2.35);
Из (2.35) видно, что чем больше база сигнала, тем меньше
эффективные значения. Формулы (2.33) — (2.35) имеют большое
принципиальное значение. Оценка эффективного значения (2.35)
совпадает по форме с (2.26), но имеет определенный коэффициент,
равный 1/2. Как будет ясно из последующего материала, оценка
(2.35) дает нижнюю границу, т. е. наименьшее эффективное
значение, поскольку получена при условии равномерного
распределения ВФН и ФН на частотно-временной плоскости. На самом деле
для реальных сигналов распределение этих функций
неравномерно. И поэтому в действительности эффективные значения ВФН и
ФН будут больше, чем определяемые в соответствии с (2.35).
Интегральные равенства. Для нахождения оценок КФ широко
используют интегральные равенства, связывающие между собой
КФ различных сигналов. Одним из общих интегральных равенств
является следующее:
] Rmi К ®i)Rjk К, Gi) е-!*« dxx = ] Rkl (т, z) RJm (т, z) x
—оо —оо
X e-iQi* d т. (2.36)
(В дальнейшем индекс 1 будет опущен).
Из формулы (2.36) можно найти частные интегральные
равенства. Рассмотрим их.
а. Положим /=£=/, г=0. Имеем равенство Бакулева
J |#(т, Q)|2dr= ] |tf(T)|2e-iQ*dx . (2.37)
— ОО —00
32
Средняя мощность модуля ФН в сечении Я=const является
преобразованием Фурье от квадрата АКФ.
б. Положим / = m, й = /, z=0. Имеем равенство Сталдера —
Кана
] \Rjk(TtQ)\*dT= J Rs(x)kh(T)e-^dx.
—оо —оо
в. Положим /=m, k = l, z=Qi = 0. Имеем
] \Rjk(T)\2dx= ] Rj(T)Rk(T)dx. (2.38)
—оо —оо
Из (2.38) следует, что среднее значение квадрата модуля ВКФ
сигналов с номерами / и к равно среднему значению
произведения их АКФ. Обозначим квадраты эффективных значений ВКФ
через ^
—ос —оо
(2.39)
где Т — длительность сигнала, a q=j или q=k. Используя
неравенство Буняко'в'ского-Шварца, из (2.38) получаем
Щк эф ^ Rf эф Rk эф- (2.40)
Из (2.40) следует, что для уменьшения эффективного значения
ВКФ необходимо уменьшать эффективные значения АКФ.
Использование приведенных интегральных равенств для
оценки КФ будет проиллюстрировано в дальнейшем.
2.4. Основные типы ШПС
Известно большое число различных ШПС, свойства которых
нашли отражение во многих книгах и журнальных статьях.
Общепринятой терминологии пока не существует. Тем не менее, ШПС
можно разбить на частотно-модулированные (ЧМ) сигналы;
многочастотные (МЧ) сигналы; фазоманипулированные (ФМ)
сигналы (сигналы с кодовой фазовой модуляцией — КФМ сигналы);
дискретные частотные (ДЧ) сигналы (сигналы с кодовой
частотной модуляцией — КЧМ сигналы, частотноманипулировянные
(ЧМ) сигналы); дискретные составные частотные (ДСЧ)
(составные сигналы с кодовой частотной модуляцией — СКЧМ сигналы).
В скобках указаны и другие названия. Иногда ФМ сигналы
называют просто ШПС, ДЧ сигналы — сигналы с «прыгающей
частотой».
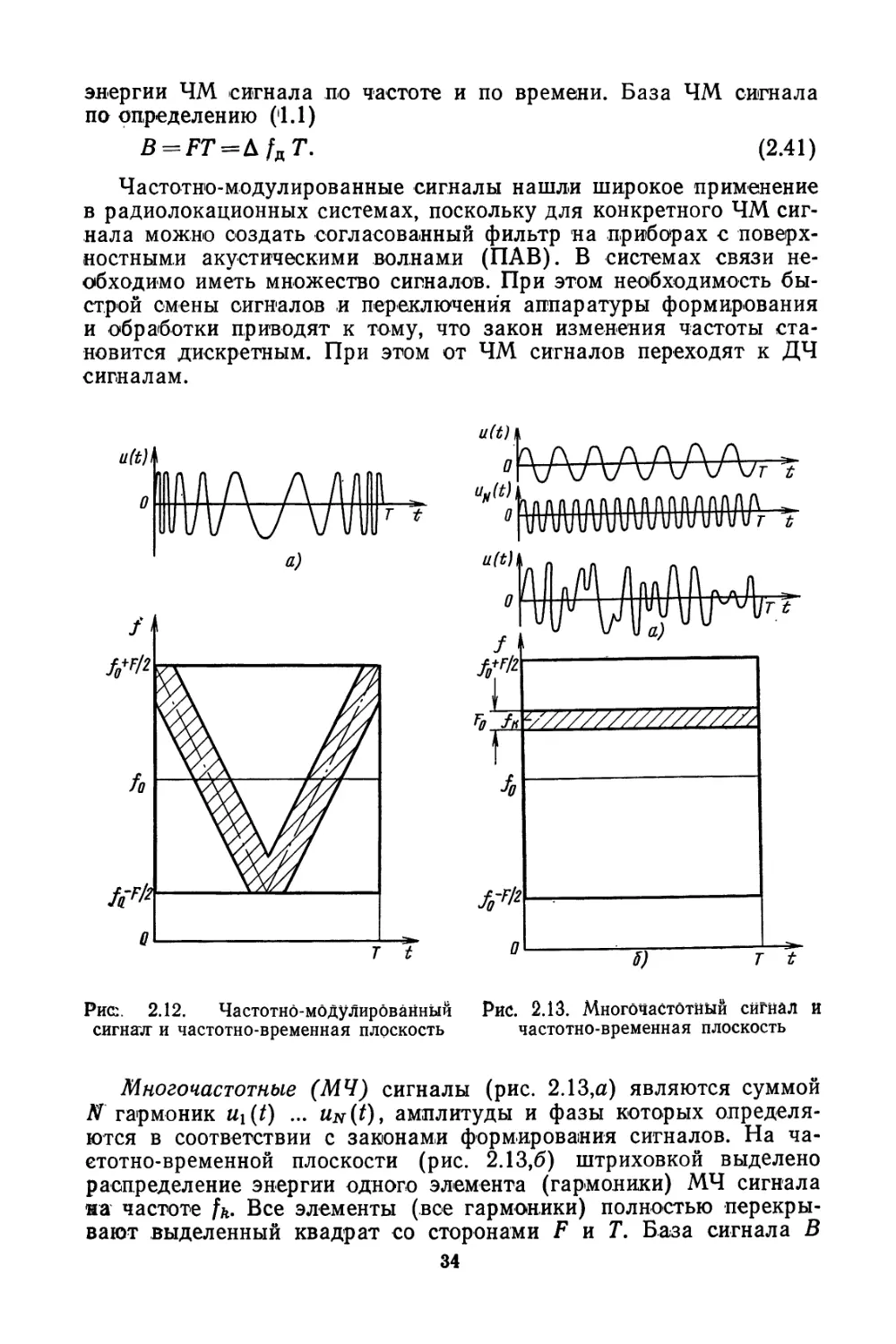
Частотно-модулированные (ЧМ) сигналы являются
непрерывными сигналами, частота которых меняется по заданному закону.
На рис. 2.12,а изображен ЧМ сигнал, частота которого меняется
по К-образному закону от /0—F/2 до fo+F/2, где /о— центральная
(несущая) частота сигнала, F — ширина спектра, в свою очередь
равная девиации частоты F=AfA. Длительность сигнала равна Т.
На .рис. 2.12,6 представлена частотно-временная (/, t) —плоскость,
на которой штриховкой приближенно изображено распределение
2—111 33
энергии ЧМ сигнала по частоте и по времени. База ЧМ сигнала
па определению (1.1)
5 = Fr=A/ffr. (2.41)
Частотно-модулированные сигналы нашли широкое применение
в радиолокационных системах, поскольку для конкретного ЧМ
сигнала можно создать согласованный фильтр на приборах с
поверхностными акустическими волнами (ПАВ). В системах связи
необходимо иметь множество сигналов. При этом необходимость
быстрой смены сигналов и переключения аппаратуры формирования
и обработки приводят к тому, что закон изменения частоты
становится дискретным. При этом от ЧМ сигналов переходят к ДЧ
сигналам.
о
т t
а)
Т t
u(t)k
»rwwwu >
UJt)k ЛПЛЛЛПЛ
ToJjL
fiA
WZZZZZZZZZZZZZZA
ю
т t
Рис. 2.12. Частотно-мбДуЛированныч Рис. 2.13. Многочастотныи сигнал И
сигнал- и частотно-временная плоскость частотно-временная плоскость
Многочастотные (МЧ) сигналы (рис. 2.13,а) являются суммой
# гармоник ux(t) ... UnO), амплитуды и фазы которых
определяются в соответствии с законами формирования сигналов. На
частотно-временной плоскости (рис. 2.13,6) штриховкой выделено
распределение энергии одного элемента (гармоники) МЧ сигнала
на частоте fu- Все элементы (все гармоники) полностью
перекрывают выделенный квадрат со сторонами F и Г. База сигнала В
34
равна площади квадрата. Ширина спектра элемента F&1/T.
Поэтому база МЧ сигнала
B = FT = F/F0 = N, (2.42)
т. е. совпадает с числом гармоник. МЧ сигналы являются
непрерывными и для их формирования и обработки трудно
приспособить методы цифровой техники. Кроме этого недостатка, они
обладают также и следующими: а) у них плохой пик-фактор (см.
рис. 2.13,а); б) для получения большой базы В необходимо иметь
большое число частотных каналов N. Поэтому МЧ сигналы в
дальнейшем не рассматриваются.
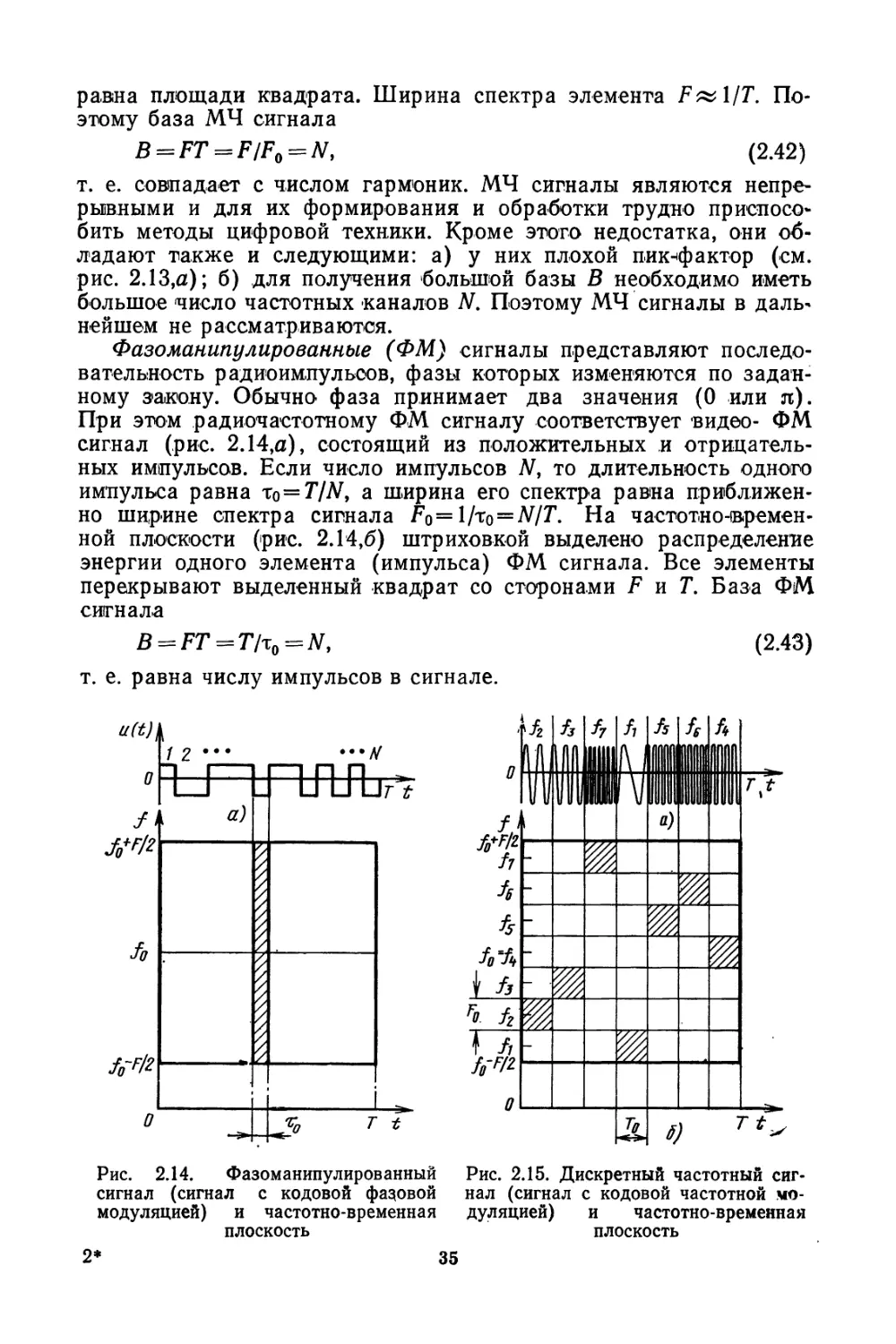
Фазоманипулированные (ФМ) сигналы представляют
последовательность радиоимлульоов, фазы которых изменяются по
заданному закону. Обычно фаза принимает два значения (0 или я).
При этом радиочастотному ФМ сигналу соответствует видео- ФМ
сигнал (рис. 2.14,а), состоящий из положительных и
отрицательных импульсов. Если число импульсов N, то длительность одного
импульса равна xq — TJN, а ширина его спектра равна
приближенно ширине спектра сигнала Fo=l/x0 = N/T. На частотно-времен-
ной плоскости (рис. 2.14,6) штриховкой выделено распределение
энергии одного элемента (импульса) ФМ сигнала. Все элементы
перекрывают выделенный квадрат со сторонами F и Т. База ФМ
сигнала
т. е. равна числу импульсов в сигнале.
(2.43)
о
FbR
/4
fa
о
1 2
ITWJhf
а)
т t
и
о
м
f,1
fiV
fo%
\fiY
го. ft
та
ffF/г
fs
fl
Tff
221
2a
i)
Tt.
Рис. 2.14. Фазоманипулированный
сигнал (сигнал с кодовой фазовой
модуляцией) и частотно-временная
плоскость
Рис. 2.15. Дискретный частотный
сигнал (сигнал с кодовой частотной
модуляцией) и частотно-временная
плоскость
2*
35
Возможность применения ФМ сигналов в качестве ШПС с
базами £ = 104 ...106 ограничена в основном аппаратурой обработки.
При использовании согласованных фильтров ib виде приборов на
ПАВ возможен оптимальный прием ФМ сигналов с
максимальными базами fimax=1000 ... 2000. ФМ сигналы, обрабатываемые
такими фильтрами, имеют широкие спектры (порядка 10 ... 20 МГц)
и относительно короткие длительности (50 ... 100 мкс). Обработка
ФМ сигналов с помощью видеочастотных линий задержки при
переносе спектра сигналов в область видеочастот позволяет
получать базы 5 = 100 при F& 1 МГц, Г» 100 мкс.
Весьма перспективными являются согласованные фильтры на
приборах с зарядовой связью (ПЗС). Согласно опубликованным
данным с помощью согласованных фильтров ПЗС можно
обрабатывать ФМ сигналы с базами 102 ... 103 при длительностях
сигналов 10~4 ... Ю-1 с. Цифровой коррелятор на ПЗС способен
обрабатывать сигналы до базы 4-Ю4.
Следует отметить, что ФМ сигналы с большими базами
целесообразно обрабатывать с помощью корреляторов (на БИС или
на ПЗС). При этом 5 = 4-104 представляется предельной. Но при
использовании корреляторов необходимо в первую очередь решить
вопрос об ускоренном вхождении в синхронизм.
Так как ФМ сигналы позволяют широко использовать
цифровые методы и технику формирования и обработки и можно
реализовать такие сигналы с относительно большими базами, то
поэтому ФМ сигналы являются одним из перспективных видов ШПС.
Дискретные частотные (ДЧ) сигналы представляют
последовательность радиоимпульсов (рис. 2.15,а), несущие частоты
которых изменяются по заданному закону. Пусть число импульсов в
ДЧ сигнале равно Му длительность импульса равна Го = Т/М, его
ширина спектра F0=i\/To=M/T. Над каждым импульсом (рис.
2.15,а) указана его несущая частота. На частотно-временной
плоскости (рис. 2.15,6) штриховкой выделены .квадраты, в которых
распределена энергия импульсов ДЧ сигнала. Как видно из
рис. 2.15,6, энергия ДЧ сигнала распределена неравномерно на
частотно-временной плоскости.
База ДЧ сигналов
B=FT = MF0.MT0=M2 F0T0 = M\ (2.44)
поскольку база импульса F0T0=l. Из (2.44) следует основное
достоинство ДЧ сигналов для получения необходимой базы В
число каналов М = }/ГВУ т. е. значительно меньше, чем для МЧ
сигналов. Именно это обстоятельство и обусловило внимание к таким
сигналам и их применение в системах связи. Вместе с тем для
больших баз В=104 ... 106 использовать только ДЧ сигналы
нецелесообразно, так как число частотных каналов М=Ю2 ... 103, что
представляется чрезмерно большим.
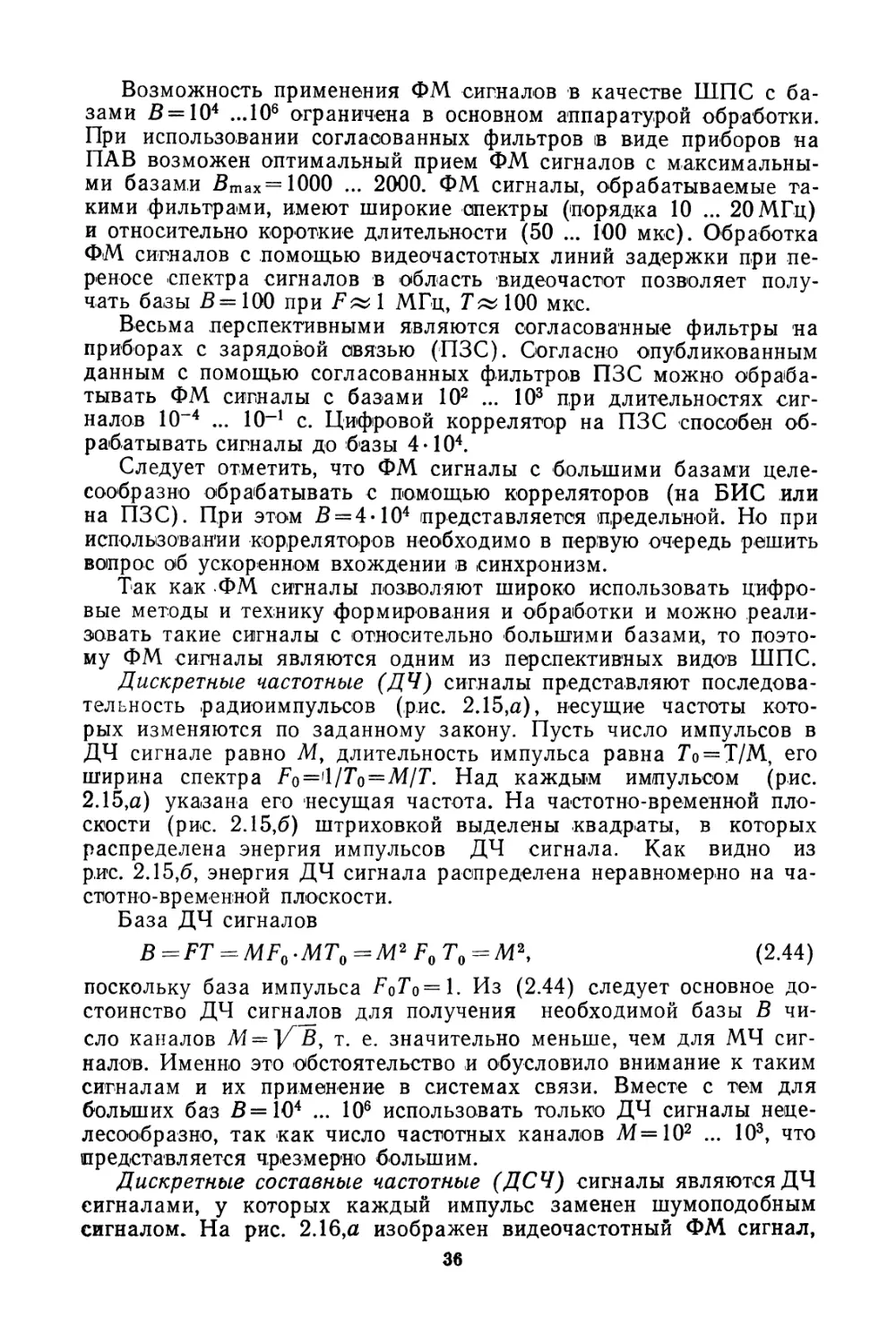
Дискретные составные частотные (ДСЧ) сигналы являются ДЧ
сигналами, у которых каждый импульс заменен шумоподобным
сигналом. На рис. 2.16,а изображен видеочастотный ФМ сигнал,
36
отдельные части которого передаются на различных несущих
частотах. Номера частот указаны над ФМ сигналом. На рис. 2.16,6
изображена частотно-временная плоскость, на которой
штриховкой выделено распределение энергии ДСЧ сигнала. Рис. 2.16,6 по
структуре не отличается от рис 2.15,6, но для рис. 2.16,6 пло-
uftjkfz
fffi
*b h
ffF/2
I
Л
JL
л
a)
УЛ
T t
fo
F I
■f -f/?
jo riL
0
{
-
[4
ч
.
t*
■».i
fs
2
l
Z
:
7
■ *
Рис. 2.16. Дискретный составной
частотный сигнал с фазовой
манипуляцией ДСЧ-ФМ (составной сигнал с
кодовой частотной модуляцией и
фазовой манипуляцией СКЧФ-ФМ) и
частотно-временная плоскость
Рис. 2.17. Частотно-временная плоскость
дискретного составного сигнала с
частотной манипуляцией ДСЧ-ЧМ
(составной сигнал с кодовой частотной
модуляцией и частотной манипуляцией
КЧМ-ЧМ)
щадь F0T0 = No — равна числу импульсов ФМ сигнала в одном
частотном элементе ДСЧ сигнала. База ДСЧ сигнала
B=FT = M2F0T0 = N0 M\ (2.45)
Число импульсов полного ФМ сигнала
N = N0M. (2.46)
Изображенный на рис. 2.16 ДСЧ сигнал содержит в качестве
элементов ФМ сигналы. Поэтому такой сигнал сокращенно будем
называть ДСЧ—ФМ сигнал. В качестве элементов ДСЧ сигнала
можно взять ДЧ сигналы. Распределение энергии такого сигнала
на частотно-временной плоскости изображено на рис. 2.17. Если
база элемента ДЧ сигнала
#о ^FqT0
mi
то база всего сигнала
В = М\М2.
(2.47)
(2.48)
37
Такой сигнал можно сокращенно обозначать ДСЧ—ЧМ. Число
частотных каналов в ДСЧ—ЧМ сигнале равно М0М. Если ДЧ
сигнал (см. рис. 2.15) и ДСЧ—ЧМ сигнал имеют равные базы, то они
имеют и одинаковое число частотных каналов. Поэтому особых
преимуществ ДСЧ—ЧМ сигнал перед ДЧ сигналом не имеет. Но
принципы построения ДСЧ—ЧМ сигнала могут оказаться
полезными при построении больших систем ДЧ сигналов.
Таким образом, наиболее перспективными ШПС для систем
связи являются ФМ, ДЧ, ДСЧ—ФМ сигналы.
3. ФАЗОМАНИПУЛИРОВАННЫЕ СИГНАЛЫ
3.1. Общие свойства
Фазома-нипулироваиные (ФМ) сигналы представляют собой
последовательность радиоимпульсов, начальные фазы которых
изменяются по заданному закону. На рис. 2.1,а приведен в качестве
примера ФМ сигнал. В большинстве случаев ФМ сигнал состоит
из радиоимпульсов с двумя значениями начальных фаз: 0 и я.
Комплексная огибающая таких ФМ сигналов представляет собой
последовательность положительных и отрицательных
видеоимпульсов (см. рис. 2.9,а, 2.14,а). Поскольку между ФМ сигналом и его
комплексной огибающей — последовательностью видеоимпульсов —
существует однозначное соответствие, то обычно и комплексные
огибающие (рис. 2.1,г, 2.9,а, 2.14,а) также называют ФМ
сигналами. Если сигнал многофазный (МФ), то комплексная
огибающая состоит из действительной и мнимой частей. Поэтому
графическое изображение ее более сложное, чем у ФМ сигналов с двумя
значениями начальных фаз. Случай МФ сигналов будет
рассмотрен особо.
На рис. 3.1 приведен ФМ сигнал, состоящий из N = 64
прямоугольных импульсов. Практически всегда форма импульсов оди-
lf(t)k
шгш
и
\Т t
Рис. 3.1. Фазоманипулированный сигнал с N=64
uB(t)k
Рис. 3.2. Прямоугольный
импульс
накова и в большинстве случаев она является прямоугольной.
Такое предположение о прямоугольности импульсов, образующих
ФМ сигнал, справедливо для теоретических исследований. Однако
при формировании ФМ сигналов и их передаче по каналам связи
38
с ограниченной полосой пропускания импульсы искажаются и ФМ
сигнал перестает быть таким .идеальным, как это представлено на
рисунке. Вопрос об искажениях ШПС, в том числе и ФМ
сигналов, будет рассмотрен в дальнейшем. Поэтому в настоящей главе
предполагается, что импульсы, образующие ФМ сигнал,
прямоугольны.
Прямоугольный импульс Uo(t) (рис. 3.2) с единичной
амплитудой и длительностью то записывается как
и0 (0 = 1 при 0^/<т0. (3.1)
Такой импульс в дальнейшем называется единичным
прямоугольным импульсом. Он тождественно равен нулю вне отрезка [0, то].
Пусть амплитуда /г-го импульса в видео-ФМ сигнале ап равна +1
или — 1, что соответствует начальным фазам 0 или я в радио- ФМ
сигнале. При таком определении ФМ сигнал (точнее комплексная
огибающая радио- ФМ сигнала) записывается следующим
образом:
U(t) =2 anu0[t-(n-l)r0). (3.2)
ФМ сигнал (3.2) состоит из N прямоугольных импульсов Uo(t),
причем /г-й импульс имеет амплитуду ап и запаздывает
относительно начала координат на время (п—1)то, равное суммарной
длительности всех предыдущих импульсов. Длительность ФМ
сигнала
T = Nx0. (3.3)
Кодовые последовательности. Последовательность символов
(амплитуд импульсов)
A=(a1a2...an...aN) (3.4)
называется кодовой последовательностью. Например, для ФМ
сигнала, изображенного на рис. 3.1, кодовая последовательность
имеет вид
Л =(111111 —1 — 1 —1 — 1 —1 — 11 —1 — 1 —1 — 111-1 — 1—
— 11 — 11 — 1 —11111 — 1
1 — 1 — 1 —1111 — 1 — 11 — 1 — 11 —111 —1111 —111 — 1 —
—111 — 11 — 11 — 1).
Кодовая последовательность иногда обозначается как {an}N\. В
цифровой технике используют символы 0 и 1. Таблица 3.1
характеризует соответствие между начальными фазами радио-ФМ
сигнала 6П, амплитудами импульсов ап (символов кодовой
последовательности (3.4) и символами кодовых последовательностей апв
цифровой технике.
Спектры ФМ сигналов. Спектральные свойства ФМ сигнала
определяются спектром импульса Uo(t) и кодовой последовательно-
39
стью А. Обозначим спектр импульса uo(t) как So(u>). По
определению (2.5)
S0 (со) = I u0 (t) е-'<■>' dt.
(3.5)
Для прямоугольного импульса, изображенного на рис. 3.2,
So Н = *о Sin(OT0o/2) exp (- i сот0/2). (3.6)
Спектр So (со) состоит из трех сомножителей. Первый, равный то,
есть площадь импульса 1-то. Второй множитель sin(a)To/2)/(a)To/2)
Таблица 3.1. Соответствие между фазами
и символами
Начальная
фаза
0»
0
п
Символ кодовой
последовательности
ап
1
— 1
Символ кодовой
последовательности
0
1
% Ъ *п
к
Рис. 3.3. Амплитудный и фазовый спектры
произвольного ФМ сигнала
-дг
2L Ш Ш_ 6)
•о % *0 %
а)
А
А
в виде функции отсчета sin*/;*; характеризует распределение
спектра ,по частоте. (График функции отсчета, в других координатах,
приведен на рис. 2.11,6). Третий множитель expf—ia>To/2)
является следствием смещения центра импульса1 Uo(t) относительно
начала координат на половину длительности импульса т0/2.
Спектр ФМ сигнала (точнее, спектр комплексной огибающей
ФМ сигнала) в соответствии с (2.5) имеет следующий вид:
N
G((o)=S0(co) j anexp[ — i (л— 1)(от0]. (3.7)
Сумма в правой части (3.7) является спектром .кодовой
последовательности А и обозначается как Я (со). Поэтому спектр ФМ
сигнала можно представить в виде произведения, т. е.
G(©)=S0 (©)//(©), (3.8)
где S0(юз) —спектр импульса (3.5) или (3.6),
НИ = У ап ехр [ — i (n— 1) сот01 (3.9)
п==\
— спектр кодовой последовательности.
Представление спектра ФМ сигнала в виде произведения (3.8)
удобно тем, что можно сначала отдельно .найти спектры Soi(ko) и
40
Я)(со), а затем, перемножив их, найти спектр ФМ сигнала. Для
ФМ сигналов символы ап являются действительными; величинами.
Поэтому амплитудный -спектр кодовой последовательности |#(со) |
является «четной функцией частоты, а фазовый спектр if (со)
—нечетной функцией, причем
/_ _
^ 2 anaKcos(n—K)m0i (3.10)
п=\ дс=1
tg г|) (со) = | £• ansin(n— 1)сот0|Д V ап cos (п— 1)сот0 J .
(3.11)
На рис. 3.3,а изображен |//(со) | —четная функция частоты
относительно со = 0 для произвольного сигнала. Штриховой линией
представлен амплитудный спектр |5о(со)| прямоугольного
импульса. На рис. 3.3,6 изображен фазовый спектр i|)(ico)—нечетная
функция частоты относительно со = 0. Необходимо отметить, что
амплитудные спектры кодовых последовательностей |//(со) |
реальных ФМ сигналов отличаются от изображенного на рис. 3.3,а
наличием значительных флюктуации. Средняя частота
флюктуации амплитудного спектра соф~2я/Г, что объясняется наличием
юооинусоидального множителя в правой части (3.10). При со=0
значение амплитудного спектра согласно (3.10)
1#(0)1 = У ап> (3.12)
/~\
т. е. равно среднему значению амплитуд импульсов. Среднее
значение квадрата модуля амплитудного спектра
^1.|Я<ш)|Мш-|Л (3-13)
Поскольку ап = ±1, то из (3.13) следует, что
1- *Т \Н((о)\Ыа>= N . (3.14)
(2 я/т0) J/Xo
Поэтому флюктуации амплитудного спектра |#(со)| кодовой
последовательности реальных ФМ сигналов происходят около
среднего значения V~~N. Флюктуации амплитудного спектра не
будет у тех сигналов, которые обладают идеальной АКФ без
боковых пиков (рис. 2.10). Амплитудный спектр таких сигналов
|Я(со)|ид = К^ (3.15)
Поэтому чем меньше уровень флюктуации спектра ФМ
сигнала, тем меньше уровень боковых пиков АКФ.
Корреляционные функции ФМ сигналов. ВФН двух ФМ
сигналов с номерами / и k в соответствии с (2.18) записывается
следующим образом:
41
I N N
Rjk (т, Q) = — S 2 aJn akm R0 [t—(л—m) т0, Q] x
^ n=l m=l
X exp[i(Az—l)Qr0]. (3.16)
В (3.16) a;n, uhm — символы кодовых последовательностей
Aj и Ah, причем * — знак комплексной сопряженности — введен
для того, чтобы (3.16) была справедлива и для многофазных оиг-
*
налов. Для ФМ сигналов с двумя значениями фазы ahm=akm.
Функция 7?о(т, Q) — ФН единичного имлульса. Она определяется
согласно (2.21). Если единичный импульс является
прямоугольным (3.1), то
/?o(t>Q)=(1-|t|/t0) *inO,5QT0(l-|Tl/T0)
'о; 0,5Qt0(1 — |t|/t0)
X exp [i 0,5 Q (т0 + т)] при |т| < т0, (3.17)
где т — задержка, Q — доллеровский сдвиг частоты.
При т=|хт0 ВФН /?jfti(fiTo, Q) зависит только от слагаемых с
данным \i, так как соседние слагаемые в (3.16) с ц±1 на линии
т=р/то равны нулю. Поэтому
Ял 0*0.0)=^ S ajnahtn^exp[i(n~l)Qx0]t (3.18)
п=п1
причем пределы суммирования определяются следующими
равенствами:
Л! = |1+ 1, n2 = N при |i>0;|
/ii = 1, п2 =N—j|x| при |i<0. J
Число слагаемых в (3.18) равно N—\\х\ при любом \i.
Корреляционная функция (3.18) определяет сечения ВФН вдоль линии
т = р/го лри изменении \i от —(N—1) до (N—1). При \i = ±N
ВКФ Rjh(±N%o, Q)=0. Если \х = 0у то ВКФ
Rjk (О) = ^ S а^ кп exp [i (я- 1) От0]. (3.20)
При Q = 0 ВКФ согласно (3.16), (3.17)
RjkW=-jr "l! S ajnak,n^R0(x~iix0) , (3.21)
где пределы суммирования определены согласно (3.19).
При выводе (3.21) двойная сумма в (3.16) была разбита на
внутреннюю с (i = const и на внешнюю с изменением \i от —{N—1)
до (N+l). Ro(t—цто) — АКФ единичного прямоугольного
импульса, определяемая согласно (3.17) при Q = 0. При x = (ixo ВКФ
ФМ сигналов определяется соотношением
ЯдО0=(1/Л0 2 атк,п-»> (3.22)
п=пг
42
а дри j=k АКФ —
N
ЯМ=(1/Л0 2- «"V..
(3.23)
/I=JLl+l
поскольку R (—ц) =J? (ц).
ВКФ и АКФ полностью определяются своими оточетньши
значениями Rjk(\i) и R(\i). Эти значения, отложенные по оси
времени т через интервалы т0, образуют так называемую решетчатую
функцию. По известной решетчатой функции можно построить
ВКФ или АКФ, если около каждого значения Rjk(\i) .или R(ii)
построить АКФ Rd(x) единичного импульса с амплитудой, равной
Rjk{\x) или R{[i).
На рис. 3.4,а изображена комплексная огибающая (в данном
случае действительная функция времени) ФМ сигнала с
единичным прямоугольным импульсом для JV=5, на рис. 3.4,6 —
решетчатая функция ФМ сигнала, на рис. 3.4,в — решетчатая АКФ.
Тонкими линиями на рис. 3.4,в показана АКФ ФМ сигнала. Для
прямоугольных единичных импульсов единичный отклик /?о(т)
имеет (В,ид тругольногр импульса, поэтому для построения
автокорреляционной функции ФМ сигнала достаточно соединить между
собой соседние значения R(\x).
Все предыдущие определения ВКФ и АКФ (3.16) ... (3.23)
справедливы для апериодического режима работы передающего
устройства, т. е. jb том случае, когда излучается и принимается
один сигнал. На рис. 3.5,а представлены ©ременные диаграммы
для апериодического режима .в виде модулей огибающих сигнала
]Ur(t)\ и импульсной характеристики фильтра \Uk(t)\. Сдвиг
между ними т является аргументом ВКФ Я#(т). Кроме аперио-
u(t)
о
:0
tfh-
•а)
M.I
S)
Рис. 3.4. Фазоманипулиро-
ванный сигнал и АКФ
Wj(t)\ |
WJt)\ k
Wj(t)\ k
tn+T
w
tn + T+ir
a)
I I
0
\un(t)\ \
0
Рис. З.5. Апериодический и
периодический режимы работы
передатчика
\
Y^ 3»
т гт
i
т+г
зт t
t
43
дического, возможен также периодический режим, когда сигнал
излучается периодически с периодом, равным длительности
сигнала Т (рис. 3.5,6). При периодическом режиме ВКФ
ЛЛ(|*) —(1/ЛО J aJnak,n^ (3.24)
п=\
а АКФ —
Д(ц) = (1/Л0 2 апап-». (3.25)
В (3.24), (3.25) число слагаемых в суммах равно JV, т. е.
числу символов в кодовых последовательностях.
Интегральное равенство. Между корреляционными функциями
и спектрами .кодовых последовательностей существует -взаимосвязь,
вытекающая из определений (2.18), (3.7), (3.8), (3.9), используя
которые, можно показать, что имеет место интегральное равенство
Щк (ртв, Q) - -^у- Т Я> (<°-Q) ^ И е1»"**©. (3.26)
Интегральное равенство (3.26) широко используется при
нахождении оценок АКФ и ВКФ.
Если j=k и Q = 0, то из (3.26) получаем определение АКФ
1 Я/То
# (^) = —1 f \H (ш)|2 e^^odco. (3.27)
2яЛГ/т0 _^/То
При |х= 1 из (3.27) имеем (3.14).
Перейдем к рассмотрению наиболее распространенных ФМ
сигналов.
3.2. Сигналы Баркера
Кодовая последовательность сигнала Баркера состоит из
символов ап = ±1 и характеризуется АКФ вида
1 для fi = 0
О для (г = 2/+1, (3.28)
_^_-у для (г = 2/,
Я О*)
где / = 0, 1, ..., (N-l)/2.
Знак IB последней строке (3.28) зависит от величины N.
В табл. 3.2 приведены известные кодовые последовательности
Баркера1. В последнем столбце таблицы приведен уровень боковых
пиков автокорреляционной функции (1).
1 Для некоторых N существует две последовательности. Например, для
JV^3 имеем {1, -1, 1}, {1, 1, -1}, для ЛГ=4-{1, 1, 1, —1}, {1, 1, — 1, 1}-
44
Таблица 3.2. Кодовые последовательности Баркера и АКФ
N
3
4
5
7
11
13
ап при п
1
2 | 3 | 4 1 5 1 6 | 7 1 8 | 9 1 10 1 И 1 12 | 13
— 1
1
— 1
— 1
— 1
1
1
— 1
— 1
1
1
— 1
— 1
— 1
1
— 1
— 1
1
— 1
1
1
—1
— 1
1
— 1
1
н~.
•"2/
-1/3
+1/4
1/5
-1/7
-1/11
1/13
Комплексные огибающие сигнала Баркера для N=6 и его АКФ
изображены «а рис. 3.4, а АКФ сигнала Баркера для N=7, 11,
13 — на рис. 3.6 [12].
Кодовые последовательности, обладающие свойством (3.28),
для N>13 не найдены.
Рис. 3.6. АКФ сигналов Баркера с
ЛГ=7, 11, 13
Рис. 3.7. Амплитудный и фазовый
спектры кодовых
последовательностей Баркера с N=11 и 13
8 4
4*fc|Mr
L1 -х1г\
I
\
ь
V
\
/
/
г
X
\
ti-n
\ 1
, ч
Ж/2
ю
Спектр кодовой последовательности. Амплитудный спектр
\Н(х) | кодовой последовательности может быть найден
.непосредственно из .выражения (3.10). Энергетический спектр кодовой
последовательности Баркера при R(\x) = l/N описывается выражением
|tf<*)|=Wl--L + -J-^), (3.29)
\ JV JV sin* j
а при #(ц)=—-1/N
\H(x)\* = n( l+±.—L*UL>L), (3.30)
\ N N sin х J
где лг=/(о,то- На рис. 3.7,а изображены зависимости \H(x)\/VN,
45
рассчитанные по формулам (3.29), (3.30) для N=11; 13. Из
рисунка видно, что амплитудные спектры при л:=0, я имеют или
провал, или пик. Фазовые спектры для сигналов Баркера были
рассчитаны численно и изображены на рлс. 3.7,6 для тех же N9
что и амплитудные спектры.
На рис. 3.8 изображены амплитудные спектры сигналов
Баркера с N=11 и 13, построенные согласно формуле (3.8), т. е. при
перемложении спектра одиночного импульса (3.6) на спектр
кодовой последовательности (3.29) или (3.30) [12].
Тело неопределенности. На рис. 3.9 и 3.10 изображены
|/?(т, Q) | для N=11; 13, построенные в соответствии с формулол
(2.23) при
Q = —- для / =
t0N
= 0, ± 1, ... , ±ЛЛ
(3.31)
Дискретные значения |i?(t, Q)|, полученные для /=const и
jbi=var, соединены прямыми линиями. Как видно из рис. 3.9, 3.10,
основной лик тела неопределенности окружен довольно большими
боковыми пиками. Вдоль оси Q боковые пики не изображены, так
как при выбранном смещении частоты (3.31) сечения |#(т, Q) |
проходят через нули сечения
lG(w)lfa
Г
^
—/
i
\
\
№3
\—i
i
г
IfJ
ч
\
V
ч
ч,
*:.
atz o<t o,6 0,8 ько/гх
Рис. 3.8. Амплитудные спектры
сигналов Баркера с N=11 и N--=
= 13
/?(Q)=sin(Qr/2)/(Qr/2) (2.28).
Для N=11 максимальное
значение бокового пика равно 0,53
(jut±3, /=±1), для N=13
максимальное значение бокового
пика — 0,378 (|i = ±2, / = ±1).
Наличие относительно больших
боковых пиков на плоскости (т, Q)
представляется естественным,
так как сигналы Баркера (см.
табл. 3.2) похожи на сигнал с
линейной частотной модуляцией
(ЛЧМ сигнал): чем больше вре-
Рис. 3.9. Тело неопределенности сиг- Рис. 3.10. Тело неопределенности
нала Баркера с N=\\ сигнала Баркера с #=13
46
мя (аргумент сигнала), тем чаще происходит смена знаков
импульсов. Однако боковые пики сигналов Баркера меньше, чем в случае
ЛЧМ сигнала. Объясняется это свойством фазоманипулированных
сигналов: если есть один боковой пик определенной величины, то
таких пиков на плоскости (т, Q) должно быть по крайней мере
четыре вследствие симметрии тела неопределенности относительно
осей тий.
Формирование и обработка сигналов Баркера. Формирование
сигналов Баркера может осуществляться несколькими способами,
так же, как и произвольного ФМ сигнала. Общие методы
формирования и обработки ФМ сигналов будут подробно рассмотрены в
гл. 21, 22. Поскольку сигналы Баркера были первыми ШПС,
причем с наилучшими АКФ, рассмотрим кратко один из возможных
способов формирования и обработки сигналов Баркера.
На рис. 3.11 изображен генератор сигнала Баркера с N=7.
Генератор синхроимпульсов (ГСИ) формирует узкие
прямоугольные синхроимпульсы (рис. 3.12,а), период следования которых ра-
А
5)
И
Рис. 3.11. Генератор сигнала Баркера
N=7
Рис. 3.12. Временные диаграммы
процесса формирования сигнала Баркера
с N=7
г)
7Г0
Q"
щтттштшт^
^mmsmmimmw
вен длительности сигнала Баркера Г=7т0, а т0 — длительность
одиночного (единичного) прямоугольного импульса. Генератор
синхроимпульсов запускает генератор одиночных импульсов (ГОЙ)
который ,в свою очередь формирует одиночные прямоугольные
импульсы длительностью т0 и периодом Т (рис 3.12,6). Одиночные
прямоугольные импульсы поступают на вход многоотводной
линии задержки (МЛЗ), которая имеет ЛГ—1=6 секций с отводами
через интервалы времени, равные т0. Число отводов, включая
начало линии, равно 7. Так как кодовая последовательность Баркера
с N = 7 имеет вид 1 1 1 -1 — 1 l _i, TO им-пульсы с первого,
второго, третьего и шестого отводов (счет ведется от начала
линии) поступают на вход сумматора ( + ) непосредственно, а
импульсы с четвертого, пятого и седьмого отводов поступают на вход
сумматора через инверторы (ИН), которые превращают
положительные одиночные импульсы в отрицательные, т. е. осуществляют
изменение фазы на я. Поэтому (инверторы называются также
фазовращателями. На выходе сумматора имеет место видеосигнал
Баркера (рис. 3.12,<з), который затем поступает на один вход баланс-
47
ного модулятора (БМ), на другой вход которого подается
радиочастотное колебание (рис. 3.12,г) на несущей частоте,
формируемое генератором несущей частоты (ГНЧ). Балансный модулятор
осуществляет фазовую манипуляцию радиочастотного колебания
ГНЧ в соответствии с кодовой последовательностью Барк-ера: ви-
деоимлульсу с амплитудой 1 соответствует радиоимпульс с фазой
О, а видеоимпульсу с амплитудой —1 — радиоимпульс с фазой я.
Таким образом, «а -выходе балансного модулятора имеет место
радиочастотный сигнал Баркера (рис. 3.12,(9). Следует отметить, что
в генераторе сигнала Баркера многоотводная линия задержки
(рис. 3.11) является (видеочастотной.
Оптимальная обработка сигналов Баркера так же, как и
других ШПС, производится либо с помощью согласованных
фильтров, либо с помощью корреляторов. Возможно несколько
способов построения согласованных фильтров и корреляторов,
отличающихся друг от друга в техническом выполнении, по
обеспечивающих одно и то же максимальное отношение сигнал-помеха на
выходе. На рис. 3.13 приведена схема согласованного фильтра для
СФОИ
)
Гй"
1
млз '|
\
г
1
'
1
И
1
н
г
j
\
L
н
1
\
1 1
' г
Рис. 3.13.
Согласованный фильтр сигнала
Баркера с N=7
сигнала Баркера с N = 7. С выхода усилителя промежуточной
частоты приемника (на схеме рис. 3.13 приемник не показан) сигнал
поступает на согласованный фильтр одиночного импульса
(СФОИ), который производит оптимальную обработку
(фильтрацию) одиночного прямоугольного радиоимпульса с центральной
частотой, равной промежуточной частоте приемника. На выходе
СФОИ радиоимпульс имеет треугольную огибающую (ом. рис. 2.8).
Треугольные радиоимпульсы с длительностью по основанию 2то
поступают на МЛЗ, которая .имеет 6 секций и 7 отводов (включая
начало линии). Отводы следуют через то. Так как импульсная
характеристика согласованного фильтра совпадает с зеркально
отраженным сигналом, то кодовую импульсную характеристику
фильтра для сигнала Баркера с N=7 следует устанавливать в
соответствии с последовательностью —11 —1 —1111. Поэтому
радиоимпульсы со второго, пятого, шестого и седьмого отводов МЛЗ
поступают 'В сумматор ( + ) непосредственно, а радиоимпульсы с
первого, третьего и четвертого отводов — через инверторы (ИН),
которые меняют фазу на я. На выходе сумматора имеет место
АК'Ф сигнала Баркера, огибающая которой приведена рис. 3.6.
Необходимо отметить, что при оптимальной обработке
радиочастотного сигнала Баркера все элементы схемы рис. 3.13 являются
48
радиочастотными, т. е. СФОИ, МЛЗ, ИН и сумматор должны
работать на промежуточной частоте и иметь необходимую полосу
пропускания, которая определяется шириной спектра сигнала Бар-
кера.
Если сигналы Баркера используются в электросвязи, т. е. их
передача осуществляется по широкополосному кабелю, то в схеме
генератора, изображенной на рис. 3.11, нет необходимости в ГНЧ
и БМ, а ^се элементы схемы согласованного фильтра (рис. 3.13)
являются видео'частотными, ,в том числе и МЛЗ.
3.3. ^-последовательности. Основные свойства
Среди фазоманипулированных сигналов особое место занимают
сигналы, кодовые последовательности которых являются
последовательностями максимальной длины или М-последовательностя-
ми. Такие последовательности обладают следующими основными
свойствами:
1. М-последовательность является периодической с периодом,
состоящим из N импульсов (символов).
2. Боковые пики периодической автокорреляционной функции
сигналов, образованных М-последовательноетью, равны —1/N.
3. ^-.последовательность в общем (случае состоит из нескольких
видов импульсов (например, импульсы могут отличаться
начальными фазами, .несущими частотами и т. д.). Импульсы различного
В1ида встречаются в периоде примерно одинаковое число раз, т.е.
все импульсы распределяются в периоде равновероятно.
Вследствие этого ^-последовательности называют часто
псевдослучайными.
4. Формируются Af-последовательности с помощью линейных
переключательных схем на основе сдвигающих регистров. При
этом, если применяется регистр с k разрядами и в Af-последова-
тельности используются р .различных видов импульсов
(отличающихся, например фазами), то
N = pk—l. (3.32)
Число разрядов регистра k = log(N +1)/logр. Следовательно, зна-
читательное увеличение числа импульсов N в периоде Af-последова-
вательности вызывает незначительное увеличение числа разрядов
регистра, так как зависимость k от N является логарифмической.
5. Автокорреляционная функция усеченной М-последователь-
ности, под которой понимается непериодическая
последовательность длиной в период N, имеет величину боковых пиков,
близкую к 1/VN. Поэтому с (ростом N величина боковых пиков
уменьшается.
Благодаря перечисленным -свойствам М-последовательности
широко применяют в радиотехнических системах. Для пояснения
этих свойств рассмотрим пример.
Допустим, что сдвигающий регистр (рис. 3.14) состоит из трех
триггерных ячеек 77, 7\2, ТЗУ которые выполняют роль дискрет-
49
ных элементов задержек, и сумматора. На триггеры поступают
сдвигающие импульсы, которые на рис. 3.13 не доказаны. Они
следуют с тактовой частотой 1/то. Каждый тактовый импульс
вызывает изменение состояния (напряжения на выходе) всех
триггеров. При этом напряжение на выходе каждого триггера
(символ) становится равным напряжению (символу) на его входе для
предыдущего такта. Символы могут принимать два значения,
которые условно обозначим 0 и 1. При суммировании любых
комбинаций- входных символов на выходе сумматора получаются
только символы 0 и 1. Правило суммирования символов в
двоичной системе счисления (с двумя возможными значениями
символов) по модулю 2 (mod2) определяется табл. 3.3.
Таблица 3.3. Суммирование
по mod 2
ф
0
0
0
1
1 1 '
1
1
0
77
71
TJ
в-
Рис. 3.14. Генератор Af-после-
довательности с N = 7
Выясним, в каких состояниях может находиться схема,
представленная на рис. 3.14. Предположим, что в исходном состоянии
символ на одном из выходов триггеров отличается от нуля,
например символ на выходе триггера Т1 имеет значение 1, а на
выходе Т2 и ТЗ — значение 0. Тогда исходное состояние
сдвигающего регистра характеризуется комбинацией выходных символов
100. На входе Т1 символ равен 0, так как согласно с табл. 3.3
символ на выходе сумматора равен 0Ф0 = 0. С поступлением на вход
схемы очередного сдвигающего имоульса символы со входов
триггеров «переходят» на их выходы. Новое установившееся состояние
регистра описывается комбинацией выходных символов 010. На
входе Т1 появляется 1, так как в соответствии с табл. 3.3
выходной символ сумматора равен 1©0=1. Аналогично определяются
все состояния регистра, приведенные в табл. 3.4.
Из рассмотрения табл. 3.4 видно, что состояния регистра
(символы на выходе 77, Т2, ТЗ) различны для тактов 1—7, а для
последующих тактов они повторяются. Так как число разрядов
регистра k = 3, а основание системы счисления (число используемых
символов) р = 2, то число возможных различных состояний
регистра рь = 23=в.
В табл. 3.4 отсутствует нулевая комбинация 000, так как её
наличие согласно табл. 3.3 приводит к обращению в нуль всех
символов во всех остальных комбинациях. Поэтому в табл. 3.4
приведены только возможные для нормальной работы схемы
(рис. 3.14) состояния регистра, число которых 23—1 = 7. После
50
Таблица 3.4. Состояния регистра
Номер
такта
.
,
1
2
3
4
5
Вход Тх
.
.
0
1
1
1
0
Выход
Тх
.
.
1
0
1
1
1
т2
0
1
1
1
п \
.
.
о
о
1
о
1 1
Номер
такта
6
7
8
9
1 .
.
1 9
Вход Тх
0
1
0
1
.
.
.
Выход
Тх
0
0
1
0
.
.
#
Г,
1
0
0
1
.
9
Тг
1
1
0
0
.
.
,
семи тактов состояния регистра повторяются. Если символы
непрерывно считывать -со входа 77, то получим периодическую
последовательность
... 01 1 100 10 1 1 100101 1 10... (3.33)
с периодом, равным N=7. Отметим, что символы можно
считывать с выхода любого триггера. В этом случае получаются
последовательности, сдвинутые во времени (табл. 3.4).
Подчеркнем, что период последовательности (3.33) является
максимально возможным для данного числа разрядов (триггеров)
схемы рис. 3.14 я выбранного основания системы счисления. Это
следует из того, что в регистре последовательно сменяются все
возможные состояния, кроме нулевого. Период N=7 для
последовательности (3.33) совладает со значением, определяемым
формулой (3.32), дри k = 3 н р=2.
Необходимо отметить, что дри заданных k и р период
последовательностей вида (3.33) определяется схемой включения
отводов сдвигающего регистра (выходов триггеров) в цепь
обратной связи. Он может быть получен и меньше максимально
возможного. Выбор соединений отводов сдвигающего регистра в
цепи обратной связи для получения максимального периода
последовательности при заданном числе разрядов регистра и основания
системы счисления к настоящему моменту полностью определен
и решается с помощью таблиц неприводимых многочленов.
При рассмотрении работы схемы рис. 3.14 было сделано
допущение, что исходное состояние регистра характеризуется
комбинацией 100. Из табл. 3.4 видно, что в качестве исходного • можно-
взять любое состояние регистра. Это вызовет лишь сдвиг
последовательности (3.33) во времени.
Число единиц и нулей в периоде последовательности (3.33)
соответственно jxi=4, ^о=3, причем \xi + \io=N. Отметим, что отличие
между \ix и \х0 на единицу в последовательностях вида (3.33)
имеет общий характер. В общем случае при р=2 число единиц в
последовательности равно 2ft_1, а число нулей 2k~l—1.
Сумма двух М-последователБностей, сдвинутых друг
относительно друга, является М-последовательностью. В этом можно
51
убедиться, суммируя согласно правилам табл. 3.3
последовательность (3.33) и, например, ^последовательность с выхода ТЗ на
рис. 3.14, т. е.
... 01110010111001011100101110...
...00101 1 100101 1 100101 1 100101... (3.34)
... 0101 1 100101 1 100101 1 100101 1 ...
Это является следствием того, что сдвинутые ЛГ-последова-
тельности можно получите с помощью одной и той же схемы.
Фазоманипулированный сигнал с помощью М-лоследователь-
ностей формируется следующим образом. Каждому символу
последовательности ставится в соот-
Таблица 3.5. Умножение символов ветствие радиоимпульс СО своей
начальной фазой. В двоичной
системе счисления (р = 2) это
соответствие можно определить как
X
1
1 1 -1
i
1
_1 ! -1
1
—1
1
0 аа е!<> = 1
U ^ (3.35)
1фФе1л = —1,
где двойная стрелка означает
соответствие.
В соответствии с (3.35) табл. 3.3 сложения символов 0 и 1
предращается в таблицу умножения символов 1 и —1 (табл. 3.5).
АКФ периодического ФМ сигнала определяется согласно (3.25),
где ап = ±1. Обозначая символы М-последовательности (3.33)
через Ьп и сравнивая табл. 3.3 и 3.5, замечаем, что
ап ап-» &Ьп® Ь„_д (mod 2). (3.36)
Если \кфШ для любого /=0, 1, ..., то сумма двух -М-последо-
вательностей является тоже ^-последовательностью. Но в ней
число единиц в периоде на единицу больше числа «улей. Поэтому
сумма по всем Ьп ©Ьп-д при /г=1, ..., N будет равна единице, а в
выражении для АКФ (3.25) сумма будет равна согласно (3.35)
—1/JV. При \к — Ш для любого /=0, 1, ... временной сдвиг между
двумя М-последовательностями равен нулю. При этом из (3.25)
получаем, что /?(|л) = 1.
Объединяя полученные результаты, получаем
' —1/ЛГ, если \i=£lN, (337)
если \i = lN,
где /=Ю, 1, ...
На рис. 3.15,а изображена М-шследовательность с N=15, на
рис. 3.15,6 — периодическая АКФ, дискретные значения которой
построены согласно (3.37), на рис. 3.15,в — апериодическая АКФ.
Рассмотренный пример подтвердил основные особенности М-
последовательности.
Прежде чем рассматривать формирование А1-последовательнос-
52
R(H.,
тей, обратимся к принципам формирования произвольных
последовательностей .с помощью цифровых автоматов.
Цифровые автоматы формирования кодовых
последовательностей с заданным периодом. С помощью цифровых автоматов
можно сформировать ходовую последовательность с заранее заданным
п
а)
1
\u(t)
0
-J l
pi
J LJ
T I]
IRf
U u
t
IT
Рис. 3.15. Af-последовательность с ЛГ=Ш (а), периодическая АКФ (б),
апериодическая АКФ (в)
периодом N*. Цифро.вой автомат [13], предназначенный для
формирования двоичной кодовой последовательности (рис, 3.16),
состоит из сдвигающего регистра с k элементами задержки (на
рис. 3.16 триггера Т1... Т6)у дешифратора (ДШ) заданной кодовой
комбинации из двоичных символов, сумматора © до mod2 и
триггера Т для дополнительной задержки на один такт. На рис. 3.16
Рис. 3.16.
Цифровой автомат
формирования
двоичной
последовательности с
периодом N* = 5l
I—m~r лш i
53
не показан генератор тактовых .импульсов, которые поступают на
все триггеры и в соответствии с тактовой частотой продвигают
информацию со входа каждого триггера на его выход.
Дешифратор опознает заданную кодовую комбинацию, и после опознания
формирует двоичную единицу, поступающую на вход сумматора
по mod2. На два других входа сумматора по mod2 поступают
двоичные, символы с выходов двух триггеров сдвигающего
регистра. Период последовательности определяется числом триггеров в
сдвигающем регистре, видом кодовой комбинации, которую
опознает дешифратор, и номерами триггеров, с выходов которых
символы поступают на вход сумматора по mod2. Цифровой автомат
рис. 3.16 формирует последовательность с периодом М*=15 при
заданной кодовой комбинации 001111. Период кодовой
последовательности и число триггеров в сдвигающем регистре k связаны
неравенством
2*-i <^N*< 2*. (3.38)
В табл. 3.6 [13] приведены параметры цифрового автомата,
формирующего кодовые последовательности с заданным периодом, в
том числе период N*9 номера отводов сдвигающего регистра,
заданная кодовая комбинация. Для Af-последовательностей нет
необходимости в дешифраторе (см. рис. 3.14), лоэтому в столбце
«Кодовая последовательность» для ^последовательностей
кодовые комбинации не указаны. В табл. 3.6 приведены параметры
цифровых автоматов для Af*^131. В работе [13] приведены
параметры ЛГ*<£2047.
Цифровой автомат формирования М-последовательностей.
Общая схема цифрового автомата, формирующего М-последователь-
ность, приведена на рис. 3.17. Его основу составляет сдвигающий
'* Рис. 3.17. Цифровой автомат
формирования М-последова-
тельности
регистр с триггерами 77, Т2> ..., 7&, которые осуществляют
задержку входного символа да один такт длительностью то. Допустим,
что используются р различных символов: 0, 1, 2, ..., р—1, которые
образуют конечное 1М'ножество символов S=£(0, 1, ..., р—1).
Символы на выходах триггеров при /-м такте обозначены через x\,jy
x2,j> ..., Xk,jy причем xi,j^S. Символ на входе первого триггера
обозначен Xqj. Символ на выходе 1-го триггера на (/+1)-м такте
Xi, j+i=^_i,;, так как с каждым тактом символ со входа
«переходит» на выход. Символы с выходов триггеров поступают на
умножители, С ВЫХОДОВ КОТОРЫХ СНИМаЮТ СИМВОЛЫ C\Xi,j, C2X2,jy ...,
ChXk,]. Множители Ci^S. Поэтому, если операция умножения
в множителе производится по модулю p(modp), то символы
54
Таблица 3.6. Параметры цифровых автоматов, формирующих
последовательности с заданным периодом
Период
N*
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53 |
54 |
55
56
57 1
Номера
отводов регистра
3,2
3,2
3,2
3,2
4,3
4,3
4,3
4,3
4,3
4,3
4,3
4,3
5,3
5,3
| 5,3
5,3
5,3
5,3
5,3
5,3
5,3
5,3
5,3
5,3
5,3
5,3
5,3
5,3
6,5
6,5
6,5
6,5
6-5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5
6,5 |
6,5 i
6,5
6,5
6,5 1
Кодовая
комбинация
111
001
101
1100
1000
1001
0111
0001
оно
1101
10100
00011
00111
пою 1
11001
оюп
11111
10011
01101
00100
оюю
01100
10000
10111
11100
011100
100101
010000
ЮПИ
011101
111010
101011
111111
110011
010001
011110
001000
100001
101001
001010
001110
110110
000110
111000
001111
011010
100000
110010
010100
110100
000111 1
Период
N*
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87 '
88
89
1 90
1 91
92
! 93
94 !
95
96
97
98
99
Юо
Ю1
102
ЮЗ
Ю4
Ю5
Ю6
Ю7
108
109
ПО
HI
Номера
отводов регистра
6,5
6,5
6,5
6,5
6,5
6,5
7,6
7,3
7,6
7,6
7,6
7,6
7,6
7,3
7,3
7,6
7,6
7,6
7,3
7,6
7,6
7,6
7,3
7,3
7,6
7,6
7,3
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,3
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6 |
Кодовая
комбинация
000001
101101
100111
010110
111101
0011111
1000010
0111001
0100000
1111000
юоопо
юопю
ооопоо
1000001
1111111
0011001
0110100
0011011
0010101
оооюоо
1000001
0110111
0101111
опюоо
1101000
опии
ооооио
0101111
1010110
01001П
1100ЮО
mono
1100010
ооююо
0101П0
опию
1000100
0000011
1001000
1011010
опии
0001110
0101000
1110001
0010000
1001О1О
llOHO'l
011001О
1110011
1101001
1011011
1011110
0100001
55
Окончание табл. 3.6
Период
N*
112
ИЗ
114
115
116
117
118
119
120
121
Номера
отводов регистра
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
7,6
Кодовая
комбинация
0100101
0001111
1101100
1000000
1011100
0001010
1100110
1011001
0000111
0000001
Период
iV*
122
123
124
125
126
127
128
129
130
131
Номера
отводов регистра
7,6
7,6
7,6
7,6
7,6
7,6
9,5
9,5
9,5
9,5
Кодовая
комбинация
0110110
1110100
0010001
0101001
1111101
101101111
000000011
000000110
110110111
ciXij^S. Смысл умножения по модулю становится понятным при
рассмотрении сравнения двух чисел по третьему числу (модулю).
Два целых числа а и Ь называются сравнимыми по модулю р,
если при делении обоих чисел на р их остатки равны. Сравнение
двух чисел обозначается как
a = b(modp). (3.39)
Остаток от деления любого числа ,на р всегда меньше р и лежит
в пределах от 0 до р—1. Например, если р = 5, то 12е=2(mod 5),
так как остатки от деления обоих чисел равны двум. Сравнение
(3.39) означает, что разность а—Ъ делится на р без остатка, что
иногда записывается а—fcsO(modp). Сравнимость двух чисел по
модулю р позволяет записать их в следующем виде: a = q{p + rt
b = qiP + r, где qu q<i — любые целые числа; г — остаток, 0^/*^:
^р—1. В приведенном ранее примере 12 = 2x5 + 2; 2 = 0X5 + 2.
Таким образом, сравнение по модулю р означает перевод
произвольного целого числа в конечное множество S, состоящее из р
элементов.
Умножение двух чисел по модулю р производится следующим
образом. Два числа перемножаются обычным образом, а их
произведение переводится в конечное множество S с помощью
сравнения по модулю р. Умножение двух чисел по модулю р
записывается как aft = d=n(modp), при О^г^р—1. Например, если
а = 2, 6 = 4, то d=8 и для р = 5 8s3(mod5), т. е. число 8,
которого лет в множестве S, переводится в число 3. Правило умножения
двух чисел по модулю 5 определяется табл. 3.7.
Отметим, что каждая строка и столбец таблицы состоят из
всех возможных символов множества S и не содержат, за
исключением нулевого столбца и строки, одинаковых символов. Это
является следствием того, что в качестве модуля р взято простое
число 5. Если р — составное число, то при умножении в одной
строке или столбце могут оказаться одинаковые числа, т. е.
операция умножения не будет однозначной. Для сохранения
однозначности в качестве модуля берут простые числа.
56
Таблица 3.7. Умножение по mod 5 Таблица 3.8. Сложение по mod 5
®
0
1
2
3
4
0
0
0
0
0
1 °
1
0
1
«
3
4
2
0
2
4
1
3
3
0
3
1
4
2
4
0
4
3
2
1
е
0
1
2
3
4
0
0
1
2
3
, 4
1
1
2
3
4
1 °
2
2
3
4
0
1
3
3
4
0
1
2
4
4
0
1
2
3
Отметим, что умножение любого числа на нуль означает, что
символ на выходе умножителя всегда (равен нулю. Это
эквивалентно разрыву цепи между выходом триггера и сумматором.
Следовательно, умножитель может быть опущен. Например, при р=2
(символы 0 и 1) .множитель ci может принимать значение или О,
или 1, т. е. выходы триггеров или .подсоединены к сумматорам,
или нет. После умножения суммирование производится также по
модулю р. Сумма двух целых чисел переводится с помощью
сравнения в конечное множество S, т. е. а+b=d=r (mod p) для
О^г^р—1. Для примера в табл. 3.8 приведено правило
сложения по модулю 5. Следовательно, в результате операций
умножения и сложения получаются только элементы множества S.
Возвращаясь к работе сдвигающего регистра (см. рис. 3.17),
можно записать, что символ на входе Т1 в ;-м такте равен
X0j = с1 Xl,j + C2 *2.j+ .« +Ct XltJ+...+Ch-t Xk-ltJ + Ck XhJ.
(3.40)
Выражение (3.40) является линейным рекуррентным
уравнением. Оно позволяет по известным k символам на выходах
триггеров найти символ #o,j, который в последующем такте
перейдет на выход Т1.
Для /+1 такта состояние регистра характеризуется
переменными, которые можно записать как
X1j+1=ClXltj + C2X2tj+...+ClXltj+...+Ck-1Xk-ltj + CkXktS )
X2,f+lz=Xl,j
Х3, j+1 ^ X2*J |
^z+1,/4-1— xi*J
xk-l.j
(3.41)
57
Анализ работы цифрового автомата формирования М-тюсле-
довательности на основе рекуррентного уравнения (3.40)
показывает, что работа этого автомата полностью определяется
характеристическим многочленом
/ (х) =а0х* + аг xk~l +... + ak-t x+ ah, (3.42)
коэффициенты которого связаны с множителями с\у ..., Си
следующим соотношением:
с»=(-1)*+1 ап. (3.43)
Отрицательные значения сп (3.43) можно свести с помощью
сравнения по modp к положительному числу множества S.
Для двоичных ^последовательностей, состоящих из символов
О in 1 (р = 2), множители сп и коэффициенты ап согласно (3.43)
равны, т. е. сп = ап, причем ао=с0=1.
Таким образом, для определения структуры цифрового
автомата (необходимо знать характеристический многочлен степени k.
Из теории ^последовательностей известно, что
характеристический многочлен f(x) степени k, во-первых, должен быть
неприводимым, т. е. его нельзя представить в виде произведения
многочленов меньших степеней, а во-вторых, он должен быть
первообразным (примитивным) относительно двучлена xN—1, т. е.
характеристический многочлен f(x) (3.43) должен делить xN—1 без
остатка. Поэтому характеристический многочлен является
первообразным корнем уравнения xN—1. Если характеристический
многочлен является первообразным, то он является и /неприводимым.
Таким образом, чтобы при заданных N, k и р определить
структуру регистра для формирования ^-последовательности с
периодом N=pk—1, необходимо в качестве характеристического
многочлена взять первообразный многочлен степени k.
Поскольку двоичные ТИ-последовательности играли и играют
особо важную роль в радиотехнических системах, то их свойства
были изучены достаточно глубоко, в том числе и
характеристические многочлены. Известны таблицы (см., например, [14]), в
которых приведены неприводимые многочлены до степени & = 34.
В табл. 3.9 приведены в двоичной форме коэффициенты
характеристических многочленов ап [15] для k = 3... 11, т. е. N=7...
... 2047, совпадающие с множителями сп в схеме цифрового
автомата (рис. 3.17), т. е. ап = сп> Характеристическому многочлену
f(x) (3.42) в табл. 3.9 соответствует последовательность
афхач... ап ... а&, представленных в виде 1 или 0. В каждом
столбце указана степень многочлена k и его коэффициенты. В табл. 3.9
приведены только те характеристические многочлены, которые
порождают М-носледовательности. Соответственно период М-после-
довательности N=2h—1. Знание коэффициентов ап позволяет
однозначно построить цифровой автомат формирования М-последо-
вательностей. Если ап = сп = 1, то выход п-то триггера подключен
к сумматору по mod 2, если ап = Сп = 0, то выход /г-го триггера к
сумматору по mod 2 не подключен.
58
Таблица 3.9. Характеристические многочлены,
порождающие М-последовательности
1 6=3
1011
1101
6=4
10011
11001
6 = 5
100101
101001
ЮПИ
110111
111011
111101
6=6
1000011
1010111
1011011
1100001
1100111
1101101
1110011
6 = 7
10000011
10001001
10001111
10010001
10011101 !
10100111 !
10101011
10111001
10111111
11000001
11001011
11010011
11010101
11100101
11101111
11110001
11110111
11111101
6=8
100011101
| 100101011
100101101 |
1 101001101
101011111
101100011
101100101
101101001
101110001
110000111
110001101
110101001
111000011
111001111
111100111
111110101
6=9
1000010001
1000011011
1000100001
1000101101
1000110011
1001011001
1001011111
1001101001
1001101111
1001110111
1001111101
1010000111
1010010101
1010100011
1010100101
1010101111
Ю10П0111
1010111101
1011001111
1011010001
1011011011
ЮШ10101
ЮШ11001
1100010011
1100010101 1
1100011111
1100100011
1100110001
1100111011
1101001111
1101011011
1101100001
1101101011
1101101101
1101110011
1101111111
1110000101
1110001111
1110110101
1110111001
1111000111 1
I 1111001011
1111001101
1111010101
1111100011
1111101001
1111111011
6=10
10000001001
10000011011
10000100111
10000101101
10001100101
10001101111
10010000001
10010001011
10011000101
10011010111
10011100111
10011110011
10011111111
10100001101
10100011001
10100100011
10100110001
10100111101
10101000011
10101010111
ююпоюп
10110000101
10110001111
юиооюш
Ю1ЮЮ0001
ЮП1000111
Ю11П00101
10111110111
Ю111111011
11000010011
11000010101
11000100101
11000110111
11001000011
11001001111
11001011011
11001111001
11001111111
11010001001
11010110Ю1
11011000001
11011010011
11011011111
11011111101
11100010111
11100011101
11100100001
11100111001 1
11101000111 \
11101001101 Г
А 1 1 v 1 V/V/ А 1 \J я. 1
11101010101
11101010110
11101100011
11101111101
11110001101
11110010011
11110110001 1
11111011011
11111110011
11111111001
6=11
! 100000000101
100000010111
100000101011
100000101101 Г
100001000111
100001100011
100001110001 |
100001111011 [
100010001101
100010010101 f
100010011111
100010101001
100010110001 ;
100011001111
100011010001
100011100001
100011100111 |
100011101011 {
100011110101 f
looiooooiioi
100100010011
100100100101 Г
100100101001
100100111011 f
100100111101 f
100101000101 |
100101010001
100101011011 f
100101110011 f
100101110101
100101111111 l
100110000011 '
100110001111 \
100110101011 f
100110101101 f
100110111001
100111000111 \
100111011001
100111100101
100111110111
101000000001
101000000111 t
59
Окончание табл. 3.9
k=\\
101000010011
101000010101
101000101001
101001001001
101001100001
101001101101
101001111001
101001111111
101010000101
101010010001
101010011101
101010100111
101010101011
101010110011
101010110101
101011010101
101011011111
101011101001
101011101111
101011110001
101011111011
101100000011
101100001001
101100010001
101100110011
101100111111
101101000001
101101001011
101101011001
101101011111
101101100101
1 101101101111
101101111101
101110000111
101110001011
101110010011
101110010101
101110101111
ioiiioiioin
101110111101
101111001001
101111011011
101111011101
101111100111
101111101101
110000001011
110000001101
110000011001
110000011111
110001010111
110001100001
110001101011
110001110011
110010000101
110010001001
1100100101П
110010011011
110010011101
110010110011
110010111111
110011000111
110011001101
110011010011
110011010101
110011100011
1 110011101001
110011110111
110100000011
110100001111
110100011101
110100100111
110100101101
110101000001
110101000111
110101010101
110101011001
110101100011
110101101111
110101110001
110110010011
110110011111
110110101001
110110111101
110111001001
110111010111
110111011011
110111100001
110111100111
110111110101
111000000101
111000011101
111000100001
111000100111
111000101011
111000110011
111000111001
111001000111
111001001011
111001010101
1 111001011111
111001110001
111001111011
111001111101
111010000001
111010010011
111010011111
111010100011
111010111011
111011001111
111011011101
111011110011
111011111001
111100001011
111100011001
111100110001
111100110111
111101011101
111101101011 |
111101101101
111101110101
111110000011
111110010001
111110010111 i
111110011011
111110100111
111110101101
111110110101
liiiiiooiioi s
111111010011
111111100101
111111101001
В табл. 3.9 приведены значения k + \ коэффициента ап, л =
*=0, k. Коэффициент ao=l всегда по определению. Для
определения структуры цифрового автомата, изображенного на рис. 3.17,
необходимо учитывать (Коэффициенты an, /г=1,&.
Для примера на рис. 3.18 изображена схема цифрового
автомата .формирования М-иоследовательности с &=10 и N=210—1 =
= 1023. В 'качестве характеристического многочлена взят
многочлен с коэффициентами 10000001001 (лервый в столбце с £=10
табл. 3.9). В соответствии с коэффициентами многочлена на сум-
НЕН^Н^Н^ЧШН
Рис. 3.18. Цифровой автомат формирования ЛГ-последовательности с периодом
#=1023
60
Таблица ЗЛО. Число Af-последовательностей
к
1
2
3
4
5
6
7
8
9
2
1
1
2
2
6
6
18
16
48
3
1
2
4
8
22
48
150
320
1008
Q при
5
2
4
20
48
304
720
—
—
—
р
7
2
8
48
160
1120
—
—
—
—
11 1
.4 1
16
176
960 1
—
—
—
—
—
k
10
11
12
13
14
15
16
17
18 (
19
2
60
176
144
630
156
1800
2048
7710
7776
27594
3
2640
—
—
—
—
—
—
Q при
5
Р
7
11
матор по mod 2 поступают символы с выходов 7-го и 10-го
триггеров.
Число М-последовательностей Q определяется следующим
выражением:
<Э=Ф(Л0//с, (3.44)
где ф(Л0 —функция Эйлера (число чисел в ряду 1, 2,... N—1
взаимно простых с числом N), N=pk—1, k — число разрядов «в
сдвигающем регистре. Если N — 'простое число, то q>(N)=N—1.
Значения Q для различных р ,и k приведены в табл. 3.10 [4, 15].
В табл. 3.11 .приведены все периоды ^-последовательностей
для & = 3...34 в ©вде разложения «а простые множители [14],
из которой следует, что не все периоды ^-.последовательностей
являются простыми числами. Это и объясняет нелинейный
характер числа Q от k.
Длительность М-последовательности T=Nro, где N=pk—1
согласно (3.32), то — длительность одиночного импульса (символа).
Для двоичных ^-последовательностей N=2k—1. Если тактовая
Таблица 3.11. Разложение N=2k—l на простые множители
2»-1=7
2*-1=Зх5
2е—1=31
2«—1=3x3x7
27—1 = 127
28—1=3x5x17
2»—1=7x73
2Ю—1=3X11X31
211—1=23x89
212_1=ЗХЗХ5Х
Х7Х13
213—1=8191
2**— 1=3X43X127
21б-1=7х31Х151
216-1=3х5х 17X257
2"—1 = 131071 !
21*— 1=3X3X3X7X19X73
2^—1=524287
220—1=3x5x5x11x31x41
22i_i = 7x7x 127X337
222-1=3x23x89x683
223—1 =47 X178481
22*—1=ЗХЗХ5Х7Х13Х
Х17Х241
226—1=31x601x1801
226—1=3x2731x8191
227—2=7x73x262657
228_1=ЗХ5Х29Х43Х 113 X 127
229—1=233x1103x2089
230_i=3x3x7xllX31X
X 151X331
231—1=2147483647
232—1=3x5x17x257x65537
233_1=7Х23Х89Х599479
234—1=3x43691x131071
61
Таблица 3.12. Периоды Af-последовательностей различной длины
с тактовой частотой следования 1 МГц
Регистр
длины h
7
8
9
10
И
12
13
17
19
23
27
31
43
61
89
Длина последовательности
127
255
511
1 023
2 047
4 095
8 191
131 071
524 287
8 388 607
134 217 727
2 147 483 647
879 609 302 207
2 305 843 009 213 693 951
618 970 019 642 690 137 449 562 111
Длительность периода
поел едова тел ыюсти
1,27. Ю-4 с
2,55-Ю-4 с
5,1Ы0-4 с
1,023-Ю-3 с
2,047-Ю-3 с
4,095-Ю-3 с
8.191-Ю-8 с
1,ЗЬ Ю-* с
5,24.Ю-1 с
8,388 с
13,421 с
35,8 мин
101,7 дня
7,3-104 лет
1,95-109лет
частота -в сдвигающем регистре /т=1/т0, то T=(2h—l)/fT.
В табл. 3.12 приведены длительности периода
Af-последовательности для &=7... 89 с тактовой частотой /т=1 МГц [7].
Характеристики апериодических корреляционных функций.
Периодическая АКФ ^-последовательностей имеет характерный
вид, представленный на рис. 3.15. Боковые пики ПАКФ равны
—1/N. Поскольку ЛГчпоследовательности достаточно просто
формируются и обладают такими малыми боковыми пиками в
периодическом режиме, то они с самого открытия до настоящего
времени находятся под пристальным вниманием разработчиков
радиотехнических систем. Одним из главных направлений
исследований является изучение свойств ^-последовательностей в
апериодическом режиме, что характерно для передачи информации
в системах связи. К настоящему времени накоплены сведения по
корреляционным свойствам ЛГ-последовательностей в
апериодическом режиме—как по АКФ, так и по ВКФ. Имеются
многочисленные данные по конкретным АКФ и ВКФ М-последователь-
N427
Рис. 3.19. АКФ ^-последовательности
62
ностей различной длины, а также обобщенные характеристики
корреляционных функций. На рис. 3.19 изображен пример АКФ
ЛГ-последовательности с N=127 [16]. Из рис. 3.19 видно, что
боковые пики АКФ -в апериодическом режиме существенно больше
боковых пиков ПАКФ. Приведем лишь основные характеристики
К'Ф ^-последовательностей.
Таблица 3.13. Характеристики корреляционных функций
^^последовательностей и случайных последовательностей
Корреляционные функции
АКФ ^-последовательностей
ВКФ М-последовательносгей
КФ случайных
последовательностей
oRVN
1
0,4
0,73
0,7
m\R\ VN
0,32
0,54
0,56
o]riVn
0,26
0,48
0,43
*maxVU
0,7..Л,25
1,4...5
2,1...3,5
В табл. 3.13 [16] приведены основные характеристики
корреляционных функций (АКФ и ВКФ) Af-последовательностей и
случайных последовательностей. Последние приведены для
сравнения их свойств со свойствами ^-.последовательностей. В качестве
характеристик взяты .следующие:
среднеквадратическое значение боковых пиков Ru определяемое
через дисперсию
У,
<А==т.
*Н /=,-(N-\)
среднее значение модулей боковых пиков
N-1
mii?i =
(3.45)
(3.46)
среднеквадратичное значение модулей боковых пиков,
определяемое через дисперсию
(3.47)
'1*1
= °*-ml*|
а также значение максимального бокового пика i?max. В табл. 3.13
все характеристики приведены -в ненормированном виде, т. е.
умножены на V~N. В результате цифры, приведенные в табл^З.13,
характеризуют превышение oRi m\R\,o\R\ , i?max уровня у N.
Отметим, что среднее значение боковых пиков mR=Q. Во второй
строке табл. 3.13 приведены характеристики АКФ, а в третьей
строке — характеристики ВКФ Af-последовательностей [16]. Из
сравнения цифровых данных второй и третьей строк следует, что
ВКФ ^-последовательностей имеет большие боковые пики по
63
сравнению с баковыми пиками АКФ. В четвертой строке
приведены характеристики КФ (АКФ и ВКФ) случайных
последовательностей, относительно которых было предположено, что их КФ
распределены по нормальному закону
w
(*) = }/-£-е
—NR*
(3.48)
с дисперсией o2R=l/2N. Соответственно m\R\ = 0,56/]/^V, а а\щ =
= 1/(1—2n)/2N=0,43/yr N. Как видно из сравнения третьей и
четвертой строк табл. 3.13, характеристики ВКФ М-последователь-
ностей близки к статистическим характеристикам случайных
последовательностей, что и является обоснованием названия
«псевдослучайные последовательности» для ^-последовательностей и
им подобных. На рис. 3.20,а [16] приведен пример ВКФ двух
^-последовательностей длиной N=127. Вместе с тем, некоторые
пары ^-последовательностей имеют периодические ВКФ,
отличающиеся от случайных, так как такие ВКФ имеют всего три
уровня (рис. 3.20,6):
( R1=~~l/N с числом (N—l)/2,
R
R2 = V~2/N—1/N с числом (N + 1 +|/2 N)/4, (3.49)
R3 = — ~|/~2/W— 1/Nc числом (N+l—VTR)/4.
N427
201
N = 127
ПВКФ
Рис. 3.20. ВКФ и ПВКФ М-последовательностей
64
М-последовательности, имеющие трехуровневые ПВКФ,
называются также последовательностями Голда [5, 16, 17]. Более
подробно они будут рассмотрены в паралрафе, поовященном
системам сигналов. Отметим, что последовательности Голда имеют
ПВКФ, максимальные значения которых близки к V 2/N. Вместе
с тем, надо подчеркнуть, что последовательности Голда
составляют только часть ^-последовательностей, т. е. их число мало.
Функция неопределенности. Можно показать, что исходя из
ограниченности объема тела неопределенности произвольного
сигнала (2.34), среднеквадратичное значение ФН равно 1/N. На
рис. 3.21 приведена ФН Af-последовательности с N=15. Макси-
Рис. 3.21. Функция
неопределенности
^-последовательности
-15 2Я/Г
мальный боковой шик равен 0,33. При N=15 статистическая
оценка 1/1/^=0,26, т. е. реальные боковые пики превышают в 1,38
раза статистическую оценку. Как показывают многочисленные
расчеты, для различных Af-последовательностей уровень
максимальных пиков может превышать значение l/V N в 5... 6 раз.
3.4. Последовательности Лежандра и Якоби.
Минимаксные последовательности
Периодические АКФ ряда кодовых последовательностей
обладают интересными свойствами, что проиллюстрируем на
примере ненормированной ПАКФ, которую определим согласно (3.25)
в виде:
(3.50)
Если обозначить максимальное значение ПАКФ (3.50) через
V(|n)max, то известны возможные оценки максимального знач^
ния:
0 для N=0 (mod 4),
1 для N = 1 (mod 4),
2 для N=2 (mod 4),
— 1 ддя N=3 (mod 4).
З—lll 65
Пц),
(3.51)
В (3.51) сравнения осуществляются по модулю 4 (mod 4).
Кодовые последовательности, у которых ПАКФ .имеет точное значение
У(м-)тах =—1, часто называются минимаксными. К минимаксным
последовательностям относятся и ^последовательности. В табл.
3.14 приведены известные минимаксные последовательности.
Таблица 3.14. Минимаксные
последовательности
Вид
последовательности
Af-последователь-
ности
Последовательности Лежандра
Последовательности Холла
Последовательности Якоби
Период
N = 2k—:1
ЛГ=4/ + 3
ЛГ=4/2 + 27
N=t{t + 2)
Примечания
k — целое
число
N — простое
число
1 —- целое
число
N — простое
число
t — целое
число
tt / + 2 —
простые
числа
Та
блица
3.15.
Виды
последовательностей
N
3
7
И
15
19
23
31
Вид
М
м
L
М
L
L
M,L
N
35
43
47
59
63
67
71
Вид
/
L
L
L
М
L
L
N
79
83
103
107
127
131
139
Вид
L
L
L
L
M4L
L
L
N
.143
151
163
167
179
191
199
Вид
/
L
L
L
L
L
L
Следует отметить, что если данному периоду N .соответствуют
различные по виду последовательности, то эти
последовательности могут совпадать. Последовательности Холла с N=4£2 + 27 =
= 4(/2 + 6)+3 совпадают с последовательностями Лежандра при
t=f2 + 6. Последовательности Якоби в общем случае
характеризуются периодом t(t + l)f где значение / может быть равно 2; 4; 6,
но только при 1=2 эти последовательности минимаксные
(Vmax=—1). Последовательности Якоби с периодом N=t(t+2)
называются также дважды простыми последовательностями.
Как видно из табл. 3.14, различным N могут соответствовать
различные последовательности. В табл. 3.15 указаны виды
последовательностей для N, изменяющегося от 3 до 200. Через L
обозначены последовательности Лежандра, через / —
последовательности Якоби, М соответствует М-,последовательности.
Последовательности Лежандра. Если (—) ^сть символ
Лежандра (симзол п по отношению к N), то символы
последовательности Лежандра определяются как
( 1 при п=0 (modiV),
л - X t n n (3-52)
\\n) при/г^° (modAr)-
Отметим, что в теории чисел символы Лежандра вводятся при
рассмотрении уравнений второй степени:
x2?=n(modN),
66
(3.53)
причем общий наибольший делитель (nfN) = l. Решить
уравнение (3.52) означает найти такое х, при котором (3.52)
«превращается IB тождество. Сравнение (3.52) имеет решения не при
любых значениях п. Значения п, при которых уравнение (3.52)
имеет решения, называются квадратичными вычетами, а
значения п, при которых (3.52) не имеет решений, называются
квадратичными невычетами. Символ Лежандра определяется как
/ п \ _| 1, если п — (квадратичный вычет,
\N ) \—>!, если п — квадратичный невычет.
(3.54)
Он определен для всех п> не делящихся без остатка на N,
причем N — простое число, большее двух. Если символ Лежандра
найден, то становится известным, имеет ли решение уравнение
(3.52) при данном я. Из (3.52) следует, что если число п
представляет собой квадрат какого-то числа по модулю N, то он
является квадратичным вычетом. Например, для уравнения x2s=
= 17 (mod lft) имеем решение 62 = 36=17 (mod 19), т. е. число
17 — квадратичный вычет. Основные свойства символов
Лежандра сводятся к следующим выражениям:
2
(*)-<-•>"
W*-l
8
nk2
N
м—1 ш к—\_
2 2
( — j=(—1) 2 2 ( — ),еслидг,&—простые нечетные числа
(nu'N) = (n/N)f если пх = п (mod N).
Отметим, что при п=О (mod N) символ Лежандра не определен.
На рис. 3.22 изображен сипнал Лежандра, построенный
согласно последовательности Лежандра для N=19:
1 1 —1 —1 1 1 1 1 -4 1 —1 1 —1 —1 —1 —1 1 1 —1.
Последовательности Лежандра, как и ^-последовательности,
являются линейными рекуррентными и описываются линейным
1
LR
\Т t
Рис. 3.22. Сигнал Лежандра
рекуррентным уравнением вида п = Ь+(п—1), где Ь — целое
число. Значение каждого символа последовательности ап получается
путем преобразования п в символ Лежандра ( —), если он
определен. Последовательности Лежандра, как и М-последо.вательно-
сти, являются минимаксными.
3* 67
Последовательность Якоби. Бели символ Якоби
(^)-(fXf)
(3.55);
где общий наибольший делитель (nfp, k) = 1, а р, q—простые
числа, то последовательность Якоби для p>q определяется как
{ (—) при пфО(шойр), Ai^O(mod^),
ап= \ 1 при n=0(modpq),
(3.56)
1 при /iss=0(modp), /i#0(mod<7),
( —1 при /i#Q(modp), n=Oi(modq).
Раньше было оговорено, что под последовательностями Якоби
будут подразумеваться такие, у которых р = <7+2, период равен N,
а п изменяется от 0 до N—1. Так как символ Якоби
определяется произведением символов Лежандра, то вычисление его
производится согласно правилам определения символов Лежандра.
Например, при р = 7, q=5 период N=35, а символы
последовательности Якоби за период чередуются следующим образом:
11—111—1—11—11—11111—111—1—1—11
—1 —1 —1—1—1111 —1 —1 —11 —1. Легко убедиться, что
найденная последовательность Якоби является минимаксной.
Соответствующий сигнал изображен па рис. 3.23.
u(t)
7
О
-1
Vt
Рис. 3.23. Сигнал Якоби
Последовательности Лежандра и Якоби, а также родственные
им исследованы подробно, но они менее распространены по
сравнению с ^-последовательностями.
3.5. Нелинейные последовательности
Период М-последовательности N=pk—1, где k — число
разрядов репистра, р — число различных используемых символов.
Напомним, что среди всевозможных кодовых комбинаций символов
в регистре комбинация из k нулей (000... 0) является
запрещенной. Если в регистре по каким-либо причинам такая комбинация
возникнет, то 'колебания в регистре сорвутся и регистр
установится в нулевое состояние.
Используя дополнительные логические операции, можно так
построить схему репистра, что кодовая комбинация символов из
k нулей перестает быть запрещенной. В этом случае период
последовательности
#=/>*, (3.57)
68
а получаемая в регистре последовательность символов
описывается нелинейным рекуррентным уравнением. Подобные последо*
вательности называются нелинейными.
Рассмотрим пример. На рис. 3.24 представлена схема
регистра (р=2), отличающаяся от схемы, приведенной на рис. 3.14,
следующим. Во-первых, каждый триггер на рис. 3.24 схематично
разделен вертикальной линией на две половины. С выхода одной
половины снимается прямой символ х9 с выхода другого — его
инверсия х. Прямой и инверсный символы удовлетворяют
условию
jc + JC=l(mod2). (3.58)
Если инверсный символ #=1, то это означает, что прямой
символ х=0. Во-вторых, на схему совпадения И поступают
инверсные символы со всех триггеров (77, Т2), кроме последнего. На
выходе схемы И символ 1 появится только
тогда, когда инверсные символы триггеров
77, Т2 принимают значение 1. При любых
других комбинациях инверсных символов
триггеров 77, Т2 на выходе схемы И будет
символ 0. В-третьих, в схеме включен
дополнительный сумматор по mod 2, на входы
которого поступают символы со схемы И и ри 324 Р
сумма символов цепи обратной связи реги- линейной' об>атн?йСсвя-
стра. Так как цепь обратной связи замкну- зью
та, то в схеме возможны колебания. Можно
показать, что в триггере будут иметь место все кодовые
комбинации длиною k символов, в том числе и комбинация 000.
Введение в схему регистра нелинейного элемента в виде
схемы И приводит только к появлению одной дополнительной
комбинации символов 000. Нелинейная последовательность символов
может быть получена при считывании символов со входа или
выхода любого триггера регистра. Например, считывая символы
со входа триггера 77, получим периодическую
последовательность
..01110001011100010111...
(3.59)
Необходимо отметить, что в нелинейных последовательностях
вида (3.59) число символов 1 и 0 за период равно друг другу.
В отличие от ЛГ-последовательностей сумма двух сдвинутых
нелинейных последовательностей не является циклически
сдвинутой относительно исходно нелинейной последовательностью.
Действительно, если просуммировать последовательность (3.59) с
последовательностью, сдвинутой относительно нее, например, на три
такта, то получим
01110001011100010111
0 0 101110001011100010
010 11111010111110101
69
Малый уровень боковых пиков (—i/N) периодической АКФ
^-последовательностей является следствием того, что сумма двух:
^-последовательностей также ЛГ-последователыгость. Так как
нелинейные последовательности этим свойством не обладают, то
можно предположить, что уровень боковых .пиков их АКФ будет
больше уровня боковых пиков АКФ ЛГ-последовательностей.
Нелинейное рекуррентное уравнение. Когда число различных
используемых символов р является простым, то одной из
возможных схем регистра формирования нелинейной
последовательности будет схема, приведенная на рис. 3.25. Она построена на
*oj Т1 хи Т2 X2jy ТУ
ТИ-1 xK-1j ТИ XHj
Рис. 3.25. Автомат формирования нелинейных последовательностей
том же принципе, что и схемы на рис. 3.17, 3.24. Схема И
является схемой совпадения k— 1 единиц; т. е. на .выходе схемы И
символ 1 проявляется тогда, когда на всех ее входах единицы.
При этом
Xij=*i,j+1 (modp). (3.60)
Схема И на работу регистра не влияет, за тем лишь
.исключением, что между кодовыми комбинациями 000... 01 и 100 ...00
она создает «комбинацию символов из k нулей (000... 00). Поэтому
выбор характеристического многочлена (определение
коэффициентов си ..., Ck) для определения структуры регистра,
(Приведенного на рис. 3.25, следует делать так же, как и для
^последовательности.
Прямой символ на выходе 1-го триггера на /+1 такте
xi>3+i=Xi-i,j> так как с каждым тактом символ со -входа
переходит на выход. Сим(вол ,на входе первого триггера в /-м такте
*о./= J, ctxlfj+ П *i./, (3.61)
/=i /=i
где
1 ПрИ Xj
п *,,- V
7=1 10 При Xj
операция символического умножения, выполняемая схемой И.
70
Используя (3.60), нелинейное рекуррентное уравнение (3.61)
можно записать как
*о.;= 2 °ixi-s+ П (xi.,+ 1).
i=i i=\
(3.62)
ЛГ
^Hm
Нелинейность уравнений (3.61), (3.62) приводит к тому, что
непосредственный анализ состояний регистра сопряжен с
большими математическими трудностями. Иногда анализ состояний
регистра не требуется, поскольку выбор структуры регистра
(рис. 3.25) можно производить на основе теории
^последовательностей.
Известна формула для числа нелинейных последовательностей,
возможных при данном k:
L = 2*k-l~k. (3.63)
Например, если &=13, то число возможных нелинейных
последовательностей равно 24083, в то время как число М-иоследо^а-
тельностей — 630. Такое большое различие по числу
последовательностей объясняется тем, что введение нелинейных логических
операций значительно расширяет
возможности при проектировании
формирующих схем.
АКФ. На рис. 3.26,а
изображена АКФ нелинейной
последовательности для N = 32. На этом
рисунке для области т^О
изображена периодическая АКФ, для
области т^О — непериодическая.
На рис. 3.26,6 изображены АКФ
периодической нелинейной
последовательности с периодом
#=32: 11111010001001
010110000011100110.
Как видно из рисунков,
боковые пики периодических АКФ
нелинейных последовательностей
значительно отличаются от
— 1/N. Для сравнения на рис.
3.26,6 представлена АКФ М-по-
следовательности, период которой
#=31 имеет вид 11111010001001010110000
1110 0 110. Несмотря на разницу -в периоде ib один символ 0,
автокорреляционные свойства нелинейных периодических
последовательностей, с точки зрения уровня боковых пиков значительно
хуже, чем Мнпоследовательностей. Это является следствием того,
что сумма двух нелинейных последовательностей не является
циклически сдвинутой нелинейной последовательностью.
Вместе с тем, необходимо отметить, что до настоящего вре-
71
а)
10
Ww
о
ш\
8)
т г
Рис. 3.26. АКФ нелинейной (а) и М-
последовательности (б)
меня не опубликованы регулярные алгоритмы формирования
нелинейных последовательностей с числом последовательностей,
определяемых формулой (3.63). Известны лишь частные алгоритмы,
которые с помощью схем на сдвигающих регистрах (рис. 3.25)
позволяют формировать нелинейные последовательности N=2k—4,
объемом L=25ft [18].
3.6. Дополнительные последовательности
Последовательности {ап} и {ап} называются дополнительными
[19], если
10 при |» = ±1,... ,±(N— 1),
где
ы п=д+1 N nJr+l
Например, последовательности
111—1 1 1—1 1
111—1 —1 —1 1 —1
(3.64);
(3.65)
(3.66)
являются дополнительными. Значения их автокорреляционных
функций приведены в табл. 3.16.
Таблица 3.16. АКФ дополнительных последовательностей
v>
*«й
**ц
tf(^+V
0
8
8
16
1
—1
1
0
2
0
0
0
3
3
-3
0
4
0
0
0
5
1
—1
0
6
0
0
0
7
1
—1-
0
8
0
0
0
Отметим, что в дальнейшем рассматриваются
последовательности, у которых ап = 1; —'1. При заданном N можно построить
несколько различных пар дополнительных последовательностей,
комбинируя положения символов.
У дополнительных последовательностей число символов
должно быть одинаковым и равно N. При этом число N является
четным и равно сумме квадратов двух целых чисел
N^(N-p-qf + {p-q)\ (3.67)
где /?, q— целые числа, равные числу —1 в первой и второй до-
72
полнительных последовательностях. Формула (337) означает, что
число символов N может быть только суммой квадратов двух
целых чисел, включая нуль. Например, при JV^lOO имеется ряд
чисел 2, 4, 8, 10, 16, 18, 20, 26, 32, 36, 40, 50, 52, 58, 64, 68, 72,
74, 80, 82, 90, 98, 100, ш которых можно найти N для
дополнительных последовательностей.
Необходимо отметить, что условие (3.67) является
необходимым, по не достаточным. Например, доказано, что не существует
дополнительных последовательностей с N=18.
Композиции дополнительных последовательностей. Если
имеется пар.а дополнительных последовательностей- {ап} и {ап}
длины N, то их композициями будем называть дополнительные
последовательности длины 2N, образованные по определенным
правилам из исходных последовательностей. Известны два правила
образования композиций: правила чередования и присоединения.
Правило чередования означает следующее. Если заданы две
последовательности: {ап}^= Дь..., аП9..., aN и {an}=3i,..., йп> — f
aN) то последовательность {ап : ап} =аь йь аг,... ,ап, йп,... ,aN,
Un, © которой символы одной исходной последовательности
чередуются с символами другой, называется составленной по правилу
чередования.
Можно доказать, что последовательности
аг, а1у..., апУ ап, ^ , aN, aNi (3.68)
al> — а1> — > am—an* ••• >aN> —0>N*
являются дополнительными. Используя правило -чередования k
раз, получим пару дополнительных последовательностей длины
Nh = 2kN. (3,69)
Правило присоединения означает следующее. Если заданы две
последовательности {ап}=аи ..., an,..., un и {ап} =аи ..., йп,...,
aNi то последовательность {ап|5п}=Яь..., an,..., cln> Si,..., аПу...,
aNy в которой за символами одной исходной последовательности
следуют символы другой, 'называется составленной по правилу
присоединения.
Можно доказать, что последовательности
а1% ™ , ап,..., а#, —аг, ^ ,—ап, ...,—ам (3.70)
являются дополнительными. Повторяя последовательно k раз
правило присоединения (3.70), получаем последовательность длины
2W (3.69).
Частным случаем (3.69) является число 2fe. В качестве
исходной последовательности при k = 0 берется один символ 1, при
этом {an} = {an} = l. При &=1 согласно (3.70) имеем
73
\(*п\ On) =
\an|—an} =
к)=1,-1.
Пр,и k=2
{оп} = 1, 1, 1, -1,
fej=i>
1,-1,1
и т. д.
Корреляционные свойства дополнительных
последовательностей при N=2k. Рассмотрим два сигнала с комплексными
огибающими U\\(t) и U2{t) длительностью Т и энергией Е. Образуем
композиции, аналогичные (3.70):
£/з(0=^х(t) + U2 (/), f/4 (t)=U1 (t)-U2 (t). (3.71)
Функции .неопределенности (ФН) сигналов (3.71) в соответствии
с (2.21)
Rs (т, Q) = R± (т, Q) + R2 (т, Q) exp (i Q Т) ± #12 (т + 7\ Q) ±
± #21 (т—7\ Q) exp (i Q Г), * (3.72)
где / = 3 или 4, знак « + » соответствует /=3, знак «—»
соответствует / = 4; ФН Ri(%> Q), /?2(т, Q) определяются согласно (2.21), а
ВФНЯ12(т,Й), #2i(r, Й) —согласно (2.18);
#з (т, й) + /?4 (т, Q) = 2 [R± (т, й) + #2 (т, Q) exp (i Q Г)]. (3.73)
Как видно, ВФН R\2 и R2\ не вошли «в (3.73). Это приводит
к следующему. Поскольку длительности сигналов U\(t) m U$(t)
равны Г, то их ФН [R\(x, Й) и J?^(t, й)] отличны от нуля только
в пределах полосы (—Г^т<Г, —оо<й<оо). В то же время
сигналы (3.71) имеют длительность 27, и их ФН (3.73) отличны
от нуля в пределах полосы (—2Г^т^2Г, —oo<jQ<oo).
Следовательно, суммирование корреляционных функций 7?3(т, й) и/?4(т, Й)
приводит к полному подавлению боковых пиков в полосах (—27^
^т^—Г, — оо<й<оо) и (Г^т^2Г, —оо<й<оо). Это
свойство сигналов (3.71) имеет общий характер.
Действительно, .используя последовательно правило
присоединения (3.71), получим сигналы длительностью 2ft+17 вида
U2k+3 (t) = <У2ИЬ1 (t) + U2k+2 (/-2* T)y
^м-4 W =<Wi W-tf»-H «~2* T). (3.74)
При & = 0 .получаем исходные сигналы (3.71). Можно показать,,
что модуль суммы ФН сигналов (3.74)
\R2k+3 (*. a) + tf2fe+4 (т, Q)| «2*+2 I Rx (т, Й) П cos Й Т 2*-*
I v=0
(3.75)
Следовательно, при произвольном k тело неопределенности
(3.75) суммы двух ФН совпадает в основном с корреляционной
74
функцией R(x, Q) исходного сигнала, но с изменением масштаба
оси частот Q в соответствии с длительностью сигналов (3.74).
Если тело неопределенности исходного сигнала имеет центральный
пик и малые боковые пики, то и тело неопределенности (3.75)
будет иметь центральный пик не шире исходного и малые боковые
пики.
Спектральные свойства дополнительных последовательностей
при N = 2k. Если спектр комплексной огибающей Ui(t)
G± (со) = \иг (/) е-{«>* dt9 (3.76)
о
то спектры комплексных огибающих (3.71) при условии U{(t) =
= U2(t) равны, т. е.
G3(o))=G1((o)[l+exp( — i<*)T)]=2G1 (со) cos — exp f — i со 7/2],
(3.77)
<?4 (©)=<?! (©Ml— exp( — i(*>T))=*2G1 (со) sin— exp[i(o)7/2 + ^/2)].
(3.78)
Модули выражений (3.77) и (3.78) отличаются гармоническими
множителями. Следовательно, нули этих спектров будут
чередоваться. При этом, конечно, не учитываются нули исходного
спектра Gi(o)). Причем имеет место соотношение
lG3(©)l2+|G4(o))l2 = 4|G1(©)|2, (3.79)
т. е. спектры как бы дополняют друг друга. С увеличением
номеров сигналов характер спектров становится более сложным, но и
свойство «дополнительности» (3.79) сохраняется. Если G2k+i((d) и
G2k+2((u)—спектры комплексных огибающих U2k+i(t) и U2k+2(t)
аналогично (3.76), то
IG2k+z (©)12 + IG2*+4 (©)12 - 2 [ |G2*+i (со)|2 + |G2*+2 (©)12]• (3.80)
Соотношение (3.80) аналогично (3.79).
3.7. Последовательности максимальной вероятности 1
ПМВ обладают статистическими характеристиками
корреляционных функций, близкими к характеристикам Л4-последовательно-
стей, число их может быть большим и для них можно предложить
регулярное правило формирования. Сначала обратимся к
свойствам случайных последовательностей.
Статистические свойства случайных последовательностей.
Известно, что с ростом числа символов N в последовательности
дисперсия боковых пиков АКФ уменьшается как 1/2N, а
максимальные пики при заданной вероятности уменьшаются как V(lnN)/N.
1 Данный параграф написан по материалам совместной работы с Г. Г.
Моисеевой [20].
75
В результате с ростом N АКФ случайной последовательности
стремится к идеальной в виде дельта-функции.
Известно также, что сигналы, у которых АКФ обладают
малыми боковыми пиками, содержат оптимальное число блоков
M0 = (N+1)/2. (3.81)
Блок — последовательность символов одного знака. Формула
(3.81) справедлива для нечетных N, Для четных N M0=N/2 или
Мо=Л/У2+1. Доказано, что (3.81) является средним значением
числа блоков в последовательности из N символов. Так как
распределение числа блоков описывается биномиальным законом, то
(3.81) является также и наиболее вероятным значением числа
блоков. Блоки могут быть единичными (состоят из одного символа),
двойными (состоят из двух символов) и т. д. Обозначим число
блоков одинаковой длины k через Ль, причем длина блока равна
числу символов в нем. Например, Ai — число единичных блоков.
Для последовательности длины JV, состоящей из М блоков, имеют
место два равенства:
kmax *max .
Af= V Ufe, M= J Afe' (3.82), (3.83)
где &max — длина максимального блока.
Считая &тах постоянной величиной, усредняя обе части
равенства (3.83), обозначая среднее значение Ль через Ль, получаем
Af0= |]aX (3.84)
Среднее значение числа блоков длиной k может быть найдено
следующим образом. Положим, что положительные и отрицательные
символы последовательности равновероятны. При этом вероятность
появления блока длиной k (т. е. состоящего из k символов) равна
ft = 1/2*. (3.85)
Если последовательность имеет Мо блоков, то
Ak = MoPk=M02-k. (3.86)
К этому же результату можно прийти, учитывая взаимосвязь
между числом символов в последовательности и числом блоков. При
наличии Мо блоков в последовательности имеется Мо—1 перемена
знака. Вероятность перемены знака равна отношению (Мо-—1)
к (N—1). Вероятность сохранения знака равна (N—M0)/(N—1).
Вероятность получения блока длиной k будет равна вероятности
сохранения знака на (k—1) позиции, а затем перемены знака, т. е.
Pk ={N-Mo)k-{ (Af о- 1)/(ЛГ-1)". (3.87)
Подставляя (3.81) в (3.87), получаем (3.85). Здесь следует
отметить одну математическую особенность полученных результатов.
Если подставить (3.86) в (3.87), точное равенство имеет место
76
лишь при &max->cx>, т. е. необходимо учитывать блоки любой
длины, хотя вероятность появления больших блоков уменьшается с их
величиной согласно (3.85). Выбор значения kmax для
последовательностей конечной длины будет рассмотрен в дальнейшем.
В табл. 3.17 приведены значения вероятностей появления
блоков различной длины в случайных двоичных последовательностях,
полученных из десятичных случайных последовательностей. Были
взяты выборки из 800 символов.
Таблица 3.17. Вероятности появления блоков длины k
Длина
блока k
1
2
3
4
5
6
Вероятности для
случайных
последовательностей
(I группа)
0,487
0,268
0,133
0,0525
0,0276
0,015
Вероятности для
случайных
последовательностей
(II
группа)
0,504
0,237
0,121
0,0705
0,0352
0,0176
Вероятности,
рассчитанные
по
формуле (3.75)
0,5
0,25
0,125
0,0625
0,0312
0,0156 !
Длина
блока k
7
8
10
11
Вероятности для
случайных
последовательностей
(I группа)
0,010
0,000
0,0005
0,000
0,0025
Вероятности для
случайных
последовательностей
(II
группа)
0,0076
0,0076
0,000
0,000
0,000
Вероятности,
рассчитанные
по
формуле (3.75)
0,0078
0,0039
0,002
0,001
0,0005
Как следует из данных табл. 3.17, эмпирические значения
вероятностей, полученные для последовательностей конечной длины,
близки к теоретическим значениям (3.85).
Таким образом, в типичной или «средней» случайной
последовательности число символов должно удовлетворять равенству
(3.82), общее число блоков — равенству (3.81), а число блоков
длины k — равенству (3.86). Число таких последовательностей
определяется полиномиальным законом
/Лтах
П М (3-88>
где аргумент характеризует блоковую структуру
последовательности. Например, при Л/г= 16, М0 = 8, Ai=4, Л2=2, Л4==0 и Л3=Л5=1
имеем L(Mo9 Л) =840. При этом число последовательностей,
удовлетворяющих (3.85), составляет, примерно, 1/80 часть от общего
числа последовательностей длины Л/"=16(216^6,4-104).
Для типичной последовательности, удовлетворяющей
равенствам (3.81) — (3.83), можно постулировать следующее утверждение:
статистические характеристики их АКФ и ВКФ будут лучше, чем
статистические характеристики полного кода, поскольку типичные
последовательности являются наиболее вероятным
представителем случайной последовательности с хорошими корреляционными
свойствами. Именно на этом постулате и основаны
последовательности максимальной вероятности.
77
Свойства последовательностей максимальной вероятности. ПМВ
формируются из блоков, длины которых k, и число Ан выбираются
из условия
К —
6=2]* 1Л* — Ak\ = min> (3.89)
где k0 — длина блока, для которого Ль=1 и из (3.86) ko = \og2Mo.
Минимальные значения б для М=М0 равны 0 и 1.
Таким образом, единичные блоки должны составлять
примерно половину от общего числа блоков, двойные — четвертую часть,
тройные:—восьмую часть и т. д. При этом блоки чередуются в
порядке уменьшения их вероятностей. На первом шаге из М0
блоков выбирается один из наиболее вероятных блоков, т. е.
единичный блок, начальная вероятность которого согласно i(3.85) равна
0,5. После этого остается (Mq—1) блоков и вероятности появления
оставшихся блоков изменяются. Для единичных блоков она
станет меньше и будет
а для других блоков возрастет и станет
(M,/2fe) _ 1
Phi-
M0—l 2k
(,+t)- ,M1>
В (3.90), (3.91) второй индекс означает номер шага формирования
последовательности.
На втором шаге выбирается единичный блок, если ри>р2и
или двойной блок, если р2\>Рп- Эта процедура повторяется на
каждом шаге, при котором выбирается блок с максимальной
вероятностью из оставшихся.
Таким образом, на /+1 шаге выбирается блок длиной k, для
которого вероятность pkj максимальна. Если блоки различной
длины обладают одинаковыми вероятностями, то порядок выбора
этих блоков не имеет значения. Следует отметить, что при
формировании последовательности символы каждого последующего
блока имеют противоположную полярность по сравнению с
символами предыдущего блока.
Для полного определения ПМВ необходимо найти значение
бтах. Поскольку ПМВ, кроме равенств (3.81), (3.89), должны
удовлетворять равенству (3.82), то длина максимального блока
должна дополнять сумму 2 kAk до значения N. Например, если
k=\
Л/"=16, М0 = 8У то Ai = 4, Лг —2, Лз=1, при этом блока длиной k=4
быть не может, а должен быть блок длиною & = 5, т. е. Л4==0, Лб^
= 1. Следовательно,
*max=^£>Afe. (3,92)
78
Число ПМВ определяется числом вариантов чередования блоков
разной длины при совпадении их вероятностей и числом таких
совпадений. Так, при совпадении вероятностей Q различных блоков
количество вариантов их чередования равно Q!. Следовательно,
общее число последовательностей L можно определить по
формуле
L = Q1\Q2\Q3\...y (3.93)
где Qi —число различных длин блоков, Q2 — число различных
длин блоков k таких, для которых Л&^2, Q3 — число различных
длин блоков k таких, для которых L&^3 и т. д.
Для случая М=М0 и 6 = 0 или 6=1 (6=1 для M0=N/2+l)
формула (3.93) может быть представлена в виде
L= (log. Af0+ 1)!10&П i~W1Afe-mW,m-\ (3.94)
где М определяется согласно (3.81).
По этой формуле при 6 = 0 и 6=1 для N=16 имеем 96
последовательностей, для N=32-I-5760 последовательностей, для N=64
приблизительно 3,3-106 последовательностей. Таким образом, с
ростом N количество ПМВ быстро растет. Кроме того, для каждой
последовательности можно построить обратную и инверсную
последовательности, а также использовать их циклические
перестановки.
В табл. 3.18 приведены 48 последовательностей максимальной
вероятности в виде записи длин блоков для ЛГ=16, М0=8 и 6=0.
Таблица 3.18. Последовательности максимальной вероятности
с W=16, Л10 = 8, 6 = 0
11211235
11211253
11211325
11211352
11211532
11211523
11212135
11212153
112135,12
11213521
11215123
11215132
11215213
11215231
11215312
11215321
11122315
11122351
11122513
11122531
11123125
11123152
11123215
11123251
11212315
U212351
11212513
11212531
11213125
11213152
11213215
1 11213251
11121235
11121253
11121325
11121352
11121523
11121532
11122135
11122153
11123512
11123521
11125123
11125132
11125213
11125231
11125312
11125321
Для ПМВ табл. 3.18 были рассчитаны АКФ и определены
статистические характеристики модулей боковых пиков. В табл. 3.19
приведены статистические характеристики ПМВ. В этой же
таблице приведены характеристики ^-последовательностей и
случайных последовательностей. В табл. 3.19 приведены границы модуля
максимального бокового пика \Rmax\VN, среднее т\&\У~ N и
среднеквадратичное <х|я| значения.
Как следует из табл. 3.19, ПМВ обладают статистическими
характеристиками, близкими к характеристикам наилучших
последовательностей, а именно ^-последовательностей. В то же время
79
Таблица 3.19. Статистические характеристики АКФ ПМВ
Тип последовательности
Последовательности максимальной
вероятности
^-последовательности
Сегменты ^-последовательностей
Случайные последовательности
Статистические характеристики
*тах V*
0,75...2,0
0,7...1,25
1,45...4,1
2,1...3,5
т,д, VN
0,35
0,32
0,52
0,56
«|*| УТ
0,33
0,4
0,9
0,43
число их существенно больше числа ^-последовательностей.
Процедура формирования ПМВ достаточно просто
алгоритмизируется, что позволяет получить регулярные правила формирования.
3.8. Многофазные сигналы. Сигналы Фрэнка
Символы сигналов Фрэнка ап, п=Л, N [21] определяются следующим
образом:
где
£ = exp(i2jtp/M), (3.96)
М — простое. число, р — число, взаимно простое с М> а произведения v\i
определяются квадратной матрицей порядка М:
10 0 0
0 1 2
0 2 4
В =|| v|i||
0
М—\
2(Af—1)
(3.97)
|0 (М— 1) 2(М— 1) .. (М— 1)2I
Каждый элемент матрицы В есть vji, v, jx=0, 1, ..., М—1, v — номер строки, [i—
номер столбца. Общее число элементов матрицы и символов в сигнале N=M2.
Номера элементов по индексу.п исчисляются, начиная с левого верхнего (я=1),
по строкам, выписывая строку за строкой. Номер символа
я — vAf + ii+l. (3.98)
Последовательность символов в сигнале в записи по правилу
присоединения выглядит следующим образом
{6«»|61м|6*д...|6<м-1)м}, „в0,1 N1—1. (3-99)
Фазы символов сигнала Фрэнка в соответствии с (3.95), (3.96), (3.97)
(3.100)
80
ew««(2wP/Aflv|i.
R(m) =
-с
(3.101)
Например, при М—Ъ и p=il
0оо 0oi 602 6ю 6ц 612 в2о 62i 622
0 0 0 0 2я/3 4я/3 0 4я/3 8я/3.
Периодическая АКФ сигналов Фрэнка имеет нулевые боковые пики, т. е.
1 при т кратном М,
[0 при т не кратном М.
Для апериодических АКФ максимальный боковой пик обычно не
превосходит 1/]/1\Г—1/М, т. е.
Rmax^l/1/TV. (3.102)
Расчеты показывают, что для реальных сигналов максимальные боковые
пики меньше, чем оценка (3.102). В табл. 3.20, составленной по результатам [21],
приведены известные уровни максимальных боковых пиков.
Как видно из нижней строчки табл. 3.20 оценка (3.102) для N"^9 примерно
в 3 раза больше реальной. Поэтому для расчета приближенно можно полагать
Ятах«1/ЗУ^.
Таблица 320. Оценки максимальных боковых пиков сигналов Фрэнка
JV
м
■fvmax
■1/Т/лГ
1/УЙ/#тах
4
2
0,25
0,5
2
9
3
0,11
0,33
3
16
4
0,088
0,25
2,8
25
5
0,064
0,2
3,1
36
6
0,055
0,167
3,2
49
7
0,046
0,143
3,1
64
8
0,041
0,125
3,05
Тело неопределенности непериодического многофазного сигнала,
определяемого последовательностью (3.99), близко к телу неопределенности сигнала с
линейной частотной модуляцией, что определяется квазиквадратным изменением
фаз символов сигналов Фрэнка.
Многофазные сигналы класса р [22]. Фазы символов многофазных сигналов
р определяются следующим соотношением:
ev|i=— (n/M)(M—2v— \)(vM + \i). (3.103)
Для М=3
0оо vqi 602 9ю Оц 012 "20 021 022
0 — 2я/3 — 4я/3 0 0 0 2я/3 2я/3 4я/3.
Апериодические АКФ многофазных сигналов р имеют малые боковые пики.
81
Для многофазного сигнала с Л!=9, т. е. W=81, максимальные пики АКФ
равны, примерно, —28 дБ, что на 9 дБ меньше уровня 1/V N.
Многофазные сигналы — аналоги ЧМ сигналам. Многофазные сигналы
можно построить то аналогии с частотно-модулироваиными (ЧМ) сигналами. ЧМ
сигнал приближенно можно представить в виде последовательности
радиоимпульсов с мгновенной частотой, линейно изменяющейся в течение импульса.
На рис. 3.27 изображена зависимость фазы 9 от t ЧМ сигнала, длительность
которого равна Т. Согласно рисунку сигнал разбит на N импульсов
длительностью т0=77ЛГ. Принята следующая нумерация импульсов: 0, 1, ..^ N —1.
1№1\
Ofi
Ofi
Ofi
0,2
Г
1
I
1
\\р
AS =24
54
\*
^-\
о>
Д
Г
^
ц/к.
Рис. 3.27. Фаза ЧМ сигнала
Ог2 Ofi Ofi' Ofi «/Г
Рис. 3.28. АКФ КЧМ сигнала
(сплошная линия) и МФ сигнала
(штриховая линия)
Заменим непрерывную функцию 9(0 линейно-ломанной, значения которой
совпадают с 9(0 в точках, кратных т0. Обозначим
9п=9(/гт0) при /г=0, 1, ..., N—\. (3.104)
В качестве начальных фаз многофазного сигнала целесообразно брать
средние значения фаз соседних отсчетов, т. е.
вфп = (вп + в„+1)/2. (3.105)
Если в качестве аналога взять сигнал с линейной частотной модуляцией
(ЛЧМ), то начальные фазы многофазного сигнала согласно (3.105)
Ьп=-- — (п* + п),
(3.106)
где п — номера имиульсов, л=0, N—.1. Модуль АКФ многофазного сигнала
(3.106)
1*<1*>1=^Г
(3.107)
| sin Л|л (1 — ц/N) |
I sin n\i/N
Если в качестве аналога взять сигнал с квадратичной частотной
модуляцией (КЧМ), то начальные фазы многофазного сигнала
фн
яЛГ / 2/i
(-Ь'Г
(3.108)
82
На рис. 3.28 приведены графики модулей АКФ при N=24 для КЧМ
сигнала (сплошная линия) и для многофазного сигнала (штриховая). Как видно
из рисунка, отличие между ними незначительное.
3.9. Амплитудно-фазоманипулированные сигналы
Уменьшения боковых пиков можно добиться, вводя дополнительную
амплитудную манипуляцию. Свойства амплитудно-фазоманипулированных (АФМ)
сигналов и их АКФ целесообразно определять через спектр кодовой
последовательности (3.9). АКФ произвольного ФМ сигнала определяется через спектр
кодовой последовательности Н(х) следующим образом:
j Я
*(|1) = "£57 Ля<*>12е1|А***' (-ЗЛ09>
где *=сдт0, а
N
#(*) = 2a»e~~i(n~1)*- (злю)
п=1
Положим согласно (3.15) |#(х)|=Т/^- Подставляя (3.15) в (3.109), получаем
*<HJ 171: (зш)
т. е. АКФ состоит из одного основного пика и не имеет боковых пиков.
Такая АКФ является идеальной с точки зрения подавления боковых пиков.
Выясним, какие сигналы характеризуются АКФ (3.111). Для полного
определения сигнала кроме модуля амплитудного спектра (3.15) необходимо знать
(или определить) и фазовый спектр кодовой последовательности 'ф(х). Из
формулы (3.110) с помощью преобразования Фурье получаем
ап = -г~ n\H(x)tmUx^^- U{*W+Xn*dx. (3,112)
2п-л 2п -я
Если экспонента exp [iif (x) ] может быть разложена на конечное число
гармоник с периодами, кратными 2я, то согласно (3.112) существует конечное
число символов апфО. Это означает, что боковые пики АКФ сигнала
отличны от нуля, или, по крайней мере, всегда /?w-i=awai¥=0, так как а\ф0 и
cln = 0. Поэтому АКФ может быть только у сигналов, состоящих из бесконечно
большого числа импульсов. Следовательно, реализовать АКФ (3.111) нельзя.
Однако из теории рядов Фурье известно, что амплитуды гармоник при
достаточно больших п начинают уменьшаться и асимптотически стремятся к нулю.
Поэтому символы ап (3.112), соответствующие краям сигнала, оказываются
малыми и начиная с некоторых n(n<Nu n>N2) их можно отбросить. Но при
этом из-за конечного числа импульсов в сигнале нарушается свойство (3.111),
т. е. боковые пики не являются тождественно равными нулю. Выбирая
амплитуду отброшенных импульсов, можно регулировать уровень боковых пиков
АКФ: чем меньше по амплитуде краевые импульсы в сигнале, тем меньше
боковые пики. Это означает, что для большего подавления боковых пиков
необходимо увеличивать длительность сигнала.
Рассмотрим, как преобразуются формулы (3.109), (3.112) при бесконечном
83
числе импульсов в сигнале. Предположим, что сигнал состоит из бесконечного
числа импульсов с амплитудами ап. Обозначим
n= 2 i*»i2 (ЗЛ13>
Л=— оо
и допустим, что N — конечно (это соответствует конечной энергии сигнала).
Тогда выражение (3.109) запишется в виде
1 °° *
'— оо
При ц=0 значение основного пика /?о=1. Спектр кодовой
последовательности
#(*)= S a*exp(— in*), (3.114}
Я=—оо
а АКФ /?(ц) и символы ап определяются через спектр кодовой
последовательности (3.114) в соответствии с (3.109), (3.112). При бесконечном числе
импульсов величину N (3.113) можно условно определить как «число» импульсов
в АФМ сигнале.
Сигнал, которому соответствует идеальная АКФ (3.111), состоит из
бесконечного числа импульсов. Отсчет номеров импульсов будем вести от
середины сигнала, где /г=0. Реальный сигнал всегда состоит из конечного числа
импульсов N, которое для простоты расчетов будем считать нечетным.
Обозначим Ni — 0y8(N—1). Тогда величины ±#i представляют номера крайних
импульсов в сигнале.
Известно, что при отбрасывании краевых импульсов с |/i|>#i в АФМ
сигнале максимальные боковые пики АКФ удовлетворяют следующей оценке:
Ятах .<*«/*. (3.115)
где к=атлх/а — пик-фактор АФМ сигнала, аШах — значение модуля
максимального по величине символа, а — среднее значение модулей символов сигнала»
а=\ая +i\/a—отношение модуля первого отброшенного символа с номером
N+1 к среднему значению а, / — номер производной функции ехр[гф(х)],
терпящей разрыв непрерывности.
Согласно выражению (3.115) для уменьшения боковых пиков следует, во-
первых, уменьшать пик-фактор сигнала к, т. е. делать сигнал более постоянным
по амплитуде (равномерным). Отметим, что минимальное значение отношения
к равно единице. Во-вторых, уменьшать а — относительную амплитуду первого
отброшенного импульса на краях сигнала, т. е. использовать более мелкую
структуру на краях сигнала. При такой структуре сигнала увеличивается его
длительность (соответственно и сложность согласованного фильтра) без
существенного увеличения его энергии, что является недостатком. В-третьих,
следует увеличивать номер / производной функции ехр [гф (х) ], терпящей разрыв.
АФМ сигнал с квадратичным фазовым спектром. Исследования показали,
что указанным условиям наилучшим образом удовлетворяет сигнал с
квадратичным фазовым спектром
*W=U (iv*)(*+«*) -«<*<о. (3116)
где Do — постоянная.
84
Во-первых, при таком выборе устраняются разрывы функций ф(*) н $'(х)~
Так как устранить разрыв ф"(х) нельзя, то значения \ап\ на краях сигнала»
уменьшаются не быстрее, чем 1/л3. Во-вторых, фазовый спектра
соответствующий (3.116), обладает симметрией относительно точек х—±я/2. При этом*
а-п=(—1)пЯп, т. е. вычисление сигнала упрощается. Огибающая такого
сигнала изменяется по косинусоидальному закону, т. е. пик-фактор равен, примерно,
"1/57 Символы такого АФМ сигнала определяются следующим выражением:
+UM-»wi«[f ("+XD,>' }}■
(3.1171
где 2i=(n—0,5/>o)/VA), 22= (n+0,5D0)/VDQi C(z), S(z) — интегралы
Френеля. Асимптотически можно показать, что основная часть сигнала изменяется
следующим образом:
я(п + 0,5£0)2
an = VW]D~Qcos\-
2£>о
т]-
(3.118),
Уровень АКФ такого сигнала определяется оценкой
«тах = а/У2"=а(|Пв1/УА,)/У2, (3119)
где а зависит от амплитуды первого отброшенного символа, -а ло= (N—Д>4-
4-1)/2 — число импульсов, оставшихся на краях сигнала. Функция а~1 =
= |n0|/V^o — обратная функция к а. Параметры, входящие в (3.117) —(3.119),
связаны уравнением
D0 =* N + 1 + 2 [ а-1 (У 2 /?max)]2—
-2а-1 (УЗГ *max)V N + 1 +1 а"1 (У 2 #max)]2. (3120*'
Рассмотрим пример расчета сигнала. Пусть N=21, Яшах=6-Ю-2. Для
У2/?тах=0,085 имеем а~1 = |/г0|/У5^=0,8. Подставляя N=21 и а-1=0,8 в*
(3.120), получаем £>0= 15,68. Округляем полученный результат до ближайшего*
W
щ
9)
Г «-
Рис. 3.29. АФМ сигнал с квадратичным фазовым спектром и его АКФ
четного числа: £>0=16. Для такого D0 по формуле (3.117) был рассчитан
сигнал, который изображен на рис. 3.29,а. На рис. 3.29,6 представлена АКФ
рассчитанного сигнала. Максимальный боковой пик автокорреляционной функции
равен З-'Ю"2, т. е. меньше заданного. Непосредственный расчет показывает, что*
85
по сравнению с энергией сигнала, имеющего равномерную огибающую при
ограниченной пиковой мощности и N=21, энергия сигнала с квадратичным
фазовым спектром в 2,3 раза меньше, т. е. пик-фактор сигнала равен 1,52, что
несколько превышает пик-фактор косинусоиды, равный "j/2. Недостатком таких
сигналов является неравномерность их огибающей.
АФМ сигналы с трехимпульсной АКФ [23]. Если сигнал состоит из
конечного числа импульсов, то его АКФ имеет по крайней мере два боковых пика,
расположенных на ее краях, поскольку эти пики определяются произведением
первого и последнего импульсов и ничем не компенсируются. Известно решение
задачи синтеза АФМ сигнала, АКФ которого имеет только эти два неизбежных
боковых пика. Решение этой задачи основано на использовании оператора
задержки и свойств многочленов.
Пусть сигнал состоит из N+\ импульсов и определяется кодовой
последовательностью
{ап} = а0, ах ап aN, (3.121)
Формально можно ввести оператор задержки Д который задерживает импульс
на время т0, равное задержке между соседними импульсами. Например, если
взять импульс u0(t), то D[uo(t)]=uo(t—то). В таком случае, кодовую
последовательность (3.121) можно записать в виде многочлена
A(D)=±a0 + a1D+...+anDn+...+aNDN, (3.122)
каждое слагаемое которого действует на своем временном интервале.
Представление последовательности (3.121) в виде многочлена (3.122) позволяет
рассматривать D как независимую переменную и использовать для решения задач
синтеза сигналов свойства многочленов.
Импульсная характеристика согласованного фильтра описывается
многочленом
A'1 (D) = aN + aN_lD+.. +an DN~n +... + a0DN. (3.123)
Для того, чтобы определить АКФ, необходимо ввести многочлен
B(D)=A~l(D)DN. (3.124)
Можно показать, что имеет место соотношение
N
A (D) B(D)=(N+1) 2 Я (|i) D» , (3.125)
где АКФ
I N
*0*) = д, , 1 S апап-» ПРИ И = °. N>
a *(~|i)-*(|i).
Идеальной является такая автокорреляционная функция, для которой
R(\i)=0 при всех \i, кроме |х=0 (основной пик) и \i±N (два крайних боковых
лика). Обозначая
N
Я=2 KI2, (3.126)
п=0
86
получаем произведение многочленов
A (D) В (D) = а0 aND-N+E + aNaoDN, (3.127)
соответствующее идеальной АКФ.
Известно интересное представление (3.127) в виде произведения двух
многочленов, которые в принятых обозначениях записываются как
A (D) В (D) = -(DN — 9N) (1 —D~N 9~N) (3.128)
или
A (D) В (D) = (DN + р") (1 + DT-* р-"). (3129>
Перемножая правые части (3.128) или (3.1129), можно убедиться в их
совпадении с правой частью (3.127), если положить, что |а0а#| = 1, a £=p^+p-*v.
Синтез сигнала сводится к определению корней di многочленов DN—р^ и
1—Л-*р-* или DN+pN и \+D-Np~N:
di=pexp(i2nllN) и dz=p-1 ехр(—i2nl/N), /=0\
ш
Корни di и di являются комплексно-сопряженными. Графически их можно
отобразить на комплексной плоскости (рис. 3.30, N=13). Корни di расположены
на окружности радиуса р, а номер / определяет угловое положение корня,
поскольку окружность делится на N одинаковых секторов.
••
••
••
•••••
Ч
• •
J
Рис. 3.30. Корни
многочленов задержки, N=3
Рис. 3.31. Случайное
распределение корней
В свою очередь корни d\ расположены на окружности радиуса р-1. Из всех
2N корней половина принадлежит многочлену A{D) (черные точки на рис. 3.30).
Часть из них расположена на внешней окружности, часть — на внутренней.
Каждый сопряженный корень расположен на другой окружности и
принадлежит многочлену B(D) (светлые точки на рис. 3.30).
Синтез сигнала сводится к нахождению радиуса р и распределению всех
2N корней между многочленами A(D) и B(D). Как р, так и 2N определяют
временную структуру сигнала. Например, если р=1, то корни полиномов A(D)
и B(D) совпадают, так как располагаются на одной окружности. Поэтому
A(D)=DN—1, т. е. сигнал будет состоять из двух импульсов, расположенных
на его краях. При очень большом р вся энергия сигнала сосредоточивается в
одном импульсе.
В настоящее время аналитический метод определения р и распределения
корней еще не найден. С помощью ЭВМ было промоделировано случайное
распределение корней на окружности. На рис. 3.31 приведено распределение кор-
87
«ей одного из многочленов при #=100. На рис. 3.32,а представлен сигнал,
которому соответствует полученное распределение корней (рис. 3.31), а на рис.
.3.32,6 —его АКФ. Подавление боковых пиков на краях АКФ равно 25,64.
Переход от АФМ к ФМ сигналам. Если произвести двоичное квантование
ло уровню АФМ сигнала (3.117), т. е. получить а* = + 1 или —I,, то АКФ
полученного ФМ сигнала будет обладать большими, но все же достаточно малыми
«боковыми пиками.
Rtfi
ю
~ЧХ
Рис. 3.32 АФМ сигнал с трехимпуль-
сной АКФ
Рис. 3.33. АФМ сигнал (а), ФМ
сигнал (б), АКФ ФМ сигнала (в)
На рис. 3.33,а изображен АФМ сигнал с квадратичным фазовым спектром
при W=37, рассчитанный по формулам (3.117). Максимальный боковой пик его
АКФ равен 1,5%. На рис. 3.33 представлен соответствующий ему ФМ сигнал,
полученный согласно двоичному квантованию, АКФ которого приведена на
рис. 3.33,в. Максимальный боковой пик такой АКФ равен 5/37=0,135, что
несколько меньше il/]/W==l/|/37. Таким образом, при переходе от АФМ сигнала
к ФМ боковые пики АКФ увеличились примерно на порядок, но все же
остались малыми.
Можно показать, что среднеквадратическое значение боковых пиков АКФ
этаких ФМ сигналов при оптимальном выборе их параметров
oR = 1/V(1— 2Т/2/я)/^= 0,913/VF» 1/УлГ. (3.130)
Оценка (3.130) показывает, что подобные ФМ сигналы можно отнести к
оптимальным (или минимаксным) ФМ сигналам.
3.10. Минимаксные ФМ сигналы
Такие ФМ сигналы, у которых максимальные боковые пики
АКФ минимальны, были получены некоторыми исследователями
[24... 30]. В табл. 3.21 [30] приведены краткие сведения о
минимаксных ФМ сигналах, полученных как на основе символов Ле-
88
^:^^^<^С2?0>0^фСЛСЛСлелСЛ^^^^^4*4*СОСОСОСОСОСОСОЮМ
С0 10^0^0>адн-ОФООСЛ^КЭ^О>СЛСОЬО^О^^^С0 10н-ОФОО^О>СЛ^СОЬО^О
О^О^СЛО^СЛО^О^СЛСЛСЛСЛСЛСЛ^4ьСЛ^4ьСЛ4ь4ьф>4ьСОСОСОСОСОСОМ
to to to to to to to to to to to to to to to tototo to
to to to to to to to to to to to to to to ю to to to to
CQCOCO<OCO<QCOCOCOCO
to to
tOCD tO tOtOSO CO
МЬ5ЮММ^и.мммммм»-ммммммммммммн-ммми.мммммммммм
cotototo^-cotococooo*vj--aa>05cnoi»»*.cococococototototoN3H-b-h— мк-н-оооооооо<оо«о^^Фовоооодедо^^
соф^со^<о^со^ь-фсо^со^ь-фф^о>ь-©^о>слсо^ф^слсомн-©оо^съсо1о^оф^о^слс^
CO
to
^-»-OOOOOOtOOtO<£)00<OOOOO^OOCO<000^4t040»-O^^SOOtOOOOOS00000005444400000005SlSO)^0)0)
X
cowcococowcococowcowwcococowcowcocowcoco
oooo о oooooooooo о oooooooooo oooooooooo oooo о ooooooooooooooooooooooo
I
я
to*
^00^а>СЛ^СЛО^О^а5О^СЛО^^СЛСЛСЛСЛСЛО^СЛСЛ^4^4^4^СЛО5^
WWWWWWWWWWWWWWWWWWWWWWOOWWWWWWWWWWCOWbOWWM
OOOOOOOOOOOOOOOOOOOOO OOOOOOOOOOOOOO00 000000 OOOOOOO0000O00 00 OOO
^СОСОСО^Чаа^-^-СО-^^СОСО»--*»!»—СаЭ^СО*>4^СО>-*»-- CA3"^0a*-*COCO*slCOH-N-i to^GO^^—tOCO-sl^»—<OG0-*l-*l>—C0>—C0»—С
z
■е-
з
towbDKDMtoiowtotototototototototototototototototototOH-toto^to^H-h3H-H^
COtO^OtOKDtOtOCOCOCOtOH-io^H-H-iotOtOH-O^^OO^O^O^^OOOCOO^^OtO<0<0*-4^tOOOOOOOCOOO-^H-to^
gggggggggggggggggggggggggggggggggggggggggggggggggggggg
Окончание табл. 3.21
N
859
863
377
881
883
887
901
907
911
V
22
23
23
23
24
24
26
24
23
11
30
30
30
30
30
30
30
30
30
N
919
929
937
941
947
953
! 967
971
977
V
22
27
25
25
24
25
25
24
26
[] .
30
30
30
30
30
30
30
30
30
N
983
991
997
1009
! 1023
3989
4001
4003
4007
V
26
25
26
25
29
57
68
64
55
[]
30
30
30
30
28
30
30
30
30 1
N
4013
4019
4021
4027
4049
4051
4057
V
57
56
60
65
66
70
71
[]
30
30
30
30
30
30
30
жандра и родственных им, так и с помощью различных методов
синтеза. В [30] обобщены результаты ряда работ. В столбце N
указана длина соответствующего сигнала, в столбце
V—максимальный ненормированный боковой пик АКФ, и в столбце [ ] —
номер работы, где приведены подробные данные по данному ФМ
сигналу. Боковой ПИК V—дта
XN. Соответственно Rmax= V/N.
/
У ..
> 1 1 t I I I I I t 1 1 1 I i'i Г I I I I I I I I I 1 I I I I I м I м 1
и 100 200 300 400 500 600 700 800 300 N
Рис. 3.34. Зависимость максимальных пиков АКФ — минимальных ФМ
сигналов от длины последовательности
На рис. 3.34 [30] представлена зависимость максимальных
боковых пиков АКФ минимаксных сигналов от длины
последовательности N, построенная в соответствии с табл. 3.21. Как следует из
рис. 3.34, максимальные пики минимаксных сигналов меньше
0,9 VN.
В табл. 3.22 приведены некоторые минимаксные ФМ сигналы
и близкие к ним, полученные методом синтеза [28, 31].
3.11. Оценки апериодических АКФ
Одной из первых интегральных оценок АКФ является оценка
полученная из ограниченности объема тела неопределенности
(2.34) на плоскости время — частота. Полагая объем тела неоп-
90
Таблица 3.22. Минимаксные ФМ сигналы
N
16
17
19
23
31
43
47
53
61
V
2
2
3
3
3
4
4
5
5
Последова гелыгость
0 0 0 0 111
0 1 0
1110 0 0 0 0 0 1
110 110 1
110 10 0 1
10 10 0 10
1110 111
10 10 0 0 1
10 0 0 111
1111111
0 0 110 0 1
0 10 10
0 0 11111
0 0 1110 1
10 10 10 1
1 10 0 0 0 1
110 0 0 11
10 110 10
1 1 0
0 0 0
1 1 1
1
0 1 1
0 0 1
10 0 10 0
0 10 0 110
1110 0 0 111
1000100000111
1100001100110
10 00000100100
110 10 0 10 10
10000111100011
101iai loiooioi
1000000110000111
1011011011011100
00010110000101100
11111010110000011
1110 0 1
1101111110111001110111
110101100010010101011011
97 7 011100000101100001011100
011010111010001010011111
0 0 10
000111111111110001000 11
110000011111000111000111
00011101110011001100110
110011011011011011011010
110101101011010100101010
10 10 110
125 7
10011101111. 1111011000000
000001111111000001111111
100000111110001111000001
10 000111001111000111000
1100111000110011000
01001100010 011001000 1100
110110011011001111101101
101101101101101101101001
011010010100101001010010
101101010101101011101001
01010101010101010
251 13
91
Окончание табл. 3.22
N
Поел едова тел ьвость
513 21
0 0 10 0
10 10 1
0 10 0 1
0 110 1
10 10 1
10 10 1
10 110
0 10 0 1
0 1111
10 110
0 110 1
0 110 0
10 0 11
10 0 11
10 0 0 0
10 0 11
10 0 0 1
0 1110
1110 0
0 1111
1110 0
1110 0
0 0 0 11
11111
0 0 0 0 0
10 111
0 1 1
0 0 1
0 0 0
0 1 О
1 0 1
10 1
1 О О
0 0 1
1 0 1
0 1 О
1 О О
1 1 О
0 0 0
0 0 1
1 1 О
1 О О
1 О О
О 0 1
0 0 1
1 О О
0 0 0
0 0 0
1 1 О
1 1 1
1 1 1
1 1 1
О 0 1
0 0 0
1 0 1
1 О О
О 0 1
0 1 О
1 О О
О 0 1
0 0 1
1 1 О
1 О О
0 1 О
1 О О
1 О О
О 0 1
1 1 1
0 1 1
1 1 О
I 1 1
О 0 1
II 1
0 1 1
1 1 1
1 1 О
1 1 1
1 1 1
О 1 О
о
0 1 1
1 0 1
О 1 О
0 1 О
1 0 1
0 1 1
1 0 1
1 1 О
1 1 О
0 1 1
1 1 О
О 1 1
0 0 0
0 0 1
1 О О
0 0 0
0 0 0
1 1 О
1 1 О
1 1 1
0 0 0
0 0 0
1 1 1
1 1
1 О О
О 1 О
О 1 О
О 1 1
0 0 0
0 1 О
1 0 1
О 1 1
О 0 1
0 1 О
1 1 О
О 0 1
О 1 1
О 0 1
О 1 О
1 О
1 1
1 1
1 1
О 1
0 0 0
1 1 О
0 0 0
0 0 0
1 1 1
0 1 О
1 0 1
1 0 1
0 1 О
1 0 1
1 О О
О 1 1
0 1 1
1 0 1
О 1 О
0 1 1
1 О О
0 0 1
1 О О
О 1 1
0 0 1
1 0 1
0 0 1
1 О О
О 1 1
О 1 1
0 0 0
0 0 1
1 О О
1 1 1
ределенности равным единице, можно показать, что
среднеквадратическое значение функции неопределенности (ФН)
аФН = 0,5/К^ (3.1311
Это значение в ] 1J раз меньше среднеквадратического
значения АКФ случайных сигналов
аАКФ= l/j/Ж" (3.132)
Как показывают многочисленные расчеты,
среднеквадратическое значение АКФ многих ФМ сигналов близко к (3.132) и лишь
путем оптимизации с помощью ЭВМ можно несколько снизить
этот уровень (см. табл. 3.13, 3.18, 3.21, 3.22).
Известна [32, 33] нижняя оценка среднеквадратического
значения АКФ, полученная на основе статистических методов:
= 1/V2HN
(3.133)
"АКФ min
где парамер #« 12,32. Оценка (3.133) дает среднеквадратическое
значение АКФ в 3,5 раза меньше (3.132) для случайных сигналов.
Такое значение у реальных ФМ сигналов не было получено.
Исключением могут быть многофазные сигналы.
Несмотря на то, что практически для каждого значения N в
92
пределах 11 ... 1009 известны минимаксные последовательности
[24—31], у которых максимальные боковые пики минимальны, тем
не менее проблема построения таких последовательностей
окончательно не решена. Известные минимаксные сигналы имеют
максимальные боковые пики порядка (0,6... 0,9)/К#, что близко к
среднеквадратическому значению для случайных сигналов (3.132).
Если положить, что максимальные пики АКФ случайных сигналов
не превышают утроенного среднеквадрэтического значения, то у
минимаксных сигналов боковые пики в 2,1 ...3,5 раза меньше, чем
у случайных.
4. СИСТЕМЫ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ
4.1. Многоканальные системы связи
с кодовым разделением абонентов и системы сигналов
Многоканальные автономные системы (MAC) связи служат
для обеспечения обмена информацией между абонентами, когда
по некоторым причинам нельзя применять централизованное
объединение абонентов. Такими причинами могут быть размещения
абонентов на большой территории, случайность размещения
абонентов, большие скорости движения абонентов, необходимость
обеспечения большей надежности и живучести по сравнению с
многоканальными централизованными системами (МЦС) и т. д.
В этих случаях MAC может быть только асинхронной по
времени, так как осуществить синхронизацию в перечисленных
случаях практически невозможно. По этой причине в MAC нашли
применение частотное уплотнение и разделение (ЧР) и кодовое
уплотнение и разделение (КР).
При ЧР каждому абоненту отводится свой частотный интервал
(абонентская полоса частот) в пределах общей полосы частот. В
этом случае передатчики и приемники пары абонентов, ведущих
обмен информацией, должны быть настроены на частоты
выделенных интервалов. Поскольку другие абоненты в этих частотных
интервалах не работают, то прием информации осуществляется без
взаимных помех. Максимальное число активных абонентов в
системе равно общему числу абонентов и определяется как
отношение ширины общей полосы частот F& к ширине абонентской полосы
Fa, т. е.
£чР=='7й/'7а-
Если все абоненты работают одновременно, а ширина
абонентской полосы Fa равна ширине спектра передаваемого сообщения
Fc, то отведенная полоса частот используется полностью. При этом
число абонентов на единицу полосы максимально и равно 1/FC.
При ЧР реальная ширина абонентской полосы F^Fc. Кроме
того, при малой активности абонентов число активных абонентов
93
U намного меньше максимального числа активных абонентов в
системе /а max, т. е. при этом общая полоса частот используется
плохо.
С увеличением числа абонентов возникают серьезные
трудности распределения полосы частот между ними. Следует заметить,
что с некоторых пор число абонентских полос в большинстве
диапазонов частот много меньше числа возможных абонентов. Для
увеличения числа абонентов в системе связи целесоббразно
переходить к кодовому разделению.
Кодовое разделение основано на том, что каждому абоненту
выделяется свой (абонентский) алфавит сигналов (или кодовых
последовательностей), с помощью которого он передает
информацию. Разделение возможно потому, что сигналы различных
абонентов существенно отличаются по форме. При таком способе
разделения передаваемая информация снабжается адресом, роль
которого играют выделенные сигналы. Наличие адресов позволяет
реализовать асинхронный режим совместной работы многих
абонентов. По этой причине MAC с КР получили название
асинхронных адресных систем связи (ААСС).
Началом исследований по кодовому уплотнению и разделению
можно с полным основанием считать работу Д. В. Агеева [3],
опубликованную в 1935 г. В этой работе даны основы теории
линейного разделения, осуществляемого при использовании
линейно-независимых сигналов. При линейном разделении нет
взаимных (междуканальных) помех. При кодовом разделении в ААСС
имеют место взаимные помехи, которые являются следствием
одновременной работы абонентов в общей полосе частот. Однако при
кодовом разделении можно так выбрать параметры сигналов, что
уровень взаимных помех будет сколь угодно малым, т. е.
обеспечить заданную помехоустойчивость.
Как отмечалось ранее, ААСС основаны на использовании
кодового уплотнения и разделения абонентов (КР). При этом
требуемое для ААСС число сигналов равно произведению числа
абонентов на число сигналов в алфавите (полагаем, что все
абоненты используют алфавиты одинакового объема). Минимальное
число сигналов равно числу абонентов. Если число абонентов в ААСС
велико, то выбор сигналов является главным вопросом при
разработке ААСС.
Именно поэтому в настоящее время чрезвычайно актуальной
остается проблема построения систем ШПС. Системой сигналов
называется множество сигналов, определяемых единым правилом
построения (алгоритмом). Если число сигналов в системе равно
L, то L называется объемом системы сигналов. Принято
сравнивать объем системы сигналов L с базой ШПС 5. Различают
малые системы сигналов с L— У"В<С5, нормальные (ортогональные
или квазиортогональные) системы сигналов с L«B, большие
системы сигналов cL>B.
Большинство известных систем сигналов являются малыми
или нормальными. Для современных систем связи необходимо
94
иметь системы ШПС, объем которых экспоненциально зависит от
базы, т. е.
L=cexpyB, (4.1)
где с, 7 — некоторые постоянные. Если такой закон реализовать
нельзя (таких систем в настоящее время нет), то необходимо
реализовать большие системы, объем которых растет по
степенному закону, т. е.
L = cBn, (4.2)
где с, п — постоянные, причем п>1.
Сигналы, входящие в систему, должны обеспечивать
минимально возможный уровень взаимных помех, который в основном
определяется допустимым уровнем максимальных пиков
взаимокорреляционных функций
Rm* = <*/VB, (4.3)
где а — пик-фактор ВКФ, в общем случае зависящий от 5. Чем
меньше а, тем лучше корреляционные свойства.
В настоящее время еще не существует алгоритмов построения
больших систем ФМ сигналов, у которых пик-фактор КФ достигал
бы значений нескольких единиц. Например, если 5=104, то
может оказаться необходимой система с L=108... 1012 и а«2,... ,5.
Но такие системы пока что неизвестны, хотя факт их
существования не отрицается. Именно поэтому в настоящее время
существует следующая нерешенная проблема — разработка
алгоритмов построения больших систем ФМ ШПС с хорошими
корреляционными свойствами. Алгоритмы построения систем ФМ
сигналов должны быть детерминированными, поскольку сигналы
должны быть известными в точке приема.
4.2. Полный код
Известны пределы любой большой системы ШПС — так
называемые полные коды. Полный код — это система сигналов,
состоящая из всех сигналов данного класса при заданном алфавите
символов и числе символов в сигнале. Алфавит символов — число
различных символов, из которых состоит сигнал. Полный код
нельзя увеличить, он включает в себя все возможные сигналы.
Поскольку любая система ШПС является подмножеством
своего полного кода, то она должна обладать некоторыми общими
свойствами полного кода. Причем чем больше система, тем ближе
она по своим свойствам к полному коду. Именно поэтому
исследование свойств полных кодов имеет принципиальное значение для
изучения корреляционных свойств больших систем ШПС.
Полный код ФМ сигналов содержит
L=/ (4.4)
95
кодовых последовательностей, N — длина кодовой
последовательности, р — объем алфавита символов.
Полный код является группой (в алгебраическом смысле) и
обладает свойством ортогональности. Упорядочим
последовательности полного кода. Подставим в соответствие каждой кодовой
последовательности Aj= (uju —, cijn) число /, записанное в р-ичном
счислении, причем /=0, L—1, а объем полного кода L=pN.
Представим полный код в виде матрицы jtpjv:
*&==
«01
«02
«On
«OiV
«11 .
«12 •
«in •
d\N .
• • «71 •
. . «/2 •
• • «7'n •
. . «/W .
. . «L-l, 1
. . «L-l, 2
. . «L-l,h
. . «L-l.W
(4.5)
Каждая кодовая последовательность является столбцом
матрицы npN- Всего столбцов L, а строк N. Каждый столбец
получается из предыдущего вписыванием снизу 1, а первый столбец
(«оь #02 ...«oiv) =0 0...0 — состоит из N нулей. Например, при р = 3
N=1, 2, 3 имеем следующие матрицы:
10 001 1 122 21
0 1 2 0 1 2 0 1 2 Г
я? = |0 1 2|, я| =
(4.6)
я? =
00000 000011111
00011 122200011
0 1201 201201201
1 1 1 122222222 21
122200011122 2
201201201201 2|
В соответствии с правилом построения и примерами (4.6)
матрицу ji*>n+i можно представить в символическом виде следующим
образом:
0 1 ... p-lj
«J+l-
К
%
К
Здесь верхняя строка содержит столько символов 0,1 и р—1,
сколько содержится столбцов в матрице nvN. Из приведенных
примеров (4.6) и символической записи (4.7) видно, что каждая
строка матрицы tl?n содержит целое число периодов. Число периодов
/г-й строки равно рп"~1, /г=1,#. Длина периода равна Qn=p^"n+1.
Рассмотрим суммы вида
S(n, fc) = 2 aJn®aJh, (4.8)
где © — знак операции в группе. Ортогональность полного кода
заключается в том, что имеет место равенство:
[0 при п Фk,
[L при n=k.
96
S(/Z, *) = {<
(4.9)
Из периодичности строк матрицы я^ (4.5) следует, что
Среднее значение произведения любого числа несовпадающих
строк матрицы (4.5)
L-1
S(n, k,..., и)= J, a/n©a77le...©a;tt = 0.
/=о
ВКФ ФМ сигналов с номерами / и k согласно (3.22) определяется
следующим образом:
Rjk(v)=(l/N) J aMa*,„_„. (4.10)
В полном коде групповыми свойствами обладают и ВКФ (4.10)
при /, &=0, L—1, поскольку ajna*h,п-ц=а>т является элементом
алфавита, где т является одним из значений 0, р—1 и некоторой
функцией от /, k9 п, ц, т. е. /n=cp(/, k9 n9 \i). Подставляя ат в
(4.10) и отбрасывая индексы /, k, n, \i, получаем
R = (l/N)j]am. (4.11);
т
В (4.11) суммирование производится по всем т, число
слагаемых равно /г, причем 0^.n^.N. Последовательность Ат={ат}у
состоящая из п символов, является одной из последовательностей
полного кода объема pN. Поэтому сумма
№=|]ят (4.12)
т
является одной из возможных сумм полного кода. Сумма W (4.12)
называется весом кодовой последовательности. Число всех весов
W равно pN9 но число разных весов будет гораздо меньше.
Поскольку вес (4.12) и значение КФ (4.11) связаны соотношением
R=W/N, (4.13)
то знание распределения весов полного кода позволяет
определить статистические характеристики КФ. Максимальное число
различных весов равно CNN+V-U где Стп — биномиальный
коэффициент.
Определим n-й начальный момент периодической КФ (ПКФ)
R*:
ML /=0 k==Q ll=lXo
где L=pN — объем полного кода; суммы по / и k с множителями
1/L означают усреднение периодических КФ по всем
последовательностям полного кода, а сумма по \i с множителем 1/N
означает усреднение по сдвигам.
4—111 97
Заменяя в (4.14) КФ на вес согласно формуле (4.13), получаем
1 L-l L-l »0+N-l
;2 2 S «^М- (415>
Nn+lL2 £о£о £±ц.
Доказано, что среднее значение ПКФ mi=0, а дисперсия
o2=l/N. (4.16)
Для апериодических КФ среднее значение mi=0, а дисперсия
а2 = 1/2ЛЛ (4.17)
Полный код с основанием манипуляции /?=2 называется
полным двоичным кодом. Хотя он является частным случаем полного
произвольного кода с р>2, полный двоичный код имеет большое
значение по следующим причинам. Во-первых, многие
применяемые системы сигналов являются двоичными — они позволяют
широко использовать цифровую технику для формирования и
обработки. Во-вторых, для полного двоичного кода получены
некоторые дополнительные результаты, которые для р>2 в настоящее
время не известны.
Положим, что двоичный алфавит является мультипликативной
двоичной группой, т. е. состоит из символов 1 и —1. Поэтому
символы CLjn кодовых последовательностей равны 1 или —1.
Периодическая КФ содержит постоянное число слагаемых в своей сумме.
Пусть оно равно N. Произведение ajnakVi при любых /, ky л, jx
равно или 1, или —1. Вес кодовой последовательности (4.12) в
таком случае равен разности между суммой 1 и суммой —1. Пусть
число 1 в сумме (4.12) равно Q, а число —1 равно N—Q, так как
всего слагаемых в (4.12) N. В результате вес
W=2Q—N, (4.18)
причем Q = (UV". Если Q = 0, то W=— N, если Q=N, то W=N.
Шаг изменения веса равен 2. В соответствии с (4.13) КФ, если она
содержит N слагаемых, выражается следующим образом:
R**W/N~(2Q—N)/N. (4.19J
Число кодовых последовательностей, имеющих данный вес, т. е.
заданное число 1, находится как число сочетаний из N элементов
по Q и равно C<*N. Из (4.18)
Общее число кодовых последовательностей равно 2*. Вероятность
появления кодовой последовательности с данным весом, т. е. с
заданным значением КФ,
p(47) = C0/(W2-" (4.20)
Распределение (4.20) является биномиальным. Следует
учитывать только, что вес изменяется с шагом, равным 2. Так как КФ и
вес связаны соотношением (4.19), то распределение (4.20)
однозначно определяет распределение КФ.
98
Так как дисперсия ПКФ равна 1/N, то биномиальное
распределение можно аппроксимировать нормальным
w (Я) = К#/2яехр (—NR*/2). (4.21)
Соответственно для апериодических КФ приближенно можно
пользоваться нормальным распределением с дисперсией (4.17).
На рис. 4.1,а вертикальными линиями показано распределение
вероятностей p(W) для апериодических КФ. На рис. 4.1,6
вертикальными линиями представлено распределение весов в более
крупном масштабе. Кривые рис. 4.1,а и б изображают нормальный
закон распределения
w(W) =
T/nN
a-W*/N
(4.22)
с дисперсией o2w=:N/2. Такая дисперсия веса кодовой
последовательности соответствует
ш
т
W
дисперсии апериодической
КФ (4.17). Из рис. 4.1
видно, что наибольшие
отклонения распределения
вероятностей p(W) от
нормального закона имеют
место в центре и на краях.
Хотя такими отклонениями
в некоторых случаях
пренебрегать нельзя, но в
большинстве случаев можно
считать распределение весов
нормальным с плотностью вероятности
к значениям КФ, получаем
т
и
N
т
н
ш
-з -4 -г а г h ew
а)
пни
ца/6
UtUIZ.
ПППЙ
UJUUO
ПППй
(1
\
\
^
1
f 6 7 W
Рис. 4.1. Распределение апериодических
КФ полного двоичного кода
w(R) =VN/7texp(—NR2).
(4.22). Переходя от весов
(4.23);
Точное выражение распределения апериодических ВКФ
полного кода приведено в работе [34]:
»(*) = -£- \(0,5/\f2nNexp(-R*/N) +
N-I
+ 3 (1/"|/2япехр(—R*(n)
n=l
(4.24)
Так как среднее значение mi^O, то четвертый начальный момент
полного кода
М4= (2N*—2N* + N)/2N*.
Поскольку дисперсия равна 1/2N, то коэффициент эксцесса
y=Mjo*—3=1— 4/N+2/N2. (4.25)
Предельное значение у=1 при #->оо. Таким образом,
предельное значение коэффициента эксцесса полного кода больше нуля.
4* 99
Положительное значение коэффициента эксцесса свидетельствует
о том, что функция распределения должна быть «обострена» в
области малых значений R относительно нормального закона
(должна быть больше при малых R) и иметь большие значения на
краях (при /?->±1). Из рис. 4.1 видно, что характер распределения
вероятностей p(W) соответствует положительному значению
коэффициента эксцесса у. Таким образом, можно считать, что
характер распределения вероятностей при различных N будет близок
к представленному на рис. 4.L
Среднее значение КФ полного кода равно нулю, а дисперсия
o2=l/2N. Расчеты, проведенные для различных систем сигналов,
показали, что их дисперсии близки к дисперсии полного кода. В
табл. 4.1 приведены данные для систем ФМ сигналов двух
подклассов, которые будут более подробно рассмотрены в
дальнейшем: системы Уолша (У) и производной системы (П). Число
последовательностей равно числу символов N и указано в первом
столбце табл. 4.1. Например, для системы У—16 JV==16 и т* д.
Производная система для определенного N была получена из
системы Уолша путем посимвольного перемножения каждой
последовательности на производящую нелинейную последовательность
с тем же N.
Во втором столбце табл. 4.1 приведено предельное среднеквад-
ратическое значение a=l/|/2Af, а в третьем —
среднеквадрэтическое значение реальных систем. Сравнивая результаты второго и
третьего столбцов, видим, что они близки.
Если ввести переменную *=log2N, т. е. N=2X, то
у=-А-22~х + 21-2х. (4.26)
Зависимость (4.26) приведена на рис. 4.2. Точками снизу вверх
отмечены значения у для N=2, 3, 4, рассчитанные
непосредственно. Звездочками слева направо отмечены значения у для
производных систем П-16, П-32, П-64, приведенные в четвертом столб-
Таблица 4.1. Характеристики систем ФМ
сигналов
3
SS
°«
с£
к.к
У-16
П-16
У-32
П-32
У-64
П-64
Предельное
среднеквадра-
тическое
значение
0,177
0,177
0,125
0,125
0,0885
0,0885
Среднеквадра-
тическое
значение
системы сигналов
0,173
0,171
0,128
0,123
0,0885
0,088
ци-
цес-
емы
Ж о Н О
фа О Ч
л. в) S СО
gh°E
» a> о о
6,33
0,35
4,5
0,64
20
0,64
и
а
^
15
9
31
17
63
25
У
0,8
0,6
OJf
0,2
0
%б
%8
-1,0
Рис. 4.2. Коэффициент эксцесса
100
/ * f
Т/ Зё Г
0 1 2 J 4- 5 6 7 X
де табл. 4.1. Как видно из рис. 4.2, коэффициент эксцесса
производных систем близок к у (4.25), но все меньше, что является,
несомненно, достоинством таких систем сигналов по сравнению с
системами Уолша, у которых у^> 1.
4.3. Системы Уолша
Среди систем ФМ сигналов многие образованы на базе систем
Уолша.
Системам Уолша и их применению посвящено большое число
работ (см., например, [5]). Существуют различные и адекватные
определения систем Уолша. Для исследования систем Уолша с
точки зрения их корреляционных свойств целесообразно
использовать матрицы Адамара, которые определяются следующим
символическим равенством:
\hn hn\ (427J
tiN —nN\
где HN — матрица Адамара порядка N (число строк равно числу
столбцов N), a H2n — матрица Адамара порядка 2N. Полагая
#1 = 1, из (4.27) получаем следующие матрицы порядка 2, 4, 8:
#2iV =
#,
1
1
1
— 1
. tf«-
1
1
1
1
1
— 1
1
— 1
1
1
— 1
— 1
1
— 1
— 1
1
(4.28), (4.29)
Нл
(4.30)
Используя (4.27), можно найти матрицы Адамара для любого
Af=2w, где т — целое число. Матрицы Адамара известны не
только порядка N=2m, но и других значений N. В основном известны
матрицы Адамара порядка кратного 4. В табл. 4.2 [14] приведены
Матрицы Адамара для N<10Z и кратных 4.
Матрицы Адамара удовлетворяют уравнению
HNHTN = NI, (4.31)
где HTN — транспонированная матрица Адамара; 1 — единичная
матрица. В (4.31) используется обычное произведение матриц.
Матрица порядка 2N может быть получена путем применения
дрямого (или внешнего) произведения матриц. Если HN и Нм —
Матрицы Адамара порядков N и М, то прямое произведение
101
Таблица 4.2. Параметры матриц Адамара
щ = 4 = 22
т = 8 = 2*
т = 12=11 + 1
щ^=16 = 2*
т = 20=19+1
т = 24 = 2(11 + 1)
т = 28=^3*+1
т = 32 = 2*
т== 36 = 2(17+1)
т=40 = 2(19+1)
т = 44=43+1
т = 48 = 22;(11+1)
т = 52 = 2(52 + 1)
т = 56 = 2(3*+1)
т = 60 = 59 + 1
т==б4 = 2в
m^68=67 + l
т=72 = 22(17+1)
т = 76 = 2(37+1)
т=80 = 22(19 + 1)
т = 84 = 83+1
т = 88 = 2 (43+1)
т = 92
т=9б = 23(11 + 1)
т=100 = 2(72+1)
т= 104 = 22(52+1)
т= 108 = 107+1
т=112 = 22(3?+1)
т = 11б
т=120=2(59+1)
т = 124 = 2(61 + 1)
т=128 = 27
т= 132 = 131 + 1
ms= 136 = 22 (33+1)
т = 140 = 139+1
т=144=2»(17+1)
т=148^2 (73 + 1)
т = 152 =22 (37+1)
т= 156
т== 160=^23 (19 + D
т = 164 = 163+1
т= 168 = 2 (83+1)
т=172
т=1765=22;(43+1)
т = 180 = 2(89 + 1)
т = 184
т=188
т = 192=24(11 + 1)
т = 196 = 2 (97 + 1)
т = 200 = 22(72+1)
Я^фЯл1 =
КхНт к^Нм ... 1i2nHm
Hn\Hm Ь,тНм ... IinnHm
(4.32)
где hjk — элементы матрицы HN. В (4.32) каждый элемент
умножается на все элементы матрицы Нм по правилу умножения
матрицы на скаляр. Порядок матрицы Hn®Hm равен произведению
NM. Из (4.32) следует, что матрица
H2N=1ff2®HN
(4.33J
Формула (4.33) соответствует символическому равенству (4.27J.
В качестве кодовых последовательностей системы Уолша
можно брать строки или столбцы матрицы Адамара. Число кодовых
последовательностей равно порядку матрицы N. Следовательно,
объем системы Уолша равен N. Обозначать системы Уолша будем
следующим образом: например, У-8, где цифра равна объему.
Обозначим /-ю кодовую последовательность Уолша как {Wj}\
а ее п-й символ через Wj(n). Уравнение (4.31) определяет
ортогональность кодовых последовательностей Уолша, т. е.
выполняется равенство
sV,Wr.W-{' """ {*": (4.34)
Z±o \n
при
при
Для символов последовательностей Уолша используется еле*
дующее мультипликативно-двоичное представление:
102
Wj («)=(-!)■
2 •/<"»[-£■]
m=0 l J
(4.35)
где
S = log2#—1, (4.36)
[x]—целая часть x, a,j(m)—двоичное представление номера
последовательности /. В формуле (4.35) j=0,N—1, n=0,N—I.
Рассмотрим пример. Пусть N=8 для матрицы Адамара (4.30). В
табл. 4.3 приведены формулы для определения показателя степени
Wj(n) при /=const и сами последовательности.
Та
J
0
1
2
3
4
5
6
7
блица
4.3.
т
о 1
0
1
0
1
0
1
0
1
1 1
0
0
1
1
0
0
1
1
2 I
0
0
0
0
1
1
1
1
Мультипликативно-двоичное представление
последовательностей Уолша
Показатель степени
0
п
[я/2]
п + [п/2]
[/г/4]
п +["/41
[п/2] + [/г/4]
п+[п/2] + [п/Ц
п
0 1 1 |
—1
—1
i
—1
2 1 3 J 4 | 5 | 6 | 7
— 1
—1
—1
— 1
— 1
—1
—1
— 1
—1
—1
—1
— 1
1
— 1
—1
—1
—Г
—1
—1
!—1
—1
— 1
—1
—1
В первом столбце табл. 4.3 приведены номера
последовательностей / в десятичном счислении, а в трех последующих столбцах —
в двоичном счислении. Номера двоичных символов т
расположены в порядке возрастания разрядов слева направо так же, как и
в сумме показателя степени в (4.35). В пятом столбце приведены
формулы для нахождения показателя степени, который равен
сумме слагаемых вида [п/2т].
Напомним определение целой части [х]: если *=<7+г> где q —
Целое число, (h^r^l, то [x]=q. Число слагаемых в сумме равно
103
числу единиц в двоичном представлении числа /. Для /=0 вся
сумма равна 0, для /=1 сумма равна первому слагаемому [я/2°] =
= [л]=л, для у=2 сумма равна второму слагаемому [л/21] = [л/2]
и т. д. Вычисляя показатель степени для каждого п и возводя —1
в получаемую степень, получаем все символы Wj(n)f которые
приведены в последующих столбцах табл. 4.3. Сравнивая полученные
кодовые последовательности (строки табл. 4.3, состоящие из 1 и
—1) с кодовыми последовательностями матрицы (4.30), замечаем,
что они идентичны.
Система Уолша является группой. Доказательство следует из
представления (4.35). Произведение
Wj(n)Wk(n)=(-l)
m=0 L J
(4.37)
Сумма aj(m)+ah(m)=al(m), где {a>i(m)} — некоторая
последовательность, принадлежащая тому же полному коду с JV=const,
что и последовательности {аД/п)} и {аъ.{т)}. Следовательно,
произведение Wj(ri)Wk{n) = Wi(n) является последовательностью
Уолша. Для примера в табл. 4.4
приведена таблица умножения для | Р J
системы Уолша У-8. | 1 » / и
В табл. 4.4 / и k — номера
последовательностей Уолша,
упорядоченных в соответствии с табл.
4.3. Произведение двух
последовательностей Уолша дает новую
последовательность Уолша.
Например, если /=6, & = 5, то в
результате умножения получается
последовательность с номером 3.
Из табл. 4.4 следует, что
нейтральным элементом является
последовательность с номером / = 0,
Таблица 4.4. Групповые свойства
системы Уолша
I
1
А
п.
t
1 ?■
П ^
t
j
0
i
2
3
4
5
6
7
0
0
1
2
3
4
5
6
7
Последовательность Уолша
1
1 1 2
1
0
3
2
5
4
7
6
2
3
0
1
6
7
4
5
1 з
3
2
1
0
7
6
5
4
1
4 1 5
4
5
6
7
0
1
2
3
5
4
7
6
1
0
3
2 1
при к
1 6 | 7
6
7
4
5
2
3
0
1
7
6
5
4
3
2
1
0
пм
5 J
В 7
1
п п п г
1 |_| 1 1 |_| t
[ишь
Рис. 4.3. Система Уолша
104
1 2
15 12
14 13
4
10
11
состоящая из одних единиц, а обратными элементами являются
сами элементы.
Так как система Уолша является подклассом полного
двоичного кода объемом L=2^ и в то же время она является группой,
то она есть пбдгруппа полного кода. В результате полный
двоичный код может быть разложен по системе Уолша. Например, пусть
#=4. Полный код имеет объем 24=16. Пронумеруем все
последовательности полного кода номерами от 0 до 15.
Последовательности Уолша имеют номера 0, 3, 5, 6. Одно из возможных
разложений полного кода имеет следующий вид:
0 3 5 6
I (4.38)
8.
В (4.38) верхняя строка представляет собой систему Уолша,
а остальные строки — смежные классы. В соответствии с
классификацией систем сигналов каждая строка — подкласс полного
кода. Выбор образующих определяет свойства подкласса. Число
смежных классов, включая систему Уолша, равно 2N/N. Так как N=2,
где п — целое число, то число смежных классов равно 2^~п.
На рис. 4.3 приведены кодовые последовательности У-8,
упорядоченные по числу блоков [х, а |х= 1, JV. На рис. 4.3 справа
указаны число блоков \i и номер последовательности / в соответствии с
табл. 4.3. Для системы Уолша характерно то, что число блоков в
последовательностях изменяется от 1 до N. Поэтому система
Уолша должна обладать плохими корреляционными свойствами, так
как у большинства последовательностей число блоков далеко от
оптимального. Это подтверждается тем, что большинство АКФ и
ВКФ последовательностей Уолша имеют большие боковые пики
{см., например, табл. 4.1).
Известно, что спектры сигналов Уолша сдвинуты относительно
друг друга по частоте. Сдвиг можно характеризовать как
положением максимума спектральной плотности мощности, так и
эффективной шириной спектра. Чем больше число блоков \i, тем больше
сдвиг спектра. Если обратиться к спектру кодовой
последовательности (3.9), то можно показать, что спектр кодовой
последовательности с ц,= 1 имеет максимум при <о=0, а спектр кодовой
последовательности с \i=N имеет максимум при о>=я/то. Оба
максимума равны N. Соответственно максимум спектральной плотности
мощности равен №. У остальных последовательностей максимумы
спектров лежат между значениями о>=0 и ю=я/то. При
исследовании спектральных свойств системы Уолша целесообразно
использовать двоичное (или диадное) упорядочение кодовых
последовательностей. Это показано в табл. 4.5.
В первом столбце табл. 4.5 дан номер последовательности в
десятичной системе счисления, а в трех последующих — в
двоичной системе. Кодовые последовательности {Ьн(п)} содержат;млад-
йгай разряд справа, а число символов в них равно log2#. В пятом
105
Таблица 4.5. Диадное представление системы Уолша
к
О
1
2
3
bk (n)
п
0
0
0
0
0
1 1
0
0
1
1
2 1
0
1
0
1
**
1
2
4
3
J
о
4
2 1
б !
к
4
5
6
7
bk(n)
п
0 1
1
1
1
1
1
0
0
1
1
2
0
1
0
1
м-
8
7
5
6
J
1
5
3
7
столбце указано число блоков \х9 а в шестом — номер / — строки
матрицы Адамара, приведенной в табл. 4.3. Используя
последовательности {bft(n)}, можно представить спектр кодовой
последовательности Hk{x) в следующем виде:
Hh(x)= П [1 + (-1)ь*(п)ехр(-12л*)], (4.39)
п=0
где S определено (4.36). Подставляя {bh(n)} в (4.39), можно
найти спектры кодовых последовательностей Уолша.
Сигналы Уолша рис. 4.3 имеют много общего с
тригонометрическими функциями. Особенно это видно при сравнении
положений нулей спектров сигналов Уолша и нулей спектров
тригонометрических функций. Общность между ними подчеркивалась
неоднократно. В отличие от тригонометрических функций, сигналы
Уолша позволяют широко и просто использовать цифровую
технику при формировании и обработке, что делает их
перспективными. Как было отмечено корреляционные свойства систем Уолша
нельзя признать удовлетворительными. Но на базе систем Уолша
можно строить производные системы сигналов, которые обладают
хорошими корреляционными свойствами. Производные системы
будут рассмотрены в дальнейшем.
4.4. Коды Велти. Четверичные коды
Они известны двух видов: D-коды и £-коды.
D-коды. Их построение основано на использовании /правила присоединения
(см. § 3.6). Обозначим i-ю последовательность £>нкода порядка к как
{d*}=dUhd2i,...,dnh...,dNJ. (4.40)
Здесь длина последовательности N и ее порядок k связаны соотношением
N—2h\ номер символа изменяется в пределах л=1, 2, ..., JV; а номер
последовательности * = 0, 1, ..., N—1.
Число последовательностей, по определению, равно числу символов в
последовательности, т. е. N=2h. Введем последовательность { й\}
дополнительную для {dhi}. Тогда правило образования D-кода с помощью правила
присоединения (3J0) записывается как
{dj}^^1!3^1) при | = 0, 1,..., 2*-1 —1, (4.41)
106
или как
{^}={^-И^-.} «л» <-*
А-1
,..., 2й—1.
(4.42)
Последовательности {dki}y {dhj} называются парными (а как будет видно из
дальнейшего, они являются дополнительными), если \i—j\*=2k~l. Например,
если &=2, t=l, то /=3.
Использование правил (4.41), (4.42) проиллюстрируем на примерах. В
качестве исходных возьмем дополнительные последовательности для А = 1.
Полагая {d°o} = l, согласно (4.41), (4.42) имеем
: ;: (4.43)
{d\} = i, -i.j
Отметим, что последовательности (4.43) являются дополнительными и
парными, т. е. можно записать, что {dlo} = {dli} и {31i} = {d10}.
Введем обозначение символов <х = 1, р =—1. Для этих символов правило
умножения определяется табл. 4.6.
Используя указанные обозначения, из (4.43) получаем
{dl0} = a, а,
Пусть &=2. Согласно (4.41), (4.42) находим, что
(4.44)
[4} = {di\do} = [4\d\) = at а> а> Р-
(4.45)
а:
K}=Ki|-2{} = {4|-dSHa. В, б.Р-
При построении последних равенств в (4.45) знак минус перед d'i и d'o
•пределялся согласно табл. 4.6: —а=(5а=р и —р=рр = а, т. е. операция
умножения символов а, р на —1 эквивалентна умножению на р.
Аналогично, при k=3
{4}={4|d<)} = {4|4}=a. «• a- P. «. «• P. a:
{^}={dfj3f}=={^|d|} = a, p, a, a, a, p, p, fS;
{4} = {4\Щ = №\4}=а' «• P. a- a- «. «. P;
{4)={ WHKK}=«. p, p, p, a, p, a, a;
{*3} = {41-?5} = {<*о|-4}=«. «. «. P. P. P. «. P;
{di}= {df| —3f} = {41—dI} = «. P. «. «. P, «, a, a;
{4} = {4|-*f} = {4|-4l=«• a p. «. p p. P. *
{4}={4|-232} = {4|-4}=«. P; p.p. p. «. P. p-
107
(4.46)
Таблица 4.6. Правило
умножения D-кода
X
а
Р
а | р
»
1
— 1
—1
1
Для других значений k метод по»
строения /)-кода аналогичен
рассмотренному в примерах.
Из рассмотрения кодов (4.44) ...
... (4.46) следует, что парные
последовательности являются дополнительными.
Например, при k=2 последовательности
{d20} и {dh} являются парными. Но
0Ч« {*. \dhl a {dh}= {d*. |-ЛЬ
т. е. они соответствуют правилу
присоединения (3.70). Следовательно, они
являются дополнительными. Из
рассмотренных примеров видно также, что 2*
последовательностей D-кода можно представить в виде 2ft~4 пар дополнительных
последовательностей. Обозначив через {dk} и {Я*} произвольную пару
дополнительных последовательностей, согласно правилу присоединения при опускании
индекса i правило образования D-кода можно записать как:
{*№},
{dk\-dk},
{dk\ d%
{2*1-<**}. j
Если произвести операцию (4.47) для всех пар дополнительных
последовательностей порядка k, то получим те же последовательности порядка £+1, что
и при использовании правил (3.72), (3.73). Однако чередование
последовательностей (ио номеру i) будет несколько иным, чем при использовании правил
(4.41), (4.42). Поскольку каждая пара порождает четыре новые
последовательности, то общее число последовательностей равно 2*+|.
Последовательности, образующие £>-код, взаимно-ортогональны. Условие
ортогональности двух последовательностей {dhi}9 {dh§} записывается в виде
2*
для *\ / = 0, 2*— 1. (4.48)
(4.47)
2<i</=°
Правило построения D-кода (4.47) во многом похоже на правило
построения систем Уолша (4.27) на основе матриц Адамара. Оно позволяет построить
систему сигналов из 2N последовательностей длины 2N, т. е. объем системы
равен длине последовательности. В состав такой системы входят N пар
дополнительных последовательностей. Предложены и другие методы построения £-ко-
дов [36], в том числе и с использованием многофазных сигналов в качестве
исходных [37].
Корреляционные свойства D-кода. Рассмотрим D-код порядка k+1, каждая
последовательность которого представляет комбинацию двух дополнительных
последовательностей кода порядка k, т. е. имеет место одна из комбинаций
(4.47).
Можно показать, что АКФ любой последовательности D-кода при четных
^сдвигах равна нулю, т. е.
Л0*)-0.при [1=21, /=1, 2... (4.49)
108
Прн нечетных [i значение R(\i)<.lf2i так как при \i<.N оно определяется
суммой, число слагаемых которой равно \i. Если все слагаемые входят в
сумму с одинаковым знаком, то R(\i)=[i/2N при 0<\i<N.
При [i^N максимальное значение R(\i)=\(2N— \i)/2N. Следовательно,
максимально возможное значение бокового пика АКФ дополнительной
последовательности равно 0,5, при этом \i=N. Расчеты показывают, что это значение
практически не достигается.
Значения АКФ при нечетных \i определяются произведениями символов
вида dndn_llt номера которых подчиняются следующему условию: если л —
четное (нечетное) число, то (п—ц) — нечетное (четное). Это означает, что
dndn_tl при нечетном ц всегда представляет произведение четного символа на
нечетный. Если для нечетного \i выполняется равенство
<*п<*л_й = 0, (4.50)
то /?(jx)=0 и для нечетных ц. Отметим, что условие (4.50) является основным
в определении четверичных или £-кодов [35].
Относительно взаимокорреляционных свойств пар дополнительных
последовательностей можно утверждать, что они будут лучше, чем у случайных
последовательностей. Обратимся к равенству Сталдера-Кана (2.40), которое для ФМ
сигналов имеет следующий вид:
N-l N-l
2' */*(■*>= 2 **(!*> **(!*)• (4.51)
ц=_(#-1) ц=-(ЛГ-1)
Поскольку для дополнительных последовательностей имеет место равенство
(3.64), то произведения АКФ в правой части (4.51) равны 1 при ц=0 и
—R2j([i) при [1ф0у так как Rj([i) =— Rh([*>) при \1ф0. Подставляя эти
соотношения в (4.51), получаем
N-l N—l
2 Я/аМ^1—22 */<!*>■ (4.82)
|*=-<ЛГ-1) Д=1
Так как второе слагаемое в правой части (4.52) всегда больше нуля, то
поэтому сумма квадратов значений ВКФ всегда принимает минимальное значение
только для дополнительных последовательностей. Если положить, что среднеквадра-
тическое значение АКФ равно 1/1/2N и учесть соотношение (4.49), то средне-
квадратическое значение ВКФ дополнительных последовательностей
оВКФО=1/2УЕГ, (4.53У
т. е. в"1/ 2 раз меньше, чем у случайных последовательностей.
Е-код. Если определен /)-код, то £-код определяется через него следующим
образом: символ ehn,i, последовательности {eki} связывается с символом d*n,i
последовательности {dki} соотношением
dhn,u если п — нечетное число,
ehn i= Y> если п — четное число, dftn,i = a, (4.54)
б, если п — четное число, dkn,i — ^.
109
Правила умножения символов а, р, y» б приведены в табл. 4.7.
Например, для последовательности {d\} — at a, a, р, a, a, p, a, согласно (4.54)
{e3o}=a, v, a, 6, a, y» P» Y- АКФ каждой последовательности £-кода при т=|хто
#(fi) = 0 для ii=l, 2, 3,..., 2k. (4.55)
При четном |х соотношение (4.55) обусловлено свойствами АКФ />-кода
(4.49), поскольку произведения вида ehn,i&n—\kti определяются элементами оф
И7бв тех квадрантах табл. 4.7, в которых эти элементы отличны от нуля. При
нечетном ц, эти произведения равны нулю аналогично (4.50), так как они
определяются элементами квадрантов, равными нулю. Отметим, что ВКФ пары
дополнительных последовательностей £-кода равна нулю при всех значениях
ц, удовлетворяющих условию —2ft^|i^2k.
Таблица 4.7. Правило
умножения £-кода
X
a
Р
Y
6
a
1
—1
0
0
Р
—1
1
0
0
V
0
0
1
—1
6
0
0
—1
1
Таблица 4.8. Правило умножения
£-кода (неортогональность)
X
a
Р
Y
6
a
1
—1
V
—V
&
—1
1
—V
V
V
е
—е
1
—1
6
—е
е
—1
1
В некоторых случаях при перемножении четных и нечетных символов £-ко-
да получить полную ортогональность нельзя. Тогда правило умножения будет
отлично от идеального, приведенного в табл. 4.7. Неидеальное правило умно-
ножения приведено в табл. 4.8.
Оценка для R(\i) [35] в этом случае определяется как
ОД'
ц-
т-
,*-1
)
при ц
1. 3,.
k-l И+1
2*-1 —1,
)]
(4.56)
■ —o*-l.
при |* = 2*—* + l 2* — 1.
Необходимо отметить, что последовательности D-кода и £-кода получили, в
цервую очередь, применение в радиолокации. Но в настоящее время их
используют и в системах связи [38]. Они могут найти также применение и в
качестве исходных систем при построении производных систем сигналов.
4.5. Производные системы сигналов
Производным сигналом называется сигнал, который получается в
результате перемножения двух сигналов. В случае ФМ сигналов перемножение долж-
йо осуществляется поэлементно или, как чаще называют, посимвольно.
Система, составленная из производных сигналов, называется производной. Среди
110
производных систем особое значение имеют системы, построенные следующим
образом. В качестве основы используется некоторая система сигналов,
корреляционные свойства которой не вполне удовлетворяют требованиям к КФ, но
которая обладает определенными преимуществами с точки зрения простоты
формирования и обработки. Такая система называется исходной. Затем выбирается
сигнал, который обладает определенными свойствами. Такой сигнал называется
производящим. Умножая производящий сигнал на каждый сигнал исходной
системы, получаем производную систему. Производящий сигнал следует
выбирать так, чтобы производная система была действительно лучше исходной, т. е.
чтобы она обладала хорошими корреляционными свойствами. Комплексная
огибающая производного сигнала Sv-m(t) равна произведению комплексных
огибающих исходных сигналов Um(t) и производящего сигнала V (/), т, е,
S£=£/m(OV'b (4.57J
Если индексы в (4.57) изменяются в пределах m=l, Af, m=l, Я, то
объем производной системы сигналов
L = jW#. (4.58)
Если M—H=N — базе ФМ сигнала, то объем L=N2f т. е. полученная система
сигналов будет относиться к большим системам. При построении произвольных
систем необходимо знать их корреляционные свойства. Положим, что энергии
исходных, производящих и производных сигналов равны, что всегда имеет
место для ФМ сигналов одинаковой длительности. Для таких сигналов известны
интегральные соотношения (см., например, [5]):
оо
для ВКФ <гй£(т)=(Г/2я) $Ят„(т, — Q)^v(t, Q)dQ; (4.59)
ОО
оо
для АКФ <Э(т) = (772я) j Ruin, — Q)Rv(i, Q)dQ, (4.60)
—оо
где Qvvmn(i) —ВКФ, Q(t) —АКФ производных сигналов:
Rmn(i, Q) — ВФН, Ru(i, Q) — ФН исходных сигналов;
R (т, Q) — ВФН, Rv(it Q) — ФН производных сигналов.
Интегрирование производится по частоте Доплера, т. е. корреляционные
свойства производных сигналов зависят от свойств исходных и производящих
сигналов на частотно-временной плоскости. Из (4.59), (4.60) можно найти
следующие оценки
для ВКФ: Q^vmn(T)^(772ji) т/Ч|#тп(т, -Q) \2dQ 11/?^ (т, Q\4Q;
(4.61)
для АКФ: Q(t)^(772ji) l/j \Rv(xt — Q)\2dQ J \RV(%, Q)\2dQ.
Уф ф
(4.62)
Оценки (4.61), (4.62) во многом зависят от соотношения ширины ВКФ
исходных и производящих сигналов вдоль оси доплеровских частот, т. е. от
значения ширины интервала интегрирования Ф. Широкополосный производящий*
111
сигнал соответствует получению производной системы сигналов из системы
Уолша, а узкополосный производящий сигнал — системе, состоящей -из
сегментов М-последовательности.
Широкополосный производящий сигнал. Пусть исходные и производящие
сигналы имеют одинаковую длительность Т и различные по ширине спектры.
Обозначим ширину спектра исходных сигналов через Fu, а производящих
сигналов— через Fv, причем положим, что Fv>Fu. Пусть все сигналы имеют
прямоугольные огибающие, а | V | = 1.
Допустим, что ВФН исходных и производящих сигналов равномерно
распределены на плоскости (т, Q). Тогда согласно (2.35) среднеквадратические
значения ВФН
о
К
Так как Fv>FUt то ширина ВФН исходных сигналов по оси Q меньше
ширины ВФН производящих сигналов и поэтому 0=4nFtf. Заменяя в (4.61)
|#тп(т, — х)\ и |#ду (т, х)\ их среднеквадратическими значениями,
получаем
QZirXO^YFy/Fy. (4.64)
Из неравенства (4.64) следует, что значения ВКФ производных сигналов
при произвольном аргументе т меньше или равны 0,5~[/Fu/Fv. Это означает,
что и максимальные пики ВКФ будут меньше этого значения. Следовательно,
для уменьшения максимальных пиков ВКФ необходимо увеличивать ширину
спектра производящего сигнала. Такой результат является следствием
предположения о равномерном распределении боковых пиков ВФН производящих
сигналов на плоскости (т, Q) в пределах полосы частот ±Fv. Из (4.64) следует,
что метод перемножения сигналов приводит к уменьшению боковых пиков ВКФ
производных сигналов, если только база производящих сигналов FVT больше
базы исходных сигналов настолько, что~[/FvT>FvT.
Уменьшение максимальных пиков Б/(Ф. Соотношения (4.59)...(4.62)
позволяют обосновать метод уменьшения максимальных пиков ВКФ. Допустим, что
ВФН исходных сигналов занимают полосу Ф, ширина которой по оси частот
мала. Так, например, если исходные сигналы близки к простым (FuTatl), то
Ф«4я/Г.
Можно допустить, что вне этой полосы ВФН исходных сигналов стремятся
к нулю. В этом случае из неравенства (4.61), (4.62) следует, что необходимо как
можно сильнее уменьшать значения ФН производящего сигнала в той полосе,
где сосредоточены ВФН исходных сигналов. Если в соответствии с (4.64) для
получения Q^mi'Cl имеет место неравенство
F„ » Fv , (4.65)
то полоса частот ширины Ф=4я/7гг будет узкой по сравнению с шириной ФН
производящего сигнала по оси частот. Причем эта полоса Ф является
центральной временной полосой. Поскольку в узкой центральной временной полосе
боковые пики близки к боковым пикам вдоль оси времени т при Й=0, то в
качестве производящего сигнала следует выбирать такой, у которого АКФ имеет
минимальные боковые пики. Естественно, что при этом должно выполняться
условие (4.65).
112
Таким образом, чтобы правые части неравенств (4.61), (4.62) были
уменьшены, необходимыми и достаточными условиями являются выполнение
неравенства (4.65) и малость боковых пиков АКФ производящих сигналов. Левые
части неравенств (4.61), (4.62) представляют мгновенные значения ВКФ и АКФ
при различных т, причем эти неравенства дают верхнюю оценку указанных
функций. Изменяя т, можно пройти все боковые пики, в том числе и
максимальные. Поэтому (4.61), (4.62) включают оценки и максимальных боковых
пиков. Следовательно, уменьшение правых частей неравенств (4.61), (4.62)
приведет к уменьшению максимальных боковых пиков ВКФ.
Выбор производящих сигналов. Из предыдущего материала следует, что
выбор производящих сигналов определяется рядом факторов, в том числе и исходной
системой. Если сигналы исходной системы широкополосные, то производящий
сигнал может быть широкополосным и иметь малые уровни боковых пиков
ФН, близкие к среднеквадратическому значению (4.63). Если же сигналы
исходной системы узкополосные, то достаточно выполнения неравенства (4.65) и
требования малости боковых пиков АКФ.
Возьмем в качестве исходной систему Уолша. В этом случае производящие
сигналы должны быть широкополосными (4.65) и иметь хорошие АКФ. Кроме
того, производящий сигнал должен иметь столько же элементов, что и
исходные сигналы, т. е. число элементов N—2hy где k — целое число. Этим условиям
в целом удовлетворяют нелинейные последовательности. Поскольку основным
является требование малости боковых пиков АКФ, то в классе нелинейных
последовательностей были отобраны наилучшие сигналы с числом элементов
N=16, 32, 64. Эти сигналы показаны на рис. 4.4. На рис. 4.4 указаны также
\
N=16,/1*9
г%
шиш
а)
N*3Z,/i46
Т t
б)
Рис. 4.4. Производящие ФМ сигналы
значения числа блоков \i для каждого производящего сигнала. Они близки к
оптимальному значению \io=(N+l)f2. Это и является необходимым условием
получения хорошей АКФ с малыми боковыми пиками.
Свойства производной системы. Объем производной системы равен объему
системы Уолша Ы. С помощью ЭВМ были рассчитаны все КФ большого
числа производных сигналов. Оказалось, что системы, производящие сигналы
которых изображены на рис. 4.4, являются типичными. Статистические характери-
113
стики таких производных систем (П) были приведены в табл. 4.1, причем там
же для сравнения даны характеристики систем Уолша (У).
Из табл. 4.1 следует, что среднеквадратические значения КФ обеих систем
близки к значению \f\/2Nt а коэффициенты эксцесса различаются значительно.
Для производных систем коэффициент эксцесса гораздо меньше коэффициента
эксцесса систем Уолша. Оценим увеличение вероятности ошибки из-за наличия
коэффициента эксцесса. Увеличение вероятности ошибки приближенно
пропорционально множителю a=l+v/24n3a4. Полагая a2=l/2N, а число я="|/#,
получаем a=l+Y"l/W6- При #=64 для системы Уолша а «27, а для
производной системы а «2. Следовательно, вероятность ошибки при использовании
системы Уолша будет на порядок выше, чем в случае производной системы.
Большое значение коэффициента эксцесса систем Уолша объясняется
наличием больших боковых пиков КФ. Для таких систем ненормированное
значение максимального пика Vm&x^N—1, а нормированное /?тах=|1—1/W.
Значения Утах приведены в пятом столбце табл. 4.1. Отметим, что для
производных систем максимальный пик близок к утроенному среднеквадратическому
значению. Имеем
Утах«ЗУЩ"Ятах«3/УЖ (4.66)
Для #=16 Vmax«9, для #=32 V\nax«12, а для #=64 Утах = 17. Данные
пятого столбца табл. 4.1 близки к этим значениям.
Из данного пункта следует, что производные системы обладают лучшими
корреляционными свойствами, чем системы Уолша.
4.6. Сегментные системы
Сегментными называются системы, образованные из сегментов (отрезков)
^-последовательностей. Сегментная система является производной, так как
выделение сегмента из Af-последовательности эквивалентно применению
узкополосного производящего сигнала — простого сигнала с прямоугольной
огибающей, длительность которого равна длительности сегмента. Одной из первых
работ, в которой указывалось применение сегментных систем, была [39]. М-по-
следовательность с числом символов #=217—1 = 131071 разбивалась на
неперекрывающиеся сегменты с длиной #о=63 символам. Было получено 2080
сегментов, из которых с помощью ЭВМ было отобрано L=1000 сегментов, ВКФ
которых не превышали 0,25.
Методика определения чисел Nt N0t L0 и их взаимосвязь с ВКФ
приведена в [5]. Обозначим комплексную огибающую исходного сигнала U(t), а
огибающую производящего сигнала V(t). Допустим, что
£/(/)=1 при 0<*<Г; V(/)=l при 0<*<Гв, (4.67), (4.68)
а вне указанных отрезков U{t)=Q и V(t)=Q. Кроме того, допустим, что
длительность производящего сигнала Го меньше длительности исходного сигнала Г,
т. е. Г0<7\ Назовем р-м сегментом производный сигнал вида
Sp(t) = U(t + tp)V(t), (4.69]
причем Sp(t) расположен на отрезке [0, 7*] и вырезается из исходного, сиг-
вала на отрезке [/Р, /Р + Г0]. Последовательность сегментов {S?}, p—\, Lt
образует систему сигналов.
114
ВФН сегментов Sp(t) и Sq(t) записывается в следующем виде
1 со
Qpq (т, Q) = — $SP (t) *Sq (t—c) exp (i Qt)dt, (4.70J
S —00
где Es — энергия сегментов. Обозначая ФН исходного и производящего
сигнала, получаем
*и (т> Q) = ТГ 1^ W & ('—*) exp (i Q О Л, (4.71)
Як (т, Q) = -~- ]v (t) V (t—т) exp.(i Qt)dt, (4.72)
a Euy Ev — энергии этих сигналов. Из формулы (4.70), используя (4.71), (4.72),
получаем ВКФ:
ео
Qpq(t)=P j Rv (т + ^р — /g, Q)exp( — iQtp)Rv (т, — Q)dQ, (4.73)
—oo
где p*=EuEvlnEs.
Отметим особенности полученного выражения. Значение ВКФ при
заданном т определяется интегралом от произведения частотных сечений ФН
исходного и производящего сигналов (Ru и Rv), а также экспоненты ехр(—iQtp).
Из-за того, что разным сегментам соответствуют различные сдвиги tPy ВКФ
зависит как от значения tp в показателе экспоненты, так и от разности tp—tq в
ФН Ru. Поскольку для рфц разность tp—tq=£0, положения центров ФН, где
Ru = l и /?у = 1, не совпадают. Более того, так как #у=0 лишь при т^Го, то
если tP—tq>T0, центр ФН Ru не попадает в полосу, занимаемую ФН Rv. Это
означает, что в подынтегральном выражении (4.73) Ru не достигает своего
максимального значения, равного единице. Сегменты с tP—tq ^ Tq будут
неперекрывающимися. Причем, если tp—tq>T0l то сегменты называются разнесенными, а
с tp—tq = TQ — примыкающими. Если tP—tq<TQt то сегменты будут
перекрывающимися.
Из (4.73) получаем
•о
Qmax<P $\Ru(x+tp—tq, Q)\\RY(T, —Q)\dQ, (4.74)
—ob
т. е. определенное таким образом максимальное значение ВКФ зависит
только от разности tp~tq. Следовательно, максимальные значения ВКФ сегментов
с tp—tq=const зависят лишь от одной полосы ФН Ru.
Корреляционные свойства неперекрывающихся сегментов. Анализ
корреляционных свойств сегментов, выделяемых из М-последовательности, показывает,
что для них справедлива оценка
QpgWaRuWN; (4.75)
где Ru —' максимальное эффективное значение боковых пиков
А!-последовательности. Полагая Ru=\l"V~2Nt из (4.75) имеем
Qpq (т) « VW/V2N0 = a VF/N0, (4.76)
где o«='l/V2- Отметим, что при выводе (4.76) нигде не была оговорена дли-
115
тельность сегмента To=N0To. Следовательно, оценка (4.76) приближенно
справедлива как для длинных сегментов (#о>1/#/2), так и для коротких
(No<yN/2). При коротких сегментах оценка (4.76) становится более точной.
Однако при этом Qpq(x) меньше величины, которая в свою очередь больше
единицы. Так как 0р9тах(т)<1, то полученный результат свидетельствует о
том, что среди коротких сегментов обязательно будут такие, у которых
уровень ВКФ будет соизмерим с единицей. При N0>~[/N/2 значения ВКФ меньше
единицы. Поэтому при таком выборе длины сегмента можно быть уверенным,
что ВКФ будут малыми. Для уменьшения значений ВКФ необходимо так
выбирать ^-последовательность, чтобы ее АКФ имела малые боковые пики.
Для примыкающих сегментов tp—tq=T0. Число таких сегментов (т. е.
число сигналов в системе)
L = N/N0. (4.77)
Обычно из условий применения системы сигналов задается либо
максимальное значение, либо эффективное значение ВКФ сигналов (либо то и другое
вместе). Поэтому, полагая, что Qpg(t)^Q=const, из (4.76) и (4.77) имеем
N0 = ayW/Q; L^QVW/a. (4.78), (4.79)
Например, если N—131071, Q=0,25, а=1/ У 2, то JVo=1020, a 1=127. Если же
<3=0Л, то М>=2550, L=51.
Корреляционные свойства перекрывающихся сегментов. Для
перекрывающихся сегментов разность задержек tv—fg = 7V~<A7\ где АГ—AJVt<>>0. В ©том
случае приближенная оценка ВКФ
Qpq(i)KAN/N0 (4.80)
Допустимое перекрытие сегментов определяется согласно (4.73) при Qe=*
= Q. В этом случае
AN = QN0 =a"l/F. (4.81)
Если заданы Q=Qo и N, то длительность сегментов определяется формулой
(4.78), а число сегментов
L = N/(N0—A N) = Q УлГ/a (1 — Q), (4.82)
т. е. по сравнению с (4.79) увеличилось в (1—Q)-1 раз. Например, если N—
= 131071, то при Q=0,25, а=1/У2 число сегментов 1=17Ю, а при Q=0,1 оно
равно L=57. Следовательно, перекрытие сегментов увеличивает их число при
том же значении ВКФ.
Оценка максимальных боковых пиков. Для получения более точной оценки
максимальных боковых пиков ВКФ сегментов было использовано циклическое
свойство Af-последовательностей, заключающееся в том, что сумма по mod 2
двух одинаковых М-последовательностей, сдвинутых относительно друг друга,
является той же ^-последовательностью, но имеющей иной сдвиг во времени.
Из этого свойства следует, что сумма двух сегментов Af-последовательиости
является сегментом той же ^-последовательности, но с произвольным сдвигом.
Была найдена верхняя оценка максимальных боковых пиков ВКФ сегментов
^-последовательностей
ftn«<l,2eyF/JV§. (4.83)
116
Эта оценка примерно в 1,77 раза превышает приближенную оценку (4.76),
т. е. в этом случае коэффициент а=1,2б. Следует отметить, что верхняя
оценка (4.83) встречается очень редко. Для большинства рассмотренных М-последо-
вательностей
Q**yW/NQ, (4.84J
что в У 2 раз превышает оценку (4.76). При этом коэффициент <х=1. Расчет
длины сегментов, их перекрытия и числа сегментов при использовании оценок
(4.83), (4.84) следует вести по формулам (4.78), (4.81), (4.82) с учетом
значения коэффициента а.
Примеры расчета длинных сегментов. Приведем характеристики двух систем-
сигналов, являющихся сегментами ^-последовательностей с числом символов
#=255 (характеристический многочлен л;8+л;5+*3+*+1) и #=511
(характеристический многочлен *9+х4-И). Предварительно были определены все веса
произвольных сегментов, в результате чего уточнены коэффициенты а. Оказалось,
что для М-последовательности с #=255 коэффициент а«0,81, а для #=511
а«1,06. Для заданных Q (при #=255, Q=0,4 см. табл. 4.9, а при #=511, Q=»
=0,3 см. табл. 4.10) и уточненных коэффициентах а были вычислены длина
сегментов #о, их перекрытие Д# и число сегментов L. Эти
величины приведены в табл. 4.9, 4.10 на. первых строках. Затем в
соответствии с полученными #в и А# исходные ЛГ-последовательности
разбивались на сегменты, причем с произвольным началом первого сегмента.
С помощью ЭВМ были найдены ВКФ сегментов. Оказалось, что значения*
ВКФ не превосходят заданного значения Q.
На строках 2, 3, 4 табл. 4.9, 4.10 приведены значения ##, Д#, L для аг
соответствующих приведенным ранее оценкам: a=0,71 = l/V2 соответствует
оценке (4.76), а ='1 — оценке (4.84), a =1,26 — верхней оценке (4.83). Как
видно из табл. 4.9, 4.10, расчетные значения #о, Д#, L первых строк лежат между
значениями, соответствующими а=0,71 и а=1,26. Таким образом, расчет
характеристик сегментов по формулам (4.78), (4.81), (4.82) при а=0,71 и а—
= 1,26 укажет границы, в пределах которых будут лежать характеристики
сегментов. Поскольку а=1 близко к среднеарифметическому значению указанных,
а, то расчет характеристик при а=1 даст результаты, близкие к реальным.
Таблица 4.9. Характеристики Таблица 4.10. Характеристики
сегментов сегментов
a
1,06
0,71
1,00
1,26
N.
80
54
76
96
AL
24
16
23
29
L
9
14
10
8
a
0,81
0,71
1,00
1,26
N.
33
28
40
51
AN
11
11
16
20
L
12
15
11
8
4.7. Циклические системы
Допустим, что имеются дяе кодовые «последовательности {^(v)} и {B(v)}r
где v — номер элемента. Положим, что v = 0, #—1 и символы этих
последовательностей, A(v), B(v) принадлежат мультипликативной комплексно-сопряжен -
117
вой ручной группе. Если р>2, то будем называть сигнал 'многофазным.
Кодовым последовательностям {A(v)}, {B(v}} можно поставить в однозначное
соответствие кодовые последовательности {a(v)}9 {b{v)}t символы которых
«(v) и b(v) принадлежат аддитивным р-ичным группам. При р«2 символами
последовательностей {A(v)}t {B(v)} являются 1 и —1, а символами
последовательностей {a(v)}t {b(v)}—0 и 1 Образование КФ сводится к
перемножению символов A(v) и B(v), где * — знак комплексной сопряженности с
последующим суммированием. При переходе к символам a(v), b(v) КФ
определяется через разности этих символов по mod р.
Для построения циклической системы ФМ сигналов надо выбрать кодовые
последовательности {a(v)}9 {b(v)}t обладающие следующим циклическим
свойством: разность по mod p кодовой последовательности {a(v)} и ее циклической
перестановки {a(v+M»)} является другой циклической перестановкой {a(v+K)}
исходной кодовой последовательности, т. е.
{a (v)} — {ау + ц} = {a (v + A,)}r (4.85}
где ХФО и ХФ[Л (modp). Циклические перестановки получаются так: исходная
кодовая последовательность {a(v)}f где v=0, N—lt продолжается
периодически, т. е. записывается в виде бесконечной последовательности ... a(JV—2)*
a(tf-l), a(0), a(l) ... a(v), ... а(ц), ..., a(tf_2),a(tf-4l), a(0), a(l) „.
Исходная последовательность {a(v)} начинается с символа а(0) и
заканчивается символом a(N—1). Циклическая перестановка {a(v+ji)} начинается
с символа а(|х) при v=0 и заканчивается символом a(\i+N—1) при v—N—1.
Аналогично (4.85) определяется циклическое свойство последовательности
{b(v)}t а именно:
{Ь (v)} — {b (v + ji)} = {b (v + *,)} • (4.86)
Равенства (4.85), (4.86) выполняются для М-последовательностей в
соответствии с аддитивно-циклическим свойством и для последовательностей,
построенных по правилу
fl(v)=av(modp), (4.8.7)
•где a —- первообразный корень уравнения xN—\=9t
р = #+1 (4.88)
и является простым числом, v=0, N—\. Для последовательностей вида (4.87)
a (v) —a (v + |х) = av (l — a% (4.89)
(1=1, N — \.
Так как a — первообразный корень, то l = a0 = a^ и поэтому a^l при |х=
= 1, N— 1. Следовательно, 1—ansa*., где Я#р,, и из (4.89) имеем
a (v)—a (v + ц) = а хах = av+A = a (v + Я), (4.90)
что и определяет равенство (4.85). Пусть последовательности {a(v)} и {b(v)}
обладают циклическим свойством (4.85), (4.86). Циклическая система [17]
состоит из последовательностей {cj(v)}t где /=Q, N— 1, символы которых
определяются равенством
c/(v) = a(v)—b(v + j), (4.91)
118
v=0, N—l. Каждая последовательность циклической системы равна разности
между последовательностью {а(\)} и циклической перестановкой {b(v+j)} т. е.
{<7(v)} = ia(v)} — {b(v + j)}. (4.92>
Можно доказать, что последовательности системы (4.92) являются симп«.
лексными. Отметим, что циклические системы являются производными, так как.
система последовательностей {b(v+j)} является исходной, а последователь»
ность {a (v)} — производящей.
Корреляционные функции циклических систем. Поскольку символы с$
последовательностей {cj(v)} относятся к мультипликативной группе, то
взаимокорреляционная функция (ВКФ) определяется следующим образом:
I iV—А—1 ( 2я 1
%« = 7 2 «p{i—to(v + *) —*(v)]l. (4-93>
Используя свойства образующих последовательностей {a(v)}, {b(v)} (4.85),.
(4.86) и определение (4.91), запишем
cj(v + K) — ck(v) = a(v + X)—b(v + j + K)—a(v) + b(y + k)^
==a(v, X) — 6, (v, A,, J, k)modp, (4.94>
где a(v, Я), 6(v, Я, /, k) —некоторые циклические перестановки образующих
последовательностей.
Обозначим периодическую ВКФ образующих последовательностей (4.94)
N-X
1 "~1 ( 2я 1
« w=тг 2 ехр и — ta <v+*>—*.М1} » <4-95>
юдическую ВФН
Q(*. P) = -j^-y^p{i ~-[а(^ + Ц—*(v)]}exp(i-^), (4.96>
где р определяет дискретные значения доплеровской частоты.
Известна оценка ВКФ сигналов циклической системы [5]
где
#тах (Я) <тах \Q Ml + max \Q (Я, р)| 6\ (4.97)
Л А, Р
6=lniV-Yln(2[y-] + l). (4.98)
Для построения системы минимаксных сигналов (у которых максимальные
пики минимальны) необходимо, чтобы периодические ВКФ и ВФН образующих
сигналов имели малые боковые пики. В общем случае регулярного метода
построения таких сигналов нет.
Для двоичных М-последовательностей (р=2) известен метод Голда [17,
40], позволяющий выбирать пары образующих М-последовательностей. Этот
метод основан на выборе последовательностей в соответствии со свойствам»
многочленов. Каждой М-последовательности длины N=2n—1, где п —
некоторое целое число, соответствует свой неприводимый многочлен степени п.
Неприводимым называется такой многочлен, который не может быть
представлен в виде произведения многочленов с меньшими степенями. Каждому корню»
119
многочлена степени п может быть поставлен в соответствие элемент поля
Галуа GF(2n) (кодовая последовательность полного кода длины /г, за
исключением элемента, состоящего из одних нулей). Всего ненулевых элементов име*
ется 2П—1. Корень а, все степени которого а0, а1, а2, ..., а2/г"1=ао дают
различные элементы поля, называется первообразным или примитивным.
Неприводимый многочлен, одним из корней которого является примитивный элемент
поля, называется примитивным. В соответствии с методом Голда образующим
Af-последовательностям должны соответствовать примитивные многочлены,
корнями которых являются a-v для первой и i(a2Z+1)~v для второй
последовательностей, где / — любое целое число, взаимно-простое с п. Выбираются такие
последовательности достаточно просто с помощью таблиц неприводимых
многочленов [14]. Если ^-последовательности выбраны по методу Голда, то их
периодические ВКФ являются трехуровневыми, т. е. принимают только три
значения [17, 40]:
Q (Я) = J Q2 = УЩ— 1 /JV, (4.99)
Вероятности появления этих значений следующие:
Pt=l/2—\/2Nt P2=\/4+\/4N — l/y$N, P8= 1/4+ 1/4JV + 1/УШ.
(4.100)
Периодические ВКФ циклической системы могут принимать только
значения (4.99), причем вероятности (4.100) соответствуют случаю усреднения по
всем ВКФ всех циклических перестановок. Дисперсия периодических ВКФ по
определению {\+4fN)/Nttl/N. Отметим, что максимальные боковые пики для
полного кода можно оценить по формуле 3/~1/#, в то время как (4.99) дает
значения 2/Т/Л/-«1,41/УлГ, в два раза меньше.
Таким образом, оценка первого слагаемого в (4.97) дается максимальным
значением (4.99), равным y2/N+l/N. Максимум модуля периодической ВФН
max|Q(;t, р)<(23/2я~1 N~l/2 + ЛГ1)1/2 да 0,94 W"1/4, (4.101)
А, р
Подставляя в (4.97) оценки (4.99), (4.101), находим оценку максимальных
пиков ВКФ циклической системы:
Rm*xM<yW+VN + 0,94bfrF. (4.102)
Пример расчета. Для трех значений N=31, 127, 511 найдены оценки
максимальных боковых пиков ВКФ циклических систем. Результаты расчета
приведены в табл. 4.11.
Таблица 4.11. Характеристики циклических систем
N
31
127
511
maxQ(A) max Q (A, p)
0,29
0,134
0,059
0,39
0,28
0,20
^max (*)
0,935
0,74
0,61
3/ V2N
0,37
0,18
0,09
120
Как видно из табл. 4.11, оценки Яшах (А,) достигают больших значений и
существенно превышают утроенное среднеквадратическое значение 3/V2JV. Это
объясняется тем, что данные оценки пропорциональны l/y^N. На самом деле
максимальные пики будут меньше. Были рассчитаны все АКФ и ВКФ
циклической системы для #=31. Образующие М-последовательности строились на
основе примитивных многочленов foW=^5+^3+l и }ь(х)=х5+х*+х3+х+1.
Многочлену fa(x) соответствует последовательность {a(v)} с начальными условиями
—11 —11 1, многочлену }ъ(х)—последовательность {6(v)}. Нормированное
значение максимальных боковых пиков удовлетворяет неравенству
Ятах(Я)<0,42, что близко к значению 3/]/"2ЛГ=0,37 табл. 4.11.
Последовательности Касами. Образование циклических последовательностей
при аддитивных символах согласно (4.91) можно записать символически, вводя
задержку D(j). При этом правило образования циклической системы (4.91)
можно представить следующим образом:
{Cj (v)} = {A (v)}®{D (/) В (v)}, (4Л03)
где символ ® означает посимвольное умножение последовательностей {A(v)}
и {D(j) B(v)}, а произведение D(j)B(v) является символом B(v)t сдвинутым
на / тактов, /=0, N—1. Число всех последовательностей равно W+2, так как
имеется всего N сдвигов плюс две исходные последовательности.
Касами i[41] предложена система ФМ сигналов, которая получается
посимвольным перемножением ^-последовательности {A(v)} с «периодом #=2П—1
и Af-последовательности {B(v)} с периодом Nx=2nl2—1, причем используются
циклические сдвиги {D(j)B(v)}. Поэтому система Касами получается
аналогично (4.103), но /=0,2П/2. В результате число последовательностей
L = 2"/2 = yAT+l. (4.104)
Поэтому систему Касами с объемом (4.104) называют малой. Максимальные
пики ВКФ малой системы Касами удовлетворяют соотношению
Яшах > (2п/2+ 1)/(2п— 1) « 1/VW. (4.105)
Большая система Касами [41] получается при посимвольном
перемножении двух ^-последовательностей с периодами N—2n—1, образующих
циклическую систему (4.103), на М-последовательность с периодом Ni=2n/2—1, причем
« — четно. Таким образом, символически алгоритм формирования большой
системы Касами записывается следующим образом:
{Kij (v)} = {A (v)}®{D (j) В (v)}®{D (0 С (v)}, (4.106)
где {A(v)}t {B(v)\ — Af-последовательности периода N; {C(v)} — М-последо-
вательность периода Nt; D{j)t D (i) — символы сдвига, /=0, #—1, i=0, N— К
При ns~2mod4 объем системы равен 2П/2(2П-И), а при /zs==0mod4 он равен
2п/2(2п + 1)—1. При больших п объем большой системы Касами
L«23"/2«tf3/2) (4.107)
т. е. в "I/ N раз больше объема нормальной системы. Корреляционные свойства
большой системы Касами удовлетворяют оценке (4.105). В табл. 4.12 приведе-
121
Таблица 4.12. Циклические системы последовательностей
*
31
«3
65
!27
255
s
о
я
я
S
С
3551
2373
14551
14343
12471
1527
133605
10762
41567
231441
264455
326161
267543
11367
6031603
ю по-
ова-
ностей
:rS£
33
33
65
65
64
8
520
63
129
257
257-
256
256
16
4111
31
31,...
31
31
31
Значения, принимаемые
корреляционными функциями
7 —1 —9
И 7 3—1 —5 —9
15 —1 —17
15 И 7 3 —1 —5 —9 —13
15 7 -1 -9 -17
7 -1 -9
15 7 —1 —9 —17
15 11 7 3 —1 —5 —9 —13
15 —1 —17
15 —1 —17
, 15 11 7 3-1—5—9 —13 —17 —29
15 —1 —17 —33
15 —1 —17 —33
15 —1 —17
15 —1 —17 —33
Примечание
Последовательности
Голда
Взаимно-обратные
М-последовательности
Последовательности
Голда
Взаимно-обратные
М-последовательности
Последовательности,
двойственные кодам БЧХ
Малое множество
последовательностей Касами
Большое множество по-
следовательностей
Касами
—
Последовательности
Голда
М-последовательности
Взаимно-обратные
М-последовательности
Поел е дова тел ь ности
типа Голда
Последовательности,
двойственные кодам БЧХ
Малое множество
последовательностей Касами
Большое множество
последовательностей
Касами
ны данные [41] по системам ФМ сигналов, являющихся последовательностями
Голда, Касами и родственных им.
В первом столбце указана длина последовательностей, во втором —
образующий полином, представленный в восьмиричной записи, в третьем — число
последовательностей, в четвертом — значения периодических ВКФ, в пятом —
названия систем и последовательностей.
Таким образом, циклические системы Голда и Касами позволяют строить
нормальные и большие системы ФМ сигналов.
4.8. Системы многофазных сигналов
Положим, что в дискретном многофазном сигнале число различных фаз
равно р, а фазы принимают значения
fy(v)=-(2nr/p) aj(v). (4.108)
Числа г и р — взаимно-простые; v — номер элемента, v=0, N— 1; cij(v)-&
символ у-й кодовой последовательности {aj(v)}.
ВКФ сигналов / и k по определению записывается следующим образом:
j N-X-X
Яд (А,)» — 2 exp{i[e,(v+l)—eft (v)]}.
122
(4.109)
Подставляя (4.108) в определение (4.109), находим
tf-A-I
Модуль максимального пика
#тах=(1/Л0/тах, («И}
где
/тах=тах"|/д(Я)|, (4.112)
/t &» A
/д(Ч= J «p{/[e/(v + X)— в*(Х)]>. (4.113)
v=0
Максимальный боковой пик будет минимальным, если максимальное значение
/max минимально, т. е.
max \I3h(k)\= min. (4.114)
Исследования показали [5], что для уменьшения /max необходимо иметь
исходные сигналы, у которых периодические АКФ имеют положительные
боковые пики. Оценка ВКФ при #>1
*mai<(l/V^)(l+e). (4.115)
где б определяется соотношением (4.98).
Пример системы. Неравенству (4.115) удовлетворяет система кодовых по*
следовательностей {flj(v)}, символы которой определяются из сравнения второй
степени:
aj (v) вв / v» -f *i v + £Ь (mod N), (4.116)
где /=1, N— 1—номер последовательности; сь со — целые числа v=0, AT—1; # —
простое число. Например, при #=11, с\=Со=*0
01495335941
0287 10 66 10 782
03154994513
04539 119354
0 5 9 13 4 4 3 19 5 ,,117v
062 10 8778 10 26 l*-"'J
07682 10 10 2867
08 10 672276 10 8
09341 551439
0 10 726 8862 7 10
Каждая строка (4.117) является кодовой последовательностью {flj(v)}. Для
систем (4.116) при p=N периодическая АКФ каждой последовательности имеет
нулевые боковые пики. Следовательно, для систем (4.116), (4.117) справедлива
оценка (4.115).
Большие системы многофазных сигналов. Приведем методы построения
систем многофазных сигналов, объем которых L"^>N[5]. Положим в (4.108)
p=N, т. е.
ej(v)»-^aj(v)f (4.118)
123
где г и N — взаимно-простые числа. Определим символы a,(v) кодовых
последовательностей через сравнение /г-й степени:
s=2
(4.119)
где Cj,=Ot N—1 не равны нулю одновременно; с\> cq — произвольные целые
числа: v=0, N—1; n<N; N — простое число; / — номер сигнала. Символы a,(v)
лежат в классе наименьших неотрицательных вычетов по модулю числа N.
Любые две последовательности, определяемые уравнением (4.119), отличаются друг
от друга хотя бы одним из коэффициентов Cj8. причем все CjS не равны нулю
одновременно. Поэтому максимальный объем системы
L^N*-1— 1. (4.120)
Свойства систем сигналов зависят от тех ограничений, которые могут быть
предъявлены к коэффициентам CjS. Окончательные результаты приведены в
табл. 4.13.
На первой строке табл. 4.13 приведены данные системы (4.116) объема
JV—1, а во второй и третьей строках приведены данные систем большого
объема или больших систем. Как следует из оценок ВКФ табл. 4.13, увеличение
объема системы приводит к ухудшению корреляционных свойств.
Таблица 4.13. Системы многофазных сигналов
Коэффициент
л = 2; cj2=l, -V—1
гс>3; cin=l, N—\; cjt n-i = 0
остальные CjS = 0, N—1
az>4 — четное:
[0, N—1 при четных s
[0 при нечетных s
Объем системы
N—l
{N-~\)Nn~3
#п/2_!
Оценки ВКФ
(п — 1) —
Vn
,» ! + 6
P — V—rpr
Уы
4.9. Большие производно-циклические системы
Они основаны на посимвольном перемножении производящей
последовательности {V} на последовательность Уолша {Wk} и на циклическую
последовательность Голда {Сп}, т. е. /-я последовательность определяется следующим
образом:
{Aj} = {V}®{Wk}®{Gn}. (4.121)
Поскольку k—\t N, /г=1, N, то /=1, N2, т. е. объем такой системы
124
(4.122)
Если вместо системы Голда использовать большую систему Касами (4.106),
то
{Aj} = {V}®{Wk}®{Kn}. (4.123)
Так как /г=1, N3/2, то объем системы (4.123)
L = N5/2. (4.124)
Однако характеристики ВКФ систем (4.121), (4.123) пока что не известны.
4.10. Линейно-производные системы ФМ сигналов 1
Максимальный объем циклических систем ФМ сигналов равен N3/2 для
больших систем Касами. В работе [42] предложен новый класс больших систем
ФМ сигналов — линейно-производных систем. Рассмотрим линейную систему ФМ
сигналов, которая согласно [42] может иметь объем
L~2k, £ = 07Ж (4.125)
где k — выбирается согласно требованиям конкретно решаемой задачи, N —
база ФМ сигнала (длина последовательности). Линейная система Я формируется
путем перебора всех L «различных сочетаний произведений к базисных кодовых
последовательностей {#*}, i'=lf k, элементы которых принимают значения 1 и
—1. В случае представления базисных кодовых последовательностей элементами
двоичного поля они должны быть линейно-независимыми, а линейная система
будет содержать все L их линейных комбинаций. Например, при необходимости
построить систему объемом L«106 ее можно задать £=20 базисными
кодовыми последовательностями.
Введем теперь понятие линейно-производной системы на основе
рассмотренной линейной системы Я. С этой целью выберем из полного кода ФМ
сигналов с базой N произвольную кодовую последовательность {Л},
удовлетворяющую условию {о}ёЯ, которую назовем производящей кодовой
последовательностью. Далее умножим посимвольно каждый сигнал линейной системы Я на
производящий сигнал {Л}, тем самым получив новую совокупность ФМ
сигналов, которую назовем линейно-производной системой ФМ сигналов. Операцию
формирования линейно-производной системы Л с производящим сигналом {а}
из линейной системы Я будем условно записывать в виде символического
произведения
{Л}«{а} {Я*}. (4.126)
Установим некоторые свойства введенных систем ФМ сигналов. Прежде
всего из определения Я и Л следует что Л является смежным классом
разложения .мультипликативной группы полного кода -по подгруппе Я. Кроме того,
объем системы Л равен объему системы Я. Из теории групп известно, что число
различных смежных классов, tf следовательно, линейно-производных систем
для заданной линейной системы Я объемом, определяемым формулой (4Л25),
составляет
М = 2N~k, (4.127)
1 Параграф 4.10 написан на основе совместной работы с Ю. К.
Сальниковым [42].
125
причем в это число входит также и система Я, которую можно рассматривать
как линейно-производную систему с производящей кодовой последовательностью
из всех единиц. Задание всех М систем сигналов можно осуществить,
используя выбор производящих сигналов таким образом, чтобы они составляли
подгруппу полного кода. Пусть G — такая подгруппа. Тогда ее можно задать
матрицей
G =
gii » • • • *8ш
(4.128J
£#_kf , • • -SN-k,N\
являющейся порождающей матрицей подгруппы производящих сигналов.
Аналогично тому, как это имеет место для (порождающей матрицы
линейной системы Я, в (4.128) строки матрицы — базисные кодовые
последовательности подгруппы G. Поскольку линейная система Н также задается базисными
кодовыми последовательностями, для определения всех М линейно-производных
систем ФМ сигналов объемом L=2ft достаточно задать N базисных кодовых
последовательностей. Причем k из них определяют линейную систему, N—k —
подгруппу производящих сигналов.
Корреляционные свойства линейно-производной системы А лучше исходной
линейной системы, что доказано путем определения р-го момента КФ,
усредненного по всей системе [42]. Если тР(А)—р-й момент КФ системы Л, тр(#) —
то же для системы Я, то имеет место неравенство
тр(Л)<тр(Я). (4.129)
Неравенство (4.129) является доказательством того, что при построении
производных систем ФМ сигналов возможно улучшение корреляционных свойств,
причем не только в статистическом смысле, но и по максимальным пикам, как
это следует из результатов, полученных в [43]. Экспериментальное
доказательство неравенства (4.129) получено путем машинного расчета КФ
линейно-производных систем на основе подгруппы Уолша.
4.11. Объем больших систем ФМ сигналов
Первой работой, в которой было приведено доказательство
существования больших систем ФМ сигналов, является работа [44].
В ней приведена нижняя граница объема больших систем,
удовлетворяющих условию, при котором КФ сигналов, образующих
систему, не превышают заданного уровня. С помощью границы
Чернова в [44] найдено, что среднее значение объема большой
системы удовлетворяет неравенству
Г> -^ к 1+/адн*. (1 -^i^ojiv/2, (4.1зо)
где Ro — допустимый уровень (максимум модуля) КФ. При Яо<1
неравенство (4.130) преобразуется в следующее:
L>-Le " , (4.131)
которое свидетельствует об экспоненциальном росте объема боль-
126
шой системы ФМ сигналов. Работа [44] имеет принципиальное
значение для теории ФМ сигналов. Вместе с тем, необходимо
отметить, что оценка биномиального распределения КФ с помощью
границы Чернова дает хорошие результаты только при больших
значениях КФ. В случае малых допустимых значений КФ
корректнее использовать аппроксимацию биномиального закона
рядом Эджворта:
•ю-Тг/^'+^Чт)]- (4'132)
где дисперсия a2 = l/2N9 коэффициент эксцесса y=1 при N»l;
На — полином Эрмита. При этом среднее значение объема
большой системы [45, 46]
— qiAT RlN
Из формулы (4.129) также следует экспоненциальный рост
объема большой системы с ростом длины последовательностей N,
что совпадает с результатом работы [44] в соответствии с
формулой (4.131). Вместе с тем, при увеличении N уменьшается и
дисперсия КФ. Поэтому возникает вопрос, как правильно задавать
совместно допустимый уровень Ro и длину последовательности N.
Исследование этого вопроса, приведенное в [45], показало, что
КФ обладают «пороговым свойством»: при /?о<#пор КФ
произвольного сигнала превышает порог с вероятностью, близкой к 1,
при /?о></?пор это событие происходит с малой вероятностью.
Пороговое значение
Rnop**V\n(aN)/Ny (4.134)
где а» 1,6. Если положить, что допустимый уровень
Я0=У^ГЯПОР, (4.135)
то среднее значение объема большой системы [45]
Г>С(а) ^' (4.136)
[ln(atf)]3/2
где с(а) =3я1/2а~а2~2а3/2. Из (4.136) следует, что среднее значение
объема больших систем с допустимыми корреляционными
свойствами растет по степенному закону, который существенно
отличается от экспоненциального закона. Введение «относительной
единицы» измерения уровня КФ в виде /?ПОр (4.134) позволило
корректно определить объем большой системы сигналов. Например,
если необходимо построить систему сигналов с объемом, равным
базе, т. е. длине последовательности N9 то надо положить <х=2.
При этом допустимый уровень КФ должен в 2]/ln(aiV)
превышать среднеквадратическое значение, равное lf]/r2N. Если
необходимо построить системы с E&N2, то множитель а=3 и т. д.
127
Таким образом, более реальная задача, которую возможно
решить,— построение системы сигналов с объемом, который
определяется степенным законом
L=AN«-\ (4.137)
где А — некоторая постоянная, зависящая от N и а.
4.12. Оценки апериодических ВКФ
Оценки ВКФ необходимы как для определения взаимного
влияния абонентов в системах связи, так и для оценки объема
больших систем. Кроме того, оценки ВКФ служат для определения
полезности тех или иных алгоритмов построения систем сигналов.
Исторически первой оценкой КФ была оценка, полученная из
условия ограниченности объема тела неопределенности.
Поскольку в дальнейшем была доказана ограниченность объема взаимной
функции неопределенности (ВФН) (см., например, [5]), то из
условия ограниченности объема получается следующая оценка сред-
неквадратического значения ВФН при усреднении по времени и
по частоте [5]:
<ЪфЧ-1/2КЖ (4.138]
Эта оценка в ]/1Граз меньше, чем оценка ВКФ aR для
случайных последовательностей. При выводе (4.138) было положено, что
база ФМ сигнала равна N. Среднеквадратическая оценка
апериодических ВКФ для случайных последовательностей сгвкф = l/V^JV—
одна из наиболее характерных для ФМ сигналов, поскольку
многие иные оценки пропорциональны ей.
Оценка (4.138) по сути является интегральной, поскольку
производится усреднение по времени и по частоте. Можно найти
несколько оценок КФ на основе других интегральных равенств,
справедливых для корреляционных функций. Одним из наиболее рас-
пространственных является интегральное равенство Сталдера —
Кана [б]:
if */*(*>* Ji ЯМЫ*). (4.139);
П=.1(ЛМ) n=-(W-l)
Левая часть равенства равна сумме произведений квадратов
значений ВКФ, а правая — сумме произведений значений АКФ.
Обозначим среднеквадратическое значение ВКФ через сгвкф- Из
(4.139) получаем
о* =
1
ВКФ 2N — 1
1+2J **<*)**(*>
(4.140)
Равенство (4.140) соответствует тому, что АКФ — симметричная
функция и Rj(0) =Rk(0) = 1. Из этого равенства можно получить
128
ряд оценок. Сначала допустим для простоты, что /?*(л)—Л*(л)=»0
при пФО. В этом случае
<Ъкф= 1/УШ=1 « 1/V2N, (4.141)
что совпадает с оценкой среднеквадратического значения ВКФ
случайных последовательностей. Преобразуем равенство (4.140),
используя неравенство Коши — Буняковского,
л-i | Г"-1 9 11/2 Г"-1 о I1/2
iS Ъ^ЪЩ< 2 *?<Л> S ** <л> • <4142*
n=i I L«=i J Ln=i J
Применяя неравенство (4.142) к (4.140), получаем две оценки:
сверху
1 ( \N~l 9 I1/2 Г"-1 9 I1/2 1
Ьг{1+[ 2, *'(Л) I [2,** (пп }; (4Л43>
"i-'-sbrl'-lS^WJ [S,^WJ }• (4.144)
Найдем статистические характеристики величины о2вкф (4.140).
Поскольку можно .полагать, что АКФ в правой части (4.140)
распределены по биномиальному закону с нулевым средним
значением и дисперсией 0,5Af, то среднее значение
"5|^=1/2^-1 «1/2АГ, (4.145J
а дисперсия
М2{а2КФ}=2(^-1)/3(2^-1)^8 « 1/ЗЛР. (4.146):
Отношение
у2 <;
снизу
убывает с ростом N. Поэтому при N^$>1 среднее значение (4.145)
достаточно точно характеризует величину о2вкф. Оценка (4.145)
совпадает с дисперсией КФ случайных последовательностей.
Поскольку отклонение о2вкф от среднего значения (4.145) с ростом
N уменьшается, то в неравенствах (4.143), (4.144) приближенно
квадраты значений АКФ можно заменить их дисперсиями l/2iV.
В результате из неравенства (4.143) получаем, что
Wmax^l/l^ (4.148)
а из (4.144)
oB^mm*l/V2N. (4.149)
Следует отметить, что минимально возможное значение
модуля -пика КФ равно или 1/N или 0. Наличие в знаменателе правой
части (4.149) величины У~2 свидетельствует об «усреднении» пиков
с амплитудами, равными 1/N и 0. Минимально возможное значе-
5—111 129
ние ВКФ (4.149) может иметь место только для дополнительных
последовательностей, у которых Rj(n)=—Rk(n) для пфО.
Необходимо подчеркнуть, что .интегральные оценки дают
представление только о среднеквадратическом уровне ВКФ и не
позволяют судить о максимальных пиках. Проблеме минимизации
максимальных пиков КФ, в том числе и синтезу ФМ сигналов с
минимальными пиками, посвящено большое число работ.
Многочисленные .исследования лучших из известных систем ФМ
сигналов показали, что верхняя и нижняя экспериментальные оценки
распределены в (интервале от
max mln
«1/V2N до ДВКФ
max max ~
ъл/Vn.
Для оценки максимальных пиков можно использовать
вероятность превышения пиком ВКФ допустимого уровня. Если положить
вероятность превышения Р=1/4Л/Г, то приближенно можно
получить следующую вероятностную оценку максимальных пиков КФ:
#юах &V~2\n(aN)/N, (4.150)
где а«1,6. Как видно из (4.150), максимальные пики растут от-
носительно среднеквадратического значения 1/ V 2N как 2]/" In {аЩ
с ростом N.
Оценки максимальных пиков можно получить с помощью
метода моментов, .развитого в работе [43]. Он заключается в
следующем. Допустим, ВКФ имеет Q пиков со значением i?max и
2N— 1—Q пиков со значением i?n, причем i?n<#max. Момент КФ
р-го порядка, по определению,
2N-Q-1
тр
, Г 2N-Q-1
(4.151)
С ростом р второе слагаемое в правой части (4.151) становится
Существенно меньше, чем первое. Поэтому при N^1 из (4.151)
/?m.x«ymp2^/Q. (4.152)
Если можно найти значение момента тр каким-либо
косвенным образом, то в соответствии с (4.152) можно найти и оценку
максимальных пиков. В работе [43] показано, что оценки КФ
определяются следующими выражениями:
сверху
Яша* шах **У{1 + УШ)/М. (4Л53)'
снизу
«max mln « УШ (4ЛБ4>
Следует отметить, что оценки (4.153), (4.154) получены на
основе второго и четвертого момента. Если будут найдены
моменты более высокого порядка, то они позволят получить более
точные оценки. Вместе с тем необходимо подчеркнуть, что в настоя-
130
щее время не решена основная задача в теории оценок КФ: не
создан метод нахождения оценок максимальных пиков для
конкретной системы сигналов по структурным свойствам сигналов.
б. СИСТЕМЫ ДИСКРЕТНЫХ ЧАСТОТНЫХ СИГНАЛОВ
/4
F
5.1. Корреляционные функции ДЧ сигналов
и число совпадений
Наибольшее распространение на практике получили
дискретные частотные {ДЧ) сигналы, обладающие только одним
частотным элементом во временной полосе. Примеры таких сигналов
приведены на рис. 2.15,6 и 5.1.
Подобные ДЧ сигналы
называются сигналами первого порядка X
[5]. Поскольку только такие сиг- 3
налы и будут рассматриваться, то ь
в дальнейшем их порядок
указываться не будет. Обзор работ по
ДЧ сигналам до 1978 г. и их
свойства можно найти в [4, 5].
Поэтому в данном параграфе будут
приведены только основные
свойства ДЧ сигналов [5] и алгорит-
7
б
с
3
г
мы построения систем таких сиг- *
Af
ш
-I
I
Л
i
<А
ш
-А
At
а /
г t
W
2345678 3,
Рис. 5.1. Частотно-временная матрица
налов. Положим, что ДЧ сигнал
состоит из М элементов, а все
элементы имеют одинаковую
форму Ф(0- Пусть номера
элементов v изменяются от 0 до М—1,
dj(v) — комплексная амплитуда v-ro элемента, а положение v-oro
элемента по частоте определяется сдвигом, равным yj(v)A(oy где
Уз (у) — символ частотной кодовой последовательности (ЧКП)
{Yj(v)}, 'причем yj(v) при изменении v=0, M—1 меняется в таких
же пределах от 0 до М—1, но в определенном порядке.
С учетом сделанных предположений комплексная огибающая
ДЧ сигнала
М-1
Uj(t)= 2 aj(v)0{t—vAt)exp(iyj(v)A(ot)
v=0
(5.1)
причем здесь и в дальнейшем используется условие
AG)A* = 0(mod2rt), (5.2)
где Асо=2гоД/ — ширина спектра элемента, At— его длительность.
Смещение соседних элементов по частоте равно До, а по
времени — At. Как видно из (5.1), изменение аргумента у элемента
Ф(£) происходит линейно в соответствии с изменением v, а сме-
5* 131
щение по частоте — в .соответствии с изменением YiM- Например,
для ДЧ сигнала, показанного штриховкой на частотно-временной
плоскости (ом. рис. 5.1), ЧКП {yj(v)}= 085210741963.
Известна [5] частотно-временная дуальность ДЧ сигналов.
Использование её позволяет расширять применение тех или иных
полученных результатов. Чтобы воспользоваться этим, преобразуем
комплексную огибающую ДЧ сигнала, используя временную
кодовую последовательность (ВКП) {vj(y)}, к следующему виду:
U* W = 2 а* (V) Ф И—Ъ (У) A t] exp (i VA о t). (5.3)
В формуле (5.3) линейно меняется смещение по частоте в
соответствии с .изменением v^O, N—1, а изменение аргумента у
элемента Ф(/) 'происходит в соответствии с изменением ВКП
{vj(y)}, символы которой изменяются в тех же пределах от 0 до
М—1, но в определенном порядке. Например, для ДЧ сигнала,
изображенного на ,рис. 5.1, ВКП {v,(y)} =073106295184.
Формулы (6.1), (5.3) и определяют частотню-временную
дуальность ДЧ сигналов: в (5.1) отсчет производится по времени (по
номерам дискретов v), а в (5.3) — по частоте (по сдвигу
частоты, пропорциональному у).
Используя определение ФН /?Ф (т, Я) элемента Ф(£) и условие
'(5.2), можно получить ВФН сигналов (5.1), (5.3). Полагая Я = 0
и учитывая предположения, сделанные при определении
комплексных огибающих (5.1), (5,3), находим, что ВКФ ДЧ сигнала с
ЧКП (5.1)
1 ЛГ—1 ЛГ—1 *
^(т)==17 2 2 Mv)aft0*)#<i>{(T + ([*-v)A/,
lyj(v)—yk(n)]A<i>}, (5.4)
а ВКФ ДЧ сигнала с ВКП (5.3)
(5.5)
Рассмотрим ВКФ (5.4), (5.5) в дискретных точках, полагая
т = ЯД*. (5.6)
Подставляя (5.6) в (5.4), (5.5), получаем:
, ЛГ—1 Л*—1 #
#j^) = 4t2 S^M^W^^+^-vJA/. [T/(v)-T*(|i)]A©};
М v==0 ц=о
(5.7)
ЯЛ(Х)=4г 2.^aHY)«fta)«o>{^ + vft(i)-vn7)]A^ (T-5)Aa>).
(5.8)
132
М v^oi^o
Анализ ВКФ (5.7), (5.8) существенно упрощается, если
использовать условия ортогональности элементов, которые сводятся к
тому, что различные элементы не перекрываются во времени, а их
спектры не перекрываются по частоте. Отметим, что такие
условия не могут выполняться одновременно, так как спектр функции,
ограниченной по длительности, имеет неограниченную ширину. Но
для простоты анализа убудем считать, что условия
ортогональности имеют место. Поэтому положим, что в дискретных точках
частотно-временной плоскости для ФН элемента <D'(f) выполняются
условия ортогональности, а именно:
/?Ф0ЛИ,<7Д") = {л П**Р=0, q = °' (5.9)
[О при остальных значениях р и q.
Используя условия ортогональности (5.9) ,и полагая |a/(v)| =
в1ал:(*0| — 1| из (5.7), (5.8) получаем оценку модуля ВКФ в
дискретных точках
\RJk(k)\<mfM, (5.10)
где т — число решений следующих систем уравнений:
* + (A-v = 0 | Hn(5)-vHv)=0 1 (5.11); (5.12)
Система (5.11) соответствует ВКФ (5.7), а система (5.12) —
ВКФ (5.8). В этих системах % изменяется от —М до М, a v, |х, у,
£=0, М—1. Используя одно из уравнений систем (5.11), (5.12)
можно свести эти системы к уравнениям:
T/(v)-T*(v-*) = 0; v,(v)-vft(v)-^ = 0. (5.13), (5.14)
Число решений целочисленных уравнений (5.13), (5.14) меньше
числа решений соответствующих сравнений по модулю М:
Vj (v)—Tft (v~Ь) — 0 (mod M)\ v, (у) —vk (у)—А, ев 0 (mod M).
(5.15), (5.16)
Сравнения (5.15), (5.16) являются частными случаями
сравнения
щ (v)—ak(v—\i)—X = 0 (mod M), (5.17)
где v=0, M—1, А,=0, М— 1, |х=—М, M.
Если сравнение (5.17) имеет rfi решений, то оценка (5.10)
преобразуется к следующей
iVWK«/^ (5Л8)
причем th^m. Если /ft = 0, то формально \Rju(h) | = 0, но это
будет в том случае, если всюду выполняется условие
ортогональности (5.9). Но так как строгой ортогональности во всех дискретных
точках добиваться нельзя, то при ffi = 0 \Rjk(fo) |<Cl/M.
Поскольку последовательности {a,j} и {а&} состоят из символов,
принадлежащих к одному алфавиту (0, 1, ..., М—1), то при
изменении номеров v, р, Я рано или поздно возможно совпадение
133
кодовых последовательностей, т. е. возможно решение совпадения
(5.17). Бели при данных v, р, Я, /, k имеет место одно решение
(одно совпадение), т. е. /ft=l, то \Rjk(h) | = 1/А1. Увеличение
числа решений, во-лервых, увеличивает максимальный уровень ВКФ
согласно (5.18), во-вторых, ухудшает использование отведенной
полосы частот для сигнала (5.1) с ЧКП, так как спектры
некоторых элементов будут совпадать (ухудшает использование
отведенного времени и пик-фактор сигнала (5.3) с ВКП, так как будут
совпадать некоторые элементы); в-третьих, увеличивает число
сигналов в (Системе. Именно третье следствие позволяет строить
большие системы сигналов, но при условии т>1. Назовем ДЧ
сигналы, обеспечивающие одно совпадение т=1, оптимальными.
5.2. Распределение числа совпадений
в корреляционных функциях ДЧ сигналов
Число совпадений элементов т в ДЧ сигналах согласно (5.10) определяет
ВКФ таких сигналов в дискретных точках. Сначала рассмотрим случай, когда
два ДЧ сигнала (полезный и мещающий) полностью перекрываются по
времени. При этом число совпадений т может изменяться от 0 до М. Полное
перекрытие двух сигналов возможно, когда между полезным и мешающим
сигналом нет временного сдвига или когда каждый из сигналов излучается
непрерывно (периодически). При этом на выходе согласованного фильтра будем
иметь периодическую ВКФ. Перейдем к распределению числа совпадений.
Число ДЧ сигналов без совпадений элементов по частоте
L=MI (5.19)
Соответственно число пар сигналов равно (Ml)2 Из них Ml пар сигналов
состоят из тождественно одинаковых сигналов и имеют М совпадений, а из
оставшихся (Ml)2—М! пар сигналов половина не различима, так как каждой
паре с номерами / и / соответствует пара с номерами / и /, т. е. из (Ml)2
можно исследовать не более [(Ml)2—Ml]/2 пар сигналов.
Доказано [5], что относительное число пар перестановок с т совпадениями
или вероятность т совпадений
PM(m) = M\DMiJ(Ml)* = DM >m/Ml (5.20)
Число DM,m называется субфакториалом, так как доказано, что оно имеет
много свойств, аналогичных свойствам факториалов.
Субфакториал
^=^[1-тг+1г—-+(-,)M irl (5-21)
Таблица 5.1. Субфакториал
м
Dm
1
0
2
1
3
2
4
9
5
44
6
265
7
1854
8
14333
9
133496
10
1334961
134
Его значения приведены в табл. 5.1.
Для субфакториала известны рекуррентные соотношения:
*>м.т-<%DM_mt DM = MDM_l + (-\)M, (5.22), (5.23)
которые позволяют найти любое DM и DM,m. Формулы (6.20) — (5.23)
позволяют найти вероятность т совпадений.
При больших М выражение в квадратных скобках (5.21) стремится к е*1,
что позволяет аппроксимировать распределение вероятностей (5.20) законом
Пуассона со средним значением, равным единице [5]:
Рм(т)~-1/ет1. (5.24)
Из (5.24) следует, что при М>1 вероятность Рм{т) практически не зависит
от Af. Наиболее вероятны случаи, когда т=0 (совпадений нет) и т=1 (одно
совпадение). Их вероятности примерно равны е-1»0,368. В табл. 5.2
приведены значения вероятностей Рм(т) для М=5 и М=9, рассчитанные по точной
формуле (5.20).
Таблица 5.2. Распределение числа совпадений
т
Р5(т)
Р9(т)
0
0,366
0,368
1
0,375
0,368
2
0,167
0,184
3
0,083
0,061
4
0
0,015
5
0,0083
0,003
6
5-Ю-4
7
ю-*
8
0
9
3-10—в
Сравнение данных табл. 5.2 с законом (5.24) позволяет использовать этот
закон для приближенных расчетов. Распределение Ръ(т) при М=Ъ (табл. 5.2)
незначительно отличается от распределения (5.24), а распределение Р*(т) при
Л1=9 практически не отличается от (5.24). Поскольку наиболее вероятными
согласно (5.24) являются или т=0, или т=1, то модуль ВКФ (5.10) наиболее
вероятно будет равен или 0 или 1/М. Среднее значение числа совпадений,
распределенного по закону Пуассона (5.24), равно 1. Поэтому среднее значение
модуля ВКФ (5.10)
#"=111! {|*Л (Я)|} = ЦМ. (5.25)
Вероятность появления т=0 или т—\ равна 0,736, вероятность появления
т^.2 равна 0,92, а вероятность появления т<4 равна 0,981. Отметим, что
эти вероятности согласно (5.24) не зависят от М. И поэтому при М>1 уровни
ВКФ (5.10) должны быть малыми.
Если полезный и мешающий сигналы перекрываются частично, то в этом
случае на выходе согласованного фильтра будет иметь место апериодическая
ВКФ. На рис. 5.2 изображено совместное расположение двух частично
перекрывающихся ДЧ сигналов первого порядка: сигнал А (левая штриховка)
опережает сигнал В (правая штриховка) на два элемента. Перекрытие сигналов
возможно только в прямоугольнике АВ, выделенном толстой линией. При
перекрытии сигналов А и В, изображенном на рис. 5.2, имеет место одно совпаде-
135
ние (квадрат с совпадающими штриховками). Допустим, что временной сдвиг,
кратен длительности элемента А*, т. е. %=nAt, где л — целое число,
удовлетворяющее условию |л|=0, ЛГ, где ЛГ —число элементов в ДЧ сигнале. При л«0
имеем случай периодической ВКФ, при
\п\=М сигналы не перекрываются. Так
как п полностью характеризует
временной сдвиг, то в дальнейшем будем
оперировать только с п.
Доказано [5], что вероятность т
совпадений при временном сдвиге п
т
АВ
Ш
%
где неполный субфакториал [5]
(5.26)
Рис. 5.2. Частичное совпадение
ДЧ сигналов
М\\
1-
С}
М—п
с2
М-п
• + (-1)*-*]'
м ■ м(м—\) ' N "' ■ (5'27J
При д=0 правая часть формулы (5.27) совпадает с определением
субфакториала (5.21).
Для неполного субфакториала справедливо соотношение
DMt mtn~ Gm-пиМ-т, О, л>
,/>л
(5.28)
где Djtf-m,o,n определяется согласно (5.27).
Если сдвиг п небольшой (л<0,6Л1), то вероятность совпадений (5.26)
*W")
'М-п
1
"М—п
С fit
м
т[е
р*и.
(5.29)
где Рм(т) определяется согласно (5.24). Более точное приближение для
бюлыпих п обеспечивает следующая формула для вероятности совпадений:
/ ч СГм-п (, п \
/т\ ж 1 «и
*м И.
(5.30)
Но формула (5.30) будет справедлива лишь при т<М.
5.3. Алгоритмы построения оптимальных
и квазиоптимальных систем ДЧ сигналов
Алгоритмы построения оптимальных и квазиоптимальных систем ДЧ
сигналов приведены в [6]. Они были получены на основе теории чисел. В табл. 5.3
приведены алгоритмы построения последовательностей {a,>(v)},
удовлетворяющих сравнению (5.17). В табл. 5.3 приведены правила образования
последовательностей (<Xj(v)}; ограничения, налагаемые на определенные коэффициенты;
объем системы и оценка ВКФ.
В первой строке табл. 5.3 число а — первообразный корень по модулю
простого числа Af+1. Все остальные правила основаны на степенных сравнениях
136
Таблица 5.3. Алгоритмы построения оптимальных и квазиоптимальных
систем ДЧ сигналов
Правила образования
последовательностей
a,- (v) s= соа^+v (mod M)
a,- (v) ss /v+Co (mod Af)
<Zi(v)=s/v2 + CiV +
H-Co(modAf)
ctj (v) s= /vr+Co (mod M)
r
«i(v)= 2 CjsV°+
s=l
4- Co (mod Af)
Коэффициенты
Со=Л, Af; /, v=0, Af—1
v, c0=0, Af—1; /=1, Af—1
v, d, Co=0, Af—1; /='1, Af—1
(r, Af—1) = 1; /=il, Af—1
v, Co=0, Af—1
r>2; Cj> = 1, Af—1;
Co=0, M—l;
CjS=5^0 одновременно
r>2; cir=l, Af—(1;
ciff._is=0; Co=0, M—l;
остальные CjS = 0, Af—1
r>J3 — нечетное;
v, Co=0, Af—.1;
JO, Af—1 при нечетных s;
Cjs— \
10 при четных s.
Объем
системы
м
Af--1
(Л1—1)М
Af—l
Af'—11
(Af—1)X
XAfr~2
Af(r+i)/2_
—1
Максимум
ВКФ
1</Af
1,/Af
2/Af
1/Af
r/M
r/M
rJM
по модулю простого числа Af. В четвертой строке числа г и Af—1
взаимно-простые, т. ё. (г, Af—1) = 1.
Первая строка табл. 5.3 дает алгоритм построения оптимальной системы с
максимальным объемом L, равным числу элементов в сигнале Af, а вторая и
четвертая строки дают алгоритмы, при которых L=Af—il.
Остальные строки табл. 5.3 дают алгоритмы построения систем, близких к
оптимальным, но большего объема.
Обратимся к примерам. Сначала рассмотрим систему сигналов,
построенную согласно правилу первой строки. Положим Af+ 1=7, т. е. Af=6, а с0=1.
Символы кодовых последовательностей определяются сравнением <Xj(v)=a'+v.
В качестве первообразного корня по модулю 7 возьмем а=3. После
вычислений получаем следующую систему последовательностей:
(5.31)
В системе (5.31) кодовыми последовательностями являются строки,
которые представляют циклические перестановки. В соответствии со значениями
137
цифр необходимо располагать элементы по времени, т. е. строки (5.31)
являются временными кодовыми последовательностями. Сигналы, построенные в
соответствии с кодовыми последовательностями (5.31), приведены на рис. 5.3.
Номер сигнала соответствует номеру строки. По горизонтали отсчитывается
время, по вертикали — частота. Если положить ЛИ-1 = 11, т. е. М=10, и в
4 5 6
яп пп m
UEd Z_JE1 C_aJ
Рис. 5.3. Оптимальная
система ДЧ сигналов
(ВКП)
качестве первообразного корня по модулю 11 положить а=2, то имеем
следующую систему:
12485 10 9736
485 10 97361
485 10 9736 1
8
5
10
9
7
3
5
10
9
7
3
6
10
9
7
3
6
1
9
7
3
6
1
2
7
3
6
1
2
4
3
6
1
2
4
8
6
1
2
4
8
5
1
2
4
8
5
10
2
4
8
5
10
9
4
8
5
10
9
7
(5.32)
1
4 8 5 10 9 7 3
Рассмотрим системы, построенные согласно правилу второй строки табл. 5.3.
Положим М=7, Со=0. После вычислений имеем систему кодовых
последовательностей
(5.33)
В отличие от последовательностей (5.31), (5.32), кодовые
последовательности (5.33) могут быть использованы и в качестве временных, и в качестве
частотных. Сигналы, построенные в соответствии с кодовыми последовательностя-
0
0
0
0
0
0
1
2
3
4
5
6
2
4
6
1
3
5
3
6
2
5
1
4
4
1
5
2
6
3
5
3
1
6
4
2
6
5
4
3
2
1
0 ЕЗ № Ш ЕЗ Н р^й
Оптимальная
система ДЧ сигналов
ми (5.33), изображены на рис. 5.4. При М=11, с0=0, имеем следующую
систему:
1
3456789 10
0 2 4 6 8 10 1
3 6
1
5 7 9
7 10 2 5 8
0
0
0
0
0
0
0
4
5
6
7
8
9
10
8
10
1
3
5
7
9
1
4
7
10
2
5
8
5
9
2
6
10
3
7
9
3
8
2
7
1
6
2
8
3
9
4
10
5
6
2
9
5
1
8
4
10
7
4
1
9
6
3
3
1
10
8
6
4
2
7
6
5
4
3
2
1
(5.34)
138
Рассмотрим системы, построенные согласно правилу четвертой строки табл.
5.3. Положим М=7, со=0, г=5. После вычислений имеем систему:
(5.35)
Соответствующая система сигналов приведена на рис. 5.5. При Af=ll, Со=0,
г—3, получим следующую систему кодовых последовательностей:
01 85947263 10
025 10 78341 69
0
0
0
0
0
0
1
2
3
4
5
6
4
1
5
2
6
3
5
3
1
6
4
2
2
4
6
1
3
5
3
6
2
5
1
4
6
5
4
3
2
1.
0 3
4 5 1 10 6 7 9 8
04 10 935682 1
0
0
0
0
0
0
5
6
7
8
9
10
7
4
1
9
6
3
3
8
2
7
1
6
1
10
8
6
4
2
9
2
6
10
3
7
2
9
5
1
8
4
10
1
3
5
7
9
8
3
9
4
10
5
4
7
10
2
5
8
6
5
4
3
2
1
(5.36)
Как видно из табл. 5.3, объем оптимальных систем ДЧ сигналов (с одним
совпадением) удовлетворяет следующему соотношению
{М при четном М,
М—1 при нечетном М.
(5.37)
Равенства (5.37) являются фундаментальными для систем ДЧ сигналов
f47]. Взаимное расположение элементов ДЧ сигнала определяется задержками
7
Рис. 5.5. Оптимальная
система ДЧ сигналов
3 4 ? 6
m ггч pti Гчл
L-J Ll^-J L_a LZLa
«x друг относительно друга, т. е. и«тервалами между ними. Число возможных
различных интервалов (положительных и отрицательных) между парой
произвольных элементов равно 2(М—1). Возьмем два произвольных ДЧ сигнала. В
каждом из них выберем две произвольные пары элементов на совпадающих
частотах (на одинаковых частотных строках). Если интервал между парой
элементов у одного сигнала не равен интервалу между парой элементов второго
сигнала, то при взаимном сдвиге по времени эти пары дадут не более одного
совпадения. Два совпадения возможны только тогда, когда интервал между
выделенными элементами одного сигнала равен интервалу между элементами
второго сигнала. Таким образом, чтобы две частотные строки двух сигналов
давали не более одного совпадения, интервалы между элементами сигналов
необходимо выбирать различными.
Так как число различных интервалов между парой элементов равно
2(Af—1), то можно образовать 2(М—1) пар частотных строк, дающих при
любом временном сдвиге не более одного совпадения. Допустим, что ДЧ сигнал
имеет четное М. Такой сигнал состоит из Mf2 пар частотных строк. Рассмотрим
сначала процесс образования пар для положительных интервалов, число
которых равно М—1. Поэтому первую пару частотных строк (произвольных в об-
139
щем случае в сигнале) можно выбрать М— 1 способом. При этом будет
использован и максимальный интервал, равный М—1. Так как в рассматриваемых
ДЧ сигналах элементы не могут занимать одинаковые временные интервалы,
то для последующих пар частотных строк нельзя использовать интервал,
равный М—1. Поэтому на вторую пару частотных строк приходится М—2
различных интервала, причем максимальный равен М—2. Точно так же на
третью пару частотных строк приходится М—3 различных интервала, на k-ю
пару — М — k интервалов. Так как в сигнале всего М/2 пар, то на последнюю
пару приходится М—М/2=М/2 различных интервалов. Из М/2 интервалов
можно образовать только М/2 частотных строк, которые дадут не более одного
совпадения. Учитывая отрицательные интервалы, получаем, что максимальное
число оптимальных сигналов, которое можно объединить в систему, при
четном М равно М. При нечетном М таким же методом можно показать, что
число оптимальных сигналов в системе будет равно М—\. Таким образом, объ-
ем оптимальной системы определяется соотношением (5.37).
Из приведенного доказательства следует, что свойства оптимальной
системы ДЧ сигналов зависят от интервалов между элементами сигналов. Если
одновременно произвести перестановку частотных строк с одинаковыми
номерами всех ЧВМ, то интервалы между элементами сигналов не изменятся.
Следовательно, такие перестановки частотных строк дают новые системы ДЧ
сигналов. На рис. 6.6,6 приведены Ч)ВМ новой оптимальной системы ДЧ сигналов,
0 0 ЕЭ Q
а)
ЕЗ 0 Ш Е2
9
Н ЕЗ
Ш 0
Рис. 5.6. Перестановка строк ЧВМ ДЧ сигналов
полученной из системы с ЧВМ рис. 5.6,а путем перестановки первой строк»
(нижней) всех матриц на рис. 5.6,а на третье место, а шестой строки — на
четвертое место. Кодовые последовательности новой системы имеют вид
3
2
6
4
5
1
(5.38)
Сравнивая (6.38) с (5.31), замечаем, что перестановка строк ЧВМ рис. 5.6,а
(или 5.3) соответствует перестановкам столбцов в (5.31): первый и шестой
столбцы (5.31) перемещены на третье и четвертое места.
С комбинаторной точки зрения образование новых оптимальных систем ДЧ
сигналов сводится к перестановкам из М элементов, поскольку
осуществляются перестановки М частотных строк. Поэтому с учетом всех перестановок
число Q различных оптимальных систем ДЧ сигналов будет не меньше, чем
Qmln = M\ (5.39)
140
Обратимся теперь к квазиоптимальным системам, которые имеют больший
уровень ВКФ, но обладают и большим объемом. Сначала рассмотрим систему,
правило построения которой приведено в третьей строке табл. 5.3. Положим,
что М=7, с0=0, a Ci и / меняются в пределах: Ci = l, М—1, /=1, М—1. Число
сигналов в системе равно (М—l)Af=42. Эти сигналы имеют частотные
элементы, совпадающие по времени, что в свою очередь приводит к появлению
пробелов в сигнале по времени и к ухудшению его пик-фактора. Максимум ВКФ
таких сигналов равен 2/7.
Рассмотрим систему сигналов, построенную согласно правилу шестой
Строки табл. 5.3. Положим, что М=7, г=3, Со=0, Cj3=C3— 1, а С}\=С\ изменяется
от 0 до 6. Число таких сигналов равно (М-ч\)Мг~2 = 42, а максимум ВКФ
равен 3/7. Сигналы этой системы имеют еще большее число совпадений элег
ментов по времени, чем предыдущие сигналы, и еще большее число
пробелов по времени. Поэтому система сигналов, полученная с помощью
этого правила, уступает по своим свойствам системе сигналов, построенной на
правилу третьей строки.
Исследования [48] показали, что объединением всех возможных
оптимальных систем, построенных по любому из приведенных алгоритмов при
различных значениях одного из параметров (а, г или с0), в одну общую систему
можно получить систему ДЧ сигналов существенно большего объема с
ограниченным уровнем пиков ВКФ. Максимальное значение пиков ВКФ и объем
полученной системы зависят от выбора алгоритма и изменяемого параметра. Такие
системы называются композиционными [48].
Очевидно, максимальный объем композиционной системы определяется
числом всех различных оптимальных систем, которые можно построить по
данному алгоритму путем изменения выбранного параметра.
Взяв в качестве исходного алгоритм первой строки табл. 5.3, изменению
может быть подвержен только параметр д, так как изменение с0 ведет лишь к
перенумерации сигналов в системе. Число оптимальных систем, которые можно
построить по данному алгоритму, сравнительно невелико (а следовательно, и
объем композиционной системы) и равно числу первообразных корней по
простому модулю Af+1, не превосходящих по величине Af, так как при а>М
полученные оптимальные системы повторяют уже найденные. Так, при Af=6
таких систем две, при М=10 — четыре и т. д.
Аналогично, при использовании второго алгоритма (четвертой строки табл.
5.3) и изменении параметра г различные оптимальные системы получаются при
г^.М—1, а следовательно, максимальный объем композиционной системы
также относительно невелик и равен (М—1)Хф(М— 1), где <р(М—1) — функция
Эйлера. В обоих случаях уровни ВКФ для сигналов больших баз (£^132=169),
образующих систему максимального объема, могут оказаться хотя и
ограниченными, но недопустимо большими (порядка 50% от главного пика АКФ).
Однако за счет сокращения числа объединяемых оптимальных систем, т. е. за
счет уменьшения объема композиционной системы, можно получить заданный
уровень пиков ВКФ. Ввиду указанных недостатков приведенных
композиционных систем, следует отдавать предпочтение другому алгоритму построения
композиционной системы, подробно рассматриваемому ниже.
141
5.4. Большие квазиоптимальные композиционные
системы ДЧ сигналов1
Наилучшими свойствами с точки зрения получения максимальных объемов и
хороших корреляционных свойств обладают композиционные системы,
полученные путем объединения оптимальных систем, построенных по алгоритму
(четвертой строки табл. 5.3) при гф\ по ЧКП при различных значениях
параметра £о=0, М—1.
Изменение параметра Со в сторону увеличения означает циклический сдвиг
ЧВМ сигнала вверх. Число совпадений элементов ЧВМ двух сигналов при
временном сдвиге ХД1 определяется числом решений сравнений типа (5.15),
которое сводится к сравнению r-й степени:
/ </ 5= k (v—%)г + q (mod M), (5.40)
где q=Coh—-Со$\ /> k=*\t Af—l.
Данное сравнение можно представить в виде f(v)s=0(modAf), где f(v) —
многочлен r-й степени относительно неизвестного v, коэффициенты которого не
кратны М. В соответствии с теорией чисел сравнение такого типа не может
иметь более г решений (но может иметь меньшее число решений), а значит,
всегда можно построить композиционную систему сигналов с заданными
корреляционными свойствами, выбрав за основу второй алгоритм с допустимым
значением параметра гдоп.
/доп<#тахМ» (5.41)
где Ятах — максимально допустимое значение ВКФ.
Например, если гМЗ, то после объединения получим квазиоптимальную
систему ДЧ сигналов с максимальным значением ВКФ, не превышающим 3/М.
Объем композиционных систем этого вида наибольший и составляет
гМ(М—1) при нечетном М,
Ьком- | М2 при четном Mf (5.42)
что следует из объемов оптимальных подсистем и их числа, определяемого
возможными значениями с0=0, М—1.
Следует подчеркнуть, что данная процедура синтеза композиционных
систем неприменима для линейных оптимальных подсистем (г=1).
Хотя объем нелинейных композиционных систем при незначительном
ухудшении корреляционных свойств существенно больше объема оптимальных
систем, следует отметить, что, как показало исследование полного кода ДЧ
сигналов малой базы методом прямого перебора, он не является предельно
достижимым для заданного уровня ВКФ. Например, для М=5 объем
композиционной системы сигналов с #тах=3/М равен 20 сигналам, тогда как объемы
некоторых систем, найденные из полного кода, составляют 48—51 сигнал.
По предложенным правилам были построены конкретные композиционные
системы для разных баз сигналов. Расчеты нашли свое отражение в табл. 5.4,
в первом столбце которой записан алгоритм формирования оптимальной
подсистемы, во втором — изменяемый при переходе от одной подсистемы к дру-
1 Параграф 5.4 написан на основе совместной работы с О. В.
Матвеевой [48].
142
Таблица 5.4. Алгоритмы построения композиционных систем ДЧ сигналов
.в
с
*
1
2
3
Алгоритм
Yj(v) s=c0j+v(mod M)
а — первообразный корень,
Af+1 —простое число афМ\ с0 =const
7i (v) ==/(v)r+Co (mod M)
Af— простое число, (r, Af—(1) = 1
/, v=0, Л1—1; Co=const
у j (v) be /vr+Co (mod M)
гФ\\ r=const
r=5
r=3
r=;5
| r=3
r=5
r=5
r=3
Измеряемый
параметр и
пределы изменения
1<а<М
0<г<М
Со=0, М— 1
л*
6
10
12
7
11
13
17
7
t И
13
1 17
17
29
29
■^max
12
40
48
12
40
48
128
42
110
156
272
272
912
912
■**тах
2/6
3/10
6/12
3/7
3/11
7/13
5/17
3/7
3/11
3/13
3/17
4/17
5/29
| 3/29
гой параметр, в третьем — число элементов в сигналах системы, в двух
последних — максимальные объемы композиционных систем и максимальные пики ВКФ.
Приведенная таблица подтверждает указанные «выше преимущества
последнего способа построения нелинейных композиционных систем,
позволяющего получать квазиоптимальные системы наибольшего объема. Как и
следовало ожидать, в этом случае максимальные уровни пиков ВКФ не
превышают значения г/М.
Для примера рассмотрим большую квазиоптимальную композиционную
систему с максимальным числом совпадений ЧВМ сигналов равным трем,
построенную на основе третьего алгоритма табл. 6.4 при значении параметра г=3
для сигналов с базой Af2=ll2=il21.
Данная композиционная система представляет собой объединение
одиннадцати оптимальных подсистем, построенных по алгоритму при различных
значениях параметра с0=0, 10, причем каждая подсистема содержит 10
сигналов, а полный объем такой композиционной системы составит ПО сигналов.
Таблица 5.5. Распределение числа совладений
0
1
2
3
Вероятность числа совпадений при [к\
0
0,1
0,9
0
0
1 1 2
0,44
0,31
0,15
0,1
0,47
0,31
0,15
0,07
3
0,51
0,29
0,16
0,04
4
0,56
0,25
0,18
0,01
5
0,59
0,28
0,12
0,01
6 | 7 | 8 | 9 | 10
0,63
0,29
0,07
0,01
0,69
0,25
0,06
0
0,75
0,22
0,03
0
0,82
0,17
0,01
0
0,9
0,1
0
0
143
Был проведен расчет числа совпадений элементов ЧВМ всех пар сигналов
данной системы с учетом взаимных сдвигов во времени. В табл. 5.5 приведены
данные расчета вероятности числа совпадений т при фиксированных
временных сдвигах | % |. Аналогичный характер носит распределение вероятности
числа совпадений для любой композиционной системы, построенной на основе
третьего алгоритма табл. 5.4 изменением параметра со-
5.5. Объем больших систем ДЧ сигналов
В работе [44] был определен объем больших систем фазома-
нилулированных сигналов. Используя основы метода,
предложенного в [44] и рассмотренного в [45], можно найти объем больших
систем ДЧ сигналов. Корреляционные функции ДЧ сигналов при
дискретных временных сдвигах А, где % — целое число, —(М—
—l)^.k^.M—1, определяются числом совпадений частотных
элементов на частотно-временной плоскости. Если число совпадений
равно /п, то модуль корреляционной функции (КФ) R=m/M.
Среди систем ДЧ сигналов особое место занимают
оптимальные системы, у которых число совпадений между различными
парами сигналов при произвольных временных сдвигах равно 0 или 1.
Объем таких оптимальных систем не превышает числа частотных
элементов М, т. е. существенно меньше базы ДЧ сигналов.
Вместе с тем в ряде технических задач необходимо иметь большие
системы ДЧ сигналов, объем которых L^>M2. Поиски таких
систем ведутся в настоящее время, но детерминированные
алгоритмы построения еще неизвестны. Представляет интерес объем
большой системы ДЧ сигналов с заданным числом совпадений [49].
Метод построения системы ДЧ сигналов с заданным числом
совпадений аналогичен методу построения систем фавоманипули-
рованных сигналов, описанному в [44]. Полный код ДЧ сигналов
содержит Lhk=M\ сигналов. Выберем случайным образом L<LnK
ДЧ сигналов. Рассчитаем все КФ этих сигналов. Выберем
некоторое допустимое число совпадений /г, причем 0^п^.М. Если
число совпадений авто- я взаимокорреляционной функции (АКФ и
ВКФ) превышает допустимое число совпадений п, то сигналы с
такими АКФ и ВКФ удаляются из первоначальной системы.
Таким образом, при помощи подобной операции можно получить
некоторую систему объемом Lo<L, причем L0 — случайная
величина. Если ее среднее значение не равно нулю, то такая система
должна существовать. Обозначая через Р вероятность того, что
число совпадений превышает допустимое, можно показать, как это
сделано в [44, 45], что среднее значение объема искомой системы
ДЧ сигналов равно
L0>0,25P~1 . (5.43)
Следует отметить, что неравенство (5.43) .справедливо при
предположении статистической независимости КФ ДЧ сигналов,
входящих в первоначальную систему. В общем случае это ле
имеет места. Но при построении большой системы ДЧ сигаалов необ-
144
ходимым условием является малый уровень КФ построенной
системы сигналов, т. е. малое число совпадений т^М. При таком
условии можно пренебречь статистической зависимостью КФ, что
и позволяет использовать неравенство (5.43) для оценки среднего
значения объема системы ДЧ сигналов при заданном числе
совпадений.
Вероятность появления т совладений при заданных числе
частотных элементов М и дискретном временном сдвиге X
определяется следующим выражением в соответствии с (5.26)
М\т\ £i0 V ' ii\(M — т— \%\— ц)1
(15.44)
где число совпадений т удовлетворяет неравенству O^m^Af—
— \K\f а модуль дискретного временного сдвига |Я|=0, М—1.
Формула (5.44) соответствует апериодическим КФ.
Положим, что дискретные временные сдвиги равновероятны, а
вероятность их появления равна 1/(2М—1), где 2М—1 — число
дискретных временных сдвигов. Безусловная вероятность
появления т совпадений в апериодической КФ
1 [Рм(т, 0)+2%1Рм(т, \к\)]. (5.45)
/г=0 J
Рм(т)=-
2М—\
Вероятность того, что число совпадений т не превысит пу
Pn=P{m<n}=§ Рм(т). (5.46)
т=0
Соответственно вероятность превышения
Р = 1-Рп. (6.47)
Приближенная аналитическая оценка вероятности
п 1 е-1 ем Г, Мп+1ем "1 ,, ,оч
Рп»^--(п^-тш^-тптту (,5,48)
При М^>п второе слагаемое в квадратных скобках выражения
(5.48) много .меньше единицы, поэтому
e-i ем
Р» ~ 1— (я+1)! ~ЖШ' (5'49)
При М^>п>\ третье слагаемое много меньше второго, что
можно показать, используя формулу Стирлинга для факториала
М\. Подставляя (5.49) в (5.47), получаем
Г0 > 025 (п + 1)! ММ\ [ММ\ е"1 + (п + 1)! ем]~1 • (5.50J
В квадратных скобках неравенства (5.50) первое слагаемое
всегда много больше второго при М^>п>1. Пренебрегая вторым
слагаемым, получаем
Г0>025е(л+1)!. (5.51)
Как следует из (5.51), объем больших систем ДЧ сигналов
145
растет как (л+1)! и практически не зависит от М. Это следует
из предположения о том, что М»я, а также из того, что
вероятность Рм(т) очень слабо зависит от М, поскольку при Af>I
Pjf(m)» (eml)-1. Относительный объем системы ДЧ сигналов
L0/Af!« (n+l)\/M\ и при ЛГ»я системы ДЧ сигналов с малым
числом совпадений составляют небольшую долю от полного кода.
5.6. Дискретные составные частотные сигналы
В таких сигналах каждый элемент в свою очередь является
сложным /сигналом, т. е. может представлять набор более простых
элементов. Различные составные сигналы известны давно (см.,
например, [5]). Иногда их называют каскадными кодами.
Составные сигналы являются производными сигналами, так как
получаются в результате модуляции одного сложного сигнала
другим, т. е. по сути дела перемножаются два сигнала: исходный и
производящий. Общие свойства таких сигналов справедливы
независимо от выбора исходных и производящих сигналов.
Обычно составные сигналы применяются для упрощения
аппаратуры формирования и обработки при больших базах
производных сигналов (Б>102—104). Рассмотрим два приема дискретных
составных частотных (ДСЧ) сигналов.
Принцип построения ДСЧ сигнала с частотной манипуляцией
поясняется рис. 2.17. Исходный ДЧ сигнал с числом элементов
М=7. В качестве производящего сигнала взята последовательность
из семи ДЧ сигналов первого порядка также с М=7. После
манипуляции по частоте исходного сигнала производящим сигналом
получим составной (производный) сигнал, изображенный на
рис. 2.17. Он состоит из М2=49 элементов.
В общем случае исходный сигнал может содержать М\
элементов, а одиночный ДЧ сигнал производящего — М2 элементов.
В этом случае составной сигнал будет содержать М\М2
элементов. Если в качестве всех ДЧ сигналов, входящих и в исходный
сигнал, и в производящий, взять сигналы, принадлежащие
оптимальным ДЧ системам, то максимум ВКФ не будет превышать
значения 2\М\М2. Это обусловлено тем, что при произвольном
временном сдвиге могут частично перекрываться дв>а элемента
исходного сигнала (рис. 2.17), каждый из которых дает не более
одного совпадения. Объем системы таких сигналов мал и равен
объему ДЧ .системы производящего сигнала.
Принцип построения ДСЧ сигнала с фазовой манипуляцией
иллюстрируется рис. 2.16. Исходный ДЧ сигнал первого порядка
имеет М=7. В качестве производящего сигнала (рис. 2.16) взят
дискретный ФМ сигнал. Он представляет последовательность семи
ФМ сигналов, каждый из которых состоит из N = 5 символов и
является в свою очередь производным сигналом. Производящий
сигнал (рис. 2.16) является последовательностью семи
производных сигналов. Составной сигнал получается после перемножения
исходного и производящего сигнала.
146
РАЗДЕЛ П.
ПОМЕХОУСТОЙЧИВОСТЬ ШИРОКОПОЛОСНЫХ
СИСТЕМ СВЯЗИ
6- ОСНОВНЫЕ СВЕДЕНИЯ О СИСТЕМАХ СВЯЗИ
6.1. Шумоподобные сигналы
и широкополосные системы связи
Как было отмечено ранее, шумоподобными сигналами
являются такие, у которых база £ = /Т»1.
Широкополосными системами связи являются такие, которые
используют ШПС в качестве переносчиков информации и у
которых ширина спектра ШПС много больше ширины спектра
передаваемого сообщения. Широкополосные системы связи (ШСС)
характеризуются высокой помехоустойчивостью ,(см. гл. 1) при
действии помех с ограниченной мощностью. Помехоустойчивость
определяется отношением сигнал-помеха А2 на входе решающего
устройства приемника, которое при воздействии флюктуационной
помехи равно A2=f:/iVn, где Е — энершя сигаала, Nn —
спектральная плотность мощности помехи -в виде «белого» шума.
Отношение сигнал-помеха А2 в общем виде не зависит от свойств
сигнала, .в том числе и от его ширины спектра. Но при
воздействии флюктуационной помехи с ограниченной мощностью Рп и
действующей в полосе частот сигнала шириной F её спектральная
плотность МП=РП/Л откуда следует, что чем шире спектр сигнала
(ШПС), тем меньше спектральная плотность помехи, тем выше
будет отношение сигнал-шмеха А2 и тем выше будет
помехоустойчивость ШОС. В свою очередь энергия сигнала Е — РСТ.
Подставляя приведенные соотношения и обозначая отношение 'мощности
сигнала к мощности помехи на .входе приемника через p2=PJPn,
получаем А2=;р2В (1.6). Если отношение мощностей на входе
приемника р2<С1, то /выбором базы ШПС, при котором В>1 и
р2В>1, всегда можно получить А2^1, что и обеспечит высокую
помехоустойчивость ШСС при действии мощных помех с Рп^>Рс-
6.2. Основы передачи сообщений в системах связи
Системы свяли служат для передачи сообщений от одного
абонента к другому. Сообщения могут быть дискретными и
непрерывными. Дискретные сообщения представляют собой
последовательности символов, причем число различных символов конечно. При-
147
мерами дискретных сообщений могут служить телеграфные
сообщения, телекодовые 'и т. д. Источники информации, которые
создают дискретные сообщения, называются дискретными.
Непрерывные .сообщения представляют собой непрерывные функции
времени. Источники информации, которые создают непрерывные
сообщения, называются непрерывными. Примерами непрерывных
сообщений могут служить речь, музыка, значения некоторого
параметра, изменяющегося во времени, и т. д.
Системы связи, предназначенные для передачи дискретных
сообщений, называются диакретными или цифровыми, а системы
связи, предназначенные для передачи непрерывных сообщений,—
непрерывными или аналоговыми.
Каналы, по которым передаются дискретные сообщения,
называются дискретными, а каналы, по которым передаются
непрерывные сообщения — непрерывными. Передача непрерывных
сообщений возможна и в дискретном виде. Для этого необходимо
непрерывные сообщения источника непрерывной информации
превратить в дискретные и ло каналу будут передаваться дискретные
сообщения, т. е. канал будет дискретным.
Замена непрерывных сообщений дискретными всегда
производится с заданной точностью. Для этого следует разложить
непрерывное сообщение в ряд по ортогональным функциям, т. е.
представить
5(0= S 5пФп(4 (6.1)
Л=—оо
где Sn — коэффициент разложения, фп(0 — ортогональные
функции, образующие оистему ортогональных функций. Две функции
(или два сигнала) называются ортогональными, если они
удовлетворяют соотношению
(<PnW<Pm (*)#=={ * ^ (6.2)
_i [Еп при п =т.
Здесь Еп — энергия функции (сигнала) фп(0- Определение
(6.2) справедливо для любых систем ортогональных функций; как
ограниченных по времени (финитных), так и имеющих
бесконечную протяженность. Коэффициенты разложения находятся
согласно равенству
Sn = lT ]s(t)<pn(t)dt. (6.3)
Если система ортогональных функций состоит из комплексных
функций фп(0» то разложение записывается, как и при
вещественных функциях, в виде (6.1), а условие ортогональности и
коэффициенты разложения определяются так:
°с ,*\* и\л f° прилет, ,аА.
№>п(0Фт(*)Л=:| F ^ (6.4)
_i [Еп при п= т.
148
Sn = -F~ ]s(t)k(t)dt. (6.5)
Сравнивая (6.3), (6.5) с определением корреляционных
функций, можно видеть, что коэффициенты разложения Sn являются
коэффициентами корреляции между сообщением S(t) и
функциями фп(0-
Ряд ((6.1) в общем случае содержит бесконечное число членов.
Задаваясь требуемой точностью, всегда можно оставить конечное
число членов разложения, отбросив те, которые мало влияют на
(6.1). При этом .получаем
S(t) «SxW^ fs/qUO- (6.6)
п=п1
В (6.6) число членов ряда равно п2—п\ + \. Будем считать, что*
оно конечно. Величина среднеквадратической ошибки
г=у/ \\m^J{S(t)-S^t)?dt (6.7)
определяется отброшенными членами разложения (6.1). Выбором
п\ и п2 можно обеспечить, чтобы е<е3ад, где е3ад — заданное
значение среднеквадратической ошибки.
Представление (6.6) означает, что сообщение S(t) с заданной
степенью точности полностью определяется конечным набором
коэффициентов разложения Sn. Затем необходимо заменить
конечный набор коэффициентов разложения Sn конечным набором
символов — для передачи по дискретному каналу.
Выбор системы ортогональных функций и метода перевода
коэффициентов разложения в символы определяется свойствами
сообщения и требуемой точностью его воспроизведения. Например,
если спектр .сообщения ограничен но ширине FCi то целесообразно
с практической точки зрения представлять его в виде ряда Ко-
тельникова, в котором
*й- Sin2f/,f ?аУ ' ^
2л Fc(t — п A t)
2l At=0,5Fc. Функцию фп(0 называют функцией отсчетов. При
этом сообщение S(t) заменяется последовательностью отсчетов Sn,
которые следуют друг эа другом с интервалом At. Производя
квантование отсчетов ло амплитуде, получаем конечное число
различных значений Sn. При квантовании по амплитуде возникает
ошибка квантования, которая тем меньше, чем больше уровней
квантования. Исходя из требуемой точности воспроизведения
сообщения можно найти необходимое число уровней квантования.
После квантования получаем, что сообщение определяется
конечным набором квантованных отсчетов. Заменяя тот или иной
квантованный отсчет своим символом, получаем возможность
передавать непрерывное сообщение в виде дискретного. Именно такой
149
метод дискретизации и квантования и составляет основу импульс-
но-кодовой модуляции ИКМ.
При иных свойствах сообщения может оказаться более
целесообразным с практической точки зрения другое разложение по
ортогональным функциям. Например, если разбить сообщение на
отрезки длительностью Г, то на каждом отрезке сообщение S\(t)
можно представить в .виде ряда Фурье, в котором
q>n(t)=exp[i(2nnt/T)]. (6.9)
Экспонента (6.9)' является периодической функцией с
периодом Г. Кроме упомянутых, известно большое число других систем
ортогональных функций, многие из которых нашли применение в
системах связи.
Следует отметить, что системы ортогональных функций широко
используют в математике для решения различных задач.
Ортогональные функции, используемые для передачи сообщений, будем
называть ортогональными сигналами. Соответственно
совокупности таких сигналов являются системами ортогональных сигналов.
Применение систем ортогональных сигналов для представления
непрерывных сообщений в виде рядов является одним из примеров
применения систем сигналов в .системах связи. Из (6.2), (6.4)
следует, что сигналы таких систем должны удовлетворять
единственному условию ортогональности.
6.3. Многоканальные системы связи
Необходимость обмена информацией между многими
абонентами привела к построению многоканальных систем связи.
Каждая многоканальная система связи работает в своем диапазоне
частот, который определяется ее назначением. Абоненты,
©ходящие в многоканальную систему связи, работают в общей полосе
частот, ib .пределах которой каждому из них предоставляется канал
для передачи информации.
Образование многоканальной системы связи из многих
абонентов может быть осуществлено двумя методами объединения
абонентов. Один из них называется централизованным
объединением, а другой -автономным. При централизованном объединении
обмен информацией между двумя абонентами производится через
центральные станции (ЦС на рис. 6.1,а и б). При передаче
информации на большие расстояния от абонентов одной зоны она
сначала объединяется в собственной центральной станции (ЦС1 и
ЦС2 на рис. 6.1,а), затем посылается по линии в ЦС другой зоны,
после чего разделяется по абонентам этой зоны. На рис. 6.1,а
стрелками показан путь прохождения информации между
.абонентами Aij и A2ft. Назовем подобные многоканальные системы связи
многоканальными централизованными линейными системами
(МЦЛС). К МЦЛС относятся радиорелейные линии связи,
кабельные линии связи, а также радиотелеметрические системы и
др.
150
Централизованное объединение абонентов может быть
использовано и для обмена информацией между абонентами внутри
одной зоны (рис. 6.1,6). При этом требуется одна ЦС. Стрелками
на -рис. 6.16,6 изображен путь прохождения информации между
абонентами Aj и Ak. Из рис. 6.1,6 видно, что передача
информации осуществляется по радиусам-векторам, выходящим и входящим
Рис. 6.1. Многоканальные системы связи
в центральную станцию. По этой причине подобные
многоканальные системы можно назвать многоканальными централизованными
радиальными системами (МЦРС). Примерами МЦРС являются
системы KB и УКВ радиосвязи, городские телефонные сети,
системы управления воздушным движением, системы командного
радиоуправления и др.
«В тех случаях, .когда не будет отмечаться линейность или
радиальность, многоканальные системы связи с централизованным
уплотнением будем называть многоканальными
централизованными системами (МЦС).
Другим методом объединения абонентов является автономный,,
при котором абоненты обмениваются информацией
непосредственно друг ,с другом (рис. 6.1,в). При этом нет необходимости в
центральной станции. Подобные системы связи называют
многоканальными автономными системами (MAC). Примерами MAC
являются системы низовой радиосвязи (|войско»вой, сельской), системы
командного радиоуправления и др.
Многоканальная централизованная система позволяет
устанавливать более эффективный обмен информацией между многими
абонентами, лучше использовать отведенные полосы частот \и
время. Однако наличие ЦС делает МЦС более уязвимыми по ера©*
151
нению с MAC, так как выход из строя ЦС приводит к выходу из
строя ©сей МЦС. Наличие ЦС во многих случаях усложняет
систему .передачи информации (СПИ) .в целом и увеличивает ее
стоимость. Кроме того, в некоторых случаях в соответствии с тактико-
техническими требованиями применение ЦС просто невозможно.
Следует отметить, что в некоторых случаях многоканальные
системы связи могут быть построены как с централизованным
объединением абонентов, так и с автономным. В таких случаях
метод объединения должен осуществляться с учетом
тактико-технических и экономических требований. Кроме того, возможно
совместное применение и централизованного, и автономного
объединения.
6.4. Методы уплотнения и разделения
каналов и абонентов
В зависимости от назначения, каждой СПИ выделяется
некоторый диапазон частот, который в дальнейшем называется
общей полосой частот (общей для всех абонентов). Использование
общей полосы частот абонентами определяется методами
уплотнения (размещение спектров сигналов всех абонентов в общей
полосе) и разделения (выделение сигналов абонента). Поскольку
тот или иной метод уплотнения однозначно определяет метод
разделения (обратное также справедливо), то в дальнейшем будем
классифицировать методы уплотнения и разделения по методам
разделения.
Возможны три метода разделения информации различных
абонентов, передаваемой по выделенным для них каналам. Метод
частотного разделения (ЧР) заключается в том, что каждому
абоненту отводится своя абонентская полоса частот (частотный
канал) в пределах общей полосы частот системы. При этом
абонентские полосы частот не перекрываются, но сигналы абонентов
перекрываются во времени. Метод временного разделения (ВР)
заключается в том, что каждый абонент работает в свой
абонентский интервал времени (временной канал), в течение которого
другие абоненты информацию не передают. Спектры абонентов
занимают всю общую полосу частот и полностью перекрываются.
Метод кодового разделения (КР) заключается в том, что
разделение осуществляется по форме сигналов, которые использует тот
или иной абонент, причем абоненты работают в общей полосе
частот в одно время.
Первым нашло применение частотное разделение, так как оно
было известно раньше других методов и достаточно просто
реализовалось практически. Развитие импульсных методов
модуляции привело к появлению временного разделения. Основы
разделения информации по форме сигналов (основы линейной
селекции или кодового разделения) были развиты Д. В. Агеевым в
1935 л [3].
Иное положение имеет место в случае СПИ с кодовым разде-
152
лением. Поскольку кодовое разделение основано на различии
сигналов, то построение таких СПИ и их характеристики
определяются выбором сигналов и их свойствами. Обычно число абонентов
достаточно велико, поэтому выбор сигналов для СПИ с КР
сводится к определению систем сигналов с заданными свойствами.
Развитие СПИ с КР и привело к исследованиям в области теории
систем сигналов, основные результаты которой будут изложены в
дальнейшем.
Системы связи с КР являются адресными системами, так как
сигналы абонента выполняют роль его адреса. Адресные системы
связи можно разделить на два класса — синхронные адресные
системы (САС) и асинхронные адресные системы (ААС). Первые
используются в основном при централизованном объединении
абонентов, вторые — при автономном. В САС передача информации
осуществляется таким образом, что переносчики информации
удовлетворяют условию ортогональности (6.2), т. е. если /- и k-й
абоненты используют сигналы Uj(t) и Uk(t) со спектрами gj{®) и
£ь((о), то при \Фк имеют место равенства
]tij(t)uk(t)dt=0, ]gj(<*)gk(<*)d<* = 0. (6.10), (6.11)
—00 ОО
Отметим, что условия ортогональности (6.10), (6.11)
являются частными случаями линейной независимости сигналов. Если
соблюдается равенство (6.10), то выполняется и (6.11). Если
сигналы линейно-независимы, то они разделяются без взаимных
помех. На практике обычно используют ортогональные сигналы.
Поскольку при временных смещениях ортогональность
нарушается, то для обеспечения ортогональности необходимо иметь
синхронизацию до /времени. Таким образом, в САС передача
информации различными абонентами осуществляется ортогональными сиг-
валами при условии временной синхронизации между ними.
Наличие синхронизации приводит к тому, что в САС взаимные помехи
не возникают.
Следует отметить, что © системах связи с ЧР взаимные помехи
принципиально существуют всегда, так ка<к сигналы с конечной
длительностью имеют бесконечно протяженные спектры, а
разделительные фильтры пропускают с конечным ослаблением все
частоты. По этим двум причинам часть энергии сигнала
произвольного канала в системах связи с ЧР попадает в любой канал,
создавая взаимную помеху. Выбором сигналов (уменьшением «внепо-
лосных» излучений) и фильтров (повышением ослабления вне
полосы пропускания), размещением каналов по частоте можно
уменьшить взаимные помехи до допустимого малого уровня. При
этом можно считать, что приближенно условие ортогональности
(6.11) выполняется.
В ААС равенства (6.10), (6.11) не имеют места, поэтому в
таких системах существуют «взаимные помехи между абонентами,
которые иногда называются «шумами неортогональности» или
системными помехами. Из-за взаимных помех число одноаремен-
153
но работающих а;бонентов в ААС при той же помехоустойчивости
будет меньше, чем в синхронных. Но при построении ААС нет
необходимости в обеспечении синхронизации абонентов по времени
и по частоте. В этом существенное преимущество ААС перед
синхронными системами, особенно в тех случаях, когда невозможно
обеспечить временную" синхронизацию абонентов, разбросанных
на большой территории, по этой причине ААС и получили
развитие.
В САС и ААС для обеспечения работы большого числа
абонентов необходимо иметь, по крайней мере, такое же число
различных сигналов. Поскольку сигналы нельзя выбирать
произвольно, необходимо использовать системы сигналов с определенными
свойствами. Решение вопросов выбора систем сигналов во многом
определяется назначением системы связи и ее характеристиками.
Основными характеристиками системы связи являются
помехоустойчивость и эффективность. Под помехоустойчивостью системы
связи подразумевают ее способность противостоять помехам, а лод
эффективностью — использование общей полосы частот, времени
и мощности передатчика.
Поскольку любые системы связи состоят из каналов (в
предельном случае из одного), то сначала необходимо рассмотреть
помехоустойчивость одного канала, т. е. одноканальной системы
связи, предназначенной для передачи дискретных или
непрерывных сообщений.
7. ПОМЕХОУСТОЙЧИВОСТЬ ПРИЕМА
ДИСКРЕТНЫХ СООБЩЕНИЙ
7.1. Дискретная система связи
На рис. 7.1 представлена структурная схема дискретной
системы связи. Источник информации (ИИ) создает дискретную
информацию в виде последовательности символов Sv . Положим,
что число символов конечно, т. е. v=0, п—1. Совокупность
символов Sv, v=0, n—1 называется алфавитом источника, an —
объемом этого алфавита. Если я=2, то алфавит является двоичным, а
если я>2 — то многозначным или я-ичным. Соответственно при
п=2 символы называются двоичными, а при п>2 — я-ичным1И.
Кодер (кодирующее устройство К) преобразует я-ичный
алфавит источника в m-ичный алфавит, т. е. заменяет символы Sv
символами s^. Совокупность символов s^ , где |х = 0, т—1, назы-
ПГ"
ь>>
—^-
м
Ufc
Пер
иа
КМ
X
JUL
X
дм
V
дк_
л^.
пи 1
\п
Рис. 7.1. Структурная схема дискретной системы связи
154
вается алфавитом кодера, а т — объемом этого алфавита. Если
т=2, то символы s^ и алфавит являются двоичными, а если
т>2, то т-игаными. Отметим, что в общем случае тфп и,
возможно, т>п или т<.п. Если т=я, то Sv=Sn. При этом
необходимость в кодере отпадает.
Модулятор (М) каждый символ s^ однозначно преобразует в
сигнал Up, т. е. осуществляет процесс модуляции. Передатчик
(ПЕР) усиливает сигнал по мощности и направляет сигнал и^
в канал. Совокупность сигналов и^, jui=0, т—1, как было
отмечено ранее, называется алфавитом сигналов. Соответственно число
т является также и объемом алфавита сигналов.
В канале (КАН) на сигнал действует помеха n(t).
Предположим, что она является флюктуациовной аддитивной домехой в
виде гауссовского случайного стационарного процесса с нулевым
средним и с равномерной спектральной плотностью мощности No.
Такая помеха .называется также белым шумом.
На входе .приемника (ПР) действует сумм<а сигнала и помехи
x{t)=u^ (t) +n(t). Приемник усиливает принятый сигнал x(t)9
переносит его в область промежуточных или видеочастот.
Демодулятор (ДМ) анализирует x(t) и принимает решение о том,
какой сигнал был передан -и в соответствии с принятым решением
выдает символ sй. Если 5Й=5Ц, то осуществлен правильный
прием, если 5ц#5д, то при принятии решения была совершена
ошибка из-за помехи на входе приемника. Декодер
(декодирующее устройство ДК) преобразует символы s^ в символы sv ,
которые затем поступают на вход получателя информации (ПИ).
Отметим, что если т=я, то необходимость в декодере отпадает.
Из описания системы связи, структурная схем.а которой
приведена на рис. 7.1, следует, что основные различия между
всевозможными системами связи с точки зрения передачи и приема
информации определяются объемом алфавита источника п и
сигналов т. В зависимости от значения т системы связи можно
разделить на двоичные системы связи (т=2) и т-ичные системы связи
(т>2).
7.2. Скорость передачи информации
Положим, что она равна W бит. Длительность двоичного
символа Т2 в двоичной системе связи и скорость передачи
информации связаны соотношением
W= 1/7V (7.1)
Положим, что в m-ичной системе связи, в которой
используются m символов, объем алфавита
т= 2* , (7.2)
где k — целое положительное число. Допустим, что символы на
выходе источника информации равновероятны. Согласно общим
положениям теории информации каждый тничный символ перено-
155
сит k=log2m двоичных единиц, т. е. m-ичный символ
эквивалентен кодовой последовательности .из k двоичных символов. Так как
длительность двоичного символа T2=l/W, то длительность т-ич-
ного символа
Tm=kT2 = k/W = log2 m/W. (7.3)
Соответственно длительности двоичных и m-ичных сигналов
будут Т2 и Тш.
7.3. Помехоустойчивость двоичных систем связи
Помехоустойчивость дискретных систем связи характеризуется
вероятностью ошибки Рош. Она зависит от применяемых сигналов
и метода приема. Сначала предположим, что осуществляется дри-
ем полностью известных сигналов. Это означает, что ©се
параметры сигнала известны в точке приема, т. е. известны его форма,
амплитуда, частота, задержка ©о времени и начальная фаза.
Когда известна начальная фаза, то прием называется когерентным.
Неизвестным является только то, какой сигнал находится на
интервале наблюдения. Определение номера сигнала является
задачей приемника. Оптимальный приемник минимизирует
вероятность ошибки.
Если известны все параметры сигналов, за исключением
начальной фазы, то прием называется некогерентным.
Рассмотрим сначала когерентный прием. В двоичных СПИ
для передачи информации используются два сигнала: uo(t) и
u\(t). Вероятность ошибки при когерентном приеме
(распознавание двух сигналов)
Рош=1-^(#), (7.4)
где интеграл вероятности
/><*)=-^г fe—/»<fe, (7,5)
а аргумент
н= !/[(£,+ял/глд (1-х), (7.6)
Ей, Ех — энергии сигналов u0(t), Ui(t) соответственно, а
* = —?—l4W«i(0«tt. (7.7)
^0 + ^1 0
Коэффициент К с точностью до постоянной совпадает с
коэффициентом корреляции сигнала u0(t), u\{t). В зависимости от
значения коэффициента корреляции между сигналами X может
принимать различные значения и согласно (7.4), (7.6)
вероятность ошибки будет различна.
Рассмотрим случаи, наиболее интересные с практической точки
зрения.
156
1. В случае равенства энергий сигналов, максимум Н будет
при минимуме А,, которая в точности равна коэффициенту
корреляции с минимумом —1 при противоположных сигналах:
Uo(t)=—ti\(t). Обозначая энергию двоичного сигнала через Е2=
=Е0=Еи из (7.6), (7.7) получаем H=V2E2/N0. 2. Передача
двоичной информации противоположными сигналами обеспечивается
фазовой манипуляцией (начальная фаза принимает два значения,
разность между которыми равна я). Поэтому такой метод передачи
получил название фазовой манипуляции (ФМ). Иногда он
называется методом фазовой телеграфии. 3. Если сигналы ортогональны,
а энергии их равны, то из (7.7) имеем Л,=0, а из (7.6) получаем
Н=У E2/N0. Метод передачи двоичной информации с помощью
ортогональных сигналов назовем ортогональной манипуляцией
(ОМ). Часто этот метод называется частотной телеграфией, когда
ортогональность сигналов обеспечивается сдвигом их несущих
частот. Но это частный случай ортогональности сигналов. 4. Если один
из сигналов тождественно равен нулю, например, tti(f)=0, то из
(7.6), (7.7) получаем А,=0, H=VE2I2Nq. Этот случай называется
амплитудной манипуляцией (AM) или «пассивной паузой».
Объединяя три результата для ФМ, ОМ и AM при
когерентном приеме, запишем вероятность ошибки (7.4) в следующем
виде:
Рош=1-^(а^), (7.8)
где а — коэффициент вида манипуляции (а = 1^2 при ФМ, а=1
при ОМ, а=1/]/2 при AM); h2— отношение сигнал-шум,
приходящееся на одну двоичную единицу информации
Щ=Е2/М0, (7.9)
Е2— энергия двоичного сигнала. При ФМ и ОМ энергию
двоичного сигнала можно заменить через среднюю мощность сигнала
Рс следующим образом: Е2=РСТ2 или согласно (7.1) E = PJW.
Заменяя Е2 в (7.9), т соответствии с приведенными равенствами
имеем
hl=PcT2/N0=Pc/WNQ. (7.10)
На рис. 7.2 представлены графики зависимости вероятности
ошибки Р0ш от отношения сигнал-шум h2. Кривая ФМ
соответствует фазовой манипуляции, кривая ОМк — ортогональной
манипуляции при когерентном и ОМнк при «екогерентном приеме,
кривая AM—амплитудной манипуляции. Наилучшей
(Помехоустойчивостью обладает двоичная система связи с фазовой манипуляцией,
так как при одном и том же значении отношения сигнал-шум h2
вероятность ошибки будет меньше, чем в других случаях. Вместе
с тем, ФМ требует системы фазовой синхронизации. В двоичных
системах связи очень часто вместо ФМ используют
относительную фазовую манипуляцию (ОФМ), которая называется также
157
относительной фазовой телеграфией. Суть ОФМ сводится к тому,
что начальная фаза последующего двоичного сигнала
сравнивается с начальной фразой предыдущего. При этом допускается, что
нестабильности фазы малы и за время между двумя символами
начальная фаза практически не изменяется. Таким образом
обеспечивается 1Квазикогерентный прием. Вероятность ошибки пои
ОФМ г г у
Рошофм = 2Рошфм(1— Р0ШФм)«2(1— F("|/2fc|)), (7.11)
т. е. всего в 2 раза больше вероятности ошибки при ФМ.
И
70~Ь
5W5
1(Г5\
5W6
в
± hz
фм\ом\\
\
\лм
■^ип\
\\
\\
А^
СФ
п
СФ7
СФ2
^
р</
Рис. 7.2. Вероятности ошибки
в двоичной системе связи
Рис. 7.3. Оптимальные
приемники при когерентном
приеме
Наихудшей помехоустойчивостью обладает амплитудная
манипуляция, а ортогональная манипуляция занимает среднее
положение между ФМ и AM. Это определяется коэффициентом вида
манипуляции а в формуле (7.8). При сравнении ОМ и AM
следует иметь в виду, что кривые рис. 7.2 построены для А2 согласно
(7.9), т. е. А22 пропорционально энергии двоичного сигнала. Когда
определяющей является средняя мощность сигнала Рс, энергия
двоичного сигнала Е2 при AM может быть увеличена вдвое по
сравнению с ОМ_при той же средней мощности Рс. Поэтому, хотя
при AM а в 1/^2 меньше, чем при ОМ^ но учитывая увеличение
энерши вдвое (h2 увеличивается в V2), получаем, что
помехоустойчивость AM и ОМ при когерентном приеме будет
одинаковой. Вероятность ошибки .в этом случае представляется кривой
ОМк на рис. 7.2.
На рис. 7.3 представлены структурные схемы оптимальных
когерентных приемников двоичных систем связи с применением
согласованных фильтров. Напомним (см. § 2.1), что импульсная
характеристика k(t) фильтра, согласованного с сигналом u(t),
определяется соотношением h(t)=au(T—1)> где а — постоянная, Т —
158
длительность сигнала u(t). Если g(a>) спектр сигнала u(t), то
коэффициент передачи согласованного фильтра fe(oo) =
=ag*((u)eri(oT. Отношение сигнал-шум на выходе согласованного
фильтра (Максимально в момент окончания сигнала и составляет
q2=V2/o2=2E/No7 где V — максимальное значение сигнальной
составляющей на выходе согласованного фильтра, которое и имеет
•место «в момент окончания сигнала при t=T; a2 — мощность
шума на выходе фильтра; Е — энергия сигнала на входе фильтра;
N0 — «спектральная плотность мощности шума.
При фазовой манипуляции структурная схема оптимального
приемника (рис. 7.3,а) состоит из согласованного фильтра (СФ)
и решающего устройства (РУ), которое принимает решение о том,
какой сигнал был послан. Решение принимается в момент
окончания сигнала, который фиксируется синхронизатором (на рис. 7.3
это условно показано вертикальной стрелкой). По принципу
действия РУ при ФМ является пороговым, причем значение порога
равно нулю. При ортогональной манипуляции оптимальный
приемник (рис. 7.3,6) состоит из двух согласованных с сигналами
Uo(t) и Ui(t) фильтров СФ1 и СФ2 соответственно. Решающее
устройство принимает решение но максимальному значению
напряжения на выходе обоих каналов.
Оптимальный приемник при AM совпадает по схеме с
оптимальным приемником для ФМ (рис. 7.3,а), но порог в РУ должен
быть V/2.
Оптимальные приемники можно построить с использованием
корреляторов. При этом каждый согласованный фильтр на
структурных схемах рис. 7.3 за;меняется соответствующим
коррелятором (|рис. 2.5), который состоит из перемножителя, интегратора
и (Генератора опорного сигнала. Опорный сигнал с номером [i
полностью совпадает и по форме, и ло всем параметрам с сигналом
ид(£). Напряжение на выходе коррелятора z= $ x(t)u(t)dt9 где
о
x(t) —напряжение на его входе, a(t) —опорный сигнал.
Коррелятор и согласованный фильтр эквивалентны с точки
зрения приема информации и обеспечивают одинаковую
помехоустойчивость.
На рис. 7.4 приведена схема оптимального приемника ОФМ.
Она отличается от схемы рис. 2.5 тем, что после интегратора
сигнал направляется во второй перемножитель непосредственно
—ш*ш
I
roc
1 *1Х Г-*- Г
сф„
HZH
СФТ
гнты
Р£Г
т
Рис. 7.4. Оптимальный приемник ОФМ Рис. 7.5. Оптимальный приемник
при некогерентном приеме
159
и через линию задержки на время Гг, равное длительности
двоичного символа. Во втором леремножителе и осуществляется
сравнение начальных фаз предыдущего и последующего символов.
При медленных релеевских замираниях, когда при
многолучевом распространении радиоволн разность между задержками
крайних лучей Ат<С1/^, a F — ширина ШПС, вероятность ошибки при
когерентном приеме двух противоположных сигналов (ФМ)
Рош» 1/4*02» (7.12)
а при ортогональных сигналах (ОМ)
Рош«1/2/&, (7.13);
где А2о2 — среднее значение отношения сигаалншум А2,
усредненное по всем лучам, причем Л22=Л2ог (|ы2/|х2о), а ^ — «коэффициент
передачи луча, р,2о — его среднее значение.
При некогерентном приеме начальная фаза неизвестна и
является случайной величиной. Наибольшая помехоустойчивость
имеет место при передаче двоичной информации ортогональными
сигналами. Вероятность ошибки при некогерентном приеме двух
ортогональных сигналов
Pom=0,5exp(-0,5/i2), (7.14)
где А2 определено формулами (7.9), (7.10). Зависимость
вероятности ошибки (7.14) от отношения сигнал-шум была
представлена на рис. 7.2 кривой ОМнк. Из сравнения ОМк и ОМнк на
рис. 7.2 видно, что помехоустойчивость при когерентном и
некогерентном приеме двух ортогональных сигналов отличается
незначительно. Потери в отношении сигнал-шум при некогерентном
приеме относительно когерентного при Рош=10~^ составляют
«1,2 дБ и уменьшаются с ростом h2.
Структурная схема оптимального некогерентного приемника
приведена на рис. 7.5. Он состоит из двух каналов, в каждом из
которых есть согласованный фильтр и детектор огибающей (Д).
Решающее устройство принимает решение по максимальному
значению огибающей на выходах каналов в момент окончания
сигнала.
При оптимальном некогерентном приеме ОФМ -вероятность
ошибки
Рош==0,5ехр(-/122), (7.15J
При медленных релеевских замираниях и оптимальном
некогерентном приеме ОФМ вероятность ошибки (при Д-t^lAF)
1/2(А202+1), (7.16)
а при приеме двух ортогональных сигаалов
Рош«1/2/1202. (7.17)
Необходимо отметить, что многолучевость резко снижает
помехоустойчивость систем связи. Для этого достаточно сравнить
160
(7.14) и (7.17): в постоянном канале вероятность ошибки
определяется экспонентой от отношения сигнал-шум, а в
многолучевом— самим отношением.
7.4. Помехоустойчивость /п-ичных систем связи
При передаче информации алфавитом сигналов, объем
которого т>2, и когерентном приеме наибольшую
помехоустойчивость обеспечивают симплексные (или равноудаленные, или
трансортогональные) сигналы. Такие сигналы обладают
интересным свойством. Бели произвольный сигнал трактовать как точку
в m-мерном пространстве, то симплексные сигналы соответствуют
вершинам m-мерной геометрической фигуры — симплекса.
Вершины максимально и одинаково удалены друг от Друга, т. е.
симплексные сигналы максимально отличаются друг от друга, что
является причиной максимальной помехоустойчивости. Из-за
максимального отличия по форме коэффициент корреляции таких
сигналов
*л=-]Г ]*Л*Ш*)<и (7.18)
не зависит от номеров / и k и равен
Ял=Я=-1/(т-1). (7.19)
При т>>1 коэффициент корреляции R мало отличается от нуля
и поэтому ортогональные сигналы, у которых i? = 0, обеспечивают
почти такую же помехоустойчивость, что и симплексные
сигналы. Если все коэффициенты корреляции равны между собой, т. е.
Rjk=R, то доказано следующее равенство для вероятности
ошибки с равными коэффициентами корреляции
Рош (Am, R) = Pom {hmVT=R, 0) , (7.20)
где отношение сигнал-шум, приходящееся на один т-ичный сигнал,
Лт=Р0Г«/ЛГ0, (7.21)
Тт — длительность m-ичного сигнала, Р0ш(Ат, R) — вероятность
ошибки при отношении сигнал-шум hm и коэффициенте
корреляции R, a P0ul(hmV I—R, 0) —вероятность ошибки при
ортогональных сигналах. Выражение (7.20) показывает, что
помехоустойчивость при равнокоррелированных сигналах будет такой же, как
и при ортогональных, но с измененным отношением сигнал-шум,
равным hmV\—R- Для симплексных сигналов (7.19) равенство
(7.20) приобретает вид
Рош(Лт> - l/(m- l))='Pom(hmVm/(m-1), 0). (7.22)
При т>1 множитель т[(т—1)«1 и ортогональные сигналы
обеспечивают такую же помехоустойчивость, что и симплексные.
6—Ш 161
При когерентном приеме т ортогональных сигналов
вероятность ошибки определяется отношением:
Рош = 1--7= ]*-ttl2[F{t + VZhm)]m-1 dU (7.23)
где F(x) —интеграл вероятности (7.5).
При некогерентном приеме т ортогональных сигналов
оо -(**+2Л2)/2 _
Рош = 1-^е т) /o(K2/im0(l-e~^2)m-1^, (7.24)
о
где 1о(х) — модифицированная функция Бесселя нулевого
порядка.
Интегралы в (7.23), (7.24) в элементарных функциях не
выражаются, но они достаточно подробно табулированы. Отметим,
что при больших т различие между когерентным и
некогерентным приемом незначительно.
При отношении сигнал-шум hm^>l известны приближенные
формулы:
для когерентного приема из (7.23)
Pom«(m-l)[l-F(/im)l; (7.25)
для некогерентного приема из (7.24)
Pom ~ \{m- l)/2] exp (-/i2m/2). (7.26)
При т=2 из (7.23), (7.24) получаем точные равенства (7.8)
(а=1) и (7.14).
На рис. 7.6 представлены кривые вероятности ошибки при
когерентном и некогерентном приемах ортогональных сигналов для
т = 2 (двоичные, СПИ) и т = 64,1024. Для когерентного приема
кривые изображены сплошными линиями, а для некогерентного —
штриховыми. Кроме того, для сравнения на рис. 7.6 представлена
кривая вероятности ошибки при приеме двух противоположных
сигналов (кривая ФМ, т=2). Кривые рис. 7.6 отображают
зависимости вероятности ошибки от отношения сигнал-шум h2 (7.10),
приходящиеся на одну двоичную единицу информации. Поскольку
в формулах (7.23), (7.24) используется отношение сигнал-шум
hm (7.21), то согласно (7.3) можно заменить hm на h2 по
формуле
hm =h2Vk = кУЩ^. (7.27)
Соотношение (7.27) позволяет рассчитать вероятности ошибки
при любом т как функции h2. Отметим, что выбор h2 в качестве
аргумента при сравнении вероятностей ошибок с различным т
является наиболее обоснованным, так как Л2 содержит основные
энергетические и информационные характеристики системы
связи: мощность сигнала на входе приемника Рс, которая
пропорциональна мощности передатчика; спектральную плотность
мощности шума N0 и скорость передачи информации W.
162
oVua 1
Из рис. 7.6 видно, что с увеличением объема алфавита т
помехоустойчивость т^ичной системы связи растет, так .как при
A2=const .вероятность ошибки уменьшается. Поскольку т-ичные
системы связи обеспечивают большую помехоустойчивость при
A2=const, то они дают возможность передавать информацию с
заданной помехоустойчивостью (P0m=const) и при меньшем
значении отношения сигнал-шум Л2. Из рис. 7.6 следует, что при
Рош = const требуемое значение
h2 тем меньше, чем больше т.
Таким образом, /n-ичные
системы связи обеспечивают
выигрыш в отношении сигнал-шум
по сравнению с двоичными
системами связи. При постоянных
значениях N0 и W выигрыш в
отношении сигнал-шум Л2
эквивалентен согласно (7.10)
выигрышу в мощности сигнала Рс.
Будем называть его выигрышем
по мощности.
Таким образом, m-ичные
системы связи являются более
помехоустойчивыми, чем двоичные,
а при заданной вероятности
ошибки обеспечивают выигрыш
по мощности, поэтому применение
в системах связи алфавитов с ^ ~~ « *
D uiticmaA ^олоп a./14/ciD v^ рис j§ ВврОЯТНОСТИ ОШИбКИ В Щ-
объемом т>2 имеет практиче- ичной СИСтеме связи
ское значение.
Преимущество m-ичных СПИ перед двоичными известно
давно. Оно полностью согласуется с общими положениями теории
информации. Отметим, что приведенный результат (рис. 7.6) по
сути подтверждает основную теорему Шеннона [2] о пропускной
способности канала. Однако в настоящее время известно лишь
несколько примеров систем связи с алфавитами, объем которых
/п>2. Многочисленные исследования в теории кодирования не
привели пока <к реальной возможности создания СПИ с очень
большими алфавитами. Это во многом объясняется наличием
порогового эффекта в m-ичных системах связи.
7.5. Сравнение двоичных и m-ичных систем связи
При сравнении двоичных и m-ичных систем связи необходимо иметь в
виду, что объем алфавита источника п и объем алфавита сигналов т могут быть
не равны между собой. Поэтому в зависимости от соотношения между ними
применяют различные методы декодирования символов § в символы §v. С
этой точки зрения двоичные системы связи можно разделить на два класса:
двоичные системы связи без декодирования или просто двоичные системы
связи (/7?.=п=2); двоичные системы связи с л-ичным декодированием (т=2, л>2>.
6* 163
К первому классу относятся системы связи, в которых двоичные символы
источника информации взаимно независимы и используются получателем
информации независимо друг от друга. Примером .двоичной
системы связи может служить командная радиолиния управления, в
которой каждый двоичный символ поступает по своему адресу. Ко
второму классу относятся системы связи, у которых последовательность
двоичных символов на выходе приемника преобразуется в л-ичные символы.
Примером двоичной системы связи с л-ичным декодированием может служить
двоичная система связи, в которой непрерывная информация передается с помощью
двоичной импульсно-кодовой модуляции (ИКМ), называемой некодированной
икм.
В двоичной системе связи с л-ичным декодированием при заданной скорости
передачи информации W длительность двоичных сигналов удовлетворяет
равенству (7.1). Если один /г-ичный символ заменяет собой k двоичных единиц, то
согласно (7.2) п=2к. Будем полагать, что в дальнейшем равенство т=п
имеет место. Такие системы связи будем называть двоичными системами связи с
m-ичным декодированием.
Аналогично, m-ичные системы связи можно разделить на два класса:
m-ичные системы связи без декодирования или просто m-ичные системы связи
{т—п>2)\ m-ичные системы связи с двоичным декодированием (т>2у п=2).
К первому классу относятся системы связи, у которых получатель
информации непосредственно использует m-ичные символы. Например, при
передаче непрерывной информации путем дискретизации по времени и квантовании
по уровню каждый m-ичный символ может быть непосредственно преобразован
б квантованный отсчет. Такой метод передачи информации называется т-нч-
ной или кодированной ИКМ. Ко второму классу относятся системы связи, в
которых каждый m-ичный символ преобразуется в последовательность из k
двоичных символов. Примером m-ичной системы связи с двоичным
декодированием может служить командная радиолиния управления, в которой для
повышения помехоустойчивости применяется укрупненный алфавит сигналов, или
система связи, в которой передача информации осуществляется с помощью
двоичной ИКМ.
Сравнение двоичных и m-ичных систем связи всех классов следует
производить с учетом получателя информации. С этой точки зрения двоичные
системы связи без декодирования и m-ичные системы связи с двоичным
декодированием эквивалентны, так как в обоих случаях на входе получателя информация
представлена в виде двоичных символов. При сравнении таких систем связи
аеобходимо сравнивать вероятности ошибки, приходящиеся на один двоичный
символ. Точно так же для получателя информации двоичные системы связи
с m-ичным декодированием и m-ичные системы связи без декодирования
эквивалентны, так как в обоих случаях на входе получателя информация
представлена в виде m-ичных символов. В таких системах связи необходимо
сравнивать вероятности ошибки, приходящиеся на один m-ичный символ.
Общий метод сравнения двоичных и m-ичных систем связи заключается в
том, чтобы найти выигрыш по мощности в m-ичной системе связи при равных
вероятностях ошибок.
Сначала произведем сравнение двоичной системы связи без
декодирования с m-ичной системой связи с двоичным декодированием. В m-ичной системе
связи с двоичным декодированием источник информации создает информацию
164
в виде двоичных символов со скоростью W. Кодер последовательно разбивает
двоичные символы на кодовые последовательности из k двоичных символов.
Согласно (7.2) число различных кодовых последовательностей /я=2*. Затем
кодер каждую кодовую последовательность преобразует в m-ичный символ,
который передается соответствующим сигналом. Назовем кодовую
последовательность, соответствующую переданному сигналу, исходной. В приемнике
восстанавливается m-ичный символ, который затем преобразуется в кодовую
последовательность из k двоичных символов. Эту кодовую последовательность
назовем восстановленной.
В случае правильного приема переданный и принятый m-ичные символы
совпадают, что приводит к совпадению исходной и восстановленной кодовых
последовательностей во всех символах. Если произошла ошибка в приеме
m-ичного символа с вероятностью Л>шт, то переданный и принятый символы
не совпадут. (Индекс т подчеркивает, что вероятность ошибки относится к
m-ичному символу). Из-за симметричности канала на выходе приемника
может появиться равновероятно любой из т—1 остальных m-ичных символов,
которые назовем ошибочными. В результате восстановленная кодовая комбинация
равновероятно может быть любой из т—1=2*—1 ошибочных кодовых
комбинаций. При этом исходная и восстановленная кодовые комбинации отличаются
друг от друга, причем отличие сводится к тому, что часть символов или все
символы в этих кодовых последовательностях при позиционном сравнении (по
номерам) будут различны. Но некоторые символы могут совпадать, даже если
произошла ошибка. Этот факт необходимо учитывать при расчете вероятности
ошибки, приходящейся на один двоичный символ. Эта вероятность равна
Обозначим ошибку при приеме двоичного символа в двоичной системе
связи через Рошг- Приравнивая вероятности ошибки в двоичном символе
двоичной системы связи без декодирования и m-ичной системы связи с двоичным
декодированием Р0ш2=Р'ош2 и подставляя в (7.28), имеем
Рош2 = 0,5т(т—l)~1Pomm. (7.29)
Таким образом, если имеет место равенство (7.29), то двоичная система
связи без декодирования и m-ичная система связи с двоичным декодированием
эквивалентны с точки зрения равенства вероятностей ошибки в одном двоичном
символе. Вероятности Р0ш2 и Р0ш т определяются или формулой (7.23), или
(7.24) при т=2 и тф2.
Сравнение m-ичных систем связи без декодирования и двоичных систем
связи с m-ичным декодированием основано на вычислении вероятности ошибки,
приходящейся на один m-ичный символ. Пусть Р0Ш2 — вероятность ошибки при
приеме двоичного символа в двоичной системе связи с m-ичным
декодированием. Вероятность правильного приема одного двоичного символа равна 1—Р0ш2,
а вероятность правильного приема k двоичных символов равна (1—Рошг)*, так
как она равна вероятности того, что все k символов приняты правильно.
Поэтому вероятность ошибки при приеме k двоичных символов (одного т-ичного
символа)
Рошт=1~(1— Роша)*- (7.30)
165
Вероятность ошибки при приеме m-ичного символа в m-ичной системе
связи обозначим, как и раньше, через Р0ш т. Приравнивая вероятности ошибок
приема k двоичных единиц двоичной и m-ичной системы связи Р'0ш ш=^ош m
и подставляя в (7,30), получаем
1 —(1—Рош^-Рошт- (7.31)
Таким образом, если имеет место равенство (7.31), то двоичная система
связи с m-ичным декодированием и т-ичная система связи без декодирования
эквивалентны с точки зрения равенства вероятностей ошибки при приеме
одного /тг-ичного символа (k двоичных единиц). Если Р0ш2<1> то из (7.31)
находим
Рошг^А^Рошт- (7.32)
Формула (7.32) определяет эквивалентную вероятность ошибки,
приходящуюся на одну двоичную единицу информации в m-ичной системе связи.
Можно заметить, что вероятности ошибки, приходящиеся на одну двоичную
единицу, рассчитанные по формулам (7.29), (7.31), (7.32), будут различны. Это
различие определяется следующим. При расчете вероятности ошибки в m-ичной
системе связи с двоичным декодированием было показано, что ошибка в
m-ичном символе приводит лишь к ошибке в части двоичных символов. При
пересчете вероятности ошибки в m-ичной системе связи без декодирования к
вероятности ошибки, приходящейся на один двоичный символ, было положено,
что ошибка в m-ичном символе приводит к ошибке во всех двбичных
символах.
На рис. 7.7. представлены кривые вероятностей ошибок Рошг, Рошт, Р'ош2>
Р'оштг построенные по формулам (7.14), (7.24), (7.28), (7.30). Аргументом,
как и ранее, является отношение сигнал-шум (7.10), приходящееся на один
двоичный символ. Из рисунка следует, что т>2 имеют неравенства
ш m <Рош2, Рош2<Р' ош ш, Рош т ош т.
Из неравенств видно, что наилучшую
0 1 2 3 **_ 5 h£ помехоустойчивость обеспечивает
т-ичная система связи с двоичным
декодированием. Особенно это заметно в
области малых отношений сигнал-шум h%.
Рисунок 7.7 показывает, что m-ичные
системы связи обеспечивают большую
помехоустойчивость по сравнению с
двоичными системами связи независимо от
метода декодирования.
Приведенные в данном параграфе
формулы по расчету помехоустойчивости
(вероятностей ошибок) были получены
для «белого» шума с равномерной
спектральной плотностью, мощности. Эти
формулы справедливы и для шума, дей-
Рис. 7.7. Сравнение вероятностей
ошибок в двоичных и m-ичных
системах связи
166
71
/И
W'5\
1(Г6
10
1
р'
аш2
\р
U ош т
Р \
rt>U)Z л
<Р'
к=6
\
\
Л
ствующего только в полосе частот полезного сигнала. Поэтому, заменяя
отношение сигнал-шум /i22 (или №ту или h\) на отношение сигнал-помеха № (1.6),
получим формулы для расчета помехоустойчивости ШСС с ШПС при действии
шумовой помехи с ограниченной мощностью.
8. СОВМЕСТНОЕ ПРИМЕНЕНИЕ ШПС
И КОРРЕКТИРУЮЩИХ КОДОВ1
8.1. Параметры ШСС с ШПС и корректирующими кодами
Как было отмечено в гл. 6 и 7, помехоустойчивость систем
связи, в том числе и ШСС, определяется отношением
сигнал-помеха на выходе согласованного фильтра (коррелятора). При
ограниченной мощности помехи
^=раВ, (8.1)
где р2=Рс/Рп—отношение мощности сигнала к мощности
помехи на входе приемника; B=FT — база ШПС; F — ширина
спектра ШПС; Т — его длительность; индекс m означает объем
алфавита.
Выбором базы ШПС можно получить значение А2т, при
котором достигается заданная помехоустойчивость. Это особенно
важно, когда отношение сипнал-ломеха на входе приемлика мало:
Рс/Рп<.1. Однако прл высоких скоростях передачи информации
длительность ШПС мала, я для достижения заданной ломехо-
устойчивости требуется широкая полоса частот, трудно
реализуемая. Известно [14, 50], что применение корректирующего
кодирования позволяет повысить помехоустойчивость системы связи,
поэтому используя корректирующие коды, можно обеспечить
заданную помехоустойчивость при .меньших отношениях
сигнал-помеха по сравнению с системой связи без кодирования. При этом
согласно (8.1) информацию можно передавать в более узкой
полосе частот. В настоящее время известно большое число
различных кодов [14, 50]. Одними из наиболее перспективных с точки
зрения практического использования являются блоковые коды
[51]. Среди этих кодов отметим разделимые коды с достижимым
максимальным расстоянием. К ним относятся некоторые коды
Боуза — Чоудхури — Хоквингема (БЧХ) и коды Рида —
Соломона (PC). При одинаковых длине кода ih максимальном числе
.исправляемых ошибок эти коды обладают максимальными
скоростями [14, 50] по сравнению с другими. Оптимальные коды
находим в классе разделимых кодов. Как известно, высокой
помехоустойчивостью обладают т-.ичные системы связи с ШПС.
Поэтому целесообразно находить ойтимальные коды применительно
1 Материалы данной главы основаны на совместной работе с Ю. К. Саль*
никовым [52].
167
к этим системам. Основные результаты исследований
совместного применения ШПС и корректирующих -кодов /приведены в [52] *.
Схема системы связи представлена на рис. 7.1: информация
от источника ИИ поступает ,на вход кодера К в виде
последовательности гничных символов, где эти символы сначала
группируются по блокам длиной k0. Каждый блок представляет собой
т-»чный символ; где
m=v4 (8.2)
Затем /пличные символы группируются по блокам длиной k (рис.
8.1,а), кодируются ;и на выходе кодера формируется
последовательность m-чичных символов длиной п (рис. 8.1,6), являющаяся
кодовой последовательностью. Ее символы принимают значения
из поля GF(vk°). Далее в модуляторе М каждый символ кодовой
последовательности модулируется ортогональными ШПС (рис.
8.1,в) ;и передается по каналу связи, где действует аддитивная
помеха с равномерной спектральной плотностью мощности в
полосе частот приемника. Число различных ШПС (объем алфа,ви-
та) равно т.
*Wk>
] т. —»■
МММ MMMMI
а)
ШПС
к0к/Щ = пТ
б)
ПТ
в).
Рис. 8.1. Кодирование и ШПС
Рис. '8.2. Зависимость вероятности
ошибки от параметров кодов
Демодулятор представляет собой оптимальный приемник в
смысле максимального .правдоподобия, принимающий решение по
каждому т-;ичному ШПС отдельно. С выхода ДМ
.последовательность т-1ичных символов поступает .на декодер (ДК), где
принимается решение о каждом блоке т-и-чных символов длиной п.
В результате декодирования на выходе ДК формируется
информационная последовательность длиной ky поступающая
получателю информации (ПИ).
168
Помехоустойчивость приведенной системы связи задается в
виде эквивалентной вероятности ошибки на v-ичный
информационный символ Pv. Любой (Корректирующий код кроме длины
кодовой последовательности п и числа .информационных символов k
характеризуется скоростью C=kfn. Для разделимых кодов С при
заданном п однозначно определяет его корректирующие свойства.
Используя введенные параметры кода, можно найти
длительность ШПС. Пусть v-ичные символы поступают на вход кодера
со скоростью Wv. Если все символы рашовероятны, а скорость
передачи информации W задана в двоичных единицах, то имеет
место равенство
W=Wvlogtv.
Поскольку длительность m-ичного сигнала на входе кодера
k0/Wv (рис. 8.1,а), а длительность кодовой лоследовательности
k0k/Wv (рис. 8.1,6), то длительность m-ичного символа на его
выходе или длительность ШПС на выходе модулятора (рис. 8.1,б)
r = ^lo&v. (8.3)
8.2. Вероятность ошибки
Вероятность ошибки при некогерентном приеме ШПС
определяется формулой (7.30)
m 1 "Л2 /2
Рош~^е т\ (8.4)
где т определяется согласно (8.2), h2m—ло (8.1). Подставляя
(8.3) в (8.1), находим
ftm = P2^T*oClog2v. (8.5)
В системе связи используется код с параметрами п, k, г, т. е.
(п, k, г)-код. Если ошибки в канале возникают независимо,
кодовая последовательность будет декодирована неправильно при
появлении любых г+1 и более независимых ошибок. Вероятность
ошибки декодирования [14, 50]
р= j] сМш(1-р0Ш)п~\
где С{п=п\11\(п—i)I; Рош определяется согласно (8.4). С другой
стороны, информационная последовательность длиной k принята
правильно только тогда, когда безошибочно приняты все k$k
v-ичных символов. Это означает, что 1—Р0ш= (1—Pv)h°k, откуда
при Pv < 1
Pv«-L у С^ш(1-РошГ1'- (8-6)
169
Зависимости P2=PV от Аг для случая, когда информация
представлена в двоичном виде v=2, рассчитанные по (8.4), (8.6),
приведены на рис. 8.2. Для каждого из четырех значений т —
= (8, 16, 32, 64) зависимости Р2 от Аг «рассчитаны для двух РС-
кодов. Эти коды -имеют соответственно параметры: (7,5,1), (7,3,2),
(15,11,2), (15,7,4), (31,25,3), (31,27,2), (63,53,5), (63,49,7). Кроме
тою, .на этом же рисунке приведены зависимости для /пличных
систем связи без кодирования, рассчитанные по формулам (7.26),
(7.29):
Р2«-~е 2 '. (8.7)
Из рис. 8.2 видно, что различные коды одной и той же длины
дают разные вероятности ошибок: например, системы связи с
кодами (31,25,3) и (15,11,2) обладают более высокой
помехоустойчивостью, чем системы связи с кодами (31,27,2) и (15,7,4).
Отсюда следует, что среди кодов одинаковой длины существуют
оптимальные коды.
8.3. Выбор оптимального кода
Как отмечалось, критерием оптимальности кода является
минимум требуемой полосы частот. Поэтому целесообразно ввести
параметр
Y=-f"£"l°&v, '(«-8)
который при заданном р2 полностью определяет полосу частот F.
Оптимальные коды, минимизирующие у, можно найти, подставив
(8.5), (8.8) в (8.4):
Рошъ^е-""0. (8.9)
Для выбора оптимального кода необходимо найти зависимость у
от его параметров. Для этого необходимо и а ити з ависим ость Р ош
от Pv посредством (8.6), а затем выразить у через Рош, исходя
из соотношения (8.9).
Точного аналитического выражения для обратной функции
Poui(Pv) ДО настоящего времени не найдено. Можно показать,
что
Pv < —— Я-*" \i-»n Р2ш • (8.10)
Правая часть неравенства (8.10)—монотонно возрастающая
функция от Рош. Для значений Р0ш таких, что
Pom<(*o*Pv)r+1 *|Л (8.П)
170
эквивалентная вероятность ошибки «а v-ичный информационный
символ не превышает заданной Pv.
Прологарифмировав обе части равенства (8.9), получим
1*,ТсЬл*г:1' (8Л2)
«о ь * ош
Выражения (8.11) и (8.12) в явном виде показывают взаимосвязь
•между у и .параметрами кода при фиксированных числе ШПС и
вероятности Pv. Параметры fe, г, Я, \i для разделимых кодов
однозначно выражаются через скорость кода С, следовательно,
(8.12) .можно рассматривать как функцию скорости кода.
Очевидно, с возрастанием С корректирующие свойства кода
ухудшаются .и Р0ш убывают. При этом второй сомножитель в пра»вой
части (8.12) логарифмически возрастает с ростом С, а первый
сомножитель равенства с ростом С убывает по закону гиперболы.
Отсюда можно .предположить, что при низких скоростях кодов у
принимает большие значения и оптимальными будут
высокоскоростные коды. В общем случае зависимость у от С имеет
сложный характер.
8.4. Оптимальные коды Рида — Соломона
Из (8.8) для у следует, что выбор v не является
принципиальным в рассматриваемой постановке задачи, поэтому полагаем
v=2. В этом случае символы кодовой последовательности
принимают значения из поля GF(2k°). По определению, длина РС-
кода над полем GF(2ko) [14, 50]
п = 2*о— 1=т— 1 (8.13)
и выбор объема алфавита ШПС однозначно задает длину кода.
Подставляя (8.13) в (8.12), получаем
уж —— ln^—. (8.14)
ko С 2 Рош
Вычислив значения Нош» при которых эквивалентная
вероятность ошибки на двоичный информационный символ не
превышает значения Р2=10~4, по точной формуле (8.6); подставив его в
(8.14), находим зависимости у от С для всех РС-<кодов длиной
/г=7, 16, 31 и некоторых PC-кодов длиной л=63. Значения у
при Р=10~4 рассчитанных кодов представлены в табл. 8.1 и на
рис. 8.3. Из кривых на рисунке видно, что для всех п существует
оптимальный код, позволяющий реализовать минимальную
полосу частот приемника при заданных скорости .передачи
информации W и отношении р2 на его входе. Оптимальные коды
являются высокоскоростными. При скоростях кодов С^0,5 зависимость
у от С слабо выражена, поэтому можно воспользоваться любым
кодом, если увеличение у, которое в этом случае незначительно,
не играет существенной роли. При низкоскоростных кодах С<0,5
параметр у резко возрастает, поскольку возрастает избыточность*
кода.
171
ttOH'dOH*
-U '4 *w)
(л 'ц 'у)
©OW^CNlO ЛО>^Ю СО ч* О Ь» СО ^ СО 1Л
ОООСЬсЛСО—« COIOCNO О ~* СО ^ Г*» ^ ^ Ю
СО О rt< СО СО 00 —«ООО ОООООСОЮ^
~н~н CN СОЮСО
•»
ЮСОСЛС^Ю©
~ч СОЮСО СОЮ
>о>с
слсосоосослсо^ооюсою^
lOOOOt^COCOt^OOOi—«ЮСЛСЛ
r*»t^.cococococococot"-oococN
_^h^CNCO —i ООООООООООО^-.-*
СО СЛ СО 00 CN d
Фоою^о ь-
юооосм t^ о
СООсООО*-«ЮСЛ'-ч^,000>ЮО*
♦^•♦-HCOCOCOCO^^OiCNOOOOCM
ю^сососососососо^^сою
с^сОсоюоою
C*Q
нСООО
2 ^<n со <* ю
^or^inco^*
со со со со со со
-н CN СО^Ю^СО h- 00 Oi 2 — rS *-^
—11^ со
•—"СЛ^»ЮСО»-нСЛ^«ЮсО»-нЮ "
соююююю^^т^^ео^^н
сососососососососососососо
сососососососососососососо
юсо со счг^союю юю cncoco^cn^
О Oi —* ООСО^ОЮ 00~ч ^ч Tf ~-4 0> ~ч СО
СО^ О ОСЧСОЮЮ OO ОО^-нСОт)*
0>*-«CN CO СО ^ Ю 00 СО СО CN •*• Tf CN CO ~ О 00 CN
lOCN© Ю П« О т*< CN CO CO •*• 0> 00 О ^ CO ^ О* О
ОО^нО h» t^ 00 О CN О CO t^ CO CO CO t^ h» 00 00 О
©~чСО ОООО^н^нЮ OOOOOOOO^-»
со
CN
s
CN
CNC0O5 CN ^ CN CN CO Ю Tt*
^Млл^лл ^HCNCO^iOCOl^OOOi
^^.^ - -co^iocor^ *
^hCNCO CO^h ~ " - - * О>^ЮС0~-4О>Г^Юс0
*-Г " ^^СЛ^ЮСО—i CN CN CN CN CN ~-« ~-« ~-« ^
• * •> ЮЮЮЮЮЮЮ ~Ч -Ч ^-4 ^-4 ^Х ^-4 ^-4 ^-4 —«
t>«- h» h» «-и -н ^4 ^4 ^4 ^4 ^4 CO CO CO CO CO CO CO CO CO
00
>»
Он
Я нч
я »я 5S
й п ч В
Я ^ г°- S
** Р Й «
8В8№
а со s os
3 со S .
&*8 §
я я о о w
3 S * Я Я
pq w л я О
C\i C\j 1
2-^ / /
V
I*?
e|a
о ci,
О S ев
* Ё §
s|s
* S Й
CQ
О CQ
s £
Я
«5
* о
•е-
О Л1
S s
5 « |
со «
со &
о
о 5
^ к а
я S л о о
Я О ST С С
Значения 7=Т™Код, рассчитанные по (8.15) для Р2=10~4,
также даны в таблице. Зависимость у от k0 (числа ШПС)
представлена .на рис. 8.4, кривой 2; кривая 1—зависимость, в которой
применены оптимальные коды (7, 5, 1), (16, 11, 2), (31, 25, 3),
(63, 53, 5). Как видим, применение оптимальных кодов
позволяет получить существенный выигрыш в полосе частот по
сравнению с аналогичной системой без кодирования. Данные табл. 8.1
показывают, что не всякий код уменьшает полосу частот.
Использование кодов с низкими скоростями передачи требует
расширения полосы частот и поэтому нецелесообразно в системах
свяэи с ШПС. Вместе с тем необходимо отметить существование
оптимальных кодов минимизирующих полосу частот и
обеспечивающих выигрыш в полосе частот по сравнению с m-ичньш
кодированием.
9. ПОМЕХОУСТОЙЧИВОСТЬ ПРИЕМА
НЕПРЕРЫВНЫХ СООБЩЕНИЙ
9.1. Основные методы передачи н приема
непрерывных сообщений с помощью ШПС
Передача и прием непрерывных сообщений (например,
телефонных) с помощью шумоподобных .сигналов возможны путем
применения дискретных или аналоговых методов модуляции.
При дискретных методах модуляции непрерывное сообщение дис-
кретизируетоя по времени, затем превращается или в
последовательность импульсов с амплитудно-импульсной модуляцией
(АИМ), или в последовательность импульсов с широтно-имцульс-
ной .модуляцией (ШИМ), или в импульсную кодово-модулирован-
ную, последовательность (ИКМ). Далее импульсы
соответствующих последовательностей с помощью модуляторов превращаются
в ШПС. Поэтому возможны АИМ—ШПС, ШИМ^ШПС, ИКМ—
ШПС, а также и другие методы модуляции. В случае АИМ—
ШПС из-за -амплитудной модуляции плохо используется
мощность передатчика, поэтому такой метод модуляции обычно не
применяют. При ИКМ—ШПС необходимо расширять полосу
частот, что вызывает дополнительные ошибки квантования.
Поэтому из упомянутых методов модуляции при ШИМ—ШПС
полностью используется мощность передатчика, не возникают ошибки
квантования, нет необходимости в дополнительном расширении
спектра, «что и создает определенные преимущества ШИМ—41ЩС
перед другими дискретными методами модуляции непрерывных
сообщений.
Вместе с тем ИКМ—ШПС позволяет более полно
использовать цифровую технику при формировании и обработке ШПС.
При передаче непрерывных сообщений с помощью аналоговых
методов модуляции в основном используется только частотная
173
модуляция (ЧМ), поскольку она обеспечивает выигрыш в
помехоустойчивости при отношениях сигнал-помеха на входе больше
порогового значения. Преобразовав непрерывное сообщение в
ЧМ колебание, можно затем произвести дополнительную
модуляцию с помощью ШПС, в результате чего получается колебание
ЧМ—ШПС.
Оба вида модуляции (и ШИМ—ШПС, и ЧМ—ШПС)
известны давно (см. .например, [6, 7, 53]). Точные соотношения,
определяющие помехоустойчивость приема непрерывных сообщений для
этих .видов модуляции приведены .в работе [54].
9.2. Помехоустойчивость приема ШИМ—ШПС
На рис. 9.1 изображены структурные схемы передатчика и
приемника ШИМ—ШПС. В передатчике (рис. 9Л,а) .непрерывное
сообщение от .источника .информации (ИИ) поступает на широтно-
импульсный модулятор (ШИМ), «который управляется генерато-
ЕН
ШИМ
, f
\гтч
GM
t
гшпс
Пер
а)
J Ь
[пр~
6М
\
гшпс
■ п
ли |
Рис. 9.1. Структурные схемы передатчика и приемника ШИМ—ШПС
ром тактовой частоты (ГТЧ). ШИМ колебание подается на
балансный модулятор (БМ), который выполняет функции
перемножителя. На .второй .вход балансного модулятора подается ШПС
в виде фазоманипулиронанного сигнала (ФМ) от генератора шу-
моподобных сигналов (ГШПС). В мощных каскадах передатчика
(ПЕР) производится перенос ШИМ—ШПС на несущую частоту
и усиление по мощности, а затем сигнал излучается в
пространство. Сигнал, поступающий .на вход приемника (ПР) (рис. 9.1,6),
усиливается в первых каскадах ПР и переносится на
видеочастоту, а затем /поступает на вход БМ, который выполняет
функции паремножителя. На второй вход балансного .модулятора
поступает ШПС от ГШПС. Затем ШИМ колебание ()без ШПС)
подается на широтно-импульсный демодулятор (ДМ), с выхода
которого сообщение направляется получателю информации (ПИ).
Широтно-импульсный демодулятор состоит из интегратора
(время .интегрирования равно длительности ШПС Г), преобразователя
ШИМ—АИМ |И фильтра нижних частот (ФНЧ).
Положим, что длительность ШПС равна интервалу отсчета
согласно теореме Котельшжова T=l/2W, где W — верхняя
частота сообщения. Если ширина спектра ШПС равна F, то база ШПС
B=FT=F/2W.
(9.1)
174
Обозначим через v(t) ШИМ сигнал:
1 при 0<г<— +А/,
v(t)={ 2 (9.2)
_1 при -JL + At^t^T,
где At=aS(tk) —отклонение центра ШИМ сигнала при
модуляции, S(tk) —k-й отсчет сообщения в дискретный момент времени
tky а—коэффициент пропорциональности. Отметим, что Д*тах=
= 7/2. При тональном сообщении в виде гармонической функции
S(t)=cosQt, причем Qmax=2nW.
Обозначим через u\(t) ФМ ШПС, для которого справедливо
М*)1 = 1- (9.3)
Сигнал на выходе балансного модулятора передатчика (рис.
9.1, а) имеет вид u(t)v(t). Ha входе приемника полезный сигнал
равен Ueu(t)v(t)cos wot, где Uc — .амплитуда сигнала на входе,
о)о — его несущая частота. Мощность сигнала на входе приемника
Pc = U2c/2. Относительно помехи предположим, что она является
гауссовским случайным процессом с нулевым средним и
мощностью Рп в полосе пропускания приемника, равной ширине
спектра ШПС F. Если помеха обладает равномерной спектральной
плотностью, то спектральная плотность мощности помехи Nn=
= PJF.
Предположим, что в приемнике осуществляется синхронный
прием с точностью до начальной фазы, т. е. в состав первых
каскадов приемника (ПР) входит система фазовой автоподстройки
частоты (ФАПЧ). При этом на входе балансного модулятора
приемника будем иметь колебание x(t) = V~Pcu(t)v(t)+n(t)9 a
на его выходе x(t)Uf(t—x) = \rPcu{t)u(t—%)v(t)+rt(t)u(t—т).
Задержка т определяет сдвиг .во времени между ШПС на входе
приемника и опорным ШПС от генератора ГШПС. Для устранения
задержки т приемник должен содержать систему поиска и
синхронизации ШПС по времени. В режиме синхронизма т=0 и
поэтому колебание на выходе балансного модулятора имеет вид
y(t) =VPcV(t)+n(i)u(t)9 поскольку u2(t) = l «согласно (9.3).
После интегрирования в широтно-имиульоном демодуляторе отсчет
сигнальной составляющей
Vc = Vc (tk) = VPc$v(t)dt=2VPrcAt, (9.4)
о
что соответствует определению (9.2). При тональной модуляции
мощность отсчета сигнальной составляющей
VU=Pc^2/2. (9.5)
Шумовая составляющая на выходе интегратора
г= $n{t)u(t)dt. (9.6)
175
Поскольку n(t) —гауссовский случайный процесс с нулевым
средним и мощностью Рп, то среднее значение mi{z}=0, а
мощность
ol = M2{z} = PnT/2F. (9.7)
Так как широтно-импульоный демодулятор является
линейным устройством (с точки зрения передаваемого сообщения), то
отношение сигнал-помеха на выходе широтно-имлульсного
демодулятора
См^сэфК- (9.8)
Подставляя в (9.8) значения (9,5), (9.7), получаем
где р2=Рс/Рп — отношение сигнал-помеха на входе.
В систем-ах связи целесообразно -использовать в качестве
параметра коэффициент расширения спектра, т. е.
B0 = F/W, (9.10)
причем В = 0,5В0. Подставляя (9.10) в (9.9), .находим отношение
сигнал-помеха на входе широтно-импульсного демодулятора
См = 0.5р26о- (9.Н)
Сравнение (9.9), (9.11) с известными формулами для
отношения сигнал-помеха на выходе (Согласованного фильтра q2=2p2B
показывает, что отношение сигнал-помеха <72ШИм в 2 раза меньше
отношения сигнал-помеха >на выходе согласованного фильтра q2
и совпадает с отношением сигаал-помеха при некогерентлом
приеме двух ортогональных сигналов (1.6), (7.9).
9.3. Помехоустойчивость приема ЧМ—ШПС
На рис. 9.2 изображены структурные схемы передатчика и
приемника ЧМ—ШПС. В передатчике (рис. 9.2,а) непрерывное
сообщение от источника информации (ИИ) .поступает на частотный
модулятор (ЧМ), на второй вход .которого поступает
смодулированное колебание от генератора опорной частоты (ГОЧ). Затем
ЧМ сигнал поступает на вход БМ, который выполняет функции
перемножителя. На второй вход БМ поступает ФМ сигнал от
ГШПС. В мощных каскадах ПЕР производится усиление ЧМ—
Г^ТЧ
ЧМ
ш
5М
иг-Л Ь
Ь-*Ч Пер > '
ГШПС
а)
[гшпс
-Н СЧА \
5)
Рис. 9.2. Структурные схемы передатчика и приемника ЧМ—ШПС
176
V (t) = COS
ШПС, перенос его на несущую частоту, после чего он излучается
в пространство.
В первых каскадах ПР (рис. 9.2,6) -производится усиление
принятого сигнала .и перенос его на промежуточную частоту.
Затем ЧМ—ШПС поступает на -вход БМ, на .второй вход которою
подается ШПС от ГШПС. Балансный модулятор выполняет
функции паремножителя. При синхрон из ачщи ГШПС с принятым ШПС
в балансном модуляторе производится демодуляция ШПС и на
стандартный частотный детектор (СЧД) поступает ЧМ сигнал,
освобожденный от ШПС. Стандартный частотный детектор
состоит из усилителя промежуточной частоты (Ж1Ч), амплитудного
ограничителя с полосовым фильтром, частотного дискриминатора,
ФНЧ. Полоса пропускания УПЧ должна равняться ширине
спектра ЧМ сигнала. Граничная частота ФНЧ равна (Верхней частоте
сообщения W. Характеристики всех каскадов приемника
предполагаются идеальными. Демодулированное сообщение с выхода
СЧД направляется получателю информации.
На выходе частотного модулятора ЧМ сигнала
(d0t + Aa>\s(t)dt\t (9.12)
где (оо — опорная частота, Д© — девиация частоты, S(t)
—сообщение. При тональной модуляции, т. е. при S(t) =oosQ/, ЧМ сигнал
согласно (9.12)
v{t)=cos{a>0t + msinQt)1 (9.13)
где индекс модуляции т=Аы/£1. В дальнейшем при определении
индекса модуляции положено Й = ЙШах.
На выходе балансного модулятора передатчика ЧМ — ШПС
имеет вид v(t)u(t), где u(t) —ШПС, удовлетворяющий условию
(9.3). Обозначим ширину спектра ЧМ сигнала (через F4fA. Она
приближенно равна F4lA «2тД(о/2я = тД(о/я. Обозначим ширину
спектра ШПС через ^Шпс- Определим приближенно ширину
спектра ЧМ—ШПС. Пусть G4M (со) —спектр ЧМ сигнала, а
£шпс(<°) —спектр ШПС, причем
СЧм И = ]v (t) е-'°< dt, Сшпс (со) = ]и (t) e-1*' dt,
о о
где Т — длительность ШПС. Спектр произведения двух сигналов
равен свертке спектров G4m((o), бшпс(о)), т. е.
Очм-шпсИ = у- ]G4lfi(x)Gmnc(^—x)dx. (9.14)
— оо
Предположим, что амплитудные спектры ЧМ и ШПС близки
к прямоугольным, что обычно имеет место на практике для ШПС
с большими базами и ЧМ с относительно -большими индексами
модуляции. При таком предположении ширина спектра ЧМ—
ШПС в соответствии со свойствами интеграла свертки (9.14)
177
F^Fmnc+F4lA. (9.15)
Сигнал «а выходе балансного модулятора приемника будет
иметь вид Ucw{t)u(t—x)v(t)+n(t)u(t—т), где Uc — амплитуда
сигнала, т — сдвиг между ШПС на входе приемника и опорным
ШПС, п(t) —помеха. Для устранения задержки т приемник
должен содержать систему поиска и синхронизации ШПС по
времени. В режиме синхронизма т=0 и колебание на входе СЧД имеет
вид y(t)=Ucv(i)+n(t)u(t), поскольку u2(t) = l согласно (9.3).
Поскольку прием ЧМ сигналов сопровождается пороговым
эффектом, то предположим, что отношение сигнал-помеха на входе
СЧД больше порогового значения, которое для простоты
положим ровным 10 дБ, или равно ему. При подаче на вход СЧД
колебания y(t) мощность сигнальной составляющей на выходе
СЧД РСвых=|(Ао))2/2. Найдем мощность помехи на выходе СЧД
при воздействии на его входе помеховой составляющей £(/) =
=n(t)u(t). Как и в случае приема ШИМ—ШПС, предположим,
что n(t) —нормальный случайный процесс с нулевым средним
и с мощностью Рп в полосе пропускания первых каскадов
приемника, ширина которой равна ширине спектра ЧМ—ШПС (9.15).
Случайный процесс §(/) также является нормальным с нулевым
средним и с дисперсией «(мощностью) М2{£(0}=^п. Однако
знание мощности помехи на входе СЧД еще не достаточно.
Необходимо знать ее спектр для того, чтобы определить
спектральную плотность мощности в полосе ЧМ сигнала на входе
частотного дискриминатора. Допустим, что n(t) —узкополосный
процесс относительно опорной (промежуточной) частоты о>о с
симметричным равномерным спектром. Пусть спектральная плотность
мощности помехи Nn=Pn/F. В этом случае корреляционная
функция случайного процесса l(t) на выходе перемножителя
(балансного модулятора)
г» / \ г» sin я Ft d /v
Вг(г) = Р„ £„(t)cos(d0t,
71 Г Т
где
1 —|т|/т0 при 0<|т|<т0,
Ви
I 0 при |т|>т0
— корреляционная функция ФМ — ШПС с большой базой, а то —
длительность элементарного импульса ФМ—ШПС.
Корреляционная функция (9.16) является идеализированной, поскольку в ней
не учтены боковые пики.
Энергетический спектр случайного процесса §(/) на выходе
перемножителя [65]:
|Gg(G))|2 = 2PnT *1П*/% gM(T)COS(0)-(00)TdT +
tf ПГ T
+ 2РЛ sin"Fx g„(T)cos(G) + co0)TdT, (9.17)
0J nFx
178
причем первое слагаемое в (9.17) определяет спектр в
окрестности частоты й) = соо, а второе — .в окрестности частоты ш = —<оо.
В дальнейшем (Интерес /представляет спектральная плотность в
окрестности 'частоты юо »в полосе 2Дш. Поскольку 2Дй><С2я/гШПо
можно приближенно допустить, что спектральная плотность
мощности в этой полосе постоянна и .совпадает со значением
|Gg(iu)o)|2. Подставляя в (9.17) корреляционную фунадию (9.16)
и а)='соо, находим, что
iGgK)i2=^ Г-«(«*)--l i-co;»*i,
F L я я я& J
д:
где интегральный синус Si(*) = j sin г/г dz, a fe=FTo-
о
При я&>1, что обычно имеет место на практике, Si(nk)
~ (я/2) — (cosn&)/(tt&). Поэтому
^w'^-rl'-^r)
и для приближенных расчетов можно положить, что | Gg (coo) |2=
= PJF. Используя этот результат, можно найти мощность помехи
на выходе СЧД Р„вых= (2я)2Рп№*/ЗРсР.
Учитывая, ЧТО Ус вых — (2яД/)2/2, находим, что отношение
сигнал-помеха на выходе СДЧ
?Wmnc = 3P2/J4Mm*, (9.18)
где р2=Рс/Рп — отношение сигнал-помеха на входе приемника,
Ячм = №ш (9.19)
— коэффициент расширения спектра, т — индекс модуляции
го=Д//ИГ. (9.20)
Как следует из (9.18), использование ЧМ с индексом
модуляции т приводит к выигрышу в помехоустойчивости,
пропорциональному кубу индекса модуляции т3, что является естественным
для ЧМ [56]. Вместе с тем отличие от известных формул
составляет наличие в (9.18) множителя р25чм, который представляет
собой отношение сигнал-помеха на входе частотного
дискриминатора. Поэтому выигрыш в помехоустойчивости при приеме ЧМ—
ШПС начнется с таких отношений сигнал-помеха на входе р2,
при которых отношение сигнал-помеха
^м = Р2Ячм>^оР. (9.21)
Положим /i2nop=10, т. е. /12пордб = 10 дБ.
Для сравнения помехоустойчивости приема ЧМ — ШПС с
помехоустойчивостью приема другими методами, целесообразно
выразить отношение сигнал-помеха (9.18) через коэффициент
расширения спектра Bo = F/W. Используя (9.10), из (9.18) находим
^м-шпс = Ь5р2В0т2. (9.22)
179
При этом, если Во = const, т. е. и F=const, то выигрыш в
помехоустойчивости растет как /п2.
Определим пороговое отношение сигнал-помеха. Из (9.10),
(9.19), (9.20) находим, что Вчм=В0/2т. Подставляя это
выражение в (9.21) и полагая в правой части равенство, получаем
PLP=Anop2m/B0. (9.23)
Если /i2nop=10 дБ, то
Рпор = 20т/В0. (9.24)
Таким образом, чем больше индекс модуляции т, тем больше
согласно (9.18), (9.22) помехоустойчивость приема, но тем выше
пороговое отношение сигнал-помеха на входе р2ПОр согласно (9.23),
(9.24).
9.4. Сравнение помехоустойчивости ШИМ—ШПС и ЧМ—ШПС
На рис. 9.3 изображены графики помехоустойчивости —
зависимости отношения сигнал-помеха q2, дБ на выходе приемников
ШИМ — ШПС и ЧМ — ШПС от отношения сигнал-помеха р2, дБ
на входе, построенные в соответствии с (9.11) и (9.22) (для В0=
= 105 — сплошные линии, для В0 = Ю4 — штриховые, для Во=103 —
70 20/>г,дБ
Рис. 9.3. Зависимости отношения сигнал-помеха на выходе приемников ШИМ-
ШПС и ЧМ—ШПС от отношения сигнал-помеха на входе
180
штрих-пунктирные, для В0=102 — треугольно-штриховые; для
ШИМ — ШПС — прямые наклонные линии, для ЧМ — ШПС —
вертикально-наклонные линии). Как следует из сравнения (9.11)г
(9.22), выигрыш ЧМ —ШПС перед ШИМ— ШПС равен ЗтК
При т=4 он равен 17 дБ, при т=10 он равен 25 дБ. Этот
выигрыш имеет место при р2^р2ПоР (9.24). При р2 = р2ПоР отношение
^2чм-шпспор=30т3, при т = 4 оно равно 33 дБ, а при т=10 равна
45 дБ.
Таким образом, применение ЧМ — ШПС позволяет получить
существенный выигрыш по сравнению с ШИМ — ШПС при
одинаковой ширине спектра результирующего сигнала. Вместе с тем,
прием ЧМ — ШПС сопровождается пороговым эффектом.
9.5. Помехоустойчивость ИКМ—ШПС
Основы передачи и приема символов ИКМ были рассмотрены
в гл. 7 при обсуждении помехоустойчивости m-ичных систем
связи. Но при этом не были рассмотрены ошибки квантования,
которые сопровождают процесс преобразования непрерывного
сообщения в ИКМ. Как известно [57], передача телефонных
сообщений с помощью ИКМ сопрвождается ошибками квантования я
ошибками решения. Ошибки квантования вызваны квантованием
телефонного сообщения на т уровней, а ошибки решения
определяются возможностью ошибочного приема кодовой комбинации с
вероятностью Р0ш из-за воздействия помех. Отношение сигнал-шум
по мощности на выходе демодулятора ИКМ [57]
?2=(т-2 + 2Рош)^. (9.25)
Первое слагаемое в знаменателе правой части (9.25)
представляет собой шумы квантования, а второе — шумы решения,
нормированные относительно полезного сигнала на выходе
демодулятора. Если 2Р0ш^т~2, то максимальное значение отношения
сигнал-шум раВНО Q щах = т2. Однако для этого необходимо, чтобы
помехи на входе демодулятора были малыми. При конечном (или
заданном) отношении сигнал-шум на входе демодулятора
существует оптимальное соотношение между шумами квантования и
шумами решения, что определяет оптимальное число уровней
квантования. Это следует из того, что вероятность ошибки Рош зависит
от числа уровней квантования. Поэтому знаменатель правой
части (9.25) зависит от т двояким образом: чем больше число
уровней квантования, тем меньше шумы квантования, но тем больше
шумы решения. Поэтому при заданном числе уровней квантования'
и существует оптимальное отношение сигнал-шум на входе
демодулятора.
Обозначим через W верхнюю частоту спектра телефонного
сообщения. Соответственно интервал между отсчетами T=l/2W.
В m-ичной ИКМ каждый отсчет передается одним из т
возможных ортогональных сигналов длительностью Т. Будем предпола-
181
гать, что осуществляется некогерентный прием т ортогональных
«сигналов. При демодуляции принимается решение о том, какой
сигнал был принят, и на этом основании восстанавливается от-
счетное значение телефонного сообщения. Вероятность ошибки
при некогерентном приеме т ортогональных сигналов (7.26)
Рош m « On—1)/2 ехр (—ВД, (9.26)
где отношение сигнал-шум на входе демодулятора
ft2=/>c77#n, (9.27)
Рс— мощность сигнала и Nn— спектральная плотность мощности
шума на входе демодулятора.
В двоичной ИК1М1 каждый отсчет телефонного сообщения
передается с помощью кодовой комбинации из к двоичных символов,
причем число квантованных уровней т и k связаны соотношением
m = 2fe. (9.28)
Длительность двоичного символа
T2=T/k, (9.29)
вероятность ошибки при некогерентном приеме двоичных символов
(7.18)
Рош 2 = 0,5 ехр(—ft2/2fc), (9.30)
а вероятность ошибки при приеме кодовой комбинации из k
двоичных символов
Рош* = 1-(1-Рош!)*Ж*РоШ1. (9-31)
причем приближенное равенство справедливо при Рош2<С1, что
должно иметь место на практике в реальных линиях связи.
Для m-ичной ИКМ, подставляя (9.26) в (9.25), и полагая, что
/гс»1, получаем
<7а я? [т-2 + т ехр (—h2/2)]-1. (9.32)
Дифференцируя правую часть (9.32) и приравнивая нулю
первую производную, получаем уравнение m3=2exp(/i2/2), решение
которого определяет соотношение между оптимальными
значениями тОПТ и Л2опт. Решая уравнение относительно Л2, находим h2onT
при заданном т:
Кит » 2 1п К/2)- <9'33>
Соответственно при заданном Л2
топт «(2 ехр/да/3. (9.34)
Подставляя (9.33) в (9.32), получаем оптимальное значение
(условный максимум) отношения сигнал-шум на выходе
демодулятора
Я20ПТът2/3. (9.35)
182
В свою очередь, при подстановке (9.34) в (9.32) получаем
<7опт « 41 /з. 3-* ехр (Л«/3) = 0,53 (ехр Л2/3); (9.36>
правые части (9.35) и (9.36) равны.
Сравнивая (9.35) с (9.25), замечаем, что q2onr наступает при
Рошт=1/^2. Из (9.35) следует, что q20nr меньше в 3 раза (на
5 ДБ) <72тах, Существующего При 2Р0га m<.fn~2, ЧТО ВОЗМОЖНО ЛИШЬ
при h2^>2ln(m3/2). Однако существенное увеличение h2 приводит
к ужесточению требований к каналу связи, что не является
целесообразным. Сравним оптимальное значение ?2ОПт (9.36) с нижней*
границей отношения сигнал-шум ?2нижн^З-1ехр(/12/3),
приведенной в [57]. Из сравнения следует, что <72опт больше <72Нижн в 1,6 ра-^
за, т. е. на 2,1 дБ. В табл. 9.1 приведены оптимальные значения
<72оптдб и /12оптдб , рассчитанные согласно (9.33), (9.35). Как
следует из таблицы, /12оптдб изменяется в пределах 11,8... 16 дБ при?
широком диапазоне изменения т от 16 до 1024. Это объясняется
логарифмической зависимостью h2Qm от т.
Для двоичной ИКМ, используя (9.30), (9.31) и заменяя k =
= log2m, получаем
q2 « [m-2 + 2(log2 m) ехр (—h2/2 log2 m)]-\ (9.37)*
где отношение сигнал-шум на входе демодулятора определяется*
согласно (9.27). Дифференцируя правую часть (9.37) и
-приравнивая первую производную нулю, находим уравнение 2(1п2)ехр(Л2/'
/21og2m) = т2 (1 -\-h2l2\og2m), решением которого является
оптимальное значение Л2опт. Логарифмируя обе части полученного
уравнения и полагая, что A2/21og2m»ln:(l+/i2/21og2m)>ln(21n2),
находим приближенное значение /i2onT при заданном т:
Km « 4 1п 2 (log2 т)2 = 2,75 k2. (9.38)
Соответственно при заданном h2
monT«2«"/4in2)i/2 (9.39)
Подставляя (9.38) в (9.37), получаем оптимальное значение*
(условный максимум) отношения сигнал-шум на выходе
демодулятора
?опт «m2/(log2m+l). (9.40)
В свою очередь, при подстановке (9.39) в (9.37) получаем
?опт « 2 ехР № In 2)l/2/(h2 In 2)1/2. (9.41)
Как и ранее, правые части (9.40) и (9.41) равны. В табл. 9.2
приведены оптимальные значения Л2опт,дб и ?20пт,дб,
рассчитанные согласно (9.38), (9.40).
Как видно из табл. 9.1, 9.2, требуемое Л2ОПт,дБ при двоичной
ИКМ больше Л20пт,дБ при m-ичной ИКМ на 6 ... 8 дБ. Это
объясняется тем, что при m-ичной ИКМ осуществляется прием
ортогонального сигнала в целом, а при двоичной ИКМ — поэлементный
183
Табкица 9.1. Параметры
m-ичной И КМ
Таблица 9.2. Параметры
двоичной И КМ
к
4
5
6
7
8
9
10
m
16
32
64
128
256
512
1024
Я. опт,дБ
17
22,3
27,5
33
39,5
44
49,6
^ опт,дБ
16,4
18,4
19,8
21,4
22,4
23,4
24,4
k
4
5
6
7
8
9
10
т
16
32
64
128
256
512
1024
Я. опт,дБ
19,2
25,2
31,2
37,2
43,2
49,2
55,2
^ опт,дБ
11,8
12,8
13,7
14,4
15,0
15,5
16,0
прием, причем длительность элемента (символа) согласно (9.29) в
к раз меньше ортогонального сигнала.
При воздействии на систему связи с ИКМ — ШПС шумовых
помех с ограниченной мощностью необходимо заменить отношение
сигнал-шум Л2 (9.27) на отношение сигнал-помеха Л2П (1.6),
10. ФИЛЬТРАЦИЯ МОЩНЫХ ПОМЕХ
10.1. Мощные помехи и принципы борьбы с ними
При передаче информации на большие расстояния в некоторых
случаях мощность преднамеренной помехи на входе приемника в
его полосе пропускания может значительно превышать (на
20... 50 дБ) мощность сигнала. Борьба с такими мощными
помехами в системах связи всегда была и остается серьезной
технической задачей. Решение этой задачи имеет большое значение еще и
потому, что число различных радиоэлектронных средств
возрастает, а диапазоны частот остаются теми же.
Для борьбы с мощными преднамеренными помехами можно
использовать шумоподобные или сложные сигналы и согласованные
фильтры или корреляторы [58]. Этот метод успешно применяется
в различных радиотехнических системах, в том числе и в системах
связи.
Помехоустойчивость приемника дискретной информации с
согласованным фильтром (или коррелятором) полностью
определяется отношением сигнал-помеха на выходе фильтра
4*=2E/NV9 (ЮЛ)
где Е — энергия сигнала; Nn — спектральная плотность мощности
помехи на входе приемника. Если средняя мощность помехи Рп
ограничена и помеха действует в полосе частот сигнала, то Nn=
=PJF. Поскольку энергия сигнала Е=РСТ, то
?*«2р«В, (10.2)
184
где отношение мощностей сигнала и помехи на входе приемника
P2 = PjPn- (10.3)
Отношение сигнал-помеха q2n (1.4), (10.2) и отношение сигнал-
помеха h2 (1.6), определяющее помехоустойчивость приема,
связаны соотношением q2n = 2h2.
Соотношение (10.2) является основополагающим в технике
борьбы с мощными помехами [58]. Оно показывает, что при
достаточно большой базе можно получить отношение сигнал-помеха
q2u достаточным для надежного приема, даже если мощность
сигнала на входе приемника много меньше мощности помехи, т. е.
если р2<1. Действительно, пусть, например, р2дБ =—40 дБ, а
требуется иметь на выходе <72дб =13 дБ. В этом случае необходимо
применять ШПС с базой 5дб =50 дБ или Б=105. Как показывают
энергетические расчеты, в современных системах связи с ШПС
В = 104... 10б.
С другой стороны, помехоустойчивость оптимального приемника
при действии помех с ограниченной спектральной плотностью
мощности не зависит от формы сигнала и его базы, а определяется
только его энергией согласно (10.1). Помехи, у которых Pn*>Pc,
т. е. р2<<1, называются мощными.
Таким образом, соотношение (10.2) указывает метод борьбы
с мощными преднамеренными помехами: использование ШПС с
большими базами. Этот метод известен давно [58], и он
непосредственно следует из теоремы Шеннона [2] о пропускной
способности канала связи с шумами. Эта теорема гласит, что можно
найти такие коды, что пропускная способность канала связи
C = Flog2(l+p2), (10.4)
где F — ширина спектра сигналов, равная ширине полосы
канала, р2 — отношение сигнал-помеха по мощности на входе
приемника (10.3). Если действует мощная помеха, т. е. p2<Cl, то С=
= Fp2/ln2. Соответственно
p2F/C = ln2. (10.5)
Согласно теореме Шеннона, если имеют место соотношения
(10.4), (10.5), то можно вести передачу информации по такому
каналу со сколь угодно малой вероятностью ошибки. В свою
очередь, если в (10.2) заменить Т на 1/W, где W — скорость передачи
информации (длительность двоичной единицы), то
?2 = 2р2 F/W. (10.6)
Сравнивая (10.6) с (10.5), можно заметить, что если положить
C=W, f. е. вести передачу информации со скоростью, равной
пропускной способности канала, то значение отношения
сигнал-помеха q2n пор = 2 In 2 является пороговым для такой системы связи:
если <72п><72ппор, то ошибка будет сколь угодно малой, если q2n<Z
<<72ппор, то ошибка резко возрастет в соответствии с теоремой
Шеннона.
185
Таким образом, соотношение (10.2) и целесообразность
применения ШПС для борьбы с мощными помехами вытекают из
теоремы Шеннона. Впервые формула (10.2) была получена для
шумовых помех с ограниченной средней мощностью, но она справедлива
и для других помех, в том числе для узкополосных, импульсных и
структурных (помехи, имеющие ту же структуру, что и полезный
сигнал) [4, 59]. К структурным помехам относят помехи
внутрисистемные, ретрансляционные, имитационные.
В последнее время борьба с преднамеренными помехами в
системах связи ведется в более широком плане: необходимо
обеспечить работоспособность системы связи при одновременном
действии комплекса помех, например, собственного шума приемника,
мощной шумовой, импульсной и внутрисистемной структурной
помех и т. п.
В большей части известных работ рассматривается совместное
воздействие шумовой и узкополосных помех. В этом случае в
состав оптимального приемника должны входить режекторные
фильтры, подавляющие узкопрлосные помехи, что является
естественным. Если просуммировать спектральные плотности узкополосной
и шумовой помехи, то оптимальный прием сводится к приему
сигнала на фоне коррелированной помехи (помехи с неравномерной
спектральной плотностью мощности). Эта задача была решена
В. А. Котельниковым в 1947 г. [1]. Он показал, что оптимальный
приемник должен содержать «обеляющий» фильтр, коэффициент
передачи которого тем меньше, чем больше спектральная
плотность помехи. По сути дела «обеляющий» фильтр положен в
основу всех оптимальных методов приема сигнала на фоне шумовых и
узкополосных помех при известных параметрах помех и всех
адаптивных методов приема, когда параметры узкополосных помех
неизвестны.
Борьбе с импульсными помехами также посвящено много
работ, но в большинстве случаев используют схему ШОУ (широкая
полоса — ограничитель — узкая полоса), предположенную А. Н.
Щукиным в 1946 г [60]. Схема ШОУ непосредственно или в
модифицированном виде входит в приемники, которые принимают
сигналы на фоне шумовых и импульсных помех. Ограничитель
подавляет импульсные помехи, но уменьшает отношение сигнал-шумовая
помеха. Совместное использование режекторных (полосовых)
фильтров и схем ШОУ составляет основу некоторых эмпирических
методов борьбы с узкополосными, импульсными, шумовыми и
структурными помехами [61, 62] и др.
Наряду с эмпирическими методами приема существуют общие
методы синтеза адаптивных приемников [63, 64] и др.
Характеристики адаптивного приемника должны слабо зависеть от
параметров функций распределения помех. Однако существующие
методы синтеза адаптивных приемников пока еще не дали
окончательного ответа на вопрос, как построить приемник для систем связи
с ШПС и какими характеристиками он будет обладать, хотя
общая структура таких приемников известна [65], а именно: это
186
многоканальный приемник, в котором анализатор измеряет
уровни помех в каналах и изменяет их коэффициент передачи. В
работе [66] исследован квазиоптимальный адаптивный приемник для
ШПС в виде фазоманипулированного сигнала, который либо
подключает канал к выходу, либо отключает его. В системах связя
оптимальные и квазиоптимальные адаптивные приемники уже
давно используют при разнесенном приеме [65 и др.]. Однако
разнесенный прием осуществляется при малом числе каналов, а
современные приемники ШПС характеризуются большим числом
каналов, что обусловливает ряд их особенностей. Поэтому
исследование помехоустойчивости систем связи с ШПС является актуальной
задачей, что подтверждается выходом в свет в нашей стране
книги [65] и выпуском за рубежом специальных номеров журнала
[67, 68].
Таким образом, для борьбы с мощными помехами следует
использовать ШПС с большими базами, а прием осуществлять с
помощью приемников — линейных с согласованными фильтрами,
нелинейных и адаптивных [4, 5, 69].
По своим частотно-временным свойствам помехи с
ограниченной мощностью можно резделить на сосредоточенные,
узкополосные, импульсные и структурные.
Сосредоточенными помехами называются такие, у которых
ширина спектра Fn совпадает с шириной спектра сигнала (сигналов)*
F, т. е. Fn = F и помеха полностью перекрывает спектр сигнала.
Узкополосными помехами являются те, у которых Fy<^F.
Импульсные помехи определяются по длительности Ги<<7\
Структурными помехами называются та-
кие, структура которых подобна
структуре используемых
сигналов, т. е. помехи состоят из тех
же элементов, что и сигналы, но
отличаются параметрами
манипуляции. К структурным помехам
относятся все взаимные или
системные помехи, а из
организованных — имитационные и
ретранслированные.
Для исследования воздействия
комплекса помех на полезный
сигнал рассмотрим распределение
энергии сигнала и помех на
частотно-временной плоскости (рис.
10.1), где выделен базисный
прямоугольник, площадь которого равна базе полезного сигнала В.
Несущая частота сигнала обозначена как /о. Базисный
прямоугольник разбит на частотно-временные элементы (ЧВЭ) с
помощью М частотных (горизонтальных) и М временных
(вертикальных) полос. Длительность и ширина спектра ЧВЭ равны
ТЭ=Т/М и Fs^F/M соответственно. Штриховкой выделены те ЧВЭУ
187
i
fa
FfF/M
\ Г"
fa-?/'
о
Ш
щ.
ш
■т/м
г t
Рис.
10.1. Частотно-временная
плоскость
в которых энергия произвольной структурной помехи
распределена в виде ДЧ сигнала. Толстой горизонтальной линией
изображено распределение энергии узкополосной помехи с шириной спектра
Fy, а вертикальной — распределение энергии импульсной помехи
с длительностью Тя.
Воздействие мощных помех существенно зависит от их
мощности. Если спектральная плотность мощности помехи описывается
функцией N (со), то средняя мощность помехи
_1_
2 я
j N(<D)d<d=] N(f)df.
(Ю.7)
Если интеграл в (10.7) сходится (имеет смысл), то мощность
помехи равна некоторой конечной величине. Помехи такого рода
будем называть помехами с ограниченной (постоянной)
мощностью. При этом Рп=const. Некторые виды мощных
организованных помех нельзя отнести к помехам с ограЬиченной мощностью,
поскольку у таких помех спектральная плотность мощности
постоянна в пределах полосы частот, которая намного шире
ширины спектра сигнала. Будем называть их помехами с ограниченной
\0 00хях0ях0я0
JfF/*
Т t
та-т/н
ft
fo^/2
К'Г/Т.-
го ч'в -
Jo
,
Jo-™
1
*■>:,
0 ■
■
■
FT^l
^
■ •
■
■ ".:■
Гд-Г/L
т**
^
г t
S)
F/'F/K
\,
fo
f = t/rL
*Q '/'0 4 —
f0*r/2
I
/
0
«« э>
4
л
[•■'1
1
1
■:■•
•v.
T0'T/L
-т/к
^
T*t.
s)
/ 1
Jk+F/Z\
1
f'-f/k
r;
ff№
—^
>
i
0
i
■
5'-
-*6—
1/П
i
Щ
1
\je-1s/
Л
s
1)
Рис. 10.2. Распределение энергии ШПС на частотно-временной плоскости
188
спектральной плотностью. К ним относится заградительная
шумовая помеха. Помехоустойчивость приема информации при
воздействии помех с ограниченной спектральной плотностью мощности
не зависит от формы сигналов и полностью определяется
отношением сигнал-помеха (10.1). Для повышения помехоустойчивости
необходимо применять m-ичные алфавиты.
Распределение энергии полезного сигнала в базисном
прямоугольнике зависит от типа сигнала. На рис. 10.2 показано
распределение ' энергии для четырех наиболее распространенных типов
ШПС: а — для фазоманипулированного (ФМ) сигнала,
состоящего из N радиоимпульсов длительностью To=T/N (энергия каждого
импульса распределена в вертикальной полосе шириной F и
длительностью Го, фазы импульсов (0 или я) указаны над базисным
прямоугольником); б — для дискретного частотного (ДЧ)
сигнала, состоящего из L радиоимпульсов, каждый из которых
распределен на прямоугольнике со сторонами То и /V, в —для
дискретного составного частотного сигнала с частотной манипуляцией
(ДСЧ — ЧМ), состоящего из L радиоимпульсов, которые
сгруппированы в К ЧВЭ длительностью Т'э и шириной спектра F'3\ г — для
дискретного составного частотного сигнала с фазовой
манипуляцией (ДСЧ — ФМ), который состоит из К ЧВЭ длительностью 7У
и шириной спектра /У, а каждый ЧВЭ содержит S
радиоимпульсов. Энергия отдельного радиоимпульса сосредоточена в
вертикальной полосе со сторонами То и /Y. В табл. 10.1 приведены
сравнительные данные рассмотренных сигналов.
Таблица 10.1. Параметры ШПС
Тип
сигнала
ФМ
дч
дсч-чм
ДСЧ-ФМ
Число
элементарных
радиоимпульсов
N
L
L
KS
Число ЧВЭ (дли-
' ка внешнего
кода)
—
L
К
К
Число импульсов
в ЧВЭ (длина
внутреннего
кода)
—
—
L/K
S
База сигнала
N
L2
■"=*"(-£)'
K*S
Помехоустойчивость приема ШПС при действии мощных помех
во многом зависит от помехоустойчивости приема отдельного
элемента ШПС. Поэтому приведем основные сведения по приему
элемента сигнала.
189
10.2. Оптимальный прием элемента сигнала
Обратимся к рис. ЮЛ. Он характеризует распределение
энергии сигнала и помех на частотно-временной плоскости. Для
данного случая сигнал и помехи совпадают только в одном элементе,
т. е. та или иная мощная помеха поражает один элемент сигнала.
В общем случае число пораженных элементов случайно. Если оно
мало, то этот факт можно использовать для уменьшения
воздействия помехи на сигнал в целом, т. е. реализовать различие
между частотно-временными структурами сигнала и помех.
Чтобы выяснить особенности приема ШПС с учетом
структурных свойств, предварительно необходимо рассмотреть прием
элемента сигнала при воздействии различных помех. Оптимальный
прием элемента при воздействии гауссовского случайного
процесса осуществляется либо с помощью согласованного фильтра, либо
с помощью коррелятора. Так как оба эти устройства
эквивалентны с точки зрения помехоустойчивости, то будем рассматривать
прием с помощью согласованного фильтра.
При приеме информации производится отсчет напряжения на
выходе согласованного фильтра в момент окончания сигнала (в
момент принятия решения). При рассмотрении приема элемента
также будем интересоваться напряжением в момент окончания
элемента.
Максимум сигнальной составляющей на выходе
согласованного фильтра в общем случае будет в момент окончания сигнала:
V=V~EH, (10.8)
где Е — энергия сигнала,
Н=— j l/fe (co)|2 rfco = 2 J \k(f)\2df (10.9)
я о о
— постоянная фильтра.
В формуле (10.9) k(<d)—коэффициент передачи
согласованного фильтра, а постоянная а=У Н/Е.
Для элемента максимум сигнальной составляющей на выходе
согласованного с ним фильтра (элементного согласованного
фильтра) согласно (10.8)
у0=У1Щ>. (юло)
где Ео — энергия элемента; Я0 — постоянная фильтра,
определяемая в соответствии с (10.9).
Для пояснения постоянной фильтра Н0 (или Н) рассмотрим
следующий пример. Предположим, что элемент обладает
равномерным амплитудным спектром шириной Fq в пределах полосы
частот. В этом случае элементный согласованный фильтр будет
иметь постоянный в этой полосе модуль коэффициента передачи
/Со. В соответствии с формулой (10.9) получаем H0=2Ko2Fo. Если
амплитудный спектр элемента (сигнала) и модуль коэффициента
190
передачи отличаются от равномерных, то при заданном
максимальном усилении фильтра, равном Ко, постоянная фильтра
пропорциональна полосе частот шириной F0. Из (10.10) находим, что
Vo = KoV 2EoF0, т. е. максимум сигнальной составляющей на
выходе элементного согласованного фильтра пропорционален
коэффициенту усиления фильтра. Аналогичное соотношение можно
найти и для V (10.8).
Сосредоточенная шумовая помеха. Предположим, что шумовая
помеха является гауссовским случайным процессом с
равномерной спектральной плотностью мощности Nn в пределах полосы
частот шириной Fo. Так как Pn=NnF0i то спектральная плотность
мощности помехи Nn = PJFo. Для помех с ограниченной средней
мощностью Pn=const увеличение ширины спектра приводит к
уменьшению спектральной плотности мощности Л/п. Это является
основной причиной повышения помехоустойчивости при действии
организованных помех с ограниченной плотностью и при действии
взаимных помех.
Мощность помехи на выходе произвольного фильтра по
определению
Лгвых-1 N(f)\k(f)\*df. (10.11)
о
Подставляя в (10.11) N(f)=Nn и используя (10.9), получаем
Л,.ых = ЛпЯ,/2. (Ю.12)
Отношение сигнал-шумовая помеха по мощности на выходе
элементного согласованного фильтра (элементное отношфше сигнал-
шумовая помеха)
^=П/Л,.вых.ш = 2 E0/Nn. (10.13)
Заменяя энергию сигнала согласно формуле Eq=PcTo, a Nn =
= Рп/7о, находим, что
<7о2ш=2р2В0, (10.14)
где
B0 = F0TQ (10.15)
— база элемента. Если вместо Во в (10.14) подставим базу
сигнала В, то получим отношение сигнал-помеха для полного сигнала.
Чем больше база элемента (сигнала), тем больше отношение
сигнал-помеха, т. е. сильнее подавляется помеха с ограниченной
мощностью.
Узкополосная помеха. Пусть узкополосная помеха на входе
является гармоническим колебанием, а ее мощность Рп.
Эффективное значение будет V Рп, а амплитуда ]/ 2РП. После прохождения
через согласованный фильтр с коэффициентом усиления Ко
амплитуда помехи станет Vy=Ko УГ2РП. Соответственно мощность поме-
191
хи на выходе будет РПвыхУ=/Со2Рп. При этом элементное
отношение сигнал-узкополосная помеха
<720y=_ll_=2p2B0. (10.16)
Рп вых у
Таким образом, и при действии узкополосной помехи имеем
выигрыш в отношении сигнал-помеха в В0 раз.
Импульсная помеха. На входе действует импульсная помеха в
виде радиоимпульса с амплитудой £/и и длительностью ти.
Мощность в импульсе или импульсная мощность Ри = £/и2/2, а средняя
мощность источника помехи Рп=Ри%и/Тп, где Гп — период
повторения импульсов. Максимальное напряжение на выходе
согласованного фильтра в момент отсчета при действии импульсной помехи
с Ти<Зг'о райно Уп=авиУ2Рс, где a=l/"tf0/£, Ои=£/ити/2 —
спектральная плотность импульсной помехи. После простых
преобразований получаем, что мощность помехи на выходе Рп = #о2^и2ти2=
= 2РиЯоТи2.
В этом случае элементное отношение сигнал-импульсная
помеха 420и=У2и/Рпвыхи=(2Рс/Ри) (ТоНи)2. ЕСЛИ ПОЛОЖИТЬ, ЧТО Ти«
«1/F, то
<-^В1 (10.17)
т. е. выигрыш в отношении сигнал-помеха пропорционален В02.
Однако этот результат получен для импульсной мощности Ри.
Поскольку средняя мощность Рп = Рити/Згп, то <7ои2== (2РС/РП)Х
Х(Т2о/%иТп). Если период повторения ТП=Т0, Fo^l/ти, то
42o„ = ^cf° =2p2B0. (10.18)
Таким образом, выигрыш в отношении сигнал-помеха
пропорционален базе В0.
Сравнение действия помех. Будем считать, что средняя
мощность источника помехи ограничена. Это означает, что средцяя
мощность помехи на входе приемника также не может превышать
некоторого предельного значения. Поэтому при сравнении
действия урех рассмотренных помех положим, что в формулах (10.14),
(10.16), (10.18) средняя мощность помехи Рп = const. Из
отмеченных формул следует, что при p2=const выигрыш в отношении
сигнал-помеха, равный отношению q2o/p2t пропорционален базе
элемента Во (в общем случае пропорционален базе сигнала В).
Таким образом, при заданной средней мощности подавление
различных помех за счет увеличения базы примерно одинаково и
пропорционально базе.
Если р2<СВ, то необходимо увеличивать энергию сигнала, т. е.
составлять сигнал из большого числа элементов и осуществлять
накопление элементов.
192
В тех случаях, когда узкополосная или импульсная помеха
воздействует на весь сигнал, в формулах (10.16), (10.18) надо
заменить базу элемента В0 на базу ШПС 5.
10.3. Накопление элементов
Предположим, что сигнал состоит из М элементов. Если
действуют помехи, отличающиеся от гауссовского случайного
стационарного процесса с равномерной спектральной плотностью
мощности («белый» шум), то различные элементы сигнала могут быть
поражены помехами по-разному: одни элементы могут быть
поражены сильнее, другие слабее. Поэтому элементные отношения
сигнал-помеха для различных элементов будут различными. При этом
возникает вопрос, как оптимальным образом принимать сигнал
при действии подобной нестационарной и коррелированной
помехи. Чтобы упростить решение задачи, предположим, во-первых, что
элементы сигнала не перекрываются или по частоте
(многочастотные сигналы), или по времени (фазоманипулированные сигналы),
или и по частоте, и по времени (дискретные частотные сигналы).
Это означает, что элементы взаимно-ортогональны.
Неперекрывающиеся элементы можно оптимальным образом обрабатывать с
помощью элементных согласованных фильтров. Сигнальные
составляющие на выходе элементных согласованных фильтров из-за
ортогональности элементов также будут ортогональны. Во-вторыХ,
предположим, что составляющие на выходах элементных
согласованных фильтров статистически независимы. Такое
предположение будет иметь место, если помехи являются гауссовскими
случайными процессами из-за ортогональности элементов. В случае
воздействия иных помех их возможной коррелированностью
можно пренебречь.
При сделанных предположениях прием каждого элемента
характеризуется своим элементным отношением сигнал-помеха.
Подробно вопрос об обработке элемента рассматривался в
предыдущем параграфе. После обработки элементов по отдельности
необходимо определить, как производить суммирование (накопление)
напряжений с выходов элементных согласованных фильтров.
Предположим, что осуществляется прием с полностью известными
параметрами. При этом прием элементов и накопление будут
когерентными. Считая накопление когерентным, остается выяснить, с
какими весовыми коэффициентами необходимо суммировать
напряжения с выходов элементных согласованных фильтров.
Сначала рассмотрим случай линейного накопления, когда эти
напряжения суммируются непосредственно без весовых коэффициентов.
Линейное накопление. Обозначим через zn напряжение на
выходе элементного согласованного фильтра с номером п в момент
окончания элемента. Оно равно сумме сигнальной составляющей
Vn и помеховой составляющей |п, т. е. гп=Уп+1п- Положим, что
среднее значение помехи mi{gn}=0, а ее дисперсия М2{£п}в<Гпа.
При этом среднее значение величины mi {z} = Vn, а ее дисперсия
7—111 193
Элементное отношение сигнал-помеха
4l = VV<. (Ю.19)
При линейном накоплении на выходе накопителя в момент
окончания сигнала
г==2 zn=V + %, (10.20)
где
V-S Vnt 6-2 6Л. (10.21), (10.22)
n=i п=1
Среднее значение (10.20) mi{z} = V, а дисперсия
м.й-2 °2в0"- (10-23)
Равенство (10.23) справедливо при статистической
независимости случайных величин gn, что было предположено ранее. Обычно
это имеет место на практике в большинстве случаев. Отношение
сигнал-помеха на выходе линейного когерентного накопителя
равно
^=уш,0 = {£ yj^l £ а2 (10.24)
Проиллюстрируем формулу (10.24) на простом примере.
Положим, что все сигнальные составляющие равны Vo, а дисперсии
помехи принимают два значения а2о и а2и причем будем считать,
что ai2><7o2. Предположим, в т элементах действует помеха с
дисперсией cti2, а в оставшихся М—т — помеха с дисперсией а02.
Соответственно элементные отношения сигнал-помеха (10.19)
равны qo2=Vo2/o02 и ql*=Vi2/ox2. Так как qi2<qo2, то обозначим
Л» =Mql (10.25)
Подставляя введенные значения в (10.24) и преобразуя,
получаем
92/^а» = П + (т/М) foS/tf-1)]-1. (10.26)
На рис. 10.3 кривыми 7, 2 представлены зависимости (10.26).
Кривая / соответствует значениям <7о2 = 1, <7i2=0,l, т. е. отношение
<7o2/<7i2 = 10, а кривая — значениям <7о2 = 1, <7i2 = 0,01, т. е.
отношение <7o2/<7i2 = 100. Из рассмотрения этих кривых следует, что с
появлением элементов, на которые воздействует мощная помеха,
суммарное отношение сигнал-помеха резко падает. С увеличением
т/М суммарное отношение сигнал-помеха стремится к своему
предельному значению; q2=Mq\2, а кривые /, 2 на рис. 10.3 — к
значению <7i2/<7o2. При т=0 отношение <72/<72тах=1.
194
Формула (10.26) получена при условии, что суммарная
дисперсия (мощность) более сильной помехи увеличивается
пропорционально т, о2тгх=то\2, где <7i2 = const. Положим теперь, что
постоянной является суммарная дисперсия о2\ max мощной
помехи, т. е. положим <72i max^const. При этом дисперсия,
приходящаяся на один элемент, равна
2=/т2
af ==а
lmax'
/т
и уменьшается с ростом т. Обозначая
Ч\т\п к0/и1тах,
из (10.26) получаем
?
» max
= [l + (m/M)(^/^mln/n_i>j-i.
(10.27)
(10.28)
(10.29)
1
0.8
0.6
Ofi
0,2
l\ l^w I I I
l\] ^w
ШУ
Формула (10.29) справедлива при m = l, Mt так как
при m-^O дисперсия (10.27) a2i-voo. При m=0 отношение
<72/<72тах=1, по определению. Положим ^2imin=10"2, qo2=l, а
Л! = 10. Отношение <7o2/<72min=102. При этих данных кривая 3 на
рис. 10.3 представляет зависимость (10.29). Как видно из рисунка»
распределение помехи по элементам
не имеет особого значения, так как
отношение сигнал-помеха (10.29)
остается практически постоянным и малым,
а кривая 3 — по сути дела прямая
линия.
Кривые /, 2, 3 были рассчитаны
для случая, когда мощная помеха
имела превышение по мощности в 10—
20 дБ, т. е. такую помеху нельзя
признать чрезмерно мощной. Но даже в
этом случае наличие мощной помехи
вызывает резкое уменьшение
суммарного отношения сигнал-помеха. Если
мощная помеха станет более сильной,
то возрастет ее влияние на уменьшение
суммарного отношения сигнал-помеха.
Резкое уменьшение суммарного отношения сигнал-помеха на
начальном участке кривых 1, 2 (рис. 10.3) обусловлено
появлением пораженных элементов, которые в общую сумму (10.20)
вносят основную долю шумов с большой мощностью. Естественно, что
если отказаться от линейного накопления и суммировать
напряжения с выходов элементных фильтров с весовыми
коэффициентами, то можно уменьшить влияние пораженных элементов на
суммарное отношение сигнал-помеха. Очевидно, что чем меньше
элементное отношение сигнал-помеха, тем с меньшим весом оно
должно входить в общую сумму. Это случай оптимального
линейного накопления. Подобная задача решена в теории разнесенного
приема.
7* 195
0Л Ofi 0,6 Ofi m/M
Рис. 10.3. Зависимость
отношения сигнал-помеха от числа
пораженных элементов ШПС
Оптимальное линейное накопление. При когерентном весовом
накоплении
м
*= 2 ф»*»вУФ+Бф» (ю.зо)
л=1
где фп — весовые коэффициенты, а
^ф= S Ф* ^»> 6ф^ 2 Ф»БП. (10.31), (10.32)
л=1 л=1
Среднее значение mi {г} = Кф, а дисперсия
M2W=a2=2 Ф2а2 • (Ю.ЗЗ)
л=1
Величина
«■=*>* (Ю.34)
является отношением сигнал-помеха на выходе когерентного
весового сумматора. Подставляя (10.31) и (10.33) в (10.34),
получаем
<72 = (j| Ф* ^)2у/ Д Ф2 °л • (Ю.35)
В соответствии с отмеченным ранее, необходимо определить
веса фп, которые максимизируют отношение сигнал-помеха q2
(10.35). Эта задача имеет следующее решение:
Vn^VJal (10.36)
Таким образом, чтобы получить максимум числителя в (10.35),
необходимо выбирать весовые коэффициенты пропорционально
сигнальной составляющей и обратно пропорционально дисперсии
(мощности) помеховой составляющей на выходе элементного
согласованного фильтра.
Максимизация числителя в (10.35) влечет за собой
максимизацию отношения сигнал-помеха. Полагая, что условие
максимизации (10.36) выполняется, окончательно получаем
?2=f Я1. (Ю.37)
л=1
В этом случае отношение сигнал-помеха равно сумме
элементных отношений сигнал-помеха. Поясним равенство (10.37) тем же
простым примером, что и при линейном накоплении. Допустим, что
в m элементах из М элементное отношение сигнал-помеха равно
<7i2, а в М—тп элементах q2o и <72i<?o2. Подставляя значения qo2,
qi2 в (10.37) и преобразуя полученное выражение, находим:
<72/Сх = I -(m/Af) (1 -q2M). (10.38)
где <72тах=М<7о2. Зависимость (10.38) изображена на рис. 10.3
прямой 4 для отношения q02/qi2 = l0. При m=M <72A7i2max=<7i2/<7o2, т. е.
196
q2=Mqi2. С уменьшением отношения qi2/qo2 отношение (10.38)
стремится к следующему пределу:
«■/#« = 1-Л1/А1. (Ю.39)
График зависимости (10.39) изображен на рис. 10.3 прямой 5.
ЕСЛИ ПОЛОЖИТЬ ПОСТОЯННОЙ Суммарную МОЩНОСТЬ ПОМеХИ а2\ max, ТО
MLk = ] -WM) (i-^min ^/92o). (Ю.40)
Зависимость (10.40) для значений <7o2/<72imin=100, Af=10
представлена кривой 6 на рис. 10.3 (между прямыми 4 и 5).
10.4. Фильтрация сосредоточенных помех
В § 10.2 было рассмотрено воздействие шумовой помехи,
действующей на произвольный элемент сигнала. Обратимся к
воздействию сосредоточенной шумовой ломехи, полностью
перекрывающей спектр всего сигнала.
Сосредоточенная помеха с равномерным спектром.
Предположим, что сосредоточенная шумовая помеха является гауссовским
стационарным случайным процессом с равномерной спектральной
плотностью мощности Nn в пределах полосы частот сигнала
шириной F. Если мощность помехи РП, то ее спектральная плотность
мощности Nn=Pn/F, а отношение сигнал-помеха на выходе
согласованного фильтра аналогично (10.2), (10.14) будет <72п = 2р2В.
Как при одном элементе, так и в случае сигнала в целом, чем
больше база, тем больше отношение сигнал-помеха q2 на выходе по
сравнению с отношением сигнал-помеха р2=Рс/Рп на входе.
Поэтому с ростом базы сигнала подавление сосредоточенной помехи
увеличивается.
Сосредоточенная помеха одинаковым образом действует на все
элементы сигнала. Если они обладают равными энергиями, то
элементные отношения сигнал-помеха q2n (10.19) равны между собой.
В результате оптимальным накоплением будет линейное, поскольку
весовые коэффициенты (10.36) также равны между собой. И в
этом случае набор каналов сводится к одному фильтру,
согласованному с сигналом.
Отношение сигнал-помеха q2n (10.2) пропорционально
отношению сигнал-помеха р2 на входе приемника. Кратко поясним, чем
определяется отношение р2. Мощность сигнала Рс на входе
приемника определяется мощностью передатчика РПер создающего
полезную информацию, КНД антенн передатчика Dnep и приемника
Dnp, расстоянием до передатчика г, условиями распространения
радиоволн. В свою очередь мощность помехи РП на входе приемника
определяется мощностью передатчика РПер, создающего помеху,
КНД его антенны Dnep.n, КНД антенны приемника в направлении
передатчика помехи Dnpn, расстоянием до него гп и условиями
распространения радиоволн. Полагая, что условия распространения
радиоволн одинаковы, имеем
197
^ PnepA,epA,p /£n,V (1Q41)
*n *iiep n ^nep n ^np n \ r /
где v зависит от среды, в которой распространяются радиоволны.
Для свободного пространства v=2. При использовании УКВ
следует полагать, что v=4. Из (10.41) видно, что отношение Рс/Рп
включает в себя основные технические и пространственные
характеристики системы передатчик — приемник—передатчик помехи.
Величины правой части (10.41) определяют стоимость и во
многом эффективность системы связи и системы разрушения
информации. Таким образом, отношение Рс/Рп имеет большое практическое
значение при разработке радиотехнических систем. В зависимости
от отношений параметров, входящих в правую часть (10.41), и,
особенно, от rjr отношение Рс/Рп может быть различным, в том
числе много меньшим единицы. Если rjr изменяется, то и PcJPu
изменяется, но более резко. Расчеты показывают, что отношение Рс/Рп
может достигать значений (10... 120) дБ. Из формулы (10.2)
следует, что если даже PJPn= р2<^1, то величина q2, которая
определяет помехоустойчивость приема информации (q2s=2h2), может
быть сделана существенно больше единицы. Следовательно,
увеличивая базу используемых сигналов 5, можно достигнуть
заданного значения q2.
Совместное воздействие помех и шума. Используя ШПС с
большими базами, можно «извлекать» сигналы из-под помехи, во
много раз превосходящей сигнал по мощности. Предел увеличения
этой способности определяют собственные шумы приемника, у
которых спектральная плотность мощности постоянна и равна No и
практически не изменяется с изменением полосы пропускания.
Известно, что при воздействии сосредоточенной помехи с
мощностью Рп и собственного шума приемника со споктральной
плотностью N0t отношение сигнал-помеха на выходе
2 ^ф—Лп/Рд = Рс 2В (10.42)
*шп ч 1 + Рш/Ри Ри + Рш К '
где q2=2E/N0 — отношение сигнал-шум; Pm=NoF — мощность
собственного шума, попадающего в полосу пропускания шириной F.
Если Рш^>Рп9 то q2um~q2, а если Рш<Лъ то с собственным шумом
приемника можно не считаться. При этом q2mn (10.42) совпадают
с?2п (10.2).
Из приведенных результатов следует, что помехоустойчивость
при воздействии сосредоточенных помех определяется р2 = Рс/Рп и
базой используемых сигналов. Отметим, что полученный результат
справедлив при двух условиях — сосредоточенная помеха является
гауссовским случайным процессом и обладает равномерной
спектральной плотностью. Во многих случаях эти условия не
выполняются, например, при действии мощной структурной помехи. В этих
случаях помехоустойчивость в значительной мере определяется
подобием и различием структур сигнала и помехи, т. е. тем, как
подавляются отдельные элементы сигнала помехой.
1D3
Сосредоточенная помеха с неравномерным спектром. Допустим,
что помеха является стационарным случайным процессом с
неравномерной спектральной плотностью мощности i\f(a)). В этом
случае коэффициент передачи согласованного фильтра определяется
следующим выражением (см., например, [4, 5]):
k(«>)=c£^-e-{<»T, (10.43)
где с — постоянная; g(oo) — спектр сигнала. Отношение сигнал-
помеха при этом определяется выражением
«"-■£-J ^<* <10-44>
При определении влияния изменения формы спектров в
формуле (10.44) на отношение сигнал-помеха при условии, что фильтр
всегда согласован с сигналом, обычно полагают постоянными
энергию сигнала
Е^ — 1 l£(a>)|2dco (10.45)
я ^
и мощность помехи на входе фильтра (10.7).
При изменении спектров сигнала и помехи могут быть два
случая. В первом случае задается спектр помехи iV(oo), а спектр
сигнала выбирается так, чтобы получить максимальное значение q29
которое обозначим <72тах. Во втором случае задается спектр
сигнала, а спектр помехи выбирается так, чтобы на выходе фильтра
получить минимальное значение <72min. В обоих случаях с
изменением спектров фильтр перестраивается так, чтобы быть
согласованным в соответствии с формулой (10.43).
Изменение спектра сигнала. Поскольку |g(oo) |2^0 и #(оо)^0,
то из формулы (10.44) получаем неравенство
<72<-^—■ J lg И12 <**>==-^- . (10.46)
Я Nmin о ^min
Здесь Nmin — наименьшее минимальное значение спектральной
плотности помехи, поскольку в общем случае минимумов JV(oo)
может быть несколько. Чтобы q2 достигло значения <72тах =
= 2£/A/min, необходимо сосредоточить спектр сигнала в той
области частот, где Ы(в>) =JVmin или близко к этому значению, что
влечет за собой сужение спектра сигнала.
Если ширина спектра помехи Fn=Wnl2n и мощность помехи
(10.7) конечна, то средняя спектральная плотность помехи
Nct> = 2nPn/Wn. (10.47)
Для помехи с равномерным спектром всегда выполняется
равенство Nmin=Ncp=No. Если в этом случае помеха перекрывает
сигнал по спектру (ширина спектра сигнала F^.Fn), то
максимальное значение отношения сигнал-помеха q2max=2E/N0.
199
Для помехи с неравномерным спектром всегда справедливо
неравенство Nmm<.NCp—No.
Таким образом, любая неравномерность спектра помехи дает
принципиальную возможность увеличить отношение сигнал-помеха
в случае подстройки спектра сигнала под помеху.
Изменение спектра помехи. Помеха подстраивается под сигнал,
а фильтр — под сигнал и помеху согласно (10.43). Помеха
выбирается так, чтобы получалось минимальное значение отношения
сигнал-помеха, т. е. <72=<72min. Это вариационная задача на условный
экстремум. Действительно, изменяя N((o), надо минимизировать
интеграл (10.44) при условии, что мощность помехи (10.7) Рп =
=const. Такая задача относится к изопериметрическим. Ее
решением является спектральная плотность
ЛГ(©)«^|*(©)|. (10.48)
Поскольку К постоянная величина, спектральная плотность
помехи должна совпадать по форме с амплитудным спектром
сигнала. Соответственно
1/Х=-^-J lg(<o)|d(D. (10.49)
о
^min
При этом обязательным условием является существование
интеграла от правой части равенства (10.49). Отметим, что для реальных
сигналов данное условие всегда выполняется. Решение (10.48)
соответствует минимуму интеграла (10.44):
= ^HrI '*((B)ld(u]a- (1050)
Предположим, что сигнал и помеха сосредоточены в
некоторой области частот S, ширина которой W=2nF. При этом энергия
сигнала и мощность помехи определяются выражениями (10.45),
(10.7), в которых пределы интегрирования определяются областью
S. Согласно неравенству Буняковского — Шварца из формулы
(10.50) следует, что
*.<£"? 1"" ±1 "М1Ч—£ -Ц^- ■ (Ю.51)
Равенство в (10.51) выполняется только при |gr(co) | =const. В
этом случае N((o)=No=Pn/F=const и максимальное значение
92min=2£/iVo. Таким образом, если помеха подстраивается под
сигнал, то максимум отношения сигнал-помеха будет тогда, когда
спектр сигнала равномерный.
Выразим q2 через отношение мощностей сигнала и помехи.
Поскольку средняя мощность сигнала на входе фильтра РС=Е/Т, то
максимальное значение <72min=2p2B. Отсюда следует, что
отношение сигнал-помеха на выходе фильтра возрастает по сравнению с
отношением сигнал-помеха на его входе в 2В раз.
200
ф
Помеха в виде суммы белого шума и узкополосных помех.
Сказанное ранее относилось к случаям, когда либо сигнал
подстраивался под помеху, либо помеха — под сигнал. На практике
представляет интерес оценка отношения сигнал-помеха для случая,
когда помеха равна сумме белого шума со спектральной
плотностью No и узкополосных помех. Будем считать, что спектры
узкополосных помех не перекрывают друг друга. Пусть k-я
узкополосная помеха сосредоточена в полосе частот 2nFk, а ее спектральная
плотность постоянна в этой полосе частот и равна Л/&. Обозначим
область частот, где действует белый шум и k-я узкополосная
помеха, через S^ а где только белый шум — через So.
При таких предположениях из формулы (10.44) получаем
^2==^-1 lg(«))|2d(D+2 2 J |ff(<D)|'<fa>. (10.52)
Суммирование производится по всем k. Имеем
«-£('-? **#*)• (ш-5з)
Допустим, что Nk^No. Тогда
Ifl'-T?*')' <«*>
Из выражения (10.54) следует, что отношение сигнал-помеха
зависит от отношения части энергии сигнала, приходящейся на
все частотные участки, где действуют узкополосные помехи, к
полной энергии сигнала. Обозначая суммарную энергию всех
узкополосных помех через
яв=2 Е*> <10-55>
k
выражение (10.54) записывается в следующем виде:
*,-^(1-^)- <io-56>
Таким образом, чем больше энергия сигнала Е по сравнению
с суммарной энергией помех ЕП, тем больше отношение
сигнал-помеха.
Оценим влияние на величину q множителя Nk/(Nk+No) в
формуле (10.53). Пусть спектральные плотности всех узкополосных
помех одинаковы и равны Nho* Полагая Nko>No, из (10.53)
приближенно получаем, что
'S«t('-T+fef)- <|0-57>
Третье слагаемое в (10.57), отсутствующее в (10.56), обусловлено
учетом множителя Nk/(Nk+No) в формуле (10.53). Чем больше
отношение Nho/No, тем меньше влияние этого слагаемого и, следо-
201
вательно, множителя Nk/(NkXN0) в (10.53). Это объясняется тем,
что с ростом Nko/No коэффициент передачи фильтра на тех
частотах, где есть узокополосная помеха, в (N0+Nko)JNo^Nho/No раз
меньше по сравнению с коэффициентом передачи на тех частотах,
где помех нет. Чем больше NkoWo, тем меньше влияние тех
частотных участков, где есть узкополосные помехи. К такому
оптимальному методу приема будет близок неоптимальный, который сейчас
и рассмотрим.
Допустим, что фильтр согласован с сигналом, принимаемым на
фоне белого шума, а узкополосные помехи вырезаются полностью
режекторными фильтрами.
Отношение сигнал-помеха на выходе фильтра
<72=т^- J IgHlMco. (10.58)
Окончательно имеем
2Е I
No \
1-5 |) • (Ю-59)
Сравнивая (10.53) и (10.59), замечаем, что разница между
ними определяется множителем Nk/(Nk+No) в формуле (10.53). С
ростом отношения Nk/No эта разница уменьшается.
Произвольная помеха. Допустим, что фильтр согласован с
сигналом в предположении, что помехой является белый шум, а в
действительности помеха обладает неравномерным спектром Лт(со).
В этом случае отношение сигнал-помеха
^£2 /J- ? \g((o)\2N{<d)d(oYl . (10.60)
^£2 (-L 7
Допустим, что спектр сигнала постоянный в полосе частот
W=2nF. Спектральная плотность сигнала записывается в
следующем виде:
G20 = nE/W = E/2F. (10.61)
Подставляя (10.61) в (10.60) и учитывая (10.7), находим
q* = 2EF/Pn. (10.62)
Если Е и Рп — постоянные величины, то отношение
сигнал-помеха увеличивается с ростом F независимо от вида помехи. Для
помехи с постоянным спектром No в полосе сигнала мощность
Pn=N0F. Тогда (10.62) превращается в известное выражение
q2=2E/N0.
Отношение сигнал-помеха (10.60) примет наименьшее
значение q2min тогда, когда интеграл примет максимальное.
Минимум имеет место при условии
|g((D)|2=b#(<D). (10.63)
Условие (10.63) означает, что спектральная плотность наиболее
202
мешающей помехи совпадает по форме с энергетическим спектром
сигнала. Окончательно имеем
^.„ = ^(^?IfirHl4dft>)~1. (10.64)
Если допустить, что спектр сигнала равномерный в полосе
частот F, то (10.64) сведется к q2min=2E/No.
Оценим, к каким потерям в отношении сигнал-помеха
приводит неравномерность спектра сигнала. Предположим, что спектр
сигнала сосредоточен в полосе частот от 0 до F, а энергетический
спектр сигнала
\g И12 =G* + x2 cos (I ©/F). (10.65)
Здесь / — целое цисло, а и — характеристика неравномерности.
Подставляя (10.65) в (10.64), получаем
2 2EF i 1 . х4 \-1
£..—p-(l+^j) • (10.66)
Второй множитель в формуле (10.66) определяет потери g2min,
обусловленные неравномерностью спектра сигнала. Если x2=G<>2
(наихудший случай), то потери отношения сигнал-помеха составят
1,78 дБ. Отметим, что величина потерь не зависит от формы
спектра сигнала, так как в формулу (10.66) не входит величина /,
определяющая характер изменения спектра (10.65). Это связано с
принятой аппроксимацией спектра сигнала (10.65).
Необходимо отметить, что если сигнал или помеха в
согласованном фильтре подстраиваются друг под друга, то наиболее часто
встречающимся на практике является случай, когда сигнал и
помеха обладают равномерными спектрами в одной и той же полосе
частот.
С точки зрения постановщика помехи необходимо так
подстраивать помеху, чтобы имело место равенство N((o)=a\g(a>\ (10.48),
где а — постоянная размерная величина. Это равенство определяет
характер оптимального воздействия помехи: сильнее подавлять те
спектральные составляющие сигнала, которые переносят большую
часть энергии сигнала. Если помеха имеет резкий пик в своем
спектре, то согласно (10.43) усиление согласованного фильтра в
области частот пика резко снижается и в этой области частот
согласованный фильтр становится режекторным и исключает эту
мощную часть помехи. Здесь имеется полная аналогия между
оптимальным накоплением с весовыми коэффициентами (10.36) и
согласованным фильтром (10.43). Весовой коэффициент (усиление
фильтра) пропорционален сигнальной составляющей (по
напряжению) и обратно пропорционален мощности помехи.
В свою очередь любой «провал» в спектре помехи позволяет
согласно (10.43) увеличить усиление согласованного фильтра и тем
самым повысить отношение сигнал-помеха (10.44). Поэтому
система постановщик помехи — приемник находится в динамическом
203
равновесии только тогда, когда спектр сигнала и спектр помехи
равномерны. При этом ни одна из сторон не получает
дополнительного выигрыша в повышении (понижении) помехоустойчиво-
сти из-за неравномерности спектра. Точно такой же результат
следует, из рассмотрения кривых рис. 10.3, которые сходятся в точке
т=М, т. е. когда помеха действует на все элементы. Особенно
показательно сравнение прямых 3 и 4. Прямая 3 характеризует
снижение помехоустойчивости, если помеха воздействует на т
элементов, а в приемнике не принято специальных мер по защите
от мощных помех и накопление в приемнике линейное. Если
приняты меры по защите от мощных помех в виде оптимального
накопления (прямая 4), то это обеспечивает существенный выигрыш
в помехоустойчивости. И только в точке т^М этого выигрыша
нет. При этом выигрыш в помехоустойчивости согласно (10.2)
можно обеспечить только за счет увеличения базы сигнала.
Если помеха не является стационарной, то сначала
целесообразно рассматривать ее воздействие на элементы сигнала, а
затем учитывать результаты накопления.
10.5. Реальная база и помехоустойчивость ШСС1
При выводе основной формулы (10.2) <72п=2р25 обычно
полагают, «что ширина спектра помехи равна ширине спектра сигнала F,
Следует отметить, что соотношение (10.2) справедливо при некото*
рых непринципиальных предположениях и для ряда других
преднамеренных помех.
Если на входе приемника PJPn4H\9 то используя ШПС с
базой В>1, можно получить отношение сигнала к помехе ^n^l и
тем самым обеспечить надежную связь. В этом и состоит выигрыш
в применении ШПС в системах
101
связи при действии
преднамеренных помех. Однако определение
реальной помехоустойчивости и
выигрыша в помехоустойчивости
согласно (10.2) затруднено тем,
что при расчете по (10.2)
возникают недоразумения в
определении ширины спектра сигнала.
Для примера рассмотрим рис.
10.4, на котором приближенно
изображен спектр в виде функции
Рис. 10.4. Спектр ФМ сигнала
g (/) =[sin я (/-/0) т0]/[я (/-/0) т0]
фазоманипулированного (ФМ)' сигнала на несущей частоте fo, где
то — длительность одиночного импульса, а число импульсов JV=
-ТЫ.
1
■^е—
г4 1
-^й ^
/
1 Материал данного параграфа написан на основе совместной работы с
В. Н. Талызиным [70].
204
На рис. 10.4 приведены два определения ширины спектра.
Видно, что при формальном вычислении при F=F2 база будет
больше, чем при F=F\. Соответственно и помехоустойчивость
согласно (10.2) при F=F2 будет больше. Но постановщику
преднамеренной помехи нет необходимости использовать помеху с
равномерной спектральной плотностью мощности при неравномерном
спектре сигнала, так как при этом ее эффективность падает [4].
С точки зрения постановщика помехи целесообразно использовать
помеху со спектральной плотностью мощности (10.48) N(g))=*
= a|g"(co) |, где |g((o)| —модуль спектральной плотности сигнала,
а — размерный коэффициент пропорциональности, определяемый
из условия ограниченности средней мощности помехи Рп=const,
размерность [а] = [Вт/В].
Если помеха выбирается под заданный сигнал согласно (10.48),
то отношение сигнала к помехе <72мин будет минимальным [4]. В
соответствии с (10.2) имеем
?min = 2P2Smin, (10.67)
где Bmin — коэффициент, определяющий минимальный или
реальный выигрыш в помехоустойчивости при использовании ШПС.
Соответственно Втт будем называть реальной базой ШПС.
Отношения q2mln= (Рс/Рп)выхтШ И Рс/Рп^ (Рс/Рп)вх МОЖНО ИЗМврИТЬ ИЛИ
рассчитать. По результатам измерений или расчетов можно
вычислить и реальную базу
2
В _^ (Рс/Рп)ъыхт1й _. 9min (10 68)
т,П 2(РС/РП)ВХ 2(РС/РП)ВХ
которая определяет минимально допустимый выигрыш в
помехоустойчивости. Отношение
Ь = Втп/В (10.69)
определяет потери, которые могут возникнуть в реальной системе
связи относительно идеальной системы с помехоустойчивостью
(10.2) и базой B = FT.
В работе [70] определена реальная база (10.68) и потери
(10.69) для типовых ШПС, применяемых в современных системах
связи.
Модель канала связи с ограниченной полосой частот. На рис.
10.5 представлена структурная схема упрощенного канала связи*
На модулятор поступают колебания от генератора шумоподобного
сигнала ГШПС и от генератора несущей ГН. На выходе модуля-
Рис. 10.5. Модель канала связи
205
тгора стоит полосовой фильтр с полосой пропускания F, равной
ширине спектра сигнала. Далее ШПС с ограниченным по ширине
спектром усиливается по мощности в передатчике Пер, проходит
через канал Кан и поступает на вход приемника Пр вместе с
помехой, создаваемой генератором помех ГП.
Ширина спектра помехи равна ширине спектра сигнала F.
Сумма сигнала и помехи проходит приемник и полосовой фильтр с
полосой пропускания F и поступает на вход согласованного
фильтра СФ, а затем на решающее устройство РУ.
Необходимость выделения полосовых фильтров на схеме
обусловлена тем, что <72min, а следовательно, реальная база и потери,
как будет показано в дальнейшем, зависят от величины полосы.
Ограничение ширины спектра сигнала приведет к появлению
межсимвольной интерференции, однако для системы связи с ШПС
влияние ее на вероятность ошибки будет незначительным и им
можно пренебречь. Вместе с тем, изменение ширины спектра
сигнала приведет к изменению абсолютного уровня спектральной
плотности сигнала, что необходимо учитывать при определении
<72min. Допустим, что средняя мощность передатчика неизменна вне
зависимости от того, какой сигнал излучается, т. е. не зависит от
того, какова ширина спектра сигнала. Следовательно, мощность
сигнала йа входе приемника также не зависит от ширины спектра
сигнала. Поскольку информационные символы в системе связи с
ШПС следуют с периодом Г, энергия каждого ШПС 'будет Е=РСТ
и не будет зависеть от ширины спектра сигнала.
В дальнейшем используем комплексную огибающую сигнала и
ее спектр G(co), который связан со спектром сигнала
соотношением [4] (см. также гл. 2).
g (со) = — G (ю-©0) при <о> 0. (10.70)
Переход от спектра сигнала g(co) к спектру комплексной
огибающей G(cd) эквивалентен переносу Начала координат на рис. 10.4
в точку f=fo = (Ho/2n.
При ограничении ширины спектра сигнала полосой F (рис. 10.4)
минимальное отношение сигнал-помеха [70]
<&in = g-[vf ЮИ1Л»]'. (Ю.71)
где коэффициент a2=E/EF — отношение полной энергии сигнала
к энергии в полосе F. Из определения (10.67) с помощью (10.71)
находим реальную базу ШПС
*mm = ^ [-£- J |G ^d(0J • (10-72>
Соответственно из (10.69) определяем потери. В [70] приведены
значения реальной базы типовых ШПС.
Идеальный фазоманипулированный сигнал. Под идеальным
фазоманипулированным сигналом (ИФМ) будем подразумевать
206
такой, автокорреляционная функция (АКФ) которого не имеет
боковых пиков. На рис. 10.6 изображена АКФ ИФМ сигнала,
описываемая выражением
£/тч ^ f 1 — 1*1/* ПРИ |т1<т0,
10 при |т|>т0,
причем то — длительность одиночного импульса, Т — длительность
сигнала, а число импульсов N=T/то-
ИФМ сигналов не существует, но для исследований модель та*
кого сигнала полезна тем, что с ростом базы реальные ФМ
сигналы приближаются к ИФМ, так как максимальные боковые пики
АКФ уменьшаются как J?max= V v//V, где v — постоянная, слаба
зависящая от N.
Спектр комплексной огибающей ИФМ сигнала
|G((o)|=]/2PctfT0
sin (q)T0/2) 1
©To/2 I *
Соответственно реальная база ИФМ сигнала
5mfn=4tfa2
'min
kn
Я
sin л:
dx
]'■
(10.73)
(10.74)
поскольку 'база B = 2kN9 ft — целое число для принятых
обозначений. Интеграл в (10.74) выражается через суммы и разности
интегральных синусов с аргументами яя, где /г=0, k\ я, ft — целые
числа.
На рис. 10.7 представлены зависимости B/N=2k и Bm\nIN как
функции относительной ширины спектра й=/7то/2, причем Bm{n/N
рассчитана согласно (10.74). Из рис. 10.7 следует, что реальная
база 5min с ростом ширины спектра растет медленнее, чем база #♦
Следовательно, реальный выигрыш в помехоустойчивости будет
меньше, чем определяемый в соответствии с (10.2). На рис. 10.8
линия ИФМ изображает
зависимость потерь Ь (в дБ) как
функцию относительной ширины
спектра. Как видно из
рисунка, с ростом F потери уве-
*/tfW*
10
~%
%
Т V
Рис. 10.6. Корреляционная функция
идеального ФМ сигнала
4
г
0
1
Рис. 10.7.
B/N
W^
* K=F<c0IZ
Реальная база
ШПС
ИФМ
207
личиваются, что свидетельствует о плохом использовании спектра
ФМ сигналами.
Исследование поведения потерь Ь при больших k показало [70],
что асимптотически
»-п[,+ у(с+ь,[т])+<-1''лГ- (10J5)
где С«0,58 — постоянная Эйлера — Маскерони, [2/k] — целая
часть числа fe/2. Из (10.75) следует, что lim Ь=0, т. е. с ростом
/е-*-оо
Л потери непрерывно растут.
/ 2 J 4 5 k=FrQ/2
ШЦ
М-1М
-1
-2
-J.
А
м
sjJM
ч
AM М
Рис. 10.8. Потери при
приеме ШПС
Рис. 10.9. Спектры ДЧ сигналов
Сигнал Баркера. В качестве примера ФМ сигналов были
определены потери для сигнала Баркера с числом импульсов 11.
Зависимость потерь Ъ на рис. 10.8 изображена кривой Б. Потери
для сигнала Баркера больше, чем для ИФМ, так как спектр
Баркера более «неравномерен», чем спектр ИФМ, поскольку имеет
провалы при значениях ю=ля/яо, где /г=0, 1, 2...
М-последовательность. В качестве другого примера ФМ
сигнала были определены потери для Af-последовательности с числом
импульсов N=15.
{Оп}= 1 1 1 1 —1 1 —1 1 1 —1 —1 1 —1 -1 —1.
Зависимость потерь Ъ на рис. 10.8 изображена кривой М.
Потери для Af-последовательности даже больше, чем у сигнала
Баркера, так как «неравномерность» спектра еще более значительна.
Дискретные частотные сигналы (ДЧ) представляют собой
последовательность радиоимпульсов, излучаемых на различных
частотах в соответствии с выбранной кодовой последовательностью.
Каждый радиоимпульс занимает определенное место по времени и
по частоте в соответствии с выбранной кодовой последовательностью.
Пусть число радиоимпульсов равно М, длительность
радиоимпульса То=Т/М и расстройка по частоте Fo. Модуль спектра
комплексной огибающей радиоимпульса описывается функцией
sin (со — Д(0т) Тр/2
(со—Дсот) То/2
208
\G(G>)\^V2PCT\
где Atom — расстройка между несущей частотой сигнала ©о=2я/о
и несущей частотой радиоимпульса ©т, т. е. Дсот==ют—<о<ь причем
т = 1,Л1.
Взаимное расположение спектров радиоимпульсов может быть
двояким, что отображено на рис. 10.9. В первом случае (рис. 10.9,а)
расстройка по частоте между соседними спектрами £0 = 1/Го, во
втором случае (рис. 10.9,6) F0 = 2/T0. На рис. 10.9 изображены
спектры комплексных огибающих радиоимпульсов без учета
интерференции между ними. Если учитывать интерференцию между
соседними спектрами, обусловленную различными фазовыми
сдвигами между частотными составляющими спектров, то для
первого случая на рис. 10.9,а в середине между соседними спектрами
суммарная спектральная плотность может изменяться от 0 до
4У 2РсТ/л [4], т. е. максимум в середине может в 4/я=1,27 раз
превышать максимальное значение спектра. Следовательно,
суммарная спектральная плотность при F0 = l/T0 будет
неравномерна. Но из сравнения рис. 10.9,а и б видно, что неравномерность
спектра во втором случае, когда Fq=2/To, будет значительно
больше, чем в первом. Поэтому рассмотрим только второй случай и
определим потери для F0.
Ширину спектра ДЧ сигнала определим так, как это показано
на рис. 10.9. Для первого случая F= (M+l)/Tof а для второго
F=2M/T0.
При таком определении ширины спектра не учитываются
боковые лепестки крайних спектров. Энергия, заключенная в этих
лепестках, очень мала и ею можно пренебречь. Потери для ДЧ
сигналов и расстройки F0=2/To [70]
где Si (я) = 1,85.
Заменяя F—2M/To и Г=ЛГто, получаем для ДЧ сигналов 6 =
=0,694 или Ь=—1,58 дБ. При сравнении полученного результата
с потерями для ФМ сигналов видно, что ДЧ сигналы
характеризуются меньшими потерями, так как для ФМ сигналов необходимо
иметь &=2-f-4. Если же использовать ДЧ сигналы с расстройкой
F0=i/T0 между спектрами, то при этом потери будут еще
меньше. Следовательно, ДЧ сигналы лучше используют отведенную
полосу частот и обладают меньшими потерями, чем ФМ сигналы.
Влияние потерь на параметры систем связи. В системах связи
с ШПС потери можно компенсировать либо за счет дальнейшего
расширения полосы частот F, либо за счет снижения скорости
передачи информации W. Допустим, что осуществляется
некогерентный прием |х ортогональных ШПС с заданной вероятностью
ошибки на одну двоичную единицу информации Р0ш2. Можно
показать, что относительная ширина спектра в такой системе связи
-L = J_ Г 1 _ 1п(4рош*>1 2 In 2 .
209
Наличие потерь Ь эквивалентно уменьшению мощности сигнала
Рс и может 'быть компенсировано увеличением ширины полосы
частот до величины Fib или уменьшением скорости передачи
информации до величины Wb.
Из результатов приведенных исследований следует, что из-за
неравномерности спектров ШПС потери могут достигать
значений 1,5,..., 6 дБ. Такие потери нельзя считать допустимыми, так
как они обусловлены неудачным выбором сигналов. Поэтому
выбор ШПС для систем связи должен предусматривать
оптимизацию по спектру таких сигналов, так как чем меньше
неравномерность спектра, тем меньше потери.
11. АДАПТИВНЫЙ ПРИЕМ ШПС
11.1. Основы адаптивного приема ШПС
При адаптивном приеме ШПС необходимо анализировать
совместное распределение помехи и сигнала на частотно-временной
плоскости (см. рис. 10.1, 10.2) и в зависимости от конкретного
распределения в соответствии с (10.43) изменять коэффициент
передачи согласованного фильтра. Реализация адаптивного
приемника, в состав которого входит согласованный фильтр с переменным
коэффициентом передачи, наиболее проста в том случае, когда
такой фильтр является многоканальным, причем в каждом канале
все частотно-зависимые элементы остаются постоянными, а
изменяется только коэффициент усиления.
Каноническая схема адаптивного приемника приведена на
рис. 11.1 [5, 64, 65, 69]. Он состоит из М каналов, в каждом из
которых есть элементный согласованный фильтр (СФ), линия
задержки и усилитель (Ус) с переменным коэффициентом усиления.
Согласованные фильтры СФь ..., СФм определены для ЧВЭ
сигнала, а линии задержки компенсируют время задержки ЧВЭ, т. е. в
момент окончания сигнала (t =
=Т) пики
автокорреляционных функций (АКФ)
элементов совпадают и
осуществляется когерентное накопление.
Анализатор каналов (АК) в
момент окончания сигналов
производит анализ отсчетов
напряжений на выходах СФ и
по принятому алгоритму
устанавливает коэффициенты
усиления, т. е. веса, с которыми напряжения на выходах фильтров
входят в общую сумму.
Помехоустойчивость адаптивного приемника при действии
помех, энергия которых каким-то образом сосредоточена в
отдельных ЧВЭ базисного прямоугольника (см. рис. 10.1), зависит от
210
• •
• •
• •
Jrm 1 ^1 »—U -
Y
t
m
m
| jAK |
Рис. 11.1. Адаптивный приемник
числа совпадений ЧВЭ сигнала и помехи и от отношения сигнал-
помеха на выходе СФ (элементное отношение сигнал-помеха).
Для определения числа совпадений необходимо проанализировать
те ЧВЭ, в которых сосредоточена энергия сигнала. В табл. 11.1
приведены число А анализируемых ЧВЭ для рассматриваемых
типов сигналов, а также базы элементных согласованных фильтров
(см. также табл. 10.1).
Для ДСЧ-ЧМ и ДСЧ-ФМ сигналов предполагалось К=М.
Число анализируемых ЧВЭ определялось путем наложения рис. 10.1 на
рис. 10,2,а... г. Как видно из табл. 11.1, наименьшее число
анализируемых ЧВЭ требуется для сигналов ДСЧ-ЧМ и ДСЧ-ФМ.
Таблица ИЛ. Число Таблица 11.2. Число совпадений
Тип сигнала
ФМ
дч
ДСЧ-ЧМ
ДСЧ-ФМ
Число
совпадений
Относительное
число
совпадений
Узкополосная
(импульсная)
помеха
М
М
| 1
1 1
им
1 ИМ
| им
| им
Среднее число
совпадений
Среднее значе- 1
ние
относительного числа
совпадений I
Структурная
помеха
| —
1
1 1
| 1
| —
| им
| им
| им
Тип
сигнала
ФМ
ДЧ
ДСЧ-ЧМ
ДСЧ-ФМ
Число
анализируемых
ЧВЭ А
AT*
М<Л<ЛР
М
М
База
элементного
согласованного
фильтра
N/M*
->щм*
L*/M
S
В табл. 11.2 приведены значения числа совпадений
узкополосной (или импульсной) и структурной помех со всеми
рассматриваемыми сигналами. При определении числа совпадений
предполагалось, что действует только одна помеха, причем структурная
помеха принадлежит к рассматриваемому классу сигналов.
Корреляционные свойства ФМ сигнала определяются
взаимокорреляционной функцией (ВКФ), а не числом совпадений. Известно,_что
среднеквадратическое значение ВКФ ФМ сигнала равно l/У N—
= 1/М, которое совпадает со средним значением относительного
числа совпадений для ДЧ, ДСЧ-ЧМ, ДСЧ-ФМ сигналов.
Как следует из табл. 11.2, рассматриваемые ШПС обладают
одинаковыми характеристиками с точки зрения числа совпадений
ЧВЭ сигнала и помехи, т. е. не имеют принципиальных
преимуществ относительно друг друга. Однако ДСЧ-ЧМ и ДСЧ-ФМ
сигналы позволяют иметь меньшее число каналов в адаптивном
приемнике. Поэтому в дальнейшем выводятся формулы для ДСЧ-ЧМ,
ДСЧ-ФМ сигналов. Однако полученные результаты будут
справедливы для любых ШПС, поскольку окончательные формулы
зависят от относительного числа «пораженных» ЧВЭ.
211
Отметим, что метод, основанный на определении числа
«пораженных» ЧВЭ и элементных отношений сигнал-помеха, справедлив
для помех, не коррелированных с ШПС.
11.2. Элементное отношение сигнал-помеха
На выходе произвольного элементного согласованного фильтра
определим это отношение следующим образом. Допустим, что
прием сигнала всегда осуществляется на фоне собственного шума
приемника, который представляет собой нормальный случайный
процесс с равномерной спектральной плотностью мощности N0. Пусть
число ЧВЭ равно М9 энергия ЧВЭ Ео=РсТ/М. Элементное
отношение сигнал-шум на выходе элементного согласованного фильтра
при воздействии только шума
ql~2E0/N0. (11.1)
Предположим, что преднамеренная помеха совпадает с m ЧВЭ
и независимо от числа пораженных элементов мощность помехи
Рп=const. В этом случае мощность помехи, приходящаяся на один
элемент, равна Рп/т, а суммарная мощность помехи и шума —
Рп/т+Рш/М9 где Pva^NoF — мощность шума в полосе пропускания
адаптивного приемника. Обозначим базу ШПС
базу ЧВЭ
отношение сигнал-помеха
tf-2p»B.
отношение мощностей сигнала и помехи
отношение сигнал-шум
отношение мощностей сигнала и шума
£ =Рс/Рт-
11.2)
11.3)
11.4)
11.5)
11.6)
11.7)
Отметим, что <72тах — максимальное отношение сигнал-шум,
равное отношению сигнал-шум на выходе когерентного
накопителя— сумматора («+» на рис. 11.1) при воздействии
собственного шума. С учетом введенных обозначений элементное
отношение сигнал-помеха при воздействии помехи и шума
я1 = я1-(1+^-У ■ (П.8)
212
Формула (11.8) справедлива для шумовых, узкополосных и
импульсных помех: для шумовых помех — при равномерной —
спектральной плотности помехи в пределах полосы частотного
элемента; для узкополосных — при постоянном в пределах полосы частот
Fo модуле коэффициента передачи элементного согласованного
фильтра; для импульсных — при Ги« 1JF.
11.3. Согласованный фильтр и линейное накопление
Сначала рассмотрим случай, когда коэффициенты передачи
усилителей на рис. 11.1 постоянны, т. е. фильтр рис.
11.1—согласованный; помехой поражены т ЧВЭ, т. е. в т каналах отношение
сигнал-помеха равно q2m (11.8), а в (М—т) каналах — q02 (11.1).
При этом отношение сигнал-помеха
,,24-1
<7с=9тах
(11.9)
Заменяя в (11.9) q02 и q2m согласно (11.1), (11.8), получаем
q2==ZQ2Q2 l(q2 + Q2 Ь
*V
max
(11.10)
где qn2 (11.4)—отношение сигнал-помеха при условии, что шума
нети помеха поражает все М элементов. На рис. Непрямая 1 —
зависимость qc2lq2max от т/М, построенная в соответствии с (11.10). Так
как <72с не зависит от т, прямая /
параллельна оси абсцисс. Из (11.10)
следуют два основных вывода. 1.
Отношение сигнал-помеха на выходе
согласованного фильтра рис, 11.2 не
зависит от числа пораженных
элементов. Это является следствием
ограничения общей мощности
помехи Ри и равномерного ее
распределения на т пораженных элементов.
2. Отношение q2c всегда меньше
наименьшего из отношений: <72тах или
<72п. ЕСЛИ <72тах><72п, ТО ?2С«^2п.
При этом, как следует из (11.4),
отношение сигнал-помеха
определяется только базой сигнала.
0,8
0.6
Ofi
Ш
02
'шах!
4 >J 2
Т1 Тч
0 0f2 Ofi 0,6 0,8т/№
Рис. 11.2. Помехоустойчивость
линейного, адаптивного и
нелинейного приемника
11.4. Адаптивный прием и оптимальное накопление
В адаптивном фильтре (см. рис. 11.1) напряжения с выходов
элементных согласованных фильтров суммируются в когерентном
накопителе с определенным весом. Веса устанавливаются в
усилителях с переменным кэоффидиентом усиления. При когерентном!
весовом накоплении на выходе сумматора максимум отношения
сигнал-помеха имеет место при весовых коэффициентах
Фп-Уп/Рпп, (11.11)
213
где Vn — сигнальная составляющая, а Рпп — мощность шума на
выходе n-го канала. Из (11.11) следует, что чем больше мощность
помехи, тем меньше весовой коэффициент. Напомним, что таким
свойством обладают «обеляющие» фильтры. При выборе <рп
согласно (11.11) отношение сигнал-помеха на выходе адаптивного
фильтра максимально и равно (10.37)
м
?1=2 < (И.12)
где qn2— отношение сигнал-помеха на выходе n-го канала.
Положим, что в т каналах отношение сигнал-помеха равно qm29 а в
(М—т) элементах — q02. Тогда
q2A=(M-m)q2 + mq2m (11л3)
Заменяя q02 и q2m согласно (11.1), (11.8), из (11.13) получаем
« - А. [ '- TF + т ('»"+ * "" I"]' ("'4)
При m<t:MqA2ttq2max(l—m/M) и мало отличается от <72тах.
Именно в этом и заключается смысл адаптивного приема: доля
ЧВЭ, пораженных мощной помехой, в общем отношении сигнал-
помеха мала и при т^М с ними можно не считаться. При т=Л1,
когда поражены все элементы, отношение сигнал-помеха q2A (11.14)
достигает своего минимального значения <7а2=<72с, т. е. адаптивный
фильтр всегда обеспечивает лучшую помехоустойчивость по
сравнению с согласованным. Кривая 2 на рис. 11.2 изображает
зависимость <7А2/<72тах, построенную в соответствии с (11.14). При m/Af<Cl
кривая 2 совпадает с прямой 3, описываемой как 1—т/М. С
уменьшением т/М кривая 2 стремится к прямой 3.
11.5. Нелинейный фильтр
В работе [62] описан приемник с нелинейным фильтром,
который отличается от представленного на рис. 11.1 тем, что в
каждом канале сначала стоит полосовой фильтр, затем ограничитель,
после которого следуют элементный согласованный фильтр и
линия задержки. В [62] проанализирована помехоустойчивость
приемника с таким нелинейным фильтром при когерентном и
некогерентном приеме. В принятых обозначениях отношение
сигнал-помеха на выходе нелинейного фильтра
q2=q2 JLt l-JlV. (11.15)
На рис. 11.2 кривая 4 характеризует зависимость <7н2/<72тах от
т/М. Множитель я/4 вызывает потери в 1 дБ. Отношение <7н2/<72тах
резко уменьшается с увеличением т/М, поскольку qH2 зависит от
т/М как (1—т/М)2. В то же время в оптимальном адаптивном
фильтре отношение сигнал-помеха уменьшается приблизительно
214
как 1—т/М. Объясняется это тем, что в адаптивном фильтре
отношение сигнал-помеха определяется формулой (11.12) —чемг
меньше элементное отношение сигнал-помеха, тем меньше оно
влияет на общее отношение сигнал-помеха, т. е. по сути дела, в
адаптивном фильтре устраняются пораженные элементы. В
нелинейном фильтре пораженные элементы всегда остаются и вносят в
напряжение на выходе помеху, равную по мощности ЧВЭ
полезного сигнала. Так как пораженные элементы при мощной помехе
являются помехами, наличие их в общей сумме всегда приводит к
ухудшению помехоустойчивости нелинейного фильтра по сравнению
с адаптивными. Как видно из рис. 11.2 при m/Af>0,6 нелинейный
фильтр будет значительно уступать и согласованному фильтру.
11.6. Оптимальный адаптивный приемник'
Для работы адаптивного приемника необходимо, чтобы
анализатор каналов устанавливал весовые коэффициенты в
соответствии с (11.11). В анализатор каналов поступает выборка г\9 z2> ...
..., Zm, по которой необходимо найти оценки амплитуды сигнала Ог
мощности шума и мощности помехи плюс шум. Нахождение таких
оценок является задачей самообучения фильтра [63—65]. Отметим,
что точность оценок тем выше, чем больше число ЧВЭ в сигнале,
так как с ростом М увеличивается объем выборки, а это
повышает точность оценок [71, 72]. В свою очередь, повышение точности
оценок приведет к приближению реальной помехоустойчивости
адаптивного фильтра к потенциальной, определяемой формулой
(11.14).
Адаптивный прием согласно (11.11) требует раздельного
измерения сигнальной и помеховои составляющих, что реализуется
весьма сложно. Использование квазиоптимальных адаптивных
приемников существенно упрощает реализацию, но в принципе при
построении таких приемников заранее предполагается
существование определенных потерь, связанных с неоптимальностью
определения весовых коэффициентов. Поэтому задача построения
адаптивного приемника ШПС, осуществляющего адаптацию с
оптимальными весовыми коэффициентами без предварительного
разделения суммы сигнала и помехи на входе приемного устройства,
актуальна. Ее решение приведено в [71].
На рис. 11.3 изображена структурная схема адаптивного
приемника ШПС. Сумма сигнала и помехи одновременно поступает
на входы информационных и измерительных каналов.
Информационный канал состоит из согласованного фильтра СФП (л=1, М)
и усилителя УСП, коэффициент усиления которого пропорционален-
весовому коэффициенту (11.11), вычисляемому измерительным
каналом (ИК). Напряжение с выходов информационных каналов
когерентно накапливается в сумматоре. Каждый /г-й измерительный
1 Параграфы 11.6, 11.7 написаны на основе совместных работ с В. Н. Та-
лизным [71, 72].
215
канал (рис. 11.4) состоит из полосового фильтра (ПФ«),
выделяющего полосу частот, соответствующую данному каналу, и
квадратичного детектора (КДп), на входе которого формируется квадрат
огибающей процесса на входе. Напряжение с выхода КД
поступает на измерители выборочного среднего значения т*т и
выборочной дисперсии М*2п квадрата огибающей. Звездочка означает, что
г+\СЯ>1 НТ^
М1
Усм\-Ч
r4mmH
чмЩ I
Рис. 11.4. Измерительный канал
Рис. 11.3. Оптимальный адаптивный
приемник
данные величины определяются по выборке случайного процесса
на выходе полосового фильтра измерительного канала. По
вычисленным т*щ и М*2п блок формирования весового коэффициента
БФВКп определяет величину <р*п и подает ее на Усп.
Допустим, что спектр сигнала сосредоточен около несущей
частоты fo, занимает полосу частот шириной F и состоит из М полос,
каждая из которых выделяется своим ПФ в измерительном канале.
Положим, что АЧХ ПФ имеет прямоугольную форму (рис. 11.5).
Полоса пропускания ПФ Fo^F/M. Допустим, что на приемник
воздействуют широкополосная шумовая помеха, спектр которой
перекрывает спектр сигнала F, и узкополосная с шириной спектра
Fn.yttFo. Максимальное число узкополосных шумовых помех
равно М. Обе помехи полагаем стационарными гауссовыми
случайными процессами с нулевым средним. Поскольку ширина спектра
сигнала F<kfo, то помеха на
выходе ПФ с полосой Fo^FtgZ
^fo является узкополосным
гауссовским процессом с
нулевым средним. Мощность
помехи на выходе ПФ равна сумме
мощности части
широкополосной помехи, прошедшей через
него, и узкополосной помехи.
Если спектральная плотность
широкополосной помехи равна
Nu.m, а уЗКОПОЛОСНОЙ — Mi.yn»
№\
Узко полосная помеха
Рис. 11.5. Спектры помех
то мощность помехи в п-м измерительном канале на выходе ПФ
Рпп=(Атп.ш+Л^п.уп)^о, а общая мощность помехи на входе
приемника
м
п—\
216
Определение оптимальных весовых коэффициентов
производится на основе анализа суммы сигнала и помехи в каждом приемном
канале. Как отмечалось, на выходе квадратичного детектора
формируется квадрат огибающей суммы сигнала с мощностью Рсп и
ПОМеХИ С МОЩНОСТЬЮ Гпп« Обозначим отсчет квадрата огибающей
через S2ni, где индекс п — номер канала; n=l9M; I — номер
отсчета; L — число независимых отсчетов.
Моменты распределения выражаются следующим образом [73]:
среднее значение
m1„=m1{S2,}=2PDn( 1+^;) ; (ПЛ6)
дисперсия
M2n=M2{S2z}=4P2n ( 1+^-) . (11.17)
Из соотношений (11.16), (11.17) можно найти мощности
сигнала и помехи на входе п-тв канала;
PQn=Vm2m-M2n; Рип = 0,5 (mln—Vmin—M2n). (11.18)
Подставляя (11.11) в (11.18), находим
Фп ор* = 2 Vm\n-M2j(mln^Vm2ln-M2n) . (11.19)
В процессе приема точные значения тщ и М2п неизвестны, по-
этому необходимо найти их оценки по выборке S2ni, л=1, М9 /==
= 1, L в соответствии с известными выражениями [55]:
выборочное среднее
выборочная дисперсия
Соответственно
Ф; = 2 KmS-Mi/Uu-l/'mlJl-M^ ) . (11.22)
Величины ф*п являются случайными и статистически
независимыми. Значения <р*п будут отличаться от оптимального весового
коэффициента, рассчитанного по (11.9), т. е. ср*п = фп+Афп, где
Афп — отклонение ф*пот оптимального значения фп. При этом
полагаем, что Афп — случайная величина, распределенная по
нормальному закону с нулевым средним. Такое допущение справедливо при
L»l, что всегда имеет место на практике и соответствует малым
ошибкам при измерении величин (11.20), (11.21).
Очевидно, что всякое отклонение от оптимального значения
весового коэффициента ухудшает помехоустойчивость приемника. При
217
равномерном распределении помехи между всеми М каналами
среднее значение отношения сигнал-помеха на выходе адаптивного
приемника [71]
mi {<72} « Я% (1-0,5 PJLM* Рсп), (11.23)
где <7о2 — отношение сигнал-помеха на выходе оптимального
адаптивного приемника (11.12) с идеальными весовыми
коэффициентами (11.11).
Уточним тип ШПС. Для дискретного составного частотного
сигнала с фазовой манипуляцией (ДСЧ — ФМ) база B=M2L, aPcn=
=РС. Подставляя эти соотношения в (11.23), находим
mi {</*} » q\ (l -0,5 PJBPC). (11.24)
При действии шумовой помехи с равномерной спектральной
плотностью отношение сигнал-помеха q2o=2PcB/Pn9 поэтому
mi{?*2}«<72oU-lA72o), (11.25)
т. е. потери определяются слагаемым 1/д2о:=(Рп1Рс)2В и чем
больше база ШПС и отношение сигнал-помеха Рс/Рп, тем меньше
потери. Для надежного приема информации отношение РС2В/РП
должно быть много больше единицы, что означает малость потерь
из-за неточного определения весовых коэффициентов. Для
многочастотного ШПС РСп=Рс/М, L=l, M=B и в результате
получаем формулу (11.24). Таким образом, потери в оптимальном
адаптивном приемнике при равномерной помехе не зависят от типа
ШПС, а определяются только его базой и отношением
сигнал-помеха на входе приемника.
В случае, когда суммарная мощность помехи Рп
неравномерно распределена между каналами, часть каналов «поражена»
мощной узкополосной помехой, а остальные каналы относительно
«свободны» — в них действует только широкополосная помеха.
Обозначим мощность помехи в «пораженном» канале Р от» а
мощность помехи в «свободном» канале Рп.шп- В «пораженных»
каналах также действует широкополосная помеха Рп.ш, поэтому Рп.у=
= Рп.шп-\-Рп.ут, где Рп.ут — мощность узкополосной помехи,
приходящейся на данный канал. Полные мощности узкополосной и
широкополосной помех:
*п.у === М * п.у т> Р п.ш == *Я Гдлп п,
где т — число «пораженных» каналов. При этом полагаем, что
Рп.ш=Рпт/А, где Л>1—коэффициент пропорциональности.
В этом случае среднее значение отношения сигнал-помеха на
выходе оптимального адаптивного приемника [71]
ХЧ ' ри.т V М AM ) [ 2РС LM V Ш)\
(11.26)
При т = 0 и А = \ выражение (11.26) сводится к (11.23),
полученному для случая равномерного распределения помехи между
218
каналами. Как следует из анализа (11.26), для достижения
хорошего качества приема необходимо PnmJ2PcL^il9 т. е. чтобы
элементное отношение сигнал-помеха
<720==2PCL/Pnm»l,
что справедливо и для случая равномерного распределения помехи
между каналами. Поскольку отношение сигнал-помеха на выходе
при надежной передаче информации должно быть примерно 10... 20,
а элементное отношение сигнал-помеха больше единицы, то
необходимо иметь 10... 15 каналов. Из (11.26) также следует, что при
равномерном и неравномерном распределении помехи между каналами
потери в оптимальном адаптивном приемнике не зависят от типа
ШПС, а определяются только его базой и отношением
сигнал-помеха на входе приемного устройства.
11.7. Квазиоптимальный адаптивный приемник
Структурная схема квазиоптимального адаптивного
многоканального приемника ШПС [72] изображена на рис. 11.6. Обозначим
мощность сигнала на входе приемного устройства Рс, а мощность
Рис. 11.6. Квазиоптимальный адаптивный приемник
помехи Рп. Сумма сигнала и помехи одновременно поступает на
входы информационных и измерительных каналов, число тех и
других равно Му а номера каналов п=1,М. Информационные каналы
состоят из согласованных фильтров (СФ1,..., СФМ) и пороговых
устройств (ПУ), пороговые уровни в которых устанавливаются с
помощью автоматического регулятора порога (АРП) на основе
оценки суммарной мощности сигнала и помехи в измерительном
канале. Каждому информационному каналу соответствует свой
измерительный, который с помощью ПФ выделяет сумму сигнала и
помехи в соответствующей полосе частот. Затем эта сумма
поступает на квадратичный детектор (КД), на выходе которого
формируется квадрат огибающей процесса на входе S2nu где п — номер
канала; /=1,L — номер отсчета, a L — число независимых
отсчетов. В некогерентном накопителе (НК1,..., НКм) формируется па-
219
раметр — средняя мощность суммы сигнала и помехи (в
дальнейшем суммарная мощность):
р*=т 2 5«/. О1-27)
L 1=1
Суммарные мощности Рп, л=1, М9 являются теми весовыми
коэффициентами, на основании которых АРП регулирует
коэффициенты передачи информационных каналов, т. е. отношение
напряжения на выходе канала к напряжению на его входе. Как было
отмечено ранее, в оптимальном адаптивном приемнике весовой
коэффициент и коэффициент передачи канала пропорциональны
отношению амплитуды сигнала к мощности помехи в канале (11.11).
В квазиоптимальном адаптивном приемнике весовые
коэффициенты могут вводиться различными способами. Наиболее простым
является использование ключевого режима работы устройства с
регулируемым коэффициентом передачи: в зависимости от уровня
средней мощности сигнал с выхода согласованного фильтра либо
проходит на вход когерентного накопителя (КН), либо нет. По
сути дела устройство с регулируемым коэффициентом передачи
на рис. 11.6 в этом случае превращается в пороговое устройство
(ПУ), а весовые коэффициенты — в пороговые уровни.
Квазиоптимальный адаптивный приемник с пороговым
устройством, предназначенный для приема фазоманипуляторных
сигналов, рассмотрен в работе [66]. Там же приведены некоторые
результаты по помехоустойчивости, не позволяющие в общем виде
судить ни о выборе весовых коэффициентов, которые сведены к
двум значениям пороговых уровней, ни о зависимости
помехоустойчивости от этих коэффициентов.
Таким образом, адаптация заключается в изменении пороговых
уровней в зависимости от меняющихся параметров входного
воздействия. При этом квазиоптимальный приемник формирует два
значения весового коэффициента в соответствии со следующим
алгоритмом:
_ (Фо пРи Рп<Рпо> (1128ч
JO при Рп > Рп0,
где фо — некоторый коэффициент передачи канала; Рп — средняя
мощность суммы сигнала и помехи на выходе измерительного
канала; Рпо — пороговый уровень.
При оценке помехоустойчивости описываемой схемы могут
возникнуть требующие анализа ситуации: во-первых, когда мощность
помехи равномерно распределена между каналами; во-вторых,
когда мощность помехи в части каналов существенно отлична от
мощности помехи в остальных каналах приема.
Приведем соотношения для измерительного канала. Положим,
что мощность помехи в канале постоянна. Как было установлено
ранее, на выходе КД получаются квадраты отсчетов огибающей
суммы сигнала и помехи, моменты распределения которых опре-
220
-и;
деляются соотношениями [73], имеющими в принятых
обозначениях следующий вид:
среднее значение квадрата огибающей суммы сигнала и
помехи (11.16)
ms2 =2Pun(l + Pc/2Pun); (11.29)
nl
дисперсия квадрата огибающей суммы сигнала и помехи (11.17)
°2с2 =4Р2Л(1 + РС/РПП), (11.30)
nl
После накопления в КН среднее значение квадрата огибающей
суммы сигнала и помехи не изменится, т. е.
ms*nl ==тпРп==2Рпп^+Рс/^РипЬ (11.31)
дисперсия уменьшится в L раз:
•*.-ЧЧ,+£)- <1|32>
Перейдем к соотношениям, характеризующим
информационный канал. Запишем сумму сигнальной и помеховой составляющих
на выходе КН:
м м
z=V2 фп+ У, <p»i», (П.ЗЗ)
п=1 /1=1
где V — сигнальная составляющая во всех каналах; £п — поме-
ховая составляющая в л-м канале; фп — весовые коэффициенты,
используемые для адаптивной установки порога. Полагаем, что
помеха на входе является гауссовским случайным процессом с
нулевым средним, следовательно, £п — гауссовская случайная
величина с нулевым средним значением. Поэтому в каждом канале на
выходе согласованного фильтра шум также является гауссовским
случайным процессом с нулевым средним значением. Среднее
значение случайной величины Z0 [55]:
м
л=1
где тФп =т1{фп}, a mi{gn}=0 согласно приведенным ранее
предположениям.
Дисперсия случайной величины Z [55]
м м
л=1 п~\
Поскольку помеха в каждом канале на входе согласованного
фильтра является гауссовским случайным процессом, на выходе
согласованного фильтра помеха также остается гауссовским
случайным процессом. Сумма помеховых составляющих на выходе
когерентного накопителя по этой причине также является нормаль-
221
ным случайным процессом, поэтому случайная величина Z распре*
делена по нормальному закону, т. е.
Предположим, что в рассматриваемой системе связи
передается двоичная информация с помощью противоположных сигналов
(фазовая телеграфия). В этом случае вероятность ошибки
Рош= I w(Z)dZ. (11.37)
Подставляя (11.36) в (11.37), окончательно получим
выражение вероятности ошибки
Pom~F{~irz) =р(-^=1-ры>
где ^(д:)—интеграл вероятности (7.5), qz2 — отношение сигнал-
помеха на выходе когерентного накопителя. В дальнейшем будет
рассматриваться только отношение сигнал-помеха, так как им
полностью определяется вероятность ошибки.
Заменяя mz и вг согласно формулам (11.34), (11.35), получим
общее выражение для отношения сигнал-помеха на выходе КН
[72]
М
«! л =? ("^
При равномерном распределении мощности помехи между
каналами Рпп=Рп/М, где Рп—мощность помехи на входе приемника,
М — число каналов приема. В этом случае выражение (11.38)
преобразуется к виду
(11.39)
где <7о2 — отношение сигнал-помеха на выходе КН идеального
адаптивного приемника с оптимальными значениями весовых
коэффициентов (без потерь). Таким образом, потери, возникающие в
рассматриваемом приемнике, будут определяться отношением
qz2/qo2.
'Можно показать, что а2Фп/т2Фп = 1/р(фо)—1, где р(фо) =
= F((Pno—mP )/аР ) — вероятность того, что мощность суммы
сигнала и помехи на входе приемника не превышает Рпо.
Обозначим отношение сигнал-помеха в n-м измерительном ка-
222
нале h2n=mpn/opn, а относительный пороговый уровень Яп=
= Рпо/арп, тогда
Анализ [72] показал, что практический интерес представляет
случай, когда Hn>hn, т. е. Pno>nipn. Это справедливо для
равномерного распределения помехи между каналами, когда сигналы
по всем каналам пропускаются с одинаковым весовым
коэффициентом, т. е. в этом случае необходимости в адаптации нет.
Выражение для потерь в отношении сигнал-помеха примет вид
<Ч1+1#+')и^-')Г- (1мо)
Очевидно, что при #n>ftn выражение (11.40) можно
приближенно записать так:
яУя1 = I/O + (яУМ) +1) f l-(Hn-hn)]}.
Из анализа выражения (11.40) следует, что для уменьшения
лотерь и улучшения качества приема желательно, чтобы пороговый
уровень был много больше отношения сигнал-помеха в канале, т. е.
Hn*>hn> так как при этом F[—(Нп—/in)]-^0.
Другим способом уменьшения потерь является увеличение
числа каналов приема в системе, при этом отношение q2o/M
уменьшается, что приводит к улучшению работы приемника.
Таким образом, для обеспечения нормальной работы системы
нужно устанавливать пороговый уровень Яп>-/1п.
Регулировка порогового уровня должна производиться на
основании анализа величин Рп, п=1уМ на выходе КН.
Предварительно предположим, что Hn = bhn, где Ь>\ —
некоторый положительный коэффициент, тогда Нп—hn=(b—\)hn и,
следовательно, можно записать
Hn—hn=(b—l)mPn/Gpn
Таким образом, для предварительной регулировки порога
необходимо знать mprt, тогд'а абсолютный пороговый уровень
определится как Рпо=тпрпЬ, но, так как тРп неизвестно, необходимо
найти оценку т*Р/г по PnU l=lt L:
При равномерном распределении помехи между каналами для
обеспечения хорошего приема достаточно устанавливать порог Рпо
одинаковым во всех каналах и в & раз больше выборочного
среднего значения (Ь принимается с учетом конкретных особенностей
системы). Как показывают расчеты, необходимо иметь
b>mD In Ж2.
Рассмотрим ситуацию, когда часть каналов в системе «пораже-
223
на» мощной помехой, а остальные каналы относительно «свобод*
ны» — в них действует только шум. Допустим, что мощность
помехи в «пораженных» каналах в А раз превышает мощность помехи
в «свободных» каналах, т. е. выполняется соотношение РПт=
= Рп,м-тА, где Рпт — мощность помехи в «пораженных» каналах;
Рп, м-т — мощность помехи в «свободных» каналах; А —
коэффициент пропорциональности. При этом полагаем, что суммарная
мощность помехи постоянна. Выражение для отношения сигнал-
помеха на выходе КН в этом случае приведено в [72].
На рис. 11.7 приведены потери в отношении сигнал-помеха
q2zlq2o для неравномерного распределения помех по каналам,
рассчитанным с помощью ЭВМ [72]. На рис. 11.7 изображено
семейство зависимостей нормированного отношения сигнал-помеха на
выходе приемного устройства как функция положения порогового
уровня Нп при различном числе
каналов в системе и /п/А! = 0,1;
Л = 102. Из приведенных кривых
следует, что при неравномерном
распределении помехи между
каналами существует явно
выраженный оптимальный пороговый
уровень, который зависит от числа
каналов в системе. Точность
установки порогового уровня в
основном определяет качество работы
системы. При отклонении от
оптимума потери быстро растут, что
приводит к полному нарушению
правильного функционирования.
Установка порогового уровня в
системе осуществляется с
помощью АРП на основе анализа
входного воздействия в каждом канале.
Алгоритм работы автоматического регулятора порога
заключается в следующем. С выхода канальных накопителей на вход АРП
поступают некоторые случайные реализации
Pnll(t),Pnl2(t), ~,PnlM(t),
из которых в каждом канале формируется выборка:
*U> "l2> — » P\L*
*21» * 22» — > P2Lf
0
-2
-4
-6
lл* 1
1
пг \ nR
г з ит
^>
\V\
\\
\
^Ahm\
4\^S0
^^J2
\d
Рис. 11.7. Потери в
квазиоптимальном адаптивном приемнике
Рм\>Рм2,~. у Рмь-
По полученной выборке формируются значения выборочного
среднего:
224
В результате этой операции формируется массив значений
выборочных средних, из которых выбираются минимальное и
максимальное значения выборочного среднего. Обозначим их
соответственно m*fc и т*г. Разброс между этими значениями определяет в
каждом конкретном случае некоторый интервал дискретизации
[т*ь, /я**], внутри которого располагается оптимальный пороговый
уровень. Для точного определения порога интервал [т*&, m*i]
подвергается последовательной дискретизации на п частей: А=
= (m*i—т*&)/я, где п — некоторое натуральное число,
определяемое требуемой точностью установки порога.
Далее, для каждого положения порога на интервале
дискретизации вычисляют отношение сигнал-помеха на выходе приемного
устройства и из полученных значений выбирают максимальное
значение и соответствующее ему значение порогового уровня.
Рассмотренная система квазиоптимального адаптивного
приемника ШПС выгодно отличается от существующих тем, что при
сравнительной простоте реализации позволяет обеспечить лучшее
качество приема. При этом потери, возникающие в таком приемнике
по сравнению с оптимальным, не превышают 0,7... 1,3 дБ для
различного числа каналов.
12. ОГРАНИЧИТЕЛЬ В ТРАКТЕ ОБРАБОТКИ ШПС
12.1. Идеальный полосовой ограничитель
Применение ограничителей в тракте обработки сигналов
целесообразно как с точки зрения подавления помех — аддитивных
(импульсных) и мультипликативных (замирания, многолучевость), так
и с точки зрения уменьшения динамического диапазона сигналов.
Поэтому ограничители широко используют в трактах обработки
ШПС. Наиболее часто используют полосовой ограничитель
(рис. 12.1,а). С выхода первого полосового фильтра (ПФ1),
ширина полосы пропускания которого равна ширине спектра ШПС,
сигнал и шум поступают на ограничитель (Огр) и после ограничения
на второй полосовой фильтр (ПФ2), который так же, как и ПФ1,
настроен на несущую частоту ШПС и имеет такую же полосу
пропускания. Второй полосовой фильтр необходим для того, чтобы не
пропустить на выход приемника комбинационные составляющие на
гармониках несущей частоты ШПС.
При фильтровой обработке ШПС вместо ПФ2 необходимо
поставить согласованный фильтр (СФ), который на рис. 12.1,6
осуществляет оптимальный фазовый прием, так как ограничитель
устраняет изменения амплитуды. Если осуществляется
корреляционная обработка ШПС, то за ПФ2 необходимо поставить
перемножитель («х» на рис. 12.1,в), на другой вход которого надо направить
ШПС от ГШПС. С выхода перемножителя сигнал поступает на
узкополосный фильтр ПФЗ, который выполняет роль интегратора.
8—111 225
Обычно в качестве ограничителя используется идеальный (или
жесткий) ограничитель, характеристика которого представлена на
рис. 12.2. На практике произвольный ограничитель становится
идеальным, если амплитуда напряжения на его входе много больше
уровня ограничения м0Гр. Совместное соединение идеального огра-
Выход
/
0
и5>
-7
Рис. 12.1. Схемы приемников с
ограничителями
Рис. 12.2. Характеристика
идеального (жесткого)
ограничителя
ничителя (с характеристикой, представленной на рис. 12.2) и
полосового фильтра (ПФ2 на рис. 12.1) называется идеальным
полосовым ограничителем (ИПО). Допустим, что сигнал на входе ИПО
является ШПС, а шум представляет собой гауссовскяй случайный
процесс.
Обозначим через
Р2х=(Л,/Лп)вх (12.1)
отношение сигнал-шум на входе ИПО, а через
Рвых =(Л,/Ли)вых (12.2)
•отношение сигнал-шум на выходе ИПО, где Рс — мощность
сигнала, а Рш — мощность шума в полосе частот, занимаемых сигналом.
Известно [74], что при малых отношениях сигнал-шум на входе
<Р2вх<1)
4 РВ2Х * 0,79 р»
(12.3)
т. е. потери составляют я/4 (1 дБ), а при больших отношениях
сигнал-шум на входе (р2вх>1)
р2 «2р2 (12.4)
г вых г'вх . v '
Увеличение отношения сигнал-шум в 2 раза (3 дБ) при р2Вх^1
обусловлено подавлением шумовой составляющей, синфазной со
входным сигналом.
На рис. 12.3 приведена зависимость отношения р2Вых/р2вх от р2вх,
построенная в соответствии со следующей формулой [75]:
2
Рвых
~5Г
*[MPb2x/2) + MPb2x/2)]s
4exp(pB2x)-n [/„ (:р1х/2) + /х(рв2х/2)]2Р;
226
2
вх
(12.5)
где /о, h — модифицированные функции Бесселя нулевого и
первого порядков. Из (12.5) при р2вх<1 получаем (12.3), а при р2вх»
>1—(12.4).
Прием ШПС на фоне мощных помех характеризуется
отношением сигнал-помеха р2вх<1. Поэтому в таком случае отношение
сигнал-помеха на выходе ИПО снижается в я/4 раз, т. е. на 1 дБ в со-
Рис. 12.3. Изменение отношения J
сигнал-помеха на выходе от отно- ^'*
шения сигнал-помеха на входе для
идеального ограничителя д Z 4 6 />*
к
ответствии с (12.3). Доказано [63, 76], что приемник ШПС (см.
рис. 12.1,6) является оптимальным фазовым обнаружителем,
причем характеристики обнаружения (или приема информации)
определяются теми же соотношениями, что и для оптимального
приемника, но отношение сигнал-помеха необходимо уменьшить в я/4
раз. Например, допустим, что осуществляется прием двоичной
информации с помощью двух противоположных сигналов.
Вероятность ошибки в этом случае определяется формулой (7.8)
Pom=l-f (V2h), (12.6)
где ^(д:)—интеграл вероятности (7.5), а отношение
сигнал-помеха h2 = Pc/WNn, W — скорость передачи информации, Nn —
спектральная плотность мощности помехи.
При наличии в тракте обработки ШПС ИПО формула (12.6)
для вероятности ошибки останется той же, но вместо h2 надо
использовать
Липо = —/i2--^- . (12.7)
ипо 4 4WNn v
Точно так же пересчитывается отношение сигнал-помеха npir
других случаях приема дискретной информации.
В работах |[77, 78] дан упрощенный анализ воздействия ШПС
и шума на ИПО, который приводит к известным результатам
(12,3), (12.4), (12.5), но по сравнению с более ранними
результатами в [77, 78] рассматриваются широкополосные системы, в
которых отношение сигнал-помеха всегда меньше единицы. Именно
для таких систем в [78] дополнительно к известным результатам
приведены следующие. Для сигнала и шума с равномерными
(постоянными) спектральными плотностями показано, что если
ширина спектра сигнала много больше ширины спектра шума, то
выходное отношение сигнал-шум уменьшается на 1 дБ. Если же
ширина спектра шума много больше ширины спектра сигнала, то потери
в отношении сигнал-шум составляют 0,6 дБ. При этом наименьшее
8* 227
подавление помех имеет место, когда полоса сигнала и шума
одинаковы, хотя с практической точки зрения изменение подавления
незначительное.
В работе '[79] приведены результаты экспериментальных
исследований прохождения ШПС, шума и помех через ИПО. На рис.
12.4,а приведены зависимости вероятности ошибки от отношения
сигнал-шум на входе р2вх для ШПС с базой £=120 и разным
уровнем ограничения. Рассчитанная вероятность ошибки Рош,
когда ограничителя нет, представлена на рис. 12.4 кривой 1.
Экспериментально полученная Рош без ограничения представлена кривой
15 2E/Na
w->
wz
w3
Ч0'5
5
I
0,1
л
" \
70
0.2
i
^
^
s)
15 2E/NL
Ф Pi '
I - I
s.
^5
J-JO^
Рис. 12.4. Зависимость вероятности ошибки при приеме ШПС
2. Экспериментальные результаты показывают ухудшение Рош
(эквивалентно уменьшению отношения сигнал-шум на выходе
согласованного фильтра приблизительно на 0,8 дБ). Это ухудшение
вызвано потерями из-за рассогласования аппаратуры и ошибками
измерения. Кривые 3 и 4 получены для Рош при ограничении смеси
сигнала и шума для уровней ограничения соответственно —20 и
—35 дБ относительно среднеквадратичного значения шума. На
рис. 12.4,6 приведены аналогичные кривые 1, 2, 3 и 4У но для ФМ
сигнала с базой £=13 (сигнал Баркера). Экспериментально
полученные результаты показывают незначительное уменьшение
вероятности ошибки при ограничении для различных сложных сигналов.
Как следует из рис. 12.4, имеет место хорошее совпадение
теоретических результатов (12.3), (12.7) с экспериментальным,
поскольку для обоих случаев р2Вх<^1.
При применении ИПО надо решать ряд задач, связанных с
влиянием его на прием ШПС в присутствии помех и шумов. К ним
относится влияние эффекта ограничения при воздействии на вход
приемника сигнала и флюктуационного шума, двух сигналов
(полезного и мешающего) и шума, системы сигналов равной
интенсивности или нескольких сигналов, имеющих большую мощность. При
работе систем связи с ШПС большое значение приобретает
случай, когда на вход приемника воздействуют два частично
перекрывающихся сигнала и шум.
Влияние эффекта ограничения для случаев, описанных выше,
228
рассмотрено в ряде работ [59, 63, 74—81]. В большинстве случаев
при оценке этого влияния используется критерий отношения
сигнал-шум (или сигнал-помеха), т. е. изменение этого отношения в
результате ограничения (12.5). В большинстве случаев знания
отношения сигнал-помеха достаточно. Однако в ряде случаев
необходимо знать уточненные вероятностные характеристики
(вероятности обнаружения, вероятности ошибки) не только при малом или
большом отношении сигнал-шум на входе. Теоретическое
исследование эффекта ограничения весьма сложно даже для простейших
случаев. Поэтому в дальнейшем будут изложены известные
теоретические результаты и дано их сравнение с экспериментальными
[79].
12.2. Воздействие да ИПО двух сигналов и шума
Прохождение двух сигналов (полезного и мешающего) и
нормального шума через ограничитель исследовано в работах [77, 78,
SO]. В работе [77] оценивается влияние эффекта ограничения на
отношение сигнал-шум при воздействии на его вход двух
синусоидальных сигналов и узкополосного нормального шума. На рис. 12.5
и 12.6 приведены некоторые зависимости, взятые из [77]. На рис.
12.5 кривые характеризуют изменение отношения сигнал-шум на
выходе от отношения сигнал-шум на входе для различных
значений отношения мощностей, подаваемых на вход сигналов (Рс2/
Лл)вх, причем р21вх = />с1вх//>швх. На рис. 12.6 кривые
характеризуют подавление одного сигнала другим в зависимости от отноше^
ния сигнал-шум на входе для одного из сигналов.
Рсг/РсгО
WMUPMi*
о
iPnftW
-W -w -20 -JO 0 10 20 J0/>f9K,dS
-20 -JO 0 JO 20 30/>ш,й&
Рис. 12.5. Отношение сигнал-помеха при Рис. 12.6. Зависимость отноше-
воздействии на ИПО двух сигналов и ния мощностей сигналов от отно-
шума шения сигнал-шум на входе ИПО
Из приведенных зависимостей следует, что когда оба сигнала
значительно слабее маскирующего шума, отношение сигнал-шум на
выходе ИПО для обоих сигналов уменьшается в 4/я раза (1 дБ).
Если мощность одного сигнала значительно больше мощности
другого и больше мощности шума, отношение сигнал-шум для менее
229
интенсивного сигнала уменьшается на 3 дБ. Таким образом, когда
сигналы на входе системы маскируются шумами, имеет место
слабое подавление одного сигнала другим. Это справедливо, если
входное отношение сигнал-шум для сигнала большей мощности не
превосходит 10 дБ. Максимальное подавление слабого сигнала
сильным происходит при больших отношениях сигнал-шум для обоих
сигналов и составляет 6 дБ.
В работе i[78] рассмотрен случай прохождения через
ограничитель синусоидального сигнала или ШПС и произвольной помехи.
При рассмотрении предполагалось, что мощность помехи на входе
ограничителя много больше мощности сигнала. Показано, что
подавление увеличивается при уменьшении флюктуации амплитуды
помехи и достигает максимального значения 6 дБ для помехи с
постоянной амплитудой.
На рис. 12.7 приведена зависимость отношения сигнал-помеха
на выходе ИПО р2Вых к отношению сигнал-помеха на выходе без
ограничения р2Выхо от отношения сигнал-шум на входе р2вх при
различном отношении мощностей сигнала и помехи (РсАРп)вх, в
качестве которых взяты Ф'М ШПС [81].
'70
'JO "20 "10 0(PjPnk„A5
~2b
-20 -JO Q
10 20^,46
(PjW-rt
r*
1 2J4
Рис. 12.7. Отношение сигнал-помеха Рис. 12.8. Зависимость вероятности
при воздействии на ИПО двух ШПС ошибки от отношения сигнал-помеха
и шума
Результаты экспериментального исследования влияния
ограничителя на вероятность ошибки, когда на его вход действует ШПС
и гармоническая помеха в присутствии нормального шума или без
него, приведены в [79]. При этом предполагается, что
гармоническая помеха действует в полосе сигнала, имеет постоянную
амплитуду Un и случайную фазу, равномерно распределенную на отрезке
[—я, я].
В этих предположениях при когерентном приеме ШПС без
ограничителя вероятность ошибки i[59]
— arccos (Uc/Un) VB .
(12.8)
230
Отношение (Uc/Un)BX для ШПС, как правило, меньше единицы.
Поэтому в подобных случаях всегда происходит подавление
сигнала в ограничителе. Если обозначить подавление сигнала по
мощности у, то с учетом того, что фазовая структура сигнала не
нарушается ограничителем, вероятность ошибки при ограничении
получается
Рош « — arccos ±= (UC/UQ)BX VB . (12.9)
При (£/с/£/п)2<Ю подавление составляет 6 дБ и коэффициент
Т=4.
Результаты экспериментальных исследований влияния эффекта
ограничения на вероятность ошибки для рассматриваемого случая
приведены на рис. 12.8 [79].
На рис. 12.8 приведена вероятность ошибки Рош в зависимости
от входного отношения мощностей сигнала и гармонической
помехи (Рс/Рп)вх- Кривые 1, 2, 3, 4 характеризуют влияние
ограничителя на Рош при прохождении через него сигнала и гармонической
помехи. Расчетные вероятности ошибок для случая, когда
ограничителя нет, представлены кривой 1У а экспериментально
полученные результаты — кривой 2. Отличие расчетных и
экспериментальных результатов вызвано ошибками измерения и
рассогласованиями в аппаратуре. Кривыми 3 и 4 представлены расчетные и
экспериментально полученные вероятности ошибок, когда включен
ограничитель (уровень ограничения —20 дБ относительно
гармонической помехи).
Кривые 5 и 6 характеризуют экспериментально полученные
вероятности ошибок, когда на вход приемника действуют сигнал,
гармоническая помеха и нормальный шум (дисперсия шума Рш =
= 17 Рс). Кривая 5 получена для случая, когда ограничителя нет, а
кривая 6 — когда ограничитель включен. Так как мощность шума
гораздо больше мощности сигнала и помехи, то подавление
сигнала в ограничителе незначительное и вероятности ошибок,
представленные на кривых 5 и б, не должны заметно различаться
между собой.
12.3. Нелинейное кодовое уплотнение и разделение абонентов
в синхронных адресных системах связи
Совместное применение жесткого ограничения группового
сигнала и линейного кодового уплотнения и разделения абонентов
(нелинейного КР) было предложено в работе [82]. В дальнейшем
нелинейное КР исследовалось [5], но в основном рассматривалась
помехоустойчивость относительно взаимных помех (так называемые
шумы нелинейного преобразования). В работе {5] был произведен
учет собственных шумов приемника. Полученные результаты
позволяют достаточно просто и наглядно сравнить нелинейное КР с
линейным КР или ЧР.
На рис. 12.9 представлена структурная схема синхронной адрес-
231
ной системы с нелинейным КР, где показаны элементы,
относящиеся к одному /-му каналу. Информация от источника в виде
двоичных единиц Sj= ± 1 поступает на модулятор. На второй вход
модулятора поступает опорный сигнал. В качестве опорного сигнала
можно взять видеочастотный дискретный фазоманипулированный
%^
X
Ар
г
>.
ни\
I VV ГГЛхШ\
Т
У№
X
-^♦я
СТ
РУ
а
Рис. 12.9. Синхронная адресная система связи с жестким ограничением
группового сигнала
сигнал. Он описывается кодовой последовательностью Aj= (а^,... >
... , ajn,... ,ajjv), состоящей из N символов ajri=±l. С выхода
перемножителя снимается кодовая последовательность Vj= (vju ...,
... fVjn, ... , VjN), СИМВОЛЫ КОТОрОЙ Vjn = Sjajn. ОчевИДНО, ЧТО Vjn =
= ±1.
На выходе устройства уплотнения (УУ) имеем групповой
сигнал Угр, равный сумме канальных сигналов. Предполагаем, что все
сигналы синхронны (это обеспечивается синхронизатором С1).
Поэтому элементы группового сигнала имеют ту же длительность, что
и элементы канальных сигналов. Амплитуда элементов группового
сигнала
m—\ m=\
Слагаемое Vjn = Sjajn выделено потому, что при передаче символа
Sj знак этого слагаемого имеет значение для определения самого
символа Sj, в то время как сумму можно считать случайной
величиной.
В ограничителе производится предельное или жесткое
ограничение группового сигнала. Амплитуда элемента на выходе
ограничителя определяется согласно известному правилу (см. рис. 12.2)
1 при t;n>0,
при vn<0.
Кодовая последовательность Х= (х\у..., хп,..., xN). На входе
канала (Кан)—сигнал x(t), состоящий из прямоугольных
импульсов длительностью Г/# и с амплитудами хП9 на выходе
канала— колебание y(t)= YPcX(t)+n(t). (Pc — мощность сигнала на
входе приемника, n(t) — гауссовский стационарный случайный про-
232
U
цесс с нулевым средним и с равномерной спектральной плотностью
мощности Л/о).
В качестве оптимального демодулятора взят коррелятор,
состоящий из перемножителя (X), интегратора (И) и решающего
устройства (РУ). Ритмом работы коррелятора управляет
синхронизатор С2. На структурной схеме рис. 12.9 показан только /-й
демодулятор.
На один из входов перемножителя поступает колебание y(t), на
другой — опорный дискретный фазоманипулированный сигнал с
кодовой последовательностью Л-/= (од,..., ajn,..., a,jN). Положим,
что опорные сигналы и соответственно кодовые последовательности
синхронны. Допустим, что передача двоичных символов
осуществляется противоположными сигналами. При этом решающее
устройство является пороговым с нулевым порогом.
Положим, что априорные вероятности появления символов Sj=
= ± 1 равны 0,5. Напряжение на выходе интегратора
*i= \ У (t)Aj(t)dt, (12.10)
где Aj(t)—опорный_сигнал с кодовой последовательностью Aj.
Заменяя y(t) на YPcx(t)+n(t) и обозначая
d=VK \ x{i)As(t)dUh=\ n(t)Aj(t)dt, (12.11), (12.12)
получаем
zj^d + h. (12.13)
Величина Zj является случайной, так как и d и h — случайны.
Первая — из-за жесткого ограничения группового сигнала,
вторая — из-за действия шума. Можно показать, что среднее значение
и дисперсия величины rf, определяемой ограничением группового
сигнала, равны:
mx {d} =VK T }/2/я(/а-1), (12.14)
M2{d}=PcT*[l-2/n(la-\)]/N &PCTVN. (12.15)
Из (12.14), (12.15) видно, что среднее значение случайной
величины d уменьшается как 1/ У /а—1, а среднеквадратическое
значение— как l/T/~/V. Их отношение
Щ. {d}lУЖЩ =V2N/n(la-l) (12.16)
тем больше, чем больше N/{U—1)=£/(/а—1), т. е. чем больше
отношение базы сигнала к числу мешающих абонентов.
Было положено, что случайная величина d является гауссов-
ской, поэтому она полностью характеризуется своими средним
значением и дисперсией. Перейдем к определению статистических
характеристик и функции распределения случайной величины h. Так
как по предположению n(t) — случайный гауссовский процесс с
нулевым средним и с равномерной спектральной плотностью мощ-
233
ности No, то ft — гауссовская случайная величина, а ее среднее
значение и дисперсия соответственно:
mi{ft}=0, М2{Л}=0,5Л/07\ (12.17)
Так как Zj является суммой двух гауссовских случайных
величин d и ft, то она сама есть гауссовская случайная величина. Ее
среднее значение согласно (12.14), (12.17)
а-пи (г,}=пц {d} + m1 {h}=VTQ T V2/n(/a—1). (12.18)
а дисперсия согласно (12.15), (12.17)
о2 ж М2 {z}} = M2{d} + M2 {ft}=Pc W+0,5^0 Г. (12.19)
Вероятность ошибки
Рош-f (~К2ЛН), (12.20)
где отношение сигнал-помеха на входе решающего устройства при
нелинейном КР
,2
ft2=a2/2a2= — ^—, (12.21)
Н я(/а-1) 2h20+N
h2o — PcT/N0 — отношение сигнал-шум на входе приемника, а РСТ —
энергия группового сигнала на его входе. Напомним, что N — число
элементов в сигнале, и можно полагать, что N = B — базе сигнала.
При N»2ft2o из (12.21) получаем
ft2H^2ft2/n(/a—1), (12.22)
а при 2h20>N
h2H^2N/n(la—l). (12.23)
Формулы (12.22), (12.23) позволяют найти отношение сигнал-
помеха в САС при жестком ограничении группового сигнала.
Отметим, что потери из-за жесткого ограничения равны 2/я, т. е.
примерно 2 дБ.
13. ФИЛЬТРАЦИЯ ВЗАИМНЫХ И СТРУКТУРНЫХ ПОМЕХ
13.1. Взаимные и структурные помехи
В широкополосных системах связи с шумоподобными сигналами
возможно воздействие различного рода помех, в том числе
шумовых, импульсных, узкополосных, которые были подробно
рассмотрены в гл. 10. Наряду с такими помехами в ШСС могут
действовать также взаимные (или системные) и структурные
(ретранслированные или имитационные) помехи, которые представляют собой
ШПС такого же типа, что и используемые в ШСС.
Взаимные (или системные) помехи имеют место в ШСС типа
234
асинхронных адресных систем связи (ААС), когда все абоненты
работают в общей полосе частот и используют один и тот же тип
ШПС, например, фазоманипулированные, дискретные частотные
или дискретные составные сигналы. В таких системах связи
разделение абонентов производится на основе различия форм ШПС,
используемых различными абонентами. Такое разделение абонентов
называется кодовым разделением (КР) [5]. В ШСС типа ААС
одновременно действует большое число абонентов, поэтому взаимная
помеха, равная сумме ШПС от отдельных абонентов, по своим
статистическим характеристикам близка к нормальному случайному
процессу, т. е. к шуму в полосе частот, занимаемых ШПС.
Структурная помеха представляет собой один мощный ШПС,
воздействующий на ШСС. Структурная помеха возникает тогда,
когда передатчик мешающего абонента расположен гораздо ближе
передатчика полезного абонента либо когда передатчик
мешающего абонента обладает гораздо большей мощностью по сравнению
с передатчиком полезного абонента. В последнем случае речь идет
о преднамеренной (или организованной) помехе, назначение
которой — подавление ШСС. В обоих случаях структурная помеха
либо повторяет форму полезного ШПС, но отличается мощностью,
задержкой и рядом других параметров, либо принадлежит к тому
же типу, что и полезный ШПС. В первом случае она называется
ретранслированной, во втором — имитационной. Структурная
помеха по своим статистическим свойствам далека от гауссовского
случайного процесса. Анализ ее воздействия необходимо проводить
с использованием структурных свойств полезного сигнала и помехи
и с учетом распределения их энергии на частотно-временной
плоскости.
Сначала рассмотрим фильтрацию взаимных помех, а затем
структурных.
13.2. Основы кодового разделения абонентов в ААС
Как отмечалось ранее, ААС основаны на использовании
кодового уплотнения и разделения абонентов. При этом требуемое для
ААС число сигналов равно произведению числа абонентов на
число сигналов в алфавите (полагаем, что все абоненты используют
алфавиты одинакового объема). Минимальное число сигналов
равно числу абонентов. Если число абонентов в ААС велико, то выбор
сигналов является главным вопросом при разработке ААС.
Обозначим через Lk число абонентов в ААС, а число активных
абонентов, ведущих передачу информации в рассматриваемый
момент времени, через /а. На вход приемника одного из абонентов,
принимающих информацию, поступают сигналы от 1 = 1а—1
мешающих абонентов, создающих взаимные помехи, и полезный сигнал от
активного абонента, который передает информацию данному
абоненту. Если /^>1, то Ы1а.
Рассмотрим влияние взаимной помехи на помехоустойчивость
передачи полезной информации. Сначала используем энергетиче-
235
ское определение взаимной помехи, которое позволяет наглядно
выяснить основные особенности приема информации на фоне
взаимной помехи [5]. Пусть ширина общей полосы частот равна F.
Допустим, что ширина спектра всех сигналов в ААС равна ширине
общей полосы частот. Предположим, что все активные абоненты
создают на входе выделенного /-го приемника сигналы одинаковой
мощности Рс. В этом случае мощность полезного сигнала Рс, а
мощность взаимной помехи /Рс. Допустим, что спектральная
плотность мощности взаимной помехи постоянна в пределах общей
полосы частот
Nn = lPjF. (13.1)
Предположим также, что число слагаемых во взаимной помехе
/»1. Поэтому можно допустить, что взаимная помеха по своим
статистическим свойствам приближается к нормальному
случайному процессу. Таким образом, сделанные предположения позволяют
считать в первом приближении взаимную помеху гауссовским
случайным процессом с равномерной спектральной плотностью
мощности (13.1).
При передаче и приеме дискретной информации
помехоустойчивость когерентного и некогерентного приема полностью
определяется отношением сигнал-шум, приходящимся на одну двоичную
единицу (7.10). Заменяя в формуле (7.10) N0 на Nu (13.1) и
опуская индекс 2, получаем
Л2 = В//, (13.2)
где B=FT=F/W— база ШПС, приходящаяся на одну двоичную
единицу. Из (13.2) следует, что для обеспечения надежной
передачи информации (h2s>l) необходимо, чтобы база В была много
больше числа мешающих абонентов В, т. е. чтобы отношение //В «С
<С1. При передаче информации с заданной помехоустойчивостью
при Л2=const формула (13.2) позволяет найти требуемое
отношение 1/В. Из (13.2) следует, что при заданном числе активных
абонентов /а=/+1 увеличение отношения сигнал-взаимная помеха
возможно только за счет увеличения базы В. Чем больше
требуемая помехоустойчивость, тем больше должна быть база В. Это
объясняется тем, что с увеличением базы (с увеличением ширины
спектра сигналов при постоянной скорости передачи информации
W) уменьшается спектральная плотность помехи Nn (13.1).
Принципиально увеличение базы В позволяет получить сколь угодно
высокую помехоустойчивость приема информации в ААС.
При когерентном приеме, как было отмечено ранее, различают
три возможные метода .передачи двоичных символов:
противоположными сигналами (фазовая манипуляция — ФМ),
ортогональными сигналами (ортогональная манипуляция — ОМ) и пассивной
паузой (амплитудная манипуляция AM). Вероятность ошибки при
когерентном приеме двоичной информации для ФМ и ОМ
соответственно:
Pom~F{-V2Wl),Pom = F(-VBri) . (13.3), (13.4)
236
При AM коэффициент а в (7.9) равен 1/2, но при этом Nn в 2 раза
меньше, так как число суммируемых сигналов в среднем равно Ц%
поскольку половина сигналов не передается. Помехоустойчивость
ОМ и AM одинаковы и определяются формулой (13.4). Отметим,
что при ОМ система сигналов в ААС должна иметь объем 2L, а
при AM—L. Однако при AM необходимо устанавливать
пороговый уровень, не равный нулю. Флюктуации порогового уровня
могут существенно снизить помехоустойчивость AM.
При некогерентном приеме двух ортогональных сигналов
вероятность ошибки
Рош = 0,5ехр(-5/2/). (13.5)
Если информация передается m-ичными символами, то
основные соотношения (13.1), (13.2) не изменяются. При этом база т-
ичных символов B = FTm. Отношение сигнал-помеха Л2, отнесенное
к т двоичным единицам, следует рассчитывать по формуле (13.2).
Используя полученное значение hy вероятность ошибки можно
рассчитывать по известным формулам (см. гл. 7).
Из соотношения (13.2) следует, что увеличением базы В всегда
можно добиться требуемого отношения сигнал-взаимная помеха.
Однако при этом не учитывается собственный шум приемника.
Рассмотрим влияние шума на снижение помехоустойчивости.
Допустим, что, кроме взаимной помехи со спектральной плотностью
Nn (13.1), действует шум, являющийся нормальным стационарным
случайным процессом с равномерной спектральной плотностью Л/^
В этом случае результирующая спектральная плотность равна NR +
+ N0, а отношение сигнал-помеха
h* = PcT(Pcl/F + N0)~K (13.6)
Преобразуя полученное соотношение и обозначая отношение
сигнал-шум h2o = PcT/No = Pc/WNy из (13.6) получаем
A»=(//B+l/AJ)-\ (13.7)
Предельное значение h2 при В-+оо равно h\ т. е. предельное
значение помехоустойчивости ААС определяется шумом.
Из соотношения (13.7) можно найти допустимое число
мешающих абонентов при заданной помехоустойчивости (задано
требуемое значение h) и для определенного уровня шума (известно
значение ho). Преобразуя (13.7), находим, что
h2l/B = l—h2/h2 (13.8)
Зависимость (13.8) представлена на рис. 13.1. Если шума нет
(Ы0-+0, /iV-^oo), то lh2/B=l и относительное число мешающих
абонентов l/B=l/h2, что совпадает с результатом, получаемым из
формулы (13.2). При увеличении шума и h2 = const допустимое число
мешающих абонентов уменьшается, а при h = ho оно равно нулю,
т. е. заданная помехоустойчивость может быть реализована, если
нет взаимных помех.
Из рассмотрения основ кодового разделения абонентов следует,
237
что помехоустойчивость ААС относительно взаимных помех
полностью определяется отношением базы сигналов к числу активных
абонентов (13.2). Увеличивая базу сигналов, можно всегда
получить требуемую помехоустойчивость или приблизиться к
предельной. Однако при постоянной скорости
передачи информации увеличение
базы сигналов означает расширение их
спектров, что приводит к увеличению
общей полосы частот ААС. При этом
возникает вопрос, насколько
эффективно используется общая полоса частот
в ААС.
Эффективность использования
общей полосы частот в ААС будем
характеризовать коэффициентом
использования частот |я и числом активных
абонентов на единицу полосы частот
v. Используя определение базы сигна-
Рис. 13.1. Зависимость числа лов, получаем \inv = la/B. Так как /а =
активных абонентов в ААС от =£+1, а при /а^>1 имеем /а~/, то в
отношения сигнал-помеха соответствии С формулой (13.2)
^ = l/h2 = t/B. (13.9)
Из полученного соотношения следует, что эффективность
использования общей полосы частот тем выше, чем меньше
требуемое отношение сигнал-взаимная помеха /i2. Поскольку отношение
сигнал-взаимная помеха (13.2) уменьшается с ростом числа
мешающих абонентов, то чем больше число активных абонентов, тем
лучше используется общая полоса частот. Величина h определяет
вероятность ошибки. Чем она больше, тем меньше вероятность
ошибки. Таким образом, ААС целесообразно применять в тех
случаях, когда не требуется высокая надежность (или высокое
качество) передачи информации, а число абонентов должно быть
большим.
Число активных абонентов на единицу полосы частот v =
= fa max//7, где /а max — максимальное число активных абонентов,
имеющих возможность одновременно передавать информацию.
Задавая качество передаваемой информации, т. е. задавая отношение
сигнал-взаимная помеха ft2, полагая согласно (13.2) l=B/h2 и
выражая базу сигналов В через отношение F/Fc (1.1), получаем
vKP=vmax/i-2, (13.10)
где Vmax=l/^c. Так же, как и в случае соотношения (13.9), чем
меньше требований предъявляется к качеству передаваемой
информации (чем меньше Л2), тем больше будет число активных
абонентов на единицу полосы.
При анализе кодового разделения [см. (13.2)] относительно
применяемых ШПС было сделано лишь одно предположение, что
ширина спектра ШПС должна быть равна ширине общей полосы
238
частот. Поскольку выполнить это условие можно достаточно
просто, то может создаться впечатление, что в ААС с кодовым
разделением применимы любые системы сигналов. Однако детальное
исследование вопроса выбора систем сигналов показывает, что
различные системы сигналов обеспечивают различную
помехоустойчивость. В то же время в формулу (13.2), кроме ширины спектра, не
входят иные свойства систем сигналов. Такое различие между
результатом (13.2) и влиянием свойств систем сигналов на
помехоустойчивость объясняется двумя основными допущениями, которые
были сделаны при выводе формулы (13.2): во-первых,
предполагалось, что взаимная помеха нормализуется, и во-вторых, что ее
спектральная плотность в общей полосе частот равномерна.
Однако и то, и другое предположение могут не выполняться, что в
значительной мере определяется свойствами используемой системы
сигналов. Влияние свойств систем сигналов на помехоустойчивость
ААС с кодовым разделением приведено в работе [5].
Рассмотрим работу приемника fe-ro абонента. Если Lk — число
абонентов в ААС, то k=l,Lk, Поскольку выделение информации
происходит на выходе приемника, определим характеристики
сигнала и взаимной помехи на выходе. Допустим, что информация
передается двумя противоположными сигналами и осуществляется
когерентный прием. Оптимальный приемник &-го абонента состоит
из согласованного фильтра и решающего устройства. На входе
приемника действует сумма полезного сигнала (последовательность
сложных сигналов, манипулированных последовательностью
информационных символов) и взаимной помехи, которая в свою очередь
является суммой мешающих сигналов. Нормированное напряжение
на выходе согласованного фильтра будет равно сумме
автокорреляционных функций (АКФ) от полезных сигналов и взаимокорре-
ляционных функций (ВКФ) от мешающих сигналов.
По определению АКФ &-го сигнала
Я*(*)=т^ ? Uk(t)Uk(t-T)dt,
^ ^ —оо
а ВКФ /-го и &-го сигналов с равными энергиями
ЛдМ = ^ I Vj(t)Uh(t-x)dt.
—оо
Решающее устройство принимает решения в момент окончание
полезных сигналов, т. е. полагаем, как и ранее, что в приемнике
есть синхронизатор, который обеспечивает синхронный отсчет
информации.
Если на входе фильтра действует только полезный сигнал, то
значение напряжения на его выходе в момент принятия решения
(момент отсчета) равно ±1, поскольку оно равно максимальному
значению АКФ с учетом знака передаваемого информационного
символа. При действии /-го мешающего сигнала значение ВКФ в
момент отсчета равно Rjk(r), где т — произвольное значение аргу-
239
мента, |т|^Г. При непрерывной передаче информационных
символов /-м абонентом в момент отсчета напряжение
VJk = tj RJk (т-*,) + б; RSk (x-tj-П (13.11)
где gj, |^=±1—случайные величины, определяемые знаками
информационных символов; tj — случайный сдвиг во времени начала
работы /-го абонента. Таким образом, величина Vjk случайна из-за
случайности информационных символов и случайного сдвига во
времени начала работы /-го абонента.
Пронумеруем номера мешающих абонентов так, чтобы /=1Д
Взаимная помеха в момент отсчета есть сумма напряжений вида
(13.11):
v e 2 v*= 2 & #>* <*-**)+li R* (*-t,-T)h (13.12)
/a /=1
причем Vkc соответствует одному из возможных сочетаний
мешающих абонентов, число которых определяется биномиальным
коэффициентом ClLk.
Обозначим через Rjk произвольное значение Rjk(%—tj), т. е.
Rjk^Rjk(x—tj). Так как tj — случайная величина, то и Rjk —
случайная величина. Аналогично R'jk&Rjk{x—tj—T). Поскольку
Rjk{r—tj) и Rjk{x—tj—Т) имеют одни и те же значения, что и
Rjkit), но только в различные моменты времени, то Rjk^Rjk(x) и
R'jk^Rjh{x). С учетом принятых обозначений получаем:
l/ = i] (IjRjK + t'fR'ib) (13.13)
Величина V — случайная, так как, во-первых, она сумма
случайных величин Vjh и, во-вторых, сумма случайного числа
слагаемых по различным сочетаниям. Таким образом, случайная
величина V, взаимная помеха в момент отсчета, представляет собой
функцию следующих случайных величин: 1) числа мешающих
абонентов /; 2) номеров мешающих абонентов (различных сочетаний
ClLk); 3) информационных символов £/, 4) момента начала работы
абонента tj.
Для расчета помехоустойчивости ШСС при воздействии
взаимных помех необходимо знать плотность вероятности случайной
величины V (13.13). При этом необходимо учесть все случайные
факторы, о которых было упомянуто. В [5] приведена методика
определения плотности вероятности взаимной помехи V. Приведем
лишь основные результаты.
Обозначим нормированное значение взаимной помехи
Z = V/oVn, (13.14)
где
*2=f 2 <ft (13*15)
1 /=i
240
— дисперсия (мощность) взаимной помехи, равная
среднеарифметическому значению дисперсий взаимной помехи от всех
мешающих абонентов,
^ = М2{/?д}=г^ ] RJk(x)dx (13.16)
2Т __т
— дисперсия ВКФ [5], а число п=21 равно числу
перекрывающихся ВКФ. Плотность вероятности взаимной помехи Z записывается
в виде ряда Эджворта [5]
Wzix)*-^e-*-n{l+J-HAx)\, (13.17)
где #4 (*)—многочлен Эрмита четвертого порядка, коэффициент
эксцесса
а коэффициент эксцесса Yjfe определяется следующей общей
формулой [55]:
Т^ = (М4/а*)-3. (13.19)
Из (13.18) следует, что у является средневзвешенным
значением коэффициента эксцесса для данного сочетания абонентов,
причем слагаемое в квадратных скобках определяет смещение.
Плотность вероятности (13.17) целесообразно использовать для
нахождения вероятности ошибки при когерентном приеме. При
некогерентном приеме (например, двух ортогональных сигналов)
необходимо учитывать также асимметрию распределения ВКФ, а
затем определить плотность вероятности модуля взаимной помехи
р= V Z2+K2, где У — квадратурная составляющая взаимной
помехи. С учетом изложенного плотность вероятности модуля взаимной
помехи [5]
w (р) « р е-Р*/2 [l+9fB4(p)+^-B6 (р)1 , (13.20)
где
*e— S ам (13-21)
— средневзвешенное значение коэффициента эксцесса, согласно
[55]
а = М3/о3, (13.22)
многочлены В4(р) = (3/4)р4—6р2+6 и 56(р) = (5/8)р6—(45/4)р4 +
+45р2—30.
Формулы (13.17), (13.20) достаточны для расчета
помехоустойчивости при действии взаимных помех.
241
13.3. Фильтрация взаимных помех
Вероятность ошибки при когерентном приеме двух
противоположных сигналов в соответствии с плотностью вероятности (13.17)
[5]
Рош ^F(-q) [ 1+ JL- (<7*-3<72)] , (13.23)
где отношение сигнал-взаимная помеха
q* = l/no2, (13.24)
/z=2/, а2 — дисперсия взаимной помехи, F(x)—интеграл
вероятности (7:5).
Если коэффициент эксцесса у системы сигналов равен нулю,
т. е. 7=0» то вероятность ошибки согласно (13:23) Р0ш=/Г(—q) и
она должна совпадать с вероятностью ошибки (13.3), т. е. должно
иметь место равенство 2В//=1/2/а2. Таким образом, из сравнения
результатов фильтрации взаимных помех с помощью
энергетического и корреляционного методов следует, что дисперсия ВКФ
ШПС а2=1/4В, где база B = FT, F — ширина спектра ШПС, Т —
длительность ШПС. Следует напомнить, что дисперсия системы
сигналов а2 определена как среднеарифметическое значение (13.15)
дисперсий ВКФ отдельных пар ШПС (13.16). Если предположить,
что различия дисперсий ВКФ отдельных пар ШПС незначительны,
то и дисперсия ВКФ o2jk = о2 =1/4В. Вместе с тем в гл. 4,
посвященной системам ФМ сигналов, отмечалось, что дисперсия ВКФ
ФМ ШПС равна 1/2ЛГ, где N — число импульсов в ФМ сигнале.
Здесь нет противоречий, поскольку в гл. 4 дисперсия ВКФ ФМ
сигналов определялась в дискретных точках, а в данном параграфе
ВКФ определяется на интервале (—Г, Т) согласно (13.16).
Поэтому при расчете взаимных помех в ШСС с ФМ ШПС необходимо
полагать B — 2JN.
Обращаясь снова к вероятности ошибки (13.23), замечаем, что
при коэффициенте эксцесса y>0 вероятность ошибки
увеличивается. Напомним, что 7=0 соответствует одномерной плотности
вероятности гауссовского случайного процесса. Поэтому система
сигналов с коэффициентом у>Ъ по своим статистическим
характеристикам отличается от реализации гауссовского случайного
процесса. С ростом числа активных абонентов I взаимная помеха
нормализуется (второе слагаемое в квадратных скобках в (13.23)
стремится к нулю) и (13.23) не отличается от (13.3).
Таким образом, в ШСС с КР необходимо использовать такие
системы, у которых коэффициент эксцесса наименьший. В [5]
приведено сравнение двух систем ФМ сигналов с В = 64 и дана
оценка влияния их корреляционных свойств на помехоустойчивость
ШСС.
Первая система (У) основана на кодовых последовательностях
Уолша, которые являются строками матрицы Адамара. Вторая
система (П) является производной системой сигналов, кодовые
последовательности которой получались при помощи посимвольного
242
10
Рис. 13.2. Зависимость
вероятности ошибки в
ААС
умножения кодовых последовательностей Уолша на производящую
кодовую последовательность. Последняя была выбрана из условия
малости боковых пиков АКФ. Были подсчитаны все ВКФ обеих
систем (в дискретных точках) и определены дисперсии и
коэффициенты эксцесса. Для системы У: <т2 = 7,8-10"3, 7 = 20. Для системы
П: а2 = 7,7-10_3, у — 0,64. Разница между дисперсиями очень мала,
а коэффициенты эксцесса сильно отличаются. Это объясняется тем,
что ВКФ системы У имеют боковые пики гораздо больше, чем
ВКФ системы П. Была рассчитана средняя
вероятность ошибки. Для расчета исполь- о 2 4 д,
зовалась формула (13.23).
На рис. 13.2 приведены полученные
зависимости Р0ш от h для обеих систем, icf2^
Сплошной линией показана зависимость
1—F(q), соответствующая нормализации
взаимной помехи. Из рисунка видно, что
система П (с меньшим коэффициентом
эксцесса) обеспечивает меньшую вероятность
ошибки, чем система У. Если вероятность
ошибки Рош=Ю~5, проигрыш в отношении
сигнал-взаимная помеха относительно 1 —
—F(q) для системы У составлял 1,7 дБ, а
для системы П 0,172 дБ. Из сравнения
следует, что реальные системы сигналов дают
вероятность ошибки больше, чем в случае
нормализации взаимной помехи. Увеличение вероятности ошибки
(или проигрыш в отношении сигнал-помеха) существенно зависит
от выбора системы сигналов. Следовательно, выбор систем
сигналов для ААС имеет практическое значение.
Вероятность ошибки при некогерентном приеме двух
ортогональных сигналов [73]:
Рош = ] dZx ] w (Zlf Z2) d Z2, (13.25)
0 Zt
где Zb Z2 — огибающие согласованного и несогласованного каналов
оптимального приемника. (Когда передается один из
ортогональных сигналов, то один из каналов оптимального приемника
является согласованным с ним, а другой — несогласованным.) Двумерная
плотность вероятности w2(Zu Z2) равна произведению одномерных,
так как Z\ и Z2 статистически независимы, поскольку сигналы и
фильтры ортогональны. Одномерная плотность вероятности в
несогласованном канале определяется выражением (13.20); в
согласованном канале плотность вероятности также определяется но
(13.20), но с введением среднего значения, равного
нормированному значению сигнала. Вероятность ошибки зависит от
вероятности превышения огибающей в несогласованном канале уровня
Z2. Как следует из (13.20), вероятность превышения величиной р
некоторого уровня определяется в значительной мере
коэффициентом эксцесса у и квадратом коэффициента асимметрии а2. По-
243
скольку при существенных значениях р многочлены (13.22)
положительны, то второе и третье слагаемые в квадратных скобках
(13.20) будут увеличивать вероятность превышения величиной р
заданного уровня. Это приведет к увеличению вероятности
ошибки. Усредняя последовательно вероятность ошибки по всем
сочетаниям и по всем абонентам, можно показать, что в первом
приближении средняя вероятность ошибки определяется квадратом
коэффициента асимметрии системы а2 и коэффициентом эксцесса 7. При
этом правило выбора системы сигналов формулируется следующим
образом: при прочих равных условиях необходимо выбирать
систему сигналов с наименьшим квадратом коэффициента асимметрии
системы, или с наименьшим коэффициентом эксцесса системы, или
с наименьшими обоими коэффициентами.
Таким образом, в ШСС типа ААС целесообразно использовать
такие системы ШПС, корреляционные свойства которых близки к
свойствам гауссовского случайного процесса с нулевыми
коэффициентами эксцесса и асимметрии. Для реальной системы ШПС
коэффициенты эксцесса и асимметрии необходимо вычислять по
формулам (13.18), (13.19), (13.21), (13.22). Начальные моменты
ВКФ определяются по формуле [5]
mv Jk - mv {Rjk} « ± J Яу4 (т) d т, (13.26)
а центральные моменты Mvj^ — по известным соотношениям [55]
для начальных моментов mvjk. Усредняя по всем ВКФ, можно
найти соответствующие значения центральных моментов М3 и Мь
входящие в формулы (13.19), (13.22).
13.4. Оптимизация ААС с КР
Расчет помехоустойчивости ААС с КР возможен по известным
формулам (13.3), (13.4) или им подобным при отношении сигнал-
взаимная помеха, определяемом согласно (13.2). Но в (13.2)
число мешающих абонентов / случайно, так как число одновременно
работающих абонентов в ААС может изменяться во времени.
Поэтому необходимо иметь убежденность, что использование (13.2)
закономерно.
В работах [83, 84] доказано, что для расчета
помехоустойчивости ААС с КР достаточно использовать отношение
сигнал-взаимная помеха (13.2), используя среднее значение числа активных
(мешающих) абонентов Я, т. е. рассчитывать отношение сигнал-
взаимная помеха по формуле
/i2 = BA. (13.27)
где Х=т\{1}~т\{1а}, поскольку /а = /+1 и при /»1 la^L
Доказательство справедливости применения (13.27) в ААС с КР
позволило также решить проблему оптимизации ААС с точки зрения
выбора ШПС. Приведем только основные результаты отмеченных
работ [83, 84].
244
Число активных абонентов / случайное. Этот факт
определяется активностью абонентов, под которой понимаем вероятность
того, что абонент работает в данный момент времени. Обозначим эту
вероятность (активность абонента) через р. Пусть общее число
абонентов в ААС равно L. В таком случае распределение числа
активных абонентов описывается биномиальным законом /[73]
P, = C[p'(l-p)b-i, (13.28>
где С1ь — биномиальный коэффициент. Среднее значение Я и
дисперсия \х2 числа активных абонентов определяются следующим»
соотношениями:
X = pL, ц2 = р(1 — p)L. (13.29)
Активность абонента р может быть определена как предел р =
= Нт((7,Пер/7,ан), где Ган —время анализа; Гпер — суммарное
время передачи информации за время анализа, при усреднении по
ансамблю абонентов. Если активность абонента в данной ААС
известна, то она определяет соотношение между длительностью
информационной единицы, равной длительности сигнала 7, и
максимальным интервалом TmaXt приходящимся на одну
информационную единицу с учетом пауз, т. е.
Р = Т/Ттах. (13.30>
Соотношение (13.30) получается следующим образом. Допустим,,
что за время анализа Тан было передано N информационных
единиц, т. е. Тпер—NT. На каждую информационную единицу в
среднем приходится интервал Tmax=T/N. Если активными являются;
все абоненты, то активность р=1 и длительность сигнала Т
достигает максимального значения, равного Ттю.
Поскольку число активных абонентов случайно, то можно
ввести его коэффициент нестабильности
S = fiA, (13.31)
который в соответствии с (13.29)
6 = V(1— р)/р£« 1/Кр/, = 1/]/Х (13.32)
Приближенное равенство справедливо при р«С1, что обычно-
имеет место на практике. Для уменьшения нестабильности числа
активных абонентов необходимо увеличивать среднее число K=pL.
Этот вывод, как будет показано в дальнейшем, имеет
фундаментальное значение для ААС. Сначала рассмотрим более простой
случай, а именно: изменение отношения сигнал-взаимная помеха
в ААС.
Поскольку число активных абонентов случайно, то и отношение
сигнал-взаимная помеха на выходе приемника
h2(l)=B/l (13.33)
будет случайной величиной (более точно, дискретным, марковским
245
процессом). Введем коэффициент нестабильности отношения
сигнал-помеха
&п=внГк\ (13.34)
где й2, он — среднее и среднеквадратическое значения случайной
величины h2(l).
Следует отметить, что хотя закон распределения числа
активных абонентов известен (13.28), но моменты h2(l) в замкнутом
виде найти не удалось вследствие того, что / в формуле (13.33)
входит в знаменатель. Поэтому было предположено, что закон
распределения / имеет ярко выраженный максимум, а это
действительно имеет место для биномиального закона при К^>1. Поэтому,
используя асимптотический метод Лапласа, можно показать [83],
что
-л, в ! л . 1 \ в о я2 / . 1 \ в2
Я\я; X h А* V X ) А,3
(13.35), (13.36)
Последние приближения в (13.35), (13.36) сделаны потому, что
Я»1, по предположению. Подставляя (13.35), (13.36) в (13.34),
получаем, что 6л« 1/"|/Т~6, т. е. нестабильность отношения
сигнал-помеха совпадает с нестабильностью числа активных
абонентов в ААС. Таким образом, для уменьшения коэффициента
нестабильности отношения сигнал-помеха необходимо увеличивать
среднее число активных абонентов X=pL. В свою очередь, это
требование означает, что при постоянном общем числе абонентов в ААС
целесообразно увеличивать их активность р для стабилизации
отношения сигнал-помеха. Увеличение активности абонента р
возможно только за счет увеличения длительности используемых
сигналов Т до максимально возможного значения Гтах согласно
(13.30). Поэтому в ААС целесообразнее использовать сигналы с
максимально возможной длительностью, хотя из известной до
настоящего времени формулы (13.27) это не следует, так как в ней
не учитывается изменение числа активных абонентов во времени.
Сделанные выводы имеют качественный характер, поскольку
было проанализировано только изменение отношения
сигнал-помеха. В работе ,[84] дано доказательство этого принципиального
результата и при определении помехоустойчивости ААС. Показано,
что вероятность ошибки при приеме противоположных сигналов
Рош « F (—V2h) + (2 я)"1/2 2-4 б2 (2 /i2)3/2 exp (—Л2), (13.37)
где h2 определено согласно (13.27). Первое слагаемое F(—V2h)
представляет собой вероятность ошибки без учета случайности
числа активных абонентов, т. е. когда расчет ААС производится при
замене случайного числа абонентов I его средним значением.
Последнее слагаемое вызывает увеличение ошибки. Оно
пропорционально квадрату нестабильности числа активных абонентов. Чем
меньше коэффициент нестабильности, тем меньше вероятность
ошибки. В соответствии с (13.32) б2=1Д, т. е. для уменьшения ве-
246
f3l
rS
\Л--Г
7-/=7у^Д
1
1 1
.Iff
Ж
ш
Ш
70'
Р
ош
Рис. 13.3. Влияние
нестабильности отношения
сигнал-помеха на
вероятность ошибки
роятности ошибки необходимо увеличивать среднее число
активных абонентов. Этот вывод совпадает с выводом, полученным
после рассмотрения нестабильности отношения сигнал-помеха.
На рис. 13.3 изображена зависимость вероятности ошибки Рош
от отношения сигнал-помеха h при различных значениях среднего-
числа активных абонентов А,«1/62. Из ри- г z 3 ^ /?
сунка видно, что при А,= 100 влияние слу- цу.
чайности числа активных абонентов
незначительно. Однако при малом числе актив- W
ных абонентов вероятность ошибки
увеличивается. Например, при Х=1 увеличение
вероятности ошибки значительно, особенно
при больших отношениях сигнал-помеха (на /tf~7L
два порядка). В этом случае необходимо
для получения прежней вероятности
ошибки увеличивать отношение сигнал-помеха
примерно на 0,5 дБ, это эквивалентно
уменьшению числа абонентов на 12%, что крайне
нежелательно, если учитывать
необходимость повышения эффективности
использования спектра радиочастот.
Как следует из приведенного материала, для повышения
эффективности ААС необходимо увеличивать среднее число активных
абонентов X. Из формул (13.29), (13.30) следует, что
\ = pL = TL/TMX. (13.38)
Вместе с тем от X зависит и И? (13.27). Подставляя (13.38) в
(13.27) и учитывая, что B = FTt получаем
h2 = FTmax/L=BMaJL. (13.39)
Из (13.39) следует, что отношение сигнал-помеха в конечном
счете определяется только максимальной базой Bmax = FTmax и
общим числом абонентов L и не зависит от длительности сигнала.
Поскольку с увеличением длительности сигнала Т до
максимально возможного значения Ттах увеличивается X и уменьшается
вероятность ошибки, то отсюда следует, что в ААС необходимо
использовать сигналы максимально возможной длительности.
В ряде ранних и в некоторых современных работах для
использования в ААС рекомендуются различные импульсные
сигналы. Как следует из материалов данной работы, подобные
рекомендации нельзя считать корректными. Наилучшими являются
сигналы максимальной длительности.
13.5. Фильтрация мощных ФМ структурных помех
При действии преднамеренных структурных помех мощность
Рп помехового ШПС может быть во много раз больше мощности
Рс полезного ШПС. Мощность сигнальной составляющей на
выходе согласованного фильтра в момент принятия решения (отсчета)
247
пропорциональна Рс, а мощность мешающей составляющей равна
PnWjkix), где Rjk(x) — ВКФ полезного А-го сигнала и /-го
мешающего. Величина т определяется смещением ВКФ относительно
момента отсчета. Отношение сигнал-помеха на выходе
где
92(т) = р*Д2,(т),
(13.40)
(13.41)
— отношение мощностей сигнала и помехи на входе приемника.
Отношение сигнал-помеха (13.40) зависит от т. Наименьшее
отношение сигнал-помеха
Я2; =Р2/?
2
max,
(13.42)
где /?тах=тах|/?3-ь(т) | — максимальное значение |##(т) |.
Очевидно, что всегда необходимо уменьшать максимальные боковые пи-
«и. Отсюда следует правило выбора сигналов, образующих
систему: при прочих равных условиях необходимо выбирать сигналы, у
которых максимальные пики ВКФ минимальны.
Если максимальные пики ВКФ уменьшены до среднеквадрати-
ческого уровня ajfc=or, то среднее отношение сигнал-помеха q2=
=p2a2. Если дисперсия ВКФ сигнала и помехи a2=l/2J3, то
среднее значение отношения сигнал-помеха
<72 = 2р2В,
(13.43)
10
что совпадает с отношением сигнал-помеха при воздействии
шумовой помехи (1.4).
Однако наличие больших пиков ВКФ сигнала и помехи может
привести к существенному снижению эквивалентного отношения
сигнал-помеха в соответствии с( 13.43). В работе [85] подробно
исследовано воздействие мощной структурной помехи в виде ФМ
ШПС на систему связи ФМ ШПС
в режиме поиска ШПС и в режиме
приема информации. Приведем
основные результаты [85].
На рис. 13.41 приведены
зависимости нормированного отношения р2,
необходимого для достижения либо
заданных характеристик
обнаружения в режиме поиска ШПС
(вероятность ложной тревоги Рл.т=10-3 и
вероятность пропуска Рпр=10~3),
либо заданной вероятности ошибок
(Рош=10"~3) в режиме приема
информации ![85]. Эти зависимости
приведены как функции
коэффициента эксцесса 7» характеризующего
-70
-20
С
*с~
*~-
В*?27у
1023
127
1023
12
16
Рис. 13.4. Зависимость
отношения сигнал-помеха от
коэффициента эксцесса и базы ШПС
1 Последующий материал данного параграфа написан на основе совместной
работы с А. В. Власовым [85].
248
отклонение плотности вероятности ВКФ от нормального закона.
Чем больше у, тем больше вероятность появления больших пиков.
ВКФ. При небольших у плотность вероятности ВКФ можно
приближенно представить рядом Эджворта [см., например, (13.17)].
Для реальных ШПС, используемых в качестве помех, коэффициент
Y может быть большим и в этом случае приближение рядом
Эджворта не является достаточным. Поэтому для корректного решения
задачи в [85] было использовано распределение Пирсона.
Из рис. 13.4 видно, что в режиме поиска ШПС необходимое
значение отношения р2 значительно выше, чем в режиме приема
информации. Так, при 5=127, 7=1» Для обеспечения работы системы
поиска необходимо иметь отношение р2 на 8 дБ больше, чем в
режиме передачи информации. Это объясняется тем, что в режиме
передачи информации решение принимается на основе анализа
одного отсчета. В режиме поиска принятие решения происходит на
основе анализа одного отсчета. В режиме поиска принятие
решения происходит на основе анализа всех интервалов
неопределенности, число которых равно базе ШПС В, причем для достижения
заданных характеристик обнаружителя необходимо, чтобы
вероятность ошибочного решения в одном интервале неопределенности
была мала. Это достигается увеличением отношения р2.
В работе [85] рассмотрены два способа выбора структурной
помехи. Во-первых, структурная помеха может представлять ФМ —
сигнал со случайным чередованием нулей и единиц. В этом случае
структурную помеху можно рассматривать как ФМ сигнал,
произвольно выбранный из полного кода. Поэтому распределение
пиков ВКФ организованной таким образом структурной помехи и
ШПС системы связи будет иметь дисперсию ВКФ <т2=1/В и
коэффициент эксцесса y^I- С другой стороны, структурная помеха
может иметь вид, близкий одному из сигналов системы. Это
соответствует, например, организованной ретранслированной помехе. В
этом случае мешающее действие структурной помехи существенно
зависит от статистических характеристик системы используемой
ШПС, в частности, от коэффициента эксцесса у распределения
пиков ВКФ.
Пусть система поиска работает с сигналом мощности Рс и
обеспечивает при этом Рл.т=Ю~3, Рдо^Ю-3. Будем считать систему
связи вышедшей из рабочего состояния, если она имеет
характеристики хуже заданных, и определим отношение р2, необходимое для
того, чтобы система находилась в рабочем состоянии. Из рис. 13.4
следует, что в первом случае (случайная структурная помеха) для
этого требуется, чтобы отношение р2 превышало —1 дБ при 5=127
и —9 дБ при В =1023. Отсюда следует, что при заданной мощности
помехи с увеличением базы используемого в системе ШПС
эффективность помехи падает. Это объясняется уменьшением дисперсии
распределения пиков ВКФ с ростом базы.
Во втором случае (помеха принадлежит к используемой
системе ШПС) мешающее воздействие структурной помехи
существенно зависит от коэффициента эксцесса 7 распределения пиков ВКФ
249
ш
системы сигналов. Так при использовании сигналов с большим
коэффициентом эксцесса система находится в рабочем состоянии,
если только отношение р2 превышает 1 дБ (В =1023), т. е. на 10 дБ
больше по сравнению с воздействием случайного ШПС.
Таким образом, ретранслированная ФМ помеха,
принадлежащая к системе используемых ШПС и обладающая большими
пиками ВКФ, может привести к большему подавлению системы
связи по сравнению с воздействием шумовой помехи или случайной
структурной помехи. Дополнительные потери могут составлять
10 дБ. Для устранения эффекта дополнительного подавления
необходимо в системе связи использовать ШПС с малыми пиками
ВКФ.
13.6. Фильтрация мощных ДЧ структурных помех
Как было отмечено в гл. 10, борьба с мощными помехами
должна вестись с учетом знания распределения энергии сигнала и
помехи на частотно-временной плоскости. Для сигналов и помех в
виде дискретных частотных (ДЧ) ШПС это особенно наглядно,
поскольку такие ШПС имеют ярко выраженное распределение
энергии в М из М2 квадратов
частотно-временной плоскости (см.
рис. 10.1).
При передаче информации в
системе связи каждый полезный
сигнал принимается на фоне
мешающих сигналов, имеющих
такую же структуру. На рис. 13.5
полезный ДЧ сигнал на интервале
0, Т показан прямоугольником,
Рис. 13.5. Частотно-временная плос- выполненным «жирными» линия-
кость с ДЧ сигналом и ДЧ помехой ми. Он «перекрывается» на
частотно-временной плоскости двумя
соседними ДЧ сигналами от одного мешающего абонента.
Штриховка у мешающих сигналов повернута на я/2 относительно
штриховки полезного сигнала. Сдвиг между мешающими сигналами
относительно полезного равен М. Хотя мешающие сигналы
полностью «перекрывают» полезный сигнал по времени, из-за
различия в кодовых последовательностях на частотно-временной
плоскости перекрываются только два элемента с двойной штриховкой
на рис. 13.5. Именно эти элементы и будут определять снижение
помехоустойчивости. Такое перекрытие полезного сигнала
соседними сигналами от мешающего абонента является аналогом
периодической взаимокорреляционной функции (ВКФ) этих сигналов.
Будем называть подобное перекрытие периодическим режимом. В
работе [86] определены статистические характеристики числа
совпадений сигналов и помех в виде ДЧ ШПС. Приведем основные
результаты работы [86].
Предположим, что структурная ДЧ помеха, так же, как и
сигнал, содержит М элементов. Допустим, что каждый элемент может
250
ей.
I
4
ш
-T+At
0 At
Г T+At t
равновероятно занимать одно из М положений в столбце частотно-
временной плоскости (см. рис. 10.1). Вероятность совпадения
элемента помехи с элементом сигнала при этом предположении равна
1/М, а вероятность несовпадения 1—1/М. Допустим теперь, что на
ДЧ сигнал действуют X помех. Вероятность несовпадения всех
элементов от X помех с элементом сигнала в одном из столбцов будет
равна (1—1/М)1. Соответственно вероятность совпадения будет
равна 1—(1—1/М)К Вероятность п совпадений в столбцах
определяется биномиальным законом и записывается следующим
образом:
Рмл(п)=С*м[1—(1 — 1/М)*]п(1 — 1/Мр<м-»\ (13.44)
Среднее значение и дисперсия числа совпадений по
определению [55]
ля = Л1 [1 — (1 — MMfbol =М[1— (1 — ЦМ)Ц{\— 1/М)\
(13.45), (13.46)
Если %4£М, а Л1»1, то биномиальный закон (13.44) стремится
к пуассоновскому. По мере увеличения X закон (13.44) стремится к
нормальному закону при условии, что М»1. В общем случае при
М>1 из формул (13.45), (13.46) находим
ля = Л1[1— ехр(—Х/М)], (13-47>
о2п & М [1—ехр (—Х/М)] exp {—Х/М). (13.48)
Если Х<М, то из (13.47), (13.48) имеем п%^Ху о2п~Х и
биномиальный закон (13.44) стремится к пуассоновскому, т. е.
Рм.х(п)=Хпе-*/п1 (13.49)
Если Х=1, то Рмд(я) =е~1/п\ и наиболее вероятными будут
случаи, когда или нет ни одного совпадения (п = 0), или одно
совпадение (я=1).
При Х-+М биномиальный закон распределения стремится к
нормальному со средним значением Я^ = М(1—е-1) =0,63 М и с
дисперсией а2п~0,25М. При Х*>М среднее значение пу,
стремится к М, а дисперсия а2п-И), т. е. нормальный закон стремится к
дельта-функции с Ях = М. При этом вероятность полного
совпадения всех элементов сигнала стремится к единице, что является
естественным.
Рассмотрим помеху в виде оптимальных ДЧ сигналов,
которыми являются сигналы, имеющие попарно не более одного
совпадения (п=0 или п=1) при любых временных смещениях друг
относительно друга. При этом на каждый ДЧ сигнал накладывается
только один мешающий, что соответствует апериодическому
режиму работы.
При передаче информации в радиотехнической системе ДЧ
сигналами каждый из них перекрывается последовательностями
мешающих ДЧ сигналов. При полном перекрытии оптимальных ДЧ
сигналов число совпадений п может принимать уже три значения:
251
О, 1 или 2. Число совпадений /г=2 появляется тогда, когда
полезный ДЧ сигнал имеет по одному совпадению с частями обоих
соседних ДЧ сигналов, которые перекрывают полезный. Для
сигналов, представленных на рис. 13.5 при дискретных временных
сдвигах, числа совпадений составляют последовательность 0, 1, 2, О,
2, 1.
Закон распределения числа совпадений оптимальных ДЧ
сигналов неизвестен ни для апериодического режима работы (п=0
или 1), ни для периодического (/1=0, 1 или 2). Однако для
периодического режима задачу можно упростить следующим образом.
Обозначим через vo, vi, V2 число совпадений с я=0, п=1 и п=2.
Для сигналов рис. 13.5 vo=2, vi=2, V2=2. Можно показать, что для
любых оптимальных ДЧ сигналов при периодическом режиме
имеют место следующие два уравнения: vo+vi+V2=Af, v\+2v2=M. Из
этих уравнений следует, что всегда V2=vo. Если определить
вероятность появления щ совпадений как отношение Vj/M, то среднее
-значение числа совпадений равно единице, что следует из
равенства V2=vo. Исходя из этого факта, допустим, что в случае
мешающих сигналов в виде оптимальных ДЧ сигналов при любом
временном сдвиге всегда будет только одно совпадение.
Используя такое допущение, перейдем к рассмотрению
воздействия X помех в виде оптимальных ДЧ сигналов, каждая из
которых дает одно совпадение с полезным сигналом. Суммарное
число совпадений при Х^М может быть равно или к, или X—1, или
X—2,..., или 1. Число совпадений п=Х имеет место тогда, когда
-сигналы помех поражают различные элементы, а /1=1, когда все
помехи поражают один и тот же элемент.
Исследования привели к следующему рекуррентному виду
закона распределения вероятностей Рмд(я) совпадений при X
помехах:
VM,x(n)=(n/M)PM.x-i(n) + (l-n/M +1/М)Рт,А_1(л-1), (13.50)
причем Pm,i(1) = 1 по определению (при Х=1 всегда имеем одно
совпадение), Рмд(1) = 1/А1Лг-1, а
Рм,х(Х) = (1-Ш+1/М)Рм,х-1(Ь-1)- (13.51)
Если Х<^М, то можно показать, что Рмл(Х) ~ехр[— Х(Х— l)/2Af],
Рм,ь(Х— \)~[Х(Х— 1)/2ЛГ]ехр'[— (X— I) {X—2)/2ЛГ]. При малых X
наиболее вероятное значение числа совпадений равно Х> т. е.
элементы, пораженные различными помехами, не совпадают. С
увеличением X наиболее вероятное число совпадений становится меньше
Я.
Среднее значение числа совпадений по определению равно
лх = 2 пРм.х(п). (13.52)
Подставив в (13.52) рекуррентное определение Рм,&(я) (13.50),
преобразуя его, получаем
252
nK = %(n+l — n/M)PM.x-i(n). (13.53)
Поскольку Пх-\ = 2 лРм,а-1(л)> то из (13.53) получаем рекур-
рентную формулу п%=п%^х(\—1/М) + 1, причем ui = l. Вычисляя
последовательно значения яь, &=1, X, можно найти, что
п% = М(\ — 1/М)[1 — (1 — 1/Л1)Л-1]+1. (13.54)
В пределе из (13.54) имеем
пк^М[1 — (1 — 1/Л*)ехр(—(Я— 1)/ЛЦ. (13.55)
При Л1»1 и Я3>1, пренебрегая единицей по сравнению с этими
величинами, из (13.55) получаем экспоненциальный закон (13.45).
Следовательно, среднее число совпадений не зависит от выбора
сигналов и совпадает со средним числом при случайных ДЧ
сигналах. Дисперсия числа совпадений для оптимальных ДЧ
сигналов не была найдена. Но есть основания считать, что ее закон
изменения близок к изменению дисперсии (13.46). Во всяком
случае с ростом к дисперсия числа совпадений должна стремиться к
нулю, так как вероятность поражения всех М элементов в свою
очередь стремится к единице.
14. ОБНАРУЖЕНИЕ И АНАЛИЗ ШПС
В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
14.1. Методы обнаружения и анализа ШПС
в условиях априорной неопределенности
В последнее время за рубежом уделяется большое внимание
обнаружению ШПС в условиях априорной неопределенности [87—
90], когда ряд параметров ШПС (в том числе и закон модуляции
или манипуляции) априорно неизвестен. При этом обнаружение
ШПС может сочетаться с анализом (определением или
измерением) неизвестных параметров ШПС. Обнаружение ШПС
необходимо в тех случаях, когда надо установить факт работы
широкополосной системы связи (ШСС) с ШПС, а обнаружение и анализ
ШПС необходимы в тех случаях, когда надо либо извлечь
передаваемую в ШСС информацию, либо создать наиболее эффективную
помеху для подавления ШСС [87, 89].
Методы обнаружения и анализа ШПС во многом зависят от
степени априорной неопределенности, которая имеет место в реальной
задаче. Например, если неизвестны все параметры ШПС, в том
числе диапазон частот, то поисковый приемник [91] должен
производить поиск и обнаружение ШПС в широком диапазоне частот. В
этом случае поисковый приемник представляет собой
энергетический обнаружитель или радиометр. Если известна ширина спектра
253
ШПС, но неизвестна несущая частот, то можно применить либо од-
ноканальный приемник с перестройкой частоты (последовательный
анализ), либо многоканальный приемник (параллельный анализ)
[91], причем ширина полосы канала (радиометра) должна быть
равна ширине спектра ШПС. Если же известно, что в ШСС
возможно применение нескольких ШПС с известной формой, то
поисковый приемник будет многоканальным, а в каждом канале
должен стоять согласованный фильтр для конкретного ШПС. Таким
образом, методы обнаружения и анализа ШПС и их схемная
реализация во многом зависят от априорной информации о ШСС.
Вместе с тем основой для сравнения возможных методов
обнаружения ШПС является энергетический обнаружитель или
радиометр [91, 92]. Поэтому сначала будет рассмотрен именно такой
обнаружитель, а затем и другие [87 ... 90].
14.2. Энергетический обнаружитель ШПС
Допустим, что априори известны диапазон частот, несущая
частота и ширина спектра ШПС. Неизвестным является сам факт
работы ШСС, а также неизвестны остальные параметры ШПС, в том
числе и его форма. Положим, что мощность ШПС в точке приема
Рс, а его спектральная плотность мощности
NC = PJF. (14.1)
Схема энергетического обнаружителя или радиометра
приведена на рис. 14.1 [63, 93]. Полосовой фильтр (ПФ) имеет ширину
полосы пропускания, равную ширине спектра ШПС. В качестве
полосового фильтра обычно используется УПЧ. (Отметим, что на
рис. 14.1 не показаны входная цепь, преобразователь частоты и
гетеродин, входящие в реальный радиометр. Для выяснения
особенностей обнаружения ШПС они не имеют принципиального
значения.) За ПФ следует квадратичный детектор (КД), напряжение
с выхода которого поступает на интегратор (И). В качестве
интегратора используют фильтр нижних частот (ФНЧ). Напряжение
ПФ
КД И ПУ
жнхн^к
Рис. 14.1. Структурная схема
энергетического обнаружителя (радиометра)
Рис. 14.2. Рабочие характеристики
энергетического обнаружителя
<лр
0,8
0,6
0,2
\d~~z /
s^fj^
^**7а
<^oZ'
*Y
0,2 QJt
0,6
0,8
ГЛ.Т
254
с выхода интегратора поступает на вход порогового устройства
(ПУ), где оно сравнивается с заранее установленным порогом. На
выходе ПУ имеет место решение: есть ли ШПС или его нет.
Постоянная времени интегратора (или постоянная времени ФНЧ)
равна времени анализа Та. С интервалом Та производится
принятие решения.
Прием ШПС производится на фоне собственных шумов
радиометра, которые характеризуются спектральной плотностью
мощности
N0 = kT0(D-l)t (14.2)
где £=1,38-Ю-13 Вт-с/гр— постоянная Больцмана, 7,0 = 293°К —
комнатная температура в градусах Кельвина, D — коэффициент
шума приемника.
Энергетический обнаружитель формирует величину [63, 93]
£2 = ^tV(/)d/, (14.3)
где x(t) —колебание на выходе полосового фильтра, и сравнивает
величину £2 с некоторой константой [63]
72=2(1 +N0/NC) \n[c(l+Nc/N0)»/4. (14.4)
В (14.4) с—пороговое значение, определяемое критерием приема
ШПС, а
N=2FTa (14.5)
— число отсчетов процесса x(t) за время анализа Та. Формула
(14.5) соответствует теореме отсчетов Котельникова. По сути
дела, энергетический обнаружитель производит обнаружение
шумового сигнала или ШПС со спектральной плотностью мощности Nc
(14.1) на фоне собственных шумов со спектральной плотностью
мощности А/о (14.2).
Обнаружение ШПС при таких априорных условиях
характеризуется [63] вероятностью ложных тревог и вероятностью пропуска
сигнала:
IW;T*/2)
,т T(N/2) v '
р ч2 2 NC + N0) (
пр Г (N/2)
где Г(х), Г(х, у) —гамма-функция и неполная гамма-функция
соответственно. При малом отношении сигнал-шум на входе (Afc<C
<СЛ/о), что обычно имеет место на практике, для уверенного
обнаружения необходимо иметь большую выборку (N»l), т. е.
большое время анализа. При этом формулы (14.6), (14.7) заменяются
асимптотическими [63]:
P*.*Kl-F[{y-VN)V2]> (14.8)
255
PnV^F[(yVN0/(Nc + N0)-V^)V2)9 (14.9)
где F(x) —интервал вероятности (7.5).
На рис. 14.2 приведены рабочие характеристики
энергетического обнаружителя (зависимость правильного обнаружения ШПС
1—РПр от вероятности ложных тревог РЛт), которые определяются
параметром обнаружения
*--?-(-£-)'■ <141°>
Параметр d2 является отношением сигнал-шум на выходе
энергетического обнаружителя. Как следует из рисунка, чем больше d2>
тем больше вероятность правильного обнаружения ШПС 1—РПр
при заданной вероятности ложных тревог Рл/Г.
В случае критерия максимального правдоподобия порог с=1
[63], вероятности (14.8), (14.9) становятся равными друг другу и
представляют собой вероятность ошибки
Pm**l-F(d/2)-' (14.11)
Чем больше d, тем меньше вероятность ошибки.
Для определения .необходимого времени анализа ШПС
положим, что параметр d задан. Заменим в (14.11) число отсчетов N
согласно (14.5) и спектральную плотность мощности ШПС Nc
согласно (14.1). В результате находим время анализа обнаружения
ШПС при заданных характеристиках обнаружения
Tu=Fd*(PjNJ-*. (14.12)
Значение времени анализа (14.12) приведено также в работах
[87, 88, 90]. Из (14.12) следует, что время анализа увеличивается
с ростом ширины спектра ШПС, т. е. чем больше ширина спектра
ШПС F, тем больше время анализа. Это объясняется тем, что с
ростом ширины спектра ШПС уменьшается его спектральная
плотность Л/с в соответствии с (14.1). Хотя с ростом F растет число
отсчетов (14.5), уменьшение спектральной плотности Nc изменяется
согласно квадратичной зависимости (14.10). Из (14.12) следует
также, что время анализа Тл увеличивается при увеличении
требуемого отношения сигнал-шум на выходе d2 и при уменьшении
отношения сигнал-шум на входе Pc/No, причем отношение Pc/N0 входит
в степени «—2», что еще более увеличивает время анализа Га.
Вместе с тем отметим, что основным результатом, вытекающим из
(14.12), является пропорциональное увеличение времени анализа
(обнаружения) ШПС при увеличении ширины его спектра F.
Таким образом, увеличение ширины спектра ШПС приводит к
увеличению его энергетической скрытности. Перейдем к рассмотрению
более сложных случаев обнаружения ШПС.
14.3. Оптимальный обнаружитель m-ичной ШСС с ШПС
В работе [90] решена задача обнаружения m-ичной ШСС с
ШПС. На рис. 14.3 представлена схема оптимального
многоканального некогерентного обнаружителя [90] в предположении, что в
25в
ШСС используется т ШПС для передачи информации и что
форма ШПС известна в точке приема. Кроме того, схема рис. 14.3
соответствует малому отношению сигнал-шум на входе. При
отмеченных предположениях оптимальный обнаружитель содержит т
каналов по числу ШПС, в каждом из которых стоит согласованный
1СФ1
н
3
■ ■
W
д
iflM
+
| ы\^\ ГФ [*\ехр |^ЦфНч|
№
Рис. 14.3. Структурная схема обнаружителя m-ичной ШСС
фильтр (COi... СФт), предназначенный для приема i-ro ШПС, / =
= 1,т. За согласованными следуют детекторы огибающих (D), а
затем блоки нелинейные (/0) с характеристиками ивых = 10(ивх), где
/о — модифицированная функция Бесселя нулевого порядка.
Напряжения с выходов всех каналов суммируются в сумматоре ( + ),
а затем сумма поступает на блок нелинейности с логарифмической
характеристикой мВых = 1п(мВх). Затем напряжение поступает на
гребенчатый фильтр (ГФ), настроенный на частоту повторения
ШПС, равную 1/Г, где Т — длительность ШПС. После
гребенчатого фильтра следует блок нелинейности с экспоненциальной
характеристикой мВых = ехр(мВх), затем ФНЧ, память которого равна
длительности ШПС Т.
Основной результат работы [90] заключается в следующем.
Характеристика обнаружения d\ (отношение сигнал-шум на
выходе) оптимального обнаружителя, представленного на рис. 14.3,
выражается через характеристику обнаружения d\ (14.10)
энергетического обнаружителя и через параметры ШПС следующим
образом:
d\=d\Blm,
(14.13)
где база ШПС B = FTt a m — число ШПС, используемых для
передачи информации.
Из (14.13) следует, что чем больше база ЩПС В, тем больше
отношение сигнал-шум на выходе оптимального обнаружителя по
сравнению с энергетическим обнаружителем. По сути дела
оптимальный обнаружитель использует наиболее полную информацию
о ШПС — знание их формы. Эта априорная информация заложена
в импульсных характеристиках согласованных фильтров схемы,
представленной на рис. 14.3. В свою очередь, увеличение объема
алфавита m приводит к повышению скрытности ШСС, так как
снижает отношение сигнал-шум d20 (14.12).
Используя определение отношения сигнал-шум на выходе
энергетического обнаружителя (14.10), отношение сигнал-шум на
выходе оптимального обнаружителя (14.1) и базы ШПС, находим вре-
9—111 257
мя анализа (обнаружителя) ШПС оптимальным обнаружителем:
Tb = mT-ldl(Pc/Nbr2 (14.14)
Как следует из (14.14), время анализа Тл не зависит от ширины
спектра ШПС, поскольку она в неявном виде входит в импульсные
характеристики согласованных фильтров, т. е. учитывается в
процессе анализа. Следует отметить, что время анализа
увеличивается при увеличении объема алфавита m и при уменьшении
длительности ШПС. Если первый фактор определяется влиянием пг на
d\ (14.13), то второй фактор — увеличение Га при уменьшении Т—
определяется памятью гребенчатого фильтра и фильтра нижних
частот, которая равна длительности ШПС Т. Поэтому уменьшение
Т приводит к уменьшению объема накапливаемой выборки, что
приводит к увеличению времени анализа (обнаружения) ШПС.
14.4. Квазиоптимальный многоканальный обнаружитель ШПС
В работе [88] приведена схема многоканального обнаружителя ШПС,
занимающего промежуточное положение между энергетическим обнаружителем
(рис. 14.1) и оптимальным обнаружителем (рис. 14.3). Обнаружитель,
приведенный в [88], назовем квазиоптимальным, так как хотя он и не содержит
информацию о форме ШПС, но учитывает распределение энергии ШПС на
частотно-временной плоскости.
На рис. 14.4 представлено распределение энергии для наиболее характерных
случаев обнаружения ШПС. На рис. 14.4,а представлено распределение
энергии фазоманипулированного (ФМ) сигнала. Он полностью занимает весь
интервал Т и полосу частот F. Соответственно его база B=FT равна максимально
возможному значению. На рис. 14.4,6
представлено распределение последовательности
ФМ сигналов, причем моменты их появления
случайны. База ФМ сигналов в этом
случае Bo=FTo, причем поскольку Го<7\ то
и £0<В. Пусть число ФМ сигналов за
время Т равно Ьу тогда этому ЬВ0^В.
Сигналу подобного вида соответствует
время — импульсная модуляция (ВИМ), в
которой в качестве модулируемого импульса
используется ФМ' сигнал. Поэтому ШПС,
представленный на рис. 14.4,6, можно
назвать ВИМ—ФМ.
/
/
ft
F
f\
Г
1
[ Г
ШПИЛИ!
ФМ а)
1-
*-
J 1 LI ' " I I"
a[x Tff
1 ВИМ-ФМ б)
---^r4f--_-
ДСЧ В) •
1
. | *В4| | $£»|
-
йим-чим-фм ,% '
t
t
L
г t
t
Рис. 14.4. Распределение энергии ШПС на
частотно-временной плоскости
На рис. 14.4,в представлен дискретный составной частотный (ДСЧ) сигнал
с базой элемента Bq=F0To. Число частотных полос M=*F/Fq, На рис. 14.4г
представлен ДСЧ сигнал со случайной модуляцией по времени и по частоте. База
элемента Bq—FqT0. Сигнал подобного вида представляет собой комбинацию
258
ВИМ с частотно-импульсной модуляцией т. е. такой ШПС можно назвать
ВИМ—ЧИМ—ФМ.
На рис. 14:5 приведена схема квазиоптимального обнаружителя ШПС [88],
который состоит из М каналов. Число каналов определяется структурой ШПС.
Каждый канал состоит из полосового фильтра (ПФ) с полосой пропускания
F0—F/My детектора огибающей (Д) и порогового устройства (ПУ , i*=l, M).
С выходов ПУ напряжение в виде 1 или 0 поступает в сумматор ( + ), а затем
на цифровой детектор со «скользящим окном» (ЦДСО). За ЦДСО следует ПУ,
на выходе которого образуется решение.
Рис. 14.5. Структурная
схема квазиоптимальио-
го обнаружителя ШПС
• * •
• • •
L*|n<pM|-4^J-Hny«K
+
-*|1йй|-^-[пу}
Приемник, изображенный на рис. 14.5, может работать в двух режимах.
Во-первых, в режиме регистрации превышения порога в любом из М каналов
(импульсный режим). При этом ШПС считается обнаруженным, если на выходе
сумматора имеется хотя бы один импульс, а ЦДСО просто фиксирует
превышение порога. Во-вторых, может использоваться ЦДСО по следующему принципу:
в ЦДСО производится иод счет -числа 'импульсов за время некоторого интервала;
если это число на данном интервале (длительности «окна») равно £, а на
предыдущем интервале k—1, то происходит превышение порога в ПУ, и выдается
решение «ШПС есть». Поэтому ЦДСО должен подсчитать число импульсов на
определенном интервале на выходе сумматора и сравнить его с числом на
предыдущем интервале. Поэтому ЦДСО содержит счетчик, цифровую линию
задержки, компаратор. Назовем такой режим накопительным, так как ЦДСО
по сути дела осуществляет накопление импульсов за интервал «окна».
Опуская математические выкладки, приведем основные результаты работы
[88]. На рис. 14.6 приведены зависимости требуемого отношения сигнал-помеха
E/No от базы элемента Bo=\F0To для ДСЧ—ФМ сигнала (рис. 14.4,в) [88].
Энергия Е равна сумме энергий всех ШПС, число которых 6 = 103, т. е. £=
=£06, а Ео=РсТ0. Вероятность правильного обнаружения РПр = 0,5: частота
ложных тревог Va.T = F-\0-n. Сплошная линия с k — l соответствует
импульсному режиму обнаружения, сплошная линия с оптимальным значением £0pt —
накопительному режиму. Штриховая линия соответствует энергетическому
обнаружению. Из рис. 14.6 следует, что с ростом базы элемента Во требуемое
значение отношения сигнал-шум растет, так как при постоянной длительности
элемента с ростом В0 растет ^0, а это приводит к необходимости увеличения
времени обнаружения (или энергии сигнала) в соответствии с (14.11). Кроме
того, использование накопительного режима с ЦДСО (кривая с £0pt) дает
выигрыш в 3,3 дБ. Следует отметить также, что с ростом базы элемента Во
простой энергетический обнаружитель может быть более эффективным
(штриховая прямая), чем квазиоптимальный обнаружитель (схема на рис. 14.5).
На рис. 14.7 [88] приведены зависимости требуемого отношения сигнал-шум
при обнаружении ШПС вида ВИМ—ФМ (рис. 14.4,6) в зависимости от
интервала Т. Сплошные линии с k=\ соответствуют импульсному режиму
квазиоптимального обнаружителя, сплошные линии с £0пт — накопительному режиму
9* 259
квазиоптимального обнаружителя, а штриховые линии—энергетическому
обнаружению. Ширина спектра F=10 МГц, T0=1/F=0,1 мкс, вероятность правильного
обнаружения РПр=,0,5, частота ложных тревог Wt^I'O-4 1/с. Число импульсов
Ь = 102, 103, W. Из рисунка следует, что при энергетическом обнаружении и
/ ю В0 Ю+ W'3 10~г ТО'1 7 Г, с
Рис. 14.6. Характеристики обнаружения ДСЧ—ФМ сигналов 6=103 импульсов
(B=FT=W)
Рис. 14.7. Характеристики обнаружения ВИМ—ФМ сигнала
при накопительном режиме квазиоптимального обнаружения требуемое
отношение сигнал-шум растет с ростом Т. Это объясняется тем, что графики
рис. 14.7 построены при Theorist. Поэтому увеличение Т приводит к
относительному уменьшению Г/Го, что и вызывает необходимость увеличения
отношения сигнал-шум. Постоянство характеристик при импульсном режиме (&=1)
объясняется, по-видимому, независимостью принятия решения в пороговом
устройстве ПУ (при ВИМ—ФМ сигнале Л1 = 1) от длительности элемента Г0, так
как в канале нет последетекторного накопления.
На рис. 14.8 [88] приведены зависимости выигрыша G в использовании
накопительного режима с ЦДСО в квазиоптимальном обнаружителе при
обнаружении ДСЧ—ФМ сигнала для различного числа фильтров N=F/F0 и баз
элемента В0. Выигрыш построен как функция числа элементов Ь на интервале
обнаружения Г. Чем больше число импульсов, тем больше выигрыш, но он
уменьшается с увеличением числа фильтров.
На рис. 14.9 [88] приведены рекомендации по выбору режима
обнаружения. На рис. 14.9 приведены три кривые при следующих общих данных:
вероятности правильного обнаружения />ПР=0,5, частоте ложных тревог Ул.т»
=77-10-11. Кривая с В0=\ соответствует следующим ШПС видов: ДЧ, ВИМ,
ВИМ—ЧИМ. Кривые с £0=10 и 102 соответствуют следующим ШПС: ДСЧ—
ФМ, ВИМ—ФМ, ВИМ—ЧИМ—ФМ. По оси абсцисс отложено число импульсов
Ь, по оси ординат база В. Правый нижний заштрихованный угол соответствует
нереальным 6, так как должно выполняться условие ЬВ0^В. Если для данной
260
ШСС точка с координатами (bt В) попадает выше кривых, то для обнаружения
ШСС целесообразно использовать квазиоптимальный обнаружитель (схема при*
ведена на рис. 14.5). Если же точка (Ь, В) лежит ниже кривых, то для
обнаружения ШСС целесообразнее использовать энергетический приемник (схема
приведена на рис. 14.1).
•6,46 _ , , , в
Рис. 14.8. Зависимости от выигрыша при обнаружении ШПС
Рис. 14.9. Области применения квазиоптимального и энергетического
обнаружителя
14.5. Анализ параметров ^-последовательностейх
Наряду с обнаружением ШПС часто возникает задача определения их
параметров, в частности определение параметров ^-последовательностей [7].
Это объясняется тем, что в настоящее время во многих системах связи с шу-
люподобными сигналами в качестве носителя информации используются фазо-
манипулированные сигналы (ФМ), модулированные усеченными М-последова-
тельностями [7]. Основной характеристикой М-последовательностей является
степень примитивных многочленов п. Если величина п известна, то длина
сигнала (его база) определяется выражением В=2п—1 и для обнаружения
можно применить методы, используемые при обнаружении сигналов с точно
известными параметрами. Однако представляет интерес исследование методов
обнаружения и анализа таких сигналов при априорной неопределенности
относительно степени примитивного многочлена принимаемого сигнала.
В работе [94] рассмотрен метод обнаружения псевдослучайных ФМ сигналов,
позволяющий различать случайную последовательность и М-последовательность
и определять степень примитивного многочлена п М-последовательности.
Приведем основные результаты [94]. Пусть на вход приемника поступает ФМ
сигнал с несущей частотой f0 и тактовой частотой fT. Допустим, что при помощи
1 Данный параграф написан на основе совместной работы с А. В.
Власовым [94],
261
панорамного приемника или какого-либо другого приемника
автоматизированного типа эти параметры измерены и известны в точке приема [91]. В этом
случае принятый сигнал после переноса в область видеочастот превращается в
видеочастотную двоичную кодовую последовательность, которая и поступает на
вход исследуемого обнаружителя. Таким образом, будем считать, что на входе
обнаружителя может быть или двоичная псевдослучайная последовательность
(ПСП) в виде Af-последовательности, искаженная с вероятностью ошибки в
одном двоичном символе р, или случайная последовательность (СП).
Обозначим через Н0 простую гипотезу о том, что принятая
последовательность носит случайный характер, альтернативной гипотезой для которой
является сложная гипотеза Ни состоящая в том, что принята ПСП, образованная
примитивным многочленом степени я. Обнаружитель принимает либо решение
уь о том, что справедлива гипотеза Я0, либо решение 7ь означающее принятие
гипотезы Ни причем решение vi принимается совместно с оценкой параметра п
принятого сигнала.
При решении подобной задачи необходимо задаться свойствами сигнала, на
основе которых будет производиться обнаружение, и построить оптимальный с
точки зрения выбранного критерия обнаружитель при заданной совокупности
свойств сигнала.
Рассмотрим блоковую структуру исследуемых сигналов. Будем называть
нулевым блоком последовательность нулевых символов, а единичным блоком —
последовательность единичных символов. На рис. 14.10 сплошной линией
показано распределение вероятности появления нулевого блока в СП, штриховой
линией — аналогичное распределение для неискаженной ПСП, образованной
примитивным многочленом степени п. Вероятность появления нулевого блока
длины i в случайной последовательности
Pi = l/2*+l (14.I5)
и совпадает при i^n—2 с вероятностью появления блока такой же длины в
ПСП. При i>n—2 распределения вероятностей появления блоков
определенной длины в СП и ПСП будут существенно различаться.
При построении структуры обнаружителя будем использовать то, что для
любой ПСП, образованной примитивным многочленом степени я, вероятность
появления нулевого блока длины i—n равна нулю, а вероятность появлении
нулевого блока длины г=/г—*1 в 2 раза больше, чем в случайной
последовательности.
Пусть за время наблюдения Т принято Nc.4 двоичных символов. Среднее
число блоков равно M=NC.4[2.
Предположим, что ле[яь Яг], где щ — минимально возможная степень;
л2 — максимально возможная степень примитивного многочлена. Сформируем?
в конце интервала наблюдения вектор
Л=(Лпа-ь ..., Лг, Л*+1 Л„5),
где Лг- — число принятых за интервал наблюдения нулевых блоков длины /„
и построим обнаружитель, принимающий решение на основе анализа
компонентов вектора Л.
Будем характеризовать два соседних компонента вектора Л кодовой
группой {Лг, Лг+i}. Тогда произвольный элемент кодовой группы соответствует
элементу §, если принята СП или ПСП с n>i+l; элементу т|, если принята
262
ПСП с rt=t+l, и элементу £, если принята ПСП с n<i+l. Из рис. 14.10
видно, что два соседних компонента Лг, Лг+1 вектора Л могут характеризоваться
ОДНОЙ ИЗ КОДОВЫХ Групп Si={t], Q. 52={6, £}, 53*={5, £} И 54={|, Х\}.
Обнаружитель принимает решение yit если существует такое t*e[«i—1,
«2—1]э для которого два соседних компонента Л*, Л»+1 вектора Л
соответствуют кодовой группе sif причем величина t*+l считается в этом случае степенью
примитивного многочлена, характеризующей класс используемых сигналов
(n=i*+l). В противном случае принимается решение Yo-
ы
п+1
п-3
п-г п-1
Рис. 14.10. Вероятности появления
блоков
^1—z
1 /~\2
А<?
J J !
ш
Aj.ZJ+1/M
Рис. 14.11. Плотности
вероятности
Таким образом, исследуемый обнаружитель должен оптимальным образом
ОТЛИЧаТЬ КОДОВУЮ Группу S\ ОТ КОДОВЫХ ГруПП 52, S3 И S4.
Рассмотрим произвольную составляющую Л» вектора Л и запишем
выражение для условных распределений W[Ail%\y W[Ai/t\] и №[Лг/£].
Распределение W[Ai/%] —распределение числа нулевых блоков длины i в
-СП при условии, что принято #с.ч двоичных символов. Распределение
ЩЛг/|] — биномиальное, однако, предполагая интервал наблюдения
достаточно большим и используя теорему Муавра — Лапласа, запишем его
нормальную аппроксимацию
W[Ai/t]=2N(Mpit Mptqt), (14.16)
где N([L, а2) = (1/У2яа)ехрГ-^1=1И12
[-*§?]•
величина р* определяется
выражением (14.15), a qt = l—р». Распределение W[Ai/t] числа нулевых блоков длины
i>n—1 при приеме ПСП существенно зависит от вероятности ошибки в одном
двоичном символе р. Примерный вид распределения для различных значений р
«оказан на рис. 14.11 (кривые 1, 2). При р = 0 в любой принятой ПСП нет
нулевых блоков длины i>n— 1 (рис. 14.11) и распределение W[Aifc] имеет
•б-образный характер ЩЛ,/£] =6(Л,). При этом считается, что вероятность
образования блока такой длины на стыке двух сигналов чрезвычайно мала.
С увеличением вероятности ошибки р распределение W[Ai/t] расплывается.
Это связано с тем, что блоки такой длины могут быть образованы из блоков
меньшей длины за счет ошибочных символов, содержащихся в принятой
последовательности. Рассматривая реализацию ПСП при заданной символьной
вероятности ошибки р и перечисляя всевозможные варианты образования нулевых
263
блоков длины i, получим выражение для вероятности появления нулевого блока
длины i>n— 1 в ПСП, аналогичное выражению (14.15) для СП
Pi» PV2'-1. (14.17)
Заметим, что при р->0,5 вероятность р7-^рг и распределение приближается
к распределению таких блоков в СП, т. е. к распределению W[Aife]. Отсюда
следует, что нормальная аппроксимация распределения W[Ai/%] имеет вид
_lF[A|/a=tf(Afpi, Afpiqi) (14.18)
где q» = 1—pi-
Аналогичные рассуждения можно привести и для распределения №[Лг/т1]„
т. е. распределения нулевых блоков длины i=n—\ в ПСП при вероятности
ошибки в одном двоичном символе р.
Нормальная аппроксимация распределения имеет вид W[Ailx\\—N(M{pi>
Alpiqi], где рг= (p2+q2)/2l"; q= 1—р; ф = 1—рг. При~р=0 распределение
ЩЛг7т]] также имеет б-образный характер W[Ai/i\]=d(Ai—М/2*), а при
р-н0,5 совпадает с распределением W[Ai/%] нулевых блоков в СП. Примерный
вид распределения W[Aifr\] представлен на рис. 14.11 (кривые 3).
Перейдем к рассмотрению структуры обнаружителя, оптимальным образом?
отличающего кодовую группу S\ от кодовых групп 52, 53 и s4. Зададимся
произвольным значением i и запишем отношение правдоподобия [73] для кодовых
групп Si и s2:
W [Л, Л,+1Л1]
W[Ai9 Ai+l/s2]
В случае, если Лг-, Лг+i — число нулевых блоков длины / и i+1, в СП, та
так как длина нулевого блока не зависит от длины предшествующих нулевых
блоков, случайные величины Л», Лг+1 независимы. Если Лг-, Лг+i — число нулевых
блоков соответствующей длины в искаженной ПСП, то, считая преобразование
блока длины i в блок длины г+1 или блока длины t'+l в блок длины i
маловероятным, приходим к независимости компонентов Лг, Лг+i вектора Л.
W[At/ri]WlAi+l/a
То.М|„,^+.)-Г1А|/НГ[Д^,. <14.И>
В качестве критерия оптимальности используем критерий Неймана — Пирсона,
согласно которому величину /12(1, t+1) надо сравнить с некоторым порогом,
т.е. /12(/, i+l)*hit{+l. (14.20V
Пользуясь независимостью составляющих Лг, Лг+1 учитывая выражение
(14.19), представим решающее правило (14.20) в виде системы двух
независимых решающих правил:
«•*■ .-:-»-*.■ <■""■<■->
где величины hBit hHi+i выбираются из требований к статистическим
характеристикам обнаружителя.
В [94] доказано, что решающие правила (14.21), (14.22) полностью
определяют структуру исследуемого обнаружителя, а алгоритм обнаружения сво-
264
дится к формированию на основе входной двоичной последовательности вектора
Л и последовательному анализу пар компонентов Л,-, Лг+i вектора по
решающим правилам (14.21), (14.22) для всех te^—»1, /ie—1]. Если существует
такое i*, для которого будут одновременно выполнены оба неравенства,
обнаружитель принимает решение, что принята ПСП, образованная примитивным
многочленом степени n = i* + \. В противном случае принятая последовательность
считается случайной. Отметим, что предлагаемый алгоритм обнаружения
псевдослучайных последовательностей легко реализуем на ЭВМ.
В [94] показано, что для обнаружения М-последовательности с
неизвестным п необходимо принять
импульсов, где
С!У2+с2рУ2 п2
1/2—2р2
.-.[-
]*■
(14.23)
(14.24)
а
60
50
40
30
20
\Рпг-'0-*
\РП0
\пг'15
hz--JO/
so/
7П
/
wo/
15
31
63
127 В
где Си С2 — некоторые константы, определяемые заданными вероятностями
ложных тревог Рд.т и правильного обнаружения рПр [94], а р — вероятность
ошибки при приеме одного импульса. Обратимся к случаю, когда анализируемая
двоичная последовательность получена в.
результате посимвольного приема входного ФМ
сигнала, и на конкретном примере рассмотрим
числовые характеристики предлагаемого
метода обнаружения. Предположим, что /zi = 2,
Лг = 15. На рис. 14.12 представлена зависимость
числа сигналов Q, которые необходимо принять
для достижения требуемых статистических
характеристик обнаружителя, от базы ФМ
сигналов, испльзуемых в системе при различных
отношениях сигнал-шум h2=E/No. Так, при
базе сигнала В =127 и отношении сигнал-шум
^г^цоо для достижения Рлт=10-3, Рпр=0,99
необходимо принять 38 сигналов, а при h2= 50
необходимо принять 55 сигналов. При
больших значениях В зависимость числа сигналов Q от величины базы можно
аппроксимировать выражением Q= (jt/4/i2) (ci+c2)25, из которого следует, что
при увеличении базы сигнала или при уменьшении отношения сигнал-шум
случайная и псевдослучайная последовательности становятся неразличимыми.
Из приведенных выше результатов видно, что для снижения вероятности
обнаружения сигнала >в условиях априорной неопределенности необходимо
увеличивать его базу, что равносильно увеличению степени примитивного
многочлена, соответствующего сигналу. Кроме того, снижение вероятности
обнаружения может быть достигнуто за счет усложнения алгоритма формирования
используемых сигналов, в частности путем использования нелинейных законов
формирования модулирующей последовательности.
Заметим, что аналогичный обнаружитель может быть построен и на основе
анализа распределения единичных блоков в принятой последовательности.
Объединение двух указанных методов позволяет улучшить статистические
характеристики обнаружителя.
265
Рис. 4.12. Характеристики
обнаружения
РАЗДЕЛ III.
ПОИСК И СИНХРОНИЗАЦИЯ ШПС
15- ОСОБЕННОСТИ ПОИСКА И СИНХРОНИЗАЦИИ ШПС
15.1. Прием информации и неопределенность по времени
и по частоте в широкополосных системах связи
Назначение любой системы связи, в том числе и
широкополосной, заключается в приеме (выделении) передаваемой
информации. Прием ШПС, несущих информацию, в ШСС осуществляется
и на фоне помех, т. е. для приема информации необходимо
выделять ШПС из помех. Прием ШПС, как, впрочем, и любых других
сигналов, осуществляется с помощью оптимальных приемников,
минимизирующих вероятность ошибки. Структура оптимального
приемника зависит от вида передаваемой информации (фазовая
или частотная манипуляция и т. п.) и от степени «известности»
сигнала в точке приема (когерентный или некогерентный прием и
т. п.). Но в любом случае в состав оптимального приемника входит
согласованный фильтр или коррелятор и решающее устройство.
Согласованный фильтр или коррелятор служат для оптимального
приема ШПС, а решающее устройство определяет символ
передаваемой информации.
Рассмотрим для примера случай передачи и приема двоичной
информации с помощью противоположных сигналов (фазовая
манипуляция— ФМ). Оптимальный приемник (рис. 15.1) состоит из со-
СФ
РУ
а
Рис. 15.1. Схема оптимального приемника
при неизвестной задержке сигнала
гласованного фильтра (СФ), решающего устройства (РУ), а также
синхронизатора (С), назначение которого будет объяснено в
дальнейшем. Согласованный фильтр согласован с ШПС, который
переносит информацию. Если используется ШПС u(t), то импульсная
характеристика согласованного фильтра
h(t)=au(t—T)9 (15.1)
где а —некоторая постоянная, Т — длительность ШПС. Для
передачи «1» информации используется сигнал u(t), для передачи «О»
информации используется обратный (противоположный) сигнал —
u(t). Напряжение на выходе согласованного фильтра представляет
266
собой автокорреляционную функцию (АКФ) ШПС, с которым
фильтр согласован. Максимум АКФ на выходе согласованного
фильтра
исф=а£, (15.2)
где Е — энергия ШПС, а максимум имеет место в момент
окончания ШПС. Решающее устройство должно в момент окончания
сигнала принять решение: какой сигнал был передан u(t) или — u(t),
т. е. выдать решение, какой информационный символ (1 или 0),
был передан. Но для того, чтобы принять решение в момент
окончания сигнала, надо знать (или предварительно измерить) момент
прихода сигнала и момент его окончания. В теории оптимального
приема при определении структурных схем оптимальных
приемников сначала полагают, что все параметры принимаемого сигнала,
в том числе и его запаздывание по времени, в точке приема
известны. В этом случае оптимальный приемник для приема ФМ
действительно содержит только согласованный фильтр и решающее
устройство. Но в реальных условиях в начале сеанса связи время
запаздывания сигнала неизвестно. Его надо измерить и ввести в том
или ином виде в решающее устройство.
На рис. 15.2 приведены временные диаграммы, поясняющие
процесс принятия решения при приеме ФМ сигналов. На рис.
15.2,а представлено напряжение на выходе согласованного фильт-
Рис. 15.2. Диаграммы, поясняющие процесс принятия решения (выделения
информации)
ра мСф. Оно представляет последовательность АКФ сигнала u{t).
Для простоты изображены идеальные АКФ в виде треугольных
импульсов с длительностью основания 2то. Поскольку длительность
ШПС равна 7\ то АКФ следуют с интервалом, равным Т. Таким
образом, база ШПС равна В = Т/х0. На рис. 15.2,а изображена
передаваемая информационная последовательность 1 1 0 1 0, в
соответствии с которой АКФ принимают либо положительное, либо
отрицательное значение. Первая АКФ запаздывает относительно
267
начала координат на время t3. Поэтому решающее устройство
должно принимать решение в моменты времени t3> T+t3, 2T+t3 и т.д.
Если момент времени t3 неизвестен в месте приема, а именно так и
обстоит дело в реальных системах связи, то оптимальный
приемник должен помимо согласованного фильтра и коррелятора
содержать также синхронизатор (С на рис. 15.1), который измеряет вре:
мя задержки t3 и определяет моменты времени t3, T+t3f 2T+t3-n
т. д., в которые и принимаются решения. На рис. 15.2,6
изображена последовательность синхроимпульсов ис, которые с выхода
синхронизатора подаются на решающее устройство. Длительность
импульсов ис должна быть много меньше длительности пика АКФ, а
середина этих импульсов должна приходиться на максимум АКФ,
что и позволяет принять решение о переданном информационном
символе в момент окончания ШПС.
Таким образом, оптимальный приемник при неизвестной
задержке ШПС в точке приема должен выполнять две функции:
1) измерение времени задержки t3 ШПС в начале приема
информации (этот процесс называется также поиском ШПС по времени);
2) создание меток времени, соответствующих окончанию ШПС, и
обеспечение совпадения (синхронности) меток с центром АКФ
на выходе согласованного фильтра (этот процесс называется
синхронизацией ШПС).
Согласованный фильтр, как и все пассивные фильтры, является
устройством, инвариантным к задержке ШПС: задержка АКФ
равна задержке ШПС и при любой задержке ШПС на выходе
согласованного фильтра всегда будет АКФ от ШПС на входе. Тем не
менее, для приема информации необходим синхронизатор,
обеспечивающий поиск ШПС (точнее, поиск центрального пика АКФ) и
последующую синхронизацию моментов окончания ШПС
(максимумов АКФ) с ртсчетными моментами.
Коррелятор является эквивалентом согласованного фильтра при
приеме сигнала с известной задержкой с точки зрения
помехоустойчивости приема: и коррелятор, и согласованный фильтр
обеспечивают одинаковую помехоустойчивость. Но коррелятор не
является устройством, инвариантным к задержке ШПС. Напряжение
на выходе коррелятора
"коР=Д $°u(t-t3)u(t-t0)dt, (15.3)
to
где t3 — время задержки ШПС на входе приемника, to — время
задержки опорного ШПС в генераторе относительно начала
координат, а — постоянная, см. (15.1). Лишь при t0=t3 напряжение на
выходе коррелятора
vK0V=aE (15.4)
совпадает с максимумом, который имеет место на выходе
согласованного фильтра (15.2). Но, если t0=£t3, то vKOP^0 (оно совпадает
с соответствующим значением бокового типа АКФ), т. е. на
выходе коррелятора максимума уже не будет. Поэтому и в коррелято-
268
ре при неизвестном времени задержки необходимо производить его
измерение.
На рис. 15.3 представлена схема оптимального приемника для
приема двух противоположных сигналов (ФМ), выполненного на
основе коррелятора. Он состоит из перемножителя (X),
интегратора ( S), генератора ШПС (ГШПС), решающего устройства (РУ)
и синхронизатора (С). Перемножитель, интегратор и генератор
Рис. 15.3. Схема оптимального
корреляционного приемника с
синхронизатором
ЕШЧ
. 1
[ГШПС
/
J
1
1
с
РУ |
А
представляют собой коррелятор, решающее устройство принимает
решение об информационном символе, а синхронизатор
обеспечивает поиск ШПС (измерение времени задержки fa) и последующую
синхронизацию. Напряжение на вход синхронизатора поступает с
интегратора. Если измеренное время задержки не совпадает с
истинным (напряжение на выходе интегратора не превышает
заранее установленный порог), то синхронизатор изменяет время
задержки ШПС в генераторе ШПС. Кроме того, синхронизатор
должен обеспечить включение и выключение интегратора (момент t0
и T+to), а также подачу отсчетных импульсов на решающее
устройство. Если длительность ШПС Г, а длительность центрального
пика АКФ хо=Т/В, то всего имеется
В = Т/т0 (15.5)
интервалов неопределенности по задержке. Поэтому в процессе
поиска ШПС синхронизатор должен обеспечить перестройку
задержки ШПС в генераторе от нуля до Т—хо с интервалом то. Как
только задержка ШПС на входе совпадет с задержкой ШПС в
генераторе, напряжение на выходе интегратора превысит установленный
порог и синхронизатор останавливает процесс поиска ШПС и
переходит к осуществлению процесса синхронизации отсчетных
моментов с моментами окончания ШПС, а решающее устройство
начинает принимать решения о символах передаваемой информации.
Таким образом, и в оптимальном приемнике с согласованным
фильтром (см. рис. 15.1), и в оптимальном корреляционном
приемнике (см. рис. 15.3) при неизвестной задержке ШПС необходим
синхронизатор, который сначала осуществляет поиск ШПС, а затем
синхронизацию. Основное отличие синхронизаторов обоих
приемников заключается в том, что синхронизатор корреляционного
приемника должен изменять задержку ШПС в ГШПС, а процесс поиска
ШПС в корреляционном приемнике осуществляется путем
просмотра всех интервалов неопределенности. Поэтому время поиска ШПС
в корреляционном приемнике может в В раз согласно (15.5)
превышать время поиска ШПС в оптимальном приемнике с
согласованным фильтром. При больших базах ШПС подобное увеличение
269
времени поиска ШПС может быть чрезмерным, и поэтому
необходимо применять методы более быстрого поиска ШПС. В то же
время согласованные фильтры на большие базы являются очень
сложными устройствами и их реализация затруднительна.
Поэтому для их обеспечения быстрого поиска ШПС и относительной
простоты оптимальных приемников на практике используются
комбинированные методы приема, основанные на совместном
применении и согласованных фильтров (на малые базы), корреляторов.
Необходимо отметить, что синхронизаторы в оптимальных
приемниках (рис. 15.1, 15.3), измеряющие время задержки ШПС, а
затем осуществляющие синхронизацию, во многом подобны
устройствам автоматического сопровождения по дальности (АСД),
применяемым в радиолокационных станциях. В ШСС подобные
устройства называются схемами слежения за задержкой (ССЗ) или
схемами автоматической подстройки времени (АПВ). Поэтому для
анализа и синтеза оптимальных измерителей можно использовать
методы, широко развитые в радиолокации. Эти вопросы подробно
будут рассмотрены в дальнейшем.
В точке приема может быть неизвестна и частота
принимаемого сигнала. Неопределенность по частоте вызывается или неста-
бильностями частоты задающих генераторов передатчика и
приемника, или доплеровским смещением частоты из-за движения
приемника относительно передатчика, или и тем и другим. На рис.
15.4 приведена частотно-временная плоскость, на которой
штриховкой отмечены части плоскости с распределенной энергией ШПС.
Рис. 15.4. Неопределенность ШПС по времени и по частоте
Несущая частота ШПС равна /о, его длительность Г, а ширина
спектра F. Неизвестная задержка первого ШПС равна t3. Если
несущая частота ШПС точно равнялась бы значению /0, то энергия
всех ШПС распределялась бы в полосе между значениями частот
от fo—F/2 до fo + F/2. Однако из-за доплеровского смещения
частоты (а также из-за других возможных причин) несущие частоты
ШПС могут отличаться друг от друга, что и отражено на рис. 15.4,
на котором несущая частота первого ШПС равна /о+/д, где /д —
доплеровское смещение частоты. При этом ШПС могут занимать
270
полосу от /min=/o—F/2—FJ2 до ftmx=fo+FI2 + FJ29 где FA —
ширина частотного интервала, соответствующего доплеровскому
смещению частоты.
Таким образом, при неизвестной задержке и неизвестной
частоте синтезатор оптимального приемника должен осуществить поиск
ШПС по времени и по частоте, а затем обеспечить синхронизацию
по этим параметрам, которые могут изменяться во времени.
Отметим, что поиск и синхронизация по частоте обеспечиваются
устройствами автоматической подстройки частоты (АПЧ), в основе
которых лежит фазовая автоподстройка частоты (ФАПЧ).
Поэтому синхронизатор при неизвестных времени задержки и частоте
ШПС должен содержать комбинации ССЗ и ФАПЧ.
Поиск и синхронизация ШПС является серьезной проблемой
теории и техники ШСС, поскольку быстрый поиск и устойчивая
синхронизация обеспечивают надежный прием информации.
Поэтому решению проблемы поиска и синхронизации ШПС уделяли
серьезное внимание многие исследователи (см., например, книги
[5—8, 13, 15, 16, 95—99] и библиографию, приведенную в этих
книгах, а также журналы [67, 68]). Несмотря на принципиальную
ясность вопросов измерения и синхронизации (см. упомянутые
книги, а также основополагающие труды по оптимальным
измерителям [1, 56, 57, 73, 75, 93, 100—102], до сих пор многие
вопросы поиска и синхронизации ШПС остаются открытыми. В
первую очередь, не решена окончательно задача построения
оптимального синхронизатора с максимальным быстродействием при
минимальных потреблениях мощности, массе и габаритов,
обеспечивающего поиск и синхронизацию ШПС с большими и очень
большими базами (В>103... 105). В этом направлении известен ряд
методов, но считать решенной эту задачу нельзя.
Как следует из приведенных рассуждений, синхронизатор
должен обеспечивать поиск ШПС, а затем его синхронизацию. Оба
эти процесса происходят при воздействии шумов или помех
(преднамеренных или системных). Поэтому и процесс поиска, и процесс
синхронизации сопровождаются ошибками. Следовательно,
необходимо так выбирать параметры синхронизатора, чтобы
минимизировать ошибки измерения. Прежде всего необходимо выяснить,
от чего зависят ошибки измерения. Ответ на этот вопрос дает
статистическая теория приема сигналов и измерения их параметров,
основы которой были заложены академиком В. А. Котельнико-
вым [1].
15.2. Потенциальные точности измерения
времени задержки и частоты
Как следует из теории оптимального приема [1, 63, 73, 75, 93],
измерение параметров ШПС (времени задержки, частоты)
производится одновременно с его обнаружением, т. е. производится
обнаружение и измерение параметров. При наличии помех задача
обнаружения сигнала и измерения его параметров является статис-
271
тйческой. В большинстве случаев для получения оценки
параметров используется метод максимального правдоподобия (или метод
обратных вероятностей). Известно, что при большом отношении
сигнал-помеха в точке приема многие оптимальные методы оценки
параметров сводятся к методу максимального правдоподобия.
Согласно методу максимального правдоподобия вычисляется
отношение правдоподобия или, что эквивалентно, апостериорная
вероятность того, что в принятом приемником колебании случайные
параметры имеют вполне определенные значения. Если наряду с
измеряемыми случайными параметрами (запаздывание t3, частота
f) сигнал содержит паразитные, т. е. не подлежащие измерению,
случайные параметры (например, случайная начальная фаза), то
по этим паразитным параметрам необходимо произвести
усреднение. Известно, что если помеха представляет гауссовский
случайный процесс с равномерной спектральной плотностью N0t то
апостериорная вероятность того, что в принятом колебании x(t)
полезные параметры равны t3 и f, определяется выражением
w[t9, Л*(01 = Мо[^^]. (15.6)
Здесь k\ — постоянная величина; /0 — модифицированная функция
Бесселя нулевого порядка; Z(t3, f)—огибающая напряжения на
выходе согласованного фильтра.
Измеряемые параметры t3 и / содержат постоянные
составляющие, т. е. их можно представить в виде: <3=^зо+т, f=/o+fa где
(постоянные составляющие параметров t30 и [0, а т и /д=й/2я —
отклонения от постоянных составляющих. Поскольку постоянные
составляющие на оценку параметра не влияют, то в общем случае
можно записать:
w[x9 G|*(*)]=*b/0[2Z(T, Q)W (15.7)
Далее Z(t, Q) представляется в виде суммы сигнальной
(отклик) и шумовой составляющих и находятся ошибки, к которым
приводит действие помехи. Но поскольку помеха вызывает ошибку
при измерении параметров, можно предположить, что на вход
согласованного фильтра поступает сигнал со случайными
параметрами, отличными от тех, для которых фильтр согласован. Такой
подход справедлив, если отношение сигнал-помеха в точке измерения
намного превышает единицу, т. е. при точных измерениях.
Предположив, что фильтр согласован с сигналом, имеющим параметры т=
= 0, й = 0, получим, что для входного сигнала с параметрами хфО,
Q=7^=0 огибающая напряжения на выходе согласованного фильтра
равна E\R(r, Q)\t а выражение (15.7) записывается как
w[x9 Q\x(f)]=k1I0\-^-lR(x,Q)\]9 (15.8)
где т, Q — случайные параметры с нулевыми средними
значениями, функция неопределенности (ФН) ШПС определяется
известным выражением
272
Я(т, Й)=— lu(t)U(t—T)e[Qtdt, (15.9)
2E -i
£ — энергия ШПС, (7(0—его комплексная огибающая.
Предположим, что 2E/N0^1. Тогда функцию Бесселя можно
приближенно представить в виде экспоненты:
ш[т, Q\x(t)]=k2exp[j^-\R(xf G)|], (15.10)
где &2 — постоянная величина.
В дальнейшем исследование апостериорной вероятности (15.10)
проводится с учетом свойств модуля комплексной огибающей | R (т,
Q) | — модуля ФН.
Модуль ФН |/?(т, Q) | определяет разрешающие способности и
точности измерения времени задержки и частоты. С точки зрения
измерения времени и частоты интерес представляет центральная
часть ФН — основной пик. Его размеры то оси времени т и оси
частот Доплера й и определяют разрешающие способности и
точности измерений времени и частоты.
Оптимальным методом измерения параметра является такой,
при котором отсчет параметра производится по максимуму
напряжения на выходе детектора. При наличии помех положение
максимума становится случайным. Так как параметр измеряется на
выходе согласованного фильтра, где уровень помехи много меньше
отклика, то смещение максимума не превосходит размеров
основного пика. Но и в этом случае при измерении параметров вследствие
действия помех возникают ошибки, которые приводят к
неопределенности отсчета точного значения параметра. Ошибки зависят от
размеров основного пика, т. е. от вида его поверхности \R(x, Q)\.
Именно поэтому поверхность \R(x, Q)\ и получила название
поверхности неопределенности.
Если боковые пики поверхности неопределенности намного
меньше основного, то они на процесс измерения непосредственно
не влияют. Если боковые пики соизмеримы с основным, то при
наличии помех нельзя с большой достоверностью выделить основной
пик. В этом случае возникает так называемая неоднозначность
отсчета. Из сказанного ясно, что наибольшее значение для измерения
параметров имеет основной пик. Это справедливо, если боковые
пики относительно малы.
Для наглядности принято изображать ФН в виде
топографических диаграмм в изометрических проекциях. На рис. 15.5,а
изображена ФН простого сигнала (база 23=1), /[4], причем ось
частот f=Q/2n. Овалом с густой штриховкой внутри представлена
область высокой корреляции (центральный пик), в которой
производится измерение, а вне этой линии — область слабой
корреляции (редкая штриховка). Незаштрихованная часть (т>7\ т<—Т)
соответствует |£|=0.
Из рис. 15.5,а видно, что для простого сигнала —
прямоугольного радиоимпульса — границы области сильной корреляции опре-
273
деляются по оси времени длительностью импульса 7\ а по оси
частот — величиной 1/7\ Следовательно, чем больше длительность
импульса, тем больше размер области сильной корреляции по оси
времени, но тем меньше ее размер по оси частот Q, и наоборот.
Таким образом, для прямоугольного радиоимпульса разрешающие
способности по времени и частоте зависят друг от друга. При этом
с увеличением одной из них другая уменьшается. Отметим, что
такая взаимосвязь характерна для всех простых сигналов.
г % г
ц
m
ш
-г
I/F
t4
'
5)
Т V
Рис. 15.5. Функции неопределенности простого сигнала (В=1) и ШПС (£>1)
Если используются ШПС, то можно повысить разрешающую
способность по времени благодаря сжатию их во времени.
Действительно, ширина основного пика АКФ ШПС по оси времени
равна приблизительно 1/F. При постоянной длительности сигнала 71,
расширяя F, можно получить малую длительность центрального
пика по оси времени. В то же время ширина центрального пика по
оси частот определяется длительностью сигнала и равна 1/Г.
Поэтому, увеличивая базу ШПС B = FT, можно получить центральный
пик малых размеров. Топографическая диаграмма для этого
случая приведена на рис. 15.5,6. Чтобы исключить неоднозначность
отсчета, желательно иметь нулевые боковые пики в квадрате со
сторонами 27\ 2F. Вне этого квадрата боковые пики равны нулю,
поскольку полная длительность отклика не может превышать 2Г, а
смещение спектра сигнала по частоте на ±F приводит к тому, что
спектр сигнала не попадает в полосу пропускания приемника.
Однако получить тело неопределенности с нулевыми боковыми
лепестками невозможно, так как существует ограничение, которое
не позволяет произвольно менять форму тела неопределенности.
Это ограничение получило название принципа неопределенности.
Суть его заключается в том, что объем, заключенный между
поверхностью \R(xt Q)\2 и плоскостью (т, Q), не зависит от формы
сигнала и равен единице (2.34). Таким образом, объем тела
неопределенности является постоянным. Поэтому при одновременном
измерении времени и частоты необходимо стремиться к такой
форме тела неопределенности, при которой все боковые пики равны
и равномерно распределены в квадрате (27\ 2F), так как в этом
случае они минимальны по амплитуде. Тело неопределенности та-
274
кой формы изображено на рис. 15.6. Узкий основной пик стоит на
основании высотой Ro. При равномерном распределении боковых
пиков R0= 1/2)/1?. Для ШПС с базой Б0>1 с боковыми пиками
можно не считаться. Поэтому в задачах обнаружения ШПС и
измерения их параметров учитывают только область сильной
корреляции— центральный пик \R(x, Q) |.
W А\
Рис. 15.6. Тело неопределенности ШПС
Возвращаясь к апостериорной вероятности (15.10), следует
отметить, что при малой помехе ошибки измерений малы и.всегда
меньше размеров центрального пика тела неопределенности.
Поэтому, рассматривая только область сильной корреляции,
поверхность неопределенности в окрестности точки максимума (т=0, й =
= 0) приближенно можно представить параболоидом вида
|*(т, Q)l «l+^/^t» + /^TO + -l./fS0fff (15.11)
где R"XXi R"xq, , R"qq — вторые частные производные |#(т, Q) \
[4], определяемые в точке т=0, Q = 0.
Формула (15.11) представляет ряд Тейлора, в котором
слагаемые третьего и более высокого порядка малости отброшены. В
общем случае в формулу (15.11) может входить линейный член,
зависящий от т. Это будет уточнено в дальнейшем. Подставляя
(15.11) в (15.10), получаем
w\%, Q\x(t)] = k2exp^yxp[-^ {R;t42 + 2R^tQ + R'^Q*)].
(15.12)
Сравнивая выражение (15.12) с двумерным нормальным
законом распределения [55], имеющим вид
1 Г *2
w (*1э Х2) = Т/т=^Г ехР '
2nG1G2yl—г2 I
г хгх2
4 1
1(1 -г*) а* [
2(1—Г*) О?
(1—^)0! О,
(15.13)
275
получаем, что апостериорная вероятность (15.12) является
двумерным нормальным законом распределения случайных величин т
и Q. Введя обозначение отношения сигнал-помеха на выходе
согласованного фильтра
q* = 2E/N0, (15.14)
дисперсии, второй центральный смешанный момент и коэффициент
корреляции случайных величин т и Q запишем в следующем виде:
ЧН ^ , аа = т1 , (15.15), (15.16)
q2Rxx(l-r*) *»*ов(1—Ч)'
'* = -Лг4-^. r- ,rJ^- ■ (16.17), (15.18)
т2 -=.
^^(1_Г2) • V/&*;
Отметим, что при определении a2xQ было использовано
соотношение a2TQ = raT<TQ.
Отметим общие особенности соотношений (15.15) — (15.17). Из
них следует, что чем больше отношение сигнал-помеха q2, тем
меньше дисперсии оценок. Дисперсии оценок зависят от формы
тела неопределенности, так как в (15.15) — (15.17) входят частные
производные выражения (15.11). При заданных J?"xx и R"qq
дисперсии оценок являются минимальными, если г2 = 0. При этом
равна нулю вторая смешанная производная R" xQ и смешанная
дисперсия а2та. Поэтому оценки тий оказываются независимыми. В
[4] показано, что вторая смешанная производная R"xq = 0 для
сигналов с симметричной частотной модуляцией и для ФМ
сигналов. Положим \R"xq = 0. Если воспользоваться спектральным
определением ФН
R(xtQ)=—— 7 G((o)G*(o)—Q)ele"d<o, (15.19)
4 я Е J^
то можно показать, что
r™~~I7Te f ^И'2^- (15-20>
—оо
Правая часть с точностью до постоянного множителя
определяет квадрат эффективной ширины спектра сигнала. Переходя к
линейным частотам, можно записать, что
Кч = -Тр1ф, (15.21)
где Т^эФ — эффективная ширина спектра, определяемая следующим
соотношением
^=12 ] f*\G(f)\*df I ] |G(/)|2d/. (15.22)
—оо / —оо
Для ШПС с равномерным спектром \G(f)\ = Go,
сосредоточенным в полосе частот шириной F из (15.22) получаем F^ = F, т. е.
276
определение (15.22) дает такое значение /^ф, которое
соответствует ШПС с равномерным спектром в этой полосе частот.
Аналогично, используя определение ФН через комплексную
огибающую (15.9), можно найти, что
«So 7-^/12. (15.23)
где эффективная длительность ШПС определяется соотношением,
аналогичным (15.22):
т1ф = 12 ? t*\U(t)\*dt I ] \U(t)\*dt. (15.24>
—ОО / —00
Для ШПС с прямоугольной огибающей \U(t)\ = U0 и
длительностью Т эффективная длительность ТЭф = Т.
Используя приведенные соотношения (15.21), (15.23), полагая-
R"t& =0 и обращаясь к линейной частоте /=й/2я из формул
(15.15), (15.16) находим дисперсию оценки времени задержки
o» = aVF4 (15.25)
и дисперсию оценки частоты
^ = aV^2T4. (15.26)
где величина а="КЗ/я. Таким образом, для повышения точности
измерения обоих параметров необходимо повышать отношение
сигнал-помеха q2. Кроме того, для повышения точности измерения
времени задержки надо увеличивать ширину спектра сигнала F^
~^эФ, а для повышения точности измерения частоты надо
увеличивать длительность сигнала Т^Т9ф. Очевидно, что одновременное
увеличение и Т9 и F возможно только для ШПС, база которых В =
= РТ^РЭфТЭф. Чем больше база ШПС, тем большая точность
измерения времени задержки и частоты. Вместе с тем, необходимо
помнить, что для точных измерений, во-первых, надо иметь высокое*
отношение сигнал/помеха на выходе измерителя q2^l и, во-вторых,
система поиска ШПС должна «вывести» измеритель в область
сильной корреляции — в центральный пик ФН. Если отношение
сигнал-помеха <72<С1, то измерения бессмысленно проводить, можно
заняться просто гаданием о значении параметра. Поэтому
синхронизатор должен обеспечить высокое отношение сигнал-помеха на
выходе измерителя. Если же измеритель не попадает в область
сильной корреляции, то он производит измерения по шумам и от
таких измерений тоже можно отказаться. Эти факторы полностью
определяют и структуру синхронизатора, и его характеристики.-
Рассмотрим сначала вопрос о выборе необходимого отношения
сигнал-помеха в ШСС на выходе измерителя.
15.3. Отношение сигнал-помеха на выходе измерителя в ШСС
Если время задержки сигнала и его несущая частота
медленно изменяются при передаче информации, то один из методов
приема заключается в том, что в состав обычного оптимального при-
277
емника вводят измеритель времени задержки (рис. 15.7) и
измеритель частоты, которые измеряют соответствующие параметры и
вводят их в оптимальный приемник. Такой метод приема
называется квазиоптимальным [73]. Измерители осуществляют
синхронизацию по времени и частоте между принятым и опорным
сигналами и являются синхронизаторами. Процесс синхронизации, как
было отмечено ранее, сопровождается ошибками. Будем
рассматривать только случайные ошибки, которые возникают из-за действия
шума, причем будем полагать эти ошибки малыми. Ошибки при
измерении времени прихода сигнала и его частоты приводят к
рассинхронизации по этим параметрам и в конечном счете
снижают помехоустойчивость приема информации. Исследованию
помехоустойчивости квазиоптимальных приемников посвящено
значительное число работ, однако в большинстве из них
рассматриваются различные случаи
квазиоптимального когерентного приема. На
практике часто используется
квазиоптимальный некогерентный прием.
При этом необходимо оценить сни-
"^ жение помехоустойчивости при
совместной рассинхронизации по
времени и частоте для произвольных
сигналов, найти условия, при
которых ошибки по времени и частоте
Рис. 15.7. Оптимальный измери- можно рассматривать независимо
тель друг от друга, определить влияние
формы сигнала на
помехоустойчивость квазионтимального приемника. Решение сформулированных
задач для случая квазиоптимального некогерентного метода
приема двоичной информации при совместной рассинхронизации по
времени и частоте дано в [5].
Допустим, что информация передается двумя равновероятными
ортогональными сигналами. Пусть Е — энергия сигналов.
Предположим, как и ранее, что шум является случайным гауссовским
стационарным процессом с нулевым средним и с равномерной
спектральной плотностью мощности No. Оптимальный приемник при
известном времени задержки сигнала и известной несущей
частоте состоит из двух каналов, каждый из которых представляет собой
последовательное соединение согласованного фильтра (СФ1 или
}
ГШ1
f
СФ2
Л
Д
)
[ !
'
г
РУ
J
>
F
от j
0Л2
•
•
0"ml
РУ
Рис. 15.8. Квазиоптимальный приемник
278
СФ2) и детектора огибающей Д (рис. 15.8). Решающее устройство»
(РУ) выбирает максимальное значение на выходе детекторов
огибающих. Каждый фильтр согласован со своим сигналом.
Синхронизатор (С) осуществляет поиск ШПС, а затем и синхронизацию
по времени и по частоте. Оценка по частоте вводится в
подстраиваемый генератор (ПГ), напряжение с которого поступает в
преобразователь частоты (ПЧ). Напряжение на промежуточной
частоте, учитывающее оценку по частоте f, усиливается в УПЧ и
поступает на входы согласованных фильтров. Оценка по задержке
т вводится в решающее устройство и фиксирует моменты принятия
решения. Так как сигналы ортогональны, то ортогональны и
фильтры. Поэтому шумовые составляющие на выходах фильтров в
совпадающие моменты времени некоррелированы. Поскольку шум на
входе и на выходе фильтров является гауссовским случайным
процессом, то шумовые составляющие на выходах фильтров в
совпадающие моменты времени независимы. В результате огибающие
на выходах детекторов также будут статистически независимы в
совпадающие моменты времени.
При рассинхронизации по времени (ошибка равна т) и по
частоте (ошибка равна Q = 2nf) в момент принятия решения, который
определяется синхронизатором, огибающая на выходе
согласованного канала определяется огибающей функцией неопределенности
(ФН) передаваемого сигнала \R(i, й) | (15.9), а огибающая на
выходе несогласованного канала — огибающей взаимной функцией
неопределенности (ВФН) \i(%9 Q)=Rjk(t, Q). Независимо от
значений т, Q шумовые составляющие на выходах фильтров остаются
некоррелированными в совпадающие моменты времени.
Следовательно, огибающие в момент принятия решения будут также
статистически независимыми, как и при т=й = 0. Поэтому плотность-
вероятности огибающих на выходах детекторов описывается
законами Релея — Раиса, у которых сигнальные составляющие равны-
|/?(т, Q)| и \\l(t, Q)\. Отметим, что R (0, 0) = 1, a \i (0, 0)=0..
Обозначим отношение сигнал-шум в информационном канале
h2 = E/N0. (15.27)
Можно показать, что вероятность ошибки при рассинхронизации
равна [5]
Рош К Й) =ехр [-А2 (R2 + \i2) ] z* ехр (0,5 г2)/0/(1/2hRz) x
X ] t exp (0,5 t2) /0 Q/2 h \i t) dtdz, (15.28)
z
где R=\R(%, Q)\, \i= |ji(t, Q)|. При T=Q = 0, # = 1, [i = 0,
вероятность ошибки определяется известной формулой * ош— * ош (0,0) =
0,5 ехр (—0,5/i2). Предположим, что синхронизатор (измеритель)
является оптимальным, т. е. обеспечивает минимальные в средне-
квадратическом смысле ошибки при совместном измерении време-
279
ни и частоты. При достаточно большом отношении сигнал-шум на
выходе измерителя (15.14)
<72=2£ИЗМ/ЛГ0, (15.29)
где Ешм — эквивалентная энергия сигнала в измерительном
канале, совместная плотность вероятности ошибок т, Q при
некогерентном приеме приближенно определяется выражением (15.10).
Интегрировать в (15.10) надо в пределах центрального пика ФН, так
как при предположении q2^>\ ошибки малы. В [5] показано, что
если ВФН имеет малые боковые пики в окрестности центра (т=0,
Й = 0), то ее влиянием на вероятность ошибки можно пренебречь.
Такому условию удовлетворяют сигналы, у которых боковые
пики около центра плоскости неопределенности меньше 1/V В, где
В — база сигнала. Полагая jj, = 0, из (15.28) находим, что
вероятность ошибки
Рош (т, Q) =0,5 ехр (-0,5 h2\R (т, Й)|2).. (15.30)
Средняя вероятность ошибки при усреднении поти й
Рош ср = И Рош (*> О) о>2 Гт, Й) d т d Q, (15.31)
—оо
где Шг(т, Q) —совместная плотность вероятности ошибок т и й,
определяемая согласно (15.10), т. е. ш2(т, Q)=w[r9 Q\x(t)].
Интегрирование следует производить по области определения
центрального пика ФН.
Относительно центрального пика ФН предположим, что он
симметричен относительно осей т, й. Это имеет место, как было
отмечено ранее, для ФМ сигналов и ЧМ сигналов с четным законом
изменения частоты. При этом ошибки тий статистически
независимы, а модуль центрального пика ФН может быть записан в виде
|Я(т, Q)| = 1—(|t|/t0)v—(|Q|/Q/)A, (15.32)
где |т|^то; |й| ^Qo. Представление (15.32) является частным
случаем (15.11), поскольку положено R'\q =0. Из (15.32) для
сигналов с прямоугольной огибающей А,=2. Для ФМ сигналов
v=l, для ЧМ сигналов v = 2. При таком представлении
центрального пика ФН интегрировать в (15.31) необходимо в пределах
(—то, то), (—&о, &о). Совместная плотность вероятности ошибок т
и й, при условии, что они малы, определяется формулой (15.10).
Интегрируя и нормируя, получаем [5], что средняя вероятность
ошибки
Рош ср « 0,5 ехр ( — 0,5 h2) {1 — h2/q2)~^+^^ = .
= Рош (1 — W^(v+WvA- (15.33)
Из (15.33) следует, что средняя вероятность ошибки не зависит
от ширины центрального пика ФН по времени и частоте, так как
в это выражение то и йо не входят. Таким образом, средняя
вероятность ошибки при оптимальном измерении времени задержки и
и доплеровской частоты не зависит от базы используемых сигна-
280
лов. Поскольку форма центрального пика ФН (15.32) зависит от
показателей v и Я, то и средняя вероятность ошибки зависит or
формы центрального пика, но зависимость эта слабая, так как
отношение /г2/(72^0,5. При этом из (15.33)
Рош ср « Рош О + [(v + fc)M] (/i2/<72)}- (15.34)
Например, для ФМ сигнала v=l, Я=2, a (v + A,)M=3/2. Для 4'М
сигнала v = A,=2, a (v + K)/vX=l. Обычно h2^iq2. Поэтому различие
в форме центрального пика сказывается слабо. Следовательно,
средняя вероятность ошибки практически не зависит от формы
сигнала и его базы, а определяется только отношениями сигнал-шум
на выходах информационного и измерительного каналов. Поэтому
для повышения помехоустойчивости некогерентного
квазиоптимального лриема необходимо увеличивать отношение сигнал-шум на
выходе обоих каналов. Чтобы ошибки при синхронизации
сказывались слабо, необходимо иметь q2^>h2.
Таким образом, на первый взгляд, имеет место парадокс. С
одной стороны из формул (15.25), (15.26) следует, что с ростом
базы ШПС точности измерений растут, так как дисперсии ошибок
уменьшаются с ростом ширины спектра и длительности ШПС. С
другой стороны, из (15.34) следует, что вероятность ошибки при
приеме информации не зависит от ширины спектра и длительности
ШПС. Парадокса в этих фактах нет, так как, действительно, с
ростом базы точности измерений растут, но величина ошибок,
отнесенная к ширине центрального пика, остается неизменной, поскольку
из (15.25), (15.26) <jTFBit> = OfT3(t>ttOxfro^OQ/Qo~a'lq, где q —
отношение сигнал-помеха на выходе измерителя. Поэтому важно,
чтобы синхронизатор определил параметры ШПС (время задержки
и частоту) с точностью до центрального пика ШПС, т. е.
синхронизация должна осуществляться при малых расстройках по времени
и по частоте внутри центрального пика ФН. Таким образом, хотя
вероятность ошибки (15.34) в явном виде не зависит от свойств
ШПС, но для ее обеспечения необходимо, чтобы система поиска
ШПС определила параметры ШПС с точностью до размеров цент*
рального пика ФН, а затем система синхронизации должна
обеспечивать синхронизацию с минимальными ошибками (15.25) т
(15.26) внутри центрального пика ФН. При этом необходимо,
чтобы отношение сигнал-помеха на выходе измерительного канала q2
было существенно больше отношения сигнал-помеха на выходе
информационного канала.
15.4. Пространство параметров и многоканальный измеритель
Как следует из предыдущего материала, для нормальной
работы ШСС необходимо сначала осуществить поиск ШПС по
неизвестным параметрам (времени задержки и частоте), а затем
обеспечить синхронизацию. После завершения этих процессов ШСС
является работоспособной. Поиск должен закончиться обнаружением
ШПС и измерением его параметров — времени задержки и часто-
281
ты, причем точность измерений должна быть такова, чтобы
ошибки не выводили значения параметров из области центрального
пика ФН. Это означает, что два соседних значения параметра можно
считать неразличимыми, если разность между ними меньше
ширины центрального пика ФН. Поэтому при обнаружении ШПС и
измерении его параметров в процессе поиска ШПС можно считать,
что параметр изменяется дискретно, т. е. принимает ряд
дискретных значений. Например, пусть время задержки т изменяется от О
до Т — длительности ШПС. Если обозначить через Ат—ширину
интервала неопределенности, внутри которого значения
неразличимы с точки зрения измерений, то число значений параметра т
равно
тв = Г/Ат, (15.35)
где индекс «в» означает параметр «время задержки». Шаг
дискретности Ат называется интервалом неопределенности или интервалом
распознавания. Аналогично, если интервал изменения частоты
равен Fn, а интервал неопределенности по частоте равен А/, то число
дискретных значений частоты
m4-Fft/A/, (15.36)
где индекс «ч» означает параметр «частота».
Интервалы неопределенности Ат и Af определяются в
соответствии с теоремой Котельникова шириной спектра ШПС и его
длительностью, которые в свою очередь определяют ширину
центрального пика ФН. Если ширина спектра ШПС равна F, то интервал
неопределенности по времени в соответствии с теоремой
Котельникова
Ат « 1/2 F. (15.37)
Аналогично, если длительность ШПС равна Т, то интервал
неопределенности по частоте в соответствии с теоремой
Котельникова
А/ ж 1/2 Г. (15.38)
Таким образом, при неизвестных времени задержки и частоте
имеется m параметров; согласно (15.35) — (15.38)
m = mB m4 = 4 АРД Г, (15.39)
где B = FT — база ШПС. Первый множитель в правой части (15.39)
В — представляет собой число интервалов неопределенности по
времени, а второй — FAT — число интервалов неопределенности по
частоте.
На рис. 15.9 изображена частотно-временная плоскость, на
которой область неопределенности параметров — времени задержки
% и частоты / ограничена прямоугольником со сторонами в виде
«толстых» линий. Пределы изменения равны 0—Т и 0—FA
соответственно. Область неопределенности параметров разделена на интер.
валы неопределенности по времени и по частоте с шагом Ат (15.37)
и А/ (15.38) соответственно, в результате чего область неопреде-
282
ленности параметров разделена сеткой на ячейки в виде
прямоугольников со сторонами Дт и Af. Общее число ячеек равно т
(15.39). Площадь каждой ячейки приближенно равна площади
центрального пика ФН, т. е. в каждой ячейке можно расположить
только один центральный пик ФН. Таким образом, сетка на рис.
15.9 определяет границы между распознаваемыми значениями
параметров, а сами распознаваемые параметры соответствуют
центрам интервалов неопределенности (см. значения %п и /& на рис..
15.9).
Параметры принимаемого ШПС могут принимать любые
значения из тв и тч. Для примера, на рисунке выделена ячейка,
полностью заштрихованная, соответствующая принимаемому ШПС.
Поэтому синхронизатор в процессе поиска должен найти эту
ячейку, в которой расположен центральный пик ФН принимаемого
ШПС и более точно определить центр ячейки с неизвестными
параметрами %i и fj, t= l, mB, /= 1, тч.
Покажем, что задача обнаружения ШПС и измерения его
параметров при дискретном изменении параметров сводится к
задаче распознавания т ортогональных сигналов, где т определяется
согласно (15.39). Действительно, каждой паре параметров тп и fh
можно поставить в соответствие свой сигнал u(t; rn, Ы> гДе п==
= 1,тв, &=1,тч. Поскольку два соседних значения параметра,
например, тп и Tn+i разделены интервалом неопределенности Ат, то
можно считать, что ФН таких сигналов имеют несовпадающие
центральные пики. В свою очередь, это позволяет утверждать, что
взаимная функция неопределенности подобных сигналов
принимает малые значения (порядка l/V^B) и при В»1 этими
значениями можно пренебречь. Такое заключение позволяет полагать
сигналы с различными значениями параметров ортогональными, т. е.
Е при /z = /, k = p
О при пф1,
при Ь,ф р,
или и п ФI
и кфр.
(15.40)
Интегральное равенство (15.40) утверждает, что
корреляционный интеграл от сигналов с различными номерами измеряемых
параметров равен нулю, т. е. такие сигналы ортогональны. Таким
образом, задача обнаружения ШПС и измерения его параметров
может быть сведена к задаче распознавания т ортогональных
сигналов, решение которой хорошо известно [1, 57, 59 и др.].
На рис. 15.10 представлена схема оптимального
многоканального измерителя, который состоит из т каналов, а т — число пар
неизвестных параметров (15.39). Каждый канал состоит из
согласованного фильтра (СФ1... СФШ) для сигнала u(t; %n, fk) с
определенными значениями пары параметров, детектора огибающей (Д)
283
j u(t\rn$fh)u (t; Tj, fp) dt ^
и порогового устройства (ПУ). С выходов всех каналов
напряжения поступают на решающее устройство (РУ), которое принимает
решение: сигнал обнаружен с параметрами, которые
соответствуют каналу с максимальным выходным напряжением. Такой
оптимальный многоканальный измеритель работает в соответствии с
критерием максимального правдоподобия. Основные соотношения
для характеристик обнаружения и измерения можно найти в [5].
/Л»
W
з
z
7
г 1
j, Jk 1 1 1 1 | 1 1
к 1 1 1 1 1 I I
11Н1111
m
г1 ill!
II 1 1 1 1 1 1 1
Ч т Ъ
1 Z J •■
Рис. 15.9. Область неопределенности
параметров—времени задержки т и
частоты f
Рис. 15.10. Схема оптимального
многоканального измерителя.
••• Щ
Если сигнала на входе не было, порог хотя бы в одном из
каналов превышен, то возникает ложная тревога. Вероятность
ложной тревоги [5]
Рл.т = 1— (1— Рл.т0)т, (15.41)
где Рл.то — вероятность ложной тревоги в одном канале. Если
Рл.то/я<1, то
*л.т ^ fft * л.т. а>
(15.42)
т. е. вероятность ложной тревоги в целом в m раз больше
вероятности ложной тревоги в канале. Вероятность ложной тревоги в
канале при некогерентном приеме
Рл.т о = j ^ ехр (—z2/2) dz = ехр (—б2 <?2/2),
bq
(15.43)
где b—Vo/V — относительный порог, У0 — абсолютный порог, V —
максимум сигнальной составляющей на выходе согласованного
фильтра, q2 — отношение сигнал-помеха на выходе согласованного
фильтра (15.14). При фиксированной вероятности ложной тревоги,
т. е. при Рл.т=const
bq = V 2 In (ш/РЛ1).
(15.44)
Из (15.44) следует, что требуемое отношение сигнал-помеха растет
как In m.
284
Вероятность правильного обнаружения-измерения [5]
р— -1 * «р (-**) I. т [' -«р (-f)'
т—,1
dz.
(15.45)
Множитель в квадратных скобках
Ф (г) = 11 —ехр (—г2/2)]т~1 (15.46)
является весовой функцией и ее можно аппроксимировать
единичным скачком. Момент скачка z0 = V2\п(т— 1).
Для того, чтобы вероятность правильного
обнаружения-измерения была близка к единице, необходимо иметь такое отношение
сигнал-помеха q2, чтобы обобщенное рэлеевское распределение
лежало правее скачка, т. е. чтобы имело место неравенство q>Zo. С
другой стороны, порог bq должен быть меньше q> т. е. q>\bq.
Поскольку bq (15.44) всегда больше г0, то вероятность правильного
обнаружения РПрав-^1 при условии
q* > 2 In (т/РЛт). (15.47)
Из (15.47) следует, что требуемое отношение сигнал-помеха
растет как lnm, т. е. с увеличением точности измерений необходимо
увеличивать отношение сигнал-помеха.
Формулы (15.44), (15.45) позволяют рассчитать
характеристики оптимального многоканального измерителя, схема которого
приведена на рис. 15.10. Кроме характеристик обнаружения-измерения
процесс поиска и синхронизации характеризуется также и
временем синхронизации, в течение которого синхронизатор обеспечивает
поиск ШПС и вхождение в синхронизм.
Время синхронизации Тс равно сумме времени поиска ШПС
7П и времени вхождения в синхронизм TBt т. е.
ТС = Т„ + ТВ. (15.48)
Оптимальный многоканальный измеритель обеспечивает только
поиск ШПС, причем время поиска минимально. Действительно,
измеритель, схема которого представлена на рис. 15.10, производит
одновременный поиск во всех возможных ячейках области
неопределенности параметров (рис. 15.9). Поэтому, если время
анализа одной ячейки равно Га, то время поиска ШПС многоканальным
измерителем
r„.MK = 7V (15.49)
Найдем приближенно время поиска. Из (15.34) следует, что
для хорошей синхронизации необходимо иметь отношение сигнал-
помеха на выходе измерительного канала q2 существенно больше
отношения сигнал-помеха на выходе информационного канала /г2.
Допустим, что осуществляется некогерентный прием двух
ортогональных сигналов и вероятность ошибки РОш=10-5. При этом
требуется /г2=21 или 13 дБ. Допустим, что q2=Wh2, т. е. q2=2W или
23 дБ. Отношение сигнал-помеха h2=PcT/No, а q2=2PcT№iu/No, где
285
T — длительность ШПС, а T^m—QT— длительность сигнала,
обрабатываемого одним каналом измерителя, причем Q — число ШПС,
укладывающихся в Гизм. Так как Тшм = Тд2/21г2> то для приведенных
чисел Q = 5. Таким образом, длительность сигнала,
обрабатываемого в канале измерителя, должна быть в 5 раз больше
длительности ШПС, т. е. канал измерителя должен обрабатывать или
накопить Q = 5 ШПС. Поэтому измерительный канал должен (рис.
15.11,а) содержать согласованный фильтр (СФ), когерентный
накопитель (КН) и детектор огибающей (Д). При когерентном
накоплении отношение сигнал-помеха на выходе накопителя
,2 _-
=Qq,
2
вх,
(15.50)
т. е. в Q раз превышает отношение сигнал-помеха q2BX на входе
накопителя. Поскольку когерентные накопители-устройства сложные,
особенно при накоплении ШПС с очень большими базами, то
возможно осуществлять некогерентное накопление. При
некогерентном накоплении (рис. 15.11,6) за согласованным фильтром (СФ)
следует детектор огибающей (Д), а затем некогерентный
накопитель (НН). Если отношение сигнал-помеха на входе накопителя
<72вх>>1, то потери при некогерентном накоплении малы и
отношение сигнал-помеха на выходе накопителя определяется согласно
(15.50).
112
[сф
| с«р'
-^»
КН
а)
А
А |
; НН |
ЕЖ
М/13
а)
д)
Рис. 15.11. Канал измерителя
TWh^m
6)
Рис. 15.12. Аналоговые
накопители
а — с многоотводной линией
задержки, б —« рециркулятор
Накопители [12] могут быть аналоговыми и цифровыми. На
рис. 15.12 приведены схемы двух наиболее распространенных
аналоговых накопителей. Накопитель с многоотводной линией
задержки (МЛЗ) (рис. 15.12,а) производит суммирование Q сигналов в
сумматоре ( + ), каждый из которых задержан относительно
соседнего на длительность сигнала Т. Для этого задержка между
отводами равна Т. Накопитель в виде рециркулятора (рис. 15.12,6)
осуществляет накопление (суммирование) сигналов в сумматоре
( + ), поступающие как со входа, так и с выхода через линию
задержки (ЛЗ) со временем задержки, равным длительности
сигнала Т. Усилитель (< ) необходим для компенсации потерь в ЛЗ и
286
для установления такого усиления в кольце обратной связи, чтобы
не возникало генерации. Число накапливаемых импульсов в ре-
циркуляторе
Q»(14h (15-51)
где Ко — коэффициент усиления рециркулятора в разомкнутом
состоянии. Чем ближе /Со к 1, тем больше Q. Но при /Со, близком к
1, возникает генерация. Поэтому число Q не превышает 10—20.
Оптимальный многоканальный измеритель (см. рис. 15.10)
обеспечивает минимальное время поиска ШПС, равное времени
анализа одной ячейки (15.49); с учетом накопления
Tu = Tb = QT9 (15.52)
где Q — число накапливаемых ШПС, Т — длительность ШПС. Но
многоканальный измеритель является очень сложным устройством.
Сложность радиоэлектронной аппаратуры — понятие весьма
емкое и зависящее как от многих параметров, так и от используемой
технологии. Вместе с тем, в устройствах обработки ШПС есть один
параметр, который может служить основой для сравнения
различных устройств обработки. Этим параметром является
эквивалентная память устройства обработки, а сложность любого
радиоэлектронного устройства будет пропорциональна его памяти. Если взять
согласованный фильтр, то его память равна базе, т. е. количеству
информации, которое можно хранить в нем. Память отдельного
канала измерителя при когерентной обработке составит B(Q+1),
поскольку память отдельной ячейки когерентного накопителя на
многоотводной линии задержки (рис. 15.11,а) равна базе ШПС.
Число каналов в измерителе равно /п, поэтому эквивалентная
память измерителя
Bmu^mB(Q+l). (15.53)
Так как m определяется согласно (15.39), то
ВтыътчВЦ<2+1)у (15.54)
где гпч — число интервалов неопределенности по частоте.
Рассмотрим пример. Пусть F=10 МГц, 7,==1 мс, ^д=100 кГц.
При таких данных В=104, тч=102, т=106 и Визм-б-Ю10, т. е.
5изм~Ю4 Мбайт. Если учесть, что такую огромную память надо
создать на устройствах, пропускающих полосу частот 10 МГц, то
станет очевидным, что создание подобных измерителей
представляет серьезную техническую задачу.
Необходимо отметить, что такой многоканальный измеритель
используется только в начале сеанса связи, когда необходимо
найти ШПС и войти в синхронизм, а затем можно использовать
наиболее простой оптимальный корреляционный приемник. Поэтому
всегда, когда это возможно, необходимо использовать наиболее
простой измеритель. Наиболее простым измерителем является од-
ноканальный следящий измеритель.
287
15*5. Одноканальный следящий измеритель
Одноканальный измеритель работает следующим образом.
Сначала анализируется одна ячейка в области неопределенности
параметров (рис. 15.9). Если ШПС с параметрами этой ячейки не
обнаружен, то программное устройство переводит схему поиска в
другую ячейку, в простейшем случае в соседнюю. Таким образом
происходит последовательный анализ ячеек неопределенности до тех
пор, пока ШПС не будет обнаружен в какой-либо ячейке. Если
используется дискретная модель изменения параметров, то и
программное устройство перестраивает схему поиска дискретно. Но
можно осуществить и непрерывную перестройку схемы поиска
ШПС, поскольку реально параметр может принимать любые
значения внутри интервала неопределенности.
Обычно измеряемые параметры ШПС — время задержки и
частота — изменяются во времени из-за движения передающей или
приемной станции, нестабильностей частот и т. п. Поэтому
измеритель должен не только измерить (найти) параметры, но и
осуществлять слежение за параметрами, т. е. осуществлять
синхронизацию. Именно поэтому такие измерители называются следящими.
Одноканальные следящие измерители являются по сути дела
системами автоматического регулирования (САР), теория которых
разработана достаточно глубоко. Следящие измерители для
поиска и синхронизации ШПС безусловно имеют свои особенности,
которые кратко будут рассмотрены в дальнейшем, но основные
положения теории САР применимы и для таких измерителей.
Приведем основные положения теории одноканальных следящих
измерителей [102].
Положим, что измеряемый параметр, например ц,, изменяется во
времени, т. е. [i = [i(t). Поскольку прием ШПС сопровождается
помехами, то процесс \i(t) содержит как полезную сигнальную
составляющую \ic{t)y так и помеховую составляющую ц,п(0> т- е-
|j.(f) = |Ас(0 + |Хц(^). Задача измерителя процесса [i(t) заключается
в создании оценки [i*(t)> которая минимально, в соответствии с
принятым критерием, отличается от действительного закона
изменения [ic(t). Поэтому измеритель является сглаживающим
фильтром для [i(t). Структура измерителя должна быть такой, чтобы
обеспечить максимальное подавление (фильтрацию) помеховой
составляющей iin(t).
Параметры ШПС, которые необходимо измерить и за
изменением которых необходимо следить, нелинейно входят в ШПС.
Например, сигнал на входе приемника может иметь вид
u(t\ *8, ©) = £/(*— tJco&[(x>(t—tJ + B(t—tB) + q>], (15.55)
где U(t) — амплитудная огибающая сигнала, со — несущая частота,
Q(t) —закон изменения угловой модуляции, ф — случайная
начальная фаза, t3— задержка по времени. Параметры / и а) нелинейно
входят в принимаемый сигнал (15.55). Поэтому измерители
процессов t3(t) и co(t) являются нелинейными фильтрами.
288
Строгое решение задач нелинейной фильтрации хорошо
известно [103, 104]. При больших отношениях сигнал-помеха используют
гауссово приближение, которое заключается в том, что полагают
измеряемый процесс гауссовым. Именно такое приближение
сделано при переходе от апостериорной плотности (15.7) к (15.12).
Переход к гауссовым процессам позволяет линеаризировать задачу
оценки процесса и воспользоваться теорией оптимальной линейной
фильтрации. Линеаризация заключается в том, что из входного
сигнала формируется линейная функция малых отклонений
текущего значения параметра g = fi—\ю относительного некоторого
опорного значения, близкого к истинному значению ц,о. Для параметров
ШПС малые отклонения параметров определяются как
T=/8_f, Q = (o—(o0, (15.56), (15.57)
относительно которых и определялись ошибки (15.25), (15.26)
Устройство, которое сравнивает мгновенные значения \i и [ю,
называется дискриминатором (различителем). Опорное значение [Хо
вводится заранее. Оно известно и вводится системой поиска.
Обычно характеристика дискриминатора в определенных пределах ли*
нейна. Выходной сигнал дискриминатора является линейной
функцией малых отклонений £. Если измеряемый параметр не выходит
за пределы линейного участка характеристики дискриминатора,
то и на выходе дискриминатора можно поставить оптимальный
линейный фильтр, который будет сглаживать помеховую
составляющую и выдавать опенку £*. Необходимо отметить, что оценка |*
запаздывает на некоторое время относительно £ из-за задержки в
фильтре.
На рис. 15.13 приведена схема линейного оптимального
измерителя. Он состоит из дискриминатора (ДК), оптимального фильтра
(ОФ) и сумматора ( + ). На один вход дискриминатора поступает
сигнал u(t, \i), на другой вход — опорное значение параметра \хо.
На выходе дискриминатора имеем разность l = [i—ц,о- На рис. 15.14
*-^\ 15 I 1 \ \Po+t
*\АК |—^| 0Р I—Н+К"^
( f A
Рис. 15.13. Линейный оптимальный из- Рис. 15.14. Характеристика дне-
меритель криминатора
изображена характеристика дискриминатора. Для слежения за
изменением параметра обычно используется центральная линейная
часть характеристики. Оптимальный фильтр выдает сглаженную
оценку g*. Обычно фильтр строится на основе критерия
минимизации среднеквадратической ошибки между измеряемым параметром
и его истинным значением. На выходе измерителя формируется
10—111 289
значение параметра м/=3=М'0+£*> которое в соответствии с
критерием минимума среднеквадратической ошибки минимально в среднем
оталоняется от истинного значения. Значение параметра yj может
быть введено в необходимые узлы синхронизатора.
Опорное значение параметра \ю вводится в измеритель из
схемы поиска. В процессе измерений значение параметра [i на входе
дискриминатора может и выйти из пределов характеристики
дискриминатора, что приводит к срыву измерения параметра, т. е. к
срыву синхронизации. Поскольку изменения параметров обычно
медленные, то можно не только производить фильтрацию, но и
осуществлять экстраполяцию (предсказание) параметра и
использовать такое значение параметра в качестве опорного. При этом
устраняется опасность срыва синхронизации. Для экстраполяции в
качестве фильтра на рис. 15.13 используют экстраполирующий фильтр
или экстраполятор. Чем точнее предсказывает экстраполятор
ожидаемое значение процесса, тем меньше рассогласование между
опорным и входным процессами. Таким образом, оптимальный од-
ноканальный измеритель должен содержать дискриминатор и
экстраполятор.
Для обеспечения работоспособности измерителя необходимо на
временной дискриминатор подать опорное значение [i0. Начальное
значение этого параметра обеспечивается схемой поиска.
На рис. 15.15 представлена схема следящего измерителя. Он
состоит из дискриминатора (ДК), экстраполятора (ЭП), генератора
(Г), схемы поиска (СП). Последняя в свою очередь состоит из
схемы захвата (СЗ) и программного устройства (ПУ). Схема
захвата представляет собой коррелятор, за которым следует
пороговое устройство, а за пороговым
устройством — реле захвата.
На коррелятор поступают два
ШПС: со входа u(t, \x) со
значением параметра |аис
выхода генератора u(t, \i0) со
значением параметра \i0. Если
разность между параметрами
больше ширины центрального
Ч^^о) пика ФН, то на выходе
коррелятора сигнальной
составляющей не будет. Соответственно
не будет превышен порог и
реле захвата не сработает.
Генератор (Г) создает сигналы
u(t, \io) со всеми значениями (г0 внутри интервала
неопределенности. Изменение параметра \х0 в сигнале u(t, \i0) осуществляется
значением параметра £*, снимаемым с выхода экстраполятора.
Следящий измеритель работает в двух основных режимах: в
режиме поиска и в режиме слежения.
В режиме поиска программное устройство через экстраполятор
лерестраивает по определенной программе значение £*, что вызы-
290
1
1 Г
1
u(t,ju)
1
~Н СЗ \—Л ПН I [
1 -^ !\ц I -». 1 on 1
• -» ДГ\ ^-j JH 1 '
А
г W
Г
» *•>
Рис. 15.15. Следящий измеритель
бает формирование генератором сигнала u(t, \io) с соответствую**
щим значением параметра \i0. Например, программнае устройство
может обеспечить изменение параметра fi0 в заданных пределах
(от 0 до jjimax) с требуемой скоростью. Когда в процессе поиска
опорное значение параметра м-о окажется близким к истинному
значению \х (разность между ними меньше ширины центрального
пика ФН по этому параметру), то напряжение на выходе
коррелятора схемы захвата превысит порог, реле захвата сработает и
поиск прекратится. При этом начальное рассогласование \х—fi0
попадает в линейную часть характеристики дискриминатора,
который вырабатывает сигнал рассогласования. Следящее кольцо
(дискриминатор, экстраполятор, генератор) замыкается и измеритель
цереходит в режим слежения.
При ложных захватах от помехи или при пропадании сигнала,
реле захвата спустя некоторое время размыкается и схема поиска
вновь начинает поиск до обнаружения сигнала.
В режиме слежения сначала обрабатывается начальное
рассогласование между |л и [iQt что является переходным процессом. По
окончании переходного процесса в установившемся режиме
слежения рассогласования в дискриминаторе в среднем равны нулю и
экстраполятор вырабатывает оценку \i*(t) = |хо(/).
Таким образом, одноканальный следящий измеритель (рис.
15.15) осуществляет и поиск сигнала, и слежение за его
параметром. Измеряемыми параметрами ШПС являются время задержки
т и частота й. Измеритель для двух параметров должен
содержать два измерителя, аналогичных следящему измерителю,
представленному на рис. 15.15.
Одноканальный измеритель (рис. 15.15) является наиболее
простым, так как его память намного меньше базы ШПС.
Например, если в качестве ШПС используется ^-последовательность,
то память генератора равна 5r=log2 В, где В — база ШПС, что
несравненно меньше памяти многоканального измерителя (15.54).
Однако время поиска ШПС одноканальным измерителем
значительно больше времени поиска многоканальным измерителем.
Если положить, что число различимых значений параметров равна
т (15.39), а время анализа одной ячейки составляет Га, то
максимальное время поиска одноканальным измерителем составит
Тп.ои=тТй, (15.58)
что в m раз больше времени поиска (15.49) многоканальным
обнаружителем. Среднее время поиска
Гп.0Н = т7У2. (15,59)
Следует отметить, что и (15.49), и (15.58) не учитывают
появления ложных тревог и пропусков сигнала. Эти вопросы будут
рассмотрены в дальнейшем.
Таким образом, два обнаружителя — многоканальный и
одноканальный —- дают два значения времени поиска — минимальное и
максимальное соответственно. Поскольку одноканальный обнару-г
iO* 291
житель наиболее простой, то существует проблема создания
малоканальных обнаружителей на базе одноканальных, которые были
бы относительно простыми и в то же время обеспечивали
достаточное быстродействие. При этом возможны различные процедуры
поиска ШПС [96—98, 105]. Поиск в оптимальном многоканальном
измерителе производится одновременно во всех каналах. Такой
поиск называется параллельным. В отличие от него поиск,
осуществляемый одноканальным измерителем, называется
последовательным поиском. Иногда его называют также последовательным
шаговым поиском. Если такой поиск заключается в
последовательном переходе к анализу соседней ячейки, то его называют иногда
«слепым» или поиском по методу перебора. Многоэтапный поиск
заключается в следующем. Сначала на первом этапе относительно
быстро просматривают все ячейки и отбирают те, в которых
вероятность нахождения наибольшая. На втором этапе более детально
просматривают отобранные ячейки и т. д. Такой поиск можно
осуществлять в несколько этапов. Полихотомический поиск
заключается в том, что область параметров делят на Я частей и для каждой
определяют вероятность нахождения ШПС. Затем выбирают часть
с максимальной вероятностью и снова делят ее на К частей и т. д.
Простейший случай %=2, что соответствует дихотомическому
поиску. Возможны также специальные процедуры, основанные на
алгебраических свойствах кодовых последовательностей, и т. п. Более
подробно эти процедуры и методы поиска будут рассмотрены в
дальнейшем.
16. КОГЕРЕНТНАЯ ОБРАБОТКА ШПС
И НЕКОГЕРЕНТНОЕ НАКОПЛЕНИЕ
16.1. Основы квазиоптимальной обработки ШПС
Поиск ШПС во многом определяется их структурными
свойствами. При больших базах ШПС обеспечить полную когерентную
обработку всего сигнала весьма затруднительно. Поэтому часто
используют комбинированную обработку — часть сигнала
обрабатывается когерентно, а затем производится некогерентное
накопление [12, 16, 65]. Точно такое же положение при поиске — ШПС
когерентно обрабатывается согласованным фильтром, а затем
производится некогерентное накопление. Такая обработка ШПС
называется квазиоптимальной, а соответствующие приемники —
квазиоптимальными.
На рис. 16.1 представлена схема квазиоптимального
приемника с когерентной обработкой ШПС и некогерентным накоплением,
который предназначен для приема двоичной информации,
передаваемой с помощью ортогональных сигналов. Приемник содержит
два канала, в каждом из которых имеются согласованный фильтр
(СФ), детектор огибающей (Д), некогерентный накопитель (НН).
292
Напряжения с выхода каналов подаются на вычитающее
устройство (—), а затем на пороговое устройство (ПУ) с нулевым
порогом. Комбинация из вычитающего и порогового устройств
реализует выбор максимального значения из напряжений на выходах
каналов. Положим, что длительность ШПС, обрабатываемого
когерентно, равна Т, число накапливаемых ШПС равно Q. Поэтому
длительность ШПС, обрабатываемого согласованным фильтром и
накопителем, равна QT.
Рис. 16.1. Квазиоптимальный при- Рис. 16.2. Квазиоптимальный прием-
емник с когерентной обработкой ник, адекватный приемнику рис. 16.1
ШПС и иекогерентным накоплением
При когерентной обработке ШПС длительностью QT
отношение сигнал-помеха на выходе приемника
f=2P0qr/Nn=4lQ> (16Л)
q\ = 2PQTINn (16.2)
—отношение сигнал-помеха на выходе согласованного фильтра.
Формула (16.1) подчеркивает характерную особенность
когерентной обработки, в том числе и когерентного накопления:
отношение сигнал-помеха q2 на выходе согласованного фильтра (или
когерентного накопителя) линейно растет с увеличением
длительности ШПС или числа накапливаемых ШПС.
При некогерентном накоплении отношение сигнал-помеха на
выходе некогерентного накопителя будет меньше значения (16.1),
т. е. при некогерентном накоплении имеют место потери в
отношении сигнал-помеха. Поэтому можно записать, что отношение
сигнал-помеха на выходе некогерентного накопителя
<r2=<W> (16.3)
где коэффициент r)2^l определяет потери в отношении сигнал-
помеха.
Алгоритм работы квазиоптимального приемника с
некогерентным накоплением определяется следующим неравенством:
£""•(-£•)> £""•(-£-)■ <1М>
где /о (х) — модифицированная функция Бесселя нулевого
порядка; Vhu k=lf Q — значение огибающей £-го ШПС на выходе
согласованного фильтра в момент окончания этого ШПС для
символа 1; 1/feo, k=l, Q — значение огибающей k-то ШПС на выходе со-
293
гласованного фильтра в момент окончания этого ШПС для
символа 0. Если имеет место неравенство (16.4), то принимается
решение, что был послан символ 1, если имеет место обратное
неравенство, то принимается решение, что был послан символ 0.
В соответствии с неравенством (16.4) детектор огибающей в
схеме квазиоптимального приемника (рис. 16.1) должен иметь
характеристику вида In /о (х).
В зависимости от отношения сигнал-помеха на выходе
согласованного фильтра qo детектор с характеристикой 1п/0(я) может
быть либо квадратичным, либо линейным, так как
1 т /* ("Г*1* *<<1? (9о<<1)' пап
In /0 (лг) = | 4 (16.5)
[ х, х$>1, (<70>1).
Поэтому неравенство (16.4) преобразуется в следующее:
при квадратичном детекторе
/г=1 £=1
при линейном детекторе
S^i>T^o- (16-7)
Tax, как операции вычитания и суммирования линейны, то их
можно поменять местами. Поэтому квазиоптимальный приемник
с некогерентным накоплением может быть построен по схеме,
изображенной на рис. 16.2. В этом случае необходим только один
некогерентный накопитель.
16.2, Помехоустойчивость квазиоптимального приемника
При большом отношении сигнал-помеха на выходе
согласованного фильтра q2^>l потерь за счет некогерентного накопления
практически нет [12], т. е. г)2«1 и для расчета
помехоустойчивости квазиоптимального приемника можно использовать
отношение сигнал-помеха q2, рассчитанное по формуле (16.1). При этом
вероятность ошибки в квазиоптимальном приемнике (рис. 16.1,
16.2) определяется известным соотношением:
Рош=0,5ехр(-/12/2), (16.8)
где
h2=qV2=PcTQ/Nu. (16.9)
При малом отношении сигнал-помеха на выходе
согласованного фильтра <72о<С1 потери могут быть значительны, т. е. г)2<^1-.
Для обеспечения надежного приема информации потери
необходимо компенсировать увеличением числа Q накапливаемых ШПС.
Рассмотрим случай малых q20 более подробно.
294
В cootBeTCTBHH с (16.6) при малых q20 детекторы в
квазиоптимальном приемнике на рис. 16.2 являются квадратичными и
на выходе накопителя формируется величина
К —fjMi—V*o), (16,10)
которая является суммой разности квадратов огибающих V2ki и
V2ko на выходах согласованных фильтров COi и СФ0. При приеме
информации один из каналов содержит сигнальную и шумовую
составляющие, а другой — только шумовую составляющую.
Случайная величина У распределена по закону %2 с Q степенями
свободы. При <720<1 число Q»l. Поэтому можно считать, что при
больших Q случайная величина У распределена по нормальному
закону, характеристиками которого являются среднее значение и
дисперсия. Полагая величины V2n\ и V2ft0 статистически
независимыми, находим среднее значение
Y^m1(Y)^Q[m1{v\)--m1{vl)l (16.11)
o2Y = M2(Y)=Q[M2{V2{) + M2{V20)l (16.12)
где mi(F2i), mi(K2o) —средние значения квадрата огибающей на
выходе согласованных фильтров COi и СФ0, a M2(V2i) и
М2(К2о)—дисперсии тех же огибающих. Положим, что V\
содержит сигнал и помеху, Vo — только помеху. В этом случае [73]
m1{V2l)=2o2(l+a2/2o2)t (16.13)
М2 (У?) =4а^1 +-£). (16.14)
тг{У20)=2о\ М2(Уо)=4а4, (16.15), (16.16)
где а и а2 — сигнальная составляющая и дисперсия помехи на
выходе согласованного фильтра.
Соответственно из (16.11), (16.12) имеем
Y=Qa2, a£=Q4a4(2 + a2/a2), (16.17), (16.18)
причем
<7§ = a2/a2 (16.19)
является отношением сигнал-помеха на выходе согласованного
фильтра.
Распределение случайной величины У, в соответствии с ранее
сделанными предположениями, является нормальным
w(Y) = —1 ехр[-(Г-У)2/2а£]. (16.20)
y2noY
Вероятность ошибки
Рош= $w(Y)dY=F{-hH), (16.21)
295
где F(x) -
меха
уг
интеграл вероятности (7.5), а отношение сигнал-ио-
— Qtf-
(16.22)
«у 4(2 + ^)
Для того, чтобы найти потери при некогерентном накоплении,
обратимся к когерентному приему двух ортогональных сигналов
длительностью QT. Вероятность ошибки
P0m=F{-hh), где h\=Qh\ = Qq\l2, (16.23), (16.24)
поскольку h20 = q2ol2. Сравнивая (16.23) и (16.24), замечаем, что
коэффициент потерь
П
,2 .
^0
я1
2(1+Л20) 2(2 + $
При Л20<1
n2«ft20/2-^/4.
Коэффициенты потерь
(16.25)
(16.26)
в теории
(16.25), (16.26) хорошо известны
некогерентного накопления.
На рис. 16.3 изображена зависимость потерь г)2 в отношении
сигнал-помеха при некогерентном накоплении от элементного
отношения сигнал-помеха h20,
построенная по формуле (16.25). Левее
значения h20 =—10 дБ зависимость
г\2, дБ, линейная, что следует из
формулы (16.26). С ростом Л2о,
Нтт12 = 0,5, т. е. г\2 стремится к
значению —3 дБ (на рис. 16.3
штриховая линия).
Так как при Л203>1 потерь нет,
то график коэффициента потерь в
области от —10 дБ до 20 дБ (см.
рис. 16.3) построен приближенно.
Поскольку расчет
помехоустойчивости ШСС ведется по отношению
сигнал-помеха h20 = q20/2, то при
/t2o<l из формул (16.22), (16.26)
получаем, что отношение сигнал-помеха на выходе некогерентного
накопителя при большом числе накапливаемых ШПС
hl=Qt&Tf&Qhl/2. (16.27)
Отсюда число накапливаемых ШПС.
Q=2h2Jhi (16.28)
Формула (16.28) позволяет по заданной помехоустойчивости
ШСС, определяемой отношением сигнал-помеха Л2Н на выходе
некогерентного накопителя, и по заданному отношению сигнал-
помеха h20 на выходе согласованного фильтра определить
требуемое число накапливаемых ШПС.
10hz0,AG
Рис. 16.3. Зависимость потерь в
отношении сигнал-помеха при
некогерентном накоплении от h20
296
17. ПОИСК И СИНХРОНИЗАЦИЯ ПШС ПО ВРЕМЕНИ
17.1. Автоматическая подстройка времени
В реальных условиях при приеме информации в начале сеанса
связи несущая частота сигнала и его время задержки в точке
приема неизвестны. Поэтому необходимо провести поиск и
синхронизацию ШПС по частоте и по времени. На рис. 17.1 приведена
схема приемника, предназначенного для приема двоичной
информации. Он состоит из стандартной части (ПР), включающей
преобразователь частоты, усилитель промежуточной частоты,
гетеродин. Эта часть приемника не рассматривается, так как она не
влияет на поиск и синхронизацию ШПС. Кроме того, приемник
включает схемы фазовой автоподстройки частоты (ФАПЧ) и
автоподстройки времени (АПВ) первый перемножитель (X $ и
информационный коррелятор (ИК). Последний состоит из
второго перемножителя ( X ), интегратора ( $), решающего
устройства (РУ), генератора ШПС (ГШПС) и генератора
синхроимпульсов (ГСИ).
Рис. 17.2. Схема когерентной АПВ
ь Рис. 17.1. Корреляционный приемник
с ФАПЧ н АПВ
Фазовая автоподстройка частоты (ФАПЧ) осуществляет
поиск и синхронизацию по частоте. На выходе ФАПЧ имеется
восстановленное значение несущей частоты сигнала в диапазоне
промежуточных частот. Поэтому на выходе первого
перемножителя ШПС переведен в область видеочастот. Таким образом, ФАПЧ
обеспечивает синхронный прием информации при условии точной
синхронизации по времени, которую в свою очередь
осуществляет АПВ. После поиска ШПС по времени (измерение задержки
ШПС) АПВ обеспечивает синхронизацию ГШПС и ГСИ по
времени, что необходимо для выделения информации. ШПС с ГШПС
поступают на вход второго перемножителя, на выходе которого
модуляция по ШПС отсутствует. Короткие синхроимпульсы от
ГСИ с частотой fT=l/T, где Т — длительность ШПС, управляют
работой интегратора и решающего устройства.
Совместно ФАПЧ и АПВ представляют собой синхронизатор
(С). И ФАПЧ, и АПВ являются одноканальными следящими
измерителями (рис. 15.16). Предположим, что ФАПЧ обеспечивает
297
достаточную точность восстановления несущей. Поэтому
допустим, что неизвестным является только время задержки ШПС.
Поиску и синхронизации ШПС по времени посвящено много
работ, см., например, [5—8, 13, 16, 16, 67, 68, 96—99, 102, 105, 106].
На основе этих работ в гл. 15 были приведены основные свойства
следящих измерителей. Поскольку в данном параграфе
рассматривается поиск и синхронизация ШПС по времени, то приведем
основные схемы и параметры следящих измерителей времени,
.которыми и являются АПВ.
На рис. 17.2 представлена схема когерентной АПВ,
предназначенной для поиска и синхронизации фазоманипулированных (ФМ)
сигналов [7, 8, 15, 98], более точно для поиска и синхронизации
М-последовательностей или близких к ним псевдослучайным
последовательностям (ПСП). На схеме рис. 17.2 не показаны
элементы схемы поиска и схемы захвата, изображенные на рис. 15.16.
Для' данного материала они не являются принципиальными.
Схема АПВ, представленная на рис. 17.2, является когерентной, так
как для нормальной работы такой схемы необходимо
восстанавливать частоту с точностью до начальной фазы. Так как схема
предназначена для ПСП, то регистр сдвига (PC) из п каскадоз
является генератором ПСП длиной N = 2n—1 и длительностью
T = Nxq, то — длительность одного импульса ПСП. Сигнал с
выхода второго перемножителя приёмника, схема которого
изображена на рис. 17.1, поступает на вход АПВ — на два перемножителя
(см. рис. 17.2). На другие входы перемножителя подаются ПСП с
п- и (п—1)-го каскада регистра сдвига. Поэтому ПСП имеют
сдвиг, t равный то. Напряжения с выходов перемцожителей
поступают на сумматор ( + ), который по сути дела выполняет
функции вычитающего устройства, так как на один вход
сумматора напряжение поступает с плюсом, а на другой — с минусом.
С выхода сумматора напряжение поступает на усилитель с
коэффициентом усиления /С, затем на фильтр (Ф), затем на
управляющий элемент (УЭ), а затем на управляемый генератор (УГ).
Цепочка УЭ и УГ преобразует сигнал ошибки (напряжение) в
фазу тактовых импульсов, снимаемых с выхода УГ. Тактовые
импульсы с частотой 1/то поступают на регистр сдвига.
Два перемножителя, сумматор и регистр сдвига образуют
дискриминатор, точнее, временной дискриминатор. На рис. 17.3
представлены характеристики дискриминаторов. На рис. 17.3,а и б
изображены центральные пики идеальных АКФ ПСП (к ним
близки АКФ ^-последовательностей), снимаемых с (/г—1)-го
каскада регистра сдвига (рис. 17.3а) и с я-го каскада. Между ними
сдвиг по времени, равный то. На рис. 17.3,в изображена
характеристика дискриминатора (рис. 17.2). Ее линейная часть имеет
ширину то в интервале (—то/2, то/2). Если ПСП на входе АПВ
совпадает с ПСП от /г—1 каскада, регистра сдвига, то на выходе
сумматора напряжение равно — 1. Если ПСП на входе АПВ .сов*
ладаеу р-ЛСП от л каскада регистра сдвига, то напряжение на
выходе сумматора равно 1 & промежуточном случае оно равно 0.
298
Отклонение напряжения на выходе сумматора является сигналом
ошибки, который усиливается затем усилителем, проходит через
фильтр (экстраполятор на рис. 15.15) и через УЭ и УГ изменяет
моменты появления (фазы) тактовых импульеов, определяющих
ритм работы регистра сдвига.
а)
б)
*)
г)
Рис. 17.3. Характеристики
дискриминаторов
\RZ
Рис. 17.4.
Пропорционально-интегрирующий фильтр
Дискриминатор может иметь
большую ширину линейной части
характеристики, если на
перемножители подавать ПСП,
снимаемые с /г-го и (п—2)-го каскада
регистра сдвига. При этом ПСП
сдвинуты на 2то. Такая
характеристика изображена на рис. 17.3,г.
Ширина линейной части равна
2то. АПВ с характеристикой
дискриминатора, изображенной на
рис. 17.3,в, обозначают АПВ1, а
с характеристикой, изображённой
на рис; 17.3;г — АПВ2 (АПВ1
обладает большей
помехоустойчивостью [8], АПВ2 позволяет
быстрее произвести поиск ШПС).
Цепочка УЭиУГ (иногда н'азы-
бается генератором, управляемым напряжением — ГУН) tfa рис.
+7:2 под воздействием напряжения сигнала ошибки с выхода
фильтра изменяет частоту следования тактовые импульсов сот —
= 2jt/¥o- Временное положение-тактовых импульсов является их
фазой. Чистота са и фаза ф связаны известными соотношениями
®(0.
dt
Ф(0 =.{©(*)#.
о
f!7.1)
Частота тактовых импульсов <DT(0=tfoe(f)i '-где г/Со-":-^ #Ьэффи-
299
циент передачи усилителя, фильтра и ГУНа, e(t) —сигнал
ошибки на выходе фильтра. Поэтому
Ф(/)=*о/е(0Я, (17.2)
о
т. е. ГУН является интегратором.
Коэффициент передачи фильтра (экстраполятора)
определяется из условий минимизации среднеквадратического значения
сигнала ошибки. Он во многом определяется характером изменения
сигнала ошибки во времени. Оптимизация фильтра — серьезная
математическая задача, решаемая на основе теории марковских
процессов [73, 75, 103, 104, 106]. Не рассматривая всего
многообразия фильтров и проблем их выбора, отметим, что наиболее
часто используется пропорционально интегрирующий фильтр (рис.
17.4). Его передаточная функция
£(р)=(1+р72)/(1 + р7\), (17.3)
где р — оператор Лапласа, постоянные времени
T^fa + RJC, T2=R2C. (17.4)
Отношение постоянных времени т = Т2/Ти
Числитель в (17.3) характеризует предсказывающие
(экстраполирующие) свойства фильтра, так как передаточная функция
1+рТ2 является передаточной функцией форсирующего звена.
Выражение 1/(1 +р7\) является передаточной функцией
интегрирующего звена. Особенность пропорционально-интегрирующего
фильтра заключается также в следующем. На высоких частотах
напряжение на выходе фильтра пропорционально напряжению на
входе, а в области нижних частот оно зависит от интеграла
напряжения на входе фильтра. В дальнейшем будет использоваться
параметр
Fm=V2/T2, (17.5)
который определяет полосу пропускания фильтра и практически
является шумовой полосой [8] следящей системы, которой
является АПВ.
В схеме АПВ измерение времени задержки сопровождается
тремя видами шумов. Во-первых, шумами фильтрации,
возникающими в схеме, (собственные шумы АПВ) при фильтрации сиг-
кала ошибки. Они характеризуются дисперсией о2ф и зависят от
спектральных свойств сигнала на входе АПВ. Во-вторых,
шумами, возникающими из-за воздействия флуктуационных помех на
входе АПВ. Они характеризуются дисперсией а2„ и определяются
свойствами помехи (шума) на входе АПВ и свойствами
сигналов и приемного тракта. В-третьих, нелинейными искажениями»
которыми пренебрежем.
Дисперсия шума фидьтрацнн составляющей для АПВ [8]
а!«т§(Ршт0/2), (17.6)
300
а дисперсия шумовой или помеховой составляющей
o2m^Tl(FmN0/Pc)9 (17.71
где то — длительность импульса ПСП, Рс — мощность сигнала на
входе приемника No — спектральная плотность мощности
помехи на входе приемника. Как следует из формул (17.6), (17.7),
действие шумов уменьшается с уменьшением /^ — ширины
полосы пропускания фильтра (17.5), т. е. чем более узкополосным
становится фильтр, тем меньше дисперсии шумовых составляющих
(17.6), (17.7). Пороговое отношение сигнал-помеха PJN0 можно
найти из (17.7), полагая для АПВ2 что утроенное среднеквад-
ратическое значение не выходит за пределы линейной части
дискриминатора, т. е. если аш^О,Зто. При этом пороговое
отношение сигнал-помеха
(Pc/No)nop*10Fm, (17.8)
т. е. чем меньше Fm, тем меньше пороговое отношение сигнал-
помеха.
При изменении времени задержки в установившемся режиме
возможны динамические ошибки. В АПВ с
пропорционально-интегрирующим фильтром динамическая ошибка возможна только
в случае, если время задержки изменяется с ускорением. При
этом динамическая ошибка [8]
At«*/(2FJ«, (17.9)
где t = d2r(t)/dt2. Из (17.9) следует, что динамическая ошибка
тем меньше, чем больше Fm, т. е. чем больше полоса пропускания
фильтра. В этом отношении увеличение Fm повышает
быстродействие АПВ, но ухудшает помехоустойчивость.
В самом начале процесса синхронизации, когда
заканчивается поиск, разность т между начальным временем задержки t и
истинным значением to не выходит за пределы характеристики
дискриминатора, т. е. |т| = |*—*о|<то для АПВ2. Значение т в
начальный момент является воздействием на АПВ, которая
начинает обрабатывать это воздействие. Через некоторое время в
течение переходного процесса АПВ отработает это воздействие и в
установившемся режиме разность т=0. Длительность переходного
режима [8]
Tmv»(S...lO)/Fm9 (17.10)
т. е. чем больше полоса фильтра, тем быстрее заканчивается
переходной процесс.
Исследование переходных процессов с помощью методов
фазовой плоскости показало, что скорость перестройки времени
задержки [8, 15] не должна превышать, примерно,
т = 4т/А w2Fbt0, (17.11)
т. е. чем меньше Fm, тем меньше скорость перестройки времени
задержки. Например, если необходимо иметь скорость перестройки
301
x=%o/T=l/N, где N— число импульсов в ПСП, то /7Ш= 1/2Т, т. е.
полоса фильтра обратно пропорциональна удвоенной
длительности ПСП.
В тех случаях, когда ФАПЧ не может обеспечить подстройку
частоты с точностью до начальной фазы, используется
некогерентная АПВ (рис. 17.5) [8, 98, 99, 101, 107]. Она состоит из двухка-
нального коррелятора огибающей (КО), собственно АПВ (Ф, УЭ,
УГ, PC) и выделителя информации (ВИ). Коррелятор огибающей
\п\пч\п-г\ 11Т>
PC
ГбИ *
—I
№
ПФ4
Рис. 17.5. Схема некогерентной АПВ
по сути дела является дискриминатором. На его вход с полосового
фшштра (ПФ1) поступает сигнал и помеха. Допустим, что сигнал,
переносит двоичную информацию в виде фазовой манипуляции
(ФМ). Коррелятор огибающей состоит из двух каналов, в каждом
№ которых расположены: перемножитель (X), полосовой фильтр
4ДФ2 или.Г1ФЗ) и квадратичный детектор (Д)* Полосовые
фильтры ПФ2 и ПФЗ необходимы для фильтрации удвоенной-частоты.
Дзе ДСП с отводов п- и (я-^1)-го каскадов регистра сдвига {PC)
через..перемножители (X), на вторые входы которых поступает
опорное колебание cos(g)i/+i|)) со вспомогательно» частоте^ <oi,
поступают на входы перемножителей корреляционных каналов (с
Шолоховыми фильтрами ПФ2 и ПФЗ). В режиме слежения при
атдутстзии щумов задержка ПСП на-входе коррелятора вгибающей
Ваана «а/2 относительно ПСП, снимаемой о (V— 1)лт каскада
802
резистора сдвига, и опережает на то/2 ПСП, снимаемую с az-fo
каскада регистра сдвига. При этом сигнал ошибки на выходе
фильтра (Ф) равен нулю и цепочка управляющий элемент (УЭ) —
управляемый генератор (УГ) поддерживает постоянной фазу
тактовых импульсов, снимаемых с У Г. Цепочка УЭ—УГ называв
ется также ГУНом. Для того, чтобы выделить информацию,
необходимо перемножить входное колебание с ПСП, которое сов*
падает по фазе с ПСП на входе. Для этого ПСП с (п—1)-го
каскада регистра сдвига задерживается на пол-такта, т. е. на то/2 и
подается на перемножитель в каскаде ВИ, на второй вход
которого поступает колебание со вспомогательной частотой ©ь С
выхода ПФ4 снимается колебание, маиипулированное только
информационной последовательностью. В этом колебании ПСП нет. С
выхода ПФ4 напряжение должно поступать на оптимальный
демодулятор сообщения (оптимальный приемник для приема двоич*
ной информации).
17.2. Сравнение непрерывного и дискретного
поиска ШПС по времени
В гл. 15, 16 и в § 17.1 приведено достаточно много различных
формул, определяющих поиск и синхронизацию ШПС по
времени. Эти формулы получены для различных, на первый взгляд,
условий. Поэтому необходимо дать сравнение этих условий и оп-«
ределить основные факторы, определяющие поиск и синхрониза*
цию ШПС по времени.
Дисперсии а2т ошибки измерения времени многоканальным
оптимальным измерителем определяется формулой (15.25). Эта
формула выражает потенциальную помехоустойчивость, при этом
дисперсия (15.25) минимальна для заданного отношения сигнал-
шум q2. Многоканальный измеритель является дискретным
измерителем, так как весь диапазон изменения времени разделяется на
конечное число интервалов неопределенности, равное числу
каналов.
Схема АПВ реализует непрерывный поиск. Точность измерения
времени в АПВ характеризуется двумя составляющими с
дисперсией шума фильтрации а2ф (17.6) и с дисперсией шумовой
составляющей а2ш (17.7). Прежде всего отметим, что а2ф<а2ш,
поскольку отношение PcW2Af 0 <^ 1. Это действительно имеет место в
резальных ШСС, так как должно быть PcT/2N0>lt а отношение
T/%o = N^>l. Поэтому в дальнейшем шумы фильтрации не
рассматриваются. Для сравнения дисперсий (15.25) и (17J)
необходимо сначала выразить Р2Эф в (15.25) через реальный параметр
ФМ — ШПС длительность одиночного импульса то. АКФ ФМШПС
не имеет второй производной /?"тт. Для приближенного
решения задача заменим центральный пик АКФ ФМ ЩЙС
параболой: R(r) = 1 — (т/то)2 при |т|^т0: При этом #"tj=
=—2/т2о. Подставляя это значение \R"XX в (15.21), находив Р%ъ —
= 6/ят2ь. Заменяя в (15.25) /72Эф, согласно найденному соотноше-
303
нию, <х2=3/я2 и q2=*2En/N0, где Еи — энергия накапливаемых ШПС,
#о — спектральная плотность шума, получаем
<%Ъ=Щ4ВЖ. (17.12)
В (17.12) Еи — энергия ШПС, обрабатываемого когерентно.
Положим, что длительность ШПС равна Т, а число накапливаемых
ШПС равно Q. Поэтому из (17.12)
оУ*1 = М0/4Рс(1Т. (17.13)
Сравнивая (17.7) с (17.13), находим, что схема АПВ
обеспечивает потенциальную помехоустойчивость, если ее шумовая
полоса
Fm=l/4QT. (17.14)
Из (17.14) следует, что шумовая полоса обратно
пропорциональна длительности ШПС, обрабатываемого когерентно.
Поскольку шумовая полоса связана с параметрами ФНЧ (17.5), то,
зная заданную помехоустойчивость измерителя (17.13), можно
однозначно найти параметры фильтра АПВ.
Число накапливаемых ШПС Q можно найти из следующих
соображений. Вероятность ошибки при приеме дискретной
информации при рассинхронизации определяется формулой (15.34).
Положим, что вероятность ошибки при приеме ФМ ШПС
увеличивается на 15% из-за рассинхронизации, т. е. РОШси& 1,15Рош. При
этом отношение сигнал-помеха на выходе измерительного канала
(накопителя) q2H и отношение сигнал-помеха на выходе
информационного канала h2 соотносятся следующим образом:
q\ «10ft2. (17.15)
Так как h2=PcTfN0, a <72h = 2P<TQ/No, to при когерентном
накоплении в соответствии с (17.15) число накапливаемых ШПС
Q«5. (17.16)
Из (17.14) находим, что шумовая полоса АПВ должна быть
равна
Ршж\/20Т. (17.17)
Время поиска ШПС в АПВ ограничивается скоростью
перестройки (17.11). В формуле (17.11) первая производная t=:2Fujto
является безразмерной величиной. За длительность ШПС, равную
Г, интервал времени, проходимый схемой поиска, равен Дт=тГ=
=2FшTo7^ Соответственно время поиска
7п = Г(Г/Дт) = 7/т = Г/2^шт0. (17.18)
Рисунок 17.6 иллюстрирует определение времени анализа Та
одной ячейки неопределенности длительностью Ат в схеме АПВ.
Так как согласно (17.18) Гп=77т, то tga=r и Га=Ат/т. Таким
образом, чем больше скорость перестройки, тем меньше время
анализа одной ячейки и тем меньше время поиска ШПС. Вместе
с тем, необходимо помнить, что скорость перестройки ограничена
согласно (17.11). Если в (17.18) подставить значение Fffl
согласно (17.14), то
Tn~2QT*/x.. {ПЛщ
Так как число импульсов в ФМ ШПС ЛГ=Г/т0, то
Tn = 2QNT, ' (17Щ
т. е. время поиска пропорционально числу накапливаемых ШПС»
базе (или числу импульсов) и длительности ШПС. В ряде
случаев интерес представляет относительное время поиска Zn = TJT.
Из (17.20) имеем
Zn=2QN. (172l)
Если число накапливаемых ШПС Q=5 согласно (17.16), то
Тпш 10 NT. Zn=10tf. (17.22Ц
Обратимся теперь к дискретному поиску, при котором время
задержки опорного ШПС изменяется дискретно. Ранее было
допущено, что число параметров по времени задержки согласно
(15.35) и (15.37) Г/Дт«2/Т, где Дт=1/2Л Эти соотношения
свидетельствуют, что шаг
перестройки схемы поиска Ат =
=та/2. Если число симво- г|
лов в ФМ ШПС N = Г/то,
то общее число шагов пе-
Ат
Рис. 17.6. Время анализа ячейки
неопределенности
рестроики 77Дт=2ЛЛ Если взять число накапливаемых импульсов
равным Q, то время поиска Tn=*2QTNt т. е. совпадает со
временем поиска схемой АПВ (17.20). При Q = 5 имеем соотношения
(17.22). Таким образом, доказано, что схемы поиска с
непрерывным и дискретным изменением задержки опорного ШПС
обладают одинаковыми характеристиками поиска. При этом
необходимо иметь в виду основное соотношение (17.14), связывающее
шумовую полосу Лц АПВ с длительностью ШПС,
обрабатываемого когерентно, и равной Q7, где Q — число накапливаемых ШПС
в когерентном накопителе.
При сравнении не были учтены переходной процесс в АПВ
(17.10), ложные срабатывания АПВ (ложные тревоги) и пропуск
ШПС. Если допустить для простоты, что ложных тревог и
пропусков ШПС нет, то ко времени поиска (17.18) —(17.22) надо
добавить время переходного процесса 7пер (17.10), которое и является
временем вхождения в синхронизм Гв( 15.48). Положим, что Г„ер=
= W/Fm. Согласно (17.14) rnep=40Qr. Суммируя время поиска
(17.20) и длительность переходного процесса Гпер, находим время
синхронизации
305
Tc = Tti+Tn*P=2QTN(l+20/N)=Tn(l+20/N). (17.23)
Если jV>20, to со временем переходного процесса можно не
считаться. При этом время синхронизма практически совпадает
со временем поиска ШПС. Такой вывод справедлив при условии,
что вероятности ложных тревог и пропуска ШПС малы. При
увеличении вероятности ложных тревог схема АПВ будет
останавливаться на каждом ложном выбросе и задерживаться до
окончания переходного процесса В этом случае учет длительности
переходного процесса необходим. Вероятности ложных тревог
и пропуска ШПС будут малыми только в том случае, если на
выходе измерительного канала (или на выходе схемы АПВ)
отношение сигнал-помеха будет существенно больше единицы.
17.3. Алгоритмы поиска ШПС по времени задержки
Непрерывный поиск ШПС по времени задержки,
осуществляемый схемой АПВ, реализует так называемый последовательный
поиск, когда интервал неопределенности последовательно
просматривается схемой поиска до обнаружения ШПС и вхождения в
синхронизм. Если осуществляется дискретный поиск ШПС по
времени задержки, то последовательно просматриваются все
ячейки неопределенности с шагом Дт«1/2/\ Такой поиск называется
последовательным шаговым поиском. Последовательный поиск (в
том числе и шаговый) называется иногда слепым поиском. Как
следует из материалов данного раздела, основными
характеристиками процесса поиска ШПС является вероятность правильного
обнаружения ШПС с оценкой его параметров и время поиска. При
оптимизации процедуры поиска возможны два критерия: 1.
критерий минимума среднего времени поиска при заданной
вероятности обнаружения; 2. критерий максимума вероятности
обнаружения при заданном времени поиска.
Как было отмечено ранее, наряду с последовательным
поиском может осуществляться и параллельный поиск.
Последовательный поиск осуществляется схемой АПВ, параллельный поиск —
многоканальным измерителем, в котором число каналов равно
числу ячеек неопределенности. Время поиска максимально при
последовательном поиске и минимально при параллельном
поиске, ко многоканальный измеритель значительно сложнее схемы
АПВ. Следует отметить, что многоканальный измеритель в ШСС
необходим только в процессе поиска ШПС и вхождения в
синхронизм. Во время приема информации при измеренных (и уже
известных) параметрах ШПС надо иметь только коррелятор. На
рис. 17.7 и?ображена упрощенная схема квазиоптимального
приёмника ШСС. Синхронизатор (С) осуществляет поиск ШПС и
синхронизацию генератора ШПС (ГШПС). Информация
выделяется с помощью коррелятора (К) и решающего устройства
(Р¥) Обычяо задача разработчика-ШСС заключается в том,
чтобы обеспечить минимальное время поиска ШПС при минималь-
306
ной сложности синхронизатора, причем полагают вероятностные
характеристики обнаружения и измерения заданными. Такая
задача до настоящего времени не имеет окончательного решения.
Известно большое число различных вариантов построения
синхронизаторов и процедур поиска [6, 7, 8, 13, 15, 16, 96—99, 105].
Кроме последовательного (одноканального) и параллельного
(многоканального) поиска на практике используются
параллельно-последовательный, многоэтапный, полихотомический поиск ШПС
по времени. Кроме того, известны алгоритмы поиска с учетом
алгебраических свойств ФМ ШПС и беспо-
йсковый алгоритм [105]. Кратко
рассмотрим отмеченные алгоритмы с учетом
вероятностных характеристик
обнаружения ШПС.
Последовательный поиск. Положим,
что имеется m ячеек неопределенности, а
центральный пик АКФ ШПС расположен
в последней ячейке. Процесс поиска ос- рис ,,„ Квазиоптималь.
«ганавливается каждый раз, когда возни- ный ПрИеМник ШСС
кает ложная тревога, а завершается
правильным обнаружением ШПС. Обозначим через Тц — среднюю
длительность цикла поиска до ложной тревоги, а через пц —
среднее число циклов до завершения поиска. В этом случае среднее
значение времени поиска [97]
Гп = ГдЯц. (17.24)
Более точно формула (17.24) определяет среднее значение
максимального времени поиска, так как было предположено, что
полезный сигнал содержится в последней ячейке
неопределенности. Известно [97], что среднее значение времени поиска (17.24)
1—(\—Р \т
А л,т0) (1725)
Т =Т
1 и * а
Р ^m_1 1
л.то; J
где Га — время анализа одной ячейки, Рл.то — вероятности
ложной тревоги ячейке (15.43), где нет полезного сигнала, Рпр —
вероятность пропуска полезного сигнала [формулы (15.45) при
т^=1] При этом процедура поиска может закончиться правильг
ным обнаружением с вероятностью
*обн —
(1-Рпр) (1-Рл.т.о)
1-
5пр(
1—р
л.тО
т—\
(17.26)
или ложной тревогой с вероятностью
Р-л = -
^С-Рл-то)
т~\
1-Рцр<1-РЛ1,Г-1
(17.27)
причем "Рл.т — 1—Я0бн.
Допустим, что отношение сигнал-помеха на выходе измери-
307
тельного канала достаточно высоко, так что можно положить
РПР-Ч), Рл.то->0. При этом из формул (17.26), (17.27) имеем
А>бн=1, Рл.т = 0, а из (17.25) Тп=тТа. Полагая m = 2N и Га=<?Г,
где N — число символов в ФМ ШПС, Q —число накапливаемых
ШПС, получаем Tn=2QNT, что совпадает с временем поиска АПВ
и одноканального измерителя, найденного ранее (17.20) без
учета характеристик обнаружения. Если Рл.то-*1, то Гп=Га, но
вероятность правильного обнаружения Робн = 0, т. е. поиск закончится
ложной тревогой. Если Рл.то~>0, а РПр->-1, то Гп->-оо из-за
пропуска ШПС. Поэтому при заданных вероятностных характеристиках
обнаружения Р0бн и Рл.т можно найти среднее значение времени
поиска. При конечных вероятностях Рл.то и Рпр среднее значение
времени поиска Тп будет всегда больше значения, определяемого
согласно (17.20).
При последовательном поиске с использованием
последовательного анализа Вальда время анализа Га не фиксируется, а
определяется достижением сигнала на выходе накопителя
определенного порога. При таком методе поиска вероятности
обнаружения и ложной тревоги определяются выражениями (17.26),
(17.27). Среднее значение времени поиска определяется
соотношением [97]
т т (1 рд т 0 s) (i нл т 0)
/я=/ао : m ■ 1 {i/.zb)
Р-.то11-Рпр(1-Рл.то)т"1]
где Га0 — время анализа в ячейке, где сигнала нет, l = Tai/Tao9
Та\ — время анализа в ячейке, где есть сигнал. Если 1=1, то
(15.28) переходит в (17.25).
Последовательно-параллельный поиск. При этом синхронизатор
содержит / каналов, каждый из которых является одноканальным
измерителем. Сначала синхронизатор анализирует I ячеек
неопределенности. Если сигнал не обнаружен, то синхронизатор
перестраивается на / следующих ячеек. Эта процедура продолжается
до тех пор, пока не произойдет обнаружение сигнала или
постоянно будет фиксироваться ложная тревога. Число каналов в общем
случае 1^/^т. При /=1 имеем последовательный поиск, при
1=т — параллельный поиск. При последовательно-параллельном
поиске обычно отношение т/1 является целым числом. Среднее
время поиска ШПС при последовательно-параллельном
поиске [97]
Гв = Га (- ^ -. (17.29)
При малых вероятностях ошибок (РПр<1, тРд.т<1) из (15.29)
Тп «!Та пг/1 - 2QNTIU (17.30)
т. е. среднее значение времени поиска уменьшается в I раз. Чем
больше каналов, тем меньше время поиска. При /=1
(последовательный поиск) время поиска Гп^тГа, при l^m (параллельный
S08
поиск) Тп=Та. Если вероятности ошибок конечны, то при /=1
формула (17.30) переходит в (17.25), а при l=m (параллельный
поиск)
^«ГаП-РирО-Рл^Г-Ч-1. (17.31)
При использовании последовательного анализа Вальда
имеем [97]:
т =т 1~(1~р^.)т~<[1-^(1-(1-рл.то)0] (1732)
а0' 11-(1-Рл.то)'Н1-Рпр(1-Рл.то)'""1] '
где Га 01 — среднее время анализа в группе из / ячеек, где
сигнала нет: £ = Гаи/Га<н; Гаи — среднее время анализа в группе из.
/ ячеек, среди которых сигнал есть. При /=1 формула (17.32)
переходит в формулу (17.28). При /=т и |=1 формула (17.32)
переходит в формулу (17.31) при условии, что Га —среднее
значение времени анализа.
Анализ времени поиска при последовательном,
последовательно-параллельном и паоаллельном поиске показал, что при
достаточно высоком отношении сигнал-помеха на выходе
измерительного канала в первом приближении можно не учитывать
вероятности ошибок и для оценки времени поиска целесообразно
использовать простые формулы (17.20) и (17.30).
Многоэтапный поиск. При многоэтапном поиске процесс
поиска разбивают на несколько этапов. Результаты, полученные на
предыдущем этапе, используют при анализе на последующем
этапе. На первом этапе отмечают те ячейки, в которых произошла
превышение порога, на втором этапе — анализируют только те, в
которых ранее был превышен порог и т. д. При многоэтапном
поиске возможно уменьшение времени поиска по следующим
причинам: во-первых, из-за уменьшения числа ячеек поиска на первом
этапе при увеличении размера ячейки неопределенности;
во-вторых, из-за уменьшения времени анализа ячейки при увеличении
вероятности ложной тревоги на первых этапах: в-третьих,
анализом на последующих этапах ограниченного числа ячеек, в которых
наблюдалось превышение порога на первых этапах. При ц-этап-
ном поиске вероятность правильного обнаружения [97]
PoCH-fi(l-Pnpi) (17.33)
и вероятность ложной тревоги
Рл.т=ПРДт/. (17.34)
где РПр и Рл.т i — вероятности пропуска ШПС и вероятность
ложной тревоги на £-м этапе. Для наиболее часто используемого дву-
этапного поиска (|а«=2) среднее значение времени поиска [97]:
rp rp 1 V1 ^Л.тГЛ.т2) "T"» fl.Tl'i ~*
"—О ~РЛ.Т1 Рл.т»Г~' I1 -,РЛ.Т 2 С1 -РПР l)]} (1735)
-х(1-Рпр2)](1-РЛт1РЛт2)—!}
где Рл.п, Рл.т2, Рпрь Рпр2 — вероятности ложной тревоги и
пропуска сигнала на первом и втором этапах; 7ai — среднее значение
времени анализа на первом этапе; £=7^2/^1; Та2 — среднее
значение времени анализа на втором этапе. При этом вероятность
правильного обнаружения ШПС на втором (окончательном)
этапе определяется формулой [97]
Робн== О^Рдр^О-Рдр^О-РщРл.т!)1""1 в (t7<36)
1_[1_(1_Рпр1)(1_Рпр2)](1_Рлт1Рлт2)^1
Среднее значение времени поиска (17.35) зависит от многих
параметров. Можно оптимальным образом выбрать параметры
первого и второго этапов, что позволяет, примерно, в 2 раза
уменьшить время поиска по сравнению с одноэтапным
последовательным поиском [97]. Увеличение числа этапов уменьшает
время поиска, но уже при ^ = 4 и 5 уменьшение времени поиска
становится медленным и дальнейшее увеличение числа этапов
нецелесообразно [97].
Полихотомический поиск. Разновидностью многоэтапного .
поиска является полихотомический поиск [96, 105]. При таком
поиске область неопределенности делится на \i частей и с помощью
специального синхронизатора определяется, в какой части
находится ячейка с полезным сигналом. Затем часть области
неопределенности, в которой содержится полезный сигнал, делится . на
и частей й снова определяется часть, в которой содержится
„полезный сигнал и тГ д. Эта процедура продолжается до тех .пор,
пока не будет определена единственная ячейка, в которой
содержится полезный сигнал. Простейшим случаем полихотомического
поиска является дихотомический поиск с \х = 2,_ при котором
область неопределенности делится сначала на,две части,
затем.^также'на две части, и т. д. Для реализации прлйхотомии необходимо,
найти операцию деления* области неопределенности на |i частей
ру
Рис. 17.8. Дихотомический:
обнаружитель
й определить структуру обнаружителя. В[9б, 105] приведена
схема обнаружителя, работающего по принципу дихотомии (|х = 2)
для поиска ФМ? ШПС с N=^2n. На рис. 17.8, приведена-схема
дихотомического^ обнаружителя. Коррелятор. {К) последовательно йьь
чшляеъп интегралов входам*® сигналах тестовыми сигналами; ойи*
аю
маемых с генератора тестовых сигналов (ТТС). Смена -тестовых
сигналов производится командным устройством (КУ) после
окончания интегрирования и принятия решения решающим
устройством (РУ). Если полезный сигнал содержится в анализируемой
части, то сигнал на выходе коррелятора максимален ртах, если
полезного сигнала нет, то на выходе коррелятора сигнал будет
обладать некоторым фоновым (взаимокорреляционным)
значением р(т). Задача обнаружения сводится к распознаванию макси*
мального значения на некотором фоне. Параметр
Aj^max(l-b)1/2, (17.37Д
где 1=1, п, Я=рг(т)/ргтах, называется контрастностью ШПС. Для
полихотомии найдено значение контрастности [105]:
/ / „-(-I \1/2
( ulog N ПРИ * нечетном>
Л< } * (17.38)
K(^-l)log^ ) при учетном.
Соответственно при jx = 2 имеем
Л < (2/log2 Л/)1/2 =(2/л)!/2 . (17.3Й);
Известно [105], что полихотомический поиск имеет
определенные преимущества перед последовательным поиском: время
поиска уменьшается в NA2/{\i—ljlog^N раз. Для дихотомии
имеем выигрыш 2Njn2. Вместе с тем, полихотомический поиск
возможен только для специальных ШПС, построенных на основе
функций Радемахера и Уолша [96, 105]. Поэтому полихотомические
методы применимы в настоящее время только для очень
ограниченного класса ШПС.
Беспоисковая синхронизация. Так называют такой способ вхр-
ждения в синхронизм, при котором в состав синхронизатора на
рис. 17.7 входит согласованный фильтр на весь ШПС или
согласованный фильтр на некоторый сегмент ШПС с последующим
накоплением (чаще всего с некогерентным накоплением). При
этом v синхронизатор не содержит генератора опорного
ШПС с перестраиваемым временем задержки.
Поскольку согласованный фильтр для ШПС с большой базой является
очень сложным устройством и, кроме того, он необходим только
в процессе поиска и вхождения в синхронизм, то обычно в
синхронизаторе (рис. 17.7) используется согласованный фильтр,
рассчитанный на обработку сегмента ШПС. Этот метод более
детально будет рассмотрен в следующем параграфе.
17.4. Поиск ШПС с некогерентным накоплением
Синхронизатор состоит из согласованного фильтра для
сегмента ШПС, детектора огибающей, некогфёнтного накопителя и
порогового устройства (см. рис. 16.2). Положим, что база ШПС
311
8=*FT, а база сегмента Bo=*FT09 где Т0—длительность
сегмента. Отношение
М=В/В0=>Т/Т0 (17.40)
определяет часть ШПС, обрабатываемую когерентно с помощью
согласованного фильтра. Число М является числом сегментов в
ШПС. Пусть отношение сигнал-помеха на входе решающего
устройства информационного канала
h2=PGT/Nu = (>*Bf (17.41)
где отношение сигнал-помеха на входе приемника р2=Рс/Рп, а
Ра и Рп — мощности сигнала и помехи на входе. Отношение
сигнал-помеха на выходе согласованного фильтра (сегментного)
hl^PcTt/N^PcT/NvM^hVM, (17.42)
т. е. в М раз меньше, чем на выходе информационного канала.
Отношение сигнал-помеха q2H на выходе некогерентного
накопителя синхронизатора при большом М определяется в соответствии
<: (16.28):
^-2/^QH/iJ, (17.43)
где Qh — число накапливаемых сегментов в некогерентном
накопителе (точнее, число накапливаемых АКФ сегментов ШПС).
Чтобы увеличение ошибки из-за рассинхронизации было
незначительным, надо в соответствии с (15.34) иметь
?2=10/ta. (17.44)
Подставляя (17.42), (17.43), в (17.44), находим требуемое
число накапливаемых сегментов:
QH=10AfW. (17.45)
Из (17.45) следует, что число накапливаемых сегментов тем
больше, чем больше М, т. е. чем меньше база сегмента. Кроме того,
число накапливаемых сегментов уменьшается с ростом отношения
сигнал-помеха/i2: чем оно больше, тем больше при заданном М
отношение сигнал-помеха на выходе согласованного фильтра А2о в
соответствии с (17.42), тем меньше потери при некогерентном
накоплении.
Заменяя в (17.45) М согласно (17.40), имеем
QH = 10 В2/h2B20. (17.46)
Время поиска (более точно, время обнаружения) ШПС
rnH-QHr. (17.47)
Соответственно относительное время поиска ШПС при некоге-
3>еятном накоплении
2^-Qh. (17.48)
Сравним полученный результат со временем поиска ШПС при
последовательном поиске. Согласно (17.21) Zne==32QKS> где Q«—-
312
число ШПС, накапливаемых когерентно, В — база ШПС
Отношение
y=ZuJZnK (17.49)
показывает выигрыш поиска с некогерентным накоплением па
сравнению с последовательным поиском: чем больше у, тем
больше выигрыш. Подставляя приведенные значения ZnH (17.48) и Z*,,
получаем
T = QKft2B20/5B. (17.50>
Ранее было доказано, что при когерентном накоплении
достаточно иметь QK=5. Поэтому
у=Ь?ВуВ. (17.51}
Поиск ШПС с некогерентным накоплением не имеет выигрыша
по времени поиска по сравнению с последовательным поиском,
если 7^1. Полагая 7=1> находим граничное значение базы сегмента
Б0.ГР-(Б/Й2)1/2. (17.52)
Например, если £ = 2-104, /i2=20, то Богр«32. На рис. 17.9
приведена зависимость выигрыша у дБ = 10 lgy от базы сегмента Во
(прямая ФМ). Естественно, чем больше Во, тем больше выигрыш.
Необходимо отметить, что выигрыш у не » ^
зависит от расположения сегмента и его
формы, поскольку расположение сегмента
внутри ЩПС известно заранее, а форма сег- J5|
мента учтена импульсной характеристикой
фильтра. Главным является база сегмента
Во; чем она больше, тем меньше время
поиска ШПС. Поэтому поиск любых ШПС с
некогерентным накоплением приводит к
одинаковым результатам, поскольку число
накапливаемых сегментов согласно (17.45)
зависит только от числа сегментов М и от
требуемого отношения сигнал-помеха Ь2 на
выходе информационного канала.
30
25
го
15
10
дет-w
т
тХ
/
Рис. 17.9. Зависимость выигрыша по времени поиска
при поиске ШПС с некогерентным накоплением по
сравнению с последовательным поиском 0
J2 54 J28 Z56 Off
С уменьшением числа сегментов М, т. е. с увеличением базы
сегмента Во, отношение сигнал-помеха на выходе согласованного
фильтра Л2о (17.42) увеличивается и потери на некогерентное
накопление уменьшаются. Постепенно с уменьшением М отношение
сигнал-помеха h20 станет больше единицы и потерь не будет.
Граничным значением числа сегментов является M0 = h2. При М<М0
/*2о>1. Поэтому при М>М0 можно полагать, что при накоплении
313
потерь нет. Следовательно, отношение сигнал-помеха на выходе
накопителя в соответствии с (16.1)
ql=Q'Kql=2Q'Ahl=:2Q-Kh*/M, (17.53)
где Q*K — число накапливаемых сегментов. Полагая, что и в этом
случае должно выполняться условие (17.44), находим число
накапливаемых сегментов
Q*=5M. (17.54)
При М=1 (согласованный фильтр обрабатывает весь ШПС)
Q*K=5, что совпадает с (17.16). Значение <2*к=^пн. Подставляя
его в (17.49) и учитывая, что Znn=2QK£, и полагая QK=5,
находим выигрыш во времени поиска ШПС алгоритма с
некогерентным накоплением (точнее, квазикогерентным накоплением,
также /t2>l) по сравнению с последовательным поиском
у=2В/М. (17.55)
Отметим, что формула (17.55) справедлива при M<C.h2.
Соответственно формула (17.51) справедлива при Af>h2.
Максимальное значение утах = 2В при М=1. Если В = 2-104, то 7тахДБ =
=46 дБ.
Как было отмечено ранее, при одном и том же числе сегментов
согласно (17.45) поиск различных ШПС при некогерентном
накоплении сопровождается одинаковым временем поиска. Однако
для реальных ШСС ограничивающим фактором является база
ШПС В. Полагая базу ШПС B = const, уточним влияние
структуры ШПС на выигрыш по времени поиска. Для ФМ ШПС база
ШПС B = Ny база сегмента Bo=N0i где N, N0 — число импульсов в
ШПС и в сегменте. Поэтому согласно (17.51).
?Фм=й2ЛУЛЛ (17.56)
Именно эта зависимость отображена прямой ФМ на рис. 17.9,
причем положено Л2 = 20, N = B = 2-104> No=B0.
У дискретных частотных (ДЧ) сигналов база В=М2, где М —
число частотных каналов. При этом формула (17.45) справедлива
и выигрыш для ДЧ ШПС
7дч=/12. (17.57)
В свою очередь М = В0 и при В = 2-104 М=141. Значение
выигрыша Тдчдб^З дБ отмечено точкой на линии ФМ (см.
рис. 17.9).
У дискретных составных частотных сигналов с фазовой
манипуляцией (ДСЧ—ФМ ШПС) база B=N0M2, где N0 — база ФМ
ШПС в одном частотном канале, М — число частотных каналов.
При этом из (17.45) имеем QH==lOBfh2No. Поэтому выигрыш для
ДСЧ—ФМ ШПС
Тдсч.фм = Л2#о- (17.58)
При No = 32, Л2=20 выигрыш равен 28 дБ.
314
Однако этот выигрыш справедлив лишь для M>h2. Полагая
А2 = 20, В = 2-104, находим, что при М = 20 длина сегмента N0=
= Bo=5/Af2o=50. Поэтому при Л/г0>50 выигрыш необходимо
рассчитывать по формуле (17.55), которая для ДСЧ—ФМ ШПС
принимает вид
7дсч-фм=2КЩ. (17.59)
Эта зависимость справедлива при Л/г0>50. На основании
(17.58), (17.59) построена кривая выигрыша, изображенная на
рис. 17.9 линией ДСЧ—ФМ. Больший выигрыш ДСЧ—ФМ по
сравнению с ФМ объясняется тем, что при ограниченной базе ШПС
(при fi = const = 2-104) и одном и том же значении В0 = В число
сегментов в ДСЧ—ФМ ШПС в VB/N0 раз меньше, чем в ФМ
ШПС. Поэтому потери на некогерентное накопление при поиске
ДСЧ—ФМ ШПС меньше, чем при поиске ФМ ШПС, что и
обусловливает меньшее время поиска ДСЧ—ФМ ШПС. Следует
также отметить, что при одном и том же N0 согласованный фильтр
для сегмента ДСЧ—ФМ ШПС будет проще, чем согласованный
фильтр для ФМ ШПС, так как полоса пропускания фильтра для
ДСЧ—ФМ ШПС в М раз меньше полосы пропускания фильтра
для ФМ ШПС.
Наиболее простым является согласованный фильтр для
сегмента ДЧ сигнала — в качестве его можно использовать
полосовой фильтр с оптимально выбранной шириной полосы
пропускания.
Поскольку наибольший выигрыш по времени поиска при
ограниченной базе ШПС обеспечивают ДСЧ—ФМ ШПС, то их
целесообразно использовать в ШСС.
18. ПОИСК И СИНХРОНИЗАЦИЯ ШПС
ПО ВРЕМЕНИ И ПО ЧАСТОТЕ
18.1. Оптимальный квазикогерентный приемник
с поиском ШПС по времени и по частоте
Особенности поиска и синхронизации ШПС по времени и по
частоте были подробно рассмотрены в гл. 15. На рис. 17.1
приведена упрощенная схема корреляционного приемника. Поиск ШПС
и синхронизацию по времени обеспечивает схема автоматической
подстройки времени (АПВ), а по частоте — схема фазовой
автоподстройки частоты (ФАПЧ).
На рис. 18.1 представлена структурная схема оптимального
квазикогерентного приемника с поиском ШПС по времени и по
частоте [8, 15, 98, 99]. Он состоит из ФАПЧ, АПВ, двух
перемножителей (X), фазовращателя (я/2) и линии задержки (то/2).
Данный приемник является оптимальным, поскольку
обеспечивает оптимальные оценки времени задержки и частоты. Посколь-
315
ку частота и фаза сигнала на входе флюктуируют, то оценки не
остаются постоянными. Поэтому приемник, схема которого
представлена на рис. 18.1, является квазикогерентным.
Схема ФАПЧ педставляет собой замкнутый контур,
состоящий из фазового детектора (ФД), усилителя (>ф), фильтра
(Фф)» управляющего элемента (УЭф), управляемого генератора
ВхоЭ
ФАПЧ
НН^Н^Н^]]
L.
щ]
№
лвп
In \n-1\n-Z\ \1 [
ЕНЗ-~Н
!
1
■^ \"'У[
—Ц *» 0ЫХ91
Рис. 18.1. Квазнкогерентный корреляционный приемник с поиском и
синхронизацией но времени и по частоте
(УГф). Индекс «ф» означает подстройку по фазе. С выхода
управляемого генератора снимается гармоническое колебание, частота
которого совпадает с несущей частотой ШПС на входе
приемника. Фаза колебания с выхода УГф опережает фазу ШПС на
входе приемника на я/2. Гармоническое колебание с выхода УГф,
жроходя через фазовращатель (я/2), поступает на вход второго
жеремножителя (X), с выхода которого снимается
видеочастотное колебание.
Схема АПВ, представленная на рис. 18.1, полностью
совпадает со схемой АПВ, изображенной на рис. 17.2. Схема АПВ
представляет собой замкнутый контур, состоящий из регистра сдвига
(PC), двух перемножителей (Х)\ сумматора ( + ), усилителя
(>,), фильтра (Фт), управляющего элемента (УЭХ),
управляемого генератора (УГТ). Индекс «т» означает подстройку по
времени. С выхода УГ, снимаются тактовые импульсы, фаза
которых изменяется во времени в соответствии с управляющим
напряжением на выходе УЭ. Псевдослучайная последовательность
316
(ПСП), снимаемая с (л— 1)-го каскада регистра сдвига,
опережает на то/2 ПСП, содержащуюся в ШПС на входе приемника.
Поэтому с выхода линии задержки (то/2) снимается ПСП,
совпадающая с ПСП в ШПС. Она передается на первый перемножитель
(X), с выхода которого снимается колебание, не содержащее
ПСП. Опорная ПСП, снимаемая с выхода линии задержки (то/2),
далее поступает в информационный коррелятор.
Таким образом, АПВ и ФАПЧ связаны перекрестными
связями: АПВ снимает модуляцию по ПСП и позволяет ФАПЧ
работать с более узкими спектрами; ФАПЧ, в свою очередь,
поставляет в АПВ квазикогерентное колебание, что позволяет АПВ
работать с видеочастотными сигналами.
Приемник, схема которого представлена на рис. 18.1, является
базовым. На его основе разработано много приемников,
осуществляющих прием информации при слежении за временем
задержки и за частотой [8, 15, 95, 97, 98, 101, 103, 104], поскольку
отличия в таких приемниках определяются видом передаваемой
информации (ФТ, ЧТ, AT), типом ШПС (ФМ, ДЧ, ДСЧ—ФМ),
характером изменения времени задержки и частоты во времени,
нричем существуют когерентные и некогерентные приемники для
всех этих условий. Этим и объясняется большое многообразие
различных следящих приемников. Кроме того, следует учесть, что
и слежение по частоте может быть сделано на основе ФАПЧ
[8, 100] или на основе схемы Костаса [8]. Это еще более
увеличивает многообразие схем следящих приемников.
Поиск ШПС по времени и по частоте в приемнике,
представленном на рис. 18.1, осуществляется аналогично тому, как это
производилось в следящем приемнике с АПВ, но уже с учетом
необходимости поиска и по частоте.
В начале сеанса связи задержка ШПС по времени и его
несущая частота неизвестны и поиск может осуществляться
следующим образом. Пусть частота управляемого генератора УГф
принимает минимальное значение. При этом значении частоты
схема АПВ осуществляет поиск и синхронизацию по времени.
Если сигнал на данной частоте не обнаружен, то УГФ должен
создать частоту следующего частотного интервала, а затем схема
АПВ снова должна осуществлять поиск и синхронизацию ШПС
но времени и т. д. Возможны и другие процедуры поиска.
Например, схема АПВ перестраивается дискретно, а схема ФАПЧ
непрерывно. Это не имеет принципиального значения. Важно то,
что схемы АПВ и ФАПЧ должны пройти весь диапазон
изменения времени задержки ШПС и изменения его частоты.
18.2. Время поиска ШПС при когерентной обработке
Ранее была показана идентичность следящего измерителя
(АПВ) и дискретного измерителя. Поэтому для простоты
рассуждений примем дискретные модели изменения времени задержки
и частоты. Время синхронизации (15.48) равно сумме времени
317
поиска и времени вхождения в синхронизм. Но вхождение в
синхронизм возможно только при обнаружении ШПС. Поскольку
обычно число ячеек неопределенности (15.39) велико, а ШПС
содержится только в одной, то временем вхождения в синхронизм
при приближенном рассмотрении вопроса можно пренебречь.
Точно так же в первом приближении можно пренебречь и ложными
выбросами. При таких предположениях время синхронизации
равно приближенно времени поиска, которое в свою очередь равно
Тп = тТ„ (18.1)
где т — число ячеек неопределенности, Га — время анализа одной
ячейки. Время анализа одной ячейки
ra-QT, (18.2)
a Q — число накапливаемых ШПС, связанное с шумовой полосой
Fm схемы АПВ соотношением (17.14). Схема АПВ эквивалентна
когерентному накопителю. Поэтому, как и ранее, будем полагать,
что Q«5 (17.16).
Число интервалов неопределенности по задержке согласна
(15.35)
/пв=77Дт, (18.3)
а интервал
Атя^ 1/2F, (18.4)
где F — ширина спектра.
Число, интервалов неопределенности по частоте определяется
длительностью когерентного обрабатываемого ШПС, которая
равна QT. Поэтому число интервалов неопределенности по
частоте равно
m4=FA/A/, (18.5)
а интервал
A/-1/2QT, (18.6)
где Fa — ширина доплеровского изменения частоты. Так как
число ячеек неопределенности в соответствии с (15.39) т=твтч, то.
подставляя в это выражение (18.3) — (18.5), имеем
m=4QBAfi, (18.7>
где
ЛД=^ДТ, B = FT. (18.8)
Соответственно из (18.1), (18.2), (18.7) находим
относительное время поиска
2П=ТП/Г=4(32БД5. (18.9)
При Q=5 получаем
гп=100ЯдЯ. (18.10)
318
Например, если 7=1 мс, 7^=10 кГц, Б = 2-104, то Zn = 2-107,
а абсолютное время поиска 7п=2-104 с «5,55 ч. Данный
пример показывает, что необходимо уменьшать диапазон доплеров-
еких частот, а также использовать схемы ускоренного поиска
ШПС. Одна из таких схем будет рассмотрена в следующем
параграфе.
18.3. Время поиска ШПС при некогерентном накоплении
Оно определено в работе [108]. В качестве примера
рассмотрим ДСЧ—ФМ сигнал, который, как было показано ранее, при
прочих равных условиях обеспечивает меньшее время поиска.
На рис. 18.2 изображена частотно-временная плоскость (f, t),
на которой условно показано распределение энергии ДСЧ—ФМ
сигнала. Ширина спектра ДСЧ—ФМ сигнала равна F, его
длительность Г, смещение его несущей частоты f0 относительно
опорной частоты /о равно 6/ = /'о—/о. Смещение первого сигнала во
FA
*/
'fa
At
fb
-е- 7"
%
Рис. 18.2. Частотно-временная плоскость с ДСЧ—ФМ сигналом
времени относительно начала координат равно At. База ДСЧ—
ФМ сигнала равна B=FT. Допустим, что ДСЧ—ФМ сигнал
состоит из М элементов, смещенных друг относительно друга как
по времени, так и по частоте. Элементы ДСЧ—ФМ сигнала
являются ФМ сигналами. На рис. 18.2 они заштрихованы. ФМ
сигналы имеют длительность Т0 = Т/М и ширину спектра F0 = F/Mf т. е.
база одного ФМ сигнала (элемента) равна Bo = FoT0=:B/M2. На
рис. 18.2 ширина диапазона изменения несущей частоты
обозначена через ^д. На рис 18.2 FR>F, но это условие не является
обязательным.
Задача системы поиска ШПС в общем случае сводится, во-
первых, к измерению смещения несущей частоты б/, и во-вторых,
к измерению временного запаздывания At или At+kT, где k —
целое число. Измеренное значение смещения несущей частоты
используется затем для подстройки частоты, а измеренное значе-
919
ние временного запаздывания — для синхронизации по времени.
Процесс поиска ШПС по времени и по частоте можно
представить следующим образом. Допустим, что приемник настроен
на некоторую частоту и известно, что ШПС имеется на выходе
приемника с неизвестной частотой. Согласованный фильтр (СФ)
на рис. 18.3 осуществляет обработку ШПС, а накопитель (Н),
расположенный после детектора (Д) осуществляет некогерентное
накопление. Если несущая частота ШПС не совпадает с частотой
Рис. 18.3. Приемник с некогерентным накопителем
Рис. 18.4. Приемник с некогерентным накопителем для приема ДСЧ—ФМ
сигнала
настройки приемника, то на выходе когерентного накопителя
пороговый уровень не будет превышен с вероятностью, близкой к
единице. Поэтому по истечении заданного времени приемник
необходимо перестроить на другую частоту и снова осуществить
обработку и накопление ШПС. Этот процесс необходимо
продолжать до тех пор, пока ШПС не будет обнаружен. При этом
будут измерены его несущая частота и временная задержка. По*
добный метод поиска ШПС требует определения интервала
перестройки частоты приемника, который зависит от ширины
центрального пика функции неопределенности ШПС по частоте,
обратно пропорциональной длительности когерентно
обрабатываемого ШПС или его части. Если когерентно обрабатывается весь
ШПС (схема рис. 18.3), то интервал перестройки частоты
следует взять равным 1/2Г. Соответственно число частотных каналов
m4=2FnT. (18.11)
В отличие от схемы рис. 18.3, осуществляющей полную
когерентную обработку ШПС и некогерентное накопление, схема,
изображенная на рис. 18.4, осуществляет частичную когерентную
обработку каждого ДСЧ—ФМ сигнала с помощью элементного
согласованного фильтра (СФт), т=1, М. На рис. 18.4 изображен
один из М каналов, состоящий из полосового (ПФт) и
согласованного (СФт) фильтров, детектора (Д), линии задержки (т™).
Напряжения с выходов всех каналов суммируются, а затем
поступают на некогерентный накопитель (Н). Отличие схемы рис.
18.4. от рис. 18.3 сводится к тому, что изготовить М
согласованных фильтров с базой В0 = В/М2 проще, чем один согласованный
фильтр с базой Б. Вместе с тем отношение сигнал-помеха на
выходе согласованного фильтра СФ на рис. 18.3 в М раз больше, чем
на выходе элементного согласованного фильтра на рис. 18.4.
Поэтому некогерентное накопление в схеме рис. 18.4 будет осуществ-
320
ляться со значительными потерями по сравнению с накоплением
в схеме рис. 18.3. С другой стороны, в схеме рис. 18.4 когерентно
обрабатывается только элемент ДСЧ—ФМ сигнала, длительность
которого Г0. Поэтому интервал перестройки приемника по
частоте равен 1/2 Т0 и число частотных каналов
m4 = 2FAT0=2FJiT/M. (18.12)
т. е. в М раз меньше, чем при полной когерентной обработке ДСЧ —
ФМ сигнала. Таким образом, в схеме с частичной когерентной
обработкой ШПС время поиска, с одной стороны, должно
увеличиваться из-за потерь при некогерентном накоплении, а с другой, —
должно уменьшаться из-за уменьшения числа частотных каналов.
Именно поэтому и возникает вопрос об определении параметров
схемы с частичной когерентной обработкой ШПС, причем интерес
представляет только определение числа элементов сигнала (или
каналов приемника) М, поскольку величина базы ШПС В обычно
задана из общих технических требований к ШСС.
В общем случае максимальное время поиска равно
произведению времени анализа в одном частотном канале Га на число
частотных каналов тч, т. е.
Tn^m4Ta = m4QTJ (18.13)
где Q — число накапливаемых ШПС. Относительное время
поиска (максимальное значение)
Zn = Tn/T=m4Q. (18.14)
Следует заметить, что схема с частичной когерентной
обработкой ШПС (рис. 18.4) имеет много различных модификаций.
Она существенно проще схемы с полной когерентной обработкой
(рис. 18.3). Именно поэтому исследование характеристик схемы
с частичной когерентной обработкой имеет большое
практическое значение. Ошибки в измерении частоты и времени
запаздывания в процессе поиска, а затем в процессе приема приводят к
увеличению вероятности ошибки.
Сигналы на входе некогерентных накопителей в схемах рис.
18.3 и рис. 18.4 имеют различную форму (имеется в виду
центральный пик функции неопределенности), но это не сказывается
на средней вероятности ошибки. Согласно (15.34), средняя
вероятность ошибки в случае рассматриваемых ШПС определяется
одной и той же формулой, а именно
Рошср«Рош(1+3/12/2(/2), (18.15)
где h2 = PcT/Nn — отношение сигнал-помеха на выходе
информационного канала согласованного фильтра (см. рис. 18.3) или на
выходе сумматора (см. рис. 18.4), a q2H — отношение
сигнал-помеха на выходе накопителя, Рош — вероятность ошибки при точных
значениях частоты и времени. Для того, чтобы вероятность
ошибки была мала, достаточно иметь q2H=l0h2 (17.15).
11—111 321
Таким образом, если отношение сигнал-помеха на выходе на-
кмителя: существенно больше отношения сигнал-помеха на выходе
информационного канала, то средняя вероятность ошибки
практически не зависит от ошибки измерения частоты и времени и не
зависит также от формы центрального пика функции
неопределенности рассматриваемых сигналов и от схем их обработки.
Отношение сигнал-помеха на выходе согласованного фильтра
(рис. 18.3) при приеме двух ортогональных сигналов
№ = 1±В, А2=р25, (18.16)
где р2=Рс/Рп — отношение сигнал-помеха на входе. Отношение
сигнал-помеха на выходе элементного согласованного фильтра
(рис. 18.4)
ft2 = ft2/Af, (18.17)
т. е. в М раз меньше, чем отношение сигнал-помеха на выходе
фильтра при полной когерентной обработке ШПС.
Для приема информации с малой вероятностью ошибки (Р0ш<
<10~4) необходимо иметь отношение сигнал-помеха на выходе
согласованного фильтра (см. рис. 18.3) Л2»1. Обычно Л2«20.
Поэтому дальнейшее некогерентное накопление в схеме,
изображенной на рис. 18.3, осуществляется практически без потерь. В
результате отношение сигнал-помеха на выходе накопителя после
приема Q ШПС
q\=2Qh\ (18.18)
Подставляя (18.11) и (18.18) в (18.14), находим
относительное время поиска при полной когерентной обработке
Zm = F*Tq\lh\ (18.19)
В правой части (18.19) все параметры являются заданными.
Поэтому ZnK может служить основой для сравнения последующих
результатов.
Определим время поиска при частичной когерентной
обработке ШПС и некогерентном накоплении. Сначала рассмотрим
случай, когда число элементов в ДСЧ—ФМ сигнале мало, т. е.
Л4<С10. В этом случае отношение сигнал-помеха h20 на выходе
элементного фильтра больше единицы и потери на
некогерентность при накоплении малы, и поэтому для отношения
сигнал-помеха на выходе накопителя приближенно можно считать
справедливым равенством (18.18). Подставляя (18.12), (18.18) в (18.14),
получаем относительное время поиска при частичной
когерентности и малом М в следующем виде:
^чк = Fд TqllMh* ^ZjJM. (18.20)
Из сравнения (18.19), (18.20) замечаем, что переход к
частичной когерентной обработке привел к улучшению
характеристики системы поиска, поскольку время поиска в М раз меньше. Это
объясняется тем, что число частотных каналов уменьшилось в
322
М раз, а потери из-за некогерентности накопления малы, так как
мало М. При М>10 потерями на некогерентность накопления
пренебрегать нельзя. Отношение сигнал-помеха на выходе
накопителя согласно (17.43) с учетом потерь в этом случае
ql = QMh\. (18.21)
Поэтому при большом М согласно (18.17) Л2о<^1 и потери
Л2о/2<с1. Из (18.21), после преобразований находим требуемое
число накапливаемых ШПС:
Q=qllMh\ = Mqytfi. (18.22)
Подставляя (18.12), (18.22) в (18.14) и используя (18.19),
получаем относительное время поиска при частичной когерентности и
большом М в следующем виде:
Zw= 2FAr#tf= 2ZnK//i2. (18.23)
Как видно из (18.23), и при большом М частичная
когерентная обработка имеет преимущество перед полной когерентной
обработкой, так как время поиска меньше в 2/h2 раз. Например,
если Л2 = 20, то выигрыш во времени поиска составляет 10 раз.
Вместе с тем из (18.23) следует, что при большом М правая
часть (18.23) от М не зависит. Это произошло потому, что с
ростом М уменьшается число частотных каналов согласно (18.12), но
растут потери и число накапливаемых импульсов согласно
(18.22).
Щ
0,5
Рис. 18.5. Выигрыш по времени
поиска при частично когерентной
обработке ДСЧ—ФМ—ШПС с некоге-
' 10 м рентным накоплением
На рис. 18.5 приведена зависимость относительного времени
поиска ШПС Z4K/ZnK от числа элементов М, объединяющая
результаты (18.20), (18.23). График имеет качественный характер
и соответствует значению Л2=20. При 1^-М<С10 время поиска
уменьшается по гиперболе (18.20), при М>10 время поиска от
М не зависит согласно (18.23).
19. СИНХРОНИЗАЦИЯ СТАРТСТОПНЫХ
ШИРОКОПОЛОСНЫХ СИСТЕМ СВЯЗИ
19.1. Стартстопные асинхронные адресные ШСС
Необходимость передачи информации на борт летательных аппаратов с
одновременным измерением их координат привела к развитию стартстопных
асинхронных адресных систем передачи информации (ССААС). В таких системах
11*
323
для разделения абонентов и для передачи информации используются шумопо-
добные сигналы (ШПС) Примером подобных систем служит система ДМЕ
[109], в которой ШПС используются в качестве адресного синхросигнала,
адресных командных и информационных сигналов. Система ДМЕ позволяет
осуществлять управление сотней летательных аппаратов, поэтому количество
передаваемой информации значительно, что приводит к увеличению базы ШПС.
Аналогичная задача решается в работе [11].
Базу ШПС можно увеличивать расширением спектра сигнала или
увеличением длительности. Однако спектр сигнала ограничен возможностями устройств
формирования и обработки, а его длительность — скоростью передачи
информации. В ССААС ограничены и ширина спектра, определяемая допустимой
шириной полосы пропускания радиоканала, и длительность сигнала, так как на
передачу информации (синхросигнала, командных и информационных сигналов)
каждому абоненту отводится определенное время. При наличии таких
ограничений является актуальной задача оптимизации параметров ССААС, которая
сводится к оптимальному выбору длительности синхросигнала, командных и
информационных сигналов при заданном количестве передаваемой информации.
Действительно, при увеличении длительности синхросигнала увеличивается
вероятность правильного вхождения в синхронизм, но уменьшается вероятность
правильного приема информации из-за уменьшения длительности командных и
информационных сигналов. Таким образом, в такой задаче существуют
оптимальные значения длительностей синхросигналов, командных и информационных
сигналов. Определение их приведено в работе [111].
Структура сообщения, передаваемого произвольному абоненту, приведена
на рис. 19.1. Сообщение состоит из синхросигнала длительностью Т8> за
которым следуют командные и информационные сигналы. Последние состоят из m
Иомандмые и имрорма-
Синхросигнал ционныс сигналы
ъ
[^ '
1 \~2 [J | ••• \rl\n ]
Т*
Т
' ^
Рис. 19.1. Структура сигнала в старт-
стопной ШСС
символов одинаковой длительности Tm^Ti\n. Каждый символ является
ортогональным m-ичным символом и принадлежит к алфавиту объемом т. Общий
объем информации, передаваемой в течение сообщения,
/ = /z log2m = /zfc дв. ед., (19.1)
где fc=*=log2m — количество информации в одном символе. При оптимизации
параметров будем полагать, что /=const. Если ширина спектра ШПС,
переносящих пнхросигнал, командные и информационные сигналы, одинакова и равна F%
то база синхросигнала Bs^FTs, а база командных и информационных
сигналов Hm=FTm.
Система работает следующим образом. На выходе согласованного с
синхросигналом фильтра (СФ) установлено решающее устройство, имеющее порог W
Если максимальную амплитуду напряжения на выходе СФ обозначить через
Vjtiy TQ относительный порог b=V0IVm.
При превышении напряжением с выхода СФ порога включается устройство
324
распознавания и обработки п командных и информационных символов,
предназначенных для данного адреса.
Так как длительность центрального пика автокорреляционной функции
(АКФ) синхросигнала конечна, то можно принять дискретную модель
изменения задержки. Число дискретных значений задержки определяется отношением
интервала наблюдения Гн к половине ширины центрального пика АКФ,
равного l/F(F—ширина спектра сигнала) и будет равна M—2THF.
Пусть решающее устройство производит обнаружение синхросигнала с
измерением неизвестной задержки. В этом случае вероятность правильного
обнаружения синхросигнала согласно (15.45)
*t+qS I —*L\M—l
(-.-*)
Pnpa»S= $ге 2 M**s)U-« / *• (19-2)
В этом выражении отношение сигнал-помеха
Я% =2Рс7уЛГп, (19.3)
где Рс — мощность сигнала, Nn — спектральная плотность мощности
нормальной флюктуационной помехи. Если помеха сосредоточенная, то JVn^Pn//7, где
Рд — мощность помехи.
Вероятность ложной тревоги можно определить из выражения (15.41):
Рл.т=1-(1-Рл.тоЛ <19-4>
где Рлто — вероятность ложной тревоги при произвольном дискретном значении
задержки. Причем согласно (15.43):
г» ь^ «2
Рлто= J" Л = е 2 (19.5)
Наконец, вероятность правильного распознавания п информационных
ортогональных сигналов алфавита т при некогерентном приеме
Гоо _!^ ( "\*-* V
Рправп = [{« 2 l9(qmz)\\—b ) dz\ . (19.6)
При этом отношение сигнал-помеха
c?m = 2PcT2k/NUt (19.7)
где T2=Tm/k — длительность эквивалентного двоичного сигнала.
19.2. Вероятность ошибки
Вероятность правильного приема информации можно найти из выражения:
Рправ = Рправ s * Рправ п» О9.8)
где Рправ s и Рправ п определяются из (19.2) и (19.6).
Обозначим плотность вероятности
w(xt y) — xe /e(x, y)t
325
а весовую функцию
q>(*. L) = [l— exp(—*/2)]L~l,
где для интеграла (19.2) y=qs, x=z, L=M; x=bq8y L=M для равенства (19.4);
У=Ят, x=z, L=m для интеграла (19.6); /о — модифицированная функция
Бесселя первого рода нулевого порядка.
С учетом таких обозначений (19.2), (19.4) и (19.6) будут иметь вид
соответственно:
оо
PnpaBS= J»(*. fe)«P(*. M)dz, Рлт«1 — <f(bqs, M), (19.9), (19.10)
"прав n —
Ja>(z, <7т)ф(*. rn)dt
Lo
(19.11)
Функция w(x, у) есть плотность вероятности, распределенная по закону Ре-
лея— Рейса. Чем больше уу тем ближе w(x, у) к нормальному закону.
Максимум w(xy у) в этом случае имеет место при х*=у.
По своей форме весовая функция <р(*, L) близка к единичному скачку. С
ростом L «скачок» смещается в сторону больших ху а его крутизна в
центральной части растет. Крутизна весовой функции максимальна при *0=
="j/21n(L—1), что следует из уравнения <р"(*, L)=0. При изменении
отношения сигнал-помеха х плотность вероятности w(xy у) перемещается по оси х.
Если **>*о, то при этом весовая функция <р(*, L) в окрестности х—х* слабо
зависит от х. Для (19.2) это условие означает:
<7s»l/21n(M—1)/&. (19.12)
Тогда вероятность правильного обнаружения синхросигнала
оо
PnpanS = !ш(2' ?s)<P(2' M)dz&q>(qSy M)X
bQc
*s
( _ir-'
X \w(z, qs)dz*<p(qs, Af)=\l— e 2/ (19.13)
Здесь имеется в виду, что интеграл от w(x, q8) примерно равен единице.
Строго говоря, вычисление Рправ s должно производиться при фиксированном
значении Рл.т (19.4).
При увеличении М для сохранения постоянного значения необходимо
увеличивать относительный порог 6, что приводит к изменению Рправ s. Однако
если значения qs удовлетворяют условию (19.12), то изменением Рправ s можно
пренебречь и считать эту величину постоянной. Этот случай и рассматривается
в дальнейшем.
Для выражения (19.6) условие **>*0 означает:
qm » V21n(m—1). (19.14)
Тогда вероятность правильного распознавания информационных сигналов
326
Рправп = П^(2, <7т)ф(*, m)dz\ « <p<p(<7m, т) \w(zt qm)dz\ s
( ~=И " "
*фл(<7т, т) = \1— е 2 /
.2 \п(т-1}
(19.15)
Подставляя (19.13) и (19.15) в (19.8), получим:
При достаточно больших qs и qm можно получить
-af/2
Рправ» 1-(М—1)е —п(т— 1)ехр(—q2m/2).
Тогда вероятность ошибки
Рош = 1 — Рправ « (М— 1) ехр ( — q%l 2)+п (т— 1) ехр ( — ^/2 ). (19.16)
Перейдем к минимизации (19.16).
19.3. Минимизация вероятности ошибки
при заданном количестве информации
Оптимальное соотношение между длительностями синхросигнала, командных
и информационных сигналов находится при ограничивающем условии:
Ts + ^2 nk = Т = const. (19.i7)
Обозначим относительную длительность синхросигнала через 6(0^6^1).
Тогда
Ts = bT. (19.18)
Подставляя (19.18) в (19.17) и решая относительно Г2, получаем:
T2 = (T—Ts)/nk. (19.19)
Из (19.3) и (19.7), используя (19.18) и (19.19), находим qh и qzm\
<7|=6<78» <72т=01--6)<72/л, (19.20), (19.21)
где q2=2PcTINu — отношение сигнал-помеха, соответствующее сигналу в целом.
Подставляя найденное из (19.1) значение m=2I/n, q2s и q2m согласно
(19.20) и (19.21) в (19.26), получим выражение Рош при заданном количестве
передаваемой информации /:
Рош«(М-1)ехр^— ^-^ + п\2П— ijexp^-^.-^y
(19.22)
Обозначив а=ехр(—<72/2), из (19.22) найдем
( - ^ ~
&(М—\)аб + п\2п—\)ап .
(19.23)
Определим оптимальное значение б, при котором имеет места минимум
Рош. Для этого, приравняв производную dPom/dd нулю и решив относительно б,
получаем оптимальное значение относительной длительности синхросигнала:
327
uopt
Я+1
2_
Я2
In
I 27/n—1 I
л-fl
(19.24}
На основании (19.22) и (19.24) итерационным методом были рассчитаны
зависимости 60pt и требуемого значения q от /, М и п при фиксированном
значении />ош = 10_4. Эти зависимости представлены на рис. 19.2, 19.3*. Как видно
из рис. 19.2, 60pt с ростом / уменьшается, a q необходимо увеличивать для
поддержания постоянной величины РОш = 10-4, причем в пределах от 1 до 32
дв. ед. изменение q незначительно. Из рис. 19.3 следует, что 60pt уменьшается
с ростом я, a q необходимо так же увеличивать, как и в случае рис. 19.22.
Как показывают расчеты [111], отклонение относительной длительности син-
Ofi
V\
trf
1Г
М*2Ш
*L
^ «•
<
■<г
У>
У
1 Z + 8 /6 JZ S4 128 2561
—V я
0.8
0,6
О/г
ОЛ
О
^
**
с
i
с
•""■"
16
М*2(М
16
40
30
ZQ
ГО
г ь в б ю 12 п л
Рис. 19.2. Зависимость 60pt и q от / при фиксированных М, п и РОш=10-*
Рис. 19.3. Зависимость 60pt и q от п при фиксированных М, I и РОш = 10-4
хросигнала от оптимальной величины приводит к
существенным энергетическим потерям.
На рис. 19.4 представлены зависимости Рош
(19.22) и Рл.т (19.4) и (19.5) от q при 6 = 60pt и
различных л, /. Как видно из рисунка,
энергетические потери в случае п=1 при увеличении
количества передаваемой информации невелики.
Это можно объяснить тем, что при фиксированном
значении п=1 ухудшение помехоустойчивости,
связанное с увеличением количества информации,
компенсируется уменьшением вероятности ошибки
при увеличении алфавита сигналов т, имеющим
Рис. 19.4. Зависимость Р0ш и Рлт от q, I и п
при М=2048
место в этом случае. Если же количество информации увеличивать при
неизменном алфавите сигналов, например при k=2t то можно наблюдать существенные
энергетические потери. Значительные энергетические потери имеют место также
при увеличении п (уменьшении т) и фиксированном значении количества
передаваемой информации /.
* Графики рассчитаны Е. А. Рябовым.
328
РАЗДЕЛ IV.
ФОРМИРОВАНИЕ И ОБРАБОТКА ШПС
20. ОСНОВЫ ФОРМИРОВАНИЯ И ОБРАБОТКИ ШПС
20.1. Основные требования к ШПС
и устройствам формирования и обработки
Характеристики широкополосных систем связи определяются, с
одной стороны, тактико-техническими требованиями (скорость
передачи информации, помехоустойчивость, дальность действия и
т. п.), а с другой,— применяемыми ШПС. Характеристики ШПС
во многом обусловливают характеристики ШСС. Основными
характеристиками ШПС являются: объем системы ШПС и база
ШПС; структурные свойства ШПС (вид элементов и их
расположение на частотно-временной плоскости); корреляционные
свойства ШПС (ВКФ и АКФ, их характеристики); возможность
быстрой смены ШПС; простота устройств формирования и
обработки, малые габариты и масса.
База ШПС определяется требованиями к помехоустойчивости
ШСС при воздействии шумовых и структурных помех. Чем больше
база, тем выше помехоустойчивость. Объем системы ШПС зависит
как от числа абонентов в ШСС, так и от необходимости
обеспечения защиты от несанкционированного доступа к информации. Чем
больше объем системы ШПС, тем больше может быть абонентов в
ШСС, тем выше ее защита от несанкционированного доступа при
условии быстрой смены ШПС по программе. Структурные и
корреляционные свойства ШПС взаимосвязаны. Основное требование
к ним — при хороших корреляционных свойствах необходимо
обеспечивать относительно простые методы формирования и обработки.
В соответствии с такими требованиями к ШПС к устройствам
формирования и обработки предъявляют следующие основные
требования: относительная простота формирования и обработки ШПС
с базами 103... 106; быстрая перестройка передающего и приемного
оборудования на любой сигнал из используемой системы сигналов
объемом 103... 1010; малые потери при формировании и обработке
ШПС, так как из-за потери необходимо еще более увеличивать
базу ШПС и расширять полосу частот.
В ШПС могут применяться фазоманипулированные сигналы,
дискретные частотные сигналы, дискретные составные частотные
сигналы с фазовой манипуляцией. Возможность применения тех
или иных ШПС обусловливается требуемой базой ШПС, объемом
329
системы ШПС, методами и устройствами обработки, назначением
ШСС, массой и габаритами, отводимыми для устройств
формирования и обработки. Несмотря на множество требований, иногда
взаимно противоречивых, конструктор ШСС должен выбрать
единственно возможный тип ШПС и наилучшие (для конкретной ШСС)
методы и устройства формирования и обработки. Заранее
невозможно высказать рекомендации по выбору ШПС и методов их
формирования и обработки, так же как и невозможно в настоящее
время в ограниченных объемах привести все известные методы и
устройства формирования и обработки ШПС. Поэтому среди
различных методов и устройств формирования и обработки, которые
нашли отражение в книгах, обзорах (см., например, [5—9, 12, 13,
15, 16, 59, 61, 73, 95, 98, 99, 112—137]), а также в многочисленных
статьях, в дальнейшем будут рассмотрены только те, которые
позволяют осуществлять быструю смену ШПС и являются
относительно простыми.
Применение ШПС усложняет аппаратуру формирования и
обработки. Чем больше база ШПС, тем сложнее изготовить такую
аппаратуру. Однако такие сигналы, как было показано ранее, имеют
неоспоримые преимущества перед простыми. Поэтому несмотря на
возрастающую аппаратурную сложность, они находят применение
в современных ШСС и будут применяться в системах будущего.
Следовательно, проблема разработки простых методов
формирования и обработки систем сложных сигналов весьма актуальна. Ее
решение зависит как от нахождения таких методов, так и от
широкого применения цифровых и аналоговых интегральных
микросхем. Достижения микроэлектроники, развитие цифровых методов
обработки сигналов, опыт проектирования ШСС со сложными
сигналами и с применением интегральных микросхем позволяют
утверждать, что эта проблема разрешима.
20.2. Пассивные и активные фильтры
для оптимального приема ШПС
Известно, что оптимальный приемник при воздействии на его
вход суммы x(t) =u(t) +n(t) известного сигнала u(t) и
нормального белого шума n(t) должен вычислять значение корреляционного
интеграла. Это значение вычисляется, коррелятором или
согласованным фильтром. Импульсная характеристика согласованного
фильтра (2.11) h(t)=k0u(T—1)9 где k0 — постоянная величина, Т —
длительность ШПС, совпадает с зеркально отраженным сигналом.
Если ШПС u(t) имеет спектр #(со), то коэффициент передачи со-
*
гласованного фильтра (2.12) &(со) = &og(o))exp(—шТ), где * —
знак комплексной сопряженности. Коэффициент передачи й((о)
является комплексно-сопряженным к спектру ШПС. Согласованный
фильтр (см. рис. 2.6) является фильтром с постоянными
параметрами в том смысле, что его параметры во (времени не изменяются.
(Старение элементов фильтра со временем в теории и технике оп-
330
тимального приема не рассматривается.) Такие фильтры
называются также пассивными фильтрами.
Напряжение на выходе согласованного фильтра с импульсной
характеристикой h(t) в соответствии с интегралом свертки в
момент t*
v{t*)=hlx{t)u{t—t* + T)dt. (20.1)
о
Интеграл (20.1) является корреляционным и в отсутствие
шума v(t*) совпадает по форме с автокорреляционной функцией
(АКФ) ШПС. В момент окончания ШПС при t* = T
v0=v {T) = Цх(t) и (t) dt. (20.2)
о
Коррелятор (рис. 2.5) состоит из перемножителя (X),
генератора опорного ЩПС (Г) и интегратора ( J ). На выходе
перемножителя напряжение равно произведению k0x(i)u(t)9 где &0 —
постоянная. На выходе коррелятора (на выходе интегратора) в
момент окончания ШПС напряжение
v0 = k0$x(t)u(t)dt. (20.3)
о
Таким образом и согласованный фильтр, и коррелятор в
момент окончания ШПС имеют на своих выходах одно и то же
напряжение, причем в этот момент отношение сигнал-шум на выходе
обоих устройств максимально. Это обусловливает их
эквивалентность с точки зрения оптимального приема ШПС.
В отличие от согласованного фильтра параметры коррелятора
изменяются во времени, так как режим работы перемножителя
определяется опорным ШПС u(t)y а режим работы интегратора — на*
чалом (в момент *=0) и окончанием (в момент t=T)
интегрирования. Поэтому коррелятор является фильтром с переменными
параметрами. Такие фильтры называются также активными
фильтрами.
Согласованный фильтр или коррелятор является устройством
фильтрации (выделения) сигнала из шумов и помех. Для
выделения информации необходимо в момент окончания сигнала
принимать решение, какой информационный символ был послан. Для
этого напряжение с выхода согласованного фильтра (или с
выхода коррелятора) подается на решающее устройство, которое с
частотой, равной скорости передачи информации, производит отсчет
в моменты окончания сигналов и принимает решения. Поэтому в
системе связи при любом оптимальном фильтре (согласованном
фильтре или корреляторе) необходимо иметь информацию о
задержке ШПС. Измерение задержки и ввод ее значения в
оптимальный фильтр осуществляется синхронизатором. В подвижных
системах связи необходимо иметь также информацию о доплеров-
ском сдвиге частоты, что также обеспечивается синхронизаторам.
331
Вход
x(t)
0
4
IfZ
гя*
РУ
3^
Выход
Решете
*
Рис. 20.1. Квазиоптималь
ный приемник
Кроме того, в процессе приема задержка и частота ШПС могут
флюктуировать. Поэтому необходимо обеспечивать слежение за
этими параметрами в процессе приема. Приемник, в котором
производится измерение параметров ШПС и использование
измеренных значений при выделении информации, называется
квазиоптимальным. На рис. 20.1 приведена схема
квазиоптимального приемника. Он
состоит из оптимального фильтра (ОФ),
синхронизатора (С) и решающего
устройства (РУ): в качестве ОФ используется
либо согласованный фильтр, либо
коррелятор (или набор согласованных фильтров
или набор корреляторов); С измеряет
параметры ШПС (время задержки т, доп-
леровскую частоту Q) и вводит
измеренные параметры (т*, Q*) в оптимальный
фильтр и в решающее устройство; РУ выдает решение о том, какой
информационный символ был передан.
Общие принципы измерения времени задержки и частоты были
приведены в третьем разделе. При измерении времени задержки в
ШСС имеют место следующие особенности. Во-первых, при
передаче информации сигналы следуют непрерывно друг за другом в
течение длительного интервала времени. В результате при измерении
времени задержки по последовательности сигналов, переносящих
информацию в СПИ, необходимо учитывать влияние боковых
пиков АКФ и ВКФ на характеристики измерения времени задержки.
Во-вторых, при передаче информации на вход приемника поступает
случайная последовательность сигналов, образующих алфавит
источника. Так как сигналы, переносящие информацию, следуют
непрерывно друг за другом с периодом, равным длительности
сигналов Т9 то сумма откликов всех согласованных фильтров будет
содержать центральные пики АКФ всех сигналов, следующих с тем
же периодом Т. Поэтому ддя измерения времени задержки
необходимо объединять (суммировать) отклики всех согласованных
фильтров. При этом в промежутках между центральными пиками
соседних АКФ будут суммироваться боковые пики АКФ и ВКФ на
выходах всех согласованных фильтров, что увеличивает время
измерения задержки.
При корреляционном методе приема квазиоптимальный
приемник должен иметь устройство поиска сигналов по времени
задержки. В соответствии с принятым алгоритмом приемник
перестраивает генераторы опорных сигналов, чтобы задержка опорных
сигналов совпала с задержкой принимаемых сигналов. Необходимость в
блоке поиска определяется неинвариантностью корреляторов
относительно времени задержки.
Отметим, что, используя основные положения теории измерения
параметров сигналов и теории передачи сообщений, можно
составить схемы квазиоптимальных приемников как когерентного, так и
некогерентного методов приема сигналов. Однако при этом остает-
332
ся неясным, насколько оптимален в целом весь квазиоптимальный
приемник. Это особенно важно знать при совместном измерении
нескольких параметров по принятому сообщению, например,
задержки и доплеровского сдвига по частоте. Для решения
поставленного вопроса необходимо использовать методы статистической
радиотехники с учетом характера изменения передаваемых сообщений и
измеряемых параметров. Поскольку измеряемые параметры входят
нелинейно в принятые сигналы, то теория приема сигналов в этих
условиях получила название теории нелинейной фильтрации.
Именно эта теория позволяет определить структуру квазиоптимального
приемника при измерении нескольких случайных параметров,
характер изменения которых определяется некоторыми
стохастическими дифференциальными уравнениями. Наибольшее значение она
имеет при определении структуры квазиоптимального приемника
для приема сигналов с неизвестным временем задержки и
неизвестным доплеровским сдвигом по частоте. При этом
квазиоптимальный приемник (см. рис. 20.1) содержит синхронизатор, который
обеспечивает поиск ШПС и измерение его параметров. Теория
нелинейной фильтрации и методы синтеза квазиоптимальных
приемников ШСС изложены в ряде книг (см., например, [73, 75, 103,
104] и др.).
Независимо от сложности в любом случае квазиоптимальный
приемник содержит согласованный фильтр или коррелятор, или их
комбинации. И согласованный фильтр, и коррелятор в
соответствии с (20.1), (20.3) являются линейными устройствами. По этой
причине согласованные фильтры иногда называют линейными
согласованными фильтрами, чтобы отличить их от дискретных
согласованных фильтров, которые также будут рассмотрены в
дальнейшем.
20.3. Основы формирования ШПС
Формирователи ШПС с большими базами (5^>1), где база
(1.1), являются активными устройствами, т. е. генераторами ШПС.
На рис. 20.2 изображена в общем виде схема формирователя
одиночного ШПС. Он состоит из генератора тактовых импульсов
(ГТИ) и генератора ШПС (ГШПС), ГТИ запускает ГШПС
тактовыми импульсами с частотой /Т=1/Г. Основная проблема,
возникающая при создании генераторов ШПС — максимальное
уменьшение памяти, которое необходимо для формирования ШПС.
Максимальная память равна базе ШПС.
Некоторые ШПС, основанные на рекуррентных методах
формирования (например, ^-последовательности 'И подобные им псев-
гти
ГШПС
йыход
-иМ
ЛФШПС
Выход Uf(t)
Рис. 20.2. Формирователь Рис. 20.3. Автомат-формирова-
ШПС тель ШПС
333
дослучайные последовательности), позволяют формировать ШПС
с помощью устройств, память которых Br=log2B. Например, при
В =1024 достаточно иметь регистр сдвига с числом разрядов
(памятью) Вг=10. К сожалению, в настоящее время известно малое
число последовательностей, которые позволяют иметь
формирователи с памятью, близкой к значению Вг, и обладают хорошими
корреляционными свойствами.
Еще более остро эта проблема — создание формирователей с
малой памятью — стоит при разработке многоадресных ШОС со
сменой ШПС. Для таких ШСС необходимо иметь
автоматы-формирователи ШПС (рис. 20.3), которые в общем случае состоят из
номеронабирателя (Н) и собственно автомата-формирователя ШПС
(АФШПС). Например, если объем системы сигналов L = B2, то
максимальная память. АФШПС составит 5а=53. Например, если
В=104, а каждый элемент памяти потребляет 1 мкВт, то общее
потребление автомата составит 1 МВт, что, безусловно,
недопустимо. Проблема создания систем ШПС, позволяющих иметь
автоматы, экономичные и по памяти, и по потреблению энергии, до
настоящего времени не решена.
20.4. Критерии качества формирования и обработки ШПС
Надежность приема информации в ШСС определяется как
качеством работы информационного канала (согласованный фильтр
или коррелятор), так и качеством работы измерительного канала
(синхронизатор). Качество работы информационного канала
определяется отношением сигнал-помеха на входе решающего
устройства
h% = P0T/Nn, (20.4)
где Рс — мощность ШПС, Nn— спектральная плотность помехи.
Качество работы синхронизатора характеризуется вероятностью
правильного обнаружения — измерения ШПС РПрав при заданной
вероятности ложных тревог Рл.т.
Формирование и обработка ШПС не являются идеальными
процессами. При формировании сигнал на выходе формирователя
u(t) может отличаться от заданного u0(t)y точно так же и
импульсная характеристика согласованного фильтра h(t) может отличаться
от требуемой h0(t). Эти отличия вызываются рассогласованиями
параметров формирователя и согласованного фильтра
(коррелятора), поскольку это напряжение включает в себя и сигнал
(параметры формирователя), и импульсную характеристику
согласованного фильтра.
Если на входе согласованного фильтра действует сигнал, с
которым фильтр согласован, то нормированное напряжение на
выходе фильтра является функцией неопределенности (ФН) сигнала
(2.21):
334
R(x,Q)=-^ ]u0(t)00(t-T)ei*dt =
—oo
— ?G0(©)G0(«>—Й)е,<аМ(». (20.5)
4* £_oo
В (20.5) £ — энергия ШПС, U0(t) и G0((») —комплексная
огибающая ШПС и ее спектр, х — время задержки, Q — доплеровский
сдвиг частоты. Время задержки т отсчитывается от момента
окончания ШПС, т. е. при t* = T в (20.1) т=0 в (20.5). Если Q=0, то
АКФ ШПС
*<T>eTF ]Uo(t)U0(t-x)dt=^- ]\G((o)\*e™dw. (20.Щ
В подынтегральных выражениях интегралов (20.5), (20.6) hep-
вый множитель является сигналом, т. е. определяется
формирователем, а второй — импульсной характеристикой, т. е. определяется
согласованным фильтром. В идеальном случае, когда
рассогласований нет, при т=0, £2 = 0 максимальное значение ФН и АКФ Rmax=
— R(0)=R(0y 0) = 1. Центральный пик ФН имеет ширину по оси
времени Ai^l/F и по оси частот AQ^2n/T. Боковые пики ФН и
АКФ при |т| >Ат и \Q\ >Ай имеют случайный характер. Их сред-
неквадратическое значение близко к величине gr=1/]^2B и с
ростом базы ШПС асимптотически уменьшается.
При рассогласованиях между сигналом и импульсной
характеристикой фильтра происходят следующие я;вления:
— уменьшается амплитуда центрального пика. Вместо
максимального значения /?тах=1 при рассогласованиях амплитуда
центрального пика /?<i?max=l. Это приведет к уменьшению
отношения сигнал-помеха из-за уменьшения сигнальной составляющей на
выходе фильтра (шумовая составляющая практически не
изменится);
— увеличивается ширина центрального пика, что приводит к
некоторому уменьшению точности измерения времени задержки и
частоты. Этот факт имеет особое значение в радиолокации, но
поскольку расширение не является значительным, то в ШСС с этим
явлением можно не считаться;
— увеличивается уровень боковых пиков, в результате
снижается вероятность правильного обнаружения.
Таким образом, очевидными критериями, определяющими
качество формирования и обработки ШПС в ШСС, являются
минимальное уменьшение центрального пика и минимальное увеличение
боковых пиков.
Отношение сигнал-помеха при рассогласованиях может быть
представлено в следующем виде:
/i2=/i2tf2(£), (20.7)
где h20 (20.4) — отношение сигнал-помеха в идеальном случае,
R2(l) —квадрат амплитуды центрального пика ФН (АКФ) при
335
наличии рассогласований £, которые могут иметь различную
физическую природу. Отметим, что в общем случае £ может быть
набором нескольких рассогласований (£ь £2,...), т. е. в этом случае
будет функцией многих переменных. Обычно рассогласования £i,
£2»... независимы друг от друга. Поэтому их можно рассматривать
самостоятельно. Если рассогласований нет, то £ = 0 и /? (0) = 1. При
наличии рассогласований в реальных фильтрах /?2(£)<;1. Поэтому
Л2<Л2о. Так как в ШСС отношение сигнал-помеха определяет
вероятность ошибки, то при заданной вероятности ошибки задано и
значение h2. Поэтому для обеспечения требуемой
помехоустойчивости при наличии рассогласований (/?2(£)<1) необходимо
увеличивать отношение h\ т. е. в соответствии с (20.4) увеличивать
мощность передатчика. Конкретное значение R2(l) зависит от
характера и пределов изменения случайной величины £.
Увеличение боковых пиков приводит к уменьшению вероятности
правильного обнаружения — измерения ШПС. Боковые пики
идеальной ФН (АКФ) с ростом базы ШПС В асимптотически
уменьшаются. Из-за рассогласований боковые пики не могут быть
уменьшены ниже некоторого значения (так называемые «технические
боковые пики»). Это значение составляет 2—5%, а иногда (в
наихудших случаях) может достигать и 10—15%. Вероятность
правильного обнаружения-измерения ШПС сложным образом зависит
от боковых пиков [5] и определяется конкретным распределением
боковых пиков данного ШПС. Эта вероятность достигает своего
максимального значения, если боковые пики однородны, т. е.
имеют одинаковые амплитуды. В этом случае вероятность
правильного обнаружения-измерения записывается следующим образом [5]:
Рправ « Рправ о ( 1 — 0»5/П Я/?2),
(20.8)
где Рправо — вероятность правильного обнаружения-измерения без
боковых пиков, т — число независимых отсчетов на интервале
измерения, /?б — уровень боковых пиков, Я — функция отношения
сигнал-помеха q2 на выходе
измерителя, равная, примерно,
Таблица 20.1. Максимальная база
ШПС при рассогласованиях
<72
•Отах
10
3-102
20
104
40
6-107
Н « 0,5<74 ехр (—0,5<72). Чем
больше q2t тем меньше Я, тем
меньше влияние боковых
пиков на вероятность Рправ. Но с
ростом базы растет число
отсчетов /п = 2В. Поэтому для
ШПС с большими базами
влияние технических боковых пиков на вероятность правильного
обнаружения измерения может оказаться существенной. При
равенстве нулю скобки в правой части (20.8) вероятность РПрав=0.
При этом максимальная база ШПС
Втах~{НЩ)-> . (20.9)
В табл. 20.1 приведены значения максимальной базы ШПС, при
336
превышении которой прием становится невозможным. Уровень
боковых пиков положен R6 = 10%.
Как следует из табл. 20.1, необходимо стремиться уменьшать
боковые пики, возникающие из-за рассогласований, так как иначе
необходимо увеличивать отношение сигнал-помеха q2 на выходе
измерителя.
20.5. Оценка общих рассогласований
Рассогласования в формирователе и оптимальном фильтре
(согласованном фильтре или корреляторе), а также в трактах
передатчика и приемника могут иметь различный характер в
зависимости от типа ШПС, методов формирования и обработки, от
'построения устройств формирования и обработки, от используемой
элементной базы и т. п. Из них можно выделить общие
рассогласования, которые присущи почти любым вариантам ШСС с ШПС:
нестабильность несущих частот; изменение масштаба времени
(нестабильности тактовых частот, времени задержки в линиях
задержки); паразитная модуляция; частотные искажения;
нелинейные искажения.
Относительно нелинейных искажений известно ^[115], что они
малы. Поэтому в дальнейшем они не рассматриваются.
Нестабильность несущих частот. Если несущая частота
передатчика изменилась на Acoi, а частота опорного генератора
приемника на Асог, то совместная нестабильность частоты
До)=Дсо1 + Асо2. (20.10)
При таких нестабильностях отклонение частоты Асо будет
сказываться на АКФ ШПС (20.6) так же, как и доплеровский сдвиг
частоты на ФН, т. е. вместо R(x) на выходе согласованного
фильтра будет функция /?(т, Асо). Амплитуда центрального пика
определена при т=0, т. е. из (20.5) при U(t) =const находим
R = R (Асо) = sin (Асо Т/2)/(Асо Т/2). (20.11)
Полагая допустимые потери в 1 дБ, находим, что /? = 0,89, а
Д/Г=0,26, (20.12)
где Af=Aco/2tt. Вводя несущую частоту fo и базу ШПС 5, из (20.12)
можно найти допустимую нестабильность частот
б / = A f/f0 = 0,26 (В /0/F)-i . (20.13)
Например, если B = 2-104, /0=1ГГц, ^=20 МГц, то 6/=
= 2,6-10~7. При этом максимальные нестабильности передатчика и
приемника должны быть вдвое меньше согласно (20.10)
S/imax^S^^^ClStfi/o/F)-1 . (20.14)
Поскольку нестабильности Acoi и Асог — случайны, то оценим их
допустимые значения, исходя из их статистических характеристик.
Положим, что Acoi, Асог — независимые случайные величины с
нулевыми средними значениями и с равными дисперсиями 02д<а==:
337
= (2я)2о2д/. Для решения этой задачи целесообразно (20.11)
представить в виде
#= 1— (Дсо)272/4я2. (20.15)
После статистических преобразований и полагая, что среднее
значение /? = 0,89 (потери 1 дБ), находим допустимое значение
ад,Т = 0,23. (20.16)
Естественно, при этом допустимые нестабильности частоты
могут быть больше в 1,8 раза, чем при расчете по максимальным
отклонениям (20.14).
Из-за нестабильности частоты боковые пики АКФ также
изменяются, так как при этом вместо АКФ R(x) имеем ФН /?(т, Асо).
Уровень боковых ликов определяется уровнем ФН при Q = A<o.
Изменение масштаба времени. При этом вместо сигнала U0(t)
может быть сигнал
U0(t)=U0(kt), (20.17)
где k — масштабный множитель. Если £>1, то сигнал U\(t) сжат,
т. е. его длительность T\ = T/k. Спектр сигнала U\{t) равен
GiH=(l/fc)G((o/fc). (20.18)
При k*>\ спектр Gi(со) расширяется. Масштабный множитель
k мало отличается от единицы. Положим &=l + a, a<Cl. В этом
случае изменением амплитуды спектра можно пренебречь и
приближенно записать
Gx((o) «G (со—асо). (20.19)
Из сравнения (20.19) со спектром ШПС, входящим в
определение ФН (20.5), следует, что слагаемое асо влияет на АКФ так же,
как доплеровский сдвиг частоты Q на ФН. Поэтому асо будет
влиять на амплитуду центрального пика и на уровень боковых пиков,
так же, как и нестабильность Асо согласно (20.11). Вместе с тем
имеется определенное отличие — в множителе асо частота со
является переменной интегрирования. Если положить со=<отах = 2я/7
равной ширине спектра ШПС, то обеспечим нахождение
максимально допустимого отклонения. При этом можно воспользоваться
оценкой (20.12) с заменой А/ на а/7. В результате получаем при
снижении отношения сигнал-помеха на 1 дБ из-за наличия
масштабных рассогласований допустимое значение
a = 0,26/5. (20.20)
Выясним, как определяется а при тех или иных
рассогласованиях. Сначала рассмотрим изменение масштаба из-за различной
скорости распространения волн в линии задержки, входящей в
согласованный фильтр. Пусть время задержки в линии определяется
уравнением /3= Tl/kLy где I — текущее значение элемента задержки,
L — длина линии задержки. При k=l U(L) = T. При k>\ t3(L) =
338
= Tx = T/k<T. Обозначим AT=T—TU т. е. ТХ = Т(1—АТ/Т).
Поэтому а=А7,/Г. Следовательно, допустимое отклонение
А Т/Т = 0,26/5. (20.21)
Например, для ФМ сигнала В = Т/х0у где то — длительность
одиночного импульса. Из (20.21) следует, что допустимое отклонение
масштаба должно привести к уменьшению длительности сигнала
на величину АТ^т0/4.
Определим допустимую нестабильность тактовой частоты на
примере ФМ ШПС с B=Nt где N — число импульсов. Генератор
тактовой частоты должен создавать тактовые импульсы с частотой
fтo=l/to=Л/'/7,. Допустим, что на самом деле тактовая частота fT =
=/To + AfT. При такой тактовой частоте длительность ШПС будет
равна Т\ = Т/(\ + Д/уго)» Т (1—Д/тто). Отклонение длительности
ШПС AT=AfTxoT или AT/T=AfTXQ. Соответственно из (20.21)
находим Д/уго=0,26/М. Вводя тактовую частоту /то=1/то получаем
допустимую нестабильность тактовой частоты
б fT = Д fT/fT0 = 0,26/W. (20.22)
Например, при ЛГ=2-104 из (20.22) находим в/т=1>3-10-5, т. е.
стабильность генератора тактовых импульсов должна быть
высокой. Чем больше база ШПС, тем выше стабильность тактовой
частоты.
Паразитные модуляции. К ним относятся дополнительная
паразитная амплитудная и фазовая модуляции. Они полностью
учитываются, если в определение ФН (20.5) вместо сигнала U0(t)
ввести сигнал
иг (t)=A (t) U (t) exp [i x (<)]. (20.23)
Здесь A(t)—паразитная амплитудная модуляция,
%(/)—паразитная фазовая модуляция. Тогда
RA%(x9 Q) = — 7 A(t)U(t)0(t—T)eiQ*el*Wdt. (20.24)
2 Е -op
Индексы Л, % соответствуют амплитудным и фазовым
паразитным модуляциям. Чтобы определить влияние паразитных
модуляций, необходимо вместо обозначений A(t) и %(t) подставить
наиболее часто встречающиеся законы модуляции. В этом отношении
целесообразным следует признать тригонометрическую
аппроксимацию i[136]:
A(t)=l+acas(m — t + %\ , 0<*<7, (20.25)
х (t) = b sin I — f, 0 < t < 7\ (20.26)
причем a<Cl и Ь^2я. Случай а=Ь = 0 соответствует работе без
искажений. Представление паразитных модуляций в виде (20.25)
и (20.26) хорошо тем, что в таком виде можно аппроксимировать
большинство искажений, так как выбор величин a, m, cpo, b, l по-
339
зволяет получать различные функции времени и в то же время
позволяет легко анализировать влияние паразитных модуляций.
Отметим, что т и / не обязательно целые числа. Используя запись
косинуса в виде формулы Эйлера и выражение для бесселевых
функций,
ml /
\b Sin / ?£L /
е Т = § Jn(b)e T
П=—оо
(20:27)
где Jn(b) —функция Бесселя /г-го порядка, при малых а и b из
формулы (20.24) получаем
'Rax (*. Й)=Л (Ь)Д (т, Q)+ —^ е{Фо # (т, Q +w L5^ +
+ ^^е-1фо/?(т,й_т^^+Л(Ь)/?(т,0 + /^)-
—Ji(b)R (t,Q—/ — ] . (20.28)
Для 6<Cl в ряду (20.27) надо учитывать только бесселевы
функции /о, J\ и /-1 = —/ь потому что они наибольшие.
На рис. 20.4 изображены функции /о и J\. Они необходимы для
оценки допустимых паразитных модуляций, определяемых по фор-
DBW,Jj(b)
0,5 Гг0 1,5 Ъ
Рис. 20.4. Бесселевы
функции
Рис. 20.5. Составляющие
функции неопределенности
ЛАДУ-
Мт-т 2ж/Т)к
й(г,12х/Г)к
~^ЛА
R(c9-l 2x/T)l
^дУЬ
340
муле (20.28). При малых Ь справедливы следующие приближения:
J0 (Ь) ъ 1 —Ь2/4, Л (Ь) « 6/2. (20.29)
Поясним структуру суммы (20.28). Возьмем Q = const, например,,
Q = 0. (Все рассуждения справедливы и для других Q=^0.) Первое
слагаемое совпадает по форме с неискаженной корреляционной
функцией, но остальные будут отличаться, так как они определены
для других значений частоты Доплера, а именно Q±rn2n/T и Q±
±/2я/Г.
Следовательно, сумма (20.28) зависит не только от формы не-
искаженной корреляционной функции для Q = const, но и соседних
по частоте корреляционных функций. Следовательно, она зависит
от корреляционных свойств сигнала на плоскости время —
частота, т. е. от формы тела неопределенности. Поэтому для различных,
сигналов одна и та же паразитная модуляция может оказывать
различное влияние.
На рис. 20.5 представлены корреляционные функции (сечения
тела неопределенности) для различных частот Доплера,
соответствующие слагаемым суммы (20.28), в случае произвольного
сигнала. Чтобы найти сумму (20.28), надо каждую корреляционную
функцию умножить на свой коэффициент, /0 или /ь а результаты
сложить. Оценку уменьшения амплитуды центрального пика и
увеличения боковых пиков можно найти, если в (20.28) положить
|#(т, Q±/2n/7')|, (j—nt или /=/), т. е. максимальному значению.
Тогда
A RM < 1 -J0 (b) + a J0 (b) + 2 Л (fe), (20.30)
АЯб<в-М*) + 2Л(&). (20.31)
Например, если a=5%, fc=0,5, то Ai?M=0,57 и Ai?e=0,54, т. е,
ШСС система полностью выйдет из строя. Отметим, что 6^0,5 не
является большой величиной, так как она соответствует
максимальному размеру паразитной фазовой модуляции поряДка одного
радиана, в то время как набег фазы в течение всего сложного
сигнала во много раз больше — порядка Вп.
Подчеркнем, что формулы (20.29) и (20.30) не учитывают
формы корреляционных функций. Поэтому они обеспечивают грубые
оценки и годны для ориентировочных расчетов. Для более точных
оценок надо учитывать значения #(т, Q±m2n/T) и #(т, Q±l2n/T).
Частотно-фазовые искажения. Они возникают из-за
неравномерности амплитудно-частотной характеристики тракта и
нелинейности его фазовой характеристики. Их можно учесть, если вместо
спектра сигнала G0(<o—Q) ввести
G (со) = \Н (co)|G0 (со—Q) exp [i 8 (©)], (20.32)
где |Я((о) | учитывает неравномерность амплитудной, а е(<о)
—нелинейность фазовой характеристики. Тогда
#ле(т, Q)= -Ц 7 \H((o)\G(co—Q)G (©) ei™+ie<(«» d©.
4 я Е j^
(20.33)
341
Аналогично предыдущему используем тригонометрическую
аппроксимацию
|#(<о)| = l+ccos/? ^(о, е (со) = d sin q — (>>, (20.34), (20.35)
где W=2nF. Как и раньше, находим
Rhs (t, Q) =/0 (d) R (т, Q)+ С^ЬЖ R (% + р^ , 0\ +
+
с J0 (d)
Z(*-P^>a) + Ji(d)R(x + q^,Q)-
-aw«(t-?2^q)
(20.36)
Полученная сумма состоит из слагаемых, совпадающих по
форме и сдвинутых друг относительно друга во времени, в то время
как в формуле (20.28) слагаемые сдвинуты по частоте. Причем
относительно центрального пика (первое слагаемое) остальные
слагаемые симметрично сдвинуты вправо и влево попарно.
Рис. 20.6. Влияние чаетотно-фазовых искажений на АКФ
На рис. 20.6 изображены все слагаемые суммы (20.36). Для
простоты #(т, Й) взята для 2 = 0 в виде треугольного импульса.
Грубые оценки уменьшения амплитуды выброса и увеличения
боковых пиков равны:
A*M<0,5/e(d)(l+c)f
bR*<095J0(d) + J1(d).
(20.37)
(20.38)
^Полученные формулы оценки временных и частотных
искажений позволяют определить влияние рассогласований как в самих
фильтрах, так и в передатчике и приемнике и найти допуски на
отклонения параметров от номинальных.
Однако, кроме рассогласований, рассмотренных в данном пара-
342
графе, каждому фильтру присущи свои специфические
рассогласования.
Влияние мощных каскадов передающего устройства на
искажения АКФ. Преобладающим источником временных искажений в
мощных каскадах [136] являются флюктуации тока электронного
луча, которые приводят к амплитудным и фазовым искажениям.
Например, эквивалентная паразитная фазовая модуляция с
амплитудой 19,1° приводит к увеличению боковых пиков на 10%.
Для малых изменений напряжения (или тока) луча фазовая
чувствительность Аф приблизительно постоянна. Величины, которые
дают представление о фазовой чувствительности, принято измерять
в градусах на 1% изменения напряжения. Для триодов это 1, для:
клистронов — 10, для ЛБВ — 20. Например, если для клистрона
допустить изменение боковых пиков на 1% (—40 дБ), то
требуемая нестабильность питающих напряжений не должна быть
больше ю-3.
Для амплитудных искажений порядка —40 дБ необходимо,
чтобы спад мощного импульса не превышал 4%.
Кроме временных, в мощных каскадах возможны и частотные
искажения. Отмечается, что в пятирезонаторном клистроне
неравномерность амплитудно-частотной характеристики равна примерно
1 дБ, а нелинейность фазовой — 4° [136].
Влияние усилителей промежуточной частоты на искажения
АКФ. Обычно многокаскадные УПЧ вносят частотные искажения
из-за неравномерности амплитудно-частотной характеристики и
нелинейности фазовой характеристики. В табл. 20.2 приведены
данные [136] об увеличении боковых пиков при прохождении сигнала
через шестикаскадные УПЧ.
Таблица 20.2. Увеличение боковых пиков
Тип фильтра
Чебышевский с 10% пульсациями
Чебышевский с 5% пульсациями
Чебышевский с 1% пульсациями
С максим, плоской АЧХ
С максимально-плоской характеристикой
задержки
Шесть
одноконтурных
фильтров
0,16
0,07
0,1
0,6
0,6
Три двухкон-
турных филь-
| тра
0,2
0,17
0,5
0,21
0,12
Два трехкон-
турных
фильтра
0,28
0,1»
0,08
0,2
0,04
Как видно из таблицы, боковые лепестки меньше 4% для
рассмотренных фильтров не могут быть получены. Дело в том, что1
эти фильтры обладают взаимосвязью между амплитудно-частотной
и фазовой характеристиками. Улучшение одной из них приводит
к искажениям другой.
343
21. ЛИНЕЙНЫЕ СОГЛАСОВАННЫЕ ФИЛЬТРЫ
21.1. Методы линейной обработки ПШС
Линейные согласованные фильтры (ЛСФ) являются
пассивными фильтрами, их параметры не изменяются во времени.
Структура пассивных фильтров определяется элементами сигнала
(импульсной характеристикой фильтра). Пассивные методы
обработки можно разделить на три основные вида: частотный, временной,
частотно-временной.
При частотном методе произвольный сигнал представляется в
ъиде последовательности частотных элементов (элементарных
функций, смещенных по частоте). В общем случае вид этих
элементов и их расположение по частоте определяются
преобразованием Фурье исходного сигнала. В частном случае формирования
сигнала из частотных элементов он является частотным.
Согласованные фильтры, построенные в соответствии с частотным методом,
являются многоканальными фильтрами (МКФ), каждый канал
которых выделяет соответствующую полосу частот сигнала и
производит необходимую оптимальную обработку этой части сигнала.
При временном методе сигнал представляется в виде
последовательности элементов во времени, например, в виде
прямоугольных импульсов или в виде функций отсчета. Последние
соответствуют разложению сигнала в ряд Котельникова. Поэтому
согласованный фильтр, соответствующий временному представлению сигнала,
строится на основе многоотводной линии задержки (МЛЗ).
Частотно-временной метод обработки сложных сигналов основан на
представлении сигналов в виде элементов, разнесенных как во
времени, так и по частоте. Он объединяет, как это следует из
названия, частотный и временной методы. Согласованный фильтр
содержит ряд частотных каналов и многоотводную линию задержки
(или набор линий). Частотный метод целесообразно применять для
обработки частотных сигналов, временной — для обработки ФМ
сигналов, частотно-временной — для обработки дискретных
частотных сигналов.
21.2. Частотно-временной метод обработки
дискретных частотных сигналов
ДЧ сигналы были подробно рассмотрены в гл. 4. Комплексная
огибающая ДЧ сигнала определяется соотношением [5]
Af-l
U (t) = 2 ат U0 (t-m T0) exp [i am Aco {t-m 70)], (21.1)
где а™. — комплексная амплитуда элементарного сигнала или
одиночного импульса, Uo(t)—огибающая или форма элементарного
сигнала, Го — длительность элементарного сигнала, Дю = 2я/7о, а
Fq—ширина спектра элементарного сигнала; аш — частотная кодо-
344
вая последовательность. В общем случае амплитуда ат^
= |От|exp(i0m), где \ат\—амплитуда, а вт — начальная фаза
m-го элементарного сигнала. В простейшем случае Om=l, 9m=0.
Огибающая элементарного сигнала Uo(t), отлична от нуля при
О^^Го. В простейшем случае U0(t) = U0 при OsgfsgTV
Длительность ДЧ сигнала Т=МТ0. Ширина спектра элементарнога
сигнала F0 равна также частотной расстройке между соседними
каналами. Ширина спектра ДЧ сигнала F=MF0, a Fq=IITo.
Поэтому база ДЧ сигнала B=FT=M2. Частотная кодовая
последовательность (ЧКП) От представляет собой последовательность
чисел от 0 до М—1, устанавливаемых в соответствии с алгоритмом
формирования ДЧ сигнала.
Спектр ДЧ сигнала имеет вид
G (со) = J l amrS ((o—am Дсо) ехр (—i m <o Г0), (21.2)
где
S (б)) = ( U0 (t) ехр ( —i со t) dt (21.3)
— спектр элементарного сигнала.
Коэффициент передачи согласованного фильтра определяется
соотношением (2.12)
Af-l „
k И =£0 2 \ат\ ехр (—i em)S (со—am Дсо) x
m=0
X exp[ — ico(T—mT0)]. (21.4)
Как следует из (21.4), согласованный фильтр должен состоять
из М каналов, выходы которых суммируются. Каждый канал —
прототип каждого элемента сигнала. Имеются некоторые
различия, которые определяются формулой (2.12). Во-первых,
комплексная амплитуда каждого канала (21.4) комплексно сопряжена по
сравнению с комплексной амллитудой От элемента в сигнале. По
этой причине канал должен содержать усилитель с коэффициентом
усиления \ат\ и фазовращатель, который создает сдвиг фаз,
равный —0W или 2я—0т. Во-вторых, АЧХ каждого канала
определяется комплексно-сопряженным спектром элементарного сигнала
S((o), смещенного по частоте на ту же величину amAco, что и
соответствующий элемент сигнала. Обычно элементарные сигналы име-
ют симметричную форму. В этом случае S(cd)=S((d) и АЧХ
каждого канала согласованного фильтра будет совпадать со спектром
элементарного сигнала. В-третьих, если задержка каждого
элемента в ДЧ сигнале составляет тТ0, то в согласованном фильтре
задержка соответствующего элемента согласно (21.4) равна Т—тТ0.
Следовательно, первые элементы сигнала задерживаются в
согласованном фильтре больше, чем последние, что полностью
соответствует общим свойствам согласованных фильтров.
345
На рис. 21.1 (Представлена структурная схема линейного
согласованного фильтра, предназначенного для обработки ДЧ сигнала
первого порядка. Сигнал с выхода предыдущих каскадов
приемника (с усилителя промежуточной частоты) поступает на МЛЗ.
Число отводов линии, включая начало, равно числу элементов М.
Общая задержка в линии (М—1)То=Т—Т0. Если ширина спектра
сигнала F, то полоса пропускания МЛЗ должна быть не меньше
F. Напряжение с каждого отвода поступает в канал, который
состоит из полосового фильтра с АЧХ |S (со—amA<o) | и с частотным
смещением ОтДю, усилителя с коэффициентом усиления \ат\ и
фазовращателя ф, обеспечивающего сдвиг фаз —0Ш или 2я—0т.
Число каналов равно М. Выходы всех каналов поступают в сумматор.
Структурная схема рис. 21.1 полностью соответствует
коэффициенту передачи (21.4).
Эквивалентная память МЛЗ равна ВМлз = (^—T0)F=B(1—
—l/М). Если учесть, что в схеме рис. 21.1 имеется М полосовых
фильтров, эквивалентная память которых равна 1, то общая
память согласованного фильтра ВСФ = 5. При М^$>1 5млз ~В. При
этом следует учесть, что МЛЗ должна быть радиочастотной, т. е.
на некоторой промежуточной частоте fo без больших искажений
пропускать спектр ШПС шириной F. Именно поэтому МЛЗ в
линейных согласованных фильтрах являются и наиболее
ответственным, и наиболее трудноисполнимым устройством. И чем больше
база ШПС, тем сложнее выполнить МЛЗ. Более подробно МЛЗ
для ЛСФ будут рассмотрены в дальнейшем.
Вход
1
Канал М~7
Вход
[1Н>НЗ
Канал га
Канал О
\7_
ЕЕ
Е
—»■
i
1
Выход
St*t>*r~]
с%
кн
Выход
Рис. 21.1. Структурная схема со- Рис. 21.2. Структурная схема согласо-
гласованного фильтра для ДЧ сиг- ванного фильтра для ДСЧ—ФМ
сигнала нала
Согласованный фильтр для обработки ДСЧ — ФМ сигнала
(рис. 21.2) во многом совпадает с фильтром для ДЧ сигнала (рис.
21.1). Отличие заключается в том, что в каждом канале должен
стоять элементный согласованный фильтр СФт, т = 0, М— 1,
который предназначен для обработки элементного ФМ сигнала с базой
/?o=Af0, a No — число импульсов в элементном ФМ сигнале. База
346
ДСЧ — ФМ сигнала B = N0M2. Такой же будет и эквивалентная
память согласованного фильтра В СФ ^N0M2. Канальные линии
задержки имеют полосы пропускания, равные полосам пропускания
F0 полосовых фильтров. Поскольку структура ДСЧ — ФМ сигнала
является достаточно сложной, то дополнительная фазовая
манипуляция амплитуд ат не применяется, т. е. 9т=0. Поэтому на рис.
21.2 фазовращателей нет.
21.3. Многоканальные согласованные фильтры
при частотном методе обработки многочастотных сигналов
Комплексная огибающая многочастотного (МЧ) сигнала
определяется соотношением [5]
U (f) =£/0 (t) J" an exp (i n Асо t), (21.5>
где U0(t)—огибающая элементного сигнала, ап= |an|exp(i6n) —
комплексная амплитуда, \ап\ — ее модуль, а 8П — фаза; Дю = 2л;/7о>.
а F0— ширина спектра элементного сигнала. Обычно
U0 (t) = U0 при О <*<Г (21.6 >
и нулю при других значениях времени t. Произведение F0T=l.
Сумма в (21.5) является суммой гармоник, манипулированных па
амплитуде множителем \ап\ и по фазе множителем ехр(Юп). В
большинстве случаев |an| = l. МЧ сигналы дуальны по
отношению к ФМ сигналам. При этом все известные способы кодирования
ФМ сигналов переносятся на МЧ сигналы с той разницей, что а
ФМ сигналах импульсы манипул ируются по времени, а в МЧ
сигналах— манипулируются частотные гармоники [5].
Спектр многочастотного сигнала
G (со) = J* anS (<й—п До)). (21.7)
Коэффициент передачи согласованного фильтра в соответствии
с (2.12)
k (со) = £0 Yi \an\ e*P ( — i6n)l S (<o—n Дю) exp (—i со T).
(21.8>
Структурная схема многоканального согласованного фильтра
приведена на рис. 21.3. Обозначения те же, что и на рис. 21.1.
Полоса 'пропускания каждого фильтра примерно равна F/N, а N —
число элементов в сигнале и число каналов в фильтре. Задержка,,
равная Ту в множителе ехр(—шТ) в данном случае
принципиального значения не имеет, так как она всегда обеспечивается
реальными полосовыми фильтрами.
Многоканальные согласованные фильтры можно применять для
обработки не только частотных сигналов, у которых частотная
347
.структура выражена явно. Как известно, из теории рядов Фурье,
любой сигнал, удовлетворяющий некоторым общим условиям,
обычно имеющим место в радиотехнике, можно приближенно
представить конечной суммой гармоник. Для радиочастотного сигнала
следует суммировать только те
Канал Л/-/
гИНЖЗН
Капап п
H>HZH
+
Капал О
гармоники, которые проходят
через линейную часть
приемника (смеситель, УПЧ).
Согласованный фильтр при таком
представлении сигнала будет
многоканальным.
При построении
многоканальных согласованных фильтров
большое значение имеет АЧХ
полосовых фильтров, которая в
свою очередь определяется спек-
Рис. 21.3. Структурная схема много- тром элемента S(©). Во многих
канального согласованного фильтра случаях элементы являются
простыми сигналами. Например, есл.'?
элемент является прямоугольным радиоимпульсом, то в
соответствии с (21.6) спектр
(21.9)
5 (со) = ( Т sin *2l.\ /(со Т/2) ехр (— i со Г/2).
•Согласно (21.9) АЧХ полосового фильтра должна быть вида
| sin(cor/2)/(cor/2) |. По этому поводу следует заметить, что такая
АЧХ не реализуется с помощью цепей с постоянными
параметрами. Поэтому возникает вопрос о замене подобной АЧХ более
просто реализуемой. Одним из наиболее простых фильтров,
удовлетворяющих этому условию, можно считать фильтр с несколькими
одиночными контурами с одной и той же резонансной частотой при
слабой связи между ними. Частотная характеристика такого
фильтра приближается к гауссовой. В этом случае необходимо решить,
как следует выбирать полосу такого фильтра. ВФН элементов
Uo(t) /?<у[т, (п—/п)Д<о] будут перекрываться при спектре элемента
в виде (21.9). Эти ВФН зависят от модуля разности номеров \п—
—гп\. Можно показать, что если Дю = 2я/7\ то
sin [я (л—т) (1 — \т\/Т)
\Ro [т, (п—пг) А(о]| =
(21.10)
я (п—т)
Из формулы (21.10) следует, что с ростом \п—т\ ВФН
элементов уменьшается обратно пропорционально этой разности.
Начиная с \п—т\^3 влияние ВФН (21.10) на АКФ частотного
сигнала становится малым и практически их можно не учитывать.
Если элемент является гауссовым радиоимпульсом, т. е.
Ur(t)=F0Texp(-nFm (21.11)
то его спектр
Sr(©) = Texp[—я(©«/^2)1#
(21.12)
348
где Wo=2nF0 характеризует ширину спектра элемента (и полосу
пропускания полосового фильтра) на уровне ехр(—я/4) «0,46. В
этом случае ВФН элементов
R0 [т, (п-т) Дсо] = ехр {- -=- [f» т* + ^=^-]} • (21.13)
Как и в случае прямоугольного элемента, вес функций /?о с
ростом \п—т\ падает, причем при больших \п—т\ более резко,
что определяется вторым слагаемым в экспоненте формулы (21.13).
Изменение Ro зависит от величины F0. Ее приближенный выбор
может быть сделан следующим образом. Чтобы АКФ сигнала с
гауссовой срезающей функцией не отличалась намного от АКФ
сигнала с прямоугольной срезающей функцией, надо обеспечить, во-
первых, примерно равное изменение R0 от \п—т\ в обоих случаях
и, во-вторых, приблизительно одинаковую форму #о(т) для одних
и тех же п—т. Строгое определение оптимального значения F0
достаточно сложно. Однако оказывается, что оба условия имеют
место с точностью, достаточной для практических целей, если
F0 «(1,2-1,5) Д/ = (1,2-1,5)/7. (21.14)
Если Fo в формулах (21.11), (21.12) выбирается в соответствии с
(21.14), то АКФ сигнала с гауссовой срезающей функцией будет
мало отличаться от исходной, причем уровень боковых лепестков
может стать даже меньше. Что касается сигнала, то он будет
иметь уже не прямоугольную форму, а гауссову. При этом
равномерность огибающей сигнала будет несколько хуже, чем в случае
прямоугольной формы.
21.4. Согласованные фильтры с многоотводными
линиями задержки при временном методе обработки
фазоманипулнрованных сигналов
Комплексная огибающая ФМ сигнала определяется
соотношением [5]
U(t) = IT anb\(t-nxQ\ (21.15)
где tq=T/N — длительность одиночного импульса,
an = |ajexp(iej, U0(t)=U0 при 0 < t < т0 (21.16)
и равна нулю при других значениях времени t. Обычно вп = 0 или
л. Сигналы с такими значениями фаз называются бинарными ФМ
сигналами или просто ФМ сигналами. Если 9П= (2я/р)а(/г), где
р>2, а(п)—кодовая последовательность из чисел 0, р—1, то
такие сигналы называются многофазными (МФ).
Спектр комплексной огибающей ФМ сигнала (21.15) имеет
вид:
G (<o) =S (со) J ап ехр ( —i n (от0). (21.17)
л=0
349
Канал N"t
Коэффициент передачи согласованного фильтра в соответствии
с (2.12)
k(<>>)=k0S(<x>) 2 la»lexp(—iGJexpl — ico(T—пт0)]. (21.18)
/i=0
Структурная схема соответствующего согласованного фильтра
приведена на рис. 21.4. Обозначения те же, что и на рис. 21.1. В
данном случае имеется только один полосовой фильтр с частотной
характеристикой 5(со), который может быть расположен как на
входе согласованного фильтра (как
это показано на рис. 21.4), так и
на его выходе. Число отводов МЛЗГ
включая начало, равно N, общая
задержка равна (N— 1)%0 = Т—то.
Полоса пропускания МЛЗ должна
быть равна ширине спектра
сигнала F. Центральная частота МЛЗ
должна совпадать с несущей
частотой сигнала на входе фильтра.
Усилители и фазовращатели должны
обеспечивать необходимое усиление
и сдвиг фаз в полосе частот, равной
ширине спектра сигнала Fy и не
вносить заметных
амплитудно-частотных и фазо-частотных искажений.
Фазоманипулированные сигналы можно обрабатывать и с
помощью видеочастотных линий задержки. Для этого необходимо
перенести спектр ФМ сигнала в область видеочастот. При
когерентной обработке сигнала на нулевой несущей частоте радиочастотный
фильтр заменяется видеочастотным согласно структурной схеме
рис. 21.5,а, а при некогерентной обработке — согласно структурной
Нана/i ть
1H>4ZH
Канал О
Рис. 21.4. Структурная схема
согласованного фильтра для
сигнала
ФМ
|х
—-^
сф]
Н
X
u^
СФ
U-э*»
K6
|C0S lxJQt 1
L-^4
£
+
iiSlnCOgt A
X
4¥
гмГ
5)
Рис. 21.5. Схемы обработки ФМ сигналов на видеочастоте
схеме рис. 21.5,6 [12]. Эти структурные схемы содержат
умножители, генераторы гармонических колебаний с частотой, равной
частоте сигнала, согласованные фильтры (СФ), квадраторы (Кв) и
сумматор. Генераторы опорных сигналов при когерентном приеме
создают гармоническое колебание cos ооо*, где соо — несущая
частота сигнала на входе радиочастотного фильтра; при некогерент-
350
ном —два квадратурных гармонических колебания cosooo* и sinooof.
Согласованные фильтры выполняются по структурной схеме рис.
21.4. Они являются в данном случае видеочастотными.
21.5. Комбинированные методы обработки
Согласованные фильтры на многоотводных линиях задержки
(СФМ) и многоканальные фильтры (МКФ) хорошо сочетаются
друг с другом и позволяют обрабатывать ШПС с большими
базами при больших длительностях и спектрах большой ширины.
Объединение СФМ и МКФ и является комбинированным методом
обработки ШПС. Этот метод позволяет сочетать широкую полосу
частот, присущую частотному методу (МКФ), относительно большую
длительность, присущую временному методу (СФМ), и простоту
изготовления, настройки и эксплуатации обоих методов.
При построении комбинированных схем обработки,
соответствующих таким методам, главную роль играет соотношение полос
пропускания МКФ и СФМ. Когда полосы равны, существенного
увеличения базы получить нельзя, но из-за уменьшения числа
отводов у МЛЗ базу все-таки можно увеличить. Такой случай
назовем случаем равнополосных фильтров. Большой интерес
представляет случай, когда полоса МКФ много больше полосы СФМ, т. е.
случай разнополосных фильтров. Отметим, что будем
рассматривать прием квазидетерминированного сигнала (со случайной
начальной фазой). В настоящее время известно большое число
комбинированных схем. Остановимся на двух из них.
Структурная схема оптимального приемника с равнотюлосными
фильтрами приведена на рис. 21.6. С выхода МКФ напряжение
поступает на два кзадратурных канала, состоящих из перемножите-
ля, СФМ и квадратора (Кв). Напряжения с квадраторов
поступают на сумматор. Представленная схема является накопителем для
-^Я—| Ц"
^
СФМ
Гк?
♦ С05 (л)0 t у
Г 1 **»-* 1
н
isiRCOgt 1
L—>.
X
СФМ
Кб
I
.
1
Рис. 21.6.
Комбинированный фильтр с МКФ и
СФМ
квазидетерминированного сигнала [12]. Принцип работы такой
схемы известен (см. рис. 21.5), поэтому останавливаться на нем
не будем. База обрабатываемого сигнала равна произведению
базы частотного сигнала, обрабатываемого МКФ, на базу
дискретного сигнала, обрабатываемого СФМ. В целом сигнал является
дискретным составным сигналом.
На рис. 21.7 представлена структурная схема
квазиоптимального приемника с разноподосными фильтрами. Пусть FMKo, /*сфч —
351
полосы пропускания МКФ и СФМ. Если число каналов равно N,
то
^мкф^сфмМ. (21.19)
Каждый канал приемника рис. 21.7 совпадает с приемником рис.
21.6, начиная от МКФ. Вся полоса частот, занимаемая сигналом,
Канал /
Канал М
—з*.
X
СФМ
—^>
*Кб1
\ COS й)7 t
1—*"
X
—^»
СФМ
—&*
Кб]
Г""5*"
X
—^
СФМ
-^
~кв]
| cos сом t
lsinu)„t
2<_
—>~
СФМ
Кб j
Рис. 21.7. Многоканальный комбинированный фильтр
делится на N полос, каждой соответствует свой канальный
полосовой фильтр. Частоты о)Ь ... ,соп,..., (un удовлетворяют равенству
®п—®1 + (п— 1)Д®, A(d = 2nF/M. (21.20)
Напряжения с такими частотами формируются генератором сетки
частот, который на схеме не показан. Хотя общая база сигнала
равна NBc0fA , сжатие сигнала определяется только базой МЛЗ
(т. е. величиной ВСФМ ), так как в каждом канале выделяется
огибающая и устраняется фазовая структура.
Рассмотренные в данном параграфе методы нашли широкое
применение на практике. На их основе найдено большое число
различных конкретных схем обработки ШПС.
21.6. Многоотводные линии задержки
Основные характеристики. От того, с каким качеством
выполнена МЛЗ, от ее полосы пропускания и времени задержки
практически полностью зависит реализация согласованного фильтра в
целом, поскольку все остальные элементы фильтра не являются
столь трудоемкими и сложными.
Идеальная линия задержки имеет плоскую АЧХ |&((о)| = 1 в
бесконечной полосе частот и линейную ФЧХ ф(о))=—оо/3, которые
изображены на рис. 21.8,а и б соответственно сплошными линиями.
Производная ФЧХ
d<p((d)/d(u = —13 (21.21)
352
и определяет время задержки U. Сигнал, спектр которого
изображен на рис. 21.8,а штрих-пунктиром, пройдет без искажений и
задержится на время t3. У реальных линий и АЧХ, и ФЧХ отличают-
ся от идеальных. Реальные АЧХ и ФЧХ (пример реализации)
изображены на рис. 21.8 штриховой линией. Если спектр сигнала
проходит через неискаженную часть АЧХ и ФЧХ, то он и не получает
искажения. Если же искажения АЧХ и ФЧХ имеют место на тех
же частотах, то, естественно, сигнал искажается.
\km\k
Рис. 21.9. Многоотводная электрическая линия
задержки
Рис. 21.8. АЧХ и ФЧХ линии задержки
МЛЗ очень часто создаются из одинаковых звеньев,
соединенных последовательно. Коэффициент передачи МЛЗ, состоящей из
п звеньев, записывается следующим образом:
^млзИ=^Н=|&оН1Пехр[1лф0(со)]. (21.22)
Из (21.22) следует, что АЧХ звеньев перемножаются, а ФЧХ —
складываются. На тех частотах, где АЧХ |^0(со)|<1, возведение
в степень п приводит к резкому уменьшению полосы пропускания
МЛЗ. В тех случаях, когда ФЧХ отдельного звена имеет
нелинейную составляющую е(со), например, фо(со)=—соо4+€(со), то ФЧХ
МЛЗ будет содержать нелинейную составляющую /ге(со), что
приведет к сильным искажениям АКФ ШПС.
Первые МЛЗ выполняли на электрических линиях задержки с
сосредоточенными параметрами, но такие линии имели небольшую
полосу пропускания и малые длительности ШПС.
Электромагнитные линии задержки (отрезки высокочастотного кабеля)
обеспечивали широкую полосу частот, но малую длительность ШПС.
Затем были разработаны ультразвуковые магнитострикционные
линии задержки. Их полоса была небольшой, но они позволяли
получать большие длительности ШПС. Самое большее
распространение получили МЛЗ, использующие поверхностные акустические
волны (ПАВ). Они позволяют получать широкие полосы, но
длительности ШПС пока что небольшие. Рассмотрим подробнее эти
типы линий задержки.
Многоотводные электрические линии задержки. Схема МЭЛЗ
приведена на рис. 21.9. Она представляет собою набор звеньев,
12—111 353
состоящих из индуктивностей L, и конденсаторов С. МЭЛЗ
является видеочастотной линией задержки. Отводы пронумерованы от
О до N—1. Задержка на одно звено типа т
т80«1,ЗуТС. (21.23)
При этом частота среза (ос=2/т3о. Если задержка небольшая, то
достаточно выбрать, чтобы ширина спектра F^ioJ^n, т. е. меньше
частоты среза в 2 раза. На практике МЭЛЗ собирается из
стандартных безотводных линий задержки, каждая из которых обычно
состоит из шести звеньев. Для составления МЭЛЗ необходимо,
чтобы звено обладало как можно более равномерной амплитудной
характеристикой в полосе частот,
H(f)
Ю
0,8.
ЖЯ-2,1
\Э-7(Г60шт)
\
V.
ыгок
3-1
V
\
>^
V 1 2 J 4 /,МЩ
Рис. 21.10. Амплитудно-частотная
характеристика МЭЛЗ
соответствующей спектру
импульса, и как можно более линейной
фазовой характеристикой.
На рис. 21.10 изображены
амплитудные характеристики двух
стандартных звеньев — линии
задержки Э—1 (то = 0,5 мкс,
характеристическое сопротивление W =
= 500 Ом) и линии задержки
ЛЗТ—2,0—1200 (то = 2 мкс, W=
= 1200 Ом). Линия Э—1
обладает равномерной амплитудной
характеристикой в большей
полосе. Поэтому она пригодна для
создания многоотводных линий с
большим числом отводов.
Максимальная задержка (максимальное число звеньев)
зависит от скорости уменьшения амплитудной характеристики звена
k0(f) в начале координат. Поскольку звенья соединяются
последовательно, то амплитудная характеристика всей многоотводной
линии согласно (21.22) может быть записана в виде
k(f)=kn0(f). (21.24)
Здесь L—число звеньев, причем п= (N—1)/, /=то/т3, а
т3—задержка безотводной линии. Если k'=k'(f) при f=0, то можно
записать, что в области, близкой к f=0, k0(f)
k0{f) = \-k%
Поскольку спад k0(f) должен быть малым, то tff^l. Поэтому
из (21.24) получаем
kif)*z\—Lk'f. (21.25)
Определяя граничную частоту /г многоотводной линии из
условия равенства нулю выражения (21.25), находим
fv « l/Lk'. (21.26)
Например, для линии Э—1 коэффициент £'«0,01 1/МГц. На
рис 21.10 идеализированная характеристика kQ(f) для Э—1 изо-
354
бражена штриховой линией. (Пульсации вблизи нуля
существенного значения не имеют, их положение и величина зависят от
выбранного экземпляра, в то время как к' одинаково.) Если взять ЛГ=*
= 160 шт. (время задержки 80 мкс), то /г«0,63 МГц, что с
достаточной для практики точностью совпадает с экспериментальными
данными (рис. 21.10).
Из формулы (21.26) можно определить примерную
максимальную границу для базы в случае использования МЭЛЗ со
стандартными звеньями. Если положить jF^/г, то
В =FT «N%JLk' = N%J{N— \)k' = 4jk'. (21.27)
Для звена типа Э—1 получаем В «50. Следовательно, такой
тип линий задержки не позволяет получить очень больших
значений баз. Можно полагать, что £ = 50-г150 является максимальной,
причем верхний предел требует коррекции амплитудной
характеристики.
Достоинствами МЭЛЗ являются простота изготовления, малое
потребление энергии, малые потери сигнала. Недостатки МЭЛЗ —
малые базы ШПС, относительно большие габариты.
Многоотводные электромагнитные линии задержки. В качестве
таких линий используют отрезки кабеля (рис. 21.11). Поскольку
' ■ 9 Ф - I - i i 4 • 1 ..... I
Рис. 21.11. Многоотводная электромагнитная линия задержки
скорость распространения волны по кабелю не очень сильно
отличается от скорости распространения в свободном пространстве, то
получить большие задержки при разумных габаритах фильтра
нельзя. Например, в [121, 138] описан согласованный фильтр, в
котором используется кабель длиной 195 м. Он обеспечивает
полную задержку 1 мкс и имеет 20 отводов. (Общее сжатие равно
100, что обеспечивается дополнительной обработкой сигнала на
выходе отвода полосовым фильтром). Отводы сделаны с помощью
коаксиальных ответвителей. В работе [138] приведена фотография
многоотводной линии задержки, собранной из свернутого
миниатюрного экранированного кабеля. Отводы осуществляются с
помощью коаксиальных катушек связи за счет утечки поля через
оплетку экрана. Число отводов равно 40.
Многоотводные линии задержки с поверхностными
акустическими волнами. МЛЗ ПАВ являются ультразвуковыми линиями
задержки и получили широкое распространение в связи с развитием
интегральной технологии. Широкое использование ультразвуковых
линий задержки (УЛЗ), в том числе и МЛЗ ПАВ, объясняется тем,
что скорость ультразвуковой волны в звукопроводе много меньше
скорости света. Это и позволяет при малых габаритах УЛЗ тюлу-
12* $55
чить относительно большую задержку сигнала по времени по
сравнению с задержкой в кабеле. Скорость распространения
ультразвуковых волн зависит от материала звукопровода и типа волны. В
основном для создания линий задержки используется звукопровод
в виде твердого тела, причем материал подбирается в зависимости
от назначения линии. В твердом теле могут распространяться
следующие волны [139]: продольные, поперечные (сдвиговые), изгиб-
ные, волны растяжения, поверхностные (релеевские) и
крутильные. Название соответствует типу колебания, которое совершает
частица твердого тела. В табл. 21.1 приведены значения скоростей
продольных, поперечных и поверхностных волн для некоторых
металлов, а также постоянные, которыми они характеризуются [139].
Таблица 21.1. Скорость распространения ультразвука
Материал
Алюминий
Вольфрам
Медь
Никель
Кварц
Стекло
о.
Плотность
г/см3
2,7
19,1
8,9
8,8
2,6
3,6
Я
9«
Г-
7100
36200
12500
20540
7630
5850
н
К -
Коэффицие
а Пуассона
0,34
0,35
0,35
0,31
0,17
0,22
• 2 ч>
° к Я
ач о
Скорость п
дольной во
в неогр. ср
V, м/с
6260
5460
4700
5630
5570
4260
, a .
ач^
Скорость п
дольной во
в стержне
1 м/с
5080
4310
3710
4785
5370
4000
лны
о о
1 Скорость п
неречной в
V2, м/с
3080
2620
2260
2960
3515
2560
У
®«а Я
9 ач
2860
2440
2110
2760
3200
2350
О <u
sis
pq с а
169
1042
418
495
145
154
Наибольшая скорость распространения — скорость продольной
волны в неограниченной среде, наименьшая — скорость
поверхностной волны.
Например, если взять алюминиевый стержень, то для получения
задержки в 1 мс необходимо, чтобы его длина была равна 5,08 м
(продольная волна) или 2,86 м (поверхностная волна). При этом
длина волны, определяемая по формуле
X = v/f, (21.28)
равна 5,08 см (v=V\) и 2,86 см (v=Vz) соответственно, если
частота /=100 кГц.
Принципиально для создания МЛЗ можно использовать любой
из перечисленных типов волн, если возбудить именно этот тип
волны и между началом и концом линии обеспечить съем колебаний
через интервалы, кратные длительности импульсов.
Следует подчеркнуть, что возбуждение ультразвуковых
колебаний производится радиочастотными колебаниями, причем
частоты колебаний, естественно, равны, а длины волн отличаются из-за
различия скоростей распространения.
Возбуждение ультразвуковых волн осуществляется с помощью
преобразователей электрических колебаний в механические с дан-
356
ным типом волны. Прием задержанных импульсов производится
при помощи обратных преобразователей механических колебаний
в электрические. Для создания ультразвуковых линий задержки
используются два типа преобразователей (прямых и обратных):
пьезоэлектрические и магнитострикционные. Первые основаны на
пьезоэлектрическом эффекте, который заключается в растяжении
или сжатии определенного кристалла (кварца, турмалина и др.)
лод действием электрического поля. Второй основан на магнито-
стрикционном эффекте — изменении размеров ферромагнитного
материала под действием магнитного поля. Оба эти эффекта
обратимы. Пьезоэлектрические преобразователи позволяют
возбуждать продольные, поперечные, поверхностные и крутильные
волны, а магнитострикционные — продольные.
Хотя принципиально и можно создать МЛЗ на любом типе
болны, но наиболее просто осуществить большое число отводов
можно только при использовании поверхностных акустических
волн (ПАВ). Именно МЛЗ ПАВ получили наибольшее распро-
проволочте соединение
\38укопраВод-
- твердый
диэлектрик
^ис. 21.13. Согласованный фильтр
на МЛЗ ПАВ для сигнала Баркера
с JV='5
Рис. 21.12. Встречно-штыревой
преобразователь для возбуждения ПАВ
странение в настоящее время
и считаются одним из
перспективных устройств для
обработки ШПС [124, 130, 131].
Возбуждение ПАВ в зву-
копроводе производится с
помощью встречно-штыревых
преобразователей (ВШП)
[124, 130, 131]. Схематическое
изображение ВШП приведено
на рис. 21.12 (а —вид сбоку на
звукопровод, б — вид сверху).
Наиболее простой ВШП пред-
357
ставляет собой совокупность параллельно расположенных
металлических электродов, размещенных на поверхности
звукопровода, в качестве которого используется твердый пьезоэлект-
рик. Электроды имеют периодическую структуру. Они разделены
на две группы, а к общим элементам групп присоединяются
входные (выходные клеммы). При подаче на входы электрического
поля в звукопроводе возникает электрическое поле, которое за счет
пьезоэлектрического эффекта создает механические напряжения,
приводящие к появлению ультразвуковых волн. На каждом
электроде электрическое поле меняет знак. Поэтому на частотах, для
которых длина периода решетки К равда нечетному числу длин
волн, ПАВ излучаются в обоих направлениях по поверхности
звукопровода. Прием ПАВ, а также и съем ПАВ с промежуточных
отводов осуществляется с помощью аналогичных ВШП. Например,
на рис. 21.13 схематично изображен согласованный фильтр на
МЛЗ ПАВ, предназначенный для обработки инверсного сигнала
Баркера с N=5. Фазирование обеспечивается кодированным
присоединением ВШП отводов к выходным шинам с помощью
проволочных соединений.
ВШП возбуждает не только ПАВ, но и объемные волны [130].
Формирование объемных волн приводит к дополнительным
потерям, к изменению характера излучения ПАВ, к искажениям
сигнала. Отраженные сигналы, искажающие полезный сигнал,
возникают из-за отражений объемных волн от нижнего края
звукопровода (подложки), а также из-за отражений ПАВ и объемных волн
от торцов звукопровода. Для борьбы с отражениями используют
поглотители.
Как было отмечено, в качестве звукопроводов в МЛЗ ПАВ
используются твердые пьезоэлектрики, параметры которых
приведены в табл. 21.2. Чем больше относительная полоса пропускания,
т. е. чем больше база ШПС, тем больше потери при возбуждении
и приеме ПАВ. На рис. 21.14 представлены кривые потерь для
звукопроводов из различных материалов [124, 130, 131].
Наименьшие потери у ниобата лития, что согласуется с табл. 21.2.
Таблица 21.2. Параметры
пьезоэлектриков [130]
Материал
Кварц
Кварц (НС)
Кварц (ST)
Ниобат лития
Танталат лития
Германат висмута
Скорость
ПАВ,
см/с
3159
3209
3157
3488
3230
1620
Относительная
полоса
пропуска*
ния, %
5,4
4,5
24
10
10...15
Рис. 21.14. Зависимость между полосой Относительная ширинапо/?осы,'Ь
и затуханием ПАВ
358
ВО
о
$50
I
I
**30
6
п
1 1 1 .1 1 1II 11
i-MO\
жш
/Av%y\
/if
i i i i it tid
Таблица 21.3. Параметры линейных согласованных фильтров
на МЛЗ ПАВ для ФМ ШПС [124]
Параметр
Центральная частота, МГц
Длительность задержки Г, мкс
Длительность одиночного
импульса То, МКС
Число импульсов N (база
ШПС)
Материал звукопровода
Затухание, дБ
Технические боковые пики, дБ
Энергетические потери, дБ
Динамический диапазон, дБ
Фильтр I
2,5
50
1,6
31
Кварц
XY
90
14
1
30
Фильтр II
20
10,4
0,8
13
Кварц
XY
50
29
3
30
Фильтр III
60
12,5
0,05
255
Кварц
YX
30
22
2
60
Фильтр IV
40
1
0,2
5
Ниобат
лития
20
30
2
80
Фильтр V
60
102
0,1
1023
Кварц
ST
50
30
3
ПО
В табл. 21.3 приведены параметры пяти линейных
согласованных фильтров на МЛЗ ПАВ [124], разработанные для обработки
ФМ ШПС.
Особое внимание привлекает пятый фильтр, позволяющий
обрабатывать ФМ ШПС с базой N=1023 при ширине спектра F^
«10 МГц и длительности Г«102 мкс Недостатком является
довольно большое затухание (50 дБ), для компенсации которого
необходимо использовать широкополосные усилители.
Из табл. 21.3 следует, что максимальное время задержки МЛЗ
ПАВ составляет 100 мкс. Это является серьезным ограничением
для применения согласованных фильтров на МЛЗ ПАВ.
Ограничением дальнейшего увеличения времени задержки является длина
звукопровода-пьезоэлектрика. Например, чтобы получить
задержку, равную 1 мс, необходимо иметь сплошную кварцевую пластину
длиною, примерно, 3 м. В настоящее время такие пластины не
получены. Для построения безотводных ЛЗ ПАВ используют
сложные звукопроводы с удлиненным ходом волны {130, 131], но
использование их в качестве многоотводных весьма проблематично.
Для того, чтобы увеличить длительность ШПС, используют
каскадное соединение МЛЗ ПАВ [130, 131], но при этом необходимо
компенсировать большое затухание, что приводит к значительным
габаритам согласованных фильтров.
Необходимо отметить, что при взаимодействии двух
поверхностных волн в линии задержки возникают нелинейные явления,
которые позволяют получить произведение этих сигналов [131]. Так как
линия задержки на ПАВ обладает памятью, то © этом случае
можно получить не только произведение двух сигналов, но и интеграл
от них. Устройства такого типа на ПАВ получили название кон-
вол ьверов [ 131]. В конвольвере входной сигнал подается на ВШП,
расположенный на одном конце линии задержки, а опорный
сигнал — на ВШП, расположенный на другом конце линии
задержки. С промежуточных отводов снимается напряжение, пропорцио-
359
нальное значениям корреляционных интегралов, при различных
временных сдвигах между входным сигналом и опорным. На базе
коввольверов на ПАВ строятся многоканальные корреляторы.
Многоотводные магнитострикционные линии задержки. Такие
линии задержки также являются ультразвуковыми. Магнитострик-
ционный преобразователь (рис. 21.15) состоит из катушки 2 и
магнита 3. Магнит, создавая напряженность магнитного поля Я0,
выводит рабочую точку на линейный участок характеристики (рис.
,3
1
Рис. 21.15. Магнитострикционный
преобразователь
21.16)—кривой магнитострикции (Я — напряженность
магнитного поля, А/// — относительное изменение длины ферромагнетика
из-за магнитострикции). Импульс тока, протекая по катушке 2,
создает переменное магнитное поле, которое сжимает или
расширяет ферромагнитный стержень 1. Возникшая продольная волна
распространяется по стержню. Для того, чтобы импульс мало
искажался, необходимо иметь АЯ<Я0. Приемный преобразователь
такой же. Он основан на обратном магнитострикционном эффекте.
На рис. 21.17 приведены кривые магнитострикции для
некоторых металлов и сплавов [139, 140]. Кривая 1 соответствует
никелю Ni, кривая 2 — железу Fe, кривые 3—5 — железоникелевым
сплавам: 3 —Fe 94%, Ni 6%; 4 — Fe 71%, Ni 29%; 5 —Fe 24%,
Ni 76%. В основном для линий задержки используется никель, так
как он обладает лучшими механическими характеристиками.
Рис. 21.16. Характеристика
магнитострикционного
преобразователя
Рис. 21.17. Кривые
магнитострикции
йЬ/ЬЧО
30
ZQ
10
0
~10
-го\
"40
/
/
к
\\
; 1
ГУ_
^>
5
_1
L
и*-
10*
^z
L. —j
уА
2-103\
W,3pcmeff
360
Максимальная рабочая частота МЛЗ определяется
преобразователем (точнее, длиной участка звукопровода, который
охватывается магнитным полем катушки). Длина катушки должна быть
меньше %/2 (21.28), чтобы не было компенсации наводимой ЭДС в
различных частях катушки. Например, если /=1 МГц, %=5 мм, то
длина катушки должна быть меньше 2,5 мм. При такой малой
длине катушки коэффициент передачи преобразователя будет мал.
При обычных преобразователях максимальная рабочая частота
равна примерно 100—500 кГц. Приведем данные типичного
преобразователя [141]. Катушки как входного (передающего), так и
выходного (приемного) тока имеют длину 2 мм, внутренний
диаметр 1,5 мм. Диаметр провода входной катушки 0,5 мм, у
выходной— 0,3 мм. Число витков у входной катушки 500, у
выходной— 1300. Можно уменьшить участок звукопровода,
охватываемого катушкой, если применить специальный преобразователь
[142], у которого максимальная рабочая частота достигает 3 МГц.
При конструировании МЛЗ необходимо обращать особое
внимание на уничтожение ложных импульсов, отраженных от концов
звукопровода. Для этого можно использовать либо поглощение
падающей волны на концах звукопровода с помощью поглотителей,
либо производить компенсацию. На практике в большинстве
случаев используют оба метода сразу. В качестве поглотителей
используют пористую резину, полихлорвинил и другие материалы.
Пример использования магнитострикционной линии задержки
(со 100 отводами) для обработки сложного сигнала приведен'в
работе [143].
Рассмотрев типы и характеристики многоотводных линий
задержки, перейдем к вопросу о рассогласованиях и фильтрах с
такими линиями.
21.7. Влияние рассогласований
на работу согласованных фильтров с МЛЗ
Кроме общих рассогласований, рассмотренных в § 20.5, в фильтрах с
многоотводными линиями задержки всегда имеются рассогласования, вызванные
принципом построения фильтров. Как показали исследования [144, 145],
рассогласования, вносимые кодерами, можно разделить на амплитудные и фазовые,
соответственно операциям, которые осуществляет кодер. Амплитудные
рассогласования определяются отличием амплитуды п-го импульса ani от номинального
значения ап. Пусть Aan=an ±—ап. Величина Аап случайная, так как
вызывается случайными разбросами при настройке фильтров. Если дисперсия случайной
величины Аап/ап есть а2а, а среднее значение равно нулю, то среднее значение
отношения сигнал-помеха [144] уменьшится в 1—а2а/2 раз, а среднее значение
боковых пиков не изменится.
Так как a2a<tCl, то влиянием амплитудных рассогласований можно
пренебречь. Причем среднеквадратические значения отношения сигнал-помеха и
боковых лепестков Oa^vtyN, т. е. с ростом N уменьшаются.
361
Фазовые рассогласования — это отличие фазы л-го импульса 9ni от
номинального значения 9«. Пусть A9=9nr-9ft. Интерес представляет случай,,
когда А9п —случайная величина. Ее среднее значение равно нулю, а дисперсия
а20. Тогда отношение сигнал-помеха [144] уменьшается в 1—а20раз.
Например, если Oq =9,175 (19°), то 1—а2в =9,97. Таким образом, малые
фазовые рассогласования оказывают малое влияние. С ростом а0 влияние их
будет усиливаться. Среднеквадратическое значение отношения сигнал-помеха
равно a0T/2/W, т. е. с ростом N уменьшается.
Детерминированное изменение 9П не представляет интереса, так как при
этом А9П=const и суммирование импульсов не изменится.
Рассогласования, вносимые линией задержки, в основном, приводят к
смещению импульсов друг относительно друга из-за того, что задержка л-го им»
пульса tn\ может отличаться от номинальной *п = (я—1)т0. Назовем эти
рассогласования тактовыми, подразумевая под тактом момент возникновения я-го
импульса в случае, когда рассогласований нет. Тактовые рассогласования
могут быть случайными (разбросы при сборке и регулировке), так и
детерминированными (сдвиг такта при изменении температуры или других факторов,
которые изменяют задержку линии в одну сторону). Влияние тактовых
рассогласований зависит от типа отводов линии задержки (регулируемый или
постоянный), а также от того, какой сигнал обрабатывается — радиочастотный или
видеочастотный.
В табл. 21.4 приведены расчетные формулы для определения
относительного уменьшения отношения сигнал-помеха (в случае разбросов его среднего
значения) и среднеквадратическое значение изменения боковых лепестков. В табл.
21.4 приняты следующие обозначения; ©о — центральная частота,
ot—среднеквадратическое значение ошибки, с которой устанавливается положение отвода
в случае линии с регулируемыми отводами, или среднеквадратическое значение
задержки между двумя отводами в случае линии с постоянными отводами;
Таблица 21.4. Рассогласование в МЛЗ
Рассогласо-
вание
Разбросы
такта
Сдвиг такта
Сигнал
Радиочастотный
Видеочастотный
Радиочастотный
Видеочастотный
Отвод
Регул.
Пост.
Регул.
Пост.
Регул.
Пост.
Относительное
уменьшение отношения сигнал-
помеха
1—(«w)2
N
1—£-(<->оО<)2
\ — r"yt
N . 2
1—Yr<>a'
1_1Г(0)°Ат)2
1—^МД*)2
Среднеквадратическое
значение изменения
бокового пика
<УВД
№г"0
(ДТ)*
16 * '
362
r"o —вторая производная корреляционной функции одиночного импульса,
которая определяется из ее представления в виде параболы
1— г"0т20/2. (21.29)
Отметим, что если используются прямоугольные импульсы, то такая форма
записи не справедлива. Однако на практике длительность фронтов импульса
конечна. При этом формула (21.29) обеспечивает малую ошибку. Если
допустить, что длительность фронта порядка (0,1 -*-0,15)т0, то г"о=(10-н20)/т2о.
Отметим основные черты приведенных результатов. Во-первых, в случае
радиочастотного сигнала все соотношения зависят от произведения <о2о02< =
= (2n)2o2t/T2o, To=2n/(x)o, в то время как в случае видеочастотного сигнала —
от г"оо2<«20о-2*/т2о (для сдвига такта вместо Ot стоит Лтг). Так как то>Го, то*
очевидно, что требования к радиочастотной линии задержки более жесткие, чем
к видеочастотной. Поэтому изменение боковых лепестков для радиочастотного
сигнала не рассматривалось ввиду их малого значения, так как уменьшение
отношения сигнал-помеха играет в этом случае основную роль. Во-вторых, при
разбросах такта для линии с постоянными отводами уменьшение отношения
сигнал-помеха зависит от числа отводов (импульсов) N, так как в этом случае
происходит накопление тактовых рассогласований в звеньях. В-третьих, наиболее
сильно сказывается сдвиг такта, так как он приводит к смещению всех
импульсов сигнала в одну сторону относительно импульсной характеристики. Полагая
/"=19/т2о, ЛГг,,(Дт)2/24=0,21 (потери равны 1 дБ) и учитывая, что ЛтЛГ=ДГ,
получаем оценку (20.29). Таким образом сдвиг такта (изменение масштаба
времени) является наиболее сильным рассогласованием в многоотводных линиях
задержки.
21.8. Сравнение линейных согласованных фильтров
В табл. 21.5 представлены оценки основных параметров согласованных
фильтров с различными типами MJ13, полученные путем сравнения и
сопоставления параметров, приведенных в работах [16, 115, 119, 121, 124, 130, 131].
Необходимо отметить, что параметры, приведенные в табл. 21.5,
во-первых, являются довольно грубыми оценками и, во-вторых, они не могут
отразить данных о новых МЛЗ, которые появятся в ближайшем будущем. Это
определяется тем, что в настоящее время проблема создания линейных
согласованных фильтров с многоотводными линиями задержки, обрабатывающими
ШПС с большими базами, длительностями, полосами частот, обладающих
малым потреблением энергии и малыми габаритами, стоит также остро, как и
десять лет назад.
Таблица 21.5. Параметры линейных согласованных фильтров
с многоотводными линиями задержки
Тип МЛЗ
Электромагнитные (кабели
задержки)
Электрические (МЭЛЗ)
МЛЗ ПАВ
Магнитострикционные
Диапазон
рабочих
частот,
МГц
20...100
0,1...10
10...103
0,1...5
Время
задержки,
МКС
5...2
100...50
100...500
10«...100
Полоса
пропускания, МГц
5...30
0,5...2
5...200
0,1..Л
База
шлс
25...60
50...100
100... Ю3
100
Затухание, дБ
10...40
3...5
30...60
60...80
363
22. ДИСКРЕТНЫЕ И ЦИФРОВЫЕ СОГЛАСОВАННЫЕ
ФИЛЬТРЫ
1
7
i
t
8)
22.1. Дискретный согласованный фильтр
Дискретный согласованный фильтр (ДСФ) является
дискретным устройством обработки непрерывных (аналоговых) сигналов.
Принцип действия и основные работы по ДСф приведены в [5].
Принцип действия ДСФ основан на
квантовании непрерывного колебания
(рис. 22.1) по времени и по амплитуде*
Структурная схема ДСФ
приведена на рис. 22.2. Непрерывное
радиочастотное колебание с выхода
линейной части приемника с помощью
перемножителя переводится в область
видеочастот, проходит через фильтр
нижних частот и поступает на первое
решающее устройство (I РУ).
Напряжение на входе I РУ имеет вид,
изображенный на рис. 22.1,а. Первое
решающее устройство состоит из
двустороннего ограничителя и каскада
совпадения «1». В I РУ производится
Рис. 22.1. Квантование непре- (дискретизация) сигнала по времени и
рывного сигнала по амплитуде на два уровня: 1 и
0. Напряжение на выходе I РУ
изображено на рис. 22.1,в. Как следует из принципа работы I РУ,
оно принимает решение о знаке непрерывного колебания в момент
отсчета. Регистр сдвига (PC) выполнен на D-тригтерах и
является дискретной линией задержки. При некогерентном приеме на
каждый сигнал должно приходиться два квадратурных канала,
выполненных по структурной схеме рис. 22.2, но с двумя
опорными колебаниями cos toot и sin ooorf.
Свойства ДСФ имеют много общего со свойствами обычного
линейного согласованного фильтра (ЛСФ). Что же касается
особых свойств, одно из них заключается в том, что напряжение на
выходе ДСФ не является АКФ сигнала, которая имеет место на
выходе ЛСФ. На рис. 22.3 представлена ненормированная АКФ
1
в)
it
] [rg—*
гвнЙ
+
Рис. 22.2. Дискретный согласованный фильтр
364
сигнала Баркера с числом символов
N=11 (тонкая линия) и напряжение
на выходе ДСФ (толстая линия).
Напряжение на выходе ДСФ отличается
от напряжения на выходе ЛСФ не
только своей дискретной структурой,
но и формой: уровень боковых пиков
иной и имеется значительная
постоянная составляющая (штриховая линия).
Это объясняется тем, что основным
элементом ДСФ является регистр
сдвига. Допустим, что осуществляется
когерентный прием дискретного фазо-
манипулированного сигнала с числом Рис* 22,3 ^апрд^6фИе на вы~
символов N=B и энергией Е. ходе
Вероятность ошибки [5]
Рп
т WWW*
ошД
1_/7]/4£/яЛд,
(22.1)
где F(x) —интеграл вероятности (7.5).
Если прием сигнала производится линейным согласованным
фильтром, вероятность ошибки
Рошл = 1-^(К2Щ). (22.2)
Сравнение выражений (22.1) и (22.2) показывает, что
увеличение вероятности ошибки Рош д в ДСФ эквивалентно
максимальным потерям в отношении сигнал-шум в я/2 раз, т. е. на 2 дБ.
Вероятность ошибки при некогерентном приеме с помощью ДСФ
и В-^оо
Рошд «0,5ехр(—E/nN0), (22.3)
т. е. потери также равны я/2.
Исследование помехоустойчивости ДСФ при воздействии
гармонической помехи показывает, что она значительно ухудшается по
сравнению с помехоустойчивостью линейного согласованного
фильтра.
Помехоустойчивость ДСФ , построенного согласно структурной
схеме рис. 22.2, зависит от времени прихода сигнала, так как
необходима синхронизация по тактовой частоте, с которой
размещены импульсы в сигнале.
При неидеальной тактовой синхронизации отношение сигнал-
шум [123]
(22.4)
д п N 0 \ т0 /
где т —временное отклонение тактовой синхронизации, то
—длительность импульса ФМ сигнала.
Для того, чтобы ДСФ был инвариантен относительно
времени прихода сигнала, можно построить квазиоптимальный ДСФ
по схеме рис. 22.2, расширяя полосу фильтра нижних частот до
365
Af=2/to и удваивая тактовую частоту генератора тактовых
импульсов и число ячеек в регистре сдвига.
В работе [146] показано, что в среднем квазиоптимальный
ДСФ проигрывает оптимальному в отношении сигнал-шум 1 дБ.
■Максимальные потери в квазиоптимальном ДСФ [146] равны
4,5 дБ.
22.2. Дискретно-аналоговый согласованный фильтр
Принцип действия дискретно-аналогового согласованного
фильтра (ДАСФ) [134, 147, 148] поясняется рис. 22.4.
Непрерывное колебание x(t) (тонкая линия) квантуется по времени и
каждое выборочное значение запоминается на интервале
квантования. Тем самым непрерывное колебание заменяется дискретно-
аналоговым (толстые линии на рис. 22.4). Для обработки такого
колебания необходимо иметь в первую очередь
дискретно-аналоговую линию задержки (ДАЛЗ). В ячейках памяти в течение
интервала квантования должны храниться выборочные значения,
которые были записаны в начале этого интервала. В следующий
такт каждое выборочное значение должно быть переписано в
последующую ячейку памяти.
. , .Паш 1
FWA
Рис. 22.4. Дискретизация
непрерывного сигнала
Рис. 22.5.
Дискретно-аналоговый согласованный фильтр
Кл — ключ, Я — ячейка памяти
На рис. 22.5 приведена структурная схема ДАСФ. Назначение
Кл — перенос информации с предыдущей ячейки памяти на
последующую. Ритмом работы ДАСФ управляет генератор тактовых
импульсов (Г). Импульсный модулятор преобразует непрерывное
колебание в дискретно-аналоговое в соответствии с рис. 22.4. С
выхода каждого отвода ДАЛЗ (с выходов П) напряжения поступают
на усилители и фазовращатели, а затем суммируются. Отметим
только, что помехоустойчивость ДАСФ практически такая же, как
и помехоустойчивость линейных согласованных фильтров.
Збб
22.3. Приборы с зарядовой связью
Принцип действия ПЗС рассмотрен в ряде книг и в
многочисленных статьях. Данный параграф написан по материалам книг
[125, 132—134, 149, 150].
Принцип действия ПЗС основан на переносе заряда от одного
конденсатора к другому, а конденсаторы выполнены в
интегральном исполнении. ПЗС представляет собой последовательность
МОП-конденсаторов (рис. 22.6), образованных на одной
подложке. МОП-конденсатор состоит из трех элементов: металл —
окисел — полупроводник. На верхней части кремниевой
полупроводниковой подложки (я-типа) расположен слой окисла, на котором
укреплены металлические пластины (1, 2... т). К последним
подводятся управляющие напряжения, обеспечивающие перенос-
заряда от одного МОП-конденсатора к другому. Ввод и вывод
обеспечиваются специальными электродами на краях ПЗС
(области р+).
Металл
Онисел
Рис. 22.6. Структура прибора с
зарядовой связью
Рис. 22.7. Процесс переноса заряда в
трехфазном ПЗС
■&■
}
_1l
2
kJi-
]5
И/
\8
|g '"*
~П++1 1++Г Гг
LJ LJ a) L.J
_J*
2
ill.
5
6\7
8
9
_b«
2
Лг
Г
5j7j
mJ
£~~
—-I++I l++l )++l
LJ
!-J# LJ
Процесс переноса заряда в ПЗС представлен на рис. 22.7.
Необходимо отметить, что процесс переноса заряда можег
производиться в несколько тактов. Это приводит к тому, что в ПЗС
МОП-конденсаторы, работающие синхронно (в одном такте),
присоединены к одной шине (фазе). Рис. 22.7 иллюстрирует процесс
переноса заряда в трехфазном ПЗС. Электроды объединены в
группы. Слева от шин указано напряжение, действующее на
шинах. В начальный такт (рис. 22.7,а) ла электродах 1, 4, 7...
действует отрицательное (относительно подложки) напряжение —U2,
а на остальных электродах —U\, причем £/2>1. Под
электродами 1, 4, 7... присутствуют заряды (изображены знаками -*-+).
367
Во втором такте (рис. 22.7,6) к электродам 2, 5, 8...
прикладывается напряжение —Uz{Uz>U2). Под действием —£/3 заряды
перемещаются в области электродов 2, 5, 8... На третьем такте
(рис. 22.7,в) на электроды 2, 5, 8... подается напряжение —U2 и
лод этими электродами начинается этап хранения заряда.
Следовательно, тактированное изменение
управляющих напряжений позволяет
перемещать заряды вдоль ПЗС.
Минимальная тактовая частота ПЗС
составляет десятки герц, а максимальная
тактовая частота трехфазных ПЗС — порядка
10 МГц. Естественно, с улучшением
технологии диапазон изменения тактовых частот
будет расширен. Минимальная тактовая
частота в значительной степени определяется
изменением температуры окружающей
среды.
В настоящее время существует много
модификаций ПЗС. Особое внимание заслу-
0J 0,2 0,3 0/tf/fT
Рис. 22.8. Амплитудно- __ _ ^
частотная характеристи- живают ПЗС с углубленным каналом пере-
ка ПЗС носа. В них заряды перемещаются внутри
канала с некоторым объемом. Замена
поверхностного переноса заряда объемным позволяет существенно
увеличить максимальные тактовые частоты до значений 100 МГц.
Процесс переноса заряда сопровождается потерями е, которые
определяются следующим образом
e = (Qk-Qk+i)/Qk, (22.5)
где Qk — заряд 1-го МОП-конденсатора на &-м такте, Qk+i —
заряд t+1-го МОП-конденсатора на (6+1)-м такте. Величина е
характеризует потери при переносе заряда в следующий
конденсатор. Потери е в общем виде приводят к зависимости АЧХ ПЗС
от частоты. Нормированная АЧХ ПЗС описывается следующим
выражением [125, 134, 149]:
^n3c(/) = exp{-ne[l-cos(2jt///T]}, (22.6)*
где fT — тактовая частота, /—текущее значение частоты
сигнала, n = mN — число МОП-конденсаторов, т — число тактов (фаз),
N — число разрядов. На рис. 22.8 изображена нормированная
АЧХ ПЗС. Чем больше произведение пе, тем больше
результирующие потери и тем меньше полоса пропускания ПЗС, которая
определяется следующим соотношением:
F=0,5/Vexp( — ле)/0(2ле), (22.7)
где /0 — модифицированная функция Бесселя нулевого порядка.
При пе>1 ширина полосы пропускания F^fT/4(nm)l/2. Для
современных ПЗС е~10~3... Ю-4. Если положить яе = 0,1, то при е =
= 10~4 число разрядов Л^ЗЗО. Следовательно, даже малые
потери приводят к тому, что число разрядов дискретно-аналоговой ли-
368
нии задержки (ДАЛЗ) на ПЗС ограничено. Сужение полосы
пропускания ПЗС аналогично сужению полосы пропускания МЭЛЗ,
но ПЗС позволяет обрабатывать ШПС с большими базами.
В настоящее время известно большое число различных
модификаций ДАСФ на ПЗС, но в целом схема, приведенная на
рис. 22.5, остается базовой. Пока что максимальная база ФМ
ШПС обрабатываемого ДАСФ на ПЗС достигает значения N=
= 512 при тактовой частоте 10 МГц, потерях е=1,6-10-4 и
мощности потребления 2,1 Вт [151].
22.4. Программируемые согласованные фильтры
Развитие цифровой техники, приборов на ПАВ и ПЗС привело
к интенсивной разработке программируемых согласованных
фильтров (ПСФ), предназначенных для обработки ШПС с
большими базами в условиях быстрой смены сигналов [114, 125, 130,
132—135, 149, 151—154]. Принцип действия ПСФ заключается в
том, что каждый отсчет входного сигнала в соответствии с
корреляционным интегралом умножается на опорный сигнал,
хранящийся в опорном регистре. В свою очередь опорный сигнал
может быть быстро сменен в опорном регистре путем стирания
прежнего и записи нового сигнала по команде.
В оптимальном приемнике ПСФ может быть включен вместо
ДСФ (рис. 22.2) или вместо ДАСФ (рис. 22.5). На рис. 22.9 изо-
Рис. 22.9.
Программируемый
согласованный
фильтр
бражен ПСФ. Основными устройствами ПСФ являются два
регистра— две дискретные линии задержки. Сдвиговая (или
сигнальная) линия задержки (СДЛЗ) служит для создания
сдвинутых на такт копий входного сигнала, которые поступают на
перемножители. На вторые входы перемножителей поступают
постоянные напряжения, равные отсчетным значениям опорного
сигнала, от опорной дискретной линии задержки (ОДЛЗ).
Напряжения на выходах ОДЛЗ постоянны и изменяются лишь при смене
опорного колебания. Последовательность напряжений на выходах
ОДЛЗ устанавливается в соответствии с кодовой последователь-
369
ностью ФМ ШПС по команде, которая обеспечивает передачу
требуемой кодовой последовательности от постоянного
запоминающего устройства (ПЗУ), в котором хранятся все ШПС,
используемые в системе связи. По сути дела ОДЛЗ является
оперативным запоминающим устройством (ОЗУ). Умножение копий
входного сигнала, изменяющихся во времени, на постоянные значения
опорного сигнала, эквивалентно умножению входного сигнала на
импульсную характеристику согласованного фильтра. Сумматор
производит операцию суммирования, что эквивалентно
интегрированию в корреляционном интеграле. Для работы ПСФ в области
видеочастот необходимо перенести спектр с помощью
преобразователя частоты (перемножитель на входе), отфильтровать его и
затем произвести дискретизацию и квантование входного сигнала
(I РУ)так же, как это осуществляется в ДСФ (рис. 22.2). Перенос
сигналов на видеочастоту необходим в том случае, когда СДЛЗ и
ОДЛЗ выполняются на элементах цифровой техники или на ПЗС.
Если ДЛЗ выполняется на ПАВ, то перенос сигнала необходимо
осуществлять в область рабочих частот ПАВ.
Параметры ПСФ полностью определяются параметрами ДЛЗ.
Параметры ДЛЗ на ПАВ и ПЗС были рассмотрены ранее, а
ДЛЗ на элементах цифровой техники будут рассматриваться в
следующем параграфе.
22.5. Цифровые согласованные фильтры
Дискретный согласованный фильтр (ДСФ) обеспечивает прием
информации с относительно малыми потерями информации
—порядка 2... 4 дБ. Квантование входного сигнала в ДСФ
производится на два уровня, что обеспечивает простоту ДСФ и надежность
его работы. Вместе с тем, у конструкторов ШСС всегда
существует требование — уменьшить потери. Для уменьшения потерь
необходимо увеличивать число уровней квантования. В этом случае
каждый отсчет входного сигнала представляется в цифровом
виде — в виде кодовой последовательности. При этом дискретный
согласованный фильтр превращается в цифровой согласованный
фильтр (ЦСФ) [12, 119, 126, 128, 135, 155, 156].
Допустим, что входной сигнал квантуется на п уровней, причем
л = 2ж. При этом число разрядов в кодовой последовательности
равно т. Если ФМ ШПС состоит из N импульсов, то общая
память ЦСФ равна mN. На рис. 22.10 приведена упрощенная схема
ЦСФ. Входной сигнал после переноса в область видеочастот
поступает на иход дискретизатора (Д), который превращает непре-
Вход i—, .—, г-*-, I
JCQSu^
ЬЧ А™о
АСУт-г
\щ
Выход
Рис. 22.10. Цифровой согласованный фильтр
370
рывный сигнал в дискретный, т. е. на выходе дискретизатора
существует последовательность отсчетов, следующих с интервалом
отсчета. Аналого-цифровой преобразователь (АЦП) преобразует
каждый аналоговый отсчет в кодовую последовательность (КП) из
т символов и направляет символы поразрядно в соответствующие
ДСФ. Число ДСФ равно числу разрядов т. ДСФ0... ДСФт-1
оптимально обрабатывают последовательность разрядов и передают
их в цифроаналоговый преобразователь (ЦАП), который из
последовательности оптимально обработанных разрядов преобразует
дискретный сигнал в аналоговый. Если число уровней квантования
велико, то сигнал на выходе ЦАП должен иметь форму АКФ на
выходе линейного согласованного фильтра. Известно несколько
модификаций ЦСФ, но основным отличием ЦСФ от ДСФ
является наличие т ДЛЗ с общей памятью mN. Наличие АЦП и ЦАП
также отличает ЦСФ от ДСФ, но при больших базах ШПС, т. е.
при N^1, основным является наличие т ДЛЗ.
Таблица 22.1. Основные характеристики БИС
Тип БИС
ТТЛ
ТТЛ — Шоттки
эсл
И2Л
МОП-р
МОП-л
К/МОП на
монолитной подложке
К/МОП на
сапфировой подложке
К/МОП на сапфире
(1985—1990 гг.)
БИС на грсениде
галлия
(1985—1990 гг.)
Произведение
мощность X
X задержка,
пДж
30...50
10...60
15...80
0,2...2
50...500
5...50
2...40
0,5...30
0,1...0,2
0,01...0,1
Типовая
задержка, НС
6...30
(Ю)
2...10
(5)
0,7...2
(2)
7...50
(20)
30...200
(100)
4...25
(15)
10...35
(20)
4...20
(10)
0,2...0,4
(0,3)
0,05...0,1
(0,07)
Число
компонентов в
вентиле
12
12
8
3...4
3
3
4
4
3...4
2
Плотность
упаковки,
вентиль/мм2
10...20
20...40
15...20
75...150
75...150
100...200
40...90
100...200
1 200...500
300...1000
Типовое
напряжение
питания, В
+5,0
+5,0
-5,2
+1,0
—20
+5
+10
+10
+2
+1,2
371
С ростом базы ШПС N и увеличением числа разрядов т
приходится учитывать как конечное быстродействие ЦСФ, так и
потребляемую им мощность. В табл. 22.1 приведены данные современных
и будущих больших интегральных схем (БИС), которые позволяют
в первом приближении оценить быстродействие и потребление
энергии ЦСФ, выполненных по той или иной технологии [157—
161].
В табл. 22.1 в первом столбце указаны тип БИС и технология
их изготовления, причем два последних типа БИС являются
перспективными и ожидается, что они выйдут из стадии разработки
в 1985—1990 гг. [158]. Во втором столбце приведено произведение
потребляемой мощности на время задержки в пДж-Вт-с-10~12. Чем
меньше это произведение, тем лучше, так как чем меньше
потребляемая мощность одним вентилем, тем меньше потребляемая
мощность ЦСФ, а чем меньше задержка, тем больше быстродействие.
В третьем столбце приведена типовая задержка в не (в скобках
приведены значения для технологии с окисной изоляцией). Число
интегральных компонент в двухвходовом вентиле приведено в
четвертом столбце, а плотность упаковки — в пятом. Типовое
напряжение питания дано в шестом столбце.
Зная структуру ЦСФ, можно найти его параметры при
создании с помощью той или иной элементной базы. Например, ЦСФ
для ФМ ШПС с базой N=512, длительностью Г= 102,4 мке и
числом уровней квантования л = 4 при изготовлении с помощью БИС
И2Л будет потреблять около 6 Вт и состоять из 15 кристаллов.
Следует отметить, что ЦСФ (как и ДСФ), построенные на
современных БИС, потребляют значительную энергию при больших
базах ШПС. Внедрение БИС на сапфире и на арсениде галлия
(табл. 22.1) приведет к тому, что ЦСФ и ДСФ ближайшего
будущего будут быстродействующими при малом потреблении энергии.
В то же время БИС и СБИС обладают рядом преимуществ перед
ПАВ и ПЗС (лучшая технологичность, большая надежность,
лучшая стабильность параметров и малые потери).
23. ПЕРСПЕКТИВЫ СОВЕРШЕНСТВОВАНИЯ
ЭЛЕМЕНТНОЙ БАЗЫ УСТРОЙСТВ ОБРАБОТКИ ШПС
Помехозащищенные широкополосные системы связи должны
работать с ШПС, обладающими большими базами В«104... 105
[5—11]. Для уменьшения возможности несанкционированного
доступа к передаваемой информации необходимо обеспечивать в
ШСС также смену ШПС по заданной программе. Все это приводит
к тому, что устройства формирования и, особенно, обработки
являются сложными. В настоящее время наиболее перспективными
устройствами формирования и обработки ШПС являются приборы на
поверхностных акустических волнах, приборы с зарядовой связью
и цифровые интегральные микросхемы (ИС), причем среди шослед-
372
ных перспективны специализированные большие и сверхбольшие
(БИС и СБИС). Применение тех или иных приборов зависит от
множества причин, в том числе от требуемых харрактеристик ШСС
(скорости передачи информации, ширины спектра и базы ШПС и
т. п.), от назначения ШСС (наземная, подвижная, бортовая и
т. п.), от уровня развития технологии тех или иных приборов и
т. д.
В настоящее время существуют определенные мнения о
применимости тех или иных приборов для устройств формирования и
обработки ШПС. Например, в работе [162] приведены границы
применимости различных приборов для создания согласованных
фильтров, конвольверов и корреляторов, представленные в табл.
23.1. На рис. 23.1 изображены характеристики приборов на ПАВ
[130, 131, 163, 164], на рис. 23.2 — характеристики ПЗС и
приборов на ПАВ [132, 133, 165, 166], на рис. 23.3 — характеристики
ИС [158].
Таблица 23.1. Сравнение возможностей приборов на ПАВ, ПЗС,
цифровых согласованных фильтров и активных корреляторов
при обработке ФМ сигналов
Технические
характеристики устройств
обработки
Максимальная центр,
частота, МГц
Длина
последовательности, МКС
Полоса, МГц
База
Динамический
диапазон при сжатии, дБ
Уровень паразитных
откликов, дБ
Вносимые потери, дБ
Мощность,
потребляемая устройством,
Вт/аналоговый бит
Согласованный
фильтр с
фиксированными
коэффициентами
500
50
50
512
60
—40
40
Программируемый
согласованный
фильтр
250
50
20
256
50
—35
45
Конволь-
вер
50
40
100
2000
55
—40
50
Ю-з_ 10-2
Цифровой
согласованный
фильтр
Обработка на
деочастоте
ПЗС
Обработка на
деочастоте
Активный
коррелятор
>1000
Произвольная
10
1000
70
—50
—
10-1—1
10
1000
60
-40
—
ю-6 —
— ю-4
500
100000
80
—80
6
—
373
Следует отметить, что данные, представленные в табл. 23.1 и
на рис. 23.1, 23.2, 23.3, характеризуют приборы 1973—1979 гг. За
истекшее время все эти приборы непрерывно совершенствуются,
их характеристики улучшаются, а также появляются новые
приборы с новой технологией — СБИС на арсениде галлия, на
материале с цилиндрическими магнитными доменами (ЦМД) и др. [167—
177]. Поэтому предсказать, какими будут устройства формирования
и обработки ШПС в 1990—2000 гг. в настоящее время
чрезвычайно затруднительно.
0,01 0,1 10 70,0 100,0
Длительность ШПС Т; мне
Рис. 23.1. Характеристики
многоотводных линий задержки на ПАВ
Рис. 23.2. Характеристики ПЗС
приборов на ПАВ
10° 101 70г W5
Длительность ШПС Т, мне
Ю~7 10'6 W'5 Ю~* W~3 Wz 10-
Рассеиваемая мощность, Вт/белтиль
Рис. 23.3. Характеристики ИМС
374
Список литературы
1. Котельников В. А. Теория потенциальной помехоустойчивости. ^-М.: Гос~
энергоиздат, 1956.— 150 с.
2. Шеннон К. Математическая теория связи. — В кн.: К. Шеннон. Работы
по теории информации и кибернетике: Пер. с англ./Под ред. Р. Л. Добру»
шина, О. Б. Лупанова. — М.: ИЛ, 1963, с. 243—332.
3. Агеев Д. В. Основы теории линейной селекции. — Научно-технический
сборник ЛЭИС, 1935, № 10.
4. Варакин Л. Е. Теория сложных сигналов. — М.: Сов. радио, 1970. — 375 с,
5. Варакин Л. Е. Теория систем сигналов. —М.: Сов. радио, 1978. — 304 с
6. Статистическая теория связи и ее практические приложения/Под ред*
Б. Р. Левина. —М.: Связь, 1979. — 288 с.
7. Диксон Р. К. Широкополосные системы: Пер. с англ./Под ред. В. И.
Журавлева.— М.: Связь, 1979. — 302 с.
8. Спилкер Дж. Цифровая спутниковая связь: Пер. с англ./Под ред. В. В.
Маркова.—М.: Связь, 1969. —592 с.
9. Поляков П. Ф. Широкополосные аналоговые системы связи со сложным»
сигналами. — М.: Радио и связь, 1981.— 152 с.
10. Spread Spectrum Modulation Techniques. Report 651. (Study Programme
18B/1), CCIR, 1978, p. 4—14.
11. Мищенко И. Н., Волынкин А. И., Волосов П. С, Григорьев М. И.
Глобальная навигационная система NAVSTAR. — Зарубежная
радиоэлектроника, 1980, № 8, с. 52—83.
12. Лёзин Ю. С. Оптимальные фильтры и накопители импульсных сигналов.—
М.: Сов. радио, 1969. —448 с.
13. Цифровые методы в космической связи/Под ред. С. Голомба: Пер. с англ./"
Под ред. В. И. Шляпоберского. — М.: Связь, 1969. —272 с.
14. Питер сон У., Уэлдон Э. Коды, исправляющие ошибки: Пер. с англ./Под
ред. Р. Л. Добрушина, С. И. Самойленко. — М.: Мир, 1976.— 594 с.
15. Теория и применение псевдослучайных сигналов/А. И. Алексеев и др.—
М.: Наука, 1969. —368 с.
16. Шумоподобные сигналы в системах передачи информации/В. Б.
Пестряков, В. П. Афанасьев, В. Л. Гурвич и др.; Под ред. В. Б. Пестрякова.—
М.: Сов. радио, 1973. — 424 с.
17. Gold R. Optimal Binary Sequences for Spread Spectrum Multiplexing.—
IEEE Trans., Inf. Th., 1967, v. IT-13, N 4, p. 619—621.
18. Hemmati F. A Large Class of Nonlinear Shift Register Sequences. — IEEE
Trans., Inf. Th., 1982, v. IT-28, N 2, p. 355--359.
19. Golay M. J. E. Complementary Series. —IRE Trans., Inf. Th., 1961, v. IT-7,.
N 2, p. 82—87.
20. Варакин Л. Е., Моисеева Г. Г. Последовательности максимальной
вероятности.—Труды учебных институтов связи, 1976, № 80, с. 49—56.
21. Фрэнк. Многофазные коды с хорошими непериодическими
корреляционными свойствами. — Зарубежная радиоэлектроника, 1963, № 12, с. 3&—44.
22. Lewis В. L., Kretschmer F. F. A New Class of Polyphase Pulse Compression
Codes and Techniques. — IEEE Trans. Aerospace Electr. Syst., 1981, v. AES-17r
N 3, p. 364—372.
23. Haffmen D. A. The Generation of Impulse — Equivalent Pulse Trains. — IRE
Trans. Inf. Th., 1962, v. IT-8, N 5, p. 10—16.
24. Barker R. H. Group Synchronizing of Binary Digital System. In the book:
Communication Theory, ed. by W. Jackson. — London, 1953, p. 273—287.
25. Boehmer A. Binary Pulse Compression Codes. —IEEE Trans. Inf. Th., 1967,
v. IT-13, N 2, p. 156—167.
26. Turyn R. Sequences with Small Correlation. In the book: Error Correcting
Codes, ed. by H. B. Mann, —N. —Y.: John Wiley and Sons, 1968, p. 195—
228.
27. Варакин Л. Е. Синтез фазоманипулированных сигналов. — Радиотехника »
электроника, 1969, т. 14, № 5, с. 796—806.
28. Вакман Д. Е., Седлецкий Р. М.,'Шапиро И. 3. Синтез квантованных фа»
375
зоманипулированных сигналов с хорошими корреляционными свойствами.—
Радиотехника и электроника, 1970, т. 15, № 4, с. 718-—727.
29. Пелехатый М. И. О некоторых блок-конструкциях, порождающих
последовательности с хорошими автокорреляционными свойствами. — Радиотехника
и электроника, <1970, т. 15, № 7, с. 1428—1439.
30. Пелехатый М. И., Голубев Е. А. Автокорреляционные свойства некоторых
типов двоичных последовательностей. — Проблемы передачи информации,
1972, т. 8, № 1, с. 92—99.
31. Вакман Д. Е., Седлецкий Р. М. Вопросы синтеза радиолокационных
сигналов.—Сов. радио, 1973.— 312 с.
32. Goley M. J. E. Sieves for Low Autocorrelation Binary Sequences. — IEEE
Trans. Inf. Th., 1977, v. IT-23, N 1, p. 43—51.
33. Golay M. J. E. The Merit Factor of Long Low Autocorrelation Binary
Sequences.—IEEE Trans. Inf. Th., 1982, v. IT-28, N 3, p. 543—549.
34. Глобус И. А. О функции распределения ВКФ полного кода. —
Радиотехника, 1977, т. 32, № 3, с. 80—82.
35. Велти. Четверичные коды для импульсного радиолокатора. — Зарубежная
радиоэлектроника, 1961, № 4.
36. Tseng С.— С, Liu С. L. Complementary Sets of Sequences. — IEEE Trans.
Inf. Th. 1972, v. IT-18, N 5, p. 644—651.
37. Frank R. L. Polyphase Complementary Codes. —IEEE Trans. Inf. Th., 1980,
v. IT-26, N 6, p. 641—647.
38. Wilson R., Richter J. Generation and Performance of Quadraphase Welti
Codes for Radar and Synchronization of Coherent and Differentially Coherent
PSK. —IEEE Trans. Comm., 1979, v. COM-27, N 9, p. 1296—1301.
39. Кор, Кручфилд, Мерчиз. Импульсная УКВ станция, использующая шумо-
иодобные сигналы. — Зарубежная радиоэлектроника, 1966, № 4, с. 20—31.
40. Gold R. Maximal Recursive Sequences with 3-valued Recursive
Cross-correlation Functions. — IEEE Trans. Inf. Th., 1968, v. IT-14, N 1, p. 154—156.
41. Сарвате Д. В., Персли М. Б. Взаимно-корреляционные свойства
псевдослучайных и родственных последовательностей. — ТИИЭР, 1980, т. 68, № 5,
с. 59—90.
42. Сальников Ю. К., Варакин Л. Е. Моменты распределения корреляционных
функций линейных систем фазоманипулированных сигналов. — Радиотехника
и электроника, 1981, т. 16, № 2, с. 334-^338.
43. Варакин Л. Е., Сальников Ю. К. Оценки максимальных пиков
корреляционных функций фазоманипулированных сигналов. — Труды учебных
институтов связи. Приемо-передающая техника и антенны, 1978, с. 67—72.
44. Schneider К. S., Orr R. S. Aperiodic Correlation Constraints on Large Binary
Sequences Sets.— IEEE Trans. Inf. Th., 1975, v. IT-21, N 1, p. 79—84.
45. Варакин Л. Е. Объем больших систем фазоманипулированных сигналов.—
Радиотехника и электроника, 1978, т. 23, № 4, с. 735—741.
46. Варакин Л. Е. Статистическая теория фазоманипулированных сигналов/В
кн.: Statistische Nachrichtentheorie und ihre Anwendunger. Vortrage, gehal-
ten auf dem 2. Internationalen Seminar — SNT80 — in Schnett (Thuringenu,
DDR April 12. —16., 1980. —Akademie —Verlag. Berlin, 1981, S. 125—135.
47. Варакин Л. Е. Нижняя граница числа оптимальных систем дискретных
частотных сигналов. — Радиотехника и электроника, 1979, т. 24, № 8,
с. 1692—1695.
48. Варакин Л. Е., Матвеева О. В. Нелинейные композиционные системы
дискретных частотных сигналов. — Труды учебных институтов связи.
Приемопередающая техника и антенны, 1978, с. 61—67.
49. Варакин Л. Е. Объем больших систем дискретных частотных сигналов.—
Радиотехника и электроника, 1978, т. 23, № 5, с. 963—966.
50. Касами Т., Токура Н., Ивадари £., Инагави Я. Теория кодирования: Пер.
с япон./Под ред. Б. С. Цыбакова, С. И. Гельфанда. — М.: Мир, 1978.—
576 с.
51. Блох Э. Л., Зяб лов В. В. Линейные каскадные коды. — М.: Наука, 198/2.—
229 с.
52. Варакин Л. Е., Сальников Ю. К. Оптимизация системы связи с шумопо-
376
добными сигналами и корректирующими кодами. — Радиотехника, 1980,
т. 35, № 5, с. 17—22.
53. Блэсбалг. Сравнение псевдошумовых и обычных методов модуляции в
спутниковых системах связи с многократным доступом. — Зарубежная
радиоэлектроника, 1967, № 12, с. 28—54,
54. Варакин Л. Е. Помехоустойчивость ШИМ—ШПС и ЧМ—ШПС. —
Радиотехника, 1983, № 5, с. 9—14.
55. Левин Б. Р. Теоретические основы статистической радиотехники. — М.: Сов.
радио. Книга первая, 1966. — 550 с.
56. Ван Трис. Теория обнаружения, оценок и модуляции. Т. 2. Теория
нелинейной модуляции: Пер. с англ./Под ред. В. Т. Горяинова. — М.: Сов.
радио, 1975. —344 с.
57. Витерби Э. Д. Принципы когерентной связи: Пер. с англ./Под ред.
Б. Р. Левина. —М.: Сов. радио, 1970.-302 с.
58. Турин. Согласованные фильтры. — Зарубежная радиоэлектроника, 1961,
№ 3, с. 30—63.
59. Теплое Н. Л. Помехоустойчивость систем передачи дискретной
информации.—М.: Связь, 1964. —360 с.
60. Щукин А. Н. Об одном методе борьбы с импульсными помехами. — Изв.
АН СССР, серия Физическая, 1946, т. 10, № 1, с. 49—56.
61. Бенджамин. Последние достижения в технике генерирования и обработки
радиолокационных сигналов. — Зарубежная радиоэлектроника, 1965, № 7,
с. 22—48.
62. Власов В. Н. Помехоустойчивость нелинейного приемника многочастотных
сигналов. — Изв. вузов СССР. Радиоэлектроника, 1975, т. 18, № 4,
с. 87—91.
63. Левин Б. Р. Теоретические основы статистической радиотехники. — М.: Сов.
радио. Книга вторая, 1968; книга третья, 1976. — 503 с.
64. Репин В. Г., Тартаковский Г. П. Статистический синтез при априорной
неопределенности адаптация информационных систем. — М.: Сов. радио,
1977.-432 с.
65. Сикарев А. А., Фалько А. И. Оптимальный прием дискретных
сообщений.—М.: Связь, 1978. —328 с.
66. Campbell M. R., Hoff L. E., Ziemer R. E. A Large Time — Bandwidth
Product Signaling Technique for Nonwhite Noise Channels. — IEEE Trans. Comm.,
1976, v. COM-24, N 10, p. 1100—1115.
67. IEEE Trans, on Communication, 1977, v. COM-25, N 8, 125 p.
68. IEEE Trans, on Communication, 1982, v. COM-30, N 5, pt. 1,-256 p.
69. Варакин Л. Е. Помехоустойчивость систем связи с пгумоподобными
сигналами.— Электросвязь, 1979, № 1, с. 42—47.
70. Варакин Л. Е., Талызин В. Н. Реальная база и помехоустойчивость
систем связи с шумоподобными сигналами. — Электросвязь, 1978, № 5,
с. 56—61.
71. Варакин Л. Е., Талызин В. Н. Адаптивный приемник шумоподобных
сигналов с оптимальными весовыми коэффициентами. — Радиотехника, 1980,
т. 35, № 9, с. 3—«8.
72. Варакин Л. Е., Талызин В. Н. Помехоустойчивость квазиоптимального
адаптивного приемника шумоподобных сигналов. — Электросвязь, 1980,
№ 4, с. 56—59.
73. Тихонов В. И. Статистическая радиотехника. — М.: Сов. радио, 1966.—
678 с.
74. Давенпорт В. Б., Рут В. Л. Введение в теорию случайных сигналов и
шумов.—М.: ИЛ, I960. —468 с.
75. Тихонов В. И. Статистическая радиотехника. — М.: Радио и связь, 19812.—
624 с.
76. Черняк Ю. Б. О линейных свойствах системы широкополосный
ограничитель—фильтр.— Радиотехника и электроника, 1962, т. 7, № 7, с. 1073—
1076.
77. Джоунс Д. Идеальное ограничение процесса, состоящего из двух
синусоидальных сигналов и случайного шума. — Сб. статей: Некоторые проблемы
377
обнаружения сигнала, маскируемого флюктуационной помехой. М.: Сов.
радио, 1965, с. 237—263.
7$. Кэн. Отношение сигнал/помеха в полосовых ограничителях. — Зарубежная
радиоэлектроника, 1961, № 8, с. 37—46.
79. Варакин Л. Е., Власов В. Н., Волков Л. Н., Пышкин И. М.
Экспериментальное исследование прохождения сложных сигналов и шумов через
ограничитель.— Труды II Научно-технической конференции: Проблемы
оптимальной фильтрации. — М., 1968, т. 1, с. 57—74.
80. Bogotch S. Е., Cook С. Е. Effects of limiting on the detectability of partially
time coincident pulse compression signals. — IEEE Trans. Mil. electronic. 1965,
v. MIL-9, N 1, p. 17—24.
SI. Baer H. P. Interference effects of hard limiting in PN Spread — Spectrum
Systems, IEEE Trans. Com., 1982, v. COM-30, N 5, p. 1010—1017.
82. Титсворт. Применение булевой функции для построения многоканальной
телеметрической системы. — Зарубежная радиоэлектроника, 1964, № 8,
с. 33—30.
83. Varakin L. E. Optimization of Coded Channel Division Telecommunication
Systems. — 3-rd World Telecommunication Forum, Geneva, 1979, p. 2471—
2473.
84. Варакин Л. Е. Основы статистической теории асинхронных адресных сисг
тем передачи информации. — Изв. вузов СССР. Радиоэлектроника, 1981,
т. 24, № 4, с. 21—25.
£5. Варакин Л. Е., Власов А. В. Анализ воздействия мощной структурной
помехи на радиотехническую систему с шумоподобными сигналами. —
Радиотехника и электроника, 1983, т. 28, № 6, с. 1094—1101.
86. Варакин Л. Е. Совпадения структурных помех в радиотехнических
системах с дискретными частотными сигналами. — Радиотехника и электроника,
1976, с. 21, № 11, с. 2424—2425.
87. Ristenbatt M. P., Daws J. L. Performance Criteria for Spread Spectrum Com-
muications. IEEE Trans. Com., 1977, v. COM-25, N 8, p. 756—763.
88. DHlard R. A. Detectability of Spread — Spectrum Signals. IEEE Trans. AES,
1979, v. AES-15, N 4, p. 526^537.
89. Bridge W. M. IFF System Concept Based on Time Synchronization. — IEEE
Trans. Comm., 1980, v. COM-28, N 9, p. 1630—1637.
90. Krasner M. A. The Critical Band Coder — Digital Encoding of Speech
Signals Based on the Perceptual Requirements of the Auditory System. Rec.
IEEE Int. Conf. Acoust. Speech Signal Process. ICASSP, 1980, v. 2, p. 327—
331.
91. Мартынов В. А., Селихов Ю. И. Панорамные приемники и анализаторы
спектра/Под ред. Г. Д. Заварина. — М.: Сов. радио, 1980. — 352 с.
92. Справочник по радиолокации/Под ред. М. Сколника: Пер. с англ./Под ред.
К. Н. Трофимова, т. 4. —М.: Сов. радио, 1978. —376 с.
93. Ван Трис Г. Теория обнаружения, оценок и модуляции: Пер. с англ./Поц
ред. В. И. Тихонова, В. Т. Горяинова.—М.: Сов. радио, 1972, т. 1 —
744 с; 1977, т. 3. — 664 с.
94. Варакин Л. Е., Власов А. В. Обнаружение и анализ псевдослучайных фа-
зоманипулированных сигналов в условиях априорной неопределенности.—
Изв. вузов СССР. Радиоэлектроника, 1981, т. 24, № 3, с. 56—62.
95. Амиантов И. Н. Избранные вопросы статистической теории связи. — М.:
Сов. радио, 1971. —416 с.
96. Стиффлер Дж. Дж. Теория синхронной связи: Пер. с англ. Б. С. Цыбако-
ва/Под ред. Э. М. Габидулина. — М.: Связь, 19715. — 488 с.
97. Поиск, обнаружение и измерение параметров сигналов в
радионавигационных системах/Ипатов В. П., Казаринов Ю. М., Коломенский Ю. А. и др.:
Под ред. Ю. М. Казаринова. — М.: Сов. радио, 1975. — 296 с.
98. Чердынцев В. А. Проектирование радиотехнических систем со сложными
сигналами. — Минск: Вышэйшая школа, 1979.— 192 с.
99. Чердынцев В. А. Статистическая теория совмещенных радиотехнических
систем. — Минск: Вышэйшая школа, 1980, — 206 с.
100. Шахгильдян В. В., Ляховкин А. А. Системы фазовой автоподстройки
частоты.—М.: Связь, 1972. —448 с.
378
101. Линдсей В. Системы синхронизации в связи и управлении: Пер. с англ./
Под ред. Ю. Н. Бакаева, М. В. Капранова. — М.: Сов. радио, 1978.—
600 с.
102. Теоретические основы радиолокации/А. А. Коростелев, Н. Ф. Клюев,
Ю. А. Мельник и др.: Под ред. В. Е. Дулевича. — М.: Сов. радио, 1978.—
608 с.
103. Тихонов В. И., Кульман Н. К. Нелинейная фильтрация и
квазикогерентный прием сигналов. — М.: Сов. радио, 1975. — 704 с.
104. Ярлыков М. С. Применение марковской теории нелинейной фильтрации в
радиотехнике. — М.: Сов. радио, 1980. — 360 с.
105. Лосев В. В. Методы синхронизации по задержке (обзор). — Изв. вузов
СССР. Радиоэлектроника, 1979, т. 22, № 1, с. 3—13.
106. Системы фазовой синхронизации/Акимов В. Н., Белюстина Л. Н., Белых
В. Н. и др.: Под ред. В. В. Шахгильдяна, Л. Н. Белюстиной. — М.:
Радио и связь, 1982. —288 с.
107. Simon M. К. Noncoherent Pseudonoise Code Tracking Performance of Spread
Spectrum Receivers. — IEEE Trans. Com., 1977, v. COM-25, N 3, p. 327—345.
108. Варакин Л. Е. Поиск шумоподобных сигналов по времени и частоте в
системах связи. — Электросвязь, 1981, № 3, с. 44—45.
109. Marple M. J., Land W. Н., Lavin R. D. Extended Area Range
Instrumentation System Utilizing DME Links. —IEEE Trans. Aerospace and Elec. Syst.,
1967, v. AES-12, N 5, p. 590--598.
110. Rappaport S. S., Schilling D. L. A. Two-level Coarse Code Acquisition Scheme
for Spread Spectrum Radio. —IEEE Trans. Com., 1980, v. COM-28, N 9,
p. 1734—1742.
111. Варакин Л. Е., Рябов Е. А. Оптимизация стартстопной адресной системы
передачи информации с шумоподобными сигналами. — Труды учебных
институтов связи. Теория передачи информации по каналам связи, 1979,
с. а—11.
112. Вудворт Ф. М. Теория вероятностей и теория информации с применением
в радиолокации: Пер. с англ./Под ред. Г. С. Горелика. — М.: Сов. радио.
1955. —125 с.
113. Фалькович С. Е. Прием радиолокационных сигналов на фоне флюктуа-
ционных помех. — М.: Сов. радио, 1961.—> 312 с.
114. Аллен, Уэстерфильд. Цифровые корреляторы со сжатием во времени и
согласованные фильтры для активной гидролокации. — Зарубежная
радиоэлектроника, 1964, № 2, с. 32—62.
115. Варакин Л. Е. Формирование и обработка сложных сигналов в
радиолокационных и радиосвязных системах. — М.: ВЗЭИС, 1967. — 76 с.
116. Бенджамин Р. Анализ радио- и гидролокационных сигналов: Пер. с англ./
Под ред. И. Е. Овсиевича.— М.: Воениздат, 1969. — 253 с.
117. Современная радиолокация. Анализ, расчет и проектирование систем: Пер.
с англ./Под ред. Ю. Б. Кобзарева. — М.: Сов. радио, 1969. — 704 с.
118. Семенов А. М., Сикарев А. А. Широкополосная радиосвязь. — М.:
Воениздат, 1970, — 278 с.
119. Слока В. К. Вопросы обработки радиолокационных сигналов: — М.: Сов.
радио, 1970. —256 с.
120. Золотарев И. Д. Нестационарные процессы в системе сжатия
радиоимпульсных сигналов. — Воронеж, изд. ВГУ, 1970. — 96 с.
121. Кук Ч., Бернфельд М. Радиолокационные сигналы. Теория и применение:
Пер. с англ./Под ред. В. С. Кельзона. — М.: Сов. радио, 1971. — 567 с.
122. Винокуров В. И., Ваккер Р. А. Вопросы обработки сложных сигналов в
корреляционных системах.—М.: Сов. радио, 1972. — 216 с.
123. Многостанционный доступ в спутниковых системах связи/М. Д.
Венедиктов, С. А. Даниэлян, В. В. Марков, Г. С. Эйдус —М.: Связь, 1973.—97 с.
124. Каринский С. С. Устройства обработки сигналов на ультразвуковых
поверхностных волнах. — М.: Связь, 1975. — 176 с.
125. Секен К., Томсет М. Приборы с переносом заряда: Пер. с англ./Под ред.
В. В. Поспелова, Р. А. Суриса. —М.: Мир, 1978. —327 с.
126. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки
сигналов: Пер. -с англ./Под ред. Ю. Н. Александрова. —М.: Мир, 1978. —В48 с.
379
127. Лёзин Ю. С, Пахомов Ю. И., Кротов Д. И. Техника обработки сигналов
в радиотехнических системах. — Горький, изд. ГПИ, 1979. — 95 с.
12в. Применение цифровой обработки сигналов/Под ред. Э. Оппенгейм-а: Пер. с
англ./ Под ред. А. М. Рязанцева. — М.: Мир, 1980. — 552 с.
)"29. Ширман Я. Д., Манжос В. Н. Теория и техника обработки
радиолокационной информации на фоне помех. — М.: Радио и связь, 1981. — 416 с.
130. Фильтры на поверхностных акустических волнах: Расчет, технология и
применение. Под ред. Г. Мэттыоза. Пер. с англ./Под ред. В. Б. Акпамбето-
ва. — М.: Радио и связь, 1981. —472 с.
131. Поверхностные акустические волны: Под ред. А. Олинер. Пер. с англ./
Под ред. И. С. Реза. —М.: Мир, 1981. —390 с.
132. Приборы с зарядовой связью: Под ред. М. Хоувза и Д. Моргана/Пер. с
англ. — М.: Энергоиздат, 1981. — 376 с.
133. Приборы с зарядовой связью: Под ред. Д. Ф. Барба. Пер. с англ./Под ред.
Р. А. Суриса. —М.: Мир, 1982. —240 с.
134. Цикин И. А. Дискретно-аналоговая обработка сигналов. — М.: Радио и
связь, 1982.—161 с.
135. Сикарев А. А., Лебедев О. Н. Микроэлектронные устройства
формирования и обработки сложных сигналов. — М.: Радио и связь, 1983. — 216 с.
136. Ди Франко, Рубин. Анализ искажений при. обработке радиолокационного
сигнала. — Зарубежная радиоэлектроника, 1963, № 9, с. 36—430.
137. Обработка сигналов в многоканальных РЛС/А. П. Лукошкин, С. С.
Карийский, А. А. Шаталов и др.; Под ред. А. П. Лукошкина. — М.: Радио
и связь, 1983. — 328 с.
138. Мюллер, Гудвин. Широкополосный приемник со сжатием импульсов для
разведки в сантимеровом диапазоне волн. — Зарубежная
радиоэлектроника, 1963, № 6, с. 29—44.
139. Бергман Л. Ультразвук. — М.: ИЛ, 1956. — 726 с.
140. Займовский А. С., Чудновская Л. А. Магнитные материалы. — М.: ГЭИ,
1957. —224 с.
141. Cohn G. I. et al. Magnetostrictive Delay Line for Video Signals. — IRE
Trans. Сотр. Part, 1958, v. CP-5, N 1, p. 53—59.
142. Глебович Г. В. О полосе пропускания магнитострикционной линии
задержки.— Радиотехника, 1959, т. 14, № 2, с. 74—75.
143. Lerner R. M. A Metched Filter Detection System for Complicated Doppler
Shifted Signals. —IRE Trans. Inf. Th., 1960, v. IT-6, N 3, p. 373—385.
144. Варакин Л. Е. Определение допусков на параметры согласованного
фильтра.— Труды учебных институтов связи, 1964, вып. 20, с. 150—158.
145. Варакин Л. Е. Увеличение боковых лепестков на выходе согласованного
фильтра при рассогласованиях. — Труды учебных институтов связи, 1965,
вып. 27, с. 107—114.
146. Власов В. Н., Волков Л. Н., Варакин Л. Е. Анализ помехоустойчивости
дискретного согласованного фильтра. — Труды учебных институтов связи,
1968, вып. 41, с. 53^-62.
147. Цикин И. А. Дискретно-аналоговые методы оптимальной обработки
сигналов.— Радиотехника, 1969, т. 24, № 2, с. 1—'8.
148. Цикин И. А. Дискретно-аналоговые согласованные фильтры. — Изв. вузов
СССР. Радиоэлектроника, 1970, т. 13, № 2, с. 205—211.
149. Носов Ю. Р., Шилин В. А. Полупроводниковые приборы с зарядовой
связью. — М.: Сов. радио, 1976.— 142 с.
150. Пресс Ф. П. Формирователи видеосигнала на приборах с зарядовой
связью. — М.: Радио и связь, 1983. — 136 с.
151. Grieco D. M. The Application of Charge — Coupled Devices to Spread —
Spectrum Systems. — IEEE Trans Com., 1980, v. COM-28, N 9, p. 1693—1705.
152. Груздев А. В., Усов В. С. Линии задержки цифровых сигналов на
поверхностных акустических волнах и их применение. — Зарубежная
радиоэлектроника, 1980, № 4, с. 97—107.
153. Караваев Ю. А., Смирнов Н. И., Судовцев В. А. Программируемые транс-
версальные фильтры на ПАВ и ПЗС для согласованной фильтрации. —
Зарубежная радиоэлектроника, 1980, № 11, с. 29—42.
380
154. Смирнов Н. И., Караваев Ю. А., Стручков А. А. Устройства
согласованной фильтрации для цифровых систем связи. — Электросвязь, 1981, № 8,
с. 12—16.
155. Гольденберг Л. М., Левчук Ю. П., Поляк М. Н. Цифровые фильтры.—
М.: Связь, 1974.—160 с.
156. Турин. Введение в теорию цифровых согласованных фильтров. — ТИИЭР,
1976, т. 64, № 7, с. 815—109.
157. Микромощные интегральные схемы/Валиев К. А., Дягилев В. Н., Лебедев
В. И., Лубашевский А. В. —М.: Сов. радио, 1975. — 256 с.
158. Кейнис Р. Современное состояние и перспективы развития технологий
БИС: Обзор. —Электроника, 1979, т. 52, № 19, с. 28—34.
159. Аналоговые и цифровые интегральные схемы/С. В. Якубовский, Н. А.
Барканов, Б. П. Кудряшов и др.: Под ред. С. В. Якубовского. — М.: Сов.
радио, 1979. — 336 .с*
160. Нестеров П. В*-Сверхбольшие интегральные схемы: проблемы создания и
ожидаемые -результаты. — Зарубежная радиоэлектроника, 1980, № 12,
с. 3—32.
161. Полупроводниковые запоминающие устройства и их применение/В. П.
Андреев, В. В. Баранов* Н. В. Бакин и др.: Под ред. А. Ю. Гордонова. — М.:
Радио и связь, 1981. — 344 с.
162. Grant P. M. Addendum: Recent Signal Processing Developments Applicable to
Spread Spectrum Systems. — Int. Spec. Seminar on The Impact of New
Technologies in Signal Processing, Aviemore, 1976, p. 151—154.
163. Bell D. Т., Holmes J. J. D., Ridings R. V. Application of Acoustic Surface —
Wave Technology to Spread Spectrum Communications. — IEEE Trans, on
Sonics and Ultrasonics. 1973, v. SU-20, N 2, p. 181—189.
164. Холланд, Клейнборн. Устройства на поверхностных акустических волнах.—
ТИИЭР, 1974, т. 62, № 5, с. 45—83.
165. Burt D. J. Performance Limitations of Charge Coupled Devices. — Int. Conf.
Technology and Applications of Charge Coupled Devices, Edinburg, 1974,
p. 84—91.
166. Roberts J. B. G., Darby B. J., Eames R. Traitement du signal par composants
acaustiques et dispositifs a transfer! de charges (Signal Processing with CCD
and SAW Devices). —Collog. Int. radar, Paris, 1978, p. 263—278.
167. Коршак Б. А., Л я мов В. E., Солодов И. Ю., Еленский В. Г. Нелинейные
акустические устройства обработки сигнальной информации. — Зарубежная
радиоэлектроника, 1981, № 1, с. 58—77.
168. Корнел А. Акустооитика: Обзор основных принципов. — ТИИЭР, 1981, т. 69,
№ 1, с. 55--6Й.
169. Никитов В. А. Перспективы развития и применения ЗУ на ЦМД. —
Зарубежная радиоэлектроника, 1981, № 2, с. 79—94.
170. Речицкий В. И. Современные тенденции развития акустоэлектронных ра-
диокомпонентов. — Зарубежная радиоэлектроника, 1981, № 8, с. 60—76.
171. Сверхскоростные интегральные схемы на GaAs/Лонг С. И., Уэлч Б. М.,
Цукка Р. и др. —ТИИЭР, 1982, т. 70, Я» 1, с. 44—58.
172. Долбня Е. В., Соболь Н. В., Кочемасов В. Н. Спектральная и кепстраль-
ная обработка радиосигналов с применением устройств на поверхностных
акустических волнах. — Зарубежная радиоэлектроника, 1982, № 4, с. 3—32.
173. Речицкий В. И. Основные направления конструирования акустоэлектронных
устройств в Японии. — Зарубежная радиоэлектроника, 1982, № 5, с. 61—77.
174. Никитов В. А. Перспективы применения и особенности эксплуатации ЗУ
на ЦМД. — Зарубежная радиоэлектроника, 1982, № 12, с. 69—74.
175. Паринов Е. П. Элементная база устройств памяти на ЦМД с
использованием пермаллоевых управляющих покрытий. — Зарубежная
радиоэлектроника, 1983, № 3, с. 68—82.
176. Электронная промышленность США/С. С. Рылеева, Т. Н. Леандрова,
И. А. Трушина и др. — Зарубежная электронная техника, 1983, № 4.—
147 с.
177. Антонью А. Цифровые фильтры: анализ и проектирование: Пер. с англ./
Под ред. С. А. Попырко. — М.: Радио и связь, 1983. — 320 с.
381
Содержание
Предисловие „ 3
Раздел I. ОСНОВНЫЕ СВЕДЕНИЯ О ШУМОПОДОБНЫХ СИГНАЛАХ
1. Основы применения шумоподобных сигналов в системах связи 5
1.1. Определение шумоподобных сигналов и широкополосных систем
связи 5
1.2. Помехозащищенность 6
1.3. Помехоустойчивость ШСС 6
1.4. Скрытность системы связи 8
1.5. Кодовое разделение абонентов 9
1.6. Эффективность ААСС 10
1.7. Борьба с многолучев остью ...".. 12
1.8. Измерение координат подвижных объектов 14
1.9. Электромагнитная совместимость 14
1.10. Основные структурные схемы ШСС . 16
2. Шумоподобные сигналы 21
2.1. Сигналы и спектры 21
2.2. Основы оптимальной обработки сигналов 25
2.3. Корреляционные функции сигналов 28
2.4. Основные типы ШПС 33
3. Фазоманипулированные сигналы Зв
3.1. Общие свойства 38
3.2. Сигналы Баркера 44
3.3. Af-последовательности. Основные свойства 49
3.4. Последовательности Лежандра и Якоби. Минимаксные
последовательности 65
3.5. Нелинейные последовательности 68
3.6. Дополнительные последовательности 72
3.7. Последовательности максимальной вероятности 75
3.8. Многофазные сигналы. Сигналы Фрэнка 80
3.9. Амплитудно-фазоманипулированные сигналы 83
3.10. Минимаксные ФМ сигналы 88
3.11. Оценки апериодических АКФ 90
4. Системы фазоманипулированных сигналов 93
4.1. Многоканальные системы связи с кодовым разделением
абонентов и системы сигналов 93
4.2. Полный код 95
4.3. Системы Уолша 101
4.4. Коды Велти. Четверичные коды 106
4.5. Производные системы сигналов ПО
4.6. Сегментные системы 114
4.7. Циклические системы 117
4.8. Системы многофазных сигналов 122
4.9. Большие производно-циклические системы 124
4.10. Линейно-производные системы ФМ сигналов 125
4.11. Объем больших систем ФМ сигналов 126
4.12. Оценки апериодических ВКФ 128
5. Системы дискретных частотных сигналов 131'
5.1. Корреляционные функции ДЧ сигналов и число совпадений . 131
5.2. Распределение числа совпадений в корреляционных функциях ДЧ
сигналов 134
5.3. Алгоритмы построения оптимальных и квазиоптимальных систем
ДЧ сигналов 136
5.4. Большие квазиоптимальные композиционные системы ДЧ сигналов 142
5.5. Объем больших систем ДЧ сигналов 144
5.6. Дискретные составные частотные сигналы 146
Раздел II. ПОМЕХОУСТОЙЧИВОСТЬ ШИРОКОПОЛОСНЫХ СИСТЕМ СВЯЗИ
6. Основные сведения о системах связи 147
6.1. Шумоподобные сигналы и широкополосные системы связи 147
382
6.2. Основы передачи сообщений в системах связи 147
6.3. Многоканальные системы связи 150
6.4. Методы уплотнения и разделения каналов и абонентов . . .152
7. Помехоустойчивость приема дискретных сообщений 154
7.1. Дискретная система связи 154
7.2. Скорость передачи информации 155
7.3. Помехоустойчивость двоичных систем связи L56
7.4. Помехоустойчивость m-ичных систем связи 161
7.5. Сравнение двоичных и /n-ичных систем связи 163
8. Совместное применение ШПС и корректирующих кодов 167
8.1. Параметры ШСС с ШПС и корректирующими кодами . . . 167
8.2. Вероятность ошибки 169
8.3. Выбор оптимального кода 170
8.4. Оптимальные коды Рида — Соломона 171
9. Помехоустойчивость приема непрерывных сообщений 1/73
9.1. Основные методы передачи и приема непрерывных сообщений с
помощью ШПС 173
9.2. Помехоустойчивость приема ШИМ — ШПС 174
9.3. Помехоустойчивость приема ЧМ—ШПС 176
9.4. Сравнение помехоустойчивости ШИМ—-ШПС и ЧМ—ШПС . . 180
9.5. Помехоустойчивость ИКМ—ШПС 181
10. Фильтрация мощных помех 184
10.1. Мощные помехи и принципы борьбы с ними 184
10.2. Оптимальный прием элемента сигнала 190
10.3. Накопление элементов 193
10.4. Фильтрация сосредоточенных помех 197
10.5. Реальная база и помехоустойчивость ШСС 204
11. Адаптивный прием ШПС Т 210
11.1. Основы адаптивного приема ШПС 210
11.2. Элементное отношение сигнал-помеха 212
11.3. Согласованный фильтр и линейное накопление 213
11.4. Адаптивный прием и оптимальное накопление 213
11.5. Нелинейный фильтр 214
11.6. Оптимальный адаптивный приемник 215
11.7. Квазиоптимальный адаптивный приемник 219
12. Ограничитель в тракте обработки ШПС 225
12.1. Идеальный полосовой ограничитель 225
12.2. Воздействие на ИПО двух сигналов и шума 229
12.3. Нелинейное кодовое уплотнение и разделение абонентов в
синхронных адресных системах связи 231
13. Фильтрация взаимных и структурных помех 234
13.1. Взаимные и структурные помехи 234
13.2. Основы кодового разделения абонентов в ААС 235
13.3. Фильтрация взаимных помех 242
13.4. Оптимизация ААС с КР 244
13.5. Фильтрация мощных ФМ структурных помех 247
13.6. Фильтрация мощных ДЧ структурных помех 250
14. Обнаружение и анализ ШПС в условиях априорной неопределенности 253
14.1. Методы обнаружения и анализа ШПС в условиях априорной
неопределенности 253
14.2. Энергетический обнаружитель ШПС 254
14.3. Оптимальный обнаружитель m-ичной ШСС с ШПС ... . 256
14.4. Квазиоптимальный многоканальный обнаружитель ШПС . . 258
14.5. Анализ параметров ЛГ-последовательностей 261
Раздел III. ПОИСК И СИНХРОНИЗАЦИЯ ШПС
15. Особенности поиска и синхронизации ШПС 266
15.1. Прием информации и неопределенность по времени и по частоте
в широкополосных системах связи 266
383
15.2. Потенциальные точности измерения времени задержки и частоты 271
15.3. Отношение сигнал-помеха на выходе измерителя в ШСС . . 277
15.4. Пространство параметров и многоканальный измеритель . . . 281
15.5. Одноканальный следящий измеритель . 288
16. Когерентная обработка ШПС и некогерентное накопление Ш2
16.1. Основы квазиоптимальной обработки ШПС 292
16.2. Помехоустойчивость квазиоптимального приемника .... 294
17. Поиск и синхронизация ШПС по времени 1297
17.1. Автоматическая подстройка времени 297
17.2. Сравнение непрерывного и дискретного поиска ШПС по времени 303
17.3. Алгоритмы поиска ШПС по времени задержки 306
17.4. Поиск ШПС с некогерентным накоплением . . . . 311
18. Поиск и синхронизация ШПС по времени и по частоте .... 34<5
18.1. Оптимальный квазикогерентный приемник с поиском ШПС по
времени и по частоте 316
18.2. Время поиска ШПС при когерентной обработке 317
18.3. Время поиска ШПС при некогерентном накоплении . . . . 319
19. Синхронизация стартстопных широкополосных систем связи 303
19.1. Стартстопные асинхронные адресные ШСС 323
19.2. Вероятность ошибки , 325
19.3. Минимизация вероятности ошибки при заданном количестве
информации 327
Раздел IV. ФОРМИРОВАНИЕ И ОБРАБОТКА ШПС
20. Основы формирования и обработки ШПС 329
20.1. Основные требования к ШПС и устройствам формирования и
обработки 329
20.2. Пассивные и активные фильтры для оптимального приема ШПС 330
20.3. Основы формирования ШПС 333
20.4. Критерии качества формирования и обработки ШПС . . 334
20.5. Оценка общих рассогласований 337
21. Линейные согласованные фильтры 344
21.1. Методы линейной обработки ШПС 344
21.2. Частотно-временной метод обработки дискретных частотных
сигналов 344
21.3. Многоканальные согласованные фильтры при частотном методе
обработки многочастотных сигналов 347
21.4. Согласованные фильтры с многоотводными линиями задержки
при временном методе обработки фазоманипулированных сигналов 349
21.5. Комбинированные методы обработки 351
21.6. Многоотводные линии задержки 352
21.7. Влияние рассогласований на работу согласованных фильтров
с МЛЗ 361
21.8. Сравнение линейных согласованных фильтров 363
22. Дискретные и цифровые согласованные фильтры 364
22.1. Дискретный согласованный фильтр 364
22.2. Дискретно-аналоговый согласованный фильтр 366
22.3. Приборы с зарядовой связью 367
. 22.4. Программируемые согласованные фильтры 369
22.5. Цифровые согласованные фильтры 370
23. Перспективы совершенствования элементной базы устройств
обработки ШПС 372
Список литературы 375
384