/
































































































































































































































































































































































































































































































Автор: Пантелеев А.В. Ботраковский А.С.
Теги: геометрия топология задачи по геометрии
ISBN: 5-06-004761-X
Год: 2005




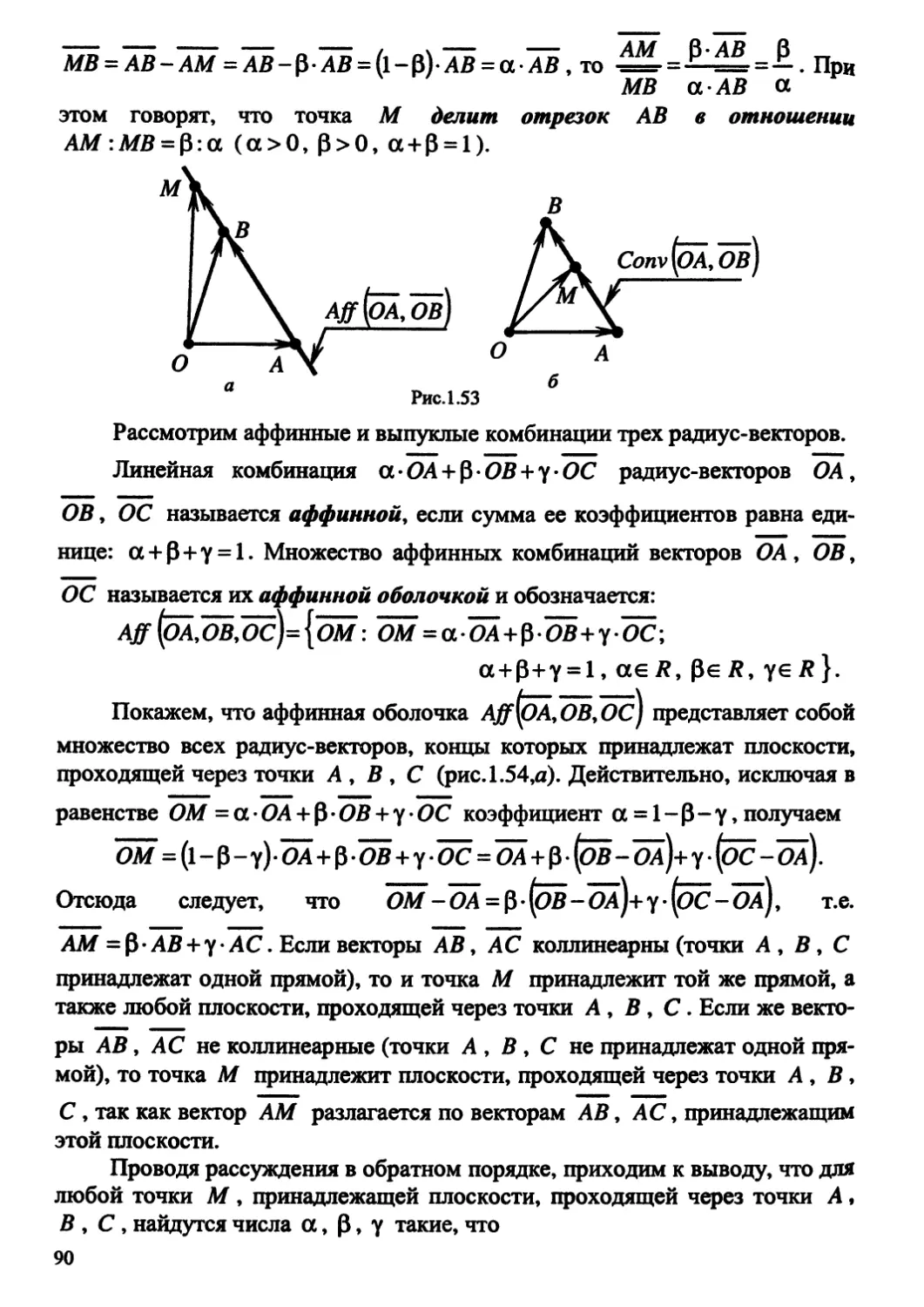
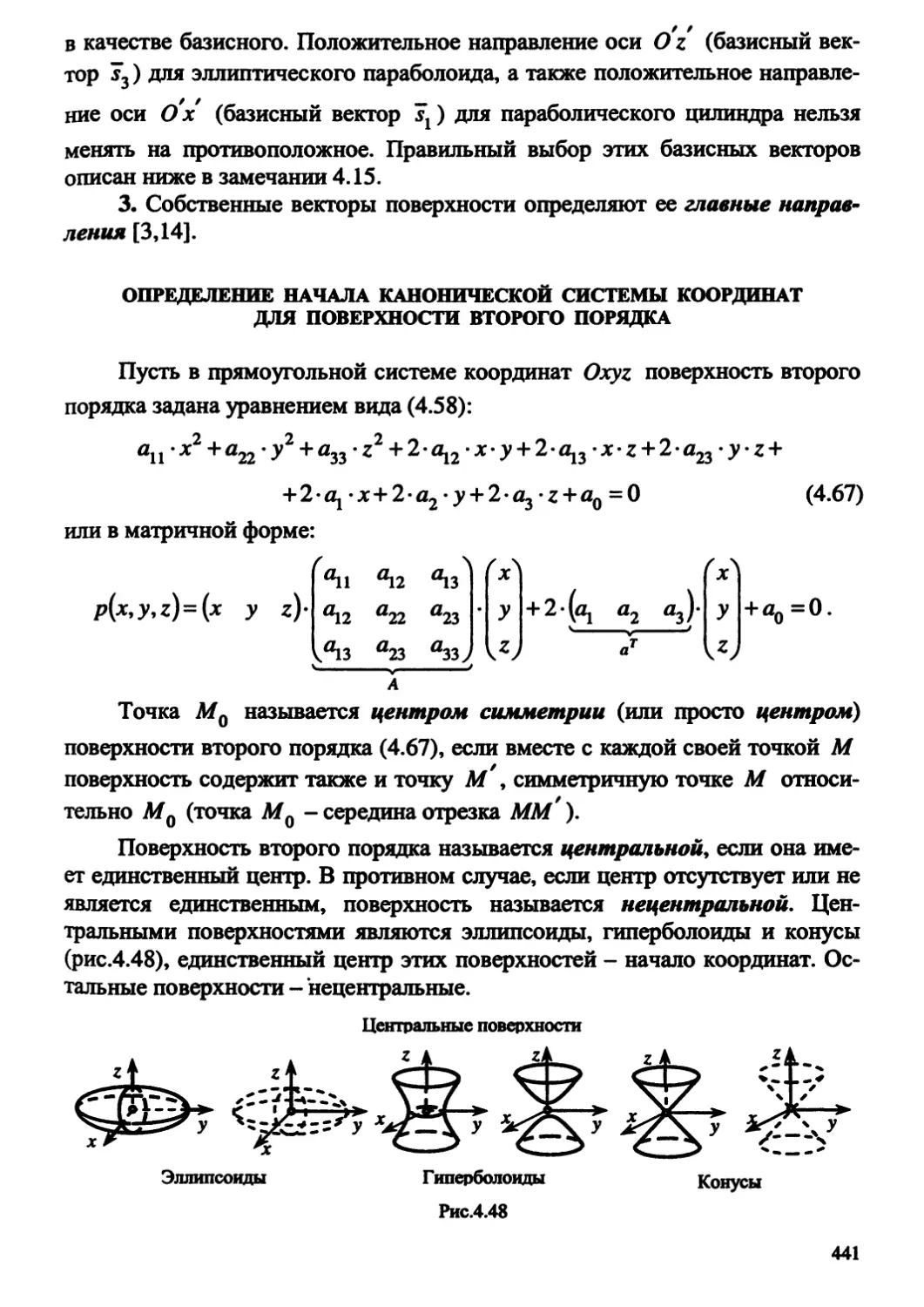
Текст
ПРИКЛАДНАЯ МАТЕМАТИКА
для ВТУЗов
А.С. Бортаковский А.В. Пантелеев
АНАЛИТИЧЕСКАЯ
ГЕОМЕТРИЯ
В ПРИМЕРАХ
И ЗАДАЧАХ
\
ПРИКЛАДНАЯ МАТЕМАТИКА
для ВТУЗов
А.С. Бортаковский
А.В. Пантелеев
АНАЛИТИЧЕСКАЯ
ГЕОМЕТРИЯ
В ПРИМЕРАХ
И ЗАДАЧАХ
Рекомендовано
Учебно-методическим объединением
высших учебных заведений Российской Федерации
по образованию в области авиации, ракетостроения и космоса
в качестве учебного пособия для студентов высших
технических учебных заведений
Москва
«Высшая школа»
2005
УДК 514
ББК 22.151.5
Б 83
Рецензенты:
кафедра «Прикладная математика»
Московского государственного технического университета гражданской авиации
(зав. кафедрой д-р техн. наук, проф. В.Л. Кузнецов);
д-р физ.-мат. наук, проф. АЛ. Сиротин
Московский авиационный институт (государственный технический университет)
Бортаковский, А.С.
Б 83 Аналитическая геометрия в примерах и задачах: Учеб. посо-
бие/А.С. Бортаковский, А.В. Пантелеев. — М.: Высш. шк., 2005. —
496 с: ил. — (Серия «Прикладная математика»).
ISBN 5-06.004761-Х
Приведены основные понятия, теоремы и методы решения задач по всем
разделам курса: векторной алгебре, системам координат, преобразованиям плоскости и
пространства, уравнениям линий и поверхностей первого и второго порядков.
Описаны некоторые приложения аналитической геометрии в механике, теории
оптимизации и математическом анализе.
В каждом разделе кратко изложены основные теоретические сведения,
приведены решения типовых примеров и задачи для самостоятельного решения с ответами.
Для студентов технических вузов и университетов
УДК 514
ББК 22.151.5
Учебное издание
Бортаковский Александр Сергеевич, Пантелеев Андрей Владимирович
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРИМЕРАХ И ЗАДАЧАХ
Редактор Е.Н. Рожкова
Художник А.А. Солдатов
Художественный редактор А.Ю. Войткевич. Технический редактор Н.И. Тростянская
Корректоры Е.И Борисова, Т.А. Вавилова
Лицензия ИД № 06236 от 09.11.01.
Изд. № РЕНТ-325. Подл, в печать 25.05.05. Формат 60 х 88У16. Бум. офсетная. Гарнитура «Ньютон».
Печать офсетная. Объем 30,38 усл. печ. л., 31,13 усл. кр.-отг. Тираж 3000 экз. Заказ № 5150
ФГУП «Издательство «Высшая школа», 127994, Москва, ГСП-4, Неглинная ул., 29/14.
Тел.: (095) 200-04-56, http^/www.v-shkolara. EraaU: info@v-shtolaju
Отдел реализации: (095) 200-07-69, 200-31-47, факс: (095) 200-34-86. E-mail: sales@v-shkolaju
Отпечатано на ФГУП ордена «Знак Почета» Смоленская областная типография им. В Л Смирнова
214000, г. Смоленск, пр-т им. Ю. Гагарина, 2.
ISBN 5-06-004761-Х © ФГУП «Издательство «Высшая школа», 2005
Оригинал-макет данного издания является собственностью издательства «Высшая
школа», и его репродуцирование (воспроизведение) любым способом без согласия
издательства запрещается.
ОГЛАВЛЕНИЕ
Предисловие 6
Введение 7
В.1. Основные метрические понятия 7
В.2. Равенство и подобие геометрических фигур 9
В.3. Бинарные отношения 11
Глава 1. Векторная алгебра 15
1.1. Векторы и линейные операции над векторами 15
1.1.1. Вектор, его направление и длина 15
1.1.2. Линейные операции над векторами 19
1.1.3. Линейная зависимость и линейная независимость векторов... 24
1.2. Проекции векторов и их свойства 26
1.2.1. Отношение коллинеарных векторов 26
1.2.2. Проекции векторов на прямую и на плоскость 28
1.2.3. Ортогональные проекции. Угол между векторами 34
1.3. Базис и координаты векторов 40
1.3.1. Базис на прямой. Координата вектора на прямой 40
1.3.2. Базис на плоскости. Координаты вектора на плоскости 42
1.3.3. Базис в пространстве. Координаты вектора в пространстве.... 45
1.3.4. Линейные операции над векторами в координатной форме.... 47
1.3.5. Ортогональный и ортонормированный базисы 50
1.4. Скалярное произведение векторов 54
1.4.1. Определение скалярного произведения 54
1.4.2. Свойства скалярного произведения 56
1.4.3. Выражение скалярного произведения через координаты
векторов 59
1.5. Векторное и смешанное произведения векторов 69
1.5.1. Векторное произведение и его свойства 69
1.5.2. Смешанное произведение и его свойства 74
1.5.3. Ориентированные площади и объемы 79
1.5.4. Двойное векторное произведение и его свойства 83
1.6. Типовые задачи векторной алгебры 86
1.6.1. Применение векторов в задачах на аффинные свойства
фигур 86
1.6.2. Метрические приложения произведений векторов 96
1.6.3. Приложения векторной алгебры в механике 105
Глава 2. Системы координат 121
2.1. Аффинные системы координат 121
2.1.1. Аффинные системы координат на прямой, на плоскости,
в пространстве 121
2.1.2. Прямоугольные системы координат 124
3
2.2. Аффинные преобразования координат 128
2.2.1. Преобразование координат вектора при замене базиса 128
2.2.2. Преобразование координат точки при замене
системы координат 132
2.2.3. Преобразования прямоугольных координат на плоскости
и в пространстве 135
2.2.4. Аффинные преобразования плоскости и пространства 144
2.3. Полярная, цилиндрическая и сферическая системы координат 163
2.3.1. Полярная система координат 163
2.3.2. Цилиндрическая система координат 169
2.3.3. Сферическая система координат 171
2.4. Координатное пространство Rn 174
2.4.1. Точки, векторы и операции над ними 174
2.4.2. Линейные и аффинные подпространства 179
2.4.3. Скалярное произведение 183
2.4.4. Преобразования систем координат 187
Глава 3. Алгебраические линии на плоскости 198
3.1. Способы задания геометрических мест точек на плоскости 199
3.1.1. Общие уравнения геометрических мест точек 199
3.1.2. Параметрические уравнения геометрических мест точек 204
3.1.3. Алгебраические уравнения линий на плоскости 205
3.2. Алгебраические линии первого порядка (прямые на плоскости).... 209
3.2.1. Уравнения прямой, проходящей через заданную точку
перпендикулярно заданному вектору 209
3.2.2. Уравнения прямой, проходящей через заданную точку
коллинеарно заданному вектору 218
3.2.3. Уравнения прямой, проходящей через две заданные
точки 223
3.2.4. Уравнения прямой, проходящей через заданную точку,
с данным угловым коэффициентом 226
3.2.5. Взаимное расположение прямых 227
3.2.6. Типовые задачи с прямыми на плоскости 234
3.3. Алгебраические линии второго порядка 254
3.3.1. Канонические уравнения линий второго порядка 254
3.3.2. Эллипс 268
3.3.3. Гипербола 274
3.3.4. Парабола 282
3.3.5. Классификация линий второго порядка по инвариантам 289
3.3.6. Приведение уравнения линии второго порядка
к каноническому виду 315
4
3.3.7. Применение линий первого и второго порядков в задачах
на экстремум функций 326
Глава 4. Алгебраические поверхности в пространстве 335
4.1. Способы задания геометрических мест точек в пространстве 335
4.1.1. Общие уравнения геометрических мест точек 336
4.1.2. Параметрические уравнения геометрических мест точек 343
4.1.3. Алгебраические уравнения поверхностей 345
4.2. Алгебраические поверхности первого порядка (плоскости) 348
4.2.1. Уравнения плоскости, проходящей через заданную точку
перпендикулярно заданному вектору 348
4.2.2. Уравнения плоскости, проходящей через заданную точку
и компланарной двум неколлинеарным векторам 356
4.2.3. Уравнения плоскости, проходящей через три
заданные точки 360
4.2.4. Взаимное расположение плоскостей 363
4.2.5. Типовые задачи с плоскостями 369
4.3. Уравнения прямых в пространстве 375
4.3.1. Уравнение прямой как линии пересечения двух
плоскостей 375
4.3.2. Уравнение прямой, проходящей через заданную точку
коллинеарно заданному вектору 376
4.3.3. Уравнение прямой, проходящей через две заданные
точки 381
4.3.4. Взаимное расположение прямых в пространстве 383
4.3.5. Взаимное расположение прямой и плоскости 387
4.3.6. Типовые задачи с прямыми в пространстве 389
4.4. Алгебраические поверхности второго порядка 394
4.4.1. Канонические уравнения поверхностей второго порядка 394
4.4.2. Эллипсоиды 410
4.4.3. Гиперболоиды 413
4.4.4. Конусы 416
4.4.5. Параболоиды 420
4.4.6. Классификация поверхностей второго порядка
по инвариантам 423
4.4.7. Приведение уравнения поверхности второго порядка
к каноническому виду 451
4.4.8. Применение поверхностей первого и второго порядков
в задачах на экстремум функций 472
Приложение 483
Литература 495
ПРЕДИСЛОВИЕ
Книга включает теоретические основы и методы решения задач
аналитической геометрии и охватывает основные разделы курса, читаемого на
факультете "Прикладная математика и физика" Московского авиационного
института.
Аналитическая геометрия, как правило, изучается во втузе совместно с
линейной алгеброй [10] и традиционно содержит следующие разделы:
векторную алгебру, системы координат, преобразования плоскости и
пространства, уравнения линий и поверхностей первого и второго порядков. Объем и
глубина излагаемого материала варьируется в зависимости от
специальности: более полно для конструкторских специальностей и для специальности
"Прикладная математика", в сокращенном варианте - для инженерных (но
не конструкторских) специальностей, а также экономистов.
Несмотря на то что курс аналитической геометрии во всех технических
университетах имеет примерно одинаковый объем и традиционное
содержание, его изложение в разных вузах существенно отличается. Причина
заключается в том, что курс имеет, условно говоря, три составляющие:
метрическую, аффинную и проективную. Метрические свойства фигур изучаются
при любом построении курса, аффинные и проективные - в зависимости от
предпочтений преподавателя и от уровня подготовки студентов. Это
обстоятельство учитывалось при написании пособия. Весь традиционный материал
аналитической геометрии излагается с метрической и аффинной точек
зрения, следуя замечательным учебникам [2,14]. Проективная геометрия в
данном пособии не рассматривается, поскольку она практически исчезла из
программ преподавания аналитической геометрии во втузах.
Процесс обучения геометрии невозможно представить без решения
задач. В отличие от алгебры здесь, как правило, нет готовых алгоритмов
решения. Поэтому особое внимание уделялось описанию методик решения
основных задач. Авторы ставили перед собой цель написать доступное для
широкой студенческой аудитории пособие, где все теоретические
положения подкрепляются подробным разбором типовых примеров.
Изложение построено по единой схеме, включая описание элементов
постановок задач, алгоритмы решения и подробный анализ типовых
примеров. Предлагаются задачи для самостоятельного решения, в том числе
зависящие от параметров т - номера учебной группы и п - номера студента по
списку группы.
Данное пособие входит в серию книг "Прикладная математика в
примерах и задачах", составляя с ними единый учебно-методический комплекс.
Авторы выражают сердечную признательность профессору, д.ф.-м.н.
В.М. Закалюкину за ценные замечания и пожелания, способствовавшие
улучшению рукописи.
6
ВВЕДЕНИЕ
В школьном курсе элементарной геометрии изучаются метрические и
аффинные свойства простых геометрических фигур и тел: многоугольников,
многогранников, окружностей, цилиндров, конусов, сфер. Основная цель
аналитической геометрии - описание тех же геометрических объектов
средствами алгебры и математического анализа. Другими словами, изменяется
метод исследования, а предмет изучения остается тем же самым. Поэтому
первичные понятия, аксиомы и теоремы, составляющие содержание курса
элементарной геометрии, используются в аналитической геометрии без
изменений. Не обсуждая вопросов аксиоматики, относящихся, скорее, к
математической логике и "основаниям геометрии", первичные геометрические
понятия и отношения будут употребляться в том наивном смысле, в каком
они употребляются в школьном курсе геометрии, зная, что под них можно
подвести безупречное аксиоматическое обоснование [1,2]. Приводимые во
введении сведения, определения и свойства часто имеют предварительный
(ознакомительный) характер. Некоторые "тонкие" моменты и вопросы здесь
не рассматриваются.
В.1. ОСНОВНЫЕ МЕТРИЧЕСКИЕ ПОНЯТИЯ
Любая система аксиом геометрии подводит к основным метрическим
понятиям - длине отрезка и величине угла. Как правило, в школьных
учебниках эти измеряемые величины определяются либо их свойствами, либо
аксиомами меры, например, в аксиоматике А.В. Погорелова. В любом
случае считаются известными понятие множества действительных чисел и их
основные свойства.
Для любых двух точек А и В пространства однозначно определено
неотрицательное действительное число р(А,2?), называемое расстоянием
между точками А и В. Функция р расстояния удовлетворяет
следующим условиям (аксиомам):
1. р(а,2?)=0 тогда и только тогда, когда А = В, т.е. точки А и В
совпадают;
2. р(а,/?)=р(#,а) для любых точек А и В (аксиома симметрии);
3. р(а,с)<р(а,#)+р(#,С) для любых точек А,В,С (неравенство
треугольника), причем равенство p(A,c) = p(A,2?)+p(l?,c) означает, что
точка В принадлежит отрезку АС.
Длиной отрезка АВ называется расстояние между его концами А и
В. Обычно отрезок АВ и его длину р(А,2?) обозначают одинаково:
АВ = р(А, В). Расстояния между точками (или длины отрезков) измеряются
по отношению к выбранной единице измерения, а именно предполагается,
что выбран некоторый масштабный отрезок А{Вг, длина которого
принята за единицу: AvBl = 1. Этот отрезок называют единичным.
Аналогично определяется мера углов. Для любого угла АОВ
однозначно определено положительное действительное число <f>(ZAOB),
называемое мерой (или величиной) угла. Функция ф меры угла удовлетворяет
следующим условиям (аксиомам):
1. <f>(ZAOB) = (f>(ZBOA) для любого угла АОВ;
2. <f>(ZAOC) = q>(ZAOB)+q>(ZBOC) для любого угла АОС и любой
точки В внутри него (рис.В.1,а).
В качестве "единичного" угла, выбирается развернутый угол, величина
которого принимается за п (радиан) или за 180° (градусов).
В дальнейшем мы будем использовать следующие две теоремы,
которые, так или иначе, доказываются при любой принятой системе аксиом [1].
Теорема В.1 (об откладывании отрезка). На каждом луче от его
начала молено отложить отрезок любой данной длины и притом только
один.
Теорема В.2 (об откладывании угла). От каждого луча по данную
сторону от него можно отложить угол заданной величины и притом
только один.
Вместе с определением расстояния теорема В.1 устанавливает взаимно
однозначное соответствие между множеством неотрицательных
действительных чисед и множеством точек луча. Если отрицательным
действительным числам поставить в соответствие точки дополнительного луча
(дополняющего данный луч до прямой), то получим числовую прямую (рис.В.1,б).
—i—i—•—i—i—i—н-^~
-2 -1 0 1 2 3 4 X
а б в
Рис.В.1
Замечания В.1.
1. Понятие непрерывности множества действительных чисел, т.е.
взаимно однозначного соответствия действительных чисел и точек числовой
прямой, вводится и обосновывается в курсе математического анализа [19]. В
геометрии непрерывность прямой вводится, как правило, аксиоматически.
Например, в аксиоматике Д. Гильберта непрерывность прямой следует из
аксиомы о вложенных отрезках (аксиомы Архимеда) и аксиомы полноты.
2. Вопросы о соизмеримости отрезков, т.е. о возможности измерить
отрезок при помощи заданного единичного отрезка, рассматривались еще
8
древнегреческими геометрами. Например, задача о несоизмеримости
стороны квадрата и его диагонали. Напомним, что два отрезка считаются
соизмеримыми, если отношение их длин является рациональным числом.
Процедура измерения, определяющая понятие соизмеримых отрезков,
следующая. При помощи циркуля и линейки несложно, используя теорему Фа-
леса, разделить отрезок на любое натуральное число равных частей. Для
этого достаточно на вспомогательном луче АС отложить п равных
отрезков АА19А1А29...9Ап_1Ап9 затем соединить конец Ап последнего отрезка с
точкой В , и, наконец, через каждую из точек А1,/Ц,..., Ап_Л провести
прямую, параллельную прямой ВАп (рис.В.1,в). Поэтому, выбрав масштабный
отрезок единичной длины, можно построить отрезок длиной — для любого
натурального числа п. Откладывая на прямой или от начала луча т раз
такие отрезки последовательно (без наложения и без промежутков), можно
получить отрезок длины ~ (для любых натуральных тип). Таким
образом, при помощи циркуля и линейки в результате конечного числа операций
можно построить такой отрезок, длина которого будет выражаться любым
заданным положительным рациональным числом. Поскольку диагональ
квадрата со стороной, равной единице, выражается иррациональным числом
(V2), то она не является соизмеримой со стороной квадрата.
3. Из п.2 следует, что процедура измерения отрезков должна быть
дополнена предельным переходом, позволяющим получать
последовательности отрезков, рациональные длины которых образуют сходящиеся числовые
последовательности. Пополняя множество рациональных чисел пределами
таких последовательностей, приходим к понятиям действительного числа
[19] и отрезка, имеющего длину, задаваемую положительным
действительным числом.
В.2, РАВЕНСТВО И ПОДОБИЕ ГЕОМЕТРИЧЕСКИХ ФИГУР
РАВЕНСТВО ГЕОМЕТРИЧЕСКИХ ФИГУР
Понятие равенства геометрических фигур в зависимости от принятой
системы аксиом вводится по-разному. Обычно, равенства отрезков или
углов определяются по их мере: два отрезка (угла) называются равными, если
они имеют равные длины (величины). Затем определяются равенства
треугольников, многоугольников, многогранников. Наконец, вводится понятие
движения, при помощи которого понятие равенства определяется
единообразно для любых геометрических фигур. В некоторых системах понятие
движения (наложения, перемещения) вводится аксиоматически.
Говорят, что на плоскости (или в пространстве) определено
преобразование f , если для каждой точки А плоскости (пространства) поставлена в
соответствие единственная точка /(л) той же плоскости (пространства).
Если преобразование / точке А ставит в соответствие точку А', т.е.
А' = /(-4), то точка X называется образом точки А , а точка А -
прообразом А'.
Движением {ортогональным преобразованием) называется
преобразование плоскости (пространства), сохраняющее расстояние между точками,
т.е. для любых двух точек А , В и их образов А*, в' имеет место равенство
АВ = А'в' - расстояние между образами равно расстоянию между
прообразами. Другими словами, длина отрезка является инвариантом для
ортогонального преобразования. Слово "инвариант" имеет смысл "остающийся
неизменным".
Две фигуры F и F' называются равными, если существует движение,
при котором фигура F преобразуется в фигуру F', т.е. каждой точке
фигуры F соответствует некоторая точка фигуры F*.
ПОДОБИЕ ГЕОМЕТРИЧЕСКИХ ФИГУР
Подобием называется преобразование / плоскости (пространства),
при котором все расстояния между точками изменяются в одном и том же
отношении к > О, т.е. для любых двух точек А , В и их образов А', в'
имеет место равенство АВ' = к • АВ. Число к>0 называется коэффициентом
подобия.
Отношение длин отрезков является инвариантом для преобразования
подобия. В самом деле, из определения следует, что
Хв' кАВ АВ
СЬ'~ k-CD~ CD'
Две фигуры F и F' называются подобными, если существует
преобразование подобия, при котором фигура F преобразуется в фигуру F', т.е.
каждой точке фигуры F соответствует некоторая точка фигуры F .
Замечания В.2.
1. Пусть на плоскости задана прямая / и пересекающая ее прямая т.
Проекцией точки А на прямую I параллельно прямой т (вдоль прямой
т) называется такая точка К прямой /, что прямая AAl параллельна
прямой т (рис.В.2,а).
Проекцией отрезка АВ на прямую / параллельно прямой т является
отрезок Кв' (случай, когда отрезок АВ и прямая т параллельны, не
рассматривается). Отношение длин произвольных отрезков при этом
преобразовании, разумеется, не сохраняется. Например, на рис.В.2,а равные отрезки
(АВ = ВС) имеют разные по длине проекции (А'в'*в'с')9 т.е. *|§
ю
Однако, по теореме Фалеса отношение длин отрезков, принадлежащих
одной прямой, не изменяется при этом преобразовании. Например, "^=~^
(рис.В.2,б). Отношение ~т для точек А ,В ,С, принадлежащих одной
прямой (причем точка В лежит между точками А и С), называется простым
отношением [14]. Как видим, простое отношение является инвариантом
для преобразования проекции.
2. Преобразования подобия и проекции относятся к так называемым
аффинным преобразованиям, которые рассматриваются в разд.2.
3. В школьном курсе геометрии изучаются метрические и аффинные
свойства фигур. К метрическим относятся такие свойства, которые не
изменяются при ортогональных преобразованиях - преобразованиях,
сохраняющих расстояния между точками, например, признаки равенства
треугольников, теорема Пифагора, метрическое свойство параллелограмма, теоремы
синусов и косинусов и др. К аффинным относятся свойства, которые
сохраняются при преобразовании подобия (которое является частным случаем
аффинного преобразования (см. разд.2.2.4)), например, признаки подобия
треугольников, свойство биссектрисы треугольника, теорема Фалеса и др.
В.З. БИНАРНЫЕ ОТНОШЕНИЯ
Рассмотрим важные логические понятия, связанные с отношениями,
которые, в частности, используются в любой аксиоматике геометрии.
Предполагается, что множества и операции над ними знакомы читателю из
школьного курса математики.
ПРЯМОЕ ПРОИЗВЕДЕНИЕ МНОЖЕСТВ
Упорядоченной парой (х,у) называется совокупность, состоящая из
двух элементов х и у , взятых в определенном порядке: элемент х
считается в паре первым, а элемент у - вторым. Две упорядоченные пары lxv yx\
и \х2,уА называются равными тогда и только тогда, когда хх=х2 и
Уг=Уг-
Прямым (декартовым) произведением множеств X и Y называется
множество всех упорядоченных пар (*,)>) таких, что хе X и ye Y . Пря-
и
мое произведение обозначается X xY , а в случае Y = X - просто X2, т.е.
Аналогично определяются упорядоченные тройки, четверки и т.д., а
также прямые произведения трех, четырех и т.д. множеств. Например,
прямым произведением RxRx...xR = Rn n множеств R действительных
п
чисел называется множество всех упорядоченных наборов Ых,х2,...,х\ из
п действительных чисел хг, х2,..., хп.
Пример В.1. Для числовых множеств X = {l, 2} и У = {3,4 } найти:
XxY; YxX; X2, Г2.
□ По определению находим: X х Y = {(l, 3), (l, 4), (2,3), (2,4) };
1),(3,2),(4,1),(4,2)}; X2 = ХхХ ={(l,l),(l,2),(2,l),(2,2)};
= {(3,3),(3,4),(4,3),(4,4)}.Заметим,что XxY*YxX . ■
БИНАРНЫЕ ОТНОШЕНИЯ. ОТНОШЕНИЕ ЭКВИВАЛЕНТНОСТИ
Бинарным отношением р /ш множестве XxY называется
подмножество р этого множества упорядоченных пар {х,у), хе X , yeY.
Если пара (х,у) принадлежит отношению р, то пишут (дс,у)е р или хру.
Если F = X , то отношение р, т.е. подмножество множества X 2, называют
бинарным отношением на множестве X .
Бинарное отношение р на множестве X называется:
- рефлексивным, если хрх для любого хе X ;
- симметричным, если для любых jc,;yG X из *p;y следует, что ур*;
- транзитивным, если для любых х,y,ze X из деру и ург следует,
что *pz.
Рефлексивное, симметричное и транзитивное отношение на множестве
X называется отношением эквивалентности на множестве X и
обозначается символом - .
Пример В.2. Даны бинарные отношения:
а) отношение = (х = у -"* равен у ") на множестве действительных
чисел;
б) отношение < (х<у -"jc меньше у ") на множестве
действительных чисел;
в) отношение < (х<у -"jc не больше у") на множестве
действительных чисел;
12
г) отношение Б (хБ у -" х брат у ") на множестве людей;
д) отношение ~ (М ~ N - "многоугольник М подобен
многоугольнику N ") на множестве правильных многоугольников;
е) отношение m = n(modp) на множестве целых чисел: "число т
сравнимо с числом п по модулю р", т.е. остатки от деления чисел тип
на натуральное число р равны.
Установить, являются ли заданные отношения рефлексивными,
симметричными, транзитивными, отношениями эквивалентности.
D а) Так как х = х для любого действительного числа х, то
отношение = рефлексивное. Поскольку из х = у следует, что у = х, то отношение
симметричное. Так как из равенств х = у и у = z следует, что х = z, то
отношение транзитивное. Таким образом, отношение равенства является
отношением эквивалентности.
б) Отношение "меньше" не является рефлексивным (неравенство х < х
неверно) и симметричным (из х < у не следует у < х), но является
транзитивным (так как из неравенств х < у и у < z следует х < z). Это отношение
не является отношением эквивалентности.
в) Отношение "не больше" является рефлексивным (неравенство х<х
справедливо для любых действительных чисел) и транзитивным (из
неравенств х < у и у < z следует х < z), но не является симметричным
(например, из 1 < 2 не следует, что 2 < 1). Это отношение не является отношением
эквивалентности.
г) Отношение "братства" не является рефлексивным (любой человек не
является братом для самого себя), симметричным (утверждение, если х
брат у (хБ у), то у брат х (у Б х) неверно, поскольку у может
оказаться сестрой для х ), транзитивным (например, если для трех людей х, у, z
имеем хБ у и у Б z*to отсюда не следует, что хБ z, поскольку z может
оказаться сестрой для х). Это отношение не является отношением
эквивалентности.
д) Каждый многоугольник подобен самому себе (М ~М). Поэтому
отношение подобия рефлексивное. Из подобия многоугольников М ~ N
следует, что N ~ М, значит отношение симметричное. Так как из подобия
многоугольников М ~ N и N ~ К следует, что М ~ К, то отношение
транзитивное. Таким образом, отношение подобия многоугольников является
отношением эквивалентности.
е) Сравнение m = n(modp) равносильно условию: разность т-п
делится на р (без остатка). Так как число нуль (т - т - 0) делится без
остатка на любое натуральное число р, то /w = m(modp), значит отношение
13
рефлексивное. Если т-п делится на /?, то и п-т делится на р,
следовательно, отношение симметричное. Наконец, если числа т-п и п-к
делятся на число р, то и их сумма (т-п)+(п-к) = т-к делится на р, т.е. из
т-п (mod р) и п = к (mod р) следует, что т-к (mod p). Поэтому
отношение транзитивное. Таким образом, отношение сравнения целых чисел по
модулю р является отношением эквивалентности. ■
РАЗБИЕНИЕ МНОЖЕСТВА НА КЛАССЫ ЭКВИВАЛЕНТНОСТИ
Говорят, что множество X разбито на классы, если оно
представлено тем или иным способом в виде объединения своих попарно
непересекающихся подмножеств. Например, множество всех студентов вуза
разбивается на учебные группы (а множество учеников школы разбивается на
классы). Любое разбиение множества X на классы определяет на X
отношение: х ~ у - " х находится в том же классе, что и)". Покажем, что это
отношение, обозначенное символом ~ , действительно является отношением
эквивалентности. В самом деле, оно рефлексивное: х ~ х, симметричное:
х ~ у => у ~ х (если х находится в том же классе, что и у, то и у
находится в том же классе, что их), транзитивное (из х ~ у и у ~ z следует,
что все три элемента х, у , z принадлежат одному классу, тогда и лс ~ z).
Следовательно, рассматриваемое отношение является отношением
эквивалентности.
Справедливо и обратное утверждение. Любое отношение
эквивалентности ~ , заданное на множестве X, позволяет разбить это множество на
непустые классы.
Классом эквивалентности, порожденным элементом х, называется
подмножество Кх множества X, состоящее из тех элементов уе X , для
которых х ~ у. Любой класс Кх - непустое множество, так как, в силу
рефлексивности х - х, он содержит по крайней мере один элемент х.
Таким образом, отношение эквивалентности на множестве X
определяет разбиение множества X на непустые классы эквивалентности
относительно этого отношения. Каждый класс эквивалентности однозначно
определяется любым своим элементом. Совокупность классов эквивалентности
называется фактор-множеством множества X .
Например, отношение подобия (см. п."д" примера В.2) разбивает
множество правильных многоугольников на классы эквивалентности:
множество правильных треугольников, множество квадратов и т.д. Отношение
сравнения целых чисел по модулю р (см. п."е" примера В.2) разбивает
множество целых чисел на р классов эквивалентности, поскольку при делении на
р количество различных остатков (0,1,..., р -1) равно р.
14
ГЛАВА 1. ВЕКТОРНАЯ АЛГЕБРА
1.1. ВЕКТОРЫ И ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
1.1.1. Вектор, его направление и длина
Вектором называется упорядоченная пара точек. Первая точка
называется началом вектора, вторая - концом вектора. Расстояние между
началом и концом вектора называется его длиной. Вектор, начало и конец
которого совпадают, называется нулевым, его длина равна нулю. Бели длина
вектора положительна, то его называют ненулевым. Ненулевой вектор
можно определить также как направленный отрезок, т.е. отрезок, у которого
одна из ограничивающих его точек считается первой (началом вектора), а
другая - второй (концом вектора). Направление нулевого вектора,
естественно, не определено.
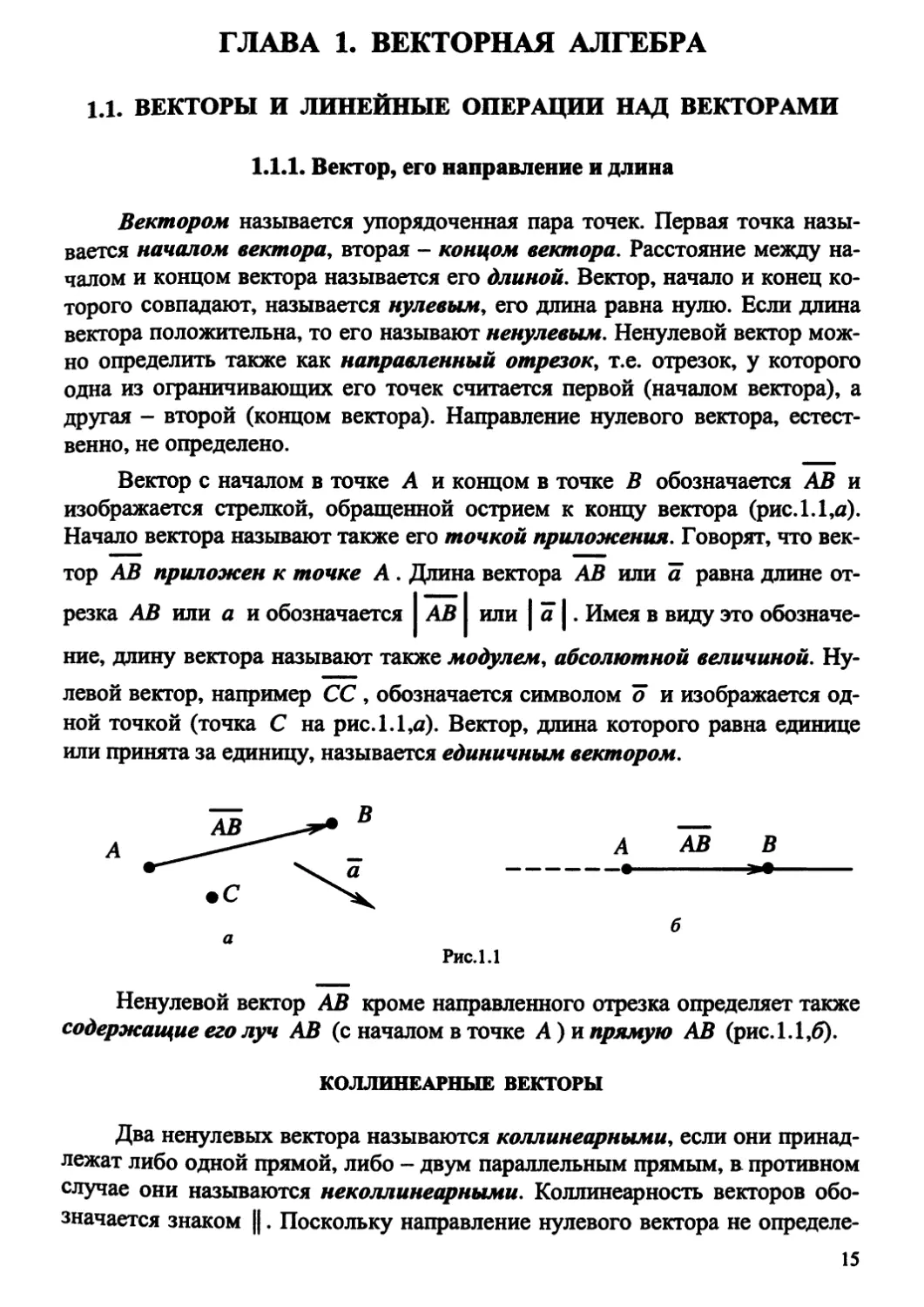
Вектор с началом в точке А и концом в точке В обозначается АВ и
изображается стрелкой, обращенной острием к концу вектора (рис. 1.1,а).
Начало вектора называют также его точкой приложения. Говорят, что
вектор АВ приложен к точке А. Длина вектора АВ или а равна длине
отрезка АВ или а и обозначается АВ или | а |. Имея в виду это
обозначение, длину вектора называют также модулем, абсолютной величиной.
Нулевой вектор, например СС , обозначается символом 5" и изображается
одной точкой (точка С на рис. 1.1,а). Вектор, длина которого равна единице
или принята за единицу, называется единичным вектором.
АВ В
Рис.1.1
Ненулевой вектор АВ кроме направленного отрезка определяет также
содержащие его луч АВ (с началом в точке А) и прямую АВ (рис. 1.1,6).
КОЛЛИНЕАРНЫЕ ВЕКТОРЫ
Два ненулевых вектора называются коллинеарными, если они
принадлежат либо одной прямой, либо - двум параллельным прямым, а противном
случае они называются неколлинеарными. Коллинеарность векторов
обозначается знаком ||. Поскольку направление нулевого вектора не определе-
15
но, он считается коллинеарным любому вектору. Каждый вектор кол-
линеарен самому себе.
aUb
Рис 1.2
Два ненулевых коллинеарных вектора называются одинаково
направленными (сонаправленными), если они принадлежат параллельным
прямым и их концы лежат в одной полуплоскости от прямой, проходящей через
их начала (рис.1.2,а); либо, если векторы принадлежат одной прямой, и луч,
определяемый одним вектором, целиком принадлежит лучу, определяемому
другим вектором (рис. 1.2,6). В противном случае коллинеарные векторы
называются противоположно направленными (рис.1.2,в,г). Одинаково
направленные и противоположно направленные векторы обозначаются парами
стрелок ТТ и Ti соответственно. Понятия коллинеарных, одинаково
направленных векторов распространяются на любое число векторов.
КОМПЛАНАРНЫЕ ВЕКТОРЫ
Три ненулевых вектора называются компланарными, если они лежат в
одной плоскости или в параллельных плоскостях (рис. 1.3,а), в противном
случае они называются некомпланарными (рис. 1.3,6). Так как направление
нулевого вектора не определено, он считается компланарным с любыми
двумя векторами. Понятие компланарных векторов распространяется на
любое число векторов.
Рис. 1.3
16
РАВНЫЕ ВЕКТОРЫ
Два вектора называются равными, если они:
а) коллинеарны, одинаково направлены;
б) имеют равные длины.
Все нулевые векторы считаются равными друг другу.
Это определение равенства векторов характеризует так называемые
свободные векторы. Данный свободный вектор можно переносить, не
меняя его направления и длины, в любую точку пространства (откладывать от
любой точки), при этом будем получать векторы, равные данному. Таким
образом, свободный вектор определяет целый класс равных ему векторов,
отличающихся только точкой приложения. Далее будут рассматриваться,
как правило, свободные векторы, при этом слово "свободные" будет
опускаться.
Замечания 1.1.
1. Определение равенства векторов можно сформулировать, не
используя понятия длины вектора [2,3]. Два вектора АВ и CD, не лежащие на
одной прямой, называются равными, если четырехугольник ABDC является
параллелограммом (рис.1.4,я). Векторы АВ и CD, принадлежащие одной
прямой, считаются равными, если существует равный им вектор EF, не
принадлежащий этой прямой (рис. 1.4,6). Это определение эквивалентно
следующему: два вектора АВ и CD называются равными, если середины
отрезков AD и ВС совпадают (рис. 1.4,в).
2. Отношение равенства векторов является отношением
эквивалентности (см. разд.В.З). В самом деле, для отношения равенства = (а=Ь -
"вектор а равен вектору Ъ "), определенного на множестве упорядоченных пар
<а,Ь > векторов, выполняются следующие условия:
а) каждый вектор равен самому себе (рефлексивность);
б) если вектор а равен вектору Ь, то вектор Ъ равен вектору а
(симметричность);
в) если вектор а равен вектору Ъ и вектор Ъ равен вектору с, то
вектор а равен вектору с (транзитивность).
2-5150 17
Это означает, что множество векторов разбивается на
непересекающиеся классы (см. разд.В.З), т.е. с каждым вектором связывается целый
класс равных ему векторов, отличающихся только точками приложения.
Поэтому говорят [37], что свободный вектор определяет класс равных ему
векторов.
3, Для любой точки А и любого вектора "а существует единственная
точка В, для которой АВ = 3F.
В самом деле, если вектор а ненулевой, то через точку А проходит
единственная прямая, параллельная вектору а (рис.1.5,а), либо его
содержащая (рис. 1.5,6). На этой прямой существуют две точки, удаленные от
точки Л на расстояние | а | > 0. Из этих двух точек выберем такую точку В ,
для которой векторы АВ и а оказываются одинаково направленными. По
построению получаем АВ = а . Если вектор а нулевой, то искомая точка В
совпадает с данной точкой А .
Ив
т >»
А В
- а А АВ В
а т и > • >•
Рис.1.5.
Таким образом, любой вектор я ставит в соответствие каждой точке
А единственную точку В такую, что АВ = а . Это соответствие называют
параллельным переносом. Поэтому свободный вектор можно отождествить
с параллельным переносом [2,3].
4. Построение, рассмотренное в п.З, называется откладыванием
вектора а от точки А или приложением вектора а к точке А .
Используя это построение, можно дать эквивалентные определения
коллинеарности и компланарности. Два ненулевых вектора называются кол-
линеарными, если после приложения их к одной точке они лежат на одной
прямой. Три ненулевых вектора называются компланарными, если после
приложения их к одной точке они лежат в одной плоскости.
5. Кроме свободных векторов в приложениях векторной алгебры
используются скользящие векторы, связанные (приложенные) векторы и др.
[8], которые отличаются от свободных векторов определением равенства.
Например, скользящие векторы называются равными, если они лежат на
одной прямой, одинаково направлены и имеют равные длины. Другими
словами, в отличие от свободного вектора, скользящий вектор можно переносить,
не меняя направления и длины, только вдоль содержащей этот вектор
прямой. Например, в механике сила, действующая на абсолютно твердое тело,
18
изображается скользящим вектором (см. разд. 1.6.3), а угловая скорость -
свободным вектором [6]. Сила, действующая на деформируемое тело,
является примером так называемого приложенного вектора. Изменение точки
приложения силы приведет к изменению ее воздействия на тело.
Пример 1.1. Дан треугольник ABC
(рис. 1.6), точки L, М, N - середины его
сторон. Для векторов, изображенных на
рис. 1.6, указать коллинеарные, одинаково
направленные, противоположно
направленные, равные.
□ По теореме о средней линии
треугольника заключаем, что ML\\AB,
LN|| АС. Поэтому векторы AM , МС , NL A N
- коллинеарные (так как лежат на одной или Рис. 1.6
параллельных прямых), одинаково направленные и имеют равные длины.
Следовательно, это равные векторы: AM = МС = NL. Аналогично,
1.1.2. Линейные операции над векторами
СЛОЖЕНИЕ ВЕКТОРОВ
Пусть даны два вектора АВ и CD . Приложим вектор CD к точке В
(концу вектора АВ) и получим вектор BDX =CD (рис.1.7,а; здесь и далее
равные векторы отмечены одинаковыми засечками). Вектор ADX
называется суммой векторов АВ и CD и обозначается ADX =AB+CD. Это
нахождение суммы называется правилом треугольника.
Сумму двух неколлинеарных векторов а и b можно найти по правилу
параллелограмма. Для этого откладываем от любой точки О векторы
ОД = а и ОВ = Ь , а затем строим параллелограмм ОАСВ (рис. 1.7,6).
Диагональ ОС параллелограмма определяет сумму: ОС = ОА + ОВ = а+Ь .
Для нахождения суммы нескольких векторов можно построить
ломаную из равных им векторов. Тогда замыкающий вектор, соединяющий
начало первого вектора ломаной с концом последнего ее вектора, равен сумме
всех векторов ломаной. На рис.1.7,в изображена сумма 7 четырех векторов
а , Ь , с , d . Таким способом {правило ломаной) можно сложить любое
конечное число векторов. Заметим, что сумма векторов не зависит от точек
приложения слагаемых и от порядка суммирования. Например, "выстраивая
2* 19
цепочку" векторов для суммы в виде Ь + d + с + а , получим вектор, равный
вектору 7 = 5ЧЬ+с + */ . Если ломаная получилась замкнутой, то сумма
равна нулевому вектору.
ADX=AB + CD
В
А
\
С
Рис.1.7
ВЫЧИТАНИЕ ВЕКТОРОВ
Вектор (-а) называется противоположным вектору а , если их
сумма равна нулевому вектору: а+(-а)=7>. Противоположный вектор (-а)
имеет длину |я|, коллинеарен и противоположно направлен вектору а
(рис.1.8,а,б). Нулевой вектор является противоположным самому себе.
-а
Рис.1.8
Разностью векторов а и Ъ называется сумма вектора "а с вектором
- Ъ ), противоположным вектору Ъ :
a-b= a + (-
Для нахождения разности векторов а и Ъ приложим к произвольной
точке О векторы ОА = а, ОВ-Ъ , а также вектор ОВ1=-ОВ = -Ь ,
противоположный вектору Ь (рис.1.9,а). Искомую разность находим по правилу
параллелограмма: ОС = ОА + ОВг =ОА-ОВ = а-Ь .
Для нахождения разности проще использовать правило треугольника
(рис. 1.9,6). Для этого прикладываем к произвольной точке О векторы
ОА = а, ОВ = Ъ . Вектор ВА при этом равен искомой разности
20
Вычитание векторов - действие, обратное сложению - можно
определить также следующим образом: разностью векторов а и b называется
такой вектор х, который в сумме с вектором Ъ дает вектор а (рис.1.9,в),
т.е. разность х=а-Ь - это решение уравнения х + b =а.
Л7. У .Л.
Bi О В I
а 6 е
Рис.1.9
Пример 1.2. Для векторов на рис. 1.6 найти следующие суммы и
разности:
BN + AM; AM-BL; AN + AM ; BN + AM+CL.
О Учитывая равенство AM = NL, получаем по правилу треугольника
Поскольку BL = -CL и АМ=МС,то AM-BL =
По правилу параллелограмма AN + AM = AL.
Таккак BN + AM = BL и CL = -BL,находим
УМНОЖЕНИЕ ВЕКТОРА НА ЧИСЛО
Произведением ненулевого вектора а на действительное число X
(Х*0) называется вектор X• а , удовлетворяющий условиям:
1) длина вектора X а равна | X | -| а |, т.е. | Ха | = | X | | а |;
2)векторы Х-а и а коллинеарные (Х-а||5*);
3) векторы Х-а и а одинаково направлены, если X >0, и
противоположно направлены, если X < 0.
Произведение нулевого вектора на любое число X считается (по
определению) нулевым вектором: Л-5" = <7; произведение любого вектора на
число нуль также считается нулевым вектором: 0 • а = о .
Из определения произведения следует, что:
21
а) при умножении на единицу (А, = 1) вектор не изменяется: 1 • а = а ;
б) при умножении вектора на -1 получается противоположный
вектор: (-l)a=-a\
в) деление вектора на отличное от нуля число |1 сводится к его умно-
. 1 „ а 1 _
жению на число А = —, обратное ц: — = — а ;
И М- И
г) при делении ненулевого вектора а на его длину, т.е. при умножении
а на число т^т» получаем единичный вектор, одинаково направленный с
И
- - 1 —
вектором а . Действительно, длина вектора е =тзг#а равна единице:
\а\
Вектор £ коллинеарен и одинаково направлен с вектором а , так как
д) при умножении единичного вектора на число X получаем коллине-
арный ему вектор, длина которого равна | X |.
1- 1-
—а а
2 2
Рис.1.10
На рис.1.10 изображены векторы, получающиеся в результате
умножения данного вектора а наХ = +2 и А = +|,атакже противоположный
вектор -a=(-l)-a.
СВОЙСТВА ЛИНЕЙНЫХ ОПЕРАЦИЙ НАД ВЕКТОРАМИ
Сложение векторов и умножение вектора на число называются
линейными операциями над векторами.
Для любых векторов а , Ъ , с и любых действительных чисел а, Р
справедливы равенства:
2.
22
3. а+о=а ;
4. а+(-а) =
5.
6.
7.
8. 1я=л.
Свойства 1, 2 выражают коммутативность и ассоциативность операции
сложения векторов, свойство 5 - ассоциативность операции умножения на
число, свойства 6,7 - законы дистрибутивности, свойство 8 называется
унитарностью [10].
Свойства линейных операций устанавливают такие же правила
действия с векторами, как с алгебраическими выражениями.
ЛИНЕЙНЫЕ КОМБИНАЦИИ ВЕКТОРОВ
Применяя линейные операции, можно составлять суммы векторов,
умноженных на числа.
Вектор а называется линейной комбинацией векторов al,a2,...yak,
если он может быть представлен в виде
а = ахах + а2я2 +... +OLkak,
где ах ,а2,...,ал - некоторые числа. В этом случае говорят, что вектор а
разложен по векторам ax,a2,...,ak, а числа at,а2,...,а^ называют
коэффициентами разложения.
Линейная комбинация 0 ^ + 0 • а2 +... + 0 • ak с нулевыми
коэффициентами называется тривиальной.
Отметим следующие свойства линейных комбинаций векторов.
1. Если векторы а{, a2,..., ak - коллинеарны, то любая их линейная
комбинация им коллинеарна.
2. Если векторы ах, а2,..., ak - компланарны, то любая их линейная
комбинация им компланарна.
Докажем, например, первое свойство. При умножении вектора на
число получаем (по определению) вектор, коллинеарный данному. При
сложении двух векторов, параллельных некоторой прямой, получаем (по
определению) вектор, параллельный той же самой прямой. Поэтому линейная
комбинация ахах +а2а2 двух коллинеарных векторов ах и а2 коллинеарна им.
По индукции свойство распространяется на любое конечное число
коллинеарных векторов.
Аналогично доказывается второе свойство.
23
1.1.3. Линейная зависимость и линейная независимость векторов
Набор векторов а19а2,...9ак называется системой векторов.
Система из k векторов al9a2,...9ak называется линейно зависимой,
если существуют такие числа а1эа2,...,а*, не все равные нулю
одновременно, что
ai ^+а2 a2 + ...+akak=o. (1.1)
Система из к векторов al9a29...9ak называется линейно независимой,
если равенство (1.1) возможно только при ах =<х2 =... = а^ =0, т.е. когда
линейная комбинация в левой части (1.1) тривиальная.
Замечания 1.2.
1. Один вектор аг тоже образует систему: при ах -Ъ - линейно
зависимую, а при ах Ф Ъ - линейно независимую.
2. Любая часть системы векторов называется подсистемой.
СВОЙСТВА ЛИНЕЙНО ЗАВИСИМЫХ И ЛИНЕЙНО НЕЗАВИСИМЫХ ВЕКТОРОВ
1. Если в систему векторов входит нулевой вектор, то она линейно
зависима.
2. Если в системе векторов имеется два равных вектора, то она
линейно зависима.
3. Если в системе векторов имеется два пропорциональных вектора
(а.= Ка.), то она линейно зависима.
4. Система из к > 1 векторов линейно зависима тогда и только тогда,
когда хотя бы один из векторов есть линейная комбинация остальных.
5. Любые векторы, входящие в линейно независимую систему,
образуют линейно независимую подсистему.
6. Система векторов, содержащая линейно зависимую подсистему,
линейно зависима.
7. Если система векторов аг,а2,...,ак линейно независима, а после
присоединения к ней вектора а оказывается линейно зависимой, то вектор
а можно разложить по векторам al9a2,...,ak, и притом единственным
образом, т.е. коэффициенты разложения находятся однозначно.
Докажем, например, последнее свойство. Так как система векторов
ах,а2 ,...,ak 9a линейно зависима, то существуют числа al,a2,..,<xk,OL, не
все равные 0,что а^+а^+.-.+сс^ +а5"=5\ В этом равенстве а*0.
В самом деле, если <х = 0, то а^+а^+^. + а^ =5\ Значит,
нетривиальная линейная комбинация векторов al9a2,...,ak равна нулевому векто-
24
ру, что противоречит линейной независимости системы аХУаг>...,ак. Сле-
- ol - а. - -
ловательно, а^Ои тогда а =—La. -...—-а. , т.е. вектор а есть линей-
" а * а *
ная комбинация векторов а^о^,...,^. Осталось показать единственность
такого представления. Предположим противное. Пусть имеется два
разложения а =<Х15'1 + ... + акак и а = Р13^ +... + Р^ , причем не все
коэффициенты разложений соответственно равны между собой (например, щ Ф $г).
Тогда из равенства сс^ +...+акак = Р^ +...+$как получаем
j
Следовательно, линейная комбинация векторов al,a2,...,ak равна
нулевому вектору. Так как не все ее коэффициенты равны нулю (по крайней мере
(Xj -Pi *0), то эта комбинация нетривиальная, что противоречит условию
линейной независимости векторов a^a^,...,*^. Полученное противоречие
подтверждает единственность разложения.
Пример 1.3. Параллелограмм ОАСВ
построен на векторах ОА и ОВ; точки М
и N - середины сторон АС и ВС
соответственно (рис. 1.11). Требуется:
а) найти линейные комбинации
б) доказать, что векторы ОА, OB, MN линейно зависимы.
D а) Так как ~OA = BN, то по правилу треугольника:
1 • ОВ+у • ОЛ = OB + 2W = ON. Рассуждая аналогично, получаем:
Построим вектор ОАГ = -|(9Л. Из равенства треугольников АКМ и
СМ// следует, что Ж = 2Ж. Тогда ±-Ш+2-Ш=7ж+Ш=Ш.
б) Учитывая, что AB-2MN и АВ = О2*-ОА, получаем:
2-MN = OB-OA. Перенося векторы в левую часть, приходим к равенству
1 • ОА+(-1) • ОВ + 2 • MN = 7, т.е. нетривиальная линейная комбинация
векторов ОА, ОВ, M7V равна нулевому вектору. Следовательно, векторы ОЛ,
ОВ, MN линейно зависимы, что и требовалось доказать. ■
25
1.2. ПРОЕКЦИИ ВЕКТОРОВ И ИХ СВОЙСТВА
1.2.1. Отношение коллинеарных векторов
В данном разделе рассматриваются векторы, коллинеарные заданной
прямой, т.е. принадлежащие или параллельные ей.
Согласно определению (см. разд. 1.1.2), при умножении данного
вектора на число получаем вектор, коллинеарный данному. Можно определить и
"обратную" операцию - "деление коллинеарных векторов".
Отношением коллинеарных векторов а и Ь Ф Ъ называется
действительное число, равное по модулю отношению длин этих векторов,
положительное, если векторы а и Ъ одинаково направленные, и отрицательное,
если векторы а и b противоположно направленные:
Ъ [-|2f|:|ft|, atib.
По определению равенство -=? = Х эквивалентно равенству а -ХЬ для
b
любых коллинеарных векторов а и b Ф'о.
Например, найдем отношения коллинеарных векторов, изображенных
на рис. 1.6:
*4Л?Х/Г=1- 7aF-jw=-i- ам - NL - 1 • 7vfiZ = -i
АС^ АС 2
СВОЙСТВА ОТНОШЕНИЙ КОЛЛИНЕАРНЫХ ВЕКТОРОВ
Для любых коллинеарных векторов справедливы следуюпще свойства.
1. Отношение — любых коллинеарных векторов а и Ъ Фо определе-
Ъ
но однозначно.
2. Арифметические действия с отношениями коллинеарных векторов
аналогичны действиям с числовыми дробями, а именно для любых коллине-
арных векторов справедливы равенства:
ч а+b а Ъ ,_ _ч ~ Я-а « а ,т^—ч
а) _ ='=•+•=' (сФо); б) —ав- = А"=> (ЬФо);
с с "с b b
а
ч 2F с" 5" — — «. _ ч ч?а /Т"^— — ^ — \
в) — •«=» (ЬФо, сФо); г) -=• = •=: (ЬФо, сФо).
ebb b_ b
Те
26
Докажем первое свойство. Предположим противное. Пусть а : Ь = X и
j:^" = |li, причем Хф\1. Тогда а=ХЬ и a=\ib , т.е. ЛЬ =|дА , и
следовательно, (X~ji)-i =5". Разделив обе части равенства на число Х-\хфО,
получим £ = 5\ что противоречит условию Ъ Ф~о .
Докажем, например, последнее равенство (свойство 2,г). Пусть — = X
с
и — = ц, тогда а = Ас и Ъ = |ыс . Надо доказать, что •=? = —. Найдем отно-
с Ь \1
\а\ \X\\c
шение длин векторов •j-=-r=
X
. По определению получаем
•, где знак плюс берется, если а ТТ Ъ , а минус - при a Ti Ъ . Если
все векторы одинаково направлены, то X > О, ц > 0, поэтому v=—. Если
5"Tic и £ Tic , то а ТТб и -=* = +7—{=—» так как ^<0 и Ц<0. Если
дТТс и fe Tic", то aTife и •=• = -7—\ ="-"• Если aTic" и £ ТТс, то
Ь {)
-tir 5" (-Л) X а X
а \^Ь и •=• = —*—-=•—. Таким образом, во всех случаях получаем •=•=—,
Ь Ц li b II
что и требовалось доказать.
Пример 1.4. Диагонали трапеции ABCD
высекают на ее средней линии MN отрезок
KL (рис. 1.12). Найти отношения векторов
~KL:AS, ~KLXiD, ШЖ^сж 7л5:'аВ = Х.
П По свойствам средних линий
треугольника и трапеции находим отношения
коллинеарных векторов: KN:AB=± (так как
*WTTa£); 7jV:CD = —^ (так как
LN Ti CD); МК :CD = -± (так как МК ti CD). Отсюда следуют
соотношения
7я+
Теперь, используя свойства отношений коллинеарных векторов, получаем
27
KL _f
~AB
AB
1 \AB | CD
2 \~AB ~AB
CD АД CD
2X '
AX ^
][
_AB-CD_Jb
AB + CD
CD
AS
1.2.2. Проекции векторов на прямую и на плоскость
ПРОЕКЦИЯ ВЕКТОРА НА ПРЯМУЮ
Пусть на плоскости задана прямая / и пересекающая ее прямая т.
Проекцией вектора "а = АВ на прямую I параллельно прямой т (вдоль
прямой т) называется вектор at = А/В/, началом которого служит
проекция Аг начала А, а концом - проекция В{ конца В вектора АВ
(рис.1.13,а). Бели прямая т перпендикулярна прямой /, то проекция
называется ортогональной.
В,
Рис.1.13
Пусть в пространстве дана прямая / и пересекающая ее плоскость п.
Проекцией вектора а=АВ на прямую I параллельно плоскости п
(вдоль плоскости п) называется вектор ~а{ = А1В1 , началом которого слу-
28
жит проекция At начала А , а концом - проекция В{ конца В вектора АВ
(рис. 1.13,6). Если плоскость я перпендикулярна прямой /, то проекция
называется ортогональной.
ПРОЕКЦИЯ ВЕКТОРА НА ПЛОСКОСТЬ
Пусть в пространстве задана плоскость п и пересекающая ее прямая
т. Проекцией вектора а=АВна плоскость п параллельно прямой т
{вдоль прямой т) называется вектор ап = \Вп , началом которого служит
проекция А^ начала А, а концом - проекция Вп конца В вектора АВ
(рис. 1.14). Если прямая т перпендикулярна плоскости я, то проекция
называется ортогональной.
В
7
Рис.1.14
СВОЙСТВА ПРОЕКЦИЙ ВЕКТОРОВ
1. Проекции вектора на параллельные прямые {или на параллельные
плоскости) равны.
2. Проекции равных векторов равны.
3. Проекция суммы векторов равна сумме их проекций.
4. Проекция произведения вектора на число равна произведению этого
числа на проекцию вектора, другими словами, отношение коллинеарных
векторов равно отношению их проекций {если оно определено).
5. Проекция линейной комбинации векторов равна линейной
комбинации проекций.
Рассмотрим эти свойства для проекций векторов на прямую /
параллельно прямой т. Для проекций векторов на плоскость или на прямую
параллельно плоскости доказательства аналогичные.
Докажем первое свойство. Пусть а{ - проекция вектора а на прямую
I вдоль прямой т, а а^ - проекция вектора а на прямую /' вдоль той же
29
прямой m, причем прямые / и /' параллельные (рис. 1.15).
Четырехугольник, образованный пересечением пары параллельных прямых / и /
штриховыми линиями, параллельными прямой т, является параллелограммом.
Следовательно, а^ = at, т.е. проекции одного и того же вектора а на
параллельные прямые равны.
Рис.1.15
' 4
Докажем второе свойство. Пусть на плоскости даны равные векторы
АВ и CD , не параллельные прямой т (см. рис. 1.16). Построим равные им
векторы Агв' = АВ и C{D* = CD . Из равенства АгВ* = CXD* следует, что
четырехугольник АгвЪ'Сг - параллелограмм, а треугольники А,/?'/?, и
ClDDl равны по стороне и двум прилежащим углам (AtB =CtD ,
l^ ZAlB/Bl = ZClD/Dl как углы с соответственно
параллельными сторонами). Следовательно, AlBl = C/D/ , т.е. равные векторы, не
параллельные прямой т, имеют равные проекции. Если же векторы
параллельны прямой т, то их проекции также равны, как нулевые векторы.
Второе свойство доказано.
Доказательство третьего свойства очевидно для векторов АВ и ВС
(рис. 1.17): проекция А/С/ вектора АС = АВ + ВС равна сумме проекций
fa . Для произвольных
АгВ( и ВХСХ векторов АВ и ВС, т.е. АгС{ =
векторов а и Ъ (у которых конец вектора а не совпадает с началом
вектора Ъ) доказательство сводится к рассмотренному случаю для равных им
векторов АВ = а и ВС = Ь , так как равные векторы имеют равные
проекции (по второму свойству).
Доказательство четвертого свойства следует из теоремы Фалеса (см.
разд. В.2). На рис. 1.18 изображены векторы АВ и АС = ХАВ (Х>0), а
30
также их проекции А1В1 и А1С1. По теореме Фалеса = l l = Х, еле-
АН At Dt
довательно, АхСг =ХА1В1, что и требовалось доказать. В случае X <0
доказательство аналогичное.
Пятое свойство проекций следует из третьего и четвертого.
Рис.1.17
Рис.1.18
Теорема 1.1 (о проекциях вектора на пересекающиеся прямые).
1. Если на плоскости заданы две пересекающиеся прямые 1{ и 12, то
любой вектор а на плоскости можно однозначно представить в виде
суммы своих проекций 5j и а2 на эти прямые (проекции на каждую прямую
берутся вдоль другой прямой), т.е. а=ах+а2.
2. Если в пространстве заданы три прямые 1г, /2 и /3,
пересекающиеся в одной точке и не лежащие в одной плоскости, то любой вектор "а в
пространстве можно однозначно представить в виде суммы своих
проекций ах, а2, а3 на эти прямые (проекции на каждую прямую берутся вдоль
плоскости, содержащей две другие прямые), т.е. a=7il+a2+a3.
В самом деле, пусть прямые 1г и /2 пересекаются в точке О
(рис.1.19,а). Приложим вектор а к точке О, т.е. рассмотрим вектор
ОА = а. По правилу параллелограмма сложения векторов (см. разд. 1.1.2)
получаем равенство О А = аг +а2, которое равносильно доказываемому
равенству а =аг+а2, так как равные векторы имеют равные проекции (см.
свойство 2 проекций). Единственность представления следует из
однозначности нахождения проекций вектора.
Если же вектор а коллинеарен одной из прямых, например 1Х, то
соответствующие проекции имеют вид: аг = а, а~2 = 7) и равенство
в = 2*! + л2 = 5"+ZT, очевидно, выполняется.
Аналогично доказывается второе утверждение.
31
Рис.1.19
Замечание 13.
Справедливы утверждения, обратные к указанным в теореме 1.1.
Если вектор на плоскости равен сумме двух неколлинеарных векторов,
т.е. а=ах+а2, то слагаемые ах и а2 являются проекциями вектора а на
прямые, содержащие векторы ах и а2 соответственно.
Если вектор в пространстве равен сумме трех некомпланарных
векторов, т.е. а =аг+а2^аъ, то слагаемые ах, а2 и а3 являются проекциями
вектора а на прямые, содержащие векторы ах, а2, аъ соответственно.
В самом деле, отложим от произвольной точки О векторы ОА = а,
ОАх=ах
=а2, ОА3=а3 (рис.1.19,6). Тогда из равенства а^
следует, что ОА = О\ +ОА2+ОА3 , т.е. вектор ОА - является диагональю
параллелепипеда, построенного на векторах ОА^, ОА2 , ОАЪ (отсюда
следует правило параллелепипеда сложения трех некомпланарных векторов).
Поэтому О\ , ОА2, ОА3 - проекции вектора ОА на прямые 1Х, /2, 1Ъ
(проекция на каждую прямую берется вдоль плоскости, проходящей через две
другие прямые). Так как равные векторы а и ОА имеют равные проекции
(свойство 2), заключаем, что проекции вектора а на прямые 1г, /2, /3 ргв-
ны аг, а2, а3 соответственно. Наконец, проекции на прямые 1г, /2, /3
равны проекциям на параллельные им прямые, содержащие векторы а{, а2, а3
соответственно.
32
Пример 1.5. Если прямая пересекает стороны АВ, ВС, СА
треугольника ABC (или их продолжения) в точках С1,А1,В{ соответственно, то
ВСХ
АВХ
"1 ^"1 **"\
D Найдем отношения проекций векторов на прямую АВ вдоль прямой
АХСХ (рис. 1.20). Для этого через точку В проведем прямую ВВ2,
параллельную прямой А1С1. По свойству 4 проекций имеем:
АС* АВ* В А* ^2^1
~всх~в~рх ' с\ ~свх'
~АС~В\~АВ.
Перемножая эти пропорции, получаем -^=-===-^=, что равносильно
ВС
СВ,
доказываемому равенству. Заметим, что доказанное утверждение является
частью теоремы Менелая [4,25]. ■
= 1
Рис.1.20 Рис-1-21
Пример 1.6. Если на сторонах АВ,ВС ,СА треугольника ABC взяты
[ветственно точки Сх, ^, Вх так, что прямые АА^, ВВг, ССХ пересека-
я в одной точке, то
соответственно lll ,
ются в одной точке, то
Iq 1\ ~свх
= -1.
П Пусть прямые пересекаются в точке Q (рис.1.21). Через точку Сх
проведем прямые С{В2 и СХА^ параллельно ВВ{ и АА1 соответственно. По
свойству проекций (свойство 4):
3 — 5150 33
АВХ _ АВ В\ _ АВ С\ CQ __ СВХ
в2вх всх' а2ах lq' а2ах c^q вгвх
Учитывая эти равенства и свойства отношений коллинеарных векторов (см,
разд. 1.2.1), преобразуем левую и правую части последнего равенства:
CQ C£j CBj ABj CBj [ AB
Запишем произведение правых частей этих равенств, учитывая, что
произведение левых частей равно единице:
АСХ СВХ [ IS) АСХ В\ Ш[ АВ
u « ^ ACi ВАх CBi 1
Найдем обратное отношение ==-•-==••== = -1, что и требовалось дока-
ВСХ С\ АВХ
зать. Заметим, что доказанное утверждение является частью теоремы Чевы
[4,25]. ■
1.2.3. Ортогональные проекции векторов. Угол между векторами
УГОЛ МЕЖДУ ВЕКТОРАМИ
Углом между ненулевыми векторами называется угол между
равными им векторами, имеющими общее начало, не превосходящий по
величине 71.
Пусть в пространстве даны два ненулевых вектора а и Ъ (рис. 1.22).
Построим равные им векторы
О А и ОВ. На плоскости,
содержащей лучи ОА и ОВ,
получим два угла АОВ,
Меньший из них, величина <р
которого не превосходит п
(0<<р<я), принимается за
Рис.1.22 угол между векторами а и Ъ .
34
Поскольку направление нулевого вектора не определено, то не
определен и угол между двумя векторами, если хотя бы один из них нулевой. Из
определения следует, например, что угол между ненулевыми коллинеарны-
ми векторами либо равен нулю (если векторы одинаково направлены), либо
равен п (если векторы противоположно направлены).
ОРТОГОНАЛЬНЫЕ ПРОЕКЦИИ ВЕКТОРОВ
Движение по любой прямой может быть в двух направлениях.
Ориентированной пряной называется прямая, на которой выбрано
направление, т.е. одно из направлений считается положительным, а
противоположное - отрицательным. Для измерения длин отрезков на прямой задается
масштабный отрезок, который принимается за единицу.
Ориентированная прямая с заданным масштабным отрезком
называется осью.
Любой ненулевой вектор £", принадлежащий прямой, называется
направляющим вектором для данной прямой, поскольку задает на ней
ориентацию. Направление вектора <? принимается за положительное, а
направление противоположного вектора (-<?) - за отрицательное. Кроме того,
длину вектора ИфЪ можно принять за величину масштабного отрезка на
этой прямой. Поэтому можно сказать, что любой ненулевой вектор
определяет ось - прямую, содержащую этот вектор, задавая на ней направление и
масштабный отрезок.
Ортогональной проекцией вектора а на ось, задаваемую вектором
1 * Ъ, называется его проекция на ось вдоль прямой (или вдоль плоскости),
перпендикулярной данной оси. Ортогональную проекцию вектора а на ось,
задаваемую вектором "еФЪ , будем обозначать пр7а .
Ортогональную проекцию вектора а на прямую I (см. разд. 1.2.2 и
рис. 1.13) будем обозначать npt я.
Ортогональную проекцию вектора а на плоскость п (см. разд. 1.2.2
и рис. 1.14) будем обозначать прп 7г .
Разность между вектором а и его ортогональной проекцией называют
ортогональной составляющей:
а±7 =а-пр-а - ортогональная составляющая вектора а
относительно вектора 1;
аи =а-пр1а - ортогональная составляющая вектора а
относительно прямой /;
3* 35
а1п =а-прпа - ортогональная составляющая вектора а
относительно ПЛОСКОСТИ 71.
mil
m
n
mln
I
1
1
\ npna
В
>
T
1
1
/
На рис.1.23 изображены ортогональные проекции вектора a = АВ :
- на прямую / (или на ось /, задаваемую вектором 7) вдоль прямой
т: АьВг =пр1 а=пр-а (рис.1.23,а);
- на прямую / (или на ось /, задаваемую вектором 1) вдоль
плоскости a: AlBl =npt a=np-a (рис. 1.23,6);
- на плоскость п вдоль прямой т: \Вп = прпа (рис.1.23,в).
На рис.1.23 изображены ортогональные составляющие вектора а :
- относительно оси / (вектора <?): ап =5"^ (рис.1.23,а);
- относительно плоскости п: а±п (рис.1.23,в).
Для ортогональных проекций справедлива следующая теорема (см.
теорему 1.1 в разд. 1.2.2).
Теорема 1.2 (об ортогональных проекциях вектора).
1. Если на плоскости заданы две взаимно перпендикулярные прямые 1Х
и /2, то любой вектор а на плоскости можно однозначно представить в
виде суммы своих ортогональных проекций на эти прямые, т.е.
а = пр{ "а + прх а (рис. 1.24,а).
2. Если в пространстве заданы три попарно перпендикулярные прямые
/j, /2 и 13, пересекающиеся в одной точке, то любой вектор 5" в простран-
36
стве mooicho однозначно представить в виде суммы своих ортогональных
проекций на эти прямые, т.е. а = пр{ а+пр1 а+ прх 5" (рис. 1.24,6).
3. Квадрат длины вектора на плоскости или в пространстве равен
сумме квадратов длин своих ортогональных проекций, т.е.
Первые два утверждения представляют собой частные случаи
теоремы 1.1. Третье утверждение следует из теоремы Пифагора (для
треугольника ОА[А (рис.1.24,д) или треугольников ОА1А1 и ОА2А (рис. 1.24,6)).
В формулировке теоремы 1.2 прямые можно заменить осями,
задаваемыми попарно ортогональными векторами.
Рис.1.24
На рис.1.24,а проекции вектора а на оси одновременно являются
ортогональными составляющими: npla=an , npta=an . На рис. 1.24,6
вектор ОА2 является проекцией вектора 5* на плоскость п, содержащую
прямые /j и /2: QAj = прпа , а вектор А^А является ортогональной
составляющей вектора а относительно плоскости п: А^А = а1п.
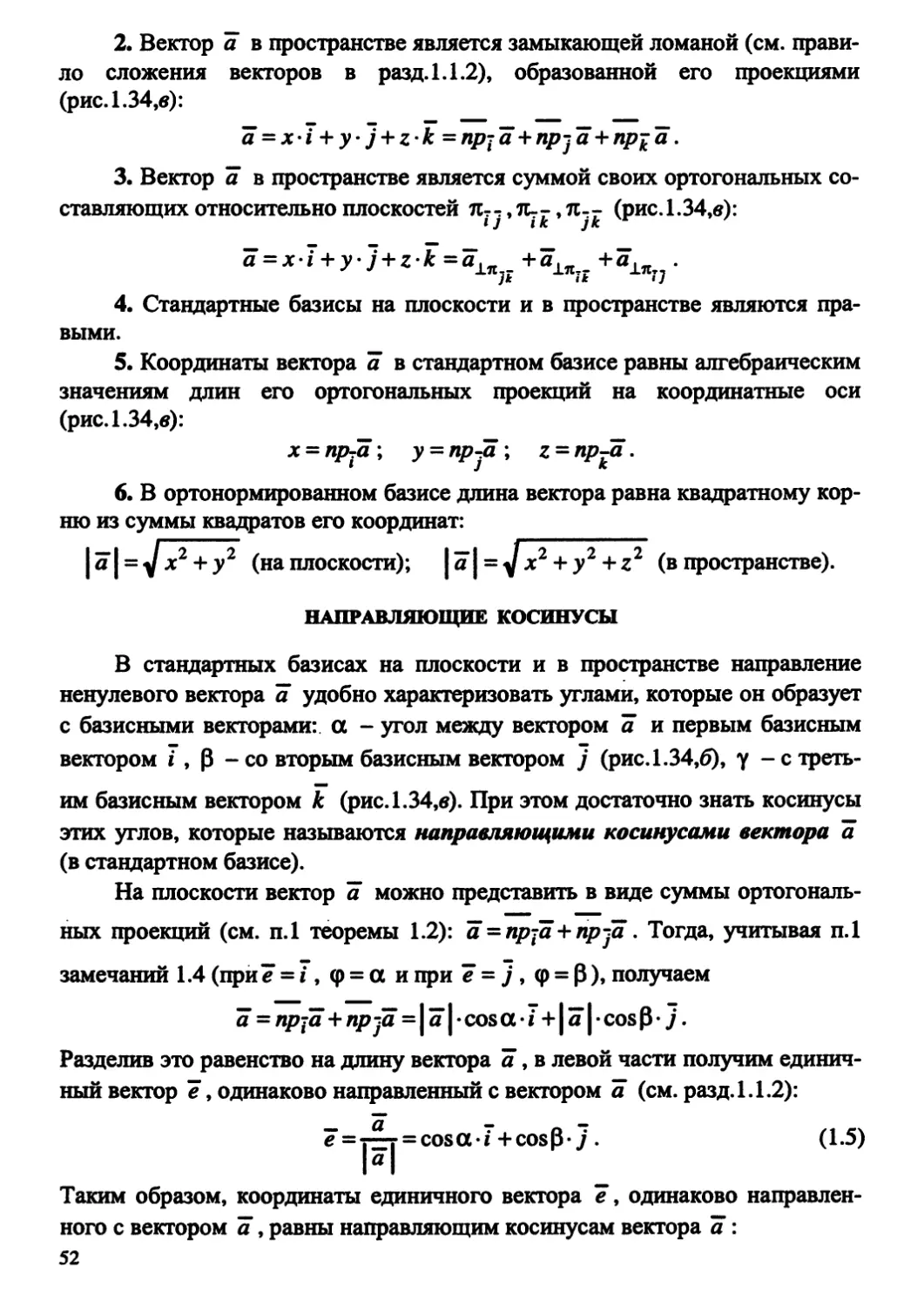
АЛГЕБРАИЧЕСКОЕ ЗНАЧЕНИЕ ДЛИНЫ ПРОЕКЦИИ
Пусть ф - угол между ненулевым вектором а и осью, задаваемой
вектором е~ФЪ, т.е. угол между ненулевыми векторами я и е~.
Алгебраическим значением длины ортогональной проекции вектора
а на ось, задаваемую вектором 7 Ф Ъ, называется длина его ортогональ-
37
ной проекции пр-а , взятая с положительным знаком, если угол ф не пре-
вышает —, и с отрицательным знаком, если угол ф больше —, т.е.:
Например, для проекций, изображенных на рис. 1.25, пр7а>0,
поскольку угол ф между векторами аи? острый, а пр-b < О, так как угол
\|/ между векторами Ъ и 1 тупой.
Некоторые свойства проекций векторов переносятся на алгебраические
значения их длин, в частности:
1. пр^^+Ь^пр^а+пр^Ь - алгебраическое значение длины
ортогональной проекции суммы векторов равно сумме алгебраических значений
длин ортогональных проекций слагаемых;
2. пр7(Х-а) = Х-пр^а - алгебраическое значение длины ортогональной
проекции произведения вектора на число равно произведению этого числа на
алгебраическое значение длины ортогональной проекции вектора.
>-a=\np7a =|a|cos<p np^ =-\np7b\=\b\cosy
b
Рис.1.25
Замечания 1.4.
1. Из определения алгебраического значения длины ортогональной
проекции следует (см. также рис.1.25), что
пр^а =\a\cos(p 9
т.е. алгебраическое значение длины ортогональной проекции ненулевого
вектора на ось равна произведению длины этого вектора на косинус угла
между вектором и осью.
Ортогональную проекцию вектора а на ось, задаваемую вектором
1Ф я , можно представить в виде
38
— _ _ 1 _ Ы-coscp _
Если £ - единичный вектор, то пр-а = л/?-а •<? = |а|
2. Равенство /ip^a = |а|со8ф можно использовать как определение
косинуса угла между ненулевыми векторами а и Ъ (или, что то же самое,
косинуса угла между осями, заданными ненулевыми векторами а и Ъ
(рис.1.26)):
пр-а пр-Ъ
Рис.1 26
3. Углом между ненулевым вектором а и прямой I называется угол
ф между вектором а и его ортогональной проекцией прр на прямую /.
Величина угла ф (0 < ф < —) может быть найдена по формуле
4. Углом между ненулевым вектором а и плоскостью а называется
угол \|/ между вектором а и его ортогональной проекцией праа на
плоскость а. Величина угла у ( 0 < \|/ < —) может быть найдена по формуле
2
\пРаа\
cos \|/ =LT=T
\а\
Пример 1.7. Основания АВ и CD равнобокой трапеции ABCD равны
а и Ь соответственно; точка М - середина стороны ВС (рис. 1.27). Найти
алгебраические значения длин ортогональных проекций векторов AM и
MD на ось, задаваемую вектором АВ.
39
D Пусть DL - высота
трапеции, N - точка пересечения прямых
АВ и DM . По свойству равнобокой
трапеции AL=—-\ из равенства
треугольников CDM и BNM:
Обозначим через х = пр— AM,
АВ
у = np—MD искомые алгебраические значения длин ортогональных проек-
АВ
ций. Тогда из равенств AM+MD = AD, AM-MD = AM +MN = AN и
свойства 1 алгебраических значений длин проекций следует:
)
^ jS, т.е.
-MD)= np—AM~np-^MD = np-^AN,т.е. *-;у =
Решая систему < 2 ' находим ^ 4, ' т.е. пр—АМ =-2~^,
1.3. БАЗИС И КООРДИНАТЫ ВЕКТОРОВ
1.3.1. Базис на прямой. Координата вектора на прямой
Базисом на прямой называется любой ненулевой вектор е на этой
прямой (рис. 1.28). Этот вектор 7 называется базисным.
_ Пусть на прямой / задан базис
7 « - - тт / -
ш * ш э i еФо. Для любого вектора а, кол-
линеарного данной прямой, опреде-
?псЛ.2Я лено отношение 5*:? = д:, причем
число х определяется однозначно
(см. свойство 1 в разд. 1.2.1). Таким образом, справедлива следующая
теорема.
Теорема 1.3 (о разложении вектора по базису на прямой). Любой
вектор а, коллинеарный прямой, может быть разложен по базису 7 на
этой прямой, т.е. представлен в виде
а=хе, (1.2)
где число х определяется однозначно.
40
Коэффициент х в разложении (1.2) называется координатой вектора
а относительно базиса 7. Поскольку векторы а и е Ф Ъ коллинеарны,
то координата х однозначно определяется их отношением (см. свойство 1 в
разд. 1.2.1): * = — • Например, если вектор я представляется в виде
а = -2 • ?, то х = -2 - его координата относительно базиса ?.
Все ненулевые векторы, одинаково направленные с вектором е ,
имеют положительные координаты, а противоположно направленные -
отрицательные. Координата нулевого вектора равна нулю.
Замечания 1.5.
1. Базисный вектор на прямой задает направление на этой прямой, а
его длина определяет масштабный отрезок. Таким образом, задав базис на
прямой, получаем ось.
2. В формулировке теоремы 1.3 прямую можно рассматривать как ось,
задаваемую вектором JF Ф Ъ.
КООРДИНАТЫ СУММЫ ВЕКТОРОВ И ПРОИЗВЕДЕНИЯ ВЕКТОРА НА ЧИСЛО
Нетрудно установить следующие свойства для векторов, коллинеарных
данной оси.
1. Равные векторы имеют равные координаты (в одном и том о/се
базисе).
2. Координата суммы векторов равна сумме координат слагаемых.
3. Координата произведения вектора на число равна произведению
этого числа на координату вектора.
4. Координата линейной комбинации векторов равна линейной
комбинации координат векторов.
5. Отношение ненулевых векторов, коллинеарных прямой, равно от-
ношению их координат, определенных относительно любого базиса на этой
прямой.
Первое свойство следует из первого свойства отношений
коллинеарных векторов (см. разд. 1.2.1).
Докажем второе свойство. Пусть векторы а и Ъ - коллинеарны оси,
задаваемой вектором 'еФ'о. Пусть дс^=а:?, jc- =6:?, дс_ -=(a+b):F -
координаты векторов а , Ъ и а+b соответственно. Тогда, складывая
равенства a=jCj'?Hi=^--?, получаем
a+b =*j;
^о равносильно равенству *_ - = х% + Xrr • Третье свойство доказывается
аналогично.
41
Четвертое свойство, которое следует из второго и третьего, можно
записать в следующем виде:
ам. +а1а2+...+а.а. а. а~ а.
—*-* Hz — = а1-^-+а9-^-+...+а.-е-.
е ее е
Пятое свойство следует из свойства 2,г отношений коллинеарных
векторов (см. разд. 1.2.1). Действительно, пусть а и Ь - ненулевые векторы,
коллинеарные оси, задаваемой вектором е * 5". Тогда свойство 5
выражается равенством
— а
и-
которое справедливо для любых коллинеарных ненулевых векторов (см.
разд. 1.2.1).
Пример 1.8. Даны векторы я=-2-7иЬ=4?, параллельные оси,
задаваемой вектором 'ёФ'д. Требуется найти координаты векторов а + Ъ ;
-Ъ ; а -Ъ ; За+2-ft относительно базиса ?, а также координату вектора
а +6 относительно базиса Ъ .
□ Используя свойства коллинеарных векторов, находим разложения
по базису F:
По свойству 5 находим •fi=^-=-|=^. Заметим, что относительно базиса ?
вектор 5"+ft имеет координату 2, а относительно базиса Ъ - координату,
равную -j, т.е. вектор имеет неравные координаты относительно разных
базисов. ■
1.3.2. Базис на плоскости. Координаты вектора на плоскости
Базисом на плоскости называются два неколлинеарных вектора 7Х ,72
на этой плоскости, взятые в определённом порядке (рис. 1.29). Эти векторы
Fj, e2 называются базисными.
Пусть на плоскости задан базис "ех 972. Построим прямые 1{ и /2,
содержащие базисные векторы 7>г и 72 соответственно. Эти прямые
пересекаются, так как базисные векторы неколлинеарные. Согласно п.1 теоре-
42
мы Ы» вектор а можно представить в виде а =ах + л2, гДе а\ ~ проекция
вектора а на 1Х вдоль /2; а2 - проекция вектора а на /2 вдоль Zt, причем
проекции определяются однозначно.
Вектор ах, принадлежащий прямой 1Х,
можно разложить по базису е\ на этой
прямой (см. разд. 1.3.1), т.е.
представить в виде 5j = х-ёх , причем число х
определяется однозначно. Вектор д2,
принадлежащий прямой /2, можно
разложить по базису е~2 на этой пря- / Рис.1.29
мой (см. разд. 1.3.1), т.е. представить в
виде а2 = х2 -e~2, причем число х2 определяется однозначно. Подставляя эти
разложения в равенство а = аг + а2, получаем
5" = дс1-ё1+дс2?2. (1.3)
Таким образом, справедлива следующая теорема.
Теорема 1.4 (о разложении вектора по базису на плоскости). Любой
вектор а, принадлежащий плоскости, может быть разложен по базису
~ех ,е~2 на этой плоскости, т.е. представлен в виде (1.3), где числа х{ и х2
определяются однозначно.
Коэффициенты х1 и х2 в разложении (1.3) называются координатами
вектора а относительно базиса 7{ ,е~2 (число х1 называют абсциссой, а
х2 - ординатой вектора а ). Например, числа 2 и -3 являются
координатами вектора 5" = 2-71-3-?2 (хх = 2- абсцисса, *2 = -3 - ордината вектора
a=2-e1-3-i2).
Базисные векторы ij ,i"2, отложенные от одной (произвольной) точки
плоскости, называются репером на плоскости [2,3,14].
ОРИЕНТАЦИИ БАЗИСОВ НА ПЛОСКОСТИ
Базис на плоскости называется правым (или, что то же самое,
упорядоченная пара неколлинеарных векторов называется правой парой), если
кратчайший поворот от первого вектора ко второму происходит против
часовой стрелки (это направление поворота считается положительным).
Базисные векторы \^2 (рис.1.30,а) правого базиса расположены
соответственно как большой и указательный пальцы правой руки, если, смотреть на ее
ладонь.
43
- 4 - f
У \ ^ / V
Левым базисом на плоскости (левой парой)
называется такой базис, у которого кратчайший
поворот от вектора ?. к вектору ?, происходит
У \ ^ / V у
• _* Т:_ по часовой стрелке (такое направление враще-
1 2 ния считается отрицательным). Базисные векто-
а б ры £ ,2L (рис. 1.30,6) левого базиса расположе-
Рис1.30 1 1
ны соответственно как большой и указательный
пальцы левой руки, если смотреть на ее ладонь.
Отметим следующее свойство: если неколлинеарные векторы а ,Ь
образуют правую пару, то пары, получающиеся перестановкой векторов
(пара Ъ ,а) или заменой одного вектора противоположным (например,
а , (- Ь)), образуют левую пару.
Пример 1.9. В параллелограмме
ОАСВ: точка N делит сторону АС в
отношении AN: NC = 2:1; точка D -
середина стороны ВС; М - точка
пересечения медиан треугольника ОАВ
(рис. 1.31). Разложить векторы ND и MN
по векторам а = О А и Ь = СШ .
□ Чтобы разложить вектор ND, применяем правило ломаной: вектор
OD замыкает ломаную OBD и ломаную О AND. Поэтому OD = OB + BD и
OD = OA + AN + ND, т.е. OB + BD = OA+AN + ND. Выразим все векторы
этого равенства, за исключением искомого вектора М), через векторы а и
Ъ. Учитывая, что BD = ~BC = ~'a\ AN=j-AC=j-b, получаем
*+~а=5'+^-6+ЛЖ>. Отсюда ND = b +~а-а-~Ь . Приводя
подобные члены, окончательно получаем ND = —~ • а + -j • 6 .
Так как точка Q пересечения диагоналей параллелограмма делит
каждую диагональ пополам, а точка М делит медиану OQ треугольника ОАВ
в отношении ОМ : MQ = 2:1, заключаем, что ОМ : ОС = 1:3, т.е.
ОМ =\-ОС =-~(Ш+02?)=у-(а +£>). По правилу сложения векторов имеем
ОМ+AW = OA+iW. Следовательно, j(5'+&)+M/V = 5'+-|F. Отсюда
находим искомое разложение
(
44
1.3.3. Базис в пространстве. Координаты вектора в пространстве
I
Рис.1.32
Базисом в пространстве называются три некомпланарных вектора
?i »*2 ' *з' взятые в определённом порядке (рис.1.32). Эти векторы 7Х ,72 ,13
называются базисными.
Пусть в пространстве
задан базис 71972,73. Построим
прямые 1Х, /2, /3, содержащие
базисные векторы Sj, i"2, е3
соответственно. Без
ограничения общности можно считать,
что эти прямые пересекаются в
одной точке (в противном
случае можно было взять любые
пересекающиеся в одной точке
прямые /j, /2, /3,
параллельные прямым 1Х, /2, /3
соответственно, поскольку проекции
вектора на параллельные
прямые равны (см. свойство 1
проекций в разд. 1.2.2)). Тогда
любой вектор а можно однозначно представить в виде суммы своих проекций:
а=аг+а2+а3,где аг, а2, а3 - векторы, принадлежащие прямым 1г, /2, /3
соответственно (см. п.2 теоремы 1.1). Раскладывая проекции ах, а2, а3 по
базисам на соответствующих прямых (см. разд. 1.3.1), находим: аг=х{-'ё19
а2 = х2 • ?2, аъ = х3 • ?3. Подставляя эти разложения в равенство
3T = 5j +a2 +ZT3, получаем
a=xl-el+x2-е2+х3 е3. (1.4)
Таким образом, справедлива следующая теорема.
Теорема 1.5 (о разложении вектора по базису в пространстве).
Любой вектор а может быть разложен по базису 7г ,е2 ,?3 в пространстве,
т.е. представлен в виде (1.4), где числа х1, х2, х3 определяются однозначно.
Коэффициенты х{, х2, х3 в разложении (1.4) называются
координатами вектора а относительно базиса 71,72,'е3 (число х{ называют
абсциссой, х2 - ординатой, а х3 - аппликатой вектора а ). Например, числа
45
3, 2, -1 являются координатами вектора а =3-е1+2-е2 -еъ (хх =3 -
абсцисса, *2=2 -ордината, хг=-1 - аппликата вектора а=3-71+2-72-'ё3).
Базисные векторы ij,^,^, отложенные от одной (произвольной)
точки, называются репером [2,3,14].
Замечания 1.6.
1. Базис на прямой, на плоскости, в пространстве определяется
неоднозначно. Например, если «j ,F2 ,?3 - базис в пространстве, то система
векторов А,е|, Хё2, Хё3 при любом А, * О также является базисом.
2. Следующие свойства выражают геометрический смысл линейной
зависимости и линейной независимости векторов:
а) два (и более) коллинеарных вектора линейно зависимы, и наоборот,
два линейно зависимых вектора коллинеарны; два линейно независимых
вектора не коллинеарны;
б) три (и более) компланарных вектора линейно зависимы, и наоборот,
три линейно зависимых вектора компланарны; три линейно независимых
вектора не компланарны;
в) четыре (и более) вектора линейно зависимы.
Докажем, например, последнее свойство. Пусть а , Ъ , с , d -
произвольные векторы. Бели первые три вектора а , Ь , с линейно зависимы, то
и вся система 5", Ъ , с , d - линейно зависима (см. свойство 6 в разд. 1.1.3).
Если же векторы "а , Ь , с линейно независимы, то согласно п.2,"б" они не
компланарны и, следовательно, образуют базис в пространстве. Тогда
вектор d можно разложить по этому базису, т.е. представить в виде линейной
комбинации векторов а , Ъ , с . В этом случае система векторов а , £ , с ,
d также линейно зависима (см. свойство 4 в разд. 1.1.3).
3. Понятие базиса непосредственно связано с понятием линейной
независимости. Базис представляет собой упорядоченную совокупность линейно
независимых векторов:
на прямой - это один линейно независимый вектор (см. п.1
замечаний 1.2);
на плоскости - это два линейно независимых вектора на этой
плоскости, взятые в определённом порядке (см. п.2,"ам);
в пространстве - это три линейно независимых вектора, взятые в
определённом порядке (см. п.2,"би).
4. Теоремы 1.3-1.5 позволяют говорить, что базис - это полная система
векторов (на прямой, на плоскости, в пространстве) в том смысле, что
любой вектор (на прямой, на плоскости, в пространстве) линейно выражается
через базисные векторы.
46
5. Теоремы 1.3-1.5 позволяют говорить, что базис - это максимальная
линейно независимая система векторов (на прямой, на плоскости, в
пространстве), так как базис - это линейно независимая система векторов, и ее
нельзя дополнить каким-либо вектором без потери линейной независимости.
6. Базис - это полная линейно независимая система векторов (на
прямой, на плоскости, в пространстве).
ОРИЕНТАЦИИ БАЗИСОВ В ПРОСТРАНСТВЕ
Базис в пространстве называется
правым (или, что то же самое, упорядо- - / ei f
ченная тройка некомпланарных векторов 2jL As.
называется правой тройкой), если, наблю- п / ) э * / * j»
дая из конца третьего вектора, кратчай- у е." \ е2
ший поворот от первого вектора ко второ- \ *
му виден происходящим против часовой
стрелки (рис.1.33,а). Бели описанный по-
Рис 1 ^Я
ворот виден происходящим по часовой
стрелке, то базис называется левым (упорядоченная тройка некомпланарных
векторов называется левой тройкой) (рис. 1.33,6).
Отметим следующие свойства: если тройка некомпланарных векторов
а ,Ь , с - правая, то тройки, получающиеся "циклической" перестановкой
трех векторов (Ь, с, а; с, а , Ь)- также правые, а тройки,
получающиеся перестановкой двух векторов (Ъ ,ИJc\ a ,"c,b ; "с,Ь,а) или заменой
одного вектора противоположным (например, а, (-Ь/, с) -левые.
1.3.4. Линейные операции в координатной форме
Равенство векторов и линейные операции (сложение векторов и
умножение вектора на число) удобно представлять в координатной форме. При
этом справедливы следующие свойства.
1. Равные векторы имеют равные координаты (в одном и том же
базисе).
2. Каждая координата суммы векторов равна сумме
соответствующих координат слагаемых.
3. Каждая координата произведения вектора на число равна
произведению этого числа на соответствующую координату вектора.
4. Каждая координата линейной комбинации векторов равна линейной
комбинации соответствующих координат векторов.
Докажем, например, последнее свойство. Проекция линейной
комбинации векторов на прямую, содержащую базисный вектор ~ёх, равна
линейной комбинации проекций векторов (составляющих линейную комбинацию)
47
на эту прямую (см. свойство 5 проекций в разд. 1.2.2). Поэтому абсцисса
линейной комбинации векторов равна линейной комбинации абсцисс этих
векторов. Аналогичное рассуждение справедливо для ординат и аппликат.
Замечания 1.7.
1. Основные теоремы 1.3-1.5 о разложении вектора по базису
устанавливают взаимно однозначное соответствие между множеством векторов
пространства и множеством их координат в данном базисе. А именно,
между векторами на прямой и действительными числами, между векторами на
плоскости и упорядоченными парами чисел, между векторами пространства
и упорядоченными тройками чисел. Например, при фиксированном базисе
(i") = (?1,i2,i3) вектору а=х1-е1+х2-'ё2+хъ-е3 однозначно соответствует
упорядоченная тройка чисел хх,х2,хъ, и наоборот, каждой упорядоченной
тройке чисел xx,x2,x3 соответствует вектор а=хг-'е1+х2-'е2-
В частности, если вектор а в базисе (e) = (<V<?2,?3) имеет разложение
a =2ij-3?2+4?3, то этому вектору соответствует тройка (2,-3,4) и
наоборот. Нулевому вектору в любом базисе в пространстве соответствует
нулевая тройка (0,0,0).
2. Взаимно однозначное соответствие
(вектор) <-> (его координаты)
сохраняет линейные операции: сумме векторов соответствует сумма их
одноименных координат, произведению вектора на число соответствует
произведение его координат на это число. Такое взаимно однозначное
соответствие называется изоморфизмом [10].
3. На практике координаты векторов удобно представлять в виде
матриц-столбцов (или матриц-строк), которые называются координатными
столбцами {координатными строками). В базисе (?) = (?1,е2,е3) вектору
соответствует координатный столбец
а
х2
Обозначение базиса (?) можно не указывать, если не может возникнуть
неоднозначности. Линейным операциям над векторами соответствуют
линейные операции над их координатными столбцами. Например, если в одном и
том же базисе (?) векторам а и Ъ соответствуют координатные столбцы
а и Ь, то их линейной комбинации с = оса+рь соответствует
координатный столбец с = а • а + Р • Ъ, т.е. координатный столбец линейной
комбинации векторов равен линейной комбинации координатных столбцов.
48
Пример 1.10. Векторы а и Ь относительно базиса ех,е2,~ёъ имеют
координаты: 2, 0, -3 и 4, 2, -1. Требуется найти координаты векторов
а+b , а-b , З-а+2-b относительно того же базиса.
D Запишем разложения по базису заданных векторов:
a=2el+0e2-3'e3; F = 4F1 + 2-72-l?3.
Используя свойства линейных операций, находим разложения по базису
е., £2, ^з искомых векторов:
Следовательно, векторы 54 Ь , а-b , З-а+2-Ь имеют координаты: 6, 2,
-4; -2, -2, -2; 14,4, -11 соответственно.
Вычислим искомые координаты, используя матричную форму записи
(см. п.З замечаний 1.7). Векторам а и Ь (в заданном базисе) соответствуют
координатные столбцы
0
ь=
"I
Находим координатные столбцы векторов а +Ъ , а -Ь , 3-а + 2-6 :
0
l-v
+
it
' 4y
2
i + 2
=
2
1-4,
b=3-
9
0
a
+2-
-b =
2
-1,
21
0
1-3,
-
4
i—
'4s
2
-
-2
l-v
•
Результаты совпадают. ■
Пример 1.11. Известны разложения векторов a=2-ej-e2;
6=^ + 2-^; с=-4-?1+2?2; rf=7?1+4?2 относительно базиса ?1Э?2
на плоскости. Разложить вектор rf :
а) по векторам а и Ъ ; б) по векторам а и с .
П а) Требуется представить вектор d в виде линейной комбинации
векторов а и Ъ : d =<х-5>Р-& . Подставим в это равенство заданные раз-
4 — 5150 49
ложения векторов: 7-2j +4-*2 = a-(2-2j -eJ+P-^ +2-?2). Приводя
подобные члены в правой части, имеем 7-5j+4e2=(2-a + P)eJ+(-a + 2P)?2.
Так как обе части равенства это разложения равных векторов по одному и
тому же базису, то можно приравнять соответствующие координаты.
Получим систему уравнений
Г 7 = a-2 + pl,
[4 = а.(-1)+р.2.
Решая систему, находим a = 2, Р = 3, т.е. d =2-a+3b - искомое
разложение.
б) Требуется представить вектор d в виде линейной комбинации
векторов а и с : d = a-a + P«c . Запишем это равенство в матричной форме
d = a • а + Р • с, заменив векторы их координатными столбцами:
которое равносильно системе уравнений
[7 = 2а-4.р,
Эта система не имеет решения (прибавив к первому уравнению удвоенное
второе, получим неверное равенство 15 = 0). Следовательно, вектор d
нельзя разложить по векторам а и "с (заметим, что векторы а и с колли-
неарны(с=-2>а),авектор d неколлинеареним). ■
1.3.5. Ортогональный и ортонормированный базисы
Два вектора называются ортогональными (перпендикулярными),
если угол между ними прямой (величина (р угла равна —).
Система векторов называется ортогональной, если все векторы,
образующие ее, попарно ортогональны. Система векторов называется ортонор-
мироеанной, если она ортогональная и длина каждого вектора равна
единице.
СТАНДАРТНЫЕ БАЗИСЫ НА ПРЯМОЙ, НА ПЛОСКОСТИ, В ПРОСТРАНСТВЕ
Базисы на прямой, на плоскости и в пространстве определяются не
однозначно. Некоторые из них, наиболее удобные в приложениях,
принимаются в качестве стандартных.
50
Стандартный базис на прямой - это единичный вектор i на данной
прямой (рис.1.34,#). Согласно теореме 1.3, любой вектор я, коллинеарный
данной прямой, может быть разложен по стандартному базису на прямой
(г = Г), т.е. представлен в виде a-x-i.
Стандартный базис на плоскости - это упорядоченная пара
единичных и перпендикулярных векторов i ,j на данной плоскости (рис. 1.34,6).
Согласно теореме 1.4, любой вектор а , принадлежащий данной плоскости,
может быть разложен по стандартному базису на плоскости (е\ = i ,?2 = j'),
т.е. представлен в виде а = x-i + y- j.
Стандартный базис в пространстве - это упорядоченная тройка
единичных и попарно перпендикулярных векторов i,y, k (рис.1.34,в).
Первый базисный вектор I на рис.1.34,в направлен перпендикулярно
плоскости рисунка (на читателя). Согласно теореме 1.S, любой вектор а в
пространстве может быть разложен по стандартному базису в пространстве
Сёг =i ,?2 -j ,?3 -к ), т.е. представлен в виде a=x-i +
np-jaj*yj
Замечания 1.8.
1. Стандартные базисы на плоскости и в пространстве ортонормиро-
ванные, поэтому во всех приведенных разложениях вектор а
представляется в виде суммы своих ортогональных проекций на соответствующие
прямые или оси, задаваемые базисными векторами (см. теорему 1.2 в
Разд.1.2.3),т.е.
51
2. Вектор а в пространстве является замыкающей ломаной (см.
правило сложения векторов в разд. 1.1.2), образованной его проекциями
(рис.1.34,в):
a=x-i + y-j + zk = npja'+ npja+ пр^а .
3. Вектор а в пространстве является суммой своих ортогональных
составляющих относительно плоскостей Ятт,Ят-,я;-- (рис.1.34,в):
4. Стандартные базисы на плоскости и в пространстве являются
правыми.
5. Координаты вектора а в стандартном базисе равны алгебраическим
значениям длин его ортогональных проекций на координатные оси
(рис. 1.34,*):
х = пр?а\ y-npja\ z = np-a.
б. В ортонормированном базисе длина вектора равна квадратному
корню из суммы квадратов его координат:
15"| = ^f x2 + y2 (на плоскости); |2Г| = у x2 + y2+z2 (в пространстве).
НАПРАВЛЯЮЩИЕ КОСИНУСЫ
В стандартных базисах на плоскости и в пространстве направление
ненулевого вектора а удобно характеризовать углами, которые он образует
с базисными векторами: а - угол между вектором а и первым базисным
вектором i, Р - со вторым базисным вектором j (рис. 1.34,6), у -с
третьим базисным вектором к (рис.1.34,в). При этом достаточно знать косинусы
этих углов, которые называются направляющими косинусами вектора а
(в стандартном базисе).
На плоскости вектор <z можно представить в виде суммы
ортогональных проекций (см. п.1 теоремы 1.2): а= npja + npja . Тогда, учитывая п.1
замечаний 1.4(прие=Г, <р = а ипри 1- J, ф = р),получаем
Разделив это равенство на длину вектора а , в левой части получим
единичный вектор £", одинаково направленный с вектором а (см. разд. 1.1.2):
*-|_|-cosa.i cos j.^
Таким образом, координаты единичного вектора е, одинаково
направленного с вектором а , равны направляющим косинусам вектора а :
52
jt = cosa, y = cosp.
Разумеется, что величины направляющих косинусов связаны условием (см.
п.З теоремы 1.2): cos2 a + cos2 P = 1.
В пространстве получаем аналогичные равенства:
а = npja + npja + пр^а = |2z|-cosa-i и- J 5" | • cos Р • у +1 a* J - cos у • ^ ;
\а\
(1.6)
т.е. координаты единичного вектора е, одинаково направленного с
вектором а , равны направляющим косинусам вектора а :
jc = coscc, ;y = cosp, z = cosy.
При этом cos2 a + cos2 P+cos2 у = 1 (см. п.З теоремы 1.2).
Пример 1.12. Прямоугольный
параллелепипед ABCDA1BlC1Dl
построен на векторах АВ = 4 • i,
15 = 5-J, 1\=4к (см. рис. 1.35).
Точка Р - центр грани АВВ^, точка
Q делит ребро AiDl в отношении
\Q' QP\ =4:1. Найти координаты,
длину и направляющие косинусы
вектора PQ.
D Запишем правило
треугольника сложения векторов: AQ = AP + PQ. Подставляя в это равенство
разложения векторов
=f-5-7+4-Jfc=4-7+4-t;
получаем 4-]+4к=2-1+2к+Р(}. Отсюда PQ = -2-i+4j + 2-k, т.е.
координаты вектора PQ : х = -2; у = 4, г = 2. Согласно п.6 замечаний 1.8,
находим длину вектора I PQ I = ^/(-2)2+42 + 22 = 2^6 . Разделив вектор PQ
на его длину, находим единичный вектор:
53
PQ -2 т 4 г 2 г -1 г 2 - 1 г
PQ| 2V6 2V6 2V6 V6 V6 V6
Согласно (1.6), его координатами служат направляющие косинусы:
cosa = —4; cosP!
cosy=-4=-.
1.4. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ
1.4.1. Определение скалярного произведения
Скалярным произведением двух ненулевых векторов называется
число, равное произведению длин этих векторов на косинус угла между ними.
Если хотя бы один из двух векторов нулевой, то угол между ними не
определён, а скалярное произведение считается равным нулю. Скалярное
произведение векторов а и Ъ обозначается
(1.7)
где ф - величина угла между векторами а и Ъ (см. рис. 1.22 в разд. 1.2.3).
Скалярное произведение (а, а)=| а | называется скалярным квадратом.
Пример 1.13. Найти скалярные произве-
дения (a,F), (б,а), (a,c), (b,c), (aj), (м),
(c,d), если известно, что 15"| = 1, \Ъ =2,
|^| = 4' 1^1 = 1» угол ф между векторами а и
Ъ равен у, с Tib, а вектор J образует с вектором а угол 8=-^
(рис.1.36).
D По определению находим
(г,*)=|а||*|со8ф = 1-2со8- = 1; (F,a)=|i |-|а|-совф»24-оов-»1.
Так как векторы Ь и с противоположно направленные, то угол \|/
между векторами а и с равен -у. Поэтому
(e,c)=|ZF|-|c|-cosv = l-4-coe—= -2.
Угол между противоположно направленными векторами бис равен я,
поэтому (б,с)= i | с | cos тс = 2-4- cos п = -8.
54
Вектор d ортогонален вектору Ь (и вектору с), так как величина уг-
ла между ними равна = — ,а cos—= 0. Поэтому \p9d)=\£9d)=0.
6 3 2 2
Угол 8 между векторами а
5п
равен —, поэтому
6
ГЕОМЕТРИЧЕСКИЙ СМЫСЛ СКАЛЯРНОГО ПРОИЗВЕДЕНИЯ
Рассмотрим ортогональную проекцию пр-да ненулевого вектора а на
ось, задаваемую вектором ЬфЪ (рис. 1.37). Согласно п.1 замечаний 1.4 (см.
разд. 1.2.3), алгебраическое значение пр-а длины проекции равно
произведению длины вектора а на косинус угла между векторами а и b :
np-ja =\ a \-cosy.
Умножив обе части этого равенства на \b , получим
\b \np-a=\a\\b Icoscp. Сравнивая с (1.7), делаем вывод: скалярное
произведение ненулевых векторов а и Ъ равно произведению длины вектора Ъ
на алгебраическое значение длины ортогональной проекции вектора а на
ось, задаваемую вектором b :
(1.8)
пръа
пръа
Рис.1.37
Эта формула остается справедливой и в случае а=о , так как пр-о = 0.
Аналогично (см. п.2 замечаний 1.4) доказывается формула
и делается вывод о том, что скалярное произведение ненулевых векторов а
и b равно произведению длины вектора а на алгебраическое значение
длины ортогональной проекции вектора b на ось, задаваемую вектором а .
55
1.4.2. Свойства скалярного произведения
Скалярное произведение векторов обладает следующими
алгебраическими свойствами.
АЛГЕБРАИЧЕСКИЕ СВОЙСТВА СКАЛЯРНОГО ПРОИЗВЕДЕНИЯ
Для любых векторов а , Ъ , с и любого действительного числа X:
2.
3.
4. (а, а)> 0, причем из равенства {а,а)=0 следует, что а = "о.
Первое свойство определяет симметричность скалярного
произведения, второе и третье - аддитивность и однородность по первому
множителю, четвертое свойство - неотрицательность скалярного квадрата.
Эти свойства аналогичны свойствам произведения чисел [10]: первое
свойство соответствует закону коммутативности умножения чисел, второе -
закону дистрибутивности умножения по отношению к сложению, третье -
закону ассоциативности умножения. Поэтому рассматриваемая операция и
называется произведением векторов. Поскольку ее результатом является
число (скаляр), то такое произведение векторов называется скалярным.
Свойства 1 и 4 следуют непосредственно из определения. Докажем,
например, аддитивность скалярного произведения по первому множителю
(свойство 2): (5Ч£,с) = (5',с) + (6,с). Если вектор с - нулевой, то все
скалярные произведения равны нулю по определению, т.е. для с =Ъ имеем
верное равенство. Пусть с Ф Ъ. Учитывая, что проекция суммы векторов
равна сумме проекций (см. разд. 1.2.2) (то же относится и к алгебраическим
значениям длин ортогональных проекций (см. разд. 1.2.3)), можно записать
np-\a+b)=np-a
Умножая обе части на | с | Ф 0, получаем
Учитывая (1.8), последнее равенство равносильно (5Ч£,с) =
что и требовалось доказать. Однородность скалярного произведения по
первому множителю (свойство 3) доказывается аналогично, используя
соответствующее свойство ортогональных проекций векторов (см. разд. 1.2.3).
Замечания 1.9.
1. Свойства аддитивности и однородности скалярного произведения
означают линейность скалярного произведения по первому множителю:
56
для любых векторов а , Ъ , с и любых действительных чисел а и Р.
2. В силу коммутативности скалярное произведение линейно и по
второму множителю, т.е. линейно по любому множителю.
3. Для любых векторов а , Ь справедливо неравенство Коти - Буня-
ковского
Это неравенство выражает условие ограниченности косинуса угла между
ненулевыми векторами. В самом деле, поскольку | cos(p| < 1, то из (1.7)
и, следовательно, справедливо доказываемое неравенство. Заметим, что
неравенство Коши - Буняковского выполняется как равенство только для кол-
линеарных векторов, т.е. при coscp = ±1.
4. Из неравенства Коши - Буняковского следует неравенство
треугольника (длина стороны треугольника меньше суммы длин двух других
его сторон и больше модуля их разности):
Докажем последнее неравенство аЧ2м<|а|+£. Используя
неравенство (a,i) <15*| • \b , которое следует из неравенства Коши -
Буняковского, оценим скалярный квадрат суммы векторов:
\а +Ъ |2 =(a +*,a+
т.е. |5Ч6 £ (| а |+1fr 11, что равносильно доказываемому неравенству.
ГЕОМЕТРИЧЕСКИЕ СВОЙСТВА СКАЛЯРНОГО ПРОИЗВЕДЕНИЯ
С помощью скалярного произведения можно находить основные
метрические величины: длины отрезков (или, что то же самое, длины векторов)
и величины углов (см. разд.В.1).
1. Длина вектора а находится по формуле:
57
2. Величина (р угла между ненулевыми векторами находится по
формуле:
lb) _ (а,Ь~)
СО8<<>=7±ГТгГ =
Отсюда заключаем, что:
- ненулевые векторы аи Ъ перпендикулярны (<р=-|) тогда и только
тогда, когда их скалярное произведение равно нулю:
alb <=* (о>)=0;
-угол между ненулевыми векторами а и Ъ острый (<р<у) тогда и
только тогда, когда их скалярное произведение положительно;
-угол между ненулевыми векторами а и b тупой (ф>-|) тогда и
только тогда, когда их скалярное произведение отрицательно.
3. Алгебраическое значение длины ортогональной проекции вектора а
на ось, задаваемую вектором ЪфЪ\
4. Ортогональная проекция вектора а на ось, задаваемую вектором
Ь*о:
прта — )—* —\-Ь .
Если ось задается единичным вектором 7, то пр- а = (а ,?)•?.
Свойства 1 и 2 следуют непосредственно из определения скалярного
произведения. Третье и четвертое свойства вытекают из геометрического
смысла скалярного произведения (см. (1.8)) и п.1 замечаний 1.4.
Пример 1.14. Доказать тождества
а) (а,Ь)Л.^а+ь\2-\а-ь\2у, б)
D Используя коммутативность и линейность скалярного произведения,
запишем равенства
()
Заменяя скалярные квадраты векторов квадратами их длин (см.
геометрическое свойство 1), получаем
2; \a-bf =\a\2-2.(a,b)+\bf.
58
Если из первого равенства вычесть второе, то придем к тождеству (а). Если
же сложить оба равенства, то получим тождество (б).
Доказанные равенства выражают следующие свойства
параллелограмма, построенного на векторах а и b (а+b иа-Ь - его диагонали):
а) скалярное произведение векторов равно одной четвертой от
разности квадратов диагоналей параллелограмма, построенного на множителях;
б) сумма квадратов диагоналей параллелограмма равна сумме
квадратов его сторон. ■
1.4.3. Выражение скалярного произведения через координаты векторов
Разумеется, что величина скалярного произведения любых векторов а
и b не зависит от базиса. Однако формулы, выражающие скалярное
произведение \а>Ь) через координаты множителей, зависят от базиса,
относительно которого определены координаты. Рассмотрим сначала случай
стандартного базиса в пространстве (см. разд. 1.3.5), а затем - произвольного.
СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ В ОРТОНОРМИРОВАННОМ БАЗИСЕ
Теорема 1.6 (формула вычисления скалярного произведения в ор-
тонормированном базисе). В ортонормированном базисе скалярное
произведение векторов равно сумме произведений одноименных координат
векторов:
если векторы а и b относительно ортонормированного базиса на
плоскости имеют координаты ха,уа и xb,yb соответственно, то
скалярное произведение этих векторов вычисляется по формуле
(1.9)
если векторы а и Ъ относительно ортонормированного базиса в
пространстве имеют координаты ха,уа, za. и xb,yb,zb соответственно,
то скалярное произведение этих векторов вычисляется по формуле
zb. (1.10)
Докажем формулу (1.10). Пусть в пространстве задан ортонормирован-
ный (стандартный) базис i , у, к . Скалярные произведения базисных
векторов находятся по определению:
(Г,Г)=1, (F,J)=O, (?Д)=О,
(7J)=0, (7.J)=1. (М)=О, (1.11)
59
Используя линейность скалярного произведения по любому
множителю, для векторов а -ха i + ya-j + zak к b =xbi + ybj + zbk получаем:
У У а ' **fr*)+ Уа' Зъ(7. j)+ Уа' *(
Учитьгоая (1.11), из девяти слагаемых только три отличны от нуля, поэтому
+ za •xb$j)+ za •
что и требовалось доказать.
Замечания 1.10.
1. Для доказательства формулы (1.9) можно использовать следующее
соображение. Множество векторов на плоскости со стандартным базисом
i, j можно рассматривать как множество таких векторов в пространстве с
базисом i , j 9k , у которых аппликата равна нулю. Поэтому формулу
вычисления скалярного произведения векторов a=xa-i + ya-j и
b=xb~i + yb* j можно получить из (1.10), полагая za = zb = 0.
2. Скалярное произведение можно записать в матричном виде: если
п~\Ха У a Zaf U ^ = \Xb Уь Zbf ~ кооР^инатные СТПОЛбцЫ ввКШОрОв
а и b в стандартном базисе, то их скалярное произведение находится по
формуле:
(a,b)=aT b = {xa ya za\
хъ
Уь
Для векторов на плоскости соответственно получаем
(«,*)=</•*=(*„ ya)-[xvb\
\Уъ)
3. Координаты вектора 'а в ортонормированном базисе равны его
скалярным произведениям на соответствующие базисные векторы:
(Л &) М)
В самом деле, подставляя в (1.10) координаты 1,0,0 базисного
вектора i, приходим к первому равенству (остальные равенства получаются
аналогично).
4, Формулы (1.9) и (1.10) совместно с геометрическими свойствами
скалярного произведения имеют многочисленные приложения (см.
разд. 1.6.2).
60
Пример 1.15. Даны векторы a=i-2j + 2k, b =2i + 3-y' + 2-Jfc ,
]-к . Найти скалярные произведения (а,б), (я,с), (б,с), (a,i), (я, у),
D По формуле (1.10) вычисляем
()(
(г,Г)=(1Г~2.7+2]к,1Т+О-7+О?)=Ь1+(- 2)0+2-0 = 1;
Сравнивая вектор a =i -2- j + 2-k со скалярными произведениями
(а,Г)=1, (л, 7) =-2, (a,ifc)=2 обнаруживаем, что при умножении вектора
на базисный вектор получается соответствующая координата данного
вектора. Этот результат иллюстрирует п.З замечаний 1.10.
Для нахождения скалярного произведения можно использовать
матричную запись (см. п.2 замечаний 1.10). Например, векторам а , Ъ , i
соответствуют координатные столбцы
а =
1
-2
2
, ь=
I2
3
Л
, i =
I1
0
1°,
Поэтому
= (l -2 2)-
(a,F)=aTi = (l -2 2).
ч2,
'Г
0
Л
= 1-2+(-2)-3+2-2=0;
что совпадает с полученными ранее результатами. ■
Пример 1.16, Прямоугольный параллелепипед ABCDAJi^D^
построен на векторах AB = 4i, AD=5j, АА1=4к (см. рис. 1.38). Точка Р
- центр грани АВВ,Д, точка Q делит ребро \DY в отношении
\Q ■ QDX = 4:1. Требуется найти:
61
а) величину ф угла между векторами АСХ и PQ;
б) длину ортогональной проекции вектора PQ напрямую АС.
П Находим координаты векторов в
стандартном базисе Г, j ,k :
PQ = -2i+4-j + 2k (см. решение
примера 1.12).
По формуле (1.10) находим
скалярные произведения:
{)
(AC, Pq)=4.(-2)+5.4 + 0-2 = 12;
а также длины векторов (см. геометрическое свойство 1 скалярного
произведения):
Длина \PQ = 2>/б была найдена в примере 1.12.
Теперь по геометрическому свойству 2 находим косинус искомого угла
20 10 10
■==—•= =—у—.т.е. <p = arccos—==■.
/57 • 2V6 3V38 3V38
Алгебраическое значение длины ортогональной проекции находим по
геометрическому свойству 3:
' г)= 12
АС
СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ В ПРОИЗВОЛЬНОМ БАЗИСЕ
Пусть 5j ,?2 ,?3 - произвольный базис в пространстве. Найдем
скалярное произведение векторов а =а1-?1+а2-<?2+о3-?3 и ft=fe1?1+fe2-
-гз)=Е&'^'^
1=1 ;=i
62
Запишем полученную формулу в матричном виде. Для этого из чисел
b,£.j, называемых метрическими коэффициентами базиса, составим
матрицу Грома системы векторов 1Х, ?2, ?3:
%Л) (ёг*2) («г*зГ
G{eve2,e3)=
Координаты каждого из векторов а и b представим в виде столбцов
(112)
а =
Л,
и Ь =
М
соответственно. Тогда для скалярного произведения получим
3 3
1=1 7=1
,) (^2 l3
,е\) (?2,ё2) (ё2,ё3
) () i
Ау
или, короче,
. (1.13)
Теорема 1.7 (формула вычисления скалярного произведения в
произвольном базисе). В произвольном базисе ?, ,е2 ,<?3 скалярное
произведение векторов а и b вычисляется по формуле (1.13), где а,Ъ -
координатные столбцы векторов а и b соответственно, a G(ej,e2,£3)
-матрица Грома (1.12) базиса ё,, ё2, ё3.
Замечания 1.11.
1. Для ортонормированного базиса Г, J ,k матрица Грама имеет вид
<?(г,7,*)=
(7.7)
(
1к,
k,kt
=
'1
0
0
0
1
0
(f
0
h
т.е. является единичной. В этом случае по формуле (1.13) получаем
()( i + ya-j+za к, xb T+ybJ + zb k)=
-к
Уа ZJ-
\
0
0
0
1
0
0>
0
К
•
хъ
Уь
ч Ь)
'гго совпадает с (1.10).
63
2. Для произвольного базиса ех, е2 на плоскости скалярное
произведение векторов я= tfj -2j + я2 12 и Ъ =bx -lx + Ь2 ?2 находится по формуле:
(аЛ (ЬЛ -
где а = \ l ,i= - координатные столбцы векторов а и b соответст-
\аг) \Рг)
венно, a G(e,9£,)= /L1' J \ }J'J\ - матрица Грама базиса е, ,е~.
1 2 l>2>*i) M2)J
В частности, для ортонормированного базиса i, j матрица Грама
является единичной: G(i,y)= , поэтому скалярное произведение
векторов a=xa'i+ya-j и b =xb-i + yb-j находится по формуле
что совпадает с (1.9). Заметим, что эта формула также следует из
полученной в п.1 при za = zb = 0.
Пример 1.17. Найти матрицы Грама для следующих базисов:
ХО а) два единичных вектора "ё{=ОА,
Ъ2=ОВ, служащие сторонами правильно-
\q го треугольника ОАВ (рис.1.39,д);
б) три единичных вектора 7{ = О А,
?2 = ОВ, <?3 = ОС, служащие ребрами
правильного тетраэдра (рис. 1.39,6).
Найти длины векторов, имеющих в данных базисах следуюпще
разложения:
D а) Учитывая, что длины базисных векторов равны единице, а угол
между ними равен—, получаем (^,7^=1, fe>?2)=:(*2'^i)="2 ' (*2'*2)=1-
/__ч ffe.^) fe.e,)! Г1 I!
Записываем матрицу Грама G^,^2j= /- -\ /- - \ = К •
Найдем теперь длину вектора a=l-?1+2F2. Составляем
координатный столбец этого вектора а = \ . Учитывая формулу (1.13), находим ска-
64
лярный квадрат: (а,а) = ат G{eve2)a = {l 2)-L |М =7.
Следовательно, | а |
б) Учитывая, что длины базисных векторов равны единице, а угол
между любыми двумя из них равен —, получаем
Записываем матрицу Грама (1.12): G\eve2,e3)=
1 2 2
± 1 ±
2 1 2
2 V
Найдем теперь длину вектора Ъ = 1-ех-2-е2 + 3-е3. Составляем
координатный столбец этого вектора Ъ = (l -2 3)Г. Учитывая формулу (1.13),
находим скалярный квадрат:
= {l -2
f \
X
JL
2
±
<2
1
2
1
2
Л
2
7
1
у
< j >
-2
3
\ У
=9.
Следовательно, |Ь | = у(ь,&) = 3.
СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ ВО ВЗАИМНЫХ БАЗИСАХ
Пусть на плоскости задан базис ё{, 72. Базис ~ё*, е2 называется
взаимным по отношению к базису ?г?2, если
Пусть в пространстве задан базис "ех, ?2, ?3. Базис ё|*, ?2*, ?3* назы"
вается взаимным по отношению к базису 7г, 72, ?3, если
;;*. .-ИЗ; У-Ш.
Взаимные базисы обладают следующими основными свойствами.
1. Свойство взаимности базисов симметричное: если второй базис
взаимен по отношению к первому, то первый взаимен ко второму.
2. Для каждого базиса (на плоскости или в пространстве) существует
единственный взаимный базис.
5-5150
65
3. Пусть векторы а и Ъ заданы своими координатами относительно
взаимных базисов:
Тогда их скалярное произведение вычисляется по формуле:
л* Ьх +а\
т.е. равно сумме произведений одноименных координат векторов, как и в
случае ортонормированного базиса.
4. Если 5р?2,?3 и ^1*'^2*'^з* взаимные базисы, то координаты
а\> а2>аъ ЛК)бого вектора а относительно базиса 7{, 72, ~еъ находятся по
формулам
Докажем свойство 2. Пусть на плоскости задан базис ех% е2
(рис.1.40,а). Вектор Sj* взаимного базиса перпендикулярен вектору £*2, так
как (?2э^1*)=^ (СМш втоРое геометрическое свойство скалярного
произведения). Из двух возможных направлений для вектора ij* выбираем то, которое
образует острый угол ф<— с вектором 7Х, так как (?1,?1*)=1>0.
Следовательно, направление вектора ~е* определено однозначно. Осталось выбрать
его длину, используя (1.7): ?j* I =tzt » так как ri'^i*)= * • Таким
образом, направление и длина первого вектора взаимного базиса определяются
однозначно. То же можно сказать и в отношении выбора вектора ё2 •
Доказательство существования и единственности взаимного базиса в
пространстве (рис. 1.40,6) проводится
аналогично [14].
Заметим, что для
стандартного базиса х , j на
плоскости (или базиса
Г, j, k в пространстве)
взаимный базис совпадает с
самим базисом i , j (соот-
Рис.1.40 ветственно Г, j Д ).
66
Докажем свойство 3. Находим скалярное произведение, используя
свойства коммутативности и линейности, а также определение взаимных
базисов:
3 3
ZI
что и требовалось доказать.
Свойство 4 следует из формулы, приведенной в п.З. В самом деле,
",^* )= \аг -Ъг+а2 •72 + a3 '^'^i /=ai • Аналогично доказываются остальные
формулы в п.4.
Пример 1.18. а) Найти базис, взаимный базису, заданному в
примере 1.17,а (рис.1.39,а).
б) Внутри угла АОВ величиной у взята точка С, удаленная от сторон
ОА и ОБ на расстояния 11 и 2 соответственно. Найти длину отрезка ОС
(рис.1.41,б).
□ а) Так как базисный вектор "е{ единичный, то, учитывая
геометрический смысл скалярного произведения (см. разд. 1.4.1), вектор ~е* можно
построить следующим образом. Через начало вектора ?2 = ОБ (точку О) и
конец вектора SJ = О А (точку А) проводим прямые, перпендикулярные
векторам ?2 и 7г соответственно (штриховые линии на рис.1.41,д). Точка
пересечения этих прямых - конец вектора ij* (его начало совпадает с точкой
О). Аналогично строится вектор ?2* (построение изображено пггрих-
пунктирными линиями на рис. 1.41,а). Тогда по построению справедливо
ij*±?2, i^lej, атакже пр77* =|^| = 1. л/?-?2* =|?2| = 1. Следовательно,
учитывая геометрическое свойство 2 и формулу (1.8): \^2»^i*)=0»
(ft,?2*)=0, (?1,ij*j=l, (j?2,?2*j=l, т.е. выполняются условия взаимности
базисов. Найдем длины векторов взаимного базиса. Поскольку угол между
векторами 7г и Sj* равен ^ (напомним, что ZAOS=^), то из
прямоугольного треугольника с катетом ОА: ij* = ' *' =-7==' • Длина вектора £,* та"
1 ' cos-| V3
каяже.
5* 67
Рис.1.41
б) Зададим на плоскости базис из единичных векторов
5j = ОА ,?2 = ОВ, который совпадает с базисом, рассмотренным в п."а". По
условию задачи известны длины ортогональных проекций вектора ОС на
оси, определяемые векторами взаимного базиса: пр_+ ОС = 2, пр_Ф ОС = 11.
е\ ег
По третьему геометрическому свойству скалярного произведения с учетом
свойства 4 взаимных базисов, получаем
где jct, x2 - координаты вектора ОС в базисе ех, ^2. Так как
ri* =г2*|Тг (см-п "а")» то ^1='4?» лг2=^. Длину вектора ОС
вычисляем по формуле, следующей из п.2 замечаний 1.10 при а=Ь, используя
матрицу Грама для базиса ij, 12, найденную в примере 1.17 п."а":
Следовательно, | ОС | = ^(<Х\ Ос) = -Л96 = 14
68
1.5. ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
1.5.1. Векторное произведение и его свойства
Вектор с называется векторным произведением неколлинеарных
векторов а и b , если:
1) его длина равна произведению длин векторов а и Ь на синус угла
между ними: |с|=|а|- \b sin(p (рис.1.42);
2) вектор с ортогонален векторам а и Ъ ;
3) векторы а ,Ь ,с (в указанном порядке) образуют правую тройку.
Векторное произведение коллинеарных векторов (в частности, если
хотя бы один из множителей - нулевой вектор) считается равным нулевому
вектору.
Векторное произведение обозначается Z = [a,b] (или axb ).
sincp
а
б
Рис.1.42
АЛГЕБРАИЧЕСКИЕ СВОЙСТВА ВЕКТОРНОГО ПРОИЗВЕДЕНИЯ
Для любых векторов а , Ъ , с и любого действительного числа X:
3. [Х-а,Ь] = Х-[а9Ь].
Первое свойство определяет антисимметричность векторного
произведения, второе и третье - аддитивность и однородность по первому
множителю. Эти свойства аналогичны свойствам произведения чисел [10]:
первое свойство "противоположно" закону коммутативности умножения
чисел (закон антикоммутативности), второе свойство соответствует
закону дистрибутивности умножения чисел по отношению к сложению, третье
- закону ассоциативности умножения. Поэтому рассматриваемая операция
69
и называется произведением векторов. Поскольку ее результатом является
вектор, то такое произведение векторов называется векторным.
_ Докажем первое свойство, предполагая, что векторы
с = [а, Ь] д и Ь не коллинеарны (в противном случае обе части
доказываемого равенства равны нулевому вектору). По
определению векторы с=[а,Ь] и d=[b,a] имеют равные
_ _а длины (|с| = |а|-\b sin<p = Id ) и коллинеарны (так как
а = [о, а\ Qga вектОра перпендикулярны одной плоскости). По опре-
Рис.1.43 делению тройки векторов 5" ,Ь , с и Ъ , a ,d - правые, т.е.
вектор с направлен так, что кратчайший поворот от а к Ъ происходит в
положительном направлении (против часовой стрелки), если смотреть из
конца вектора с , а вектор d направлен так, что кратчайший поворот от Ъ
к а происходит в положительном направлении, если смотреть из конца
вектора d (рис. 1.43). Это означает, что векторы 'end противоположно
направлены. Следовательно, с = -d , что и требовалось доказать.
Доказательство остальных свойств приведено ниже (см. п.1 замечаний 1.13).
Замечания 1.12.
1. Свойства аддитивности и однородности векторного произведения
означают линейность векторного произведения по первому множителю:
для любых векторов a , Ъ , с и любых действительных чисел а и Р.
2. В силу антисимметричности векторное произведение линейно и по
второму множителю, т.е. линейно по любому множителю.
ГЕОМЕТРИЧЕСКИЕ СВОЙСТВА ВЕКТОРНОГО ПРОИЗВЕДЕНИЯ
1. Модуль векторного произведения численно равен площади
параллелограмма, построенного на множителях (рис. 1.42,6).
2. Векторное произведение равняется нулевому вектору тогда и
только тогда, когда множители коллинеарны, т.е.
[а,Ь] = о <=> а\\Ь,
в частности, [а,5"] = 7).
Первое свойство следует из определения. Докажем второе свойство.
Равенство |a|- \b sin<p = O возможно в трех случаях: а =7>, или Ъ =о, или
sin(p = O. В каждом из этих случаев векторы а и Ь коллинеарны (см.
разд. 1.1.1).
70
Пример 1.19. Вычислить площади параллело- _
грамма и треугольника, построенных на векторах Я
, Ъ^Ип-ЪИ, где |т| = 3, |л| = 2, угол
между векторами тип равен — (рис. 1.44). Рис х u
6
D Используя алгебраические свойства, найдем сначала векторное
произведение
1, /л — 3• л]= [/л, /л — 3 • л J + [2 • л, т — 3*л] =
?, /л — 3*л] = [л1, Л1]~3*[w, л] + 2*Цл, w] —3*[л, SjJ =
= [/л, /л]-3-[/л, л] + 2-[л, /л]-6|7Г, л] = -5-[/л, л],
о -[т, п] "о
а затем его модуль I [р, #]1 = I -51 -I [m, л"] I = 5 | m I -| п\ • sin— = 5*3-2 — = 15 .
6 2
По первому геометрическому свойству векторного произведения искомая
площадь параллелограмма равна 5# = 15 , а площадь треугольника в 2 раза
меньше: 5Д =-j-S#=y. ■
ВЫРАЖЕНИЕ ВЕКТОРНОГО ПРОИЗВЕДЕНИЯ ЧЕРЕЗ КООРДИНАТЫ ВЕКТОРОВ
Пусть в пространстве задан ортонормированный
(стандартный) базис i , j Д . Векторные произведения
базисных векторов находятся по определению:
[j,i] = -k ; [к, j]--i; [i9k] = -j\ (1.14)
i
Рис.1.45 [Г, J] = [J,}] = [к, к] = о .
Формулы (1.14) можно получить, используя диаграмму (рис.1.45): если на
этой схеме кратчайший поворот от первого множителя ко второму
совершается в положительном направлении (указанном стрелкой), то произведение
равно третьему вектору, а если - в отрицательном направлении, то
произведение равно третьему вектору, взятому со знаком минус
(противоположному вектору).
Найдем выражение векторного произведения через координаты
множителей. Пусть в стандартном базисе i , j ,к векторы а и Ъ имеют
координаты ха , уа, za и хь, уъ, zb соответственно. Тогда, используя линейность
векторного произведения по любому множителю (см. п.2 замечаний 1.12) и
формулы (1.14), получаем
71
= хахь #
Запишем это равенство при помощи определителей второго порядка:
Уа
Уь
Ч
Ч
Ха
ХЬ
ч
ч
Ха
ХЬ
Уа
Уь
= Ха
(1.15)
Правую часть (1.15) можно представить как результат разложения
символического определителя третьего порядка по первой строке
1 к
У a Za
Уь Ч
Теорема 1.8 (формула вычисления векторного произведения). Если
векторы а и b в правом ортонормированном базисе i, j,k имеют
координаты xa,ya,za и xb,yb,zb соответственно, то векторное
произведение этих векторов находится по формуле (1.15), которую принято
записывать в виде
Уа
Уь
Ч
ч
Ха
ХЬ
Ч
Ч
+ *•
ха
ХЬ
Уа
Уь
1 1 к
Ха У а Ч
хь Уь Ч
(1.16)
ЕсЛи а = \ха уа zaf и Ь = \хь yb zbj - координатные столбцы
векторов а и b в стандартном базисе, то координатный столбец
с = (хс ус zc[ векторного произведения с~ = \а,Ь] находится по формуле
X
0 -Ч Уа
ч о -*.
-Уш Х« 0
Уь
КЧ)
В самом деле, выполняя умножение матрицы на столбец, получаем
УаЧ'Уь'Ч
Тогда c=[a,b] = (yazb-yb-za)T+(xbza -xazb)j + (xayb-xbya)k, что
совпадаете (1.IS).
72
Пример 1.20. Параллелограмм
ABCD построен на векторах
(рис. 1.46). Найти:
а) векторные произведения [АВ, AD]
Рис.1.46
б) площадь параллелограмма ABCD;
в) направляющие косинусы такого вектора п, перпендикулярного
плоскости параллелограмма ABCD, для которого тройка АВ, AD ,п -
левая.
D а) Векторное произведение [АВ, AD] находим по формуле (1.16):
[AB,AD] =
i
1
3
1
2
-2
к
2
1
= i •
2
-2
2
1
-7-
1
3
2
1
1
3
2
-2
Для нахождения векторного произведения можно использовать
матричную запись формулы (1.15) (см. теорему 1.8). Векторам а=АВ и
Ь = AD соответствуют координатные столбцы
т
2
А
-2
1,
По указанной формуле получаем координатный столбец с вектора
с={а,Ь}:
Ус
ГО -2 2V34
2 0-1
-2 1 0
-2
1
'0-3+(-2)(-2)+2 Г
ч-Л
т.е. с =[a,b] = 6'i+5-j-S-k . Результаты совпадают.
Векторное произведение [AC, BD] находим, используя алгебраические
свойства:
{ab+Jd, Id- ~ab]=(ab,~ad]-(ab,
-[/Ш, ав]=
= [АВ, AD]+[АВ, AD] = 2 • [АВ, AD].
Следовательно, [АС,/Ш] = 2-(б-Г+5-7-8-?)=12-Г+1О- J-16-* .
73
б) Площадь параллелограмма ABCD находим как модуль векторного
произведения [АВ9 AD]:
в) Вектор, противоположный вектору [АВ, AD], удовлетворяет
перечисленным в условии требованиям, поэтому
(
Разделив этот вектор на его длину | п | = [ АВ, AD] = 5V5 , получим единич-
п -6-Г-5-7+8-* 6 т 5 - 8 - _
ньга вектор: -j—г= р^ = =?-* т^У"1"—г*** • Согласно
|л| 5V5 5V5 5V5 5V5
(1.6), его координатами служат направляющие косинусы: cosa=-^=-,
1.5.2. Смешанное произведение и его свойства
Смешанным произведением векторов а ,Ь ,с называется число
(а, [*,с]), равное скалярному произведению вектора а на векторное
произведение векторов бис. Смешанное произведение обозначается
ГЕОМЕТРИЧЕСКИЕ СВОЙСТВА СМЕШАННОГО ПРОИЗВЕДЕНИЯ
1. Модуль смешанного произведения некомпланарных векторов
а ,Ь ,7: равен объему У г_ параллелепипеда, построенного на этих
векторах. Произведение (a, ft, с] положительно, если тройка векторов
а , Ъ , с - правая, и отрицательно, если тройка а , Ъ , с - левая, и
наоборот.
2. Смешанное произведение (я, ft, с) равно нулю тогда и только тогда,
когда векторы а ,Ь ,"с компланарны:
(a, ft, с) = 0 «=> векторы а ,ft , с компланарны.
Докажем первое свойство. Найдем по определению смешанное
произведение: (5",ft,c)=|a|- [ft,с] -cos\|/, где \|/ - угол между векторами а и
[ft,с]. Модуль векторного произведения (по геометрическому свойству 1)
равен площади S -_ параллелограмма, построенного на векторах ft и с:
74
|[£,с]| = |б I • | с | • sin ф = 5 -_. Поэтому \a9b,c)=S-_ |a|cos\|/.
Алгебраическое значение \а |cos\|/ длины проекции вектора а на ось, задаваемую
вектором [£,с], равно по модулю высоте й = |а |-|cos\|/| параллелепипеда,
построенного на векторах а ,Ь ,с (рис. 1.47). Поэтому модуль смешанного
произведения равен объему V _ - _ этого параллелепипеда:
Рис.1.47
5.A V__.
#Ьс ЪаЪс
Знак смешанного произведения определяется
знаком косинуса угла \f. Если тройка а , Ъ , с
правая, то \|/<— и смешанное произведение
положительно. Если же тройка
а ,Ь ,с левая, то \|/>— и смешанное
произведение \а,Ь9<:) отрицательно.
Докажем второе свойство. Равенство
[а,Ь,с)=\а\-\[Ь,с] -cos\|/ = 0 возможно в
трех случаях: а="о9иля [fe,c] = 5* (т.е. 6||с"),или cos\|f = 0 (т.е. вектор а
принадлежит плоскости векторов Ъ и с). В каждом случае векторы а, Ъ ,
с компланарны (см. разд. 1.1.1).
АЛГЕБРАИЧЕСКИЕ СВОЙСТВА СМЕШАННОГО ПРОИЗВЕДЕНИЯ
1. При перестановке двух множителей смешанное произведение
изменяет знак на противоположный:
(а, *,с)= -(*,а,с), (а, *,с)= -(с, *,а), (л, F,c)= -(a,c,F);
яри циклической (круговой) перестановке множителей смешанное
произведение не изменяется:
2. Смешанное произведение линейно по любому множителю.
Первое свойство следует из геометрического свойства 1 и свойств
ориентации троек векторов (см. разд. 1.3.3), поскольку от перестановки двух
множителей модуль смешанного произведения не изменяется, а меняется
только ориентация тройки. При циклической перестановке векторов
ориентация тройки не изменяется.
Второе свойство следует из линейности скалярного произведения и
свойства 1.
75
Пример 1,21. Объем параллелепипеда, построенного на векторах
а , Ъ , с , равен V . Найти объем параллелепипеда, построенного на векторах
]> = а+Ь + с ,# =5ЧЬ -с ,r =iJ-fe+c .
D Используя алгебраические и геометрические свойства, найдем
смешанное произведение
о
+ (jb,а,а -Ь +с)+ (F,F,a-bVc]-(F,с,д-Ь+с
+ (с, а,а-Ь +с)+ (с, Ь, а-b +с)-\£у c,g~b+c)=
о
= (g,fr,fl)-(fl,6,b)+(fl^
+ g^j*)- (с, a, F)+ ^0^+ (с, F, а)- ^^6)+ ^^0)=
О 0 0 0
= (а, F, с)+ (а, с, Ь )+ (*, а, с)- fe", с, а )- (с, а, *)+ (с, 6, а)= - 4 • (а, F, с),
азатем его модуль |(p,#,r)| = |-4||(5\£,cj =4V\ По первому
геометрическому свойству смешанного произведения искомый объем равен 4- V . ■
Теорема 1.9 (формула вычисления смешанного произведения).
Если векторы а,Ь,с в правом ортонормированном базисе i, j,k имеют
координаты ха,уа, za; xb,yb, zb; хс, ус, zc соответственно, то
смешанное произведение этих векторов находится по формуле
(1.17)
\
\a,b,c)=
В самом деле, учитывая (1.10) i
[х .J+ ."+z J J.
\ а а а
Уь
Ус
Ха
ХЬ
\
*(1
ч
ч
Уа
Уь
Ус
.15),
-:
ч
ч
ч
•
по определению находим:
хь
Хс
Ч
ч
4 41=
Хс Ус\
76
Уь Ч
Ус Ч
~Уа-
хь Ч
Хс Ч
а
хь Уь
Хс Ус
=
Ха У a Ч
= *ь Уь Ч
Ус V
что и требовалось доказать.
Замечания 1.13.
1. Используя свойства смешанного произведения, можно доказать
линейность векторного произведения по первому множителю (см. п.1
замечаний 1.12 в разд. 1.5.1):
Для этого найдем скалярное произведение вектора в левой части равенства и
единичного вектора i стандартного базиса. Учитывая линейность
смешанного произведения по второму множителю, получаем
т.е. абсцисса вектора, стоящего в левой части доказываемого равенства
равна абсциссе вектора в правой его части (см. п.З замечаний 1.10). Аналогично
доказываем, что ординаты, а также и аппликаты, векторов в обеих частях
равенства соответственно равны. Следовательно, это равные векторы, так
как их координаты относительно стандартного базиса совпадают.
2. Из первого алгебраического свойства смешанного произведения и
коммутативности скалярного произведения следует, что
(я, [F,c])= (a,F,c)= (c,a,fe )= (c,[a,F])= (f* ,6],c),
т.е. (a,£,cj=([a,£],cj. Последнее равенство можно взять в качестве
эквивалентного определения смешанного произведения.
3. Если тройка векторов ej,£2'^3 является базисом пространства,
то тройка векторов
образует взаимный базис.
В самом деле, указанный вектор ~ё* по определению векторного
произведения ортогонален векторам ?2 и ?3,т.е. ^2'^*)=^ и (^3>
лярное произведение v^»^i*j равно единице, так как
^у\е2,еъ]) {eve2,e3)
—г _ J v = )А J1 „\ = 1. Поэтому вектор ех содержится во взаимном
И
базисе. Аналогичные рассуждения проводятся относительно векторов е2* и
?3*. Поэтому базисы ij, ?2, ?3 и 7>*, ?2*, ?3* взаимные.
= (x
Y> b = (x
zaY> b = (xb yb z
, c = (xc yc zcf -
координатные столбцы векторов а , b , с в стандартном базисе, то их
смешанное произведение находится по формуле
0 -zb
ч о
~Уь хь
Уъ
~хь
О
С
Ус
VZcy
Пример 1.22. Параллелепипед
построен на векторах
^ -1-J + 3-ife (рис.1.48).
Требуется найти:
а) смешанное произведение \АВ, AD, АА1), а также ориентацию тройки
АВ, AD, А\ ;
б) объем треугольной пирамиды ABDA{;
в) высоту h параллелепипеда
(расстояние между плоскостями оснований ABCD и
□ а) Смешанное произведение
\АВ, AD, A4J находим по формуле (1.17):
Рис.1.48
1
3
2
2
-2
2
1
3
= -17.
Поскольку произведение отрицательно, то тройка векторов АВ, AD,
левая (см. первое геометрическое свойство смешанного произведения).
Для нахождения смешанного произведения можно использовать
матричную запись формулы (1.17) (см. п.4 замечаний 1.13). Векторам а=АВ,
b = AD, с = АА1 соответствуют координатные столбцы
'Г
а =
-2
-1
По формуле п.4 замечаний 1.13 получаем
78
(a,6,c)=(l 2 2\
0 -1 -:
1 о ~з
-1
= (1 2 2).
-7
1 ,
= -17.
Результаты совпадают.
б) Объем V треугольной пирамиды ABDA^ составляет шестую часть
объема У# параллелепипеда. Действительно, их высоты совпадают, а
площадь SOCH основания пирамиды составляет половину площади 5#
параллелограмма ABCD. Поэтому V=—5 ft= SMh=—Va. Поскольку
3 ocw 3 2 6
в) Высоту h параллелепипеда найдем по формуле й=—, где £# -
площадь параллелограмма ABCD. Поскольку V^ =17 и 5# = 5у5 (см. при-
17
мер 1.20), то h =■
1.5.3. Ориентированные площади и объемы
ОРИЕНТИРОВАННАЯ ПЛОЩАДЬ ПАРАЛЛЕЛОГРАММА
Ориентированной площадью 5* г параллелограмма, построенного
на неколлинеарных векторах аи*, называется его площадь S#. ^, взятая
со знаком плюс, если ориентация пары векторов а и b правая
5 -), и со знаком минус, если ориентация - левая
Внешним (косым) произведением неколлинеарных векторов а и Ъ на
плоскости называется число, равное ориентированной площади S* -
параллелограмма, построенного на этих векторах. Бели векторы а и b кол-
линеарны, то их внешнее произведение считается равным нулю. Внешнее
произведение обозначается Sa_-=ZFa6 . Его свойства повторяют алгеб-
#а,0
раические свойства векторного произведения, т.е. для любых векторов
я , b , с на плоскости и любого числа X справедливы равенства:
79
1) алЬ =-Ь ла\
2) (л+Ь]лс =алс'+6 лс ;
3) (Ла)лб =Л-(ал*).
4) Если векторы а и Ъ в правом ортонормированном базисе i, j
имеют координаты ха,уа и xb, yb соответственно, то внешнее
произведение этих векторов находится по формуле
..7=ол6 =
Уь
h Уь
(1-18)
Если а = (ха уа[ , Ь = (хь уь[ - координатные столбцы векторов
а, b в стандартном базисе на плоскости, то их внешнее произведение
находится по формуле
Приведенные свойства внешнего произведения следуют из
алгебраических свойств векторного произведения, если векторы а >Ь ,с на плоскости
рассматривать как векторы в пространстве с нулевыми аппликатами.
\s
Рис. 1.49
Рассмотрим задачу разложения вектора а по базису "ехЛг на
плоскости. Отложим все векторы от произвольной точки О. Сначала разберем
случаи, когда векторы а и 7г коллинеарны: одинаково направлены
(рис.1.49,а) или противоположно направлены (рис. 1.49,6). В этих случаях
ордината х2 вектора а равна нулю, а абсцисса находится как отношение
х (рис.1.49,а);
(рис.1.49,б),
80
так как пара а уе2 в первом случае правая (рис.1.49,а), а во втором случае -
левая (рис.1.49,б).
Пусть теперь векторы а и ех не коллинеарны (рис.1.49,в). Построим
проекции ах и д2 на прямые, содержащие базисные векторы: а = ах+а2.
ц3 концов векторов ах и ~ёх опустим перпендикуляры Aj и А
соответственно на прямую, содержащую вектор ?2. Учитывая, что векторы ах и ej
противоположно направлены, а также подобие прямоугольных треугольников с
гипотенузами ах и ^, находим абсциссу *t вектора а :
так как пара ij ,i"2 - правая, а пара а,ё"2 - левая. Аналогично находится
ордината (векторы а2 и ?2 одинаково направлены)
Таким образом, вектор а имеет следующее разложение по базису ~ё1>"ё2 на
плоскости:
a=^-^ + x2-?2, (1.19)
где х =
Рассмотрим применение формулы (1.19) для решения системы двух
линейных уравнений с двумя неизвестными:
Эту систему можно записать в виде 1 = х • 1 +^ • 1 \. Рассматривая
Ы \а) \Ьг)
полученные столбцы как координатные столбцы векторов с ,5* УЬ в
стандартном базисе на плоскости, получаем разложение
Таким образом, нахождение решения системы уравнений свелось к задаче
разложения вектора с по векторам а и Ъ . Предполагая, что коэффициенты
при неизвестных не пропорциональны, т.е. ах\Ъх*а2\ Ъ2 (векторы а и Ь
не коллинеарны), по формуле (1.19), полагая а=с, 5^=5", "е2=Ь,
получаем:
6 —5150 81
С2
°2
h
а ас
2 алЬ
<h ci
a2 c2
<h bi
a2 b2
c лЬ
что совпадает с правилом Крамера (см. разд.П.10, а также [8,10]).
ОРИЕНТИРОВАННЫЙ ОБЪЕМ ПАРАЛЛЕЛЕПИПЕДА
Ориентированным объемом У#А_-_ параллелепипеда, построенного
на некомпланарных векторах а , Ъ , с , называется его объем У#_ - ., взятый
со знаком плюс, если ориентация тройки векторов а ,Ь ,с правая
(Vjlг_ = V-г.), и со знаком минус, если ориентация - левая
(VA - =-У - ).
Внешним (косым) произведением некомпланарных векторов а ,6 ,с
называется число, равное ориентированному объему Vl-т-
параллелепипеда, построенного на этих векторах. Если векторы а ,Ь ,с компланарны,
то их внешнее произведение считается равным нулю. Внешнее
произведение обозначается VA_-т.=алЬл'с [5].
Внешнее произведение трех векторов совпадает с их смешанным
произведением (в силу первого геометрического свойства смешанного
произведения), т.е. V* -.=5лЬлс=(а,6,с).В ортонормированием базисе
_r_ =алЬлс =
#аЬс
Xa
Уа
za
xb
Уь
4
Xc
Ус
zc
=
хь Уь Ч
Ус
(1.20)
так как определитель транспонированной матрицы равен определителю
исходной матрицы (см. разд.П.6).
При помощи ориентированных объемов задача разложения вектора а
по базису ?j, ?2, F3 в пространстве решается так же как и на плоскости с
использованием ориентированных площадей. В результате получаем
5" = ^ ёх +х2 ё2 +х3 ёъ, (1.21)
(,2,3)
где Ху*) 2 ,М;
(eve29e3)
82
формула (1.21) соответствует правилу Крамера (см. разд.П. 10, а также
[8,10]) решения системы трех линейных уравнений с тремя неизвестными.
Пример 1.23. Заданы координатные столбцы
'Г
0
а)
. ь=
V
1
к
, с =
'0N
1
Л
, d =
2
13,
векторов a ,b yc 9d в стандартном базисе. Разложить вектор
рам а ,Ь , с .
D По формуле (1.20) находим смешанные произведения
по
векто1
0
0
1
0
0
1
1
0
1
2
3
0
1
1
0
1
1
= 1;
= -1;
Коэффициенты разложения определяем по формуле (1.21):
d,b,c)=
(a,Fj)=
1
2
3
1
0
0
1
1
0
1
1
0
0
1 :
1
1
2
3
=2;
=3.
*1=-
d,b,c
а,Ь,с
Следовательно, d = 2 • я — 1 • ft + 3 • с . ■
1.5.4. Двойное векторное произведение и его свойства
Двойным векторным произведением векторов а ,ft ,с называется
вектор [5",[ft,с] J, равный векторному произведению вектора а на
векторное произведение векторов ft и с. Произведение [a,[ft,с]] обозначается
также ax(ftxcj.
Двойное векторное произведение обладает следующими свойствами,
справедливыми для любых векторов а , ft , с :
\а\
4. Если a =
\а\
yb z
j, с = (*с ус zcf -
ко-
°РДннатные столбцы векторов а , b , с в стандартном базисе, то коорди-
6' 83
натный столбец d = [xd yd zdj двойного векторного произведения
d = [5", [ b ,с ] J находится по формуле
d = baT -c-c-aT -b
(мнемоническое правило: "бац" минус "цаб").
Первое свойство доказывается, применяя формулы вычисления
скалярного и векторного произведений в ортонормированном базисе [8,14].
Второе свойство следует из первого, если сделать циклическую
перестановку векторов: [*,[c,a]J=(i,a)c-(i,c)a, [c,[a,fe]J=(c,b)a-(c,a)b ,
а затем сложить эти равенства вместе с исходным (учитывая
коммутативность скалярного произведения).
Третье свойство следует из первого (если положить с = а ). Это
равенство дает разложение произвольного вектора Ъ в виде суммы ортогоналъ-
ной проекции пр-Ь = *£п* а и ортогональной составляющей
\а\
bL- =—Ц--|л>[£>51| вектора b относительно оси, задаваемой вектором я
(см. разд. 1.2.3).
Последнее свойство следует из первого с учетом п.2 замечаний 1.10.
Заметим, что все произведения строк и столбцов согласованы, поэтому
умножения можно производить в любом порядке, разумеется, не переставляя
матрицы.
Пример 1.24. Даны векторы а=Г+2«7+2* , Ь=3-Г-2-7+*;
с=2-Г-1-7+3-/: .Требуется:
а) показать, что векторы а 9Ь ,с образуют базис, и найти векторы
а*, b *, с * взаимного базиса;
б) найти двойное векторное произведение [a, [b ,c] J;
в) найти ортогональную проекцию вектора Ъ на ось, заданную
вектором a , и ортогональную составляющую вектора Ъ относительно этой оси.
D а) Поскольку смешанное произведение (а,6,с) =-17 , найденное в
примере 1.22, отлично от нуля, то векторы а ,Ь ,с не компланарны
(согласно второму геометрическому свойству смешанного произведения), т.е.
образуют базис пространства. Найдем векторы взаимного базиса по формулам
п.З замечаний 1.13:
I
3
2
7
-2
-1
к
1
3
84
-17
,b,c) -17
б) По свойству 1 находим
_. [a,b]
С = -
i
2
I
i
1
3
7
-1
2
7
2
-2
it
3
2
к
2
1
17
17
-(l-3 + 2(-2)+2-l)(2-7-1.7+3ifc)=(l6J-lbJ+3-ik).
Для нахождения двойного векторного произведения можно
использовать матричную форму записи (см. четвертое свойство). Векторам а , Ъ , с
соответствуют координатные столбцы
'*)
-2
а —
-1
v3y
По свойству 4 получаем координатный столбец d двойного векторного
произведения d =[a,[b,c]\:
=Ьатс-сатЬ =
-2
' 3 ^
-2
ч1,
'2
-1
3
(1 2 2).
4 4>
-2 -2
б б
•
-1
J>
3
-2
1
-
=
'2"
-1
,з,
(1
18 '
-12
б
-
2
2 '
-1
3
2)'
' 3 >
-2
-и
з ,
т.е. </=1бГ-11-7+3*.
в) Учитывая, что |а \2 = (а,а)=I2 +22 +22 = 9, (a,b)= 1 и
=9-(зГ-2-J-HJ
по свойству 3 находим
(
-l(l Г+2-7+2-*)=2бГ-2О-7+7*.
-(l-r+2-7+2ife)+-(26r-2O-7+7ife),
85
т.е. ортогональная проекция np-b =j;-a=j;-i+~j+~k , а ортогональная
составляющая равна
Г Г — Г Г 1 - 26 г 20 -7 г __
b.-=b -np-b =b а = 1 /+—к. ■
±а Уа 9 9 9 9
1.6. ТИПОВЫЕ ЗАДАЧИ ВЕКТОРНОЙ АЛГЕБРЫ
1.6.1. Применение векторов в задачах на аффинные свойства фигур
В данном разделе рассматривается применение векторной алгебры для
решения задач аффинной геометрии. В этих задачах, как правило, требуется
искать отношения длин отрезков, площадей фигур или объемов тел.
Наряду со свободными векторами будем использовать радиус-
векторы, т.е. векторы, приложенные к одной (произвольной) точке О
пространства.
ЛИНЕЙНЫЕ И НЕОТРИЦАТЕЛЬНЫЕ КОМБИНАЦИИ РАДИУС-ВЕКТОРОВ
Множество линейных комбинаций радиус-вектора ОА называется его
линейной оболочкой и обозначается
Lin|OAj= IОМ: ОМ = а• ОА; осе R J.
Линейная оболочка Lin\pAj ненулевого радиус-вектора ОА
представляет собой множество радиус-векторов, концы которых принадлежат
прямой ОА (рис.1.50,а).
Ып(оа) Соп(7)а)
М О А О А М
а б
Рис.1.50
В самом деле, ненулевой вектор ОА образует базис на прямой ОА
(см. разд. 1.3.1). Поэтому вектор ОМ можно разложить по этому базису
(см. теорему 1.3 в разд. 1.3.1), т.е. представить в виде ОМ = а-ОА, где а -
координата вектора ОМ .
Линейная комбинация а-ОА радиус-вектора ОА называется
неотрицательной, если ее коэффициент - неотрицательное число: а > 0.
Множество неотрицательных линейных комбинаций вектора ОА называется его
конической оболочкой и обозначается:
86
p){: OM=aOA\ a>0, ae R
Коническая оболочка Con \pA) ненулевого радиус-вектора ОА
представляет собой множество всех радиус-векторов, концы которых
принадлежат лучу ОА (рис. 1.50,6). Действительно, учитывая, что неотрицательная
комбинация является линейной, приходим к равенству ОМ =а-ОА, где
a > 0. При a > 0 векторы ОМ и ОА одинаково направлены, т.е. точка М
принадлежит лучу ОА. Если a = 0, радиус-вектор ОМ нулевой, т.е. точка
М совпадает с точкой О (с началом луча ОА).
Множество линейных комбинаций радиус-векторов ОА и ОВ
называется их линейной оболочкой и обозначается
Покажем, что линейная оболочка Ып\рА,ОВ) двух неколлинеарных
радиус-векторов представляет собой множество таких радиус-векторов,
концы которых (и сами векторы) принадлежат плоскости, проходящей через
точки О, А , В (рис.1.51,я).
Ып^А,Ов)
У
Of<^ » -7
/
i
/°
1 Con\pA,OB\l
Ж"
■ /
ВО AM
а б е
Рис.1.51
Действительно, неколлинеарные векторы ОА и ОВ образуют базис на
плоскости, проходящей через точки О,А,В (см. разд. 1.3.2). Поэтому для
любой точки М этой плоскости радиус-вектор ОМ можно разложить по
базису (см. теорему 1.4 в разд. 1.3.2), т.е. представить в виде
ОМ = сс-ОА+Р-0Я, где а, р - координаты вектора ОМ . И наоборот, для
любых чисел а, Р радиус-вектор 0M = aQA+P0B, a следовательно, и
точка М , принадлежат указанной плоскости.
Если векторы ОА и ОВ коллинеарны, то любая их линейная
комбинация принадлежит прямой АВ (рис. 1.51,6).
Линейная комбинация аОА+$ОВ радиус-векторов ОА и ОВ назы-
вается неотрицательной, если ее коэффициенты - неотрицательные числа:
87
а > 0, Р > 0. Множество неотрицательных линейных комбинаций векторов
ОА и ОВ называется их конической оболочкой и обозначается:
В; сс>0, Р>0, aeR, Ре R
Коническая оболочка Con \рА,ОВ) представляет собой множество всех
радиус-векторов, концы которых принадлежат плоскому углу АОВ
(заштрихованное множество на рис. 1.51,в).
Множество линейных комбинаций радиус-векторов ОА, ОВ, ОС
называется их линейной оболочкой и обозначается
Ып{рА,Ш,'дс)={'Ш': ОМ = а-Ш+р-ОВ+у-ОС; ае R, ре R, ye R }.
Любой радиус-вектор ОМ принадлежит линейной оболочке
Ып\рА,ОВ,ОС) трех некомпланарных радиус-векторов ОА, ОВ, ОС.
В самом деле, векторы ОА9 ОВ, ОС (рис.1.52,а) образуют базис в
пространстве (см. разд. 1.3.3). Поэтому (см. теорему 1.5 в разд. 1.3.3) любой
радиус-вектор ОМ можно разложить по этому базису, т.е. представить в виде
ОМ =а-0А + р*0Я + у0С,где ос,р,у - координаты вектора ОМ .
LintpA,OB,dc)
м 4с
А
б
Рис.1.52
Линейная комбинация аОА+$-ОВ+у-ОС радиус-векторов ОА,
ОВ, ОС называется неотрицательной, если ее коэффициенты -
неотрицательные числа: <х>0, Р>0, у^О. Множество неотрицательных линейных
комбинаций векторов ОА, ОВ, ОС называется их конической оболочкой и
обозначается:
а>0, р>0, y>0, aeR, ре Я, уеД}.
Коническая оболочка Соп\рА,ОВ,ОС) трех некомпланарных векторов
представляет собой множество всех радиус-векторов, концы которых
принадлежат трехгранному углу ОАВС (рис. 1.52,6).
88
Понятия линейной или неотрицательной комбинаций векторов
распространяются на любое конечное число векторов.
Векторы О\ <,ОАг ,...,ОД^ называются образующими линейной
оболочки Lin\OAl,OA29...9OAk J и, соответственно, конической оболочки
АФФИННЫЕ И ВЫПУКЛЫЕ КОМБИНАЦИИ РАДИУС-ВЕКТОРОВ
Линейная комбинация аОА + $ОВ радиус-векторов ОА и ОВ
называется аффинной, если сумма ее коэффициентов равна единице: а + р = 1.
Множество аффинных комбинаций векторов ОА и ОВ называется их
p): ОМ=аОА+$ОВ; а+Р = 1, аеД, Ре/?}.
Покажем, что аффинная оболочка Aff\pA,OB) представляет собой
множество всех радиус-векторов, концы которых принадлежат прямой АВ.
Действительно, равенство ОМ =а-ОА + $-ОВ при а + Р = 1 можно
представить в виде 0М = (1-Р)-0А + Р-0# = ОД + Р*(<ЭД-0а). Отсюда следует,
что AM = ОМ - ОА = Р • АВ , т.е. векторы AM и АВ коллинеарны
(рис.1.53,а). Следовательно, точка М принадлежит прямой АВ. Проводя
рассуждения в обратном порядке, заключаем, что для любой точки М ,
принадлежащей прямой АВ, найдутся такие числа аир, что
И?иа+Р = 1.
Линейная комбинация аОА + $ОВ радиус-векторов О А и ОВ
называется выпуклой, если все ее коэффициенты - неотрицательные числа, а их
сумма равна единице: а+Р = 1, а > 0, Р > 0. Множество выпуклых
комбинаций векторов ОА и ОВ называется их выпуклой оболочкой и
обозначается:
= 1,а>0,Р>0,(хе R,$e
Покажем, что выпуклая оболочка Conv\OA,OB) представляет собой
множество всех радиус-векторов, концы которых принадлежат отрезку АВ
(рис. 1.53,6). Действительно, учитывая, что выпуклая комбинация является
аФфинной, приходим к равенству AM = р • АВ, где 0 < Р < 1. Это равенство
означает, что точка М принадлежит отрезку АВ (включая его концы: М
совпадает с точкой В при Р = 1 и с точкой А при Р = 0). Поскольку
89
= i. При
MB a-AB ol
этом говорят, что точка М делит отрезок АВ в отношении
AM :М# = р:сс (а>0, |3>0, а
О А
а Рис.1.53
Рассмотрим аффинные и выпуклые комбинации трех радиус-векторов.
Линейная комбинация а-ОА + &-ОВ + у-ОС радиус-векторов ОА,
ОВ у ОС называется аффинной, если сумма ее коэффициентов равна
единице: а + Р + у = 1- Множество аффинных комбинаций векторов ОА, ОВ,
ОС называется их аффинной оболочкой и обозначается:
AffipAjOB^OC)^{pM: (Ж = a-<M + P-GB+y-0C;
а+р+у = 1, aeR, pe/?, ye Д }.
Покажем, что аффинная оболочка Aff\pA,OB,OC) представляет собой
множество всех радиус-векторов, концы которых принадлежат плоскости,
проходящей через точки А , В , С (рис.1.54,а). Действительно, исключая в
равенстве ОМ =а-ОА + Р-0/? + у-0С коэффициент а = 1-р-
Отсюда следует, что
) р
-\pC-OA),
т.е.
AM =р-А2? + у- АС. Если векторы АВ, АС коллинеарны (точки А, В, С
принадлежат одной прямой), то и точка М принадлежит той же прямой, а
также любой плоскости, проходящей через точки А, В , С. Если же
векторы А5, АС не коллинеарные (точки А , В , С не принадлежат одной
прямой), то точка М принадлежит плоскости, проходящей через точки А , В,
С, так как вектор AM разлагается по векторам АВ, АС, принадлежащим
этой плоскости.
Проводя рассуждения в обратном порядке, приходим к выводу, что для
любой точки М , принадлежащей плоскости, проходящей через точки А.
В , С, найдутся числа a, р, у такие, что
90
ОМ =
Линейная комбинация a • О А + р • ОВ + у • ОС радиус-векторов ОА ,
£# 9 ОС называется выпуклой, если все ее коэффициенты -
неотрицательные числа, а их сумма равна единице: а + Р + у = 1. Множество выпуклых
комбинаций векторов О А , ОВ, ОС называется их выпуклой оболочкой и
обозначается:
= 1, а>0, р>0, у^О}.
Рис.1.54
Покажем, что выпуклая оболочка Conv\pA,OB,OC) представляет
собой множество всех радиус-векторов, концы которых принадлежат
плоскому треугольнику ABC (предполагаем, что точки А , В , С не лежат на
одной прямой). Действительно, если у = 1,то ос = О, Р = 0 и
т.е. точка М совпадает с вершиной С треугольника ЛВС. Пусть
тогда а + р = 1-у и
о \
ОА£ОВ\ОС
ОМ =а-
ОА+
()
—— /V —— ft —. _
Здесь ON= ОА+—-—OB - выпуклая комбинация векторов О А и
__ <х + Р а + р
°^, поскольку ее коэффициенты - неотрицательные числа, а их сумма рав-
На единице. Следовательно, точка N принадлежит стороне АВ треугольни-
91
ка ABC и делит ее в отношении AN:NB = $:а (рис. 1.54,6). В свою
очередь, точка М принадлежит отрезку CW, так как ОМ =(l-y)-ON+y-OC
- выпуклая оболочка векторов ON и ОС. Поэтому точка М принадлежит
плоскому треугольнику ABC (включая его внутренность). Заметим, что
точка М делит отрезок CN в отношении MN: СМ = у: (l - у). Тогда
MN-y-MN = y-CM, т.е. MN = y-(CM+MN)=y-CN. Отсюда
GV: MW = 1: у • Это отношение равно отношению площадей треугольников
ЛВС и МАВ (поскольку у них общее основание АВ, а высоты, опущенные
на это основание относятся как CN:MN). Следовательно,
CN: MN = 1: у = 5АВС : 5^^. Аналогично можно показать, что
^:a~SABC:SMBC и 1:Р = 5АВС *-SMCA. Таким образом, коэффициенты а,
(3, у выпуклой комбинации равны отношениям площадей
соответствующих треугольников:
Говорят, что точка Л/ "делит" площадь треугольника ABC в отношении
Понятия аффинной и выпуклой комбинаций векторов
распространяются на любое конечное число векторов.
Векторы ОА{,ОА2 ,...,OAk называются образующими аффинной
оболочки Aff \O\JOA2>...,O\) и, соответственно, выпуклой оболочки
СВОЙСТВА АФФИННЫХ И ВЬШУКЛЫХ КОМБИНАЦИЙ РАДИУС-ВЕКТОРОВ
Сформулируем полученные результаты в виде свойств.
1. Точка М, удовлетворяющая равенству
ОМ =f-a4+(l-f)'0*» te R, (1.22]
принадлежит прямой АВ, и наоборот, для любой точки М, принадлежа*
щей прямой АВ, найдется единственное действительное значение пара*
метра t, при котором справедливо разложение (1.22). Другими словами:
геометрическим местом точек М, удовлетворяющим условию (1.22),
является прямая АВ.
2. Геометрическим местом точек М, удовлетворяющим условию
92
является отрезок АВ. При t = О точка М совпадает с точкой В, при
7 = 1 -с точкой А, л/и/ О < Г < 1 точка М делит отрезок АВ в
отношении (рис.1.55 ,д):
()
И наоборот, если точка М делит отрезок АВ в отношении
MB a
(а>0,
ОМ =
-2—
а+Р
В частности, точка М является серединой отрезка АВ ( =— = 1) то-
МВ а
гда и только тогда, когда
OM=t>OA+{l-t)OB;
ОМ =аОА+ЬОВ+сОС;
fAB
IB
SMBC '' SMCA l SMAB ~a:b:c
РИС.1.55
3. Точка М, удовлетворяющая равенству
Од7=гОА + 5ОВ + (1-г-5)ОС, геД, seR, (1.23)
принадлежит плоскости, проходящей через точки А, В ,С, и наоборот, для
любой точки М, принадлежащей плоскости, проходящей через точки
А, В, С, не лежащие на одной прямой, найдутся единственные
действительные значения параметров t и s, при которых справедливо разложение
(1.23). Другими словами: геометрическим местом точек М,
удовлетворяющим условию (1.23), является плоскость, проходящая через точки
А, В, С, не лежащие на одной прямой.
4. Пусть А, В ,С - точки не лежащие на одной прямой.
Геометрическим местом точек М, удовлетворяющим условию
93
где все коэффициенты сс,р, у - неотрицательные числа, сумма которых
равна единице, является плоский треугольник ABC. Если коэффициенты
ос,Р,у положительные и а + Р + у = 1> то точка М "делит" площадь
треугольника ABC в отношении (рис.1.55,6):
SMBC : SMСА '' SMAB = а : Р: У •
И наоборот, если точка М "делит" площадь треугольника ABC в отноше-
нии SMBC:SMCA:SMAB=a:$:y («>0, Р>0, у>0),то
ОА+ ^ Ш+ £ ОС.
P P
^ОА+
а+р+у a+P+y
В частности, точка М является точкой пересечения медиан треугольника
ABC тогда и только тогда, когда
5. Пусть А, В,С,D - точки, не лежащие в одной плоскости.
Геометрическим местом точек М, удовлетворяющим условию
где все коэффициенты а,р,у ,8 - неотрицательные числа, сумма
которых равна единице, является треугольная пирамида {тетраэдр) ABCD,
включая внутренние ее точки. Если коэффициенты a,p,Y>$ полооки-
тельные и a + P+Y + 5 = l, то точка М "делит" объем тетраэдра
ABCD в отношении:
VMBCD ' YMCDA ' VMDAB ' y MABC ** ' **' ' 'u'
б. В свойствах 1-5 точка О приложения радиус-векторов
произвольная.
Пример 1.25. На сторонах АВ и АС
треугольника ABC взяты соответственно точки М и
м N так, что АМ:МВ = 2:3 и AN:NC = 3:5. В
каком отношении делится каждый из отрезков BN и
СМ точкой К их пересечения?
□ Поскольку векторы АВ и АС неколлинеар-
ные, выберем их в качестве базиса на плоскости.
С одной стороны, точка К принадлежит прямой BN (рис. 1.56), поэтому
существует такое значение t, при котором АК = t - AN + (l -t\ AB. С другой
стороны, точка К принадлежит прямой СМ , поэтому найдется такое
значение 5, при котором AK = s-AM +(l-s)-AC. Учитывая, что AN=j-AC
и ДМ =£-л5, получаем: ^ r^+(l/)AB j
О J
94
В силу единственности разложения вектора АК по базису на плоскости,
приравниваем соответствующие координаты:
Таким образом,
ГЗг-8-81.
15-5г = 2.5,
делит отрезок ZW в отношении
|r_i2 ==-£-А#+-jy-
ВК: KN = 12:5.
, т.е. точка К
= sAM+(1-s)-AC I _25 =^--ЛМ+-—-ЛС
15— 34 34
Из
делаем
равенства
вывод:
СК:КМ=25:9. ■
Пример 1.26. В треугольной пирамиде ОАВС
найти сумму векторов, соединяющих каждую из
вершин с точкой пересечения медиан противоположной
грани.
□ Пусть А1, Вх, Сх, Ох - точки пересечения
медиан граней ОВС, ОАС, ОАВ, ЛВС соответственно.
Требуется найти сумму ООХ + АА^ + £2^ + CCj.
Возьмем некомпланарные векторы а = ОА, Ъ =ОВ,
с = ОС в качестве базисных и разложим все слагаемые
искомой суммы по этому базису. Пусть М - середина ребра ВС (рис.1.57).
Применяя свойство медиан (AOj: ОдМ = 2:1) и свойство 2 аффинных и
выпуклых комбинаций при а = 1, (3 = 2, находим:
Рис 157
Аналогично (меняя циклически буквы) получаем
(
Складывая все разложения, приходим к равенству
-^=
т.е. искомая сумма равна нулевому вектору. ■
Пример 1.27. Основанием четырехугольной пирамиды SABCD
служит параллелограмм ABCD. На боковых ребрах SB и SC взяты
соответственно точки Вх и Cj так, что 5^ : ВгВ = 5:2 и SCX: CjC = 4:3. В каком
95
отношении делит ребро SD плоскость я, проходя*
щая через точки А, Вх, Сх ?
D Пусть Dx точка пересечения плоскости с
ребром SD (рис.1.58). Найдем отношение -=- = А,.
С SD
Для этого разложим векторы SDX и SD по базису
SA,SB,SC. Так как точка Dt принадлежит
плоскости я, то по формуле (1.23)
SA=rSA+jSa+(l-r--j).5C =
Рис.1.58
Подставляя в равенство 5Dj =X-SD полученные разложения, находим
Записываем равенства соответствующих координат равных векторов:
Подставляя г=Х и s = -уЯ в последнее уравнение системы, получаем
dL л 7л\ «ч ^ л ОП ЭД 20
■7il-A+-^Al=A. Отсюда A=-U, т.е. -s=s-=—. Следовательно,
7\ 5 / 27 SD 21
делит ребро в отношении 20:7 (считая от вершины пирамиды). ■
плоскость
1.6.2. Метрические приложения произведений векторов
Перечислим свойства скалярного, векторного и смешанного
произведений (см. разд. 1.4,1.5), применяемые при решении геометрических задач.
Предполагается, что координаты векторов а ,Ь ,с, указанные в
формулах, найдены относительно стандартного базиса 1, j 9k в пространстве:
Напомним, что в стандартном базисе скалярное, векторное, смешанное
произведения векторов вычисляются по формулам (1.10),(1.16),(1.17):
96
la,b] =
J j к
Xa У a Za
Xb УЬ 4
Xa У а Za
Xc Ус Zc
1. Вектор а = о тогда и только тогда, когда
(а, а) = 0 ■*=> х2 + у2 + z\ = 0 <=» jc0 = уа = гв = 0.
2. Ненулевые векторы а и Ъ ортогональны тогда и только тогда,
когда
(а,Ь)=0 «* xa-xb + ya-yb + za-zb=O.
3. Векторы а и Ъ коллинеарны тогда и только тогда, когда
Г j к
а,Ь]=о <=>
Ха У a
хь Уь Ч
хь Уь Ч
4. Векторы а, Ъ, с компланарны тогда и только тогда, когда
ха Уа Ч
(а,Ь,с)=О *> хь уь zb =0.
Хс Ус Zc
5. Длина вектора а~ вычисляется по формуле: .
б. Угол ф между ненулевыми векторами а и Ь вычисляется по
формуле*.
7. Алгебраическое значение длины ортогональной проекции вектора а
на ось, задаваемую вектором Ъ Ф Ъ, находится по формуле:
\а,ь) х„'Хи + у -yk + z -z,
со.чф=——2' jV^er= i j
^-=ir=-
8. Ортогональная проекция вектора а на ось, задаваемую вектором
Ь *о:
7 —5150
97
9. Направляющие косинусы вектора а находятся по формулам:
I
cosa=-
\а
10. Единичный вектор е, одинаково направленный с вектором а,
находится по формуле:
7=737 = ^-cosa + 7-cosP+ik-cosy.
11. Площадь 5#_- параллелограмма, построенного на векторах а и
Ъ , вычисляется по формуле: S _ - = [я, Ъ] .
12. Объём V'-т- параллелепипеда, построенного на векторах
а ,Ъ ,с, вычисляется по формуле: V#_- ? = (а,*,с) .
13. Тройка некомпланарных векторов Ъ ,Ь ,*с - правая (левая) тогда и
только тогда, когда (а,Ь,с") > 0 (соответственно, (а,Ь,с ) <0).
14. Высота h параллелограмма, построенного на векторах а,Ь,
вычисляется по формуле (см. рис. 1.42,6):
L _ j _ [
15. Высота h параллелепипеда, построенного на векторах а,Ь,с,
находится по формуле (см. рис. 1.47):
16. Угол \|/ Л1ежду вектором а и плоскостью, содержащей векторы
Ъ и с, дополняет до прямого угла угол (р между вектором а и вектором
п=[6,с], перпендикулярным плоскости (рис.1.59,а), и вычисляется по
формуле:
98
17. Угол 8 между плоскостями, содержащими векторы а ,Ъ и с,d
соответственно, вычисляется как угол между векторами т=[а,Ь],
-fizzfiyd], перпендикулярными данным плоскостям, по формуле (рис. 1.59,6):
cos8 =
fa9b]l\[c9d]
n=[b,c]
n=[c,d]
Рис.1.59
Замечания 1.14.
1. Указанные формулы применяются также для векторов на плоскости,
полагая, что их аппликаты равны нулю.
2. Площадь SABC треугольника ABC можно найти как половину
площади S параллелограмма, построенного на векторах АВ и АС, т.е.
пАВу АС
3. Объем
треугольной пирамиды ABCD можно найти как одну
шестую объема V параллелепипеда, построенного на векторах
# А5, AC, AD
АВ, АС, AD, т.е. VAfiCZ) = •£• V — — —, поскольку объем треугольной
пирамиды равен одной трети произведения площади ее основания на высоту, а
площадь треугольника (основания пирамиды) в два раза меньше площади
параллелограмма (основания параллелепипеда).
Пример 1.28. На векторах OA = 4-F+3-J и
треугольник ОАВ (рис. 1.60). Требуется найти:
а) длины сторон треугольника;
б) длину медианы ОМ ;
в) длину биссектрисы OL;
г) величину угла АОВ;
д) площадь треугольника;
= 12-Г-5-} построен
99
е) координаты вектора ВН (в стандартном базисе), где отрезок ВН -
высота треугольника.
n D Для решения поставленной задачи используем
приведенные в данном разделе свойства с учетом п.1 за-
\М мечаний1.14.
а) Длины сторон О А и ОВ находим по свойству 5:
ОНА
РИС.1.60 | ЛП|_ /I^d лп1_ /ю2 , (_5)Z =13
Чтобы найти длину стороны АВ, определим сначала координаты вектора
AB = OB-OA = l2i-5j-<(4i+3j)=8i-8j, а затем - его длину
б) Найдем координаты вектора ОМ , учитывая, что М - середина
отрезка АВ (по свойству 2 аффинных и выпуклых комбинаций
(см. разд. 1.6.1)):
а затем его длину \ом | = y82 + (-l)2 =^65 .
в) По свойству биссектрисы точка L делит отрезок АВ в отношении
AL:LB = OA: OB = 5:13. Поэтому для вектора OL справедливы разложения
Теперь находим длину этого вектора OL = у(трГ + (-jfjr = .
г) Величину ф угла АОВ находим по формуле п.6:
.ЩЩ 513 65
Следовательно, ф = arccos-Ц-.
д) Площадь 5 треугольника ОАВ равна половине площади
параллелограмма, построенного на векторах О А и OB: S =4-S — — (см. п.2 заме-
чаний 1.14). Чтобы найти площадь параллелограмма, воспользуемся
формулой п.П. Добавляя к векторам О А и ОВ нулевые аппликаты:
ОА = 4-Т+3-]+0-к ; ОВ = 12-Т-5-]+0-к , вычисляем их векторное
произведение:
100
[0Д, OB] =
i
4
12
j
3
-5
к
0
0
— i •
3
-5
0
0
4
12
0
0
4
12
3
—5
Отсюда получаем
Значит, площадь треугольника S = -| • 56 = 28.
е) Найдем вектор ВЯ = ОН -ОВ. Проекцию ОН вектора ОВ на ось,
задаваемую вектором ОА, находим по формуле п.8:
25
Отсюда BH=±gi
координаты -Щ-i
25 25
, следовательно, его
25
. Вычислим длину этого вектора, т.е. высоту тре-
угольника: ВН = уУ'Щ') + П^Г ="^ • Заметим, что площадь
треугольника 5 = 28, поэтому высоту можно вычислить по формуле
п„ 2S 2-28 56 _
ВН = = = —. Результаты совпадают. ■
ОА 5 5 '
Пример 1.29. На векторах ОА = 1-Г+3«7-1-* , OB = 2i+lj-2k ,
ОС = 3-Т-2]+4к построена треугольная пирамида О ABC (рис. 1.61).
Требуется найти:
а) длины ребер ОА, ОВ, ОС;
б) величину ф угла АОС;
в) площадь SOAC треугольника ОАС;
г) объем пирамиды О ABC;
д) высоту пирамиды Ав , опущенную из вершины В ;
е) высоту Ад треугольника ОАС, опущенную из вер- Рис. 1.61
вершины А;
ж) угол \|f между ребром ОА и плоскостью грани 0#С;
з) величину 5 угла между плоскостями граней ОАС и ОВС;
и) радиус-вектор ОМ , где М - точка пересечения медиан
треугольника ABC;
101
к) радиус-вектор ON , где точка N делит отрезок AM в отношении
AN:NM =3:4;
л) направляющие косинусы вектора ОВ;
м) алгебраическое значение ортогональной проекции вектора ОА на
направление вектора ОВ;
н) ортогональную проекцию вектора ОА на прямую,
перпендикулярную грани ОВС;
о) единичный вектор F (орт), имеющий направление вектора АВ;
п) вектор а , имеющий длину вектора АВ и направление вектора АС.
D а) Длины ребер ОА, ОВ и ОС находим по формуле п.5:
б) Величину ф угла АОС находим как угол между векторами ОА и
ОС по формуле п.6:
() ()() 7
VU-V29 V319
i i i
т.е. cp ■— 7L—arccos . **.
в) Сначала вычислим площадь параллелограмма, построенного на
векторах ОА и ОС по формуле п. 11. Для этого найдем векторное
произведение
[ОА,ОС] =
1 3 -1
3-2 4
= 10-F-7-J-ll-lfc,
а затем его модуль: 5 =|[O4,OC]| = Vl02 + (-7)2 + (-ll)2 =V270 .
Искомая площадь треугольника в 2 раза меньше: SOAC =t*S —-- =-^f^
^ ifOAf ОС **
(см. п.2 замечаний 1.14).
г) По формуле п. 12 найдем объем V — — — параллелепипеда, постро-
nOAt OB, ОС
енного на векторах ОА, ОВ, ОС:
102
(оА,ОВ,Ос)=
1 3 -1
2 1 -2
3-2 4
= -35
-1-351-35.
Искомый объем пирамиды в 6 раз меньше: УОАВС ~Т'у1ш'ов'ос~тТ
п.З замечаний 1.14).
д) Высоту пирамиды hB находим по формуле п. 15:
_^ , #оа,ов,ос _ 35
в с
ЮКОС
е) Высоту ha треугольника ОАС, опущенную из вершины А,
находим по формуле п. 14:
, _ S*oa,oc _ V270
\ОС\ /29
ж) Сначала найдем вектор п , перпендикулярный грани ОВС:
п-[ОВ,ОС] =
2 1 -2
3-2 4
-0-Г-14-7-7-*.
Затем вычислим угол \|/ между вектором О А и плоскостью грани ОВС по
формуле п. 16:
) )
т.е.
Mil
|io+:
, ■ S
з) Найдем вектор
т=[ОА
J-(-
V(-14)24
[ОВ,
(-7)
осп
2
35 V5
-Jni-S -Jn'
т , перпендикулярный плоскости грани ОАС:
J
1
3
j
3
-2
-1
4
= lOi-7j-llk.
103
Вектор п , перпендикулярный грани ОВС, найден в п."ж". Искомый угол 8
вычисляем по формуле п. 17:
со.s_ Ik°bOC],[ОВ,ОС])\ _\(т,п)\_
\[ОА,ОС]\\[ОВ,ОС]\ |»|-|й|
х 5
т.е. o = arccos
и) Радиус-вектор ОМ находим по свойству 4 аффинных и выпуклых
комбинаций (см. разд. 1.6.1):
к) Радиус-вектор ON находим по свойству 2 аффинных и выпуклых
комбинаций (см. разд. 1.6.1):
lo j+2 -_2 j-
л) Направляющие косинусы вектора ОВ находим по формулам п.9:
("2)0 2
ОВ\ V22+l2 + (-2)2 3
ft fcij) 1 (овд) -2
cosp=-V=r|z=—; cosv=-V=T'=—.
|де| з |ов| з
Заметим, что cos2a+cos2p+cos2Y = (jf + ^)2 + (—|f =1 (см.разд.1.3.5).
м) Алгебраическое значе
формуле п.7 {а- ОА, Ъ = ОВ):
м) Алгебраическое значение пр—О А длины проекции находим по
ОВ
2
r«~" I75il з з
104
н) Искомую ортогональную проекцию пр- ОА найдем по формуле п.8
(5" = О А, Ь = п ), используя вектор п , найденный в п. "ж":
= 2-7+*.
о) Найдем координаты вектора АВ и его длину:
_ АВ 1 - 4 - 1
а затем искомый вектор е=т=г =—?=•' +—т="7
|де| Яг Яг
п) Найдем координаты вектора АС и его длину
а затем искомый вектор
1в
АС
1.6.3. Приложения векторной алгебры в механике
Опишем применение векторной алгебры в механике для решения
задачи приведения системы сил. Будем использовать элементарные
механические понятия, опираясь на их физический смысл, не придерживаясь
формального изложения теории. В частности, силы будем рассматривать как
скользящие векторы (см. п.5 замечаний 1.1), не определяя их свойства
аксиомами, как это принято в теоретической механике.
Положение точки А твердого тела будем задавать ее радиус-вектором
г = ОА с началом в некоторой заданной точке О пространства. Силы,
действующие на тело, будем обозначать прописными буквами (например, сила
F). Напомним, что сила является не свободным, а скользящим вектором
(см. п.5 замечаний 1.1). Силу можно переносить, не изменяя длины и
направления, только вдоль содержащей ее прямой (вдоль линии действия
силы), при этом механическое воздействие силы на тело остается неизменным
105
[б]. Поэтому, задавая силу F , указывают точку ее приложения (либо линию
ее действия).
Моментом силы F, приложенной в точке Л, относительно центра
О называется векторное произведение [F,F] радиус-вектора Т-ОА
насилу F (рис.1.62,а) и обозначается mo[F)=[r,F]. Из определения
векторного произведения следует, что модуль момента силы равен произведению
модуля силы на расстояние ОР от точки О до линии действия этой силы,
называемое плечом (рис.1.62,а):
mo(F)=[r,F]
Рис.1.62
Система сил Fj,F2,...,Fn, приложенных к твердому телу,
характеризуется главным вектором:
F = ^+F2+... + Fn, (1.24)
и главным моментом относительно точки О:
M0=m0(jr)+m0(F2)+...+^
где fj = ОА1 ,..., гп = ОАп - радиус-векторы точек А^, А1,..., Ап приложения
сил Fj, F2,..., Fn. В (1.24) сложение сил выполняется как сложение
свободных векторов (см. разд. 1.1.2).
Парой сил (рис. 1.62,6) называется система двух параллельных сил F
и - F (линии действия которых параллельны). Главный вектор пары сил,
разумеется, нулевой. Найдем главный момент. По формуле (1.25), учитывая
свойства векторного произведения, получаем
F] = [^F]-[F2,F] = [/i-F2,F] = [a,F], (1.26)
где а= /j -72 = А2АХ. Как видим, главный момент пары сил не зависит от
точки О (поэтому она и не указана в (1.26)). Следовательно, момент пары
сил - свободный вектор, который может быть приложен к любой точке.
Механическое воздействие на тело различных пар сил с одинаковым главным
моментом одно и то же [б].
106
ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ, ПРИЛОЖЕННЫХ К ТВЕРДОМУ ТЕЛУ
Рассмотрим задачу приведения системы сил, которая формулируется
следующим образом. Пусть к твердому телу в точках А1, Аг,..., Ап,
определяемых радиус-векторами /j = ОА1 , г2 = ОА2 ,..., Тп = ОАп , приложены силы
Ц,F2,..., Fn соответственно. Требуется упростить эту систему сил, т.е.
заменить ее минимальным количеством сил так, чтобы их механическое
воздействие на тело совпадало бы с действием заданной системы сил.
а б в
Рис. 1.63
Замечания 1.15.
1. С точки зрения векторной алгебры задачу приведения системы сил
можно рассматривать как задачу нахождения "суммы" заданных скользящих
векторов. Если бы речь шла о свободных векторах, то их можно было бы
приложить к любой точке пространства и сложить по правилу
параллелограмма (в случае двух векторов) или по правилу ломаной (см. разд. 1.1.2).
Для скользящих векторов так делать нельзя.
2, Для решения задачи приведения системы сил используется операция
"переноса" силы в точку вне линии ее действия. Пусть в точке А приложена
сила F (рис.1.63,я). Приложим к произвольной точке О две
противоположные силы F и - F , воздействия которых на твердое тело, разумеется,
компенсируются (рис. 1.63,6). При этом получим пару сил F и - F ,
приложенных к точкам А и О соответственно. Пара сил характеризуется
моментом (1.26): М = [a, F]. Таким образом, силу можно перенести в любую
точку, добавив при этом соответствующую пару сил (рис.1.63,в).
Решение задачи приведения системы сил содержит два этапа.
Первый этап. Силы Fl9F2,...,Fn, приложенные к твердому телу в
точках А1,А2,...,Ал, "переносятся" в одну точку (см. п.2 замечаний 1.15).
"Перенесем" все силы в точку О и сложим их. Получим главный вектор
(1.24), приложенный к точке О, и главный момент (1.25) заданной системы
сил. Таким образом, исходная система сил приводится к главному вектору
107
F , приложенному в точке О, и свободному главному моменту Мо.
Главный вектор F называют первым инвариантом системы сил, так как его
величина и направление не зависят от выбора точки О.
а б
Рис.1.64
Второй этап. Упрощение системы сил посредством выбора точки О.
Пусть известны: главный вектор F системы сил и главный момент Мо
относительно точки О. Найдем главный момент MQ> той же системы сил
относительно другой точки d\ Поскольку для всякой точки Af.,i = l,...,n:
г. = а + Т\ , где г. = ОА., 3^= О'Аг , а = ОО' (рис.1.64,а), то
Значит, главные моменты связаны следующим образом
Mo=M'o.+\aJ\. (1.27)
Рассмотрим частные случаи.
1. Если главный вектор сип нулевой ( F = о ), то из формулы (1.27)
следует равенство моментов ( Мо = М'»), т.е. главный момент не зависит от
центра О, а система сил эквивалентна паре. В этом случае говорят, что
система сил приводится к паре сил с моментом М (рис. 1.64,6). Если
F =5" и Мо =5\ то механические воздействия всех сил взаимно
уничтожаются (случай уравновешенной системы сил).
2. Если главный вектор сил ненулевой (F Ф Ъ ), то можно найти
ортогональную проекцию главного момента на линию действия главного вектора
(см. разд. 1.5.4):
108
Найдем проекции векторов в левой и правой частях (1.27) на линию
действия главного вектора F . Поскольку скалярное произведение векторов F и
[a, F] равняется нулю, так как эти векторы ортогональны, то
т.е. ортогональная проекция главного момента на линию действия главного
вектора системы сил не зависит от точки О (проекцию npj Mo называют
вторым инвариантом системы сил). Выберем теперь точку О> (т.е. вектор
а=ОО ) так, чтобы ортогональная составляющая М± =М0 -пр-рМ0
равнялась нулевому вектору (рис.1.65,а). Для этого от точки О отложим вектор
а перпендикулярно плоскости, содержащей векторы F и Мо, так, чтобы
выполнялось равенство [a,F ] = -М±. Найденную точку О можно
переносит» параллельно прямой, содержащей вектор F, при этом равенство
[a,F ] = -М± будет выполняться, так как не изменяется плечо для F .
Рис.1.65
Таким образом, любая система сил приводится к главному вектору F
и паре сил с моментом М^, коллинеарным главному вектору (так
называемому динамическому винту (рис. 1.65,6)).
Если второй инвариант системы сил равен нулевому вектору
(пр-р Мо = я ), то система сил сводится к одной силе F , называемой
равнодействующей, механическое воздействие которой эквивалентно
воздействию исходной системы сил. Равнодействующая системы сил совпадает с
главным вектором: F = ^ + ^+...+^.
Далее рассмотрим задачи приведения систем сходящихся и систем
параллельных сил к равнодействующей силе.
109
СИСТЕМЫ СХОДЯЩИХСЯ И СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
Система сил Fl9F29...9Fn9 линии действия которых пересекаются в
одной точке, называется системой сходящихся сил.
Пусть задана система сходящихся сил F1,F2,...,F/I с главным
вектором F = Fx + F2+... + Fn. Поскольку линии действия всех сил проходят через
одну точку А, то главный момент относительно этой точки равен нулевому
вектору: М А = <7. Тогда второй инвариант npj M А = Ъ. Такая система
приводится к равнодействующей F = Fx + F2 + ..,-\- Fn. Требуется определить
точку А (ее радиус-вектор 7) приложения равнодействующей силы.
А -
Рис. 1.66
Если все силы принадлежат одной прямой, то и равнодействующая
лежит на этой прямой (любую точку прямой можно считать точкой А
приложения равнодействующей). Если не все силы коллинеарны и линии действия
пересекаются в точке А, то эта точка является точкой приложения
равнодействующей (1.66,а). Например, в системе FX,F2,F3 (рис. 1.66,6)силы Fj и
F2 не коллинеарны, поэтому точку А (точнее ее радиус-вектор г-ОА)
можно найти из системы уравнений:
\F{ и
которая выражает условия коллинеарности векторов:
7-7t 7~-7
\г2 -г)|| F2, т.е. — 1 =^и -2_5— -г л2 # Вычитая из первого уравнения
системы второе, приходим к равенству rl-r2 + xl'Fl+x2'F2=7>t которое
можно представить в виде
110
где AF = r2 -rx. Таким образом, неизвестные хх, х2 (достаточно найти одну
неизвестную, например, хх) можно найти как коэффициенты разложения
вектора AF = 7^-7j по базису Fl9F2, а затем получить искомый радиус-
вектор:
Он определяет точку А равнодействующей силы F = X 2 3
Пример 1.30. В стандартном базисе на плоскости заданы
координатные столбцы системы трех сходящихся сил FX,F2,F3 и точек (радиус-
векторов гх, Т2, Т3) их приложения (рис. 1.66,6):
Требуется найти:
а) равнодействующую F и точку А (радиус-вектор 7) ее
приложения;
б) моменты каждой силы Fl9F29F39 момент равнодействующей F , а
также главный момент Мо заданной системы сил относительно точки О.
D а) Находим координатный столбец / равнодействующей всех сил
(см. разд. 1.3.4):
Следовательно, F = i - 3 • j.
Поскольку силы Fy, F2 не коллинеарны, то задача сводится к
разложению вектора £г = 72-7х по векторам FX,F2: AF = д^-^ + дс2^2. Находим
координатный столбец Аг вектора Аг=^-^ (см. разд.1.3.4):
(0) (2)
Аг= - =
По формулам (1.19) получаем (см. разд. 1.5.3)
-2
1
1
-1
2
0
2
0
111
Следовательно, r = rx
,т.е. F = F+2-J.
Заметим, что линия действия силы F3 проходит через найденную точ-
Л, так как векторы (^~^) и F- коллинеарны:
= -/, т.е. заданная система сил является системой
ку
г —г, = —
сходящихся сил.
б) Найдем по определению моменты сил Fl,F2,F3,F относительно
точки О:
2 1 О
1 -1 О
0 2 0
2 0 0
= -3*;
= -4*;
m»=[r,F] =
-10 0
-2 -2 0
Г 7 к
1 2 0
= 2*;
1 -3 О
Главный момент Мо системы сил находим по формуле (1.25)
Главный момент Мо можно найти по формуле (1.27): MO=MA+[T,F],
где 7 = ОА. Поскольку главный момент МА системы сил относительно
точки А нулевой (Мд = о), то Мо =[r,F] = mo{F)=-5-k . Результаты
вычислений совпадают. ■
Система сил Fl,F2,...,Fn называется системой параллельных сил,
если векторы F1,F2,...,Fa коллинеарны.
112
Пусть задана система параллельных сил Fx, F2,..., Fn с главным
вектором F = Fx + F2+...+Fn, отличным от нулевого вектора. Поскольку момент
каждой силы перпендикулярен линии ее действия, то и главный момент М о
системы параллельных сил перпендикулярен главному вектору F . Тогда
второй инвариант npj MQ = Ъ. Такая система сил приводится к
равнодействующей F = Fl + F2 + ...+Fn. Требуется определить точку А (ее радиус-
вектор 7 ) приложения равнодействующей силы.
Разберем сначала случай системы двух параллельных сил (рис.1.67,а).
Поскольку векторы Fx, F2 коллинеарны, то точка А (отмеченная
треугольником на рис.1.67,а) приложения равнодействующей F = FX + F2 делит
отрезок А1А2 обратно пропорционально силам {правило Архимеда):
А[А:АА2 = F2:FX. Поэтому согласно свойству 2 аффинных и выпуклых
комбинаций:
F ' F
h-
О
Рис.1.67
Точку приложения равнодействующей F = FX + F2 + F3 системы трех
параллельных сил (рис. 1.67,6) можно найти последовательно: сначала
равнодействующую Fx + F2 и точку N ее приложения (радиус-вектор TN ):
8 — 5150
ИЗ
а затем - искомую точку А (отмеченную треугольником на рис. 1.67,6):
'^
F
F F F 3
По индукции заключаем, что точка приложения равнодействующей
системы п параллельных сил находится по формуле
1? 7? F
г=4т1+4т,+...+4т.
F F F
ЦЕНТР МАСС И БАРИЦЕНТРИЧЕСКИЕ КООРДИНАТЫ
Под материальной точкой понимается тело, размерами которого
можно пренебречь при описании его движения. Такое тело рассматривается
как геометрическая точка (считается, что вся масса тела сосредоточена в
одной точке). Если в точке А сосредоточена масса т, то эту материальную
точку будем обозначать тА. Положение материальной точки А задается ее
радиус-вектором 7 = ОА, приложенным к некоторой заданной точке О.
Любая совокупность материальных точек называется системой
материальных точек. Например, систему образуют п материальных точек
, тпАп с массами тх, т2,..., тп, положение которых
определяется радиус-векторами 7Х = О\ , Т2 = ОА2,..., 7п = ОАп соответственно.
Предполагаем, что любые две материальные точки соединены жестким
"невесомым" стержнем. Любая часть системы материальных точек называется
подсистемой.
В поле силы тяжести на каждую материальную точку из системы
miAl9m2A2 тпАп действует сила F)=m.J, i = l,...,n, где J
-ускорение свободного падения. Эта система параллельных сил, согласно
предыдущему разделу, может быть заменена равнодействующей F=mJ, где
m = m1+m2+...+mn - масса всей системы. Точка Z (ее радиус-вектор
г = OZ ) приложения равнодействующей находится по формуле
Г=~Г1+-Г-Г2+-+~Гп
mm in
114
и называется центром масс (или барицентром) системы материальных
точек. Бели во всех точках сосредоточены одинаковые массы, центр масс
системы называется геометрическим.
Эта формула применима и в случае, когда некоторые (или все) силы
противоположны силе тяжести, например, Fl=-ml-J. В этом случае
будем считать, что масса, сосредоточенная в точке Ау, отрицательная (-
Перечислим основные свойства центра масс.
1. Каждая система материальных точек с ненулевой суммарной массой
имеет однозначно определенный центр масс
^^£ (1.28)
т tn fit
2. Положение центра масс системы miAlfm2A2^..fmnAH (с ненулевой
суммарной массой, т.е. т^ +...+тл * 0 ) не изменится, если суммарную
массу подсистемы /и^, /w2Aj,..., mkAk, k<n (с ненулевой суммарной массой,
т.е. /Wj +... + mk Ф О) перенести в ее центр масс.
Замечание 1.16. Учитывая свойство 6 аффинных и выпуклых
комбинаций (см. разд. 1.6.1), положение центра масс Z не зависит от точки О
приложения радиус-векторов. Поэтому формулу (1.28) можно использовать
в виде [5]
mm ш
не указывая точку приложения радиус-векторов.
Пример 1.31. В трех вершинах А, В, С параллелограмма ABCD
сосредоточены массы #и, (-т), /и соответственно. Найти центр масс этой
системы.
D На рис. 1.68 изображена
система сил, отвечающая условиям
задачи (сила FB, соответствующая
"отрицательной" массе, направлена
вверх). Суммарная масса всех
точек равна т (отлична от нуля). По
свойству 1 для произвольной точки
О имеем РисЛ'68
— т — -т—+гп
115
m m m
т.е. центр масс совпадает с вершиной D параллелограмма.
Пусть в вершинах треугольника А1А2А3 сосредоточены массы
/Hj, т2, /я3.
Для любой тройки чисел тх,т2,тъ (с отличной от нуля суммой)
существует единственная точка Z (центр масс системы)
и наоборот, для любой точки Z в плоскости треугольника \А2АЪ
существует единственная тройка чисел т19т29тъ (тх+т2+т3=1) такая, что
точка Z является центром масс системы.
Тройка чисел ml,m2,m3 называется барицентрическими
координатами точки Z относительно треугольника А[А2А3 -
Аналогично определяются барицентрические координаты в
пространстве.
Пример 1.32. Найти барицентрические координаты центра вписанной
в треугольник ABC окружности.
D По условию задачи требуется найти массы тА,тв,тс, которые
нужно сосредоточить в соответствующих вершинах треугольника ABC,
чтобы центр масс трех материальных точек тАА, твВ, тсС совпал с
центром вписанной в треугольник окружности. Учитывая свойство 4 аффинных
и выпуклых комбинаций векторов (см. разд. 1.6.1), получаем (рис. 1.69):
рг
рг
— ОА+— ОВ+— ОС,
2р 2р 2р
где 5 - площадь треугольника ABC, г -
радиус вписанной окружности, ар-
полупериметр. Таким образом,
барицентрические координаты центра вписанной
окружности
а+Ь+с
тг =-
с а+Ь+с
116
Задачи для самостоятельного решения
1.1. Какие ненулевые векторы а и Ъ удовлетворяют условиям:
a) |a+F|«|e-F|; б) |f|-J|T ' в) |*+F|«|a|+|F| ;
г) |a-F|=|e|+|F|; д) |a+F|=|a|-|F| ?
Ответ: а) ортогональные; б,в) одинаково направленные; г)
противоположно направленные; г) противоположно направленные и | a | > \b .
1.2. Найти геометрическое место точек М плоскости, для каждой из
которых АВ + АМ = \аВ ,где А и В заданные точки плоскости.
Ответ: окружность с центром О на прямой АВ и радиусом ОА = АВ.
1.3. Найти величину острого угла равнобокой трапеции ABCD с
основаниями АВ и CD, если известно, что AB+CD 1=1 AD .
Ответ: j.
1.4. Разложить вектор р = 2-а-3-6 по векторам q=a+b и
7 = а-Ь. Ответ: р = ~-^+-|-г.
1.5. Разложить вектор р = 2«а -Ь +с по векторам а и Ъ , если
известны разложения векторов а,6,с по базису ^,72: «=2^-2-F2,
6=2-^-?2, с=2-^+4?2. Ответ: p = -3a+5-F.
1.6. Векторы Sj ,?2,73 и а заданы своими координатными столбцами
т
1
'Г
1
А
'Г
2
А
9
14,
в некотором базисе. Показать, что векторы 7Х ,72,73 сами образуют базис
пространства и найти координаты вектора а в этом базисе.
Ответ: а =
1.7. Определить, при каких а и Р векторы а=-2-1+3-у+сс-* ,
6=Р-Г-б-7+2-* коллинеарны. Ответ: а = -1; Р = 4.
1.8. Доказать, что для любых векторов а ,Ь ,с и любых чисел <х,|3, у
тривектора a-a~P«6 , у-&-а»с , Р-с-уЗ* линейно зависимы.
117
Указание: коэффициенты разложения векторов записать в столбцы
(а -Р 0)г, (О у -сс)гэ(-у О Р)7^, из которых составить матрицу и
определить ее ранг.
1.9. В параллелограмме ABCD: AB = b , AD = d , ЛГ - середина
стороны ВС, L - середина стороны CD, М - точка пересечения медиан
треугольника ABD, точка N делит отрезок BD в отношении BN: ND = 1:3.
Разложить векторы АС, BD, АК , BL, KL, MN по векторам bud.
Ответ: ~AC = b+d; llD = d-b; ~AK=b+\d\ JL = -±b+d;
1.10. В каком отношении медиана ЛМ треугольника ЛВС делит
биссектрису BL, если известно, что АВ = Ъ-ВС1
Ответ: 4:3, считая от вершины В .
1.11. Точки М и N - середины сторон АВ и CD четырехугольника
ABCD соответственно. Доказать,что
1.12. Доказать, что МА+МВ+МС = Ъ\ если М - точка пересечения
медиан треугольника ABC.
1.13. Доказать, что ОА+ОВ + ОС = ОН, если Я - точка пересечения
высот треугольника ABC, а точка О - центр описанной около
треугольника окружности.
1.14. В треугольной пирамиде ОАВС на боковых ребрах ОА, ОВ, ОС
взяты точки Aj,^,^ так, что 04 = 30^, ОВ = 4ОВХ, ОС = 5ОС1.
В каком отношении плоскость, проходящая через точки \,ВХ,СХ, делит
отрезок, соединяющий вершину О с точкой пересечения медиан
треугольника ABC?
Ответ: 1:3, считая от вершины О.
1.15. Используя скалярное произведение векторов, доказать
метрическое свойство параллелепипеда: сумма квадратов диагоналей
параллелепипеда равна сумме квадратов его ребер.
Указание: использовать метрическое свойство параллелограмма (см.
пример 1.14).
1.16. Доказать, что векторы d =a (fe,c)-fe -(a,c) и с ортогональны.
1.17. Вычислить (а,5")-з(5",^)-2(*,с), если известно, что
fl=4i-ii, Ь =т + 2-п , с =2-т-ЗйГ, где т и п -взаимно
перпендикулярные векторы, причем 17Г | = 1.
Ответ: 19.
118
1.18. Найти единичный вектор е, коллинеарный вектору
2* = 6F-7j-6*.
Ответ: ? = £ -Г-^- j—fik .
1.19. Вычислить модуль и направляющие косинусы вектора
а=12Г-15.7-1бГ.
Ответ: |д| = 25; cos<x = -||; cosp = ™; cosy^-jf.
1.20. Вычислить угол между векторами я =3-i + 2-jf; fe = i + 5• у .
Ответ: j.
1.21. Какой угол образуют единичные векторы 5J ,F2, если известно,
что векторы a =?j+2?2 и £ =5ij-4e2 взаимно перпендикулярны?
Ответ: у.
1.22. Даны векторы a=i -З-у + 4-ife ; i =2-i ~3-j + 6-ifc . Найти орто-
гональную проекцию лр^а вектора а на ось, заданную вектором Ъ , и
ортогональную составляющую a, - вектора а относительно этой оси, а также
алгебраическое значение пр -а длины проекции вектора a .
Ответ: ^а =&.!-&.j+f.?; 2^ =-fГ-f-J-ft; np^a=5.
1.23. Вычислить (|a,6j,[a,bj)+(5',fe| , если известно, что |а| = 2,
|F| = 3. Ответ: 36.
1.24. Силы ^=2-F-jf-3-t; F2=3J+2-7~ifc ; F3 =~4-Г+J+3-ife
приложены к одной точке А . Найти равнодействующую F этих сил и
момент mo\FJ равнодействующей относительно центра О, если известно, что
Ответ: ¥ = F+2-J-ifc ; то(^)=Г-4- J-7-ifc .
1.25. Найти положения центра масс Z однородных пластинок,
изображенных на рис. 1.70:
а) из квадрата ABCD вырезана "четверть" (рис.1.70,а);
б) трапеция ABCD, основания которой относятся, как AD: ВС-2:1
(рис.1.70,б);
в) из круга с диаметром АВ вырезан круг диаметра ОВ, где точка О -
центр большего круга (рис.1.70,в).
119
Ответ: а) точка Z делит отрезок АО в отношении 5:1, считая от
точки А (рис.1.70,а); б) точка Z делит отрезок, соединяющий середины
оснований трапеции, в отношении 4:5, считая от большего основания;
в) точка Z делит отрезок АО в отношении 5:1, считая от точки А .
\С
1.26, На векторах OA = m-i +n-j-l-k , OB = n-i -
ОС = l-i +1 • у +1 • ik построена треугольная пирамида О ABC (рис. 1.71).
Требуется найти:
а) длины ребер ОА, ОВ, ОС;
б) величину угла АОС;
в) площадь треугольника ОАС;
г) объем пирамиды О ABC;
д) высоту пирамиды, опущенную из вершины В ;
е) высоту треугольника ОАС, опущенную из
вершины А;
ж) угол между ребром О А и плоскостью грани
/ ОВС;
*А з) величину угла между плоскостями граней ОАС и
Рис.1.71 ОВС;
и) радиус-вектор ОМ , где М - точка пересечения медиан
треугольника ЛВС;
к) радиус-вектор ON, где точка N делит отрезок AM в отношении
AN:NM =3:4;
л) направляющие косинусы вектора ОВ;
м) алгебраическое значение ортогональной проекции вектора ОА на
направление вектора ОВ;
н) ортогональную проекцию вектора ОА на прямую,
перпендикулярную грани ОВС;
о) единичный вектор 1 (орт), имеющий направление вектора АВ;
п) вектор а , имеющий длину вектора АВ и направление вектора АС.
120
ГЛАВА 2. СИСТЕМЫ КООРДИНАТ
2.1. АФФИННЫЕ СИСТЕМЫ КООРДИНАТ
2.1.1. Аффинные системы координат на прямой, на плоскости,
в пространстве
Пусть в пространстве фиксирована точка О. Совокупность точки О и
базиса называется аффинной {декартовой) системой координат:
- аффинная система координат на прямой (рис.2.1,а) - это точка О и
ненулевой вектор 1 на прямой (базис на прямой);
- аффинная система координат на плоскости (рис.2.1,6) - это точка
О и два неколлинеарных вектора F19?2, взятые в определенном порядке
(базис на плоскости);
- аффинная система координат в пространстве (рис.2.1,в) - это точка
О и три некомпланарных вектора 7Х, 1г, 1Ъ, взятые в определенном порядке
(базис в пространстве).
Точка О называется началом координат. Прямые, проходящие через
начало координат в направлении базисных векторов, называются коорди-
Рис.2.1
натными осями: Ох^ - ось абсцисс, Ох2 - ось ординат, Охъ - ось
аппликат. Плоскости, проходящие через две координатные оси, называются
координатными плоскостями.
Аффинная система координат в пространстве (или на плоскости)
называется правой, если ее базис является правым, и левой, если ее базис -
левый.
121
КООРДИНАТЫ ВЕКТОРОВ И ТОЧЕК
Координатами вектора в заданной системе координат называются,
как и ранее, коэффициенты в разложении вектора по базису (см.
разд.1.3.1; 1.3.2; 1.3.3).
Для любой точки А в заданной аффинной системе координат можно
рассмотреть вектор О А , начало которого совпадает с началом координат, а
конец - с точкой А (рис.2.1,а,б,в). Этот вектор называется радиус-
вектором точки А.
Координатами точки А в заданной системе координат называются
координаты радиус-вектора этой точки относительно заданного базиса. В
пространстве это координаты вектора О А в базисе ij ,?2 ,?3, т.е.
коэффициенты ах,а2>аъ в разложении ОА = о1-?1+а2-?2+а3**з (рис.2.1,в).
Координаты точки записывают в виде A(ava2,a3). Первая координата называется
абсциссой, вторая - ординатой, третья - аппликатой. На плоскости и на
прямой координаты записывают в виде A[ava2) и А(а) согласно
разложениям ОЛ = а1-?1+а2-?2 (рис.2.1,6), ОА-а'е (рис.2.1,а). Координаты точки
А , или, что то же самое, координаты ее радиус-вектора О А представляют в
виде координатного столбца (матрицы-столбца):
\ (а
в пространстве,
в пространстве, на плоскости.
Найдем координаты вектора АВ с началом в точке
A{ava2,a3) и концом в точке B[bvb2yb3). Рассмотрим
треугольник ОАВ (рис.2.2). Радиус-векторы ОА и ОВ
представляются в виде ОА = а1'ё1+а2'ё2+а3'ё3,
ОВ = bx -SJ +Ъ2 ?2 +ЪЪ • е3. По правилу треугольника (см.
Рис.2.2 разд. 1.1.2) вычитания векторов получаем
з> т.е. вектор АВ имеет
координаты Ьг-аг, Ь2-а2, Ъъ~аъ. Этим доказано следующее правило:
чтобы найти координаты вектора }нужно из координат его конца вычесть
соответствующие координаты его начала. Это же правило справедливо
для аффинных систем координат на плоскости и на прямой.
Замечания 2.1.
1. В заданной системе координат каждой точке можно поставить в
соответствие ее координаты, причем это соответствие взаимно однозначное:
122
(точка) <-» (ее координаты).
В частности, разным точкам соответствуют разные наборы координат.
2. Если вектор v с координатами vt, v2, v3 отложить от точки
A(ava2,a3)y то конец вектора AB = v будет иметь координаты
B{ax+vva2+v2Ja3+v3).
3. Координаты точки М, которая делит отрезок АВ в отношении
А АЛ ft
= — (<Х>0, Р>0), находятся по координатам его концов л(о19а29а3)
MB OL
и B(bvb2,b3):
М\ —, , .
^ а+р а+р а+Р )
В частности, координаты середины М отрезка АВ равны среднему
арифметическому соответствующих координат концов отрезка (а = Р):
2 2 2
Координаты точки М, которая "делит" площадь треугольника ABC
в отношении SMBC:SMCA:SMAB=a:$:y (а>0, Р>0, у>0), находятся
по координатам его вершин А{а1Уа2Уа3), B[bvb2,b3), c{cvc29c3):
fa
a+p+y ' a+p+Y ' a+p+Y
В частности, координаты точки М пересечения медиан треугольника ABC
равны среднему арифметическому соответствующих координат вершин
треугольника ( a = Р = y ):
Эти формулы следуют из свойств 2,4 аффинных и выпуклых
комбинаций (см. разд. 1.6.1). Они остаются справедливыми и на координатной
плоскости, если аппликаты всех точек положить равными нулю. Например,
координаты середины М отрезка АВ: Ml-^y-1-, °22 2 1, или координаты
точки М пересечения медиан треугольника ABC: м{°1+ **Cl, "2* **Сг J.
Пример 2.1. В некоторой аффинной системе координат известны
координаты вершин треугольной пирамиды ABCD(см. рис.2.3): A(l, 1,3),
123
Рис.2.3
Я(3,5,4), С(-1,3,2), D(5,3,-l). Найти координаты
(в той же системе координат):
а) точки М пересечения медиан треугольника
ABC;
б) точки Z, которая делит отрезок DM в
отношении DZ:ZM =3:1 (р = 3; 01 = 1).
D Учитывая п.З замечаний 2.1, получаем:
a)i
g±),T.t. Z(2,3,2).
2.1.2. Прямоугольные системы координат
Аффинная система координат называется прямоугольной, если ее
базис ортонормированный. Выбирая стандартные базисы (см. разд. 1.3.5),
получаем:
Oi - прямоугольную систему координат на прямой - это точка О и
единичный вектор I на прямой. Точки О и Л (рис.2.4) на координатной
оси Ох обозначаются О(о) и A(l);
-2
-1
О i
Рис.2.4
if -а{1-л)
i
Oi j - прямоугольную систему координат на плоскости - это точка
О и два взаимно
перпендикулярных единичных вектора 7
и j на плоскости (вектор Г -
первый базисный вектор, a j
- второй; пара векторов i, j
- правая). Координатные оси
Ох (абсцисс) и Оу (ординат)
разбивают плоскость на 4
части, называемые четвертями
(рис.2.5). Точка A(l,l),
например, принадлежит /
четверти;
124
-2
-1
т I
-1
Рис.2.5
IV
Oijk - прямоугольную систему координат в пространстве - это
точка О и три попарно перпендикулярных единичных вектора i, у ,к
(вектор Г - первый базисный вектор, j - второй, а к - третий; тройка векторов
1, J, Jfc - правая). Координатные оси обозначаются: Ох - ось абсцисс, Оу -
ось ординат, Oz - ось аппликат. Координатные плоскости Оху, Oxz, Qyz,
проходящие через пары координатных осей, разбивают пространство на 8
октантов (рис.2.6). Точка A(l, 2,2), например, принадлежит / октанту.
Прямоугольные системы координат обозначают также указанием
начала координат и координатных осей, например, Ох, Оху, Oxyz.
Координаты векторов и точек в прямоугольной системе координат
называются прямоугольными координатами.
VIII
Рис.2.6
Координатами вектора в прямоугольной системе координат
называются коэффициенты в разложении вектора по стандартному базису (см.
разд. 1.3.5).
Координатами точки А в прямоугольной системе координат
называются координаты ее радиус-вектора ОА в стандартном базисе. В
пространстве это коэффициенты x,y,z вразложении OA-x-i + y-j + z-k ,на
плоскости - коэффициенты х, у в разложении ОА = jc-i + у • j, на прямой -
125
коэффициент х в разложении OA = x-i. Прямоугольные координаты точки
(или ее радиус-вектора) можно представить координатным столбцом:
в пространстве,
на плоскости.
Замечания 2.2.
1. В прямоугольной системе координат расстояние АВ между
точками А[хАу уА, zA) и В[хв, ув, zB) находится по формуле
Для координатной плоскости и коорданатной прямой соответственно
получаем
AB = \xB-xA\.
2. Ориентированной площадью S^BC треугольника ABC называется
его площадь SABC, взятая со знаком плюс, если ориентация пары векторов
АВ, АС правая, и со знаком минус, если ориентация - левая. Если на
плоскости известны прямоугольные координаты вершин А\хА, уА), В[хв, ув),
С\хСуУс) треугольника ABC, то его ориентированная площадь
вычисляется по формуле
SABC -T
У А 1
У в 1
Ус 1
Действительно, по свойствам определителя (см. разд.П.6) получаем
половину ориентированной площади параллелограмма, построенного на
векторах АВ и АС (см. разд. 1.5.3):
1
ХА
ХВ
ХС
Уа
Ув
Ус
1
1
1
1
ХА
ХВ~ХА
ХС~ХА
Уа
1
хв ха у в у а
хс"ха Ус~Уа
3. Ориентированным объемом V^BCD тетраэдра (треугольной
пирамиды) ABCD называется ее объем, взятый со знаком плюс, если
ориентация тройки векторов АВ, АС, AD правая, и со знаком минус, если
ориентация - левая. Если известны прямоугольные координаты вершин
a(*a'3V*a)' Мрв'Ув'гв)* Фс^с^с), d(xd^d^zd) тетраэдра
ABCD, то его ориентированный объем вычисляется по формуле
126
У А
'ABCD
Ус zc
Действительно, вычитая первую строку определителя из остальных
строк и раскладывая затем определитель по последнему столбцу, получаем
£__ __шш» ^_^^_\
±-[АВ, АС у AD), т.е. одну шестую ориентированного объема
параллелепипеда, построенного на векторах АВ, АС, AD (см. разд.1.5.3).
Пример 2.2. Известны прямоугольные
координаты вершин A(l,l),2?(4,5),C(l3,6) треугольника
ABC (рис.2.7). Требуется найти:
а) длину медианы AM ;
б) длину биссектрисы AL;
в) высоту ha, опущенную из вершины А.
D а) Учитывая п.З. замечаний 2.1, находим
координаты точки М - середины стороны ВС:
{),т.е. М(у>т)- Учитываяп.1 замечаний2.2, получаем:
б) Найдем координаты точки L, которая делит сторону ВС в
отношении BL:LC = AB:AC (свойство биссектрисы треугольника). Так как
A5 = V(4-l)2+(5-l)2=5 и AC = V(l3-l)2+(6-l)2 =13, то, учитывая п.2
замечаний 2.1 (BL:LC=5:13 => а = 13,р = 5), находим
т.е. L(f .^.Следовательно, AL
в) Учитывая п.2 замечаний 2.2, находим ориентированную площадь
треугольника ABC:
1 1 1
33
SABC =f • ТОГДа
1
4
13
1
5
б
1
1
1
Следовательно, площадь этого треугольника
А„=
,поскольку ВС = V(l3-4)2+(6-5)2=V82.
127
Пример 2.3. Известны прямоугольные координаты вершин Л(1,1,3),
#(3,5,4), С(-1,3,2), D(5,3,-l) треугольной пирамиды ABCD. Требуется
найти:
а) длину отрезка DM, соединяющего вершину D пирамиды с точкой
М пересечения медиан грани ABC (см. рис.2.3);
б) объем VABCD пирамиды.
D а) Координаты точки М найдены в примере 2.1: М (l, 3,3). Поэтому
б) Найдем ориентированный объем пирамиды по формуле п.З
замечаний 2.2. Вычитая первую строку из остальных строк и раскладывая
определитель по последнему столбцу, получаем
VABCD
■И*
+4
Следовательно, V.
ABCD
1
3
-1
5
2 4
-2 2
4 2
= 12.1
1 3
5 4
3 2
3 -1
1
-1
-4
1
2
-2
4
3
1
-1
-4
= _1.(_16-1б-4-8-32+4)=12.
2.2. АФФИННЫЕ ПРЕОБРАЗОВАНИЯ КООРДИНАТ
Рассмотрим преобразование системы координат в пространстве.
Пусть в пространстве заданы две системы координат Oijejej и
О'ё^ё£ё£. Первую систему координат будем условно называть "старой", а
вторую - "новой". Тогда базис ~ёх ,ej ,73 - "старый", а базис ех ,е2 ,е3 ~ "н0"
вый". Старый и новый базисы представим в виде символических матриц-
строк: (ё)=(ё, ё2 ё3), (ё')=(^ ё£ «£)• Поставим следующие задачи:
1) нахождения координат вектора в новом базисе по координатам того
же вектора в старом базисе;
2) нахождения координат точки в новой системе координат по
координатам той же точки в старой системе координат.
2.2.1. Преобразование координат вектора при замене базиса
Пусть известны координаты векторов нового базиса относительно
старого базиса:
128
(2.1)
Записывая по столбцам координаты векторов е1,е2,ег относительно базиса
«1 > \' *з' с<>ставляем матрицу:
513
(2.2)
Квадратная матрица 5 ., составленная из координатных столбцов
(* И')
векторов нового базиса (ij в старом базисе (?), называется матрицей
перехода от старого базиса к новому (матрицей преобразования базиса).
При помощи матрицы перехода (2.2) формулы (2.1) можно записать в
виде:
Умножение символической матрицы-строки (е) на матрицу перехода
5, в (2.3) производится по правилам умножения матриц (см. разд.П.З).
И*)
Пусть в базисе (?) вектор v имеет координаты vx, v2, v3, а в базисе
- координаты v[, v'2, V3, т.е.
v7 = v1.?1+v2.?2 + v3-e3=v1/.^+V2-^+V3-^ или,короче, v=(?)v)
где v =(vj v2 v3jT, Хч = (у1 v2 V37 - координатные столбцы вектора
v . Подставляя в правую часть последнего равенства выражение (2.3),
получаем v =(?)• v =(?)• 5 /v' - два разложения вектора v в одном и том
() (?>>( ) \ )
же базисе (?). Коэффициенты этих разложений совпадают (по теореме 1.S),
так как это координаты одного и того же вектора в одном базисе. Поэтому
й-
9-5150
или, что то же самое,
*13
-21
ы
(2.4)
129
Формула (2.4) устанавливает связь координат вектора в разных
базисах: координатный столбец вектора в старом базисе получается в
результате умножения матрицы перехода на координатный столбец вектора в
новом базисе.
Аналогично находится связь координат вектора на плоскости при
замене базиса:
v= 5 •/ или, что то же самое, |!| = | " *12 IП . (2.5)
(е) (ЦИИ Ы |^ S){v)
где hi J - координатные столбцы вектора v относительно базисов
) = (?i ?2) и (*/=г£ %) на плоскости соответственно, а
= и 12 - матрица перехода от базиса (?) к базису (?;.
^ Sj
S22
Матрица перехода от одного базиса к другому обладает следующими
свойствами.
1. Пусть в пространстве имеются три базиса (?), \f), \g) и известны
матрицы перехода: S ,* от базиса (?) к базису (/); .5 от [fj к
(j); S от (?) /с (g). Тогда матрица S _ композиции преобразо-
ваний базисов (?)—>(/) и \f)-*(j) равна произведению матриц
преобразований базисов:
S = S, о ,5 . (2.6)
М?) (Ь(7)(?М?)
2. JS'cyzw 57 - матрица перехода от базиса (?) /с базису [fj, то
матрица S. х обратимая (невырожденная) и обратная матрица являет-
GM7)
ся матрицей перехода от базиса (/) /с базису (?): 5"") х= . ,S . Коорди-
/ш/иы вектора v в базисах (?) м (/j связаны формулами:
3. Определитель матрицы S перехода от базиса
\f)-\f\ ?г fz)K базисУ (F)=(Fi F2 *з) РЛве/| отношению ориенти-
130
рованных объемов параллелепипедов, построенных на базисных векторах
28):
det
иЛЛ)
Определитель матрицы _ S перехода от базиса v7)=\7i /2) на
плоскости к базису (g)=(^ g2) радей отношению ориентированных
площадей параллелограммов, построенных на базисных векторах (рис.2.8,б):
det 5 =
(и)
Определитель матрицы перехода положительный, если эти базисы
одноименные (оба правых или оба левых), и отрицательный, если базисы
разноименные (один правый, а другой левый).
Рис.2.8
4. Любая невырожденная квадратная матрица (2-го или 3-го
порядков) может служить матрицей перехода от базиса к базису (на плоскости
или в пространстве соответственно).
Докажем первое свойство. Запишем связь (2.4) для данных базисов:
Подставляя первое выражение во второе равенство, получаем
Of)=(?) • S, х- 5 . Сравнивая с третьим равенством, приходим к (2.6).
Докажем второе свойство. Пусть S - матрица перехода от базиса
(7М?)
(7) к базису (?). Учитывая, что матрица перехода от базиса (?) к базису
(?) - единичная, применяем свойство 1 к трем базисам (?)»у )»(*):
131
9*
E= •S/.w-xS . Для трех базисов (/)»(*)»(/) аналогично получаем:
Е-. Я • S. ..Следовательно, , ,5 = 5"! ч (см.разд.П.9).
Докажем третье свойство для базисов в пространстве. Пусть
•mi Аг Лз
/21 /
22
- матрица перехода от стандартного базиса
\А\ Аг Аъ)
(?)=(Г j к) к базису (7)=0?1 72 73)> где fx =/u-i+/21- j + f3ik,
fi~Ai'*+ Аг' J* Аг'к » 7з =/i3*'^/тз'^Аз'^ • ^° Ф^мул6 (1-20)
ориентированный объем параллелепипеда, построенного на векторах
7i»7г»7з ♦ равен смешанному произведению (7р 7г» 7з) и™» что то же са"
мое, определителю det _ F. .. Аналогично, если _ G _ - матрица перехода
от стандартного базиса к базису (g^Ofi F2 £3)» то ^et_G_ =
= (^р^2'^з)* ^3 пеРвых Двух свойств матрицы перехода следует, что
Л5 = F"?»- _ G _ . По свойствам определителя (см. разд.П.9)
det, X5 =det F-; vdet G. ^^М^=Щ^Ы9 то и требовалось
доказать.
2.2.2. Преобразование координат точки при замене системы координат
Пусть в пространстве заданы две системы координат О1Х 1г е3 (старая)
и O'e^i^ (новая), известна матрица (2.2) перехода от базиса (?) к базису
(е'), а также координаты вектора переноса начала координат 1 = 00* в
старом базисе (?):
J = ОО = 5j -Fj + $2 -5*2 + s3 -?3.
Пусть x(^,jc2,jc3) и ЯддСрХ^дСз) - координаты точки X относительно
старой и новой систем координат. Требуется найти формулы, связывающие
старые и новые координаты точки X (рис.2.9).
Запишем векторное равенство ОХ =ОО'+О'х в координатной форме
(в старом базисе (<?)), учитывая, что координаты радиус-вектора совпадают
132
с координатами точки, а старые и новые координаты вектора О X связаны
формулой (2.4). Получим
UJ
413
S23
J33;
ИЛИ
Формула (2.7) устанавливает связь координат одной и той же точки в
разных системах координат в пространстве, выражая старые координаты
через новые.
Аналогичная формула
или
(2.8)
устанавливает связь координат одной и той же точки в разных системах
координат на плоскости, выражая старые координаты через новые.
Рис.2.9
Формулы вида (2.7) или (2.8):
с любой невырожденной матрицей S задают аффинное преобразование
координат на плоскости или в пространстве. По этим формулам можно для
любой старой системы координат установить новую систему координат,
поскольку известен вектор J = ОО' переноса начала координат (координатный
столбец s ) и координаты новых базисных векторов в старом базисе
(координатные столбцы являются столбцами матрицы S), и наоборот, по новой
системе координат восстановить старую.
Пример 2.4. В прямоугольной системе координат Oij на плоскости
заданы векторы 7^2-F+J, 72=-F+2-J и точки О^ЗД), А(-1,3)
(рис.2.10). Требуется найти:
а) матрицу перехода S.. от стандартного базиса (e)=(i j) к бази-
133
б) ориентацию
i/hi/г Л);
в) матрицу перехода
базиса
S, . от
стандартного базиса {е)- (Г j) к бази-
<*(/')= (Л Л);
Рис.2.10 г) матрицу перехода (S от ба-
МЛ 72) к базису (?)=(Г J);
д) координаты вектора 5" = ОА в базисе (7)= (Л 72);
е) координаты точки А в системе координат 0/j f2.
П а) Составляем искомую матрицу S, х, записывая координаты век-
Г2 -Г\
торов /j,/2 по столбцам: _ 5, =
б) Определитель найденной матрицы
det
2 -1
1 2
5, ч положительный:
= 5, поэтому базис (7)=(7i 72) ориентирован также
как стандартный (см. свойство 3 матрицы перехода), т.е. является правым,
в) Составляем искомую матрицу / ч5/м, записывая координаты векто-
Г-1 2^
ров /2, /j (в указанном порядке) по столбцам: S, =
2 1
г) Учитывая свойство 2, матрицей перехода от базиса (7)=(7i 72) к
базису (?)=(Г J) служит матрица, обратная для S. х:
5 [-I 2
-0,2 0,4
д) Вектор а = OA является радиус-вектором точки А , поэтому
известны его координаты -1, 3 в стандартном базисе (?) = (? ]). Составим
координатный столбец а = | _ | вектора а в стандартном базисе.
Координатный столбец а этого вектора относительно базиса (7)=(71 72) связан с
134
его координатным столбцом а формулой а = S ) /а, следующей из свой-
ства 2 матрицы перехода. Учитывая п."г", вычисляем
о,4 o
т.е. 5' = 0,2-71+1,4/2.
е) Составляем координатный столбец s = \ вектора s=OO (радиус-
вектор точки О ) и записываем связь (2.8):
1 *!+2-*2=2.
Решая эту систему, находим координаты х[ = -1,2; хг -1,6 точки А в
системе координат Ojx /2. ■
2.2.3. Преобразования прямоугольных координат
на плоскости и в пространстве
ПРЕОБРАЗОВАНИЕ ПРЯМОУГОЛЬНЫХ КООРДИНАТ НА ПЛОСКОСТИ
Получим формулы, связывающие координаты точки при переходе от
одной прямоугольной системы координат к другой прямоугольной системе
координат. Рассмотрим три типа преобразований:
а) параллельный перенос;
б) поворот;
в) зеркальное отражение в оси абсцисс (изменение направления оси
ординат на противоположное).
В каждом случае координаты точки в старой Oi j и новой О i j
системах координат связаны формулой (2.8). Поэтому достаточно найти вектор
J переноса начала координат и матрицу S перехода от базиса i , j к базису
i >./ •
а) При параллельном переносе системы координат (рис.2.11,а) базис
не изменяется, поэтому матрица перехода является единичной: S = Е.
Находим координаты вектора переноса начала координат:
J = ОО' = xs • i + ys • jf. Тогда формулу (2.8) можно записать в виде
135
б) При повороте системы координат на угол <р (рис.2.11,6) начало О'
новой системы координат совпадает с началом О старой, поэтому вектор
переноса нулевой: 1-ОО = 5". Разлагая новые базисные векторы Г,/ по
старому базису, получаем i' = cos<pi + sin<p-y, / = -sin<pi +cos(p-y .
Составим матрицу перехода, записывая координаты векторов i\f по столб-
fcoscp — i^
1
цам: 5=
1
^sincp coscpj
У
О
. Тогда формулу (2.8) можно записать в виде
= х -coscp-у'-sincp,
I/ _
Рис.2.11
в) При зеркальном отражении в оси абсцисс {изменении направления
оси ординат на противоположное) (рис.2.11,в) начало О' новой системы
координат совпадает с началом О старой, поэтому вектор переноса
нулевой: 1-Od=o'. Разлагая новые базисные векторы i',/ по старому
базису, получаем Г = Ы+0«7 (так как Г = Г), 7' = 0-F+(-l)-J. Составим
матрицу перехода, записывая координаты векторов i',j по столбцам:
. Тогда формулу (2.8) можно записать в виде
\
Аналогично определяется зеркальное отражение в оси ординат
(изменение направления оси абсцисс на противоположное).
Покажем, что любое преобразование прямоугольной системы
координат сводится к последовательному применению рассмотренных
преобразований, т.е. к композиции преобразований систем координат.
Действительно, пусть на плоскости заданы две прямоугольные системы координат
136
OljnOij. Сначала, если точки О и О не совпадают, выполним
параллельный перенос старой системы координат на вектор J = ОО , при этом
получим систему координат O'i j. Затем при помощи поворота на угол ф
совместим вектор i с вектором i', при этом получим систему координат
O'i /', где вектор /' либо совпадает с вектором / (/' = j ), либо проти-
. т" -:'х
воположен ему (j =-j ). В первом случае, когда обе системы Oi j и
O'i' j одноименные, никаких преобразований делать уже не надо, так как
полученная система координат O'i'j' совпадает с заданной Oij
(рис.2.12,а). Во втором случае, когда системы Oi j и O'i j разноименные,
для получения системы O'i j' достаточно изменить направление оси
ординат на противоположное, т.е. выполнить зеркальное отражение Oij в оси
О'Т (рис.2.12,6). Формулы, связывающие старые и новые координаты
точки, имеют вид:
- при одноименных системах координат (рис.2.12,а):
- при разноименных системах координат (рис.2.12,6):
f* = *j+*;cos<p + /.sin<p,
I у = ^s + ■* "sinф—у -cos<p.
У. :
j\
■к
-
i '
i
A
к
>
О I
О J
Рис.2.12
Таким образом, любое преобразование прямоугольной системы
координат на плоскости сводится к композиции преобразований, каждое из
которых является либо параллельным переносом, либо поворотом, либо
зеркальным отражением в оси координат,
137
Замечания 23.
1. Для рассмотренных преобразований координат точек нетрудно
получить выражения новых координат через старые:
а)
в)
*=*-*., _ч х = х-со8ф+у-8Шф,
У =У~У5> [у =-дс-81Пф+;у-со8ф,
Для преобразования (2.9) аналогичные формулы имеют вид:
X = Jt,
2. При *5 =0,;у5 =0 и Ф = у из соотношений (2.10) получается
преобразование
изменяющее названия координатных осей (зеркальное отражение в прямой,
содержащей биссектрису первого координатного угла).
3. Справедливо утверждение: любое преобразование прямоугольной
системы координат на плоскости может быть представлено в виде
композиции зеркальных отражений в некоторых прямых.
Для доказательства достаточно показать, что рассмотренные выше
преобразования - параллельный перенос (рис.2.11,а) и поворот (рис.2.11,6) -
можно представить при помощи композиции зеркальных отражений.
Действительно, параллельный перенос системы координат вдоль оси абсцисс (на
вектор J = xs • i + 0 • j) можно получить при помощи двух отражений: первое
- относительно оси ординат (получим систему координат Oi" j), а второе -
относительно прямой /, проходящей через точку |-jcs на оси абсцисс
параллельно оси ординат (рис.2.13,а). Аналогично выполняется сдвиг вдоль
оси ординат. Поэтому любой параллельный перенос сводится к композиции
зеркальных отражений.
1 О
-r-t
х- о' 7
X
Рис.2.13
138
Чтобы получить поворот на угол ф, нужно выполнить два зеркальных
отражения (рис.2.13,6): первое - относительно оси ординат (получим
систему Oi'у), а второе - относительно биссектрисы / угла между векторами j
и J.
4. Утверждение п.З можно уточнить: любое преобразование
прямоугольной системы координат на плоскости может быть представлено в
виде композиции не более трех зеркальных отражений в некоторых прямых
[4].
5. Преобразования координат (2.7),(2.8) называются ортогональными,
если матрица перехода S. ортогональная, т.е. S") = S*. Нетруд-
но показать [10], что преобразования (2.9),(2.10) ортогональные, поэтому
любое преобразование прямоугольной системы координат является
ортогональным.
Пример 2.5. Известны
координаты точек A(7,-l) и
О'(й,б) в прямоугольной
системе координат Oi j на
плоскости. Найти координаты точки ч
\/
А в прямоугольной системе
координат O'i'] , полученной
при помощи зеркального
отражения в некоторой прямой /
системы Оху (рис.2.14).
D Находим вектор пере- Рис.2.14
носа начала системы координат
J = OO =8-i+6-y (xs =8, ys =6), его длину | j| = 10 и угол <x = arccosj
между векторами J и i , так как cosa=т=г=~. Ось симметрии / при
зеркальном отражении является серединным перпендикуляром к отрезку 00 ,
поэтому угол \|/, который образует ось симметрии с положительным
направлением оси абсцисс Ох, равен \|/ =•?■•+a. Отражение в оси /
представим в виде композиции следующих преобразований: параллельного
переноса на вектор J = OO' = S-i +6- j ; поворота на угол (р = 2\|/= 7t+2a;
зеркального отражения в оси абсцисс (рис.2.12,6). Старые и новые координаты
точки А связаны формулой (2.10) при jc5 =8, ys =6, <р = я+2а. Учитывая,
что since = 4 и
139
= -2- — +1 = ;
\5J 25
-2 =
5 5 25
получаем
Подставляя старые координаты х = 7, 3? = -1 точки Л , получаем ее новые
координаты:
Следовательно, точка А имеет одинаковые координаты в обеих системах,
т.е. точка А лежит на оси симметрии /. ■
ПРЕОБРАЗОВАНИЯ ПРЯМОУГОЛЬНЫХ КООРДИНАТ В ПРОСТРАНСТВЕ
Получим формулы, связывающие координаты точки при переходе от
одной прямоугольной системы координат в пространстве к другой
прямоугольной системе координат.
Рассмотрим три типа преобразований прямоугольной системы
координат:
а) параллельный перенос;
б) поворот вокруг координатной оси;
в) зеркальное отражение в координатной плоскости (изменение
направления одной координатной оси на противоположное).
В каждом случае координаты точки в старой 61 jk и новой О'г j'k'
системах координат связаны формулой (2.7). Поэтому достаточно найти
вектор 1 переноса начала координат и матрицу 5 перехода от базиса
i,j9k кбазису *',/,*'.
а) При параллельном переносе системы координат базис не
изменяется, поэтому матрица перехода является единичной: S = E. Находим
координаты вектора переноса начала координат: J = ОО = xs-i + ys-j + zs-k .
Тогда формулу (2.7) можно записать в виде
х = xs + х ,
? = >, + /.
z = zs + z .
б) При повороте системы координат на угол ф (рис.2.11,6) вокруг оси
аппликат начало О' новой системы координат совпадает с началом О ста-
140
рой, поэтому вектор переноса нулевой: J = 00 = о . Разлагая новые
базисные векторы i', /\к' по старому базису, получаем
F7?; 7' = -sin<p-7+cos<p-7+OJfc ;*' = 0-/+0-J+1-* .
'coscp -8Шф О"*
Составим матрицу перехода S =
sincp coscp О
О
1
записывая координаты
векторов i', / ,к' по столбцам. Тогда формулу (2.7) можно записать в виде
= jt'cos<p-/sin<p,
Очевидно, что система координат на плоскости Оху при этом
преобразовании поворачивается на угол <р.
в) При зеркальном отражении в плоскости Оху {изменении
направления оси аппликат на противоположное) начало О' новой системы
координат совпадает с началом О старой, поэтому вектор переноса нулевой:
J = ОО'=Ъ. Разлагая новые базисные векторы T9J9k' по старому базису,
получаем Г = 1-Г+О«7+О-* ; / = 0-Г+1- J+0-ik ; Г = О-Г+О- J-1-Jfc . Со-
ставим матрицу перехода S =
сать в виде
1
0
0
0
1
0
0
0
-К
. Тогда формулу (2.7) можно запи-
У = У .
Аналогично определяются зеркальные отражения в других координатных
плоскостях (изменение направлений осей абсцисс или ординат на
противоположные).
Матрицы переходов в п."а","б\"в" ортогональные (см. п.5 замечаний
2.3).
Как и в случае преобразований на плоскости, можно показать, что
любое преобразование прямоугольной системы координат в пространстве
сводится к композиции преобразований, каждое из которых является либо
параллельным переносом, либо поворотом вокруг координатной оси, либо
зеркальным отражением в координатной плоскости [4].
141
УГЛЫ ЭЙЛЕРА
Используя композицию, получим формулы преобразования координат
точки в пространстве при переходе от старой прямоугольной системы Oxyz
к новой Oxyz , имеющей то же начало и ту же ориентацию (т.е. новая
система координат получается из старой поворотом вокруг начала координат
О). Обе системы координат изображены на рис.2.15 (полужирными и
двойными линиями соответственно). Чтобы от системы Oxyz перейти к системе
Oxyz нужно выполнить три поворота. Сначала проведем через точку О
перпендикуляр Охх {линию узлов) к плоскости Ozz . Направление на этом
перпендикуляре выберем так, чтобы ориентация система координат Oxxzz
совпадала бы с ориентацией системы координат Oxyz. Если оси Oz и Oz
совпадают, то ось Ох{ выбирается совпадающей с осью Ох. Если оси Oz и
Oz противоположно направлены, то и ось Ох{ выбирается
противоположно направленной оси Ох. Затем последовательно сделаем три поворота:
первый поворот выполним вокруг
оси Oz на угол \|/ (0<Л|/<271) от оси
Ох до оси Ох1 (получим систему
координат Охху^х, оси Охх и Оух которой
изображены штриховыми линиями на
рис.2.15);
второй поворот выполним вокруг
оси Охг на угол в (0<8<7г) от оси
Oz до оси Oz', при этом ось Оух
примет положение Оу2 (получим систему
координат Oxxy2z2, ось Оу2 которой
изображена двойной штриховой линией
на рис.2.15);
третий поворот выполним вокруг оси Oz на угол <р (0<<р<2я) от
оси Ох2 до оси Ох .
Указанные углы у, 0, <р называются углами Эйлера, в частности, угол
V называется зилом прецессии, угол 0 -углом нутации, а угол <р -углом
чистого вращения.
Согласно п."б", запишем матрицы переходов Sx, S2,S3 от базиса к
базису для указанных поворотов соответственно:
142
cosy
sin у
0
-sin\|/
cosy
0
0
1
'\
0
0
0
cos 9
sin6
0 ^
-sin 9
cos 9 ,
coscp
0
-8Шф
СОБф
0
0>
0
1
По свойству 1 (см. разд.2.2.1) получаем матрицу перехода S от базиса
прямоугольной системы координат Oxyz к базису прямоугольной системы
координат Oxyz :
М) 1 2 3
sin\|/sin6>
sin\|f • cos<p+cos\|/ • cos9 • втф - sin\|/ • simp+cos\|/ • cos9 • совф - cosy • sin9
cos9
Отсюда следуют формулы для преобразования прямоугольных координат
точки
+ sin\|/-sin9-z ;
Поскольку каждая из матриц Sl9S2,S3 ортогональная, то и их
произведение также является ортогональной матрицей (см. п.5 замечаний 2.3).
Пример 2.6. Прямоугольная система координат Oi'j'k' получена из
стандартной системы координат Oi j к при помощи поворота на угол -у-
вокруг прямой, проходящей через начало координат и образующей равные
углы с координатными осями (на рис.2.16 эта прямая изображена одной
точкой О, поскольку перпендикулярна плоскости рисунка). Требуется
найти углы Эйлера.
D Составим матрицу 5 перехода от базиса
i,j,k к базису i',j',k'. Так как
Г=о-Г+1-7+о-*, /=oJ+(
,то 5 =
0
1
0
0
0
1
V
0
о,
. Сравнивая
i=Jfc
с матрицей S , заключаем, что 9 = -f- (так как
Рис.2.16
143
cos9 = 0 и 0<9<я); \|/=-| (таккак sin\|f = 1 и 0<\|/<2я); ф = 0 (таккак
cos<p = l и 0<ф<2я). ■
2.2.4. Аффинные преобразования плоскости и пространства
ПРЕОБРАЗОВАНИЯ ПРОСТРАНСТВА И ПЛОСКОСТИ
Напомним (см. разд.В.2), что преобразованием пространства
называется правило / , которое каждой точке X пространства ставит в
соответствие единственную точку Y = f(x) того же пространства, при этом точка Y
называется образом точки X, а точка X - прообразом точки Y [8,10,23].
Преобразование называется взаимно однозначным, если у каждой точки Y
пространства существует единственный прообраз X.
Два преобразования / и g пространства называются равными, если
f(x)=g(x) для любой точки X.
Композицией преобразований g и / называется преобразование
/ о g, определяемое равенством (/ о g)(x)=f(g(x)).
Преобразование е называется тождественным, если каждой точке
пространства ставится в соответствие эта же точка: в(х)= X .
Преобразование f~l называется обратным для преобразования /,
если /~* о / = / о у1 = £. Преобразование / называется обратимым, если
для него существует обратное преобразование. Необходимым и
достаточным условием обратимости является условие взаимной однозначности
преобразования.
Аналогичные понятия определяются для преобразований плоскости.
Преобразование / пространства можно представить в координатной
форме. Пусть в пространстве задана система координат, в которой точка X
и ее образ К имеют координаты х(хХ9х2,х3) и Y(yvy2,y3) соответственно.
Преобразование / ставит в соответствие упорядоченной тройке чисел
x = (xvx2,x3) упорядоченную тройку чисел У = {угУ2*Уз)- Такое
преобразование можно задать при помощи трех скалярных функций:
или, что то же самое, вектор-функцией f(x) = (/Д*) /2(*)
144
Преобразование плоскости задается двумя скалярными функциями
двух переменных:
или, что то же самое, вектор-функцией f(x) = {/х(х) /2{х))т •
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ ПЛОСКОСТИ
Пусть на плоскости фиксирована аффинная система координат Olx 12.
Преобразование <А плоскости называется аффинным, если координаты
у19у2 образа Y выражаются через координаты хх,х2 прообраза X
(Y = Л(Х)) по формулам
(2.11)
где A-\ lz I - невьфожденная матрица (матрица аффинного преоб-
(е) [a2l a^J
разования)у у =\ * L * =1 I - координатные столбцы образа Y и
прообраза X (координатные столбцы радиус-векторов OY и ОХ )
соответственно, а = - координатный столбец образа начала координат, или
вектора переноса начала координат. В формулах аффинного
преобразования (2.11) подчеркивается зависимость матрицы преобразования и
координат векторов от выбранной системы координат. Обозначение системы
координат в (2.11) будем опускать, если понятно, в какой системе координат
задано преобразование.
Замечания 2.4.
1. Столбец а = в (2.11) определяет координаты образа 0' = df(0)
\аг)
начала координат. Действительно, подставляя координаты хх=х2=0 точки
О в (2.11), получаем координаты ух =ах, у2 =а2 точки О* = еД(о). Можно
сказать, что при аффинном преобразовании начало координат переносится
на вектор а=ОО\ координатный столбец которого равен а.
Ю-5150 145
2. Аффинное преобразование (2.11) в любой другой аффинной системе
координат О ех е2 задается формулами того же вида.
Действительно, пусть известны: матрица S = _ S перехода от
старого базиса (?) = (<?! е2) к НОВОМУ базису \j?)= (е^ ^) и координатный
столбец s вектора переноса начала координат J = ОО* (рис.2.17). Тогда по
формуле (2.8) x = $ + Sx' и y = s + S-y', где х, у и х',/ - координатные
столбцы точек X, Y (радиус-векторов OX ,OY и с/х , o'Y) в старой
О1^г и новой О'е^ системах координат.
Подставляя в (2.11), получаем
j + Sy =a + A ^ + SvxJ.
Учитывая, что матрица S
обратимая (см. свойство 2 матриц
перехода в разд.2.2.1),
выражаем координатный столбец у'
образа Y через координатный
столбец х прообраза X в
системе координат О ех ег:
•5х =а +Л х .
Рис.2.17
у = S~l {a + A'S-s)+ S^
В результате получили аффинное преобразование вида (2.11):
с матрицей A' = S~l-A-S и координатным столбцом a'= S~l-(a + As-s)
вектора переноса.
Таким образом, связь матриц одного и того же аффинного
преобразования в разных базисах, а также координатных столбцов вектора переноса,
имеет вид
(2Л2)
где А, Av - матрицы (а ,а - координатные столбцы вектора переноса)
аффинного преобразования в старом и новом базисах, a S.- матрица
(ef>(e )
перехода от старого базиса к новому.
3. Запишем (2.11), обозначив образ точки X через X' = сА{Х):
146
i i n l 12 2 или X=a + Ax. (2.13)
Сравнивая формулы (2.13) аффинного преобразования плоскости с
формулами (2.8) аффинного преобразования координат, заключаем, что эти
соотношения:
х' = а + А-х и x = s + S х
будут равносильными, если положить S = А"1 и s = -Л"1 -а.
Действительно, умножая обе части равенства х = - Л""1 • а + А"1 • х , следующего из
первого соотношения, на матрицу А слева, с учетом равенства А • А"1 = Е
получаем А-х = -А-А~1-а + А-А~1х', т.е. А-х = -а + х', что равносильно
х =а + Ах . Таким образом, изменение координат точки будет одно и то
же, подвергаем ли мы плоскость аффинному преобразованию, оставляя
систему координат неизменной, или лее оставляем плоскость неизменной,
подвергая систему координат обратному преобразованию.
4. Аффинное преобразование плоскости порождает преобразование
векторов на плоскости, если рассматривать векторы как упорядоченные
пары точек, а именно: при аффинном преобразовании <А каждому вектору v
(рассматриваемому как упорядоченная пара точек v = MN ) ставится в
соответствие вектор V (V = m'n\ причем Af' = d?f(M), N' = cA{n)),
координаты которого выражаются через координаты прообраза v no
формулам:
v' = A-v, (2.14)
где v, v - координатные столбцы векторов v, v' (относительно одного и
того же базиса), А - матрица аффинного преобразования (в том же
базисе).
Это свойство следует из правила нахождения координат вектора,
согласно которому из координат конца вектора надо вычесть координаты его
начала. Если w,m ,п,л - координатные столбцы точек М ,Af ,N,N
соответственно, то учитывая (2.13): т = а + А - т, п' = а + А-п, получаем
что и требовалось доказать.
Рассмотрим способы задания аффинного преобразования плоскости.
Первый способ. Чтобы задать аффинное преобразование плоскости
по определению, достаточно указать систему координат 07^ и
формулы (2.11), т.е. задать невырожденную матрицу А преобразования и
координатный столбец а в (2.11).
ю* 147
Второй способ. Пусть на плоскости заданы две аффинные системы
координат: старая О7х72 и новая О'е^ё^ (рис.2.18). Тогда существует
единственное аффинное преобразование еД плоскости, которое каждой
точке X ставит в соответствие точку Y = <А(х), координаты которой в
новой системе координат О~е^ег совпадают с координатами точки X
в старой системе координат.
Действительно, пусть 1 = ОО' - вектор переноса начала координат,
_ S. - матрица перехода от старого базиса (?)=(?! ?2) к НОВОМУ базису
- Тогда, учитывая (2.8), имеем у =д+ _ S • V . Подставляя
(?) \е) \ег*(е) \jt)
V = х (координаты образа Y = е#(х) в новой системе координат
совпадают с координатами прообраза X в старой системе координат), получаем
аффинное преобразование
(2.15)
вида (2.11) с невырожденной матрицей А= S и столбцом а = s . Су-
(е) (?Ц(?/) (?) (?)
ществование аффинного преобразования доказано. Докажем единственность
от противного. Пусть преобразование £ удовлетворяет тем же условиям,
что и кА, но для некоторой (хотя бы одной) точки X образы <А{х) и $}(х)
не совпадают. Тогда в новой системе координат О~е^ег разные точки сЛ{х)
и &(х) будут иметь равные координаты (такие же, как координаты точки
X в старой системе координат О1Х ?2), чего быть не может (см. п.1
замечаний 2.1). Полученное противоречие доказывает единственность аффинного
преобразования.
Таким образом,
Y = сА(х) аффинное
преобразование (2.15) может
быть задано указанием
двух аффинных
систем координат.
Говорят, что аффинное
преобразование
задано переходом от
одной аффинной
системы координат к
другой.
148
О
Третий способ. Аффинное преобразование плоскости вполне
определяется образами трех данных точек, не лежащих на одной прямой, т.е.
существует единственное аффинное преобразование, переводящее три точки
q t А, В, не лежащие на одной прямой, в три точки О ,А ,В , также не
лежащие на одной прямой.
В самом деле, заданные точки О ,А,В и о' ,А* ,в' порождают две
аффинные системы координат О ij ?2 и О ех е2, где 7Х = ОА, ?2 = ОВ,
^ ^ =0>'в' - пары базисных (неколлинеарных) векторов, и тем
самым однозначно определяют аффинное преобразование.
Пример 2.7. В
прямоугольной системе координат
OJj заданы точки (рис.2.19):
<2(2Д), А(б,4), Д(-2,4),
У,
8
7
6
S
/ >
-2 О
*.
1 V_J->J^.?
1
r—
1
|
6
Рис.2.19
*9
1
1
1
10 x
x(2,7). Требуется вывести
формулы (2.11) аффинного
преобразования *А,
отображающего точки б, А,В в
точки Q\ а! ,в\ и найти
координаты образа Y = с#(х)
точки X:
а) в системе координат Оё{ёг, ^ = QA, ?2 = (?2?;
б) в заданной прямоугольной системе координат.
D а) Искомое преобразование сЛ отображает систему координат
Оё(ёг в систему координат
Формулы, задающие такое преобразование с#, имеют вид (2.15), где s -
координатный столбец вектора J = QQ' в базисе (<?) = (<?! ?2), а _ 5 -
матрица перехода от базиса (?) = (<?! ?2) к базису (?/)=(^ <^). По
рис.2.19, учитывая, что i =<5"(^i~^2)» ^="б#(^1+^2/' определяем
разложения векторов J ,"ех ,&£ по базису (?):
•;=т-(«г
149
з'*1 + з'*2
Следовательно, в системе координат Qexe2 преобразование (2.15)
имеет вид
;;Н4>(! Ж
поскольку согласно (2.2) матрица перехода формируется путем записи по
столбцам координат векторов ^, 7^ в базисе (?).
Найдем координаты образа точки X. В системе координат Qex ?2
точка X имеет координаты JCj=l, jc2 =1, так как QX =1?1+1?2. Подставляя
в найденные формулы координаты прообраза, получаем искомые
координаты образа:
Заметим, что в новой системе координат Qe^e^ точка ^ = ^(^) имеет
координаты J£j(l,l), которые совпадают с координатами точки Х(1Д) в старой
системе координат Qex ?2.
б) Подставляя в (2.11) координаты образов и прообразов, получаем:
- Ю-
Ы-Й
ЫЙ
Вычитая первое уравнение из второго и третьего, получаем
—4.
(1 -2)
Решая эту систему, находим элементы матрицы А = 2Х 53 , после чего
\1 Т)
определяем столбец а = = Л . Таким образом, искомое преобразова-
ние с^ в заданной прямоугольной системе координат имеет вид
150
з L f -f 1 f ^
\12J V 8 6
Найдем координаты образа точки X (2,7):
;;Н1№ -
Получим теперь формулы аффинного преобразования of в системе
координат Qex e2, используя связи (2.12). Учитывая, что переход от
прямоугольной системы координат Oi j к системе координат Q"e{e2 определяет-
(4 -4] (2\ _
ся матрицей 5=1 I и столбцом s = \ , поскольку s = OQ,
^ =4-i +3-J, i"2 =-4-i +3*7 , находим
24 1-3 4j[§4+f-lJ 24 U 4JUJ 24 Ы HJ'
что совпадает с результатами п.иа". ■
Аффинные преобразования плоскости обладают следующими
свойствами.
1. Аффинное преобразование взаимно однозначное, кроме того:
а) преобразование, обратное к аффинному, является также аффин-
ным\
б) композиция аффинных преобразований является такэюе аффинным
преобразованием.
2. При аффинном преобразовании векторы преобразуются следующим
образом:
д) равные векторы - в равные;
б) коллинеарные - в коллинеарные, причем отношение коллинеарных
векторов сохраняется;
в) неколлинеарные — в неколлинеарные.
151
3 При аффинном преобразовании сохраняется отношение, в котором
точка делит отрезок.
4. При аффинном преобразовании (2.11) площадь любого
параллелограмма изменяется в одном и том оюе отношении, т.е. умножается на
одно и то же число (называемое коэффициентом искажения площади):
5#/ = I det АI • 5#, где £# — площадь параллелограмма, a S#> - площадь
образа этого параллелограмма. Другими словами, коэффициент искажения
площади при аффинном преобразовании равен модулю определителя
матрицы этого преобразования.
Первое свойство следует из обратимости матрицы А аффинного
преобразования, поскольку из (2.11) можно выразить координаты прообраза
через координаты образа:
Заметим, что эти формулы имеют тот же вид, что и (2.11), т.е.
преобразование, обратное к аффинному, является аффинным преобразованием с
матрицей Л"1 и вектором переноса (-А"1***). Композиция аффинных
преобразований у = а + А-х и z=b + B-y:
у
также является аффинным преобразованием с матрицей В • А
(невырожденной в силу невырожденности В и А) и вектором переноса Ъ + В-а.
Докажем второе свойство. Пусть ненулевые векторы v и iv коллине-
арны, причем — = 'Х • Надо доказать, что их образы v' = с#(у) и vf = <A(w)
w
также коллинеарны и -zy = X. Действительно, если v и w - координатные
w
столбцы векторов v и Tv,to v = A-w. Тогда для координатных столбцов v
и w (векторов V и w') по формуле (2.14) получаем (см. п.4
замечаний 2.4):
v = А• v = А• (X• w)=X• A^w = A,• w ,
т.е. v = X • w . Следовательно, v' = X - vf, т.е. векторы v7 и w коллинеарны
V uu, —
Из = А. Если же хотя бы один из векторов нулевой, например, v = о , то
его образ (по свойству 2) также нулевой вектор V = <7, который коллинеа-
рен любому вектору \v . При X = 1 получаем, что равные векторы
преобразуются в равные. Наконец, неколлинеарные векторы не могут
преобразоваться в коллинеарные, поскольку в этом случае при обратном преобразова-
152
нИи коллинеарные векторы преобразуются в неколлинеарные, что
противоречит п.2,"бн.
Третье свойство следует из второго (см. п.2,"б"). Действительно, пусть
точки А , В , С отображаются в точки А\в\ d соответственно. Если точка
С делит отрезок АВ в отношении АС: СВ = а: р, то векторы АС и АВ
а
коллинеарные и АС = АВ (см. разд. 1.6.1). По свойству 2 п."б" векто-
сс+Р
ры fid и К В* также коллинеарны и А'с' =
т.е. точка с'
делит отрезок А'В' в отношении Aid: С'в' = а: Р = АС: СВ.
Обсудим четвертое свойство. На рис.2.20 заштрихованы
параллелограмм, построенный на
базисных векторах ?х, ?2, и его образ
(параллелограмм, построенный
на базисных векторах ех,е2).
Справедливость утверждения
для параллелограммов следует
из свойства 3 матрицы перехода
от одного базиса к другому (см.
разд.2.2.1). Любой
параллело\
О
грамм разбивается диагональю
Рис.2.20
на два равных треугольника. Следовательно, утверждение справедливо для
треугольников, а значит и для многоугольников, поскольку любой
многоугольник разбивается на конечное число треугольников. Средствами
математического анализа это свойство может быть распространено на
произвольную измеримую плоскую фигуру [19].
Замечания 2.5.
1. Третье свойство является характеристическим для аффинного
преобразования и может быть взято в качестве эквивалентного определения
[14].
2. Преобразование (2.11) для произвольной квадратной матрицы А
(быть может, вырожденной) называется линейным, при этом матрица А
называется матрицей линейного преобразования [10]. Любое аффинное
преобразование является линейным, но не всякое линейное преобразование
является аффинным.
3. Квадратные матрицы А' и А, связанные соотношением
А = S~l • А • S , называются подобными [10], а матрица S - преобразующей.
В силу (2.12) матрицы аффинного преобразования в разных базисах
оказываются подобными, причем преобразующей матрицей служит матрица
перехода от одного базиса к другому.
153
Рассмотрим примеры преобразований.
1. Движением называется преобразование плоскости, при котором
сохраняются расстояния между точками, т.е. расстояние между образами X' и
Y равно расстоянию между их прообразами X и Y: X'Y=XY".
Из определения следует, что при движении сохраняются углы, так как
из равенства треугольников ABC и А'в'с' (по трем сторонам) следует
равенство соответствующих углов.
Таким образом, при движении прямоугольная система координат
переходит в прямоугольную (рис.2.21,а). Учитывая (2.9), (2.10), а также п.З
замечаний 2.4, получим формулы, выражающие координаты образа через
координаты прообраза:
{*' = xs + jc-cos<p- у -sincp,
(такое движение называется собственным)',
{
У = ;У5+
(такое движение называется несобственным).
о ъ
Рис.2.21
Сравнивая с (2.11), делаем вывод, что собственное движение является аф-
fcos(p — si
финным преобразованием с матрицей А = \
1Б
-с матрицей Л =
, а несобственное
. На рис.2.21,а изображены исходная сие-
тема координат О1Х12 и новая система координат ОГте^ег, в которой
координаты образа X' любой точки совпадают с координатами прообраза X в
старой системе координат О1^ёг (см. второй способ задания аффинного
преобразования).
154
2. Гомотетией с центром в точке О с коэффициентом X > 0
называется преобразование плоскости, при котором каждой точке X ставится в
соответствие такая точка X ,что ОХ = Х-ОХ (рис.2.21,б).
Докажем, что гомотетия является аффинным преобразованием. Для
этого выберем аффинную систему координат О'е1е2, начало которой
совпадает с центром гомотетии. Пусть точка X имеет координаты хх, х2, тогда
ее образ X' при гомотетии имеет координаты х[ = X • хх, х'2 = X • х2, т.е.
{хк=Х-х1>
х'2=Х-х2.
Сравнивая эти формулы с (2.11) делаем вывод, что гомотетия есть аффинное
преобразование с матрицей Л = | и нулевым столбцом а.
Определим гомотетию, используя второй способ задания аффинного
преобразования. Для старой системы координат О1^е2 построим новую
аффинную систему координат О ех е2, в которой координаты образа X при
гомотетии совпадают с координатами прообраза X в старой системе
координат. Примем точку О за начало (точка О' совпадает с точкой О), а
векторы е{=Х-'ё1,е2=Х-"е2 в качестве нового базиса. Найдем координаты
точки X' в системе координат (Уе^е2:
ОХ = J
+х2 -?2 =х\ 'Х-^ +х2 -Х-
Поскольку ОХ = хг -7г + х2 72, то точки X и х' имеют равные координаты
в аффинных системах координат О'ё^ёг и Ое^е^2 соответственно.
Наоборот, если заданы аффинные системы координат О?х 72 и Оехе2,
то существует единственное аффинное преобразование, при котором
координаты точки X (в системе координат О'е^е^) совпадают с координатами
образа X (в новой системе координат Ое{ е2), и это преобразование
является гомотетией (см. второй способ задания аффинного преобразования).
3. Сжатием плоскости к прямой I вдоль пересекающей ее прямой
т с коэффициентом Х>0 (косым сжатием) называется преобразование
плоскости, при котором каждая точка L, принадлежащая прямой /,
остается неподвижной (преобразуется в себя: L' = L), а каждой точке X, не
лежащей на прямой /, ставится в соответствие такая точка X , что
155
XtX* = X-XtX, где Xt - проекция точки X на прямую / вдоль прямой т
(рис.2.22,а). При X > 1 это преобразование называют также растяжением.
В частности, сжатием к прямой / с коэффициентом X > О называют
сжатие в направлении, перпендикулярном прямой /, т.е. в случае, когда
прямая т перпендикулярна прямой / (рис.2.21,6).
Покажем, что это аффшгаое преобразование. Выберем аффинную
систему координат Oij ?2 так, чтобы ее начало совпадало с точкой О
пересечения прямых т и /, а векторы ij и "е2 принадлежали прямым / и т
соответственно. Из формулы XtX -X-XtX следует, что при сжатии абсцисса
точки X не изменяется, а ордината умножается на коэффициент сжатия X:
I х -Хх
Сравнивая с (2.11), делаем вывод, что сжатие является аффинным
преобразованием с матрицей А = \ и нулевым столбцом а.
т
т
О ex=
Рис.2.22
4. Отражением плоскости в прямой I параллельно пересекающей
ее прямой т (вдоль прямой т ) называется преобразование плоскости, при
котором каждая точка L, принадлежащая прямой /, остается неподвижной
(преобразуется в себя: l! = L), а каждой точке X, не лежащей на прямой /,
ставится в соответствие такая точка X', что Ххх' = -ХгХ , где Хг -
проекция точки X на прямую / вдоль прямой т (рис.2.23,а).
Это преобразование является аффинным, поскольку оно не изменяет
расстояний между точками, т.е. представляет собой движение. Выберем
систему координат Оег ?2 так, чтобы ее начало совпадало с точкой О
пересечения прямых т и /, а векторы 1Х и е2 принадлежали прямым / и т
156
соответственно. Найдем матрицу А преобразования, записывая по
столбцам координаты образов базисных векторов. Поскольку 5^ = ^=1-5^+0-?2
5. Проекцией плоскости на прямую I параллельно пересекающей ее
прямой т (вдоль прямой т) называется преобразование плоскости, при
котором каждая точка L, принадлежащая прямой /, остается неподвижной
(преобразуется в себя: L' = L), а каждой точке X, не лежащей на прямой I,
ставится в соответствие ее проекция Х/ на прямую / вдоль прямой т
(рис.2.23,б).
Это преобразование является линейным, но не является аффинным. В
самом деле, выберем аффинную систему координат О7г ?2 так, чтобы ее
начало совпадало с точкой О пересечения прямых т и I, а векторы е~х и "ег
принадлежали прямым / и т соответственно. Найдем матрицу А
преобразования, записывая по столбцам координаты образов базисных векторов.
Поскольку е1=е1=1-ег+0-е2 и е2 =о =
, то А
-f1 °1
Как ви-
дим, матрица А преобразования вырожденная, поэтому преобразование не
является аффинным, но является линейным (см.п.2 замечаний 2.5).
Рис.2.23
б. Инверсией плоскости относительно окружности радиуса R с
центром в точке О называется преобразование плоскости, при котором точки,
принадлежащие данной окружности, остаются неподвижными
(преобразуются в себя), а каждой точке X, отличной от О, ставится в соответствие
такая точка Х',что ОХ'=-~&
'1
(рис.2.24), т.е. радиус-векторы ОХ' и
ОХ образа и прообраза коллинеарны, а произведение их длин равно квад-
157
рату радиуса окружности (при R = 1 длины радиус-векторов взаимно обрат-
=у=г). Для взаимной однозначности преобразования предпола-
ные: \ОХ
гают, что точка О отображается в некоторую "бесконечно удаленную
точку" плоскости. Преобразование инверсии называется также зеркальным
отражением в окружности.
Это преобразование не является линейным (и, следовательно,
аффинным). В самом деле, выберем прямоугольную систему координат Oi j,
начало которой совпадает с центром данной окружности. Выразим
прямоугольные координаты х ,у образа X' через координаты х,у
прообраза X . Записывая равенство ОХ = д • ОХ в
\ох\
координатной форме, получаем:
У =
Рис.2.24
что отличается от (2.11), так как зависимость
нелинейная.
Замечания 2.6.
1. Справедливо утверждение [4]: любое аффинное преобразование
плоскости можно представить в виде композиции, движения и двух сэюа-
тий (во взаимно перпендикулярных направлениях).
2. В п.З. замечаний 2.4 показано, что изменение координат точки будет
одно и то же, подвергаем ли мы плоскость аффинному преобразованию,
оставляя систему координат неизменной, или же оставляем плоскость
неизменной, подвергая систему координат обратному преобразованию.
Например, при повороте
плоскости на угол ф вокруг
начала системы
координат Oi j (рис.2.25,я)
координаты точек
меняются так же, как при
повороте системы координат
Oi j на угол, равный
(-ф), т.е. при переходе
к системе координат
О Г J (рис.2.25,б). Рис.2.25
158
Пример 2.8. Пусть на плоскости задана окружность. В результате
прямого сжатия плоскости к прямой / с коэффициентом 0 < Я < 1 в
направлении, перпендикулярном / (рис.2.26,а), окружность преобразуется в кривую,
называемую эллипсом (см. разд.3.3.2), а центр окружности - в центр
эллипса. При этом образом каждого диаметра окружности служит диаметр
эллипса, т.е. хорда, проходящая через центр эллипса.
Доказать, что:
а) для любого данного диаметра Л'в' эллипса существует
единственный диаметр А1В1, который делит пополам все хорды, параллельные
данному диаметру;
б) существуют два взаимно перпендикулярных диаметра эллипса,
называемых его главными осями.
т
а б
Рис.2.26
D Для решения задачи используем два свойства аффинного
преобразования: параллельные отрезки отображаются в параллельные отрезки (что
следует из свойства 2); середина отрезка отображается в середину образа
этого отрезка (см. свойство 3).
а) Сформулированное в п. "а" свойство диаметров очевидно для
окружности (рис.2.26,а), поскольку диаметр окружности, перпендикулярный
хорде, делит ее пополам.
Рассмотрим эллипс (рис.2.26,б) как образ окружности при сжатии
плоскости к прямой /, проходящей через центр О окружности. Сжатие
происходит вдоль прямой т, перпендикулярной /, при этом точка О
остается неподвижной. Пусть Кв' - диаметр эллипса (центр О эллипса -
середина А В ), а АВ - его прообраз, который является диаметром окружности
(поскольку центр О окружности - середина АВ). Рассмотрим хорды
окружности, параллельные диаметру АВ. Геометрическим местом середин
этих хорд является диаметр А{В1 окружности (рис.2.2б,а), поскольку
диаметр окружности, перпендикулярный хорде, делит ее пополам. При сжатии
параллельные хорды окружности преобразуются в параллельные хорды эл-
159
липса, а диаметр АХВХ окружности преобразуется в диаметр А1В1 эллипса.
Поскольку середина любого отрезка при аффинном преобразовании
переходит в середину образа этого отрезка, то диаметр А^В[ будет делить пополам
все хорды эллипса, параллельные диаметру А В . Существование диаметра
с указанными свойствами доказано. Единственность следует из
единственности перпендикулярного к АВ диаметра А1В1 окружности. Конечно,
перпендикулярность диаметров АВ и А1В1 окружности, вообще говоря, не
сохраняется для диаметров а'д' и \В[ эллипса, так как при сжатии
плоскости углы, в общем случае, изменяются. Аналогично можно показать, что для
данного диаметра А1В1 существует единственный диаметр А В , который
делит пополам все хорды, параллельные \ВХ. Два диаметра, каждый из
которых делит пополам хорды, параллельные другому диаметру, называются
сопряженными. В данном случае сопряженными являются диаметры АВ'
и А1В1. Заметим, что описанное свойство очевидно для взаимно
перпендикулярных диаметров окружности: любые два взаимно перпендикулярных
диаметра окружности являются сопряженными, например АВ и Afil.
б) Выберем диаметр АВ. эллипса, перпендикулярный прямой. /
(рис.2.26,в). Этот диаметр является образом диаметра АВ окружности,
который также перпендикулярен прямой /. Диаметр \ВХ окружности,
перпендикулярный, а значит, сопряженный (см. п. "а"), диаметру АВ, лежит на
прямой /. Поскольку все точки прямой / при сжатии к ней отображаются в
себя, то диаметр А1В1 окружности является также диаметром эллипса
(см.п."а"), сопряженным для АВ'. Таким образом, диаметры А В и \ВХ
эллипса взаимно перпендикулярны. ■
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ ПРОСТРАНСТВА
Пусть в пространстве фиксирована аффинная система координат
O^Sjij. Преобразование Л пространства называется аффинным, если
координаты ух,у2,у3 образа Y выражаются через координаты хгх2,хъ
прообраза X ( Y = сб(х)) по формулам:
или у=ф+^-ф. (2.16)
160
где Д =
«11 «12 «13
«21 «22 «23
l«31 «32 «33)
- невырожденная матрица {матрица аффинного
преобразования), у =
Уг
•A1
- координатные столбцы образа Y и
прообраза X (координатные столбцы радиус-векторов OY и
соответственно,
«2
- координатный столбец образа начала
координат^ или вектора переноса начала координат. В формулах
аффинного преобразования (2.16) подчеркивается зависимость матрицы
преобразования и координат векторов от выбранной системы координат.
Обозначение системы координат в (2.16) будем опускать, если понятно, в
какой системе координат задано преобразование.
Аффинное преобразование пространства, так же как аффинное
преобразование плоскости, можно задать несколькими способами.
При первом способе (по определению) нужно зафиксировать в
пространстве аффинную систему координат О'ё^ё^ёъ и задать невырожденную
матрицу А и столбец а в (2.16).
При втором способе нужно взять две аффинные системы координат
О"ёх ?2 ?3, О е1 е2 е3 и определить аффинное преобразование Л, поставив в
соответствие каждой точке X такую точку х' = с#(х), координаты
которой относительно системы координат О ех е2 е^ совпадают с координатами
точки X в системе координат 0e^F2?3- Говорят, что аффинное
преобразование %А задается переходом от одной аффинной системы координат
3 к другой '^!^
Третий способ - задание образов четырех точек, не лежащих в одной
плоскости, а именно существует единственное аффинное преобразование,
переводящее четыре точки О,А,В,С, не лежащие в одной плоскости, в
четыре точки О' ,/l ,В' ,С*, также не лежащие в одной плоскости.
Для аффинных преобразований пространства остаются справедливыми
свойства 1-3, доказанные для преобразований плоскости. Четвертое
свойство формулируется следующим образом:
при аффинном преобразовании (2.16) объем любого параллелепипеда
изменяется в одном и том же отношении, т.е. умножается на одно и то
11—5150
161
же число (называемое коэффициентом искажения объема):
V^' = | det А | • V#, где V# - объем параллелепипеда, a V^ - объем образа
этого параллелепипеда. Другими словами, коэффициент искажения объема при
аффинном преобразовании равен модулю определителя матрицы этого
преобразования.
Примерами аффинного преобразования пространства могут служить
движение, гомотетия, сжатие к плоскости.
Сжатием пространства к плоскости п вдоль пересекающей ее
пряной т с коэффициентом X > О (косым сжатием) называется
преобразование пространства, при котором каждая точка Р, принадлежащая
плоскости п, остается неподвижной (преобразуется в себя: р' = Р), а
каждой точке X, не лежащей на плоскости п, ставится в соответствие такая
точка х',что ХпХ' = Х-ХпХ ,где Хп - проекция точки X на плоскость п
вдоль прямой т. При X > 1 это преобразование называют также растя
нием.
Сжатием пространства к плоскости п называют сжатие вдоль
направления, ортогонального плоскости я, т.е. в случае, когда прямая т
перпендикулярна плоскости п.
Замечания 2.7.
1. Справедливо утверждение [4]: любое аффинное преобразование
пространства можно представить в виде композиции движения и трех
сжатий (во взаимно перпендикулярных направлениях).
2. Для аффинных преобразований пространства остаются
справедливыми соотношения (2.12), (2.14), (2.15), полученные для аффинных
преобразований плоскости (с соответствующими изменениями размеров матриц А,
S и столбцов a,s>jc,у ), а также вывод, аналогичный указанному в п.2
замечаний 2.6.
Пример 2.9. Рассматривая эллипсоид (см. разд.4.3.2) как образ сферы
при композиции двух сжатий пространства к плоскостям (вдоль взаимно
перпендикулярных направлений), доказать, что существуют три взаимно
перпендикулярных диаметра эллипсоида, которые называются его
главными осями.
D Сформулированное свойство очевидно для диаметров сферы
(рис.2.27,а). Пусть AB,CD 9EF - три взаимно перпендикулярных диаметра
сферы. Выполним сжатие пространства с коэффициентом 0<Хх <1 к
плоскости, проходящей через прямые CD и EF. При этом отрезок АВ
преобразуется в диаметр АВ' эллипсоида, а диаметры CD и EF останутся без
изменений (рис.2.27,б). Если выполнить второе сжатие с коэффициентом
О < Х2 < 1 к плоскости (рис.2.27,в), проходящей через диаметры а!в' и CD,
162
то диаметр EF преобразуется в диаметр E'f" , а диаметры л'#' и CD
останутся без изменений. В результате получим три взаимно
перпендикулярных диаметра А'в', CD, e"f" эллипсоида. ■
В
В'
2.3. ПОЛЯРНАЯ, ЦИЛИНДРИЧЕСКАЯ И СФЕРИЧЕСКАЯ
СИСТЕМЫ КООРДИНАТ
2.3.1. Полярная система координат
Полярная система координат на плоскости - это совокупность точки
О у называемой полюсом, и полупрямой Ох, называемой полярной осью.
Кроме того, задается масштабный отрезок для измерения расстояний от
точек плоскости до полюса. Как правило, на полярной оси выбирается
вектор i, приложенный к точке О, длинна которого принимается за величину
масштабного отрезка, а направление вектора задает положительное
направление на полярной оси (рис.2.28,а).
Положение точки М в полярной системе координат определяется
расстоянием г (полярнымрадиусом) от точки М до полюса (т.е. г = \ОМ |)и
углом ф (полярным углом) между полярной осью и вектором ОМ .
Полярный радиус и полярный угол составляют полярные координаты точки М ,
что записывается в виде М(г,ф). Полярный угол измеряется в радианах и
отсчитывается от полярной оси:
- в положительном направлении (против направления движения
часовой стрелки), если значение угла положительное;
- в отрицательном направлении (по направлению движения часовой
стрелки), если значение угла отрицательное.
и* 163
Полярный радиус определен для любой точки плоскости и принимает
неотрицательные значения г > О. Полярный угол <р определен для любой
точки плоскости, за исключением полюса О, и принимает значения
-я < ф < п, называемыми главными значениями полярного угла. В
некоторых случаях целесообразно считать, что полярный угол определен с
точностью до слагаемых 2яи, где л€ Z. В этом случае значениям <р+2яи
полярного угла для всех neZ соответствует одно и то же направление
радиус-вектора.
М(г,Ф)
Рис.2.28
С полярной системой координат Огф можно связать прямоугольную
систему координат Oi j , начало О которой совпадает с полюсом, а ось
абсцисс (точнее положительная полуось абсцисс) - с полярной осью. Ось
ординат достраивается перпендикулярно оси абсцисс так, чтобы получилась
правая прямоугольная система координат (рис.2.28,б). Длины базисных
векторов определяются масштабным отрезком на полярной оси.
Наоборот, если на плоскости задана правая прямоугольная система
координат, то, приняв положительную полуось абсцисс за полярную ось,
получим полярную систему координат (связанную с данной прямоугольной).
Выведем формулы, связывающие между собой прямоугольные
координаты х, у точки М , отличной от точки О, и ее полярные координаты
г, ф. По рис.2.28,б получаем
(2.17)
= r-sin(p.
Эти формулы позволяют найти прямоугольные координаты по известным
полярным координатам. Обратный переход выполняется по формулам:
(2.18)
164
Последние два равенства определяют полярный угол с точностью до
слагаемых 2яи, где nsZ. При х*0 из них следует, что tgф = —. Главное
х
значение полярного угла ф (-ж ф < я) находится по формулам (рис.2.29):
у
arctg—,
X
у
я+arctg—,
X
у
-я+arctg—,
X
я
т
п
*>0,
х<0,у>0,
х<0,у<0,
х = 0,у>0,
х = 0,;у<0.
III
у
X
X
Рис.2.29
2
X
IV
Пример 2.10* В полярной системе координат Ог<р:
а) изобразить координатные линии г = 1, г = 2, г = 3, ф = -у, Ф = -|»
б) изобразить точки М х, М 2 с полярными координатами /j = 3,
фх =«2р, г2 = 3, ф2 = - •—. Найти главные значения полярных углов этих
точек;
в) найти прямоугольные координаты точек М1, М2.
D а) Координатные линии г = 1, г = 2, г = 3 представляют собой
окружности соответствующих радиусов, а линии ф = -2-, Ф = -|' Ф=^
-полупрямые (рис.2.30,а).
б) Построим точки Л/ДЗ,-^) и М2(з,—у-) (рис.2.30Дв). Их
координаты отличаются полярным углом, однако, имеют одно и то же главное
значение ф = j. Следовательно, это одна и та же точка, которая совпадает с
точкой М(з, ~), изображенной на рис.2.30,а.
в) Учитывая п."би, найдем прямоугольные координаты точки М . По
формулам (2.17) получаем:
я 3V2 . . . и ъ4г
=; y rsii^ 3-sin—= ,
4 2
I2 2 J
165
(р = —
Замечания 2.8.
1. Главное значение полярного угла можно выбрать иначе [2,3],
например, 0 < ф < 2я.
2. Расстояние между двумя точками Mx(rv <рх) и М2(г2, ф2) (длина
отрезка МХМ2 ) вычисляется по формуле
что следует из теоремы косинусов (рис.2.31).
3. Ориентированная площадь S£ параллелограмма (рис.2.31),
построенного на радиус-векторах ОМХ и ОМ2 , находится по формуле
=Г1
Она положительна, если ф1 < ф2 (при этом ориентация пары радиус-
векторов ОМХ и ОМ2 правая), и отрицательна, если ф1 > ф2 (ориентация
пары радиус-векторов ОМХ и ОМ2 левая).
Пример 2.10. Даны полярные координаты Фд =~~>гд =4 и
2я
3
= — ,гв=2 точек Л и В (рис.2.32). Требуется найти:
а) скалярное произведение (Ш, 05 j;
б) длину отрезка AS;
166
в) внешнее произведение ОА л ОВ ;
г) площадь S0AB треугольника ОАВ;
д) координаты середины С отрезка АВ в прямоугольной системе
координат, связанной с данной полярной.
Рис.2.31
Рис.2.32
D а) По определению скалярного произведения находим
б) Находим длину отрезка (см. п.2 замечаний 2.8):
s—= 4.
в) Внешнее произведение находим как ориентированную площадь
параллелограмма, построенного на векторах ОА и ОВ:
ОАлОВ = rA-rB
г) Площадь треугольника ОАВ находим как половину площади
параллелограмма, построенного на радиус-векторах ОА и ОВ. Так как
|0Ал0£| = 47з (см.п."в"),то 5^=^.473=21/3.
д) По формулам (2.17) находим прямоугольные координаты точек Л и
sin((p£-фА)= 2-4-sin — \ =
Площадь положительная, так как векторы ОА и ОВ образуют правую пару
В:
*A=VcoscpA=4~ = 2;
~
167
*в=гв-совфв=2.|-т| = -1;
а затем координаты середины С отрезка АВ (см. п.З замечаний 2.1):
Уа + Ув 2^3+V3 3^3 _
Пример 2.11. На координатной
плоскости Оху отмечена точка Л(4;-3).
Найти:
а) полярные координаты точки А ,
образа точки А при повороте радиус-
вектора ОА на угол ~ вокруг начала
координат (рис.2.33);
б) полярные координаты точки A{J
образа точки А при инверсии плоскости
относительно окружности единичного
радиуса с центром в начале координат (см. пример 6 преобразований
плоскости в разд.2.2.4).
□ а) Найдем полярные координаты точки А . По формулам (2.17),
учитывая рис.2.29, получаем:
Уа
Рис.2.33
= V42 +("
-3
:-arctgT,
так как точка А лежит в TV четверти.
При повороте радиус-вектора ОА вокруг полюса на угол у полярный
радиус не изменяется, а полярный угол увеличивается. Следовательно,
полярные координаты точки A': rA*=rA=5f фд'=фА+у=у-ак^-|,причем
ФА' - главное значение полярного угла (-тс<ф , <п).
б) При инверсии относительно окружности радиуса R полярные
координаты г',ф' образа выражаются через полярные координаты г,ф
прообраза следующими формулами:
Г= , ф=ф.
г
Поэтому, учитывая п."а", находим (для R = l):
=-L=I = 3 ~
Гд- гд 5' ФА Фа
168
2.3.2. Цилиндрическая система координат
Для введения цилиндрической системы координат в пространстве
выбирается плоскость {основная плоскость) и на ней задается полярная
система координат с полюсом О и полярной осью Ох. Через точку О
перпендикулярно основной плоскости проведем ось Oz {ось аппликат) и выберем
ее направление так, чтобы возрастание полярного угла, наблюдаемое со
стороны положительного направления оси Oz, происходило против часовой
стрелки (рис.2.34,д).
В цилиндрической системе координат положение точки М, не
принадлежащей оси аппликат, характеризуется полярными координатами г, <р
точки Мо - ортогональной проекции точки М на основную плоскость, и
аппликатой z - координатой точки М z - ортогональной проекции
точки М на ось аппликат. Таким образом, цилиндрические координаты
точки М - это упорядоченная тройка чисел r,<p,z - полярный радиус
(г>0), полярный угол (-я<ф<я) и аппликата (-°o<z<+°°). У точек,
принадлежащих оси аппликат, не определен полярный угол, они задаются
указанием нулевого полярного радиуса и аппликатой.
Рис.2.34
С цилиндрической системой координат Ortyz можно связать
прямоугольную систему координат Oijk (рис.2.34,б), у которой начало и
базисные векторы i , k совпадают с началом цилиндрической системы координат
и единичными векторами на полярной оси и оси аппликат соответственно, а
базисный вектор j выбирается так, чтобы тройка i, j, к была правой (при
этом базис оказывается стандартным).
Наоборот, если в пространстве задана правая прямоугольная система
координат, то, приняв положительную полуось абсцисс за полярную ось,
получим цилиндрическую систему координат {связанную с данной
прямоугольной).
169
Поскольку аппликата z точки М в прямоугольной системе координат
и аппликата z в цилиндрической системе координат совпадают, то
формулы, связывающие между собой прямоугольные координаты х, у, z точки
М и ее цилиндрические координаты г, <р, z , имеют вид, следующий из
(2.17), (2.18):
= r-cos<p,
(2.19)
Эти формулы позволяют найти прямоугольные координаты по известным
цилиндрическим. Обратный переход выполняется по формулам
cos<p =
(2.20)
sin<p =
Главное значение полярного угла <р (-7t<<p<7t) находится по формулам
(см. рис.2.29).
Пример 2.12. В
цилиндрической системе координат
rz = 0
а) построить
координатные поверхности г = R,
ф = 0,ф = ф0, z = 0, z = zo;
б) найти цилиндрические
координаты точки А , если
известны ее прямоугольные
координаты Л(4, -3, 2);
в) найти прямоугольные
координаты точки В , если
известны ее цилиндрические
координаты: гв = 2, <рв =-^»
Рис.2.35
О а) Координатной
поверхностью г = Я, т.е. геометрическим местом точек М(i?,cp,z) при
фиксированном значении полярного радиуса г = R, является прямой круговой
цилиндр, ось которого параллельна оси аппликат (рис.2.35). Этим объясняется
название цилиндрической системы координат. Координатной поверхностью
170
ф = ф0, т.е. геометрическим местом точек А/(г,фо,г) при фиксированном
значении полярного угла Ф = Ф0, является полуплоскость, ограниченная
осью аппликат (на рис.2.35 изображены полуплоскости ф = 0 и
ф = ф0 =^). Координатной поверхностью z = z0, т.е. геометрическим
местом точек м(г,ф,г0) при фиксированном значении аппликаты z = z0,
является плоскость, перпендикулярная оси аппликат (на рис.2.35 изображены
плоскости z = О и z = 2).
б) Найдем цилиндрические координаты точки Л(4, -3, 2). Аппликата
zA=2y полярный радиус и полярный угол находим по формулам (2.20) (см.
пример 2.11):
и 5=? ~Л А. _1- I — ^ I ^^ ^ • гл ^- ^—-^*^ ^ ^; дугИ-гу з; —arnfjy— '
JCm 4 4 А
g— = -arctg--; zA=2,
хА 4 4
так как -я<ф<я и ортогональная проекция точки А на координатную
плоскость Оху (основную плоскость) лежит в IV четверти.
б) Найдем прямоугольные координаты точки В. По формулам (2.19)
вычисляем (см. пример 2.10):
2.3.3. Сферическая система координат
Для введения сферической системы координат в пространстве
выбирается плоскость (основная плоскость) и на ней задается полярная система
координат с полюсом О (начало сферической системы координат) и
полярной осью Ох. Через точку О перпендикулярно основной плоскости
проведем ось Oz (ось аппликат) и выберем ее направление так, чтобы
возрастание полярного угла со стороны положительного направления оси Oz
происходило против часовой стрелки (рис.2.36,а).
В сферической системе координат положение точки М , не лежащей
ОМ до начала
координат, полярным углом ф точки Мо - ортогональной проекции точки М на
основную плоскость, и углом 6 между вектором ОМ и положительным
направлением оси аппликат [15,40]. Таким образом, сферические
координаты точки М - это упорядоченная тройка чисел р,ф,9 -радиус (р>0),
долгота (-я<ф<я) и широта (0<6<я). У точек, принадлежащих оси
171
аппликат, не определена долгота, их положение задается радиусом р и
широтой 6 = 0 для положительной части оси Oz и 9 = я для отрицательной ее
части. Начало координат задается нулевым значением радиуса р. Иногда
[2,3] вместо угла 0 широтой называют угол у =•§•-в, принимающий
значения --|
м(р,ф,е)
Рис.2.36
Со сферической системой координат Орфв можно связать
прямоугольную систему координат Oij к (рис.2.36,б), у которой начало и
базисные векторы i ,к совпадают с началом сферической системы координат и
единичными векторами на полярной оси Ох и оси аппликат Oz
соответственно, а базисный вектор j выбирается так, чтобы тройка i 9j 9k была
правой (при этом базис оказывается стандартным).
Наоборот, если в пространстве задана правая прямоугольная система
координат, то, приняв положительную полуось абсцисс за полярную ось,
получим сферическую систему координат (связанную с данной
прямоугольной).
Получим формулы, связывающие между собой прямоугольные
координаты x,y,z точки М и ее сферические координаты р,ф,6. По
рис.2.36,б получаем
= p-cos<p-sin9,
= p-sin<p-sin8,
(2.21)
Эти формулы позволяют найти прямоугольные координаты по известным
сферическим координатам. Обратный переход выполняется по формулам
172
(2.22)
0 = arccos-^ = arccos
Формулы (2.22) определяют долготу <р с точностью до слагаемых 2лп, где
у
пе Z. При х Ф 0 из них следует, что tgcp = —. Главное значение долготы (р
х
(-п< ф < п) находится по формулам (см. рис.2.29).
Пример 2.13. В сферической системе координат Орфб:
а) построить координатные поверхности р = /?, Ф = Фо, z = z0;
б) найти сферические координаты р ,ф, 0 точки А, если известны ее
прямоугольные координаты А(4,-3,12);
в) найти прямоугольные
координаты х, у , z точки В , если
известны ее сферические
координаты: р = 4;ф=^, 0=^.
D а) Координатной
поверхностью р = R, т.е. геометрическим
местом точек А/(/?,ф,0) при
фиксированном значении радиуса
р = R, является сфера с центром в
начале координат (рис.2.37). Этим
объясняется название сферической
системы координат. Координатной
поверхностью ф = ф0, т.е.
геометрическим местом точек М(р,фо,б) при фиксированном значении долготы
Ф = ф0, является полуплоскость, ограниченная осью аппликат (на рис.2.37
изображена полуплоскость (р = 0 ). Координатной поверхностью 0 = 0О, т.е.
геометрическим местом точек М(р,ф,0о) при фиксированном значении
широты 0 = 0О Ф -|, является конус, ось которого совпадает с осью аппликат, а
вершина - с началом координат. При G=j получаем основную плоскость.
На рис.2.37 изображены конус 0 = 0О Ф у и основная плоскость 0=~.
173
Рис.2.37
б) Найдем сферические координаты точки л(4,-3,12). По формулам
(2.22), учитывая рис.2.29 (см. пример 2.12), получаем
42 + (~3)2+122 =13; cp = -arctg—; 9 = arccos—.
v ' 64 13
б) По формулам (2.21) получаем
2.4. КООРДИНАТНОЕ ПРОСТРАНСТВО R"
2.4.1. Точки, векторы и операции над ними
В разд.2.1 подчеркивалось, что введение аффинной системы координат
на прямой, на плоскости, в пространстве устанавливает взаимно
однозначное соответствие между точками и их координатами. Эта идея, лежащая в
основе аналитической геометрии, обобщается в данном разделе.
Рассмотрим множество Rn упорядоченных наборов п действительных
чисел JCj,jc2,...,xn, которое будем называть п'Мерным аффинным
пространством (п-мерным декартовым пространством, п-мерным
арифметическим пространством), а его элементы - точками и обозначать их
прописными буквами, например, A\av...,an). Две точки А\ах,...,ап) и
B\bv,..,bn) называются совпадающими, если ах =ЬХ ,...,#„ =Ьп .
Число п называется числом измерений или размерностью
пространства Rn. Например, в силу введения аффинных систем координат на
прямой, на плоскости и в пространстве (см. разд.2.1) можно говорить, что
прямая, плоскость, пространство являются одномерным (R), двумерным (R2)
и трехмерным (R3) аффинными пространствами соответственно. Примером
четырехмерного пространства служит пространственно-временной
континуум, используемый для описания физических процессов, в котором
каждому "событию" ставится в соответствие набор четырех чисел \t,xl9x2,x3),
где t - момент времени, в который произошло "событие", а хх, х2, хъ -
координаты "места события" [15].
174
Упорядоченная пара точек пространства Rn называется вектором.
Первая точка называется началом вектора, вторая - концом вектора.
Начало вектора называют также его точкой приложения. Вектором АВ с
началом в точке А(ар...,ап) и концом в точке B{br...,bn) называется матрица-
столбец (см. разд.П.1)
Вектор, начало и конец которого совпадают, называется нулевым и
обозначается о = (0 • • • 0)г.
ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
Операции сложения векторов и умножения векторов на число
определяются как соответствующие операции над столбцами [8,10,37]:
суммой векторов jc = (jc^ ••• xnj и y = (yi "• Уп/ называется
вектор
х+у =
произведением вектора х = [х1 ••• хп[ на число X называется век-
тор
Хх =
Я-х.
Эти операции удовлетворяют свойствам 1-8 линейных операций над
векторами в разд. 1.1.2. Поэтому пространство Rn можно рассматривать как
линейное (векторное) пространство [8,10].
Два ненулевых вектора называются коллинеарными, если существует
такое число X, что у = Хх. Нулевой вектор считается коллинеарным
любому вектору. Каждый вектор коллинеарен самому себе.
Замечания 2.9.
1. Совершенно так же, как в разд. 1.1.2, 1.1.3, 1.2.1, вводятся
следующие, связанные с линейными операциями над векторами, понятия:
противоположных векторов, разности векторов, отношения коллинеарных векторов,
линейной зависимости и линейной независимости векторов. Свойства 1-7
175
линейно зависимых и линейно независимых векторов (см. разд. 1.1.3)
переносятся на векторы пространства Rn без изменений.
2. Рассматривая множество упорядоченных наборов п комплексных
чисел zl,z2,--*,zn, приходим к понятию п-мерного комплексного
арифметического пространства Сп, где zx = хг + i ух е С ,..., zn = хп + i yn e С;
С - множество комплексных чисел. Все точки пространства Rn содержатся
в Сп (при jj =... = >п =0) и называются вещественными
(действительными) точками пространства С".
Понятия вектора, размерности пространства Сп, линейных операций
над векторами и их свойства аналогичны соответствующим понятиям й
свойствам действительного арифметического пространства Rn.
СТАНДАРТНАЯ СИСТЕМА КООРДИНАТ В Rn
Базисом пространства Rn называется упорядоченная система п
линейно независимых векторов (базисных векторов).
Упорядоченный набор векторов
(2.23)
называются стандартным базисом в пространстве Rn.
Векторы стандартного базиса линейно независимы и любой вектор
х = (х1 ••• xnf может быть разложен по базису, т.е. представлен в виде
линейной комбинации базисных векторов:
(2.24)
Как и ранее (см. разд. 1.3), координатами вектора х относительно
базиса {е) = (е1 ••• еп) называются коэффициенты х1Ух2,...,хп в
разложении (2.24). Как видим, в стандартном базисе (2.23) координаты хх,х2,...,хп
176
V
0
0
1
А
' е2 =
1
0
1
' •■••«« =
'0^
1
0
0
W
*1
Х2
Л,
=v
0
А
1
А
+...+V
0
вектора х = (хг — хп[ совпадают с его элементами, а координатный
столбец \х1 — хп j - с самим вектором х.
Например, в одномерном пространстве R вектор х представляется
столбцом х = (xj), в двумерном пространстве R2 - столбцом х = (хх х2[ ,
в трехмерном пространстве R3 - столбцом х = (jCj дс2 дс3 )Г .
Совокупность точки О и базиса (^) = (^1 ••• *п) называется
аффинной (декартовой) системой координат пространства Rn. Точка О
называется началом системы координат.
Вектор ОХ , начало которого совпадает с началом О системы
координат, а конец - с точкой х(хХ9...9хп) пространства, называется радиус-
вектором точки X . Координатами точки Х\х1,,..,хп) в пространстве Rn
называются координаты ее радиус-вектора ОХ относительно базиса
el9...,en. Разумеется, что соответствия
(точка) <-> (радиус-вектор точки) <-> (координаты точки) <-»
<-> (координатный столбец радиус-вектора точки)
взаимно однозначные.
Система координат с началом в точке О(0,...,0) и стандартным базисом
el,...,en (2.23) считается стандартной системой координат пространства
Rn и обозначается Ое1..^п или Oxl..jcn . В этой системе координат точка
Х(дс1,...,хл) имеет координаты xl9...9xn,так как ОХ =х1е1+...+хп-еп.
Заметим, что правило нахождения координат вектора (см. разд.2.1.1),
согласно которому из координат конца вектора нужно вычесть координаты
его начала, было фактически принято в качестве определения векторов в
Rn. Действительно, в стандартной системе координат вектор АВ с началом
в точке A(ap...,an) и концом в точке B[bv...9bn) обозначается матрицей-
столбцом
-
У* Ч
где а = ОА и ft = OB - радиус-векторы точек А и В соответственно.
12-5150 177
ЛИНЕЙНЫЕ, НЕОТРИЦАТЕЛЬНЫЕ, АФФИННЫЕ И ВЫПУКЛЫЕ
КОМБИНАЦИИ ВЕКТОРОВ
Вектор v пространства Rn называется линейной комбинацией
векторов vt, v2,..., v^, если он может быть представлен в виде
где ах, сс2,..., ak - некоторые числа.
Множество линейных комбинаций векторов vl9v2,...,vk называется
их линейной оболочкой и обозначается
Lin(vvv2 vj={v: v = a1-v1+a2-v2+...+aik-vik; a.eR, i = l,...,*}.
Векторы v19v2,...,V£ называются образующими линейной оболочки
Un(vvv2,...,vk).
Линейная комбинация ах • О\ + а2 • О\ +...+ак • ОАк радиус-векторов
О\ ,OA^ 9...,OAk называется неотрицательной, если все ее
коэффициенты - неотрицательные числа. Множество неотрицательных комбинаций
радиус-векторов OAi9OA2 ,...9OAk называется их конической оболочкой и
обозначается:
аг >0,<х2 >0,...,с^ >0, ara2 ak eR}.
Линейная комбинация а{ - О\ + а2 • ОА1 +...+с^ • ОАк радиус-векторов
О\,О\,...,ОАк называется аффинной, если сумма ее коэффициентов
равна единице: at + a2 +...+ак =1. Множество аффинных комбинаций
радиус-векторов О\,ОА2,...,ОАк называется их аффинной оболочкой и
обозначается:
2+...+ал =1, ара2,...,а^е/?}.
Линейная комбинация ах • О\ + а2 • О/Ц +...+а^ • О\ радиус-векторов
, ОАг ,..., ОАд. называется выпуклой* если все ее коэффициенты -
неотрицательные числа, а их сумма равна единице: ах + а2 +...+а^ = 1.
Множество выпуклых комбинаций радиус-векторов О\ ,0^ ,...,ОА^ называется
их выпуклой оболочкой и обозначается:
178
Conv\O\,OA1 O\ )={oM: OM =al0Al+a20A2+...+ak0Ak;
cXj+a2+...+aft=l, a1>0,a2>0,...,aik>0, ava2,...,akeR }.
Радиус-векторы О\,ОА2 ,...9OAk называются образующими
конической оболочки Con\OAl9OA2,...,OAk)y аффинной оболочки
Aff \OAl,OA29...,OAk ), выпуклой оболочки Conv\OA^%OA29...9OAk ].
Учитывая взаимно однозначное соответствие радиус-векторов и точек
пространства Rn, можно говорить о неотрицательной, аффинной или
выпуклой комбинации точек А^, ^,..., Ак, полагая (по определению)
)=Conv\OAl,OA2,...,OAk ).
Свойства линейных, конических, аффинных и выпуклых оболочек
использовались в разд. 1.6.1 для описания простейших геометрических
объектов: прямых, плоскостей, отрезков, треугольников, плоских и трехгранных
углов, тетраэдров. В л-мерном пространстве линейные, конические,
аффинные и выпуклые оболочки служат для определения аналогичных
геометрических объектов (см. разд.2.4.2).
2.4.2. Линейные и аффинные подпространства
ЛИНЕЙНОЕ ПОДПРОСТРАНСТВО
Непустое подмножество L векторов из Rn называется линейным
подпространством пространства Rn, если:
1) w + veL Vn,veL (подпространство замкнуто по отношению к
операции сложения);
2) XveL VveLn любого действительного числа X
(подпространство замкнуто по отношению к операции умножения вектора на число).
Для указания линейного подпространства будем использовать
обозначение L < Rn. В частности, множество {о }, состоящее из одного нулевого
вектора, и все пространство Rn считаются подпространствами Rn:
{о }< Rn, Rn < Rn . В "обычном" пространстве R3 координатная ось ( R) и
координатная плоскость (J?2 ) являются подпространствами: R < R2 < R3.
Линейное подпространство L называется т -мерным, если в нем
существует система из т линейно независимых векторов, а любая система из
большего количества векторов линейно зависима. Число т называется
12* 179
размерностью (числом измерений) линейного подпространства L и
обозначается dimL, в частности, dim {о }=0 (так как в множестве {о } нет
линейно независимых векторов), dim{/?n]=n (что совпадает с данным в
разд.2.4.1 определением размерности Rn). Другими словами, размерность
подпространства - это максимальное число линейно независимых векторов
этого подпространства.
Базисом т -мерного линейного подпространства называется
упорядоченная совокупность т линейно независимых векторов (базисных
векторов). Например, векторы i, j образуют базис на координатной плоскости
R2, являющейся подпространством R3.
Замечания 2.10.
1. Линейное подпространство - это непустое подмножество Rn,
которое содержит любую линейную комбинацию своих векторов, т.е.
L<Rn <=> a1-v1+a2-v2+...+aife-viteL
Vvv...,vke L Vav...,ak gR VkeN.
Это утверждение следует из условий 1, 2 в определении линейного
подпространства и может быть взято в качестве эквивалентного
определения [2,3].
2. Базис линейного подпространства - это полная система векторов
этого подпространства в том смысле, что любой вектор подпространства
линейно выражается через базисные векторы. Другими словами, т -мерное
линейное подпространство L есть линейная оболочка своих базисных век-
торов lt lm: L = Lin{fv...,lJ.
3. Базис линейного подпространства - это максимальная линейно
независимая система векторов этого подпространства, так как базис - это
линейно независимая система векторов, и ее нельзя дополнить каким-либо
вектором из подпространства без потери линейной независимости.
4. Базис линейного подпространства - это полная линейно независимая
система векторов линейного подпространства.
АФФИННОЕ ПОДПРОСТРАНСТВО
Непустое подмножество П точек из Rn называется аффинным
подпространством, если вместе с любыми двумя своими точками оно
содержит и любую их аффинную комбинацию:
для любых точек А и В (концов радиус-векторов а, Ь
соответственно), принадлежащих П, точка С, радиус-вектор которой имеет вид
также принадлежит П.
180
Например, аффинными подпространствами являются точка, прямая,
плоскость или все пространство R3 (см. также разд. 1.6.1).
Покажем, что аффинное подпространство можно задать при помощи
операции откладывания векторов от точки (см. п.4 замечаний 1.1).
Действительно, пусть А - некоторая точка Rn (a - ее радиус-вектор), а
L<Rn - линейное подпространство. Рассмотрим множество П таких точек
Р (р - радиус-вектор точки Р ) из Rn, которые получаются в результате
откладывания от точки А векторов из L (рис.2.38):
TI = a + L = {peRn: p = a + U Isl]. (2.25)
Пусть точки Aj и Aj принадлежат П, т.е. их радиус-векторы имеют
вид аг =а+1г и а2 = а+12. Тогда их аффинная комбинация также
принадлежит П, так как
( 0( О() Л+(Х2 12 =
где /3€ L (/3 - линейная комбинация векторов 1Х и /2 из L).
Рис.2.38
Таким образом, множество П (2.25) является аффинным
подпространством и называется плоскостью, проходящей через точку А (конец
радиус-вектора а ) параллельно линейному подпространству L. При этом
линейное подпространство L называется однородной частью аффинного
подпространства П. Говорят также, что плоскость П получена в
результате параллельного переноса линейного подпространства L на вектор а.
Размерностью плоскости П называется размерность ее однородной
части, т.е. (ШпП = dimL. Например, точка, прямая, плоскость в "обычном"
пространстве R3 являются нульмерным, одномерным, двумерным
аффинными подпространствами соответственно. Плоскость размерности (n-l) в
пространстве Rn называется гиперплоскостью. Прямая на координатной
181
плоскости или плоскость в "обычном" пространстве R3 являются
гиперплоскостями.
Замечания 2.11.
1. Аффинное подпространство - это непустое подмножество Rn,
которое содержит любую аффинную комбинацию своих точек.
2. Точки AQ , Al,..., Аг называются геометрически независимыми,
если векторы AQAl,AQA2 ,...,AQAr образуют линейно независимую систему.
В г -мерной плоскости П = aQ + L существует не более (г +1)
геометрически независимых точек.
В самом деле, пусть Ао - любая точка плоскости П (а0 - радиус-
вектор точки Ао), a liJ29...9lr -базис L, тогда точки \^\ ,...,АГ
-концы радиус-векторов а0, а0 + 1Х, aQ + /2,..., а0 + 1Г геометрически независимы,
так как векторы /19/2,...,/г линейно независимы. Существование (r + l)
геометрически независимых точек доказано. Предположим, что в г -мерной
плоскости П имеются (г+ 2) геометрически независимых точек
В0,Д1,...1Вг,Вг+1. Тогда по определению получим линейно независимую
систему (r + l) векторов /^В^, Z2=V*2 ••••»^ЗА' /г+1 = ^0Вг+1
подпространства L, что противоречит его г -мерности.
3. Геометрически независимые точки аффинного подпространства
аналогичны базису линейного подпространства, а именно: если A0,Al,...fAr -
геометрически независимые точки г -мерной плоскости П, то
4. Выпуклая комбинация Conv (о^, О\,..., ОЛГ) геометрически
независимых точек Лд, Aj,..., Аг (их радиус-векторов) называется г'Мерным
симплексом (с вершинами Ао, Aj,..., Аг) и обозначается Л^..^..
Например, в "обычном" пространстве /?3: тетраэдр AQAlA2A3 (включая его
внутренние точки) является трехмерным симплексом, плоский треугольник
А0\А2 - двумерным симплексом, отрезок А0А{ - одномерным симплексом,
а точка \ - нульмерным симплексом.
Выпуклая комбинация k (0<k<г) точек из набора АО,А1,...,АГ
называется к-мерной гранью г-мерного симплекса \\.Аг. Например,
нульмерные грани тетраэдра А0А{А2А3 - это его вершины, одномерные
грани - ребра, двумерные грани - "обычные" грани тетраэдра.
182
2.4.3. Скалярное произведение
Стандартным скалярным произведением векторов х = (х1 ••• xnf
и у = (ух ••• упУ называется число
(х,у)= хТ • у = *, • уг +х2-у2 + ... + *„ .уя • (2.26)
Скалярным квадратом вектора д: = (л:1 ••• jcn; называется
скалярное произведение вектора на себя: (jc, х)=лсг • х = дс2 + jc2 +... + *2 .
Скалярное произведение (2.26) обладает свойствами 1-4
(перечисленными в разд. 1.4.2), из которых следует неравенство Коши - Буняковского
(см. п.З замечаний 1.9):
справедливое для любых векторов а = \ах ••• ап[иЬ = [Ь1 ••• Ьп[ .
Используя скалярное произведение, можно определить основные
метрические понятия: длину вектора и величину угла между векторами (см.
геометрические свойства 1,2 скалярного произведения в разд. 1.4.2).
Длиной вектора х = [х{ ••• хп[ называется квадратный корень из
скалярного квадрата:
Вектор, длина которого равна единице, называется единичным.
Расстояние между точками A[av...,an) и B\bv...,bn) находится как
длина вектора АВ-Ь-а:
где а = (а1 ••• ап[ и b = (b{ ••• bnf - радиус-векторы точек А и В
соответственно (см. разд.2.4.1).
Величиной ф угла между ненулевыми векторами а = \а{ ••• ап[
и6 = (^ ••• £Л)Г называется число 0<ф<п:
-- .т М
MM
Векторы называются ортогональными {перпендикулярными), если их
скалярное произведение равно нулю.
Система векторов называется ортогональной, если все векторы
системы попарно ортогональны.
183
Система векторов называется ортонормированной, если все векторы
системы попарно ортогональны и их длины равны единице.
Покажем, например, что стандартный базис (2.23) (см. разд.2.4.1) - ор-
тонормированный. Действительно, длина каждого вектора стандартного
базиса равна единице, например,
а угол между разными векторами стандартного базиса равен ~, например,
угол ф между векторами ех и е2:
{eve2) 10+01+00+...+00 Л п
cos(p=. v *' = — = 0, т.е. ф = -.
KI-KI ы 2
Поэтому стандартную систему координат Oxy.jcn называют
прямоугольной.
П -МЕРНЫЙ ОРИЕНТИРОВАННЫЙ ОБЪЕМ
Введем по индукции понятие ориентированных объемов
параллелепипедов в пространствах R , R2, R3,..., Rn.
Пусть ^,02,...,^ - линейно независимая система векторов п-
мерного пространства Rn. Множество точек Р, радиус-вектор ОР которых
удовлетворяет условиям
называется п-мерным параллелепипедом, построенным на векторах
а{,а2 ,...,ал, и обозначается #al,a2,...,an. Например, одномерный
параллелепипед #ах в пространстве R -это отрезок числовой оси Ох; двумерный
параллелепипед #а19а2 в пространстве R2 - это параллелограмм на
координатной плоскости Оххх29 трехмерный параллелепипед #ах,а2,а3 в
пространстве R3 - это параллелепипед в координатном пространстве Ох1х2хъ.
Обозначим:
V#a = ах - одномерный ориентированный объем, определяемый вектором
(числом) ах из пространства R ;
12 - двумерный ориентированный объем, опреде-
а2х а22
ляемый ориентированной площадью параллелограмма #ага2, постро-
184
енного на векторах ах = п, а2= 12 пространства R2 (см.
I ЙЛ. —. - I 1 ■ * — — I
*22
разд. 1.5.3);
«23
- трехмерный ориентированный
«31 «32 «33
объем, т.е. ориентированный объем параллелепипеда #ava2,a3, по-
строенного на векторах а{ =
ва R3 (см.разд.1.5.3);
«11
«21
l«3lj
, аг =
«12
«22
1«32>
'«3 =
/ \
«13
«23
l«33J
пространстлп\
- п ^мерный ориентированный
/" Ч
«11
Ль
, а2 =
/ \
«12
1-
«л2>
,. •., Uji
S Ч
'-
\ ЯП/
объем параллелепипеда #яр...,ал, построенного на векторах
пространства /?п.
Заметим, что п -мерный объем параллелепипеда (неориентированный) равен
\V#a
Замечания 2.12.
1. Скалярное произведение векторов пространства Rn можно
определить следующим образом:
где G - любая симметрическая положительно определенная матрица п -го
порядка [8,10,15].
2. Ориентированный объем п -мерного симплекса ОАгА2..Ап в Rn
находится по формуле [40]:
а21 а22 -
пп2
185
а неориентированный - равен
a
Пример 2.14. В пространстве R* даны радиус-векторы
т
0
0
к
Т
1
0
А
'Г
1
1
А
'Г
1
1
-1
точек Ах, >Ц, Аз, Л4 соответственно. Требуется найти:
а) длину диагонали ОА = а = а1+а2 + а3+а4 параллелепипеда
#а19а2,а39а4, построенного на векторах aY, а2, а3, а4;
б) четырехмерный объем параллелепипеда #ava2,a3,a4;
в) объем четырехмерного симплекса О\А2АЪАА;
D а) Находим вектор
О А = а = аг+ аг+ я 3 + а4 =
1
0
0
.0,
+
1
1
0
0
+
1
1
1
0
+
1
1
1
-1.
4 '
3
2
-и
1
0
0
0
1
1
0
0
1
1
1
0
1
1
1
-1
а затем его длину |а| = у 42 + 32+22+(-l)2 =
б) По определению находим четырехмерный ориентированный объем
параллелепипеда #ах, а2, а3, а4:
=-1.
Следовательно, четырехмерный объем равен \V#a а а а =|-l| = l.
в) Согласно п.2 замечаний 2.12, находим ориентированный объем
симплекса ОА1А2А3А4:
1 1 Л 1
оа1а2а3а4 " ^, #o4J",o^',a^',aAj"" 4! #ep*2'a3«a4 "" 24
Поскольку искомый объем (неориентированный) есть величина
неотрицательная, то Vt ""
186
2.4.4. Преобразования координат
ЛИНЕЙНЫЕ НЕВЫРОЖДЕННЫЕ ПРЕОБРАЗОВАНИЯ КООРДИНАТ
Пусть в пространстве заданы две аффинные системы координат, т.е.
каждой точке X поставлены в соответствие два упорядоченных набора п
действительных чисел хг,х2,...,хп (старые координаты) и хх,х2,...,хп
(новые координаты). Выражения старых координат через новые имеют вид
линейных невырожденных преобразований координат (см. разд.2.2.2):
(2.27)
где S - невырожденная матрица (матрица перехода от базиса старой
системы координат Oxl..jcn к базису новой системы координат Oxy.jcn), a
s = ОО' - вектор переноса начала координат; х и х - координатные
столбцы радиус-векторов одной и той же точки х(д^,...,дсп) и x(j£,...,j£) в
соответствующих системах координат. Координаты вектора Х0Х, или
Ах = х - х0 , в старом базисе выражаются через координаты этого же вектора
Ах' = х- х'о в новом базисе по формуле (см. разд.2.2.1):
(2.28)
Аналогично случаю аффинного преобразования координат "обычного"
пространства ( /?3 ) определитель матрицы S равен отношению п -мерных
ориентированных объемов параллелепипедов, построенных на базисных
векторах новой и старой систем координат, а модуль определителя равен
коэффициенту искажения объемов при аффинном преобразовании (см.
свойство 3 в разд.2.2.1 и свойство 4 аффинных преобразований пространства
в разд.2.2.4). Коэффициент искажения объема | detS | при аффинном
преобразовании координат одинаков для всех точек пространства.
НЕЛИНЕЙНЫЕ ДИФФЕРЕНЦИРУЕМЫЕ ПРЕОБРАЗОВАНИЯ КООРДИНАТ
Пусть в пространстве заданы две системы координат, т.е. каждой
точке X поставлены в соответствие два упорядоченных набора п
действительных чисел хх,х2,...,хп (старые координаты) и л^л^,...,*^ (новые
координаты), причем известны выражения старых координат через новые:
187
■ = g{x),
(2.29)
где £Д*р-..,*л), i = l,...,л - непрерывно дифференцируемые функции;
гИ-
lt.W,
- столбец заданных функций; * и х -
координатные столбцы радиус-векторов точки X в старой и новой системах
координат.
(dgl(x)
Обозначим через
дх'п
дх[
Ъх'
рицу частных производных первого порядка заданных функций (матрицу
Якоби преобразования (2.29)). Определитель detl —т матрицы Якоби на-
зывается якобианом преобразования координат.
Точки, где якобиан преобразования равен нулю или не существует,
называются особыми, а остальные точки называются неособыми.
По теореме об обратном преобразовании [23]: если задано
преобразование координат (2.29): x = g(x), выражающее старые координаты
хх,...,хп произвольной точки X е Rn через новые х1,...,хп, причем
хо = tffco) ^ля некоторой фиксированной точки XQeRn ,иякобиан преоб-
разования
в этой точке XQ (при х = х0) отличен от куля, то в
достаточно малой окрестности точки Хо можно выразить новые
координаты Xj,...,jcn через старые:
<=> x=f{x),
(2.30)
Л =
188
причем Xg=f{x0). Матрица Якоби -т— =
3xL
Эл,
Ъх,
э*
обратного преобразования будет обратной для матрицы - , .. .
^дх Дх'о
Поясним это утверждение. Пусть х0, х0 - координатные столбцы
радиус-векторов точки Хо в старой и новой системах координат, причем
якобиан преобразования
в этой точке Хо отличен от нуля. Разло-
жим функцию g(x) в ряд Тейлора в окрестности точки Хо, оставляя члены
только первого порядка. Получим выражение приращения Ах = х-х0
старых координат через приращение Ах =х -х'о новых координат:
Ах
(2.31)
или в координатной форме
Ъх_
*0
4 *о п *о
Формула (2.31) представляет собой локальное преобразование
координат в окрестности точки Хо с учетом членов только первого порядка.
Сравнивая (2.31) с формулами (2.28), делаем вывод: в окрестности точки
Хо старые локальные координаты Ах = х-х0 и новые локальные
координаты Ах =х -х0 вектора XQX преобразуются так же, как при аффинном
преобразовании (2.28) с матрицей S =
ленной в точке Хо (при / = jCq).
- матрицей Якоби, вычис-
1хо
189
Другими словами, преобразование координат (2.29) в окрестности
неособой точки XQ можно рассматривать как переход от одной аффинной
системы координат к другой, т.е. локальное преобразование координат
является невырожденным линейным преобразованием координат (2.28).
Аффинное преобразование координат, как известно, обратимо и матрица
-г— обратного перехода является обратной для
(см. свойства
матрицы перехода от одного базиса к другому в разд.2.2.1). При этом
модуль якобиана равен коэффициенту искажения объемов (в окрестности
рассматриваемой точки XQ ) [40]. В отличие от аффинных преобразований
коэффициент искажения объемов при нелинейных преобразованиях, вообще
говоря, меняется в зависимости от точки XQ.
Пример 2.15. На плоскости в прямоугольной системе координат Оху
отмечена точка Q(l,0) и введена система координат, в которой положение
произвольной точки М задается двумя углами ф, \|/. Оба угла отсчитыва-
ются от оси абсцисс в положительном направлении (против движения
часовой стрелки) до вектора ОМ и вектора QM соответственно (рис.2.39,а),
причем диапазоны изменения углов <р, \|/ выбираются как в полярной
системе координат: -7С<ф<я, -ж\|/<я (допустимые значения углов ф,у
изображены на рис.2.39,б (два заштрихованных треугольника), где учтены
очевидные неравенства ф < \|f для точек, принадлежащих I и II четвертям,
иф>\|/ - для точек в III и IV четвертях). Требуется:
а) вывести формулы (2.29) преобразования координат;
б) вывести формулы (2.31) локального преобразования координат;
в) указать особые точки полученного преобразования координат.
П а) Найдем полярный радиус г точки М . По теореме синусов для
треугольника OQM :
У '
М
Рис.2.39
190
1
г =-
sin \J/
sin(7t-\|/) sin ZOMQ ' 8ш(\|Г-ф)'
так как \|/ = Z0Лf^2 + ф (внешний угол треугольника равен сумме двух
внутренних углов, не смежных с ним) и, следовательно, Z.OMQ = \|/ - ф.
Теперь, используя связь (2.17) прямоугольных и полярных координат,
получаем
_апу-со8ф
X — / v :
sin w-sin ф
б) Найдем матрицу Якоби
Эф
(
Э\|/
(
sin\|f-cos\|f
8т2(у-ф) sin2(y-<
sin2
Эф Э\(/
Следовательно, локальное преобразование координат (2.31) в окрестности
точки М имеет вид
sin у-cosy sinф-cosф
sin2\|f
к8т2(чг-ф) si
в) Находим якобиан преобразования:
siny-cos\|r
М-
det
8Ш2(\|/-ф)
sin2\|f
8Ш2(||Г-ф) 5Ш2(\|/-
Он равен нулю или не имеет смысла для точек, принадлежащих оси абсцисс,
т.е. при ф = \|/ = 0, ф = \|/ = я, ф = 0 и \|/ = я. Остальные точки плоскости
являются неособыми. ■
ПЕРЕХОД К ПОЛЯРНОЙ СИСТЕМЕ КООРДИНАТ
Пусть на плоскости заданы прямоугольная система координат Оху и
соответствующая ей полярная система координат Опр, для которых (см.
разд.2.3.1)
(2.32)
191
т.е. в(2.29) *!=*, х2=
Найдем матрицу Якоби
g2
(x')=r-si
sin<f>.
(cosy -r-sm<f>\
r-cos2(f)+r-sin2<p =
отличен от
Якобиан преобразования deu \ ! =
\Э(г,ф);
нуля всюду (г > 0), за исключением начала координат О, где г = 0.
Следовательно, точка О - единственная особая точка преобразования (2.32).
Вычислим коэффициент искажения площади в окрестности
произвольной неособой точки Хо. Пусть точка Хо имеет прямоугольные координаты
*0,у0 и полярные координаты го,фо, причем г0 >0. В окрестности точки
XQ введем две аффинные системы координат XQAxAy и Х0АгАф (см.
рис.2.40,а), связанные локальным преобразованием координат (2.31):
,sin<Po го
альны
(co
[sin
(2.33)
О i xo v б
Рис.2.40
Аффинное преобразование (2.33), описываемое матрицей Якоби,
можно представить в виде композиции двух преобразований: поворота на угол
ф0 и сжатия к оси Хо Аг с коэффициентом г0 (см. разд.2.2.4):
|"cos<p0 -r
Базисные векторы системы координат XQAxAy совпадают со стандартным
базисом i , j прямоугольной системы координат Оху, а базисные векторы
г , / системы координат XQ Аг Аф связаны с ними соотношениями
г = \г
192
Ортогональность базисных векторов при такой композиции преобразований
естественно сохраняется: i'l/. Поэтому квадрат, построенный на
базисных векторах i , j (изображен на рис.2.40,д штриховой линией), единичной
площади 5 - - =|i? 1-1 у I = 1 преобразуется в прямоугольник (изображен на
рис.2.40,а сплошной линией) площади S'^y -.> - \i:' I • / = rQ • i: I • \j \ = rQ.
Таким образом, в окрестности неособой точки коэффициент искажения
площади г0 равен модулю якобиана преобразования (2.32):
со$ф0 -го-япфо
Коэффициент искажения площади равен rQ и применяется при вычислении
двойных интегралов [19,23,40].
Сравним теперь полное искажение площади в результате
преобразования (2.32) и при локальным преобразовании (2.33). Рассмотрим множество
#гф точек, полярные координаты г, <р которых удовлетворяют условиям
го<г<го+Аго, <ро<ф<фо + Д<ро.
Это множество представляет собой криволинейный четырехугольник
(заштрихованный на рис.2.40,б), ограниченный дугами окружностей r = rQ,
г = го+Аго и отрезками лучей ф = ф0, ф = фо + Дфо. Найдем площадь S
этой фигуры:
АФ2 АФА+дФА2
В аффинной системе координат Х0АгАф множество #АгАф точек,
координаты Аг,Аф которых удовлетворяют условиям
0<Аг<Аг0, 0<Аф<Аф0,
представляет собой прямоугольник (изображен сплошными линиями на
рис.2.36,б) площади S# = r0- Аф0 • Аг0. Искомая разность площадей
*-*.-{
■Аг*
Так как относительная ошибка
го
стремится к нулю при Аг0 —> 0, то при вычислении искажения площадей
можно использовать локальное преобразование координат (2.33) вместо
преобразования (2.32).
13 — 5150 193
ПЕРЕХОД К ЦИЛИНДРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
Пусть в пространстве заданы прямоугольная система координат Oxyz
и соответствующая ей цилиндрическая система координат Or<pz, для
которых (см. разд.2.3.2)
' ; = г-со8ф,
^ = г-8тф, (2.34)
Найдем матрицу Якоби
-r-sincp 0>
г-совф О
О 1
Якобиан преобразования
= lr-cos ф+г
■8Ш2ф)-1 =
г отличен
от нуля всюду (г > 0), за исключением оси Oz, где г = 0. Следовательно,
все точки оси аппликат (и только они) являются особыми точками
преобразования (2.34). Коэффициент искажения объема равен г и применяется при
вычислении тройных интегралов [19,23,40].
ПЕРЕХОД К СФЕРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
Пусть в пространстве заданы прямоугольная система координат Oxyz
и соответствующая ей сферическая система координат Орфб, для которых
(см. разд.2.3.3)
Найдем матрицу Якоби
(2.35)
= p-cos0.
Э(р,ф,б)
. cosG
Вычислим якобиан преобразо]
совф-зш© -p*sii^-sin0 p-
8Шф8т0 pcos9-sin0
р8ШфСО80
-p-sin©
вания
cosф-sin0 -р-
COS0
-psin0
= -p2sin0.
194
При р > 0 и при 8*0 или 0 Ф п якобиан отличен от нуля. Следовательно,
все точки оси аппликат Oz (и только они) являются особыми точками
преобразования (2.35). Коэффициент искажения объема равен p2sin9 и
применяется при вычислении тройных интегралов [19,23,40].
Задачи для самостоятельного решения
2.1. На координатной плоскости Оё|72 заданы вершины A(l,2),
2?(3,5), С(5, -l) треугольника ABC. Найти координаты:
а) середины К стороны ВС ;
б) точки М пересечения медиан;
в) середины N средней линии треугольника, параллельной стороне
ВС;
г) точки L, которая делит сторону ВС в отношении BL: LC = 2:3.
Ответ: г) К(4Л)\ б) м(3,2); в) tf(§,2); г) b(f ,f).
2.2. В координатном пространстве О1^ё^ъ заданы вершины А(4,4,б),
#(l2,10,2), С(20, - 2,4) треугольной пирамиды ОАВС. Найти координаты:
а) точки М пересечения медиан грани ABC;
б) точки N, которая делит отрезок ОМ вотношении ON:NM =3:1.
в) середины Z отрезка, соединяющего середины противоположных
ребер пирамиды.
Ответ: a) M(l2,4,4); б) #(9,3,3); в) z(9,3,3) - совпадает с N.
2.3. На координатной плоскости Oi j заданы векторы fx =3-i +2-у,
/2=2-i+l-y, ^=2-1-2-у, #2=-1-/+ 6- j. Доказать, что каждая из
систем (7)=(7р72) и {j)={jgvj2) я8™6™ базисом; найти матрицу перехода
от базиса (/) к базису (j); определить координаты вектора а =2 Jx +1- J2
в базисе (/).
2.4. На плоскости заданы две системы координат О^?2 и Ое^Щ с
общим началом О и взаимными базисами: v^p^i*)=(^2'^2/=^
=^- Найти матрицу 5, , преобразования координат, если
известно, что единичные векторы Sj и ?2 образуют угол ф.
13* 195
Ответ: S. x—
2.5. На плоскости заданы две системы координат Оех е2 и О ех е2.
Начало О' второй системы координат относительно первой системы
координат имеет координаты (-1*3), а базисные векторы ^ и^ имеют в базисе
7Х ,?2 координаты 2,3 и 1,1 соответственно. Найти:
а) координаты хх*х2 точки в первой системе координат О'ехё2, если
известны координаты х'х,х'2 этой точки во второй системе координат
б) координаты хх, х2 точки во второй системе координат О ех е2, если
известны координаты jCj , х2 этой точки в первой системе координат О1Х ?2;
в) координаты точки О во второй системе координат О ех е2.
Ответ: a) x1=2-ji^ + jc2~1; jc2=3-^+x2 + 3; б) л^ =-д^+^2-4;
4=3.^-2-^+9; в)0(-4,9).
2.6. В пространстве заданы две системы координат О~ё^ё7еъ и
О ех е2 е3. Начало О' второй системы координат относительно первой
системы координат имеет координаты (1,1,2), а базисные векторы е[9 "е2 и ^
имеют в базисе ~ех ,72 ,?3 координаты 4, 2, 1; 5, 3, 2 и 3, 2,1 соответственно.
Найти:
а) координаты хГх2^хъ точки в первой системе координат 0ё[72^9
если известны координаты х[,х2Ух3 этой точки во второй системе коорди-
нат О ехе2е3;
б) координаты хХуХ2*хъ точки во второй системе координат О'е^*»'
если известны координаты д^, л2, хъ этой точки в первой системе координат
Оехе2е3;
в) координаты точки О во второй системе координат О'е^е^е^.
Ответ: а) хх =4-д(+5-х2 + 3.дс2 + 1; х2=2-хх+3-х'2 + 2-'
' !2; б) хх=хх-х2-х3 + 2, х'2=-х2 + 2-
j2jc3 + 2; в)
196
2.7. Найти координаты неподвижной точки собственного
ортогонального преобразования
{х = х -coscp- у -sin<p+xQ,
где ф * я • п, л е Z ; система координат Оху прямоугольная.
Ответ: x=±\xQ-y0'Ctg%), y=\ \хос1£%+Уо)-
2.8. На координатной плоскости Оху (в прямоугольной системе
координат О\' j ) задана точка х(4, б). Найти координаты образа Y этой точки
при следующих преобразованиях плоскости:
а) поворот плоскости на угол у вокруг начала координат;
б) отражение в оси абсцисс параллельно оси ординат;
в) отражение в оси абсцисс параллельно прямой у = х;
г) сжатие к оси абсцисс (вдоль оси ординат) с коэффициентом ^-\\
д) сжатие к оси абсцисс вдоль прямой у = х с коэффициентом X=1;
е) гомотетия с центром в точке О и коэффициентом X = 2;
ж) параллельный перенос на вектор a=2i-j;
з) ортогональная проекция на ось абсцисс;
и) проекция на ось абсцисс параллельно прямой у = х.
Для каждого из преобразований а,б,в,г,д,е,ж определить коэффициент к
искажения площади.
Ответ: a) f(2-3-V3,2V3+3), 4 = 1; б) Г (4,-б), *=1;
в) Г(-8,-б), 4 = 1; г) Г(4,3), 4=А; д) У(1,3), 4=1; е) г(8,12), 4 = 4;
ж) Г(б,5), 4 = 1; з) Г(4,0); и) г(-2,0).
2.9. В прямоугольной системе координат Оху заданы точки А(3,4) и
B(l2,S). Найти координаты этих точек в полярной системе координат Огф,
а также угол ф между векторами О А и ОВ.
Ответ: Л(5, arctgy), #(l3, arctg-jj), ф = arctgy- arctg—.
2.10. В прямоугольной системе координат Oxyz заданы точки Л(3,4,5)
и #(б,6,-7). Найти координаты точки А в цилиндрической системе
координат Oripz, а координаты точки В в сферической системе координат
Орфв.
Ответ: A(5,arctg-|,5), J5(ll,-j,^-arccos^).
197
ГЛАВА 3. АЛГЕБРАИЧЕСКИЕ ЛИНИИ
НА ПЛОСКОСТИ
Предметом аналитической геометрии является описание и
исследование свойств геометрических фигур средствами алгебры и математического
анализа, а также изучение и классификация уравнений с геометрической
точки зрения. При этом геометрические свойства фигур вьфажаются
алгебраически, как свойства соответствующих уравнений, и наоборот, результаты
анализа уравнений получают геометрическое представление. Тем самым
возникает связь алгебры и геометрии, обогащающая оба раздела
математики.
В геометрии любую фигуру можно рассматривать как геометрическое
место точек (гл*.т.), т.е. как множество точек, каждая из которых
удовлетворяет заданному характеристическому свойству, а точка, не
принадлежащая этому множеству, не удовлетворяет этому свойству. Например, в
элементарной геометрии окружность определяется как г.м.т., равноудаленных
от заданной точки (центра окружности), серединный перпендикуляр к
отрезку - как г.м.т., равноудаленных от концов этого отрезка и т.п.
В аналитической геометрии, созданной Ренэ Декартом, геометрические
фигуры задаются как множества решений соответствующих уравнений.
Рассмотрим, например, уравнение
F{x,y)=0
с двумя неизвестными х, у . Его решением называется пара чисел хо,уо,
при подстановке которых вместо неизвестных х = х0, у = у0 уравнение
превращается в верное числовое равенство F[xQ,yo)=O. Каждое решение
хо,уо уравнения F(x,y) = 0 можно рассматривать как точку М0\х0,у0) на
координатной плоскости с абсциссой дг0 и ординатой у0. Таким образом,
множество решений уравнения F(x,y) = 0 определяет на координатной
плоскости П некоторую фигуру
F =
Например, уравнение х2 + у2 = 1 в прямоугольной системе координат
Оху задает окружность единичного радиуса с центром О (рис.3.1^).
Переход к этому способу описания геометрических фигур базируется
на введении системы координат, которая позволяет вместо точек
(элементарных геометрических объектов) оперировать с числами (элементарными
алгебраическими объектами). В разд.2 подчеркивалось, что введение
системы координат устанавливает взаимно однозначное соответствие между
точками и их координатами (числами или упорядоченными наборами чисел),
т.е. соответствие, удовлетворяющее двум условиям:
198
1) разным точкам множества соответствуют разные наборы координат,
отличающиеся хотя бы одной координатой;
2) любому набору координат соответствует некоторая точка.
Введение системы координат позволяет задать любую геометрическую
фигуру уравнением, связывающим координаты таким образом, что
координаты любой точки, принадлежащей заданной фигуре, удовлетворяют этому
уравнению, а координаты точки, не принадлежащей фигуре, не
удовлетворяют уравнению. Такой способ описания геометрических фигур
применяется в аналитической геометрии.
Рисунки, изображающие геометрические фигуры, в аналитической
геометрии играют вспомогательную роль. Аналитическое решение любой
геометрической задачи сводится к алгебраическим методам и
вычислительным процедурам, при выполнении которых изображения фигур не
используются. Такие методы и процедуры без труда переводятся на
алгоритмический язык и реализуются на компьютере. Во всех разбираемых ниже
примерах иллюстрация геометрическая фигур приводится, но не используется в
ходе решения.
3.1. СПОСОБЫ ЗАДАНИЯ ГЕОМЕТРИЧЕСКИХ МЕСТ ТОЧЕК
НА ПЛОСКОСТИ
3.1.1. Общие уравнения геометрических мест точек
Уравнением множества F точек (уравнением г.м.т.) координатной
плоскости называется равенство, связывающее координаты точек, верное
для координат точек, принадлежащих множеству F , и неверное для
координат точек, не принадлежащих F . Например, уравнение множества в
аффинной системе координат Ох{х2 имеет вид:
F(^,x2)=0, (3.1)
в частности, в прямоугольной системе координат Оху:
F(x,y)=0,
а в полярной системе координат Ог(р:
G(r,q>)=0, (3.2)
где F и G - некоторые функции двух аргументов.
Уравнения (3.1), (3.2) представляют собой аналитическую запись
функциональной зависимости между координатами точек на плоскости,
образующих геометрическое место точек. В частных случаях одна из
координат может быть выражена через другую, т.е. одна координата задается как
явная функция другой координаты. Тогда получается уравнение,
разрешенное относительно этой координаты, например:
y = f{x), r = #(<p).
199
Заметим, что уравнениями вида у = f(x) в прямоугольной системе
координат Оху могут быть заданы графики элементарных функций: степенных,
тригонометрических, показательных, логарифмических.
Пример 3.1* Изобразить на координатной плоскости Оху (в
прямоугольной системе координат) множества точек, координаты которых
удовлетворяют следующим уравнениям:
а) *-;у = 0; б) х2-у2=0; в) х2 + у2=0;
г) *2 + )>2-1 = 0; д) |jc|—jc = O; e) х2 + ;у2+1 = 0.
□ а) Уравнению х - у = 0 удовлетворяют только те точки плоскости, у
которых равны абсциссы и ординаты (у = х). Эти точки лежат на
биссектрисах / и /// координатных углов (рис.3.1,а).
б) Разлагая левую часть уравнения на множители, получаем уравнение
(х- у)- (х + у)=0, которое равносильно совокупности уравнений
Г У = х
1У = ~
Первому уравнению отвечают биссектрисы нечетных координатных углов,
второму - биссектрисы четных координатных углов. Следовательно,
заданному уравнению удовлетворяют только те точки, которые принадлежат хотя
бы одной из указанных биссектрис (рис.3.1,6).
в) Уравнение х2 + у2 = 0 равносильно системе уравнений
которая определяет единственную точку О (начало координат) на
плоскости (рис.3.1,в).
г) Выражение х2 + у2 есть квадрат расстояния от точки (х9у) до
начала координат. Поэтому уравнению х2 + у2 -1 = 0 (или х2 + у2 = 1)
удовлетворяют только те точки, которые удалены от точки О на расстояние,
равное 1. Это множество точек является окружностью с центром в начале
координат и радиусом 1 (рис.3.1^).
А у = х
О
х
1
0
X
J
с
Ко
\У
\ 1
//<
й
У
0
X
в
Рис.3.1
200
д) Уравнению | х | + х = 0 удовлетворяет каждая точка с
неположительной абсциссой. Следовательно, множество решений этого уравнения
представляет собой полуплоскость jt<0, ограниченную осью ординат
(рис.3.1,д).
е) Уравнение *2 + з>2+1 = 0 не имеет действительных решений,
поэтому на координатной плоскости нет точек, удовлетворяющих этому
уравнению. ■
Пример 3.2. На координатной плоскости Оху (в прямоугольной
системе координат) отмечены точки Л(2,0) и 2?(0,4). Вывести уравнения
заданных множеств:
а) прямой АВ (рис.3.2,а);
б) серединного перпендикуляра к отрезку АВ (рис.3.2,6);
в) окружности с диаметром АВ (рис.3.2,в).
М{х9у)
□ а) Точка М(х,у) принадлежит прямой АВ тогда и только тогда,
когда ее радиус-вектор ОМ удовлетворяет условию ОМ =t-OA + (l-t)-OB,
где t - некоторое действительное число (см. разд. 1.6.1). Записывая это
векторное равенство в координатной форме, получаем
екмэ
Исключая параметр t из этой системы (например, подставляя во второе
уравнение t = у), приходим к уравнению у = 4-2-х или 2-jc + >>-4 = 0.
б) Пусть М (jc, у) произвольная точка плоскости. Эта точка
принадлежит серединному перпендикуляру к отрезку АВ тогда и только тогда, когда
MA = MB. Записывая это равенство в координатной форме, получаем
х-2
Возводя в квадрат и приводя подобные члены, приходим к уравнению
в) Найдем радиус заданной окружности
201
и координаты центра Q окружности - середины отрезка АВ: Q(l, 2), так
(см. разд.2.1.1). По определению точка М(х,у) принад-
как
;
лежит этой окружности тогда и только тогда, когда MQ = г. Записывая это
равенство в координатной форме, получаем
Возводя в квадрат и перенося все члены в левую часть равенства,
получаем
Пример 3.3. Изобразить на плоскости в полярной системе координат
Огхр множества точек, координаты которых удовлетворяют следующим
уравнениям:
а) г = ф (спираль Архимеда); б) r = l + cos<p (кардиоида);
в) г2 = cos 2ф (лемниската Бернулли).
D а) Построение выполняется по точкам при 0 < ф < 2я. Далее
учитывается, что при каждом полном обороте полярный радиус увеличивается на
2я (рис.3.3,я).
Лемниската Бернулли
Спираль Архимеда
Кардиоида
Рис.3.3
б) Построение выполняется по точкам при 0<ф<я, а затем
продолжается симметрично полярной оси, так как замена ф на -ф не изменяет
уравнения (рис.3.3,б).
в) Построение выполняется по точкам при 0<ф^у, а затем
продолжается симметрично полярной оси и полюса О (рис.3.3,в). ■
202
УРАВНЕНИЯ ПЕРЕСЕЧЕНИЙ И ОБЪЕДИНЕНИЙ
ГЕОМЕТРИЧЕСКИХ МЕСТ ТОЧЕК
Рассмотрим основные операции с множествами точек на координатной
плоскости, заданными своими уравнениями.
Пусть множества F и G в аффинной системе координат Оххх2
заданы общими уравнениями f(xvx2)=0 и g(xvx2)=0 соответственно.
Пересечение F П G множеств F и G состоит из точек, координаты
которых удовлетворяют системе уравнений
fo2
G{xvx2)=0.
Можно составить одно уравнение, равносильное этой системе, например:
{F{xvx2)f+{G{xrx2)f=0.
Объединение FUG множеств F и G состоит из точек, координаты
которых удовлетворяют совокупности уравнений
{)
равносильной одному уравнению, например:
()()
Включение F с G с алгебраической точки зрения означает, что
уравнение g(jCj , х2) = 0 является следствием уравнения f[xx , х2)=0, т.е.
F(xvx2)=0 => G(xvx2)=0.
Равенство F =G означает, что уравнения f(xvx2)=0 и g(^,jc2)=0
равносильны (эквивалентны), т.е.
fo)
В частности, равносильные уравнения, описывающие одно и то же
геометрическое место точек, получаются при тождественных
алгебраических преобразованиях равенств, например, при умножении обеих частей
уравнения на отличное от нуля число, при приведении подобных членов,
при переносе членов из одной части уравнения в другую с изменением знака
на противоположный и т.п.
Полученные соотношения, сводящие операции с множествами на
плоскости к алгебраическим операциям с уравнениями этих геометрических
мест точек, не зависят от выбора системы координат. Например, в
прямоугольной системе координат Оху аналогичные соотношения получаем,
полагая хх = х, х2 = у, а в полярной системе координат O/tp при х1 = г,
203
(3.3)
3.1.2. Параметрические уравнения геометрических мест точек
Функциональная зависимость между координатами точек плоскости,
например в прямоугольной системе координат Оху, может быть задана в
параметрической форме, в которой обе координаты выражаются в виде
функций вспомогательной переменной, называемой параметром:
J *=/(*),
Ь=*(<),
где / - параметр, принимающий действительные значения. Систему (3.3)
называют параметрическим уравнением геометрического места точек.
Пример 3.4. Изобразить на координатной плоскости Оху (в
прямоугольной системе координат) множества точек, координаты которых
удовлетворяют следующим параметрическим уравнениям:
x-t-smt, ,)]*-«•'.
y = l-cost; [y = stn t.
П а) Исключим из заданной системы уравнений параметр t. Возведя
обе части каждого уравнения в квадрат и сложив почленно результаты,
получим* уравнение окружности х2 + у2 = 1 (см. пример 3.1 ,г). Параметром t
служит величина угла поворота радиус-вектора изображающей точки,
измеряемого от положительного направления оси абсцисс (рис.3.4,я).
б) Уравнения задают циклоиду - линию, которую описывает точка,
принадлежащая окружности при качении этой окружности (без
проскальзывания) по прямой (оси абсцисс). Построение одной арки циклоиды
выполняется по точкам при 0<?<2я. Затем эта арка "переносится" вдоль оси
абсцисс (рис.3.4,б). Параметром t служит величина угла поворота радиуса
катящейся окружности.
Астроида
Окружность
Циклоида
в) Уравнения задают астроиду (гипоциклоиду) - линию, которую
описывает точка, принадлежащая окружности при качении этой окружности
(без проскальзывания) по другой неподвижной окружности, касаясь ее
204
внутренним образом. Астроида и обе окружности изображены на рис.3.4,в
(астроида полужирной линией, неподвижная окружность сплошной, а
подвижная - штриховой). Построение выполняется по точкам при 0<Г <у,
а затем продолжается симметрично координатным осям. ■
3.1.3. Алгебраические уравнения линий на плоскости
Напомним, что многочленом степени п одной переменной х
называется выражение вида
где ао,а1У...,ап - действительные числа (коэффициенты многочлена)*
ап * 0 - старший коэффициент, а0 - свободней член. Степень
многочлена обозначается deg р(х) - п.
Многочленом двух переменных хг, х2 называется выражение вида
а1'$ -*2 +агАг -Х2 +~+а4я -Х2Я '
где аг,а2,...,ат - действительные числа (коэффициенты многочлена),
kl9...9km9 li*--->lm - целые неотрицательные числа. Число degp(xl,jc2)=
= maxjuj + 1г, k2 + Z2;...; km + /да } называется степенью многочлена.
Алгебраической линией на плоскости называется множество точек,
которое в какой-либо аффинной системе координат Ох1х2 может быть
задано уравнением вида
р(х19х2)=09 (3.4)
где p(^,^2) - многочлен двух переменных хх, х2.
Уравнение вида (3.4) называется алгебраическим уравнением с двумя
неизвестными. Степенью уравнения (3.4) называется степень многочлена
p(xvx2). Одна и та же линия может быть задана уравнением вида (3.4) с
многочленами разных степеней. Порядком алгебраической линии
называется наименьшая из степеней этих многочленов.
Всякую неалгебраическую линию называют трансцендентной.
В примере 3.1,аДв,г,е - линии алгебраические: а - первого порядка,
б,в,г,е - второго порядка. Примером трансцендентной линии служит
синусоида, т.е. график функции у = shut. Эту линию нельзя задать
уравнением вида (3.4).
Теорема 3.1 (об инвариантности порядка алгебраической линии).
Если в некоторой аффинной системе координат на плоскости линия
задана уравнением (3.4), то и в любой другой аффинной системе координат
эта линия задается уравнением того же вида (3.4) и той же степени.
205
Действительно, пусть в аффинной системе координат Ое{е2
уравнение имеет вид (3.4):
а • х.*1 • х1 + а • г*2 . х2 + + а • r*m • jr'1" — 0
а1 *1 *2 +Д2 *1 *2 +*" + ат *1 X2 ~U*
Получим уравнение этой линии в другой (новой) аффинной системе
координат О ег е2. Старые координаты точки связаны с новыми ее
координатами выражениями (2.8):
где sx, s2 - координаты вектора переноса начала координат 7 = ОО , а
fsu s.~\
sn, sl2, s2l, 5^ - элементы матрицы перехода _ 5 = от старого
(е)*(е ) ^ SJ
базиса (?) = (?! ?2) к новому (г')=(^ i^). Подставим эти выражения в
одночлен ах jc^ -x!} :
Раскрывая скобки, получаем многочлен двух переменных хх,х2,
степень которого не больше, чем (кг +/J. Аналогичные многочлены получим
из других одночленов, входящих в левую часть (3.4). Сложив эти
многочлены, получим многочлен ^(дг^д^),'степень которого не превосходит степени
исходного многочлена p(xvx2): degp<degp . Таким образом, при замене
системы координат порядок алгебраической линии не увеличивается. Но он
не может и уменьшиться, так как если порядок уменьшится при переходе к
новой системе координат, то он должен увеличиться при обратном переходе
к старой системе координат. Следовательно, порядок алгебраической линии
остается неизменным в любой аффинной системе координат (говорят, что
порядок алгебраической линии является инвариантом). Теорема доказана.
В аналитической геометрии на плоскости изучаются:
- алгебраические линии первого порядка, описываемые
алгебраическим уравнением первой степени с двумя неизвестными:
- алгебраические линии второго порядка, описываемые
алгебраическим уравнением второй степени с двумя неизвестными:
Замечания 3.1.
1. Теорема 3.1 фактически выражает свойство многочленов: при
линейной невырожденной замене переменных
206
или
где 5 = l , 5 = n 12 , det S * 0, степень многочлена р(хЛ,x,) не из-
I с I I С С I
меняется.
Действительно, преобразование уравнения р(дс1,д:2)=0 при переходе
от одной системы координат к другой соответствует линейной
невырожденной замене переменных хх,х2 многочлена p[xvx2) в левой части
уравнения.
2. Алгебраическое уравнение (3.4) может не иметь действительных
решений. Например, на плоскости Охгх2 нет точек, координаты которых
удовлетворяют уравнению jc^ + л:^ +1 = 0. Однако в области комплексных
чисел, согласно основной теоремы алгебры [3,8,10], любое алгебраическое
уравнение имеет решения. Поэтому каждое алгебраическое уравнение (3.4)
р(г1,г2)=0, где z1=xl + i-yleC9 z2 =x2 + i-y2e С, задает некоторую
алгебраическую линию на двумерной комплексной плоскости С2 (см. п.2
замечаний 2.9). Если все точки этой линии вещественные (действительные),
т.е. zl=x{J z2=x2,a. yx = у2 = 0, то линию называют вещественной
{действительной), В противном случае линию называют мнимой.
3. Алгебраическими неравенствами с двумя неизвестными
называются неравенства вида
p(xl,x2)>09 p(xvx2)<0y p(xvx2)>0, p(xvx2)<09
где p\xvx2) - многочлен двух переменных хх,х2. Степенью
алгебраического неравенства называется степень многочлена p[xvx2).
4. Многочлены первой степени и алгебраические уравнения
(неравенства) первой степени называются линейными.
5. Многочлен второй степени
p(xvx2)=oll-xf+2-al2-xl'X2+a22-xl+2-al-xl+2-a2-x2+a0
называется также квадратичной функцией двух переменных; многочлен
ап'х\ +2'an'xi°x2 + a22'x2 называется квадратичной формой
(квадратичной частью функции), многочлен а1-х1+а2-х2 -линейной формой
(линейной частью функции), коэффициент aQ - свободным членом. По
сравнению со стандартной записью многочлена некоторые коэффициенты
квадратичной функции удвоены для удобства выполнения алгебраических
преобразований.
207
б. Квадратичную функцию можно записать:
а) в матричном виде
Р{*)=
\\ «12
аг
= хт-Рх,
где Р =
«11 «12 «1
«12 «22 «2
- матрица квадратичной функции; х =
расширенный (дополненный единицей) столбец переменных;
б) выделяя квадратичную и линейную части:
Ч У
= хт -А-х+2-а1
где Л =
- матрица квадратичной формы; а
= I М- столбец
аг)
коэффициентов линейной формы; х = \ I - столбец переменных.
\хг)
7. Многочлены второй степени и алгебраические уравнения
(неравенства) второй степени называются квадратичными (квадратными).
8. Линии, задаваемые системой алгебраических уравнений и
неравенств, называются полуалгебраическими. Например, уравнение У = |*|
задает на координатной плоскости Оху полуалгебраическую линию:
9. Теорема 3.1, разумеется, справедлива для прямоугольных систем
координат на плоскости. Напомним, что преобразования прямоугольных
систем координат (см. разд.2.2.3) являются ортогональными (см. п.5
замечаний 2.3). Поэтому соответствующие этим преобразованиям линейные
замены переменных x = s + Sx' (см. п.1) с ортогональной матрицей S
(ST = 5"1) называются ортогональными (неоднородными при s*o или
однородными при s = o). Далее, как правило, будут рассматриваться
уравнения, записанные в прямоугольной системе координат Оху.
208
3.2. АЛГЕБРАИЧЕСКИЕ ЛИНИИ ПЕРВОГО ПОРЯДКА
(ПРЯМЫЕ НА ПЛОСКОСТИ)
3.2.1. Уравнения прямой, проходящей через заданную точку
перпендикулярно заданному вектору
ОБЩЕЕ УРАВНЕНИЕ ПРЯМОЙ
Ненулевой вектор п , перпендикулярный заданной прямой, называется
нормальным вектором (или, короче, нормалью) для этой прямой.
Пусть на координатной плоскости Оху (в прямоугольной системе
координат) заданы:
а)точкаМ0(*0,;у0);
б) ненулевой вектор п = А • Г+В • j (рис.3.5,а).
Требуется составить уравнение прямой, проходящей через точку
М 0 (дг0, у0) перпендикулярно вектору п .
Нормаль
,у«)~/
Векторное уравнение прямой:
(г-го,п)=О.
Общее уравнение прямой:
А-х+В-у+С=О,
Рис.3.5
Выберем на плоскости произвольную точку м(х,у). Обозначим
r=OM =x-i + y-j, r0=OMQ=x0-T+y0j - радиус-векторы точек
м(х,у) и М0(х0,у0). Точка М принадлежит заданной прямой тогда и
только тогда, когда векторы MQM и п перпендикулярны (рис.3.5,б).
Условие ортогональности запишем при помощи скалярного произведения (см.
разд.1.6.2):
(мом,/г)=о.
Учитывая, что MJ4 = г — г0, получаем векторное уравнение прямой:
(r-ro,n)=O.
14 — 5150
(3.5)
209
Это уравнение можно записать в другой форме. Преобразуем левую часть
(г-^,л)=(г,п)-(^,п), используя свойства скалярного произведения (см.
разд. 1.4.2). Обозначая с = (/^,л), получаем уравнение (г,л)-с = О или
(г,л) = с, (3.6)
выражающее постоянство проекций на нормаль п радиус-векторов точек,
принадлежащих прямой.
Получим координатную форму записи векторного уравнения прямой
(3.5). Так как r-rQ ={x-xQ)-i+(y-y0)- J, n=Ai+Bj, no формуле (1.9)
находим (?-/•>,л )=(х-хо)-А + (у-уоУв = О или
A-(*-iJ+B.(y-;yo)=O. (3.7)
Полученное соотношение (3.7) позволяет по координатам точки M0\xQ,y0)
и координатам А, В нормали л записать уравнение прямой без
промежуточных вычислений.
Обозначив С = - А • jc0 - В • у0, получим уравнение
0, (3.8)
которое называется общим уравнением прямой на плоскости. Поскольку
коэффициенты А и В не равны нулю одновременно (это координаты
ненулевого вектора л), уравнение (3.8) является алгебраическим уравнением
первой степени, т.е. линейным уравнением с двумя неизвестными.
Следовательно, прямая является алгебраической линией первого порядка.
Проводя рассуждения в обратном порядке, делаем вывод о том, что
линейное уравнение (3.8) задает на координатной плоскости прямую.
Полученные выводы сделаны для прямоугольной системы координат, но,
учитывая теорему 3.1 (см. разд.3.1.3), они переносятся (без изменений) и на
любую аффинную систему координат.
Теорема 3.2 (об алгебраической линии первого порядка). Всякое
уравнение первой степени с двумя неизвестными задает в аффинной
системе координат прямую, и наоборот, всякая прямая в любой аффинной
системе координат может быть задана уравнением первой степени с
двумя неизвестными. Другими словами, алгебраическая линия первого порядка
есть прямая.
Замечания 3.2.
1. При составлении общего уравнения прямой нормаль выбирается
неоднозначно: можно выбрать любую, отличную от нуля, длину нормали л , а
также одно из двух возможных направлений (противоположный вектор
(-п) также является нормалью). Например, вместо нормали л можно взять
нормаль -7-л, что соответствует умножению обеих частей уравнения (3.8)
на число -7.
210
2. Если один из коэффициентов уравнения прямой (3.8) равен нулю,
общее уравнение прямой (3.8) принимает один из следующих частных
видов:
Q
а) если А = 0, уравнение (3.8) имеет вид В-у + С = 0 или у =
В
уравнение прямой, параллельной оси абсцисс (рис.3.6,я); при С = 0 прямая
у = О совпадает с осью Ох;
Q
б) если 5 = 0, уравнение (3.8) имеет вид Ах+С=0 или х =
А
уравнение прямой, параллельной оси ординат (рис.3.6,6); при С = 0 прямая
х = 0 совпадает с осью Оу ;
в) если С = 0, уравнение (3.8) имеет вид А-х+В-у = 0 - уравнение
прямой, проходящей через начало координат (рис.ЗДв).
О
п
1
n=Oi+Bj
У = -
в
л=л-Г+о-7
с
дг =
А
б
Рис.3.6
3. Нормаль n=Ai+Bj к прямой А х+Ву + С = 0 совпадает с
градиентом функции f(x9y)=Ax+By + C:
В курсе математического анализа [19] доказывается, что градиент
направлен в сторону наискорейшего возрастания функции в данной точке.
4. Прямая А-х + В-у + С = 0 разбивает плоскость на две
полуплоскости (рис.3.7,а): положительную, координаты всех точек которой
удовлетворяют неравенству Ах+Ву + С>0, и отрицательную, для точек
которой Ах+Ву + С<0. Нормаль л=аГ+В-7, приложенная к любой
точке прямой, принадлежит положительной полуплоскости. Другими
словами, нормаль, приложенная к произвольной точке прямой, указывает на
положительную полуплоскость (рис.3.7,а)
Действительно, обозначим через р(х,у)= А-хЛ-В- у + С - многочлен
первой степени от двух переменных х, у. Тогда для любой точки
М0(х0,у0)9 принадлежащей прямой (3.8), справедливо р{хо,уо)=О. Пред-
14*
211
ставим значение многочлена р{х9у) в произвольной точке М*\х*,у*)
плоскости в виде скалярного произведения:
9у0)=.А.х* + В-у*+С-{А-х0 + В-у0 + с)=
=0
М0М* -|n|-cos<p,
где п=(А В)т - нормаль к прямой А-л:+Д-у + С = 0; Мо(д:о,уо)-точка,
принадлежащая этой прямой. Знак выражения р(х9у) определяется
величиной угла ф между нормалью п и вектором М0М* . Например, для точки
Ml\xl9yl) угол фх острый (рис.3.7,б), поэтому р(х19у1)>09 а для точки
М2(х29у2) угол ф2 тупой (рис.3.7,б), поэтому р{х29у2)<0. Следовательно,
координаты любой точки М*(**,у*), принадлежащей полуплоскости, на
которую указывает нормаль, удовлетворяют неравенству
А-х*+Д-у*+С>0, а координаты точек М*[х*9у*) другой
полуплоскости-неравенству А-дс*+Д-у* + С<0.
Положительная полуплоскость
Л-лс+В-у+С^О
Прямая
Ах+Ву+С=0
Рис.3.7
Отрицательная полуплоскость
Ах+Ву+С£0
5. Абсолютное значение | А-дг+Д-у + С| пропорционально
расстоянию отточки М(х9у) до прямой А-х+Д-у + С = 0, т.е. отношение
расстояний от точек мДхрЗ^) и М2(*2,;у2) до прямой Ах+Д^у + С = 0 равно
отношению
Действительно, в п.З получено представление значений линейного
трехчлена р(х9у)=А-х+В-у + С в виде скалярного произведения, которое
212
можно выразить через алгебраическое значение длины ортогональной
проекции (см. разд. 1.4.1):
Запишем отношение значений линейного трехчлена р(х,у) для двух точек
мАхгух) и М2(х29у2):
npJ[M0M2
вая, что абсолютная величина пр- MQM* равна расстоянию от точки М*
до прямой, получаем искомое отношение
прп М0М
\Ах2+Ву2+с\'
6. В аффинной системе координат О1^е2 линейное уравнение
ах -хх +а2 -х2 +а3 =0 задает, согласно теореме 3.2, прямую. Выводы,
полученные в п.2,3,4,5, остаются справедливыми с тем лишь исключением, что
вектор Л-а1'ё1-\-а1'"е2 не является нормалью.
Пример 3.5. На координатной плоскости Оху (в прямоугольной
системе координат) заданы точки AT(l,2) и l(S,O). Составить уравнение
серединного перпендикуляра к отрезку KL (рис.3.8).
D Серединный перпендикуляр, по
определению, проходит перпендикулярно отрезку KL через
его середину. Находим координаты середины М
отрезка KL (см. п.З замечаний 2.1 в разд.2.1.1):
М\ , 1, т.е. Af(3,l). Вектор KL можно
V 2 2 )
взять в качестве нормали для серединного
перпендикуляра. Находим координаты этого вектора,
вычитая из координат его конца соответствующие координаты его начала:
Рис.3.8
Следовательно, уравнение (3.8) искомой прямой имеет вид
Осталось найти величину свободного члена С. Поскольку точка М (3, l)
принадлежит прямой, то ее координаты х = 3, у = 1 должны удовлетворять
уравнению этой прямой, следовательно, 4-3-2-1+С = 0. Отсюда С = -10.
213
Таким образом, серединный перпендикуляр задается уравнением
4-х-2-у-10 = 0 <=> 2-jc-)i-5 = 0.
Уравнение этой прямой можно было получить в виде (3.7), подставляя
координаты нормали л =(4 -if иточки м(3,1): 4-(jc-3)-2-(?-l) = O.
Решение задачи получено аналитически без использования
графического изображения (рис.3.8). Чертеж в аналитической геометрии служит, как
правило, лишь иллюстрацией к решению. ■
РАССТОЯНИЕ ОТ ТОЧКИ ДО ПРЯМОЙ
Пусть заданы:
а) прямая, описываемая общим уравнением (3.8): Ах+Ву + С = 0;
б) точка М*\х*,у*) на плоскости.
Требуется найти расстояние d от точки до прямой.
Искомое расстояние равняется длине ортогональной проекции вектора
MQM* на направление нормали п (рис.3.9):
где Мо \х0, у0) - любая точка на заданной прямой.
Расстояние d отточки М \х ,у ]
до прямой А-х+В-у+С=0:
d-
Рис.3.9
Запишем правую часть в координатной форме, выражая скалярное
произведение и длину через координаты векторов п=(А В) ,
М0М*=(х*-х0 /-уоГДсм.
Поскольку координаты точки MQ(xQ9y0) удовлетворяют уравнению (3.8), то
А- х0 + В- yQ = - С. Подставляя это выражение, получаем
214
(3.9)
Пример 3.6. На координатной плоскости Оху (в прямоугольной
системе координат) заданы точки tf(l,2) и L(5,0). Требуется найти, в каком
отношении прямая т: 3-jt-4-;y-10 = 0 делит отрезок KL.
□ Найдем значения линейного трехчлена
р(х,у) = 3-х-4-у-10 в точках К(\Л) и L(5,0):
p(l,2)=3-l-4-2-10 = -15; /?(5,0)=5. Получили
значения разных знаков. Следовательно, точки К и
L лежат по разные стороны от прямой т (согласно
п.4 замечаний 3.2, эти точки лежат в разных
полуплоскостях), т.е. прямая т действительно пересекает
отрезок KL (в точке М на рис.3.10). Так как эти значения по абсолютной
величине пропорциональны расстояниям от точек К и L до прямой т, то
КМ
ML
Этот же результат можно получить по формуле (3.9). Находим
расстояния dK и dL от точек К и L до прямой т:
О
Рис.3.10
_|
1-42-10|
15
5
_5_1
5
п KM dK 3 ,
Следовательно, =—£-=—. I
ML d, I
НОРМИРОВАННОЕ УРАВНЕНИЕ ПРЯМОЙ
Преобразуем общее уравнение прямой А-дг+#-;у + С = О следующим
образом. Если свободный член С < 0, то разделим обе части на длину
нормали |7Г|=у А2 + В2 , а если С>0, то разделим на -|/Г| = -
Получим уравнение
ABC
215
в котором свободный член . с в силу описанного выбора знака, нетто-
±Ja2+b2
ложительный. Обозначим его через -р =
. Коэффициенты при не-
1 _
известных являются координатами единичного вектора ттгг71 или
1и1
-Tzr-n , и равны направляющим косинусам (см. разд. 1.3.5, а также п.9 в
М
разд.1.6.2):
cosa=-
r, cos|3 =
Тогда уравнение принимает вид
и называется нормированным уравнением прямой.
(3.10)
Замечания 33.
1. Свободный член р нормированного уравнения (ЗЛО) равен
расстоянию от начала координат до прямой.
Действительно, по формуле (3.9) находим расстояние d от начала
координат О(0,0) до прямой, описываемой уравнением (3.10):
|
p
.=—= р.
1
Нормированное уравнение
прямой:
*-cosa+y-cosfi-p = 0 , р>0 .
ycos2a+cos2P
2. Нормированное уравнение прямой (3.10) можно записать в виде
(3.7): (г,п) = р, если в качестве нормали п выбрать единичный вектор
п =cosa-i+cosP-y , так как x-cosa + y-cos$ = (r,n). Из двух возможных
единичных нормалей условию р>0
отвечает нормаль я, направленная к прямой
(рис.3.11), если вектор п приложить к
началу координат. При выборе
противоположного вектора (-7Г) получилось бы
отрицательное значение р, которое не
допускается в уравнении (3.10).
3. Коэффициенты общего уравнения
прямой (3.8) определяются неоднозначно в
силу неоднозначного выбора нормали (см.
п.1 замечаний 3.2). При составлении
нормированного уравнения (3.10) прямой такого
216
М(х,у)
произвола нет. Здесь все коэффициенты определены однозначно (при р > 0)
или с точностью до знака (при р = 0).
4. Нормированное уравнение прямой имеет смысл только в
прямоугольной системе координат.
Пример 3.7. На координатной плоскости Оху (в прямоугольной
системе координат) заданы вершины P(l,2),Q(l3,-3),J?(5,5) треугольника
(рис.3.12). Требуется:
а) составить общее и нормированное уравнения прямой, содержащей
высоту РН;
б) найти расстояние от начала координат до прямой РН ;
в) найти расстояние d от точки Q до прямой РН .
D а) Вектор RQ, перпендикулярный прямой РН , является нормалью
для этой прямой. Находим координаты вектора п = RQ, вычитая из
координат конца координаты его начала:
Коэффициенты при неизвестных в общем уравнении прямой РН равны
координатам нормали, поэтому А = 8, В = -8, т.е. уравнение имеет вид
8jc~8-j + C = O. Подберем свободный член С так, чтобы прямая
проходила через точку Р. Для этого подставим координаты х = 1, у = 2 точки Р в
уравнение: 8-1-8-2+С = 0. Отсюда С = 8. Таким образом, искомое общее
уравнение имеет вид: 8-дг-8-;у + 8 = 0 <=» х-у + 1 = 0.
Преобразуем общее уравнение х - у +1 = 0.
Поскольку в этом уравнении А = 1, 2? = -1,
С = 1>0, разделим его на
*!-1)2^^. Получим
нормированное уравнение прямой РН:
—j* = 0. Сравнивая с (3.10),
находим направляющие косинусы cosa = --4=r, cosP=-^- и параметр Р=-т=г-
б) Из п.1 замечаний 3.3 следует, что искомое расстояние от начала
координат до прямой РН равно р = -ть.
в) Расстояние d отточки Q(l3,—3) до прямой РН ( лс-;у + 1 = 0)
находим по формуле (3.9): rf = l113+H>HKi|= п и
Vi2+(-i)2 V2
217
3*2.2. Уравнения прямой, проходящей через заданную точку
коллинеарно заданному вектору
ПАРАМЕТРИЧЕСКОЕ УРАВНЕНИЕ ПРЯМОЙ
Направляющим вектором прямой называется ненулевой вектор, кол-
линеарный этой прямой, т.е. принадлежащий или параллельный ей.
Пусть на координатной плоскости Оху заданы:
а)точка Afo(*o,;yo);
б) ненулевой вектор р = а • i + Ъ • j
(рис.3.13).
Требуется составить уравнение
прямой, коллинеарной вектору р и
проходящей через точку М0 (jc0 , у0).
Выберем на прямой
произвольную точку М(х,у). Обозначим 7 = ОМ , 70 = ОМ0 - радиус-векторы точек
М(х,у) и М0(х0,у0) (рис.3.14).
у и
О
Направляющий
вектор прямой
Рис.3.13
Направляющий Нормаль
векторпрямой. n=Al+Bj
-> = ai+bj k
\
Векторное параметрическое
уравнение прямой:
r=70+t-J>, teR .
Параметрическое уравнение прямой:
Щх,У)
Каноническое уравнение прямой:
х-х0 у-у0
а Ь
Рис.3.14
Точка М принадлежит заданной прямой тогда и только тогда, когда
векторы М0М и р коллинеарны. Запишем условие коллинеарности:
МQM = t • р, где t - некоторое действительное число (параметр). Учитывая,
что MQM =7-7Q, получим векторное параметрическое уравнение
прямой:
teR,
(3.11)
где р - направляющий вектор прямой, аг0- радиус-вектор точки,
принадлежащей прямой.
218
Координатная форма записи уравнения (3.11) называется
параметрическим уравнением прямой
te Д,
(3.12)
где a,b - координаты направляющего вектора р прямой. Параметр t в
уравнениях (3.11),(3.12) имеет следующий геометрический смысл: величина
t пропорциональна расстоянию от начальной точки М0[х0,у0) до точки
M(xo+a-t, yo+bt). Физический смысл параметра t в параметрических
уравнениях (3.11), (3.12) - это время при равномерном и прямолинейном
движении точки м(х,у) по прямой. При t = 0 точка м(хуу) совпадает с
начальной точкой М0, при возрастании t движение происходит в
направлении, определяемым направляющим вектором ~р .
КАНОНИЧЕСКОЕ УРАВНЕНИЕ ПРЯМОЙ
Выразим параметр t из каждого уравнения системы (3.12):
а затем исключим этот параметр:
а2+Ь2Ф0. (3.13)
а Ъ
Уравнение (3.13) называется каноническим уравнением прямой. В этом
уравнении коэффициенты a,b не равны нулю одновременно, так как это
координаты направляющего вектора прямой.
Замечания ЗА
1. Если один из знаменателей дробей в (3.13) равен нулю, то считается,
что соответствующий числитель дроби равен нулю:
каноническое уравнение
мой, параллельной оси
ординат (рис.3.15,а);
каноническое уравнение
0
Ъ
- это уравнение х = jc0
пря1У
- это уравне-
лельной
(рис.3.15,6).
прямой, парал- о
оси абсцисс
Уо
хо
а
О
Рис.3.15
p=ai+Oj
219
2. Поскольку направляющий вектор p = a-i+b-j коллинеарен
прямой, а нормаль n = A-i+B- j ей перпендикулярна, то векторы рил
ортогональны. Следовательно, их скалярное произведение равно нулю:
()
т.е. координаты направляющего вектора прямой и ее нормали связаны
однородным уравнением: а-А+ЬВ = О. Подставим, например, решение
А = -6, В = а этого уравнения в общее уравнение прямой (3.7):
-b(x-xo)+a{y-yo)=O.
Это соотношение позволяет по координатам направляющего вектора и
координатам точки М0(х0, у0) записать уравнение прямой без промежуточных
вычислений.
3. Направляющий вектор р прямой определяется неоднозначно.
Например, любой ненулевой вектор Лр, где Хе R, также является
направляющим вектором для той же прямой.
4. Для перехода от общего уравнения прямой (3.8) А-х+В-у + С = 0
к каноническому (3.13) нужно выполнить следующие действия:
1) найти любое решение (xQ9 у0) уравнения А-*+В-;у + С = 0,
определяя тем самым координаты точки М0(лг0, у0), принадлежащей прямой;
2) найти любое ненулевое решение (a, b) однородного уравнения
A-fl + 5-i = 0, определяя тем самым координаты аУЪ направляющего
вектора р , в частности, можно взять а = В, Ъ = - А;
3) записать каноническое уравнение (3.13).
5. Чтобы перейти от канонического уравнения к общему, достаточно
перенести все члены уравнения (3.13) в левую часть:
а Ъ abba
Полученное уравнение (при аФО, ЬфО) имеет вид (3.8) с А=—, 2? = —,
а Ъ
~~Ъ 7'
6. Чтобы перейти от канонического уравнения к параметрическому,
следует приравнять левую и правую части уравнения (3.13) параметру t и
записать полученное двойное равенство в виде системы (3.12):
<» \ , teR.
Ъ [ b
7. Параметрическое (3.12) и каноническое (3.13) уравнения прямой,
полученные в прямоугольной системе координат, имеют тот же вид в любой
220
другой аффинной системе координат. Геометрический смысл
коэффициентов в уравнениях остается прежним.
Пример 3*8. На координатной плоскости
Оху (в прямоугольной системе координат)
заданы прямая /: х-Зу + 3 = О и точка м(5,б)
(рис.3.16). Требуется:
а) составить параметрическое уравнение
прямой /и, проходящей через точку М
перпендикулярно заданной прямой;
б) найти ортогональную проекцию М/
точки М на прямую I;
в) найти координаты точки М , симметричной точке М относительно
прямой /.
D а) Нормаль л к прямой / является направляющим вектором ~р для
прямой т. Координаты нормали определяем по общему уравнению прямой
/: л =l-i -3-7 , тогда p = l«i-3-y, jc0 =5 ,^0 =6. Составляем
параметрическое уравнение (3.12) прямой т:
т: \ , v teR.
б) Проекция М{ точки М является точкой пересечения прямых т и
/. Найдем ее координаты. Для этого подставляем в уравнение прямой /:
х-3-у + 3 = 0 выражения координат jt = 5+f ,>> = 6-3-f из
параметрического уравнения прямой т. Получим уравнение
5+£-3-(б-3-г)+3 = О «=> 10^-10 = 0 <=> Г = 1.
Значению параметра ^ = 1 отвечает точка с координатами х =
у = 6-31 = 3. Следовательно, искомая точка мДб,3).
в) В п."а" составлено параметрическое уравнение прямой т. В этом
уравнении при t = 0 получаем точку М , при t = 1 - точку М{, значит
искомую точку м' получим при 1 = 2, поскольку в силу симметрии
MMt= MtM . Вычисляем координаты искомой точки:
Лф + Ь^б+^З)^), т.е. М'(7,0). ■
Пример 3.9. На координатной плоскости Оху (в прямоугольной
системе координат) заданы вершины P(l,2),Q(l3,-3),/?(5,5) треугольника
(рис.3.17). Составить:
а) каноническое уравнение прямой, содержащей высоту РН
треугольника;
221
б) каноническое и параметрическое уравнения прямой, содержащей
биссектрису PL треугольника.
□ а) В примере 3.7 было
получено общее уравнение лс-;у + 1 = О
прямой РН (А = 1,2? = -1,С = 1).
Перейдем от общего уравнения к
каноническому.
1) Найдем любое решение
уравнения jc - у +1 = 0, например,
*0=-1, уо=О (точка М0(-1,0)
Рис.3.17 принадлежит прямой РН).
2) Найдем ненулевое решение однородного уравнения
А-а + В-й = 1«д-1«6 = 0, например a = b = l (направляющий вектор р
прямой РН имеет координаты а=Ь = 1).
x-(-l) У-О д:+1 у
е: *—-= «=» =—.
б) Найдем направляющий вектор I биссектрисы PL. Для этого отло-
Tq Tr
жим от вершины Р единичные векторы т==г,т=гт и построим на них
\pq\\pr\
ромб (изображенный на рис.3.17 пггриховой линией). Поскольку диагональ
* с ~ 7 Tq Tr
ромба является биссектрисой, то вектор / = . . + , . является направ-
\pq\ \pr\
3) Запишем каноническое уравнение:
pq\ \pr
ляющим вектором биссектрисы PL. Находим координаты и длины
векторов:
«
-КНЮ
PR=\ - =
PR\ {У
Щ Щ ш UJ UJ
Составляем каноническое уравнение прямой с направляющим вектором /,
проходящей через точку P(l, 2):
112 i£
65 65
х-1_у-2
222
Чтобы получить параметрическое уравнение прямой PL,
приравниваем левую и правую части канонического уравнения параметру t:
1 У2
. Записываем полученную систему в виде (3.12):
1 У
— = t = —
8 1
teR.
3.2.3. Уравнения прямой, проходящей через две заданные точки
Пусть на координатной плоскости Оху заданы две точки MQ[x0,y0) и
. Требуется составить уравнение прямой, проходящей через
заданные точки.
Как показано в разд. 1.6.1, точка М(х,у) принадлежит прямой М0Мг
тогда и только тогда, когда ее радиус-вектор ОМ удовлетворяет условию
(рис.3.18):
Ш7 ()^^ (3.14)
где t - некоторое действительное число (параметр). Уравнение (3.14), а
также его координатную форму
U_,).W+,.M o Гх-д^-Ь-дь).
Ы V (Уо) UJ \у = Уо+*-\У1-Уо)
будем называть аффинным уравнением пряной, проходящей через две
точки М0[х0,у0) и Mj^.yJ.
М(х,у)
Аффинное уравнение прямой:
{jc=(l-/)jco+r-x.,
Уравнение прямой, проходящей
через две точки Мо и А/,:
хГ*о Уг-У
Рис.3.18
Выражая параметр t из первого и второго уравнений системы (3.15),
получаем:
= *= —
хг-х0
. Исключая параметр t, приходим к уровне-
нию прямой, проходящей через две точки М0(х0,у0) и М^х^у^:
223
(3.16)
У\~Уо
Уравнение (3.16) можно получить из канонического уравнения (3.13),
выбирая в качестве направляющего вектора ~р = аЛ+Ъ- j вектор
' J ' те- подставляя а = д^ -х0, Ъ = ух -;у0.
УРАВНЕНИЕ ПРЯМОЙ "В ОТРЕЗКАХ"
Пусть на координатных осях заданы точки Xx\xv0) и УДО, yj, причем
х{ *0, ух*0 (рис.3.19). Требуется составить уравнение прямой,
проходящей через эти точки.
Уравнение прямой "в отрезках":
Рис.3.19
Подставляя в уравнение (3.16) х0 = хх> у0 =O,jCj =09уг = ух,
ползаем:
х-х. у-0 х % у л х у
O-Xj ух-0 хх ух ^ ух
Меняя левую и правую части равенства, получаем уравнение
—+-^ = 1, х*0, У1*0, (3.17)
*i Ух
которое называется уравнением прямой "в отрезках44. Говорят, что прямая,
проходящая через точки Хх[хх$] и кДо,^), отсекает на координатных
осях "отрезки": хх на оси абсцисс и ух на оси ординат. Разумеется, длины
отрезков ОХХ и OYX равны | хх | и | ух | соответственно.
Замечания 3.5.
1. Перейти от общего уравнения прямой (3.8) А-х+В-у + С = 0
к уравнению "в отрезках" (3.17) можно при условии, что все коэффициенты
общего уравнения отличны от нуля. Для этого нужно перенести свободный
член в правую часть уравнения: А • х+В • у = - С, а затем разделить обе
части уравнения на -С: г^#*+^£># у = 1. Обозначив хх=-£, ух =-•§■»
получим уравнение "в отрезках" (3.17):
224
х
2. Уравнения (3.16), (3.17), полученные в прямоугольной системе
координат, имеют тот же вид в любой другой аффинной системе координат.
Геометрический смысл коэффициентов в уравнениях остается прежним,
однако, величины \хА и I ух I в общем случае не равны длинам отсекаемых
отрезков ОХ{ и OY{,
Пример ЗЛО. На координатной плоскости Оху (в прямоугольной
системе координат) заданы вершины P(l,2), Q(l3,-3), /ф,5) треугольника
(рис.3.20). Составить:
а) уравнение "в отрезках" для прямой, содержащей высоту РН
треугольника;
б) уравнение "в отрезках" для прямой, содержащей биссектрису PL
треугольника;
в) уравнение прямой, содержащей медиану РМ треугольника.
□ а) В примере 3.7 было
получено общее уравнение
*-;у + 1 = 0 прямой РН.
Перенесем свободный член в правую
часть: х-у = -1 и поделим обе
части уравнения на (-1):
-jc + у = 1. Запишем это уравнение
Рис.3.20
в виде (ЗЛ7): -^-+у = 1. Эта
прямая отсекает на координатных осях
"отрезки" (-l) и 1 соответственно.
1 v—2
б) В примере 3.9 было получено каноническое уравнение g ==^в
прямой PL. Перейдем к общему уравнению, перенося все члены в левую
часть: ^-^j- = 0. Умножая обе части на 8 и приводя подобные члены,
получаем дг-8«у + 15 = О. Теперь переходим от общего уравнения к
уравнению "в отрезках" (аналогично п."а"):
<=» -£-+-21-1
-15 -15
в) Найдем координаты середины М отрезка QR (см. п.З замечаний
2.1 в разд.2Л.1): М{Щ1,^), т.е. М(9,1). Составим уравнение (3.16)
прямой, проходящей через точки /^1,2) и Af(9,l): •5rj-=£f' ** J8i=^T- m
15-5150 225
3.2.4. Уравнения прямой, проходящей через заданную точку,
с данным угловым коэффициентом
Пусть заданы:
а) точка Мо(о,уо) на оси ординат;
б)угол сс,О<а<я,а*-| (рис.3.21,а).
Требуется составить уравнение прямой, пересекающей ось ординат в
заданной точке и образующей с положительным направлением оси абсцисс
угол заданной величины а.
Величину, равную тангенсу угла а, который образует прямая с
положительным направлением оси абсцисс, называют угловым коэффициентом
прямой и обозначают k = tgcc (рис.3.21,а).
Уо
Угловой коэффициент у 11
*=tga 4^ol^'^oi Уравнение прямой
MO(O,JOJ З'а^^ / \ с угловым коэффициентом:
*=tga.
Выберем на прямой произвольную точку Ml[xvyl), отличную от
Af0(0, у0), т.е. д:х ^ 0. Запишем уравнение (3.16) при дс0 = 0:
Jc-0 _ У-Уо
Отсюда {у1-~У0)'Х = (у-у0)-х1 <=» У^Уо+^Т2"*- Подставляя
i-Д = tg a = к, получаем уравнение
х\
у = кх+у0, (3.18)
которое называется уравнением прямой с угловым коэффициентом (или
уравнением прямой, разрешенным относительно у).
Найдем, например, величину а угла между прямой РН (см. пример
3.7, рис.3.12) и положительным направлением оси абсцисс. Для этого из
общего уравнения jc-> + 1 = 0 прямой РН выражаем у = дс + 1. Сравнивая с
(3.18), получаем к = 1, следовательно, tg a = к = 1, т.е. a = -у.
Замечания 3.6.
1. Чтобы перейти от общего уравнения прямой (3.8) A-jc+B-j + C = O
/с уравнению с угловым коэффициентом (3.18), нужно разрешить общее
уравнение относительно неизвестной у :
226
где £ =""" *f' ^о = "" *§ * Такой переход возможен при условии ВфО.
2. Бели в поставленной задаче заданная точка М0[х0,у0) не лежит на
оси ординат, то, проводя аналогичные рассуждения, получаем уравнение
пряной с угловым коэффициентом вида:
3. Уравнение прямой (3.18) с угловым коэффициентом применяется
только в прямоугольной системе координат, поскольку в любой другой
аффинной системе координат в уравнении (3.18), разрешенном относительно
неизвестной у, коэффициент к утрачивает смысл углового коэффициента.
3*2.5. Взаимное расположение прямых
КОЛЛИНБАРНЫБ ПРЯМЫЕ
Две прямые называются коллинеарными, если они параллельны или
совпадают.
Получим условие коллинеарности двух прямых 1Х и /2, заданных
общими уравнениями:
lx: A1x+Bxy + Cx=0; /2: ^-х+В2-у + С2=0. (3.19)
Необходимым и достаточным условием коллинеарности прямых (3.19)
является условие коллинеарности их нормалей 7ix=Ax-i+Bx-j,
л2 = А}! + B2j. Следовательно, если прямые (3.19) коллинеарны, то
пх || п2, т.е. существует такое число X Ф 0, что
и наоборот.
Прямые совпадают, если помимо этих условий справедливо СХ=ХС2.
Тогда первое уравнение в (3.19) имеет вид X - (А^ • х+В2 - у + С2 )=0, т.е.
равносильно второму, поскольку X Ф 0.
Таким образом, прямые (3.19) параллельны тогда и только тогда,
когда соответствующие коэффициенты при неизвестных в их уравнениях
пропорциональны, т.е. существует такое число ХфО, что i41=X-A2,
ВХ=Х-В2, но СхфХ-С2. Прямые (3.19) совпадают тогда и только тогда,
когда все соответствующие коэффициенты в их уравнениях
пропорциональны: \ sX-Aj, ВХ=ХВ2, Сх =ХС2.
is* 227
n=A'i+Bj
Условия параллельности или совпадения прямых (3.19) можно
записать в виде
а1 вх сг _ а1 _ вх q
***у ^'у ^*"> ^^ v 9
Условие коллинеарности двух прямых (3.19) можно записать в виде
В2
ЛИНИИ УРОВНЯ ЛИНЕЙНОГО ТРЕХЧЛЕНА
Линией уровня функции f(x,y) двух переменных называется
геометрическое место точек координатной плоскости Оху, в которых функция
принимает постоянное значение, т.е. /(*, у) - const (см. [19,28,40]).
Для линейного трехчлена
р(х,у)=Ах+В-у + С уравнение
линии уровня p(x,y) = const имеет
вид
Ax+By + C = consl. (3.20)
При любом фиксированном
значении постоянной уравнение
(3.20) описывает прямую. Рассмот-
РисЗ.22 Р™ поведение семейства линий
уровня, отличающихся значением
постоянной. Поскольку коэффициенты А и В не изменяются, то у всех
прямых (3.20) будет одна и та же нормаль n = A-i +B-j. Следовательно,
линии уровня линейного трехчлена р{х,у)= Ах+Ву + С представляют
собой семейство параллельных прямых (рис.3.22). Поскольку нормаль
совпадает с градиентом (см. п.З замечаний 3.2), а градиент направлен в сторону
наискорейшего возрастания функции, то при увеличении постоянной линии
уровня (3.20) переносятся параллельно в направлении нормали.
ПЕРЕСЕКАЮЩИЕСЯ ПРЯМЫЕ
Необходимым и достаточным условием пересечения двух прямых
(3.19) является условие неколлинеарности их нормалей, или, что то же
самое, условие непропорциональности коэффициентов при неизвестных:
в.
или
(3-21)
При этом условии система уравнений
228
имеет единственное решение х0 ,у0, которое определяет точку Afo(jco,yo)
пересечения прямых (3.19) (см. [10]).
УГОЛ МЕЖДУ ПРЯМЫМИ
Углом между двумя прямыми на плоскости называется угол между их
направляющими векторами. По этому определению получаются не один
угол, а два смежных угла, дополняющих друг друга до п. В элементарной
геометрии из двух смежных углов, как правило, выбирается меньший, т.е.
величина ф угла между двумя прямыми удовлетворяет условию 0<ф<у.
п2
/,
Рис.3.23
Если Pi=fli-i+^-J и р2=а2-Г+62«7 - направляющие векторы
прямых /j и /2 соответственно (рис.3.23^), то величина ф угла между
этими прямыми вычисляется по формуле:
Чтобы получить величину ф острого угла между прямыми, нужно правую
часть взять по абсолютной величине:
Угол ф между прямыми (3.19) можно вычислить как угол между их
нормалями nl-Al'i + Bl-j nn2 = A2-i+B2j:
,=_&М_= -i --? ■ -1 -г (322)
229
Чтобы получить величину <р острого угла между прямыми, нужно правую
часть взять по абсолютной величине:
Необходимым и достаточным условием перпендикулярности прямых
(3.19) является условие ортогональности их нормалей, т.е. fa, 7Г2)=0:
По формуле (3.22) получаем острый угол <р между прямыми (3.19),
если Ai-A2 + Bl-B2>0 (рис.3.23,а), и тупой в противном случае:
А1А2 + В1В2<0 (рис.З.23,6). Другими словами, по формуле (3.22)
находится тот угол между прямыми, в котором лежат точки, принадлежащие
разноименным полуплоскостям, опреляемым данными прямыми. На рис.3.23
положительные и отрицательные полуплоскости отмечены знаками + или -
соответственно.
Если прямые заданы уравнениями с угловыми коэффициентами:
, *2=tga2, a2*f,
то угол ф между ними (один из смежных углов) находится по формуле
/ ч tga,-
sv ! 2/ 1+tg(X
(3.23)
Если правая часть (3.23)
положительна, то угол ф острый (рис.3.24), в
противном случае - тупой. Чтобы
получить острый угол ф, нужно правую часть
(3.23) взять по абсолютной величине:
tg<P =
Рис.3.24
Если кх = к2 (условие параллельности прямых), то ф = 0. Если
^^2+1 = 0 (условие перпендикулярности прямых), то правая часть (3.23)
не определена (tg ф = «>). Тогда полагают, что ф=~.
Пример 3.11. Найти величину того угла, образованного прямыми 1г:
Зх-у-3 = О и /2: jc-2j + 4 = 0, внутри которого лежит точка Л/(5,2).
230
О
Рис.3.25
D По общим уравнениям прямых находим
нормали #^=3-Г-1'7, i72=lf-2j, а также величину
<р угла между нормалями, используя (3.22):
cos(p""V32+(-i)2Vi2+(-2)2 ""^Г""^ ^ ф"4-
Подставляя координаты точки Af (5,2) в левые
части уравнений прямых, выясняем, каким
полуплоскостям принадлежит эта точка. Для прямой 1Х имеем
3-5-2-3>0, значит точка М лежит в
положительной полуплоскости, определяемой прямой /г Для прямой /2 имеем
5-2-2+4>0, значит, точка М лежит также в положительной
полуплоскости, определяемой прямой /2. Поскольку точка М принадлежит
одноименным полуплоскостям (положительным), то искомый угол - это угол \|/,
смежный найденному углу ф=<у: V =я—ф=я—j=^f • Приведенные
рассуждения кажутся ненужными, так как положение точки М сразу же
выясняется по рис.3.25. Однако, как это было ранее отмечено (см. введение к
главе 3), при аналитическом решении изображения фигур не используются,
поскольку записать вывод "по рисунку видно, что..." на алгоритмическом
языке невозможно. ■
Пример 3.12. Составить уравнение прямой,
проходящей через точку у0 = 1 на оси ординат и
образующей с прямой у=-|-я: + 1 угол -j.
□ Искомая прямая (с угловым коэффициентом
к ) образует с заданной прямой / (с угловым
коэффициентом -М острый угол ф=т» tgф = 1. По
формуле (3.23), учитывая, что угол ф острый,
составляем уравнение и упрощаем его:
1=
2 — 2
I L 2 * 2
Отсюда находим два решения кг = 3 или к2 = --|. Следовательно, учитывая
(3.18), поставленной задаче удовлетворяют две прямые (рис.3.26)
1Х: ;у = 3-* + 1; или /2: у =—~х + 1.
Заметим, что прямые 1{ и /2 взаимно перпендикулярны, поскольку
выполняется условие к1к2+1 = з[-^)+1 = 0. ■
231
ПУЧКИ ПРЯМЫХ
Собственным пучком прямых на плоскости называется совокупность
всех прямых плоскости, проходящих через фиксированную точку (центр
пучка).
Несобственным пучком прямых называется совокупность прямых,
параллельных фиксированной прямой (центром несобственного пучка
прямых считается бесконечно удаленная точка плоскости).
Любые две прямые
^^ZI^^Z^I^^ i h и *2 определяют пу-
чок прямых, содержа-
щий заданные прямые
и^шши^т" i ки *2 • ^сли прямы& h
и /2 пересекаются, то
с* б
Рис. 3.27 точка Мо их
пересечения является центром собственного пучка (рис.3.27,а). Если 1Х и /2
параллельны, то они определяют несобственный пучок параллельных прямых
(рис.3.27,6).
Пусть заданы уравнения двух прямых (3.19)
lx: Aj-x+Bx*у + Сх = 0; /2: А2-х-¥В2-у^гС2 =0.
Линейной комбинацией этих уравнений называется уравнение
Хх • (i4j • х + Вх • у + Cj)+ Я2 • (А^ -д:+52-у + С2)=0, (3.24)
где числа Хх Д2 - коэффициенты линейной комбинации. Его можно
записать в форме
Заметим, что линейная комбинация уравнений является уравнением первой
степени для любых значений коэффициентов, кроме случая, когда оба ко-
эффициента при неизвестных равны нулю, т.е. при Хх-Ах+Х2-А2=0 и
Хх • Вх + Х2 • В2 = 0. Эти значения параметров Хх, Х2 считаются
недопустимыми.
Уравнение (3.24) называется уравнением пучка прямых, содержащего
прямые Ах*х+Вх-у + Сх=0 и А2-х + В2-у + С2=0.
При любых допустимых значениях параметров ХХ,Х2 уравнение (3.24)
задает прямую, принадлеоюащую пучку, и наоборот, для любой прямой пучка
найдутся такие значения параметров ХХ,Х2, что уравнение (3.24) будет
задавать эту прямую.
Действительно, уравнения прямых 1Х и /2 получаются из (3.24) при
Хх =1, Х2 =0 ипри Хх =0, Х2 =1 соответственно.
232
Если прямые lx и /2 параллельны, то существует такое число X * О,
что А{=Х-А2 и Z?j=A,-£2. Тогда при любых допустимых значениях
параметров Хг,Х2 прямая (3.25) параллельна прямой /2, так как
коэффициенты при неизвестных пропорциональны:
Х1-А1+Х2-А2=(Х1-Х+Х2)-А29 Х1-В1+Х2-В2=$.1-Х+Х2)'В2.
Если прямые 1Х и /2 пересекаются в точке М0(х09у0)9 то любая
прямая (3.24) проходит через точку M0(xQ9yQ) пересечения прямых 1Х и /2,
поскольку
о о
при любых значениях Хх, Х2.
Осталось показать, что для любой точки М *(х*,;у*) плоскости
существуют такие значения параметров Хх Д2, при которых уравнение (3.24)
задает прямую I, проходящую через точку М*(**,)>*). В самом деле, подставим
координаты точки М*\х*,у*) в уравнение (3.24):
Это означает, что прямая (3.24) проходит через точку М *. Отсюда опреде-
ляется отношение -^- = —-— «— -, равное по абсолютной вели-
А2 А^-х +Вг-у +C
чине отношению расстояний от точки М* до прямых /2 и /х (см. п.5
замечаний 3.2). При таком выборе параметров XVX2 уравнение (3.24) будет
задавать прямую, проходящую через точку М *, т.е. прямую /.
Пример 3.13. Составить уравнение прямой, проходящей через точку
пересечения прямых 2-jc + )> + 4 = 0, 3-х-у-1 = 0 и через точку М*(2,з).
D Искомая прямая входит в пучок прямых, задаваемый уравнением
( )()
Подставляя координаты точки М *(2,3), получаем:
А1-(2-2+3 + 4)+Я2-(3-2-3-1) = 0 <=> П-^ + г^ =0.
Возьмем, например, Хх = -2, Х2 = 11 и подставим в уравнение пучка:
Искомое уравнение получено. ■
233
3.2.6. Типовые задачи с прямыми на плоскости
СОСТАВЛЕНИЕ УРАВНЕНИЙ ПРЯМЫХ
Разнообразие видов уравнений прямых на плоскости порождается
многообразием геометрических способов задания прямых. По любому набору
геометрических данных, однозначно определяющих прямую на плоскости,
можно составить уравнение этой прямой, причем геометрические данные
будут отражены в коэффициентах уравнения. И наоборот, коэффициенты
любого уравнения прямой имеют геометрический смысл, соответствующий
способу задания прямой на плоскости.
Для удобства решения типовых задач, связанных с прямыми на
плоскости, все основные типы уравнений прямых и соответствующие
геометрические способы задания этих прямых отражены в таблице 3.1.
Примеры составления прямых по геометрическим данным, указанным
в таблице 3.1, разбирались в разд.3.2.1-3.2.4. Рассмотрим примеры
нахождения уравнений прямых, заданных как геометрические места точек.
Пример 3.14. По сторонам ОА и ОВ
равнобедренного треугольника ОАВ
(ОА = ОВ) перемещаются точки \ и Вх так,
что О\ = ВВХ (рис.3.28). Найти
геометрическое место точек М - середин отрезков \ВХ.
□ Введем аффинную систему координат
^д ^хх 0*1^2 с базисными векторами *ех=ОА и
"ё2 = ОВ (рис.3.28). Вершины А и В
треугольника имеют координаты A(l,0), /*(0,1),аточки АХ и ВХ -координаты
Aj(f,О), яДоД-г), где t - параметр, принимающий значения 0<г<1
Середина М отрезка \ВХ имеет координаты м(~^,-^:у^), т.е.
^y). Это означает, что при изменении параметра г координаты точки
М изменяются по закону
Получили параметрическое уравнение прямой. Поскольку t изменяется в
пределах 0<*<1, то при f = 0 Jtj =0, x2=j, точка Af(o,-j) совпадает с
серединой С стороны ОВ; при t = 1 jCj =-j» х2 ==^' точка Af(y,O) совпа-
234
дает с серединой D стороны ОА . Поэтому искомое геометрическое место
точек - отрезок CD, а именно средняя линия треугольника ОАВ,
параллельная стороне АВ. Ш
Таблица 3.1. Основные типы уравнений прямых на плоскости
Название
Общее
уравнение прямой
Параметрическое уравнение
прямой
Каноническое
уравнение
прямой
Уравнение
прямой,
проходящей
через две
точки
Уравнение
прямой
"в отрезках"
Уравнение
с угловым
коэффициентом
Уравнение
А-х+В-у+С=О,
А2+Я2*0
J jc=jco+a-f,
\ У=Уо+Ь*,
teR;
a2+b2*0
х-хо_У~Уо
а Ь
\-Ч УгУо
-*- + ^ = 1,
xi У1
*!*(>, У1Ф0
у=к-х+у0
Способ задания прямой
Прямая проходит через
точку М0(х0,у0)
перпендикулярно
вектору
П-А-Т+В-] (рис.3.5,а)
Прямая проходит через
точку М0(х0,у0)
коллинеарно вектору
p=al+bj (рис.3.13)
См. параметрическое
уравнение
Прямая проходит через
точки М0(х0,у0) и
Mi(xvyi) (Рис.3.18)
Прямая отсекает на
координатных осях
"отрезки" xt и ух
(рис.3.19)
Прямая проходит через
точку (о,уо) на оси
Оу и образует угол а
с положительным
направлением оси Ох
(рис.3.21,с)
Геометрический смысл
коэффициентов
Коэффициенты А, В -
координаты нормали
n=A-T+Bj;
свободный член
С=-А*0-ву0
Коэффициенты а , Ь -
координаты направляющего
вектора p-a-J+b-j;
хо,уо - координаты точки
Мл(хл. v« ). поинадлежашей
прямой
См. параметрическое
уравнение
Коэффициенты х0, у0 и jc, ,
у1 - координаты точек
Мо(*о>Уо) и Mi(xi*yi)
Коэффициенты jc,, yi
определяют точки на
координатных осях, через
которые проходит прямая
Угловой коэффициент
*=tga, 0<а<я, a^-j' yo ~
ордината точки пересечения
прямой с осью ординат
Пример 3.15. Найти геометрическое место точек плоскости, разность
квадратов расстояний от каждой из которых до двух заданных точек
плоскости постоянна (равна с).
D Пусть А и В - заданные точки. Введем прямоугольную систему
координат Оху (рис.3.29): начало координат О совпадает с серединой
отрезка АВ, ось абсцисс совпадает с прямой АВ (направление на оси абсцисс
выберем от точки А к точке В , т.е. i TT АВ), тогда ось ординат совпадает
235
с серединным перпендикуляром к отрезку АВ (направление на оси ординат
выбирается так, чтобы система координат была правой, хотя для решения
задачи это не важно). Обозначим через 2а > О длину отрезка АВ, тогда
точки Л и В имеют координаты А(-а,О) и В(а,6). Пусть М(х,у)
произвольная точка искомого множества. По условию задачи MA2 -MB2 =c или
MB2 - MA2 = с. Запишем равенство MA2 - MB2 = ± с в координатной
форме:
Раскрывая скобки и приводя подобные члены, получаем
4ах = ±с <=>
с
4а
м
1V
А
yi
у)
—
О
а В
с
4а
±с
4а
Это уравнение определяет пару прямых,
перпендикулярных оси абсцисс (или ось
ординат при с = 0). Следовательно,
искомое геометрическое место точек -
серединный перпендикуляр к отрезку,
соединяющему заданные точки (при с = 0 ), или
Рис.3.29
два перпендикуляра х =
прямой, проходящей через заданные точки. ■
и * = --
МЕТРИЧЕСКИЕ ПРИЛОЖЕНИЯ УРАВНЕНИЙ ПРЯМЫХ НА ПЛОСКОСТИ
Перечислим формулы для вычисления длин отрезков (расстояний) и
величин углов по уравнениям образующих их прямых.
1. Расстояние d отточки М*\х*9у*) до прямой А-х+В*у + С = О
вычисляется по формуле:
2. Расстояние между параллельными прямыми А1-х+В1-у + С1=О и
А2-х+В2-у + С2=0 находится как расстояние dx отточки М2(х29у2),
координаты которой удовлетворяют уравнению А2-х2 + В2-у2 + С2=0, до
прямой Al-x+Bly + Cl=O по формуле:
236
3. Острый угол ф между двумя прямыми 1Х и /2 находится по
формуг,если pl=ali+blj и p2=a2-i+b2j -
лам:
а)
направляющие векторы прямых 1Х и 12 соответственно (в случае задания
прямых каноническими или параметрическими уравнениями);
||
б) СО8ф=
если
=Ai-i+Bl-j
n2=A2-i+B2-j - нормали к прямым 1{ и /2 соответственно (в случае
задания прямых общими уравнениями);
в)
если кх =tgaj и к2 =tga2 -угловые
коэффициенты прямых 1Х и /2 соответственно (в случае задания прямых уравнениями
с угловыми коэффициентами).
При решении задач свойства 1-3 используются наряду с метрическими
приложениями векторной алгебры (см. разд. 1.6.2).
Пример 3.16. Катеты прямоугольного треугольника равны 9 см и
12 см. Найти расстояние от точки пересечения медиан до центра вписанной
в треугольник окружности.
D Пусть ABC - заданный треугольник с
катетами АС = 9 см и ВС = 12 см. Введем
прямоугольную систему координат Сху (рис.3.30):
начало координат совпадает с вершиной прямого
угла треугольника ABC; ось абсцисс содержит катет
AC (FTfCA), ось ординат - катет ВС
(yTTCB). Тогда вершины треугольника имеют
координаты А(9,0), #(0,12) С(0,0). По
координатам вершин треугольника находим координаты
точки М пересечения его медиан:
Рис.3.30
^^),т.е. М(3,4) (см. разд.2.1.1). Найдем координата центра О
вписанной окружности. Поскольку центр принадлежит биссектрисе /
прямого угла, уравнение которой у = х,то абсцисса и ордината точки О
равны, т.е. О(г, г), где г - радиус вписанной окружности. Выразим радиус г
как расстояние от точки О до гипотенузы АВ. Уравнение прямой,
содержащей гипотенузу, имеет вид
237
9 12
Это уравнение прямой "в отрезках". Запишем его как общее уравнение
прямой f+J5~-l = 0> и по свойству 1 выразим расстояние от точки О до
гипотенузы: г-
~И.г«|21.г-108|.
т.е. г = 3 (радиус вписанной окружности) или г = 18 (радиус вневписанной
окружности с центром Ос, касающейся гипотенузы). Следовательно, точка
О имеет координаты 0(3,3). Осталось найти искомое расстояние
ОМ =V(3-3)2+(4-3)2 =!.■
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ С ДВУМЯ НЕИЗВЕСТНЫМИ
Системой т линейных алгебраических уравнений с двумя
неизвестными называется система уравнений вида
(3.26)
"ml
Числа atj, i = l,...,m, 7 = 1,2 называются коэффициентами системы;
b[,b2y...Jbm- свободными членами, хх,х2 - неизвестными (см. разд.П. 10,
а также [10]).
Решением системы называется упорядоченная пара чисел (осра2)
такая, что после замены неизвестных хг, х2 соответственно числами ах, а2
каждое уравнение системы превращается в верное числовое равенство.
Система называется совместной, если она имеет хотя бы одно решение. Если
система не имеет ни одного решения, то она называется несовместной.
Система (3.26) называется однородной, если все свободные члены
равны нулю:
х2=0,
•х,=0.
(3.27)
238
Б отличие от однородной, систему общего вида (3.26) называют
неоднородной.
Систему (3.26) принято записывать в матричной форме. Для этого из
коэффициентов системы составляем матрицу системы
<ап *1
ат2.
свободные члены записываем в столбец свободных членов Ъ =
(х
= \
а неизвестные -в столбец неизвестных х =
Матричная запись неоднородной системы уравнений (3.26) имеет вид
Ах = Ь9 (3.28)
а однородной:
Ах = о, (3.29)
где символ о в правой части обозначает нулевой столбец размеров mxl:
о =
Блочная матрица (А | b)=
называется расширенной
Vaml am2
матрицей системы (3.26).
Рассматривается случай, когда все уравнения системы первой степени,
т.е. коэффициенты при неизвестных каждого уравнения не равны нулю
одновременно. Поэтому матрица А системы ненулевая, более того, все ее
строки ненулевые.
В соответствии с матричной записью решением системы (3.28)
называется столбец jc = I 1 , при подстановке которого в (3.28) получаем верное
равенство для столбцов в левой и правой частях. В частности, нулевой
столбец о является решением однородной системы (3.29), т.е. любая
однородная система уравнений совместна.
Рангом системы уравнений (3.26) называется ранг матрицы А
системы: г = rg А, т.е. максимальное число линейно независимых строк матри-
239
цы А (максимальное число линейно независимых уравнений системы).
Поскольку матрица системы (3.26) ненулевая и содержит два столбца, то ее
ранг г = rg А < 2. Ранг может быть равен либо единице (г = 1, если все
строки матрицы А пропорциональны), либо двум (г = 2, если имеются две
линейно независимые строки).
Выясним геометрический смысл и свойства решений системы
уравнений (3.26).
Пусть на плоскости задана аффинная система координат Оххх2. Как
показано в разд.3.2.1, множество точек х(х1, *2), координаты которых
удовлетворяют линейному уравнению с двумя неизвестными ап • Xj + a.l2 • х2 = b.,
или an-xl-¥a.2'X2-bi=09 представляет собой прямую. Поэтому
множество решений системы уравнений является пересечением прямых
ail'Xl +ai2'X2 ~bi =0' ' =1-"»1Я .
Рассмотрим примеры пересечения прямых.
Если ранг системы (3.26) равен 1, то коэффициенты при неизвестных
всех уравнений пропорциональны. В этом случае любые две прямые
параллельны (система уравнений несовместна (рис.3.31,я)) или совпадают (в этом
случае вся система (3.26) равносильна одному, например, первому ее
уравнению (рис.3.31,6)).
Бели ранг системы равен 2, то в системе имеются хотя бы два линейно
независимых уравнения. Прямые, соответствующие этим уравнениям,
пересекаются, например, в точке ^(х^,х^). Поэтому множество решений
системы (3.26) либо одна точка (система совместна, все прямые проходят через
точку XQ, т.е. все прямые принадлежат собственному пучку прямых
(рис.3.31,в)), либо пусто (система несовместна (рис.3.31^)).
Рис.3.31
Для решения системы (3.26) обычно применяется метод Гаусса
исключения неизвестных [10], при котором уравнения системы заменяются
линейными комбинациями уравнений (см.разд.3.2.5), содержащими меньшее
количество неизвестных, при этом расширенная матрица системы
приводится к ступенчатому виду. Продемонстрируем этот метод на примере.
240
'1
2
1
-2
-4
-2
Г
2
-1
'1
2
1
-2
-4
-2
Г
2
-1,
Г1
0
0
-2
0
0
0
"2,
Пример 3.17. Решить системы уравнений:
xl-2x2=l9 jCj-2jc2=1, Г ^+2^=3, f JCj + 2jc2 = 3,
а) 2^-4д:2 = 2, б) - 2jCj-4j:2 = 2, в) I хг-4х2 =-3, г) I ^ -4jc2 =-2,
Изобразить множество решений на координатной плоскости Оххх2.
D а) Составляем расширенную матрицу системы
(А | »)«
Поскольку ап =1*0 (элемент ап - ведущий), прибавим ко второй и к
третьей строкам первую, умноженную на (-2) и на (-l) соответственно:
(А | »)-
Последняя строка соответствует уравнению 0-х1+0-х2 =-2, которое не
имеет решений. Следовательно, множество решений системы пустое
(прямые, задаваемые уравнениями системы, изображены на рис.3.31,а),
б) Составляем расширенную матрицу системы
'1 -2 Г
(A\b)= 2-4 2
-1 2 -1
ч •
Поскольку ап =1*0 (элемент ап - ведущий), прибавим к третьей строке
первую, а ко второй - первую, умноженную на (- 2):
(А | Ь)=
Система равносильна одному уравнению х1 -2*2 =1. Множество ее
решений представляет собой прямую на координатной плоскости Охххг.
Координаты любой точки этой прямой удовлетворяют системе уравнений,
следовательно, система имеет бесконечно много решений (рис.3.31,6).
в) Составляем расширенную матрицу системы
г\ -2
2 -4
-1 2
Г
2
-1
'1 -2
0 0
0 0
г
0
<=>
'1 -2^
0 0
о о,
(Я-
т
0
А
'1
1
1
2
-4
-2
3>
-3
-и
16 — 5150
241
'1
1
1
2
-4
-2
3'
-3
-к
'\
0
,0
2
-6
-4
3^
-6
Поскольку ап =1*0 (элемент ап - ведущий), прибавим ко второй и
третьей строкам первую строку, умноженную на (-1):
(А | »).
Разделим вторую строку на (- б), а затем к первой и третьей строкам
прибавим вторую, умноженную на (- 2) и на 4 соответственно:
(А\ь)~
Получили единственное решение д^ = 1, хг-\, которому соответствует
точка X0(l,l) на координатной плоскости (рис.3.31,в).
г) Составляем расширенную матрицу системы
'\ 2
0 -6
0 -4
3'
-6
"4,
'1 2
0 1
0 -4
3N
1
-4
~
'1 0
0 1
0 0
1
о,
0 1
о о,
'Г
1
(А | 6)=
Л
1
1
2
-4
-2
-1
1
1
1
2
-4
-2
3 >
-2
-1
1-Н
0
0
2
-6
-4
3
-5
-4
Поскольку ап =1*0 (элемент ап - ведущий), прибавим ко второй и к
третьей строкам первую строку, умноженную на (~l):
(А | *)-
Разделим третью строку на (-4), а затем ко второй строке прибавим
третью, умноженную на 6:
(А | Ъ)~
Вторая строка соответствует уравнению 0Xj+0jc2 =1, которое не имеет
решений. Следовательно, система несовместна (прямые, задаваемые
уравнениями системы, изображены на рис.3.31 ,г). ■
242
'1
0
о
2
-6
-4
3'
-5
1-Н
0
0
2
-6
1
3'
-5
1-Н
-
'1
0
0
2
0
1
1
1-Н
СИСТЕМЫ ЛИНЕЙНЫХ НЕРАВЕНСТВ С ДВУМЯ НЕИЗВЕСТНЫМИ
Системой т линейных алгебраических нестрогих неравенств
с двумя неизвестными называется система неравенств вида
а2\
(3.30)
Числа aijy i = l,...,m, у = 1,2 называются коэффициентами системы;
bl,b2j.-;bm- свободными членами; хх,х2- неизвестными.
Решением системы называется упорядоченная пара чисел (ссра2)
такая, что после замены неизвестных хг, х2 соответственно числами аг, а2
каждое неравенство системы превращается в верное числовое неравенство.
Система называется совместной, если она имеет хотя бы одно решение.
Если система не имеет ни одного решения, то она называется несовместной.
Система (3.30) называется однородной, если все свободные члены
равны нулю:
апх1+а12х2>0,
a2lxl+a22x2>0,
(3.31)
"ml
+am2X2>°-
В отличие от однородной, систему общего вида (3.30) называют
неоднородной.
Систему (3.30) принято записывать в матричной форме. Для этого из
коэффициентов системы составляем матрицу системы
ап <h N
пт2
свободные члены записываем в столбец свободных членов Ъ =
■■О-
а неизвестные - в столбец неизвестных х
Матричная запись неоднородной системы неравенств (3.30) имеет
Ах>Ъ, (3.32)
243
ВИД
а однородной:
Ах>о, (3.33)
где символ о в правой части обозначает нулевой столбец размеров mxl.
Сравнение левой и правой частей неравенств (3.32), (3.33) выполняется
покомпонентно: два столбца a = (aj — amY и P = (pi •• Pm/
одинаковых размеров удовлетворяют неравенству a > Р тогда и только тогда, когда
все неравенства ах > $х,..., <хда > Рда выполняются одновременно.
Блочная матрица (A \b)=
Kj
называется расширенной
матрицей системы (3.30).
Рассматривается случай, когда все неравенства системы первой
степени, т.е. коэффициенты при неизвестных каждого неравенства не равны нулю
одновременно. Поэтому матрица А системы ненулевая, более того, все ее
строки ненулевые.
В соответствии с матричной записью решением системы (3.32) называ-
КЗ-
ется столбец jc = I L при подстановке которого в (3.32) получаем верное
KJ
неравенство для столбцов в левой и правой частях. В частности, нулевой
столбец о является решением однородной системы (3.33), т.е. любая
однородная система неравенств совместна.
Рангом системы неравенств (3.30) называется ранг матрицы А
системы: г = rg A, т.е. максимальное число линейно независимых строк
матрицы А (максимальное число линейно независимых неравенств системы).
Поскольку матрица системы (3.30) ненулевая, то ее ранг может быть равен
либо единице ( г = 1, если все строки матрицы А пропорциональны), либо
двум ( г = 2, если имеются хотя бы две непропорциональные строки).
Выясним геометрический смысл и свойства решений системы
неравенств (3.30). Напомним, что множество точек (на плоскости или в
пространстве) называется выпуклым* если вместе с любыми двумя своими
точками оно содержит и весь отрезок, соединяющий эти точки (рис.3.32,а).
Пустое множество и множество, состоящее из одной точки, по определению
считаются выпуклыми. Отрезок, луч, прямая, треугольник (вместе с
внутренними его точками), врут, плоскость, полуплоскость, треугольная
пирамида, шар и т.п. являются выпуклыми множествами. Фигура, изображенная
на рис.3.32,б,не является выпуклой, поскольку отрезок (штриховая линия),
соединяющий две точки фигуры, не принадлежит целиком этой фигуре.
Примерами невыпуклых множеств являются также ломаная, окружность,
сфера и т.п.
244
а б *
Рис.3.32
Отметим важное свойство выпуклых множеств: пересечение любого
числа выпуклых множеств является выпуклым множеством.
Действительно, пусть две точки принадлежат пересечению
ф = Фх П Ф2 двух выпуклых множеств Фг и Ф2 (рис.3.32,в), т.е. обе точки
принадлежат каждому из множеств Ф1 и Ф2. Тогда весь отрезок,
соединяющий выбранные точки, принадлежит каждому из множеств Ф1 и Ф2,
поскольку они выпуклые. Следовательно, весь отрезок принадлежит
пересечению Ф = Фх П Ф2 • Это рассуждение распространяется на любое
количество выпуклых множеств.
Пусть на плоскости задана аффинная система координат Ох1х1. Как
показано в разд.3.2.1, множество точек x(xvx2), координаты которых
удовлетворяют линейному неравенству с двумя неизвестными
ап Ху +апх2>Ь., представляет собой полуплоскость, ограниченную
прямой an-xx+ai2x2=br Поэтому множество М решений системы
неравенств является пересечением полуплоскостей an-xl+ai2-x2>br
i = l,...,m. Поскольку полуплоскость является выпуклым множеством,
пересечение конечного числа полуплоскостей также является выпуклым
множеством, которое называется выпуклым многоугольным множеством. Таким
образом, множество решений системы неравенств (3.30) - это выпуклое
многоугольное множество.
Рассмотрим примеры пересечения полуплоскостей.
Если ранг системы (3.30) равен 1, то коэффициенты при неизвестных
всех неравенств пропорциональны. В этом случае все прямые,
ограничивающие полуплоскости, параллельны. Пересечение М таких
полуплоскостей может быть либо пустым множеством (система неравенств
несовместна), либо прямой (рис.3.33,а), либо полосой (рис.3.33,6), либо
полупространством (рис.3.33,*). Здесь и далее на рисунках прямая, ограничивающая
полуплоскость, изображается со стрелками, указывающими на выбранную
полуплоскость, а также, как правило, штриховкой, которой отмечается
другая полуплоскость, не удовлетворяющая неравенству. При пересечении
полуплоскостей заштрихованное множество не удовлетворяет системе
неравенств.
245
о
i О
V
б
Рис.3.33
Если ранг равен 2, то не все прямые ап • х1 + ап • д:2 = b., i = l,...,m,
параллельны. В этом случае пересечение полуплоскостей может быть либо
пустым множеством, либо точкой (рис.3.34,а), либо полупрямой
(рис.3.34,6), либо отрезком (рис.3.34,в), либо многоугольником (рис.3.34^),
либо выпуклым многоугольным множеством (рис.3.34,д).
О
МЕТОД ИСКЛЮЧЕНИЯ НЕИЗВЕСТНЫХ
Для решения системы (3.30) можно применить метод исключения
неизвестных [39]. При этом нужно учитывать, что в отличие от уравнений
линейная комбинация неравенств является следствием системы неравенств
только при положительных коэффициентах, т.е.
246
при Хх >0,...Дш >0, за исключением случая Хх =... = Хт =0. Такие
линейные комбинации называются положительными. Поэтому метод Гаусса,
где используются линейные комбинации с положительными и
отрицательными коэффициентами, для систем неравенств неприменим.
Рассмотрим метод исключения неизвестных, применяемый для
решения системы (3.30).
1. Выбираем в матрице А системы неравенств (3.32) столбец, в
котором имеются нулевые элементы или элементы противоположных знаков
(такой столбец называется ведущим, его элементы - ведущими, а
неизвестная, соответствующая ведущему столбцу, - ведущей). По ведущему столбцу
формируется новая система неравенств A'-x>b', в которой ведущая
неизвестная отсутствует (исключается ведущая неизвестная).
Например, если первый столбец матрицы А ведущий, то в новую
систему К-х>Ъ' записываем:
- все неравенства исходной системы, в которых неизвестная хх входит
с нулевым коэффициентом;
- положительную линейную комбинацию i -го и j -го неравенств, если
аа>0иа.х<0:
an'[aj\ **i +аяшХг)-ап'(ап 'xi + аптХг)*ап bj"aj\ bi'
т.е. к j -му неравенству ajX • д^ + aj2 • х2 > Ъ., умноженному на ап > 0,
прибавляем i -е неравенство ап • д^ + ai2 - х2 > Ъ{, умноженное на - а Л > 0. В
этой комбинации неравенств коэффициент при неизвестной хх получается
равным нулю. Другими словами (при исключении неизвестной хх),
расширенная матрица [А' | Ь) новой системы составляется из строк расширенной
матрицы (А | b) системы (3.32) с нулевыми ведущими элементами, и
положительных комбинаций строк матрицы (А | b) с ведущими элементами
противоположных знаков (коэффициенты положительной комбинации
выбираются так, чтобы ведущие элементы взаимно уничтожались). После
процедуры исключения неизвестной хх в матрице А' первый столбец оказывается
нулевым.
Если в матрице А нет ведущего столбца (элементы каждого столбца
матрицы отличны от нуля и имеют одинаковые знаки), то исключить
неизвестную в этой системе нельзя.
247
2. Если в системе исключена неизвестная х{, то решаем систему
А • х>Ь с одной неизвестной х2, преобразуя ее к системе А х>Ь ,
состоящей из одного или двух неравенств. В результате получаем один из пяти
частных случаев:
а) 0 дс2>^,где £/><); б) О-х^^'.где b[<0\
в) х2>Ъ[, т)-х2>Ь[,
д) \ 2 I, где Ьх<-Ь2.
{-х2>Ь2,
В случае "а" неравенство не имеет решений, следовательно, исходная
система неравенств Ах>Ь несовместна (процесс решения заканчивается). В
остальных случаях исходная система совместна.
Бели в исходной системе нельзя исключить одну неизвестную, то
полагаем формально 0 • х2 > О (А' = 0, ft' = 0 ). Этому неравенству
удовлетворяют любые значения неизвестной х2, т.е. -се < х2 < -и».
3. Преобразуем исходную систему неравенств Ах>Ь, выражая
неизвестную хх через х2. Получим систему А-х>Ь , разрешенную
относительно хг.
4. Записываем "цепочку" систем:
A-x>b => A' x>b\
полученных в п.2,3. Эти системы задают полное описание множества М
решений исходной системы (считаются ее полным решением). Чтобы
получить какое-либо одно решение исходной системы, нужно взять
фиксированное решение х2 = х^ системы a'-jc>&', подставить его в систему А-х>Ь
и найти какое-либо ее решение хх = *10. Столбец (хю д:20)г будет
решением исходной системы (3.32).
Первые два пункта алгоритма составляют прямой ход метода
исключения, третий и четвертый - обратный ход.
Замечания 3.7.
1. При исключении неизвестной (прямой ход) получаем следствие
исходной системы: Ax>b ^> A'x>b'.
2. Множество решений системы неравенств A' x>b' после
исключения неизвестной хх представляет собой проекцию на ось Ох2 (вдоль оси
Охх) множества М решений исходной системы неравенств. Поскольку
М - выпуклое многоугольное множество, то его проекция на ось
представляет собой либо пустое множество (см. п.2,"а"), либо ось Ох2 (см. п.2,"б"),
248
либо луч (см. п.2,"в","г"), либо отрезок (см. п.2,"д" при Ъ[<-Ъ2 ), либо
точку (см. п.2,"д" при Ъ[=~Ъ'г ).
3. При исключении неизвестной из линейно зависимых неравенств
получается неравенство вида 0• JCj + 0• дс2 >Р, которое либо выполняется при
всех значениях неизвестных (если Р<0), либо не имеет решений (если
Р>0). В первом случае его можно удалить из системы, не изменив при
этом множества ее решения. Во втором случае новая система, а также
исходная система не имеют решений.
Пример 3.18. Упростить системы неравенств:
-2jc2>-1,
a)<j 2xx+4x2>6, 6)
2xx+x2>3;
b)
+ 2х2>1;
хг + 2х2 > 3,
*j-4*2>-3, г)
-хх-х2>-5,
хг-х2>-1,
2хг+5х2>П,
-хх+2х2>-1.
Найти какое-либо решение. Изобразить множество решений на
координатной плоскости Оххх2.
О а) Прямой ход. 1,2. Элементы каждого столбца матрицы А = 2 4
2 1
Ч у
системы неравенств имеют одинаковые знаки. Такую систему упростить
нельзя. Прямой ход метода исключения завершается составлением
неравенства 0- х2 > О, которому удовлетворяют любые значения неизвестной х2.
Обратный ход. 3. Выражаем неизвестную хх из каждого неравенства
Г ^ + 2*2>3,
исходной системы: < 2хх+4х2>6, <=>
Первые два неравенства совпадают, поэтому одно из них можно удалить.
4. Записываем "цепочку" систем, полученных в результате прямого и
обратного хода:
хх>3-2х2
0-х2>0.
"цепочка" систем дает полное описание множества М решений
исходной системы (см. рис.3.35,а). Проекция множества М на ось Ох2 (вдоль
оси Охх) совпадает со всей осью Ох2 (см. п.2 замечаний 3.7).
249
Рис.3 35
Найдем какое-либо решение системы. Выбирая любое решение второй
системы в "цепочке", например х2 = 3, подставляем это значение в первую
систему "цепочки" и решаем ее:
Следовательно, любое неотрицательное значение хг является решением
исходной системы при х2 = 3, например, пара (l, 3) - решение исходной
системы.
б) Прямой ход. 1. Составляем расширенную матрицу системы
(А\Ь)=
и выбираем первый столбец матрицы А в качестве ведущего (поскольку он
содержит элементы противоположных знаков). Исключаем ведущую
неизвестную хх. Прибавляем к третьей строке первую, а ко второй - первую,
умноженную на 2. Полученные строки записываем в матрицу [А* \ Ь)
(индексы комбинируемых строк указаны справа в скобках):
-1
2
1
2
-4
2
-Г
2
1
-1
2
1
2
-4
2
-f
2
1>
О 0
0 4
(1,2)
(U)
0 0
0 4
«э-
2. Первое неравенство справедливо при любых х{ и х2 (его можно
удалить из системы (а' | Ь) (см. п.З замечаний 3.7)). Второе неравенство
4-я;2>0 справедливо для неотрицательных значений х2. Следовательно,
исходная система совместна.
Обратный ход. 3. Выражаем неизвестную JCj из каждого неравенства
исходной системы:
250
2*1-4jc2>2, <=> i xx>l + 2x2,
xx>l-2x2.
Первые два неравенства можно заменить уравнением хх = 1+2х2.
4. Записываем "цепочку" систем, полученных в результате прямого и
обратного хода:
Г" V2' => х2>0.
\хх>\-2х2, 2
Эта "цепочка" систем дает полное описание множества М решений
исходной системы (см. рис.3.35,6). Проекция множества М на ось Ох2 (вдоль
оси Охх) совпадает с неотрицательной частью оси Ох2 (см. п.2
замечаний 3.7).
Найдем какое-либо решение системы. Выбирая любое решение второй
системы в "цепочке", например х2 =3, подставляем это значение в первую
систему "цепочки" и решаем ее:
Получили решение (9,3) исходной системы.
в) Прямой ход. 1. Составляем расширенную матрицу системы
(А | Ь)=
1
-1
2
—4
2
3^
и выбираем первый столбец матрицы А в качестве ведущего (поскольку он
содержит элементы противоположных знаков). Исключаем ведущую
неизвестную хх. Прибавляем к первой и ко второй строкам третью. Полученные
строки записываем в матрицу [а' \ bj (индексы комбинируемых строк
указаны справа в скобках):
2 3 ^ '0 4 | 4 ^ (1,3)
(А\Ь)=
-3
1 -4
\г1 2
2. Решаем полученную систему неравенств:
Н>4,
Получили единственное решение, следовательно, исходная система
неравенств совместна.
251
Обратный ход. 3. Выражаем неизвестную Xj из каждого неравенства
исходной системы:
Xj >3-2jc2,
-4х2>-3, <=>
4. Записываем "цепочку" систем, полученных в результате прямого и
обратного хода:
I
Xj>-3+4jc2,
Эта "цепочка" систем дает полное описание множества М решений исход-
ной системы (см. рис.3.35,в). Подставим х2 = 1 в первую систему "цепочки11:
-1
1
2
-1
-1
-1
5
2
-5Л
-1
11
-к
Следовательно, исходная система имеет единственное решение (l,l),
отмеченное на рис.3.35,в точкой М.
г) Прямой ход. 1. Составляем расширенную матрицу системы
(А |*)=
и выбираем первый столбец матрицы А в качестве ведущего (поскольку ои
содержит элементы противоположных знаков). Исключаем ведущую
неизвестную х{, комбинируя строки с ведущими элементами противоположных
знаков. Прибавляем ко второй строке первую, а к третьей строке - первую,
умноженную на 2; затем прибавляем ко второй строке четвертую, а к
третьей строке - четвертую, умноженную на 2. Полученные строки записываем в
матрицу [А' | Ъ) (индексы комбинируемых строк указаны справа в
скобках):
(А\Ь)=
f-\
1
2
-1
-1
-1
5
2
-1
11
-к
'1*1-
0
0
0
0
-2
3
1
9
-6^
1
-2
9,
(и)
М)
(2,4)'
(3,4)
252
2. Решаем полученную систему неравенств:
*2>-2, ^ { х2>\.
9х2>9,
Получили отрезок 1 < х2 < 3 оси 0*2 - проекцию множества М решений
исходной системы неравенств. Следовательно, исходная система неравенств
совместна.
Обратный ход. 3. Выражаем неизвестную хг из каждого неравенства
исходной системы:
-хг-х2>-59
-хг+2х2>-1.
-xl>-l-2x2.
4. Записываем "цепочку" систем, полученных в результате прямого и
обратного хода:
—5+jc2 ,
-х2>-3,
х2>1.
-хх>-1-2х2.
Эта "цепочка" систем дает полное описание множества М решений
исходной системы, которое представляет собой незаштрихованный
четырехугольник М нарис.3.35,г.
Найдем какое-либо решение исходной системы. Подставим, например,
решение х2=2 второй системы "цепочки" в первую систему "цепочки":
^>~1+2,
2 2*"
-^>-1-2-2.
Следовательно, при х2 = 2 любое число xt из промежутка [ 1; 3 ]
удовлетворяет исходной системе. Например, пара (2,2) является решением
системы. ■
253
3.3. АЛГЕБРАИЧЕСКИЕ ЛИНИИ ВТОРОГО ПОРЯДКА
3.3.1. Канонические уравнения линий второго порядка
Рассмотрим задачу приведения уравнения линии второго порядка к
наиболее простому (каноническому) виду.
Напомним (см. разд.3.1.3), что алгебраической линией второго порядка
называется геометрическое место точек плоскости, которое в какой-либо
аффинной системе координат Ох{х2 может быть задано уравнением вида
где /^(дср х2) - многочлен второй степени двух переменных л^, х2.
Требуется найти прямоугольную систему координат, в которой
уравнение линии приняло бы наиболее простой вид.
Результатом решения поставленной задачи является следующая
основная теорема.
Теорема 3.3 (классификация алгебраических линий второго
порядка). Для любой алгебраической линии второго порядка существует
прямоугольная система координат Оху, в которой уравнение этой линии
принимает один из следующих девяти канонических видов:
, х2 У2 ,
2 Х\у2
7 7
jc2 у2
a2 b2
x2 v2
4- 7-7'1
x2 v2
a2 b2 °
2 =
уравнение эллипса;
уравнение мнимого эллипса;
уравнение пары мнимых
пересекающихся прямых;
уравнение гиперболы;
уравнение пары пересекающихся
прямых;
*'*
ч* х
6. у2 = 2 • р • х уравнение параболы;
254
—\
У'
x
Г X
7 у2 - b2 = 0 уравнение пары параллельных прямых;
3 у2 + &2 = 0 уравнение пары мнимых параллельных
прямых;
9. у2 = О уравнение пары совпадающих прямых.
В этих уравнениях а > О, & > О, /? > О, причем а>Ь в уравнениях 1,2.
Теорема 3.3 дает аналитические определения линий второго порядка.
Согласно п.2 замечаний 3.1, линии (1),(4),(5),(6),(7),(9) называются
вещественными (действительными), а линии (2),(3),(8) -мнимыми.
Приведем доказательство теоремы, поскольку оно фактически
содержит алгоритм решения поставленной задачи.
Без ограничения общности можно предполагать, что уравнение линии
второго порядка задано в прямоугольной системе координат Оху. В
противном случае можно перейти от непрямоугольной системы координат
Оххх2 к прямоугольной Оху (см. разд.2.2.2), при этом уравнение линии
будет иметь тот же вид и ту же степень согласно теореме 3.1 (см. разд.3.1.3).
Пусть в прямоугольной системе координат Оху алгебраическая линия
второго порядка задана уравнением
в котором хотя бы один из старших коэффициентов ап, а12, а22 отличен
от нуля, т.е. левая часть (3.34) - многочлен двух переменных х, у второй
степени. Коэффициенты при первых степенях переменных х и у, а также
при их произведении х • у взяты удвоенными просто для удобства
дальнейших преобразований.
Для приведения уравнения (3.34) к каноническому виду используются
следующие преобразования прямоугольных координат (см. разд.2.2.3):
{jt = *'cos<p
у-х -smcp
- поворот на угол ф \ , , (3.35)
•sin<p+;y cos<p;
- параллельный перенос \ ° / (3.36)
- изменение направлений координатных осей (отражения в
координатных осях):
255
оси ординат « , оси абсцисс < , обеих осей < , (3 У)\
[у=-у * [у = у* [y = -yi }
- переименование координатных осей (отражение в прямой у = х)
= У'/ (3.38)
= х,
где jc , у и jc , у - координаты произвольной точки в старой (Оху ) и новой
(Оху' ) системах координат соответственно.
Кроме преобразования координат обе части уравнения можно
умножать на отличное от нуля число.
Рассмотрим сначала частные случаи, когда уравнение (3.34) имеет вид:
(I): Л22
(П): Л2
(Ш): А,
Эти уравнения (также многочлены в левых частях) называются
приведенными. Покажем, что приведенные уравнения (1),(П),(Ш) сводятся к
каноническим (1)-(9).
Уравнение (I). Если в уравнении (I) свободный член равен нулю
(aQ =0), то, разделив обе части уравнения Х2 -у2 =0 на старший
коэффициент (А,2 Ф 0 ), получим у2 = 0 - уравнение двух совпадающих прямых (9),
содержащих ось абсцисс (у = 0). Если же свободный член отличен от нуля
(а0 *0), то разделим обе части уравнения (I) на старший коэффициент
(Х2 Ф 0 ): у2 +— = 0. Если величина —2- отрицательная, то, обозначив ее
Л2 Л2
через -Ь2, где i = J-Ta-, получаем у2"~*2=0 -уравнение пары парал-
лельных прямых (7): у = 6' или у = -Ь. Если же величина —^ положитель-
ная, то, обозначив ее через Ь2, где Ъ = J -г2-, получаем у2 + &2 = 0 - уравне-
f A2
поры мнимых параллельных прямых (8). Это уравнение не имеет
действительных решений, поэтому на координатной плоскости нет точек,
отвечающих этому уравнению. Однако в области комплексных чисел уравнение
у2 + Ь2 = 0 имеет два сопряженных решения y = ±ib9 которые
иллюстрируются штриховыми линиями (см. п.8 теоремы 3.3).
256
Уравнение (П). Разделим уравнение на старший коэффициент (Х2 Ф 0)
и перенесем линейный член в правую часть: у2 = --х. Если величина
Л2
3- отрицательная, то, обозначая р = —- > 0, получаем у2 = 2 • р • * -
Л2 А2
уравнение параболы (6). Если величина — положительная, то, изменяя на-
правление оси абсцисс, т.е. выполняя второе преобразование в (3.37),
получаем уравнение [у) =——-х или \yf=2-p-x\ где р=—>0. Это
л2 л2
уравнение параболы в новой системе координат Ох у .
Уравнение (Ш). Возможны два случая: либо старшие коэффициенты
одного знака (эллиптический случай), либо противоположных знаков
(гиперболический случай).
В эллиптическом случае (Х1 -Х2 >0) при а0Ф0 переносим
свободный член в правую часть и делим обе части на -а0 Ф 0:
(Ш) ^ V*2+Vy2=-flb » i.jc2
Если знак старших коэффициентов Xj Д2 противоположен знаку а0,
— д — л
то, обозначая положительные величины —2- и —2- через а и 6 , полу-
Aj A2
х2 у2
чаем —+—y = 1 -уравнение эллипса (1).
Если знак старших коэффициентов \Л2 совпадает со знаком а0, то,
обозначая положительные величины — и —2. через а2 и Ь2, получаем
Aj X2
jc2 у2 х2 у2
—= ;Г = 1 ^^ "^Г+"^Г = ~^ — уравнение мнимого эллипса (2). Это
а * а2 Ь
уравнение не имеет действительных решений. Однако оно имеет решения в
области комплексных чисел, которые иллюстрируются штриховой линией
(см. п.2 теоремы 3.3).
Можно считать, что в уравнениях эллипса (действительного или
мнимого) коэффициенты удовлетворяют неравенству а > Ъ, в противном случае
17-5150 257
этого можно добиться, переименовывая координатные оси, т.е. делая
преобразование (3.38) системы координат.
Бели свободный член уравнения (Ш) равен нулю (а0 = 0), то,
обозначая положительные величины т—г и -.—г через а2 и Ь2, получаем
11 2,2
iiiuivuiun хсшопшс; ngjininnoi | i И i i Через С "
ы га
x у
—:r+—= 0 -уравнение пары мнимых пересекающихся прямых (3). Этому
уравнению удовлетворяет только точка с координатами х = 0 и ;у = 0, т.е.
точка О - начало координат. Однако в области комплексных чисел левую
часть уравнения можно разложить на множители
х2 у2 (у . хЛ(у . х}
—=-+—г-= —+1 — Н 1— I, поэтому уравнение имеет сопряженные ре-
а2 Ъ2 \Ъ а) \Ъ а)
Ъ
шения y = ±i—х, которые иллюстрируются штриховыми линиями, пере-
а
секающимися в начале координат (см. п.З теоремы 3.3).
В гиперболическом случае (Хх -Х2 <0) при я0 * О переносим
свободный член в правую часть и делим обе части на -а0 Ф 0:
л 2,2 \ г К г
(Ш) <=> Хг-х2+Х2'у2 = -а0 <=> —1— х2+—Z~y2=1.
Величины —— и —2- имеют противоположные знаки. Без ограниче-
Ах А2
ния общности считаем, что знак Х2 совпадает со знаком свободного члена
а0, т.е. ——>0. В противном случае нужно переименовать координатные
оси, т.е. сделать преобразование (3.38) системы координат. Обозначая по-
~ао ао 2 »2 х2 У2 л
ложительные величины —— и —— через а и о , получаем ——j-l -
Aj А2 а Ь
уравнение гиперболы (4).
Пусть в уравнении (Ш) свободный член равен нулю (а0 =0). Тогда
можно считать, что Хг > 0, а Х2 < 0 (в противном случае обе части
уравнения умножим на -1). Обозначая положительные величины — и че-
Aj А2
рез а2 и i2, получаем —--^-т-0 -уравнение пары пересекающихся пря-
а Ъ
258
мых (5). Уравнения прямых находятся в результате разложения на множите-
х2 у2 (х \Л (х \Л л , Ь
ли левой части уравнения ——т- = ~ и —+т =0,т.е. у = ± — х.
а Ь \а Ъ) \а Ь) а
Таким образом, приведенные уравнения (1),(П),(Ш) алгебраической
линии второго порядка сводятся к одному из канонических видов (1) - (9),
перечисленных в теореме 3.3.
Осталось показать, что общее уравнение (3.34) можно свести к
приведенным при помощи преобразований прямоугольной системы координат.
Упрощение общего уравнения (3.34) производится в два этапа. На
первом этапе при помощи поворота системы координат "уничтожается" член с
произведением неизвестных. Если произведения неизвестных нет (ап = 0),
то поворот делать не надо (в этом случае переходим сразу ко второму
этапу). На втором этапе при помощи параллельного переноса "уничтожаются"
один или оба члена первой степени. В результате получаются приведенные
уравнения (1),(П),(Ш).
Первый этап: преобразование уравнения линии второго порядка при
повороте прямоугольной системы координат.
Если коэффициент ап Ф О, выполним поворот системы координат на
угол ф. Подставляя выражения (3.35) в уравнение (3.34), получаем:
Лцв1* совф-у sm(f) +2-ап -[х -
( ' . ' \2
+ а22 \Х #sm<P+J 'COStyJ •
Приводя подобные члены, приходим к уравнению вида (3.34):
а'п\х) +2-0^- х' • у + а'22\у) +2-ai-x' +2а'2-у +а'0=0 * (3.39)
где
ап =
2 . 2
8 ф-sin
а22 = аи" sin2 ф "~ 2 • Oj2 • со$ф - sin ф + а22 - cos2 ф;
а2 =-а1-8тф+а2-со8ф; а0 =а0-
Определим угол ф так, чтобы а12 = 0. Преобразуем выражение для ап,
переходя к двойному углу:
Угол ф должен удовлетворять однородному тригонометрическому
уравнению fl222g|1 • sin 2ф+Oj2 • cos2ф = 0, которое равносильно уравнению
17* 259
(3.40)
поскольку al2 Ф 0. Это уравнение имеет бесконечное количество корней
|-n,rae neZ.
Выберем любой из них, например, угол ф из интервала 0<<р<~. Тогда в
уравнении (3.39) исчезнет член 2-а'п-х -у\ поскольку а12=0. Обозначив
оставшиеся старшие коэффициенты через \=а'п и \2=а'22, получим
уравнение
(/)2(/)2'//O. (3.41)
Согласно теореме 3.1, уравнение (3.41) является уравнением второй
степени (при преобразовании (3.35) порядок линии сохраняется), т.е. хотя
бы один из старших коэффициентов кг или Х2 отличен от нуля. Далее
будем считать, что именно коэффициент при (у) не равен нулю (Х2ф0). В
противном случае (при Х2 = 0 и \г*0) следует сделать поворот системы
координат на угол ф+-|, который также удовлетворяет условию (3.40).
Тогда вместо координат х ,у в (3.41) получим у\-х соответственно, т.е.
отличный от нуля коэффициент А,х будет при (у) .
Второй этап: преобразование уравнения линии второго порядка при
параллельном переносе прямоугольной системы координат.
Уравнение (3.41) можно упростить, выделяя полные квадраты. Нужно
рассмотреть два случая: Хг Ф 0 или Хх=0 (согласно предположению
Л2 *0), которые называются центральный (включающий эллиптический и
гиперболический случаи) или параболический соответственно.
Геометрический смысл этих названий раскрывается в дальнейшем.
Центральный случай: Х{±0 и Л2 Ф 0. Выделяя полные квадраты по
переменным х , у , получаем
= 0 «=>
260
<=* V дм
/ \2 f ' \2 /
ут-\ -V тЧ -V
После замены переменных
jc = д:
получаем уравнение
(3.42)
(3.43)
Параболический случай: Хх = 0 и Х2 Ф 0. Выделяя полный квадрат по
переменной у , получаем
+ао=О
(3.44)
Если а[ Ф 0, то последнее уравнение приводится к виду
=0.
Сделав замену переменных
JC —» *
получим
. / //V2 // //
Х2\у f+2'Oi-x =0,
где Oj = Oj.
Если о. = 0, то уравнение (3.44) приводится к виду
(3.45)
(3.46)
261
(3.47)
// /
x —x ,
// / До (3.48)
У = У+т^-
Л2
Замены переменных (3.42), (3.45), (3.48) соответствуют параллельному
переносу системы координат Ох у (см. п. Га" замечаний 2.3).
Таким образом, при помощи параллельного переноса системы
координат Ох'у получаем новую систему координат о"х"у", в которой уравнение
линии второго порядка принимает вид (3.43), или (3.46), или (3.47). Эти
уравнения являются приведенными (вида (Ш),(П) или (I) соответственно).
Основная теорема 3.3 о приведении уравнения алгебраической линии
второго порядка к каноническому виду доказана.
Замечания 3.8.
1. Система координат, в которой уравнение алгебраической линии
второго порядка имеет канонический вид, называется канонической.
Каноническая система координат определяется неоднозначно. Например, изменяя
направление оси ординат на противоположное, снова получаем
каноническую систему координат, так как замена переменной у на (- у) не изменяет
уравнений (1) - (9). Поэтому ориентация канонической системы координат
не имеет принципиального значения, ее всегда можно сделать правой,
изменив при необходимости направление оси ординат.
2. В разделе 2.2.3 показано, что преобразования прямоугольных систем
координат на плоскости сводятся к одному из преобразований (2.9) или
(2.10):
'
jt'cos(p-;y'sin<p, Jjt = jt0+x/-cos<p+/-sin<p,
'Z [;y = ;y0+jii;/-sm<p-/-cos<p.
Поэтому задача приведения уравнения линии второго порядка к
каноническому виду сводится к нахождению начала О\х0, у0) канонической системы
координат О'ху и угла <р наклона ее оси абсцисс ОV к оси абсцисс Ох
исходной системы координат Оху.
3. В случаях (3),(5),(7),(8),(9) линии называются распадающимися,
поскольку соответствующие им многочлены второй степени разлагаются в
произведение многочленов первой степени.
262
ПОРЯДОК ПРИВЕДЕНИЯ УРАВНЕНИЯ ЛИНИИ ВТОРОГО ПОРЯДКА
К КАНОНИЧЕСКОМУ ВИДУ
Пусть в прямоугольной системе координат Оху алгебраическая линия
второго порядка задана уравнением (3.34):
Чтобы привести уравнение к каноническому виду, нужно выполнить
следующие действия.
1. Если в уравнении имеется член с произведением неизвестных
(а12 Ф О), то делаем поворот системы координат:
х = x'-coscp- y'-sincp,
на угол ф (0<ф<-|-)> удовлетворяющий равенству ctg2ф = °12 п72 . При
этом получим "почти" приведенное уравнение линии второго порядка:
Если а12 = 0, переходим к п.2, поворот системы координат делать не
нужно, так как исходное уравнение имеет "почти" приведенный вид.
2. Выполняем параллельный перенос системы координат:
а) если в уравнении нет линейных членов, то переходим к п.З;
б) если в уравнении имеется линейный член с какой-либо
неизвестной и квадратичный член с этой же неизвестной, то, дополняя эти члены до
полного квадрата, делаем замену, чтобы в уравнении не стало линейного
члена с этой неизвестной. Например, если в уравнении Х1*0 и о^*0, то
выполняем преобразования:
а затем замену неизвестных х" = х + ^f-, у" = у , после которой в уравнении
не будет линейного члена с неизвестной х';
в) если в уравнении имеется только один линейный член с какой-
либо неизвестной, а квадрат этой неизвестной отсутствует, то при помощи
замены этой переменной надо сделать равным нулю свободный член
уравнения. Например, если уравнение имеет вид
то, выполняя замену неизвестных х = *, у = у+<г^зг» получаем
уравнение без свободного члена: Хх • \x"j + 2 • а'2 • у' = 0.
263
3. Полученное в результате упрощений (п.2) уравнение имеет "почти"
канонический вид [9]. Для окончательного упрощения "почти"
канонического уравнения при необходимости применяются следующие преобразования:
а) переименование координатных осей: х' = у"\у = х';
б) изменение направления координатной оси, например оси абсцисс:
х = -х ,у =у ;
в) умножение обеих частей уравнения на отличный от нуля
множитель;
г) перенос членов из одной части уравнения в другую.
В результате этих преобразований уравнение приводится к
каноническому виду. Замену неизвестных, приводящую уравнение поверхности к
каноническому виду, определяем как композицию всех замен, применяемых в
ходе решения.
Пример 3.19. В прямоугольной системе координат Оху заданы
уравнения алгебраических линий второго порядка:
а) х2-у2-4-х+6-у-5 = 0;
б) jc2
в) 3-
г) 52*2+72*;у + 73;у2-280я:-29();у+ 325 = 0.
Каждое уравнение привести к каноническому виду. Указать связь между
исходной и канонической системами координат.
D а) Сравнивая заданное уравнение с общим уравнением (3.34),
находим коэффициенты ап=1, а12=0, а22=-1, ^=-2, а2=3, ао=-5.
1. Поскольку а12 = 0, поворот системы координат делать не нужно.
2. В уравнении имеются квадраты обеих неизвестных. Преобразуем
левую часть заданного уравнения, выделяя полные квадраты:
Следовательно, уравнение можно записать в виде (х-2) ~-{у—3) =0.
Делая замену
{х' = х-29 (;t = jc'+2,
< , или, выражая старые координаты через новые: \ ,
[у =у-з, [у = у +з,
/ /V2 / /V2
получаем ^-j—* * =0 - каноническое уравнение пары пересекающихся
прямых (см. уравнение (5) в теореме 3.3 при а = Ъ = 1). В данном случае п.З
алгоритма не выполняется.
264
б) Сравнивая заданное уравнение с общим уравнением (3.34), находим
коэффициенты яи=1, Д12=0> а22=0> а\ = "~2' а2 = 2' ао = 4-
1. Поскольку в заданном уравнении нет произведения неизвестных
(ап = 0), то уравнение имеет "почти" приведенный вид.
2. Выделяя полный квадрат по неизвестной х, получаем
Делая замену
х = -у,
, или, выражая старые координаты через новые:
У =х-2,
получаем \у[ =2-2 х - каноническое уравнение параболы (см. уравнение
(6) в теореме 3.3 при р = 2 ).
в) Сравнивая заданное уравнение с общим уравнением (3.34), находим
коэффициенты яп=3, а12=5, а22=3, ^=0, а2=0, ао=8.
1. В заданном уравнении имеется произведение неизвестных
(я12 =5*0), поэтому необходимо сделать поворот системы координат.
Величину ф угла поворота находим по формуле (3.40):
я,, — а** 3—3 Л
ctg2<p=-3J и= __=0,
2 • Oj2 2 • 5
т.е. ф = -у, учитывая ограничение 0 < ф < -|. При повороте системы
координат на угол 9 = j старые координаты выражаются через новые по
формулам (3.35):
Подставляя их в левую часть заданного уравнения, получаем
3.(4-4/)!+.o.(4/-4/).(4,-+f/)+
Раскрываем скобки и приводим подобные члены:
2. Так как линейные члены отсутствуют, то параллельный перенос
системы координат делать не нужно.
3. Переносим свободный член в правую часть и делим обе части
уравнения на (-8):
26S
I2 22
Осталось поменять названия координатных осей, т.е. сделать замену
, „ после которой получаем •*-£—v J =1 -
у х 22 I2
X = V
, „ после которой получаем -»-^—Y ' = 1 - каноническое уравне-
у =х , 22 I2
ние гиперболы (см. уравнение (4) в теореме 3.3 при а = 2,Ь = 1). Найдем
формулы перехода от исходной системы координат Оху к канонической
Г '— "
Ох'у". Подставляя \ , „' в формулы поворота на угол ф = 4, получаем
[У=х
г) Сравнивая заданное уравнение с общим уравнением (3.34), находим
коэффициенты ^=52, а12=36, а22=73, ^=-140, а2=-145, ао = 325.
1. В заданном уравнении имеется произведение неизвестных
(а12=36*0), поэтому необходимо сделать поворот системы координат.
Величину ф угла поворота находим по формуле (3.40):
52-73 -21 7
ctg2a>=.
6 2-a12 2-36 72 24
l-tg2o l-tg2a> 7
Так как ^2ф = 2-JL, то из уравнения 2—!-- = находим тангенс
2tgq> 2tg(p 24
, то из уравнения
2-tgq> 2tg(p 24
искомого угла: 24^2ф-14^ф-24 = 0 <=» tgф = ~ или tg9=у.
Ограничению 0<ф<-|- удовлетворяет острый угол ф = агс1§-|. Вычисляем
\ 1 3 . Г — 4
= J т-=—» япф = у 1-cos ф=— и делаем замену:
V 1 + tg^ 5 5
[У 5 Л +5 У '
соответствующую повороту (3.35) на угол ф = arctg j. Получаем уравнение
-280-(f -jc'-f. /)-290-(f •x/+i-/)+ 325 = 0.
Раскрываем скобки и приводим подобные члены:
52.9+72.12+7М6 Л/У 52(-24)+72-(9-1б)+73.24 / ' 5246+72f-12)+73£
25 \/ 25 " л • ^ т 25
-2803-29Q.4 / -280(-4)-290.3
266
Получили приведенное уравнение (III).
2. "Уничтожаем" линейные члены, выделяя полные квадраты:
100-(jc/-2f+25-(/+l)2-400-25 + 325 = 0 <=>
<=> 100(/-2f+25-(/+l)2-100=0.
После замены
* = х -2, * = х +2,
„ , или, выражая старые координаты через новые: < , „
У =У +1. I У =У -U
получаем 100 (x"f + 25 (y"f -100=0.
3. Переносим свободный член в правую часть и делим обе части
уравнения на 100:
Ш.,
I2 22
Это уравнение похоже на каноническое уравнение эллипса (см. уравнение
(1) в теореме 3.3 при а = \ и 6 = 2). Однако, его коэффициенты не
удовлетворяют неравенству а>Ь. Поэтому необходимо переименовать коорди-
х =у ,
// ///
У =х ,
натные оси, т.е. сделать замену < „ ,„ после которой получаем кано-
ническое уравнение эллипса ^ £ + Y 2f = 1.
Формулы перехода от исходной системы координат Оху к
канонической получаем как композицию преобразований прямоугольных координат,
3 ' 4 '
JC= —' X ——-у
JC X у
\ , \ / выражения параллельно-
V X + V
го переноса \ , „ 'а затем - отражения \ ~ „ J ,„' Первая подста-
[У =У -1.
[х~-у~.
\у" = х'".
новка дает:
х"-±.у"
вторая подстановка дает искомую связь
!. j m \ err
x = 2-j-x Ц.у ,
y = l+fx +f-y .
267
3.3.2. Эллипс
ФОКАЛЬНОЕ СВОЙСТВО ЭЛЛИПСА
Эллипсом называется геометрическое место точек плоскости, сумма
расстояний от каждой из которых до двух заданных точек Fx и F2 есть
величина постоянная (2а), ббльшая расстояния (2с) между этими заданными
точками (рис.3.36,я). Это геометрическое определение выражает фокальное
свойство эллипса.
Точки Fj и F2 называются фокусами эллипса, расстояние между ними
2c = FjF2 - фокусным расстоянием, середина О отрезка FXF2 -центром
эллипса, число 2а - длиной большой оси эллипса (соответственно, число а
- большой полуосью эллипса). Отрезки FXM и F2M , соединяющие
произвольную точку М эллипса с его фокусами, называются фокальными
радиусами точки М . Отрезок, соединяющий две точки эллипса, называется
хордой эллипса.
Отношение £ = — называется эксцентриситетом эллипса. Из опре-
а
деления (2а>2с) следует, что 0<е<1.При е = 0,т.е. при с = 0, фокусы
F1 и F2, а также центр О совпадают, и эллипс является окружностью
радиуса а (рис.3.3б,б).
Геометрическое определение эллипса, выражающее его фокальное
свойство, эквивалентно его аналитическому определению - линии,
задаваемой каноническим уравнением эллипса:
4+4-»-
а2 Ъг
(3.49)
Эллипс
Окружность
268
Действительно, введем прямоугольную систему координат (рис.3.36,*).
Центр О эллипса примем за начало системы координат; прямую,
проходящую через фокусы (фокальную ось или первую ось эллипса), примем за ось
абсцисс (положительное направление на ней от точки Fx к точке F2)\
прямую, перпендикулярную фокальной оси и проходящую через центр эллипса
(вторую ось эллипса), примем за ось ординат (направление на оси ординат
выбирается так, чтобы прямоугольная система координат Оху оказалась
правой).
Составим уравнение эллипса, пользуясь его геометрическим
определением, выражающим фокальное свойство. В выбранной системе координат
определяем координаты фокусов ^(-с,0), F2(c, О). Для произвольной
точки М (х,у), принадлежащей эллипсу, имеем:
Записывая это равенство в координатной форме, получаем:
x+cf + у2 +J (x-cf + у2 =2а.
Переносим второй радикал в правую часть, возводим обе части уравнения в
квадрат и приводим подобные члены:
(x+cf + y2 =4-a2 -4-a-<J {x-cf + y2 +(x-cf + у2
Разделив на 4, возводим обе части уравнения в квадрат:
a2-(x-cf+a2-y2=a4-2'a2-c-x + c2-x2 »
^ {а2-с2\х2+а2-у2=а2\а2-с2\
Обозначив & = уа2-с2 >0, получаем Ь2 х2+ а2-у2 =а2 Ь2. Разделив обе
части на а2 - Ъ2 Ф О, приходим к каноническому уравнению эллипса:
"^2"+ЬГ= "
Следовательно, выбранная система координат является канонической.
Бели фокусы эллипса совпадают, то эллипс представляет собой
окружность (рис.3.36,6), поскольку а = Ъ. В этом случае канонической будет
любая прямоугольная система координат с началом в точке OsFjsF2, a
уравнение
х2 + у2 = а2
является уравнением окружности с центром в точке О и радиусом,
равным а.
269
Проводя рассуждения в обратном порядке, можно показать, что все
точки, координаты которых удовлетворяют уравнению (3.49), и только они,
принадлежат геометрическому месту точек, называемому эллипсом.
Другими словами, аналитическое определение эллипса эквивалентно его
геометрическому определению, выражающему фокальное свойство эллипса.
ДИРЕКТОРИАЛЬНОЕ СВОЙСТВО ЭЛЛИПСА
Директрисами эллипса называются две прямые, проходящие
параллельно оси ординат канонической системы координат на одинаковом
расстоянии -^- от нее. При с = 0, когда эллипс является окружностью,
директрис нет (можно считать, что директрисы бесконечно удалены).
Эллипс с эксцентриситетом 0 < е < 1 можно определить, как
геометрическое место точек плоскости, для каждой из которых отношение
расстояния до заданной точки F {фокуса) к расстоянию до заданной прямой
d {директрисы), не проходящей через заданную точку; постоянно и равно
эксцентриситету е {директориальное свойство эллипса). Здесь F и d -
один из фокусов эллипса и одна из его директрис, расположенные по одну
сторону от оси ординат канонической системы координат, т.е. Fl,dl или
В самом деле, например, для фокуса F2 и директрисы d2 (рис.3.37,6)
условие — = е можно записать в координатной форме:
Избавляясь от иррациональности и заменяя е=~, а2 -с2 = Ъ1, приходим к
каноническому уравнению эллипса (3.49). Аналогичные рассуждения можно
провести для фокуса Ft и директрисы dx: — = е.
270
УРАВНЕНИЕ ЭЛЛИПСА В ПОЛЯРНОЙ СИСТЕМЕ КООРДИНАТ
Уравнение эллипса в полярной системе координат Fxr(p (рис.3.37,в)
имеет вид
l-e-cos<p'
Ъ2
где р= фокальный параметр эллипса.
а
В самом деле, выберем в качестве полюса полярной системы
координат левый фокус Fj эллипса, а в качестве полярной оси - луч FXF2
(рис.3.37,в). Тогда для произвольной точки м(г,ф), согласно
геометрическому определению (фокальному свойству) эллипса, имеем r + MF2=2a.
Выражаем расстояние между точками Af(r,<p) и F2(2c,0) (см. п.2
замечаний 2.8):
F2M =
Следовательно, в координатной форме уравнение эллипса FXM + F2M = la
имеет вид
r2-4crcos<p+4c2 = 2a.
Уединяем радикал, возводим обе части уравнения в квадрат, делим на 4 и
приводим подобные члены:
r2-4-cr-cos<p+4-c2=4-a2-4-a-r + r2 <=> a-ll—•
Выражаем полярный радиус г и делаем замену е =—, Ь2 =а2 -с2, р =—:
Л2 „2 А2
Г= т г <=> Г= т г «=> Г= ,
что и требовалось доказать.
ГЕОМЕТРИЧЕСКИЙ СМЫСЛ КОЭФФИЦИЕНТОВ В УРАВНЕНИИ ЭЛЛИПСА
Найдем точки пересечения эллипса (см. рис.3.37,а) с координатными
осями (вершины эллипса). Подставляя в уравнение у = 0, находим точки
пересечения эллипса с осью абсцисс (с фокальной осью): х = ±а.
Следовательно, длина отрезка фокальной оси, заключенного внутри эллипса, равна
2а. Этот отрезок, как отмечено выше, называется большой осью эллипса, а
число а - большой полуосью эллипса. Подставляя jc = O, получаем
у = ±Ь. Следовательно, длина отрезка второй оси эллипса, заключенного
271
внутри эллипса, равна 2Ь. Этот отрезок называется малой осью эллипса, а
число Ъ - малой полуосью эллипса.
Действительно, Ь = уа2-с2<уа2=а, причем равенство Ь = а
получается только в случае с = 0, когда эллипс является окружностью.
Отношение к=—<\ называется коэффициентом сжатия эллипса,
а
Замечания 3.9.
1. Прямые х = ±а , у = ±Ь ограничивают на координатной плоскости
основной прямоугольник, внутри которого находится эллипс (см.
рис.3.37,а).
2. Эллипс можно определить, как геометрическое место точек,
получаемое в результате сжатия окружности к ее диаметру.
Действительно, пусть в прямоугольной системе координат Оху
уравнение окружности имеет вид х2 + у1 = а2. При сжатии к оси абсцисс с
коэффициентом 0<&<1 (см. разд.2.2.4) координаты произвольной точки
М(jc, у), принадлежащей окружности, изменяются по закону
J х' = х,
\у'=к-у.
Подставляя в уравнение окружности х = х и y=j--y , получаем уравнение
для координат образа М'(*', у) точки М (х, у):
ИИ- -
поскольку b = k-a . Это каноническое уравнение эллипса.
3. Координатные оси (канонической системы координат) являются
осями симметрии эллипса (называются главными осями эллипса), а его
центр - центром симметрии.
2 2
Действительно, если точка М (х,у) принадлежит эллипсу —+-^г- = 1,
а Ъ
то и точки м\х,-у) и м"(-х,у), симметричные точке М относительно
координатных осей, также принадлежат тому же эллипсу.
р
4. Из уравнения эллипса в полярной системе координат г =
l-£-cos<p
(см. рис.3.37,в), выясняется геометрический смысл фокального параметра -
это половина длины хорды эллипса, проходящей через его фокус
перпендикулярно фокальной оси (г = р при Ф = f).
272
= eo<el<e2<\
Xjzy
У1
Уо
о\
ъ
(^.
V °'
У
)а
X
Рис.3.38
5. Эксцентриситет е характеризует форму эллипса, а именно отличие
эллипса от окружности. Чем больше е, тем эллипс более вытянут, а чем
ближе е к нулю, тем ближе эллипс к окружности (рис.3.38,а).
Действительно, учитывая, что е =— и с2 = а2 -б2, получаем
I
где к - коэффициент сжатия эллипса, 0<*<1. Следовательно,
£ = V l-£2 . Чем больше сжат эллипс по сравнению с окружностью, тем
меньше коэффициент сжатия к и больше эксцентриситет. Для окружности
х2 у2
б. Уравнение -rr+-ir- = l при а<Ъ определяет эллипс, фокусы кото-
ar b2
рого расположены на оси Оу (рис.3.38,6). Это уравнение сводится к
каноническому при помощи переименования координатных осей (3.38).
7. Уравнение
= 1, а >Ь, определяет эллипс с цен-
тром в точке О\х0,у0), оси которого параллельны координатным осям
(рис.3.38,в). Это уравнение сводится к каноническому при помощи
параллельного переноса (3.36).
При а = 6 = /? уравнение {x-x^f i-iy-y^f =R2 описывает
окружность радиуса R с центром в точке О'(х0 ,у0).
&. Параметрическое уравнение эллипса в канонической системе
координат имеет вид
18 — 5150 273
' 0<t<2n.
Действительно, подставляя эти выражения в уравнение (3.49),
приходим к основному тригонометрическому тождеству cos21 + sin21 = 1.
Пример 3.20. Изобразить эллипс
х2 У2 .
—г-+-=гг- = 1 в канонической системе ко-
22 Х2
ординат Оху. Найти полуоси, фокусное
расстояние, эксцентриситет, коэффициент
сжатия, фокальный параметр, уравнения
директрис.
Рис 3 4Q "г х-
U Сравнивая заданное уравнение с
каноническим, определяем полуоси:
а = 2 - большая полуось, 6 = 1- малая полуось эллипса. Строим основной
прямоугольник со сторонами 2а = 4, 2Ъ-2 с центром в начале координат
(рис.3.39). Учитывая симметричность эллипса, вписываем его в основной
прямоугольник. При необходимости определяем координаты некоторых
точек эллипса. Например, подставляя jc = 1 в уравнение эллипса, получаем
^-^г = 1 <^> у1 -\ <=* у = i*2^- • Следовательно, точки с координатами
f 1, Ц- ], 11, -^ I принадлежат эллипсу.
Вычисляем коэффициент сжатия *=7="2; ФокУсное расстояние
2c = 2<Ja2-b2 =2-V22-l2 =2^3; эксцентриситет е=±=&;
фокальный параметр р=—=-^-=-|.. Составляем уравнения директрис: * = ± —
3.3.3. Гипербола
ФОКАЛЬНОЕ СВОЙСТВО ГИПЕРБОЛЫ
Гиперболой называется геометрическое место точек плоскости, модуль
разности расстояний от каждой из которых до двух заданных точек F{ и F2
есть величина постоянная (2а), меньшая расстояния (2с) между этими
заданными точками (рис.3.40,а). Это геометрическое определение выражает
фокальное свойство гиперболы.
274
Точки F{ и F2 называются фокусами гиперболы, расстояние
2с = FXF2 между ними - фокусным расстоянием, середина О отрезка
FXF2 - центром гиперболы, число 2а - длиной действительной оси
гиперболы (соответственно, а - действительной полуосью гиперболы).
Отрезки FXM и F2M , соединяющие произвольную точку М гиперболы с ее
фокусами, называются фокальными радиусами точки М . Отрезок,
соединяющий две точки гиперболы, называется хордой гиперболы.
Гипербола
2a
2c
\
\
-cJ-
-
^^
a
F2M\\ = 2a
Рис.3.40
Отношение е-— называется эксцентриситетом гиперболы. Из оп-
а
ределения(2а<2с)следует,что е>1.
Геометрическое определение гиперболы, выражающее ее фокальное
свойство, эквивалентно ее аналитическому определению - линии,
задаваемой каноническим уравнением гиперболы:
Действительно, введем прямоугольную систему координат (рис.3.40,6).
Центр О гиперболы примем за начало системы координат; прямую,
проходящую через фокусы {фокальную ось), примем за ось абсцисс
(положительное направление на ней от точки Fx к точке F2); прямую,
перпендикулярную оси абсцисс и проходящую через центр гиперболы, примем за ось
ординат (направление на оси ординат выбирается так, чтобы прямоугольная
система координат Оху оказалась правой).
Составим уравнение гиперболы, используя геометрическое
определение, выражающее фокальное свойство. В выбранной системе координат
определяем координаты фокусов Fj(-c,O), F2(c,0). Для произвольной точки
М(х, у), принадлежащей гиперболе, имеем:
18* 275
-If2m|| = :
Записывая это уравнение в координатной форме, получаем:
Выполняя преобразования, аналогичные преобразованиям, используемым
при выводе уравнения эллипса (т.е. избавляясь от иррациональности),
приходим к каноническому уравнению гиперболы:
х2 У2 ,
где Ъ = у с2 -а1 , т.е. выбранная система координат является канонической.
Проводя рассуждения в обратном порядке, можно показать, что все
точки, координаты которых удовлетворяют уравнению (3.S0), и только они,
принадлежат геометрическому месту точек, называемому гиперболой.
Таким образом, аналитическое определение гиперболы эквивалентно его
геометрическому определению.
ДИРЕКТОРИАЛЬНОЕ СВОЙСТВО ГИПЕРБОЛЫ
Директрисами гиперболы называются две прямые, проходящие
параллельно оси ординат канонической системы координат на одинаковом
а2
расстоянии — от нее (рис.3.41,д). При а = О, когда гипербола вырождается
с
в пару пересекающихся прямых, директрисы совпадают.
Рис.3.41
Гиперболу с эксцентриситетом е>\ можно определить, как
геометрическое место точек плоскости, для каждой из которых отношение
расстояния до заданной точки F (фокуса) к расстоянию до заданной прямой
d (директрисы), не проходящей через заданную точку, постоянно и равно
эксцентриситету е (директориальное свойство гиперболы). Здесь F и
276
d - один из фокусов гиперболы и одна из ее директрис, расположенные по
одну сторону от оси ординат канонической системы координат.
В самом деле, например, для фокуса F2 и директрисы d2 (рис.3.41,а)
условие — = е можно записать в координатной форме:
Р
Избавляясь от иррациональности и заменяя е=—, с2 -я2 =Ь2, приходим к
каноническому уравнению гиперболы (3.50). Аналогичные рассуждения
можно провести для фокуса Fx и директрисы dx:
Pi
УРАВНЕНИЕ ГИПЕРБОЛЫ В ПОЛЯРНОЙ СИСТЕМЕ КООРДИНАТ
Уравнение правой ветви гиперболы в полярной системе координат
F2 гф (рис.3.41,6) имеет вид
r P
l-e-cos<p
где р= фокальный параметр гиперболы.
а
В самом деле, выберем в качестве полюса полярной системы
координат правый фокус F2 гиперболы, а в качестве полярной оси - луч с началом
в точке F2, принадлежащий прямой F{F2, но не содержащий точки Fx
(рис.3.41,6). Тогда для произвольной точки М(г,ф), принадлежащей правой
ветви гиперболы, согласно геометрическому определению (фокальному
свойству) гиперболы, имеем FlM-r = 2a. Выражаем расстояние между
точками М(г,ф) и ^(2с,я) (см. п.2 замечаний 2.8):
FXM =
Следовательно, в координатной форме уравнение гиперболы имеет вид
2 -г-2а.
Уединяем радикал, возводим обе части уравнения в квадрат, делим на 4 и
приводим подобные члены:
277
- 1-—coscp -r = c2-a2.
К * )
b2
Выражаем полярный радиус г и делаем замены е = —, Ъ2 = с2 - а2, /> =—:
a a
с2-a2 b2
щ ^» . . %^^^ щ ^» """^Т""^^^""1^^^^^ \^^ * "^
a-(l-£-cos<p) tf-(l-£-cos<p) 1-e-coscp'
что и требовалось доказать. Заметим, что в полярных координатах
уравнения гиперболы и эллипса совпадают, но описывают разные линии,
поскольку отличаются эксцентриситетами (е > 1 для гиперболы, 0 < е < 1 для
эллипса).
ГЕОМЕТРИЧЕСКИЙ СМЫСЛ КОЭФФИЦИЕНТОВ В УРАВНЕНИИ ГИПЕРБОЛЫ
Найдем точки пересечения гиперболы (рис.3.42,а) с осью абсцисс
{вершины гиперболы). Подставляя в уравнение у = 0, находим абсциссы точек
пересечения: х = ±а. Следовательно, вершины имеют координаты (-а, 0),
(а,О). Длина отрезка, соединяющего вершины, равна 2а. Этот отрезок
называется действительной осью гиперболы, а число а -
действительной полуосью гиперболы. Подставляя х = 0, получаем y = ±i-b.
Длина отрезка оси ординат, соединяющего точки (0,-b), (0,2>), равна 2Ь. Этот
отрезок называется мнимой осью гиперболы, а число b - мнимой
полуосью гиперболы. Гипербола пересекает прямую, содержащую
действительную ось, и не пересекает прямую, содержащую мнимую ось.
Замечания ЗЛО.
1. Прямые jc = ±a, y = ±b ограничивают на координатной плоскости
основной прямоугольник, вне которого находится гипербола (рис.3.42,а).
2. Прямые у = ±—х, содержащие диагонали основного прямоуголь-
а
ника, называются асимптотами гиперболы (рис.3.42,а).
Для равносторонней гиперболы, описываемой уравнением
х2 у2
——^5" = 1 (т.е. при а = Ь), основной прямоугольник является квадратом,
а а
диагонали которого перпендикулярны. Поэтому асимптоты равносторонней
гиперболы также перпендикулярны, и их можно взять в качестве
координатных осей прямоугольной системы координат Ох'у (рис.3.42,6). В этой
системе координат уравнение гиперболы имеет вид у '= 7 (гипербола
£ * X
278
совпадает с графиком элементарной функции, выражающей обратно-
пропорциональную зависимость).
= £.
Рис.3.42
В самом деле, повернем каноническую систему координат на угол
Ф = - j (рис.3.42,6). При этом координаты точки в старой и новой системах
координат связаны равенствами
х2 у2
Подставляя эти выражения в уравнение ~t~':V=1 равносторонней гипер-
а а
болы и приводя подобные члены, получаем
2
=1
-у =
у= 7
2-х
3. Координатные оси (канонической системы координат) являются
осями симметрии гиперболы (называются главными осями гиперболы), а
ее центр - центром симметрии.
Действительно, если точка М(х,у) принадлежит гиперболе
х2 у2
—=—^- = 1, то и точки М\хь-у) и м"(-х,у)9 симметричные точке М
а Ь
относительно координатных осей, также принадлежат той же гиперболе.
Ось симметрии, на которой располагаются фокусы гиперболы,
является фокальной осью.
4. Из уравнения гиперболы в полярных координатах г=
l-e-cos<p
(см. рис.3.41,6) выясняется геометрический смысл фокального параметра -
279
это половина длины хорды гиперболы, проходящей через ее фокус
перпендикулярно фокальной оси (г = р при ф = f )•
5* Эксцентриситет е характеризует форму гиперболы. Чем больше е,
тем шире ветви гиперболы, а чем ближе е к единице, тем ветви гиперболы
£ке (рис.3.43,а).
Действительно, величина у угла между асимптотами гиперболы,
содержащего ее ветвь, определяется отношением сторон основного
прямоугольника: tg—=-—. Учитывая, что е =— и с2 = а2 +Ъг, получаем
2 а а
2
Чем больше е, тем больше угол у. Для равносторонней гиперболы ( а = 6 )
имеем е = ^2 и у=-|. Для е>^2 угол у тупой, а для \<е<ы2 угол у
острый (рис.3.43,а).
Рис.3.43
б. Две гиперболы, определяемые в одной и той же системе координат
х2 у2 jc2 у2
уравнениями —-—=V = 1 и —г-ч-^т-25!» называются сопряженными друг
а Ъ а Ъ
с другом. Сопряженные гиперболы имеют одни и те же асимптоты
х1 у2
(рис.3.43,6). Уравнение сопряженной гиперболы —г+~г- = 1 приводится
ar bz
к каноническому при помощи переименования координатных осей (3.38).
280
7. Уравнение
= 1 определяет гиперболу с центром в
точке О'{х09у0), оси которой параллельны координатным осям (рис.3.43,в).
Это уравнение сводится к каноническому при помощи параллельного
переноса (3.36). Уравнение - l*~*of+(?-
а
гиперболу с центром в точке О\х0, у0).
= 1 определяет сопряженную
8. Параметрическое уравнение гиперболы в канонической системе
координат имеет вид
{;::
teR,
где chf = гиперболический косинус, a. shf =
гиперболический синус.
Действительно, подставляя выражения координат в уравнение (3.50),
приходим к основному гиперболическому тождеству ch2t - sh2f = 1.
х2 у2
Пример 3.21. Изобразить гиперболу — —^" = 1 в канонической сие-
теме координат Оху. Найти полуоси, фокусное расстояние, эксцентриситет,
фокальный параметр, уравнения асимптот и директрис.
D Сравнивая заданное уравнение с
каноническим, определяем полуоси: a = 2 - действительная
полуось, Ь = 3 - мнимая полуось гиперболы. Строим
основной прямоугольник со сторонами 2а = 4, 2Ь = 6
с центром в начале координат (рис.3.44). Проводим
асимптоты, продлевая диагонали основного
прямоугольника. Строим гиперболу, учитывая ее
симметричность относительно координатных осей. При
необходимости определяем координаты некоторых точек
гиперболы. Например, подставляя х = 4 в уравнение
гиперболы, получаем -^—^Г = 1 *^ у2 =27 <=>
3> = ±3-V3. Следовательно, точки с координатами [4,3-V3], [4,-3-V3J
принадлежат гиперболе. Вычисляем фокусное расстояние
= 2-v22 + 32 =2j\b ; эксцентриситет *=7= 2 ; Фокаль"
281
Рис.3.44
ный параметр р = «^-=-у = 4,5. Составляем уравнения асимптот у = ±—• х,
= ±~х, и уравнения директрис: дг = ±-^- <=> * = ±-4=
т.е. у = ±~х, и уравнения директрис: дг = ±-^- <=> * = ±-4=г. ■
3.3.4. Парабола
ДИРЕКТОРИАЛЬНОЕ СВОЙСТВО ПАРАБОЛЫ
Параболой называется геометрическое место точек плоскости,
равноудаленных от заданной точки F и заданной прямой d, не проходящей
через заданную точку. Это геометрическое определение выражает
директориальное свойство параболы.
Точка F называется фокусом параболы, прямая d - директрисой
параболы, середина О перпендикуляра, опущенного из фокуса на
директрису, - вершиной параболы, расстояние р от фокуса до директрисы -
параметром параболы, а расстояние ~ от вершины параболы до ее фокуса -
фокусным расстоянием (рис.3.45,а). Прямая, перпендикулярная
директрисе и проходящая через фокус, называется осью параболы (фокальной осью
параболы). Отрезок FM , соединяющий произвольную точку М параболы
с ее фокусом, называется фокальным радиусом точки М . Отрезок,
соединяющий две точки параболы, называемся хордой параболы.
Для произвольной точки параболы отношение расстояния до фокуса к
расстоянию до директрисы равно единице. Сравнивая директориальные
свойства эллипса (см. разд.3.3.2), гиперболы (см. разд.3.3.3) и параболы,
заключаем, что эксцентриситет параболы по определению равен единице
(* = 1).
Геометрическое определение параболы, выражающее ее директори-
альное свойство, эквивалентно ее аналитическому определению -линии,
задаваемой каноническим уравнением параболы:
у2=2.рх. (3.51)
Действительно, введем прямоугольную систему координат (рис.3.45,6).
Вершину О параболы примем за начало системы координат; прямую,
проходящую через фокус перпендикулярно директрисе, примем за ось абсцисс
(положительное направление на ней от точки О к точке F ); прямую,
перпендикулярную оси абсцисс и проходящую через вершину параболы,
примем за ось ординат (направление на оси ординат выбирается так, чтобы
прямоугольная система координат Оху оказалась правой).
Составим уравнение параболы, используя ее геометрическое
определение, выражающее директориальное свойство параболы. В выбранной
системе координат определяем координаты фокуса ^^f »0J и уравнение дирек-
282
трисы * = —§ • Для произвольной точки М {х,у), принадлежащей параболе,
имеем:
FM=MM
d
где Md\—jj у) - ортогональная проекция точки М(х,у) на директрису.
Записываем это уравнение в координатной форме:
Возводим обе части уравнения в квадрат: ус —jf + ;y2=*2 + p'Jt+^j-.
Приводя подобные члены, получаем каноническое уравнение параболы
т.е. выбранная система координат является канонической.
Парабола
&У)
Рис.3.45
Проводя рассуждения в обратном порядке, можно показать, что все
точки, координаты которых удовлетворяют уравнению (3.S1), и только они,
принадлежат геометрическому месту точек, называемому параболой. Таким
образом, аналитическое определение параболы эквивалентно его
геометрическому определению, выражающему директориальное свойство параболы.
УРАВНЕНИЕ ПАРАБОЛЫ В ПОЛЯРНОЙ СИСТЕМЕ КООРДИНАТ
Уравнение параболы в полярной системе координат Fry (рис.3.45,в)
имеет вид
283
где р - параметр параболы, а е = 1 - ее эксцентриситет.
В самом деле, в качестве полюса полярной системы координат
выберем фокус F параболы, а в качестве полярной оси - луч с началом в точке
F, перпендикулярный директрисе и не пересекающий ее (рис.3.45,в). Тогда
для произвольной точки Л/(г,ф), принадлежащей параболе, согласно
геометрическому определению (директориальному свойству) параболы, имеем
MMd = г. Поскольку MM d = р + г-coscp, получаем уравнение параболы в
координатной форме:
что и требовалось доказать. Заметим, что в полярных координатах
уравнения эллипса, гиперболы и параболы совпадают, но описывают разные
линии, поскольку отличаются эксцентриситетами (0 < е < 1 для эллипса, е = 1
для параболы, е > 1 для гиперболы).
ГЕОМЕТРИЧЕСКИЙ СМЫСЛ ПАРАМЕТРА В УРАВНЕНИИ ПАРАБОЛЫ
Поясним геометрический смысл параметра р в каноническом
уравнении параболы. Подставляя в уравнение (3.51) ^="f» получаем у2 =р2,
т.е. у = ± р. Следовательно, параметр р - это половина длины хорды
параболы, проходящей через ее фокус перпендикулярно оси параболы.
Фокальным параметром параболы, так же как для эллипса и для
гиперболы, называется половина длины хорды, проходящей через ее фокус
перпендикулярно фокальной оси (см. рис.3.45,в). Из уравнения параболы в
полярных координатах при Ф = у получаем г = р, т.е. параметр параболы
совпадает с ее фокальным параметром.
Замечания 3.11.
1. Параметр р параболы характеризует ее
форму. Чем больше р, тем шире ветви
параболы, чем ближе р к нулю, тем ветви параболы
уже (рис.3.46).
2. Уравнение уг=-2рх (при р>0)
определяет параболу, которая расположена
слева от оси ординат (рис. 3.47,а). Это
уравнение сводится к каноническому при помощи из-
Рис.3.46 менения направления оси абсцисс (3.37). На
рис. 3.47,а изображены заданная система
координат Оху и каноническая Ох у .
284
3. Уравнение \у-у0) =2-р-(х-х0), р>0, определяет параболу с
вершиной О'(х09у0)9 ось которой параллельна оси абсцисс (рис.3.47,6). Это
уравнение сводится к каноническому при помощи параллельного переноса
(3.36).
Уравнение {x-xQf =2-р-(;у-;у0), р>О, также определяет параболу
с вершиной O'(xQ9y0), ось которой параллельна оси ординат (рис.3.47,в).
Это уравнение сводится к каноническому при помощи параллельного
переноса (3.36) и переименования координатных осей (3.38). На рис. 3.47Дв
изображены заданные системы координат Оху и канонические системы
координат Оху .
р>0
О х
О
У к (у-у0У=2.р.{*-х0)у
О
, р>о
V / '•"
УоУУ ^ у
О
Рис.3.47
4. График квадратного трехчлена у
параболой с вершиной в точке ОД—£z*-
оси ординат, ветви параболы направлены вверх (при а>0) или вниз (при
а < 0). Действительно, выделяя полный квадрат, получаем уравнение
= а-х2 +Ь-х+с9
b
является
, ось которой параллельна
а\Х+ 2-а) 4аЛ
которое приводится к каноническому виду [у ) = 2 • р • дг', где р = I-JL , при
помощи замены у = х+тг-» ^' = ± (у +& ";4g<cl Знак выбирается совпадаю-
щим со знаком старшего коэффициента а. Эта замена соответствует компо-
/о^ч * Ъг-4-а-с
зиции: параллельного переноса (3.36) с ха = , уп = , пе-
2 а 4 а
реименования координатных осей (3.38), а в случае а < 0 еще и изменения
направления координатной оси (3.37). На рис.3.48,а,б изображены заданные
системы координат Оху и канонические системы координат Оху' для
случаев а > 0 и а < 0 соответственно.
285
■ у
о
1
О
хо
У1
Уо
1
О
а<0
\у
X \
хох
5. Ось абсцисс
канонической системы координат
а>0 я<0 является осью симметрии
параболы, поскольку замена
переменной у на -у не
изменяет уравнения (3.51).
Другими словами,
координаты точки М(х,у),
принадлежащей параболе, и коор-
Рис.3.48 динаты точки М\х, -у),
симметричной точке М
относительно оси абсцисс, удовлетворяют уравнению (3.51). Оси
канонической системы координат называются главными осями параболы.
Пример 3.22. Изобразить параболу у2 = 2-х в канонической системе
координат Оху. Найти фокальный параметр, координаты фокуса и
уравнение директрисы.
□ Строим параболу, учитывая ее симметрию
относительно оси абсцисс (рис.3.49). При
необходимости определяем координаты некоторых точек
параболы. Например, подставляя х = 2 в уравнение
параболы, получаем у2 =4 <=> у = ± 2 .
Следовательно, точки с координатами (2,2), (2, - 2) принадлежат
параболе.
Сравнивая заданное уравнение с каноническим
(3.51), определяем фокальный параметр: р = 1. Координаты фокуса
xF =~=-j, yF = 0, т.е. f(j, о). Составляем уравнение директрисы х = —£,
т.е. х = -4-. ■
НЕКОТОРЫЕ ОБЩИЕ СВОЙСТВА ЭЛЛИПСА, ГИПЕРБОЛЫ, ПАРАБОЛЫ
1. Директориальное свойство может быть использовано как единое
определение эллипса, гиперболы, параболы (см. рис.3.50): геометрическое
место точек плоскости, для каждой из которых отношение расстояния до
заданной точки F {фокуса) к расстоянию до заданной прямой d
(директрисы), не проходящей через заданную точку, постоянно и равно
эксцентриситету е, называется:
а) эллипсом, если 0 < е < 1;
б)гиперболой,если е>\\
в) параболой, если е = \.
286
Рис.3.50
2. Эллипс, гипербола, парабола
получаются в сечениях кругового конуса
плоскостями (см. разд.4.4.4) и поэтому называются
коническими сечениями. Это свойство также
может служить геометрическим определением
эллипса, гиперболы, параболы.
3, К числу общих свойств эллипса,
гиперболы и параболы можно отнести биссек-
ториальное свойство их касательных [14].
Под касательной к линии в некоторой ее
точке К понимается предельное положение
секущей КМ , когда точка М, оставаясь на
рассматриваемой линии, стремится к точке
К. Прямая, перпендикулярная касательной к
линии и проходящая через точку касания,
называется нормалью к этой линии.
Биссекториальное свойство касательных (и нормалей) к эллипсу,
гиперболе и параболе формулируется следующим образом: касательная
(нормаль) к эллипсу или к гиперболе образует равные углы с фокальными
радиусами точки касания (рис.3.51,а,б); касательная (нормаль) к параболе
образует равные углы с фокальным радиусом точки касания и перпендикуляром,
опущенным из нее на директрису (рис.3.51,в). Другими словами, касательная
к эллипсу в точке К является биссектрисой внешнего угла треугольника
FXKF2 (а нормаль - биссектрисой внутреннего угла FXKF2 треугольника);
касательная к гиперболе является биссектрисой внутреннего угла
треугольника FlKF2 (а нормаль - биссектрисой внешнего угла); касательная к
параболе является биссектрисой внутреннего угла треугольника FKKd (а
нормаль - биссектрисой внешнего угла). Биссекториальное свойство
касательной к параболе можно сформулировать так же, как для эллипса и гиперболы,
если считать, что у параболы имеется второй фокус в бесконечно удаленной
точке.
287
4. Из биссекториальных свойств следуют оптические свойства
эллипса, гиперболы и параболы, поясняющие физический смысл термина
"фокус". Представим себе поверхности, образованные вращением эллипса,
гиперболы или параболы вокруг фокальной оси (см. разд.4.4.2; 4.4.3; 4.4.5).
Если на эти поверхности нанести отражающее покрытие, то получаются
эллиптическое, гиперболическое и параболическое зеркала. Согласно закону
оптики, угол падения луча света на зеркало равен углу отражения, т.е.
падающий и отраженный лучи образуют равные углы с нормалью к
поверхности, причем оба луча и ось вращения находятся в одной плоскости. Отсюда
получаем следующие свойства:
если источник света находится в одном из фокусов эллиптического
зеркала, то лучи света, отразившись от зеркала, собираются в другом фокусе
(рис.3.52,а);
если источник света находится в одном из фокусов гиперболического
зеркала, то лучи света, отразившись от зеркала, расходятся так, как если бы
они исходили из другого фокуса (рис.3.52,6);
если источник света находится в фокусе параболического зеркала, то
лучи света, отразившись от зеркала, идут параллельно фокальной оси
(рис.3.52,*).
5. Диаметральное свойство эллипса, гиперболы и параболы можно
сформулировать следующим образом [14]:
середины параллельных хорд эллипса (гиперболы) лежат на одной
прямой* проходящей через центр эллипса (гиперболы);
середины параллельных хорд параболы лежат на прямой, коллинеар-
ной оси симметрии параболы.
Геометрическое место середин всех параллельных хорд эллипса
(гиперболы, параболы) называют диаметром эллипса (гиперболы, параболы),
сопряженным к этим хордам.
Это определение диаметра в узком смысле (см. пример 2.8).
В разд.3.3.5 дано определение диаметра в широком смысле, где диаметром
эллипса, гиперболы, параболы, а также других линий второго порядка назы-
288
вается прямая, содержащая середины всех параллельных хорд. В узком
смысле диаметром эллипса является любая хорда, проходящая через его
центр (рис.3.53,а); диаметром гиперболы является любая прямая,
проходящая через центр гиперболы (за исключением асимптот), либо часть такой
прямой (рис.3.53,б); диаметром параболы является любой луч, исходящий из
некоторой точки параболы и коллинеарный оси симметрии (рис.3.53,в).
Два диаметра, каждый их которых делит пополам все хорды,
параллельные другому диаметру, называются сопряженными. На рис.3.S3
полужирными линиями изображены сопряженные диаметры эллипса, гиперболы,
параболы.
Касательную к эллипсу (гиперболе, параболе) в точке К можно
определить как предельное положение параллельных секущих МХМ2, когда
точки Мг и М 2, оставаясь на рассматриваемой линии, стремятся к точке К.
Из этого определения следует, что касательная, параллельная хордам,
проходит через конец диаметра, сопряженного к этим хордам.
К
6. Эллипс, гипербола и парабола имеют, кроме приведенных выше,
многочисленные геометрические свойства и физические приложения.
Например, рис.3.50 может служить иллюстрацией траекторий движения
космических объектов, находящихся в окрестности центра F притяжения.
3.3.5. Классификация линий второго порядка по инвариантам
ПРЕОБРАЗОВАНИЯ КВАДРАТИЧНОЙ ФУНКЦИИ
Рассмотрим преобразование квадратичной функции
p(*) = *ir if+ 2-^.^- x^a^-xl + 2-^-^ +2- a2x2+aQ (3.52)
при линейной невырожденной замене переменных:
Ы^ + ''Ь+'-* 'f (3.53)
, 5 = - невырожденная матрица (det S Ф 0).
1*21 S22j
19-5150 289
При любой невырожденной замене переменных квадратичной функции
р(х) получаем снова квадратичную функцию р'\х) (см. п.1 замечаний 3.1):
р [х )=an-{xl
2 • а • х + 2 - а -х + а (3 S^
Найдем формулы, связывающие коэффициенты функций (3.52) и (3.54).
Представим квадратичные функции в матричном виде (см. п.6
замечаний 3.1):
ЖМ'.Р.*, p'(x')=(x'J-P'.x\
где Р =
ций, Jc =
\\
«12
«22
«2
«2
«0>
/
, Р =
( /
"И
Д12
а1
/
/
«22
Л2
«2
«0
- матрицы квадратичных функ-
\ у
, х =
1
- расширенные (дополненные единицей) столбцы
переменных. Замену переменных (3.S3) запишем для расширенных
столбцов:
чЬ
0 0 1
, т.е.
, где Т =
S\l
*21 522 ^2
0 0 1
невырожденная матрица, поскольку detr = detS*O (в этом можно
убедиться, раскладывая определитель матрицы Г по третьей строке).
Подставляя х = Тх в р(х), получаем, учитывая свойство
транспонирования произведения матриц (А • в)т =ВТ -Ат:
Сравнивая с р'[х)=(ic/ • Р* • (JcJ, заключаем, что
Р' = ТТРТ. (3.55)
Получим аналогичные формулы для квадратичных функций (3.52),
(3.54), представленных в виде суммы квадратичных и линейных форм (см.
п.6 замечаний 3.1):
р(х)=хт Ах+2ат
290
p'(x')=(x'J-X-x+l\dJ -х+а'о,
где А= и 12 , А'=\, ,\- матрицы квадратичных форм;
1*12 a22j Vht агг)
( \ ( '\
\аг) Ы
a=L а'=|J - столбцы коэффициентов линейных форм функций
\аг) Ы
(3.52) и (3.54), Подставляя х = s + S • х в р(х), получаем
Учитывая свойства (АВ)Т =ВТ Ат и (а+#)г = Аг+#г матричных
операций, симметричность матрицы А (т.е. Ат = А), а также равенство
W И1
выражающее свойство транспонирования скалярного выражения (число,
рассматриваемое как матрица размеров 1x1, при транспонировании не
изменяется), упростим квадратичную функцию
Сравнивая с р'\х)=(jcJT • а' • х + 2 • (а / /+а'о, заключаем, что
A' = STAS; а/ = 5г-(а + А-5); а^ =/-А^ + 2-аг^ + а0. (3.56)
Итак, формулы (3.55) и (3.56) выражают преобразования квадратичных
функций при линейной невырожденной замене переменных (3.53).
ОРТОГОНАЛЬНЫЕ ИНВАРИАНТЫ КВАДРАТИЧНОЙ ФУНКЦИИ
Выражения, составленные из коэффициентов квадратичной функции
(3.52), которые не изменяются при линейной невырожденной замене
переменных (3.53), называются инвариантами относительно аффинной
замены переменных или, короче, аффинными инвариантами квадратичной
функции. Например, знак определителя detA матрицы квадратичной формы
функции (3.52) не изменяется при замене (3.53), так как, согласно (3.56),
()
поскольку определитель произведения матриц равен произведению их
определителей и detSr =det5 (см. разд.П.6). Аналогично, учитывая (3.55),
получаем, что detP/ = (detr)2-detP, т.е. знаки определителей detP' и detP
совпадают при любой линейной невырожденной замене переменных.
Выражения, составленные из коэффициентов квадратичной функции
(3.52), которые не изменяются при линейной невырожденной замене
переменных (3.53) с Ортогональной матрицей S (ST =S~l), называются инва-
19* 291
риантами относительно ортогональной замены переменных или,
короче, ортогональными инвариантами квадратичной функции. Эти
алгебраические выражения являются важнейшими геометрическими
характеристиками линий второго порядка и могут быть использованы как для их
классификации, так и для построения, поскольку преобразование прямоугольной
системы координат соответствует ортогональной замене переменных. Далее,
если не оговорено противное, будем рассматривать преобразования
квадратичных функций при ортогональных заменах переменных.
Обозначим через
, 8 =
«12
а..
А =
«12 <h
°22
выражения, зависящие от коэффициентов функции
,. (3-57)
а через т', 5', Д' - соответствующие выражения для функции
которая получается из р(х,у) при ортогональной замене переменных (см.
п.9 замечаний 3.1):
или
= л + 5
(3.58)
где s = ]
- ортогональная матрица (ST = S х).
Теорема 3.4 (об ортогональных инвариантах). При любой
ортогональной замене переменных (3.58) квадратичной функции (3.57) выражения
X, 8, А не изменяются: t = t', 5 = 8', А = ДГ.
Выражения т, 8, Д называются ортогональными инвариантами
квадратичной функции.
Действительно, из равенства (3.55) Р' = ТТ РТ, учитывая, что
определитель произведения равен произведению определителей, а также
равенство detrr = detr, получаем
detP^detr7 detPdetr = (detr)2 detP.
Для ортогональной матрицы S: ST = 5"1 <=» ST -S = E =>
detSr det5 = detE = 1 => (dets)2 = 1. Поскольку det7 = detS (как
показано выше), получаем (detг)2 = 1. Следовательно, det Р* = det P, т.е. Д' = Д.
Рассмотрим теперь квадратичную функцию
292
р(х,у)-Х-х2-Х-у2
двух переменных х, у, зависящую от параметра X. Матрица квадратичной
формы этой функции
A-X.E = \a» a"U\lo °
л\2
после замены переменных (3.58) преобразуется по закону (3.56):
Поскольку (det S)2 = 1, то
Следовательно, при любой ортогональной замене переменных (3.58)
a22-X
ап-Х
ап
ап
Раскрывая определители, с учетом введенных обозначений получаем
тождественное равенство двух многочленов
Приравнивая коэффициенты, имеем: т = т' и 8=5. Таким образом, при
любой ортогональной замене переменных (3.58) квадратичной функции
(3.57) выражения т, 5, А не изменяются: т = т/, 5 = 8', Д = Д/. Теорема
доказана.
Замечания 3.12.
1. При любой однородной (s = o) ортогональной замене переменных
(3.58) квадратичной функции (3.57) выражение
к =
"22
п2
"2
ао
не изменяется: к = к .
Выражение К называется ортогональным семиинвариантом
{полуинвариантом) квадратичной функции, поскольку к не изменяется только
при однородных ортогональных преобразованиях [14], т.е. при наложении
дополнительного условия s = о по сравнению с условиями теоремы 3.4.
2. Если у квадратичной функции (3.52) 8 = 0 и А = 0,/по при любой
ортогональной замене ее переменных (3.53) выражение к не изменяется:
к = к', другими словами, выражение к является ортогональным
инвариантом для квадратичной функции при 5 = А = 0.
Доказательство утверждений п. 1,2 приведено в [14].
293
3. Характеристическим многочленом квадратной матрицы А
называется многочлен det(A-X-is). Уравнение det(A-X/s)=O называется
характеристическим для матрицы А .
4. Из доказательства теоремы 3.4 следует, что характеристический
многочлен матрицы квадратичной формы не изменяется при
ортогональной замене переменных, т.е. является ортогональным инвариантом.
5. Корни характеристического многочлена матрицы квадратичной
формы являются ортогональными инвариантами.
Это следует из ортогональной инвариантности характеристического
многочлена.
6. Из доказательства теоремы 3.3 следует, что для любой квадратичной
функции (3.52) существует такая ортогональная замена переменных (3.53):
х = S • х , где ST = S~l, при которой у функции (3.54) будет отсутствовать
произведение переменных:
т.е. матрица А квадратичной формы функции (3.54) будет диагональной:
Записывая характеристический многочлен этой матрицы, получаем
j-Л О
О Л2-Л
т.е. числа Л1, Х2 являются его корнями. Из инвариантности
характеристических многочленов det(A-Я • Е)- det(A -X • Е) следует, что
Отсюда получаем:
1=^+^2, 8=Xj-X2.
7. Корни Яр Х2 характеристического уравнения
Л2-т-Л+8 = 0
действительные, так как его дискриминант неотрицателен:
8. При линейной невырожденной замене переменных (соответственно,
при преобразовании аффинных, не обязательно прямоугольных, систем
координат) не изменяется знак выражений 5 и А. Действительно, из (3.55) и
(3.56) следует, что A/ = (detr)2-A и 8/ = (det5)2-5. Таким образом, знаки
выражений 5 и А являются аффинными инвариантами квадратичной
функции.
294
9. При умножении квадратичной функции р(х, у) на отличное от нуля
число ц получаем квадратичную функцию р(я:,;у) = ц-р(х,у), для которой
выражения инвариантов т , § , Л, семиинварианта к, а также корни \,
Х2 характеристического уравнения пропорциональны соответствующим
вьфажениям т, 8, Л, к, Хх, Л2 для функции р(х, у):
т=цт, 8=|12-8, Д=ц,3Д, к = |12к, 3^ =|х-Л19 Х2=ц-А2.
Поскольку все коэффициенты функции р(х,у) умножаются на число ц, то
определители второго (8, к) и третьего порядков (Л) умножаются на ц2 и
[I3 соответственно.
Отсюда следует, например, что знаки выражений 8, к и х-А
сохраняются. Для пропорциональных уравнений р(х,у) = О и [I-р(х,у) = 0 (при
любом ц Ф 0), определяющих одну и ту же линию второго порядка,
постоянными характеристиками (инвариантами) являются sgnS, sgnK, sgn(x-A).
ОПРЕДЕЛЕНИЕ ВИДА КАНОНИЧЕСКОГО УРАВНЕНИЯ ЛИНИИ
ВТОРОГО ПОРЯДКА ПРИ ПОМОЩИ ИНВАРИАНТОВ
Пусть в прямоугольной системе координат Оху линия второго порядка
описывается уравнением
р{х,у)=0, (3.59)
где р(х, у) - квадратичная функция (3.57):
Согласно теореме 3.3, в любой другой прямоугольной системе координат
О'ху уравнение этой же линии имеет ввд
р{х',у')=0, (3.60)
где квадратичная функция
2al2x' у +2UL-X'+2-а'2у +а0 ) (3.61)
получена из квадратичной функции р(х, у) в результате умножения на
отличный от нуля множитель |Л и ортогональной замены переменных:
0-й-
295
f jc0 ] ?
Здесь s= - координатный столбец вектора 1 = 00 переноса начала
\уо)
(S\\ S\'l\ Т -1
координат, S = 1 ортогональная матрица (5 = £ ) перехода от
\S2\ S22j
базиса i , j системы координат Оху к базису системы координат О'ху .
Корни характеристических уравнений матриц квадратичных форм,
инварианты и семиинварианты квадратичных функций р(х9у), р[х\у)
обозначим соответственно
A,j,A,2,t, 5, А, к; Хх, Х2, т, 5, А, к.
По теореме 3.3 и п.9 замечаний 3.12 эти выражения связаны формулами
\=\1'ХгЛ2=11^2; т=ц-т; 8 = |12-8; А = (Х3.Д; к = ц2к. (3.63)
Используя эти связи, выясним признаки видов канонических
уравнений, а также выразим коэффициенты канонических уравнений.
Предполагаем, что система координат о'ху каноническая, т.е. уравнение р[х\у')=0
имеет один из девяти канонических видов, указанных в теореме 3.3. В этом
случае матрица А квадратичной формы функции р(х\у) имеет
диагональный вид:
Коэффициенты при квадратах неизвестных в канонических уравнениях (1)-
(9) равны корням Хг, Л2 характеристического уравнения этой матрицы. В
зависимости от знаков чисел Я1Д2 уравнения (1)49) разбиваются на три
группы:
- корни Х{ =-у Д2 =-у отличны от нуля и имеют одинаковые знаки
(8 =Xj -\2 >0 - эллиптический тип): уравнения эллипса (1), мнимого
эллипса (2), пары мнимых пересекающихся прямых (3);
- корни Я1=-уД2=—у отличны от нуля и имеют разные знаки
(8=Хх'Х2<0 - гиперболический тип): уравнения гиперболы (4) или пары
пересекающихся прямых (S);
- один из корней X2,X2 равен нулю (Xt =0, 8 =ХХ -Х2 =0 -
параболический тип): уравнения параболы (6), пары параллельных прямых (7),
пары мнимых параллельных прямых (8) или пары совпадаюпщх прямых (9).
296
Тип уравнения (3.59) не изменяется в ходе приведения его к
каноническому виду (3.60), так как, согласно (3.63), выражения 8 и 8 для исходного
(3.59) и канонического уравнений отличаются только положительным
множителем 8 = |ы2-8. Поэтому условия 8>0, 8<0, 8 = 0, определяющие тип
канонического уравнения, равносильны условиям 8>0, 8<0, 8 = 0,
определяющим тип исходного уравнения.
Рассмотрим уравнения эллиптического типа (8 > 0).
Для уравнения (1) эллипса Щ-+Щ--1 = 0 имеем: X, =-^-, Х2 =-^-»
а Ь 1 а Ь
' = а2Ф2
о
0
0
0
0
0
0
-1
значит, т-Д<0, Д = -8, 0<Х1<Х2, так как a>b>0. Учитывая (3.63),
получаем:
Следовательно, т • А < 0, fi = —|-. Преобразуем неравенства 0 < р, • Хх < \1 • Х2
<=> 0<||иЛ1|<|цЯ2| <=> 0<|Л1|<|Л2|, т.е. ХХ - меньший (точнее, не
больший) по модулю корень характеристического уравнения
х=-^, |и,-А,2=-у, на-
А,2-т-А,+8 = 0. Подставляя Ц = —д в равенства
ходим а = ^-
Таким образом, при 8 > 0, х-А < 0 уравнение (3.59) описывает эллипс
сполуосями а = J~
Для уравнения (2) мнимого эллипса Щ-+Щ-+1 = 0 аналогично полу-
а Ь
чаем: 8>0, т-Д>0, а = /^? , £ = J-Ar.
Для уравнения (3) пары мнимых пересекающихся прямых
•^5-+-Цр = 0 находим 8 > 0, А = 0. В отличие от уравнений (1),(2) отсутст-
а Ь
вует связь: А = ±8. Поэтому коэффициент пропорциональности \х в (3.61)
найти однозначно нельзя. Однако для справедливости отношения tl=^t
Л2 а
достаточно положить а = / -Дт , ft = / т-^-т .
297
Рассмотрим уравнения гиперболического типа (5 < 0).
Для уравнения (4) гиперболы Щ- -Щ- -1 = 0 имеем: Хх = -у,
*HHr. «=
о -4-
jr о о
°0 -£ 0
0 0-1
значит, Д*0, Д = -8, Xj=^->0, X2=—V<0.Учитывая(3.63),получаем
Следовательно, Д^О и |1 = ~. Подставляя jul = —j- в соотношения для
корней характеристического уравнения, получаем: —|-Л1=~->0 и
—|"Л2=—7<0. Отсюда « = 1/-'з^5 и *=t/l^5 • Таккак 8<0,то Лх -
тот корень характеристического уравнения, знак которого совпадает со
знаком А, т.е. XjA>0 (второй корень \2 противоположного знака).
Таким образом, при 5<0, А^О уравнение (3.59) описывает
гиперболу с полуосями Л
Для уравнения (5) пары пересекающихся прямых -^---^- = 0 анало-
а b
гично получаем: А = 0, « = Jt", Ь = ./~т-,где \ - положительный ко-
рень характеристического уравнения, аХ2- отрицательный.
Рассмотрим уравнения параболического типа (8 = 0).
Для уравнения (6) параболы \у) -2-р-д:/ = 0 имеем: Ях=0, А,2=1,
х=1, 8 =
0 0
0 1
= 0, А =
О 0 -р
О 1 О
-р 0 0
значит, А^О, Д = -р2, Я2 = х = 1. Учитывая (3.63), получаем jlji3• А^0»
ц3-Д = -р2, |i-X2=)i-T = l. Следовательно, А^О, р = у-|13-Д, Ц=^»
298
0
0
0
1
= 0,
Д =
0
0
0
0
1
0
0
0
-b2
= 0,
к =
0
0
0
-b2
1
0
0
-b2
Таким образом, при 8 = 0, А Ф 0 уравнение (3.59) описывает параболу
с фокальным параметром P = J--t.
Для уравнения (7) пары параллельных прямых [у)-Ь2=0 имеем:
Х1=0, Х2=1, т = 1,
=-ь2.
Значит, А = 0, Х2 = т = 1, ic = -Ъ2<0. Напомним (см. п.2 замечаний 3.12),
что выражение к является ортогональным инвариантом при условиях
8 = А = 0. Учитывая (3.63), получаем Д = 0, А2=т=—, к<0. Из равенства
к = -*2 имеем ц,2к = -*2,т.е. b = J —\ .
Таким образом, при 8 = 0, А = 0, к<0 уравнение (3.59) является
уравнением пары параллельных прямых с коэффициентом b-J —у .
Для уравнения (8) пары мнимых параллельных прямых (у) +Ь2 =0
аналогично получаем: А = 0, к>0, b =
Для уравнения (9) пары совпадающих прямых (у) =0 получаем:
8 = 0, Д = 0, к = 0.
Таким образом, классификацию поверхностей второго порядка можно
записать, используя инварианты квадратичной функции (см. таблицу 3.2).
Замечания 3.13.
1. Матрица квадратичной формы для левой части канонических
уравнений имеет диагональный вид Л = I1 , где Хх> Х2 ~ корни характе-
ристического уравнения Л2-хЯ+8 = 0, взятые согласно правилам:
- для эллиптического случая (при 8>0): |Я1|<|А2|;
- для гиперболического случая (при 8<0): А,А>0, если А^0, и
\ > 0, если А = 0;
- для параболического случая (при 8 = 0): Х{ = 0.
299
2. Отношения -~-, ~-, где Хг Д2 - корни характеристического
уравнения, взятые согласно правилам п.1, не изменяются при умножении
уравнения на отличный от нуля множитель и при ортогональной замене
неизвестных.
Поскольку отношение к = ^ сторон основного прямоугольника,
эксцентриситет е и фокальный параметр р выражаются через указанные
инварианты: для эллипса &= —= -/-т-*-,
а t А2
для гиперболы
к2 ; для эллипса, гиперболы и параболы /7 = J""^"»
Л
так как -*- =
х
A4 2
= —- = -р
2
р , то они, в свою очередь, также являются
инвариантами.
3. Тип линии не изменяется при аффинном преобразовании координат
(см. п.6 замечаний 3.12), так как сохраняется знак 8 (условия 8 > 0, 8 < 0,
8 = 0 остаются справедливыми при аффинных преобразованиях координат
и при умножении уравнения на любое отличное от нуля число).
Следовательно, знак 8 является аффинным инвариантом линии второго порядка.
Таблица 3.2. Классификация линий второго порядка
Признаки вида
Название линии
8>0
г
8<0
т-А<0
Эллипс
Т-Д>0
Эллипс мнимый
д=о
Пара мнимых
пересекающихся прямых
Гипербола
Д = 0
Пара пересекающихся
прямых
300
Парабола
8 = 0
г
д=о
к<0
Пара параллельных прямых
К>0
Пара мнимых
параллельных прямых
к = 0
Пара совпадающих прямых
Пример 3.23. По ортогональным инвариантам определить виды
алгебраических линий второго порядка, заданных в примере 3.19:
а) х2-у2-
б) jc2-4-
в) 3-*2
г) 52-х2 + 72-х.)> + 73-;у2--280-л;-290-у+ 325 = 0.
□ а) Для квадратичной функции р(х,у)=х2-у2 -4-х+6-у-5 (левой
части заданного уравнения) вычисляем инварианты
1 0 -2
т=1-1=0, 5 =
1 0
0 -1
= -1, Д =
0-13
-2 3 -5
=5+4-9=0.
По таблице 3.2 определяем, что уравнение задает пару пересекающихся
прямых, так как 5 < 0, А = 0.
б) Для квадратичной функции р(х,;у) = *2-4-дс+4-;у + 4 (левой части
заданного уравнения) вычисляем инварианты
1 0 -2
= 1, 8 =
1 0
0 0
= 0, А =
о о
= -4.
2
-2 2 4
По таблице 3.2 определяем, что уравнение задает параболу, так как 8 = 0,
(левой
в) Для квадратичной функции p(jc,;y)=3-Jc2 + 10-Jt-;y + 3-
части заданного уравнения) вычисляем инварианты
= 3+3 =
8 =
3 5
5 3
= 9-25 = -1
А =
3
5
0
5
3
0
0
0
8
= 8(-1б)=-128.
По таблице 3.2 определяем, что уравнение задает гиперболу, так как 8<0,
0.
г) Для квадратичной функции
(левой части заданного уравнения) вычисляем инварианты
52 36 -140
1 = 52+73 = 125, 8 =
52 36
36 73
= 2500, А =
36
73 -145
-140 -145 325
301
52
36
0
36
73
0
-140
-145
-100
= -100-
=-250000
36 731
(к третьей строке определителя А прибавили вторую и удвоенную первую).
По таблице 3.2 определяем, что уравнение задает эллипс, так как 5 > 0,
Д*0, т-Д<0.
Классификация заданных линий совпадает с результатами
примера 3.19. ■
ОПРЕДЕЛЕНИЕ КАНОНИЧЕСКОГО БАЗИСА ДЛЯ ЛИНИИ ВТОРОГО ПОРЯДКА
Ненулевой столбец s называется собственным вектором квадратной
матрицы А, если выполняется равенство
A-s = X-s.
Число X в этом равенстве называется собственным значением матрицы А.
Говорят, что собственный вектор s соответствует {принадлежит)
собственному значению X.
Ненулевой вектор J, а также его координатный столбец s = (jc yj,
будем называть собственным вектором линии второго порядка
если выполняется равенство
ь* As = Xs, (3.64)
1*12 агг)\У) \У)
т.е. координатный столбец собственного вектора линии второго порядка
яв= 12 .
1*12 a22j
ляется собственным вектором матрицы А = \ I. Собственный
вектор, соответствующий нулевому собственному значению (A-s = 0-s <=>
As = o), будем называть особым собственным вектором линии второго
порядка.
Перенося неизвестные в левую часть, запишем систему уравнений
(3.64) в виде
(ап-Х ап
I ап *22"
Эта однородная система имеет ненулевые решения тогда и только тогда,
когда ее определитель равен нулю (см. разд.П.Ю, а также [10]):
det(A - X • Е) = 0. Другими словами, собственные значения матрицы А
являются корнями характеристического уравнения det(A - X • Е) = 0, и
наоборот.
302
Укажем следующие свойства собственных векторов линии второго
порядка.
1. Собственный вектор линии второго порядка не изменяется при
ортогональном преобразовании координат и при умножении обеих частей
уравнения линии на отличное от нуля число, другими словами, линии (3.59) и
(3.60) имеют одинаковые собственные векторы.
Покажем сначала, что собственный вектор не изменяется при
однородном ортогональном преобразовании координат. Действительно, пусть sx -
собственный вектор матрицы А (соответствующий собственному значению
Хх). Тогда вектор s[ = S~l-sl является собственным для матрицы
A' = ST -A-S, где S - ортогональная матрица. В самом деле, учитывая, что
ST =S~l, sx =5 s[ и A-sx =Я1-^1,получаем
= & • A • Д'Д • S* = о • A' S, = A* • о • A
т.е. Л • 5j = Xj • sx. Следовательно, ^х - собственный вектор,
соответствующий собственному значению Хг.
При параллельном переносе системы координат матрица квадратичной
формы не изменяется (Л' = 5Г-A-S = A, если 5 = £), поэтому не
изменяются и ее собственные векторы. Если же обе части уравнения (3.59)
умножаются на отличное от нуля число |Х, то все элементы матрицы А, а также
ее собственные значения, умножаются на число ц. Однако, собственный
вектор линии не изменяется, поскольку условия A-sl=Xl-s1 и
\i-A-sl=\i-Xl-sl равносильны (при ji^O).
2. Собственные векторы, соответствующие разным собственным
значениям, взаимно ортогональны.
В самом деле, пусть Jx и J2 - собственные векторы, соответствующие
разным собственным значениям (Х{ *Х2), т.е. координатные столбцы s{ и
s2 этих векторов удовлетворяют условиям: A-sl=Xl-s1 и А• s2 = А,2• s2.
Первое равенство умножим слева на строку j J, а второе - на s[, и вычтем
второе равенство из первого:
s2 -A'Sx-Si -A-s2 =Xl-s2-sl-\2-sf -s2.
Поскольку при транспонировании число (рассматриваемое как матрица
размеров 1x1) не изменяется (см. разд.П.4), то правую часть этого равенства
можно преобразовать к виду
303
так как s\ -sx = [s^ -s2) = s[ -s2, а левая часть рассматриваемого равенства,
учитывая симметричность матрицы А (Ат = А), равна нулю, так как
sT2-A.Si=(sl -AT -sj =sl Ат -s2 = Sl As2.
Следовательно, рассматриваемое равенство можно записать в виде
(Xj-Х2)-^-^2 =0 или 5^-52=0,
поскольку Хх Ф Х2. Последнее равенство означает, что (jp J2)=^ -s2 = 0 -
скалярное произведение ненулевых векторов 5j и J2 равно нулю, т.е. они
ортогональны.
3. Базисные векторы канонической системы координат являются
единичными взаимно ортогональными собственными векторами линии.
Действительно, в канонической системе координат d \ J2 матрица А
квадратичной формы имеет диагональный вид Л = Л= , где Хр
Х2 - корни характеристического уравнения (см. п.6 замечаний 3.12) или,
что то же самое, собственные значения матрицы А. Записывая (3.64) для
координатных столбцов sx = (l Qlf, s2 = (О l)r базисных векторов Jx, J2,
получаем
() «ИЗ Г
) «ИЗ- Г»
Первое соотношение выполняется при Х = Х{, второе - при X = Х2.
Следовательно, базисные векторы Jx, J2 являются собственными,
соответствующими собственным значениям Х = ХХ для первого базисного вектора (Sj),
Х = Х2 - для второго (72 ). При этом не исключается случай равенства
собственных значений.
Таким образом, для определения канонического базиса нужно найти
два взаимно ортогональных единичных собственных вектора.
Замечания 3.14.
1. Собственные векторы матрицы определяются неоднозначно.
Например, если s - собственный вектор матрицы (или линии), то столбец \i-s
при любом отличном от нуля числе \х также является собственным
вектором, соответствующим тому же собственному значению X, что и вектор s.
2. Матрицу S перехода от базиса i, j исходной системы координат
Оху к базису Jx, J2 канонической системы координат Оху образуют
304
координатные столбцы sx, s2 взаимно ортогональных единичных
собственных векторов линии второго порядка.
В самом деле, пусть sx, s2 - координатные столбцы (относительно
исходной системы координат Оху) единичных взаимно ортогональных
собственных векторов Jj, 72. Тогда по определению собственных векторов
выполняются равенства A-sl=\l-sl9 А • s2 = Я2 • s2, а из условий нормировки
И ОрТОГОНаЛЬНОСТИ: (jpjjs *[-St = 1, (3Г1Д2)=*1<"Д2=0» \*2'*2/=52 "*2=1#
Составим из координатных столбцов sl9 s2 матрицу S = \sl \s2). Во-
первых, эта матрица ортогональная (ST = S~l), так как
Во-вторых, ортогональное преобразование координат с этой матрицей
приводит матрицу А квадратичной формы к каноническому (диагональному)
виду:
sl \s2)=ST{A •sl \As2)=
3* Два единичных взаимно ортогональных собственных вектора линии
второго порядка определяются с точностью до множителя ( -1), т.е. каждый
из них можно заменить на противоположный, тем самым изменить
направление соответствующей координатной оси. Для всех линий, за исключением
параболы (6), выбор положительного направления на координатных осях
может быть произвольным, другими словами, если, например, вектор 1г
базисный, то и противоположный вектор (-?}) также можно взять в качестве
базисного. Положительное направление оси Ох (базисный вектор Jx) для
параболы нельзя менять на противоположное. Правильный выбор этих
базисных векторов описан далее в п.2 замечаний 3.16.
ОПРЕДЕЛЕНИЕ НАЧАЛА КАНОНИЧЕСКОЙ СИСТЕМЫ КООРДИНАТ
ДЛЯ ЛИНИИ ВТОРОГО ПОРЯДКА
Пусть в прямоугольной системе координат Оху поверхность второго
порядка задана уравнением (3.S9):
an-x2 + 2'al2.x-y + a22-y2+2-a1-x+2'a2-y+a0=0. (3.65)
Выбор начала О канонической системы координат Оху
определяется свойствами симметрии линии второго порядка. Например, координатная
20-5150 305
ось Ох является осью симметрии любой линии второго порядка (см. разд.
3.4.2-3.4.4); ось ординат dy служит осью симметрии любой линии, за
исключением параболы, начало координат О' является центром симметрии
линий (1) - (5), (7) - (9), т.е. всех линий, за исключением параболы.
Точка MQ называется центром симметрии (или просто центром) линии
второго порядка (3.65), если вместе с каждой своей точкой М линия
содержит также и точку М , симметричную точке М относительно М0 (точка
MQ - середина отрезка ММ').
Линия второго порядка называется центральной, если она имеет
единственный центр. В противном случае, если центр отсутствует или не
является единственным, линия называется нецентральной. Центральными
линиями являются эллипсы, гипербола и пары пересекающихся прямых
(рис.3.54), единственный центр этих линий - начало координат. Остальные
линии - нецентральные.
Заметим, что линии эллиптического или гиперболического типов
являются центральными, а линии параболического типа - нецентральными,
как это указано в первом столбце таблицы 3.2.
Центральные линии
Эллипсы Гипербола пЧ>ы пересекающихся
прямых
Рис.3.54
Прямая, каждая точка которой является центром симметрии,
называется прямой центров. На рис.3.55 изображены линии, имеющие прямую
центров (эта прямая совпадает с осью абсцисс канонической системы координат
(двойная линия на рис.3.55)).
Прямая /0 называется осью симметрии линии второго порядка (3.65),
если вместе с каждой своей точкой М поверхность содержит также и точку
Af', симметричную точке М относительно прямой /0 (прямая lQ
перпендикулярна отрезку ММ' и делит его пополам).
Оси симметрии имеют все линии второго порядка. Если линия
центральная, то ось симметрии проходит через ее центр. Например,
координатные оси канонической системы координат являются осями симметрии
эллипсов, гиперболы, пар пересекающихся прямых (рис.3.54). Если
нецентральная линия имеет прямую центров, то эта прямая служит осью
симметрии. Например, ось абсцисс канонической системы координат для пар
параллельных или совпадающих прямых (рис.3.55). Ось ординат также являет-
306
ся осью симметрии этих линий. Ось Ох является единственной осью
симметрии для параболы (рис.3.56).
Если линия (3.65) имеет хотя бы один центр, то этот центр можно
принять за начало канонической системы координат (рис.3.54, 3.55). Если линия
не имеет ни одного центра (является параболой), то началом канонической
системы координат является точка пересечения этой параболы с ее осью
симметрии (рис.3.56).
Ось симметрии линии,
Линии центров не имеющей центра
—1-—*
Г
Пары параллельных прямых Пара совпадающих Парабола
прямых
Рис.3.55 Рис.3.56
Составим уравнения для определения центра линии (3.65). Для этого
сделаем ортогональное преобразование координат (3.58):
/ / ИЛИ
где s = \ I - координатный столбец вектора J = OO переноса системы
\уо)
координат, а ортогональная матрица S = (s{ \s2) составлена из единичных
взаимно ортогональных собственных векторов линии (3.65),
соответствующих собственным значениям Aj,X2. В новой системе координат Оху
уравнение линии будет иметь вид
где, согласно (3.56) и п.6 замечаний 3.12, матрица A' = STAS =
I- диагональная, столбец коэффициентов линейной формы
(
а =5г-(А-5+а), а свободный член а'о = p(s) = sT -A-s + 2-aT -s + aQ.
Если в уравнении (3.66) отсутствуют линейные члены (а = о), то
начало координат О* является центром симметрии, поскольку при
одновременной замене неизвестных х <->(-х), у'<->(-у) уравнение (3.66) не
изменяется. Другими словами, если координаты точки М\х,у)
удовлетворяют уравнению, то и координаты \-x\-y) точки, симметричной точке М
относительно начала координат, также удовлетворяют уравнению.
20* 307
Так как матрица S невырожденная, то равенство а = ST • (А • s + а) = о
равносильно системе линейных уравнений (см. разд.3.2.6):
или I " ° 12 ° ' (3.67)
а12 "
которая определяет координаты х0 , j0 центра симметрии, т.е. точки О .
Эта система имеет единственное решение только тогда, когда
8 =
ап ап
ФО или rgA = rg(A | а) = 2. Следовательно, условие 8*0
является критерием наличия у линии единственного центра.
При rgA = rg(A | а) = 1 система (3.67) имеет бесконечно много
решений, т.е. центры симметрии линии образуют прямую центров. При
rgA<rg(A | а) система не имеет решений, т.е. линия не имеет ни одного
центра.
Таким образом, для линий второго порядка, имеющих хотя бы один
центр симметрии, этот центр служит началом О' канонической системы
координат системы О'ху . Координаты х0, ;у0 находятся как решение
системы (3.67), причем это решение единственное для центральных
поверхностей.
Рассмотрим теперь случай, когда система (3.67) несовместна. В этом
случае линия (3.65) не имеет ни одного центра (см. рис.3.56), т.е. является
параболой.
Получим уравнение оси симметрии линии (3.65). Для этого запишем
столбец a' = ST-(A-s + a) коэффициентов линейных членов уравнения
(3.66), учитывая, что матрица S = \5г \s2) составлена из собственных
векторов матрицы А, т.е. 5ГА = Л-5Г (последнее равенство можно считать
матричной формой записи (3.64)):
Если Xj *0, то уравнение \msf -s + sf -a = 0, или, что то же самое, в
координатной форме
М
имеет решение s = (xQ yQ[ , то, взяв точку О'(х0,у0) в качестве начала
системы координат О'ху , получим уравнение (3.66), в котором будет
отсутствовать линейный член с неизвестной х , так как
a'l=\l-sl s + sf а = 0. Такое уравнение при замене неизвестной
308
( не изменяется. Другими словами, если координаты точки
м{х\у) удовлетворяют уравнению (3.66), то и координаты (-х\у) точки,
симметричной точке М относительно оси О'у , также удовлетворяют
уравнению (3.66) (при аг = 0 ). Следовательно, если уравнение
имеет решения, то оно определяет ось симметрии О у линии (3.65).
В случае параболы собственное значение Х2 отлично от нуля ( Хх = 0),
поэтому уравнение
X2sls + sl-a = 0 (3.68)
имеет решения, которые определяют ось симметрии параболы. Заметим, что
ось симметрии, определяемая уравнением (3.68), коллинеарна особому
собственному вектору Jj (соответствующему нулевому собственному
значению Хг = 0 ).
Обозначим через а вектор с координатным столбцом а,
составленным из коэффициентов линейных членов уравнения (3.6S). Представим этот
вектор (а также его координатный столбец) в виде
*=%+5± ** а = апр+а±>
где anp={aJl)-'sl - ортогональная проекция вектора а на ось симметрии
(3.68), коллинеарную Jx (см. разд. 1.4.2); ах=а-а - ортогональная
составляющая вектора а относительно оси (3.68); а , а± - координатные
столбцы соответствующих векторов. Тогда для указанного разложения
вектора а справедливы равенства
5j • а^ = 0 , $2 # Л = $2 " Яjl »
ПОСКОЛЬКУ 4'a = (J2'J)=(72'%^ И
О
S* -aL = v?1.5'jB)= 0, что следует из ортогональности векторов 1Х и 5"±.
Найдем координаты точки О' пересечения оси симметрии (3.68) с
линией (3.65), т.е. найдем такой столбец s, удовлетворяющий (3.68), чтобы
т т
s -A'S + 2-a -5+ло=О. Для этого, учитывая (3.68), Хх =0 и равенство
А = S • Л • ST, преобразуем произведение
309
Поскольку матрица А симметрическая, то sT • А = - а[ и
sT -
Добавляя уравнение |а + а ]г • s + а0 = 0 к уравнению (3.68), получаем
систему уравнений, определяющую начало О* канонической системы
координат для параболы:
Замечания 3.15.
1. Определение центра или оси симметрии равным образом относится
как к вещественным, так и мнимым линиям, т.е. включает случай
комплексных решений. При этом оказывается [14], что координаты любого центра
линии, любой точки оси симметрии являются вещественными.
2. Система уравнений A -s+a± =o всегда совместна: ее решениями
являются координаты центра симметрии, если линия имеет центр; либо
координаты оси симметрии (коллинеарной особому собственному вектору),
если поверхность не имеет центра.
3. Если система уравнений As+a = o не имеет решений, т.е. линия не
имеет ни одного центра, то система
s+a0=0
совместна и ее решение определяет начало канонической системы
координат [9]. Другими словами, эта система равносильна системе (3.69) в случае
параболы.
4. Направлением на координатной плоскости называют множество
коллинеарных ненулевых векторов (а также множество координатных
столбцов этих векторов). Все ненулевые векторы, коллинеарные, например,
ненулевому вектору а-Г+P-J, а2+р2*0, имеют вид Х-(а i+P-y) при
X Ф 0, т.е. зависят только от отношения координат а: Р. Поэтому
направление обозначается отношением а:Р, при этом базисные векторы системы
координат имеют направления 1:0 и 0:1, а отношение 0:0- недопустимо.
Говорят, что прямая, отрезок, вектор имеют направление <х:Р, если они
310
коллинеарны вектору а-Г+P-J. Направления, определяемые собственными
векторами линии второго порядка, будем называть собственными.
5. Два направления ах: рх и а2: Р2 называются взаимно
сопряженными относительно квадратичной формы
«12
-(. 7>л$
если
Направление а: Р, взаимно сопряженное самому себе, т.е.
называется самосопряженным {асимптотическим).
Любая прямая неасимптотического направления пересекает линию
второго порядка в двух точках (быть может мнимых) [2,14]. Прямая
асимптотического направления либо не пересекает линию второго порядка,
либо пересекает ее в одной точке, либо целиком принадлежит линии второго
порядка. На рис.3.57 двойными стрелками изображены асимптотические
направления для гиперболы (а), пары пересекающихся прямых (б), параболы
(в), пары параллельных прямых (г).
>€ X <5
б
Рис.3.57
6. Середины всех хорд неасимптотического направления а: Р лежат
на одной прямой, имеющей сопряженное направление [2,14]. Эта прямая
называется диаметром линии второго порядка, сопряженным направлению
ос: р. На рис.3.58 изображены хорды и сопряженные им диаметры эллипса
(а), гиперболы (б,в) и параболы (г). Два диаметра, имеющие сопряженные
(неасимптотические) направления, называются сопряженными
диаметрами. Каждый из них делит пополам все хорды, параллельные другому (на
Рис.3.58,аДв. полужирными прямыми изображены взаимно сопряженные
Диаметры эллипса и гиперболы).
7. Свойства сопряженных направлений используются в численных
методах поиска минимума функций нескольких переменных [28].
311
a
Рис.3.58
8. Направление называется главным направлением относительно
линии второго порядка, если это направление и перпендикулярное к нему
являются взаимно сопряженными. Главные направления являются
собственными направлениями, определяющими направления осей канонических
систем координат.
КВАДРАТИЧНЫЕ НЕРАВЕНСТВА С ДВУМЯ НЕИЗВЕСТНЫМИ
Вещественная линия второго порядка р(х,у) = О разбивает
координатную плоскость Оху на области. В силу свойств многочленов второй степени
(в частности, их непрерывности) для решения квадратичных неравенств
р{х,у)>0, р(х,у)<0, р(х,у)>0, р(х,у)<0 достаточно определить знак
многочлена р(х, у) в одной внутренней точке какой-либо области. Знаки в
других областях проставляются по правилу чередования знаков (аналогично
методу интервалов): переходя через границу области, знак многочлена
р(х, у) меняется на противоположный, за исключением совпадающих
прямых (при переходе через них знак многочлена не меняется). В случае
мнимых линий знак многочлена сохраняется на всей координатной плоскости.
Для всех вещественных линий, за исключением пары пересекающихся
прямых, назовем внутренними те точки, координаты которых (в
канонической системе координат) удовлетворяют неравенствам
^"+ьг<1> ^~бг<1' y2<2px> у2~ь2<0> у2<0
соответственно. Другими словами, во внутренних точках левая часть
канонического уравнения линии меньше правой.
Внешними точками по отношению к каждой из перечисленных линий
назовем точки, для которых значения левой части канонического уравнения
больше правой его части. На рис.3.59 внутренние точки отмечены минусом,
а внешние - плюсом. Заметим, что для совпадающих прямых все точки,
кроме точек, принадлежащих линии, являются внешними.
Учитывая п.9 замечаний 3.12, для уравнения (3.59) линии второго
порядка в прямоугольной системе координат Оху можно сформулировать
условия, равносильные определениям внутренних и внешних точек линии.
312
Внутренние и внешние точки
Эллипс Гипербола Парабола Пара параллельных
прямых
Теорема 3.5 (о внутренних и внешних точках линии второго
порядка). Пусть уравнение р{х,у) = 0 определяет вещественную линию
второго порядка, за исключением пары пересекающихся прямых.
1. Если уравнение р\х, у) = 0 определяет эллипс, параболу или пару
параллельных прямых, то неравенству
удовлетворяют координаты всех внутренних (внешних) точек этих линий.
2. Если уравнение р(х,у)=О определяет гиперболу, то неравенству
Ар(х,у)<0 (Ар(х,у)>0)
удовлетворяют координаты всех внутренних (внешних) точек гиперболы.
Справедливы и обратные утверждения.
В самом деле, пусть уравнение р(х,у)=0 определяет вещественную
линию второго порядка, за исключением пары пересекающихся прямых.
Тогда в канонической системе координат уравнение имеет вид (3.60):
р\х\у ')=0, где квадратичная функция р[х\у) получена из квадратичной
функции р(х, у) в результате умножения на отличный от нуля множитель ц
и ортогональной .замены переменных (3.62). По определению внутренние
точки удовлетворяют неравенству р\х\у)<09 которое равносильно
неравенству ц • р(х, у) < 0 в исходной системе координат.
Если уравнение р{х,у)=0 определяет эллипс, то ji = -i, 8>0 и
т-Д<0 (см. определение вида канонического уравнения). Поэтому
&р(х,у)<0 <=> ~р{х,у)<0 <=> ±р(х,у)>0 <=> х- р(х,у)<0.
Если уравнение р(х, у)=0 определяет гиперболу, тоц = --|-и8<0. Поэтому
Vp{x,y)<0 <* ~р{х,у)<0 <^> ±р{х,у)<0 <=> А р{х,у)<0.
Если уравнение р(х9 у)=0 определяет параболу или пару параллельных пря-
то М-=7- Поэтому iip(x,y)<0 <=> ~р(х,у)<0 <=> тр(х,у)<0.
313
Утверждения для внешних точек и обратные утверждения доказываются от
противного.
Замечания 3.16.
1. Для пары пересекающихся прямых предлагаемое определение внут-
ренних и внешних точек не годится, поскольку эта пара разбивает плоскость
на "похожие" области, каждую из которых равным образом можно считать
внутренней или внешней. Например, пара пересекающихся прямых
х2 - у2 = 0 разбивает плоскость на четыре прямых угла, т.е. на равные
"четверти", которые "накладываются" одна на другую при помощи поворота
вокруг начала координат на угол, кратный у.
2. При выборе положительного направления оси о'х канонической
системы координат о'ху для параболы, заданной уравнением (3.59) вида
р(*»)0 = О» достаточно проверить, является ли точка М с координатами
х = 1, у = 0 внутренней. Этой точке соответствует координатный столбец
\Х1 Ух) =5 + 'yi в исходной системе координат, где $ = (*<) уо)т -
координатный столбец точки о'. Вычислим значение квадратичной функции
при подстановке координат s + sx:
T -s + aQ+sT -A-Si+sf -A-s + 2-aT -sl=2-aT -sx,
поскольку sT -A-s + 2-aT -s + a^ = 0 (точка О* принадлежит параболе), а
также А - sx = о, так как s{ - особый собственный вектор параболы. Из
теоремы 3.5 следует, что точка М {ОМ = J+J3) является внутренней при
условии тр(х1,^1)< 0, т.е. при условии т-аг-^<0.
3. Из теоремы 3.5 следует, что градиент функции р(х,у) в точках
линии уровня р(х, у)=0 направлен при т > 0 в сторону внешних точек
эллипса или параболы, при Д > 0 - в сторону внешних точек гиперболы, в
противном случае, при т < 0 для эллипса и параболы или при А < 0 для
гиперболы градиент направлен в сторону внутренних точек (рис.3.60).
4. Линии уровня р(х,у)=const квадратичной функции (3.57) являются
линиями второго порядка. При изменении величины параметра (const)
меняется свободный член функции р(х,у)~const, однако при этом не
изменяются выражения т и 5, а, следовательно, и корни характеристического
уравнения, поскольку они не зависят от свободного члена. Поэтому тип
линии уровня (эллиптический, гиперболический или параболический)
сохраняется. Для всех центральных линий уровня р(х,у)=const сохраняется от-
314
ношение а: Ъ сторон основного прямоугольника, а также эксцентриситет и
фокальный параметр для эллипсов, гипербол и парабол. Вид линии может
измениться, поскольку выражения Лик зависят от свободного члена.
Например, при некоторых значениях постоянной (const) линия р(х,у)=const
может быть вещественным эллипсом, при других значениях - мнимым
эллипсом, а при одном значении - парой мнимых пересекающихся прямых.
Направления градиента функции р{х,у) в точках линии уровня p(xty)=const
т<0
;>•-€ к -4
Линия уровня - эллипс Линия уровня - гипербола Линия уровня - парабола
Рис.3.60
5. Линии уровня р{х,у)=const заданной квадратичной функции при
различных значениях параметра (const) имеют постоянные собственные
направления, т.е. базисные векторы канонической системы координат не
изменяются. Следовательно, если линии уровня p(jt,;y)=const центральные,
то все они имеют одну и ту же систему координат. При возрастании
параметра (const) эллипсы и гиперболы изменяются гомотетично (центр
гомотетии совпадает с центром линии) в направлениях, указанных на рис.3.60.
Если линии уровня р(х, у)=const параболические, то все они имеют одну и
ту же ось абсцисс канонической системы координат. При возрастании
параметра параболы перемещаются в направлениях, указанных на рис.3.60.
33.6. Приведение уравнения линии второго порядка
к каноническому виду
Рассмотрим задачу приведения к каноническому виду линии второго
порядка, заданной в прямоугольной системе координат Оху уравнением
(3.34):
anjc2 + 2o12 •x-y + a22-y2+2-al-x + 2-a2-y + a0=0. (3.70)
Квадратичную функцию в левой части (3.70) обозначим р(х,у), ее матрицу
и матрицу квадратичной формы, как и ранее, обозначим через Р и А
соответственно.
Требуется определить один из девяти возможных канонических видов
линии (см. теорему 3.3), найти каноническую систему координат О'ху , в
которой уравнение линии имеет канонический вид, а затем построить линию
в канонической и исходной системах координат. Построение, разумеется,
производится только для вещественных линий.
315
АЛГОРИТМ ПРИВЕДЕНИЯ УРАВНЕНИЯ ЛИНИИ ВТОРОГО ПОРЯДКА
К КАНОНИЧЕСКОМУ ВИДУ
Для приведения уравнения (3.70) линии второго порядка, заданной в
прямоугольной системе координат Оху, к каноническому виду, нужно
выполнить следующие действия.
1. По уравнению (3.70) линии второго порядка составить матрицу Р
квадратичной функции, матрицу А квадратичной формы и столбец а
коэффициентов линейной формы:
Р =
«11 «12 «1
«12 «22 «2
CL CLf% Лл
Л =
агг
а-|
2. Составить характеристическое уравнение А2-тА,+8 = 0, либо
вычисляя его коэффициенты по формулам: т = аи+а22, 8= п 12 , либо
«12 «22
«11 ~Х «12
«12 «22-;
Найти корни Хг, Х2 (с учетом кратности) характеристического уравнения.
разлагая определитель det(A-A,-/?)=
Вычислить инвариант А = det P =
лить семиинвариант к =
«11 «1
«11 «12
«12 «22
«1 «2
+
«22 «2
«2 «0
«1
«2
«0
Если 5 = А = 0, то вычис-
3. По таблице 3.2 определить вид линии.
4. Занумеровать корни \Л2 характеристического уравнения в
соответствии с правилами:
а) если линия эллиптического типа, то \Хг \< \Х21;;
б) если линия гиперболического типа, то:
- при А Ф 0: Хх • А >0 (знак \ совпадает со знаком А);
-при Д = 0: Хх>0;
в) если линия параболического типа, то \ =0, Я2 ^0.
5. Найти взаимно ортогональные собственные направления /19 /2,
соответствующие корням Xj Д2 характеристического уравнения:
316
а) если Хх = Х2, то базисные векторы исходной системы имеют
искомые направления lx = (l Oj , Z2 = (О \f ;
б) если корни Хх, Х2 простые (Хх Ф Х2), то для каждого корня найти
ненулевое решение однородной системы уравнений [А -X. • Еу I. = о ,
/ = 1,2. Например, собственное направление /2 = (jc2 у2[ для простого
корня Х2 находится как любое ненулевое решение системы
аиЛ2).* + а12-;у=0, , ,
/ . \ л или 1А—A, mt)-L =o.
Если Xj = 0, то направление /t должно удовлетворять
дополнительному условию т • ат • /j < 0, в противном слз^чае следует заменить столбец Zj на
противоположный (-/j).
Нормируя полученные векторы /х, /2, определить координатные
столбцы sx =т—r-Zj, 52 =1—r-Z2 векторов Jx, J2 канонического базиса.
П1 VA
6. Найти координаты д:0, у0 начала О* канонической системы
координат:
а) для линий, имеющих хотя бы один центр (т.е. всех линий, за
исключением параболы), найти любое решение s = [xQ yof системы
уравнений
или
б) для параболы найти решение s = (jc0 Jq У системы:
7. Вычислить коэффициенты канонического уравнения:
а) для линий эллиптического типа (5 > 0):
(1) при т-Д <0 - уравнение эллипса Щ-+Щ- = 1 с коэффициен-
Щ-
317
(2) при т • А > О - уравнение мнимого эллипса Щ-+Щ- = -1 с ко-
а Ь
эффициентами а2 = -^, Ь2 = -^;
(3) при А = 0 - уравнение пары мнимых пересекающихся прямых
Щ-+Щ- = О с коэффициентами а2=ттт, 62=тгт;
а ь \кх\ \кг\
б) для линии гиперболического типа (8 < 0):
(4) при А Ф О - уравнение гиперболы ^f---^-[~ = 1 с коэффициен-
(5) при Д=0 - уравнение пары пересекающихся прямых
Щ—Щ-^0 с коэффициентами я2=у-, Ъ2 =-4-;
а Ь 12
в) для линии параболического типа (5 = 0):
(6) при Д*0 - уравнение параболы (у)=2-р-х с параметром
(7) при А = 0, к<0 - уравнение пары параллельных прямых
(у) -62=0скоэффициентом Ъ2 = —\;
(8) при А = 0, к > 0 - уравнение пары мнимых параллельных
прямых (у) +Ь2 =0 с коэффициентом Ъ2 =^-;
(9) при Д = 0, к = 0 - уравнение пары совпадающих прямых
8. На координатной плоскости Оху изобразить каноническую систему
координат О'х'у , координаты х0, у0 начала О' которой найдены в п.6, а
координаты базисных векторов - в п.5.
9. Построить линию второго порядка в канонической системе
координат Оху по каноническому уравнению, найденному в п.7. Построение
центральных линий (эллипса, гиперболы, пары пересекающихся прямых)
удобно начинать с изображения основного прямоугольника (см.
разд.3.3.1; 3.3.2). При построении параболических линий (параболы, пары
параллельных прямых, пары совпадающих прямых) использовать
разд.3.3.3; 3.2.4). Мнимые линии не изображаются, за исключением
уравнения пары мнимых пересекающихся прямых, действительным решением
которого является единственная точка О'.
318
Замечания 3.17.
1. Согласно п.З замечаний 3.15 для нахождения начала канонической
системы координат для параболы (см. п.6,"б" алгоритма) можно
использовать систему
{A -s + a± =0,
(a + ajf 5 + ^=0,
2. Систему уравнений в п.6,"б" алгоритма можно заменить системой
которая получена умножением обеих частей первого уравнения на
3. В случае параболы (Хг = 0) в качестве собственного направления /2
можно взять любой ненулевой столбец матрицы А (или ненулевой столбец,
пропорциональный столбцу матрицы А ).
Пример 3.24. В прямоугольной системе координат Оху построить
линию, заданную уравнением:
52-х2 + 12-х-у+73-у2-2&0-х-290-у + 325 = 0.
П 1. Составляем матрицу Р квадратичной функции, матрицу А
квадратичной формы и столбец а коэффициентов линейной формы:
52 36 -140"!
36 73 -145
-140 -145 325
2. Вычисляем инварианты (см. пример 3.23,г):
52
36
а =
-140
-145
: = 52+73 = 125, 8 =
52
36
36
73
= 2500, Д =
52
36
-140
36
73
-145
-140
-145
325
52
36
36
73
= -250000
52 36 -140
= 36 73 -145 =-100
0 0 -100
(к третьей строке определителя А прибавили вторую и удвоенную первую).
Так как 5 * 0, то вычислять семиинвариант к не нужно.
Составляем характеристическое уравнение Л2-125-А. +2500 = 0,
находим корни X = 25 и X = 100.
319
3. По таблице 3.2 определяем, что заданное уравнение является урав-'
нением эллипса, так как 8>0, Д*0, т-Д<0.
4. Поскольку линия эллиптического типа, корни характеристического
уравнения обозначим следующим образом (см. п.4,"а" алгоритма): кх = 25,
Х2 = 100, чтобы выполнялось неравенство \ХХ \<\Х21.
5. Находим взаимно ортогональные собственные направления /х, /2>
соответствующие корням Х{, А,2 характеристического уравнения. Поскольку
корни простые (п.нби), то находим ненулевые решения 1Х, /2 однородных
систем (а-Х. E)l. =o, i = l,2:
для Хх = 25
'52-25
36
для Х2 =100
36 ЛГх} (0
36 Vx^ fO^i
-HX>JU=loJ
52-100
36 73
Нормируя полученные векторы /19 /2, определяем координатные
столбцы векторов канонического базиса:
6. Находим координаты х0, у0 начала о' канонической системы
координат, решая систему уравнений (см. п.6,"а" алгоритма):
52л+36у-140=0,
= o или
Получаем jc0 = 2, у0 = 1. Следовательно, вектор 7 = 00* переноса начала
координат имеет координаты s = (2 l)7^ или, что то же самое, начало О
канонической системы координат имеет координаты О'{ 2,1) относительно
исходной системы координат.
7. Вычисляем коэффициенты канонического уравнения (1) эллипса (см,
п.7,"а" алгоритма):
2= А _ -250000 А _ -250000^
п ЯГ5 252500 И Х25 1002500
320
Следовательно, каноническое уравнение
заданной линии имеет вид:
22 I2
8. На координатной плоскости Оху
изображаем каноническую систему
координат о'ху с началом в точке О'(2; l), с
базисными
Рис.3.61
векторами
72 =7^+7*7 <см- рис.3.61).
9. В канонической системе координат строим основной прямоугольник
(см. разд.3.3.2) со сторонами 2-я = 4, 2Ь = 2, а затем эллипс iii-+^- = l
(см. пример 3.20). ■
Пример 3.25. В прямоугольной системе координат Оху построить
линию, заданную уравнением:
-90
D 1. Составляем матрицу Р квадратичной функции, матрицу А
квадратичной формы и столбец а коэффициентов линейной формы:
-7 26 -90 S
26 32 -180
-90 -180 720 у
2. Вычисляем инварианты: X = -7+32 = 25,
-7
-7 26
26 32
-7 26
26 32
= -900, A =
26 -90
26 32 -180
-90 -180 720
-7 10 -90
40 -20 0
-146 28 0
= -90
40 -20
-146 28
=162000
(ко второй и к третьей строкам определителя А прибавили первую,
умноженную на (-2) и на 8 соответственно, а затем разложили по третьему
столбцу).
Так как 5 * 0, то вычислять семиинвариант к не нужно.
Составляем характеристическое уравнение X2-25-к-900=0, нахо-
Димкорни Я = -20 и Х = 45.
3. По таблице 3.2 определяем, что заданное уравнение является
уравнением гиперболы, так как 5 < 0, Д Ф 0.
21-5150 321
4. Поскольку линия гиперболического типа, корни характеристическое с
го уравнения обозначим следующим образом (см. п.4,"б" алгоритма):
Xj = 45, Х2 = -20, чтобы выполнялось условие Хх • А > 0.
5. Находим взаимно ортогональные собственные направления 1Х, /2 э
соответствующие корням Хх Д2 характеристического уравнения. Поскольку
корни простые (п. "б"), то находим ненулевые решения 1Х, /2 однородных
систем (а-Х.•£)•/, = 0, i = l,2:
для Xj = 45
-7-45 26 V^ ((Л fx = l, . Г1
26 32-
для Х2=-20
-7 + 20 26
26
Нормируя полученные векторы /19 /2, определяем координатные
столбцы векторов канонического базиса:
6. Находим координаты х0, у0 начала О канонической системы
координат, решая систему уравнений (см. п.6,"а" алгоритма):
-7jc+26^-90 = 0,
-о или
J-7-jc+2<
Получаем jc0 = 2, ;у0 = 4. Следовательно, вектор J = ОО переноса начала
координат имеет координаты s = (2 4^ или, что то же самое, начало О*
канонической системы координат имеет координаты О\ 2,4) относительно
исходной системы координат.
7. Вычисляем коэффициенты канонического уравнения (4) гиперболы
(см. п.7,"би алгоритма):
2__ А 162000 _А L A 162000 _л
° " V5" 45.(-900)"4 И *"Ve""9
322
Следовательно, каноническое
уравнение заданной линии имеет вид:
8. На координатной плоскости
Оху изображаем каноническую
систему координат о'х'у с началом
в точке О\ 2, 4), с базисными
векторами у= 1 J+ 2.J.
Рис.3.62
9. В канонической системе координат строим основной прямоугольник
(см. разд.3.3.3) со сторонами 2 • а = 4, 2 • £ = 6, затем - асимптоты
(продлевая диагонали прямоугольника) и, наконец, - гиперболу ±-£—-^- = 1 (см.
пример 3.21). ■
Пример 3.26. В прямоугольной системе координат Оху построить
линию, заданную уравнением:
25х2-120-л;;у + 144- у2-78л:+1066;у + 845 = 0.
D 1. Составляем матрицу Р квадратичной функции, матрицу А
квадратичной формы и столбец а коэффициентов линейной формы:
25 ~L' " A-{25 ~(
1-60 144
Р =
-60 144 533
-39 533 845
2. Вычисляем инварианты: 1 = 25+144 = 169,
25
-39
5=detA =
25 -60
-60 144
= 0, A=det/» =
-60
-39
-60 -39
144 533
533 845
= -39
-60 -39
144 533
-533
25 -39
+845-8 = -4826809
-60 533
(раскладываем определитель А по третьей строке, учитывая, что 5 = 0). Так
как Д * 0, то вычислять семиинвариант к не нужно.
Составляем характеристическое уравнение А2-169-Л = 0, находим
корни Х = 0 и Х = 169.
3. По таблице 3.2 определяем, что заданное уравнение является
уравнением параболы, так как 5 = 0, Д * 0.
21* 323
4. Поскольку линия параболического типа, корни характеристического
уравнения обозначим следующим образом (см. п.4,ив" алгоритма): ^=0,
Х2 = 169, чтобы выполнялись условия Хх = 0, Х2 Ф 0.
5. Находим взаимно ортогональные собственные направления /19 /2,
соответствующие корням Хх Д2 характеристического уравнения. Поскольку
корни простые (п."б"), то находим ненулевые решения 1Х, /2 однородных
систем [а-Хг е)-1г =оу i = l,2:
для Л = 0
25 -(
-60
согласно п.З замечаний 3.17, в качестве /2 возьмем ненулевой столбец
/2 = I I, пропорциональный первому столбцу матрицы А.
Условие T-tf^-Zj^O для направления 1Х не выполняется:
таг-/1=169-(-39 533)4 =371293>0. Поэтому заменяем столбец 1Х
на противоположный, полагая 1Х =1
Нормируя полученные векторы /х, /2, определяем координатные
столбцы векторов канонического базиса:
;
6. Находим координаты х0, у0 начала О7 канонической системы
координат. Поскольку линия является параболой, вычисляем
Составляем систему уравнений с учетом п.2 замечаний 3.17:
324
Г845-Д
1 117-
169-(5 -12
(117
*-2028;у-6591 = 0,
х+598;у + 845 = 0,
Г 5-JC-12-
[9-X+46-
+ 845 = 0,
-12^-39 = 0,
Получаем х0 = 3, уо=-2. Следовательно, вектор s = ОО переноса начала
координат имеет координаты s = (3 -2)Г или, что то же самое, начало О*
канонической системы координат имеет координаты О\ 3,-2)
относительно исходной системы координат.
7. Вычисляем коэффициент
канонического уравнения (6) параболы (см. п.7,"в" ал-
ч I а" / -4826809 1 гу
горитма): P = J—3=t/ 5— = *- ^ле"
довательно, каноническое уравнение
заданной линии имеет вид: [у) =2Л-х .
8. На координатной плоскости Оху
изображаем каноническую систему
координат О'ху с началом в точке О\ 3, - 2), с
базисными векторами Jx = -|| • i: - •—• • j';
9. В канонической системе координат строим параболу \у\ =2-1- х
(см. пример 3.22 в разд.3.3.4). ■
Пример 3.27. В прямоугольной системе координат Оху линии второго
порядка заданы уравнениями:
а) 52.*2 2
б) -7
в) 25л
Определить расположение начала координат О(0,0) относительно
заданных линий.
□ а) Вычисляем инварианты (см. пример 3.24): т = 125, 5 = 2500,
А = -250000 и находим по таблице 3.2, что заданное уравнение определяет
эллипс. Вычисляем значение квадратичной функции
325
в точке 0(О,О): р(0,0)=325. Так как т • р(0,0)= 125•325 > 0, то делаем вы*
вод, что точка О(0,0) лежит вне эллипса, т.е. является внешней для
заданного эллипса (см. п.1. теоремы 3.5).
б) Вычисляем инварианты (см. пример 3.25): т = 25, 8 = -900,
А = 162000 и находим по таблице 3.2, что заданное уравнение определяет
гиперболу. Вычисляем значение квадратичной функции
в точке О(0,0): р(0,0) = 720. Так как А р(0,0)=162000-325>0, то делаем
вывод, что точка О(0,0) внешняя точка гиперболы (см. п.2. теоремы 3.5).
в) Вычисляем инварианты (см. пример 3.26): т = 169, 5 = 0,
А = -4826809 и находим по таблице 3.2, что заданное уравнение определяет
параболу. Вычисляем значение квадратичной функции
в точке О(0,0): р(0,0) = 845. Так как тр(0,0)=125-325 >0, то делаем
вывод, что точка О(0,0) лежит вне параболы (см. п.1 теоремы 3.5).
Полученные выводы подтверждаются рис.3.61,3.62,3.63. ■
3.3.7. Применение линий первого и второго порядков в задачах
на экстремум функций
Рассмотрим задачу поиска минимума функции двух переменных [28].
Пусть заданы:
а) функция f(x) = f{xx, x2) двух переменных (х€ R2);
б) множество допустимых решений М (М с Л2).
Требуется найти такую точку х* из множества допустимых решений,
которой соответствует минимальное значение функции f(x) на этом
множестве:
Аналогично формулируется задача поиска максимума. Задача поиска
минимума и максимума называется задачей поиска экстремума. Множество
допустимых решений М задается условиями (ограничениями) на х, как
правило, уравнениями или неравенствами. В этом случае поставленная
задача называется задачей поиска условного экстремума. Если множество
допустимых решений совпадает со всей плоскостью (М = R2), т.е.
ограничения отсутствуют, решается задача поиска безусловного экстремума.
326
Постановки задач поиска экстремума функции принято записывать в
сокращенной форме, например:
fix)—>max, , ,
Г/(
Последние две записи относятся к одной и той же задаче поиска
безусловного экстремума, а первые две - к задаче поиска условного экстремума с
ограничениями, задаваемыми функциями gx{x), g2(x).
Напомним, что линией уровня функции f{x) = f(xvx2) называется
геометрическое место точек плоскости, в которых функция принимает
постоянное значение, т.е. f[xl, х2)=const.
Ниже рассматриваются задачи, в которых функция f(x) и функции,
задающие ограничения, являются многочленами двух переменных первой
или второй степени. В этом случае построение множества допустимых
решений М и линий уровня функции f(x) сводится к построению
алгебраических линий первого или второго порядков (см. разд.3.2, 3.3).
В основе графического метода
решения задачи поиска условного
экстремума лежит следующее соображение.
Если линия уровня /(*) = const имеете
множеством допустимых решений М
хотя бы одну общую точку, то это
значение постоянной (const) является
допустимым, так как функция достигает
его на множестве М. Если же линия
уровня f(x) = const не имеет общих
точек с множеством М, то это значение
постоянной (const) является
недопустимым, поскольку функция не достигает его на множестве М. В
частности, функция f(x), линии уровня которой изображены на рис.3.64, на
множестве М принимает, например, значения с,,с2,с* (они являются
допустимыми) и не принимает значений сх и с3 (они являются недопустимыми).
АЛГОРИТМ ГРАФИЧЕСКОГО РЕШЕНИЯ ЗАДАЧИ ПОИСКА УСЛОВНОГО
ЭКСТРЕМУМА
1. Построить на координатной плоскости R2 множество допустимых
решений М.
2. Построить семейство линий уровня f(x) = const.
327
Рис.3.64
3. По линиям уровня определить все допустимые на множестве М
значения функции: с+ < f(x)<c*.
4. Для наименьшего значения с, = min f(x) найти координаты общих
точек линии уровня f(x) = c+ и множества допустимых решений М. В
результате получим точки условного минимума функции. Для наибольшего
значения с* = max f(x) аналогичным образом найти точки условного мак-
хеМ
симума функции. Например, на рис.3.64: точка Д, - точка условного
минимума, а точки В*, В2 - точки условного максимума.
Замечания 3.17.
1. Возможны случаи, когда на множестве М функция f(x) не
ограничена сверху (с* =+«>) или снизу (сф =-<*>), тогда точек условного
максимума или минимума нет.
2. Для решения задачи поиска безусловного экстремума допустимые
значения постоянной (const) в п.З алгоритма определяются так: если линия
уровня f(x) = const имеет хотя бы одну точку (вещественную) на плоскости
R2, то это значение постоянной (const) является допустимым, в противном
случае - недопустимым.
3. За исключением простых задач, графическое решение требует
проверки аналитическими методами теории оптимизации [28].
Пример 3.28. Графическим методом найти экстремумы:
a) /(*)=-i-
б)
/(*)=**+*£-> «tor,
gl(x)=xl+x2-l = 0;
в)
д)
/(дс)=jcf + jc^ -> extr,
/(*)=*2->extr,
e)
D a) 1. Множество М допустимых решений строить не нужно, так как
оно совпадает со всей плоскостью: М = R2.
328
2. Линия уровня ——+х% = const при const > 0 представляет собой
эллипс (см. рис.3.65,а), при const = 0 - пару мнимых прямых,
пересекающихся в вещественной точке 0(О,0), при const < 0 - мнимый эллипс. При
увеличении постоянной полуоси эллипса пропорционально увеличиваются. На
рис.3.65,я изображены эллипсы -jf+x* =1 (я = 2, b = l) и -j-+*2 =<4 или
i+^p = l (a = 3, *=-|). Стрелками указаны направления наискорейшего
возрастания функции (градиента).
3. Из п.2 следует, что допустимые значения функции определяются
неравенством 0 < f(x) < -и».
4. В точке 0(0,0) достигается безусловный минимум функции, так как
в этой точке функция принимает наименьшее значение по сравнению со
значениями в других точках плоскости, а наибольшего значения функция не
достигает.
б) Решается задача поиска условного экстремума с ограничением типа
равенств.
1. Строим множество М допустимых решений - прямую
хх + х2 -1 = 0 (см. рис.3.65,6).
2. Линии уровня ^ + ^2= const представляют собой семейство
концентрических окружностей (при const>0). При const > у окружность
х\+*г =const пересекает прямую xl+x2-l = 0, при const=~ -касается
этой прямой в точке a(j, -j) »при 0 < const < у - не пересекает прямую.
3. Из п.2 следует, что допустимые значения функции определяются
неравенством ~ < f(x) < -н».
4. Наименьшее значение на множестве М, равное -|, функция
достигает в точке л(у,-|-). Наибольшего значения на множестве М функция не
достигает.
в) Решается задача поиска условного экстремума с ограничением типа
равенств.
1. Строим множество М допустимых решений - гиперболу х\ - х\ = 1
(см. рис.3.65,в).
2. Линии уровня jc^+jc^ = const представляют собой семейство кон-
Центрических окружностей (при const>0). При const >l окружность
329
л , л
хг + х2 = const пересекает гиперболу в четырех точках, при const = 1 -
касается гиперболы в точках Л(1,0), В(-1,0), при 0 < const < 1 - не
пересекает гиперболу.
м
25
Рис.3.65
330
3. Из п.2 следует, что допустимые значения функции определяются
неравенством l</(jc)<+<».
4. Наименьшее значение на множестве М, равное 1, функция
достигает в точках A(l,0) и 2?(-1,0). Наибольшего значения на множестве М
функция не достигает.
г) Решается задача поиска условного экстремума с ограничением типа
неравенств.
1. Строим множество М допустимых решений: множество, ограни-
ченное эллипсом —+jc^ = 1, включая внутренние точки эллипса (см.
рис.3.65^).
2. Линии уровня (д^-З/^+дСз = const представляют собой семейство
концентрических окружностей (при const >0) с центром в точке б(3,0).
При 1 < const < 25 окружность х^+дс^ = const пересекает множество Л#,
при const = 1 - касается эллипса в точке Л(2,0), при const = 25 - касается
эллипса в точке 2*(-2,0), при 0<const<l или const > 25 окружность не
имеет общих точек с множеством М.
3. Из п.2 следует, что допустимые значения функции определяются
неравенством 1 </(*)< 25.
4. Наименьшее значение на множестве М, равное 1, функция
достигает в точке Л(2,О). Наибольшее значение на множестве М, равное 25,
функция достигает в точке 2?(-2,0).
д) Решается задача поиска условного экстремума с ограничениями
типа неравенств. Данная задача относится к классу задач линейного
программирования [28] (функция f(x) и все функции, задающие ограничения,
линейные).
1. Строим множество М допустимых решений: в данном случае
выпуклый четырехугольник (см. рис.3.65,д и рис.3.35,г к примеру 3.18).
2. Линии уровня х2 = const представляют собой семейство
параллельных прямых. При 1 < const < 3 прямая х2 = const пересекает множество М,
при const = 1 прямая проходит через вершину Д(3, l) четырехугольника, при
const = 3 прямая проходит через вершину в(2,3) четырехугольника, при
const < 1 или const > 3 прямая не пересекает четырехугольник М.
3. Из п.2 следует, что допустимые значения функции определяются
неравенством 1 £ f(x) < 3.
331
4. Наименьшее значение на множестве М, равное 1, функция
достигает в точке л(3, l). Наибольшее значение на множестве М, равное 3,
функция достигает в точке в(2,3).
е) Решается задача поиска условного экстремума с ограничением типа
равенств.
1. Строим множество М допустимых решений - прямую
Xj - х2 +1 = 0 (см. рис.3.65,е).
2. Линии уровня 4-jCj -jc^ = const представляют собой семейство
парабол, симметричных относительно оси Охг. При увеличении постоянной
(const) параболы перемещаются вдоль оси Ох{ в сторону ее
положительного направления. При const < 0 парабола 4-^-xl = const пересекает
прямую М в двух точках, при const = 0 парабола касается прямой в точке
A(l, 2), при const > 0 парабола не имеет общих точек с М.
3. Из п.2 следует, что допустимые значения функции определяются
неравенством -«></(*)< 0.
4. Наибольшее значение на множестве М, равное 0, функция
достигает в точке A(l, 2). Наименьшего значения на множестве М функция не
достигает. ■
Задачи для самостоятельного решения
Во всех задачах предполагается, что на плоскости задана прямоугольная система
координат Оху. Коэффициенты в общем, параметрическом, каноническом уравнениях прямых,
указанные в ответах, определяются неоднозначно.
3.1. Для прямой, проходящей через точки A(l, 4) и в(2,0), составить:
а) общее уравнение; б) параметрическое уравнение; в) каноническое
уравнение; г) уравнение "в отрезках"; д) уравнение с угловым коэффициентом.
Ответ: а) 4-*+;у-8 = 0; б) \ ' teR; в)-—=- ;
[;y = 4-4-f, 1 -4
г) |+| = 1; д) з> = -
2 о
3.2. Заданы координаты вершин A(l,2), 2?(-3,5), С(5,2) треугольника
ABC. Составить уравнения прямых, проходящих через вершину А и
содержащих медиану, высоту и биссектрису треугольника, а также уравнение
серединного перпендикуляра к стороне ВС.
Ответ: х-1 = 0; 8-jc-3-^-2 = 0;—=-^; 16-х-б-;у + 5 = 0.
332
3.3. Составить общее уравнение прямой, симметричной прямой
3-Jt-;y+5 = O относительно прямой х + у-1 = 0.
Ответ: х-3;у + 7 = 0.
3.4. Даны координаты двух вершин Л(-10,4),Я(4,3) треугольника
ABC и точки #(4,-2) пересечения его высот. Найти координаты вершины
С треугольника.
Ответ: с(^-
3.5. Составить уравнение прямой, проходящей через точку A(l,-l) и
образующей с прямой *-2;у + 2 = 0 угол величиной -у.
Ответ: 3*-;у-4 = 0 или
З.б. Найти величину и составить уравнение биссектрисы того угла
между прямыми 3-х-;у-4 = 0 и 2-дс + б-у + 3 = 0, в котором лежит начало
координат.
Ответ: f;
3.7. Используя ортогональные инварианты, показать, что линия,
заданная уравнением 34-Jt2+24-jt-;y + 41-;y2 -44-дс+58-у + 1 = 0, является
эллипсом. Найти полуоси и эксцентриситет этого эллипса.
Ответ: 4l\ U^.
3.8. Используя ортогональные инварианты, показать, что линия,
заданная уравнением 7-jc2+48-jc-;y-7-;y2-62-jc-34-;y+98 = 0, является
гиперболой. Найти полуоси и эксцентриситет этой гиперболы.
Ответ: 4l\ 4l\ <J2.
3.9. Используя ортогональные инварианты, показать, что линия,
заданная уравнением х2 + 2-х-у + у2 + х = 0, является параболой. Найти
параметр этой параболы.
Ответ: —.
3.10. Привести уравнение линии второго порядка к каноническому
виду, определить название линии и указать соответствующую ортогональную
замену неизвестных, построить линию в исходной и канонической системах
координат:
а) 9-Jc2+4-y2-18-Jc+16-y-ll = 0;
б) *2-4.з>2 + 2.*+16-з> + 1 = 0;
333
в) у2-Ю-х-2-у-19 = 0;
г) ^2-y2-
д)
е) 3-
ж) 25
з) 8jc2 + 6jc-у + б-дс+3
и)
Ответ: а) эллипс ^-+*LL. = 1\ дс = ;/+1, y = Jt'-2; б) гипербола
-*j$- = l; * = /-1, у = /+2; в) парабола (y'f =2-5-/; дг = х'-2,
У+1; г)пара пересекающихся прямых \х) ~-\У) =0; jc = jc'+2,
/+3; д)эллипс
-*/+Л?'/' ж)парабола {/f =2-jL-x'\ х = -Л
' 3)паРа пересекающихся прямых "^—*2 =0»
^'^; и)паРа паР^ельных пря-
Замены неизвестных определяются неоднозначно.
3.11. Привести уравнение линии второго порядка к каноническому
виду, определить название линии, найти каноническую систему координат и
построить линию в исходной и канонической системах координат:
a) (m-nf х2 +(m+nf у2 -2m(m-nY x+2n(m+nf -у +
б) пх2-т2-у2+2
в) п2 -х2 + 2т-п-х у + т2 - у2+ 4т-п-х+2-т2
334
ГЛАВА 4. АЛГЕБРАИЧЕСКИЕ ПОВЕРХНОСТИ
В ПРОСТРАНСТВЕ
Пространственные фигуры изображаются на рисунках в виде
проекций. Как правило, используются проекции фигуры на плоскость вдоль
заданной прямой (см. разд. 1.2.2, 1.2.3). Проекция, разумеется, не дает полного
представления о фигуре, кроме того, измеряемые величины (длины отрезков
и величины углов) искажаются (см. свойства проекций в разд. 1.2.2).
Поэтому рисунки пространственных фигур в стереометрии играют
вспомогательную роль. В аналитической геометрии, как это было отмечено ранее (см.
введение к разд.З), решение любой геометрической задачи сводится к
алгебраическим методам и вычислительным процедурам, при выполнении
которых изображения фигур не используются. Такие методы и процедуры без
труда переводятся на алгоритмический язык и реализуются на компьютере.
Во всех разбираемых ниже примерах геометрическая иллюстрация фигур
приводится для наглядности, но не используется в ходе решения.
4.1. СПОСОБЫ ЗАДАНИЯ ГЕОМЕТРИЧЕСКИХ МЕСТ ТОЧЕК
В ПРОСТРАНСТВЕ
В стереометрии любую пространственную фигуру можно
рассматривать как геометрическое место точек (г.м.т.)9 т.е. как множество точек,
каждая из которых удовлетворяет заданному характеристическому свойству
(точка, не принадлежащая этому множеству, не удовлетворяет этому
свойству). Например, в элементарной геометрии сфера определяется как г.м.т.,
равноудаленных от заданной точки (центра сферы), круговая
цилиндрическая поверхность как г.м.т., равноудаленных от заданной прямой (оси
цилиндрической поверхности) и т.п.
В аналитической геометрии пространственные геометрические фигуры
задаются как множества решений соответствующих уравнений. Рассмотрим,
например, уравнение
F(x,y,z)=0
с тремя неизвестными х, у , z . Его решением называется тройка чисел, при
подстановке которых вместо неизвестных уравнение превращается в верное
числовое равенство. Каждое решение x,y,z уравнения F(x,y,z)=0
можно рассматривать как точку M(x,y,z) в координатном пространстве с
абсциссой х, ординатой у и аппликатой z . Таким образом, множество F
точек Af(jt,;y,z), координаты которых удовлетворяют уравнению
F(x, у, z)=0, образуют в координатном пространстве некоторую фигуру
335
Например, уравнение jc2 + ^2 + z2=1 (или х2 + у2 + г2-1 = 0) в
прямоугольной системе координат Oxyz задает сферу единичного радиуса с
центром О (рис.4.2,в).
Переход к этому способу описания геометрических фигур базируется
на введении системы координат в пространстве, которая позволяет вместо
точек (элементарных геометрических объектов) оперировать с числами
(элементарными алгебраическими объектами). В разд.2 подчеркивалось, что
введение системы координат устанавливает взаимно однозначное
соответствие между точками пространства и их координатами (упорядоченными
наборами из трех чисел), т.е. соответствие, удовлетворяющее двум условиям:
1) разным точкам пространства соответствуют разные наборы
координат, отличающиеся хотя бы одной координатой;
2) любому набору координат соответствует некоторая точка.
Введение системы координат позволяет задать любую геометрическую
фигуру уравнением, связывающим координаты таким образом, что
координаты любой точки, принадлежащей заданной фигуре, удовлетворяют этому
уравнению, а координаты точки, не принадлежащей фигуре, не
удовлетворяют уравнению. Такой способ описания геометрических фигур
применяется в аналитической геометрии.
4.1.1. Общие уравнения геометрических мест точек
Уравнением множества F точек (уравнением г.м.т.) в
координатном пространстве называется равенство, связывающее координаты точек,
верное для координат точек, принадлежащих множеству F , и неверное для
координат точек, не принадлежащих F . Например, уравнение множества в
аффинной системе координат Ох1х2х2 имеет вид:
в частности, в прямоугольной системе координат Oxyz:
в цилиндрической системе координат Onpz:
С(г,ф,г)=О, (4.2)
в сферической системе координат ОрфО:
#(р,ф,9)=0, (4.3)
где F, G и Н - некоторые функции трех аргументов.
Уравнения (4.1)-(4.3) представляют собой аналитическую запись
функциональной зависимости между координатами точек в пространстве,
образующих геометрическое место точек. В частных случаях одна из
координат может быть выражена через другую, т.е. одна координата задается как
336
явная функция другой координаты. Тогда получается уравнение,
разрешенное относительно этой координаты, например:
z = f{x,y), г = ^(г,ф), р = й(<р,в).
Заметим, что уравнениями вида z = f(x,y) в прямоугольной системе
координат Oxyz задаются графики функций двух переменных.
Пример 4.1. Изобразить в координатном пространстве Oxyz (в
прямоугольной системе координат) множества точек, координаты которых
удовлетворяют следующим уравнениям:
а) *-1 = 0; б) х2-у2=0; в) *2 + ;у2=0;
г) *2 + з>2-1 = 0; д) |х|+|у|+|г|-х-у-г = 0.
□ а) Уравнению jc—1 = 0 удовлетворяют только те точки
пространства, у которых абсцисса равна единице (х = 1), а ординаты и аппликаты
могут принимать любые значения. Эти точки принадлежат плоскости,
параллельной координатной плоскости Oyz и пересекающей ось абсцисс в точке
jc = 1 (рис.4.14).
б) На плоскости Оху заданное уравнение определяет две
пересекающиеся прямые у = ±х, при этом аппликата z не входит в уравнение и
поэтому может принимать любые значения. Следовательно, заданное
уравнение определяет две пересекающиеся по оси Oz плоскости, проходящие
через прямые у=х и у = -х на плоскости Оху (рис.4.1,6).
в) Уравнение х2 + у2 = 0 равносильно системе уравнений
1у=о,
которая определяет прямую, совпадающую с осью аппликат (рис.4.1,в).
kZ
г) Выражение х2 + у2 есть квадрат расстояния от точки (x,y,z) до ее
ортогональной проекции (0,0,z) на ось Oz. Поэтому уравнению
* +з>2-1 = 0 (или х2 + у2=1) удовлетворяют только те точки, которые
22-5150 337
удалены от оси аппликат на расстояние, равное 1. Это множество точек
является круговой цилиндрической поверхностью радиуса 1 (рис.4.1,г).
д) Учитывая неравенства: |jc|>jc, | У | ^ У, |z|^z, делаем вывод, что
левая часть заданного уравнения неотрицательна и равна нулю только при
одновременном выполнении условий *>0, у>09 z>0. Следовательно,
заданное уравнение определяет множество точек первого октанта системы
координат Oxyz (рис.4.1,д). ■
Пример 4.2. Применяя цилиндрические или сферические координаты»,
изобразить множества точек, заданных в прямоугольной системе координат
Oxyz уравнениями:
a) x2 + y2-z = 0; б) *2 + ;y2-z2=0; в) x2 + y2 + z2-1 = 0.
D а) Запишем уравнение в цилиндрической системе координат Orifz
(см. разд. 2.3.2): z = r2, где г2 = х2 + у2. Это уравнение не зависит от
полярного угла ф. При любом фиксированном значении <р уравнение z = г2
определяет параболу. Например, при ф = -| (* = r-cos-| = 0, j = rsin-|=r)
получаем параболу z = у2 в плоскости Oyz • Следовательно, описываемое
множество точек можно получить, вращая параболу z = у2 вокруг ее оси
симметрии Oz (рис.4.2,а). Получаемая при этом поверхность называется
параболоидом вращения.
б) Запишем уравнение в цилиндрической системе координат
(см. разд. 2.3.2): z2 = г2 «=> | z | = г (напомним, что полярный радиус г > 0
по определению). Это уравнение не зависит от полярного угла ф. При
любом фиксированном значении ф уравнение | z | = г определяет угол,
составленный из двух лучей z = r , z = -r (r >0). Например, при Ф = у получаем
два луча z = у, z = -y (y>0) в плоскости Oyz. Следовательно,
описываемое множество точек можно получить, вращая угол вокруг оси Oz, про-
338
ходящей через вершину угла. При этом получаем коническую поверхность
(рис.4.2,б).
в) Запишем уравнение х2 + у2 + z2 -1 = 0 в сферической системе
координат Орфб (см. разд. 2.3.3): р2=1 <=> р = 1 (напомним, что радиус р>0
по определению). Это уравнение не зависит от широты <р и долготы 6.
Следовательно, это множество точек, равноудаленных от начала координат,
т.е. сфера (рис.4.2,в). ■
Пример 4.3. В координатном пространстве Oxyz (в прямоугольной
системе координат) отмечены точки д(0,2,0) и /*(0,8,0). Вывести
уравнение геометрического места точек М , отношение расстояний от каждой из
которых до двух заданных точек равно к:
а)для Jk = l,T.e
б)для * = 2,т.е.
D а) Точка M(x,y,z) равноудалена от заданных точек. Запишем
уравнение MB = MA в координатной форме:
Отсюда получаем у=^-> т.е. у = 5 . Следовательно, искомое г.м.т. - это
плоскость, перпендикулярная отрезку АВ и проходящая через его середину
(рис.4.3,а).
б) Запишем уравнение MB = 2 • MA в координатной форме:
М
Рис.4.3
Возводя обе части уравнения в квадрат и приводя подобные члены,
получаем 3-jc2+3-;y2+3-z2-48 = 0 <=> х2 + у2 + z2 = 42, т.е. уравнение сферы
с центром в начале координат и радиусом 4.
Заметим, что при любом положительном кФ\ искомое
геометрическое место точек является сферой {сферой Аполлония). ■
22*
339
УРАВНЕНИЯ ПЕРЕСЕЧЕНИЙ И ОБЪЕДИНЕНИЙ
ГЕОМЕТРИЧЕСКИХ МЕСТ ТОЧЕК
Рассмотрим основные операции с множествами точек, заданными
своими уравнениями в координатном пространстве.
Пусть множества F ибв аффинной системе координат Оххх2 х3
заданы общими уравнениями F[x1,xvx3)=0 и G\xvx2Jx3)= О
соответственно.
Пересечение F П G множеств F и G состоит из точек, координаты
которых удовлетворяют системе уравнений
()
Не трудно составить одно уравнение, равносильное этой системе, например:
Объединение FUG множеств F и G состоит из точек, координаты
которых удовлетворяют совокупности уравнений
равносильной одному уравнению, например:
Включение FcG с алгебраической точки зрения означает, что
уравнение g(jc^, х2, х3)=0 является следствием уравнения f(jCj , х2, х3)=0, т.е.
Равенство F =G означает, что уравнения F[xx, х2, х3)=0 и
x^x^-O равносильны (эквивалентны), т.е.
В частности, равносильные уравнения, описывающие одно и то же
геометрическое место точек, получаются при тождественных
алгебраических преобразованиях, например при умножении обеих частей уравнения на
отличное от нуля число, при приведении подобных членов, при переносе
членов из одной части уравнения в другую с изменением знака на
противоположный и т.п.
Полученные соотношения, сводящие операции с множествами в
пространстве к алгебраическим операциям с уравнениями этих геометрических
мест точек, не зависят от выбора системы координат. Например, в
прямоугольной системе координат Oxyz аналогичные соотношения получаем, по-
340
лагая jCj = х, х2 = ;у, jc3 = z , в цилиндрической системе координат Orifz
при Xj=r, *2=<р, *3 = z' B сферической Орфв при хх=р, *2=ф,
ПЛОСКИЕ СЕЧЕНИЯ
Пусть в прямоугольной системе координат Oxyz фигура F
определяется уравнением
F(*, )>,*)=0. (4.4)
Подставляя в уравнение некоторое фиксированное значение z = const,
получаем уравнение с двумя неизвестными х, у :
F(x,;y, const) = 0.
Это уравнение описывает некоторое множество на координатной плоскости
Оху (см. разд.3.1.1). Запишем уравнение в виде равносильной ему системы
уравнений
(F(x,y,z)=O,
I z = const.
(4.5)
x = const
Рис.4.4
Второе уравнение системы определяет плоскость, параллельную
координатной плоскости Оху * Следовательно, система (4.5) описывает множество
точек фигуры F, принадлежащих плоскости z = const (см. рис.4.4,а), т.е.
плоское сечение фигуры F. Каждую фигуру F, заданную уравнением
F(*, у, z)=0, можно представить как совокупность ее плоских сечений (4.5)
при всех значениях постоянной (const). Тем самым исследование и
построение пространственной фигуры сводится к исследованию и построению
ее плоских сечений. В этом состоит идея метода сечений. Разумеется,
можно рассматривать сечения фигуры F плоскостями х = const (рис.4.4,б)
или у = const, параллельными координатным плоскостям Oyz или Oxz
соответственно.
341
ЦИЛИНДРИЧЕСКИЕ ФИГУРЫ
Фигура, состоящая из параллельных прямых, называется
цилиндрической. Прямые называются образующими цилиндрической фигуры.
Пусть в прямоугольной системе координат Oxyz фигура F
определяется уравнением
()O, (4.6)
в котором неизвестная z отсутствует. Обозначим через М множество
решений этого уравнения как уравнения с двумя неизвестными х и у , а
также соответствующее множество точек на координатной плоскости Оху (при
z = 0). Тогда вместе с любой точкой м(хо,уо,о) € М уравнению (4.6)
удовлетворяют также и все точки прямой, параллельной оси аппликат Oz и
проходящей через точку M(xQ9y0,0). Таким образом, фигура F является
цилиндрической, ее образующие параллельны оси Oz и пересекают
плоскость Оху в точках множества М (рис.4.5,а). Уравнения F(jc,z)=O или
F(y,z)=О также описывают цилиндрические фигуры, образующие которых
параллельны оси ординат или абсцисс соответственно.
z
М
(р>Фо'ео)
Рис.4.5
КОНИЧЕСКИЕ ФИГУРЫ
Фигура, состоящая из лучей, имеющих общее начало, называется
конической. Лучи называются образующими, а их общее начало -
вершиной конической фигуры.
Пусть в сферической системе координат Орфб фигура F
определяется уравнением вида (4.3):
F(<p,8)=0, (4.7)
342
в котором неизвестная р отсутствует. Обозначим через М множество
решений этого уравнения как уравнения с двумя неизвестными ф и в, а
также соответствующее множество точек на сфере р = 1. Тогда вместе с любой
точкой м(1,фо,во)б М уравнению (4.7) удовлетворяют также и все точки
луча ОМ , исходящего из начала О системы координат. Таким образом,
фигура F является конической, ее вершина совпадает с началом координат,
а образующие пересекают множество М (рис.4.5,б).
ФИГУРЫ ВРАЩЕНИЯ
Пусть в цилиндрической системе координат Ortyz фигура F
определяется уравнением вида (4.2):
F(r,z)=0, (4.8)
в котором неизвестная ф отсутствует. Обозначим через М множество
решений этого уравнения как уравнения с двумя неизвестными г и z, а также
соответствующее множество точек на
плоскости ф = 0 (т.е. на плоскости Oxz,
соответствующей прямоугольной системе координат).
Тогда вместе с любой точкой М(го,О, z0) е M
уравнению (4.8) удовлетворяют также и все
точки Л/(го,ф, z0) окружности радиуса rQ с
центром в точке z = z0 на оси аппликат Oz,
плоскость, содержащая окружность,
перпендикулярна этой оси (рис.4.6). Таким образом,
фигуру F можно представить как фигуру
вращения, полученную путем вращения
множества М вокруг оси аппликат (оси
вращения).
M[rQ90,z0)
Рис.4.6
4.1.2. Параметрические уравнения геометрических мест точек
Функциональная зависимость между координатами точек
пространства, например в прямоугольной системе координат Oxyz, может быть задана
в параметрической форме, в которой координаты выражаются в виде
Функций вспомогательной переменной, называемой параметром:
У = g(t), (4.9)
343
где t - параметр, принимающий действительные значения. В общем случае
при задании множества не обязательно использовать один параметр, т.е.
вспомогательных переменных может быть несколько, например, двухпара-
метрическое множество точек описывается системой:
где tx, t2 - параметры, принимающие действительные значения. Каждую из
систем (4.9), (4.10) называют параметрическим уравнением
геометрического места точек.
Пример 4.4. Изобразить в координатном пространстве Oxyz (в
прямоугольной системе координат) множества точек, координаты которых
удовлетворяют следующим параметрическим уравнениям:
* = 0,
в)
а)
б)
У = *>
z = -t;
□ а) Из первого уравнения следует, что все точки заданного множества
принадлежат координатной плоскости Oyz. Из двух последних уравнений
следует, что z = -у. Таким образом, заданное множество - это прямая
z = - у в плоскости Oyz (рис.4.7,а).
X /
*Z-
? >
б) Исключим из первых двух уравнений параметр t. Возведя обе части
каждого уравнения в квадрат и сложив почленно результаты, получим
уравнение окружности х2 + у2 = 1. Параметром t служит величина угла
поворота радиус-вектора изображающей точки, измеряемого от положительного
направления оси абсцисс (см. рис.3.4,а). При равномерном увеличении угла
поворота / равномерно увеличивается аппликата изображающей точки, так
как z = f. Следовательно, заданная система описывает винтовую линию
(рис.4.7,б)при *>0.
344
в) Запишем заданное параметрическое уравнение в матричном виде
X
У
V
0
А
1
А
+(l-r1-f2)-
0
а затем в векторной форме г = fj -I+t2 • J+(l-^ -f2)*fc , где 7 = ОМ -
радиус-вектор произвольной точки Af (*,>>, z). Полученное уравнение является
аффинным уравнением плоскости (см. разд. 1.6.1), проходящей через концы
базисных векторов i, j, к (рис.4.7,в). ■
4.1.3. Алгебраические уравнения поверхностей
Напомним, что многочленом степени п одной переменной х
называется выражение вида
где ао,а19...,ап - действительные числа (коэффициенты многочлена),
ап Ф 0 - старший коэффициент, а0 - свободный член. Степень
многочлена обозначается deg р(х) = п.
Многочленом трех переменных х{,х2, х3 называется выражение вида
где ^,^2,...,^ - действительные числа (коэффициенты многочлена),
kl9...,kn; /1Э...,/Л; m1,...,m/l - целые неотрицательные числа. Число
degp(ji^,j:2,jc3)=max{ik1 +/j +mj;k2 +l2 +m2;...;kn +ln + mn \ называется
степенью многочлена.
Алгебраической поверхностью называется множество точек, которое
в какой-либо аффинной системе координат Ох1х2х3 может быть задано
уравнением вида
р(х1,дг2,дс3)=0, (4.11)
где /?(jCj, х2, х3) - многочлен трех переменных хх, х2, х3.
Уравнение вида (4.11) называется алгебраическим уравнением с
тремя неизвестными. Степенью уравнения (4.11) называется степень
многочлена рЦ, х2, х3). Одна и та же поверхность может быть задана уравнением
вида (4.11) с многочленами разных степеней. Порядком алгебраической
поверхности называется наименьшая из степеней этих многочленов.
Всякую неалгебраическую поверхность называют трансцендентной.
В примере 4.1,а,б,в,г - поверхности алгебраические: а - первого поряд-
к&, б,в,г - второго порядка. Примером трансцендентной поверхности служит
345
цилиндрическая поверхность у = sin*, образующие которой, параллельные
оси Oz, пересекают координатную плоскость Оху в точках синусоиды
у = sin х. Эту линию нельзя задать уравнением вида (4.11).
Теорема 4.1 (об инвариантности порядка алгебраической
поверхности). Если в некоторой аффинной системе координат в пространстве
поверхность задана уравнением (4.11), то и в любой другой аффинной
системе координат эта поверхность задается уравнением того же вида (4.11)
и той же степени. Другими словами, порядок алгебраической поверхности
является инвариантом (остается неизменным в любой аффинной системе
координат).
Теорема доказывается аналогично теореме 3.1.
В аналитической геометрии в пространстве изучаются:
- алгебраические поверхности первого порядка, описываемые
алгебраическим уравнением первой степени с тремя неизвестными
- алгебраические поверхности второго порядка, описываемые
алгебраическим уравнением второй степени с тремя неизвестными
Замечания 4.1.
1. Теорема 4.1 фактически выражает свойство многочленов: при
линейной невырожденной замене переменных
Х2 "" S2 ^21 " **1 "*" ^22 * *2 "*" ^23 " *3 '
или
где s =
, 5 =
42 43
, detS *0, степень многочлена p[xl,x2,x3)
*31 J32 ^33^
«е изменяется.
2. Алгебраическое уравнение (4.11) может не иметь действительных
решений. Например, в пространстве Ох{х2х3 нет точек, координаты которых
удовлетворяют уравнению х\ + х\ + х\ +1 = 0. Однако в области
комплексных чисел, согласно основной теореме алгебры [3,8,10], любое
алгебраическое уравнение имеет решения. Поэтому каждое алгебраическое уравнение
(4.11) вида p{zvz2,z3)=0, где zx=xx+i-yxeC, z2=x2 + i-y2eC,
z3=x3+i-y3eC, задает некоторую алгебраическую поверхность в
трехмерном комплексном пространстве С3 (см. п.2 замечаний 2.9). Если все
346
точки этой поверхности вещественные (действительные), т.е. zx = хх,
1г = х2, z3 = х3, а з^ = Уг = )>3 = 0, то поверхность называют вещественной
(действительной). В противном случае поверхность называют мнимой.
3. Алгебраическими неравенствами с тремя неизвестными
называются неравенства вида
/7^tpjc2,jt3 js^O, р\х^уХ2уХ3 J^sOj р\х^^х2^х3 />0, р\Хр<х2»<х3 j<0,
где p(jCj,jc2,jc3) - многочлен трех переменных хг,х2,х3. Степенью
алгебраического неравенства называется степень многочлена p(^,jc2,jc3).
4. Многочлены первой степени и алгебраические уравнения
(неравенства) первой степени называются линейными.
5. Многочлен второй степени
+2-a23-x2-x3+2-al-xl+2-a2-x2+2-a3-x3+aQ
называется также квадратичной функцией трех переменных; многочлен
называется квадратичной формой (квадратичной частью функции),
многочлен al-xl+a2-x2+a3-x3 - линейной формой (линейной частью
функции), коэффициент а0 - свободным членом. По сравнению со стандартной
записью многочлена некоторые коэффициенты квадратичной функции
удвоены для удобства выполнения алгебраических преобразований.
б. Квадратичную функцию (см. п.5) можно записать:
а) в матричном виде
хг хз
«11
«12
«13
«1
«12
«22
«23
«2
«13
«23
«33
«3
«1
«2
«3
Х2
х3
где Р-
«11
«12
«13
«1
«12
«22
«23
«2
«13
«23
«33
«3
«1
«2
«3
«oJ
- матрица квадратичной функции; х =
-расширенный (дополненный единицей) столбец переменных;
б) выделяя квадратичную и линейную части:
р(х)= р{х1,х2,хг)=(х1 х2
«11
«12
«13
«12
«22
«23
«13
«23
«33>
347
аг агУ
= хт -А-х+2-ат -х+а0,
где А =
ап ап °13
«12 «22 «23
«13 «23 пЪъ
- матрица квадратичной формы, а =
al
a2
столбец коэффициентов линейной формы, х =
х-
- столбец перемен»
ных. Матрицы А и Р называются также матрицами малой и большой
квадратичных форм квадратичной функции р(х).
7. Многочлены второй степени и алгебраические уравнения
(неравенства) второй степени называются квадратичными (квадратными).
8. Теорема 4.1, разумеется, справедлива для прямоугольных систем
координат на плоскости. Напомним, что преобразования прямоугольных
систем координат (см. разд.2.2.3) являются ортогональными (см. п.5
замечаний 2.3). Поэтому соответствующие этим преобразованиям линейные
замены переменных x = s + Sx' (см. п.1) с ортогональной матрицей 5
(ST = S~l) называются ортогональными (неоднородными при бФо или
однородными при s = o). Далее, как правило, будут рассматриваться
уравнения, записанные в прямоугольной системе координат Oxyz.
4.2. АЛГЕБРАИЧЕСКИЕ ПОВЕРХНОСТИ ПЕРВОГО ПОРЯДКА
(ПЛОСКОСТИ)
4.2.1. Уравнения плоскости, проходящей через заданную точку
перпендикулярно заданному вектору
ОБЩЕЕ УРАВНЕНИЕ ПЛОСКОСТИ
Ненулевой вектор п , перпендикулярный заданной плоскости,
называется нормальным вектором (или, короче, нормалью) для этой плоскости.
Пусть в координатном пространстве Oxyz (в прямоугольной системе
координат) заданы:
а)точкаМ0(х0,;у0,г0);
б) ненулевой вектор n = A-T+Bj + Ck (рис.4.8,а).
348
Требуется составить уравнение плоскости, проходящей через точку
M0{x0,y0,zQ) перпендикулярно вектору п .
Общее уравнение плоскости:
А2 +В2 +С2 *0, D = -
Нормаль
n=A-l+Bj+Ck
Нормаль
Рис.4.8
Выберем в пространстве произвольную точку M(x,y,z)- Обозначим
:, rQ=OM0=x0-i + y0-j + z0'k -радиус-векторы
точек M(x,y,z) и M0[xQ9yQ,z0)- Точка М принадлежит заданной
плоскости тогда и только тогда, когда векторы MQM и п перпендикулярны
(рис.4.8,б). Условие ортогональности запишем при помощи скалярного
произведения (см. разд. 1.6.2):
(м0М,п)=0.
Учитывая, что MQM =T-70, получаем векторное уравнение плоскости:
(г-го,7Г)=О. (4.12)
Это уравнение можно записать в другой форме. Преобразуем левую часть
(г-^,/Г)=(г,л)-(/^,п), используя свойства скалярного произведения (см.
разд.1.4.2). Обозначая с = (^,л), получаем уравнение (г,п)-с = 0, или
{Т,п) = с9 (4.13)
выражающее постоянство проекций на нормаль радиус-векторов точек,
принадлежащих плоскости.
Получим координатную форму записи векторного уравнения
плоскости (4.12). Так как r-rQ =(*-*0).F+(;y-yo)-j + {z-zo)k,
л = А • i + В • j + С • к , по формуле (1.10) находим
349
A.{x-xo)+B.{y-yo)+C-{z-zo)=O. (4.14)
Полученное соотношение (4.14) позволяет по координатам точка
MQ(xQ,y09z0) и координатам Л,В,С нормали п сразу записать искомое
уравнение плоскости.
Обозначив D = -А • х0 - В - у0 - С • z0, получим уравнение
A-jt+£;y + Cz + D = O, (4.15)
которое называется общим уравнением плоскости. Поскольку
коэффициенты А , В , С не равны нулю одновременно (это координаты ненулевого
вектора п ), уравнение (4.15) является алгебраическим уравнением первой
степени, т.е. линейным уравнением с тремя неизвестными. Следовательно,
плоскость является алгебраической поверхностью первого порядка.
Проводя рассуждения в обратном порядке, делаем вывод о том, что
линейное уравнение (4.15) задает в координатном пространстве плоскость.
Полученные выводы сделаны для прямоугольной системы координат, но,
учитывая теорему 4.1 (см. разд.4.1.3), они переносятся (без изменений) и на
любую аффинную систему координат.
Теорема 4.2 (об алгебраической поверхности первого порядка).
Всякое уравнение первой степени с тремя неизвестными задает в
аффинной системе координат плоскость, и наоборот, всякая плоскость в любой
аффинной системе координат может быть задана уравнением первой
степени с тремя неизвестными. Другими словами, алгебраическая
поверхность первого порядка есть плоскость.
Замечания 4.2.
1. При составлении общего уравнения плоскости нормаль выбирается
неоднозначно: можно выбрать любую, отличную от нуля, длину нормали п ,
а также одно из двух возможных направлений (противоположный вектор
(-7Г) также является нормалью). Например, вместо нормали п можно взять
нормаль -7 •/Г, что соответствует умножению обеих частей уравнения (4.15)
на число -7.
2. Если в общем уравнении плоскости (4.15) коэффициент при
неизвестной равен нулю, то плоскость параллельна координатной оси.
Например, если А = 0, то плоскость (4.15) параллельна оси абсцисс Ох
(рис.4.9,д); если А = В = 0, то плоскость (4.15) параллельна координатным
осям Ох и Оу, т.е. параллельна координатной плоскости Оху (рис.4.9,б).
Бели в общем уравнении плоскости (4.15) свободный член равен нулю
(D = 0), то плоскость проходит через начало координат (рис.4.9,в).
3. Нормаль n = A-T+B-j + Ck к плоскости А-х+В- y + C-z + D = 0
совпадает с градиентом функции f(x,y,z)= A-x + B- y + C-z + D :
350
) т df(x,y,z) -:1 df(x,y,z) г
oy az
В курсе математического анализа [19] доказывается, что градиент
направлен в сторону наискорейшего возрастания функции в данной точке.
/Ax+By + Cz = O
в
Рис.4.9
4. Плоскость A-x + B-y + C-z + D = O разбивает пространство на два
полупространства (рис.4.10): положительное, координаты всех точек
которого удовлетворяют неравенству A-x + B-y + C-z + D>0, и
отрицательное, для точек которого A-x + B-y + C-z + D<0. Нормаль
п = A-i +В- j + C-k,
приложенная к произвольной точке
плоскости А х+By+ Cz + D = 0,
указывает на положительное
полупространство (рис.4.10).
Это свойство следует из п.З.
5. Абсолютное значение
|A-jt+2?-;y + C-z + Z)|
пропорционально расстоянию от точки
М (*, у, z) до плоскости
Ax + B-y + C-z + D = 0, т.е.
отношение расстояний от точек
Afi{xvyvzl) и M2{xvyvz2) до плоскости
отношению
Положительное полупространство
Плоскость
А • х + В • у + С • z + D = 0
Отрицательное полупространство
А • х + В • у + С • z + D £ 0
Рис.4.10
= 0 равно
Доказательство аналогично доказательству п.5 замечаний 3.2.
б. В аффинной системе координат О'ех'ё2е~ъ линейное уравнение
аГ хх + а2 • х2 + а3 • х3 + а4 = 0 задает, согласно теореме 4.2, плоскость. Вы-
351
воды, полученные в п.2,3,4,5, остаются справедливыми с тем лишь
исключением, что вектор п=а1-^+а2-?2+а3-?3 не является нормалью.
Пример 4.5. В координатном пространстве Oxyz (в прямоугольной
системе координат) заданы точки /ф,2,3) и L(5,0,l). Составить уравнение
плоскости, перпендикулярной отрезку KL и проходящей через его середину
(рис.4.11).
D Находим координаты середины М отрезка
- KL (см. п.З замечаний 2.1 в разд.2.1.1):
,f те Mi?X2) Векгор
можно взять в качестве нормали к плоскости.
Находим координаты этого вектора, вычитая из коорди-
нат его конца соответствующие координаты его на-
Рис.4.11
чала:
Следовательно, уравнение (4.15) искомой плоскости имеет вид
4х-2;у-2 z + D = O.
Осталось найти величину свободного члена D. Поскольку точка м(3,1,2)
принадлежит плоскости, то ее координаты jt = 3,y = l,z = 2 должны
удовлетворять уравнению этой плоскости, следовательно, 4-3-2-l-2-2+D = 0.
Отсюда D = -6. Таким образом, искомая плоскость задается уравнением
4-х-2-з>-2-г-6 = 0 <=> 2-jt-;y-z-3 = 0.
Уравнение этой прямой можно было получить в виде (4.14),
подставляя координаты нормали /F = 4-F-2-jf-2-Jfc и точки А/(3,1,2):
РАССТОЯНИЕ ОТ ТОЧКИ ДО ПЛОСКОСТИ
Пусть заданы:
а) плоскость, описываемая общим уравнением (4.15):
б) точка Af*(;t*,y\z*) в пространстве.
Требуется найти расстояние d от точки до плоскости.
Искомое расстояние равняется длине ортогональной проекции вектора
М0М* на направление нормали п (рис.4.12) и находится по формуле п.7 в
разд. 1.6.2:
352
d= \np-M0M*
где Мо [х0, yQ, z0) - любая точка на заданной плоскости.
п=А-1+В]+Ск
Z *
Расстояние d отточки
до плоскости A-x+B-y+C'Z+D-O:
Рис.4.12
Запишем правую часть в координатной форме, выражая скалярное
произведение и длину через координаты векторов n = A-i+
(см.разд.1.6.2):
Поскольку координаты точки М0(*0,з>0,г0) удовлетворяют уравнению
(4.15), то A-jto + Z?«;yo+C'Zo =-D. Подставляя это выражение, получаем
(4.16)
Пример 4.6. В координатном пространстве Oxyz (в прямоугольной
системе координат) заданы точки АГ(1,2,3) и L(S,O,l). Требуется найти, в
каком отношении плоскость п: 3-Jt-4-y + z-13 = O делит отрезок KL
(рис.4.13).
D Найдем значения линейного четырехчлена p(x,y9z)=3-x-4y +
+Z-13 вточках К(12,3>) и L(5,0,l): p(l,2,3)=31-4-2+3-13 = «15;
23-5150 353
к
p(5,0,l)=3. Получили значения разных знаков.
Следовательно, точки К и L лежат по разные
стороны от плоскости 71 (согласно п.4 замечаний 4.2,
эти точки лежат в разных полупространствах), т.е.
плоскость п действительно пересекает отрезок KL
(в точке М на рис.4.13). Так как эти значения по
абсолютной величине пропорциональны
расстояниям от точек К и L до плоскости п, то
КМ _ Р(1,2,3) _|-15|_5
ML />(5,0,l) 131 Г
Этот же результат можно получить по формуле (4.16). Находим
расстояния dK и dL от точек К и L до плоскости п:
Рис.4.13
_
Следовательно,
_|3 1-42+3-13| 15
" "7^
ML
НОРМИРОВАННОЕ УРАВНЕНИЕ ПЛОСКОСТИ
Преобразуем общее уравнение плоскости
следующим образом. Если свободный член D < 0, то разделим обе части на
длину нормали
|п| = у
2., а если D>0, то разделим на
-1 п | = - у А2 + В2 + С2 . Коэффициенты при неизвестных при этом станут
равными направляющим косинусам нормали (см. разд. 1.3.5, а также п.9 в
разд. 1.6.2):
А „ В С
cosoc=-
cosy=-
а свободный член f D в силу описанного выбора знака, будет
±Va2+^2+c2
неположительным. Обозначим его через -р =
А2+В2+С
. Тогда уравнение
2
принимает вид
jc-cosa + jcosP+zcosY-p = 0, p>0,
и называется нормированным уравнением плоскости.
354
(4.17)
Нормированное уравнение
плоскости:
р>0.
Рис.4.14
Замечания 4.3.
1. Свободный член р нормированного уравнения (4.11) равен
расстоянию от начала координат до плоскости. Это следует из формулы (4.16).
2. Нормированное уравнение
плоскости (4.17) можно записать в виде (4.13):
(г,л) = р, если в качестве нормали п
выбрать единичный вектор
п = cosa-7+cos|3-J+cosy к, так как
;c-cos(x+j-cosP+z-cosy = (F,/i). Из двух
возможных единичных нормалей условию
р > 0 отвечает нормаль п , направленная
к плоскости (рис.4.14), если вектор п
приложить к началу координат. При
выборе противоположного вектора (-п)
получилось бы отрицательное значение р,
которое не допускается в уравнении (4.17).
3. Коэффициенты общего уравнения плоскости (4.15) определяются
неоднозначно в силу неоднозначного выбора нормали (см. п.1 замечаний
4.2). При составлении нормированного уравнения (4.17) плоскости такого
произвола нет. Здесь все коэффициенты определены однозначно (при р > 0)
или с точностью до знака (при р = 0).
4. Нормированное уравнение плоскости имеет смысл только в
прямоугольной системе координат.
Пример 4.7. В координатном пространстве Oxyz (в прямоугольной
системе координат) заданы точки АГ(1,2,3) и L(5,0,l) (cm. рис.4.11).
Требуется:
а) составить нормированное уравнение плоскости, перпендикулярной
отрезку KL и проходящей через его середину;
б) найти расстояние от начала координат до этой плоскости.
D а) Общее уравнение искомой плоскости было получено в
примере 4.5: 2*-;у-г-3 = 0. Найдем длину нормали п = 2-Г—1-J—1-Jk :
| п | = у 22 + (- if + (-1)2 = V6 . Так как свободный член отрицательный,
разделим уравнение на V6: -р--*—\=-у—t-z—р- = 0. Нормированное
V6 V6 V6 V6
Уравнение плоскости получено.
б) По нормированному уравнению определяем расстояние р=-р от
V6
начала координат до плоскости (см. п.1 замечаний 4.3). ■
23*
355
4.2.2. Уравнения плоскости, проходящей через заданную точку
и компланарной двум неколлинеарным векторам
Напомним, что три или более векторов называются компланарными,
если существует плоскость, которой они параллельны. Эту плоскость будем
называть компланарной заданным векторам.
Направляющими векторами плоскости называются два неколлинеар-
ных вектора, компланарных этой плоскости, т.е. принадлежащих
плоскости или параллельных ей.
Пусть в координатном про-
Направляющие странстве Oxyz заданы:
векторы плоскости / \
+ v* а)точкаМ0(*0,;у0,г0);
. б) два неколлинеарных вектора
(рис.4.15).
Требуется составить уравнение
плоскости, компланарной векторам
pj, p2 и проходящей через точку
Рис415
Выберем на плоскости произвольную точку Af(jc,y,z). Обозначим
г = ОМ, 70 = ОМ0 - радиус-векторы точек M(x,y,z) и MQ(xQ,y0,z0)
(рис.4.16).
Условие компланарности векторов MQM , /?19 р2 (рис.4.16) можно
записать, используя свойства смешанного произведения ^Л/0М,р1,р2)=0.
Применяя формулу (1.17), получаем уравнение плоскости, проходящей
через заданную точку и компланарной двум неколлинеарным векторам:
х-х0
= 0. (4.18)
ПАРАМЕТРИЧЕСКОЕ УРАВНЕНИЕ ПЛОСКОСТИ
Пусть в координатном пространстве Oxyz заданы:
а)точкаМ0(х0,:У0,г0);
б)два неколлинеарных вектора }>l=ai-i+bi-j + cl-k9 *p2=a2-i
+b2j + c2k (рис.4.15).
356
Требуется составить параметрическое уравнение вида (4.10) плоскости,
компланарной векторам plf р2 и проходящей через точку M0{x0,y0,z0).
Нормаль
=A-UB. J+C*
Направляющие
Векторное параметрическо
уравнение плоскости:
Параметрическое уравнение плоскости:
Уравнение плоскости, компланарной
двум неколлинеарным векторам:
Рис.4.16
х~х0 у-у0 z-z0
ах Ьх сх
а2 Ь2 сг
= 0.
Выберем на плоскости произвольную точку M(x,y,z). Обозначим
г = ОМ, 70=ОМ0 - радиус-векторы точек Af(x,y,z) и MQ(x0,y0,z0)
(рис.4.16).
Точка М принадлежит заданной плоскости тогда и только тогда, когда
векторы М0М, />j, p2 компланарны (см. разд. 1.3.2). Запишем условие
компланарности: М0М = ^ • Pj + ^2" ?2» где ^1» '2 ~ нвкоч^рь16
действительные числа (параметры). Учитывая, что MQM =г-^, получим векторное
параметрическое уравнение плоскости:
2, tvt2eR, (4.19)
где рх, р2 "" направляющие векторы плоскости, а 7^ - радиус-вектор точки,
принадлежащей плоскости.
Координатная форма записи уравнения (4.19) называется
параметрическим уравнением плоскости:
= xo+al-tl+a2-t2,
где al,blycl и а2,Ь2,с2 - координаты направляющих векторов "рх и р2
соответственно. Параметры t{y t2 в уравнениях (4.19),(4.20) имеют
следующий геометрический смысл: величины tx, t2 пропорциональны расстоянию
от заданной точки MQ(xQ,y0,z0) до точки М(x,y,z), принадлежащей плос-
357
кости. При tx = t2 = 0 точка М(дг, у, z) совпадает с заданной точкой М0. При
возрастании tx (или *2) точка M(x,y,z) перемещается в направлении
вектора /?! (или р2), а при убывании ^ (или t2)-B противоположном
направлении.
Замечания 4.4.
1. Поскольку направляющие векторы плоскости неколлинеарны, то они
ненулевые.
2. Любой вектор Ji = a-i+b- j+c-k , коллинеарный плоскости,
ортогонален нормальному вектору п=А-Т+В-]+С-к для этой плоскости.
Поэтому их скалярное произведение равно нулю:
()
(р)
Следовательно, координаты ах,Ьх,сх и а2,Ъ2,с2 направляющих векторов
~рх и р2 плоскости и ее нормали связаны однородными уравнениями:
A iB CO Л6Б С 0
3. Направляющие векторы плоскости определяются неоднозначно.
4. Ддя перехода от общего уравнения плоскости (4.15)
A-jc + B-^ + C-z + D = 0 /с параметрическому (4.20) нужно выполнить
следующие действия:
1)найти любое решение (*0,}>0,z0) уравнения A-x+B-y + C-z +
+D = 0, определяя тем самым координаты точки Afo(jco,jo,zo),
принадлежащей плоскости;
2) найти любые два линейно независимых решения \al,bvcl),
(a2,fc2,c2) однородного уравнения А>а + В-Ь + С-с = 09 определяя тем
самым координаты a{,bl,cl и а2,Ь2,с2 направляющих векторов "рх и р2
плоскости;
3) записать параметрическое уравнение (4.20).
5. Чтобы перейти от параметрического уравнения плоскости к
общему, достаточно либо записать уравнение (4.18) и раскрыть определитель,
либо найти нормаль как результат векторного произведения направляющих
векторов (см. разд. 1.5.1):
<*2 ъг сг
Ь2
А
Cl
С2
I-
О,
п2
В
с,
С2
■] +
°2
С
ьг
k,
и записать общее уравнение плоскости в форме (4.14):
A[x-xo)+B[y-yo)+c{z-zo)=O.
358
6. Векторное параметрическое уравнение плоскости (4.19), полученное
в прямоугольной системе координат, имеет тот же вид в любой другой
аффинной системе координат. Геометрический смысл коэффициентов в
уравнении остается прежним.
Пример 4.8. В координатном пространстве Oxyz (в прямоугольной
системе координат) заданы точки ЛГ(1,2,3) и L(5,0,l) (cm. рис.4.11).
Требуется:
а) составить параметрическое уравнение плоскости, перпендикулярной
отрезку KL и проходящей через его середину;
б) составить общее уравнение плоскости, проходящей через середину
отрезка KL и компланарной радиус-векторам ОК и OL.
D а) Общее уравнение искомой плоскости было получено в
примере 4.5: 2-jt-;y-z-3 = 0. Составим параметрическое уравнение:
1) находим любое решение уравнения 2-jt-;y-z-3 = 0, например,
х0 = у0 = 0, z0 = -3, следовательно, точка М0(0,0,-3) принадлежит
плоскости;
2) находим два линейно независимых (непропорциональных) решения
однородного уравнения 2x-y-z = 0, например (l,I,l) и (0,1,-1),
следовательно, векторы pj=i+y + fc, p2 = y-A: являются направляющими для
плоскости;
3) записываем параметрическое уравнение плоскости (4.20):
tvt2eR.
б) Координаты середины М (3,1,2) отрезка KL были найдены в
примере 4.S. Нормаль к искомой плоскости получим как векторное
произведение ее направляющих векторов
= l-i + 2j+3k, OL = 5i+0j+l-
j к
2 3
0 1
= 2-F+14.J-10-ifc .
Составляем уравнение (4.14):
2-(х-3)+14-(у-1)-10-(г-2)=0 «• 2-jc+14y-10z = 0
Тот же результат можно получить, записывая уравнение (4.18):
х-3 y-l z-2
= 0 <=> :
1
5
2
0
3
1
359
4.2.3. Уравнения плоскости, проходящей через три заданные точки
Пусть в координатном пространстве Oxyz заданы три точки
Mo(xOJyo,zo), Ml(xl9yvzi), M2(jt2,y2,z2), не лежащие на одной прямой
(рис.4.17). Требуется составить уравнение плоскости, проходящей через
заданные точки.
Аффинное уравнение плоскости
€ R•
Уравнение плоскости, проходящей
через три заданные точки:
= о.
Рис.4.17
Как показано в разд. 1.6.1, точка M(x,y,z) принадлежит плоскости,
проходящей через точки М0, М t, M2 тогда и только тогда, когда ее радиус-
вектор ОМ удовлетворяет условию:
где txJ2 - некоторые действительные числа (параметры). Это уравнение, а
также его координатную форму
будем называть аффинным уравнением плоскости, проходящей через
точки MQ(xQ9y0,z0), Ml(xl,yvzl), M2(x2,y2,z2).
Используя векторы рх =МОМХ ^-^Jj+fo->>(>)• J+fc-«b)'* и
р2=МоМ2=(д:2-л:о).Г+(у2-уо).7+(г2-го)-* в качестве направляющих
векторов плоскости, составим уравнение вида (4.18):
364)
У-Уо
= 0,
(4.21)
которое называется уравнением плоскости, проходящей через три
заданные точки.
УРАВНЕНИЕ ПЛОСКОСТИ "В ОТРЕЗКАХ*'
Пусть на координатных осях заданы точки Х1(х19090)9 1|(0,у190) и
Z^OAzJ, причем Jtj^O, у{*0, zx*0 (рис.4.18). Требуется составить
уравнение плоскости, проходящей через эти три точки.
Уравнение плоскости "в отрезках":
Рис.4.18
Подставляя в уравнение (4.21) координаты заданных точек Xv
получаем:
-хх у-0 z-0
-хх 0-0 zx-0
Разделив уравнение на д^ • ух • zx * 0, получаем уравнение
х у z
хх ух zx *l *Ух '**
которое называется уравнением плоскости "в отрезках". Говорят, что
плоскость, проходящая через точки Хх(хХ90,6)9 Yx{p9yX9O) и Z^O^zJ,
отсекает на координатных осях "отрезки": хх на оси абсцисс, ух на оси
ординат и zx на оси аппликат. Разумеется, длины отрезков ОХХ, OYX и OZX
равны | хх |, | ух | и | zx | соответственно.
361
(4.22)
Замечания 4.5.
1. Перейти от общего уравнения плоскости (4.15) A-x + B-y + C-z +
+D = 0 к уравнению "в отрезках" (4.22) можно при условии, что все
коэффициенты общего уравнения отличны от нуля. Для этого нужно перенести
свободный член в правую часть уравнения: A-x + B-y + C-z = -D, а затем
разделить обе части уравнения на -D : -^-x+^-y+^-z^l. Обозначив
xl=--j, yx =■"■§•' zi = """с"' получим уравнение в отрезках (4.22):
2. Уравнения (4.21), (4.22), полученные в прямоугольной системе
координат, имеют тот же вид в любой другой аффинной системе координат.
Геометрический смысл коэффициентов в уравнениях остается прежним,
однако величины I хх , I уг I и I zx I в общем случае не равны длинам
отсекаемых отрезков ОХХ, OYX и OZX.
Пример 4.9. В координатном пространстве Oxyz (в прямоугольной
системе координат) заданы точки ЛГ(2,3,4), L(6,-3,4), М(-4, 6,-4).
Требуется:
а) составить общее уравнение плоскости треугольника KLM ;
б) составить уравнение в "отрезках" для плоскости треугольника
KLM ;
в) определить точки пересечения этой плоскости с координатными
осями.
D а) Составим уравнение (4.21):
х-2 у-3
6-2 -3-3
z-4
4-4
-4-2 6-3 -4-4
= 0 <=»
jc-2 у-3 z-4
4-6 0
-6
-8
= 0.
Раскрывая определитель и приводя подобные члены, получаем
48-(jt-2)+32.(;y-3)-24.(z-4) = 0 **
б) Переносим свободный член общего уравнения плоскости (см. п. "а")
X V Z
в правую часть и делим уравнение на 12: —+—— = 1. Получили уравне-
2 3 4
ние плоскости в "отрезках".
в) По уравнению плоскости в "отрезках" заключаем, что плоскость
(см.п."б") проходит через точки Х(2,0,0), r(0,3,0), Z(0,0,-4) на
координатных осях. ■
362
4.2.4. Взаимное расположение плоскостей
ПАРАЛЛЕЛЬНЫЕ ПЛОСКОСТИ
Получим условия параллельности или совпадения двух плоскостей пх
и п2, заданных общими уравнениями:
п2: A2x + B2y + C2z + D2=0. (4.23)
2:
Необходимым и достаточным условием параллельности или совпадения
плоскостей (4.23) является условие коллинеарности их нормалей
Hj =Ai-i + Blj + Clk, n2 = A2-i+B2j + C2k. Следовательно, если
плоскости (4.23) параллельны или совпадают, то nj || п2, т.е. существует
такое число Я Ф О, что
и наоборот.
Плоскости совпадают, если помимо этих условий справедливо
DX=XD2. Тогда первое уравнение в (4.23) имеет вид
=0y т.е. равносильно второму, поскольку
Таким образом, плоскости (4.23) параллельны тогда и только тогда,
когда соответствующие коэффициенты при неизвестных в их уравнениях
пропорциональны, т.е. существует такое число ХфО, что А1=Х-А2,
В{=Х-В2, Сх = Х-С2, но DX*X-D2. Плоскости (4.23) совпадают тогда и
только тогда, когда все соответствующие коэффициенты в их уравнениях
пропорциональны: Ai=X-A2, Вг=Х-В2, СХ=Х-С2, DX=X-D2.
Условия параллельности и совпадения плоскостей (4.23) можно
записать в виде
А _ в\ _ ci D\ = А _ в\ -£l-Bl
*2 В2 С2 D2 ' 2 ^2 В2 С2 D2
Отсюда следует критерий параллельности или совпадения двух
плоскостей (4.23):
Га * <
ИЛИ WjSJC2 «=> rg
V^2 B2 (
363
ПОВЕРХНОСТИ УРОВНЯ ЛИНЕЙНОГО ЧЕТЫРЕХЧЛЕНА
Поверхностью уровня функции f(x,y,z) трех переменных называется
геометрическое место точек координатного пространства Oxyz, в которых
функция принимает постоянное значение, т.е. /(jc,y,z)=const (см.
[19,28,40]).
n=Al+B-J+Ck
Рис.4.19
Для линейного четырехчлена p(x9y,z)=A-x+B-y + C-z + D
уравнение поверхности уровня p(jt,y,z) = const имеет вид
Ax + By + Cz + D = const. (4.24)
При любом фиксированном значении постоянной уравнение (4.24)
описывает плоскость. Рассмотрим поведение семейства поверхностей
уровня, отличающихся значением постоянной. Поскольку коэффициенты А , В
и С не изменяются, то у всех плоскостей (4.24) будет одна и та же нормаль
n = A-i+B-j + C-k. Следовательно, поверхности уровня линейного
четырехчлена р(х,y,z)=A-x + B-y + C-z + D представляют собой семейство
параллельных плоскостей (рис.4.19). Поскольку нормаль совпадает с
градиентом (см. п.З замечаний 4.2), а градиент направлен в сторону наискорейшего
возрастания функции, то при увеличении постоянной поверхности уровня
(4.24) переносятся параллельно в направлении нормали.
ПЕРЕСЕКАЮЩИЕСЯ ПЛОСКОСТИ
Необходимым и достаточным условием пересечения двух плоскостей
(4.22) является условие неколлинеарности их нормалей, или, что то же
самое, условие непропорциональности коэффициентов при неизвестных:
При этом условии система уравнений
364
имеет бесконечно много решений [10], которые определяют прямую
пересечения плоскостей, заданных уравнениями (4.23).
УГОЛ МЕЖДУ ПЛОСКОСТЯМИ
Угол между двумя плоскостями можно определить как угол между
их нормальными векторами. По этому определению получаются не один
угол, а два смежных угла, дополняющих друг друга до п. В элементарной
геометрии из двух смежных углов, как правило, выбирается меньший, т.е.
величина ф угла между двумя плоскостями удовлетворяет условию
0<Ф<|.
Если ril=Ali + Bl-j + Clk и n2 = A2I+B2j + C2k - нормали к
плоскостям пг и п2 соответственно (рис.4.20,а), то величина ф угла между
этими плоскостями вычисляется по формуле:
I
COS ф — | _
Ы
Необходимым и достаточным условием перпендикулярности
плоскостей (4.23) является условие ортогональности их нормалей, т.е. (/Г1,7Г2)=0:
При пересечении двух плоскостей образуются четыре двугранных угла
(рис.4.20). Величина ф двугранного угла удовлетворяет условию 0 < ф < п.
У?
По формуле
Рис.4.20
Ы"Ы
(4.26)
получаем острый двугранный угол ф, образованный плоскостями (4.23),
если А1А2 + В1В2 + С1С2>0 (рис.4.20,а), и тупой в противном случае:
365
\ • Aj + Вх • В2 + Cj • С2 < 0 (рис.4.20,б). Другими словами, ло формуле (4.26)
находится тот двугранный угол, образованный плоскостями, в котором
лежат точки, принадлежащие разноименным полупространствам, опре-
ляемым данными плоскостями. На рис.4.20 изображены пересекающиеся
плоскости, положительные и отрицательные полупространства отмечены
знаками + или - соответственно.
Пример 4.10. Найти величину того угла, образованного плоскостями
пх: 5-дг-3-;у + 4-г-3 = 0 и п2: 2*+;у + 2г + 4 = 0, внутри которого
лежит точка Af(5,2,l).
□ По уравнениям плоскостей находим нормали Hj=5-i-3"i/ + 4-Jfc>
п2 = 2-i +l«y + 2«jfc, атакже величину ф угла между нормалями, используя
(4.26):
5-2+(-3)-1+4-2 и 1 п
cos<p= . v ; . = 7_=-р=- => Ф=т-
V52+H)2+42V22+l2+22 3^50 Л 4
Подставляя координаты точки Af(S, 2,l) в левые часта уравнений
плоскостей, выясняем, каким полупространствам принадлежит эта точка.
Для плоскости пг имеем 5-5-3-2 + 4-1-3>0, значит, точка М лежит в
положительном полупространстве, определяемом плоскостью пг. Для
плоскости п2 имеем 2-5 + 2+2-1 + 4>0, значит, точка М лежит также в
положительном полупространстве, определяемом плоскостью п2. Поскольку
точка М принадлежит одноименным полупространствам (положительным),
то искомый угол - это угол \|/, смежный найденному углу Ф=^:
ПУЧКИ ПЛОСКОСТЕЙ
Собственным пучком плоскостей называется совокупность всех
плоскостей, проходящих через фиксированную прямую (ось пучка).
Несобственным пучком плоскостей называется совокупность
плоскостей, параллельных фиксированной плоскости (осью несобственного
пучка плоскостей считается бесконечно удаленная прямая).
Любые две плоскости пх и п2 определяют пучок плоскостей,
содержащий заданные плоскости пх и п2. Если плоскости п{ и п2
пересекаются, то прямая т пересечения является осью собственного пучка
(рис.4.21,а). Если плоскости пг и п2 параллельны, то они определяют
несобственный пучок параллельных плоскостей (рис.4.21,б).
Пусть заданы уравнения двух плоскостей (4.23):
366
nx: Aj-jc+Bj-y + C^-z + D^O; %2\
Линейной комбинацией этих уравнений называется уравнение
X1-(i41-A: + fi1.^ + C1-z + D1)+X2-(i42^ + B2-y + C2-z + D2)=0, (4.27)
где числа Хх Д2 - коэффициенты линейной комбинации. Его можно
записать в форме
()(
Заметим, что линейная комбинация уравнений является уравнением первой
степени для любых значений коэффициентов, кроме случая, когда все
коэффициенты при неизвестных равны нулю, т.е. при одновременном
выполнении условий
х1-а1+х2-а2=о, х1в1+х2в2=о, \1с1+х2с2=о.
Эти значения параметров Л1ЭА,2 считаются недопустимыми.
Рис.4.21
Уравнение (4.27) называется уравнением пучка плоскостей,
содержащего плоскости
D^O и A
При любых допустимых значениях параметров Х{, Х2 уравнение (4.27)
задает плоскость, принадлежащую пучку, и наоборот, для любой плоскости
пучка найдутся такие значения параметров \,\2, что уравнение (4.27)
будет задавать эту плоскость.
Доказательство утверждения аналогично доказательству свойства
пучка прямых (см. разд.3.2.5).
Пример 4.11. Составить уравнение плоскости, проходящей через
прямую пересечения плоскостей 2-jc + 2^y-z + 3 = O, 6-jc-3-;y + 2-z + l = 0 и
через точку Af*(2,3,l).
D Искомая плоскость входит в пучок плоскостей, задаваемый
уравнением (4.27)
367
Подставляя координаты точки М*(2, ЗД), получаем:
Х1.(2-2+2-3-1+3)+Л2-(б-2-3-3 + 2-1 + 1)=О «=> 12-А1 + б-Х
Возьмем, например, Хх = -1, Л2 = 2 и подставим в уравнение пучка:
Искомое уравнение получено. ■
СВЯЗКИ ПЛОСКОСТЕЙ
Собственной связкой плоскостей называется совокупность всех
плоскостей, проходящих через фиксированную точку (центр связки).
Несобственной связкой плоскостей называется совокупность
плоскостей, параллельных фиксированной прямой (центром несобственной
связки плоскостей считается бесконечно удаленная точка).
б
Рис.4.22
Уравнение собственной связки плоскостей с центром Mo(xOJyo,zo)
имеет вид
A-[x-xo)+B-{y-yo)+c{z-zo)=O,
где А, В, С - произвольные параметры, одновременно не равные нулю.
Уравнение связки плоскостей (собственной (рис.4.22,а) или
несобственной (рис.4.22Д)) можно получить в виде линейной комбинации
уравнений трех плоскостей:
(
где Хг, Я2, Х3 - коэффициенты линейной комбинации. Заметим, что
линейная комбинация уравнений является уравнением первой степени для
любых значений коэффициентов, кроме случая, когда все коэффициенты при
неизвестных равны нулю. Эти значения параметров Хх, Х2, А3 считаются
недопустимыми.
Уравнение (4.28) называется уравнением связки плоскостей,
содержащей три плоскости
+D2 =0, A
368
При любых допустимых значениях параметров ХрЛ2 Д3 уравнение
(4.28) задает плоскость, принадлежащую связке, и наоборот, для любой
плоскости связки найдутся такие значения параметров ХрЛ2 Д3, что
уравнение (4.28) будет задавать эту плоскость.
Доказательство утверждения аналогично доказательству свойства
пучка прямых (см. разд.3.2.5).
4.2.5. Типовые задачи с плоскостями
СОСТАВЛЕНИЕ УРАВНЕНИЙ ПЛОСКОСТЕЙ
Разнообразие видов уравнений плоскостей порождается
многообразием геометрических способов их задания. По любому набору геометрических
данных, однозначно определяющих плоскость, можно составить уравнение
этой плоскости, причем геометрические данные будут отражены в
коэффициентах уравнения. И наоборот, коэффициенты любого уравнения
плоскости имеют геометрический смысл, соответствующий способу задания
плоскости.
Для удобства решения типовых задач, связанных с плоскостями, все
основные типы уравнений плоскостей и соответствующие геометрические
способы задания этих плоскостей отражены в таблице 4.1.
Примеры составления плоскостей по геометрическим данным,
указанным в таблице 4.1, разбирались в разд.4.2.1-4.2.3.
МЕТРИЧЕСКИЕ ПРИЛОЖЕНИЯ УРАВНЕНИЙ ПЛОСКОСТЕЙ
Перечислим формулы для вычисления длин отрезков (расстояний) и
величин углов по уравнениям образующих их плоскостей.
1. Расстояние d от точки M*\x*9y*,z*j до плоскости
A-x+B-y + C-z + D = O вычисляется по формуле:
2.Расстояние между параллельными плоскостями А1-х+В1-у +
+Cj z + Dx=0 и A2-x+B2-y + C2-z + D2=0 находится как расстояние d{
от точки M2(jt2,;y2,z2), координаты которой удовлетворяют уравнению
A2x+B2-y + C2z + D2=0, до плоскости A1-x + Bly + Clz + Dl=O no
формуле:
24-5150 369
Таблица 4.1. Основные типы уравнений плоскостей
Название
Общее
уравнение
плоскости
Параметрическое уравнение
плоскости
Уравнение
плоскости,
проходящей
через точку и
компланарной
двум неколли-
неарным
векторам
Уравнение
плоскости,
проходящей
через три
точки
Уравнение
плоскости
"в отрезках"
Уравнение
Ax+By+Cz+D=
А2 +В2 +С2 *0
Г*=*0+<у*1+<12.Г2
лУ=Уо+Ь1'*1+ьг'*2
[z=zo+c1-r1+c2-/2,
tteR, t2 e R у
f Q% Ь* С« 1
1 1 "\ 11 r
Ig 1 1 — A
x-x0 y-y0 z-z0
al b\ cl
a~ b~ c~
0 0 *0
■^""'o У\ Уо ^\ ^0
•*2 ~^O ^2 ~^0 ^2 "~^O
x у z
0,
= 0
— л
— и
Способ задания
плоскости
Плоскость проходит
через точку
MQ(x0,y0,z0)
перпендикулярно
вектору
п = аТ+В- j + Ck
(рис.4.8,а)
Плоскость проходит
через точку
Мо\хо*Уо*2о)
компланарно
неколлинеарным
векторам
(рис.4.15)
См. параметрическое
уравнение
Прямая проходит
через точки
Л*Д*о'Уо»го/'
Af ( z )
iVWr 1/»
Af (л2,у2^2)
(рис.4.17)
Плоскость отсекает
на координатных
осях "отрезки"
JCj , yf И Zj
(рис.4.18)
Геометрический смысл
коэффициентов
Коэффициенты А ,В ,с -
координаты нормали
n = A i + B-J + cF;
свободный член
D=-Ajro-Byo-Czo
Коэффициенты ау, Ъх, с(,
в2 , Ь2, с2 -координаты
направляющих векторов
р =а J + b j + c к ,
точки MQ(x0,y0,z0),
принадлежащей плоскости
См. параметрическое
уравнение
Коэффициенты *0, VV
V V W >2» г2*
координаты точек
М (х у z )
0\ о» о» о/»
^(jti.ypZi).
Коэффициенты х{, yr zt
определяют на
координатных осях точки, через
которые проходит
плоскость
370
3. а) Угол ф между двумя плоскостями
Ttj: Aj • х + 2?j • у + Cj • z + Dx = 0 и я2:
находится по формуле:
cos<p =
уд2+qc2|
стям пг и п2 соответственно.
б) ЛЬ формуле
- нормали к
плоскоcosq> =
находится величина ф того двугранного угла, образованного плоскостями
пхи %2, в котором лежат точки, принадлежащие разноименным
полупространствам, опреляемым данными плоскостями.
При решении задач свойства 1-3 используются наряду с метрическими
приложениями векторной алгебры (см. разд. 1.6.2).
Пример 4.12. В координатном пространстве Oxyz заданы вершины
Л(1,3,-1), В(2,1,-2), С(4, 2,-б) треугольной пирамиды ОАВС. Требуется:
а) составить общее уравнение плоскости, содержащей грань ABC;
б) найти расстояние d от вершины С до плоскости грани ОАВ;
в) найти величину ф угла между плоскостями граней ABC и ОАВ;
г) найти величину \|f двугранного угла, образованного гранями ABC и
ОАВ пирамиды.
D а) По формуле (4.21) составим уравнение плоскости пАВС,
проходящей через три точки А, В, С:
х-1 у-3 z+1
2-1 1-3 -2-(-1)
4-1 2-3 -6-(-l)
= 0
1
3
-2 -1
-1 -5
= 0.
Разлагая определитель по первой строке, получаем
Искомое уравнение составлено.
б) Для нахождения расстояния d составим уравнение плоскости,
проходящей через точки О, А9В (см. п."а"):
24* 371
jt-0 y-0 z-0
1-0 3-0 -1-0
2-0 1-0 -2-0
=0 <=>
X
1
2
У
3
1
z
-1
-2
= 0 <=»
Расстояние находим по формуле п.1 (см. метрические приложения) для
Vl2+02+l2
в) Острый угол ф между плоскостями
9*+2;у + 5г-10 = 0 и x+z=0
находим по формуле п.3,"а":
|91 + 20+5l| 14 7
+02 + l2 ^220 V55
cos<p=
Следовательно, <р =
N
Рис423
г) Двугранный угол \|f, образованный
гранями ABC и ОАВ пирамиды либо равен
острому углу ф между плоскостями граней,
либо дополняет его до п: \|/ = я-ф.
Вычисляя угол ф по формуле п.3,"б", получаем тот
же результат, что и в п."в": ф = агссо8-р=-,
V55
т.е. острому углу принадлежат точки,
принадлежащие разноименным
полупространствам. Выясним, в каких полупространствах (одноименных или
разноименных) относительно плоскостей граней ABC и ОАВ лежит пирамида. Для
этого достаточно проверить одну точку пирамиды, не принадлежащую
граням ABC и ОАВ. Возьмем точку N - середину ребра ОС: N(291,-3)
(рис.4.23). Вычислим значения линейных четырехчленов в этой точке:
9«2 + 2*1+5-(— З)—10 = —5<0 и 1-2+0'1 + 1-(— 3)+0 = —1<0.
Следовательно, точка N принадлежит одноименным полупространствам.
Поэтому двугранный угол при ребре АВ не острый, а тупой, т.е.
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ С ТРЕМЯ НЕИЗВЕСТНЫМИ
Системой т линейных алгебраических уравнений с тремя нет"
вестными называется система уравнений вида
372
(4.29)
Числа aijy i = l,...,m, j = 1,2,3 называются коэффициентами системы;
bi>b2,.-;bm- свободными членами; хг,х2,х3 - неизвестными.
Решением системы называется такая упорядоченная тройка чисел
(а1,сх2,а3), что после замены неизвестных хх,х2 ,х3 соответственно
числами <Xi,a2,a3 каждое уравнение системы превращается в верное числовое
равенство. На системы с тремя неизвестными переносятся все термины,
применяемые к системам с двумя неизвестными (см. разд.3.2.6).
Матричная запись неоднородной системы уравнений (4.29) имеет вид
Ах = Ь, (4.30)
где Л =
K^ml am2 атЪ
- матрица системы, Ъ =
- столбец
свободных членов, х =
- столбец неизвестных.
Рангом системы уравнений (4.29) называется ранг матрицы А
системы: r = rgA, т.е. максимальное число линейно независимых строк
матрицы А (максимальное число линейно независимых уравнений системы).
Рассматривается случай, когда все уравнения системы первой степени,
т.е. коэффициенты при неизвестных каждого уравнения не равны нулю
одновременно. Поэтому матрица А системы ненулевая, более того, все ее
строки ненулевые.
Поскольку матрица системы (4.29) ненулевая и содержит три столбца,
то ее ранг r = rgA<3. Ранг может быть равен либо единице (г = 1, если все
строки матрицы А пропорциональны), либо двум (г = 2, если имеются две
линейно независимые строки), либо трем (г = 3, если имеются три линейно
независимые строки).
Выясним геометрический смысл и свойства решений системы
уравнений (4.29).
Пусть в пространстве задана аффинная система координат Ох1х2х3.
Как показано в разд.3.2.1, множество точек x(jCj,jc2,jc3), координаты кото-
удовлетворяют линейному уравнению с тремя неизвестными
373
ail 'Х\ +ai2 'Х2 +ai3'X3 =*i' ИЛИ ai\ 'Xl +ai2'X2 +fli3 'X3 ~bi =0 '
ет собой плоскость. Поэтому множество решений системы уравнений
является пересечением плоскостей ап -хх +а(2-х2 +ап -х3 -b. = 0, i = l,...,m.
Рассмотрим примеры пересечения плоскостей.
Если ранг системы (4.29) равен 1, то коэффициенты при неизвестных
всех уравнений пропорциональны. В этом случае любые две плоскости
параллельны (система уравнений несовместна (рис.4.24,а)) или совпадают (в
этом случае вся система (4.29) равносильна одному, например, первому ее
уравнению (рис.4.24,б)).
Если ранг системы равен 2, то в системе имеются два линейно
независимых уравнения. Плоскости, соответствующие этим уравнениям,
пересекаются, например, по прямой / (рис. 4.24,в,г). Поэтому множеством
решений системы (4.29) является либо эта прямая (система совместна, все
плоскости проходят через прямую /, т.е. все плоскости принадлежат
собственному пучку плоскостей (рис. 4.24,в)), либо пустое множество (система
несовместна (рис.4.24,г)).
Если рант системы равен 3, то в системе имеются три линейно
независимых уравнения. Плоскости, соответствующие этим уравнениям,
пересекаются в одной точке, например, в точке XQ (рис. 4.24Де). Поэтому
множеством решений системы (4.29) является либо одна точка Хо (система
совместна, все плоскости проходят через точку Хо, т.е. все плоскости
принадлежат собственной связке плоскостей (рис. 4.24,д)), либо пустое
множество (система несовместна (рис. 4.24,е)).
374
4.3. УРАВНЕНИЯ ПРЯМЫХ В ПРОСТРАНСТВЕ
4.3.1. Уравнение прямой как линии пересечения двух плоскостей
Пусть в координатном пространстве Oxyz (в прямоугольной системе
координат) две плоскости заданы общими уравнениями
пх: Ax-x + Bx-y + Cx-z + Dx=0\ n2: A2-x + B2-y + C2-z + D2=0,
в которых коэффициенты при неизвестных непропорциональны, т.е.
\ в\
rg
1 =2. Это
условие означает, что плоскости пх и п2 пересе-
каются (см. условие (4.25)), поскольку их нормали г^ = ^ • i + Вх • j' + Сх • к и
п2 = ^ • I+В2 • j + С2 - к неколлинеарны (рис.4.25). Тогда линия
пересечения плоскостей описывается системой уравнений
= 0.
• у+ С2
(4.31)
Система (4.31) называется общим уравнением прямой в пространстве.
Г (к в с \
Общее уравнение прямой: J A^+^+Crz+A850* rgl ^ ! 4 = 2.
Нормаль к плоскости я2: п2 - А2 -Т + Д2 -7 + С2 к
Нормаль к плоскости п{:
Рис.4.25
Пример 4.13. В координатном пространстве Oxyz (в прямоугольной
системе координат) заданы вершины л(1,2,3), 2?(3,0,2), с(7,4,б) треуголь-
^ка (рис.4.26). Требуется составить уравнение прямой, содержащей высоту
АН треугольника.
375
точки А
х-1
3-1
7-1
Рис.4.26
,в,с
у-2
0-2
4-2
Z-3
2-3
6-3
=
х-1
2
6
у-2
-2
2
плоскости
z-3
-1
3
= 0
D Прямая АН является линией
пересечения двух плоскостей:
плоскости пх треугольника ABC и плоскости
я2, проходящей через точку А
перпендикулярно вектору ВС (рис.4.26).
По формуле (4.21) составим уравнение
, проходящей через три
По формуле (4.14) составим уравнение плоскости я2, проходящей через
точку А перпендикулярно вектору BC = (7-3)-i +(4-0)-7 + (б-2)-4 =
Следовательно, общее уравнение (4.31) прямой АН имеет вид
4.3.2. Уравнение прямой, проходящей через заданную точку
коллинеарно заданному вектору
ПАРАМЕТРИЧЕСКОЕ УРАВНЕНИЕ ПРЯМОЙ
Напомним, что направляющим
вектором прямой называется ненулевой вектор,
коллинеарный этой прямой, т.е.
принадлежащий или параллельный ей.
Пусть в координатном пространстве
Oxyz заданы:
а)точкаМ0(дс0,у0,г0);
б) ненулевой вектор р = аГ+Ь-}+с-^
(рис.4.27).
Требуется составить уравнение прямой,
коллинеарной вектору ~р и проходящей через
точку M0{x0,y0,z0).
376
Направляющий вектор прямой
Рис.4.27
Выберем на прямой произвольную точку M(x,y9z). Обозначим
г = 0М, 70 = ОМ0 - радиус-векторы точек M(x,y,z) и MQ(x0,yQ,z0)
(рис.4.28).
Точка М принадлежит заданной прямой тогда и только тогда, когда
векторы MQM и "р коллинеарны. Запишем условие коллинеарности (см.
разд. 1.2.1): MQM -t-'p, где t - некоторое действительное число
(параметр). Учитывая, что MQM -7-7Q, получим векторное параметрическое
уравнение пряной в пространстве:
r = ro+tp, teR, (4.32)
где р - направляющий вектор прямой, a 7Q - радиус-вектор заданной точки
Мо [х0, у0, z0), принадлежащей прямой.
Направляющий вектор прямой
Векторное параметрическое уравнение
прямой:
Параметрическое уравнение прямой:
{
y=yo+b-t, teR.
z=zo+c-t,
Каноническое уравнение прямой:
У-Ур _ z-z0
Ь с
Рис.4.28
Координатная форма записи уравнения (4.32) называется
параметрическим уравнением прямой в пространстве
: = xo+a-t,
' = yo+b't, teR,
(4.33)
где a,b,c - координаты направляющего вектора р прямой. Параметр t в
Уравнениях (4.32),(4.33) имеет следующий геометрический смысл: величина
* пропорциональна расстоянию от заданной точки М0(дг0,;у0,г0) до точки
W(x,y,z)sM(xo+a«r,yo+6'f,zo+C'/). Физический смысл параметра t в
параметрических уравнениях (4.32),(4.33) - это время при равномерном и
прямолинейном движении точки M(x,y,z) по прямой. При t = 0 точка
377
M(x,y,z) совпадает с заданной точкой Мо, При возрастании t движение
происходит в направлении направляющего вектора.
КАНОНИЧЕСКОЕ УРАВНЕНИЕ ПРЯМОЙ
JE — X
Выразим параметр t из каждого уравнения системы (4.33): t= &.у
V ""* V Z. ~~~ Z.
t = -, t = -, а затем исключим этот параметр:
Ъ с
а2+Ь2+с2*0.
(4.34)
_У~Уо _z~Zq
а Ъ с
Уравнение (4.34) называется каноническим уравнением прямой в про»
странстве. В этом уравнении коэффициенты а ,Ь ,с не равны нулю
одновременно, так как это координаты направляющего вектора прямой.
Замечания 4.6.
1. Если один или два из трех знаменателей дробей в (4.34) равны нулю,
то считается, что соответствующий числитель дроби равен нулю. Например:
Х"тХ У — V Z — Zf\
а) каноническое уравнение — = - = — - это уравнение
0 0с
прямой, параллельной оси аппликат (рис.4.29,а);
V "~" V Z ~ Z
-= - = - - это уравнение
(;■■■
б) каноническое уравнение
а Ъ О
!z = z0,
x-Xq y-yQ прямой, параллельной координатной плоскости Оху
а ~ Ъ
(рис.4.29,б).
2. Направляющий вектор р прямой определяется неоднозначно.
Например, любой ненулевой вектор Яр, где \е R, также является
направляющим вектором для той же прямой.
378
3. Для перехода от общего уравнения прямой (4.31) к каноническому
(4.34) нужно выполнить следующие действия:
1) найти любое решение \xo,yo,zo) системы
определяя тем самым координаты точки M0[xQJy0,z0), принадлежащей
прямой;
2) найти направляющий вектор "р прямой как векторное произведение
нормалей nl=A1-i+Bl-j + Cl-k9 /f^y^F+i^-J+C2-fc заданных
плоскостей:
i 1 к
2 В2 С2
3) записать каноническое уравнение (4.34) с учетом п.1 и 2.
4. Чтобы перейти от канонического уравнения к общему, достаточно
двойное равенство (4.34) записать в виде системы
У-У
Ь
и привести подобные члены.
5. Чтобы перейти от канонического уравнения к параметрическому,
следует приравнять каждую дробь в уравнении (4.34) параметру t и
записать полученные равенства в виде системы (4.33):
*-*о У-Ур z-Zp .
a b с
= xo+a-t,
teR
6. Если в каноническом уравнении (4.34) прямой фиксировать
координаты х0, yQ, zQ точки Мо, а коэффициентам а, Ъ, с придавать
произвольные значения (не равные нулю одновременно), то получим уравнение связки
прямых с центром в точке M0(x0,y0,z0), т.е. совокупность всех прямых,
проходящих через точку М0.
7. Параметрическое (4.33) и каноническое (4.34) уравнения прямой,
полученные в прямоугольной системе координат, имеют тот же вид в любой
Другой аффинной системе координат. Геометрический смысл
коэффициентов в уравнениях остается прежним.
379
Пример 4.14. В координатном пространстве Oxyz (в прямоугольной
системе координат) заданы вершины Л(1,2,3), Д(3,0,2), С(7,4,б)
треугольника (рис.4.30). Требуется:
а) составить каноническое уравнение прямой, содержащей высоту ЛЯ
треугольника;
б) составить общее уравнение прямой, содержащей биссектрису AL
треугольника.
D а) Общее уравнение прямой АН получено в примере 4.13:
Перейдем от общего уравнения к каноническому.
1) Найдем любое решение ixo,yo,zo) системы, например, *О=1Э
уо=2, z0 = 3 (это координаты точки Л(1,2,3)).
2) Найдем направляющий вектор р прямой как векторное
произведение нормалей ^ =l-i +3-у—4-ife , n2 =l-i + l-y+l-Jfc заданных плоскостей
«7-Г-5-7-2-*.
3) Запишем каноническое уравне-
,ArtA. jc-l y-2 г-3
ние(4.34): = - = .
7 -5-2
б) Сначала составим каноническое уравнение прямой AL. Для этого
нужно найти направляющий вектор / этой прямой. Учитывая, что
диагональ ромба является биссектрисой, Т = Ь+с,где£ ис- единичные
векторы, одинаково направленные с векторами АВ и АС соответственно.
Находим
«. лп о 2 - 1 —
3 biJk
i
1
1
j
3
1
к
-4
1
q 6 — 2 — 3 —
АС =7, с=т=гг=—F+— J+—i
' ЛС 7 7 7
7 г _ f 2 т 2 - 1 тЛ (б т 2 - 3 гЛ 32 т 8- 2Г
/=i+c= —i i к + —1+—#+—к = 1 /+ к .
U 3 ; 3 J i7 7 У 7 J 21 21 У 21
Составляем каноническое уравнение прямой AL:
32 _J_
21 21
21
380
Записывая двойное равенство в виде системы, получаем общее уравнение
прямой AL:
r
J
32 " _J_ '
21 21
y-2_z-3
21 21
РАССТОЯНИЕ ОТ ТОЧКИ ДО ПРЯМОЙ
Найдем расстояние d от точки M1{xvyvzl)
до прямой /, заданной каноническим уравнением
(рис.4.31)):
а Ь с
Искомое расстояние равно высоте параллелограмма
(см. разд. 1.6.2), построенного на векторах
ри 4 31
и т=
_\[т,р]\ J\ а ь И ь с\
(4.35)
4.3.3. Уравнение прямой, проходящей через две заданные точки
Пусть в координатном пространстве Oxyz заданы две точки
^ov^o'^O'^o) и ^lfa'^i'^i)- Требуется составить уравнение прямой,
проходящей через заданные точки.
Как показано в разд. 1.6.1, точка M(x,y,z) принадлежит прямой MQMX
тогда и только тогда, когда ее радиус-вектор ОМ удовлетворяет условию
(рис.4.32):
где t - некоторое действительное число (параметр). Это уравнение, а также
его координатную форму
(4.36)
381
будем называть аффинным уравнением пряной, проходящей через две
точки М0(х0,уоао) и Ml(xl,yvzl).
Выражая параметр t из каждого уравнения системы (4.36), получаем:
х"хо У~Уо z~zo
sl= SL= sl = х. Исключая параметр t, приходим к уравнению
*1-*о Уг-Уо *i-*o
прямой, проходящей через две точки M0(xQ,yo,zQ) и Ml(xl,yvzl):
(4.37)
Аффинное уравнение прямой:
M(x,y,z)
Уравнение прямой, проходящей
через две точки Мо и М,:
х~хо У-Уо _ z"zo
хГхо " УгУо ~ zrzo '
Рис.4.32
Уравнение (4.37) можно получить из канонического уравнения (4.34),
выбирая в качестве направляющего вектора р = д-Г+&-}+сА: вектор
, т.е.
Пример 4.15. В координатном
пространстве Oxyz (в прямоугольной
системе координат) заданы вершины
Л(1,2,3), Я(3,О,2), С(7,4,б)
треугольника (рис.4.33). Требуется:
а) составить уравнение прямой
ВС;
б) составить уравнение прямой, содержащей медиану AM
треугольника;
в) найти высоту А треугольника, опущенную на сторону ВС.
□ а) Записываем уравнение (4.37) прямой, проходящей через точки
Я(3,0,2),С(7,4,б):
х-3 __ у-0 _z-2 х-Ъ у _z-2 х-3 у _z-2
7-3~4-0~6-2 ** 4 ~4~ 4 ** 1 ~1~ 1
382
б) Находим координаты середины М стороны ВС: М(5,2,4).
Составляем уравнение (4.37) прямой AM :
5-l2-24-3 ** 4 0 1
в) Искомую высоту А находим по формуле (4.35), полагая
4.3.4. Взаимное расположение прямых в пространстве
^
Возможны четыре различных случая
расположения двух прямых в пространстве: р
- прямые скрещивающиеся, т.е. не лежат в
одной плоскости;
- прямые пересекаются, т.е. лежат в одной тл
плоскости и имеют одну общую точку;
- прямые параллельные, т.е. лежат в одной m\V\*yv*b)
плоскости и не пересекаются; Рис.4.34
- прямые совпадают.
Получим признаки этих случаев взаимного расположения прямых,
заданных каноническими уравнениями
, . *-*i _ У'Уг _ *-*1 , . Х~Х2 _ У-Уг _ z-Ч
с,
где Ml(xi9yvzi)9 M2(x2,y2,z2) - точки, принадлежащие прямым 1Х и /2
соответственно, a Pj =al-i+b1-j + cl-k , p2=a2-i +Ъ2- } + с2-к
-направляющие векторы (рис.4.34). Обозначим через
i2 {2iy
вектор, соединяющий заданные точки.
Перечисленным выше случаям взаимного расположения прямых 1г и
12 соответствуют следующие признаки:
- прямые /j и /2 скрещивающиеся <=> векторы т, р19 ~рг не
компланарны;
- прямые 1Х и /2 пересекаются <=> векторы т, ~рх, J>2 компланарны,
а векторы ~рх, р2 не коллинеарны;
383
- прямые /j и /2 параллельные <=> векторы рх, р2 коллинеарны, а
векторы т , /^ не коллинеарны ;
- прямые /j и /2 совпадают <=> векторы т, ]5j, p2 коллинеарны.
Эти условия можно записать, используя свойства смешанного и векторного
произведений (см. разд. 1.6.2). Напомним, что смешанное произведение
векторов в правой прямоугольной системе координат находится по формуле:
2~Х\ У2~У\ Z2~*
<h К с\
п2 Ъ2 С2
Равенство нулю смешанного произведения векторов является необходимым
и достаточным условием их компланарности (см. разд. 1.6.2).
Поэтому:
- прямые 1Х и /2 скрещивающиеся <=> определитель отличен от нуля;
- прямые /j и /2 пересекаются <=> определитель равен нулю, а вторая
и третья его строки не пропорциональны, т.е. rgf в| х С| 1 = 2;
\а2 Ъ2 C2j
- прямые 1Х и /2 параллельные <=> вторая и третья строки
определителя пропорциональны, т.е. rgf "l bl С| ) = 1, а первые две строки не про-
Vfl2 Ъ2 C2j
порциональны,т.е. rg( *г~*х у\Ух z*~Zx} = 2;
V ai bi ci )
- прямые /j и 12 совпадают <=> все строки определителя пропорцио-
хг-хх
нальны, т.е. rgl ax
=1.
РАССТОЯНИЕ МЕЖДУ ПАРАЛЛЕЛЬНЫМИ ПРЯМЫМИ
Найдем расстояние d между параллельными прямыми, заданными
каноническими уравнениями (рис.4.35)
a b с {^ Ьх сх
где Afo(jco,^o,Zo), Ml(xi,yvzi) - произвольные точки на прямых / и 1Х
соответственно, а координаты направляющих векторов прямых пропорции-
а Ь с
нальны: — = —=—.
384
Искомое расстояние d равно высоте параллелограмма, построенного
на векторах
ibj k и m
и может быть найдено по формуле (4.35).
■А
7
- >
Рис.4.35
Рис.4.36
РАССТОЯНИЕ МЕЖДУ СКРЕЩИВАЮЩИМИСЯ ПРЯМЫМИ
Напомним, что расстоянием между скрещивающимися прямыми
называется длина их общего перпендикуляра, т.е. кратчайшее расстояние
между точками этих прямых.
Найдем расстояние d между скрещивающимися прямыми, заданными
каноническими уравнениями
flj ^ Cj a2 b2 c2
где Af^jCj^pzJ, М2(;с2,з>2,г2) - произвольные точки на прямых 1г и /2
соответственно.
Искомое расстояние d равно высоте параллелепипеда (см. разд. 1.6.2),
построенного на векторах т = МХМ2 = \х2 - д^ )• i + (j2 - ^ )* j + (^2 ~ zi / ^ »
Ik, p2 =a2-i +b2-j + c2-k (рис.4.36),т.е.
=Oj-i
(4.38)
«1 *,
^2 ^2
в2 Ьг с2
- смешанное и
векторное произведения векторов (см. разд. 1.5.1-1.5.3). Как показано выше,
прямые /j и /2 скрещивающиеся тогда и только тогда, когда векторы
п , pt, р2 некомпланарные, т.е.
25-5150 385
2"*1 У2-У1
ax bx
Отсюда следует, что вторая и третья строки не пропорциональны. Поэтому
векторы jpj, р2 неколлинеарные, т.е. | [^v"p2 1| * О» И знаменатель в правой
части (4.38) отличен от нуля.
УГОЛ МЕЖДУ ПРЯМЫМИ
Угол между прямыми определяется как угол между их
направляющими векторами. Поэтому величина <р острого угла между прямыми
у-у, z-i
у-у2 z-z2
а2
вычисляется по формуле
-т ,l(*fa)l,
Пример 4.16. Найти расстояние d между прямой, проходящей через
точки В(3,0,2), С(7,4,б), и осью абсцисс. Найти величину ф острого угла
между этими прямыми.
□ Каноническое уравнение оси абсцисс имеет вид —=—=—, так как
ось проходит через точку О(0,0,0), а Г - ее направляющий вектор.
Каноническое уравнение прямой ВС получено в примере 4.15,"аи:
Ill'
Полагая m = o£ = (3-0)-f+(0-0)-7+(2-0)-ik =3-Г+О-7+2-*,
p^l-F+0-J+O-Jfc , р2 = 1-Г+1-7+1А:, по формуле (4.38) получаем:
3 0 2
1 0 0
1 1 1
= 2,
i j к
1 О О
1 1 1
= 0-1-1-7 + 1-
_\{т>РуР2)\_
d =
Острый угол ф находим по формуле (4.39):
386
1
т.е. <р = arccos-рг.
4.3.5. Взаимное расположение прямой и плоскости
Возможны три случая взаимного расположения прямой и плоскости:
- прямая и плоскость пересекаются, т.е. имеют одну общую точку;
- прямая и плоскость параллельны, т.е. не имеют общих точек;
- прямая лежит в плоскости, т.е. все точки прямой принадлежат
плоскости.
Получим признаки для всех этих случаев. Пусть прямая / и плоскость
п заданы уравнениями:
I Л'~Д(:0 У "УО Z~~Z0 „
I: = —-— = ; п: i
а Ь с
т.е. прямая / проходит через точку Afo(jto,;yo,zo) коллинеарно вектору
]? = a-i+b-j + c-k, а плоскость п перпендикулярна вектору
Перечисленным выше случаям взаимного расположения прямой / и
плоскости п соответствуют следующие признаки:
- прямая / и плоскость п пересекаются «=> векторы рил не
ортогональны (рис.4.37,а);
- прямая I и плоскость я параллельны <=> векторы "р и п
ортогональны, а точка М0 не принадлежит плоскости п (рис.4.37,6);
- прямая / лежит в плоскости п <=$ векторы ~р и п ортогональны, а
точка MQ принадлежит плоскости п (рис.4.37,в).
Рис.4.37
25*
387
Учитывая свойство скалярного
(/?, п)=а • А+Ъ • В + с • С, получаем:
- прямая / и плоскость я пересекаются <=> а
- прямая / и плоскость п параллельны <=>
произведения векторов
- прямая / лежит в плоскости п <=>
Г a-A+fc-2» + c
[А.^ + Я-Уо + С
Рис.4.38
УГОЛ МЕЖДУ ПРЯМОЙ И ПЛОСКОСТЬЮ
Угол между прямой / и
'1УУр плоскостью п определяется как
/С уг°л между прямой и ее ортого-
i • / нальной проекцией на плоскость
** ^ (рис.4.38). Из двух смежных углов
ф и ф;, как правило, выбирают
меньший. Если прямая /
перпендикулярна плоскости (ее
ортогональная проекция на плоскость
является точкой), то угол считается
равным у. Если обозначить \|/ и \|/ углы, образованные наклонной / с
перпендикуляром к плоскости, то
sin(p = sin(p =|cos\|/| = lcos\|/
Поскольку угол \|г (или \|/) равен углу между направляющим вектором ~р
прямой / и нормалью п к плоскости тс, то sin<p = |cos\|/| = | ' ',. Запи»
сывая скалярное произведение через координаты множителей, получаем
формулу вычисления угла <р между прямой и плоскостью:
sin<p =
\а-А+ЬВ + с-
(4.40)
Отсюда, например, следует полученное ранее необходимое условие
а- А+6-В + с-С = 0 параллельности прямой и плоскости.
388
4.3.6. Типовые задачи с прямыми в пространстве
СОСТАВЛЕНИЕ УРАВНЕНИЙ ПРЯМЫХ
Разнообразие видов уравнений прямых в пространстве порождается
многообразием геометрических способов их задания. По* любому набору
геометрических данных, однозначно определяющих прямую в пространстве,
можно составить уравнение этой прямой, причем геометрические данные
будут отражены в коэффициентах уравнения. И наоборот, коэффициенты
любого уравнения прямой имеют геометрический смысл, соответствующий
способу задания прямой в пространстве.
Для удобства решения типовых задач, связанных с прямыми в
пространстве, все основные типы уравнений прямых и соответствуюпще
геометрические способы задания этих прямых отражены в таблице 4.2.
Примеры составления уравнений прямых в пространстве по
геометрическим данным, указанным в таблице 4.2, разбирались в разд.4.3.1-4.3.3.
Таблица 4.2. Основные типы уравнений прямых в пространстве
Название
Общее
уравнение
прямой
Параметрическое
уравнение
прямой
Каноническое
уравнение
прямой
Уравнение
прямой,
проходящей
через две
точки
Уравнение
\ AfX+Bfy+^z+BfO,
•»U ** cJ
(x=xo+at,
y=yo+b-t,
teR,
a2+b2+c2*0
x-*o У-Уо г-Ч
a b с
x-*o У-Уо z~4
хГхо УГУо *,-*0
Способ задания
прямой
Прямая определяется
как линия
пересечения двух
плоскостей
Al-x+Bl-y + Cl-z + Dl =0
И
А2'Х + В2-у + Сг z + D2 =0
(рис.4.25)
Прямая проходит
через точку
^e(wo) кол-
линеарно вектору
]>=а -Т + b •] + с -к
(рис.4.27)
См. параметрическое
уравнение
Прямая проходит
через точки
Мо(хо>Уо>*о)>
(рис.4.32)
Геометрический смысл
коэффициентов
Коэффициенты А^В^С^
А1*вг'С1 -координаты
нормалей
n^v + vJ+c,.*,
n2=A2.7+B2J + C2?
Коэффициенты а, Ъ, с -
координаты направляющего
вектора p=a-T + b-j + ck;
Wzo -координаты
точки MQ(x0,y0,z0),
принадлежащей прямой
См. параметрическое
уравнение
Коэффициенты xQ, yQ , zQ,
V V zi -координаты
точек M0(x0,y0,z0),
*i(*pJr*i)
389
МЕТРИЧЕСКИЕ ПРИЛОЖЕНИЯ УРАВНЕНИЙ ПРЯМЫХ
Перечислим формулы для вычисления длин отрезков (расстояний) и
величин углов по уравнениям образующих их прямых.
1. Расстояние d от точки Mx[xX9yvzx) &° прямой
х-х
а
вычисляется по формуле
По этой oice формуле вычисляется расстояние мео/сду параллельными
прямыми
~хо У~Уо z~zo
- = - =
, координаты
а Ъ с
направляющих векторов которых пропорциональны: — = — = —.
аг Ьг сг
2. Расстояние d между скрещивающимися прямыми
<h bi ci
вычисляется по формуле
x-x2 y-y2 z-
]{«*>РуР2)\
где {m,pvp2)=
Уг'Ух
Ъх
, [pvp2h
1
al
1
\
к
с\
- смешанное и
a2 b2 c2
векторное произведения векторов m = \x2 - л^ )• i + \y2 - yx у j + \z2 - zx)• k,
px=axi+bxj + cxk , Р2=а2#~
3. Угол ф между двумя прямыми
и
вычисляется по формуле
4
390
й — = —= —
4, Угол ф между прямой
а Ъ с
= O вычисляется по формуле
\а-А+ЬВ + сС\
и плоскостью
При решении задач свойства 1-4 используются наряду с метрическими
приложениями векторной алгебры (см. разд. 1.6.2).
Пример 4.17. В координатном пространстве Oxyz (в прямоугольной
системе координат) заданы вершины A(l,3,-l),
J?(2,l,-2), С(3,-2,4) треугольной пирамиды
ОАВС (рис.4.39). Требуется:
а) найти угол <р между ребром ОА и
плоскостью грани ABC;
б) составить каноническое уравнение прямой
ОМ , где М - точка пересечения медиан
треугольника ABC;
в) найти проекцию Н точки О на плоскость
грани ABC;
г) составить каноническое уравнение прямой О'м, симметричной
прямой ОМ относительно плоскости грани ABC;
д) найти угол \|/ между прямыми ОМ и АВ;
е) найти расстояние d между прямыми ОМ и АВ;
ж) найти проекцию с' точки С на прямую ОА ;
з) составить уравнение прямой, содержащей ортогональную проекцию
высоты ON грани ОВС на плоскость грани ABC.
х у z
□ а) Составим уравнение прямой ОА: —=—=—. Уравнение
плоскости грани ABC было найдено в примере 4.12: J5-jc+7-;y + z-35 = 0.
Вычисляем искомый угол ф (формула п.4):
|М5+3-7-М| 35 7
Vl2+32+(-l)2Vl52+72+l2 55 П
Следовательно, угол ф = arcsm-jy.
б) Координаты точки пересечения медиан треугольника ABC находим
как среднее арифметическое координат его вершин: М y*?f3, 3^~2, ""1~"2*^),
т.е М(2,у,у). Теперь составляем уравнение прямой, проходящей через две
точки О и М (см. таблицу 4.2):
391
x-0 y-
в) Составим параметрическое уравнение прямой ОН (см. таблицу 4.2).
Направляющим вектором этой прямой служит нормаль л=15-Г+7-7+Ь?
к плоскости ABC (см. п."аи). Поэтому
Подставляя эти соотношения в уравнение плоскости грани ABC (см. п. "а"),
находим значение параметра t, соответствующее точке Я :
1515f + 7-7f + llf-35 = O <=» 275*-35 = 0 <=» *=—.
Координаты точки Н вычисляем по параметрическому уравнению прямой
ОН, подставляя найденное значение параметра t:
1С 7 21 _ 7 49 7
157
г) Координаты точки О , симметричной точке О относительно
плоскости грани ABC, находим, подставляя в параметрическое уравнение
прямой ОН значение г = 2~ = -Ц. Получим О/(^,Ц,~-). Теперь составляем
уравнение прямой, проходящей через точки МиО' (см. таблицу 4.2):
*l-2 ^-^ i^-1 ** 300 184 -13 "
11 2 55 3 55 3 JUU 1б* 1J
д) Угол \|f между прямыми ОМ и ЛВ находим как угол между их
направляющими векторами 0M=2-F+j-J+j-Jfc, AB = hi-2-j-l*k
(формула п.З):
т.е. \ir = arccos / .
^246
e) Расстояние J между прямыми ОМ и ЛВ находим по формуле п.2,
полагая pj =OAf = 2-?+-|-}+-|-t, р2 =А2? = Ы-2- J-l* , ^=04==
392
= 1-Г+3-7~1* (на прямой ОМ выбираем точку О, а на прямой АВ -
точку А):
1 3 -1
1 -2 -1
d =
35
i j k
^ з з
1 -2 -1
: = V5.
ж) Составим уравнение (4.14) плоскости, проходящей через точку
с(3,-2,4) перпендикулярно прямой ОА (нормалью к этой плоскости
служит вектор OA = li+3j-lk ):
Найдем точку пересечения этой плоскости с прямой ОА . Для этого
подставим в уравнение плоскости соотношения из параметрического уравнения
прямой ОА, получаемого из канонического: т= а ="^Г=^ (см' п-"а")-
1 3 -"I
лучим r + 3-3r+r + 7 = O <=> ^ = ~п'- Подставляя теперь значение
параметра в уравнение прямой ОА, находим координаты точки (f: х = —^,
и
--L те Г(—L -iL Л)
~и 'т*е' CV и' liMi/'
з) Составим общее уравнение искомой прямой HN (см. рис.4.39) как
линии пересечения плоскости основания ABC пирамиды и плоскости,
проходящей через точку О и перпендикулярной прямой ВС. Уравнение
плоскости грани ABC было найдено в примере 4.12: 15дс+7;у + г-35 = О (см.
п."а"). Общее уравнение плоскости, проходящей через точку О(0,0,0) с
нормалью ВС = (3-2)Г+(-2-1)7+(4-(-2))*=1Г-3-7+6* имеет
вид: 1-jc-3-)> + 6-z = O. Записывая уравнения плоскостей в систему,
получаем общее уравнение искомой прямой HN:
393
4.4. АЛГЕБРАИЧЕСКИЕ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
4.4.1. Канонические уравнения поверхностей второго порядка
Рассмотрим задачу приведения уравнения поверхности второго
порядка к наиболее простому (каноническому) виду.
Напомним (см. разд.4.1.3), что алгебраической поверхностью второго
порядка называется геометрическое место точек плоскости, которое в какой-
либо аффинной системе координат Оххх2хъ может быть задано уравнением
вида
+а22-х2
#JC3
+ 2alxl+2a2x2+2a3x3+a0=0, (4.41)
где левая часть - многочлен трех переменных хх, х2, х3 второй степени.
Коэффициенты при первых степенях переменных хх, х2, х3, а также при их
произведениях х1-х2>х1-х39х2-х3 взяты удвоенными просто для удобства
дальнейших преобразований.
Уравнение (4.41) можно записать в матричном виде:
где А =
*11 а12
al2 a22 a
23
- матрица квадратичной формы, а =
- столбец
\АЗ а23 а2
коэффициентов линейной формы (см. п.5 и п.6,"би замечаний 4.1).
Требуется найти прямоугольную систему координат Oxyz, в которой
уравнение поверхности приняло бы наиболее простой вид.
Результатом решения поставленной задачи является следующая
основная теорема.
Теорема 4.3 (классификация алгебраических поверхностей второго
порядка). Для любой алгебраической поверхности второго порядка
существует прямоугольная система координат Oxyz, в которой уравнение
этой поверхности принимает один из следующих семнадцати
канонических видов:
.. 4*44"
а2 Ь2 с2
уравнение эллипсоида;
х2 у2 z2
2. —+—+—- = -1 уравнение мнимого эллипсоида;
а Ъ с
394
х2 у2 z2
а Ь с
x2 v2 z2
4 —+-—— = 1
a2 b2 c2
уравнение мнимого конуса;
уравнение однополостного
гиперболоида;
х2 у2 z2
5. —г-+—= т = "" 1 уравнение двуполостного
а Ъ с
гиперболоида;
х2 у2 z2
w у" Z"
6. -у+——- = 0 уравнение конуса;
а Ъ с
7 —+^-=:
уравнение эллиптического
параболоида;
8.
9.
10.
П.
а2
*2
х2
а2
х2
а2
£—-1.?
с/
уравнение гиперболического
параболоида;
уравнение эллиптического
цилиндра;
уравнение мнимого
эллиптического цилиндра;
уравнение пары мнимых
пересекающихся плоскостей;
-\ У
395
х2 у2
12. — —- = 1 уравнение гиперболического
цилиндра;
13. — —- = 0 уравнение пары пересекающихся
плоскостей;
14. у2 = 2 • р • х уравнение параболического
цилиндра;
15. у -fe =0 уравнение пары параллельных
плоскостей;
16. у2 + б2 = 0 уравнение пары мнимых
параллельных плоскостей;
17. у2 = 0 уравнение пары совпадающих
плоскостей.
В этих уравнениях а> 0, fe>0, с>0, р>09причем а>Ъ>с вурав-
нениях 1,2; а>& в уравнениях 3,4,5,6,7,9,10.
Теорема 4.3 дает аналитические определения поверхностей второго
порядка. Согласно п.2 замечаний 4.1, поверхности (1),(4),(5),(6),(7),(8),(9),
(12),(13),(14),(15),(17) называются вещественными (действительными), а
поверхности (2),(3),(10),(11),(16) -мнимыми.
Поясним доказательство теоремы. Оно аналогично доказательству
теоремы 3.3 и фактически содержит алгоритм решения поставленной задачи.
Без ограничения общности можно предполагать, что уравнение
поверхности второго порядка задано в прямоугольной системе координат. В
противном случае можно перейти от непрямоугольной системы координат
Ох1х2х3 к прямоугольной Oxyz (см. разд.2.2.2), при этом уравнение линии
будет иметь тот же вид и ту же степень согласно теореме 4.1 (см. разд.4.1.3).
Пусть в прямоугольной системе координат Ох^^ алгебраическая
поверхность второго порядка задана уравнением (4.41), в котором хотя бы
один из старших коэффициентов аи, а22, а33, а12, а13, а23 отличен от нуля,
396
поскольку левая часть уравнения - многочлен трех переменных х{,х2>хъ
второй степени.
Упрощение общего уравнения (4.41) производится в два этапа. На
первом этапе при помощи однородного ортогонального преобразования
координат "уничтожаются" члены с произведением неизвестных, как и в случае
уравнения линии второго порядка (см. разд.3.3.1), при этом достаточно
сделать три поворота (см. углы Эйлера в разд.2.2.3).
Докажем, что существует однородная ортогональная замена
переменных
9 или x =
(4.42)
+lS
32 *
где х =
"11
, х =
- столбцы старых и новых переменных,
"13
S23
532
- ортогональная матрица (ST = S"1), при которой
квадратичная форма
приводится к каноническому виду
(xj •A-x=\\x[
для которого матрица квадратичной формы диагональная: Л =
О Х2 О
О О X,
Действительно, подставляя x-S-x в квадратичную форму хТ Ах,
получаем
xTA-x = (Sx'f-ASx=(x'J-STA-Sx=(xjA'-x,
т.е. при однородной ортогональной замене переменных (4.42) матрица
квадратичной формы преобразуется по закону
A' = STAS. (4.43)
Составим характеристическое уравнение для матрицы А (см. п.З замечаний
3.12):
397
ап-Х
«12
«13
«12
«23
«13
«23
«зз-
= 0.
Так как это уравнение третьей степени, то оно имеет хотя бы один
действительный корень [10]. Обозначим его Л3. Однородная система уравнений
=0, или
определитель которой равен нулю, имеет бесконечно много ненулевых
решений (см. разд.П.Ю). Обозначим через 13 вектор, координатный столбец
которого совпадает с ненулевым решением s3 =
системы,
удовлетворяющим условию нормировки \s3 = J[s3>^3) = у s3 •s3 = 1. Дополним этот
единичный вектор ?3 векторами Jx, J2 до ортонормированного базиса
Jx, J2, J3 пространства. Координатные столбцы sx, s2,53 векторов Jj, 72, J3
удовлетворяют условиям
кроме того столбец s3 удовлетворяет равенству \А-Х3 -E)-s3 =o или, что
то же самое, A»s3 = Х3 • ^3. Из координатных столбцов sx ,s2 ,s3 базисных
векторов составим матрицу S = \sx \s2 \ s3), которая в силу (4.44) является
ортогональной, так как
Г,тЛ
г
ft
54
h -S2
I:
=
'1
0
0
0
1
0
(Г
0
h
и, следовательно, ST = S 1. Сделаем в квадратичной форме хт Ах замену
переменных x-S-x с ортогональной матрицей S = (sx \ s2 | 53). По закону
(4.43) находим
A/ = Sr-A-5 = 5r-A-(j1 |^2 | ^3)=(sr-A -sx \sT-As2 \sT-As3).
Последний столбец этой матрицы, учитывая равенство А • s3 = X3 • s3 и
ортогональность S*, имеет вид
398
\
Ы
■s =X
(sT-s 1
\ з зу
0
0
S • A • 5- = A, • S • s~ = A, •
Следовательно, в матрице А' элементы а\ъ = а2з = 0 и а33 = А3. Поэтому
квадратичная форма имеет вид
Как показано при доказательстве теоремы 3.3, многочлен
^iVvO +2'0n--V*2+£l22 лх2/ Д8^ переменных при помощи поворота
системы координат Ох[х2 можно привести к виду \\x\f +Я2•(*£/ . Этот
поворот соответствует повороту найденной системы координат О7Х72J3
вокруг оси аппликат.
Таким образом, существует преобразование прямоугольной системы
координат, приводящее квадратичную форму к каноническому виду. При
этом уравнение (4.41) не содержит членов с произведением неизвестных:
Агд:2+А2-з'2+Х3-г2+2-а1/-д: + 2-а2-у + 2-а3-г + а0=0. (4.45)
На втором этапе, при помощи параллельного переноса
"уничтожаются" один, два или все три члена первой степени. В результате всех
преобразований получаем систему координат O'x'y'z , в которой уравнение (4.45)
становится приведенным (одного из следующих пяти типов):
(Ш): V
(IV): v
(V): Ar
Уравнения (1),(Н),(Ш) совпадают с приведенными уравнениями линии
второго порядка, поскольку не зависят от неизвестной z . В разд.3.3.1 показано,
что они сводятся к каноническим уравнениям эллипсов, гиперболы,
параболы или пар прямых. Поэтому уравнения (1),(П),(Ш) соответственно сводятся
к каноническим уравнениям цилиндров (9),(10),(12),(14): эллиптического,
гиперболического, параболического, или пар плоскостей (11), (13), (15),
(16), (17).
Уравнение (IV) в зависимости от знаков коэффициентов сводится к
каноническим уравнениям параболоидов (7) или (8). Например, если все
коэффициенты Х19Х29 а'ъ положительны, то, перенося линейный член аъг
399
в правую часть и разделив обе части уравнения на -ja3, получим
—Л • (jt'Jr + —Л • \у) = - 2 • z . Обозначим положительные величины
а2 =4т-» ft2 =^т~ и изменим направление оси аппликат, т.е. сделаем заме-
ну: дс' = х", у' = у", z' = -z''. В результате получим уравнение эллиптиче-
ского параболоида (7): * ' + * ' = 2 • z Если окажется, что а < Ь, то пе-
а Ъ
// /// // ///
реименуем координатные оси: дс =^ , у =х .
Уравнение (V) в зависимости от знаков коэффициентов сводится к
каноническим уравнениям эллипсоидов (1),(2), гиперболоидов (4),(5) или кону-
сов(ЗШ.
Замечания 4.7.
1. Система координат, в которой уравнение алгебраической
поверхности второго порядка имеет канонический вид, называется канонической.
Каноническая система координат определяется неоднозначно. Например,
изменяя направление оси ординат на противоположное, снова получаем
каноническую систему координат, так как замена переменной у на (- у) не
изменяет уравнений (1)—(17).
2. Поверхности второго порядка, приведенные в формулировке
теоремы 4.3, изображены в канонической системе координат. Изображение
мнимых поверхностей дается штриховыми линиями только для иллюстрации.
3. В случаях (11),(13),(15Н17) поверхности называются
распадающимися, поскольку соответствующие им многочлены второй степени
разлагаются в произведение многочленов первой степени.
4. Напомним, что ненулевой столбец х = \хх х2 х3[ ,
удовлетворяющий равенству
Ах = Хх,
называется собственным вектором матрицы А, а число К - собственным
значением этой матрицы. Говорят, что собственный вектор х
соответствует (принадлежит) собственному значению X.
Как показано при доказательстве теоремы 4.3, при помощи однородной
ортогональной замены переменных (4.42) x = Sx или, что то же самое,
при помощи поворотов прямоугольной системы координат Ох1х2х3 вокруг
ее начала О, квадратичную форму
можно привести к каноническому виду
(x'f -А-х =Хг\л$ +X2\x'2f +\3-(x'3f,
400
где A,j Д2 Д3 - собственные числа матрицы А квадратичной формы, т.е.
корни характеристического уравнения: det(A-X-/s) = O, а матрица
5 = (sx | s2 \ s3) замены переменных составлена из попарно ортогональных
единичных собственных векторов 5rJ2, s3 матрицы А, соответствующих
собственным значениям Л19Л2 Д3. Другими словами, для любой
квадратичной формы хТ - А • х (трех переменных) существует ортонормирован-
ный базис 1г,12,13, составленный из собственных векторов матрицы А, в
котором квадратичная форма имеет канонический вид.
5. При ортогональном преобразовании координат собственные
векторы матрицы А квадратичной формы не изменяются, а именно, если s{
собственный вектор матрицы А (соответствующий собственному
значению Xj), то вектор s[ = S"l'Sl является собственным для матрицы
А' = ST • A- S, где S - ортогональная матрица.
Действительно, учитывая, что ST=S~l, sx=S-s[ и A»sx =X1-s{,
получаем
т.е. A' -s\ =Xx -s[ . Следовательно, s[ - собственный вектор,
соответствующий собственному значению Хг.
б. При однородной невырожденной замене переменных x = S-x
линейная форма аТ-х = ах-х1+а2-х2 + а3-х3 меняется следующим образом
ат Sx' = (a'Yx\ т.е. столбец коэффициентов линейной формы изменяется
по закону a =ST -а . Свободный член квадратичной функции при
однородной замене переменных * = £•*' не изменяется.
ПОРЯДОК ПРИВЕДЕНИЯ УРАВНЕНИЯ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
К КАНОНИЧЕСКОМУ ВИДУ
Пусть в прямоугольной системе координат Oxyz поверхность второго
порядка задана уравнением
Чтобы привести уравнение к каноническому виду, нужно выполнить
следующие действия.
26-5150 401
1. Составить матрицу квадратичной формы и столбец коэффициентов
линейной формы:
«11
«12
,«13
«12
«22
«23
«13
«23
«33 J
а =
«1
«2
1«з>
\ о о>
о х2 о
о о я,
,то
Если матрица квадратичной формы диагональная, т.е. А =
положить 5 = Е и перейти к п.4.
2. Составить характеристическое уравнение
„-Л аи а,ъ
<hi "гг-Ь агъ
и найти его корни Хх Д 2, Х3 (с учетом кратности).
3. Найти взаимно перпендикулярные единичные собственные векторы
si»52' ^з» соответствующие корням Хх, Л2, Х3 характеристического
уравнения, и составить из них матрицу S = [sx \s2 \s3):
а) если уравнение имеет один тройной корень Хг =Х2 = Х3, то базис
исходной системы координат является каноническим. Поэтому полагаем
5 = Е и переходим к п.4;
б) если все корни Х19Х2,Х3 простые, то для каждого корня найти
ненулевое решение однородной системы уравнений (л-X.• е)- 1(=о,
i = l,2,3. Например, собственный вектор /3=(*3 ?з гз/
корня Х3 находится как любое ненулевое решение системы
{all-X3)-x+al2
(
или
в) если имеется двойной корень, например Х1=Х2фХ3>то для
простого корня Л3 найти соответствующий собственный вектор 13 - любое
ненулевое решение системы {а~Х3-E)13 =o. Для кратного корня Хх =Х2 в
качестве /2 взять любой ненулевой столбец матрицы А-Х3 Е, а
координатный столбец /j найти, используя векторное произведение ^ = [12J3 J.
402
Нормируя найденные в п. "б" или "в" собственные векторы 1Х J2J3»
получаем координатные столбцы
1 . 1 , 1
<1 '«1 V l2 l2 V 1Ъ 1Ъ
базисных векторов новой прямоугольной системы координат Ox'y'z'.
Составляем матрицу S перехода к новому базису, записывая собственные
векторы sx, s2, s3 по столбцам: S = [sx \s2 | $3).
4. Вычислить столбец коэффициентов линейной формы a' = ST а и
составить "почти" приведенное уравнение поверхности второго порядка:
2#ai -х'+2а'2 • /+2-вз z'+ao=O.
В зависимости от вида этого уравнения выполнить следующие
действия.
а) Если в уравнении нет линейных членов, то переходим к п.5.
б) Если в уравнении имеется линейный член с какой-либо
неизвестной и квадратичный член с этой же неизвестной, то, дополняя эти члены до
полного квадрата, делаем замену, чтобы в уравнении не стало линейного
члена с этой неизвестной. Например, если в уравнении ХХФО и ах Ф О, то
выполняем преобразования:
^^
'
а затем замену неизвестных jc" = jc'+-£l, у ' = /, z" = z', после которой в
Л1
уравнении не будет линейного члена с неизвестной х".
в) Если в уравнении имеются два линейных члена с двумя
неизвестными, а квадраты одноименных неизвестных отсутствуют, то делаем
ортогональную замену этих неизвестных так, чтобы заменить их одной
неизвестной. Например, если в уравнении Хх Ф 0, Х2 = 0, Я3 = 0, ах = 0, а2 Ф 0,
а'ъ Ф 0, т.е. уравнение имеет вид
\'[х) +2-а2-у +2-a3-z +ao=O,
то нужно выполнить замену неизвестных
Х =Х > У =»\а2-У+аЗ-*+2а0)> Z =-t-ra3-y+a2-
где M- = t/(«2J' +(^3/ • Э™ ортогональная замена неизвестных приводит
уравнение к виду
26* 403
г) Если в уравнении имеется только один линейный член с какой-
либо неизвестной, а квадрат этой неизвестной отсутствует, то при помощи
замены этой переменной надо сделать равным нулю свободный член
уравнения. Например, если уравнение имеет вид
\xf +X2 \yj + 2а'3 -г '+а0 = 0,
то, выполняя замену неизвестных х" = х , у" = у , z" = z'+—*Ц-» получаем
2а
уравнение без свободного члена:
5. Полученное в результате упрощений (п.4) уравнение имеет "почти"
канонический вид [9]. Для окончательного упрощения "почти"
канонического уравнения применяются при необходимости следующие преобразования:
а) переименование координатных осей, например, х =у ,у =х ,
б) изменение направления координатной оси, например:
х = -х ,у =у , z = z ;
в) умножение обеих частей уравнения на отличный от нуля
множитель;
г) перенос членов из одной части уравнения в другую.
В результате этих преобразований уравнение приводится к
каноническому виду. Замену неизвестных, приводящую уравнение поверхности к
каноническому виду, определяем как композицию всех замен, применяемых в
ходе решения.
Пример 4.18. В прямоугольной системе координат Oxyz заданы
уравнения алгебраических поверхностей второго порядка:
а) jc2 + y2 + 2
б) х2+6-у-
в) 3-jc2-7-y
Каждое уравнение привести к каноническому виду. Указать связь между
исходной и канонической системами координат.
D а) 1. Составляем матрицу А квадратичной формы и столбец
коэффициентов линейной формы
<Г* "~~
404
'1
0
0
0
1
0
(Г
0
о,
, а =
' 1У
-2
1,
2. Матрица А диагональная (Я1 =Х2 =1, Х3 = 0), а уравнение имеет
"почти" приведенный вид. Поэтому полагаем, что 5 = Е и переходим к п.4.
4. В заданном уравнении имеются линейные члены всех неизвестных, а
также квадраты неизвестных х и у. Дополняем члены с этими
неизвестными до полных квадратов (см.п.4,"б" алгоритма):
() ( )
Сделаем замену jc' = jc+1, у ' = ;у-2, z' = z: (jc'J+(/)r+2-z'-4 = 0.
Получили уравнение, в котором имеется один линейный член с неизвестной z , a
квадрата этой неизвестной нет (см.п.4,"г" алгоритма). Сделаем замену
z" = z'-2, чтобы в уравнении исчез свободный член (для единообразия
обозначим jc = х , у = у ):
5. Полученное уравнение \х) + yyj + 2 • z" = 0 имеет простейший вид
(IV). Переносим линейный член в правую часть: (jc")t + \у") = -2 • z", и
делаем замену z = -z' , меняя направление оси аппликат (для единообразия
обозначаем х = х , у = у ):
Получили каноническое уравнение (7) эллиптического параболоида с
коэффициентами а = Ь = 1.
Найдем замену неизвестных, приводящую данное уравнение к
каноническому виду. В п.4,5 решения были сделаны следующие замены: х = jc+1 ,
у =у-2, z =z; х =х , у =у , z =z-2; х =дс , у =у , z =-z .
Выражая заменяемые неизвестные, получаем цепочки замен:
""-JC—l JC=JC JC "~ x
' = /+2, / = /', / = /
/ / // _ // /
z = z' = z//+2 = -z///+2.
Следовательно,
jc = jc'"-1,
3> = /"+2, или
z = -zw+2,
Таким образом, найдены координатный столбец s вектора 7 = 00
переноса начала координат и матрица 5 перехода к каноническому базису:
405
у
=
2
.2>
+
'l 0 0^
0 1 0
0 0 -1.
•
JC
zw;
<=>
'jc^
У
X
у"
2
2,
, s =
0
0
0
1
0
0^
0
-к
0
0
0
0
0
oy
0
, a-
'o^
3
,"4>
б) 1. Составляем матрицу А квадратичной формы и столбец
коэффициентов линейной формы
2. Матрица А диагональная (Лх =1, Х2 =Я3 =0), а уравнение имеет
"почти" приведенный вид. Поэтому полагаем, что 5 = Е и переходим к п.4.
4. В заданном уравнении имеются линейные члены двух неизвестных
у и z , а также квадрат другой неизвестной х. Поэтому заменяем
неизвестные (см. п.4,"в" алгоритма):
*' = *, /=JL.(j.y-4-z+fl0), z'=±.(4.y+3-z),
где ц = у З2 + (~4)2 = 5. После такой замены уравнение принимает вид
(xf + 2-5y'=0.
5. Полученное уравнение (лг')г + 2 • 5 • у = 0 имеет простейший вид (П).
Переносим линейный член в правую часть: \х) = -2-5 • /, и делаем замену
х =—у , ;/' = *', z" = Zj после которой получаем уравнение
(у jr = 2 -5 • *". Это уравнение (14) параболического цилиндра с параметром
р=5.
Найдем замену неизвестных, приводящую данное уравнение к
каноническому виду. В п.4,5 решения были сделаны следующие замены: х' = х,
у =f-y—y-z + 1, z=j-y+j-z; x =-y » У =^,z = z . Выражая
заменяемые неизвестные, получаем цепочки замен:
5*^5 5' У
1 ' А ' 1 Ч ^ А
5^5 5 55
——1
5
z = -l.y+2.
Следовательно,
l,
—j, или
'хУ
У
< j
_
0
-2
5
4
1 5 )
0 1 0
. 5 5/
406
Таким образом, найдены координатный столбец s вектора 1-00
переноса начала координат и матрица S перехода к каноническому базису:
'о'
_2
А
'о
-2
4
ч 5
1
0
о
ч
4
5
2
в) 1. Составляем матрицу А квадратичной формы и столбец
коэффициентов линейной формы
3 4 -4^
А =
4 -7
а =
-1
-3
1-4 -4 3
Ч • v •
2. Составляем характеристическое уравнение:
3-Л 4 -4
4 -7-Я -4 =0.
-4 -4 3-Л
Раскрывая определитель, получаем (см. разд.П.6)
(3-Я)2-(-7-Я)+128-16-(-7-А,)-32(3-Л.)=0
<=> -А?-А,2+81А,+81 = 0 <=> (X+l)(81->
Таким образом, корни характеристического уравнения Х,=-1, А.2=9,
Х3 = -9.
3. Поскольку все корни Х1Д2, Я3 простые, то для каждого корня
находим ненулевое решение однородной системы уравнений \A-'kiEyii -о,
j =1,2,3:
ГЗ+1 4 -4
4 -7+1 -4
-4 -4 3+1
А
=0,
=0,
= 0
=> /j =
'Г
0
ч у
ГЗ-9 4 -4"
4 -7-9 -4
-4 -4 3-9
3+9 4 -4"
4 -7+9 -4
-4 -4 3+9
•
/ ч
=
0
А
-6
=0,
•
• ч
=
0
А
'-Г
4-^ + 2-jc2-4-jc3=0,
-4 •jc1-4-jt2+12-Jt3=0,
407
Нормируя собственные векторы 1хЛ2^ъу П0ЛУчаем координатные
столбцы Sj, s2, s3 базисных векторов новой прямоугольной системы
координат Ox'y'z и составляем матрицу S = [sx \s2 \s3):
о
3
1
3
_2
зЛ
Та
JL 2 L_
Л з з-Л
"з 7л
4. Вычисляем столбец коэффициентов линейной формы a =ST -a:
^ зЛ з-Тг з-Тг^
-7
-6^2
Составляем "почти" приведенное уравнение:
Поскольку для каждой неизвестной имеются линейный и
квадратичный члены, то дополняем их до полного квадрата:
+8-8 =
где х =х -V2» У =У +з' z =z + "з "
S. Для окончательного упрощения умножим уравнение на (-l) и
перенесем свободный член в правую часть:
Делаем замену х =х , у =z , z =
оси:
переименовывая координатные
.,
Получили каноническое уравнение (4) однополостного гиперболоида.
408
Найдем замену неизвестных, приводящую исходное уравнение к
каноническому виду. В п.3,4,5 были сделаны следующие замены:
2 _
з
о 4-
'З 3-Л;
•
{ f\
X
У
9
{ *\
X
f
У
=
х +^2
" i
у -\
=
U~2\
-.1
з
+
X
X
у"
=
fl
0
^0
0
0
1
0'
1
•
у"
г"
Следовательно,
1 2
Л з
0 т
,Л з зЛ,
з
j
3 у
-1
о i
•
(\
0
0
0
0
1
1
о
•
zw
ч У
Л з-Л з
///
Таким образом, начало канонической системы координат относительно
исходной системы координат имеет координаты 1, -1, 1, а матрица перехода
от исходного базиса к каноническому имеет вид
5 =
*-*
2
i
-1
Проверим ортогональность этой матрицы. Поскольку
SS1
Л з-Л з
i
1
-2
3-V2 3-V2 3-V2 "
2
-2
=
0
0
0
1
0
(Г
0
К
найденная матрица является ортогональной. I
409
4.4.2. Эллипсоиды
Эллипсоидом называется поверхность, определяемая в некоторой
прямоугольной системе координат Oxyz каноническим уравнением
х2 v2 z2
где a, Ъ ,с - положительные параметры, удовлетворяющие неравенствам
а>Ь>с.
Если точка M(x,y,z) принадлежит эллипсоиду (4.46), то координаты
точек (±x,±y,±z) при любом выборе знаков также удовлетворяют
уравнению (4.46). Поэтому эллипсоид (4.46) симметричен относительно
координатных плоскостей, координатных осей и начала координат. Начало
координат называют центром эллипсоида (4.46). Шесть точек (±а,0,0),
(О,±6,0), (0,0,±с) пересечения эллипсоида с координатными осями
называются его вершинами, а три отрезка координатных осей, соединяющих
вершины, - осями эллипсоида. Оси эллипсоида, принадлежащие
координатным осям Ox,Oy,Oz, имеют длины 2-е,2-6,2-е соответственно. Если
а>Ь>с, то число а называется большой полуосью, число Ъ - средней
полуосью, число с - малой полуосью эллипсоида. Если полуоси не
удовлетворяют условиям а>Ь>с, то уравнение (4.46) не является каноническим.
Однако при помощи переименования неизвестных можно всегда добиться
выполнения неравенств а > Ъ > с.
ПЛОСКИЕ СЕЧЕНИЯ ЭЛЛИПСОИДА
2 у2
Подставляя z = 0 в уравнение (4.46), получаем уравнение —г+ :Г=1
линии пересечения эллипсоида с координатной плоскостью Оху. Это
уравнение в плоскости Оху определяет эллипс (см. разд.3.3.2). Линии
пересечения эллипсоида с другими координатными плоскостями также являются
эллипсами. Они называются главными сечениями {главными эллипсами)
эллипсоида.
Рассмотрим теперь сечение эллипсоида плоскостью, параллельной
какой-нибудь координатной плоскости, например Оху. Подставляя z-h, где
h - произвольная постоянная (параметр), в уравнение (4.46), получаем
с2 Ь2 с2 а2 Ъ2 с2
410
При \h\>c уравнение не имеет действительных решений (правая часть
уравнения отрицательная, а левая неотрицательная), т.е. плоскость z = А не
пересекает эллипсоид. При A = ±c уравнение (4.47) имеет нулевое решение
д: = ^ = 0. Следовательно, плоскости z = ±c касаются эллипсоида в его
вершинах (0,0,±с). При |А|<с, разделив обе части уравнения (4.47) на
1—2j">0, получаем уравнение эллипса / ,\> +7"лГ с П0ЛУ0СЯМИ
с \ЬУ
а= а • J1 -Л-, б' = 6 • J1 - Аг • Следовательно, сечение эллипсоида плоско-
f с2 fcz
стью z = Л при | Л | < с представляет собой эллипс.
2 у2 2
Сечения эллипсоида •==: Н—г-+•*=- = 1
л^ I»* ^»х
Эллипс,
Основной прямоугольный
параллелепипед
i
Рис.4.40
Плоские сечения дают возможность составить полное представление
о виде эллипсоида (рис.4.40,д)
ЭЛЛИПСОИДЫ ВРАЩЕНИЯ
Эллипсоид, у которого две полуоси равны, называется эллипсоидом
вращения (или сфероидом). Такой эллипсоид является поверхностью
вращения (см. разд.4.1.1). Например, если а = 6, то линии (4.47) при |^|<с
являются окружностями. Следовательно, сечения эллипсоида плоскостями
z = А, | А | < с представляют собой окружности с центрами на оси аппликат.
Такую поверхность можно получить, вращая вокруг оси Oz эллипс
у2 2
•i5-+-s5- = l, заданный в плоскости Oyz (рис.4.41,а).
411
Если b = с , то все сечения эллипсоида (4.46) плоскостями х = h при
| А | < а будут окружностями с центрами на оси абсцисс. Такой эллипсоид
2 v2
можно получить, вращая вокруг оси Ох эллипс -^т+^т^ (рис.4.41,б).
а Ь
Если все полуоси эллипсоида равны (a=b = c = R), то он представляет
собой сферу х2 + у2 + г2 = /?2 радиуса /?, которую можно получить,
например, вращая окружность такого же радиуса вокруг любого диаметра.
Эллипсоид вращения Эллипсоид вращения
5££1- a-b i+i+i=l- b-c
Эллипсоид, у которого полуоси попарно различны (а>Ь>с),
называется трехосным (или общим).
Замечания 4.8.
1. Плоскости jc = ±a, y = ±b, z = ±c определяют в пространстве <к>
иовиой прямоугольный параллелепипеду внутри которого находится
эллипсоид (см. рис.4.40,б). Грани параллелепипеда касаются эллипсоида в его
вершинах.
2. Эллипсоид можно определить, как геометрическое место точек,
получаемое в результате трех сжатий (растяжений) сферы единичного
радиуса к трем взаимно перпендикулярным плоскостям.
3. Начало канонической системы координат является центром
симметрии эллипсоида, координатные оси - осями симметрии эллипсоида,
координатные плоскости - плоскостями симметрии эллипсоида.
В самом деле, если точка M(x>y,z) принадлежит эллипсоиду, то точки
с координатами (±x,±yy±z) при любом выборе знаков также принадлежат
эллипсоиду, поскольку их координаты удовлетворяют уравнению (4.46).
412
4.4.3. Гиперболоиды
Однополостным гиперболоидом называется поверхность,
определяемая в некоторой прямоугольной системе координат Oxyz каноническим
уравнением
х2 у2 z2
_+2r-ir=1. ,4.48,
Двуполостным гиперболоидом называется поверхность, определяемая
в некоторой прямоугольной системе координат Oxyz каноническим
уравнением
х2 v2 z2
В уравнениях (4.48),(4.49) а, Ъ ,с - положительные параметры,
характеризующие гиперболоиды, причем а > Ъ.
Начало координат называют центром гиперболоида. Точки
пересечения гиперболоида с координатными осями называются его вершинами. Это
четыре точки (±а,0,0), (0,±6,0) однополостного гиперболоида (4.48) и две
точки (0,0,±с) двуполостного гиперболоида (4.49). Три отрезка
координатных осей, соединяющих вершины гиперболоидов, называются осями
гиперболоидов. Оси гиперболоидов, принадлежащие координатным осям Ох,Оу,
называются поперечными осями гиперболоидов, а ось, принадлежащая оси
аппликат Oz, - продольной осью гиперболоидов. Числа а, Ъ, с, равные
половинам длин осей, называются полуосями гиперболоидов.
ПЛОСКИЕ СЕЧЕНИЯ ОДНОПОЛОСТНОГО ГИПЕРБОЛОИДА
2 у2
Подставляя г = 0 в уравнение (4.48), получаем уравнение -^+-— = 1
линии пересечения однополостного гиперболоида с координатной
плоскостью Оху. Это уравнение в плоскости Оху определяет эллипс (см.
разд.3.3.2), который называется горловым. Линии пересечения
однополостного гиперболоида с другими координатными плоскостями являются
гиперболами. Они называются главными гиперболами. Например, при х = 0 по-
V2 2
лучаем главную гиперболу ^--*f = l, а при у = 0 - главную гиперболу
Ь с
Рассмотрим теперь сечение однополостного гиперболоида
плоскостями, параллельными плоскости Оху. Подставляя z = А, где А -
произвольная постоянная (параметр), в уравнение (4.48), получаем
413
a2
2l^
b2 c2
* 2 '
значении параметра
- = 1 с полуосями а = <
уравнение определяет эллипс
. Следовательно,
При любом
х2 у7
сечение однополостного гиперболоида плоскостью z-h представляет
собой эллипс, центр которого лежит на оси аппликат, а вершины - на
главных гиперболах. Среди всех эллипсов, получающихся в сечениях
плоскостями z-h при различных значениях параметра h, горловой эллипс
(при А = 0) является эллипсом с наименьшими полуосями.
Таким образом, однополостный гиперболоид можно представить как
поверхность, образованную эллипсами, вершины которых лежат на главных
гиперболах (рис.4.42,а)
Сечения однополостного
гиперболоида
Однополостный гиперболоид
вращения
У2 т2
Прямолинейные
образующие
ОДНОПОЛОСТНОГО
гиперболоида
ПЛОСКИЕ СЕЧЕНИЯ ДВУПОЛОСТНОГО ГИПЕРБОЛОИДА
Сечения двуполостного гиперболоида координатными плоскостями
Oyz и Oxz представляют собой гиперболы (главные гиперболы).
Рассмотрим теперь сечения двуполостного гиперболоида плоскостями,
параллельными плоскости Оху. Подставляя z = h, где h - произвольная
постоянная (параметр), в уравнение (4.49), получаем
414
a2 b2 с2 а2
Ь2 с2
При |Л|<с уравнение не имеет действительных решений (правая часть
уравнения отрицательная, а левая неотрицательная), т.е. плоскость z = А не
пересекает двуполостный гиперболоид. При А = ±с уравнение имеет
нулевое решение х = у = 0. Следовательно, плоскости z = ±c касаются
двуполостного гиперболоида в его вершинах (0,0,±с). При |А|>с получаем
уравнение эллипса
^+jL,
W
= 1 с полуосями
2 * »
b'=b-J-^—1. Следовательно, сечение двуполостного гиперболоида
плоскостью z = А при | А | > с представляет собой эллипс с центром на оси
аппликат, вершины которого лежат на главных гиперболах.
Таким образом, двуполостный гиперболоид можно представить как
поверхность образованную эллипсами, вершины которых лежат на главных
гиперболах (рис.4.43,д)
Сечения двуполостного
гиперболоида
Двуполостный гиперболоид
вращения
Основной
прямоугольный
параллелепипед
Гипербола
хОкружность
а б в
Рис.4.43
ГИПЕРБОЛОИДЫ ВРАЩЕНИЯ
Гиперболоид, у которого поперечные полуоси равны (а = £),
называется гиперболоидом вращения. Такой гиперболоид является поверхностью
вращения (см. разд.4.1.1), а его сечения плоскостями z = h (для
двуполостного гиперболоида при | А | > с ) представляют собой окружности с центрами
415
на оси аппликат. Однополостный или двуполостный гиперболоиды можно
v2 2
получить, вращая вокруг оси Oz гиперболу -^—•5г = 1 (рис.4.42,б) или со-
b с
V2 2
пряженную гиперболу ~—-^ = -1 (рис.4.43,б) соответственно. Заметим,
что уравнение последней можно записать в форме —Ц-+-*? = !
(см. разд.3.3.3)
Гиперболоид, у которого поперечные оси различны {аФЬ), называется
трехосным (или общим).
Замечания 4.9.
1. Плоскости х = ±а , у = ±Ь, г = ±с определяют в пространстве яе-
новной прямоугольный параллелепипеду вне которого находится
двуполостный гиперболоид (рис.4.43,в). Две грани (z = ±c) параллелепипеда
касаются гиперболоида в его вершинах.
2. Сечение однополостного гиперболоида плоскостью, параллельной
оси аппликат и имеющей одну общую точку с горловым эллипсом (т.е.
касающейся его), представляет собой две прямые, пересекающиеся в точке
касания. Например, подставляя х-±а в уравнение (4.48), получаем уравне-
V2 2
ние -^—"*г = 0 двух пересекающихся прямых (см. рис.4.42,а).
3. Однополостный гиперболоид является линейчатой поверхностью,
т.е. поверхностью, образованной движением прямой (см. рис.4.42,в).
Например, однополостный гиперболоид вращения можно получить, вращая
прямую вокруг другой прямой, скрещивающейся с ней (но не
перпендикулярной).
4. Начало канонической системы координат является центром
симметрии гиперболоида, координатные оси - осями симметрии гиперболоида,
координатные плоскости - плоскостями симметрии гиперболоида.
В самом деле, если точка M(x,y,z) принадлежит гиперболоиду, то
точки с координатами (±x,±y,±z) при любом выборе знаков также
принадлежат гиперболоиду, поскольку их координаты удовлетворяют
уравнению (4.48) или (4.49) соответственно.
4.4.4. Конусы
Конусом называется поверхность, определяемая в некоторой
прямоугольной системе координат Oxyz каноническим уравнением
Г2 V2 72
416
где а, Ъ ,с - положительные параметры, характеризующие конус, причем
Начало координат называется центром конуса (рис.4.44,а).
Конус является конической фигурой (см. разд.4.1.1), поскольку вместе
с любой своей точкой М (x>y,z) уравнению (4.50) удовлетворяют также все
точки (t-x, t-y, tz) при f >0 луча ОМ . Точка О является вершиной
конуса (4.S0), а любой луч ОМ , принадлежащий конусу, является его
образующей.
ПЛОСКИЕ СЕЧЕНИЯ КОНУСА
Сечения конуса координатными плоскостями Oxz, Oyz представляют
собой пары пересекающихся прямых, удовлетворяющих в этих плоскостях
2 2
уравнениям -^у—2г = 0 (при У =
или -^—-^ = 0 (при х = 0)
соответственно .
Сечения конуса
Круговой конус
Асимптотический
конус
у Окружность
б — в
Рис.4.44
Рассмотрим теперь сечение конуса плоскостями, параллельными
плоскости Оху. Подставляя z = h, где А - произвольная постоянная (параметр),
в уравнение (4.50), получаем
*1
с2
a2 b2 с2'
При А = 0 этому уравнению удовлетворяет одна вещественная точка -
начало координат. При любом отличном от нуля значении параметра А
27-5150
417
уравнение определяет эллипс / /V2 + , = 1 с полуосями а' =—|ftl
[aj (b'Y с
b'=—I h I. Следовательно, сечение конуса плоскостью г = й представляет
с ' '
собой эллипс, центр которого лежит на оси аппликат, а вершины
принадлежат координатным плоскостям Oxz и Oyz •
Таким образом, конус можно представить как поверхность,
образованную эллипсами, центры которых лежат на оси аппликат, а вершины
принадлежат координатным плоскостям Oxz и Oyz (см. рис.4.44,а).
КРУГОВОЙ КОНУС
При а = Ъ все сечения конуса плоскостями z = h ( А * 0) становятся
окружностями. Такой конус является фигурой вращения и называется
прямым круговым конусом. Он может быть получен в результате вращения,
например, прямой z=j-y (образующей) вокруг оси аппликат (рис.4.44,б).
Замечания 4.10.
1. Конус является линейчатой поверхностью, поскольку может быть
получен при помощи перемещения прямой [14].
2. Конус, образованный асимптотами гипербол, получающихся при
пересечении гиперболоида плоскостями, проходящими через ось Oz,
называется асимптотическим конусом этого гиперболоида. На рис.4.44,в
изображен асимптотический конус для однополостного и двуполостного
гиперболоидов.
3. Конус (4.50) может быть получен из прямого кругового конуса
x2 + y2-z2 =0 (у которого а = Ъ = с = 1) в результате двух сжатий
(растяжений) к координатным плоскостям Oxz и Oyz.
4. Начало канонической системы координат является центром
симметрии конуса, координатные оси - осями симметрии конуса, координатные
плоскости - плоскостями симметрии конуса.
В самом деле, если точка М (x,y,z) принадлежит конусу, то точки с
координатами (±дг,±y,±z) при любом выборе знаков также принадлежат
конусу, поскольку их координаты удовлетворяют уравнению (4.50).
5. Рассмотрим сечение прямого кругового конуса х2 + у2 -z2 =0
плоскостями, не проходящими через его вершину, например, плоскостями
z = k • у +1, где к - произвольная постоянная (параметр) - угловой
коэффициент прямой z = ky + l в плоскости Oyz* Заметим, что образующие
рассматриваемого конуса в плоскости Oyz описываются уравнением z = k-y
418
с угловым коэффициентом к=±1. Подставляя z = ky + l в уравнение
конуса, получаем
Это уравнение проекции на координатную плоскость Оху линии
пересечения плоскости с конусом. Вычисляем инварианты (см. разд.3.3.5)
1 О О
5 =
1 О
О 1-к2
А =
О 1-к2 -к
= -1; т = 2-*2.
О -к -1
При |к|< 1 имеем 5>0, А * 0, т-А = А:2 -2<0. Потаблице 3.2
определяем, что рассматриваемое сечение, которое пересекает все образующие пря-
Конические сечения
Парабола
а б
Рис.4.45
мого кругового конуса, является эллипсом. При | к | > 1 имеем 5 < 0, А Ф 0.
По таблице 3.2 определяем, что рассматриваемое сечение, которое
параллельно двум образующим кругового конуса, является гиперболой. При
к = ±1 имеем 8 = 0, А Ф 0. По таблице 3.2 определяем, что
рассматриваемое сечение, которое параллельно одной образующей кругового конуса,
является параболой. Поскольку при аффинных преобразованиях тип линий не
изменяется, такой же вывод можно сделать для произвольного конуса (4.50):
- сечение конуса плоскостью, пересекающей все его образующие,
является эллипсом (рис.4.45,а);
- сечение конуса плоскостью, параллельной двум его образующим,
является гиперболой (рис.4.45,б);
- сечение конуса плоскостью, параллельной одной его образующей,
является параболой (рис.4.45,в).
б. Конические сечения могут быть взяты в качестве эквивалентных
определений эллипса, гиперболы, параболы.
27* 419
4.4.5. Параболоиды
Эллиптическим параболоидом называется поверхность,
определяемая в некоторой прямоугольной системе координат Oxyz каноническим
уравнением
Гиперболическим параболоидом называется поверхность,
определяемая в некоторой прямоугольной системе координат Oxyz каноническим
уравнением
В уравнениях (4.51),(4.52) а и Ъ - положительные параметры,
характеризующие параболоиды, причем для эллиптического параболоида а > Ъ.
Начало координат называют вершиной каждого из параболоидов
((4.50) или (4.51)).
ПЛОСКИЕ СЕЧЕНИЯ ЭЛЛИПТИЧЕСКОГО ПАРАБОЛОИДА
Плоскость Oxz пересекает эллиптический параболоид (4.51) по линии,
имеющей в этой плоскости уравнение -^у = 2- z, которое равносильно
уравнению х2 = 2 • р • z параболы с фокальным параметром р = а2. Сечение
параболоида плоскостью Oyz получаем, подставляя дг = О в уравнение (4.51):
v2 1
-^ = 2-2. Это уравнение равносильно уравнению у =2 qz параболы с
фокальным параметром q = b2. Эти сечения называются главными
параболами эллиптического параболоида (4.51).
Рассмотрим теперь сечение эллиптического параболоида плоскостями,
параллельными плоскости Оху. Подставляя z = h, где h - произвольная
постоянная (параметр), в уравнение (4.51), получаем
х2 v2
При й<0 уравнение не имеет действительных решений, т.е. плоскость
z = h при h<0 не пересекает параболоид (4.51). При й = 0 уравнению
(4.51) удовлетворяет одна вещественная точка О - вершина параболоида.
х2 у2
При й>0 уравнение определяет эллипс 7~"лГ+7"Л2" = * с П0ЛУ0СЯМИ
420
а' = a^2h , b' = b-<j2-h . Следовательно, сечение эллиптического
параболоида плоскостью z = h (при/|>0) представляет собой эллипс, центр
которого лежит на оси аппликат, а вершины - на главных параболах.
Сечения эллиптического
параболоида
4+4=2-*
Параболоид вращения
Парабола
Рис.4.46
Таким образом, эллиптический параболоид можно представить как
поверхность, образованную эллипсами, вершины которых лежат на главных
параболах (рис.4.46,д).
ПАРАБОЛОИД ВРАЩЕНИЯ
Эллиптический параболоид, у которого а = Ъ, называется
параболоидом вращения. Такой параболоид является поверхностью вращения (см.
разд.4.1.1). Сечения параболоида вращения плоскостями z-h (при й>0),
представляют собой окружности с центрами на оси аппликат (рис.4.46,б).
Его можно получить, вращая вокруг оси Oz параболу у2 =2 qz, где
ПЛОСКИЕ СЕЧЕНИЯ ГИПЕРБОЛИЧЕСКОГО ПАРАБОЛОИДА
Сечения гиперболического параболоида координатными плоскостями
Oxz и Oyz представляют собой параболы (главные параболы) х2 = 2 • р - z
или
2 =
= b2
у2 = -2 q • z с параметрами р = а2 или q = b2 соответственно.
Поскольку оси симметрии главных парабол направлены в противоположные
стороны, гиперболический параболоид называют седлоеой поверхностью.
421
Рассмотрим теперь сечения гиперболического параболоида
плоскостями, параллельными плоскости Оху. Подставляя z = А, где А -
произвольная постоянная (параметр), в уравнение (4.52), получаем
х2 у2
При А > 0 уравнение равносильно уравнению гиперболы
х2
И2
= 1 с
полуосями а = а-у 2-А , Ъ = Ь-у 2-А , т.е. сечение гиперболического
параболоида плоскостью z = А при А > 0 представляет собой гиперболу с
центром на оси аппликат, вершины которой лежат на главной параболе
х2 = 2 • р • z . При А < 0 получаем уравнение сопряженной гиперболы
• = 1 с полуосями a=fl'J-2-t, b =b-J-2h (см.
разд.3.3.3), т.е. сечение гиперболического параболоида плоскостью z = h
при А < 0 представляет собой сопряженную гиперболу с центром на оси
аппликат, вершины которой лежат на главной параболе у2 =-2 qz- При
х2 у2
А = 0 получаем уравнение пересекающихся прямых —г—-=^- = 0, т.е. сече-
аг Ь2
ние гиперболического параболоида плоскостью z = 0 представляет собой
пару пересекающихся в начале координат прямых.
Сечения гиперболического
параболоида
Параболические
образующие
гиперболического
Прямолинейные
образующие
гиперболического
параболоида
б
Рис.4.47
422
Таким образом, гиперболический параболоид можно представить как
поверхность, образованную гиперболами (включая и "крест" из их
асимптот), вершины которых лежат на главных параболах (рис.4.47,а).
Сечение параболоида плоскостью х = h, где h - произвольная
постоянная, представляет собой параболу
равную главной параболе у2 =-2qz с параметром q-b2 , вершина
которой лежит на другой главной параболе х2 = 2-p-z с параметром р = а2.
Поэтому гиперболический параболоид можно представить как поверхность,
получающуюся при перемещении одной главной параболы так, чтобы ее
вершина "скользила" по другой главной параболе (рис.4.47,б).
Замечания 4.11.
1. Гиперболический параболоид является линейчатой поверхностью
[14], т.е. поверхностью, образованной движением прямой (рис.4.47,в).
2. Ось аппликат канонической системы координат является осью
симметрии параболоида, а координатные плоскости Oyz, Oxz - плоскостями
симметрии параболоида.
В самом деле, если точка M(x,y,z) принадлежит параболоиду
(эллиптическому или гиперболическому), то точки с координатами (±х,± у,z) при
любом выборе знаков также принадлежат параболоиду, поскольку их
координаты удовлетворяют уравнению (4.51) или (4.52) соответственно.
Поэтому параболоид симметричен относительно координатных плоскостей Oyz,
Oxz и координатной оси Oz.
4.4.6. Классификация поверхностей второго порядка по инвариантам
ПРЕОБРАЗОВАНИЯ КВАДРАТИЧНОЙ ФУНКЦИИ ТРЕХ ПЕРЕМЕННЫХ
Рассмотрим преобразование квадратичной функции трех переменных
o (4.53)
при линейной невырожденной замене переменных:
x2=s2+s2l-xl+s22-x2 + s23'X3, или x = s + S-x , (4.54)
/ / /
ХЪ ~ S3 + ^ЗГ *1 + 532 " Х2 + 533 ' ХЪ »
423
где s =
1*3,
, 5 =
sn
- невьфожденная матрица (det 5 Ф 0).
Напомним, что замена переменных (4.54) называется аффинной, а если
матрица S ортогональная ( ST = S~l) - ортогональной.
При любой аффинной замене переменных квадратичной функции р(х)
получаем снова квадратичную функцию р'[х) (см. п.1 замечаний 4.1):
(4.55)
Выделим в функциях р(дс) и р (V) квадратичные и линейные формы
(см. п.5,6 замечаний 4.1):
р(х) = хТ А-х+2аТ
р'(х')=(х'У -A'-x'+2(a'Y -х'*^,
где Л =
«11 «12 «13
«12 «22 «23
l«13 «23 «33j
, А' =
«11 «12 «13
«12 «22 «23
— матрицы квадратичных
(,«13 «23 «33>/
форм; a = (al a2 a3/, a' = (d£ a'2 a3) - столбцы коэффициентов
линейных форм функций (4.53),(4.55).
Аналогично случаю двух переменных (см. разд.3.3.5) получаем
формулы, связывающие коэффициенты функций (4.53),(4.55):
A' = STAS; a' = ST-(a + A-s); a'0=sT-As + 2aT-s + aQ. (4.56)
Квадратичные функции (4.53), (4.55) можно представить в матричном
виде
где
«и
«12
«13
«1
«12
«22
«23
«2
«13
«23
«33
«3
«1
«2
«3
«0>
/
«и
а'п
«13
«1
«12
«23
«2
«13
«33
«3
«1
«2
«3
«0
- матрицы квадратичных
функций, х = (д^ х2 х3 ljT, jc' = (j^ x2 x3 1 jf - расширенные
(дополненные единицей) столбцы переменных. Замену переменных (4.54) можно
записать для расширенных столбцов
424
где
ЛП а12 J13
О 0 0
- невьфожденная матрица, поскольку
Выполняя такую замену, получаем
р' = Тт-Р-Т. (4.57)
Итак, формулы (4.56) и (4.57) выражают преобразования квадратичных
функций трех переменных при линейной невырожденной замене (4.54).
ОРТОГОНАЛЬНЫЕ ИНВАРИАНТЫ КВАДРАТИЧНОЙ ФУНКЦИИ
Выражения, составленные из коэффициентов квадратичной функции,
которые не изменяются при линейной невырожденной замене переменных
(4.54), называются инвариантами относительно аффинной замены пег
ременных, или, короче, аффинными инвариантами квадратичной
функции. Например, знак определителя detA матрицы квадратичной формы
функции (4.53) не изменяется при замене (4.54), так как, согласно (4.56):
()
Аналогично, учитывая (4.57), получаем, что detP' = (detr)2 detP, т.е. знаки
определителей detP' и detP совпадают при любой линейной
невырожденной замене переменных.
Выражения, составленные из коэффициентов квадратичной функции,
которые не изменяются при линейной невырожденной замене переменных
(4.54) с ортогональной матрицей S (ST = 5"1), называются инвариантами
относительно ортогональной замены переменных, или, короче,
ортогональными инвариантами квадратичной функции. Эти алгебраические
выражения являются важнейшими геометрическими характеристиками
поверхности второго порядка и могут быть использованы как для их
классификации, так и для построения, поскольку преобразование прямоугольной
системы координат соответствует ортогональной замене переменных. Далее,
если не оговорено противное, будем рассматривать преобразования
квадратичных функций при ортогональных заменах переменных.
Для функции (4.53) введем обозначения
а22
= detA =
а72 <*23
*23 аЗЗ
«13
«33
«11 с
«12 й
«12
Г22
«13 «23
«1 <
ч
«22
«23
«13
«23
«33
«3
«23
«33
«1
«2
«3
«0
425
где х1 - след матрицы А (сумма диагональных элементов матрицы А), а
т2 - сумма главных миноров второго порядка матрицы А, 8 -
определитель матрицы А квадратичной формы, А - определитель матрицы Р
квадратичной функции. Обозначим через Tj, т2, 8' = detA', A' = detP'
аналогичные выражения для функции (4.55).
Теорема 4.4 (об ортогональных инвариантах). При любой
ортогональной замене переменных (4.54) квадратичной функции (4.53) выражения
Tj, т2, 5, А не изменяются: х\ = тх, т2 = т2, 8' = 8, А' = А.
В самом деле, согласно формуле (4.56), при замене переменных (4.54) с
ортогональной матрицей S (ST = S"1) не изменяется определитель
квадратичной формы:
таккак (detS)2 =detSr-detS = det«ST1 delS =det(s4 s)=det£ = 1.
Аналогично из (4.57) получаем det P' = (det r)2 • det P = det P,
поскольку detr = det 5 (в этом можно убедиться, раскладывая определитель
матрицы Т по последней строке) и (det S)2 = 1.
Таким образом, определители матриц квадратичных форм не
изменяются при ортогональной замене переменных:
detA detA, detPdetP
Эти равенства 5=5, А = А устанавливают ортогональную инвариантность
выражений 5 и А.
Рассмотрим теперь квадратичную функцию
где k - некоторая постоянная (параметр). Матрица квадратичной формы
этой квадратичной функции имеет вид
'X 0 0>
О Л О
о о я,
ап а\2 а\з
*\2
1ЛЗ «23 «33J
ап-Х
ап
При ортогональной замене переменных (4.54) матрица квадратичной формы
преобразуется по закону (4.56):
а ее определитель не изменяется, т.е.
426
Напомним, что определитель dzt(A-XE) представляет собой
многочлен переменной X, который называется характеристическим
многочленом матрицы А :
det(A-X-E) =
«11 "х
«12
«13
«12
«22 -*
«23
«13
«23
«33 ~Х
где 8 = detA, хх =лп+я
22
элементов матрицы А), а т2 =
- след матрицы
«11
«12
«12
«22
«И
«13
А
«13
«33
(сумма
«22
«23
диах
«23
«33
- сумма
главных миноров второго порядка матрицы А. Из ортогональной
инвариантности характеристического многочлена, т.е. из равенства
det(A-X-E) = dct\A'-Х-Е), следуют равенства соответствующих
коэффициентов:
т2=т2,
что означает ортогональную инвариантность выражений %х и х2.
Замечания 4.12.
1. При любой однородной (s = o) ортогональной замене переменных
(4.54) квадратичной функции (4.53) выражения
«11 «1
«1 «О
«22 «2
«2 «О
«33 «3
«2 =
«11
«12
«1
«12
«22
«2
«1
«2
«0
+
«13 «1
а1 а3
22
а23 а2
"23 *33 пЪ
а2 а3 а0
не изменяются: кх = кх, к2 = к2.
Выражения Kj, к^ называются ортогональными семиинвариантами
(полуинвариантами) квадратичной функции (см. п.1 замечаний 3.12). Для
доказательства [14] нужно рассмотреть характеристический многочлен
матрицы Р квадратичной функции.
2* Если у квадратичной функции (4.53) 8 = А = 0, то при любой
ортогональной замене ее переменных (4.54) выражение к2 не изменяется:
к2 = к2, другими словами, выражение к2 является ортогональным
инвариантом для квадратичной функции при 5 = А = 0.
3. Если у квадратичной функции (4.53) 5 = А = 0 и хх = т2 = 0, то при
любой ортогональной замене ее переменных (4.54) выражение к1 не изме-
427
няется: кг = кх, другими словами, выражение кх является ортогональным
инвариантом для квадратичной функции при 8 = Д = 0мт1=т2=0.
Доказательство утверждений п.2,3 (теоремы Моденова П.С.) приведено
в [14].
4. Из доказательства теоремы 4.4 следует, что характеристический
многочлен матрицы квадратичной формы является ортогональным
инвариантом.
5. Корни характеристического многочлена матрицы квадратичной
формы являются ортогональными инвариантами.
Это следует из ортогональной инвариантности характеристического
многочлена.
6. Из доказательства теоремы 4.3 следует (см. п.4 замечаний 4.7), что
существует такая ортогональная замена переменных x-Sx (ST =S~l)
функции (4.53), при которой у функции (4.55) будут отсутствовать
произведения переменных:
т.е. матрица А квадратичной формы функции (4.55) будет диагональной:
0
0
Записывая характеристический многочлен этой матрицы, получаем
-A. О О
det(A-X-E)=
О
О Л2->
о о
т.е. числа Я1, Х2, Л3 являются его корнями. Из инвариантности
характеристических многочленов det(A - Л • Е)=det(A - X • Е) следует, что
Отсюда получаем:
х2 =
7. Корни Xj, X2> X3 характеристического уравнения
Х3-х,Х2+т2Х-8 = 0
действительные.
В самом деле, диагональная матрица Л = S~l AS действительная, так
как матрицы А и S действительные.
428
8. Корни Хх, Х2, Х3 характеристического уравнения имеют
одинаковые знаки (все положительные или все отрицательные) тогда и только то-
гда, когда т2 > О и хх -8 > О.
Необходимость условий легко проверяется по теореме Виета для
кубического уравнения (см. п.6):
т2 = Xl-X2+k2-k3+X3-Xl >0, т1-8 = (Л1+Л2
если все числа Хх, Х2, Х3 положительные, либо все отрицательные.
Докажем достаточность. Покажем, что при условиях т2 > 0 и т{ -8 > 0
выполняется неравенство Хг -Х2 > О, т.е. числа Хх и Х2 имеют одинаковые знаки. В
самом деле, так как т2 > 0, то
тг5
Величины Хх-Х2 и —— имеют одинаковые знаки (в силу неравенства
\-Х2
т1-8>0) и их сумма положительна, поэтому они положительные, т.е.
Хг -Х2 >0. Аналогично показывается, что и Хх -Х3 >0. Следовательно, все
числа Хх, Х2, А,3 одного знака.
9. При умножении квадратичной функции (4.53) на отличный от нуля
множитель \х собственные значения матрицы А умножаются также на ц, а
инварианты и семиинварианты (см. п.1) умножаются на ц, |Ш2, |Л3 или ц4,
согласно свойству определителей: Ц-Tj, Ц2-т2, ц3-8, \i*A, M"2#Ki»
ОПРЕДЕЛЕНИЕ ВИДА КАНОНИЧЕСКОГО УРАВНЕНИЯ ПОВЕРХНОСТИ
ВТОРОГО ПОРЯДКА ПРИ ПОМОЩИ ИНВАРИАНТОВ
Пусть в прямоугольной системе координат Oxyz поверхность второго
порядка описывается уравнением
p(at,j,z)=O, (4.58)
где p(x,y,z) - квадратичная функция:
(4.59)
Согласно теореме 4.3, в любой другой прямоугольной системе координат
Oxyz уравнение этой же поверхности имеет вид
429
p(x\y',z)=O,
где квадратичная функция
(4.60)
+ 2-а[3-х • z +2-а23-у • z +2-а[-х +2-а'2-у +2*а'3-z +а'о ) (4.61)
получена из квадратичной функции р(х, у, z) в результате умножения на
отличный от нуля множитель \х и ортогональной замены переменных:
= Уо +lS
2i -
или
z
. (4.62)
Здесь 5 =
Уо
*0 "^31 * * ^32 * У *^33 * Z '
- координатный столбец вектора J = 00' переноса начала
координат, S =
1*31
- ортогональная матрица (ST =S l)
перехода от базиса i, j, к системы координат Oxyz к базису системы координат
dxyz . Собственные значения матриц квадратичных форм, инварианты и
семиинварианты квадратичных функций p(jt,;y,z), p[x\y\z) обозначим
соответственно
1' 2' 3 ' 1 * 2' ' ' ^1' ^2 ' 1' 2' 3 * Т.' Т2 • ' • 1' 2 *
По теореме 4.3 и п.9 замечаний 4.12 эти выражения связаны формулами
Используя эти связи, выясним признаки видов канонических
уравнений, а также выразим коэффициенты канонических уравнений.
Предполагаем, что система координат dxyz каноническая, т.е. уравнение
p(x\y\z')=0 имеет один из семнадцати канонических видов, указанных в
теореме 4.3. В этом случае матрица А квадратичной формы функции
Р\х\ у\ z) имеет диагональный вид:
\ о о4
0 Л2 0
о о
*ъ)
430
Коэффициенты при квадратах неизвестных в канонических уравнениях (1)-
(17) равны собственным значениям Хг,Х2,Х3 этой матрицы (или, что то же
самое, корням характеристического уравнения). В зависимости от знаков
чисел Хг>Х2,Х3 уравнения (1)-(17) разбиваются на три группы:
-корни ^1=-t,^2="V»^3="V отличны от нуля (8 =Х1Л2-Х3 *0)и
имеют одинаковые знаки {эллиптический тип): уравнения эллипсоида,
мнимого эллипсоида, мнимого конуса;
-корни Хх =-у Д2 =-у Д3 =—^ отличны от нуля (8 = Л1-Я2-Л3 *0)
и имеют разные знаки (гиперболический тип): уравнения однополостного
или двуполостного гиперболоидов, конуса;
- хотя бы один из корней ХХ,Х2,Х3 равен нулю (Х3=0,
8=ХХ-Х2-Х3 =0) (параболический тип): уравнения эллиптического или
гиперболического параболоидов, а также цилиндры и пары плоскостей.
Тип уравнения (4.58) не изменяется в ходе приведения его к
каноническому виду (4.60), так как, согласно п.9 замечаний 4.12, корни
характеристических уравнений связаны формулами Xj =|Х-Х19 Х2 = ц-Л2, Я3 =ц-Л3,
т.е. отличаются только множителем ц Ф 0. Поэтому, если Хг, Х2, Х3 имеют
одинаковые знаки (что равносильно условиям х2 >0 и Xj -5 >0 (см. п.8
замечаний 4.12)), то и А19Я2 Д3 имеют одинаковые знаки (что равносильно
условиям т2>0 и х1-8>0). Если ХХ>Х29Х3 имеют разные знаки (что
равносильно условиям х2<0 или х^-8<0), той Х{,Х2,Х3 имеют разные
знаки (что равносильно условиям х2 < 0 или хг • 8 < 0). При этом выражения х2
и х2, а также \ • 8 и xt • 8 имеют одинаковые знаки, что следует из (4.63).
Для уравнений эллиптического типа (Xj=-y>0, X2=-j>0,
(1) эллипсоида Хг \х) +Х2 -(у ) +Я3 -\z ) -1 = 0;
(2) мнимого эллипсоида Хх • \х) + Х2 • \у) + Х3 • \z) +1 = 0;
(3) мнимого конуса Хх - \х) + Х2 • \у) + Х3 • \z) = 0,
определитель А матрицы Р квадратичной функции p(x\y\z) имеет один
из следующих видов:
431
А =
*.
0
0
0
0
0
0
0
0
0
0
0
0
-1
, д =
0
0
0
0
0
0
0
0
0
0
0
0
1
, А =
\
0
0
0
0
0
0
0
0
Х3
0
0
0
0
0
(4.64)
т.е. для уравнений эллипсоида А < 0, мнимого эллипсоида А > 0 и мнимого
конуса - А = 0.
Для уравнений гиперболического типа (Xj=-y>0, Л2=-~>0,
(4) однополостного гиперболоида \ • (х) + Х2 • (у) + Х3 • (z) -1 = 0;
(5) двуполостного гиперболоида \ • (х) + Х2 • \у) + %3 • (z) +1=0;
(6) конуса \ • (x'f + Х2 • (y'f + Л3 • (z'f = 0,
определитель А матрицы Р квадратичной функции p\x\y\z) имеет один
из указанных в (4.64) видов, т.е. для однополостного гиперболоида А>0,
двуполостного гиперболоида А < 0, конуса - А = 0.
Для уравнений параболоидов (Хг =-у> О, Я3=0, 8=Х1-Я2-Я3 =0):
(7) эллиптического параболоида Xl-\x) +^2'vT ""2-z'=0, X2=-y>0;
(8) гиперболического параболоида Хх • (х) + Х2 • (у) - 2 • z = 0, Я2 = —^ < 0,
определитель А матрицы Р квадратичной функции P\x',y',z) имеет вид:
(4.65)
т.е. для уравнений эллиптического параболоида А<0, гиперболического
параболоида А > 0.
Из формул (4.63) следует, что выражения А и А имеют одинаковые
знаки, поскольку А = ц4 • А. Поэтому для перечисленных выше уравнений в
условиях А<0, А>0, А = 0 определитель А можно заменить на А.
Следовательно, признаками вида для уравнений эллиптического или
гиперболического типа служат неравенства А<0, А>0, А=0, а для уравнений
параболоидов - неравенства А < 0, А > 0.
В остальных случаях при 5 = А = 0 определение вида поверхности
производится аналогично определению вида линии второго порядка (см.
разд.3.3.5), так как в канонических уравнениях цилиндрических поверхно-
432
0
0
0
0
0
0
0
0
0
-1
0
0
-1
0
стей отсутствует неизвестная z . При а13 = а^ = д33 = аъ =
равенства
имеют место
т2=8,
К2=А,
где
т2, Kj, к2 ~ инварианты цилиндрической поверхности, а т, 8, к,
Д - инварианты линии второго порядка.
Таким образом, классификацию поверхностей второго порядка можно
записать, используя инварианты квадратичной функции (см. таблицу 4.3).
Пример 4.19. По ортогональным инвариантам определить виды
алгебраических поверхностей второго порядка, заданных в примере 4.18:
а) *2 + ;y2+2
б) *2+6;у-
в) 3-x2-7-y
□ а) Собственные значения А^ = Л2 = 1, Я3 = О матрицы А
квадратичной формы найдены при решении примера 4.18,"а". Согласно п.5
замечаний 4.12:
т1=Х1+Х2+Х3=2, T2=XrX2+X2-X3+XrX3=l, 8=ЛгЛ2-Х3=0.
Так как хотя бы один из корней равен нулю, то тип поверхности -
параболический. Вычисляем
1
0
0
1
0
1
0
-2
0
0
0
1
1
-2
1
1
Следовательно (см. таблицу 4.3), заданная поверхность является
эллиптическим параболоидом (параболоидом вращения).
б) Собственные значения Кг =1, Х2=Х3=0 матрицы А квадратичной
формы найдены при решении примера 4.18,"б". Согласно п.5 замечаний
4.12:
т1=Х1+Х2+Я3=1, T2=XrX2+X2-X3+XrX3=
Следовательно, тип поверхности - параболический. Вычисляем
8=Х1-Я2-Л3=0.
А =
1
0
0
0
0
0
0
3
0
0
0
-4
0
3
-4
10
1
0
0
0
0
3
0
3
10
+
1 О
о о
О -4
-4
10
0
0
= 0,
-4
3 -4 10
= -9-16+0 = -25*0.
Следовательно (см. таблицу 4.3), заданная поверхность является
параболическим цилиндром.
28-
5150
433
Таблица 4.3. Классификация поверхностей второго порядка
Признаки вида
Название поверхности
5*0
т2>о,
1 ' 2 ' 3
одного знака
т2<0,
Z
1 ' 2 ' 3
разных знаков
д<0
Эллипсоид
Д>0
Мнимый эллипсоид
Мнимый конус
Д>0
Однополостный гиперболоид
А<0
Двуполостный гиперболоид
Д = 0
Конус
Д<0
Эллиптический параболоид
Д>0
Гиперболический параболоид
д = 0
т2>0
т2<0
Т1К2<0
Эллиптический цилиндр
Мнимый эллиптический
цилиндр
К2=0
Пара мнимых пересекающихся
плоскостей
Гиперболический цилиндр
Пара пересекающихся
плоскостей
Параболический цилиндр
к. <0
Пара параллельных плоскостей
К,>0
Пара мнимых параллельных
плоскостей
к,=о
Пара совпадающих плоскостей
434
в) Собственные значения Хх = -1, Х2 = 9, Х3 = -9 матрицы Л
квадратичной формы найдены при решении примера 4.18,"в". Согласно п.5
замечаний 4.12: хг =Х1+Х2+Я3=-1, т2=Л1-Я2+Х2-Л3+Я1-Л3=-81, 8 =
= Х1-Х2-А>3 =81. Поскольку корни характеристического уравнения имеют
разные знаки, тип поверхности - гиперболический. Вычисляем
А =
3 4-45
4 -7 -4 -7
-4 -4 3 -3
5 -7 -3 -8
= 81>0,
Следовательно (см. таблицу 4.3), заданная поверхность является однополо-
стным гиперболоидом.
Классификация заданных поверхностей совпадает с результатами
примера 4.18. ■
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ КАНОНИЧЕСКОГО УРАВНЕНИЯ
ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА ПРИ ПОМОЩИ ИНВАРИАНТОВ
Найдем формулы, выражающие коэффициенты канонических
уравнений поверхностей через коэффициенты общего уравнения (4.58).
Для уравнений эллиптического типа:
- эллипсоида (1): Хх \х) +Я2 \у) +Х3 \z) -1 = 0,
- мнимого эллипсоида (2): Хх \х) +Х2 • [у') +Я3 -\z) +1 = 0,
- мнимого конуса (3): Хх - \х) + Х2 • \у) + Х3 • \z) = 0,
где %г =-у, Х2 =-у, Х3 =—-, причем 0<%г <%2 <%3. Учитывая (4.63),
запишем равенства ц-Xj =Я1=-у, ц-Л2=Я2=-^-, р,Х3=Х3=-у» 5=ц3-8,
А = ц4А. Для уравнения эллипсоида А = -5 (см. первый определитель в
(4.64)). Поэтому IX4 • Д = -ц3 • 5, значит \х = —j-. Тогда полуоси эллипсоида
вычисляются по формулам а = J —j^g-» 6 = J ""JTJ • с = t/ ""1^6 » пРичем
для выполнения неравенств а>Ъ>с (или, что то же самое Х1<Х2<Х3)9
корни характеристического уравнения нужно занумеровать так, чтобы они
Удовлетворяли условиям | Х{ | < | Х21 < | Х3 J. Для уравнения мнимого
эллипсоида А = 8 (см. второй определитель в (4.64)). Поэтому ц4 • А = ц3 -8, зна-
\i=-~. Тогда полуоси мнимого эллипсоида вычисляются по формулам
причем корни характеристического урав-
W 1 - f "2 w f "3 "
28* 435
нения нужно занумеровать так, чтобы | Хг | < | Х21 < | Х31. Разделив
уравнение мнимого конуса на величину ||ы|^0, получим уравнение
| Хх | • (х) +1Х21 • (у) +1Х31 • (z') = 0. Отсюда находим коэффициенты
Для уравнений гиперболического типа:
-однополостногогиперболоида(4): Хх• (я; + Х2• [у) + Х3• [z) -1 = 0;
- двуполостного гиперболоида (5): Хх • (jc'Jr + Х2 • (y'jr + Х3 • [zj +1 = 0;
- конуса (6) Хх \xj + X2 -(y'f +X3 \zf =0,
где AjSs-y, ^2="V' ^з =—V<^» причем Л1<Х2, аналогичным образом
получаем
для однополостного гиперболоида: а2 = - ^g-, fe2 = - -^, с2 = -^;
для двуполостного гиперболоида: а2 = -j-^g » ^2 = "3^5 • с2 = ~ лГб '
даяконуса: а2 =р^, Ь2 =^-{, с2 =-fo,
причем корни Хг Д2Д3 характеристического уравнения нужно
занумеровать так, чтобы Хх и Х2 были одного знака и | Х11 ^ | Л21, а корень Х3 -
противоположного знака.
Для уравнения эллиптического параболоида (7):
учитывая (4.63), запишем равенства \к • Хх = Ях = -у, ц • Х2 = Я2 = -у,
т2 =|12-т2, А = |И4-А. Поскольку Я3 =0, то т2 =Я1-Л2 =~А (см. (4.65)).
Следовательно, |Ы2т2 =-ц4А, отсюда Ц2=-"т-- Тогда а2 = /-т^- и
fr2= /-тг^"» причем корни Я19Л2Д3 характеристического уравнения
нужно занумеровать так, чтобы нулевым оказался корень Х3 = 0, а
ненулевые корни Xj и Х2 одного знака должны удовлетворять условию
Для уравнения гиперболического параболоида (8):
436
2 I T"~ 2 / 7—
аналогично получаем а = / —5^—, b = /—~—, причем корни
Ях Д2»^з характеристического уравнения нужно занумеровать так, чтобы
нулевым оказался корень Я3 = 0, а из ненулевых корней Л1 и Л2 разных
знаков положительный обозначить Х1 (\г > О).
Для уравнений цилиндрических поверхностей формулы для
нахождения коэффициентов канонических уравнений по коэффициентам исходного
уравнения выводятся аналогично тем, которые были получены в разд.3.3.5.
Действительно, учитывая, что в канонических уравнениях цилиндрических
поверхностей отсутствует неизвестная z , т.е. ахъ = а23 = а33 = а3 = 0,
получаем равенства
Х1=Т' Т2=5' К1=К> К2=А,
где Tj, т2, Kj, к2 - инварианты цилиндрической поверхности, а т, 6, к,
А - инварианты линии второго порядка. Например, для параметра параболы
у2 =2рх в разд.3.3.5 получена формула р = J—4" • Следовательно,
параметр параболического цилиндра у2 =2-р-х (в этом уравнении
отсутствует неизвестная z) вычисляется по формуле р = J —~ .
¥ Ti
Пример 4.20. По ортогональным инвариантам определить
коэффициенты канонических уравнений алгебраических поверхностей второго
порядка, заданных в примере 4.18,"а","б||,"в":
а) *2 + ;y2 + 2-jt-4-;y + 2-z + l = 0; б) *2+6-;у-8-г + 10 = 0;
в) 3-х2-7 y2+3z2+&x-y-Sxz-Syz + l0x-U.y-6z-S = 0.
D а) Заданное уравнение определяет эллиптический параболоид (см.
решение примера 4.18,"а" или 4.19,"а"). Собственные значения Хг =Л2 =1,
Я3 = 0 матрицы А квадратичной формы найдены при решении примера
4.18,"а", инвариант Д = -1 вычислен в примере 4.19,иа". Заметим, что корни
характеристического уравнения занумерованы в соответствии с условиями
^з=0, ЛJ< Л2 . Найдем инвариант т2 =Л1-Л2+А,2-Л3+Л1-Л3 =1 ивы-
числим коэффициенты канонического уравнения а2 = / - -~— = J —у- = 1,
V Aj #T2 w 1 *1
* = а2 = 1, так как Хх = Я2. Таким образом, каноническое уравнение имеет
***(x'f+(y'f=2.z.
437
б) Заданное уравнение определяет параболический цилиндр (см.
решение примера 4.18,"б" или 4.19,"б"). Инварианты тх = 1, к2 =-25 найдены
при решении примера 4.19,"б". Вычисляем параметр параболического ци-
i K i
линдра P = J—t^J^^-S- Таким образом, каноническое уравнение
имеет вид (у) =2-5-/.
в) Заданное уравнение определяет однополостный гиперболоид (см.
решение примера 4Л8,"ви или 4.19,"в"). Собственные значения А, = -1,
X = 9, X = -9 матрицы А квадратичной формы найдены при решении
примера 4.18,"в", инварианты 8 = 81 и А = 81 вычислены в примере 4.19,"ви.
Обозначим корни следующим образом: корни одного знака (отрицательные
корни) обозначим Х{ = -1, Х2 = -9 так, чтобы \ХХ \< \Х21, а корень
противоположного знака А3 = 9. Вычислим коэффициенты канонического урав-
Таким образом, каноническое уравнение имеет вид -Ц^+-Ц^---^*- = 1.
9 9
Канонические уравнения заданных поверхностей совпадают с
полученными в примере 4.18,"а","б\"ви. ■
ОПРЕДЕЛЕНИЕ КАНОНИЧЕСКОГО БАЗИСА ДЛЯ ПОВЕРХНОСТИ
ВТОРОГО ПОРЯДКА
Ненулевой вектор I, а также его координатный столбец
s = (x у zf, будем называть собственным вектором поверхности
второго порядка (4.58), если выполняется равенство
*п ап
а12 а^
kai3 атз
^13
лзз.
(4.66)
т.е. координатный столбец собственного вектора поверхности (4.58)
является собственным вектором матрицы А квадратичной формы функции (4.59).
Говорят, что собственный вектор J соответствует {принадлежит)
собственному значению X. Собственный вектор, соответствующий нулевому
собственному значению (As = Os <=> As = o), будем называть особым
собственным вектором поверхности второго порядка.
Укажем следующие свойства собственных векторов поверхности
второго порядка.
438
1. Собственный вектор поверхности второго порядка не изменяется
при ортогональном преобразовании координат и при умножении обеих
частей уравнения поверхности на отличное от нуля число, другими
словами, поверхности (4.S8) и (4.60) имеют одинаковые собственные векторы.
Действительно, согласно п.5 замечаний 4.7, собственные векторы
квадратичной формы не изменяются при однородном ортогональном
преобразовании координат, а именно, если sx собственный вектор матрицы А,
соответствующий собственному значению Хг то вектор s'x = 5"1 -sx
является собственным для матрицы А' = ST • А • S, где S - ортогональная матрица.
При параллельном переносе системы координат матрица квадратичной
формы не изменяется (А' = ST • А• S = А, если S = Е), поэтому не
изменяются и ее собственные векторы. Если же обе части уравнения (4.S8)
умножаются на отличное от нуля число ц, то все элементы матрицы А , а также
ее собственные значения, умножаются на число ц. Однако, собственный
вектор поверхности не изменяется, поскольку условия A-sl=Xl-sl и
\i-A-sx =ц-Х1'51 равносильны (при jii^O).
2. Собственные векторы, соответствующие разным собственным
значениям, взаимно ортогональны.
В самом деле, пусть Jx и 12 - собственные векторы, соответствующие
разным собственным значениям (Хг *Х2), т.е. координатные столбцы s{ и
s2 этих векторов удовлетворяют условиям
А • S+ ~ /\»| • S« И А * Sty = <Л»2 " S*y •
Первое равенство умножим слева на строку s2 , а второе - на sx , и вычтем
второе равенство из первого:
S/% ' /\ * «У» "~~ о* " А.' S/y — /v| * S*y ' j| """ *»л # »У| * Ол •
Поскольку при транспонировании число (рассматриваемое как матрица
размеров 1x1) не изменяется (см. разд.П.4), то правую часть этого равенства
можно преобразовать к виду
так как ^2 # 51 = г Г * 52 / = 5Г# ^2 ♦ а левая часть рассматриваемого равенства,
учитывая симметричность матрицы А (АТ = А), равна нулю, так как
Jj'^'^^^i #^ '^2/ =|S1 '^ #<S2 =|S1 '^<lS2*
Следовательно, рассматриваемое равенство можно записать в виде
l s2=0 или sxs2=0,
439
поскольку A.j * А2. Последнее равенство означает, что {svs2)=sl s2=0 -
скалярное произведение ненулевых векторов J{ и 12 равно нулю, т.е. они
ортогональны.
3. Базисные векторы канонической системы координат являются
единичными взаимно ортогональными собственными векторами поверхности.
Действительно, в канонической системе координат матрица А квадра-
точной формы имеет диагональный вид А = Л =
О Х2 О
О 0 Хъ)
, где
Хъ - корни характеристического уравнения (см. п.б замечаний 4.12).
Записывая (4.66) для координатных столбцов sx = (l 0 6f, s2 = (0 1 Q!f,
53 = (О 0 l)7^ базисных векторов Jx, J2, Т3, получаем
Первое соотношение выполняется при X = Хг, второе - при Л=Х2, третье -
при Л = Я3. Следовательно, базисные векторы Jj, ?2'^з являются
собственными, соответствующими собственным значениям Л = Я1 для первого
базисного вектора (Jx), X = Л2 - для второго (72) и Я = Х3 - для третьего
(?3). При этом не исключается случай равенства собственных значений.
Таким образом, для определения канонического базиса нужно найти
три взаимно ортогональных единичных собственных вектора.
Замечания 4.13.
1* Собственные векторы матрицы определяются неоднозначно.
Например, если s - собственный вектор матрицы (или поверхности), то столбец
ii-s при любом отличном от нуля числе (Л также является собственным
вектором, соответствующим тому же собственному значению X, что и
вектор s.
2. Три единичных взаимно ортогональных собственных вектора
поверхности второго порядка определяются с точностью до множителя ( -1).
Другими словами, каждый из них можно заменить на противоположный,
тем самым изменить направление соответствующей координатной оси. Для
всех поверхностей, за исключением эллиптического параболоида (7) и
параболического цилиндра (14), выбор положительного направления на
координатных осях может быть произвольным, другими словами, если, например,
вектор 7j базисный, то и противоположный вектор (-SJ) также можно взять
440
в качестве базисного. Положительное направление оси О z (базисный
вектор J3) для эллиптического параболоида, а также положительное
направление оси ОV (базисный вектор 1Х) для параболического цилиндра нельзя
менять на противоположное. Правильный выбор этих базисных векторов
описан ниже в замечании 4.15.
3. Собственные векторы поверхности определяют ее главные
направления [3,14].
ОПРЕДЕЛЕНИЕ НАЧАЛА КАНОНИЧЕСКОЙ СИСТЕМЫ КООРДИНАТ
ДЛЯ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
Пусть в прямоугольной системе координат Oxyz поверхность второго
порядка задана уравнением вида (4.S8):
(4.67)
+ ао=О.
или в матричной форме:
«11
«12
Лз
«12
«22
«23
«13
«23
«33,
Точка Мо называется центром симметрии (или просто центром)
поверхности второго порядка (4.67), если вместе с каждой своей точкой М
поверхность содержит также и точку М , симметричную точке М
относительно М0 (точка Мо - середина отрезка ММ').
Поверхность второго порядка называется центральной, если она
имеет единственный центр. В противном случае, если центр отсутствует или не
является единственным, поверхность называется нецентральной.
Центральными поверхностями являются эллипсоиды, гиперболоиды и конусы
(рис.4.48), единственный центр этих поверхностей - начало координат.
Остальные поверхности - нецентральные.
Центральные поверхности
Эллипсоиды
Гиперболоиды
Рис.4.48
Конусы
441
Заметим, что поверхности эллиптического или гиперболического
типов являются центральными, а поверхности параболического типа -
нецентральными, как это указано в первом столбце таблицы 4.3.
Прямая или плоскость, каждая точка которой является центром
симметрии, называются пряной центров или плоскостью центров
соответственно. На рис.4.49 изображены поверхности, имеющие прямую центров (эта
прямая совпадает с осью аппликат канонической системы координат
(двойная линия на рис.4.49)). На рис.4.50 изображены поверхности, имеющие
плоскость центров (эта плоскость совпадает с плоскостью Oxz
канонической системы координат (выделена двойными линиями на рис.4.50)).
Прямые центров
Гиперболический
цилиндр
Эллиптические
цилиндры
Рис.4.49
Пары пересекающихся
плоскостей
Прямая /0 называется осью симметрии поверхности второго порядка
(4.67), если вместе с каждой своей точкой М поверхность содержит также и
точку М , симметричную точке М относительно прямой lQ (прямая /0
перпендикулярна отрезку ММ* и делит его пополам).
Оси симметрии имеют все
Плоскости центров поверхности второго порядка.
Если поверхность центральная,
то ось симметрии проходит
через ее центр. Например,
координатные оси канонической
системы координат являются
осями симметрии эллипсоидов,
гиперболоидов, конусов (см.
рис.4.48). Если нецентральная
поверхность имеет прямую
центров, то эта прямая служит
осью симметрии. Например, ось аппликат канонической системы координат
для гиперболического или эллиптических цилиндров, или пар
пересекающихся плоскостей (см. рис.4.49). Другие координатные оси также являются
осями симметрии этих поверхностей. Ось Oz является единственной осью
симметрии для параболоидов (рис.4.51), а ось абсцисс - единственная ось
симметрии для параболического цилиндра.
442
Пары параллельных или совпадающих
плоскостей
Рис.4.50
Параболоиды
Параболический цилиндр
Рис.4.51
ПЛОСКОСТЬ По оси и плоскость симметрии поверхностей, не имеющих центра
называется
плоскостью симметрии
поверхности
второго порядка (4.67),
если вместе с
каждой своей точкой
М поверхность
содержит также и
точку м\
симметричную точке М относительно плоскости тс0 (плоскость я0
перпендикулярна отрезку ММ и делит его пополам).
Плоскости симметрии имеют все поверхности второго порядка. Если
поверхность центральная, то плоскость симметрии проходит через ее центр.
Если нецентральная поверхность имеет прямую центров, то эта прямая
принадлежит плоскости симметрии. Например, плоскость Oxz канонической
системы координат для гиперболического или эллиптических цилиндров,
или пар пересекающихся плоскостей (см. рис.4.49). Если нецентральная
поверхность имеет плоскость центров, то эта плоскость служит плоскостью
симметрии поверхности, например, координатная плоскость Oxz для пар
параллельных или совпадающих плоскостей (см. рис.4.50). Эта же плоскость
Oxz является плоскостью симметрии для параболоидов и параболического
цилиндра (см. рис.4.51).
Если поверхность (4.67) имеет хотя бы один центр, то этот центр
принимается за начало канонической системы координат (см. рис.4.48, 4.49,
4.50). Если поверхность не имеет ни одного центра, то началом
канонической системы координат является либо точка пересечения оси симметрии
параболоидов с его поверхностью, либо любая точка пересечения плоскости
симметрии параболического цилиндра с его поверхностью (см. рис.4.51).
Составим уравнения для определения центра поверхности (4.67). Для
этого сделаем ортогональное преобразование координат (4.62):
или
= 5 + 5
^ = Z0+S3l'X' + S32'y' + S33'Z
где s = {x0 y0 zo[ - координатный столбец вектора 1-ОО' переноса
системы координат, а ортогональная матрица S = (sl | s2 \s3) составлена из
единичных взаимно ортогональных собственных векторов поверхности
(4.67), соответствующих собственным значениям Хх, Х2 Д3. В новой
системе координат O'xyz уравнение поверхности будет иметь вид
443
\-(x'f +\2-{y'f + X3-(z'f + 2-a[-x +2-a2- у +2-а3- z'+ao = O, (4.68)
\ 0 0
0 X2 0
-
диагональгде, согласно (4.56), матрица А'=ST • А • S = Л =
О О
ная, столбец коэффициентов линейной формы a =ST -(A-s+a), а
свободный член а'о = sT -A-s + 2-aT -s + a0.
Если в уравнении (4.68) отсутствуют линейные члены (а' = о), то
начало координат О является центром симметрии, поскольку при
одновременной замене неизвестных х <-» (- х'), /<->(- у), z' <-» (- z j уравнение
(4.68) не изменяется. Другими словами, если координаты точки М \x\y\z')
удовлетворяют уравнению, то и координаты \-x\-y\-z) точки,
симметричной точке М относительно начала координат, также удовлетворяют
уравнению.
Так как матрица S невырожденная, то равенство а = ST • (А • s + а)=о
равносильно системе линейных уравнений (см. разд.4.2.5):
или \an-xo+a22-yo+a23-zo+a2=O9 (4.69)
которая определяет координаты дг0, у0, z0 центра симметрии, т.е. точки О .
Эта система имеет единственное решение только тогда, когда
*11 *12 а13
8= Oj2 а22 а23 ФО или rgA = rg(A | а)=3 (см. разд.П.10). Следова-
«11
«12
«13
«12
«22
«23
«13
«23
«33
тельно, условие 8*0 является критерием наличия единственного центра
(т.е. критерием для центральных поверхностей).
При rgA = rg(A | а) = 2 или при rgA = rg(A | а)=1 система (4.69)
имеет бесконечно много решений, т.е. центры симметрии поверхности
образуют прямую или плоскость центров соответственно. При rgA<rg(A | а)
система не имеет решений, т.е. поверхность не имеет ни одного центра
(см. рис.4.51).
Таким образом, для поверхностей второго порядка, имеющих хотя бы
один центр симметрии, этот центр служит началом О' канонической
системы координат системы O'x'y'z'. Координаты д:0, у0, z0 находятся как реше-
444
Г.тЛ
\
Г 1 Т\
l'SlT
< 3 3 )
,т.е. а -
s\-s + sl a
то уравнение Xx-s[-s + sj>a = 09 или в координатной
ние системы (4.69), причем это решение единственное для центральных
поверхностей.
Рассмотрим теперь случай, когда система (4.69) несовместна. В этом
случае поверхность (4.67) не имеет ни одного центра (см. рис.4.51), т.е.
является либо параболоидом (эллиптическим или гиперболическим), либо
параболическим цилиндром.
Получим уравнения плоскостей и осей симметрии поверхности (4.67).
Для этого запишем столбец a =ST (A-s+a) коэффициентов линейных
членов уравнения (4.68), учитывая, что матрица S составлена из
собственных векторов матрицы А , т.е. ST -A = A-ST (последнее равенство можно
считать матричной формой записи (4.66)):
\ О О
о х2 о
О О А,,
Если
форме
имеет решение s = [xQ у0 z0 f . Тогда, взяв точку O\xQ, yQ, z0) в качестве
начала системы координат Oxyz , получим уравнение (4.68), в котором
будет отсутствовать линейный член с неизвестной х\ так как
а'г = Хх • S* • s + s^ • а = 0. Такое уравнение при замене неизвестной
;/<-»(-;/) не изменяется. Другими словами, если координаты точки
M[x\y\z) удовлетворяют уравнению (4.68), то и координаты \-x\y\z)
точки, симметричной точке М относительно плоскости о'уг , также
удовлетворяют уравнению (4.68) (йри а'х=0). Следовательно, если уравнение
Xl*s[ >s + s[ -а = 0 имеет решения, то оно определяет плоскость симметрии
Oyz поверхности (4.67).
В случаях эллиптического или гиперболического параболоидов
собственные значения Хг и Х2 отличны от нуля (при этом Х3 = 0 ), поэтому
система уравнений
" """ а= • (4.70)
совместна. Первое уравнение системы определяет плоскость симметрии
О у z , второе уравнение системы - плоскость симметрии О х z , а сама сис-
445
тема - ось симметрии О z параболоидов (как пересечение координатных
плоскостей). Заметим, что ось симметрии, определяемая системой (4.70),
коллинеарна особому собственному вектору J3 (соответствующему
нулевому собственному значению Х3 = 0).
Обозначим через а вектор с координатным столбцом а,
составленным из коэффициентов линейной формы в левой части уравнения (4.67).
Представим этот вектор (а также его координатный столбец) в виде
~~ пр L ^^ ~" пр 1'
где а^ =(д,73)-73 - ортогональная проекция вектора а на ось симметрии
(4.70), коллинеарную ?3 (см. разд. 1.4.2); aL =5"-а - ортогональная
составляющая вектора а относительно оси (4.70); а , ах - координатные
столбцы соответствующих векторов. Тогда для указанного разложения
вектора а справедливы равенства
т т
= л а.
s2 a =
поскольку
h^^h5
h5! 'a
i-
Аналогично доказывается второе равенство, а третье равенство следует из
ортогональности векторов J3 и д±: s3 а± = ^а^-О.
Найдем координаты точки О' пересечения оси симметрии (4.70) с
поверхностью (4.67), т.е. найдем такой столбец s, удовлетворяющий (4.70),
чтобы sT-A-s + 2-aT-s+aQ =0. Для этого, учитывая (4.70) и равенства
А = 5-Л-5Г, ST =S-1, jS = (jj |^2 | *з)» ^з = 0, преобразуем произведение
(л
si
■4
-s
s
-s
J
н
si
0
ч
-а
-а
У
•г
4
к
al
Таким образом, столбец s удовлетворяет уравнению А • s + aL = о .
Поскольку матрица А симметрическая, то sT • А = - aTL и
Добавляя уравнение \а + а у • s+а0 = 0 к cncteMe (4.70), получаем систему
уравнений для нахождения начала О канонической системы координат для
параболоидов:
446
(4.71)
В случае параболического цилиндра собственное значение Х2 отлично
от нуля (при этом Хх =Х3 =0), поэтому уравнение %>2-s2 s + s2 -а = 0
определяет плоскость Оxz симметрии параболического цилиндра. В
качестве координат начала канонической системы координат можно взять любое
решение системы уравнений
Г х sTs + sTa = 0
Последнее уравнение можно записать так же, как последнее уравнение
системы (4.71):
.с ., + ,_ .Л_о, (472)
где а = а - а±, а± = \ат - s2 )• s2, т.е. а - ортогональная проекция вектора
И на плоскость, компланарную особым собственным векторам 1Х и 73;
а± - ортогональная составляющая вектора а относительно этой плоскости.
Замечания 4.14.
1. Определение центра, оси или плоскости симметрии равным образом
относится как к вещественным, так и мнимым поверхностям, т.е. включает
случай комплексных решений. При этом оказывается [14], что координаты
любого центра поверхности, любой точки оси или плоскости симметрии
являются вещественными.
2.Система уравнений As+a±=o всегда совместна: ее решениями
являются координаты центра симметрии, если поверхность имеет центр;
либо координаты оси симметрии (коллинеарной особому собственному
вектору) или плоскости симметрии (компланарной особым собственным
векторам), если* поверхность не имеет центра.
3. Если система уравнений A-s+a = o не имеет решений
(rg A < rg (А | а)), т.е. поверхность не имеет ни одного центра, то система
г
= 0,
447
совместна и ее решение определяет начало канонической системы
координат [9]. Другими словами, эта система равносильна системе (4.71) в случае
параболоидов и системе (4.72) в случае параболического цилиндра.
КВАДРАТИЧНЫЕ НЕРАВЕНСТВА С ТРЕМЯ НЕИЗВЕСТНЫМИ
Вещественная поверхность второго порядка p(x,y,z)=O разбивает
координатное пространство Oxyz на области. В силу свойств многочленов
второй степени (в частности, их непрерывности) для решения квадратичных
неравенств /?(*,;y,z)>0, p(jt,;y,z)<0, р(*,;у,г)>0, p(x,y,z)<0
достаточно определить знак многочлена p(x,y,z) в одной внутренней точке какой-
либо области. Знаки в других областях проставляются по правилу
чередования знаков (аналогично методу интервалов): переходя через границу
области, знак меняется на противоположный, за исключением совпадающих
плоскостей (при переходе через них знак многочлена не меняется).
Для всех вещественных поверхностей, за исключением
гиперболического параболоида и пары пересекающихся плоскостей, назовем
внутренними те точки, координаты которых (в канонической системе координат)
удовлетворяют неравенствам
4— ^г<1» у2<2рх, у2-Ь2<0
соответственно. Другими словами, во внутренних точках поверхности левая
часть канонического уравнения меньше правой.
Внешними точками по отношению к каждой из перечисленных
поверхностей назовем точки, для которых значения левой части канонического
уравнения больше правой его части. На рис.4.52 внутренние точки отмечены
минусом, а внешние - плюсом. Заметим, что для совпадающих плоскостей
все точки, кроме точек, принадлежащих поверхности, являются внешними.
Учитывая п.9 замечаний 4.12, для уравнения (4.67) поверхности
второго порядка в прямоугольной системе координат Oxyz можно
сформулировать условия, равносильные определениям внутренних и внешних точек
поверхности.
Теорема 4.5 (о внутренних и внешних точках поверхности). Точка
Ml(x19yvzl) является внутренней точкой поверхности (4.67) тогда и
только тогда, когда
^i'p{xvyvzl)<0 <=> 8 p(xl,yvzi)<0-дляэллипсоида;
5- p[xl,yvzl)>0 - для гиперболоидов и для конуса;
448
Ti 'P\x\*yvzi)<® - для эллиптического параболоида, эллиптического
и параболического цилиндров, пары параллельных плоскостей;
К2' Pyti»3>i»Zj) < 0 - для гиперболического цилиндра.
Доказательство теоремы аналогично доказательству теоремы 3.5.
Замечания 4.15.
1. Для гиперболического параболоида и пары пересекающихся
плоскостей предлагаемое определение внутренних и внешних точек не годится,
поскольку каждая из этих поверхностей разбивает пространства на "похожие",
области, каждую из которых равным образом можно считать внутренней
или внешней. Например, пара пересекающихся плоскостей х2 - у2 = 0
разбивает пространство на четыре равные "четверти", которые
"накладываются" одна на другую при помощи поворота вокруг оси Oz на угол, кратный
у. Гиперболический параболоид х2-у2 =2-г разбивает пространство на
две равные области, которые симметричны прямой f="f = о" *
2. При выборе положительного направления оси Oz канонической
системы координат Oxyz для эллиптического параболоида, заданного
уравнением р(х, у, z) = 0, достаточно проверить, является ли точка М с
координатами х = 0, з> = 0, z =1 внутренней. Вычислим значение
многочлена p(x,y,z) в точке M(xlJyvzl) в исходной системе координат Oxyz- Из
равенства ОМ = ОО'+J3 = J+J3, где s = (*0 y0 zQ )T - столбец координат
точки О', определяем координатный столбец точки M\xi9yvzl):
(jtj yx z1)r=^ + J3. Подставляя этот столбец в квадратичную функцию
р{х,у, z)y получаем
29-5150 449
7 -s + aQ+sT •A-s3+sl'A-s + 2-aT -s3=2-aT -s3,
поскольку sT • A • s + 2 • aT • s + a0 = 0 (точка #' принадлежит поверхности
параболоида), А • s3 = о, так как $3 - особый собственный вектор
параболоида. Из теоремы 4.5 следует, что точка М (ОМ = 7+Г3) является
внутренней при условии Tj • р(хх, ух, zx) < 0, т.е. при условии Tj • ат -s3 < 0.
Аналогично заключаем, что правильный выбор направления вектора
£J, определяющего положительное направление оси Ох' для
параболического цилиндра, отвечает условию хх • ат sx < 0.
Пример 4.21. Поверхности второго порядка заданы в прямоугольной
системе координат Oxyz уравнениями (см. пример 4.18):
а) jc2 + y2 + 2-jc-4-y + 2-z + l = 0; б) x2 + 6y-Sz + l0 = 0;
в) 3-jc2-7^2 + 3-z2+8-jc^-8-jc.z-87-z + 10-jc-147-6-z-8 = 0.
Внутренней или внешней точкой по отношению к каждой поверхности
является начало координат О ?
D а) Заданная поверхность - эллиптический параболоид (см. решение
примера 4.19,"а"). Согласно теореме 4.5, проверяем условие хх • р(0,0,0)<0,
где p(;t,)>,z)=*2 + ;y2+2-Jt-4-)> + 2-z+l - левая часть уравнения
поверхности, a Tj=2 (см. решение примера 4.19,"а"). Поскольку неравенство
т1р(0,0,0)<0 <=> 21<0 неверное для точки О(0,0,0), делаем вьгоод о
том, что точка О является внешней для заданной поверхности.
б) Заданная поверхность - параболический цилиндр (см. решение
примера 4.19,"б"). Согласно теореме 4.5, проверяем условие хх - р(0,0,0)<0, где
p{x>y>z)=x2 +6-;y-8-z+10 - левая часть уравнения поверхности, а тх =1
(см. решение примера 4.19,"б"). Поскольку неравенство хх • р(0,0,0)<0 <=>
Ы0<0 неверное для точки О(0,0,0), делаем вывод о том, что точка О
является внешней для заданной поверхности.
в) Заданная поверхность - однополостный гиперболоид (см. решение
примера 4.19,"в"). Согласно теореме 4.5, проверяем условие 5-р(0,0,0)>0,
где p(x,y,z) - левая часть уравнения поверхности, а 8 = 81 (см. решение
примера 4.19,"ви). Поскольку неравенство 8-р(0,0,0)>0 <=» 81-(-8)>0
неверное для точки о(0,0,0), делаем вывод о том, что точка О является
внешней для заданной поверхности. ■
450
4.4.7. Приведение уравнения поверхности второго порядка
к каноническому виду
Рассмотрим задачу приведения к каноническому виду уравнения
поверхности второго порядка, заданной в прямоугольной системе координат
Oxyz уравнением (4.67):
ап-х2 + а22• у2
х-у + 2-
-y-z +
0. (4.73)
Требуется определить один из семнадцати возможных канонических
видов поверхности (см. теорему 4.3), найти каноническую систему
координат dxyz , в которой уравнение поверхности имеет канонический вид, а
затем построить поверхность в канонической и исходной системах
координат. Построение, разумеется, производится только для вещественных
поверхностей.
АЛГОРИТМ ПРИВЕДЕНИЯ УРАВНЕНИЯ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
К КАНОНИЧЕСКОМУ ВИДУ
Для приведения поверхности второго порядка, заданной в
прямоугольной системе координат Oxyz уравнением (4.73), к каноническому виду
нужно выполнить следующие действия.
1. По уравнению (4.73) поверхности второго порядка составить
матрицу Р квадратичной функции, матрицу А квадратичной формы и столбец а
коэффициентов линейной формы:
«11 «12 «13 «1
«12 «22 «23 «2
«13 «23 «33 «3
2. Составить характеристическое уравнение - Я3 + %х • А? - т2 • X+8 = 0,
либо вычисляя его коэффициенты по формулам: %х = Яц + а22 + д33,
«11
«12
,«13
«12
«22
«23
«13
«23
«33 J
, а =
«1
«2
1*3 J
«11
«12
«12
«22
«11
«13
«13
«33
«22
«23
«23
«33
= detA =
либо разлагая определитель
с,, -Я
det(A-XE)
«12
«13
«12
«23
«13
«23
г,,-Л
«И «12 «13
«12 «22 «23
«13 «23 «33
!-т,-Я+5.
451
Найти корни ХХ,Х2,Х3 (с учетом кратности) характеристического
уравнения.
Вычислить инвариант А = det P =
«11
«12
«13
О,
«12
«22
«23
«2
«13
«23
«33
«3
«1
«2
«3
«0
. Если 8 = Д = 0,
то вычислить семиинвариант
«11 «12 «1
«12 «22 «2
«1 «2 «О
«11 «13 «1
«13 «33 «3
«1 «3 «0
«22 «23 «2
«23 «33 «3
«2 «3 «О
Если 6 = Д = 0 и т, = т2 = 0, то вычислить семиинвариант
К" —
1
«11
«1
«1
«0
«22
«2
«2
«0
«33
«3
«3
«0
3. По таблице 4.3 определить вид поверхности.
4. Занумеровать корни A,x Д2 Д3 характеристического уравнения в
соответствии с правилами:
а) если поверхность эллиптического типа, то 1ХХ \< \Х21 < А,31;
б) если поверхность гиперболического типа, то обозначить через Хх
и Х2 корни одного знака так, чтобы IХ1 < Л2 , а через Х3 - корень
противоположного знака;
в) если поверхность параболического типа, то
- если нулевой корень двойной, то Хх = Х3 = 0 и Х2 Ф 0;
- если нулевой корень простой, а ненулевые корни одного знака, то
- если нулевой корень простой, а ненулевые корни разных знаков,
то Хъ = 0 и
либо Хх > 0, если А Ф 0 или А = к2 = 0;
либо Я1к2>0,если Д = 0 и к2 *0.
5. Найти взаимно ортогональные собственные направления 1Х, /2, /3»'
соответствующие корням Ях Д2 Д3 характеристического уравнения:
а) если Хх = Х2 = Х3, то базисные векторы исходной системы имеют
искомые направления lx=(l 0 О)7^, /2 =(0 1 0^, /3 =(0 0 if ;
452
б) если все корни ХХ>Х2^Х3 простые, то для каждого корня найти
ненулевое решение однородной системы уравнений [А-X. • Еу 1.=о,
i = 1,2,3. Например, собственное направление /3=(*3 у3 z3) для
простого корня Х3 находится как любое ненулевое решение системы
или
Если Х3 = 0 и корни Хг и Х2 имеют разные знаки (Х{ -Х2 <0), то
направление 13 должно удовлетворять дополнительному условию ат -13 <0, в
противном случае следует заменить столбец 13 на противоположный (~/3).
Если Х3 = 0 и корни Ях и Л2 одного знака (Х{ -Х2 >0), то
направление /3 должно удовлетворять дополнительному условию тх-ат -13<0, в
противном случае следует заменить столбец 13 на противоположный (-/3 );
в) если имеется двойной ненулевой корень XX=X2*X3, то для
простого корня Х3 найти соответствующий собственный вектор /3 - любое
ненулевое решение системы (л -Х3 • е)- 13 = о, а для кратного корня Xj = Х2 в
качестве /2 взять любой ненулевой столбец матрицы Л -Я3 • Е, а вектор 1г
найти, используя векторное произведение: Тх = [Г2,Г3 J;
г) если имеется двойной нулевой корень Хх = Х3 = 0, то направление
/2, соответствующее простому корню Х2, найти как ненулевое решение
системы (а-Х2-е)-12=о. Вычислить проекцию п^-cl j- l2. Если
а = о, то направление 1г найти как ненулевое решение системы А-1х-о.
Если a^^Oj-ro направление /2 = -Tj • а^. Направление /3 найти, используя
векторное произведение: Т3 = \ТХЛ2 \-
Нормируя полученные векторы 1г, /2, /3, определить координатные
столбцы ^=-8—г'/j, ^2=т—г-/2, ^з21!—Г з вектоРов ^i» S2* •У3канониче"
\ \1 \1\
ского базиса.
453
6. Найти координаты х0, у0, z0 начала О* канонической системы
координат:
а) для поверхностей, имеющих хотя бы один центр (эллипсоидов,
гиперболоидов, конусов, цилиндров, пар плоскостей), найти любое решение
5 = (дс0 yQ zo) системы уравнений
=0 или
б) для поверхностей, не имеющих ни одного центра, найти:
-в случаях эллиптического или гиперболического параболоидов ре-
Уо zoY
шение s =
системы
пр
в случае параболического цилиндра - любое решение
Уо zoY системы
s-a = 0
7. Вычислить коэффициенты канонического уравнения:
а) для поверхностей эллиптического типа:
(1) - при Д<0 - уравнение эллипсоида *ч£-+Щ-+Щ- = 1 с ко-
а Ь с
эффициентами л2=—^, *2=—^, с2=—^;
(2) при А>0 - уравнение мнимого эллипсоида
= -1 с коэффициентами Д2=
(3) при А = 0 - уравнение мнимого конуса •^£+^£.+•^-
a b с
коэффициентами а2 =т£-г > Ь2 =т^-т» с2 =7тЧ-;
= 0 с
2 =7тЧ-;
454
б) для поверхностей гиперболического типа:
(4) при Д>0 - уравнение однополостного гиперболоида
- = 1 с коэффициентами а2=-^, b2=--fa,
(5) при А<0 - уравнение двуполостного гиперболоида
-i с коэффициентами а2
a2 b2 с2
С 2 «_ А .
(6) при А = 0 - уравнение конуса Щ-+^т— 2^ = 0 с коэффици-
а Ь с
ентами а2 =
в) для поверхностей параболического типа:
(7) при А<0 - уравнение эллиптического параболоида
•^j-+-^- = 2*z с коэффициентами a2~J—2^"»
(8) при Д>0 - уравнение гиперболического параболоида
*Ц—j^- = 2'Z с коэффициентами а
а Ь
(9) при А=0, т2 >0, хх к2 <0 - уравнение эллиптического
цилиндра Щ-+J2f- = 1 с коэффициентами а2 = - т-т"»
А2 Т2
(10) при А = 0, х2 > 0, тх • к2 > 0 - уравнение мнимого
эллиптического цилиндра J^+-^j-- = -l с коэффициентами я2=хт7"'
455
(11) при Д = 0, т2>0, к2=0 - уравнение пары мнимых
пересекающихся плоскостей •*-*-+■**■£- = О с коэффициентами
а Ъ
(12) при Д = 0, х2<0, к2 *0 - уравнение гиперболического
цилиндра Щ—Щ- = 1 с коэффициентами а2 = —г"2-» *2 = Т"Т" >
а Ь ЛГТ2 Л2*Т2
(13) при А = 0, т2<0, к2 =0 - уравнение пары пересекающихся
плоскостей Щ--Щ- = 0 с коэффициентами а2 = -А-, fe2 = —J-;
fl Л А1 Л2
(14) при А = 0, т2=0, к2^0 - уравнение параболического
цилиндра (у) = 2 • р • дс' с коэффициентом р = J —^-;
(15) при А = 0, т2=0, K2=0, Kj<0 - уравнение пары
параллельных плоскостей [у') -Ь2 = 0 с коэффициентом Ъ2 = —^;
(16) при А = 0, T2=0, K2=0, Kj>0 - уравнение лары мнимых
параллельных плоскостей [у)+Ь2=0 с коэффициентом
(17) при А = 0, х2=0, к2=0, кх=0 - уравнение лары
совпадающих плоскостей (у) = 0.
8. В координатном пространстве Oxyz изобразить каноническую
систему координат dxyz , координаты х0, у0, z0 начала О' которой
найдены в п.6, а координаты базисных векторов - в п.5.
9. Построить поверхность второго порядка в канонической системе
координат dxyz по каноническому уравнению, найденному в п.7.
Построение центральных поверхностей (эллипсоида, гиперболоидов, конуса) удобно
начинать с изображения основного параллелепипеда (см. разд.4.4.2-4.4.4).
При построении параболоидов, цилиндров и пар плоскостей использовать
разд.4.4.5; 3.3.2-3.3.4, 4.2.1-4.2.5). Мнимые поверхности не изображаются,
за исключением уравнения мнимого конуса или пары мнимых
пересекающихся плоскостей, действительными решениями которых являются точка
О' или ось O'z соответственно.
456
Замечания 4.16.
1. Согласно п.З замечаний 4.14 для нахождения начала координат
параболоидов или параболического цилиндра (см. п.б,"б" алгоритма) можно
использовать систему
(A =0,
1 [a + a^J -t
где a = (ar • s3 )• s3, aL = a - а в случае эллиптического или
гиперболического параболоидов; а± = угт • s2 )• j2 , а = a - а± в случае параболического
цилиндра.
2. Системы уравнений в п.6,"б" алгоритма можно записать в
эквивалентном виде:
- в случаях эллиптического или гиперболического параболоидов:
где ащ> = (ат s3)s3, a^a-a^;
- в случае параболического цилиндра:
3. Если требуется получить правую каноническую систему координат,
а в результате применения алгоритма каноническая система координат
оказалась левой, то достаточно изменить направление оси ординат на
противоположное, т.е. заменить базисный вектор 72 на противоположный вектор
(-?2).
4. Согласно п.6 замечаний 4.12, если известны корни Xj Д2,А,3 (с
учетом кратности) характеристического уравнения, то инварианты можно
вычислить по формулам (см. п.2 алгоритма):
Tj =A,j+А,2+Л3; т2 =Х1'Х2+Х2-Я3+Xj *X3; 8=Л1*Х2«Я3.
Пример 4.21. Поверхность второго порядка задана в прямоугольной
системе координат Oxyz уравнением
457
Найти канонический вид уравнения поверхности и каноническую
систему координат.
D 1. Составляем матрицу Р квадратичной функции, матрицу А
квадратичной формы и столбец а коэффициентов линейной формы:
Г2
0
0
^2
0
5
3
8
0
3
5
8
21
8
8
л =
'2
О
О
О
5
3
(Г
3
5,
а =
<2>
8
А
2. Составляем характеристическое уравнение
(2-X)\5-Xf-9\=0 ~ (2-Xf.(S-X)=0.
2-Х О О
О 5-Х 3 =0 <=>
О 3 5-Я
Находим его корни X = 2 (двойной корень) и X = 8 (простой корень).
Учитывая п.4 замечаний 4.16, вычисляем инварианты:
Tj =Xl +Х2 +Х3 = 2+2+8 = 12;
2
0
0
2
0
5
3
8
0
3
5
8
2
8
8
10
2
0
0
0
0
5
3
8
0
3
5
8
2
8
8
8
= 2
•8-
5
3
1
3
5
1
8
8
1
Д =
3. По таблице 4.3 определяем, что поверхность эллиптического типа
(все корни характеристического уравнения одного знака, что также
подтверждается условиями т2=36>0 и т1-8 = 12-32>0). Поскольку А<0,
заданная поверхность - эллипсоид.
4. Поскольку поверхность эллиптического типа, корни
характеристического уравнения обозначим следующим образом (см. п.4,"ан алгоритма):
Хг =А,2 =2, А,3 = 8, чтобы выполнялись неравенства |А>11<|А,2|<|Л3|.
5. Находим взаимно ортогональные собственные направления /19 /2,
/3, соответствующие корням \г,\2,\3 характеристического уравнения.
Поскольку имеется двойной ненулевой корень Хх = Л2 = 2 (см. п.5,"в"
алгоритма), то для простого корня Л3 = 8 находим ненулевое решение /3
однородной системы уравнений (А - 8 • Е)- /3 = о:
f(2-8).;t+0-;y+0-z = 0,
или
Г-6
0
о
о <П
-3 3
з -:
458
Возьмем, например, решение jc = O, у = 1, z = 1, т.е. /3 = (0 1 1/ . В
качестве направления /2 принимаем первый (ненулевой) столбец матрицы
А - 8 • Е: /2 = (-6 0 Of . Направление /t определяем, используя
векторное произведение:
следовательно, 1Х = (0 6 -6^.
Нормируя полученные векторы 1Х, /2, /3, определяем координатные
столбцы векторов канонического базиса:
i
-6
0
1
0
1
к
0
1
=0-7+6-7-6-*,
6. Находим координаты x0, y0, z0 начала О канонической системы
координат, решая систему уравнений (см. п.6,"а" алгоритма):
= о или
Получаем *0=-1, уо=-1, zo=-l. Следовательно, вектор 1 = 00*
переноса начала координат имеет координаты s = (-1 -1 - l)r, или, что то же
самое, начало О' канонической системы координат имеет координаты
О'(-1,-1,-1) в исходной системе координат.
7. Вычисляем коэффициенты канонического уравнения (1) эллипсоида
(см. п.7,"а!! алгоритма):
Следовательно, каноническое уравнение заданной поверхности имеет вид
22 22 I2
459
8. В координатном пространстве
Oxyz изображаем каноническую систему
координат O'x'y'z с началом в точке
О (— 1,—1,—1) и базисными векторами
Jj, J2, ?3, координатные столбцы которых
найдены в п.5 (рис.4.53).
9. Строим эллипсоид вращения в
канонической системе координат Oxyz по
каноническому уравнению, найденному в
п.7 (рис.4.53). ■
Пример 4.22. Поверхность второго порядка задана в прямоугольной
системе координат Oxyz уравнением
где а)ао=-8; б)ао=-9; в)до=-1О.
Найти канонический вид уравнения поверхности и каноническую
систему координат.
D 1. Составляем матрицу Р квадратичной функции, матрицу А
квадратичной формы и столбец а коэффициентов линейной формы:
3
4
-4
5
4
-7
-4
-7
-4
-4
3
-3
5 '
-7
-3
ап ,
3 4-4
4 -7 -4
-4 -4 3
-7
2. Характеристическое уравнение имеет корни Л = -1, Л = 9, Я = -9
(см. решение примера 4.18,"в"). Поэтому, учитывая п.4 замечаний 4.14,
вычисляем инварианты:
231з
8=VVX3=(-l)-9.(-9)=81;
А =
3
4
-4
5
4
-7
-4
-7
-4
-4
3
-3
5
-7
-3
-1
0
-4
1
0
-11
-4
-11
-1
-1
3
0
2
-10
-3
во-3
= -1
11
4
11
-1
7
-1
-10
-И
ао-1
=
11
-4
-11
1
7
-1
10
-11
ао-1
-10-1 2
0 -11-1 -10
0-4 7 -11
0 -11 -1 ло-1
11 1 10
-81 0 -81
0 0
460
3. По таблице 4.3 определяем, что поверхность гиперболического типа
(корни характеристического уравнения имеют разные знаки). При а0 = -8
заданная поверхность - однополостный гиперболоид, так как А = 81>0;
при ао= -9 заданная поверхность - конус, так как А = 0; при а0 = -10
заданная поверхность - двуполостный гиперболоид, так как А = -81 < 0.
4. Поскольку поверхность гиперболического типа, корни
характеристического уравнения обозначим следующим образом (см. п.4,"б"
алгоритма): Хг = -1, Х2 = -9, т.е. Хг и Х2 корни одного знака, причем | Хг | < | Х21,
а корень противоположного знака Х3 = 9.
5. Находим взаимно ортогональные собственные направления 1{у /2,
/3, соответствующие корням Хг,Х2,Х3 характеристического уравнения.
Поскольку все корни простые, то для каждого из них находим ненулевое
решение однородной системы [А-Х.-Е)-1. =оу i = 1,2,3. Учитывая
решение примера 4.18,"в", получаем
т
0
l
-f
4
1,
Г 2 i
1
1-2,
Нормируя полученные векторы /19 /2, /3, определяем координатные
столбцы векторов канонического базиса:
= J (-If
• »,=rfr',= i •
И1' 4
б. Находим координаты jc0 , у0, z0 начала о' канонической системы
координат; решая систему уравнений (см. п.6,"а" алгоритма):
Л s + a = o или «I 4-jc-I
461
Получаем xQ = 1, уо=-1, zQ = 1. Следовательно, вектор J = 00 переноса
начала координат имеет координаты s = (l -1 if или, что то же самое,
начало О' канонической системы координат имеет координаты o'(l,-l,l)
относительно исходной системы координат.
7. Вычисляем коэффициенты канонического уравнения (см. п.7,"б"
алгоритма):
- при а0 = -8 находим коэффициенты и каноническое уравнение (4)
однополостного гиперболоида:
Я,-5 (-lJ-81 х> " Я2-8 (-9)81 9'
>\2 ( /\2
.2 _ А _ 81 _ 1
м2+м2 («г.,.
Л3-8 9-81 9'
- при ао=-9 находим коэффициенты и каноническое уравнение (б)
конуса:
- при а0 = -10 находим коэффициенты и каноническое уравнение (5)
двуполостного гиперболоида:
1 62
с = —
9-81-9
8. В координатном пространстве Oxyz изображаем каноническую
систему координат O'xyz с началом в точке O'(l,-1, l) и базисными
векторами Sj, J2,73, координатные столбцы которых найдены в п.5 (рис.4.54).
9. Строим однополостный гиперболоид (рис.4.54,а), конус (рис.4.54,б),
двуполостныи гиперболоид (рис.4.54,в) в канонической системе координат
Oxyz по каноническому уравнению, найденному в п.7. ■
462
Пример 4.23. Поверхность второго порядка задана в прямоугольной
системе координат Oxyz уравнением
Найти канонический вид уравнения поверхности и каноническую
систему координат.
D 1. Составляем матрицу Р квадратичной функции, матрицу А
квадратичной формы и столбец а коэффициентов линейной формы:
'-2 -ю -4 -13^ (-2 -10 -4\ ' ч
-10 -2 4 -11
-4 4 4-2
-13 -11 -2 -12
-10 -2
-4 4
4
4
я =
-и
-2
2. Вычисляем инварианты:
2
10
г
3
-10
-2
+
2+4
-2
-4
= 0,
-4
4
т
+
-2
4
«11
«12
«12 «22
4
4
+
«11
«13
«13
«33
+
«22
«23
= -96-24-24 = -144.
«23
«33
6 =
«11
«12
«13
«12
«22
«23
«13
«23
«33
=
-2 -10 -4
-10 -2 4
-4 4 4
= 0,
А =
-2
-10
-4
-13
-10
-2
4
-11
-4
4
4
-2
-13
-11
-2
-12
24 -36 -30 -13
12 -24 -18 -11
0 0 0-2
И -35 -26 -12
= 864.
Составляем характеристическое уравнение:
24 -36 -30
3(-2)- 12 -24 -18
И -35 -26
-Х3+144Я = 0. Его корни:
463
3. По таблице 4.3 определяем, что поверхность параболического типа
(5 = 0, т.е. характеристическое уравнение имеет нулевой корень).
Поскольку А > 0, заданная поверхность - гиперболический параболоид (8).
4. Поскольку поверхность параболического типа, корни
характеристического уравнения обозначим следующим образом (см. п.4,мв" алгоритма):
Х3 = 0 - единственный нулевой корень; так как ненулевые корни разных
знаков и Д Ф 0, то Хх = 12, тогда Х2 = -12.
5. Находим взаимно ортогональные собственные направления 1г, /2,
/3, соответствующие корням Хг,Х2,Хъ характеристического уравнения.
Поскольку все корни простые, то для каждого из них находим ненулевое
решение однородной системы (л-X. • е)-l.=o, i = 1,2,3:
для Хх =12
А
(0\
у—l. => h-
z=-l,
/2 =
•
у
=
0
*я-1.
=> /3 =
-1
-1
'Г
1
А
-1
1
-2
Г-2-12 -10 -4
-10 -2-12 4
-4 4 4-12J
для Х2 =-12
(-2 + 12 -10 -4
-10 -2+12 4
-4 4 4+12J
для Хъ =0
'-2 -10 -4^1
-10 -2 4
-4 4 4
Так как Хъ = 0 и корни А^ и Я2 имеют разные знаки, то направление /3
должно удовлетворять дополнительному условию ат -1Ъ <0. Найденное
направление /3 этому условию не удовлетворяет:
(-1)
-И -2)-
= 6>0.
Поэтому его нужно заменить на противоположное, положив
/3=(1 -1 2f.
Нормируя полученные векторы 1Х, /2, /3, определяем координатные
столбцы векторов канонического базиса:
464
*"ЕР"
1*21 UJ |«s|
/,=
is
-is
6. Так как заданная поверхность (параболоид) не имеет центра, то
составляем систему уравнений для нахождения координат xo,yo>zo начала
О' канонической системы координат (см. п.6,"б" алгоритма). Вычисляем
f-l\
ат -s3 =(-13 -и -2)
ч -
f•-(* -* -*> -11 =0; ^-(* * °)
ч-2/
is
-is
UJ
-11
v-2,
1
-2
24
-13^
-11
+
1
,"2>
-14
-10
Решаем систему уравнений
С)г-
-14^-10^-4^-12
Эта система имеет единственное решение х0 = 0, у0 = -2, Zq = 2.
Следовательно, вектор 1 = ОО' переноса начала координат имеет координаты
s = (О - 2 2^ или, что то же самое, начало О' канонической системы
координат имеет координаты О'(0,-2,2) в исходной системе координат.
Согласно п.1 замечаний 4.16, начало канонической системы координат
можно найти, решая систему
=o,
(a+aJr5+a0=0,
30 — 5150
465
f-П f-i
где а±=а-а =
-11
-12
7. Вычисляем коэффициенты канонического уравнения (8)
гиперболического параболоида (см. п.7,"ви алгоритма):
,2^ / Д__ / 864 _ Уб и2_ I А _ / 864 "_<
= / * - / 864 _ 7б .2_ / Д _ / 86^
V Х1Т2 V 122-(-144) 12 ' у Х22т2 V (-12)2(
12 '
Следовательно, каноническое уравнение заданной поверхности имеет вид
12
8. В координатном пространстве Oxyz
изображаем каноническую систему координат
dxyz с началом в точке с/(0,-2,2) и
базисными векторами 7Г72Д3> координатные
столбцы которых найдены в п.5 (рис.4.55).
9. Строим гиперболический параболоид
в канонической системе координат dxyz по каноническому уравнению,
найденному в п.7 (рис.4.55). ■
Пример 4.24. Поверхность второго порядка задана в прямоугольной
системе координат Oxyz уравнением
Рис.4.55
Найти канонический вид уравнения поверхности и каноническую
систему координат.
D 1. Составляем матрицу Р квадратичной функции, матрицу Л
квадратичной формы и столбец а коэффициентов линейной формы:
'о
2
1
^2
2
8
2
4
1
2
0
0
2)
4
0
-V
А =
'0
2
1
2
8
2
V
2
я =
2
4
А
2. Вычисляем инварианты: %х =аХ1+а22+а33 = 0+^+0 = [
гг а23
0 2
2 8
0 1
1 0
■в "зз
8 2
2 О
а23
4бб
5 =
«11
«12
«13
«12
«22
«23
«13
«23
«33
=
0
2
1
2
8
2
1
2
0
= 0;
д=
Так как Д = 5 = 0, то вычисляем
0
2
1
2
2
8
2
4
1
2
0
0
2
4
0
-9
0
2
1
0
2
8
2
0
1
2
0
0
2
4
0
-9
«11
«12
«1
«12
«22
«2
«1
«2
«0
+
«И «13 «1
«13 «33 «3
«1 «з «О
0
2
2
2
8
4
2
4
-9
+
0
1
2
1
0
0
2
0
-9
+
8
2
4
2
0
0
4
0
-9
а2 а3 а0
= 36+9+36 = 81.
Составляем характеристическое уравнение: -А?+8-А,2+9-А, = 0. Его корни:
Я=-1Д = 0Д=9.
3. По таблице 4.3 определяем, что поверхность параболического типа
(5 = 0, т.е. характеристическое уравнение имеет нулевой корень).
Поскольку А = 0, то поверхность цилиндрическая. Так как т2 < 0 и к2 Ф 0, то
заданная поверхность - гиперболический цилиндр.
4. Поскольку поверхность параболического типа, корни
характеристического уравнения обозначим следующим образом (см. п.4,"в" алгоритма):
Х3 = 0 - единственный нулевой корень; так как ненулевые корни разных
знаков и Д = 0, а к2=81>0, то ^=9, чтобы выполнялось условие
Х1-к2>0,тогда Л2=-1.
5. Находим взаимно ортогональные собственные направления 1Х, /2,
/3, соответствующие корням Х1Д2Д3 характеристического уравнения.
Поскольку все корни простые, то для кажцого из них находим ненулевое
решение однородной системы (а-Х. • е)-1. = о, i = 1,2,3:
для Хг=9
0-9
2
1
2
8-9
2
1 д
2
0-9,
•
X
У
<zj
=
0^
0
IA
30*
467
ддяХ2=-1
fO+1 2 1 "\
2 8+1 2
х * 2 0+1
для Х3=0
0
2
1
2
8
2
Г
2
о,
•
/ \
X
У
0
А
-1
2
Так как Л3 = 0 и корни Х{ и Л2 имеют разные знаки, то направление /3
должно удовлетворять дополнительному условию ar Z3<0. Найденное
направление /3 этому условию удовлетворяет:
ат13={2 4 0)
-1
ч2,
= 0.
Нормируя полученные векторы /,, /2, /3, определяем координатные
столбцы векторов канонического базиса:
6. Так как заданная поверхность (гиперболический цилиндр) не
является центральной (она имеет прямую центров), то достаточно найти любое
решение s = (х0 у0 z0) системы уравнений (см. п.6,"а" алгоритма):
2jc+8
или
Возьмем, например, решение xQ = 0, yQ = 0, z0 = -2. Следовательно, вектор
J = ОО' переноса начала координат имеет координаты s = (0 0 - 2)Г или,
что то же самое, начало О' канонической системы координат имеет
координаты О\ 0,0,-2) относительно исходной системы координат.
7. Вычисляем коэффициенты канонического уравнения (12)
гиперболического цилиндра (см. п.7,"в" алгоритма):
468
12=-
1 _, L2_
_ 81
r=9.
h FiH^9)
Следовательно, каноническое уравнение заданной поверхности имеет вид
8. В координатном пространстве Oxyz
изображаем каноническую систему координат
O'xy'z с началом в точке О\ 0,0,-2) и
базисными векторами Sj, 72,73, координатные
столбцы которых найдены в п.5 (рис.4.56).
9. Строим гиперболический параболоид в
канонической системе координат O'xyz по
каноническому уравнению, найденному в п.7
(рис.4.56). ■
Пример 4.25. Поверхность второго порядка задана в прямоугольной
системе координат Oxyz уравнением
Рис.4.56
Найти канонический вид уравнения поверхности и каноническую
систему координат.
D 1. Составляем матрицу Р квадратичной функции, матрицу А
квадратичной формы и столбец а коэффициентов линейной формы:
4 2-63
2 1-3-1
-6 -3 9 -3
3 -1 -3 11
А =
4
2
-6
2
1
-3
-6
-3
9 ,
, а =
3
-1
-3
2. Вычисляем инварианты:
Т1=а11+Л22+аЗЗ==4 + 1 + 9 = 14' Т2 =
4
2
2
1
+
4
-6
-6
9
+
1
-3
-3
9
13 «33
=0+0+0=0,
аъъ
5 =
«11
«12
«13
«12
«22
«23
«13
«23
«33
ZZ
4 2-6
2 1 -3
-6 -3 9
= 0,
469
д =
4
2
-6
3
2
1
-3
-1
-6
-3
9
-3
3
-1
-3
11
0 0 0 5
2 1-3-1
0 0 0-6
3 -1 -3 11
2 1 -3
0 0 0
3 -1 -3
= 0.
Так как Д = S = 0, то вычисляем
К2 =
«11 Й12 аХ
ап а22 а2
а, а2 а0
"13
Н аз ао
агг агъ а2
а2Ъ а33 аъ
а2 а3 а0
4
2
3
2
1
-1
3
-1
11
+
4
-6
3
-6
9
-3
3
11
+
1
-3
-1
-3
9
-3
-3
11
= -25-9-36 = -70.
Составляем характеристическое уравнение: -А?+14-А,2=0. Его корни:
Л = 0 (двойной корень), Я =14 (простой корень).
3. По таблице 4.3 определяем, что поверхность параболического типа
(5 = 0, т.е. характеристическое уравнение имеет нулевой корень).
Поскольку А = 0, то поверхность цилиндрическая. Так как т2 =0 и к2 Ф0, то
заданная поверхность - параболический цилиндр.
4. Поскольку поверхность параболического типа, корни
характеристического уравнения обозначим следующим образом (см. п.4,"ви алгоритма):
\ = Х3 = 0 - двойной нулевой корень; тогда \2 = 14.
5. Находим взаимно ортогональные собственные направления 1Х, /2,
/3, соответствующие корням Х1,Х2,\3 характеристического уравнения.
Поскольку Хх =Х3 =0 - двойной нулевой корень (см. п.5,"г" алгоритма), то
находим направление 12, соответствующее простому корню Х2 = 14, как
ненулевое решение системы [А -Я2 • Eyl2 = о:
4-14
2
-6
2 -6^1
1-14 -3
-3 9-14
Вычисляем ат 12 = (3 -1 -3)
/,=
-1
aT-L
'3>
-1
-14
14
-2^
-1
'Г
-2
0 ,
470
Так как а *о, то направление 1Х = -т1 а =-14-а =(-14 28 0) .
Направление /3 находим, вычисляя векторное произведение
Г J *
*3 =
-14 28 О
-2 -1 3
Следовательно, /3 = (84 42 70^.
Нормируя полученные векторы /j, /2, /3, определяем координатные
столбцы векторов канонического базиса:
KI-14-V5. |/2|=Vl4,
6. Так как заданная поверхность (параболический цилиндр) не имеет
центров, то составляем систему уравнений для нахождения координат
xQ,y0, zQ начала О* канонической системы координат (см. п.6,"б"
алгоритма). Учитывая п.5, вычисляем
-2
я.... =
-2
0
-1
-3
Л.
V14
0
-1
-3
-3
Решаем систему уравнений
Эта система имеет бесконечно много решений. Возьмем, например, решение
дс0 = -5, у0 = 0, z0 = -3. Следовательно, вектор J = 00* переноса начала
координат имеет координаты s = (-5 0 - 3f или, что то же самое, начало
О' канонической системы координат имеет координаты О'(-5, 0,-3) в
исходной системе координат.
Согласно п.1 замечаний 4.16, начало канонической системы координат
можно найти, решая систему уравнений
471
=0,
(a+aJ-
■s + ao=O,
«=>
3
-1
-
1
-2
=
2
1
гдеа1=а-а =
7. Вычисляем параметр канонического уравнения (14) параболического
цилиндра (см. п.7,"в" алгоритма):
Следовательно, каноническое уравнение заданной поверхности имеет вид
8. В координатном пространстве Oxyz
изображаем каноническую систему координат Oxyz
с началом в точке 0'(-5,О,-3) и базисными
векторами Jj,72,J3' координатные столбцы которых
найдены в п.5 (рис.4.57).
9. Строим параболический цилиндр в
канонической системе координат o'xy'z по
каноническому уравнению, найденному в п.7 (рис.4.57). ■
v
Рис.4.57
4.4.8. Применение поверхностей первого и второго порядков
в задачах на экстремум функций
Общая постановка задачи поиска экстремума функций приведена в
разд.3.3.7. Рассмотрим задачу поиска безусловного экстремума функций
двух переменных.
АНАЛИТИЧЕСКИЙ МЕТОД ПОИСКА ЛОКАЛЬНОГО БЕЗУСЛОВНОГО
ЭКСТРЕМУМА
Пусть задана дважды непрерывно дифференцируемая функция
f(x) = f(xx, x2) двух переменных.
Точка х* называется точкой локального минимума, если существует
такая окрестность этой точки, для всех точек которой выполняется условие
472
< f(x).
Если знак неравенства < заменить на знак >, то получится определение
локального максимума. Точки локального минимума или максимума
называются точками локального экстремума функции.
Требуется найти точки локального экстремума функции f(x).
Порядок решения поставленной задачи содержит два этапа [28].
На первом этапе при помопщ необходимых условий экстремума
первого порядка:
э/Ы
дх,
= 0,
Э/(д
Эх,
= 0,
(4.74)
находятся стационарные точки х , "подозрительные" на наличие
локального экстремума (частные производные первого порядка в точке х* равны
нулю).
На втором этапе проверяются достаточные условия экстремума, а
если они не выполняются, то и необходимые условия второго порядка. Они
следуют из формулы Тейлора для приращения функции в точке л*
(учитывая члены до второго порядка включительно):
»4
, а члены с
производными первого порядка отсутствуют, так как точка х
удовлетворяет (4.74).
Равенство
(4.75)
можно рассматривать как уравнение поверхности второго порядка
относительно неизвестных Ахх,Ax2,Af. Уравнение (4.7S) можно записать в
матричной форме
{K )(4(^J (4-76)
где Н[х*) - матрица квадратичной формы, называемая матрицей Гессе.
473
Она составлена из частных производных второго порядка, вычисленных в
стационарной точке jc* :
Э2/(х) Э2/(*
Эх,2 Эх, Эх2
Э2/(х) Э2/(х)
Эд? J
Как показано в разд.4.4.1, при помощи поворота системы координат
вокруг оси ДГ можно квадратичную форму в правой части (4.76) привести к
каноническому виду
Af^kta'P+VKPL (4-77)
где \Л2 - собственные значения матрицы Гессе Н[х*).
В зависимости от знаков собственных значений возможны следующие
случаи:
если собственные значения одного знака, то поверхность (4.77)
представляет собой эллиптический параболоид: выпуклый при Я1 > 0, Х2 > О
(рис.4.58,а), или вогнутый при Хх < 0, Х2 < О (рис.4.58,б);
если собственные значения имеют разные знаки, то поверхность (4.77)
представляет собой гиперболический параболоид (рис.4.58,в при Х{ > О,
Х2<0);
если одно из собственных значений равно нулю (например, при
Х2 = 0 ), то поверхность (4.77) представляет собой параболический цилиндр:
выпуклый при Хх >0 (рис.4.58^) или вогнутый при Х{<0 (рис.4.58,д).
В случае эллиптического параболоида стационарная точка jc* является
либо точкой локального минимума функции при Хг > 0, Х2 > 0, либо
точкой локального максимума функции при Хх < 0, Х2 < 0. В случае
гиперболического параболоида (Хх и Х2 имеют разные знаки) в стационарной точке
jc* нет экстремума. В случае выпуклого параболического цилиндра можно
сказать, что точка х* не может быть точкой максимума, но может быть
точкой минимума, в случае вогнутого параболического цилиндра точка jc* не
может быть точкой минимума, но может быть точкой максимума. Таким
образом, если хотя бы одно собственное значение равно нулю, судить о
наличии экстремума в точке jc* нельзя, так как нужны дополнительные
исследования, учитывающие в формуле Тейлора члены выше второго порядка.
474
< ит\7 t *
АЛГОРИТМ ИССЛЕДОВАНИЯ ФУНКЦИИ НА ЛОКАЛЬНЫЙ ЭКСТРЕМУМ
1. Составить и решить систему (4.74) - найти стационарные точки х*.
Бели система не имеет решения, то точек локального экстремума нет.
2. Составить матрицу Гессе н[х*) и найти ее собственные значения Хх
и Х2, решая характеристическое уравнение dGt\H\x*)-\- Е)=0.
3. Проверить выполнение следующих условий.
а) Бели Хг > 0, Х2 > О, то х* - точка локального минимума.
б) Бели Хг < О, Х2 < 0, то х* - точка локального максимума.
в) Если Хг > 0, Л2 > 0, то х* может быть точкой локальнрго
минимума (требуется дополнительное исследование).
г) Бели \ < 0, Х2 < 0, то х* может быть точкой локального
максимума (требуется дополнительное исследование).
д) Если Xj и Х2 разных знаков (Хх -Х2 <0), то х* не является точкой
локального экстремума.
Пример 4.25. Найти экстремумы функции f(x) = jcj* + x2 - 3 • х^ • х2.
D 1. Решая систему уравнений
ОХХ 0Х2
находим стационарные точки О(0,0) и Af(l,l).
2,3. Составляем матрицу Гессе Н(х) = 1
I -3 в'хг)
В стационарной точке О(0,0) матрица Гессе #(*)L = •
Найдем собственные значения матрицы Гессе. Характеристическое уравнение
475
-X -3
-3 -Я
= 0 <=» А,2 -9 = 0 имеет корни Хх = 3, Х2 = -3 разных знаков.
Следовательно, точка 0(0,0) не является точкой экстремума (см. п.3,"ди
алгоритма).
(6 —3^
В стационарной точке Af(l,l) матрица Гессе ^(jc)| = . Ха-
^-3 6)
6~Х ~\ =0 « (б-Х)2-9 = 0 имеет
—3 6—Л
рактеристическое уравнение
два положительных корня Хх =3, Х2 =9. Следовательно, точка М(l,l)
является точкой минимума (см. п.3,"а" алгоритма). ■
ПРИМЕНЕНИЕ ГРАФИЧЕСКИХ МЕТОДОВ ПОИСКА ЭКСТРЕМУМА ФУНКЦИИ
Рассмотрим постановку задачи поиска условного экстремума функции
трех переменных [28].
Пусть заданы:
а) функция /(*)= f(xvx2,x3) трех переменных (лее R3);
б) множество допустимых решений М (М с /?3).
Требуется найти такую точку х* из множества допустимых решений,
которой соответствует минимальное значение функции f(x) на этом
множестве:
Алгоритм графического метода поиска условного (или безусловного
экстремума) функции аналогичен алгоритму, рассмотренному в разд.3.3.7
для функции двух переменных. Однако его применение на практике
ограничивается возможностями изображения пространственных фигур. Как
правило, используется плоское изображение пространственных фигур, т.е.
проекции этих фигур на плоскость, что не дает полного представления о взаимном
их расположении.
Ниже рассматриваются задачи, в которых минимизируемая функция и
функции, задающие ограничения, являются многочленами трех переменных
первой или второй степени. Построение множества допустимых решений и
поверхностей уровня функции f(x) сводится к построению алгебраических
поверхностей первого или второго порядков (см. разд.4.2, 4.4.1-4.4.7).
В этих задачах применение графического метода упрощается.
Напомним, что поверхностью уровня функции f{x) = f(xvx2,x3)
называется геометрическое место точек пространства, в которых функция
принимает постоянное значение, т.е. f(x) = const.
476
Если функция f(x)= f(xvx2,x3) является многочленом первой
степени, то ее поверхности уровня f(x) = const при разных значениях
постоянной (const) представляют собой семейство параллельных плоскостей
(несобственный пучок плоскостей).
Если функция /(*) = f(xvx2,x3) является многочленом второй
степени, то ее поверхности уровня /(*)=const при разных значениях
постоянной (const) представляют собой поверхности второго порядка. Поскольку
уравнения разных поверхностей уровня отличаются только свободными
членами, то собственные векторы, собственные значения Хг Д2 Д3, а также
инварианты т{, т2, S остаются постоянными для всех поверхностей уровня
/(*) = const. Следовательно, тип поверхности и канонический базис
остаются постоянными для всех поверхностей уровня квадратичной функции.
Пример 4.26. Графическим методом найти экстремумы:
/(x)=jc3->extr,
а) /(*)=<+-?■+*£->«*; 6)\ ^+-|ч-*3=1,
!>0, *2>0, х3>0;
П а) 1. Множество М допустимых решений строить не нужно, так как
оно совпадает со всем пространством: М = R3.
х2
2. Поверхность уровня х?+—+*?= const при const > 0 представляет
4
собой эллипсоид (рис.4.59,а), при const = 0 - мнимый конус с единственной
вещественной точкой о(0,0,0), при const < 0 - мнимый эллипсоид. При
увеличении постоянной ( const) полуоси эллипсоида пропорционально
увеличиваются. На рис.4.59,а изображены эллипсоиды л^+—+*3 =1 (а = 1,
Ь 2, с 1)и х++44,или++ 1 (а 2, * 4, с 2).
4 4 16 4
Стрелками указаны направления наискорейшего возрастания функции.
3. Из п.2 следует, что допустимые значения функции определяются
неравенством 0 < f(x) -
477
4. В точке О(0,0,0) достигается безусловный минимум функции, так
как в этой точке функция принимает наименьшее значение по сравнению со
значениями в других точках пространства, а наибольшего значения функция
не достигает.
Рис.4.59
б) Решается задача поиска условного экстремума с ограничениями
типа равенств и неравенств.
1. Строим множество М допустимых решений - часть плоскости
X X
—+—+дг3 =1 в первом октанте, т.е. плоский треугольник с вершинами
А(2,0,0), В(0,3,0), С(0,0,1) (рис.4.59,б).
2. Поверхности уровня х3 = const представляют собой семейство
параллельных плоскостей, каждая из которых перпендикулярна оси аппликат.
На рис.4.59,б изображены три плоскости уровня х3 = 0, х3 = 1, хъ = 2. При
const < 0 или const >1 плоскость *3= const не имеет общих точек с
треугольником ABC; при 0 < const < 1 плоскость хъ = const имеет общие точки
с треугольником ABC, в частности, при const = 0 плоскости х3 = 0
принадлежит сторона АВ треугольника, при const = 1 плоскости *3=1
принадлежит вершина С треугольника.
3. Из п.2 следует, что допустимые значения функции определяются
неравенством 0<f(x)<l.
4. Наименьшее значение на множестве М, равное нулю, функция
достигает в любой точке отрезка АВ; наибольшее значение на множестве М,
равное единице, функция достигает в точке C(0,0,l).
в) Решается задача поиска условного экстремума с ограничением типа
равенств.
1. Строим множество М допустимых решений - сфера д^2 + х\ + х% = 1
единичного радиуса с центром в начале координат (рис.4.60).
478
2. Поверхности уровня xf+x% -jc2 = const представляют собой либо
однополостный гиперболоид вращения при const > 0 (например, однополо-
стный гиперболоид xf+x% -х\ = 1 (рис.4.60,а)), либо круговой конус
д^2 + х\ ~ *з =^ ПРИ const = 0 (рис.4.60,б), либо двуполостный гиперболоид
вращения при const < 0 (например, двуполостный гиперболоид
j^+j^-Лз =-1 (рис.4.60,*)). При const >1 поперечные полуоси однополо-
стного гиперболоида jc^+jc^-jc2 = const больше единицы, и он не имеет
общих точек со сферой единичного радиуса. При const < -1 продольная
полуось двуполостного гиперболоида д^2 + jc2 -х* = const больше единицы, и
он не имеет общих точек со сферой xf + х% + х* = 1. При -1 < const < 1
поверхность уровня Jcf+Jc^ ~xl = const имеет общие точки с заданной
сферой.
3. Из п.2 следует, что допустимые значения функции определяются
неравенством -1 < f(x) < 1.
4. Наименьшее значение на множестве М, равное -1, функция
достигает в точках (0,0,±l) - вершинах двуполостного гиперболоида
jtj2 +*2 -*2 =~* (рис.4.60,в); наибольшее значение на множестве М,
равное единице, функция достигает в точках окружности
*з=°>
т.е. в точках горлового эллипса (в данном случае окружности) однополост-
ного гиперболоида вращения xf + х\ -х\ = 1 (рис.4.60,а). ■
479
Задачи для самостоятельного решения
Во всех задачах предполагается, что в пространстве задана прямоугольная система
координат Oxyz. Коэффициенты в общих и параметрических уравнениях прямых и плоскостей, а
также в канонических уравнениях прямых, указанные в ответах, определяются неоднозначно.
4.1. Плоскость задана уравнением *+2;y-3z-6 = 0. Составить
параметрическое уравнение и уравнение "в отрезках" этой плоскости.
i*=6-2.f1+3/2, X У Z
?=*,, txe R, t2eR; —+—+— = 1.
z=*2, 6 3-2
4.2. Плоскость проходит через точки A(l, 2,3), в(-1,3, l), С(3, - 4,0).
Составить для этой плоскости: а) общее уравнение; б) параметрическое
уравнение; в) уравнение "в отрезках".
il
?=2+/2, txeR, t2eR;
«тЧг+тг-'-
3 2 2
4.3. Прямая проходит через точки A(l,2,3), fi(-l,3,l). Составить для
этой прямой: а) общее уравнение; б) параметрическое уравнение; в)
каноническое уравнение.
Ответ:*) \ ' ; б) \ ушйн. te R; в) ^
[ + 2 0 [
2-12
4.4. Найти ортогональную проекцию К точки л(3,-4,-2) на шюс-
кость, проходящую через точку 5(2,3,-3) и прямую = = .
13 1 —4
Ответ: Л'(2,-3,-5).
4.5. Найти точку с', симметричную точке С(2,-5,7) относительно
прямой, проходящей через точки Л(5,4, б) и 2?(-2, -17, -8).
Ответ: (/(4,1,-3).
4.6. Заданы координаты вершин Л(1,2,3), я(-1,3,1), С(3,-4,0)
треугольника ABC. Составить уравнения прямых, проходящих через вершину
Л и содержащих медиану, высоту и биссектрису треугольника, а также
уравнение серединного перпендикуляра к стороне ВС, принадлежащего
плоскости треугольника.
Ответ* —=И1ж— • I 4**-7*:y-z+i3=o, ii!_2l£~il2 • J *-*-7-у-г-7«о,
" 0 * 1 * 1 ' \ 3*+2-y-2-z-l-0; 8 ~ 11 " 23 ' | Зл+2у-2г-1=О.
480
4.7. В пространстве заданы три прямые:
_ х-2 у + 3 z + 3
г, teR\ = -— = .
1 8 3
Найти величину угла между скрещивающимися прямыми. Составить общее
уравнение плоскости, проходящей через параллельные прямые.
Ответ: arccos-Ц; 23-jt + 4;y-3z-19 = 0.
4.8. Заданы координаты вершин О(0,0,0), A(m,n,-l), в(я,-m,l),
C(l, I, l) треугольной пирамиды ОАВС. Требуется:
а) составить общее уравнение плоскости грани ABC;
б) найти расстояние от вершины О до плоскости грани ABC;
в) найти величину угла между плоскостями граней ОАВ и ABC;
г) найти угол между ребром ОА и основанием ABC пирамиды;
д) найти проекцию вершины О на плоскость основания ABC;
е) составить каноническое уравнение прямой, проходящей через
вершину О и точку М пересечения медиан треугольника ABC;
ж) найти угол между прямыми ОМ и АВ;
з) найти расстояние между прямыми ОМ и АВ;
и) найти ортогональную проекцию С' вершины С на прямую АВ;
к) составить уравнение прямой, симметричной прямой ОМ
относительно плоскости основания ABC.
4.9. Определить виды линий второго порядка, получающихся в
сечениях поверхности jt2 + 2-;y2-3z2-l = 0 плоскостями: а) * = 0; б) х = 1;
в)* = 2.
Ответ: а) гипербола; б) пара пересекающихся прямых; в) гипербола.
4.10. Используя ортогональные инварианты, при каждом
действительном значении X определить вид поверхности:
а) Х-х2
б)*2-:
в)>
Ответ: а) однополостный гиперболоид при X < 8, эллиптический
цилиндр при X = 8, эллипсоид при X > 8; б) двуполостный гиперболоид при
Я<1, конус при Л = 1, однополостный гиперболоид при А>1; в)
гиперболический параболоид при X < 4, параболический цилиндр при X = 4,
эллиптический параболоид при X > 4.
4.11. Привести уравнение поверхности второго порядка к
каноническому виду, определить название поверхности и указать соответствующую
ортогональную замену неизвестных:
31-5150 481
а) x2 + y2-z2-
б) *2-у2-*2-
в) jc2-
г) 2'jc2
д) 3-jt2
е) 2
ж) 16x2+9y2-z2-24xy-9-x-12y + 4
Ответ: а) однополостный гиперболоид (вращения) Щ-+Щ--Щ- = 1;
jc'+1, у = /+1, z = z'+l; б)конус (круговой) i^+i^L-i^L = O;
z\ у = х'—1 z = y\ в) параболический цилиндр (у')г = 2-~х'\
/+2, y = ^t z = l-/; г)эллипсоид
1 Ы (*)
: ; д) конус
гиперболоид
5*у 2 5*у 2
e)двуполостный
+ O-jc/
4r-
V2
V2
V2 V2
= /; ж) гиперболический параболоид
'*^ -
+ /. Замены переменных определяются неоднозначно.
4.12. Привести уравнение поверхности второго порядка к
каноническому виду, определить название поверхности, найти координаты начала
канонической системы координат и ее базисных векторов относительно
исходной системы координат:
а) т-х2 +n-y2-z2-2-m-n-x-2-m-n-y-2-m-n-z+m2 -п-(2-п)=0;
б) njc2 + n
482
ПРИЛОЖЕНИЕ
НЕОБХОДИМЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ [10]
П.1. Числовые матрицы
Матрицей размеров тхп называется совокупность тп чисел,
расположенных в виде прямоугольной таблицы из т строк и п столбцов:
' ап ап ... а1ч
а21
а2п
или А = (atj), i = l,..,m ; j = 1,..,л .
ml «m2 - amnj
Числа, составляющие матрицу, называются элементами матрицы: atj -
элемент матрицы, стоящий на пересечении i -й строки и j -го столбца
матрицы. Всюду далее предполагается, что элементы матриц являются
действительными числами, если не оговорено противное.
Две матрицы А и В называются равными {А-В), если они имеют
одинаковые размеры (тхп)и равные соответствующие элементы:
aij=bij, i = l,..,m; y = l,..,/i.
ТИПЫ МАТРИЦ
В общем случае матрицу (размеров тхп) называют прямоугольной.
В частности, если матрица состоит из одного столбца (л = 1) или одной
строки (т = 1), то она называется матрицей-столбцом или матрицей'
строкой (либо просто столбцом или строкой) соответственно. Матрицы-
строки или матрицы-столбцы часто обозначают строчными буквами.
Матрица размеров 1x1 - это просто число (единственный элемент матрицы).
Если у матрицы количество строк (т) равно количеству столбцов (п),
то матрицу называют квадратной (п-го порядка). Элементы
a11,a22'»"><Irot образуют главную диагональ квадратной матрицы (ей
соответствует штриховая линия на
рис. П.1, соединяющая левый верхний
угол матрицы (элемент аи) с правым ^ ,-
нижним углом (элемент аш)). Диаго- ,' ч
наль, соединяющая левый нижний
угол (элемент ап1) с правым верхним
углом (элемент а1л), называется
побочной.
Побочная диагональ
Главная диагональ
Рис. П.1
483
Квадратная матрица вида А =
аи О
О а22
0}
О
, у которой все
элементы, стоящие вне главной диагонали, равны нулю, называется
диагональной и обозначается diag(an, а22,-, а^). Частным случаем
диагональной матрицы служит квадратная матрица
17 —
П о
о 1
о о
о
1
которая называется единичной (п -го порядка) и обозначается Е (или £„).
Если все элемен-
Диагональная
Верхняя
треугольная
Нижняя
треугольная
Рис. П.2
ты квадратной
матрицы, расположенные
ниже (выше) главной
диагонали, равны
нулю, то матрицу
называют верхней
треугольной {нижней
треугольной). На
рис. П.2 изображены диагональная и треугольные матрицы (здесь и далее
будем полагать, что в частях матрицы, помеченных символом О, все
элементы равны нулю, а в частях, помеченных символом * и линиями,
элементы матрицы могут быть произвольными). Заметим, что диагональная
матрица, в частности единичная, является одновременно верхней и нижней
треугольной.
Матрица, все элементы которой равны нулю, называется нулевой.
П.2. Линейные операции над матрицами
СЛОЖЕНИЕ МАТРИЦ
Пусть А = (а,у) и B = (bjj) - матрицы одинаковых размеров тхп.
Матрица С = (су) тех же размеров тхп называется суммой матриц А и
В, если ее элементы равны сумме соответствующих элементов матриц
А и В : Сц- a(j +Ьу, i = l,..,m ; j = 1,.., л . Сумма матриц обозначается
С = А + В. Операция сложения матриц определена только для матриц
одинаковых размеров и выполняется поэлементно.
484
УМНОЖЕНИЕ МАТРИЦЫ НА ЧИСЛО
Произведением матрицы А = (а^) на число X называется матрица
С = (су) тех же размеров, что и матрица А , каждый элемент которой равен
произведению числа X на соответствующий элемент матрицы А :
Произведение обозначается ХА или АХ. Операция умножения матрицы на
число выполняется поэлементно.
Матрица (-1) - А называется противоположной матрице А и
обозначается (- А). Сумма матриц В и (-А) называется разностью и
обозначается В - А. Для нахождения разности матриц В - А следует из элементов
матрицы В вычесть соответствующие элементы матрицы А . Вычитать можно
только матрицы одинаковых размеров.
П.З. Умножение матриц
ОПРЕДЕЛЕНИЕ ПРОИЗВЕДЕНИЯ МАТРИЦ
Пусть даны матрицы А = (а^) размеров тхр и В = (Ьу) размеров
рхп . Матрицу С размеров /ихл, элементы ctJ которой вычисляются по
формуле
Су = anbij +ai2b2j +'.- + aipbpj, i = l,..,m ; j = l,..,/i;
называют произведением матриц А и В и обозначают С = АВ. Операция
умножения матрицы А на матрицу В определена только для согласован-
ных матриц, у которых число столбцов матрицы А равно числу строк
матрицы В:
С = АВ .
тхп тхр рхп
А
тХр
\
В
J
i
j
тхп
рхп
Рис. П.З
485
Чтобы получить элемент ctj, стоящий на пересечении i -й строки и j -го
столбца матрицы С, следует выделить i -ю строку матрицы А и j -й
столбец матрицы В (рис. П.З). Они содержат одинаковое число элементов, так
как матрицы А и В согласованы. Затем найти сумму попарных
произведений соответствующих элементов: первый элемент i -й строки умножается
на первый элемент j -го столбца, второй элемент i -й строки умножается на
второй элемент j -го столбца и т.д., а результаты перемножений
складываются.
В произведении А-В матрицу А называют левым множителем для В
и говорят об умножении матрицы В на матрицу А слева. Аналогично
матрицу В называют правым множителем для А и говорят об умножении
матрицы А на матрицу В справа.
СВОЙСТВА УМНОЖЕНИЯ МАТРИЦ
Пусть X - любое число, А, В, С - произвольные матрицы, для
которых определены операции умножения и сложения, записанные в левых
частях следующих равенств. Тогда определены операции, указанные в правых
частях, и справедливы равенства:
1. (АВ)С = А(ВС) ; 2. А(В + С) = АВ + АС;
3. (А + В)С = АС + ВС; 4. \(АВ) = {М)В.
В общем случае умножение матриц не является коммутативным.
Произведение зависит от перестановки множителей, т.е. АВ*ВА.
Для любой квадратной матрицы А порядка п справедливы
следующие равенства АЕ = ЕА = А, где Е - единичная матрица порядка п.
Для любой квадратной матрицы А справедливы равенства А-О = О и
О-А = О, где О - нулевые матрицы соответствующих порядков.
П.4. Транспонирование матриц
Для любой матрицы А =
рицей называется матрица А =
т _
аП а12'"а1п
а2\ а22'"а2п
\am\am2'"amn)
aUa2\'"am\
a\2a22'"am2
транспонированной мат-
получающаяся из матрицы
А заменой строк столбцами, а столбцов - строками. Чтобы по данной мат-
486
рице А получить матрицу Ат , нужно первую строку матрицы А записать
как первый столбец матрицы Ат, вторую строку матрица А записать как
второй столбец матрицы Ат и т.д. Эта операция называется
транспонированием матрицы А.
Квадратная матрица называется симметрической, если
АТ=А.
У симметрической матрицы элементы, расположенные симметрично
относительно главной диагонали, равны между собой.
СВОЙСТВА ОПЕРАЦИИ ТРАНСПОНИРОВАНИЯ
Пусть X - любое число, А , В - произвольные матрицы, для которых
определены операции умножения и сложения, записанные в левых частях
следующих равенств. Тогда определены операции, указанные в правых
частях, и справедливы равенства:
1. {КА)Т =Х-АТ; 2. (A+Bf =At+Bt;
Ъ.{АВ)т=ВтАт; 4.(atJ=A.
Операцию транспонирования можно применить к числам, считая их
матрицами размеров 1x1. Разумеется, что при транспонировании число не
изменяется: (Х)т = X.
П5. Блочные (клеточные) матрицы
Числовая матрица А размеров mxn, разделенная горизонтальными и
вертикальными линиями на блоки (клетки), которые представляют собой
матрицы, называется блочной (клеточной) матрицей. Элементами блочной
матрицы А являются матрицы Ау размеров mzxn;, / = 1,2,...,/?,
у = 1,2,...,#,причем m1+/n2 + ...+mp =/и и щ+г^+.-. + Пц^п.
Операции с блочными матрицами выполняются по тем же правилам,
что и с числовыми матрицами.
П.6. Определители
Пусть А - квадратная матрица порядка п. Определитель
(детерминант) квадратной матрицы А - это число det A-, которое ставится в
соответствие матрице и вычисляется по ее элементам согласно следующим
правилам.
1. Определителем матрицы А = (ап) порядка п = 1 называется
единственный элемент этой матрицы: det^i)=an.
487
2. Определителем матрицы А =
а\п
"ппу
порядка п>\
называется число
detA = (-\Т\хМп +(-1Г2«12^12 +-. + (-^ТПа1пМХп ,
где MXj - определитель квадратной матрицы порядка л-1, полученной из
А вычеркиванием первой строки и у-го столбца.
Определитель матрицы обозначают, заключая матрицу в "прямые"
скобки:
detA=|A| =
ап
а\п
Имея в виду это обозначение, для краткости говорят о порядке определите'
ля, строках или столбцах определителя, элементах определителя,
опуская при этом слово "матрица". Например, первая строка определителя п -го
порядка - это первая строка аи,а12,...,а1л квадратной матрицы л-го
порядка.
Квадратную матрицу, определитель которой равен нулю, называют
вырожденной {особой), в противном случае - невырожденной (неособой).
ФОРМУЛЫ ВЫЧИСЛЕНИЯ ОПРЕДЕЛИТЕЛЕЙ
Индуктивное определение позволяет вычислить определитель любого
порядка.
Определитель второго порядка вычисляется по формуле
Определитель второго порядка равен разности произведения элементов,
стоящих на главной диагонали, и произведения элементов, стоящих на
побочной диагонали (см. схему на рис. П.4).
Определитель третьего порядка вычисляется по формуле
«и
«21
«31
Ol2
«22
агг
«13
«23
«33
=«11-
аЪ2
а2\ агъ
О31 «33
-«22^31)=
"а\2а2\аЪЗ '~'а\\а2ЪаЪ2
488
Схема вычисления определителя Схема вычисления определителя
второго порядка третьего порядка
Рис. П.4 Рис. П.5
Для запоминания формулы используется правило треугольников: надо
сложить три произведения трех элементов, стоящих на главной диагонали и
в вершинах двух треугольников, имеющих сторону, параллельную главной
диагонали (рис. П.5,я), и вычесть три произведения элементов, стоящих на
побочной диагонали и в вершинах двух треугольников, имеющих сторону,
параллельную побочной диагонали (рис. П.5,б).
Для определителя квадратной матрицы А порядка п справедливы
формулы
п
det А = 2j ("~ tf+j ai№» (формула разложения по i -й строке);
п
= ^(-lf*Ja..Mi. (формуларазложения по j-му столбцу),
где М.. - определитель квадратной матрицы порядка л-1, полученной из
матрицы А вычеркиванием i -й строки и j -го столбца.
Определитель верхней или нижней треугольных матриц равен
произведению элементов, стоящих на главной диагонали.
НЕКОТОРЫЕ СВОЙСТВА ОПРЕДЕЛИТЕЛЕЙ
1. Для любой квадратной матрицы detA = det(Ar), т.е. при
транспонировании определитель не изменяется.
2. Если в определителе один из столбцов нулевой (все элементы
столбца равны нулю), то определитель равен нулю: det(... о...)=0.
3. При перестановке двух столбцов определитель меняет знак на
противоположный (свойство антисимметричности):
det(...ay ...ak ...)=-det[...ak ...aj ...).
4. Если в определителе имеется два одинаковых столбца, то он равен
нулю: det(... ау-... ak ...)= О при я,- = ак .
5. При умножении всех элементов одного столбца определителя на
число определитель умножается на это число:
489
det^ ...Xaj ...aJ=X-det(oi ...о, ...an).
6. Определитель произведения квадратных матриц одного и того же
порядка равен произведению их определителей: det( АВ) = det А • det В.
П.7. Линейная зависимость и линейная независимость
строк (столбцов) матрицы
В П.2 были введены операции умножения матриц на число и сложения
матриц, в частности, для матриц-столбцов (nxl) и матриц-строк (lxn).
Матрицы-столбцы (матрицы-строки) будем называть далее просто
столбцами (соответственно строками) и обозначать в данном разделе прописными
буквами. При помощи этих операций можно составлять некоторые
алгебраические выражения. Напомним, что равными считаются столбцы
одинаковых размеров с равными соответствующими элементами.
Столбец А называется линейной комбинацией столбцов Ai9A29.^9Ak
одинаковых размеров, если
где a!,a2,...,a^ - некоторые числа. В этом случае говорят, что столбец
А разложен по столбцам Ai9A2,...9Ak9 а числа ос^о^ ,...,<** называют
коэффициентами разложения. Линейная комбинация A = O-Aj +
+ 0 • Aj +...+0 • Aj с нулевыми коэффициентами называется тривиальной.
Если столбцы имеют вид
А =
,
,... , Ak =
то матричному равенству А = ах>Ц +а2А2 +...+сх^АЛ соответствуют
поэлементные равенства
а{ =ах аа +а2 ап +...+а* аЛ, i = 1 п.
Набор столбцов Ai,A2y...,Ak одинаковых размеров называется
системой столбцов.
Система из к столбцов А1,А2,...,Ак называется линейно зависимой,
если существуют такие числа al9a2,...,a^, не все равные нулю
одновременно, что
a1A1+(X2A2+... + aitAfc =0. (П.1)
Здесь и далее символом о обозначается нулевой столбец соответствующих
размеров.
490
Система из к столбцов ^,Л2,...,А^ называется линейно
независимой, если равенство (П.1) возможно только при ах =а2 = ...-(Хк =0, т.е.
когда линейная комбинация в левой части (П.1) тривиальная. Аналогичные
определения формулируются и для строк (матриц-строк).
Свойства линейно зависимых и линейно независимых столбцов
аналогичны свойствам линейно зависимых и линейно независимых векторов.
П.8. Ранг матрицы
Пусть А - матрица размеров тхп, а к - натуральное число, не
превосходящее тип: к< min{ т; n }. Минором к -го порядка матрицы А
называется определитель матрицы к -го порядка, образованной элементами,
стоящими на пересечении произвольно выбранных к строк и к столбцов
матрицы А.
В матрице А размеров тхп минор г-го порядка называется
базисным, если он отличен от нуля, а все миноры (r + l)-ro порядка равны нулю
или их вообще не существует.
Рангом матрицы называется порядок базисного минора. В нулевой
матрице базисного минора нет. Поэтому ранг нулевой матрицы, по
определению полагают равным нулю. Ранг матрицы А обозначается rg A.
Другими словами, ранг матрицы равен наибольшему порядку
отличного от нуля минора этой матрицы.
Теорема о ранге матрицы. Ранг матрицы равен максимальному числу
линейно независимых строк этой матрицы.
Следствие. Максимальное число линейно независимых строк в
матрице равно максимальному числу линейно независимых столбцов:
rgA = rgAr.
Необходимое и достаточное условие равенства нулю определителя.
Для того чтобы определитель был равен нулю, необходимо и
достаточно, чтобы один из его столбцов {одна из его строк) был линейной
комбинацией остальных столбцов {строк).
П.9. Обратная матрица
Пусть А - квадратная матрица порядка п. Матрица А"*1,
удовлетворяющая вместе с заданной матрицей А равенствам:
А~1-А = А-А-1=Е9
называется обратной. Матрицу А называют обратимой, если для нее
существует обратная, в противном случае - необратимой.
Из определения следует, что если обратная матрица А"1 существует,
то она квадратная того же порядка, что и А. Однако не для всякой квадрат-
491
ной матрицы существует обратная. Если определитель матрицы А равен
нулю (det А = 0), то для нее не существует обратной.
Квадратная матрица А =
, определитель которой от-
\ап\ '" апп)
личен от нуля, имеет обратную матрицу и притом только одну:
Ап А21 ... Ап1
1
det A
Ап А22 ... Ап2
1
det A
f A A A \
All A21 ••• ^rtl
где А+ =
- матрица, транспонированная для матри-
цы, составленной из алгебраических дополнений элементов матрицы А .
Матрица А+ называется присоединенной матрицей по отношению к
матрице А.
СВОЙСТВА ОБРАТНОЙ МАТРИЦЫ
Операция обращения матрицы обладает следующими свойствами:
1. (а-1)[1 = А; 2. {АВУ1 = В'1 А'1; 3. (ат\1 = (a~1J ;
4. det A x=-
det A
5.
если имеют смысл операции, указанные в равенствах 1-4.
ОРТОГОНАЛЬНЫЕ МАТРИЦЫ
Действительная квадратная невырожденная матрица А называется
ортогональной, если А"1 = АТ. Из определения следуют основные свойства
ортогональной матрицы А.
1. АТА = Е = ААТ.
2. | det А | = 1 - модуль определителя ортогональной матрицы равен
единице.
3. Матрица А"1 (или, что то же самое А7) является ортогональной.
4. Произведение ортогональных матриц одного и того оке порядка
является ортогональной матрицей.
492
П.10. Системы линейных алгебраических уравнений
Системой т линейных алгебраических уравнений с п неизвестны-
ми называется система уравнений вида
Числа atj, i = 1,..., т, у = 1,..., п называются коэффициентами системы-,
bi,b2,...,bm- свободными членами, хх,хг,...,хп - неизвестными.
Количество т уравнений в системе может быть меньше, больше или равно числу
п неизвестных.
Решением системы называется упорядоченная совокупность п чисел
(ах,а2^.^ап) такая, что после замены неизвестных xl,x2,...,xn
соответственно числами а1,а2,...,<хп каждое уравнение системы превращается в
верное числовое равенство. Система называется совместной, если она
имеет хотя бы одно решение. Если система не имеет ни одного решения, то она
называется несовместной.
Система (П.2) называется однородной, если все свободные члены
равны нулю:
anxl+al2x2+-+ainxn=0,
=0. (П 3)
В отличие от однородной, систему общего вида (П.2) называют
неоднородной.
Матричная запись неоднородной системы уравнений (П.2) имеет вид
Ах = Ь, (П.4)
- матрица системы, дс= • - столбец неизвестных,
Ч
Ь = \ I I - столбец свободных членов. Матричная запись однородной сие-
темы уравнений (П.З) имеет вид:
(П.5)
где символ о в правой части обозначает нулевой столбец размеров тх\.
493
ПРАВИЛО КРАМЕРА
Если определитель А матрицы системы п линейных уравнений с л
неизвестными отличен от нуля, то система имеет единственное решение,
которое находится по формулам дс, = —■*-, i = 1,..., л, где Д. -
определитель матрицы, полученной из матрицы системы заменой i -го столбца
столбцом свободных членов, т.е.
«21
УСЛОВИЕ СОВМЕСТНОСТИ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Рассмотрим систему (П.4) т линейных уравнений с л неизвестными.
Составим блочную матрицу, приписав к матрице А справа столбец
свободных членов. Получим расширенную матрицу системы:
(А | *)-
fl2i - am
/mx(n+l)
Эта матрица содержит всю информацию о системе уравнений, за
исключением обозначений неизвестных.
Теорема Кронекера-Капелли. Система Ах-Ъ совместна тогда и
только тогда, когда ранг матрицы системы равен рангу расширенной
матрицы: rg A = rg (A \ b).
Следствие 1. Система Ах = Ь имеет единственное решение тогда и
только тогда, когда ранг матрицы системы и ранг расширенной матрицы
равны числу неизвестных (rg A = rg (A \ b)=л).
Следствие 2. Система Ах-Ъ имеет бесконечно много решений тогда
и только тогда, когда ранг матрицы системы равен рангу расширенной
матрицы и меньше числа неизвестных ( rg A = rg (A \ b)< л ).
Однородная система линейных уравнений (П.5) всегда совместна, так
как имеет тривиальное решение х{=х2=... = хп=0 (х = о).
Следствие 3. Однородная система Ах = о имеет единственное
(тривиальное) решение тогда и только тогда, когда ранг матрицы системы
равен числу неизвестных ( rg А = л ).
Следствие 4. Однородная система Ах-о имеет бесконечно много
решений тогда и только тогда, когда ранг матрицы системы меньше числа
неизвестных ( rg А < п ).
494
ЛИТЕРАТУРА
1. Александров АД. Основания геометрии. - М.: Наука, 1987.
2. Александров П.С Лекции по аналитической геометрии. - М.: Наука,
1968.
3. Александров П.С Курс аналитической геометрии и линейной алгебры. -
М: Наука, 1979.
4. Атанасян Л.С, Денисова НС, Силаев Е.В. Курс элементарной
геометрии. В 2-х ч. - М.:"Сантакс-Пресс", 1997.
5. БалкМ.Б., Болтянский ВТ. Геометрия масс. - М.: Наука, 1987.
6. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С Теоретическая механика в
примерах и задачах. Т.1. - М.: Наука, 1971.
7. Бахвалов СВ., Моденов П.С, Пархоменко А.С. Сборник задач по
аналитической геометрии. - М.: Наука, 1964.
8. Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры. -
М.: Наука, 1984.
9. Беклемишева Л.А., Петрович А.Ю., Чубарое И.А. Сборник задач по
аналитической геометрии и линейной алгебре / Под ред. Д.В. Беклемишева. -
М.: Наука, 1987.
10. Бортаковский А.С, Пантелеев А.В. Линейная алгебра в примерах и
задачах. - М.: Высшая школа, 2005.
11. Бугров Я.С, Никольский СМ. Элементы линейной алгебры и
аналитической геометрии. - М.: Наука, 1980.
12. Вержбицкий В.М. Основы численных методов. - М.: Высшая школа,
2002.
13. Данко П.Е., Попов А.Г., Кожевникова Т.Я. Высшая математика в
упражнениях и задачах: Учеб. пособ. для студентов втузов. В 2-х ч. Ч.1.- М.:
Высшая школа, 1986.
14. Делоне Б.Н., Райков ДА. Аналитическая геометрия. Т.1. - М.-Л.: ОГИЗ
Гостехиздат, 1948.
15. Дубровин Б.А., Новиков СИ, Фоменко А.Т. Современная геометрия:
Методы и приложения. - М.: Наука, 1979.
16. Ефимов Н.В. Краткий курс аналитической геометрии. - М.: Физматгиз,
1962.
17. Задачник-практикум по аналитической геометрии и высшей алгебре:
Учеб. пособ. / Волков В.А., Ефимова Т.А., Райнес А.А., Шмидт Р.А. - Л.:
Изд-во ЛГУ, 1986.
18. Ильин В.А., Лозняк Э.Г. Аналитическая геометрия. - М.: Наука, 1981.
495
19. Ильин В.А., Садовничий В.А., Сендов Бл.Х. Математический анализ -
М: Наука, 1979.
20. Канатников А.Н., Крищенко AM. Аналитическая геометрия.- М: Изд-
во МГТУ, 2000.
21. Киреев В.И., Пантелеев А.В. Численные методы в примерах и
задачах.- М.: Высшая школа, 2004.
22. КлетеникД.В. Сборник задач по аналитической геометрии.- М.: Нау-
ка,1980.
23. Кудрявцев Л.Д. Курс математического анализа: Учебник. - М.: Высшая
школа, 1988.
24. Моденов П.С., Пархоменко А.С. Сборник задач по аналитической
геометрии. - М.: Наука, 1976.
25. Моденов ПС. Аналитическая геометрия. - М.: Изд-во МГУ, 1969.
26. Нефедов В.Н., Осипова В.А. Курс дискретной математики. - М.: Изд-во
МАИ, 1992.
27. Пантелеев А.В., Бортаковский А.С. Теория управления в примерах и
задачах. - М.: Высшая школа, 2003.
28. Пантелеев А.В., Летова Т.А. Методы оптимизации в примерах и
задачах. - М.: Высшая школа, 2002.
29. Пантелеев А.В., Якимова А.С. Теория функций комплексного
переменного и операционное исчисление в примерах и задачах. - М.: Высшая
школа, 2001.
30. Пантелеев А.В., Якимова А.С, Босов А.В. Обыкновенные
дифференциальные уравнения в примерах и задачах. - М.: Высшая школа, 2001.
31. Погорелое А.В. Аналитическая геометрия. - М.: Наука, 1968.
32. Постников М.М. Аналитическая геометрия. - М.: Наука, 1973.
33. Прасолов В.В. Задачи по планиметрии. В 2-х ч. - М.: Наука, 1991.
34. Прасолов В.В., Шарыгин И.Ф. Задачи по стереометрии. - М.: Наука,
1989.
35. Привалов И.И. Аналитическая геометрия. - М.: Наука, 1964.
36. Сборник задач по математике для втузов. Линейная алгебра и основы
математического анализа / Под ред. А.В. Ефимова, Б.П. Демидовича.- М.:
Наука, 1981.
37. Федорчук В.В. Курс аналитической геометрии и линейной алгебры:
Учеб. пособ. - М.: Изд-во МГУ, 1990.
38. Цубербиллер О.Н. Задачи и упражнения по аналитической геометрии. -
М.: Наука, 1966.
39. Черников С.Н. Линейные неравенства. - М.: Наука, 1968.
40. Шилов Г.Е. Математический анализ (функции нескольких веществен-
ных переменных). - М.: Наука, 1972.