/






































































































































































































































































































































































































































































































































































































































































Текст
Данный файл содержит отсканированную в разрешении 300 точек на дюйм
книгу "Проектирование ракетных и ствольных систем" под редакцией проф
Б В Орлова 31, "31ашиностроение", 1974 г , 828 стр Авторы книги Б В Орлов,
ЮИ Топчеев, В Ф Устинов, В В Алферов, АН Бакулин, В А Светлицкий,
А Б.Хворостин
Работа по сканированию выполнена студентом группы (3/6-112 Бечасновым
П 31 в январе 2005 г
Посвящается А Д
ОГЛАВЛЕНИЕ
Стр.
Предисловие.'............................................... •............. 3
Основные условные обозначения и. сокращения............. . . ............ 5
Введение . ........................................................... 8
Глава I. Структура, состав и назначение ракетных и ствольных комплексов 12
§ 1.1. Общая характеристика боевой эффективности комплексов.........12
§ 1.2. Летно-технические характеристики типичных целей.......... . . 16
§ '1.3 . Состав ракетных и ствольных зенитных и авиационных комплексов 18
§ 1.4. Характеристика радиолокационных станций и головок самонаведения 23
§ 1.5. Неуправляемые и управляемые ракеты ..........................29
§ 1.6. Пусковые установки ракет.................................... 31
§ <1.7 . Ствольные подвижные установки............................. 32
§ ,1.8 . Боеприпасы ракетной и ствольной артиллерии..................35
Список литературы к главе I ...................................... 42
Глава II. Внутренняя баллистика и баллистическое проектирование стволов -44
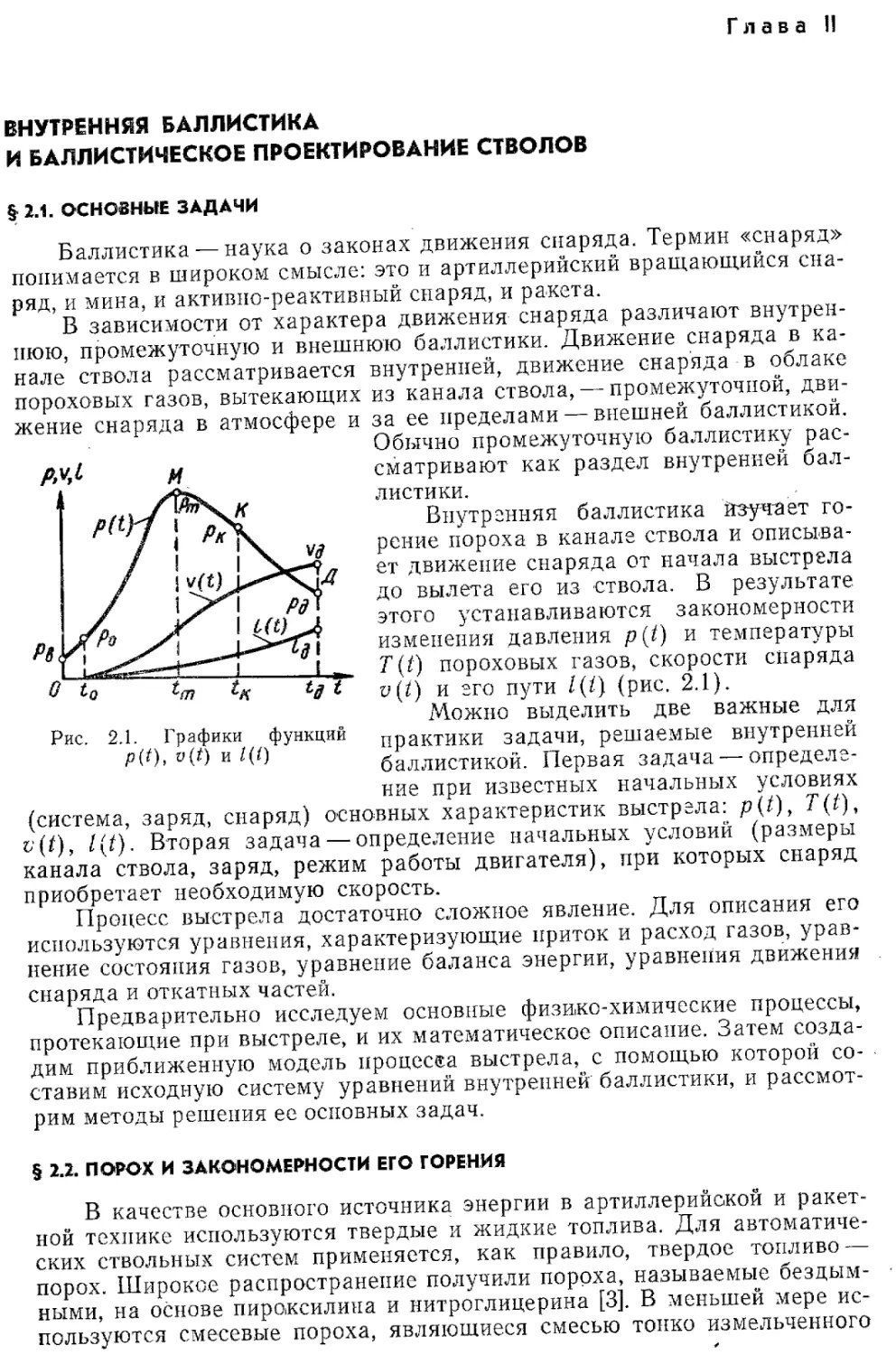
§ 12.1. Основные задачи ............................................ 44
§2.2. Порох и закономерности его горения............................44
§ 2.3. Исходная система уравнений внутренней баллистики..............48
§ 12.4. Внутренняя баллистика классического орудия...................53
§2.5. Упрощенное решение задачи внутренней баллистики для автоматиче-
ских систем среднего и крупного калибров.............................67
§ 2.6. Особенности решения задачи внутренней баллистики для безоткат-
ных и частично уравновешенных орудий.................................75
§ 2.7. Баллистическое проектирование артиллерийских стволов..........77
Список литературы к главе II . . . ... ... ... . ..................84
Глава III. Проектирование активно-реактивных снарядов и ракетных двига-
телей на твердом топливе...................................................85
§ 3.1. Устройство, принцип действия и баллистическое проектирование
активно-реактивных снарядов . .......................................85
§ 3.2. Выбор давления сгорания топлива' и величины тяги двигателя ... 88
§ 3.3. Выходные характеристики РДТТ................................ 90
§ 3.4. Расчет веса воспламенителя....................................98
§ 3.5. Выбор наибольшего, давления воспламенителя............... . 102
§ 3.6. Течение двухфазового потока в сопле и расчет выходных характе-
ристик РДТТ на смесевом топливе.....................................106
Список литературы к главе III..................................... 116
Глава IV. Введение в теорию проектирования газовых устройств . .... . .117
§ 4.1. Газодинамические параметры состояния стационарного потока . . .117
§ 4.2. Течение газа в сопле . .. ............................... . 123
§ 4.3. Отклонение газового потока в кососр езанных сопле и цилиндриче-
ской насадке...................................................... 128
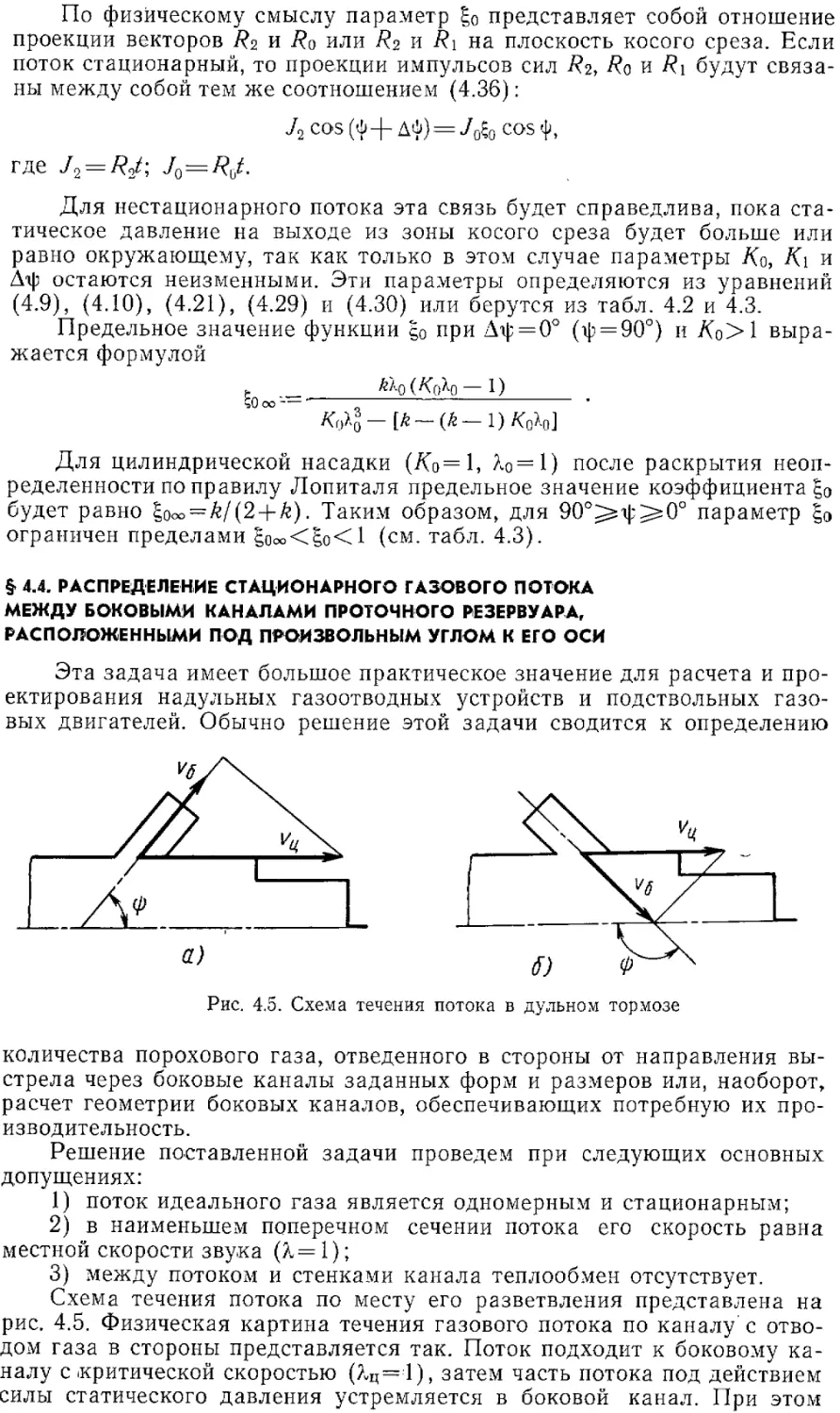
§ 4.4. Распределение стационарного газового потока между боковыми ка-
налами проточного резервуара, расположенного под произвольным
углом к его оси............................................... 132
§ 4.5. Изменение полной реакции или полного, импульса потока путем отво-
да газа из проточного резервуара в стороны ... .-.............141
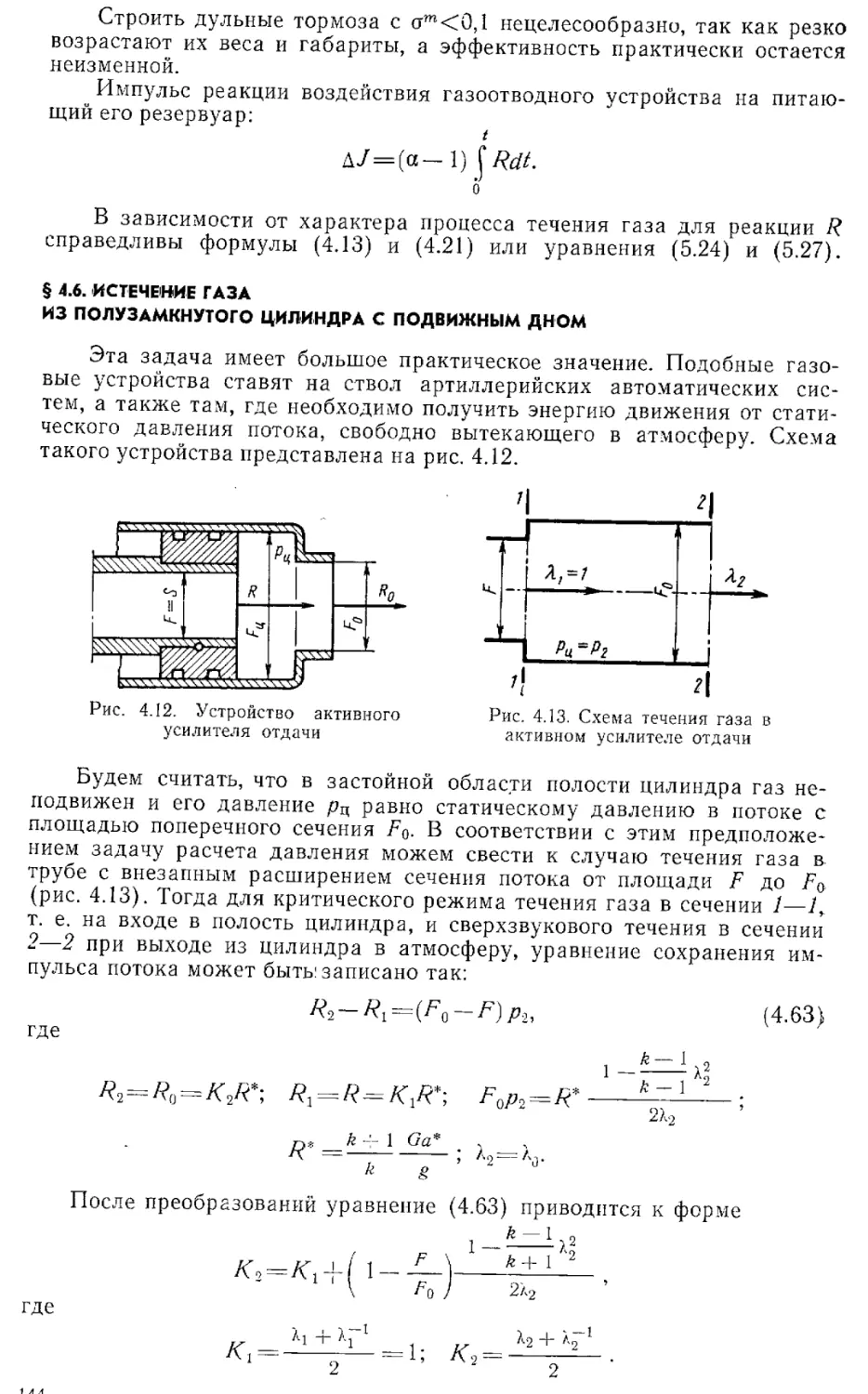
§ 4.6. Истечение газа из полузамкнутого цилиндра с подвижным дном . . 144
§ 4.7. Силовое воздействие газовой струи на плоскую преграду.........145
Список литературы к главе IV...................................... 150
Г л а в а V. Проектирование противооткатных газовых устройств и двигателей 151
§ 5.1. Период последействия орудия без надувального устройства. Проме-
жуточная баллистика ................................................ 156
§ 5.2. Период последействия орудия с надульным устройством...........175
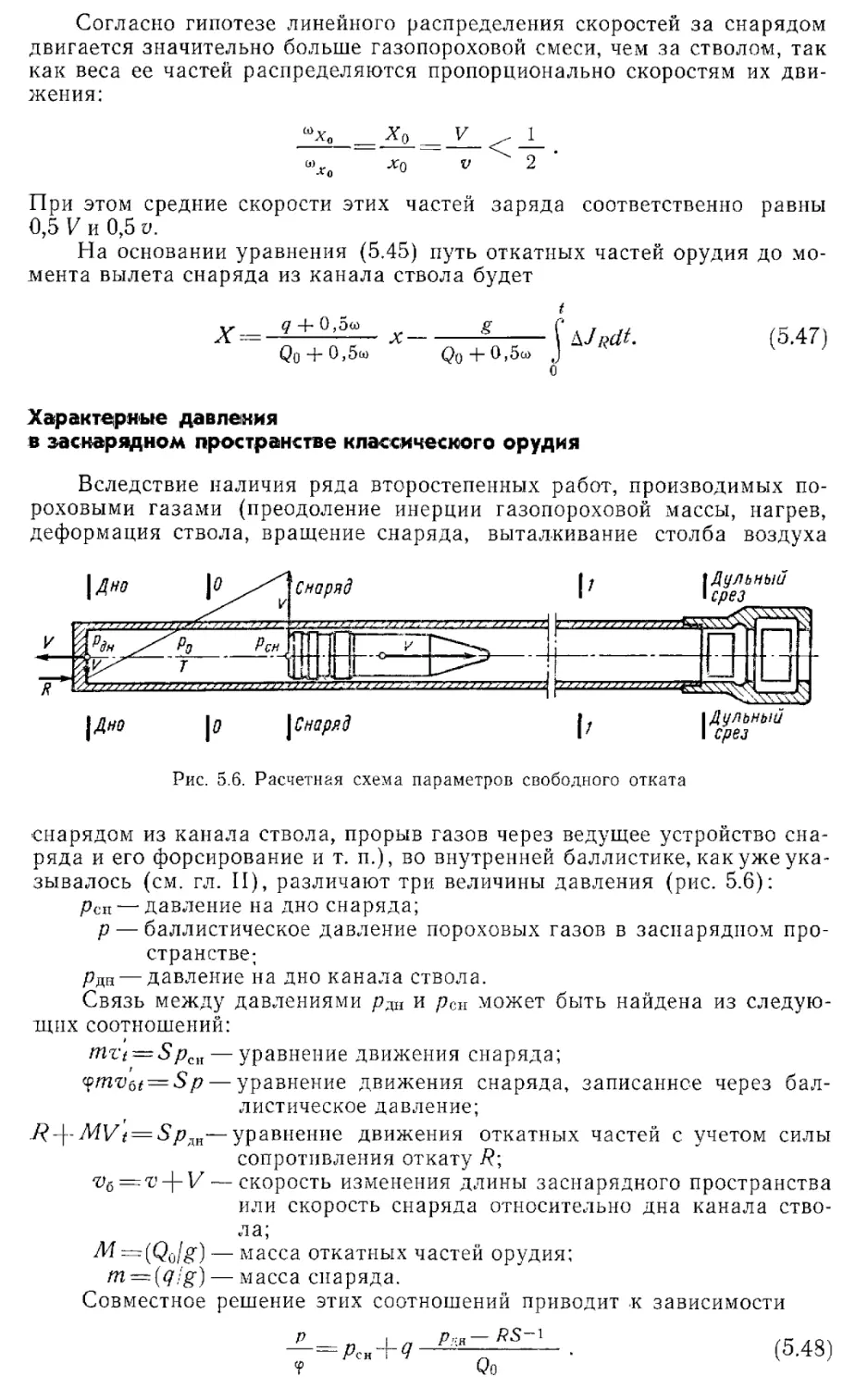
§ 5.3. Избыточное давление на местах орудийного расчета..............178
Стр.
'/ § 5.4, Скорость откатных частей орудия до момента вылета снаряда из ка-
нала ствола ...........................................................
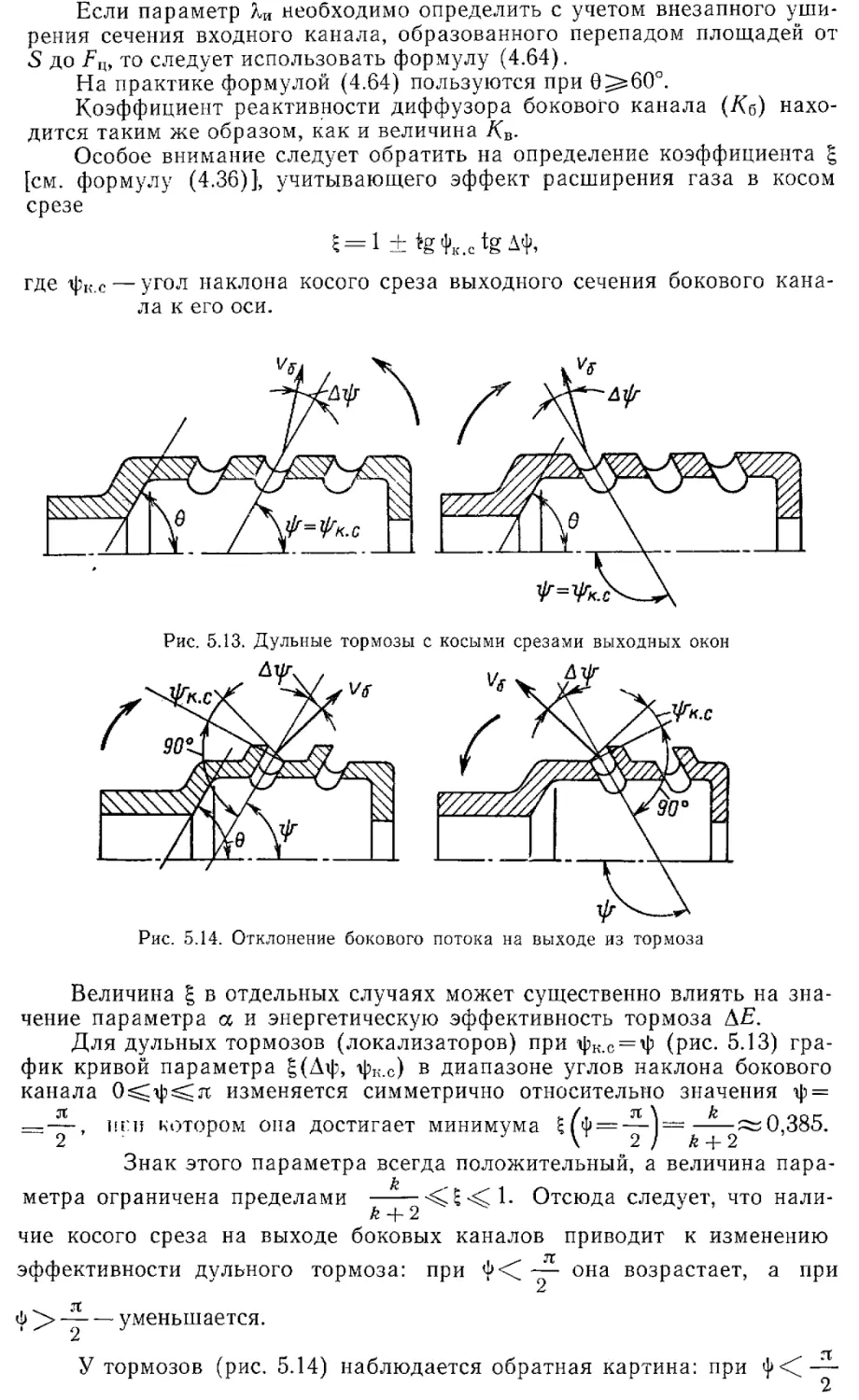
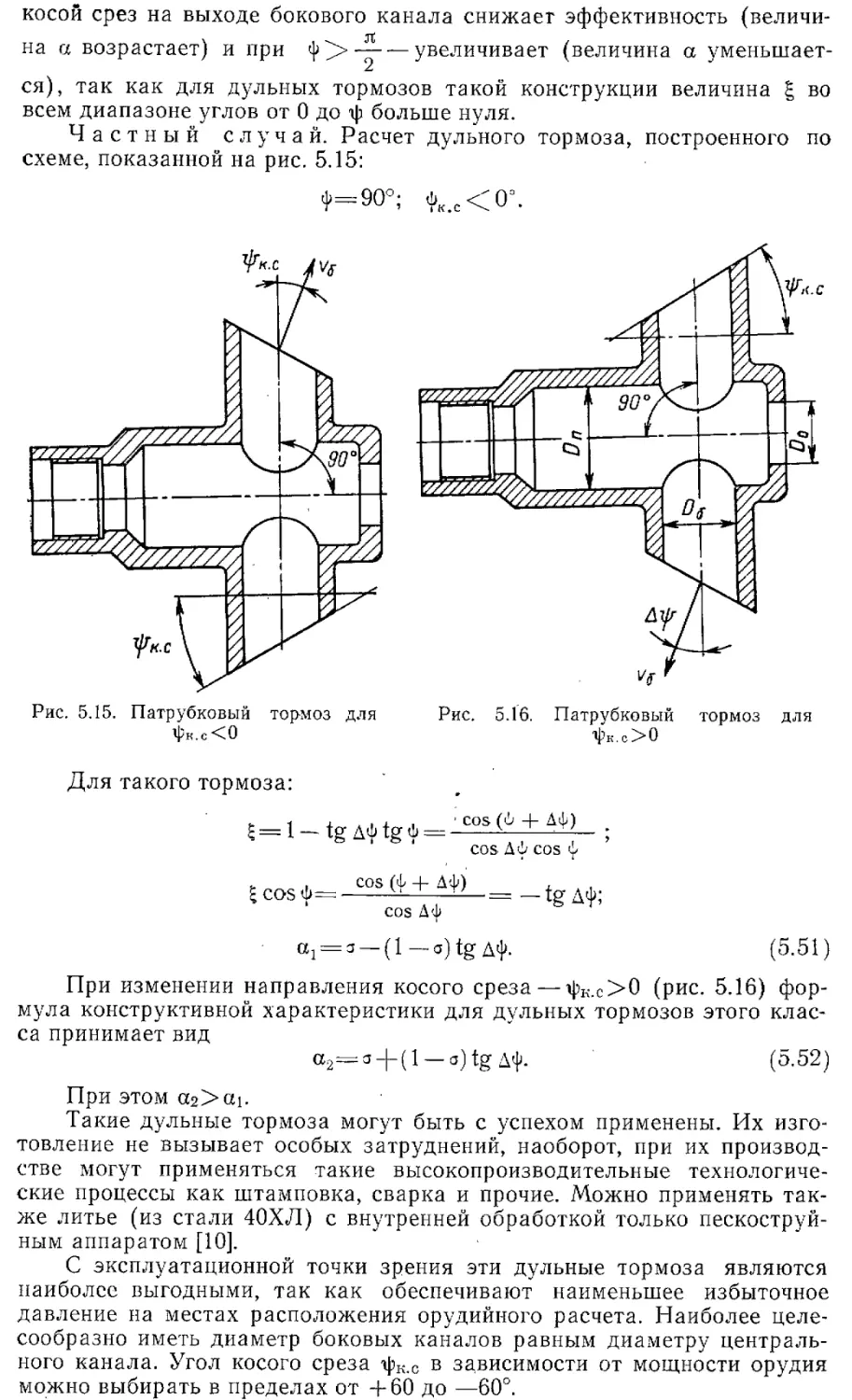
§ 5.5. Расчет газовых тормозов и локализаторов......................
§ 5.6. Расчет газовых усилителей отдачи.............................
§ 5.7. Расчет газовых компенсаторов.................................
§ 5.8. Расчет теплообмена в газопроводах и ресиверах для приводов, рабо-
тающих на горячем газе...............................................
§ 5.9. Элементарный расчет газовых двигателей и противооткатных уст-
ройств автоматического оружия........................................
§ 5.10. Упрощенный расчет буфера с отсечкой газа....................
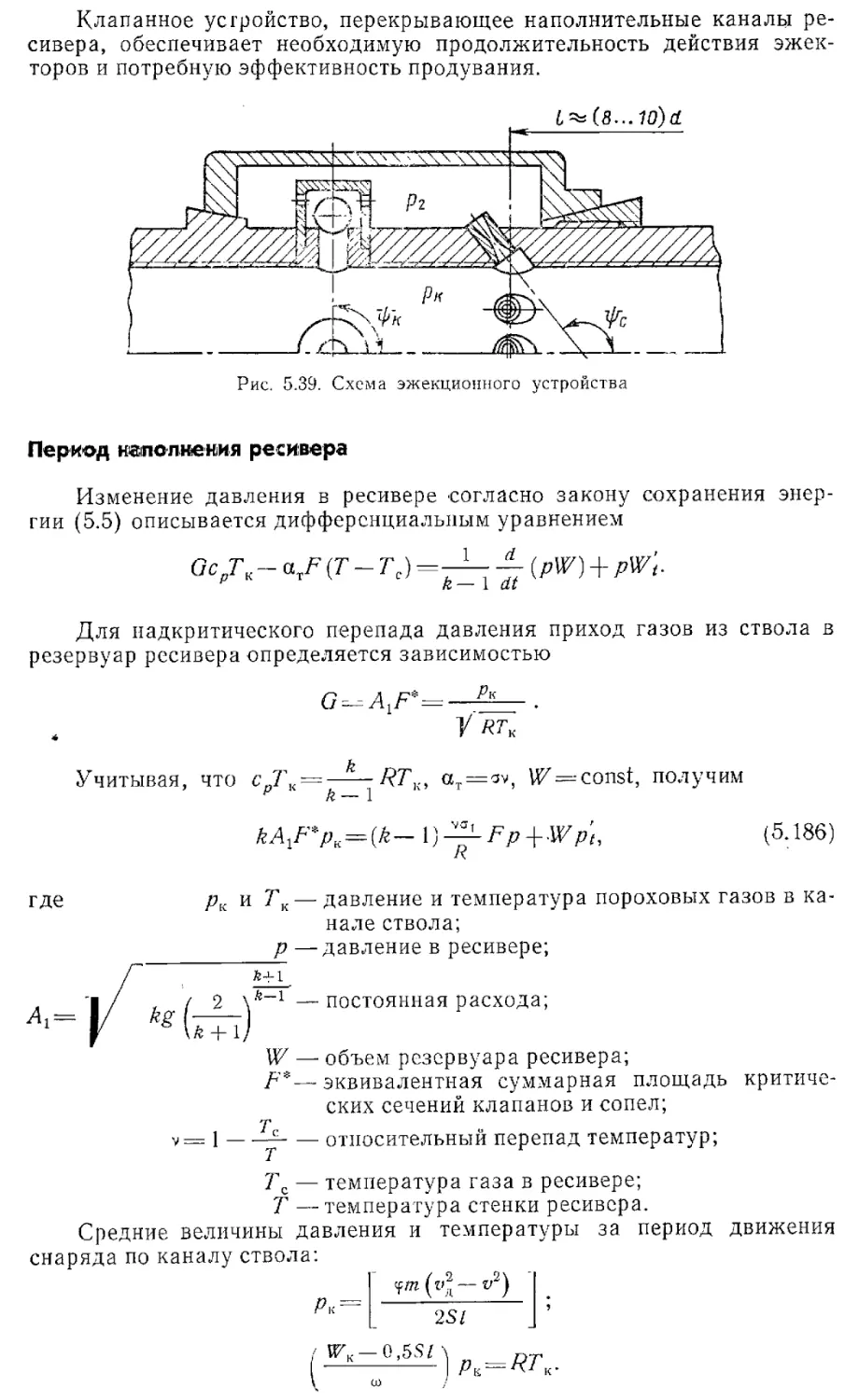
§ 5.11. Расчет эжекционного устройства артиллерийского орудия.......
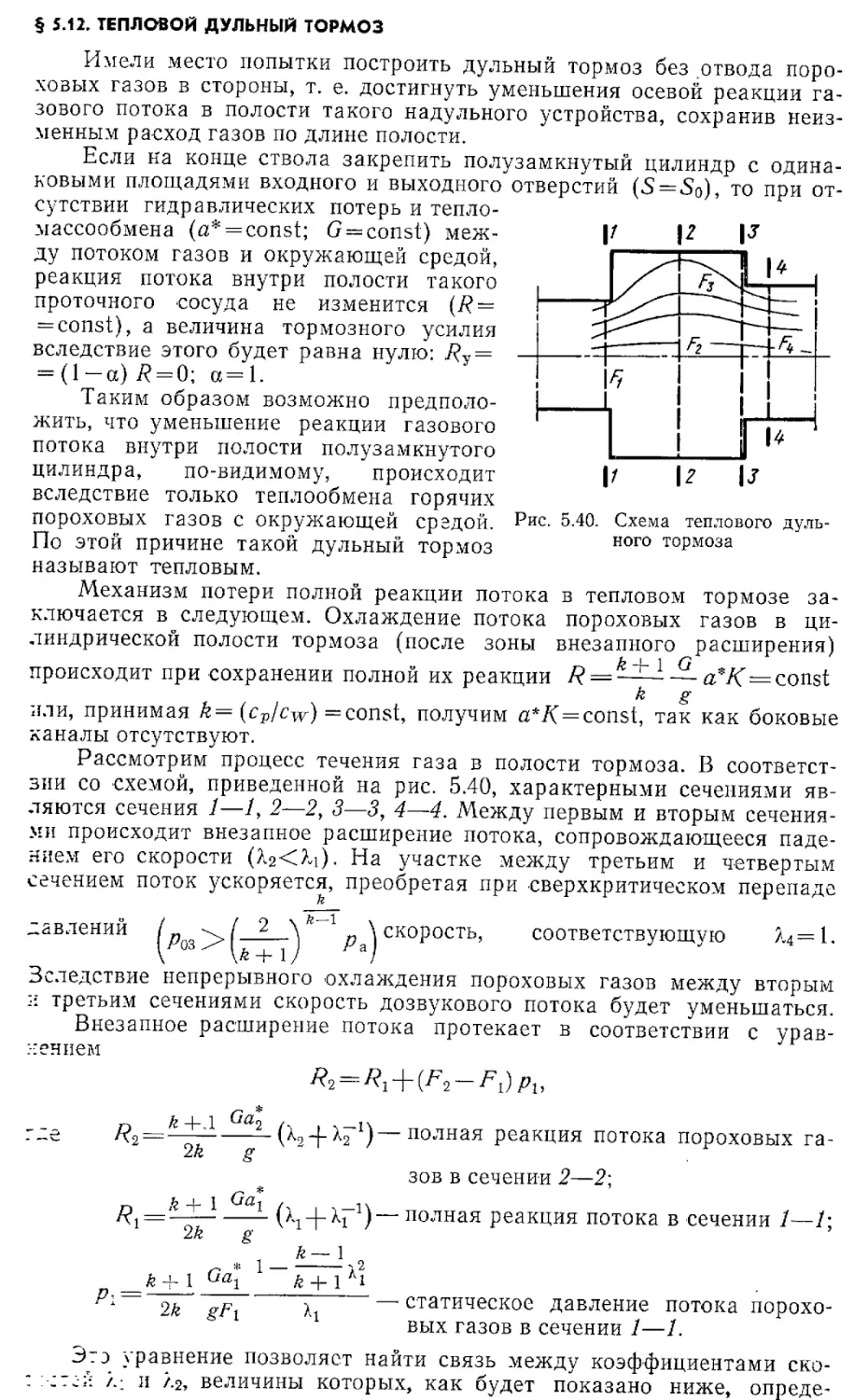
§ 5..12. Тепловой дульный тормоз....................................
Список литературы к главе V.........................................
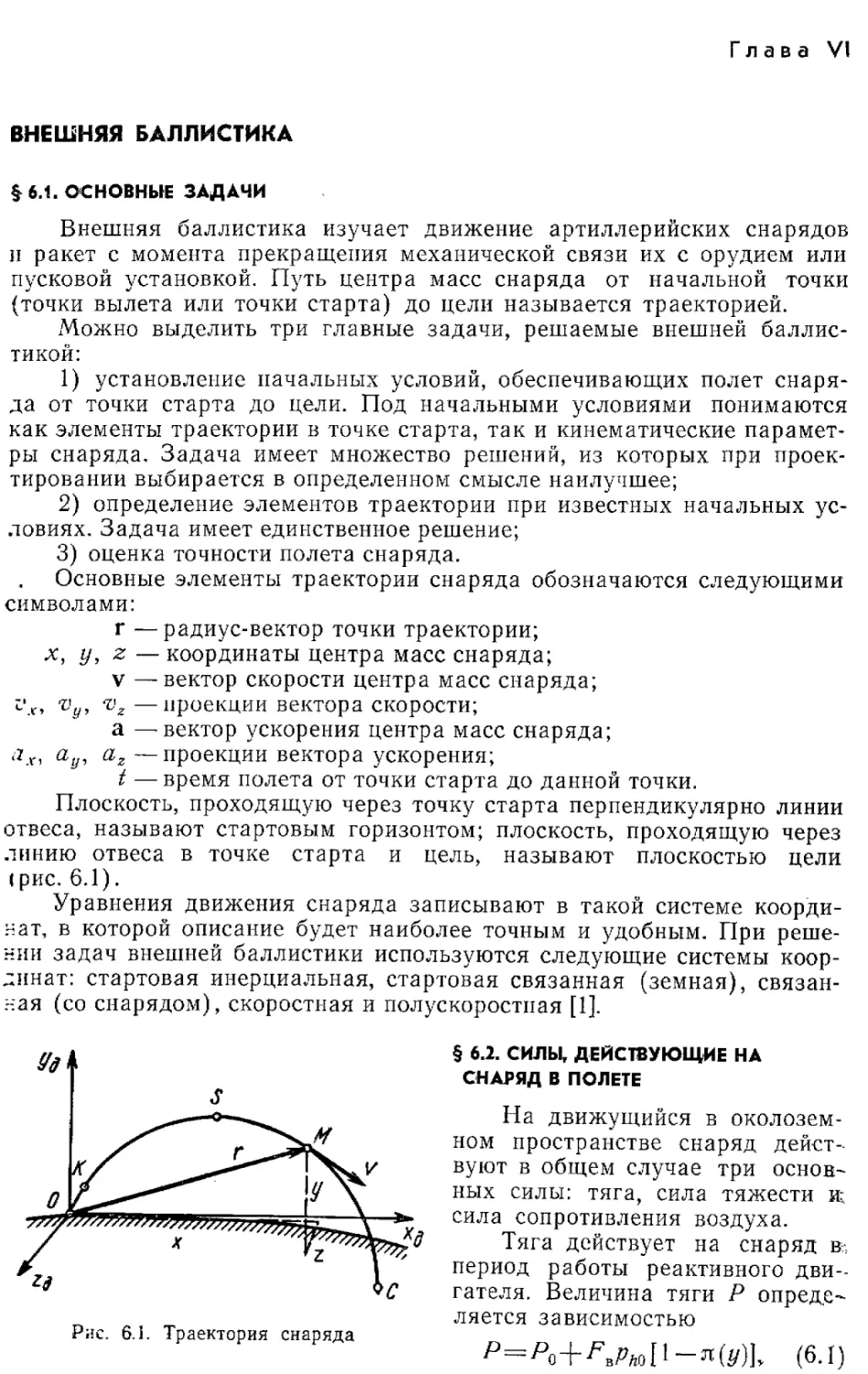
Глава VI. Внешняя баллистика..............................................
§ 6.1. Основные задачи .............................................
§ 6.2. Силы, действующие на снаряд в полете..................... .
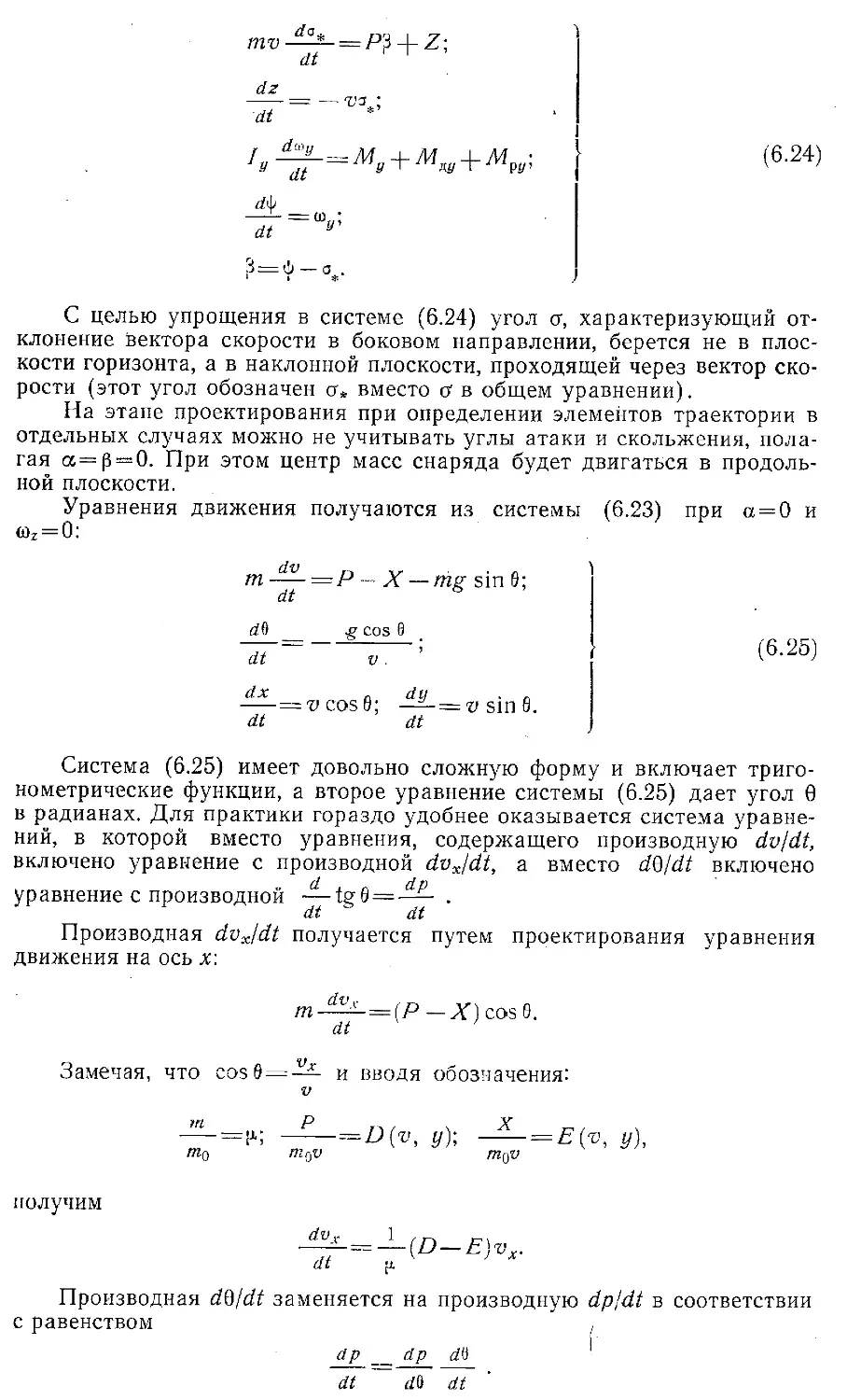
§ 6.3. Уравнения движения снаряда ..................................
§ 6.4. Численное интегрирование уравнений движения снаряда..........
§ 6.5. Табличные методы определения элементов траектории............
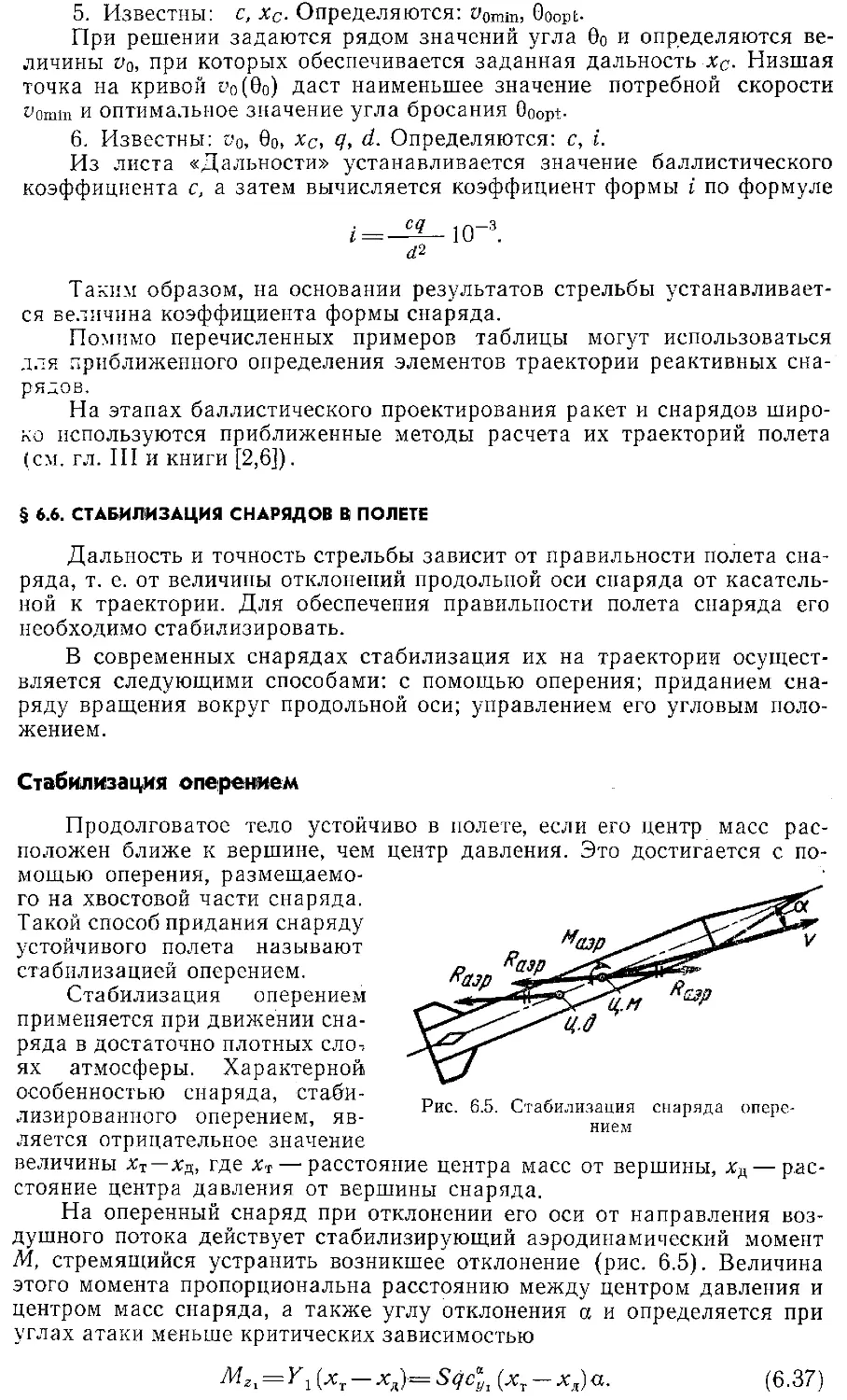
§ 6.6. Стабилизация снарядов в полете...............................
Список литературы к главе VI........................................
Глава VII. Устройство и проектирование артиллерийских стволов и систем
их охлаждения ............................................................
§ 7.1. Артиллерийские стволы .......................................
§ 7.Й. Расчет крутизны нарезов канала ствола........................
§ 7.3. Расчет системы принудительного охлаждения....................
§ 7.4. Расчет прочности ствола-моноблока............................
§ 7.5. Теория расчета скрепленных труб..............................
§ 7.6. Расчет прочности артиллерийских стволов со свободной трубой или
лейнером......................................................... .
§ 7.7. Методика расчета на .прочность двухслойного ствола...........
§ 7.8. Прочность ствола с межслойным охлаждением....................
§ 7.9. Сопротивление автофретированного ствола.....................
§ 7.10. Живучесть стволов..........................................
§ 7.11. Расчет на прочность казенников и затворов...................
Список литературы к главе VII........................................
Глава VIII. Методы расчета и исследования механизмов автоматики систем
с неподвижным стволом ....................................................
§ 8.1. Уравнение движения автоматики ...............................
§ 8.S. Определение приведенных масс и сил ..........................
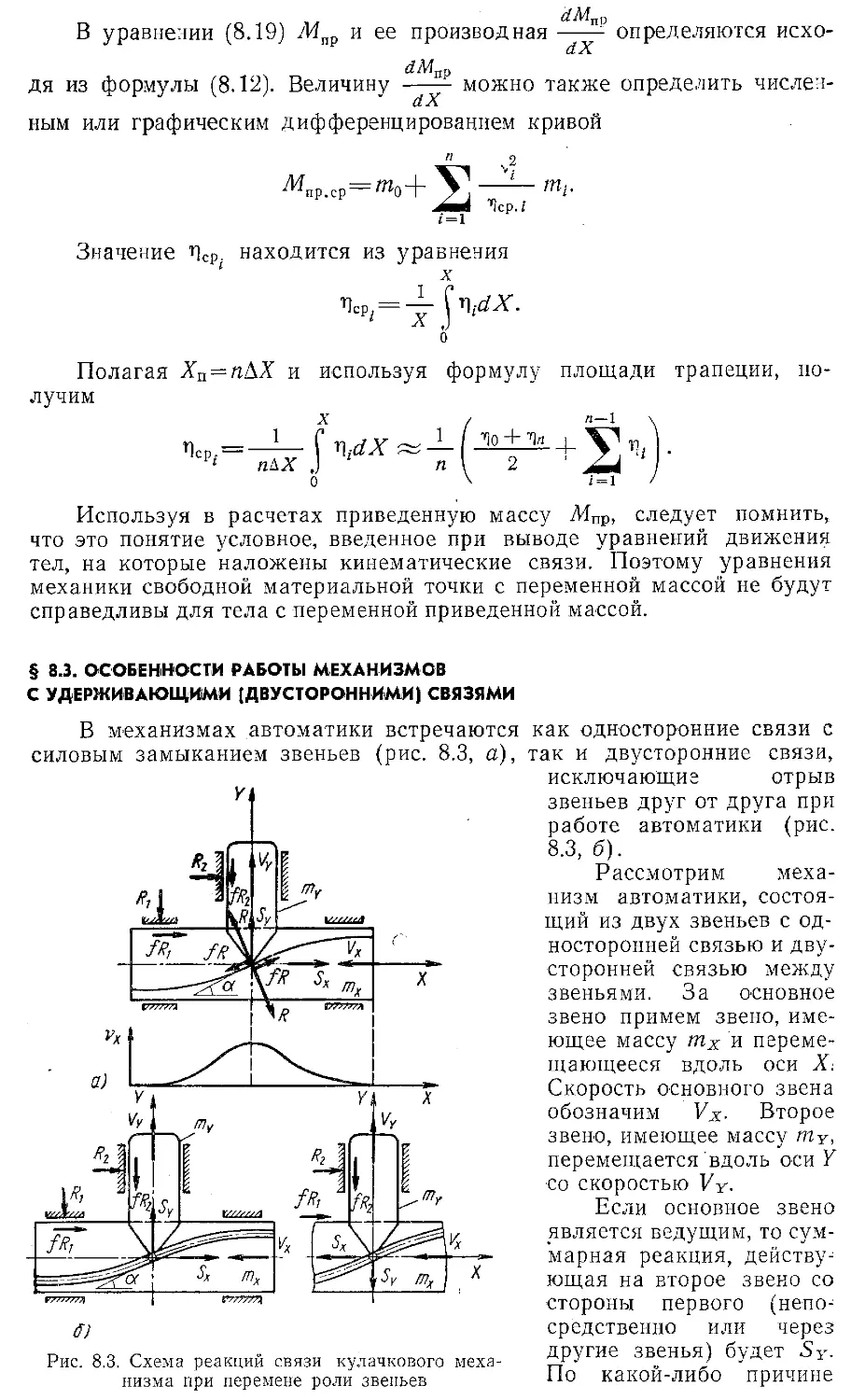
§ 8.3. Особенности работы механизмов с удерживающими (двусторонними)
связями . ...........................................................
§ 8.4. Методы решения уравнений движения механизмов автоматики . .
§ 8.5. Соударение механизмов и деталей при работе автоматики . . . . - .
' § 8.6. Расчет параметров движения механизмов автоматики с применением
ЦВМ . ................................................................
§ 8.7. Выбор параметров пружинных амортизаторов .......... .
Список литературы к главе VIII.................................. .
Глава IX. Кинетика автоматических пушек с коротким ходом ствола ....
§ 9.1. Кинетика безударной работы ускорителя........................
§ 9.2. Кинетика удара в работе рычажного ускорителя.................
§ 9.3. Элементарный расчет деталей, испытывающих ударные нагрузки
§ 9.4. Кинетический анализ автоматики с учетом инерционного перекоса
подвижных элементов..................................................
§ 9.5. Технические пути снижения веса автоматических пушек в боевом
положении............................................................
§ 9.6. Приближенный метод расчета упругих реакций лафета ...........
§ 9.7. Влияние упругости установки на работу автоматики пушки с корот-
ким ходом ствола...........................•.........................
Список литературы к главе IX.........................................
Глава X. Элементарная теория устойчивости артиллерийского орудия при вы-
стреле, устройство и проектирование накатников, гидравлических
тормозов и уравновешивающих механизмов....................................
§ 40-1 . Динамическая устойчивость полевого артиллерийского орудия при
выстреле............................................................
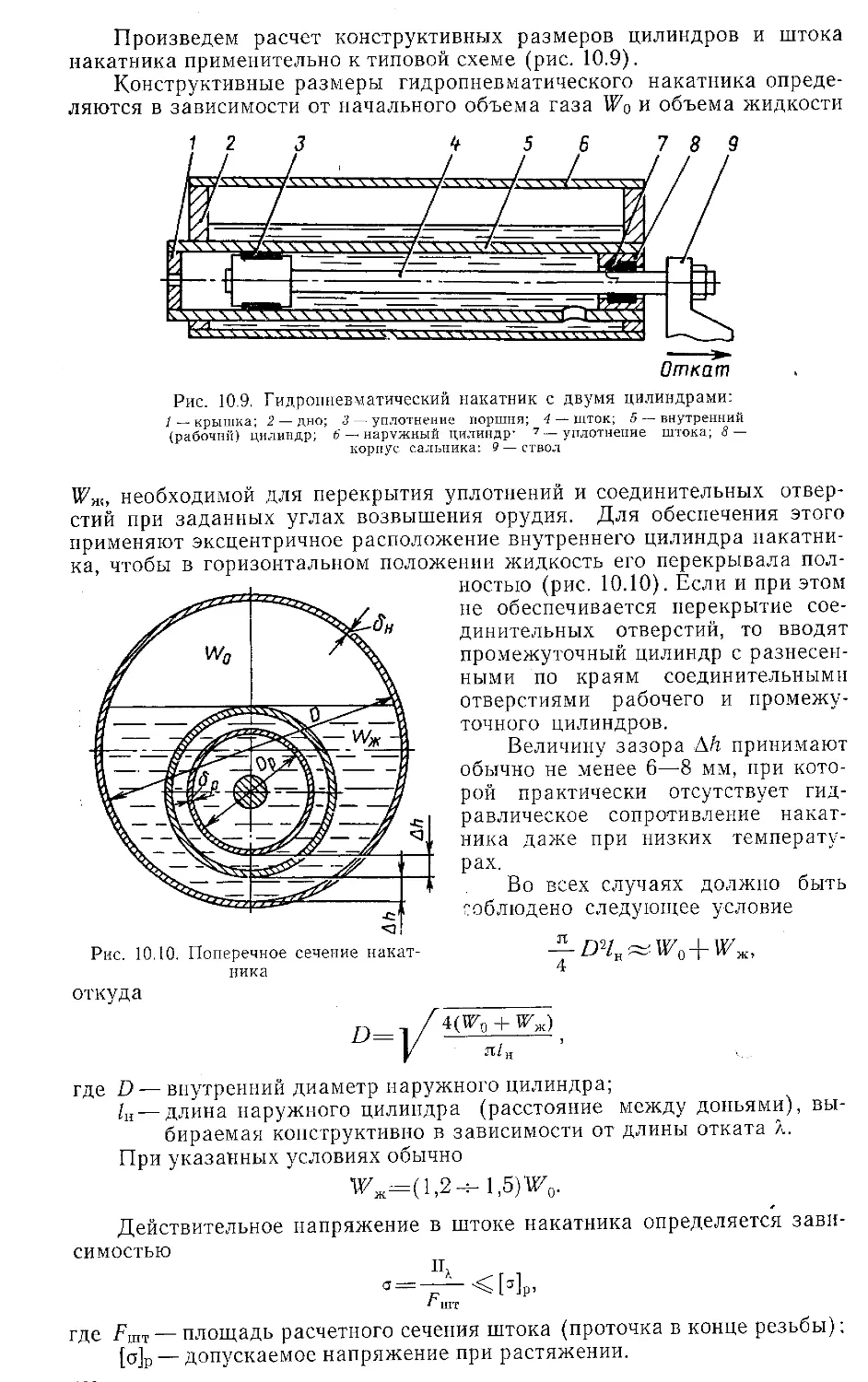
§ 10.2. Устройство и проектирование накатников и гидравлических тормо-
зов ................................................................
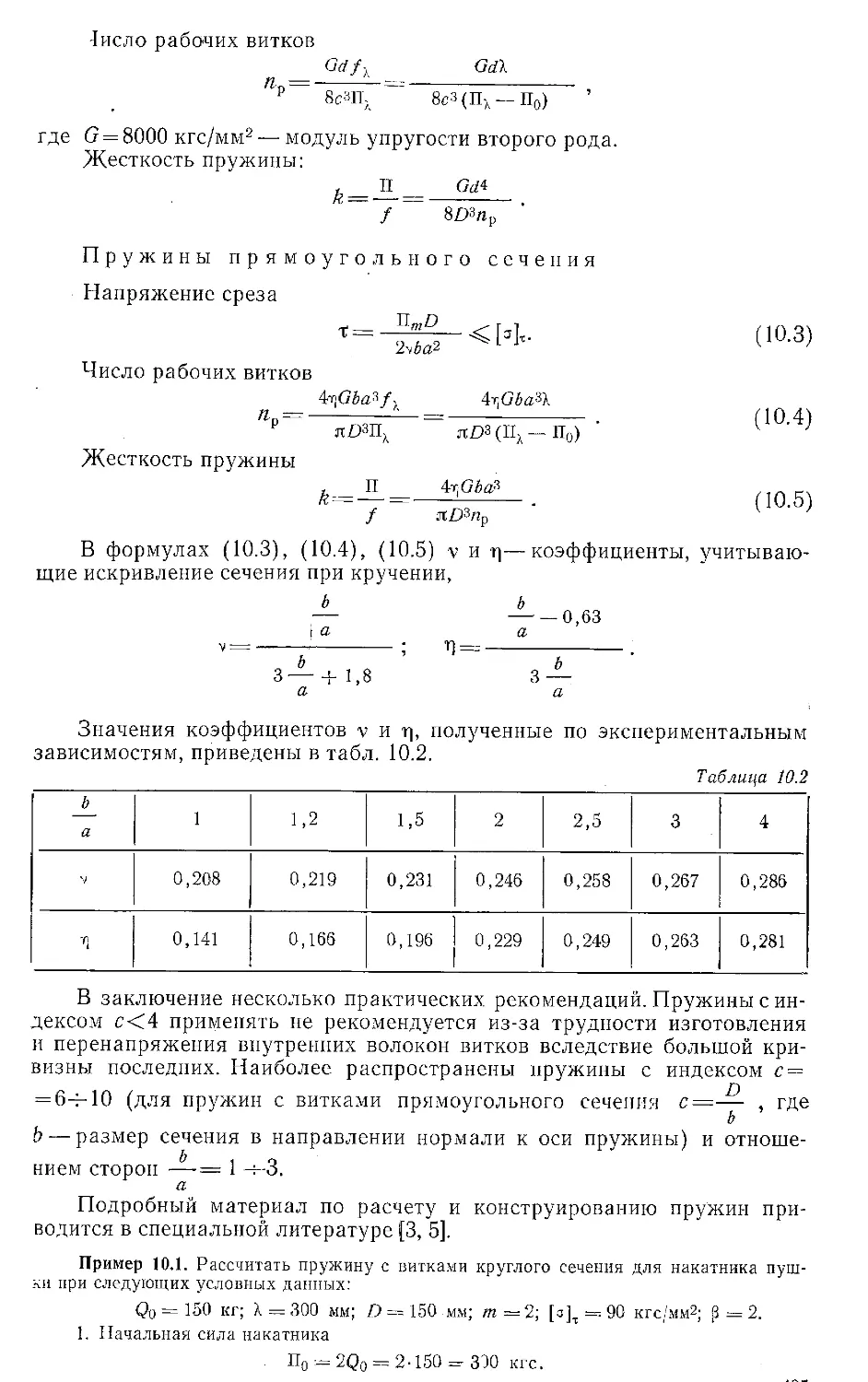
§ 10.3. Пружинный накатник........................'................
§ 10.4. Гидропневматический накатник...............................
§ '10. 5. Пневматический накатник и гидропневматический тормоз-накатник
§ 10.6. Элементарные гидравлические противооткатные устройства . . . .
181
188
195
199
211
240
267
281
291
298
299
299
299
304
311
314
317
322
323
323
327
336
344
350
355
357
361
364
370
373
377
378
378
384
386
389
400
402
405
413
414
414
421
434
439
450
452
463
475
476
476
481
483
487
495
496
Стр.
§ 10.7. Тормоз «отката — наката» канавочно-игольчатого типа ..... . 503
§ 10.8. Тормоз «отката—наката» веретенно-модераторного типа..........508
§ 10.9. Тепловой расчет тормоза отката...............................514
§ Ю.Ю. Устройство и расчет уравновешивающих механизмов..............516
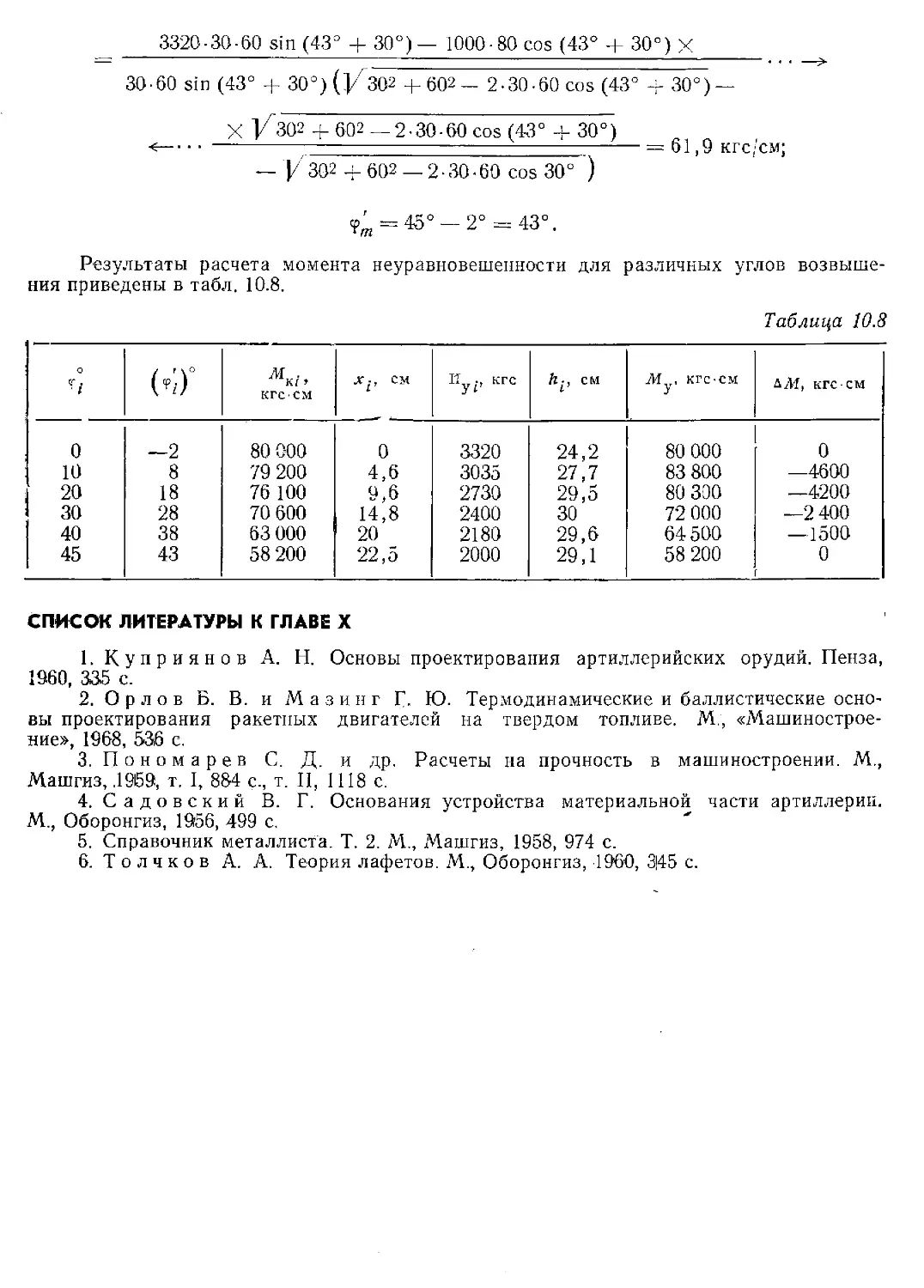
Список литературы к главе X..........................................520
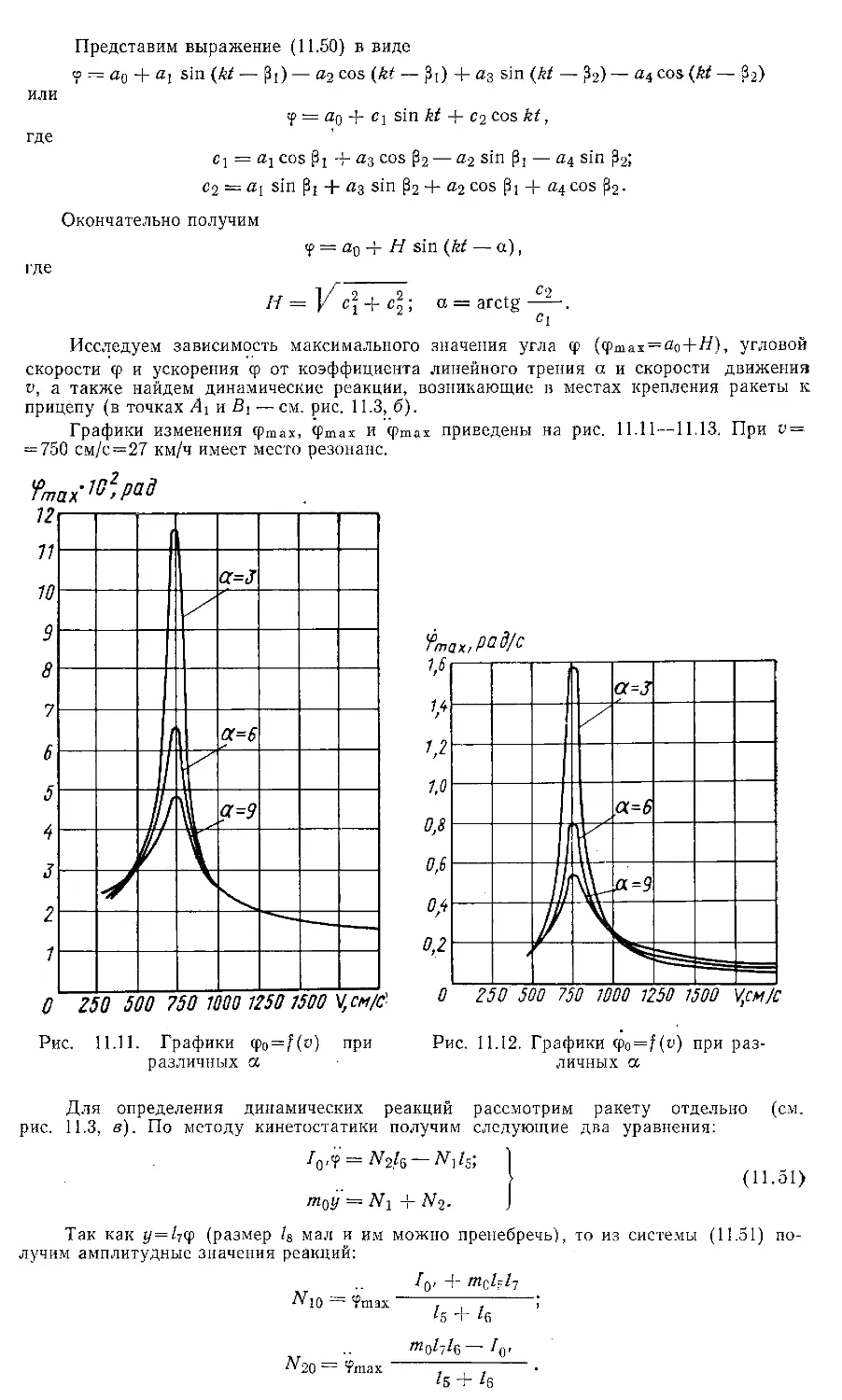
Глава XI. Некоторые вопросы динамики пусковых установок и пуска ракет 521
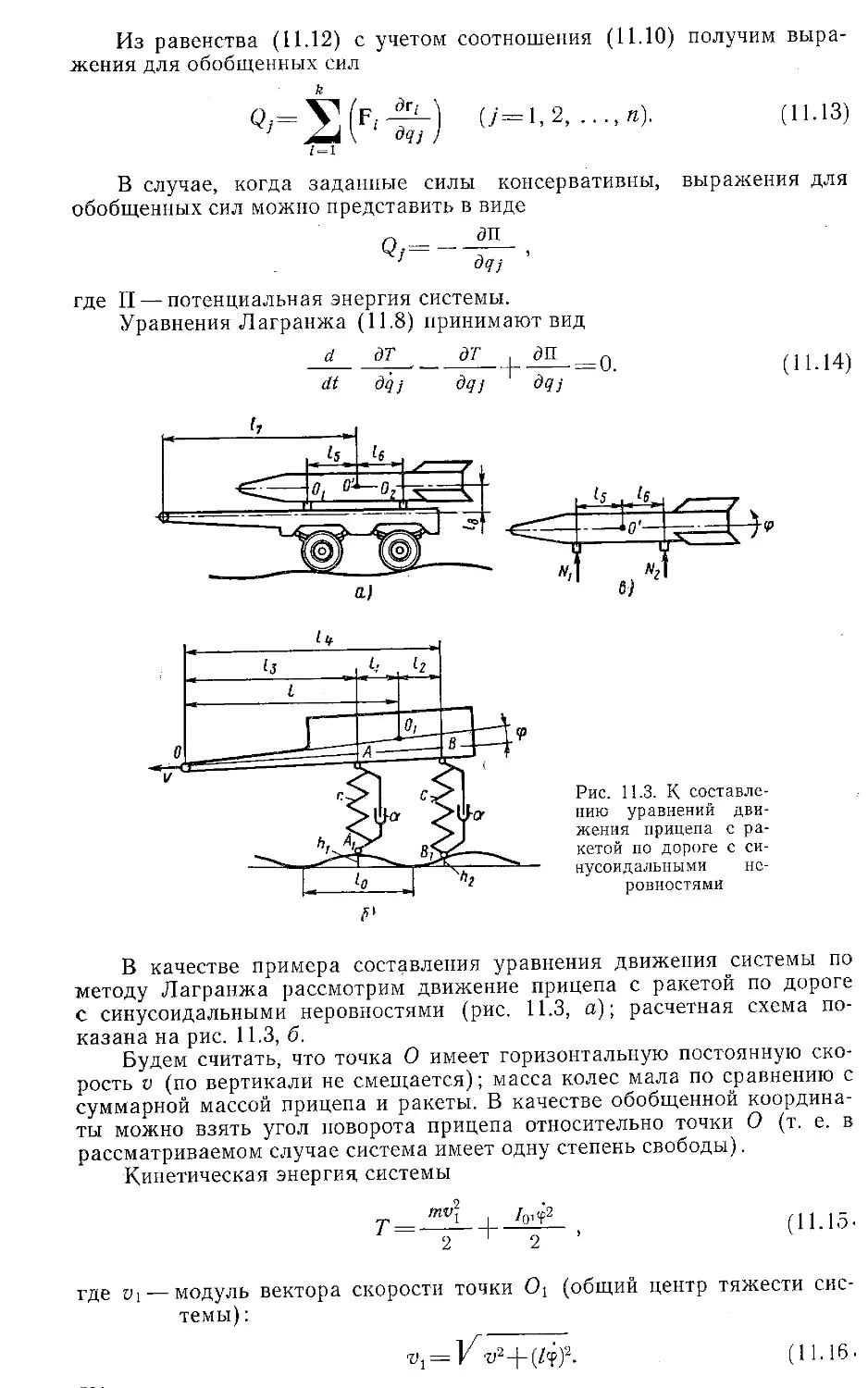
§ 11.1. Уравнения движения системы...................................522
§ 1112. Основные понятия теории механических колебаний...............530
§ 11.3. Нелинейные колебания ........................................538
§ 11.4. Теоретические основы исследования динамических систем, находят
щихся под воздействием случайных возмущений..........................543
Список литературы к главе XI.........................................562
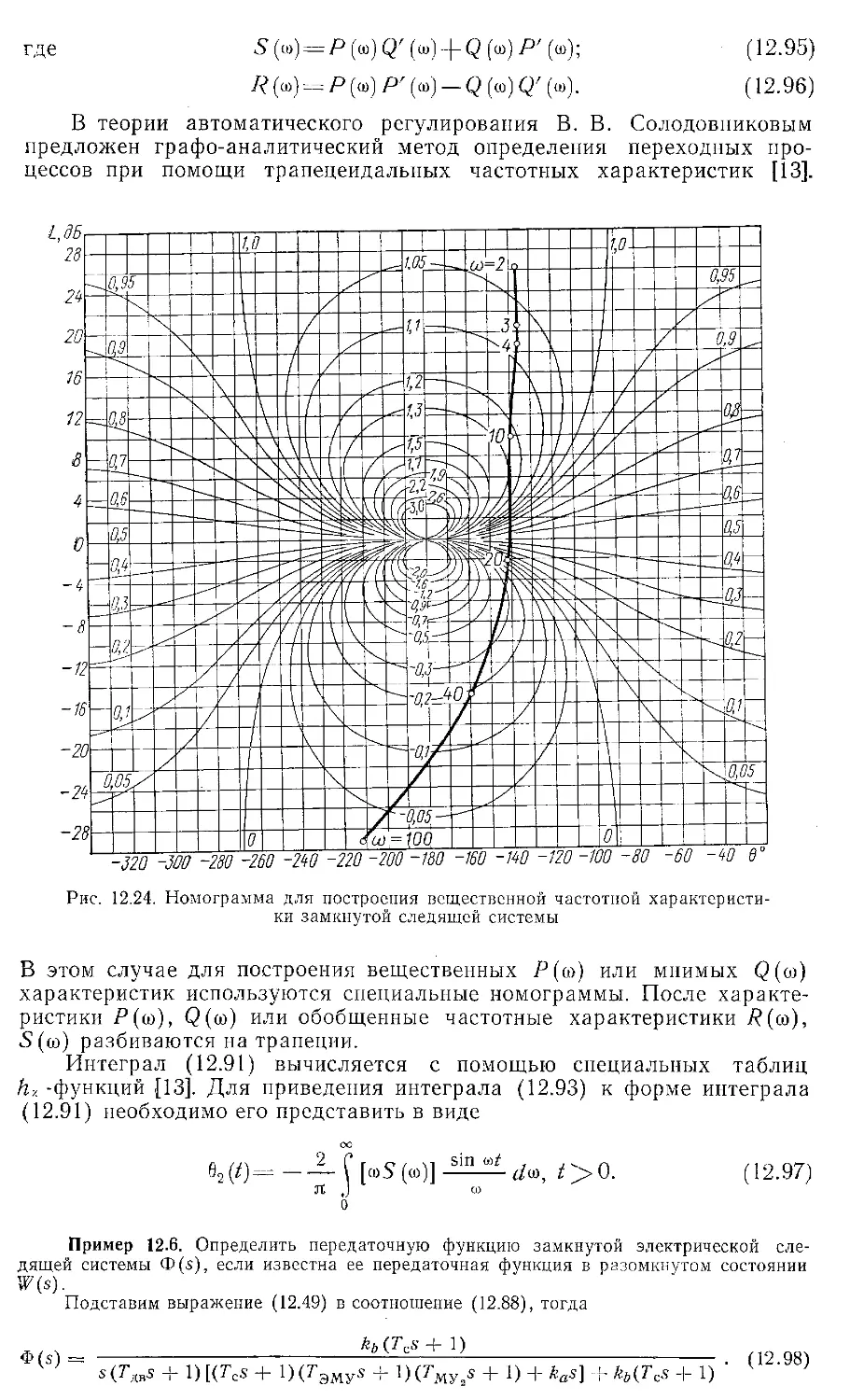
Глава XII. Силовые следящие системы артиллерийских установок..............563
§ 12.1. Принцип действия и основные типы схем электрических и электро-
гидравлических следящих систем.......................................564
§ 12.2. Выбор типа.двигателя и механической передачи для следящей си-
стемы ...............................................................573
§ 12.3. Ограничения зоны возможного поражения целей параметрами сле-
дящей системы при стрельбе из пушечной установки.....................579
§ 12.4. Уравнения динамики и структурные схемы электрических и электро-
гидравлических следящих систем . . . .«..............................584
§ 12.5. Анализ устойчивости следящих систем методом логарифмических
частотных характеристик. Показатели качества и точности следящих
систем при действии регулярных и случайных управляющих и воз-
мущающих воздействий.................................................592
§ 12.6. Синтез следящих систем при регулярных и случайных воздействиях 610
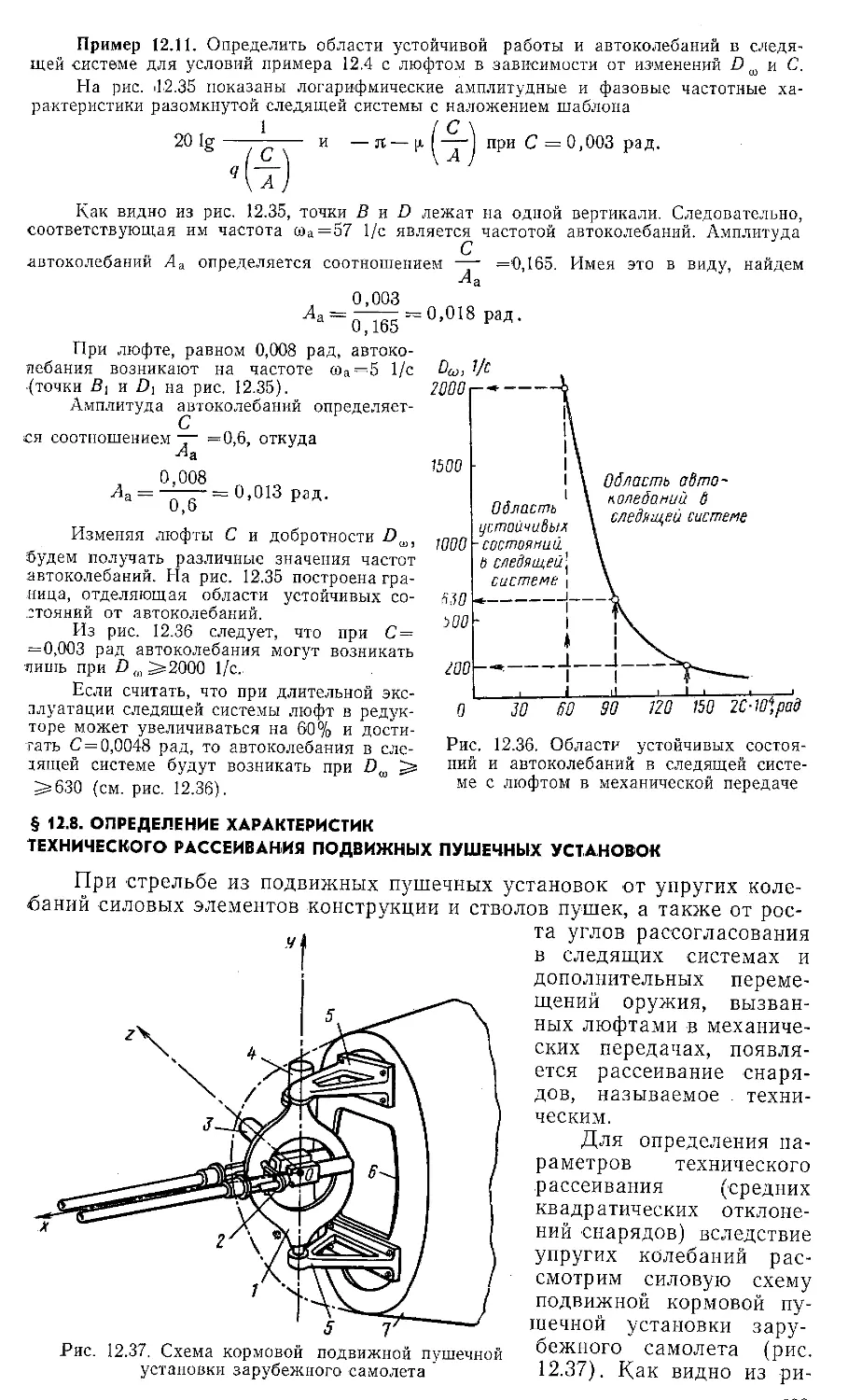
§ 1)2.7 . Влияние люфтов в механической передаче на следящую систему 619
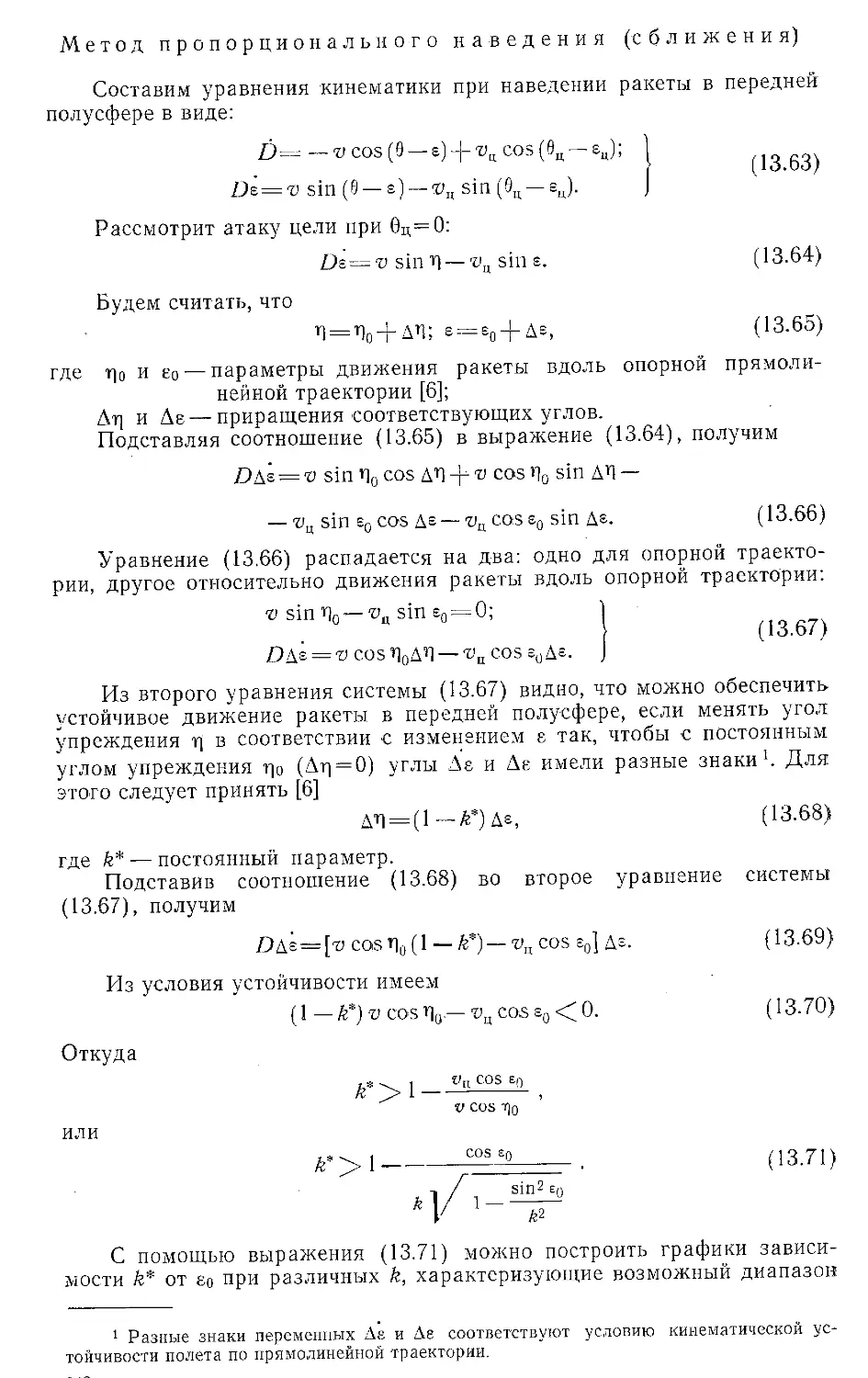
§ 12.8. Определение характеристик технического рассеивания подвижных
пушечных установок ..................................................623
Список литературы к главе XII........................................628
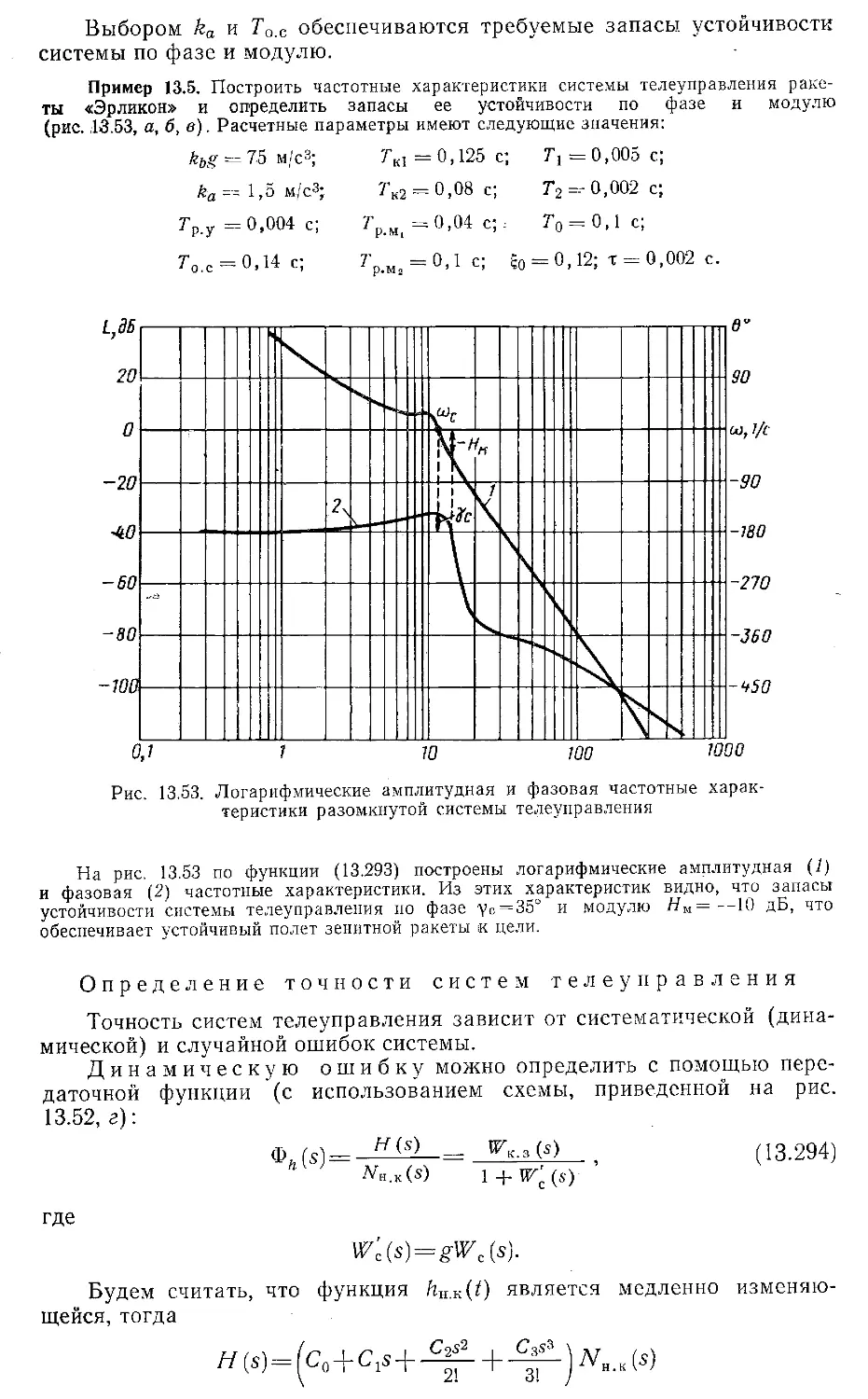
Глава XIII. Системы управления зенитными и авиационными ракетами. . . 629
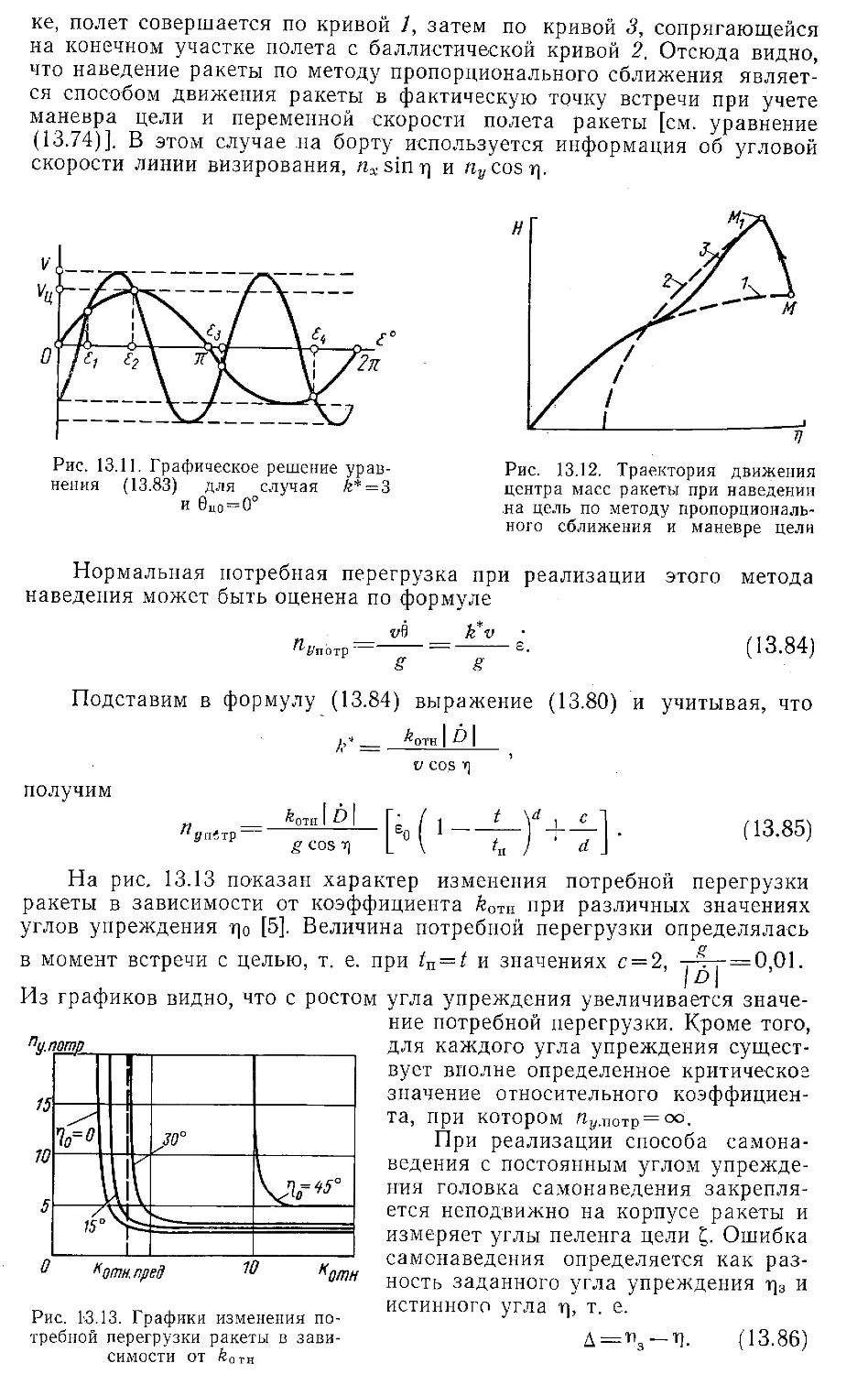
§ 1611. Методы наведения ракет......................................630
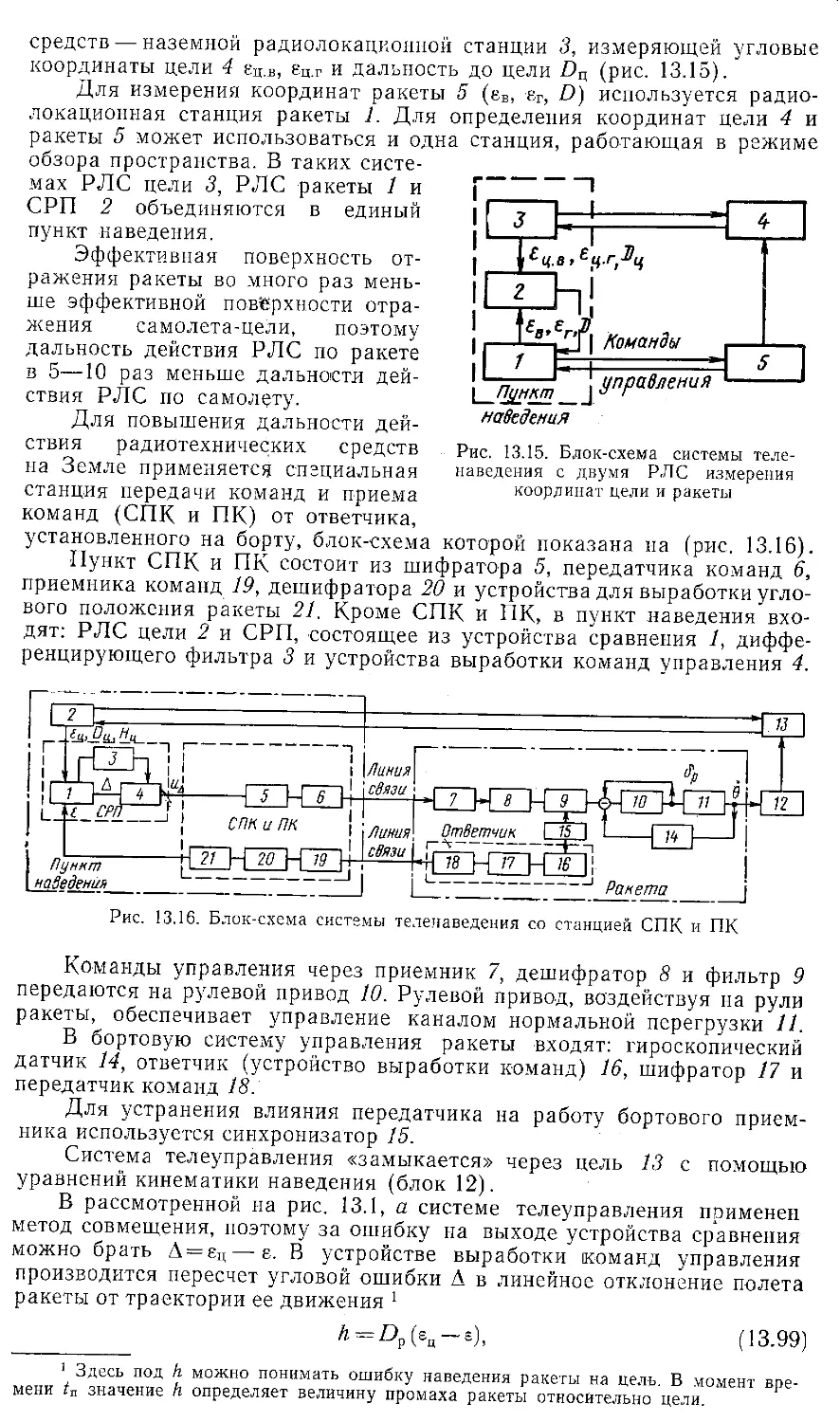
§ 1'3.2. Структура системы управления и состава ее аппаратуры........648
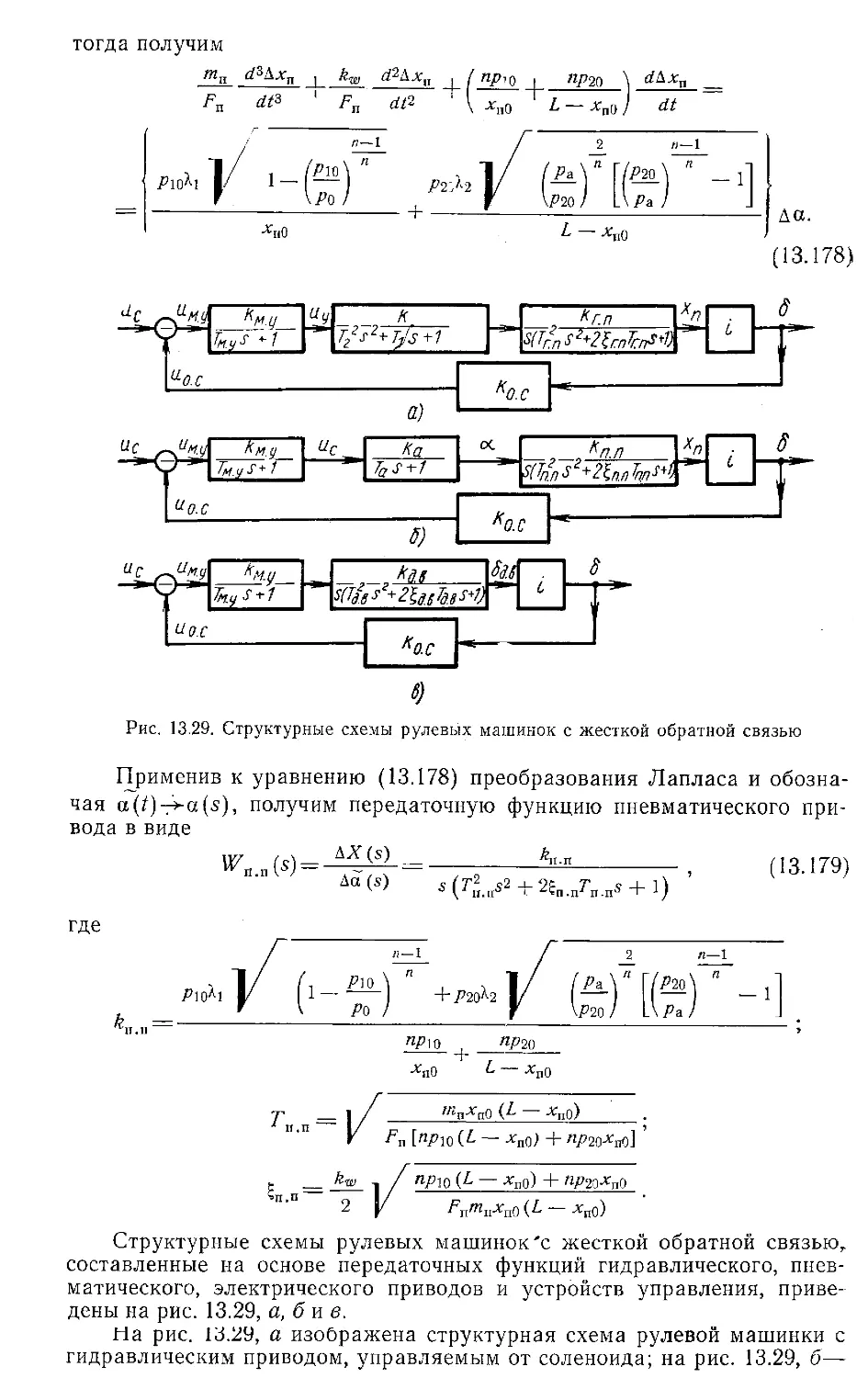
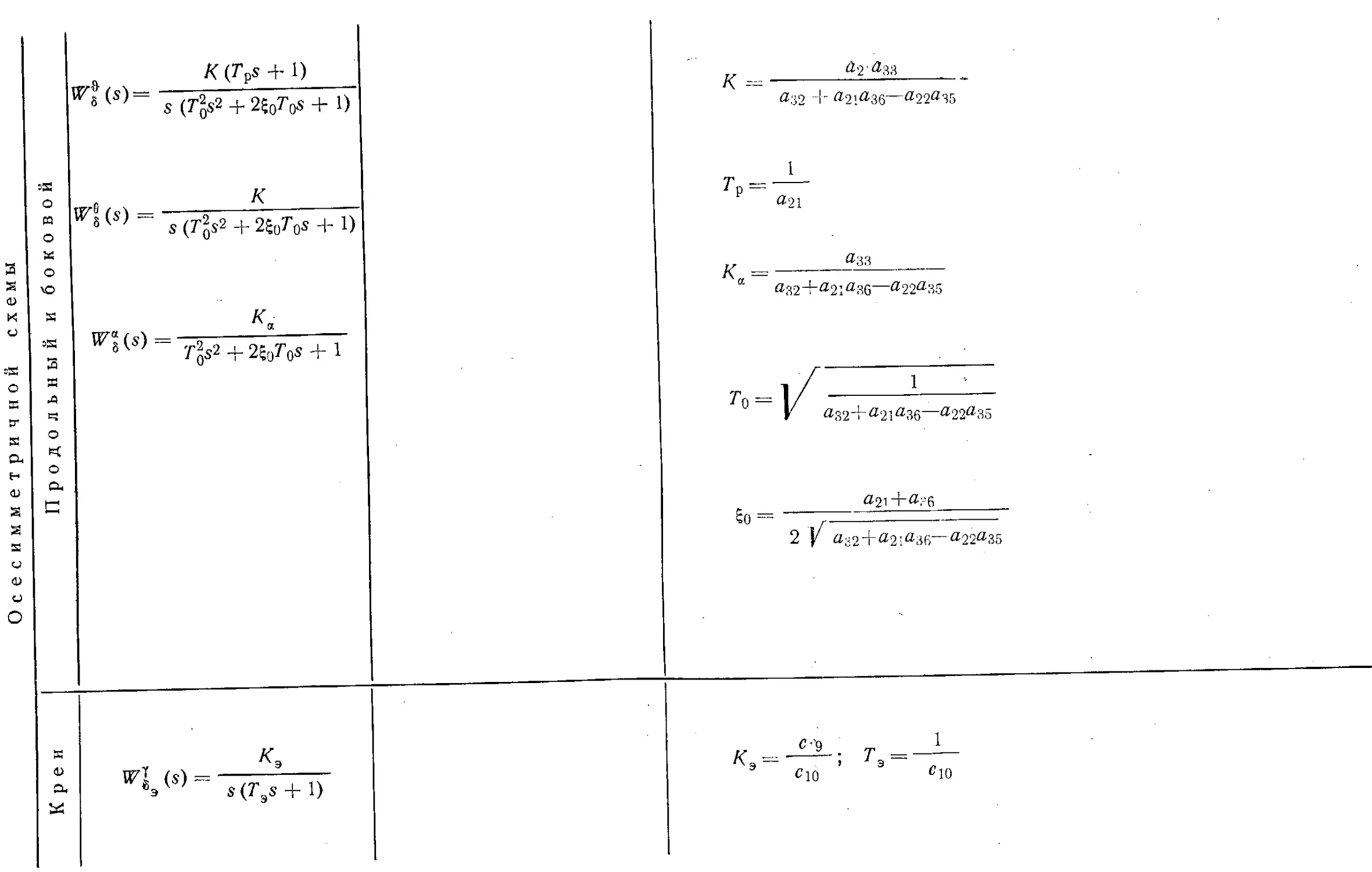
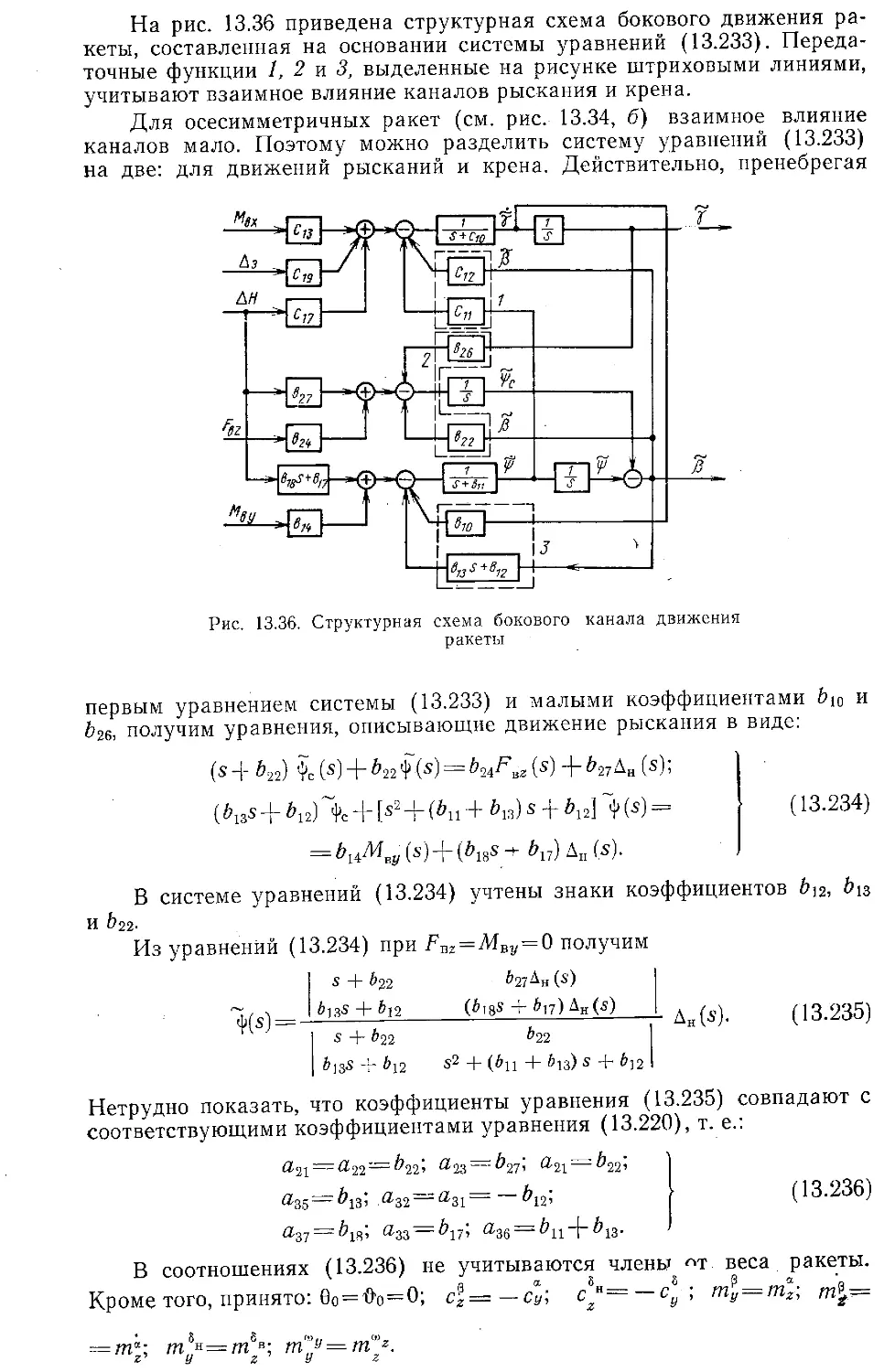
§ 13.3. Уравнения динамики полета ракеты............................672
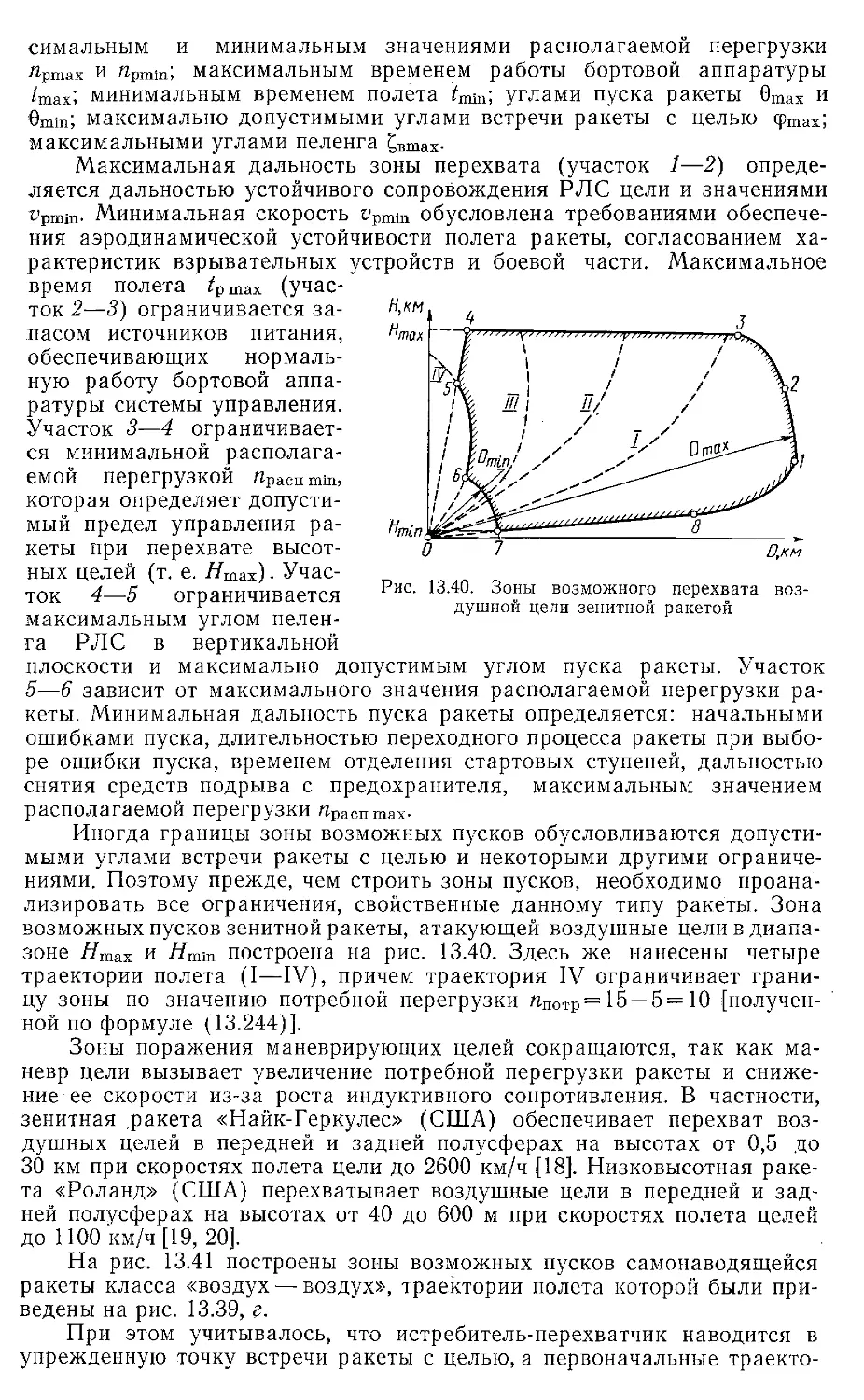
§ 13.4. Потребные и располагаемые перегрузки ракеты. Траектории полета
ракеты . ........................................................... 692
§ 43.5. Формирование систем стабилизации зенитных и авиационных ракет 698
§ 13.6. Формирование систем телеуш>авления зенитными и авиационными
ракетами.............................................................708
§ 13.7. Формирование систем самонаведения зенитных и авиационных ра-
кет .................................................................718
Список литературы к главе XIII.......................................722
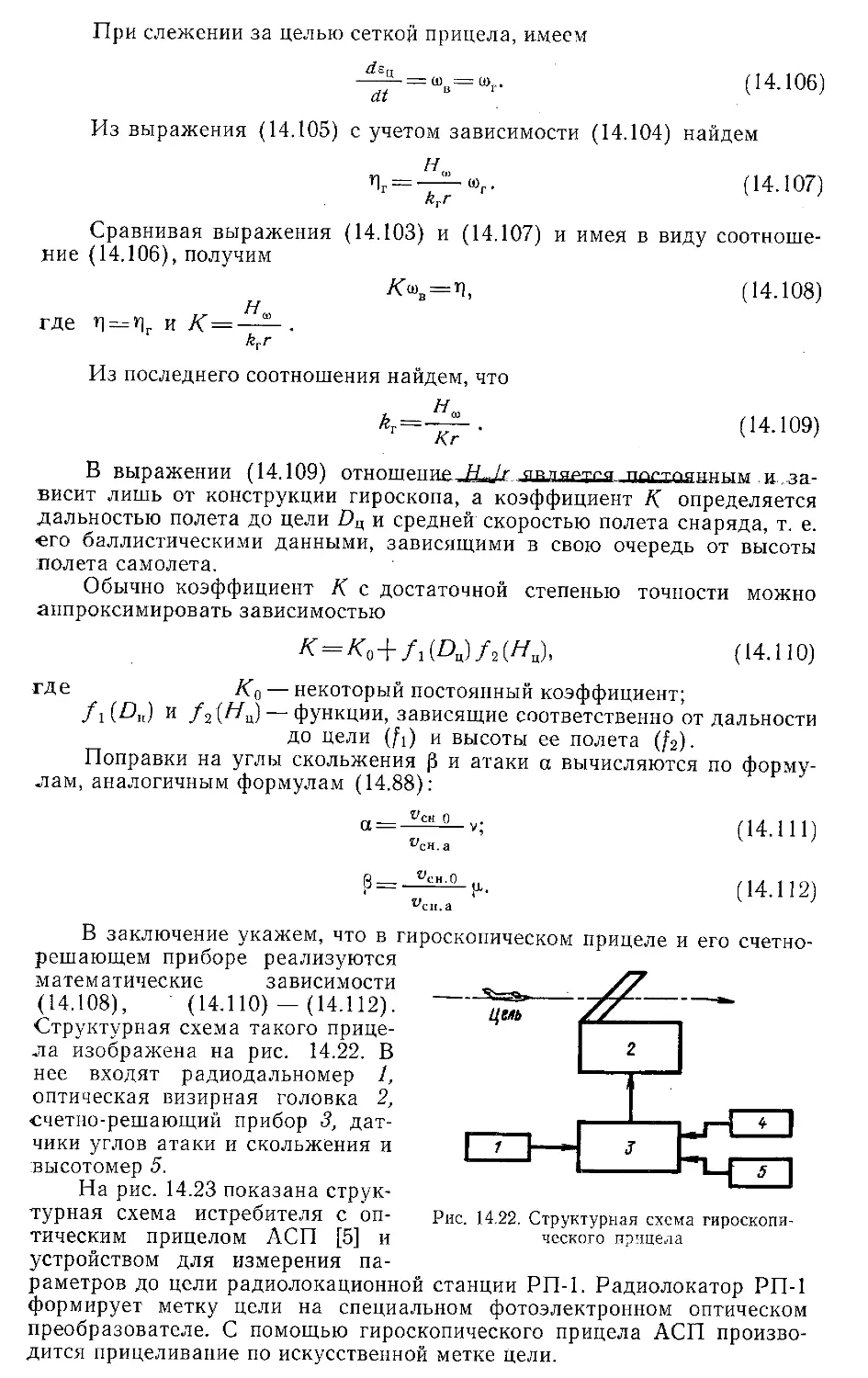
Глава XIV. Счетно-решающие приборы и прицелы зенитных и авиационных
ракетных и ствольных комплексов...........................................723
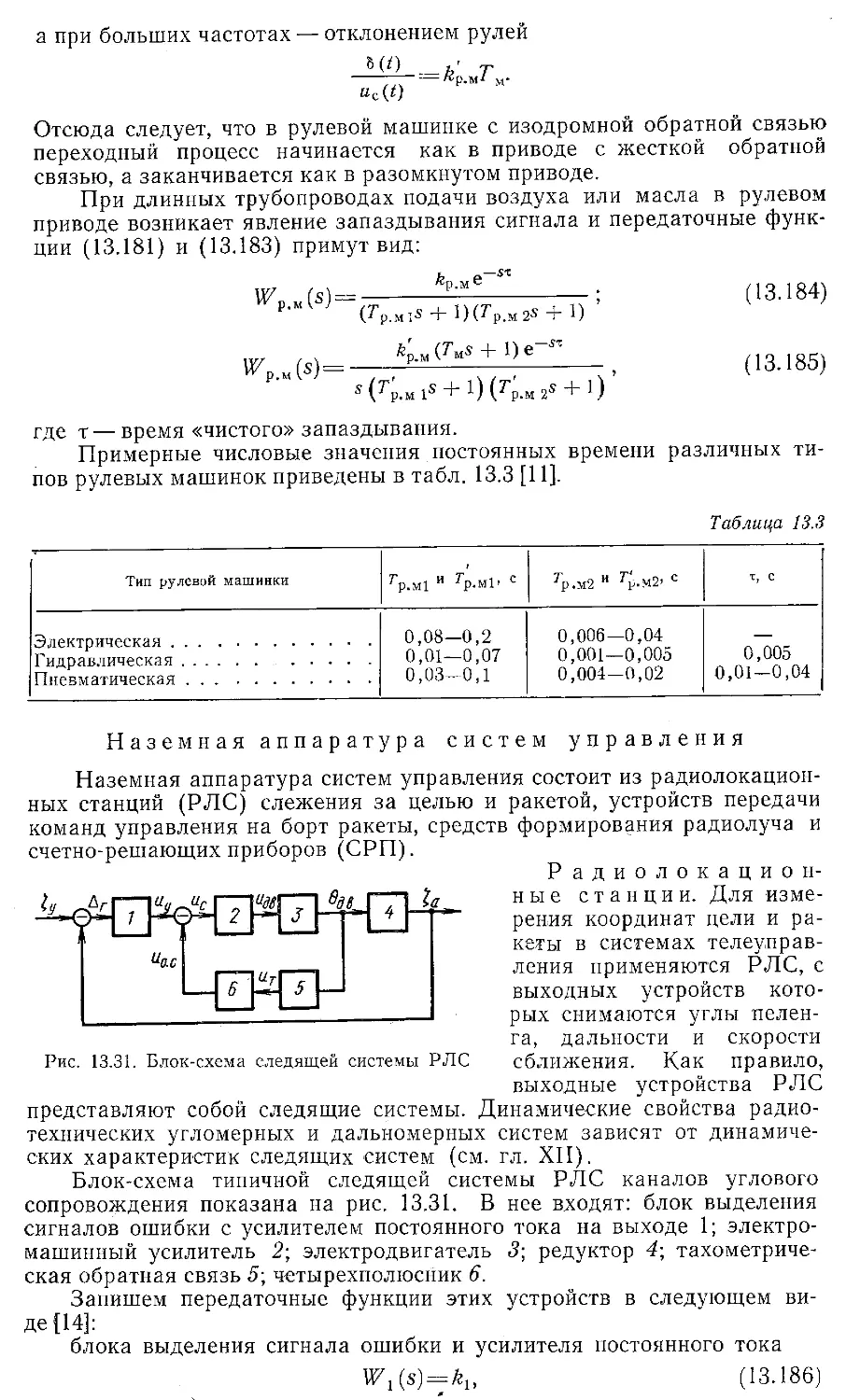
§ 14.1. Структурные схемы управления огнем зенитной артиллерии и при-
целивание с самолетов при стрельбе по воздушным целям .... . 723
§ 14.2. Математические зависимости для решения задачи о точке встречи
снаряда с целью..................................................... 727
§ 14.3. Реализация математических зависимостей о точке встречи на анало-
говых вычислительных устройствах......................................733
§ 14.4. Реализация математических зависимостей о точке встречи на циф-
ровых вычислительных машинах..........................................743
§ 14.5. Определение параметров движения баллистической ракеты по за-
мерам радиолокационной станции . . . ........................747
§ 14.6. Математические зависимости для решения задачи прицеливания с
самолетов-истребителей при стрельбе по воздушным и наземным це-
лям ..................................................................751
Список литературы к главе XIV......................................758
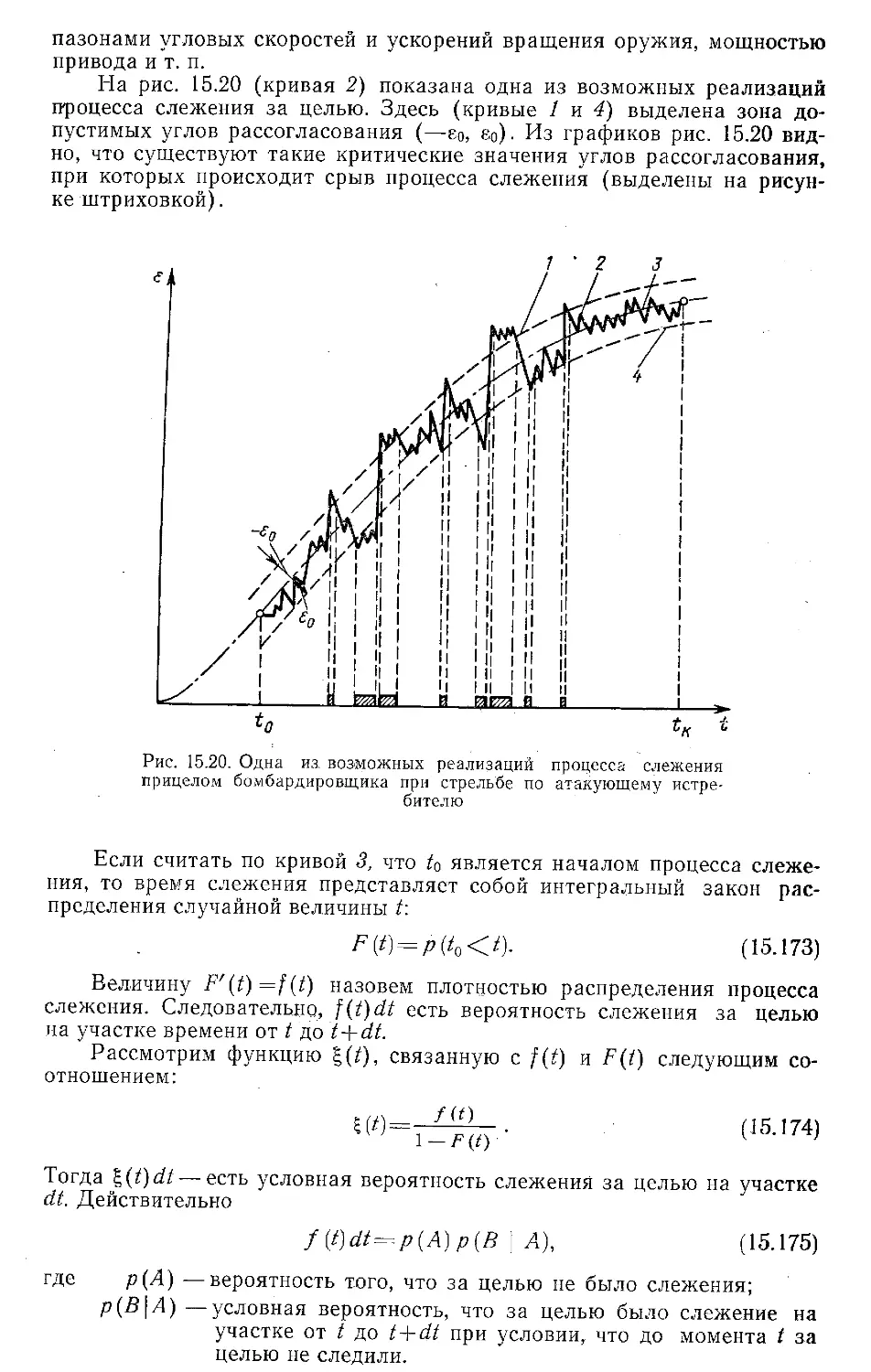
лава XV. Боевая эффективность ракетных и ствольных комплексов .... 760
§ 15.1. Эффективность комплексов ................................ 761
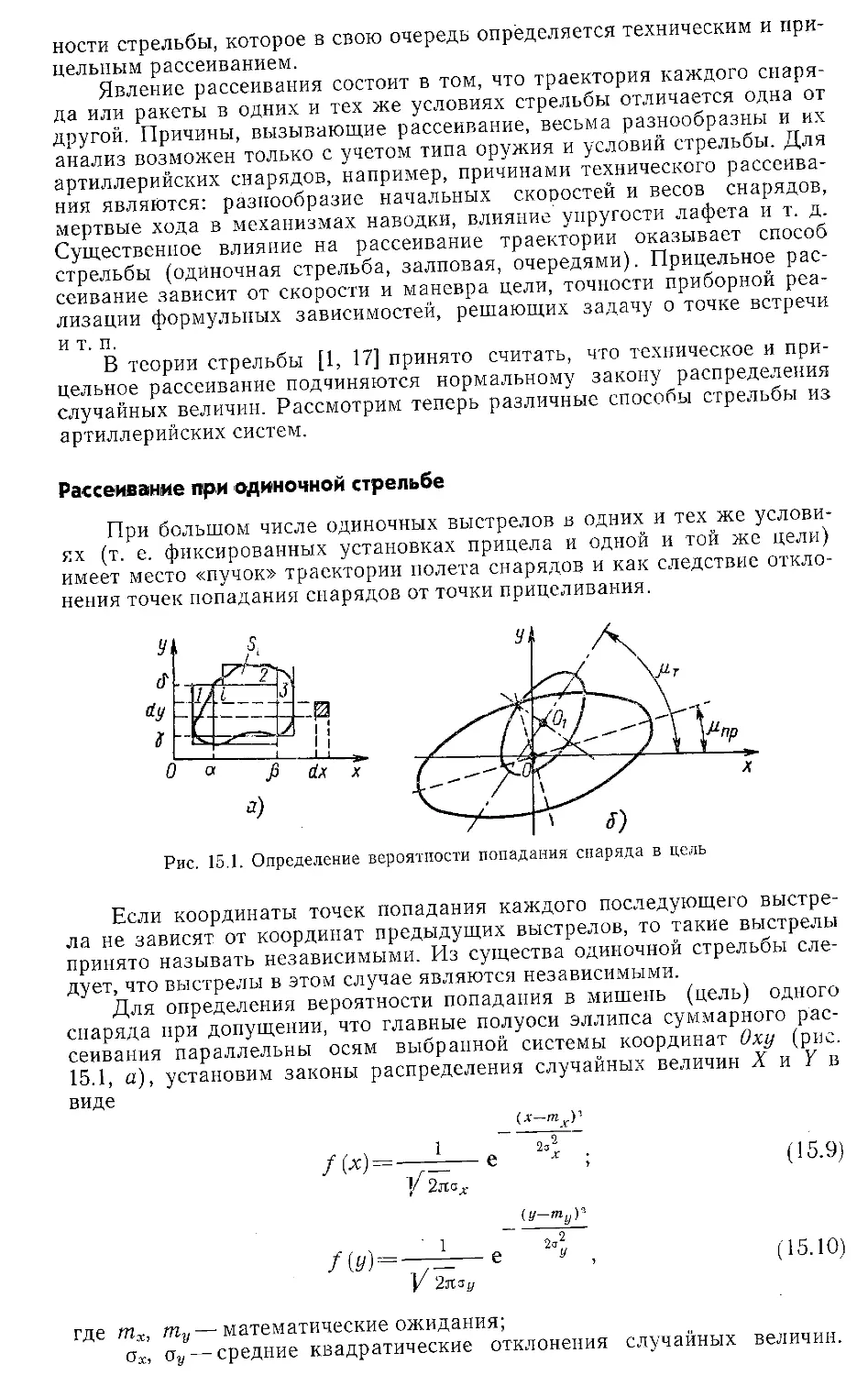
§ <1512. Определение вероятности попадания' в цель при стрельбе снарядами
ударного действия..............................................1 . .763
§ 15.3. Законы поражения целей.............................' . . . . 772
§ 15.4. Определение вероятности поражения целей.....................780
§ 15.5. Надежность действия ракетных и ствольных комплексов..........788
§ 15.6. Боевая эффективность ракетных и ствольных комплексов .... . 7S8
§ 15.7. Боевая эффективность группировок ракетных и ствольных комп-
лексов ..............................................................806
§ 15.8. Влияние противодействия противника и экономических затрат на
обобщенную оценку боевой эффективности комплексов....................810
Стр.
Список литературы к главе XV................................. 820
Приложения.
I. Значения функции Лапласа ..................................... . 822
2. Значения коэффициента k для вычисления вероятности поражения цели
при зависимых выстрелах.......................................823
3. Таблица перевода размерностей физических величин в систему СИ . . . 823 ,
Вениамин Вассианович Алферов, Анатолий Иванович Бакулин,
Борис Викторович Орлов, Валерий Александрович Светлицкий,
Юрий Иванович Толчеев, Владимир Федорович Устинов,
Александр Евгеньевич Хворостин
ПРОЕКТИРОВАНИЕ РАКЕТНЫХ И СТВОЛЬНЫХ СИСТЕМ
редактор издательства Л. В. Северьянов Технический редактор И. В. Тимофеева
Корректор Л. Е. Хохлова Художник Е. П. Громов
Сдано в набор 14/XI 1973 г. Подписано к печати 27/V 1974 г. Т-09568
Формат 70х108'/1б Бумага № 1 Уел. печ. л. 72,45 Уч.-изд. л. 63,65
Тираж 2000 экз. Изд. зак. 2889. Цена 2 р. 58 к.
Издательство «Машиностроение». 107885 Москва Б-78, 1-й Басманный пер.. 3
Московская типография № 8 «Союзполиграфнрома»
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли,
Хохловский пер., 7. Тип. зак. 3783.
ПРЕДИСЛОВИЕ
За последние годы развитие ракетного и ствольного артиллерийского вооружения,
наряду с увеличением могущества, шло главным образом в направлении автоматизации,
более широкого применения систем управления и внедрения разнообразной приборной
техники, т е обеспечения использования вооружения в составе специализированных вы-
сокоэффективных комплексов
В то же время, имеющаяся научно-техническая и учебная литература рассматрива-
ет в основном вопросы, относящиеся к проектированию и исследованию либо только
непосредственно ракетных и ствольных систем, либо только приборного оснащения, раз-
деляя. как правило, вопросы теории проектирования механических элементов от решения
предопределяющих их задач (задачи внутренней и внешней баллистики и др.) Кроме то-
го. по теории проектирования ствольных артиллерийских систем, учитывающей
последние достижения науки, литературы вообще крайне мало Авторы настоящей книги
поставили перед собой задачу в какой-то мере восполнить указанный пробел
Поскольку отдельные элементы комплексов взаимозависимы, и эффективность их
применения во многом определяется правильным взаимодействием этих элементов, во-
просы проектирования ракетных и ствольных артиллерийских систем излагаются с учетом
этой взаимосвязи
В учебнике основное внимание уделено теории проектирования автоматических
зенитных и авиационных ствольных систем, а также ракетных артиллерийских комплек-
сов По вопросам проектирования артиллерийского вооружения других видов, которые
более полно освещены в имеющейся литературе, авторы ограничились лишь изложением
методов расчета отдельных узлов и механизмов
Рассмотренные в учебнике примеры позволяют проследить последовательность
проектирования и расчета ракетного или ствольного артиллерийского комплекса при вы-
бранных тактико-технических требованиях
Материал учебника может быть разделен на три тематические логически увязанные
между собою части
1) основы баллистического и газодинамического проектирования ракетных и ствольных
комплексов.
2) кинетические основы проектирования ствольных зенитных и авиационных автоматов и
пусковых установок.
3) оценка точности стрельбы и боевой эффективности ракетных и ствольных комплек-
По боеприпасам, прицельным устройствам ствольных комплексов и боевым голов-
кам ракет даны только сведения, необходимые для оценки эффективности поражения
цели Радиоприборные и счетно-решающие устройства в общей проблеме проектирования
комплекса не рассматриваются и сведения о них ограничены лишь материалами, необхо-
димыми для анализа динамики контура управления ракетой, расчета вероятности
перехвата цели, и построения зон поражения комплекса в целом
Материал учебника излагается с учетом применявшихся до настоящего времени
терминологии и единиц физических величин, так как рассматриваемые методы проекти-
рования и расчетов во многом основаны на использовании уже изданных таблиц
внутренней и внешней баллистики и др . а также эмпирических формул и коэффициентов
(могущества систем, веса снаряда, использования заряда, запасов прочности и т и )
Перемежающееся использование в указанной литературе единиц измерений из аб-
солютной практической системы (МКС) и технической системы (МКТСС) в некоторых
случаях привело к определенной некорректности и неточности отдельных терминов, на-
пример. к двойственному использованию термина «вес объекта» (системы, снаряда,
ракеты ит д ) - и как характеристики силы тяжести (т е в точном значении термина), и
как характеристики, полученной в результате «взвешивании» объекта (т е эквивалентной
международному эталону массы)
Поскольку в указанной выше литературе для величин силы тяжести, давления, мас-
сы и некоторых других используются единицы с размерностями соответственно «кгс».
«кгс/см’». «кгс-с’/м» и т д . учитывая специфику книги в целях исключения разночтении
для характеристик объектов, определяемых «взвешиванием» (т е по содержанию харак-
теристик массы) и производных от них в учебнике сохранены термины «вес снаряда» (кг),
«вес заряда» (кг), «плотность заряжения» (кг/дм3), «сила пороха» (кгс-дм/кг). «коэффици-
ент веса снаряда» (кг/дм3), «поперечная нагрузка» (кг/дм2) и т и
В приложении 3 приведены соотношения между размерностями единиц физиче-
ских величин, используемых в учебнике, и таблица для их перевода в систему СИ
Учебник написан коллективом авторов гл I — Ю И Морозовым, гл II —В. Ф
Устиновым и Ю И Морозовым, гл III. IV. V. VII. IX — Б В Орловым, гл VI—В Ф Ус-
тиновым. гл VIII и § 7 11 —В В Алферовым, гл X—Б В Орловым. В И
Скоробогатским и А Е Хворостиным. гл XI —В А Светлицким. гл XII. XIII. XIV — Ю
И Топчеевым. гл XV — АП Бакулиным и Ю И Топчеевым. § 4 7 и 14 1 —Ю И Мо-
розовым В написании § 7 1 участвовал А А Королев. Б К Новиков и В И Строгалев. §
8 6 и 12 3 написаны В С Вдовиным
Авторы выражают глубокую благодарность Заслуженному деятелю науки и техни-
ки РСФСР, д-ру техн наук, проф Ю В Чуеву, д-ру техн наук, проф М И Кузьмину и
канд техн наук, доц А М Богородецкому за ценные замечания и советы, сделанные ими
при рецензировании рукописи книги
Авторы весьма признательны Б К Новикову. М И Патричной. Е Г Спиридонову.
Л И Колобаеву. И А Мухину и В И Строгалеву за большую помощь при подготовке
рукописи к печати
Отзывы и замечания просьба направлять по адресу Москва. Б-78. 1-й Басманный
пер , 3, изд-во «Машиностроение»
ВВЕДЕНИЕ
История развития артиллерийской науки, конструирования, производства артилле-
рийской техники и тактики ее применения свидетельствует о том. что отечественные
ученые в решении этих вопросов в основном шли своим путем, зачастую намного опере-
жая соответствующие исследования и работы за рубежом
Еще в 1586 г русским мастером А Чеховым была создана «царь-пушка» (калибр
— 890 мм. вес — 39 т) К началу XVIII в относится создание наиболее удачной системы
артиллерийского вооружения и правил использования его в бою В этот же период на воо-
ружении русской армии впервые появились осветительные ракеты Первые в мире орудия
с клиновыми затворами и механическими приводами, созданные в начале XVII в . и пред-
ложенные М В Даниловым. А К Нартовым и С А Мартыновым в XVIII в пушки-
единороги являлись лучшими образцами своего времени
Труды М В Ломоносова и Л Эйлера были основополагающими для развития та-
ких наук, как внешняя и внутренняя баллистика В 30—50 гг XIX в большие
исследования по созданию и совершенствованию боевых ракет были проведены А Д За-
сядко и К И Константиновым
Значительный качественный скачок в развитии артиллерии произошел во второй
половине XIX в Этому способствовали следующие обстоятельства
1 Изобретение бездымных порохов и сильных взрывчатых веществ (тротила), что по-
зволило резко увеличить дальность стрельбы и могущество действия снаряда у цели
2 Применение нарезной артиллерии позволило придать снаряду быстрое враще-
ние и. вследствие этого, обеспечить его высокую устойчивость на траектории и улучшить
кучность стрельбы Использование снаряда продолговатой формы дало возможность
уменьшить его аэродинамическое сопротивление по сравнению с ядром и повысить
благодаря этому дальность стрельбы, новая форма снаряда позволила также увеличить
количество взрывчатого вещества в снаряде и могущество действия его у цели
3 Производство орудийных сталей с высокой прочностью также способствовало
повышению могущества артиллерии
4 Изобретение русским конструктором В С Барановским противооткатных уст-
ройств позвонило уменьшить силы. воздействующие на лафет при выстреле и. как
следствие, снизить веса и габариты орудий, а также повысить их маневренность и устой-
чивость при выстреле
5 Создание прицельных приспособлений и основ теории стрельбы, наряду с улучше-
нием кучности и меткости. обеспечило возможность вести стрельбу с закрытых
позиций по невидимым целям
Немалый вклад в артиллерийскую науку внесли в этот период В С Барановский,
первый в мире сконструировавший 63.5-мм скорострельную пушку (1872—1875 гг) с
унитарным патроном, а также создатель пироколлодия Д И Менделеев, известные балли-
стики Н В Майевский и Н А Забудский. металлург Д К Чернов, основатель теории
проектирования скрепленных стволов АВ Гадолин. РА Дурляхов и др В 1903 г НФ
Дроздов впервые дал приемлемое для инженерной практики решение основной задачи
внутренней баллистики, позволившее позднее создать табличные методы ее расчета
В России в 1904 г капитаном Л Н Гобято и мичманом С Н Власьевым был изо-
бретен миномет, а в 1912 г Ф Ф Лендером создано первое в мире, зенитное орудие, в
1916 г появился прототип безоткатного оружия — «Труба Рябушинского».
После Великой Октябрьской социалистической революции до 1930г проводилась в
основном модернизация старых образцов вооружения Последующее развитие мощной
социалистической индустрии дало возможность разработать и внедрить в производство
самые современные образцы артиллерийских орудий
В этот период проводились большие работы по созданию артиллерийского воору-
жения различных видов Наиболее успешно работали, коллективы конструкторов под
руководством В. Г Грабина. Ф Ф Петрова. И И Иванова. Б И Шавырина Созданные
ими всемирно известные 57-мм пушка обр 1943 г . 76-мм пушка обр 1942 г., 122-мм гау-
бица обр 1938г. 152-мм гаубица-пушка обр 1937. 152-мм гаубица обр 1943 г, 120-мм
миномет обр 1938 г и многие другие образцы, вооружения сыграли выдающуюся роль в
Великой Отечественной войне
В развитие идеи Рябушинского известными русскими артиллеристами В М Тро-
фимовым и И Л Курчевским были предложены оригинальные схемы артиллерийских
безоткатных орудий
Параллельно с проектированием и производством артиллерийских, орудий и ми-
нометов советские конструкторы Е А Беркалов и В И Рдултовский создали новые типы
снарядов и взрывателей.
В немалой степени успешной работе конструкторов способствовали советские уче-
ные Д А Вентцель. П И Граве. В Д Грендаль. М Е Серебряков. Г В Оппоков, П А
Гельвих. Б Н Окунев. Э К Ларман. М И Крупчатников. В А Алексеев. Я М Шапиро,
М С Горохов. В Е Слухоцкий. Л Л Голочков и другие, внесшие большой вклад в артил-
лерийскую науку
Автоматическая артиллерия была создана по существу только в годы Советской
власти Развитие автоматических пушек связано, прежде всего, с появлением высокопод-
вижных целей (самолетов) В 1939 г на вооружение была принята 37-мм автоматическая
зенитная пушка, а в 1940 г — 25-мм автоматическая зенитная пушка
За годы Великой Отечественной войны и особенно в последний период произошли
значительные изменения в летно-технических характеристиках воздушных целей и в так-
тике их применения Резко возросли скорости и маневренность самолетов Это в большой
степени затруднило борьбу артиллерии с авиацией противника, так как уменьшилось вре-
мя нахождения цели в зоне действительного огня орудия
Эффективность стрельбы зенитной артиллерии была значительно, повышена бла-
годаря полной автоматизации в орудиях процессов перезаряжания и производства
выстрела, а также наведения орудия и установки взрывателя Автоматическая установка
взрывателя по упрежденной наклонной дальности, вырабатываемой прибором управления
артиллерийским зенитным огнем, а также появление неконтактных взрывателей, открыли
возможность для автоматизации орудий не только мелкого и среднего калибров, ведущих
ударную стрельбу, но и орудий, крупного калибра для дистанционной стрельбы
В области теории и практики проектирования автоматов можно выделить работы
В Г Федорова. А А Благонравова. А Э Нудельмана. Л В Люльева. А А Рихтера. Э А
Горова. И. И Жукова. М А Мамонтова. В А Малиновского и др
Совершенно новым видом вооружения Советской Армии стали ракеты. Заложен-
ные в трудах Н Е. Жуковского. К Э Циолковского. И В Мещерского. Ф А Цандера. Ю
В Кондратюка теоретические основы ракетостроения были претворены в жизнь коллек-
тивами. работавшими под руководством талантливых конструкторов-ученых Б С
Петропавловского. С П Королева. В П Глушко. Г Э Лангемака. В В Разумова. И Т
Клейменова и др
Первые разработки носили в основном поисковый характер, но уже перед Великой
Отечественной войной на вооружение самолетов поступили реактивные снаряды РС-82 и
РС-132. а во время войны прославились гвардейские реактивные минометы — боевые
машины БМ-13 В послевоенные годы, используя достижения радиотехники, радиоэлек-
троники. вычислительной техники и других наук созданы новые образцы управляемого и
неуправляемого ракетного оружия, способного успешно выполнять во взаимодействии с
другими видами вооружения различные боевые задачи
Доказательством несомненных успехов советской науки и техники в ракетострое-
нии являются грандиозные достижения в освоении космического пространства
Образцы артиллерийского вооружения и. в частности, ракетные и ствольные сис-
темы разрабатываются на основе тактико-технических требований (ТТТ) На основании
анализа современной военной стратегии и тактики опыта использования военной техники
в прошлых войнах, состояния науки и экономики можно сформулировать определенные
общие требования к вооружению, которые условно разделим на три группы
1 Боевые требования — понятие инженерно-тактическое и его определяет комплекс
технических характеристик вооружения
а) высокая боевая эффективность — обеспечение заданного уровня вероятности пораже-
ния типичных воздушных целей. имеющих заданный диапазон летно-технических
характеристик, быстродействие и помехозащищенность системы управления снарядом,
осуществление поражения маневрирующей цели на безопасном расстоянии от защищае-
мого объекта; всепогодность действия управляемых комплексов.
б) маневренность, хотя и тактическое понятие, но в целом зависит от технических воз-
можностей вооружения В это понятие включается, с одной стороны, подвижность
комплекса, зависящая от его весовых и габаритных характеристик, удобство транспорти-
ровки на любой местности и в любой обстановке (в том числе и
аэротранспортабельность), с другой. - свойства, относящиеся к гибкости огня (быстрота
развертывания комплекса, возможность переноса огня с одной цели на другую и т и ).
в) надежность — долговечность, безотказность и восстанавливаемость вооружения в по-
левых условиях
2 Экономические требования включают в себя стоимость вооружения, сроки его из-
готовления и ремонта, возможность модернизации
Эти показатели вооружения, в конечном итоге, зависят от
а) технологичности конструкции элементов комплекса.
б) взаимозаменяемости и стандартизации деталей и узлов, обеспечивающих массовость
производства, простоту ремонта и т д .
в) применения современных методов технологии.
г) использования освоенных в производстве и унифицированных деталей, механизмов,
агрегатов;
д) пригодности, по возможности, оборудования и оснастки для выпуска не только воен-
ной. но и мирной продукции
3 Эксплуатационные требования к вооружению определяются
а) простотой и удобством обслуживания.
б) возможностью быстрого обучения личного состава войск эксплуатации вооружения,
в) безопасностью его использования
На основании общих требований к системе вооружения составляются тактико-
технические требования (ТТТ) или технические задания (ТЗ) на проектирование и произ-
водство отдельных ее образцов и их элементов (см гл I и работы [4, 9, 17, 18]).
В общем случае процесс разработки новой ракетной или ствольной системы вклю-
чает в себя следующие основные этапы
1) поисковые работы и предварительное исследование возможных вариантов конструк-
тивной реализации заданных ТТТ и их оценка,
2) разработка эскизного проекта.
3) разработка технического проекта.
4) стендовая отработка опытных образцов и их отдельных элементов, которая может сов-
падать с этапами эскизного и технического проектирования,
5) испытания (заводские, полигонные, государственные, войсковые) опытных образцов и
их оценка
Глава I
СТРУКТУРА, СОСТАВ И НАЗНАЧЕНИЕ РАКЕТНЫХ
И СТВОЛЬНЫХ КОМПЛЕКСОВ
Комплексом называется наименьшая единица вооружения, обеспе-
чивающая выполнение боевой задачи. Для поражения различных типов
воздушных или наземных целей ракетные и ствольные зенитные комп-
лексы, а также подразделения авиации с соответствующим вооружени-
ем, могут объединяться в группировки. При объединении комплексов в
группировку средств 'Противовоздушной обороны (ПВО) снаряды зе-
нитных пушек и ракеты поражают воздушные цели (самолеты, вертоле-
ты, тактические ракеты «поверхность — поверхность» и ракеты «воз-
дух— поверхность»). А при установке ракет и пушек, например, на
самолетах-штурмовиках, объединяемых в ударные авиационные группы,
ракетные и ствольные комплексы предназначаются для поражения
наземных целей (танков, бронетранспортеров и автомашин, пехоты, ра-
диолокационных станций, пусковых установок и т. п.).
Объединение ракетных и ствольных комплексов в группировки по-
вышает эффективность их боевого применения, особенно в условиях
активного и пассивного противодействия противника. При выходе из
строя отдельных устройств в группировке, хотя и снижается эффектив-
ность действия, однако в целом группировка обеспечивает достаточно
высокую боеспособность.
§ 1.1. ОБЩАЯ ХАРАКТЕРИСТИКА БОЕВОЙ ЭФФЕКТИВНОСТИ КОМПЛЕКСОВ
Эффективность -боевого применения оценивается с -помощью крите-
рия эффективности группы ЕГр (см. гл. XV). Рассмотрим некоторую ус-
ловную группировку комплексов, образующую соединение ПВО
(рис. 1.1) [19]. Ширина полосы обороны Z выбирается из условий опе-
ративно-тактической обстановки. В этой полосе в глубину от линии бо-
евого соприкосновения (ЛВС) располагаются наземные радиолокаци-
онные станции (РЛС), обеспечивающие своевременное определение
параметров воздушных целей в радиусе /? и их передачу на командный
пункт (КП). На командном пункте принимается решение о применении
тех или иных средств поражения противника (малокалиберная зенитная
артиллерия—МЗА, ракеты — ЗУР, истребители-перехватчики), из усло-
вий -возможного положения рубежей ПВО по ширине В. В полосе Z
должно быть несколько групп средств поражения. Это исключает воз-
можность беспрепятственного проникновения противника вглубь оборо-
няемой территории.
Введем следующие обозначения: Dc — рубеж перехвата истребите-
лями; — дальняя граница зоны поражения снарядами МЗА. Из
рис. 1.1. видно, что граница зон поражения воздушных целей противни-
ка расположена впереди границы обороны объекта, а ее глубина рав-
ва /. Количество средств ПВО для поражения воздушных целей на глу-
бине L выбирается так, чтобы при различных способах налета против-
ника на объект обеспечивалась заданная эффективность поражения це-
лей Бгр. Значительный состав средств поражения требует обеспечения
определенной вероятности нахождения комплекса в состоянии боевой
готовности и получения вероятности перехвата различными сред-
ствами №с. На эффективность боевого применения групп оказывают
существенное влияние противодействия противника, оцениваемое веро-
ятностью №пр, а также влияние внешних условий (погоды и т. д.), кото-
рое характеризуется вероятностью TFBH. Имея это в виду, можно напи-
сать
(1.1)
Условные обозна чения:
ттЛЯЯ-граНиЦЯ ОбОрОНЫ
^-стартовые позиции ЗУР
ъя^-азродромь! истребитевеи-
т%%&-перехдатчико&
4__^-батареи МЗА
i “ РЛС 5 а марей МЗА
'g-P/IC ЗУР
РАС дальнего обнаружения
и наб ед гния истребителей-
-перехватчиков
гш-котндный. пункт
1 подразделения ПВО
^п^-командный пункт батареи
кпркУРП -командный пункт ракетного
комплекса
Рис. 1.1. Схема размещения групп ракетных и ствольных зенитных и авиационных
комплексов ПВО
Величина Wr средств поражения оценивается по формуле
(1.2)
где 7б.г— среднее время нахождения всех средств ПВО в боевом со-
_ стоянии;
^н.б.г — среднее время нахождения всех средств ПВО в небоевом
состоянии (ремонт, выход из строя в результате боевых дей-
ствий и т. п.).
Для определения значений Гс.г и Тн.б.г можно пользоваться следую-
щими зависимостями:
где Гр — время межрегламентного периода;
Г6—время безотказной работы всех средств перехвата;
Т3 ч — время ожидания запасных частей;
Л.ч— вероятность получения запасных частей;
70б — время, затрачиваемое на обнаружение отказа;
Рноб — вероятность появления необнаруживаемого отказа;
рем
— время, затрачиваемое на ремонт.
Необходимо отметить, что
эффективность боевого примене-
ния ракетных и особенно авиаци-
онных комплексов в значитель-
ной степени зависит от времени
Гн.б.г, так как велики Тоб и 7рем.
Это приводит к необходимости
увеличения средств ПВО в обо-
роняемой полосе.
Существенное значение на
вероятность поражения оказы-
вает высота полета самолета-це-
ли. На рис. 1.2 показаны кривые,
характеризующие изменение ве-
роятности Wc для зенитной ар-
тиллерии (кривые 1) и зенитных
ракет (кривые 2). Область наи-
более рационального применения
зенитной артиллерии выделена
штриховкой [14, 5]. Для МЗА эта
область заключена в пределах от
wT 50 до 2000 м. Область рацио-
6
Рис. 1.2. Графики зависимости эффектив-
ности поражения целей ракетными и
ствольными комплексами от высоты по-
лета
нального применения зенитных
ракет находится в пределах от
500 до 20 000 м \ Следует также
указать, что увеличение скорости
полета воздушных целей у Земли
и на высоте оказывает некоторое
влияние на расположение кривых 1 и 2. С ростом скорости уменьшается
вероятность поражения воздушных целей как зенитными ракетами, так
и при стрельбе из пушек.
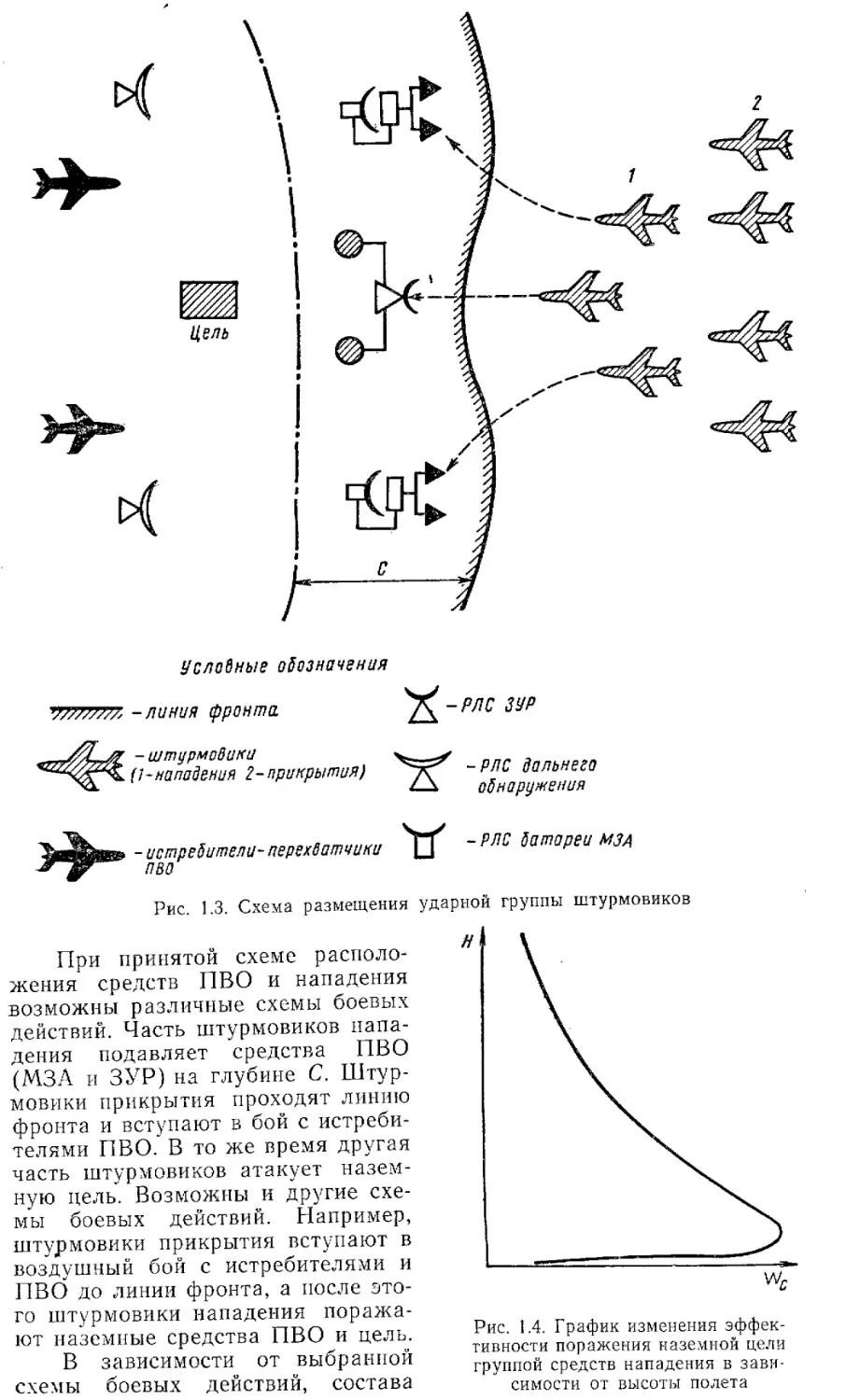
Рассмотрим действие состава условной ударной авиационной груп-
пы нападения, состоящей из семи штурмовиков. Три самолета-штурмо-
вика выполняют боевую задачу прорыва фронта и атаки цели, подавляя
наземные средства ПВО неуправляемыми ракетами, ракетами «воз-
дух—-поверхность» и стрельбой из пушек. Четыре самолета прикрыва-
ют боевые действия атакующих штурмовиков от истребителей ПВО
противника (рис. 1.3) [19].
1 В последние годы стали получать распространение зенитные маловысотные раке-
ты типа «Хоук», способные поражать воздушные цели на высотах меньше 150 м [15].
Условные обозначения
^7/ZW/z -линия фронта
- РЛС ЗУР
- штурмовики
(/- нападения 2 - прикрытия)
-РЛС дальнего
обнаружения
- истребители-перехватчики
ПВО
- РЛС батареи мзд
Рис.
1.3. Схема размещения
При принятой схеме располо-
жения средств ПВО и нападения
возможны различные схемы боевых
действий. Часть штурмовиков напа-
дения подавляет средства ПВО
(МЗА и ЗУР) на глубине С. Штур-
мовики прикрытия проходят линию
фронта и вступают в бой с истреби-
телями ПВО. В то же время другая
часть штурмовиков атакует назем-
ную цель. Возможны и другие схе-
мы боевых действий. Например,
штурмовики прикрытия вступают в
воздушный бой с истребителями и
ПВО до линии фронта, а после это-
го штурмовики нападения поража-
ют наземные средства ПВО и цель.
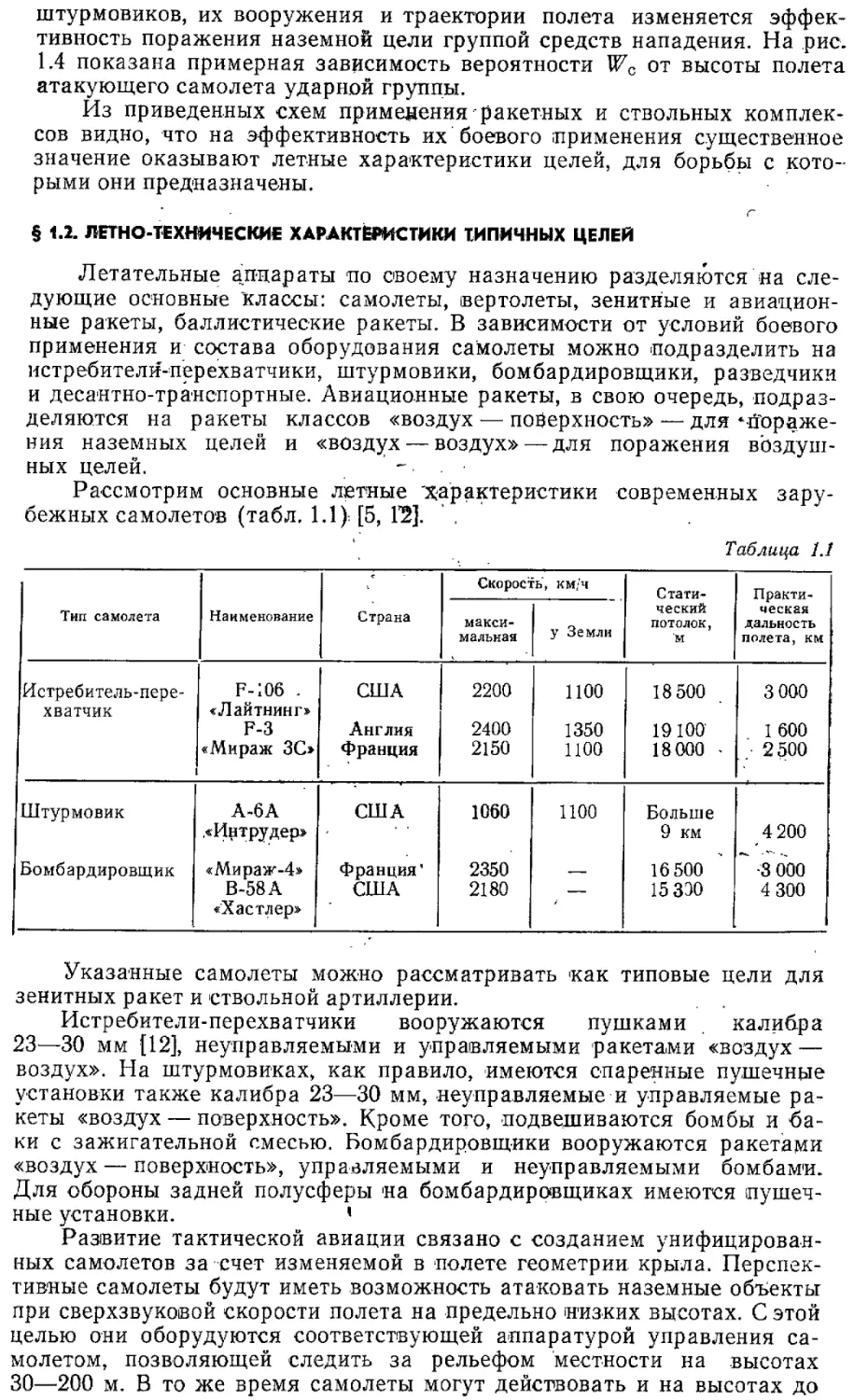
В зависимости от выбранной
схемы боевых действий, состава
ударной группы штурмовиков
Рис. 1.4. График изменения эффек-
тивности поражения наземной цели
группой средств нападения в зави-
симости от высоты полета
штурмовиков, их вооружения и траектории полета изменяется эффек-
тивность поражения наземной цели группой средств нападения. На рис.
1.4 показана примерная зависимость вероятности Wzc от высоты полета
атакующего самолета ударной группы.
Из приведенных схем применения ракетных и ствольных комплек-
сов видно, что на эффективность их боевого применения существенное
значение оказывают летные характеристики целей, для борьбы с кото-'
рыми они предназначены.
§ 1.2. ЛЕТНО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ТИПИЧНЫХ ЦЕЛЕЙ
Летательные аппараты по своему назначению разделяются на сле-
дующие основные Классы: самолеты, вертолеты, зенитные и авиацион-
ные ракеты, баллистические ракеты. В зависимости от условий боевого
применения и состава оборудования самолеты можно подразделить на
истребители-перехватчики, штурмовики, бомбардировщики, разведчики
и десантно-транспортные. Авиационные ракеты, в свою очередь, подраз-
деляются на ракеты классов «воздух — поверхность» — для ‘Пораже-
ния наземных целей и «воздух — воздух» — для поражения воздуш-
ных целей. "
Рассмотрим основные летные 'характеристики современных зару-
бежных самолетов (табл, 1.1): [5, Г2].
Таблица 1.1
Тип самолета Наименование Страна Скорость, км/ч Стати- ческий потолок, ’М Практи- ческая дальность полета, км
макси- мальная •l у Земли
Истребитель-пере- хватчик F-106 . «Лайтнинг» F-3 «Мираж ЗС> США Англия Франция 2200 2400 2150 1100 1350 1100 18 500 19 100 18000 ’ 3 000 I 600 2500
Штурмовик Бомбардировщик А-6 А «Ин труд ер» «Мираж-4» В-58 А «Хастлер» США Франция’ США 1060 2350 2180 1100 г Больше 9 км 16 500 15 330 4200 3 000 4 300
Указанные самолеты можно рассматривать как типовые цели для
зенитных ракет и ствольной артиллерии. . .
Истребители-перехватчики вооружаются пушками калибра
23—30 мм [12], неуправляемыми и управляемыми ракетами «воздух —
воздух». На штурмовиках, как правило, имеются спаренные пушечные
установки также калибра 23—30 мм, неуправляемые и управляемые ра-
кеты «воздух — поверхность». Кроме того, -подвешиваются бомбы и ба-
ки с зажигательной смесью. Бомбардировщики вооружаются ракетами
«воздух — поверхность», управляемыми и неуправляемыми бомбами.
Для обороны задней полусферы на бомбардировщиках имеются пушеч-
ные установки. ’
Развитие тактической авиации связано с создание^м унифицирован-
ных самолетов за счет изменяемой в полете геометрии крыла. Перспек-
тивные самолеты будут иметь возможность атаковать наземные объекты
при сверхзвуковой скорости полета на предельно низких высотах. С этой
целью они оборудуются соответствующей аппаратурой управления са-
молетом, позволяющей следить за рельефом местности на высотах
30—200 м. В то же время самолеты могут действовать и на высотах до
30 км. Разрабатываемые самолеты предполагается снабжать как мощ-
ным вооружением (в том числе ракетами «воздух — поверхность», на-
пример типа «Шрайк»), так и средствами радиопротиводействия, позво-
ляющими получить высокие плотности помех [5, 12].
Войсковые зенитные комплексы участвуют в защите войск от воз-
душных средств нападения.
Характеристики авиационных ракет класса «воздух — воздух» и
«воздух — поверхность» приведены в тарл. 1.2 [2, 5, 15].
Таблица 1.2
Тип ракеты Наименование Страна Диаметр, м Стартовый вес, кг Вес бое- вой части, кг Назначение
„Воздух — воздух“ „Сайдуиндер" АР-8 США 0,127 70 11,3 Поражение само- летов в воздухе
„Матра“ R-530 Франция 0,26 195 30 То же
- „Феникс" AJM-54A США 0,38 450 25
„Воздух — поверх- ность" „Булнап" GAM-83B США 0,3 200 113 Поражение назем- ных малоразмер- ных целей
.Норд* AS-30 Франция 0,35 665 230 То же
„Шрайк* AQM-45A США 0,21 230 18 Поражение назем- ных РЛС
Основные характеристики войсковых ракет класса «поверхность —
поверхность» приведены в табл. 1.3 [5, 6, 12].
Таблица 1.3
Тип ракеты Наименование Страна Диаметр, м Вес, кг Вес боевой части, кг Макси- мальная дальность полета, км Макси- мальная скорость полета *
Оператив- но-такти- .Сержант* М-26 США 0,79 4540 750 (ядерная) 160 3,5 М
ческие .Першинг* MGM-31A США 1 4500 750 (ядерная) 540 4,5 М
Тактические „Литл - Джон" М-51 США 0,3 365 115 (ВВ) 10 1,5 М
* М — от! „Онест-Джон" М-31 юшение скорости л США олета ракет 0,76 ы к скорое 2200 2ТИ ЗВУК 680 (ядерная) а. 20 1,5 М
Данные табл. 1.1, 1.2 и 1.3 показывают, что современные средства
нападения характеризуются широким диапазоном скоростей, высот, раз-
личной маневренностью, разнообразной тактикой применения, наличием
мощного радиопротиводействия противнику.
§ 13. СОСТАВ РАКЕТНЫХ И СТВОЛЬНЫХ ЗЕНИТНЫХ
И АВИАЦИОННЫХ КОМПЛЕКСОВ
Для успешной защиты войск от нападения с воздуха ракетные и
ствольные зенитные комплексы должны обладать высокими тактико-тех-
ническими характеристиками и хорошей организацией ведения огня.
Рис. 1.5. Системы координат для зенитной
стрельбы
Рассмотрим принципиальную
структуру и схему работы зе-
нитных ракетных комплексов
(ЗРК).
Весь процесс боевой рабо-
ты ЗРК при стрельбе по воз-
душной цели можно разделить
на следующие основные опера-
ции: обнаружение воздушной
цели; ее опознавание; целерас-
пределение; определение мо-
мента пуска ЗУР; наведение
ЗУР; поражение цели. Для уп-
равления стрельбой по зенит-
ным целям служит последова-
тельный ряд приборов и уст-
ройств, выполняющих эти опе-
рации.
Прежде всего должны быть
определены координаты воз-
душной цели (рис. 1.5). Обыч-
но для определения положения цели, находящейся в рассматриваемый
момент времени в точке А, используют одну из следующих систем коор-
динат:
Рис. 1.6. Блок-схема ЗРК с командной системой наведения
к огневому
комплексу
— сферическую (D — наклонная дальность, |3 — азимут, который
отсчитывается от какого-либо ориентированного направления, чаще все-
го меридиана Север — Юг, в — угол места цели);
— коническую (Н — высота полета цели, углы ей |3);
— цилиндрическую (d — горизонтальная дальность, Н— высота
полета цели, угол Р);
— прямоугольную с координатами х, у, z.
Положение вектора скорости цели Кц в пространстве задается кур-
совым углом q и углом к, называемым углом кабрирования при Z>0 и
углом пикирования при Л<0.
Параметр Р называют иногда курсовым параметром цели.
Структура ЗРК определяется системой наведения ракеты на цель
(командный метод, самонаведение или комбинация этих способов).
На рис. 1.6 представлена блок-схем^ ЗРК с командной системой
наведения.
Станция обнаружения (СО) осуществляет операцию обнаружения
цели (целей) и определения ее координат. По информации, поступаю-
щей с СО (координаты цели в функции времени), на командном пункте
(КП) рассчитываются параметры движения воздушной цели (положе-
ние и величина вектора скорости), а по ним — траектория ее будущего
движения. Определение траектории будущего движения цели часто на-
зывают решением задачи пролонгации, которое осуществляется на циф-
ровой или аналоговой ЭВМ или счетно-решающем приборе (СРП) спе-
циального назначения.
Такими же машинами осуществляется решение задачи целераспре-
деления. Операция целераспределения заключается в выборе и назна-
чении воздушной цели для обстрела тому или иному ЗРК. Командный
пункт связан взаимной информацией о воздушной обстановке с огневы-
ми комплексами, соседними зенитными частями, штабами войск, ко-
мандными пунктами ПВО войск и т. д.
В состав СО входит система опознавания. Операция опознавания
осуществляется после обнаружения цели и заключается в определении
ее принадлежности («свой», «чужой»).
По результатам решения задачи целераспределения на КП прини-
мается решение о назначении для обстрела цели тому или иному огне-
вому комплексу. В состав огневого комплекса входят: станция сопро-
вождения цели (ССЦ), СРП, станция наведения ЗУР (СН), станция
передачи команд (СПК), пусковые установки (ПУ). Станция сопровож-
дения цели по информации, поступающей с КП, производит захват (об-
наружение) цели и ее непрерывное сопровождение. На ССЦ определя-
ются координаты цели в функции времени: D(t), р(0, s(0- Эти коор-
динаты, либо их производные [П(/), р(/), s(/)] поступают в СРП.
В СРП, по исходным данным от ССЦ, решаются следующие задачи:
определение параметров движения цели; расчет положения упрежден-
ной точки; отработка углов наведения (угла возвышения и азимута
пусковой установки); определение момента пуска ЗУР; расчет управ-
ляющих команд для ЗУР во время ее полета в соответствии с принятым
методом наведения; определение момента подрыва боевой части ЗУР.
В ЗРК с самонаведением ЗУР отсутствуют станция наведения и
станция передачи команд.
Устройство зенитных комплексов рассмотрим на примере войсковых
комплексов «Роланд-2» и «Хоук» [14, 15].
Комплекс «Роланд-2» (рис. 1.7) состоит из радиолокационной си-
стемы обнаружения и опознавания целей /. Антенна РЛС имеет много-
лепестковую диаграмму направленности и вращается с башней самоход-
ного бронетранспортера с постоянной скоростью. При появлении в зоне
обнаружения самолета на индикаторе возникают отметки, характери-
зующие положение цели. Если целью является противник, то оператор
наводит на цель антенну радиолокатора наведения 2 и оптический при-
цел 3, совмещая для этого соответствующие индексы индикатора по
азимуту, углу места и дальности. Момент пуска определяется в СРП.
Управление полетом ракеты 10 может осуществляться автоматиче-
ски. В этом случае сигналы, пропорциональные угловому отклонению
между целью и ракетой и угловой скорости линии визирования, посту-
пают в СРП, где вырабатываются команды наведения, передаваемые
на борт ракеты с помощью радиолокационной станции. При переходе с
автоматического режима управления полетом ракеты на полуавтомати-
ческий, оператор сопровождает цель через оптический прицел 3, а спе-
циальное инфракрасное устройство 7, постоянно направленное на фа-
кел 8 трассера 9 ракеты, дублирует слежение за полетом ракеты.
Оптический прицел, инфракрасное оборудование, радиолокатор
наведения, гидроприводы поворота башни- и направляющие для пуска
ракет размещены в верхней части башни; передатчик команд 5, СРП 4
и сиденье оператора — в нижней части бронетранспортера.
Скользящие контакты соединяют башню с источником питания 6
и блоками радиолокационного оборудования, размещенными в корпусе
бронетранспортера.
В заключение рассмотрим схему размещения комплекса зенитных
эакет «Хоук» (рис. 1.8). В комплекс входят: I и II — батареи ракет;
Л—позиция средств системы управления. Радиолокационная станция
обнаружения целей 1 (импульсная) или 2 (доплеровская) обнаружива-
ют цели и посылают их координаты на командный пост 5, который вы-
рабатывает команды управления пусковыми установками 6 и РЛС под-
света цели 4. Радиодальномер 3 при работе непрерывных станций под-
света измеряет все время дальности до цели и посылает результаты на
пост 5. Электропитание РЛС, следящих приводов пусковых установок
и командного поста управления огнем обеспечивается генераторами 7.
Схема взаимной связи ЗРК «Хоук» изображена на рис. 1,9, где
условно показаны линии сигналов: 1 —подготовки к пуску; 2 — запроса
точной дальности до цели; 3— данных о точной дальности до цели; 4 —
данных об азимуте цели; 5 — целеуказания; 6 — данных о сопровождае-
мой цели; 7 —координат пусковой установки; 8 — команды на пуск ра-
кеты; 9 — данных об обнаруженной цели; 10 — информации от команд-
ных пунктов системы ПВО.
Как видно из рисунка, ракетный комплекс «Хоук» входит в соедине-
ние ПВО, для чего существует линия связи 10, по которой поступает
информация от других командных пунктов ЗРК (см. рис. 1.1).
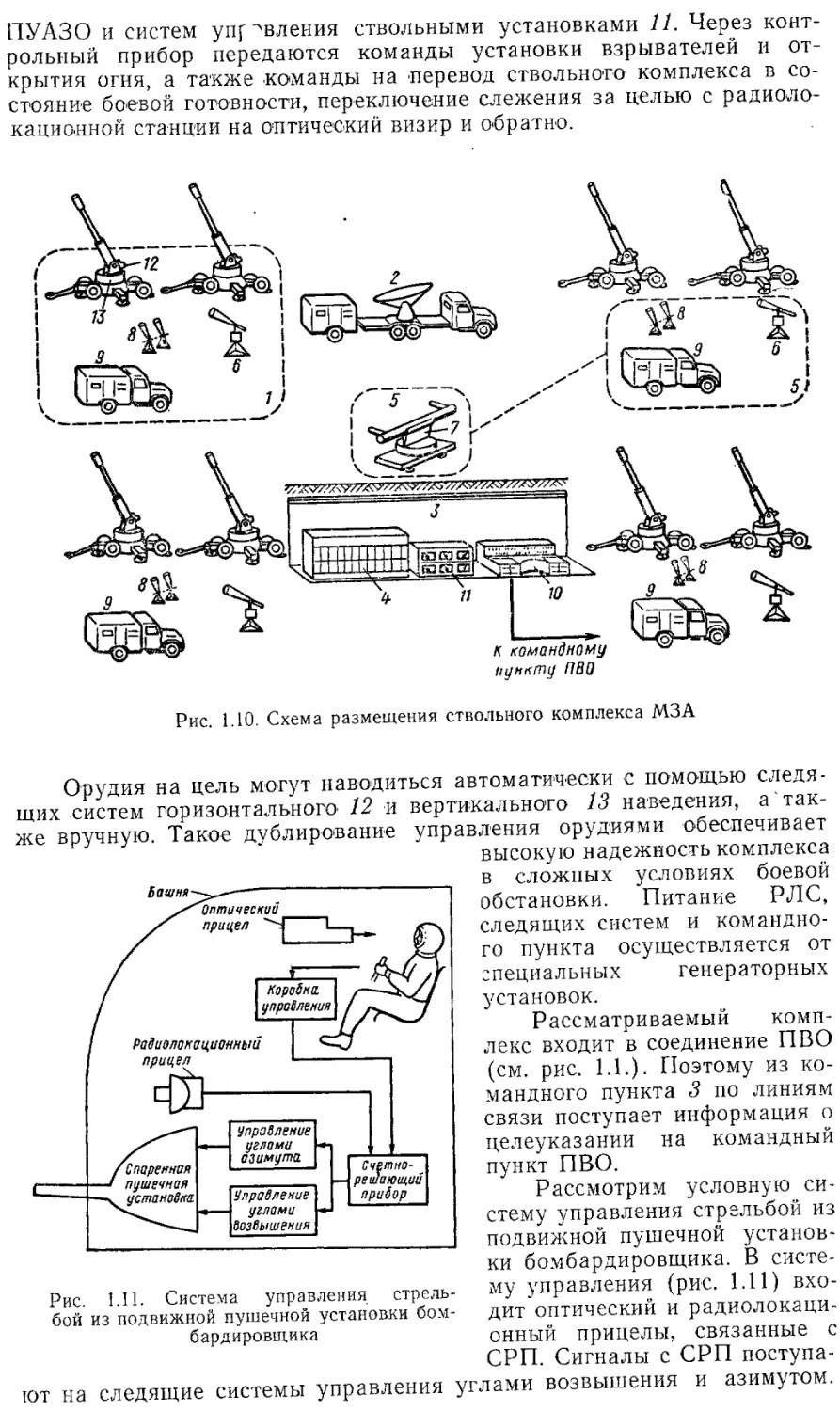
Зенитный ствольный комплекс состоит из артиллерийской батареи
4-х и 8-ми орудийного состава, расположенной на огневой позиции 1
(рис. 1.10). Обнаружение и опознавание воздушной цели производится
с помощью РЛС кругового’ или секторного обзора 2. Данные с РЛС по-
ступают на командный пункт <3, где координаты цели снимаются и пере-
даются на ЦВ/М 4 для решения задачи о целераспределении. Координа-
ты цели, которая является наиболее опасной, передаются на тот огневой
комплекс, который с наибольшей вероятностью может обеспечить пора-
жение цели. Задача о точке встречи снаряда с целью решается
ПУАЗО 5. В комплект ПУАЗО входят радиолокационный или оптиче-
ский визир 6, дальномер 7 и СРП 9. Для измерения скорости цели слу-
жит радиолокатор S.
Рис. 1.8. Схема размещения ЗРК «Хоук»
Рис. 1.9. Схема взаимной связи ЗРК «Хоук»
Из рис. 1.10 видно, что ПУАЗО может работать как по данным РЛС,
так и определяемым оператором с помощью оптического визира. Пере-
ключение с одного режима на другой производится с помощью нажатия
специальной кнопки, установленной на командном пункте батареи 10.
Здесь же установлена аппаратура контроля неисправности РЛС,
ПУАЗО и систем управления ствольными установками И. Через конт-
рольный прибор передаются команды установки взрывателей и от-
крытия огня, а также команды на перевод ствольного комплекса в со-
стояние боевой готовности, переключение слежения за целью с радиоло-
кационной станции на оптический визир и обратно.
пункту ПВО
Рис. 1.10. Схема размещения ствольного комплекса МЗА
Орудия на цель могут наводиться автоматически с помощью следя-
щих систем горизонтального 12 и вертикального 13 наведения, а'так-
же вручную. Такое дублирование управления орудиями обеспечивает
Рис. 1.11. Система управления стрель-
бой из подвижной пушечной установки бом-
бардировщика
высокую надежность комплекса
в сложных условиях боевой
обстановки. Питание РЛС,
следящих систем и командно-
го пункта осуществляется от
специальных генераторных
установок.
Рассматриваемый комп-
лекс входит в соединение ПВО
(см. рис. 1.1.). Поэтому из ко-
мандного пункта 3 по линиям
связи поступает информация о
целеуказании на командный
пункт ПВО.
Рассмотрим условную си-
стему управления стрельбой из
подвижной пушечной установ-
ки бомбардировщика. В систе-
му управления {рис. 1.11) вхо-
дит оптический и радиолокаци-
онный прицелы, связанные с
СРП. Сигналы с СРП поступа-
ют на следящие системы управления углами возвышения и азимутом.
$ 1.4. ХАРАКТЕРИСТИКА РАДИОЛОКАЦИОННЫХ СТАНЦИИ
И ГОЛОВОК САМОНАВЕДЕНИЯ
Радиолокационные станции
Радиолокационные станции ракетных, авиационных и артиллерий-
ских комплексов предназначены для обнаружения, опознавания, целе-
указания, сопровождения и наведения на цели [14, 15]. Часть простран-
ства, в которой радиолокационные станции обнаруживают цель, называ-
ется зоной обнаружения. Зона обнаружения характеризуется углом
места и азимутом, а также дальностью действия радиолокатора
(рис. 1.12).
Рис. 1.12. Зоны обнаружения, захвата и сопровождения радиолокационными станциями
зенитного комплекса:
а — по углу места; б — по азимуту
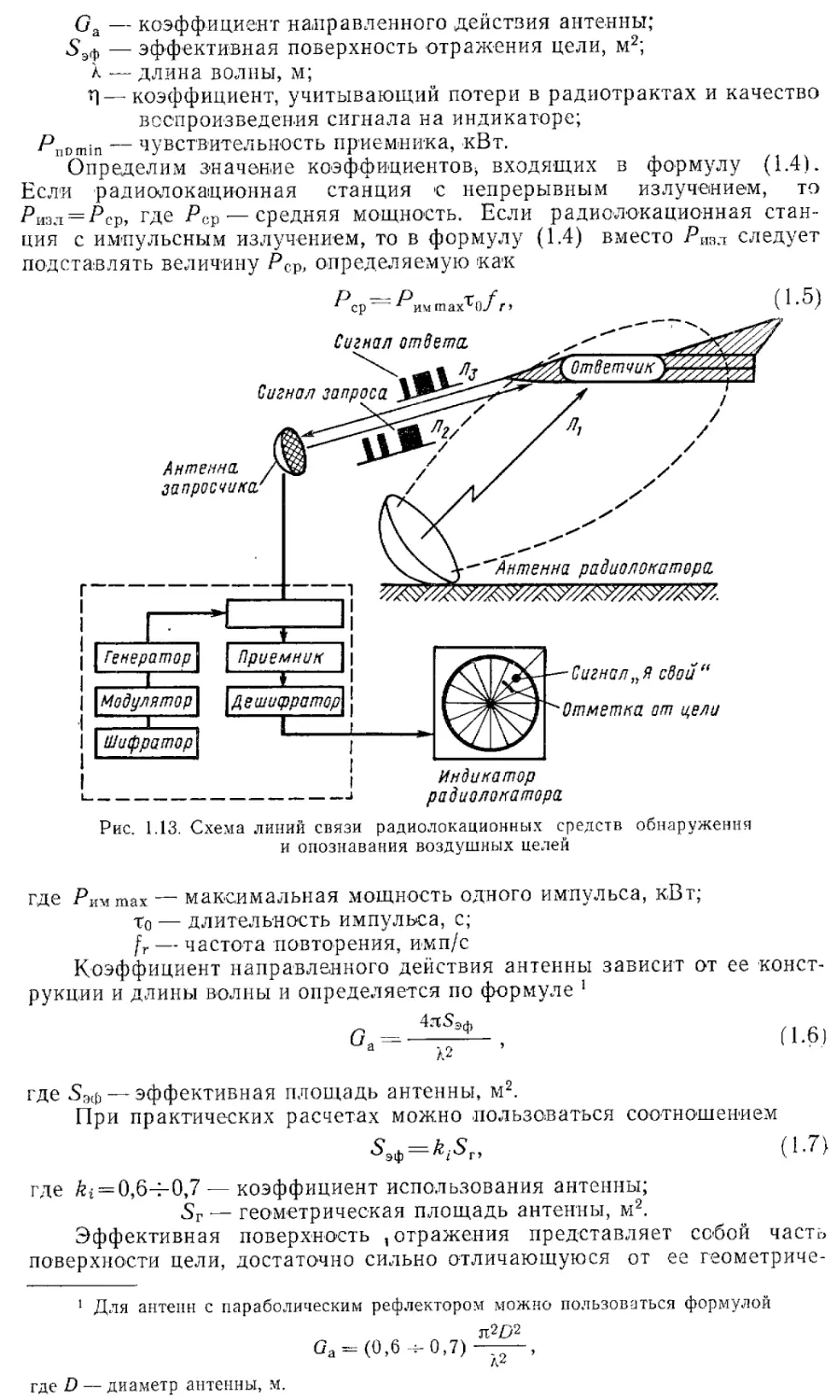
Опознавание производится в зоне обнаружения посылкой определен-
ной последовательности импульсов по радиоканалу антенной запроса.
Если летит свой самолет, то от ответчика самолета'поступает сигнал по
каналу связи на приемник, а затем на индикатор станции. Оператор визу-
ально видит метку, показывающую, что это свой самолет — «Я свой;>
(рис. 1.13). В тех случаях, когда летит чужой самолет, па индикаторе
станции отсутствует отметка о принадлежности самолета.
По мере подлета самолета к цели увеличивается величина отражен-
ного' сигнала и после достижения определенного уровня происходит за-
хват радиолокационной станцией цели. Зона захвата цели также харак-
теризуется углами места, азимутом и дальностью (см. рис. 1.12).
Дальности действия радиолокационной станции в режимах обнару-
жения или захвата целей определяется по формуле [3]
(1.4)
где D — дальность действия РЛС, м;
а—коэффициент нормирования дальности, учитывающий вероят-
ный характер обнаружения или захвата цели;
Ри3л — мощность излучения передатчика станции, кВт;
Ga — коэффициент направленного действия антенны;
5эф — эффективная поверхность отражения цели, м2;
X — длина волны, м;
Л—коэффициент, учитывающий потери в радиотрактах и качество
воспроизведения сигнала на индикаторе;
Aomin — ЧуВСТВИТеЛЬНОСТЬ ПрИвМНИКЗ, кВт.
Определим значение коэффициентов^ входящих в формулу (1.4).
Если радиолокационная станция с непрерывным излучением, то
Риэл = Рср, где Рс-р — средняя мощность. Если радиолокационная стан-
ция с импульсным излучением, то в формулу (1.4) вместо РИЗл следует
подставлять величину PCJh определяемую как
им max
г >
Модулятор
1
Шифратор
Индикатор
-----------□ радиолокатора
Рис. 1.13. Схема линий связи радиолокационных средств обнаружения
и опознавания воздушных целей
где Рим max — максимальная мощность одного импульса, кВт;
То — длительность импульса, с;
fr — частота повторения, имп/с
Коэффициент направленного действия антенны зависит от ее конст-
рукции и длины волны и определяется по формуле 1
где 5Эф — эффективная площадь антенны, м2.
При практических расчетах можно пользоваться соотношением
где ki = 0,64-0,7 — коэффициент использования антенны;
Sr — геометрическая площадь антенны, м2.
Эффективная поверхность t отражения представляет собой часть
поверхности цели, достаточно сильно отличающуюся от ее геометриче-
1 Для антенн с параболическим рефлектором можно пользоваться формулой
Ga = (0,6 -т-0,7) ——,
где D — диаметр антенны, м.
ской поверхности. Обычно значение эффективной поверхности отражения
определяется экспериментальным путем или моделированием. Средние
экспериментальные значения 5Эф при А = 3~~ 10 см для различных целей
приведены в табл. 1.4 [3, 19].
Таблица 1А
Тип целей 5эф’ “2
Истребители-перехватчики j. . . . . Бомбардировщики Подводные лодки в надводном состоянии . . . Морские корабли (водоизмещением 1—3 тыс. тонн) Морские корабли (водоизмещением 10—20 тыс. тонн) 5-15 40—150 40—100 3 020—10 000 15000-20 000
Рис. 1.14. Графики вероятности обнаружения и захвата целей в
функции от параметров F и L
Чувствительность приемника .можно определить по формуле
Р„рПйп=М7а-^Д^. (1-8)
где Лфтт — чувствительность приемника, кВт;
k^=P^Pm — коэффициент шум-фактора приемника [здесь
— мощность шума на выходе 1-го каскада
приемника, пересчитанная к входу в кВТ;
/У - мощность шума на входе 1-го каскада в кВт (при
Л = 3-у10 см, km = 15 дБ)];
kx = 1,37• 10~23 Вт.с — -постоянная Больцмана;
Га—абсолютная температура эквивалентного сопро-
тивления на входе приемника (при практических
расчетах обычных приемников принимают
Та = 290 К);
—‘— отношение мощности полезного сигнала к мощ-
пости шума;
Д/7— полоса пропускания усилителя промежуточной
частоты приемника, Гц.
Дальности обнаружения, захвата и сопровождения цели при дейст-
вии флюктуаций от цели, собственных шумов приемника и влияния атмо-
сферы являются случайными величинами. Поэтому при их определении
приходится пользоваться интегральными функциями распределения веро-
ятности обнаружения, захвата и сопровождения Р. Для этого- в формулу
(1.4) введен коэффициент а, определяемый по параметрам: F — вероят-
ности ложной тревоги (рис. 1.14, а) и L — количества импульсов в пачке
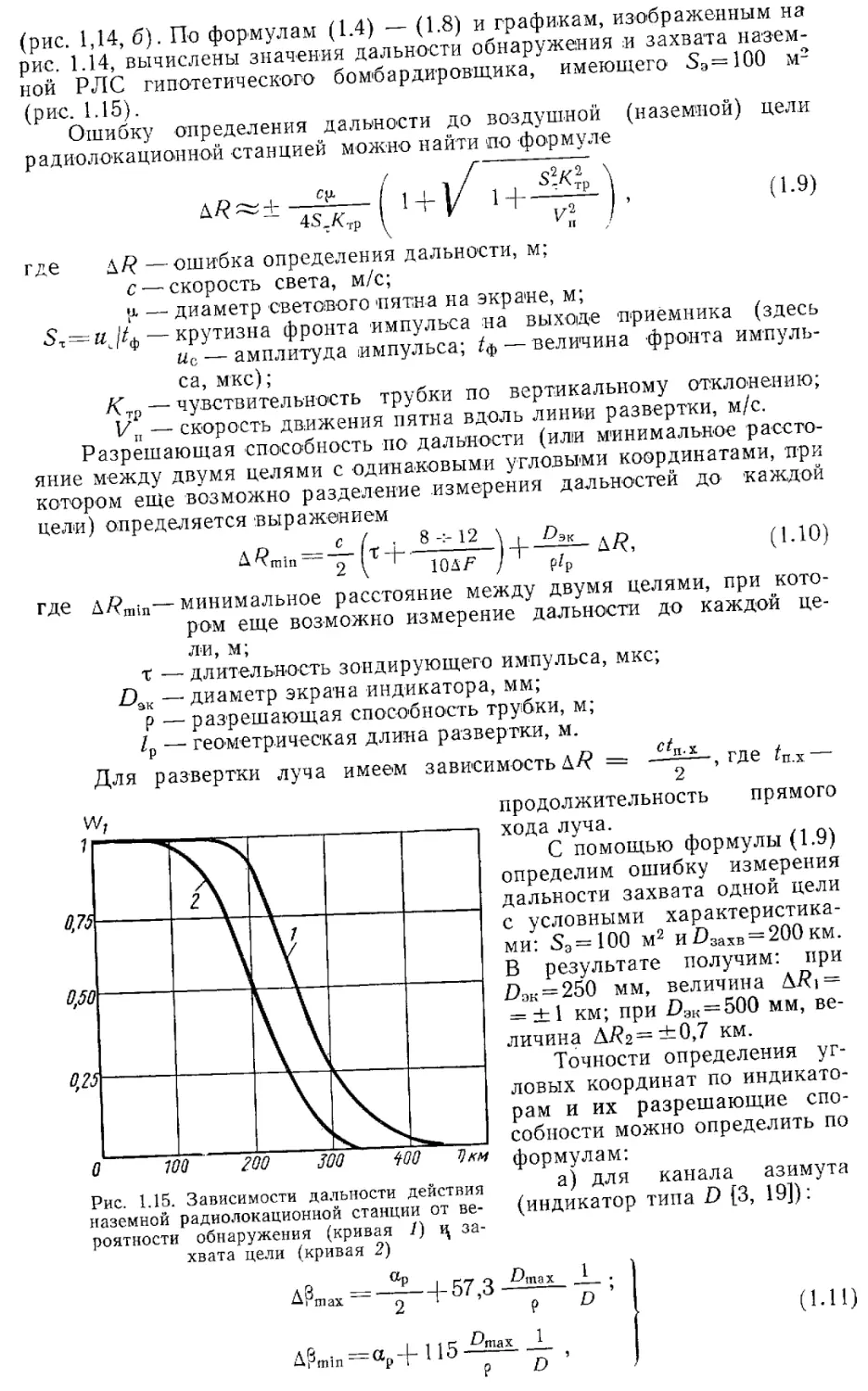
(рис. 1,14, б). По формулам (1.4) — (1.8) и графикам, изображенным на
рис. 1.14, вычислены значения дальности обнаружения и захвата назем-
ной РЛС гипотетического бомбардировщика, имеющего Зэ=100 м-
(рис. 1.15).
Ошибку определения дальности до воздушной (наземной) цели
радиолокационной станцией можно найти по формуле
--- 1 + 1/ 1+—(1.9)
~ 4S,K.rp I 'У ' + I ’
" \ п /
где Д/? —ошибка определения дальности, м;
с—'Скорость света, м/с;
— диаметр светового пятна на экране, м;
— крутизна фронта импульса на выходе приемника (здесь
«с — амплитуда импульса; /ф— величина фронта импуль-
са, мкс);
/Сгр — чувствительность трубки по вертикальному отклонению;
1/п — скорость движения пятна вдоль линии развертки, м/с.
Разрешающая способность по дальности (или минимальное рассто-
яние между двумя целями с одинаковыми угловыми координатами, при
котором еще возможно разделение измерения дальностей до каждой
цели) определяется выражением
д^п=-Нт+А//й+-^д/?’ (1Л0)
2 \ ЮДЛ / р/р
где — минимальное расстояние между двумя целями, при кото-
ром еще возможно измерение дальности до каждой це-
ли, м;
t —длительность зондирующего импульса, мкс;
Z)3K —• диаметр экрана индикатора, мм;
р — разрешающая способность трубки, м;
/р — геометрическая длина развертки, м.
ct
Для развертки луча имеем зависимость Д/? = —где —
Рис. 1.15. Зависимости дальности действия
наземной радиолокационной станции от ве-
роятности обнаружения (кривая 1) ц за-
хвата цели (кривая 2)
продолжительность прямого
хода луча.
С помощью формулы (1.9)
определим ошибку измерения
дальности захвата одной цели
с условными характеристика-
ми: S3= 100 М2 иР3ахв = 200кМ.
В результате получим: при
£>эк = 250 мм, величина Д7?1 =
= ±1 км; при /)эк = 500 мм, ве-
личина км.
Точности определения уг-
ловых координат по индикато-
рам и их разрешающие спо-
собности можно определить по
формулам:
а) для канала азимута
(индикатор типа D {3, 19]):
Д?тах=-у-+57,зЛ-
2 р
Д₽т1п = а₽+Н5-^-Л
(1-11)
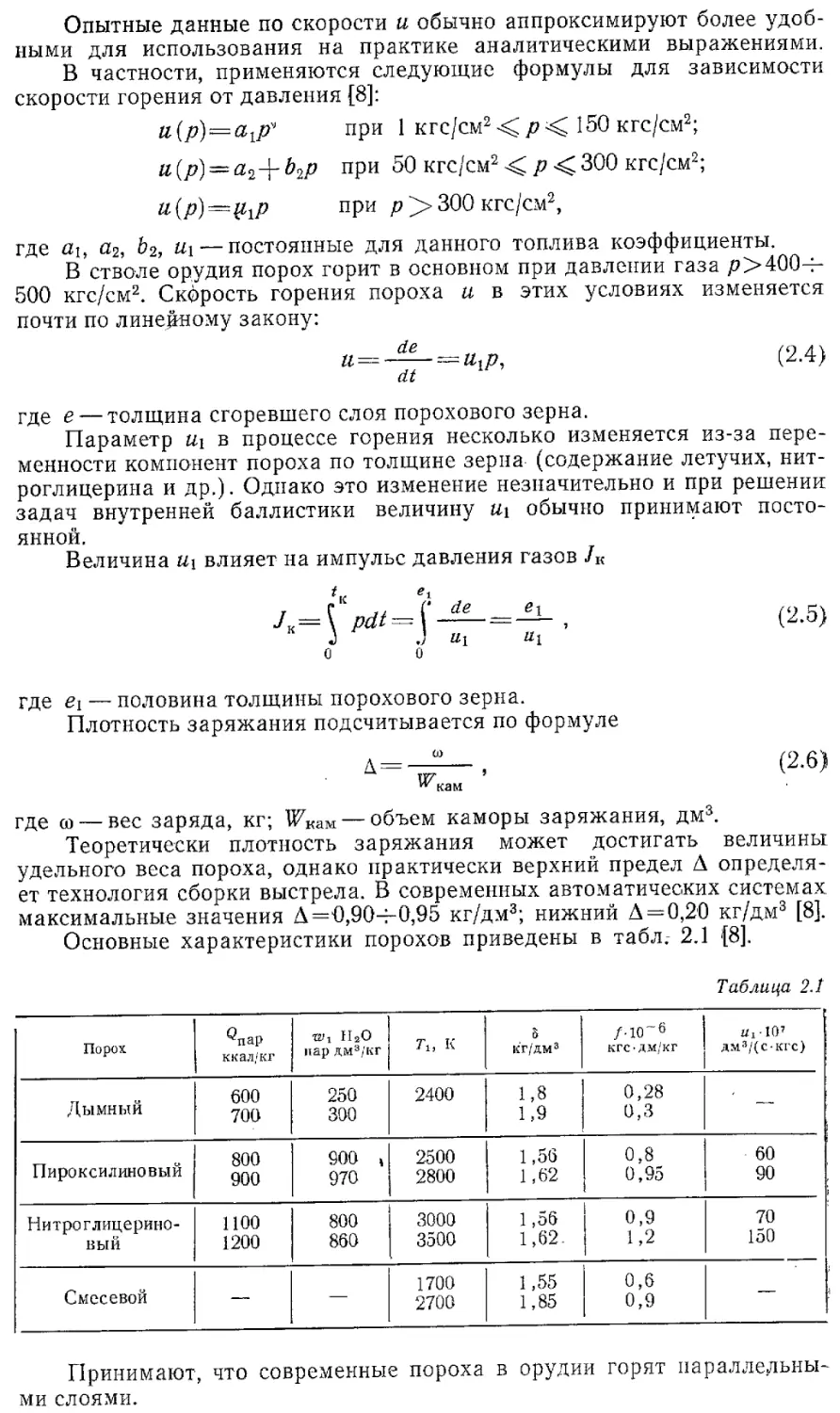
Таблица 7.5
Тип комплекса Индекс станции Назначение станция Год выпуска ‘ X, см Ризл’ кВт Частота повторения, Гц Длитель- ность им- пульсов, мкс Размеры антенны, м2 Дальность, км Высота цели, км
^обн ^зах
Авиацион- ный назем- ный AN/TRS-27 Обнаружение и сопро- вождение воздуш- ных целей 1963 23 15 000 150-3000 2-4 160 300 200 31
AMES-85 То же 1966 5-7 4x5000 270 5 19X7 800 600 30
Авиацион- ный борто- вой AN/APQ-45 1960 3,2-3,4 250 416 или 4000' 2 5 или 0,25 0,58 55 зо, 20
«Сирано-2» » I960 3 230 640 или 2000 1,75 или 0,5 0,58X0,48 40 25 24
AN/APQ-100 Обнаружение и сопро- вождение воздуш- ных целей 1964 1,7-5,7 1000 —— — 0,75 140 115 25
Ракетный наземный AN/MPQ-35 Обнаружение высот- ных целей 1961 22-24 650 800 - “ 105 — — “
AN/MPQ-34 Обнаружение низко- высотных целей 1961 3 0,2 (непре- рывное) •—— — — 65
AN/MPQ-33 Подсвет целей 1961 3 0,2 (непре- рывное) — — — — 65
AXVMSW-1 Обнаружение целей 1959 8,5-10 1000 500 1,3 260 30
AN/MPA-4A Слежение за целью 1959 3,1-3,5 250 500 0,25 — " 220 25
AN/MPA-4B Слежение за ракетой 1959 3,1-3,5 120 500 0,25 200 25
где ар — угол раствора диаграммы направленности, рад;
D — текущая дальность, м;
б) для канала угла возвышения (индикатор типа В, [3, 19]):
(1-12)
где ф—угол сектора обзора пространства, рад.
Период обзора пространства Гобз или сканирования зависит от ско-
рости движения цепи ац, диаметра светового пятна на индикаторе ц,
скорости его движения 17п и определяется условием
обз
(1-13)
Если условие (1.13) не выполняется, то на индикаторе наблюдается
скачкообразное перемещение цели, в сильной степени затрудняющее ра-
боту оператора.
Угловую скорость сканирования можно определить по формуле
(1.14)
где ф — в радианах; ТОб3 —в секундах.
У наземных РЛС с механическим сканированием <оСк изменяются от
150 до 400 рад/с. При применении электрического сканирования значе-
ния (оск могут быть больше [19]. В тех случаях, когда определяется даль-
ность действия станции приема команд от активного ответчика D', рас-
положенного на борту летательного аппарата, то
4яРпрт!п
где 1У—дальность действия, м;
Рптв — мощность ответчика, кВт;
Об — коэффициент направленного действия антенны станции прие-
ма команд;
5эф—значение эффективной площади антенны станции передачи
команд, м2.
Из сравнения формул (1.4) и (1.15) видно, что дальность действия
РЛС, работающей по ответчику, будет больше, чем дальность действия
станции по отраженному сигналу.
Некоторые данные зарубежных РЛС ракетных комплексов, а также
авиационных наземных и бортовых комплексов приведены в табл. 1.5
[5, 6, 7, 19].
Головки самонаведения
Головки самонаведения делятся на три типа: активные, полуактив-
ные и пассивные. В активных Золовках самонаведения подсвечивание
цели и прием отраженных сигналов производится с борта ракеты. В по-
луактивных головках самонаведения цель подсвечивается с земли или
самолета-носителя, а отраженные от цели сигналы принимаются на бор-
ту ракеты. Пассивные головки (например, тепловые) работают без сиг-
нала, излучаемого собственно целью (по тепловому излучению).
Дальность действия активных радиолокационных головок самона-
ведения определяется по формуле (1.4), а пассивных по формуле (1.15).
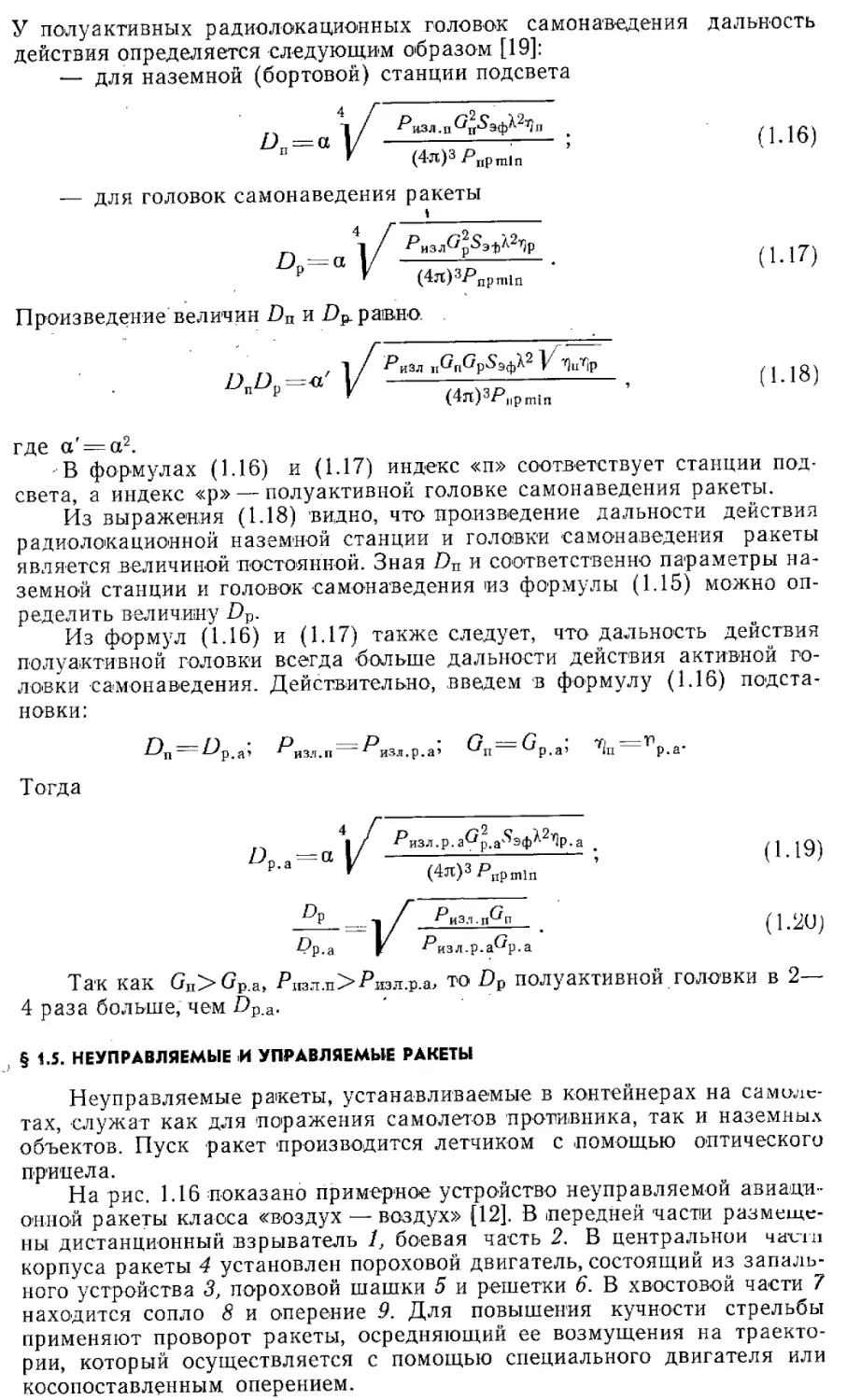
У полуактивных радиолокационных головок самонаведения дальность
действия определяется следующим образом [19]:
— для наземной (бортовой) станции подсвета
из л. п Л
(4л)3 Рпрт1п
(1.16)
— для головок самонаведения ракеты
1________
гл 1 /
£) = а I/ --------------
Р У (4л)зрпрт1п
Произведение величин Dn и Dp. равно.
(1.17)
(1.18)
где а' = а2.
В формулах (1.16) и (1.17) индекс «п» соответствует станции под-
света, а индекс «р» — полуактивной головке самонаведения ракеты.
Из выражения (1.18) видно, что произведение дальности действия
радиолокационной наземной станции и головки самонаведения ракеты
является величиной постоянной. Зная Dn и соответственно параметры на-
земной станции и головок самонаведения из формулы (1.15) можно оп-
ределить величину Dp.
Из формул (1.16) и (1.17) также следует, что дальность действия
полуактивной головки всегда больше дальности действия активной го-
ловки самонаведения. Действительно, введем в формулу (1.16) подста-
новки:
Тогда
D =D
^р.а’ ^р.а*
изл.п
изл.р.а’
(1.19)
(1.20)
Так как Gn>Gp.a, Ризл.п>Л1эл.р.а, то Dp полуактивной головки в 2—
4 раза больше, чем Dp.a.
§ 1.5. НЕУПРАВЛЯЕМЫЕ И УПРАВЛЯЕМЫЕ РАКЕТЫ
Неуправляемые ракеты, устанавливаемые в контейнерах на самоле-
тах, служат как для поражения самолетов противника, так и наземных
объектов. Пуск ракет производится летчиком с помощью оптического
прицела.
На рис. 1.16 показано примерное устройство неуправляемой авиаци-
онной ракеты класса «воздух — воздух» [12]. В передней части размеще-
ны дистанционный взрыватель 1, боевая часть 2. В центральной части
корпуса ракеты 4 установлен пороховой двигатель, состоящий из запаль-
ного устройства 3, пороховой шашки 5 и решетки 6. В хвостовой части 7
находится сопло 8 и оперение 9. Для повышения кучности стрельбы
применяют проворот ракеты, осредняющий ее возмущения на траекто-
рии, который осуществляется с помощью специального двигателя или
косопоставленным оперением.
Существуют ракеты и других схем. Например, боевая часть разделя-
ется на две: одна ‘помещается в переднем отсеке ракеты, а другая — в
хвостовой.
В табл. 1.6 приведены основные данные некоторых зарубежных не-
управляемых авиационных ракет [5].
Рис. 1.16. Устройство неуправляемой авиационной ракеты класса «воздух — воздух»
Таблица 1.6
Наименование ракеты Страна Калибр, мм Вес ракеты, кг Вес боевой части, кг Максимальная скорость, м/с
«Майти-Маус» США 70 10 4,4 700
«Зуни» » 127 48,5 20,5
«Бофоре» Швеция 75 7 1,7 800
«Эрликон» Швейцария 80 10 3,6 700
Рассмотрим устройство зенитной управляемой ракеты [12]. На
рис. 1.17, а показана компоновка зенитной управляемой ракеты типа
«Терьер» с поворотными крыльями без ускорителя. К корпусу ракеты 7
Рис. 1.17. Устройство управляемых зенитных ракет:
а — типа «Терьер»; б — типа «Роланд-2»
прикреплены неподвижные стабилизаторы 8. В передней части ракеты
размещены: неконтактный взрыватель /, боевая часть 2, аппаратура си-
стемы управления 3, баллон со сжатым воздухом 4 и рулевые машинки 5
для управления поворотными крыльями 6. В хвостовой части располо-
жено сопло реактивного двигателя 9.
На рис. 1.17, б показана компоновка ракеты «Роланд-2» [15], выпол-
ненная по схеме «утка» с неподвижным крылом 7. Для подрыва боевой
части 4 ракеты используется неконтактный взрыватель 1. Система уп-
равления с рулевыми машинами размещена в отсеке 3. Рулевые маши-
ны поворачивают рули 2. В качестве запального устройства применен
пиропатрон 5. В ракете имеются два двигателя: маршевый 6 и старто-
вый 8. В хвостовой части двигателя расположено сопло 9.
Наведение ракет на цель осуществляется двумя способами:
— с помощью команд, вырабатываемых на наземном пункте (зенит-
ные ракеты) или самолете-носителе (авиационные ракеты) — теленаве-
дение;
— с помощью команд, вырабатываемых на борту ракеты после
преобразования сигнала, поступающего от цели 1 — самонаведение.
Возможна комбинация этих двух способов наведения: на началь-
ном участке командное наведение с последующим переходом на конеч-
ном участке на. самонаведение.
В качестве двигателей для стартовой ступени ракеты используются
двигатели твердого топлива (РДТТ), которые наиболее просты по уст-
ройству и надежны в эксплуатации. В маршевых двигателях применя-
ются двигатели, работающие на жидком топливе (ЖРД) или ракетно-
прямоточные двигатели. Можно* отметить, что в маршевых двигателях
довольно часто осуществляется изменение тяги двигателя за счет приме-
нения специальной системы автоматического регулирования критическим
сечением сопла. В ракетах класса «воздух — воздух» как стартовые, так
и маршевые двигатели являются твердотопливными.
Стартовые двигатели располагаются на ракетах по двум схемам:
первая — тандем, когда стартовый двигатель размещен за маршевым, и
вторая—• с боковым расположением стартовых двигателей. В последней
схеме стартовые двигатели охватывают корпус маршевой ступени, при
этом существенно сокращается общая длина ракеты, но усложняется от-
деление стартовых ступеней. Имеются конструкции двигателей, когда
стартовый и маршевый двигатели располагаются в общей камере.
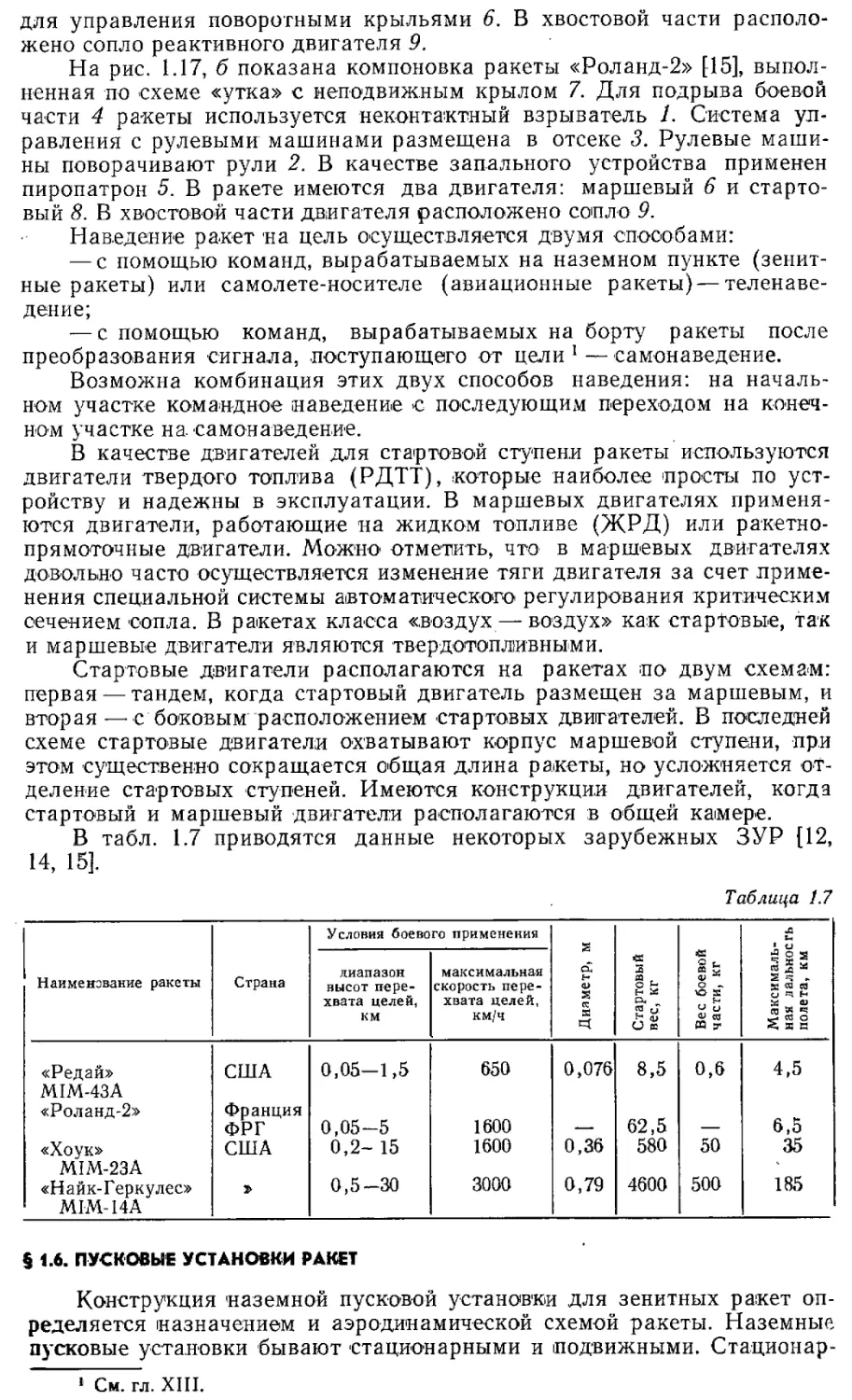
В табл. 1.7 приводятся данные некоторых зарубежных ЗУР [12,
14, 15].
Таблица 17
Наименование ракеты Страна Условия боевого применения Диаметр, м Стартовый вес, кг Вес боевой части, кг Максималь- ная дальность полета, км
диапазон высот пере- хвата целей, км максимальная скорость пере- хвата целей, км/ч
«Редай» MIM-43A «Роланд-2» США Франция 0,05—1,5 650 0,076 8,5 0,6 4,5
ФРГ 0,05-5 1600 62,5 — 6,5
«Хоук» MIM-23A США 0,2- 15 1600 0,36 580 50 35
«Найк-Геркулес» MIM-14A 0,5-30 3000 0,79 4600 500 185
$ 1.6. ПУСКОВЫЕ УСТАНОВКИ РАКЕТ
Конструкция наземной пусковой установки для зенитных ракет оп-
ределяется назначением и аэродинамической схемой ракеты. Наземные
пусковые установки бывают стационарными и подвижными. Стационар-
1 См. гл. XIII.
ляющей 3, горизонтального 4
Рис. 1.18. Подвижная пусковая
установка зенитной ракеты
ные установки обычно используются для пуска тяжелых ракет, а под-
вижные (возимые и самоходные) — для пуска легких ракет.
Общий вид возимой подвижной пусковой установки показан на
рис. 1.18. Пусковая установка состоит из платформы 1, станка 2, направ-
ляющей 3, горизонтального 4 и вертикального 5 приводов. Приводные
механизмы обеспечивают вполне опре-
деленное положение направляющей по
азимуту и углу места. Управляемые
ракеты с дальностью полета более
50 км, как правило, запускаются
при постоянных углах возвышения,
равных 65—90°.
, Самоходные пусковые установки
зенитных ракет монтируются на шасси
бронетранспортеров (см. рис. 1.7), ав-
томашин и танков. Для уменьшения
действия газовой струи ракеты на уста-
новку в ее конструкцию вводится спе-
циальное газоотражательное устрой-
ство.
Пусковые установки авиационных
управляемых' ракет представляют со-
бой балочные держатели с направляю-
щими для схода ракет. Для пуска ави-
ационных неуправляемых ракет используются кассетные направляющие.
Основными требованиями, предъявляемыми к пусковым установкам для
авиационных ракет, являются: малый вес, хорошая аэродинамическая
форма, надежность схода ракет после пуска.
§ 1.7. СТВОЛЬНЫЕ ПОДВИЖНЫЕ УСТАНОВКИ
Ствольные малокалиберные подвижные установки подразделяются
на наземные и авиационные. Малокалиберные наземные установки пред-
назначены для борьбы с низколетящими воздушными целями и легко-
бронированными наземными -целями. Авиационные ствольные установки
размещаются, как правило, на бомбардировщиках и используются для
отражения атак истребителей-перехватчиков.
Рассмотрим состав ствольной малокалиберной зенитной установки
(рис. 1.19). В нее входят следующие основные устройства: пушка
броневая башня 2, силовые электрогидравлические приводы по ази-
муту и углу места цели, система подачи боеприпасов, автоматы пере-
зарядки, счетчики патронов (на рисунке не показаны). Броневая башня
может устанавливаться стационарно в наземном блиндаже или на гусе-
ничном шасси танка [14, 15].
Для удаления вредных газов при стрельбе в броневой башне уста-
навливаются вентиляторы. Пороховые газы с помощью вентиляторов
удаляются из башни по специальным газоотводным каналам. С этой
же целью могут бытыиспользованы эжекционные устройства (см. § 5.11).
Малокалиберная пушечная авиационная установка (см. рис. 1.11)
размещается в хвостовой ча^ти самолета. Она состоит из башни, имею-
щей ограниченные углы поворота по азимуту и углу места, установки с
пушками, силовых следящих приводов, системы подачи боеприпасов из
патронных ящиков (на рисунке не показана). '
Силовые следящие приводы артиллерийских установок обычно вы-
полняются либо- с электрическим, либо с электрогидравлическим управ-
лением L В ряде случаев применяются механические системы поворота
башен.
1 См. гл. XII.
Типовая блок-схема силового следящего двухканального привода
артиллерийской установки для наведения по азимуту (I) и углу места
цели (II) показана на рис. 1.20. Наведение пушек может осуществлять-
ся наводчиком от оптического прицела с помощью ручек 8 и 8'. При
этом создаются сигнальные напряжения, поступающие в СРП и усили-
тели системы.
Рис. 1.19. Бронированная башенная зенитная установка
Г СРП
8
К СРП
Рис. 1.20. Блок-схема наведения зенитной установки по азимуту
и углу места цели
Сигналы текущей дальности и текущих углов пеленга цели могут
поступать в СРП и от РЛС. В результате обработки этих данных (см.
гл. XIV) в СРП вырабатываются сигналы управления (упрежденный
угол азимута и упрежденный угол места цели), поступающие к следя-
щим приводам установки. Наводчик удерживает линию визирования на
цели, а пушки все время направляются в упрежденную точку.
Наименование установки Страна Шифр пушки Калибр Количество стволов Темп стрельбы одной пушки, выстре- лов; мин Боекомп- лект Вес установки, кг
53TI Франция АМЕ-621 20 1 740 400 635 й
ХМ-163 „Вулкан* США М-61 20 6 500 500 1,2000
АМХДСА-ЗЭ Франция «Испако- Сюиза» HS-83/SL/75 30 2 650 600 4 950
^.-1 ФРГ - 30 2 650 1 11 600
Z-70 Англия «Бофоре» 40 —" 120 4 600
М-42 США и ФРГ М-1 40 2 135 '11 —' 22700
Из рисунка видно-, что оба канала наведения по своему составу ап-
паратуры совершенно идентичны. В канал наведения входят: механиче-
ская передача 1 для поворота оружия, гидравлический силовой двига-
тель 3, гидравлическая помпа переменной производительности 4, элек-
трический сервопривод малой мощности 5, усилитель мощности 6, потен-
циометр 7 и тахогенератор обратной связи 2.
Основные характеристики некоторых зарубежных артиллерийских
зенитных установок приведены в табл. 1.8 [5, 15]. В табл. 1.9 приводятся
характеристики некоторых авиационных пушек [15].
Таблица 1.9
Наименование пушки Страна Год выпуска Калибр, мм Темп стрельбы, выстре- лов/мин Начальная скорость, м/с Вес пушки, кг Вес снаряда, кг
М-39 США 1954 20 1500 юзо 77 0,103
МК-1 Англия 1954 30 1600 700 89,5 0,276
«Дефа-552» Франция 1957 30 1400 820 80 0,236
«Вулкан» М-61 США 1961 20 6000 1050 136 0,103
«Вулкан» М-67 США 1964 30 6600 1000 136 0,225
По данным табл. 1.8 и 1.9 можно рассчитать коэффициент могуще-
ства пушек СЕ, пользуясь формулой 1
£_______
-j? d$
где q — вес снаряда, кгс;
Уо — начальная скорость снаряда, м/с;
g = 9,81 м/с2 — ускорение свободного падения;
d — калибр снаряда, дм.
Величина коэффициента могущества, умноженная на количество вы-
стрелов в секунду и, характеризует коэффициент могущества секундного
залпа пушечной установки К , т. е.
2g d3
1 Здесь и далее размерность веса (силы тяжести) —«кгс» (см. приложение 3).
Таблица 1.8
Вес одной пушки, кг Вес снаряда, г Начальная скорость снаряда, м/с Макси- мальная дальность стрельбы, м Тип привода Углы наведения, град Максимальные угло- вые скорости наве- дения, град/с
по азимуту по углу места цели по ази- муту по углу места цели
58 100 1030 Ручной механичес- кий 0—360 —3-Г83 30 15
136 103 1050 3 000 Электри- ческий С—360 —5+80 90 45
135 400 1080 10 200 Автомати- ческий электрогид- равлический 0—360 —8+85 80 2
— 400 1080 9 080 То же 0—360 -4-5-1-90 —
900 875 0-360 — —
—— 870 900 — 0—360 " ““ '
На рис. 1.21 приведены графики изменения значений коэффициента
могущества секундного залпа авиационных пушек по годам их выпуска.
Как видно, этот коэффициент могу-
щества в период 1950—1970 гг. за каж-
дые 10 лет увеличивался примерно в
5—8 раз. Аналогичен и рост коэффи-
циента могущества секундного залпа
зенитных пушек.
Большие величины моментов
инерции пушек зенитных установок и
максимальных угловых скоростей и
ускорений их вращения по горизонту
и в вертикальной плоскости привели
к существенному росту мощностей
приводных двигателей. У современных
приводов пушечных установок мощно-
сти двигателей достигают 15—30 кВт.
Поэтому электрические силовые дви-
гатели и их системы управления стали
заменяться гидравлическими силовы-
ми приводами с насосами переменной
производительности. Суммарная мощ-
ность потребления энергии приводами
зенитной пушечной установки дости-
гает 60—150 кВт [15].
Рис. 1.21. Графики изменения ко-
эффициента Кд для авиационных
пушек по годам выпуска
§ 1.8. БОЕПРИПАСЫ РАКЕТНОЙ И СТВОЛЬНОЙ АРТИЛЛЕРИИ
Поражение воздушных целей обеспечивается боевыми частями ракет
и артиллерийскими снарядами. Подрыв боевых частей и снарядов осу-
ществляется взрывателями, которые в общем случае подразделяются на
контактные и неконтактные.
Появление неконтактных взрывателей связано с тем, что, во-первых,
существует оптимальное расстояние боевой части от цели, на котором
обеспечивается максимальная эффективность действия боевой части при
ее подрыве, и, во-вторых, системы телеуправления, самонаведения ракет
наведения пушек не всегда гарантируют прямое попадание в цель
: акет или снарядов.
Наибольшее распространение получили неконтактные взрыватели,
работающие на принципе использования электромагнитных волн (радио-
локационные). Меньшее применение имеют взрыватели с временным
механизмом подрыва, а также'барометрические взрыватели.
Предохранительные устройства гарантируют безопасность обслужи-
вающего персонала от преждевременного- разрыва боевой части ракеты
или снаряда. Довольно часто предохранительные устройства выполня-
ют роль и самоликвидатора боевого заряда путем его подрыва по исте-
чении определенного промежутка времени, если встреча с целью не со-
стоялась. Однако основное назначение предохранительного устройства
состоит в исключении преждевременного подрыва боевого заряда.
Артиллерийские снаряды
Артиллерийские снаряды предназначены для поражения воздушных
и наземных целей. В зенитных и авиационных пушках применяют:
осколочно-трассирующие, осколочно-зажигательно-трассирующие, оско-
лочно-фугасно-зажигательные, бронебойно-трассирующие и бронебойно-
•зажигательно-трассирующие снаряды. - -
В табл. 1 ДО [15] приведены основные относительные характеристики
снарядов: коэффициент веса снаряда Сф коэффициент наполнения
аь относительный вес снаряжения К 2 , относительная толщина кор-
пуса в цилиндрической части снаряда б, вычисленные по формулам:
где
q и Q —соответственно- вес снаряда и боевого снаряжения, кг;
d — калибр снаряда, дм.
Таблица ПО
Тип снаряда ь ЙС1, % *2 8
О скол очно-трассирующий .... Осколочно-зажигательно-трас- 15—16 3,5—5 0,5-0,8 048-0,2
сирующий 14-16 5—8 0,8—1,5 0,15-0,18
Осколочно-фугасно-зажигатель-
иый 12—14 8—13 0,5—1,2 0,12—0,15
Бронебойно-зажигательно-трас- сирующий 16-18 0,3-0,5 0,1—0,5 0,2-0,3
Боевые части
Боевые части поражают цели в результате взрыва. Боевые части
могут иметь ядер ное и обычное снаряжения. Ядерные боевые части обес-
печивают большие радиусы поражения, чем боевые части с обычным
взрывчатым веществом (ВВ). Поражающими факторами ядерного взры-
ва являются ударная волна (55% энергии, выделившейся при взрыве),
световое излучение (30%)- Радио-активное излучение продуктов взрыва
(10%) и проникающая радиация (5%) поражающего действия на воз-
душные цели практически не оказывают [14\
Боевые части с обычными ВВ выполняются в трех вариантах: с го-
товыми осколками, с полуготовыми осколками, с кумулятивными заря-
дами.
Боевые части с готовыми осколками бывают двух типов: с осколка-
ми, расположенными в полом двухстенном корпусе (рис. 1.22, а), и с
осколками, расположенными в одностенном корпусе (рис. 1.22, б).
В двухстенпом корпусе (см. рис. 1.22, а), имеющем внутреннюю 4 и на-
ружную 6 стенки, расположены готовые осколки 5; ВВ 3 и боевая труб-
ка 2 размещены в центральной части корпуса; боевой заряд с боковых
сторон прикрыт крышками 1 и 7.
Боевая часть в одностенном корпусе (см. рис. 1.22, б) состоит из
стекло-текстолитового корпуса 4, закрытого» с обоих торцов крышками
1 и 6; ВВ 5 и боевая трубка 7 также размещаются в центральной части
корпуса; готовые осколки 2 размещаются сверху корпуса и закрепляют-
ся лентой из стеклонленки 2.
Рис. 1.22. Схема боевой части с готовыми осколками:
а — с осколками, расположенными в двухстенпом корпусе; б- с осколками,-распо-
ложенными в одностенном корпусе
Рис. 1.23. Схема боевой части с полу-
готовыми осколками
Рис. 1.24. Схема боевой части куму-
лятивного действия
Готовые осколки обоих типов боевых зарядов могут иметь цилинд-
рическую, сегментную, кубическую формы. Иногда готовые осколки
предварительно крепятся в кассетах. За счет этого удается получить бо-
лее равномерное распределение осколков вокруг заряда.
Боевые части с лолутотовыми осколками образуют осколки задан-
ной формы и размеров за счет предварительного нанесения на корпус
рифлений, ослабляющих сечение осколочного цилиндра, или кольца.
На рис. 1.23 -показана схема боевой части с полуготовыми осколка-
ми. Рифленый цилиндр 3 закреплен с торцов крышками 1 и 7. Боевой за-
ряд 4 и трубка подрыва 6 разложены внутри цилиндра. Заряд 4 прикры-
вается сверху стеклотканевой лентой 5, а рифленый цилиндр—оболоч-
кой 2.
Для поражения воздушных целей применяются также боевые части
кумулятивного действия. На рис. 1.24 показана схема боевой части ку-
мулятивного» действия. Кумулятивные заряды 2 с осколками 3 закреп-
ляются на несущем корпусе 5. Боевая часть подрывается от боевой труб-
ки 7 через кольцевые детонаторы 4, между которыми установлены
ограничители 6. Кронштейн 1 служит в качестве боковой стенки и узла
крепления оболочки всей боевой части.
Взрыватели
Как уже раньше указывалось, взрыватели артиллерийских снаря-
дов и боевых частей разделяются на контактные и неконтактные. Для
артиллерийских снарядов малых калибров применяются контактные
взрыватели (ударные мгновенного действия). Подрыв снаряда с такими
взрывателями происходит либо при соударении с целью, либо в случае
промаха от временного механизма (самоликвидация или дистанционное
срабатывание).
Взрыватели ударного действия делятся на головные и донные. Го-
ловные, донные и головодонные взрыватели срабатывают примерно че-
рез 0,001—0,04 с после встречи с целью. Существуют ударные взрыва-
тели с замедленным действием, которые срабатывают через 0,005—0,01 с.
Основными элементами артиллерийского взрывателя (рис. 1.25)
являются ударный механизм с предохранителями (конденсатор для не-
контактных взрывателей), установочный механизм и огневая цепь.
Структура огневой цепи (рис. 1.26) зависит от типа взрывателя и
потребного времени его действия. В огневую цепь обязательно входят
капсюль-воспламенитель (рис. 1.27), капсюль-детонатор и детонатор.
В артиллерийских боеприпасах наибольшее распространение имеют ком-
бинированные капсюли-детонаторы (рис. 1.28). Их заряд состоит из ини-
циирующего (обычно азид свинца или тринитрорезорцинат свинца —
ТНРС) и бризантного (обычно тетрил) ВВ, расположенных слоями. Луч
огня от капсюля-воспламенителя вызывает инициирование азида свинца,
вследствие чего детонирует и бризантное ВВ. Действие капсюля-детона-
тора усиливается чувствительным детонатором-зарядом и мощным ВВ,
помещаемым между капсюлем-детонатором и разрывным зарядом.
При установке взрывателя на замедление в огневую цепь входит
замедлитель — спрессованный пороховой столбик. Замедлитель включа-
ется в огневую цепь параллельно огнепроводному каналу. Если устано-
вок несколько, то она производится специальным краном, направляю-
щим луч огня от капсюля-воспламенителя к капсюлю-детонатору непо-
средственно по открытому каналу или через замедлитель.
Огневая цепь взрывателя может быть замкнутой или разомкнутой
В замкнутой цепи даже случайное срабатывание капсюля-воспламените-
ля автоматически приводит к разрыву снаряда. Чтобы избежать этого,
огневую День размыкают, изолируя капсюль-воспламенитель от капсюля-
детонатора или отделяя оба капсюля от детонатора. Замыкание цели
происходит только после взведения взрывателя.
Накол и воспламенение капсюля-воспламенителя осуществляется
ударным механизмом. При мгновенном действии ударник смещается ре-
акцией преграды, В ударном механизме инерционного действия причи-
ной его движения являются возникающие вследствие резкого торможе-
ния снаряда инерционные силы. Предохранители препятствуют переме-
щению ударника от случайных нагрузок и в служебном обращении и при
перевозке, а также обеспечивают безопасность во время выстрела и на
начальном участке траектории полета снаряда.
Предохранители могут быть механическими и пороховыми. В меха-
нических предохранителях для снятия отдельных ступеней предохране-
ния чаще всего используются инерционные силы, возникающие при вра-
щении снаряда и ускорении (замедлении) его поступательного дви-
жения.
Пружинный центробежный предохранитель (рис. 1.29) своими сто-
порами удерживает ударник мгновенного действия от смещения, пока
величина центробежной силы не окажется достаточной для преодоления
сопротивления пружин стопоров и их утапливания в соответствующих
гнездах.
Жало
Укол—|
Капсюль-
воспламени-
тель
капсюль-
детонатор
Детона- \
ция I
Рис. 1.25. Схема артилле-
рийского взрывателя:
/ — корпус; 2— ударный ме-
ханизм; 3 — предохраните-
ли; 4 — капсюль-воспламе-
нитель; 5 — установочный
кран; 6 — капсюль-детона-
тор; 7 — детонатор; 3 — по-
роховой замедлитель
Детонатор
детона-\
ция "1
Рис. 1.26. Огневая цепь
взрывателя
Рис. 1.27. Капсюль-вос-
пламенитель:
1 — колпачок, 2 — заряд;
3 — покрытие
a) S)
Рис. 1.28. Комбинированные капсюли-
детонаторы:
а — лучевой: /—.мельхиоровый колпачок с
буртиком; 2 — алюминиевая чашечка с отвер-
стием, 3 — шелковая сетка; 4— ТНРС; 5 —
азид свинца; б — тетрил; б — иакольный: 1 —
колпачок с буртиком; 2 — алюминиевая ча-
шечка с утоненной серединой; 3 — иакольный
состав; 4 — азид свинца; 5 — тетрил
Рис. 1.29. Ударный меха-
низм с центробежными
предохранителями:
1 — ударник; 2 — центробеж-
ные стопоры; 3—предохра-
нительные пружины; 4 —
капсюль; 5 — контрпредо-
хранительная пружина
Рис. 1.30. Пороховой
предохранитель
Предохранитель порохового типа (рис. 1.30) состоит из стопора с
пружиной 1, порохового элемента 2 и воспламенительного устройства 3.
При выстреле жало воспламенительного устройства оседает по инерции
и накалывает капсюль, 4, который воспламеняет пороховой элемент.
В освобождающийся вследствие сгорания элемента канал под действи-
ем пружины перемещается стопор и освобождает ударник.
Рассмотрим устройство некото-
рых типов взрывателей. Нарве. 1.31
показана схема ударного взрывате-
ля с четырьмя установками. Поми-
мо ударного механизма этот взры-
ватель имеет устройство, состоящее
из колпачка и крана, позволяющее
производить установку на мгновен-
ное и замедленное срабатывания.
При положении крана, показанном
на рис. 1.31, а, его вырез располо-
жен так, что луч огня от капсюля-
воспламенителя к капсюлю-детона-
тору может пройти через пороховой
усилитель и замедлитель. В нор-
мальных условиях луч огня через
усилитель пройдет быстрее, чем че-
рез замедлитель, в результате чего
такое положение крана соответствует установке взрывателя без замед-
ления. Воспламенение замедлителя необходимо лишь для дублирования
действия усилителя. При положении крана, показанном на рис. 1.31, б,
огонь от капсюля-воспламенителя может пройти к капсюлю-детонатору
только через замедлитель, и, следовательно, такое положение крана со-
ответствует установке взрывателя на замедление.
Таким образом, при помощи колпачка и крана в рассматриваемом
взрывателе можно произвести следующие четыре установки:
1) колпачок снят и кран открыт на пороховой усилитель — мгновен-
ное (осколочное) действие взрывателя;
2) колпачок надет и кран открыт — инерционное (фугасное) дейст-
вие взрывателя;
3) колпачок снят, кран закрыт — малое замедление;
4) колпачок падет, кран закрыт — большое замедление.
В применении к осколочно-фугасным снарядам первая установка
взрывателя позволяет получить осколочное действие по открытым жи-
вым целям, вторая и третья установки пригодны для стрельбы по слабым
полевым укрытиям, четвертая установка дает полное фугасное действие,
а при малых углах падения снарядов обеспечивает разрывное поле рико-
шета и наилучшее осколочное действие по открытым подвижным целям.
Рассмотрим два наиболее распространенных типа неконтактных
взрывателей: радиолокационный и оптический.
Основная задача неконтактных взрывателей —обеспечение подрыва
боевого заряда на определенном расстоянии от цели.
В радиолокационном взрывателе (рис. 1.32) это расстояние опреде-
ляется сравнением излучаемых через передающую антенну высокочас-
тотных колебаний, генерируемых передатчиком, с сигналом, отражен-
ным от цели и принятым приемной антенной. В случае, если время меж-
ду началом работы 'передатчика и приходом отраженного сигнала (или
другой параметр, позволяющий определить дальность) становится мень-
ше определенной величины, то преобразованный по частоте и усиленный
в приемнике сигнал поступает на предохранительно-исполнительный ме-
ханизм (ПИМ). Радиолокационные взрыватели могут иметь передатчи-
ки, работающие в режимах непрерывного или импульсного излучений.
Оптические взрыватели работают аналогично радиолокационным.
Однако при этом имеются определенные трудности в определении рас-
стояния до цели. Обычно оптические взрыватели срабатывают при поле-
те снаряда мимо цели в случае, если относительная скорость сближения
цели и снаряда лежит в определенном диапазоне. Для определения этой
Рис. 1.32. Блок-схема радиолокационного взрывателя
Рис. 1.33. Блок-схема оптического взрывателя
Сигнал по каждому каналу проходит следующим образом (рис. 1.33):
при попадании в поле зрения светофильтра отраженного от цели им-
пульса света этот сигнал поступает на фотоэлемент. От светового воз-
действия увеличивается ток фотоэлемента и этот сигнал поступает на
сравнение с сигналом второго канала. В случае, если время между при-
ходом сигналов лежит в требуемом допуске, то усиленный сигнал про-
ходит на ПИМ.
Оптические взрыватели более помехозащищены, чем радиолокацион-
ные и имеют меньшие веса и габариты.
Предохранительно-исполнительный механизм боевых частей
На рис. 1.34 показана блок-схема ПИМ боевой части зенитной раке-
ты [11]. Он состоит из групп блоков, объединенных в две линии. Первая
линия — срабатывания (блоки 2—7), включающие в себя детонацион-
ную цепь (блоки 3—7), Блок-2 линии срабатывания получает сигнал от
дистанционного взрывателя и через блоки 3—7 передает его боевому за-
ряду. Вторая линия — ступеней предохранения гарантирует невозмож-
ность подрыва боевого заряда: при пуске (блок 12), в конце работы стар-
товых двигателей (блок 13), при нормальном режиме работы маршевого
двигателя (блок 14); при неисправности бортовой аппаратуры управ-
ления (блок 15); при минимально возможном ускорении на стартовом
участке (блок 16). Кроме того, в ПИМ входит источник питания 9, ме-
ханизмы самоликвидации 10 и дальнего взведения 11.
По взглядам иностранных
специалистов [6, 11, 15] современ-
ные ракетные rf ствольные авиа-
ционные и зенитные комплексы
должны обладать следующими
основными качествами:
1) высоким уровнем автома-
тизации всех процессов в комп-
лексе, обеспечивающим задан-
ную точность наведения на цель;
2) высокой надежностью
действия всех узлов комплексов
в различных метеорологических
условиях, включением необходи-
Сигнал от цели
Цель
Рис. 1.34. Блок-схема ПИМ:
1 — дистанционный взрыватель; 2 — устройство
задержки сигнала от взрывателя; <? —элект-
родетонатор; 4 — капсюль-детонатор; 5 — пре-
дохранитель; 6 — передаточный заряд; 7 — ос-
новной детонатор; 8— боевой заряд; 9— ис-
точник питания; 10 — механизм самоликвида-
ции; 11 — механизм дальнего взведения;
12—16 — ступени предохранения (12 — при
пуске, 13— в конце работы двигательной уста-
новки стартовой ступени, 14 — при нормальном
режиме работы маршевой ступени двигатель-
ной установки, 15 -• при неисправной бортовой
аппаратуре системы управления, 16 — при ми-
нимально возможном ускорении на стартовом
участке)
мого числа резервных устройств и применением средств автоматизиро-
ванного или ручного контроля;
3) высокой эффективностью действия боевых частей за счет приме-
нения дистанционных взрывателей с перестройкой диаграмм направлен-
ности и точным их согласованием с направлением разлета осколков бое-
вых частей;
4) малым временем обнаружения наземных и воздушных (особен-
но низколетящих) целей и подготовки комплекса к боевым действиям.
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ I
1. Авиационная техника ВВС капиталистических стран. Сборник переводных ста-
тей. М., Воениздат, 1964, 272 с.
2. Б е л а в и н Н. И., Купля некий В. М. Главное оружие флота. М., Воен-
издат, 1965, 280 с.
3. Белоцерковский Г. Б. Основы импульсной техники и радиолокации.
Л., «Судостроение», 1965, 460 с.
4. ВороновскийД. Д. Материальная часть артиллерии, беоприпасы и при-
боры. М., Воениздат, 1958, 335 с.
5. Вооруженные силы капиталистических государств. М., Воениздат, 1970, 488 с.
6, Вооружение сухопутных войск. Сборник переводных статей. М., Воениздат,
1966, 263 с.
7. Войска противовоздушной обороны страны. Под ред. Демидова П. К. М.*
Воениздат, 1960, 219 с.
8. Е ф имов М. Г. Курс артиллерийских снарядов. М., Оборонгиз, 1939, 320 с.
9. Латухин А. Н. Современная артиллерия. М., Воениздат, 1970, 319 с.
10. Изюмов И. И., Линде Д. П. Основы радиотехники. ' Л., Энерго-
издат, 1959, 419 с.
11. Мерил л Г., Гольдберг Г., Гельмгольц Г. Исследование опера-
ций. Боевые части. Пуск снарядов. М., ИЛ, 1959, 519 с.
12. Организация и вооружение армий к флотов капиталистических государств. М.,
Воениздат, 1965, 606 с.
13. Орлов Б. В., Мазин г Г. Ю. Термодинамические и баллистические осно-
вы проектирования ракетных двигателей на твердом топливе. М., «Машинострое-
ние», 1968, 536 с.
14. Переезда С. А. Зенитное управляемое ракетное оружие. М., Воениз-
дат, 1968, 110 с.
15. П е р е с а д а С. А. и др. Борьба с низколетящими средствами воздушного
нападения. М., Воениздат, 1971, 176 с.
16. Петров В. П., Сочив ко А. А. Управление ракетами. М., Воениздат,
1963, 264 с.
17. Третьяков Г. М. и др. Курс артиллерии. Т. II, Боеприпасы, пороха и
взрывчатые вещества. М., Оборонгиз, 1952, 483 с.
18. Чуев Ю. В. и др. Основы исследования операций в военной технике. М.,
«Советское радио», 1965, 591 с.
19. Чембровский О. А., Топчеев Ю. И., Самойлович Г. В. Общие
принципы .проектирования систем управления летательными аппаратами. М., «Машино-
строение», 1972, 4Г4 с.
Глава II
ВНУТРЕННЯЯ БАЛЛИСТИКА
И БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ СТВОЛОВ
| 2.1. ОСНОВНЫЕ ЗАДАЧИ
пороховых газов, вытекающих
жение снаряда в атмосфере и
А*/ И
Рис. 2.1. Графики функций
p(t), v(t) И 1(1)
Баллистика — наука о законах движения снаряда. Термин «снаряд»
понимается в широком смысле: это и артиллерийский вращающийся сна-
ряд, и мина, и активно-реактивный снаряд, и ракета.
В зависимости от характера движения снаряда различают внутрен-
нюю, промежуточную и внешнюю баллистики. Движение снаряда в ка-
нале ствола рассматривается внутренней, движение снаряда в облаке
из канала ствола, — промежуточной, дви-
за ее пределами — внешней баллистикой.
Обычно промежуточную баллистику рас-
сматривают как раздел внутренней бал-
листики.
Внутренняя баллистика изучает го-
рение пороха в канале ствола и описыва-
ет движение снаряда от начала выстрела
до вылета его из ствола. В результате
этого устанавливаются закономерности
изменения давления p(t) и температуры
Т (/) пороховых газов, скорости снаряда
v (/) и его пути /(/) (рис. 2.1).
Можно выделить две важные для
практики задачи, решаемые внутренней
баллистикой. Первая задача — определе-
ние при известных начальных условиях
(система, заряд, снаряд) основных характеристик выстрела: p(t), T(t),
l(t). Вторая задача — определение начальных условий (размеры
канала ствола, заряд, режим работы двигателя), при которых снаряд
приобретает необходимую скорость.
Процесс выстрела достаточно сложное явление. Для описания его
используются уравнения, характеризующие приток и расход газов, урав-
нение состояния газов, уравнение баланса энергии, уравнения движения
снаряда и откатных частей.
Предварительно исследуем основные физико-химические процессы,
протекающие при выстреле, и их математическое описание. Затем созда-
дим приближенную модель процесса выстрела, с помощью которой со-
ставим исходную систему уравнений внутренней'баллистики, и рассмот-
рим методы решения ее основных задач.
§ 2.2. ПОРОХ И ЗАКОНОМЕРНОСТИ ЕГО ГОРЕНИЯ
В качестве основного источника энергии в артиллерийской и ракет-
ной технике используются твердые и жидкие топлива. Для автоматиче-
ских ствольных систем применяется, как правило, твердое топливо —
порох. Широкое распространение получили пороха, называемые бездым-
ными, на основе пироксилина и нитроглицерина [3]. В меньшей мере ис-
пользуются смесевые пороха, являющиеся смесью тонко измельченного
минерального окислителя и органического горючего — связки. Дымные
пороха (механическая смесь селитры, угля и серы) применяются только
в качестве воспламенителя заряда.
При выстреле давление пороховых газов достигает величин 4000—
5000 кгс/см2, температура газов — 3000—3500 К, плотность — 300—
350 кг/м3. При этих условиях для описания связи между параметрами
газа наиболее пригодно упрощенное уравнение состояния Ван-дер-
Ваальса.
(2.1)
где р, Т — соответственно давление, удельный объем и температура
газа;
R —газовая постоянная;
а—коволюм (величина, характеризующая объем молекул
газа).
Свойства пороха как топлива характеризуются: составом продуктов
сгорания, калорийностью объемом газов коволюмом а, темпера-
турой- горения Ть удельным весом б, химическим составом, формой и
размерами порохового зерна.
Калорийность пороха — это количество тепла, выделяющегося при
полном сгорании 1 кг пороха. Для экспериментального определения ка-
лорийности навеска пороха, имеющего начальную температуру 17° С,
сжигается в бомбе постоянного объема. Продукты сгорания охлаждаются
до 17° С в калориметрической установке, с помощью которой находится
тепловой эффект сгорания.
Различают калорийности при жидкой воде — и парообразной во-
де Qnap. Величина Q?K больше Qnap на количество тепла, выделяющегося
при конденсации водяных паров, содержащихся в продуктах сгорания.
Объем газообразных продуктов сгорания 1 кг пороха определяе-
мый после приведения газов к нормальным условиям (температуре 0°С
и давлению 760 мм рт. ст. при парообразной воде), зависит от природы
и состава пороха, а также условий горения.
Коволюм пороховых газов а при давлениях до 4500—5000 кгс/см2
можно принимать постоянным и равным 0,001 wi.
Температура пороховых газов 7\ определяется при сгорании поро-
ха в условиях постоянного объема и отсутствий тепловых потерь.
Химический состав продуктов сгорания зависит от конкретной ре-
цептур^ пороха и от условий его сгорания. Обычно при сгорании артил-
лерийских порохов образуются следующие газы: Н2О, Н2, СО, СО2, N2.
Работоспособность пороха в орудии определяют баллистические ха-
рактеристики: сила пороха Д, коэффициент скорости горения им-
пульс давления газов /к, плотность заряжания А.
Сила пороха ft в общем случае равна
= (2.2)
где в — доля твердых остатков в продуктах сгорания (для дымных по-
рохов 8^0,5; для пироксилиновых, нитроглицериновых и смесевых
8^0).
Сила пороха связана с его калорийностью С?ж зависимостью
(2.3)
где ----------показатель адиабаты.
cw
Из опыта известно, что скорость горения и зависит от химического
состава топлива, давления окружающих газов р и характера его изме-
нения во времени, начальной температуры заряда и скорости омываю-
щих заряд газов.
Опытные данные по скорости и обычно аппроксимируют более удоб-
ными для использования на практике аналитическими выражениями.
В частности, применяются следующие формулы для зависимости
скорости горения от давления [8]:
и^р^адр при 1 кгс/см2 р 150 кгс/см2;
= при 50 кгс/см2 300 кгс/см2;
и (p'j—^p при р > 300 кгс/см2,
где iZj, «2, и\ — постоянные для данного топлива коэффициенты.
В стволе орудия порох горит в основном при давлении газа р>4004-
500 кгс/см2. Скорость горения пороха и в этих условиях изменяется
почти по линейному закону:
« = -77- = (2.4)
dt
где е— толщина сгоревшего слоя порохового зерна.
Параметр в процессе горения несколько изменяется из-за пере-
менности компонент пороха по толщине зерна (содержание летучих, нит-
роглицерина и др.). Однако это изменение незначительно и при решении
задач внутренней баллистики величину ti\ обычно принимают посто-
янной.
Величина и\ влияет на импульс давления газов
(2.5)
где ei — половина толщины порохового зерна.
Плотность заряжания подсчитывается по формуле
Д = -^-, (2.6)
** кам
где со — вес заряда, кг; ТГкам — объем каморы заряжания, дм3.
Теоретически плотность заряжания может достигать величины
удельного веса пороха, однако практически верхний предел А определя-
ет технология сборки выстрела. В современных автоматических системах
максимальные значения А — 0,904-0,95 кг/дм3; нижний А = 0,20 кг/дм3 [8].
Основные характеристики порохов приведены в табл. 2.1 {8].
Таблица 2.1
Порох Qnap ккал/кг II20 пар дм3/кг Л, к 6 кг/дм3 /•10~6 кгс- дм/кг Hi -IO7 1 дм3/(с-кгс)
Дымный 600 700 250 300 2400 1,8 1,9 0,28 0,3
Пироксилиновый 800 900 900 970 2500 2800 1,56 1,62 0,8 0,95 60 90
Нитро глицерино- вый 1100 1200 800 860 3000 3500 1,56 1,62- 0,9 1,2 70 150
Смесевой — 1700 2700 1,55 1,85 0,6 0,9
Принимают, что современные пороха в орудии горят параллельны-
ми слоями.
При давлении газов воспламенителя рв^50 кгс/см2 воспламенение
заряда протекает практически мгновенно. Число зерен в заряде доста-
точно велико. Размеры и характеристики пороховых зерен более или ме-
нее одинаковы. Давление газов, окружающих пороховые зерна, также
одинаково. Эти факторы предопределяют одинаковые условия горения
зерен заряда и позволяют определять относительный вес сгоревшей час-
ти заряда
4=-^£_ (2.7)
характеристиками единичного среднего порохового зерна.
Геометрический закон горения в общем случае описывается трех-
членной формулой
<p(z)=xtz( 1 + kjz-|-р.рг2), (2.8)
где ; Хр X] и —характеристики формы порохового зерна.
Наряду с функцией ф геометрический закон горения среднего поро-
хового зерна можно задать его относительной поверхностью о, также
зависящей от относительной толщины сгоревшего зерна z и характерис-
тик его формы.
По определению
•$горО
где 5гор — текущая поверхность горения зерна;
Sropo — начальная поверхность зерна.
Найдем аналитическое выражение * функции <г. Для зерна любой
формы справедливо соотношение
-^=Srop«8 = Srop()3«8. (2.10)
at
Используя формулы (2.4) и (2.10), а также условие: о=1 при z = 0, пос-
ле дифференцирования выражения (2.8) найдем:
I м *
*!=—гор—0(2)= (2.11)
(О
' ‘ Характеристики формы Порохов, горящих без распада зерна, при-
ведены в табл. 2.2 [8].
Таблица 2.2
Порох Х1 • Р1
Лента 2^iX2/»x2c «1- , 0 = о с 1 1+«1+0 ^4+ 1 +сч+|3 «10 1 +а1+р
Пластинка 2eiX2£>x26 * „ О _ е1 а1 = р — , ь 1 -p2ccj 2(Х]-р 1+204 9 а1 1+2сц
D~d Трубка 2₽i = а 1 = 0 ₽ = -^- С 1 + 0 ~ 1+0 0
Семиканальные пороха, широко применяющиеся в автоматических
системах, горят с распадом зерна на звездки. Их горение расчленяют па
две фазы: 1-я — от начала горения до распада на звездки (сгорает око-
ло 85% зерна), 2-я — горение звездок.
В 1-й фазе характеристики формы пороха определяются зависимос-
тями:
А
3272 -1- 247 Т 1
3 — (4? ч- 5) Зу
где
у = — ; A=4(4y+5)y+(32y‘H24y-H)?-
с d
Во 2-й фазе характеристики формы определяются решением систе-
мы уравнений:
Фз — xlj2 (1 -j-
ФК=Ч2*К (1 +Xi 2гк + [11,2г2);
—= 1
•^гор О
Величина фд в момент распада зерна на звездки определяется по
формуле для 1-й фазы при 2s = 1, фк= 1, ^к= 1 + — . В указанных завися-
мостях: р — толщина наружной звездки; SrOps — поверхность горения в>
момент распада зерна на звездки; индекс «к» соответствует моменту
полного сгорания зерна.
При приближенных решениях задачи внутренней баллистики вместо
трехчленной формулы (2.8) используют двучленную
4(^)=z^(l + М- (2.12)
Двучленная формула для относительной поверхности имеет вид
с (г)= 1 -%2Хг.
(2.13)
Коэффициенты формы хил двучленной формулы подбираются так,
чтобы для порохов, горящих без распада зерна, формулы (2.12) и (2.8)
давали одинаковые значения ф при 2 = 0,5 и 2=1.
Коэффициенты х и X определяются решением системы уравнений:
Х1 (1 о,5% + 0,25^)=х П + 0,5%;
zi (l+\+?i)=y-(i+C-
§ 2.3. ИСХОДНАЯ СИСТЕМА УРАВНЕНИЙ
ВНУТРЕННЕЙ БАЛЛИСТИКИ
Достижения прикладной термогазодинамики позволяют описать
процессы выстрела в системах, различных по схемам действия и кон-
структивному оформлению (классическое артиллерийское орудие, дина-
мо-реактивные системы, РДТТ и др.), одной системой уравнений, бази-
рующейся на единой теплофизической модели. Впервые это важное с ме-
тодической и практической точки зрения предложение было высказано и
реализовано проф. Б. В. Орловым [7].
За основу исследования принимаем частично уравновешенное ору-
дие (рис. 2.2). В отличие от безоткатного орудия, в котором импульс вы-
стрела и сила отдачи, действующие на лафет, полностью уравновешены
силой реакции газов, вытекающих через сопловой блок в направлении,
противоположном движению снаряда, в частично уравновешенном ору-
дии сила отдачи компенсируется не полностью. Иными словами, для час-
тично уравновешенного орудия справедливо соотношение
nSp^QPiJr,
где п — коэффициент уравновешенности;
5 — площадь поперечного сечения канала ствола с учетом на-
резов;
р — баллистическое давление к (среднее для данного момента вре-
мени давление газов в заснарядном пространстве);
—расход газов через сопловой блок орудия 1;
JT — удельный импульс, развиваемый пороховыми газами при ис-
течении из сопла (см. гл. III).
Л
Рис. 2.2. Схема частично уравновешенного орудия
Величина коэффициента уравновешенности неограничен а предела-
ми для классического артиллерийского орудия п = 0 для без-
откатного п=1.
Будем полагать также, что имеет место прорыв пороховых газов
через ведущие устройства снаряда, количественно характеризующийся
расходом GPr
Исходную систему уравнений запишем при следующих допущениях:
1) горение пороха происходит параллельными слоями;
2) давление р, температура Т и плотность газопороховой смеси в
заснарядном пространстве для каждого момента времени t равны их
средним по объему значениям (гипотеза квазистационарности про-
цесса) ;
3) состав продуктов сгорания не меняется во время выстрела, а
/г Р.
удельные теплоемкости газов при постоянном давлении с =---------—
k 1
и постоянном объеме cw-=--------- раины их средним значениям для
k — 1
всего диапазона изменения температур, следовательно, показатель адиа-
баты Пуассона k = -----= const;
с w
4) воспламенение порохового заряда происходит мгновенно;
5) отсутствует выброс несгоревших частиц пороха.
При выводе системы уравнений используем основные законы термо-
газодинамики.
Уравнение первого закона (начала) термодина-
мик и — закона сохранения энергии запишем в виде
dQ ____ du dL
dt ~ dt dt
(2.14)
1 Здесь и далее размерность расхода газов G — «кг/с» (см. приложение 3).
dQ
Здесь -----
dt
du
dt
— скорость изменения тепла в газе, вес которого к рассмат-
риваемому моменту времени составит юг, вследствие его
взаимодействия с окружающей средой;
— скорость изменения внутренней энергии газа, где
; (2.15)
(2.16)
dL
—-----мощность, развиваемая газом при его расширении или
сжатии.
Применительно к периоду движения снаряда при горящем заряде
dQ _ dQx . dQ% j dQ
dt • dt dt 1 dt
на
Здесь —AQ^G^— скорость подвода тепла вследствие сгорания
порохового заряда, где Qm — калорийность пороха при жидкой воде, А =
= 4270 кгс-дм/ккал, 0^=—^ —приход продуктов сгорания;
dt ' ' :..
—срТ(GPl ОРа) — скорость оттока тепла из
камеры орудия в атмосферу вследствие истечения газов через сопло и
зазоры между ведущими устройствами снаряда и стенками канала ство-
ла, где 1=срТ — энтальпия 1 кг газа;
-Ф3 =-----^0'г-п — скорость изменения тепла вследствие тепло-
dt d
отдачи между газами и стенками ствола (символ Я показывает, что
<7QT.n не является полным дифференциалом).
Скорость отвода тепла из заснарядного пространства в стенки кана-
ла ствола
^-=^-\aT{T~Tci)dF,
dt dt J
dL
dt
Здесь
/ ^ПР
где ат — коэффициент теплоотдачи от газа к стенкам;
Гст — температура внутренней поверхности канала ствола;
F — поверхность, омываемая газами.
Точно уравнение (2.17) решается совместно с уравнением теплопро-
водности материала стенки при соответствующих краевых условиях.
Удовлетворительные результаты могут быть получены с помощью раз-
ностных методов расчета или использования аналоговых устройств [7].
Величина в общем случае выражается уравнением
dt
dW f Gnp \ dW (f) t d /o iq\
—-----a-^- +/7 }’ ^p——{Sl). (2.18)
dt & dt J dt dt
W — свободный объем заснарядного пространства;
_£_) — мощность, создаваемая газом вследствие сгора-
ния заряда с учетом истечения части газа из за-
снарядного пространства;
---мощность, затрачиваемая на упругие деформации
стенок гильзы и ствола, где W(t)—«упругое»
приращение заснарядного объема. Обычно этой
мощностью пренебрегают, хотя в пушках высоких
давлений она может оказаться ощутимой;
— a
В dt
p^-(Sl) = pSv (2.19)
di
— мощность, расходуемая на поступательное движение снаряда с уче-
том второстепенных работ (перемещение газопороховой смеси, вращение
снаряда и преодоление трения между снарядом и стенками канала ство-
ла, перемещение откатных частей системы, выталкивание столба возду-
ха снарядом из канала ствола); I — путь снаряда относительно стенок
канала ствола. v
С учетом выражений (2.15), (2.16), (2.18) уравнение сохранения
энергии применительно к рассматриваемой схеме (см. рис. 2.2) приво-
дится к виду
Л(2Ж(?ПР - срТ (GPl + GPi) -
Соотношение (2.20) называют также основным уравнением внутрен-
ней баллистики.
Уравнение сохранения вещества может быть записа-
но в виде
С„Р-ОР1-ОР~^-. (2.21)
Lv ts
Приход газов вследствие сгорания пороха Gk = -—сг определяется
________________________________________dt
по формуле (2.10). Если порох горит параллельными слоями, а для ско-
рости горения и справедливо выражение (2.4), то формула (2.10) с уче-
том выражения (2.5) преобразуется к виду
G„p=~&-p. (2.22)
'К
Величины GP1, GPz зависят от значений полной температуры Т00
и полного давления газов роо в заснарядном пространстве, а также пло-
щадей критического сечения сопла F* и зазоров F3.
При расчете расхода GP2 следует дополнительно учитывать изме-
нение скорости снаряда и формы зазора во времени (см. гл. IV):
Gpj=GPi (pQQ, T’oo, F ); GPz= QPi (рОо, T^, F3, ji, tj).
Коэффициент расхода ц учитывает особенности истечения порохо-
вых газов через подвижный зазор и определяется экспериментально [2].
т т
Член —-------скорость изменения количества газов в заснарядном
dt
пространстве.
Уравнение движения снаряда найдем из формулы
(2.19). Можно показать [8], что второстепенные работы газа при выстре-
ле пропорциональны основной работе на поступательное движение сна-
ряда весом q, поэтому
pSv= —— /
dt \ 2g
(2.23)
Коэффициент ср, учитывающий второстепенные работы, рассчиты-
вается по достаточно сложным зависимостям [8]. Обычно при его опре-
делении используют приближенную формулу:
ч=к+^- (2'24)
пренебрегая изменением его величины за время выстрела.
В зависимости от .калибра и начальной скорости для снаряда с ве-
дущим пояском коэффициент К = 1,02-у 1,05. С уменьшением калибра ве-
личина К возрастает и уменьшается с ростом начальной скорости. Для
пуль, имеющих калибр меньше 14,5 мм и не имеющих ведущего пояска
1,2-н1,3.
После дифференцирования соотношения (2.23) получим уравнение
движения снаряда через баллистическое давление:
q dv
—------
dt
(2.25)
В соответствии с выражением (2.25) ср трактуют также как коэф-
фициент фиктивной массы снаряда.
Уравнение состояния пороховых газов в заснарядном пространстве
обычно записывается в виде (2.1) или для произвольного количества
ГаЗОВ й)г
pUZ^RTZ
В соответствии с выражениями (2.8) и (2.18) свободный объем
О б о
так как
о
Для решения основной задачи внутренней баллистики должны быть
известны законы скорости горения пороха и и изменения поверхности по-
рохового зерна в функции толщины горящего свода е (или относитель-
ной толщины z).
Таким образом, параметры состояния газа, а также скорость и путь
снаряда до момента его вылета из ствола могут быть найдены из сле-
дующей системы уравнений:
lip х 1 1 -4Z
— а ( \ I р G"P _ а I <W) I SV
di \ k— 1 / ‘ . L 8 dt ' dt
i
Gpt — Qpi(Ao> Tm, F'); OPs—GPi (p0Q, T00, F3, p, гл);
^—~ = Sp; PW=^.RT;
g dt
W=WxaH-^- + ^-^W+Sl-, ~-v,
dz __ и
dt . ’
u~u(p}\
aT (T — T^)dF\
fiSp^zGpJ p.
(2.26)
При известных начальных условиях система (2.26) имеет единствен-
ное решение.
Накладывая определенные ограничения, с помощью полученной сис-
темы уравнений можно описать процессы выстрела в следующих систе-
мах: безоткатном орудии (п=1); миномете (п = 0, GP1=0); классиче<
ском орудии (n = Q,GPi = GP2=0); ракетном двигателе (GPi =0, и = 0);
бомбе постоянного объема (GPi = G: * =0, о = 0).
Если параметры состояния газов определяются после окончания го-
рения заряда, в системе (2.26) следует положить Згор = 0 и и = 0. После
вылета снаряда из канала ствола расчет производится при SrOp = 0; п = 0;
E3=S и из системы (2.26) исключается уравнение движения снаряда.
Как уже указывалось, систему уравнений внутренней баллистики
(2.26) получена для баллистического давления, соответствующего сред-
нему давлению газов в заснарядном пространстве в данный момент вре-
мени. В действительности, вследствие наличия второстепенных работ,
производимых пороховыми газами, в различных сечениях заснарядного
пространства давление неодинаково. Во внутренней баллистике различа-
ют три значения давлений (см. § 5.3):
р — баллистическое давление в заснарядном пространстве;
рсн — давление на дно снаряда;
Рдн — давление на дно канала ствола.
Связь между давлениями рдн и рсн, а также распределение статиче-
ского давления в заснарядном пространстве изложены в § 5.1 и 5.2.
§ 2.4. ВНУТРЕННЯЯ БАЛЛИСТИКА КЛАССИЧЕСКОГО ОРУДИЯ
Характеристики процесса выстрела
Начало выстрела — срабатывание капсюля-воспламенителя и заж-
жение воспламенителя. Воспламенитель, сгорая, создает давление газов
/?в^50 кгс/см2 и в течение очень малого времени воспламеняет основной
заряд. Под действием возрастающего давления газов происходит вреза-
ние ведущих устройств снаряда в парезы канала ствола. Перемещение
снаряда за время врезания незначительно, поэтому некоторый промежу-
ток времени порох горит почти в постоянном объеме.
Одновременно с началом движения снаряда приходят в движение
откатные части орудия. Далее давление газов продолжает нарастать,
достигает наибольшего значения рт, после чего уменьшается; скорость
снаряда при этом непрерывно возрастает.
В правильно спроектированном орудии горение пороха заканчивает-
ся до вылета снаряда из канала ствола. После сгорания пороха
^0,75 /д кинетическая энергия снаряда продолжает возрастать за счет
энергии, выделяемой при расширении пороховых газов. В момент выле-
та из канала ствола (прохождение дна снаряда или центрующего утол-
щения мины через дульный срез ствола) снаряд имеет скорость (дуль-
ная скорость). После вылета из ствола скорость снаряда еще немного
возрастает до величины Оо (начальная скорость) под действием газов,
вытекающих из канала ствола. Увеличение скорости снаряда в период
последействия газов примерно равно скорости отката ствола в момент
вылета снаряда (Ед). Вследствие этого обычно величину скорости
принимают за начальную скорость снаряда v0.
При решении задач внутренней баллистики весь процесс выстрела
упрощенно разбивают на четыре периода: предварительный, 1-й период
движения снаряда, 2-й период движения снаряда, период последействия
газов.
Предварительный период протекает от начала выстрела до полного
врезания ведущей части снаряда в нарезы. Условно считается, что порох
в этот период горит в неизменном объеме. Давление газов в конце пред-
варительного периода достигает величины р0> условно называемой дав-
лением форсирования. При расчетах орудий в среднем принимается
ро = ЗОО кгс/см2. В стрелковом оружии ведущей частью пули является
оболочка, длина которой достигает одного калибра, поэтому давление
форсирования достигает величины 1000-4-1500 кгс/см2. В гладко-
ствольных орудиях р0~0.
1-й период движения снаряда по каналу ствола протекает в пере-
менном объеме и начинается от конца предварительного периода и до
полного сгорания пороха. Затем наступает 2-й период движения снаря-
да, который длится до момента вылета снаряда из канала ствола.
Период последействия газов протекает от момента вылета снаряда
до прекращения воздействия газов на снаряд и систему.
Основное уравнение внутренней баллистики
Это уравнение устанавливает соотношение между количеством сго-
ревшего пороха, давлением газов, скоростью снаряда и величиной пути,
пройденного снарядом, и является следствием закона сохранения энер-
гии.
С учетом выражения (2.20), 2.21), (2.23) и при условии —г
уравнение сохранения энергии на 1-м периоде выстрела принимает
вид
—£_ (-1 __ цй) _ и dW dl------X-Lw. ф (2.27)
a dt dt dt \ 2g J
Перед началом движения снаряда в орудийной каморе имеется оп-
ределенное количество газов шн, характеризующееся давлением форси-
рования ро и температурой Ги. Интегрируя соотношение (2.27) в преде-
лах от начала движения снаряда (£ = £о) до момента времени, при кото-
ром скорость снаряда, давление, температура и количество газов в
заснарядном пространстве равны их текущим значениям, получим основ-
ное уравнение внутренней баллистики:
^0
“г i —
- f S- (1 - aS) af<or - f dW (0 dt —v2. (2.28)
J a J dt 2g
% *0
На 2-м периоде движения снаряда — после окончания горения за-
ряда (й>г = о)) уравнение
образом:
сохранения энергии записывается следующим
t
^rRTK f*
k~ 1 J
dQ’r.n
dt
C„ "V
J ' dt ‘1g
(2.28а)
где Тк и — соответственно время, температура газов в заснаряд-
ном пространстве и скорость снаряда в момент окончания горения заряда.
На начальном периоде выстрела основное уравнение внутренней
баллистики может быть представлено зависимостью
t ~ « t _
&rRT Г ^От.п Гг р /1 . sn .у С dW (/) ,,
—7—— --- - — Г ' dt ~ . 1 ~ ай) rftOr ~ \ Р---di-
k— 1 2 dt .IS J dt
0
0
0
Система уравнений внутренней баллистики
классического орудия
Применительно к рассмотренной схеме выстрела при горящем за-
ряде система уравнений (2.26) принимает вид:
ЛП п 5Qr.n________/ ^rRT \ I „ ^ПР
а
dW(t)
dt
ж пр
п
__ d<^
пр'~ dt
' (2.29)
pW^RT]
Г=Гкам-4+^(1-«8) + ^) + ^
й о
dl
dt
<ог = шф(г);
и = ихр-,
dz _ р
df. JK
Решение уравнений внутренней баллистики
численными методами
Система уравнений внутренней баллистики (2.29) является доста-
точно сложной и получить ее аналитическое решение без определенных
упрощений не представляется возможным. Основным методом решения
уравнений внутренней баллистики без дополнительных допущений яв-
ляется метод численного интегрирования. Вследствие быстрого развития
ЦВМ этот метод стал весьма распространенным (см. § 8.4 и [1]).
Решение задачи внутренней баллистики методом численного интег-
рирования достаточно трудоемко -и производится обычно только тогда,
когда существующие аналитические и табличные методы не дают требуе-
мой точности решения. При использовании численного интегрирования
должно быть достаточно точное математическое описание процесса и
высокая точность исходных данных.
Практически необходимость применения метода численного интег-
рирования может возникнуть в следующих случаях:
1) при составлении таблиц внутренней баллистики;
2) при решении задачи внутренней баллистики на основе физиче-
ского закона горения [8];
3) при решении задачи внутренней баллистики на основе модели не-
стационарного процесса [2];
4) при расчете потерь на теплоотдачу с учетом изменения поверх-
ности, омываемой газами, и неодинаковости температуры металла на
внутренней поверхности канала ствола;
5) при строгом учете врезания ведущей части снаряда в нарезы.
Все указанные случаи описываются достаточно сложными уравне-
ниями, поэтому решать задачи целесообразно с помощью ЦВМ. Шаг ин-
тегрирования может установить сама машина (автоматический выбор
шага), однако процесс интегрирования требует достаточно много време-
ни и поэтому такой способ следует применять как можно реже.
В случае отсутствия колебательных процессов при интегрировании
уравнений внутренней баллистики с аргументом время шаг ht можно-
ориентировочно принимать равным ht =0,05 —~— и уточнять в процес-
се расчета. Наличие колебательных процессов (например, при учете
волнообразного движения) требует значительного уменьшения шага ар-
гумента. Основным методом интегрирования при использовании ЦВМ
является метод Рунге — Кутта [1].
Очень часто методом численного интегрирования приходится вычис-
лять время движения снаряда по каналу ствола (при вычислении осталь-
ных элементов аналитическим способом). Время целесообразно вычис-
dt h TI dt 1
лять методом трапеции, интегрируя уравнение ----=---- или-----=— .
dz р dl v
В начальной точке производная dt/dl, а также dtjdz при ро = О об-
ращаются в бесконечность. При вычислении времени следует выделять
небольшой начальный участок длиной 1 /0 и время движения по
нему определять отдельно. Можно рекомендовать для вычисления
следующую приближенную формулу
Начиная с момента вычисления проводятся по обычной схеме.
Интегрировать полную систему уравнений внутренней баллистики
рекомендуется только при высокой точности исходных данных. На эта-
пе проектирования с целью сокращения времени расчетов без существен-
ного снижения точности решения можно воспользоваться одним из уп-
рощенных методов.
Аналитический метод решения основной задачи
внутренней баллистики артиллерийского орудия
на различных периодах выстрела
В книге [7] предложен аналитический метод решения системы (2.29)
для зарядов с постоянной поверхностью горения или слабо дегрессив-
ных порохов (трубка, лента), который, в отличие от известных ранее,
позволяет сравнительно просто учесть тепловые потери при выстреле, а
также работу газов при сгорании заряда. Этот метод дает решение за-
дачи внутренней баллистики в виде конечных формул и потому особенно
удобен при баллистическом проектировании орудий (см. § 2.7).
Рассмотрим решение этой задачи в более общем случае, когда от-
носительный вес сгоревшей части заряда при выстреле изменяется со-
гласно зависимости (2.12).
-г * ( dQr и \
Для приближенного учета теплоотдачи -----— воспользуемся до-
\ dt 1
лущением [7], согласно которому процесс теплоотдачи можно считать
квазистационарпым, а коэффициент теплоотдачи — линейно зависящим
от удельного веса газов у в заснарядном пространстве1:
ат=зту, (2.30)
где Пт — постоянная коэффициента теплоотдачи.
1 Здесь и далее размерность удельного веса у — «кг/дм3» (см. приложение 3).
Так как у
——, то
RT
ст
dt
Введем
обозначение
—, тогда
т
F
т* п
dt
(2.31)
Величины ат и vi находятся экспериментально. Для автоматических
пушек допустимо принимать [7]: сгт= (0,74-0,9) ккал-дм/(кг-с-К);
vi = 0,7.
В некоторых случаях потери на теплоотдачу можно учесть введени-
ем поправки в величину калорийности.
Для простоты изложения рассмотрим аналитическое решение основ-
ной задачи внутренней баллистики на различных периодах выстрела без
учета упругих деформаций (VE—0) при изменении поверхности горения
порохового зерна согласно зависимости (2.12).
Период форсирования
Если пренебречь незначительным изменением объема вследствие
выгорания заряда (в периоде форсирования порох горит в постоянном
объеме, так как снаряд неподвижен), то параметры состояния порохо-
вых газов определяются системой уравнений (2.29) с учетом зависимо-
сти (2.31):
da>r
dt
IF = W----------------- 4- (1 - «8).
Л ft I ft '
о о
Интегрирование системы (2.32) позволяет найти зависимость давле-
ния газов в каморе пушки от количества сгоревшего пороха, а также
количество пороховых газов шн при давлении форсирования ро:
где рв — давление воспламенителя;
Хн=1-----tV1Z7k--коэффициент, учитывающий тепловые потери на
начальном периоде.
Из соотношения (2.33) при (ог=№ можно получить часто применяе-
мую на практике формулу для определения максимального давления
пороховых газов рт в бомбе постоянного объема — const (бомбе
Вьеля):
Рт
(2.35)
кам
Учитывая, что AQJJt — рт^> рв, —^- = Д, приведем
КЭМ
формулу (2.35) к виду, предложенному Ноблем и Абелем (Англия) в
1870—1877 гг.:
Рт
1 — aS
Из выражения (2.34) найдем величину
£|>н ___ Д S
“ /1Хн , 1
------- 4- a — —
Ро 8
В конце периода форсирования относительная поверхность горения:
Закон изменения давления газов от времени, а также время дости-
жения давления форсирования найдем из системы (2.32) при условии
Srop=const. Так как на периоде форсирования для пушек
Гкам--------» ^-(1-а8),
К <1X1 S' *
ТО
(туг х з. ,
pw \ ______о dp
k—\) k ~ 1 dt
Тогда совместное решение первых двух уравнений системы (2.32) при-
водит к соотношению
to
Т W кам а,
А S dp
откуда:
где
р=р*ел‘‘;
— In ,
«1 рв J
- 1)9ж <>
(2.36)
Период движения снаряда по каналу ствола
при горении заряда
(1-й период)
При принятых допущениях исходная система уравнений имеет вид:
1
t
I
(2.37)
<?-^-~Sp-, pW=«>TRT-,
g dt dt
= ^кам - у + -у- (1 - «В) + Si,
так как z—z^ —--—.
опг g 54
Интегрирование системы (2.37) удобно проводить при аргументе tr.
Связь между аргументами v и шг найдется из совместного решения урав-
нений скорости газообразования и закона движения снаряда, из кото-
рого следует
(2.38)
Подставляя выражение (2.38) в уравнение энергии системы (2.37) и
учитывая, что:
где FCp — средняя поверхность охлаждения; /?Ср — среднее давление в
рассматриваемом периоде, получим
14- 2рср^^_ (1 - а8) - 2AQ
$2'к
^-т2.
2g
(2.39)
Значения FCp и рСр могут быть определены как
где d — калибр орудия; /к^ (0,854-0,9)/д (/д— путь снаряда до момен-
та его вылета из ствола).
СП
После введения обозначений:
GqCOX
Л’ср 1 — aS
s леи
т*!' ср
2-----------
coxAcpgr
'СР / О г ’
ancA q
,, -----Ф —
Л n q 1
S2J2 g
запись уравнения (2.39) упрощается и принимает вид
<ог/?Г еря I 2^
(2.40)
Необходимый объем канала ствола для получения заданной ско-
рости снаряда в период горения пороха определяется по интегральной
формуле закона сохранения энергии:
t
Pwk--
(fc-1) aq'
-----dt
^rRT
(2.41)
где
Wq — начальный свободный объем при давлении форсирования.
Исключая член —— из интегрального уравнения, получим
k 1
f(k — p (С+С4и)Л
Hi — \---------dt ~ — | ,
1 J ^rRT J —
о - о
где
= 2Д(?.К ---22-2L
ж \- SJK RQXS
Ci = 4AQxc-^-^.
(S/K)2 g
, (2.42)
где
KJ J К
Согласно уравнению (2.40) — скорость снаряда в полубесконеч-
ном стволе (Г->0).
На основании соотношения (2.42) можно записать
pwk=p0Wq
Так как pW=arRT; p0W0=asRTa, то, используя формулу (2.40),
функцию скорости ф(у). можно представить в виде
cc,+c,ct
/ ] - \ о
<^4
2С3
<?(») =
Найдем связь между скоростью
висимости
V
получим
Дх
BS^K
где
(2.45)
(1 — vi) (1 — v2) _
и путем I снаряда. Используя за-
W. — W —-
0 ™ кам
— (1-а8);
8
1 — а 8 сох а
--------------yJL
$ - к g
q
а8)<р----V
. <7
Лер-------V
к
—L2-- iy
д
8
-^-(1-аВ)
RT^
— —относительный путь снаряда;
h
_—— — приведенная длина каморы заряжания.
$д
Подставляя найденное выражение для W/WQ в уравнение (2.44) и
решая относительно Л, получим явную зависимость пути снаряда от его
скорости:
1
ft—1
хД
8S/K
д
1-т
Ро 1—аВ
RTa В
I I
“Л ao Н-77“ v
Закон изменения давления в заснарядном пространстве в функции
скорости снаряда находится из совместного решения уравнений (2.43) и
(2.44)
C0a~i~CiC4 С 4
““Г“Т /1 — \ г 1 \ 2Сз
/’=Ро[фО)] (----^-) ------------—) (2-47)
К / L (1 —vi)(i—v2) /
или
1
Найдем координаты характерных точек на кривой давления. Из пре-
образованного уравнения сохранения энергии
следует, что скорость снаряда, отвечающая максимальному давлению
(если аналитический максимум существует), определится из уравнения
(2.14) при условии -^j-=0 . Откуда
dW
k
(2.48)
Так как
dt
Лат'^Г cp
RS
(2.49)
£^=„ J^(l_a8)?JLJ*L
dt * ISJK g dt
(2.50)
то после подстановки выражений (2.49) и (2.50) в формулу (2.48), по-
лучим
откуда
С 4- C4V
2
k
k — 1
(2.51)
Скорость снаряда в конце горения пороха
_. ________________________ 'к /1 ____ ~
(1 ~0
??
(2.52)
Максимальное давление и путь снаряда, пройденный к моменту до-
стижения рт, а также характеристики процесса выстрела в конце го-
рения заряда вычисляются по формулам (2.46) и (2.47) после подста-
новки v = vm и w = uK. Связь между временем движения снаряда и его
скоростью находится численным интегрированием уравнения
dl (v)
и
(2.53)
Для зарядов с постоянной поверхностью горения: с>о = 1; %=1; Х=0;
С3=1; С4 = 0 и формулы (2.46), (2.47), (2.51), (2.52) переходят в за-
висимости, полученные в книге [7].
Период движения снаряда после сгорания
заряда (2-й период)
При решении задачи внутренней баллистики во 2-м периоде в каче-
стве аргумента по-прежнему принимаем скорость снаряда v. Уравнение
(2.28а) при выполнении условия (2.31) и принятии допущений:
может быть представлено в виде
(Сг + 2С1-о - г2) ,
й-1 2д v
(2.54)
где
2g соДУк | 2HgTviFcp
yq k — 1 RS
i 2
+ *>K; a)r=a>;
<*RTK
k — 1
=-^(С2+2СЛ-^);
2^Г
' ^ar'Jl ^ср
1— Я8 ’
TK— температура газов в заснарядном пространстве в момент окон-
чания горения заряда.
Интегрирование уравнения второго закона (начала) термодинамики,
записанного применительно к рассматриваемому периоду в виде
t
г (k-l)AQ'^/
У ITrt
pW*==PilW*&
C'+2C'®—v»
Cdv
приводит к соотношению
__О'
(г г х v'^-1
-----;—-—H
V — Vj VK — ^2 /
(2.55)
где
то
<2=c; ± K(Ci)2+^-
рк и WK— соответственно давление и свободный объем заснарядного
пространства в момент окончания горения заряда.
Так как
С'
г
1Г у-1 <д/?7\ / v — v2 Рк — \ Vt~Z
^к/ ^iRT I V — VK — Vq /
\ X “ л /
/ V — ^2 VK—V1 s*2
з I 7~ )
\ V — t/j t/K — V2 J
2^ТК
(й — 1)?5 ’
кам
кам
Л=(1+Лк-ад)[?>Т_1 -1 + ад.
Из совместного решения уравнений (2.55) и (2.56) получаем форму-
лу для вычисления давления газов в заснарядном пространстве:
к
(2.58)
Если пренебречь теплоотдачей (сгт = О, Cz = 0, С/ = 0), то соотноше-
ния (2.57) и (2.58) превращаются в обычные формулы внутренней бал-
листики (см. § 2.5):
кам
fe—1 i
к — аД
Время движения снаряда по каналу ствола на 2-м периоде выстрела
также определяется численным интегрированием уравнения (2.53).
>1 = 0,9;
Ь = 1,6 кг/дмЗ;
2^1 = 0,570 мм;
их =70-10~7 дм3/(с-кгс);
х — 1; = 0;
— 850 000 кгс- дм/кг;
Тх = 2750К.
Пример 2.1» Решение задачи внутренней баллистики по методу проф. Б. В. Орлова.
Условные исходные данные:
d = 23 мм;
S =0,0432 дм2;
=0,0785 дм3;
/д = 14,2 дм;
q = 0,19 кг;
со = 0,062 кг;
= 300 кгс/см2;
а = 0,98 дм3/кг;
/к=407 кгс с/дм2;
Лат = 4270 кгс-дм2/(кг-с-К);
С целью упрощения рассмотрим
стоянной поверхностью горения.
1. Вычисление постоянных:
плотность заряжания
поставленной задачи для порохов с по-
решение
(1)
кам
0,062
0,0785
= 0,79 кг/лм3;
приведенная длина каморы
кам
0,0785
----— = 1,82 дм;
0,0432
полный относительный путь снаряда
14,2
коэффициент фиктивности массы снаряда
со
<1
0,062
0,19 =
газовая постоянная
850 000
-„--л = 309 кгс. дм/(кг • К);
/ о и
площадь внутренней поверхности каморы
4со 4-0,062
свободный объем каморы (начальный)
0,062
кам й = 0,0785 — — ~ = 0,039 дм3;
В 1.6
поверхность горения
w 0,062
гор — n т д = 13,55 дм2.
0,00285-1,6
д —
Н --
2. Предварительный период:
а)
7
\ J к
! 0,062 0,9'4270
= 850 000------— 0,25—4------ 1,365 —— = 3158 1/с.
407 309 /0,0397 '
Количество топлива, сгоревшего в период форсирования,
“ Ро — Ра 0,062 30 000— 100
= — £2-----=---------------------= о,ОО144 кг.
/к О] 407 3158
Относительное количество сгоревшего топлива
«„ 0,00144
^ = —=4-7^=0,0232.
w 0,062
3. Первый период (расчет проводится по упрощенным формулам).
Активный импульс заряда в конце его горения
S/к 0,0432-407
---™— = 284 с.
0,062
а
(D
Среднее давление в канале ствола
gS 4 98,1-0,0432-4072
Рср =------~ =----------------------= 164 000 кгс/дм2;
р <fq 21к 1,134-0,19-2-9,94 ' ’
/к = 0,7/,: /к = 0,7-14,2 = 9,94 дм.
Баллистические постоянные
орудия:
„ 850 000-0,062 „„„„
= 2 —----------!---= 23 960 дм/с;
0,25-0,0432-407 '
0S/K
Рср
— аВ)
164 000
0,5-23960 —(1 — 0,98-1,6)——— = 12189 дм/с;
о/а 1о284
ч>1 = ш — <он = 0,062 — 0,0014 = 0,0606 кг;
W0 = «^кам — -V- = 0,0785 — = 0,0407 дм3;
□ 1,0
- Л"7» 2(Г 30000-0.0407.2-98.1 , ,
Сг = —V" 0.23.1,134.0.10 “!;А
Характеристические скорости:
= 24540 дм/с;
t»2 = — —
V}
Показатель функции теплоотвода
—7— 10® = — 181 дм/с.
24 540 '
23 960
—----------= 0,968.
24540 - 181
Найдем параметры выстрела в характерных точках.
Скорость снаряда в момент достижения рт
С 23 960
= 12 189 - — —- = 2605 дм/с.
2k 2,5
Относительные величины характеристических скоростей:
Функция теплоотвода.
\ 1
Функция скорости снаряда
ЛГ9
1 — 0,10
0.968
I =15,6.
vm.
15,6
---------------------= 1,13.
2605
——-(2.12 189- 2605)
4,4о»1и
Функции давления и пути
к 1
[?ММ = 1,135= 1,84; НМ*”1 = 1,134 = 1,63.
Максимальное давление в канале ствола
k
Pm=Po[<f(vm)]
30000-15,6
-----------= 254300,09 к г с/ д м2.
Относительный путь снаряда в момент достижения рт
1-0,79
1,6-0,0432-407
0,19
(1 — 0,98-1,6) 1,134----
4 7 98,1
0-1,134-0,19
98,1-0,0432-407
Скорость снаряда в конце горения заряда-.
98,1-0,0432
1,134-0,19
407 = 8010 дм/с.
Относительные величины характеристических скоростей:
ук 8010
24540
= 0,326;
Функции теплоотвода
8010
181
1 + 44,3 \0,968
1 — 0,326/
58,9.
Функция скорости снаряда
15,6
8010
4,43-I06
= 1,742.
(2-12 189 — 8010)
1 —
Функции давления и пути:
k
['?(^к)]*=Г=1>7425= 16,04;
1_
[?(vK)]*=T = 1,742'*= 9,209.
- - i ~ '.aiia.'e ствола к концу горения заряда
- -с— 30 000-58,9
а = ро (a)] — = 108 500 кгс<дм •
10,04
Относительный путь снаряда:
( 1 1 Ак = П? (А)]*-1) / А \ / \ Д 1 — 1 + ~77— — (1 —аВ) — = \ 0 / \ ° ** кам / й
/ 0,7\ = (9,209—1)11 — \ 1,6/ / 0,00144 Д пп 0,79 1+ >—(1 — 0,98-1,6) = 4,44; 1,6 0,0785 J 1,6 Ак 4,44 —= -Ч- = 0,634; А„ 7,8
/к = Лк/0 = 4,44-1,82 = 8,1 дм.
4. Второй период.
Дулыюе давление
= 108 500
1,25
= 55 100 кг с/дм2.
Дульная скорость
/1 + 4,44-0,98-0,79
\ 1 + 7,8-0,98-0,79
2-98,1-0,0432
0,25-1,134-0,19
801О2 +
108 500-1,82
Х(1 +4,44 — 0,98-0,79) = 8770 дм/с.
$ 2.5. УПРОЩЕННОЕ РЕШЕНИЕ ЗАДАЧИ ВНУТРЕННЕЙ
БАЛЛИСТИКИ ДЛЯ АВТОМАТИЧЕСКИХ СИСТЕМ СРЕДНЕГО
И КРУПНОГО КАЛИБРОВ
В артиллерийских системах среднего и крупного калибров обычно
период адиабатического расширения пороховых газов в канале ствола
практически отсутствует. Отношение веса заряда к поверхности канала
ствола сравнительно велико, поэтому относительная доля энергии газов,
передаваемая стенкам ствола вследствие теплоотдачи при выстреле, не-
велика, и потерями на теплоотдачу при решении задачи внутренней бал-
листики можно пренебречь.
Для систем средней мощности (рт<4000 кгс/см2) можно пренебречь
также и работой газов, связанной с выгоранием заряда. Некоторые
погрешности от этого допущения легко компенсируются соответствую-
щим назначением характеристик пороха, в частности, величины импуль-
са давления газов /к.
Указанные особенности позволят существенно упростить основное
уравнение внутренней баллистики классических артиллерийских систем.
Если пренебречь тепловыми потерями ( п = 0 , работой газов
\ dt )
<13
г
за счет выгорания заряда [ С — (1 — aS)df(or= 0] и упругими деформация-
J s
а>
______ н
ми = то после введения обозначений:
0=^-1; /,==ХГи7кам-+ + -+(1-а8)],
О L 6 о
(где /ф — приведенная длина каморы с учетом выгорания заряда), из
уравнения (2.28) получим
(2.59)
Это уравнение было получено в 1864 году Резалем, поэтому в лите-
ратуре оно известно также как уравнение Резаля.
При рассматриваемом решении коэффициент ф принимается посто-
янным. Можно также считать, что в системах указанного класса в те-
чение всего времени горения пороха справедлив линейный закон вида
(2.4).
При принятых допущениях система уравнений внутренней баллисти-
ки может быть записана в виде:
(2.60)
Система (2.60) включает семь неизвестных величин и имеет един-
ственное решение при известных начальных условиях. Эта система спра-
ведлива в течение всего времени движения снаряда по каналу ствола.
Для описания процесса после окончания горения заряда необходимо
1
положить 6=1 и = = ——аш). . .
О
В общем виде система (2.60) решается методом численного инте-
грирования. Определенные выгоды при решении задачи внутренней
V
баллистики с помощью ЦВМ может дать переход к аргументу х = —,
так как величина х в течение 1-го периода изменяется .в пределах от
О до 1.
Из третьего уравнения системы (2.60) имеем
v = —
№
откуда вытекает соотношение
•г=го + (1 — zo)x-
Из пятого уравнения системы (2.60) время исключается следующим
преобразованием:
г/Z __ dl dx ____ dl p
dt dx dt dx (1—^q) Jk
на основании чего
Система уравнений при аргументе х имеет вид:
(2-61)
где 5 = (ЭД2 *—
— параметр условий заряжания, введенный впер-
вые проф. Н. Ф. Дроздовым.
Если ввести в рассмотрение относительный путь снаряда Л, то си-
стема (2.61) может быть преобразована к виду:
(2.62)
где
B(l-z0)2x
ф —— (1
2
эд=1 - 4+(а _ “г);
о \ о /
А (х)=К (х) L (х).
Аналитическое решение по методу проф. Н. Ф. Дроздова
Фундаментальное решение задачи внутренней баллистики в анали-
тическом виде было разработано в начале XX в. проф. Н. Ф. Дроздовым
[5]. В 1903 г. им было опубликовано решение задачи при ро=О, а в
1910 г. — при ро>О. Это решение базируется на геометрическом законе
горения, характеризуемым двучленной формулой ф(г) и линейным за-
коном скорости горения (2.4). Показатель адиабаты k и коэффициент
фиктивности ф приняты постоянными в течение всего времени движения
снаряда по каналу ствола.
Процесс выстрела разбивается на четыре периода: предваритель-
ный, 1-й период движения снаряда по каналу, 2-й период движения сна-
ряда по каналу и период последействия. Решение распространяется на
первые три периода, последствие газов не рассматривается. Исходной
системой уравнений является система (2.60).
Предварительный период. Порох горит в постоянном объ-
еме, давление газов нарастает до давления форсирования.
На основании зависимости (2.1) в конце предварительного периода
Значение фо находится в пределах от 0,02 до 0,1.
Величину 2о можно определить приближенно как
Время предварительного периода определяется по формуле
, 1 — аЛ г 1« До
4) = — — .
f Дв
где рв — давление газов воспламенителя.
1-й и е р и о д. В качестве независимой переменной проф. Н. Ф. Дроз-
дов принял величину x = z — [следует помнить, что это значение х от-
лично от аргумента х в системе (2.61)].
Величина ф при новом аргументе будет выражаться формулой
ф _____ фо । 2^g) jc “J- хХ^^.
Интегрируя 3-е уравнение системы (2.60), можно получить выраже-
ние для скорости
Интегрированием 1 и 3-го уравнений системы (2.60) находится путь
снаряда
где
°1
Величины lnZx сведены в таблицы.
Из основного уравнения внутренней баллистики находится выра-
жение для давления газов
2-й период. Процесс расширения газов во 2-м периоде прини-
мается адиабатическим. Количество газов постоянным. В качестве
независимой переменной принимается путь снаряда I.
На основании уравнения адиабаты получаем
/,=л(-ч±гпУ+в’ где (2-64)
\ Ч “Г • /
Из основного уравнения определяется скорость
Величины с индексом «к» в выражениях (2.64) и (2.65) отвечают
концу 1-го периода.
Вывод зависимостей (2.63) — (2.65) изложен в работе [5], там же
даются таблицы для функции 1g Zx-1.
Время движения снаряда по каналу ствола как в 1-м, так и во 2-м
периодах определяется численным интегрированием уравнения
dt _ \
dx р
Температура газов в канале ствола определяется на основании
уравнения первого закона термодинамики:
т 1 /1Н g 2
На базе решения проф. Н. Ф. Дроздова в дальнейшем разрабаты-
вались как уточненные, так и еще более упрощенные методь* решения
задачи внутренней баллистики.
Так, проф. В. Е. Слухоцкий, приняв величину U постоянным сред-
ним значением в течение всего l-ro периода и приближенное выражение
для скорости n = дал аналитическое решение задачи в 1-м периоде,
не содержащее вспомогательных таблиц.
Проф. М. Е. Серебряков создал решение, базирующееся на физи-
ческом законе горения пороха. В этом решении используется зависи-
мость для ф, получаемая по данным опытов в манометрической" бом-
бе [8].
Проф. М. С. Горохов разработал методику решения задачи внут-
ренней баллистики при сокращенном числе параметров [8], дав как бы
обобщенное решение задачи внутренней баллистики.
Интересное исследование было проведено проф. К. П. Станюкови-
чем и С. А. Бетехтиным [2], в котором с определенными допущениями
рассмотрено решение задачи внутренней баллистики на основе модели
нестационарных процессов.
Метод, предложенный проф. Б. В. Орловым [7], рассматривался
выше.
Разработанные аналитические решения задачи внутренней балли-
стики при исследовании некоторых вопросов имеют определенные пре-
имущества по сравнению с решением на ЦВМ.
Табличные методы решения задачи внутренней баллистики
При баллистическом проектировании артиллерийских систем при-
ходится просчитывать и сравнивать с целью выявления наилучшего
решения большое число вариантов. Для облегчения подобных расчетов
проф. Н. Ф. Дроздов в 1910 г. создает табличный метод решения задачи
внутренней баллистики. В дальнейшем исследования в области создания
таблиц продолжались. В настоящее время при проектировании исполь-
зуются «Таблицы внутренней баллистики», выпущенные Главным артил-
лерийским управлением (ГАУ) в 1947—1948 гг. [9].
При составлении таблиц ГАУ процесс выстрела разбивается на
три периода: предварительный, 1-й период и 2-й период движения сна-
ряда по каналу ствола. Принимается, что в предварительном периоде
пороховой заряд горит в неизменяемом объеме; давление в конце его
достигает величины ро (давление форсирования). В качестве исходной
системы уравнений принята система (2.62).
Анализ системы (2.62) показывает, что основные характеристики
выстрела зависят от большого числа параметров, так:
v = v\B, , р0, х);
X W )
А=А(В, Д, а, %, л, 0, р0, х);
р~р(В, Д, /1, а, х, л, 0, о, р0, х);
t=t{B, Д, ——, а, х, 6, о, р0, 1й, х ) .
\ W /
Составить таблицы при переменности всех перечисленных парамет-
ров невозможно, следует разумно ограничить число переменных пара-
метров. Для сокращения объема таблиц прежде всего наложены огра-
ничения на характеристики пороха. Таблицы составлены для орудий с
зарядом, составленным из трубчатого или ленточного пороха со сле-
дующими характеристиками: х=.1,06; хЛ=—0,06; 6 = 1,6 кг/дм3; а=
~1 дм3/кг; / = 950 000 кгс-дм/кг; 0 = 0,2. Давление форсирования приня-
то равным среднему значению для большого числа систем, а именно
ро=ЗОО кгс/см2.
О) 1
Величины ------и Zo, входящие в выражения для скорости и време-
ни, приняты равными единице, т. е.
j I ’ А) табл 1 ДМ.
Т7 / табл
Пересчет скорости и времени от табличных значений к действитель-
ным производится в соответствии с теорией подобия по формулам:
^==^табл I/ --- ;
*=Wo]/ --ю-6-
СО
Множитель 10~6 в выражении для времени вызван соображениями
удобства печатания таблиц.
Указанные ограничения привели к тому, что число варьируемых па-
раметров сократилось до двух: В и А. Это значительно облегчило состав-
ление таблиц и упростило пользование ими.
Для 1-го периода движения снаряда по -каналу ствола интегриро-
ванием системы (2.62) вычислены для различных В и А величины
^табл(я), А(х) и /табл(х'). Так как переменная х является проме-
жуточной величиной, то произведен пересчет применительно к незави-
симой переменной А и в таблицах помещены ^табл (Л) И ^табл (А).
Скорость снаряда и давление газов в канале ствола для 2-го перио-
да движения снаряда по каналу ствола вычислялись по аналитическим
формулам вида (2.64) и (2.65). Время вычислялось численным интегри-
dt /п
рованием уравнения= .
Таблицы внутренней баллистики ГАУ позволяют при известных В,
А и Ад получить зависимости о (А), р(А) для всего времени движения
снаряда по каналу ствола.
Пределы изменения плотности заряжания при составлении таблиц
приняты равными от А = 0,05 до А = 0,95 кг/дм3; диапазон изменения па-
раметра заряжания В — от 0 до 4. Для избежания ненужного увеличе-
жзж объема таблиц принята предельная йеличина' рт=&000-т-
@00 кгс см2. При больших плотностях заряжания нижний предел
гззаметра принимается В = 2. Относительный путь А изменяется от
:лл?20.
Таблицы ГАУ включают четыре части: в I части «Давления» дают-
величины давлений р, во II части «Скорости» — величины скоростей
гТ1-л: в III части — «Времена» — величины времени /Табл- Часть IV —
«Таблицы для баллистического расчета» (ТБР) связывают при различ-
ных А табличное значение дульной скорости £д.Табл, наибольшее давле-
ние рт и относительный путь снаряда по каналу Ад.
С помощью ТБР решаются следующие задачи:
I) определяется длина ствола при известных А, уд и рт;
2) определяется дульная скорость при известных Д, рт, Лд;
3) выбираются марки пороха для обеспечения требуемого рт при
выбранной плотности заряжания Д.
Таблицы ГАУ, составленные для пороха с /1 = 950 ООО кгс-дм/кг,
можно применять и для порохов с иной силой. Если действительная
сила пороха заключена в пределах 900 0001 000 000 кгс-дм/кг, то
при применении таблиц ГАУ параметр В вычисляется по действитель-
ной силе пороха и никаких дополнительных поправок не вводится. Если
действительная сила пороха находится в пределах 0fB-106^/i<
<0,9-106и 1 • 106<Л^ 1,1 • 106 кгс-дм/кг, то при применении таблиц
ГАУ параметр В вычисляется по табличной силе пороха /иабл =
— 950 000 кгс-дм/кг, но в результат вводятся согласно следующим со-
отношениям поправки:
п__ п /1лейст ,
” j. ’
‘ /1табл !;
тт 1
При порохах, сила которых меньше 800 000 или ’ больше
1 100 000 кгс-дм/кг, пользоваться таблицами ГАУ для решения5 задач
внутренней баллистики не рекомендуется. ‘ ,!
С помощью таблиц ГАУ можно решать задачу внутренней баллис-
тики для зарядов, составленных из порохов семиканальной формы.
Исследования показывают, что семиканальные пороха в баллистиче-
ском отношении равноценны трубчатым, т. е. при стрельбе из одного и
того же орудия равные по весу заряды из трубчатого и семиканального
порохов сообщают снарядам одинакового веса при одинаковой величи-
не рт примерно одинаковую начальную скорость. Равные значения рт
достигаются при соотношении толщин зерен
1)семикан (2е1)грубч *
Так, например, семиканальный порох 9/7 с толщиной свода 2et~
- 9,9 мм в баллистическом отношении равноценен трубчатому пороху
12/1 с толщиной свода 2^= 1,2 мм [8].
С целью возможности, использования таблиц ГАУ семиканальные-
пороха обычно наряду с действительной величиной /к характеризуются,
также и условной (несколько завышенной) величиной /к.усл.
В табл. 2.3 приведены значения /к.усл Для семиканальных поро-
хов [8].
При применении таблиц ГАУ по величине JKyCn вычисляется па-
раметр В,
Таблица 2.3
Марка пороха . . . 6/7 7/7 9/7 12/7 14/7 15/7 17/7
Л.усл>кгС’с/Дм2 • • • 555 690 945 изо 1230 1340 1420
Используя таблицы ГАУ при семиканальных порохах, следует иметь
в виду, что действительное положение рт по сравнению с расчетным бу-
дет на,0,5—1 калибра ближе к дульному срезу, а действительное дуль-
ное давление на 5—6% выше расчетного.
Таблицы ГАУ можно также применять при зарядах, составленных
из нескольких марок пороха (комбинированные заряды). При этом
подобный заряд следует охарактеризовать условными величинами силы
пороха flop и импульса давления газов /к.ср, определяемыми зависи-
мостями:
где (Of, ft, — вес, сила пороха и импульс давления газов г-й марки
п
пороха соответственно; о>=
г
Параметр В и плотность заряжания при 0,9-106^fiCp^
1 • 106 кгс-дм/кг вычисляются по формулам:
со
^кам
Следует помнить, что положение конца горения комбинированного
заряда определяется с помощью таблиц ГАУ приближенно, так как ко-
нец горения действительного заряда зависит не от среднего значения
/к.ср, а от величины /к для наиболее толстого пороха, входящего в заряд.
Пример 2.2. Решение задачи внутренней баллистики по таблицам ГАУ.
Условные исходные данные:
d = 23 мм;
5 =0,0432 дм2;
Гкам=^ 0,0785 дм3;
= 14,2 дм;
q = 0,19 кг;
« = 0,062 кг;
— 300 кгс/см2;
а = 1 дмз/кг;
Ь = 1,6 кг/дм6;
2ei — 0,570 мм;
= 70-10 3 дмЗ'(С‘КГс)
Л = 1 + & = 1,2;
% = 1,06; хХ = — 0,06;
/i = 850 000 кгс-дм/кг.
1. Вычисление постоянных:
0,062
—----- =0,79 кг/дм3; /0 =
0,078а
каи 0,0785
-— — 1 , оЗ ДМ,
5 0,0432
(О
кам
ег 0,00285 , 9
7 8; А = — =-----------г- = 407 кгс • с/дм2;
’ к «1 70-10~7
Zo г’82 1 с
Аам — — 1 нл ДМ,
X 1,58
1 <0 0,062
т ~ К + ~ 1,03 -г 0,333 = 1,134;
3 q 0,19
в = (SJK)2—= (0,0432-407)2
f'-'iq
98,1__________
О,95-106-0,062-1,134-0,19
= 2,39.
2. Определение давления газов, скорости и времени движения снаряда по кана-
лу ствола.
Из таблиц ГАУ при Л =0,79, В = 2,39 и Лд = 7,8 определяются табличные значения
рта б.7, Эта б л и /Табл. Действительные величины вычисляются по формулам:
Р ' ’ Ртабл
850 000
950 000
— 0,895/>табл»
, / О) 850 000
V —Утабл I/ rrnmn »
у Т7 9э0 000
л f ЧЯ 950 000
t = U'o Ю-6 / — ——- = 3,58-10-6/та6д.
/ а) 850 000
Результаты вычисления сводятся в таблицу:
в 2,3 2,39 2,4 В 2,3 2,390 2,4
Рт табл vm табл табл Рт> КГС/СМ2 vm, м/с г с 0,555 3333 611 296 0,550 3209 598 298 2870 304 0,00107 ND Си СО О 1 | .0(0^. GO Ф со О1 111 си сп. о /*д.табл Ус.табл Лг.таб л рД) кгс/см2 г/л, м/с С 626 1762 835 633 1742 847 566 884 0,00303 634 1740 848
Ак Рк.табл ^'к.таб 1 к. табл рк, кгс/см2 j м/с с 3,381 1619 1437 560 3,852 1437 1465 597 1286 730 0,00214 3,849 1417 1468 601 Результаты: рт = 2870 кгс/см2 р% — 566 кгс/см2 г/д = 884 м/с = 0,00303 с = = 0,494 Ал •/, 7,8
§ 2.6. ОСОБЕННОСТИ РЕШЕНИЯ ЗАДАЧИ
ВНУТРЕННЕЙ БАЛЛИСТИКИ ДЛЯ БЕЗОТКАТНЫХ
И ЧАСТИЧНО УРАВНОВЕШЕННЫХ ОРУДИЙ
Точное решение этой задачи может быть получено численным инте-
грированием системы уравнений (2.26). В книге [7] была предложена
упрощенная методика расчета внутренней баллистики безоткатного и
частичного уравновешенного орудий. Эта методика применима для
артиллерийских систем, заряды которых* составляются из порохов с по-
стоянной поверхностью горения или слабо меняющейся во времени..
К таким порохам относятся трубчатые пороха, бронированные с торцов.
К ним могут также быть с определенными оговорками отнесены про-
стые трубчатые и ленточные пороха. Действительно, поверхность труб-
чатых порохов в процессе горения изменяется сравнительно мало. Так,,
например, для пороха марки 16/1 его поверхность в процессе горения
уменьшается не более, чем на 10%.
В отличие от обычного безоткатное орудие имеет специальную за-
глушку (поддон), закрывающую отверстия истечения. Она обеспечива-
ет нормальное воспламенение заряда и препятствует вылету несгорев-
ших частиц пороха в процессе его зажжения.
Характерной особенностью безоткатного орудия является то, что
сила давления газов на дно канала ствола уравновешивается силой
реакции газов, вытекающих из заснарядного пространства через сопло-
вой блок. Условие равновесия имеет вид
(2.66)
где S/?дн — сила давления газов на дно канала ствола;
Ор = Д1/7* —— секундный расход газов через сопловой блок;
\ RT
k, —— 1 Якр
—— ЛГВ------- —удельный импульс соплового блока.
k g
В указанных формулах:
F* и /'в — соответственно площади критического и вы-
ходного сечений соплового блока;
Х = 1----------коэффициент влияния атмосферного давле-
SP
ния;
/Св— коэффициент реактивности соплового блока;
1 —скорость газов в критическом сечении сопла.
? Коэффициент реактивности Кв У безоткатных орудий изменяется
£лабо, его величина обычно находится в пределах 1,15^КВ^1,3. Вслед-
ствие этого в большинстве случаев в процессе выстрела можно считать
Показатель адиабаты k для пороховых газов можно также прини-
мать постоянным и равным k = 1,25.
I Помимо выражения (2.66) для безоткатных орудий можно напи-
сать интегральное условие равновесия:
t t
При упрощенном решении задачи внутренней баллистики для без-
откатных орудий, помимо указанных выше допущений, дополнительно
принимается давление форсирования равным давлению разрушения
поддона.
Решение задачи внутренней баллистики в предварительном периоде
безоткатного орудия ничем не отличается от решения для обычного
орудия.
В 1 и 2-м периодах давление газов и относительный путь снаряда
для безоткатного орудия связаны со скоростью зависимостями (2.46) и
(2.47), только постоянные С и С\ существенно меньше. Величины этих
постоянных определяются по формулам:
Величины со, Рср и F/S при расчетах можно приближенно вычислять
из выражении!
Ia + ’г . п _ g (S ’к)2
14 =--------Г~,--’ Ар--------—т;— >
g Jah ^'-fgSlx
г _ Wf, . r _ <fqv„
Ja ’ Jf •
g^a g^r
Здесь iofl — вес заряда, обеспечивающий заданную скорость в
орудии обычной схемы;
t
>= | Gpdt — вес газов, вытекающих через сопловой блок за время
о
/д движения снаряда по каналу ствола;
Величина скорости &д при баллистическом проектировании бывает
известна.
Решив задачу внутренней баллистики при приближенно установлен-
ных параметрах, производят однократное уточнение решения.
§ 2.7. БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ
АРТИЛЛЕРИЙСКИХ СТВОЛОВ
Баллистическое проектирование артиллерийского ствола заключает-
ся в установлении характеристик снаряда, конструктивных размеров
канала ствола и характеристик заряда, при которых наилучшим обра-
зом (в определенном смысле) выполняются тактико-технические требо-
вания.
Задача обычно расчленяется на две части:
1) устанавливаются калибр орудия, тип снаряда и его начальная
скорость, обеспечивающие решение поставленной боевой задачи;
2) определяются размеры канала ствола и характеристики заряда.
Первая часть задачи имеет сравнительно мало вариантов решения,
так как тактико-технические требования обычно более или менее одно-
значно определяют вес снаряда, что в свою очередь определяет калибр
системы и начальную скорость снаряда. Решение второй части балли-
стического проектирования имеет множество вариантов и отыскание
наилучшего без хорошей методики потребует значительного времени.
В качестве основного метода решения задачи внутренней баллисти-
ки при баллистическом проектировании обычно используется табличный
метод, позволяющий достаточно быстро определять все параметры ин-
тересующего варианта. В последние годы для решения этой задачи ис-
пользуются также ЦВМ.
Порядок баллистического проектирования
артиллерийского ствола
1. В соответствии с ТТТ устанавливается вес снаряда q, калибр си-
стемы d, начальная скорость снаряда vq. Вес и кинетическая энергия
снаряда определяются из условия поражения цели, калибр желательно
брать равным одному из существующих. По расстоянию до цели и энер-
гии снаряда у цели определяется начальная скорость.
2. Определяются исходные данные для баллистического решения.
С этой целью вычисляется:
— дульная энергия снаряда
— коэффициент могущества
г _ Е.
Е — —
d*
причем величина дульной скорости принимается равной начальной ско-
рости, т. е.
Величина коэффициента могущества Се определяет в первом при-
ближении исходные данные системы. Проф. В. Е. Слухоцкий, проана-
лизировав большое число артиллерийских систем, установил приближен-
ную зависимость между коэффициентом могущества Се и основными
характеристиками орудия. Результаты этого исследования приведены
в табл. 2.4 [8].
Таблица 2.4
1 С ' м/дм3 Ьч И * s 3 у Е- Рт. кр» кгс/см2 А, кг’дм3 7. калибры СЕ> тс • м,-дм3 т НО , тс - м КГ Р т кр > кгс см2 ь-п < X калибры
100 124 1700 0,5 1,02 14 900 106 3250 0,69 1,85 71
200 120 1950 0,55 1,09 23 1000 105 3350 0,69 1,98 78
300 117 2200 0,59 1,18 31 1100 104 3450 0,7 2,11 85
400 114 2400 0,62 1,28 38 1200 104 3550 0,71 2,25 91 1
500 112 2600 0,64 1,39 1300 103 3650 0,71 2,4 98
600 ПО 2800 0,66 1,5 51 1400 103 3750 0,72 2,57 105 I
700 108 2950 0,67 1,61 57 1500 102 3900 0,73 2,75 112
800 107 3100 0,68 1,73 64 1600 102 4000 0,74 2,95 119
В таблице помещены значения максимального давления газов в ка-
нале ствола, измеряемого крешерным прибором, коэффициента исполь-
зования заряда т]со и коэффициента бутылочности каморы %. Расчетное
наибольшее давление, используемое в ТБР, определяется по зависи-
мости
__ 1,12т
Рт , . Ртнъ*
I to \
1,02 1 +0,5 —
\ Q )
Значения наибольшего давления рт) установленные с помощью
табл. 2.4, следует увеличивать примерно на 10—15%, так как с момен-
та составления таблицы повысилось качество ствольных сталей [8]>
Табл. 2.4 дает только ориентировочные данные, поэтому необходимо
исследовать варианты при других плотностях заряжания и коэффициен-
тах использования заряда.
3. Установление диапазона изменения исходных данных. Верхнее
значение исследуемой плотности заряжания рекомендуется брать близ-
ким к величине, при которой получается орудие наименьшего объема.
Вопрос об орудии наименьшего объема -подробно исследован проф.
М. Е. Серебряковым и М. С. Гороховым [8]. Рекомендуемые значения
плотностей заряжания Дн.о, обеспечивающие наименьший объем ору-
дия, приводятся в табл. 2.5, а значения коэффициента использования
заряда т] ш в орудиях наименьшего объема в табл. 2.6 [8].
Таблица 2.5
Порох Рт’ сгс/см2
2000 2400 2 "00 3200 3:00 4000
Лента 0,53 0,6 0,66 0,71 0,76 0,8
Трубка ... ...... 0,54 0,62 0,68 0,73 0,77 0,82
Семиканальный 0,66 0,74 0,78 0,84 0,88 0,93
Таблица 2.6
Се тс м дм3 .... 100-1000 1200 1400 1600
т Я'~- ~ тс-м/кг ч « * * в 80 85 84 83
Орудие наименьшего объема оказывается реально приемлемым
лишь при начальной скорости у0> 1300 м/с [8]. При меньших начальных
с?. '?:<тях следует отойти от него, что осуществляется увеличением ко-
эрфициента использования заряда, т. е. увеличением длины ствола.
Таким образом, плотность заряжания Л и коэффициент использо-
вания заряда в исследуемых вариантах следует брать в пределах от ве-
личин, даваемых таблицей исходных данных (см. табл. 2.4), до их зна-
чений у орудий наименьшего объема.
Зная плотность заряжания А, коэффициент использования заряда
V и наибольшее давление рт, нетрудно получить все исходные пара-
метры для расчета вариантов.
Выпишем основные формулы:
.. ~. iv/ ._______. _ ^кам . / __ ?
со — , W кам — —— , Lq - , 4кам ,
тд<о До 7
Рис. 2.3. Директивная диаграмма
Проф. М. Е. Серебряков [8] для установления вариантов решения
предлагает использовать специальный график / —, Д , называемый
\ Я /
директивной диаграммой (рис. 2.3). Центром графика является точка
с координатами ДНф0 и I —] , соответствующая орудию наименыпе-
го объема.
Вокруг центра диаграммы располагаются кривые, отвечающие рав-
ным объемам канала ствола. Справа график ограничивает наклонная
линия, отвечающая сгоранию за-
ряда в сечении дульного среза.
Все реальные варианты находят-
ся слева от этой линии. Дирек-
тивная диаграмма показывает, в
каком направлении следует ид-
ти, чтобы получить желаемое из-
менение баллистических харак-
теристик ствола.
При проектировании авто-
матических систем малого калиб-
ра следует обратить внимание на
то, что эти системы имеют боль-
шие плотности заряжания —
А = 0,84-0,9 кг/дм3 [8], при кото-
рых сокращаются габариты и
вес патрона, что облегчает про-
ектирование механизмов автоматики. Такие плотности заряжания обес-
печиваются применением мелких трубчатых или семиканальных по-
рохов.
4. Расчет вариантов.
В каждом варианте .необходимо определить длину нарезной части
ствола и полную длину ствола с затвором, а также примерное число вы-
стрелов за время баллистической жизни ствола (для систем большого
срока боевой службы).
Первая часть задачи легко разрешается с помощью ТБР. По вели-
чинам рт и г’д.табл 'При данном Л определяется относительный путь сна-
ряда Лд, затем /д = Лд/о и полная длина ствола с казенником:
Для оценки живучести можно использовать упрощенную формулу
проф. В. Е. Слухоцкого для условного количества выстрелов за время
баллистической жизни ствола [8]:
где А — постоянное для всех вариантов число;
Vi 2,31-105 /Д1+хАЛ)
^д.табл^д.табл Тлпр
По значению можно сравнивать исследуемые варианты ре-
шения.
Если при расчете вариантов потребуется учесть потери на теплоот-
дачу, то следует интегрировать полную систему уравнений (2.29) или
воспользоваться методом проф. Б. В. Орлова (см. § 2.4).
5. Сравнение вариантов и выбор лучшего.
Одним из основных вопросов баллистического проектирования яв-
ляется оценка полученных вариантов решения и выбор среди них наи-
лучшего. При анализе вариантов необходимо учитывать целый ряд
факторов, среди которых следует отметить эксплуатационные качества
будущей артиллерийской системы (длина и вес ствола, габариты и вес
патрона, дульное давление), экономичность системы (стоимость заря-
да, стоимость ствола), срок службы системы (баллистическую живу-
честь) и др.
Многие баллистики занимались разработкой критериев оптималь-
ности баллистического решения, получили формулы для оценки вари-
антов. Примером такого критерия является критерий, разработанный
на основании опыта Великой Отечественной войны 1941 —1945 гг. проф.
В. Е. Слухоцким [8]. Он предлагает оценивать варианты по величине
или после подстановки коэффициентов
1
где М — постоянное число, кратное 10.
Лучшим решением считается вариант, имеющий большее значение
критерия Z. Несколько иную форму имеют критерии оптимальности
баллистического решения, предложенные проф. М. Е. Серебряковым и
Б. Н. Окуневым. Однако все разработанные критерии базируются на
определенном уровне развития артиллерийской техники и во многом
отражают взгляды данного периода. Вследствие этого с течением вре-
мени они пересматриваются и видоизменяются.
Недостатком общих критериев является то, что одним критерием
трудно оценить артиллерийские системы различных классов. Например,
критерий оценки полевой артиллерии оказывается малопригодным для
зенитной, то что хорошо для зенитной артиллерии, неприемлемо для
танковых пушек и т. д. Видимо, наиболее целесообразно создание кри-
териев баллистических решений по классам артиллерии.
В настоящее время надежных критериев для различных классов
орудий не разработано, вследствие этого наилучший вариант, в конеч-
ном счете, определяет конструктор системы. Базируясь на современных
материалах и уровне производства, конструктор выбирает вариант,
наиболее полно удовлетворяющий предъявляемым тактико-техническим
требованиям. Естественно, при этом использует весь накопленный опыт,
в том числе и существующие критерии.
6. Уточненный расчет выбранного варианта и построение кривых
p(l), v(l) и t(l).
Для выбранного варианта производится уточнение баллистическо-
го решения, заключающееся в более аккуратном учете второстепенных
работ (уточнение коэффициента фиктивности) и, если необходимо, уче-
те потерь на теплоотдачу.
По значениям рт и Д из ТБР определяется параметр условий заря-
жания В и вычисляется импульс давления газов
j _, f Bfx^q
к V ^2
По импульсу /к из таблиц выбирается наиболее подходящая для
данной системы марка пороха. Значения 7К Для некоторых порохов
приведены в табл. 2.7 [8].
Таблица 2.7
Марка пороха 4 t кгс-с/дм2 Марка пороха 4 > кгс-с/дм2 Марка пороха 4. кгс-с/дм2 Марка пороха 4. КГС-С/ДМ2
Пироксилиновые пороха Нитроглицериновые пороха
4/1 310-340 6/7 555 9/1 НГВ 615 100/50 Н 1690
18/1 1350 7/7 690 НДТ-2 16/1 1450 100/50 НЦ 1710
22/1 1550 9/7 945 НДТ-3 16/1 1510 НДТ-3 18/1 1760
100/50 1635 12/7 изо 130/55 НГВ 1660 305/52 НГВ 3690
130/55 1855 14/7 1230
120/50 2000 15/7 1340
203/50 2820 17/7 1420
Для семиканальных порохов в табл. 2.7 приведены условные вели-
чины импульса — 7к.усл (из условия баллистической равноценности
трубчатым порохам).
Для выбранной марки (при конкретных значениях fi) вычис-
ляется уточненное значение параметра В. Затем по ТБР уточняется ве-
личина Ад, обеспечивающая требуемое значение скорости Уд.табл- После
этого определяются данные, необходимые для построения кривых /?(/),
у(/) и 1(1).
7. Установление с помощью таблиц ГАУ кривой наибольшего дав-
ления газов на стенки ствола.
При расчете ствола на прочность важно знать кривую наибольшего
давления газов на стенки ствола. Определять величины наибольших
давлений в различных сечениях ствола следует с учетом возможного*
отклонения температуры заряда от нормальной. При составлении таб-
лиц за нормальную принята температура заряда, равная +15° С.
При построении кривой наибольших давлений следует исходить из
следующих положений:
1) в момент достижения расчетного значения рт наибольшее дав-
ление газов на стенки ствола изменяется по линейному закону от ве-
личины
Рен т
Рт
у дна снаряда до величины
оз
1 -0,5 —
____________д
Р КН т Рт
Т
у дна канала ствола;
2) во всех сечениях за сечением, соответствующем давлению
Рт = наибольшее давление газов на стенки ствола равно давлению
газов на дно снаряда в момент прохождения дна снаряда через это
сечение;
3) кривая наибольших давлений газов на стенки канала ствола
представляет собой огибающую кривую наибольших давлений, постро-
енных при трех температурах заряда:
/ __i р / и/
^зарЛ7 10 зартах 11 ^зартт*
Кривые давлений при температурах заряда, отличных от нормаль-
ной, т. е. при ^зарД^/зарЛ', можно строить по таблицам ГАУ. Для этого с
помощью поправочных формул определяется влияние отклонения тем-
пературы заряда на наибольшее расчетное давление
-^-=fntM3ap
Рт
и вычисляется само наибольшее расчетное давление
Pm=Pm,N-T^Pm-
По величине рт и плотности заряжания А из части I таблиц ГАУ
находится параметр заряжания В, а затем по значениям В, А и Лд
строится кривая давлений для данной температуры.
Если при наименьшей температуре заряда расчетное положение
конца горения заряда /к окажется больше действительной длины /д, то
необходимо найти такое В, при котором конец горения будет совпадать
с сечением дульного среза. Кривая давлений, отвечающая полученному
значению В, будет определять наибольшее давление газов на стенки
> ствола на участке, прилегающем к дульному срезу.
Пример 2.3. Установить размеры канала ствола и назначить марку пороха для
условной 40-мм зенитной пушки.
1. Исходные данные: d = 40 мм; 7 = 0,94 кг; v0= 1000 м/с.
2. Исходные данные для баллистического решения:
= v0 — 1000 м/с;
’ qvl 0,94-10002
„ £.1 48
СЕ = — = —з = 7а0 тс-м/дмз.
a6 (J ,Т
По табл. 2.4 определяем:
т} “ 108 тс-м/кг; pWKp = 3025 кгс/см2; Д = 0,68 кг/дм3; %=1,67; Лств = 60 калибров.
Наибольшее давление газов ртКр увеличиваем на 15% и принимаем ртКр =
= 3500 кгс/см2.
3. Диапазон изменения Д и % при подсчете вариантов: верхняя граница плотно-
сти заряжания — Дв=0,87 кг/дм3 (см. табл. 2,5); нижняя граница — Ли = 0,68 кг/дм3.
Верхняя граница коэффициента использования заряда — г| <й в = 108 тс-м/кг, нижняя гра-
ница — ч о) и = 86 тс • м/кг (см. табл. 2.6),
4. Расчет вариантов:
№ варианта 1 2 \/ з 4 5 6
Д 0,68 0,7 0,72 0,74 0,8 0,87
r/(Ji 108 107 105 103 96 86
(В 0,444 0,448 0,457 0,465 0,503 0,558
кам 0,653 0,64 0,635 0,628 0,629 0,641
h 5,04 4,94 4,9 4,85 4,86 4,95
АйМ 3,04 2,96 2,94 2,9 2,91 2,97
1,19 1,19 1,19 1,19 1,21 1,23
Рт 3600 3500 3600 3600 3575 3550
^д.табл 1595 1582 1566 1551 1507 1440
Ад 3,75 3,72 3,.67 3,65 3,69 Не реален
18,9 18,4 18 17,7 17,9
^СТВ 57 56 54 54 54
•Ti£ 4,14 4,23 4,33 4,39 4,35
А'усл 1,01 0,99 0,95 0,94 0,88
рт, кгс/см^ 4000 4400 4800 5200 5600 6000
А 3,33 3,03 2,9 2,68 2,54 2,43
/д, дм 16,3 14,9 14,2 13,1 12,5 11,9
£ств (калибры) 49,8 46,5 44,8 42 40,5 39
5. Сравнение вариантов.
Из рассмотренных вариантов наиболее удачным следует признать вариант № 3,
для которого при Д = 0,72 кг/дм3: ©=0,467 кг и 7Ств = 54 калибра.
Для выбранного варианта проанализируем влияние величины давления рт на дли-
ну ствола.
На основании полученных данных устанавливаем, что повышать давление выше
4000 кгс/см2 нецелесообразно, так как это не дает существенного уменьшения длины
ствола (при заметном увеличении его веса).
6. Уточненный расчет выбранного варианта.
По полученным Д = 0,72 кг/дм3 и рт = 3600 кгс/см2 из ТБР находим В = 1,758. Да-
лее вычисляем
0?94
----=720 кгс-с/дм2.
По значению /к = 720 кгс-с/дм2 из табл/27 выбираем марку пороха 7/7 (/к = 690).
Уточняем параметр условий заряжания:
98,1 (0,1295-690)2
950 000 0,457-1,19-0,94 = 1,615‘
Уточняем с помощью ТБР значение относительной длины:
Ад = 3,36; /д ~ 16,45дм; 7ств^50 калибров.
По таблицам ГАУ (части I—III) определяем данные для построения кривых /?(/),
v U) и /(/):
А Z, дм ‘р, кгс/см2 ^табл’ V, м/с *табл* с/дм МО3, с
0 0 300 0 0 0 0
0,1 0,49 2181 201 129 159 1,22
0,2 0,98 3030 336 215 197 1,51
0,3 1,47 3519 449 287 224 1,72
0,4 1,96 3780 549 351 246 1,89
0,5 2,45 3910 637 408 263 2,02
0,6 2,94 3940 716 458 278 2,13
5 Jk Z, лм р, кгс/см2 гтабл. м с V, м/с 'табл, т ли МО3, с
0,7 3,43 3917 787 504 290 2,23
0,8 3,92 3863 853 о46 302 2,32
0,9 4,41 3787 913 584 313 2,4
1 4,9 3692 968 620 324 2,49
1,5 7,35 3213 1187 760 368 2,82
2 9,8 2423 1335 854 408 3,13
2,5 12,25 1911 1439 920 434 3,33
3 17,7 1567 1520 972 477 3,66
А^=3,36 16,45 1390 1566 1000 500 3,83
3,5 1321 1584 509
Ат = 0,6; рт = 3941 кгс см2; = 1,г39; —— = 0,46
т т к ,
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ II
1. Березин И. С,, Жидков Н. П. /Методы вычислений. Т. I и II., М., Физ-
матгиз, 1962, т. I 464 с., т. II 620 с.
2. Бетехтин С. А. и др. Газодинамические основы внутренней баллистики.
М., Оборонгиз, 1957, 384 с.
3. Будников М. А. и др. Взрывчатые вещества и пороха. М., Оборонгиз,
1955, 363 с.
4. Г о р о х о в М. С. Внутренняя баллистика. Томск, изд-во ТГУ, 1943, 243 с.
5. Д р о з д о в Н. Ф. Решение задач внутренней баллистики для бездымного по-
роха трубчатой формы. М., изд. Артакадемии, 1941, 122 с.
6. Корнер Д. Ж. Внутренняя баллистика орудий. М., ИЛ, 1953, 461 с.
7. О р л о в Б. В., М а з и н г Г. Ю. Термодинамические и баллистические осно-
вы проектирования ракетных двигателей на твердом топливе. М., «Машинострое-
ние», 1968, 536 с.
8. Серебряков М. Е. Внутренняя баллистика ствольных систем и порохо-
вых ракет. М., Оборонгиз, 1962, 703 с.
9. Таблицы внутренней баллистики. М., Воениздат, 1948, т. I 348 с., т. II 336 с.,
т. III 344 с., т. IV 160 с.
Глава III
ПРОЕКТИРОВАНИЕ АКТИВНО-РЕАКТИВНЫХ СНАРЯДОВ
И РАКЕТНЫХ ДВИГАТЕЛЕЙ НА ТВЕРДОМ ТОПЛИВЕ 1
§ 3.1. устройство, принцип действия и баллистическое
ПРОЕКТИРОВАНИЕ АКТИВНО-РЕАКТИВНЫХ СНАРЯДОВ
Одним из путей повышения дальности стрельбы артиллерийского
орудия или миномета при сохранении его веса, габаритов и живучести
ствола является использование ракетного двигателя для снаряда. Ра-
Рис. 3.1. Схема АРС
больше ее начального значе-
L/1
t
Рис. 3.2. График изменения
скорости'АРС во времени
кетный двигатель (РД), как правило, включается после вылета снаря-
да из канала ствола, т. е. на траектории. Такой снаряд (рис. 3.1) назы-
вается активно-реактивным (АРС).
Действие РД приводит к уменьшению падения скорости снаряда на
траектории под влиянием сил сопротивления воздуха и тяжести. Поэто-
му, если тяга Р двигателя превышает сумму силы сопротивления возду-
ха = сх^м Р^2 и составляющей веса снаряда q sin 0, его ско-
рость в конце работы двигателя будет
ния £>oi в момент включения двигателя.
В противном случае, когда P<Rv+q sin 9,
будем иметь ок<^оь
Участок траектории полета снаряда,
на котором действует РД, иногда назы-
вают активным. Движение снаряда под
воздействием внешних сил (например,
сопротивления воздуха и силы притяже-
ния Земли) часто называют пассивным, а
его траекторию — баллистической или
пассивной.
При включении двигателя на траектории дульная или стартовая
скорость снаряда всегда больше его скорости к моменту начала ра-
боты РД, т. е. Уд>г>оь так как движение снаряда на этом отрезке тра-
ектории является пассивным (рис. 3.2).
В зависимости от способа стабилизации на траектории АРС может
быть оперенным или без оперения, т. е. выполненным по типу мины или
артиллерийского снаряда.
1 Материал излагается на основе зарубежных литературных источников.
Снаряды без оперения стабилизируются на траектории вращением
и выстреливаются из нарезного ствола орудия. Движение снаряда по
нарезам канала ствола обеспечивается посредством ведущего пояска.
Угол наклона нарезов в дульном срезе назначается из условия обеспе-
чения необходимой угловой скорости вращения снаряда, достаточной
для его устойчивого движения на траектории (см. § 7.1). Такие снаряды
имеют ограниченную длину, не превосходящую 5,5 калибров (рис. 3.3).
Оперенные снаряды обычно выстреливаются из гладкоствольного ору-
дия. Стабилизация на траектории обеспечивается оперением, т. е. так
же. как у мин. Длина оперенных снарядов (рис. 3.4) больше и может
достигать 10—12 калибров [4].
Размещение двигателя в корпусе снаряда приводит к заметному
снижению его наполнения В В и, как следствие, к уменьшению могуще-
ства действия снаряда у цели.
Рис. 3.3. Вращающий АРС
Рис. 3.4. Оперенный АРС
Коэффициент наполнения ВВ у АРС составляет порядка 5—10%
вместо 10—25% для обычного артиллерийского снаряда калибра
£/>100 мм. Создавать АРС малого калибра нецелесообразно, так как
в этом случае количество ВВ снижается до недопустимо малых преде-
лов, а возможный при этом запас топлива не обеспечивает потребного
приращения скорости или дальности стрельбы.
Из анализа приближенных уравнений для сверхзвуковой скорости
v и пути снаряда х—х0, записанных для двигателя с постоянной тягой
на прямолинейном участке траектории с углом наклона его к эквипо-
тенциальной поверхности Земли 0 [7]:
я =JL sine- - ; (3.1)
С gc — ц
х - х01----------------1 [1 - (1 - ЙГ Ч + % •' [ 1 — (1 — -
С . gc + р. gc + U
— 0,5 4- sin(). [1 — (1 — ЙО2] + > °2 [1 -(1 -й)’+4 (3.2)
Н Sc — F — Г"
следует, что с уменьшением баллистического коэффициента
с = °Рд/7м *
2^0 Cqdn
кинематические параметры v и х—xOi увеличиваются. Это утверждение
становится очевидным, если от ускорения движения снаряда
g 1 -ж
взять частную производную
-------------------------------------<0.
дс 1 — р./
Откуда следует, что при dc<Q функция v растет, т. е. ускорение снаря-
да увеличивается с уменьшением баллистического коэффициента.
На практике этого можно достигнуть увеличением калибра снаря-
да с? и его относительной длины .
d
В рассмотренных выше формулах:
V
а
р. /1
const;
а0
п=— ;
d
с = J kgRTh — скорость звука в атмосфере на высоте полета снаряда /г;
Р — тяга двигателя;
—начальный вес снаряда.
Для дальнобойных снарядов в диапазоне скоростей 400^v
^1200 м/с значение сг~0,8 [7]. Поэтому ожидаемый эффект от АРС
увеличивается с ростом его калибра и длины. Например \ при калибре
снаряда 283-мм и начальной скорости порядка 1150 м/с возможно уве-
личить дальность стрельбы не менее, чем на 30% (примерно с 60 до
SO км). В то время как для 30-мм снаряда с той же аэродинамической
формой и одинаковым коэффициентом относительного веса баллистиче-
ский коэффициент возрастает в 9,5 раза, т. е. ускорение торможения
30-мм снаряда от силы сопротивления воздуха почти в 10 раз больше
соответствующей величины для 283-мм снаряда.
Приблизительно во столько же раз возрастает тяговооруженность
двигательной установки rj и относительный расход топлива ц для обес-
печения заданного приращения скорости снаряда. Учитывая, что с
уменьшением калибра снаряда коэффициент наполнения В В снижается,
в результате получим уменьшение относительного запаса топлива при
резком возрастании его потребного относительного расхода р,. Иными
словами, для АРС малого калибра требуется в отдельных случаях такой
запас топлива, который не может быть размещен в снаряде.
Из приближенного выражения для коэффициента наполнения ВВ
<ц при фиксированных значениях давлений в канале ствола р и предела
текучести металла корпуса снаряда сц
“1=
следует, что си в зависимости от
величины
-— ограничено пределами:
°s
«1
£_>о.
удельные веса ВВ и металла снаряда;
Здесь ув 3 и у—соответственно
/ и /3—соответственно приведенные длины снаряда и заря-
да ВВ.
Вследствие этого для АРС весьма важно получить заданную на-
чальную скорость снаряда уд при минимально возможной величине
максимального давления р™ в канале ствола.
Далее при проектировании АРС следует иметь в виду, что с увели-
чением дульной скорости снаряда уд термический коэффициент полез-
ного использования активного заряда <п уменьшается, так как
-----«
Это обстоятельство приводит к уменьшению удельного импульса
активного метания Л = ~ • Поэтому с некоторого значения дуль-
(О
1 В частности, применительно к железнодорожной пушке К-5 бывшей немецкой
армии»
# zV.4
л
I — —
s
а = с
а 5 ^3
О
ной скорости снаряда (уд>1400 м/с) величина удельного импульса
РД Jr окажется больше т. е. реактивный принцип метания снаряда
будет выгоднее активного.
Физическое объяснение этого явления состоит в том, что с увели-
чением заряда возрастает расход его потенциальной энергии на переме-
щение собственной массы по каналу ствола. В частных случаях, напри*
Рис. 3.5. Графики изменения дальности стрельбы 107-мм снарядом
в зависимости от момента включения РД
мер для орудий с малой дульной скоростью снаряда (гаубицы, ДРП,
минометы и т. п.), активно-реактивный способ метания при сохранении
их весовых и габаритных характеристик может дать достаточно высокое
Рис. 3.6. Графики изменения дальности
стрельбы легким снарядом в зависимости
от начальной скорости
относительное приращение
скорости снаряда на траек-
тории или дальности его по-
лета.
Момент включения РД
снаряда на траектории обыч-
но назначается из условия
получения наибольшей даль-
ности стрельбы. На рис. 3.5
приведены графики измене-
ния дальности стрельбы ги-
потетическим 107-мм снаря-
дом (ф = 50°; уо = 5ОО м/с;
Ду = 300 м/с; <7=17 кг; wp =
=2,3 кг) в зависимости от
момента включения РД.
Таким образом, использование активно-реактивного способа мета-
ния снаряда требует предварительного установления его целесообраз-
ности. Нельзя утверждать, что этот принцип метания снаряда всегда
выгоден по сравнению с активным или реактивным.
На рис. 3.6 представлены графики изменения расчетной дальности
стрельбы снарядом с С^ = 9 кг/дм3 из 152-мм орудия в зависимости от
начальной скорости снаряда.
§ 3.2. ВЫБОР ДАВЛЕНИЯ СГОРАНИЯ ТОПЛИВА
И ВЕЛИЧИНЫ ТЯГИ ДВИГАТЕЛЯ
При включении двигателя на траектории наибольшее давление в
его камере определяется прочностью корпуса снаряда, обеспечивающей
его надежное функционирование в канале ствола. Поэтому оболочка
двигателя оказывается толстостенной, позволяющей сжигать медленно
горящее топливо при высоких давлениях и получить за счет этого удель-
ную тягу двигателя АРС несколько большую, чем для РДТТ ракет. л
При движении снаряда в канале ствола сопла двигателя закрыва-
ются поддоном для того, чтобы исключить перетекание пороховых газов
из заснарядного пространства в камеру двигателя и тем самым избе-
жать его включение в канале ствола. Для схемы АРС (см. рис. 3.1), ис-
пытывающего в канале ствола в основном только осевую перегрузку,
размеры оболочки по месту опасного сечения I—I определяются по
формуле
41
4-1.
(где — осевое напряжение в опасном сечении;
$= 1----— —коэффициент распределения весов снаряда относи-
я
тельно опасного сечения I—I —-сумма весов за-
ряда двигателя и части снаряда, лежащей позади
опасного сечения);
п~1,2 —запас прочности по отношению к пределу текучести;
Р^т — наибольшее давление в канале ствола при предельно-
допустимой максимальной начальной температуре за-
ряда орудия; *
а21=—-------отношение наружного и внутреннего диаметров обо-
лочки двигателя.
Допустимое тангенциальное напряжение от крутящего момента по
месту опасного сечения
T^2tg ар„т
4
^21
4 1
а21 1
где а — угол наклона нарезов канала ствола.
Суммарное напряжение
^=]/о2 + Зт2=.Атт—-^У £2-]-12tg2 а —-
4-1 а^ + 1
(3.3)
Принимая os равным пределу текучести материала корпуса сна-
ряда, определяем величину a2i методом последовательного сближения
результатов или по формуле Кардана, так как решаемое уравнение яв-
ляется кубическим относительно a2i2-
При найденной величине a2i допустимое давление в камере двига-
теля, включаемого на траектории, определяется по формуле
2 24i + 1
Приравнивая щ и получим
3 Рсттл21
(3.4)
Из выражения (3.4) следует, что допустимое давление в камере дви-
гателя пропорционально наибольшему давлению в канале ствола.
На практике допустимое давление в двигателе можно определить
также из уравнения
з 4-1
2" - I
(3.5)
так как должно обеспечиваться ov = a^се.
Величина рдв может ограничиваться, исходя и из других соображе-
ний, например, задаваемой продолжительностью работы двигателя, от-
сутствием топлива с потребной скоростью горения или необходимым за-
коном изменения тяги и т. и. Во всех этих случаях следует иметь
Рдвтп2^/?дв*
Тягу двигателя обычно выбирают постоянной из условия
sin 9),
(3.6)
где а2 — коэффициент стабилизации скорости снаряда на активном
участке траектории.
При ct2=l тяга двигателя равна суммарной силе сопротивления
движению снаряда. В этом случае, скорость снаряда практически со-
храняется постоянной. При О2< 1 скорость снаряда уменьшается, а при
аг> 1—увеличивается. В обоих этих случаях скорость снаряда будет
приближаться к ее предельному значению
Р — q sin 9
найденному из условия г?=0, т. е. при Р—Rv—q sin 0 = 0.
Здесь q — текущий вес снаряда;
9 — угол наклона вектора скорости к горизонту;
сх — коэффициент лобового сопротивления;
р — плотность атмосферы;
— площадь поперечного сечения снаряда.
§ 3.3. ВЫХОДНЫЕ ХАРАКТЕРИСТИКИ РДТТ
Для постоянного значения тяги расход топлива
(3.7)
Для удельного импульса двигателя на баллиститном топливе спра-
ведлива формула [7]
(3.8)
9
где Joo—1/ —и GJX —соответственно удельный импульс
Г g
и тяга двигателя с полубесконеч-
ным соплом в пустоте;
Z — коэффициент тепловых потерь;
в=-------относительный коэффициент реактивности сопел;
Коо
— фактический коэффициент реактивности сопел;
—’ коэффициент реактивности полубесконечного сопла;
— суммарная площадь выходных сечений сопел;
— число сопел в днище снаряда;
ph — давление атмосферы на высоте й.
Величина Кв с учетом диссипативных сил и радиальной составляю-
щей.потока газов в диффузоре сопла [см. выражение (4.21)] определяет-
ся по формуле
Къ=7л [ I 4“Х2(АГв.и— 1)],
где
Zi=0,98;
In sec2 Oj
tg26j
0i — угол раструба конического диффузора сопла.
Значения коэффициента %2 в зависимости от угла 01 раструба кони-
ческого диффузора сопла приведены в табл. 4.1 (см. гл. IV).
Величина коэффициента реактивности идеального сопла (%i =
= /2=1), заданного размера (FB/F*), для случая Рк^рн определяется в
результате совместного решения уравнения сплошности течения из-
энтропического потока и выражения для #Ви [см. зависимости (4.10)
и (4.21)]:
где
1
^В.И
^в.м
а*
—1
в. и
— площадь выходного сечения сопла;
— площадь критического сечения сопла;
— коэффициент скорости продуктов сгорания
в выход-
^в. и
1
ном сечении идеального сопла (отношение скоростей
потока газа к скорости звука в критическом сечении).
При проектировании, когда величина Кв задана, удобнее пользо-
ваться формулами:
Площадь критического сечения сопла для заданного расхода про-
дуктов сгорания
gVrtx
(3.9)
где
— коэффициент расхода (при£ = 9,81 м/с2,
1
А=1,25, ^41 = 2,1 м2 /с).
Давление в камере двигателя должно быть выбрано из условия
(см. гл. IV)
k
Й —1
Рл 1-
2
в. и
(3.10)
При знаке равенства имеем расчетный режим работы сопла (рв =
=ph) и наибольшее значение удельного импульса при заданном р^
В случае, когда имеет место неравенство, статическое давление ръ по-
тока в выходном сечении сопла будет больше давления ph окружающей
атмосферы
k
Р°о ( 1 , ’ ’ Чи I — А > Ptr
\ k 4- 1 /
Для расчетного сопла удельный импульс и скорость газа в выход-
ном сечении сопел РДТТ в зависимости от давления в его камере изме-
няются в соответствии с зависимостями (3.8) и (4.14):
Из этих формул следует, что с увеличением давления р^ выходные
параметры Ц и Хв>и монотонно растут, приближаясь к своим предель-
ным значениям: и . При этом согласно уравнению
(4.10) степень уширения сопла Л/F* быстро стремится к бесконечности
(см. табл. 4.12). Поэтому на практике величину FBjF* выбирают из кон-
структивных соображений и, таким образом, налагают ограничения на
выходные характеристики двигателя (7 и Хв), так как согласно форму-
лам (4.13), (4.14), (4.21) они однозначно определяются заданной вели-
чиной FkIF*.
Для расчета температурного комплекса RT^ с учетом теплоотдачи
через стенки камеры двигателя можно пользоваться формулой (7]:
(3.11)
Jrv
Здесь
— коэффициент тепловых потерь;
^0,7 — относительный перепад температур стен-
ки камеры и продуктов сгорания;
Л=427 кге-м/ккал — механический эквивалент теплоты;
Сж — теплотворная способность топлива при
заданной его начальной температуре;
ат^0,1 ккал-м/(кГ‘С-К)—постоянная коэффициента теплоотдачи;
F— внутренняя поверхность камеры сгора-
ния;
Л—поверхность горения топлива (заряда);
—скорость горения топлива при давлении
Рос*
В инженерной практике для определения калорийности баллистит-
ных порохов можно пользоваться формулой
k~ i ’
где fi—R1\ — сила пороха, найденная в манометрической бомбе при
жидкой воде.
Сила пороха для многих его марок считается известной и прове-
ренной длительной практикой баллистического проектирования артил-
лерийских орудий (см. гл. II). Связь между давлением р^, температу-
рой Тж и площадью критического сечения сопел F* при заданном зако-
не горения топлива и(р) может оыть найдена из термодинамического
расчета двигателя.
Характерные параметры топлива и двигателя \и(р), рЖу Ты,
Fx] связаны уравнениями [7]:
сохранения энергии
Gn AQJK=GpcpT + aTF (T - T„) + -Д- ) + р ;
at dt
сохранения вещества
dt
Для совместного решения их необходимо присоединить еще три
уравнения:
уравнение изменения скорости свободного объема камеры сгорания
dW
dt
— S
уравнение состояния для средних параметров продуктов сгорания
в камере двигателя
pW=^RT\
уравнение и(р} квазистационарной скорости горения топлива.
В практике термодинамического (баллистического) проектирования
РДТТ и артиллерийских орудий для закона горения принимают анали-
тические зависимости:
для
и=а-\~Ьр для
для
О < р 200 кгс/см2; 1
200 С 800 кгс/см2; >
р^> 800 кгс/см2.
(3-12)
Применительно к этим соотношениям исходная система уравнений
термодинамического расчета РДТТ решена в книгах [7] и [8]. Здесь же
ограничимся лишь решением для предельных значений параметров р»,
Too и «оо, т. е. для периода стабильной работы РДТТ (dp/dt — O),
Если положить,, что:
то уравнения сохранения энергии и вещества приводятся к виду:
(k — 1) S3u^AQ^=k — Зз^ооУоД RT^ +
со
7*
СО ,
СО
Р оо
ГДе Yoo = •
оо
Откуда для
заданной величины предельного давления роо следуют
расчетные соотношения:
и
оо оо
оо
00
оо
ж
ЖЧ5
k
Поверхность горения заряда S3 определяется по формуле
S3= - , Р°°-----. (3.14)
Л(ь—Тоо)^
Здесь отношения в зависимости от закона горения топлива
соответственно будут равны:
Роа Рос '>
------ ДЛЯ Itoo--U.Pao >
“оо «1
Рос. Р ОО I 1
----—---------- для иоо=а-\-Ьрх,-,
«» а + Ьрх
Рсс 1
=— для их=и1рх.
II
ОО------------i
При от = 0 чувствительность давления к площади критического сече-
ния сопла F* соответственно определяется уравнениями:
(8-Y=o) К/?Ло-
S 1
л у<
Сравнительный анализ зависимостей для dF^jdp^ показывает, что
при одночленном линейном законе горения давление в камере двигателя
роа весьма чувствительно к изменению площади критического сечения
й . ИЖГ
сопла /**, так как абсолютная величина ------= А---------- много
дР* S«i
больше единицы. Поэтому незначительное изменение площади F* (на-
пример, вследствие разгара) приведет к резкому падению давления роо
и снижению удельного импульса двигателя.
В литературе имеется указание о том, что одночленный линей-
ный закон горения топлива в РДТТ не реализуется, а топливо горит в
соответствии с законом, близким к линейному двухчленному или степен-
ному одночленному £14]. То же показывают и формулы dF^/dp^ В самом
деле, при >ос обе зависимости dF^/dp^ написанные для одночлен-
ного степенного и линейного двухчленного законов горения топлива, вы-
рождаются в формулу, справедливую при линейном одночленном законе
горения:
lim
Роо^°°
1
= lim
Таким образом, одночленный линейный закон горения не может
быть реализован, так как он, строго говоря, проявляется в области прак-
тически недостижимых давлений.
Пример 3.1. Рассчитать РДТТ для гипотетического 152-мм АРС, выстреливаемого
из пушки с начальной скоростью 800 м/с, а также приближенно найти его скорость в
конце активного участка траектории полета.
Исходные данные:
9 ~ 45°; утс = 2500 кгс/см2; а ~ 7°; cs = 80 кгс/мм2; du ~ 14-0 мм;
= 3 дм3; ZB = 2 с; £ = 0T85; q — 42 кг; сх = 0,27; Q = 890 ккал/кг.
Будем считать, что скорость горения топлива подчиняется, например, уравнению
и ~ 3,5 + 4,5-10”2/?,
где а — в мм/с; р — в кгс/см2.
1. Допустимая толщина стенки оболочки двигателя при условии размещения на
ней ведущего пояска, исключающего радиальное обжатие оболочки двигателя порохо-
выми газами заснарядного пространства:
л я21-1 1400,22
А = —-----------— —------— = 12,5 мм,
2 л21 2 1,22
где
а2, f 1 — - 1 = fl -0,85-1,2
х ае / \
2500 \~1
8000 /
= 1,48,
2. Внутренний диаметр камеры сгорания
dK — dn — 2 А = 115 мм.
3. Длина камеры сгорания
4 WK 4 З.Ю.2
ZK =------—-------------= 290 мм.
Я 4 л 1>152
Допустимое давление в камере двигателя
3 аЛ. ^21
3 8000 0,5
-----~ —— = 1000 кгс/см2.
е —
5. Скорость снаряда в момент включения двигателя (Z = 2 с):
v0i = voe sct — (1 — е g’rf)=800e 0,115 — й?Д-з 9,81 (1—е °’115) = 583 м/с,
С О,оО-•1U
где
aapf'M 216-0,125 ч 9 „ *
с = „ = „ Г,84-10“2 = 5,85-10-3 с/м;
2q 2-42
get =9,81 -5,85 -1О’“3-2 — 0,115; ас = сv v0 = const = 0,27-800 = 216;
х о
FM = 1,84-10“2 м2; 0,125 кг-с2/м4 (на высотах до 1000 м).
6. Тяга двигателя при «2=1,31:
Р = а2ц((щ 4- sin 6) = 1,31 -42(5,75-10~3-583 + 0,71) = 226 кгс,
где = Cq — = 5,75-10 3 с/м.
Ро
7. Расход топлива при Л = 200 кгс-с/кг:
G = — = 1,13 кг/с.
Jr
8. Наружный диаметр одношашечного заряда (п=1) при ии=100 [7]:
хХ 1 ЮО-1,152
102
--- — =110 мм,
/1002-1,152
1 + 4-2,92
где Z3 —1К = 2,9 дм.
9. Внутренний диаметр заряда при хвн = 150:
4Z3 4-2,9-1О2 „ „
dR =----=-----------= 7,5 мм.
150
10. Поверхность горения заряда при бронированных торцах шашки:
S3 = + dB)Z3 = 3,14(1,1 +0,075)2,9 = 10,6 дм2.
11. Вес заряда в заданном объеме камеры
« = — (d2 — d2) Z3B = 0,785 (1,12 — 0,0752)2,9-1,6 = 4,3 кг.
4
12. Время работы двигателя
13. Потребная скорость горения
— dB ПО — 7,5
it —-----------—-----------= б,7а мм/с,
^оо 4-3,8
14. Для пороха, горящего в соответствии с двухчленным линейным законом иоа =
= 3,5+4,5-10-2 рос:
йоо“д 6,75 — 3,5
/? =-----------= 9 =72 кг с/см2.
°° b 4,5-10“2
Отсутствие медленно горящих порохов не позволяет реализовать давление рдв ш,
допускаемое прочностью снаряда. Для его реализации требуется топливо, имеющее ско-
рость горения не свыше 10 мм(с при Доо — 1000 кгс/см2 [см. формулу (3.23)].
15. Скорость снаряда в конце активного участка траектории в первом приближе-
нии можно оценить по формуле
vK = —
^2
Здесь
— [(1 - Л — (1 - н)Ч = 606 м'с-
£С2 —Р-
(О
gc2 9,81-5.1-10“3
I1
о___226
О' = 42
2,7-10“2
= 1,85; + = 583 м/с;
G 1,13
ц = —= — = 0,027 1/с;
q 42
4- = 0,102; с2 = с0-------= 5,85-10“3-0,87 = 5,1-10“3 с/м
42 р0
— среднее значение баллистического коэффициента (без учета уменьшения донного со-
противления на активном участке траектории) при рзср ^0,87ро (на высотах от 1
до 3 км), где ро — плотность атмосферы у поверхности Земли.
16. Температура продуктов сгорания в камере двигателя при Vi = 0,7 и от —
= 0,08 ккал-м/(кг-с-К):
UL =
640 000
- 2М0 К;
V =
^1 =
00
k~ 1 1
=-----HQy =—427-890-0,843 = 64 000 кгс-м/кг,
k 5
где
_ !_____ 0,7-0,08 7200 1
Z —1— RQ S В их =1~ 32-890 1>2’ 1,6 6,75-Ю-2
17. Площадь критического сечения сопла
о Vrt^
~ са
А1Рос
1,13-253
2,1-72
см2
18. Коэффициент скорости продуктов сгорания в выходном сечении идеального
сопла при ръ = 0,8 кгс/см2:
^.и = Хоо У l-(Ph!Px)k =зУ 1 — (0.8/72)1'5 = 2,32.
19. Коэффициент реактивности идеальных сопел
в.и + ^в.и 2,32 + 2,32
----"-------= --------------------= 1 ,375
20. Фактическое значение коэффициента реактивности сопла всего блока
при 15°:
Кв = Xi [1 + ЫКв.и- 1)] = 0,98 [1 + 0,96-0,375] = 1,33,
где
In sec2 0 In sec215°
21. Коэффициент уширения диффузора
22. Диаметр критического сечения сопла в блоке, состоящего из семи сопел
(п=7):
24. Диаметр выходного сечения сопла и суммарная площадь сопел:
dB = rf* У vB 20 мм; FB = п —-— = 22 см2.
4
25. Фактическая тяга двигателя
к
/ 2 \ /г-'1
Р = (1 +£) ——) KJ^P^ — '^Ph^ 1,24-1,33-2-72 — 10,3-2-0,8^220 кгс.
\k 4- 1 /
26. Фактический удельный импульс
Р 220
Z, = — = —- = 195,5 кгс-с/кг.
Ст 1,13
При этом значении Jr скорость снаряда равна 606 м/с.
27. Изменение силы лобового сопротивления Rv сверхзвукового снаряда за счет
уменьшения донного вакуума, вследствие его заполнения продуктами сгорания из дви-
гателя, приблизительно можно оценить по формуле:
- Ру .
Величина статического давления продуктов сгорания на дно снаряда после вне-
запного расширения площади поперечного сечения их потока от FB до площади попе-
речнего сечения снаряда F\
= 1,098; Fr = 22,0 см2; f 184 см2.
В нашем случае Др = 0,1 кгс/см2; SRv = \pF ж 18,4 кгс или Д/?*% =&сх% ж 10%.
Такое снижение силы сопротивления на активном участке траектории полета снаряда
увеличит его скорость к моменту конца работы двигателя примерно на 15 м/с и ее ве-
личина составит около 621 м/с.
Для расчета веса воспламенителя следует пользоваться уравнениями, приведенны-
ми в § 3.4 и 3.5, а также в книге [7].
В первом приближении вес воспламенителя типа ДРП можно подсчитать по
формуле
0,1 S3&b£b — 0,035 кг,
где S3 = 10,6 дм2; Вв= 1,65 кг/дм3; 2ев = 0,04 дм.
Рассмотрим более подробно процесс автономного горения воспламе-
нителя и выбор его наибольшего давления.
§ 3.4. РАСЧЕТ ВЕСА ВОСПЛАМЕНИТЕЛЯ
Задачу будем решать при гипотезе осреднения параметров состоя-
ния продуктов сгорания в камере двигателя. При небольших значениях
х^ЮО средние параметры состояния могут быть приняты равными пол-
ным параметрам потока газа на входе в конфузор сопла. Связь между
полными параметрами продуктов сгорания и их параметрами у дна ра-
кетной камеры, а также закон их изменения вдоль поверхности горения
устанавливаются на основе уравнений механики.
Далее примем, что зерна воспламенителя начинают гореть одновре-
менно по всей их поверхности, а продукты его горения не содержат кон-
денсированной фазы.
В качестве исходной системы уравнений для процесса изменения
давления в камере РДТТ используют:
— закон сохранения энергии
Qt—(3.15)
— закон сохранения вещества
Оп —Ор = о)/; (3.16)
— закон горения топлива
w=/(/?);
— текущий объем камеры
i
Sudt\
— уравнение состояния газов
pW — ^rRT.
Из уравнения закона сохранения энергии (3.15) найдем кривую из-
менения давления в камере двигателя при горении воспламенителя
Скорость подвода тепла вследствие горения воспламенителя
Унос пли отток тепла из камеры в атмосферу происходит вследствие
истечения газов через сопло и теплоотдачу от продуктов сгорания к
стенкам камеры РДТТ со скоростями, равными
рр
^-=-атГ(7’-Гс).
(3-17)
Суммарная скорость изменения количества тепла в камере двигателя
Qi=Qit 4" Qu Qs/-
Для скоростей притока и оттока продуктов сгорания справедливы
тзомулы:
» Л w
Дегрессивность формы зерна воспламенителя будем учитывать ко-
эффициентом т, т. е. принимать
t
5в=5вОе Ч (3.18)
Величина коэффициента т ограничена пределами 0<т<3. При
/71 = 0 имеем 5B = SB0; при т = 3 получаем закон изменения поверхности
горения, близкий к закону изменения поверхности зерна шаровой фор-
мы. Величина т определяется из опыта на основе результатов обмера
зерен воспламенителя.
Влияние воздуха, заполняющего свободный объем камеры —
= ув.з^о, на; кривую р (t) учтем приближенно:
f
“г? а>в.з
7—=Лв--------
^П.в (0В
(3.19)
Величина коэффициента также устанавливается опытным путем.
По физическому смыслу она ограничена пределами 0<nB< 1.
Совместное решение уравнений (3.19) и (3.16) приводит к зави-
симости
(3.20)
Вследствие малости изменения свободного объема камеры за время
горения воспламенителя примем
W = W04^
2Вв
= const.
Для коэффициента теплоотдачи ат в соответствии с критериальной
зависимостью Стантона 1
S t= 0,023Re- ° 2 Рг- ° -6=——
CP1bv
имеем
aT=StcpYBa,
или
От=’Л, (3.21)
1 См. гл. V.
где crT —Stfpv; ср и v — соответственно удельная теплоемкость и ско
рость газов в камере сгорания.
Для стенки с термопокрытием от = 0,04 ккал-м/(кг*с-К) Для сталь
ной стенки От ='0,1 ккал • м/ (кг • с • К).
На основании выражений (3.21) и (3.27) получим
dQs_____
dt R
где 1 —(Т cjT) = 0,5 -4-0,7.
Примем, что закон горения и(р)
КЗДП имеет вид и(р) = const [8].
На основании изложенного выше
приводится к виду
-
воспламенителя типа ДРП или
закон сохранения энергии (3.15)
iTFp3 Т kSup — W
так как
dL dW
,, Рь
dt dt
dt k—\ dt v B
dW Q
----= Stt.
dt B B
Из уравнения (3.20) имеем
toR.3 \ 1
/
В. 3
Тогда дифференциальное уравнение кривой p(t) примет вид
Л2/7*2
ОЛН
г5 П
dPn
dt
— Pjl_l_k —1 L
liB 5B SB Ов Ьв^в 5B
Величина члена k — по сравнению с величиной {k—1)/IQ
(менее 1%), поэтому ею можно пренебречь.
Введем обозначения:
мала
If*2
шв.з \ 1
сов /
(3.22)
в
1
В В
Рв
Тогда
как —
dt
С2У + ^3 —г + у ------тг) •
\ dt 5В dt /
m
— , то уравнение приводится
виду
R
г
^В йв
в
в
в
C==Cl^2 + C2i/ + C3
dy
dt
(3.23)
' m W 1
где е2 = с2--------------------
tB LLB 8В
После разделения переменных получим
dy
У~У1
У — У2
= ——(yi — yzW,
оз
г
где z/i и уо—корни квадратного уравнения rz/2—|—— у—— = 0
С1 С1
ляемые выражением
2
У\ 2= —— I/ —
1)2 2С1 “ У \ 2с
При этом z/i>0; z/2<0-
Интегрируя уравнение (3.23), получим
___ У\ —
опреде-
(3.24)
С1
1
1 —
где
£1
Сз
^у » #oi
#01 — #2
/?н — начальное давление в камере сгорания; SBo — начальная
ность горения воспламенителя.
В соответствии с принятым обозначением у= (p^jS^) для
рв(0 получим
поверх-
кривой
в
Найдем время, определяющее максимальное давление при автоном-
ном горении воспламенителя.
Условие экстремума -^£^=0 приводит к уравнению
dt " dt
откуда на основании соотношения (3.23) имеем
^ах-—^ + |/ (^У +
(3.28)
Сопоставление формул для ух и #тах позволяет установить, что ве-
личину z/max можно определить одновременно с расчетом значения пара-
метра у\ по формуле (3.24). Для этого достаточно постоянную с<2 при-
нять равной с2- Тогда параметры #i и #Шах будут связаны соотношением
Искомое время
__ 1 Inf ^max #2
зт о 111
Р \ #тах — У1
(3.29)
На основании формул (3.27) и (3. 29)
температура будут:
максимальное давление и
т
_ 9 ( 1
Рът ^шах в-) I тт
\
#тах #1 в . р _________1
t, „ I > втах х,
#тах #2 / Я
(3.30)
J
Если величина рВт задана, то для определения веса воспламенителя
получим формулу
/ mt
р г~ 1 р—т
% = 5в9»в8в \ е в dt = 5в9ев8Е , (3.31)
о
где 2ев — начальная толщина порохового зерна.
Полное время /в горения воспламенителя и его начальная поверх-
ность SB0 определяются зависимостями [с учетом выражения (3.30)]:
Рвтп
Утах
т
Утах У2 @ в .
//max У1 .
(3.33)
Подставляя выражения для /в и SBo в уравнение (3.31), получим
формулу для расчета веса воспламенителя в зависимости от потребной
величины наибольшего давления:
//max
т
Утах У2 в 1
Утах У'1 .. т
(3.34)
1 _е— т
Для 0<т<2,75 имеем 1>-------------->0,34; величина коэффици-
т
ента согласования К ~0,8.
Вес воспламенителя с учетом поправки на воздух, находящийся в
свободном объеме камеры сгорания, приближенно оценим по формуле
(3.35)
С учетом конденсированной фазы в продуктах сгорания воспламени-
теля решение этой задачи должно быть построено на дифференциальном
уравнении кривой p(t) для смесевого топлива (см. § 3.6).
§ 3.5. ВЫБОР НАИБОЛЬШЕГО ДАВЛЕНИЯ ВОСПЛАМЕНИТЕЛЯ
Эта задача является весьма сложной. Предлагаемое решение осно-
вано на приближенной физической модели теплопередачи от газов к
топливу.
Максимальное давление воспламенителя определяет его начальную
поверхность горения, обеспечивающую требуемую интенсивность тепло-
вого потока для устойчивого процеса горения топлива.
Динамическое равновесие теплового обмена между продуктами
сгорания воспламенителя и слоем топлива, участвующим в реакции, вы-
ражается формулой [7]
ат(Г-7’:)=гт8«(7':-7’н), (3.36)
где ат = атун— коэффициент теплоотдачи от продуктов сгорания к топ-
ливу; ст — удельная теплоемкость топлива.
Уравнение (3.36) приводит к следующему условию достаточности
интенсивности теплового потока, воздействующего на поверхность вос-
пламеняемого топлива:
+ (3.37)
где — скорость горения топлива в момент его вспышки;
Т s — температура вспышки топлива;
Тк — начальная температура топлива;
Т — температура продуктов сгорания воспламенителя в мо-
мент вспышки топлива, определяемая как
2
R
Выражение (3.36) можно представить в
динамического равновесия теплового обмена
ния и поверхностью заряда:
9 9
iCK
г5 Н
виде инварианта подобия
между продуктами сгора-
D
т стЬи A2F*2&2 _______
т #max
Для момента вспышки топлива, лежащего
кривой р(/), после несложных преобразований
водится к формуле
— const
на восходящем участке
неравенство
(3.37) при-
*
всп
С -г
—
1
1— V
РкГТГ
PT*S
Д2 /г*2 2
^гпах
Пои
л.
-------—у = const эта формула приооретает вид
k R
1
V
(3.39а)
В формуле (3.39) параметр г/max, как показывает уравнение (3.28),
зависит от условий заряжания и скорости горения воспламенителя. Ве-
личина неравенства Рвт Р^и устанавливается опытом.
Формула (3.39) определяет величину давления /?Всп, при котором
скорость теплового потока или интенсивность теплового воздействия про-
дуктов разложения воспламенителя на поверхность заряда оказывается
достаточной для возбуждения устойчивого процесса его горения.
В заключение; отметим, что до момента вспышки топлива под ат сле-
дует понимать приведенную величину коэффициента теплоотдачи
ат=а3
3 «3 /
где г—площадь поверхности камеры двигателя, омываемой продук-
тами разложения воспламенителя;
53 —площадь поверхности горения заряда;
а3—коэффициент теплоотдачи от продуктов разложения воспла-
менителя к поверхности горения заряда;
ад — коэффициент теплоотдачи к поверхности камеры двигателя
после вспышки топлива.
Решение задачи о моменте вспышки топлива, как уже отмечалось,
дано для квазистационарных условий теплового обмена между продук-
тами сгорания воспламенителя и топливом основного заряда РДТТ. При
этом сделано допущение, что коэффициент теплоотдачи зависит только
от весовой плотности газов, воздействующих на поверхность заряда дви-
гателей.
Необходимость знания требуемой величины давления газа воспла-
менителя для обеспечения динамически устойчивого горения топлива
после его вспышки побудила дать приближенное инженерное решение
этой задачи (3.39). В противном случае было бы весьма трудно (вслед-
ствие неопределенности выбора достаточности давления воспламените-
ля) назначить требуемый вес воспламенителя сов, так как при расчете
его рв т должен быть больше Лаг
Коэффициент надежности воспламенения топлива р = уела-
Т^всп
навливается опытным путем для нижнего предела диапазона отрица-
тельных температур заряда топлива или приближенно из условия
* 2
Рвсп з Рът*
Принятая модель процесса теплопередачи, содержащая в себе, оче-
видно, неточности, может быть до некоторой степени уточнена соответ-
ствующим выбором коэффициента от, который следует рассматривать
как коэффициент согласования с опытом. При наличии опытного мате-
риала коэффициенты т, п, от позволяют получить достаточно надежные
результаты выбора требуемого веса воспламенителя по формуле (3.34).
Пример 3.3. В методических целях рассмотрим решение задачи расчета периода
воспламенения гипотетического твердотопливного заряда, имеющего следующие физико-
химические характеристики и условия заряжания:
<2^ = 870 ккал/кг; 7о = 29О К; роо = 7000 кге/дм2; 5 = 388 дм2; IF0 = 134 дм3; щ =
= 1,16-10~4 дм3/с-кгс; v = 0,7; F=4,65 дм2; F0=0,73 дм2; /?=320 кгс-дм/(кг-К); Рвт =
2
=— Роо; От = 0,40 ккал-дм/(кг-с-К); ст=0,18 ккал/(кг-К); 6 = 1,65 кг/дм3; Ts = 550 К.
3
В качестве воспламенителя выбираем зерненое топливо со следующими условными
характеристиками:
QB ж = 730 ккал/кг; т=2; &=1,25; 6В = 1,65 кг/дм3; 2ев = 0,04 дм; ив = 0,5 дм/с;
/в =0,04 с.
Вычислим постоянные коэффициенты исходного дифференциального уравне-
ния (3.22) 1:
с = (k - 1) .4QB ж = 780 000 дм;
с\ = с2 — — ~ — 8,395 дмф'кг;
k — 1 v! a F
с<> = —— А------------= 5 дм5/кг;
Р «в
Л^2
Cy — k--------= 38,5 дм9/кг;
Ь2в«в
г,
Сз = —----— 168 дм°-с/кг.
Корни характеристического уравнения (3.24):
^1,2 —
с2
2Ci
i/i = 289; .1/2= -71.
Наибольшее значение параметра // при автономном горении воспламенителя (3.28):
Необходимая начальная поверхность горения воспламенителя (3.18) и (3.29):
t
т R max
Se0 = —^-е 'в =97 дм2,
_____ У'л max
1 Здесь и далее указывается расчетная формула.
где
j. 1 i и ^max Уч л лП1 о
max— Q Пу —0,0218 с;
Р #шах Ут
Пу = — = —4,06;
1/2
Э = — (1/1 - 1/2) = 83 1/с.
Сз
Необходимый вес воспламенителя (3.31):
1 — е~~т
йв = ^вО^вО^в '— 1 КГ.
т
Вес воздуха в камере сгорания
“в.з = Ъ.з^о = 1,293-0,134 = 0,173 кг.
Вес воспламенителя с учетом веса воздуха при п ъ 1 (3.35):
адв1 =
ив
== 1,45 кг.
Координаты кривой давления при автономном горении воспламенителя (3.27):
А>(О =
У\ —
1 — Пйе“^
*8в0®
Результаты расчета для интервала времени 0^/^/в сведены в табл. 3.1.
Таблица 3.1
Л С 0,001 0,008 0,014 0,0218 0,030 0,040
Рв(/), кгс/дм2 430 2840 4220 4700 4300 3170
Давление вспышки холодного заряда двигателя, имеющего температуру Тв =
= 240 К (3.39):
$
Т’всп
С'£
1 у—
1 —--------
71 г
1
0,18 4
1,65-1,16-10~4-320-310
0,4
_________1________
320-550-0,52-1,65
0,3
— 4200 кгс/дм2.
6,32-0,732.14’2
При Т — —-—JQ = 1950 К формула (3.39а) дает тот же резул тат.
k
При нормальной температуре заряда 7Н = 290 К давление вспышки топлива
/?*сп = 2400 кгс/дм2. Таким образом, условие ръгп >/>всп выполняется.
Согласно данным табл. 3.1. Время вспышки заряда топлива составит:
— для холодного заряда £всп = 0,014 с;
— для заряда при нормальной температуре t3сп = 0,0067 с.
Параметры рвсп и /Всп являются начальными условиями для расчета кривой дав*
ления в периоде совместного горения топлива й-воспламенителя.
§ 3.6. ТЕЧЕНИЕ ДВУХФАЗОВОГО ПОТОКА В СОПЛЕ И РАСЧЕТ
ВЫХОДНЫХ ХАРАКТЕРИСТИК РДТТ НА СМЕСЕВОМ ТОПЛИВЕ
Согласно закону сохранения энергии для продуктов сгорания
Qt = Ut-\-pWt применительно к равновесному тепловому состоянию их
фаз в камере двигателя можно записать
AQxGa = O,.CpT±A + ,
К dt k — 1 dt
где Qt — Qu + Q2/ +Q3/ + Q4/ —скорость изменения количества тепла в
камере двигателя;
— скорость притока тепла от сгорания топ-
лива;
Qs/= - ~GyCpT — скорость уноса из камеры двигателя теп-
ла газовой фазы вследствие истечения
продуктов сгорания через сопло в атмо-
сферу;
Qa/ — — С?тстГ — тоже для конденсированной фазы;
С?4/= — а/7 (Т — Гст) — отток тепла вследствие теплоотдачи;
Gn = Ог-|-От~ Sitcxfi — расход продуктов сгорания из камеры
двигателя;
Ог — расход газовой фазы;
GT — расход конденсированной фазы продук-
тов сгорания;
— калорийность топлива;
ет— удельная теплоемкость конденсирован-
ной фазы;
t Ср «
k — ——— отношение удельных теплоемкостей для
cw
газовой фазы;
р и Т—среднее давление и температура продук-
тов сгорания в камере двигателя.
В соответствии с уравнением состояния для средних параметров про-
дуктов сгорания pW = ^rRT и соотношением Мейера ср—cw = R выраже-
ние внутренней энергии для газовой фазы и = ытС\уТ приведено к виду
и=-^.
k~1
Выражение для коэффициента теплоотдачи от газовой фазы продук-
тов сгорания к стенке камеры двигателя на основании критерия
St=—— =0,023Re-°’2Pr-06
при стабильных значениях скорости газов в камере сгорания можно при-
нять в виде
где
= Stгут ^0,1 н-0,05 ккал-м/(кг-с-KJ-
Поэтому выражение для на основании уравнения состояния
p=yRT приводится к виду
где
А — 427 кгс-м/кг; —-^-^0,7;
{ т
7 ст — средняя температура внутренней поверхности камеры сгора-
ния; А?~32-?33 кгс-м/(кг-К).
— с G
Введяоб означения с„=— и 5=——, получим
Ср Ог
(k - 1 )AQJjn = (1 + kQrRT + (k - 1) A Fp + kpW't f W pt.
/\
Исходя из уравнения сохранения вещества для стационарного перио-
да работы двигателя (Р/ = 0)
Опоо — Ог-|- От 4" SyUoa t
расход газовой .фазы продуктов сгорания определяется выражением
G — -2^'1 —22. ='Д ,F* ——— ,
v \ b ; 1 + е y-RT^
fe+1
/ 2 \fe—1
1де kg I----------- ^2,1 м1/2/с —постоянная расхода для га-
Р \£ +1/
зовой фазы;
усм — удельный вес продуктов сго-
рания в камере двигателя.
Тогда из уравнения сохранения энергии при р/ = 0 имеем выражение
для температурного комплекса в камере двигателя
rt„=— држ (1 - Д -М 1 .
k RQx ®мси у 1 + Ср^
Учитывая, что усмС8 и k—— <^AQX, дифференциаль-
ное уравнение сохранения энергии приводится к виду
где
со — вес топлива;
^кам — объем камеры сгорания.
Решение этого уравнения, описывающего индикаторную кривую дав-
ления в камере сгорания p(t), было изложено в книге [7] для широко из-
вестных квазистационарных законов горения твердого топлива и(р):
u = ii=a{JrbYp; и — -— ----.
а ч- ьрп
Удельная тяга двигателя согласно ее выражению, записываемому в
общем виде как
при условии, что полная температура газовой фазы в выходном сечении
сопла равна температуре определяется формулой
где
J<x = ]/ — хЖ2ж— предельная удельная тяга двигателя с полубес-
V g
конечным соплом в пустоте (ря=0);
— коэффициент, учитывающий отставание конден-
v
сированной фазы от газовой при истечении про-
дуктов сгорания через сопло;
J ' - гл GTvT в
=------- — составляющая реакции потока продуктов сгора-
g
ния от конденсированной фазы в выходном се-
чении сопла;
/г _|_ 1
. А,—----------—то же от газовой фазы;
_________
а*со= j/^-2/g gRT<x> — критическая скорость газовой фазы.
При равновесном тепловом состоянии фаз (ТГ = ТГ = Т) площадь
критического сечения сопла
где хт=1-]------—-------коэффициент, учитывающий объем конденси-
К я
рованной фазы в потоке продуктов сгорания. Его величина, как показал
расчет с точностью порядка одного процента, равна единице.
Зависимости /ц F*9 RT^ и p(t) справедливы и для двигателя на бал-
листитном топливе. В этом случае £ — 0.
При движении продуктов сгорания в сопле имеет место неравновес-
ное состояние фаз (7\>Т), которое неизбежно приводит к неточности
найденных формул Для тяги Р и удельного импульса Ji двигательной
установки.
Формулу для удельной тяги выводим с учетом сопротивления сил
трения и межфазового теплообмена в процессе движения продуктов сго-
рания смесевого топлива в сопле, исходя из законов сохранения энергии
и механических работ: ’
dq — d (cwT) 4- pdw\
^dp-\-d-----—|— dL^ — 0.
Здесь dq = dq\ -\-dq2— подвод тепла к газовой фазе продуктов сгорания
вследствие межфазового теплообмена (dqp) и от работы сил трения
(dq2):
dqi = \c1d{Tx — T1)=~'rc,k^dT\ dq2~dL^,
1 ^1,1 — коэффициент тепловой инерции конденсированной
фазы;
Т, р, w — соответственно текущее статическое давление, температу-
ра и удельный объем газовой фазы продуктов сгорания в рассматривае-
мом сечении канала сопла, — температура твердой фазы в том же се-
чении сопла;
dL — — работа газа, затрачиваемая на преодоление сопротивле-
2^
ния от сил трения, где ^ = 0,024-0,05— постоянный коэффициент, зави-
сящий от технологического качества поверхности канала сопла и числа
Рейнольдса;
^2
dLM = ld —1—работа газа, затрачиваемая им на разгон конденсирован-
ной фазы, где £——г — относительное количество конденсированной фа-
зы в продуктах сгорания, v — скорость газовой фазы продуктов сгора-
ния в рассматриваемом сечении сопла.
С помощью уравнения состояния pw^RT исходная система приво-
дится к виду:
W ДС = О;
о2 п
отношение теплоемкостей топлива и газовой фазы про-
где cw=~------
cw
дуктов сгорания;
Kv—— ~0,9 — коэффициент проскальзывания (отставания) конденси-
V
рованной фазы от газовой.
Совместное решение этих уравнений приводит к зависимости
—^4-------P(l+5c^T)rf(/»w)-|-(й—l)pdw=0.
Отсюда после интегрирования
WCj у1
~ I ,
w I
где =
— показатель политропы.
Для скорости газовой фазы имеем формулу
р
V2 -р
Ра
ИЛИ
k
v2=vo +
п—1
п
^0
1 пл
Так как
Кг -
п ___ k k w
n. — 1 ~ # — 1 J c ’
i-е^й, + c
TO
r?—1
о 2 I o & P0w0 Fl I P \ >L 1
•»2=®o+2g-—!“ —
k— 1 Ct2 L \Po /
1 + + C /1 C \ <
где az =---------I 1---------— коэффициент межфазового
iic-Air \ 14-^^4-C/
k w
энергообмена в продуктах сгорания при их движении по каналу сопла.
Оценим количественно параметры а2 и п. На практике продукты сгорания смесе-
вых топлив могут иметь:
6 = 0,2; Ку = 0,9; ЛГТ = 1,11; 7^ = 1/3.
В этом случае для #=1,25 и £ = 0,05 получим а| = 1,1; п = 1,22 и -- =
k
= 5,55 вместо # = 1,25 и--= 5.
#—1
Решая уравнение для о2 относительно р, найдем закон изменения
давления в канале сопла:
где
м= —; Мо=—; tf^kgRT, a^kgRT^
а а0
г° 1+—<?м2
Имея в виду, что
2
можно записать
где
*2____
^(Х> ~~
k + 1
gRTx;
= +Ц-^-а2М^;
\ /
Изменение коэффициента скорости и зависимость от его размеров
сопла (Fo, F) найдем из уравнения сплошности течения газовой фазы:
F = ?о уд
Fg р v ’
1
ГПР _Р0 — ( РоДП V° — *0
-* АС — I I j •
р \ Р / V К
Подставляя вместо р его выражение через %, получим
1
Наименьшая площадь поперечного сечения сопла определяется из
уравнения
Откуда
(г4=о.
dF _ j 1п + 1
d\ k 4- 1 п — 1
1
Полагая Fn=Fm n и ка = кт, получим
/?—1
где л =-----.
Кп
При Х = 1
2k \
г —-------gRToo] и М=1 (v = kgRT) соответственно
й 4 1 /
имеем:
1
Сопоставляя выражения для Лиш, Fx и FM, приходим к нера-
венству
так как
а2
£
Из равенства Gr~—— следует, что
Так как
1
/ 2 \Л“1
YOT=Voo —-т
^'т
то справедливо равенство
= (1+е)-
Отсюда наименьшая площадь поперечного сечения канала сопла
+5)
где
С учетом объема конденсированной фазы в продуктах сгорания пло-
щадь Лтпбудет несколько больше найденной:
где ут — удельный вес частиц конденсированной фазы.
Коэффициент скорости ZB в выходном сечении расчетного сопла
(Рв=рь) находим по формуле
л—1
где
При изэнтропическом истечении
гр -( /Z 1 k 1
Так как а 1 и ---------<;-----, то
п k
импульс двигателя с расчетным соплом
обмена и сил трения -
Поэтому удельный
при учете межфгзового тепло-
будет в ХвАв.и раз меньше величины 7И, найденной для случая изэнтро-
пического процесса истечения продуктов сгорания.
Оценим это количественно.
Приа2=1,1; £=1,25; п= 1,22; -^- = тсА=О,О1 имеем
Рао
п—1
п
где
п — 1 -2 Ph
. . Ав—I
п + 1 \ Роо
В.И -- I
\ Роо
й-1
k
= 0,398;
V
и
*
В. и
—-2,33 ==253 кгс с/кг.
9,81 1
В рассматриваемом случае
<4=1085 м/с; ХвИ = з/1-0,01°’2=2,33.
С учетом межфазового энергообмена
Л = 0,925Уи = 234 кгс-с/кт.
Все приведенные выше расчетные формулы будут справедливы и
для РДТТ на баллиститном топливе. Для этого достаточно параметр g,
характеризующий относительное количество конденсированной фазы в
продуктах сгорания, положить равным нулю.
Пример 3.4. Для двухфазового потока с учетом непрерывного энергообмена в нем
определить характерные размеры сопла и единичный импульс ракетного двигателя, име-
ющего следующие исходные данные:
S — 120 дм2; Р == 144 дм2; — 7000 кг с/дм2; S = 1,6 кг/дм3; k = 1,25;
_ 4
Q==1150 ккал/кг; ср~—; а = 0,39 ккал-дм/(кг-с-К); Л =4270 кгс-м/ккал;
15
= 0,075 дм/с; R — 320 кгс-дм/(кг-К); Л1 = 6,5 дм1/2^С; рв = Ph — 70 кгс/дм2;
lw = vi = 0,65; £ = 0,2; /<,, = 0,9; Кт=1,1; < = 0,05.
3
Размеры сопла и удельный импульс двигателя без учета
межфазового энергообмена в продуктах сгорания
1. Расход продуктов сгорания через сопло
G = Su S = 120-0,075'1,6 = 14,4 кг/с.
2. Коэффициент тепловых потерь в двигателе
avj F Poo 0,39-0,65-144-7000
•у = 1__—------------ =1___________________________ 0 952
RQ S aj 320-1150-120-0,075-1,6 ’ '
3. Температурный комплекс продуктов сгорания в камере двигателя
k — 1 , 1+J 0,25-0,952-4270-1150-1,2
—— -------- =---------------——----------= 1,065.10'
£ 1 ~+ -х- I 0,2 • 4\
1 1,25(1 +——
\ 1о /
кгс-дм.
4. Площадь критического сечения сопла
_ °псо ГЖТ = 14,4 /1,065.106
— 1+5 А1Рх) ~ 1,2.6,5-7000
= 0,272 дм2.
5. Коэффициент скорости газовой фазы в выходном сечении идеального расчет-
ного сопла
где
6. Коэффициент реактивности предельного сопла
7. Коэффициент реактивности сопла с учетом потерь в нем осевой скорости газа
Кв = Xi [1 + 72 (Хв.и- 1)] = 0,98 [1 +0,97 (1,378 — 1)] = 1,34,
где
In sec2 0i
В =0,98; у.2 = = 0,97; = 12°.
' tg2
8. Фактическая скорость потока газа в выходном сечении сопла
9. Уширение диффузора сопла, реализующего потребную скорость Хв.и при изэн-
тропическом течении газовой формы:
10. Площадь выходного сечения сопла
+В = ^ВЛ* = 10,3-0,272 =2,8 дм2.
И. Удельный импульс двигателя
в
2
— 'МО
g
У(1+5)(1 + $ср) G«°o
= 0,801
•0,952-4270-1150
1 25
1 +^—0,2-0,9-1,66
2,25
0,2-4
15
2,8-70
------ =242,8 кгс-с;кг,
14,4
где
лв 2,22
= 1,336
°о г------
V 1
в
< в
о
о »
„ 1,335-3
— = --------= 0,801.
оо
Размеры
сопла и удельный импульс двигателя
учетом межфазового энергообмена
1. Показатель политропы
п —
0,05-0,25
2. Коэффициент межфазового энергообмена в продуктах сгорания при их движе-
нии по каналу сопла
а —
С.
\т —
k °w
0,2-0,92 + 0,05
0,05
= ) 1,0976 = 1,0477.
1,25
3. Наименьшая площадь поперечного сечения канала сопла
^min —
оо
оо
4,4]/1,065-106
- ------------ =0,302 дм2,
1,2.5,86-7000
где
п— 1
а
п —
k — 1
1,25-98,1
1,0477
2.22
°’22 0,22
0,25
---------- =5,86 дм1/2('с,
4. Коэффициент скорости продуктов сгорания в выходном сечении идеального рас-
четного сопла
ОО
в. и =
а
rt-'l
0,22
1,22
1,0477
5. Коэффициент реактивности идеального сопла
В. И —
в.и “ в.и
= 1,3079.
6. Фактический коэффициент реактивности
в.и
Так как влияние сил трения учтено коэффициентом то %i —L
7. Фактическое значение коэффициента скорости в выходном сечении сопла
Лв = Кв +у <-1 =1,3+ ]/1,32—1 =2,127.
8, Коэффициент скорости в наименьшем сечении сопла
1
1,0477
/0,22-2,25
2,22-0,25
0,9015.
Потребное уширение сопла для реализации скорости Хв.и:
1 1
/ 2 2 ^*22
VB =
Ав
_______]_
П — 1 — qV-1
—7л;
1
0,22
где
2,15
-ч— = 2,385.
0,9015
10.
И.
'"tn
Площадь выходного сечения сопла
7*в ~~ '’'вТ7nljn = 11,3-0,302 = 3,4 дм2.
Удельный импульс двигателя с расчетным соплом (рв = рл):
Ав. и
в
в ---
2,127 = 229,7 кгс-с/кг,
где
« = 10 774 ДлМ/с.
На
удельный импульс двигателя заметно влияет трение в канале сопла, которое
учитывается коэффициентом При С равном 0,05; 0,02 и 0 единичный импульс двигате-
ля соответственно равен 229,7; 231,7 и 233,1 кгс-с/кг.
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ III
1. Алем асов В. Е.. Теория реактивных двигателей. М., Оборонгиз, 1962, 476 с.
2. Барр ер М., Хомотт А., Вебек Б, Ф., Ванде нкеркхове Ж
Движение ракет. М., ИЛ, 1959, 4’11 с.
3. Барр ер М., Хомотт А., Вебек Б. Ф., Ванде нкеркхове Ж.
Ракетные двигатели. М., Оборонгиз, 1962, 799 с.
4. К У р о в В. Д., Должанский Ю. Н. Основы проектирования пороховых
реактивных снарядов. М., Оборонгиз, 1961, 294 с.
5. Кутателадзе С. С. Основы теории теплообмена. М., Машгиз, 1962, 660 с.
6. Николаев Г. А. Термодинамический расчет ракетных двигателей. М., Обо-
ронгиз, 1960, 148 с.
7. О р л о в Б. В., М а з и н г Г. JO. Термодинамические и баллистические осно-
вы проектирования ракетных двигателей на твердом топливе. М., «Машинострое-
ние», 1968, 536 с.
8. О р л о в Б. В. и др. Основы проектирования ракетно-прямоточных двигате-
лей. М., «Машиностроение», 1967, 424 с.
9. Сполдинг Д. Б. Основы теории горения. М., Госэнергоиздат, 1959, 320 с.
10. Стечкин Б. С. и др. Теория реактивных двигателей. М., Оборонгиз, 1958,
533 с.
11. У им пресс Р. Н. Внутренняя баллистика пороховых ракет. М., ИЛ, 1952,
191 с.
12. Феодосьев В. И. и Синярев Г. Б. Введение в ракетную технику.
М., Оборонгиз, 1960, 506 с.
13. Хемфресс Дж. Реактивные двигатели и управляемые снаряды. М.,
ИЛ, 1958, 304 с.
14. Ш а п и р о Я. М. и др. Теория ракетного двигателя на твердом топливе. М.,
Воениздат, 1966, 256 с.
15. Шапиро Я- М. и др. Основы проектирования ракет на твердом топливе. М.,
Воениздат, 1968, 352 с.
Глава IV
ВВЕДЕНИЕ В ТЕОРИЮ ПРОЕКТИРОВАНИЯ
ГАЗОВЫХ УСТРОЙСТВ
Для исследования, расчета и проектирования газовых устройств
(тормозов, двигателей, эжекторов, газопроводов и т. п.) необходим ряд
теоретических сведений из прикладной газовой динамики и знание ос-
новных уравнений, определяющих параметры состояния газового пото-
ка (р, у, Т и v) в зависимости от геометрии (F, ф и х) проточного сосуда
и условий тепломассообмена с окружающей средой. Ниже кратко обос-
новываются обобщенные зависимости для параметров состояния потока,
которые использованы в расчете выходных характеристик типичных га-
зовых устройств, рассмотренных в гл. Ill, IV, VI.
При решении практических задач газовой динамики приходится
пользоваться полными параметрами состояния потока, т. е. параметра-
ми, которыми обладал бы газ при изэнтропическом торможении потока
до скорости, равной нулю. Иногда полные параметры называют парамет-
рами потока в заторможенном состоянии или параметрами торможения.
Параметры потока в незаторможенном состоянии принято называть
статическими.
В этом заключается некоторая физическая условность, так как из-за
диссипативных сил или отличительных качеств сверхзвукового течения
(постоянной склонности сверхзвукового потока к ударному уплотнению)
торможение газового потока по закону изэнтропы = const) не мо.
\ Р /
жет быть осуществимо на практике. В противном случае изэнтропиче-
ское (адиабатическое) уплотнение означало бы обратимость процессов
течения. По этой причине, кроме удобства построения решения задач,
вычисление полных параметров состояния р00 или роо обуславливается
необходимостью проверки правильности результатов решения с точки
зрения законов термодинамики при принятых рабочих гипотезах физиче-
ских процессов.
Термин «диссипативные силы» является собирательным для
свойств реального газа, под которыми прежде всего понимают его
кинематическую еязкость —) и температуропроводность 1а = —р
Идеальный газ не обладает диссипативными силами, а поэтому чис-
ла Рейнольдса [Re = -^-j и Пекле |Ре— равны бесконечности.
X / \ /
§4.1. ГАЗОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ СОСТОЯНИЯ
СТАЦИОНАРНОГО ПОТОКА
Найдем выражение параметров состояния стационарного потока в
л:лсэм его сечении в зависимости от л или числа М.
Напомним, что к параметрам состояния относятся: статическое р и
л ? давления; статическая Т и полная 700 температуры; статиче-
-- ’ ?: полная роо плотности вещества, а также полная реакция R га-
. : п . гена.
Так как функции параметров состояния потока имеют одни и те же
аргументы k, G, a*, % или k, G, a*t M, то их следует рассматривать как
обобщение решения задачи определения характеристик стационарного
газового потока. При этом расход G и критическая скорость газового
потока а* в общем случае определяются законами сохранения вещества
и энергии. В частном случае, когда поток стационарен и изолирован от
массо-теплообмена с окружающей средой, величины G и а* в силу зако-
нов сохранения вещества и энергии остаются неизменными.
Связь между аргументами л и М
По определению
а* ’ а ’
но a1=kgRT и a*2=kgRT*, поэтому
Х2 = М2 — .
у1*
(4.1)
Здесь а* — скорость газа в сечении потока, где она численно равна
местной скорости звука (Х=1). Поэтому скорость а* является критиче-
ской и характерной величиной для заданного потока. Следует подчерк-
нуть, что из-за изэнтропической природы распространения слабых воз-
мущений скорость этого распространения равна скорости звука:
(4.2)
В силу этого величина а*, выраженная через местную температуру га-
за, оказывается функцией показателя адиабаты Пуассона k\
a*—VkgRT*. (4.3)
Поэтому в выражении для скорости звука замена показателя адиа-
баты показателем политропы является чисто формальной операцией и
физически недопустимой.
Согласно закону сохранения энергии —\~соТ=срТ^ полная
и статическая температуры в каждый данный момент в фиксированном
сечении потока связаны соотношением
так как
“-=14-—или = 1 +
Т 4gcpT Т 2
__
2gcpT 2
(4.4)
Полагая М=1 и Т=Т*, найдем связь между полной и критической
температурами:
k— 1 ,
1 +----м2
Тоо _ *4-1 . 7* _ 2
Т* ~ 2 ’ Т ~ k +1
Подставляя Т*/Т в
соотношение для л2,
получим искомые формулы:
=-М2
---; М2=а2
м2
к2
Следствием этих формул будет соотношение
1 -- НД X2 W14- -—-мр = 1.
k+1 Д' 2 )
Статическое давление потока
В любом сечении потока идеального газа для статического давления
справедливо соотношение p = g$RT (уравнение состояния). Статическая
плотность газового потока согласно закону сплошности течения
(^py77 = const) равна
gp = GlFv.
Местная статическая Т и полная 7оо температуры в соответствии с
их определением связаны зависимостью
Г = Дор--—- >Д .
\ k +1 )
При этом в общем случае совершенно необязательно выполнение
условия термоизолированности потока (дТ^/дх) = 0 (т. е. постоянства
полной температуры вдоль потока 7\ю(х) = const). Иными словами, связь
между Т и Too сохранит силу и при (dTGG/dx) У=0, только в этом случае
Too принимает смысл местной (в данном сечении) температуры торможе-
ния. Исключая из уравнения состояния gpT и учитывая, что
а*2= gRTcQ, получим
(4.6)
Иногда функцию
1
называют газодинамической функцией статического давления потока.
При выводе зависимости р(к) не было сделано предположения о
каком-либо конкретном процессе изменения состояния. И если допус-
тить, что в рассмотренном сечении потока известны истинные (местные)
значения расхода и полной температуры (например, экспериментально
определены или теоретически вычислены на основании законов сохране-
ния вещества и энергии), то формула для р(%) может быть использо-
вана для потока, изолированного от внешней среды (G = const;
£* = const) и неизолированного (G=^= const, а* =Дconst).
Пример 4.1. Показать, что в критическом сечении потока (т. е. при и=а*) динами-
ческая составляющая полной реакции в k раз больше статической — Ga*jg~kF*p.
Из выражения (Д.6) имеем
2k X
А + 1 £—1 ,
1 —----X
Полагая Х=1, получим
k + 1 Ga*
-
2 * g?*p
Полное давление погона
Величина полного давления потока определяется из предположения»
что процесс торможения является обратимым, т. е. протекает в соответ-
ствии с уравнением адиабаты Пуассона. Однако полное давление в;
отличие от полной температуры не может быть зарегистрировано экспе-
риментом, так как реальный процесс торможения газового потока необ-
ратим и сопровождается постоянным падением (потерей) полного давле-
ния. Поэтому полное давление (или полная плотность) является величи-
ной фиктивной и представляет теоретический интерес как этап в логике
решения задачи или как критерий правильности его результатов.
Полная температура может быть легко определена на практике, так
как пограничный слой газового потока (у стенок проточного резервуара
или у поверхности термопары) неподвижен и имеет полную температуру.
В случае термоизолированного и нетеплопроводящего потока, как пока-
зывает закон сохранения энергии, величина полной температуры будет
неизменной (4.4):
Тт =----—= const. (4.7)
k-- 1 о
Статическую (истинную) температуру газового потока трудно за-
мерить, так как для этого необходимо передвигать термопару со ско-
ростью газового потока.
Используя найденные выше выражения для р и Т, получим величи-
ну полного давления при изэнтропическом процессе торможения:
к
Рж=Р Нг 4.8)
\ Т ) 2k gF
Функцию
часто называют газодинамической функцией'полного давления.
Найдем связь между площадями сечений потока и коэффициентом
скорости л для изэнтропического течения.
При условиях /?01 = /?02; G1 = G2; ai = a2, справедливых для изэнтро-
пического потока газа, имеем:
1
Ga* & 4- 1 г-'. /1 k — 1 ' V 1 —— = рК 1 Л = gPoo 2k \ k 4- 1 2) Отсюда получим непосредственную связь F(X): _£2_ = Д j 1 — £ + 1 A1 | ^1 X2 1 . & ~ : 2 1 \ k + 1 / Взяв характерное сечение потока = и М = 1 / 2 у-1 F U + 1 / g* 1 ( A-1.,)*-1 11- Л" 44-1 = const. (4.9) = 1, получим (4.Ю).
Формула (4.10) позволяет вычислить F, если известно X, либо найти X
при заданной F. Зависимости (4.9) и (4.10) называют уравнениями не-
разрывности или непрерывности течения изэнтропического потока.
Поггная реакция потока
В отдельных практических задачах полная реакция газового пото-
(jU
ка R —------\-Fp является самоцелью решения. Поэтому весьма удобно
g
найти ее обобщенное выражение в зависимости от аргументов Gy а*, X,
k, характерных для газового потока. Если из выражения для R, поль-
зуясь соотношениями (4.1) и (4.6), исключить и и р\
k— 1 о
1 —-----X2
D Ga* > , k Ч- 1 Ga* k H- 1
=------A -f-----------------,
g 2k g л
то после алгебраических преобразований искомое выражение примет вид
^4+1 Г<ых). (4.11)
2k g
По аналогии с qx и функцию ^3(Х) = Х+Х~Т называют газодинами-
ческой функцией полной реакции.
Сопоставляя формулы для р(Х), роо(Х) и 7?(Х), можно заметить, что
k ~j— 1 Ga* Р*
все они имеют одинаковый множитель —--------= — и отличаются
только видом газодинамических функций ?(Х). Используя это формаль-
ное структурное сходство, можно сделать обобщение:
2pF = qxR*\ 2p^ = (hR\ 2R=q3R*.
Физический смысл /?* — полная реакция потока в сечении, где у = й*,
т. е. Х= !.
Для потока, изолированного от внешней среды, величины G и а* ос-
таются неизменными, откуда следует, что связь между параметрами со-
стояния в любых сечениях изолированного потока является функцией
коэффициента скорости X в этих сеченяих и их площади:
Р\, _ ^2 ?1 (М) . Р01 _ р2 Я2 G1) . R\ __ (4 12}
Р'2 Pl ^1(^2) Р02 Pl <72 (Х2) #2 ^3(^2)
Если не требуется учитывать переохлаждения газового потока, ста-
тические параметры его состояния р, р, Т в выходном сечении полубеско-
нечной насадки (F=oo) будут стремиться <к нулю. Это означает, что вся
потенциальная энергия потока перешла в кинетическую.
Для решения практических задач (например, расчет соплового блока
двигателя) полную реакцию потока на выходе из сопла удобнее вычис-
лить, пользуясь формулой:
R=R*K„ (4.13)
где Лв=(^з/2)—коэффициент реактивности сопла. Его величина пока-
зывает относительное увеличение полной реакции потока в диффузной
части сопла по сравнению с ее значением 7?* в критическом сечении F*.
Формулы, полученные для параметров изменения состояния потока в
зависимости от коэффициентов скорости X, являются приближенными не
только из-за неучета диссипативных сил, но прежде всего потому, что
они выведены для случая одномерного течения идеального газа.
Пример 4.2. Найти пределы изменения коэффициентов реактивности для диффу-
зорной части сопловой насадки.
При изэнтропическом движении газа р^ = const по диффузорной части сопла из-
менение коэффициента скорости потока в зависимости от размеров площади поперечных
сечений происходит в соответствии с уравнением (4.10). Из этого уравнения следует, что
при F = F* коэффициент Л=1, а при
Теоретический предел коэффициента реактивности будет конечным и составит
Таким образом, при имеем 1 Кв С/С», откуда следует, что в сопло-
вых насадках заданных размеров приращение реакции потока в диффузорной части
существенно зависит от k. Так, при 6 = 1,25 коэффициент А’ВСс = 1,67, а при 6 = 1,1
= 2,41. Это обстоятельство требует сознательного выбора величины 6 в зависимости от
размеров насадки, т. е. от статической температуры газа в выходном сечении сопла..
Изэнтропическое течение газа
Как было отмечено выше, выражения параметров состояния пото-
ка (4.6), (4.8) и (4.11) справедливы для любого процесса изменения со-
стояния как при G = const; a* = const, так и при G = var; a* = var, если в
рассматриваемом сечении потока известны расход G и полная темпера-
тура Too. Там же было показано, что для случая G = const; a* = const в
любых сечениях потока его параметры состояния связаны зависимостя-
ми (4.12). Для изэнтропического потока, как уже отмечалось, справед-
ливо условие обратимости: для любого его сечения полное давление
остается постоянным poi = Роз- Следствием этого является формула (4.9).
Исключая из зависимости (4.12) F2/F1 с помощью выражения (4.9), по-
лучим
/1 1 .2
или р=р11й 1— —— к2
\ 6 -F 1
(4.14)
На основании уравнения закона сохранения энергии (4.7) и урав-
нения состояния p=g$RT имеем
(4.15)
ИЛИ
(4.16)
Эти же зависимости для параметров изэнтропического потока мож-
но получить непосредственно из уравнения адиабаты Пуассона
1
исключив TJTz в соответствии с законом сохранения энергии (4.7).
бходимо обратить внимание на то, что уравнения
нельзя считать равноценными при выполнении условия термоизолиро-
ьанности потока (a* = const). В действительности эти уравнения тожде-
ственны только для случая изэнтропического потока -^- = const,
т. е. /?0() = const), когда выражение (4.14) следует рассматривать, как
частное решение более общего уравнения (4.6).
При решении практических задач для определения коэффициента
скорости удобно пользоваться формулой
/ „ \ К—1 -1
I — I
\ РОО '
(4Л7)
которая является результатом решения уравнения (4.14) относитель-
но Х2.
$ 4.2. ТЕЧЕНИЕ ГАЗА В СОПЛЕ
Исследование течения газа в сопле и расчет его параметров для
обеспечения заданной эффективности проведены для случая, когда ста-
тическое давление потока в выходном сечении больше или равно окру-
жающему.
На практике под эффективностью сопла обычно подразумевают ве-
личину коэффициента его реактивности К, характеризующего относи-
тельное ускорение газового потока в диффузоре или относительное уве-
личение реакции воздействия потока на питающий сопло резервуар.
Пренебрегая влиянием диссипативных сил, процесс течения газа в соп-
ле считают изэнтропическим. Для уменьшения влияния радиального
расширения газа на величину коэффициента реактивности диффузор-
ную часть сопла профилируют таким образом, чтобы по выходе из соп-
ла поток был плоско-параллельным. Конфузор сопла профилируют так-
же из условий наименьших потерь. Однако не всегда целесообразно
делать канал сопла специального профиля, так как повышение коэф-
фициента реактивности сопла, как показывает формула (4.21) при этом
не превосходит 1—1,5%.
Параметры состояния изэнтропического потока
в критическом сечении сопла
Для изэнтропического процесса течения площади поперечного сече-
ния потока и коэффициента скорости связаны уравнением (4.9), где Ь
и Fi зафиксированы. Из схемы, по- 7
казанной на рис. 4.1, видно, что —к 6
функция v=Fi/F2 имеет максимум \ 2
при F2 = F*, так как F*<772. j #
Рис. 4.1. Схема профиля сопла
Поэтому значение V, при котором функция у достигает максимума, на-
ходится из уравнения
или
Тт=х^-1=о.
6^2
Отсюда следует, что в сечении наименьшей площади сопла (Fz =
= F*) скорость газа численно равна местной скорости звука (л2=Л* = 1
или = На основании этого в критическом сечении параметры со-
стояния газового потока соответственно равны:
1 k
q / 9 X —1 z 9 X &—1
р*= гю р«; рМгтт (4Л8>
Й т 1 -1- 1/ +1/
Согласно уравнениям (4.8) и (4.11) расход и реакция стационарно-
го потока в его критическом сечении выражаются формулами:
Сам факт, что в критическом сечении скорость газа равна местной
скорости звука, величина которой зависит от температуры газа, с физи-
ческой точки зрения является примечательным: как бы не повышали
давление газа в резервуаре, скорость его потока в критическом сечении
сопла остается неизменной, если сохраняется неизменной температура.
Эта закономерность объясняется тем, что истечение газа происхо-
дит из среды с большим давлением в среду с меньшим давлением. При
этом перепад давлений, формирующий поток, распространяется со ско-
ростью звука в направлении, обратном истечению газа, — от среды с
меньшим давлением в среду с большим давлением. Абсолютная же ско-
рость распространения перепада давлений (так называемых волн раз-
режения) равна разности между скоростью звука и скоростью переме-
щения газового потока = a—v. Поэтому волны разрежения не прони-
кают в среду с большим давлением через сечение, где их абсолютная
скорость уа = 0. Отсюда следует, что при уа>0 скорость газа в критиче-
ском сечении сопла меньше скорости звука v*<a* и определяется пере-
падом давлений. По мере увеличения перепада давлений величина v*
будет возрастать, приближаясь к своему предельному, критическому
значению а*.
Иногда при вычислении величины а* пользуются уравнением по-
литропического процесса изменения состояния параметров среды р!рп =
= const, учитывая таким образом взаимодействие потока с окружаю-
щей средой ngRT\ где n^k. Однако такой подход к определе-
нию а* противоречит природе образования критического потока, так как
процесс изменения состояния параметров среды при распространении
слабых возмущений является изэнтропическим:= const Поэтому с
физической точки зрения для скорости звука справедливо единственное
уравнение
= V kgRT.
Р
Таким образом, недопустимо отождествлять процесс изменен?:па-
раметров состояния потока при его взаимодействии с окружающей сре-
дой и процесс распространения слабых возмущений в среде газового
потока, так как в общем случае они могут быть различными по своей
природе. Первый может быть любым политропическим, второй — только
изэнтропическим.
Расчет сопловой насадки
На практике процесс изменения параметров состояния газа в сопле
принимают изэнтропическим (poi = Po2=.const). Поэтому размеры пло-
щадей поперечных сечений канала сопла и коэффициенты скорости свя-
заны уравнением (4.9).
При изэнтропическом процессе течения газа в сопловой насадке па-
раметры состояния газа в зависимости от коэффициента скорости выра-
жаются уравнениями (4.14), (4.15) и (4.16). Для тяги двигателя с уче-
том внешнего противодавления ра на основании уравнений (4.11} и (4.13)
можно получить формулу
—(4.20)
-1 £ g
где К3= —коэффициент реактивности сопла;
Хв — коэффициент скорости потока в выходном сечении
сопла.
Использование зависимостей (4.12), (4.13), (4.14), (4.15) и (4.16)
на практике может привести к заметным ошибкам, если не учитывать
угол раструба конического диффузора. Так как указанные зависимости
получены для одномерного стационарного потока, то при больших углах
раструба диффузора появляется радиальная составляющая потока, ко-
торая теорией одномерного потока не учитывалась. Поэтому при расчете
размеров конической сопловой насадки должны учитываться не только
диссипативные силы, но и угол ее раструба 20. В противном случае бу-
дет получаться заниженная эффективность сопла, т. е. несколько мень-
шее значение коэффициента реактивности Кв по сравнению с тре-
буемым.
Учет влияния указанных потерь на полную реакцию потока приво-
дит к следующей зависимости для коэффициента реактивности соп-
ла [7]:
Хв=Х1[1 + х2(Хв.и-Ы, (4.21)
где
26° 100 по 120 130 140 150 160 170 180
Х2 0,62 0,54 0,46 0,37 0,28 0,19 0,11 0,04 0
Формула (4.22) может быть получена для следующей модели кони-
ческого течения газа в диффузорной части сопла (рис. 4.2).
Наличие угла 0S порождает радиальное расширение потока, т. е.
двумерное течение газа, и вследствие этого снижает его осевую реакцию
в коническом диффузоре сопла.
Величина осевой реакции конического потока для средних парамет-
ров состояния по его поперечному сечению определяется интегральным
выражением
cosG^rf/?,
где dR=iKn— 1)--------2nrsds — элементарное приращение реакции по-
пг2
о
тока вдоль конической поверхности тока.
Рис. 4.2. Схема течения газа в конфузоре сопла
Из рис. 4.2 следует, что:
г — I sin 6; dst — ldbs\ ds = l-CQ—^ d$s, rs~l cos 0 tg ft.
B 1 s cos 0$ 5 5
Учитывая эти соотношения после интегрирования и алгебраическо-
го преобразования, получим
9
д г>_ 1 п* С 2 sin 65^/65 _। ч yj* In sec2 6
“ tg2 0 J COS 9. И j tg20 ’
0
так как d cos 0S =—sin 0sd0s и —2 In cos 0 = ln sec20. Поэтому полная осе-
вая реакция потока в выходном сечении конического сопла с учетом ра-
диального расширения газа и диссипативных сил определяется фор-
мулой
= = (4.23
где у1 = 0,98 — коэффициент, учитывающий диссипативные
силы;
^в=/я[1 + (^и-1)А]—коэффициент реактивности конического со-
пла;
/Си = 0,5 (\i-pV1) — коэффициент реактивности одномерного по-
тока идеального газа в выходном сечении
сопла;
In sec20
7я=—----------коэффициент, учитывающий двумерность
течения газа в коническом диффузоре
сопла.
Размеры сопла, обеспечивающие фактическое значение коэффици-
ента реактивности Дв, следует рассчитывать, исходя из величины коэф-
фициента реактивности для идеального сопла.
При проектировании сопла, обычно задают величину избыточного
давления в его выходном сечении
где лн— коэффициент нернечетности сопла.
В этом случае рекомендуется придерживаться следующего порядка
расчета размеров сопла:
k~~l
k
И со
сю
_
и Л
(4.24)
(4.25)
/г-1
у ---------И
В Г?*
-— [см. формулу (4.10)];
А—1
2
и
4.
I ^’5
£ ___ В
fif* tj
(4.26)
где I — длина диффузора сопла;
d* — диаметр критического сечения сопла.
Специальное профилирование сопла на основе волновой теории
уменьшает потери полной реакции потока приблизительно на 1 % за
счет коэффициента /2, значение которого в этом случае равно единице.
Интересно отметить, что значения функции (4.10) очень медленно
увеличиваются при малых значениях А, а начиная с л = 2,25 настолько
быстро возрастают, что пр И /и ^ОО 3 величина v равна бесконечности
(табл. 4.2)
Таблица 4.2
' ^в 1 1,25 1,5 1,75 2 2,25 2,5 3
• 1 1,07 1,32 1,89 3,3 7,8 28,2 оо
В некоторых случаях необходимо определить тягу при заданных
площади выходного сечения сопла и полном давлении роо- Для этой це-
ли удобно использовать зависимость
P=f (К) i\Pw-г р^
(4.27)
где
1
f W = 9Г1 (U Яг W=(1 + (1 - ^7 ф
\ Л 4- 1 /
Влияние диссипативных сил и неодномерности лечения на величину
скорости потока в выходном сечении учитывается при вычислении Хв по
формуле
(4.28)
При расчете 'реактивного усилителя отдачи к артиллерийскому
стволу автоматической пушки уравнение (4.21) следует записывать в
виде
^-0,98 [ 1 + Z2Zh (К, - 1)], (4.29)
где Zh^0,90 — коэффициент, учитывающий не-стационарность газового
потока.
Реактивный усилитель отдачи имеет ограниченную эффективность.
Опыт проектирования реактивных усилителей отдачи показывает, что
угол 0 нежелательно брать более 12°. В противном случае может наблю-
даться заметное снижение их эффективности из-за отрыва потока поро-
ховых газов от стенок диффузора вследствие большой нестационарности
течения. На практике величина 1,25, хотя дульное давление состав-
ляет несколько сот атмосфер. Иногда реактивный усилитель отдачи на-
зывают пламегасителем. Такое название им получено вследствие замет-
ного снижения свечения пороховых газов из-за падения их статической
температуры по выходе в атмосферу.
§ 4.3. ОТКЛОНЕНИЕ ГАЗОВОГО ПОТОКА
В КОСОСРЕЗАННЫХ СОПЛЕ И ЦИЛИНДРИЧЕСКОЙ НАСАДКЕ 1
В зоне косого среза газовый поток, наряду с дополнительным раз-
гоном вдоль оси сопла, претерпевает и боковое отклонение от его оси
на угол Дф (рис. 4.3).
7 2
Рис. 4.3, Схема кососрезанного сопла
Угол ф определяется согласно выражению [7]
. sin ДО
Здесь
— cos. др
(4.30)
дф = arccos (cos <?);
. cos ср ( 1 — sin ср
Voa •—-----— 1 <
, 1 + sin I 1 — k sin <p
1
А—1
1 См. книгу [7].
где
COS ч ts \ Г ,z2 f
<p=arccos - ; *„= К„+у Ки— 1.
В указанных выражениях ф и Ки являются известными величинами,
а Лтр — искомой.
При истечении газа из кососрезанной насадки в пустоту пределы
изменения для Дф найдем из условий:
ф = 90°
V2O=1; С05Дф=1; Дф=о°;
ф=0~
Отсюда
1 1 COS дб „ , Хи
sin<₽ = —; cos'₽=----=------Дф«, = агссо8—— ,
* *со Коо
где К<х, — —- - - —предельное теоретическое значение коэффициента
У Л2 — 1
реактивности, определяемое условием V2o= со-
предельный случай, когда ф->0 при зафиксированном значении
Ки<Кх>, предполагает сохранение условия ф>0, хотя оба угла стре-
мятся к нулю. Физически это означает, что Fq остается конечной вели-
чиной, большей или равной Fi, а зона косого среза вырождается в ко-
сосрезанный полу бесконечный цилиндр.
Соотношение для предельного значения угла Дфоо показывает, что
с ростом Fq угол Дфоо стремится к нулю, так как при Fq-^оо коэффи-
циент Кц-^Kcc. Отсюда следует, что с увеличением Ли эффект расшире-
ния газа в косом срезе уменьшается, т. е. величина угла Дф убывает.
Таким образом, значение угла Дф ограничено пределами О^Аф^Аф,^.
Задаваясь значениями угла Дф в найденных пределах его значений,
можем для конкретных величин взятых в диапазоне 1<Ки<К<х»
найти отвечающие им углы ф. Результаты расчетов для k= 1,25 сведе-
ны в табл. 4.3. и представлены графиками на рис. 4.4. Данные таблицы
и кривых для ф(Аф) позволяют по ф находить Аф.
Таблица 4.3
Д-р3 к и Предельное значение
1 1,1 1,2 1,3 1,4
Ф £ Ф Ф 4 е ф с ч Ф £ Д'Фео
5 81°12/ 0,435 75°42' 0,657 69°51' 0,771 61°52' 0,836 49°33' 0,897 1,0 53° 0,384
10 7Г53' 0,461 62°14' 0,665 51°35' 0,778 42° 0,852 2б°37' 0,912 1,1 48°36' 0,518
15 61°41' 0,503 48°2Г 0,698 36°14' 0,804 24°27' 0,878 13°32' 0,936 1,2 44° 0,754
20 50°31° 0,558 35°6' 0,734 24°3' 0,836 13°55' 0,91 5°52' 0,963 1,3 38°36' 0,836
25 38°55' 0,627 24°51' 0,784 14°20' 0,881 6°32' 0,948 1°31' 0,988 1,4 32°48' 0,926
30 27°3V 0,699 13°13' 0,843 6°59' 0,929 1°57' 0,98 0°3' 0,9994 в—«ч
35 17°8' 0,782 7°35' 0,907 2°40' 0,968 0°8' 0,998 — 1 — - —
40 8°28' 0,8/5 2°22' 0,965 0°13' 0,997 — —— — •— —
45 2°32' 0,956 0°10' 0,907 — 11 ——> — — —
50 0°8' 0,997
С._Q7QQ
Для кососрезанной цилиндрической насадки (Л\г^1) расчетное
уравнение углов ф(Аф) является частным случаем общей зависимости
(4.30):
6 = arctg
tg Д6
1
1 — sin Д6
(4.31)
Л-1
— 1
так как при Лп= 1 значение cos <p = cos Л-ф и
1
cos Д /1 — sin Дф \ А“'1
'^20 —---------------------I--------------------I
1 -4- sin Дф \1 — k sin Дф )
Таким образом, наибольшее отклонение потока в косом срезе на-
блюдается у цилиндрической насадки. При этом угол отклонения пото-
ка от оси насадки всегда будет значительно меньше Афоо:
Дф< Дфоо —arcsin — .
k
Полученные результаты исследования эффекта расширения газа в
косом срезе, найденные для случая истечения в пустоту (ра = 0), спра-
ведливы и для реальных условий, если поток по выходе из зоны косого
среза (см. рис. 4.3, сечение 2—2) имеет избыточное статическое давле-
ние больше нуля, т. е. р2—
Статическое давление и температура газового потока в сечении
2—2 определяются по формулам:
(4.33)
где Х2 = /С2 -|- /62—1.
Если в зоне косого среза между сечениями 1—1 и 2—2 поток испы-
тывает перерасширение (р2—ра<0), угол Аф может существенно отли-
значения, найденного по уравнениям (4.30) и (4,31). При этом
^г. •тактическая величина может оказаться не только равной нулю, но
и стать отрицательной, т. е. поток отклоняется в противоположную сто-
рону — к вершине косого среза.
Отклонение газового потока
при его перерасширении в зоне косого среза
Рассмотрим случай, когда статическое давление потока в каком-то
сечении зоны косого среза диффузора становится равно окружающему
(Р2=Ра)- Задачу решаем приближенно, допуская, что дальнейшее дви-
жение потока в зоне косого среза сохраняется неизменным, т. е. отсут-
ствует глубокое перер асширение и возможный скачок уплотнения.
Коэффициент скорости потока Х2 в сечении, где избыточное стати-
ческое давление равно нулю, найдем из уравнения (4.33) при р2=ра-
i
Искомые значения углов Дф и ф определяются системой урав-
нений [7]:
где
/г--1
sin ф
Х2 k — (& — 1) /С2Л2 .
_____ Sin(4 4-Дф)___ Хо \k~ (k— 1Жо'Ло
v20 —
1
о—
(4.34)
(4.35)
Здесь углы Лф и ф являются неизвестными, а параметры К2, л2; Xi —
заданными. Связь между углами ф и Дф определяется уравнениями
14.34) и (4.35).
Проекция полкой реакции погона на плоскость
косого среза сопла
Практические задачи, связанные с учетом эффекта расширения га-
зового потока в косом срезе, обычно сводятся к определению величины
проекции полной реакции потока (или ее импульса) на плоскость косо-
го среза (например, турбореактивные снаряды, газовые тормоза артил-
лерийского орудия и т. д.): 7?2со8(ф4-Дф).
На практике искомую проекцию реакции удобно вычислять через
глную реакцию потока на входе в зону косого среза (7?j = или на
зыходе из нее (7?0 = Ко7?*):
<~:юда следует, что
cos (ф 4- дф)=cos ф.
?о =--1-^Ф^Дф,
cos ф cos ДФ
I i
(4.36)
И
По физическому смыслу параметр go представляет собой отношение
проекции векторов Rz и или Rz и на плоскость косого среза. Если
поток стационарный, то проекции импульсов сил Rz, Rq и 7?i будут связа-
ны между собой тем же соотношением (4.36):
J2cos (ф+дф)=/050 соэф,
где J2 = RJ-, J0=Rbt.
Для нестационарного потока эта связь будет справедлива, пока ста-
тическое давление на выходе из зоны косого среза будет больше или
равно окружающему, так как только в этом случае параметры Kq, Дд и
Аф остаются неизменными. Эти параметры определяются из уравнений
(4.9), (4.10), (4.21), (4.29) и (4.30) или берутся из табл. 4.2 и 4.3.
Предельное значение функции go при Аф = 0° (ф = 90°) и Ко>1 выра-
жается формулой
~ ^'-0 — 1)_
ъ0~_______________________- [k~ (k- 1) АГ0Х0]
Для цилиндрической насадки (Ко=1, Ао=1) после раскрытия неоп-
ределенности по правилу Лопиталя предельное значение коэффициента g0
будет равно g0oo = &/(2 + &). Таким образом, для 90°^ф^0° параметр g0
ограничен пределами goco<go<l (см. табл. 4.3).
§ 4.4. РАСПРЕДЕЛЕНИЕ СТАЦИОНАРНОГО ГАЗОВОГО ПОТОКА
МЕЖДУ БОКОВЫМИ КАНАЛАМИ ПРОТОЧНОГО РЕЗЕРВУАРА,
РАСПОЛОЖЕННЫМИ ПОД ПРОИЗВОЛЬНЫМ УГЛОМ К ЕГО ОСИ
Эта задача имеет большое практическое значение для расчета и про-
ектирования надульных газоотводных устройств и подствольных газо-
вых двигателей. Обычно решение этой задачи сводится к определению
Рис. 4.5. Схема течения потока в дульном тормозе
количества порохового газа, отведенного в стороны от направления вы-
стрела через боковые каналы заданных форм и размеров или, наоборот,
расчет геометрии боковых каналов, обеспечивающих потребную их про-
изводительность.
Решение поставленной задачи проведем при следующих основных
допущениях:
1) поток идеального газа является одномерным и стационарным;
2) в наименьшем поперечном сечении потока его скорость равна
местной скорости звука (Л = 1);
3) между потоком и стенками канала теплообмен отсутствует.
Схема течения потока по месту его разветвления представлена на
рис. 4.5. Физическая картина течения газового потока по каналу с отво-
дом газа в стороны представляется так. Поток подходит к боковому ка-
налу с критической скоростью (^ц=1), затем часть потока под действием
силы статического давления устремляется в боковой канал. При этом
статическое давление центрального потока падает, а его скорость воз-
растает (Хц>1).
Наибольшее значение скорости центральный поток имеет по месту
конца отвода газа в стороны. Прекращение расходного воздействия на
центральный поток, по-видимому, порождает скачок уплотнения, за кото-
рым скорость потока становится дозвуковой. После скачка уплотнения
дозвуковой поток ускоряется и при подходе ко второму боковому каналу
вновь достигает критической скорости с последующим ее переходом в
сверхзвуковую область.
Уравнение равновесия потока на входе в боковую трубу, запи-
санное через его средние параметры состояния, имеет вид
Л0бА.
£
(4.37)
Здесь
и
у—Ч #
<4)^6
--------полная реакция потока по месту его крити-
ческого сечения в боковом канале;
^обА — соответственно статическая и динамическая
составляющие потока на входе в боковой
канал,
где G6—расход газа через, боковой канал;
^об=^ц созф —Хцлцсозф — начальная скорость бокового потока;
— среднее значение коэффициента скорости
потока в центральном канале на входе в бо-
ковой канал;
£б, — соответственно критическая скорость пото-
ка в боковом и центральном каналах;
Fo6 — наименьшая площадь поперечного сечения
потока на входе в боковой канал;
i .
~ * 1 —----А 2
k + 1 k + 1 ц
р„ =---------------------среднее статическое давление в централь-
26 gFu
ном потоке на входе в боковой канал.
Согласно законам сохранения энергии и вещества можно положить:
$ * * —
Ц = = CLQy\ С/ц
" ^б’
Подставляя в исходное уравнение (4.37) вместо параметров рц, Об,
/?б* и г?оц их выражения, после алгебраических преобразований получим
k — 1
1 Лгб 1 ~ 6 + 1 Ц г ,1 — <4 , ч
— □ —--------------\-k — X cos6= 1 — а.
2 Дц лц 1 6Д-1 ц
Отсюда доля газа, оставшаяся в центральном канале после его отвода
в стороны
«=-----, (4.38)
1 +
где
— площадь снарядного окна.
(4.39)
Для Fd<l среднюю величину Хц в первом приближении можно
принять равной единице. При Хц=1 для расчета параметра 61 с учетом
диссипативных сил имеем упрощенную формулу
1 4- k (1 — cos Ф)
(4.40)
Отсюда следует, что величина б в зависимости от угла ф ограничена
пределами
1 < 8, < —5— ~ ; 0° < Ф < 180°.
1 1 + 2k 7 ‘
В общей постановке рассматриваемая задача может быть сформули-
рована так: определить изменение плотности потока б на вход в боковые
каналы в зависимости от угла ф пересечения их осей с осью центрально-
го проточного резервуара (см. рис. 4.5).
Величина ф ограничена пределами 0°^ф^180°. По определению
(?у)б
(Р^)ц
(4.41)
где (Р^)б — плотность потока в критическом сечении бокового канала;
(Р^)п —-плотность потока в центральном проточном резервуаре.
Газ при заходе в боковой канал имеет начальную скорость v§ =
= t/ц cos ф, величина и направление которой зависят от угла ф. При
ф<90° (см. рис. 4.5, а) вектор vq совпадает с направлением бокового
потока и тем самым начальная скорость способствует истечению. При
ф = 90° начальная скорость потока обращается в нуль, и расход газа че-
рез боковой канал определяется только статическим давлением в цент-
ральном канале. Дальнейшее увеличение угла ф приводит к изменению
направления начальной скорости на входе в боковой канал и росту ее
величины. Поэтому в диапазоне углов 90°<ф<18'0° (см. рис. 4.5, б) ско-
рость препятствует истечению газа через боковой канал.
Описанная гипотеза формирования бокового потока показывает, что
его удельный расход непрерывно уменьшается по мере увеличения угла
ф и достигает наименьшей величины при ф= 180°.
Решение поставленной задачи проводится в предположении, что в
наименьших сечениях потока скорость газа равна критической, а пло-
щадь поперечных сечений боковых каналов достаточно мала по сравне-
нию с соответствующей площадью центрального канала. В этом случае
удельные расходы бокового и центрального потоков (р^)б и (рп)ц с уче-
том их коэффициентов начальной скорости и Хц на входе для диапа-
зона углов 0°^ф^90° определяются формулой
Поэтому для функции б (4.41) можно написать уравнение
(4.42)
Полагая = const, принимаем Лб = ЛцСозф. При изменении угла ф
в диапазоне 0°^ф^90° величина функции б ограничена пределами
k ~i~ 1
В зависимости от 1Ц значения функции 6 определяются пределами:
0<8<1; Д >Д>0, где Д=—
k— 1
В случае, когда ф>90° процесс втекания газа в боковой канал пред-
положительно можно разбить на две фазы. В первой происходит гаше-
ние начальной скорости, сопровождающееся потерей статического давле-
ния рц (изэнтропическое торможение):
к
/ 1 k~~ 1
Рб=Рц( 1— —~Лб
\ Л-t 1 /
Во второй фазе наступает истечение газа через боковой канал под дав-
лением рб при отсутствии начальной скорости потока.
В соответствии с предполагаемой схемой процесса формирования
бокового потока искомые удельные расходы и их отношение будут
равны:
где
Хб=\ cos-]>.
(4.43)
В зависимости от значений лц и ф величина функции б ограничивает-
ся пределами:
Таким образом, при заданном значении %ц величина функции S мо-
нотонно убывает по мере увеличения угла ф и достигает минимума при
ф=180°:
0°<ф<180°.
С увеличением скорости потока в полости центрального проточного
резервуара функция б уменьшается и при некотором значении обра-
щается в нуль. Физически это объясняется тем, что величина статиче-
ского давления в полости резервуара, определяющая расход газа через
боковые каналы, достигает величины окружающего давления. При от-
сутствии окружающего давления расход через боковые каналы будет ра-
вен нулю (6 = 0) в том случае, когда газ в центральной полости дости-
гает предельной скорости (Лоо). В этом случае величина статического
давления будет равна нулю.
Если в полости центрального проточного резервуара имеются мест-
Рис. 4.6. Схема бокового криволи-
нейного канала дульного тормоза
ные сопротивления в виде кольцевых
выступов или выточек, сверхзвуковой
поток (Лц>1) в результате возникнове-
ния скачка уплотнения переводится в
дозвуковой и величина функции 6 воз-
растает.
Предполагая, что обращение сверх-
звукового потока в дозвуковой проте-
кает в соответствии с кинематическим
уравнением Прандтля Л1Л2 = 1, для
функции б получим выражения:
(4.44)
COS2 Ф
В общем случае, когда боковой канал является криволинейным
(рис. 4.6), коэффициент скорости Лб вычисляется по углу захода потока:
^*6 пзх*
Отсюда следует, что для повышения производительности (расхода)
боковых каналов целесообразно ф11Х выбирать минимальным. Это усло-
вие позволит создать газоотводное устройство наименьших размеров
при заданной его эффективности.
В формулах (4.42), (4.43), (4.44) в отличие от уравнений (4.39) и
(4.40) коэффициент сжатия потока по месту его критического сечения
не учтен (е= 1).
Коэффициент сжатия газовой струи
Наибольшее сжатие получает сечение струи при вытекании из от-
верстия с острыми кромками. Наличие скругления (притупления) острых
кромок уменьшает сжатие струи.
Определим сжатие газовой струи при истечении через круглое от-
верстие с острыми кромками без учета диссипативных сил и при нали-
чии противодавления ра.
Сжатие струи характеризуется отношением 8 = Л1/Л)» которое назы-
вается коэффициентом сжатия или сужения (рис. 4.7, а).
Напишем уравнение равновесия потока
?о (Ро + Рог'о) = (Р* + Рй^н) + (Л) - А- (4.451
Де /?0, р0, Vq — параметры состояния потока в резервуаре;
/?к, Рн> — параметры состояния потока в наименьшем сечении
струи.
Отсюда
так
1 + —
Рь Рь
е=--------------------,
Рц 1 + ш* — —
Рн
как — v—= &МА Для дозвукового потока Мн< 1; ра=Рн~
Р
На основании этого можно написать
(4.46)
5)
Рис. 4.7. Схема сжатия газовой струи
При Л4о = О и ро = р& функция е(Л1о, ро/ра) имеет минимум
-^-1
г— lim -------—----------
Р^Ра к-=±
ы 17 Ро \ _ j’
k — i L\ ра)
Наибольшее значение е= 1
будет при ЛТо = 2Иц= 1:
й
k
^мГГ
Таким образом, реальные значения коэффициента е ограничены пре-
делами 0,5^85^1. С физической точки зрения нижний предел значения
е отвечает течению несжимаемой жидкости через малое отверстие с ост-
рыми кромками и, как известно из гидравлики, величина коэффициента
сжатия струи в этом случае равна половине. Верхний предел величины е
соответствует критическому течению газа в резервуаре, что возможно
только при равенстве площадей отверстия и поперечного сечения резер-
вуара.
Наличие противодавления приводит к некоторому увеличению сжа-
тия струи (е уменьшается).
Найдем частные выражения функции е для некоторых случаев исте-
чения газа в окружающую среду с критической скоростью Мн=1. Под-
ставляя
в формулу (4.46), получим
(4.47)
1 + ЛМд — —
Для случая Ра<СРо можно принять
(4.48)
1 +
В функции коэффициента скорости формула (4.48) примет вид
_ 1 1
, 9 / 9 \ Й — 1/ Ь 1 . 9 \й — 1
= 0,5(1 4-Ао) (——) (1--—
U +1 / \ *4-1 /
(4.49)
так как
При ло = О
(4.50)
Выявим влияние частного скругления острых кромок на величину
коэффициента сжатия струи (рис. 4.7, б). Согласно схеме, показанной
на рисунке, коэффициент сжатия струи при наличии частичного скруг-
ления равен
Так как Fn/F=z\ F$/F= (d0/d)2; d0 = d+2r, то приближенная зави-
симость для ег приводится к виду
с ------- а
** Jt —J **
Физически ег не может быть больше единицы. Поэтому существует
предельное значение радиуса притупления кромок Too, при котором
Ег = 1 Дальнейшее увеличение г не изменит величину в.
Таким образом, в зависимости от радиуса притупления острых кро-
мок круглого отверстия величина коэффициента сжатия струи ограни-
чена пределами При этом диапазон изменения радиуса при-
тупления острых кромок, так как е>0,5, составляет
Поэтому при истечении горячего газа через отверстие с острыми
' кромками величина е с течением времени вследствие их эрозии может
достигнуть верхнего предела. При этом реальное значение коэффициен-
та расхода фг, учитывающее, кроме коэффициента сжатия струи, влия-
ние диссипативных сил (% = 0,95), можно принять равным срг — %ег^0,95.
Доля газа, отведенного в стороны из проточного резервуара
через боковой канал произвольного размера
Пусть площади поперечного сечения бокового канала и горловины
проточного резервуара соответственно равны F& и FA. Рассмотрим изме-
нение расхода в сечениях 1—1 и 2—2 (рис. 4.8). На основании закона
сохранения вещества можно записать бщ = Оц2+Сб5 где Оц,б= (в^рц)цгь
Отсюда
Рис. 4.8. К расчету расхода газа через
боковой канал
Рис. 4.9. К расчету тормоза
Используя уравнение (4.41), получим выражение для определения
доли газа, отведенного в стороны через боковой канал
1
е6 а
где Вц — коэффициент сжатия струи при истечении газа из полости цент-
рального резервуара через его горловину;
Вб — коэффициент сжатия струи на входе в боковой канал.
£ 1
Вид функции —------будет определяться, как было показано вы-
ев з
ше, неравенством ф^90°.
Полагая, что в наименьших сечениях потока скорость равна крити-
ческой, а противодавление пренебрежимо мало по сравнению с давлени-
ем в полости резервуара (т. е. рц>ра), при наличии острых кромок со-
гласно уравнениям (4.42), (4.43), (4.49) для ф^90° будем иметь:
k +1
Для случая ф^90° примем ее = const = 0,8 и ец= 1. Тогда
I6_= o,8zrf 1 -X?W1 _
£ц L\ & +1 / \ л ч-1
(4.53)
В общем случае величина ед/ец находится в пределах 0,8—1.
Если для определения функции <"1=8 —— используются уравне-
£ц
ния (4.44) и (4.49), то расчетные формулы примут вид:
Таким образом, для расчета производительности бокового канала
надульного устройства можно пользоваться формулой (4.51).
При наличии нескольких рядов боковых каналов (рис. 4.9) доля га-
за, отведенного из центральной полости резервуара в стороны, подсчи-
тывается по формуле
a6~a6i + a62(l —%) Т Зба(1 — %)(1 + абл (1 — °6i) ... (1
где
п — число рядов боковых каналов;
os, —доля газа, отведенного в стороны че-
рез первый ряд боковых каналов;
1 — %—-доля газа, оставшегося в полости ре-
зервуара после первого ряда боковых
каналов;
аб2(1 — 3бЗ — доля из оставшегося (после первого
ряда боковых каналов) газа, отведен-
ного в стороны через второй ряд боко-
вых каналов;
(1 — — доля из оставшегося газа (после ряда
боковых каналов), отведенного в сто-
роны через последний ряд
каналов.
боковых
Удобнее принять
' 1 .-------------------------------------------------------------
I I
(4.54)
ч Fai
где
Для определения Оц. также можно рекомендовать формулу
1
1 1
1 4-—---------------:
Fu 1 4-Л(1 —cos?)
&
которая вытекает из уравнений (4.37), (4.38) и (4.40).
(4.54а)
Тогда
(4.55)
Сб-- 1 -U ----------°Ца)_ЬаЦ1!3Ц3(1 -аЦ3)Н“ ‘ • *
После алгебраических преобразований получим:
аб= 1 ’ЗцхЯцЛз • • •
аб + ац= 1-
Согласно закону сохранения вещества доля газа, оставшегося в
центральном проточном резервуаре после n-го ряда боковых каналов,
составит
ац=аЦхац,оЦз • • • %• (4.56)
i V
§ 4.5. ИЗМЕНЕНИЕ ПОЛНОЙ РЕАКЦИИ
ИЛИ ПОЛНОГО ИМПУЛЬСА ПОТОКА ПУТЕМ ОТВОДА ГАЗА
ИЗ ПРОТОЧНОГО РЕЗЕРВУАРА В СТОРОНЫ
В общей постановке эта задача может быть сформулирована так:
найти полную реакцию потока /?в или ее полный импульс J R^dt на вы-
ходе из горловины газоотводного устройства, а также определить силу
Рис. 4.10. Схема тормоза
Рис. 4.11. Схема газоотводного уст-
ройства
Р воздействия газоотводного устройства на питающий его резервуар и
ее импульс f Pdt. При этом полная реакция потока R на входе в газоот-
водное устройство может быть величиной постоянной (ракетный двига-
тель) или переменной (ствол артиллерийского орудия).
Согласно уравнению dP = dR запишем (рис. 4.10)
дР=7?г-7?=(а-1)/?,
(4.57)
где 7?г— горизонтальная составляющая реакции потока на выходе его
из каналов газоотводного устройства;
7? — реакция потока на входе в газоотводное устройство;
a=/?r/Z?.
Коэффициент а является функцией размеров и формы газоотвод-
ного устройства и практически не зависит от параметров состояния пото-
ка. Вследствие этого параметр а, характеризующий эффективность газо-
отводного устройства, называют конструктивно-импульсной характерис-
тикой.
Газоотводные устройства, имеющие а>1, увеличивают начальную
реакцию потока, и поэтому их называют газовыми ускорител-ями или
усилителями отдачи, а газоотводные устройства с а<1 выполняют роль
газовых тормозов.
При отсутствии внешнего давления и потерь внутри газоотводного
устройства предельные теоретические значения параметров а равны
—— -——для газовых ускорителей;
У £2 — 1
k
^ОО - А СО- ----
V&- 1
— для газовых тормозов.
С физической точки зрения величина параметра ctoo соответствует
случаю, когда весь поступающий в устройство газ посредством сопло-
вых насадков бесконечно больших размеров или отбрасывается строго
назад ф —180° или отводится вперед ф=0. При отсутствии газоотводно-
го устройства параметры ДР = 0, сх = 1.
Таким образом, реальные значения параметра а будут ограничены
пределами:
1<а</Ссо — для газовых ускорителей;
1 >а>—/Ссо — для газовых тормозов.
Найдем функциональную зависимость параметра а от размеров и
формы газоотводного устройства, предполагая поток газа критическим
и изэнтропическим.
Спроектируем реакции боковых потоков (рис. 4.11) на ось централь-
ной полости газоотводного устройства:
/?г =• -R\. COS (Фг 4- Дф!) Ч-cos (ф2 + Дф2) +
cos Д'Ы cos Дф‘2
%- соз(*3+дф3)+Д=<х/?, (4.58)
cos Д|з
D Л -г 1 Ga* г.
где К -----------------л — реакция потока на входе в полость устрой-
ства;
#4-1
Ал——------------/С1 — полная реакция потока на выходе из перво-
го ряда боковых каналов, взятая по месту
сечения 1—1 (перед косым срезом);
& । • С/2^2
/?2 =-----------А"2 —• то же для второго ряда боковых каналов;
£ g
jT-y
=------------К3 —то же для третьего ряда боковых каналов;
k g *
D k + 1 г,
-----------лв— полная реакция потока газа, неиспользо-
£ g
-ванного в газоотводном устройстве.
Пренебрегая тепловыми потерями, примем = а\=а\
На основании закона сохранения вещества G=Gi + G2-tG3+Gb, как бы-
ло показано в формулах (4.55) и (4.56), имеем:
G2 = ^(l — j2)O;
Ов=о1а2о3О.
Разделив левую и правую части уравнения (4.58) на /?, получим ис-
комое выражение для параметра а:
а = 1 — ,3i) cos -ф /с(1 - - g2) cos Ф2 -ф
+ Оза1М1 - 3з)СО8ф3,
(4.59)
где cos (оz 4- Ду_ tg^tg Дфх-— коэффициент, учитывающей эф-
cos cos Дф/
фект расширения газа в косом
срезе (см. табл. 4.3);
-77 Кв 77 Ki .
лв-—Ki = —-—относительные величины коэф-
К К
фициентов реактивности.
Для т-рядного (m-камерного) газоотводного устройства по анало-
гии с уравнением (4.58) будет справедливо выражение
а=А>т- • 3m+2°iC2°3- -’/-1(1— а/)cosф,- (4.60)
1
При расширяющейся форме каналов коэффициенты их реактивности
определяются по формулам (4.29) и (4.10); для параметра сч— согласно
уравнению (4.54). Если_форма и размеры боковых каналов одинаковы,
т. е. щ=о; = = £г = |, уравнение для параметра а приводится
к виду
а = —зт) соэф. (4.61)
Такое устройство отвечает условиям наименьшего веса и габари-
тов1. Если при входе в полость газоотводного устройства критический
поток при Х=1 не ускоряется (К = 1), а боковые каналы имеют постоян-
ную площадь поперечных сечений, то расчет параметра н проводится по
формуле
= (1 — am) COS ф. (4.62)
Проведем анализ уравнения для параметра а. Легко заметить, что
уравнение (4.61) является общим и охватывает как газовые тормоза,
так и ускорители.
При от=1 (боковых каналов нет) выражение для а вырождается в
зависимость сс = Л?в, характеризующую ускорение потока в сопловой
или ступенчатой цилиндрической насадках:
а<^/Соо — для сопла;
-----------Для ступенчатого цилиндра.
2й 1 1)
Предельное теоретическое значение параметра а для газовых тор-
мозов выбранной конструкции получим в случае, когда весь газ, посту-
пающий в полость газоотводного устройства, отводится в стороны
(о™~0). Полагая £=1_(боковые каналы не имеют косого среза) и
180°, получим а =—Ав.
Все реальные значения параметра а значительно меньше и состав-
ляют:
1 1,35 — для реактивных ускорителей (усилителей отдачи);
—1—ДЛЯ ТОрМОЗОВ.
равносильно неравенству
- Это утверждение вытекает из очевидного условия
т ~ 2 при F6 Лбасоответ-
ственно имеем + Л|2 > 2Г6/ба или (F6i — Гба)2> 0.
Строить дульные тормоза с сгш<0,1 нецелесообразно, так как резко
возрастают их веса и габариты, а эффективность практически остается
неизменной.
Импульс реакции воздействия газоотводного устройства на питаю-
щий его резервуар:
1)
6
В зависимости от характера процесса течения газа для реакции R
справедливы формулы (4.13) и (4.21) или уравнения (5.24) и (5.27).
§ 4.6. ИСТЕЧЕНИЕ ГАЗА
ИЗ ПОЛУЗАМКНУТОГО ЦИЛИНДРА С ПОДВИЖНЫМ ДНОМ
Эта задача имеет большое практическое значение. Подобные газо-
вые устройства ставят на ствол артиллерийских автоматических сис-
тем, а также там, где необходимо получить энергию движения от стати-
ческого давления потока, свободно вытекающего в атмосферу. Схема
такого устройства представлена на рис. 4.12.
Рис. 4.12. Устройство активного
усилителя отдачи
Рис. 4.13. Схема течения газа в
активном усилителе отдачи
ооласти полости цилиндра газ не-
Будем считать, что в застойной
подвижен и его давление рц равно статическому давлению в потоке с
площадью поперечного сечения Fq. В соответствии с этим предположе-
нием задачу расчета давления можем свести к случаю течения газа в.
трубе с внезапным расширением сечения потока от площади F до Fq.
(рис. 4.13). Тогда для критического режима течения газа в сечении 1—Л
т. е. на входе в полость цилиндра, и сверхзвукового течения в сечении
2—2 при выходе из цилиндра в атмосферу, уравнение сохранения им-
пульса потока может быть: записано так:
^2_/?1=(Г0-Л)р
(4.63)
где
1-----
<*------------;
где
__k -у 1 Ga*
k g
После преобразований уравнение
(4.63) приводится к форме
1 —
2а2
- >~1
2
__ ч + ч 1
1 ~ 2
2 —
2
1 л л
Откуда имеем:
л2=А_+]/j------L_£_ ; S=1(1 _. (4.64)
2 е П V е2 е Ао 1 k + Л Fq j !
Подставляя найденное значение Кг в уравнение (4.63), определяем
статическое давление потока в полости цилиндра
(4.65)
Сила давления газа на поршень (см. рис. 4.12)
A/>=(FIt-F)A=№-l)-JL^^. (4.66)
Г0 — г
С другой стороны, согласно уравнению (4.57)
дР=(а-1)/?*.
Приравнивая два последних соотношения, получим
а = 1 +(/С2— 1)
Т'ц Р
(4.67)
Для заданной природы газа параметр а является функцией только
размеров полузамкнутого цилиндра Кц, F, FQ.
В гл. V рассматривается задача расчёта силы отдачи Р и ее импуль-
са f Pelt для орудия с любым надульным устройством.
§ 4.7. СИЛОВОЕ ВОЗДЕЙСТВИЕ ГАЗОВОЙ СТРУИ
НА ПЛОСКУЮ ПРЕГРАДУ1
Во время пуска ракеты и ее последующего движения по направляю-
щей имеет место силовое, тепловое и химическое взаимодействия газо-
вой струи с элементами пусковой установки и комплекса. Физическая
модель этих явлений сложна и недостаточно изучена. Поэтому необхо-
димые расчеты проводятся пока на основании экспериментальных иссле-
дований с широким привлечением теории подобия и размерностей.
В общем случае истечение струи из сопла происходит в условиях
нерасчетного режима (давление в потоке газа на срезе сопла рв отли-
чается от атмосферного pF). Как правило, сопла стартовых двигателей
ЗУР и неуправляемых ракет работают в режиме недорасширения
(Рв>Ра). Вследствие этого на участке струи, прилегающем к соплу, воз-
никает система волн расширения и сжатия, а также скачков уплотнения.
Расчет начального газодинамического участка, где влияние вязкости
и теплопроводности сказывается лишь в тонком пограничном слое, и пе-
реходного участка струи, в котором существенно влияет турбулентность,
ио имеется ядро постоянной скорости и вектор максимальной скорости
не направлен по оси струи, может быть проведен методом характеристик
.11] или по одномерной теории нерасчетной сверхзвуковой струи газа
10]. Имеются также аппроксимирующие зависимости [12], позволяющие
найти геометрические размеры струи и характерные давления газодина-
мического и переходного участков. Для основного участка струи, на ко-
тором осевая скорость становится максимальной по сечению, справедли-
вы основные соотношения теории свободных турбулентных струй [10].
Сравнительно простые зависимости для определения силового воз-
действия газовой струи на преграду можно получить с помощью упро-
1 § 4.7 написан Ю. Н. Морозовым.
щенной картины течения, изображенной на рис. 4.14. Обозначения на
рисунке имеют следующий физический смысл:
Ж 7"о — соответственно полное давление и температура в камере
сгорания двигательной установки;
G—расход газа из камеры сгорания;
рв, /?в, — статические плотность, давление и температура на срезе
сопла площадью = — Di;
4
— скорость газа на срезе сопла.
Предполагаем, что в однофазной газовой струе отсутствуют хими-
ческие реакции, а процесс расширения потока до давления окружающей
неподвижной среды на начальном газодинамическом участке I происхо-
Рис. 4.14. Упрощенная схема течения газа в недорасширен-
ной газовой струе
дит по адиабатическому закону. Тогда параметры начала переходного
участка II, для которого характерно наличие ядер постоянных темпера-
тур и скоростей, могут быть найдены из трех законов сохранения стацио-
нарного газового потока, записанных применительно к сечениям в — в и
1—1:
(4.68)
— 'Увп-(/’в-Л)^в==— *T- (4-69)
g ё
, k k fh t4 70)
2 ' k — 1 pB 2 1 k — 1 pi
Совместное решение уравнений неразрывности (4.68), сохранения
импульса потока (4.69) и энергии (4.70) позволяет определить скорость
и плотность газа в сечении 1—7, а также площадь этого сечения:
г,1=г’в+-у-(/’в—а);
О
(4.71)
(4.72)
(4.73)
Температура 1\ находится из уравнения состояния
Ph
(4.74)
Величины ув, рв, Рв, 7В рассчитываются по зависимостям, приведен-
ным в § 4.1.
На переходном II и основном III участках происходит турбулентное
смешивание частиц струи с окружающим воздухом и обмен импульсами.
Поэтому струя продолжает расширяться, масса ее возрастает, а ско-
рость падает. Внешняя граница струи представляет коническую поверх-
ность, условная вершина которой находится в точке, называемой полю-
сом. Расстояние от полюса до начала переходного участка (глубина по-
люса) /?0 ~ (2-Н4) Ид внешний радиус струи гс = —; длина
Ао 2
переходного участка на основании экспериментальных данных S0 = 3Di
[12].
На основном участке струи скорость и температура максимальны на
оси струи и изменяются в зависимости от координаты сечения по экспо-
ненте:
—А/— - -
D1 ; ^=0,04-4-0,05;
Лпах-Л, =е ^=0,25,
71— Тк
(4.75)
(4.76)
где Гн — температура окружающей среды.
Изменение скорости и избыточной температуры по сечению струи
подчиняется следующим закономерностям [11]:
Гстах Гн
(4.77)
— =/О);
/(Л)=(1-П3'2)2,
(4-78)
(4-79)
где ТОг и vr — соответственно полная температура и скорость газа на
расстоянии г от оси струи.
На начальном участке ордината Лн=—-—отсчитывается от наруж-
ной границы, а на основном участке ордината *1 =-----отсчитывается
от оси струи.
Полная температура в сечении с координатой х находится из соот-
ношения
(4.8U)
где R — газовая постоянная.
На основном участке струи закон изменения полного давления по
сечению может быть аппроксимирован зависимостью
Por^POnfi 'С , (4.81)
h
Величина рот определяется из трансцендентного уравнения
— ph) 2nrdr = лгс
а
=/>.
Откуда
/ РОт— Ph „ \ „ 2 _р
/-----------Ph. | ЛГС— Г,
I ( Р\)т )
I In-------- /
V Ph '
£
где Р =—^в+(/7в — ph]f\ — тяга двигательной установки.
(4.82)
Если неограниченная преграда расположена к оси струи под углом
Р (10°^р^90°), то воздействие на нее
/?p-/?zsin₽. (4.83)
Действительное воздействие на преграду на 15—>20% больше, чем
получаемые по формулам (4.81) и (4.83) вследствие некоторого отраже-
ния потока от поверхности преграды. Поэтому Л?7 = (1,154-1,2) Р.
Воздействие на преграду конечных размеров находится как сумма
элементарных воздействий на площадки, причем необходимые для про-
ведения расчетов значения скорости и температуры, а также полного
давления определяются по зависимостям (4.75), (4.81), (4.83).
Для определения параметров сплошной струи на турбулентном
участке используется приближенный принцип сложения скоростных на-
поров, согласно которому скоростной напор сплошной струи в произ-
вольной точке равен сумме скоростных напоров одиночных' струй в этой
точке.
Пример 4.3. Определить параметры струи и ее силовое воздействие на плоскую
неограниченную преграду, наклоненную к оси струи под углом 20° при Гн=290 К.
Найти параметры газа в точке, расположенной на оси струи и удаленной от вы-
ходного сечения сопла на расстояние 2 м.
Параметры гипотетической двигательной установки:
^ = 100 кгс/см2; Го = 3000 К; £ = 1,25; (7 = 200 кг/с; ^=5; /?=32 кгс м/(кг.К),
Вычисления:
1 '2 -
м1 4с;
t у
200]/ 32-3000
2,02-100
= 307 см2;
FB = 1535 см2; DB = 44 см; лв = 2,14;
/ 2<fe / 2 1 25
Й* = 1/ —у gRTw = |/ 1 25’+ - 9,81-32-3000 = 1040 м/с;
= а*лв = 1040-2,14 = 2230 м/с;
к 1,25
h__. л \ к — 1 / 1 25__ 1 >1,25 1
Л = =Ю0 1--^—-2,142 = 2,86 кгс/см2.
\ к 1 / \ 1 ,za ~г 1 ]
Тяга двигательной установки
Р = —vB + (,pB—ph)Fa = 2230 4-(.2,86— 1) 1535 = 48 320 'кгс.
g 9,81
Статические температуры и плотность газа на срезе сопла:
! k—l п „ f 1,25 — 1 Л
Тв = Тй (1 —------К2 =3000 1 — -л—-------2,142 = 1470 К;
и \ k +1 3) \ 1,25 + 1/
Рв 2,86-Ю4 „ „ _2
рв — --------------=6,2*10 кгс-с2/м4.
1! gRTB 9,81-32-1470 '
Определяем параметры газа в сечении /—7:
„ 9,81-1535
v 1 = vB + -ё—- (/;„ — ph) = 2230 + ——— (2,86— 1) = 2370 м/с;
k— гh
2 2
VB~Vt
k
—;------1 • 104
1.25 — 1 „
---------------------r=2,52-10 2 кгс-с2/м4
2,86-Ю4 22302—23702
в
1,25 — 1 6,2-10“2
Pl
Ы0
9,81-32-2,52-10“2
200
= 1260 К;
, =0,341 м2;
9,81-2,52-10~22370
4-3410 „ к
------= 65,5 см.
л
Глубина полюса
Ло — = 3-65,5 = 196 см.
Протяженность ядра постоянных скоростей и избыточных температур
$0 — 3Dj = 196 см.
Уравнение внешней границы струи (в продольном сечении струи):
Di , v 0,655
= — (Ло + х) = —— (1,96 + х) = 0,328 + 0,167л.
Z/Iq 2* 1 ,УО
На расстоянии 2 м от выходного сечения сопла:
г; = 0,328 + 0,167 =0,328 +0,167(2-65’Д~ 441,96^ = 0,555 м.
\ / \ 65,5 /
Распределение скорости и избыточной температуры в основной зоне на оси струи:
_ к /?о+х ^0,045(1,9R+X)
vm = v!e ' D* =2370е °’6S5 = 2070e"°’OS88-v:
-0,25Ь96±£
Гщах = гн + (Л — Гн) е Di = 290+ (1260 —290) е °-655 =
= 290 + 458е~ °>382х.
На расстоянии 2 и ст выходного сечения сопла:
vm = 2070е“0.0688-1,36 = 1960 м/с.
Лпах = 290 + 458е-°>382 1’36 = 562 К;
.2
гп
1,25 — 1 I9602
„ , „ , „„ = 1780 К.
Полное давление газа на оси струи найдем из уравнения:
P<im Ph „ \ 2 D
------------Ph I Лгс = Р<
, РОт
In----- I
f Р^т.
|п Р^т
\ ° 1
л55,5~ =48 320 кгс.
Откуда
р$т = 18,5 кгс/см2; а = 4,1.
Закон изменения полного давления в рассматриваемом сечении:
г2
~а~ _4 i г'2
„л __ „ р Гс ’ 55,5* w -—0,00133г2
pQr —Р0т& — 1О,0с — 10,0
Силовое воздействие на неограниченную преграду, наклоненную под углом 20°"
к оси струи:
R. = 1,15Р sin 20° = 1,15-48 320-0,342= 19 000 кгс.
г
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ IV
1. Абрамович Г, Н. Прикладная газовая динамика. М., ГТТИ, 1953, 824 с.
2. Б а з а р о в И. П. Термодинамика. М., Физматгиз, 4961, 292 с.
3. Жуковский В. С. Техническая термодинамика. М., ГТТИ, 1952, 439 с.
4. Л а н д а у Л. Д., Лифшиц Е. М. Механика сплошных сред. М.,
ГТТИ, 1953, 788 с.
5. Леонтович М. А. Введение в термодинамику. М., ГТТИ, 1953, 199 с.
6. Л о й ц я н с к и й Л. Г. Механика жидкости и газа. М., Физматгиз, 1959, 784 с.
7. О р л о в Б. В. и Мазинг Г. Ю. Газодинамические и баллистические осно-
вы проектирования ракетных двигателей на твердом топливе. М., «Машиностроение»,
1968, 536 с.
8. Станюкович К- П. Неустановившиеся движения сплошной среды. М.,
ГТТИ, 1955, 854 с.
9. Ч а р н ы й И. А. Основы газовой динамики. М., Гостоптехиздат, 1961, 200 с.
10. Абрамович Г. Н. Теория турбулентных струй. М., Физматгиз, 1960, 715 с.
11. Гинзбург И. П. Аэрогазодинамика. М., «Высшая школа», 1966, 404 с.
12. С. Крист, А. Шерман, Д. Г л асе. Исследование сильно недорасширеи-
ной звуковой струи. — «Ракетная техника и космонавтика», 1966, № 1, с. 87—92.
Глава V
ПРОЕКТИРОВАНИЕ ПРОТИВООТКАТНЫХ ГАЗОВЫХ УСТРОЙСТВ
И ДВИГАТЕЛЕЙ
В артиллерийских системах используются газовые устройства раз-
личного назначения. С помощью их производят поглощение избыточной
кинетической энергии подвижных частей автоматических пушек или
откатных частей артиллерийских орудий, либо осуществляют их разгон
в том случае, когда у подвижных частей не хватает кинетической энергии
для завершения заданного цикла автоматики.
Эти газовые устройства по физическому принципу действия можно
разделить на две группы:
1) статические (поршневые) двигатели с условно постоянным и яв-
но переменным количеством газа в запоршневом пространстве полости
цилиндра;
2) реактивные двигатели с полузамкнутой или проточной рабочей
полостью.
К первой группе относятся газовые буферы, газовые противооткат-
ные устройства (тормоз-накатник), газовые подствольные двигатели, а
также газовые приводы механизмов питания и экстракции гильз из пат-
ронника ствола.
Вторую группу — группу надульных газовых устройств составляют
газовые дульные тормоза и локализаторы, реактивные и активные уско-
рители отката, а также компенсаторы устойчивости пространственного
положения оружия и движения их носителя (например, самолета) в про-
цессе стрельбы.
Под надульными газовыми устройствами будем понимать дульные
(газовые) тормоза, предназначенные для уменьшения величины импуль-
са отдачи от выстрела— —+ (см. § 5.1 и 5.2), и применяе-
мые в некоторых малокалиберных автоматических пушках (оружии)
усилители отдачи для увеличения этого импульса в том случае, когда
кинетической энергии отката не хватает для приведения в действие ме-
ханизмов автоматики. Несмотря на разность целей, газодинамический
принцип действия как дульных тормозов, так и усилителей отдачи, оди-
наков. Для проектирования газовых компенсаторов, несмотря на разли-
чие своего назначения по сравнению с тормозом или усилителем отдачи,
также не требуется самостоятельной теории в силу физической общности
газодинамических процессов, протекающих в них.
Для авиационной пушки среднего калибра (d>23 мм), имеющих
избыточную энергию отдачи, функции дульного тормоза и локализатора
. /вмещают. В тех случаях, когда энергия отдачи незначительна и воз-
тействие локализатора на подвижной ствол не допускается, его крепят
хе на дульной части ствола, а непосредственно к кожуху автомата или
.танку (установке).
В автоматическом оружии малого калибра (d<23 мм), когда энер-
отдачи ствола недостаточно для обеспечения заданного цикла отка-
‘з и наката ствола, применяют газовые усилители отдачи (ускорители),
. ттрые делятся на активные и реактивные.
Активный усилитель представляет собой полузамкнутый цилиндр,
размещенный впереди дульного среза ствола и охватывающий закреп-
ленный на конце ствола поршень. После вылета снаряда сила отдач*
ствола с таким надульным устройством возрастает на величину реакции
от действия на площадь поршня статического давления потока порохо-
вых газов, вытекающих из канала ствола через полузамкнутый цилиндр
усилителя отдачи в атмосферу.
Реактивный усилитель отдачи работает как сопло ракетного двига-
теля (РД), Т. е. увеличение силы отдачи ствола происходит за счет ста-
тического давления потока пороховых газов на стенки конической на-
садки (диффузора сопла). В соответствии с третьим принципом меха-
ники Ньютона это увеличение силы отдачи будет равно абсолютному
приращению величины полной реакции потока газа в диффузорной части
сопла. Здесь мы имеем полную аналогию с процессом периода последей-
ствия тяги РД, при этом объем канала ствола следует рассматривать
как камеру двигателя, а сопло, размещенное на конце ствола, как сопло-
вой блок РД.
В дульном тормозе величина полной реакции пороховых газов из-
меняется за счет диаметрально симметричного отвода части их в сторо-
ны под заданным углом к оси канала ствола. Таким образом тянущее
усилие тормоза возникает в результате изменения направления движе-
ния (истечения) некоторой части порохового газа, вытекающей из кана-
ла ствола. Количество газа, отводимого в стороны и направление отвода
определяются заданной энергетической или импульсной эффективностью
дульного тормоза.
Известно, что дульный тормоз наряду с простотой своей конструк-
ции в отличие от тормозных устройств первой группы обладает только
ему присущим свойством уменьшения импульса выстрела, действующего
на лафет орудия. Это свойство дульного тормоза, как известно, позво-
ляет облегчить конструкцию лафета и таким образом снизить вес орудия
(см. § 9.5). Однако на практике весьма затруднительно, а иногда вооб-
ще невозможно, построить дульный тормоз высокой эффективности. Ос-
новное затруднение в создании высокоэффективного тормоза носит
принципиальный характер и заключается в существенном превышении
/ q \
количества движения снаряда [ — 1 над импульсом силы реакции
' g /
порохового газа |р — Vo [.Кроме этого, предел допустимого избыточного
\ g 1
давления (0,4 кгс/см2) ударной волны на местах боевого расчета орудия
ограничивает величину угла отвода порохового газа в стороны от на-
правления выстрела (ф<135°). По этой причине оказывается возможным
построить дульный тормоз относительно высокой эффективности только
для орудия с высокой начальной скоростью снаряда (z?o> 1000 м/с) или
большим относительным весом заряда ^—>0,5^, т. е. для орудий, у кото-
рых импульс полной реакции порохового газа в дульном срезе превыша-
ет начальное количество движения снаряда р — ^'о > — г’о •
\ g g J
В целях обеспечения устойчивой работы компрессора турбореактив-
ного двигателя (ТРД) в процессе стрельбы пушек, расположенных по-
близости к воздухозаборникам двигателя, на дульную часть ствола ста-
вят специальное устройство, напоминающее по своей форме дульный
тормоз. Это надульное устройство предназначается для симметричного
отвода порохового газа, вытекающего из канала ствола в направлении
выстрела, в сторону безопасной зоны для работы компрессора. Без та-
кого надульного устройства струя порохового газа, вытекающая из ка-
нала ствола и имеющая расход, соизмеримый с расходом воздуха (а
иногда существенно его превышает), через компрессор, порождает перио-
дический отсос воздуха от воздухозаборника. Поэтому во время стрель-
бы на входе в компрессор образуется пульсация воздушного потока,
приводящая к помпажу ТРД и как следствие этого — к полному пре-
кращению его функционирования как на земле, так и в воздухе. Иногда
такое надульное устройство называют глушителем или локализатором.
Локализаторы авиационных пушек, в отличие от дульных тормозов,
обеспечивают отвод порохового газа в стороны до 98% при наименьшем
эффекте торможения или при заданной его величине. Поэтому, как пра-
вило, локализаторы имеют угол отвода газов в стороны значительно
меньше 90°.
Большие скорости самолетов требуют, чтобы локализатор имел
аэродинамическую форму с малым коэффициентом лобового сопротив-
ления. Вследствие этого локализаторы имеют вытянутую форму при ми-
нимальном поперечном сечении и большое количество боковых щелей.
В стрелковом оружии в целях стабилизации его устойчивости во
время выстрела очень часто на надульную часть ствола ставят специаль-
ные газовые устройства — компенсаторы. При прохождении порохового
газа через такое надульное устройство возникает усилие, компенсирую-
щее динамический момент выстрела.
Динамический момент, нарушающий во время выстрела положение
оси канала ствола в пространстве, возникает по причине несовпадения
центра массы оружия с линией действия силы отдачи выстрела.
Если оружие имеет дульный тормоз или усилитель отдачи, то для
стабилизации его устойчивости при выстреле делают комбинированное
надульное устройство, в котором функции компенсатора и одного из этих
надульных устройств совмещены. Газовые компенсаторы обычно пред-
ставляют собой кососрезанную цилиндрическую или коническую насад-
ки, закрепляемые непосредственно на конце ствола или его кожухе с та-
ким расчетом, чтобы боковое усилие компенсатора действовало бы в
плоскости динамического момента и создавало бы момент обратного
знака. Иногда компенсатор целесообразно выполнить в виде дульного
тормоза с явно несимметричным или односторонним отводом пороховых
газов по отношению к оси канала ствола.
В процессе стрельбы из пушек под воздействием силы отдачи само-
лет претерпевает изменение курса своего движения. Для парирования
этого возмущения траектории носителя прибегают к компенсатору, сво-
бодно надетому на дульную часть ствола и закрепленному на корпусе
самолета. В этом случае боковая и осевая реакции компенсатора воспри-
нимаются самолетом и создают необходимый момент относительно его
центра массы.
Размеры компенсатора и направление его реакции воздействия на
самолет должны быть выбраны такими, чтобы момент от этой реакции
уравновешивал (или в значительной степени компенсировал) момент
силы отдачи выстрела.
Таким образом, силовое воздействие любого надульного устройства
за его крепление является результатом им вызванного принудительного
изменения направления и величины вектора полной реакции газового по-
тока, проходящего через это надульное устройство. В дульном тормозе
5 локализаторе, как правило, имеет место изменение направления век-
тора полной реакции потока, а в усилителях отдачи—ее величины.
Эжекционное устройство в некотором смысле можно отнести ко вто-
рой группе газовых устройств, если его назначение рассматривать как
механический ускоритель процесса очистки канала ствола от пороховых
Г23ОВ за время между очередными выстрелами. В действительности
эжекционное устройство является струйным насосом, недопускающим
после открывания затвора истечения порохового газа из канала ствола
«рез его казенный срез и удаляющим их через дульный срез.
Принцип действия такого насоса заключается в создании вакуума
в дульной части канала ствола при помощи высоконапорной с низкие
статическим давлением газовой струи, обеспечивающей интенсивный под-
сос воздуха атмосферы через казенный срез.
Эжекционные устройства бывают надульные (рис. 5.1) и ствольные
(см. рис. 5.39).
Ствольное эжекционное устройство размещается на стволе на рас-
стоянии 8—10 калибров от дульного среза. Такие эжекционные устрой-
ства обычно применяются для неавтоматических танковых и казематных
орудий среднего и крупного калибра. В автоматических пушках мало-
го калибра используют эжекционные устройства надульной конструк-
ции, заметным образом снижающих задымляемость на местах боевого
расчета.
Газовые устройства первой группы в качестве рабочего тела пере-
менной или постоянной массы используют пороховой газ, отведенный из
E2ZHZZZZZZZZZZZZZZZ2ZZZZZZZ2 rzzzzzzzzza
Рис. 5.1. Схема надульного эжектора
канала ствола в полость их цилиндра. В действительности вследствие
постоянной утечки порохового газа из рабочего цилиндра через явные и
неявные зазоры масса рабочего тела всегда оказывается переменной.
Упругость порохового газа, несмотря на его интенсивный тепломассооб-
мен с окружающей средой, позволяет при сжатии его обеспечить энер-
гичное торможение отката подвижных частей орудия и накопить потен-
циальную энергию газа, достаточную при его последующем расширении
для разгона и наката в исходное положение подвижных частей агрегата
запирания или ствола.
Газовый накатник-тормоз пушки обладает тем свойством, что в про-
цессе отката и наката ствола потенциальная энергия порохового газа в
цилиндре накатника непрерывно рассеивается вследствие тепломассооб-
мена с окружающей средой. Этот тепломассообмен за время цикла от-
кат— накат ствола вызван, с одной стороны, утечкой горячего порохово-
го газа из полости цилиндра через уплотнительные устройства и, с дру-
гой,— нагревом его стенок.
В случае необходимости тепломассообмен рабочего тела накатника
с окружающей средой можно программировать и тем самым обеспечить
потребный закон движения ствола. За счет такого программированного
энергомассообмена кинетическая энергия наката ствола по сравнению с
энергией его отката может быть снижена до любого уровня. Таким об-
разом, противооткатное устройство типа газового накатника как бы сов-
мещает в себе функции пневматического (или пружинного) накатника и
гидравлического тормоза.
Газовый буфер, цилиндр которого в процессе выстрела наполняется
пороховым газом, .предназначается как для амортизации ударов отката
подвижных частей в граничном (крайнем) положении, так и для обес-
печения им высокой начальной скорости при накате. Иными словами га-
зовые буфера работают в режиме тормоза и ускорителя движения и дей-
ствуют весьма кратковременно и на небольшом пути подвижных частей
автомата. Однако, несмотря на это, при расчете цикла работы газового
буфера необходимо учитывать тепломассообмен его рабочего тела с ок-
ружающей средой.
Газовые приводы (двигатели) для подачи (подтягивания) патрон-
ной ленты и для досылки патрона или экстракции стреляной гильзы
используются в автоматике пушек с большим темпом стрельбы и поэто-
му отличаются весьма высоким быстродействием. Заметим, что широкое
внедрение газовых механизмов в автоматику пушек наблюдается при ис-
пользовании патрона с электрокапсюлем.
Упрощенная классификация газовых устройств артиллерийских сис-
тем представлена на рис. 5.2.
Газовые устройства артиллерийских
систем
Газопроводе/
| Двигатели
струйные
Противооткатные Зжекторы (насосы)
устройства струйные
Поршневые
Реактивные
Поршневые
Реактивные
Тепловые
!
кососрезан-
ныенасавки
Дульные тормоза
с симметричным
расположением
Роковых
каналов
Дульные тормоза
с несимметрич -
ним расположена
ем соковых
каналов
Сопловые
Рис. 5.2. Классификация газовых устройств артиллерийских систем
В каждой из рассмотренных выше двух групп газовых устройств
имеется по одному типичному образцу, методика расчета и проектирова-
ния которого является общей, т. е. справедливой для всех остальных уст-
ройств в этой группе.
В первой группе таким типичным устройством является газовый на-
катник или подствольный газовый двигатель (см. рис. 5.34), во второй —
дульный тормоз (см. рис. 5.8). Поэтому ниже приведено теоретическое
обоснование методики расчета только для типичного газового устрой-
ства, а для других — ее получим как частный случай этого обобщенного
решения задачи.
Наряду с перечисленными выше надульными устройствами суще-
ствует так называемый тепловой дульный тормоз. Конструкция его пред-
ставляет собой бочкообразную цилиндрическую насадку, у которой диа-
метр полости больше калибра ствола и заметно превышает диаметр сна-
рядного окна. Боковых каналов у теплового тормоза нет. Тормозное уси-
лие в такой насадке возникает вследствие охлаждения газа, вызываемо-
го его теплообменом с окружающей средой и перестраивающего течение
потока в полости тормоза таким образом, что на переднее его дно (об-
ласть снарядного окна) действует большее давление, чем на заднюю
(область дульного среза ствола).
Существуют так называемые ствольные дульные тормоза, окна ко-
торых выполняются непосредственно в стенках ствола и по своей длине
иногда занимают более половины длины ствола. Такие длинные тормоза
не следует применять и прежде всего потому, что заметным образом рас-
тет вес заряда. В противном случае при общей заданной длине ствола
существенно снизится дульная скорость снаряда. Кроме того, для задан-
ной баллистики орудия навинтной дульный тормоз в несколько раз бу-
дет короче ствольного и обеспечит более низкие избыточные давления
на местах орудийного расчета. В тех случаях, когда от дульного тормоза
требуется небольшая эффективность, его можно выполнять в виде
ствольного, если нет особых технологических трудностей.
На практике тепловой дульный тормоз почти не применяется вслед-
ствие низкой его энергетической эффективности. Инженерный расчет
эффективности теплового тормоза представляет интересную термодина-
мическую задачу из области течения газа в проточном резервуаре с вне-
запными уширениями его канала при наличии теплообмена с окружаю-
щей средой.
Для расчета надульного устройства любого назначения необходимо
знать параметры состояния порохового газа на входе в надульное устрой-
ство, т. е. в дульном срезе канала ствола. Последняя задача в практике
проектирования артиллерийских систем имеет самостоятельное значение
и составляет основу-теории истечения газа из канала ствола после выле-
та снаряда. Решение этой задачи составляет основу промежуточной бал-
листикой артиллерийского орудия. Содержание дисциплины «Промежу-
точная баллистика» несколько шире задачи истечения порохового газа
из канала ствола оружия и включает в себя определение силы давления
газа на дно канала ствола и снаряда, а также закон распределения па-
раметров состояния газа по длине канала ствола. В специальной артил-
лерийской литературе вместо термина «промежуточная баллистика» час-
то употребляют термин «теория периода последействия выстрела» или
просто «период последействия».
§ 5.1. ПЕРИОД ПОСЛЕДСТВИЙ ОРУДИЯ БЕЗ НАДУЛЬНОГО
УСТРОЙСТВА. ПРОМЕЖУТОЧНАЯ БАЛЛИСТИКА
После вылета снаряда пороховой газ свободно истекает в атмосфе-
ру и его давление в канале ствола весьма быстро падает до атмосфер-
ного.
В процесс истечения порохового газа сила давления на дно канала
продолжает ускорять откат ствола и увеличивать импульс отдачи выстре-
ла. Таким образом, в периоде последействия ствол артиллерийского ору-
дия подобен ракетному двигателю, у которого площадь критического
сечения сопла равна площади поперечного сечения камеры сгорания, ра-
ботающей в режиме последействия тяги. Вследствие этой конструктив-
ной особенности ствола по длине его канала появляются большие гра-
диенты скорости и статического давления потока порохового газа.
Для определения параметров движения откатной части или пара-
метров состояния порохового газа в газоотводном устройстве при их за-
полнении в периоде последействия необходимо знание закона изменения
во времени давления на дно канала и полной реакции порохового газа в
дульном срезе.
Процесс истечения газов из канала ствола
Эту задачу решим приближенно, предполагая, что процесс истечения
газа из канала ствола является квазистационарным, параметры состоя-
ния газа внутри канала в каждый момент времени постоянны (одинако-
вы) по его длине и равны среднему значению, а сам процесс подчиняется
уравнению состояния идеального газа.
Прежде чем приступить к решению поставленной задачи, установим
характер процесса истечения газа из канала ствола, законы распределе-
ния скорости и статического давления порохового газа по его длине, а.
также возможность использования гипотезы осреднения параметров со-
стояния и учета теплообмена порохового газа со стенками канала
ствола.
Изменение параметров состояния порохового газа в канале ствола
артиллерийского орудия в течение периода последействия может быть
найдено из обобщенного аналитического решения уравнения первого на-
чала термодинамики или закона сохранения энергии [6]:
i
pWk=exp (k —
Qtdt
<*rRT
или
(5.1)
t
pWk=pHW^exp (А-1Д
0*
Q'tdf
~~pW
Величина давления p в канале ствола составляет несколько сот
атмосфер, а поэтому влиянием коволюма допустимо пренебречь.
Истечение порохового газа происходит из постоянного объема ка-
нала ствола, поэтому W=
Отвод тепла Q из канала ствола происходит вследствие истечения
газа в атмосферу и непосредственного теплообмена его со стенками
ствола. Скорость изменения тепла в объеме канала определяется зави-
симостью
где Qi/== — GJ—скорость отвода тепла пороховым газом в
атмосферу;
' G—расход порохового газа из канала ствола в
атмосферу;
J= сТ = —— RTm — энтальпия (теплосодержание) порохового
р k — 1
газа в заторможенном состоянии;
ср = ~^—1 А:—удельная теплоемкость газа при постоянном
давлении;
Qu——— —скорость отвода тепла из объема канала
ствола в результате теплообмена;
— коэффициент теплоотдачи [6];
— удельный вес газа при температуре 7;
Ру
7С—температура стенки канала ствола;
«>г—текущий вес газа, оставшегося в канале
ствола;
F^ndlvv—боковая поверхность канала ствола;
d — калибр ствола;
/кн—длина канала ствола;
t— время, отсчитываемое от момента вылета
снаряда;
0,1ккал*м/(кгс-с-К)—коэффициент пропорциональности (в общем
случае его величина зависит от материала
* стенки и качества ее поверхности [6]).
Выражение для при допущении, что 7\/7 = const можно при-
вести к виду
где
p = yRT*, v = l-------- = const; v = —
При WH = const уравнение (5.1) принимает вид
/ Qtdt
p=pHexp(A:-l) \—— , (5.2)
0
где
RT&T=pW.
Средние значения полной и статической температур в начале перио-
да последействия для случая линейного закона распределения скорости
потока порохового газа вдоль оси канала ствола ( Х»ХД— ; —1
X ^кн ^кн /
[см. формулу (5.10)] приближенно связаны соотношением
х — расстояние фиксированного сечения канала ствола от казен-
ного среза;
Хл= I —коэффициент скорости потока в сечении дульного среза;
£ = 5/4—показатель адиабаты Пуассона для периода последействия.
При %Д='О функция <рт согласно правилу Лопиталя обращается в
единицу, т. е. статическая и полная температуры равны друг другу.
Для %д—1 она достигает наибольшего значения, равного
(5.3)
Поэтому выражение для скорости уноса тепла пороховым газом в ат-
мосферу через его среднюю статическую температуру можно записать
так:
Qlt = Gc <?тТ. (5.4)
г
Ввиду несущественного отличия величины коэффициента фт от еди-
ницы и приближенности принятой физической модели процесса истече-
ния порохового газа из канала ствола можно принять Qf = cpT.
Сделанное замечание позволяет выражение интеграла для
р Q^dt
N = (k—1) 1------- привести к виду
о
J -г я J V
о о
Так как G——. а — = — , то можно записать
dt w d
AT=A!ln^- + c/, (5.5)
°T
где
d R 7
(Оог~ о — вес заряда.
Поэтому обобщенное уравнение процесса изменения параметров со-
стояния (5.1) применительно к истечению порохового газа из канала
ствола артиллерийского орудия в соответствии с выражением (5.5) вы-
рождается в формулу
Р = РЛ[—) е г , (5.6)
\ со ]
где Зт = с.
При отсутствии теплоотдачи ('Q^ = 0 или (Зт = 0) имеем формулу
адиабатического (изэнтропического) процесса истечения газов из канала
ствола
/ / Р /СТ ’7'1
Р~Р\\~] ИЛИ 0Jr—О) — . (0.7)
X 03 / X Р:\ J
При адиабатическом процессе средняя температура газа в канале
ствола за полное время его истечения
где соа — вес порохового газа, оставшегося в канале ствола к концу пе-
риода последействия, на практике величина соа^оз.
Полученный результат означает, что за время полного истечения
£ р
газов их средняя температура Tcpt в канале ствола в й =— раз мень-
cw
ше начальной Тл. Этот же результат можно получить из равенства
внутренней энергии порохового газа, которым он обладал в момент вы-
лета снаряда (сощуТд), и тем количеством тепла, которое ушло в ат-
мосферу вместе с газом за время процесса истечения (wCpT^t)f т. е.
Откуда
1 срг1 с 1 Д’
W
Соотношение для Гсрг полезно помнить при термодинамическом
расчете подствольных газовых устройств (например, эжекционного уст-
ройства, газового накатника, газового буфера и т. п.), рабочие емкости
которых в основном заполняются пороховым газом в течение периода
последействия (см. § 5.8 и 5.9).
Закон распределения скорости газа и статического давления
по длине канала ствола
Для расчета производительности боковых каналов, сделанных в
стенке ствола, через которые заполняются емкости подствольных и на-
дульных устройств, необходимо знать закон распределения скорости по-
рохового газа по длине канала ствола п(х). Количество газа, отводимо-
го в стороны через наклонные каналы, существенно зависит от его на-
чальной скорости на входе в эти каналы.
Для фиксированного момента времени t этот закон распределения
скорости при допущении gp = ——const I-^-=0 ) можно найти из
дх '
уравнения сплошности нестационарного одномерного потока, т. е. для
случая движения газа в цилиндрическом канале с постоянной площадью
поперечного сечения:
dt
(рх?) = О или ——-0,
откуда после интегрирования имеем
где
с (f) = — In р.
k 7 dt
Рис. 5.3. Графики законов изменения скорости (а) и давления .(б) в заснарядном
пространстве
Для фиксированного момента времени неизвестные с (У) и DU}
определяются граничными условиями потока: т, = — V, х = 0 и =
х = 1кп. Поэтому D(f)= —Vt, — — , а функция ’у(х) в этом
Лен
случае приобретает вид
o=(4v + ^t—Vt, (5.9)
*кн
где V\ —текущая скорость отката ствола,
—текущая скорость порохового газа в дульном срезе.
Таким образом, допущение постоянной плотности газа вдоль канала
ствола (др/дх) =0 приводит к линейному закону распределения скорости
по его длине (рис. 5.3, а).
В частном случае, когда ствол неподвижен У=0 или зави-
симость у(х) вырождается в общеизвестную формулу
v = (5.10)
^КН
При этом величина градиента скорости (dvjdx) = (УдгДкн) составляет
сотни метров на единицу длины канала ствола.
Закон распределения статического давления по длине канала ствола
выведем на основании следующих соображений. Поток газа внутри ка-
нала ствола, при (д?/дх)=0 и характеризуется параболиче-
ски
ским законом распределения текущего статического давления вдоль ко-
ординаты х (рис. 5.3, б):
Pt Рлн t (Лн t Put)
2
КН
или
1
так как
/?лн t
\ * q J
Для доказательства этого положения обратимся к уравнению дви-
жения одномерного потока
dv
dt
dv
= 0.
дх р / дх
На основании зависимости ------------- вправе записать
^кн
dv д ( х- А
—; у-------=----- ---------.
dt A<h dt дх дх I 2 p
\ *KH' /
Поэтому при допущении бр/бх = 0 уравнение движения газа в полузамк-
нутом цилиндре принимает вид
v\t X2
dv
х dv^
КН
Z2
S<h
Р/
^-=0.
дх
Интегрирование его по
времени t дает выражение
координате х при
фиксированном значении
ci-------
1 27
-^кн
—•‘Од/'Ь—
2Й„ Р/
rkri
! являются функциями времени и
Здесь постоянные с,=——
1 dt
определяются для данного момента времени граничными условиями:
кн»
где /?лн/—текущее давление на дно ствола;
— текущее статическое давление потока пороховых газов в
дульном срезе ствола.
При этих граничных условиях:
Ci —
1 I
4 КН
РкнЛ Р рЯ
v2
W Т
^1 — ,
Р7
Подставляя найденное значение D\
движения, будем иметь
и сг в интегральное уравнение
2/кн
КН
г/2
Рдн t РрЯ Д
2
х2 \ Pt — Рт t
2 /2 Pt
*кн
Р*
Р*
Р*
получим искомый закон мгно-
потока вдоль канала
После приведения подобных членов
венного распределения статического давления
ствола (5.11). При и ^ = vCH формулы (5.9) и (5.11) (см. рис. 5.3).
определяют изменение скорости и давления газа по длине заснарядного
пространства до момента вылета снаряда из канала ствола.
Изменение во времени среднего давления в канале ствола
Адиабатическое (изэнтропическое) истечение газа из канала ствола
описывается уравнениями:
— процесса изменения состояния газов
1
_ %
<ог — юл; ;
— закона сохранения вещества
wr/= — G.
Знак минус в последней формуле означает, что функция ог(^) с те-
чением времени убывает. При изэнтропическом процессе истечения газа
с критической скоростью их расход G, как известно, определяется по
формуле [см. выражение (4.19)]
G — A..S .
VRT
Для нахождения постоянной расхода Ах с учетом начальной скоро-
сти потока уд используем выражение (4.14):
fe+i fe+i
/ 1 9\ 2(*—1)
A, = AX (1 - J—k?
\ 2 j \ k H-1 /
где S — площадь поперечного сечения канала
_____________ ствола;
[“ а*4- 1
1 / /2 \й—1
А: = I/ kg I1 — постоянная расхода;
Мд=1/л/ал — число М для момента вылета снаряда из
ствола;
&z = Vkg#7\— скорость звука в среде порохового газа
в момент вылета снаряда из ствола;
/(1 — Лд) — температурный комплекс в момент выле-
та снаряда из ствола;
Лл = (А —1)—:----термический к. п. д. орудия;
2^/<о
f — сила пороха;
<р—коэффициент фиктивности массы снаря-
да.
к-Л
Используя уравнение адиабаты Пуассона (р1рл) к = (Г/ГД), выра-
жение для расхода газов можно привести к виду
к 4-1
G=G^y (5.12)
где Од= Аг ——— — расход газа в момент вылета снаряда;
V
я — р]рК— относительное изменение среднего статического дав-
ления в канале ствола к моменту времени t\
рл — баллистическое давление в канале ствола в мо-
мент вылета снаряда из ствола.
Нетрудно показать, что среднее давление в канале ствола в момент
вылета снаряда, найденное по формуле
и баллистическое р6 практически равны, т. е. рср так как мно-
житель — 1 ч---------------------—---- по своей величине близок к
?\ 3 q 6<?o/Qo + # + w
единице (больше 0,94).
п Рб Qo 4- 0,5<о
В указанных формулах /?^сн==“——--------------давление на дно
? Qo + ^ + to
снаряда в момент его вылета из канала ствола;
Рб Я 4- 0,5со Qn г о
р^=±^ —----------——давление на дно канала ствола (см. 5.3).
? Qo + 7 ' г « q
За начальное давление процесса истечения порохового газа (/=0;
/? = /?д) из канала ствола примем его баллистическое давление, вычислен-
ное для момента вылета снаряда из ствола.
Дифференцируя соотношение (5.7) и подставляя в него вместо о/Г£
выражение расхода (5.12), получим следующее дифференциальное урав-
нение:
1—fe 1+fe
1 k ' 2fe
(0Л Л/= —
k------------*
или
die
dt.
Интегрирование его в пределах от 1 до п и от 0 до t приводит к фор-
муле, определяющей закон изменения давления в канале ствола в про-
цессе истечения газа:
или
„ 2А
л=(1+^) А-1
_ 2fe
^=А(1 + ^) к~
(5.13)
где
Найденную зависимость л(/) можно аппроксимировать экспонент-
ной
Л= e~blt.
(5.14)
При этом величину параметра Ь\ находят из интегрального уравне-
ния, т. е. из равенства полных импульсов давления газа на дно канала
ствола за время периода последействия /п-
t ___2fe i
k~xdt= Ce~^dt
o oJ
или
й-bl
k-l
J
Л-м,
— e »
Так как (l-f-5ifn)^e ftl«<^l, то
где k = 1,25.
СО
1
При найденном соотношении между постоянным Ь\ и В формулы
(5.13) и (5.14) практически дают одинаковый результат.
Е. Л. Бравин для функции л(^) предложил формулу в виде следую-
щей экспоненты:
где
р=рле~ь‘,
gSp^ .
(₽ —0,5) cov0 1
(5.14a)
Q 1300
-----коэффициент полного действия массы пороховых газов на
^0
ствол [см. выражение (5.21)].
Выражение для показателя интенсивности истечения было установ-
лено Е, Л., Бравиным из соотношения
t
г- П о
_ Q0+O,a.o = С Sp е-«„
g J b
0
в левой части которого записано приращение количества движения от-
катной части орудия за время периода последействия, а в правой—пол-
ный импульс сил давления на дно канала ствола.
Верхний предел интегрирования равен полному времени истечения
порохового газа из канала ствола £п. Величина времени ^п^0,1 с. Зна-
чение функции. < 1, так как величина параметра b на три поряд-
ка больше значения tn.
Если в формулу Е. Л. Бравина подставляются опытные величины
параметров [3 и рд, то потери давления вследствие теплоотдачи не сле-
дует особо учитывать.
Нетрудно показать, что функция я—е~^ характеризует закон
падения давления в канале ствола при изотермическом процессе (fe=l)
истечения порохового газа
2k
14 (л . k— 1 G, Д _bt
Р = Рд Ьш 1 + —-------- И = р,£ т ,
Л-1 \ 2. J
_ G-
где Ьг = —- .
О)
На практике обычно пользуются полуэмпирической формулой
(5.14а).
С учетом теплоотдачи в соответствии с уравнениями (5.6), (5.7),
(5.14) закон изменения давления в канале ствола после вылета снаряда
описывается формулой
где
р=р^
(5.146)
Для ДО1 = 42,7 м2/(с-К); /?=32 м/К; <7Д=-^-; * = 0,75; 6=1,25
величина = ----, так как 8 л/^1.
Zkh d '
Z?s 8 /кн
Из выражения для Ьъ следует, что --------= 1 4-------• Так, для ги-
И 9
потетической пушки с длиной канала ствола/кн=50 калибров и v^'—
= 800 м/с величина превышает значение Ьг приблизительно на 5%:
Ьу — Ь] 8 500
-----= — —=0,055, где 6,=
bl---9 800 1
— 1,12 —
OJ /кн
Из уравнений (5.13) и (5.14) для времени периода последействия /п
соответственно для изэнтропического и изотермического процессов мож-
но получить следующие формулы:
(5.15)
так как при изотермическом процессе k~^ 1, а величина
k
—>е-0?5.
В формулах (5.15) ра—атмосферное давление, k= 1,25 — показа-
тель адиабаты Пуассона. В этих формулах принято также, что конечное
давление в канале ствола равно соответствующей критической вели-
чине:
fe
Л = Ра(-----) ~ 1,8 кгс/см^ —для изэнтропы;
рк == Рае°'5 ~ 1 >6 кгс/см2 —для изотермы.
В соответствии с принятой гипотезой о равномерной плотности газов
по длине канала ствола (др/дх—Q) для начального расхода газа через
дульный срез ствола может быть использована формула
= (5.16)
^КН
так как Од=^5рдг1д; ^Рд5/ьн=«>; gp,S=-^- .
^КН
На основании этого для приближенных расчетов можно пользовать-
ся зависимостями:
(5-17)
так как обычно величина 2,3 1g— <С5.
Рк
Если учитывать теплообмен между пороховым газом и стенками
ствола, то в формулы (5.15) вместо Ь\ и В следует соответственно под-
ставлять 0s и ------
& 4- 1
Импульс полной реакции потока порохового газа.
Коэффициент полного действия р
Проектирование надульных газоотводных устройств (дульного тор-
моза, усилителя отдачи, компенсатора, локализатора) ведется на основе
уравнения полной реакции потока газа, вытекающего из канала ствола.
Расчет параметров свободного отката подвижной части орудия с на-
дульным устройством возможен только при наличии выражения полной
реакции, записанной в функции времени Уравнение полной реак-
ции потока газа также нужно для вычисления полного импульса отдачи:
о
Для полной реакции стационарного газового потока справедлива
формула (4.12)
где tz0 =
00 —критическая скорость потока;
00 — полная температура газа (в заторможенном
состоянии потока);
-----коэффициент скорости потока;
т1 — скорость потока газа.
Полагая поток порохового газа в дульном срезе ствола квазиста-
ционарным и критическим (7,= 1), для любого фиксированного момен-
та времени t можно записать
k
где
d^T' „ V
t=------------текущий расход газа через дульный срез ство-
dt
ла;
*
at=
oz — текущая критическая скорость потока газа.
Согласно уравнению изменения параметров состояния изэнтропиче-
ского потока (5.7) имеем
=5= *
(Пг
(О /
Поэтому выражение для текущего значения полной реакции потока при-
водится к виду
*
k О)
2
dt
Интегрирование этого выражения
текущего импульса полной реакции
по времени дает уравнение для
1
Используя зависимость (or/w = л , получим уравнение текущего
импульса потока порохового газа в функции давления и времени
sR / А 4” 1 \ %
2 “«д . -2Г 2 “«л
------\ 1 —-Л / —------
kg kg
1 — (J + Bt)~ ft-1
Если воспользоваться аппроксимирующей зависимостью
лучим более простую формулу
(5.18)
(5.14), по-
(1—е~^
(5.19)
При выводе уравнения (5.17) было принято, что поток газа являет-
k
М + п*"1
ся критическим (л=1) или р - /?а.
\ /
Так как дульное давление порохового газа много больше атмосфер-
ного (рд^>ра), то величиной як = — по сравнению с единицей можно
Рл
пренебречь. Поэтому величину полного импульса потока порохового га-
за, вытекающего из ствола орудия, можно принять равной
Л. (5-20>
£ g
С другой стороны, согласно третьему закону Ньютона величина /п яв-
ляется долей количества движения откатной части, которую она преоб-
рела за время выстрела от воздействия массы порохового газа <o/g
на ствол.
Для удобства ведения расчета величину полного импульса /п при-
нято записывать в виде
г о (0
''п Р ^д*
g
Приравнивая между собою выражения 7(Р) и J (k, ад*), для коэф-
фициента полного действия инерции порохового газа на ствол получим
формулу
(5.21)
те —------начальное (в момент вылета снаряда из
ствола) значение коэффициента скорости
потока порохового газа;
яд—1/ т—— критическая скорость потока газа в момент
f k —J™ 1
вылета снаряда;
Пд — термический к. п. д. орудия.
При k= 1,25 и g = 9,81 м/с2 формула для р принимает вид
р=—Кл(1-и
vn.
(5.21а)
где в кгс-м/кг; т'д— в м/с.
Для примера рассчитаем значение коэффициента р для некоторых
систем. Так, для 76-мм пушки обр. 1936 г. [7] при /1 = 95000 кгс-м/кг,
1280
ид=685 м/с, т]д=0,39 коэффициент 0= -----. Для 100-мм пушки обр.
1944 г. [7] при fi = 95ООО кг-м/кг, ^д = 900 м/с, т]д = 0,34 коэффициент
п 1320
.
На основании общей формулы р (5.21) и частных результатов рас-
чета можно утверждать, что экспериментальная зависимость
справедлива только для орудий с очень высоким термическим к. п. д.
(т|д=34-4-39%). Эта величина к. п. д. характерна для орудий с началь-
ной скоростью не свыше 1000 м/с. Для орудий с vQ> 1000 м/с в силу огра-
ничения длины ствола по эксплуатационным соображения (/CT<60d)
относительный путь снаряда Лд (степень расширения порохового заряда
в канале ствола) резко уменьшается иногда Лд=4 и меньше. В этом
случае термический к. п. д. орудия снижается до 20% и ниже, а эффек-
тивная скорость истечения порохового газа при = 95 000 кгс-м/кг и
т]д = 0,2 возрастает до ^0 = 5,3 (1 — Пд)= 1450 м/с.
Таким образом, для орудий большой мощности (1000<v0< 1200 м/с)
приближенную оценку величины коэффициента (3 можно производить по
формуле
о I400
р =--- .
v0
Во избежании ошибки при определении величины коэффициента пол-
ного действия р следует пользоваться теоретической зависимостью
(5.21а).
Реакция потока порохового газа при квазистационарном
и нестационарном процессах течения
На основании предположения о квазистационарности процесса ис-
течения порохового газа из канала ствола выражение для полной реак-
ции газового потока R приводится к виду
fe-i
так как
й+1
*
а =а^
(5.23)
Q Г) _k “Г 1
Здесь Кд=------------— полная реакция потока газа в дульном сре-
£ g
зе в момент вылета снаряда [см. выражение
(4.12)];
—0,5 (Хд-рр^ — коэффициент реактивности газового пото-
ка (обычно принимают 1).
Подставляя вместо л его выражения (5.13) и (5.14), получим урав-
нение полной реакции потока в функции времени
_ 2fe
(5-24)
Более точное выражение для полной реакции потока газа можно
получить из дифференциального уравнения механики одноамерного не-
стационарного течения
dt
(р®) +
д
дх
(р-|- рт’2) = 0.
Полагая канал ствола цилиндрическим с постоянной площадью
поперечного сечения (S = const), после интегрирования этого уравнения
по объему канала для любого фиксированного времени получим урав-
нение механики в интегральной форме
W/KH
— { ?vdW + — (p+?v2)dW=0,
di J J dx
о о
где
dW=Sdx,
По физическому смыслу выражение Sp + Spy2 — текущее значение
полной реакции потока, т. е. Sp + Spy2=\Rt, a Spy =— —оасход газа.
g
Для фиксированного момента времени t можно принять (dRt/dx)dx =
= dRt, а пределы интегрирования заменить соответственно на 5рдн^ (у
дна канала у = 0) и на 7?дг (в дульном срезе у = уд^).
С учетом этих замечаний уравнение приводится к виду
^кн - ...
4- f (P^W-f- ( dRt=0.
of J J
0 SpTK t
Отсюда получаем выражение для силы отдачи орудия (силы давления
порохового газа на дно канала ствола)
P=Sp№ , (5.25)
ot
тг
кн
где L = J (p'r)^lF — текущее количество движения порохового газа в
о
полном объеме канала ствола.
Член dL/dt имеет размерность силы и численно равен скорости из-
менения количества движения порохового газа, заключенного в объеме
канала ствола tFKH.
С другой стороны, величину силы отдачи орудия можно определить
по формуле (5.14, а) или с помощью теоретических зависимостей (5.13)
и (5.14, б):
_ 2fe
P = SPm(l+Bt) k-} Sрлке-^‘. (5.26)
Считая функцию Р известной, на основании соотношения (5.25) по-
лучим выражение для полной реакции потока порохового газа в дульном
срезе ствола:
РЛЯ^Р~%- (5.27)
Найдем приближенное уравнение для члена dLjdt в зависимости от
времени.
В момент вылета снаряда из ствола количество движения газа в
объеме канала ствола £д при линейном законе распределения скорости
потока в заснарядном пространстве
— определяется по фор-
муле
I xdx~—
(5.28)
Через время t, когда фиксированный слой газа, имеющий коорди-
нату х в момент вылета снаряда (/ = 0), подойдет .к дульному срезу, на-
чальное количество движения уменьшается до величины
2g
При одинаковой плотности газа в заснарядном пространстве
(др/дх = О) справедливы соотношения:
= o>=gP,W\H. (5.29)
£>
Соотношения (5.28) и (5.29) позволяют привести зависимость для L
к виду
k w /
Отсюда следует, что
dL г/д ыг
dt g со dt
При изэнтропическом процессе истечения
1 1-й
Поэтому
2-й
dL k
--- —— т: тг/.
dt kg
Подставляя выражения для л в зависимости (5.13) и (5.14) соот-
ветственно получим:
А-^3
dL;dt =—^-(1 + Я/р-1;
g
dL/dt= e-^1.
g
На основании полученного выражения для (dL/dt)k=i формула для
текущего значения полной реакции потока газа, вытекающего из канала
ствола, согласно уравнению (5.27) приводится к виду
g
целях упрощения расчета примем
gSp™
(J3 — 0,5)o.v;[
Тогда при проектировании и расчете надульных устройств можно поль-
зоваться формулами:
g
(3 — 0,5)
Ч-г.
(5.30)
Если из выражения для R^t на основании соотношения b\^b исклю-
чить начальный расход газов, то получим
_ $Р та е—2М ____Ч-^д е—2М
dt р —0,5 g
Нетрудно заметить, что
f —ОО t =00
п я
\ ^/=? —®д; С
J g J dt 2g
(5.31)
(5.31)
При этом импульс силы отдачи орудия за время периода последействия
tn будет
t = оо t =оо
п п
(5.32)
dL ,, - J г й)1\
где —dt=aL', А
dt д 2j?
Пример 5.1. Определить параметры состояния газопороховой смеси в заснарядном
ду
пространстве при допущении — = 0 на основе стационарных уравнений газовой
динамики, т. е. получить простые и достаточно точные зависимости для:
— расхода газопороховой смеси в любом поперечном сечении заснарядного прост-
ранства (Gx);
— закона распределения скорости газопороховой смеси по длине заснарядного
пространства;
— закона распределения статического давления порохового газа по длине засна-
рядного пространства.
Расход Gx через любое поперечное сечение Sx заснарядного пространства, отстоя-
щего от дна канала ствола на расстоянии х, определяется зависимостью
@Х -- Зх^Х^Х*
Так как
то согласно принятому допущению (гипотезе
Пиобера) =
— Т — —-— получим следующие зависимости:
to
v сох = »
x 'кн
где co — полный вес заряда.
Дифференцируя последнее соотношение по времени и помня, что (в = const, имеем
dx dl _ . d&x
СО = (О у -I— I ------
dt ' dt dt
ил I
C (0 >
dl dx
так как ------ и --------— v v.
dt CH dt
d
Величина C(/)=/—— зависит только от времени, а поэтому ее мгновенное значе--
L£- v
кие, т. е. при заданном (фиксированном) времени t будет определяться граничными,
(краевыми) условиями:
' х = I; vx = &; о.; х = 0; vx = 0; = °.
При наличии равенства счх = о>.г7 этим краевым условиям удовлетворяет- соот*.
ношение
^СН ’
<ОЛ^СН илч Цл. =
Покажем, что в этом случае постоянная С (/) ~~ I----действительно равна нулю.
dt
В самом деле
dffi у d
----— — -------- co
dt dt
или
d<& x
di
= to
di
х dl \
П dt /'
Но —
dt
и
dl
—- = усн, поэтому
dt
так как Z 0
^Х -- г ^СН
и
Vx
^сн
= 0,
Полученный закон распределения скорости газопороховой смеси по длине засна-
рядного пространства (закон Пиобера) является линейным.
При наличии скорости отката ствола V, т. е. переносной скорости, найденное выра-
жение для примет вид
4r + y = y(vCH + V).
Отсюда следует, что
VX = (vCH + V) -J- — V.
£
Обычно Vx^V, поэтому величину V не учитывают.
Закон распределения давления по длине заснарядного пространства найдем из
уравнения равновесия потока газопороховой смеси в канале с постоянной площадью
поперечного сечения (Sx = const):
/?ЛН = Rx = Rp
Это уравнение утверждает, что при условии Sx = const (dSx = 0), в любом сечении
Заснарядного пространства величина полной реакции потока газопороховой смеси яв-
ляется постоянной.
В рассмотренных выражениях:
+ Spx — полная реакция потока по месту его сечения с координатой х;
— статическое давление порохового газа в том же сечении;
GvCH
Rt =-------+ 5/?сн—полная-реакция потока газопороховой смеси по месту дна
снаряда;
Ядн = $Pn—полная реакция потока у дна канала ствола, где его скорость
обычно принимают равной нулю (7=0).
Gx и G, пользуясь выведенными выше
Если из выражений для Rx и Ri исключить
для них зависимостями, то получим соотношения:
9
to^/L
L. H.
CH
или:
toT/2
L £1
Отсюда:
2 9
М V it
Рх = Рдн _ о ’ ~~ст~ ~ Рла РсН‘
2
vz
сн
Поэтому можно записать
X
Рх /*дн (рдн /’сн) Г-
tr
сн
g
gSl : ~
Так как —— ~•, то получим искомую зависимость
си
Рх — Рд.н (Рлн Рен) •
Отсюда следует, что закон распределения статического давления по длине заснарядного
пространства является параболическим. Связь между граничными давлениями рдн и рсн
определяется совместным решением уравнений:
I
^сн
CH --
Й^СН
dt
d&
CH*
Из первого уравнения после
t/vCH
Х ----- -г
dt
его
^CH
дифференцирования по времени следует
dl
dt
dt
dv
dt
q
0
dx dl
Так как ---= vx и ------~ игн
di dt
ro
dl
^СН
dt
dvx
dt
dt
_ * dvcn
I dt
(О
При ~ — dx,
имеем
dVx со
—— dw ——
dx
dt
dt
fj
0
dt
Поэтому
CO
dt
Подставляя вместо ускорения снаряда его выражение через
^сн g „
— ^Рсн»
dt q
давление
получим формулу Пиобера
со
\ q /
На основании этой формулы выражение для рх приводится
К виду
СО
где
Рх---Рен
Найденное уравнение для рх может использоваться
ла. Оно справедливо в течение всего времени движения
Величина среднего давления в заснарядном объеме
при расчете на прочность ство-
снаряда по каналу ствола.
со
0
Рдн--Рен
q
/2
3 ч
Лр- z }
с
Если не пренебрегать скоростью откатных частей V, то
Так как
то уравнение
приводит к формулам:
со
СО
со
(О
— 0,5 —
,5- 4
Qo
/2
При ----
Qo
О имеем прежнюю формулу
Л „ со / X*
1 -0,5— 1— —
? \ /2
Подставляя в уравнение движения откатных частей выражение
дно канала ствола, получим
для давления на
1 --о,5 —
dv----------q-
со
1 +°’0-Qo
Интегрирование этого уравнения приводит к формуле
q + 0,5со
Qo + 0,5w
^сн »
Атн --Рен
я
где V и Рен — соответственно абсолютные скорости откатных частей и
t
та импульса или сопротивления противооткатных устройств | Rdt.
‘ t
С учетом сил сопротивления R скорость торможенного отката
снаряда без уче-
откатпых частей
орудия
q 4- 0,5w
Qo +0,5со
V =
t
»сн — I Rdt.
Qo J
о
При решении задачи внутренней баллистики обычно скорость откатных частей не
учитывают, т. е. принимают V=0. Работу порохового газа на перемещении массы заря-
да и откатных частей учитывают интегрально с помощью коэффициента фиктивности
массы снаряда ср
В качестве исходного уравнения движения снаряда с учетом фиктивной массы
имеем
= Sp,
£f
1 Методика расчета коэффициента фиктивности ср приведена в § 2.3.
где р — баллистическое давление, получаемое из решения основной задачи внутренней
баллистики.
.Связь между давлениями рДц; рСн и р найдем в результате совместного решения
уравнений:
---= SP> Рт = Рен I 1 + 0 >5
Откуда
Р
Рен ---
<?
<0 \
1 +0,5 —
Я )
В момент вылета снаряда из ствола характерные параметры состояния порохового
газа будут
а скорость свободного отката откатных частей орудия (см. § 5,4)
q + 0,5<о
------------
Qo 0
§ 5.2. ПЕРИОД ПОСЛЕДЕЙСТВИЯ ОРУДИЯ
С НАДУЛЬНЫМ УСТРОЙСТВОМ
В периоде последействия на дно канала ствола действует часть пол-
ной реакции потока газа Р^; сила P<Rat разгоняет откатные части ору-
дия. Составляющая же полной реакции dLjdt на ствол без надульного
устройства не действует, так как она
представляет собою скорость изме-
нения начального количества дви-
жения порохового газа вследствие
его истечения из канала ствола. Од-
нако она воздействует на любую
преграду, расположенную перед
дульным срезом ствола. Если эту
преграду связать со стволом, то на
него будет действовать сила, про-
порциональная полной реакции по-
тока в направлении истечения газа,
Рис. 5.4. Схема надульного устрой-
ства
т. е. в сторону, противоположную
действию силе отдачи Р. Реакция воздействия преграды на ствол вызы-
вает торможение откатной части.
Величина тормозного усилия зависит от количества порохового газа,
попавшего на преграду, и от угла отражения его потока от этой прегра-
ды. На практике такие преграды выполняются в виде надульного уст-
ройства специальной конструкции, обеспечивающей необходимое изме-
нение направления вектора полной реакции потока порохового газа
(дульные тормоза, компенсаторы и локализаторы) или только ее вели-
чины (усилители отдачи).
Согласно рис. 5.4 изменение полной реакции потока газа А/? после
его прохождения через любое надульное утройство будет
д/? = aRxt—Ru=(а - 1) RKt.
(5.33)
где — реакция потока на входе в надульное устройство, т. е. в дуль-
ном срезе ствола;
aRr^t — суммарная реакция потока на выходе из надульного устрой-
ства, взятая в направлении движения снаряда.
Коэффициент а, как показал опыт, является функцией размеров и
формы надульного устройства и практически не зависит от параметров
состояния потока. Вследствие этого параметр а, характеризующий эф-
фективность конструкции надульного устройства, называют конструктив-
но-импульсной характеристикой. Иногда его называют геометрической
характеристикой надульного устройства. В общем случае параметр а
может быть больше и меньше единицы (см. § 4.5).
Газовые надульные устройства, имеющие п>1, увеличивают началь-
ную реакцию потока а поэтому такие устройства называют ускори-
телями или усилителями отдачи. Газовые устройства с сс< 1 уменьшают
реакцию потока и, таким образом, выполняют роль дульного тормоза.
При наличии надульного устройства активная сила давления газа на
дно канала ствола Р и время периода последействия tn практически не
изменяются. Поэтому после вылета снаряда на ствол с надульным уст-
ройством действует активная осевая сила Ру, равная алгебраической
сумме
Ру=/5 + д/? = Р+(а-1)^,/. (5.34)
Подставляя в зависимость для Ру вместо Р его выражение согласно фор-
муле (5.25), получим обобщенное уравнение для силы отдачи ствола,,
справедливое как для орудия с надульным устройством (а^1), так и
без него (сс = 1):
= + (5.35)
На основании уравнений (5.35) и (5.30) выражение для Ру приво-
дится к виду
Py=aspMe~bt-р(а — 1) Лл. sp№e~b‘f (а, ?, /), (5.36)
где
267
(О
gspx
(3 — 0,5)<*>ид
а ~ 1 рbt
Импульс силы отдачи ствола с надульным устройством
и свободный откат откатных частей орудия
Текущее значение импульса силы Ру, численно равное приращению
количества движения откатных частей орудия с надульным устройством,
определяется уравнением
АЛ = £ Pydi = а (₽ - 0,5) — г-д (1 - е-") + (а - 1) (1 - . (5.37)
J g 2g
о
Полагая получим полное приращение
откатных частей орудия с надульным устройством:
д7уоо — (аЗ — 0,5) — т/д.
g
количества движения
(5.38)
Выражение для Ру имеет большое прикладное значение в теории
проектирования лафетов и установок артиллерийских орудий. Оно позво-
ляет определить параметры свободного отката откатных частей орудия
с любым
надульным устройством (ускорение, скорость, путь): *
5
0/ Qo
(5.39)
t
о
Здесь Qq — вес откатных частей орудия;
V02, ^02 — скорость и путь откатных частей к моменту вылета сна-
ряда (см. § 5.3);
t
-%- Г Д Jydt= а - 0,5) V, Р —У (1 - е-«)1 +
Qo J Qo L Ь J
о
0,5(а-1) — v
Qo
— текущее приращение пути откатной части в периоде последействия.
Если на откатные части действуют силы сопротивления R со сторо-
ны противооткатных устройств (тормоз, накатник и трение), то парамет-
ры ее торможенного отката описываются формулами:
t
Расчет на прочность крепления надульного устройства к стволу сле-
дует производить на тянущее усилие
д/?=(а-1)/?л/=(а-1)(^дне-йЧ-^е-^ . (5.40)
\ g 1
Если в уравнении для Ум (5.39) положить уоо, то получим
скорость свободного отката откатных частей артиллерийского орудия с
надульным устройством в конце периода последействия
т/ _____Я
V 04н —
4- ар (о
Qoh
(5.41)
л
Для орудия без надульного устройства (а = 1)
(5.41а)
Значения Уо4н<Уо4 Для Qo с дульным тормозом и Vo4h>VO4 с усилием
отдачи.
На практике энергетическую ДЕ и импульсную Д/ характеристики
эффективности любого надульного устройства определяют по формулам:
(5.42)
где
Qo н» Qo — вес откатных частей орудия соответственно с надульным
устройством и без него.
По физическому смыслу АЕ и А/ характеризуют соответственно от-
носительное приращение кинетической энергии свободного отката от-
катных частей орудия и импульса отдачи за время действия надульного
устройства.
Для тормозов и локализаторов (а<1) величины АЕ и А/ отрица-
тельны. Знак минус указывает на уменьшение кинетической энергии от-
катных частей орудия или импульса выстрела, вызванного надульным
устройством. Для усилителей отдачи эти величины больше нуля и харак-
теризуют увеличение кинетической энергии откатных частей орудия или
импульса выстрела. На практике величины АЕ и А/ обычно выражают в
процентах.
Между собой параметры АЕ и А/ связаны соотношением
М/ 1+^д£-0.
Если величины АЕ и А/ заданы, то геометрическая характеристика
надульного устройства однозначно определяется формулой
§ 5.3. ИЗБЫТОЧНОЕ ДАВЛЕНИЕ НА МЕСТАХ
ОРУДИЙНОГО РАСЧЕТА
Процесс истечения порохового газа из канала ствола является весь-
ма кратковременным. Его продолжительность Ег составляет несколько
сотых долей секунды. В первом приближении время истечения газа из
канала ствола может быть найдено по формуле [см. выражение (5.17)]
/ — 5/КН _ 5
Si г.
За это время давление порохового газа в канале ствола уменьшится
приблизительно в 150 раз, а скорость его истечения — только в 1,5 раза.
Большие величины давления горячего газа и скорости его движения
вызывают сильное возмущение окружающей атмосферы. Скорость дви-
жения и объемное расширение струи порохового газа относительно ат-
мосферы в несколько раз превышает скорость распространения в ней
звука. По этой причине возникает ударное уплотнение воздуха, которое
распространяется вокруг орудия со скоростью, значительно превышаю-
щую скорость звука. Будем считать, что возникшая ударная волна яв-
ляется сферической с радиусом R, а ее отражение от поверхности Земли
достаточно слабым. В этом случае интенсивность ударной волны умень-
шается пропорционально Е3; интерференцией прямой и отраженной от
Земли волн допустимо пренебречь.
Далее примем, что скорость истечения порохового газа из канала
ствола является постоянной и равной среднему импульсному значению
и
— V Rtdt=^^
О) J
О
G v
где ---^-А- е~ж—полная реакция потока газа в дульном
срезе.
Величина коэффициента полного действия газов р определяется по
формулам (5.21а) и (5.22).
Так как рпд много больше скорости распространения слабых возму-
щений (звуковых) в, окружающей орудие атмосфере, то возникает силь-
ное ударное сжатие воздуха и кратковременное повышение давления.
Для удобства исследования процесса действия ударной волны при-
нимают, что ее фронт неподвижен, а газ набегает на него со скоростью
распространения волны в неподвижной атмосфере (oi = Р^Д). Согласно
теории прямого скачка уплотнения [6] при встрече потока с неподвижной
преградой динамическое уплотнение его составит:
Д/> = (— — 1 ) А=т^7-(М2 — 1)а>
\ Pi ) k +1
где
/>г _ 2feM2—(fe—1) . . м
Pi k + 1 ’ P1 kW ’ а
pz — давление во фронте ударной волны;
pi — статическое давление в набегающем потоке;
а — скорость звука в воздухе.
Величина р\ найдена из условия, что это есть давление порохового
газа в объеме W перед фронтом скачка уплотнения. Для этого объема
при малых углах возвышения и условии, что R>h в первом приближе-
нии будет справедлива зависимость
— л/?3+л/?2Л,
где h — высота линии огня.
Окончательно получим
. 2 /ЛЛ9 1'
Д;’=ГЛ(М ’
<о/?Гд
где Рд=——~ —дульное давление порохового газа;
™кн
—объем канала ствола.
Вследствие неравномерности объемного расширения в атмосфере
истекающей из ствола струи газа, поверхности изобар заметно будут от-
личаться от сферической формы. Будем считать, что они сжаты в на-
правлении выстрела. Предположим также, что величина избыточного
давления в зависимости от координаты контрольной точки (£?, ф) подчи-
няется уравнению
Д^=т|-(М2-1)/2
ГЬ 1
О
1 4- COS2 2
2
Здесь угол ф отсчитывается от направления выстрела.
При наличии дульного тормоза, отводящем часть газового потока
1—(ут в стороны под углом ф, поле изобар будет более равномерным и в
первом приближении распределение избыточного давления опишем фор-
мулой
(М2— ф, R)-
К 1
Для выявления вида функции f произведем ее качественный анализ.
При отводе газового потока в стороны избыточное давление будет повы-
шаться в направлении под углом ф и тем больше, чем больше отводится
газа в стороны. Возмущение атмосферы газом, вытекающим в направ-
лении выстрела, очевидно, сохранится таким же, как и при выстреле из
орудия без дульного тормоза. Этому условию удовлетворяет функция
вида
1\ Л’
л/?2 (Р 4- А)
----(1 4“ COS2 —) -| — (1 cos2 * " ) ,
Л1 \ 1 2 /-«2-\ 2 /J
где и п2 — опытные коэффициенты.
При сравнительной теоретической оценке величин Др для различных
орудий значения П\ и п2 в первом приближении можно принять равны-
ми 711—^2 = 2.
Пример 5.2. Найти распределение избыточного давления при выстреле из орудия
с дульным тормозом и без него для следующих условных исходных данных:
W%H = 0,05 м3;
и,х = 1000 м/с;
= 800 кгс/см2;
ii = 1,5 м;
? = 0°, 90° и 180°;
Ф — 90°;
* 7
=0,4;
= 6 м;
а = 326 м/с;
£ = 1,4
п = п2 == 2.
Для орудия без дульного тормоза (ф = 0; (Ут~1) величина избыточного давления
на расстоянии Pi = 6 м от дульного среза ствола без учета баллистической волны от
снаряда составит:
— в направлении выстрела (<р = 0°)
ДА) =
(М2- 1)рл
КН ( 1 + c°s2 4
•_= — (42 — 1) 800
4- h
0,05-2
9
1300 '
где М =------- =------4:
а 326
— в стороне от орудия :(<р = 90°)
= 0,8 кгс/см2,
У
1 + COS 2 2
&Pi = Дро-------7------— °>6 кгс/см2;
— сзади орудия (ср = 180°)
1 4- COS2 2
Др2 = Д/?о--------------= 0,4 кгс/см2.
Для орудия с дульным тормозом, отводящим 60% порохового газа в стороны под
углом ср = 90°, будем иметь соответственно:
— в направлении выстрела (ср — 0)
/ ? А т I V ?
' 1 4- cos2 — j’4- (i — <1 ) 11 + COS2 "
= 0,4(0,4-2 %-0,6-1,5) = 0,68 кгс/см2,
где 1 — = 0,6;
— в стороне от орудия (ср = 90°)
Др1т = 0,4 (0,4-1,5 + 0,8-2) = 0,88 кгс/см2;
— сзади орудия (ср= 180°)
Д/?2т = 0,4(0,44- 0,6-1,5) = 0,52 кгс/см2.
Сопоставление величин Лр2 и Др2т показывает, что дульный тормоз.на 30% повы-
сил избыточное давление в зоне боевого расчета орудия.
Пример 5.3. Для исходных данных примера 5.2 найти избыточное давление на
расстоянии м. В этом случае Ар2 уменьшается:
Я2/ U24-M Ы 8,5
Таким образом, на расстоянии 7 м избыточные давления по сравнению с найден-
ными в примере 5.2 для расстояния 6 м уменьшаются на 35% и соответственно составят:
Д/?о = О,52 кгс/см2; Др0г = 0,44 кгс/’см2; Д/д — 0,33 кгс/см2; Д/д-г = 0,57 кгс/см2;
Д/?2 = 0,26 кгс/см2; Д/?2т = 0,337 кгс/см2.
Пример 5.4. Найти величину избыточного давления в области уха стрелка
((р= 180°), стреляющего из винтовки стоя, для следующих исходных данных:
Рх = 800 кгс/см2; 3^-1,3; = 1000 м/с; £ = 1,4; R — 0,5 м;
IFkft = 2,2-10—5 м3; М2 — 1 = 15 (см. пример 5.2).
Для случая h>R искомая величина избыточного давления находится по формуле:
3 Л12 ^-1 ^КН
^Р = ~л----
4 £4-1 лЛ
3 15 _ 2,2-10“5 Л
Г800 ~7п 53 ~0,21 кгс>'см2-
4 , д- v j о
$ 5.4. СКОРОСТЬ ОТКАТНЫХ ЧАСТЕЙ ОРУДИЯ
ДО МОМЕНТА ВЫЛЕТА СНАРЯДА ИЗ КАНАЛА СТВОЛА
При движении снаряда по каналу ствола примем плотность газопо-
роховой смеси по длине заснарядного пространства одинаковой, а закон
распределения скорости линейным (рис. 5.5). При отсутствии внешних
сил и сил трения центр тяжести
(точка 0) системы тел «заряд —
снаряд — откатные части» в абсо-
лютной системе координат в соот-
ветствии с первым законо-м Ньютона
остается неподвижным.
Рис. 5.5. Расчетная схема движения
газопороховой смеси в заснарядном
пространстве
Для фиксированного момента времени вправе написать:
—о)-----2—----вес части заряда, идущей в откат вместе со стволом;
° х0 4- л0
-*о
^0=to------— —вес части заряда, двигающейся вслед за снарядом;
•*0 + А0
ш — полный вес заряда.
Отсюда следует, что при
1 1 f’U'ii ,
----------2— =----------2— = const:
XQ 4- 2Cq xq xo 4- X
=--------- dx—элементарный вес газопороховой смеси, двигаю-
л0 4- 2Cq
щейся вслед за снарядом;
-------dX—элементарный вес газопороховой смеси, идущей
х0 4- Ло
в откат.
Части заряда и обладают количеством движения:
61 и
о
Согласно схеме, приведенной
на
рис. 5.5:
•*о +
и Лхо можно записать так:
О) V
Поэтому выражения для L
г 6) V
1* _ —— '
2g v + V
где v и V— абсолютные скорости снаряда и откатных частей.
В выбранной системе координат уравнение закона сохранения коли-
чества движения с учетом сил сопротивления R (торможенный откат)
имеет вид
qv
(5.44)
или
/ I w V
v -----------------
<0
I Rdt-—текущий импульс сил сопротивления и трения.
Перепишем последнее уравнение следующим образом:
(? + О,5со) - gvJR=(QQ + 0,5со) V2 + (Qo - q) vV + gVJ*.
Решая это уравнение относительно V, получим
' (Qo — q)v
2 (Qo “ 0,5aj) I' _ 2 (Qo H- 0,5co) _ Qq 4- 0,эю Qq 4- 0,5w
Нетрудно показать, что подрадикальчое выражение тождественно
выражению
рости откатных частей орудия преобразуется к виду
г (QpH-ff 4- о>) У~
l 2 (Qo 4-Й,5^
В момент
(/я = 0):
. На ос-овании этого формула для ско-
(5.45><
вылета снаряда из ствола скорость свободного отката
q 4- 0,5^
Qo 4 0,5со
^д-
(5.46>
О
О
оэУ Xq
*0
12
v
v1_ gv-fl?
V ~
Иногда в литературе приводится вывод формулы (5.46) для ско-
рости отката, основанный на утверждении, что одна половина заряда
двигается за снарядом, а другая — за откатными частями. Такое утверж-
дение не согласуется с гипотезой линейного распределения скорости пе-
ремещения газопороховой смеси в заснарядном пространстве, а сам вы-
вод этой формулы является физически неверным.
Согласно гипотезе линейного распределения скоростей за снарядом
двигается значительно больше газопороховой смеси, чем за стволом, так
как веса ее частей распределяются пропорционально скоростям их дви-
жения:
_ Х$ _ V
ш „ Ло V
л о
При этом средние скорости этих частей заряда соответственно равны
0,5 V и 0,5 v.
На основании уравнения (5.45) путь откатных частей орудия до мо-
мента вылета снаряда из канала ствола будет
q + 0
Qo “Ь 0
g
Qo -h 0,5w
(5.47)
A 7R(lt.
Характерные давления
а заснарядном пространстве классического орудия
Вследствие наличия ряда второстепенных работ, производимых по-
роховыми газами (преодоление инерции газопороховой массы, нагрев,
деформация ствола, вращение снаряда, выталкивание столба воздуха
Рис. 5.6. Расчетная схема параметров свободного отката
снарядом из канала ствола, прорыв газов через ведущее устройство сна-
ряда и его форсирование и т. п.), во внутренней баллистике, как уже ука-
зывалось (см. гл. II), различают три величины давления (рис. 5.6):
Рен — давление на дно снаряда;
р— баллистическое давление пороховых газов в заснарядном про-
странстве;
Рдн — давление на дно канала ствола.
Связь между давлениями рдн и рсн может быть найдена из следую-
щих соотношений:
mz't — SpCil — уравнение движения снаряда;
ymv6t = Sр— уравнение движения снаряда, записанное через бал-
листическое давление;
MVt = Sp^—уравнение движения откатных частей с учетом силы
сопротивления откату
— скорость изменения длины заснарядного пространства
или скорость снаряда относительно дна канала ство-
ла;
714 — (QJg) — масса откатных частей орудия:
m = — масса снаряда.
Совместное решение этих соотношений приводит к зависимости
—+ (5.48)
? Qo
Для линейного закона распределения скорости газопороховой смеси
в заснарядном пространстве (см. рис. 5.5 и 5.6) скорости снаряда и от-
катных частей связаны соотношением
t
g f Rdt
<7 + ^ v£
Qo + (1 — M-) w Qo + (1 - у.) ’
где р-^0,5.
Дифференцируя последнее соотношение и подставляя в уравнение
кинематической связи тело орудия — снаряд, получим
Qo -1- (1 — р.) to
ткуда после подстановки v6=(Sp\®m} и vt = (Spcyjm) следует, что
? + to Qo yqR
Qo+(1—'-t)to SQq + (1 —p.)to
(5.49)
Тогда соотношение (5.48) с учетом зависимости (5.49) принимает
вид
Qo .-g + p,to. (1 —[i)to R
Я Qo + (1—p) to Qo + (1—h) °
При Qq->oo получим формулу Пиобера (ц = 0,5)
Пример 5.5. По приведенным ниже исходным данным построить кривые скоростей
свободного и торможенного откатов Vo (О, V(t), V(X). Найти наибольшее значение
скорости при торможенном откате считая, что давление в канале ствола в период после-
действия меняется по экспоненте
Условные исходные данные:
d =57 мм; S --26,2 см2; q = 2,8 кг; Vq = 1100 м/с; «> = 1,62 кг; ДЕ = 35%;
X = 350 мм; /ств = 3,78 м; ср = 1,22.
Кривые р(0, а(0, ^(0 считать заданными.
Построение кривых скоростей свободного
и торможенного откатов по времени
1. Конструктивная характеристика дульного тормоза:
а
= Уо,65
1300 1300
= = 1,18;
По 1100
1,18-1,62
2,8
= 0,685;
= 0,52.
2. Вес откатных частей Qo определяется из условия 1ГС4 < 15 м/с. Принимаем
q + аЗсо _
=----------v$= 12 м/с. В этом случае
Qo
Qo —
(q -н офсо)
1100
04
12
(2,8 4- 0,52-1,18-1,62) = 350 кг.
3. Определение параметров свободного отката в характерных точках.
Точка 1 — соответствует наибольшему давлению в канале ствола (р — рт).
Из кривых р(0, ^(0, ^(0 имеем:
Zi = 5,3 дм = 0,53 м; t\ =3,4-10 3 с; Цб1 = 535 м/с.
Поэтому
350 + 2,8 + 1,62
0,53 = 0,0054 м;
q + 0,5ш
Qo + q + <*>
2,8 + 0,5-1,62
350 + 2,8 + 1,62
535 = 5,45 м/с.
Точка 2— соответствует моменту вылета снаряда из канала:
= 6,1-10-3 с;
р = рд = 1360 кгс/см2; 1% — /л = 2,88 м; = 1100 м/с;
^02 =
2,88 = 0,029 м;
1100 = 11,4 м/с.
^02 = —--------- ^0 = —----
02 Qo 350
Точка 3 определяется из условия V't = 0; S/+.He~‘^3 = R.
Точка 4 — соответствует концу периода последействия: Т17о4=12 м/с.
Расчет времени периода последействия:
_____д д
(£ —О,5)о^0’
рл ( (о \ 1360 / 1,62\
гРкк.л =---- 1 + 0,5 — = 1 -J-°,5 — ) = 1440 КГС/СМ2;
, 9,81-26,2-1440
Ь =----;---------7Z----= 305 1 /с;
(1,18-0,5)1,62-1100
2,3 5 5
/4 ^2 + /п, Zn = 1g р^ ;
^n=-r = i=16’4-10“3 с;
b 305
*4 = 6,1-10~3 + 16,4-10—3 = 22,5-10—3с.
Путь свободного отката к концу периода последействия
где
---а ----
Qo *
в b
Qo
а — 1 ~ J
л я \ а
ода0 1,62-1100
,, =-----= -— -------- 460 кг/cj
1 L 3,78
267
2-460
~^:ла1к
Х„ = 0.0293 + 11,4.16,4.10-’ -0,52 —6^‘440 ['16,4-10-’--^;
Зо0 305 \ 305
<0
0,52— 1 460-1100 ( ,1
-------9,81 16,4-10~3 — —
570-350 9,81 I 570
= 0,222 м.
4. Для случая R^const величину силы сопротивления определяем по формуле
Валье (см. § 11.6):
350
2-9,81
0,35 + 12-22,5-10—3— 0,222
= 6450 кгс.
5. Параметры торможенного отката в характерных точках:
V t — w Qi — ,, , »
где gR* 9,81-6450 — ~ 181 м/с2; Qo 350 gR L, —90,5 м/с2.
Точка /: Ki=5,45—181 -3,4-10~3 = 4,85 м/с; Ал = 0,0054 — 90,5-3,42-10—6 = 0,0044 m.
Точка 2: V2= 11,4— 181-6,l-10~3= 10,3 м/с; X2 = 0,0293 — 90,5-6,12-IO-6 = 0,026 m.
Точка 4; V4=12 — 181-22,5-10~3 = 7,95 м/с; X4 = 0,222 — 90,5-22,52-10~6 = 0,176 m.
6. Условие достижения Vm имеет вид Rj = R:
Rj = aSpKa,^-bt +(а— 1) e~at = R = 0,52-26,2-1440е-'’' +
S
460— 1100 _ni „ .
+ (0,52 — 1)-----------— е at = 64а0 кгс.
9,81
При а « 26
19 600г — 24 750г2 — 6450 = 0
или
г2— 0,793г+ 0,26 = 0;
г = 0,396 ± ]/о,156— 0,26.
Мнимость корня указывает на то, что при данной мощности дульного тормоза ско-
рость торможенного отката в периоде последействия непрерывно уменьшается.
7. Определение времени отката. Конец отката отвечает времени t5.
Условие его достижения:
Отсюда
= ^04 -
gRts
Qo
______
gR ~ 181
= 67,3-10“3 с.
Проверка точности вычислений.
Должно быть-
Имеем
ХО5 = Ло4+ 1Гс4(/5 — /4) = 0,222 + 12(67,3— 22,5)-10—3 = 0,759 м;
Х5 = 0,759 — 90,5-67,32-10-8 = 0,35 м.
8. Определение параметров свободного и торможенного откатов в промежуточ-
ных точках.
Для определения характера кривых скоростей отката выбираем четыре промежу-
точные точки, например:
— в периоде последействия
/6 = 8-Ю Зс и ^7= 15-10 3с1
— после окончания действия газов на ствол
g = 35*10 3 с и /9 = 53-10 3 с.
Точка 6\
кн. л
а—1 GfSv. * -|
------------- (1 — е-а*6) ;
a g J
/g =—/2 = 10—3(8 — 6,1) = 1,9-10—3 с;
(0,52- 1)460-1100
570-350
(1 — е О’57'1’9) = ц,4 м/с;
кн.
—Ыъ
Qo Ь
6
g а— 1 СдУд
Qo a g
е 6)
-3-1,81-1,9-10-3- —
305
-0,305-1,9
6 а
— 1,19-1,19-Ю-3 —-—(1 — е—0,S7’1’9) = 0,0508 м;
570
iz6 = UT'oe — -^^- = 11,4— 1,81-8-10“3 = 9,95 м/с;
Qo
eRt^ 2 S
Х6 = Лоб— -тт—= 0,0508 —90,5-82-10~6 = 0,045 м.
2Qo
Точка 7:
t-j =. t'l — /2 = 8,9*10 3 с;
1Г07 = 11,4 + 1,81 (1 — е-0’305'8-9) _ 1,19 (1 _ е-о,57-8,9).
1^07 ~ 11,9 м/CJ
= 0,0293+ 11,4-8,9-10~3+ 1,81 ^8,9-10—3 — ^2——'1 —
\ 305 /
/ 0 994\
— 1,19 8.9-10-3—-т—1=0,1325 м;
\ 570 )
&RI-]
V? = Г07 — -^-~= 11,9- 1,81 -15-10“3 = 9,2 м/с;
Уо
gRt^ 2 fi
Х7 = Х07 — -Z7T- = 0,1325 — 90,5-152-10~ =0,112 м.
^Уо
Точка 8:
/8 = 35-103 с;
08 = Л’4 + ^04(ts~ = 0,222 + 12-10~3 (35 — 22,5) = 0,372 м;
^08 = 'С+
= 12 — 181 -0,035 = 5,7 м/с;
Qo
gRtl
Х8 = 2ГС8—- • ' = 0,372 — 90,5-352-10~ь = 0,261 м.
2Qo
Точка 9:
— 53-10 3 с;
Лод = 0,222 + 12(53 — 22,5) 10’ 3 =
= 0,588 и;
Х9 = 0,588 — 90,5 - 532 10~й = 0,334 м;
V9 = 12 — 0,053-181 =2,4 м/с,
Результаты вычисления пути и ско-
рости отката сведены в табл. 5.1 и пока-
заны на рис. 5.7.
Рис. 5.7. Графики изменений скоростей
отката во времени
Таблица 5.1
Точка 1 2 6 7 4 8 9 10
/-103, с 3,4 6,1 8 . 15 22,5 35 53 67,3
> ММ 5,4 29,3 50,8 1 132,5 . 222 372 588 759
Xt, мм 4,4 26 45 112 176 261 334 350
Wzw, м/с 5,45 11,4 П,4 11,9 12 12 12 12
У/, м/с 4,85 10,3 9,95 9,2 7,95 5,7 2,4 0
§ 5.5. РАСЧЕТ ГАЗОВЫХ ТОРМОЗОВ И ЛОКАЛИЗАТОРОВ
Проектирование и проверочный расчет надульного устройства осно-
ваны на использовании закона изменения полного импульса порохового
газа, вытекающего из канала ствола через эти устройства (см. § 5.2).
Известно, что полные импульсы порохового газа орудия с надульным
устройством /н.у и без него /в связаны зависимостью
Под термином полный импульс порохового газа понимают ту часть
полного импульса силы отдачи Р, которая является следствием инерци-
онных свойств порохового газа.
Величина этого импульса численно равна количеству движения по-
рохового газа, вытекающего из канала ствола без надульного устройст-
ва в направлении движения снаряда.
Расчет эффективности дульного тормоза
В общем случае конструктивная характеристика дульного тормоза
выражается формулой (4.59). Обычно камеры дульного тормоза имеют
одинаковую форму и размеры. При расчете и проектировании их сле-
дует пользоваться формулой (4.61).
Рис. 5.8. Двухкамерный дульный тормоз
средней эффективности
Рис. 5.9. Двухкамерный дульный тормоз
высокой эффективности с отражательны-
ми открылками около выходных окон
Рис. 5.10. Дульный тормоз с окнами щелевой формы средней
эффективности
Рис. 5.11. Дульный тормоз с окнами щелевой формы
повышенной эффективности
Дульные тормоза с неравновеликими камерами не представляют
практического интереса, так как они при одинаковой эффективности с
тормозом подобной геометрии, имеющим равновеликие камеры, имеют
больший вес.
На рис. 5.8 и 5.9 показаны схемы двухкамерного дульного тормоза.
Схемы многорядных дульных тормозов показаны на рис. 5.10 и 5.11. На
рис. 5.12 показана схема многорядного дульного тормоза с окнами в
виде отверстий круглой формы.
Иногда тормоз по типу, показанному на рис. 5.10 и 5.11, называют
цилиндрическим щелевым, а дульный тормоз по типу, показанному на
рис. 5.12 — цилиндрическим дырчатым.
Для тормозов камерного типа число камер обычно не превышает
двух (п = 2), а для цилиндрических тормозов число рядов окон не пре-
вышает восьми (щ = 8).
Вследствие этого, дульные тормоза полевых орудий в большинстве
случаев имеют оп^0,2 и 1р^120°. В танковых и авиационных пушках
могут применяться дульные тормоза с ап^0,1 и ф^150, т. е. с а+(0,5ч-
0,4). Дульные тормоза с боковыми окнами сопловой формы приме-
няются очень редко. Поэтому, как правило, Кб=1. Величину также
можно принимать равной единице.
Рис. 5.12. Дырчатый тормоз
Таким образом, расчетная формула конструктивной характеристи-
ки наиболее распространенных дульных тормозов в первом приближе-
нии может быть записана в виде (4.59):
g = + £б ( 1 — Jm) cos ф.
Заметим, что величины S и дь весьма чувствительны к значению от-
ношения скоростей Ли на входе в полость камеры тормоза, т. е. к углу
0 раструба диффузора (см. рис. 5.17, 5.20 и 5.21).
Величины Ли и 0 связаны соотношениями вида (4.28) и (4.29):
+—ЛГв~1;
Кв^0,95 1 ц-0,9 1)—
где
— коэффициент реактивности одномерного потока
идеального газа.
Если поток при выходе из канала ствола не претерпевает внезапно-
го расширения, а двигается по плавному коническому переходу от дуль-
ного среза ствола до полости камеры тормоза, его параметр Ли опреде-
ляется уравнением вида (4.10)
где — площадь поперечного сечения полости камеры по месту начала
боковых окон (каналов).
Величину Ки можно найти также с помощью табл. 4.3.
Если параметр %и необходимо определить с учетом внезапного уши-
рения сечения входного канала, образованного перепадом площадей от
S до то следует использовать формулу (4.64).
На практике формулой (4.64) пользуются при 0^60°.
Коэффициент реактивности диффузора бокового канала (Кб) нахо-
дится таким же образом, как и величина Кв.
Особое внимание следует обратить на определение коэффициента g
[см. формулу (4.36)], учитывающего эффект расширения газа в косом
срезе
?=1 ±
где фк.с — угол наклона косого среза выходного сечения бокового кана-
ла к его оси.
Рис. 5.13. Дульные тормозы с косыми срезами выходных окон
Рис. 5.14. Отклонение бокового потока на выходе из тормоза
Величина g в отдельных случаях может существенно влиять на зна-
чение параметра а и энергетическую эффективность тормоза АЕ.
Для дульных тормозов (локализаторов) при фк.с = ф (рис. 5.13) гра-
фик кривой параметра ^(Лф, фк.с) в диапазоне углов наклона бокового
канала
л
изменяется симметрично относительно значения ф =
пги котором она достигает минимума £ ~= 0,385.
Знак этого параметра всегда положительный, а величина пара-
ограничена пределами -----Отсюда следует, что нали-
метра
чие косого среза на выходе боковых каналов приводит к изменению
эффективности дульного тормоза: при 6<С — она возрастает, а при
Ф "> ~— уменьшается.
* 2 J
У тормозов (рис. 5.14) наблюдается обратная картина: при —
косой срез на выходе бокового канала снижает эффективность (величи-
на а возрастает) и при
ф^> ——увеличивает (величина а уменьшает-
ся), так как для дульных тормозов такой конструкции величина g во
всем диапазоне углов от 0 до ф больше нуля.
Частный случай. Расчет дульного тормоза, построенного по
схеме, показанной на рис. 5.15:
Рис. 5,15. Патрубковый тормоз для
фк.с <0
Ке<0°.
Рис. 5.16. Патрубковый тормоз для
Фк. С >0
S= 1 — tg Дф tgtb
Для такого тормоза:
cos (6 + ДФ)
cos Дф cos ф
. . cos (Ф + Дф) , х .
£ COS ф=------—— = — tg Дф;
cos Дф
<*1 = сг —(1 —<з) tg Дф.
(5.51)
При изменении направления косого среза — фк,с>0 (рис. 5.16) фор-
мула конструктивной характеристики для дульных тормозов этого клас-
са принимает вид
з1 — + tg дф. (5.52)
При этом a2>cti.
Такие дульные тормоза могут быть с успехом применены. Их изго-
товление не вызывает особых затруднений, наоборот, при их производ-
стве могут применяться такие высокопроизводительные технологиче-
ские процессы как штамповка, сварка и прочие. Можно применять так-
же литье (из стали 40ХЛ) с внутренней обработкой только пескоструй-
ным аппаратом [10].
С эксплуатационной точки зрения эти дульные тормоза являются
наиболее выгодными, так как обеспечивают наименьшее избыточное
давление на местах расположения орудийного расчета. Наиболее целе-
сообразно иметь диаметр боковых каналов равным диаметру централь-
ного канала. Угол косого среза фк.с в зависимости от мощности орудия
можно выбирать в пределах от +60 до —60°.
При косом срезе, обращенном назад, имеют место большая эффек-
тивность и большие избыточные давления. При косом срезе, обращен-,
ном вперед, эффективность дульного тормоза и избыточные давления
понижаются.
Для орудий с начальной скоростью снаряда vo< 1000 м/с плоскость
косого среза направляется назад; при Vq> 1000 м/с, чтобы сохранить из-
быточные давления в пределах допустимого, плоскость косого среза
следует направлять вперед.
Дульные тормоза можно создать самой разнообразной геометрии,
так как в соответствии с выражением для а многие размеры полости ка-
Рис. 5.17. Однокамерный тормоз
без отбойных тарелей
Рис. 5.18. Щелевой тормоз
мер тормоза и его боковых каналов остались между собою совершенно
не связанными. К таким размерам в первую очередь следует отнести
диаметры полостей камер тормоза Dn и снарядного окна £>Ок, длину / и
ширину боковых каналов Ь, углы их наклона на входе фвх и выходе
фвых газового потока. Длину боковых каналов и отбойных тарелей с
также нельзя назначать произвольно.
Все перечисленные размеры тормоза должны быть выбраны и увя-
заны между собою так, чтобы они обеспечили отвод потребного количе-
ства порохового газа в стороны под заданным углом фВЪ1Х при мини-
мальных габарите и весе тормоза. Всякое отклонение размеров, вызы-
вающее увеличение габарита и веса тормоза, нельзя считать полезным.
По этой причине недопустимо «проскальзывание» газового потока через
боковые окна большой длины, при которой их пропускная способность
заметно превышает отражательную. Пропускная способность бокового
канала определяется площадью его поперечного сечения, а отражатель-
ная— размером поверхности, воспринимающей удар отводимого в сто-
роны газового потока.
Условие равенства пропускной способности боковых каналов и от-
ражательной— для камеры тормоза приводит к следующим дополни-
тельным соотношениям:
— для тормозов, изображенных на рис. 5.8, 5.9, 5.17 и 5.18
9>8F6 или £>п=1/ —
V л
— для тормозов, изображенных на рис. 5.18 и 5.19 ф
(5.54)
cos (л — ф) — 8 sin ф ;
— для тормозов, изображенных на рис. 5.9 и 5.20:
/cos (л — ф);
(5.56)
(5.57)
В указанных формулах значения 6 определяются по формулам,
приведенным в гл. IV.
Уравнение (5.54) справедливо для тормозов с боковыми каналами
прямоугольной формы, а уравнение (5.55) —круговой формы.
Для тормоза (схемы, показанной на рис. 5.20) формула (5.56) вы-
ражает условие отвода потока с помощью отбойной тарели под углом ф,
равным углу наклона тарели, а соотношение (5.57) —достаточность от-
ражающей поверхности этой тарели. Диаметр полости камеры такого
тормоза должен быть рассчитан по формуле (5.53).
Рис. 5.19. Размеры бокового
канала
Рис. 5.20. Тормоз с отбойными тарелями
Расчет дульного тормоза на прочность
Основными силами, нагружающими корпус тормоза по месту опас-
ного сечения первой камеры, являются тянущее усилие (5.40)
Д/?т=(1 — а)/?л
и статическое давление в полости камеры
S
изгибающее боковые перемычки между ее окнами.
На величину тянущего усилия должно рассчитываться крепление
тормоза к стволу.
Во второй камере величины Д7?т и ря уменьшаются в соответствии
с зависимостями:
Д^т2=(«1 — а)/?д;
где <4 =/Qb-Hi (1 — ajcostb — коэффициент импульсной эффективно-
сти первой камеры;
_ 1
°i— д —доля газа, поступающего из первой ка-
1 + 5-- меры во вторую.
? о
В тормозах щелевых многорядных (см. рис. 5.10 и 5.18) параметры
Д7?т и вдоль тормоза изменяются примерно так:
=(0,-! -а)/?/,
1/?д т *
Здесь
где i — номер камеры, отсчитываемый от дульного среза ствола.
В расчетах полную реакцию газового потока в момент вылета до-
пустимо принять равной
9
ц
д
-I н
? \
где /кн — длина канала ствола;
/?д —дульное давление.
Допустимое напряжение растяжения по месту опасного сечения сое-
динения дульного тормоза со стволом с учетом динамического нагруже-
ния может быть выражено формулой
где f — площадь опасного сечения;
V =1,2-ч- 1,6 — коэффициент динамического нагружения.
Приближенно величину V можно вычислить по формуле
V = 1 -U-1 + ge-
являющейся результатом решения волнового уравнения
— CL ст
д/2 дх^
для упругого стержня с заделанным концом, к свободному концу кото-
рого приложена сила, меняющаяся по закону (5.40).
В рассмотренных формулах1:
—
=—— •
47 Д ’
Уд — дульная скорость снаряда;
яст = 5000 м/с — скорость звука в стали.
Изложенная методика расчета дульного тормоза справедлива и для
локализатора. При этом для заданного значения параметра а стремят-
ся обеспечить минимальную величину <jw за счет числа рядов m и уг-
ла ф.
$ 5.6. РАСЧЕТ ГАЗОВЫХ УСИЛИТЕЛЕЙ ОТДАЧИ
Обычно различают два типа усилителей отдачи: реактивный (рис.
5.21) и активный (рис. 5.22). Иногда усилители отдачи, применяемые в
автоматических пушках, называют газовыми ускорителями.
Реактивный усилитель отдачи имеет форму конической сопловой
насадки. Часто такую насадку называют пламегасителем.
Активный усилитель отдачи представляет собой конструкцию, со-
стоящую из полузамкнутого цилиндра 3 и размещенного в нем порш-
ня 2. Цилиндр закреплен на неподвижных частях пушки, а поршень
укреплен на конце ствола 1. В цилиндре для прохода снаряда (или пу-
ли) имеется круглое отверстие (окно), называемое центральным или
снарядным.
1 См. также формулы (5.16) и (5.31).
При проектировании орудия на основании его кинетического ана-
лиза выясняется требуемая величина энергетической эффективности
усилителя отдачи Д£. Конструктивная характеристика а усилителя от-
дачи и его импульсная эффективность А/ (а также баллистические па-
раметры орудия Э) связаны зависимостью
f 1-[——Л т (5.58)
\ Э /
где дУу=1/04у — 1 —приращение импульса отдачи;
И04у =—— ----относительное увеличение скорости свободного от-
“ ^04
ката;
1300(0
^0
Рис. 5.21. Реактивный усилитель отдачи
Рис. 5.22. Активный усилитель
отдачи
Рис. 5.23. Графики конструктивной характе-
ристики <ха активного усилителя отдачи
При а>1,35 следует вы-
бирать усилитель отдачи ак-
тивного типа. Реактивный
усилитель отдачи не может
обеспечить получение кон-
структивной характеристики
а>1,35, так как в этом слу-
чае его размеры будут прак-
тически неприемлемыми.
Конструктивная харак-
теристика усилителей отда-
чи рассчитывается по фор-
мулам вида (4.29) и (4.67):
а) для усилителей реак-
тивного типа
б) для активного типа
aa=l+(K2-l)2kz|_ .
Го — О
Для реактивного усилителя отдачи методика расчета величины ар
изложена в § 4.2. Выражения для определения силы отдачи ствола с
газовым ускорителем остаются прежними (5.35) и (5.36).
Величина ар не может быть больше 1,3 в то время как значение сса
иногда превышает 2,5. Откуда следует, что активный усилитель отдачи,
выполненный в приемлемых габаритах, приблизительно в два-три раза
эффективнее реактивного газового ускорителя (пламегасителя).
Зависимость конструктивно-импульсной характеристики аа актив-
ного усилителя отдачи от его размеров при Ki = l показана в табл. 5.2
и на рис. 5.23.
Таблица 5,2
1
1 2 3 4 5 1 2 3 4 5
1 1 1,445 1,89 2,335 2,775 0,4 1,127 1,34 1,552 1,765 1,975 ,
0,9 1,032 1,338 1,665 1,982 2,3 0,3 1,141 1,343 1,545 1,74-6 1,95
0,8 1,056 1,337 1,618 1,9 2,18 0,2 1,154 1,348 1,541 1,735 1,927
0,7 1,077 1,334 1,59 1,845 2,105 0,1 1,166 1,351 1,536 1,722 1,907
0,6 0,5 1,095 1,112 1,334 1,336 1,572 1,56 1,812 1,772 2,08 2 0 1,178 1,356 1,534 1,71 1,89
Наибольшая реакция усилителя отдачи активного типа, передавае-
мая непосредственно на лафет, выражается формулой
где
Яа.л=(аа.л-1)Яд,
«а..,
(5.59)
Сила /?а,л направлена вперед и стремится сдвинуть лафет в сторону
движения снаряда.
Наибольшее давление в цилиндре усилителя отдачи равно
S 3
Принимая Хд = 1, Л=1,25,----------- = —, получим ^ц~0,6/7д.
/’’о 4
Наружный диаметр цилиндра
можно определить по формуле
Зае + 2pn v
3<^ -- 4:рп V
где — предел упругости материала;
п= 1,25 — запас прочности;
V= 1,24-1,6 — коэффициент динамического нагружения.
Толщина диафрагмы цилиндра принимается равной
Напряжение растяжения по месту крепления корпуса цилиндра уси-
лителя отдачи к лафету подсчитывается по формуле
Для снижения усилия рывка вперед, т. е, для компенсации силы
7?а.л, сразу за снарядным окном размещают пламегаситель, жестко за-
крепленный на корпусе цилиндра усилителя отдачи. В этом случае ре-
зультирующая сила
Величины Кв рассчитывают по той же методике, что и коэффициент
ар реактивного усилителя отдачи. При этом в расчетные формулы вмес-
то S подставляют Fo.
При наличии табл. 5.2 или кривых конструктивных характеристик
(см. рис. 5.23) расчет и проектирование активного усилителя отдачи за-
метно упрощается. По значениям S/Fo и аа непосредственно определяют
величину Рц/Fq.
С помощью таблицы и кривых аа(5/77о, F^/Fq) также просто ре-
шается и обратная задача, т. е. нахождение значения конструктивной
характеристики по заданным значениям S/F^ и Fn/FQ.
С чисто методической целью рассмотрим несколько числовых при-
меров расчета надульных устройств.
Пример 5.6. Определить размеры активного усилителя отдачи, имеющего конст-
руктивную характеристику а =4,5 при Fo/S~1,2 и £=5/4.
Коэффициент скорости потока на выходе в атмосферу:
где
Коэффициент реактивности потока при Х2=1,36:
1,35 + 1
= 1,049.
Площадь поршня определяется из уравнения
ц
Откуда
Fa
а — 1
0,5
—----0,2 = 3,04.
0,049
Для 23-мм пушки, имеющей в момент вылета снаряда дульный расход газа
С?о = -—-—15,5 кг/с при р0^900 кгс/см2 и t'o = 700 м/с, наибольшая сила отдачи
GriVn „ 15,5 -700
Р = ctS/?o + (а — 1)----- = 1,5-4,155-900 + 0,5 —— = 6150 кгс.
Пример 5.7. Показать практическую невозможность применения реактивного (соп-
лового) усилителя отдачи для условий примера 1.
В соответствии с условиями примера 1 коэффициент реактивности сопловой на-
садки #в = 1,5. С учетом потерь величина коэффициента реактивности сопла составит
^В,И - 1 1 1
7.27.3
где %з=0,96 — коэффициент, учитывающий неполноту работы диффузора сопла вслед-
ствие нестационарности истечения газа из канала орудия;
%2=0,98—.коэффициент, учитывающий потери импульса потока от радиального рас-
ширения в диффузоре при 0 = 11°;
= 0,98 — коэффициент диссипативных сил.
Коэффициент скорости на выходе из сопла
в.и -- ''в.и
в.и
Площадь выходного сечения сопла для £ = 1,25:
fe-i
м — 'И
--------
!г—1
= 440; —-^21.
d
в. и
в.и
£— 1
1 —----
1
Длина диффузора сопла
2 tg 6
м Ж
d = 5М •
Сопло длиной, равной 51 калибру ствола, строить нецелесообразно, так как оно
соизмеримо с длиной ствола.
Пример 5j8. Найти размеры надульного устройства, позволяющего снизить им-
пульс отдачи орудия на 50%. Тип тормоза щелевой цилиндрический (см. рис. 5.11).
Искомое снижение импульса отдачи выстрела (5.42)
Г%=(1-а)—= 0,5,
Примем коэффициент 3 = 0,7.
Решая уравнение для Д7В относительно а, получим
— 14-3 1,7
а = 1 —Д/в-------= 1 — 0,5 ——— = -0,21.
3 0,7
В соответствии с уравнением (4.61)
_ а ~ Е^б cos
cos ф
Из конструктивных соображений примем ф = 135°, ЛВ=Л%=1. При ф = 135°, пара-
метр £=0,59 и Аф=25°. Для т = 8 получим о=0,79.
Относительная площадь боковых щелей каждого ряда:
Лл 1 — а 1
-£- =------^0,83, где -------------------------= 0,32.
Fn Sa 1 4- k (1 — cos ф)
Условие равенства производительности боковых каналов и отражательной способ-
ности экрана диафрагмы (см. рис. 5.18) дает связь между диаметром полости тормоза
и размерами боковых каналов:
F / 4 Лл
~ = 8-0,32-0,83 = 2,125; Pn = rfol/ 1 + —«В —— = 1,92d0.
ул гц
где dQ — диаметр снарядного окна.
Угол отклонения бокового потока от оси канала ствола
фс = ф — Дф^110°.
Пример 5.9. Оценить снижение эффективности тормоза, рассмотренного в приме-
ре 5.8, вызываемое косым срезом боковых каналов.
Пользуясь формулой (4.62) при £=1 и о=0,79 имеем:
а — ат 4- (1 — aw) cos ф = — 0,46:
___ Э __
Д/в = (1 — а)--------= 0,6 вместо Д/в = 0,5.
1 4- Э
Откуда искомое снижение эффективности надульного устройства составляет при-
близительно 17%.
§ 5.7. РАСЧЕТ ГАЗОВЫХ КОМПЕНСАТОРОВ
Надульное устройство, предназначенное для несимметричного отво-
да порохового газа в стороны от оси канала ствола с целью стабилиза-
ции положения оружия при стрельбе, называют газовым компенсатором
или стабилизатором.
При несимметричном отводе газа возникает, наряду с продоль-
ной, поперечная составляющая реакции надульного устройства на
ствол или на тело, к которому крепится это устройство. На рис. 5.24 и
5.25 представлены схемы возможных конструкций газового компенсато-
ра оружия или его носителя.
Согласно этим схемам несимметричный отвод газа достигается с
помощью несимметрично расположенных боковых окон или косого среза
на выходе пульного (снарядного) окна. В отдельных случаях, когда
требуется значительная поперечная составляющая реакции на ствол
(или носитель), одновременно используют и то и другое.
Рис. 5.24. Кососрезанный газовый
компенсатор
Рис. 5.25. Комбинированный газовый компенсатор
Боковая составляющая реакции кососрезанной
надульной насадки
На основании схемы, показанной на рис. 5.24, поперечная реакции
кососрезанной насадки на ствол выражается формулой:
Py=(/Co#* — F2/?Jt-g4^/f0/?*tgA<p, (5.60)
где F2pa — составляющая реакции от противодавления со стороны окру-
жающей среды;
F2 — площадь поперечного сечения потока по месту, где его стати-
ческое давление равно атмосферному;
ра— давление атмосферы.
Параметры Kq и Дф могут быть вычислены по уравнениям (4.10),
(4.29)и (4.30) или взяты непосредственно из табл. 4.3.
Поперечная (боковая) реакция такого компенсатора действует пер-
пендикулярно оси ствола и лежит в плоскости, проходящей через его
ось и вершину косого среза. Если в зоне косого среза потока не перерас-
ширен, т. е. в сечении 2— 2 (см. рис. 4.3) избыточное давление больше
или несколько меньше нуля (рв — ра> —0,5 рА)> то осевая реакция ком-
пенсатора на ствол
/?х^(а-1)/?д,. (5.61)
Для инженерного расчета полной реакции потока порохового газа
в дульном срезе ствола (/?д0 справедлива формула (5.30).
В общем случае параметр а в зависимости от конструкции компен-
сатора и может быть больше или меньше единицы (а^1).
Если компенсатор выполнен в виде кососрезанной цилиндрической
или сопловой насадки (см. рис. 5.28), то величина а>1, т. е. осевая реак-
ция на ствол направлена в сторону действия усилия отдачи. Вследствие
этого в периоде последействия сила отдачи оружия с таким компенсато-
ром возрастает и в соответствии с уравнением (5.36) составит:
Рл = а/?д;+-^_^а5Лн.де-«+ (а-1) е^, (4.29)
ет g
где а = ул [ 1 +Х2Х3 (АГо — 1)] — конструктивно-импульсная характери-
стика газового компенсатора кососре-
занного сопла;
д0 =-----------коэффициент реактивности одномерного
потока на входе в зону косого среза
сопла.
Рис. 5.26. Схема отклонения газового потока на выходе из ко-
сосрезанного цилиндрического компенсатора
На практике в качестве компенсатора используют кососрезаннукЬ
цилиндрическую насадку. Предпочтение цилиндрическому компенсато-
ру перед сопловым отдают потому, что он при малом увеличении силы
отдачи оружия обеспечивает большую поперечную реакцию воздействия
потока порохового газа на ствол.
При входе в полость такого компенсатора поток газа, как правило,
претерпевает незначительное внезапное расширение (см. рис. 5.26), пре-
водящее к небольшому относительному увеличению его полной реакции:
Величину коэффициента реактивности потока Ко у основания косо-
го среза цилиндрической насадки можно подсчитать по формуле (4.29)
при Х2 = Хз= 1:
(5.62)
где % = 0,98 — коэффициент потерь, определяемый диссипативными си-
лами.
Коэффициент скорости после внезапного расширения потока на-
ходится из уравнения механики для случая %о>Лд«1, т. е. точно так же
как и для активного усилителя отдачи (%2==Хо) по уравнению (4.64).
5 F
Обычно в расчетах принимают k = —и —— = 1,2. Поэтому ?
4 S
55
54 ’
к0= 1,37 и ЛГ0 = О,98
--------= 1 03. На основании этого в соот-
2
ветствии с формулами (5.36), (5.60) и (5.62) имеем:
Рх = 1,035 Ан ле-« + 0,03 е-2«;
g
Ру=а /?я, 1,03 f Spiu^‘ + е-Ч tg Дф,
J J у g У
где <xy=/CQtgM».
(5.63)
Угол Дф находят из уравнений (4.30) или (4.31) для заданных зна-
чений Ко~1,03 и ф или по табл. 4.3 с помощью линейной интерполяции.
Особенности расчета компенсатора
типа «лоток»
Такой компенсатор (рис. 5.27) можно рассчитывать по формулам
для кососрезанной цилиндрической насадки. При этом угол ф находят
Рис. 5.27. Компенсатор типа «лоток»
из условия равенства боковых площадей косого среза, подверженных
одностороннему воздействию газового потока:
-^d2Q=hldM.
Отсюда эквивалентный угол косого среза цилиндрической насадки
ф arctg — ,
г 4 th
где I — длина „лотка44;
1/ —Fo — диаметр канала компенсатора;
Расчет выходных характеристик комбинированных надульных
устройств типа «активный усилитель отдачи-компенсатор»
и «дульный тормоз-компенсатор»
Эти комбинированные надульные устройства (см. рис. 5.24 и 5.28)
могут быть рассчитаны на основе теорий дульного тормоза (см. § 5.4) г
усилителя отдачи (см. § 5.5) и кососрезанной насадки (см. § 4.4)..
Надульное устройство, выполняющее одновременно функции актив-
ного усилителя отдачи и компенсатора (см. рис. 5.24) создает реакцию
воздействия потока порохового газа на ствол:
— в осевом направлении [(см. формулу (5.35)]
— в боковом направлении [см. формулу (5.60)]
где
ах=1 + (/С0-1)^|- ; (5.64)
Г о — «Ь
ау = ^о^Дф; (5.65)
Рис. 5.28. Комбинированный несимметричный газовый компен-
сатор
Сила PQx, минуя ствол, непосредственно действует на оружие и тя-
нет его в направлении выстрела. Сила же Рх воздействует на подвиж-
ный ствол и направлена в противоположную сторону. Вследствие этого
сила Рх увеличивает отдачу оружия, а сила Р$х ее уменьшает.
Для силы PQx справедлива формула (5.59)
где
аАг = аа.д —1-
Так как сила Рх приложена к подвижному стволу, а сила — РОх~
к неподвижной части оружия, то их складывать нельзя. Полный же им-
пульс осевой отдачи оружия определяется простым суммированием
t ->оо t ->оо
,r ^-P0,5:n
где v0— -----5—v — импульс отдачи оружия к моменту вылета снаряда.
g
После преобразования получим
-7 + (а.г— а0х)3<о
s =---------------------^д,
g
(5.66)
так как
t
(*п
\ — чб
J g
о
AdL н
\----dt= —0,о— ^д.
J д- g
о
Импульс отдачи оружия в поперечном направлении за время перио-
да последействия /п определяется по формуле
t
$,п
Ry4t=с^8 — ид. (5.67)
g
о
Суммарная боковая Ру и осевая Рх составляющие воздействия на
оружие комбинированного надульного устройства «компенсатор-тормоз»
при его закреплении на стволе для случая одинаковой геометрии бо-
ковых каналов описываются соответственно формулами (см. рис. 5.28):
РХ ®ЧХР1Ш Ь >
(5.68)
(5.69)
где РТ0=ат^/?д, —боковая составляющая реакции тор-
моза;
aT£Z = /C6^(l — om) sin — коэффициент эффективности боковых
каналов m-рядного тормоза, создаю-
щего поперечную составляющую реак-
ции воздействия газового потока на
оружие;
= — боковая составляющая реакции на
ствол по месту косого среза снарядно-
го окна;
а tg дф —. коэффициент эффективности косого
среза снарядного окна;
/Со ~ 1,03 —коэффициент реактивности потока на
входе в канал снарядного окна;
= 1 + tgA'!>6 Фб — коэффициент, учитывающий влияние
косого среза боковых каналов на бо-
__ ковую реакцию;
- aTX = /C0ow ~р(1 — аот)^/Сбсозфб— конструктивная характеристика ком-
пенсатора как дульного тормоза [см.
формулу (4.60)];
1
а==-----—------доля газа, остающаяся в канале «ком-
1 4-
пенсатора-тормоза» после каждого ря-
да (бокового окна);
-----------------относительная плотность потока газа в
1 4- £ (1 — cos <] б)
боковых каналах (6=1,25);
F6=—------отношение площади бокового канала
Р о
каждого ряда к площади снарядного
окна;
= 1 — tg Дфб tg фб — коэффициент, учитывающий влияние
косого среза боковых каналов на осе-
вую реакцию;
Фб — угол наклона боковых каналов относи-
тельно оси канала ствола;
ф — угол косого среза канала снарядного
окна.
Величины углов Аф и Афб, а также — коэффициентов £ и £б опреде-
ляют с помощью табл. 4.3 линейной интерполяцией.
Полные импульсы отдачи «компенсатора-тормоза» соответственно
будут:
— в осевом направлении
J з =----
g
— в поперечном направлении
(5.70)
ТД»
где
=«к., + ату = tg Дф+К&у (1 — зт) sin фб. (5.72)
Обычно Ао = Кб — 1.
Рассмотрим некоторые частные зависимости для Рх и Ру.
1. Снарядное окно не имеет косого среза (ф = 90°; Аф = 0°). В этом
случае изменится только выражение боковой составляющей (5,68)
(Г^2‘ аК0 = О).
2. При отсутствии косого среза (Афб —0; gy=l) на выходе боковых
каналов цилиндрической формы (7<б = 1) реакции воздействия потока га-
за на ствол определяются уравнениями:
Ру
^Х
где
СЕзу = 7С0 tg Дфз™ + (1 — am) sin фб,
«За- = К^т + ( 1 — ^) COS фб.
3. При отсутствии вообще боковых каналов (7б = 0; о=1) расчетные
зависимости для параметров ау и аЛ- совпадают с соответствующими
формулами для кососрезанной цилиндрической насадки (5.63).
По величине избыточного давления на местах боевого расчета ком-
пенсатор, выполненный в виде дульного тормоза с односторонним распо-
ложением боковых каналов, не имеет явного преимущества перед ко-
сосрезанной цилиндрической насадкой. В сравнении с этой насадкой
«компенсатор-тормоз» обеспечивает большее боковое усилие Ру и умень-
шает силу отдачи оружия Рх в периоде последействия.
Некоторое снижение действия баллистической волны от боковых ка-
налов на стреляющего достигается уменьшением их угла наклона фб
до 45°—30° и устранением косого среза (Афб = О), восполняя при этом
неизбежное падение величины силы Ру соответствующим увеличением
числа их рядов т.
Особенности расчета эффективности компенсатора
типа дульного тормоза при наличии симметрично расположенных
боковых окон
Такое надульное устройство (рис. 5.25) отличается от устройства,
показанного на рис. 5.28, наличием симметрично расположенных окон
вдоль оси г. Эти добавочные боковые окна увеличивают реакцию воз-
действия на ствол Рх и снижают Ру. В этом случае усилия Рх и Ру вы-
ражаются прежними уравнениями (5.68) и (5.69), в которых коэффи-
циенты эффективности подсчитываются по формулам:
ауи = К^т tg Дф + К&у (1 — <^) sin фб; (5.73}
(1 - cos ф5, (5.74)
где (см. рис. 5.28)
п = 3 — общее количество боковых окон в каждом ряду.
При от<0,5 угол ф следует принять равным 90°, так как эффект от
косого среза на выходе снарядного окна становится незначительным.
В этом случае формулы для a,s и аТх примут вид:
sin
=°т -т О (1 - зга)СО3
Все приведенные выше формулы справедливы для расчета и проек-
тирования стабилизатора движения носителя (например, самолета) во
время стрельбы пушек.
Для компенсаторов с симметричным расположением равновеликих
окон осевое усилие вычисляется по формуле (5.68), а боковое
Ру =
где a =/Cs>3(l — зт) sin фcos ; 2ср— угол между боковыми окнами.
Потребные конструктивные характеристики компенсатора [ссх и «Д
Достоверность уравнения движения оружия при выстреле опреде-
ляется не только правильностью координат приложения сил, его возму-
щающих, но и выбором физической модели, отображающей физическую
Рис. 5.29. Расчетная кинематическая схема оружия при выстреле
структуру и динамическое состояние оружия в процессе выстрела. Рас-
смотрим, например, упрощенную схему движения ручного стрелкового
оружия при выстреле (рис. 5.29). Целью поставленной задачи является
не только определение изменения углового положения оси канала ствола в
процессе выстрела (у, y/ = Q), но и расчет потребных усилий «тормоза-
компенсатора» (Рх\ Ру), стабилизирующих положение оружия в плос-
кости стрельбы.
Несовпадение центра масс (и. м.) оружия и направления реакции
плеча стрелка с осью канала ствола вызывают вращательное движение
оружия.
Период движения пули по каналу ствола
До момента вылета пули из канала ствола надульное устройство не
действует, а поэтому Px = Sp^ut и Ру = 0.
Суммарную реакцию рук стрелка Пу и им создаваемый демпфирую-
щий момент учитывать не будем вследствие их малого значения по срав-
нению с величиной силы отдачи Рх и ее моментом уъРх.
В этом случае динамическое состояние оружия с учетом изменения
момента его инерции / описывается уравнениями:
— движения пули
q 4-0,5to
— перемещения оружия
— вращательное движение оружия
lQ't=Pxy2 — y^MV't.
Величина (d<Q, а поэтому ее в уравнении перемещения оружия
можно не учитывать. Момент инерции оружия относительно точки его
опоры (плечо стрелка) является величиной переменной вследствие пере-
мещения пули по каналу ствола и определяется по формуле / /0 ф- —%2,
где х— текущее расстояние между пулей и центром масс оружия до
выстрела.
По физическому смыслу член Q// = 2Qmxv, характеризующий ско-
рость изменения момента количества движения оружия в процессе вы-
стрела 7Q, является моментом кориолисовой силы и способствует устой-
чивости оружия. Величина этого момента незначительна по сравнению со
значением Q// и в принципе ею можно пренебречь, т. е. принять
1 = const и (2/)'^/2'.
Совместное решение двух последних уравнений их исходной системы
приводит к зависимости
1^=^ - Ух) S p№t+yjlx.
Отсюда после интегрирования в соответствии с уравнением движения
пули для угловой скорости имеем формулу
^7 _ ? + 0,5(о ,
Повторное интегрирование последнего уравнения приводит к иско-
мому выражению для текущего угла наклона оси канала ствола
о о
где уо=у2—У1 — плечо динамическом пары;
х и v — соответственно путь и скорость пули в канале ствола.
В момент вылета пули из канала ствола на основании найденных
выражений для Q и у имеем:
Скорость и путь поступательного перемещения центра масс оружия
для времени t — t^. соответственно будут
V g + Cjj dt ;
& ] Л-
о
Х,=?--0,5<° хд- dt
Q .) .)
О о
Уменьшение величин уз и Q2 возможно достигнуть только выбором
соответствующей формы приклада и мер динамического балансирова-
ния, обеспечивающих минимальные значения геометрических парамет-
ров Уо И Z/1.
Период последействия
После вылета пули из канала ствола вращательное движение в
плоскости стрельбы оружия с надульным устройством описывается урав-
нением
Так как
^х “4~ и Ру tiyRpj,
TO
/2^ (у^х - х^у) /?д, + у0 -L у{ Пг
Интегрирование этого уравнения при отсчете времени t от момента
вылета пули приводит к зависимссти
/Q -р(&хУо R"'Г Уо ^о) Н~ п»
где (см. § 5.1)
i
О
ОШ ;г
t
Т__Т pSbt.
Л
(3 — 0,5) «Уд
-* л____ .
э
01
н 1 х
и
Повторное интегрирование найденного уравнения й =
приводит
к следующему выражению для текущего угла положения оси канала
ствола:
g L л
~Уо
2g
2b
+.V1
t t
\dt\ ^xdt.
1 1
о 0
Пренебрегая величиной егЫп по сравнению с единицей для конца
периода последействия (/ = /ц) при допущении, что ’за время /д + tn=h
выполняется условие
соответственно получим:
«
^^02 У*
где
^д*
приходим к выражению
Принимая в уравнении для уп сумму интегралов, стоящую перед па-
г-м
л п
раметром у\, равной J dt I
о о
/ V,. = /Уо2+Jso А + (ахУй - “/1)
ь
to Vw it 1
— u0------— t„----------
2p \ " 2b
п
д
Д’
так как в соответствии с правилом интегрирования по частям имеем
t t t t
[dt f П di=i Г
J Л I V* t) "**
0 0 о 0
t
Интеграл же выражающий статический момент площади
о
t
j* через координату ее центра тяжести, может быть записан в ви-
о
t
де Г TLxdt.
о
Д П ДГЛ . а rt
При выполнении условия, что С Xixdt=^ f pxdt=q- -
об
в первом приближении можно принять Г =
—Если в найдек-
2
ных выражениях для йп и уп положить ах=1 и ау = 0, то получим угло-
вую скорость и угол наклона оси канала ствола оружия без надульного
устройства в конце периода последействия.
Выражения для Йп и уп, характеризующие вращательное движение
оружия в конце процесса выстрела, используем для определения кон-
структивных характеристик ах и исходя из очевидного условия уп =
= йп = 0. Иными словами найдем такие величины параметров ах и ау,
которые к началу очередного выстрела обеспечат оружию его первона-
чальное (исходное) положение в плоскости стрельбы. В этом случае
совместное решение уравнений уп = 0; Qn = 0 после соответствующих ал-
гебраических преобразований приводит к следующим приближенным
формулам:
(5.75)
= — полный путь пули по каналу ствола.
Из выражения для ах следует, что его значение весьма чувствитель-
но к изменениям величины /п. Реальные значения параметра ах ограни-
чены весьма узкими пределами /^ах<0. Поэтому величины 1и следует
вычислять из условия ссх>0, которое, как правило, выполняется при
tu=— . За время периода последействия давление в канале ствола по
Ь
сравнению с дульным рд уменьшается приблизительно в 60 раз, а ве-
личина неучтенного импульса реакции потока пороховых газов /?дг со-
ставит менее 2%.
Анализ формул для уп и Йп показывает, что если компенсатор не
будет работать в режиме тормоза, т. е. при надульном устройстве с
ах^1, то для рассмотренной модели действия сил на оружие при вы-
стреле (см. рис. 5.24) физически нельзя одновременно (хотя бы прибли-
зительно) обеспечить равенство нулю угловой скорости Qn и угла уп к
моменту очередного выстрела автомата. В этом случае соответствующим
выбором величины возможно лишь обеспечить к концу последействия
выстрела либо уп = 0 либо Йп = 0. По этой причине кососрезанные сопла
и цилиндрическая насадка, используемые в качестве компенсатора ус-
тойчивости, не могут привести к удовлетворительному результату.
Полное решение задачи, обеспечивающее yn = rn.iri и Qn^min, сле-
дует ожидать при динамическом балансировании или введении «пара-
зитной» откатной'части, которое позволит получить минимальное зна-
чение плеча динамической пары е.
Пример 5.10. Найти величины ссх и ау для следующих произвольно взятых исход-
ных данных:
£/0 = —; г/2 = 0,025 м; Xi = 0,5 м: S =0,5 см2; v:k = 900 v/c;
4
— 870 кгс/см2; w= 0,005 кг; Э ~ 0,65; Л? = 1,5* 10~~3 с.
1. Величина показателя интенсивности истечения пороховых газов после вылета
пули из канала ствола [см. формулу (5.14а)]:
1300
где £ =----------= 1,45.
(3 — 0,5) соуд
= 1000 1/с,
2. Потребная импульсная характеристика тормоза-компенсатора в режиме тормоза
[см. формулу (5.76)]:
где /п =— = 4-10_з с; хл = Xi = 0,5 у; </ = 0,011 кг,
b
Осуществить такое надульное устройство с приемлемыми эксплуатационными ха-
рактеристиками затруднительно прежде всего вследствие больших избыточных давлений
в области головы стрелка. Если возможно yQ увеличить до 4/з, то ах достигнет приемле-
мой величины («х = 0,185).
3. Параметр определяющий потребную величину поперечной составляющей ре-
акции на ствол при ах = 0,185 составит [см. формулу (5.75)]:
4. При отводе пороховых газов в стороны под углом фб=90° относительная вели-
чина площади боковых каналов тормоза-компенсатора при т=\ и Ко=1 будет [см. фор-
мулу (5.74)]:
—
— — 1 — av
Откуда T'g — = 9,8, где & = 0,45.
х л cU
5. Потребная неравновеликость боковых каналов определяется из уравнения (5.73)
при т = 1; Кб = 1; фб =90°; Дф = 0; 1^=1:
«/; = (!-• <зх) ——--—— = 0,086.
^бх -F ?бу
Отс юда и м ее м = 9,235F&x.
Совместное решение уравнений и Uy(F$X) ^бу) приводит к резуль-
тату /?бг —4,4 и F$y = 1. При диаметре пулевого окна do=9 мм боковые каналы
тормоза-компенсатора должны иметь размеры:
V?бх = 18,9 мм; = dQ V?бх +^бу = 20,9 мм.
§ 5.8. РАСЧЕТ ТЕПЛООБМЕНА В ГАЗОПРОВОДАХ
И РЕСИВЕРАХ ДЛЯ ПРИВОДОВ, РАБОТАЮЩИХ НА ГОРЯЧЕМ ГАЗЕ
Газопроводы — длинные металлические и неметаллические трубки
широко используются в артиллерийских автоматах и управляемых раке-
тах для подачи порохового газа (или вообще продуктов сгорания) из
камеры РД, порохового аккумулятора давления (ПАД) или из канала
ствола в газовые приводы исполнительных органов. Например, при
расположении газового буфера в задней части кожуха автомата длина
газопровода достигает нескольких десятков калибров, а длина бортовых
газопроводов управляемых ракет — нескольких сот калибров. В таком
г а.-с проводе пороховой газ сильно охлаждается, а стенки газопровода
.’згоеваются.
1
Расчет параметров состояния потока, в частности, его полной тем-
пературы на выходе из газопровода, т. е. на входе в камеру исполнитель-
ного привода, представляет весьма сложную термодинамическую задачу.
Сложность ее состоит в нахождении такого решения, которое было бы
относительно простым и приемлемым для инженерной практики.
Точное решение этой задачи даже при наличии ЦВМ получить за-
труднительно. И прежде всего потому, что исходные данные, необходи-
мые для решения этой задачи, могут быть найдены лишь приближенно
и в отдельных случаях с большой погрешностью. Такая приблизительная
оценка исходных данных и, в частности коэффициентов теплоотдачи а
(от турбулентного газового потока к стенке газопровода) и пн (от его
стенки в атмосферу), вызвана отсутствием динамических зависимостей.
Величины этих коэффициентов вычисляются с помощью статистических
формул, в которых в качестве аргументов выступают критериальные за-
висимости— числа Re, Nu, St, Рг, Gr и др.
Статистические формулы Nu(Re, Pr), Nu(Gr, Рг) и St (Re, Рг), слу-
жащие для определения а и ан, найдены для вполне конкретных условий.
Поэтому их нельзя считать универсальными, т. е. точными для любого
частного случая, характеризуемого технологическим качеством изготов-
ления газопровода, его формой поперечного сечения, теплофизическими
свойствами порохового газа и материала газопровода, нестационарно-
стью процесса течения и т. п.
Пренебрежение осевой теплопроводностью вдоль металлического
газопровода (в отличие от газового потока) вносит заметную погреш-
ность в температурное состояние его стенки. Сложная функциональная
зависимость коэффициента теплоотдачи а приводит, в конечном итоге, к
итерационному методу решения задачи.
Перечисленное выше не только указывает на сложность и громозд-
кость решения, но и на относительно низкую точность решения постав-
ленной задачи вообще. Лишь в отдельных случаях ее упрощенное реше-
ние, при удачно выбранной физической модели и наличии коэффициен-
тов согласования с опытом, может дать вполне приемлемый для
инженерной практики результат.
Теллофизические характеристики стационарного
турбулентного потока и материала газопровода
Для вычисления стационарного теплового потока от газа к стенке
резервуара пользуются формулой Ньютона
<? = а(Т-Тст). (5.77)
Величина коэффициента а является полной или эффективной, так
как она учитывает оба процесса теплообмена — конвективный ак и лу-
чеиспусканием (хл. Для горячего порохового газа имеет место соотноше-
ние «л = (0,154-0,2) ак. Часто для ориентировочной оценки принимают
1,15ак [6].
Коэффициент конвективной теплоотдачи от потока, газа к поверхнос-
ти канала газопровода обычно вычисляют по формуле
a, = Stc„YrTL или a.. = Nu. (5.78)
n . Р > 1 1 К о К/
Для коэффициента теплоотдачи от наружной поверхности газопро-
вода в атмосферу используют уравнение [6]
a = IS|Ucba..4_4 9—---^10-8,
da ' ' Т-Тл
где Ат.а — коэффициент теплопроводности атмосферы;
8с — степень черноты материала газопровода;
ег — степень черноты газов.
Это выражение при значениях ес = 0,8 и Ег=0,3 [6] приводится к
виду:
1
/ т т X 4 о 8Г4 __О ЗГ4
а— 1,3• 10“3 [ +1,36 10-11 —- -ст>н - . (5.79)
В первом случае коэффициент а имеет размерность ккал/(м2-ч« К),
во втором — ккал/(м2*с*К).
Для величины критерия Прандтля Рг = 0,74 (продукты сгорания бал-
листитного топлива) критерий Нуссельта Nu и число Стантона St соот-
ветственно вычисляются по формулам:
— при вынужденной конвекции
Nu = 0,02Re0’3;
St —0,027Re-°*2;
— при свободной конвекции
Nuc=0,5 (Сг)0,25,
где Re = ——число Рейнольдса;
„ А Та \ • Г А
Gr —----- 1-------) — критерии Грасгофа.
'*2 \ ^ст.н/
В приведенных выше формулах приняты обозначения:
dR и 2гк — соответственно наружный и внутренний диа-
метры газопровода, м;
7"ст.н — температура наружной стенки, К;
Га —температура воздуха, К;
Yr и — соответственно удельный вес и скорость пото-
ка газа в канале газопровода, кг/м3 и м/с;
ср— теплоемкость газа при постоянном давлении
ккал/кгс- К;
v = 1,6-10-5 м2/с— кинетическая вязкость атмосферы при Та =
= 300 К;
£ = 9,81 м/с —ускорение свободного падения.
Учитывая, что в случае стационарного потока газа для газопровода
с постоянной площадью поперечного сечения угОг = const, выражения для
определения числа Рейнольдса Re и a (St) приводятся к виду:
(5.80)
где р — коэффициент динамической вязкости газа, кгс • с/м2;
G — расход газа через газопровод, кг/с.
Для продуктов сгорания пороха при 7^2500 К коэффициент р~
^7-10~6 кгс-с/м2. При других значениях Т коэффициент ц приближенно
можно оценить по формуле
[1 = 7-IO-8 X.
2500
Теплоемкость для порохового газа ср и газовая постоянная 7? свя-
заны соотношением
ср~— =0,30 = 0,37 ккал/(кгс-К),
k — 1
где *=1,25 (при 1000ЛГ < Г < 25007Q и *=1,33 (при Г<1000К);
* = (30-е-34) кгс-м/(кгс-К). Л =427 кгс-м/ккал.
Коэффициент теплопроводности газа 7т.г приближенно можно оце-
нить по формуле Эйкена
\ Л /
Отсюда
лт.г^4,6ц для 7^2500 К; \.г~3,9[л для Т > 1000К.
Здесь Лт.г — в ккал/ (м»с • К) -
Полагая для этих случаев ц = 7• 10-6 кгс-с/м2 и ц = 2,8-10_6 кгс-с/м2,
соответственно получим
лт.г — 32-10“6 ккал/(м»с*К) и XT.r= 11 10_6 ккал/(м-с-К).
Коэффициент Ат.г также можно вычислять через число Пекле
(Pe = RePr) или Прандтля Рг. Из очевидного равенства а = Nu
Т г
к
——следует зависимость
Принимая во
= 0,023Re-°-2Pr-°>6(—
\ Nu
внимание,
1
2 St с»
-------— Q.
л Nu rK
Nu = 0,023Re°>8Pr°>4
ЧТО
Ре КеРг ’
------- , получим
лгк£Г р. }
(5.81)
st=
т. г
И
2 Gcp
। _____________и
ТфГ л rKRePr
Здесь = ккал - м/(кгс-с2’К) при 1000 К <^Т
<;2500К и /Ст = 4 ккал-м/(кгс-с2-К) при Т <Z 1000АЗ
Полученные значения для Хт.г практически одинаковы. Однако опре-
деление коэффициента теплопроводности через критерий Прандтля [см.
формулу (5.82)] предпочтительнее, так как в этом случае функции
a (St) и a(Nu) дадут одинаковый результат.
Для газопровода, изготовленного из стали с пассивным термоизо-
ляционным покрытием на основе асбеста, ориентировочные значения теп-
лофизических параметров приведены в табл. 5.3.
Таблица 5.3
Материал с ккал/(кг-К) 7 кг/ма лт-1(В ккал.'М-с-К и
Сталь 0,16 7850 100 7,96-10”б
Асбестовая изоляция 0,25 580 0,54 3,72-10-7
Следует иметь в виду, что приведенные значения заметно зависят
от температуры. С повышением температуры теплопроводность металла,
как правило, уменьшается, а газа увеличивается.
Процесс стационарной теплопередачи
и термическое сопротивление газопровода 1
В общем случае задача нестационарного нагрева (или охлаждения)
газопровода является весьма сложной, а ее решение громоздким и
малопригодным для прикладных целей.
1 См. работы [4, 6].
Практически приемлемое для инженерной практики решение этой
задачи основывается на предположении существования регулярного ре-
жима нагрева \ когда локальный закон изменения температуры во всех
точках нагреваемой поверхности можно считать одинаковым и сдвину-
тым лишь по длине газопровода на время движения потока газа до рас-
сматриваемого сечения. Это время запаздывания теплового воздействия
приводит к неравномерному нагреву газопровода по его длине. Темпера-
тура поверхности газопровода в этом случае убывает в направлении
движения потока. В целях облегчения решения задачи предположим, что
осевая теплопроводность пренебрежимо мала по сравнению с радиаль-
Рис. 5.30: Схема распростране-
ния теплового потока в ради-
альном направлении
Рис. 5.31. Температурное поле в попереч-
ном сечении газопровода
ной. Для тонкостенного или относительно длинного газопровода это до-
пущение является достаточно правдоподобным почти в течение всего
периода нестационарного прогрева газопровода.
В процессе нагревания газопровода температура его стенки непре-
рывно растет, стремясь к своему предельному значению. В результате
этого с течением времени процесс теплоотдачи становится стационар-
ным, т. е. наступает тепловое равновесие, характеризуемое равенством
тепловых потоков q от газа к стенке канала и от внешней стенки газо-
провода в окружающую среду, например, в атмосферу.
При стационарном режиме теплоотдачи температура меняется толь-
ко в радиальном направлении и остается постоянной вдоль концентри-
ческой поверхности относительно канала газопровода. На рис. 5.30 пред-
ставлена схема изменения температуры в поперечном сечении газопро-
вода (б — толщина пограничного слоя).
Температурное состояние стенки газопровода при стационарном ре-
жиме теплопередачи (dq/dr='O) определяется из очевидного условия
qi = q2 = qi = const (рис. 5.31), представляющего собой равенство тепло-
вых потоков в фиксированном сечении газопровода единичной длины.
Здесь 44 = 2ла (ТОх — Тст) rv — поток тепла от газа в стенку;
о ч f dT \
= 2лгкл f । —поток тепла через стенку газопровода к
его наружной поверхности;
1 Регулярным режимом нагревания или охлаждения тел называется такой режим,
при котором относительное изменение температур как в пространстве, так и во времени
не зависит от начального распределения температур в теле.
— —поток тепла от наружной поверхности
газопровода в окружающую среду;
7 — 2лгка2 (,ГОх — Га)—поток тепла от газа в окружающую сре-
ду.
В этих соотношениях обозначено:
а —коэффициент теплоотдачи от газового по-
тока к поверхности стенки с учетом лу-
чеиспускания, ккал/(м2-с-К);
ан — то же от наружной стенки в окружаю-
щую среду, ккал/(м2-с-К);
Хт—коэффициент теплопроводности материа-
ла стенки, ккал/(м-с-К);
2гк и 2гн— соответственно внутренний и наружный
диаметры газопровода, м;
Гст, У'ст.н и Та — соответственно температуры внутренней
поверхности стенки, наружной и окру-
жающей среды, К;
. — полная температура потока в том же се-
чении газопровода, в котором взяты Тст
и Тст.Н) К;
— коэффициент теплопередачи, ккал/ (м2 X
Хс-К).
Для температурного градиента на внутренней поверхности цилинд-
рического канала в теории теплопередачи используется выражение [4, 6}
/ \ ?Ут ?УТ.Н
Условие стационарности теплопередачи позволяет написать выра-
жение термического сопротивления газопровода
т
, , rK In —
L—}I rK I rK
Ct СЕцГ
Отсюда следует формула для коэффициента теплопередачи
as =----------------------(as«<a). (5.83)
_L t ln Zk , 2k _L
Зная температуры газа на внутренней поверхности стенки Тст и
внешней среды 7\, можно найти температуру на любой концентрической
поверхности по формулам (см. рис. 5.31):
— на внутренней поверхности стенки
— ца наружной поверхности стенки
(5.84)
Количество тепла, аккумулированного стенкой газопровода, еди-
ничной длины можно подсчитать по формуле
Qл(гк + г„)ДусАт(
ст.н
где Д = гн ——толщина стенки газопровода;
уст и сст— соответственно удельный вес и теплоемкость материа-
ла газопровода;
Гст0 —1 начальная температура стенки газопровода.
Если поверхность канала газопровода покрыта слоем пассивной
термоизоляции, имеющей толщину Лиз и теплопроводность то тем-
пературное состояние такого газопровода определяется уравнениями:
— на внутренней поверхности термоизоляции
а
— на внешней поверхности термоизоляции
— на наружной поверхности газопровода
ТТ.н=TQX - (ТОх - Га) a JT + -^ In (1 + рМп
ЛиЭ \ Тк / тк т лиз
где
Следует подчеркнуть, что при заданной температуре потока тепло-
физические параметры материала газопровода (Хст, лиз) имеют стабиль-
ные значения. Величины же коэффициентов а и ан представляют собою
функцию многих независимых переменных, в том числе и теплопровод-
ности газа. В теории теплообмена величину а а называют коэффициен-
том теплопередачи через многослойную стенку, а ее обратное значение
«в-1 — термическим сопротивлением этой стенки.
Температурное состояние стенки газопровода
при регулярном режиме его нагрева
При заполнении газопровода газом температура стенки не является
величиной постоянной. Она меняется во времени по длине газопровода.
Ее увеличение продолжается и после заполнения газопровода до тех
пор, пока процесс теплоотдачи не станет стационарным.
До этого режима, т. е. в процессе прогрева газопровода, закон из-
менения температуры в любом фиксированном сечении стенки будем
считать регулярным и подчиняющемся уравнениям температурного со-
стояния для плоской пластины при двустороннем ее нагреве с одинако-
вой интенсивностью [4], [6]:
т_. т 2В1 —ф2Ро
7 ОХ 7 СТ X ______________ е 1г 0 ,
Tqx — ^сто Bi 4- Bi2 + Ф|
^Ох Гх ср 2Bi Bi „ф2р0
-----------=--------------------е 1
?0х — Т'оср Bi + Bi2 4- Ф? Ф?
1 1
(5.87)
где Тстх\ ТпХ—соответственно текущие значения температур на
внутренней и внешней поверхностях стенки в се-
чении с координатой х\
ТХс?—-среднее значение температуры по толщине стен-
ки в том же сечении;
70ср = Гн0лг=Гст0 — начальная температура стенки;
Bi = ---критерий Био;
Хст
р0=_£ст^---критерий Фурье;
Д 2
7Д-— текущее значение полной температуры в сечении
с координатой х\
асг = ”----коэффициент температуропроводности материа-
лист
ла стенки газопровода;
Ф1— первый корень трансцендентного уравнения
Ф tg Ф = ВЙ
Нетрудно проверить, что функция Oi(Bi) вполне удовлетворитель-
но аппроксимируется зависимостью
j
1 + п Bi
(5.88)
где
/2 = 0,365 для 0 В1Д 7;
п = 0,4 для 7 Bi <; оо.
Точные значения Ф12 приведены в книгах [4, 6].
Для порохового газа при значениях Рг=О,74 и числе Мх<1 можно
допустить
Ох 1 ООх 1 х
где Г00х — температура восстановления;
Тх — местная статическая температура газа в ядре потока, т. е.
вне зоны пограничного слоя 6 (см. рис. 5.31);
Мх — число 1VL в сечении газового потока с координатой х.
Таким образом, приближенный закон изменения местной темпера-
туры Тстх во времени описывается уравнением
Tet х = тах - (Т„х- Тет 0) (5.89)
о а 1
где & =-----------------показатель интенсивности
С?сгД 1 + п Bi
зопровода;
нагрева стенки га-
В действительности величина то» может значительно отличаться от
единицы.
Отклонение величины тОх от единицы противоречит физическому
смыслу процесса нагревания стенки, так как начальное условие (£ = 0;
Тстх = ТСто) не выполняется:
СТЛ— -Ли (Tqx Д.г о) тОх )> Т ст 0.
Точное же выражение для тох [15, 20]
2 sin Ф cos Ф, — ф2Ро
V V V
---------------------е
sin Ф., cos Ф7 Н- Фу
v = l
при этом условии обращается в единицу.
2 sin cos Фч
Здесь соотношение------------- после совместного решения вы-'
sin cos Ф7 + Фу
ражения для гох с уравнением Ф, tg®v = Bi приводится к виду
2 Bi
В1-рВ12 + Ф^
Корректирование члена тОл.е~'^ произведем приближенно, удовлет-
ворив условиям:
/=0, то е“^=1; / = тд е_р1/ = 0; t= \ с, =
Отсюда следует, что
Bi +В12 + Ф?
£=(₽! — 1птОж); -1птОх=1п----—------. (5.89а)
2 Bi
Поэтому для 7Стх имеем формулу
Дтх=Г0.г-(Г0^-7’ст0)е-^. (5.90)
На основании этих же рассуждений для средней температуры стен-
ки получим также приближенные формулы:
ТХсР = ТОх-(ТОх-Тста)е-^, (5.91)
где тлср=гОх—У или гХср=гОх(1 + пВ1);
Ф1
₽2=i(₽i—1птХСр)—показатель интенсивности нарастания средней тем-
пературы.
Текущее количество тепла, аккумулируемого стенкой, газопровода
единичной длины составляет
Q/ ст ^Тст 'х ср Лт о) ЗЛГК Д.
Для температуры наружной стенки газопровода Тхи ст формулы бу-
дут те же самые— (5.87) и (5.88), только вместо Тох и р или тхср и р2
следует подставить
Все приведенные здесь формулы для Т^тх, и ТХСр являются при-
ближенными и дают практически приемлемый результат лишь в области
малых чисел Био (Bi^2).
Стационарный процесс теплообмена
при регулярном режиме нагрева стенок газопровода
Для газопровода с ограниченной толщиной стенки с течением неко-
торого времени наступает стационарный режим теплообмена с окру-
жающей средой —Q; ’ Величина этого времени со-
гласно уравнениям (5.84), (5.85), (5.90) соответственно определяется
зависимостями:
— для внутренней поверхности газопровода
ЛТх=7’ох-(ГОх-ГстО)е-?<1~ =70.с-(Г0л-Га) (5.92,
d
— для наружной поверхности газопровода
н.ст х
=тОх-(тОх-
а2
аз
(5.93)
Отсюда следует:
где
^Х1оо — In Tqk — Тох- Тст С -7а a as 'I
Лзоа — In Зз Лх— ТОх- Л СТ -7а аз as
1 1 I Гк 1 Гн 1 1 1
—- =------1---In — ИЛИ =-----------------------
а3 а Хст гк а3 аБ ан
(5.94)
Для газопровода с относительно тонкой стенкой для стационарного
режима можно принять £100=^300- Тогда
In a3as 1
In ааД1
При ТСто = Та формулы приобретают вид
Лсо^Л1*1—5 ^oc = -^-ln— .
3 a2j ?3 as
(5.95)
Для t^tloo И температурное состояние стенки газопровода бу-
дет сохраняться неизменным. Поэтому температуры газопровода и пото-
ка следует рассчитывать внутри интервала времени т. е. в те-
чение нестационарного процесса.
Полная температура потока при течении
по газопроводу и температурное состояние его стенки
Поток газа, нагревая газопровод, охлаждается. Изменение полной
температуры потока может быть найдено в результате совместного ре-
шения уравнений закона сохранения энергии газового потока и темпера-
турного состояния стенки газопровода:
q: = (8u>zOj.)J; (5.96)
Тс„=Т0х-(Т0х-Т„0)е-9‘, (5.97)
где iex=cpTQx— текущее значение полной энтальпии потока в фиксиро-
ванном сечении с координатой х\
уг8Ц7 — фиксированный вес газа в объеме 6IF;
5Ц7 = — объем газа при весе дсо;
Вл — текущая протяженность элементарного объема б IF..
При решении дифференциального уравнения сохранения энергии га-
зового потока следует иметь в виду:
— закон сохранения вещества при отсутствии массообмена с окру-
жающей средой
— (8<о)= 0; (5.98)
dt
— уравнение состояния идеального газа
pW=tuRT; (5.99)
— скорость отвода тепла от потока газа в стенку газопровода
Q;=-a(70,-7CT^85;
(5.100)
где 6F = 2лгк6х — поверхность охлаждения объема 6W.
Поверхность 6F и объем 6W7 связаны геометрическим соотношением
2
Для коэффициента теплоотдачи а и теплопроводности потока Хт.г
справедливы зависимости вида (5.78) и (5.82) h
a = Stc уг^г; a~Nu ;
р 2гк
Х1Г=— — g—fx; Рг^0,74.
т,г л k— 1 ЛРг г
Определим полную температуру потока для случая стационарного
режима теплопередачи.
Изменение полной температуры при Т^Х = Т^ =
= const.
1. Cl== St СрУг^Г"
С учетом выражений (5.98), (5.100) исходное уравнение сохране-
ния энергии потока (5.96) приводится к виду
-Stc^T^-T^F^c^^W. (5.101)
и dt
Подставляя вместо SF и 6U7 их выражения,
после сокращения на
6x^=0 получим
2 ,, dT^x
----StvTdt=—^—-2—
Т'од; Гст
Интегрирование этого уравнения приводит к зависимости В. Г. Шу-
хова:
То.-Тст + (ТОО-Тст)е-^ (5.102)
2
где Ь~— St — показатель интенсивности падения полной температуры
Г к
потока по длине газопровода;
Тоо — полная температура потока на входе в газопровод.
Найденное уравнение для характеризует изменение полной тем-
пературы газа в фиксированном сечении потока по мере его движения
по каналу газопровода. При х = / имеем полную температуру потока на
выходе из газопровода
Т0/=Тс. + (Т00-Тст)е-Ч (5.103)
Таким образом при стационарном теплообмене температура ТОх по-
тока по длине газопровода (/^х^0) ограничена пределами Тог^ТОх^
Too.
2. a=-^LNu.
2rK
В этом случае исходное уравнение записывается так
-^Nu(r0;-rCT)=Cpyr^. (5.104)
Разделив переменные и интегрируя в пределах от 0 до t и от Too до
То. при среднем значении коэффициента температуропроводности ат.г,
получим
^=*Ът+(Лю-Ът)е-Ч (5.105)
где Ьг = ~- Nu — показатель интенсивности падения полной температу-
гк ры во времени в фиксированном сечении при движе-
нии потока по каналу газопровода;
1 С учетом теплообмена лучеиспусканием величину коэффициента а следует уве-
личить на 15—20%.
г = ----коэффициент температуропроводности газового по-
с ph
тока.
Для его вычисления ат.г можно рекомендовать приближенную зави-
симость
v 7,25
т,г Рг р
где ат<г — коэффициент температуропроводности, м2/с;
р— статическое давление потока в канале газопровода,
кгс/см2;
Рг» 0,74 — число Прандтля для порохового газа;
5 35
у = —----кинематическая вязкость порохового газа, м2/с [6].
Р
Параметры хи/ связаны уравнением
(5.106)
Функции ух и vx будут найдены ниже [см. формулы (5.119), (5.120)].
Приближенная связь между /их следует из равенства bx = b]t:
Изменение полной температуры потока при
у = —ст — const
Тъх
Условие vt —const означает, что в любом сечении газопровода тем-
пература стенки прямо пропорциональна полной температуре потока:
7стх =Vt7ox.
Интегрирование исходного уравнения (5.95) при
a (St); v1==(l — vT) = const; — Stiyrf/ = —— -
f к
приводит к простой зависимости, характеризующей падение полной тем-
пературы потока вдоль газопровода:
= (5.107)
где Ь2 = ^ХЬ — St.
Гк
В случае, когда a(Nu), получаем уравнение изменения во времени
полной температуры потока при его движении по каналу газопровода:
TQx=T^~b^ (5.108)
где 63=^^.
Изменение полной температуры потока при регу-
лярном режиме газопровода
При регулярном режиме нагрева поверхности канала газопровода
местные значения полной температуры потока TQx и стенки газопровода
Тст х связаны зависимостью, получаемой из выражения (5.90):
Т0х^Тстх^(Т0х-Тстй)^‘.
Дополнительную функциональную связь между искомыми величина-
ми TQx и 7Стх устанавливает уравнение закона сохранения энергии
(5.104), записываемые в следующем виде:
- a (Nu) (ТОх - Тсм) = срЪ
' dt
или
(Т’ох-Лгх) dt=dTox. (5.109)
Прежде чем совместно решить оба эти уравнения, сделаем следую-
щие пояснения о периоде нестационарного (квазистационарного) тепло-
обмена между газом и стенками газопровода.
Период нестационарного теплообмена. Первая пор-
ция газа, поступившая в холодный газопровод, будет испытывать наи-
больший перепад температуры ТОх = ТстО, т. е. будет подвержена наи-
большему охлаждению по сравнению с последующими порциями газа.
Так как TCT0=,const, то полную температуру первой порции газа в
любом сечении газопровода можно найти из уравнений вида (5.102) и
(5.105):
—bit
—bX'
1 Qx 7 ctO l 100 J cr/v 1 Ox * cr(J4\J 00 * стО/4'
Последующие порции газа будут поступать в уже подогретый газо-
провод и иметь меньший перепад температур, чем предшествующие. При
этом температура стенки Тстх непрерывно меняется по длине газопрово-
да, убывая по направлению движения потока и возрастая с течением
времени в каждом сечении газопровода - стх-<^0; —> О .
Согласно уравнению температурного состояния стенки газопровода
(5.90), если пренебречь температуропроводностью вдоль газопровода, то
перепад температур в любом фиксированном сечении газопровода со-
ставит
1 0х у стх I7 Ох 1 ctOJ с л 1 Ю)
где tx— время движения потока от начала газопровода до фиксиро-
ванного сечения с координатой х\
t — время теплового ^воздействия потока на стенку канала по
месту входного сечения газопровода;
t—tx — время теплового воздействия потока на стенку по месту фик-
сированного сечения газопровода.
Подставляя текущий перепад температур по месту фиксированного
сечения (5.110) в уравнении сохранения энергии (5.109), получим эле-
ментарное приращение полной температуры потока в этом сечении:
- b. (TQx - тст0) dix=dT.x.
Для того чтобы найти полную температуру потока в фиксирован-
ном сечении канала газопровода с учетом предшествующего процесса
охлаждения потока до этого сечения, необходимо просуммировать эле-
ментарные приращения полной температуры dT$x в каждом сечении га-
зопровода на отрезке его длины от нуля до х:
6
0х
С
J Т()х Т'стО
Too
После интегрирования получим закон изменения полной температу-
ры потока по длине газопровода:
1 —
Подставляя выражение (5.111) в уравнение (5.110), найдем изме-
нение температуры поверхности канала газопровода в фиксированном се-
чении Тст х.
Исследуем найденное уравнение. При /х=0 имеем полную темпера-
туру потока на входе в газопровод TGx = T0Q. Полагая t=tx, получим наи-
меньшее значение полной температуры потока в фиксированном сечении
канала газопровода при его заполнении
^ = Лто + (Лм-Лго)е-вл
где —
При р = 0, т. е. в случае, когда температура стенки газопровода ос-
тается неизменной (Тстх = Тсто = const) найденное выражение TQx об-
ращается в формулу (5.105), так как при
*0 значение linifri ------= Вг1х.
По физическому смыслу Тох является температурой первой порции
газа в фиксированном сечении газопровода. На выходе из газопровода
ее температура достигает наименьшей возможной величины
=Tot= Т„а + (Тю - Гсг0) е-^( (5.112)
где 23»=-——(1 — е~₽<г).
0
Так как Bi^Bx^Q, то полная температура первой порции газа Tqx
при ее движении по газопроводу ограничена пределами Toi^TGx^T()O.
Иными словами величина Ты является начальной температурой потока
на выходе из газопровода.
Период выхода газопровода на стационарный
режим теплообмена. Температура последующих за первой пор-
цией газа будет монотонно возрастать вследствие непрерывного прогре-
ва стенки газопровода предшествующими порциями газа [см. выраже-
ние (5.111)]:
^г=Л1о+(7'оо-Л1о)е~^1 (5.113)
где
Неравенство означает, что отсчет времени ведется от начала
заполнения газопровода, т. е. от момента входа в газопровод первой пор-
ции газа. Если отсчет времени производить, от начала заполнения резер-
вуара, подсоединенного к газопроводу, то для Тог получим формулу
Лто + (^0/ - r„o) exp Вt (1 - е~Ч (5.114)
где /р=/ — /z.
При этом температура внутренней поверхности стенки на выходе из
газопровода ‘(x = Z) возрастает согласно уравнениям (5.90) (5.110) и при
1 а
некотором значении времени t=— In-------[см. формулу (5.95)] дости-
₽ ав
гает предельной величины
Лт(х-г)о0=Го00 -(Го» -Та)— , (5.115)
а
где
Л>оо=Гст0+(Г00-ГсЛ)е-в1~ (5.116)
’— установившаяся полная температура потока на выходе из газо-
провода.
В выражениях (5.115) и (5.116):
51=0=-^— (1-е-^)=5г
р (X
(5.117)
р — показатель интенсивности стационарного теплообмена газово-
го потока с окружающей средой через стенки газопровода;
«jj — коэффициент теплопередачи газопровода;
а — коэффициент теплоотдачи от потока к поверхности канала га-
зопровода.
Начальная температура стенки 7сто принята равной атмосферной
as
Та- Так как 0<^----<Д, то полная температура потока и стенки газо-
провода на его выходе будет ограничена пределами:
70Z <4 70/70оо
Т << т
* ст00 \ 1 0°°*
Для длинного газопровода с относительно тонкими стенками, когда
распространением тепла в осевом направлении можно пренебречь, пре-
дельные значения полной температуры потока 70х£ и температуры стенки
Тстх по длине такого газопровода соответственно определяются соотно-
шениями:
T’qoo < 7" оо;
т < 1 стО "'Г << * стлг°° 7*000;
1 стх°° 7ст(х=0)оо,
<х«
ТСт(х=0)оо = Тста 4" (г00 — тст0) —
a
где
Здесь функции TQxt и 7СТх выражаются очевидными уравнениями:
(5.118)
Они представляют собою изменение полной температуры потока и тем-
пературы поверхности канала газопровода по его длине при стационар-
ном режиме теплообмена.
Показатель интенсивности стационарного теплообмена Bxt0O =
61 aS /1 — 0/ i >
= —— —-—(1—е -v зависит только от времени движения потока tx
Р a
до фиксированного сечения газопровода. Это время находится в преде-
лах
Результаты расчетов параметров ГОх, 70z, ТОхь 7СТХ, 70оо и Тст<х>
представлены графиками на рис. 5.32, где обозначено:
^>^ + ^оо — область стационарного режима теплообмена;
оо — область нестационарного режима теплообмена;
абв — область изменения полной температуры потока при
нестационарном режиме, т. е. за время 6+^;
— закон изменения полной температуры первой порции
потока по длине газопровода при стационарном режи-
ме теплообмена;
аб—закон изменения полной температуры первой порции
потока по длине холодного газопровода;
бв — закон изменения полной температуры потока на выхо-
де из газопровода при нестационарном режиме;
б'в' — закон изменения температуры стенки газопровода в
его выходном сечении;
•— время движения первой порции потока по холодному
газопроводу (Гстх = Тст0);
//оо — то же при стационарном режиме теплообмена (ТСГх =
— Тсто©);
t~tx—временная связь между функциями 7Ст/ и Тог или
сдвиг их аргументов;
оаг— изменение температуры стенки на входе в газопровод.
Рис. 5.32. Графики изменения полной температуры горя-
чего потока Тot и стенки холодного газопровода Т(ст
При расчетах также принято, что В действительности по
мере прогрева газопровода (Тстж>Тст0) охлаждение потока в нем сни-
жается (Го/>7о/), а вследствие этого время движения потока по газо-
проводу ti уменьшается (кривая б в" на рис. 5.32). Ниже будет найдена
зависимость /ДТ0/).
Статические параметры состояния потока на вы-
ходе из газопровода. Для определения параметров состояния
потока /?(%), у (я), Т(х) в канале газопровода наряду с уравнениями
полной температуры Tqx = T00{x) и состояния р(х)!у (х) =7?Т(х) не
достает еще двух соотношений. Такими добавочными уравнениями для
стационарного потока газа (—— = 0; —— — - будут:
\ dt дх dx /
— уравнение сохранения полной реакции потока R
&
Ga
—0 или /?л.=/?0 = const;
— уравнение сплошности потока
dt
(М=0 или G=F хухъх^Рйчйъ0= const;
* / k
Здесь ах = 1/ 2g-—- RTGx —критическая скорость потока в фикси-
рованном сечении с координатой х;
1 VX лл
‘'"я — '—;-коэффициент скорости потока в этом
ах
сечении;
Fk= лгк= const—площадь поперечного сечения канала
газопровода;
Уо и г/0 — соответственно удельный вес и ско-
рость газа на входе в газопровод.
Совместное решение двух последних уравнений приводит к выраже-
нию, связывающему между собою параметры состояния потока уу и Tqx:
1о_у~2 — 10 I а*х — О,
lx ) *о 7х kg
Отсюда относительные изменения плотности потока и его скорости вдоль
канала газопровода в зависимости от полной температуры TGx соответ-
ственно будут равны
X is I 1/ if- л*2*
Aq — А о i г А о dx
где
Vx \ __ If ! 1 f 1ft
Aq — л о т |/ Ao dx ,
*0
Q-X —do ———, dx =----— ,
Too a*
Ao=0>5(\)-|-^o dx =-—- gRTox-
, “h 1
*
—л gKToo
Здесь ло=^/ - gKi qo критическая скорость потока на вхо-
де в газопровод (х = 0). Оба решения имеют физический смысл: знак
плюс отвечает сверхзвуковому течению (%0>1), а знак минус — дозвуко-
вому (Zo<l).
Для инженерных задач при проектировании ракетных и ствольных
систем представляет практический интерес лишь дозвуковое течение га-
за в газопроводах. Поэтому и рассмотрим решение задачи применитель-
но к дозвуковому режиму течения.
В этом случае имеем:
или
vx7_
= Х0аГ2(/С0 + У/Со-аТ) ; (5.119)
(5.120)
Для статических температуры Тх и давления рх потока:
(5.121)
Эти уравнения справедливы для любого сечения газопровода в те-
чение всего времени его действия и являются функцией только полной
температуры потока по месту фиксированного сечения. Найденные вы-
ше формулы для этой температуры (5.111), (5.112) и (5.113) непосред-
ственно использовать нельзя, так как в них входит время движения по-
тока по газопроводу.
При практических расчетах величины можно пользоваться при-
ближенной зависимостью, справедливой для параболического закона
изменения функции v (х):
, I .3
,
где = .
Полная температура потока при регулярном
режиме нагревания газопровода
одновременно по всей его длине (дТ^дх = 0)
Такое изменение температуры Тст можно ожидать в коротком газо-
проводе с относительно тонкой стенкой. Время движения потока по та-
кому газопроводу хотя и весьма небольшое, но для определения измене-
ния полной температуры потока его величину необходимо знать. При
расчете нагрева стенки газопровода величиной этого времени можно
пренебречь.
Искомый результат определяется совместным решением двух диф-
ференциальных уравнений, являющихся следствием закона сохранения
энергии:
— уравнения нагревания всей массы газопровода при отсутствии теп-
лообмена с окружающей его средой (например, атмосферой)
Vcyc.tdTcr=а (ТОх - Тет) Fdt\ (5.122)
•—уравнение охлаждения потока при движении его по газопроводу
----2-a(7’ftr-r„)^=CpYrflrT0x. (5.123)
Г к
В этих уравнениях t — время воздействия потока на газопровод; tx —
время движения фиксированного слоя потока по газопроводу.
Найдем локальную связь между температурами Tqx и Гст, т. е. при
условии /= tx. В этом случае на основе совместного решения исходных
уравнений (5.122) и (5.123) можно записать
dT^=-x^T.x, (5.124)
ГД₽ r0=
<7>Tr F +
---------= const;
Нет V
1/ = л(Гн —Гк)/—объем материала газопровода;
F = 2nrKl — поверхность канала газопровода;
Д = гн — гк —толщина стенки газопровода.
Величина параметра то, характеризующего температурное равнове-
сие между стенкой канала и потоком газа, не зависит от длины газопро-
вода I.
После интегрирования зависимости (5.124) получим уравнение свя-
зи между температурами потока и стенки за время tx:
Т ст Т CTtH — т0 (Т00 ТОл
(5.125)
С другой стороны, для определения Т$х имеем уравнение (5.123), в
котором примем a = Nu—-—Тогда
2гк
Nil Хт г r, zZT'rjr
-------- -г dt = ——
rj? ср1г ^Ол Тст
л,
Учитывая уравнение (5.125), получим
bxdt =
dT$x
(1 + Tq) Tqx TqTqo Дет. н
После интегрирования в пределах от 0 до tx и от ТОо до Т$х приходим
к формуле, характеризующей изменение полной температуры потока за
время его пребывания в газопроводе:
№о+Тт.н+(^о - Л™) е~*‘Ч (5.126)
i т то
где
^=(1+t0)^=(1-H0)Nu^£
(5.127)
Температура Тст.н является функцией полного времени воздействия
потока на стенку газопровода и может быть найдена из уравнения
(5.122):
V cyCJdTCTia=a(TQx — 7Vr.Hj Fdt,
которое с учетом формулы (5.126) приводится к виду
Усус^Тст,я=(1Р ---------(Гоо - T„^dt.
1 Н- т0
Разделяя переменные и интегрируя в пределах от Дето до Тст.н и от
tx до t, получим
где
^.«=7’оо-(7'о0-ГС10)е-ло
(5.128)
t — tx
^Пст
(t0-pe ъ*х).
(5.129)
/W=-^
1 +'
При этом температура стенки с учетом ее нагрева за время tx будет
определяться выражениям (5.125). Полагая в уравнениях (5.126) и
(5.128) tx~ti, с помощью зависимости (5.125) получим выражения для
текущих температур потока TQt и стенки газопровода TCnt для любого
момента времени t>tr.
ТО(=ТОх=Таа-----------------^00-Гст0)е-/(<- V ; (5.130)
1 + Tg
ГСТ,= ГС.,=ГОО- !-±2g-------, (5.131)
1 + ^0
где
ti—полное время пребывания фиксированного слоя потока в газо-
проводе.
Вследствие относительно небольшого охлаждения потока в корот-
ком газопроводе величину ц допустимо вычислять по формуле
Если в формуле для TCTt величиной ti пренебречь, то она приводится к
виду
Т ct/=^ оо — (Т оо 7\то) е~^}
где й0 =---— .
Нс#
Допущение, что ^=0 (е~1), равносильно условию TGt = ТОх= TOq,
Выше было показано (5.115), что стационарный режим нагрева га-
зопровода характеризуется уравнением, которое в этом случае может
быть записано так:
Т стоо — Гоо (Тоо
= const.
Приравнивая 7Ст/ = Гстсо, находим время установления в газопрово-
де стационарного режима теплового обмена с окружающей средой:
__1 T'oQ ^ст.н а
“ Зо Лю- Л
(5.132)
Охлаждение газа в замкнутом резервуаре
с относительно тонкими стенками
Решение этой задачи, как и предыдущей, описывается той же исход-
ной системой уравнений (5.122), (5.123), записанных лишь для случая,
когда время продолжительности теплового воздействия газа на стенки
резервуара и время пребывания газа в нем равны между собою, т. е.
Vc^dTc ,r- G (Го/ - ГСт) Fdt- (5.133)
- «(TGt - Гст) FdL (5.134)
Приравнивая левые части уравнений, находим дифференциальную
связь между температурами стенки и газа
ст
Отсюда после интегрирования имеем
Лт-Лто-^ДГо»^), (5.135)
гдето1 = -~----коэффициент интенсивности нагрева оболочки резер-
V Пет
вуара;
V — объем массы оболочки резервуара;
W — объем газа в резервуаре, т. с. его полости;
7%— начальная температура газа (/ = 0).
На основании формул (5.134), (5.135), уравнение процесса охлаж-
дения газа приводится к виду
*
_ с dt= г.
* * (1 “Ь 41) T.f 4Л) ^стО
о т0
Интегрируя это уравнение, получим закон падения температуры га-
за в резервуаре:
г----[t01r0+7'сто+(Т’о - W е->Н- (5.136)
При этом температура стенки согласно зависимости (5.135) увеличи-
вается
Гст=7 стоН-(7" о — Д-Го) —~ (5.137)
1 + 41
Для практических расчетов представляет интерес соотношение
(5.138)
где Ь5=-~—O+W
>vCp7r
а = ас + ал — коэффициент теплоотдачи при свободной конвекции с уче-
том лучеиспускания.
Формула (5.138) является следствием уравнений (5.136) и (5.137).
Коэффициент теплоотдачи свободной конвекции вычисляется по
формуле [1], [2]:
«c = Nuc^.
Здесь Nuc = 0,54 (GrPr)0>25,
gd2, т т \
где Gr= —I < 2,5-107; Рг- 0,74;
>2 \ Л) /
б?п — диаметр полости резервуара;
v — кинематическая вязкость газа при начальных параметрах его
СОСТОЯНИЯ (70, Ро), М2/с.
Приближенно кинематическую вязкость порохового газа (например,
в камере газового буфера) можно оценить по формуле
Т2
v^10-6_!—, (5.139)
р
где р — давление газа в резервуаре, кгс/м2;
Т — абсолютная температура, К.
Коэффициент теплоотдачи излучения ал ориентировочно можно оп-
ределить по формуле
а ,= 10-п---------5-----
Л Гр rri
* 0 * стО
где ал — в ккал/(м2-с-К);
То и Тсто —в К.
В общем случае удельный поток излучения, воспринимаемой стенкой
резервуара [22]
где <?д —в ккал/(м2-4); Го и Гсг—вК.
Отсюда для коэффициента теплоотдачи излучения ал справедлива
формула
(5.140)
Здесь ал — в ккал/(м2-ч<К)
Для РДТТ малого калибра Д. А. Франк-Каменецкий приводит сле-
дующие результаты расчета величин и ал [6].
Таблица 5.4
т, к 1800 2100 2400 2700
ккал/(м2- ч) ал, ккал/(м2-ч-К) ег 4-I0-5 270 0,85 6,8105 380 0,79 12,28-105 600 0,82 20,5-105 860 0,86
Приведение в табл. 5.4 величины степени черноты порохового газа
ег рассчитаны при величине степени черноты стенки из окисленной
стали 8с = 0,8 [9] по формуле
Используя формулы (5.140) и данные табл. 5.4, оценим значения ег*
Анализ этих результатов показывает, что в РДТТ малого калибра сте-
пень черноты продуктов сгорания приблизительно равна 0,8.
Вследствие этого для суммарного коэффициента теплоотдачи можно
рекомендовать приближенную формулу
а 0,5Gr0’25 _l ю-п-----------------2—
То- Тс1о
(5.141)
Пример 5.11. Найти параметры состояния стационарного потока порохового газа
на выходе из нетермоизолированного стального газопровода, а также его температурное
состояние для следующих произвольно взятых данных:
с?к — 10 мм; 4н=15мм; /" 1000 мм; = 1500 К; род — 50 кгс/см2;
ко = 0,5 (на входе); R = 33 кгс-м/(кг-К); и = 7- 10“б кгс-с/м2; Гоо — 2500 К;
Рг — 0,74; Л=1,25; с = 0,16 ккал/(кг-К); аст = 10 ~2 ккал/(м-с-К) (дня стали);
7 — 7850 кг/м3 (для стали); Гст0 = Т.Л — 300 К.
Решение задачи производится в следующем порядке.
1. Критическая скорость потока на входе в газопровод
* f 2k
aQ = 1/ —— gRTm = 730 м/с.
у k +1
2. Скорость потока на входе в газопровод
v0 = X0#q = 365 м/с.
3. Статические плотность и удельный вес потока газа на входе в газопровод:
РОО /, Л Г.ОП
1—------л« =0.930 кгс'
gRTw k + 1 °)
7о = <?Ро = 9,12 кг/м3.
4. Кинематическая вязкость газа
где
Т'оо / k — 1 о \
(< = Р-О'^п’ 1 ~7Т7ко ) = 4,1-10-6 КГС-С/М2;
ZOUU \ к 1 J
та = 7*00 (1 - гттхо) = 1460 К-
\ К + 1 /
5. Число Рейнольдса
Re==_£o^ = 8i3.1O5_
6. Удельная теплоемкость газа при 6 = 1,25:
k
ср~ ------(R/А) = 3,33 ккал/(кг-К),
k— 1
где А = 427 кгс-м/ккал,
7. Коэффициент теплопроводности газа:
Хт.г = = 17,6-10-6 ккал/м-с-К;
КТ = КТ + (^т —= 4,3 ккал/(кг-с2-К);
Т1 ‘ \ та ТХ; 2500-1000
Кт =4; X =5
Т1 1 ™2
[соответственно при Т—(1000 и 2500 К — см, формулу (5.82)].
8. Число Нуссельта при вынужденной конвекции
Nu = 0,023Re°’8Pr°'4j« 1 100.
9. Число Стантона
St = 0,023Re—0,2Рг~° 6 = 1,8*10-3.
10, Коэффициент теплоотдачи от газа к стенке газопровода соответственно в
функции Nu и St:
Хг
а = Nu -----=1,93 ккал/(м2-с-К);
а ~ StCp7r^o — 2,24 ккал/(м2-с-К).
Для дальнейших расчетов величину а примем равной 2,2 ккал/(м2-с-К).
Лучистый теплообмен особо не учитывался, так как температура газа относительно
небольшая. Отличие величин a (St) и a(Nu) прежде всего следует объяснить неточно-
стью вычисления их определяющих параметров (Хг и ср, уг, иг).
11. Число Грасгофа при (Га/Ги) ср=0,5:
= 65000,
где — 1,6-10—5 м2/с при 7\ = 300 К.
12. Число Нуссельта при свободной конвекции:
Nuc = 0,5 (Gr)0’25 = 8.
13. Коэффициент теплоотдачи от наружной стенки газопровода в атмосферу без
учета лучистого теплообмена:
ас = Nuc —— = 3,4-10—3 ккал/(м2-с -К),
где = 0,64-10~5дКал/(м-с-К) (для воздуха при Та ~ 300 К).
14. Коэффициент теплопередачи газопровода
=------------------------------------ =0,51-10“ 2 ккал/(м2 с • К).
1 dK dH dK 1
-----------In----+------------
а 2ХТ.Г dK ас
15. Предельные температуры внутренней и наружной поверхностей газопровода,
характеризующие стационарный режим теплообмена:
Т'ст.воо — Т’оо—(Т'оо — Л)) — 1496 К;
а
Т’ст.к» = 7’00 - (Т’оо - ra) ав Р- + In /М = 1494 К.
Полученные значения температур указывают на то, что газопровод работает в не-
стационарном режиме теплообмена, так как предельное его температурное состояние
лежит возле точки плавления стали.
16. Критерий Био
а Д
Bi = —----= 0,55,
Хет
где Д = 0,5(й?н—dK) = 2,5-10~3 м.
17. Первый корень трансцендентного уравнения OtgO = Bi:
1 + 0,365В i
= 0,457.
18. Показатель интенсивности нагрева стенки газопровода
а 1
---------------------= 0,585 1/с.
с^Д 1 + 0,36oBi
19. Изменение температуры поверхности канала на входе газопровода во времени:
7СТ = Тфо— (Tqo — Т’сто)
Bi 4- Bi2 ф2
где р = + 1п-------—--------= 0,076 1/с;
2В1
f? T'crO ~ а ~ 300К.
При Л = 1 с, ^ — 2 с, /з=2,7 с температуры соответственно ГСт1 = 939К, Т’ст2=1238К,
Тстз = 1326 К.
20. Время достижения па поверхности канала газопровода предельной температу-
ры, характеризующей стационарный теплообмен:
1 а
= Т 1"—~7,98с.
21. Допустимое время работы газопровода по месту его входа при сохранении его
механической прочности (Тст.в~800 К):
Лю — ст0
=----In
? Ло Лт.в
22. Показатель интенсивности падения полной температуры потока при движении
его по газопроводу:
4-^1- Nu=264 1/с,
d%
К
где <zr,r =
Рг
23. Время движения первой порции газа по каналу газопровода (первое при-
ближение) :
I
1,5------= 4,110~~3с.
24. Полная температура первой порции газа на выходе газопровода:
Л» — ^стЮ + (Ло—^сто) е В/ = 707К,
где
Bl = -71- (1 - е“3'г)« bitt = 1,08.
р
25. Скорость первой порции газа на выходе газопровода:
где vi 146 м/с; af = -~_°1 = 0,47;
7 00
26. Коэффициент скорости потока на выходе газопровода:
v?
X? = Ло —— = 0,085; X, = 0,29.
27. Время движения первой порции газа по газопроводу (второе сближение)
3 I
il=----------------= 4,6-10—3 с.
1 + v0
28. Полная температура первой порции газа на выходе газопровода (второе
сближение)
Ты = ТС10 + (Too- Тсто) е~Вг = 670 К,
где
Bt^bxti = 1,18.
29. Полное давление первой порции газа на выходе газопровода
1
где
'5*^]/О7^0}б6б.
30. Полная температура потока газа на выходе из газопровода после его за-
полнения:
Л)/ = ЛтО + (Лю — ^сто) е z >
где
Bf = Bie * == I,18e
Для ti— 1 с, Z2=2 с, /з=2,7 с соответственно:
rot = ЛтО + (Лю — Лто) exp (1,18e-0’7t *);
70/i = 990К, = 1230 К, = 1330 К.
31. Изменение скорости потока на выходе газопровода по мере его нагревания:
—*
а1,2/
^1,2/ =
—
«0/ = 0,74(/i = 1с), v2Z = 0,86(/2 = 2c);
v3Z = 0,91 ('3 = 2,7 c).
Здесь
(7*0/) {,2
соответственно равны 0,66; 0,82; 0,88.
—\2
Д1,2/ = т
1 00
32. Изменение коэффициентов скоростей потока на выходе газопровода по мере
его нагревания для /1 = 1 с, /2—2 с, /з=2,7 с:
и = ^^~ =0.206;
а*и
t =0,23.
33. Изменение полных давлений потока на выходе газопровода по мере его нагре-
вания для /1 = 1 с, /г=2 с, /з=2,7 с:
—*—*£
P0I =Р^а1
1
й-i
Хр \
и 1
k— 1 5
---X?
= 44 кгс/см2;
р02^47,6 кгс/см2; /703 — 48,4 кгс/см2.
34. Изменение
мулу (5.113)]:
температуры поверхности канала на выходе газопровода [см. фор-
—Тсто—300 К;
Тс w =667 К;
Тст! = 1026 К;
Тстг = 1198 Л;
при t — ti = 0
При ti — tl = l
при tz — ti = 2
при /з — /г =2,7
35. Температура потока и стенки газопровода на его выходе при /« = 7,98 с:
Т —Т .->(Т_______T .UytW_____1
ool — * сто t
00/ = И96 K;
„ст/ = 1493 К.
Пример 5.12. Сравнить для исходных данных примера 5.11 изменения полной тем-
пературы потока первой порции газа для случая Tert — const и — = const.
1 о/
В соответствии с уравнениями (5.103) и (5.107) отношение полных температур
(^0?)1 Г ^стО , /, Л:ТО \ — bl
----------------------------- е
А)0 /
-0,576
(Л/)2
где Ь —------- St =
г к
---— 1,8-10-3 = 0,72 1/м;
0,005
=0,576 1/м; / = 1м.
Ло /
с
с
с
c
Таким образом, при условии Тет = 300 К—const имеем более резкое падение полной
температуры чем в случае СТ -const. При этом значения абсолютных температур
'оо
соответственно равны:
при Тст = const
ron = 7crt + (Лю - Лто) e“*z = 300 + (1500 — 300) е~0’72 = 884 К;
т ст
при 1 —-------= const
Лю
То12 = T00e-bil = 150Q—0,576 = 843 К.
Пример 5.13. Найти время заполнения газопровода (т. е. пребывания) первой пор-
Т
ции газа для случая ~ 1 —~— = 0,8 и исходных данных примера 5.11.
'оо
По формуле, найденной из условия (5.106),
где Ло=О,5; Ко= 1,25; £>2=0,576; /=1 м;
Хо (*0 + ]/ГКо-е~ь*1} = 1,125.
Пример 5.14. Для исходных данных примера 5.11, найти параметры состояния
потока при одинаковом нагревании стенки газопровода по всей его длине [см. форму-
лу (5.126)].
1. Коэффициент температурного равновесия стенки газопровода и потока га-
за (5.124) 1
т0=^--^—— =0,0022,
2 су V
где ==----------------“==3,2.102 1/м;
2 +-----
Д = 0,5(rfH — dK) = 2,5*10“3м;
7Г = 9,12 кг/м3; гк = 0,005 м; ср ~ 0,38 ккал(кг*К);
7 = 7850 кг/м3; с = 0,16 ккал/(кг * К).
2. Показатель интенсивности изменения полной температуры потока (5.127)
Z>4 = (1 4- Тч))^1 = 264 1 /с»
где
. ar г 6 *10-6
=—— Па = ----------- 1100 = 264 1/с.
г2 52-10-6 7
' к
3. Безразмерная функция интенсивности охлаждения потока (5.129) для t — ti=\
и 2,7 с:
• F 1 —bit,
/1(ЛЛ)=а—-------(if— /г)е 1 =
iV «7
= 2,2-3,2-102
1
0,16-7850
, -288-4,(1-10'3
1 е
= 0,166;
/2(Л it) = 2,2-3,2.102
1
0,16-7850
--288-4.6-1СГ3
у / С
= 0,45.
1 Здесь и далее указаны номера соответствующих формул.
4. Полные температуры потока на выходе из газопровода для То
и 2,7 с (5.130):
7’on = 7’oo-(7’oo-7'crt)(l -е М/) е
= 1500 —(1500 —300) (1 _ е-288'4’б10“3) е“°’15
7'0/2= 1500—(1500 —300)(1 —е-288'4’6'10 3) е 0,405 = 962К.
5. Температуры стенки при то~О соответственно для /=1 и 2,7 с (5.131):
7CTi = Лю ~ (Лю - Лто) е = 483 К;
Тст2 = 735 К.
Пример 5.15. Найти изменение параметров состояния газа в замкнутом объеме
шарообразной формы для следующих данных:
7о=15ООК; (ор=уК=0,6 кг — вес оболочки резервуара; сог = 0,006 кг — вес газа;
сvr =0,30 ккал/(кг-К); сР = 0,38 ккал/(кг-К); 1^=600 см3 — объем газа; ро=5О кгс/см2;
Гст0=ЗООК; Лг = 17,8‘10-6 ккал/(м-с-К); v=4,4*10-6 -м2/с; с=0,16 ккал/(кг*К);
уг = 9,12 кг/м3.
1. Диаметр полости резервуара
— Ц7 0,104 м.
л
Число Грасгофа
•з
п
Т о — 7 сто
—------—= 4,56-108.
3.
Коэффициент теплоотдачи от газа к стенке резервуара с учетом лучеиспускания
7'4
0
а = 0,5Gr0,25 —-
<4
П 17,8-10-6
= 0,5 (4,56-IO»)0’20 —т—--------
’ 1 ’ 0,104
-11
10“п
Tq - ЛтО
д; — =5,4-10—2 ккал/(м2-с-К).
1500 — 300 ’ ' 7
4. Показатель интенсивности охлаждения газа
5,4-10~2
а
J 0,38-9,12
где
(о £ дет 0,006 0,3
т01=—~ —----------’—0,019;
01 (0Р с 0,6 0,16 ’ '
5. Температура газа и поверхности полости резервуара соответственно че-
рез 1 и 2 с: ♦
-b5t
T0b
7 СТ} = 331 К;
Ты = 793 К;
= 510 К;
Пример 5.16. Определить среднюю температуру порохового газа на входе и на вы-
ходе газопровода для следующих данных (см. пример 5.11 и рис. 5.33):
Q;f< = 800 ккал/кг; ад = 1000 м/с; /д = 1600 мм; S-—7,2 см2; </ = 0,35 кг; со = 0,20 кг;
ф=1,24; рбо = 5О кгс/см2 — начальное давление в камере буфера; рд = 500 кгс/см2; R=
— 33 кгс-м/(кг*К); /От= Ю00 м — расстояние от дульного среза ствола до газоотводного
отверстия; 7ст0 = 300 К; щ)Т — 500 м/с — скорость снаряда по месту газоотводного от-
верстия.
1. Термический коэффициент полезного действия пушки
1,24-0,35-10002
7] —--------— =---------------------- — 0 324
л 2gAQ^y 2-9,8b 427-800-0,2
2. Коэффициент полного действия газов
з ]/(А-1)ЛОж(1-4,0 = ~йг Ь,25-427-800-0,676 = 1,275.
ц;[ 1000
3. Показатель интенсивности падения давления в канале ствола после вылета
снаряда
gSP:, 9,81-7,2-500
о = -------------- ~----------------- = 22о 1 / с.
(₽ —0,5)ошд 0,775-0,2-1000
Газопровод
Рис. 5.33. Схема газового буфера
4. Время падения давления в
канале ствола до 50 кгс/см2:
1
1
— In
b
Рк
Роб
228
In 10 10 ‘2 с.
5. Среднее значение полной температуры потока газа на входе в газопровод:
— 1)Лф>к(1 — 7]д) = 0,25-427-800-0,676 = 57 800 кгс-м/кг;
70ср = 1750К.
6. Показатель интенсивности охлаждения порохового газа в канале газопровода
где = 264 1/с; р =0,76 1/с;
^ = 4,6>10“3с (см, пример 5.11).
—з^
Вследствие малости времени наполнения буфера (/$) можно принять е ° «1
и Bt В[=Ь^1 = 1,21.
7. Полная температура на входе в камеру буфера
Т’бо = Лю + Перо — Луго) = 300 + 1540е~т-21 = 732 К.
Пример 5.17. Найти температурное состояние стенки двигателя на входе в конфу-
зор сопла для следующих исходных данных [6]:
^=0,73 с — время работы двигателя; Тх = 2873 К — температура продуктов сгора-
ния топлива; а=2,08 ккал/(м2-с-К); Л —3,05 мм; Лт = 1,03-10~2 ккал/(м-с-К);
г=0,1305 ккал/кг-К; у =-7850 кг/м3.
1. Критерий Био
«А
Bi =------=0,615.
Л
2. Показатель интенсивности нагрева внутренней поверхности камеры двигателя
1 Bi2 + Bi + Ф2
? = + 7Г 1п----------ЛГ---------= °’74 1/с-
2В1
где
где
= 1/с;
а
------------= 0,545 1/с;
1 +0,365Bi
=
= 0,502.
3. Изменение температуры внутренней поверхности камеры
Тс1 = - (Тх - Tvo) e-i3Z = 2873 - 2540е-°’Ж
тсг0 = зззк.
4. Температура внутренней поверхности камеры при t=0,73 с
Гст = 2873 — 2540е~0,54 = 1380К.
5. Температура наружной поверхности камеры
Т'ст.н = Л» ~ (Т№ - 7сг0) = 1057 К,
где
Bt + Bi2 -ь Ф?
Эз = — I"------------- — = 0,46 1/с.
. 1 Л Bi2
V1+ ф*
6. Средняя температура стенки
- {Т№ - 7'ст0) = 1157 К,
где
Bi + Bi2 4- Ф?
₽2= 31 4- In -----—-------Ф* = 0,537 1/с.
7. Количество тепла, поступившее в стенку,
Q х с^Д (Tcf — Тст0) = 2575 ккал/м2.
§ 5.9. ЭЛЕМЕНТАРНЫЙ РАСЧЕТ ГАЗОВЫХ ДВИГАТЕЛЕЙ
И ПРОТИВООТКАТНЫХ УСТРОЙСТВ АВТОМАТИЧЕСКОГО ОРУЖИЯ
Газовые двигатели используются в качестве привода подвижных
частей автоматики, осуществляющих процесс перезаряжания. По прин-
ципу действия и конструктивному оформлению их подразделяют на два
xaaeeaaassaaeseBsisosgiaB9^^
I9SS69998669S65
Рис. 5.34. Газовый двигатель
закрытого типа
(рт
типа: закрытый (рис. 5.34) и открытый (рис. 5.35). У закрытого двига-
теля поршень размещается внутри цилиндра и приводится в поступа-
тельное движение силой статического давления порохового газа, отве-
денного из канала ствола через специальное отверстие в его стенке.
Открытый подствольный двигатель не имеет цилиндра и поршень приво-
дится в движение от реакции удара о его поверхность свободной струи
порохового газа, вытекающей из ствола через боковой газоотводный ка-
нал.
Газовые противооткатные устройства служат для поглощения избы-
точной энергии отката подвижных частей автоматики.
Газовое противооткатное устройство, действующее в конце отката
или наката подвижных частей автоматики, называют газовым буфером.
Тормозное усилие противооткатных устройств равно силе статиче-
ского давления на поршень сжатого им порохового газа. В газовых про-
тивооткатных устройствах так же как и в газовых двигателях в качестве
рабочего тела используется пороховой газ. Для уменьшения разгара
газоотводного отверстия его выполняют под углом к оси канала ствола,
отличным от 90°.
^7////////7/////////777/»»»77777. 7/77/Д
В функционировании газовых подствольных устройств различают
три характерных периода, протяженность которых определяется соот-
ветственно временами:
— движения снаряда по каналу ствола;
— истечения порохового газа из канала ствола после вылета из него
снаряда;
— автономного действия.
Период автономного действия характеризуется отсутствием притока
порохового газа из канала ствола в полость цилиндра газового уст-
ройства.
Газовые подствольные двигатели и противооткатные устройства
имеют различные назначения, но термодинамические процессы, проте-
кающие в них с учетом массотеплообмена с окружающей средой, описы-
ваются одной и той же системой исходных дифференциальных урав-
нений:
— сохранения энергии
Q^U^pW^ (5.142)
— сохранения вещества
Gn~ Gp=<4t;
(5.143)
— изменения механической энергии подвижных частей
(5.144)
В последнем уравнении знаки « + » и «—» характеризуют соответ-
ственно механические действия двигателя и тормоза на подвижные
части.
Сила реакции Лгу на осях механических ускорителей движения или
передаточных звеньев (кулачки, кулисы, зубчатые колеса и т. п.) не вхо-
дит в уравнение механической энергии подвижных частей автомата, так
как их оси неподвижны и вследствие этого работа сил реакций N? рав-
/г
на нулю i Nydx= О
\о
Сила Ny непосредственно входит в уравнение движения ведущего
звена, записанного в функции времени:
ms—— + ^y + 7V=± FiiP.
Ее выражение можно найти в результате совместного решения урав-
нений движения и механических работ, если последнее записать в раз-
вернутом виде:
m*VVx + ---+ N - ± Др,
где VV'jc=V't.
Вычитая из одного уравнения другое, получим искомую зависи-
мость:
, т , dm^ diYU
N=Q,5V2-------- = 0,51/---
у dx dt
где -----= \ ----- -----mi (см. гл. VIII и IX).
dx dx \ тц /
i
Таким образом сила N— сопротивление движению подвижных час-
тей со стороны пружин и кул о нового трения. Остальные члены исход-
ной системы уравнений имеют следующий физический смысл:
Qt— скорость изменения тепла в рабочем цилиндре
привода вследствие массотеплообмена с окру-
жающей средой;
Ut — скорость изменения полной внутренней энер-
гии рабочего тела в цилиндре;
pW t— мощность, развиваемая двигателем или тор-
мозом;
—• скорость изменения веса рабочего тела вслед-
ствие массообмена с окружающей средой;
Оп—скорость притока порохового газа из канала
ствола в цилиндр;
Gp—скорость оттока газа из полости цилиндра в
атмосферу;
р — статическое давление газа в цилиндре;
2
т% = М Ц- X------nti — приведенная к поршню масса подвижных час-
тей автоматики;
Fn — рабочая площадь поршня привода;
V — скорость поступательного движения поршня.
Для скорости изменения рабочего объема цилиндра в зависимости
от назначения газового привода будет справедливо соотношение
W’t = + FnV. Здесь знак « + » берется для двигателя, а знак «—» — для
тормоза. Физически это означает, что у двигателя рабочий объем ци-
линдра увеличивается, а у тормоза — уменьшается.
Совместное решение первого и третьего уравнений исходной систе-
xd т г
мы, так как ---=V, приводит к зависимости
На основании соотношения Мейера ср—cw = R и уравнения состоя-
ния газа для средних параметров pW=\&rRT выражение для его внут-
ренней энергии U = &YCwT можно записать так:
k~ 1
где k=— .
cw
Скорость изменения количества тепла в рабочем объеме цилиндра
определяется притоком в него и оттоком из него газа, а также теплоот-
дачей в стенки газопровода и цилиндра. Поэтому можно записать
1 = 4
1
где Qm—GkcpJ\ — скорость притока тепла из канала ствола в
цилиндр привода;
Q2 = ~GpcpT— скорость оттока тепла из цилиндра, уносимого
газом при его истечении в атмосферу через за-
зор между поршнем и стенками цилиндра;
Qs/= — скорость оттока тепла в стенки цилиндра;
Q4/= — ar/\(Тт — Тсг) — скорость оттока тепла в стенки газопровода.
Исключая Qt из уравнения закона сохранения энергии, получим
°ncpj к = GpCpT+aTF (Т - Гст) +
+ arFr (Тг - Г„) + U\+NV+(0,5/^И2);. (5.145)
В целях упрощения решения задачи примем допущение, что зерна
несгоревшего пороха не переносятся газовым потоком из канала ствола
в полость цилиндра привода, а сам процесс перетекания газа является
квазистационарным и критическим, т. е.
On=A^FT ; Q= A^FZ , (5.146)
V RTK У RT
где и Тк — соответственно статическое давление и температура
порохового газа в канале ствола;
Fr — соответственно площади поперечного сечения газо-
отводного канала в стенке ствола и зазора между
поршнем цилиндра и его стенками;
|лс « 0,8 — коэффициент расхода через газоотводный канал;
Рз=—-—=0,61 —коэффициент расхода через щелевой зазор,
л + 2
Постоянные расхода Aj и Ах при k = 1,25 соответственно равны:
Ах = Ах ( 1 —Хг cos2 Ф
Знак « + » берется при углах наклона газоотводного канала ф>90°,
а знак «—» при ф<90° (см. § 4.7). При этом угол ф отсчитывается от
направления движения снаряда.
Вследствие малости величины -—^л?соэ2Ф по сравнению с едини-
& 4- 1
цей, в первом приближении можно принять Лх=4ь Величина Ai мало
зависит от значения k.
Если допустить, что коэффициент теплотдачи ат прямо пропорци-
онален удельному весу газа у в цилиндре, можно записать, что
ат=оту; Q^t = - ccTF (Г - Г J = - А Fp,
к
так как p = yRT.
Здесь ат== 0,1 ккал-м/(кг* К);
V =1-2^~о,7;
1 ул 1
7?=32 кгс • м/(кг • К);
лг^Хд —— —коэффициент скорости газа в канале ствола в сечении
^кн
по месту газоотводного отверстия;
А = 427 кгс-м/ккал — механический эквивалент теплоты.
Коэффициент теплоотдачи от порохового газа к стенке газоотводно-
го канала определяется уравнением
“r=st cpYr-or. (5.147)
Так как
St=0,023 Re -°’2Pr-°’6; co=—R; p? = yrRTr,
V k~ 1
то при
2
Pr = 0,74; A=l,25; pr =
получим формулу
Q\t— — /7rAz»rvT5pK= — £iVvSpK, (5.148)
где
A t<p=vTFr№r=0,22drlr
Re0’2
lT=—-----относительная длина газопровода;
d —калибр канала ствола;
d? — диаметр канала газопровода.
Среднюю скорость потока газа в канале газопровода оценим по фор-
муле
Для относительно коротких газопроводов (Zr<10) среднее значение
температуры можно найти :по зависимости вида (5.107)
Т =Т e~b2lr
J г.ср 1 к.ср
Поэтому ъ==1/ g/^гK cpxit
где r1 = e-6sZr; Z>2Zr=4(l —v) St /г —коэффициент тепловых потерь в
газопроводе.
Для более точного определения 7?Гг.ср можно воспользоваться фор-
Л1улой (5.113).
После подстановки выражений для pW't, Gnf Qp сст, Q\t и v в урав-
нение энергии получим
АнЛ V~pFKSpK=-^- Ар-Л /~RTFnP+
k— 1 k~ 1
где
К л dt 2
(5.149)
dn — диаметр поршня;
/ц — начальная длина рабочего объема цилиндра;
X — путь поршня двигателя « + » или тормоза «—».
Найденное уравнение справедливо для любого привода, работаю-
щего как в режиме двигателя (ускорителя) так и в режиме тормоза. Ин-
тегрирование этого уравнения возможно при допущении RT = RTZ^
Среднее значение температуры в цилиндре привода Тер приближен-
но можно найти из выражения
RT ср =^1^2Т3/?Т‘ кср.
Коэффициент Т2 учитывает теплоотдачу в стенки цилиндра:
t е-^-1+0’5д/)
где
8 =4(£-Д-^-; V -0,7;
v ' R.dD 3 Rda 1 ’ ’
ti—время, отсчитываемое от момента прохождения снарядом газо-
отводного отверстия.
Коэффициент т3 определяет изменение температуры газа в цилиндре
привода вследствие его расширения (в случае ускорителя) и сжатия (в
случае тормоза).
Для приближенного расчета величины т3 воспользуемся выраже-
нием
х
Отсюда имеем:
— для ускорителя
— для тормоза
Вследствие относительно низкой температуры Т в приводе по срав-
нению с температурой газа в канале ствола 7К примем k = — и 2 — k=
2
3
Для коротких газопроводов формула для п приведена выше.
В случае длинных газопроводов величину п следует рассчитывать с
учетом зависимостей (5.111) и (5.112) следующим образом:
гНМЖ(е"ЧеА
где >т^0,7.
Исключая из уравнения энергии (5.149) множитель Fnp, с помощью
0,5 (znEV2)^ + NV
.выражения Fnp = ±-------- , получим
сЩ/?7’к5А-Д^к=(^-) +(1 ± +
\k— \ V ) \ dt 2 /
где
с1=14тл^;
На основании соотношения
(pW\-Wpt = — -А- + NV
это уравнение приводится :к виду
Cl Vff\SpK-№,SpK = (— + ^-)(— + Av) + , (5.150)
1 к Лк т \k— V )\dt 2 ' / 1 h— 1 dt ’
где = ±FnX.
Интегрирование его в ограниченной области даст выражение
Д^ д/
aQx= сД VRTKSp^dt — ^SpKdt —
о б
где 2VCP = V^V^ 2Ncp=N^N^ ± 0,55пдХ;
+ Лт2У2 = (т2У2)^(т2У2);_ь
Величину приращения давления в цилиндре привода Др = р~Pi-i
найдем из уравнения работ, записанного через конечные разности пара-
метров:
pi + p;__i /7ZvV2
д^=д + ^срдА’,
где д117= +
Отсюда имеем:
+ ^|^+ЛГсрД^- ± 0,5FnA*)-
(5.152)
(5.153)
Поэтому можно написать
Это уравнение относительно Vi является кубическим. В случае по-
стоянного значения приведенной массы ots подвижных частей автомати-
ки оно обращается в квадратное:
(5.155)
^V2 + 2ai^V-bi = 0,
где
b‘{Y i<?' Т - V -
— ер (4i + -^1-1)
0,57Vср (k 1) VTPi—\Fп (/„ + X;_i). .
Здесь знак « + » относится к приводу, работающему в режиме уско-
рителя (двигателя), а знак «—» — в режиме тормоза.
Осреднение массы на пути поршня ДХ допустимо производить по
формуле
п
т^ = М
i
При малой жесткости возвратной пружины можно принять
^ср^Л^г-ь Тогда, зная приращение скорости ДК, находим
дХ = (1Л-1ф0,5дЮ Д/; Х^Х/^+дХ.
Количество тепла AQi, поступившего из канала ствола в цилиндр
привода за время А/, определяется аналитически как за .время движения
снаряда по каналу ствола, так и в периоде последействия.
Период движения снаряда по каналу ствола
Величину AQi можно найти-двумя путями:
1) через среднюю температуру в канале ствола
t
— дт’р) J Sp^dt,
_____ о
где v(p=c1 /АТк.ср;
2) непосредственно из выражения (без осреднения температуры)
д/ ________________________ д/
iQ1==C1 VRTKSpKdt — hv,? f SpKdt.
о 0
Среднее значение температуры порохового газа в канале ствола оце-
ним по формуле
v
^к.ср=—--------С RTdv,
V — t»1K J
Vi
rji,eRT =f(\ — -—процессе горения заряда;
\ 2 fgaty )
RTK =f( 1 _'j — после конца горения заряда (<Ь= 1);
\ 2 fg<i J
ф ж----относительная часть сгоревшего заряда;
—скорость снаряда в конце горения заряда;
^—скорость снаряда в сечении по месту газо-
отводного отверстия.
После интегрирования соответственно получим:
где Пд=(*-1)^
Согласно уравнению движения снаряда <р — dv = SpKdt можно за-
g
писать
= — Д^-,
g
где т)1<^.<ик;
Функция v(t) известна из решения задачи внутренней баллистики.
Необходимое значение = — v^i определяется величиной Д/.
При определении AQz, можно избежать осреднения температуры^
Lt
если для вычисления
интеграла J
о
использовать текущие
значения RTK и SpKdt. В этом случае получим:
В итоге имеем следующие формулы для расчета AQh с утечом теп-
лообмена в газопроводе:
— для теплоподвода в процессе горения заряда
3 3
ВД-П 2
дг<р, (5.156)
/ g
где £=1,2;
— для теплоподвода после конца горения заряда
где £=1,2;
1 k
—-------
2 k-A
Если в этих зависимостях текущие значения скоростей соответствен-
но принять = Vi-vK и = Vi~v^, то получим формулу для
полного количества тепла:
AQi = aQh(^z-i = ^i; ^ = ^к) + AQn(^z- 1 = ^к; = (5.158)
отведенного в цилиндр привода до- момента вылета снаряда из канала
ствола.
Количество газа, поступившее из канала ствола в полость цилиндра
привода, вычисляется по формуле
t
oDr= Grdt,
о
где —±=г .
V
Исключая SpK и /?ГК, после интегрирования получим следующие
расчетные формулы для определения количества отведенного газа в
цилиндр привода:
— до конца горения заряда
— после конца горения заряда
Д(ог9=: / arc sin Ух\,——arc sin /Чд—.
V^f j
Суммарное количество газа, отведенного' в цилиндр привода за пол-
ное время движения снаряда по каналу ствола, составит
ДсоГ1 = До>г1 Ц- Д<*>г2.
Период последействия
Количество тепла за время Д/ вычисляется по прежней зависимости
Af ______________________ AZ
AQ2=ci J Г/?7\ Sp^di — Lv, J Sp*dt,
0 0
где
___________ ___ 2fe x 2fe
; SpK=SpA(\+Bt) к-г.
После интегрирования получим
где
(5.159)
2fe
Рд
*=1,25.
Подставляя вместо В, бд и Ai их выражения, после алгебраических
преобразований при допущении ¥*- = е~м получим
Ра
k+1
\ 1 / fi 1
-(?- 0,5) — 'ИдД^е-0,8^-1 (1 - e-°’86W)- (5.160)
g
Здесь
RT,=f(\-Пд); Хл^тИ1/----------* + 1.. •; ад=К^Гя;
V 2 + (^-1)^
ti — время, отсчитываемое от момента вылета снаряда из канала ствола.
Полное количество тепла, поступившее в полость цилиндра привода
за период последействия, определяется формулой
AQ2 = AQiAQq; (Л'—1 — 0; —
Среднее значение температуры в канале ствола за любой отрезок
времени истечения порохового газа определим из уравнения
Согласно зависимости (5.6) при рт = 0 имеем
fe-i 1
RT = R7\n k
k-\
&
6)
i = ~L
Поэтому после 'интегрирования получим
РТ —
ср k
1
- k
Количество газа, отведенного из канала ствола в цилиндр привода
за время t, вычисляется по формуле
t
Да)г = J QTdt,
о
где Ог=ДА;хк ;
V RTK
fc-M
V RTK V RTK
После интегрирования -получим
/ fe+i \
Д(ог=oFr(o 1 — тс j, (5.161)
где
2k
л^(14-5/)“ А~х ~е“^;
*+1
2(й-1)
Автономный период действия привода
Прекращение притока газа из канала 'ствола в цилиндр привода
(если нет отсечки) или начало автономного периода наступит при
р = Рн*. После этого момента пороховой газ из цилиндра привода будет
сбрасываться через газопровод (если он не перекрывается) обратно в
канал ствола, а затем —.в атмосферу. При этом изменение тепла в поло-
сти цилиндра привода можно учесть с помощью функции щ:
A, Gs/s+ftA) гRTCP 4- А '7 2z-u- . (5.162)
• ъ' -L ц
Приближенно суммарный расход газа из цилиндра привода со-
ставит
Диг=± (5.163)
V RT*p
Как при наличии отсечки газа, так и при ее отсутствии скорость дви-
жения поршня рассчитывается по уравнению (5.155) при AQi = 0.
Для приближенного расчета скорости Vi движения поршня привода
можно ограничиться шестью характерными точками:
— конец горения заряда (Д^ = /к — ;
— момент вылета снаряда из канала ствола (Д/2=^д — 6);
— после вылета снаряда соответственно для времен:
А, 1 д, 2 А, 3 А, 4
А^з——Г' Ац — — , Ats — —У А?5=— .
ь ъ ъ ь
В этом случае расчет строится следующим образом.
Выписываются исходные данные:
— баллистические
^1, Рд, Рд, Д С, ®> ₽» Л ?> % b, R, k;
— конструктивные
г* п> * з» ^ц> И/Ц»
Задаются начальные условия:
/=0, У-0, Х = /^0, W=FnliV 7Уср-Л^
Далее расчет ведется в следующем порядке.
I. Расчет параметров движения на первом участке (A/i):
Д-Г1 = 'ОК — V = VK-, = —
где h — время движения снаряда до газоотводного отверстия;
/к — время конца горения заряда.
где k— 1,25; /? = 32 кгс-м/(кг*К); v = 4,4-10“6 м2/с;
3) Re=^^-; St=^^-; b2lT= l,2ZrSt; xl = e~b^-,
Re0’2
4) Д®1¥ = 0,22^4-^- ,
Re0’2
где c2=1--L-a^kFt^- V^f ; HK = 0,8; £=1,25; 4^2,1 MV2/c;
3 k— 1 g 1),Л
_g Mj
Z? \ Q 4 я T 2 _ <
6) f*T= —4-^; t2=e ; T3=l,
3 Rd,.
где vT = 0,7; от = 0,1 ккал-м/(кг-с-К); Л —427 кгс-м/ккал;
7)
k — 1 R tZn
где A1 = 2,l m^c; ^ = 0,61; ^=4/3;
/ ь__1 4 /„ \
8 2a1 = —— + 2-—--TciH—— -M ;
mos “ \ k + 1 k 4- 1 Д/ )
Если Ni, тз и т\ъ существенно отличают от их начальных значений
(более 5%), необходимо произвести сближение результатов.
Ввиду приближенности оценки массотеплообмена (vv и Аут), а
также метода интегрирования, значения давления в полости цилиндра
p(RFCp) могут заметно друг от друга отличаться, особенно при боль-
шом АЛ
II. Расчет параметров движения на втором участке (Д/2):
1) ^к.ер = /(1-г)д-" + Р^ + ^; г/г = 1/-H-g/?rK.cpTi:
1 3v‘ / ¥ k + 1
х д /
2) .
Re0,2
Число Re можно не уточнять, так как оно слабо влияет на значе-
ние St. Поэтому Ti и Re допустимо принять постоянными и равными их
начальной величине.
где
6)
д012=-—t-
1 2 k— 1
arc sin т^+УпдЗ-Пд)-
ср 2 K.cpvIь2V35
-8 (Д^+О^ДМ.
1
ср 2
II
'Ч J- г L\
2 + 2А
п
— mh
4
2.
2(/ц +
> Аа
п
где
Л/ -1
------ Дг2 ±
^22
4 Zu jz J
+ 1 ^2
Д^2 ’
2 Л^12 - 2 ~2~ ^2jVcP
“^ср2^ц± -^1) 0,5JVcp 2^! 1) Д^2 +п(Хи±
1 п
22
где k = 4/3;
8) ДИ2= — #2 i <32"|~ ^21
9) ДХ2=(У1+4- =
10) До)2 = А^к^г - (arcsin ]А]Д — arcsin ]А1д —
V^f I
12) т^ = М+ у ту /?^ср = /?Гк
1
где v2l.(X2); Тз= ± -^т-Г(1 ± -^Ц2,3— 1 .
^2 1\ *ц /
Если величины параметров m2s, т3 и т^, Тз отличаются друг от
друга более чем на 5%, то следует произвести сближение результа-
тов, т. е. повторить вычисления величин:
ДК2, 1^2» р2 И Л^2.
III. Расчет параметров движения на третьем участке (А^з)*
1 \ dt R ^д1 — е1 t / 2k 11 RT-^=f t _±’ ^=V 1 — e b где k= 1,25; 2) Д^3 = 0,22^4-^- ; Re0,2 О, лГ> p /1 k - 1 ^RT 3) aQs — 11 1 (1 e ) \ k -ь 1 ) k — 1 X(l- e-<M), ГЖ >.!==< i+1 : 2+(й— 1)ЛГ2 2И1 = ^-; 4=^/(1-Пя); k= 1,25; р=1Д-°/1- 4) ЦТз ср = ^?^к.ср1'1^2'1'3» -₽tG2 + v) J 1 где r2=e ; д/3= ; b b== /Й ,SX ; (p — 0,5) 3 /ц ГЛ , X2 + V^ts Tq— т It - 2 ДГ2 + У2ЛЛ |A ~ 7ц 5) Д^3?3К/?Г3 CP+ 2Л^л -2(/ц + ? k— 1 r R где k=-^~ ; W\.CP;, (? 0,5) ОдД-Уоз X g 2у X2/3 ~ 1 1 , f2) + У2Д73
п
— 0,5 (k-\-1) N з ср1/2Д^з 4“ п i -^2)j i
где k = 4/3;
8) AVZ3 =—a3-\-]/~#3~h b3\
9) X^= JVo-f" (V 2 4~ 0,5д!/3) д/3; V3 = ]/'2-^- AV^;
ДХз=(У2-|- 0,5д1/3) Д/3; Л/"з =-Л/"2d“ ^A^V3;
*+i k+1
10) Дсп3 = р.к/?к 1 ——-Ад О>(1—е ),
\ ** I *• /
где £=1,25; |лк = 0,8;
3
ЛГср 3 Асо/
11) р3 —--------i---- ,
Лх('ц + *з)
3
где V Д»г = Д«>1+ Дю2+ Д(о3;
1
12) тю=М-]-\\ '2?>3Z- mz; Тз=±—— (1±-^-¥'3~- 1 .
2 L\ h /
1
Расчет действия привода в течение последующего времени Д/4, А/5
и Д4 проводится точно так же, как и на отрезке времени д/3 = — .
Приближенный расчет газового двигателя закрытого типа
Рассмотрим интегральную методику приближенного расчета газо-
вых приводов, позволяющую в отдельных случаях достаточно быстро
определить их выходные характеристики (импульс и наибольшую ско-
рость Vm) или по заданным характеристикам найти необходимые раз-
меры цилиндра Fn и питающего его газопровода Fr.
Полный импульс J=^Fnpdt, развиваемый двигателем, можно
6
найти из уравнений (5.144) и (5.149), если их проинтегрировать для
случая постоянного значения приведенной массы и при допущении, что
в конце действия двигателя так же, как и в начале внутренняя энергия
газа в его цилиндре пренебрежимо мала (UQ=U\ ~0). Иными словами
предполагаем, что в конце отката поршня количество оставшегося газа
в цилиндре двигателя достаточно мало.
При сделанных допущениях интегрирование этих уравнений приво-
дит к выражениям:
tflvV2 р
&Q=—-------+ VdJ; m?V=J—JN.
.2 91
о
Совместное решение этих уравнений приводит к результату
зг2
/Удг J N
(5.164)
Учитывая, что
J —
^2
б/У дг
после алгебраических преобразований получим
2h?sAQ =J^~\-2 (fftsVу— Jpj) J + Л*
Отсюда предельный импульс, развиваемый двигателем
J= -т8У?+УЛ. + К(/пяУР— JNy—Jn+^гпМ (5.165)
При этом согласно уравнению конечная скорость подвижных частей
v^=^v,+^ +
Полученную формулу для Vm можно использовать и для приближен-
ного расчета конечной скорости наката ствола. В этом случае достаточно
положить параметр AQ равным внутренней энергии U оставшегося газа
в цилиндре тормоза отката к концу пути отката подвижных частей. Теку-
щая скорость наката определяется по изложенной выше методике для
случая газового двигателя закрытого типа.
Подствольный газовый двигатель открытого типа
Ввиду весьма большого зазора между поршнем и стенками цилинд-
ра в этом двигателе по существу силой давления на поршень является
реакция струи порохового газа 7?*, вытекающей из канала ствола через
газоотводное устройство (см. рис. 5.35).
При взаимодействии струи с рабочей поверхностью поршня она из-
меняет направление своего движения на угол ф, сообщая при этом порш-
ню дополнительную реакцию 7?соэф. Таким образом, полная сила воз-
действия струи газа на поршень составит
(1 — cos ф). (5.166)
Величина угла отражения струи ф зависит от формы рабочей по-
верхности поршня. Для увеличения силы /?п необходимо величину угла ф
иметь близкую к 180°. Такого отражения струи от дна поршня можно до-
стигнуть за счет формы его поверхности, т. е. путем придания поршню
формы полузамкнутой конической камеры (рис. 5.36).
В пределе, когда полость в дне поршня по форме приближается к
цилиндрической, условия отражения струи при выходе конца газопрово-
да из этой полости могут ухудшаться и быть близкими к условиям взаи-
модействия струи с плоской преградой (ф—90°= 15-4-20°). Выполнение
выходной части газопровода в виде конического сопла так же приводит
к увеличению реакции воздействия струи на поршень согласно зависимо-
сти (4.13) :
^п = Т<в^(1-со5Ф),
(5.167)
где Лв ~1,25 — коэффициент реактивности.
Рекомендации по размерам конического уширения выхода газопро-
вода см. в § 4.2 и 5.5.
Величина силы /?п, рассчитанная по формулам (5.167), может ока-
заться несколько меньше фактической. Такое расхождение объясняется
не учетом этими формулами воздействия статического давления струи
Рис. 5.36. Схема экрана газового двигателя открытого типа
при выходе ее из газопровода на его закраины. В результате такого вза-
имодействия струи с торцем стенок газопровода ее реакция возрастает.
При отсутствии сопла на выходе из газопровода не исключается воз-
можность действия статического давления отраженной струи на торец
стенок полости поршня.
С учетом сделанных замечаний силу воздействия газовой струи сле-
дует определять по формуле
Яп = ^Л*(1~с<М), (5.168)
где £=1,054-1,1—коэффициент, учитывающий взаимодействие струи с
торцами стенок газопровода и поршня при 1.
Величина полной реакции критического потока
/ 9 \ 1
-Ь 1 /
строго говоря, не является величиной стабильной. Она постепенно увели-
чивается по мере износа оружия, приводящего к притуплению (скругле-
нию) острых кромок на входе газоотводного отверстия. После несколь-
ких десятков выстрелов коэффициент сжатия струи в газоотводном от-
верстии можно принять равным ei = 0,924-0,95, а значение R* при k = 1,25
определить по формуле
Rn = A2Fyp,
(5.169)
где Аг= 1,15 ч- 1,20;
ЛГВ (1 — cos ф) const
— коэффициент усиления реакции воздействия струи на поршень
двигателя.
Уравнение движения поршня для двигателя открытого типа с учетом
переменности массы подвижных частей автоматики имеет вид
(W)+JV Л
dt 2 dt
Интегрирование этого уравнения выполним приближенно в ограни-
ченной области перемещения поршня, когда текущее значение скорости
перед дифференциалом массы допустимо заменить ее средней величиной.
Для этого случая получим
му, - М + ±JNl =v‘ + v‘^ (М, - м,у + ДЛ.
4:
Отсюда следует
4Д/г + (ЗЯ~-1 + Я')
ЗА11 -J-
(5.170)
где
дч—
Nxdt Nv срД/; Д7) =
— до момента вылета снаряда;
g
—после вылета снаряда из ствола.
Для случая = = const с допустимой погрешностью можно вы-
числить скорость поршня в конце действия двигателя по формуле
ту _ ^2 —
» гг *
где J2=Ayr
—uJ-HP —0,5) — /;
g
(5.171)
/1 /
1 п
А-1= J
б
JNl — импульс сил сопротивления упругих связей и трения;
t — время движения снаряда от газоотводного отверстия до
дульного среза;
/п~ А1п — — время периода последействия (см. гл. IV).
О 2
Расчет подствольных газовых двигателей по методам А. А. Благо-
нравова, Е. Л. Бравина, Э. А. Горова и М. А. Мамонтова изложен в ра-
ботах [2, 5] и § 10.4.
Ниже в целях уяснения методики расчетов газового узла рассмот-
рено несколько примеров, исходные данные которых взяты произволь-
ными.
Пример 5.18. Определить приближенное значение скорости поршня двигателя за-
крытого типа в конце его действия для следующих данных:
7 = 0/150 кг; со = 0,060 кг; Qo = gM = 6t0 кг; 7Vcp = 100 кгс; 1000 м/с;
vr = 800 м/с; р = 1,3; Лт = 2,0 м1/2 с; Р - 33 кгс • м/(кг К);
f = 80 000 кгс-м/кг; /к = 0,04 с; = 0,1 ккал-м/(кг-с-,К);
А = 0,01; А = 0,02; А = 4; £=1,25; д = 0,5; ^ = 0,55.
1. Приращение количества движения снаряда за время его движения от газо-
отводного отверстия до дульного среза:
9,81
2. Коэффициент
снаряда из ствола:
скорости притока тепла в цилиндр двигателя до момента вылета
k Лцх^г l/flT’cp =5-2-0,02-218= 43,6 м/с,
^2 =
1 ——
'2 + V2 \
= 218 м1'2
V2 I
Д J
2
= 0,477.
3. Количество энергии (тепла), перенесенной из канала ствола в цилиндр двига-
теля за время периода последействия:
со/ (1 0.06-8-104
ДЕ аб------------------— = 0,01 -------------0,523 = 80 кгс • м,
° k— 1 k 1,25 — 1
где аб = ВЕг=0,01.
4. Общее количество энергии (тепла), поступившей в двигатель за время его
действия:
ДФ = 4^4/1 + Д£ = 43,6-3,67 -80 = 240 кгс-м.
5. Импульс сил сопротивления движению поршня:
JNX = 2Vcp/K = 100-0,04 = 4 кгс - с.
6. Коэффициент скорости утечки тепла из цилиндра двигателя:
k — г-------------- va-| —
^<р2 ~ V Гц.ф 4- А ~ F —
= 5-2,1-0,55-10-2.197 +427 в’^0,1 4 = 15 м/с,
где ]/етц.ср =0,9У^Гср = 197(кгс-м/кг)1/2.
7. Скорость отката поршня в конце действия двигателя:
// г 4-9,81 V 2-240-9,81
(15-—-------------1 +------^—^—«14,5 м/с.
Пример 5.19. Найти скорость отката поршня двигателя открытого типа в конце его
действия для следующих данных:
# = 0,15 кг; w =0,06 кг; = 1,2; /V = 25 кгс; v,(—г/г = 200 м/с;
Qo = 2 кг; Ёг = 0,09; ф = 150°; /к = 4-10-2 с; АГВ=1,2.
1. Коэффициент усиления реакции воздействия струи на поршень:
А2 = 1,45К’В (1 — cos ф) 1,15• 1,2-1,87 = 2,58.
2. Полный импульс воздействия струи газового потока на поршень:
« -я Г W
— 2,58-0,09-8,54 = 1,98 кгс-с.
—
3. Скорость поршня в конце действия двигателя:
7 2 — 7/у] 0,98
=^—9,81 = 4,8 м/с,
М 2
где Jдц = 25-0,04 = 1 кгс- с.
Из сопоставления исходных данных и результатов решения примеров 5.18 и 5.19
следует, что двигатель открытого типа развивает значительно меньший импульс по
сравнению с закрытым газовым двигателем.
Пример 5.20. Определить импульс, развиваемый подствольным газовым двигате-
лем закрытого типа, и наибольшую скорость отката подвижных частей автомата пушки
со следующими условными данными (рис. 5.37):
d = 23 мм; / = 85 000 кгс-м/кг; со —0,036 кг; q = 0,196 кг; <р = 1,05;
Од = 680 м/с — дульная скорость снаряда;
= —'Скорость снаряда в конце горения заряда;
уг = 48О м/с —скорость снаряда в сечении по газоотводному отверстию;
/кн = 1000 мм — длина капала ствола;
/г = 360 мм —расстояние от пенька ствола до газоотводного отверстия;
5 = 4,25 см2 — площадь поперечного сечения канала ствола;
di =5,5 мм —диаметр газоотводного отверстия;
ф = 90°—угол наклона газоотводного отверстия к оси канала
. 1
ствола;
/ = 40 мм —длина газопровода;
dn = 32 мм—диаметр поршня;
Дс?п = 0,25 мм —диаметральный зазор между стенкой цилиндра
нем;
Wo= 17 см3 —начальный объем цилиндра;
Fo-37 см2—начальная поверхность теплоотдачи цилиндра;
Qo = 4,9 кг — вес подвижных частей автомата;
N = 40 кгс — сила сопротивления движению поршня;
л=0,1 м—ход поршня;
рд = 400 кгс/см2
k= 1,25
7/T
— —— — 0,8а — относительный температурный перепад между
* Ц
и порш-
газом и
стенкой цилиндра;
о=0,11 ккал-м/(кг-с-К)
Ц2 = 0,55 —коэффициент расхода
через зазор между стенкой ци-
линдра и поршнем;
Ai =2,1 м1'2 с —постоянная расхода;
р.| = 0,35—средний коэффициент расхода через газоотводное отвер-
стие из канала ствола в цилиндр.
1000
1. Количество энергии (тепла), отводимой из канала ствола в цилиндр двигателя
до момента вылета снаряда:
9
, „ г-.
3/2 *
= 0,138.1,05-0,02 V85000
1 - г-. 2
1Д
680
0,395
480\з/2
1 —0,395 —
680/
,3/2
vKvr \3''2
д
где с[ =
— 205 кгс-м,
2 k
--------"ЛнЛ = 0,138 м1/2/с; щ = 0,35;
3 k — 1
nd?
fr =-------= 0,056; ик = v;x = 680 м/с;
4-s
^ = (^-0-177^=0,25
2/оз
1,05-0,02-6802
2-85 000-0,036
= 0,395.
2. Среднее значение температурного комплекса газа в канале ствола за время дви-
жения снаряда от газоотводного отверстия до дульного среза:
( &к v„- + ( 680 4- 480\
RT^= f \ — —-----+;---— 85 000 1 —0,395 = 56 400 кгс*м/кг.
\ \ 2-680 J
3. Коэффициент скорости потока порохового газа в момент вылета снаряда
из канала:
680
где Мд =------= '~+~ = 0,855;
79э
ал = Vkgf (1 — ч,) = V 1,25-9,81-85000(1 —0,395) = 795 м/с.
4. Дополнительное количество энергии (тепла), поступившее в цилиндр двигателя
за время периода последействия:
/ 0,8722 V'5
= 1-0,056-0,036-85 000*0,605 1 — —----------- = 70кгс*м,
' 9 7
где С2 = 1 м /с.
5. Полное количество энергии (тепла), поступившее в цилиндр двигателя за время
выстрела:
Е ~ В\ -И = 205 + 70 = 275 кгс - м.
6. Среднее значение температурного комплекса газа в канале ствола за время по-
следействия:
/(1 — -П;.) _ 85 000-0,605
k 1,25
— 41 000 кгс-м/кг.
7. Среднее значение температурного комплекса газа в канале ствола за время
выстрела:
Е} Е2 205 70
RT^= —— /?Г1ср + ~—^-£Т2ср = —— 56 400 + ——41 000 ~ 52 400 кгс-м/кг.
£ Е 275 275
8. Относительное падение температуры в газопроводе:
Т| = (1 — vT) + vTe = 0,15 + 0,85“0,053° = 0,95,
где
8-10“6
/>4 = 4—5-Nu = 4----------940 = 1000 1/с;
5,52-10-6
6-10-6
дт =
Рг 0,74
= 8-10 6 м2/с;
Nu = 0,020Re°’8 = 0,020 (7,0 105)° 8 = 940;
ady 750-5,5-10—3
Re =------- =---------=-------= 7-105;
ч 6-10—6
а = 1/ gRTcp =1/ 2о1’^5 9,81-52 400 = 750 м/с;
I/ k + 1 I 2,25
ЬлЬ = 1000 = 0,535.
4 г 750
9. Относительное падение температуры газа вследствие его расширения в цилинд-
ре двигателя находим по приближенной формуле:
/ 21Г0 \0,25 / 2-17 \0,25
т------------= --------------------------- — 0 74,
2 \ 21Г0 +/у// \2-17 + 8,15-10 /
10. Относительное падение температуры газа в цилиндре двигателя вследствие
теплоотдачи:
Тз=е°>^ =е-4,7-8,8-10-3 =0>9б>
где
Ь —
2-0,64
1160
300 300
32"
d'
КН
485
-----4- — In
vr b
4,25-400
In-----------
-3
2
т
N
gsp*
(р — 0,5) wv,
1300
9,81-4,25-400
1,41-0,036-680
1300
— 485 1/с;
^3
И. Среднее значение температурного комплекса газа в цилиндре двигателя за
время его действия:
/?Гц,ср = т^оТз^Гср — 0,95-0,74-0,96-52 400 — 35 000 кгс-м/кг.
12. Скорость изменения количества тепла в цилиндре двигателя вследствие утечки
газа через зазоры и теплоотдачи:
= 5-2,1-0,55-1,57-Ю~2/35 000 + 427 -°— '°’П 10,85 = 30,5 м/с,
37 + 0,5лЗ,2-10
0,785-3,22
= 10,85.
13. Импульс сил сопротивления
Jjv = ЛГ/2 = 40-8,8-10 3 = 0,35 кгс-с.
14. Импульс сил давления, развиваемый газовым двигателем:
7пВ = - (Mv2 -0,5 £v) + у (Му2 -О,57Л.)2 + 2Л1 (£- £jV) =
= — (0,5-30,5 — 0,5-0,35) + ‘/(0,5-30,5 - 0,5-0,35)2 -|- 2-0,5 (275 — 16) = 7 кгс-м,
XX
где = -------------= 16 кгс-м.
k — 1
15. Наибольшая скорость отката подвижных частей автомата
— }N
Рассмотренная выше задача решалась методом конечных разностей (см.
пример 5.21).
Пример 5.21. Найти скорость штока V(t) и давление p(t) пороховых газов в ци-
линдре подствольного газового двигателя автоматической пушки со следующими
данными:
d = 23 мм; S = 4,25 см2; q= 0,196 кг; cd = 0,036 кг; ср =1,05; & = 1,25; / = 85 000 кгс-м/кг;
Vi = 480 м/с — скорость снаряда в сечении по газоотводному отверстию; с’к = Гд =
= 680 м/с — скорость снаряда в конце горения заряда и дульная скорость; рд =
= 400 кгс/см2 — давление в сечении дульного среза; /1 = 0,0018 с--время движения сна-
ряда до газоотводного отверстия; /к = /д = 0,0028 с — время конца горения заряда;
/д = 1000 мм — длина канала ствола; /Г1 = 360 мм — расстояние до газоотводного отвер-
стия; /г~40 мм — длина газопровода; /ц = 21 мм — начальная длина цилиндра; dr =
= 5,5 мм — диаметр газопровода; dn = 32 мм — диаметр поршня газового двигателя;
Adn = 0,25 мм - -зазор между цилиндром и поршнем; Q0 = 4,9 кг — вес движущихся час'
тей; jVo = 4O кгс — сила сопротивления движению подвижных частей.
Начальные условия: / = 0; Р=0; Х = 0; р~0.
Период движения снаряда по каналу ствола
1. Определим величины:
Д/1 = /к — tx 0,0028 — 0,0018 = 0,001 с;
~ vK — Vj = 680 — 480 = 200 м/с;
/ V} + t'K \ / 480 4- 680 \
ЯЛс.ср = f 1 ~ = 85 000 I1 - 0,396---------- = 56 290 кгс - м/кг,
где
коэффициент заполнения индикаторной диаграммы
0,25-1,05-0,106-6802
—!____'_________________ о 396
2-9,81-85 000-0,036 ' ’
2. Средняя скорость потока газа
в канале газопровода
2k
9,81-56 290 = 783,3 м/с.
3. Число Рейнольдса
Re =
783,3-5,5-10“3
----------------=9,79-105,
4,4-10~6
где
М2/С.
Число Стантона
St = 0,023Re“°’2Pr“°'6 = 1.74-10“3
где
Рг = 0,74,
4. Коэффициент, учитывающий потери в газопроводе:
6rZr = e 0,0152 = 0,985,
где 1Т = —g = 7,27;
CL с? j с?
/>ГТГ = 1,2/7 St = 1,2-7,27-1,74-10“3 = 0,0152.
5. Скорость потока газа в канале газопровода:
. / 2k
Wrl = l/ r+Tg/?rK-cpTi = 777>4 м/с;
vrlrfr 777,4-5,5-10“3 „ Лг
Re = г =-------------’---’--------= 9,71-105;
v 4,4-10“°
777 4
Ди. = 0,225Д-^— =0,22-0,2392-7,27-----------------’ пп =4,5 м/с,
0 r Re0'2 (9,71-1O5)0,2
— dr 5,5
где dr = —— = — = 0,239.
а
6. Количество энергии (тепло), отведенное в цилиндр привода до момента вылета
снаряда:
\ 3'
1/д /
AQi = cz
W(t»K—Vj) ч
—--------=
= 3297
480 \з,2
1 — 0,396 ——
680 /
— (1 — 0,396)3/2 — 1,05-0,02-200-4,5 = 449,9 кгс-м,
2 k — yqV fv.t
где с2 = V 7----------7 А1НЛ -----------------"
3 k— 1 gT),(
2-1,25-2,1-0,8-0,056-1,05-0,02-680 1/85 000
3-0,25-0,396
= 3297;
г =-=- = 0,056; А^2,\^1с- цк = 0,8.
7. Коэффициент, учитывающий падение температуры из-за теплообмена в ци-
линдре:
-0 _39
гт 9 9
т2 — е = е = 0,98,
4 vTaT 4-427-0,7-0,1
где 8Т = — А----------—---------------------- = 39 1/с;
3 Rdn 3-32-32-10-з
/? = 32 кгс-м/(кг-К); — 0,7;
ат = 0,1 ккат-м/(кг-с-К); А = 427 кгс-м/ккал; т3«1.
8. /?Лср ^iV^K.cp ~ 0,985-0,98-56 290 =54 380 кгс-м/кг;
= гЧ Л(Лз73 + 4Л =
v k — 1 Rdn
1Z------ 427-0,7-0,1-0,021
= 4-2,1 0,61 -0,0157 /54380 4-4 --------- -------------= 21,2 м/с,
oZU,Uoz
где k = 1,33; p.3 = 0,61;
F3 2icL. 2-0,025
= 3,2
9. Коэффициенты уравнения AV2 + 2atAV — 6i = 0:
N Qt) At ।
2aj =-----------
m
k - 1 4/ц
4------2v +---------------
£4-1 (£ + 1)Д6
где
40-0,001
0,5
2-21,2 4-0,021-3
--------4- ------------= 42,14 м/с;
7 7-0,001
ах = 21,07 м/с,
ср = M) = 40 кгс;
Со л с ,
т —------- = 0,5 кг = const;
4
^7ГГ“
СрДЛ -Nср^Ц
4-3
7-0,5
ИЗД _ 2.,2.40.0,001 _д
6 6
= 253,7.
10, Скорость поршня в конце первого интервала:
v1 = ду1= — Й1 4- j/a, + 61 = -21,07 +1/21,072 4-253,7 = 5,34 м/с.
11. Перемещение поршня
1 AVi 5,34
X, = ДХ1 = —- Д/1 = - 0,001 =2,67 мм.
12. Коэффициент, учитывающий падение
температуры вследствие расширения газа:
3 /ц
2 ДХ\
21 Г/ 2,67 \2/з
2,67 Ц1 + 21 ]
= 0,97;
/?ГС₽1 =етк.с1,т1т2т3 = 56 290-0,985-0,98-0,97 = 52 730 кгс-м/кг.
13. Давление в цилиндре в конце интервала:
Д^ЯГср! 0,00166-52 730
р1 = —---------------------=-------------------------- 466 кгс/см2.
ЛД^ + ДХО 8,04(0,021 +0,00267)
где
Д'Л] = 2AniKfK —'' ( 1/ 1 — Т),, —— — У1 — 1 =
2-2,1-0,8-0,056-1,05-0,02-680 / 480 ------—
-----------’--. --------- I I / 1 —0,396------ — У 1 —0,396
0,396^85 000 'Г 680
— 0,00166 кг.
Период последействия
1. дг2=4'="^= 1’782*ш-зс’
Ь 561
где
9,81-4,25-400
------!--------------= 561 1/с
(1,714-0,5)0,036-680-1
— показатель интенсивности падения давления в периоде последействия;
1500 — 1500 лГ--------
—-У 1-0,396=1,714
OoU
— коэффициент полного действия газов.
( _ 21
й\1 —е к
_bt 0,604 1 - —
--------= 85 000------------------
'j 1,25 f 1 о з
J \ е ,0
= 47 147 кгс-м/кг.
Время отсчитывается от начала периода последействия
t = Л = 1,25.
b
3. Скорость газа в канале газопровода:
vr --
2£
£/?Гк.ср =
9,81-47 147 = 717 м/с; •
—0— иг
= 0,22^г/г q 2 — 4,23 м/с;
Ке ’
где Re =------
717-5,5-10“3
-------------= 8,96-Юл
(3 — 0,3) <dv
4. Количество энергии (тепла), отведенное в цилиндре привода за период Д^:
k— 1 ,2\2(ft-D «>RT:{
----------л, --------------
X, I 1 Д I h 1
<о । ----ъ~ I / 0 Д5б \4’5
_ е к ] = 0,8-0,056 1 - —“ |
0,036-51 340
0/25
1,214-0,036-680-4,23-0,55
0,632 =----------------------------= 133,8 кгс•м,
9,81
где RT\ — f (1 — f];i) = 85 000 (1 — 0,396) = 51 340 кгс-м/кг;
йд = VkgRTx = У 1,25-9,81 -51 340 = 793,4 м/с;
У = Л12--------------------= 0,756.
Л ? + (*- 1)Л42
T9 — е
-39 f0 0Ql+^00178
2 ' = е \ 2 ' =0,93;
/ A" j + Vi Д19 \ 2/ з
“ 1 + —1 =0,92.
----- 2427-0,7-0,1
= 4-2,1-0,61 ]/39 740 +
32
32
где k = 1,33; А = 2,1 м1/2/с;
7. Коэффициенты уравнения:
* ср
4
т
о2
ДЛ
45,34+-------- 0,00178+ — 1
0,а 7
23,67 3 8,04-0,00178-466
17,82 — 7 0,5
Й2 = 16,69 м/с;
= 33,4 м/с;
Ь-2 =
Г 13,38
466-8,04-5,34-0,00178
7-0,5
19,32
----— 40 0,00178 —
6
Тз =
k
6- ^=—1
6
г
ц
1
ц
2 -
ДС?2 +
2
п
2
40-5 34
- 40-0,02367 — ——2-------0,00178 + 465-8,04-0,02367
о
= 436,5.
8. ду2=_а2+ И а2 + й2 = — 16,69 + /16,69^ + 436,5 = 10,05 м/с;
V2 — Vj + AV2 — 5,34 + 10,05 = 15,39 м/с;
— Xi — АХо = 2,67 18,48 = 21,15 мм;
I AV? \
ДХ2 = Vi + ------“ Д*2 = (5,34 + 5)0,00178 = 18,48 мм.
\ J
9. Давление в конце второго интервала:
/rT'scpSAw 39 740-2,3
Й Лп «. + X,) 8,04(21 ^21,15) " 271 К'С/С“!-
fe+1 / (k+l)bt\
- L k — 1 п\2(Й-1) -----2^
д<о2 — Р к-* г О £ ] а I м \. 1 е / —
= 0,8-0,056-0,673-0,036-0,585 = 0,64 г;
УДи = Д^ + Д<о2 = 1,65 + 0,64 = 2,3 г.
Расчет действия привода в течение последующего времени — Д^3, AZ4, Д£5, Д/6 про-
изводится аналогично расчету на отрезке времени Д/2. Результаты вычислений при
коэффициентах расхода газа через газоотводной канал при рк = 0,8 и цк = 0,35 сведены
в табл. 5.5 и представлены в виде графиков p—f(t) и V=f(t) на рис. 5.38.
Таблица 5.5
t, с 0,001 0,0027 0,0045 0,0068 0,0081 0,0099
ДГк.ср, кгс-м/кг t'r, М/С 56 290 47 147 44 500 42 920 42 030 41 560
777,4 717 696 684 677 673
А <р , м/с 4,5 4,23 р.к = 0,8 4,133 4,074 4,04 4,022
AQ, кгс-м 449,9 133,8 48,7 17,7 6,4 2,3
0,98 0,93 0,86 0,81 0,75 0,7
Тз 0,97 0,92 0,79 0,71 0,65 0,61
/?7ср, кгс-м/кг 54 380 39,735 30 070 24 270 20 420 17 630
, м/с 21,2 19,32 20,4 23,3 27,2 31,5
а 21,07 16,39 37 59,3 81,9 105
b 253,7 436,6 434,4 324,7 244,3 189,1
AV, м/с 5,34 10,05 5,47 2,68 1,48 0,9
V, м/с 5,34 15,39 20,86 23,54 25 25,9
X, мм 2,67 21,15 53,5 93 136,3 181,7 '
SAw, г 1,667 2,31 2,56 2,76 2,71 2,73 ,
р, кгс/см2 466 271 (лк = 0,3 130 5 71 44 29,6
AQ, кгс-м 186,5 54,5 19,6 6,9 2,4 0,8
т2 0,98 0,93 0,86 0,81 0,75 0,7
т3 0,97 0,96 0,87 0,8 0,74 0,7
А?7\-р, кгс-м/кг 54 380 41 460 33 100 27 300 23 24-0 20 200
v© , -м/с 21,2 19,2 19 19,9 21,5 23,6
а 21,07 14,4 24 35,9 48,6 61,8
b 103,2 174 179 147,8 115,8 90,7
AV, м/с 2,32 5,12 3,47 2 1,18 0,73
V, м/с 2,32 7,44 10,91 12,91 14,09 14,82
X, м м ГАоц г 1,16 9,86 26,2 47,5 71,5 97,3
0,73 1,01 1,12 1,17 1,19 1,2
р, кгс/см2 220 169 98 58 37 25
Из графиков видно, что скорость поршня привода и давление в цилиндре приво-
да весьма чувствительны к величине коэффициента расхода газа через газоотвод-
ной канал.
§ 5.10. УПРОЩЕННЫЙ РАСЧЕТ БУФЕРА С ОТСЕЧКОЙ ГАЗА
Газовый буфер (см. рис. 5.33) предназначается для торможений
подвижных частей в граничном положении. Путь торможения составля-
ет несколько миллиметров или сантиметров, а время работы — доли се-
кунды. Задача проектирования сводится к определению размеров рабо-
чей полости и поршня буфера по заданной его энергоемкости. Началь-
< / Р' о об \
ная энергоемкость оуфера — потенциальная энергия газа ——— и ход
\ k— 1 /
поршня (%) определяются поглощаемой кинетической энергией подвиж-
/ mV~Q\
ных деталей —-— и допускаемой величиной усилия торможения
(РрРб). При отсутствии блокировки подвижных частей в крайнем поло-
жении (после взаимодействия их с буфером) буфер должен обеспечить
им заданную скорость отскока. Иными словами, газовый буфер в этом
случае работает как тормоз в откате, и как ускоритель в накате.
Рис. 5.38. Графики изменения дав-
ления в камере газового двигателя
и скорости его поршня:
—Нк = 0,8;-----------------р.к = 0,35
Рабочая полость буфера заполняет-
ся пороховым газом в процессе выстре-
ла. Основная доля газа в буфер посту-
пает за время периода последействия.
После момента времени, когда давле-
ние в полости буфера становится боль-
ше давления в канале ствола, происхо-
дит перекрытие наполнительного газо-
провода. Отсечку газа можно произве-
сти автоматически при помощи шари-
кового клапана. В промежуток време-
ни между окончанием наполнения и
ударом подвижных частей о буфер по-
роховой газ в его полости охлаждается
и давление в ней падает как за счет
теплоотдачи, так и вследствие утечки
газа через зазоры в атмосферу, а при
отсутствии принудительной отсечки
происходит сброс газа обратно в канал
ствола через газопровод.
При работе буфера теплоотдача и
утечка газа также приводят к непре-
рывному понижению потенциальной
энергии газа. Вследствие этого процесс сжатия в полости буфера как бы
сдвигается от изэнтропы в сторону изобары.
Схема газового буфера представлена выше на рис. 5.33. Изменение
скорости подвижной части автомата при ее взаимодействии с буфером
определяется исходной системой уравнений (5.142), (5.143), (5.144).
Если принудительная отсечка не предусмотрена, то в процессе рабо-
ты буфера газ непрерывно будет сбрасываться из его камеры через га-
зопровод в канал ствола. Влияние обратного сброса газа на энергоем-
кость буфера можно учесть. Для этого необходимо увеличить площадь
зазоров Дз на величину площади газоотводного отверстия Fr, т. е. в фор-
мулу для расхода газа G вместо ц3Е3 следует подставить цзДч + цк-А.
Если отбросить силы трения, то дифференциальное уравнение сохра-
нения энергии приводится к виду
v^Vt = + (mzV) V't.
\ k — 1 )t
После интегрирования имеем
«обЧТ’об , msV% M(>Rt i
-------------------- /72 0 —----------------
k—1 1 2 у ° k— 1 2
(5.172)
(5.173)
где
1ZO, V— соответственно начальная и
текущая скорости подвижной
части автомата;
k
1
Г!
р-\-А — [—j —скорость потери потенциаль-
F \ Т7 п /ср
ной энергии в камере буфера,
вызванной теплообменом с ок-
ружающей средой и утечкой
газа;
7 \ 4/б , о
— -----\-2— среднее значение отношения
п /ср ^б
площадей поверхности охлаж-
дения газа F и поршня буфера
й?б — диаметр камеры буфера;
4 — начальная длина камеры бу-
фера.
Из уравнения (5.173) текущее значение скорости движения поршня
при сжатии буфера
(^0
(5.174)
Текущее значение веса газа в камере буфера
0) = %б“ = .. ...
Количество газа, поступившего из канала ствола в камеру буфера,
с учетом объема газопровода Иг—“Т“ аА\ определяется уравнением
—ь ц
Ч
J
о
(5.175)
где £ =
г ^0б
Доля газа, поступающего с критической скоростью из канала ство-
ла в газоотводное отверстие, вычисляется по формуле
*6 =--=---, (5476)
1 4- Fr + k (1 — cos ф)
где Fr=[ir-^; k = 1,25; p.r^0,8;
О
S — площадь поперечного сечения канала ствола.
Для первого выстрела температуру газов в буфере ТОб в первом
приближении можно принять
Температура и вес газа при у = 0, т. е. в конце пути торможения %б
определяются по формулам:
®хб/?Гхб=<о0б^0б (^0 —
(5.177)
л F я б
“хе = “об - A A— Ws ;д__
Рв V RTCP
(5.178)
При сближении результатов решения соответственно следует при-
нять:
RTср = RTоб; АТср=
+ Роб^сб + Аб^хб
шсб 4" °Дб
°Дб 4“.wx6
Уравнение процесса изменения давления в камере буфера найдем в
результате интегрирования дифференциального выражения закона со-
хранения энергии:
— kQRT — {k —= + - 1).
Учитывая, что — G = и pW=^RT, получим
k —
Wi
(О
ср
Отсюда после интегрирования
5
4;C1 / И \ . I j ,J
\ /€р \ W уСр /об—0>5Хб
^^0,7 = const;
4б = ——; ^б —полный ход поршня буфера.
Значение постоянной С находим из начальных условий:
/ —0; VS7 — U706; cu~wo6.
Поэтому уравнение для закона изменения давления при сжатии бу-
фера приобретает вид
/ ^об
Р=РО6
(О .
----- Q.—art
°" Об /
(5.179)
Начальная скорость подвижной части с учетом массы поршня бу-
фера rrtQ определяется из уравнения сохранения импульса удара:
v и , >
где /у.б — импульс удара подвижных частей о буфер;
та — масса подвижных частей автоматики.
При проектировании буфера из конструктивных соображений зада-
ют: ход поршня буфера Лб, наибольшее усилие р\$ и площадь поршня
Fn. Кроме этого, из условия обеспечения повышенной энергоемкости бу-
фера назначают величину
— =1-н2.
/>0б
В этом случае порядок определения исходных данных для расчета
и проектирования будет следующим.
1. Давление в конце сжатия буфера
Рм>
Л
* п
Начальное давление в камере буфера
Роб —
3. Начальный объем камеры буфера находят в результате совмест-
ного решения уравнений состояния, записанных для начального и ко-
нечного положений поршня:
Р)з^)&=^)6Ц7\б
и формулы энергоемкости буфера [см. зависимость (5.128)]
шхб/?7’м>=<и06/?Гоб + ms(V0 — 2v9) V'o.
После очевидных алгебраических преобразований имеем
Р)б=Р0б
^0(И0- 2*0
Доб^Сб
(5.180)
Для определения изменения объема камеры буфера при его сжа-
тии можно воспользоваться приближенной зависимостью
(Лб + ^об) ^,rZ6 = fnsVo=:2£'o6, (5.181)
справедливой для линейной функции р(%).
Здесь
где
Решая это уравнение относительно ЛДб, получим
= 4£о^сб -----J ) (5.182)
2 1 + V1 - z
где
2=«х6/?Гхб + ^бГоб + 2£-05; г = ,8.^^об .
Формула для /дАб является достаточно точной, так как вследствие
больших потерь потенциальной энергии газа в камере буфера кривая
р(к) близка к прямой с весьма малым углом наклона. Эту же формулу
в случае необходимости (например, когда путь торможения % большой)
можно использовать для расчета рабочего торможения подвижных час-
тей пушки по участкам спрямленной кривой р(^).
4. Необходимое количество порохового газа для обеспечения задан-
ной энергоемкости буфера находят из уравнения состояния
, Л Ж^об
06 RTo6
(5.183)
Величину RTg$ в первом приближении можно принять равной
/?г06=/(1-пд)-^-
о 4- о
(5.184’1
где
b=- ^ = ^Nd;7 = (^-l)AQ.
К
В дальнейшем после выбора определяющих размеров газопровода,
координат положения газопровода и координат положения газоотвод-
ного отверстия на стволе, величину RTqs рассчитывают и затем уточня-
ют геометрические и газодинамические характеристики буфера:
Гоб, Робч Рм,
5. В общем случае текущие значения давления или тормозного уси-
лия буфера определяют методом последовательного сближения резуль-
тата по формулам:
Pq6
k f °'6
\ 0)об
к
2 /’об^сб "/
А“об
/«2
k
^~axt
°Чгб
а0б
з
1 Г
ср
О
Первый результат решения находят для случая ai = 0, (охб = о)об,
х = Ах. Величину шага расчета допустимо принять ДЛ = — -ь — .
При разжатии буфера уравнение энергии (5.172) имеет вид:
— т^\У\={ —
\ £ —1 и
Поскольку mzVt = Fnp,w скорость наката подвижных час-
тей определяется формулой
<?
“мЛ7\б — “:б#7"1б
«в
(5.185)
Пример 5.22. Найти размеры газоотводного отверстия для буферного устройства,
обеспечивающего следующие характеристики:
/уб = 50 кгс/см2; £рб = 20кгс-м; Jq = 4 кгс с;
По6 = 2000 кгс; 1Гоб = 280 см3; 5 = 7,2 см2.
1. Площадь поршня
Псб
ц = —— = 40 см2.
РС-б
Длина камеры буфера
где
3.
, 7П
Zo6 =-------= 70 мм.
Тц
Начальное количество порохового газа в камере буфера
^об^об 50.104-280-10-6
06 РТо6 33-732
Гсб = 732 К; /? = ЗЗкгс-м/(кг-К)
(см. пример 5.11).
4. Объем канала газопровода (см. пример 5.11)
г —
nd*
----1 = 7$ см3.
5. Производительность газоотводного отверстия при <о=200г и Тг = 0,28 прибли-
женно можно вычислить по формуле
сб =
’ = 3,7-lQ—2*
со
Расход газа через дульный срез ствола в момент вылета снаряда:
= 100 кг/с,
где
w = 0,2 кг; V. = 100 м/с; = 2 м.
' * Д « > Лч
6. Площадь и диаметр газоотводного отверстия при %—1 [см. формулу (4.54а)]:
5
Н2 1 — <*б
[1 + k (1 — cos Ф)] = 0,99 см2;
= 10,7 мм,
где р2 = 0,8; ф = 120°.
На входе в газопровод коэффициент скорости газового потока для случая его
торможения при внезапном расширении диаметра сечения, например, с 8 до 10 мм опре-
деляется формулой [6]:
0,5,
/ FK \ £+ 1 Ак / 10 \2
где Ко=1+ Нг--1 --------------------------= 1,278; —-=—" = 1,68;
1 — коэффициент скорости в газоотводном отверстии.
Для Ло = 0,5 параметр интенсивности охлаждения газа в канале газопрово-
да Bt = 1,18.
7. Количество газа, оставшееся в камере буфера к концу торможения откатных
частей:
“}.б = “(б —АЛ —= 5,3 г,
V RT6.cp
где
А\ = 2,05 м^2/с; Zo = mVg = 4 кгс с;
_ itoF- 0,8-0,467 ,
Лг = = —------!----= 0,934-10~2;
Л 40
ЯГб.ср « /?70б = 24 150 м;
Vo = 2-^-= 10 м/с.
7q
8. Скорость потери потенциальной энергии газа в камере буфера вследствие теп-
лоотдачи и его утечки в канал ствола через газопровод:
j" Л1^г Уя/б.ср 4- А 15,43 м/с,
—-— = 5; Гг = 0,934-10~2; RTq сР = RT^e = 24 150 кгс-ги/кг;
k — 1
а1 = 0,01 ккал-м/(кг-с*К); R == 33 кгс-м/кг; v = 0,7; А — 427 кгс-м/ккап;
Лр =-/—= 2 +-^-= 6,06.
'и
9. Температурный комплекс газа в конце пути торможения (V = 0):
Ев = “>б^Л.б = о’сбЛУсб + (к — 1)/о(Уо — 2и?) =
= 5,8-10“3-24 150 + 0,25-4(10,0 — 30,86) = 119 кгс-м.
10. Температура газа в конце пути торможения:
4.6^4
г>6 = ----------- = 680 К (RT./6 = 22 450 кгс-м/кг),
"хб"
11. Изменение объема камеры буфера в конце пути торможения:
F . 4£06Гс6 1
Л/б =---------------------------------------= 40 см3,
1 + / I _ 8£СбР0б^Сб
где
£об = 2000 кгс-см; W'od — 290 см3; р^ = 50 кгс/см2;
1 = Шхв/?Гхб + ровнее + 2£0б = (И9 4- 140 4- 40) Ю2 = 29 900 кгс-см.
12. Давление газа в камере буфера в конце пути торможения:
(“лб^Лб) 116-102
Аб = ---= ояо----ГТ = 49’6 кгс/см2.
иЛб — гпЛб 280 — 40
13. Полный ход поршня буфера (Хб) и конечное усилие торможения (П х б):
(Л,Х6)
>6 = —------- =12,4 мм; П;б = Рар^ = 1984 кгс.
*п
14. Время торможения
2'Лб 2,4840-2
10
~2,4810-J3c,
Пример 5.23. Определить начальный объем газового буфера и его геометрические
параметры с учетом тепловых потерь в газопроводе при следующих исходных данных
(см. гл. IV):
4=23 мм; ®=60 г; ? = 200 г; ^д=890 м/с; / = 95000 кгс-м/кг; Гп = 2750 К; %=-
= 33 кгс-м/(кг-К); роб = 30 кгс/см2; Кб =2 см; Е=8 кгс-м — энергия откатных частей в
момент удара; 7 = 2 кгс-с — импульс откатных частей; / = 700 мм — длина газопровода;
4П = 6 мм — диаметр газопровода; А = 2 мм — толщина стенки газопровода; /д= 1,250 м —
длина ствола орудия; /д—/от = 0,625 м — расстояние от дульного среза до газоотвод-
ного отверстия; /Эап = 0— время запаздывания удара откатных частей о газовый буфер,
отсчитанное от момента выстрела.
Порядок расчета
Расчет процессов, протекающих после выстрела в газовых трактах артиллерий-
ского орудия, может быть разделен на четыре следующих основных этапа.
1. Расчет процессов, протекающих в канале ствола орудия, с целью определения
исходных параметров для расчета газопровода. Сюда входит определение температуры,
давления и расхода на входе в газопровод в функции времени.
2. Расчет термодинамических процессов при течении газа по каналу газопровода с
целью определения начальной температуры газа на входе в газовый буфер и времени
движения первой порции газа по каналу газопровода.
3. Расчет процесса наполнения газового буфера и определение его энергетических
характеристик при заданной геометрии при наполнении и последующем охлаждении
газа в буфере.
4. Определение потребной энергоемкости буфера, достаточной для погашения ки-
нетической энергии откатных, частей на заданном пути отката.
Очевидно, что поставленная задача не может быть решена непосредственно ана-
литическим путем, поскольку сложные функциональные зависимости, связывающие
исходные и расчетные параметры, позволяют использовать для решения задачи только
метод последовательных сближений.
1. Коэффициент фиктивности массы снаряда
_ 1 С°
<Р 1 , Ой + ------------------— 1 , ОО +
3 q
1 60
3 200
1,15.
2.
Коэффициент полезного действия орудия
8902
------ =0,405.
2.9.5-104-60-10-3
1,15
Принимая закон изменения скорости снаряда параболлическим:
Г U/2
I ,
д /
в точке
отвода имеем следующее значение скорости снаряда:
t/0T = v0
,5 — 630 м/с.
4. Средний к. и. д. орудия на длине ствола от газоотводного отверстия до дуль-
ного среза:
Л Щт?
vo
0,2
1,15 ~
2-104.9,5-60-Ю-з
6302 + 8902
----Т7-- =0,3.
ymv2
=
5. Температура газа, поступающего из канала ствола через газоотводное отверстие
в газопровод:
1— т „ 1 — 0,3
7\п = /1----=9,5-104--------—= 2020 К.
1 Л R 33
6. Объем, занимаемый пороховым зарядом до начала горения:
(О
гк=-------.
7п
Удельный вес пороха с учетом засыпки уп = 1,2 г/см3. Тогда
60
1ГК = —— = 50 см3 = 50 -10—6 м3.
1,2
7. Объем заснарядного пространства канала ствола в момент прохождения снаря-
дом газоотводного отверстия:
^к.с.от = — 1<я = — 0,023-0,625 = 2,6- Ю-4 Мз.
8. Объем канала ствола
тг /У 2
1ГК.С = —-Z.( = 5,2-10-4m3.
т:
9. Давление в заснарядном пространстве в момент прохождения снарядом газо-
отводного отверстия:
_______RT к/Щ
7^001 ОТ тту тту J
W к.с. от К
33-2020-0,06
/’ОО/ОТ = 2,6-10-4 + 0,5-10-4 = 1 >29-107 Кгс/М2 =- 1290 кгс/см2.
10. Давление в канале ствола в момент вылета снаряда
Рш =
RTKt^
Й^К.С +
33-2020-0,06
P№t = 5,2ЛБ-4+'о,5-10-4 = °’7'107 кгс/м2 = 700 кгс/см2'
11. Среднее давление в канале ствола на участке движения снаряда от газоот-
водного отверстия до дульного среза
PootQ т + 7W 1290 -ь 700
ACfcp ~----------“-------= --------------= 9,95*106 кгс/м2 = 99о кгс/см^.
12. Скорость газа на входе в газопровод
«0-яо=|/ —-gRTKti =1/ — ’ 9,8-33-2020 = 852 м/с.
tr R “j" 1 f Ji у “у" 1
13. Время заполнения газопровода в первом приближении можно определить так:
// = 1,25——; // = 1,25-^—- = 0,00103 с.
v0 852
14. Статическая температура и давление на входе в газопровод определяется че-
рез стандартные газодинамические функции л(Х) и т(Х):
т = ^к/1т(1); р =/’иисл(1).
При k— 1,25 имеем:
Го = 2020-0,889 = 1790 К;
Pq — 995-0,555 = 5,52-106 кгс/м2 = 552 кгс/см2.
15. Коэффициент температуропроводности газа может быть определен по прибли-
женной формуле
7,25
5,52-106
7,25
Р
= 1,31 • 10“6 м2/с.
16. Коэффициент кинематической вязкости газа
v : #ггрг при Рг = 0,74;
у = 1,31 -10“6-0,74 = 0,97• 10“s М2/с.
в
5,52-106
33-1790
93
17. Удельный вес газа на входе
Ро
70 ~ RTa
18. Плотность газа
7о
рп = ---- = ----— = У,О КГС-С2/МЧ.
™ g 9,8
19. Динамическая вязкость газа
[!= pv = 9,5-0,97-10-6 = 9,2-10“6 кгс-с/м2.
20. Коэффициент теплопроводности газа
Х.п. = 5р. = 5-9,2-10 6 = 4,б-10 5 ккап/(м-с К).
21. Число Рейнольдса
Re =------
852-0,003
0,97-10“6
= 2,64-10“ 5.
22. Число Нуссельта
Nu = 0,023Reo'8Pr0,4 = 0,023 [2,64- 10б]°’8[0,74]°’4 = 2,68-103.
23. Коэффициент теплоотдачи
а = Na —— 2,68- Ю3 —-------------= 20,5 ккап/(м2-с- К).
0,6 10-2
24. Критерий Био
аД 20,5-2-10”^ .
Bi =------=----------------- =4,1 при Аст = 0,01 ккал/м-с-К (для стали).
кт 10~2
25. Первый корень трансцендентного уравнения OitgO = Bi (с использованием
аппроксимирующей зависимости):
,2 Bi 4,1
1 1+0,4Bi 1+4,1-0,4
26. Показатель интенсивности нагрева стенки газопровода
а 1
1 -h nBi
Для стали (с=0,16 ккал/кг-К; у = 7850 кг/м3)
46 1
в, —-----------------------------= (
14 0,16-7850-2-Ю-з 14,0,4.4,1
27. Параметр тОх:
______________________2В1_________2-4,1
Т°Х Bi + Bi2 + Ф2 4,14-4,12+1,55
28. Модифицированный показатель интенсивности нагрева стенки газопровода
₽ = ₽! —1пт0х = 6,9 —1п0,182 = 8,6 1/с.
29. Показатель интенсивности падения полной температуры во времени при дви-
жении потока по каналу газопровода:
*1 = Nu;
1 Qi . 1 Л—6
*1 = —7------™-----2,68-10~3 = 392 1/c.
(3-10“3)2
30. Показатель Br.
Bt = -Д- (1 - eM'z) = -^ (1 - e-8>6 0-001) = 0,39 1/c.
P 8,6
31. Температура первой порции газа на выходе из газопровода:
Ты = Т’ост + (Тт — ГОст)Т^ = 293 + (2020 — 293) е“°’39 = 1462 К.
32. Для уточнения значения времени ti определяем:
Для л0 = 1
Значение ti уточняем по формуле параболического распределения
852
= 0,00127 с.
Следовательно,
—8,50.00127
Т01 = 293 + 1727е-0,5 = 1340 К.
33. Делаем второе сближение:
ТС1 1340
а», = ~~ = ----------= 0,663;
1 Too 2020 ’ ’
0,663
= 0,42;
V; =
852 1 + 2-0,415
= 0,00133 с.
34. Делаем третье сближение:
Bi = 45,6 (1 — е“ 0i0115) = 0,5 1/с;
TN =- 293 4- 1727е-0’5 = 1340 К;
Ты == 1340 К; /1 = 0,00133 с.
35. Для заданного давления в камере буфера в момент отсечки /?об=ЗО кгс/см2
начальный объем буфера при проектировании может быть определен, исходя из уравне-
ния сохранения энергии для газового буфера в момент остановки:
Роб^об г Аб^хб
-I ~ 7 I J
k — 1 * k — 1
I Хб А.6 / ^06 V
Рт-,6 Л)б 1------. так как ---------------- = ——
\ J Реб \ №;б
Следовательно, уравнение энергии может быть записано в виде
ЗТ о /"
P06^d6l6 ( , , 1 — 0,5 —
4 VO] 14 1 £(-
к i £°тк Г°тк n I ~4 + " /
—1 К I 6?б /б Лб
\ ~ t6
Откуда
Дальнейший расчет проводим следующим образом.
Принимаем /б—-4 см^4-10-2 м, Ле = lt5 см = 1,5-10-2 м.
Задаваясь de =8 см^8-10~2 м, определяем в первом приближении величину дав-
ления Рои, необходимого для гашения энергии откатных частей:
4-20
При = 8* 10 2 м
420
РГз ~ 64-10-4
13,6
———-------— 3,95-104 кгс/м2 = 3,95 кгс/см2.
512-Ю-б
Вычисляем коэффициенты уравнения наполнения газового буфера, полученного
совместным решением уравнений сохранения энергии пороховых газов для канала
ствола и полости буфера:
1) показатель интенсивности истечения пороховых газов из канала ствола:
9,8 —(2,3.10-2)2.700-10-4
Ь = ------------------
<^ — 0,5)о)0Уд
1300
где 3* =--------== 1,46;
------------------------ — 1/с
(1,46 — 0,5)63-Ю-з-890 ' Z ’
2) показатели в формуле для роб:
556 = 55,6 1/с;
^2 — <4 + 3 = 55,6 4- 8,6 = 64,2 1/с;
ЗА —1 2,75
сз - Ь 4- ₽ - —— 556 4- 8,6 = 620,2 1/с;
2А 2,5
б _ 4 1
dfr * /g
= (1,25-1)
0,5-42,7
33
8-Ю-з
где <7д = Z^o;
tjg = —:------------------
4-1,25(1—cos
= 0,029 (дгя ф =90°);
Gj; = 556-60-10~3 = 33,4 кг/с;
0,029-33,4
4~(2,3-10-2)2 4-10 2
- „ -4; .
= 7,3-104;
ах = 1,62-.10-1
1 Л л , 0,648
4-10-2 . ’ 5 ‘ :
2
б
,2
а\ с
(Реб/Т'оо/) ь (Рсб/Роо /У ь
Я) С2
) ь — (Аб/Роо t)b
Cl —
Ял Сз > „
, DT (.Рсб/Pwt) ь —(Лб/Роо/) 6 , t . г. „ г„
+ RTqI--------------------.. .... ----1 + Pa (Лб/Ж t) = 490-104 + 0,84-104 =
<?3 — й1 . 1 .
= 490,89 кгс/см2.
/?0б — ^2 I ^^0 ст
Принимая роб = ЗО кгс/см2, определяем ао:
490-104---4-0,89-104^ 30-104,
0,029
отсюда
аб = 0,0017.
Так как
2,25об _ 2,25-0,0017
1 —% = 0,9983
= 0,00388;
то
rf0T„ й?к.с V ?й =-- 23 у 0,00389 = 1,43 мм.
По значениям
Е -- —-— — 8 кгс-м и J ~ ~ 2 кгс-с определяем
1/0--- 8 м/с; /ns = 0,25 кгс-с/м.
Далее задаемся шагом АХ = 0,5 см = 5-Ю-3 м и, учитывая, что
Го6 =-----б-16 = + (8-10“2)2-4-10“2 = 20,2-10-5 м3;
4 4
FB =-------=5,05-10~5 м2;
/ Л \ 4 1 1б 4 1 1 — 0,25
\ /ср <!& ' !б 8-10“2 + 4-10-2 °,5
16
= 0,5-102 + 0,376 102 = 87,5 1/м,
получаем
•*01 / F \ 0,5-42,7 „ , „ „„
« «-----— — 16 = —Н—— 87,6-4-10“2 = 56,6-4-10-2 = 2,26 м/с.
? R \ W Уср 33
Далее определяем параметры движения поршня буфера:
1) для X = ДХ
ТЛ 11/ /17 ^2 2 ^06^(6 V1-V+]/ 7 ^об y-1 ’ L\ w/зб ; J
-1 f 30-104-20,2-IO-5 = 2,26+]/ 33-8 ++ '/ 20,2-10~5 _\20,2-10-5 — 5,05-10~3-5-10-3
_ 7,37 м/с;
3-5-Ю-з
2-8 + 7,37
= 6,45-10-4 с;
/ V -a.bt
W~-P^X ) е =
= 30-104-1 ,141’2Se—12,1 -6,45-10-4 = 35 >2.104 Кгс/М2;
^ = 2,25 + ^/33 — 194[1,035-0,992—1] =7,76 м/с;
2) для Х = 2АХ
/„ п 17,7-10—s-35 ,2-104
3°.2 - 8---------------Г77---------
и. ZU
< 17,7-1Q—5 \°-25
I 15,2-10-5 )
~ 6,96 м/с;
ТО
Д*2 =
3-5-10-3
2-7,76 + 6,96
= 6,65 -10—4 с;
рб2 = 35,2-104.1,171’25-0,992 = 42-104 Кгс/м2;
= 2,25+ у"39,2—6 = 7,15 м/с;
3) для X = 3A/Y
И3 -2,25
42-104.10“°.15,2
24 — 8----------------—
15,2-10-5 \0’25
12,7-10
= 5,95 м/с;
Д^з =
3-5-19-3
2-7,15 + 5,95
= 7,4-10-4 с;
4) для Х=4АХ
Рбз = 42-104-1,21’25-0,99 = 52-104 кгс/м2;
V'2 = 2,25 + у 24 — X = 6,23 м/с;
У4 = 2,25 +
52404-12,7-10-5
0,25
12,7\0>35
10,2/
= 4,01
м/с;
15-10-3
2-6,23 + 4,01
= 9,2-10-4 с;
/>64 =52-104-1,31 -0,988 = 67,2-104 кгс/м2;
' К4 = 2,25 + ]/15,8— 10,6 = 4,53 м/с.
Так как при Wx$ = 10,1 -10 5 м3, V =
Wx6 = Woi — 7ПДХК = 10,2-10—5 -5,05-10—3ДХК = 10,1 -10“3 м3;
0 1 10“5
ЛХК =-----1-----— = 0,0198-10~2 м = 0,0198 см = 0,2 мм.
5,05-10—3
Таким образом,
/?об = 30 кгс/см2; <70ТВ = 1,43 мм; d$ = 80 ум; = 40 мм; Хб —~ 20,2 мм.
$ 5.11. РАСЧЕТ ЭЖЕКЦИОННОГО УСТРОЙСТВА
АРТИЛЛЕРИЙСКОГО ОРУДИЯ 1
Эжекционное устройство располагается на дульной части ствола и
предназначается для продувки его канала от пороховых газов. Ресивер
эжекционного устройства наполняется пороховым газом в период вы-
стрела. Затем, после того как давления в ресивере и в канале ствола
выравняются, пороховые газы вытекают обратно в канал ствола через
наклонные сопла в направлении дульного среза (рис. 5.39) и отсасыва-
ют пороховые газы из казенной части ствола.
1 См. работу [6].
Клапанное устройство, перекрывающее наполнительные каналы ре-
сивера, обеспечивает необходимую продолжительность действия эжек-
торов и потребную эффективность продувания.
Рис. 5.39. Схема эжекционного устройства
Период наполнения ресивера
Изменение давления в ресивере согласно закону сохранения энер-
гии (5.5) описывается дифференциальным уравнением
GcpTK - aTF (Т - Гс) =-Ы (pW) + pW’t.
1 й — 1 dt
Для надкритического перепада давления приход газов из ствола в
резервуар ресивера определяется зависимостью
G^A^=—
]/ RT к
k
Учитывая, что с„Т,. =------AT,., aT = ov, lT=const, получим
fa_ j n
kAxF*pK = (k-
(5.186)
где
рк и Тк — давление и температура пороховых газов в ка-
нале ствола;
р —давление в ресивере;
*~1 — постоянная расхода;
W — объем резервуара ресивера;
Л’*—эквивалентная суммарная площадь критиче-
ских сечений клапанов и сопел;
г
-----относительный перепад температур;
— температура газа в ресивере;
Т —температура стенки ресивера.
Средние величины давления и температуры за период движения
снаряда по каналу ствола:
Рк =
W
После интегрирования и потенцирования получим закон нарастания
давления в ресивере
р = р^ (1 - Д + p^b,t Роо (1 - е-*'9> (5.187)
В рассмотренных выше формулах:
/’“==TL; di = apKVRTK\ b^[k — \)A
*V О -£
Pz — начальное давление в ресивере;
S — площадь поперечного сечения канала ствола;
I — расстояние от дульного среза до каналов эжекционного
устройства;
— дульная скорость снаряда;
VPK и о? —соответственно объем канала ствола и вес заряда;
v—скорость снаряда в сечении газоотводных каналов эжек-
ционного устройства.
Для периода последействия в соответствии с формулой (5.146) те-
кущее значение температурного комплекса будет
рЛ^к=РяУ~ЯГд-±=-е~Ь**, (5.188)
Vk
d —диаметр поперечного сечения канала ствола;
(1-Ь^дПо—полная длина канала ствола с учетом бутылочности камо-
ры заряжания;
/0—приведенная длина каморы заряжания;
Хд~ Ан---степень расширения газов в канале ствола;
/сн — полный путь снаряда в канале ствола.
Подставляя в уравнение (5.186) текущее выражение для
Рк V rrk, получим:
p't — b'p = a^
(e-w_e-^ + Ae-w
(5.189)
где a2=kA^V RT.-^-; b'=^ R~ 1 A — v, £=1,1-1,2;
1 д W d2 — di R
A“(i-e-ft’T; ; RT\=f i
*т V + V, \
9
Ср/ТШд
2uAQ
рд и Тд —соответственно дульные давление и температура;
di и ^ — соответственно наружные диаметры ствола и ресивера.
Для коэффициента а2 после преобразования можно получить более
удобную формулу
ftp V д //д
a2=k----—------:,
4”
где /гл= 4г-= °.015 = 0,03; ^ =—=0,1-0,25.
к
Если в уравнение (5.189) подставить выражения для tm = — 1п-^-
*1 Д02
и аъ то для наибольшего давления с учетом теплопотерь можно по-
лучить формулу
Уч. (5.190)
\ 1 + пЬг /
где
03
— nF -Г Ь\ Г — Я]
/г=-----------------77 ; Ь^ = ~.---77 J Р = — •
И — " ^2 — Ь Р*
Эквивалентная суммарная площадь критических сечений клапанов
и сопел
где Fc — суммарная площадь критического сечения сопел;
7*л — наименьшая площадь канала клапана;
и рькл —условные коэффициенты расхода газа через сопла и кла-
паны.
Величины цс и цкл могут быть определены по формулам:
______________________________1__________ .
1 4- k [1 + cos(180° — Фс)] ’
_______________1__________
Кл — 1 4-Ml + (cos 180° — 6КЛ)] ’
где фс и фкл — соответственно углы наклона сопел и клапана
нала ствола.
Вес пороховых газов в ресивере в конце его наполнения
^09 - •
RTvi
Период продувания канала ствола
В период продувания канала ствола давление в ресивере
дать. Закон изменения давления может быть представлен зависимостью
вица (5.146)
Р=Ро2^~>2‘, (5.193)
к оси ка-
(5.192)
будет па-
где р02 — наибольшее давление в ресивере;
?2 = У+ ; О02 = ЛХ № .
“°2 V РТ02
При 6=1,25 параметр A i = 6,3 дм /с.
Полное время продувки канала орудия /з согласно уравнению
(5.193)
где t3— время открывания затвора, отсчитываемое от момента вылета
снаряда из канала ствола.
Потребное количество воздуха, обеспечивающее надежное продува-
ние канала ствола,
“взбили1 + ХдУ(А (5.194)
где = 1,3 -ч- 2 — коэффициент надежности продувания;
YB3=1,29-10~3 кг/дм3 — плотность воздуха.
Количество воздуха, подсасываемое в канал ствола,
<°вз = \ Oxdt,
О
где G\ — расход воздуха через казенный срез ствола.
Расход воздуха Gi определяется исходной системой уравнений:
— сохранения вещества
Gi + G2 = G3;
— сохранения энергии
— J fix + 2^2;
— сохранения импульса потока
/?3 = /?х + /?2 СОБфс.
(5.195)
Индексы «1», «2» и «3» относятся к сечениям, проведенным соответ-
ственно через казенный срез, по месту эжектора и по месту полного сме-
шения потоков воздуха и пороховых газов.
В системе уравнений (5.195) параметры /ь G2, Л, Rz известны,
а параметры Gb /3, Х3, G3 являются неизвестными. Для их определения
исходная система должна содержать четыре уравнения. Величина ста-
тического давления потока для дозвукового течения в канале ствола
сохраняется постоянной. Поэтому четвертым уравнением будет равен-
ство
Р1 = Рз- (5.196)
С учетом последнего соотношения третье уравнение системы (5.195)
приводится к виду
Д^.+^сазФ =-^-, (5.197)
g g
так как
^i = — ‘Ti + 5Jp1; /?3 = — г/3+5/73.
g g
Скорости потока гчд могут быть записаны через его полные эн-
тальпии
^1,3 = ^1,3# 1.3,
где
2gJ1>s;
г \k 4- 1 '1,3 — 1
— газовая постоянная воздуха;
Га — температура воздуха.
Энтальпия смешанного потока
j /]G? 4-
3“ Gi + О2
(5.198)
Тогда в соответствии с уравнением (5.197)
G\\\ar 4- gR% cos Фс
<J Ф
у"»
C/3&2
или
(5.199)
так как
где
« П- i ,
1/ таД1 4-------Д9 cos ФР
Из уравнения для полной реакции воздушного потока
имеем
где
(5.200)
Выражения (5.199) и (5.200) подставим в соотношение (5.196),
тогда
Для дозвукового течения (kr X), когда [-----------Х2| I, можно
+ 1 /1,3
принять
или
(5.201)
Решая уравнение (5.187) относительно Oi, получим формулу для
коэффициента эжекции
(qpi-D(i+ т)
(1 + Р2 + 'Н
1
(«Р1-РЧ1 +О2
G+T)2+v2]2
где
У1=^^/т:ЛГ2созфс.
к
Расход подсасываемого воздуха согласно уравнению (5.198) будет
(а2 — С?2)(1 + т)
, (5.202)
где
V" Xki gSpa k + 1 J, „ „ —32(Л/з + Р
а2=-------— ------/<2 со-s Ф ; O, = G0,e ;
*i + i 4 k ,c - °-
Si = ^_|_(1+t)2; ₽2=0,9&;
д/3=/3— tm — время запаздывания открывания затвора;
t — время продувания канала ствола, отсчитываемое от мо-
мента открывания затвора.
В уравнении (5.202) имеется член G2(/), поэтому для определения
количества воздуха, прошедшего через канал ствола, строят график
функции Gi(/) или берут величину GJ/) средней:
ср ду (G01 -J- G01{),
£
где Goi — начальный расход воздуха;
GOk — конечный расход воздуха.
Конечный расход воздуха GoK = tfiG2K определяется величиной
fe+i _ fe+i
O2k=G02(^) k (1-^4 >4 (5.203)
\P02 f \ Й+1 7
где
= К % -k К2 — 1 •
Это допущение следует рассматривать как запас надежности про-
дувания.
По физическому смыслу G2k является предельным значением рас-
хода, после которого величина коэффициента реактивности сопел эжек-
тора начинает уменьшаться вследствие перерасширения пороховых га-
зов на выходе из них.
Время эффективного продувания канала ствола
k
\ £ + 1 / Ра
Вес эжектируемого воздуха, т. е. количество воздуха, вошедшего
е канал ствола через его казенный срез:
“вз-Сю/эф- (5.204)
Для проектирования необходимо знание следующих основных ха-
рактеристик эжекционных устройств:
— характеристики надежности продувания накала ствола;
— место расположения ресивера /, его объем длина и диаметр
dp, диаметры и углы наклона клапанных отверстий dKJI, фкл и
сопел dc*, фс к оси канала ствола.
Оптимальные значения этих параметров определяются при реше-
нии приведенных выше уравнений (с использованием ЦВМ), исходя из
заданной надежности продувания канала ствола.
Методика расчета надежности продувания приведена в работе [6].
На основании практики можно рекомендовать принимать при проек-
тировании следующие значения:
/=(8н- 10)rf; — = 2,5 = 3,5; фс=( 155-s- 165)°.
rfp
*2 .2
# ftdc
Наиболее важные проектные параметры Wp:, /с ———, /кл —
определяются следующими соотношениями:
^=-±=0,12-4-0,22; Д=±± =0,003 ч- 0,005; /кл=2±1=0,01 = 0,03.
Инн о о
Пример 5.24. Найти производительность эжекционного устройства для 76-мм пушки
обр. 1936 г., имеющей следующие данные:
оз = 1,08 кг; 5 = 0,47 дм2; q = 6,2 кг; уд= 700 м/с; /0== 3,23 дм;
IFKH — 14,8 дм3; I = 7 дм; v = 665 м/с; ? = 1,09; У7* = 0,0446 дм2;
Ри — 370 кгс/см2; Хл = 10,3; do d\ = 0,5 дм; IT = 4 дм3; Къ — 1,25;
•> = 0,7; Д1 = 6,3; f — 950 000 кгс*дм/кг; а = 1 ккал• дм/(кг• с-К);
количество сопел — 4; & = 1,2; = 330 кгсдм/(кг-К); dz = 2 мм;
Фкл = 90°; фс = 150°; У7^ = 4 см2.
Период заполнения ресивера
Суммарная площадь критического сечения сопел
* Р'КЛ^КЛ й
--------------• ^* = 4-------=12,56 мм.
с Р*с ’ с 4
Условные коэффициенты расхода:
ас =-------------------------= 0,308;
1 +Л[1 + cos (180 — фс)]
цкл -------------------—------- = 0,454.
1 -I- k [1 4- cos (180° — фкл)]
Эквивалентная суммарная площадь критических сечений клапанов и сопел
/=’ = ^.с7* + = 1,85 см2.
Давление в ресивере в момент вылета снаряда
Pl =/’оо(1 — + = 14,71 кгс/см2,
где = -±1— = 93 960 кгс/см2;
«1 = kA!pKF* VRTK^ 1,2-6,3-0,0185-3,9-107 = 0,545-107 кгс-дм/с;
va 1 0,7-1
= (k — 1) А —— F = — 4270 —---------- 32 = 58 дмЗ/с:
' ' R 5 330 ’
4Г Й_
Л = -------— = 32 дм2; Ь' =-у = 14,5 1/с;
— d [ iv
2Z
ti =-----;-----= 1,025-10“3 c; b'tx = \ ,47- IO-2; рае-ь'^ »1 кгс/см2;
V + V д
<Р7 (г»д — ей)
/?ГК = -^-(IFKH— 0,5SZ) = 609 000 кге-дм/кг.
<0
Наибольшее давление с учетом теплопотерь
(р + п Ьл \b- _
________) =53,3 кгс/см2,
1 + п Ь\ /
где р = — == 0,0398; Ьг = -г- 1 ,, = 1,021;
Рд . — °
*2 = -------—— =1,07; *! = ]/*— - ' - — = 210кгс/с;
— b (1 + Ад) Zo
b-z = bi + {k — 1) A ------y- = 220 кг/с;
/< a
f F*
n =-------= 0,145; nf= —— = 0,0394;
nw •
W
~~ W'kh
= 0,27.
Время наполнения ресивера
^17/— 10,25 * 10 с,
где
tm = -1— In = 0,00922 с.
« PQ2
Количество порохового газа в ресивере
р021Г
“02 = ----= 0,0628 кг,
«/02
где
/ <fmvl \
f I 1 —(k — 1) —-——- ) = 6,37-105 кгс-дм/кг.
\ 2о>/ /
Закон изменения давления в ресивере при продувании канала ствола:
Р ^P^~^2t = 53,3е“15,4/,
где
С02 = ——2— — 0,052 кг/с;
^2 = b’ + Vk °02- = 15,4 1/с.
ш02
Расход воздуха, подсасываемого через казенный срез ствола:
G - 1 + Т (а п \ -u 1 / (1+Т)2 (п (2a2-G2)G2
<31 - - 8j («2 - G2) + |/ (а2 - Ф2 + — --------
а1
где т =-----— = 0,222; а[ ~ 330 м/с;
fl2cp
/?Т'п2 ( Р \
^т2ср = “й^— 1 —------------- =4,42-105 кге-дм/кг; k2 — 1,3;
г2 S \ Р02 1
моментом начала опорожнения
Если открывание затвора совпадет по времени с
ресивера, то начальный расход воздуха при G2=Gq2 = 0,052 кг/с составит
(0,736 — 0,
(0,736 — 0,052)0,052
0,3622. -------= 0,7671 кг/с.
0,23
Конечный эффективный расход
ройства
порохового газа из ресивера эжекционного уст-
/>02
\ 20*2-1) =0,0261 кг/с.
1
2
Конечный эффективный расход воздуха через казенный срез ствола
60к = — 0,5313 (0,736 —
(2-0,736 — 0,0261)0,0261
0,377 4- ------------ ------
= 0,7754 кг/с.
Средний расход воздуха через казенный срез ствола
1ср= т (Got + еОк) = 0,7712 кг/с.
Количество воздуха, прошедшего через казенный срез ствола (время открывания
затвора равно нулю),
где
/?02 1,43
In
32
= 5,07-Ю~2 с.
s ~
2*3
Количество воздуха в канале ствола
“1вз = = 1.48-1,29-10~3 = 19 г.
Коэффициент надежности продувания канала ствола
п ~------- = 2.
При расчете количества воздуха не был учтен период продувания канала ствола,
определяемый изменением параметра ог = 2 до Л2=1. Если это учесть, то величи-
на п возрастет:
1 G0K(/n— fs) 1 0,7754-13,6-10—2 „ ол
«1 ~ п + -----------------= 2 + — --------------;----=3,84,
3 <»1вз 3 1,9-10
где время снижения давления в ресивере до 2 кгс/см2 (ta—.l),
§ 5.12. ТЕПЛОВОЙ ДУЛЬНЫЙ ТОРМОЗ
г Г Р
Рис. 5.40. Схема теплового дуль-
ного тормоза
Имели место попытки построить дульный тормоз без отвода поро-
ховых газов в стороны, т. е. достигнуть уменьшения осевой реакции га-
зового потока в полости такого надульного устройства, сохранив неиз-
менным расход газов по длине полости.
Если на конце ствола закрепить полузамкнутый цилиндр с одина-
ковыми площадями входного и выходного
сутствии гидравлических потерь и тепло-
массообмена (a* = const; O = const) меж-
ду потоком газов и окружающей средой,
реакция потока внутри полости такого
проточного сосуда не изменится (/? =
=const), а величина тормозного усилия
вследствие этого будет равна нулю: У?у =
= (1 —а) /? = 0; 1.
Таким образом возможно предполо-
жить, что уменьшение реакции газового
потока внутри полости полузамкнутого
цилиндра, по-видимому, происходит
вследствие только теплообмена горячих
пороховых газов с окружающей средой.
По этой причине такой дульный тормоз
называют тепловым.
Механизм потери полной реакции потока в тепловом тормозе за-
ключается в следующем. Охлаждение потока пороховых газов в ци-
линдрической полости тормоза (после зоны внезапного расширения)
происходит при сохранении полной их реакции = — £*/C = const
£ g
или, принимая k= (cp/cw) = const, получим a*K=const, так как боковые
каналы отсутствуют.
Рассмотрим процесс течения газа в полости тормоза. В соответст-
вии со схемой, приведенной на рис. 5.40, характерными сечениями яв-
ляются сечения 1—/, 2—2У 3—3, 4—4. Между первым и вторым сечения-
ми происходит внезапное расширение потока, сопровождающееся паде-
нием его скорости (Л2<М). На участке между третьим и четвертым
сечением поток ускоряется, преобретая при сверхкритическом перепаде
отверстии (д =оо), то при от-
скорость, соответствующую
давлений (п \ / 2 V
гоз ;
\ \k + 1)
Вследствие непрерывного охлаждения пороховых газов между вторым
и третьим сечениями скорость дозвукового потока будет уменьшаться.
Внезапное расширение потока протекает в соответствии с урав-
нением
А ]_ I G&C1 / _
——±-(x9-|-k2 )—полная реакция потока пороховых га-
26 g
зов в сечении 2—2;
h _L_ 1 f _ч \ ,
-----------L () -LL 1—полная реакция потока в сечении 1—/;
1 2k g
k—\
__ Л щ 1 Ga\ k -I- 1
Z7!— ~ —'Статическое давление потока порохо-
g 1 4 вых газов в сечении 1—1.
Это уравнение позволяет найти связь между коэффициентами ско-
рей /< и ?.2, величины которых, как будет показано ниже, опреде-
ляются размерами полости тормоза (F^ F2, F4).
Подставляя в приведенное выше уравнение выражения для R2
и р\ и решая его относительно Хь получим
или
где
Поток газов между сечениями 2—2 и’ 3 — 3 движется в соответст-
вии с условием Т?2 = /?з или a2K^ — a^K^ так как
*3 = ^—(Хз + ^)-
g
Поэтому выражение для Xi можно записать так:
где
При наличии острых кромок на переходе от сечения 3—3 к сечению
4—4 между коэффициентами реактивности потока и площадями этих
сечений существует связь [6] RzF4 = K4F^ так как из-за малой протяжен-
ности зоны 3—4 принято ^3=^4, где Кзл=0\зл-Ь^зл)- Решая это
уравнение относительно Хз, получим зависимость
•з —
Для сверхкритического перепада давления:
где
Так как Къ=К<—-
^4 ^4
то формула для примет вид
(5.205)
При некотором значении F3jl коэффициент скорости Xj достигает
величины, равной единице. Дальнейшее увеличение отношения F5/Fi
по сравнению с критическим (F3/Fi) * не повлияет на величину Хь она
сохранится неизменной и равной единице.
В случае (Т^/Л) 5= (A/FJ * полное давление потока пороховых га-
зов роз в сечении 3—3 определяется формулой
/д
А>з = Ал -г- •
Г 4
Критическое отношение площадей (FJF\) * находится из уравнения
=(^4" 1)&3,Н7 3,4“^-
откуда
Порядок расчета параметров состояния газового потока внутри по-
лости тормоза следующий.
1. Определяем характер неравенства
A.i^+l)^3,4~£ = (/7зл) •
(5.206)
Если > (^3,1) , Т0 Х1= 1, Х1=1 И Д)3 = А)Д14-
Если Л3д (F3)i)*, для определения необходимо пользоваться
формулой (5.205), которая приводится к виду
F 3,l/?4J3 = ^?4ti;
Fl}3F3} 1 = F\ ^4,3 ~F4,1^1,3.
где
Полное давление в этом случае определяют по формуле
1_ 1
!k+ IX*-1 , Л k— 1 .s'/’1
Аю — Ai* Ц4 - Ml ~ А
\ 2 ] я 4~ 1 /
В соответствии с выражением для коэффициента скорости Х3
независимо от знака неравенства (5.206) при /<4“1 будет справедливо
выражение
Х3 = /73 4 —
Поскольку М= 1, то расход газа подсчитывают по формуле
V R7\,;>
1
где £4
— коэффициент сжатия по-
тока;
— постоянная расхода;
703 —полная температура по-
тока в сечении 3—3.
Определим изменение реакции потока Л/? при прохождении его че-
рез тепловой тормоз, т. е. между сечениями 1—1 и 4—4\
Так как ^?з=^1 + (^'з —Л) ^i, т0 в общем случае (АД < АД)
можно записать •
А/?=/?!-/?4=(К1Хз-1)/?4>0,
где
ЛГ1 1; «1,3=—— > 1; ЛГ1,4==
—1 $
Для случая г3,1>Гз,1, когда Aj-l и
К^== 1, приращение
реакции
д/?=(«1,з— 1)/?4>0.
При отсутствии теплообмена (#3,1 = 1) имеем вполне очевидный
результат А/? = 0, т. е. изменения реакции потока между сечениями
1—1 и 4—4 не произойдет и торможения отката ствола не будет.
Поскольку при наличии теплоотдачи Л7?>0, т. е. уменьшение силы
отдачи орудия с тепловым дульным тормозом составит:
+ = +
dt dt
— сила отдачи, действующая на ствол без
надульного устройства;
— текущее значение полной реакции пото-
ка пороговых газов в дульном срезе.
Подставляя в уравнение для Ру вместо /?4 его выражение в зависи-
мости от 7?i, получим
дЬ
dt
где
dt
где а——коэффициент импульсной эффективности.
В тепловом дульном тормозе канал снарядного окна цилиндриче-
ской формы постоянный по сечению, поэтому 1 и а = ЯздКГ1-
Делать этот канал в виде конической насадки не следует, так как в слу-
чае /^4>1 величина а возрастает и эффективность тормоза падает.
В зависимости от характера неравенства Ад^^зд Для коэффи-
циента а получено две формулы: при справедлива фор-
мула а=аз,ъ при Дзд ^зд надлежит пользоваться зависимостью а —
гх—1
= &ЗдЛл •
При вычислении коэффициента реактивности /С1 = 0,5(Х1-(-Х1 *) для
расчета величины используют формулу (5.205).
‘Л / 2k Г\ —*
Определение величины а3= I/ ---------gRT^ или значения #3,1 =
j/ А I 1
= \/ является весьма сложной задачей, особенно для первых
выстрелов. Рассмотрим приближенное решение этой задачи, основанное
на допущении квазистационарчого теплообмена с окружающей средой
[Q/= — аЛДЛи-Л)! при постоянном значении температуры стенки
полости тормоза (Tc = eonst). Кроме этого, примем, что полная темпера-
тура газов в дульном срезе (сечение 1—/) в течение периода последст-
вия сохраняется постоянной и равной ее среднему значению:
В общем случае изменение параметров состояния рабочего тела
любой термодинамической системы согласно закону сохранения энергии
определяется уравнением
Q\dt
Аналитическое решение интеграла найдем для замкнутого резервуа-
ра (1ГН=В7) и при допущениях:
wRTot= paiW„t-, ат=уа; Pot^VoftToe
Из теории теплопередачи для параметра о можно получить зависи-
мость (T = Stcpn. Учитывая, что длина тормоза относительно небольшая
(меньше 5 б?п.т), то скорость потока, так же как и температура стенки
тормоза вдоль его полости практически везде одинакова, а величина
о = const. На основании этого
где v = -—~0,7.
Tot
Подставляя вместо Qt его выражение в функции давления и ис-
пользуя уравнение состояния для средних параметров, получим
Здесь отношение полной поверхности охлаждения полости тормоза
Fn.T к ее объму 1^п.т можно определить по формуле
где rfn.T, /ц.т — соответственно диаметр и длина полости.
Поэтому падение полных давления и температуры газов, находя-
щихся в постоянном объеме (WB=W), приближенно описывается урав-
нением
где
п- т
п-т /
Z
Интересно отметить, что интенсивность теплоотдачи рт при——
^п.т
очень мало зависит от длины полости тормоза. Поэтому ее длину сле-
дует выбирать такой, чтобы избежать образования застойной зоны по
всей полости, т. е. не допустить «прострела» потока через снарядное ок-
но. Достаточность значения /п.т устанавливается опытом. Большую длину
тормоза также не следует брать, так как в этом случае увеличивается
вес системы.
Время пребывания газов в полости тормоза (или ее заполнения
свежей порцией их) составит
t=
a)
п.т
1 w
где .
^Ср
В первом приближении удельный вес пороховых газов у в полости
примем равным его среднему значению по времени, а его на-
величину, равной удельному весу газов в сечении дульного
На основании этого можно записать
t
п
тормоза
чальную
среза уд.
где Ь=-------------
(3 —0,5)<оид
Отсюда
П.Т
П.т
О) Ь
где —=Ц7 объем
КН
Ъ
w rt.T
w кн
канала ствола;
П-Т
Подставляя найденное выражение для t в формулу для средней тем-
пературы, получим
01
“Р #П.Т
)
п 1
О
ь
где р = —.
ь
Поэтому
—*
&зл =
-0.5^И11,
— = e
TQ1
а формула для коэффициента а приобретает вид
Оь — /\ 1 “
Поскольку величина Л1>1, то необходимо для Zi обеспечить мини-
мальное значение (М< 1). Это возможно, как было показано выше, при
условии
—*
Пример 5.25, Определить эффективность теплового дульного тормоза для 30-мм
пушки.
Условные исходные данные:
~ 800 м/с; q = 0,4 кг; 0,11кг; S—7,2 см2; 1ГКН = 1 дм3;
= ООО кгс/см2; / = 950 000 кгс-дм/кг; = 1,1; а == 1 ккал-дм/(кг-с-К); £—1,25;
R = 330 кгс-дм/кг.
Размеры полости тормоза: -
dn.t = 0,90 дм; /п.т=1дм; = 0,64 дм3; F4|] = -^-; F3)i = 9.
О
Расчет тормоза
Коэффициент полного действия газов
1300 1300
----=_ 1 (
v0 [800
Показатель интенсивности истечения
gSp* _ 9,81-7,2-600
(₽ — 0,5)uv;x .^1,13-0,11 -800
Время периода последействия
2,3 t 2л. 2,3
= ~~Г 1g = -4г 1g 400 = 0,014 с.
Л о 4/0
Показатель интенсивности теплоотдачи
Относительные значения показателя интенсивности теплоотдачи и объема полости
тормоза:
— 14 5 .
Р = ’ — 3,42-10~2; Г7П1Т = 0,64.
Относительное изменение критической скорости потока
^11 = е"5’ = 0,99.
Коэффициент скорости пороховых газов на входе в полость тормоза
Коэффициент реактивности потока в дульном срезе при наличии тормоза
К1 =0,5(Х1 +АГЬ= 1,079.
Параметр импульсной эффективности тормоза
0,99
а — К. -- — 0,92.
1 3-! 1,079
Параметр баллистической эффективности тормоза
св 0,11
Э = = 1,63—= 0,45.
q 0,4
Энергетическая эффективность тормоза без учета его собственного веса:
/ 1 _L „о \2 / 1 -L о 09.0.45 \2
Д£ =
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ V
1. Гинзбург И. П. Прикладная гидрогазодинамика. Л., изд. ЛГУ, 1958, 388 с.
2. Г о р о в Э. А. Основания проектирования автоматического оружия. М., изд.
Артиллерийской академии им. Дзержинского, 1954, 672 с.
3. И р о в Ю. Д. и др. Газодинамические функции. М., «Машиностроение»,
1965, 400 с.
4. Кутателадзе С. С. Основы теории теплообмена. М., Машгиз, 1970, 660 с.
5. М амон тов М. А. Некоторые случаи течения газа. М., Оборонгиз, 1950, 490 с.
6. О р л о в Б. В., Мазин г Г. Ю. Газодинамические и баллистические основы
проектирования ракетных двигателей на твердом топливе. М,, «Машиностроение», 1968,
536 с.
7. Серебряков М. Е. Внутренняя баллистика ствольных систем и пороховых
ракет. М., Оборонгиз, 1962, 703 с.
8. Шлихтинг Г. Теория пограничного слоя. М., ИЛ, '1956, 743 с.
9. Краткий физико-технический справочник. Т. Ill, М., Физматгиз, 1962, 683 с.
10. То л оч ко в А. А. Проектирование артиллерийских лафетов и установок. М.,
Оборонгиз, 1960, 345 с.
Глава VI
ВНЕШНЯЯ БАЛЛИСТИКА
§ 6.1. ОСНОВНЫЕ ЗАДАЧИ
Внешняя баллистика изучает движение артиллерийских снарядов
и ракет с момента прекращения механической связи их с орудием или
пусковой установкой. Путь центра масс снаряда от начальной точки
(точки вылета или точки старта) до цели называется траекторией.
Можно выделить три главные задачи, решаемые внешней баллис-
тикой:
1) установление начальных условий, обеспечивающих полет снаря-
да от точки старта до цели. Под начальными условиями понимаются
как элементы траектории в точке старта, так и кинематические парамет-
ры снаряда. Задача имеет множество решений, из которых при проек-
тировании выбирается в определенном смысле наилучшее;
2) определение элементов траектории при известных начальных ус-
ловиях. Задача имеет единственное решение;
3) оценка точности полета снаряда.
Основные элементы траектории снаряда обозначаются следующими
символами:
г —радиус-вектор точки траектории;
л, у, z — координаты центра масс снаряда;
v —вектор скорости центра масс снаряда;
—проекции вектора скорости;
а —вектор ускорения центра масс снаряда;
ау, az—проекции вектора ускорения;
t —время полета от точки старта до данной точки.
Плоскость, проходящую через точку старта перпендикулярно линии
отвеса, называют стартовым горизонтом; плоскость, проходящую через
линию отвеса в точке старта и цель, называют плоскостью цели
(рис. 6.1).
Уравнения движения снаряда записывают в такой системе коорди-
нат, в которой описание будет наиболее точным и удобным. При реше-
нии задач внешней баллистики используются следующие системы коор-
динат: стартовая инерциальная, стартовая связанная (земная), связан-
ная (со снарядом), скоростная и полускоростпая [1].
Рис. 6.1. Траектория снаряда
§ 6.2. СИЛЫ, ДЕЙСТВУЮЩИЕ НА
СНАРЯД В ПОЛЕТЕ
На движущийся в околозем-
ном пространстве снаряд дейст-
вуют в общем случае три основ-
ных силы: тяга, сила тяжести и
сила сопротивления воздуха.
Тяга действует на снаряд в
период работы реактивного дви-
гателя. Величина тяги Р опреде-
ляется зависимостью
^=Л)+Л,/М1-л(г/)], (6.1)
где Pq— тяга на уровне моря;
Ръ— площадь выходного сечения сопла;
Рм — давление воздуха на уровне моря;
= [5].
Лю
Направление тяги будем задавать упрощенно, предполагая, что ли-
ния ее действия проходит через точку пересечения продольной оси сна-
ряда с плоскостью среза сопла. Углы, определяющие положение линии
действия тяги относительно связанной (со снарядом) системы коорди-
нат, обозначим через ар, Рр. Проекции тяги на оси связанной системы
координат определяются зависимостями:
^^Pcosapcos^;
Р'у^Р sin ap;
PZl = — Р cos ap sin pp; J
проекции момента тяги — зависимостями:
= РZ\ (-^т
Ру\ (*^т '
(6.2)
(6.3)
где I и хт — расстояния от теоретической вершины снаряда соответст-
венно до среза сопла и до центра масс.
Сила тяжести является следствием воздействия на тело поля тя-
готения Земли и ее вращения. Вектор ускорения свободного падения g
равен разности векторов ускорения от силы притяжения gT и центро-
стремительного ускорения ацс:
g=gT~ а«с- (6.4)
Здесь
3-пер *>3 X («3 X Г),
где £='3,986-1014 м3/с2— гравитационный параметр Земли;
= 7,2921 • 10-5 рад/с — угловая скорость вращения Земли;
г — расстояние рассматриваемой точки от центра Земли.
Если за фигуру Земли принять эллипсоид Красовского, то нормаль-
ное ускорение свободного падения на поверхности Земли равно
g0:= 9,78049(1 + 0,0053029 sin2 ?r - 0,0000059 sin2 2<pr), (6.5)
где фг — географическая широта точки.
На основании соотношения (6.5) ускорение силы тяжести на эквато-
ре £оэ = 9,78049 м/с2, на полюсе—gon = 9,83235 м/с2. Ускорение свобод-
ного падения на высоте h над поверхностью Земли определяется вы-
ражением
где —расстояние данной точки геоида от его центра;
go — ускорение свободного падения на поверхности Земли.
При решении многих задач внешней баллистики можно за фигуру
Земли принимать шар с радиусом R = 6371 км, а ускорение свободного
падения считать постоянным и равным g = 9,806 м/с2 [2]. При малых
дальностях стрельбы можно также не учитывать кривизну земной по-
верхности.
Сила сопротивления воздуха 7?аэр, действующая на снаряд в поле-
те, пропорциональна площади поперечного сечения корпуса снаряда S,
скоростному напору q =~ и аэродинамическому коэффициенту cR
^аэр .
(6.6)
Рис. 6.2. Сила сопротивления воздуха
где р — плотность воздуха [5].
Сила сопротивления воздуха приложена в центре давления, кото-
рый в общем случае не совпадает с центром масс снаряда. Положение
центра давления снаряда относительно его теоретической вершины за-
дается величиной хд. При ре-
шении задач внешней балли-
стики удобно заменять силу
Raap, приложенную в центре
давления снаряда, силой
Raap, приложенной в центре
масс, и моментом Маор отно-
сительно центра масс (рис.
6.2). При этой замене снаряд
рассматривается как абсо-
лютно твердое тело.
Проекции силы Ra3p, приложенной в центре масс, на оси скоростной
системы координат имеют вид:
А" сxq S, Р— cyqS, — czqS.
(6.7)
Аэродинамические коэффициента сх, су и cz являются функциями
числа М = — , числа Рейнольдса Re=-^- (где v — коэффициент кине-
а v
магической вязкости [5]), угла атаки а и угла скольжения р. Для осесим-
метричных снарядов cy^cz. При углах атаки меньше критических
дсу а
си = —— а =
у да у
Аэродинамический момент М_аэр представляется в виде суммы
Маэр-М + Мд.
Для осесимметричного снаряда проекции первой составляющей —
стабилизирующего момента на оси связанной системы координат запи-
сываются в виде:
ЛЦ=0;
Myi = myiqSl.
MZt=m^gSl. .
(6.9)
При углах атаки и скольжения меньше критических:
о
dmz а
т2л —------ а.
л1 -I
да
Для ] статически устойчивых снарядов:
:т:тически неустойчивых: ^>0,
<<0, m^<0;
ДЛЯ
Проекции второй составляющей — демпфирующего (тушащего) мо-
мента на оси связанной системы координат будут:
1 v
(1),,
v
(!)
Z1 v
Аэродинамические коэффициенты
(6.10)
входящие в зави-
симости (6.10),'меньше нуля.
При изучении движения вращающегося снаряда выделяют отдель-
но силу Магнуса, появляющуюся вследствие обтекания потоком возду-
ха вращающегося тела.
Методы определения аэродинамических коэффициентов изложены
в курсах аэродинамики [4].
Наибольшее влияние на характер траектории оказывает сила лобо-
вого сопротивления X которая в настоящее время наиболее полно изу-
чена. Установлено, что при изменении размеров снаряда одного класса
аэродинамический коэффициент сх изменяется незначительно, отноше-
ние функций сх для двух снарядов примерно одинаково во всем диапа-
зоне чисел М. Тщательное исследование снаряда современной дально-
бойной формы позволило составить для него эталонную функцию схэт.
У нас наиболее широко используется «функция 1943 г.» («Закон сопро-
тивления 1943 г.») [2,7]. Переход к функции сх конкретного снаряда осу-
ществляется с помощью коэффициента формы снаряда i:
X ЭТ* (6.11)
Используя эталонную функцию схэт и коэффициент формы ц можно
определить ускорение снаряда /аэр от действия силы сопротивления воз-
духа
(6.12)
Раскрывая значения q, S и производя перегруппировку множителей,
выражение (6.12) приведем к виду
ja9p=cH (6.13)
где
с — -— 103 = —-— 103—баллистический коэффициент;
ч dCa
Si
——функция изменения плотности воздуха
Р° „ r-i
С ВЫСОТОЙ [о];
£Р01О %2сХ9т —закон сопротивления воздуха.
Таблица функции F(y), составленная для эталонной функции
1943 г., предполагает, что скорость звука равна ее нормальному значе-
нию на уровне моря a01V. Учет действительной скорости звука осущест-
вляется через условную скорость vx
/7(®)=/7табл (гч) , (6.14)
(W
где т — виртуальная температура [5];
V
В отдельных случаях удобно использовать функцию
(6.15)
С целью управления движением снаряда изменяется вектор тяги
Р или вектор силы сопротивления воздуха /?аэр- Доля тяги и силы со-
противления воздуха, используемая для управления, хотя сравнительно
и невелика, но в полете сильно изменяется.
При решении задач внешней баллистики удобно вводить в уравне-
ния движения тягу и силу сопротивления воздуха при нейтральном по-
ложении органов управления. Изменение этих сил в полете с целью
управления можно учесть введением управляющих сил fynp. Управление
тангенциальными перегрузками снаряда осуществляется изменением
модуля тяги или модуля силы сопротивления воздуха. Управление нор-
мальными перегрузками применяется гораздо шире и осуществляется
изменением направления указанных сил.
Рассмотрим образование управляющей силы в продольной плоско-
сти с помощью воздушных рулей. При повороте рулей на угол 6 возника-
ет сила У1Р, поворачивающая снаряд относительно его центра масс на
угол атаки а. По окончании переходного процесса устанавливается ди-
намическое равновесие между моментом от органов управления и аэро-
динамическим стабилизирующим моментом
(6.16)
где Хд.р, хд, хт — соответственно расстояния от теоретической вершины
снаряда до центра давления рулей, центра давления снаряда и центра
масс снаряда.
Угол атаки снаряда, удовлетворяющий уравнению (6.16), называют
балансировочным углом атаки as, его величина равна
су^р х'г Х|м> *
(6.17)
Величина силы Уз , изменяющей траекторию снаряда на активном
участке, будет
= Р sin cis + ^i + ^ip) cos аб-
(6.18)
Для снаряда, выполненного по нормальной аэродинамической схе-
ме [4], хд,р>хт и хд>хт, поэтому положительный угол поворота рулей б
всегда будет создавать отрицательный угол отаки as. Силы yip и У1
всегда будут противоположны по направлению, и в выражение для Уз
войдет их разность.
Вследствие малости располагаемых нормальных перегрузок нор-
мальная аэродинамическая схема применяется для снарядов с малой
маневренностью.
У снаряда, выполненного по схеме «утка», хд.р<хт, а хд>хт, поэтому
положительному углу поворота рулей 6 соответствует положительный
угол атаки ag. В выражение для Уз всегда входит сумма У1 + У1Р. Сна-
ряд, выполненный по схеме «утка», имеет большие нормальные пере-
грузки, обладает большей маневренностью. Повышенный возмущающий
момент по крену парируется элеронами.
§ 6.3. УРАВНЕНИЯ ДВИЖЕНИЯ СНАРЯДА
В общем случае движущийся снаряд является телом переменной
массы. Для описания его движения можно использовать уравнения ди-
намики точки и тела переменной массы.
Движение тела переменной массы описывается в общем случае дву-
мя уравнениями:
1) уравнением движения центра масс тела (его иногда называют
уравнением сил);
2) уравнением движения тела относительно центра масс (его иног-
да называют уравнением моментов).
Для получения этих уравнений тело переменной массы можно рас-
сматривать как совокупность конечного числа точек переменной и по-
стоянной массы.
Движение центра масс тела переменной массы определяется уоав-
нением
= F + Фг+ т —+ m2o> X ,
dt r dt
(6.191
где — абсолютная скорость центра масс в инерциальной системе от-
счета;
F — главный вектор внешних сил, действующих на точку;
Фг — вектор сил, обусловленный отделением или присоединением
массы;
v^m—скорость центра масс относительно твердой оболочки тела;
и —мгновенная угловая скорость вращения тела относительно
оси, проходящей через начало отсчета.
Для характеристики движения твердого тела переменной массы от-
носительно центра масс воспользуемся уравнением моментов, имеющим
вид
П г
di dt
I
(6.20)
п
где (р, X — кинетический момент тела относительно
1
системы координат с началом в центре
масс;
Му? — момент всех внешних сил;
М® — момент реактивных сил;
р„— радиус-вектор точки с массой т, относи-
тельно центра масс;
V,/11 — скорость точки v относительно центра масс.
Последнее слагаемое в уравнении (6.20) характеризует момент ко-
личества движения частиц, отделяемых телом в единицу времени.
Вывод уравнений (6.19) и (6.20) изложен в книге [3].
Уравнения (6.19) и (6.20) с добавлением связей, накладываемых
управлением, полностью описывают движение тела переменной массы.
Уравнения движения снаряда в общем виде
Уравнения движения снаряда получим на основании общих уравне-
ний движения тела переменной массы (6.19) и (6.20). На снаряд в поле-
те действуют три основные силы: сила тяжести FT, сила тяги Р и сила
сопротивления воздуха Ra3p. Выделим отдельно управляющую силу Fynp,
как наиболее изменчивую часть силы тяги и силы сопротивления воз-
духа.
Введение управляющей силы Fynp потребует включения в систему
уравнений движения дополнительных соотношений, устанавливающих
связь между управляемыми элементами траектории и положением ор-
ганов управления. Связи, накладываемые управлением по всем элемен-
там, будем записывать в виде
S [с = (F(r, ru- V, Xi, 0))], (6.21)
где —управляемый элемент траектории;
(у7— оператор, определяющий отклонение органа управления
данным элементом траектории в зависимости от отклонений
действительной величины элемента траектории и производ-
ных различных порядков от их требуемых значений. На-
пример, при управлении высотой траектории по величине рас-
согласования самой высоты и ее первой производной опера-
тор рр будет иметь вид
= Ку (у У пр) К у (у Уйр)-
Сумма в выражении (6.21) берется по всем каналам управления.
Положение центра масс снаряда относительно его корпуса изме-
dpP' <г\
гяется сравнительно медленно, поэтому слагаемыми т—- и m‘2v>Xvn.„
dt
в уравнении (6.19) можно пренебречь по сравнению с основными сила-
ми F и Фг
С учетом указанных выше замечаний запишем уравнения движения
снаряда:
rfv(a)
т^=р + Рт+к +F
dt J
dK
L[SE=5'(r> ru, V, X1, W)].
dm.
(6.22)
dt
Система (6.22) является общей системой уравнений движения сна-
ряда. Она справедлива как для управляемых, так и для неуправляемых
снарядов. В последнем случае отбрасываются связи, накладываемые
управлением и приравниваются нулю управляющие силы и их моменты.
При решении практических задач первые два уравнения системы
(6.22) проектируются на оси системы координат, наиболее удобной для
решения данной конкретной задачи [2].
Пути упрощения уравнений движения снаряда
При практических расчетах исходные данные всегда имеют огра-
ниченную точность. Так, аэродинамические коэффициенты задаются с
шибками порядка 0,5—1% от их величины, ошибки параметров атмо-
:;еры могут достигать 2—3%; также с ошибкой задается величина си-
тяги. Наличие подобных ошибок часто делает при проектировании
- е целесообразным вычисление элементов траектории решением полной
: дтемы уравнений. В полной системе уравнений имеются отдельные
:.*2"2емые, неучет которых приводит к ошибке результатов меньше, чем
-с точности исходных данных. В таких случаях, естественно, следует
.’si гзаться более простой системой уравнений.
Система уравнений движения упрощается в следующих направле-
1. Отличие формы Земли от шарообразной сравнительно невелико
(главное сжатие характеризуется величиной с= -----— I . Макси-
4? O'JU /
мальное отклонение направления силы тяжести от центра Земли состав-
ляет 11,5'. Вследствие этого при проектных расчетах можно не учиты-
вать неиентральность поля тяготения и принимать тело Земли за шар.
При расчете траекторий малой протяженности (хс<204-25 км) можно
не учитывать кривизну земной поверхности.
2. Ускорение ацс в достаточной близости к Земле меньше ускорения
от силы тяготения. Максимального значения ацс достигает на экваторе,
где оно равно <о| Д =0,033 м/с2, что составляет 0,34% от ускорения от
силы тяготения. В большинстве случаев целесообразно вводить в рас-
смотрение геометрическую разность этих двух ускорений, определяемую
зависимостью (6.4) и называемую ускорением свободного падения g,
а величину его считать постоянной на всей траектории снаряда.
3. При расчете траекторий или их участков сравнительно малой про-
тяженности можно не учитывать кориолисово ускорение вследствие
вращения Земли.
4. Параметры атмосферы, влияющие на полет снаряда, являются
функциями времени полета и координат траектории. Однако при срав-
нительно небольших расстояниях вдоль поверхности Земли (до 800—
1000 км) и при временах полета не более 20—30 мин изменение пара-
метров атмосферы достаточно мало. Вследствие этого при проектирова-
нии целесообразно использовать стандартную атмосферу, учитывающую
изменение параметров атмосферы только при изменении высоты полета
и иметь некоторый запас дальности стрельбы. При определении истин-
ных элементов траектории при стрельбе следует вводить поправки на
отклонение параметров атмосферы.
5. Для снарядов многих классов боковое движение вследствие не-
значительности угла скольжения £ и угла отклонения вектора скорости
в боковом направлении о сравнительно мало влияет на продольное дви-
жение, а поэтому можно вначале рассматривать только движение сна-
ряда в продольной плоскости (плоскости бросания) независимо от бо-
кового движения.
Определив элементы траектории vx(t), vy(t), x(t), y(t), можно пе-
рейти затем к определению элементов бокового движения vz(t) и z(t).
6. При проектировании артиллерийских снарядов в отдельных слу-
чаях оказывается возможным раздельное рассмотрение движения цент-
ра масс снаряда и движения снаряда относительно центра масс.
Элементы траектории управляемых снарядов иу, х, у опреде-
ляются при балансировочных углах атаки. После этого исследуется дей-
ствительное движение снаряда относительно центра масс. Проекции ско-
рости vx, vy и координаты х, у неуправляемого снаряда определяются
при нулевых углах атаки. Вычисление элементов траектории vx, vy, х, у
без учета движения снаряда относительно центра масс значительно со-
кращает время расчетов.
7. При исследовании влияния на движение снарядов возмущений и
управляющих воздействий можно проводить линеаризацию уравнений
движения. При этом задача сводится к определению отклонений элемен-
тов траектории от их невозмущенных значений. Линеаризация уравне-
ний движения широко применяется при исследовании динамических
свойств снарядов и при анализе работы их системы управления.
Допустимость перечисленных упрощений определяется в каждом
конкретном случае.
Упрощенные уравнения движения неуправляемого снаряда
на активном участке траектории
Неуправляемые реактивные снаряды в настоящее время находят
применение как при стрельбе с земли по наземным и воздушным целям,
так и при стрельбе с самолетов. Отдельные образцы управляемых ракет
также могут иметь неуправляемый участок полета с работающим дви-
гателем. Протяженность этого неуправляемого полета сравнительно не-
велика (как правило, не превосходит 10—15 км) и он происходит в до-
Рис. 6.3. Движение неуправляемо-
го снаряда в продольной плос-
кости
Рис. 6.4. Движение неуправляемо-
го снаряда в боковом направле-
нии
статочно плотных слоях атмосферы, где сопротивление воздуха
существенно влияет на движение снаряда. При расчете элементов тра-
ектории неуправляемого снаряда могут быть приняты все допущения,
рассмотренные выше.
Движение неуправляемого снаряда в продольной плоскости упро-
щенно описывается системой уравнений (рис. 6.3):
гп---— Р~Х—mg sm 8 ;
dt
mv ^-=Pa-\-Y — mg cos 9;
dt
-^- = rcos9; -^- = ,<Jsin9;
dt dt
= ш ; a = $ — 9.
dt
(6.23)
В системе (6.23) опущен индекс «1» при записи момента инерции,
хтловой скорости и проекций моментов относительно оси Zi связанной
системы. Угол атаки а считается достаточно малым, поэтому cosu~l,
sin а «а.
При описании бокового движения предполагаются уже известными
элементы продольного движения. Угол скольжения считается достаточ-
но малым, поэтому cosfi^l, sin |3~ф Влияние крена вследствие сим-
метричности снаряда относительно его продольной оси не учитывается.
Уравнения бокового движения неуправляемого снаряда (рис. 6.4)
записываются в виде:
mv da~— — PS -I- Z;
dt 1
<6'24>
3 = ^-<V
С целью упрощения в системе (6.24) угол ст, характеризующий от-
клонение вектора скорости в боковом направлении, берется не в плос-
кости горизонта, а в наклонной плоскости, проходящей через вектор ско-
рости (этот угол обозначен ст* вместо ст в общем уравнении).
На этапе проектирования при определении элементов траектории в
отдельных случаях можно не учитывать углы атаки и скольжения, пола-
гая а=р = 0. При этом центр масс снаряда будет двигаться в продоль-
ной плоскости.
Уравнения движения получаются из системы (6.23) при а = 0 и
<аг = 0:
т -^L = p х — mg sin 0;
dt
dx n dll . „
----=dcos0; —^- = wsin6.
dt--dt
Система (6.25) имеет довольно сложную форму и включает триго-
нометрические функции, а второе уравнение системы (6.25) дает угол 9
в радианах. Для практики гораздо удобнее оказывается система уравне-
ний, в которой вместо уравнения, содержащего производную dvjdt,
включено уравнение с производной dv^dt, а вместо dfydt включено
d , „ dp
уравнение с производной —tg0 — —— .
dt “ dt
Производная dvjdt получается путем проектирования уравнения
движения на ось х\
т^-=\Р -АГ) cos 0.
dt
Замечая, что cos0 = — и вводя обозначения:
V
—-=н; —-—~D(v, у)‘, х у),
m-Q mov тр
получим
(it JI
Производная dQjdt заменяется на производную dpjdt в соответствии
с равенством
dp dp
dt dO dt
Тригонометрические функции sin0 и cos 9 заменяются выраже-
ниями:
cos9 = -^-; sin0=/?—— ; p=ig&.
V V
После преобразований получим:
dU j- 1 / rr\ -7r=—(D-£) dt jj. dp g , dx _ dt vx dt = -Г = PVX- dt (6.26)
Значение скорости, необходимое для вычисления определяется из зависимости параметров D и Е,
Система (6.26) обычно используется при расчете активных участ-
ков неуправляемых реактивных снарядов. Эта система удобна для рас-
четов в тех случаях, когда угол 0<65°. В случае 0>65° вместо соотно-
шений (6.25) пользуются уравнениями:
(6.27)
Величину скорости, необходимую при вычислении
и Е, находят из выражения
параметров D
-1/ 2 । 2
» = У 'Vx-T'Vy,
а угол наклона касательной к траектории определяют из зависимости
tg 6 = р
Уу
ух
Система (6.27) применима при любых значениях угла 0, однако
расчеты с помощью ее требуют несколько больше времени по сравнению
с расчетами с помощью системы (6.26).
Упрощенные уравнения движения неуправляемого снаряда
на пассивном участке траектории
Для движения неуправляемого снаряда на пассивном участке спра-
ведливы сделанные выше допущения для активного участка полета.
Поэтому пассивный полет снаряда (Р=0) описывается системами урав-
нений (6.23), (6.24), которые в этом случае имеют вид:
— в продольном направлении
dv чу .
т----= — л — mg sin 9;
dt
tnv--= Y — mg cos 9;
dt
cos0; — =nsinO;
dt dt
= JI a=»-6;
z dt д dt z
(6.28)
— в боковом направлении
d с j. dz
mv—2-=Z; ----=
dt dt
I = M + /И •
dt ttiw
'6.29)
Если положить углы атаки и скольжения равными нулю, то боко-
вого движения не будет, а продольное будет описываться системой:
'rfW тл - г,
т----= — X — mg sin 0;
dt
d.fl g cos fl
dt v
dx n dy . л
--=v cos 9; —— = 11 sin 0.
dt dt
При расчетах более удобной оказывается не
стема при аргументе х, полученная на ее основе,
дит уравнение с dvxjdx, получаемое из соотношения
dvr dv,: dt
dx dt dx
и уравнение
-^-=— tgS,
dx dx
(6.30)
система (6.30), а си-
B новую систему вхо-
получаемое с помощью соотношения
dp dp dt
dx dt dx
Система уравнений при аргументе х имеет простой вид и удобна
для расчетов:
dvx dx -^ = - dx g .
1 « 1
dy dx dt _ _ 1 (6.31)
dx vx
V = Vx V 1 + A2;
j—«
где £ =--------.
mv
Систему (6.31) следует использовать при углах наклона касатель-
ной, не превышающих 65°. При больших значениях углов целесообразно'
пользоваться системой уравнений:
dVx — - Еу • .dVy_ = — Ev —g-
dt x' dt y
(6.32)
При этом величина скорости v, необходимая для вычисления Е, оп-
ределяется из выражения
г тго.т наклона касательной — из выражения
. tg0 = -^- .
Для приближенных аналитических решений задачи внешней бал-
листики для артиллерийских снарядов используется система уравнений
при аргументе 0. Переход к новому аргументу может быть осуществлен
на основании соотношения
dU dU dt v dU
df) dt df) g cos 9 dt
Система уравнений при аргументе 0 имеет вид:
dvr „ v2
——= Е — ;
g
dx _ v2 _ dy _ v2 , g.
rfO g ’ df) g
dt __ v
df) g cos 0
(6.33)
Правая часть первого уравнения системы (6.33) при использовании
эталонной функции для сж может быть преобразована в соответствии с
выражением (6.13) к виду
V2 Уаэо С
Е — = v = — Н (у) F (-п)щ
g g g '
§ 6.4. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
ДВИЖЕНИЯ СНАРЯДА
Движение снаряда описывается достаточно сложными системами
нелинейных дифференциальных уравнений с переменными коэффициен-
тами. Даже в простейших случаях при изучении движения центра масс
снаряда в плоскости бросания приходится интегрировать не менее четы-
рех уравнений. Коэффициенты дифференциальных уравнений зависят
от ряда параметров, задаваемых таблицами или в виде графиков (на-
пример, параметры атмосферы, аэродинамические коэффициенты).
Вследствие указанного основным методом расчета траекторий снарядов
является метод численного интегрирования с использованием ЦВМ.
Общие замечания
Для определения элементов траектории зенитных снарядов можно
рекомендовать систему уравнений (6.32), позволяющую наиболее удоб-
но вычислять элементы траектории в функции времени. Элементы тра-
ектории авиационных снарядов достаточно точно определяются интегри-
рованием системы (6.31) или (6.32).
Элементы траектории снарядов полевой артиллерии при углах бро-
сания 0О<65° целесообразно определять интегрированием системы
(6.29), а при Оо>65° — интегрированием системы (6.32). Для определе-
ния элементов активного участка траектории неуправляемого реактив-
ного и активно-реактивного снарядов следует использовать систему
(6.26) или (6.27).
Оценку динамики снаряда целесообразно производить по результа-
там интегрирования уравнений движения в отклонениях [2]. Движение
снаряда относительно центра масс имеет обычно колебательный харак-
тер, при определении элементов траектории с учетом его следует исполь-
зовать систему уравнений (6.23) или (6.24).
Численное интегрирование уравнений движений снаряда при ис-
пользовании ЦВМ обычно производится методом Рунге — Кутта, а при
использовании арифмометров — разностным методом. Шаг интегрирова-
ния при применении этих методов примерно одинаков. Величина шага
аргумента определяется колебательным процессом с наибольшей час-
тотой. Желательно так выбирать шаг аргумента, чтобы в пределах од-
ного периода колебаний Т было 10—15 расчетных точек, т. е.
ht=(0,1 0,07)7’.
Для вращающегося артиллерийского снаряда шаг аргумента при
решении задачи внешней баллистики с учетом колебательного движения
относительно его центра масс должен быть порядка десятитысячных до-
лей секунды.
Колебания и переходные процессы оперенных снарядов протекают
с частотами порядка десятков герц, поэтому шаг аргумента при расчете
траекторий этих снарядов берется равным ht = 0,005-4-0,01 с. Шаг аргу-
мента при расчете траектории артиллерийского снаряда, рассматривае-
мого в качестве материальной точки, определяется изменением произ-
водных 4ГТ = — и -т~=-----у-
Наибольшую скорость снаряд имеет в момент вылета из канала
ствола. В этот момент производная dvjdx имеет наибольшее значение,
а производная dp/dx— наименьшее. В процессе полета скорость снаря-
да на восходящей ветви траектории уменьшается, производная dvjdx
уменьшается, а производная dpjdx увеличивается.
Шаг аргумента при интегрировании уравнений движения артилле-
рийского снаряда разностным методом можно на большей части траек-
тории принимать постоянным и равным: Лж = 200—250 м для снарядов
калибром cf<25 мм и Лх = 500 мм для снарядов калибром d>25 мм.
В области трансзвуковых скоростей, где имеет место резкое измене-
ние коэффициента гх рекомендуется шаг расчета уменьшить в
два раза.
При расчете активных участков траекторий реактивных и активно-
реактивных снарядов величина шага аргумента зависит от скорости дви-
жения снаряда. При интегрировании системы (6.26) производная-^- =
= — — в момент схода реактивного снаряда с направляющих ДОСТаТОЧ-
t/j.
но велика. Поэтому шаг аргумента следует брать меньше и увеличивать
его по мере роста скорости снаряда. Шаг аргумента ht при и0 = 204-
30 м/с следует брать равным 0,1—0,2 с, а при 00 = 304-50 м/с равным
0,25—0,5 с.
В отдельных случаях может оказаться целесообразным интегриро-
вание с различным шагом для разных уравнений системы. Так, напри-
мер, уравнения, определяющие скорость о, угол наклона касательной 0,
координаты х и у в системе (6.23), интегрируются с крупным шагом
(й4 = 0,1 с), а уравнения, определяющие '& и а — с мелким шагом (h; =
= 0,0054-0,01 с). Причем при определении Ф и а величины V, 0, х и у на
участке /г( = 0,1 с можно считать постоянными. Это упрощение при огра-
ниченной точности исходных данных дает сокращение времени вычис-
лений без ухудшения точности расчета.
В процессе вычислений ведется контроль за правильностью выбора
шага. При вычислениях на ЦВМ производится периодический счет с
уменьшенным в два раза шагом. При вычислениях с помощью арифмо-
метров шаг определяется по характеру убывания разностей.
Особенности расчета траекторий снарядов на ЦВМ
Численное интегрирование уравнений движения снарядов на ЦВМ
имеет две особенности:
1) помимо общих математических таблиц используется большое
число таблиц для определения сил и моментов, действующих на снаряд;
2) требуется определить элементы траектории в характерных точ-
ках, значение аргумента в которых не кратно принятому шагу.
При вычислениях можно идти двумя путями, во-первых, вводить все
необходимые таблицы в память машины и, во-вторых, аппроксимиро-
вать табличные величины аналитическими зависимостями. В первом
случае не требуется предварительной обработки табличного материала
(таблица целиком вводится в память машины). Введение табличных
функций требует большого объема памяти машины.
Особенностью интегрирования уравнений внешней баллистики яв-
ляется расчет элементов траектории в точке, определяемой некоторым
заданным значением функции (сокращенно будем называть эту задачу
выходом в заданную точку). Решение подобных задач имеет важное
значение при исследовании ряда автоматических систем. Выход в задан-
ную точку необходимо производить непосредственно в процессе счета,
так как от момента выхода зависит дальнейшее поведение исследуемой
системы, например, режим полета.
Пусть задано значение элемента траектории UK, и требуется опре-
делить значение остальных элементов в этот момент. Для решения по-
ставленной задачи вычисляются элементы траектории с запоминанием
определенного числа значений контролируемого элемента траектории.
В районе достижения заданной величины Йд разности двух текущих зна-
чений Un—Un-<2. сравниваются с разностью Сф—Un. При Un— Un_2<
<Ua—Un продолжается нормальный счет, при t/„ —Пп_2>[/д—1/;г
считаются элементы еще одной точки, а затем обратным экстраполиро-
ванием определяется значение аргумента при заданной величине t/a.
При полученном значении аргумента вычисляются все элементы траек-
тории. Дальнейший счет определяется задачами исследования.
В некоторых случаях для выхода в заданную точку можно исполь-
зовать счет с изменением знака и величины шага аргумента. В процессе
счета текущая величина интересующего элемента траектории Un срав-
нивается с заданной UR. После того как Un превзойдет заданное значе-
ние UA, изменяется знак и уменьшается в два раза величина шага аргу-
мента. Определенное в результате вычислений значение Un вновь срав-
нивается с t/д. В зависимости от их разности определяется знак шага
аргумента для следующего счета, а величина шага вновь уменьшается
в два раза. Процесс заканчивается при заданной точности приближения
Un к t/д.
При втором способе выхода в заданную точку следует внимательно
проанализировать возможность счета с отрицательным шагом.
Особенности расчета траектории снарядов без применении ЦВМ
При расчете одной-двух траекторий с точки зрения быстроты полу-
чения решения иногда может оказаться более выгодным счет с помощью
арифмометра или логарифмов (сокращается подготовительное время).
Из разработанных методов численного интегрирования в этом слу-
чае наиболее приемлем метод трапеций (точность расчета две-три
значащие цифры) и разностный метод (точность расчета — четыре зна-
чащие цифры).
При расчетах с помощью арифмометров или логарифмов важное
значение имеет правильная организация счета и рациональная запись
результатов [2]. Подготовка и вычисления слагаются из следующих
этапов: 1) выбор системы уравнений; 2) выбор шага аргумента; 3) со-
ставление основного бланка вычислений; 4) составление вспомогатель-
ного бланка вычислений; 5) начало вычислений; 6) решение задачи;
7) выход в заданную точку (или определение элементов характерных
точек).
В начале вычислений определяются значения производных, необхо-
димых для использования основных формул разностного метода. При
решении уравнений внешней баллистики обычно достаточно бывает
найти, помимо значения производных в начальной точке, еще значения
их в трех точках, используя для этого способ последовательных прибли-
жений Крылова. Указанный способ применим для решения всех задач
внешней баллистики. Затраты времени, как правило, меньше, чем при
применении метода Рунге — Кутта.
Решение краевых задач внешней баллистики
Во внешней баллистике, помимо задач с начальными условиями
(задач Коши), встречаются также краевые задачи, в которых условия,
определяющие единственность решения, заданы в различных точках,
например, в крайних точках траектории. Одним из универсальных мето-
дов решения краевых задач теории полета является метод проб. Сущ-
ность этого метода заключается в приближенном задании недостающих
условий и решении обычной задачи с начальными условиями с их по-
следующим уточнением.
Рассмотрим пример: заданы координаты начальной точки траекто-
рии А в момент / = 0: х = х0, */=г/о; задана скорость в начальной точке
п = ь’о; траектория должна проходить через точку В с координатами:
x = Xi, y = yi при а = 0.
Для решения этой задачи задаемся примерным значением угла 0о.ы
Решая задачу одним из изложенных выше численных методов, найдем
величину ординаты т/щ на втором конце. Естественно, величина бу-
дет отличаться от заданного значения yi, например, yi,i>yt. После пер-
вой пробы известно направление, в котором нужно изменять начальное
значение угла 0О. При второй пробе задаемся 0о.2<Оо,1, и вновь опреде-
ляем ординату. При третьей пробе величину угла 0О можно уточнить по
формуле
9о,з= Йод - — Чд - 9о,2).
#1,1 #1
При четвертой пробе величина 0О уточняется по квадратичной интерпо-
лирующей формуле. Решение краевых задач методом проб достаточно
трудоемко, и его целесообразно проводить па ЦВМ.
§ 6.5. ТАБЛИЧНЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ
ТРАЕКТОРИИ [7, 8]
Сущность табличного метода заключается в следующем. Элементы
невозмущенной траектории снаряда определяются сравнительно неболь-
шим ^числом параметров. Анализ уравнений движения (6.32), где
Е =—! — = сН (у) F (w) показывает, что при начальных условиях:
mv т г
/=0; А'о = О; г/0 = О; vXo = v0 cos 0О; ъУо = v0 sin 0О
элементы траектории полностью определяются начальной скоростью и0,
углом бросания 0О и баллистическим коэффициентом с.
Для любого элемента U траектории справедлива функциональная
зависимость
М = /(г>с, 0О, с,
(6.34)
Выражение (6.34) показывает, что при составлении таблиц для те-
ж.тпих элементов траектории необходимо иметь четыре входные величи-
ны (сокращенно четыре входа): v0, 0О, с и t, а для элементов характер-
ных точек — три входа.
В характерных точках (точка вылета 0, вершина траектории S и
точка падения С) значения аргумента определяются отличительным
признаком этой точки. Так, например, в точке падения г/с = О, что позво-
ляет записать
Ус^Ус^'К с> *с)=°,
откуда
ео> С)'
Остальные элементы точки падения будут определяться зависимо-
стью вида
UС — С> ^с)— С°(Ь в0, С).
(6.35)
При составлении таблиц элементы траектории в узловых точках вы-
числяются численным интегрированием, а затем с помощью нелинейных
интерполирующих формул определяются элементы промежуточных то-
чек, отстоящих друг от друга на величину шага таблицы.
Для артиллерийских систем были созданы два вида таблиц внеш-
ней баллистики: для зенитных снарядов и снарядов для стрельбы по
наземным целям.
При пользовании таблицами всегда необходимо знать, применитель-
но к какому закону сопротивления воздуха составлялись таблицы, так
как от этого зависит численное значение баллистического коэффициен-
та с.
Таблицы внешней баллистики [зенитные траектории)
Таблицы позволяют определить текущие элементы траектории х, у
и в-в функции времени при известных параметрах v0, 0О и с. Для удоб-
ства пользования таблицы состоят из нескольких книг для разных диа-
пазонов скоростей [2,7]. Для зенитной стрельбы таблицы составлены для
ц0>700 м/с, при углах бросания Оо от 0 до 90° и баллистических коэф-
фициентах от 0,3 до 6. Аргумент — время t выбран так, чтобы охватить
восходящую ветвь траектории; наибольшие значения аргумента немного
превышают время полета до вершины ts (при малых углах бросания
обычно элементы траектории даются до точки падения). Для каждого
элемента траектории — дальности х, высоты у и скорости v в таблицах
имеются отдельные листы.
Вид таблиц виден, например, из формы листа «Дальности»:
vo =
Дальности х
Таблицы внешней баллистики непосредственно дают только величи-
ны трех элементов траектории х, у, и а. Четвертый элемент — угол на-
клона касательной 0 приближенно можно определить по формуле
Уп-^1 Уп—1
(6.36)
С помощью таблиц внешней баллистики можно решить следующие
задачи.
1. Известны: v0, Оо, с. Определяются элементы траектории.
2. Известны: v0, с, t. Строится изохрона — геометрическое место то-
чек, отвечающих одному времени полета.
В интересующем нас диапазоне углов бросания 0О для каждой со-
вокупности параметров v0, 0О, с определяются координаты х и у при за-
данном времени t (варьируется угол бросания). По полученным данным
строится изохрона.
3. Заданы: v0, с, координаты х и у. Определяется угол бросания 0о
и потребное полетное время t.
Задача решается рядом попыток: задаются значением Оо, опреде-
ляется по величине х время t и ордината у. Приемлемость решения оце-
нивается по результатам сравнения полученного значения у с заданным.
4. Заданы: с, координаты х и у. Определяются: начальная скорость
v0 и угол бросания 0О.
Задача решается рядом попыток: задаются значением 0О и опреде-
ляется попытками требуемая скорость v0. Контроль правильности ре-
шения ведется по величине ординаты у при данной абсциссе х. Затем
задаются другим значением 60, определяют новое значение t>o и т. д.
В результате получают семейство траекторий, из которого на основании
дополнительных требований выбирается желаемая траектория.
Таблицы внешней баллистики (элементы траекторий
при стрельбе по наземным целям]
При стрельбе по наземным целям наибольший интерес представля-
ют элементы точки падения и высота траектории. Поэтому таблицы для
этих элементов имеют только три входных величины v0, 0о и с и позво-
ляют определять полную горизонтальную дальность хс, скорость сна-
ряда у цели vc, угол его падения 0с, а также полетное время tc и высоту
вершины траектории у8 [2].
Диапазон изменения начальных скоростей Vo в таблицах — от 60—
80 м/с до 1500—2000 м/с; угол бросания 0О — в пределах от 0 до 90°, бал-
листический коэффициент с — от 0 до 6.
Для каждого из перечисленных элементов траектории имеются от-
дельные листы таблицы. С целью пояснения структуры таблиц приведем
в качестве примера форму листа «Окончательные скорости»:
%= . . .
М/с с 60—80 1500—2000
0 Окончательные скорости v(:
Таблицы внешней баллистики можно применить для решения мно-
гих задач, приведем некоторые из них:
1. Известны: ц0, 0О, с. Определяются: хс, vc, 6с, Д, Уз-
2. Известны: v0, с, Хс. Определяются: 60, vc, 0с, tc, Уз-
При решении используется вначале лист «Дальности»; по известным
величинам г?о, с и хс находится угол 0р, а затем по другим листам — эле-
менты точки падения и вершины.
3. Известны: 0О, с, хс. Определяются: va, vc, 0с, tc, ys-
Используя лист «Дальности», можно найти v0, а затем по другим
листам — элементы точки падения и вершины.
4. Известны: v0, с. Определяются угол наибольшей дальности 0От
и наибольшая дальность Хст-
При решении задаются рядом значений утла 0О и определяют даль-
ность хс так, чтобы захватить район вершины кривой хс(0о). Интерпо-
лированием определяется точное значение 0от и хСт.
5. Известны: с, хс. Определяются: Pomin, Ooopt-
При решении задаются рядом значений угла 0о и определяются ве-
личины v0, при которых обеспечивается заданная дальность хс. Низшая
точка на кривой t’o(6o) даст наименьшее значение потребной скорости
cinmin и оптимальное значение угла бросания 0оор+-
6. Известны: о0, 0О, хс, q, d. Определяются: с, I.
Из листа «Дальности» устанавливается значение баллистического
коэффициента с, а затем вычисляется коэффициент формы i по формуле
1=-^— КГ3.
Г
Таким образом, на основании результатов стрельбы устанавливает-
ся величина коэффициента формы снаряда.
Помимо перечисленных примеров таблицы могут использоваться
для приближенного определения элементов траектории реактивных сна-
рядов.
На этапах баллистического проектирования ракет и снарядов широ-
ко используются приближенные методы расчета их траекторий полета
(см. гл. III и книги [2,6]).
§ 6.6. СТАБИЛИЗАЦИЯ СНАРЯДОВ В ПОЛЕТЕ
Дальность и точность стрельбы зависит от правильности полета сна-
ряда, т. е. от величины отклонений продольной оси снаряда от касатель-
ной к траектории. Для обеспечения правильности полета снаряда его
необходимо стабилизировать.
В современных снарядах стабилизация их на траектории осущест-
вляется следующими способами: с помощью оперения; приданием сна-
ряду вращения вокруг продольной оси; управлением его угловым поло-
жением.
Стабилизация оперением
Продолговатое тело устойчиво в полете, если его центр масс рас-
положен ближе к вершине, чем центр давления. Это достигается с по-
мощью оперения, размещаемо-
го на хвостовой части снаряда.
Такой способ придания снаряду
устойчивого полета называют
стабилизацией оперением.
Стабилизация оперением
применяется при движении сна-
ряда в достаточно плотных сло-
ях атмосферы. Характерной
особенностью снаряда, стаби-
лизированного оперением, яв-
ляется отрицательное значение
Рис. 6.5. Стабилизация снаряда опере-
нием
величины хт —хя, где хт— расстояние центра масс от вершины, хд — рас-
стояние центра давления от вершины снаряда.
На оперенный снаряд при отклонении его оси от направления воз-
душного потока действует стабилизирующий аэродинамический момент
М, стремящийся устранить возникшее отклонение (рис. 6.5). Величина
этого момента пропорциональна расстоянию между центром давления и
центром масс снаряда, а также углу отклонения а и определяется при
углах атаки меньше критических зависимостью
= Уг (хт — хл)= Sqcy, (х.
(6.37)
В известной мере о стабилизации снаряда можно судить по запасу
устойчивости Сц.д, который представляет собой
£ц.д = 1°°%-
(6.38)
Однако запас устойчивости не является исчерпывающей характеристи-
кой стабилизации; величина его не дает достаточно полного представле-
ния о точности полета снаряда с данным стабилизатором.
При проектировании снарядов необходимо учитывать все многооб-
разие явлений, возникающих при применении стабилизации оперением:
отклонение продольной оси снаряда от направления воздушного потока,
увеличение веса и коэффициента лобового сопротивления снаряда, а
также ветровое воздействие и
ухудшение маневренных ка-
честв снаряда.
На реактивном снаряде
стабилизаторы должны уста-
навливаться в хвостовой части
корпуса не далее среза сопла
двигателя.
При определении размеров
стабилизатора необходимо учи-
тывать влияние стабилизатора
на точность стрельбы.
Характеристика рассеивания в боковом направлении В& зависит от
величины средней хорды стабилизатора Ьср.
График характеристики Вд (£ср) обычно имеет минимум, в районе
которого и следует выбирать величину средней хорды стабилизатора
(рис. 6.6). На рисунке показаны: сплошной линией — суммарное возму-
щение; пунктирными: 1 — влияние ветрового возмущения, 2 — влияние
колебательного движения.
Расчеты показывают, что размах оперения находится в пределах
1,8—2,2 калибров.
При выбранных таким образом размерах стабилизатора следует
оценить влияние колебательного движения на рассеивание по дальности
или по высоте.
Исследование по выбору размеров стабилизатора желательно про-
изводить при нескольких положениях центра давления стабилизатора
относительно вершины снаряда.
В заключение следует определить величину запаса устойчивости
снаряда Сц.д: у неуправляемых ракет запас устойчивости обычно состав-
ляет 8—10%, у управляемых — 3—5%.
Для определения аэродинамических коэффициентов и положения
центра давления при различных размерах оперения можно пользовать-
ся методикой, изложенной в книге [7]. Для определения характеристик
кучности стрельбы В,-, и Вя можно воспользоваться данными, приведен-
ными в книге [2].
Стабилизация вращением
Вращающийся артиллерийский снаряд обладает свойством сохра-
нять положение своей продольной оси в пространстве при определенном
уровне действующих возмущений. Минимально допустимая угловая ско-
рость вращения снаряда определяется правильным движением снаряда
на начальном участке, где величина случайных возмущений наиболее
велика. Увеличение угловой скорости вращения сверх необходимой ве-
дет к увеличению кинетического момента снаряда и к уменьшению от-
клонений его продольной оси от невозмущенного состояния при прямо-
-и::;-;':?:ом движении. Однако вследствие действия силы тяжести траек-
г.гия снаряда искривлена и по мере удаления от начала траектории
касательная к траектории понижается.
При движении снаряда на криволинейном участке траектории на
него действует аэродинамический момент одного направления, вследст-
вие чего динамическая ось равновесия снаряда отклоняется от касатель-
ной к траектории. Угол отклонения динамической оси бр тем больше,
чем больше кривизна траектории и чем больше угловая скорость враще-
ния снаряда.
Устойчивый снаряд должен следить за касательной на всем расчет-
ном участке траектории, поэтому допускать больших отклонений дина-
мической оси равновесия не следует, и, следовательно, нельзя чрезмерно
увеличивать угловую скорость вращения снаряда. Верхняя граница зна-
чений угловой скорости будет определяться устойчивым движением сна-
ряда в районе вершины траектории. Возможны случаи, когда величина
угловой скорости, необходимой для правильного движения на начальном
участке (нижняя граница), превосходит верхнюю границу. Очевидно в
этих случаях обеспечить устойчивый полет вращающегося снаряда на
всей траектории не представляется возможным. По этой причине не
представляется возможным обеспечить хорошую устойчивость на траек-
тории вращающегося снаряда при стрельбе по наземным целям при уг-
лах бросания больше 65—70° (из-за невозможности обеспечить доста-
точную устойчивость снаряда в вершине траектории при сохранении ее
на начальном участке). Для авиационных снарядов, выстреливаемых по
самолетам, этой опасности нет, так как траектории их имеют сравнитель-
но малую кривизну. При зенитной стрельбе также не страшна потеря
снарядом устойчивости в вершине траектории, ибо цели поражаются на
восходящей ветви траектории. Только в случае применения зенитных
систем для стрельбы по наземным целям следует обязательно устанав-
ливать верхний предел углов возвышения, при котором обеспечивается
достаточная устойчивость вращающегося снаряда на всей траектории.
Для перестабилизованного снаряда на криволинейном участке тра-
ектории угол между осью снаряда и касательной к траектории будет
непрерывно возрастать. Такое же явление можно наблюдать и при по-
лете снаряда в весьма разреженных слоях атмосферы. В этих условиях
снаряд может подойти к цели своей донной частью.
Реактивные снаряды закручиваются с помощью винтовых направ-
ляющих пусковой установки или косопоставлепных сопел.
Угловую скорость снаряда, обеспечивающую его устойчивое дви-
жение, устанавливают по начальному участку траектории, а затем про-
веряют величину угла отклонения динамической оси равновесия бр в
районе вершины при стрельбе под наибольшим углом возвышения. Если
угол бр не превосходит допустимой величины, то назначенная угловая
скорость считается приемлемой.
Рассмотрим условие гироскопической устойчивости снаряда на на-
чальном участке траектории. В первом приближении начальный участок
можно считать прямолинейным, вследствие чего динамическая ось рав-
новесия на этом участке совпадает с касательной к траектории. Из об-
щих уравнений движения можно выделить уравнение вращательного
движения, имеющего вид 1
^-2^ WiK=0, (6.39)
at* at
: См. кпчгу [7].
где Ак= р + га — комплексный угол атаки;
1 /Л1 Q
= Т !zt ~ ’
MZi S?maz
Izv2a 2lZi
При исследовании устойчивости движения вращающегося артилле-
рийского снаряда в пределах небольшого начального участка траекто-
рии скорость снаряда v, плотность воздуха р и аэродинамический коэф-
фициент m"z можно считать постоянными. Аналогично можно считать
эти величины постоянными и для неуправляемого реактивного снаряда
в районе точки конца работы двигателя. При этом допущении коэффи-
циенты / и № будут также постоянными.
Вместо аргумента t введем в рассмотрение путь снаряда по траек-
тории S, определяемый уравнением —— v. При новом аргументе
dt
уравнение вращательного движения записывается в виде
= (6.40)
dS1 dS
Полученное дифференциальное уравнение при принятых допущени-
ях является линейным уравнением с постоянными коэффициентами.
Его решение записывается в форме
^=Се .
Из характеристического уравнения
х2 — 2ifv~ — К2—0
определяется
v.= if ± + 3), (6.41)
где
С учетом зависимости (6.41) решение уравнения (6.40) имеет вид
AK=Cie'7(1+’)S+C2eV(1“o)S. (6.42)
При оценке устойчивости вращающегося снаряда нас интересует
область, в которой модуль угла Ак будет ограничен.
При действительных значениях о (предельное значение <т=1) реше-
ние выражается через тригонометрические функции и модуль угла Дк,
определяемый выражением
I А к I = —f— Сг ~f- 2CrC2 cos 2fa,
будет ограничен. Следовательно, в области устойчивости справедливо
неравенство
/2
Можно показать, что при 1—— <(0 величина а принимает мни-
мое значение, решение выражается через гиперболические функции и
модуль угла Дк будет неограниченно возрастать.
Итак, для того чтобы вращающийся снаряд был устойчив, необхо-
димо выполнить условие
1-^->0, (6.43)
или
(6.44)
Вывод формулы для определения крутизны нарезов артиллерийско-
го ствола, исходя из условия устойчивости снаряда на начальном уча-
стке траектории, приведен в гл. VII.
После обеспечения устойчивого движения на начальном (или актив-
ном) участке траектории для снарядов класса «земля — земля» обяза-
тельно проверяется правильность движения в районе вершины траекто-
рии. Для этой оценки в нескольких точках, близких к вершине, вычис-
ляется величина угла бр отклонения динамической оси равновесия сна-
ряда от касательной к траектории.
Приближенно угол бр можно вычислять по формуле
8 2_Д.^СО5±. (6.45)
Максимальное значение угла бр, получаемое при стрельбе под наи-
большим углом возвышения, не должно превосходить 15°.
Наличие на криволинейном участке траектории систематического
отклонения динамической оси равновесия (вправо при правом враще-
нии) приводит к тому, что продольная ось снаряда систематически от-
клонена в одну сторону от плоскости бросания. Появляющаяся вследст-
вие этого боковая сила вызовет систематическое боковое отклонение
снаряда. В артиллерии это боковое отклонение называют деривацией.
Величина деривации существенно зависит от кривизны траектории. Так,
при одной и той же дальности стрельбы в случае навесной траектории
деривация в несколько раз больше, чем в случае настильной. Деривация
является систематическим отклонением, величина ее учитывается при
составлении таблиц стрельбы [2,7].
Универсальным способом стабилизации снарядов, применимым как
в плотных слоях атмосферы является управление его угловым положе-
нием. При этом виде стабилизации для придания снаряду желаемого
углового положения в пространстве необходимо иметь органы управле-
ния и источник энергии. При наличии рассогласования между истинным
положением снаряда и желаемым система управления вырабатывает
управляющий сигнал, в соответствии с которым и поворачиваются орга-
ны управления.
В самом общем случае угол поворота органов управления б опреде-
ляется зависимостью
иР), (6.46)
где Si — угол, определяющий положение оси снаряда.
Символ U понимается как оператор, он показывает, что в общем
случае угол б зависит как от отклонения угла gi от его программного
значения g!np, так и от отклонений производных угла от их программных
значений.
В практике управления снарядами часто угол поворота органов уп-
гзалення определяется зависимостью
8==J^i (?щ»inp) + ^C(, (?i — ?iпр). (6.47)
Система управления осуществляет стабилизацию снаряда с требуе-
ч : й точностью (см. гл. XIII).
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ VI
1. Гантмахер Ф. Р., Левин Л. М. Теория полета неуправляемых ракет.
М„ Физматгиз, 1959, 360 с.
2. Дмитриевский А. А. Внешняя баллистика. М., «Машиностроение», 1972,
583 с.
3. Космодемьянский А. А. Курс теоретической механики. Т. 2. М., «Про-
свещение», 1966, 398 с.
4. К р а с н о в Н. Ф. и др. Аэродинамика ракет. М., «Высшая школа», 1968, 772 с.
5. Таблица стандартной атмосферы. М., изд-во Стандартов, 1964, 57 с.
6. О р л о в Б. В., М а з и н г Г. Ю. Термодинамические и баллистические осно-
вы проектирования ракетных двигателей на твердом топливе. М., «Машинострое-
ние», 1968, 536 с.
7. Шапиро Я. М. Внешняя баллистика. М., Оборонгиз, '1946, 407 с.
8. Баллистические таблицы. М.—Л., изд-во Наркомвоенмора, 1934, ч. II, кн. 1,
864 с., кн. 2, 561 с.
Глава VII
УСТРОЙСТВО И ПРОЕКТИРОВАНИЕ АРТИЛЛЕРИЙСКИХ СТВОЛОВ
И СИСТЕМ ИХ ОХЛАЖДЕНИЯ
§ 7.1. АРТИЛЛЕРИЙСКИЕ СТВОЛЫ
Ствол артиллерийской системы представляет собой толстостенную
трубу. В казенной части ствола (задней) располагается камора (каме-
ра) заряжания (патронник), где помещается гильза (патрон) или в слу-
чае раздельного заряжения картуз с зарядом. Со стороны казенной час-
ти канал ствола закрывается затвором. На дульной (передней) части
ствола может располагаться тормоз, а в средней — эжекционное устрой-
ство.
Зарядные каморы
Конфигурация каморы (патронника) определяется в основном спо-
собом заряжания.
Для унитарного патрона (снаряд впрессован в дульце гильзы) ка-
мора заряжания (рис. 7.1, а) образована, как правило, двумя конически-
ми поверхностями, эквидистантно расположенными коническим поверх-
ностям гильзы. Основной пологий конус каморы имеет уклон в пределах
от 1/50 до 1/120. Последующий конус, в поверхность которого упирается
соединительный скат гильзы, более крутой с уклоном от 1/3 до 1/10 [3].
Далее поверхность каморы заряжания переходит в цилиндрическую, оп-
ределяемую размерами дульца гильзы [3,6]. Диаметральные зазоры меж-
ду гильзой и каморой заряжания выбираются из условия сохранения в
процессе выстрела упругой деформации корпуса гильзы. Они прибли-
зительно составляют 0,1—0,15 мм в области дульца и 0,5—0,7 мм в дон-
ной части гильзы [3,1]. Выбор такой формы и размеров каморы заряжа-
ния обеспечивают надежное извлечение (экстракцию) стреляной гильзы.
Камора для разделыю-гильзового заряжания (рис. 6.1, б) состоит
из конической (конусность 1/75—1/120) и цилиндрической частей.
Ориентировочные размеры каморы орудий с картузным заряжани-
ем (рис. 7.1, виг) могут быть определены из следующих соотношений:
c/K=l,05tZ; l1 = 5(d0 <^к); Z2=5 (d0 a!H); Z3=(0,6 -+-O,8)of; /4 = 0,5d.
Размеры l0 и d0 зависят от объема каморы 1Ккам (см. гл. III) и ко-
-рфициепта ее уширения / (коэффициент «бутылочности»). В указан-
ых соотношениях d— калибр орудия.
В орудиях картузного заряжания первых выпусков для уменьшения
воздействия пороховых газов на затвор во время выстрела предусматри-
валась горловина (см. рис. 7.1, г). В каморах современных орудий в
целях обеспечения высоких плотностей заряжания горловина не де-
лается.
Камора заряжания посредством опорной конической поверхности
। конуса врезания) с уклоном 1/10—1/20 переходит в цилиндрическую
.зерхность канала ствола, который имеет нарезы или является гладко-
. . МП.
Ведущий поясок снаряда (ВП) упирается в соединительный (опор-
ный) конус каморы (рис. 7.2). Объем металла гильзы не превосходит
10% объема каморы [3].
Рис. 7.1. Типы зарядных камор:
а— для унитарного заряжания; б — для раздельно-гильзового заряжания; в — для кар-
тузного заряжания
Диаметр канала ствола соответствует калибру снаряда по месту
его центрирующего утолщения. Нарезной канал ствола применяется для
снарядов, устойчивость которых на траектории обеспечивается враще-
нием. В этом случае канал ствола является не только направляющей,
Конический скос
наоезов
Рис. 7.2. Схема расположения снаряда в
канале ствола перед выстрелом
Рис. 7.3. Схема ствола-моноблока:
7 ~ труба; 2 — казенник; 3—затвор
на длине которой снаряд разгоняется до заданной скорости, но и обес-
печивает снаряду нужную для стабилизации полета скорость вращения.
Стволы с гладким каналом применяются для снарядов, стабилизация
полета которых осуществляется оперением.
Стенки стволов
Пороховой газ в стволе при горении заряда находится под весьма
большим давлением.
Для орудий калибра не свыше 100 мм при давлении не более
5000 кгс/см2 ствол, как правило, делают в виде однослойной нескреплен-
ной трубы — ствол-моноблок (рис. 7.3) или двухслойным со свободной
трубой (или лейнером), вставленной с зазором в кожух (см. рис. 6.5).
Ствол-моноблок в настоящее время находит наибольшее распростране-
ние. При давлении пороховых газов до 5000 кгс/см2 и длине ствола по-
рядка 50 калибров снаряду сообщается скорость около 1000 м/с [7].
Стремление получить большую скорость приводит к увеличению ве-
са порохового заряда, давления пороховых газов, длины, толщины сте-
нок и веса ствола. При этом вес заряда быстро приближается к весу
снаряда, а непроизводительная энергия, затрачиваемая на перемещение
газопороховой смеси, увеличивается, приводя к снижению к. п. д. ору-
дия. Так, при давлении не свыше 5000 кгс/см2 и длине ствола не более
'00 калибров и весе заряда,
равном весу снаряда, расчет
ная начальная скорость снаря-
да не превосходит 1600 м/с.
Дальнейшее повышение на-
чальной скорости снаряда при-
водит к еще более резкому nai
дению производительности за-
ряда. Поэтому активный прию
цип метания снарядов с боль-.
Рис. 7.4. Схема скрепленного ствола:
1 — труба (лейнер); 2 — кожух; 3 — казенник; 4 —
затвор
шой скоростью оказывается ме-
нее эффективным по сравне-
нию с реактивным (даже без учета баллистической живучести ствола).
Активное метание снаряда при высоких давлениях в канале требует
специальной конструкции ствола, так как предел упругости сталей, ис-
пользуемых в настоящее время в артиллерийских орудиях, не превосхо-
дит 100 кгс/мм2 [1, 3, 4].
В целях более рационального использования стенки ствола и сниже-
ния его веса для мощных артиллерийских орудий в некоторых случаях
используются скрепленные стволы (рис. 7.4),
3 4
Рис. 7.5. Схема ствола со свободной трубой или
лейнером:
состоящие из нескольких
труб, одетых друг на
друга с натягом. Такой
ствол с предварительно
напряженной внутрен-
ней трубой позволяет
как бы повысить пре;
дел упругости материа;
ла на величину напря-
жения предваритель-
кого сжатия металла
поверхности канала
1 — труба (лейнер); 2 — кожух; 3 — казенник;
4 — затвор
ствола.
Стволы артилле-
рийских систем имеют
ограниченный срок службы, так как их канал изнашивается в процессе
эксплуатации. Для восстановления баллистических свойств орудия не-
скрепленный ствол заменяется полностью, а в скрепленном обычно за-
меняется изношенная труба.
Для облегчения перестволения можно использовать орудийные ство-
лы, у которых труба вставляется с выбираемым во время выстрела за-
зором. Практическое применение нашли два типа подобных стволов: со
свободным лейнером и свободной трубой. В стволах со свободным лей-
нером (рис. 7.5) зазор между тонкостенной трубой (лейнером) и внут-
ренней поверхностью оболочки по мере увеличения давления выбирает-
ся, после чего в деформации ствола участвует и оболочка. Дульная часть
лейнера работает как простой моноблок, так как под действием сравни-
тельно небольших давлений зазор полностью не выбирается.
Лейнер, вставляемый в оболочку с казенной части ствола, от про-
движения вперед и назад удерживается специальным буртом и навинт-
ным казенником, а от поворота — стопорным винтом или планкой. Для
уменьшения скручивания лейнера в его дульной части устанавливаются
шпонки. Обычно наружная поверхность лейнера имеет небольшую ко-
нусность (3—4%) для облегчения его извлечения из оболочки.
Величины диаметральных зазоров в современных стволах с Лейне-
рами равны: 0,05—0,2 мм — для орудий средних калибров и 0,15—
0,25 мм —для орудий крупных калибров [3].
Для предотвращения раздутия гильз вследствие больших по срав-
нению с обычным моноблоком упругих деформаций внутренней стенки
лейнера, зазор над каморой делается меньше.
Свободная труба в отличие от свободного лейнера закрыта оболоч-
кой не по всей длине. Это выгодно, так как уменьшаются поверхности,
подлежащие точной обработке. Однако стенки свободной трубы должны
быть толще, чем у лейнера.
Износ канала ствола обусловливается разгаром каморы заряжания
и нарезов канала ствола. Такое разрушение каморы и нарезов приводит
к уменьшению скорости снаряда, а при достижении предельных вели-
чин— к срыву его ведущего пояска. В последнем случае снаряду не со-
общается необходимое для устойчивости на траектории вращение. Ствол
считается изношенным, если начальная скорость снаряда уменьшилась
на 10% или овальность пробоин от снаряда в щите достигла 1,5 калиб-
ра [6].
Основной причиной износа ствола является разгар канала ствола
вследствие теплового воздействия порохового газа, температура которо-
го достигает 2500—3000 К, и больших сил трения между нарезами и ве-
дущим пояском. В скорострельных орудиях нагрев ствола от выстрела к
выстрелу увеличивается, так как за время между выстрелами металл
ствола не успевает остыть. Возрастание температуры металла ствола и
глубины его прогревания приводят к быстрому износу нарезов, а в от-
дельных случаях и к потере стволом прочности.
Для снижения нагрева ствола и увеличения допустимой продолжи-
тельности непрерывной стрельбы при сохранении требуемой живучести
ствола можно применять принудительное охлаждение (прогон под дав-
лением охлаждающей жидкости между кожухом и лейнером ствола или
впрыскивание ее в капал ствола в перерыве между выстрелами. Внеш-
нее жидкостное или воздушное охлаждение ствола является малоэффек-
тивным и применяется только в стрелковом оружии с невысоким темпом
стрельбы.
Нарезная часть канала ствола
Нарезы канала ствола артиллерийского орудия могут иметь посто-
янную и переменную крутизну. Обычно крутизна нарезов канала ствола
выбирается постоянной. Однако постоянная крутизна нарезов приводит
к неравномерному давлению ведущего пояска на боевую грань. При
этом закон изменения напряжений смятия пояска по длине капала иден-
тичен кривой давления порохового газа в заснарядном пространстве,
взятой в функции пути снаряда. Поэтому наибольшее напряжение смя-
тия ведущего пояска определяется наибольшим давлением в канале
ствола.
При крутизне нарезов более 25 калибров и наибольшем давлении
порохового газа до 3000 кгс/см2 напряжение смятия для медного веду-
щего пояска не превосходит предельно допустимой величины, равной
45 кгс/мм2 [1, 3, 4].
В некоторых случаях для нарезов постоянной крутизны напряже-
ния смятия на ведущем пояске достигают недопустимой величины (на-
пример, в авиационных пушках при стрельбе у Земли по курсу само-
лета необходимая крутизна нарезов возрастает и их шаг уменьшается до
18—20 калибров). Снижение этого напряжения возможно получить при
нарезах переменной крутизны.
Для обеспечения равномерного износа нарезов их крутизна должна
выбираться так, чтобы напряжение смятия было постоянным по всей
длине канала ствола. Если длина пути снаряда позволяет осуществить
требуемую крутизну нарезов, то на их начальном участке (длиной до
2—3 калибров), т. е. в зоне наибольшего термонапряжения, крутизна
нарезов берется равной нулю.
Для уменьшения разгара канала ствола у каморы его начало (па
длине до 0,5 калибра) можно делать гладким. В целях уменьшения
Рис.
. 7.6. Поперечное сечение на-
резной части канала ствола
влияния разгара канала ствола на жи-
вучесть его нарезы можно делать пере-
менной глубины, постепенно уменьша-
ющейся от каморы к дульному срезу
(обычно по линейной зависимости). В
казенной части ствола глубина нарезов
может быть 3—4%, а в дулыюй—
1,5—2% от калибра. При таком законе
изменения глубины нарезов достигает-
ся более надежная обтюрация порохо-
вого газа ведущим пояском [3, 6].
Лучшим материалом для ведущего
пояска является медь, сдобренная ни-
келем. Однако дефицитность этих ма-
териалов вынуждает для ведущего по-
яска выбирать и другие материалы, на-
пример, пористое железо. Поэтому на-
ряду с медными поясками встречаются
железокерамические [13].
Геометрические параметры нарезки выбираются исходя из следую-
щих соображений [3, 4, 6].
Число нарезов берется кратным четырем и равным ti^3d, где d —
калибр орудия в сантиметрах. Для определения глубины Дн и ширины а
поля нарезов (рис. 7.6) можно рекомендовать следующие соотношения
[1,6]:
Дн = 0,015rZ;
а = (1,2 -э- 2,0) Ь,
где d — калибр орудия;
b —ширина дна парезов.
§ 7.2. РАСЧЕТ КРУТИЗНЫ НАРЕЗОВ КАНАЛА СТВОЛА
Потребная крутизна нарезов а сечении
дульного среза ствола
Коэффициент запаса гироскопической устойчивости снаряда на тра-
ектории о определяется соотношением [10, 11]1
ч=1—L==1_^L->o.
1* /2 '
Здесь
(y)hvl,
!zb glz
где р — коэффициент опрокидывающего момента, рад/с2;
М—опрокидывающий момент от лобового сопротивления атмо-
сферы, кгс-м;
1 См. гл. VI.
1г—полярный момент инерции снаряда, кгс-м-с2;
б—угол нутации снаряда, рад;
I— коэффициент формы снаряда;
d— калибр, м;
g— ускорение свободного падения, м/с2;
—аэродинамический коэффициент опрокидывающего мо-
мента, являющийся функцией числа М = —, кгс/м3 (см.
а
табл. 7.1);
Н (у) —функция, равная отношению плотности воздуха на высоте
у к плотности его у поверхности Земли (при расчете кру-
тизны нарезов принимают Н(у) = 1);
h—аэродинамическое плечо опрокидывающего момента (рас-
стояние между центрами сопротивления и тяжести снаря-
да), м;
Уо — начальная скорость снаряда, м/с;
где уНут — угловая скорость нутации, рад/с;
1Х и Л — моменты инерции снаряда, кгс-м-с2;
2л v д
S = —- —угловая скорость вращения снаряда в сечении дульного
тД
среза, рад/с;
— дульная скорость снаряда, м/с;
Ц —шаг нарезов в калибрах орудия.
Таблица 7.1
V/а 0,5 0,6 0,7 0,8 0,9 1,0 1,1
/<мкгс/м3 0,81 0,85 0,90 0,99 1,08 1,12 1,12
via 1,2 1,3 1,4 1,5 1,75 2 3
Хмкгс/м3 1,И 1,08 1,05 1,04 1,03 1,02 1,01
Начальная скорость снаряда относительно Земли несколько боль-
ше дульной. Это отличие составляет около 1%. Для наземной артилле-
рии в практических задачах можно принимать их равными, т. е. счи-
тать, что опрокидывающий момент определяется не начальной, а дуль-
ной скоростью снаряда. Однако для авиационных пушек это различие
является весьма существенным, так как скорость снаряда относительно
Земли при стрельбе по курсу самолета равна
= +
где Vi = (0,24-0,5) — скорость самолета.
Поэтому в формуле для опрокидывающего момента снаряда авиа-
ционных пушек вместо v0 следует подставлять гди. Вследствие этого не-
обходимая крутизна нарезов для стволов авиационных пушек в 1,2—1,5
раза больше, чем для наземных. При установке такой пушки на ту-
рель следует иметь в виду, что при боковой или кормовой стрельбе сна-
ряд будет перестабилизирован, так как ц01 уменьшается в соответствии
с формулой
foi = fo + ^icos
где ср —угол между направлением стрельбы и курсом самолета.
При воздушной стрельбе с перестабилизацией снаряда можно не
считаться, так как воздушный бой ведется на расстоянии, меньшем
длины восходящего участка траектории полета снаряда. Поэтому
встреча снаряда с целью всегда будет под углом, обеспечивающем нор-
мальное функционирование головного взрывателя.
При наземной стрельбе с большими углами возвышения ствола пе-
рестабилизированный снаряд встретится с поверхностью Земли донной
частью, так как в этом случае ось снаряда практически сохраняет угол
возвышения ствола орудия по всей траектории полета. Ввиду этого для
наземной артиллерии перестабнлизация снаряда недопустима.
Для вывода зависимости, определяющей потребное значение кру-
тизны нарезов т], подставим в соотношение для а выражения р и уну1.
В итоге получим
v„ л
<?01 2
/г ft
1 X
(7-1)
где а-? — У 1 — а «0,954-0,85, так как обычно <т= 0,14-0,2;
р= --------коэффициент распределения массы снаряда;
yd2
Са = —, кг/м3 — коэффициент веса снаряда; q —вес снаряда, кг.
4 а3
Для современных снарядов [7, 10]
[1 = 0,48 ч-0,68; Cq= 15 10 кг/дм3.
Величину h можно приближенно оценить по формуле Гобара
Л=й1 + 0,57й2 —0,164/,
где /?1—расстояние от центра массы снаряда до основания его голов-
ной части (оживала); Л2— длина головной части снаряда.
Сила давления ведущего пояска на боевую грань нареза
Общий вид развертки нареза канала ствола орудия и схема дей-
ствия сил на боевые грани нарезов представлены на рис. 7.7.
Рис. 7.7. Развертка нареза канала
ствола и схема действия сил на веду-
щий поясок снаряда при выстреле
Для определения нормальной силы N давления ведущего пояска;,
на боевые грани нарезов имеем систему уравнений, определяющих^
mt't—Sр — F — поступательное движение снаряда;
F =----- sin (а -4- р)—силу сопротивления движению снаряда cq-. сто-
COS р
роны нарезов;
A = Q — вращательное движение снаряда;
Q = . У - ('р д а) — силу от момента вращения снаряда вокруг его
COS р
оси;
2 _ 2 (у + Ю tg а — текущую угловую скорость вращения снаряда.
d
Из последнего уравнения получим
2<= — [(«г + V;) tg a -ф (-о -ф V) 4" (t’g а)
d L dt
или для случая V < v
d I dl J
(7.2)
где v и V — соответственно абсолютные скорости снаряда и ствола;
I — абсолютный путь снаряда по каналу ствола.
Подставляя найденное выражение для й/ в уравнение вращатель-
ного движения снаряда, получим
2А [ ' , , о d , \ N .
-— щ tg а Ц- — tg а =---------- cos (a ф р).
d \ dl ) cos p
Так как
то
Sp N sin (a У- p)
m cos pm
Spy\ +
N =]x COS p —-------------------------------
pit/) sin (a + p) + cos (a + p)
(7.3)
где p = arctg/ —угол трения;
y)=tga; уi = d- tga.
dl
При p = a = 7°
COS P
cos 7°________
sin (a + p) + cos (a + p) 0,5-0,12 sin 14° + cos 14
=--------1:2?-------= i 006.
0,06-0,242 + 0,97
Таким образом, с погрешностью порядка 1 % для определения си-
лы N можно пользоваться формулой [3]:
7V = P (Spyi (vy'i)i, (7.4)
так как Sp.
При yt — — (tga)=0, т. е. для нарезов постоянной крутизны
dl
(a=const) имеем формулу
N = [A tg aSр.
Крутизна нарезов, обеспечивающая постоянство
усилия на боевую грань
Найдем уравнение кривой развертки нарезов постоянной глубины
у(1), обеспечивающих практически постоянную величину N по всей
длине канала ствола.
Уравнение (7.4) приведем к виду
---=a?(tHga) или -----(v tg а).
ixmv и.т
Если начальный участок канала ствола гладкий, или имеет наре-
зы «нулевой» крутизны, то после интегрирования при N = const получим
W - Zh) = tg а - tg ан),
где пп— скорость снаряда в начале нарезов;
/п— время движения снаряда по гладкому участку канала ствола,
имеющего длину /н;
Иц — начальный угол наклона нарезов.
Отсюда следует, что
о tg а = !- г>н tg а„.
рт
Так как
, du dl , du
tg a=—— ; u =— ; v tg a =—— ,
dl dt dt
то уравнение развертки кривой нарезов, обеспечивающих A/’ = const,
будет иметь вид
, ,, , , . ЛГ(/ - /н)2
У = tg ctH (t - tK) -|-4- .
2pm
Зная функцию 1(f), построим кривую развертки у{1). При условии
безударного врезания (у"=0) согласно уравнению (7.4) можно за-
писать
Л^ = ут5>н tg ан= (v tg а- г-н tg ан),
* гн
так как по правилу Лопиталя при t=tH, tga = tgaH и v = vB, имеем для
цп = const и tH=const:
Начальное значение tg aH найдем из условия
N = tg aH = —(г>д tg a, - ту tg aH).
*д
Откуда
tga =_________________
mvH + SpH«x —ZH)
где tga,= -^- .
Ширину ведущего пояска hB и глубину нарезов Лп следует принять
такими, чтобы выполнялось условие
Ы tg ан,
где [оу] — допустимое напряжение ведущего пояска на смятие.
Крутизна нарезов, обеспечивающая постоянство мощности
истирания ведущего пояска
В целях снижения износа ведущего пояска целесообразно крутиз-
ну парезов выбирать из условия ]Wn=const. При f=tgp = const это ус-
ловие согласно уравнению (7.4) будет выполняться при соблюдении
соотношения
Nv— ?mv — (v iga)=const.
Откуда
tga —— tg aH-f
С Г dt_
pmv J v
V
Постоянную С найдем из выражения
С =рт
v„tga, — vHtgaH
Усилия
Смешанная крутизна нарезов
Для повышения живучести начального участка канала ствола 1о и
улучшения функционирования ведущего пояска иногда на этом участ-
ке вводят парезы с нулевой крутизной (рис. 7.8). Далее крутизна на-
резов на участке /пр постепенно увеличивается, а в конце канала перед
дульным срезом на участке /с на-
резы имеют постоянную крутизну,
Участок /с имеет длину от 5 до 10
калибров и вводится с целью
улучшения правильности полета
снаряда. Длина участка нулевой
крутизны 1о того же порядка и оп-
ределяется размером зоны наи-
большего износа канала ствола.
На практике величину /о прини-
мают примерно равной пути сна-
ряда до момента наибольшего
давления в канале ствола. Учас-
ток /Пр называют участком прогрессивной нарезки ------- >0
\ dl ) ‘
Указанная смешанная крутизна нарезов имеет некоторое преиму-
щество перед постоянной. При смешанной крутизне нарезов добивают-
ся наиболее выгодного (в отношении живучести канала ствола и функ-
ционирования ведущего пояска) распределения давления на боевые гра-
ни нарезов. Иными словами, область наибольших удельных давлений
на грани нарезов переносят на тот участок канала ствола, который
меньше подвержен износу. Более благоприятные условия функциони-
рования ведущего пояска при смешанной крутизне нарезов позволяют
повысить на 20—35% величину удельного усилия, определяемого со-
отношением
N
у*т nh^
При этом величина наибольшего давления Л/удт зависит от формы
кривой у{1) участка прогрессивной нарезки /пр, его длины и места рас-
положения. Поэтому длина этого участка не может быть выбрана про-
извольной. Для пушек с начальной скоростью снаряда до 1000 м/с его
длина находится в пределах от 35 до 45 калибров. При меньшей длине
удельное усилие может выйти за допустимый предел. От размера
участка нулевой крутизны величина Л/уДт почти не зависит.
При проектировании канала ствола с прогрессивной нарезкой сле-
дует иметь в виду, что омеднение такого канала иногда резко увеличи-
вается по сравнению с каналом, имеющим нарезы постоянной крутиз-
ны. В этом случае ствол выходит из строя, как правило, по критерию
правильности полета снаряда, причем периодическое размеднение ка-
нала ствола не всегда восстанавливает правильность полета снаряда.
Более интенсивное омеднение канала с прогрессивной крутизной наре-
зов объясняется непрерывным изменением формы начального отпечат-
ка нарезов на ведущем пояске при движении снаряда по каналу ство-
ла. При таком функционировании ведущего пояска резко увеличивает-
ся налипание меди на грани нарезов. После нескольких значительных
по продолжительности очередей стрельбы нарезы оказываются полно-
стью забитыми медью. В канале с нарезами постоянной крутизны это-
го не наблюдается. Здесь происходит только их истирание со стороны
боевой грани нареза. Таким образом, при стрельбе без размеднителя
применение прогрессивной крутизны нарезов в отдельных случаях мо-
жет существенно понизить живучесть ствола.
Аналитический расчет нарезов прогрессивной крутизны
Способ расчета кривой у(х=1) для участка прогрессивной крутиз-
ны нарезов согласно уравнению (7.4) сводится к определению инте-
гралов:
^x)=_l_ f ^(л); (7.5)
[j.mv J v
О
X X
' \ 1 Г dx r N t
£/(*)=—\-—\—dx. (7.6)
am j v j v
о о
Интегралы (7.5) и (7.6) можно находить графическим путем, т. е.
планиметрированием площадей, заключенных между соответствующей
кривой и осью абсцисс х.
Форма кривой должна обеспечивать равенство
Г=С
л 1 f’' /у
—=-------- ) —dx. (7.7)
q |X/7Zt>np ) V
В противном случае кривую функции N/v следует изменить, соблюдая
предъявляемые к ней требования:
#0=% = °; N
Таким образом, эта задача решается подбором необходимой функ-
ции N (х).
Рассмотрим аналитический способ расчета кривой у(х), при кото-
ром подбор необходимой функции Nm(x), .как правило, исключается.
Примем следующие обозначения:
/пр — длина участка прогрессивных нарезов;
/с —длина участка нарезов постоянной крутизны;
/4р и цг;р — соответственно давление и скорость в конце участка
/пр — время движения снаряда на пути /пр.
Любая кривая у(х), если она непрерывна на участке /др (см. рис.
7.8), может быть представлена рядом Маклорена
У= У (0) + у' (0) х + у" (0) ^+<Г(0)^+ .... (7.8)
Безударное врезание ведущего пояска [Лгуд(0) =0] согласно урав-
нению (6.4) выражается условием -
/(О)=/до)=о.
Тогда уравнение (6.8) принимает вид
oJ 4!
Производные от у(х) в начальной точке (х = 0) являются функ-
цией от исходных данных, например, от конечного значения крутизны
нарезов и допустимой величины Л'у1.
'i
Если допустить, что достигает наибольшего значения при х =
= Л<4тр и заметно от него не отличается на всем интервале /j-н/пр, то
искомое уравнение можно записать в следующем виде:
y(x)=af- + ^ + c^. (7.9)
С помощью трехчленного уравнения из соотношения (7.4), с до-
статочной для практики точностью, можно получить любую форму кри-
вой Л/уД(х). Форма этой кривой изменяется в зависимости от выбора
положения промежуточной точки (x = /J и величины iVyn(/i).
Для характеристики промежуточной точки введем параметры:
Согласно равенству (6.8) с уменьшением параметра (’> при задан-
ном значении ад величина 7/уд„г уменьшается. Наименьшая величина
Л^удто соответствует значению «з = 1.
Для исходных, данных:
л = /пр; г/1ф(х) = -^; 7СуЛ(л:)=^,д.11р;
х = 1г; ЛгуД(х) = ^д1; р(х)=р1; u(x)-^-v1
система уравнений для определения коэффициентов а, Ь, с формулы
(7.9) имеет вид
N = -
уд'пр лЛвД
г/ир
SpJ —+
z2 z3
пр | £ ‘пр
2! -Г 3!
Z2
SfllP I ул1
C
4!
/з
с —;
mv2
Spi
3! 1 С 4! ’
Z5 Z3
У\ = я/, 4- b —— -I- с ——.
Z2 ,3
Решение этой системы уравнений дает следующие выражения для
коэффициентов а, Ь, с:
а = —---------= —Унут'); (7.10)
ь
6
a3 n ^„p
3 p, Spy
nrJ1,
«3(1-2^)^
?(3-l) + (3p — 2)
2
/nVj
spl/np
/3
24
c = ~^
Zllp
2
mvz
?(?-!) + (33-2)——
Spi z„
«Л^пр я
P’S/'uP 1
SPnpAip 2n
ml,up 11
2
тяг:
2(3? — 2^ — 1)———— ₽ (1~3)2
SAAiP
л / 2mt4 \ азяЛГ„р
+ I ? + : I — ~tt
Ti \ SP1 4ip / 3S,№ 24
mt/2 I*
2(33-232-1)——-8(1 -3)2
Sa^hp
(7.12)
Здесь Mjp=Л^уд.приЛвЛн — полное давление ведущего пояска на боевые
грани.
На основании соотношений (7.4) и (7.5) можно утверждать, что
существует такое значение р, при котором величина Nyn на участке
ZiH-Znp будет равна или незначительно отличаться от выбранной:
^.дИ<^уД(/1)<^уД(/пр) = /Уулт;
/1<л
“'С 4iP
Величину параметра (1 при а3 = 1 можно оценить по формуле
р = 21_ = 0,9-^- ,
71? Alp
где /(т) —путь снаряда за время т;
4 i л и. mv„n \
г —____ / /_______-_____— I
L О ‘‘«Р ХГ
3 \ 4 п Na9 )
(7-13)
Полный путь снаряда, соответствующий давлению порохового га-
за и скорости снаряда в точке 1у, равен
7 Н- Л 4 ~ н41р'
При аз=1 величина параметра |3, найденная по формуле (7.13), в
большинстве случаев подчинена условию р^0,5.
Для а3=р = 1 уравнение (7.9) обращается в двучленную зависи-
мость
где
2я
^2р/ир
г; п \
3/и^р
SPnp4ip
6/2
^гг,пргпр
Л^Пр- — — *5'/?пр (н
п \
2»№ир j
^PnpAip /
Двучленная зависимость для г/(х) может дать значение в про-
межуточной точке 1у на 20—30% выше величины Л^уд.пр- Это зависимо-
стью можно пользоваться при v0^900 м/с и р1П<:2800 кгс/см2.
Трехчленная формула (7.9) обеспечивает практически постоянное
значение Л/уд на всем интервале Л-у/пр- В любой промежуточной точке
указанного интервала наибольшее отклонение ЛГУД от величины Л^пр
находится в пределах точности баллистического расчета ствола и из-
готовления нарезов.
Рис. 7.9. к расчету нарезов смешанной крутизны
Пример 7Л. Найти смешанную крутизну нарезов для пушки со следующими услов-
ными данными:
со = 0,06 кг; <? = 0,2 кг; rf = 23 мм; Г] =28; п=10; /о = ЗО мм; /о = 70 мм; ZHp = 1000 мм;
7 = 0,55; /гвА = 2,3 мм2; Ууд = 45 кгс/мм2; <х3= 1; р = 0,556.
Для /=/о+/пр = ЮЗО мм с кривых v(l) и р(1) имеем (рис. 7.9): рПр = Ю70 кгс/см3;
спр = 816м/с.
Согласно уравнению (7.13) р = 0,6. При Д = ]3/пр + 1о = 630 мм давление и скорость
равны: = 1450 кгс/см2; ср =715 м/с.
На основании формул (6.7), (6.9), (6.10), (7.12) искомое уравнение кривой раз-
вертки нарезов имеет вид
д;3 х^
t/(x) = 0,584 — -1,48 — + 1,58 —.
31 4! 5!
Угол наклона нарезов а на прогрессивном участке определяется уравнением:
а = arctg у' (х) = arctg(0,292x2 — 0,247х3 -у 0,066х4).
В зависимостях у(х) и а(х) значения текущей длины прогрессивного участка
нарезов х выражаются в метрах.
Для найденного уравнения у(х) кривая Ууд(х) представлена на рис. 7.9.
Наибольшее отклонение величины ЛДдт от принятой в расчете (45 кгс/мм2) со-
ставляет 4% (1,8 кгс/мм2).
§ 7.3. РАСЧЕТ СИСТЕМЫ ПРИНУДИТЕЛЬНОГО ОХЛАЖДЕНИЯ
При выстреле часть тепла пороховых газов расходуется на нагрев
стенки ствола. Причем непрерывная стрельба может привести к тако-
му нагреву ствола, при котором дальнейшая стрельба невозможна.
Высокая температура размягчает металл па поверхности канала ство-
.-.а особенно в его казенной части и вызывает интенсивный износ наре-
зов. Поэтому стрельба должна вестись короткими очередями.
Программа стрельбы, т. е. длина очереди и интервалы между ни-
ми выбираются из условия обеспечения приемлемой живучести ствола.
Для авиационных и зенитных автоматических пушек это снижает эф-
Рис. 7.10. Система охлаждения с вводом охлаждающего аген-
та в канал ствола
фективность стрельбы иногда до неприемлемого предела, так как без
принудительного охлаждения интервалы между очередями стрельбы
существенно превышают их продолжительность. Поэтому практиче-
ская скорострельность автоматических пушек, не имеющих принуди-
тельного охлаждения, оказывается в несколько раз ниже темпа стрель-
бы. Применение принудительного охлаждения повышает практическую
Рис. 7.11. Система межслойного охлаждения
Лейнер
скорострельность и в принципе может ее сделать в течение продолжи-
тельного времени равной темпу стрельбы.
Ствол можно охлаждать как путем непосредственного ввода ох-
лаждающего агента в канал ствола (рис. 7.10), так и за счет съема теп-
ла потоком охладителя, омывающего лейпер ствола (рис. 7.11). По-
следний способ охлаждения ствола иногда называют межслойным.
Нагревание ствола в процессе стрельбы
Нагревание ствола может быть рассчитано, если известно количе-
ство тепла, поступающего в стенки ствола при выстреле. Предполагая
процесс теплопередачи квазистационарным, a (TwIT) = const, количест-
во тепла от одиночного выстрела можно определить по формуле Нью-
гона:
&Q — ^aF(T — Tzi)di— \Л'ра1,
о 6
(7.14)
где
а = ау — коэффициент теплопередачи от порохового
газа к стенке канала ствола, ккал/(м2-ч-К);
F=r.ndl —площадь боковой поверхности заснарядного
пространства, м2;
I — длина заснарядного пространства, м;
ккал-м/(кг-с-К) — постоянная коэффициента теплопередачи;
Y=_^T — плотность порохового газа, кг/мд
т
v=l-----^=0,7 — относительный перепад температур порохо-
вых газов и стенки ствола;
Т„ и Т — соответственно температуры поверхности ка-
нала ствола и порохового газа, К.
Для артиллерийских стволов значения (14-0,5) ккал-дм/(кг-с-К)
приблизительно соответствуют а= (10004-5000) ккал/(м2-ч-К).
Практически параметры опт следует рассматривать как коэффи-
циенты согласования с опытом.
_ Г 4
Так как — = —, а а = оу, то
w d
t
aQ = 4-^| pWdt.
о
Используя уравнения:
движения снаряда
S р\
состояния порохового газа
pW — u>r.RT;
сохранения энергии (первый закон термодинамики)
- 4Q; = pW't Н-— (pW)t,
k — 1
для заряда с постоянной поверхностью горения (S3 — const) при усло-
вии Wt'mSv, получим
рУ7=0>^Г = (А:- 1)Др853-^?тц-(/г- 1)^- ф-
f
^WaRT0-(k-l)^\pWdt.
Rd J
0
Тогда согласно обобщенному решению Лагранжа для линейных
уравнений первого порядка
t t
pWdi= и°^0 (1 — е-а/)ф- е~а/ (сп — ли2) &atdi,
6 о
где
а = 4 (А—1) —— (>1; c — (k—1) AQS38 — от;
Rd S
А = 427 кгс-м/ккал—механический эквивалент тепла;
г 5 ,
<•>/ = —ир-рпгчц —скорость убывания веса заряда;
Д— время периода форсирования.
При малой величине показателя теплопотерь at можно принять
а
t t
pWdt = ^RTljt^cl-''r(k- 1) vhtt,
о 4
так как
t 1
(* С 1 — e“nZ
ct~at \ vtatdt ce^aivcP I eatdl=cvc -----------^сг> J=cZ
J J ' р а
to о Р
И
р 4 1 Р«?
ne~at\ v2eatdt ne~ai I eatdt = n ('г2)ср—:-----------«(-02)ср/.
to о
Поскольку
t i
(w2) = — f 'v'2dt= — Г vdl
1 t J t J 3 t
о о
то
t
С 2
ne~at I v2eatdt=—nvl.
J 3
0
t
Выражение J v’-dt представляет собой площадь, ограниченную кри-
^0
вой v (Г) и осью абсцисс в пределах от /0 до /, т. е.
t i
rv'1dt = J vdl ~ -у- г<1.
/о I о
Используя указанную зависимость, количество тепла, аккумулиро-
ванное стенками ствола за время периода форсирования и движения
снаряда по каналу ствола можно оценить по формуле
aQ* = 4 ЧН1| —AQ f1 - V М , Т-15)
Rd ILt'K \ з j] )
где
(k~l)AQ^RT0; г]л=±.
ylQoi
То и ш0 — соответственно температура газа и вес сгоревшего
пороха за время форсирования /0;
$3 S
<о=— одррттк — вес заряда;
vK — скорость снаряда в конце горения заряда;
^=1,2—показатель адиабаты;
/д и — соответственно путь и время движения снаряда до
сечения дулы-юго среза.
Членом (!)п/С7'о = /^пЙ/о, характеризующим энергию порохового газа
за период форсирования, ввиду его малости можно пренебречь. Тогда
выражение для AQi приводится к виду
AQ1 = 4-^-Kw^-l)AQfl—(7.16)
/\d и г \ о /
Для расчета величины AQi также можно пользоваться формулой
AQj = — j ISpdt,
о
F 4/
так как — = — .
S d
Здесь I — текущее расстояние от снаряда до дна канала ствола.
При гильзовом заряжании I равно текущему пути снаряда по каналу
ствола.
Исключая из указанного выражения Sp с помощью соотношения
о dv
8р=ч}т-----, получим
dt
4
aQ1==—( Idv.
Rd J
о
Приближенное значение интеграла оценим по формуле
V I
Idv = 1/0 — Г vdl ~ — vl,
J J 3
о о
так как функция v(l) близка к параболе.
Поэтому можно написать
aQ. = — _Д_ Дд com®-,
41 3 R d ' д
(7.16а)
где —длина ствола в калибрах.
После вылета снаряда ствол продолжает нагреваться практически
в течение всего периода последействия. Это дополнительное количество
тепла, полученное стволом, определяется по формуле
t
дф2^4~-Г, [pdf, (7.17)
о
так
где
как 1Г=Ц7Д= const.
Полный объем канала ствола
И7д=ж+а
, о>
Zo= — — приведенная длина каморы заряжания;
д — плотность заряжания.
Для зависимости p(t) существует функция
Р=Ряе~ь‘,
где —дулыюе давление;
Ь=------------показатель интенсивности истечения пороховых
(3 — 0,5)иуд
газов' из капала ствола.
Поэтому
. др2=4^(?-0,5)^гл, (7.18)
q
гд 6 Zc т Zo 4-
Суммарное количество тепла в соответствии с выражениями (6.16)
п (6.1'8) при допущении, что ук~^д, определяется зависимостью
Qs = AQ1 + aQ2=4-^-4Q«A.
/ 9 \
(й-1) i-f пя +
\ К / AQg J
(7.19)
На практике также можно пользоваться формулой [см. выражения
<7.16а) и (7.18)]
Q3 = -4-(? - 0,5) -^1 тъл, (7.19а)
R d |_ 3 q J
где с? — коэффициент фиктивности массы снаряда;
vmv: Л ~
п =2. А 5—термический к. п. д. орудия.
д 2Л(?ш ’
Пример 7.2. Найти количество тепла от одиночного выстрела, ушедшее на нагрева-
ние ствола 30-мм пушки, для следующих условных данных:
уд = 1000 м/с; /д = 1,600 м; /о=О,2 м; d=0,03 м; Q = 800 ккал/кг; <о=0,2 кг; /? =
= 32 кгс-м/(кг-К); <т=0,09 ккал-м/(кг-с-К); ? = 0,35 кг; <р = 1,2; v=0,7; й = 1,25.
1. К. п. д. орудия
1,2-0,35-106 п ,
т, =--------=--------------------- =. 0,314.
,л ‘IgAQ* 2-9,81-427-800-0,2
2. Коэффициент полного действия:
3. Искомое количество тепла за один выстрел [см. формулу (6.19)]:
0,09-0,7 1,6 Г / 2 \
= 4—:------— 427-800-0,2------;- 0,25 1 — — 0,314 +
Vs 32-0,03 1000 L \ 3 /
( 0,2 X 106 I
+ 1 + —~ (1,3 — 0,5) ----------------- =13,6 ккал.
\ 1,6 / 427-800-9,81 J
Формула (7.19а) практически дает тот же результат:
0,7-0,09
= 4 32
1,6. /1,2 0,2 \
------I — + 0,8
0,03 \ 3 0,35 /
0,35
9,81
1000 = 14 ккал.
Охлаждение ствола в процессе стрельбы
Расчет производительности насоса, нагнетающего жидкость для
охлаждения лейнера ствола, произведем для стационарного процесса
теплоотвода. Количество тепла, снимаемое потоком жидкости, в этом
случае будет
= (7.20)
где стад—удельная теплоемкость охлаждающей жидкости,
ккал/(кг-К);
а7'ж = 7’ВЬ]Х 7в,. — нагрев жидкости в стволе;
О—расход охлаждающей жидкости через ствол, кг/с;
/ц=—;----время цикла автоматики или время перерыва между
п
выстрелами, с;
п — темп стрельбы, выстрелов/с;
Гвх и Лых — соответственно температура жидкости на входе в
ствол и выходе из Него.
Откуда расход жидкости, обеспечивающий необходимый теп.щ-
съем
G = Qn .
С1ХЛА7Ж
С другой стороны, при квазистационарном процессе теплообмена
количество тепла, прошедшее через лейнер и отданное охлаждающей
жидкости, определяется формулами:
nQ = 2nXc(Tc-7’CB)—; (7.21-
, dw
In —
d
ftQ = ^dalca(Tcll — Tx), (7.22;
где /с — полная длина ствола;
7',.—температура внутренней поверхности лейнера;
Тсв—температура наружной поверхности лейнера;
Гж=-^-(Гвх-|-ГвЫХ) — средняя температура охлаждающей жидкости;
dH— диаметр лейнера по доньям канавок охлажде-
ния;
Хс =32 ккал/(м-ч-К) — коэффициент теплопроводности металла лей-
нера.
Совместное решение уравнений (7.20) — (7.22) позволяет найти
температуры:
— охлаждающий жидкости на выходе из ствола
'г ___t । nQ .
ВЫХ 1 вх 1 ’
^Ссхл
— наружной поверхности лейнера
лтр 'т' । /^11 \
СН ВХ “I ~ I п ~ »
\ 2 С?б?охл /
— поверхности канала ствола (лейнера)
Гс = ГвХ Н---------b nQ In — Н—.
ndHaZc 2rtXcZl. dj 2GctXjl
Для определения коэффициента теплоотдачи от стенок лейнера к
охлаждающей жидкости (например, воде или антифризу) можно поль-
зоваться формулой
a = 0,023Re°’8Pr°’4 ;
Лэ
П 20 П "
где Re=--------------------число Рейнольдса;
*схл7охл Щ
рг у^охл---число Прандтля;
Д-р
Хсхл—коэффициент теплопроводности охлаждаю-
щей жидкости;
2cfi
d =----------эквивалентный гидравлический диаметр-
е-1- А
для канавки прямоугольной формы.
В указанных выражениях:
с и h. — соответственно ширина и глубина канавки;
—число канавок охлаждения;
v0XiI— кинематическая вязкость охлаждающей жидкости;
Тьхл—удельный вес охлаждающей жидкости;
ат ——-----температуропроводность охлаждающей жидкости.
<\.хл!охл
Для расчета мощности насоса, нагнетающего охладитель,
пользоваться формулой
МОЖНО
G(bp + Ьр»)
N
G3 fl +5 -Ц
\£з )
нас
02
где Др —давление, обеспечивающее расход охладителя, без
2gtoH3‘ к
учета гидравлического сопротивления;
Др^ — потери давления в системе охлаждения вследст-
вие гидравлического сопротивления, определяе-
мые по формуле
‘2g d3 d3 2g-[0^Fl
I — длина канавок системы охлаждения ствола;
FK=n.\ch — площадь поперечного сечения канавок системы
охлаждения.
Для определения величины коэффициента сопротивления трения £
следует пользоваться формулами:
— при 104 < Re < 108
£ = 0,00332 + 0,221 Re-0-38’;
— при ReKP = 2300<Re< 105
£ = 0,316Re-°’25.
Пример 7.3. Найти мощность насоса и расход воды, обеспечивающий непрерывное
охлаждение ствола 30-мм пушки (см. пример 7.1) при конечном значении температуры
охладителя ТВЫх=400 К.
Исходные данные:
QB —13,6 ккал — количество тепла, аккумулированное стволом за один выстрел;
c = ft = 5 мм; /<. = 1600 мм; с/и = 38 мм; <7 = 31 мм; «1 = 12; и = 20 выстрелов/с;
Твх = 300 К; Гвых=420 К; Рг=1,2; мохл=2-10-7 м2/с; ЛОХЛ=0,475 ккал/(м-ч-К);
£Охл = 1 ккал/(кг-К); уОхл=Ю00 кг/м3; Хс = 32 ккал/(м ч• К).
1. Потребный расход воды
Q _ nQb
20-13,6
= 2,27 кг/с.
1-120
2. Число Рейнольдса потока воды в канавках охлаждения
_____________________2G__________ 2-2,27_____
Re = -охПохл (с + *)«! 2-10-7-103.10- 2-12 1 ’9'10°'
3. Эквивалентный гидравлический диаметр потока воды
ch 5-5
d3 2-----------— — 2-----— 5 мм.
с + h 10
4. Коэффициент теплоотдачи от стенки лейнера к воде
а = 0,023Re°'8Pr°’4 = 0,023(1,9-105)°-81 2°’4---------------
d3 3,6-103-5-10—3
= 11 ккал/(м2-сК)
5. Температура поверхности канала ствола
____1
2п/сл,
= зю + 20.13,в|----------<-------+
0,038-1,6-11 2л1,6-32 31
с — 7"вх + «Q |
\ л</н/са
1
dK
In —— +
d
1
2
2 Gc^J
1 \
2,27-1 /
= 1100 К.
6. Коэффициент гидравлического сопротивления трения
$ = 0,00332 + 0,221 Re-0,237 = 0,0 1 57.
7. Мощность насоса, нагнетающего воду в канавки охлаждения:
G3fl + 6— 'j 2,273 (1 + 1,57-10~2 -1600- ~)
, г _______\/ \ 5 у
О/нас •— „ ~ =1,1 Л. С.
WUrA 150-9,81-0,5-106-32.Ю“8
Здесь т|=0,5 — к. п. д. насоса с учетом гидравлических потерь в коммуникациях,
подводящих воду к стволу и iiacocv;
Л: = 12-0,5-0,5=3 смг.
8. Избыточное давление воды на входе в ствол
, / Zc \ G2 2,272 . „
ДР = 1 + 6 ~~ 9 = 6 ------------а------ = 1 >7° КГС/СМ2.
\ / 2^27оХЛ 2-9,81-32.10”8-103
9. Скорость движения воды по канавкам охлаждения
й 2,27
v =--------=--------------= 7,5 м/с.
Тох.Л 103.3-10-4
§ 7.4. РАСЧЕТ ПРОЧНОСТИ СТВОЛА-МОНОБЛОКА
Расчет прочности ствола-моноблока артиллерийского орудия осно-
вывается на теории сопротивления толстостенной трубы — задаче Ляме,
которая применительно к стволам артиллерийских орудий была разви-
Рис. 7.12. Схема напряженного со-
стояния ствола-моноблока при вы-
стреле
та проф. А. В. Гадолиным и Н. Ф. Дроз-
довым.
Решение задачи Ляме — Гадолина
получено при следующих допущениях:
— металл ствола считается одно-
родным;
— действие давления пороховых
газов на ствол принимается статиче-
ским и является одинаковым по всей
длине;
— ствол имеет одинаковую толщи-
ну по всей полубесконечной длине;
— зависимость о(е) линейна; щ =
= 0.
Найдем условие равновесия эле-
мента, вырезанного из бесконечно тон-
кого кольца (рис. 7.12). Размеры эле-
мента: dr — толщина; rdQ— ширина;
длину элемента примем равной едини-
це. Вследствие симметричного нагружения трубы уравнение равновесия
элемента не будет зависеть от угла 0. Иными словами, в случае плоской
деформации и отсутствия массовых сил напряженное состояние элемен-
та будет меняться только в зависимости от радиуса кольца [5]. На осно-
вании этого можно записать:
да„ да д~, d~r
— = 0; —7.=0; — = — ,
59 dl dr dr
Поэтому радиальное равновесие элемента rdQdr выражается уравне-
нием
d , , .
~Г =
dr
(7.23)
Относительные изменения размеров деформированного элемента в
.направлении радиуса трубы (радиальное) и вдоль касательной фикси-
рованного кольца (тангенциальное) соответственно будут:
Вгн— 8r d
г ==—------=
Er dr
rKdd — rd® Д г
р - - п-------------.
т nrt г ’
(Аг); (7.24)
где 8гн = 8г-|——(Д/‘)8г—толщина фиксированного кольца после
dr
нагружения;
г и гН‘—радиусы фиксированного кольца соответ-
ственно до и после нагружения трубы;
дг = гн —г —приращение радиуса фиксированного
кольца при нагружении трубы.
Таким образом, исходная система уравнений, описывающая напря-
женное состояние трубы, в соответствии с выражениями (7.23) — (7.25)
имеет вид:
d
ах =----
dr
</tjr
dr ’
d de^
sr = — Ov) = sT+r —— .
dr dr
Умножая правую и левую части последнего уравнения на модуль
упругости Е, получим
d d<:
ar = — — , (7.26)
dr dr
где
oz = er£'; ox = e^£’.
Складывая уравнения (7.23) и (7.26), приходим к соотношению
r-^y(^ + sr)=°
или
or-\rax = 2A = const. (7.27)
Совместное решение уравнений (7.26) и (7.27) для главных напря-
жений дает следующие гиперболического вида функциональные зависи-
мости напряжений от параметра г:
=<^л-4- (7-28)
Постоянные А и В определяются граничными условиями (см. рис.
7.12):
г = г1; ar=-Pl;
г = г2; —
где р2 и pi — соответственно давление, действующее на внешнюю и внут-
реннюю поверхности трубы.
Таким образом, постоянные А и В определяются системой урав-
нений:
_А==д+_^.
Введем обозначение — = и21, тогда
А=—--------; В — (р2—Pi)
4-1
Подставляя найденное выражение для А и В в уравнения (7.28),
получим формулы для расчета главных напряжений в стенке трубы:
и <4-->-')-»Wj-4L>(>. (7.29)
«21 — 1
= - (+-1) + +Ч,-+,). <Oi (Л30)
4-1
где а2г = — .
Из выражений (7.29) и (7.30) следует, что от>0, а сц<0, т. е. тан-
генциальные напряжения характеризуют растяжение, а радиальные —
сжатие фиксированного слоя стенки трубы (см. рис. 7.12).
На внутренней (а2г = а21) и внешней (а2г=1) поверхностях трубы
главные напряжения (+,, аГ1, сГ2) достигают значений:
/>1 (4 Ч-1) — 2/>24 1
з- =-------------------; ]
4-1 (7.31)
3Г!=— PV J
2pi— /44 + 0
(7.32)
Зг2 = — Pi-
Согласно теории наибольших деформаций приведенные напряжения
равны:
£4^ = ^—р.зг; (7.33)
£'snr = '3r —рз-. (7.34)
Так как цг<0, а с+ >0, то абсолютные величины приведенных на-
пряжений больше главных:
i I > | 3Г | •
Для удобства преобразований обычно принимают величину коэф-
фициента Пуассона = . В этом случае в соответствии с уравнения-
ми (7.29), (7.30), (7.34) и (7.35):
_2 />1(24 + 1)-^ (4+ 24) .
с еПт — — - , (/. о о;
О z?2 _ 1
а21 1
_ 2 /?1(2«2г— 1)+/>2(4 —2а2г) ,7 од,
£ SIir - - . (/ .ОО)
3 «21-1
По своей структуре формулы для главных напряжений (7.29), (7.30)
и приведенных (7.35), (7.36) одинаковы в смысле чередования знаков и
. ' ются лишь постоянными коэффициентами, стоящими перед аргу-
мент:?.' а-'., и множителем 2/3 перед всей дробью.
ь оощем случае, когда , рабочие формулы для приведен-
3
иых напряжений имеют вид:
(7.37)
(7.38)
С уменьшением величины ц значения приведенных напряжений
уменьшаются, приближаясь к своему пределу (при ц = 0) —главным на-
пряжениям.
Чувствительность приведенных напряжений к значениям коэффи-
циента ц определяется выражениями:
Ezu. = {Pl- р2)
G> 7 X air
— Еs„r = - (Pl - р2) —-----
а^-1
Из этих соотношений следует, что приведенные напряжения для
труб с относительно тонкой стенкой (а21~1) весьма чувствительны к
величине коэффициента ц. Поэтому для высокопрочных сталей наряду
с пределом упругости (ае) необходимо точно знать величину коэффици-
ента ц.
Другие теории прочности по сравнению с теорией наибольших де-
формаций дают меньшие величины приведенных напряжений.
Найдем выражения для допустимого давления (/ц) в канале одно-
слойной нескрепленной трубы (ц2 = 0) для некоторых теорий прочности.
Теория наибольших деформаций
(вторая теория прочности]
Из выражения (7.38) при р2 = 0; a2, =a2i искомая величина
£гпт а21 1
Принимая величину приведенного тангенциального напряжения на
поверхности канала трубы равной пределу упругости Ее.цт = ое, получим
формулу
Pi
ае Д21 1
1 +|Л +1
1 — jx Й21 + 1
(7.39)
Теория наибольших касательных напряжений
(третья теория прочности)
Исходным уравнением для определения ру в теории наибольших
касательных напряжений будет соотношение
°тах 2 ~
Отсюда согласно формулам (7.31)
„ а21 ~ 1
Сопоставляя выражения для ру и рв, получим
п 2
ру 1 ^а21
ГТ 1 \ 1
При Р = — и а21 > 1
и
Р\ = 3 !
Pl- 2 +
Таким образом, во всех случаях третья теория прочности дает мень-
шую величину допустимого давления в канале ствола, т. е. для обеспе-
чения одинакового приведенного напряжения стенка ствола, рассчитан-
ная по второй теории прочности, будет тоньше по сравнению с ее раз-
мером, найденным по третьей теории прочности.
Так, при «21 = 2; /?1=1,2/?1Т и при условии р,= рг- («21 = 2) г
согласно формулам для рг и р^ имеем
3 Ди"1 д21~ 1 1
2 + 1 4
Откуда размер трубы, рассчитанный по второй теории прочности:
2 _ Ml-1 _ 7 . „ __ ]/'Т
4 4- 2 4 rl 2
— ! ап
4 rl
При этом относительное уменьшение толщины стенки ствола со-
ставит
Дг1 — Й21 ____
a2i — 1
V 2-1
- 19,5%.
Энергетическая теория прочности
(четвертая теория прочности)
Согласно четвертой теории прочности сложное напряженное состоя-
ние заменяется простым из условий равенства удельной потенциальной
энергии деформации и.
Для простого напряженного состояния потенциальная энергия в еди-
нице объема
а2
2Ё” ‘
В случае сложного напряженного состояния имеем
1 , , . >
« = — + syZy +
Приравнивая выражения для и и полагая:
аг = 0; а = =
получим
a^ = J£'(^sT4-arBJ.).
Так как
Егх — <зх — узд Егг='зг — рю,,
то
2 2 । 2 л
Ое = От Т- Ог — 2^отзг.
Подставляя в последнее уравгение для случая р2=0 и Р = п- выра-
жения и аГ1 (7.31), еХ1 (7.37), sr, (7.38), получим для допустимой
величины давления в канале ствола формулу
„ ___Д____________а21~ 1
Е' £ э ______ _____________ •
]/2(1-и) . /1 + И 4 ,
|/ Г^ + 1
При р = -|-
„ _]//Зое й21—1
Л' 1 а 1 *
2
При равных размерах трубы величины р{ и pis связаны соотноше-
нием
Р1 2(1 +|Л)4 -Р2(1-(Л) t
•Р1э (1 + (л) ^21 + (1 — !-0
Так при р = — Для «21 = 2 и «11=3 соответственно имеем
3
Д-=1Г/^ТТ=,,05„ 1.08.
Д1э 2aL + 1
В общем случае отношение p\lpw для l<fl2i<°° ограничено пре-
делами
Обычно величина a21<cV2. Поэтому можно считать, что теории
наибольшей деформации и энергетическая дают практически одинако-
вый результат. Однако расчетные зависимости теории наибольшей де-
формации для скрепленного ствола имеют более простую структуру, а
зес ствола в конечном итоге дают меньший. В связи с этим им отдается
предпочтение по сравнению с другими возможными формулами.
Теория энергии формоизменения
(пятая теория прочности)
Пятая теория прочности исходит из равенства энергии формоизме-
нения для простого и сложного напряженных состояний:
у —1 + ^o32-
«п- 6£
«с [(З..г — ^)2 + (Зл- — + (3У — °г)2]-
О С,
Равенство «п = ие для щ = 0 приводит к соотношению
2.2 2
°т “г — яе-
Используя зависимости (7.29) и (7.30), получим
а21 1
Р1Ф---^е ~:
1/ 1
Из сравнения формул пятой и четвертой теорий прочности сле-
дует, что они для значений 1 <А ali <С со дают почти одинаковый ре-
зультат:
1<^=гТуЛ 34^1 <г06
?1ф 2 ' 2а^ + 1
Анализ расчетных формул различных теорий прочности показы-
вает, что:
1) теория наибольших деформаций определяет ствол наименьшего
веса;
2) все рассмотренные выше теории прочности, кроме третьей, в об-
ласти реальных значений д|1<^4 практически дают одинаковый ре-
зультат;
3) третья теория прочности приводит к весьма заметному утяжеле-
нию ствола.
§ 7.5. ТЕОРИЯ РАСЧЕТА СКРЕПЛЕННЫХ ТРУБ
Скрепленные артиллерийские стволы могут быть многослойными.
Казенная часть ствола, где давление порохового газа в заснарядном
пространстве достигает наибольшей величины, конструктивно оформ-
ляется в виде двух или трех труб (иногда для орудий крупного калиб-
ра— больше), одетых друг на друга с натягом. Такая конструкция ство-
ла позволяет обеспечить наименьший вес за счет перераспределения
нагружения по толщине его стенки.
В скрепленном стволе внутренняя труба перед выстрелом находит-
ся в напряженном состоянии сжатия, а наружная труба (кожух) имеет
напряженное состояние растяжения. Наличие предварительного напря-
жения сжатия на поверхности канала ствола как бы искусственно повы-
шает предел упругости материала.
Металл скрепленной трубы в процессе выстрела претерпевает зна-
копеременное нагружение: по мере увеличения давления в канале ство-
ла в результате его деформации напряжения сжатия исчезают и появ-
ляются напряжения растяжения. Нетрудно представить, что в скреплен-
ном стволе предел упругости металла внутренней трубы как бы
возрастает на величину предварительного напряжения для тангенциаль-
деформации (Т) и на величину, пропорциональную коэффициенту
Л; ассона для радиальной деформации (цТ).
Ствол с лейнером или со свободной трубой можно рассчитать по
; .-рмулам для скрепленных труб. Для этого достаточно только изменить
д-ак натяга Дпат с «плюса» па «минус», т. е. представить зазор как отри-
цательный натяг.
В практике проектирования стволов различают упругий и возмож-
ный пределы их сопротивления. Пределом возможного сопротивления
скрепленного ствола называют такое его напряженное состояние, когда
ла поверхности канала трубы величины приведенного тангенциального
или радиального напряжения достигнут значения предела упругости ее
металла:
При этом величина напряжения на поверхности канала кожуха, как пра-
вило, несколько меньше предела упругого сопротивления его металла:
Еегг1 <^2.
В случаях, когда на поверхностях каналов трубы и кожуха опасные
приведенные напряжения одновременно достигают величины предела
\ пругости их металла, такое напряженное состояние ствола называют
пределом его упругого сопротивления:
Е Д-ИТ,.
Теоретически предел упругого сопротивления ствола несколько
больше возможного и характеризует потенциальные возможности упру-
гого сопротивления ствола в целом. Погрешности технологии производ-
ства стволов, определяемые системой допусков, не позволяют на прак-
тике обеспечить для скрепленного ствола предел упругого сопротивле-
ния. Наличие погрешностей изготовления стволов в конечном итоге
приводит к снижению их прочности по сравнению с упругим сопротивле-
нием. Поэтому прочность реальных стволов характеризуется пределом
возможного (допустимого) сопротивления.
Предел упругого сопротивления скрепленного ствола
Для приведенных напряжений на поверхности канала трубы скреп-
ленного ствола согласно выражениям (7.37) и (7.38) при р. = — спра-
О
ведливы формулы для приведенных тангенциальных и радиальных на-
пряжений на поверхности канала трубы (a2r=a2i):
E^ t = JL ^i(Mi + 1)-№34 . (7Л0)
3 4 1
|д£г I =j_^(24-i)-^4 , (7Л1)
3 4-1
где р2 — внешнее давление па трубу со стороны кожуха.
Величина этого давления согласно уравнению (7.39) зависит от
размеров кожуха ц32=— и предела упругости его металла
«32 — 1
2 2«з2 + 1
(7.42)
Полагая ЕгХ11=ее1 или Ee.riI=set, соответственно получим:
3 «21 — 1 .
т EEi-----------г а —-------;
* ^21 ^21
3
2 ч 2
«21 1 , «21
------------Н Рг---------
2«21 — 1 2^21 — 1
Подставляя вместо р2 его выражение, окончательно получим:
„ 3 «21~1 I з За221 а|2—1
Т'и—дг °«i —д г дг ае2 - —— ;
2 2a|j + 1 2 2a|j + 1 2«|, + 1
3 «21— 1 , 3 «21 «за—1
—-------^ел ' Н----------------------*
2 — 1 2 2^2! — 1 2a|, + 1
(7.43)
(7.44)
(7.45)
(7.46)
Формулу для pi т называют пределом тангенциального упругого со-
противления ствола. Выражение для pir именуют пределом радиального
упругого сопротивления.
Возможное сопротивление скрепленного ствола
Введем обозначения:
2днатг2т — деформация наружного диаметра трубы после
скрепления;
2днатг2к— деформация внутреннего диаметра кожуха после
скрепления;
2д = 2г2т + 2Дватг2К — абсолютный диаметральный натяг.
Деля выражение для AHaT на диаметр канала кожуха 2г2, получим
величину относительного натяга:
Л = ^ + <, (7.47)
где
т 2Днатг2т . к 2Днатг2[с
S- , =-------1 =---------- •
2г2 2г2
Приведенные тангенциальные напряжения (7.35) на наружной по-
верхности трубы при pi = 0 и a2r= 1
;^i =4^4^- ^-48)
з 4-1
На внутренней поверхности кожуха при р2 = 0, а21 = аз2 и а2г = аз2
соответственно имеем
£< = 4 Р’2 ^±1, (7.49)
«32 ‘ 1
где р'2 — радиальное давление на поверхности между трубой и кожу-
хом, произведенное скреплением.
Совместное решение уравнений (7.47) — (7.49) приводит к выра-
жению
«21 + 2
«21-1
2
^=4^
о
2
з
, 2«з2 + 1
—------г
«32 1
(7.50)
(7.51)
Учитывая, что 021032 = 031, после алгебраических преобразований по-
лучим формулу
, _Ец (ац 1) (Й32 1)
А 2(4-1)
От давления скрепления р2=р2 при pi=0 на внутренней поверхно-
сти трубы (02г = 021) согласно формуле (7.35) возникает предварительное
приведенное тангенциальное напряжение сжатия Т\. Поэтому для задан-
ного Т\ потребная величина давления скрепления
Согласно формулам (7.51), (7.52) потребная величина натяга ц и
предварительное напряжение связаны уравнением
-31~Й21 . (7.53)
4-i
Полное давление на поверхности скрепления кожуха и трубы при
выстреле
Рг=Р2 + р"2, (7-54)
где р[ — составляющая давления на поверхности скрепления, произве-
денная выстрелом.
На основании принципа независимости действия сил величину р2"
можно найти по формуле (7.30), полагая Рг = Рз=0, 02г = 0зг, 021 = 030
2
п Ом — 1
= . (7.55)
Л31 1
Поэтому согласно формулам (7.52), (7.54), (7.55)
„ п 4-1 4-1
------2—гй-----------
Й21 Я31 1
Подставляя выражения для р2 в формулы для приведенных танген-
циальных и радиальных напряжений на поверхности канала трубы
(7.40) и (7.41), соответственно будем иметь:
а32 1
4-!
2 24+1 2 34 / Tl — 1
2 2a2i 1 2 а21 (3 j. 4 1 ।
3 Р1 Л _ 1 3 У _ -I I 2 1 л2 г
“21 1 “21 1 \ а21
Полагая соответственно — и £'еГ11 = а(>1, а также учитывая,
что 021032 = 031, после алгебраических преобразований выражений (7.56)
получим формулы для возможного сопротивления скрепленного
ствола:
з 4 — 1
; (7-57)
2 2л2! + 1
3 / 1 \ 4 — 1
— • <7-58)
2 \ 3 /24—1
Если вместо Т\ подставить его предельно возможное значение
, 2Д21
Г loo Р2оо — ~ ,
а11~ 1
где
(7.59)
(7.60)
, П „ «32
Р2со=^«-/>2; рг=рх —------
4 - 1
3 «32 1
Асо “7“ 3Й2 ~ ,
2 2«|2 + 1
то для этого частного случая формулы (7.57) и (7.58) вырождаются в
зависимости (7.45) и (7.46), т. е. пределы упругого и возможного сопро-
тивлений становятся численно равными:
Р^Р^с Р\г = Р\г-
В формуле (7.60) р2оо — предел упругого сопротивления кожуха.
Для коэффициента Пуассона р, отличного от принятого (р.=—I >
\ о /
формулы для возможного сопротивления ствола (7.57) и (7.58) приобре-
тают вид:
1 1г
1
1 —[Л
При этом
Pl
«31 1
.Ltty j.i
1-/31 ‘ 1
«31 1
---«31 — 1
1-^ 31
7\ = -—
2
р'
'2 2
«21 1
1
1 —н
Критерии выбора расчетных формул
При расчете скрепленного ствола на прочность необходимо в каж-
дом конкретном случае установить опасные напряжения и в зависимости
от этого проводить расчет на прочность по формуле предела возможного
тангенциального сопротивления или формуле предела возможного ра-
диального сопротивления.
Для того чтобы установить, какое из приведенных напряжений яв-
ляется наибольшим, воспользуемся формулами (7.35) и (7.36), записан-
ными для поверхности канала трубы (а2Г = а2\)
F? 9 2лп-| Ч- 1 п 21 2 3«21
jCc”n Q ”1 3 «21 — 1 3 Р' «21 — 1
। 2 2я21 1 2 2 «21
^11 «21 3 Р^- 2 «21 — 1
Из формулы для £ет„ найдем величину р2 и подставим ее в выраже-
ние для ЕеГ11- В результате получим связь между приведенными напря-
жениями
2 2e^ — 1 а2] «2 _ 1 / 2 2«2 + 1
сгг,.= — р,-----------------------------— р,--------------се-
3 а21 — 1 «21 — 1 3«21 \ 3 «21 — 1
После алгебраических преобразований приходим к равенству
Е- 8 | 1 о
£''-“Та+т£!'-
Отсюда следует, что приведенные напряжения одновременно достигают
одинакового значения Е^Х1 = ЕгГх = зе только при условии
3
При — опасными будут приведенные тангенциальные на-
пряжения:
г> з
В случае, когда рх > — зе, приведенные радиальные напряжения
бсдут больше тангенциальных:
= Е^,<Уе.
В общем случае, когда рт^’/з, критериальное соотношение приобре-
тает вид:
ДгГ1==(1—5^-
1 —
§ 7.6. РАСЧЕТ ПРОЧНОСТИ АРТИЛЛЕРИЙСКИХ СТВОЛОВ
СО СВОБОДНОЙ ТРУБОЙ ИЛИ ЛЕЙНЕРОМ
Для предела возможного сопротивления стволов, имеющих трубу
пли лейнер, вставленные с диаметральным зазором Азаз в кожух, будут
справедливы полученные выше формулы (7.57), (7.58). В этих форму-
лах достаточно положительный знак натяга Анат изменить на отрица-
тельный, т. е. зазор трактовать как отрицательный натяг.
Поэтому формулы для возможного сопротивления ствола со свобод-
ной трубой принимают вид:
2
L; t™!)
1 2йф + 1
Покажем справедливость такого формального утверждения на при-
мере вывода формулы для предела возможного тангенциального сопро-
тивления ствола со свободной трубой.
При наличии зазора р2 = 0. Согласно формуле (7.35) деформации
трубы для случая р\=рх', а2г = а22=1 и кожуха при Pi = p2 = 0 в момент
окончания выбора зазора соответственно равны:
Es^=p'i —~; £К2=о.
«21 -1
Полагая £Д21 = £т], получим выражение для давления при кото-
ром полностью выбирается зазор между трубой и кожухом:
^-^-(«21-0, (7.63)
где ’! = ———относительный зазор.
Приведенное тангенциальное напряжение на поверхности канала
трубы после выбора зазора определяется формулой (7.40). Величину
этого напряжения в момент выбора зазора найдем по формуле (7.40),
ПОЛОЖИВ /?2 = 0 И p\=pi'.
t г 9
= f Pl
2ah + 1
«21 — 1
На основании уравнения (7.63) получим
2«21 + 1
3
(7.64)
Величина /д находится из условия равенства относительных дефор-
маций наружного диаметра трубы и внутреннего диаметра кожуха
после выбора зазора ets,=₽TjV Согласно уравнению (7.35) величины
совместных деформаций трубы гТа2 и кожуха еТз2 равны:
E^=(Pi-Pi)- 2-
«11—1
Д21 + 2
«21 — 1
2
3
А
2
А
О
2«32 + 1
й32 1
где П32А1 — Ар
рг — р'г — избыток давления в канале трубы, определяющий дефор-
мацию внутренней поверхности кожуха.
Приравнивая правые части этих уравнений, получим величину дав-
ления между трубой и кожухом:
А=(а~ а)
а32 1
а31 1
(7.65)
Исключим из выражения для £eT11 (7.40) параметры р2 (7.65) и
затем р\ (7.63):
^21
a2I — 1
77 2
ЕР>
и
2 ( аЪ — 1 \ За?, «?, — 1
— р, - £Т) —- -??——-.
3 V 2 M-H-i
После приведения подобных членов получим
2 2а?, +1 «?, —«?,
= V А -г—+----------=г
3 4i-i aii-i
Отсюда, отвлекаясь от физической сущности соотношения (7.53), можно
получить выражение для предела возможного сопротивления ствола со
свободной трубой pi (7.61). Однако фактическая связь между относи-
тельным зазором ц и напряжением на поверхности канала Т\ в момент
контакта трубы и кожуха в отличие от уравнения (7.53) выражается
формулой (7.64).
Таким образом, расчетные формулы для скрепленного ствола спра-
ведливы и для стволов со свободной трубой или лейнером при условии
формальной замены знака «плюс» перед членом Л на знак «минус».
§ 7.7. МЕТОДИКА РАСЧЕТА НА ПРОЧНОСТЬ
ДВУХСЛОЙНОГО СТВОЛА
При расчете скрепленного ствола вызывает затруднение выбор раз-
меров г2 или безразмерной величины «21. Найдем «21 из условия обеспе-
чения заданного давления в канале ствола р\ при наименьшем значении
наружного диаметра кожуха 2 г3, т. е. величины а3ь
Эта задача сравнительно легко решается для теоретического слу-
чая — применительно к уравнению предела упругого сопротивления, на-
пример, двухслойного скрепленного ствола (7.45):
3 «21 1 , 3 «32 1
— <зе*---------------]--------------------------------
2 2д21 + 1 2 2«21 + 1 2яд2 + 1
Решение данной задачи равноценно определению значения а21 из
условия наибольшей величины р\ при фиксированном значении а3ь Для
др^ п
этого решим уравнение------; =U относительно а2ь
При дифференцировании следует помнить, что <z31 = const, а пара-
метр а32 = аз’ . В этом случае уравнение для р} приводится к виду
«21
__ 3 «si 1 । 3 Зд21 а21
Z?1 ' 3 g — ~“ 1 .
2 2а,, + 1 2 2а|. + 1 2«|, +
После дифференцирования и приведения подобных членов приходим
к соотношению
(ai2 — 1 — 6&з1) ац -|-4 (<з12 — 1) а^а-п 4*2 (2о12-[-1) д31 = 0.
Откуда следует, что
2 2 (<112 1)«31
«21=-----—-----------—
6а31 + 1 — а12
2
*12 — 1)«л
31
(2aJ2 + 1)
4* ~ _ • (7-66)
6e31 + 1 — °12
В частном случае, когда пределы упругости материалов кожуха
- /- ае, , \
и трубы равны ( а12=-------=1 получаем известное соотношение
X )
Г адолина
й21==<331 ИЛИ <Z21 = «32, rl = rxrz. (7.67)
Это соотношение показывает, что у двухслойного ствола наимень-
шего веса толщина стенки трубы (тр меньше толщины стенки кожу-
ха /кож-
Так как = [см. выражение (7.67)], то можно написать:
г2 ri
22—1 = или -±₽_=^<1,
Г 2 r 1 Г2
где
ZrP = r2-H = r2(«21— 1);
Для случая С12^2 и asi2^4 с
77ИНЯТЬ
<(0Ж=Г3 —Г2=Г2(«32- 1).
погрешностью порядка 5%
можно
«и— а31 г о12
(7.68)
или a2j = a32]/ai2; а32 =—! «32 =----------------pyz—• (7.69)
У Я]2 У о!2
Из этих соотношений следует, что при О12>1 и a3j = const толщина
стенки трубы возрастает.
Обратимся к формулам (7.57) и (7.53). Если в уравнение для 1\
подставить «21 = й31то формула для рх примет вид
I Е-n Д31~а31Уог2
% Т"с I ; I ,
Д31 1 / 2^31 + 1
3
Решая это уравнение относительно a3i, получим
а _ г3 = 3__________У g|2
31 - П 2 с + &1-(4/3)Л
° + - - (4/3)/?;
3(%t + £>]) —4/ч
2р, 4- 3=ге
Этим уравнением можно пользоваться, если задан натяг т], т. е.
решать обратную задачу проектирования.
Зная Яз1 и 012, на основании соотношения (7.69) легко находим
остальные размеры сечения скрепленного ствола.
Рассмотрим случай, когда для обеспечения заданной величины ри
необходимо выбрать потребные значения параметров а21 и т].
Максимальное значение натяга т] должно быть таким, чтобы при
выстреле тангенциальные напряжения на поверхности канала кожуха
не могли превзойти предел упругости материала. Поэтому согласно ра-
венству р'^ = р^ оо р" и формулам (7.30), (7.45), (7.59) должно быть:
2^21 / 3 д32 1 fl32 1
“Д о Т7! -
Д21 ---- 1 Z 2/Zg2 +1 «31 - 1 У
3 a2i 1 । 3 За21 а32 1
---3 е t ~у- е г ---------------------
2 2а2, + 1 2 2а2, -j- 1 2аза + 1
(7.70)
(7.71)
К этим двум уравнениям присоединим полученные выше соотно-
шения:
2 1/Л— 2 йя1
а21=азЛ иг; «32=-= уу.-
J/ а12
Тогда уравнение (7.71) приводится к виду
„ 3 «31У ®12 — 1 । з з«31 у а12
Pl < — --------—=------1-—---------——
2a3i V ai2 + 1 2«31 У а12 + 1
или в пределе
2«31 + У 012
После приведения подобных членов имеем
У^з12(4Л — 2о12 — 3) <2з1 ф- [2/1 (1 —с12) —|- (2 — <з12) я12-|-Зз12]а31 -|-
-На12~Ь 21) ]///'si2=0.
Отсюда относительный внешний диаметр кожуха, обеспечивающий уп-
ругое напряженное состояние ствола, будет
аз1 = а+/аЯ-К (7.72)
где
_ / 1 - \ - 3-
Л(1 + Я12)11 —— aI2)ai2+ — я.12
а—------------1-------L--------- ;
V а12(3 + 2а12 + 4Л)
А + ^2 . д_ ~ _ %,
р ~ _ ,71 ------- , u J 2------- •
3+2о]2-4Д 3%2 %2
Необходимое предварительное напряжение на внутренней поверхно-
сти трубы в соответствии с уравнением (7.57) составит
T'lmax з Pl
2«31 + 1
«31 1
т 1ОО.
Подставляя найденные значения а31 (7.72) и a2i (7.66) в уравнение
(7.53), получим предельно допустимую величину относительного и аб-
солютного натягов:
7\ 4, — 1
_________________________________ -^-анат ________________ 1 imax al_
lmax- 2r2________________________________________________Е «31 —«21
Т, (2oi — 1
___г п 1 Тгпах 31_______________
наттах г1^21 £2 2 *
Й31 Й21
(7.73)
Минимальный натяг
АнатпНп ^наттах
где бАтр —; поле допуска изготовления трубы;
бАкож — поле допуска изготовления кожуха.
Иногда на практике, исходя из технологических и эксплуатацион-
ных соображений наружный размер трубы принимают равным среднему
арифметическому значению:
«21
«31 + 1
2
(7.74)
т. е.
В этом случае относительный внешний размер кожуха a3i и допу-
стимое максимальное предварительное напряжение поджатия трубы
Г;max определяется; по уравнениям (7.57) или (7.58).
Рассмотрим случай, когда опасны . В соответствии с уравне-
нием (7.57) имеем
Pl 2 T'lmax)
4i 1
2«ti + 1
При этом величина
хулой
т —
1 Imax
___ , 2а31
- -- =------------- •
«31+1
предварительного напряжения определяется фор-
2а21 ( 3 «32 1 «32 1
ДГ Pl
«21 ~ 1 \ 2аЛ2 +1 «31 — 1
(7.75)
> V^rt.
«32 — 1 ~'
2ah+l =
Найдем выражения a%i(a31) и a|2(«3i):
2 , Й31 + 2дз1 — з
«21 — 1 =---------л-------
4
За®! — 2д31 — 1
(«31 + I)2
9(2^1 4- 2#з1 4- 1
(«31 + 1 )2
Тогда уравнение для Типах приводится к виду
Тцпах— 2
За2! — 2а31 — 1
Л2! + 2йз1 — 3
3 , («si + I)2 „ 1
О , /Л ,
9йз| 4~ 2&з1 4- 1 — 1
(7.76)
Таким образом, выражение для р} при «21= Й31 1 является
функцией только от «31.
Уравнение р\(ае„ сге!, «31) можно решить относительно a3i графи-
ческим путем или методом последовательного сближения результатов.
Обычно величина «31 лежит в пределах 2<«31<3. После выбора
максимального натяга лтах прочность ствола проверяют при r|mm, най-
денную с учетом допусков на изготовление трубы; и кожуха:
__3_
Timin
Й31 «21 А «31 1
min 1 ~
«31-1 у 2д31 + 1
При расчете ствола со свободной трубой или лейнером при задан-
ной толщине трубы а21 и выбранном относительном зазоре л наружный
размер кожуха определяется согласно уравнению
2 . 3 (%, — £i)«21) + 2?!
«31 — -------------------•
3(ае, — £•'])— 4/>i
Для лейнеров «21 = 1,154-1,25. При этом величина л с уменьшением
калибра ствола возрастает. Относительный зазор берется равным мак-
симальной величине, т. е. с учетом допусков на изготовление труб для
артиллерийских стволов.
Величины натяга и зазора обычно ограничены пределами:
0,001 < л <0,002.
Приведенные выше формулы для расчета стволов позволяют сразу
найти их размеры для ряда калибров, так как решение этой задачи по-
лучено в безразмерной форме («21, «31, «32, л) - Поэтому, задаваясь лю-
бым значением калибра d\ = d— 2ДН (см. рис. 7.6), получим требуемые
размеры ствола:
d3 = «216(4 d3 = d33d^.
Такой ряд стволов имеет одинаковые пределы упругости металла
(<, ав2) и выдерживает одно и то же давление.
Таким образом, стволы, имеющие одинаковые значения безразмер-
ных параметров a2i, «32, «31 и л, являются подобными для заданных зна-
чений р[, сге, И <Те2.
Собственно методику расчета стволов на прочность и выбора их
размеров можно уяснить из рассмотренных ниже числовых примеров.
Там же приведены некоторые вспомогательные формулы, являющиеся
следствием выведенных здесь основных расчетных уравнений.
§ 7.8. ПРОЧНОСТЬ СТВОЛА С МЕЖСЛОЙНЫМ ОХЛАЖДЕНИЕМ
Рассматриваемую задачу (см. рис. 7.11) решим при допущении, что
радиальное давление на поверхность оснований и вершин ребер распре-
делено равномерно. Большое число канавок системы охлаждения на
внешней поверхности трубы (лейнера) или на внутренней поверхности
кожуха позволяет пренебречь напряжением изгиба в стенке трубы или
кожуха по месту разрыва сплошности их контактной поверхности и счи-
тать эту поверхность сплошной. Обычно количество канавок (или ребер)
назначается приблизительно равным числу нарезов канала ствола п,
а толщина стенки t трубы между ребрами — не менее ширины канавок
с. Высота ребра или глубина канавки h и ширина b принимаются также
близкими по величине к ширине канавок с системы охлаждения.
Ствол такой конструкции в первом приближении можно представить
в виде кожуха со свободной или скрепленной трубой без ребер, имею-
щего меньшие внутренний и наружный диаметры. Внутренний диаметр
с/2 = 2г2=2(Г1+7) С учетом податливости деформации ребра h аб-
Е
солютный зазор Д'заз или натяг А'нат соответственно равны:
Дзаз= ДзазЧ"А; Днаг = ДНат
Е Е
Напряжения среза в стенке ствола между ребрами:
Tj=-£1- — О,5/21;
1 2 t х
так как c^t.
Принимая (£а)?„+4т1 = 3е,, получим допустимую величину приве-
денного тангенциального напряжения на поверхности канала ствола:
с 1 / 2 2 С2
ае1-л—-=ап.
Величину наружного диаметра кожуха расчетной модели ствола
определим из уравнения
Q
й31 1
2в31 + 1
где
7’1=£'ц',н
9 9
Й31 1
Знак «—» перед Т\ отвечает стволу со свободной трубой, а знак
« + »— со скрепленной трубой. Подстрочный индекс «з, н/означает со-
ответственно: «з» — при зазоре; «и» — при натяге.
Из выражения для pi следует
. 2 __ Зстп + 2/’! ± 2 2
&з1----------------------- =
Зсгп ~ 4Р1 ± 3£д, 3
Соотношение Пз1 = Яз2й21= (fs/^i) справедливо при /г = 0. В случае
й>0:
а31
Гз
«2!
Гз
; Й32^21
Поэтому
г3 — а 31
Для относительных величин т)'заз и т]'нат справедливы формулы:
' Дзаз [ pyh . ' Днат
Чзаз- ------------Z------ , Чнат —
Г2 Ег-2 Г2
pih
Егг
Радиальное давление между трубой и кожухом соответственно
равно:
для ствола со свободной трубой
а32 1
Pi= Pi
9 9
«31~«21
«31 1
для ствола со скрепленной трубой
__ «32 1 । р ' «21 1 «31 «21
Р 2 — Р\ — Гс "нат - ' ~
«31 — 1 * 2а21 «31 - 1
Учитывая, что
„ _ Г3 _ П _ «3!
«32— , , , . —“31 , , — ,
rx + t + h. rx + t a2i
эти уравнения можно переписать так:
Pi = \ Py ^Лзаз «21 -1 j 4i- — «21 1
2 «11 — 1 4i
1 P\^^заз «21 1 \ 4i -«11 i
Р<1 2 ' «li — 1 «li
Так как в соответствии с выражением для a3i
41—«21 _ 2/)1(2«21 + 1)+3(Д21— 0ап
41 — 1 ^i ± 3£4,з(41-О
то для скрепленного ствола и ствола со свободной трубой получим еди-
ную формулу
_ 2/7] (2д|1 + 1)-3(а|1— 1)а„
Pi-------------Гг ’
6«21
Если же из уравнений для р2 исключить Лмт и П,'аз, то получим значе-
ния для любых размеров a3i, которые соответственно будут:
для ствола со скрепленной трубой
9 , 9^99
«32 1 «21 1 «31 «21
Pl 2 + ^HIT 7, ~
__ «31 1 2a2i «31 1
J «21 1 41 «21
г2 2«21 «31 — 1
для ствола со свободной трубой
«32 1 «21 1 «31 — «21
Л 2 Г" ^Лзаз —~ ~
$31 1 — 1
i h 41 -«21
r2 2a21 a31 — 1
Найденная величина р2 является одинаковой как для скрепленной
трубы, так и для свободной. Однако в этом случае, согласно формуле
для а3[ наружные размеры кожуха будут соответствующим образом от-
личаться «31 (Е ^?нат) ^31 (ЕРзаз) (см. пример 7.4). При проектировании
ствола вначале находят а затем вычисляют <Тз1(Ан,з, Рг) •
Необходимый предел упругости материала кожуха <+, определяется
по формуле
2 2«з2 + 1
где
а32 — й31
Пример 7.4. Найти наружный диаметр кожуха ds и предел упругости его материа-
ла ае° для следующих условных данных: a2i=l,2; di=!100 мм; А=с=/=Ю мм; pi=
= 4000 кгс/см2; Д я,3 = 0,06 мм;»с =100 кгс/мм2, а также для каждого ствола (в целях
проверки вычислений) определить величины р2(Лнат) и р2(т|за!,), значения которых
должны быть равны.
1. Давление между кожухом и трубой
2р; (2^ + 1) — 3 (а^ — 1) ]/ - - pl
2 4000 (2-1,44 + 1) — 3 (1,44 — 1) ]/10 0002 — 40002
=-------------------------------————— = 2192,4 кгс/см2.
6-1,44
2. Наружный размер трубы
г2 = Г1 + i ~ 50 4- 10 — 60 мм.
3. Для скрепленной трубы:
относительный натяг
"% ат
\ат p2h
Г 2 Ег2
0,06
60
2192,4-10
2-106-60
= 0,000817;
отношение г3/Г]
" / 3 )/ рх -4 2/7; + ЗДт;н.1та21
«з1 = I/ ----------------------------------------------
3 К ае, ~ p'i — 4А + 3£71ват
/ 3-9165 + 2-4000 + 3-2-106-8,17-10-4.1,44
|/ 3-9165 — 4-4000 + 3-2-106-8,17
радиус наружной поверхности кожуха
r-[ + t -h h
Лз = «31-------------—-------Г] = 1 ,611
Г1 + t
50 + 10+10
50 + 10
50 = 93,975 мм;
требуемая прочность кожуха
П , ...
«32 = «31 , , =1,61
п +1
50
50 + 10
= 1,3425;
2 2«з2 + 1
------
«32 1
2 2-1,802
—— 2192,4 ----------- = 8389,43 кгс/см2.
3 1,802+1
4. Для ствола со свободной трубой:
относительный зазор
’ Дзаз _у p2h __ 0,06
Г‘заз"" г2 £г2 ~ 60
2192,4-10
2-106-60
= 0,001183;.
где
отношение а31=г3/г1
«31
4,—?! +2А—3^зазд21
— р\ -4?1—ЗЕ^аз
f3-9165 + 2-4000 — 3-2-106.11,83 10—4-1,44 о „по
f ------------------------------------—-----•= 2,39 о,
3-9165 + 4-4000 — 3-2-106.11,83-10-4
—р\ = У10,0002 — 40002 -= 9165 КГС/СМ2
радиус наружной поверхности кожуха
г 4-1 + h
и = 2,398 -——° + — 50 = 279,77 мм;
11 50 + 10
требуемая прочность кожуха
Гт 50
«32 — «31 — 2,398 ~ — 1,998;
rx + t 50 + 10
2 2яз2 + 1
Зс2= Др’2
“32 1
’32
2 2-3 902 -k 1
= Т 21S2’4 3,992+ 1 4385'65 КГС/СМ2'
5. Проверка величины рг:
для ствола со скрепленной трубой
4 -1
?11 + Я^нат--Z--
Р2 = „ Z
«31~ 1 2 h «21—1
й2 — а2 Й21 + г2 2
“31 а21
4000 + 2 106. Ю~3 —-
2,595 —1 ,, 10 1,44 —1
—----------- 1,44 +--------------
2,595 — 1,44 60 2
= 2192,34 кгс/см2;
для ствола со свободной трубой
«21 — 1
Р1 — £Ъаз--------
Р2 =
«31 1
«31 — «21
h «21 1
Г2 2
Гз = <*31
, 1,44—1
4000 —2.106.10- 3 —----
2
5,748— 1 10 1,44—1
5,748 + 1 + 60 2
= 2192,56 кгс/см2.
§ 7.9. СОПРОТИВЛЕНИЕ АВТОФРЕТИРОВАННОГО СТВОЛА
Автофретирование ствола осуществляется воздействием высокого
давления, создаваемого, например, жидкостью или пороховыми газами
специально рассчитанного выстрела на стенки канала. Давление выби-
рается с таким расчетом, чтобы слои металла под поверхностью канала
получили остаточную деформацию. Тогда после снятия давления слои
металла, лежащие выше зоны пластической деформации, будут нахо-
диться в состоянии упругой деформации и как бы обжимать ,эту зону.
Таким образом, автофретированный ствол можно рассматривать как
скрепленный, состоящий из бесконечно большого числа элементарных
тонких труб (слоев), одетых друг на друга с натяжением. Если при этом
предположить, что давление между этими элементарными слоями яв-
ляется предельным и в соответствии с выражением (7.42) определяемым
зависимостью
___3_ _ г2г~ ГП
2 2< + d, '
где r2i и Гц — соответственно наружный и внутренний радиусы элемен-
тарного слоя, то, используя формулу (7.45), при = =
= щ и Г1=Гн, r2 = r2j, r3 = r3i будем иметь
„ Г г2 г2 Чг2 г2 г2 4
3 '2/ '1/ , йГЧ1 r3i Г21 ।
П, =---ае ----------------------------------У . . . .
2 Or2 4_ г2 9г2 ’ г2 9r2 J. г2
L Ar4i + ru 'if 2r3Z + r2; J
Так как:
r3l--r2Z = r2i-ru=--Ar;
r2i —rt- = 2rAr+Дг2;
rh — rh = 2дг • гГ Здг2,
то, отбрасывая приращения второго порядка малости и выше, после ал-
гебраических преобразований получим
1
При п->оо (Дг->0) в пределе будем иметь 1
Г
Р^е [— =Мп— . (7.77)
J Г Г1
Эта формула определяет предел упругого сопротивления автофрети-
рованного ствола для случая наибольшей тангенциальной деформации
и показывает, что его величина, в отличие от определяемой по форму-
лам (7.37) и (7.45) не зависит от коэффициента Пуассона.
Описанный выше механизм сопротивления автофретировапного
ствола является идеализированным (se] =consi), поэтому форму-
ла (7.77) является приближенной и результаты расчета по ней следует
рассматривать как теоретически возможный предел упругого сопротив-
ления толстостенной трубы. Фактическая прочность ее будет больше,
так как материал зоны пластической деформации упрочнился сгп1 >aen2.
Уточним формулу упругого сопротивления автофретированной тру-
сы. Предположим, что после автофретирования толщина зоны пластиче-
ской деформации ограничивается радиусами rj и гп, а зона упругой де-
формации— соответственно гп и г2. Глубина зоны пластической дефор-
мации (гп — ri) должна быть такой, чтобы можно было обеспечить при
аыстреле величину наибольших суммарных упругих напряжений слоев
металла, лежащих вне этой зоны, близкую к пределу упругости ое. При-
Тлиженно можно показать, что глубина зоны пластической деформации
= та формула может быть получена из уравнения сопротивления бесконечно тон-
нагруженного до предела упругости (2rdp=oe2dr).
имеет предельный размер, превышение которого приводит к падению об-
щего предела сопротивления ствола-моноблока. При таком сложном на-
пряженном состоянии ствола перед выстрелом внутренние слои металла
его будут сжаты, а внешние растянуты.
В первом приближении такой ствол можно рассматривать как двух-
слойный скрепленный, труба которого имеет толщину, равную глубине
зоны пластической деформации, а кожух состоит из бесконечного числа
упруго напряженных элементарных слоев, как бы одетых друг на.друга
с натягом.
Далее допустим, что в процессе выстрела на границе зон пластиче-
ских и упругих деформаций ствола имеет место давление р2 = ое 1п(г2/'п),
определяемое упругой деформацией элементарных слоев металла зоны
('У — гп) и обжимающее зону пластической деформации металла ствола
(гп — /у). Тогда в соответствии с уравнением (7.42) при допущении
: —ае„2 °е суммарный предел упругого сопротивления
ствола будет
/ г2—г2 2г2 \
/ 11 1 1 11 In г2 '
' 2Ti + ‘ 2г2 + г2 )
(7.78)
Вводя обозначения ап1 = —и «п2 = -Д-, получим
ri гп
3
А= —
In ап2
В общем случае, когда цеп¥=ое, Для предела сопротивления ствола
при допущении одинакового упрочнения металла в зоне пластической
деформации имеем формулу
3 Яп1 ~ 1
9 °е ,
2 + 1
Pi
2а2
anl — 1
(7.79)
ае 4
In fln2
где з——— )> 1 — коэффициент упрочнения материала внутренней
зоны трубы, подвергнутой предварительной плас-
тической деформации;
зеп = аеп1 — предел упругости металла после сообщения предва-
рительной пластической деформации слоям в зо-
не Г1-Угп;
— предел упругости металла слоев в зоне гп^-г2, не
подвергшихся предварительной пластической де-
формации.
Из теории сопротивления материалов известно, что сталь после на-
гружения выше предела упругости и последующего снятия нагрузки при-
обретает новые свойства — более высокие пределы пропорциональности
и текучести, поэтому сг> 1.
Если в формуле (7.78) положить aul = 1 и ап2=1, соответственно
будем иметь:
— предел сопротивления идеализированного автофретированного
ствола-моноблока, не имеющего зоны предварительной пластической де-
формации, определяемый выражением (7.77);
— предел сопротивления ствола при сквозной предварительной
пластической деформации его стенки
Функция, выраженная зависимостью (7.79), имеет максимум при
,2 2 Ру ! агп
Йп1 — —------------|--------
<5 °е
(7.80)
Несмотря на произведенное уточнение формулы (7.78), она остает-
ся по-прежнему приближенной. Более точно решить задачу о прочности
автофретированного ствола не представляется возможным без экспери-
ментального изучения закона предварительной деформации металла по
толщине стенки трубы. С учетом реальных свойств слоев металла ство-
ла в зоне пластической деформации задача сопротивления автофретиро-
ганных труб решена Смирновым-Аляевым [8], Пономаревым [5] и Де-ля-
шез [11].
Формулой (7.78) следует пользоваться весьма осторожно, так как
она справедлива только для относительно малых значений апь
Обычно предполагают, что при выстреле только слои зоны с оста-
точными деформациями агц нагружаются до предела текучести (пеп~Оз)
)3]. Тогда общее сопротивление ствола
A=3e.iln«ni + A, (7.81)
3_о ап2 - 1
2 °'24 +1
где
давление, обжимающее слои металла в зо-
не пластической деформации.
Иными словами, величина рг находится из предположения, что зо-
на упругих деформаций аП2 работает аналогично кожуху скрепленного
ствола. Такое допущение приводит к скачкообразному изменению напря-
жений на границе зон аа1 и ап2. В действительности, в отличие от искус-
ственно скрепленного ствола для автофретированного ствола на границе
этих зон должно наблюдаться плавное изменение напряжений а, и оу.
Следовательно, вывод формулы (7.81), так же как и зависимости (7.79),
основан на грубой физической модели, далеко неполно отражающей ис-
тинное напряженное состояние в процессе выстрела автофретированного
ствола.
Отсутствие необходимых опытных и теоретических материалов по
исследованию сопротивления автофретированных стволов заметно сдер-
живает их внедрение в артиллерийскую практику, хотя первый автофре-
тированный ствол был изготовлен фирмой Шнейдер во Франции еще в
1912 г. для 138-мм пушки обр. 1910 г. Снижение предела сопротивления
Pi автофретированного ствола при высокой температуре его нагрева так-
же еще слабо изучено.
Рассмотрим еще одно приближенное решение задачи расчета пре-
дела сопротивления ствола, основанное на уравнениях вида (7.23) и
(7.25):
(7.82)
= -От, (7.83)
dr
где р= — аг.
Если эквивалентное напряжение металла любого слоя ствола дове-
дено до величины предела текучести ЛСт = з5 при (as?^a.), то <зт=ае —
— р/ц Поэтому уравнение (7.83) приводится к виду
rdp^- pdr= —{pe-~^p}dr.
Отсюда
dp
°е + (1— И)Р
или
[ае+(1 — р)р] a'j*1 — ае
На наружной поверхности (г=г2) величина p = Q, поэтому справед-
лива зависимость
= (7.84)
1 —[Л
Приравнивая между собой указанные выражения для р1г получим
формулу для радиального напряжения (ог= — р) в слое с координа-
той г:
1—р.
Согласно уравнению (7.33) тангенциальное напряжение в том же
слое трубы
з- = з — рр=———(1 — рй'2ГР')- (7.85)
1 —р
Полагая a2r=a2i и a2r=l, определим величины тангенциальных на-
пряжений соответственно на внутренней (r = rj) и наружной (г = г2) по-
верхностях трубы:
1 — ра^Г*1
; Зт2==%.
1 —р.
Прир=-|-:
Если принять ц= 1, т. е. допустить, что для всех слоев ствола, ис-
пытывающих остаточные деформации, эквивалентное напряжение чис-
того растяжения равно пределу упругости материала трубы (ае=От4-'
+р), то для его предела сопротивления получим выражение (7.77)
А~-=Ит - gg..(агГ;1^ 0 = In a21,
ix-i 1 —р
а на внутренней и наружной поверхностях ствола будут иметь место на-
пряжения
при ЭТОМ р2 = 0.
Нетрудно показать, что
Pi (Н < 1)>Р1(Р= О-
Обе эти функции, так же как и функция (7.81), монотонно возраста-
ют по мере увеличения толщины стенки ствола, т. е. не имеют максимума.
Приведенные выше формулы (7.79), (7.81), (7.84) и (7.85) йуж-
даются в серьезной экспериментальной проверке.
Пример 7.5. Рассчитать размеры ствола-моноблока 85-мм пушки для следующих
условных данных:
рт = 3200 кгс/см2; рА = 900 кгс/см2; рк = 2000 кгс/см2; Ртин = 3500 кгс/см2;
rfj = 88,5 мм; /т= 1520 мм; 1л = 4000 мм; /к = 2600 мм; /кам = 500 мм;
й1дн = 100 мм; ае = 7500 кгс/см2.
Для расчета ствола пользуются расчетным давлением
Р\ = пр,
где р — давление, полученное в результате решения задачи внутренней баллистики;
п — коэффициент запаса прочности.
Коэффициент п назначается для компенсации неучета ряда факторов, уменьшаю-
щих сопротивление ствола. К ним относятся:
— ошибки методов определения давления (расчетных или экспериментальных);
— отклонения условий эксплуатации орудия от нормальных;
— технологические погрешности изготовления ствола и боеприпасов;
— снижение характеристик прочности металла из-за нагрева ствола;
— погрешности метода расчета прочности;
— неучет второстепенных нагрузок (инерционные силы, вес ствола, удары снаряда
о стенки ствола, радиальное давление ведущего пояска и т. п.).
На участке длины ствола между началом нарезов и сечением, отстоящим в на-
правлении к дульному срезу па 1,5—2 калибра от положения дна снаряда в момент
максимального давления в заснарядном пространстве, принимают пДэ1,35.
В камерной части ствола, где ведущий поясок снаряда не воздействует на стенки,
а гильза при ее наличии снижает тепловое воздействие порохового газа на стенку
ствола, принимают n^l. С учетом сопротивления казенника иногда у дна каморы при-
нимают п = 0,8=0,9. На расстоянии 2d от дульного среза п^1,9 и определяется не усло-
виями прочности, а необходимостью обеспечения жесткости ствола. На оставшейся части
ствола запасы прочности изменяются по его длине примерно по линейному закону [4] *.
Необходимо иметь в виду, что в автоматических пушках и стрелковом оружии
ствол по сравнению с расчетным иногда значительно утолщают для обеспечения потреб-
ной жесткости его или улучшения условий охлаждения.
В соответствии с указанными замечаниями величины расчетных давлений будут:
в сечениях у дна каморы
pi = пртХЯ = 0,9-3500 = 3150 кгс/см2;
в сечениях нарезной части ствола, подверженной действию давления рт
Pi = прт = 1,35-3200 «4300 кгс/см2;
в сечениях, соответствующих концу горения заряда
/>1 = прк = 2-2000 == 4000 кгс/см2;
в дульной части
Pi = пря — 2,5-900 = 2250 кгс/см2.
~ Р1 _
Относительные величины наружного диаметра ствола для случая Pi = --------- —
________ °е
4300 з , . _ 1 / 3 + 2/>1
— = 0,574</—— определяются по формуле (а21)1 — I/ _ и соответ-
7500 4 ' 3 — ipi
ственно равны: («21)1 = 1,68; («21)2=2,42; («21)3 = 2,18; («21)4=1,41.
Тогда наружные диаметры ствола:
в сечениях у дна каморы
= («21)1^1 = 1,68-100 = 168 мм;
в сечениях нарезной части ствола, подверженной действию давления рт
£12(^21)2^1 = 2,42-88,5 = 214 мм;
в сечениях, соответствующих концу горения заряда
d^, = («21)3^1 = 2,18-88,5 = 193 мм;
в дульной части
= («21)4^1 = 1,41-88,5 = 125 мм.
Пример 7.6. Найти размеры скрепленного ствола 85-мм пушки для следующих ус-
- : = -:ых данных: /?1 = 3200 кгс/см2; <Л=88,5 мм; п=1,35; о, ] =7500 кгс/см2;
.=4500 кгс/см2; £ = 2,1-10е кгс/см2.
! При расчете размеров ствола по кривой наибольших давлений, исходя из воз-
» к-ых температур порохового заряда (см. § 2.7), должны приниматься соответствую-
t методике коэффициенты запасов прочности.
Рассмотрим два варианта скрепленного ствола, отличающихся величиной давле-
ния щ при выстреле.
Вариант 1: р2 = 1000 кгс/см2.
Относительный наружный диаметр кожуха:
За +2р2 3-4500 + 2-1000
«?, =------------=--------------------= 1,63; <т32 = 1,28.
32 Зае2 —4,о2 3-4500 — 4-1000 2
Относительный наружный диаметр трубы:
За +Чр. 3-7500 + 2-4320
al =--------51-----------=---------------------------= 4,3; а21 = 2,07.
21 Зай1 +2р2 — 4?! 3-7500 + 2-1000 — 4-4320 1
Относительный наружный диаметр кожуха:
a2j = = 7,05; «31=2,64.
Допустимое тангенциальное напряжение на внутренней поверхности трубы при
«нулевом натяге»:
2 2аз1 + ! 2 2-7,05 + 1
Г1 = а - — Р1 —------------= 7500 - — 4320 - --- = 300 кгс/см2.
1 3 +____1 3 7.05 — 1
Предельно возможная величина относительного натяга
ЗГ1 1 3-300 1 п .
тнат =---------------=----------------------' = 0,40-10 -
Е 2«2i + l 2,1-106 2-4,3 + 1
Абсолютная величина предельно допустимого натяга
Днат = ЧнатЯгЛ = 0,45 • 10“4 2,14 88,5 = 0,82-10“2 мм.
Давление в канале ствола, при котором снимается предварительное напряжение:
, 41 ~ 1 -4 4,3—1
рг = До] --------=2,1-106-0,45-10 4 —---------= 156 кгс/см2.
Диаметры ствола:
rf2 =-«21^1 = 2,07-88,5 = 183 мм;
+ = «3^! = 2,64-88,5 = 234 мм.
Вариант 2: р2= 1500 кгс/см2. Рассчитывается аналогично.
Данные расчета вариантов 1 и 2 сведены в табл. 7.2.
Таблица 7.2
Вариант мм d2l мм d3, мм Д -10“2, нат ’ мм р2, кгс/см2 pt, кгс/см2 р’, кгс/см2 Г], кгс/см2
1 2 88,5 88,5 183 173 234 256 0,82 2,09 1000 1500 4320 4320 156 354 300 560
§ 7.10. ЖИВУЧЕСТЬ СТВОЛОВ
Продолжительность службы артиллерийских систем и стрелкового
оружия определяется прежде всего баллистической живучестью их ство-
лов. Например, при общей живучести стрелкового вооружения от 20 до
100 тыс. выстрелов живучесть стволов составляет всего от 4 до 15 тыс.
выстрелов.
В технологическом отношении стволы являются сложными деталя-
ми, требующими больших затрат на изготовление с применением доро-
гостоящих специальных сталей. Вследствие этого проблема повышения
живучести стволов имеет исключительно важное значение.
Процесс износа поверхности канала стволов весьма сложен. Он оп-
ределяется большим числом факторов конструктивных, технологических,
баллистических и эксплуатационных.
К конструктивным факторам относятся устройство стволов (калибр,
длина, число, глубина, ширина и форма нарезов и др.), устройство сна-
рядов (пуль) (диаметр ведущего пояска, его ширина и др.), соотноше-
ние размеров канала ствола и ведущего пояска и ряд других факто-
ров [7].
Влияние технологии изготовления стволов и боеприпасов на живу-
честь определяется способом изготовления, термообработкой и металлом
ствола, а также специальными покрытиями ведущего пояска и его ма-
териалом.
К баллистическим факторам относятся величина заряда, состав и
калорийность пороха, давление пороховых газов, закон изменения ско-
рости движения снаряда по каналу и т. д.
Большое влияние на живучесть стволов оказывают условия эксплуа-
тации: режим огня, наличие и интенсивность охлаждения, чистка и смаз-
ка стволов, условия хранения.
Все названные факторы находятся во взаимной связи и живучесть
стволов определяется их совокупным воздействием, причем в теоретиче-
ском плане влияние некоторых из них не поддается даже качественному
анализу.
Износ стволов при стрельбе происходит в определенной последова-
тельности и сопровождается появлением сетки трещин, выкрашиванием
полей нарезов, эрозией металла ствола [6].
В результате ряда исследований износа каналов стволов были вы-
двинуты различные теории, объясняющие причины износа тепловым,
механическим, химическим воздействием газопороховой смеси и боепри-
пасов на поверхность канала. В настоящее время установлено, что из-
нос ствола вызывается всеми воздействиями одновременно, проявляю-
щимися в большей или меньшей степени в различных системах. Напри-
мер, в стрелковом оружии износ стволов определяется в основном
истиранием канала ствола пулями; в орудийных стволах превалирующее
значение приобретает эрозия металла.
Приближенно физическую модель износа канала ствола можно
представить следующим образом:
— нагревание поверхности канала ствола пороховым газом до тем-
пературы 2000—3500 К в зависимости от марки пороха;
— нагревание поверхности канала ствола от работы сил трения по
месту контакта ведущих устройств снаряда с поверхностью канала
ствола;
— нагревание ствола теплом, выделяющимся от работы преодоле-
ния внутренних сил трения в металле ствола при его деформации от
давления порохового газа и ударного воздействия центрирующего утол-
щения снаряда на поверхности нарезов;
— износ нагретого ствола вследствие механического снятия металла
с поверхности его канала потоком порохового газа в заснарядном про-
странстве и в зазорах между ведущим пояском снаряда и поверхностью
канала ствола, а также ведущими устройствами снаряда.
Ввиду исключительной сложности процесса износа ствола, не позво-
ляющего с достаточной степенью точности рассчитать количество выст-
релов, приводящее ствол в негодное состояние, до настоящего времени
определение живучести стволов производится экспериментальным пу-
тем. Попытки получения теоретического решения задачи определения
живучести предпринимались. Эта задача и в настоящее время составляет
одну из наиболее актуальных проблем.
Для примера рассмотрим следующие рекомендации по теоретиче-
скому расчету живучести стволов. В работе [7] предложена формула для
расчета живучести ствола при стрельбе одиночными выстрелами:
W=^3p------------------------------/Ч+J-------(
0,0022а, а ю-з+о.оог*. му2Гл /-EkV + (—УЛ
е д д \ V- ) \ /
где k\, k2, kz — коэффициенты, зависящие от калибра орудия, крутизны
и глубины нарезки;
р —ударная вязкость металла трубы, кгс-с2/м4;
Do — наибольший наружный диаметр ведущего пояска снаря-
да, мм;
d — калибр системы, мм;
р0 —давление форсирования, кгс/см2;
t —толщина поверхностного слоя канала орудия;
t\ — температура горения пороха, [71= (7’1 — 273)° С];
щ—средняя скорость газов в горловине каморы за время
движения снаряда по каналу, м/с;
v2 — средняя скорость газов в горловине каморы за время пе-
риода последействия газов, м/с;
ид —дульная скорость, м/с.
Значения коэффициента kt определяются из таблицы [7]. По реко-
мендации проф. В. Е. Слухоцкого для современных артиллерийских си-
стем принимают: йг=1; &з=1-
Значения члена — 10~3 принимают-’
£
орудий; 1,4 —для стрелкового оружия.
т г / V9 \2 / V9 Щ \2
Членом — ввиду того, что — < Ал —L , как правило, пре-
\ \ ЧХ / ' \ /
небрегают. Величины отношения — определяются по таблице в функ-
v>,
цни от Ад и хн, где хн=-^-; Ан=/н-}-0,Ibd — расстояние от дна камо-
Д-н
ры до ее горловины [7].
Значение коэффициента может быть рассчитано также по
формуле
1,28 — для артиллерийских
____________1
Хн— о,75г/
X
l0
Рассмотрение указанной выше физической модели износа канала
ствола приводит к заключению, что интенсивность этого процесса зави-
сит от температуры пороховых газов, коэффициента веса снаряда, калиб-
ра ствола и начальной скорости.
Математическое выражение для допустимого количества выстрелов
N в первом приближении можно записать в виде зависимости
N = —^-----.
С'^
Температурный коэффициент Кт зависит от калорийности пороха и
механических характеристик металла ствола.
При заданных марках пороха и заданном материале ствола вели-
чину Кт для орудий с подобной баллистикой можно считать постоянной.
Величины показателей х, у, z в первом приближении можно принять со-
ответственно равными:
х—3; у = 4,5; г=2,5.
Пример 7.7. Определить живучесть ствола условных пушек калибра 37 мм, 88 мм
и 170 мм, имеющих начальные скорости снаряда 900' и 1500 м/с.
Пусть из опыта известна живучесть какого-либо ствола, например для 37-мм пуш-
ки с начальной скоростью снаряда по=9ОО м/с. Условно примем, что допустимое число
одиночных выстрелов п=21 ООО, х=3, у=4,5 и z=2,5.
Если коэффициенты весов снаряда одинаковы (Cj=const), то искомое число вы-
стрелов при Хт = const составит:
для 37-мм пушки при ио=15ОО м/с
п = «1
V0, \4,5 [ 900 \4,5
-21- = 21 000 -------— = 2100;
«02 / \ 1500 /
для 88-мм пушки при п0= 1500 м/с
п = щ
/ 37 \2.5
= 21 000 — -0,1 =240;
\ 88 /
для 170-мм пушки при г>о=1500 м/с
/ df \2.5 / VO1 \4,5
и = nd---------- ------ = 40.
\ а?2 / \ vp2 /
При ио=900 м/с живучесть стволов 88-мм и 170-мм пушек соответственно будет
2400 и 460 выстрелов.
Режим стрельбы, определяемый временем между выстрелами, заметно влияет на
живучесть ствола, так как его температура непрерывно растет от выстрела к выстрелу.
В автоматических пушках с высоким темпом стрельбы температура ствола при стрельбе
сплошной очередью может достигнуть такой величины, при которой предел текучести
его металла уменьшится до недопустимой величины. Ствол в этом случае получит боль-
шие остаточные деформации или вообще будет разрушен. Кроме того, до момента раз-
рушения ствола он выйдет из строя по критерию правильности полета снаряда вследст-
вие нарушения необходимого сцепления между нарезами и ведущим пояском снаряда.
При непрерывной автоматической стрельбе ствол настолько интенсивно нагревает-
ся, что даже при наличии межслойного охлаждения он весьма быстро разрушается.
Требуемую живучесть ствола возможно обеспечить только программированной стрель-
бой, т. е. соответствующим выбором сплошной продолжительности очереди стрельбы и
перерыва между ними. Принудительное охлаждение канала ствола позволяет лишь не-
сколько увеличить продолжительность сплошной очереди и сократить время перерыва
в стрельбе.
Опыт показывает, что живучесть ствола резко падает с увеличением начальной
скорости снаряда и при некотором ее значении становится недопустимо низкой. В этом
случае единственно практически возможный путь повышения живучести ствола является
использование подкалиберных снарядов, имеющих малое значение коэффициента Ся.
Для примера найдем изменение живучести 88-мм ствола при стрельбе из пего
50-мм снарядом и 170-мм ствола при стрельбе из него 88-мм снарядом.
В этом случае живучесть ствола без учета веса поддона снаряда повысится:
для 88-мм пушки
- / V ( \2.5 I rf2 \6,5 7 88 \6-5
\ у \ di / \ di / \ 50 у
для 170-мм пушки
- / 170 \6,5
п = ------- =71,
\ 88 I
т. е. соответственно в 63 и 71 раз.
Если принять, что вес поддона составляет 25% от веса снаряда, то найденная жи-
вучесть ствола уменьшится приблизительно в четыре раза.
§ 7.11. РАСЧЕТ НА ПРОЧНОСТЬ КАЗЕННИКОВ И ЗАТВОРОВ
Рассмотрим основы расчета на прочность деталей узлов запирания
казенника и затвора без самооткрывания. Узлы запирания должны
обладать достаточной прочностью, чтобы не произошло их разрушения
20 время выстрела, а также необходимой жесткостью, чтобы не возникло
чрезмерных деформаций гильзы и не произошло ее разрушения.
В неавтоматических артиллерийских системах соединение ствола и
затвора при выстреле осуществляется при помощи казенника. Казенни-
ком называют отдельную деталь ствола, в которой размещается затвор
? к которому крепятся подвижные части противооткатных устройств
• штаки или цилиндры).
Через затвор казенник воспринимает давление пороховых газов при
выстреле. Вместе с затвором и гильзой (или обтюратором при картузном
заряжании) он должен обеспечивать надежное запирание канала ствола
при выстреле. Это достигается прочностью казенника и его соединений,
а также исключением взаимных перемещений казенника и ствола.
В зависимости от способа соединения со стволом различают навинт-
ные и ввинтные казенники. В полевой артиллерии наиболее распростра-
нены навинтные казенники с муфтой. Такая конструкция упрощает тех-
нологию изготовления труб и кожухов вследствие отсутствия на них
соединительной резьбы, а также облегчает сборку ствола. Ввинтной ка-
зённик, имеющий меньшие габариты по сравнению с навинтным, приме-
няется в крупнокалиберных орудиях с поршневыми затворами.
Хотя воздействие выстрела на казенник имеет динамический харак-
тер, прочность казенника проверяют на статическую нагрузку при до-
стижении в канале ствола максимального давления. Обычно проводят
следующие расчеты казенника [4, 6].
1. Проверка поперечного сечения казенника на поперечный разрыв
при действии силы
Рк ,с= '-'к тРт лн к
Здесь
SKm—наибольшая площадь поперечного сечения
Qo
( с „
V*3 Рт дн
Qq
каморы заряжания при выстреле;
хВл>_Я)-сила инерции затвора, прижимающая его к
стволу во время отката (где Qs — вес затво-
ра; Qo — вес откатных частей);
— сила сопротивления противооткатных уст-
ройств, соединенных с бородой казенника;
- R)— сила инерции части казенника, расположен-
ной за боевыми уступами (опорными плоско-
стями) затвора (где AQK— вес части казен-
ника, расположенной за боевыми уступами);
Rr— сила сопротивления гильзы.
Допустимое напряжение на растяжение =
где бг —пре-
дел упругости материала казенника.
2. Проверка резьбового соединения казенника с муфтой или кожу-
хом при действии силы Ркс (AQK=QK) по известным формулам для
расчета резьбы при коэффициенте запаса прочности по пределу упруго-
сти, равном двум.
3. Расчет казенника в месте соединения с опорными поверхностями
затвора при действии силы P3=pmS№, где 5ДН — площадь дна каморы.
Резьбу для поршневого затвора рассчитывают при коэффициенте
запаса прочности по пределу упругости, равном двум. Щеки гнезда для
клинового затвора рассчитываются на изгиб и растяжение при коэффи-
циенте запаса прочности, равном трем. Смятие проверяется при коэффи-
циенте запаса прочности, равном двум.
В зависимости от формы основной запирающей детали затворы ар-
тиллерийских систем разделяют на клиновые и поршневые. Клиновые
затворы применяются в современных артиллерийских орудиях раздель-
но-гильзового и унитарного заряжания. Обтюрация пороховых газов
осуществляется в этом случае гильзой. По направлению движения клина
различают вертикальные и горизонтальные клиновые затворы. Послед-
ние выгодно применять в орудиях крупного калибра, имеющих тяжелые
затворы, так как при их горизонтальном перемещении не затрачивается
работа на преодоление силы тяжести.
Обтюрация в поршневых затворах орудий раздельно-гильзового и
унитарного заряжания осуществляется гильзой, а при картузном заря-
жании — специальным обтюратором.
Для расчета затворов на прочность даже при применении высоко-
прочных легированных сталей с соответствующей термообработкой при-
нимается: допустимое напряжение смятия опорных поверхностей [стСм]^
з
<40 кгс/мм2; допустимое напряжение среза [тср]=— [зск] [3]. Сам
расчет трудностей обычно не представляет. Действующая на затвор си-
ла Р3 = ?к.с при AQIt = 0. После определения величины силы Р3 состав-
ляются уравнения равновесия затвора и определяются реакции, по кото-
рым рассчитываются напряжения растяжения, сжатия, смятия и среза.
На практике чаще всего реальная
высота клина h (рис. 7.13) значительно
больше расчетной из-за необходимо-
сти расположения в клине различных
механизмов. Напряжения среза обыч-
но невелики.
Ориентировочные размеры клина
могут выбираться по данным табл. 7.3
в зависимости от диаметра каморы у
казенного среза ствола dK [3].
При расчете поршневого затвора
Таблица 7.3
Раз- меры клина Для пушек Для гаубиц
а (1,7—:-1,8) дГк (1 ,4н-1,5)й?к
h (1,5-:-1,8) dK (0, 75—1,2) rfK
b (1,5ч-1,7) rfK (1,8-: 2,3) dK
С (2,бт 3)dK (2,6-3) dK
на прочность в первом приближении можно исходить из допущения, что
реакции SA распределяются по боевым выступам затвора пропорцио-
нально их жесткости.
При практических расчетах можно считать, что жесткость боевых
выступов затвора пропорциональна площади, работающей на срез Fcp,
F
и нагрузке, приходящейся на один зуб N\ = N—— ,
где F% — суммарная площадь среза боевых выступов затвора.
Количество боевых выступов на поршневом затворе бывает от одной
до шести пар. Количество выступов и их размеры определяются углом
поворота поршня и напряжениями смятия, среза и изгиба. Большее ко-
личество выступов делать не рекомендуется, так как последние ряды вы-
ступов бывают не нагружены.
После определения нагрузки, приходящейся на каждый боевой вы-
ступ jVi, можно найти напряжения среза, смятия и изгиба для каждого
выступа.
Введем коэффициент р, учитывающий часть окружности, занятой
секторами боевых выступов. При двух секторах в ряду можно прини-
мать р « 0,48, при четырех секторах — р — 0,65 [3].
Момент сопротивления сечения боевого выступа
_ 3я (D + М)
И/ - .
6
Площадь, работающая на срез
Fcp=pn +
Площадь, работающая на смятие,
/7см=?л(О+д3)Л
Размеры D, Д3 и h} видны из рис. 7.14.
Напряжение изгиба в сечении боевого выступа
Напряжение среза
t — N— It 1
1еР р ^ПсрГ
Г ср
Напряжение смятия
Обычно такого расчета достаточно
и эквивалентные напряжения
можно не определять.
Обеспечение прочности гильзы при
Рис. 7.14. К расчету поршневого затвора
выстреле зависит от величины
упругой деформации узла за-
пирания или величины коэф-
фициента жесткости узла запи-
рания. За характеристику ста-
тической жесткости примем ко-
эффициент k, представляющий
собой отношение действующей
силы Р3 и деформации узла за-
пирания Л.
При последовательном сое-
динении деталей, работающих
на растяжение и сжатие, общая деформация узла запирания
где — абсолютная деформация г-й детали.
Величину X, можно определить, зная относительную деформацию де-
тали ег.
о
где — длина детали;
е;= -L. — относительная деформация;
Е
ах — напряжения в деталях;
Е — модуль упругости I рода.
Учитывая, что
* 3
=-----
Si
где Si — площадь поперечного сечения i-й детали, для последовательно-
го соединения деталей имеем
Если коэффициент жесткости узла запирания
следовательном соединении деталей
, Рз
k=-^~, то при по-
£ ^1
1=1
где ki — коэффициенты жесткости деталей, входящих в узел запирания.
В тех случаях, когда детали работают параллельно, Z = a k =
Величину усилия сопротивления гильзы при наличии осадки узла за-
пирания, равной %, приближенно можно оценить по формуле
о ЕРЛ
где Fr — площадь поперечного сечения цилиндрической эквивалентной
гильзы, имеющей тот же объем стенок;
Е — модуль упругости материала гильзы;
/г — длина эквивалентной гильзы;
Pi — опытный коэффициент.
В первом приближении можно принять Pi = 2-i-3— теоретическое
значение, найденное для цилиндрической гильзы при условии линейного
или квадратичного закона падения растягивающего усилия по ее длине.
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ VII
1. Арефьев М. Г., Карпов Л. И. Производство стволов стрелкового ору-
жия. М., Оборонгиз, 1945, 226 с.
2. Благонравов А. А. Основания проектирования автоматического оружия.
М.. Оборонгиз, 1940, 487 с.
3. Л а р м а н Э. К. Проектирование и расчет орудийных стволов и затворов. М..,
Оборонгиз, 1939, 164 с.
4. Л а р м а н Э. К. Проектирование и производство артиллерийских систем.
Ч. I — «Проектирование . орудийных стволов и затворов». М., изд. Академии
и. Ф. Э. Дзержинского, 1949, 395 с.
5. П о н о м а р е в С. Д. и др. Основы современных методов расчетов на
точность в машиностроении. М., Машгиз, ч. I, 1950, 703 с., ч. II, 1952, 862 с.
6. Садовский В. Г. Основания устройства материальной части артиллерии.
. Воениздат, 1956, 499 с.
7. С е р е б р я к о в М. Е., Третей К. К. и О и п о к о в Г. В. Внутренняя
'т.тлистика. М., Оборонгиз, 1939, 591 с.
8. С м и р н о в - А л я е в Г. А. Теория автоскреплениых цилиндров. М., Обо-
- счгиз, 1940, 284 с.
9. Таптун А. С. Нарезание орудийных стволов. (М., Оборонгиз, 1945, 178 с.
10. Ш а п и р о Я. М. Внешняя баллистика. М., Оборонгиз, 1946, 407 с.
11. Де-ля-шез М. Расчет автофретировэнных орудий. М., Оборонгиз, 1940,
12. Горов Э. А. Основания проектирования автоматического оружия. М., изд.
-• з гемин им. Ф. Э. Дзержинского, 1954, 672 с.
13. Латухин А. Н. Современная артиллерия. М., «Воениздат», 1970, 319 с.
Глава VIII
МЕТОДЫ РАСЧЕТА И ИССЛЕДОВАНИЯ МЕХАНИЗМОВ
АВТОМАТИКИ СИСТЕМ С НЕПОДВИЖНЫМ СТВОЛОМ
§ 8.1. УРАВНЕНИЯ ДВИЖЕНИЯ АВТОМАТИКИ
Для исследования работы механизмов автоматики рассчитывают
параметры их движения и определяют динамические характеристики
всех звеньев механизма и темп стрельбы. Данному вопросу посвящен
ряд работ, в частности А. А. Благонравова [1], Е. Л. Бравина [2]г
Э. А. Горова [3] и др.
Ниже рассматриваются общие методы расчета и исследования дви-
жения механизмов автоматики применительно к системам газоотводного
типа с неподвижным столом.
Уравнения движения звеньев автоматики можно получить методами
аналитической механики [4].
Рассмотрим математическое описание работы механизма автомати-
ки газоотводного типа (рис. 8.1), например, с помощью уравнения Ла-
гранжа второго рода:
-^-(-44-^+^=$ (7=1,2, 3), (8.1)
<И dq I dc/j dq.
где Т и II — соответственно кинетическая и потенциальная энергии си-
стемы;
С; —соответственно обобщенная координата и скорость;
qJ — обобщенная сила;
/— время;
J — индекс, соответствующий степени свободы системы.
f*c
/
Рис. 8.1. Взаимодействие звеньев при амортизации механизма
В качестве обобщенных координат примем кобрдинаты: qi=X—
положения основного звена относительно короба; qz — XK— положения
короба; <7з = Уу — узла крепления оружия на установке относительно
инерциальной системы отсчета.
Механизм автоматики рассматривается как жесткая система, имею-
щая одно основное и п рабочих звеньев, связь между которыми является
геометрической и зависящей от времени. В этом случае можно восполь-
зоваться понятием передаточного числа от основного звена к i-му ра-
бочему:
7,.= -^^ = ^-, (8.2)
‘ дХ х
/
где Xi — координата i-ro рабочего звена относительно короба.
На рис. 8.1 для простоты показано только одно из рабочих звеньев.
Обозначив через т -и V соответственно массы и абсолютные скорости
элементов системы с соответствующими индексами, для кинетической
энергии системы можно записать зависимость
hiqV“ m-Xl* XI
7 = 1
Выражая абсолютные скорости через обобщенные скорости:
1/2 = (% + ХТ: VK = XK\ Пу = %у;
V]=^]X~ + xl + 2v;XA’,( cos a;,
где ai — угол между направлением координаты Xi и направлением коор-
динаты X, совпадающим с направлениями координат Хк и Ху, получим
Принимая во внимание, что передаточные числа Vf являются функ-
-иями координаты основного звена X, определим производные, входя-
щие в уравнения (8.1):
n=-J- [й0х2+^а(Хк-ху)2-^Х],
-щ -г; — жесткость возвратной пружины механизма автоматики;
-щ — жесткость пружины амортизатора;
-Гт — жесткость установки.
Производные соответственно будут равны:
—=kQX\ -^-=kaXK~k,Xv; -^=(Aa + y^rv->feaArK.
дХ и дХк а к а у дХу k а 1 у а к
Уравнения (8.1) справедливы для системы с идеальными связями.
Для обобщенных непотенциальных сил, учитывающих силы трения,
справедливы выражения:
^=^-^+2^-2 2
* '=1 i=1 <=1 (8.3)
Q2 = Рк — Па sign Xv — F sign XK;
Qa=Па sign XK 4- F sign XK;
где Pq — активная сила, приложенная к основному звену;
По — усилие предварительного поджатия возвратной пружины;
Pi — активная сила, приложенная к z-му звену;
Foi — сила трения, действующая на основное звено при его взаи-
модействии с z-м рабочим;
Fi — сила трения, действующая на z-e звено;
Рк — активная сила, приложенная к коробу;
Па — усилие предварительного поджатия пружины амортизатора;
sign — символ Кронекера:
( 1, если Хк )>0;
sign JfK=
(— 1, если Хк <( 0.
Силы трения учтем посредством коэффициента полезного действия
передачи
(8.4)
d0i
где Sot=S'oi-]-F0[ (i= 1,.. ., п); (8.5)
S—S'i-Fi (z= 1,..., ft); (8.6)
S'ot и S'i — проекции нормальных идеальных реакций.
Уравнение движения любого рабочего звена имеет вид
т(-^-Л = 5г, (/=!,..., ft), (8.7)
dt
где Ui — проекция абсолютной скорости г-го звена на направление его
движения относительно короба.
Из рис. 8.1 следует, что
Ut=vlX -j- Хк cos az.
После дифференцирования имеем
= X + ^Х + XK’cos a.t. (8.8)
di dt
Для системы, имеющей п звеньев, можно записать
2^=2 ^+2F°‘- (8-9)
z = l / = 1
С учетом соотношений (8.4), (8.5) и (8.6) уравнение (8.9) приво-
дится к виду
(8-1о>
1=1 1=1 1=1
Используя выражения,
Soi==mi^L-pt 4 л,
at
уравнение (8.10) можно записать так:
Исключая ^4-с помощью зависимости (8.8), для обобщенной силы
dt
Q* .получим выражение
п п
х(х ^4V;% + XKco.saz
\ at
Учитывая, что
X d ( । \1 2 I XI d^t ,
-----т0 4 \ vzmz = X , ч1т1—-
2 dX I 0 1 dt
\ i=i / i=i
d d , j, &
dt dt "T” dX
получим уравнения движения системы в следующем виде:
п 'i
У^-^+мХ+АЛ==^в;
ZbA -'ll дХ
/=1
= Рор;
туХу 4 (ka 4 4.) Ху - йахк=па sign хк 4 F sign Хк, ,
где
( п 2 \ / _ \
т°+2ч£т,/; м°р= mo + m“+ md ;
/=1 / X г=1 !
( п v / л \
тй 4 — Щ/ cos ai j; 7И,= 1 т0 4 cos a; j:
;Т1 1 / V 1=1 /
п
Р.в= Ра-По 4 V Рг; Рор-Р,-паsign XK-Fsign Xк
(8.11)
(8.12)
Если в механизме, кроме рассмотренных п. звеньев имеется еще q
вращающихся звеньев, центры тяжести которых совпадают с осями вра-
щения либо оси вращения параллельны направлению движения короба,
то в уравнениях (8.11) следует принять:
(8.13)
где Is — момент инерции вращающегося звена;
rs— радиус инерции;
zs = — и — соответственно передаточное число и коэффициент
rs
полезного действия от основного звена к вращающе-
муся;
Ls — момент силы полезного сопротивления, приложенный
к звену s.
Передаточное число
„ _ _ 2.5
Л г. — 1 .
дХ х
где <ps и Q.s— соответственно угловые перемещение и скорость звена $.
Запишем систему уравнений (8.11) в виде, удобном для численного
решения:
По= — Рав---------—-MTyK~k0X] ; Х = 1/о;
0 Мпр \ п 2 dX ' ° / °
; *К=ИК;
л^ор L J
14=-l^sign^K + ^sign^K-(*a+*УИу+*лк]; Ау = Пу.
J ту j у j j
Отсюда следует, что
И0 = Л(/, X, Ио, Ик); X = F2(V0y,
vo, X, Хк, Хуу, XK=FdVK)-,
Vy==F5(XK, IZk, xy, Xy.=F6(Vy).
(8-14)
(8.15)
При закреплении оружия с амортизатором на абсолютно жесткой
установке (ХУ=>ХУ = ХУ=О) имеем:
У2 dM,.j)
<рХ+4- _^+Л17)Хк + ^=Рав;
Z аЛ
dt
(8.16)
В большинстве случаев для практических расчетов можно принять
= const и представить уравнение (8.16) в виде
Л1Х + —-^-=p;s, (8.17)
1 2 дХ k 7
Лк Лк
Рая=РаЛ~- kaxK - kox - —M>0₽-
Л1ор Afop
В тех случаях, когда нельзя принять это допущение, первое уравне-
ние системы (8.16) записывается как
мх+V{Х)=^В1
где
) 2Л1ор dX ( М, j
Определяя из уравнения (8.17) X и подставляя его во второе урав-
нение системы (8.16), получим
х^[р'—
Хк=-----— Г/^ав - ——-Х2[х(Х)1-—— .
k ЛЦ, Жр L 2 дх п J Л1ор dX
Поступая так же, как при выводе уравнений (8.15), получим исход-
ную систему для численного решения:
1/0=Л(^> X, Vo, Хку, A'0 = F2(V0); (8 18]
1/K = F3(/, X, VQ, Хк); XK = F,{VK\
При коробе, закрепленном на жесткой установке (Хк=Хк=Хк = 0)
согласно уравнений (8.16) имеем
М ^v0 I rf^np р/
"р dt ' 2 dX
или
;>..Л)=Р'+ТС^. (8.|9)
-т- ttAd у . dA^ /а ,0.,
Так как = ~^х ' то УРавнение Движения (8.19) для ведущего
звена автоматики, например, ствола пушки (см. гл. IX) приводится к
виду
d рпР^П „
dX \ 2 / 15
где Р1 = Рав — К0Х;
X — путь отката ствола.
Рассмотрим некоторые частные случаи уравнения (8.19).
При постоянной массе звеньев (mj=const) имеем
У — т‘ ^Г=Р'-
dt т]х- dt
Z=1
При постоянных передаточных числах (v,=const) и переменной
массе звеньев (m,=var) имеем уравнение
(Л4прУ0)
dt
dm-.
—--------- ui
Vi dt
которое при постоянной массе звеньев mi сводится к зависимости
М
пр
di
§ 8.2. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МАСС И СИЛ
Для определения приведенных масс и сил нужно знать передаточ-
ные числа и к. п. д. связей на всех участках движения механизма. Пере-
даточные числа, если нельзя их вычислить аналитически, можно опреде-
лить с помощью построения планов механизма или полюсных планов
скоростей для ряда положений механизма. Планом механизма называ-
R
Rslna+fRcosa I
| Rslna
f(Rsina+fRcosa)
7
У////////////Л.
fR
Рис. 8.2. Реакции связи в кулач-
ковом механизме
/ I
IЕ?R sina Rsina+fRcosa
if » | ----------
(7
VXW/M7/77A
R
Rccsa-fRsina
'(Rcosa-fRsina)
ют графическое изображение для данного момента взаимного располо-
жения звеньев.
После построения планов можно определить ДАС и Аду, соответст-
вующие выбранному АХ. Это дает возможность определить Vi и xs. Для
более точного определения vt и xs пользуются полюсными планами ско-
ростей. Полюсным планом скоростей именуют векторное изображение
скоростей его звеньев, построенное для данного положения механизма.
Передаточные числа связей определяются отношениями скоростей, сни-
маемых с планов.
Рассмотрим аналитическое определение к. п. д. связи на примере ку-
лачкового механизма (рис. 8.2). На рисунке показаны все реакции свя-
зей, действующих на звенья, перемещающиеся по направлению X и У,
включая реакции от сил трения на кулачковой связи fR и на направ-
ляющих: fP(sin a+f cos а) и fR(cos а—f sin а).
Напишем сумму проекций реакций, действующих на основное зве-
но, на направление движения этого звена — ось X:
SX = R [sin а (1 — /2)-|-2/ cos а].
Сумма проекций реакций связи, действующих на второе звено, на
направление движения этого звена — ось У:
Sy=R [cos а (1 — /2) — 2/ sin а].
Так как ц =.vSy/Sx, то для случая /2-С 1 получим
„ cos а — 2/ sin « ,
П =--------------------------------—— tg а,
sin а + 2/ cos а
или
(8.20)
П = _1-2Л
> +2/
где v=tg а.
Полагая угол трения р=0,5 arctg 2Д приведем формулу (8.20) к
виду
____115____
tg (а + 2р)
Формулы для к. п. д. связи рычажных механизмов выводятся ана-
логичным образом.
В тех случаях, когда при аналитическом определении к. и. д. связи
возникают трудности, можно воспользоваться графическим методом
определения усилий на связях (см. § 9.1).
После нахождения передаточных чисел и к. п. д. связи можно опре-
делить приведенную массу основного звена механизма по формуле
1,2 Я 2
1-1
Многие системы автоматического оружия с неподвижным стволом
работают на принципе отвода пороховых газов. В таких системах на
подвижные части действует сила давления пороховых газов, отведенных
из канала ствола в специальную камеру газового двигателя Рг=’Рг(г)
(см. § 5.7).
В уравнении движения пружину можно принимать невесомой, а мас-
су подвижных частей увеличивать на одну треть массы пружины и счи-
тать М' = М + (m/З).
Если усилие предварительного поджатия пружины По, то ее упру-
гая сила
Пп = По kX,
где X — величина деформации при растяжении или сжатии;
k — коэффициент жесткости пружины.
Многие образцы автоматического оружия имеют ленточную подачу
и при расчете автоматики у них в уравнение движения входит усилие
сопротивления патронной ленты
где Ел — скорость подтяга ленты;
та — масса патрона и звена;
ka — жесткость звена;
()л — вес свешивающейся части ленты и сила трения в рукаве;
fj< 1 — опытный коэффициент.
При наличии гидравлического тормоза в уравнении движения по-
явится сила сопротивления гидротормоза Ф=Д(Х)Ео2 (см. гл. X). При
наличии надульных и подствольных газоотводных устройств в уравне-
ние движения войдет сила Рн.у(0 (см. гл. V). Если эта сила действует
не на основное звено, то после приведения ее она будет иметь вид Рн~
= Рн(Х, t).
Таким образом, приведенная активная сила, действующая на основ-
ное звено и входящая в уравнение движения, будет иметь вид
+ Д(Х)Х+Х(^)+ХХ, t)=P'(X, t, v0).
В уравнении (8.19) Л4пр
</Afno
и ее производная----1 определяются исхо-
dX
дя из формулы (8.12). Величину
d-Mnp
---- можно также определить числен-
dX
ним или графическим дифференцированием кривой
п
-Ч,р.ср=^о+ У]
/=1
\2
Лер./
mt.
Значение Лср. находится из уравнения
‘ х
о
Полагая Ха=пДХ и используя формулу
площади трапеции, по-
лучим
Лер.
X'
= —— f r^dX
пДХ J
о
1 / •Чо + Ля
п I 2
Используя в расчетах приведенную массу А1пр, следует помнить,
что это понятие условное, введенное при выводе уравнений движения
тел, на которые наложены кинематические связи. Поэтому уравнения
механики свободной материальной точки с переменной массой не будут
справедливы для тела с переменной приведенной массой.
§ 8.3. ОСОБЕННОСТИ РАБОТЫ МЕХАНИЗМОВ
С УДЕРЖИВАЮЩИМИ [ДВУСТОРОННИМИ) СВЯЗЯМИ
В механизмах автоматики встречаются
силовым замыканием звеньев (рис. 8.3, а),
У
Л
Рис. 8.3. Схема реакций связи кулачкового меха-
низма при перемене роли звеньев
как односторонние связи с
так и двусторонние связи,
исключающие отрыв
звеньев друг от друга при
работе автоматики (рис.
8.3, б).
Рассмотрим меха-
низм автоматики, состоя-
щий из двух звеньев с од-
носторонней связью и дву-
сторонней связью между
звеньями. За основное
звено примем звено, име-
ющее массу тх и переме-
щающееся вдоль оси X:
Скорость основного звена
обозначим Vx- Второе
звено, имеющее массу mY,
перемещается вдоль оси Y
со скоростью VY-
Если основное звено
является ведущим, то сум-
марная реакция, действу-
ющая на второе звено со
стороны первого (непо-
средственно или через
другие звенья) будет SY.
По какой-либо причине
первое звено может замедлить свое движение или второе ускорить. При
этом Sy<0, и звенья поменяются ролями. Второе звено в момент Sy = 0
станет ведущим, а первое ведомым. При односторонней связи второе зве-
но оторвется от первого, и они будут двигаться независимо.
На рис. 8.3, б показаны суммы проекций реакций связи в том слу-
чае, когда ведущим звеном является первое звено, имеющее массу
(левый рисунок), и в том случае, когда ведущим звеном является вто-
рое звено, имеющее массу mY (правый рисунок). В первом случае
Sy>0 и баланс работ реакций связи определяется уравнением
Откуда к. п. д. связи для случая, когда ведущее звено движется вдоль
оси X
Sx
где vx=c?K/cfX=ilzy/V’x — передаточное число связи для приведения
второго звена к первому.
Таким образом, для случая ведения первым звеном второго коэф-
фициенты приведения сил и масс в уравнениях движения соответствен-
но будут:
$Х ''А' $Х
Такое действие связи назовем
Для кулачкового механизма
вии с формулой (8.20)
лобовым.
(см. рис. 8.3) при 7?у>0 в соответсг-
где
I - 2/vx
+ 2/
vx = -—=fga.
(8.21)
Для рассматриваемого случая коэффициент приведения масс в
уравнениях движения
? X--V у
Х *1-2/.
а коэффициент приведения сил
2y + V
"'еХ
i-2/v
Л
При перемене знака (Sy<0) уравнение для работ реакции связи
имеет вид
r\YSYdY=SxdX.
n sx
Поэтому т)г=——
Sy
__ SY _ 1 .
V Sx ’
(8.22)
(8.23)
dX Vv 1
где vy=------= ——=--------передаточное число связи от первого звена
17 г "'х
ко второму.
Уравнения движения основного звена
mxJх = Рх $х-
При освобождении от связи
mxJx = Px‘-> Jх= ~ (8.24)
тх
Уравнение движения побочного звена
-J-Sy. (8.25)
Подставляя значение ускорения
2 V
j* = J Х*Х + X —-----
в уравнение (8.25), получим
n ,г
т xix У X ~F X - = Р ¥+*5” к,
откуда ускорение побочного звена
1 (Ру о d> v X 1 Sy
; I ' if2 X 1 t 1
Jx — ’
м \ mY dX ) ч mY
При Sy = 0 это будет ускорение «свободного» движения побочного
звена, отображенное на направление X, т. е.
(№=— ( — (8-26)
'/ \ ту dX
А X 1 /
Формулами (8.24) и (8.26) можно пользоваться, если в движении
участвуют несколько звеньев. Формула (8.26) для z-го звена будет
иметь вид
Применяемые в автоматическом оружии связи в большинстве слу-
чаев бывают обратимыми несамотормозящимися (tg2a>2/). В этом
случае
‘ga-2/ ^tga-2/>0.
1-2/tga &
Если tg а<2/, то связь будет необра’тимой и
\=-
’l
Для механизма, изображенного на рис. 8.3, при двусторонней связи
между звеньями рассчитывать его движение следует, пользуясь урав-
нением
dV „ d^
(тх + <?хту) -_^=Px-^cPY-Vx\mY ,
dt dX
в котором выражения для параметров vx и <рх меняются в зависимости
от характера неравенства (/Д) (/т)х-
Уравнения движения сложного звена автоматики с учетом инерци-
онного перекоса его деталей рассматриваются в гл. IX.
§ 8.4. МЕТОДЫ РЕШЕНИЯ УРАВНЕНИЙ ДВИЖЕНИЯ
МЕХАНИЗМОВ АВТОМАТИКИ
Параметры движения механизмов автоматики рассчитываются при
решении системы дифференциальных уравнений (8.18), записанных при
аргументе t или системы уравнений (8.17) при аргументе X. В ряде слу-
чаев систему уравнений при аргументе X удобнее привести к виду:
(^)'-91(АГД, Vo); #=?2(|/0), (8.27)
где
?1(Х, t, 1Д) =------------ ал ; 72(1/0)
Л!„р
В уравнениях движения точка соответствует производной по време-
ни, штрих соответствует производной по пути.
Для удобства записи в указанных уравнениях произведена замена
I т/2
— V о -----
2 ах
(8.28)
Для различных участков отката или наката деталей автоматики
уравнения движения могут меняться вследствие включения в работу
различных механизмов. Поэтому при анализе циклограммы механизмов
автоматики необходимо выбрать участки, которые описываются урав-
нением без разрывов, и в соответствии с характером уравнения выбрать
метод его решения.
Расчет механизмов автоматики сводится к определению законов
Vo= V\(X), У0=|У2(/) или Х = Х(1) для основного звена или некоторых
других звеньев механизма, а также в определении времени цикла меха-
низмов автоматики.
Рассмотрим параметры движения основного звена под действием
активной силы Р=Р(Х).
В систему уравнений (8.27) введем новую переменную Vp = z и с
учетом выражения (8.28) обозначим:
М(Х)
^пр
Р[Х)=2Р'(Х)
^ПР
Тогда исходная система приводится к линейному уравнению z'+
-M(X)z=P(X).
Решение этого уравнения при принятии пределов интегрирования
от Хо до X имеет вид
' х х
X J M(X)dX
z = Vl= —~--------*-----------------. (8.29)
! M(X}dx
eA'»
При учете выражения (8.28)
x
S M(X)dX
e x° =<P;
X I M(X)dX X
jP(X)ex° = 2\‘ P'(X)dX
и решение уравнения имеет вид
'X
2 f P’(X)<iX+M'0V2m
Исследование этого уравнения применительно к системам с корот-
х
ким ходом ствола дано в § 9.1. Интеграл f Р' (X)dX в общем слу-
ха
чае представляет собой работу сил пружин, трения, подтяга ленты и
воздействия пороховых газов на ствол на пути ведущего звена.
В случае, если Л1лр=const и приведенная активная сила является
функцией перемещения и скорости основного звена, исходное уравнение
имеет вид
M^V = P'{X,V)
и характеризует движение подвижных частей механизмов автоматики
под действием пружины при одновременной подаче патронов лентой.
При этом приведенную активную силу можно представить следующим
образом:
Р'{Х, Ю = + +
где <71, </2 и <7з — постоянные коэффициенты.
При введении обозначений:
2(Х=Л1_; Z=XX
<Ипр Л4пр Q%
уравнение принимает вид
X-!-2p^ + a2(^ + Z) = 0.
Решение его зависит от соотношения величин ц и Q:
при (ц/Й) < 1
X = f ^z-— sin ]/"22 — р.2/ -j- z cos ]/22 — р7 — z\
1/Щ2 — U.2 )
у { V cos |/й2 — р7--------Ke11 + sjn уй<2— р.7 j ;
\ 1А’2 — р2 /
при (р/2) > 1
X=e~'Ji' / —_ sh у р,2— <27 _|_г ch)/ р2— 27 — г;
Ур2 — О2 J
V = е~^ f Vo ch ]/р2 —27 —K)i± + Q2z sh /р2-27 \ .
\ Vp2 —22 /
При. расчетах масса звеньев может меняться внезапно, т. е. скач-
ком. Расчет для этого случая надо вести отдельно для участка до отде-
ления массы (или присоединения) и после отделения (или присоеди-
нения) .
Решения уравнений движения механизмов автоматики численными
методами позволяют использовать различного рода вычислительные
машины, применение которых делает возможным проведение большого
числа вычислительных операций за короткое время [8].
Прежде чем перейти к выбору наиболее приемлемых методов для
расчета движения механизмов автоматики, остановимся на выборе ар-
гумента для интегрирования. Аргумент X очень удобен в том случае,
когда коэффициенты уравнения имеют разрывы. При этом в ряде слу-
чаев вести расчет без интерполяции в точках разрыва можно только по
X. Однако в некоторых случаях необходимо интегрирование при аргу-
менте t. Так, например, систему уравнений (8.14) удобнее решать при
аргументе t, так как при интегрировании по пути очень затруднительно
согласование функции X с аргументом Ак, и наоборот. При расчетах
механизмов автоматики довольно часто встречается случай «нулевых
начальных условий», т. е. Хо=О, Vo = O и £о = 0. При Ко=0 величина про-
изводной /0' равна бесконечности и начать интегрирование при аргумен-
те X невозможно. Производная Vo' в этом случае также равна бесконеч-
ности. При Ко = О можно начать интегрирование при аргументе t и, по-
лучив начальные значения t\ и продолжать его при аргументе X.
Когда нет разрывов коэффициентов уравнений, одним из наиболее рас-
пространенных разностных методов численного интегрирования являет-
ся метод Адамса, усовершенствованный Крыловым. При наличии раз-
рывов коэффициентов уравнений и при резком изменении их значений
более удобны для расчета движения механизмов автоматики одноша-
говые методы, например, методы Рунге-Кутта. Эти методы обладают
рядом очень важных преимуществ:
— при интегрировании нужна информация только о предыдущей
точке;
— произвольным образом можно менять шаг;
— не требуется вычисления производных;
— ошибка метода пропорциональна величине khP+\ где h — шаг
интегрирования, k — коэффициент, р — порядок метода.
Методы Рунге — Кутта согласуются с разложением в ряд Тейлора
до (р+ 1)-го члена.
Если в качестве исходной системы уравнений движения механизмов
автоматики принята система (8.18), то значения функций при шаге ин-
тегрирования 1г = &Х последовательно вычисляются по формулам:
^0i+1=Koi + AV0£ = ^0i + ®vAJT; /;+1=/(.4-^=/; + Ф£ААГ. (8.30)
Функции
ФИ = ФИ(Х,., VOi, LX) и Ф£=Ф£(Уй1, ДХ)
зависят от порядка метода, т. е. от принятого числа членов разложения
функций в ряд Тейлора и выбранной схемы интегрирования.
Форма основного бланка для расчета по методам Рунге — Кутта по-
казана в табл. 8.1.
Таблица 8.1
1 ьх Xi AV i = ЬХФуг = = ДТ(’Ф + &2: + 4’>з;) 6 Д^=ДХФП = = “Г" (т1г + т2г + 4Тз/) 6 К+1 = = V/+AW
Одним из методов Рунге — Кутта первого порядка является метод
Эйлера — наиболее простой одношаговый способ решения дифференци-
альных уравнений. Этот метод заключается в переходе от точки Ко; к
точке V(H+i по прямой линии.
Значения коэффициентов для этого метода при Хк = 0 {см. систему
уравнений (8.18)]:
Ф1/ = Ф1(Х/,/£, V0(); Ф£=Ф2(1/0/).
При шаге интегрирования h=XX, учитывая, что ЛЛ1|1Г,; = Л1пРг+1—
— .Wnpi, и принимая скорость в функции Ф2(У(и).для уточнения средним
значением, получим:
Фк(АгЛД*)
Р- {Xi, ti, Voi)
(М,р/ ^nPi+l^Ol
AfIiP1VOl-
2Л4пр/АХ
ФДУ0/, Д*)
2АХ
V0i + ^Oi + l
(8.31)
По формулам (8.31) последовательно вычисляются значения функ-
ций Фу и Ot, а по формулам (8.30) —значения V и t.
Если в качестве начальных условий задано Хо = О, /0=О и Ко = О, то
начальный участок необходимо считать при аргументе t. При малом
шаге /г = А/, принимая все коэффициенты средним значением, получим:
Р'п(Х, t, Уо)
дуоэ= ° Л; д^; да0
л^про
(8.32)
2
Формулы (8.32) легко привести к виду:
2р;ах0
AluPo
Д^о
2АА0
ДЕ00
Увеличение точности расчета можно достигнуть, применяя методы
Рунге — Кутта второго порядка. Ошибка для них пропорциональна kh3.
При использовании методов Рунге — Кутта второго порядка для системы
уравнений (8.18) можно вычислять при помощи формул (8.32), приняв
Фр ДАТ — Ап&1г + А12&2Р ФдА" — А21тп + Л22т:2[,
где
&1. = дХФ^Хг.,ПОг.,а ^Д^РС + ацД^ ММь
^Н-¥11Т1г);
(8.33)
тн — ДА^Ф2 (У Oi); t2/ — ДАФ2 (IZo; -|-
В методах Рунге — Кутта второго порядка, как и в методах более
высоких порядков неизвестные коэффициенты связаны системой урав-
нений, получаемых из условия обеспечения необходимой точности.
Если принять
Ац = Л12= А21 = А22= — ; an=Pn + «2i=Yn = l,
то получим схему решения, известную как исправленный метод Эйлера
или метод Эйлера — Коши.
При принятых значениях коэффициентов:
’ фидл-=^-р1г+Ч-); ф;ДЛ'=^(т1г+т2г),
где
^дАГФ^, 1/ог,^); &21. = ДХФ1(АГ1. + ДХ, K0i- + 8io )
(8.34)
т =дХФ2(У0г.); т2/=дХФ2(Уог+И1г). )
Если принять
Ац=А21 = 0; А12=А22=1; a11 = pi1 = a21 = Уп ==~^_ ,
то получим метод добавочного полушага
Ф|/ДАГ = 8’2; Ф 2дА =-= t2j- ,
(8.35)
где
&2/=дагфх [МуА*, VOZ+-U1Z, ^yT14
ть- = дАФ2(1/о;); t2Z = a^2(i/0/+-1-&1z) .
Рассмотрим применение метода Рунге — Кутта первого и второго
порядков для расчета движения механизмов автоматики на условном
примере.
Рис. 8.4. Графики значений Мпр,=Л4пр'(Х), Л41Пр/=Л1ц1р/(А')
и dMnv'ldX=f(X)
Пример 8.1. Рассчитать параметры движения механизмов автоматики при откате
23-мм автоматической пушки с отводом пороховых газов, закрепленной на жестком
лафете. Закон изменения приведенной массы подвижных частей автоматики показан на
рис. 8.4. Кривая давления пороховых газов в канале ствола ркн и в камере газоотвод-
ного устройства рг дана на рис. 8.5.
Усилие возвратной пружины Пп(Х) =40 + 0,26Х, где X — перемещение основного
звена в миллиметрах; передаточное число привода подачи кулачкового типа Vi = 0,318;
Рис. 8.5. Графики значений рКн=Ркн(0 и pr=pr(t)
к. п. д. привода подачи r]i=0,65; масса патрона со звеном тл=0,0349 кгс-с2/м; жест-
кость звена k л — 35 000 кгс/м; вес свешивающейся части ленты примем Сл = 5?л,
где q.- -=m:ig. Тогда
£ (X, Vo) = — (б?л + •
"Пл
В нашем случае при ул= const
Е{Х) = 0,853 + 5,45У0.
Полное открывание затвора в системе происходит после прохождения подвижны-
ми частями автоматики пути Х = 20 мм.
В начале отката подвижных частей затвор закрыт, а после его открывания, как
показывает расчет, давление в канале ствола можно принять равным нулю, так как
при />25 10-4 с оно меньше давления, прижимающего гильзу к стенке патронника.
В начале расчета Хо = О, to=O и Ро = О. Поэтому для определения Д7о и ДХо поль-
зуемся формулами (8.32).
Зная, что
. Р'(Х, i, V)=prsn —П(Х)—Е(У0) при sn = 8,55 см2,
задаем шаг At = 6-10~4 с и получаем
Pq(X, t, Уо) = 1240 кгс.
Затем в первом приближении определяем:
ДУ0=1,5м/с; ДХ0 = 4,55-Ю-4 м
и, уточняя, находим для первого шага:
Д'о = 6,3-10~4с; ДУ0 = 1,59 м/с; ДХо = 5-1О~4м.
Откуда:
t1 = /0 + д/о = 6,3-ю~4 с;
V1 = + ДИц = 1,59 м/с;
Xi = Хо + ДХ0 = 5-10~4 м = 0,5 мм.
После определения начальных условий в точке Хь по формуле (8.30) последова-
тельно определяем значения Vo и t, задав шаг вычислений АХ=5-1О-4 м. После значе-
ния Х=4-10-3 м шаг увеличиваем.
Значения функций Фг и Фг определяем для метода Эйлера по формулам (8.31),
для метода Эйлера — Коши —по формулам (8.33) и для метода добавочного полуша-
га— по формулам (8.34). Результаты расчетов приведены на рис.*8.6. При сравнении
графиков отчетливо видно накопление ошибки при применении метода Рунге — Кутта
первого поряда — метода Эйлера (рис. 8.6).
Для более точных и ответственных расчетов при ручном счетё сле-
дует рекомендовать методы Рунге — Кутта третьего порядка. В этом
случае для системы уравнений (см. 8.18) вычисления следует произво-
дить по формулам (8.30), приняв:
ФкД^=А11&1г + Д1А1+Л13&3/;
фДХ = Д21Ти + ^22^2; ~Г Аз^з/,
где
&11.= ДА’Ф1(Х(., IZ0(,
&2(=ДА'Ф1(Хг + а11ДА', Vo/^+УцТк);
—дЛ'ФД^Д-а^дЛ’, + +Т12т2г+Т1згз<); . (8.36ч
tn = ДХФ2 (V ог);
т2г = дА,Ф2(1/0(. + а21&1,-);
Тзг= ДХ®2 (V о/ а22®21 Д’ а23^1()-
Классической схеме метода Рунге — Кутта соответствуют коэффи-
циенты:
= А21 = А13= —;
2
^12 = А22 =— ; у12= 2; Yi3 = 1;
°11-P1I — И21-а12------И22--Il ?12--2; 813— 1.
Рис. 8.6. Результаты расчетов по методам Рунге — Кутта первого
и второго порядка:
______метод Рунге — Кутта первого порядка;-------метод Рунге — Кутта
второго порядка; — • — — • — метод Рунге — Кутта второго порядка (доба-
вочного полушага)
При приведенных значениях коэффициентов:
О
Ф/ДАЛ — — (т1; 4-4т2г--|-т31-).
Можно выбрать схему, несколько сокращающую промежуточные
вычисления при подсчете коэффициентов. Для этого принимаем значе-
ния коэффициентов:
1 1 2
Ац=-А21 = Л12 = А22= — ; а22=а12 = — ; А13 = А23 = — ;
а11~а21==?11= I! Р12= ₽13 = i Y12 = Y13 = ~r •
Тогда:
ФкдА—!-(&„+&2;+4»3/);
О
ФдХ=^-(т11. + т21.+4т3/).
(8.37)
(8.38)
Коэффициенты в формулах (8.38) определяются зависимостями:
^Д^ФЦХ,, th l/o;); 1
Ч = Д^ф1(^ + Д^> ^4А/.
~ 4 4 ' (8.39)
t1z = aX®2(Koz);
т2(- = дХФ2(У0/ + &п);
*з/ = Д*Ф2|Ч+ ^t8n )•
\ 4 / >
Вычисления по рекомендуемому методу Рунге — Кутта третьего
порядка следует проводить по формулам (8.30) с использованием блан-
ка (см. табл. 8.1).
Значения функций подсчитываются по формулам (8.38) и (8.39) с
использованием вспомогательного бланка, форма которого показана в
табл. 8.2.
Методы Рунге — Кутта четвертого порядка служат основой стан-
дартных программ для решения систем дифференциальных уравнений
на ЦВМ.
Таблица 8.2
i kXi tr, Voz) &и = дхфР> t]Z = Ф<2)(Х, + ДХ; Voz + »JZ; t-t + T1Z) 92l- = дхф^2) 0(2)(yoz + 4z) T2Z = AX'lf) ф(х3)(^+ 2 ; voz+ 2(: ti+ 114 j »3Z = дхф(3) Ф(3)^О(.+1К±^ t3Z = ДХФ<3>
Примечание. Верхние индексы при функциях Ф соответствуют индексам при вели-
чинах & и t
Для классического варианта метода Рунге — Кутта четвертого по-
рядка:
ФИДМ = -1- р1г + 2»2; + 2D3Z + М;
ф ~ [t1z 4- 2t2Z + 2r3Z 4- r4i ],
где
«„-ДЛГФЛЛ,, 8!,=4хф1^, + ^. i, + 4);
a„=ЛЛГФ, (л,+42 vw + 4.; t, +44
= д%ф1(Мг-|-дх, V4Z&3Z, 44'T3i-);
г1г=дХФ2(Ио;); ти=дХФ2(ц0/ + -^ ;
t3Z= дЛЛФ2^1/0г-| ; T4Z — Д2СФ2(У0/4-
Пример 8.2. -Рассчитать параметры движения механизмов автоматики при откате
для автоматической пушки с отводом пороховых газов по данным примера 8.1.
Пушка установлена на амортизаторе, имеющем усилие предварительного поджа-
тия Па=240 кгс и коэффициент жесткости йа = 180 кгс/мм.
Дополнительно задано: масса пушки Л4ор=4 кгс-с2/м; масса штока тш =
—0,5 кгс-с2/м.
После прохождения штоком пушки пути 20 мм включается механизм подачи и мас-
са штока становится равной
-,2
MipW = тш + -----~тц-
5п
Масса подвижных частей автоматики с учетом извлекателя (рис. 8.7)
Л1п!1 = тш -4- —— тп + —— т.
"г-
График изменения силы давления пороховых газов на дно канала 7’кн = /’кн«д
дан на рис. 8.8.
Рис. 8.8. Результаты расчета
Для решения системы уравнений значения коэффициентов определяются приведен-
ной массой подвижных частей автоматики Л1пр=Л1пр(Х) (см. рис. 8.4) и массой:
Л4пР(Х)-^(Х)
Л1Т| == тш н---------------,
''л
где
та = — т3.
Значения коэффициентов тд и т]д для рассматриваемой пушки даны на рис. 8.7..
График Л17 =Л4р (Z) дан на рис. 8.8. Масса Л4, определяется зависимостью
Мпр(Х)-Х(Х)
м, = тш + ----------------- 1]
Графики Л!.; = Mv (X) и dM.JdX — = M.t (X) даны на рис. 8.8. Значения
Л,(Х)Л1 (X)
М (X) = М' (X) ------—--------
Мор
и
[М(Х)]^=Л4^(Х)
в виде графиков показаны на рис. 8.7.
Приведенная активная сила, действующая па подвижные части автоматики,
Р' =P(t)— П(Х) — £(Х, V).
Значения Р'(Х, t, V) соответствуют значениям Р' (X, t, V) примера 8.2. Сила, дей-
ствующая на систему при закрытом затворе
Дор — Дкн Щ йаХк.
Отношение
\
— да 1 = const,
м, /
Поэтому в дальнейшем при расчете можно принять
Параметры движения механизмов автоматики и короба рассчитаны методом
Рунге — Кутта третьего порядка в указанной последовательности по приведенным выше
формулам. Основной бланк интегрирования дан в табл. 8.3. Бланк для определения
вспомогательных функций дан в табл. 8.4.
По результатам расчета строятся графики:
v0 = v0(O; х = х(О; vK = v,t(O; и ха = хк(О+х(О;
8.8).
XK = XK(t) (см. рис.
Максимальное усилие, передаваемое на установку при закреплении ее на жестком
основании (без амортизатора) Ятах = 13 500 кгс. При безударном откате подвижных
частей автоматики максимальное перемещение короба Хтах=9,28 мм и поэтому усилие,
передаваемое на установку
Дтах = Щ + йаАЛк = 240 + 180-9,28 да 2000 кгс.
Таблица 8.3
i м ti XVi = = = ~ (91/ + вщ + 4&зг) О ДХ; = ДМ>_п = 1 = g (Zu + Х.21 + 4/3;) Д17кг = ДМ>К1- = 1 = g (?1/ + + 4<Рз1)
Продолжение табл. 8.3
V0;+i= xi+i = VK;+i= Xk Z + l —
1 = — (у-и + х2/ + 4х3/) б = V0i + AVi = Xi + AXi = vKi + avkZ - XK(- 4- AXKi
Подвижные части автоматики приходят в заднее положение с абсолютной скоро-
стью V0=16 м/с, а короб в этот момент уже перемещается вперед навстречу подвиж-
ным частям автоматики со скоростью VK«1,4 м/с. Массы подвижных частей и короба
соответственно равны: Л4цР = 0,62 кгс-с2/м; /ИКПр=3,5 кгс-с2/м.
Таблица 8.4
i
F^Xf, te, Vo; XKi)
11!г = MF\1>
F(3r)(Xi; Л-; vOi- xKi)
F(4l) = (VKi)
v.u = AtF^
f^ (h + Mi"> X, + xu;
XKi + xi /)
»2i = Д^2)
^!2)(Yoi + *h)
Z2Z = дИ2)
F^tfi + Mi, Xi + w
V()i + Xki 4- x];)
?2i =
F<? = (VK! + ?1,-)
y.2i = AtF^
F^ — Xi + + te ;
1 V 2 4
ft] i + „ X1 i + X21 \
Vei + I ’ X«i + 4 J
&31- = W<3>
\ x /
X2< = Д^<3)
^>(o + ^;x, + b^-:
„ 1 + »2i . „ XU + y-2i \
V^l + 4 ’ Xk/ + 4 J
?3; = MF^
r(3) Ar . ! \
V K‘ ‘ 4 )
x3i = Д^3)
Примечание. Верхние индексы при функциях F соответствуют индексам при величинах
X, ЧР, У-
Если принять коэффициент восстановления
скорости после удара будут (см. § 8.5):
скорости V = 0,6, то соответствующие
Vo = Vo -
(1 +V)(VO-VK)
1/06,2 м/с;
VK = VK -
(1 + v)(Vq-Vk)
Ук^2,8 м/с.
При этом импульс удара
/ = Л!' (Vo —У0) = Л4к(^к —Ик)яа_14 кгс-с.
Дополнительную величину прогиба амортизатора AXa = 10 мм, поглощающего ки-
нетическую энергию короба автомата, найдем из уравнения
ТТ
--------= ПахДХк + йа —— ,
где
ПаХ = па + k^K, •Х’к = 7 ММ.
Поэтому максимальная деформация пружины амортизатора Х=17 мм и макси-
мальное усилие, воспринимаемое установкой
/?тах =-= 240 + 180 17 3500 кгс.
§ 8.5. СОУДАРЕНИЕ МЕХАНИЗМОВ И ДЕТАЛЕЙ
ПРИ РАБОТЕ АВТОМАТИКИ
Работа механизмов автоматического оружия, как правило, сопро-
вождается ударами взаимодействующих деталей [2, 3]. Ниже ударное
взаимодействие деталей автоматики рассмотрено, в основном, примени-
тельно к автоматам с непод-
вижным столом. Для автома-
тов с коротким ходом ствола
эта задача рассматривается в
гл. IX.
Ударом обычно называют
взаимодействие двух или не-
скольких материальных тел,
при котором большая сила
действует в течение короткого
промежутка времени. При вы-
сокой жесткости деталей авто-
матического оружия время их
ударного взаимодействия бу-
дет очень малым, а изменение
скорости соударяющихся дета-
Рис. 8.9. Схема свободного соударения двух лей происходит почти внезап-
тел но, скачкообразно. Если дета-
ли с основным звеном соударя-
ются без удерживающей связи, то происходит свободный удар с коэф-
фициентом восстановления скорости, зависящим от материала соуда-
ряемых тел. Если связь между соударяющимися звеньями является
удерживающей, то приведенная масса основного звена увеличивается
на величину массы второго звена.
Рассмотрим плоскую задачу свободного соударения двух произволь-
но движущихся тел при отсутствии трения (рис. 8.9). Обозначим: V —
точка соударения; Ci и С2— центры тяжести соударяющихся тел;
W'xi, Wxz,Wyi, V7y2 —проекции скоростей центров тяжести до удара;
V/ и V/— скорости точки V первого и второго тел до удара; Q/ и П/ —
угловые скорости тел до удара.
Вследствие удара двух тел, имеющих массы mt и т2 и соответствен-
но моменты инерции Л и 12, их скорости изменяются и после удара будут
для первого тела IFxi, IPyi, Pi и Qi и для второго тела 1Рж2, Wy2, V2 и Q2.
Напишем для соударяющихся тел уравнения изменения количества
движения и уравнения изменения момента количества движения:
— для первого тела
—т^'х1=—Jx', m^Yi — mW'yx==JY', —/1Й1 = 7Г1;
— для второго тела
m2W'x2=Jx', m2W у2—m2Wy2= — J /2S2 —/2S2= —Jr
Здесь J— полный импульс реакции удара;
/х и /у — проекции вектора полного импульса на соответствую-
щие оси координат.
Приведенная система уравнений содержит семь неизвестных. Для
получения седьмого уравнения воспользуемся зависимостью для коэффи-
циента восстановления скорости. Применительно к рассматриваемому
случаю коэффициент восстановления будет представлять собой отноше-
ние проекций относительных скоростей тел до удара и после удара на
общую нормаль:
V2cos Э2 —У] cos
V[ cos Q] — V2 cos a2
В этом выражении скорости Vf и V до и после удара должны быть
выражены через скорости W' и W поступательного движения центров
тяжести Ci и С2 и угловые скорости вращения й'и й вокруг Ci и С2 при
помощи формул:
Vx=Wx-qQ'-, V'y=W'Y-[-pQ'-
V x = Wx — qQ', Vy = VCy-f- p&-
В приведенных формулах, которые необходимо записать для обоих
тел, величины plt qi и р2, q% означают координаты точки удара V отно-
сительно обеих координатных систем с началами в точках Ci и С2.
Различные примеры плоского удара, в том числе и косого, будут
представлять собой частные случаи рассмотренной схемы.
Рассмотрим частный случай прямого центрального удара двух тел.
Обозначив V/ и Р2' как скорости тел до удара, a Vi и Р2 как скорости
тел после удара, описанную выше систему уравнений можно записать
как одно уравнение
ту^ -|-тЛС = тгV\ -ф-m2V'2.
При ai = a2=Pi = p2=0 коэффициент восстановления имеет вид
у= .
Для абсолютно неупругого удара V = 0; для абсолютно упругого
удара V = 1; для стальных деталей V = 0,35-4-0,5.
Совместное решение рассмотренных уравнений дает:
1Z V' (i + v)(^-PD .
v 1 = V 1--------------------,
1 + (ОТ1//И2)
„ . c + v)(p;- и;)
Vх 2 — 2 П-------------------•
1 + («г2/Ж1)
(8.40)
Рассмотрим удар подвижных частей о буфер, находящийся в жест-
ко закрепленном корпусе. Если VY— скорость до удара, то после удара
на основании формул (8.40)
r1=v;______
1 + (/И1/М2)
С учетом массы пружины ш2=тт-ф- —тпр для случая П2 — 0:
3
(1 + у)т2
mi + т2
(8.41)
Если после удара тарель буфера движется вместе с затвором при
высокой собственной частоте колебаний буфера, можно принять V = 0
и формула (8.41) принимает вид
У1 = 1/;/ 1-----------
\ Ш-, + «2
Иногда включение детали в работу сопровождается серией последо-
вательных ударов. При бесконечно большом числе соударений
mi +
так как диссипативные силы полностью погасят скорость отскока V<pV/.
Эту формулу можно получить непосредственно из формулы (8.4),
если положить в ней V = 0.
Рассмотрим воздействие внешнего ударного импульса по кулачково-
му механизму, изображенному на рис. 8.10. Уравнение для определения
скорости после удара получим из выражения (8.40):
ту +--------т<2
Ч
тх + tg a tg (а + р) т2
где V/ — скорость ползуна до удара;
v — передаточное число связи;
ц — к. п. д. связи кулачкового механизма;
а — угол наклона кулачкового паза;
р — угол трения.
На рисунке показаны значения v=fi(a) и 'q=fs(a) при коэффициен-
те трения f = 0,1.
Скорость звена, имеющего массу щ2, после удара V2=vVi.
Рис. 8.10. Схема соударения для кулачкового
механизма и графики v=/i(a) и т]=/2(а)
Приведенный метод не поз-
воляет непосредственно найти
время и силу удара. Для опре-
деления этих характеристик'
удара необходимо рассмотреть
процесс деформации соударяю-
щих звеньев и их связей. Такой
метод изложен в гл. IX. Там
же получены формулы для со-
ударения деталей, одновремен-
но находящихся во вращатель-
ном и поступательном движе-
ниях.
§ 8.6. РАСЧЕТ ПАРАМЕТРОВ
ДВИЖЕНИЯ МЕХАНИЗМОВ
АВТОМАТИКИ С ПРИМЕНЕНИЕМ ЦВМ
Во' время проектирования
новых систем автоматического
оружия обычно бывает необхо-
димо проводить многочислен-
ные расчеты с использованием одного и того же алгоритма при измене-
нии некоторых параметров системы (например, параметров газоотвод-
ного устройства, амортизаторов и т. п.).
Рассмотрим возможности использования для указанных расчетов
ЦВМ. Программирование проведем на алгоритмическом языке Алгол-60.
Программы для ЦВМ типа М-222 и БЭСМ-4 при решении задачи о
движении механизмов автоматики при откате готовятся следующим об-
разом (по данным примера 8.1): вводятся таблицы значений приведен-
ной массы Л1пр, определяемой по формуле
j.
м^ = тй+ 2j
4 = 1
и производных
9vi -ч- d'<t
dX 2j.mi ']/ dX ’
i-l
рассчитываемых с шагом по параметру X равным 4 мм, а также исполь-
зуется стандартная программа аппроксимации функций /Ипр и dM^dX
с помощью полинома n-й степени, наилучшего в смысле средней квадра-
тической погрешности
Р(Х) = а^ахХ-у...+апХ\
Таблица вводимых значений может быть разбита на следующие уча-
стки:
2) 12<Х<20;
ил ал
3) 20<Х<36; Л4пр3 = 0,6; -^^ = 0;
’ пр ’ах
4) 36 112; <P4==^np4(Jf); =
ал ал
5) 112<Х<120; Л4- = 0,6; —^ = 0.
7 \ \ "₽5 ’ dX
Необходимые значения производной dM^jdX могут быть получены
также численным дифференцированием аппроксимирующего полинома
для приведенной массы
« 2
на соответствующих участках с шагом Л/2 и формированием массивов
значений dM^ldX в памяти машины. Этот случай представлен на блок-
схеме решения пунктирной линией (рис. 8.11).
Уравнения движения механизмов автоматики решаются с помощью
стандартной программы интегрирования системы дифференциальных
уравнений методом Рунге — Кутта. Перед обращением к стандартной
программе вычисляются начальные условия и шаг интегрирования. Вы-
ход из программы осуществляется при достижении пути отката величины
120 мм. Через каждые 4 мм движения автоматики выводятся на печать
параметры Vo, t и X.
Условные операторы, используемые при вычислении правых частей
дифференциальных уравнений вводятся непосредственно в блок стан-
дартной программы. При значении А = 20 мм начальное условие по ско-
рости Ко= Кс получалось из расчета при внезапном возрастании приве-
денной массы.
Перед составлением программы на языке Алгол-60 удобно предста-
вить решение в виде блок-схемы (см. рис. 8.11). На этой схеме овалами
обозначаются операции ввода и вывода информации, прямоугольника-
ми — операции, производящие вычисления, а ромбами — операторы
сравнения.
НИЙ
В дальнейшем примем, что Л1пр2/ и
</Л1пр
----- на
dX
Af и
пр dX
втором участке, a ТИпр4у и
— массивы значений
— массивы значе-
на
четвертом участке. Через Л2(Х), В2(Х), А4(Х) и
и
ВВод исходных данных
MW4 ’мару;(^
^Программа дшрфёХ Стандартная програм-
\ренцирования поА ма аппроксимации поли-
лин ома п-й сте\ номом п-й степени по
тени с шагом Д/А методу наименьших
I----п-----------1 квадратов
j array
[aM/jp2\ сам^руХ
номом п-й степени по
Аппроксимирующие
полиномы
А2(Х);А11(Х);В2(Х))ВДХ)
начальные
условия
Хе;
а=х0
I
Стандартная программа интегрирования дифференциальных уравнений методом
Рунге-Кутта
Нет
Нет
Hem
Hem
Х=20
М
Да
Да
Да
Да
v = Vf
Мпрг=Аг(х)
аМпР2_я (Х\
~йг-Вгт
Xnpi —0,5
<1МпЫ
их и
Мпрч —Ач(Х)
Мррз — 0,6
ОМпрз
~йх=0
Да
Mnps~0,6
^прь _ „
ах
0<X^
Hem
V=V'\.X,t,V,M„p(X);
t’= t'OC.V)
X=7
X=J2
Стоп
Рис. 8.11. Блок-схема расчета механизма автоматики на ЦВМ
Вц(Х) обозначены аппроксимирующие полиномы приведенных масс и
производных на втором и четвертом участках, соответственно.
Введение вспомогательного параметра а и выражения а = а+4 по-
зволяет выводить на печать необходимые величины через 4 мм, а не на
каждом шаге интегрирования, величина которого составляет h = 0,1 мм.
Здесь следует отметить, что с математической точки зрения равенство
а = а + 4 не имеет смысла, однако при машинном счете такая операция
выполняется и расшифровывается следующим, образом: вычислить новое
значение а, равное сумме старого значения и величины 4 мм.
Для расчета правой части первого дифференциального уравнения
используется аналитическая зависимость, описывающая изменение дав-
ления в камере газоотводного устройства. Третье дифференциальное
уравнение Х'= 1 необходимо для работы стандартной программы.
Рис. 8.12. Результаты расчета автоматики на ЦВМ
Решение примера расчета движения автоматики проводилось на
ЦВМ М-222; результаты решения представлены в виде графиков на
рис. 8.12.
Параметры движения частей автоматики можно рассчитывать на
всех типах ЦВМ. Во многих случаях удобны для практических расчетов
малые ЦВМ типа «Наири».
§ 8.7. ВЫБОР ПАРАМЕТРОВ ПРУЖИННЫХ АМОРТИЗАТОРОВ
На корпус автоматического оружия при стрельбе действует сила
отдачи. Если корпус оружия жестко закрепить на установке, то при ра-
боте газоотводных систем с неподвижным стволом сила отдачи будет
приложена непосредственно к установке. Наиболее существенной состав-
ляющей силы отдачи в этом случае является сила давления пороховых
газов на дно канала ствола. Как показывают расчеты, у оружия калибра
20 мм и более максимальное значение этой силы превышает 10 тс. При
таких усилиях требуется установка значительной массы и обеспечение
большой прочности.
Для снижения величины силы отдачи используют амортизаторы, ко-
торые заметным образом растягивают во времени действие импульса вы-
, q + авыг»п
стрела Ц =-----------. В этом случае на установку действует уже не
сила отдачи, а значительно меньшая сила реакции амортизатора Па =
= П0 + /г;,К,,
Таким образом, снижение силы отдачи посредством амортизации
оружия происходит при сохранении импульса выстрела j Hat//==/B
о
за время полного цикла автоматики /ц. Так как время значительно
больше времени действия газов на ствол, то усилия отдачи снижаются в
несколько раз.
Ниже рассматривается вопрос выбора оптимальных характеристик
амортизатора для газоотводных систем автоматики с неподвижным ство-
лом, закрепленных на жесткой установке. Определение реакций упругих
установок и выбор параметров амортизаторов для систем с коротким
ходом ствола рассматриваются в гл. IX.
Рис. 8.13. Расчетная схема амортизации
Графическое представление силы отдачи оружия на абсолютно же-
стком лафете называют импульсно-силовой диаграммой, примерный вид
которой показан на рис. 8.13, где изображена расчетная схема для рас-
сматриваемого случая. Методы построения импульсно-силовых диаграмм
рассматриваются в гл. IX. .
При решении уравнения движения цапф подбуференного короба от-
носительно неподвижного лафета сделаем допущение, что сила отдачи,
действующая по месту крепления- короба (кожуха) к амортизатору, не
зависит от податливости последнего.
Считая, что параметры движения автоматики X и X выражаются
в функции от времени t, второе уравнение (8.16) можно записать так:
Мор + ^аХк ^Р(/)-Па sign sign Пк; ^-=ПК. (8.42)
Для упрощения исследования движения оружия на амортизато-
рах приведем уравнения (8.42) к безразмерному виду. В качестве харак-
. „60
терного времени выберем время цикла автоматики Т — --секунд,
п
где п — темп стрельбы, выстрелов/мин.
Характерные величины скорости и перемещения обозначим через
Vi и Xi. При этом
XK=Uri; 1/^МЛ, (8.43)
где 0, X и тЗ- — соответственно коэффициенты времени, перемещения и
скорости.
Используя выражения (8.43), уравнения движения (8.42) можно за-
писать так:
d& , к,ХуТ _ ТР(ТЯ)
М + Л10РУ! —
ГПа
М,₽С1
signXA'1
TF
MopV!
sign SIZp
Неизвестные величины Xi и Vi определим из условий:
1 г
= fp<T8)^8 = —— t P(t)dt=—— = 1,
MoVi J AfopVj i
о 0
где / — импульс силы отдачи за один выстрел.
В результате получим
V\=—;
Мор Л4оР
Так как величины J, Т и Мор всегда положительны, то:
ST S
sign----X=signX; sign------&=sign ft.
Л10р -Л^ор
Теперь уравнения движения примут вид:
-^_-фа2Х=ф(6)—30signX —rslgnft; = &
или
X -ф ц2Х = О (6) — з0 sign X — г signX,
где
о Аа Па? FT , 7Р(0Г)
а2=—— Т2; а0 = —2—; г =-----; Ф(9) =---—
Мор ° J J TV 7 J
(8.44)
(8.45)
(8.46)
Таким образом, движение оружия на амортизаторах характеризует-
ся безразмерными возмущающей функцией ф(0) и параметрами аморти-
зации а, а0 и г.
При изучении амортизации автоматического оружия с отводом по-
роховых газов часто оказывается возможным пренебречь динамически-
ми реакциями механизма автоматики и считать, что сила отдачи опре-
деляется в основном силой давления пороховых газов на дно канала
ствола.
Если воспользоваться методом вариации постоянных [9], решение
уравнения (8.45) запишется в виде
в
Х= A cos 0.8-ф В sin а О-)- -Н [Ф («) — а0 sign X — г sign X] sin а (8 — u'}du,
о
(8.47)
где и — переменная интегрирования;
А и В — произвольные постоянные, определяемые из начальных ус-
ловий и независящие от действующих сил.
В самом деле, при 0 = 0 интеграл в формуле (8.47) обращается в
нуль так же, как и его производная по 0.
Представим интеграл в выражении (8.47) в виде двух интегралов
и рассмотрим каждый из них. Будем считать, что сила ф(6) действует
в течение относительно небольшого промежутка времени (0; 0И), поэто-
му при 0>ОИ интеграл, в который входит только ф(0), сведется к ин-
тегралу по промежутку (0; 0И), так как при 0>0И ф(6) =0- Следователь-
но, при 0>0И
Ф(«)з}па(0— u)du = sva ad I <b(«)cos audit —
о 0
fl
— cosaS j <|>(и) sin audit.
о
(8.48)
Применяя к полученным в выражении (8.48) интегралам теорему
о среднем, имеем:
»И ?и
J (и) cosaud и = cos а j (0<Е1<1);
6 6
рИ рИ
I ф (и) sin audu = sin а£20и I ty(u)da- (0<q<l),
о о
где gi0H и ^20и — некоторые значения времени в промежутке (0; 0И).
При практически встречающихся значениях а произведения agi6u и
«Ь0и будут малы. Тогда, заменяя cosa£i0H=l, sinagz0H=O и учитывая,
что при приведении дифференциального уравнения движения к безраз-
“и
мерному виду ) '\(u)du = \, получим
о
е
— f ф(«) sin а (8 — u)du = — sin a9.
a J а
о
Второй интеграл выражения (8.47) приводится к виду
в
— (ст0 sign л-f- г sign х) С sin a (9 — u}du =
a J
о
= — (a0 sign X + r sign 1) (1 — cos aS).
a
С учетом полученных для интегралов выражений решение уравне-
ния (8.45) запишется в виде
Х = A cos a6-|- В sin aS J- — sin -----—(Зо sign X-]-г sign/) X
а я2
Х(Т — cosaS). (8.49)
Вид третьего члена в правой части выражения (8.49) указывает на
то, что импульс силы ф(0) заменен единичным мгновенным импульсом
и его действие выражается в скачке скорости.
Рассмотрим установившееся движение оружия на амортизаторах.
Задача будет заключаться в определении связи между параметрами
амортизации а, о0 и г, обеспечивающей требуемый характер установив-
шегося движения.
Точные периодические решения найдем методом «припасовывания»
[6] на основе выражения (8.49). Используя этот метод, необходимо за-
даться типом и периодом искомого решения. Так как конечной целью
исследования процесса отдачи является определение таких значений па-
раметров амортизации, при которых на установку действуют наимень-
шие усилия для заданного образца оружия, должно выполняться усло-
вие (2л/а)>1. При этом период интересующего нас решения совпадает
с периодом возмущающей функции и равен единице.
Рассмотрим решения, для которых 7,>0. Движение за один цикл
разбиваем на две области и описываем уравнениями:
при X )>0
= cos а8-\- sin sin aS------------------(1 — cos a9);
Л = a ( —A, sin aO-\-B1 cos a9)-|- cos a&-°0 +-— sin a8),
a
при k<(0
X2= A2 cosa6-|- B2 sin aS------(1 — cos a 9);
a2
X2=a(— A sin aS -|- В cos aS)-——— sin a 0.
a
(8.50)
(8.50а)
Поскольку координата Л. и скорость к при пересечении границы меж-
ду областями изменяются непрерывно, в момент 01 должны быть выпол-
нены следующие условия:
которые приводят к уравнениям:
A —A+-^cos«9i+(A + -^-— sinaOi=-^
/ 2г \ / 1 \
- ( Aj— А2 -j-) sin aSj Д-( В, -I-BA cos a9.=0.
\ a2 / \ a I
(8.51)
Если искомое решение периодическое, то в исходное состояние си-
стема должна возвращаться в момент времени 0=1. При этом должны
выполняться еще два условия:
М0)=М1); М0) = М1),
что дает нам систему уравнений:
А — (А 4
В, +(А +——— I sin а — В2 cos a = 0.
\ a2 7
(8.52)
Наконец, точка пересечения границы областей должна удовлетво-
рять условию Ai = (01) =0.
При этом
-^A1 + -°J~r - j sin aS, + - Ajcosyjr ,o. (8.53;
Решая систему уравнений (8.51) относительно выражений в скоб-
ках, получим:
A-7l2=-^"(cosa91-l);
Вх— В2 sin aS,------— .
a2 а
(8.54
л
Совместное решение уравнений (8.52) и (8.54) дает:
1 Г 4r а (1 — 0]) ай] , а )
=--------------------sin —1-------— cos —— 4- cos — !
а [ а 2 2 2
2а sin —
2
g0 +
а2
Обратимся теперь к максимальной величине отката Хт в установив-
шемся движении, которая будет иметь место на границе между областя-
ми. Воспользуемся решением, справедливым в первой области. Исполь-
зование решения для второй области приводит к аналогичному резуль-
тату. Подставляя выражения для Ai и В\ в уравнение (8.50) и записывая
его для момента времени 0], получим
9-111 а Г 2г . а , /0 1 \
«Чг-Но — г =-------- — sm—+ cosa 0J-— -
ala 2 \ 2 /
2 sin —
—— sinafo, —У (8.55)
a \ 2 /
Из условия (8.53) с учетом выражений для А[ и В2 имеем
sin а + —— cos а —2-)==~~ COS ' (8.56)
Результатом совместного решения уравнений (8.55) и (8.56) будет
+ =~ + 1. (8‘57)
2 sin -У Г а2
Ввиду ограниченности хода, допускаемого амортизаторами, жела-
тельно, чтобы движение оружия происходило вблизи положения стати-
ческого равновесия. Для этого, полагая в установившемся движении
?.(0) =Л(1) =0, получим
а
а
2 (4г2 + #2) sin
4г21/~ 4r2 - sin2 — 1 -|-a2cos-^^
У а2 2 2 /
(8.58)
С помощью выражения (8.58) исключим один из трех параметров
амортизации и в дальнейшем будем рассматривать влияние только двух
параметров а и г.
На рис. 8.14 представлены графики, показывающие характер иссле-
дуемого движения и влияние параметров а и г на максимальные вели-
чины отката и усилия, действующего на установку. Максимальное уси-
лие ат определяется при допущении, что силы, действующие со стороны
амортизатора, на оружие и установку равны. В этом случае
°пг= а-2^т “1“ 30 + Г (8.59)
При стрельбе очередью движение автоматического оружия на амор-
тизаторах начинается из положения статического равновесия. Поэтому
до момента времени, когда устанавливается периодическое движение,
имеет место некоторый переходный процесс.
Так как параметр ст0 однозначно определяется для любой пары зна-
чений а и г, при оценке переходных процессов рассматривается влияние
только двух параметров а и г. На основе выражений (8.49) и (8.58) со-
ставляется программа вычислений для ЦВМ. Результаты вычислений
приведены на рис. 8.15. Пунктирными линиями изображены зависимости
наибольшей величины отката от приведенной циклической частоты а
при различных значениях приведенной силы трения г. Сплошными ли-
Рис. 8.15. Графики влияния параметров
амортизации на характеристики переход-
ных процессов (результаты вычислений
на ЦВМ)
Рис. 8.14. Графики влияния параметров
амортизации на характеристики устано-
вившегося движения
ниями показана зависимость наибольшего усилия аи, действующего на
установку в переходном процессе, от рассматриваемых параметров. На
этом же рисунке изображены переходные процессы, соответствующие
малым и относительно большим значениям параметра а. Переходные
Рис. 8.16. Графики для выбора оптимальных характеристик амортизатора
процессы при больших значениях а характеризуются тем, что наиболь-
шие величины отката и усилия достигаются при первом выстреле.
Штрихпунктирной линией показана граница раздела переходных процес-
сов типа изображенных на рисунке.
Величина максимального хода определяется экспериментально для
патронов различного калибра и различных типов патронной ленты.
На рис. 8.16, а представлено изменение величины он в зависимости
от циклической частоты а и силы трения г. Наличие минимума наиболь-
шего усилия, действующего на установку, объясняется различным ха-
рактером переходных процессов. Штрихпунктирная линия на рис. 8.16, а
соответствует переходным процессам, для которых '„' = >.„ . Следует
отметить, что при значениях а, близких к оптимальным, а г<0,3 и z.n>
>0,^движение неустойчиво и мало пригодно для практической реали-
зации. На рис. 8.16, б приведены графики зависимостей и а =
=ИМ-
Пример >8.3. Автоматическая пушка имеет следующие условные данные:
Л1ор — 4 кгс-с2/м; J — 20 кгс-с; 7 = 0,02 с.
Выбрать оптимальные параметры для двух симметрично расположенных амортиза-
торов при наибольшей допустимой длине отката Хн = 30 мм.
1. Наибольшая приведенная длина отката
ЛТ0!Л„ 4-0,03
Хн =---------=----------= 0,3.
JT 20-0,02
2. Величины а и г. Из графика на рис. 8.16, б имеем: при Лн=0,3 а=1,34 и г=0,45.
3. Значение Оо. Используя выражение (8.58) при а=1,34 и г=0,45:
а
°о =--------------------------
2 (4r2 + a2) sin
-)- «2 cos
= 0,944.
4. Суммарная жесткость пружин амортизаторов
«2Л4О? 1,342.4
ka =-------= ------------ = 18 кгс/мм.
Г2 0,02
5. Суммарное усилие предварительного поджатия
20-0,944
0,02
= 944 кгс.
Для каждой пружины будем иметь жесткость, равную 9 кгс/мм, и усилие предва-
рительного поджатия — 472 кгс.
6. Суммарная сила трения
7 =
20-0,45
0,02
= 450 кгс.
Для определения силы трения, приходящейся на каждый демпфер, необходимо из
суммарной величины F вычесть экспериментально или другим способом найденную
силу трения в направляющих и результат разделить на количество демпферов.
7. Максимальная длина отката в установившемся движении:
JT 20-0,02
Хт = —----- --------------= 0,1 дм = 10 мм,
где Л™ определено по формуле (8.57).
Максимальное усилие, действующее на установку,
+ А + Па = 1654 кгс.
8. Наибольшее усилие в переходном процессе
RH — kaXa + F + Пл = 1934 кгс.
По найденным характеристикам рассчитываются пружины амортизаторов и фрик-
ционные демпферы.
В ряде случаев конструктивные характеристики оружия и установки
не позволяют использовать амортизаторы с оптимальными параметрами.
В этом случае выбирается пружина с жесткостью, наиболее близкой к
оптимальной, и приемлемая по габаритам. Затем по формуле (8.58) и
выражению
задавшись в начале г = 0,5, методом последовательных приближений
находят параметры по и г.
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ VIII
1. Благонравов А. А. Основания проектирования автоматического оружия.
М., Оборонгиз, 1940, 487 с.
2. Б р а в и н Е. Л. и др. Стрелково-пушечное вооружение самолетов. М., Воен-
издат, 1941, 303 с.
3. Г о р о в Э. А. Некоторые вопросы анализа и синтеза механизмов автоматиче-
ского оружия. М., изд. Академии им. Ф. Э. Дзержинского, 1946, 266 с.
4. Г а н т м а х е р Ф. Р. Лекции по аналогической механике. М., «Наука», 1966,
300 с.
5. Бессонов А. П. Основы динамики механизмов с переменной массой звень-
ев. М., «Наука», 1967, 279 с.
6. Вульфсон И. И., Коловский М. 3. Нелинейные задачи динамики ма-
шин. М., «Машиностроение», 1968, 282 с.
7. М а к - К р а к е р Д., Д о р н У. Численные методы и программирование па
фортране. М., «Мир», 1969, 583 с.
8. Березин И. С., Жидков Н. П. Методы вычислений. М„ «Наука», 1966,
т. I, 464 с., т. II, 639 с.
9. Обморшев А. Н. Введение в теорию колебаний. М., «Наука», 1965, 276 с.
Глава IX
КИНЕТИКА АВТОМАТИЧЕСКИХ ПУШЕК
С КОРОТКИМ ХОДОМ СТВОЛА
В автоматических пушках, построенных на принципе использования
энергии отдачи при коротком ходе ствола, имеется рычажный ускори-
тель, основное назначение которого состоит в том, чтобы сообщить за-
твору, после его разъединения со стволом, необходимую скорость отката.
В некоторых системах отпирание затвора производится при помощи ус-
корителя. Процесс отпирания затвора (разворот и присоединение затво-
ра к ползуну) сопровождается ударом. Иногда удар имеет место при
включении в работу ускорителя.
При проектировании автоматических пушек этой схемы очень важ-
но знать кинетическую характеристику удара: силу и скорость откатных
частей (после удара), которые необходимы для расчетов темпа стрельбы
и прочности деталей автоматики. Ниже приводится решение этой задачи
без учета и с учетом влияния инерционного перекоса подвижных элемен-
Рис. 9.1. Схема действия идеаль-
кого ускорителя
тов автоматики.
§ 9.1. КИНЕТИКА БЕЗУДАРНОЙ РАБОТЫ
УСКОРИТЕЛЯ
Рассмотрим идеальный, т. е. без уче-
та сил трения, случай движения двух тел
по инерции, на которые наложена кине-
матическая связь (рис. 9.1).
Согласно принципу Даламбера—
Лагранжа имеем
+ т У'уЪХу + 72/За = О,
(9.1)
где Л4 — масса ствола;
т — масса затвора (ударника);
I — момент инерции ускорителя;
2 —угловая скорость ускорителя;
Vc и Иу—соответственно скорости ствола и ударника.
Перепишем уравнение (9.1) так:
УИу' _L.z/a; = o,
t 1 J t 1 ’
где
вху
V =------------------------- •
BXC
Из рис. 9.1 следует, что
Ру b
v =----= —;
Ис а
ъа
—
вх
2 sin2 а
й=х/с.
X
Тогда уравнение (9.1) примет вид
(7И + >Рт) У'сД vml/cv; -j-Z (xV^ + =0
или
Интегрируя уравнение (9.2), получим
Ve
(М + У2Ж + х2/) V2..
---------------------= const,
2
(9.2)
(9-3)
М + 'flm + х2/
что соответствует закону сохранения энергии.
Так как обычно
М -|- v2m /у.2,
в практических расчетах механизмов автоматики пушек можно пользо-
ваться зависимостью
(М + -fim} Vl
= const.
2
Зависимость (9.3) показывает, что при откате скорость ствола
уменьшается, как бы вследствие непрерывного увеличения массы от-
катных частей. Это фиктивное изменение массы происходит в связи с
Рис. 9.2. Схема действия реального ускорителя
увеличением передаточного числа ускорителя. Назовем выражение М +
4-у2т = Л1пр приведенной массой и соответственно Qc + v2Qy=Qnp— при-
веденным весом откатных частей пушки.
Установим характер влияния сил трения на закон движения рас-
сматриваемой системы тел (рис. 9.2). Прежде всего отметим, что для
идеальных условий движения этой системы кинематическое передаточ-
ное число v совпадает с силовыми vc, т. е.
Ис d s’
У
Здесь S'c и S'y — проекции нормальных идеальных реакций соответ-
ственно ствола и затвора на направление движения.
Это утверждение вытекает из соотношения Эйлера
s;i/y=sx.
Напишем уравнение равновесия ускорителя с учетом реакции на оси
ускорителя
7?оси и сил трения
SA0 - /7?с<г - /?угу+fRyb -/г/?оси^0,
откуда Sc cos (a—p) cos 8 . . Vc — ! — V - X cos a cos (p + p) J у / r -^ОСИ \ X — Ry - ~ , (9.4' 1-/— ' “> Q
так как: 5 — /J cos (« — p) . £ cos (p + P) . C1 c cos p ’ 1 y cos p
, , , , cos p , , . , cos p X ^tgp) -1 —; df—(rc atg?) , cos (3 + p) cos (a — p) ry cos ₽ c , rc cos a d
Рис. 9.3. Реакция подвижных час-
тей на ускоритель при у>0
Рис. 9.4. Реакция подвижных частей на ус-
коритель при у<0
Для положений ускорителя, изображенных на рис. 9.3 и 9.4, уравне-
ние (9.4) соответственно имеет вид:
Ха cos (« + (i) COS 3
Sya cos a cos (₽ + p)
X
(9.5)
’с» cos (a — p) cos 3
VCg =-------2— = V----------1~-------------—
5уз cos a cos (₽ -f- p}
(9.6)
f lie j = a rcj ’дееяякЕ..
ibesm >5c-iзоэд. re Дё-Лё-сёс сзЛ'ГЭС'Г'О ”tOci;7Oчного числа, так же
ui. и • инеМвП^есЕОГс. сводится к вычислению отношения двух отрезков
с- и d-. величины которых находятся графически (см. рис. 9.2—9.7). По-
этому ускоритель удобно рассчитывать графо-аналитическим методом.
Принимая
-££Д-~—2£и_=ч — 1, получим (рис. 9.5):
/?У Sy
чс cos (а — р) cos ₽
1 — — /ф
v cos а cos (Р + р)
Ъ г
1-f ----- + /(v-l)--------
________ry______________________ry ___________________. cf
a_______________________________c df
(9-7)
cos (a + p) cos 3
cos a cos (3 + p)
vCj cos (a — p) cos p
v cos a cos (0 + p)
Размеры отрезков Cf и c, df и d всегда подчинены условию Cf>c и
df<d.
Параметр ф имеет определенный механический смысл. Его величи-
на равна отношению силового передаточного числа ускорителя к кинема-
тическому. Обратная вели-
чина этого отношения равна
текущему к. п. д. ускорителя
Рис. 9.5. Реакция ускорителя на подвижные
части
В идеальном случае,
когда сил трения нет, т. е.
/=0, параметры ф и q обра-
щаются в единицу. Это озна-
чает, что силовое и кинема-
тическое передаточные чис-
ла совпадают и потери энер-
гии в ускорителе нет. На
практике же, как правило,
ф значительно больше единицы, а в отдельных случаях его величина
может доходить до 1,35.
Специальные расчеты показали, что средняя величина к. п. д. меха-
нических ускорителей около 80%.
Движение откатных частей пушки без ствольной коробки
В рассматриваемом случае ствол и подвижные части затвора дви-
жутся по одной и той же направляющей в кожухе автомата. Уравнения
движения ствола и частей агрегата запирания для пушки без ствольной
коробки имеют вид (см. рис. 9.5):
W;, + Sc[l+/tg(a± Р)]=О; (9.10)
ml/;/-Sy[l-/tg(P+p)] = O. (9.11)
На основании этих уравнений можно записать
MV'Ct^mVy=0, (9.12)
где параметры е; с учетом выражений (9.7) — (9.9) соответственно равны:
=1), 1 -4- / tg (а — р)
4 l-/tg(₽+ р)
1 + / tg(ct + р) _ Л о .
1 —/tg(p + р) ‘"а'
1 -г/tg(« —р) = Г, о
1 — /tg(? + p) i2 а'
(9.13)
(9.14)
(9.15)
Величина 110=---------есть текущее значение к. п. д. подвижных
ч
частей. Исследования показали, что средняя величина цо около 70%.
Выражения (9.13) — (9.15) можно записать в таком виде:
cos а + 2/ sin а — р cos а гу — /& + /(> — 1) г
е< =----------------------------------------------; (9.1b)
cos 3 — 2/ sin р — /2 cos fl r,. — fa
(1 — /2) cos a rv + fb + 7(v — l)r
e9—--------------------------------------------; (У. 1 /)
cos p — 2/ sin 3 — /2 cos p rc — fa
cos а + 2/ sin a — p cos a г,- + fb + f (y — 1) r
e, —----------------------------------------------. 19.18)
cos p — 2/ sin p — p cos p rc + fa
Пренебрегая членами, содержащими f2, получим:
cos a+ 2/sin a ry—fb +/(»—l)r
e. =---------------------------------------
cos p — 2/ sin p rc — fa
cos a ry + fb + f (y — 1) г
e, =--------------------------------------
cos p — 2/ sin p rc — fa
cos a -r 2/ sin a ry + fb -f- f ('< — 1) r
s,=----------------------------------------
cos p —2f sin p rc + fa
Движение откатных частей пушки со ствольной коробкой
В этом случае подвижные части затвора перемещаются по направ-
ляющей в ствольной коробке, жестко связанной со стволом. Поэтому
исходное уравнение движения ствола (9.10) принимает вид
W;z + Sc + /[Sctg(a+ p)-Sytg(0+p)] = O, (9.19)
где Sc=vi|){Sy, так как сила реакции ствольной коробки на кожух пушки
равна вертикальной составляющей усилия на оси ускорителя (см.
рис. 9.5).
В соответствии с уравнениями (9.7), (9.8), (9.11) и (9.19) выраже-
ния для параметров еь е2 и е3 в формуле (9.12) изменятся следующим
образом:
1 + 7 [tg (а — ?) — —у— tg (3 + р) 1
________L_______________Фт'1___________ J = gi .
1 — Z tg-(₽ + р) 11 а'
1 + / [tg (а — р) — -у— tg (р + р)]
________L_______________Y2V____________J __ °2 .
1— / tg (3 + р) П °'
1 + f [tg(а — р) — —г~—tg(₽ + р)|
_____I___________W_________J_ °з
1— /tg(M-p) °'
(9.20)
(9-21)
(9.22)
Для ускорителей (рис. 9.6) значения кинематического v и силового
vc передаточных чисел будут равны Ч
а г
l + — Ct
vc=v.--------—(9.23)
d b r df
d d
где коэффициент потерь энергии в ускорителе
а — г
1 + f----
с с f d cf d
Ф _-------------=—i-------~--------.
b + r c c df
1— f-——— af
d
Если не пренебрегать трением на
будет равен отношению отрезков c'f и
dj и отстоящим от них на рас-
стоянии радиуса оси ускорителя.
Величина 1/ф равна текуще-
му значению к. п. д. ускорителя.
оси ускорителя, то параметр vc
d't, параллельных отрезкам су и
Рис. 9.6. Кулачковый ускоритель
Передаточные числа ускорителя
с подвижной осью вращения
Рассмотрим графо-аналити-
ческий метод определения кине-
матического и силового переда-
точных чисел рычажных ускори-
телей с осью вращения на стволь-
ной коробке (рис. 9.7).
Такой ускоритель при неболь-
шом ходе ствола обеспечивает
' злее высокие передаточные числа, чем ускорители с неподвижно за-
крепленной осью (см. рис. 9.4 и 9.6).
Кинематическое передаточное число ускорителя v=(Vy/Vc) нахо-
дится из уравнения для угловой скорости
„ Ус cos a AVv
S = —-------=------—cos 9,
Гс гу
‘ Значение vc найдено из уравнения равновесия ускорителя
Si0 = Syc — Scd + fSya + fScb 4- f (Sc — Sy) r = 0.
откуда
cos а
cos 3
ДИу = 1/с
Рис. 9.7. Рычажный ускоритель
Так как
Уу = Ус + дУу
'у >
------- ~г
cos 3 cos а
cos а
ТО
ас
v =----— .
Оа
Силовое передаточное число
ускорителя находится из уравне-
ний равновесия Ч
SK 5У
S£(l =-----------(rc cos р 4- дщ sin р)------------
0 cos (а- Рр с cos (? + р)
X(rycos р-|-дгу sin р)=о,
откуда
Sy (гс cos р + Дгс sin p)cos (3 + р) Ob
SK (ry cos р + Дгу sin р) cos (а — р) Qa
Sy Sy оь Ob
Если углы аир меняют свои знаки одновременно, то найденное
аналитическое выражение для vc будет справедливо для всего периода
работы ускорителя. В противном случае определение зависимости для
vc будет аналогично получению уравнений (9.4) — (9.6).
Графо-аналитический метод вычисления силового передаточного
числа vc справедлив для любого положения ускорителя.
Таким образом, рассмотренный метод графо-аналитического опреде-
ления кинематического и силового передаточных чисел ускорителя сво-
дится к нахождению отношения двух отрезков, лежащих на прямой, про-
веденной через ось вращения ускорителя нормально к направлению пе-
ремещения подвижных частей.
Для кинематического передаточного числа (см., например, рис. 9.7)
первый отрезок отсекается нормалями к профилю ускорителя по месту
его контакта с упорами разгоняемой детали и кожуха. Второй отрезок
заключен между осью ускорителя и точкой пересечения нормали к про-
филю ускорителя по месту его контакта с упором на кожухе.
Силовое передаточное число ускорителя равно отношению соответ-
ствующих отрезков, отсекаемых отклоненными на угол трения р норма-
лями к профилю ускорителя по месту его контакта с упорами.
Отклонение нормали всегда направлено по вектору скорости про-
скальзывания упора относительно профиля ускорителя.
1 Уравнение моментов составлено без учета сил трения на оси ускорителя.
§ 9.2. КИНЕТИКА УДАРА В РАБОТЕ РЫЧАЖНОГО УСКОРИТЕЛЯ
Зависимость (9.19) непригодна для определения скоростей откат-
ных частей в процессе удара, так как в этом случае закон изменения
скоростей иной. При ударе тел происходит не только перераспределение
между ними кинетической энергии, но и потеря ее, вызванная остаточ-
ной деформацией.
Процесс удара реальных тел можно разделить на две фазы: в пер-
вой фазе происходит накопление деформации; во второй — восстановле-
ние деформации. При этом ускорения тел не меняют знака. В момент
окончания восстановления деформации контакт между телами нару-
шается, а скорость их относительного движения достигает наибольшей
величины. После этого дальнейшее движение тел становится независи-
мым (если на них не наложена кинематическая связь).
Задачу соударения тел решим при следующих допущениях:
1) соударяемые тела представляем состоящими из пружины и сосре-
доточенной массы:
2) при ударе соударяемые тела (ползун, ускоритель, ствол) не от-
деляются друг от друга по крайней мере в течение полупериода основ-
ного вида колебаний;
3) за время удара передаточное число ускорителя v = const;
4) жесткость соударяемых деталей равна жесткости всей цепи си-
ловых деталей;
5) влияние возвратных пружин ствола и затвора и прочих сил со-
противления на падение скорости откатных частей за время соударения
учитываем особо по уравнению (9.19).
Случай ударного начала работы ускорителя
с неподвижно закрепленным корпусом пушки 1 (см. рис. 9.9, в)
При включении ускорителя отката в работу удар возможен в том
случае, если передаточное число ускорителя v>l.
При неподвижно закрепленном кожухе в течение всего периода уда-
ра, т. е. пока существует контакт соударяемых тел, справедливы сле-
дующие уравнения:
уравнение непрерывности процесса деформации кинематической
связи соударяемых деталей
vnc = V;v4-x;; (9.24)
уравнение движения ствола
(9.25)
уравнение движения ползуна затвора
mVyt = kx. (9.26)
Здесь V с—скорость ствола;
1/у —скорость ползуна затвора;
х — линейная деформация;
k — приведенная жесткоть деформирующихся деталей;
Л4 = — — масса ствола;
g
Qy
т=------масса ползуна (ударника).
! В целях уяснения метода определения характеристик удара здесь приводится
-дробный вывод расчетных формул. В остальных случаях соударения промежуточные
•аг..садки упущены.
Совместное решение этих уравнений дает закон деформации дета-
лей в дифференциальной форме
xt -ф 02л = 0, (9.27)
где круговая частота деформации деталей
’=/ Нгг+Э (9-28)
Интегрируя уравнение (9.27), получим
x=csin(9/-|-a). (9.29)
Значения постоянных с и а определяются из начальных условий дефор-
мации:
Z = 0; х=0; x’t=(y- 1)И0,
где Со — начальная скорость ствола и ударника.
После подстановки уравнение (9.29) примет вид
л = ф — 1) sin 9/.
v ’ о
(9.30)
Изменение скорости ствола во времени найдем из уравнений (9.25)
и (9.30):
— Vcf + ^(v- 1) Z<Lsm6/ = 0. (9.31)
g 6
После интегрирования уравнения (9.31)
получим
Vc
М dVc-]-kv(v—
sin ^tdt = Q
/и (nc-IZ0)-b(v- 1) 21 (cos l) = 0.
(9.32)
Решая уравнение (9.32) относительно Vc, найдем изменение скоро-
сти ствола в процессе удара
ИС = УО 1
— (1-cosW) .
т
(9.33)
Для конца удара справедливо условие
04 = у + а, (9.34)
где
На основании уравнений (9.34) и (9.33) скорость ствола в конце
удара
Qc + >Qy —Дм — l)vQv
Vc = Ио ------~-----------— , (9-351
Qc + '<2Qy V
где V = sina — коэффициент упругости удара (коэффициент восстанов-
ления скорости).
Скорость ползуна найдем из уравнений (9.26) и (9.30):
mVyt = — ^- 1)1/0 sin 6/. (9.36
6
После интегрирования уравнения (9.36)
\ dVv= — ~—-1/0 sinew/
j m 8 J
Vo 0
получим выражение для скорости ударника
(» — 1) (cos Of — 1)'
(9.37)
Далее на основании уравнений (9.34) и (9.37) получим формулу
для скорости ползуна затвора в конце удара
'Ос + '<20у + (» — 1) vQc
Qc '-20у
(9.38)
Определим энергию, расходуемую при ударе. Текущее значение
энергии деформации найдем из уравнения
kE = k \ xdx = — .
J 2
о
(9.39)
С учетом уравнения (9.30) выражение (9.39) можем записать так:
ДД=
^=^0
Для конца удара имеем [см. выражение (9.34)]
ДД=(1-у2)
C~l)2Qc
Ос + v2Qy
Qy
2^
vl
(9.40)
Формула (9.40) выражает энергию, расходуемую при ударе в ры-
чажном механизме
Проверим справедливость формул (9.35), (9.38) и (9.40). Согласно
закону сохранения энергии сумма энергии после удара должна быть рав-
на кинетической энергии откатных частей до удара, т. е. равенство
(Ad + т) У2 MV; -у mVl + 2ДД
------------------------------- у-- . (9.41)
2-------------------------------------------2-v
является тождеством.
После преобразования уравнение (9.41) с учетом формул (9.35),
(9.38) и (9.40) имеем
(7И + т) = L-И Г Af + -.w->C-l)yW у +
I L JW + 'fim J
+ т Г ^ + ^ + (Г-1)уМ у+( J _ v2) Мт _ (v _ 1)2|
L Л1 + •fim | М + 'fim 1
Убедимся в этом.
1 В общем случае энергия, расходуемая при ударе двух тел, связанных рычагом,
выражается уравнением
тМ 9
Д£ =-------------(1 — у2)(> ± 1)2И
2(Л4 + у2т)1 2 • ! 0
ИДИ
тМ
д£ = оГлд , о Д1 - ^2)СТ + У-2)2-
2 (Л1 + ^т)
Здесь знак «минус» соответствует попутному движению тел (17 и V% одного направ-
.тенпя), знак «плюс» — встречному (Vi г V2 противоположного направления).
Если считать, что за время удара передаточное число v ускорителя
и к. п. д. т]о системы остаются постоянными, то оказывается возможным
просто учесть влияние сил трения на потерю скорости. Это допущение
не может привести к большой ошибке, так как время удара очень неве-
лико (порядка одной тысячной секунды).
Для этого случая система исходных уравнений принимает вид:
vI/c=x< + Vry; MVct-|~vcAx=0; mV'yt = akx-, vc=<[w.
Параметры g' и о, являются составляющими полного к. п. д. ц0 = 1/е,-
[см. выражения (9.13) — (9.22)].
Совместное решение этих уравнений приводит к следующему изме-
нению соотношений (9.35), (9.38) и (9.40):
v '^Qe^Qy + vi^-m^ f9_38a ’ TJoQc + '>2Qy ° A£ = (l-V2)0'-1-2^ — Vo, (9.40a •^oQc + ^Qy 2g
а 1 где п0=’—= — •; Qc=gM-, Qy=gm-
Таким образом, чтобы учесть силы трения, достаточно массу ство-
ла уменьшить пропорционально к. п. д. кинематической цепи.
Случай ударного начала работы ускорителя
при свободном корпусе пушки
Если ось ускорителя закреплена в подвижном основании (рис. 9.8),
то процесс соударения описывается следующими уравнениями:
кинематическим условием деформа-
ции
уравнением движения кожуха
«кПк;=(’>— 1)Ьг;
уравнением движения ползуна за-
твора
mVyt=kx;
„ „ „ „ , уравнением движения ствола
Рис. 9.8. Схема деформации ' ,
ускорителя '/kx = 0.
Здесь М, т и тк — соответственно массы частей ствола, ползуна за-
твора, и неподвижных частей пушки (кожуха).
Эти уравнения сводятся к одному
где
','Чд+-+—1)!~
«к
Тогда
Vo ,
X = -—- sin pt,
р
где l/0 = vIZc0 — (v— 1)V\.O — Иу0 — скорость соударения (начальная ско-
рость деформации);
Ус0—скорость ствола перед ударом;
—скорость ударника перед ударом;
Пк0 —скорость кожуха перед ударом.
Для скорости после удара соответственно имеем уравнения:
для ствола
1/с = Ус0- v (j + v). (9 42)
У2 --- + (v — I)2 -
т. тк
для ползуна затвора
'^с0 + Fy0 + ф- 1) Vy0
(1 +v);
(9.43)
для кожуха
к — ^ко+ (v~’ 1)
^с0-Гу0-(';-1)7к0
(9.44)
Энергия, расходуемая при ударе,
д£ = 0,5(1 —V2)
Мтт К Г Vyo vK0 - > — — о— 1) vc0 vc0 2
Мтк + + (v — 1)2тЛ1
(9.45)
При неподвижно закрепленном кожухе (тк->оо; Ук0 = О) эти урав-
нения приводятся к следующим (см. рис. 9.9, в):
(9.46)
(9.47)
(9.48)
Приняв Vyo=Vco, уравнения (9.46), (9.47) и (9.48) превращаются в
•ормулы (9.35), (9.38) и (9.40).
Уравнения (9.46) и (9.47) выражают в общем виде изменение ско-
: сетей при ударе двух тел через рычаг, когда начальные скорости дви-
жения тел не равны. Например, при повторнохм соударении агрегата за-
-ирания (или ползуна затвора) со стволом, что имеет место после вре-
менного отрыва частей агрегата запирания от ускорителя. Причиной
~двторного соударения тел является частичное восстановление их де-
гермации в момент удара.
Отрыв также возможен и после повторного соударения. Однако, как
~:авило, после повторного удара последующая скорость Уу0 — Ус0 со-
дарения уменьшается. Вследствие этого при правильно выбранном про-
зиле ускорителя более трех повторных ударов при расчетах не рассмат-
ггаается.
По окончании восстановления деформаций удара связь между тела-
ми нарушается и они приобретают относительную скорость движения
(отскок):
при ударном включении ускорителя
V(v-l)Vc0;
при повторном соударении
V
V
cl’
После отскока тела движутся независимо друг от друга. Процесс
движения описывается уравнениями:
ml/;t + ny + Fv = 0;
W^+nc+Fc = 0,
откуда
ц,=|/
у М
Здесь Vc/-] и Уу(--1 — абсолютные скорости движения тел (например,
ствола и ударника) после удара;
Пу и Пс — усилия возвратных пружин;
Fc и — силы трения;
Дс/, Луу, Ау, Ас — соответственно работы сил трения и возвратных
пружин.
Время и путь повторного соударения определяются уравнениями:
1
у 1/,,гд/ = У >гус;д/.
.V I ч
1 1
Следует заметить, что жесткость лафета авиационных пушек невели-
ка по сравнению с жесткостью деталей автоматики, передающих усилие
удара на цапфы пушки. В этом случае более правдоподобно рассматри-
вать процесс удара в автоматике подобной схемы как соударение трех
свободных тел (см. рис. 9.8).
При свободном кожухе пушки [см. уравнения (9.45) и (9.48) ] изме-
нения энергии и скорости ствола будут несколько меньше, чем при непо-
движно закрепленном. На практике при соответствующем выборе вели-
чин коэффициента V уравнения (9.42), (9.43) и (9.35), (9.38) могут быть
равноценными.
Уравнение (9.44) применяют для определения скоростей сдвига ко-
жуха при расчете усилий отдачи пушки на упругом основании.
Если в уравнениях (9.46), (9.47) и (9.48) положить пуо=О, то полу-
чим формулы, характеризующие ударный бросок неподвижной детал::
стволом. Например, для броска затвора стволом с шептала эти уравне-
ния с учетом цо примут вид:
’loQc — vA?y
vc-i/c0
OaQc + ',2Qy
(9.461
V\ = IZc,(l + V)
W-Qe
7ioQc + ',2Qy
A£ = (l-V2)
•QoQc
2g
_______-<2Qy
f'lOQe + ~‘2Qy
VcO-
(9.47а)
(9.48а)
Здесь Qy — вес агрегата запирания с учетом веса патрона.
Процесс присоединения затвора к ударнику
В момент присоединения затвора к его ползуну удар происходит
вследствие внезапного изменения скорости движения затвора: затвор,
разъединившись со стволом, присоединяется к ударнику, имеющему ско-
рость vVc больше скорости ствола Vc-
Усилие этого удара и его продолжительность определяются жестко-
стью деталей, передающих реакцию удара па цапфы крепления орудия.
Неподвижный кожух
В период присоединения затвора при неподвижно закрепленном ко-
жухе закон деформации х силовых деталей приближенно описывается
следующими уравнениями:
— условием непрерывности процесса деформации
>1/с = У3+х;; (9.49)
— уравнением движения затвора
my'st — kx-, (9.50)
— уравнением движения откатных частей
^pVct + ^x=0. (9.51)
После совместного решения этих уравнений получим
лу—|—
где
62^4— ----h— Ь М,о = Л4 + ^Щ.
к «3 МПР Л пр '
Это уравнение имеет решение
х=с sin (С/ + а).
Значения постоянных с и а определяются начальными условиями:
/ = 0; х=0; лу=(м— 1)17с0.
Тогда
х = р— 1)sin (7. (9.52)
Скорость ствола после удара определяется совместным решением
уравнений (9.51) и (9.52):
Уу > Уз~ — Уз
Qc + '*2 (Qy + Q3)
где
V = sina; a = — + .
2
На основании уравнения (9.52) и соотношения
чение энергии, расходуемой при ударе:
' ес+'2(е, + о,) 2г
с0>
(9.53)
(9.39) получим зна-
(9.54)
Скорость ударника найдем из предположения, что затвор и его пол-
зун после удара двигаются совместно. Согласно закону сохранения
энергии
откуда у —?£—/Qc + + 'Д'Оу yg--2£.у2_Д£Л. (9.55.
у V Qy + Q3 I 2g 2g }
Пример 9.1. Оценим влияние коэффициента упругости удара V на изменение ско-
рости и кинетической энергии откатных частей. Верхний предел определяется условием
полностью упругого удара (V = l); нижний — абсолютно неупругого удара (V = 0).
Рассмотрим систему со следующими весами откатных частей:
Qc = 20 кг; Qy = 2 кг; Q3=l кг и найдем относительные приращения скорости ДР
и кинетической энергии Д£ откатных частей:
V (v =0) — V (v = 1)
ДУ = - P(v=0)---------- ’ Д£ = 1 -(1 - ДГ)2‘
Удар в начале работы ускорителя (v = l,25).
При V =1
— уменьшение скорости ствола
V у (у — 1) Qy
др = -100------------—= -2,8%;
* Qc + vQy
— уменьшение кинетической энергии ствола
— увеличение скорости ударника
ДР,, = 100
J 1
у (у — 1) Qt
''Qc + '<2Qy
= 17,8%;
— увеличение кинетической энергии ударника
Г / ДР„, \21
\EV = 100 1—1 —---------LL = 32,5%.
У1 L \ 100 у J
При V = 0,5
ДРГ =1,4%; =2,8%; ДР„ =9%; ДД. =17%.
Са ' J С2 ’ У 2 ’ У 2
Присоединение затвора к ударнику.
Для случая v=2,2, пользуясь формулой (9.53), получим:
при V=1
У (у — 1) vQs
Qc + 'Qs + ~'2Qy
8,3%; Д£С1=—16%;
при V = 0,5
ДРСз= — 4,15%; Д£Сг=—8%.
Изменение скорости и кинетической энергии ударника в соответствии с уравнения-
ми (9.54) и (9.55) будет равно:
— при V = 1
ДРУ1=—14,2% Д£у1 = — 26%;
— при V=0,5
ДР„ = —5,4%; ДД. = —10%.
У2 ’ } 2
Из полученных результатов следует, что коэффициент упругости удара V значи-
тельно влияет на скорость подвижных частей и что определение их скорости по форму-
лам для вполне неупругого удара (V = 0) может привести к большой ошибке, особенно
в отношении скорости ударника. Для рассмотренного примера при V = 0,5 ошибка в
определении скорости ствола составляет около 5% и скорости ударника около 10%.
Поэтому нельзя пренебрегать влиянием коэффициента упругости удара на скорость
откатных частей.
Кинетические расчеты автоматики, проведенные для V = 0,4-4-0,5 и коэффициенте
трения /=0,1-24-0,15, хорошо согласуются с практикой.
Свободный кожух
В этом случае, для того чтобы по уравнениям (9.42), (9.43) и (9.44)
найти скорости подвижных частей автомата, достаточно принять т =
=т3+ту. Тогда скорость движения агрегата запирания после неупру-
гого соударения (присоединения) затвора и ударника
р/Ус0(, 1)уко] Qy +Q3Kc0
V
” Qy + Q3
После преобразований уравнения (9.42), (9.43) и (9.44) примут вид:
О
1/с=ИсЭ—V
('< 1) (Уср Ук0)'-'з /1 । — \.
Qc . 1 Qc Qy 4- Q3
—l— I \ - J_ JZ
Qy 4- Q3 Qk
И-1)(УТо-Ек0)(1 + у)
Q:
Qy + Q:
Ц/у “Г" Ц/З
TZ 1Z I 1)2 (4То 1^ко)(1 + v)
V к — V кО П
(9.42а)
(9.43а)
Q3
Qk Ok Qy T Q3
Qc Qy 4- Qs
Изменение скорости при повторном соударении агрегата запирания
(Qa + Qy) находится также при помощи уравнений (9.42), (9.43) и (9.44).
При этом под параметром т следует подразумевать сумму т = т.у+т3.
Если кожух пушки считать неподвижным (QK->oo, l/i;O = 0, Уу0 =
= Есо), уравнения (9.42а) и (9.43а) примут вид:
.. ,, Qc + '4Qy 4- '-Q3 — V’' С — 1) Q3
И с— * с0
(9.44а)
Qc 4
Иу=>Ис0----
Qc “Г ’4 (Qy + С?з)
<?з Q,
’з
Qc + (Qy + Qa)
(9.426)
(9.436)
Чтобы учесть силы трения в момент присоединения затвора к удар-
нику, достаточно в уравнениях (9.426) и (9.436) вес Qc ствола умно-
жить на к. п. д. OioQc).
Уравнение (9.436) отличается от уравнения (9.55). Это отличие
прежде всего определяется допущениями, исключающими одну из двух
степеней свободы между затвором, ударником и стволом.
При выводе уравнения (9.55) исключена степень свободы между
стволом и ударником [см. уравнение (9.51)]. Вывод же уравнения (9.436)
построен при отсутствии степени свободы между затвором и ударником.
Количественное отличие результатов этих уравнений для v<2,5 незна-
чительно:
ДИу
Д у2
2 Vy '
Разворот затвора
Процесс удара при развороте затвора состоит в том, что затвор вне-
запно приходит во вращательное движение с большой угловой скоро-
стью Q.
Определим скорости ствола и ударника в конце разворота затвора.
Обратимся к кинематической схеме пушки разбираемого принципа
(рис. 9.9).
Соединение затвора с ползуном строится так, чтобы поступательное
движение ударника трансфомировалось во вращательное движение за-
при помощи спирального паза, проре-
занного в ударнике или затворе (см.
рис. 9.9, а и б).
Поступательное движение ударник
получает от ствола через ускоритель
.(рычаг), ось качания которого крепит-
ся в кожухе пушки. Вследствие дефор-
мации деталей, передающих движение
затвору, последний приходит во вра-
щение не мгновенно, а в течение
определенного времени. При этом
угловая скорость его вращения изме-
няется от 0 до Й.
Рассмотрим разворот затвора при
свободно перемещающемся кожухе.
Параметры движения откатных частей
в процессе разворота затвора и вели-
чина возникающего при этом усилия в
деталях приближенно определяются
следующими уравнениями:
— кинематической связи деталей
?г + 2 =^~ [О'- 1) (Vc-VV>— х;]; x; + Vy = Wc-(>- 1) I/K;
— вращательного движения затвора
— движения откатных частей
(Qy+Q3) V'ct + 1) /?=0;
— движения корпуса пушки
(Q-jtQJ l'Zcz4~QyVzy<-{-Q1(l/K/==0;
— силовой связи деталей
kzx = R;
осевого усилия разворота затвора (см. рис. 9.9, а)
9
(а+р);
d
момента сил трения в зубцах запирания затвора
В этих уравнениях:
й — угловая скорость затвора; I — момент инерции затвора; Ьш —
шаг спирали паза разворота; D—средний диаметр зубцов запирания;
d— средний диаметр паза разворота; kx —жесткость кручения деталей;
kz — жесткость растяжения деталей; f — коэффициент трения; р — угол
трения; — угловая деформация деталей; х — линейная деформация де-
талей.
твора.
это достигается
Затвор
Спиральный паз
Ствол // у спор ат ель Лолзун
V затвора
Зу=КХ
(v-l)Sy
а)
в)
Рис. 9.9. Схема
открывания затвора
Совместное решение приведенных уравнений дает следующий закон
деформации деталей:
T< + Yi?=°- (9.56)
Здесь
г Л
ь 1-Нд-Г)'2^ Г(0)
„ Г. , D , । Л Опр
Y =— 1-/ —Ш(«+Р) --------------~
1 / L d 4Я k.
1 + 7C7^tg(a + р)
А kz
D
k 1 — f— tg(a -г p)
~ ______d__________
I 4ct ’
1 + tg (“ + P)
ьш« kz
так как в большинстве случаев
(>-l)2^-F(Q)« 1.
Qnp
В указанном выражении
^4 = ------ztg(o + р)----коэффициент податливости затвора разво-
W 1-Ле(а+р)4 Р°ТУ;
d
Qk — (л 1) Qy Qy Qs l Qc ! ^Qy
1 + " ° “ ° QK-(^-i)Qy
Q„p = Qc + '-Qy+Q3;
Q0 = Qc-|-Qv-(-Q3-(-QK —общий вес автомата.
Уравнение (9.56) имеет решение
у=В sin CY/-J-&).
Значения постоянных В и b определяются начальными условиями:
/ = 0; х=® = 0;
0-1) -^(^0-^0) = ^ ^o + ?Lo=--
О
г— — tg(a+P) ^-о-
L ^d kz
4л
При этих условиях уравнения угловой и линейной деформации при-
мут вид:
2л — 1 Vco — VK0 . ,
<s —---------------------------sin у J;
i-ш 4л k. 7, (9.57)
1 + T~1 tg(a +
ЬщЯ kz
---------—1 veo Уко sin V1Z. (9.58)
Livd kz-------------------------------------Ti
1+п5-Л'с‘8(« + ?)
4jt
Подставляя найденные выражения угла <р в уравнения
корпуса пушки и откатных частей, после интегрирования получим:
. ('' — 1)2£q4 (Уд — Уко) (1 + v) Qs + Qc + Qy^
движения
Опр
-----+ (V — 1 )2gA
Qo
(9.59)
P(Q)
('J I)2 gA (УсО— Kko)(1 + V) /. Qa + Qc + JQv \ _
---------------------------- 1-----------------. (9.6u
_^_ + (V-1)2^Z Q° '
F(Q)
При неподвижно закрепленном кожухе пушки (QK->oo, Ук0 = 0), так
как F(Q) = 1, скорость ствола после сдвига затвора определяется урав-
нением
0пР —у(*—1)^-4 у
Опр +
(9.61)
После полного разворота затвора ударник и затвор представляют
одно целое, поэтому в уравнении (9.61) V следует принять равной нулю.
Изменение скорости ударника в момент запирания канала ствола
(накат затвора) можно найти по формуле (9.61), которая в этом случае
примет вид
, (9.62)
. , gA
где Qy — вес ударника без учета веса затвора и патрона.
В заключение отметим, что уравнения (9.42) — (9.44), (9.59) и (9.60),
полученные нами для случая соударения тел через рычаг, могут быть
распространены на любой случай удара в рычажном механизме.
Введение параметра А, имеющего размерность массы, позволило
кинематически отождествить продольный и крутящий удары.
Усилие и время удара
Усилие удара необходимо знать при расчете агрегата запирания на
динамическую прочность. Изложенный метод определения скоростей тел
после соударения позволяет без большого труда (с точностью принятых
допущений) определить силу и время удара.
При ударном включении ускорителя и присоединении затвора наи-
большее усилие удара находится согласно уравнению
/?m = ^xm = (v-l)V’c0^. (9.63)
Pi
Наибольшая деформация отвечает условию л( = 0. Это возможно
t JT
при pt = — ,
Время удара (контакта) соударяемых тел можно оценить по фор-
муле
п
— + arc sin у
t = —------------. (9.64)
Pi
В уравнениях (9.63) и (9.64) параметр р\ соответственно находится
из выражений:
при ударном включении ускорителя
при присоединении затвора
р1 — gk /--------1—— ) .
1 & г \Qc + '-2Qy Qa I
При развороте затвора момент Lm и усилие Rm можно оценить по
формулам:
(9.65)
(9.66)
Время сдвига затвора
л
— + arcsin у
t= —-------------
71
(9.67)
Импульс воздействия на жесткий лафет
при ударном взаимодействии элементов автоматики
Включение ускорителя отката и наката, а также разворот и присое-
динение затвора к своему ползуну (ударнику) протекают весьма быстро
и характеризуются практически внезапным изменением скоростей взаи-
модействующих элементов автоматики. Продолжительность этого взаи-
модействия определяется жесткостью элементов конструкции (ускори-
тель, стебель затвора, кожух, лафет и т. п.), воспринимающих реакцию
соударяющихся деталей.
Для упрощения решения рассматриваемой задачи будем считать ла-
фет абсолютно жестким, а сам процесс соударения протекающим по схе-
ме системы с одной степенью свободы. В этом случае реакция оси уско-
рителя Дл и ее импульс Д, воздействующие на лафет, будут равны:
7?л=( —— lAfex; Rudi.
\ ч )
о
Для функции x(f) соответственно справедливы найденные выше
формулы (9.29), (9.52) и (9.58):
— для ударного включения ускорителя отката
-Х1=-—- ИсЭ sin ft; d2 = gk(——I—— ''l ;
1 в s bQc Qy Г
— для ударного разворота затвора
х2=-------------------------sinW;
Z.H1tZ kz Vi
1 Л. —2!-— rtcr (n J- nt 11
k 1 —/~‘8(а+р)
*4 d
— для присоединения затвора
= ' 1/сЯ sin е/;
и
02 = gk (--------------
I Qo + ^2Qy
На основании этого в соответствии с выражением для Л получим:
— импульсы удара, воспринимаемые лафетом за время включения
ускорителя отката и наката (см. ниже рис. 9.17 и 9.18):
А=(—- 1U-1)—Qc?y (l + v)Hc0 — ;
1 Qc + — Qy S
Л
Qc {Qy + Qs)
Qc + (Qv + Qb)
"Q
(9'446)
(I +v) I/c0 —
g
— импульс удара, воспринимаемый лафетом за время разворота
затвора
- lkv-l)(l + v)4Hc0; (9.59а)
— импульс удара, воспринимаемый лафетом за время присоедине-
ния затвора к ударнику
J5U^-lU-l)-^^(l + v)lzc0-L. (9.44в)
\ ’’l ! Qup + Qb g
Выражения для определения величины Ц нужны для построения
импульсно-силовой диаграммы автомата (см. § 9.6).
§ ‘9.3. ЭЛЕМЕНТАРНЫЙ РАСЧЕТ ДЕТАЛЕЙ,
ИСПЫТЫВАЮЩИХ УДАРНЫЕ НАГРУЗКИ
Приведенные выше уравнения для вычисления усилия удара, как
нетрудно показать, могут быть получены на основании закона сохране-
ния энергии для невполпе упругого удара: энергия ДЕ, расходуемая при
движении соударяющихся деталей, равна их энергии деформации —
ДЕ =
1
(9.68)
откуда сила удара R = V 2kEk, (9.69)
1 п 1
где — = 2------суммарная податливость силовых деталей.
Выбор вполне неупругого удара объясняется только тем, что в этом
случае наибольшее значение энергии деформации, примерно, равно по-
терям кинетической энергии соударяющихся деталей, если пренебречь
диссипативными силами.
Если скорости деформации всех точек соударяющихся тел одновре-
менно пройдут через нуль, то энергия их деформации будет равна поте-
репной энергии движения тел при абсолютно неупругом ударе. В против-
ном случае она будет несколько меньше, причем величина этого нера-
венства зависит от формы детали. Наибольшее отклонение количества
энергии деформации от названной потери энергии следует ожидать при
узловом распределении масс, т. е. при различной жесткости сечений.
Уравнение (9.66) является решением общего случая сложного уда-
ра, когда деталь одновременно испытывает растягивающий (или сжи-
мающий) и крутящий удары.
При k х->оо или /г2-^оо уравнение (9.66) соответственно выражает
усилие простого удара: растягивающего или крутящего.
Агрегат запирания рассчитывается на динамическую прочность по
обычным уравнениям теории сопротивления материалов.
Уравнения (9.63), (9.65) и (9.66) дают завышенные результаты. Не-
точность этих уравнений (в рамках принятых допущений) прежде всего
объясняется неточной оценкой суммарных жесткостей kz и й- деталей,
передающих усилие удара па крепление пушки. На практике очень труд-
но найти жесткость всей силовой цепи деталей (пушка-установка) !. По-
этому при ее оценке обычно ограничиваются двумя или тремя деталями.
Неучет скорости нагружения деталей также приводит к значитель-
ному завышению величины расчетного усилия удара против действи-
тельной.
Если в силовой цепи между деталями имеется зазор, то усилие уда-
ра несколько снижается вследствие последовательного соударения де-
талей.
Детали, испытывающие нагрузки, как правило, должны полировать-
ся. Наличие резких переходов, выточек, отверстий и т. и. по месту опас-
ного сечения совершенно недопустимо, ибо в отдельных случаях кон-
центрация местных напряжений может в несколько раз превысить сред-
нее расчетное напряжение. Особенно это опасно для деталей, имеющих
знакопеременную нагрузку. Для повышения прочности и живучести де-
талей, как показала практика, целесообразно их опасные места дробе-
струить. В этих же целях необходимо соударяющимся деталям прида-
вать форму, которая обеспечила бы им наименьшие жесткость и вес.
Иногда в целях повышения живучести деталей может быть выгоднее
даже несколько уменьшить их поперечные размеры.
В более общем случае наилучшая конструкция соударяющихся де-
талей будет та, при которой для каждой детали произведение ее жест-
кости на вес, отнесенное к площади ее опасного сечения, будет наи-
меньшим.
Ввиду того, что ооычно g —Ч-—1, для практических расчетов
Qnp
параметра можно рекомендовать формулу
1 — /-у-tg (« + р)
d
4л k~
1 + Г77 *8<а+ р)
Z. kZ
Согласно уравнениям (9.56) и (9.66) усилие удара при развороте
затвора увеличивается с уменьшением члена 1 — / — tg (а+ р).
d
Пример 9.2. Найти скорости подвижных частей и усилие при развороте и присо-
единении затвора пушки при следующих данных:
V==0,4; 1 — f ~ tg (а + р) = 0,58; tg (а + р) = 1,5;
Qc. = 20 кг; Qy = 2 кг; Q3=l кг; QK = 17 кг; Qo = 4O кг; / = 8-10-в кгс-м-с2; £ш =
= 0,12 м; d = 0,035 м; Аг = 5,7-106 кгс/м; Ат=2,4-103 кгс-м; в момент разворота затвора,-
'-=1,7; Усо = 7 м/с; в момент присоединения затвора — v=2,2; Vco=5 м/с.
После разворота затвора на основании уравнений (9.59) и (9.60) приращения ско-
? зстей ствола ДУС, ударника ДУу и кожуха ДЦК равны:
('*—I)2 £21(1 -У v) Vc0 I Qc + Qs + '‘Qy \
ДЦС = —------------------------------ 1 — --------------- I = — 0,09 м/с;
Qnp \ Qo /
----- -|-ф — I)2 £Л
/=((?)
: Жесткостью установки можно пренебречь, если вес соударяемых деталей много
ьше веса корпуса пушки, например, в момент открытия затвора и начала работы
.. рителя. При ударе же ствола о корпус пушки жесткость лафета необходимо
. читывать.
где
ДУК =
(-> — 1)2^Л (1 + v)Vc0
1“ Qa + ''Qy
----------=0,141 м/с;
Qo
Qnp
ДУу = уДК.-(у—1)ДКк= —0,252 м/с,
4л/
tg(a+ р)
= 0,06 кгс-с2/м;
1 — 7-V tg (а + р)
а
^(Q) =
Qo
Qx-K-DQy '
1______________
Qy Q3 + Qc + ’'Qy
1 + V (у — 1) —-- —-------—
Qnp Qnp — К—i)Qy
Qnp = Qc + Qa + ^2Qy = 26,8 КГ.
При неподвижно закрепленном кожухе (QK-»-«>) приращения скоростей ствола и
ударника составляют:
= 2,25;
<у-1)2^(1 + V)Kc0 ,
ДУ,. = —--------------------= —0,104 м/с;
Qnp+(у —1)2^Л
ДПу = чДКс = — 0,177 м/с.
Усилие и момент удара соответственно равны [см. уравнения (9.65) и (9.66)]:
К-1)Ко
Rm =-----------
71
L Kz
1
К 4л
= 2350 кгс;
где
L_____
— Т
1
k~
1 4л
1Г75Г,г<“ + р)
= 27,46 кгс-и,
1 — f у tg (а + р)
4л kx
1 +------— tg(a+ р)
Ьщ fcz
После присоединения затвора к ударнику приращения скоростей подвижных частей
и кожуха согласно уравнениям (9.42а), (9.45а), (9.44а) будут равны (Ук0 = 0):
(v —1)(1 + v)Vc0 Q3 „„ ,
----------------------------------— = — 0,47 м/с;
Qy + Q3
ДК
ДКУ =
<V— 1) Qr
Qa
ДУК =
к.
= 7760 1/с.
о— 1)2-77
+ Qy . , 9 Qy + Qa
1 ~п -----------------
(у-1)2ус0(1 + V)
Qk
(v-l)2+>2-^
Qc
При неподвижно закрепленном кожухе (QK—>~ •
__ — 1) (1 + у) K0Q3
Qc + '-2 (Qy + Qs)
,,r (v — 1) Q3 1 + V
ДУу= - п ,.п---------------
ДК
•^со = — 1,41 м/с;
Qk
— 0,3 м/с.
Qy + Qs
приращения скоростей
= — 0,54 м/с;
л = ——
7 =
3
---Ко= —1,62 м/с.
3
Усилие удара в момент присоединения затвора к ударнику определим по уравне-
нию (9.63)
1) Vco = 4410 кгс,
Р1
где______________________________________________
= I/ gkz (------------+ —-—) = 7750 1/
1 \ Qc + <?з /
Жесткость kz цепи силовых деталей определяется из уравнения потенциальной
п
энергии при деформации от статически действующей единичной силы:
п
2 2^
1
Например, для схемы запирания (см. рис. 9.9), жесткость стебля затвора, удар-
ника и ускорителя можно оценить по формулам:
сцС/р atEF3 EF З^Е1ус
; > F3 = ' ; йу — - ; kyc — “,
z3 l3 ly (>—1)2 ZyC
где /Р — полярный момент сечения стебля затвора;
F3 — площадь поперечного сечения стебля затвора;
/з —длина стебля затвора;
F, — среднее значение площади поперечного сечения ударника;
v —передаточное число ускорителя в момент удара;
Ely с — среднее значение жесткости сечения ускорителя;
lye —эффективная длина ускорителя (расстояние от оси до точки контакта с
ударником);
«1 — коэффициент, зависящий от распределения масс между головкой затвора и
стеблем (1 sg щ sC3).
При равномерном распределении масс (цилиндр) ai = 3. При сосредоточении всей
массы затвора на его конце (в одной точке) «1 = 1. Для затвора схемы, показанной на
рис. 9.9, a.i = 2.
Суммарная жесткость этих деталей находится из уравнения
1111
— 4- 4-
k3 fey Fye
При определении усилий удара в момент разворота и присоединения затвора:
kz = 5,7-106 кгс/м; k_ = 2,4-Ю3 кгс-м.
Выбор оптимального передаточного числа
для ускорителя ударного действия
Рассмотренные ускорители применяются для получения высоких
средних скоростей движения. Время действия такого ускорителя (раз-
гона детали) незначительно. Вследствие этого величина усилия, дейст-
вующего на ускоритель, оказывается очень большой и определяется по-
датливостью соударяющихся деталей.
Рассмотрим ударный ускоритель, действующий от ствола. В общем
случае связь между скоростями до и после действия ускорителя выра-
жается уравнениями (9.43а) и (9.44а). При этом начальные условия
броска могут быть следующими:
1) начальные скорости ствола и разгоняемой детали равные между
собой (Ру0=Рс0);
2) разгоняемая деталь неподвижна (Vry0 = 0).
Соответственно с этими начальными условиями согласно формулам
(9.46) и (9.47) скорости ствола и разгоняемой детали после действия
ускорителя выражаются уравнениями (9.35а), (9.38а), (9.46а), (9.47а):
при Иу0=1/с0
у _ +Л1 + уот — уу (у — 1) от у
с т)0Л4 + у2т с0
у = УТ]ОЛ4 4- у2от + у (у — 1) У10Л1 у
} +уИ + 'firn
при Иу0=0
у =-г10М—^'^т
С Т|0Л1 + '/2т
у 4- у)
у t]0M + 'fim
Значение передаточного числа, при котором скорость разгоняемой
детали достигает небольшого значения, определяется из условия суще-
ствования экстремума:
avy w
—- = 0; -------<о.
д'/ а\2
Отсюда
(ДЛЯ IZvp = IZc0); I
(для У р = 0). |
1
(9.71)
Выбирать v = vm нецелесообразно, так как максимум функции Vy(v)
очень пологий, а зависимость усилия удара R(y) экстремума не имеет и
в области v'm существенно изменяется. Поэтому величину v следует
выбирать несколько меньше vm. Наибольшее значение R(v) достигает
при v-э-оо и в рассматриваемых случаях составит — у так
как величина энергии деформаций A£(V = 0) при v-э-оо равна кинетиче-
ской энергии ствола с учетом потерь на трение:
Д-t ОО --- 5
2 2k
где k — коэффициент жесткости системы, воспринимающей удар.
При v=vm величины R вычисляются соответственно по формулам:
= = / ‘2UE (v = vj = (vm- 1)Ус0 Г—Л-------------; (9.72)
I/ , 1
Т|0/И ‘ от
/?(>=>.)= -.у.» Л- ]/• (973)
V
где Д£ выражается зависимостями (9.40а) ц (9.48).
Пример 9.3. Найти vm и 7?(v=vm) для следующих данных:
М
gM = 20 кгс; — =Ю; т]о = 0,7; Vv0 = Ус0 = 5 м/с; Hvq = 0; k = 4-105 кгс/м.
от J J
Согласно уравнениям (9.70) и (9.71) передаточные числа, обеспечивающие наи-
большие скорости броска соответственно равны:
1) vm = l + |/ 1 +-^ = 1 +У1 +0,7-10 = 3,82;
пг
Д ~'т “
^ = 2,65.
т
Наибольшее усилие деформации соударяющихся деталей вычисляются по фор-
мулам (9.72) и (9.73):
1) ЛО = ^) = (,га-1)Ус0
k____
2
ут 1
77
т
= 2,82-5
4-106
--------------------= 7,25-103 кгс;
3,822.9,81 9,81
0,7-20 ~ 2
,------/ 2 0
2) /?(v = vOT) = Vc0]/015Ai)0M= 5 1/ 0,5-4-106.0,7-—-/— = 8,4-103 кгс.
[/ 9,81
§ 9.4. КИНЕТИЧЕСКИЙ АНАЛИЗ АВТОМАТИКИ
С УЧЕТОМ ИНЕРЦИОННОГО ПЕРЕКОСА ПОДВИЖНЫХ ЭЛЕМЕНТОВ
В § 9.1 и 9.2 рассматривался кинетический анализ автоматики без
учета инерционного перекоса деталей ее подвижных узлов. Причиной
такого перекоса является несовпадение центра тяжести подвижной де-
тали с направлением ее возможного перемещения. Поэтому при ускорен-
ном движении узлов, состоящих из нескольких деталей вследствие их пе-
рекоса, могут возникнуть дополнительные силы трения значительной
величины. В связи с этим даже в инженерном прикидочном расчете ими
пренебрегать нельзя.
Учет этих сил трения усложняет расчетные уравнения параметров
движения и уравнения по своей структуре будут тем сложнее, чем боль-
ше деталей в узле. Кроме того, уравнения движения узлов, находящих-
ся под действием возвратных пружин, справедливы только для одного
направления движения.
Ниже изложен вывод уравнений параметров движения узлов с уче-
том сил трения от инерционного перекоса для автоматических пушек с
коротким ходом ствола.
Вывод уравнения движения узла, состоящего
из двух деталей
В качестве простейшего примера составления уравнения движения с
учетом инерционного перекоса рассмотрим движение в направляющих
узла, состоящего из двух деталей и связанных между собой клиповым
замком (рис. 9.10).
Рис. 9.10. Подвижная часть из двух Рис. 9.11. Силовая реакция звеньев
звеньев при откате
Движение такого узла зависит от направления вектора скорости V.
Поэтому уравнения движения не могут быть общим для отката и наката,
так как силы трения
возвратной пружины.
а) Параметры
т2и mi имеют вид:
меняют свое направление относительно усилия
отката (рис. 9.11). Уравнения движения масс
Так как
m2V2l = — S2 — fN2.
(974)
JV2=TV1 = ji? cos(a+ p);
= fN2=ri2S2;
= S2= R sin (a-j- p); Vl=V2-^=]/t
то уравнения приводятся к виду:
П-|- WjIZ t = (1 — Pi) Sp
m2V't= — (l+P2)Sj.
Коэффициенты |3i и в общем случае могут зависеть от сил тре-
ния при перекосе, их реактивных моментов и динамической пары (инер-
ционной).
Исключая из уравнений получим
miv't + m2V't + П = 0.
1 + pi
В рассматриваемом случае Pi = p2 = f ctg(a + p), где f — коэффициент
трения; a — угол клина; p = arctg(K — угол трения на поверхности клина.
Интегрирование этого уравнения приводит к формуле
И2=Ко-—. (9.75)
«о
Здесь
I 1 — Р2
т„ — т, 4---— т2;
1 1 + 31
X
А = С (ПоЧ~ kX] dX — энергия деформации прчжины при откате, где
1а П0 = £Х0; Хп<Х;
k — жесткость пружины;
Vo~ начальная скорость отката.
Активное усилие (т. е. сила, вызывающая ускорение движения тел)
равно
Pa = (mi + m2)V; = n^l4b^2
м0
П________
т2 ф + Зг
т} + т2 1 + 31
б) Параметры наката (рис. 9.12). В этом случае уравнения
движения масс цц и т2 имеют вид:
Рис. 9.12. Силовая реакция звеньев
при накате
mii/;+n=-(i+s2)5i;
Исключая из уравнений Si, получим
т\ ш+п=о.
\ 1 — р 1 /
Откуда
l/2=|Zo + —; ]
mH
, . , (9.76)
-----— m2,
H 1 ' 1 —?! I
X
гдеА= — J (Ц04-йХ)d.X — энергия разжатия пружины (X <ZX~X
Активное усилие
уг> _jj т2__ П
Э тн } j т2 ?i + ?2
т\ + т2 1 — pt
Реакция системы на связи равна активной силе. Отношение актив-
ного усилия Ра к приложенному усилию П характеризует величину рас-
ходуемой энергии.
Из рассмотренного следует, что сопротивление при перекосе деталей
узла может быть учтено соответствующим изменением величины дви-
жущихся масс или соответствующим коэффициентом перед значением
усилия пружины. При этом измененная таким образом величина усилия
пружины представляет собой активную силу.
Реакция /?0 системы на связи, например, усилие на цапфах оружия,
при отсутствии внешней силы (7' = 0) численно равна активной силе, так
как Ro = F — 'ZmVt'. Выражения для фиктивной массы при откате и на-
кате отличаются только знаками коэффициентов ₽i и р2, учитывающих
силы трения.
Уравнения движения рассмотренного узла показывают, что расход
энергии зависит от соотношения масс деталей т\1т2. С уменьшением
этого отношения расход энергии увеличивается.
Параметры движения агрегата запирания,
состоящего из трех деталей (рис. 9.13 и 9.14)
В качестве примера рассмотрим движение агрегата запирания.
Параметры отката. Разделим данный узел натри детали:
затвор, ударник и движок, заменив взаимное их воздействие соответ-
ствующими реакциями по месту разъема. Тогда уравнения движения
каждой детали будут иметь вид:
myV’t=Sx~P—fNy-,
[m3-PmT)V't= ~ Sx —f N3,
fN==iP- fNy = {iSx + yP- fN3 = aS2-,
N\ = N2 = R cos (aSX = S2 = R sin (a-f- p).
(9.77)
Здесь тя — масса движка с учетом возвратной пружины; ту — масса
ударника; т3 — масса затвора; тг— масса гильзы.
Парамеры а, р, у, а — величины безразмерные и являются функцией
коэффициента трения и координат перекашивающего усилия и его реак-
ций.
Совместное решение уравнений (9.77) дает уравнение движения уз-
ла в следующем виде
т0у;~!-Пд=О,
(9.78)
где
—(m3+mr)
1 +Т
Отсюда скорость движения узла при откате
/ Ио-2 , (9.79)
к /«о
где Лл= J TTr.cZX — работа возвратной пружины при откате.
X
Параметры наката. Так как
запирания изменила свое направление
при накате скорость агрегата
относительно векторов Пд и S,
Рис. 9.13. Подвижная часть из трех
звеньев
то и силы трения соответственно изменили свой знак. Следовательно,
приведенная масса при накате агрегата запирания будет выражаться
зависимостью
Так как уравнение движения узла по своему виду остается прежним
[см. уравнение (9.78)], то скорость при накате находится по формуле
т.
(9.80)
где VH0 — начальная скорость наката;
Ая — работа возвратной пружины при накате.
Для агрегата запирания параметры а, (3, у, о определяются соот-
ношениями:
а = р=2/ctg(a-j-р); у = 2/-|-; а =
где f— коэффициент трения; d — средний диаметр спирали; D — сред-
ний диаметр зубцов запирания; a — угол подъема спирали; р — угол
трения; а и Ь — плечи перекашивающих сил; Ц и /2 — плечи реактивных
моментов.
Активные усилия агрегата запирания при откате и накате соответ-
ственно равны:
Ра = ЕтИ;;
Р 1т0 . ГТ .
а.о m Л’
где 2m0=ZmH= шу4- тдЦ- т3-\- тг.
Реакция 7?0 = 2F—Sml7/ на связи (сила воздействия пушки на абсо-
лютно жесткое основание) при движении агрегата запирания, находяще-
гося под воздействием возвратной пружины, равна активному усилию с
обратным знаком (/?о =—SmVY), так как внешних сил нет >(Р = 0).
Если откат агрегата запирания происходит одновременно с откатом
ствольной коробки, то ее скорость определяется из уравнения
Wcr + nc-a/?-?/?-yF=0. (9.81)
Складывая уравнения (9.78) и (9.81), получим
+ + (9.82)
где
оР=-^-(тХг+Пд).
1 — а
Уравнение (9.82) решается точно, но это решение ввиду его гро-
моздкости не имеет прикладного значения. На практике для прикидоч-
ных расчетов допустимо пользоваться уравнением (9.79).
Метод решения уравнения (9.82) заключается в следующем. Из
уравнения (9.78) определяется путь частей агрегата запирания
А\ = ДХ sin(/?/+eJ; = . (9.83)
Постоянные Ая и ед определяются начальными условиями:
^0; Хл=Хд3; X s X .
На основании уравнения (9.83) равенство (9.82) может быть запи-
сано так: Xct+PeXc = B sin (/</-|-ед); хя(= - А,Яsin (л/+sJ; пх=МлпШ£л); ’ (9’84) R — A 1т0~т в АдРл м .
Система (9.84) имеет решение
Хс= Ас sin (Л^ес) + --В sin (jpAt -f- ед); р[ = А
дс-д.;
Постоянные Ас и е0 определяются начальными условиями:
^ = 0; Хс=Хс0; Х;, = Хс0.
Уравнения (9.83) и (9.84) справедливы до тех пор, пока
XcZ>0; Хл/>0.
Откат подвижных частей в периоде работы
ускорителя
Структура уравнений движения элементов автоматики зависит от
способа обеспечения направления отката (наката), например, при помо-
щи кожуха или ствольной коробки.
Откат подвижных частей в пушке
без ствольной коробки
Для того чтобы учесть все силы сопротивления движению подвиж-
ных частей, необходимо рассмотреть в отдельности движение движка,
ударника и агрегата ствола (рис. 9.15).
Рис. 9.15, Силовая реакция подвижных частей автомата (пространственная схема)
Уравнение движения движка
Щл^ + Пд=Р(1-у), (9.85)
о , а
где у=2/ — .
Л
Уравнение движения ударника
[1 - f tg (Н р)-2/ -£|-Р(1 + Ю-Ж. (9.86)
где р1==2/ — .
1 z2
Объединяя уравнения (9.85), (9.86) и. имея в виду, что V^ = Vvt, а
/Qy пренебрежимо мало, получим
(m« + TTrm>)v';' + I1’='T-T(1_v)S’’ (9'87)
k 1 + Р1 / 1
где
^ = /tg(9+P) + 2/^.
'2
Так как ствольная коробка отсутствует, то уравнение движения
ствола запишется так:
W^=PKH-nc-Sc[l+/tg(a± P)]-/Qc. (9.88)
Из уравнения равновесия ускорителя имеем
Sc = — Sv. (9.89)
’l '
Vy-
Здесь v=~----кинематическое передаточное число ускорителя;
Л = —---к. п. д. ускорителя;
Ф/
Пс — текущая сила пружины ствола;
Ркн — сила давления порохового газа на дно канала ствола;
Л1 — масса агрегата ствола с учетом его пружины.
Исключая из уравнений (9.87) и (9.88) с помощью соотношения
(9.89) Sy и Sc и обозначая /tg(a±p) =<тс, получим
+- 7^? (ту+Ч V'^ + - П<+П'/ - = °’
>) 1 — kf\ ' 1 — 7 / I 1—А/1—7
(9.90)
где ircf=Hc4-/Qc — усилие пружины ствола с учетом постоянных сил
трения;
т? — масса агрегата запирания с учетом затвора и
гильзы.
До открывания затвора, массы затвора и гильзы входят в массу
агрегата ствола.
Переходя к аргументу Хс (к перемещению ствола), получим урав-
нение элементарных работ
Md (У®
2
1 1 +°с
2i) 1 — kf
(//иу+тл\ d (^у) +
\ 1 — 7 )
+ Г — Vй' п’ + 1 dX< = °-
[т;1 — kf \ — 7 J J
(9.91)
Если в уравнении (9.91) принять Pi = с> =£/ = у = 0 ит| = 1, получим
уравнение работ без учета сил трения
Md (vT) (mv + m:.}d (1Д)
+ Д_у-----l. у/ + (уПд + Пс/ _ Лн) dXc = o. (9.92)
По аналогии с последним соотношением уравнение (9.91) можно пе-
реписать следующим образом:
Md (У?) Фот («у + т.) d (И)
—~ + Z у 1 Д + (^пПд+Пс/ _ ркн) rfXc=о, (9.91а)
где
. , , «у + :-----------тя
_ 1 1 + ac 1 — 7
Т/П 1 1. .
— kf Шу +
1 1 +acl + Pi
т] 1 —Ayl —7
Коэффициенты фт и фп характеризуют потери энергии на трение на
соответствующих участках кинематической цепи. Величины, обратные
значениям параметров и ф1Г, представляют собой ее к. п. д.:
Интегрирование уравнения (9.91а) на участке пути ствола ЛХС при
допущениях:
Фи — ~ (4*п/ ТФи/-1)
приводит к формуле
2дл
= v2._i + 2 {9 93>
где
приведенная масса на предшествующем участке пути ствола
Л1пр= М + г._р? (ту 4- тд);
приведенная масса на расчетном участке пути
<р i = М А А (ту + тд);
суммарная работа активных и пассивных сил
з
2 дД= — дА,— длс+ Д-Лг;
1
работа сил сопротивления со стороны движка
ддд^ф„ (пд + ДХЯ .
работа сил сопротивления пружины ствола
А^д^;
работа силы давления порохового газа на дно ствола
ДАsP^bti^ <1 A ^bUr) дАА
Здесь параметр Ь вычисляется по формулам (см. § 4.1):
ь _ gSp* д__1300
(Э —O,5)<ov0’ ‘ v0
Изменение скоростей подвижных частей в узловых моментах рабо-
ты автоматики (ударное начало работы ускорителя, разворот и присое-
динение затвора к ползуну) находится по уравнениям, приведенным
в § 9.2.
При вычислении приращения работы пороховых газов на пути ство-
ла ДХС можно пользоваться формулой
Д^уДШ+W
где
/ *6 \ i
, Sp, —ы. , Н —ь -т- , , 2ЛХ„ , VI ;
kJrl = —^e ‘-Ц1 — е 2 ; -----£—; дЛ.
1 ь Vi + Vi^ U ‘
1
В этом случае уравнение (9.92) приводится к виду
у Г 1 I / / Г \2 1 Д с Z-1 1 с‘ 2Л!„Р t У 1 AfnpZ 1 ywnp 1 (9.94
При работе механизма питания от ствола уравнение скорости ство-
ла имеет тот же вид
V
C! 2Л1ПР i
,9'9S)
Здесь Д7П= — V ^3шпдХс —импульс сил сопротивления движения лен-
т
1П
ты на пути ДХС; Vn — передаточное число подающего механизма; т)п--
к. п. д. подающего механизма; k3 — жесткость звена ленты; та — масса
патрона с учетом массы звена.
Здесь
Откат подвижных частей при наличии
ствольной коробки
В этом случае подвижные части агрегата запирания двигаются по
ствольной коробке и тормозятся силами трения относительно ее. Эти си-
лы трения в системе «ствольная коробка — агрегат запирания» являют-
ся внутренними силами. Под действием их абсолютная скорость движе-
ния агрегата запирания уменьшается, а скорость ствольной группы со-
ответственно увеличивается.
Уравнения движения частей агрегата запирания движка и ударни-
ка) имеют тот же вид, что и при отсутствии ствольной коробки [см. урав-
нения (9.85) и (9.86)].
Уравнение движения частей ствола изменяется следующим образом:
MV’t + пс=Ркн - Sc - /Qc - fS0 ,в + + kfSr (9.96)
+ — сила трения ползуна затвора о
ствольную коробку;
•S’o.b—5ctg(a + р) — Sy tg(8-j- р) — вертикальная составляющая
реакции на оси ускорителя;
/(^o.B + Qc) = /Qc + ac\ — ^у Р)—сила трения ствольной короб-
ки о кожух.
В дальнейшем член f tg (3 + р) обозначен через оу.
Силами трения ствольной коробки от реакций, вызванных перекосом
ползуна затвора (я^ —ау)—: можно пренебречь вследствие большой
базы направления у ствольной коробки.
Исключая из уравнения (9.96) Р и 5У с помощью соотношений
(9.85) и (9.86), получим
+ [(1 + Дд) Н-(1 - Д,) ] V'y( + Цс/ 4 (1 + Дд) Пд = Ркн
или
М -А-
dX т
Здесь
V2 \
-9- +ПС/ + Ф„ПД = РКН.
(9.97)
1
(1 + Дд) /Ид + (1 -- Ду) /Ну
Иу + /Ид
д
1 — I 1 — kf \ 7]
Лу_
1 +°у\____7
1 + oj 1 - 7
1 + °у \
Интегрирование уравнения (9.97) на элементарном участке пут>
ствола Д%с дает
п Л1..., i] о 2
+ А9'
М1Р < -'^пр I
Здесь значения Afnpj-, МПрг-1,фт и фп те же, что и в уравнениях
(9.91), (9.93) —(9.95);
дЛд=Ох------——!---------— ДХу — работа пружины движка на пути
ствола Lxci.
Скорость агрегата запирания задается кинематической связью Vyi-=
-=ViVci. Учет работы механизма питания приведет к зависимости, ана-
логичной уравнению (9.95).
Силы трения, возникающие от инерционного перекоса отдельных де-
талей узла, могут достигнуть значительной величины. Для отдельных
систем, как показал расчет, в периоде работы ускорителя отката масса
агрегата запирания и сопротивление его возвратной пружины увеличи-
ваются от сил трения больше чем в 1,5 раза. После отрыва агрегата
запирания силы трения инерционного перекоса составляют порядка 30е.
от усилия возвратной пружины.
Таким образом, при определении параметров движения узлов, со-
стоящих из нескольких деталей, силами трения пренебрегать нельзя.
Усилие отдачи пушки на абсолютно жестком лафете
в периоде работы ускорителя отката
Пушка без ствольной коробки
Реакция на связи любой системы равна внешней силе Рвн за выче-
том сил инерций поступательно двигающихся частей:
Ra=Pw-^fnV't. (9.99 >
В нашем случае Рвн=Лш и уравнение (9.99) запишется так:
Ао = Ркн — MV'et - (ту -Д mJ V\t-
Используя соотношения (9.87) и (9.88), получим
1 Т) 1 — kf\ — 7
! 1 -у сс / V 1 — niy тл \
1 ^/| 7 1 + °с 1 + 31 | ’
\ ту +------- т-< I
\ 1 — 1 '/
Скорость частей агрегата запирания можно рассчитывать по фор-
муле
mAVyt- (9-100
1 — 7
MV;-/
Vyt =
* 1 -г I Т Н1 тт
Ркн—ПсГ— Л
(9.101
или обычным путем
Л1 + —
Л 1 — й/
----т
1-7 '
V'
Иу(- —
Соотношение (9.101) является результатом совместного решения
уравнений (9.87), (9.88), (9.89).
При сокращенном обозначении относительных потерь энергии от сил
трения через фт и хрп уравнения (9.100) и (9.101) примут вид:
/?0 = П<Д + Фп'Лд + ("*л + wy) И™ — 1 )
Л1 + У (пг - пс/ - фп-л;()
у/ М + + тл)
(9.102)
(9.103)
Если пользоваться формулой (9.103), то производную от передаточ-
ного числа (vc)xz по пути ствола следует определять графическим диф-
ференцированием кривой v(xc). При этом передаточное число ускори-
теля также вычисляется графическим путем.
В том случае, когда передаточное число ускорителя оценивается как
ДХу
среднее в виде отношения перемещения v =------- , производная переда-
Дхс
точного числа берется также средним значением:
Д-7 Д2Ху
(vc)^ = ~— = —~
д-*с Дл<2
Остальные параметры в уравнении (9.103) известны.
Из уравнений (9.100) и (9.103) следует, что при вычислении усилия
отдачи пушки на жестком лафете нельзя пренебрегать силами трения.
Увеличение отдачи от сил трения можно найти по зависимости
Д^о~ *Пд(фй- 1) + (тд + ту) [№ - 1) V'yt - (V- 1)1/;,] +/Q,
Выражения усилия отдачи (9.100) и (9.103) справедливы до момен-
та присоединения затвора к ударнику (ползуну). После присоединения
затвора, как правило, наступает отрыв агрегата запирания от ускорите-
ля отката
у М
Пушка со ствольной коробкой
Согласно уравнениям (9.99) и (9.97) усилие на цапфах пушки
^о=Пс/ 4“ (1Дд) Пд4-(Дяпгд-|~ Ду/Пу) V у,. (9.104)
Вводя обозначения фт и фп, получим
А\)=Пс/4-фп1Тя4-('4т— 1)(тл4-ту)1/;,. (9.105)
Решая совместно уравнения (9.87), (9.89), (9.96), получим выраже-
ние для ускорения ударника в зависимости от передаточного числа v
ускорителя [см. зависимость (9.103)].
Приведенный анализ уравнений движения откатных частей автома-
тической пушки, устроенной на принципе использования энергии отда-
чи при коротком ходе ствола, показал, что силами трения пренебрегать
нельзя.
Основные силы трения возникают от инерционного перекоса подвиж-
ных частей автоматики пушки. Эти силы трения вызывают значительные
дополнительные усилия в деталях автоматики, что, в конечном итоге,
приводит к понижению их живучести, и ограничению темпа стрельбы.
Поэтому при проектировании автоматических пушек, особенно с корот-
ким ходом ствола, следует динамически сбалансировать массы подвиж-
ной части автомата или обеспечить им большую базу соприкосновения
с направляющими поверхностями скольжения.
§ 95. ТЕХНИЧЕСКИЕ ПУТИ СНИЖЕНИЯ ВЕСА
АВТОМАТИЧЕСКИХ ПУШЕК В БОЕВОМ ПОЛОЖЕНИИ
В начале проектирования пушки или при обосновании тактико-тех-
нических характеристик на новый образец, веса его составных элементов
неизвестны и подлежат ориентировочному определению. К таким состав-
ным узлам артиллерийской ствольной системы относятся лафет (станок),
качающая и откатная части орудия. У автоматической пушки под откат-
ной частью обычно понимают
подвижные части автомата, а
под качающейся — собственно
автомат. Несущая способность
лафета определяется весом ав-
томата Qa и усилием воздейст-
вия выстрела (отдачей) 7?.
На практике эту задачу
решают с помощью статисти-
ческого материала, отражаю-
Рис. 9.16. График функции i]B(d) щего весовые характеристики
составных узлов аналогичных
систем. Обычно эти статистические весовые характеристики для неавто-
матических пушек представляют в функции коэффициента использова-
ния металла системы (отношение дульной энергии к весу пушки в бое-
вом положении)
<7^
где <Эб — вес пушки в боевом положении.
Примерный характер кривой Цб(^) представлен на рис. 9.16. С уве-
личением калибра пушки величина цб растет; то же имеет место при
сохранении калибра по мере повышения дульной скорости снаряда.
Для пушек с подвижным стволом и калибром более 23 мм величину
т)б в первом приближении можно вычислять по линейной зависимости
1l6=’r16o + 0>3At/s,
где Лбо — коэффициент использования металла исходного образ-
ца пушки (например, 30-мм пушки);
Ld = (d — 30) — разность калибров;
d — калибр пушки, мм.
Зависимость Цб, хотя и характеризует совершенство конструкции
автоматической системы в целом, но использовать ее в общем случае для
расчета веса элементов системы весьма затруднительно, так как эта за-
висимость не учитывает импульс воздействия выстрела на лафет при на-
личии надульного устройства.
По-видимому, физически более обосновано вместо зависимости Цб(^)
использовать соотношения
Об
или
20е
характеризующие импульс или энергию непосредственного воздействия
выстрела на силовые узлы комплекса. В связи с этим предлагается дру-
гой способ ориентировочного расчета весов элементов системы. Суть его
состоит в следующем.
При выбранной скорости свободного отката ствола V04 оценку веса
подвижных частей автомата можно производить по формуле
где А?
. а Д- а8«
где JK=L-----— ^0 — импульс воздействия выстрела на ствол;
а — конструктивно-импульсная характеристика надуль-
ного устройства (тормоза или усилителя отдачи).
Вес неподвижных частей автомата с коротким ходом ствола, как по-
казывает статистика, достаточно близок к весу откатных частей:
Qa, = (0,8 - 1)QO.
В этом случае вес автомата составит величину
Qa = (l,8^2)Q0.
При выбранном или заданном весе Qo боевой вес пушки можно при-
ближенно определить по формуле
\ л
5 о -| — средняя величина силы сопротивле-
Х + ~~Ц14- о-Э) Qo
Уо J
ния откату ствола;
X — длина отката ствола;
JB—— (1 + аЭ) Цд — импульс отдачи;
Э = ——коэффициент баллистической эф-
я
фективности..
Величина коэффициента Сл, определяющего несущую способность
лафета при выстреле, вычисляется для имеющейся пушки с аналогичным
проектируемому образцу принципом действия автоматики по зависимо-
сти
С — Qa +
Л~ Qo-Qa ’
Анализ значений Qo Для различных систем показывает, что эффек-
тивные дульные тормоза (а^О) могут заметно снизить боевой вес пуш-
ки с высокой начальной скоростью снаряда (n0>1000 м/с; Э>0,7). Одна-
ко в этом случае чрезмерное снижение веса лафета будет уже лимити-
роваться транспортными перегрузками. Кроме того, следует помнить, что
использование мощных дульных тормозов не всегда допустимо по нор-
мам физиологического воздействия ударной волны на боевой расчет
пушки. Для систем с коротким ходом ствола использование дульного
тормоза возможно только для пушек калибром более 30 мм, когда ки-
нетическая энергия откатных частей заметно превышает потребляемую
автоматикой.
При отсутствии по каким-либо причинам дульного тормоза некото-
рого снижения боевого веса автоматической пушки с подвижным ство-
лом можно достигнуть, уменьшая силу отдачи R за счет выбора плавно-
го закона изменения передаточного числа механического ускорителя vc
по пути ствола, т. е. за счет уменьшения величины (v )]. [см. выражения
(9.101) и (9.103)].
Уменьшение импульсных нагрузок на лафет от удара подвижных
частей автомата в граничных положениях также приводит к снижению
боевого веса пушки. Оба эти пути возможны только при сохранение
надежной работы автомата в различных условиях.
Более радикальным способом снижения боевого веса пушки являет-
ся применение податливой упругой силовой связи между автоматом и
его лафетом, позволяющей осуществить весьма короткий откат качаю-
щейся части относительно лафета. Такая упругая силовая связь назы-
вается амортизатором. Схематически конструкцию амортизатора можно
представить в виде штока и цилиндра, в полости которого заключен уп-
ругий элемент с высоким предварительным поджатием и относительно
малой жесткостью (ki), приблизительно на порядок ниже конструктив-
ной жесткости лафета (k2). В качестве упругого элемента обычно исполь-
зуют цилиндрическую винтовую пружину или, если это необходимо, па-
кет стальных цилиндрических колец, работающих как клиновой аппарат.
Для пушек с неподвижным стволом амортизатор в комбинации с
дульным тормозом при относительно малой деформации упругого эле-
мента может весьма существенно снизить величину упругой реакции
лафета Ri и как следствие — боевой вес фб.
Эффект же амортизации автомата с подвижным стволом существен-
но ниже, особенно при отсутствии больших ударных нагрузок на лафет.
Физически это объясняется более растянутым во времени импульсом воз-
действия выстрела на лафет у этих автоматов.
В отличие от дульного тормоза амортизатор не уменьшает импульса
воздействия выстрела на лафет, а растягивает во времени действие им-
пульса и тем самым снижает амплитуду силы, возмущающей лафет.
Правильно спроектированный амортизатор для автомата с коротким хо-
дом ствола уменьшает упругую реакцию его лафета на 204-40%. При
этом величина усилия предварительного элемента амортизатора П20 не
должна превышать наибольшее значение силы отдачи автомата на аб-
солютно жестком лафете (7?ц—Рт).
§ 9.6. ПРИБЛИЖЕННЫЙ метод расчета упругих реакции лафета
Конструкция установки (лафета) автомата представляет собой уп-
ругую систему, жесткость которой колеблется в довольно широких пре-
делах (200^^1^2000 кгс/мм).
Действие отдачи автомата на лафет вызывает в нем упругую реак-
цию Д1, превосходящую по величине амплитуду возмущающей силы
P(t) и обусловленную наличием больших скоростей деформации х\.
Закон изменения возмущающей силы называется импульсно-сило-
вой диаграммой (ИСД) —см. рис. 9.17—9.20.
Снижение упругих реакций в лафете Ri при наличии амортизатора
происходит в соответствии с законом сохранения импульса сил отдачи
t ti ta
f P (0 dt--= f R, (/) dt + j‘ n2 (ф dt.
0 6 h
Податливый упругий элемент амортизатора увеличивает время t
действия сил отдачи на лафет ПДф до величины t2 и вследствие этого
уменьшает их амплитуду, а все ударные нагрузки Ji обращает в непре-
рывно действующие во времени силы, не превышающие по величине уп-
ругую реакцию амортизатора П2. Сложность питания подвижного авто-
мата и высокий темп его стрельбы п не всегда позволяют осуществить
необходимую деформацию амортизатора относительно цапф лафета л<.
Амортизация автомата необходима для устранения в отдельных
случаях, когда — V kJМ2, роста упругой реакции лафета в
JT
зависимости от темпа стрельбы /г:
/?1 = ТИ21/01/ -^ = ^Л7И2И0,
1 V Ж 2 °
где А12У0Д — импульс единичного выстрела;
М2—масса неподвижных частей с учетом приведенной мас-
сы лафета;
п — темп стрельбы (количество выстрелов в секунду).
Такая закономерность роста упругой реакции особенно характерна
для пушек с неподвижным стволом и весьма опасна, так как при некото-
ром значении темпа стрельбы может привести к разрушению лафета.
Она появляется только в том случае, когда времена очередного выстре-
ла (1/п) и наибольшей деформации лафета tm совпадают или достаточно
близки по величине друг к другу:
2 у k\ п
Упругие деформации Xi и реакции R\ = k\X,x лафета будем рассчиты-
вать при допущении, что ИСД не зависит от жесткости лафета ki и совпа-
дает с законом изменения усилия отдачи автомата на абсолютно жест-
ком основании. Далее, в целях упрощения задачи ее решение построим
применительно к упругой системе с одной степенью свободы при отсут-
ствии амортизатора и с двумя степенями свободы для амортизированно-
го автомата.
Таким образом, при наличии амортизатора расчет упругой реакции
лафета, определяющей его прочность и вес, состоит из трех этапов:
1) построения ИСД для абсолютно жесткого основания автомата;
2) расчета упругой реакции лафета до включения амортизации;
3) расчета упругой реакции лафета в процессе действия амортиза-
тора.
Эти задачи решим упрощенно аналитическим и графо-аналитиче-
ским методом.
Построение импульсно-силовой диаграммы
Импульсно-силовая диаграмма представляет собой графическое изо-
бражение функции изменения во времени усилия отдачи Р на цапфах ав-
томата в процессе осуществления им цикла выстрела. На график функ-
ции Р (t) наложены графики ударных нагрузок (импульсов), при этом
их действие на цапфы считается мгновенным и по времени совпадаю-
щим с началом процесса соударения подвижных узлов автомата с его
кожухом.
Для пушек с коротким ходом ствола ИСД представлены на рис. 9.17
и 9.18, для пушек с неподвижным стволом на рис. 9.19 и 9.20. При по-
строении диаграмм используются следующие понятия и обозначения.
Пушки с коротким ходом ствола:
^а(^о,н—изменение усилия на цапфах автомата в течение времени
одного цикла выстрела, т. е. во время отката и наката
ствола;
Л (/) — то же при накате агрегата запирания;
Jr = m3V3 — импульс удара затвора о пенек ствола;
~?2=таУи— импульс удара ползуна о затвор после запирания канала
ствола с учетом потери количества движения при разворо-
те затвора;
Рис. 9.17. Импульсно-силовая диаграмма автомата с подвижным
стволом
Рис. 9,18. Упрощенная импульсно-силовая диаграмма автомата с
подвижным стволом
Рис. 9.20. Упрощенная импульсно-силовая дна-
ip.'iMM.i ; 1 в I <»м a j ; i с неппапи/кным •
Рис 9.19. Импульсно-силовая диаграмма автомата с неподвиж-
ным «’ТИОЛОМ
73 — импульс удара на оси ускорителя ствола при его включе-
нии;
J4 — импульс удара на оси ускорителя при развороте затвора в
процессе открывания канала ствола;
/5 — импульс удара на оси ускорителя в момент присоединения
затвора к ползуну;
J6 — импульс удара ствола о кожух в конце отката с учетом его
отскока;
J7 — импульс удара агрегата запирания в затыльник кожуха с
учетом посадки на шептало, т. е. его величина вычисляет-
ся для случая абсолютно неупругого удара;
Д — импульс удара на оси ускорителя наката при ударе об аг-
регат запирания;
J9 — импульс удара ствола о кожух в переднем положении;
—время наката затвора;
Lt — время запирания канала ствола;
/ф —время периода форсирования;
4— время включения ускорителя отката;
ti — время начала открывания канала ствола;
4 — время присоединения затвора к ползуну;
t6 — время отката ствола;
t- — время прихода агрегата запирания в крайнее заднее поло-
жение;
4 — время включения ускорителя наката:
4 — врег^я цикла движения ствола;
4 — время цикла автоматики.
Для пушек с неподвижным стволом, автоматика которых приводит-
ся в действие от подствольного газового двигателя, ИСД имеет весьма
простую расчетную структуру (см. рис. 9.19 и 9.20). Допустимость такого
упрощения ИСД вытекает из условия кратковременности действия силы
давления порохового газа на дно капала ствола и большой ее величины
по сравнению с усилиями, возникающими на цапфах автомата, в про-
цессе его действия.
На рисунках обозначены:
— время наката подвижных частей автомата;
— время движения снаряда по каналу ствола;
4— время приложения ударного импульса, эквивалентного им-
пульсу газового двигателя;
4— время начала приложения импульса газового двигателя, дей-
ствующего на цапфы автомата в противоположном направле-
нии силе отдачи;
4— время приложения ударного импульса, эквивалентного им-
пульсу выстрела;
4 — 4 — время действия газового двигателя.
Его величину можно оценить по формуле
t 0,6(1 + 7)4 + (р-0,5)Д(4-Ю,ЗГ)
5 1 + э
где
Ч
Т — время периода последействия.
В первом приближении можно принять 4 ~ 24-
Значения импульсов (см. рис. 9.20) определяются согласно выраже-
ниям:
•4 = WH; 4="г(1+а5)цл;
4 О
Л=[ S„prdt— f nadt,
К о
где Sn — площадь поршня газового двигателя;
pr — давление в газовом двигателе.
Диаграмма «путь — скорость»
Графо-аналитический способ расчета упругой реакции лафета осно-
ван на диаграмме «путь — скорость» («П—С») {2, 4, 5]. При отсутствии
амортизатора она представляет собой графическое изображение ИСД в
координатах:
t t
Г)= (Рф sin P\drc 8 = J P(£)cos Р>(&,
о о
где
t — фиксированный отрезок времени;
£— текущее время в интервале от 0 до if;
р__у / /г — частота упругих колебаний лафета.
1 И м2
Под силой /J(g) следует понимать функцию силы отдачи на фикси-
рованном участке времени или импульс удара.
На графике (рис. 9.21), по-
Рис. 9.21. График изменения импульса
упругой реакции в системе коорди-
нат г), О’
строенном в системе координат т|, &,
выберем точку К на расстоянии ОК
от начала координат. Построим в
этой точке касательную и нормаль
к кривой т]('&), а затем из начала
координат опустим перпендикуляр
ON на нормаль.
Рассмотрим свойства элементов
кривой т) (&): радиуса кривизны р,
длины кривой OK = s и отрезков
ON, NK, ОК, а также угла наклона
касательной а.
Радиус кривизны в точке К оп-
ределяется уравнением
ds
? = — •
da
Элементарная дуга ds и tg а равны:
= V йРР ф- d№=Р (5) с/:;
dv
Отсюда следует, что
OK = s= f Pfydl; da —pd& (a = pty; p =
J n
Таким образом, длина кривой ОК пропорциональна импульсу сил
за время t, угол наклона касательной (а) —времени t, а радиус кривиз-
ны — силе, возмущающей лафет.
Покажем, что размеры отрезков NK, ON, ОК соответственно опре-
деляют:
— текущую деформацию лафета Xi;
— текущую скорость его деформации хр,
— текущую величину максимальной деформации лафета Xim.
Из рис. 9.21 следует:
ON = NNp- 0 cos а 4^ 9 sin а!
NK = NXE — СЕ = & sin а -- Ц cos а.
Так как а = pg, координаты точки К соответственно равны:
t t
&=[P(5)cos pfyfa л = f P (4) sin рЫЬ
о 0
При независимости параметров t ng:
____ t
ON = ^P($ws ptt-tyd»-,
о
_____ t
sin plt-^dl.
6
С другой стороны, в соответствии с уравнениями вынужденных ко-
лебаний
Л'Х=р7И3х1;
откуда
NK • ON
1 рМ2 1 м2
Из соотношения OK2— ON2-\- NK2 следует, что при отсутствии
диссипативных сил
Поясним построение «П—С»-диаграммы для характерных элемен-
тов ИСД:
— сосредоточенного импульса /;
— постоянной силы Р;
— силы, изменяющейся но линейному закону P = P0±at.
Для сосредоточенного импульса J кривая ОК вырождается в пря-
мую линию, в общем случае наклонную под углом pt к оси О.
При постоянной величине возмущающей силы Р кривая ОК «П—С»-
диаграммы представляет собой часть дуги окружности с радиусом
р>
Р= — и протяженностью pt. В случае, когда возмущающая лафет си-
Р
ла меняется во времени по линейному закону Р = P0-pat, центры радиу-
сов кривизны кривой ОК располагаются на окружности с радиусом
г = ——, т. е.
ria
. л
г= Ч----.
-
Знак «минус» указывает па то, что центр окружности эволюты нахо-
дится перед начальным радиусом кривизны Ро = — кривой ОК\ знак
Р
«плюс» — за ним.
Упругая реакция лафета при одиночном выстреле автомата
При заданной ИСД упругая реакция лафета в любой момент време-
ни ti до момента включения амортизатора определяется уравнение к
вынужденных колебаний для системы с одной степенью свободы
х '
= ;-i cos АД^ + ^i sin Pt^t ±Pt J p(i) sin Pi —
Pi
(9. Hr
где P(£) — текущее усилие на цапфах автомата;
лу z-i; х,_1 — деформация лафета и ее скорость в начале расчетное
участка Д/д
— частота колебаний на расчетном участке.
V М2
Частота рг- изменяется внезапно вследствие, например, скачкообраз-
ного увеличения неподвижной массы автомата М2, вызванного приходе v
ствола в крайнее переднее положение или посадкой агрегата запирая?:-
на шептало и т. п.
Если в начале расчетного участка имеет место удар подвижной час-
ти автомата о его кожух с последующим ее присоединением к нему, г
наряду с соответствующим изменением скачкообразно увеличится ско-
рость деформации ii-i на величину
дх(-_1=------:,
М2 i-j + mi
(9.1 С"
где /уД—туt — количество движения детали автомата, присоединив-
шейся к его кожуху;
/И; и У1—соответственно масса и скорость этой детали относи-
тельно кожуха.
В том случае, когда импульс /уд передается на цапфы автомата че-
рез ось механического ускорителя, например, при ударном броске агре-
гата запирания, в этот момент меняется только скорость деформации л г-
* У д
фета на величину дх/_1 =------
м2/_1
Расчет величины Ууд изложен в § 9.2
Рис. 9.22. Система с двумя степенями
свободы
Момент включения амортиза-
тора также как и последующий зе-
тем процесс деформации лафе-;
описывается уравнениями коле'?
тельной системы с двумя степеням?
свободы (рис. 9.22):
М1х1 ф- ktxr == П2;
<хц + П2=Р(/);
Лц=Л1 ф~-Х2,
(9.Е-
где -Ч—перемещение цапф лафета относительно его непс -
вижной части;
М2— текущая масса автомата, неподвижная относитель-
его цапф;
— абсолютное перемещение цапф автомата;
THj — приведенная масса лафета с учетом присоединенные
ней частей амортизатора;
П2=П02ф-Л2х2 — текущее упругое усилие пружины амортизатора;
(9.109)
П02— усилие предварительного поджатия этой пружины;
л2 — перемещение кожуха автомата относительно цапф ла-
фета.
Совместное решение уравнений исходной системы для относитель-
ного ускорения цапф автомата х2 приводит к выражению
•• __ + — П2(^ + ^2)
Л" О -
ЛЦМэ
Момент включения или выключения амортизатора соответственно
определяется условиями: и лд^О. Поэтому для определения вре-
мени включения амортизатора tB имеем уравнение
Р (О Mi Д] (О М2 д>рр f9 110)
Л11+Л12 °2’
где — усилие воздействия автомата на амортизатор в момент его
включения;
— упругая реакция лафета в момент включения амортизатора.
Обычно уравнение (9.110) решается методом последовательного
сближения результатов.
Для определения упругих деформаций Xi, х2 и их скоростей ад, х2
после включения амортизатора систему уравнений (9.108) приведем к
виду:
— /г2х2 = П02;
Л'12хц + k2x2= Р($ — П02
Положив правые части этих уравнений равными нулю, найдем их
главное решение в форме взаимно независимых гармонических колеба-
ний координат и х21Ц: ,
л ’:.ц =Л,2 sin (pt -{- si. ' : ' /Д
После подстановки вместо лд.2 и Xi12 соответствующих выражений
Х1,ц и Х1,ц придем к зависимостям:
— М1р2А1 Аг — М2р2А2=0;
— M2p2A2~k2A-lJr k2A2 = 0.
Отсюда следует, что амплитуды главных колебаний Ai и А2 связаны со-
отношением
At (&2 —р2М2) С-2 д2Л42С2 □
Л2 A2Cj (Л1—д2Л11)С1
(9.111)
a уравнение частот имеет вид
— р2М2)(Р1 — p2Ml)= p2M2k2
или
£,м2 + ^2{ Лф, + Л12) р2
k-ti2
Поэтому частоты первой и второй главных гармоник будут соответствен-
но равны
0.
Pl,2 =
k]M2 + k2 (Alj + ЛД)
244^2
, - / Г k\Л42 -f- k2 (Л41 Л42) ~|2 &Д2
I/ 2Л11Л42 J A4iAI2
При этом свободные колебания координат Xi и х2 выражаются уравне-
ниями:
(9.112)
Р
Xj=Mi sin (Р/+е1) + Мг sin (p£ + e2);
л-,( =Д1 sin(p1i!4-e1)4-Д2 sin (p/ -f-e2),
где
ЛГ2р| fe —/фи2 M2pl k2 — />2^2
p x =-----------------------; p 2=--------------=------------
k\— />>1 £2 4 — ^2 P2M2
(9.113)
Величины постоянных AIt A2, ei и e2 определяются начальными ус-
ловиями:
/=0; х1=х01; Xj = Xq1; хц=хОц; хц=хОц.
Для этого общего случая их значения равны
Аг
Pi
1 Х01 ?9ХОЦ .. -[—7—5 , *01 3*2*011
----------?--V 1 + tg2 4; tg S, = A ----------------------------— ;
Pl — P2 *01 — 32*Оц
^^-/i+tg4; tge2=A
PH Pl— P2 31*0ц — *01
В момент включения амортизатора (/ = 0, *оц = О, жоц=О) выражения
для постоянных принимают вид:
— V1 + tg'41 tg ei = Pi
А2= 1 - X()1 -y~l+tg4>; tge2=p2^-.
Pi 32 — 31 х01
Если включение амортизатора по времени совпадает с ударным
присоединением к кожуху автомата его подвижной детали, то следует
принять:
___^уд
-*-0 ц и, Хо ц = —
Л1г-_! + т
При Mi = 00 (р2 = 0; Pi = oo; р1 = 0), т. е. в случае жесткого основания
автомата, колебательная система с двумя степенями свободы вырож-
дается в систему с одной степенью свободы:
А = /l + tg2s2 sin (а/-М2); Xj = 0,
Pi
2 ^2 , *011
ГДеА>=Д7~; tge2=A^— •
Л'2 *0ц
Частные решения исходной системы уравнений (9.111), определяю-
щие вынужденные колебания системы с двумя степенями свободы, вы-
раженные через главные координаты 0j имеют вид
t
О,. sin(9.115)
J MinPi
о
где Pin — приведенные к главной координате силы Р1 = П02 и Р2 =
= Р—П02, возмущающие упругую систему;
Min — приведенные к главной координате массы системы Mj и ЛЬ.
Перемещения *i и хц с главными координатами ©i и 02 связаны со-
отношениями:
a=Pi@i4-P202 и x^ej+02.
Тогда на основании уравнения элементарных работ возмущающих сил
Р^Х1 + Р28х2 = Plnse1 + р2п802
получим
Лп=(?1-1)п02+Л р2п=(?2-1)п02+р.
Здесь параметры Pi и f>2 подсчитываются по формулам (9.114).
Выражения приведенных масс Л11п и Л42п найдем из равенства кине-
тических энергий системы
M^xl + Л12Лц = 7И1П0? 4- ТИ2п02.
Отсюда следует, что:
= + Л42п=^ + ^2,
так как для взаимно независимых координат ©i и @2 член
2(у2/И1 + Л42)01ё2=О.
Суммируя главные (9.113) и частные (9.115) решения для переме-
щений Х[ и хц, получим уравнения:
sin (PMS1) + M2 sin (/72/ + $2) +
+ f ^<0 +O.-DHoa sin +
Я J Л12 +
ЛЦ = А1 sin(/?/ + e)4-A2 sin (/></+?) +
+^f-P(£)+(V)n°2
Pi J Л12+?>1
I 1 C P (E) + (?2— 1) n02 . n u M
П-----\ ------------------ Sin /?2 (Г — :;l di,.
P2 i M2 +
При Afj =oo:
Xi = 0;
t
^oh sin р2/+лОц cos P-J H — ( 1102' sin p2 (t - ?) dl-
Pl P2 J M2
0
Это уравнение справедливо и для свободного перемещения системы
(р2 = 0, По2 = О). В соответствии с правилом Лопиталя для этого случая
оно вырождается в формулу
t
ХИ= х0ц “И х0а^ + ( —гр— Ц — Ю dl,.
J М2
о
На практике формулами для Xi и хц пользоваться затруднительно
вследствие их громоздкости и сложности структуры функции P(f).
Для случая, когда перемещения существенно меньше хц, можно
пользоваться приближенными зависимостями:
Xi = xOi cos р^-\-^~ sin /?1/4--П°г + fe2X2cp (1 — cos pfy (9.1 16)
Рт.
t
x2 =x02cosp/4-—— sin/?2/ + — f sin Pi^ — £)d$ —
Pz kz J
о
__^02__LZ,2X2cp('i_cos (9.117'
«2
г„р „2 — fel „2- _^L- r _ *02 + *2
4 Pl~ M, ’ M2’ 2cp“ 2
Эти формулы можно получить из системы уравнений (9.108), поло-
жив хц~х2. При пользовании приближенными формулами для х2 и х:
расчет следует вести по участкам At, начиная с момента включения
амортизатора:
-’со2=0; ло2 = О; л01 = л:00; л01==х00;
t=u,
х21 = -Р^~ f /’(?)sinp21(^i — -^-(1— COS^A/J;
kz J *2
0
, , xn0 , . 2П02 + &2*21 Z1 ..
bi = -*oocos ----------— sm Pi^i H---------Д7-------G — CQS Pl&l)-
Pi 2fei
Для /-го участка расчета:
JC1Z = a;^—! cos sin Jo1A/.-+-^-(l —cos /?1Д/г-);
Pi ki
x2l = x2i-l cos ' sin p2i^ti -r-~~ i Pi (0 X
Pzt kz J
0
Xsin —Ю di---------------02;— (1 — cos p^Ait'},
kz
II ____ TT I h x’2i- 1 + xZi . 2 k2
где ii02(- — ii02-j-«2------------, p2i--------—.
2
Изменение массы M2i на расчетном участке 0sCtAti возможно
вследствие присоединения подвижных деталей автомата к его кожуху.
Следует помнить, что этот процесс присоединения сопровождается вне-
запным изменением скорости деформации пружины амортизатора
L I Х-i
Текущие значения времени t{ и упругих реакций амортизатора R2i
и лафета 7?1г- вычисляются по формулам:
^ = 2Д^’ ^zi = k2x2i; Ru = kpcu
При наличии аналоговых вычислительных машин система уравне-
ний (9.108) достаточно легко исследуется в целях установления опти-
мальных характеристик амортизатора (1IO2, k2 и A2/fei), обеспечивающих
наименьшую упругую реакцию лафета при заданной величине отката ав-
томата. Характеристики предварительно выбранного с помощью АВЛ1
оптимального варианта амортизатора можно уточнить на ЦВМ.
§ 9.7. ВЛИЯНИЕ УПРУГОСТИ УСТАНОВКИ НА РАБОТУ
АВТОМАТИКИ ПУШКИ С КОРОТКИМ ХОДОМ СТВОЛА
Рассмотрим задачу кинетического анализа автоматики пушки с уче-
том жесткости ее лафета. При безударной работе автоматики влиянием
жесткости лафета обычно пренебрегают и учитывают ее лишь в случае
удара. Между тем, из теории вынужденных колебаний известно, что в
случае действия безударной нагрузки внутренняя реакция нагружаемой
детали зависит от ее жесткости и закона изменения нагружаемого уси-
лия во времени. Так, предельное значение упругой реакции при мгновен-
ном приложении постоянной внешней силы достигает удвоенной величи-
ны возмущающего усилия.
Большие упругие реакции и деформация лафета приводят к ухуд-
шению кучности стрельбы и утяжелению веса лафета. В связи с этим ис-
следуются возможные пути снижения упругой силы отдачи пушки. За
время одного цикла автоматики пушки с коротким ходом ствола дефор-
мация ее установки вызывается как значительными усилиями на цапфах
автомата при безударном взаимодействии его подвижных деталей, так и
при их соударениях, например, при включении механических ускорите-
лей отката и наката, развороте затвора, присоединении его к ползуну,
приходе ствола и агрегата запирания в граничные положения.
Деформация лафета при безударном взаимодействии
подвижных частей автоматики
Для схемы работы автоматики на упругом основании, представлен-
ной на рис. 9.23, уравнения кинетического анализа записываются сле-
дующим образом:
для движения ствола
+ Ще + kc (Хс - X J + 5С - РК1 = 0;
для движения агрегата запирания или его элементов
щЛу + По + £(*у-^ц)-5у=О;
для движения кожуха и связанных с ним деталей
АТК + Поц+knXa=5С - 5у + Пос + kc (Хс - Хц) + По + k (%у - Хц).
Рис. 9.23. Схема безударной работы автоматики пушки на упругом
основании
В качестве кинематической и силовой связи подвижных элементов
используются еще два соотношения:
кинематической связи
(%с-Х> = Ху-Хц;
силовой связи
5c=vc5y.
Эта система пяти уравнений приводится к трем:
МСХС + ,стХу + vcn0 + \k (Ху - Хц) + Пос + kc (Хс - XJ = Ркн;
М X + Мсхс + тХу+ПОЙ + й.цхц= Ркн;
Ху=vXc - (V - 1) хц; Ху=>хс - (V - 1) (%с - Хц).
(9.118)
В данных уравнениях неизвестными являются абсолютные переме-
щения ствола Хс, агрегата запирания Ху и цапф автомата Хц. После от-
пирания затвора сила давления порохового газа на дно канала ствола
равна нулю (РКн=0). Возможные функции PKn(t)=P = Wi приведены
в § 4.1, 4-2 и 9.2.
Анализ системы уравнений (9.118), определяющих цикл автоматики
на упругом лафете, целесообразно проводить на АВМ.
Совместное решение уравнений исходной системы приводит к диф-
ференциальному выражению закона сохранения энергии
/ MKV* , г V
+ + [Ac(A"c—2СЦ)]; +
(9.119)
где 1/с = Л'с — текущая скорость ствола;
1/у=Ау — текущая скорость агрегата запирания;
1/ц = Хц — текущая скорость перемещения цапф автомата;
-Ас — энергия, аккумулированная возвратной пружиной ство-
ла;
А.— энергия, аккумулированная возвратной пружиной агре-
гата запирания;
Ац — энергия, аккумулированная лафетом;
В-—к. п. д. кинематической связи между стволом и агрега-
том запирания;
Аг — работа, совершаемая силой давления порохового газа на
дно канала ствола.
Энергетический баланс подвижных частей автомата изменяется не-
прерывно вследствие затраты части энергии на деформацию лафета. Ве-
личина энергии, аккумулированной лафетом, существенно зависит от его
жесткости. С уменьшением жесткости ее величина резко возрастает, вы-
зывая уменьшение скоростей подвижных частей автомата.
Пример 9.4. Пусть для коэффициента жесткости лафета йц=700 кгс/мм упругое
усилие лафета составляет Яц = 1800 кгс. В этом случае энергия деформации лафета
Е„ = — = 2,3 кгс• м.
ц 2ky
Это означает, что на такую величину уменьшалась энергия подвижных частей
автоматики. Если жесткость лафета уменьшить еще в четыре раза, то величина временно
потерянной энергии движения автоматики составит около 10 кгс-м. Такое количество
энергии уже становится соизмеримым с ее общей величиной, затрачиваемой автомати-
кой на осуществление всего процесса перезарядки. Поэтому в подобных случаях кине-
тический анализ работы автоматики следует производить с учетом упругости лафета.
По этой же причине стремятся повысить жесткость установки пушки, а при наличии
специальной амортизации лафета — обеспечить стрельбу на выкатке кожуха
автомата.
При ударной работе автоматики, когда перегрузки установки и ее деформация
оказываются весьма значительными, пренебрегать скоростью перемещения кожуха авто-
мата нельзя, особенно при малой жесткости лафета. В этом случае большие скорости
перемещения кожуха приведут к увеличению скорости ствола и уменьшению скорости
агрегата запирания, т. е. к уменьшению темпа стрельбы.
Деформация лафета при ударном взаимодействии
подвижных частей автоматики
В § 9.2 было рассмотрено соударение деталей автоматики пушки на
абсолютно жестком лафете. Для податливого лафета процесс их соуда-
рения протекает по схеме колебания системы с двумя степенями свободы
(см. рис. 9.23).
Включение ускорителя с ударом
Динамическое состояние колебательной системы «ствол — агрегат за-
пирания — кожух» в процессе соударения описывается уравнениями:
кинематики деформации силовых деталей
^у=4+л^с-4)-А';
движения ствола
AfcIZc + vc^xy =0;
движения ползуна затвора
mVy — kxy = Q (Sy=kxy);
движения цапф автомата
('’с (*^с ^у=Ус&Ху Ьф),
где ху — деформация соударяемых деталей (ускоритель, ударник,
ствол);
k — их приведенный коэффициент жесткости.
Эта система уравнений при допущении v = vc сводится к двум зави-
симым линейным дифференциальным уравнениям второго порядка:
^ц+Мц=уЧ; 1 (9.120)
где
Будем искать решение данной системы уравнений в виде независи-
мых гармоник:
xn = A sin (ft-I- е): 1
(9.121)
Ху = /Д sin (6/-|-g). j
4».
Для определения частот колебаний получим выражения
~А^ + Ар^-А2-
- Лаб2-}-
Откуда имеем следующие зависимости между амплитудами гар-
моник:
А2 _ А1 г , А2 Дц~ 62 .
р^~ 62 72 Л1 Tf2
А2 _ о2
А1 а2 — в2
(9.122)
Приравнивая правые части двух последних соотношений, после ал-
гебраических преобразований получим уравнение частот
64 — (В2 -L /22 ) 02 82/?2 — s2y2 _ Q.
Положительные корни его будут искомыми частотами гармоник:
г-----------------------д ' 1
V
&2+Дц V 2 2
—j -pIp ;
(9.123)
Таким образом, на основании соотношений (9.121) — (9.123)
решение принимает вид
A = hY2 sin(0/+s1)-4-ti2y2 sin (02^ + е2); 1
л:у=И1(/’12 — 61) sil1 (ei^4-£1) +Р-2Оц — ег) sin(02/+s2). I
Значение постоянных щ, ц2 ei и
виями процесса удара:
/=0; лу=0; хц=х01[;
Они будут равны:
2 о2
а _ -^Оц_____.
' 1 у2 sin El e2 _ в2
искомое
(9.124)
е2 определяются начальными усло-
ц=лОц; ху = (>- 1) ПОс- (9.125)
„2_ »2
= _До1д_ I .
2 72 sin е2 в2 — 62
Wi (Дц — е1)
s^arctg
-*оц (д2 — й1) — О — 1) ИН2
-*0ц62 (Дц~ ei)
s2 = arctg
-*0ц (Ра — °1) — О — 1) ^ОеТ2
Для случая, когда хОц и хОц малы (хОц?кО; хгщ^О), перемещения
цапф автомата и линейная деформация силовых деталей ху будут из-
меняться во времени, согласно уравнениям:
х„=(> — 1)-^------—— sin 62i— sin 6,/j ;
’ 0i 02-о2 \ в2 /
(9.126)
, ,> VOc Дц—6i / 0, Дц —62 с , дЛ
X , =^(v — 1) — --— —'--------— Sin ВТ — Sin 0/ .
У 01 02— О2 \ 02 п- — 02
1 °2 \ 2 Дц —°1 /
При Л1к = оо (цапфы автомата закреплены неподвижно) уравнения
(9.126) вырождаются в выражение вида (9.30), характеризующее ко-
лебание системы с одной степенью свободы,
Л
— 1
1/Ос sin pi,
Р
где
Разворот затвора
Ударный процесс открывания поршневого затвора в первом прибли-
жении описывается следующими дифференциальными уравнениями:
кинематики разворота затвора
силовой деформации агрегата запирания
2й.<р
Vy = -^— tg(.a+p);
деформации лафета или перемещения цапф автомата
(v — 1)
поступательного движения агрегата ствола и затвора
AJnlX/ + (A- 1)Му = 0;
вращательного движения поршня затвора
где момент трения в зубцах запирания затвора
Lf~fkzxy — .
В приведенных уравнениях:
2 —угловая скорость вращения затвора;
Ху —линейная скорость деформации стебля
затвора и изгиба ускорителя;
— угловая деформация стебля затвора;
kz — коэффициент осевой жесткости линейно
деформирующихся деталей автомата;
k- — коэффициент тангенциальной жесткости
стебля затвора;
. nd
а= arctg —-----угол спирали разворота;
D — средний диаметр зубцов запирания;
d —средний диаметр спирали;
/ — момент инерции затвора;
Л4пр = Л1сЦ-/п3-)-у2(т — т3) — приведенная масса подвижных частей аг-
регата запирания;
т., — масса затвора.
Это исходная система из пяти уравнений сводится к двум уравне-
ниям:
Ху "ф = а2-^Д!
(9.127)
где
D , J d 2л(v—1)2 / 1 1 \
— tg (« + р) ---------- +----1------ — + -----)
* J 2/tg(a+ р) L (Л1пР < )
Для этих двух дифференциальных уравнений справедливо найден-
ное выше решение (9.124), в которое вместо жу= (v—1) ГД должно быть
подставлено новое значение начальной скорости деформации стебля за-
твора, определяемое соотношением
_______РРрс___________ _
, kz kd Ctg(g + p)
k-r, 4л
Присоединение затвора к ползуну
Процесс присоединения затвора к его ползуну описывается следую-
щими уравнениями:
деформации силовых деталей
^з=>(^с-хц)4-лц-х3;
движения затвора
т.у.,-= Л?
движения агрегата ствола
^прЙс + ^х3==0;
перемещения цапф автомата
Л!кхц -ф kyxy = (vc - i) kx3.
В уравнении движения агрегата ствола
4
где т — масса ползуна;
k — коэффициент жесткости деталей, передающих усилие присоеди-
нения на цапфы автомата.
Решение этой системы уравнений, как и предшествующих, имеет вид
(9.124). При этом в решение вместо т и Мс следует подставлять соответ-
ственно т3 и Л1Пр.
Граничные удары агрегатов ствола
и запирания
Динамическое состояние системы в момент граничного удара харак-
теризуется уравнениями:
кинематической связи деформаций корпуса кожуха х и лафета хц
^с=х-гДг.>
деформации лафета
Л4кхц+^л—
движения ствола (или агрегата запирания)
A4cVc-j-^x = 0.
После алгебраических преобразований получим:
л-|-йД-^Л,,:
•• , 2 ,
Д ЛДДД
где
Л2 = д2 = А_; 52 = fc(_S [ L_\ .
Мк Л1К ( Л1С 1 Л1к J
Искомые деформации кожуха автомата х и лафета хц выражаются
уравнениями (9.124).
Замечание к определению постоянных
в уравнениях (9.124)
Начальные скорости перемещения тел, принимающих участие в про-
цессе соударения и образующих при их взаимодействии колебательную
систему с несколькими степенями свободы, строго говоря, должны нахо-
диться из уравнений полной их кинематической связи. Так, при вклю-
чении механического ускорителя и граничном ударе подвижных частей
автоматики для определения постоянных ць ц2> ei и е2 в уравнениях
(9.124) следовало бы использовать соотношения:
1) (>-i)i/oc=-s+(*-iR;
(v — 1) kx= -j-' УИкХц;
2) I/Oc^% + 4;
kx=kaxa-[-M^xn.
В этом случае, в отличие от применявшихся выше формул (9.125)
для начальных скоростей деформаций, получаем выражения:
2) лу — VОс
^V"oc Л1кХ()ц
FVОс 44кхоп
При этих уточненных начальных условиях уравнения для деформа-
ций упругих элементов системы (9.124) и (9.126) для случая ударного
включения ускорителя принимают вид:
ху = A sin 0/-|-В sin 0£/;
х,. = А------------ sin 0/ 4- В-------------sin 04,
где
(9.128)
Для граничного удара агрегата ствола и запирания функцию F
найдем из условия отсутствия ускорителя [(v—1) = 1]. Сопоставление
результатов численного решения уравнений (9.124), (9.126) и (9.128),
(9.129) показывает, как это следует из рис. 9.24 и 9.25, что уточненные
уравнения дают несколько большие деформации системы. При этом ха-
рактер кривых хд(1) и xy(t) совершенно идентичен, т. е. обе кривые эк-
Рис. 9.24. Графики деформации упру-
гого основания при соударении тел
(<Qo = 2O кг; QK = I0 кг; йц = 70 кгс/мм;
Гос=3 м/с):
---------для системы с двумя степенями
свободы;-——для системы с двумя
степенями свободы и учетом функции F
Рис. 9.25. Графики деформации упру-
гого основания (йц=700 кгс/мм; VOc =
= 3 м/с; Qo = 20 кг; <2к = 10 кг):
----------для системы с двумя степенями
свободы;--для системы с одной
степенью свободы; — • — • — для системы
с двумя степенями свободы и учетом
функции F
видистантнь!, а количественное значение величин деформаций практиче-
ски одинаково. Однако при решении задач удобнее пользоваться упро-
щенным решением (9.124) и (9.126). Влияние жесткости лафета, соуда-
ряемых масс и их скоростей показано на рис. 9.26 и 9.27.
Рис. 9.26. Графики деформации А'ц
упругого основания при соударении
тел (Qo = 20 кг — подвижная часть,
С2ц = 10 кг — неподвижная часть, йц =
= 700 кгс/мм, Цс—З м/с, k —
= 5000 кгс/мм):
--------- для систем с двумя степенями
свободы; — — —для системы с одной
степенью свободы
Рис. 9.27. График наибольших дефор-
маций Хцщах и реакции установки
в зависимости от ее жесткости и со-
отношения соударяемых масс (Voc =
= 1 м/с):
------<2о=20 кг; QK=15 кг;---------Qo =
= 15 кг; QK=15 кг; — . — . —Qo=10 кг;
Q к — 25 кг
Пример 9.5. По заданной ИСД построить кривую изменения во времени упругих
сил и деформаций лафета заданной жесткости.
Задачу решить аналитическим и графо-аналитическим способами.
Исходные данные:
Л4 = 10 кгс-с2/м;
k = 500 кгс/мм;
/j = j2 — 15 кгс-с; р ~pi-----------;
Рх = 1500 кгс; Р'2 = 4000 кгс;
О = б- 10~3с; if2 = 1б-10~3с; ^3= 25• 10“Зс;
Р
5'105
----- =224 с
10
— = 28-Ю~3 > t3 =25-10~3 с.
Р
Аналитическое решение
I. Участок 0—1 (рис. 9.28).
1. Величина деформации в любой точке на участке 0—1:
t
хо 1 С
х =-----sin pt + х0 cos pt 4- ——— \ Р (S) sin р (t — 5) d£;
Р pm J
о
х0 = 0; х0 = 0; х0, = —
15
— = 1 ,о м/с;
10
Р,
Р(5) = —Ц.
и
Рис. 9.28. Результаты аналитического определения упругих сил и деформаций
лафета
Вычислим интеграл для линейного закона изменения
t
= Р\~ и приведем общее выражение для x(t) к рабочему виду:
О
t t
возмущающей
силы P =
P(S) sinp(l —5)d£ =
Pi
£ sin p(t — $)<*£ =
o
о
sinp(f —\ di
V
sin p(t— i)di
Jo
--------к cosy? (t — s) — 1 cos p (t — О di_
h p L J
sin pt
P
о ph \
-Vo '^>1 / sin pt \
x = ----- sin pt 4- --- t — ;
P ktx\ p Г
1,5 . ,лп. c л. 1500 Г „ sin (224-0,006) 1
X, =— sin (224-6-10 3) -T----------------- 6.10-3—-------1-----’--=
1 224 k ’ 5-105-6-1O~3 L 224 J
= 0,00735 м = 7,35 мм.
2. Скорость деформации:
Pi
x = AT, cos pt +------ (1 — cos pt);
kt\
1500
x = 1,5 cos 77° +------z---------(1 — cos 77°) = 0,72 м/с.
5-10s-6-10~3
3. Упругая реакция лафета в точке 1'.
РЛ1=кх, =500-7,35 = 3675 кгс.
Наибольшая деформация при условии отсутствия возмущающих сил при t>ti оп-
ределяется из уравнения
или
Отсюда
II.
1.
2.
3.
Хо cos pt 4------(1 — cos pt) = 0
kt\
1,5 cos pt + 0,5 (1 — cos pt) — 0.
2
q-osptm = — 0,5; ptm = — л (120°);
О
2л 2л „
tm = -—- =--------= 9,3o-10 3 c.
m 3p 3-224
Участок 1 — 2: 0 < t < t2 — t\ = 10~2 c.
Xj P2
x = -----sin pt 4- Xi cos pt 4- — (1 — cos pt) или при P2 = const;
p k
Xi J2
x — -----sin pt 4- Xi cos pt 4----(1 — cos pt);
p k
0,72 4000
x2 =-----sin 128° 4-0,00735 cos 128° 4--------(1 — cos 128°);
224 5-105
p(t2 — z^) = 224-10—3 (16 — 6) =2,24 = 128°;
x2 = 10,9 mm;
P2y?
x = Xi cos pt — Xip sin pt 4- —-— sin pt;
x2 = — 0,72-0,616 — 0,00735-224-0,788
4000-224
--------0,788;
5-105
x2 = — 0,34 м/с.
/?л2 = &X2 = 500-10,9 = 5450 кгс;
PlP
Xi cos pt — Xjp sin pt +---- sin pt = 0;
k
0,72 cos
/4000-224 \
pt 4- [-------— 0,00735-224 sin pt = 0;
V 5-10° J
0,72 cos (ptm) 4-0,14 sin {ptn) = 0;
tgptm = —5,15; ptm = 101°;
101 ar
Zm =---------= 7,9-10'
m 180-224
c.
Так как — it, то xmai — реальная величина и при cos ptm=—0,1*91,
sin ptm =0,982:
0,72 4000
*max = *4 =-^-0,982 — 0,00735-0,191 + - - f-(1 +0,191)= 11,3 мм;
Rx max = kxmax = 500-11 ,3 = 5650 КГС.
III. Участок 2—3:
0</< t3 — /2 = 9-+Г3 c;
p (t3 — /2) = 224 (25 — 16) 10~3 = 2,02 (115°30');
sinp (t3 — +) = 0,903; cos p (t3 — Z2) = — 0,4305; P(£) = 0.
1. x =----sin pt + x2 cos pt;
P
0,34
x3 — —------ 0,903 — 0,0109-0,430a = —6,07 мм.
224
2. x = x2 cos pt—x2p sin pt;
x3 = — 0,34( — 0,4305) —0,0109-224-0,903 = —2,06 м/с;
x3, = л'з + = — 2,06 + — = — 0,56 м/с.
ь ° Л/t Ш 1
3. Определение Zmax; ZmIn(V); Vmin x = 0;
x2 cos pt — x2p sin pt = 0;
.1'1
tgp/max =-------
X2P
0,34
0,0109-224
0,1395;
ptmux = 172° > 115°30' = p(f3 — t2),
t. e. на участке 2—3 максимум деформации отсутствует.
На участке 2—3 деформации изменяется от +10,9 мм до —6,07 мм, т. е. ее зна-
чение переходит через нуль. Так как перемещение и его скорость выражаются грамо-
нической функцией, то этой точке должен соответствовать максимум скорости.
Наибольшая скорость деформации будет в точке 5, где
Р
x3 = Xg = 0; — x2p sin pt — x2p" cos pt — 0;
82л
------=6,4-10”3 <
180-224
Полное время
^min — t$ — t~ + t2— 22,4-10 3 с;
x5=A-min = —0,34 cos 82° — 0,0109-224 sin 82°= —2,47 м/с;
0,34
x5 = —-0,99 + 0,139-0,0109 = 0,01 мм = 0 (проверка);
/?лз = kx3 — —500-6,07 = —3035 кгс; /?л5 = 0.
Графо-аналитическое решение
I. Участок 0—1 (рис. 9.29).
Масштаб для J принимается равным т/ = 0,2 кгс-с/мм. Дуга, равная импульсу
сил, действующих на участке 0'—1, изображается эвольвентой 0'—1 с полярным углом
p!i = 224-6-10-3= 1,344(77°6') и радиусом-вектором в точке I
Pt
Pl =
Pmj
1500
224-0,2
= 33,5 мм.
Радиус окружности эвольвенты:
Pl
Ptl
33,5
1,314
= 25 мм.
Для построения эвольвенты выбраны промежуточные точки а и &:
/а = 2-10“3 с; = 0,448 (25 °42');
Ра 500
Ра = 500 кгс; ра =------=--------= 11,2 мм;
а va рт} 224-0,2
/& = 4-10~3 с; ptb = 0,896(51 “24');
?b =
Pb
pmJ
1000
224-0,2
= 22,4 мм;
2, Участок 1—2:
p (h~ *i) = 2,24(128°);
Рис. 9.29. Графо-аналитическое определение упругих сил
и деформаций лафета
3. Результаты построений сведены в табл. 9.1.
Для измерения соответствующих отрезков имеем масштабы:
т, 0,2
т. =—— = — = 0,02 м/(с-мм);
х М 10 Л ”
m.j 0,2 1
Шг =--------= -------=----- 10~3 м/мм.
х рМ 224-10 11,2
Сняв с диаграммы длины отрезков On и nk в миллиметрах, получим скорости
упругой деформации лафета и его перемещения по месту цапф:
х = 0,02Оп м/с; х = ^j-^-lO-3 м.
4. Время, отвечающее точкам 4 и 5, определяется углами, указанными на диа-
грамме:
по результатам измерения
Л}= 13,8-10~3 с; i5 = 22,6-10“3 с;
Таблица 9.1
' Точка j Параметр 0 ог 1 2 3 3' 4 5
ММ Графо-ана- литшески Обозначение на диаграмме 0 О'п0, пр «зз п3,3' 04=02 п-5
Величина 0 0 7,35 10,8 -6,07 -6,07 10,9 0
Аналитически 0 0 7,35 10,9 -6,07 -6,07 11,3 0
X, мм/с Графо-ана- литически Обозначение на диаграмме 0 Оп0, O«i On 9 О«з Оп3, О On-
Величина 0 1,5 0,72 —0,34 -2,04 -0,54 0 -2,44
Аналитически 0 1,5 0,72 —0,34 -2,06 —0,56 0 -2,47
/?л, кгс 0 0 3675 | 5450 -3035 -3035 5650 0
аналитически
4 = 13,9-10~3 с; t5 = 22,4'Ю—3 с.
Примечание. На диаграмме У(Р для Z=0 и t3 имеет место разрыв графика
скорости деформации, вызванный импульсом ударной нагрузки (см. рис. 9.28).
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ IX
1. Благонравов А. А. Основания проектирования автоматического оружия.
М., Оборонгиз, Г940, 487 с.
2. Гофман В. И., Рейдель А. Л. К амортизации удара. Инженерный сбор-
ник. Т. VIII. АН СССР, 1-950, с. 171—180.
3. Л о й ц я н с к и й Л. Г., Лурье А. И. Теоретическая механика, ч. III. М„
ГТТИ, 1934, 624 с.
4. Л ь в и н Я. Б. Применение диаграммы проф. И. М. Рабиновича к решению
задач динамики упруго-пластических систем. —В кн.: Исследование по динамике соору-
жений. М., Стройиздат, 19’74, 181 с.
5. Рабинович И. М. Геометрический метод решения задач динамики упругих
систем. — В кн.: Общая прочность и устойчивость сооружений при действии взрывной
нагрузки. М., Стройиздат, 1944, с. 425—151.
6. С о л о в ь е в А И. Техническая механика. Изд. Ростовского государственного
университета, 1968, 324 с
7. С т е п а н о в В. В. Курс дифференциальных уравнений. М., Физматгиз, 1959,
468 с.
8. С т р е л к о в С. П. Введение в теорию колебаний. М., «Наука», 1964, 437 с.
9. Тимошенко С. П. Колебания в инженерном деле. М., «Наука», 1967,439 с.
10. Т о л о ч к о в А. А. Теория лафетов артиллерийских установок. М.. Обо-
ронгиз, 1'960, 345 с.
Глава X
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ УСТОЙЧИВОСТИ
АРТИЛЛЕРИЙСКОГО ОРУДИЯ ПРИ ВЫСТРЕЛЕ,
УСТРОЙСТВО И ПРОЕКТИРОВАНИЕ НАКАТНИКОВ,
ГИДРАВЛИЧЕСКИХ ТОРМОЗОВ
И УРАВНОВЕШИВАЮЩИХ МЕХАНИЗМОВ
§10.1. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ ПОЛЕВОГО
АРТИЛЛЕРИЙСКОГО ОРУДИЯ ПРИ ВЫСТРЕЛЕ
Примем элементы конструкции орудия абсолютно жесткими и,,что
в их сочленениях зазоры отсутствуют. При выстреле на орудие, имеющее
откатные части весом Qo и жесткий лафет, действуют сила давления на
дно канала Рки, сила сопротивления откату R и сила тяжести Qg (вес
в боевом положении). Согласно рис. 10.1 для жесткого грунта равнове-
сие орудия в плоскости стрельбы определяется уравнениями:
моментов относительно опорного сошника
Е.мо=РК А - Vt(h, -е)- Q6D6 - (/S); + NaDK;
g
движения откатных частей орудия
g
Рис. 10.1. Схема полевого артиллерийского орудия
Совместное решение этих уравнений дает уравнения равновесия
РК1Р + (h3 - е) = Q6D6 + (/Q)l - N3DK,
где I — момент инерции орудия относительно сошников;
I -|-2/1 — скорость изменения момента количества движения
dx , r dx
V— — : V =—
Левая часть уравнения представляет собой опрокидывающий мо-
мент, правая — стабилизирующий.
В уравнении вращательного движения орудия член QJt' является ре-
зультатом действия кориолисовых сил инерции, возникающих вследствие
перемещений откатных частей орудия снаряда и заряда относительно
вращающегося лафета, и представляет собой момент этих сил относи-
тельно сошников орудия. До и после вылета снаряда из канала ствола
этот момент для угла возвышения ср = 0 соответственно выражается фор-
мулами:
Ql’t = 2m (а 4-х) vQ — 2М (b — X) VQ;
(Q/)'t = -2M(b-X), так как /=10-^М (Ь~Х)2.
Здесь а и b — координаты центра тяжести снаряда и откатных час-
тей относительно сошников перед выстрелом; и и V — абсолютные ско-
рости снаряда и откатных частей:
m ? + 0,5о> . Qq + 0,5м ,
g ’ g ’
q и со — вес снаряда и порохового заряда;
X и х — соответственно текущая длина откатки и абсолютный путь сна-
ряда.
Угловая скорость Q и угол поворота 0 орудия вокруг оси сошников
в процессе выстрела с учетом податливости колес и грунта определяются
из уравнений:
t
J 2Mcdt t
Й ; 0 = С Qdt,
I J
о
где
s< = p^R^-e)-^ 1
\ 6o /
ДГл=Рб-^- — реакция грунта на колеса лафета перед выстрелом;
0О — угол поворота орудия, при котором полностью выбира-
ются упругие деформации шин колес и грунта.
При О^Оо МОЖНО принять
S< = PKHe + /?^-Q6D6.
Координаты положения центра тяжести орудия относительно сош-
ников при ср = О:
— до вылета снаряда из канала ствола
U QjiDa + (Qo + 0,5а) (b .¥) + (у + 0,5 а)(а -4- х) । Qo
Qeo Qeo
— после вылета снаряда из канала ствола (при co<^Qo)
q QnDn + Qo (& — X) QooOqo — QqX — да
Qn + Qo Qeo - q
где Qn — вес лафета;
_ОЛ— координата центра тяжести лафета относительно сошников
орудия;
£>бо— координата центра тяжести орудия относительно сошников
перед выстрелом;
&X = XQ-X = -^-\dt Cm Q60 = Qji + Q0^-(? + (B;
о о
У q + 0,5ы
Приближенно высоту отрыва колес орудия от грунта можно подсчи-
тать по формуле
bJi = D$.
Орудие будет неподвижно (й = 0; й/ = 0), если при жестком грунте
и шинах имеет место неравенство
Лне + WmKQ6o6 - Л\ок.
Предельный случай статического равновесия орудия на жестком ла-
фете и грунте характеризуется условием Na = Q, т. е. реакция колес ла-
фета равна нулю. После этого орудие придет во вращательное движение
вокруг сошников, которое можно описать уравнением
где
/ = /0р + °’5ю VaжХ)2д_-go + O’510 (b-Xf-
\ g 1 g
Io — момент инерции неподвижных частей орудия (лафета) относитель-
но его сошников;
Силовая схема полевого артиллерийского орудия для ф = 0 показа-
на на рис. 10.2. В общем случае (д^О) решение уравнения статического
равновесия орудия при выстреле приводит к следующим расчетным за-
висимостям:
до вылета снаряда из канала ствола
гл _q +°-5“ ГГПсгс Qo + O,5m у
Qoo Qeo
после вылета снаряда из канала ствола
Об = —Q60-—- Над--2»--X cos ?----—---cos ®,
Обо — Я Обо ~ Я Обо — Я
где Df&0 — координата центра тяжести орудия относительно сошников
перед выстрелом при срт^О.
Согласно условию предельного равновесия, выражающегося равен-
ством
P^^R^-e)~Q6Dt = 0,
Рис. 10.2. Силовая схема артиллерийско-
го орудия
орудие тем устойчивее, чем мень-
ше /?. Ее величина ограничена пре-
делами Верхний пре-
дел силы R отвечает случаю, когда
орудие не имеет откатных частей,
нижний — свободному откату под-
вижной части
/? = -^П«-Ркн = 0.
g
Впервые в артиллерийской
практике способ стабилизации ору-
дия при выстреле с использованием
противооткатных устройств осу-
ществил русский ученый В. С. Бара-
нозский (1872 г.). Им была создана 63,5-мм горная пушка с противо-
откатными устройствами, которые были реализованы в виде гидравли-
ческого тормоза отката и пружинного накатника. Сила Р таких уст-
ройств равна
/?=П0 + ^¥ + сИ2 + ^,
где По— предварительное усилие накатника;
k— коэффициент жесткости пружин накатника;
с—постоянная сопротивления гидравлического тормоза отката;
— сила трения.
Гидравлический тормоз предназначается для рассеяния избыточной
энергии отката. Эта энергия превращается в тепло, аккумулируемое ра-
бочей жидкостью тормоза. Накатник пружинный (или пневматический)
необходим для возвращения откатных частей в исходное положение.
Рассмотрим зависимость силы сопротивления откату от длины отката
подвижной части орудия.
Предположим, что сила R = const, а полный путь отката X(Vf = 0) =
= %. Согласно уравнению
t
где =—— i Pv*dt — скорость свободного отката подвижной части
Qo J
о
орудия;
JR — j" Rdt = Rt — импульс сил сопротивления откату,
о
Текущая кинетическая энергия откатных частей для периода Аш^О
MV] MV*t gj^
2 ‘ 2 оР>?+
После конца периода последействия (Аш=0; :
-п0 = const;
И4 = 1Л)4
Qo
Поэтому
Qo
Vt=VM-£-Rt.
Qo
MV2
2
Так как -^Vt=-R, V't=VV'x, то
g
gRd2
—-----VMRf4- —
Qo d ( V? \ D Qg p ,T 7n
—----------- = — R или 1 dV2
g dx \ 2 ) 2g J
Отсюда
.Jl П2 = ^(Х-ЛГ4).
(Ю.1)
y^=vt
X
В указанных соотношениях и V4— соответственно скорости сво-
бодного и торможенного отката в конце периода последействия (t = t4).
Время t отсчитывается от момента начала движения откатных частей
орудия.
Это уравнение утверждает, что кинетическая энергия откатных час-
тей в конце периода последействия равна работе силы сопротивления
на оставшемся пути отката (?.—Х4).
Так как
^=-^ = И0,—, (10.2)
dt Qo
то X.~XQt-----и при t=f4
АЛ)
gRf?
X4=X04--^-i. (10.2а)
Совместное решение уравнений (10.1, 10.2, 10.2а) приводит к равен-
ству
Отсюда
=w_Wm
2г °* 2Q„ ° Т 2Qo
R
_______£q4__________
Л + VW4 — А”о4
и* о
2д
Эта формула обычно называется формулой Валье. Так как
то
^оЛ>^О4 \VQtdt-
J А
о
При наличии дульного тормоза или вообще любого надульного уст-
ройства по аналогии с формулой Валье имеем
FT
7?н=------
л + 1/04t4 —
где £о4 = (Пщ)2—энергия свободного отката подвижной части
2.?
орудия с надульным устройством;
т ,т q + сфа>
1/04— -------,уо .— скорость откатных частей орудия с надуль-
Qo + ?т
ным устройством в конце периода последей-
ствия (см. гл. V);
9т — вес надульного устройства.
Величина изменения силы сопротивления, вызываемая надульным
устройством, при сохранении длины отката составит
R
R
^04 X + Уд4/ — Хо4
£о4 x + yov4-xj4
Отсюда
д/?= 1--^- =
R
’ 1 + аЭ У j
1 + э J 1 + 7т
д£,
где
5 = -^-;
1300 .
vo
Чт .
т Qo ’
s=1+ (Ии-^4)^4-(Ам-Л(4)
x + v^4-x;4
В указанных выражениях:
д£=: 1 - / 1 "аЭ 'j
\ 14-3 /
— коэффициент энергетической эффективности дульного тормоза;
^04 = ^02 + - 0,5) -И
Qo \ ° J
— путь свободного отката подвижной части орудия в конце периода пос-
ледействия;
04 ----- А”02 -ф V02^’2 “Ф а (i^ — 0,5) — - v0 (t4-—'j -ф
Qo +'?т \ b /
а — 1)----------(t4--------—
2Qo + 9t \ 2Gff
— то же для орудия с надульным устройством;
ут q -|- 0,5™ <
Л 02 = -----------------i л
Qo + q ~ « + q-t
— путь свооодного отката подвижной части орудия с надульным устрой-
ством к моменту вылета снаряда из, канала ствола;
,/т _ ? + Ф5м
V 02 —-------------
Qo -т Ут 4- 0,5™
— скорость свободного отката для того же момента времени; .
gSPn ~ Gg 1 .
(Р — 0,5) ш
ф = ф — время движения снаряда по каналу ствола;
£ = /0-ф/д—приведенная длина канала ствола;
/0—приведенная длина каморы;
/д — длина пути снаряда по каналу ствола;
г>д— абсолютная дульная скорость снаряда.
§ 10.2. УСТРОЙСТВО И ПРОЕКТИРОВАНИЕ НАКАТНИКОВ
И ГИДРАВЛИЧЕСКИХ ТОРМОЗОВ
Противооткатные устройства полевого артиллерийского орудия со-
стоят из накатника и гидравлических тормозов отката и наката. Они
служат для поглощения энергии откатных частей орудия. Потенциаль-
ная энергия накатника, накопляемая за время отката, возвращает от-
катные части в исходное положение. При этом часть потенциальной
энергии накатника, перешедшая в кинетическую энергию наката под-
вижной части орудия, поглощается гидравлическим тормозом наката
(для обеспечения устойчивости орудия и допустимых ударных нагрузок
на лафет в конце наката).
Применяются следующие основные виды накатников и гидравличе-
ских тормозов: накатники — а) пружинный, б) гидропневматический,
в) пневматический; г) тормоз отката-накатник; тормоза — а) канавоч-
ный с тормозом наката игольчатого типа, б) веретенный с тормозом на-
ката модераторного типа, в) с переменной длиной отката, г) тормоз-на-
катник клапанного типа.
Наибольшее распространение получили тормоза отката веретенного
типа с некоторыми вариантами по уплотнению и способам торможения
наката орудия, схемам компенсации расширения жидкости и т. д.
Для надежного возвращения откатных частей в исходное положе-
ние и удержание их в этом положении при всех углах возвышения как
при выстреле, так и при передвижении орудия (независимо от механиз-
мов крепления по походному), необходимо, чтобы величина силы накат-
См. гл. V.
ника П соответствовала неравенству
n>Q0 sin <р + /?7 + Раят,
где Qq sin <f> — составляющая веса откатных частей;
Rf — сила трения на направляющих люльки и в уплотнениях
противооткатных устройств;
/’авт— сила сопротивления дополнительных механизмов (полу-
автоматики и т. п.) во время наката.
Сопротивление накатника имеет наименьшее значение в начале от-
ката и возрастает по мере увеличения пути отката. Отношение конечной
силы накатника Щ к начальной По называется степенью сжатия накат-
ника т.
Рис. 10.3. Графики сил, действующих на откат-
ные части орудия при откате
Рис. 10.4. Графики сил, действующих
на откатные части орудия при трех
периодах наката
Величина начальной силы По выбирается исходя из условия обеспе-
чения надежного наката и удержания откатных частей при наибольшем
угле возвышения:
По >Q0 sin om + /Q0 cos<pm 4 vQ0 4-Равт,
где fQ0 cos — сила трения на направляющих люльки;
/=0,16-5-0,2— коэффициент трения;
vQ0 — сила трения в уплотнительных устройствах, принимае-
мая пропорциональной весу откатных частей;
v = 0,1 -ч-0,5—коэффициент пропорциональности.
Выражение для По можно также записать в виде
п0=№,
где
р = sin ?ш + /cos .
Уо
Для предварительных расчетов с учетом того, что почти все совре-
менные орудия имеют механизмы, взводимые накатником, принимают
следующие значения коэффициента [3 в зависимости от величины макси-
мальных углов возвышения:
<рт=20-5-30° ?=0,9н-1,1;
= 3045° ₽= 1,1-:- 1,4;
?т>45" р=1,5 и более.
Для зенитных орудий, у которых углы возвышения достигают зна-
чения <р = 85° и больше, принимается (3 = 2.
При расчете гидравлического тормоза считается, что значения силы
сопротивления тормоза отката Фт.о в функции пути отката и силы сопро-
тивления тормоза Фп в функции пути наката известны. Общие выраже-
ния для определения текущего значения силы сопротивления откату R
и равнодействующей силы наката г имеют вид:
/?=n + ®T O + 7?/-Q0 sin?;
г—П — Фн — Rf — Qo sin
где Фт.о и Фи — соответственно силы сопротивления тормозов отката и
наката (с учетом переменной составляющей силы тре-
ния в уплотнениях).
Графики сил, действующих на откатные части орудия при откате,
показаны на рис. 10.3. Из графиков видно, что обеспечить заданный за-
кон изменения силы сопротивления можно только за счет силы сопротив-
ления тормоза отката Фто. Аналогично определяется сила Фн в зависи-
мости от выбранной схемы торможения наката (рис. 10.4) [4, 6].
§ 10.3. ПРУЖИННЫЙ НАКАТНИК
Пружинный накатник вследствие относительно малой энергоемко-
сти применяется в автоматических системах калибра до 76 мм. Основ-
ным достоинством пружинного накатника является простота конструк-
ции и постоянство действия без регулировки в течение длительного
Рис. 10.5. Пружина круглого Рис. 10.6. Пружина прямоугольного сечения
сечения
времени, так как .на его работу практически не влияет температура ок-
ружающей среды. Недостатком пружинного накатника является его
большой вес и габариты по сравнению с гидропневматическим накатни-
ком даже в случае телескопического расположения пружин.
В накатниках используются цилиндрические пружины с круглым или
прямоугольным сечением витка (рис. 10.5 и 10.6). Характеристика пру-
жины (жесткость), т. е. зависимость между нагрузкой и осадкой, пред-
ставлена на рис. 10.7, где обозначено:
fo— стрела предварительного поджатия пружины;
X — текущий путь отката;
fm — стрела сжатия до соприкосновения витков;
X— длина отката;
й0— длина пружины в свободном состоянии;
hm:—длина пружины при сжатии до соприкосновения витков;
Пх — конечная сила накатника;
Пт — сила пружины при соприкосновении витков.
Практически вследствие неравномерности шага конечный участок
характеристики при нагрузке, близкой к Пт, может быть непрямолиней-
ным. Для обеспечения работы пружины в области линейной характерис-
тики Пх не должна превышать 0,9 Пт. Зазор бр между витками при мак-
симальной рабочей нагрузке Пх во избежание соприкосновения витков
должен быть примерно равен 0,1 d.
Длина пружины, сжатой до соприкосновения витков,
h.m=(ti — 0,5) of,
где п — полное число витков, выбираемое кратным 0,5;
d — диаметр проволоки.
Рабочее число витков
лр=« —(1,5^-2).
Длина ненагруженной пружины
Ао=^т4-«р (/—</).
/л
Здесь t=d-\-------j-В — шаг пружины, где А=/0-|-л, обычно вы-
«р
бираемый в пределах от £>/3 до D{2.
Пружины, у которых2,5, могут при сжатии терять устойчи-
вость (выпучиваться); в этом случае пружины необходимо ставить на
Рис. 10.7. График изменения силы пружин-
ного накатника
оправках или монтировать в
гильзы. Для компенсации про-
вертывания конечных сечений
пружины при ее сжатии обыч-
но применяют четное число от-
дельно правых и левых пру-
жин. Эти пружины отделяются
друг от друга разделительны-
ми шайбами, играющими так-
же роль направляющих.
Величины По и 1Ь выби-
раются из условия получения
степени сжатия т=1,7н-2 или
k = O,7fo-^-fo, т. е. должны при-
близительно соответствовать
условию наименьшего веса пру-
жины.
Приведем основные^ формулы для расчета пружин.
Пружины круглого сечения
Напряжение среза
т=. 8Я1тД -<[4,
nd3
4-с 4- 2
где k гх------- "> 1— коэффициент, зависящий от формы сечения и
4с — 3
кривизны витка (см. табл. 10.1);
D
с~------ — индекс пружины;
d
[«]т — допускаемое касательное напряжение.
Таблица 10.1
с 4 5 6 8 10 12
k 1,37 1,29 1,24 1,17 1,14 1,11
Диаметр проволоки:
1исло рабочих витков
Gd f-, Gd'i.
По =------- =----------------- ,
р 8с II. 8сЗ(Пх —По)
где G = 8000 кгс/мм2 — модуль упругости второго рода.
Жесткость пружины:
, П Gd4
k = -—=--------- .
f 8D3np
Пружины прямоугольного сечения
Напряжение среза
Число рабочих витков
4-г;О/|дЗ f 4r,GbasX
яр =------=. (10.4)
р лЕ>зпх лГ>3(Пх — По) v '
Жесткость пружины
k=-=- 1-r.Gha3 (10.5)
f л£>3/гр
В формулах (10.3), (Ю.4), (10.5) v и р—коэффициенты, учитываю-
щие искривление сечения при кручении,
Ь Ь
— — — 0,63
i а а
v =-----:------ ; Т) =-------------.
3—+1,8 3 —
а а.
Значения коэффициентов v и т], полученные по экспериментальным
зависимостям, приведены в табл. 10.2.
Таблица 10.2
b а 1 1,2 1,5 2 2,5 3 4
у 0,208 0,219 0,231 0,246 0,258 0,267 0,286
Т' 0,141 0,166 0,196 0,229 0,249 0,263 0,281
В заключение несколько практических рекомендаций. Пружины с ин-
дексом с<4 применять не рекомендуется из-за трудности изготовления
и перенапряжения внутренних волокон витков вследствие большой кри-
визны последних. Наиболее распространены пружины с индексом с =
= 6+-10 (для пружин с витками прямоугольного сечения с=— , где
Ь
b — размер сечения в направлении нормали к оси пружины) и отноше-
нием сторон — = 1 -г-3.
а
Подробный материал по расчету и конструированию пружин при-
водится в специальной литературе [3, 5].
Пример 10.1. Рассчитать пружину с витками круглого сечения для накатника пуш-
ки при следующих условных данных:
Qo = 150 кг; X == 300 мм; Г> = 150 мм; т =2; [а]т = 90 кгс/мм2; /3=2.
1. Начальная сила накатника
По — 2Q0 = 2-150 = ЗЭО кгс.
2. Конечная сила накатника
+ = яг110 = 2-300 — 600 кгс.
3. Максимальное усилие накатника
П
т
600
0,9
— = 670 кгс.
0,9
4. Диаметр проволоки пружины
(с=10— задаемся; А=1,14— см. табл. 10.1)
ЬПтс п 1 Г 1,14-670-10
[°К ==1,6И 9000
= 1,48 см.
Принимаем rf=15 мм
5. Число рабочих витков
Gd X
!р= '8Сз(пх-П0)
8-105-1,5-30
8-1О3-ЗОО
6. Полное число витков
п = п9 + 1,5 = 15 + 1,5 = 16,5.
7. Шаг пружины.
Л 600
t = d +----- + == 15 + — + 1,5 = 56,5 мм.
»р 15
8. Длина пружины в свободном состоянии
Ло = (я — 0,5)d + n9(t — d)= 16-15 4- 15 (56,5 — 15) = 862,5 мм.
9. Число отдельных секций пружины
Ло
Так как — >2,5, то пружина должна состоять из двух секций, при этом длина
каждой секции
, *0 862,5
^екц = ~~ 431 ММ.
Пример 10.2. Для условий примера 10.1 рассчитать пружину накатника с витками
b
прямоугольного сечения при соотношении сторон — =2.
Ь
1. При — = 2 коэффициенты т| = 0,229; v = 0,246.
2. Размер сечения в направлении оси пружины
® / IImD 3, / 670-15
а = 1 / —j=;— = I / ----------да 1,04 см.
У МЧ. у 4-0,246-9000
Принимаем <7=10,5 мм, 6 = 21 мм.
3. Число рабочих витков
4т;6а3до 4-0,229-2,11,053-69-8-105
Пп —----------=----------------------------= 16,8.
лозп? 3,14-153-600
Принимаем лр = 17.
4. Полное число витков
п ~ «р + 1,5 = 17 + 1,5 = 18,5.
5. Шаг пружины
А 600
t = а +----+ 0,1а = 10,5 + — + 1,05=; 46,8 мм.
«р 17
6. Длина пружины в свободном состоянии
Ло = (я — 0,5)а + яр (t — а) = 18-10,5 + 17(46,8 — 10,5) = 806 мм.
7. Число отдельных секций пружины.
л0
Так как-^->2,5, то пружина должна состоять из двух секций при этом длина
каждой секции
й0 806
^секц — 2 — 2 — ^03 мм-
§ «0.4. ГИДРОПНЕ8МАТИЧЕСКИЙ НАКАТНИК
Гидропневматический накатник значительно легче пружинного, сте-
пень его надежности достаточно высока, а потому этот вид накатников
имеет наибольшее распространение как в сухопутной, так и в морской
артиллерии.
Начальное давление в накатнике р0 определяется из условия наи-
меньшей разницы во времени наката при минимальном джип и макси-
мальном tpm углах возвышения орудия. Опыт показал, что приемлемое
время наката обеспечивается при условии
ЛГ<- =0 4 (Ю.6)
VH.K(?m!n)
где 1/н,к(?от) > 0,02 м/с — конечная скорость наката при максималь-
ном угле возвышения;
^н.к (<Ptnin)^> 0,05 м/с—то же при минимальном угле возвышения.
Текущее значение скорости наката VH определяют из уравнения дви-
жения откатных частей при накате
^=11} - Фн - Т'с - fQ0 cos ?- Qo sin ср, (10.7)
g di
где П/= Акр'— —усилие накатника при накате с учетом сил
трения в воротниках его уплотнительного
устройства;
Ан = -^~ (Dp — d„)— рабочая площадь накатника;
фн = фн.н4- ®0.H = G^;
Dp—диаметр поршня (внутренний диаметр рабочего
цилиндра);
— диаметр штока накатника;
Л=л (£»р/в.р+ 4/н/в.н) — поверхность трения воротников;
/в.р и Zb.h—ширина воротников соответственно поршня и
штока;
/в = 0,07 — коэффициент трения воротников о сталь;
р' —давление в накатнике;
фн.н—сила гидравлического сопротивления тормоза на-
, ката при накате;
Фон— сила гидравлического сопротивления тормоза от-
ката при накате;
рв ~р' —давление на воротник;
Cj — характеристика тормоза наката, являющаяся
функцией его физических и конструктивных па-
раметров;
Tc=fcpzPc — сила трения в сальниках тормоза отката и на-
катника;
/с = 0,09— коэффициент трения сальниковой набивки о сталь;
рс=( 11 = 15) кгс/см2 — давление в сальниковой набивке;
s=x — X — путь наката.
В конце наката приближенно считают, что ^-=0. Тогда из ура в-
dt
нения движения (10.7) имеем
-I / (4, — /ВЕ') До — 7’ — /Qq COS у — Qo sin у
н'к— V Сг
Подставляя полученное значение скорости Еп.к в неравенство (10.6),
получим
(^н— /Qpcos ym —Qq sin >
(Л,) — /в/7') р'й — 7' — /Qo cos ymin — Qo sin ymin
откуда
rc + , fv>Ъ. [sin 7m + / (cos ym — № cos ?mIn)__ /<2 sin ?mln]
, 1-A z
Po >------------------------;-----‘
Л-/в7в
При /(«0,4, sinq)min~0, cosфть«1 для определения начального
давления в накатнике приходим к формуле
7’ -г- 1,2Q0[sin <?m + /(cos ym— 0,16)]
Po>----------------;-----;------------
Л ~ /в7в
Для полевых орудий начальное давление р0 рекомендуется брать в
пределах 30—55 кгс/см2, а для стационарных 70—100 кгс/см2.
Если при принятых размерах накатника давление р0' больше желае-
мой величины р0, то необходимо уточнить рабочую площадь накатника
Ан по формуле
л _ (Дм f вЕв) Ро 7С + Тс , Е,
i /в^в’
Рь
где F-b — поверхность трения воротников при уточненной площади Л£1;
Тс — уточненное значение величины силы трения в сальниках.
Таким образом, текущее значение усилия накатника при откате оп-
ределяется зависимостью
П/ = Лнр0 Гв.н + Л.н,
где ?"в.н = /вРл(^[Л.н + ^4.н)==/в/о/;'Вн—сила трения в воротниках на-
катника;
^с.н = /с?°са(^,р4.н + ^н^-н) = /с/’с-|рс.н —сила трения в сальниках накат-
ника;
/в.п, 4.Н—ширина воротников соответ-
ственно поршня и штока на-
катника;
4.п, 4.Н —ширина сальников соответ-
ственно поршня и штока на-
катника.
В дальнейшем необходимо различать упругую силу накатника П, т. е.
усилие за счет упругости рабочего тела, и полное усилие П/ с учетом
сил сопротивления в уплотнениях. При этом сила трения в сальниках
представляет постоянную составляющую сил сопротивления PcfcFc.n, а
сила трения в воротниках — переменную составляющую, пропорциональ-
ную давлению в накатнике.
Обозначим величину fFIilh имеющую размерность площади, чере_-
ДЛН. Тогда
п/=(4+а4)/’ + й/Л.н- (ЮЛ
При определении закона изменения силы накатника исходят из пред-
положения, что изменение давления газа в цилиндрах происходит в соот-
ветствии с политропой
pW"= рй№$ = const,
где р и U7— текущие значения давления и объема газа;
Ро и Н70 — начальные их значения;
' п— 1,3 1,35 — показатель политропы;
V7~V70 — ЛНАЛ — текущий объем газа.
С учетом этого зависимость (10.8) преобразуется к виду (рис. 10.8)
П/МЛ + ДАОРо УУ+/сДЛ.п- (10.9)
\ IV о—АНЛ /
Степень сжатия т для политропического процесса выражается за-
• висимостыо
/ Го V
т = ------у—-
\ г0 — лнх )
и, как правило, ограничена пределами:
— для полевых орудий малых и
средних калибров в условиях
обеспечения необходимой устойчи-
вости их при накате т = 2-4-3;
— для крупнокалиберной, танковой
и самоходной артиллерии /неД4д-
5.
Выбрав значение степени сжатия,
можно определить начальный объем
газа
Рис. 10.8. График изменения силы
гидропиевматического накатника
Обозначая -------— = С2, получим
1 ~ (да~) П
Wo^C9A^.
Величины параметра С2 в зависимости от степени сжатия газа т и
показателя политропы п приведены в табл. 10.3.
Таблица 10.3
2 2,1 2,2 2.3 2,4 2,5 2,6 2, < 2,8 2.9 3
1,2 1,3 2,28 2,42 2,17 2,3 2,078 2,2 2 2,113 1,933 2,04 1,875 1,979 1,823 1,924 1,779 1,873 1,735 1,827 1,7 1,789 1,667 1,752
Подставляя Га в формулу (10.9), определим усилие накатника при
откате
ПГ=(А А ДА) Рв [ + /еРАе.н-
[с2~ —
При проектных расчетах отката и наката показатель политропы при-
нимается одинаковым. В действительности вследствие наличия теплоот-
дачи при откате nQ<k, а при накате пн<га0.
Произведем расчет конструктивных размеров цилиндров и штока
накатника применительно к типовой схеме (рис. 10.9).
Конструктивные размеры гидропневматического накатника опреде-
ляются в зависимости от начального объема газа 1Е0 и объема жидкости
Откат
Рис. 10.9. Гидропневматический накатник с двумя цилиндрами:
/ — крышка; 2 — дно; 3— уплотнение поршня; 4 — шток; 5 — внутренний
(рабочий) цилиндр; 6 — наружный цилиндр- 7 — уплотнение штока; 8 —
корпус сальника: 9 — ствол
необходимой для перекрытия уплотнении и соединительных отвер-
стий при заданных углах возвышения орудия. Для обеспечения этого
применяют эксцентричное расположение внутреннего цилиндра накатни-
ка, чтобы в горизонтальном положении жидкость его перекрывала пол-
Рис. 10.10. Поперечное сечение накат-
ника
ностыо (рис. 10.10). Если и при этом
не обеспечивается перекрытие сое-
динительных отверстий, то вводят
промежуточный цилиндр с разнесен-
ными по краям соединительными
отверстиями рабочего и промежу-
точного цилиндров.
Величину зазора Ай принимают
обычно не менее 6—8 мм, при кото-
рой практически отсутствует гид-
равлическое сопротивление накат-
ника даже при низких температу-
рах.
Во всех случаях должно быть
соблюдено следующее условие
-^/Н«ГО + ГЖ,
откуда
z?_1
|/ л/н
где D — внутренний диаметр наружного цилиндра;
ZH— длина наружного цилиндра (расстояние между доньями), вы-
бираемая конструктивно в зависимости от длины отката X.
При указанных условиях обычно
№Ж=(1,2-Н,5)¥,
Действительное напряжение в штоке накатника определяется зави-
симостью
а = — <[=]₽’
1 шт
где Ешт — площадь расчетного сечения штока (проточка в конце резьбы);
[о]р — допускаемое напряжение при растяжении.
В случае, если шток идет в откат, напряжение в нем нужно дополни-
тельно проверить в начальный момент отката с учетом сил инерции
Jig -р
dt
а ——'—————
F шт
где тШт — масса штока с поршнем;
« , х-\ \ 1 hn II / r
dt Qo
Spiaim — равнодействующая сила давления пороховых газов в момент
достижения рт в канале ствола.
Толщины внутреннего (рабочего) и наружного цилиндров накатни-
ка и 6Н) обычно составляют не менее 4 мм.
Толщину стенки внутреннего цилиндра, нагруженного внешним дав-
лением, приближенно находят по формуле
(10.10)
где (о]сж — допускаемое напряжение при сжатии;
Z)p — диаметр внутреннего цилиндра.
Кроме проверки величины сжимающих напряжений, цилиндр следу-
ет проверить на устойчивость, при этом величина критического.давле-
ния определяется по формуле [5]
/ 2
-----Е| «1—14
12(1-р2)ЯЗ 1
2«i — 1 — р.
«1 /2
1 + . , п,
л;2 R2
(10.11)
где Е — модуль упругости перво-
го рода; р,— коэффициент Пуас-
сона; I — длина цилиндра; R—
средний радиус цилиндра; ti\ —
целое число, которое в каждом
конкретном случае при заданных
отношениях 1/R и R/6 выбирается
из условия наименьшего значе-
ния ркр.
Для некоторых отношений
1/R и R/8 значения щ приведены
в табл. 10.4.
Таблица 10.4
250 200 50 25
ОО 2 2 2 2
10 4 3 2 2
5 5 4 3 3
2 8 6 5 4
пр» i > 4,9 / А
и п^—2, коэффициент запаса устойчивости
«V
Лр
Л
>2,5.
Наружный цилиндр накатника рассчитывается на внутреннее давле-
ние щ и толщина его стенок:
(10.12)
Толщина стенки промежуточного цилиндра обычно берется в преде-
лах 6п = Зн-4 мм.
В некоторых случаях при расчете можно использовать зависимость
для тонкостенной оболочки
РуР
28
Количество жидкости и газа в накатнике, а также начальное давле-
ние должны соответствовать расчетным значениям. Начальное давление
ленно, поэтому процесс сжатия можно
в накатнике проверяется мано-
метром, а количество жидко-
сти проверяется или по ес
уровню в цилиндре или при
помощи специального приспо-
собления. Количество жидко-
сти в накатнике можно опре-
делить также с помощью гра-
фика по величинам давлении
при двух заданных длинах от-
ката. Искусственный откат для
этих целей производят с по-
мощью специальных приспо-
соблений.
При искусственном откате
сжатие газа происходит мед-
считать изотермическим, т. е
Р1---Рй
^н~^ж
(10.13
где р№ t— соответственно давление и объем газа в накатнике
при длине отката Z;
WzH = Wz0-|-U7iK —объем внутренней полости накатника.
Выражение (10.13) можно переписать в следующем виде:
Pi = Cpp (10.14
IFH — ТГЖ
При одних и тех же величинах Ав, I, ТГП, 1КЖ коэффициент С3 являет-
ся величиной постоянной, следовательно, уравнение (10.14) выражает
собой прямую линию. Величина коэффициента С3 зависит от количества
жидкости в накатнике. При определении количества жидкости в накат-
нике строят три линии: одну для номинального количества жидкост?:
1ГЖН и две — для предельных значений, т. е. для наибольшего 1В’н;т;1Х >:
наименьшего min (рис. 10.11).
Для удобства пользования графиком берут только ту его часть, ко-
торой пользуются в практической работе. Сначала определяют давление
в накатнике в начальном положении (на первой метке приспособления:.
Затем производят искусственный откат на длину I. Пересечение абсцис-
сы pi и координаты р0 между линиями ТГн<тах и И7жтт указывает на тс.
что объем жидкости в накатнике в пределах нормы.
Пример 10.3. Для стационарного орудия рассчитать двухцилиндровый' гидропнез-
матический накатник при следующих условных исходных данных:
S = 19,6 см2; «о = 570 м/с; <о = 1,9 кг; q = 16,4 кг;
Qo = 1120 кг; рт = 2500 кгс/см2; у,„ = 45°; QmT = 6 кг.
В результате расчета торможенного отката получены следующие величины:
7?0 — 1900 кгс; Rm — 17 700 кгс; V2 = 8,15 м/с; Х2 = 0,035 м; л = 0,342 м.
На основании этих данных назначаются геометрические размеры накатника и тор-
моза отката:
' D = 140 мм; Dp = 68 мм; da — 22 мм; rfT = 50 мм; /с н = 50 мм;
/с_т=40 мм; ZB н = 10 мм; /в.н = 8 мм; /к = 24 мм; рс = 11 кгс/см2,
где D—диаметр наружного цилиндра накатника; £>р—диаметр рабочего цилиндра на-
катника; da — диаметр штока накатника; dT — диаметр штока тормоза; /с.н — рабочая
длина сальника на штоке накатника; /с.т — рабочая длина сальника на штоке тормоза;
/в.н — рабочая длина воротника на штоке накатника; /'в.н — рабочая длина воротника
па поршне накатника; /к — толщина параниТовых колец; ра — удельное давление в
сальниковой набивке.
Определение параметров
1. Сила трения в сальниках накатника
Тс н = /cMrfH/c.H/?c = 0,09-3,14-2,2-5-11 = 34 кгс.
2. Сила трения в уплотняющих устройствах тормоза отката
= JtdT(/Jc.r + fMPc = 3,14-5(0,09-4 + 0,15-2,4)11 =125 кгс.
3. Суммарная сила трения в уплотнениях (постоянная составляющая)
Тс = Тс н + 7’с.т = 34 + 125 = 159 кгс.
3. Поверхность трения воротников накатника .
Лв.„ = л (dH/c.H + = 3,14(2,2-1 4- 6,8-0,8) = 23,9 см2.
5. Сила трения в воротниках накатника (переменная составляющая)
Дв.н = /в/’в.нР = 0,07-23, Op = 1,7р.
6. Рабочая площадь накатника
л , 9 о, 3,14 0 в
А„ = — (О2 - d2H) = — (6,82 — 2,22) = ,32,о см2.
7. Начальное давление в накатнике
7С + 1,2Q0 [sin <pm + /(cos 0,16)]
Po ~ А.-/Л.Н
159 + 1,2-1120 [sin 45° + 0,20 (cos 45° — 0,16)]
=--------------------------------------------= 41,3 кгс/см2.
32,5-0,07-23,9
Принимаем po=44 кгс/см2.
8. Начальный объем газа (m = 3, n=l,3)
1Го = О,1С’2Л„к = О,1-1,75-32,5-0,342 = 1,95 дм3.
9. Давление в накатнике (см. табл. 10.5)
10. Усилие накатника при откате (см. табл. 10.5)
II/ = (Ин + / BF в.н)Р + Рс.н = (32,5 + 1,7)/? +34 = 34,2/? + 34.
Таблица 10.5
1 0 0,035 0,069 0,119 0,165 0,223 0,240 0,280 0,320 0,330 0,342
i /?,кгс/см2 44,0 47,4 51,6 58,7 67 80,4 85,8 99,8 118 124 132
i П/, кгс 1534 1654 1794 2034 2324 2780 2974 34-54 4074 4274 4544
= 3,2 см2,
в штоке
И. Уточненное значение начального сопротивления откату
Д0 = П0/ + /Q0 + 7’c.I= 1534 + 0,20-1120 + 125 = 1883 кгс.
Полученное значение незначительно отличается от первоначально принятого,
поэтому пересчет элементов отката не требуется.
12. Наименьшая площадь штока F.
13. Действительное напряжение
ПЛ
а =----
Р
J шт
4544
—— = 1415 кгс/см2.
и, Z
Материал штока: сталь 40Х, предел текучести [5] = (+ = 5500 кгс/см2.
сЛ. 5500
Запас прочности п= =---------- = 3,9.
а 1415
14. Максимальное ускорение штока
dV Splmmg 91,6-2500.9,81 _ . „
----s»--------- =-----------------= 2000 м с2.
dt Qq 1120
15. Напряжение в штоке в начальный момент отката
dV
Пр “Ь И1ПТ ,,
at
1534 + 0,61-2000
— = 864 кгс/см2.
3,2
Масса штока тшт =
6
— =0,61 кгс-с2/м.
У, 01
16. Толщина стенки наружного цилиндра (при [о]р = 1600 кгс/см2)
= 0,5-140
Принимаем 6Н = 7 мм.
17. Толщина стенки рабочего цилиндра (при [а]р=[а]сЖ)
Принимаем 6Р = 4 мм.
18. Устойчивость рабочего цилиндра («1=2)
ЕЪ'^ 2-106-43
ркп = -----------=-----------5---Г = 753 кгс/см2
21 4(1—p2)fl3 4(1 —0,32)Зб3
Запас прочности по устойчивости
?кр
Пу = ----
А
753
^ = 5’7'
$ 10.5. ПНЕВМАТИЧЕСКИЙ НАКАТНИК
И ГИДРОПНЕВМАТИЧЕСКИЙ ТОРМОЗ-НАКАТНИК
Методика расчета пневматического накатника (рис. 10.12) по су-
ществу является частным случаем методики расчета гидропневмэтиче-
ского накатника для IF»=0. При этом пределы степени сжатия здесь
.могут быть расширены и составлять т= 1,5-4-3.
Рис. 10.12. Пневматический накатник:
7 — уплотнение поршня; 2 — уплотнение штока
Значительный выигрыш в весе и габаритах противооткатных уст-
ройств дает совмещение тормоза «отката — наката» и накатника в одном
цилиндре. Однако такое совмещение ограничивает выбор закона изме-
нения силы сопротивления при откате из-за пружины клапана, регули-
рующей гидравлическое сопротивление откату (рис. 10.13).
Рис. 10.13. Тормоз-накатник:
/--шток; 2 — плавающий поршень; <? —гидробуфер наката; 4 — клапан отката; 5 — рабо-
чая пружина; 6 -• отверстия тормоза наката
Накатник этого типа рассчитывается так же как и гидропневмати-
ческий, но с некоторыми особенностями, которые состоят в следующем:
1) количество жидкости в тормозе-накатнике должно быть не менее
0,5—0,7 л на тонну силы сопротивления откату, т. е. превышать
4^ (0,54-0,7) Rm, так как условия перетекания жидкости из одной поло-
сти в другую здесь хуже, чем в обычном тормозе отката веретенного
типа, и, следовательно, нагрев ее будет интенсивнее;
2) наружный цилиндр тормоза-накатника рассчитывается по форму-
ле (10.10) на максимальное гидравлическое давление в цилиндре при
откате рт\
3) шток тормоза-накатника рассчитывается на растяжение с учетом
максимальной силы сопротивления откату Rm:
„ „ dV
П т Rm “Ь ^шт j.
и сжатие (устойчивость) от наружного давления, равного рт—р0 (см. за-
висимости (10.10) и (10.11)].
Другой вариант тормоза-накатника с вынесенным наружу объемом
рабочего газа (см. рис. 10.14) уступает первому по весовым характерис-
тикам, но значительно стабильнее работает при интенсивных стрельбах.
Рис. 10.14. Тоомоз отката-накатник:
/--плавающий поршень; 2— воздушный цилиндр; 3 — клапан; 4 — рабочий
цилиндр
§ 10.6. ЭЛЕМЕНТАРНЫЕ ГИДРАВЛИЧЕСКИЕ
ПРОТИВООТКАТНЫЕ УСТРОЙСТВА
Гидравлический тормоз в отличие от гидравлического буфера рабо-
тает па полной длине отката подвижной части орудия. С помощью гид-
равлического тормоза поглощают также избыток энергии наката. Такой
тормоз называют тормозом наката и он, как правило, действует на вто-
рой половине пути наката подвижной части орудия. Гидравлический бу-
фер работает лишь в конце отката или наката.
В автоматических пушках малого калибра (меньше 23 мм) гидрав-
лические тормозные устройства применяются весьма редко, так как энер-
гия наката ствола мала и ее зачастую не хватает для перезаряжания
пушки или пулемета.
В артиллерийских автоматах калибром свыше 23 мм используют
гидравлические буферы для торможения подвижных частей затвора в
конце их отката и тем самым предотвращают их удар о корпус автомата.
В автоматических пушках калибром 37 мм и 57 мм для поглощения из-
быточной энергии отката ствола применяют гидравлический тормоз.
Гидравлические тормозы, работающие на всей длине отката или ее
части, в отличие от дульного тормоза, развиваемые в них усилия пол-
ностью передают па лафет. Однако усилие тормоза или буфера суще-
ственно меньше силы давления порохового газа на дно канала ствола.
Поэтому они заметным образом растягивают по времени действие им-
пульса отдачи при выстреле. Вследствие этого гидравлические тормоз-
ные устройства работают в основном после окончания действия силы
давления пороховых газов на дно канала ствола.
Сила сопротивления гидравлического тормозного
устройства
Тормозное усилие возникает от сопротивления движению поршня со
стороны действующего на него гидростатического давления жидкости,
(рис. 10.15).
При перемещении поршня в цилиндре, заполненном жидкостью, под
действием возникшего гидростатического давления жидкость с большой
скоростью перетекает (пробрызгивается) в заиоршнсвое пространство.
Таким образом, энергия откатных частей, соединенных с тормозом, не-
прерывно превращается в кинетическую энергию перетекающей жидко-
сти, которая в свою очередь в результате ударного процесса торможения
струи жидкости в запоршневом пространстве расходуется на ее нагрев.
Гидравлический тормоз или буфер может создавать любую требуе-
мую силу торможения, определяемую устойчивостью или прочностью
лафета пушки. В принципе в системах с коротким откатом ствола для его
Рис. 10.15. Схема элементарного гидравли-
ческого тормоза
торможения можно использовать собственную податливость жидкости и
материала цилиндра, не допуская ее перетекания в запоршневое про-
странство.
В общем случае в любой момент времени сила сопротивления Ф
гидравлического тормоза вследствие малости давления ри в запоршне-
вом пространстве определяется зависимостью
Ф = Л/?П, (10.15)
где А — площадь поршня;
рп— давление жидкости на поршень.
Процесс перетекания жидкости в запоршневое пространство можно
уподобить ее течению в сосуде с внезапным сужением поперечного се-
чения канала от площади А +а до а (рис. 10.16).
Рис. 10.16. Схема течения жидкости
при внезапном сужении клапана (при
наличии острых кромок)
В этом случае зависимость между давлением на поршень (заплечи-
ки проточного сосуда), скоростью перетекания идеальной жидкости и и
сжатием поперечного сечения ее струи е= — определяется следующей
а
системой уравнений:
уравнением сохранения энергии
уравнением сохранения вещества
G = у(Л-|-д) V = га\и‘, (10.17)
уравнением сохранения количества движения
а (Pv ')= — и~-гари. (10.18)
\ g /
Давление торможения на поршень равно реакции потока жидкости
на единицу его площади
+/V- (10.19)
g
Согласно уравнениям (10.18) и (10.19)
° I
^0=----« + ЕАг-
ga
Исключая G и ы[см. уравнение (10.17)], получим
С другой стороны, в соответствии с выражением (10.16) имеем
А=-М^+П-
2g
После исключения и [см. уравнение (10.17)]
/>й=^И(^+Ж1-+11. (10.21)
2g L\ а ) е2 J
Приравнивая правые части выражений (10.20) и (10.21), получим
Отсюда обратная величина коэффициента сжатия струи, вытекающей че-
рез отверстие с острыми кромками,
—=1 + 1/ 1-(——У. (10.22)
е у \a--A /
При п^-0 коэффициент е^-0,5.
Согласно схеме, приведенной на рис. 10.17, для отверстия со скруг-
ленными кромками радиусом г коэффициент сжатия струи
= . (10.23)
«о я а
Из геометрических соотношений для отверстия круглой формы
а \ а /
где d — V 4ajn.
Тогда формула (10.23) с учетом уравнения (10.22) преобразуется
к виду
При значении И 2, соответствующем предельному радиусу
скругления г=гО0 = 0,235 V а, сжатие струи практически отсутствует.
Для вязкой жидкости ее расход через отверстие будет всегда мень-
ше теоретического (для идеальной жидкости), определяемого соотноше-
нием G = srayu. Поэтому для вязкой жидкости принимают
G = perayu,
где ц «.0,94-0,95 — коэффициент расхода, зависящий от вязкости жид-
кости.
Нетрудно показать, что величины г? (10.24), ра (10.21) и Ф (10.15)
весьма чувствительны к радиусу скругления острой кромки отверстия
для перетекания жидкости:
0,5 < р.; 0<> <0,235/а.
Поэтому при расчете гидравлического тормоза необходимо знать раз-
меры отверстия перетекания и прежде всего радиус скругления его кро-
мок. В противном случае расчетные ре-
зультаты будут отличаться от опыт-
ных. Отверстия с явно острыми кром-
ками быстрее размываются протекаю-
щей жидкостью, вследствие чего при
эксплуатации такой тормоз снижает
свое тормозное усилие.
На основании изложенного при
расчете гидравлического тормоза или
буфера следует пользоваться форму-
лами:
ф=, д^м + «у k
{ а ! 1
Рис. 10.17. Схема сжатия струи
жидкости на входе в канал
ег~0,5^< 1; ?r= 1 + 1,77 -Д .
У а
Величина йДц, а, Л) изменяется в значительных пределах: 1,1 <
</?i<4. Поэтому при расчете гидравлических тормозов и буферов вели-
чину коэффициента ki принимать постоянной безотносительно к их кон-
струкции и размерам нельзя. Этот коэффициент можно считать постоян-
ным только для конкретного образца тормоза или буфера.
Расчет гидравлического буфера
При ударе подвижной части автомата весом Qo о буфер со ско-
ростью Vo процесс ее торможения описывается формулой
<10-25)
где — Д ----------- —постоянная сопротивления буфера;
2g \ а /
Щ = ± Qo sin 0 + Т— постоянная сила торможения от составляю-
щей веса подвижной части и трения.
Решение этого уравнения имеет вид
l/2 = e-₽x p)_J>e3VYj,
где
Qo Qo J ₽
Значение постоянной интегрирования D определяется начальными
условиями: А'= 0; V=V0.
На основании этого скорость отката подвижной части в процессе ее
торможения
I/2 = I/oe-₽x-5(l-e-^Y), (10.26)
;-е ?==^ /Д + ау; 5 =
Qo \ а / k-s -[А (А + а)
Текущий путь отката на основании выражения (10.26) определяется
уравнением
1 . в+vl
— In-----
И В +V2
(10.271
Время t находим из уравнения (10.25). Так как — — (V2) = —, то:
2 dX dt
dt— Qo dv
g Ufl + CV2
Отсюда после интегрирования в пределах от 0 до г1 и от Уо до V получим
* = — -=( arctg arctg I/1/ (10.28
£ усПо \ К Ио V п0/
Полное время торможения ta вычисляется по формуле (10.28) при
Р=0.
При По = О в соответствии с правилом Лопиталя имеем
,.= Qo / i___}_\
gc Vo)'
Отсюда следует, что при отсутствии постоянной составляющей силы тор-
можения нельзя обеспечить полное торможение подвижной части орудия,
так как t->oo.
Расчет гидравлического тормозного устройства
с постоянной силой сопротивления
После окончания действия порохового газа на ствол уравнение дви-
жения откатных частей при наличии пружинного накатника и гидравли-
ческого тормоза имеет вид
(1/2)=-/?. (10.29)
‘2g dX 1 '
Рассмотрим условия, при которых можно обеспечить /? = const. Тор-
моженный откат в соответствии с выражением (10.29) при R = const,
характеризуется зависимостями:
1/2 = у2—^RX;
Qo
/?=ПОс + уХ+с1/2.
Заменяя в последнем соотношении I'2, получим
R=ПОс + ktX + cVl - RX.
Qo
Отсюда следует, что величина 7? = const только в том случае, когда ал-
гебраическая сумма членов, зависящих от пути отката, равна нулю, т. е
kc-^R=Q.
V0
Это возможно получить при k, = —R или при AQ° ф
Qo 2gR
В общем случае постоянство силы торможения заданной величины
можно обеспечить лишь за счет соответствующего выбора коэффициен-
та Жесткости пружины kc, предварительного усилия ее поджатия 110с и
коэффициента сопротивления тормоза с, пользуясь соотношениями:
/? = ПОс+с^.
Qo
Так как величиной kc нельзя варьировать в широких пределах, то
при допустимом ее значении величины с и По вычисляются по формулам:
с = _Щк== п R_cV^
2gR 1 2Д « Г 0
Величину с в принципе можно иметь любую, обеспечив ее за счет
выбора соответствующей площади для отверстия пробрызгивания жид-
кости в тормозе
ас =----——----- . (10.30)
1/
При всех других постоянных значениях а, не соответствующих ве-
личине ас, определяемой формулой (10.28), сила сопротивления R будет
переменной, т. е. R (X).
Для определения силы сопротивления R(X) имеем:
V2=V20-^- f/?(X)rfX;
Qo J
о
+ f R(X)dX.
Qo J
0
Последнее выражение, которое приводится к уравнению Лагранжа
вида YX'+PY = q, имеет решение
r = e“Jwx[j q^^dX-YD^,
где
q = K^cVl + kQX-, Y'x=R{XY Р=^с.
Qo
Постоянная D находится из начальных условий: У = 0; Х = 0.
Поэтому
Х _ х
Y=^R(X)dX = e Q°
о"
2;YC Y
(По + eVо 4- k,X) e777' dX + D
= (n0+c^)^
Hc---—f-^AT-l) + £>e QaX.
Vgc)2 \ Qo Г
При Я=0и У=0
D =
nQ-cVl
Qo
2gr
Тогда
Г = (П04- cVl~kQ-^\-^ (l-e Q° )4-йс —
к 2gc / 2gc 2gc
—ly
/^XjUlIo+cVi-^^e v“ +kc^-,
к 2gc }_2gc
(10.31)
Потребные законы изменения R(X), отличные от R = const, не мо-
гут быть обеспечены при постоянном значении а(Х); для их реализации
необходим выбор нужной функции а(Х). В этом случае параметр с яв-
ляется функцией от X и выражение для ¥ примет вид
Г = е Q° Н(по + с(Х)Ио-НЛ) eQo dX\D
где
c(X)
= _г_мГ-Л+.«(*) 12;
2g L a(X) ]
2g ( c{X)tlX
79=-f [n0 + c(AOy? + ^]eQ^ = F(X = 0).
Последнее уравнение может быть использовано при решении обрат-
ной задачи, т. е. для определения силы сопротивления и скорости отката
(или наката) подвижной части орудия при заданной геометрии гидрав-
лического тормоза и пружинного накатника. В случае пневматического
накатника следует положить
П0Х/гс%=110 М-ГфЛ
\ Л — Л /
где /z1,3 ;- 1,35—показатель политропы при сжатии газа (азота);
—начальная сила давления газа в рабочем цилиндре
накатника;
Т — сила трения.
Пример 10.4. Найти характерные размеры гидравлического тормоза, обеспечиваю-
щего постоянную силу торможения 7? = 500 кгс при следующих условных данных:
Qo=2O кг; Ки=7 м/с; По=25О кгс; Ас=2500 кгс/м; А = 10 см2; у=0,8 кг /дм3.
1. Путь торможения
QoC 20-72
X =-----— =---------------= 0,1 м.
2g-/? 2-9,81-500
2. Постоянная сопротивления тормоза
k.Q0 2500-20
с =------=-------------= 5,1 кг с2.
2gR 19,62-500
3. Площадь отверстия поршня для протекания жидкости при Ai=2 (первое
приближение):
А 10
а —----- • ----=------- ----- -------------= 1,45 см2.
/2g с f 2-9,81-5,1
{Aki ~ V 800-10-IO-4-2 ~ 1
'4. Фактическое значение коэффициента гидравлических потерь в отверстии про-
брызгивания при г=2 мм и р=0,9:
1,25 / а \2 1,25 / 1,45 \2
=-------- + ------ =---------+ --------- =1,82,
1 е2 \А + а 0,8352 (11,45/
г
'fr
где г = —— = 0,835
г 2
<рг = 1 + 1,77 —— = 1 + 1.77 —:---------= 1,295.
]/ а V 1,45
5. Площадь отверстия пробрызгивания при уточненном значении коэффициента
гидравлических потерь (второе приближение):
Л Ю о, о
а = ----zzzc:---=--------- -------------------==1,37 см2.
/ 2gc / 2-9,81-5,1 _
|/ -(Л*! У 800-10-КГ4-1,82
6. Давление жидкости в цилиндре в начале пути торможения
/10 -4-1,37X2
\ 1,37 )
72 = 25 кгс/см2.
7. Сила торможения в начальный момент (поверочный расчет)
R = По + = 250 + 10-25 = 500 кгс.
Вывод уравнений для расчета гидравлических тормозов других схем
весьма громоздкий. С ним можно ознакомиться в книге '[6]. Из-за огра-
ниченности объема книги здесь рассматриваются только гидравлические
тормоза типичных схем.
§ 10.7. ТОРМОЗ «ОТКАТА — НАКАТА»
КАНАВОЧНО-ИГОЛЬЧ АТОГО ТИПА
Рассмотрим простейшую схему тормоза и рассчитаем площади попе-
речного сечения канавок ах на внутренней поверхности цилиндра, исхо-
дя из условия обеспечения заданной силы торможения Фт.о (рис. 10.18).
На рисунке обозначено: I и II — соответственно рабочая и нерабочая
Рис. 10.18. К расчету профиля канавок на внутренней поверхности цилиндра
полости цилиндра; III — полость штока; D и d„— соответственно диа-
метры поршня и регулирующего очка; d и — соответственно диаметры
штока и его полости; б — переменный диаметр контрштока; pi, р2 и
Рз— соответственно давления в полостях I, II и III; V—скорость отка-
та; и — скорость пробрызгиваемой жидкости.
Сила гидравлического сопротивления тормоза отката при откате оп-
ределяется зависимостью
®т.о — Д1гИт + 7\т — Pin (А Д А),
(10.32)
так как при откате в полостях II и III образуется вакуум и, следова-
тельно, р2 = Рз = 0-
В формуле (10.32) Лт=-^-(£)2 —at2) —рабочая площадь поршня при
откате;
7\_т = /?1/вл^/в — переменная составляющая си-
лы трения в уплотнениях;
дДт—условное «увеличение» площа-
ди поршня тормоза за счет
сил трения в уплотнениях.
Для определения давления в рабочей полости воспользуемся основ-
ными уравнениями гидрогазодинамики (см. § 10.6), совместное решение
Рис. 10.19. К определению длины канавки
которых для полостей I и II при /?2=0 приводит к формулам (10.21),
(10.22) и зависимости
(10.33)
Эти выражения справедливы для случая идеальной жидкости и от-
верстий (канавок) с острыми кромками. Для реальных условий в фор-
мулы вводится поправочный коэффициент k~ 1,14-1,25, учитывающий
потери при протекании жидкости через отверстие. Тогда
(10.34)'
/ 2г \2
где гг = г I 1 Д- — I — реальный коэффициент сжатия струи;
г — радиус притупления кромки;
, 4ах
d ——- —приведенный диаметр;
X
X — смоченный периметр.
Таким образом, сила торможения при откате [см. формулу (10.32)]
с учетом размерностей величин, принятых в настоящее время в теории
лафетов (у — удельный вес, кг/дм3; Ат и ах — площади, см2; g— ускоре-
ние свободного падения, м/с2; V — скорость отката, м/с) определяется
зависимостью
Фт о=£_Т_
т’° 20д
-i-
4 \
НИ1 (Лт-(-ДЛ.г) V2.
(10.35)
Выражение (10.35) определяет и площадь сечения канавок ах =
= nbh, где п — число канавок, b и h — ширина и высота канавки. Зная
число канавок и задаваясь шириной, рассчитывают глубину.
При проектных расчетах обычно принимают k/v,r2 по участкам вели-
чиной постоянной, хотя, строго говоря, эта величина переменная, являю-
щаяся функцией ах и, следовательно, пути отката. При таком допуще-
ниц зависимость (10.35) преобразуется к виду
, А \2
Л '
av /
ф.
k V
где Ст-0==—-^—(Ат4-дАт) —характеристика тормоза отката.
Откуда площадь канавки
а
Ф-r. о .
•Ст.0У2 “
В дальнейшем производится уточнение решения методом последова-
тельных приближений.
Рис. 10.20. К расчету профиля коптрштока
При определении длины цилиндра необходимо иметь в виду, что
длина канавок складывается из трех участков 1к = 1\ + 1ч + и, где участки
/1 и /3 являются не расчетными, а технологическими (рис. 10.19). Умень-
шать Ц и /з можно за счет уменьшения ширины канавки и увеличения
угла захода фрезы.
Длина участка /2 = л + /п, где 1а— длина поршня. Кроме того, длина
цилиндра должна быть увеличена приблизительно на 10% на возмож-
ный удлиненный откат.
Рассчитаем профиль контрштока тормоза наката, обеспечивающего
создание силы Фк.н (рис. 10.20). Торможение наката начинается в мо-
мент выбора вакуума в полостях II цилиндра и III штока, при этом ве-
личина пути, на котором выбирается вакуум, определяется выражением
/ (I \2
p = XI—-I . Сила гидравлического сопротивления тормоза Фц при на-
кате
Ф —ф -L ф
н о.н~ н.н»
где Ф0.н = ^2п(А-А); фи.н=Л1ЛР;
Ао= — D2 — рабочая площадь поршня при накате;
4
л Я ,2
Ар — — dv — площадь регулирующего очка.
Для определения давлений р2п и Рзи запишем следующие системы
уравнений.
Для полостей II и I:
закон сохранения энергии
V2 /у2
Р<1 I | ,
7 2g 7 2g
закон сохранения вещества
(А0 + «х) —
закон сохранения импульса
Рг^Г PVН~ Pi -j- рИ-iSp
Здесь р = —----плотность жидкости;
g
— скорость перетекания жидкости из полости II в по
л ость I;
гг — коэффициент сжатия струи при перетекании.
При pi = 0:
В итоге зависимость для силы гидравлического сопротивления тор-
моза отката при накате в реальных условиях будет иметь вид
Фо Н=А-П. U 1\+ И (А
W [4, К / J
Для полостей III и II:
закон сохранения энергии
ДЗ , Д2| .
7 2Д 7 2g
Ap)Vl
(10.36)
закон сохранения вещества
ApV
закон сохранения импульса
Аз + р Ии = ( Рг + Р«2 ) £2 + ( 1 — £г) Pl = Рг + Р«2®2‘
В указанных выражениях ш— скорость перетекания жидкости из
полости III в полость II;
а5=Др —Дв—площадь кольцевого зазора между
регулирующим очком и контршто-
ком;
Дв—-j-82 — площадь поперечного сечения контр-
штока.
Для определения величины р3ц имеем зависимости:
7 М
~ 2g [ 4
1
В рассматриваемом случае сила гидравлического сопротивления
тормоза наката при накате в реальных условиях определяется зависи-
мостью
Ф =k——
н’н к 20g
1 ( А" л
2 I 1
е1г \ ах
ApVl,
(10.37)
где Значения коэффициентов сжатия струи ei,- и s2r подсчитываются так
же как и в выражениях (10.24) и (10.34).
Так как сила Фы.н известна (Фп.ц=Фл—Фо.н), то из формулы (10.37)
при предположении, что по участкам является величиной постоян-
ной, может быть найдена площадь кольцевого зазора
ЛР
По полученным значениям as определяются площадь АВ=АР—as и
диаметр 6 контрштока, после чего строится его профиль.
Рассчитаем конструктивные параметры цилиндра, штока и контр-
штока тормоза отката.
Цилиндр рассчитывается на максимальное внутреннее давление в
рабочей полости цилиндра рт при откате; толщина стенки рассчиты-
вается по формуле (10.12).
Шток с контрштоком рассчитываются на устойчивость при нагруже-
нии соответственно силами Фпт и Фн.нт. Расчет на устойчивость заклю-
чается в определении критических нагрузок [3, 5]. Для всех случаев за-
крепления сжатого стержня критическая нагрузка определяется форму-
лой Эйлера
кр_ (а/)2 ’
которая справедлива в пределах сохранения пропорциональности между
напряжением и деформацией.
Так как
_ Ркр _ л2£
°кр ~ ~ т]2 ’
то условие применимости формулы Эйлера выражается неравенством
П>л (10.38)
Здесь 1]= ----характеристика гибкости стержня;
^mln
£—2- 10ь кгс/см2 — модуль упругости первого рода;
вп—предел пропорциональности для материала
стержня.
В указанных выражениях |л=0,7—коэффициент приведенной дли-
ны, зависящий от способа за-
крепления стержня и характе-
ра распределения нагрузки по
его длине I;
zmin=|//A —минимальный радиус инерции
сечения;
/ты—наименьший момент инерции
сечения;
F—площадь поперечного сечения.
При Ц2=Дц критическая сила определяется по эмпирической
формуле Ясинского
£>кр=£(а —+ сЦ2),
где а, b, с — числовые коэффициенты, имеющие размерность напряже-
ния.
Для конструкционных и легированных сталей при отсутствии непо-
средственных данных о величине коэффициентов а, Ь, с можно получить
ориентировочные значения по формулам:
а= . ь== % с = о.
•'ll—Д2 -Ч 1—^12
При этом характеристика гибкости тр определяется по формуле
(10.36), а т]2 для качественных сталей берется в пределах 15—25.
Допускаемая нагрузка должна находиться в определенном отноше-
нии к критической, т. е.
где пу — коэффициент запаса устойчивости.
Стержни, у которых т) <т]2 рассчитываются лишь по условию прочно-
сти на сжатие. В рассматриваемом случае производятся обычные проч-
ностные расчеты на максимальные усилия Фт.от для штока и Фн.нт для
контрштока.
§ 10.8. ТОРМОЗ «ОТКАТА — НАКАТА»
ВЕРЕТЕННО-МОДЕРАТОРНОГО ТИПА
У тормозов веретенного типа жидкость из рабочей полости цилинд-
ра I при откате перетекает в двух направлениях: основной поток —в не-
рабочую полость II; дополнительный поток — в полость штока Г и через
обратный клапан, называемый модератором, — в замодераторное про-
странство III.
Обычно площади отверстий в поршне достаточно велики, поэтому
можно считать, что параметры потоков жидкости в рабочей полости ци-
линдра и внутренней полости поршня одинаковы (рис. 10.21).
При последующем рассмотрении используем следующие обозна-
чения:
А:— —-(£)2 — d2)— рабочая площадь поршня при откате;
« л ,2
Ар — — аР — площадь регулирующего очка;
Ав =— о2 = Др — ах—площадь поперечного сечения веретена;
ах — площадь кольцевого зазора между регулирую-
щим очком и веретеном;
1 Я ,2
Я1 = —«1 — площадь поперечного сечения полости штока;
Ао — — D2 — площадь поршня по наружному диаметру;
4
as— площадь канавок на внутренней поверхности
штока;
S2 — минимальная площадь отверстий для прохода
жидкости в замодераторное пространство.
При расчете считается, что тормоз отката заполнен несжимаемой
жидкостью полностью, при этом движение жидкости установившееся.
Тогда гидравлическое сопротивление тормоза отката при откате
Ф-т.о — Ап (Ат + Д А) + Ап (Ах — А р) — Ап Ain
или ®т.о — Ап (Ат + ДАТ— Ар) "НАп — Ап) А-
В этом выражении первый член есть основное слагаемое сопротив-
ления тормоза при откате, обусловленное гидравлическим торможением
в регулирующем очке тормоза. Второй член — сопротивление, обуслов-
ленное гидравлическим торможением при проходе жидкости во внутрен-
нюю полость штока. Для определения давлений р1п и р3п, как и прежде,
запишем систему уравнений в следующем виде.
Для полостей I и II:
закон сохранения энергии
V2 а2
А । v = £2 । и2 .
закон сохранения вещества
АТИ = zaxii2 4- (Aj 4- «,) V-,
закон сохранения импульса
А~Ь Р^2==:
Откуда при /?2 = 0:
(10.39)
Для полостей Г и III:
закон сохранения энергии
А , (а)2 _ Рз ! А __ А , V2 .
7 2^- 7 ' 2g . 7 2д ’
закон сохранения вещества
(А[ — Ap-|-es) zzi = (sj2 eias) и3 —(Aj-j- «J •
Для проектных расчетов в первом приближении можно принять
ч = е1, тогда будет иметь:
закон сохранения вещества
(Aj — Ар + as) «1 = (2 + a J us;
закон сохранения импульса
Pi -г Р (А)2 = (а + Р*4) 4 + (1 — А) А = а+ РА4-
Откуда
Plu~ Рзп~ Р1~ Рз =
(10.40
С учетом скругления острых кромок (см. § 10.6) сила гидравличе-
ского сопротивления тормоза при откате в реальных условиях опреде-
ляется зависимостью
фт.о=£
(Дт+дДт-Др) +
(10.4 Г-
При проектных расчетах в первом приближении величины 1/е® и 1/г|
принимают постоянными и пренебрегают величиной as. Тогда за-
висимость (10.41) преобразуется в упрощенную
V Г 1 I А ____ А, \ 2 I Л?
Фто^/г-?--------- \ (Д -I-дД — Дв)-|—5--------! К2,
т'° 20g- Л ах I k г ' т 11 с2
откуда
/ ~ (Л-г—Л1)2(ЛТ + ДЛ.Г — Лр)
х г 20g Фт0 _ 1 Д?
V2 г2г Q2
По значениям ах определяют площадь ДВ=ДР—ах и диаметр 6
веретена, после чего строится его профиль.
Во избежании «пика» гидравлического давления в тормозе отката,
необходимо обеспечить в начальный момент отката кольцевой зазор
аа= 1,5-/2 мм.
Рассмотрим условие заполняемости полости штока при откате. Оно
будет выполняться, если давление в замодераторном пространстве будет
удовлетворять неравенству р3>0. Тогда в первом приближении при
й8 = 0 из формул (10.39) и (10.40) имеем
Рз— k
7
20^
откуда после преобразований
(10.42)
Таким образом, отсутствие вакуума в полости штока обеспечивает-
ся в том случае, когда минимальное отверстие, подводящее жидкость в
замодераторное пространство, будет удовлетворять неравенству (10.42)
при ах = аХт.
Рассмотрим расчет профиля канавок на внутренней поверхности по-
лости штока для создания силы торможения наката Фн (рис. 10.22).
Общее гидравлическое сопротивление тормоза при накате Фн, как
указывалось в § 10.4, после выбора вакуума в нерабочей полости ци-
линдра, определяется формулой
где
Фн=Фо.В + Фн.н,
Фо.н^^пИо-Л); ФВ.н = />ЗпА-
Накат
Рис. 10.22. К расчету профиля канавок на внутренней поверхности штока
Для определения давлений р^, и р3п используем систему уравнений
сохранения энергии, вещества и импульса (см. § 10.6), решение которой
приводит к расчетным зависимостям:
для полостей II и I
Так как сила Фп.н известна, то из формулы (10.44) искомая пло-
щадь
При предположении, что является величиной постоянной, мо-
жет быть найдена площадь сечения канавок as = nbh. Поэтому, задаваясь
шириной Ь и числом канавок п, рассчитывает их глубину.
Полученное первое приближенное значение as используется для по-
следовательного уточнения величин ах и as с помощью уравнений
< 10.41), (10.43), (10.44).
Прочностные расчеты цилиндра, штока и веретена остаются преж-
ними (см. § 10.7).
Пример 10.5. Для исходных данных примера 10.3 и табл. 10.6 рассчитать тормоз
отката веретенного типа (в откат идет шток тормоза; жидкость — стеол-М).
Конструктивные параметры тормоза отката:
.0=105 мм: d = 50 мм; di = 34 мм; dp = 30 мм; QmT = 10 кг.
1. Рабочая площадь тормоза при откате
Лт = -^- (D~ — d1) = ~^(10,52 — 5,02) = 66,96 см2.
2. Рабочая площадь тормоза наката
л: „ 3,14„ „
А, =— £ = -2—3,42 = 9,08 см2.
4 1 4
3. .Минимальная площадь отверстий для прохода жидкости в замодераторное про-
странство: £2= 1,8 см2.
4. Текущее значение силы сопротивления тормоза при откате
Фт.о = 7? — Пу — Тс.т— fQ0 = R — Пу — 125 - 0,20-1120 = /? — Пу — 349.
5. Текущее значение площади кольценого зазора между регулирующим очком и
веретеном (АЛт = 0)
4____________________
20g Фт.о 1 Д
kt V2 q2
6. Диаметр веретена
Результаты расчета приведены в табл. 10.6. В начале отката диаметр веретена
принят 27 мм, что обеспечивает первоначальный зазор 1,5 мм на сторону.
Таблица 10.5
Исходные данные ф Т.0 ! кгс Для отверстий с острыми кромками Для отверстий со скругленными кром- ками
с X, м R, кгс И3, м2/с2 КГС
ах, см2 6 Л’ - ММ а , см* 5^, мм
0 0 1 883 0 1534 0 1,34 27 1,34 27
^2 »=0,008 0,035 66,4 1654 15 697 4,56 17,9 2,29 24,7
<5 = 0,0121 0,069 j 73,6 1794 15 557 4,82 16,9 2,41 24,3
<5 = 0,018 0,119 66,6 2034 15 317 4,62 17,7 2,31 24,6
<3 = 0,024 0,165 1 54 2324 15 027 4,2 19,1 2,1 25,2
Д = 0,0323 0,223 Ч 17 7ЛЛ 36,8 2780 14 571 3,52 21,3 1 ,76 26
0,24 г 1/ /ии 31,3 2974 14 377 3,26 22 1 ,63 26,3
0,28 19,2 3454 13 897 2,6 23,8 1,3 27,1
0,32 6,82 4074 13 277 1,59 26,4 0,79 28,3
0,33 3,72 4274 13 077 1,18 27,4 0,6 28,7
0,342 0 4544 12 807 0 30 0 30
7. Проверка на заполняемость замодераторного пространства:
Лт ег 9,08
----1----av ----4,82-1 =0,76 см2.
Лт—Л1 Хт Е], 57,9
2 = 4,8
8. Напряжение в штоке тормоза
4(ФК от 4- /Ц|Г)
л (и~ —rfj)
4(15 697 + 2040)
3,14 (52 — 3,42)
= 1680 кгс/см2,
dV
шт =
dt
Qo
§Ркнт
10
1120
91,6-2500 = 2040 кгс.
Запас прочности при а8 = 5500 кгс/см2
а5500
а 1680 = 3’3
9. Проверка веретена на устойчивость.
Данные веретена:
I = 45 см; 8т1п = 1,69 см; /rain = 0,4 см4; Fm-ia = 2,24 см2.
Радиус инерции
^xnin —
Расчет:
тёп
F
0,4
-----= 0,423 см.
2,24
р7
7] = —-----
гт1п
0,7-45
———~ = 74,5; Т1 = л
0,423 ’ ’ 11
Е
----= 3,14
Зп
2-106
------=73.
4000
При р>г|1 справедлива формула Эйлера. Тогда
л2£/т,л 3,142-2-106.0,40
К₽~ W
Запас устойчивости
где
= 7950 кгс.
(0,7-45)2
г кр
п =---------
Фн.нт
7950
------= 3,18,
2500--’ ’
Р = Ро
Фи.нт~П-Rf = (32,5— 1,7)93,6 — 159 - 0,20-1120 = 2500 кгс;
/ с2 \п . / 175 \ 1,з
- ---- =44/-----------———\ = 93,6 кгс/см2;
U,ZO+ I
\ 1,75 — — /
4 0,342 !
X = X — р = 0,342 — 0,078 = 0,264 м;
С2- —
= 0,078 м.
10. Расчет штока на внутреннее давление:
где
2d2 +<4
rf2 —rfj
= — 275
О
2-52 д- 3,42
52 — 3,42
= 839 кгс/см2,
Рът
ФН.Н7Я
Л1
2500
9,08
= 275 кгс/см2.
2
3 о РЗт
О
2
Запас прочности
П = ------
а
5500
839
= 6,56.
11. Расчет цилиндра на
внутреннее давление (£>i=Z>+2d; 6 = 9 мм):
2 2О‘ + О2
3 = ~ Р\т
D^— D2
2
— 262
О
2-12,32 4- 10,52
12,33— ю,52
= 1757 кгс/см2,
где
15 697
Р\т ~ ,Фт от. = Г = 262 кгс/см2.
АТ — Лр 00,96 — 7,07
Запас прочности при crs=5500 кгс/см2
as 5500
п = —=-----------=3,13.
<т 1757
Тормоз с переменной длиной отката
Переменная длина отката применяется в орудиях, для которых
стрельба при постоянном откате на больших углах возвышения невоз-
можна. В тормозах отката такого типа отверстия истечения выполнены
в цилиндрическом веретене обычно в виде двух длинных и двух корот-
ких канавок, при этом при коротком откате длинные канавки перекрыты,
а при длинном откате работают все канавки.
Тормоз рассчитывается следующим образом. Сначала определяется
площадь канавок а при длинном откате, равная сумме площадей корот-
ких и длинных канавок. Сопротивление тормоза при длинном откате на
малых углах возвышения орудия принимается из условия устойчивости
системы при выстреле. Расчет отверстий истечения жидкости произво-
дится аналогично расчету тормоза с постоянной длиной отката.
Длина короткого отката при больших углах возвышения обычно бе-
рется в пределах Хк= (0,64-0,7) Хд. После расчета площади ак находят
площадь истечения длинных канавок: ая = а—ак.
Тормоз отката клапанного типа
Сопротивление откату рассматриваемого тормоза-накатника опре-
деляется зависимостью
/?=n + ®T.o + /?/-Q0sin<p.
С другой стороны, усилие пружины регулятора отката, т. е. пружины
клапана, регулирующей гидравлическое сопротивление откату, опреде-
ляется выражением
di),
АТ 4
где DK — диаметр клапана;
dc— диаметр направляющего стержня;
Р — текущее усилие пружины..
Начальное поджатие пружины Ро определяется по теоретическому
значению Rx, а рабочее усилие Рх — по величине Rm, т. е.
Р0— . ~~ \Р& dc), Р),— dc)-
Зная величины Ро, Рх, ат, ах, можно приступить к определению
конструктивных размеров регулятора отката, при этом необходимо обес-
печить в начальный момент отката свободный ход клапана, при котором
предварительное открытие регулирующего отверстия составляет
а0 ~ 0,5 а а •
& 10.9. ТЕПЛОВОЙ РАСЧЕТ ТОРМОЗА ОТКАТА
В качестве жидкости в противооткатных устройствах наиболее ши-
роко используются стеол-М. и веретенное масло АУ. Основные характе-
ристики указанных жидкостей приведены в табл. 10.7 [4]. Вязкость и
объем жидкости в зависимости от температуры меняются в широких
пределах, что оказывает влияние на работу противооткатных устройств.
Изменение вязкости жидкости влияет на величину коэффициента k и,
как следствие, на величину сил гидравлического сопротивления тор-
моза Фт.о и Фн, а изменение объема приводит к недостатку или избытку
жидкости. Повышение температуры вызывает уменьшение силы сопро-
тивления и увеличение длины отката, а увеличение объема рабочей
Таблица 10.7
Характеристики Стеол Стеол-М Масло АУ
Глицерин, % 57,7 46,3
Этиловый спирт, % — 20 Изготовля-
Хромовокислый калий, % 2 1,6 ется из
Едкий натр, % 0,13 0,1 нефти
Вода, % 40,17 32
Удельный вес при 15° С, кг/дм3 1,16 1,09 0,89
Температура застывания, °C Температура кипения, °C Коэффициент объемного расширения, 1/°С —35 ниже —57 -45
110-112 89—92 350
55-10-5 65-10-5 69-10-5
Средняя удельная теплоемкость, ккал/(кг-°C) 0,75 0,70 0,44
Допускаемая температура нагрева, °C Абсолютная вязкость, П: 90 90 ПО
при температуре — 30° С 3,5 3,89 48,8
—20° С 1,24 1,44 11,5
— 10° С 0,553 0,661 3,85
о°с 0,267 0,297 1,65
20° С 0,103 0,109 0,4
50° С 0,037 0,037 0,106
80° С 0,02 0,019 0,048
жидкости приводит к недокатам. Для устранения недокатов применяют
специальные компенсаторы жидкости — пружинные или пневмати-
ческие.
Таким образом, при проектировании противооткатных устройств не-
обходимо произвести тепловой расчет тормоза отката, основной задачей
которого является определение повышения температуры жидкости, что,
в конечном итоге, позволяет рассчитать необходимый объем компенсато-
ра (АИ7Ж).
Увеличение объема жидкости при нагреве ее до предельной темпе-
ратуры /пр определяется по формуле
ди7ж=^жд/йр=РЖкд/1Л/пр,
где рт—средний коэффициент объемного расширения жидкости;
Л/г—повышение температуры жидкости за один выстрел;
— число выстрелов при нагреве жидкости до температуры /пр.
Объем рабочей полости компенсатора на практике выбирается не-
сколько больше величины Ай^ж.
Повышение температуры жидкости в тормозе отката за один вы-
стрел приближенно определяется зависимостью
1 427С'.,
где Л=0,7 -ч- 0,9 — коэффициент тепловых потерь в атмосферу;
Ст= сжЧж + — теплоемкость тормоза;
сж и см— средняя удельная теплоемкость жидкости
и деталей тормоза соответственно (см =
= 0,114 ккал(кг-К);
<7Ж и </м — вес жидкости и вес металла;
Ет— энергия, поглощаемая в тормозе отката и нака-
та за один выстрел.
Величина Ет определяется соотношением
А л ^2
Ет = Фт.оп?Л- + f ФН6/Х + 2X/?Z ~ 0,45 - 2Q0X,
•) J
о о
т Я 4- ct3<o
где J3=-------—'Пд— импульс выстрела.
g
На практике допускают повышение температуры за один выстрел до
1°С для автоматических пушек и до 2° С — для артиллерийских систем
крупного калибра.
Температуру жидкости в цилиндре тормоза при N произведенных
выстрелах можно приближенно определить по формуле £04-МД/ь
справедливой при скорострельности л<4 выстрелов в минуту. При рав-
номерной скорострельности (п>4) можно пользоваться зависимостью
[1]
ст
Здесь — начальная температура жидкости;
/в — температура окружающей среды:
т — продолжительность стрельбы в часах;
’ “Т , ,
ст=----, где а — коэффициент теплопередачи;
ст
F — поверхность теплопередачи.
Температура жидкости в тормозе отката не должна превышать до-
пускаемое значение, равное 90° С.
§ 10.10. УСТРОЙСТВО И РАСЧЕТ
УРАВНОВЕШИВАЮЩИХ МЕХАНИЗМОВ
В целях обеспечения устойчивости орудия при выстреле стремятся
понизить высоту линии огня. Для этого цапфы качающейся части отно-
сят как можно ближе к казеннику и тем самым обеспечивают возмож-
ность стрельбы орудия при больших углах возвышения ствола.
При расположении центра тяжести качающейся части далеко впе-
реди цапф создается значительный по величине момент, затрудняющий
работу подъемным механизмом.
Естественное уравновешивание качающейся части с помощью гру-
зов, закрепляемых на казеннике или люльке, сохраняется и при действии
на нее динамических нагрузок в вертикальной плоскости. Поэтому этот
способ распространен в морской и танковой артиллерии. Однако ис-
пользование естественного уравновешивания приводит к увеличению ве-
са орудия.
В полевой артиллерии для уравновешивания применяют специаль-
ные уравновешивающие механизмы. Впервые они были предложены в
России при создании 152-мм гаубицы обр. 1904 г.
Уравновешивающие механизмы бывают тянущего (рис. 10.23) и тол-
кающего (рис. 10.24) типов. В качестве упругого тела используются пру-
жины, а для тяжелых орудий — воздух или азот. Пружинные уравно-
вешивающие механизмы просты по конструкции и удобны в эксплуата-
ции, хотя неизбежная с течением времени осадка пружины приводит к
нарушению уравновешивания. Пневматические уравновешивающие ме-
ханизмы компактны, однако величины создаваемых ими усилий суще-
ственно зависят от температуры окружающей среды и трения в уплотни-
тельных устройствах.
Рис. 10.23. Уравновешивающий механизм Рис. 10.24. Уравновешивающий меха-
тянущего типа низм толкающего типа
Пневматический уравновешивающий механизм (рис. 10.25) состоит
из наружного цилиндра ], внутри которого помещается полый стер-
жень 2, упирающийся сферической пятой в гнездо верхнего станка 5.
Полости цилиндра заполняются сжатым воздухом или азотом через вен-
Рис. 10.25. Пневматический уравновешивающий Рис. 10.26. Расчетная схема уравно-
механизм вешивающего механизма толкающего
типа
тиль 4; герметичность обеспечивается уплотнениями 3. Связь уравнове-
шивающего механизма с качающейся частью осуществляется с помощью
рычага 7, закрепленного на люльке и опирающегося своими лапами на
цапфы обоймы 6.
В некоторых конструкциях пневматических уравновешивающих ме-
ханизмов для уменьшения влияния температуры на режим работы вво-
дится специальный температурный регулятор.
Рассмотрим элементарный расчет уравновешивающих механизмов.
По схеме (рис. 10.26) толкающий механизм представляет собой шарнир-
ный треугольник, у которого стороны а и b имеют постоянную длину, а
сторона с изменяет свой размер при изменении угла возвышения ср и
представляет собой собственно уравновешивающий механизм.
При наличии уравновешивающего механизма момент неуравно-
вешенности
д/И=Л4к—Л4у ±<р
сводится до минимальной величины.
Здесь 7WK = QK/U cos«/—момент от веса QK качающейся части отно-
сительно цапф;
Л4 =П h—момент, создаваемый уравновешивающим
механизмом относительно цапф;
М,.р — момент от сил трения;
<р'=?±т0;
уо — угол между линией, соединяющей центр тяжести качающейся
части орудия с осью цапф и горизонтом при ср = О;
Пу — упругое усилие уравновешивающего механизма.
Для расчета усилия Пу справедливы выражения:
для пружинного механизма
Ну — ITpy kx^
для пневматического механизма
где Поу —усилие уравновешивающего механизма при ср = О;
k — коэффициент жесткости пружины;
х—ход поршня или пружины, отвечающий углу возвыше-
ния ср;
Zo=-—-—приведенная длина рабочего объема W цилиндра при <р = 0;
5 — площадь поршня цилиндра;
я= 1,15 — показатель политропы сжатого газа.
Из треугольников ОАВ и ОА'В по известным сторонам а и b и углу
между ними:
х= с — с0 =- У а2b2 — 2ab cos (ф'-|-Фо) — V а2 ф Ь2 — 2а & cos %;
А =______ab sin (?' + ф0)__
У (а2 + Ь2 — 2ab cos (ф' + фо)
На основании этих соотношений получим для пружинного меха-
низма
дАГ = QKZU cos / +Л4тр —
__дб sin (у' + фр) [Пру — & (]Лг2 + 62 — 2ab cos (и' +фо) — Уа2 + &2 — 2ab cos ф0)]
У а2 + Ь~ — 2ab cos (<?' + фо)
Предварительное поджатие пружины найдем из условия ф = 0,
ДМ = 0:
Quln cos То + Мг0 т / 7 „ , „
По =——1-------10---гр, у I й2_2й&созфо, (10.45)
у ab sin фо
где <5o=<|'o+yo-
Коэффициент жесткости пружины можно найти из условия
?=<Рт, Д/И = О:
ПОуД6 sin + фо) — (QKZa cos ч'т + МГр) ]/ а2 + — 2ab cos (<f'm + фо)
ab sin (y„ + Фо) а2 + Ь2—2аЬ cos (<?)„ + ф0) — ]/'й2 + й2 — 2ab cos ф0)
(10.46)
При конструктивно выбранных величинах а и b угол ф0 выбирается
в соответствии с допускаемым моментом неуравновешенности дИ4д,йпри
ф = у. В этом случае величина ф0 находится графическим путем из
трансцендентного уравнения
ср / со \
Д^дсп=Q A cos -у + Л/тр - ай sin + фо) X
Величина ДЛ1дОп выбирается минимальной из условия сохранения
знака зазора в подъемном механизме.
Для пневматического уравновешивающего механизма параметры
Поу, k и фо выбираются аналогичным образом.
Если какой-либо из параметров (Поу, фо, &) трудно реализовать, то
необходимо изменить величины а и Ь. Осуществить ДМ = 0 для всех уг-
лов возвышения ф не представляется возможным. Величина ЛЛ4(ф) дол-
жна быть отрицательной, т. е. ПоуйХЭДцСоз д/. Тогда для всех углов
возвышения зазоры в подъемном механизме будут одного знака, что
благоприятно влияет на кучность стрельбы орудий, у которых центр
тяжести откатной части выше оси канала ствола, а также увеличивает
срок службы подъемного механизма.
Пример 10.6. Найти характеристики пружинного уравновешивающего механизма
при следующих исходных данных:
QK = 1000 кг; Zu = 80 см; а = 30 см; й = 60см; ¥min =
<fm = 45°; до = —2°; <р'=<р— 70; Л4ТЛ = 0; ДЛ1,;оп = —3500 кгс-см.
Решая графически систему уравнений (10.45) — (10.47) относительно фо при за-
данных исходных данных для угла
найдем фо = 30°.
Назначая ДЛ4 = 0, соответственно получим:
QKZn cos То 4- Л1тр-------------------
ПОу =---------—:—;------У а’ Ь2 — 2а b cos Фд ~
J ab sin фо
1000-80 cos 2° .. -------------------------
= о» ™ ,.+ И 302 + 602-2-30-60 cos 30° = 3320 кгс;
30-60 sin 30
ПОуа6 sin + ф0) — (QKZU cos + Л4Т?) ]/ д2 + £2 _2а6 cos (<pm + фо)
ab sin (<4 + фо) ( У" «2 + &2 — 2аЬ + ф0) — У д2 + ^2-2а ft cos ф0 )
3320-30-60 sin (43° + 30°)— 1000-80 cos (43° + 30°) X
30-60 sin (43° + 30°)(j/302 + 602 - 2-30-60 cos (43° + 30°) —
X ]/"302 + 602 — 2-30-60 cos (43° + 30°)
-------- ----------------------------------= 61,9 кгс,'cm;
— J/Z 302 + 602 — 2 30.60 cos 30° )
?m = 45° — 2° = 43°.
Результаты расчета момента неуравновешенности для различных углов возвыше-
ния приведены в табл. 10.8.
Таблица 10.8
п кгссм Х-, см Иу? кгс h-, см Af , кгс-см ДЛ1, кгс-см
0 —2 80 000 0 3320 24,2 80 000 0
10 8 79 200 4,6 3035 27,7 83 800 —4600
20 18 76 100 9,6 2730 29,5 80 300 —4200
30 28 70 600 14,8 2400 30 72 000 —2 400
40 38 63 000 20 2180 29,6 64500 —1500
45 43 58 200 22,5 2000 29,1 58 200 0
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ X
1. Куприянов А. Н. Основы проектирования артиллерийских орудий. Пенза,
1960, 335 с.
2. О р л о в Б. В. и Мазинг Г. Ю. Термодинамические и баллистические осно-
вы проектирования ракетных двигателей на твердом топливе. М., «Машинострое-
ние», 1968, 536 с.
3. П о н о м а р е в С. Д. и др. Расчеты на прочность в машиностроении. М.,
Машгиз, .1969, т. I, 884 с., т. II, 1118 с.
4. Садовский В. Г. Основания устройства материальной части артиллерии.
М., Оборонгиз, 1956, 499 с.
5. Справочник металлиста. Т. 2. М., Машгиз, 1958, 974 с.
6. Т о л ч к о в А. А. Теория лафетов. М., Оборонгиз, 1960, 3!45 с.
Глава XI
НЕКОТОРЫЕ ВОПРОСЫ ДИНАМИКИ ПУСКОВЫХ УСТАНОВОК
И ПУСКА РАКЕТ
Несмотря на большое разнообразие конструкций самоходных и не-
самоходных пусковых установок (ПУ), видов направляющих и особен-
ностей пуска ракет, все они с точки зрения динамических процессов,
имеющих место при транспортировке и пуске ракет, схожи между собой.
Условно задачи, возникающие при исследовании динамики транс-
портировки и иуска ракет, можно разделить на следующие группы, вклю-
чающие определение:
1) перегрузок, действующих на ракету, и расчет па прочность эле-
ментов конструкции ПУ при транспортировке;
2) изменения параметров системы наведения при переводе систем
из походного положения в боевое;
3) .возмущений, которые испытывает ракета в момент потери связи
с пусковой установкой.
Рассмотрим эти задачи более подробно.
При транспортировке ракет из-за неровностей дороги на ПУ с ра-
кетой действуют возмущения, вызывающие колебания системы, кото-
рые приводят к появлению перегрузок, для нейтрализации действия ко-
торых требуются виброзащитные устройства (амортизаторы). Создание
эффективных амортизирующих устройств, способных изолировать раке-
ту от вибраций и ударов, является сложной технической проблемой, ре-
шение которой возможно только при всестороннем учете возмущений,
действующих на систему (как систематических, так и случайных). В на-
стоящее время наиболее полно разработана теория виброзащитпых уст-
ройств (амортизаторов) в линейной постановке.
Более сложной является задача создания оптимальной системы
амортизации, при которой динамические перегрузки были бы минималь-
ны. В ряде случаев линейная теория виброизоляции не позволяет объяс-
нить ряд явлений, возникающих при колебаниях системы, поэтому для
более точных расчетов выявляется необходимость учета различного рода
нелинейных членов, в частности в характеристиках упругих элементов.
При пуске ракет с ПУ необходимо определить разброс (отклонения
от расчетных значений) параметров движения ракеты в момент потери
связи с ПУ. Разброс этих параметров (обобщенных координат и их пер-
вых производных) вызывается систематическими и случайными возму-
щениями, действующими на ПУ и ракету при пуске.
Величина разброса параметров движения ракеты зависит от пара-
метров ПУ и, в частности, от жесткости ее отдельных узлов и элементов,.
При проектировании необходимо выбирать численные значения парамет-
ров ПУ так, чтобы величина разброса параметров движения ракеты в.
момент потери связи с ПУ были минимальной.
Для расчета на прочность и жесткость элементов ПУ необходимо
знать динамические реакции между ракетой и установкой, а также меж-
ду отдельными узлами самой установки.
§11.1. УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ
При выводе уравнений движения ПУ (при транспортировке, подъе-
ме или пуске ракет) могут быть использованы два метода: метод кине-
тостатики и метод Лагранжа (уравнения второго рода) [14, 15].
Метод кинетостатики, основанный на принципе Даламбера, позво-
ляет получить уравнения, в которые в явной форме входят и реакции
связей, что в ряде случаев бывает полезным.
Рис. 11.1. Движение ракеты по направляющей с упругой опорой
Для иллюстрации применения метода кинетостатики рассмотрим в
качестве примера движение ракеты по абсолютно жесткой направляю-
щей, которая имеет упругую опору (рис. 11.1, а). На рис. 11.1, б пока-
заны отдельно положение ракеты и направляющей в произвольный мо-
мент времени с реакциями связи Ni и N%. Аэродинамическими силами
и силами трения между ведущими бугелями ракеты и направляющей
пренебрегаем.
Проектируя силы, действующие на ракету (с учетом сил инерции),
на оси Ох и Оу, получим два уравнения поступательного движения:
тйх— — (А\-!-М2) sin 0-]-/?cos 6; (11.1)
moy = (N1-]-N2) cos ОД-/? sin 0 — Qo, (11-2)
где /? —тяга двигателя; тй=®° .
g
Рассматривая вращение ракеты и направляющей, получим еще два
уравнения:
— (11.3)
/OiS= — N% (A4-^i Д 4)—1 4~-*1—6) — с^з (0 4~ %) — (11.4)
где /о — момент инерции ракеты относительно центральной оси, перпен-
дикулярной плоскости рисунка;
ZOi — момент инерции направляющей относительно цапфы;
Xi — смещение ракеты по направляющей;
0о—начальный угол, вызванный осадкой пружины из-за действия
веса направляющей и ракеты.
Полученная система из четырех уравнений (11.1) — (Н.4) содержит
шесть неизвестных х, Xi, у, 0, и N2, поэтому необходимо получить еще
два соотношения, связывающие эти неизвестные. Такими недостающими
соотношениями являются уравнения связи (ракета двигается по направ-
Рис. 11.2. Положение центра тяжести ракеты
при ее движении
ляющей, не отрываясь от нее). (Дополнение уравнений движения урав-
нениями связи присуще всем задачам, решаемым методом кинетоста-
тики.)
На рис. 11.2 показано положение центра тяжести ракеты в началь-
ный момент (точка О') и при ее движении (точка О). Смещение центра
тяжести ракеты характери-
зуется вектором Аг (с ком*
понентами х и у), который
равен
дг=г-Нб-г0-1б. (11.5)
Модули векторов г и г0
равны
I Г I =^4 + 1 |rol==='f4-
Проектируя соотноше-
ние (11-5) на оси Ох и Оу,
получим соотношения:
x=(/4-j-x1)cos0 —Z6 sin б —/4; (11-6)
z/ = /5cos е-|-(Z4+^i) sin б — /6. (11.7)
Использование векторного равенства (11.5), характеризующего по-
ложение центра тяжести тела при движении, дает возможность наиболее
просто получить уравнения связи.
Вывод уравнений движения системы с использованием уравнений
Лагранжа второго рода сводится к следующему. Уравнение Лагранжа
второго рода имеют вид
—------------— =Q, (/ = 1, 2, , . ., п), (11.8)
dt dq j dqj J V
где — обобщенные координаты;
Q, — обобщенные силы;
Т—кинетическая энергия системы;
п — число степеней свободы системы.
Положение любой точки I системы может быть задано некоторым
радиусом-вектором г,, который может быть выражен через обобщенные
координаты <71, q2, , qn, т. е.
П = П(<71, (Н-9)
Возможное перемещение точки i определяется как вариация радиу-
са-вектора Гг, т. е.
8r, = V(11.10)
Если в точке I системы приложены силы Fit то работа таких сил на
возможных перемещениях равна
(/=1,2, ..., k). (11.11)
Эта же работа должна быть равна работе обобщенных сил на ва-
риациях обобщенных координат, т. е.
А п
(П.12)
г=1 7-1
Из равенства (11.12) с учетом соотношения (11.10) получим выра-
жения для обобщенных сил
(11.13)
В случае, когда заданные силы консервативны, выражения для
обобщенных сил можно представить в виде
Q;=—
dqj
где П — потенциальная энергия системы.
Уравнения Лагранжа (11.8) принимают вид
(H.14)
а дт дг । ап
dt dqj dqj dqj
Рис. 11.3. К составле-
нию уравнений дви-
жения прицепа с ра-
кетой по дороге с си-
нусоидальными не-
ровностями
В качестве примера составления уравнения движения системы по
методу Лагранжа рассмотрим движение прицепа с ракетой по дороге
с синусоидальными неровностями (рис. 11.3, а); расчетная схема по-
казана на рис. 11.3, б.
Будем считать, что точка О имеет горизонтальную постоянную ско-
рость v (по вертикали не смещается); масса колес мала по сравнению с
суммарной массой прицепа и ракеты. В качестве обобщенной координа-
ты можно взять угол поворота прицепа относительно точки О (т. е. в
рассматриваемом случае система имеет одну степень свободы).
Кинетическая энергия системы
2
+ 1J5.
2 2
где щ— модуль вектора скорости точки О[ (общий центр тяжести сис-
темы):
v-i = VТ/2-(-(/ср)2.
(11.16.
Выражение для кинетической энергии системы принимает вид
«£L + (/oi + mZ2)-L5 (11.17)
2 2
где I0i + ml2=I0 — момент инерции системы относительно точки О.
Потенциальная энергия системы
2'2
При равномерном движении прицепа по ровной дороге момент от
веса системы относительно точки О уравновешивается моментами от
упругих сил, т. е. имеет место равенство
Q0Z=(Z — /0)2 sin<р00сф- (Z+ Z2)2 sin?00c,
где cpoo — статический угол.
После преобразований с использованием соотношений (11.17) и
(11.18) из уравнения (11.14) получаем уравнение движения
/0? + со8?с {[(Z — ZJ sin ср— AJ(Z-Zj) +
+ [(Z + /2) sin ср—A2] (Z-hZ2)} =0. (11.19)
Если в числе сил, действующих на систему, имеются силы сопротив-
ления, зависящие линейно от скоростей точек системы, вида Fi=—-aiVi,
то можно ввести функцию
k
(Н.20)
/=1
где а; — коэффициент вязкого сопротивления;
Vi — скорости точек системы.
Функция /?, называется диссипативной функцией Рэлея. Скорость
точки системы можно представить через первые производные обобщен-
ных координат в виде
п
у = 1 1
тогда выражение (11.20) принимает вид
Обобщенная сила, соответствующая силам сопротивления, выразит-
ся формулой
Q/ =----д—- (11.23)
дЯ,
Уравнение Лагранжа с учетом сил сопротивления имеет вид
d дГ ".__—____|_+JZ__dR' =;0. (11.24)
dt dq . dq. dq. dg.
На рис. 11.3, а показан прицеп с ракетой, у которого для демпфи-
рования возникающих колебаний введены силы вязкого сопротивления
с коэффициентом вязкого сопротивления а.
Силы сопротивления Fi и + пропорциональны относительным ско-
ростям точек A, Ai и В, Bi (см. рис. 11.3, б):
F;= — a[Z — ZJ? cos ср — h.i\, •+ = ~ a V + 4) ¥ cos? —й2].
Функция Рэлея имеет вид
{[(/ — ср cos ср — +]2 + [(Z+Z2)?cos? — й2]2}. (11.25)
Уравнение движения системы с учетом сил сопротивления принима-
ет вид
/0?+ IV—4) sin Ai](/ —4)+[(^+4) sin? —Zt2](Z+Z2)) с coso-f-
-фа {[(/ —ф) ?cos? — Aj](I — /J cos?+[(Z+Z2)? cos? — Zc2] X
X (Z + Z2)cos?) .=0. (11.26)
Если отклонения системы от состояния покоя или стационарного
режима при движении малы, то уравнения движения системы линейно
зависят от обобщенных координат, т. е. могут быть представлены в виде:
М1 + М2+ • • + <*1191 + <*129’2 + • • • + «1191 +«12?2+ • • = Qi; |
^2191 + ^229г + • + a2i9i + а229г + • • • +«2191 +«229г + • • • — Qa I п , 97-,
^л191 + ^л292+ • • • +#л191 + ал292+ • +«ni9i + ал29г+ • • - Q^ I
где агу, a-ij—коэффициенты, в общем случае зависящие от вре-
мени;
Q, — обобщенные силы, действующие на систему.
Для рассматриваемого примера транспортировки ракеты, полагая
угол ф малым (cosq)~l, зшф?»ф), получим из уравнения (11.26) сле-
дующее линейное уравнение движения системы:
। о ’ I 2 с (I — I]) , , с (I + Z2) , । «(Z — Zi) + ,
? + 2я? + «)0? = V. У.. —ZE ,Й2-]----X
‘О ‘0 ‘О
+ - a (Z '- /2) , (j! ,27а)
Л)
a[(/-Zi)2 + (Z4-/.2)2] .- ...2 с [(Z — Z,)2(Z-г Z2)2]
4 /0
Рассмотрим пуск ракеты с ПУ (рис. 11.4). Ограничимся частным
случаем, когда масса установки много больше массы ракеты и направ-
ляющей. В этом случае движением основания можно пренебречь, что
приводит к расчетной схеме, показанной на рис. 11.5, а.
Считая, что за время движения по направляющей масса ракеты
практически не меняется, и что при малых углах 0О движение-ракеты по
оси х не зависит от малых угловых движений системы,- получим
тох = Р. (11.28)
Время нарастания тяги до номинального значения много меньше
времени движения ракеты по направляющей, поэтому приближенно
можно принять R = const.
Интегрируя уравнение (11.28) при нулевых начальных данных и
постоянной тяге R, получим:
х =----г, х=-------. (11.29)
m0 2т0
Уравнение (11.28) не учитывает проекции веса на ось х (QosincpH),
так как тяга много больше этой составляющей.
При движении ракеты по направляющей момент инерции системы
относительно точки О' равен
/ =/0/о'^о> (11.30)
где /0 — момент инерции ракеты;
10' — момент инерции направляющей относительно оси вращения.
Для вывода уравнения движения системы можно воспользоваться
теоремой об изменении момента количества движения систем
-^-(/90)=Л4. (11.31)
at
Здесь момент
Л1= — Мс — М — Мо,
и у У’
где ЛГс = а/з90 —момент сопротивления;
Л1у=с/|Р,0 —упругий момент;
MQ — момент от веса.
В выражении для Мо коэффициент а характеризует силы трения.
Угол 0О характеризует отклонение системы от положения равнове-
сия, поэтому в уравнение движения войдет только приращение упруго-
го момента Мг. Момент веса (точнее приращение момента относительно
статического момента) при неучете малого размера определяется за-
висимостью
Qo (Q + х) cos (<рн+90) - Qole sin (<ря + 90) -
- [Z4 cos <ри —/6 sin <рн] 9й -j- Qtl5 cos (<?н + 90) - Qrls cos <рн=
= Qox cos <рн — [(Z4+х) Qo sin <рн + Qq16 cos <?H+ЗЛ sin <?„] %.
Подставив в уравнение (11.31) выражение для момента инерции и
момента М, после преобразований получим
.. |2т0 (/4-+ х) х -у a/j] .
йо ' I J---------“о +
, cl}— [(Z4+ x)Q0 sin <pH+ l6Q0 cos <?H + Qil-a sin <рн д Q0xcos<pH ,,, oo4
П J eo — J (1 1 - Oz)
Уравнение (11.32) является уравнением с переменными коэффи-
циентами вида
б0+«11т+м*и=м^ (и-зз)
или
(11.33а)
Пример 11.1. Применительно к схеме пуска (см. рис. 11.4) рассчитать элементы
движения при следующих условных значениях параметров, входящих в коэффициенты
уравнения (11.33):
/0 = Iq, = 105 кгс-см-с2; 300 см;- Z5-- 350tm; /3-- 400 см;
т0 = 2 кгс-с2/см; <Рн = 40°; /в = 60см; Qo — 2000 кг; Qj — 1000 кг.
Время движения ракеты по направляющей
, _ I /
к‘ V R
где я»=500 см — длина пути ракеты по направляющей.
а =0;
Рис. 11.6. Графики изменения угла 60
во времени в зависимости от коэффи-
циента жесткости с подъемного меха-
низма
Рис. 11.7. Графики' изменения угловой
скорости Оо во времени в зависимости от
коэффициента жесткости с подъемного
механизма
Уравнение (11.33) решалось на ЦВМ для различных значений R, с и а (при ну-
левых начальных данных). На графиках (рис. 11.6 и 11.7) показано изменение угла
0о и угловой скорости 00 во времени при различных значениях коэффициента жесткости
с подъемного механизма при Ц = 0,2 с.
Из графиков следует, что систематические начальные отклонения ракеты (0О и
0о) с увеличением коэффициента жесткости с уменьшаются.
На рис. 11.8 показано изменение угла 0О и угловой скорости Оо в момент схода
ракеты с направляющей в зависимости от коэффициента жесткости с механизма на-
ведения при трех значениях коэффициента а. Из графиков следует, что с увеличением
коэффициента жесткости с систематические отклонения весьма значительно уменьша-
ются, в то время как силы трения практически никакого влияния на систематические
отклонения не оказывают (при принятых параметрах системы).
При стрельбе неуправляемыми ракетами рассеивание на местности
зависит, в частности, от угла и угловой скорости колебаний ракеты при
сходе с направляющей. В линейном приближении рассеивание ракет по
дальности АЛ можно характеризовать зависимостью
ДЛ0
dL
дй0
'о
dL
РО’о
'О'
Так, например, если -^— = 4-1О1 м/рад, =2-104 м-с/рад, то
д0о с>80
при с=500 кгс/см и соответствующих значениях 0 и 0 (см. рис. 1.18)
отклонение ДЛо= ~4-104-2,5 10 3 — 2- 104 • 2,7-10-2= — 640 м, а при с =
= 4000 кгс/см отклонение
Д£о= —240 м, т. е. почти в три
раза меньше.
Рассмотрим теперь как
меняются во времени реакции
Л’1 и N2 взаимодействия раке-
ты с направляющей при пуске
[см. уравнения (11.2) и (11.3)].
В рассматриваемом слу-
чае оси Ох и Оу повернуты на
угол фн, поэтому в уравнение
(11.2) вместо Qo войдет со-
ставляющая веса ракеты
Q0cos<p„. Уравнение связи
(11.7) остается без изменения.
Исключив с помощью уравне-
ния связи (11.7) из уравнения
(11.2) производную у, для оп-
ределения реакций получим
следующую систему уравнений:
Рис. 11.8. Графики изменения угла 0О и уг-
ловой скорости Оо в момент схода ракеты с
направляющей при различных значениях
коэффициента а в зависимости от коэффи-
циента жесткости с механизма наведения
N1 ~ [- =Qo cos <РН 4- 2тах0о + (Z4+х) f то:
-^2^2 ZV/j : = /060.
Зная 0о и Оо, из системы (11.34) определяем реакции Л4 и N2.
На рис. 11.9, а и б приведены графики изменения реакций Ni и Nz
во времени для различных значений коэффициента жесткости с (при
7=0 имеем статические значения реакций).
11.9. Графики изменения во времени для различных значений коэффициента
жесткости с
§ 11.2. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ
МЕХАНИЧЕСКИХ КОЛЕБАНИИ
Рассмотрим в качестве примера малые свободные колебания само-
ходной пусковой установки на автошасси (рис. 11.10, а); расчетная схе-
ма системы показана на рис. 11.10, б. Массой колес по сравнению с под-
рессоренными массами установки и ракеты можно пренебречь. Подрес-
соренная масса установки с ракетой и момент инерции системы относи-
тельно общего центра тяжести О соответственно равны т и /0; с, и с2—
приведенные коэффициенты жесткости и подвески; си и а2 — коэффи-
циенты вязкого трения.
Уравнения малых свободных колебаний системы получим, восполь-
зовавшись уравнениями Лагранжа второго рода. Кинетическая и потен-
циальная энергии и функция Рэлея соответственно определяются соот-
ношениями
Т Л)?2 । ту2 .
2'2’
п = с, (у + 1у __| С2(У — W .
2 *2’
о _ ai(y + Z|?P j ct2 (у — /г?)2
1 2 Т 2
Воспользовавшись уравнением Лагранжа второго рода, получаем
уравнения малых свободных колебаний системы [17]:
Iо?_гСа14 Н-0^2) ? + (а1Л — аг4) У ~Ь сгФ) j
ф-(сф— c2Z2)w = O; I
. 11 i2.y (11.35)
m у + (аЛ — a2Z2) у ф- (at ф- а2) у -ф (qZx — c2Z2) <f> ф- |
-ф(С1ф-с2) у — 0. '
Собственные частоты колебаний системы мало зависят от вязкого
трения, поэтому при определении их можно положить ai=ia2 = 0, что
эквивалентно рассмотрению консервативной системы. Система уравне-
ний (11.35) принимает вид:
Л?+«н?+«12У=0; 1 (и.36)
тУ~\га^-?^га-иУ=^у )
где
= Су1\ ф- С212, £Z|2 £jZj С212,
^'21:==^1^1 ‘ ^2^2’ ®22 ~ ^2*
Коэффициенты полученной системы уравнений (11.36) а^3 = а^ при
;=/=/, т. е. матрица А, составленная из коэффициентов а{, системы (11.36),
является симметричной и А* = А.
Решение системы уравнений (11.36) можно искать в виде:
<p=Csin<0(/; у= Z?sinw0/. . (11.37)
После подстановки выражений (11.37) в систему (11.36), получим
[(«11 — /о«о) С-|-4Z12Z)] sin wo/ = O; 1 (1138)
[«21С-}-(«22 — fn^o)D] sin <o0/=:0. J
Так как sin coqZ не может быть тождественно равен нулю при t не
равном нулю, то, следовательно, выражения в скобках должны быть
равны нулю, что для определения неизвестных постоянных С и D дает
систему двух уравнений:
(ап —/0“о) С фй12/) = 0; 1
2 I (. * J
Й-21^ ($22— J
Система алгебраических однородных уравнений (11.39) имеет от-
личное от нуля решение только в случае, когда определитель системы
равен нулю, т. е.
«Ц 7 q<OQ
«21
«12
2
6Z-22 — tTlitiQ
или
2
4 anm + /ca->2 2 , «11а22 — «12
“о-----------;---------“о -----------;--------
/цт
(11.40)
Уравнение (11.40) называется характеристическим уравнением для
системы (11.36). Корни уравнения (11.40) —квадраты частот колебаний
равны:
tt;im + /0Я22 _ 1 / (ДцЖ + /ся22р «11^22— ^12
(4)1,2 = -----. (11.41)
Характеристическое уравнение (11.40), получающееся из системы
уравнений с симметричной матрицей А., всегда имеет действительные
корни (частоты).
Ряд особенностей системы уравнений (11.36) имеет общий харак-
тер, независимый от числа степеней свободы колебательной системы
(имеется в виду симметричность матрицы А и действительность корней
характеристического уравнения).
В общем случае для системы с п степенями свободы система урав-
нений малых свободных колебаний (без учета затухания) может быть
представлена в векторной форме в виде
BY-j-AY = O, (11.42)
где В — диагональная матрица (например, для системы (11.36)
матрица В равна
А — симметричная матрица.
Если искать решение системы (11.42) в виде
Y = Y0sin(o^,
то получим уравнение
-B^Yo+AYo=O
или
(А —В»о) Yo= 0. (11.43)
Так как Yqt^O, то определитель системы (11.43) равен нулю, т. е.
|А —В«>2| = 0. (11.44)
Развернув определитель (11.44), получим характеристический мно-
гочлен степени 2п вида
I Л 2^7—2 I । п
а>0 J--р . . . -}~CLn—
Корни уравнения (11.45) —частоты колебаний системы
определены только численными методами [17].
(11.45)
могут быть
Пример 11.2. Исследуем установившиеся вынужденные колебания
уравнение (11.27, а)], являющегося системой с одной степенью свободы,
по дороге с синусоидальными неровностями, заданными в виде (см. рис. 11.3, а):
Д 2л1* \
— п0 1 — cos------ ;
\ Д /
, Г ( 2м>1 \1
Л2 = hQ 1 — cos —------+ ₽ •
L \ ‘о /J
Введем обозначения I—1\ = 13, 1+12=Ц и примем следующие условные значения
параметров, входящих в уравнение (11.27а):
/0 = 8-№ кгс-см-с2; Zj = 10cm;
= 550 см; h0 = 5 см;
прицепа [см.
при движении
15 = 200 см; Iq = 150 см; а
Z2 = 150 см; Z3 = 300 см;
Z7 = 400 см; с = 500 кгс/см;
2л-2,5
—у—рад;
о
= 3 кгс-с-см;
/0, = 10 кгс-см-с2;
где /0,— момент инерции ракеты относительно центральной
плоскости чертежа (см. рис. 11.3, а);
т0 — масса ракеты.
Уравнение (11.27а) можно преобразовать к виду
.. . 2 ch0(l3 +14) [ 2nvt
? -f- 2n? + <•>(/-? =--------------+ At sin —-—
'0 \ '0
т0 = 2 кгс • с2/см,
оси, перпендикулярной
где
2nvt
1й
(11.46)
Л1 =
2a/z0nv/3 \2
Л/о /
л2 =
2аЛ0Л1'74 \2
Л)Д Г
₽1 = —-------,
2а л v
Собственная частота колебаний равна (считается, что влияние сил трения мало)
р/ c[(/-/i)2 + (Z + Z2)2].
Решение уравнения (11.46) ищем в виде
? ?0+ + ?2 + ТЗ,
где Фо —решение однородного уравнения;
Фь ф2, фз — частные решения неоднородного уравнения [по числу слагаемых в пра-
вой части уравнения (11.46)].
Так как рассматриваются установившиеся колебания, то решение однородного
уравнения, имеющее множитель еге(, при большом времени t практически равно нулю
я им можно пренебречь.
Частные решения ищем в виде:
?1 = х;
( 2nvt \ { 2m>t \
?2 = х2 sin —----— ?! + х3 cos —--------— ?i ;
\ 'О 7 \ <0 J
( ‘2nvt \ / 2nwl \
<Рз = х4 sin —— — ?2 + *5 c°s —;— — ?2 •
\ <о 7 \ щ 7
Подставив в выражение (11.46) фь находим
(?о + Z4)
!ОРо
Подставив выражение для фз в уравнение (11.46), получим
„ • n / 2nvt \
?2 + + “0?2 = sin (11.47)
или в развернутом виде
Г [ 2ли \2 / 2w \ 9 "I / 2jw/ \
[ ~ hoхз+h оХ2+"Иcos (~
Г / 2лг> \2 / 2ли \ 0 "1 [ 2xut \
= — —-------- х2 — 2я —— х3 + 1^л-2 — Л] sin —------------— ?] ] = 0. (11.48)
L \ ‘о I \ to J J \ zo 7
Выражение (11.48) должно быть равно нулю для любого момента времени, что
будет выполнено, если приравнять член в квадратных скобках нулю. В результате по-
лучим два уравнения для определения х2 и xs. После преобразований имеем:
(11.49)
Выражения для и х$ аналогичны выражениям (111.49), только вместо множите-
ля А1 будет множитель А2.
После всех преобразований получим решение уравнения (11.46) в виде
с/г0(/0 + /4) Л1 Г/ о / 2лщ \2\ ( 2nvf
=------------------+-------- “л______ ________ sin -------------—
/0а>2 О L\ ° Оо У 7 I/O
?1
Представим выражение (11.50) в виде
и = а0 + Д] sin (kt — Pi) — «2 cos (kt — ?i) + дз sin (kt — З2) — Л4 cos (kt — £2)
или
где
<p = a0 + C] sin kt + c2 cos kt,
cos Pi + «з cos P2 — a-2 sin Pi — sin p2;
c2 = «1 sin pi + «з sin P2 + «2 cos Pi + «4 cos p2-
Окончательно получим
<p = a0 + H sin (kt — a),
где
H = У c\ + cl;
, C2
a = arctg-------.
Cl
Исследуем зависимость максимального значения угла ср (<pmax = no+W), угловой
скорости ср и ускорения ср от коэффициента линейного трения а и скорости движения
v, а также найдем динамические реакции, возникающие в местах крепления ракеты к
прицепу (в точках .Гиф — см. рис. 11.3, 6).
Графики изменения срта1, ершах и сртах
= 750 см/с=27 км/ч имеет место резонанс.
приведены на рис. 11.11—11.13. При v =
Рис. 11.11. Графики ср0=/(о) при
различных а
Рис. 11.12. Графики сро=/(о) при раз-
личных а
Для определения динамических реакций рассмотрим ракету отдельно (см.
рис. 11.3, в). По методу кинетостатики получим следующие два уравнения:
70,<р = М2/б — М\15; I
(11.51)
тоУ = ЛГ1 4- W2- J
Так как у = 1?<р (размер /8 мал и им можно пренебречь), то из системы (11.51) по-
лучим амплитудные значения реакций:
/0, + nifkl-j
NlO = Tmax ’ ". 1
Ф + *6
—Л)'
^20 ~ Tmax I 1 ' •
‘5 + 1б
График изменения реакций Л^о и Л'20 для разных значений а в зависимости от
скорости v аналогичен графику фт х (см. рис. 11.13).
Пример 11.3. Рассмотрим колебания контейнера (рис. 41.14, а) при внезапном
действии ветра, что эквивалентно внезапно приложенному к контейнеру моменту Мо
(рис. 1.1.14, б).
Транспортирующее средство можно представить в виде системы с одной степенью
свободы (для учета влияния податливости шасси машины). Масса wii (рис. 11.14, а)
Рис. 1,1.13. Графики 4>o=f(v) при раз-
личных а
внезапном действии ветра
Рис. 11.14. Схема колебаний контейнера при
является приведенной массой, выбранной из условия, что первая частота колебаний
шасси машины, рассматриваемой как сплошная балка, равна частоте колебаний сосре-
доточенной массы mi, находящейся на безынерционной балке.
Воспользовавшись методом Лагранжа, можно получить следующие уравнения ма-
лых колебаний системы:
Лф>
Д?2 + «цД?2 + <*12^1= ——;
'оз
(11.52)
Д#1 +«21Д?2 + а2^У\ =0.
Здесь
ац = — /3 sin2 р; а12 =------------Z3 sin ,3 sin 7;
Л» Л)3
с Ci + с sin2 7
Й21 = -------’ /3 Sin р Sin 7; «22 = --------------------
т-, mi
где /оз — момент инерции контейнера с ракетой относительно точки О3;
Ci — коэффициент жесткости шасси (при приложении силы в точке О!).
Общее решение системы (11.52) ищем в виде суммы решений однородной систе-
мы уравнений и частного решения неоднородной системы, т. е.
Д?2 = Д?20 + Д?21!
Дг/1 = Дую + Дг/ц.
Решение однородной системы уравнений ищем в виде:
Д<р20 = s'n “с/1 д#io = В sin
Д<р20 = С cos Дyw = D cos a>ot.
(11.53)
(11.54)
Для определения постоянных А и В получим два уравнения (аналогичный вид
имеют уравнения для определения постоянных С и D):
( — “q + «ц ) А + ау2В = 0;
«2М + ( — “о + «22) В = 0.
(11.55)
Определитель системы (11.55) дает частотное уравнение, из которого находим две
частоты coot и а>о2 [что было проделано в примере (11.2)]. Для каждой частоты из лю-
бого уравнения системы (11.55) находим
(11.56)
Аналогичные соотношения имеем для коэффициентов Ci,2 с Di.s:
(11.57)
Решение однородной системы имеет вид:
Д<?20 — Д'Рчо Н- — Д1 sin «q4 -f- А2 sin о>д2/ 4- Ci cos «щ/
Д#Ю — By sin u>oi^ + B2 sin <*W + B>i cos гащ/ 4- O2 c°s “02'-
C2 COS 4>q2^J
(11.58)
Использовав соотношение (11.56), получим
Д?2 = — Bj --------— sin «щ/ — B2 ------1 sin ®02< —
(«11 —“ci) («11 -“02)
Я12 «12
— Dy' cos «gi/ — D2 cos «go/:
Ь-^1) («и -4)
Д1 Bi sin «щ/ B-2 sin «02/ 4- Dy cos <o0i^ + B‘2 cos
Частное решение неоднородной системы ищем в виде
Д?21 = К; Д#ц =/V. (11.59)
Подставив выражения (11.59) в уравнение (11.52), получим:
Л!о 1
а-пК + 1 ;
;оз I (11.69)
^21^ Н“ ^22^ = О*
Найдя из системы (11.60) значения коэффициентов С и В, получим общее решение
. “темы в виде:
4?2 = — sin w01Z — В2 — —- sin о>02^ —
(«И-м01) («11 — «02)
<2-12 Й12
— D\ ------:----- COS WO1Z — D2 ------------ COS ЫП2^ +
(«п-4) («и -«&)
Мр_________а 22________
Bj3 («11«22— «21«12)
A.j/i = В sin а'о^ + В sin о>02^ + £>i cos +
Л4П а21
-J- В2 COS «02^ — ~ .
^03 («11«22~ «21«12>
Постоянные Bi, В2, Dx, D2 найдем из начальных условий:
t — 0; Д<{>2 = 0; Д^2 = 0; Лг/, = 0; Дt/j = 0.
)
(11.61)
Для определения постоянных получаем систему уравнений:
tZi? #19
В, -0 + В2-0 - -------D} - --------------2—— D2 =
(«11 — D'oi) («11 — w02)
_ М) «22 .
Л13 («ц«22 —«21«12)
.“01«12 . ^Р2«.2. д 0
(«11-«01) («п- 4)
О-Bi + о- в2 + Di + р2 = —-----------—-----------;
Ti («П«22—«21«12)
“01^1 + “02В2 + О1 -0 + D2-0 = 0.
Из системы уравнений (bl .62) находим:
Bj = В2 = 0;
Мо («12«21 — «11«22 + «22«ог) («И — «01)
Dl =-----------------------------------------’
^03 «12(ац«22 —«12«21) (ш02~ “(И )
D Af0 («12«21 —«11«22 + «22ш01) («11 — “02)
А)3 «12(«П«22— «12«21)(w02 — «01)
Окончательно получаем следующие решения системы (11.52):
Л4о«22
Д?2 = —-—— (1 — cos ш01О +——— (1 — /<2cos ЫО2/);
‘ ОзА
Л1л«21
A^i = — - (1 — К3 cos со01О —
'ОзА
где Л ац«22 — «12«2:;
(«22®02— Д)
= 71 ГТ: К2 =
«22 («02 «01)
(«22ш02 — Д) («П — “и)
1 =
^ОзА
'Wo«21
, ' (1 — Л4 COS w02t)>
^озД
(«22«01 — Д)
КЗ= / 2
«21«12 («02
«22 («02 — “01)
(«22«01 — Д) (ДИ — ° Оз)
/ 2
^21^12 (“02 ~
Рассмотрим систему со следующими условными числовыми значениями:
/оз = 2-1О4 кгс-см-с2; /П[ = 11 кгс-с2/см; /3=400 см; Zj =800 см;
1-2 — 500 см; 7= 1,97 рад; р = 0,4 рад; с = 20 000 кгс/см; Cj=3.10 кгс/см.
Подставив значения параметров системы, получим
Д?2 = 0,23 • 10“8Л10 (1 — cos 5,04-0 + 0,29 • 10~12Л10 (1 — cos 36, V);
= 1,1 1О“7Л1о (1 — cos 5,040 4- 0,2 Ю_8ЛГ0 (1 — cos 36, V).
Момент от ветра
Р^в
Л*о = сх —— S/4,
где S = DI — площадь контейнера;
р = 1,25-10—9 кгс • с2/см4 — плотность воздуха;
сх — 0,8 — аэродинамический коэффициент.
После вычислений при ов = Ю м/с, d=100 см, /4— 1000 см получим
Лф) = 0,2-105 кгс-см.
Подставив числовое значение момента в решение (11.63), можно найти макси-
мальное значение амплитуды углового ускорения колебаний контейнера
?2шах = 1,16-Ю-3 рЗД'С2.
(11.63)
§ 11.3. НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
Во многих прикладных задачах, связанных с исследованием коле-
баний, возникает необходимость учета различного рода нелинейностей,
в частности, нелинейностей упругих элементов. В общей постановке по-
добные задачи весьма сложны, поэтому наиболее подробно разработаны
методы приближенного решения нелинейных уравнений второго поряд-
ка с постоянными коэффицентами вида
My-\-f (у)=Р0 sin u)f. (11.64)
Рассмотрим сначала установившиеся свободные колебания массы
т, полагая в уравнении (11.64) Ро=0:
L(y) = my+f(y)=--0. (11.65)
При приближенном решении уравнения (11.65) воспользуемся ме-
тодом, предложенным Б. Г. Галеркиным, полагая в первом прибли-
жении
t/0 = AcoswH, (11.66)
где А и соп — соответственно амплитуда и частота установившихся ко-
лебаний (постоянные величины).
В рассматриваемом методе приближенное выражение для у0 надо
подставить в исходное уравнение (11.65), умножить уравнение на у0,
[ 2 л
проинтегрировавать в пределах от нуля до Т где Т =---------- —пе-
\ “н
риод колебаний) и приравнять полученное выражение нулю:
2~ 2ти
О) н 03
f LAyo)yadt= [ [Wo + /(Vo)]«/o^ = 0- (11.671
6 о
Подставив в уравнение (11.67) выражение для уо, получим
2 т:
шн
[ [ —-тА»нСОзсон/4-/И cos<i)Hzf)] coswH/^ —0 (11.68'
6'
— лтАша -{-
/ (A cos (Од?1) cos uyfdt=0.
(11.69)
Если обозначить а>н< = (р, то из формулы (11.69) получим выражение
для квадрата частоты колебаний нелинейной системы
<4 = —-— С / (A cos (?) cos cpafcp. (11.70)
п/zzA J
о
Пренебрегая затуханием, рассмотрим колебания прицепа с нелиней-
ной жесткостью подвеса (рис.
имеет вид, показанный на
рис. 11.16, где точка О соответ-
ствует состоянию равновесия
системы.
Зависимость силы f(y) от
амплитуды у имеет вид
ЛУ) = су+С1У3-
В этом случае
f (Л COS ф) 2 д । С( . .
-----iz_=u)0A cos ® —— X
т----т
X A3 cos3®, (11.71)
11.15, а и б). Характеристика пружины
„ 2 С
где о>о=-----квадрат частоты
т
Рис. 11.15. Схема колебаний прицепа с не-
линейной жесткостью подвеса
колебаний массы т.
Подставив зависимость
(11.71) в выражение (11.70) и
проинтегрировав, получим
2 2,3 С ( «л
®н = «о~г--- А2,
4 т
(11.72)
т. е. при нелинейных колебаниях частота колебаний зависит от ампли-
туды колебаний А. Это одна из особенностей рассматриваемых нелиней-
ных колебаний.
При определении зависимости частоты колебаний от амплитуды мо-
жет быть использован также приближенный метод «прямой линеариза-
Рис. 11.16. Характеристика
пружины
Рис. 11.17. Приближенный
метод «прямой линеариза-
ции»
ции», предложенный Я. Г. Пановко. В основе этого метода лежит заме-
на нелинейной характеристики f(y) линейной зависимостью (рис. 11.17)
= (11.73)
Коэффициент с* выбирается из условия получения минимума инте-
грала от квадратичного отклонения, т. е.
J= f [Hy)-c*yVdy. (11.74)
—А
Для определения коэффициента с* имеем уравнение
— = 0, (11.75)
откуда
А
з f f(y)ydy
Разделив обе части, выражения (11.76) на массу т, получим
д
з j” f (.у) yd у
2 —А
«)н=-------------------
(11.77)
Для рассмотренного примера при f(у) =су + с\у3 имеем следующее
приближенное значение частоты колебаний:
(11.78)
5 т
Рассмотрим теперь установившиеся вынужденные нелинейные ко-
лебания системы
тУ A- f (.У} = ръ sin,,v
(11.79)
или
L'(у)=ту-\-f {УУ~ Ро sin о:/.
(11.80)
Для приближенного решения уравнения (11.79) также можно вос-
пользоваться методом, предложенным Б. Г. Галеркиным, положив у=
= УоА sin со/ и считая, что установившиеся вынужденные колебания со-
вершаются с частотой возмущающей силы а. Тогда
2ic
[ — тАю2 sin сп/Д- f (A sin w/) — Ро sin w/] sin = (11.81 >
6
После интегрирования получим
2-
(i)
\ / (A sin <d/) sin 4>fdt~ Асо2— ~~т~ =®’ (11.82)
6
Соотношение (11.82) позволяет установить зависимость между ам-
плитудой установившихся колебаний А и амплитудой возмущающей си-
лы Ро (при заданной частоте со).
Например, для случая, когда
f (ур су + РуУ (11.83)
из выражения (11.82) получим
(«2-4) Д------Д-Д3+^-=0. (11.84)
4 т т
В линейной системе без сил сопротивления при совпадении частоты
возмущающей силы ю и частоты собственных колебаний соо амплитуда
установившихся колебаний равна бесконечности (точнее неограниченно
возрастает), что является одним из недостатков линейной системы виб-
роизоляции. В нелинейной системе в этом случае амплитуда установив-
шихся колебаний ограничена. Например, для значения упругой силы,
соответствующего зависимости (11.83), из соотношения (11.84) при со =
= <оо следует
т. е. применение подвески с нелинейной характеристикой может быть
более выгодным (в смысле минимальности амплитуд), чем с линейной
характеристикой.
Рассмотренный метод позволил получить в первом приближении
соотношение (11.84) для определения амплитуды установившихся коле-
баний при действии гармонической возмущающей силы.
Получим теперь более точное решение уравнения (11.79) для част-
ного случая, когда f (у) =<су + с\у3:
£/ + ио*Н—— у3= sin и/. (11.86)
т т
В качестве первого приближения примем
y = As’mwt. (11.87)
Для следующего приближения преобразуем уравнение (11.86) к
виду
f/-|-<A/ = ((o2 — <»о)у — ^-у3-\- sin u>i. (11.88)
т т
Подставив в правую часть уравнения (11.88) зависимость (11.87),
получим
У т®2У = [(“2 — “о) Д--—~ А3 +—^] sin uni —-Д- дз sin ЗсоЛ
L 4 т ‘mJ 4 т
(11.89)
При преобразовании правой части уравнения (11.88) использовалось
3 1
тождество sin3o>/ = —sin wt----sin 3W.
4 4
Так как ищется решение с конечными значениями амплитуды, то
член в квадратных скобках выражения (11.89) надо положить равным
нулю (в противном случае это слагаемое в правой части уравнения
(11.89) дает при решении бесконечные значения амплитуды, так как
частота возмущения со равна собственной частоте):
(Ш2_«)2)Л-А_Д_ Д3-|- ^“- = 0. (11.90)
4 т т
Выражение (11.90) тождественно совпадает с выражением (11.84).
После указанных преобразований уравнение (11.89) принимает вид
у-\-иАу= с'АЗ- sin Зо>/. (11.91)
4т
Общее решение уравнения (11.91) может быть выражено так:
У~СХ cosorf'-C, sin mt----— sin 3W. (11.91
т32ш 2
Так как решение (11.92) имеет периодический характер, то для оп-
ределения постоянных Ci и С2 можно взять момент времени, когда от-
клонение у равно максимальному значению А (это соответствует вре-
мени t, равному л/2со); скорость в этот момент равна нулю, т. е. при
/г==—— имеем г/ = Д, п=0.
2<о
Тогда
Решение уравнения (11.86) принимает вид
у = А sin сиг?-|-—(sin mt — sin 3«rf), (11.93
32w2
где амплитуда А определяется из уравнения (11.84).
Рассмотрим влияние вязкого трения на установившиеся вынужден-
ные колебания нелинейной системы. Уравнение колебаний в этом слу-
чае имеет вид
тУ^гаУ^т/(.У) = ^о sin “Р (11.94'
При исследовании колебаний с учетом сил трения естественно пред-
положить, что колебания будут отставать от возмущающей силы, поэто-
му приближенное решение следует искать в форме
у = A sin (<в^ + ₽), (11.95)
где р — фазовый угол, характеризующий рассогласование между мак-
симальным значением амплитуды колебаний и максимальным
значением возмущающей силы.
Для вычислений удобнее фазу ввести в выражение для силы, т. е.
положить Ро sin (<в/+р), а решение искать в виде у=A sin Потребу-
ем, чтобы уравнение (11.94) удовлетворялось в момент наибольшего
отклонения (a>t=-^-j и в момент перехода через положение равновесия
И=0).
При mt—-^~ имеем:
у = А; у = 0; у= — Аш2; sin («^Ц-Дтоозр.
Подставив эти значения в уравнение (11.94), получим
— mA<o2-j-/(Д)=ро cos р. (11.96)
При o>t = 0 имеем:
У = 0; /(у) = 0; у = Ат; у = 0.
Из уравнения (11.94) получим
аДа> = Р0 sin р. (11.97)
Для определения двух неизвестных Лир имеем два уравнения —
(11.96) и (11.97). Исключив фазовый угол р, получим уравнение для
определения амплитуды установившихся колебаний нелинейной си-
стемы:
f (А) = - Д2о>2а2 + тАт\
Для случая f(y) =су + с1у3 имеем
сА-\-с1А3=]/Гк12а— Л 2и':а2->-/?/Л™2. (11.98)
Из уравнения (11.98) графическим методом можно определить
амплитуду установившихся колебаний.
§-11.4. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИССЛЕДОВАНИЯ
ДИНАМИЧЕСКИХ СИСТЕМ, НАХОДЯЩИХСЯ
ПОД воздействием случайных возмущении
Во многих задачах, связанных с исследованием динамических про-
цессов, необходим анализ возможных воздействий (возмущений), при-
рода которых полностью не ясна. Причем эти воздействия могут вызы-
ваться как неконтролируемыми дополнительными физическими процес-
сами в системе, так и неконтролируемыми изменениями размеров и
параметров системы. Например, «шум» в электрических системах, неров-
ности дороги, газодинамические и технологические эксцентриситеты тя-
ги реактивного двигателя, несовершенства упругих элементов и т. д.
Иногда эти неконтролируемые воздействия к существенным изменениям
функционирования системы не приводят и в этом случае можно считать,
что поведение динамической системы во времени известно точно. Поэто-
му при данных начальных условиях и известных силах каждому момен-
ту времени соответствует вполне определенное состояние системы, а их
последовательность во времени (последовательность состояний систе-
мы) развертывается в однозначно определенную «траекторию». Такую
однозначную связь состояния системы со временем принято называть
детерминированной.
В действительности, как правило, детерминированных связей нет,
так как ни одно из множества измерений начальных данных или деист*
вующих сил не дает абсолютно точного их значения. Иными словами,
совокупность всех измерений дает разброс значений начальных данных,
т. е. некоторую область конечного размера в фазовом пространстве (об-
ласть «неконтролируемых» значений). Так, рассматривая выше транс-
портировку ракет по неровной дороге, принималось, что неровности до-
роги известны и могут быть заданы в виде некоторой известной перио-
дической функции, однако реальные условия отличаются от такой
идеализации.
Характер изменения неровностей дороги совершенно случаен и
лишь в первом приближении после осреднения неровностей может быть
принят в виде гармонической функции. При старте ракета всегда имеет
отклонение силы тяги как по величине, так и по направлению, что при-
водит к появлению случайных сил и моментов, действующих на систе-
му. Эти случайные силы и моменты вполне могут рассматриваться как
малые, однако вызванные ими случайные возмущения, которые получа-
ет ракета при сходе с направляющей, могут быть одного порядка со
систематическими возмущениями, о которых говорилось в примере 11.3,
и не учитывать их конечно нельзя.
В последующих параграфах дается краткое изложение основ тео-
рии случайных процессов. Для более глубокого знакомства с этими раз-
делами математики могут быть использованы книги [I—6].
Основные понятия теории случайных функций.
Нестационарные случайные функции
Случайной функцией называется такая функция, значение которой
при каждом значении аргумента является случайной величиной. Напри-
мер, случайной функцией (процессом) является разброс тяги двигате-
ля А/?, который зависит от времени t и для каждого значения времени
является случайной величиной.
Конкретные значения, принимаемые случайной функцией в резуль-
тате опыта, называются реализациями случайной функции. На рис. 11.18
показан ряд реализаций случайной функции Х(/). Для случайных функ-
ций можно построить вероятностные характеристики, аналогичные ве-
роятностным характеристикам для случайных величин. В отличие от
Рис. 11.18. Реализации случайной функции X(t)
числовых характеристик случайных величин, представляющих собой
определенные числа, характеристики случайных функций представляют
собой, в общем случае, неслучайные функции.
Рассмотрим сечение случайной функции X(t) при фиксированном
времени t (см. рис. 11.18). Для этого значения аргумента случайная
функция Х(/) имеет математическое ожидание
= (11.99)
являющееся функцией времени. Аналогично определяется дисперсия
случайной функции
Dx(t} = Dx\X{t)\ (11.1001
и среднее квадратическое отклонение
(11.101;
Для более полной характеристики случайной функции вводится
неслучайная функция, устанавливающая степень зависимости между
двумя сечениями случайной функции (например, между сечениями при
t и t' на рис. 11.18). Эта характеристика называется корреляционной
функцией (или автокорреляционной функцией)
= Л0(Г)], (11.102
где Хо(£), Xo(f)—центрированные случайные функции:
[X^ = X(i)-mx{t)- X^t')=X[t')-mx{t')].
Таким образом, корреляционной функцией случайной функции X(t\
называется неслучайная функция двух аргументов Кх (i, t'), которая
при каждой паре значения t, t' равна корреляционному моменту соот-
ветствующих сечений случайной функции [1].
Из определения корреляционной функции следует, что
Kx{t,t') = Kx{t', t). (11.102а
Так как
D(i)=M[X20(^)J,
то из выражения (11.102) имеем
/СЛ(^, Г)=£>(/). (11.1-.Д
Вместо корреляционной функции Кж (t, t') можно пользоваться нор-
. -щцванной корреляционной функцией
rAt,t’)=- (1L104)
М*)М* )
Для характеристик случайной функции справедливы следующие
теоремы [-1].
Если
де сД) — неслучайная функция, то:
1) ту (f)= с (t) тх (/); (11.105)
2) Dy(t) = сгД)7Д(*); (11.106)
3) Ky{t, t')—c(t)c{t')Kx(t,t'). (11.107)
Если необходимо рассмотреть действие двух случайных функций, то
возникает задача о сложении случайных функций X(t). В этом случае
необходимо знание еще одной характеристики — взаимной корреляци-
онной функции Rxy(t, t') (корреляционной функции связи), которая
равна корреляционному моменту соответствующих сечений случайной
функции X Д) и случайной функции УД), т. е.
/СЛ.Д/,Г) = ^[Х0(/)К0(П]=^ДД). (11.108)
Пример 11.4. Определить нормированную корреляционную функцию случайной
функции ЛД), если
X (t) = Ле-^,
где А — случайная величина с известным математическим ожиданием тА и дисперси-
ей Da.
Находим математическое ожидание случайной функции X:
тх = М [Ле-= e~aimA.
Находим дисперсию:
М<*) = Л< {[(Л— тл)е~а/]2) =е-2а/£>д.
Находим корреляционную функцию случайной функции X:
Кх {t, t’) = М 1(Л - тА) е~“( (Л-- ил) е-“г] =
= e~s/e-aZ,M [(Л — тл)2] = era(t+i">DA.
Средние квадратические отклонения случайной функции X для моментов времени
tut' равны:
==
Ох(*')=
Нормированная корреляционная функция равна
,, Xx{t, t') DAe-*t+v>
гх (t, t ) =--------=------------= 1.
МОМО а^е-^е-^'
Пример 11.5, Определить корреляционную функцию случайной функции Х(/),
если
X (t) = A sin mt + В cos at,
где А и В — случайные величины, для которых известны: тА, тв, о а, <Тв, Кав, при-
чем тл = тв~0, а Клв=А=0, т. е. случайные величины А и В коррели-
рованы.
По определению корреляционного момента имеем
Кх (t, t') = М [(Л sin mt + В cos ut) (Л sin u>t' + В cos ш/')] =
= A4 [Л2 sin bit sin wH + AB sin at cos u>Z' 4- AB cos ait sin at’ Д- B2 cos cos 0Ц'].
Так как математическое ожидание суммы случайных величин равно сумме мате-
матических ожиданий, то
Кх (Л Г) = sin at sin at'M [Л2] +
+ Л! [ЛВ] sin oj (t -j- t') + Л1 [B2] cos at cos at'.
Окончательно получим
Kx t') = ад sin s*n ' 4“ К AB sin co (i -|- i') + a £ cos at cos at'.
Линейные преобразования случайных функций
Рассмотрим интеграл от случайной функции
У(/) = fjf(t)rft.
6
Требуется определить и Ky(t, t'), если известно mx(t) и KX(J, t')-
Находим математическое ожидание случайной функции У(г')
7И [У (t)\=my (t)=M X (r)fifr = f М [%(r)]rft = J mx{x)dx.
об о
Корреляционная функция
Ky(t,t') = M [(У (/) - ту (/)) (У (У) - ту (У))] =
(11.109)
-=M J (X{x)-mx(x))dx <\t(X{xl) — mx{xl'))dx1 .
_o 6
Произведение двух интегралов под знаком математического
ния в формуле (11.110) равно двойному интегралу вида
J j [X (т) - тх (т) ] [X (rj — тх (tJ] dxdxr,
о о
(11.110)
ожида-
поэтому
_о о
11’
= f J Л1 [(Х(т) —m,¥(T))(X(Ti)-mv(T1))]rfrafT1 =
о о
= j" j1 Kx(t, Tx) dXdXv (11.111;
6 о
Рассмотрим производную от случайной функции
У(/)=Ах(/).
at
Математическое ожидание
M[Y = = = М[Х = .
L dt J dt dt
Соотношение, связывающее корреляционные функции Ky(t, f) и
Kx(t, t'),
Ку (I, К = М [(У (/) - ту (/)) (У (У) - ту (/'))] =
V
Произведение производных под знаком математического ожидания
можно представить в виде
4- (X (/) - тх (/)) -±- (X (Л - тх (Г)) = • (11 -113)
dt dt' dtdt
Из соотношения (11.112) с учетом выражения (11.113) получим
Кy(t, 1') = м\д2^}~о{е)] = -^М[Хо^), Х0(Г)] = —z') .
у( ’ ' L dtdt’ ] dtdt’ 1 и | dtdt’
(11.114)
Если случайные функции X (/) и Y (z1) связаны соотношением
<YX{ty ' ,
Y (t)= ---Л-, то корреляционная функция
rfZ2
Кy[t, = . (11.115)
y dt^dt’f ( !
Пример 11.5. Определить корреляционную функцию и дисперсию для производной
случайной функции X(t), если X(t) = А sin t и известны тл и ад.
Находим корреляционную функцию
Л\(/, /') = М [(А— тА) sin t(A— тА) sin Z'] =
= а2А sin t sin f — m2A sin t sin t’ = (<?д — /Яд) sin t sin t’.
Воспользовавшись формулой (11.114), получим
Xy(t, t’) = (°д — m2A) cos t cos t'.
Дисперсия
Dg(t)= Ky(t, 1')=(<12л- /Яд) COS2 Z.
Вероятностные характеристики решений
линейных неоднородных дифференциальных уравнений
Рассмотрим линейное дифференциальное уравнение первого поряд-
ка вида
y^ky = X(t), (11.116)
где X(t) —случайная функция, для которой известны mx(t) и Kx(t, f).
Требуется определить математическое ожидание ту, корреляцион-
ную функцию Kv(t, t') и дисперсию Dy(t).
Уравнение (11.116) описывает физический процесс, изменяющийся
во времени, например, работающий двигатель (рис. 11.19).
Двигатель
Рис. 11.19. Схема
работы двигателя
В установившемся режиме работы момент двигателя Л4Д(г/) уравно-
вешивается моментом сопротивления Мс((о), зависящим от угловой ско-
рости вращения ш.
При установившемся режиме количество топлива, поступающего в
единицу времени, пропорционально z/o и во времени постоянно. При слу-
чайном изменении сечения в системе питания двигателя на Ху изменит-
ся момент Мд, что вызовет изменение угловой скорости вращения на Да.
Уравнение вращения маховика имеет вид
dt
дМд-дМс,
(11.116а)
где I — приведенный к оси вала момент инерции вращающихся де-
талей;
ДЛ1д — изменение момента двигателя;
АЛ!С — изменение момента сопротивления.
Рассматривая малые отклонения от стационарного режима работы,
можно положить
дМд=аДг/; Д/Ц. =--/<Д<о.
Уравнение (11.116а) принимает вид, аналогичный уравнению
(11.116)
------ Д«5= ДУ. 11.Ибо)
М I--------------------------------I
Решение уравнения (11.116) ищем в виде (р = «&):
vtt-}-wv^kti'v=X, (11.117)
где v и и — произвольные функции.
Полагая vu+kuv=O, находим
?; = е—м.
Уравнение (11.117) сводится к зависимости
uv = X{t} (11.118)
или
«=X(/)ew. (11.119)
Интегрируя уравнение (11.119), получим
t
у--С4- j’X(x)e^dx. (11.120)
о
Окончательно имеем решение уравнения (11.116) в виде
t
у = Се~и^ f е~АР-РА'(т)б?т. (11.121)
о
При / = 0 функция р(0) =уо, что дает с = р0.
Начальное значение у может быть как случайным, так и неслучай-
ным. Рассмотрим случай, когда начальное значение г/0 случайно, причем
случайная величина у0 и случайная функция Уф) независимы. Считаем,
что вероятностные характеристики у$ известны и равны т0 и Do.
Найдем математическое ожидание у [1]:
t
ту = М[уйе~ы\-\- j* (т)] dx = тое~м Т
6
t
+ ( e-ftP-T)m.v(T)t/r. (11.122
о
Корреляционная функция
(Уоо^(-ф f e~^~^X0(x}dx ] X
о /
X ( Worthy) ,
Vo
где #oo и Aq(/) — центрированные случайные величины.
ад п=м
Так как уОо и X0(f) независимы, то после преобразований имеем
1г
Ky(t, [ f xjdxdxv (11.123)
6 о
Для получения дисперсии решения уравнения (11.121) надо после
интегрирования в выражении (11.123) положить t'=i.
Рассмотрим линейное дифференциальное уравнение второго поряд-
ка со случайной правой частью вида
У 4" -П-У "ф шоУ~X (/). (11.124)
Уравнение (11.124) в частном случае может описывать поведение
динамической системы. Иногда правую часть уравнения называют «вхо-
дом», а решение у — «выходом» системы.
Общее решение уравнения (11.124) имеет вид
y = Cyt~'f cos<u/-[-C2e_rf sin офф
t
4__L ( e-^P-P sincoj^-r)^ (r)iZt. ill. 125)
“1 J
0
При ^ = 0 имеем y0 и y0.
Из уравнения (11.125) находим Ci=y0. Дифференцируя уравнение
(11.125) по t и полагая / = 0, получим
Уо — Уоп~^^^ю1у
откуда
с _ У + У^п
°2—--------- .
“1
Рассмотрим случай, когда случайные величины у0 и уо и случайная
функция Хф) независимы, а их вероятностные характеристики извест-
ны. Математическое ожидание «выхода» (случайная функция у)
т; — пт
т (/)=- тУа cos ——--------— e~':Z sin оф -|-
0)1
t
-ф — V sin <а1 {t — r) mx (t) dx.
“i J
о
Корреляционная функция
КДФ t')=M
. • t
-ф -^22- e~ni sin «ф —— C sjn w (/ _ t) Xadx X
<O1 0)1 J
0
X ( Уоое~'г (coso)/' -ф — sin «ф7 |-фe~';Xin -ф-
\ \ ' 0>l /
V
-ф — \ sin (f — x) Xct/t
J
0
где г/оо, г/оо, Уо — центрированные случайные величины.
z/00e_nZ(cosхФ-— sin H-
\ ' <йз !
После преобразований получим
К„ (t, t'] = I)y<, (cos ш/ -ф — sin <«/') X
\ “I 1
X (cos (o,f Ц- — sin <o,f 'j e_n(/+*,)-|-D • sin ™xi ^in
\ -i 1 / «ф
t f
-|—LJ j" e^;',^-T)e_''(r~'r') sin cuj (7 —t) sin «у (f' — Tj’i Kj'r, x^dxdxv
“! о b
Решения дифференциальных уравнений в виде (11.121) и (11.125)
дают возможность исследовать нестационарные случайные процессы,
при условии, что вероятностные характеристики входа mx(Z) и f)
известны.
Пример 11.7. Рассмотрим процесс старта ракеты с пусковой установки при воздей-
ствии на нее случайных стационарных возмущений, вызванных газодинамическими
эксцентриситетами тяги е и е (см. рис. 11.5, а). На рисунке пунктиром показана линия
действия тяги при наличии газодинамических эксцентриситетов. В этом случае на си-
стему действуют дополнительная сила Na и момент М3 (приведенные к центру тяжести
ракеты), равные
N3 = Re-, Ms = — R (e + Z^e).
Уравнение движения системы было получено в § 11.1 при рассмотрении система-
тического движения, вызванного смещением центра тяжести ракеты. В рассматривае-
мом примере нас интересует дополнительное движение системы по углу 0, поэтому в
правой части уравнения (11.32) вместо момента от веса ракеты войдут момент Л7Э и
момент от силы Na [Л1Л-=Лтэ(/4-|-х)]. Поэтому уравнение движения примет вид
(z( —Z4—х)
S + ап0 + я128 = —----------j--------— —,
где / = /о + Лц 4- Zg/np + (Z4 +
Математические ожидания и корреляционные функции случайных функций е и е
известны и соответственно равны:
"Ч = те~ 0;
Ke(t, = I;
Ke(t,
Случайные функции e и e можно считать независимыми, т. е. их взаимнокорреля-
ционная функция равна нулю.
Полагая значения параметров следующими:
= ИГ7 рад2; De = 2,5-10“2 см2.
(или За£ = 0,001 рад и Зае--0,5 см); а-==200 1/с,
рассмотрим случайное движение системы при нулевых начальных данных.
Для определения дисперсии «выхода» можно воспользоваться формулой (11.111 .
которая для дисперсии угловой скорости 0 принимает вид
t t
= f f K1 (Т) bl ‘ 'rfTrfT1 +
6 6
t t
-I-)' [ ^1 (т) Мт) Ki (Т1) b2 (Ti) Dee~'11 T~'Cl 1 rfTdTi, (11.JIM'
о 6
c R^ — li — x)
где b, — — ; b =----------------- .
1 / 1
Интегралы правой части выражения (11.126) можно рассчитать на ЦВМ или опре-
делить графически. Для графического интегрирования надо построить графики функций
f j = Ki (т) ii (т) /<i (тЦ bj (т,-) е—" 1 1
для ряда дискретных значений (т,=0; 0,01; 0,02; ...; 0,2).
Для примера, на рис. 11.20 приведены графики функции fi при т< = 0,02 и 0,04 (j=
а~х —0,02: б — Х; =0,04
Далее графически определяются значения интеграла
0,2
// = f f idx (11.127)
6
и все полученные величины суммируются после умножения на т, = 0,01:
= Д 2 0,017/. (11.128)
В рассматриваемом примере после вычислений получим
к. — D. = 8,65-10“8 рад2/С2.
6s ОЕ 1
Проделав аналогичные вычисления для случайного возмущения (найдем fi, а за-
тем по формулам (11.127) и (11.128) —е), получим
А). =£>. = 36- 10“"s рад2/с2.
бе бе 11
Стационарные и эргодические случайные функции [процессы)
Стационарной случайной функцией называется случайная функция,
у которой все ее вероятностные характеристики не зависят от времени,
т. е.
тх (f)=mx = const; (11.129)
Dx(t)=--Dx(t-\-t'y.= const. (11.130)
Полагая в выражениях (11.129) и (11.130) t получим
mx(t] = mx(G}-, Dx(t)=Dx(0).
Рассмотрим корреляционную функцию, которая при смещении t а
t' на величину t\ должна оставаться неизменной, т. е.
/СД/; г?,.) = ^'х(^Н_Л, ^ + ^1) = const.
В частности, при t\ = — К
= (11.131)
Корреляционная функция стационарной случайной функции зави-
сит только от промежутка между временами t и t'.
Введем обозначение x='t—t', тогда
KAt-t', О)=УДг), (11.132)
т. е. корреляционная функция стационарной случайной функции (про-
цесса) есть функция не двух, а одного аргумента т.
Так как корреляционная функция симметрична (см. соотношение
(11.102а)], т. е.
лдд Г)=УДГ, t),
то для стационарной случайной функции
УД/-Г) = УА. (/'-/)
или
(Н-133)
Дисперсия Dx(t)=Kx(t, t'). Для стационарной случайной функции
Часто вместо корреляционной функции Кж(т) пользуются нормиро-
ванной корреляционной функцией
= (Н-134)
Пример 11.8. Найти корреляционную функцию «выхода» у, если
у +ky = X (0,
a X{i)—стационарная случайная функция с корреляционной функцией, равной
kx (т) =£>х I' у Начальное значение у0 = 0.
Введем новое независимое переменное е. Тогда выражение (11.123) примет вид
t t’
Ky(t, t')= j* f KM,
6 0
В рассматриваемом примере
Kx (т) = /Де-*1 ।.
В формуле (11.123) есть независимая переменная интегрирования. Этой же бук-
вой принято обозначать интервал времени (/—t' = t), от которого зависит корреляцион-
ная функция стационарной случайной функции.
После преобразования имеем
t г
Ky(t, r) = e~*(/+z'> f [
о 6
После первого интегрирования по 81 получим
t
Ку (t, Г) - e-ft(/+r) ——— С [e*(s+f'>-* 1 1 - efe-“E] de.
(Л—a) J
0
После второго интегрирования получим
Ку (t,
t’) = | t~f 1
(k — a)2
e—_ e(A—1] _
_______re-« 1 t-f I _ е-«-аГ _ _ U
fc-a)2 1
(11.135)
Из выражения (11.135) следует, что случайная функция «выхода»
у не является стационарной функцией, так как преобразовать выраже-
ние (11.135) к функции, зависящей только от разности t—t' нельзя.
Для получения характеристик стационарной случайной функции
X(t) —математического ожидания тх и корреляционной функции Kx(t)
необходимо иметь некоторое число реализаций случайной функции
X(t). Обработкой этих реализаций можно найти приближенные значе-
ния тх и КДт).
Возникает вопрос: нельзя ли получить те же характеристики по
одной реализации случайной функции?
Поскольку случайный процесс является стационарным и протекает
однородно во времени (математическое ожидание не зависит от време-
ни, а корреляционная функция — от начала отсчета), естественно пред-
положить, что одна-единственная реализация достаточной продолжи-
тельности может служить достаточным опытным материалом для полу-
чения характеристик случайной функции.
Случайные функции, для которых можно по одной реализации уста-
новить характеристики, называются случайными эргодическими функ-
циями. Эргодическое свойство состоит в том, что по каждой отдельной
реализации случайной функции можно характеризовать всю совокуп-
ность реализаций.
Если случайная функция Х(£) обладает эргодическим свойством, то
для нее среднее по времени значение (на достаточно большом интерва-
ле наблюдения) приближенно равно среднему значению по множеству
наблюдений, т. е.
г
tn^^X^dt, (11.136)
о
где тх—среднее значение по множеству реализаций;
I Т
— f X(t)dt — среднее значение для одной реализации.
Аналогично может быть найдена и корреляционная функция
т
f Х0(/)Х0(/ + т)^, (11.137)
6
где Хо \t}—X(f) — mx; Хо фф- т) = Х (t ф т) — тх.
При неограниченном увеличении времени реализации Т разброс
результатов вычислений уменьшается и в пределе имеют место точные
равенства:
т
mx= lim — 'i X ф) dt;
+ Т •)
о
т
/<Ь(т) = 11т -М X [t)X {t-\-x)dt.
т .1
о
(11.136а)
(11.137а)
Эргодическое свойство случайной функции использовалось для по-
лучения характеристик стационарной случайной функции [см. соотно-
шения (11.136) и (11.137)]. Однако из этого никак не следует, что свой-
ство эргодичности присуще только стационарным случайным функциям.
Установим условие, которому должна удовлетворять корреляцион-
ная функция /<х(т), если стационарная случайная функция Х(£) облада-
ет свойством эргодичности [1]. Рассмотрим, чему равно математическое
/ Т \2
ожидание квадрата случайной величины вида I — J X^t^dt I .
\ о /
Математическое ожидание
т
lim f X0(t)dt
Т^оо Т J
О
М
2 ч Г Г
= limi f fM[X0(£)X0(t')]dtdd =
Г->оо ?2 J J
J 0 0
Г г
= lim '7Г f f kx(t-t')dtdt',
T-^x 7- J J
о 0
но для эргодической функции
г т
lim — 'i X (t)dt-----— ? mxdt =
r^oo T i T J
о о J
= M[mx — znJ]=O,
поэтому
T T
lim —-—£ kx(t — t')dtdt' = Q. (11.138)
T xx TI i J
о 0
Выражение (11.138) можно преобразовать к виду [3]
т
\ (1 --^-)^(r)dT==0.
Т->оо 1 J \ 1 }
О
(11.139)
Пример 11.9. Установить, является ли эргодической стационарная случайная
функция X (?) вида
Кх (т) = Dxe~a ।т 1.
Подставив выражение для йх(т) в соотношение (11.139), получим
т. е. стационарная случайная функция X (/) является эргодической.
Спектральное представление стационарной случайной функции
Напомним некоторые основные определения и соотношения матема-
тического анализа.
Периодическую функцию f(t) можно разложить в ряд Фурье вида
оо
/(/)=а0+sin COSILY,
*=i
где а0 — среднее значение функции f (f) на период Т.
(11.140.
Коэффициенты ряда (11.140) определяются из соотношений:
Т!2
-Tj2
т; 2
Л=у 5 /Wsin-^Л:
-V/2
Г/2
п 2 , ,, 2nkt
Bk=—r \ / W cos —- at.
г ,) 1
- 7/2
(11.141)
Ряд Фурье можно также представить в комплексной форме
00 jlT.k —
т, (11.142)
k = — оо
где
2Ck=Ab-jBh.
Комплексная амплитуда
1 Тг? —]Ы у
Ск=~ j /(Z)e Tdt. (11.143)
— 772
Ряд Фурье дает разложение периодической функции по тригономет-
рическим функциям. Это разложение можно обобщить и на случай не-
периодической функции. Так (не вполне строго) можно разложить в ряд
Фурье непериодическую функцию, применив предельный переход при
7"->оо. Действительно, непериодическую функцию можно рассматривать
как предельный случай периодической функции при неограниченно воз-
растающем периоде. Подставив в формулу (11.142) выражение (11.143),
получим
1 VI Т ТС т
Zj е ) /(z)e dt- (11Л44)
* = —оо —772
Обозначив «j — частотный интервал между соседними гармониками,
2л/г 2л (А+ 1) 2л
частоты которых равны —у— и —и положив д»^—при
предельном переходе (Г —>оо) получим
, j 2л&
Ди),—> аш; -----—> м.
Г
где со — текущая частота, изменяющаяся непрерывно.
Сумма в выражении (11.144) заменится интегралом, и оно примет
вид
оо оо
/(/)= — С e3''rtdt f (11.145)
2л .1 J
—оо —оо
ИЛИ
со
f(t) = 4- \ S(^e^dt, (11.146)
zn J
—со
со
где 5(®)= J f(t)e-->a‘dt. (11.147)
—со
Формулы (11.146) и (11.147) являются основными формулами в
спектральной теории. Если ряд Фурье представляет периодическую
функцию суммой бесконечного числа синусоид с частотами, имеющими
определенные дискретные значения, то интеграл Фурье (11.145) пред-
ставляет непериодическую функцию суммой синусоид с непрерывной
последовательностью частот.
Спектр периодической функции можно изобразить графически
(рис. 11.21).
Каждому дискретному значению частоты (частоты <ок гармоник ря-
да Фурье) соответствует определенное значение коэффициента ряда Ск.
Спектр, показанный на рисунке, назы-
вается дискретным или линейчатым
ск
Рис. 11.21. Спектр периодической
функции
тудой dc
спектром.
Рассмотрим теперь спектр непе-
риодической функции. В результате
предельного перехода от ряда к инте-
гралу Фурье интервалы между отдель-
ными спектральными линиями неогра-
ниченно сокращаются и вертикальные
линии (см. рис. 11.21) все больше
сближаются между собой и спектр в
пределе должен изображаться непре-
рывной последовательностью точек
(кривой). Подынтегральная функция в зависимости (11.146) выражает
бесконечно малое слагаемое, т. е. колебание с бесконечно малой ампли-
dc = —^— S (и) e'/'a)ZtZco,
2л v 7
откуда
2л — = S (ш).
(11.148)
Из соотношения (11.148) следует, что S(co) выражает не непосред-
ственно амплитуду, а так называемую спектральную плотность.
Если в качестве функции f(t) взять корреляционную функцию 7Q (т),
то соотношения (11.146) и (11.147) принимают вид:
ОО
/С(Т)=— 5(ш)е;м(/ш; (11.149)
2л J
— со
5 («>)== J /Qr) e~^dx. (11.1501
— со
Так как корреляционная функция является четной функцией
[Кх(т) =7<ж(-т)], из соотношений (11.149) и (11.150) получим зависи-
мости (формулы Винера — Хинчина):
оо
^Сг(т)=—~~ 5(«>)costoTrfffi; (11.151
2л j
—co
S(<o)= J Kx (t)cosniXdx. (11.152.
Так как дисперсия стационарной случайной функции равна Кж(0).
то из соотношения (11.151) получим
ЛД(О) = ПС = — (’
* 2я J
(11.153)
т. е. дисперсия стационарной случайной функции равна сумме элемен-
тарных слагаемых ----каждое из которых представляет собой
2я
дисперсию, приходящуюся на элементарный участок частот d&.
Ранее рассмотренный график (см. рис. 11.21) принимает теперь бо-
лее четкий математический смысл: для случайной функции, которая
может быть представлена рядом Фурье, коэффициенты разложения Ск
являются дисперсиями ее гармоник, которые некоторым образом рас-
пределены по различным дискретным частотам.
Пример 11.10. Корреляционная функция случайной стационарной функции X(t)
.(рис. 11.22)
АД (т) = Dxe~a 1 т : •
Определить спектральную плотность Хх(й).
Воспользовавшись формулой (11.152), имеем
СО со
(‘ f - ‘2Dxa
Sx (ш) = 1 Dxe ’1 cos ortrfr — 2 I /Л е cos о>тЛ —---------------------------.
J J a2 4- «2
• —oo 0
График изменения спектральной плотности 5х(о)) показан на рис. 11.23.
Случайный процесс, у которого спектральная плотность постоянна, называется
Рис. 14.22. График корреляционной
функции Кх(т) случайной стацио-
нарной функции X (?)
Рис. 11.23. График спектральной
плотности 5 (со) случайной стацио-
нарной функции X (/)
Стационарное решение дифференциального уравнения
с постоянными коэффициентами
Рассмотрим дифференциальное уравнение второго порядка, в кото-
ром правая часть является случайной функцией:
у-\-2ny-\-ш^у = х (i). (11.154)
Случайная функция x(t) является стационарной с известной спект-
ральной плотностью 5ж(оэ). Требуется определить спектральную плот-
ность Sy (со).
Предварительно рассмотрим несколько иную задачу. Пусть динами-
ческая система описывается дифференциальным уравнением вида
dn-xy
dtn
dt
...+o, (n.155)
dtm dtm-x
где n>m; ait bi — постоянные коэффициенты.
Для дальнейших преобразований уравнение (11.155) необходимо
представить в операторной записи, для которой используется преобра-
зование Лапласа.
Если имеется некоторая функция f(t) независимой вещественной
переменной t, то ее преобразование по Лапласу в функцию F(s) опреде-
ляется соотношением
Л(з)= J/(/)e-^, (11.156)
о
где s — некоторая комплексная величина.
Функция f(f) называется оригиналом, а функция F(s) —изображе-
нием функции f(t). В табл. 11.1 приведены преобразования Лапласа для
типовых математических операций.
Воспользовавшись данными табл. 11.1, можно привести уравнение
(11.155) при нулевых начальных условиях /(0) =/'(0) =,... = 0 к виду
s"K (s)(s)4-. . . ($)=
= smX (s) + b\sm~'X (s)-\-b'mX (s), (11.155a)
где Y(s) и X(s) —изображения по Лапласу функций y(t) и x(Z).
Из уравнения (11.155a) получаем
Y (s'! s™ + + ... + b'
=-------1-----------m_ = r(s. (11.157}
X(s} sn+a\sn
Таблица 11.1
Оригинал / (1) Изображение F (s)
<2/(0 aF (s)
/1(0 + /2(0 Л (S) + Л(Л
df (О dt •s^(s)— /(0)
d2f (О dt2 S2^(S)-S/(0)-/'(0)
dnf(t) dtm snF (0) + ...]
J f (t)dt Fs s
fit—a) e~asF (s)
Функция F(s), называемая передаточной функцией системы, рав-
на отношению изображения по Лапласу выходной величины (г/(/)) к
изображению по Лапласу входной величины (при нулевых начальных
данных системы).
Пусть на вход системы (11.155) поступает гармоническое колеба-
ние вида
Решение уравнения (11,155) можно искать в виде
z/(/) = U7(yU))e>', (11.158)
где W(ja>) —неизвестный множитель.
Подставив выражение (11.158) в уравнение (11.155), имеем
е>(0/ [(/<»)" + (/ю)"”14-... 4 а'Д W7 (у<о) =
= e>z[(y®)m44 (/co)'»-i- ... 4йт].
Из соотношения (11.159) получим
W7l.. or 4 or-1 +... + г
W (/<£>) =--------;--------:.
U“) 4-я1(/и)п 14-...Ч-алг
(11.159)
(11.160)
Функция W(/со) называется частотной характеристикой (функци-
ей) линейной системы.
Из структуры выражения (11.160) следует, что частотная характе-
ристика W'(jco) равна передаточной функции, у которой s заменено
на /со.
Если на вход стационарной линейной системы поступает стацио-
нарная случайная функция x(t), то спустя некоторое время, достаточное
для затухания переходного процесса, случайная функция y(t) на выходе
линейной системы также будет стационарной, причем их спектральные
плотности связаны соотношением [1]
^М=Ж(Я12^Н, (11.161)
где 11Е(/со) |2 — квадрат модуля частотной характеристики системы.
Например, для уравнения (11.154) имеем
S,4) = --------1-------;-- X 4) (П-162)
0)2 + 2гф> + Кд
или с / ч &Х X) 5„(о>)= . (4 _ оД) + 4П2Ш2 (11.163)
Рассмотрим несколько частных случаев. Найдем связь между спек-
тральными плотностями случайных функций x(t) и y(t), связанных со-
отношениями:
(11.164)
dt
(П-165)
at*
Применяя преобразование Лапласа (при нулевых начальных дан-
ных) ,находим
E1(s)=sX(s); K2(s) = s2X(s). (11.166)
Из соотношений (11.166) находим передаточные функции:
\F1(s)=s; UZ2(s)=s2.
Квадраты модулей частотных характеристик соответственно равны:
I^jO)^2; |U72(y\<=«A
Спектральные плотности связаны соотношениями:
Syi=^Sx, Sy=^Sx. (11.167)
Если нас интересует дисперсия выходной величины Dy при извест-
ной спектральной плотности входа S«(w), то, используя соотношение
(11.167), получим
ОО оо
ЛТ J zJt J
— co —oo
(11.168)
Подынтегральное выражение в формуле (11.168) всегда можно пре-
образовать к виду
где
1^(Л)12^И =
О(»
I Л(7<о) | 2 ’
(11.169)
О(;о))==й0(7<о)2,,-2 + &1(»2"_4 +. .
Л(уш) = а0(»'! + а1(;<й)«-1+.
т. е.
1
2л
О (Л)
I Л О) | 2
dm.
(11.170)
Рассмотрим несколько частных случаев значения интегралов
Д[4]:
Ьр .
2ec«i
— bp +
_____________«2
2aifl0
— «2&0 + ~ ---------
______________________аз
2а0 (до«з — «1«2)
аой3
bp ( — ащ + л2'«з) - - «одз^1 + «о«1 ьч +--------(ас«з — «1«2>
«4
2^0 («0^3 + д1й4 — Я1Л2аз)
(11.171)
Пример 11.11. Рассмотрим движение прицепа по дороге со случайными неровно-
стями (см. рис. 11.15).
Уравнение угловых колебаний прицепа >(в линейной постановке при f(y)=cy с
учетом линейного затухания) имеет вид
, cl al - ч
9 + 2n? + «5? = — Л (О + — Л (0,
(11.172)
где h(t)—случайная стационарная функция, характеризующая воздействие дороги на
систему;
а (2
2л ;
1р
2__Щ
'° — I
70
Спектральная плотность случайной функции h(t) известна и равна
10v
-7-7- Г’
«2 + 2av2
где v — скорость движения прицела, м/с.
Требуется определить дисперсии угла <р и угловой скорости ср, считая, что колеба-
ния прицепа можно рассматривать как случайный стационарный процесс.
У J л
Для уравнения (11.72) найдем передаточную функцию W'(s) [уравнение
является частным случаем уравнения (11..177)]
cl
Л)
(11.194)
al
1Г(5) =
(11.173)
Частотная функция системы равна
cl al
T +7">
(11.174)
Спектральная плотность
h(t) соотношением (11.161)
угла <р связана со
спектральной плотностью
функции
cl al
+
(ум)2 4- 2пусо 4- “о
10v
(<о2 + 25V) ’
(11.175)
s2 -j- 2/?.s' 4- coq
(/'") =
2
а спектральная плотность угловой скорости ср — соотношением вида (11.167)
2
cl al
h[о
(jw)2 4- 2/гуш 4- «о
<о210 v
(o>2 + 25w2) •
(11.176)
Для определения дисперссии угла ср левую часть выражения (11.175) надо пре-
образовать к виду (11.169).
Выражение для дисперсии S& (со) можно представить в виде
Юг»
(11.177)
Модуль знаменателя в зависимости (11.177) равен
[ /о 4- 5v | = V 25v2 4- и2.
•ель спектральной плот-
Поэтому квадрат модуля в зависимости (11.171) дает знаменат
пости Хл(со), принятой в условии задачи.
Выражение (11.175) принимает вид
I cl al |2
10” I WЧ
а! \2
4=
| (Л)2 + 2«7<° + “о р I j“+5v I2 | [(»2 + 2л/и 4- “о
2
Юн
О)3 4-
аР
2 .
Воспользовавшись табличными интегралами (для л = 3) [см. выражение (11.171)],
получим
апа\Ьч
«3
О? — 10v
2а0 (во«з ~ «1«2>
(11.178)
где
а0 = 1;
I °^2 \
aj = 5и 4- — :
2 ,
0 ~
аР _ \ 2
----м> ; аз = 5v<«0;
V 0; Ьг =
d \2
После преобразования выражение (11.178) принимает вид
Получим выражение для дисперсии угловой скорости D- . Спектральные плотности
и S.. связаны соотношением
S . (и) = <e2S («).
ср Т
Для спектральной плотности S? (r>i) можно получить выражение
Г/ al \2 I cl \2 "1
I— О)4-( —j О)2]
S. (®) = 10v------------L~ ° ' -------- 0 7------------------- . (11.180)
т ‘ I [ а/2 \ [ а/2 ,\ <, |2
I О)3 + + —j (»2 + (5v— + Ш21 jut + 5v<uq
Дисперсия
ОО
D-——— ? S-(<»)dM. (11.181)
? 2л ,J f
—co
После интегрирования и преобразований с использованием табличных интегралов
(11.171) имеем'
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ XI
1. Вентце ль Е. С. Теория вероятностей. М., «Наука», 1964, 576 с.
2. П у г а ч е в В. С. Введение в теорию вероятностей. М., «Наука», ;1968, 368 с.
3. П у г а ч е в В. С. Теория случайных функций. М., Физматгиз, 1962, 883 с.
4. Бесекерский В. С., Попов Е. П. Основы теории автоматического ре-
гулирования. М„ «Наука», 1966, 767 с.
5. Н и к о л а е н к о Н. А. Вероятностные методы динамического расчета маши-
ностроительных конструкций. М., «Машиностроение», 1967, 368 с.
6. Силаев А. А. Спектральная теория подрессоривания транспортных машин.
М., Машгиз, 1963, 167 с.
7. Б р о н ш т е й н И. Н., Семендяев К. А. Справочник по математике. М.,
«Наука», .1965, 608 с.
8. Суриков Б. Т. Самолетные ракеты. М., Воениздат, 1962, 71 с.
9. Чуев Ю. В. Крылатые ракеты. М., Воениздат, 19.64, 85 с.
10. Латухин А. Н. Боевые управляемые ракеты. М., Воениздат, 1968, 432 с.
1. 1. Карташов II. В. Боевые неуправляемые ракеты. И.., Воениздат, 1968, 112с.
12. Патрикейцев М. В. Пуск управляемых ракет. М., Воениздат, <1963, 83 с.
13. Пронин Л. Н. Баллистические ракеты. М., Воениздат, 1969, 114 с.
14. Д ж а н е л и д з е Г. Ю., Бать М. И. Теоретическая механика в примерах
и задачах. М., «Наука», 1972, т. I, 512 с., т. II, 624 с.
15. Л о й ц я н с к и й Л. Г., Лурье А. И. Теоретическая механика, т. II, М.,
ГИГГЛ, 1955, 595 с.
16. Пановко Я. Г. Основы прикладной теории упругих колебаний. М., Маш-
гиз, 1957, 336 с.
17. Бабаков И. М. Теория колебаний. М., «Наука», 1968, 560 с.
Глава XII
СИЛОВЫЕ СЛЕДЯЩИЕ СИСТЕМЫ
АРТИЛЛЕРИЙСКИХ УСТАНОВОК
Силовыми следящими системами артиллерийских установок назы-
вают такие замкнутые динамические системы автоматического регули-
рования, у которых обеспечивается синфазное и синхронное вращение
входного и выходного валов. Входной вал рассматриваемой следящей
системы связан с измерительным прибором-датчиком и прицелом, а вы-
ходной вал — с измерительным прибором-приемником и артиллерийской
установкой (пушками). Таким образом, при перемещении прицела про-
исходит синхронное и синфазное с поправками от счетно-решающего
прибора отслеживание пушками линии визирования прицела.
В качестве исполнительных устройств в силовых следящих системах
применяются электрические и гидравлические двигатели. При этом сле-
дящие системы соответственно именуются электрическими и гидравли-
ческими. Управление силовыми гидравлическими двигателями может
осуществляться и от маломощных электрических приводов постоянного
или переменного тока. Такие следящие системы принято именовать
электрогидравлическими.
Все многообразие силовых следящих систем артиллерийских уста-
новок по принципу действия можно разделить на два типа [9, 13]:
позиционные, в которых входной сигнал в виде поворота или пере-
мещения задающего вала управляет поворотом или перемещением вы-
ходного вала;
комбинированные, где позиционное управление обеспечивается со-
четанием двух систем замкнутого и разомкнутого циклов или позицион-
ной и скоростной систем, работающих на один выходной вал.
Динамические свойства следящих систем в основном определяют-
ся исходя из законов движения цели и обеспечения условий наилучшей
фильтрации случайной составляющей входного сигнала. В зенитных ар-
тиллерийских установках приходится также учитывать весовую несба-
лансированность пушек, а в авиационных установках — действие аэро-
динамического момента.
Основными этапами проектирования следящих систем артиллерий-
ских установок являются следующие.
1. Выбор метода управления и типа привода в зависимости от ви-
да источников питания, динамических характеристик, надежности дей-
ствия, веса и габаритов. При этом производится определение передаточ-
ного отношения механической части привода [4, 7, 10].
2. Определение структуры следящей системы, выбор мест включе-
ния корректирующих устройств и размещения основных агрегатов
управления.
3. Синтез корректирующих устройств и окончательное определение
параметров всех агрегатов управления.
4. Разработка принципиальной и структурной схем следящей систе-
мы. Оценка влияния нелинейности на динамические характеристики
системы.
5. Изготовление макета следящей системы и определение экспери-
ментальных данных по характеристикам качества и точности процессов
управления. На этом этапе проектирование следящей системы обычно
заканчивается.
§ 12.1. ПРИНЦИП ДЕЙСТВИЯ И ОСНОВНЫЕ ТИПЫ СХЕМ
ЭЛЕКТРИЧЕСКИХ И ЭЛЕКТРОГИДРАВЛИЧЕСКИХ
СЛЕДЯЩИХ СИСТЕМ
Электрические и электрогидравлические следящие системы предназ-
начены для передачи на некоторое расстояние угла поворота задающего
вала или отработки входным валом непрерывно изменяющегося напря-
жения.
Блок-схемы позиционных и комбинированных следящих систем изо-
бражены на рис. 12.1.
Рис. 12.1. Блок-схемы типовых позиционных и комбинированных следящих систем
На рис. 12.1, а показана блок-схема позиционной следящей системы.
Угол поворота задающего вала 61 преобразуется сельсином-датчиком
<2Д в напряжение щ. Напряжение и2, пропорциональное углу поворота
выходного вала 02, образуется на выходе сельсина-приемника СП. Сель-
син-приемник и сельсин-датчик включаются по трансформаторной схе-
ме. Таким образом с ротора сельсина-приемника снимается напряжение
.« = , равное разности двух напряжений «1 и и2, или
йЕ=Л(91-р2), (12.1)
где kc — коэффициент пропорциональности сельсинной схемы.
Выражение (12.1) можно переписать в более общей форме
ие (12.2)
где к — угол рассогласования между входным и выходным валами.
В рассматриваемой следящей системе применяются усилители Уь
У2 и Уз, усиливающие сигналы рассогласования по мощности в десятки
или сотни тысяч раз. На выходе усилителя У3 включен двигатель Дв,
поворачивающий через механический редуктор ротор сельсина-приемни-
ка СП.
Таким образом, поворот оператором прицела на угол 01 преобра-
зуется следящей системой в угол поворота артиллерийской установки 02.
Ошибка в отслеживании угла поворота e=0i — 02 составляет несколько
.десятков угловых секунд. Как дальше будет показано, величина этой
ошибки зависит от коэффициентов усиления устройств управления сле-
дящей системы и момента нагрузки.
Для получения устойчивой работы и требуемого качества отработ-
ки наперед заданного угла рассогласования при больших коэффициен-
тах усиления в схему следящей системы включено корректирующее,
устройство КУ, охватывающее отрицательной обратной связью усили-
тельные устройства У2 и У3.
На рис. 12.1, б показана блок-схема комбинированной следящей
системы, полученной сочетанием систем замкнутого (прямоугольник I)
и разомкнутого (прямоугольник II) циклов. Здесь система замкнутого
цикла нс отличается от схемы следящей системы, изображенной на рис.
12.1, а. В схему же разомкнутого цикла входят механический редуктор
Pi, приводящий во вращение тахогенератор Тг, усилитель У4 и коррек-
тирующее устройство КУ2-
Система разомкнутого цикла предназначена для компенсации фа-
зовых искажений, вносимых в выходной сигнал 02 системой замкнутого
цикла.
С целью большего уяснения рассмотрим прохождение задающего
воздействия 0Д/) =0i3sin<a3t, предположив при этом, что сигнал uK(t)
системы разомкнутого цикла не поступает. Тогда при прохождении сиг-
нала 01 (/) через систему замкнутого цикла образуется сигнал 02(/) =
= 02з sin (®3£ + (р). При большом коэффициенте усиления в следящей си-
стеме замкнутого цикла Oi3~02a, а угол рассогласования в определяется
величиной фазового сдвига ф. Величина угла рассогласования щ в мо-
мент времени ti показана на рис. 12.2.
Теперь подадим сигнал таким образом, чтобы он поступал с
опережением по фазе <рп=<р. В этом случае отставание сигнала 02(/) по
фазе от сигнала 0Д/) не будет, так как опережение по фазе в системе
разомкнутого цикла полностью компенсирует отставание по фазе ф.
Сигналы 0Д/) и 02(/) совпадут и угол рассогласования в системе е(0
станет равным нулю.
Следует заметить, что на практике получить полную компенсацию
фазового сдвига во всем рабочем диапазоне частот следящей системы
достаточно трудно. Однако даже частичная компенсация фазового за-
паздывания в комбинированных системах приводит к существенному
уменьшению ее ошибок [5, 13].
В последнее время для повышения точности работы следящих си-
стем объединяют позиционную и скоростную системы в одну [10]. Объе-
диняющим элементом в такой системе является механический диффе-
ренциал Р3 (рис. 12.1, в). Здесь устройства скоростной следящей систе-
мы заключены в пунктирный прямоугольник I. С блока преобразователя
БП снимается сигнал ик, пропор-
циональный угловой скорости
входного сигнала, т. е.
ик = кк —1
К к , ,
dt
(12.3)
где kK — коэффициент пропорци-
ональности.
Этот сигнал проходит через
высокодинамическую скоростную
Рис. 12.2 К объяснению принципа дейст- СИСТему И компенсирует фазовое
н запаздывание 03 («) позиционной
следящей системы.
Комбинированные системы такого типа являются более сложными,
так как в них по сути дела имеются две следящих системы (двойное
количество усилительных устройств и двигателей).
Электрические следящие системы
Рассмотрим принципиальную схему силовой электрической позици-
онной следящей системы авиационной пушечной установки (рис.
12.3) [9].
Для повышения точности следящей системы применены два канала
управления (грубый и точный). Роторы сельсина-датчика и сельсина-
приемника грубого канала (СДгр и СПгр) связаны с входным и выход-
ным валами непосредственно или через редуктор с передаточным отно-
шением 1:1. Роторы сельсина-датчика и сельсина-приемника точного
канала (СДТ и СПТ) связаны с соответствующими валами через повы-
шающие редукторы Pi и Р2, имеющие передаточные отношения 31:1.
Поэтому коэффициент усиления сельсинной схемы по точному каналу
/гс = 31. Вследствие этого ошибка в измерении угла рассогласования точ-
ной системой уменьшается в 31 раз.
При повороте ротора грубого сельсина на некоторый угол ротор
точного сельсина делает несколько оборотов и через угол кратный
360°/31 в сельсинной схеме точного канала возникает несколько устой-
чивых синхронных положений Ci, С2, ..., Cf, Cj+i, .... (Д (см. рис. 12.4),
что вносит неопределенность в работу следящей системы. С целью ее
исключения введена схема разделения сигналов точного от грубого и
наоборот. При малых углах рассогласования (порядка 4°) работает
сельсинная схема точного канала, а сельсинная схема грубого канала
отключается; при углах рассогласования больше 4° включается сельсин-
ная схема грубого канала, а сигнал от точных сельсинов сильно ослаб-
ляется.
Схема разделения каналов (см. рис. 12.3) выполнена на селеновых
выпрямителях Вь В/ и В2, В2'. При угле рассогласования больше 4°
сопротивление селеновых выпрямителей Bt и В/ сильно уменьшается и
в магнитный усилитель будет поступать напряжение ы/6Гр, снимаемое с
резистора 7?i (см. рис. 12.4, б). В это же время напряжение на роторе
точного сельсина-приемника и £Т достигает достаточно большой величи-
ны, что приведет к уменьшению сопротивления селеновых выпрямителей
В2 и В/ и напряжение точного канала на резисторе R3, почти полностью
упадет (см. рис. 12.4, б). С резистора R2 снимается малый сигнал от точ-
ного сельсина иет; его влиянием на работу грубого канала можно пре-
небречь.
Рис. 12.3. Принципиальная схема
позиционной электрической следящей системы
Таким образом видно, что на вход в магнитный усилитель посту-
пает сигнал лишь от грубого сельсина.
При углах рассогласования меньше 4° значительно увеличивается
сопротивление селеновых выпрямителей В2 или В2. Если сопротивле-
ния выпрямителей В2 или В/ велики по сравнению с сопротивлением
резистора R3, то большая часть напряжения снимается с резистора R2
и на вход в .магнитный усилитель практически поступает напряжение от
ротора точного сельсина т.
' . ; Рассмотрим работу следящей системы с управлением по точному
каналу (см. рис. 12.3). Стрелок поворачивает прицел на угол 01, тогда
в сельсинной схеме образуется угол рассогласования е и напряжение и =
(пропорциональное углу рассогласования, снимаемое с ротора сельси-
на-приемника СПТ) поступает через трансформатор Тр и выпрямители
В3 и В4 на управляющие обмотки первого каскада магнитного усилите-
ля. Напряжения постоянной амплитуды образуются на двух вторич-
ных обмотках трансформатора Тр за счет напряжения питания ип, и
поступают через выпрямители В3 и В4 также па управляющие обмотка
магнитного усилителя.
Допустим, что при вращении ротора сельсина-приемника по часо-
вой стрелке результирующее напряжение и s, на управляющей обмотке
первого каскада магнитного усилителя /Иц равно сумме .двух напря-
жений
Увеличение результирующего напряжения на обмотке управления
магнитного.усилителя Мц приведет к росту тока управления Д .
Результирующее напряжение иг, на управляющей обмотке магнит-
ного усилителя Ми равно разности двух напряжений
«Ва = «в — UK.
Уменьшение результирующего напряжения приведет к падению то-
ка управления.гу . Соответственно с этим на управляющую обмотку вто-
рого каскада магнитного усилителя M2i поступит больший ток, нежели
на управляющую обмотку магнитного усилителя М22. В управляющей
обмотке электромашинного усилителя ЭМУ, включенной па выходе вто-
рого каскада магнитного усилителя потекут токи ii и Д в разных на-
правлениях, причем 1'1>Гг. За счет этого ЭМУ возбудится и на его выхо-
де образуется напряжение иа определенной полярности и якорь электро-
двигателя Дв будет вращаться в ту сторону, чтобы уменьшить угол рас-
согласования до нуля.
При отсутствии угла рассогласования, т. е. при и= = 0, через обмот-
ки управления первого и второго каскадов усиления магнитного усили-
теля будут протекать одинаковые токи, но в разных направлениях, т. е.
—/У2; <4 Поэтому результирующий ток обмотки управления
ЭМУ Ai = ii—-12 также будет равен нулю и якорь электродвигателя не
будет вращаться.
С изменением направления вращения прицела, а следовательно, ро-
тора сельсипа-датчика меняется фаза напряжения ие и на управляющей
обмотке Мп получится разность напряжений ик и иг, а па обмотке М12
будет их сумма. В соответствии с этим ток Д уменьшится, а ток z2 воз-
растет и на выходе ЭМУ изменится полярность напряжения иа. Якорь
электродвигателя будет.- вращаться в обратном направлении, сводя сно-
ва угол рассогласования к нулю.
В качестве корректирующего, устройства в системе применена RC-
цепочка, состоящая из конденсатора Ск и двух сопротивлений 7?/ и /Д"
(активные сопротивления обмоток Wi и w2 магнитных усилителей Mi2 и
Мн).
- Принцип действия корректирующего устройства следующий: при
увеличении угловой скорости вращения электродвигателя конденсатор
Ск корректирующего устройства-заряжается, а образующийся при этом
зарядный ток протекает через обмотки ®i и w2 и вызывает падение на-
пряжения и0.с, увеличивающее выходной ток магнитных усилителей, а
следовательно, и напряжение иа. Число оборотов якоря электродвигате-
s)
Рис. 12.4. Графики напряжений на выходе сельсинов гру-
бого и точного каналов до и после разделения каналов
Рис. 12.5. Блок-схемы электрических следящих систем:
а — позиционной; б — комбинированной
ля увеличивается и выходной вал следящей системы стремится как
можно быстрее прийти к синфазному положению. Пройдя синфазное
положение по инерции, выходной вал, а вместе с ним и ротор сельсина-
приемника изменит знак угла рассогласования в системе, что приведет
к торможению электродвигателя. При торможении электродвигателя
конденсатор Ск начнет разряжаться и на обмотках ®i и w2 образуется
напряжение и0.с другого знака. Ток обмотки управления ЭМУ также из-
менит знак и двигатель начнет сильнее тормозиться. За счет действия
этого корректирующего устройства удается сократить время отработки
наперед заданного угла рассогласования при переброске оружия из од-
ного положения в другое и повысить устойчивость следящей системы.
В соответствии с принципиальной схемой, показанной на рис. 12.3,
на рис. 12.5, а изображена блок-схема, где каждое устройство обозна-
чено соответствующим прямоугольником.
На рис. 12.6 показана принципиальная схема электрической следя-
щей системы пушечной установки с комбинированным управлением. Си-
стема имеет грубый и точный каналы управления. Для разделения ка-
налов применена схема, состоящая из электронного усилителя ЭУ1 и
двух неоновых ламп Л3 и [15]. С целью повышения величины напря-
жения снимаемого с задающего тахогенератора Tri применен дополни-
тельный каскад усиления ЭУ2. Сигналы от сельсинов точного канала
усиливаются электронным усилителем ЭУ3. Для связи дополнительного
усилителя с основным применен междуламповый трансформатор Tpi.
Регулировка сигналов с тахогенератора Тгь Тг2 и обратной связи по на-
пряжению, считаемому с выхода ЭМУ, осуществляется потенциометра-
ми Пь П2 и П3. Блок-схема точного канала слежения комбинированной
электрической следящей системы была изображена выше на рис. 12.5, б.
Электрогидравлические следящие системы
Силовой привод электрогидравлической следящей системы с пози-
ционным управлением показан на рис. 12.7. Привод состоит из гидрав-
лического насоса ГН переменной производительности (ПП), питающей
Рис. 12.7. Упрощенная принципиальная схема позиционной электрогидравлической
следящей системы
гидравлический двигатель ГД. Рычаг Рч насоса переменной произво-
дительности ПП изменяет наклон шайбы Шь Соответственно с этим
меняется расход масла насоса переменной производительности и изме-
няется скорость вращения выходного вала гидравлического двигателя.
Наклон шайбы Ш2 гидравлического двигателя постоянен.
Рычаг Рч управляется через редуктор 2 от маломощного электро-
двигателя Дв. Якорь электродвигателя Дв питается от электромашин-
ного усилителя ЭМУ. Обмотка управления ЭМУ запитывается от уси-
лителя ЭУ.
Ограничение угла поворота рычага насоса приводит к необходимо-
сти установки концевых выключателей КВ! и КВ2 в обоих крайних по-
ложениях рычага. При достижении рычагом насоса крайнего положения
концевые выключатели KBi и КВ2 разрывают цепи питания обмоток
реле Pi или Р2 и нормально-замкнутые контакты реле Ki и Кг отклю-
чают цепь якоря электродвигателя от ЭМУ и электродвигатель останав-
ливается.
Для снятия рычага с концевых выключателей необходимо повер-
нуть задающий вал на угол 0/ в обратном направлении, тогда в цепи;
ЭМУ изменится полярность напряжения и через диоды Д1 и Д2 потечет
ток. Якорь электродвигателя начнет вращаться и рычаг насоса отойдет
от концевого выключателя. Концевой выключатель снова включит цепь
реле, контакты реле Ki и Кг замкнутся, и напряжение с ЭМУ будет сно-
ва поступать на якорь электродвигателя.
Принцип действия электрогидравлической следящей системы за-
ключается в следующем. Если оператор вращает прицел системы, то од-
новременно с прицелом приходят во вращение роторы сельсинов-датчи-
ков грубого и точного каналов. В результате этого па управляющей об-
мотке ЭМУ появится напряжение иэму и электромашинный усилитель
приведет во вращение якорь электродвигателя Дв. Управляющий рычаг
Pi создаст наклон шайбы Ш1 и рабочая жидкость от гидравлического
насоса ПП поступит по трубопроводам на гидравлический двига-
тель ГД.
Ротор гидравлического двигателя начнет вращаться и будет приво-
дить во вращение выходной вал, а вместе с ним и пушечную установку.
Электродвигатель одновременно с поворотом рычага насоса повернет
ротор промежуточного сельсина-приемника СПпр. Ротор промежуточно-
го сельсина-датчика заторможен стопорным устройством таким обра-
зом, что при установке рычага насоса в нейтральное положение напря-
жение на роторе промежуточного сельсина-приемника станет равным
нулю.
Необходимо отметить, что напряжение на роторе промежуточного’
сельсина-приемника противоположно по фазе напряжению на роторе
сельсина-приемника выходного вала. Поэтому при вращении прицела с
постоянной скоростью напряжение на выходе электронного усилителя
определяется разностью напряжений от ротора промежуточного сельси-
на и ротора выходного сельсина. Это напряжение может быть равным
нулю, когда электродвигатель повернет рычаг насоса на некоторый по-
стоянный угол. Пушечная установка будет вращаться с постоянной угло-
вой скоростью, определяемой углом наклона шайбы насоса.
Положение динамического равновесия рычага может быть получе-
но лишь в случае движения прицела с постоянной скоростью. При за-
медлении движения прицела или прекращении его вращения сигнал с
роторов сельсинов-приемников уменьшается и на выходе управляющих
обмоток ЭМУ появится ток другой полярности. В этом случае электро-
двигатель будет перемещать рычаг насоса в обратном направлении, а
вместе с ним и ротор промежуточного сельсина-приемника к нейтраль-
ному положению. Соответственно с этим скорость вращения ротора гид-
ромотора будет уменьшаться вплоть до полной остановки. Отсюда вид-
но, что промежуточные сельсины выполняют роль «жесткой механиче-
ской» обратной связи от электродвигателя к сельсину-приемнику.
В качестве корректирующих устройств в следящей системе применены
два тахогенератора Тп и Тг2 с соответствующими /?С-цепочками.
двигателя на единицу мощности, от-
fl Ю 20 Рэв,«8т
Рис. 12.8. Графики весовых характе-
ристик электрических и гидравличе-
ских двигателей
§ 12.2. ВЫБОР ТИПА ДВИГАТЕЛЯ
И МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ
ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ
В настоящее время в следящих системах пушечных установок при-
меняются электрические или гидравлические силовые двигатели. Элек-
трические двигатели постоянного или переменного тока просты в изго-
товлении, могут размещаться на значительных расстояниях от источни-
ков питания и не имеют существенных ограничений по требованиям
эксплуатации. К числу недостатков электрических двигателей можно
отнести: относительно большой вес
носителыю невысокую надеж-
ность действия и большие посто-
янные времени, снижающие быст-
родействие следящей системы.
Гидравлические двигатели
развивают большие значения
крутящего момента на выходном
валу при малых моментах инер-
ции роторов, что приводит к су-
щественному уменьшению посто-
янных времени и повышению
быстродействия следящей систе-
мы. Гидравлические двигатели
обладают также высокой надеж-
ностью действия и малым весом
на единицу мощности. Основны-
ми недостатками их являются: высокая точность изготовления, а следо-
вательно, и стоимость; возможность воспламенения рабочей жидкости;
необходимость размещения близко от источников питания (гидравличе-
ских насосов). Кроме этого, процесс замены гидравлических двигателей
в следящей системе более сложен, нежели электрических, так как тре-
буется выполнение демонтажа и последующего монтажа трубопроводов.
После замены гидравлического двигателя необходимо обеспечить выпуск
воздуха из трубопроводов, иначе в системе появляются незатухающие
колебания. На выполнение всех этих работ приходится затрачивать мно-
го дополнительного времени, что затрудняет эксплуатацию гидравличе-
ских двигателей.
На рис. 12.8 приведены сравнительные весовые данные электриче-
ских и гидравлических двигателей в зависимости от мощности, получен-
ные на основании обработки данных следящих систем иностранных
установок [9]: область 1 соответствует электрическим двигателям посто-
янного тока с напряжением питания 24—30 В; область 2— с напряже-
нием 60—НО В. Гарантийный срок работы этих двигателей составлял
1000—3000 часов. Здесь же построена область 3 для гидравлических
двигателей, работающих при давлении 170—210 кгс/см2. Гарантийный
срок работы гидравлических двигателей не менее 1000 часов [9].
Из рисунка видно, что электрические двигатели постоянного тока,
примерно в 1,5 раза тяжелее, чем гидравлические.
Большое значение на весовую оценку агрегатов всей следящей си-
стемы имеют устройства управления (питания) двигателей. В качестве
устройств управления электрических двигателей постоянного Тока бу-
дем рассматривать электромашинные усилители, а для гидравлических
двигателей — насосы переменной и постоянной производительности1.
На рис. 12.9 приведены графики изменения весовых характеристик
в зависимости от мощности для электромашинных усилителей (об-
fl 10 20 Ру, кВт
Рис. 12.9. Графики весовых характери-
стик устройств управления электриче-
ских и гидравлических двигателей
ласть 1), гидравлических насосов
переменной (область 3) и посто-
янной (область 4) производи-
тельности. Здесь же приведены
графики (область 2), характери-
зующие зависимость веса от
мощности на валу для электриче-
ских двигателей переменного то-
ка, используемых в качестве при-
водов для гидравлических насо-
сов переменной и постоянной про-
изводительности [9]. Из рисунка
видно, что наименьшим весом
обладают насосы постоянной про-
изводительности.
Однако в случае применения
насосов постоянной производи-
тельности для питания гидравли-
ческих двигателей с дроссельным
регулированием приходится при-
менять специальные радиаторы
для охлаждения масла2. В ре-
зультате этого «затраты веса» на
единицу мощности гидравличе-
ских приводов с дроссельным ре-
гулированием значительно уве-
Рис. 12.10. Графики изменения посто-
янных времени для электрических и
гидравлических двигателей
ляется простота эксплуатации и с
личиваются.
Для оценки быстродействия
двигателей на рис. 12.10 приведе-
ны графики изменения постоян-
ных времен для электрических
(кривая 1) и гидравлических
(кривая 2) двигателей в зависи-
мости от мощности [9]. Из срав-
нительных данных видно, что по-
стоянные времени гидравличе-
ских двигателей значительно
меньше постоянных времени элек-
трических двигателей постоянно-
го тока. Поэтому, если в следя-
щей системе определяющим тре-
бованием является ее быстродей-
ствие (скорость переброски пуш-
ки из одного положения в дру-
гое), то предпочтение следует от-
дать гидравлическим двигате-
лям. Если же определяющим яв-
ость системы, то в качестве сило-
вого двигателя следует применять электрический двигатель постоянного
тока с управлением от электромашинного усилителя.
1 В случае применения насосов постоянной производительности скорость вращения
гидравлических двигателей изменяется с помощью дроссельных устройств поступатель-
ного или вращательного действия [9].
2 Насос постоянной производительности обеспечивает максимальный расход рабо-
чей жидкости независимо от режима работы пушечной установки.
Выбор мощности двигателя
Надежная работа двигателя возможна лишь при правильном вы-
боре его мощности. Завышение мощности приводит к увеличению стои-
мости следящей системы, а занижение — к снижению ее надежности.
Потребную мощность двигателя будем находить по значению экви-
валентного момента для наиболее типичного режима работы следящей
системы [1, 10]. В качестве такого режима выберем:
V^sinH, (12.4)
где Огтах — максимальная амплитуда угла поворота вала оружия;
йв — круговая частота вращения выходного вала оружия.
Угловые скорости и ускорение определяются по формулам:
02(^==е2таЛ COS <М:
М)= — 02тах“в SW «Д
(12-5)
Обозначим максимальное значение углового ускорения вала ору-
жия через ватах = 92тах«в2. Тогда при постоянных моментах нагрузки Л1н
и сил сухого трения Л1тр эквивалентный момент
/9 «2
Л2. гр. , (12.6)
I / -о 1 ТР I 1 .9 1 ДВ Q ’ Ч /
где /р — передаточное число механической передачи;
*1 — коэффициент полезного действия механической пере-
дачи;
/н —момент инерции нагрузки;
/лв —момент инерции двигателя;
v=l-]---— — коэффициент, учитывающий момент инерции зубчатых
7дв
колес механической передачи между двигателем и на-
грузкой;
/р — момент инерции механической передачи (редуктора).
Мощность на валу двигателя определяется по номинальному зна-
чению
^п= — , (12.7)
ЛДВ
где лДв — коэффициент, учитывающий возможное длительное повыше-
ние нагрузки. Для электрических двигателей постоянного тока адв=
= 0,74-0,8; для гидравлических двигателей и управляемых электрических
двигателей переменного тока — Хдв = 0,8-ь0,9.
Для определения мощности на валу двигателя воспользуемся сле-
дующей формулой:
Рв=9,81. Ю-ШЛвтах [кВт],
(12.8)
где Юдв max — максимальная угловая скорость вращения вала двигателя.
Мощность, потребляемая двигателем, равна
^B=-^ , (12-9)
где Цдв — к. п. д. двигателя.
Выбор механической передачи
Оптимальное значение передаточного числа механической передачи
можно найти, минимизируя формулу (12.6), пользуясь соотношением
По формуле (12.10) zPopt определяется методом последовательных
приближений.
При применении в качестве механической передачи редуктора с ци-
линдрическими зубчатыми колесами, необходимо выбирать такие пары
колес, при которых получаются минимальные значения момента инер-
ции колес редуктора.
Приведенный момент инерции всех вращающих масс редуктора
= + + (12Л1)
гР .
Так как наибольшее влияние на /р оказывают четыре первых зуб-
чатых колеса, то
/+ + y + , (12.12)
Р 32 L \D2 ) ‘ \ £>2 ) \D2 j \ Di ; \
где р — плотность металла зубчатых колес;
b — ширина колеса.
Введем в формулу (12.12) следующие обозначения:
D2 ; . А ; . D2 Di .
Тогда
rtpftDj
^р0 ДГ,
(12.13)
—- =0.
dz!2
Из выражения (12.13) найдем передаточное отношение
ствующее минимуму /р, пользуясь соотношением
А
Если принять = 1, то
/12, соответ-
(12.14)
г'з4 —
*12 ~ 1
2
Задаваясь различными числовыми значениями 1\2 по формуле
(12.14) вычислим оптимальные значения передаточных отношений зуб-
чатых колес (рис. 12.11, а), а по ним можно найти номограмму для ми-
нимальных значений моментов инерции зубчатых колес редуктора (рис.
12.12,6).
Пример 12.1. Определить наивыгоднейшие значения передаточных отношений пя-
ти пар зубчатых колес редуктора, если /ы = 10 кгс-м-с2, Л4н=200 кгс-с, Л4тр = 20 кгс-м.
Егтах=2 рад/с. В качестве двигателя применен электродвигатель постоянного тока с
7ДВ = 2-10 3 кгс-м-с2.
В первом приближении будем считать, что редуктор состоит из пяти пар зубча-
тых колес и его к. п. д. составит т] = 0,9. Примем также, что v=l,2.
По формуле (12.10), найдем
f)
Рис. 12.11. Номограммы оптимальных значений передаточных отношений редукторов
и минимальных моментов инерции пар зубчатых колес:
1, 2,3,4 ц 5 кривые соответственно для первой, второй, третьей, четвертой и пятой пар зуб-
чатых колес
Пользуясь номограммой (см. рис. 12.11, а) для ip=264 и пяти пар зубчатых колес
264
найдем i|2=l,6. Передаточное число без первой пары колес будет ip = j—- =165. Для
ip=.165 и четырех пар колес найдем i34=1,68. Далее !5g=1,74; i78=2,09; J9io=3,61;
Й1 12 = 7,4.
/р
По номограмме (см. рис. 12.12, б) для ip=264 определим -- = 7.
До
- Вычислим 7рр для стального зубчатого колеса, имеющего L*i=&=40 мм:
3,14 - 0,8•1030,04•0,044 .
7р0 =-----------—----------- — 0,6-10 4 кгс-м-с2.
32
При /ро=0,6-10-4 кгс-м-с2 величина /р=4,2-10~4 кгс-м-с2.
Значение первого приближения для коэффициента v' будет
4,2-10~4
v' = l+----------- = 1,21.
2-10“ 3
По найденным значениям передаточных отношений вычислим число зубьев в ко-
лесах и найдем к. п. д. зубчатых пар: щ, т]2, Цз, Ич, Лз, Затем определим общий
к. п. д. редуктора.
В рассматриваемом случае
т)1=98,5%; т]2 = 98,85%; т]3 = 98,65%; т|4==98,9%; ij5 = 99,2%; -qs = 99,8%,
а общий к. п. д.
= •№'W'15',16 = 93,7%.
Найденные значения v' и rf снова подставляются в формулу (12.10) и находится
второе приближение для iPopt
Если при расчетах получена хорошая сходимость первого и второго приближений,
то на этом вычисления заканчиваются.
Можно показать, что при выборе неоптимальных передаточных отношений v уве-
личивается до четырех и более.
Люфты в зубчатых передачах оказывают большое влияние на точ-
ность и работоспособность следящих систем. Увеличение люфтов вслед-
ствие износа зубчатых колес передачи приводит к возникновению неза-
тухающих колебаний (автоколебаний) в системе, устранение которых
представляет значительные трудности. С ростом люфтов увеличивается
также техническое рассеивание при стрельбе из пушечной установки.
Люфт в передаче возникает из-за наличия боковых зазоров в зуб-
чатых колесах и зазоров в шарикоподшипниках. Максимальные значе-
ния люфта зубчатой пары, выраженные через угол поворота ведомого
колеса, можно определить с помощью соотношения
д12 = (5’88 + ^ШП)СЛ . , (12.15)
mz2
где Сп — вероятный максимальный боковой зазор (выбирается по
ГОСТ 9587—61);
Киш — коэффициент, зависящий от класса точности подшипников
(для силовых редукторов установок Кшп = 1 -4-1,5);
т — модуль зацепления;
z2 — число зубьев у ведомого колеса.
Для ряда зубчатых колес редуктора суммарный люфт, выраженный
через угол поворота оружия, будет
л ___ А12 | А23г'12 | А34О2С4
... + 2(у-2) („-1)^34- • • ((^3) (12.16)
/р
где Д12, А23... — люфты в отдельных парах зубчатых колес.
Пример 12.2. Определить суммарный люфт в передаче, состоящий из следующих
зубчатых колес: Z]=20, z2 = 33, z3 = 20, z4 = 37, zs = 20, z6 = 48, z7 = 20, z8=100, zg = 20,
z10 = 370 при т=1 и ip = 676.
Если считать, что зубчатые колеса изготовлялись по 6-му классу точности и
Ктп=1, то согласно ГОСТу 9587—61 и формуле (12.15):
7,88-52
Д,9 а= ------
1-33
, 7,88-52
12,4'; Лз4 = -------=11,1';
37
7,88-52 о 7,88-70 „ 7,88-100
А—- = 8,5 t A?q ==-----------= о,5Л; Aqiп —----------= 2,13z.
1-48 ’ 78 1-100 ’ а1° 1-370
Суммарный люфт на оружии вычислим по формуле (12.16):
12,4 11,165
Лр = 676~ + 676 +
8,5-1,65-1,85
676
5,5-1,65-1,85-2,4
676
4-2,13 =2,27’.
Отсюда следует, что поле люфта редуктора представляет собой две параллель-
ные прямые с наклоном 45°, отстоящие от начала координат вправо и влево на расстоя-
2,27'
нии, равном С ——-— (здесь С — полузона люфта). При износе зубчатых колес ре-
дуктора поле люфта увеличивается на 40—60% и может составлять 3,2—3,6'.
§ 12.3. ОГРАНИЧЕНИЯ ЗОНЫ ВОЗМОЖНОГО ПОРАЖЕНИЯ ЦЕЛЕЙ
ПРИ СТРЕЛЬБЕ ИЗ ПУШЕЧНОЙ УСТАНОВКИ
ПАРАМЕТРАМИ СЛЕДЯЩЕЙ СИСТЕМЫ 1
При стрельбе по воздушной цепи зенитная пушечная установка со-
провождает упрежденную точку. Сопровождение цели всегда ограниче-
но возможностями следящей системы (максимальными значениями уг-
ловой скорости и ускорения
движения оружия, мощностью
двигателя и др.). За счет этого
появляется часть зоны, где не-
возможно поражение воздуш-
ной цели.
Для определения зон огра-
ничения рассмотрим положе-
ние цели (точка Ц), упрежден-
ной точки (точка У) и истин-
ной точки встречи2 В относи-
тельно точки 0, где располо-
жена пушечная установка и
РЛС (рис. 12.12). Будем счи-
тать, что снаряд находится в
точке Вь тогда из треугольни-
ка УВВ[ найдем
Рис. 12.12. к определе-
нию уравнений для зон
ограничения от угловой
скорости и углового ус-
корения вращения пу-
шечной установки ’
Дтт.|сн= Дху cos ов, (12.17)
где Ат— время движения снаряда от точки В до точки Bi;
фв — угол встречи снаряда с целью.
Расстояние ВЦ = Дтщц или
Дтг'ц = Дхц—Дху. (12.18)
Исключив из уравнений (12.17) и (12.18) переменную Ат и введя
обозначение £ = --7сн , получим
Дх = —-—----------дхц. (12.19)
3 k + COS срв
1 Данный параграф написан канд. техн, наук В. С. Вдовиным.
2 См. гл. XIV.
Откуда находим
kc= —
Дхц А 4- cos Ti
Угловую скорость линии визированая упрежденной точки У. обо-
значим через 8У, а угловую скорость линии визирования цели, когда она
совмещена с упрежденной точкой, обозначим через ец.уСл (условная уг-
ловая скорость линии визирования цели).
Можно показать, что
k
(12.20)
v.
__=k.
(12.21)
ен.усл
где Уу.т — линейная скорость движения упрежденной точки;
kc — коэффициент трансформации по скорости.
Уравнение зоны ограничения от угловой скорости вращения оружия
(применительно к случаю слежения за упрежденной точкой) при еу =
= e = const можно получить с помощью формулы
va sin ev
z=kr-----------------------------
(12.22)
где D у.т— расстояние от точки 0 до точки У.
Из формулы (12.22), найдем
D- =kc sin e ~
у.т - e
Сравнивая выражения для зон ограничения от угловой скорости
для слежения за целью и упрежденной точкой нетрудно заметить, что
D.
D.
(12.23)
Da
Отсюда следует, что для построения зоны ограничения от угловой ско-
рости достаточно каждый радиус-вектор зоны ограничения для Уу.т =
= пц=const умножить на значение коэффициента
А
k,
Для вывода выражения
упрежденной точки возьмем
роста:
А 4- cos еу
углового ускорения линии визирования
производную по времени от угловой ско-
®У
dt (
А V
k
А 4- cos еу
sin3 е.
k + COS e-
---------------f- sin 2г.
(k 4- coscy)
Выражение (12.24) можно привести к виду
< . 9 I А \2
е = ----sin 2г --------------
у £)2 у \ А + cos еу ]
Поскольку —— sin 2еу = ев уСЛ, окончательно имеем
Dy
ЕУ
sin2 e.
2 cos ey (A + cos ey)
k
А cos Су
tg Ey sin гу
2 (А 4- cos еу)
Dr.
bl .
(12.24)
(12.25)
(12.26;
Введем обозначение
k
k + COS Sy
tg Sy Sin Sy
2 (k — cos Ey) 1 1
(12.27)
где ky — коэффициент трансформации по ускорению.
Тогда
5 = ^уёц.усл- (12.28)
Положив в выражении (12.25) ey = e = const и решив его относитель-
но Dy, получим зависимость для зоны ограничения привода по углово-
му ускорению в виде
D-; = —-yzz У sin 2е
-у.т y-z J
(12.29)
Потребная мощность двигателя при слежении за упрежденной точ-
кой определяется зависимостью
V—йбг</-’а+ж.Л>- <12-30>
где ЛДТ—статический момент сопротивления пушечной уста-
новки;
Л = Лв'^'р — приведенный момент инерции пушечной установки;
/уСТ— момент инерции пушечной установки.
Подставив в зависимость (12.30) выражения (12.21) и (12.28), по-
лучим
^ут--^-(й^у/п£п.уСл + ^сЛ7С1ец.усл). (12.31)
Отношение мощности в режиме слежения за упрежденной точкой к
мощности в режиме слежения за целью можно представить следующим
образом:
Рг
*л' I 1
\ kyln sin су sin 2вуИц
H---------------1;-------------Y (12.32)
/п sin2 £ц sin 2£Ytc 1
----------------4_ i /
/
где H — высота полета цели.
Если же пренебречь значением величины статического момента со-
противлений Л1СТ = 0, то отношение мощностей в этом случае будет опре-
деляться зависимостью
kP=^kcky. (12.33)
Для построения зон ограничения, обусловленных мощностью приво-
да, необходимо в уравнении мощности, записанном через наклонную
дальность и угол визирования упрежденной точки, положить Р£ут=Р =
= const и решить его относительно Dy.
При Л4ст = 0 уравнение зоны ограничения существенно упростится:
D
р
у.т
kp sin Sy sin 2sy
102т]Р
(12.34)
Графики изменения коэффициентов kc, ky и kP при k= 1,25 пред-
ставлены на рис. 12.13. Анализ зависимостей для kt-, и kP показывает,
что их величины существенно могут отличаться от единицы.
Зоны ограничения, обусловленные угловой скоростью, ускорением и
мощностью привода, приведены на рис. 12.14 применительно к режиму
слежения за упрежденной точкой (по данным примера 12.3).
Зоны ограничения станции подсвета цели РЛС могут быть найдены
на основании анализа режима слежения за целью. Конечные выражения
Рис. 12.14. Зоны ограничения возможного поражения це-
лей параметрами следящей системы
для зон ограничения параметрами следящей системы — скоростью, уско-
рением и мощностью могут быть получены из приведенных выше зависи-
мостей, соответствующих рассмотренному режиму слежения за упреж-
денной точкой при
г ^сн
k ——£2- = оо.
«и
Это означает, что упрежденная точка совпадает с целью, а упреди-
тельный треугольник вырождается в отрезок прямой, связывающей мес-
то расположения зенитной установки с целью. При этом коэффициенты
трансформации соответственно равны kc = ky = kP=l.
Уравнения для зон ограничения, вызываемые приводом РЛС, имеют
вид:
по угловой скорости
D- = sin е
ец ц е
(12.35)
по угловому ускорению
sin 2ец; (12.36)
V Е
по мощности при Мст = О
DP =va ® /" —--in ^--in 2ец— . (12.37)
“ ц1/ 102т]Р V 7
Г 4
Если эти упрощения недопустимы, то следует решить алгебраиче-
ское уравнение третьей степени относительно наклонной дальности. Ко-
нечное выражение для зон ограничения мощностью привода в этом слу-
чае будет
ДРц=т,ц [₽Е + 0,5ys J- У уЕ (ре+0,25Ъ ] +
3 / г- А4ста. )
+ У аД8Е + О,5уЕ-УуЕ(рЕ + О,25уЕ)]+ , (12.38)
где
Sin гц „ ^ст sin2 У , . „
а6=-------2—; ре =--------------; уЕ = /п sin 2s„.
102-<]Р 27(102)2т]2Р2 ,Е " ц
Пример 12.3. Для привода вертикального наведения зенитной установки, находя-
щейся в режиме сопровождения упрежденной точки, построить зоны ограничения, обус-
ловленные угловой скоростью, угловым ускорением и мощностью следящей системы в
передней и задней , полусферах, если известно, что: цСв = 600 м/с; сц=300 м/с; е=
= 0,3)46 рад/с, е = 0,219 рад/с2; Р = О,28 кВт; /п = 40 кгс-м-с2; М0Т = 6О кгс-м; iq =0,8.
Примем следующий порядок вычислений.
1. Отношение скорости снаряда и скорости цели
й_2^ = 600 = 2
цц 300
2. Выражение для коэффициента трансформации по скорости имеет вид
k 2
k,. = ----------=------------.
k + COS s 2 + COS E
3.
Зона ограничения от угловой скорости привода согласно уравнению (12.23)
t»„ sin е 2-300 sin г
D. = k,. sin е —— =-------------------= 1736-------- м.
еу,т г 2 + cos в 0,346 2 + cos е
4.
Выражение для коэффициента трансформации по ускорению
/ k \2 Г tg е sin е 4 4 Г tg е sin е
У \й + cos е / [ 2 (k + cos s) + J (2 + cos s)2 [ 2 (2 + cos s)
5. В соответствии с уравнением (12.29)
У ky sin 2s = 1280
sin 2s Г tg е sin е 4
------------- —----------------+ 1 м.
(2 + cos е)2 [2 (2 + cos s) J
6. Для построения зоны ограничения мощностью привода воспользуемся уравне-
нием (12.3-8), предварительно вычислив значения:
а.
sin £
102т]Р
== 0,0438 sin е; р е
sin2 е
27(102)2т)2Р2
= 15,35/г'с sin2 г;
fE = &с£у/п sin 2е == 404с/гу sin 2г.
Результаты вычисления радиусов-векторов искомых зон представлены в табл. 12.1.
Таблица 12.1
Параметр ограничения Зоны ограничения при s°, м
0 30 45 60 90 135 150 180
£ 0 302 454 601 867 956 765 0
£ 0 414 490 554 0 890 1005 0
р 0 311 466 600 510 1120 816 0
Таблица 12.2
Результирующие зоны ограничения — D, м
передняя полусфера задняя полусфера
45 490 135 1120
60 600 150 1005
Зоны, рассчитанные в данном примере, представлены выше, на рис. 12.14. Из ри-
сунка видно, что внутри зон не обеспечивается слежение пушечной установкой за точкой
встречи и при требуемой по критерию эффективности 1 точности попадания воздушная
цель не поражается снарядами. Вне кривых * D-; и ®Р, зон ограничений
у.т ’у.т У-т
обеспечивается сопровождение.
Результирующие ограничения по углам возвышения оружия и дальностям в пе-
редней и задней полусферах приведены в табл. 12.2.
На зону ограничений наибольшее влияние оказывают величины ускорения еу.т и
мощность двигателя Ру.-г. Поэтому с увеличением мощности двигателя следящей си-
стемы возрастает значение эквивалентного момента Л1Э, затрачиваемого па преодоле-
ние инерционной и полезной нагрузки, и зоны слежения существенно расширяются.
§ 12.4. УРАВНЕНИЯ ДИНАМИКИ И СТРУКТУРНЫЕ СХЕМЫ
ЭЛЕКТРИЧЕСКИХ И ЭЛЕКТРОГИДРАВЛИЧЕСКИХ
СЛЕДЯЩИХ СИСТЕМ
Составим уравнения динамики устройств управления электрической
следящей системы пушечной установки, блок-схема которой была изоб-
ражена на рис. 12.5, а.
Угол рассогласования в системе определяется зависимостью
_________ (12.38)
1 См. гл. XV.
а напряжение на выходе трансформатора Трj
йс = гР1Асе(/), (12.39)
где kc — коэффициент усиления сельсинной схемы по грубому каналу;
ip — передаточный коэффициент сельсинного редуктора.
Напряжение на выходе трансформатора запишем в виде
«My,=ATp«c, (12.40)
где Атр:— коэффициент трансформации.
Напряжение на выходе первого каскада магнитного усилителя опре-
деляется по формуле
7"му, dllw-1-«Щ1 = Аму1«му1, (12.41)
dt
где Гм у, — постоянная времени первого каскада магнитного усилителя;
Аму,— коэффициент усиления первого каскада магнитного усили-
теля.
Напряжение, поступающее на вход второго каскада магнитного уси-
лителя, можно представить в виде
Иму2 = «ю—«0,с, (12.42)
где «ю— напряжение на выходе первого каскада усиления магнитного
усилителя;
и01С — напряжение в цепи обратной связи.
Напряжение на выходе второго каскада магнитного усилителя мож-
но записать в виде
। , -to doi
/му,--------- «эму = «му2«му2, (12.43)
dt
где Гмуд—постоянная времени второго каскада магнитного усилителя;
Аму2— коэффициент усиления второго каскада магнитного усили-
теля.
Уравнение динамики электромашинного усилителя будет
Гэму ~Г«а=^ЭМУ«ЭМУ, (12.44)
где Т эму — постоянная времени обмотки управления электромашинно-
го усилителя;
А эму —коэффициент усиления электромашинного усилителя по на-
пряжению.
Уравнения электродвигателя и механического редуктора запишем
в виде:
/ M(t) .
п dt't м а ip ’
„ — /? / 4- k rf9'*B
иа ,ла‘а. Г ке ,, ’
dt
fi2 _ 1
^'р
(12.45)
где /п — /я . + — момент инерции, приведенный к валу электродви-
гр
гателя;
/И (/) — момент внешних сил, действующих на пушечную
установку;
/як, /у—соответственно моменты инерции якоря электро-
двигателя и пушечной установки;
ku— моментная постоянная электродвигателя;
ke — постоянная противо-э, д. с. электродвигателя.
Уравнение переходного процесса для корректирующего устройства
имеет вид
у с 1 __у
с dt ' °'с— с dt
(12.46)
Здесь Tc = 2CcRv — постоянная времени корректирующего устройства,
где Со — емкость конденсатора корректирующего устройства;
7?у — активное сопротивление обмотки управления второго каскада
магнитного усилителя.
Применим к уравнению (12.39) — (12.41) и (12.43) — (12.45) при
M(t) =0 преобразование Лапласа при пулевых начальных условиях. Тог-
да получим следующие передаточные функции устройств управления пу-
шечной установкой:
1^(5)= Uc(s) =i9kz\
E(s) p
Vv o(sj —-----8— — ftTO,
' U. (s) TP
(5) = Uw^ = —-^2--------
^МУ2 (S) ^МУа5 + 1
U7s(s)
^эмуС5)
fe3My
^ЭМУ2 + 1
(12.47)
/
где 7\в=—— — электромеханическая постоянная электродвигателя;
k№ke
k^ = —5----передаточный коэффициент электродвигателя.
Уравнения сравнивающих устройств (12.38) и (12.42) перепишем
в виде:
E(s) = 6i(5)— е2 (5);
tyMy2(s)=t7w(s)-t/0.c(5).
(12.48)
Пользуясь передаточными функциями (12.47) и уравнениями срав-
нения (12.48), можно составить структурную схему следящей системы
пушечной установки (рис. 12.15а). На структурной схеме каждое устрой-
ство управления обозначено соответствующим значением передаточной
функции.
Пользуясь структурной схемой, можно определить передаточную
функцию всей разомкнутой следящей системы:
_______________________Л-?_______________________
5 (7\гЛ + 1)(^ЭМУЯ + П(^МУ,5 + П(^МУ25 + О
(TCS + 1) (Tg^yS + 1) (T^S +
где
. _ ^сгр,^т[ЛмуЛмУг^ЭМУ^Лв
кь—------------:-----------;
гр
ка=кку^эмуТс.
fi)
Рис. 12.15. Структурная схема следящей системы с электромашинным усилителем
По передаточной функции (12.49) можно анализировать устойчи-
вость, точность и качество процессов слежения при действии регулярных
и случайных возмущений (см. § 12.5).
Перейдем к составлению уравнений для электрической следящей
системы с комбинированным управлением. Из блок-схемы (см. рис.
12,5, б) видно, что напряжение на входе электронного усилителя ЭУ3
«у I Wo.Cj ^О.Сз,
(12.50)
где цк — сигнал цепи разомкнутого цикла;
«о.сц «о.с2 — сигналы отрицательных обратных связей.
Напряжение цепи разомкнутого цикла
d:
(12.51)
где k.Y_Y—крутизна характеристики тахогенератора;
ky3 — коэффициент усиления электронного усилителя;
&ТР1 — коэффициент трансформации трансформатора (Tpi);
z'pa— передаточное число редуктора Р2;
И коэффициент обратной связи, определяемый положением
движка потенциометра Пь
Напряжения обратных связей представим в виде:
Л —У1 4^-^;
dt
__1 q d^
dt
(12.52)
где 7\ = /?кСк;
р2 — коэффициент обратной связи, определяемый положением движка
потенциометра П2.
Напряжение основного сигнала
Ww---A^rp-A5 (^),
(12.53)
где APs— коэффициент трансформации трансформатора Тр2.
Подставим в уравнение '(12.50) соотношения (12.51) — (12.53).
Тогда получим
. «w^AAAAHAA.AApA Й«АА (12.54)
dt dt
где
(12.55)
Применив к уравнениям (12.54) и (12.55) преобразование Лапласа
и исключив переменную 0i(s), найдем
А (A=A АрА + АА. А А«)Е А+
+ (АА. А АрА — zAt.A А (А — А.с2 (^). (12.56)
Откуда
А А = 'А (5) И А + in' (s) s92 А - 1Аег (А (12.57)
[ i„ А, ГА,Г k^.n 8] \
где WK (s) = iPikiP1kc * + 1
X AAA /
или
^K(s)=AK(AH-l). (12.58)
Здесь kK^iP1krpikc;
i„ k-r га Атп р!
yi Р-2 1,1 V 2 ipl1
К~ АЧА
Пользуясь полученными передаточными функциями, составим
структурную схему электрической следящей системы с комбинирован-
ным управлением (см. рис. 12.15, б).
Передаточную функцию всей разомкнутой системы запишем в виде
АдА (TKs + i)Aft О)
г'р s(T,CBs+1)
Ai ь И) fer.r G'pAApA — АО
1 + A« О)
(12.59)
где
W7 ЙуАмУ
Wy> (s)=-----— ;
J ЭМУ5 1 1
ХАмУ^с5
IM (X)-----------;------- ,
(Tc.s + 1)(^эму5 + 1)
ХХэМуАв
(12.60)
IFlu(s) =
(Tws -h l)(r3MyS + 1)
Передаточную функцию (12.59) можно представить и в следующем
виде:
-И 1
IF Х)=-
1
гР 5 (Ав® + 1)(^ЭМУ5 + !)
^У^ЭМУ Т с®
(Д® l)(?9Mys + 1)
^у^ЭМУ^№^т.г
—~~--------АААтА — АА)
_____(р____________________
(Лив5 Н- 1) (Аму® П
(12.61)
^У^ЭМУ^:»^К
р
Знак минус в выражениях (12.59) и (12.60) указывает на наличие в
следящей системе положительной обратной связи.
В заключение рассмотрим уравнения динамики устройств управле-
ния электрогидравлической следящей системы с насосом переменной
производительности (см. рис. 12.7).
Для сельсинов (внешних), связанных с входным 01 и выходным 02
валами, имеем
ММ (ММ)-
Напряжение на входе в ЭМУ определяется следующей зависимо-
стью:
«ЭМУ (Х = /рДг (/) — йуИо.е, (/) — kyil0.^ (/) — kyu0.ca (t), (12.62)
где ky — коэффициент усиления электронного усилителя;
«о.с,— напряжение в обратной связи, снимаемое с тахогенератора
Tri и корректирующей цепочки ДС;
«о.сг — напряжение, снимаемое с ротора внутреннего сельсина-
приемника;
«о.с3—напряжение обратной связи, снимаемое с тахогенератора
Тг2 и корректирующей цепочки RC.
Дифференциальные уравнения ЭМУ и электродвигателя перепишем
в виде (12.44) и двух первых уравнений систем (12.45).
Уравнение редуктора насоса переменной производительности пред-
ставим как
' МА-—МА (12.63)
zp=
где 0р — угол поворота рычага насоса.
Уравнение ошибки промежуточного сельсинного устройства имеет
вид
АММХ-МА (12.64)
где 0пр — угол поворота ротора промежуточного ссльсинащатчика.
Для рассматриваемой схемы 0Пр=6, тогда
М)=-Л(С
или
«о.С!(0= ^ояв(А (12.65)
1 Р-2
Дифференциальные уравнения тахогенераторов и корректирующих ,
устройств представим в виде:
«т.г 1 ^1.1 _^лв_ • и —Ъ - > М'Т.Га «т. at ^ДВ г dt
«Ч.с, dt + «о.с, (*Q = ^TC1 ^т.г dt
тСг dun n ____3 dt 4“ Wo.cs (^) — (чТс2 dulr dt
(12.66)
Составим дифференциальное уравнение для гидравлического приво-
да (ГН и ГД) (см. рис. 12.7). При этом сделаем следующие допущения:
1) масса рабочей жидкости в цилиндре достаточно мала и ей прене-
брегаем;
2) обороты электродвигателя насоса ДвН не зависят от момента
нагрузки на валу гидравлического двигателя;
3) изменением вязкости рабочей жидкости от температуры прене-
брегаем.
Имея в виду эти допущения, найдем, что рабочая жидкость, посы-
лаемая насосом Q, расходуется на вращение гидравлического двигателя
О'г.д, сжатие жидкости qc и утечки <?ут, т. е.
С = ?г.д+'7с + ‘7ут- (12.67)
Из статических характеристик гидравлического двигателя следует,
что
(12.68)
dt
где Аг.д—постоянная гидравлического двигателя, зависящая от его кон-
структивных параметров.
Расход жидкости, затрачиваемой на сжатие,
при этом
Д|/ = —Д/7,
Е
где Е — модуль объемной упругости;
V — объем рабочей жидкости в цилиндре;
Ар — рабочий перепад давлений.
Тогда
(12.69).
Как известно [9], утечки рабочей жидкости зависят от рабочего пе-
репада давления, т. е.
?уТ = £утД/ц (12.70)
Будем считать, что момент нагрузки на валу гидравлического дви-
гателя определяется суммой динамического момента и момента жидко-
стного трения:
+ (12.71)
dt2 dt
где /п — момент инерции вращающихся частей, приведенный к валу
гидравлического двигателя;
kw — коэффициент жидкостного трения.
Приравнивая механическую работу, совершаемую гидравлическим
двигателем, гидравлической работе, получим
<7г.дД/?=МЯв • (12.72)
at
Кроме того,
Q = V₽(0- (12.73)
Подставив в выражение (12.67) соотношения (12.68) — (12.73),
получим
д д ^вг.д | ЛЛуГ | &аЛут Й0г.,ч (
। ^Звг,,. , Vkw . д /12 74)
£Лг.д dt3 Д/гг„, dt2
Из этого выражения с помощью преобразования Лапласа получим
передаточную функцию гидравлического привода в виде
W й ($) = ..Ws). =----------*--------- (12.75)
nk' 0p(s) s(72S2 + 257s 4-1) '
где
/ nky.cE + Vkw
2 К УЕ/П(^.Д + ^П)
Рис. 12.16. Структурная схема электрогидравлической следящей системы с насосом
переменной производительности
Применив к остальным уравнениям преобразование Лапласа, полу-
чим передаточные функции устройства управления. Пользуясь этими
передаточными функциями, составим структурную схему (рис. 12.16).
По структурной схеме найдем передаточные функции ее отдельных
контуров:
^у^ЭМУ^дв
.v-z , ._ “ (Cm5 + 1) Пэму® + 1)
И/ 1к (•£}—' — -
^У^ЭМУ^.»в^т.1^ C13s
(ТС15 + 1)(Дв®+ 1)(ГЭМУ® + 1)
12.76)
P2
&Г.Д c, 31 (s)
iVi (T^s + 1)
kWn к (s)
lF„i K(s) =
s(W + 2jTs + 1)
.________kk-t.rTcjS2s______
~(rc2s + 1)(Г2«2-r2^s + 1)
zp
(12.77)
(12.78)
(12.79)
Из рис. 12.16 видно, что электрогидравлическая следящая система
пушечной установки состоит из трех внутренних и одного внешнего кон-
туров. Второй внутренний контур и внешний контуры охвачены жесткой
обратной связью.
§ 12.5. АНАЛИЗ УСТОЙЧИВОСТИ СЛЕДЯЩИХ СИСТЕМ МЕТОДОМ
ЛОГАРИФМИЧЕСКИХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК.
ПОКАЗАТЕЛИ КАЧЕСТВА И ТОЧНОСТИ СЛЕДЯЩИХ СИСТЕМ
ПРИ ДЕЙСТВИИ РЕГУЛЯРНЫХ И СЛУЧАЙНЫХ УПРАВЛЯЮЩИХ
И ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЙ
Для анализа устойчивости следящих систем будем пользоваться
логарифмическими частотными характеристиками разомкнутых систем
и критерием устойчивости Найквиста [13, 16]. С помощью этого критерия
можно определить требования, которым должны удовлетворять лога-
рифмические частотные характеристики разомкнутых систем, обеспечи-
вающие их устойчивость в замкнутом состоянии.
На рис. 12.17, а построены логарифмические амплитудная Я] (со)
(кривая /) и фазовая 0i(co) (кривая 4) частотные характеристики по
передаточной функции всей разомкнутой системы Частоту в
точке пересечения оси частот с амплитудной характеристикой будем
именовать частотой среза иС1. Очевидно, что частота среза соответству-
ет пересечению окружности радиусом равным единице с годографом
1Г1 (/и) (кривая 1 на рис. 12.17, б).
На рис. 12.17, б значением ус, показан запас устойчивости системы
по фазе
уС1 = л — 9 (шС1). (12.80)
Здесь же отрезком между точкой (—1; /0). и точкой, соответствующей
частоте сом (полученной при 6 = л), показан запас устойчивости системы
по модулю. Обозначим его через Я(шм)=1—ЯМ1 • Эти запасы устойчиво-
сти системы приведены на логарифмических частотных характеристиках
(см. рис. 12.17, а).
Будем теперь изменять коэффициент усиления системы. С его уве-
личением в системе уменьшаются запасы устойчивости по фазе и моду-
лю и при уС2 =0 имеем ЯМз =0. Система будет находиться на грани ус-
тойчивости (кривые 2 на рис. 12.17, а и б). При еще большем увеличе-
нии коэффициента усиления (кривая 3) запас устойчивости по фазе
становится отрицательным (уСз<0); запас устойчивости по модулю
отсутствует и система становится неустойчивой в замкнутом состоянии,
так как ее годограф ТС3(/со) охватывает точку с координатами ( — 1; /0).
В условно устойчивых следящих системах, которые характеризуют-
ся потерей устойчивости не только при увеличении, но и при уменьше-
нии коэффициента усиления, логарифмические частотные характеристи-
ки имеют вид, показанный на рис. 12.17, в (кривая 1 — амплитудная,
кривая 2 — фазовая).
Система с годографом Wr1 (у<о) имеет положительный запас устой-
чивости по фазе уС1, отрицательный /У (<uMl)= —//Mt и положительный
7/(®м2) = Л/м2 запасы устойчивости по модулю.
3) е н
Рис. 12.17. Логарифмические амплитудные и фазовые частотные характеристики раз-
личных типов следящих систем
При увеличении коэффициента усиления системы годограф Ц72(/и)
(кривая 2 на рис. 12.17, а) охватывает точку с координатами (—1; /0) и
система в замкнутом состоянии становится неустойчивой; ее запас ус-
тойчивости по фазе ус2<0, а запас устойчивости по модулю отсутствует.
С уменьшением коэффициента усиления (кривая 3 на рис. 12.17, г)
годограф И73(/(о) снова охватывает точку (—1; /0) и система становит-
ся неустойчивой в замкнутом состоянии. Ее запас устойчивости по фазе
7с3<0, а запас устойчивости по модулю также отсутствует.
Запасы устойчивости следящей системы по фазе и модулю оказы-
вают большое влияние на качество переходных процессов. При малых
запасах устойчивости значительно увеличивается время переходного
процесса, возрастает максимум перерегулирования и при слежении при-
целом за целью растут колебания угловой скорости движения оружия.
При больших запасах устойчивости снижается степень колебательности
при движении оружия, но время переходного процесса сильно увеличи-
вается. Поэтому практикой были установлены следующие нормы запа-
сов устойчивости по фазе и модулю:
30° < ус <45°;
14 д Б 77 м 16 дБ;
-12дБ<-Ям<-10дБ. .
(12.81)
Приведем первую формулировку критерия устойчивости, основан-
ного на логарифмических частотных характеристиках. Следящая систе-
ма, имеющая передаточную функцию с устойчивыми звеньями, будет
устойчива в замкнутом состоянии, если на частоте среза логарифмиче-
ские фазовые характеристики имеют положительный запас устойчиво-
сти ус и запасы устойчивости по модулю ±ЯМ.
Если в следящей системе имеются неустойчивые звенья вида:
kj . _________ki_____ . _________ki______
Tis-S ’ 7'^2_2jz7’zs + 1 ’ 7<?2 + _ 1
тогда удобнее пользоваться другой формулировкой критерия устой-
чивости. Для этого введем следующее правило знаков. На отрезке
( —оо; —1, ;0) в обычном линейном масштабе, что соответствует
Я(ю)>0, в логарифмическом масштабе, будем считать переход лога-
рифмической фазовой характеристикой оси — л положительным, если
она пересекает ось — л снизу вверх, и отрицательным, если она пересе-
кает ось — л сверху вниз.
Пользуясь этим правилом, дадим вторую формулировку критерия
устойчивости, основанного на логарифмических частотных характери-
стиках. Следящая система, имеющая т неустойчивых звеньев, будет ус-
тойчива в замкнутом состоянии, если разность между положительным
и отрицательным числом переходов фазовой характеристикой оси — л
равна т/2 при тех значениях частот, для которых логарифмическая
амплитудная характеристика положительна.
Применяя вторую формулировку критерия устойчивости, следует
руководствоваться запасами устойчивости по фазе и модулю (12.81).
Логарифмический критерий устойчивости применим и к многокон-
турным следящим системам. Для того чтобы многоконтурная следящая
система с т неустойчивыми звеньями была бы устойчивой в замкнутом
состоянии, необходимо и достаточно иметь разность между числом по-
ложительных и отрицательных переходов прямой —я всеми фазовыми
частотными характеристиками, получаемыми последовательным включе-
нием каждого из контуров обратной связи за исключением одного, рав-
ную т/2 при Я(й)^0 дБ.
Очевидно, что как при т = 0, так и при любом значении т каждый
из контуров должен иметь положительные запасы устойчивости по фазе
и соответствующие запасы устойчивости по модулю. При построении ло-
гарифмических частотных характеристик замкнутых контуров следует
пользоваться номограммой замыкания [13].
Перейдем к рассмотрению конкретных примеров анализа устойчи-
вости следящих систем.
Пример 12.4. Определить запасы устойчивости по фазе и модулю в электрической
следящей системе с электромашинным усилителем, структурная схема который изобра-
жена на рис. 12.15, а.
В передаточную функцию разомкнутой следящей системы подставим тогда
получим
w ( 7<о) == —-------------------.
где
kaJui
(TcJa + 1)(Гэму/а> + 1)(7’МУ1/“’ + 1)
kb
IF/, ( /а) =
+ 1)(7’эму7ш + + Ш^МУаЛ" -J- 1)
Рис. 12.18. Логарифмические амплитудные и фазовые частотные характеристики элект-
рической следящей системы
Будем считать, что параметры следящей системы имеют следующие численные
значения [9]:
Лг* = 200 1/с; Т^у = 0,02 с;
£а = 3,16; 7MVi = 0,0025 с;
Л-= 0,4 с; 7^/=0,01 с,
Тад = 0,12 с;
Построим логарифмические амплитудную и фазовую частотные характеристики,
соответствующие передаточной функции разомкнутого внутреннего контура Wa(ja')-
На рис. 12.18 изображены логарифмическая амплитудная характеристика
|1Га(/ш) | (кривая 2) и фазовая 0о(со) (кривая 8). Логарифмическая амплитудная
характеристика пересекает линию ОдБ на двух частотах: О)с.н = 0,3 и <вс.в = 180 1/с. При
низкой частоте среза <ос.и=0,3 1/с запас устойчивости внутреннего контура по фазе
уо.н = 180°, а при высокой частоте среза <ос.в = Г80 1/с, запас устойчивости ус.в = 5>20.
Полученные запасы устойчивости гарантируют устойчивость внутреннего контура
системы в замкнутом состоянии и при изменении параметров системы в пределах
±20%.
Рис. 12.19. Номограмма замыкания
Для построения логарифмических частотных
1
---—------ необходимо ее представить в виде
1 + Wa (/“)
1
1 __ ^а(Л)
1 + Wa О) j 1
^аО)
характеристик функции
(12.83)
На рис. 12.18 построим зеркальные отображения амплитудной и фазовой ча-
стотных характеристик относительно оси частот, тогда получим (соответственно
кривые 4 и 5):
1
1
Перенесем значения этих кривых на номограмму замыкания (рис. 12.19), тогда
1
получим обратную логарифмическую амплитудно-фазовую характеристику --------------
(кривая 1 на рис. 12.19). Нанесем на эту кривую значения круговых частот св, как па-
раметров. В точках пересечения сплошных кривых номограммы с обратной логарифми-
ческой амплитудно-фазовой характеристикой найдем значения амплитуд
----пт-----Г ’ а в точках пересечения штриховых кривых номограммы — значения фаз
1
Перенесем с номограммы рис. 12.19 полученные значения па рис. 12.18, тогда най-
дем логарифмические амплитудную (кривая 7) и фазовую (кривая 6) частотные ха-
1
рактеристики для функции —— .
1 + (У"1)
Перейдем теперь к построению логарифмических частотных характеристик для
функции IF* (Jo). Они приведены на рис. 12.18: амплитудная (кривая 3), фазовая (кри-
вая 10). Сложив графически соответствующие значения амплитуд и фаз для функций
1
(]<£>) и ,-—------, получим логарифмические амплитудную 1 и фазовую 9
1 +
частотные характеристики всей разомкнутой системы.
Из этих характеристик видно, что при частоте среза <вс = 18 1/с, запас устойчиво-
сти системы по фазе ус = 35°, а запасы устойчивости по модулю — Ям = 22 дБ и +НК =
= оо, что обеспечивает устойчивость системы и хорошие показатели качества.
Пример 12.5. Определить запасы устойчивости многоконтурной электрогидравли-
ческой следящей системы по фазе и модулю с помощью передаточных функций
(12.76) —(12.79).
Будем считать, что параметры следящей системы имеют следующие значения:
ky = 34;
^эму ~ 2,5;
ЛдВ —13,1 рад/В-с;
Z =2,65;
[>2
k = 580 1/с;
гр = 170;
ipifec -- 1700 В/рад;
kz = 55 В/рад;
^ЭМУ — 0,05 с;
7’лв = 0,13 с;
Т = 0,0014 с;
7’С1 =0,15 с;
7\ = 0,3 с;
Е = 5,0;
Лтг = 0,4 В-с/рад;
?! = 0,068;
?2 = 0,78.
Подставим в выражения (1Й.76) — (12.79) s=/(0, тогда:
1)
^1к О) =
^16 О)
(12.84)
1 + ’
где
k\b
IP.,, О) =
U J >(Гда> + 1)(7'эмуло+1)
W, (/<») =-----------------------------------;
Ia U ’ (TCij^> + 1)(Гда> + 1)(ГЭмУ>+ 1)
^Hb (Ja)
^пкОм)= 1 + RzIIa(>) ’
где ^1I6 (J->) = -7^- ITlK (»;
₽2
^TrT’c.Pl^lKO)
(12.85)
3)
где
(12.86)
^1! к (» .
riH b W = Л [(7»2 + ЩТуш + 1) ’
_________kk^T^jia___________
^Illa U") = {T^jij3 + () [(r>)2 + 25Г> _|_ Ц *
Передаточная функция.
^n.^C
Г(>) = -^-1Г1Ик (Kl-
ip
(12.87)
На рис. 12.20 построены логарифмические амплитудные и фазовые частотные ха-
рактеристики по функции W'ia(/<o) (кривые 1 и 2). Как и в примере 12.4 на номограмму
(см. рис. 12.1'9, кривая 2) нанесем значения характеристики
&1а (»'
Сняв с
1
1 + ^1а (Л)
номограмы соответствующие значения, получим амплитудную
и фазовую 0ia (о>) частотные характеристики (см. рис. 12.20, кри-
вые 3 и 4}.
На рис. 12.20, б построены характеристики для функций W7ь (ju>) (кривые 1 и 2)
и результирующие характеристики первого контура |У71к(/со) | (кривая. 3) и
arg[lFiK (/®)] (кривая 4). Для второго контура характеристики | Fun(jw) | и
Рис. 12.20. Логарифмические амплитудные и фазовые частотные характеристики конту-
ра I электрогидравлической следящей системы
1
Соответствующие характеристики для функции П0СТР°ены ыа
рис. 12.21, а (кривые 3 и 4). ..
На рис. 12.21, б построены логарифмические амплитудная 11иць (jw) | (кривая 1)
и фазовая бпьб'ю) (кривая 2) характеристики. Здесь же приведены характеристики
второго контура [ llziiK (/<о) | (кривая 3) и arg [ITiik(/w)J (кривая 4).
Логарифмические частотные характеристики №nia(|a) построены на рис. 12 22, а
(кривые 1 и 2). На номограмму (см. рис. 12.19,) нанесена характеристика
(кривая 4}. С ее помощью на рис. 12.22, а получены характеристики j 1
(кривая 3) и arg Г , * ~ I (кривая 4). Характеристики У1Ш(>) построены
[ 1 + ^П1о O“)J
на рис. 12.22, б (кривые 1 и 2). Здесь же построены характеристики для всего третьего
контура (кривые 3 и 4), т. е. (|й7шк(/ы) argtW'niK(/<£»]).
На рис 12.23 (кривые 1 и 2) построены результирующие логарифмические ампли-
тудная и фазовая частотные характеристики всей разомкнутой системы.
Из рис. 12.23 видно, что запас устойчивости электрогидравлическои следящей си-
стемы по фазе составляет уо = 60° и по модулю Ям = 10 дБ.
Рис. 12.21. Логарифмические амплитудные и фазовые частотные характеристики конту-
ра II электрогидравлическои следящей системы
Рис. 12.22. Логарифмические амплитудные и фазовые частотные характеристики конту-
ра III электрогидравлическои следящей системы
Определение показателей
качества следящих систем
Показатели качества сле-
дящих систем можно получить
построением переходных про-
цессов при отработке наперед
заданного угла рассогласова-
ния ко. В этом случае имеем:
„ (1 при Z > 0 ]
eo=0i(/)= к •
( 0 при t <у О I
(12.87)
Для определения пере-
ходных процессов необходимо
найти значение 02(s) через пе-
редаточную функцию замкну-
той следящей системы Ф(х),
т. е.
Рис. 12.23. Логарифмические амплитудные
и фазовые частотные характеристики элект-
вогидравлической следящей системы
где
ГФ(0
1 + VT(s) '
(12.88)
В рассматриваемом случае:
S S
(12.89)
Пользуясь обратным преобразованием Лапласа, запишем
с-г/оо
у/)=_L- С 02 (5) />0. (12.90)
2л у J.
С—joo
Подставим в выражение (12.90) соотношение (12.89) и полагая s=j(o,
найдем [13]
ОО
92(0=— Ср(ш) s-^-^d«, />0 (12.91)
nJ СО
0
ИЛИ
МД-- Р(0Ц~ — f Q(<o) cosm/ <Ло, Z>0. (12.92)
л J «
0
Здесь Ф(_/о>)= P (<o)-\- jQ (<o),
где P (co) — вещественная частотная характеристика замкнутой системы;.
Q(<b) —мнимая частотная характеристика замкнутой системы.
В случае произвольной формы возмущающего воздействия
0'(0 =0i(Z) [или А4(0 —момента внешней нагрузки], имеем
92(0=------— С S (u>) sin wtdf), t О 0; (12.93)
Л , I
о
62 (/) = —[/?(и) co-s wWu), />0, (12.94)
Л J
о
где
S’ (е>) = Р (ш) Q' (со] Q (ц>) Р' (ш);
(12.95)
Р (и) Р (со) Р' (щ) — Q (и) Q' (ш).
(12.96)
В теории автоматического регулирования В. В. Солодовниковым
предложен графо-аналитический метод определения переходных про-
цессов при помощи трапецеидальных частотных характеристик [13].
Рис. 12.24. Номограмма для построения вещественной частотной характеристи-
ки замкнутой следящей системы
В этом случае для построения вещественных У3 (со) или мнимых Q(co)
характеристик используются специальные номограммы. После характе-
ристики /’(со), Q(w) или обобщенные частотные характеристики /?(со),
S(co) разбиваются на трапеции.
Интеграл (12.91) вычисляется с помощью специальных таблиц
hx -функций [13]. Для приведения интеграла (12.93) к форме интеграла
(12.91) необходимо его представить в виде
= f [®$ («)]-^-^ />0. (12.97)
Л,] со
О
Пример 12.6. Определить передаточную функцию замкнутой электрической сле-
дящей системы Ф(з), если известна ее передаточная функция в разомкнутом состоянии
Подставим выражение (12.49) в соотношение (12.88), тогда
Ф(5) =
kt>(Tcs 4- 1)
5(7дв5 ! 1) [(7cs + 1) (^эму5 ' В (^му25 + В + + kt>(Tcs 4- 1)
Рис. 12.25. Вещественная частотная характеристика и переходный процесс в следящей
системе при отработке наперед заданного угла рассогласования е0=Г
(12.99)
привести
(12.100)
Определим из характеристического уравнения выражения (12.881 корни, тогда
й (7’сз + 1)
Фр) =-----------------------------------------------г
(7-1А’+ 1)(7"2s+ 1)(Г3«+ 1) (7^s2 +2^45+ 1)
Пренебрегая малыми постоянными времени, выражение (12.99) можно
к виду
' Ф(8) = ----------.
(Г18 + 1)(г2«2 + 26Г48 + 1)
Пример 12.7. Построить переходный процесс в электрической следящей системе
(для условий примера 12.4) при отработке наперед заданного угла рассогласования
«0=1°.
Значения амплитуд и фаз разомкнутой системы | | и 0(<в) нанесем на но-
мограмму (рис. 12.24). Разобьем кривую Р(и) (рис. 12.25, й) на четыре трапеции и с
помощью таблиц -функций построим составляющие переходного процесса. Склады-
вая ординаты кривых 02i, 022, 023 и 024, получим искомый переходный процесс 02рег
(см. рис. 12.25, б).
Из рис. 12.25, б видно, что время переходного процесса /р = 0,65 с. Максимум
перерегулирования omai составляет 30%.
Располагая значениями tp при отработке малых углов рассогласо-
вания (80=Г), можно определять время переброса оружия на углы рас-
согласования, близкие к 180°. Для этого можно пользоваться следую-
щим приближенным выражением:
^ = (2,5-Э)/р, (12.101)
где коэффициенты 2,54-3 можно брать для тех силовых приводов сле-
дящих систем, у которых мощность двигателя Ps%5 кВт и время выхода
двигателя на номинальное число оборотов ОДс^иМ 0,15 с.
Определение точности следящих систем при действии
регулярных воздействий
Одной из наиболее важных характеристик следящей системы яв-
ляется ее динамическая точность, или ошибка в системе при подаче на
нее управляющих и возмущающих воздействий. Точность следящей
системы определяется в установившемся режиме, когда
£=е(/)|г.>со. (.12.102)
Это условие оказывает вполне определенное влияние на виды воз-
действий. Регулярными воздействиями считаются воздействия, медлен-
но меняющиеся во времени по сравнению с характеристиками переход-
ного процесса следящей системы. В этом случае точность следящей
системы определяется коэффициентами ошибок, полученными с по-
функции замкнутой системы относительно ошибки
мощью передаточной
Фг (s =—— , т. е.
Ms)
Е (s) = ФЕ (s) Ms), (12.103)
где
Разлагая выражение (12.100) в ряд Маклорена при малых s, по-
лучим
Е,,Ю (s) , C2S2B1(S) | . . . , ... 2
1! 1 2! 1 3! ' 1 (г— 1)! Г ’ 7
Постоянные Сь С2, С3, С,-., ряда (12.104) называются коэффи-
циентами ошибок следящей системы.
С помощью обратного преобразования Лапласа ряд (12.104) можно
переписать в виде
С1 , С2 ^0, д£з_Л_|_________| Сг_1 dr~lt}, ,
S' 1! dt "I 2! rff2 3! dfi ' ' (г— 1)! af-t '
В следящих системах при медленно меняющихся функциях 0i(()
можно ограничиваться несколькими членами ряда (12.105), тогда
__ 1 dfii । 1 । 1 rf36i
Dm dt De dt2 1 a(3 ’
(12.106)
для системы с астатизмом второго порядка
1 rf20, , 1
е(Л =---------------------- ,
£> Щ2 1 D. dt'i
£ £
где £)е = —; Г). =— .
С2 С2
Значения коэффициентов добротности следящей системы по скоро-
сти Da>, ускорению £>е и производной от ускорения Di можно вычис-
лять с помощью логарифмических амплитудных характеристик разомк-
нутых систем.
Для определения коэффициента добротности следящей системы с
астатизмом первого порядка необходимо найти частоту юк, соответст-
вующую точке пересечения продолжения низкочастотной логарифмиче-
ской амплитудой характеристики с осью частот (см. рис. 12.17, а):
U)it = nffl = co11020. (12.108)
При <0!= 1 имеем D==L и
L
Ои= 10 20 = /С, (12.109)
(12.107)
где К — коэффициент усиления всей следящей системы.
Если считать, что передаточная функция разомкнутой системы име-
ет вид
W (s) =_____+ ____________,
5(7)8 + IXT-sS + 1)
то коэффициент ошибки
С ..-7 +7-3-7-2____1_
2 К №
или
С2= — f— + ------------Ц- —
К \ щ Ш2 / №
(12.110)
(12.111)
(12.112)
Для исключения из полученного выражения со2 запишем
(12.113)
“2
ИЛИ
_ д_
-^-= 10 20 . (12.114)
"с
Соотношение частот имеет следующий вид:
Lr—L._
—2-=10 40 . (12.115)
Перемножив выражение (12.114) и (12.115), получим
ис |0 40
“1
откуда
/jM2=10 (12.116)
\ «2 /
Подставим в выражение (12.116) соотношение (12.114), тогда
_ Li
piV=22 io 20. (12.117)
\ ис / “с
Из выражения (12.117)
(12.118)
к>с \ шс /
ИЛИ
(12.119)
Подставим соотношение (12.119) в формулу (12.112), тогда по-
лучим
С2= —
D
со
I
1 1
со3
(12.120)
ИЛИ
А=—
1
“1
2ДШ___________
. \ 1 1
“3
(12.121)
При больших значениях
блаженное выражение
юз и D о, из формулы (12.121)
найдем при-
'е
(12.122)
Соответствующее этому случаю точное значение D е приведено в
табл. 12.3.
Продолжим низкочастотную часть логарифмической амплитудной
характеристики с наклоном —40 дБ/дек до пересечения с осью частот
(рис. 12.17, а). Обозначим эту частоту как со*. Тогда можно написать
<0
10"
со
(12.123)
Возведем полученное выражение в квадрат:
(12.124)
Имея в виду соотношение (12.108), из выражения (12.124) найдем
(<o*)2=<o1DC0. (12.125)
Таблица 12.?
Передаточная функция разомкнутой системы De , 1/с» £)> , 1/c3 £
W(s} K(T2s+l) 2Om 6Ц.,
" s(T}s+ l)(T3s + l) *(^ + D2 1 Л “c \ 1 1 1 1 Г) 1 b Г) COj \ ] Ci»3 ^(X) 1 _ 2 Г 1 + 1 .... °‘e К (O]W3 ^CO \ U'q W 3 / 1 / o\, \2 1 / Ис \ / 1 1 \ 1 Л2 \ <0i J ^uj \ оз, 1 \ а, ш3 / n2
s^ + l^s+l) K(T2s+l) — fi-1/+ 1 - —!— ®1 \ V / <*>3 Т>ш 1 2 _2_<А 1 \ 2 1/ “c f2 1A + (д2 W1C03 Dm \ <»1 ш3/ 0>1 V \ Ш] w3 / 4шс 4 /" ыс 1 + <o2/jio + <0!^ |/ Рш + П2
() ' s(T,s+ l)(r3S+ 1)2 , К (TV + 1)2 1 / <дс \ 2 1 <*>1 \ w3 2Day 1 2 2/1 2 \ 2 шс + — + — _ 2- — ш2 <0,(03 £)<о \ «! «3 / Ы! / 1 2 \ слс 1 “3/ D«^
W (S) — s(7V+ 1)2(7> +1)2 2 / , 2 1 1 ~ 1/ D + ~ D «1 \ r u<jy / w3 1 1 4 / 1 1 \ <ОС 4 + + _ 4 — + — 1 4 + _ х (о2 со2 “1“3 \ “1 “з / ы2Ощ Т)ш Х \/ '^'ЛТ,, 1 7j2 ( ®i + <°1<йз )
Сравнивая выражения (12.125) и (12.122), определим
(О2
2
(12.126)
Таким образом, с помощью логарифмической амплитудной характери-
стики разомкнутой следящей системы нетрудно найти приближенные
значения = и Д= = 2(<о*)2 [2].
Добротность рассматриваемой следящей системы Di определяется
через коэффициент ошибки С3. Соответствующая формула также приве-
дена в табл. 12.3 [12].
Для других типов передаточных функций разомкнутых следящих
систем с астатизмом первого порядка в табл. 12.3 приведены значения
/Л и D-.
Пример 12.8. Определить максимальную ошибку в следящей системе (см. пример
12.4), если
Г 1 Г 1
—- = 20 град е и —— = 20 град/с2.
L “Г Jmax L “Г Jmax
Из формулы (12.103) найдем
1 Г 610] 1 1 Г 01201 I
е=------- ---Ч + ------------ --Ч
L dt Jmax De L di2 Jmax
(12.127)
Для определения значения D m продолжим низкочастотную часть амплитудной
характеристики с наклоном — 20 дБ/дек до пересечения с осью частот со (см.
рис. 12.18). Тогда получим шк=Д щ=200 1/с.
Продолжив низкочастотную часть амплитудной характеристики с наклоном
—40 дБ/дек до оси частот, найдем (о*=8,2 1/с.
По формуле (12.126) определим
£>е = 2 (<л*)2 = 2 (8,2)2 = 134,5 1/с2.
Подставив соответствующие значения в формулу (12.107), получим максималь-
ную ошибку слежения
Следящие системы с комбинированным управлением позволяют по-
высить порядок астатизма, а следовательно, и уменьшить ошибку вос-
произведения управляющего воздействия. Точность следящей системы
также повышается и путем компенсации влияния возмущения [6].
Рассмотрим, каким образом повышается порядок астатизма по уп-
равляющему воздействию в электрической следящей системе с комби-
нированным управлением. Если в следящей системе надлежащим выбо-
ром параметров Pi и р2 удается в выражении (12.61) получить
, , МэМуМт.г г • о \ л /in 1по\
1 (^Рг^У2^тР1^1 ^р?а) — (12.128)
zp
то передаточная функция (12.61) примет вид
W (s) =-----—--------------------- , (12.129)
s2(T\s +l)(7-2s + l)(r3s + l)
где 71, Т2, Т3 — постоянные времени, полученные из решения характе-
ристического уравнения разомкнутой системы и связанные с постоян-
ными времени устройств управления следящих систем Тс, Рэму, 7ДВ, kv,
^ЭМУ-
Повышение порядка астатизма на единицу по сравнению с выра-
жением (12.49) указывает на получение второго порядка астатизма.
Точность работы такой следящей системы определяется по формуле
(12.107). Отсутствие в ней члена с добротностью по скорости указывает
па повышение ее точности.
Определение точности следящих систем при действии
случайных воздействий
Если управляющие и возмущающие воздействия представляют со-
бой случайные функции и задаются вероятностными характеристиками,
то точность следящей системы определяется не мгновенными значения-
ми ошибки, а ее средней квадратической величиной
’•=У
(12.128)
При этом считается, что сигналы 0фф или M(t) являются случайными
воздействиями.
Случайные функции, для которых независимой переменной является
время t, называются стохастическими процессами. К таким процессам
можно отнести ошибки измерения угловых координат и дальности до
цели радиолокационной станцией, ошибки прицеливания оптическим
прицелом по воздушной цели и т. п.
В качестве основных характеристик случайных процессов 0(ф
обычно используют: корреляционную функцию К6(т) и спектральную
плотность Зе (<») (11, 12]. С помощью этих характеристик можно опре-
делить значение средней квадратической ошибки в следящей системе,
если на нее действуют два раздельно приложенные случайные воздей-
ствия: управляющее m(t) и возмущающее п(ф. В этом случае выход-
ной сигнал 02(() по принципу суперпозиции можно представить в виде
интегрального уравнения
O2(Z)=J m(/-X)yfe(X)fl'X + J/z(/-X)Z(X)fl'X, (12.129)
о 6
где й(Х) и /(X)— соответствующие выбранным сигналам импульсные
переходные функции.
Корреляционная функция выходного сигнала
т
K02(T) = lim 2- f е2(/ + т)02(/)^. (12.130)
7'->оо 21 J
— Т
Подставляя выражение (12.129) в выражение (12.130), получим
/CB2 (r)=lim —— (* dt С m(/4-t —П) ^(Tj)tZ'n С m(t — X) k (X) d^-{-
Т-юа 2Т J J J
— то о
ф- j" dt j* п (t ф- т — Л) (Л) (t — X)/ (X) с/Х-[-
-т о о
ф- dt рт(/ф-т —т])й(Ц)«!г| ^n(t — Х)/(Х)а1Хф-
—т 6 о
J dt J m (t — X) k (X) z/X /z (/-|—т — Ц) Z (Л) zZЛ .
— Т 0 0
(12.131)
Откуда
Ke2(t)--= J л р.[ЛД(/+x- (nWW)+/<„(* + >•-WWH
+^(4M/(W)+M4Mwm (12.132)
где Kmn и Knm — взаимные корреляционные функции.
Спектральную плотность выходного сигнала можно найти, если вос-
пользоваться преобразованием Фурье от корреляционной функции [12].
Тогда выражение (12.132) имеет следующий вид:
оо со оо
^,(<«1=) J J [^(т + Х-пМ(Х)Ше-^ +
— ОО —00 —оо
+ кп (т + х - П) I (X) I (л) е-/- 4- Ктп (т + X - П) / (X) k (п) е-/- ф-
+ (т ф- X — л) k (X) I (ц) e-i^dklndr. (12.133)
Умножая обе части выражения (12.133) на е-7'шт и интегрируя по т
от —оо до + оо, получим
5в2 (ш)=| Ф (уш) (и) +1Y (у<о) |25л (ш) ф-
+ Ф* (у<0) Y (уо>) Smn («) ф- Ф (» X* (уШ) Snm И, (12.134)
где У(/а)=-—V -----передаточная функция относительно возму-
1 + ТС(»
щения;
Ф* (До) и У® (уш)— сопряженные передаточные функции.
В тех случаях, когда управляющее и возмущающее воздействия вза-
имно независимы, выражение (12.134) можно записать в виде
5вз (ш)=| Ф (уш) (ш) +1Y (уш) |з$л (св). (12.135)
Для определения спектральной плотности ошибки формулу (12.135)
представим в виде
5Д<о)=|ФЕ(уш)|25от(ш) + |Г(/ш)р5л(ш). (12.136)
Среднее квадратическое значение ошибки в следящей системе будет
□£=1/ \ S6(<o)d<o. (12.137)
I/ 2л .1
Подставив в выражение (12.137) формулу (12.136), получим
^ = 1/ 4“ f [1фИУ®)|25т(со) + |Г(у<о)^„(‘й)]й1». (12.138)
И/ J
f —00
При совпадении точек приложения воздействий m(t) и n(t) имеем
Y (у®)== Ф(у<о).
Тогда формула (12.138) примет вид
00
^ = 1/ 4- f П-----------i----Г^И+1 -(>) Г5л(ш)Ъш. (12.139)
I/ 2л J LI 1 + I 1 + 1Г(» | J
F —со
Если на следящую систему действует только один сигнал помехи,
то из выражения (12.138) получим
1 + Г(»
(12.140)
Пример 12.9. Определить ошибку в электрогидравлической следящей системе,
если па ее вход действует помеха n(t) в виде «белого шума» с уровнем спектральной
плотности S„'(fn) =0,6-10~6 рад2-с.
Рис. 12.26. Амплитудная характери-
стика замкнутой электрогидравличе-
ской следящей системы
Перенесем значения амплитудной и
фазовой частотных характеристик разомкну-
той следящей системы с рис. 12.23 на номо-
грамму замыкания (рис. 12.19, кривая 5),
снимем с нее значения амплитуд замкнутой
системы и построим их на рис. 12.26 (кри-
вая 1). Возведем полученные значения в
квадрат и умножим значения ординат на
5и(и) (кривая 2), Для определения инте-
грала в формуле (12.140) вычислим пло-
щадь, ограниченную кривой 2 и осью частот.
В рассматриваемом случае она равна
160 рад2. Далее удвоим значение этой пло-
щади и умножим ее на 1/2л. После извле-
чения квадратного корня найдем о'е=7,2.
§ 12.6. СИНТЕЗ СЛЕДЯЩИХ СИСТЕМ ПРИ РЕГУЛЯРНЫХ
И СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
Синтез следящих систем является основной стадией проектирова-
ния, заключающейся в таком выборе структурной схемы системы и ее
параметров, при которых обеспечиваются требуемые показатели качест-
ва переходного процесса и точности слежения оружием за целью.
В следящую систему обычно входят два типа устройств управления.
К первому типу относятся: силовой двигатель, редуктор, усилитель мощ-
ности и измерительные устройства, которые практически невозможно
изменять в процессе синтеза. Эти устройства обычно образуют так назы-
ваемую неизменяемую часть следящей системы. Ко второму типу отно-
сятся корректирующее устройство и электронный усилитель, т. е. те уст-
ройства,, которые легко можно изменять в процессе синтеза. Поэтому
синтез следящей системы обычно сводится к выбору типа и параметров
корректирующих устройств при заданной неизменяемой части системы.
В следящих системах могут применяться три вида корректирующих
устройств: последовательное, параллельное и последовательно-парал-
лельное. Последовательные корректирующие устройства повышают час-
тоты среза скорректированных следящих систем и применяются лишь в
системах, в которых практически отсутствуют сигналы шумов и помех.
Большая частота среза в системах с последовательной коррекцией
предъявляет высокие требования к динамическим характеристикам дви-
гателей.
Следует также отметить, что последовательные корректирующие
устройства достаточно чувствительны к изменениям параметров, что
требует применения высокостабильных конденсаторов и резисторов.
Основным достоинством последовательных корректирующих устройств
является их простота.
Параллельные корректирующие устройства снижают частоту среза
и делают следящую систему малочувствительной к помехам и шумам.
Значительными достоинствами параллельных корректирующих уст-
ройств является уменьшение влияния нестабильностей и нелинейностей
характеристик устройств управления, охваченных гибкой обратной
связью.
Совместным включением последовательных и параллельных коррек-
тирующих устройств удается избежать недостатков, присущих каждому
из них в отдельности, и получить более качественные следящие системы.
Синтез следящих систем при регулярных воздействиях
Первым этапом синтеза является построение желаемой логарифми-
ческой амплитудной частотной характеристики по требованиям точности
и качества процессов слежения и отработки наперед заданного угла рас-
согласования.
Рис. 12.27. Построение желаемой логарифмической амплитудной частотной
характеристики для следящей системы
Низкочастотная часть желаемой характеристики строится по требо-
ваниям точности следящей системы (добротностям по скорости и уско-
оению).
Приближенный способ построения желаемой логарифмической ам-
плитудной частотной характеристики заключается в следующем. Отло-
жим на оси частот значение Ью = ык и проведем первую прямую с на-
клоном — 20 дБ/дек (рис. 12.27). Далее из формулы (12.126) найдем,
что (o*==l/ — и через точку и* проведем вторую прямую с наклоном
V 2
— 40 дБ/дек. Точка пересечения этих прямых соответствует значе-
нию ан.
Диапазон низкочастотной части амплитудной характеристики уста-
навливается в пределах 0<и<ин и определяется точностью воспроизве-
дения медленно изменяющихся воздействий по номограмме Р(и).
Если принять за ошибку нахождения вещественной частотной харак-
теристики замкнутой системы Л = 0,05, то
| и Z = 201g| U7(»|=201gy = 26 дБ.
Таким образом, отложив на полулогарифмической бумаге величину
£ = 26 дБ можно найти а>и (см. рис. 12.27).
Среднечастотная часть амплитудной характеристики (шн<о)<соср)
определяет показатели качества следящей системы. В нее входит часто-
та среза системы и запасы устойчивости по модулю ±НМ.
Частота среза следящей системы определяется с помощью номо-
граммы В. В. Солодовникова (рис. 12.28).
По заданному отах определяется Р111ах и далее гпо кривой t
сос
находится значение k. После чего нетрудно определить
kn
i9.
со
Рис. 12.28. Номограмма В. В. Солодов-
никова
(12.141)
Через точку &)с проведем прямую с наклоном —20 дБ/дек, так как в
этом случае гарантируются не только заданные запасы устойчивости по
фазе, но и простейшая реализа-
дия корректирующего устрой-
ства.
Частота соСр должна лежать
левее значения частоты юм„ соот-
ветствующей запасу устойчиво-
сти по модулю — Ям-
Высокочастотная часть ам-
плитудной характеристики (соСр<
<со<оо) должна иметь наклоны,,
равные соответствующим накло-
нам амплитудной характеристики
неизменяемой части |lFH(/w)|. В
этом случае обеспечивается наи-
большая простота реализации
синтезируемых корректирующих
устройств. На этом построение
желаемой логарифмической ам-
плитудной характеристики сле-
дящей системы заканчивается.
Синтез последовательных
и параллельных корректирующих устройств
Рассмотрим следящую систему, состоящую из неизменяемой части
с передаточной функцией IFh(s) и отыскиваемых последовательного кор-
ректирующего устройства с передаточной функцией ITK(s) и согласую-
щего усилителя с передаточным коэффициентом ky (рис. 12.29).
Рис. 12.30. Структурная схе-
ма следящей системы с па-
раллельным корректирую-
щим устройством
Рис. 12.29. Структурная схема следящей си-
стемы с последовательным корректирующим
устройством
По требуемым точности и качестве следящей системы определим
желаемую характеристику | WJH (/ю) |.
Будем считать, что согласующий усилитель является безынерцион-
ным и имеет коэффициент усиления ky, тогда на основании рис. 12.29
можно записать
201g |1Гж(уЩ)| = 201ё1Гн(/«) + 201&и7к(/Ш) + 201ёАу, (12.142)
откуда
20 1g (» | = 20 1g | Wx (>) I - 20 1g WB (>) - 201g ky. (12.143)
Из выражения (12.143) следует, что для нахождения логарифмиче-
ской амплитудной частотной характеристики корректирующего устрой-
ства необходимо поднять амплитудную характеристику неизменяемой
части на уровень желаемой, а затем вычесть из характеристики
20 1g | (/со) | характеристику 201g 1lFn (/со) |.
По точкам излома полученной амплитудной характеристики
201g | ТГц (/со)| определяется передаточная функция последовательного
корректирующего устройства. Коэффициент согласующего усилителя
находится по формуле
ky=— , (12.144)
где К — передаточный коэффициент желаемой следящей системы.
Для синтеза параллельного корректирующего устройства рассмот-
рим структурную схему, изображенную на рис. 12.30. К этой схеме при-
водится все многообразие следящих систем с параллельными корректи-
рующими устройствами. С помощью рис. 12.30 можно получить
(» =-------. (12.145)
В существенном интервале частот roi<(o<con, где соблюдается ус-
ловие
(12.146)
справедливо соотношение
20 1g | ИД (>) | = 201g
1
(12.147)
Используя выражение (12.147), можно определить искомую пере-
даточную функцию параллельного корректирующего устройства.
Перейдем теперь к определению существенного интервала частот.
Из номограммы замыкания (см. рис. 12.19) видно, что с ошибкой, не
превышающей ±3 дБ, обеспечивается удовлетворение условия (12.146),
если выполняются следующие неравенства:
1) при 20 1g [ 1ГНГКI < 8 дБ
90° < 9„.к < 135°;
2) при 11 дБ > 201g ЦОД | > 8 дБ
-135=<0Н.К<135°;
3) при 20 lg j U7HIFK | > 11 дБ фаза может быть произвольной.
Пример 12.10. Определить тип и параметры параллельного корректирующего
устройства следящей системы, обладающей показателями точности и качества: D =
=200 1/с; Вг = 128 1/с2.
Максимум перерегулирования omaxs£30%; время фщО.б с.
Передаточная функция
s (0,005s + 1) (0,002s + 1) (0,001s 4-1) '
Построим желаемую логарифмическую амплитудную__характеристику системы с
/
использованием рис. 12.31: отложим <вк =О ши <о* = т / —— и проведем прямые с
наклоном —20 дБ/дек и —40 дБ/дек. По «шах = 30% и номограмме (см. рис. 12.28)
определим значение й = 4,7. Далее по формуле (12.141) найдем
4,7-3,14
0,6
— 24,5 1/с.
Через йс проведем прямую с наклоном —20 дБ/дек до пересечения с низкочастот-
ной частью амплитудной характеристики. Проведем через точку со = 1 неизменяемую
часть характеристики |lFH(jco)|. Высокочастотную часть желаемой амплитудной ха-
рактеристики построим с теми же наклонами, что и у характеристики неизменяемой
части. В результате этого может быть получена характеристика 20 lg| W,It (/со) |.
Определим существенный интервал частот сое—соц. Он может быть найден в диа-
пазоне усилений ±26 дБ. Затем с помощью формулы (12.47) построим характеристику
IW'kOci))! в существенном интервале частот (на рис. .12.30) проведена через
Рис. 12.31. Выбор параллельного корректирующего устройства следящей системы ме-
тодом синтеза
точку й = 1). Распространим эту характеристику на весь рабочий диапазон
частот.
Сложим характеристики 20 1 g| ТГИ| и 201g|FK|, тогда получим результирующую
характеристику внутреннего контура 20 lg| |. По точкам излома этой характери-
стики с помощью формулы
вн.к(“) = — arctg 0,333 а) — arctg 0,002со — arctg 0,001<о
построим фазовую характеристику.
Зададимся запасом устойчивости внутреннего контура по фазе ук=45°. Тогда
амплитудную характеристику следует поднять на knkK = 6 дБ.
По номограмме (см. рис.
сем значения амплитуд 20 1g
их с характеристиками 20 1g | ТТф
Как видно из построения,
12.19) замкнем внутренний контур (кривая 6). Перене-
—;--- на рис. 12.31 и соответственно сложим
1 + " н^к I
. Тогда получим кривую 20 1g| И7].
полученные характеристики близки к выбранным нами
ранее желаемым характеристикам и незначительно отличаются лишь в области низких
и высоких частот, что показывает на правильность решения задачи синтеза параллель-
ного корректирующего устройства.
Передаточную функцию корректирующего устройства получим по точкам излома
амплитудной характеристики 201g|TFK| в виде
s2(T2s + 1)
Tys + 1
(12.1481
Реализовать данное корректирующее устройство можно с помощью тахогенерато-
ра, двух /?С-цепочек и согласующего усилителя У1 (рис. 12.3’2).
Передаточная функция такого корректирующего устройства будет
ЛггйуХ7'1 № (T^s + 1)
(rlS+1)(Г38+1) ’
(12.149)
где feTr— крутизна характеристики тахогенератора. Постоянные времени Г1=/?1С1;
Т,=Я3С1;
J____т . х
Ъ Т*'1
' Rs
Т3 =
1______
/?2 ’
Параметры Rs и С3 выбираются такими, чтобы влиянием Т$ на [И7К| можно
было бы пренебречь. В этом случае выражения (12.147) и (12.148) являются одинако-
выми. Коэффициент усиления fey и ka согласующих усилителей выбирается из условий
йк=АтгйуЛ.Г1== 1 nfeHfec = 200.
Откуда
1 200
kv =--------; kr — —.
у kTIlT i k-,,
В рассматриваемом примере имеем fey=600; fee =4. Ila этом синтез параллельного
корректирующего устройства заканчивается.
Рис. 12.32. Принципиальная схема
параллельного корректирующего
устройства
Синтез следящих систем при случайных
и регулярных воздействиях
Синтез следящей системы при случайных и регулярных воздейст-
виях обычно сводится к определению импульсной переходной функции
системы, обеспечивающей минимальную ошибку от действия случайных
помех при заданных точности воспроизведения полезного сигнала и вре-
мени протекания переходного процесса [12]. При регулярном полезном
сигнале 01 (/) и сигнале помехи «(f) выражение (12.129) можно записать
в виде
е2 (/) = J [ е1 О' - *) + «] k (X) </Х. (12.150)
о
Ошибка следящей системы состоит из регулярной ед и случайной
e?J составляющих:
f 0!^-Х)А(Х)4/Х; (12.151)
о
е„(0 = J /z(^-X)/fe(X)t/X. (12.152)
о
Далее воспользуемся доказательством, приведенным в книге [5].
Разложим функцию 0i(( —X) в ряд. Тогда, получим
едг-х^едо-х + ----+(-i)r^&(ir)(*). (12.153)
Подставим выражение (12.153) в формулу (12.151), тогда
•д m=«> от - f Ч w t «л + f x k w d>. - f ь m л -i-....
•7 ♦> 64 v * Ht'
0 0 0
(12.154)
Сравнив полученное выражение с формулой (12.105), найдем
Се= С XA(X)rfX;
о
С2= р2£(Х)оО.; (12.155)
Сг_!=(-\у [ Х'-Ц-(Х)Л
о
Ошибку от действия помехи запишем через дисперсию 1 в виде
- Д
e„ = litn— С С \n.{t —Х)£(Х)]2а1Х. (12.156)
С *°° J J
р -<Р 0
Введем в полученное выражение новую переменную т], тогда выра-
жение (12.156) примет вид
1 pp
- I n(t—X)n{t—t\}di
J
~'p
„ rp . / 1
e« = \ k(X)dX 1 £(Л)сМ litn-^—
о 0
или через корреляционные функции
|\(X)rfX ^K„(X-n)A!(X)dX.
о о
Перейдя к старым переменным, получим
'₽ 'р
e^ = J k(t)dt J Kn (t — X) k (X) dX.
о о
(12.157)
(12.158)
(12.159)
Теперь можно найти импульсную переходную функцию k(i), обра-
щающую в минимум е„2 и удовлетворяющую условиям (12.155). Условие
минимума для формулы (12.159) находится с помощью вариационного
исчисления и выражения
J[k (/)]=$« — 2У1Р!-------ул, (12.160)
где
Р-1 — С-!,' —
1 Дисперсией случайной величины называется среднее значение квадрата отклоне-
ния случайной величины от среднего значения.
Среднее квадратическое значение ошибки связано с дисперсией соотношением
’ел = •
Подставим в выражение (12.160) формулу (12.159) и получим [11]
zp - %
7[^(/)Н-Дй(/)]= f Kn(t-X) [k (X) + дА (X)]rfX-
o о
zp zp
— 2Y1 f /[&(/) + Lk[t)]dt—---2y„ J tn [£(/)+ ДА(/)] dt=
о о
zp zp *p Zl>
= /(£)-|-2д f k(t)dt^ + A2 j k(t)dt § /Сл(/~л)^(Х)йГХ —
6o oo
zp zp
— 2угД J tk (/) dt — • • — 2упД j* tnk(f}dt, (12.161)
о 6
где k(t) придана вариация Ak(t). Параметр А не зависит от t и является
произвольным числом.
Необходимым условием минимума функционала (12.160) является
— [7(А + ДА)] = 0. (12.162)
Учитывая соотношение (12.162), из уравнения (12.161) получим
р(/)
6
f Kn(t — Х)А(Х)«(Х — ypf- у J1
о
ynt" dt^=o (12.163)
или
%
J КЛ-Щ(^=у^у^+ +ynt«. (12.164)
о
Будем считать, что сигнал помехи является «белым шумом» с кор-
реляционной функцией
/Сл(Х)=с28(Х), (12.165)
где с2 —• уровень «белого шума»;
б(Х) —дельта-функция.
Имея это в виду и пользуясь уравнением свертки для дельта-функ-
ции выражение (12.164) можно записать в виде
cW) = Yi^+y74--------HyA (12.166)
Зная закон изменения управляющего воздействия 0i (t) , из уравне-
ния (12.166) можно определить импульсную переходную функцию k(t),
а затем и передаточную функцию Ф(х) синтезируемой оптимальной сле-
дящей системы.
Примем, что 0i(^) =Qo+Qi^+Q2^2; Цо=1; pi = Ci; р,2=— С2, а следя-
щая система имеет астатизм первого порядка. Тогда получим
А(/)=д0+А1н-л2/2.
Из формул (12.155) найдем:
‘Р 'р *р
J А(/)д^=1; tk(t)dt = C1; j" t2k (t)dt= — C2;
обо
(12.167)
(1.2.168)
1 Выражение для свертки дельта-функции имеет вид
ОО
/(/)= J 5(Х)5(‘-Х)Л.
— со
рд0+ААА/2И=1;
о
'₽
У /(Д0 + Д1/ + Л2^)^ = С1;
6
*р
J (Аа + А^ + А^^=~С2.
(12.169)
Откуда
Дг/Р- 1 z р _
1 2 1 3
Ар ! Л./3 ЛНр (
2 1 3 4
А3р , Д1^р .
(12.170)
Решая эту систему уравнений, найдем
. 9 36 г 30 .
u 1 4 "
д JA+JAc1+—С
К ?
р р р
. _ 30 180 с 180 г ’ л G1 " с ^2- /3 t4 ГР Р
(12.171)
Подставляя эти значения в формулу (12.167), получим импульсную
переходную функцию синтезируемой следящей системы. Будем ее имено-
вать AOpt(0. так как она обеспечивает минимальную ошибку от действия
случайных помех при заданной точности воспроизведения полезного сиг-
нала и заданном времени протекания переходного процесса.
Оптимальную передаточную функцию получим после подстановки
feOEt(0 в следующее выражение:
$oPt(s) = f Ю е st?dt— е
б о
(12.172)
или
S S
+ _А ( А _ А е-^р —е“5'р - /pe-sZp У (12.173)
S \ S2 S2 S /
Подставляя в полученное выражение s=‘ia, найдем
(12.174)
лл / ч / Л] । \ । / Лр < -^i^p 2Л2 I \
QW=-Hi—-^г sin4+\ —Н-----------Н—” х
\ со* се* / Xе0 со oj° со /
Xcos<—(12.175)
со ci>3
Передаточную 'функцию разомкнутой системы выразим через пере-
даточную функцию замкнутой системы, т. е.
Г(>) = -Ф(>) . (12.176)
1 —Ф(» v
Подставляя в формулу (12.176) соотношения
Ф(/со) = Р(со) 4-yQ(<o);
W (До) = //(«) еУ9(ш)
и имея в виду выражения (12.174) и (12.175), получим
20 1g//(«)= 101g
{[1 - Р (X] Р О) — Q2 (Д)£ + ОДЛ
{[l_p(ffi)]2+Q2(<u)}2
9 (co) = arcig
_______QGH________
[l-P(o>)]P(u)-Q2(w) •
(12.177)
(12.178)
С помощью формул (12.177) и (12.178) можно вычислить и постро-
ить на полулогарифмической бумаге желаемые (оптимальные по выб-
ранному критерию) амплитудную и фазовую частотные характеристики
разомкнутой следящей системы. Далее по ранее изложенной методике
можно синтезировать потребные корректирующие устройства.
§ 12.7. ВЛИЯНИЕ ЛЮФТОВ В МЕХАНИЧЕСКОЙ ПЕРЕДАЧЕ
НА СЛЕДЯЩУЮ СИСТЕМУ
Люфты в механической передаче (редукторе) между валом враще-
ния и ротором точного сельсина-приемника являются источником появ-
ления незатухающих колебаний (автоколебаний), нарушающих нор-
мальный режим работы пушечной
установки [4, 14, 15].
Для определения параметров ав-
токолебаний приведем структурную
схему следящей системы с люфтом в
механической передаче (рис. 12.33).
На рисунке линейная часть системы
обозначена через 1^(/к>), а нелиней-
ная часть (люфт в редукторе) через
7(Л).
Линейная часть системы является
Рис. 12.33. Структурная схема сле-
дящей системы с люфтом в меха-
нической передаче
фильтром низких частот. Поэтому для
исследования нелинейной следящей системы воспользуемся методом гар-
монической линеаризации Е. П. Попова [8].
В этом случае сигнал на входе нелинейности
62(/) = A sin и/,
(12.179)
где А — амплитуда колебаний;
со — частота колебаний;
На выходе нелинейности
С2(/) = F(Asin со/).
(12.180)
Фильтр низких частот W(ja>) пропускает только первую гармонику
сигнала. Поэтому из выражения (12.180) получим
С'2 (t) = A [а (.4'j sin со/ф- й(А) cos ш/J, (12.181)
где а(А) и Ь(А) —коэффициенты гармонической линеаризации.
Ошибку воспроизведения выходного сигнала можно определить в
виде
а^)=о2(0 —б'НО-
(12.182)
/ 2л \
Функция 6 (/) является периодической Г =------- и ее среднее ква-
\ со у
дратическое значение можно определить по формуле
(12.183)
Подставив в эту фромулу выражения (12.182), (12.180) и (12.181),
можно получить выражение для величины dm2:
2гс
—— ( [F (A sin toi) — A [a (A) sin со/ -ф&(А) cos со/])2а7. (12.184)
2л J
о.
Для определения минимума ошибки воспользуемся соотношениями
_Q.
9 [Ла (Л)] ’ <3[Л6(Л)]
Тогда
2тс
j {^(Д sin со/)— А [а (Д) sin cosco/]} sin<o/rf/ = 0; (12.186)
о
2д
{F (Д sin co/) — А [а (Д) sin co/ 4- &(Д) co.s co/]} cos <o/t//=0. (12.187)
6
Из уравнения (12.186) определим
2т:
а(А\=— \ F (A sin со/) sin atdt,
яА .1
о
а из уравнения (12.187)
2-к
й(А) =---- 1 F (A sin со/) cos
nA ,)
б
(12.188)
(12.189)
Нелинейную часть системы, записанную в виде 7(A), будем имено-
вать эквивалентной передаточной функцией
У(А) = ?(А)е;>(Л), (12.190)
где ^(А)—эквивалентная амплитудная характеристика нелинейности;
р,(А) —эквивалентная фазовая характеристика нелинейности.
Характеристики q(A) и р.(А) связаны с коэффициентами гармониче-
ской линеаризации зависимостями:
д(А~) = УаЦА) + Ь2 (.4);
(12.191)
Для исследования периодических режимов в нелинейной следящей
системе рассмотрим характеристическое уравнение
1 + U7 (» J (А)=0, (12.192)
откуда
- 1=.Ц7(У'Ш)/(Д) (12.193)
или
— 1 = //(«) q (А) еЛС(”)+|1(Лм. (12.194)
Заменив в выражении (12.194) —1 на е~7~, получим условия ба-
ланса амплитуд и фаз:
1=Я(<о)<7(А);
— л = 9 (ш)-|-[1 (А).
Перепишем формулы (12.195) в виде:
20 lg Н (<о)= 20 1g—1—
9(A)
9 (ад)= — л — [л (А).
(12.195)
(12.196)
С помощью левых частей уравнений (12.196) можно строить лога-
рифмические амплитудные и фазовые характеристики линейной системы,
а по правым частям уравне-
ний— логарифмические экви-
валентные амплитудные и фа-
зовые характеристики для не-
линейности.
Из уравнения (12.196) сле-
дует, что при одновременном
выполнении условий гармони-
ческого баланса в системе воз-
никают незатухающие колеба-
ния (периодические). Одновре-
менность выполнения указан-
ных условий заключается в
том, что точки пересечения
амплитудных характеристик
20 lg Н (со) и 201g —-— и
S 9(A)
фазовых характеристик 0 (со) и
— л —ц. (А) лежат на одной вер-
тикали. На этом основании
можно предложить метод шаб-
лонов, позволяющий опреде-
лять амплитуды и частоты пе-
риодических решений в нели-
нейной следящей системе гра-
фическим путем.
люфт
Сущность этого метода заключается в следующем. На прозрачной
бумаге строим характеристики1 (шаблон) 201g—— дБ и —л—ц(Д) в
q(A) В
градусах (рис. 12.34). Накладываем шаблон на амплитудную 20 1gН(ю)
и фазовую 0(с1>) результирующие частотные характеристики линейной
системы, совмещая оси частот и относительных амплитуд С/Л. Переме-
Рис. 12.35. Определение частот и амплитуд автоколебаний в следящей системе с люфтом
в механической передаче
щением шаблона вдоль оси частот определяются взаимные расположе-
ния точек пересечения характеристик
1g------с Н (а>); — л —"j с 6 (и)
' с \ \ А }
А /
лежащих на единых вертикалях.
Изменяя величину люфта С и коэффициент добротности по скорости-
Da3, получим области устойчивой работы и автоколебаний.
1 Характеристики для нелинейности типа люфт строятся с помощью следующих
формул:
.. Л , Q /. 2С\ I 2С\ п / С / С\-
4-2 л + 2 агсзш ( 1 — — 14- — II/ — 1—— ’
L \ А Л \ A J \/ А \ A J
Приведенные формулы справедливы лишь при А^С.
Пример 12.11. Определить области устойчивой работы и автоколебаний в следя-
щей системе для условий примера 12.4 с люфтом в зависимости от изменений D ш и С.
На рис. 12.35 показаны логарифмические амплитудные и фазовые частотные ха-
рактеристики разомкнутой следящей системы с наложением шаблона
и
при С = 0,003 рад.
Как видно из рис. 12.35, точки В и D лежат на одной вертикали. Следовательно,
соответствующая им частота о)а=57 1/с является частотой автоколебаний. Амплитуда
С
автоколебаний Аа определяется соотношением =0,165. Имея это в виду, найдем
Л
. 0,003
ла = —-o.ois рад.
При люфте, равном 0,008 рад, автоко-
лебания возникают на частоте соа=5 1/с
(точки В] и £>i на рис. 12.35).
Амплитуда автоколебаний определяет-
С
ся соотношением — —0,6, откуда
-Да
0,008
Аа =-------= 0,013 рад.
а 0,6
Изменяя люфты С и добротности
будем получать различные значения частот
автоколебаний. Fla рис. 12.35 построена гра-
ница, отделяющая области устойчивых со-
стояний от автоколебаний.
Из рис. 12.36 следует, что при С=
= 0,003 рад автоколебания могут возникать
лишь при D ш 2s 2000 1/с.
Если считать, что при длительной экс-
плуатации следящей системы люфт в редук-
торе может увеличиваться на 60% и дости-
гать С=0,0048 рад, то автоколебания в сле-
зящей системе будут возникать при Dm
5=630 (см. рис. 12.36).
Рис. 12.36. Области устойчивых состоя-
ний и автоколебаний в следящей систе-
ме с люфтом в механической передаче
§ 12.8. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК
ТЕХНИЧЕСКОГО РАССЕИВАНИЯ ПОДВИЖНЫХ ПУШЕЧНЫХ УСТАНОВОК
При -стрельбе из подвижных пушечных установок от упругих коле-
баний силовых элементов конструкции и стволов пушек, а также от рос-
V
Рис. 12.37. Схема кормовой подвижной пушечной
установки зарубежного самолета
та углов рассогласования
в следящих системах и
дополнительных переме-
щений оружия, вызван-
ных люфтами в механиче-
ских передачах, появля-
ется рассеивание снаря-
дов, называемое . техни-
ческим.
Для определения па-
раметров технического
рассеивания (средних
квадратических отклоне-
ний -снарядов) вследствие
упругих колебаний рас-
смотрим силовую схему
подвижной кормовой пу-
шечной установки зару-
бежного самолета (рис.
12.37). Как видно из ри-
сунка, две пушки, установленные на упругом люфте 2, крепятся к под-
вижному кольцу 1. Вращение пушек по горизонтали осуществляется
через механическую передачу (редуктор) электродвигателем 4 следя-
щей системы. Для вращения пушек по вертикали используется механи-
ческая передача с электродвигателем 3. Кормовая пушечная установка
крепится к шпангоуту 6 фюзеляжа самолета 7 с помощью двух крон-
штейнов 5.
Пользуясь этой схемой, составим ее упрощенную механическую мо-
дель (рис. 12.38) для асинхронной 1 стрельбы в горизонтальной плоско-
сти. При составлении математических зависимостей, описывающих пове-
Ь,
Рис. 12.38. Упрощенная механическая модель пушечной установки
дение механической модели, будем пользоваться следующими допущени-
ями: все механические узлы установки представляются в виде
сосредоточенных масс, опирающихся на идеальные упругие связи; коле-
бания установки в горизонтальной и вертикальной плоскостях считают-
ся независимыми.
Из рис. 12.38 видно, что к кольцу 1 прикреплен кронштейн 2 упруго-
го откатного устройства 3. На откатном устройстве установлена пушка 4.
Задний узел пушки прикреплен к кольцу с помощью упругого узла 5.
Кольцо 1 может поворачиваться в двух цапфах 6.
Уравнения движения пушечной установки запишем в форме Лаг-
ранжа:
— ----(12.! 97)
dt dqi dq. dqf
где T и П — соответственно кинетическая и потенциальная энергии ме-
ханической системы;
q, — обобщенные координаты;
Qj(/) —обобщенная сила, соответствующая /-й координате.
С помощью рис. 12.38 составим выражение для определения кине-
тической и потенциальной энергий при с^Ъх-^ао'.
у,_тх2 , /у2
~ 2 У
ml^X's sin а -ф ml2<f sin у;
/7=Уф—л.
2 2
(12.198)
/=/„+4+^?,
где т — удвоенная масса пушки;
/п— удвоенный момент инерции пушки;
7К — момент инерции кольца;
Ci — жесткость откатных устройств пушки;
с2—'удвоенная жесткость заднего узла крепления пушки;
1 Под асинхронной стрельбой понимается стрельба из одной пушки. В этом слу-
чае рассеивание в горизонтальной плоскости будет наибольшим.
с3 — жесткость редуктора и мест крепления кольца установки;
х — перемещение центра массы пушки относительно точки вдоль
оси ствола;
ср — угол поворота пушки;
Zi — расстояние между точками Вх и В2;
Z2— расстояние между точками В\ и В3.
На рассматриваемую механическую систему действуют следующие
обобщенные силы:
сила отдачи
Q! (/) = /?(/)
(12.199)
и сила
Q2(0 = ^ (О [Л sin ct —Z2 sin у].
Если выражение (12.198) подставить в уравнение (12.197), то по-
лучим:
тх-}- miff sin a-J-mZyp sin у-}- c1x1 = Q1 (Z);
mlffc sin a sin y-(-/?-|- 0^1? = Q2 (Z).
Решение системы уравнений (12.199) без правой части найдем в
виде:
x{t) = ax sin wt; <p(Z)=a2 sin «>Z. (12.200)
Подставив соотношения (12.200) в уравнения (12.199), получим
следующую систему:
(ct — mA') — sin а ml2 sin y)<Az2=0;
— (mlx sin а ml2 sin у) ш2а1 -j- (c3Z>i — /и2) а2=0.
(12.201)
Определитель системы (12.201) запишем в виде
сх — mA — (mZt sin а-рт/2 sin у) (о2
— (mlx sin а-}-ml2 sin у) <о2 c3Z?i —/<и2
Откуда
2 (nic3i
а>12 =---
=0. (12.202)
(тс362 + /С;)2 — 4 [1т — т(1х sin а + Z2 sin 7)] c?sbx
2 [Im — т (Zi sin a + Z2 sin 7)]
(12.203)
Значения приведенных масс для принятой механической модели
найдем в виде:
mi= w + s’n a + mZ2 sin y)-|-kif;
m2 = m-[- k2(mlx sin a-\-ml2 sin y) -Ak2I,
(12.204)
где
2
— /ncoj'
m (Zi sin а + l2 sin 7) o>2
0
t?i •—
k2=------------------------.
m (Zi sin a + Z2 sin 7) w2
Решение системы уравнений (12.199) с правой частью запишем в
виде:
x(t)=A (Z)-|-5(Z);
?(Z) = MW + MW,
(12.205)
где
t
A(t)=—-— ( [Qt (/) + kYQ2(«!)] sin coj (/ —
mi“i J
о
i
В (/) = —? [Q, (0 + k2Q2 (/)] sin <o2 (t — t) dx
M2“2 J
о
или
X (t)=-Q'{t) + k]Q^ sin ш/ + Q1 {t} + k^2 (0 sin <0^; (12.206)
т^Ш] т2ш2
? (/) = 9 (z) + fel (9^ sin + 91 (t) + (Z) sin u2t. (12.207)
TWjoi m2a2
С помощью формулы (12.207) определяются угловые положения
ствола пушки при стрельбе из кормовой установки.
Пример 12.12. Определить средние
Рис. 12.39. График колебаний ствола
пушки при стрельбе из кормовой уста-
новки
квадратические ошибки рассеивания сна-
рядов от упругих деформаций при стрель-
бе из кормовой пушечной установки. Бу-
дем считать, что при стрельбе основной
нагрузкой на кормовую установку яв-
ляется единичный импульс Q=[l]. В этом
случае параметры колебаний ствола
пушки можно вычислить с помощью фор-
мулы (12.207).
Примем, что гипотетическая кормо-
вая установка имеет следующие пара-
метры:
т = 10 кгс-с2/м; 1 = 1 кгс-м-с2;
т (Zj sin а + Z2sin 7) = 1 кгс-с2;
Ci = 0,l • 106 кгс/м; Сз&22=0,2-105 кгс/рад —
поворотная жесткость кольца.
Подставляя эти значения в форму-
лу (12.203), получим (01 = 100 1/с; со2 =
=200 1/с. Далее по выражениям,(12.209)
найдем:
z»! = 70 кгс-с2/м; ж2 == 10 кгс-с2/м; #1=6; k2 = —2.
По формуле (12.207) определим д(0 в тысячных.
Соответствующее построение выполнено на рис. 12.39. Из рисунка видно, что мак-
симальное отклонение ствола пушки в горизонтальной плоскости при стрельбе состав-
6,3
ляет (ртах —6,3 тыс., а среднее квадратическое отклонение = — =2,1 тыс.
При стрельбе из пушки в следящей системе возрастает угол рас-
согласования от действия момента силы отдачи. В нормальных эксплу-
атационных условиях наибольшие значения углов рассогласования воз-
никают при асинхронной стрельбе из пушечной установки. Из выраже-
ний (12.45) и (12.47), записанных в операторной форме, получим
значение угла рассогласования от действия внешнего момента
Е ($)
И(з)
1 + Г(®)
/И (s),
(12.208)
^а^дв
Z^i
где И($) =-----И—•——передаточная функция следящей системы по
s(7’abs + 1) моменту нагрузки;
w (s)—передаточная функция разомкнутой системы
[определяется выражением (12.49)].
Представим момент от действия силы отдачи пушки в виде отдель-
ных импульсов шириной v и скважностью р (рис. 12.40). Тогда
m(C=M0[l-8(Z-v)-|-8^-p)-S^-p_v)-i---]. (12.209)
Преобразование Лапласа от этой функции будет
1 ___
т (8) = Мй-------------------
1 — е~
(12.210)
Отсюда при $=/ю:
(1 — cos эш) (1 — cos рсо) sin '«о sin рш
2(1 — cos рш)
Q.M (7ш)—
(I — COS pa>) sin \<a — (1 — COS VO>) sin рш
(12.211)
2(1 — cos рш)
Рис. 12.40. К определению угла рассогласования в следящей системе
при стрельбе из пушечной установки:
а — график, характеризующий момент от силы отдачи пушки, действующий
на подвижную установку; б — результирующий переходной процесс в электри-
ческой следящей системе
Из выражения (12.208) можно найти T’v((o) и Qy(<n). Тогда на
основании формулы (12.95) можно получить обобщенную мнимую час-
тотную характеристику S(®) и с помощью формулы (12.97) вычислить
характеристику переходного процесса ем(/).
Пример 12.13. Определить для следящей системы примера 12.4 значения углов
рассогласования при стрельбе из одной пушки.
Будем считать, что Afo=8O кгс-м; v=0,005 с; р = 0,1 с (рис. 12.40, а). С помощью
рис. 12.18 и номограммы замыкания (см. рис. 12.19) найдем характеристи----
1 + (».
Сложив их с соответствующими характеристиками для V(ju>), получим результирую-
щую характеристику Фу(/о). По ней можно найти
Ру (“) = I (со) | cos [<pv (и)]; Qy (о.) = | Фу (ш) | sin [?к (со)].
Далее по формуле
Sy (со) = Ру (<*>) (рщ (ш) + Qy (ш) PM(V,)
вычислим и построим характеристику Sv (со).
Характеристику Sy (и) умножим на со и разобьем на элементарные трапеции.
После чего с помощью Лх-функций можем получить результирующий переходный про-
цесс еЛ (0 (рис. 1-2.40, б).
Из графиков рис. 12.40, б можно найти среднее квадратическое значение угла
рассогласования в следящей системе Ом=2 тыс.
Среднюю квадратическую ошибку угла поворота оружия от люфта
в редукторе можно вычислить по формуле
= — . (12.212)
ПО ' z
Для рассматриваемого случая (см. пример 12.2) Ар= 1,1 тыс. тогда
пД11 =0,55 тыс.
Если считать, что угловые значения средней квадратической ошиб-
ки от колебания стволов оружия, углов рассогласования и люфтов яв-
ляются независимыми, тогда результирующая средняя квадратическая
ошибка технического рассеивания снарядов подвижной пушечной уста-
новки может определяться по формуле
ат = 5_'3л ~аАр- (12.213)
Пример 12.14. Определить среднее квадратическое значение ошибки технического
рассеивания гипотетической пушечной установки, рассматриваемой в примерах 12.12
и 12.13.
По формуле (12.213) найдем
а.г = ]/2,12-г 22 + 0,552 = 3 тыс.
Для неподвижных пушечных установок техническое рассеивание будет несколько
меньшим, так как а д =0 и ам=0.
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ XII
1. Беляев Н. И., На гор с кий В. Д. Выбор двигателя и редуктора следя-
щих систем. М., «Машиностроение», 1972, 216 с.
2. Бесекерский В. А. и др. Проектирование следящих систем малой мощ-
ности. Л., Судпромгиз, 1968, 5.08 с.
3. В а с и л ь е в Д. В. и др. Проектирование и расчет следящих систем. Л.,
«Судпромгиз», 1964, 607 с.
4. Жиль Ж., Пелегрен М., Дек о ль н П. Теория и техника следящих
систем. М., Машгиз, 1964, 804 с.
5. Иващенко Н. Н. Автоматическое регулирование. Теория и элементы си-
стем. М., «Машиностроение», 197,3, 628 с.
6. Кухтенко А. И. Проблемы инвариантности в автоматике. ТИТЛ
УССР, 1'963, 376 с.
7. Me л ко зеро в П. С. Энергетический расчет систем автоматического управ-
ления и следящих систем. М., «Энергия», 1'968, 304 с.
8. Метод гармонической линеаризации в проектировании нелинейных систем авто-
матического управления. Под ред. Ю. И. Топчеева. М., «Машиностроение», 1970, 567 с.
9. Основы автоматического управления. Под ред. В. В. Солодовникова. М.,
Машгиз, 1963, 550 с.
10. Рабинович Л. В. и др. Проектирование следящих систем. М., «Маши-
ностроение», 1969, 499 с.
11. Скворцов Г. В. Синтез корректирующих устройств судовых следящих си-
стем. Л., «Судостроение», .1968, 252 с.
12. С о л о д о в н и к о в В. В. Статистическая динамика линейных систем авто-
матического управления. М., Физматгиз, I960, 655 с.
13. Техническая кибернетика. Теория автоматического регулирования. Под ред.
В. В. Солодовникова. М., «Машиностроение», 1967, кн. 7, 768 с., кн. .2, 679 с.
14. Техническая кибернетика. Теория автоматического регулирования. Под ред.
В. В. Солодовникова. Кн. .3, часть I. М., «Машиностроение», 1969, 367 с.
15. Топчеев Ю. И. О надежности систем управления, склонных к автоколеба-
ниям.—В кн.: Автоматическое управление и вычислительная техника. Вып. 7. М„
«Машиностроение», 1967, 394 с.
16. Честнат Г., Майер Р. Проектирование и расчет следящих систем и си-
стем регулирования. Т. I, II. М. Л., Госэнергонздат, 1959, т. I 487 с., т. II 392 с.
Глава XIII
СИСТЕМЫ УПРАВЛЕНИЯ ЗЕНИТНЫМИ
И АВИАЦИОННЫМИ РАКЕТАМИ
Система управления полетом ракеты представляет собой замкну-
тую динамическую систему, состоящую из собственно ракеты и аппара-
туры управления, обеспечивающей автоматическое, без участия чело-
века, наведение ракеты на цель или ее полет по заданной (программной)
-траектории.
Все системы управления полетом в общем случае принято подраз-
делять на системы автоматической стабилизации, системы наведения и
системы управления вектором скорости [6]. Система автоматической
стабилизации предназначена для выдерживания требуемого углового
положения ракеты относительно трех его осей или сохранения вполне
•определенной угловой скорости вращения ракеты при действии различ-
ных возмущающих сил и моментов. Система наведения обеспечивает
движение центра масс ракеты по заданному закону управления за счет
изменения величины и направления нормальных сил.
В зависимости от принципа действия системы наведения, т. е. ис-
пользования информации для определения координат цели, ракеты и
выработки законов управления нормальными силами, все системы на-
ведения зенитных и авиационных ракет разделяют на четыре
класса:
1) автономные системы;
2) системы теленаведения (телеуправления);
3) системы самонаведения;
4) комбинированные системы.
В комбинированных системах первоначальный участок полета раке-
ты может быть автономным или телеуправляемым с последующим пере-
ходом (на конечном участке) на самонаведение.
Как следует из названия, автономные системы наведения не полу-
чают в процессе полета никакой информации о движении цели и ракеты.
В таких системах управляющим воздействием могут служить либо сиг-
налы от заранее вычисленной программы, либо сигналы от инерциаль-
ной системы, определяющей параметры движения ракеты относительно
поверхности Земли [4].
Системы теленаведения получают информацию о движении цели и
ракеты с помощью радиолокационных станций, устанавливаемых вне
ракеты на пункте наведения. Причем наведение ракеты осуществляется
с помощью радиокоманд или по радиолучу.
В системах самонаведения информация о цели поступает на борт
ракеты и там же формируются сигналы управления для наведения раке-
ты на цель. Поэтому иногда системы самонаведения принято относить
к полуавтономным, так как в таких системах отсутствует прямая связь
между командным пунктом и ракетой.
Система управления вектором скорости обеспечивает требуемую
скорость полета ракеты за счет изменения тангенциальных управляю-
щих сил. Такие системы управления могут выполняться как замкнуты-
ми, так и разомкнутыми.
Необходимо отметить, что в системах управления полетом могут
отсутствовать либо система автоматической стабилизации, либо система
управления вектором скорости или обе эти системы вместе. Например,,
в американской ракете класса «воздух—воздух» «Сайдуиндер» отсут-
ствуют системы автоматической стабилизации и система управления
вектором скорости полета. Стабилизация ракеты «Сайдуиндер» по кре-
ну осуществляется элеронами, а по тангажу и рысканию — неподвижным
хвостовым оперением. Пороховой двигатель этой ракеты не имеет
устройств управления тягой, а следовательно, и вектором скорости
полета.
У ряда зенитных ракет с жидкостными маршевыми реактивными
двигателями имеются системы управления вектором скорости, обеспечи-
вающие постоянство скорости полета ракеты на всей траектории.
§13.1. МЕТОДЫ НАВЕДЕНИЯ РАКЕТ
Под методом наведения имеется в виду закон управления ракетой
на участке ее наведения на цель. В зависимости от принципа действия
систем (теленаведение .или самонаведение) различают методы наведе-
ния. Будем рассматривать методы наведения телеуправляемых и само-
наводящихся ракет, пользуясь кинематическими соотношениями. Выбор
метода наведения определяет траекторию полета ракеты, ее потребные
перегрузки, структурную схему и состав аппаратуры наведения.
Методы теленгзедения
Для выяснения общих закономерностей процесса теленаведения
ракеты на движущуюся цель, рассмотрим случай полета в вертикальной
плоскости. Воспользуемся рядом упрощений. Ракету и цель будем рас-
сматривать как геометрические точки, причем их скорости считаются
Рис. 13.1. Геометрические соотношения при теленаведении:
а — по методу накрытия (совмещения) цели; б — по методу с углом упреждения
заданными функциями времени. Систему управления считаем идеаль-
ной, что позволяет не принимать во внимание уравнения динамики си-
стемы управления полетом.
В зависимости от расположения трех точек: командный пункт, раке-
та и цель трехточечные способы наведения разделяются на два метода.
Метод накрытия цели (совмещения), когда
Д.е—е —гц = 0, (13.1)
где е — угол линии визирования ракеты;
ец — угол линии визирования цели.
В этом случае центр массы ракеты (точка Р), (рис. 13.1, а), центр
масс цели (точка Ц) и положение командного пункта (точка К) лежат
:на прямой КЦ (рис. 13.1, а).
Метод теленаведения с углом упреждения т|, когда
вектор скорости ракеты во все время полета направлен в упрежденную
мгновенную точку встречи (точка У) (рис. 13.1, б).
Метод накрытия цели
Для упрощения аналитического описания этого метода будем счи-
тать, что цель движется с постоянной скоростью по прямолинейной го-
ризонтальной траектории; ракета также движется с постоянной средней
скоростью.
Уравнения кинематики движения составим при Ае = 0. Спроектируем
векторы скорости ракеты v и скорости цели на линию КЦ и перпен-
дикулярную к ней линию РР' (см. рис. 13.1, а):
D — цсоэ(9 — г); 1
713.2)
Це=ц sin (9 — е), J
где е — угловая скорость линии визирования.
Продифференцировав второе уравнение системы (13.2), найдем
D&-\-Ds= v sin (9— е)Д-т (9 — е) cos (0 —s). (13.3)
Подставим в выражение (13.3) уравнения системы (13.2), тогда
Це+Вг = ^Ц + Ц(9-е), (13.4)
V
откуда
9 = (2- — — V + — ё, (13.5)
\ D v / D
Так как нами было принято, что y=const, то из выражения (13.5)
следует
0 = 2s+— s. (13.6)
Ь
С помощью выражения (13.6) нетрудно получить формулу для оп-
ределения нормальной потребной перегрузки ракеты
^у.потр — I 2е-[-- — е I . (13.7)
g g \ D }
При постоянной скорости полета цели
eu=-7p- sin ец, (13.8)
по в рассматриваемом случае ец = е и £)ц= Н , поэтому
Sin г
e = -^sin2e. (13.9)
н
Продифференцировав выражение (13.9), получим
е = е sin 2г= —— sin2 г sin 2е.
//2
(13.10)
И
Введем в выражения (13.9) и (13.10) переменную
i'u
®max j-j
(13.11)
Тогда из выражений (13.9) и (13.10), получим
e = 0max)2 sin2 г;
s= smax2 sin S Sin2s-
(13.12)
Очевидно, что траектория полета ракеты останется неизменной,
если параметры иц и Н изменяются так, что еюах остается постоянной.
Рис. 13.2. Номограмма линий ранных нормаль-
ных потребных ускорений ракеты
Пользуясь системой уравнений (13.2), определим скорость сближе-
ния ракеты с целью
0 = ]/^ т2 —£)2г2='У
(13.13)
С помощью выражений (13.12) и (13.13) формулу (13.7) можно
привести к виду
^у.потр
В выражение (13.14) введем переменную
„ . ^егпах
Г - }
V
♦тогда получим
_________ vemax sin2 е А . р sin 2е
«у.ПОтр__,-------------------------------
& \ У \ — р2 sin4 г
или
й"лн.потр -q/oi Р 8*П А
--------= sm2 е | 2 -j--- - ]
Z^max \ / 1 — р2 sjn4 6)
(13.14)
(13.15)
(13.16)
(13.17)
С помощью выражения (13.17) можно построить номограмму линий
равных нормальных потребных ускорений, где
«н.потР = —maxX= const.
g
Для этого из выражения (13.17) найдем
1
(13.18)
sin2 е
sin 2е \2
х — 2 sin2 е /
Номограмма линий равных нормальных ускорений, построенная по
уравнению (13.18), показана на рис. 13.2, где
h = ^
v
(13.19)
или
h.
sin2 г
- —-Ай
sin 2s \2
х — 2 sin2 е /
(13.19а)
Здесь Ло—-проекции наклонных дальностей на ось КХ.
Рассмотрим методику построения кинематических траекторий раке-
ты при наведении по методу накрытия цели (рис. 13.3) [3]. Для упроще-
ния будем считать, что теленаведение с пункта наведения (точка К) на-
чинается с момента пуска ракеты, а цель и ракета имеют постоянные
скорости Уц1 и Црь
Траектория ракеты, наводимой по этому методу, будет проходить
через точки К, Pi, Р2, Рз, •••, Вь
При движении цели на высоте Я2 и соотношении скоростей
г -V н2
h2=hx ,
(13.20)
где
A!=-^2_; Л2=^- ,
^pl ^р2
ракета летит так же по траектории К, Pi, Р2, ДО новой
встречи В2.
Для доказательства этого положения будем считать, что за
dl линия КПо переместится в положение КЦь За это время ракета из
точки К перейдет в точку Pi. Аналогично можно рассудить и для после-
дующих промежутков времени (точки Р2, Р3 и т. д.).
Из подобия соответствующих треугольников имеем
точки
время
или
Из выражения (13.22)
Я2 Я,
ц;ц; UoUi
Я2 /Д
Vu2 Кд]
можно получить соотношение
fil2
г'р t-p Нх
(13.21)
(13.22)
Р
2
откуда
т -г Я2
h2==hx —+
(13.23)
т. е. точка В2 является точкой встречи ракеты с целью.
Определим угол упреждения для данного метода теленаведения.
На рис. 13.4 построены углы упреждения ракеты ц и цели т)ц.
Из точек Ц1 и Pi восстановим перпендикуляры к прямой КЦг и по-
лучим точки С2 и Сь Из подобия треугольников КС2Ц1 и KCjPi имеем
С2Ц, С2К
но
СгЦ^^ц sin Пцй'/; |
CiPi=^ sinpatf. |
(13.24)
(13.25)
Рис. 13.3. Кинематическая траектория
Рис. 13.4 Построение угла
упреждения
Можно считать, что С2К = Ц2К = Иц; CiK = P2K = Dp. Тогда соотно-
шение (13.24) с учетом выражений (13.25) примет вид
sin 11= --Д sinT)„ (13.26)
vaDa
или
il = arcsin (k sin Пц) , (13.27)
, V
где к—— .
Vu.
Из формулы (13.27) видно, что в начале теленаведения, когда
—С 1, Л—*0и вектор скорости ракеты направлен на цель. Следователь-
но, на начальном участке метод теленаведения близок к кривой погони.
К концу теленаведения ----->1 и метод наведения близок к методу па-
Оц
раллельного сближения так как
i1 = arcsin (k sin 1]ц). (13.28)
Для определения потребных перегрузок графическим путем на но-
мограмму (см. рис. J3.2) в том же масштабе нанесено семейство тра-
екторий при /г = 1 и /г = 1 (рис. 13.5). В точках пересечения их с кри-
выми номограммы найдем значение
н£пУ потр
ч=-----------
1 Метод параллельного сближения рассматривается ниже.
и определим %Потр. Например, для кривой 2 х = 2 и иц/и = 0,53. Тогда
при о = 600 м/с и //=10 000 м имеем потр 2.
Из графиков, приведенных на рис. 13.5, видно, что максимальные
значения перегрузок будут при встрече с целью в передней полусфере
под углами фв, изменяющимися от 60 до 90°. '
Метод параллельного
сближения
Методом параллельного
сближения называется ме-
тод, когда направление ли-
нии ракета — цель остается
в пространстве неизменным.
Иначе говоря линия, соеди-
няющая центр массы ракеты
с центром массы цели ос-
тается параллельной задан-
ному направлению.
На рис. 13.6, а показаны
угловые соотношения при
методе параллельного сбли-
жения для ракет класса
«поверхность — воздух». Из
определения существа дан-
ного метода наведения сле-
дует, что угловая скорость
8 = 0. Поэтому уравнения ки-
нематики движения имеют
вид:
= cos рц — v cos П;
О—-оц sin ® sin Л-
(13.29)
Интегрирование перво-
го уравнения системы
(13.29) дает
/) = D0 + (wlxcos *1ц — vcos л)
(13.30)
Рис. 13.5. Кинематические траек-
тории теленаведения при различ-
ных начальных углах пуска раке-
ты £0:
7 — 160°; 2—150°; 3—140°; 4 — 120°;
5 — 90°; 6 — 45°
а)
Рис. 13.6. Геометрические соотношения при
наведении по методу параллельного сбли-
жения:
а — для ракет класса «поверхность — воздух»;
б — для ракет класса «воздух — воздух»
где Do — расстояние между ракетой и целью в момент t=0.
Из второго уравнения системы (13.29) можно получить
формулу
cos п =
— sin2 р...
£2 ц
(13.31)
Тогда
/9 = D0 + Г^ц cos рц —г’
цП-
(13.32)
Из выражения (13.30) определяется время полета ракеты
Do
i.=
V COS VJ — t/ц cos Ч]ц
(13.33)
При теленаведении ракеты с постоянной скоростью полета по мето-
ду параллельного сближения на горизонтально двигающуюся цель с
t>q=const она совершает движение по прямой и ее потребная нормаль-
ная перегрузка пу.потр = 0. Если цель совершает .маневр с постоянной
перегрузкой, тогда в формулу (13.28) следует подставить соотношения:
т] = ео—0; Лч = ео —6ц. При этом формула примет вид
б = е0 — arc sin [k sin (е0 — 9Ц)].
(13.34)
Продифференцировав формулу
(13.34) по времени и заменив
f/B
g
vju
получим
fl
у.потр
1 — sin2(s0—6Ц)
Sin2(e0— Bn)
Л2
«ц-
(13.35)
Из формулы (13.35) видно, что для метода параллельного сближения
при k~^\ перегрузка ракеты меньше или равна перегрузке цели; при
&<1 перегрузка ракеты больше перегрузки цели. Однако при этом зна-
чение—sin (е0—6ц) может быть больше единицы. В этом случае фор-
k
мула (13.35) теряет смысл, так как метод параллельного сближения не
выполняется.
Рассмотрим теперь уравнения кинематики движения при телепаве-
дении ракеты с подвижного пункта наведения. Это имеет место в систе-
мах телепаведения ракет класса «воздух — воздух» с самолета-носи-
теля (рис. 13.6, б):
D = <v cos (9 — е)— cos (t) —е); 1
’ н 1 * н 7 (13.36)
De=T>sin (0 —г) —DHsin (0н—е). ]
Можно отметить, что эти уравнения по своей форме совпадают с
уравнениями самонаведения. Различие заключается лишь в том, что при
теленаведении с носителя рассматривается движение носителя и раке-
ты, а при самонаведении — движение ракеты и цели.
Методы самонаведения
Все методы самонаведения основаны на использовании информа-
ции о взаимном положении ракеты и цели. Поэтому для характеристики
метода самонаведения необходимо определить положение линии визи-
рования цели относительно выбранной опорной системы отсчета. Если:
при движении ракеты используется информация о линии визирования
цели, занимаемой вполне определенное положение относительно ее про-
дольной оси, то такой способ самонаведения относится к методу прямо-
го наведения. Если используется информация о линии визирования цели
относительно вектора скорости ракеты, то такие способы самонаведения
относятся к методам погони, наведения с постоянным углом упреждения
и пропорционального наведения *. При методе пропорционального наве-
дения угол упреждения изменяется в зависимости от угла линии визи-
рования. Если используется информация о положении определенного
фиксированного положения линии визирования относительно выбран-
ного неподвижного направления, то такой способ самонаведения отно-
сится к методу параллельного сближения.
1 Этот метод в литературе часто называют методом пропорциональной навига-
ции [7, 8].
Метод п р. я м о г о наведения
Рассмотрим случай движения ракеты на цель в задней полусфере в
вертикальной плоскости. Уравнение кинематики движения составим,
спроектировав все скорости па линию визирования РЦ и перпендику-
лярную к ней линию РР' (рис. 13.7, я):
D— — v cos (г — 9)-[-cos (е — 0ц);
= ц sin (е — S) — гу sin(s —6J;
е_9=С + а,
(13.37)
где а — угол атаки ракеты;
£ — угол пеленга.
При методе прямого на-
ведения ось ракеты все вре-
мя должна быть направлена
на цель, поэтому угол пе-
ленга цели £ = 0.
С целью упрощения си-
стемы уравнений (13,37) бу-
дем считать, что цель дви-
жется с постоянной ско-
ростью по прямолинейной
горизонтальной траектории
(т. е. 0Ц = О°), а ракета так-
же имеет постоянную сред-
нюю скорость полета и ее
углы атаки ct не превышают
12°. В этом случае система
(13.37) примет.вид:
D= — -у-у cose; 1
£)е = sin s- 1
(13.38)
Рис. 13.7. Геометрические соотношения при само-
наведении:
а — по методу прямого наведения; б — по методу погони
Для нахождения решения системы уравнений (13.38) следует положить
г’ц=0. Тогда
D=-v,
De. = 4!a.
(13.39)
К системе (13.39) добавим следующие уравнения (см. § 13.3):
Гр6==а;
а = е — 0,
(13.40)
где Тр — постоянная времени ракеты.
В результате имеем:
D=-v,
Ое = ч>а;
1
а=е-------а,
(13.41)
откуда получим решение системы уравнений (13.38):
а
ДрДо е V
D
(13.42)
где cto и Do — значения соответственно угла атаки и дальность при на-
чальных условиях.
Приняв а = «max (предельный угол атаки), можно найти минималь-
ное расстояние £>mm, на котором ракета наводится по данному методу:
о»
дшп==а^е (13.43)
®тах
Уравнения траектории получим из второго уравнения системы
(13.41):
(13.44)
Проинтегрировав выражение (13.44), найдем
о -Л
г==е0+а(Ае 7р° ( dD. (13.45)
I
D
Dp
T v
Положив е р = 1, получим
_ D
8=е„+аДе (13.46)
Выражение (13.46) представляет собой уравнение гиперболической
спирали, и траектории полета ракеты являются криволинейными.
Нормальная потребная перегрузка ракеты при ее движении по ги-
перболической спирали определяется по следующему выражению:
«¥.ПОТр=-^е (13.47)
gT?D
Из выражения (13.47) видно, что по мере приближения к цели пе-
регрузка ракеты сильно увеличивается и при 7)->0, пред-*-оо. Поэтому
метод прямого наведения может применяться лишь при атаке неподвиж-
ных целей и на относительно больших дальностях до цели.
При методе прямого наведения головка самонаведения устанавли-
вается неподвижно относительно корпуса ракеты и измеряет углы пелен-
га цели. В этом случае конструкция головки самонаведения является
простейшей. Сигналом ошибки в системе самонаведения служит угол пе-
ленга цели, т. е. Д = ?.
М е т о д погони
При самонаведении по методу погони вектор скорости ракеты всег-
да направлен на цель и т] = 0. При принятых ранее допущениях система
уравнений кинематики может быть написана в следующем виде (рис.
13.7,6):
2)=г>ц cos е — v;
De.= — г'и sin е.
Разделив первое уравнение на второе, найдем
D v • cos е '
•— =-----------е---------г.
D va sin г sin е
(13.48)
(13.49)
Проинтегрировав выражение (13.49), получим
Р dD ? k — cos е ,
I ---= ----------d&,
J D J sin e
где k= —.
Из соотношения (13.50) имеем
(13.50)
Рис. 13.8. Траектории движения ракеты при самонаведении:
а — по методу погони; б — по методу с постоянным углом упреждения
Последнее выражение может быть представлено также в виде:
lnD=(‘p(1~C0S £)
J I Sin е
(k— 1) COS S
Sin г
4- In С';
е
d cos —
In D= - 2k \- + 1) fl^J+ln C'.
J E J sin £
Откуда
In D= — 2k In cos -^--j-(k — 1) In sin s-Mn C';
n - - C'‘)k (sin e)* 1 C" <sin E)ft 1
(2со5>^-)‘ <1+cos.)’’
(13.51)
где C"— постоянный коэффициент.
С помощью выражения (13.51) построим траектории движения ра-
кеты при различных начальных условиях пуска — ео и Do (рис. 13.8, а).
Из этого рисунка видно, что прямолинейные траектории полета ракеты
возможны лишь при точном наведении в «хвост» или навстречу цели.
Все остальные траектории являются криволинейными.
Пуск ракеты в передней полусфере является неустойчивым, так как
при малых отклонениях от этого направления угол изменяется до е = 0.
Действительно, из выражения (13.51) следует, что ракета настигает
цель после того, как она зайдет ей в хвост.
Для определения значения нормальной потребной перегрузки раке-
ты при ее движении по кривой погони воспользуемся формулой (13.7).
Подставим в нее выражение для е, полученное из второго уравнения
системы (13.48):
t>u sin е
D
Имея в виду, что е = 6, получим
twu(sin e0)S 1 (1 + cos e)ft
gD0 (I + COS Eq/ (Sin e)*“2
(13.52)
(13.53)
На рис. 13.9 приведены графики зависимости Пупотр от ец при пуске
ракеты из передней полусферы и различных значениях k. Из графиков
видно, что при &<2 нормальная перегрузка возрастает достигая макси-
мума. Решая задачу на экстремум, найдем
k
^oPt = arccois—.
(13.54)
Тогда ^.^neo)ft~1 (1 +AV /1 _ jn 2. (13.55) gO0(l+cose0)* k 2 / k 4/
Итак, при k= 1,5; n = ncp = 600 м/с; г?ц = 400 м/с; е0 = 45°; £>о = 315О м,
имеем:
S 41,25 , (^.потр)тах 5,5.
При й>2 нормальная перегрузка ракеты при ее подлете к цели
сильно увеличивается, что
Рис. 13.9. Графики изменения
потребных нормальных пере-
грузок при самонаведении по
методу погони
приводит к невозможности пуска ракет из
передней полусферы. Это является основ-
ным недостатком самонаведения по мето-
ду погони. Кроме того, из выражения
(13.53) следует, что нормальное ускоре-
ние пропорционально средним скоростям
ракеты и цели. Поэтому для получения
малых значений потребной перегрузки ра-
кеты значение гшц должно быть неболь-
шим. При больших значениях этот
метод самонаведения может применять-
ся лишь при атаках в задней полусфере
с малыми значениями е.
Наведение по методу с по-
стоянным углом упреждения
При самонаведении с постоянным уг-
лом упреждения
Л — const, (13.56)
тогда при принятых ранее допущениях:
Р = v„ cos e — v cos Л; 1
. ц (13.57)
£)е= — Цц sin гф-и sin Л. J
1
--- COS е
„ D k • cos-q • , i о
Откуда — =--------------------j-------е-----------j------е. (13.58)
sin Ti — — sin е sin in — — sin e
k k
Введем следующие обозначения:
а = &созл; b=k sin л; e^arcsin/n
Тогда после интегрирования уравнения (13.58) найдем
г • • iVi—Ь'2
U [sin £[ — Sin е]
а
[1 4- COS(e + е£
(13.59)
где С — постоянная интегрирования, определяемая из начальных усло-
вий: D=D0; е = 8о.
В этом случае
|/ 1-»Л
U____П +cos (£о + sio)]
[sin е10— sin е0]
Г • • -iT'l—Л2
[sin et — Sin s]
a
[1 + COS (e +
(13.60)
Траектории полета ракеты при наведении с постоянным углом
упреждения, вычисленные по формуле (13.60), были, приведены выше
(см. рис. 13.8, б). Из этого рисунка видно, что возможны две прямоли-
нейные траектории под углами 8i = arcsin& и 8г=л—еь Действительно,
условие существования прямолинейной траектории 0 = 0 (при данном
методе наведения 0 = е) позволит получить из второго уравнения систе-
мы (13.57) зависимость
•vB sin e = v sin Л,
откуда
Г . I Vr, . ’
Л =arcsm — sin s
\ V
(13.61)
и для данного rf получим две прямолинейные траектории, когда
1&|<1.
Из графиков, приведенных на рис. 13.8, б, также видно, что ракета
при пуске по методу с постоянным углом упреждения настигает цель,
заходя в заднюю полусферу. Прямолинейная траектория при пуске из
передней полусферы является неустойчивой.
Определим значение нормальной потребной перегрузки ракеты
b — sin е
и =__________________________
“'у.потр ~
vva [sin ею— sin е0]
gD0 [1 + cos (е0 + е]0)]
[1 4- COS (£1 + £)]Z1
-a — 1
[sin £1 — Sin £] r u
(13.62)
Из формулы (13.62) следует, что при
k< - — 2-------------------------------
|/4 — 3 cos2 т>
потребная перегрузка ракеты имеет ограниченное значение. При не-
удовлетворении этого условия потребная перегрузка неограниченно воз-
растает, когда ракета приближается к цели.
Метод наведения с постоянным углом упреждения улучшает свой-
ства метода погони при атаках в задней полусфере. Однако при атаках
в передней полусфере они могут совершаться лишь при малых значениях
произведения ооц и углов е.
Метод пропорционального наведения (сближения)
Составим уравнения кинематики при наведении ракеты в передней
полусфере в виде:
£>= — ц cos (9 — e)-4-'flII cos (9„ — е ); 1
I ГГ ц к ц ц, (13.63)
sin (9 — е) — ту sin(0tl — ец). J
Рассмотрит атаку цели при 6ц=0:
Ds==T>sinT) — т'ц sin е. (13.64)
Будем считать, что
П = ПоН- АП; е = го + де, (13.65)
где т]о и ео — параметры движения ракеты вдоль опорной прямоли-
нейной траектории [6];
Дт] и Ав — приращения соответствующих углов.
Подставляя соотношение (13.65) в выражение (13.64), получим
£)Д8 = v sin ’10 cos ДЛ + Ц cos Щ sin ДП —
— цц sin е0 cos Де — va cos s0 sin As. (13.66)
Уравнение (13.66) распадается на два: одно для опорной траекто-
рии, другое относительно движения ракеты вдоль опорной траектории:
v sin Цо — г>п sin е0 = О; )
(13.67)
£)Де = г> cos Т1ОД’1 — cos г0Дг. J
Из второго уравнения системы (13.67) видно, что можно обеспечить
устойчивое движение ракеты в передней полусфере, если менять угол
упреждения т] в соответствии с изменением в так, чтобы с постоянным
углом упреждения т]0 (Дц = 0) углы Де и Дв имели разные знаки1. Для
этого следует принять [6]
ДТ] = (1 — А*) Де, (13.68)
где k* — постоянный параметр.
Подставив соотношение (13.68) во второе уравнение системы
(13.67), получим
ОДе = [ц cos 1% (1 — F) — цц cos е0] Де. (13.69)
Из условия устойчивости имеем
Откуда
( 1 — k ) V COS T)q — ®lt cos s0 < 0.
У
1
«ц cos ео
V COS 1)0
или
COS Eq
К
(13.71)
1
k
sin2 £()
Г Л'2
С помощью выражения (13.71) можно построить графики зависи-
мости k* от so при различных k, характеризующие возможный диапазон
1 Разные знаки переменных Де и Да соответствуют условию кинематической ус-
тойчивости полета по прямолинейной траектории.
значений k*. При атаках целей в задней полусфере по методу пропор-
ционального наведения может быть принят следующий диапазон изме-
нения коэффициентов: 0,2</г*<0,9, а в передней полусфере—1,,3</г*<
<2. Поэтому в зависимости от скоростей сближения с целью D, харак-
теризующих атаки в задней или передней полусфере, целесообразно
установить два значения k*.
Перейдем к определению уравнений самонаведения ракеты при на-
ведении по методу пропорционального сближения. Для этого продиффе-
ренцируем второе уравнение системы (13.63):
Ьг -ДРг= — v sin л —«Л cos н + sin qД-vaq cos q, (13.72)
где л = 9 —e; q=0a — e.'
Из уравнения (13.72) можно получить следующее выражение:
Йг -|- Dz — —V sin Л — г1 0 cos Л Д Т’г cos Л Д-
Д- sin q -|-т>ц9д cos q~ 'оце cos q. (13.73)
Подставим в выражение (13.73) первое уравнение системы (13.63).
Тогда
D& Д-279г= — v sin Л — v6 cos Л Д "Д, sin q Д cos q. (13.74)
Если в выражение (13.74) подставить соотношения Ае = А0+Ал,
то
Д0 = Й*Де
И
д9 = ^дё. (13.75)
Опустим в зависимости (13.75) знак приращения А и полученное
выражение подставим в уравнение (13.74), тогда
cos Л Д-2£>) г= — v sin Л Д-г»ц sin q Д-г’цв cos q. (13.76)
Воспользуемся подстановками
D = D0-\D\t- (13.77)
где Д— полное время полета ракеты до точки встречи;
t — текущее время полета;
|Й| —скорость сближения ракеты с целью.
В этом случае уравнение (13.76) примет вид
№.-<П + (Д“Г -2)-=
= —[тдОц cos# Д- -пц sin q — v sin л]. (13.78)
В уравнение (13.78) введем следующие обозначения:
k*v cos т „ ,
---г-г-;—!--2 = а;
I О|
—г— [т’цбц cos qJrva sin Q ~~ v sin Tl]=c.
Тогда
(Д-/)ЕД4?ё = с. (13.79)
Уравнение (13.79) является линейным дифференциальным уравне-
нием первого порядка. Запишем его решение в виде
e = sJ 1----—. (13.80)
\ 4 /
Первое слагаемое в формуле (13.80) характеризует возмущенное
движение ракеты от ошибки прицеливания, обусловленной неправиль-
Рис. ,1,3.10. Графики отработки
системы самонаведения на-
чального условия ёо в зависи-
мости от коэффициента 6тн
ным заданием угла упреждения цо-
Второе слагаемое характеризует уста-
новившееся движение ракеты от воз-
мущений, вызванных маневром цели
(начинающимся в момент времени t=
= 0) и переменностью скорости полета
ракеты.
Из формулы (13.80) видно, что
при с7> 0 и первое слагаемое стре-
мится к нулю и Если угол уп-
реждения т)0 определен без ошибки, то
возмущенное движение ракеты отсут-
ствует.
Рассмотрим характер отработки
системой самонаведения начального
условия во в зависимости от относи-
тельного коэффициента Лотн = - & —. На рис. 13.10 построены соот-
ветствующие графики, из которых видно, что при йотн—2<0 процесс са-
монаведения неустойчив: при йотн—2 = 0 — находится на грани устойчи-
вости: при йотн—2>0 — устойчив [5].
Траектории движения ракеты при самонаведении по методу пропор-
ционального сближения определим из второго уравнения системы
(13.63) при условии прямолинейного полета ракеты (е = 0):
v sin Л — гу sin (9ц — s)=0. (13.81)
Из соотношения (13.68) следует, что
П = р0 + (1-Г)(г-г0). (13-82>
Подставив выражение (13.82) в уравнение (13.81), получим
v sin [Поф-(1 — Г) s — (1 — &*) s0] — Ъ'ц sin (Оц — е) = 0. (13.83)
Графическое решение уравнения (13.83) показано иа рис. 13.11 для
случая k* = 3, 0Цо=О° и р0—(1—&*)e0=const [6].
Как видно из рисунка, при углах ец еа, е3 и £4 движение ракеты со-
вершается по прямолинейной траектории. Причем углам ei и 83 соответ-
ствуют неустойчивые траектории, а углам еа и £4 — устойчивые.
Из выражения (13.80) следует, что чем больше коэффициент ft*,
тем меньше угловые скорости линии визирования в процессе самонаве-
дения и тем ближе к прямым траектории полета ракеты. Однако при
очень больших значениях k* значительно увеличивается колебатель-
ность процессов самонаведения [5, 6].
При отсутствии начального возмущения полет ракеты в точку встре-
чи происходит по баллистической траектории (рис. 13.12).
Если считать, что траектория 1 полета ракеты к цели, баллистиче-
ская, то точкой встречи будет точка М. Допустим, что фактическая точка
встречи за счет маневра цели переместилась в точку тогда балли-
стическая траектория ракеты будет другой (траектория 2). Следова-
тельно, при полете ракеты на маневрирующую цель на начальном участ-
ке, полет совершается по кривой 1, затем по кривой 3, сопрягающейся
на конечном участке полета с баллистической кривой 2. Отсюда видно,
что наведение ракеты по методу пропорционального сближения являет-
ся способом движения ракеты в фактическую точку встречи при учете
маневра цели и переменной скорости полета ракеты [см. уравнение
(13.74)]. В этом случае на борту используется информация об угловой
скорости линии визирования, пх sin т] и nycosr].
Рис. 13.11. Графическое решение урав-
нения (13.83) для случая k* = 3
и 6цо = О°
Рис. 13.12. Траектория движения
центра масс ракеты при наведении
на цель по методу пропорциональ-
ного сближения и маневре цели
Нормальная потребная перегрузка при реализации этого метода
наведения может быть оценена по формуле
^потр=-----=-------s- (13.84)
g g
Подставим в формулу (13.84) выражение (13.80) и учитывая, что
j,* ^отн | & I
V COS V]
получим
'*£п€тр
&отн I & I
g COS 7]
f 1 С 1
rJ ‘tJ-
(13.85)
На рис. 13.13 показан характер изменения потребной перегрузки
ракеты в зависимости от коэффициента fe0TH при различных значениях
углов упреждения ц0 [5]. Величина потребной перегрузки определялась
в момент встречи с целью, т. е. при tn=t и значениях с = 2, у-щ-=0,01.
Из графиков видно, что с ростом угла упреждения увеличивается значе-
ние потребной перегрузки. Кроме того,
для каждого угла упреждения сущест-
вует вполне определенное критическое
значение относительного коэффициен-
та, при котором гау.потр = 00.
При реализации способа самона-
ведения с постоянным углом упрежде-
ния головка самонаведения закрепля-
ется неподвижно на корпусе ракеты и
измеряет углы пеленга цели £. Ошибка
самонаведения определяется как раз-
ность заданного угла упреждения т]3 и
„ истинного угла п, т. е.
Рис. 13.13. Графики изменения по-
требной перегрузки ракеты в зави- Д=т>з—Т).
СИМОСТИ ОТ 4отн
(13.86)
Напряжение на выходе координатора будет
«г=«3 —(13.87)
где kT — коэффициент пропорциональности;
ия — напряжение, соответствующее заданному углу упреждения.
Так как угол упреждения определяется зависимостью
+ (13.88)
то в системе самонаведения следует создать напряжение
«д = м3 — kT (С-фа). (13.89)
Из выражения (13.89) видно, что для получения пд необходимо на
борту ракеты измерять угол атаки а, что может производиться либо с
помощью флюгера, устанавливающегося по потоку, либо акселеромет-
ром и счетно-решающим прибором '.
Для реализации метода погони и пропорционального сближения не-
обходимо иметь координатор со стабилизированными в пространстве
осями. В этом случае чувствительный элемент координатора механиче-
ски связан с силовым гиростабилизатором. Принимая в качестве ошиб-
ки наведения
Д = г3-е, (13.91)
где е3 — требуемое значение угла, определяющего положение линии ви-
зирования в пространстве, получим на выходе головки самона-
ведения напряжение
zzr = zz3 — kr&, (13.92)
где м3— напряжение, соответствующее заданному углу е3.
Если координатор ориентирован по линии визирования с помощью
моментно-следящей системы, то с выхода головки самонаведения сни-
мается сигнал пропорциональной угловой скорости визирования
«д = Аге. (13.93)
В этом случае реализуется метод пропорционального сближения.
При формировании сигнала ошибки системы вида
Ид=^г® — &г(С-|-а) (13.94)
реализуется метод погони.
Из выражения (13.89), (13.93) и (13.94) видно, что наиболее просто
на борту ракеты реализуется метод пропорционального наведения. Для
его реализации необходимо измерять лишь одну переменную — угловую
скорость линии визирования цели. Кроме того, этот метод обеспечивает
пуск ракет как в передней, так и в задней полусфере с меньшими значе-
ниями нормальной перегрузки ракеты. Поэтому в настоящее время в за-
рубежных самонаводящихся ракетах этот метод получил наибольшее
распространение [7, 18].
1 Как известно, акселерометр измеряет перегрузку по направлению оси ракеты Y cos а 4- X sin а S Пу~ G ~ 2 СУ’
откуда у . . (13.90) о ~2~ + Х
Так как при полете X и Y изменяются с высотой и скоростью, то для определе-
ния а. необходимо измерять Н и и и с помощью счетно-решающего прибора реализо-
вать выражение (13.90).
Параллельное сближение
Получение прямолинейного полета ракеты при любых начальных
условиях требует построения угла упреждения в соответствии с зависи-
мостью
Цо=а rc sin
(13.95)
Если условие (13.95) обеспечивается, то из второго уравнения систе-
мы (13.63) при постоянных V, |Пц и 0ц имеем:
е = 0; е = const. (13.96)
Рис. 13.14. Траектории движе-
Подставим в уравнение (13.68) Де = А0 + Аг], тогда
ДП=—— - - ДО (13.97)
k*
И при Й* = 0О
дт]= — дб;
следовательно,
Дг = О; е0=const. (13.98)
Метод, удовлетворяющий условию (13.96) или (13.98), называется
методом параллельного сближения, когда линия визирования РДД пере-
мещается при движении ракеты и цели параллельно самой себе. На
рис. 13.14, а построена траектория движения ракеты и цели при посто-
янных v, va и 0ц. Точка В является мгновенной точкой встречи. На
рис. 13.14, б построены траектории движения ракеты (точки Рг) при
маневре цели (точки IE). С помощью треугольников Р0Ц0Г0 и Р1Ц17\
построены мгновенные точки встречи То, Г], ... Из рис. 13.14, б видно,
что метод параллельного сближения можно называть методом наведе-
ния в мгновенную точку встречи, понимая под ней точку, в которой ра-
кета и цель встретились бы, если они двигались прямолинейно и рав-
номерно.
Значения нормальных потребных перегрузок при самонаведении по
методу параллельного сближения можно определить по формуле
(13.35). С ростом коэффициента k (при перегрузка ракеты умень-
шается по сравнению с перегрузкой цели. Это является достоинством,
данного метода самонаведения.
Для реализации метода параллельного сближения с гиростабилизи-
рованной головки самонаведения следует снимать сигнал, пропорцио-
нальный угловой скорости линии визирования. При больших значениях
коэффициента усиления в системе самонаведения, в которой применен
метод параллельного сближения, увеличивается флюктуационная ошиб-
ка наведения ракеты на цель.
В результате рассмотрения кинематики процессов самонаведения
были проанализированы различные методы наведения. Показано, что
метод пропорционального сближения обеспечивает наведение ракеты в
фактическую точку встречи с маневрирующей целью и является самым
общим методом самонаведения. При изменении k* от 1 до оо метод про-
порционального сближения охватывает методы наведения от кривой
погони до параллельного сближения.
Метод пропорционального сближения обеспечивает наведение ракет
для любых соотношений и/^ц в передней и задней полусферах при зна-
чительных ошибках вывода ракеты на маневрирующие цели, малых зна-
чениях потребных перегрузок ракет и относительно небольших флюктуа-
ционных ошибок наведения ракеты на цель.
§ 13.2. СТРУКТУРА СИСТЕМЫ УПРАВЛЕНИЯ
И СОСТАВ ЕЕ АППАРАТУРЫ
Структура систем управления зависит от принципа действия систе-
мы и принятого метода наведения. В системах телеуправления опреде-
ление положения координат цели и ракеты, их сравнение, а также вы-
работка в счетно-решающем приборе команд управления производятся
на пункте наведения. При управлении зенитными ракетами пункт наве-
дения находится на Земле, а при управлении ракетами класса «воздух —
воздух» на самолете. С пункта наведения сигналы управления по радио-
каналу или радиолучу поступают на борт телеуправляемой ракеты.
От метода наведения зависит сложность реализации закона наведе-
ния, потребные перегрузки по траекториям полета и точность наведения
ракеты на цель.
В системах самонаведения координаты цели относительно ракеты
определяются на ее борту головкой самонаведения. В зависимости от
места расположения источника первичной энергии различаются три типа
головок самонаведения: пассивные, активные и полуактивные.
В пассивных головках самонаведения используется собственная
энергия цели в виде сигналов от радиолокационных станций, уста-
новленных на цели, или ее тепловое излучение, или контрастность цели.
В активных головках самонаведения подсвечивание цели и прием отра-
женных сигналов от нее производится с головок, расположенных на бор-
ту ракеты. В полуактивных головках самонаведения подсвечивание цели
производится с радиолокационных станций, расположенных на самоле-
тах-носителях или с Земли, а прием отраженных сигналов — головками
самонаведения ракет.
Для реализации методов самонаведения на борту ракеты, кроме
сигналов, снимаемых с головок самонаведения, используются сигналы с
гироскопических датчиков, также расположенных на борту.
Структуры систем теленаведения
Все системы теленаведения по составу аппаратуры и своей струк-
туре можно разделить на два типа: командные системы наведения и си-
стемы наведения по радиолучу. В командных системах ракета наводит-
ся на цель с помощью команд, вырабатываемых па пункте наведения и
передаваемых по линиям связи на борт ракеты. Команды управления
вырабатываются в счетно-решающем приборе (СРП) на основании ко-
ординат цели и ракеты, определяемых с помощью радиотехнических
средств — наземной радиолокационной станции 3, измеряющей угловые
координаты цели 4 ец.в, ец.г и дальность до цели £>ц (рис. 13.15).
Для измерения координат ракеты 5 (ев, ег, D) используется радио-
локационная станция ракеты 1. Для определения координат цели 4 и
ракеты 5 может использоваться и одна станция, работающая в режиме
обзора пространства. В таких систе-
мах РЛС цели 3, РЛС ракеты 1 и
СРП 2 объединяются в единый
пункт наведения.
Эффективная поверхность от-
ражения ракеты во много раз мень-
ше эффективной поверхности отра-
жения самолета-цели, поэтому
дальность действия РЛС по ракете
в 5—10 раз меньше дальности дей-
ствия РЛС по самолету.
Для повышения дальности дей-
наведения
ствия радиотехнических средств
на Земле применяется специальная
станция передачи команд и приема
команд (СПК и ПК) от ответчика,
Рис. 13.15. Блок-схема системы теле-
наведения с двумя РЛС измерения
координат цели и ракеты
установленного на борту, блок-схема которой показана на (рис. 13.16).
Пункт СПК и ПК состоит из шифратора 5, передатчика команд 6,
приемника команд 19, дешифратора 20 и устройства для выработки угло-
вого положения ракеты 21. Кроме СПК и ПК, в пункт наведения вхо-
дят: РЛС цели 2 и СРП, состоящее из устройства сравнения 1, диффе-
ренцирующего фильтра 3 и устройства выработки команд управления 4.
Рис. 13.16. Блок-схема системы теленаведения со станцией СПК и ПК
Команды управления через приемник 7, дешифратор 8 и фильтр 9
передаются на рулевой привод 10. Рулевой привод, воздействуя на рули
ракеты, обеспечивает управление каналом нормальной перегрузки 11.
В бортовую систему управления ракеты входят: гироскопический
датчик 14, ответчик (устройство выработки команд) 16, шифратор 17 и
передатчик команд 18.
Для устранения влияния передатчика на работу бортового прием-
ника используется синхронизатор 15.
Система телеуправления «замыкается» через цель 13 с помощью
уравнений кинематики наведения (блок 12).
В рассмотренной на рис. 13.1, а системе телеуправления применен
метод совмещения, поэтому за ошибку на выходе устройства сравнения
можно брать А = ец — е. В устройстве выработки команд управления
производится пересчет угловой ошибки Л в линейное отклонение полета
ракеты от траектории ее движения 1
А=/?р(ец —s), (13.99)
1 Здесь под h можно понимать ошибку наведения ракеты на цель. В момент вре-
мени t-a значение h определяет величину промаха ракеты относительно цели.
где £>р — дальность между ракетой и пунктом наведения, вычисленная
в СРП.
Для повышения устойчивости и улучшения динамических характе-
ристик системы теленаведения в сигнал управления вводится первая
производная сигнала ошибки:
= + (13.100)
а иногда наряду с первой и вторая производная:
Кд=А(Л + Гф1А-}-Гф2й), (13.101)
где ТФ1 и Гф,— постоянные времени дифференцирующих фильтров.
Сигнал h засорен шумами, поэтому дифференцирование в СРП сле-
дует производить одновременно с операцией сглаживания [12].
Рис. 13.17. Блок-схемы счетно-решающих приборов непрерывного действия
В счетно-решающих приборах непрерывного действия для выполне-
ния этих операций используется интегро-дифференцирующая ДС-цепоч-
ка (фильтр PC), включенная параллельно к электронному усилителю
(рис. 13.17, а, б).
С помощью схемы, приведенной на рис. 13.17, а и соотношений
(13.99) и (13.101)
= + -7~1ЗД^-е) (13.Ю2)
L И1« + 1)(Д>5 + 1) J
или
u^k Г?Д1^2 + (71 + Гг)5+ 1+7* j h (13 ю3)
L (7js + 1) (Z2s + 1) J
Откуда получим
и, = k Г.1 + М71 + .72 + .В* + й1г1Т2з2 ч (1 з. 104)
L (7is + i)(72* + 1) J '
где
^1^ 1^3 =Т ф2-
В тех случаях, когда в качестве метода теленаведения применен
метод наведения с упреждением, то в СРП вводятся, кроме 8Ц и е, даль-
ности до цели и ракеты Пц и D (см. рис. 13.17, б). При применении этого
метода вычисляется текущее значение угла упреждения т,, а затем опре-
деляется угловая координата ек кинематической траектории.
Угловая ошибка наведения на выходе сравнивающего устройства
СРП
Д - ек— е=зц—в-]—г), (13.105)
а угол упреждения
Л = arc sin I k —-—sin'],,'] . (13.106)
\ £>ц ц/
Команды управления в этом случае вырабатываются по структур-
ной схеме, изображенной на рис. 13.17, б. Как видно из этого рисунка,
устройство сравнения I' представляет собой блок СРПт, на выходе кото-
рого получен кинематический параметр и устройства сравнения I",
с выхода которого снимается сигнал угловой ошибки А.
Схема, показанная на рис. 13.17, а, отличается от схемы, показанной
на рис. 13.17, б, тем, что в первой из них сравнивающее устройство I
входит в замкнутую систему телеуправления, а во вторую систему
включено только устройство I", а элемент Г находится вне замкнутого
Рис. 13.18. Блок-схема системы теленаведения ракеты по радиолучу
контура. Следовательно, динамика систем сравнивания I и Г и выра-
ботки команд управления СРП определяет устойчивость и качество про-
цессов наведения в системах телеуправления.
Система наведения по радиолучу состоит из РЛС 2, следящей за
целью 1, в луче которой находится ракета. В состав ракеты входят: при-
емник 3, дешифратор 4, устройство приема команд и фильтр 5, рулевой
привод 6, устройство управления нормальной перегрузкой 7, гидроско-
пический датчик 8. Система наведения по лучу «замыкается» с помощью
уравнений кинематики (блок 9). В качестве луча может использовать-
ся равносигнальная зона радиолокатора.
Устройство радиоуправления на борту ракеты служит для опреде-
ления ее положения в радиолуче относительно равносигнального на-
правления. При отклонении ракеты от линии равносигнального направ-
Рис. 13.19. Схема теленаведения ракеты по радиолучу
ления на выходе устройства радиоуправления вырабатывается сигнал
«д= k h, (13.107)
где
Л=7?и(/)(6к-е). (13.108)
Здесь — дальность от радиолокационной станции наведения до
ракеты, заданная в виде программной известной функ-
ции времени.
Из сказанного видно, что команды управления формируются на
борту ракеты, а не на РЛС наведения.
При наведении по радиолучу для повышения запасов устойчивости
и улучшения показателей качества процессов телеуправления использу-
ются первая и вторая производные линейных сигналов отклонения:
u, = kD^\h+T^T^]. (13.109)
Основная особенность системы телеуправления по радиолучу за-
ключается в том, что полет ракеты совершается в два этапа. На первом
этапе ракета встреливается в радиолуч. После ее входа в радиолуч в
точке В (рис. 13.19) открывается бортовой приемник и ракета начнет
полет в радиолуче (участок ВЦ) по трехточечному способу наведения.
Структура систем самонаведения
В системах самонаведения сигнал управления формируется на бор-
ту ракеты. На выходе сравнивающего устройства 1 (рис. 13.20, а) обра-
зуется сигнал ошибки
Дк=е11-ек> (13.110)
где ек — кинематический угол линии визирования.
Рис. 13.20. Блок-схемы систем самонаведения
Антенна (или тепловой координатор) головки самонаведения связа-
на с гиростабилизированной платформой. Тогда сигнал с выхода гиро-
скопа платформы 8Г сравнивается на устройстве 2 с входным сигналом
Ак, т. е.
Дг Дк
(13.111)
где Дг — ошибка слежения головки самонаведения.
Напряжение на выходе головки самонаведения иг пропорционально
угловой скорости Ак или (при ец=ек) ек:
иг=Агдк (13.112)
или
ur=kl.zt., (13.113)
где kr — коэффициент усиления по скорости следящей системы головки
самонаведения.
Сигнал управления снимается с выхода усилителя и фильтра, т. е.
ih,~kyktsK, (13.114)
где — коэффициент усиления усилителя на выходе головки самона-
ведения.
Далее в систему самонаведения входит рулевой привод, гироскопи-
ческий датчик и ракета (канал нормальной перегрузки). «Замыкание»
системы самонаведения обеспечивается уравнениями кинематики наве-
дения.
Структурную схему системы самонаведения, изображенную на
рис. 13.20, а, можно упростить, объединив в пей ряд звеньев, тогда полу-
чим схему, показанную на рис. 13.20, б. Как видно из схемы, приведен-
ной на рис. 13.20, б, в системе самонаведения обеспечивается пропорци-
ональность между 0 или перегрузкой ракеты и ек, что позволяет реали-
зовать наведение по методам пропорционального или параллельного
сближений.
Аппаратура системы управления ракетой
Материалы, приведенные в § 13.1 и 13.2, были получены в предложе-
нии, что вся наземная и бортовая аппаратура, входящая в системы те-
ленаведения или самонаведения, является безынерционной и при расче-
тах учитывались только их статические характеристики. Подобного рода
идеализация позволила нам рассмотреть законы наведения ракет и про-
анализировать их преимущества и недостатки.
Для исследования вопросов устойчивости, качества и точности про-
цессов наведения ракет необходимо пользоваться динамическими ха-
рактеристиками аппаратуры ракет и наземных средств систем телена-
ведения.
Бортовая аппаратура ракеты
В состав бортовой аппаратуры ракет входят различные измеритель-
ные устройства (гироскопические датчики, акселерометры, головки са-
монаведения, радиоприемники, радиовысотомеры и др.); преобразова-
тели (усилители, вычислительные линейные и нелинейные элементы,
корректирующие /?С-цепочки, логические устройства); рулевые ма-
шинки.
Измерительные устройства служат для определения параметров дви-
жения ракеты и цели. Гироскопические датчики измеряют углы или уг-
ловые скорости тангажа, рыскания и крена. Иногда гироскопический
датчик одновременно выполняет функции измерительного и преобразу-
ющего устройства, например, интегрирующий гироскоп.
Датчики линейных ускорений (акселерометры) измеряют проекции
перегрузок ракеты при ее полете. Если датчик линейных ускорений при-
креплен жестко к корпусу ракеты таким образом, что оси его чувстви-
тельности совпадают с осями ракеты, то он измеряет проекции перегру-
зок на связанные с ракетой оси координат.
К измерительным устройствам ракет относятся и датчики для оп-
ределения высоты, скорости полета и скоростного напора. С помощью
этих датчиков реализуются законы наведения ракет, а также осущест-
вляется перестройка параметров контуров стабилизации.
Радиоприемник ракеты, наводимой по радиолучу, измеряет угловое
отклонение ракеты от равносигнального направления радиолуча и е
помощью аналогового СРП преобразует угловой сигнал в сигнал линей-
ного отклонения ракеты от оси радиолуча.
Головки самонаведения измеряют координаты цели на борту раке-
ты в системе координат осей, связанных с головкой. В качестве таких
координат могут быть: углы пеленга цели £г, « угловые скорости линии
визирования ег, ев; текущая дальность до цели £); скорость сближения
с целью D. Можно отметить, что в пассивных и полуактивных головках
самонаведения, не имеющих связи с пунктом наведения, измеряются
только углы пеленга и угловые скорости линии визирования. В активных
головках самонаведения, кроме этого, могут измеряться и дальность до
цели и скорость сближения с ней.
Свободный гироскоп применяется для измерения углов йу
ф и у. На выходе гироскопа устанавливается устройство для
пряжения 1 иг. Передаточную функцию свободного гироскопа
писать в виде2
UZC r (s) =; ,
фМ 7’2_rs2 + 25c.rTc.rs+1
где Тс,т — постоянная времени свободного гироскопа;
£с.г— степень демпфирования свободного гироскопа.
Введем в выражение (13.115) следующие обозначения:
2 1
и>0 =----- И S — Ju>.
У2
с.г
Тогда получим
съема на-
можно за-
(13.115)
(13.116)
«У2 + 2g«о (jw) +
У свободных гироскопов, как правило, собственная частота колеба-
ний ыо достаточно велика и достигает 1000—2000 1/с при 0,01 <£<0,1
[10], что позволяет считать их безынерционными, т. е. принимать
17СД#Ч.Г (13.117)
Дифференцирующий (скоростной) гироскоп исполь-
зуется для измерения угловых скоростей вращения ракеты относительно^
осей тангажа и рыскания. Рамка гироприбора связана с пружиной и
демпфером.
Передаточную функцию этого гироскопа можно представить в виде
Wл г Ы = --------, (13.118)
. ф(Д + 2!«й.гз + 1
где 7д.г — постоянная времени дифференцирующего гидроскопа;
£д.г — степень демпфирования дифференцирующего гироскопа.
У дифференцирующих гироскопов Тлт изменяется в пределах от 0,01
до 0,002 с и 0,6<£д.г<1 [Ю]. Поэтому при расчетах можно пользоваться
1 Обычно это устройство выполняется в виде потенциометра или индукционного-
датчика [10].
2 В выражении (13.1'15) под углом понимается измеряемый угол тангажа, или
рыскания, или крена.
упрощенной передаточной функцией для дифференцирующего гироскопа
= (13.119)
Интегрирующий гироскоп выполняется в виде двухстепен-
ного гироскопа и измеряет углы поворота и угловую скорость ракеты
вокруг ее оси. В отличие от дифференцирующего гироскопа интегриру-
ющий гироскоп не имеет упругой связи по оси рамки прибора. В этом
гироприборе с рамкой связан воздушный демпфер и электрическая пру-
жина, возвращающая гироскоп в нулевое положение.
Передаточная функция интегрирующего гироскопа записывается в
виде
______^И.г (7*1И.Г$ 4~ 1 )_
5(Ги2г52+2еи.гГи.г5+ 1)
(13.120)
где Тит—постоянная времени интегрирующего гироскопа;
ёи.г — степень демпфирования интегрирующего гироскопа;
Лит — дифференцирующая постоянная времени.
Интегрирующий гироскоп в контурах стабилизации ракет применя-
ется в качестве преобразовательного элемента [10]. В этом случае сигнал
цд, подаваемый на моментный датчик, вызывает момент
Мм.д=<дид, (13-121)
что эквивалентно появлению угловой скорости со<? относительно осей
тангажа или рыскания, т. е.
Ч,.д=^, (13.122)
где Н — кинетический момент гироскопа.
Применив к выражениям (13.121) и (13.122) преобразование Лап-
ласа, получим
(13.123)
Подставляя соотношение (13.123) в выражение (13.120), найдем
1ГИ r (s) = -Йм- А'г---. (13.124)
Н 5(^г52+2си.г7-и.г5+ 1)
При малых значениях Ти.т передаточную функцию (13.124) можно
записать в виде
1ГИ r (s) = .^-r(r“-rS+ 9 1 (13.125)
S
где
и
Датчик линейных ускорений представляет собой механи-
ческую систему с массой. К системе прикреплены пружина и масляный
демпфер. Передаточная функция датчика имеет вид
w (S)=-EMf>
’V ' дг
пгит
k
(13.126)
+ ^.yT^s + 1
Здесь под индексом «о.п» понимается ось чувствительности датчика
ускорений.
В зависимости от принятой системы координат измеряется попереч-
ная перегрузка ракеты. Так, например, если датчик закреплен таким
образом, что ось чувствительности акселерометра совпадает с осью 0у\,
связанной с осью ракеты, то
У cos а + X sin а
П,,,=-----------------
G
При малых а
пу1=------— (13.127)
Если ось чувствительности расположить вдоль оси Qy ракеты, то
Р sin а + У
nv =------~—
у G
ИЛИ
пу=~Г~- (13.128)
Пользуясь уравнением движения центра масс ракеты в проекциях
на нормаль траектории [см. формулу (13.209)], получим
При малой величине 0
Ра + У __ t>8
G g
Сравнивая выражения (13.128) и (13.129), найдем
(13.129)
(13.130)
(13.131)
Определим соотношение между nyi и пу в виде
'ПУ1 у|*
Пу
откуда
Подставив отношение Y/G, найденное из формулы (13.129), в выра-
жение (13.127), получим
пу\=пу—Р~Х «• (13.132)
Продольная перегрузка ракеты определяется в виде
пх=-^-. (13.133)
Тогда
пу1= пу — пха. (13.134)
Из выражения (13.134), имея в виду соотношение (13.131), получим
П*=1—а. (13.135)
Пу
Таким образом, в зависимости от отношения пх1пу и угла а изменя-
ется поправочный коэффициент ц*.
Головки самонаведения осуществляют автоматическое сле-
жение за целью и вырабатывают сигналы управления малочувствитель-
ные к колебаниям ракеты. Автоматическое слежение за целью обеспечи-
вается различными типами следящих систем. Рассмотрим, следящую
систему с электрическим приводом; блок-схема одного канала такой
системы изображена на рис. 13.21, а. Антена 1 поворачивается на оси 2
в кольце 3 с помощью механического редуктора 4 электрическим двига-
телем 5. Якорь двигателя питается постоянным током от магнитного
усилителя 6. Сигнал ошибки (рис. 13.22) определяется соотношением
ДГ = С —Сг, (13.136)
где £ = е——угол пеленга цели;
(У— угол пеленга антенны головки самонаведения.
Рис. 13.21. Схема головки самонаведения с электрическим приводом и дифференцирую-
щим гироскопом
Этот сигнал поступает на чувствительный элемент 8, на выходе ко-
торого установлен электронный усилитель 7,
ления магнитного усилителя (см. рис.
13.21, а).
Сигнал, пропорциональный углу пелен-
га антенны, снимается с потенциометра в ви-
де напряжения гл .
На антенне 1 закреплена неподвижно
площадка, на которой установлен диффе-
ренцирующий гироскоп. С выхода диффе-
ренцирующего гироскопа снимается напря-
жение «г, пропорциональное угловой скоро-
сти линии визирования цели ег.
В рассмотренной схеме головки само-
наведения кольцо 3, на котором укреплена
вся головка, воспринимает колебание корпу-
са ракеты в виде углов тангажа й. Поэтому
для получения угла ег необходимо к углу
пеленга головки £г прибавить угол й (см.
питающий обмотки управ-
Рис. 13.22. Соотношение
углов в головке самона-
ведения с электрическим
приводом
рис. 13.22).
По блок-схеме (см. рис. 13.21, а) составим структурную схему го-
ловки самонаведения со следящим электрическим приводом (см.
рис. 13.21, б). Здесь чувствительный элемент имеет передаточную функ-
цию
^ч.э (?)
Д(5)
k\
T\s+\ ’
(13.137)
^ч.Л*)
где k\ и 7]—соответственно коэффициент усиления и постоянная вре-
* мени чувствительного элемента.
Электронный усилитель совместо с магнитным усилителем, электро-
двигателем постоянного тока и механическим редуктором имеют переда-
точную функцию
Ц7 ($) = —r(S). =-----------------
р ^ч.э(5) S(7]S+ 1)(Т2$ + 1)
где kz — коэффициент усиления электронного усилителя, магнит-
ного усилителя, электродвигателя и механического ре-
дуктора;
Тх и T2— постоянные времени соответственно электродвигателя и
магнитного усилителя.
Передаточную функцию для дифференцирующего гироскопа запи-
шем в виде
= (13.139)
У («)
где k3—-передаточный коэффициент дифференцирующего гироскопа.
Пользуясь структурной схемой (см. рис. 13.21, б) и передаточными
функциями (13.137) — (13.139), получим
Й;#2Дз
Ur ($)=-----(71з^1)(7^4ЩИГ35+ 1)-------Е (13 140)
1+ s(7’1s + l)(r2s+ 1)(Г3в+ 1)
Здесь передаточная функция разомкнутой следящей системы имеет
ВИД
W4s)=------------. (13.141)
s(f1S+ I)(72s+ 1)(73s + D
После преобразований из выражения (13.140), найдем 1
UT(s} =-------------------------E(s), . (13.142)
+ 1) (7^+ О
где постоянные времени 7/, 7/ и 73' получены после нахождения корней
характеристического уравнения выражения (13.140); ^г.с = ^1^2^з-
Постоянная времени Т3' при больших значениях kik2 мала, поэтому
выражение (13.142) можно представить в виде
= -Г:—ТД:—Е (13-143)
(ту + 1)(7у+1)
Из выражения (13.143) видно, что сигнал ur(t) на выходе головки
самонаведения пропорционален угловой скорости линии визирования
цели u(f). Однако в сигнале ur(t) наряду с е(0 будет находиться и
сигнал #(/).
Оценим прохождение сигналов е(£) и ОД) через головку самонаве-
дения. По рис. 13.21, б составим соотношение
I7r(s) = -—(s)*3- ЕД)-I---*---b(s). (13.144)
1 + IT(s) } ‘ 1 + IT(s) k v
(Здесь 5 (s) —► О Д)).
Из соотношения (13.144) видно, что для точного воспроизведения
сигнала е(/) необходимо иметь
| .U1 и 1------L_Uo.
I 1 + ^0) I I 1 + 1Г(» |
Однако получить подобного рода значения амплитудных характе-
ристик можно лишь в ограниченном диапазоне частот ®. Сигнал е(/)
является медленно меняющейся функцией, поэтому получить значение
I w I = 1
I 1 + W(» I
в узком диапазоне частот не представляет значительного труда. Диапа-
зон же частот по в несколько раз выше частот сигнала s(^), что не
1 Здесь принято, что угол тангажа 0=0, тогда £г=ег.
позволяет получить амплитудную характеристику
1
1 ~г W
= 0
в рабочем диапазоне частот сигнала Поэтому в интервале частот, в
котором пропускается сигнал e(t), присутствует сигнал &(/), искажаю-
щий выходной сигнал головки
тельная обратная связь по
ф ухудшает демпфирование
ракеты по углу тангажа,
приводя на некоторых режи-
мах полета к потере устой-
чивости ее контура стабили-
зации (см. § 13.5).
С целью устранения
этих вредных явлений необ-
ходимо создавать следящие
системы головок самонаве-
дения с очень большой поло-
сой пропускания, порядка
40—60 Гц. Получение такой
полосы пропускания с су-
ществующими в настоящее,
время двигателями в следя-
щих системах практически
невозможно. Поэтому следя-
иг. Следует также отметить, что положи-
щие системы с электриче-
ским приводом В головках рис. 1323. Принципиальная схема головки само-
самонаведения применяются наведения с гиростабилизированным координато-
лишь в таких типах ракет, ром цепи
у которых наблюдаются
лишь низкочастотные колебания по углу тангажа (рыскания) [5, 6].
Применение гироскопических стабилизаторов в головках самонаве-
дения позволяет снизить во много раз влияние колебаний оси ракеты на
координатор.цели и обеспечить слежение только за медленными измене-
ниями сигнала e(t).
На рис. 13.23 показана упрощенная принципиальная схема головки
самонаведения ракеты с силовым гиростабилизированным координа-
тором цели. Силовой гиростабилизатор состоит из гироскопов I и II, мо-
ментных двигателей 3, струйных реле 2, разгрузочных пневматических
цилиндров 1, потенциометрических датчиков 4, соединительных тяг 5 и
5', антенны в кардановом подвесе 6 и двухканального усилителя момент-
ных двигателей 7.
Гироскопический стабилизатор имеет два режима работы: слеже-
ния за целью и стабилизации относительно корпуса ракеты. Будем счи-
тать, что в режиме слежения за целью в вертикальной плоскости обра-
зовалась ошибка Аг.в, тогда сигнал ошибки на выходе приемника чувст-
вительного элемента координатора (антенны) появится напряжение,
пропорциональное этой ошибке. После усиления это напряжение посту-
пает на моментный двигатель <3 гироскопа II. Двигатель создает момент
Мдв, действующий относительно оси и вызывающий прецессию гиро-
скопа. При этом произойдет поворот внутренней рамки относительно
оси Оу и тяга 5', перемещаясь, повернет антенну 6 в направлении умень-
шения ошибки Аг.в- Прецессионное движение прекратится, когда ошибка
Аг.в станет равна нулю. Отработка ошибки наведения в горизонтальной
плоскости Аг.г происходит за счет прецессии гироскопа I аналогично рас-
смотренному.
В режиме стабилизации гиростабилизатор работает следующим об-
разом. При колебаниях корпуса ракеты относительно оси Oz (т. е. по
углу рыскания) на ось наружной рамки гиростабилизатора через под-
шипник передается момент трения, заставляющий прецессировать гиро-
скоп I относительно оси Х{. Момент трения и гироскопический момент
уравновешивают друг друга, в результате чего наружная рамка в про-
странстве остается неподвижной. Гиростабилизатор будет работать до
тех пор, пока главная ось гироскопа I не совпадет с осью Oz. Это может
возникнуть лишь при действии больших внешних возмущающих момен-
б)
Рис. 13.24, Структурные схемы канала стабилизации головки самонаведения
тов, вызванных значительными колебаниями осп ракеты по углу рыска-
ния. Для предотвращения данного явления в гиростабилизаторе приме-
нен канал силовой разгрузки, состоящий из потенциометра 4, струйного
реле 3 и силового цилиндра 1. Сигнал на потенциометре 4 равен нулю,
когда главная ось гироскопа I перпендикулярна оси подвеса Oz.
При действии внешних моментов и прецессии гироскопа I на датчи-
ке 4 возникает сигнал, пропорциональный углу поворота гироскопа от-
носительно оси Xi. Этот сигнал поступает на струйное реле 2, которое
повернется и пропустит сжатый воздух в полость силового цилиндра 2.
Поршень цилиндра будет перемещаться и повернет наружную рамку,
компенсируя вредное влияние возмущающего момента. В результате
напряжение на потенциометре станет равным нулю.
При колебаниях ракеты относительно оси Оу прецессирует гиро-
скоп II и работает второй силовой канал разгрузки. Таким образом, в
результате совместной работы гироскопов и силовой разгрузки направ-
ление оси Оу останется стабилизированным в пространстве.
Структурная схема одного канала гиростабилизированной головки
самонаведения приведена на рис. 13.24, а. Как видно из этой схемы, го-
ловка самонаведения с гиростабилизатором состоит из двух взаимно
связанных контуров: 1-го контура для канала стабилизации гироскопом;
2-го канала для цели силовой разгрузки. На головку самонаведения дей-
ствуют: сигнал п (в радиолокационных головках — флюктуации радио-
сигнала) и возмущающий момент А1в.м. Будем рассматривать лишь 1-й
контур головки (рис. 13.24, б).
Передаточные функции для контура головки запишем в виде:
для приемного тракта
= (13-145)
ДгИ) 7\s + 1
для датчика моментов
Г2(5)=-Л1-^(--)-=---; (13.146)
(7r(S) r2s + l V ’
для гиростабилизатора
1Гг с ($) = Z(s) =-----------, (13.147)
MvB(s) s (T2S2 + 2£OTOS + 1)
где fei и k%— передаточные коэффициенты соответственно для при-
емного тракта и датчика моментов;
71, Т2 и То — постоянные времени соответственно для приемного
тракта, моментного двигателя и гиростабилизатора;
go — коэффициент демпфирования;
Н—кинетический момент ротора гироскопа.
На основании выражений (13.145) — (13.147), найдем передаточную
функцию головки самонаведения в виде
Фгс(я) = UAs} =---------------------. (13.148)
Е(s) kikz
Н
1 + —--------------------------------
s (7qS2 + + 1 ) (ZjS + 1) (T^s + 1)
Пренебрегая величинами To и 72 как малыми, найдем
Фг с (S) = , (13.149)
Е(«) 72cs2+2gr.cTrs+1
. н . т / Т.Н . \ Г Н
где kT _с , Ггс 1/ , $г-с 1/
«2 у k.kz 2 г T.k.kz
Из выражения (13.149) видно, что в установившемся режиме гиро-
стабилизации головка самонаведения выдает сигнал, пропорциональ-
ный угловой скорости линии визирования.
При расчетах систем самонаведения можно принимать следующие
значения параметров измерительных устройств (табл. 13.1 и 13.2) [8, 9,
10, 18].
Таблица 13.1
Измерительное устройство А Г, с Е
Свободный гироскоп Дифференцирующий гироскоп .... Интегрирующий гироскоп * . . . . Датчик линейного ускорения .... * Для интегрирующего гироскопа: 7^ 0,2—1,5, В/град 0,3—2,5, Вс/град 0,2—1,5, В-с/град 0,05-0,4, В-с2/с г = 0,1+ 0,8 с; *и.г - 0,С 0,001—0,005 0,0021—0,01 0,005 -0,001 0,001—0,0005 14-0,1 1/(В • с). 0,1-0,01 0,6-1 0,7—1 0,6-1
Таблица 13.2
Тип головки самонаведения Постоянные времени *г.с> В-с/град ^г.с
ф. с т’ Н т , с 2- Г.с
Следящая система: с электрическим приводом постоянного тока 0,07—0,2 0,001—0,005 4—20 1-2,5
с электрическим приводом переменного тока ...... . 0,02—0,08 0,005—0,01 4—20 0,8-1,8
Гиростабилизатор силовой: без разгрузки 0,1—0,2 40—100 0,5-1
с разгрузкой — 0,02—0,05 80—250 0,5—1
С)
Рис. 13.25. Блок-схемы рулевых машинок
Рулевые машинки. Рулевые машинки предназначены для переме-
щения органов управления ракеты и выполняются обычно по разомкну-
той или замкнутой схеме. В рулевую машинку входят: усилитель сигна-
лов, преобразователь сигналов и рулевой привод. Замкнутая рулевая
Рис. 13.26. Гидравлический привод с соленои-
дом
машинка, кроме того, имеет
потенциометрический или
индукционный датчик обрат-
ной связи. Типовые блок-
схемы рулевых машинок по
разомкнутой и замкнутой
схемам изображены соответ-
ственно на рис. 13.25, а и б.
По виду используемой
энергии все рулевые приво-
ды делятся на электриче-
ские, гидравлические и пнев-
магические.
Электрические
приводы выполняются в
виде электрических двигате-
лей постоянного тока или двухфазных двигателей переменного тока с
полым ротором. Уравнения динамики и передаточные функции этих дви-
гателей были рассмотрены в гл. XII. ,
Передаточные функции электродвигателей имеют вид:
постоянного тока
^ДВМ =
JWs).
Уяк(«)
________^лв________
s(72bS2+257\bs+ 1)
(13.150)
переменного тока
6ЛВ О)
t/y(s)
£дв
5 (Д'в5 + I)
(13.151)
Гидравлический привод состоит из устройства управления I
и силового цилиндра II (рис. 13.26). В устройство управления входит
соленоид 4 с подвижным якорем 3 и гидравлическим усилителем 1 с
поступательно перемещающимся золотником 2.
Дифференциальное уравнение функционирования соленоида запи-
шем в виде
у.2 dX^ j =
dfl d
(13.152)
где Хс — перемещение золотника гидравлического усилителя;
ис — напряжение на обмотке соленоида;
Л=—; Т^^-; =
с cR cR
Здесь m и с — соответственно масса якоря и коэффициент жестко-
сти пружины соленоида; ф— постоянная потокосцепления; — устано-
вившееся значение силы тока в катушке соленоида; R — сопротивление
катушки.
Из уравнения (13.152) найдем передаточную функцию соленоида
W. (s) = -Xc(s) =--------. (13.153)
T|s2 + Лз + 1
Уравнения для количества рабочей жидкости в левой и правой по-
лостях силового цилиндра имеют вид:
qv = ^bxc у у (ft-а);
(13.154)
Я2=Р-Ьхс
где qi и q2 — расходы рабочей жидкости соответственно в левой и пра-
вой полостях;
ц — коэффициент расхода жидкости;
b — ширина щели гидравлического усилителя;
Ро —давление рабочей жидкости на выходе насоса;
Рх и р2— давления жидкости соответственно в левой и правой по-
лостях;
р — плотность рабочей жидкости.
Уравнения расходов жидкости в полостях могут быть записаны так:
А Ац + Ар
a qсп, qс2>.
(13.155)
где (?Сц—количество жидкости, затрачиваемое на перемещение
поршня;
7сь 7с2 — количества жидкости, расходуемые на сжатие и расши-
рение.
Расход жидкости на перемещение поршня
= (13.156)
at
тде К,— площадь поршня;
dx„
----------скорость его перемещения.
dt
Коэффициент объемного сжатия
’ из.157)
ИДр
где V — первоначальный объем жидкости в цилиндре;
АК — уменьшение объема жидкости за счет увеличения давления
на Др.
Количества жидкости, расходуемые на сжатие в левой и правой по-
лостях, представим в виде:
dt
(13.158)
dt
Подставим выражения (13.156) и (13.158) в зависимость (13.155),
тогда
(13.159)
dt dt
Уравнение движения поршня имеет вид
d- у
dt
(13.160)
где т-а — масса поршня и двигающихся с ним подвижных частей.
Линеаризуем уравнения (13.154), (13.159) и (13.160) с помощью сле-
дующих соотношений:
А = Ао + ДА; *п=хп0+дхп;
А = Ао + ДА! хс=хсо+д*с-
Д^ = Л„ -^- + 1//fJ ;
dt 1 dt '
Д?2 = Лт
d\xlt
dt
{- V ;
' dt
d2\x., г. , ,
—^г!- = ^п(ДА’1-Да)-
dt*
(13.161)
(13.162)
(13.163)
Приравнивая правые и левые части уравнений (13.161) и (13.162),
получим:
Д/>1
— (A — Ао)~ P^col/' г_______________
Р V ₽ 2/р0-р10
_ у-, d&Xn I у g dhp-[ _
п dt ’Г 11 dt '
/ 2 \p
P 2 V P20
d\pi
dt
(13.164)
rfA.r,
dt
Для простоты математических выкладок будем считать, что поршень
силового цилиндра находится в среднем положении, т. е.
1\ = 1/2 = У,
установившиеся значения давлений:
Ро Рю — Pi
Рю-Pi^^
(13.165)
(13.166)
Рис. 13.27. Структурная схема гидравлического привода
Подставим выражения (13.165) и (13.166) в уравнение (13.163) и
сложим полученные зависимости, тогда
m'nV^ Vf 2 dPxa ,
Лп dt? "Г Рп у о dP ~Г
+ 2ДпГ^4^=2[^А)1/ — *с- (13.167)
dt V р
Здесь опущен знак приращения.
Применив к уравнению (13.167) преобразование Лапласа и выпол-
нив ряд алгебраических преобразований, найдем
^r.n(s)=^7V~~(13-168)
s(r?.nS2 + 25r.nT1,ns+ 1)
где
_ 1 1 /.
" Рл У 2 ’
__У-*Уо । / 2 в
4^п У ^ЗР/’о
ь
'г.п
Угловое перемещение рулей отличается от линейного перемещения
поршня гидравлического привода передаточным числом механической
передачи i. Поэтому уравнение устройств механической передачи пред-
ставим в виде
В(/)=/л:„ (/).
Откуда
Гм(5)=4^-=г.
(13.169)
(13.170)
Пользуясь передаточными функциями (13.153), (13.168) и (13.170), мо-
жет быть составлена структурная схема гидравлического привода (рис.
13.27).
Пневматический привод состоит из устройств управления
(соленоиды, поляризованные реле, пневматические усилители, пневмо-
реле) и пневматического силового цилиндра. На рис. 13.28 изображен
упрощенный пневматический привод, состоящий из поворотного реле I
со струйной трубкой 2, воздухоприемника 4 и силового цилиндра 5.
Под действием напряжения Uf струйная трубка отклоняется на угол а.
и воздух от компрессора под давлением р0 поступает через каналы воз-
духоприемника в полости I или II силового цилиндра. Поршень 6 начнет
Рис. 13.28 Схема пневматического привода со
струйным реле
перемещаться и через меха-
ническую передачу будет по-
ворачивать руль ракеты. На
руле закреплена ползушка 7
потенциометра обратной свя-
зи 8. Устройства 3 ограничи-
вают угол поворота струй-
ной Трубки (ctmax), COOTBeT-
ствущщий максимальной
скорости перемещения порш-
ня dxufdt.
Дифференциальное урав-
нение поворотного реле за-
пишем в виде
dt
(13.171)
где Та — постоянная време-
ни поворотного ре-
ле;
ka—-коэффициент уси-
ления поворотного
реле; •
ис — напряжение управ-
ления поворотным
реле.
Уравнение движения
поршня силового цилиндра
запишем в виде
= Р2)-
dt2 dt
(13.172)
Здесь т,,— масса поршня и присоединенных к нему устройств;
kw — коэффициент скоростного трения;
Pi и р2— давления соответственно в полостях I и II цилиндров..
Составим уравнение расходов воздуха для полостей I и II, считая
при этом, что давление изменяется при постоянной температуре:
?1 d (V,pi) .
g dt
qi _ d (V2p2)
g dt
(13.173)'
где q\ и o2 — секундные расходы воздуха соответственно в полостях I
и II;
Vi и V2 — объемы соответственно полостей I и II;
Pi и р2 — плотности воздуха соответственно в полостях I и II.
Формулы, позволяющие определить приток воздуха в полость I ци-
линдра или расход воздуха из полости II, для дозвукового истечения
имеют вид:
(13.174)
(13.175)
и
где |1— коэффициент расхода воздуха;
&э—эквивалентная ширина отверстия на входе воздухоприем-
ника;
ро—давление воздуха в компрессоре:
ра — давление воздуха в окружающей атмосфере;
ро и ра—плотности воздуха соответственно в компрессоре и окру-
жающей атмосфере;
п— показатель политропы.
К уравнениям (13.173) — (13.175) нужно добавить следующие зави-
симости:
(13.176)
После дифференцирования уравнений (13.173) и подстановки в них
выражений (13.174) и (13.175) получим:
Здесь
где L — длина цилиндра за вычетом толщины поршня.
Выражения (13.172) и (13.177) представляют собой систему нели-
нейных дифференциальных уравнений, описывающих динамические про-
цессы в пневматическом приводе. Линеаризуем эту систему уравнений,
положив:
•гп=л’по_г /?2=/?2оЧ~ Да;
/’1 = Ао + ДА; а = «о+аа,
тогда получим
тп
Лп dfi
d2kxa
dfi
>W20
L — *п0
dhxa
dt
Рис. 13.29. Структурные схемы рулевых машинок с жесткой обратной связью
Применив к уравнению (13.178) преобразования Лапласа и обозна-
чая a(/)-^a(s), получим передаточную функцию пневматического при-
вода в виде
W „ ($) = A^(s) =-------------------
(Л S(^+2en.n7n.nS + l)
(13.179)
у- ___ I / _____тихаО (L -^по)____.
И Fn[«p]0(£ — хпСрnpwxM] ’
. _ kw / np-to (L — хп0) + n/?20jrn0
2 V fnmuxnO (£ — *no)
Структурные схемы рулевых машинок'с жесткой обратной связью,
составленные на основе передаточных функций гидравлического, пнев-
матического, электрического приводов и устройств управления, приве-
дены на рис. 13.29, а, б и в.
На рис. 13.29, а изображена структурная схема рулевой машинки с
гидравлическим приводом, управляемым от соленоида; на рис. 13.29, б—
схема рулевой машинки с пневматическим силовым цилиндром и струй-
ной трубкой.
Передаточную функцию пневматической рулевой машинки (см. рис.
13.29, б) можно представить в виде
^м.у^а^п.п^'
w , у_______ Д (S) ____ s (^M.yS + DHaS + 1) (7’n,nS2 + ЗЕп.Л.п5 + 1 )
" p.м Is! rT , Z
^c(^) ^М.уЯа#п.пг^О.С
S (7м.yS + 1) (T’a» + 1) (/LjS2 + 2$n.n7nns + 1)
Рис. 13.30. Структурная схема рулевой машинки с изодромной обрат-
ной связью
Пренебрегая малыми постоянными времени, из выражения (13.180)
получим
w м(s)=_M£L=-----------------,
Р UQ(s) (rp.^s + lHTp.Ms + l) ’
(13.181)
где &р.м — передаточный коэффициент рулевой машинки;
T’p.mi и ТрМ2 — постоянные времени рулевой машинки.
Наряду с рулевыми машинками с жесткой обратной связью ис-
пользуются машинки с изодромной обратной связью. В этом случае
структурная схема рулевой машинки имеет вид, показанный на рис.
13.30.
Передаточная функция рулевой машинки с изодромной обратной
связью будет
^м.у^а^п.п*
1FZ . S(7kyS + l)(7’as + I)(72.ns2 + 2£п.пГп.п8 + 1)
№р.м^) =-----------------------7———-——-------------------------- • (13.182)
^м.у^а^п.п^о.с^ м
(rMs + 1) (Гм.у5 + l)(ras + 1) (T2.nS2 + 2^.nTn.ns + 1)
После соответствующих преобразований при малых значениях
у2
'г* п.п
Т.. v, Та и --------------------—
1 + ^м.у^а^п.п^о м
имеем
------у
(13.183)
Из выражения (13.183) видно, что отклонение рулей ракеты при ру-
левой машинке с изодромной обратной связью определяется не только
сигналом ис(0> но и интегралом от него. Поэтому можно считать, что
изодромная обратная связь в рулевой машинке на малых частотах в ус-
тановившемся режиме обеспечивает управление скоростью отклонения
рулей, т. е.
а при больших частотах — отклонением рулей
ИО
Ис (О
^р.мЛ м-
Отсюда следует, что в рулевой машинке с изодромной обратной связью
переходный процесс начинается как в приводе с жесткой обратной
связью, а заканчивается как в разомкнутом приводе.
При длинных трубопроводах подачи воздуха или масла в рулевом
приводе возникает явление запаздывания сигнала и передаточные функ-
ции (13.181) и (13.183) примут вид:
(Гр.м^ + l)(^p.M2s + 1)
(T’mS + О е~эт
s (Т’р.м Is + 0 (^р.м 2s + О
(13.184)
(13.185)
где т — время «чистого» запаздывания.
Примерные числовые значения постоянных времени различных ти-
пов рулевых машинок приведены в табл. 13.3 [11].
Таблица 13.3
Тип рулевой машинки гр.м1 11 Д.м!’ с Д.мЗ и Д.м2> с т, С
Электрическая Гидравлическая Пневматическая ООО 1 1 1 ООО ООО 0,006—0,04 0,001—0,005 0,004—0,02 0,005 0,01—0,04
Наземная аппаратура систем управления
Наземная аппаратура систем управления состоит из радиолокацион-
ных станций (РЛС) слежения за целью и ракетой, устройств передачи
команд управления на борт ракеты, средств формирования радиолуча и
счетно-решающих приборов (СРП).
Радиолокацион-
ные станции. Для изме-
рения координат цели и ра-
кеты в системах телеуправ-
ления применяются РЛС, с
выходных устройств кото-
рых снимаются углы пелен-
Рис. 13.31. Блок-схема следящей системы РЛС
представляют собой следящие системы.
га, дальности и скорости
сближения. Как правило,
выходные устройства РЛС
Динамические свойства радио-
технических угломерных и дальномерных систем зависят от динамиче-
ских характеристик следящих систем (см. гл. XII).
Блок-схема типичной следящей системы РЛС каналов углового
сопровождения показана на рис. 13.31. В нее входят: блок выделения
сигналов ошибки с усилителем постоянного тока на выходе 1; электро-
машинный усилитель 2; электродвигатель 3; редуктор 4; тахометриче-
ская обратная связь 5; четырехполюсник 6.
Запишем передаточные функции этих устройств в следующем ви-
де [14]:
блока выделения сигнала ошибки и усилителя постоянного тока
(13.186)
где k\ — коэффициент усилейия высокочастотного тракта станции с уси-
лителем постоянного тока;
электромашинного усилителя
&т^тт W, 1s) = — ; '' (7-/8+ 1)(7-к« + 1) (13.187)
электродвигателя
U73(s) = ; s (7'2bs2 + 2= „7- 3S- + 1) (13.188)
редуктора Г4М = /гр; (13.189)
тахометрической обратной связи
(7Ts ~h 1) s t 5 M T\s -I- 1 (13.190)
6 ' (7-2ks + 1) (13.191)
Пользуясь полученными передаточными функциями, найдем переда-
точную функцию всей разомкнутой системы
W)=_________^(^ + »<^ + 1)(^+2е„.^ + 0_________J92)
+ 1)
(Tfs + 1) (rKs + 1) (?2bs2 + 2-№T№s + 1) (T2ks + 1)
Параметры радиолокационной станции примем следующими [11,
14, 15]:
kxkiki\k^k^— 200 1/с:
^1^лйдв^к = 20;
77=0,007 с; 77 = 0,2 с;
7\в=0,1 с; 7\к = 0,24 с;
7\ = 0,3 с; 5= 1,2.
Для этих параметров определим передаточную функцию замкнутой
следящей системы по формуле
Подставив в нее выражения (13.192) и пренебрегая малыми посто-
янными времени, найдем
Ф (S) = = МГ2а* + 1) .
/ц (s) . (r[s + 1) (7-'2,2 + 25'7-7 + 1)
При принятых параметрах имеем:
1; 7\а = 0,3 с; Л = 0,07 с;
7-з = 0,12 с; $'=0,7.
Устройства передачи команд и приема состоят из
шифратора, передатчика, приемника и дешифратора (см. рис. 13.16).
Как уже указывалось выше, эти устройства входят в замкнутую систе-
му телеуправления. Динамические свойства устройств передачи команд
и приема можно охарактеризовать передаточной функцией:
(13.193)
где Г' — постоянная времени устройств радиоуправления;
т — время «чистого» запаздывания.
Примерные значения постоянных времени наземных РЛС и радио-
технических средств передачи и приема команд приведены в табл. 13.4
[3, 14, 15].
Таблица 13.4
Радиотехнические средства фс 4 с 4 е С й т, с
РЛС слежения за целью и ракетой . . . Радиотехнические средства передачи и приема команд . . . 0,02-0,1 0,002—0,005 0,2-0,5 0,08—0,2 0,6-0,9 1 0,001—0,005
§ 13.3. УРАВНЕНИЯ ДИНАМИКИ ПОЛЕТА РАКЕТЫ
При составлении уравнений динамики полета ракеты в простран-
стве будем рассматривать ее как абсолютно жесткое тело с шестью сте-
пенями свободы. В качестве систем координат для ракет классов «по-
Рис. 13.32. Земная
и связанная систе-
мы координат
верхность — воздух», «воздух — воз-
дух» и «воздух — поверхность» наи-
более часто принимаются: земная,
связанная, полусвязанная, скорост-
ная и поточная системы коорди-
нат [17].
Земная система коорди-
нат (рис. 13.32: начало координат
(точка О)) совмещена с центром
масс ракеты; ось Ох0 лежит в плос-
кости местного горизонта и направ-
лена по касательной к меридиану в
сторону Северного полюса; ось Оу0
направлена по местной вертикали;
ось Oz0 перпендикулярна к плоскос-
ти Ох0у0 и направлена так, чтобы
система координат была бы правой.
В земной системе координат
обычно рассматривается движение
центра масс ракеты.
Связанная система ко-
ординат1 применяется для опре-
деления положения ракеты относи-
тельно земной системы координат.
Начало системы координат совме-
щено с центром масс ракеты; оси
Oxi и Oyi расположены в вертикальной плоскости, как это показано на
рис. 13.32. Как видно из этого рисунка, ось Ох\ направлена вдоль оси
1 Уравнения движения ракеты, записанные в связанной системе координат, несколь-
ко упрощены за счет исключения членов, содержащих центробежные моменты.
корпуса ракеты; ось Oyi — по перпендикуляру к оси Oxj; ось Ozi— пер-
пендикулярна плоскости симметрии ракеты Ох\У\ и направлена вправо,
если смотреть по направлению полета.
Положение связанной системы относительно земной системы коор-
динат определяется углами: тангажа Ь, рыскания ip и крена у.
Угол тангажа — это угол между осью Ох^ и местной горизонтальной
плоскостью; угол крена у — угол между осью Оу\ и вертикальной плос-
костью, проходящей через ось Оху, угол рыскания ip— угол между осью
Ох0 и проекцией оси Ох> на местную горизонтальную плоскость (см.
рис. 13.32).
Углы тангажа, рыскания и крена связаны с проекциями вектора уг-
ловой скорости <0 на оси связанной системы координат соотношениями:
шл1 =у-Н sin 0;
co t = 4 cos & cos У + & sin ft;
('У1 = cos У — Ф cos & sin y.
(13.194)
систем
Полусвязанная
а координат: здесь ось Ох на-
правлена по проекции вектора ско-
рости полета на вертикальную плос-
кость симметрии ракеты; ось Оу —
по перпендикуляру к оси Ох также
в плоскости симметрии; ось Oz сов-
падает с осью Ozi. Ракета ориенти-
руется относительно вектора скоро-
сти v углами: атаки а и скольжения
Р (рис. 13.33). Угол атаки а —угол
между проекцией вектора скорости
на вертикальную плоскость симмет-
рии ракеты и осью Оху угол сколь-
жения р — угол между вектором
скорости и его проекцией на верти-
кальную плоскость симметрии ра-
кеты.
Скоростная система ко-
ординат: ось Ох совпадает с
вектором скорости ракеты V; ось
Оу направлена по перпендикуляру
к оси Ох; ось Oz — перпендикулярна
плоскости Оху. Положение скорост-
ной системы координат относительно зеной определяется углами: ipc и 0
(см. рис. 13.32).
Углы ipe и 0 связаны с проекциями вектора угловой скорости ю на
оси скоростной системы координат соотношениями:
<ох=ус sin В;
— с с cos 6;
(13.195)
Поточная система координат: ось Оу расположена в
вертикальной плоскости симметрии ракеты, перпендикулярной оси Ох,
ось Oz перпендикулярна плоскости Оху. Положение поточной системы-
координат относительно скоростной определяется углом ус. Формулы
связи углов и проекций вектора угловой скорости ы для поточной систе-
мы координат имеют вид:
mv=Yc-,L,k s>n °;
(’Т = 4 cos б cos Yc + & sin ус;
<ог — — % cos 9 sin ус 0 cosyc.
(13.196)
При yc = 0 поточная и скоростная системы координат совпадают.
Уравнения движения ракеты в пространстве
Уравнения движения ракеты в пространстве состоят из трех уравне-
ний сил и трех уравнений моментов, записанных относительно систем
координат Ох, Оу, Oz. Сперва напишем их в общем виде, применитель-
но к любой из пяти названных выше систем координат [7, 17]:
™ К + ^шу - V4 = Рх + Х 4 Gx + Fyx 4 ;
/И ("Уу -j- Ъги>х) Ру + Ч- Gy “Г рху 4“ рву'
т (vz + Т\ ш — = /Чг 4“ Х 4 Oz 4“ Р z Ч~ рвг'
ЦЛ + Uz — 44 u,yu)z Ч- {Ху (“Д - шу) =
-^ЧЛЛЯЛЯг
/у^У 4 (Л- ~ г) “Л 4 ху Uy^z + ®Ч ”
=^4М1У+<у4<У;
4 Uy ~ ®хшу 4~ Iху U~y ~ 4) =
= + Мх, + М„г + мпг,
йг | Л2 I yz I rZ ‘
(13.197)
где т — масса ракеты;
vx, vy, vz— проекции вектора скорости центра масс;
Рх, Ру> Pi — проекции силы тяги ракеты;
X, У, Z— проекции вектора аэродинамической силы при дви-
жении ракеты;
G,:, Gy, G, — проекции силы тяжести ракеты;
4ух, Fyy, Fyz— проекции управляющей силы, созданной органами
управления ракеты;
Т'вх, FBy, Fiiz— проекции возмущающих сил, обусловленных дей-
ствием ветра ит. п.;
/х, 1У, F.— моменты инерции ракеты;
Мах, Л1ау, Л1а?—проекции статического аэродинамического момента;
Х1Ях, ^Идг— проекции демпфирующего аэродинамического мо-
мента, зависящие от угловых скоростей ракеты
(сож, (йу, (Bz, а, Р);
Л1у.т, Myj/, Л4уг—проекции управляющего момента, создаваемого ор-
ганами управления ракеты;
Мвх, Мву, Мвг—проекции возмущающих моментов, обусловленных
эксцентрисистетом тяги, несимметрией оперения,
действием ветра и т. п.
Перепишем теперь уравнения сил ракеты в полусвязанной системе,
а уравнения моментов в связанной системе координат, когда главные
центральные оси инерции совпадают со связанными осями координат.
Тогда система уравнений (13.197) примет вид:
mv = P cos a cos p — X - mg sin 0
mv6=P (sin a cos yc -j- cos a sin p cos yc) -f-
cos yc — Z sin yc — mg cos 6 + FBZ/;
— mv cos Sc = P(sin a sin yc — cos a sin P cos Yc) +
+ Г sin vc4-Z COSYc-r^;
S x^x + ( S z — Sy) шушг = ^ax + Myx MBg,
Sушу -\-(Sx — Jz) №zwx = MsyМду-j- Myy -L
Л“г + (Sy — Ix) d)xWy = XIаг -L Л4лг 4- Л1у2 XIBZ.
(13.198)
К уравнениям динамики необходимо добавить уравнения связи уг-
лов, описывающих вращение ракеты относительно земных осей:
—Ц-(®j,cosy —<й2 sin Y); I
cos & а I
I
ft ==<»„ sin y4-“z cos у;
у 1 I A I ’
(13.199)
Y=wx — tg & (g>y cos у — ®г sin у).
Так как уравнения сил были записаны в полусвязапной системе ко-
ординат, а уравнения моментов и кинематики в связной системе коорди-
нат, то необходимо добавить уравнения связи углов в виде:
sin G = cos a cos p sin ft — cos ft (sin a cos p cos у sin p sin y);
sin 'J c cos 6 = cos a cos p sin 0 cos 0-(- sin a cos p (cos 6 sin y-|-
sin ф sin 9 cos y) — sin fl (cos cos у — sin sin ft sin y);
sin yc cos 6 = cos a sin 8 sin ft — cos ft (sin ’a sin p cos у —
— cos p sin y).
(13.200)
Кроме систем уравнений (13.198) — (13.200), необходимо добавить
математическую зависимость, определяющую изменения высоты по-
лета,
H=v sin 0.
(13.201)
Характер изменения тяги, массы и моментов инерции ракеты обычно
известен и задается в виде:
Р^Р(/);
t
= j* mdt-,
о
б
Sy (t) = SyQ-\Sydt-,
б
(13.202)
Проекции аэродинамических сил X, У и Z можно выразить так:
Х = С у = с Z = C2^- , (13.203)
х 2 у 2 2
где сх — коэффициент лобового сопротивления;
су — коэффициент подъемной силы;
cz — коэффициент боковой силы;
5 — площадь крыла ’;
р — плотность воздуха;
v — скорость полета ракеты.
Статические значения аэродинамических моментов можно записать
в виде:
= ,( 13.204)
2
где I—полуразмах крыла:
Ь— аэродинамическая хорда;
mzx, тау> таг — коэффициенты аэродинамических моментов.
Демпфирующий аэродинамический и управляющий моменты запи-
шем в виде:
= (13.205)
АХ АХ 2 ’ &У Ay Q 7 /V* Д* 2 7
и
M=mx^L- M^rn.y-1^-- Myz = my2^
ух ух 2 * уУ ^2 2
(13.206)
Система уравнений, описывающая динамику движения ракеты в
пространстве [уравнения (13.198) — (13.206)] представляет собой слож-
ную систему нелинейных уравнений, решение которых или даже их ана-
лиз представляет значительные математические трудности. Поэтому при
необходимости использования полной системы уравнений движения ра-
кеты применяются методы математического их моделирования на анало-
говых, цифровых или аналого-цифровых вычислительных машинах (см.
§ 13.7).
С целью упрощения системы уравнений применяют метод линеари-
зации уравнений динамики, позволяющий разделить их на уравнения
продольного и бокового движений. Линеаризация выполняется относи-
тельно малых отклонений переменных (приращений) для некоторой не-
возмущенной опорной траектории. В этом случае переменные записы-
ваются в виде:
0=ео + д9; & = +
а = аа + дц; 8 = ро-фдЗ;
Y==Yo + AY; ^ = т'0-]-Д'о и т. д.
(13.207)
Кроме того, безразмерные коэффициенты можно разложить в ряд
Тейлора и пользоваться первыми членами разложения, т. е.:
1 Под S понимается площадь крыла или двух крыльев в зависимости от того к че-
му были отнесены коэффициенты сх, су, при продувках в аэродинамических трубах.
Сх = СхО 4” Сх4“ С1ВД®в 4" г !
су~ су~> 4" суД.и 4* сув Д8 "И Cy&v;
Cz~ CzO~b czA^-'l~ СгнД^4- СгДЩ
max = maxQ 4- ml4- m’w
mxx = тЯхо+т”л'Ди)л 4 т^у^шу 4“ ml Д?+ml д£;
~ mSiy') 4- ГПд&$ -р|- tTlytyV',
тиУ=тиуу 4- т<уу^у 4- тух^°х 4- 4- т^д?;
^az ^azO “И /ЦгДСС -|- tTl-z^V J
^лг = ^z0 + m* Да + т*г д^;
myx=ту*а 4- т> д8э 4- wjHA8H;
тУ2/ = тт+туэД5э4-"^нД8„; '
туг = т^о 4- 4- /п‘5вД8в>
(13.208)
где
Пользуясь уравнениями (13.198) — (13.206), рассмотрим особенности
линеаризации уравнений продольного и бокового движений ракеты, вы-
полненной по самолетной схеме (рис. 13.34, а). Такая ракета имеет плос-
Рис. 13.34. Аэродинамические схемы ракет:
а — самолетная схема; б — осесимметричная схема
кость симметрии и поэтому можно считать, что движение, происходящее
в вертикальной плоскости, будет тогда, когда
?-=0; 8и=0; 8э = 0; ус = 0.
Имея это в виду, получим
tnv — Р cos а — сх — mg sin 0 4вД.;
mvti—P sin а4- с„ .Apt?— ^р- cos fl 4 Р
। у 2 ° 1 в»
/ й = (m3Z 4 т , 4 myz) bS^v2 4 М ;
Z А \ а Z i Д л | у Z > В2 ’
(13.209)
& = «)2;
//==ц sin 0;
а = & — 0.
Опорную траекторию можно найти интегрированием следующей сис-
темы уравнений:
•V (р cos а — с — mg cos й) ;
in \ 2 /
mv9 + me cos 9
a -=--------s----
S pt'2
P + Cy ~~
G = 0 — a.
(13.210)
При интегрировании будем считать, что нам известны m = m(t);
P = P(t), тогда после решения системы уравнений (13.210) найдем опор-
Рис. 13.35. Графики изменения скоростей
полета ракет:
1 — класса «поверхность — воздух»; 2 - - класса
«воздух — воздух»
ные параметры траектории
6о, Фо, Ро, ао- Графики изме-
нения v0 от времени поле-
та для двухступенчатой ги-
потетической ракеты «по-
верхность — воздух» и од-
ноступенчатой ракеты «воз-
дух— воздух» изображены
на рис. 13.35 [7].
Линеаризованные урав-
нения динамики продольно-
го движения при Р =
= const, записанные в прира-
щениях, имеют вид:
dt
— sin Oj
a . \ / p
—— c.r + g COS % д9 — — sin a0 -Г
2m / \ m
i Spuo „ И . . / M . ,
4~ „ °x I A’} — I cxo 4
2m j \ m
rfA8 f P . Sw0
----= — --------cos a0 -p -A-2
dt \ m»0--------2m
т ------cos ao 4
S?v0 ~
2m y
5рг’о Л ,
---- C r Atj —
zm /
c;-^lMAe +
^0
Г ( —!_
SPf2 C«B !
2m x m
mv^
sin адф-
S?vp
2m
S?v0
2m
bS рф
2IZ
„.,2
V , ^cosflfA
by i ;
vo I
„ bS ovi.
ЩгД9+—Г^т“Д»4
z/z
Cy"^
&P nV
mVQ
(13.211)
Zi 2
bSpvl
2/г
m8'°
z
-----ma-
2/. z
отАдв+2^о -8..-
/ П 2IZ
d\bb. , *3рг?5
dSa
dt
dt
di&
----= Дшг; Да = Д& —ДО;
dt
<PH . r. , , „ _
—=S1O 90ДЦд-Ц COS 0ОД0,
2/z
d/2
m
«> dx ( Д Л4 ZR
; z---------------£2.
z dt ' Iz
где mZo = maz<) ф- щдг0 myZo.
Полученные уравнения являются линейными дифференциальными
уравнениями с переменными коэффициентами.
Уравнения бокового движения запишем в виде:
— mv cos ХС = (Р sin a-j-K) sin yc — (P cos a sin p — Z) X
X соз ус + Хвг;
/УX/ = + тяу + m.vy) + Мву-,
: 1 , . .
Ф=------- a> cosy-ю sin y);
cos О и
i
(13.212)
Y="4 — Ш 8 (“г, cos у — <s>z sin y);
sin X cos 6 = cos a cos p sin 6 cos sin a cos p(cosO sin y-|-
-|- cos y sin ф sin 8) — sin p (cos ф cos y — sin y sin 8 sin ф);
sin Yccos0 = cos a sin sin 8 — (sin a sin cos y — cos 3 sin y)cos&. j
Линеаризуем систему уравнений (13.212) и отбрасывая члены
второго порядка малости, получим:
% c hv 4-
Vc +
mv;i 2m J 2m z mv0
rfA<Br ZS pt^ 0 ZSpt(“ ZSpVg
mx^ + /п/Д<ол -t- ——тхУ^у -p
_L AAX •
x И I .
Jx
ZSpv^ ()
(' U <o<> . I
-------m у Дш„ -4-
2!у----у у '
IS pt,?
------т °нД8., X
2/у---у н Т h
dt 2/,v
d^<py __ ZSpX
dt 21 у
IS
dA-lj
dt
dS-f
dt.
2/.r x 3 ' 21x
/?фДр 4- <„ д , /п,/Дшг J 2!y y x
пХд?4- IS pt,? . -tn ИДВ 4 21 у у h 1
_____1
cos 8-0
Д<-Х — tу 80Дау,
А-Мвг/
(13.213)
COS % -----!
u dt
д^ —cos 0оДф—cos 6ОД -'С — sin OjAy;
AYc = tg %ДЗ XAY-
cos 0О
)
Система уравнений (13.213) также является линейными дифферен-
циальными уравнениями с переменными коэффициентами.
Уравнения продольного движения и соответствующие
им передаточные функции
Линейную систему дифференциальных уравнений, описывающую
продольное движение ракеты, выполненной по самолетной схеме, пред-
ставим в виде:
где
pr 4 «Ю (4 4 «и (40 4 «12 (4 9=«и (0 8B 4 «и (4
dt
а гр (4 'v 4 «21 (4 б 4 4 «22 (4 9=«аз (4 8в 4 «24 (4 Л у;
at
«зо (4 ® 4 «31 (49 4 «35 (4 4 «з2 (4 9 4 «зо (4
at
+ -^Г=a*3 (4 8в4 «37 (4 —- 4 «34 (4
dt2 dt
(13.214 )
dt
I
«ю (4=-^-4о
т
---Г sin
sp4j »
2m
atl — s?vl
g cos Op .
<,„ю== -tsp
* Z
2m
<£sp4
Lt 2
у а0
2IZ
V
mp,
... p
«11 (4= — sin «0
m
Spop
2m
cax — gcos60;
p . , s?4)
a12 (r) =— sin a-f
m
2m
P
«13 (4 = -
sp4
2m
csb;
«21=-----
mvQ
^14 (/) —
m
cos a0 4
2m
c"
by
g sin 60 .
»o
«22 (4"
Spv0
mvQ
cos ап
‘2т
«23 (4
Sp^O с80.
2т ’
«24 (4
1
«31 (4
mvQ
bSpvl a_
«32(4--
2/г
bSfVg
mp
2iz
bs p4
«33 (4 = —
2‘ z
«34(4= —
‘ z
1 В уравнениях (13.214) для упрощения формы записи опущены символы прираще-
ния переменных А.
8
m u:
z
«35 W
т*;
2/г
bS
m'J-----------
21,
bS pv?
«36 W =-----
z
bS pv„ .
«37 (/)=—?-/«>.
zz z
т *;
Z
При практических расчетах коэффициенты
безразмерной форме:
<£> ~
и т® приводятся к
т°г = тшг —
z Z V
m“ = ma —
Z Z V
(13.215)
Для анализа уравнений продольного движения и составления соот-
ветствующих передаточных функций воспользуемся методом «заморажи-
вания» коэффициентов [7]. Считая при этом, что за время переходных
процессов ракеты коэффициенты агД/) мало изменяются1.
Продольное движение ракеты можно разделить на два движения:
короткопериодическое и длиннопериодическое. Короткопериодическое
движение в зависимости от высоты и скорости полета характеризуется
периодом от десятых долей секунды до нескольких секунд. Поэтому из-
менение коэффициентов а^(/) за время короткопериодического движе-
ния незначительно и метод «замораживания» коэффициентов применим
без существенных ограничений. Длиннопериодическое движение харак-
теризуется периодом до десятков и сотен секунд. За это время коэффи-
циенты а,Д0 могут сильно измениться и применение метода «заморажи-
вания» коэффициентов может привести к неточным результатам. Качест-
венные результаты могут считаться справедливыми2 * *.
Применим к системе уравнений (13.215) с «замороженными» (по-
стоянными) коэффициентами при нулевых начальных условиях преоб-
разование Лапласа [14, 16], тогда получим:
(s 4- а10) V (s) -f- a~f) (s) -ф a12& («) = а13дв ($) -ф a14FB (s);
(*) + ($+ «21) В (s) + «22^ (s) = «2зДв («) + «24^ («)‘>
«30 (s) + («35S 4- «31)1 (s) -ф (s2 -Ф a3ss + a32) »(s) =
— (a37s-фц33) дв (s) -фа3фИвг($),
(13.216)
где V (s), 9(s), »($), AB(s), FBX(s), Fsy (s) иЛ4вг(х) изображения оригина-
лов функций и (0, 6(/), 8в(/), Двл(7), FBy(t) и AfB2(/).
Решение системы уравнений (13.216) запишем в виде
s + «ю
«20
«зо
«п
s + «21
+ а3!
«13ДВ («) + «:4^вл(Л
«2'4 в («) + a2iFBy (s)
(«37S + а33) Дв (s) + «34^вг (s)
s + «10 «11 «12
«20 S + «21 «22
«30 «35s + «31 S2 4 «36s + «32
1 При расчетах допустимо изменение этих коэффициентов на 15—20% [1].
2 Для уточнения этих результатов обычно пользуются методом математического
моделирования процессов длиннопериодического движения на аналоговых или цифро-
вых вычислительных машинах.
откуда
5 (s)=Ив (s) Дв (s) + W^sx (s) FBX (s) 4- Wly (s) FBy (s) +
+^вг($)Мвг(«). (13.217)
Приняв, что на ракету действует только возмущение в виде откло-
нения руля дв, при некоторых конкретных значениях Щц, получим
И (s) =-----£(ns + i)(7>+J)(7\3s + l)--- , (13.218)
в (7’2S2 + 2E0ToS + l)(7’2i’2+2^? +1)
где k — передаточный коэффициент ракеты;
Т\, Т2, Т3 и Тп — постоянные времени;
до и д„ —относительные коэффициенты демпфирования.
Аналогично можно найти и передаточные функции U7*^. (s), (s)
и АН (s).
При проектировании систем управления ракет (систем стабилиза-
ции, телеуправления и самонаведения) принято считать, что движение
центра масс ракеты в направлении полета является практически неза-
висимым от движения ракеты вокруг центра масс [7]. В этом случае
можно положить До = 0. Следует отметить, что в системах управления
вектором скорости или высотой полета ракеты подобное упрощение не-
допустимо.
Итак, при Ду = 0 из выражения (13.216) имеем систему уравнений:
(s + а21) О (s)4- йа2» (s) = а23Дв (Д + (s);
(a35s + aaJ'e (s) + (s2 + a36s + a32) & (s) =
= (аз7« + <233) Дв(х)4-п'.34Л/1в2 (s),
из которой при 77ву = Л'1,.г = 0, найдем
«+«21 «2зМО I
«35$ +«31 («37$ + «33> АВ($) I
S + «21
«35-S + «31
(13.219)
Дв(х). (13.220)
«22
«2 -у a35.s + Дз2
___ _____«37^2 + («2*«37 + «33 — «23«35) S + «2Г«33 — «23«3’_
•S3 + («21 + «Зб) S2 + («32 + «21«36 — «22«35) $ + «21«32 — «22«31
Для ракет классов «поверхность — воздух» и «воздух — воздух»,
имеющих большие значения PjG можно пренебречь влиянием силы тя-
sin 0о , ,
жести, тогда слагаемым — ----------- в коэффициенте a2i также можно пре-
....
небречь. В этом случае a2ia32 — a22«3i = 0 и выражение (13.220) примет
вид
«21«33— «23«31 /«37
«32 + «21«36 — «22«35 \ «21«33 — «23«31
/ 1
.2
-------------------------s-
«32 + «21«36 — «22«35
s2 | «2’«37 + «33 ~ «23«35 s j | \ .
«21«33 — «33«31 /
—-----------------s+^s (13.221)
#32 + «21«36 — «22«35
ИЛИ
в Ab(s)
k(T)S + I)(T2s+ I)
s (TqS2 +2!-qT0s + 1 )
(13.222)
Передаточная функция (13.222) справедлива для ракет, выполнен-
ных по схеме типа «утка» или с поворотным крылом.
В формуле (13.222) следующие обозначения:
а21 а23 — Д23Д31
ай2 + Д21а36 — а22а35
(13.223)
а21 + a3fi
2 V а32 + «21а36 — а22д35
Числитель передаточной функции (13.221) запишем в виде
- As2 + 2Bs + 1 = (7\s + 1) (T2s -4- 1), (13.224)
где
Д — — . 9В = -?2'а37 + Дзз~- а23а
^21^33 — ^23^31 ^21^33 — ^23^31
Из соотношения (13.224) найдем:
7\ = В +V А^В2; 7\ В-~''А В2.
(13.225)
Подставив в выражения (13.223) и (13.225) соответствующие зна-
чения коэффициентов ац, получим параметры ракеты k0, То, g0, Л и Т2.
Их соответствующие значения приведены в табл. 13.5.
У ракет, выполненных по нормальной схеме коэффициент а37 прак-
тически равен нулю ,[7} и передаточная функция (13.222) имеет вид
У(у) _ kp(Tys + A
дв(») s (7’5s2 4-2£07ух -г 1)
(13.226)
где
Т =
1 р
Я33 — ^23^35
#21^33 — й23й31
Соответствующие значения параметров передаточной функции так-
же приведены в табл. 13.5. Здесь же в таблице приведены передаточные
функции для ракет с нормальной схемой размещения оперения и схе-
мой «утка» относительно углов 0(s) и a(s):
(ф
m (S)
о (g) .
Ms)
« (s)
М«)
и перегрузки Ny(s)
(s) —
в 4 1
Ny (s)
Ms)
Уравнения бокового движения и соответствующие
им передаточные функции
Линейную систему дифференциальных уравнений, описывающую бо-
ковое движение ракеты, выполненной по самолетной схеме, представим
в виде:
Самолетной схемы
Боковой
Осесимметричной схемы
Крен
Продольный и боковой
СЮ ^)“л-+ С11 W + с12 (0 с13 W ^вл- “Г
+ С17 Ф) 5н + С19 W 5э!
*10 «>л + + Ьп (Z) <Оу + />12 (Z) ? + *13 (Z) =
=ь^мзу^ьг1^ЛьХй
cos 0О + bn (t) ? + b'n (f) ус = &24 (Z) + b„ (I) 8Н.
Продифференцируем пятое уравнение системы (13.213), тогда по-
лучим
_^L = cOs0o——cos00-^ sin а0. (13.228)
dt dt dt dt
Подставим это выражение в третье уравнение системы (13.227):
C0S e°'SL_’j'~Sin а0'5_+г'22^^ +
+ b№ (t) ус = bu {t) F3Z + b„ (t) Вн. (13.229)
Имея в виду четвертое и седьмое уравнения системы (13.213), из
выражения (13.229) найдем
cos 0О . d$ . d-t ।
—тЧ + МР —-----------sin а0 -Ь-ф
COS »о " dt dt
+ *26 (Z) tg b’26 (Z) Y=Z>24 (Z) Гвг + bn (t) В (13.230)
COS Uq
Пользуясь уравнением (13.230), перепишем систему (13.227) в виде
+ Сю (0 + С11 (Z) и>у + с12 (Z) р = с13 (Z) Л4вх +
+ c17(Z)8h + C19(Z)83;
*io W + *и W + *12 d) ? + *1з Ф) - =
= *14И^ + *17Ф)5н+*18(^^-;
*21Ю “i, + *22 W - Sin а0 + b2B (Z) у =
= *24(0 ^ + *27 W V
(13.231)
где
bn (/) = bn (/) + bn (0 tg 0O; bn (t) = bn (Z) .
cos 0O
В уравнения (13.231) входят следующие коэффициенты:
^=-477
m“-r; сп (Z)=--------?V° тту;
х ’ 11 k ’ 2IX х
c'12 —
C13 Ф) — —
ZSpv? . ISoui s
cnW=—7---------m н; -С19(/)=---------т. ‘
2fx * 1 v 2/x x
ь1й(У=
Ь,УУ =
!^m‘\ bn(f)=
2/у у 111 1
lS^l з , ...
my> ^13 (^) —
2Iy
Ь^ = ^~\
ty
Z5pv?
м^-577-
‘'W 2/.
ZSpVp
2/j,
Z-Spt'o
2Z у
/Spv^ 5 6
m/;
ттуу,
у'
COS 0Q
cos &о
rfl bn(t)
СУо’
h /Л 5pvo в P , Psinaotgeo SPt,0tg90 . , ... 1
Ь<Я Ц1 = —--Cz----------1-----------Г •--7,---СУо’ °24 (.0
2m mvQ mvQ 2m
, /±\ P sin “ocos ,C)o । sP^o cos
0 pg — |
mv0 cos Sp m cos 9q
£ (/)=_
7 V 2m z
/«Vo
Система уравнений (13.231) не удобна для вывода передаточных
функций ракеты в боковом движении. С целью их упрощения будем счи-
тать, что полет ракеты в боковой плоскости происходит под малыми уг-
лами тангажа Фо и вектора 0о, тогда получим:
Д2
dt
№у'
£т
dt
и система уравнений (13.231) примет вид:
+ <10 W ^4~ + с12 (^ = с13 (0 Мвх + 1
dt2 dt dt
4“ ci7 У) 8н 4~ ci9
4- bu Ю 4- bw (t) -g-+b12 (t) p+b13 (/) =
dt2 dt dt dt
=bAt}M^b^tw^ba{t}^-
-^-^b^ty^ b26 (i) Y = b2i (/) FBS + b27 (/) 8H.
В системе уравнений (13.232) принято, что sin a0 — малая вели-
чина.
Воспользуемся принципом «замораживания» коэффициентов и при-
меним к системе уравнений (13.232) преобразование Лапласа при нуле-
вых начальных условиях, тогда получим:
S (S 4- cI0) Y (S) 4- У) 4- (s) = С13МВХ (s) -Н
4“ С17ДН (5) 4- с1эАэ 0s);
s(s4-&n)7(s)4-610SY (s)4- (bi3s 4-i>12) ₽(sj=
=ь14^ву (s) 4- (&I8s 4- *i7) Дн (s);
5-Гс (s) 4- b.y (S) 4- b26\’ (s') = b24FBZ (s) 4- b21 Дн (s).
(13.233)
Система уравнений (13.233) справедлива для ракет, выполненных
по самолетной схеме (т. е. несимметричных относительно оси), когда
влиянием членов сц$ф($), Ci2p(s), Ci3AH(s) и b10sy(s), b2oy(s) пренебречь
нельзя. Последнее указывает на невозможность разделения движений
рыскания от крена.
На рис. 13.36 приведена структурная схема бокового движения ра-
кеты, составленная на основании системы уравнений (13.233). Переда-
точные функции 1, 2 и 3, выделенные на рисунке штриховыми линиями,
учитывают взаимное влияние каналов рыскания и крена.
Для осесимметричных ракет (см. рис. 13.34, б) взаимное влияние
каналов мало. Поэтому можно разделить систему уравнений (13.233)
на две: для движений рысканий и крена. Действительно, пренебрегая
Рис. 13.36. Структурная схема бокового канала движения
ракеты
дн($). (13.235)
первым уравнением системы (13.233) и малыми коэффициентами bw и
&2б, получим уравнения, описывающие движение рыскания в виде:
(S 4- М & 0) + ^22 Ж = (s) + &27ДВ (з);
(^13s + ^12) Фс + [52 + (^11'+ 613) S ф й12] Ф(з) =
= (s)+- ^17) дн (4
В системе уравнений (13.234) учтены знаки коэффициентов bi2, bi3
и b22-
Из уравнений (13.234) при FBZ = MBV = 0 получим
I « + *22 627Дн(з)
__ I + &12_______(6l8S + ^17) Ан(Д
1 s + Ь22________Ь22
| £j3s 4- ^12 s2 + (6ц + Фз) s + 6j2
Нетрудно показать, что коэффициенты уравнения (13.235) совпадают с
соответствующими коэффициентами уравнения (13.220), т. е.:
^21 = ^22=Ь22, й-2з~Ь2у‘, а21 = й22;
а35=^13’ а32==®31= ^12’
ц37 = й1а; а33 = й17; <236 = bn-1- Ь13.
В соотношениях (13.236) не учитываются члены ^т веса ракеты.
Кроме того, принято: 0о = О’о = О; с£= — су\ с*= — с“у-, ml=ma2; т%—
: = тг'- т^=т^в; m”y=.tn”z.
z’ у Z ’ У Z
(13.234)
(13.236)
Имея в виду соотношение (13.236), из выражения (13.235) можно
получить передаточные функции
Wi ^C^ + ix^+i) : (]3237)
и н М«) S(7'^2 + 2S07’oS + 1) W'% (s) = = WPS+_1) _ (13.238) H МЙ +2g07-0s + 1)
Формулы (13.222) (13.237) и (13.238) полностью тождественны формулам и (13.226). Параметры передаточных функций (13.237) и
(13.238) также приведены в табл. 13.5.
Уравнение, описывающее движение осесимметричной ракеты по кре-
ну. можно получить из первого выражения системы (13.233), приняв
С\ 1 = С12 = Ci7=0, т. е.
M’+Coh (s) = c13/Wm(s)-J-c19A3(s). . (13.239)
Откуда при MBX = 0
Wl =, (13.240) 3 Дэ(«) $(Гэ5 + 1)
где k3 = -^- ; . Со Со
Соответствующие параметры передаточной функции ракеты по кре-
пу приведены выше в табл’ 13.5. Знак k3 отрицательный, так как поло-
жительное отклонение руля дэ вызывает отрицательную скорость у.
Знак Т-, положительный, так как коэффициент всегда отрица-
тельный.
Значения параметров передаточных функций
IFljs), r^(s), l^ljs), 1^(3) и
J1 В и н н
для зенитной ракеты «Эрликон», . атакующей прямолинейно летящую
цель на высоте Яц=10 км, со скоростью ац = 400 м/с, в зависимости от
времени полета приведены на рис. 13.37, а и б [7]; Как видно из рис.
13.37, а, коэффициенты kP, £р — от времени полета сильно меняются,
g
что сказывается на изменении управляемости и маневренности ракеты
(с падением коэффициентов fcp и — ухудшаются маневренные свой-
g
ства ракеты). На 45-й секунде полета происходит выключение двигате-
ля, приводящее к мгновенному изменению этих коэффициентов.
На рис. 13.37, б показаны изменения постоянных времени То, Тр и
степени демпфирования go ракеты «Эрликон» в течение полета. Пара-
метры То, Т-р и go изменяются в несколько раз вдоль траектории полета.
Для получения высокой точности наведения ракеты «Эрликон» на
цель необходимо обеспечить меньшее изменение передаточных коэффи-
циентов ракеты во время ее полета. Последнее обеспечивается надле-
жащим выбором структуры и параметров системы управления ракеты
(см. § 13.5 и 13.6).
$ 13.4. ПОТРЕБНЫЕ И РАСПОЛАГАЕМЫЕ ПЕРЕГРУЗКИ РАКЕТЫ.
ТРАЕКТОРИИ ПОЛЕТА РАКЕТЫ
Как следует из § 13.2, потребная перегрузка характеризует траек-
торию полета ракеты и определяется ее кинематическими параметрами:
v(t), 0(Z), фс(0- Действительно при наведении ракеты на цель ее век-
тор скорости все время должен следить за целью, или мгновенной, или
фактической точками встречи. Поворот вектора скорости происходит под
воздействием нормальной и боковой сил (или нормальной пу и боковой
nz потребных перегрузок).
Ракета же располагает вполне определенными аэродинамическими
возможностями, а следовательно, ограниченными значениями нормаль-
ной и боковой перегрузок. И при наведении ракеты может наступить та-
кое положение, когда рули ракеты отклонены на предельный угол (на-
ходятся на упоре), а возникшая величина нормальной и боковой пере-
грузок оказывается недостаточной для поворота ракеты (вектора скоро-
сти). Начиная с этого момента времени ракета «сходит» с принятого
метода наведения и движется с предельной перегрузкой. Если этот про-
цесс начинается на значительном расстоянии до цели, ракета пролетает
цель с большой ошибкой. Отсюда видно, что для успешного перехвата
воздушной цели ракета должна развивать нормальную и боковую пере-
грузки большие или равные потребным.
Предельная перегрузка, развиваемая сбалансированной ракетой на
определенной высоте полета, называется располагаемой перегрузкой. Ее
значения пдаасп, игРасп определяются максимальными углами отклонения
ОрГаНОВ управления битах*
Пу = П„В 5вп1ах + йР- Is
"расп ^бал вшах 1 *оал 13в=0’
пг = пъ* 8ятах.
Расп гбал
(13.241)
Перегрузка пу 5ал при 6в = 0 мала и ей можно пренебречь.
Для осесимметричных рулей
= -пъ» . (13.242)
гба.ч ^бал
Поэтому максимальное значение угла органа управления можно опре-
делить по формуле
8тах=-^. (13.243)
^бал
Зенитные ракеты класса «поверхность — воздух» и авиационные ра-
кеты класса «воздух — воздух» иностранных армий имеют /грасп=154-
-4-20 [18]. В условиях нормального полета зенитных и авиационных ра-
кет располагаемая перегрузка затрачивается на выполнение полета на
траекторйи пПОтр, на перегрузки, вызванные флюктуациями сигнала
управления Пф, на перегрузки от уходов гироскопов головок самонаве-
дения и т. п. паш т. е.
I Ярасп ; > I Япотр I +/гф + /гап- (13.244)
В зависимости от состава наземной аппаратуры наведения и бор-
товой аппаратуры значение (Пф+пап) может сильно изменяться. Поэто-
му дать какие-нибудь общие рекомендации по выбору величин Пф и пап
трудно !.
В заключение отметим, что в любой точке каждой из траекторий
полета необходимо выдержать условие (13.244), определяющее ниж-
нюю границу располагаемой перегрузки и максимальное значение углов
отклонения органов управления.
Траектории полета ракет
Траектории полета ракет при наведении на цель определяются урав-
нениями движения центра массы ракеты и кинематики наведения в со-
ответствующей плоскости (вертикальной или горизонтальной).
Рассмотрим эти уравнения для наведения в вертикальной плоско-
сти ракеты класса «поверхность — воздух» и в вертикальной и горизон-
тальной плоскостях ракеты класса «воздух — воздух».
Наведение по методу совмещения
Траекторию движения ракеты в вертикальной плоскости можно вы-
числить с помощью системы уравнений (13.245), переписанных в виде1 2 * * * * * В:
1 Ниже при расчетах условно принималось п$ + Нап=4ч-5.
2 В системе (13.245) —см. стр. 694 третье уравнение получено из соотношения
znvO = Ра + Y — mg cos 0.
Разделив уравнение (43..26) на mg, получим
т'0 + ¥
----= — cos В.
g---mg
Ра | Y
Подставив в выражение (13.247) соотношение Пу = ------------ , имеем
mg
vfl
Пу = ---- + COS 0.
g
В установившемся режиме
Пу = щ а \-(п )
^бал \ Убал/а=0
Подставив выражение (13.249) в уравнение (13.248), найдем
1 Г t fj
а = —------ -----+ cos 0 — (п ) „ .
Л® g \ »бал/а=0
(13.246)
(13.247)
(13.248)
(13.249)
(13.250)
При малом
значении) __Q получим искомое уравнение.
Р 5pv2 .
v=-----------—cr — g sm 0:
m 2m x
H = D sin s;
1 I vfl । , fl\
a - ---------------F- cos 0 I ;
(13.245)
^бал
tn = — m..
В последнем уравнении системы (13.245) тс обозначает секунд-
ный расход массы ракеты.
К системе уравнений (13.245) следует добавить два уравнения ки-
нематики наведения [см. выражение (13.2)]. Систему уравнений (13.2)
можно записать так:
D = v cos(S — г)
0—г-|- arcsin [-
(13.251)
где е = Ец(/) —известная функция времени, определяемая законом дви-
жения цели.
Последнее уравнение системы (13.251) не является дифференциаль-
ным, поэтому по нему трудно определять 0. Для вычисления 0 восполь-
зуемся выражениями (13.7) и (13.5), тогда получим
Для вычисления траекторий полета ракеты необходимо проинтегри-
ровать системы уравнений (13.245), (13.251) и (13.252) уточненным ме-
тодом Эйлера [12], определяя а/{+1 и 0,-;+| последовательными приближе-
ниями.
Наведение по методу параллельного сближения
Определим траектории движения ракеты раздельно для вертикаль-
ной и горизонтальной плоскостей.
Движение ракеты вертикальной плоскости. В этом
случае можно пользоваться системой уравнений (13.245), добавив к ней
уравнение кинематики в виде
S = s — arcsin \k sin (г — 9Ц)]. (13.253)
Из уравнения (13.253) находим значение угла наклона вектора ско-
рости 0.
Для определения 0 продифференцируем уравнение (13.253), и зная,
что
v sin (,е — 0) = sin (s — 0Ц),
получим
g_ V sin (е — 8) — v„ sin (e — 6Ц) + vu8u cos (e — 0u)
v cos (г — 6)
Интегрируя уравнения (13.245), (13.253) и (13.255), по
му методу Эйлера определим траекторию движения ракеты в вертикаль-
ной плоскости.
Движение ракеты в горизонтальной плоскости.
В этом случае траектория может быть рассчитана с помощью следую-
щей системы уравнений:
(13.254)
(13.255)
уточненно-
р
(13.256)
При наведении по методу параллельного сближения (13.256) сле-
дует добавить два уравнения:
(!с=Х— arcsin [k sin (/ — 'К.J];
_ V sin (у — Фс) — sin (у — фс.ц) + РцФс.и cos (X~ ’Ku)
lC t,cos(y—фс)
(13.257)
Интегрируя системы (13.256) и (13.257), по уточненному методу
Эйлера определим траекторию движения ракеты в горизонтальной плос-
кости.
Пример 13.1. Рассмотрим численное решение системы уравнений (13.245),
(13.251) и (13.252) для гипотетической ракеты класса «поверхность — воздух», .наводи-
мой по методу совмещения в вертикальной плоскости [7].
Будем считать, что ракета имеет следующие параметры: Р0 = 354 кгс; S = 3,22 м2;
Руд=209,4 кгс-с/кг; Шо = 1О,5 кгс2/м. Активный полет ракеты под действием ЖРД про-
исходит от 4 до 28-й секунды.
График сх(Л4, а) приведен на рис. 13.38, а. При (=4 с отделяется стартовый уско-
ритель на высоте /7=1000 м, при этом скорость ракеты f0 = 588 м/с. Иа высоте Яо =
= 1'0000 м ракета атакует горизонтально летящую цель со скоростью иц = 300 м/с.
Секундный расход топлива
Р
«с = ———=0,17 кгс-с/м. (13.258)
Сила лобового сопротивления
X = S?cx, (13.259)
V
где q = ?0М'л М = —. ()3 26О)
С помощью ЦВМ по уточненному методу Эйлера проинтегрируем системы урав-
нений (13.245), (13.251) и (13.252), учитывая при этом выражения (13.258)—(13060) и
начальные условия 0о (от 10° до 60°).
На основании вычислений на рис. 13.39, а построена зависимость скорости полет;
ракеты в функции времени. На рис. 13.39, б приведены траектории полета ракеты пр;
разных значениях 90.
Пример. 13.2. Рассмотрим численное решение систем уравнений (13.256) 1
(13.257) для гипотетической ракеты класса «воздух — воздух», наводимой по метод;
дующие параметры: Р = 274 кгс; 3 = 0,43 м2; т0=1,1 кгс-с2/м. Время активного полета
1,8 с; высота полета носителя и цели Н = 20 000 м; скорость полета цели цц=250 м/с;
скорость полета носителя t»H=75O м/с; цель совершает маневр с перегрузкой пц = 1,25.
Графики сх(М, а) и с“ (Л1) приведены на рис. 13.38, б. Определим зависимости:
— при /^1,8 с
т = 1,1 — 0,16 кгс-с2/м;
—при t 1,8 с
от = 0,8 кгс-с2/м.
Значения X и К® следующее:
X = 17схМ2 кгс; = 17с*М2 *гс.
(13.261)
(13.262)
После интегрирования уравнений получены: скорости полета ракеты (рис. 13.39, в],
и траектории ее наведения (рис. 13.39, г).
Зоны возможного перехвата воздушных целей
Под зоной возможного перехвата воздушной цели понимается об-
ласть пространства, в каждой точке которой ракета подходит к цели с
определенными параметрами, обеспечивающими заданную точность на-
ведения. В этой зоне обеспечивается также нормальная работа назем-
ной и бортовой систем управления, взрывательных устройств и боевой
части. Размеры зоны перехвата ограничиваются (рис. 13.40): предель-
ными высотами Ятах и Нт\гб предельными дальностями полета ракеты
Отах и Отщ; минимальной скоростью встречи ракеты с целью цртщ; мак-
и боевой части. Максимальное
Рис. 13.40. Зоны возможного перехвата воз-
душной цели зенитной ракетой
симальным и минимальным значениями располагаемой перегрузки
«ртах и «ртш; максимальным временем работы бортовой аппаратуры
/maxi минимальным временем полета /пип; углами пуска ракеты 0тах и
9min; максимально допустимыми углами встречи ракеты с целью ершах’,
максимальными углами пеленга ^тат.
Максимальная дальность зоны перехвата (участок 1—2) опреде-
ляется дальностью устойчивого сопровождения РЛС цели и значениями
Vpmin. Минимальная скорость upm1n обусловлена требованиями обеспече-
ния аэродинамической устойчивости полета ракеты, согласованием ха-
рактеристик взрывательных устройств
время полета /ртах (учас-
ток 2—3) ограничивается за-
пасом источников питания,
обеспечивающих нормаль-
ную работу бортовой аппа-
ратуры системы управления.
Участок 3—4 ограничивает-
ся минимальной располага-
емой ПерегруЗКОЙ ПрасппИп,
которая определяет допусти-
мый предел управления ра-
кеты при перехвате высот-
ных целей (т. е. Нтах). Учас-
ток 4—5 ограничивается
максимальным углом пелен-
га РЛС в вертикальной
плоскости и максимально допустимым углом пуска ракеты. Участок
5—6 зависит от максимального значения располагаемой перегрузки ра-
кеты. Минимальная дальность пуска ракеты определяется: начальными
ошибками пуска, длительностью переходного процесса ракеты при выбо-
ре ошибки пуска, временем отделения стартовых ступеней, дальностью
снятия средств подрыва с предохранителя, максимальным значением
располагаемой перегрузки «раепшах-
Иногда границы зоны возможных пусков обусловливаются допусти-
мыми углами встречи ракеты с целью и некоторыми другими ограниче-
ниями. Поэтому прежде, чем строить зоны пусков, необходимо проана-
лизировать все ограничения, свойственные данному типу ракеты. Зона
возможных пусков зенитной ракеты, атакующей воздушные цели в диапа-
зоне Яшах и Яш!г| построена на рис. 13.40. Здесь же нанесены четыре
траектории полета (I—IV), причем траектория IV ограничивает грани-
цу зоны по значению потребной перегрузки Пцотр= 15 — 5 = 10 [получен-
ной по формуле (13.244)].
Зоны поражения маневрирующих целей сокращаются, так как ма-
невр цели вызывает увеличение потребной перегрузки ракеты и сниже-
ние ее скорости из-за роста индуктивного сопротивления. В частности,
зенитная .ракета «Найк-Геркулес» (США) обеспечивает перехват воз-
душных целей в передней и задней полусферах на высотах от 0,5 до
30 км при скоростях полета цели до 2600 км/ч [18]. Низковысотиая раке-
та «Роланд» (США) перехватывает воздушные цели в передней и зад-
ней полусферах на высотах от 40 до 600 м при скоростях полета целей
до 1100 км/ч [19, 20].
На рис. 13.41 построены зоны возможных пусков самонаводящейся
ракеты класса «воздух — воздух», траектории полета которой были при-
ведены на рис. 13.39, г.
При этом учитывалось, что истребитель-перехватчик наводится в
упрежденную точку встречи ракеты с целью, а первоначальные траекто-
рии движения ракеты строились с учетом угла упреждения
’1p=arcsin j sin ец. (13.263)
При таком методе наведения зоны возможных пусков ракеты рас-
ширяются.
На рис. 13.41, а показаны зоны возможных перехватов ракетой це-
ли в горизонтальной плоскости, а на рис. 13.41, б — в вертикальной плос-
кости.
Рис. 13.41, Зона возможного перехвата воздушной цели ракетой
«воздух — воздух»
Следует отметить, что если у ракеты не обеспечена хорошая стаби-
лизация по крену, то необходимо строить зоны возможных пусков ракет
класса «воздух — воздух» в пространстве.
§ 13.5. ФОРМИРОВАНИЕ СИСТЕМ СТАБИЛИЗАЦИИ ЗЕНИТНЫХ
И АВИАЦИОННЫХ РАКЕТ
Система стабилизации ракеты обеспечивает при полете сохранение
заданного положения ее осей по углам тангажа, рыскания и крена, а
при наличии головки самонаведения также и определенное соотношение
между сигналами головки и нормальными перегрузками в горизонталь-
ной и вертикальной плоскостях. Как правило, система стабилизации со-
стоит из нескольких замкнутых контуров: демпфирования, управления
нормальными перегрузками и ограничения перегрузок, углов пеленга
головки самонаведения и т. п.
Контур демпфирования
При малых значениях относительного коэффициента демпфирова-
ния ракеты особенно на больших высотах происходит увеличение вре-
мени процессов отработки перегрузок пу и nz от углов отклонения ру-
лей 6в и дн. Переходный процесс для колебательного звена при нулевых
начальных условиях и единичном возмущении 6В(/) = [1]дво определяет-
ся следующей зависимостью [6, 16]:
sin / V 1 — £(]
J-arctg
вО-
Коэффициент демпфирования ракеты
-^ = «24 (^+«30 W
1 0
(13.264)
или
io_=A
T'o 2
Р , Sp»o
----[----С if
mv 2т ‘ 21 z
Чем больше величина go/7o, тем быстрее затухают свободные коле-
бания ракеты.
Частота свободных колебаний ракеты при наличии собственного
демпфирования определяется соотношением
(13.265)
- _У1-5о
10свО —
J О
a2Ia3g — а22а35----(«21 + М2 (13.266)
или
ЮсвО —
6Spt^ „ bS?vl
------mz
21 z--2IZ
S pVn а \ <i>
Г °- Си \т г —
2т У z
— — (—-—с* - - 5--0- — Й,5Р-0 /?А*) . (13.267)
4 \ mvfj 2т 21 z г 21 z z I
выражения (13.267) видно, что на частоту свободных колебаний
главным образом влияет коэффициент статической устойчивости
Из
ракеты
(здесь коэффициент maz отрицателен):
bS?V0 а
= ——mz.
При слабом демпфировании собственную частоту колебаний мож-
но определить по формуле
bSyv^
21 z
« *^0
“свО
с’]т\ (13.268)
21z \ mv0 ' 2т У) z k '
В табл. 13.6 приведены значения коэффициентов g0, %о/То и щСво для
ракеты «Эрликон», относящиеся к 20, 45 и 60-й секундам полета [7].
Таблица 13.6
Контур Время полета, с Параметры контура стабилизации
й —• р —’ * — Р.к g ь; ?к0 £о . Др ' До ’ 1/с ®св0; шсв.к0> 1/С
Собственно ракета 20 150 0,25 2,05 8
45 180 0,15 1,84 И
60 20 0,08 0,32 3
Система стабилиза- 20 18,3 12,5 270 24
ции с демпфирующим 45 80 6,5 122 18,6
гироскопом 60 14,4 3 15 4,7
Для улучшения качества переходных процессов ракеты применяют-
ся дифференцирующие гироскопы. За счет включения гироскопических
датчиков образуется первый внутренний контур системы стабилизации
ракеты — контур демпфирования.
Рассмотрим параметры контура демпфирования ракеты, содержа-
щего дифференцирующий гироскоп (рис. 13.42). При составлении схе-
мы влияние динамики рулевой машинки не учитывались. В этом случае
передаточная функция замкнутого контура имеет вид (см. рис. 13.42, а)
kp
Ц7К (*)--= -
Mrps + 1)йл.г
1 + у
Т0s2 4“ os + 1
После преобразования получим (см. рис. 13.42, б)
1У,. ($)=^------—----------,
T2kqS2 + 2£k07k0s + 1
где
, __ йр
^Р-К 1 , г, . ’
1 ^д.г^р
Я- £р7"р&д,г
(13.269)
(13.270)
V 1 + Ауйд.г )
Определим коэффициенты k„ ,. —, $г0, и <ос 0 для ракеты
Д Т’кО
с дифференцирующим гироскопом, имеющим /гд.г=1. Полученные зна-
чения параметров приведены выше в габл. 13.6. Как видно из этих дан-
ных, при наличии демпфирующего ги-
роскопа, относительный коэффициент
демпфирования ракеты увеличивается
в десятки раз. Собственная частота ко-
лебаний изменяется незначительно.
Поэтому время затухания переходных
процессов ракеты с контуром демпфи-
рования значительно сокращается.
<9 Контур перегрузок
Рис. 13.42. Структурная схема кон- Этот контур обеспечивает сохране-
гура демпфирования ракеты с - 1 г
дифференцирующим гироскопом: ние определенного соотношения между
а - исходная схема; б — преобразован- СИГНАЛОМ ГОЛОВКИ СНМОНЭВеДвПИЯ И Пб*
пая схема рвГруЗКОЙ В уСТЭНОВИВШеМСЯ СОСТОЯНИИ
и совместно с контуром демпфирова-
ния образует контур стабилизации ракеты. Рассмотрим методику выбора
параметров контура перегрузки системы стабилизации зенитной ракеты,
структурная схема которого показана на рис. 13.43.
По указанной схеме составим объединенную передаточную функ-
цию обратной связи. Для этого перенесем линию обратной связи конту-
ра I за элемент с передаточной функцией v/g. В этом случае нужно вве-
сти в контур I дополнительный элемент с обратной передаточной функ-
цией (соответствующие структурные преобразования показаны на рис.
13.43 пунктиром).
Передаточную функцию обратной связи можно записать в виде
(У k’; тгХъ- ( К1 “Н 1
= — (?> + П + "-Ч -
Ц Tk2s -г 1)
(13.270)
где
U7K(S) =
(7 к1у + О
+ 1)
Из выражения (13.270) найдем
W%.c(4-=6o.c
7^2 +25o.c7o.cs + 1
^k2-S + 1
(13.271)
Здесь
ъ _____JL-t- ь .
Л>О.С:-- ’ /Т.У’
V
f gTpTK2 .
V g + ^д.у ’
g (7р + 7"k2 + ^л.у^кТ’й) g + v^~.y
2v Vg^pTk2
Передаточную функцию разомкнутой системы стабилизации пред-
ставим в виде
(Гр2.с52 + 2So.c7q.cS + 1)
gs (Tfa + 2S070s + 1) (7trs2 + 2еи.гГи.г5 + 1)
<-------------------. (13.272)
(7p.Mjs+l)(rp.M2s + l)(7’K2s + l)
Пример 13.3. Определить запасы устойчивого контура управления перегрузкой
зенитной ракеты «Эрликон» и полосу его пропускания по уровню 10, при следующих
значениях параметров системы стабилизации:
*о.с*и. А.мМ
-----——— = 15 1/с;
g
Го.с = 0,17 с; Гр = 0,125 с; 7’и.г = 0,004 с; 7р.м1 = 0,04с; Т'р.м2 = 0,002 с;
Т’к2 = 0,005 с; = 0,25; £и.г = 0,7; £о.с = 0,15.
Для принятых параметров на рис. 13.44 по выражению (13.272) при s=/w построе-
ны логарифмические амплитудная и фазовая частотные характеристики | Ж.с (/со) |
(кривая 1) и arg[lTK.c(/со)] (кривая 2). Как видно из рис. 13.44, а, контур системы
стабилизации имеет запасы устойчивости по фазе уи.с=45° и модулю ЙЖ —12 дБ.
Это указывает на достаточно высокую устойчивость контура стабилизации ракеты по
продольному каналу. В результате чего свободные колебания ракеты хорошо задемп-
фированы системой стабилизации.
Определим полосу пропускания контура стабилизации. Для этого составим пере-
даточную функцию замкнутой системы в виде
Фс(S)=
Ж.с (S)
(13.273)
1 + Жкс (s)
где
А.мМ(7и.Г1« 4“ 1)
VK с (s) =--------------------------•------:----------------------------- .
gs ([7(М 4- 2Sq7qS 4- 1) (7’^г«2 4- 2SH.r7„.rs 4- 1] (7рм1«+1) (7р>м254-1)
(13.274)
Недостающими параметрами передаточной функции (.13.274) являются:
*И.Г*р.мМ
Тя Г1 = 0,125 с; ----------= 15 1/с.
g
Рис. 13.43. Структурная схема системы стабилизации ракеты
с интегрирующим гироскопом и датчиком линейных ускорений
ки контура стабилизации ракеты:
а — для контура демпфирования; б — для контура перегрузок
Передаточную функцию (13.273) представим в виде
1
и при s=/(o найдем
20 1g Фс (» = 20 1g
+ 20 lgyK.c(>).
Для получения логарифмических частотных характеристик функции
~ 1 ~
wVc О)
1 .
1 +---------
^К.С (/“) _
1
на номограмме рис. 13.45 кривой 1 построена характеристика —--------. В точках
Як. с (»
ее пересечения с кривыми номограммы найдем логарифмические частотные характе-
ристики:
амплитудную (кривая 3 на рис. 13.44, а)
20 1g
1
^к.с (7“)
1
1 + (»
фазовую (кривая 4 на рис. 13.44, а)
1
arg
^к.с (»
Г
1 +----------
^к.е (»
На рис. 13.44, б построены логарифмические амплитудная (кривая 5) и фазовая
(кривая 6) частотные характеристики по передаточной функции (13.27). Сложив харак-
теристики (кривые 3 и 5), получим результирующую логарифмическую амплитудную
частотную характеристику системы стабилизации (кривая 7). Сложив характеристики
(кривые 4 и 6), получим результирующую логарифмическую фазовую частотную харак-
теристику системы стабилизации (кривая 8).
Из этого построения видно, что полоса пропускания контура стабилизации по еди-
ничному уровню амплитуды (т. е. 20 1g | Фо (/ы) | =0 дБ составляет <оп = 9,5 1/с. Получен-
ная полоса пропускания обеспечивает высокое быстродействие контура стабилизации
ракеты по продольному каналу. Это показывает, что введение в цепь обратной связи
датчика линейных ускорений позволяет расширить полосу частот, пропускаемых систе-
мой стабилизации.
При формировании контура стабилизации значительное внимание
должно быть уделено выбору такого передаточного коэффициента кон-
тура по перегрузке, при котором он слабо зависит от режимов полета
ракеты.
В структурную схему рис. 13.43 введем дополнительные блоки с
передаточной функцией
(13.275)
Множитель й"и.г обеспечивает пропорциональность между сигналом ин-
тегрирующего гироскопа и ускорением.
Рис. 13,45. Номограмма для определения логарифмических амплитудных и фазовых частотных характеристик замкнутых контуров или
систем управления
В рассматриваемом случае при s->0 имеем
(13.276)
где
При < Ад.у
V
У’
(13.277)
Формула (13.277) показывает, что рассматриваемый контур стаби-
лизации в установившемся состоянии обеспечивает пропорциональность
между сигналом управления и перегрузкой независимо от высоты и
скорости полета ракеты.
Рис. 13.46. Структурная схема системы стабилизации ракеты с диф-
ференцирующим гироскопом и датчиком линейных ускорений
Сформированный таким образом контур стабилизации позволяет
создавать системы самонаведения с законами наведения по методам
пропорционального и параллельного сближений. Ограничение сигнала
перегрузки в системе стабилизации, показанной на рис. 13.43, можно
достигнуть введением нелинейного блока типа насыщения.
На рис. 13.46 показана структурная схема системы стабилизации
ракеты с дифференцирующим гироскопом и датчиком линейных ускоре-
ний. Для получения требуемых запасов устойчивости по фазе и модулю
в систему стабилизации введено корректирующее устройство 1Fki(s).
Корректирующее устройство 1Кк2(5) обеспечивает требуемую точность
систем теленаведения.
Пример 13.4. Определить показатели устойчивости и. качества процессов стабили-
зации гипотетической ракеты класса «воздух — воздух» по каналу крепа в системе
со свободным гироскопом (рис. 13.47).
Допустим, что параметры системы стабилизации имеют следующие значения:
£р.п=40 В/град;
7р.м2 = 0,(Ю2 с;
fee .г — 0,2 В/град;
Для построения частотных характеристик
ТР.м, =0,04 с;
Гт=0,1 с
составим передаточную функцию
IF”h ( J'1' )
8
На рис. 13.48 построены логарифмические амплитудная и фазовая частотные ха-
рактеристики функции (кривые / и 2)
ГГ'д (/и) =
' >(0,1> + 1)(0,04> + 1) (0,002/ш + 1)
Пользуясь кривыми 1 и 2 можно установить запасы устойчивости системы стаби-
лизации по фазе ус =40° и модулю Нм = —14 дБ. На рис. 13.48 построены частотные
характеристики (кривые 3 и 2) и для функции
40
IF/, ( ia) =
>(0,l> + i)(0,04ja>+ l)(0,002j<o + 1)
Здесь же с помощью номограммы (см. рис. 13.45, кривая 2) построены характе-
ристики |Фс(/<0) | и arg[<Dc(/(o)] (кривые 4 и 5).
Я
Рис. 13.47. Структурная схема контура стабилизации
ракеты по крену со свободным гироскопом:
а — без корректирующего устройства; б — с последователь-
ным дифференцирующим корректирующим устройством
Рис. 13.48. Логарифмические амплитудные и фазовая частотные характеристики
контура стабилизации ракеты по крену в системе без корректирующего устройства
На номограмму вещественной частотной характеристики замкнутой системы (см.
рис. 13.49) нанесена кривая / Фс (/со) и по ней определена характеристика Pi (со).
С помощью трапецеидальных частотных характеристик и h -функций вычислена
и построена характеристика переходного процесса1 отработки управляющего сигнала
1 Система стабилизации отрабатывает единичный сигнал в виде Wy(O=«yo [1],
где Иуо эквивалентно углу крена, равному 40°.
Рис. 13.49. Номограмма P(w)
113] (кривая Yi на рис. 13.50. б). Из этого графика видно, что максимальный «выброс»
угла крена составляет 10° (т. е. перерегулирование крена 0^=25%). Время затухания
переходного процесса по крену /р = 0,6 с.
Полученные показатели качества процесса отработки угла крена можно улучшить,
если ввести последовательное корректирующее устройство дифференцирующего дей-
ствия [16]. Тогда в выражение (13.278) необходимо подставить функции:
rrzz.x (0,бу» + 1)
w л (:
>(0,1Л> + 1) (0,005/со -ь 1) (0,04> 4- 1)(0,002> + 1)
TVZ , . , 8 (0, бу» + 1)
Iva (/СО) = -------------------------- .
у<о(0,1уи + 1)(0,005у<о + 1)(0,04> + l)(0,002/a> + 1)
Соответствующие этому случаю характеристики построены на рис. 13.51 (кри-
вые 1—3). На номограмму (см. рис. .13.45, кривая 3) нанесена характеристика
ПО*
-------. По точкам ее пересечения с кривыми номограммы найдем |Ф0(/со)| и
а О)
arg[®c(/ш)] (кривые 4 и 5).
По номограмме (см. рис. 13.49, кривая 2) определена характеристика Р2{а) и
построен график переходного процесса Уа(/) (см. рис. 13.50, б). В этом случае качество
системы стабилизации улучшилось, так как а=22% и fp=0,25 с.
Рис. 13.50. Вещественные частотные характеристики контуров
стабилизации ракет по крену и характеристики переходных
процессов
Рис. 13.51. Логарифмические частотные характеристики контура стабилизации по крену
системы с корректирующим устройством
§ 13.6. ФОРМИРОВАНИЕ СИСТЕМ ТЕЛЕУПРАВЛЕНИЯ ЗЕНИТНЫМИ
И АВИАЦИОННЫМИ РАКЕТАМИ
Системы телеуправления формируются с помощью структурных
схем, составляемых на основании блок-схем (см. рис. 13.15 и 13.16). Рас-
смотрим систему телеуправления ракетой, наводимой по методу совме-
Рис. 13.52. Структурная схема системы телеуправления ракеты, наводимой по методу совмещения:
а —исходная схема; б и в — преобразованные; а - расчетная (ФрлСц - передаточная функция РЛС слежения за целью; ФрлСр — передаточная функция РЛС слеже'
ния за ракетой; IFK 3 — передаточная функция кинематического звена)
щения, когда ец сравнивается с еп- В этом случае структурную схему си-
стемы телеуправления можно представить в виде, показанном на рис.
13.52, а.
Определим передаточные функции системы телеуправления. Пере-
даточная функция кинематического звена при наведении ракеты по ме-
тоду совмещения может быть получена из системы уравнений (13.2) при
малой разности углов:
D = v,
/Эе-|-це = 'П0.
(13.279)
Из системы (13.279) можно найти уравнение
продифференцировав которое получим
1 rf2(£)e) 6 dv . v dB
g dt2 g dt g dt
n v dB
Введем обозначения: п„=-------------нормальная перегрузка ракеты;
g dt
п dv
п = б------тангенциальная перегрузка ракеты, тогда
dt
1 d2 (£>е) nT rf(Z)e) _
g dt2 v dt H
Если в уравнение (13.282) ввести новую переменную
1=1Эг,
(13.281)
(13.282)
13.283)
где I — длина дуги окружности радиуса D, стягивающей угол е, то
1 rf2Z nr dl
g dt2 v dt
(13-284)
Применим к уравнению (13.284) метод «замораживания» коэффи-
циентов \ тогда при нулевых начальных условиях
(s)==gJVH(s), (13.285)
где Л1Т, NH и L — изображения функций пт, пн и I.
Передаточную функцию кинематического звена запишем в виде
^.3^) = -^- = - , х (13.286)
Л н (S) / N;g \
s s —-----
\ V /
или ^к.з(з)= /7Л* п ’ (13.287)
5(Гк,з«— 1)
< V ™ V
где 3—----; 1~---------.
• N-t h’3 Nrg
При v = const и jVt — малом можно считать постоянную времени
Тк,3— достаточно большой. Тогда выражение (13.287) примет вид
(13.288)
1 Коэффициент «т/ц является переменным во времени. Однако при многих режи-
мах полета ракеты его можно считать медленно меняющейся функцией времени, что
позволяет применять к уравнению (13.284) метод «замораживания» коэффициентов.
Передаточной функцией в виде (13.288) будем пользоваться при
практических расчетах в системах телеуправления.
Упростим схему, показанную на рис. 13.52, а, исключив из рассмот-
рения динамику РЛС слежения за целью и ракетой. При этом примем в
качестве выходной величины системы телеуправления ошибку наведения
h (промах), тогда исходную структурную схему можно привести к виду,
показанному на рис. 13.52, б.
Напишем передаточную функцию системы телеуправления так:
___________________kb + ___________________
+ D(T₽-ys + (?0s2 + + О (гР.мЛ + 0 (^.м/ + D
1 । _____________kg (ТO,CS 1)______________
№ + 2W +1) (т;.М1 s +1) (т;.мЛ +1)
(13.289)
где
^р.у^р)мЛр^
J(=—----------;
_ ^р.м^р^о.с1'
После этого нетрудно перейти от схемы, изображенной на рис. 13.52, б
к схеме, показанной на рис. 13.52, в.
С целью доведения схемы до расчетной введем новую переменную
4 = ^(7), (13.290)
где /к — длина дуги при движении ракеты по кинематической траек-
тории.
При движении по кинематической траектории ракета развивает нор-
мальную перегрузку «н.к(0> т- е-
Ак(х) = ^^. (13.291)
Пользуясь формулой (13.291) и считая, что центр массы ракеты
движется с отклонением от кинематической траектории, можно струк-
турную схему (рис. 13.52, в) привести к виду, показанному на рис.
13.52, г. По этой структурной схеме определим передаточную функцию
замкнутой системы телеуправления в виде
1
S2
Фт($) = . у I*/ =
АГн.к(з)
kbgiT^s + 1)(ГК28 + 1) е~т5
s2 (Гjs+1) (7-28+1) (Гр.у5+1) (7-2s2+2^7-os+ 1) (T'p Wi
№ + 250Г0« + 1 ) (T'pMs
(13.292)
Устойчивость системы телеуправления определяется по логарифми-
ческим частотным характеристикам функции
W' (»= [kbg (Гк1> + 1)(Гк2/ш+ 1) :
: [(>Ж>+ 1) (Л> + 1)(Гр.у>+ 1)[(ВД2 + 2^0>+ 1] X
X (фр.м1У® ф 1) (Фр.мгУ10 ф 1)] :
{ 1 Н- {№а (ТОсФ0 Ф Ф] • [[(Фо7ш)2ф2?;Хоушф 1 ] (фр.м17шф- 1 ) (фр.м2Уш -ф 1 )] } J .
(13.293)
Выбором ka и Го.с обеспечиваются требуемые запасы устойчивости
системы по фазе и модулю.
Пример 13.5. Построить частотные характеристики системы телеуправления раке-
ты «Эрликон» и определить запасы ее устойчивости по фазе и модулю
(рис. 13.53, а, б, в). Расчетные параметры имеют следующие значения:
kt)g = 75 м/с3; Гц] =0,125 с; 7'1 = 0,005 с;
ka = 1,5 м/с3; Тк2 = 0,08 с; Г2 = 0,002 с;
Тру = 0,004 с; 7уМ1 =0,04 с; : Го = 0,1 с;
То.с = 0,14с; 7'р-М2 = 0,1с; i0 = 0,12; т = 0,002 с.
Рис. 13.53. Логарифмические амплитудная и фазовая частотные харак-
теристики разомкнутой системы телеуправления
На рис. 13.53 по функции (13.293) построены логарифмические амплитудная (7)
и фазовая (2) частотные характеристики. Из этих характеристик видно, что запасы
устойчивости системы телеуправления ио фазе ус=35° и модулю Hw = —10 дБ, что
обеспечивает устойчивый полет зенитной ракеты к цели.
Определение точности систем телеуправления
Точность систем телеуправления зависит от систематической (дина-
мической) и случайной ошибок системы.
Динамическую ошибку можно определить с помощью пере-
даточной функции (с использованием схемы, приведенной на рис.
13.52, г):
ФЛу)= ^к,3 (s) (13.294)
лт.кО) 1 + (s)
где
W<(s) = g^c(s).
Будем считать, что функция йн.к(/) является медленно изменяю-
щейся, тогда
Н (s) = (co + c,s + -^ + N,.K (s)
\ 21 о! /
или
Л(/) = Солн + + , (13.295)
1 ' 0 н.к ) I 1 dt I 2 dt2 g dt3
где Co, Ci, C2, C3 — коэффициенты ошибок, которые определяются по
передаточной функции (13.294) с помощью формул
теории автоматического регулирования [15].
Для рассматриваемой системы телеуправления (см. рис. 13.52, б):
2
, 2 (й1 — а2) । аъ
(1+7Д2 * (1 + 70)3
где а^Гц;,
й2 = Т^Л-Тр.м/СР.м2Л~Тр.М1 4 ‘2ТоЬ“h^o^o.c -Д 27"0^;
«з = TJ\+7р7р.у + Tl + 7\70 + Т;?М1 + Г1Г;.М2 +
+ 7t (7 р.и, + 7р.М2) Л-Т^дЛ-^Тх70Ь+Т’р-мЛр.м2 +
+ Г2Гр.у-\-Т2Т0 4- r2r;.M1 + 727;.М2 + 7р.уг;.мг + 7р.у7с.
Следовательно, данная система телеуправления является статиче-
ской по отношению к входному сигналу
Точность работы систем телеуправления может быть повышена
двумя способами: увеличением порядка астатизма или применением
комбинированного метода управления.
Если системе, характеризуемой передаточной функцией U/C(s),.
придать астатизм первого порядка, например, за счет введения интегри-
рующего звена, т. е. получить
г;(«)
S
то коэффициенты ошибки будут иметь следующие значения:
Со=О [с2];
С. = —— ГН»].
ь ъь ' ч (13.297)
^р.М^р*О.С^ \
.с Т'к! ^к2 ) ^о.с
--------------------------- [с4].
kkp.yg-}
Необходимо отметить, что повышение точности систем телеуправле-
ния за счет введения интегрирующего звена приводит к существенному
снижению запасов устойчивости системы и требует выбора более слож-
ных корректирующих устройств. Кроме того, в таких системах не удает-
ся получить малые значения коэффициентов С] и С2.
Более перспективным является способ повышения точности за счет
комбинированного метода управления [6]. На рис. 13.54 показана струк-
турная схема системы телеуправления, построенная по комбинированно-
му методу, когда сигнал нормальной перегрузки на кинематической
траектории поступает на элемент сравнения и в цепь коррекции lEK(s).
В этом случае
//(5) =
1 rlTc(s)
(13.298)
Если выбрать функцию VTK(s), близкой к \/Wc(s), то можно ком-
пенсировать составляющие ошибок. Однако реализовать практически
такое корректирующее устройство нельзя. Можно лишь получить функ-
цию вида
Гк ($) = -Мм . (13.299)
TKXS + 1
Подбором значений kK, Ткх и Ткх удается получить Со = О, а С\ =
= - 11 сохранить требуемые запасы устойчивости системы теле-
управления. Как видно из выражения (13.299), повышение динамиче-
ской точности системы телеуправления получено дифференцированием
Рис. 13.54. Структурная схема
комбинированной системы теле-
управления
Рис. 13.55. Амплитудная частотная ха-
рактеристика системы телеуправления и
характеристика спектральной плотности
флюктуаций сигнала 5„ц((о)
сигнала пн.к или ен.ц. Однако дифференцирование этих сигналов при на-
личии шумов приводит к увеличению случайной ошибки системы теле-
управления. Поэтому при проектировании таких систем необходимо на-
ходить оптимальные корректирующие устройства, обеспечивающие ми-
нимальные значения случайной ошибки при сохранении заданных
динамической точности и времени протекания переходного процесса.
Случайные ошибки наведения, вызванные флюктуациями
сигнала, будем рассматривать для стационарной системы В этом слу-
чае ошибку системы (см. рис. 13.52, а) от действия случайного сигнала
Иц(1) можно определить с помощью выражения
ФРЛСЦ (Iм >
ФРЛСр(/“) 1 + (»
1Г" о)
2
£>25Яц(ш)с/а>, (13.300)
где S„ (ш) — спектральная плотность флюктуаций сигнала от цели.
Если считать, что следящие системы РЛС сопровождения цели и
ракеты имеют одинаковые динамические характеристики, т. е.
1 См. примечание к уравнению (13.284).
Фрлсц(/Ш) — Фр."ср(/ю), то выражение (13.300) примет вид
1 + (-Е)
2
EPS(со) c/u).
(13.30 1)
Пример 13.6. Определить динамические й случайные ошибки системы телеуправ-
ления зенитной ракеты «Эрликон», наводимой по методу совмещения, если пц = 250 м/с
и Од =5000 м.
С помощью формулы (13.296) для параметров примера 13.5 определим значения
коэффициентов G и С2. Полученные значения коэффициентов приведены в табл. 13.7.
Из выражений (13.295) и (13.297) найдем динамическую ошибку системы телеуправ-
ления (йд> табл. 13.7).
Для определения среднего квадратического значения случайных ошибок восполь-
зуемся формулой (13.301). Порядок вычислений по этой формуле будет следующим.
1. Нанесем на номограмму (см. рис. 13.45) характеристику 20 lg lFc"(/o) (кри-
вая 4}, снятую с рис. 13.53, и определим амплитудную частотную характеристику
(уы)
(рис. 13.55). Возведем ее в квадрат и полученную характеристику
1 — (»
зеркально отобразим относительно оси ординат.
2. Изменим значение ординат этой кривой на величину О25Яц (щ). (В расчетах
принято, что Sn ц (ю) =0,2-10-6 рад-с2.)
3. Вычислим графически по рис. 13.55 значение интеграла в формуле (13.301).
4. Умножим значение интеграла на 1./2(зт) и из полученного выражения извлечем
квадратный корень. Найденное таким образом числовое значение является средней
квадратической ошибкой системы телеуправления <Тл (см. табл. 13.7).
Максимальное значение отклонения ракеты от цели (промах) можно определить
по формуле
Йщах — Й + За/,.
(13.302)
Соответствующие числовые значения йта1 приведены в табл. 13.7.
Таблица 13.7
Дальность до цели d: м/с3 ^н.к dt1 м/с* Сх> с3 С2, с* Лд, м aft, м % ах’ м
5 км 20 4 0,1 2 6 11 39
Рис. 13.56. Структурная схема системы наведения ракеты по радиолучу
Рассмотрим выбор оптимального корректирующего устройства си-
стемы наведения ракеты по радиолучу. Структурная схема системы изо-
бражена на рис. 13.56. На вход системы поступает полезный сигнал
бц(/) и сигнал помехи лц(/) в виде флюктуаций. Необходимо определить
схему и параметры оптимального корректирующего устройства системы
наведения по лучу, обеспечивающего минимальные средние квадрати-
ческие значения отклонения ракеты от цели при сохранении заданной
динамической точности и времени протекания переходного процесса tp
при встреливании ракеты в радиолуч.
Из теории автоматического регулирования [15] известно, что для
обеспечения минимума средней квадратической ошибки необходимо,
чтобы импульсная переходная функция /г(т) удовлетворяла интеграль-
ному уравнению (12.164).
Будем считать, что для системы наведения ракеты по радиолучу
можно ограничиться тремя коэффициентами, тогда оптимальная им-
пульсная переходная функция [см. (12.167)]
&cpt(/) = Доф- (13.303)
При действии на вход системы флюктуаций в виде «белого шума»
коэффициенты ошибок До, Аг, А2 являются постоянными.
Задаваясь значениями С;, С2 и /р, вычислим коэффициенты Ао, Ai,
А2, а затем по формулам (12.174) и (12.175) —вещественную и мнимую
частотные характеристики желаемой системы.
Далее по формулам (12.177) и (12.178) можно определить желае-
мую логарифмическую амплитудную и фазовую частотные характе-
ристики системы наведения ракеты по радиолучу. После этого с по-
мощью рис. 13.56 составим передаточную функцию разомкнутой систе-
мы в виде
. ^.б(Я^с(Р)^к.з(»
’^ж (И =----Д-------------
1 + (АА
(13.304)
где —частотная функция желаемой системы.
Тогда при | Wc Ц7К£Д,у | 1 получим
^р.б(» W'h.s (»
(13.305)
Передаточную функцию корректирующего устройства можно полу-
чить из выражения (13.305), имея в виду, что
201g|U7K(»| = 201g|irB(;<U)|-201g[U7iI£(/<o)|. (13.306)
Неизменяемая часть имеет следующую передаточную функцию:
£р. бЯ. 3
£;’.у
Гп(/а>) =
А(Гр.6> + Ж.з>- 1)
(13.307)
По характеристике 201g |ТГк(/‘со) определяют схему и параметры опти-
мального корректирующего устройства.
Пример 13.7. Найти принципиальную схему и параметры оптимального корректи-
рующего устройства системы, если динамическая ошибка наведения ракеты по лучу
й = 5 м при ец тах =0,01 рад/с; еЦтах =0,0005 рад/с2.
В этом случае коэффициенты ошибок: С] = 0,05 с, С2=2,76 с2. Примем /р=4 с.
Тогда Д0=3,44; Д]=—4,08, Л2=0,92. По этим коэффициентам найдем Р(<о) и Q(a>)
(рис. 13.57, а и б), затем определим Нж и Q» и построим их графики (рис. 43.58).
Здесь же построим характеристику
20 1g 14ГН(» = 2О lg
______________20_____________|
(12,5> — l)(0,125yco + 1) j'
(13.308)
Вычитая из желаемой амплитудной характеристики ее неизменяемую часть, полу-
чим характеристику 20 1g 11Гк(щ>) |. По точкам ее излома с помощью таблиц корректи-
рующих устройств [11], найдем
f Г (Ry “F /?з) ^5"I
WK(s) = RRS + 1) (T-2S + 1): ЛГ2 1 + ' 5 & +
I ' L R1R2 J
где
R2 (R1 + R2 + R3) Rs
Ri R1R5
(Ri 4- R3) (R4 + Дг)
R3R5
i-0 >
(13.309)
Ri =
R2 , (Ri --'4 - - R3) (R4 4- Re)
Ri
(13.310)
R1R3
1
(13.311)
Рис. 13.57. Вещественная и
мнимая частотные характери-
стики системы наведения раке-
ты по радиолучу
(R,+R3)R5
R1R3
Рис. 13.58. Логарифмические частотные характеристики системы наведения ракеты
по радиолучу
L
Принципиальная схема корректирующего устройства приведена на рис. 13.59. Па
раметры корректирующего устройства определяются на основании логарифмических
характеристик, приведенных на рис. 13.58, и характеризуются следующими величинами:
7, =/?4С2= 1,25 с; 7'2 = 7?2Ci = 0,125.
Определим среднее квадратическое значение ошибки системы теленаведения [15]:
аЛ = С2
9^—72С1^ —60С2’р 192С^ + ЗбОС^ф + 180С^
= 10 м. (13.312)
Максимальное отклонение ракеты от цели (промах) ЛШах = 35 м.
Рис. 13.59. Принципиальная
схема корректирующего устрой-
ства
§ 13.7. ФОРМИРОВАНИЕ СИСТЕМ САМОНАВЕДЕНИЯ ЗЕНИТНЫХ
И АВИАЦИОННЫХ РАКЕТ '
При формировании систем самонаведения блок-схему (см. рис.
13.20, б) необходимо привести к структурной схеме. Для этого уравне-
ние кинематики следует представить в виде передаточной функции, по-
лученной по линеаризованному второму уравнению системы (13.63):
Р0Де + w cos (8 — в0) (Д0 — де) — т»ц cos (0ц0 - е0) (Д0Ц — Де). (13.313)
Для принятого метода наведения из первого уравнения системы
(13.63) найдем
— v cos (е0 —COS (0ц9 - e0) = D0. (13.314)
Кроме того, имеем равенство
ёо = О. (13.315)
Подставив соотношения (13.314) и (13.315) в уравнение (13.313),
получим 1
£>Де-ф ЙДе= — г’Дб-фх'11Дкц, (13.316)
где v = v cos (е0 — 0О); (13.317)
wu = tcos(s0 — 0цО). (13.318)
Выражение (13.316) является линейным дифференциальным урав-
нением, к которому можно применить метод «замораживания» коэффи-
циентов 2.
С помощью преобразования Лапласа из уравнения (13.313) по-
лучим
1 В уравнении (13.316) индекс «0» опущен.
2 Метод «замораживания» коэффициентов применим к уравнению (13.316), когда
расстояние между ракетой и целью велико. При малых расстояниях (D близко к нулю)
этот метод приводит к значительным погрешностям. Поэтому при практических расче-
тах будем считать, что метод «замораживания» коэффициентов справедлив до дально-
стей, на которых происходит ослепление головки самонаведения (когда отраженный
импульс от цели совпадает с импульсом подсвета радиолокационной станции). Отсюда
следует, что дальность ослепления зависит от ширины импульса т и скорости све-
та с [18]:
ст
7?ОСЛ = ~Д •
Например, при т=2 мкс имеем D
= 300 м.
(Z?s + b)E(s)= - ^0(5)+^цец(5),
(13.319)
откуда
E(S) = -^- 0(5) + 0;l(5).
—s + 1 . s + 1
D D
(13.320)
Пренебрегая маневром цели, из
выражения (13.320). определим
или
^К.ЗЙ =
^К. 3
1 Пс.з$
(13.322)
Из выражения (13.322) видно, что
передаточная функция кинематическо-
го звена представляет собой функцию
неустойчивого апериодического звена с
отрицательной постоянной времени Тк,3.
При больших расстояниях до цели
(£)^П0СЛ) можно передаточную функ-
цию (13.322) переписать в виде
^к.з(»)=--—• (13.323)
D s
Обратим внимание на то, что по.ме-
ре приближения к цели передаточный
коэффициент выражения (13.323) воз-
растает, при этом нарушается устойчи-
вость системы самонаведения.
Пользуясь полученной передаточ-
ной функцией кинематического звена,
составим структурную схему системы
самонаведения (рис. 13.60). Парамет-
ры контура самонаведения до О^Оосл
выбираются из условия обеспечения
определенных запасов устойчивости по
фазе и модулю. С этой точки зрения
методика формирования системы мало
чем отличается от рассмотренной в
§ 13.6.
Точность системы самонаведения
определяется значением мгновенного
промаха. Под мгновенным промахом
понимается такое значение промаха,
которое получается после ослепления
головки при неуправляемом полете ра-
Рис. 13.60. Структурная схема системы самонаведения
кеты (принимается, что ракета движется к цели прямолинейно и равно-
мерно).
Для определения мгновенного промаха будем рассматривать отно-
сительное движение ракеты. В общем случае вектор относительной ско-
рости
vUIH = v-vu (13.324)
и ракета движется по направлению вектора v0TH (рис. 13.61). Из точки Ц
проведем перпендикуляр к линии ОА, тогда расстояние ЦА есть мгно-
венное значение промаха, равное h, т. е.
A = Dsinp-. (13.325)
В свою очередь, sin у.= -^Е . (13.326)
'^01'11
Подставляя выражение (13.326) в формулу (13.325), получим
(13.326а)
fc’oTH
где Чин — 'с24-Тц —2т’т’1(cos(0—0|(). (13.327)
Рис. 13.61. К определению мгновенно-
го промаха при самонаведении
При малом угле р, можно записать, что
£)=—•n0THcos[x=—г>отн (13.328)
и из выражения (13.326) получим
=—Чел, (13-329)
D ! D I
где 7)оол, 7)Осл и ёосл берутся для момента ослепления головки самона-
ведения.
Пример 13.8. Определить значение мгновенного промаха самонаведения ракеты
если £>оол=300 м, £> = 400 м/с, еОсл=0,01 рад/с.
Согласно формуле (13.329)
Пример 13.9. Составить блок-схему моделирования системы самонаведения ракеты
по структурной схеме (см. рис. 13.60).
Моделирование головки самонаведения осуществляется с помощью четырех опе-
рационных блоков, одного нелинейного блока (типа ограничения) и одного блока по-
стоянных коэффициентов. Динамика ракеты моделируется на 14 операционных усили-
телях и трех блоках постоянных коэффициентов.
Уравнения кинематики представляют собой нелинейные дифференциальные урав-
нения [см. выражения (13.63)], поэтому для их реализации на модели требуются восемь
блоков функциональных преобразований, два операционных блока и один блок умноже-
ния. Включение блока умножения в обратную связь к операционному усилителю позво-
ляет реализовать операцию деления.
Для моделирования процессов самонаведения с флюктуациями отраженного сиг-
нала от цели в блок-схему (рис. 13.62) включен генератор шумов, с которого снимается
сигнал по угловой скорости (т. е. Лр(0)- В силу этого для определения точности про-
цессов самонаведения на шлейфовом осциллографе записываются сигналы: угловой ско-
рости линии визирования е, дальности до цели D и скорости сближения с целью D.
На рис. 13.63 показана осциллограмма характеристик процесса самонаведения,
с записанными кривыми e(I), D(t) и D(t). Как видно из осциллограммы, весь процесс
самонаведения делится на три этапа: I — отработки начальных возмущений; II — наве-
Рис. 13.62. Блок-схема моделирования системы самонаведения
Рис. 13.63. Осциллограмма характеристик процесса самонаведения ракеты,
полученная при математическом моделировании
дения; III — неустойчивого движения. На этапе III можно считать, что D(i)=const,
поэтому \t, определяющее момент ослепления головки самонаведения, можно найти
по формуле
D
= (13.330)
где D=D0C„.
Зная /„ел, по осциллограмме определим е00л и по формуле (13.3'29) найдем про-
мах ракеты. Снимая таким образом 20—30 осциллограмм, можно определить среднее
квадратическое значение промаха:
1/ S M{A}]2
= r .
1 n — 1
n
где M {k} ——------— математическое ожидание промаха.
Зная М -j h [ и Oh, определяется максимальный промах [см. формула (13.302)].
В заключение отметим, что наличие неустойчивости процесса само-
наведения на конечном участке, вызванное особенностью кинематики са-
монаведения (неограниченный рост коэффициента kK,3 при £)->0) и неста-
ционарность самого процесса, затрудняет аналитическое определение
точности систем самонаведения. Поэтому при проектировании систем
самонаведения их точности определяются на математической или полу-
натурной аналоговой модели.
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ XIII
1. Афонин П. М. и др.. Беспилотные летательные аппараты. М.. «Машино-
строение», 1967, 43'9 с.
2. Блейк л ок Дж. Г. Автоматическое управление самолетами и ракетами.
Пер. с англ, под ред. Н. Т. Кузовкова. М., «Машиностроение», 1969, 285 с.
3. Г у т к и и Л. С. Принципы радиоуправления беспилотными объектами. М.,
«Советское радио», 1959, 384 с.
4. Доброленский Ю. П., Иванова В. Н., Поспелов Г. С. Автома-
тика управляемых снарядов. М., Оборонгиз, 1963,.548 с.
5. Кринецкий Е. И. Системы самонаведения. М., «Машиностроение», 1970,
236 с.
6. Лебедев А. А., К а р а б и о в В. А. Динамика систем управления беспи-
лотными летательными аппаратами. М., «Машиностроение», 1965, 528 с.
7. Лебедев А. А., Чернобровкин Л. С, Динамика полета беспилотных
летательных аппаратов. М., Оборонгиз, 1962, 542 с.
8. Л о к к А. С. Управление снарядами. М., Физматгиз, 1958, 775 с.
9. М е р и л л Г., Гольдберг Г., Ге л иго ль ц Р. Исследование операций.
Боевые части. Пуск снарядов. М., ИЛ, 1959, 595 с.
10. Никитин Е. А., Балашова А. А. Проектирование дифференцирующих
и интегрирующих гироскопов и акселерометров. М., «Машиностроение», 1969, 216 с.
11. Основы автоматического регулирования. Т. II. Элементы систем автоматическо-
го регулирования. М., Машгиз, 1959, ч. I, 723 с., ч. II, 454 с.
Основы автоматического управления. Т1 III. Автоматические регуляторы и следя-
щие системы. Под ред. В. В. Солодовникова. М., Машгиз, 1963, 550 с.
12. Пресну хин Л. В. и др. Основы теории и проектирования вычислительных
приборов и машин управления. М., «Высшая школа», 1970, 634 с.
13. Солодовников В. В., Топчеев Ю. И., Крутикова Г. В. Час-
тотный метод построения переходных процессов. М., Гостехтеоретиздат, 1955, 1195 с.
14. Техническая кибернетика Теория автоматического регулирования, Кн. 1-я. Под
ред, В. В. Солодовникова. М., «Машиностроение», 1967, 768 с.
15. Техническая кибернетика. Теория автоматического регулирования. Кн. 2-я. Под
ред. В. В. Солодовникова. М., «Машиностроение», 1967, 679 с.
16. Техническая кибернетика. Теория автоматического регулирования, кн. 3-я, ч. 1-я.
Под ред. В. В. Солодовникова. М., «jMaittnHOCTpoeHHe», 1970, 607 с.
17. Шаталов А. С., Топчеев Ю. И., Кондратьев В. С. Летательные
аппараты как объекты систем управления. М., «Машиностроение», 1972, 414 с.
18. Ч е м б р о в с к и й О. А., Топчеев Ю. И., Самойлович Г. В. Общие
принципы проектирования систем управления летательными аппаратами. М., «Машино-
строение», 1972, 414 с.
19. International Defence Review, Febr., Vol. 4, No. 1, 1971.
20. Aviation Magazine, Vol. I, 1971.
Глава XIV
СЧЕТНО-РЕШАЮЩИЕ ПРИБОРЫ И ПРИЦЕЛЫ ЗЕНИТНЫХ
И АВИАЦИОННЫХ РАКЕТНЫХ И СТВОЛЬНЫХ КОМПЛЕКСОВ
В гл. I были рассмотрены схемы зенитных и авиационных ракетных
и ствольных комплексов. В их состав в качестве одного из устройств
входят счетно-решающие приборы (СРП) или прицелы, решающие за-
дачу прицеливания при стрельбе из пушек и пуске ракет по воздушным
или наземным (с самолета) целям.
Прибор управления огнем зенитной артиллерии (ПУАЗО) предна-
значен для решения следующих задач: слежения за целью; определения
параметров движения цели; расчета координат упреждений точки (ре-
шение задачи о точке встречи); определения потребных углов наведе-
ния пушки в горизонтальной и вертикальной плоскостях и расчете уста-
новки взрывателя при стрельбе дистанционными снарядами; введения
баллистических поправок, учитывающих отличие в условиях стрельбы
от нормальных '. Наведение пушек в горизонтальной и вертикальной
плоскостях осуществляется с помощью следящих систем (см. гл. XII).
Прицелы самолетов-истребителей обеспечивают определение необ-
ходимого для попадания в цель направления для стволов неподвижной
пушечной установки или направляющих ракет. С помощью средств пи-
лотирования самолет отрабатывает заданные направления и летчик
производит стрельбу из пушек и пуск неуправляемых или управляемых
ракет.
В настоящее время существуют два способа стрельбы с самолета:
сопроводительный и заградительный. При сопроводительной стрельбе
обеспечивается совпадение текущего и необходимого направления век-
тора абсолютной начальной скорости снаряда (ракеты) на цель во вре-
мя стрельбы очередью. При заградительной стрельбе совпадение теку-
щего и необходимого направлений вектора абсолютной начальной ско-
рости снаряда на цель обеспечивается лишь в середине очереди. Таким
образом при сопроводительной стрельбе решение задачи прицеливания
выполняется самолетом, летящим по траектории, называемой кривой
атаки. При заградительной стрельбе решение задачи преследования со-
вершается лишь для одного момента времени и самолет в этом случае
совершает полет по прямолинейной траектории.
Из этого следует, что как при сопроводительной, так и при загра-
дительной стрельбе с самолетов, с помощью прицела решаются следую-
щие задачи: определяются параметры движения цели и самолета; нахо-
дится точка встречи снаряда (ракеты) с целью; вводятся необходимые
баллистические поправки.
§14.1. СТРУКТУРНЫЕ СХЕМЫ УПРАВЛЕНИЯ ОГНЕМ
ЗЕНИТНОЙ АРТИЛЛЕРИИ И ПРИЦЕЛИВАНИЕ С САМОЛЕТОВ
ПРИ СТРЕЛЬБЕ ПО ВОЗДУШНЫМ ЦЕЛЯМ
Рассмотрим структурные схемы управления огнем зенитной артил-
лерии. На рис. 14.1 представлена схема сопровождения движущейся це-
1 За нормальное состояние атмосферы принимается: температура воздуха +15° С;
давление 750 мм рт. ст.; относительная влажность 50%; ветер отсутствует.
ли с использованием оптических элементов и СРП для наведения ору-
дий пушечной зенитной батареи. Из рисунка видно, что основная осо-
бенность системы заключается в возможности решения задачи о точке
встречи без измерения дальности до цели с помощью оптических средств
[12]. Оптический прицел 1 измеряет углы азимута и места цели (0ц и ец),
значения которых поступают в СРП 3, состоящий из трех устройств 4,
5 и 6. Устройство 4 рассчитывает и выдает величины угловой скорости
линии визирования по двум каналам ыг и сов; устройство 6 рассчиты-
вает и выдает углы наведения прицела Рпр, фпр и оружия рп, фп; устрой-
ство 5 обеспечивает отработку баллистических характеристик и времени
упреждения т. Устройство второй группы 6 решает задачу о точке
встречи и выдает необходимые данные на следящие системы 2 для ав-
томатического движения прицела оружия 7 и взведения взрывателя п.
Если в схему управления огнем зенитной артиллерии входит РЛС,
то, как правило, измеряется дальность до цели Вц.
Рис. 14.1. Структурная схема управления ог-
нем зенитной артиллерии с использованием
оптических элементов без измерения дально-
сти до цели и с помощью РЛС с измере-
нием .Оц
Рис. 14.2. Структурная схема уп-
равления огнем с применением
ПУАЗО типа М-9 или М-10
В настоящее время большинство систем управления огнем зенитной
артиллерии, наряду с измерением углов по азимуту и месту цели 0ц, ец
измеряют дальность до цели /)ц с помощью РЛС или стереодальноме-
ров. В ряде случаев вместо дальномера используется стереоскопический
высотометр (например, американские ПУАЗО М-9 и М-10) [10].
Рассмотрим структурную схему управления огнем зенитной артил-
лерии при стрельбе по воздушным целям с применением ПУАЗО типа
М-9 или М-10. В их комплект входят (рис. 14.2): прибор 1 для опреде-
ления угловых координат цели; стереоскопический высотомер 2; преоб-
разователь высоты 3; центральный прибор 4, решающий задачу о точке
встречи; блок выпрямителей 5 и агрегат питания 6.
В решающий прибор от РЛС или оптического визира и дальномера
вводятся следующие данные: текущие углы места цели 8Ц, азимута |3Ц
и высота цели Яц. Эти данные поступают в преобразователь высоты,
где рассчитывается дальность D. По параметрам е, |3 и D в центральном
приборе 4 решаются следующие задачи: вычисляются в декартовой си-
стеме координат параметры движения цели х1(, уц, Яц; определяются
скорости движения цели ухц, Vyn и о-ц [10]; вводятся баллистические по-
правки на изменение начальной скорости снаряда, на скорость ветра,
деривацию, изменение плотности воздуха; находятся упрежденные ко-
ординаты цели в соответствии с принятой гипотезой о движении цели
(ху, уу, Ну, т); вводятся данные на установку взрывателя п. С выхода
центрального прибора снимаются углы наведения пушек по азимуту 0П и
углу места цели фп.
Существуют ПУАЗО, обеспечивающие прицельную стрельбу из ба-
тарей, укомплектованных установками с пушками разных калибров (т. е.
снаряды этих орудий имеют различные баллистические характеристики)
[1]. На рис. 14.3 изображена структурная схема ПУАЗО, управляющего
стрельбой двух батарей с пушками разных калибров. Значения углов
азимута |3ц и места цели ец поступают от РЛС автоматически на решаю-
щий прибор 3 или вводятся вручную по данным оптического визирного
устройства. С помощью рукояток 1 и 2 вводятся данные о скорости цели
ия или ее истинной высоте Яц; посредством рукояток 3 и 4 вводятся бал-
листические поправки Д/71 для пушек одного калибра или А Ла для пу-
шек другого калибра.
Рис. 14.3. Структурная схема управления огнем зенитной артиллерии
для пушечных установок различных калибров
Данные о дальности до цели £>ц поступают в прибор 3 через переклю-
чатель 5. Если переключатель 5 поставлен в нижнее положение (замкнут
контакт Дн), то сигнал Рц поступает на прибор 3, где решается задача
о точке встречи и вырабатываются необходимые углы наведения первой
пушечной батареи — вертикальный tpni и горизонтальный 0ni (позиция
10). Одновременно с этим производится и установка взрывателя щ. Если
теперь переключатель поставить в верхнее положение (замкнуть контакт
Дв), то сигнал дальности Дц поступает на усилитель мощности 6, на вы-
ходе которого установлен электродвигатель 7. Движение вала электро-
двигателя передается на импульсное множительное устройство 8 с по-
стоянным коэффициентом — через редуктор 9. Этот коэффициент
выбран таким, чтобы преобразовать истинный сигнал дальности в
фиктивный сигнал Е>ц.ф, т. е. на множительном устройстве реализуется
математическая зависимость:
^Ц.ф—(14.1)
у,
Здесь kM=—— , где 7\— время полета снаряда первой пушечной
Т‘2
установки; Т2— время полета снаряда второй пушечной установки.
Напряжение сигнала, пропорциональное фиктивной дальности на
блоке 8 умножается на коэффициент &п, зависящий от высоты полета
цели. Таким образом на блоке 8 реализуется также и математическая
зависимость
Оц.ф = Лн (//ц)/4Ц ф. (14.2)
Значение фиктивной дальности поступает на прибор 3, где вы-
рабатываются углы Рп2, фп2 для орудий второй установки, а также уста-
новки взрывателя п2.
В системах управления огнем зенитной артиллерии большое распро-
странение получают цифровые вычислительные машины (ЦВМ). Так,
например, в системе управления «FALKE» (ФРГ) применяется ЦВМ
«TR-84» [1]. Упрощенная структурная схема управления огнем зенитной
артиллерии с применением ЦВМ изображена на рис. 14.4. В систему
входят: измерительный зонд 1 для определения метеорологических дан-
ных; радиолокационные и оптические визиры 4\ устройства для звуко-
вой разведки 6.
Данные о цели 2, полученные с помощью средств визирования или
разведки поступают на устройства цифровой переработки информации 3,
Рис. 14.4. Структурная схема управ-
ления огнем зенитной артиллерии с
применением ЦВМ
Рис. 14.5. Построение упредитель-
ного треугольника
5, 7, а затем на ЦВМ 8. Цифровая вычислительная машина по данным о
цели и баллистическим поправкам вычисляет параметры установок пу-
шек 11, которые с учетом топографической привязки установки передают-
ся на батарею с помощью телетайпов 10. Для ввода программ применен
телеграфный аппарат 9. Контроль работы всей системы управления ог-
нем осуществляется с помощью выводного устройства 12, расположен-
ного на командном пункте.
Цифровая вычислительная машина «TR-84» имеет следующие ос-
новные параметры [1]:
количество разрядов ...................................... 18
число команд.............................................. 30
объем памяти оперативного запоминающего устройства.......... от 4096
до
16 384 ма-
шинных
слов
сложение............................................... 4 мкс
умножение..........'................................... 8 мкс
время выбора числа из оперативного запоминающего устройства 2 мкс
потребляемая мощность..................................... 100 Вт
вес..................................................... 24 кг
Следует отметить, что в данной системе управления путем приме-
нения ЦВМ определяются координаты ряда целей и производится от-
деление координат истинной цели от ложных.
§ 14.2. МАТЕМАТИЧЕСКИЕ ЗАВИСИМОСТИ ДЛЯ РЕШЕНИЯ ЗАДАЧИ
О ТОЧКЕ ВСТРЕЧИ СНАРЯДА С ЦЕЛЬЮ
Решение задачи встречи заключается в определении координат точ-
ки пространства, в которой произойдет встреча снаряда с целью. Допус-
тим, что в точке О (рис. 14.5) установлена зенитная пушка, а самолет-
цель, обнаруженный РЛС, находится в точке Вц. Самолет-цель соверша-
ет прямолинейный полет в направлении точки Ву. Если ствол пушки
направить по линии ОА, то снаряд, двигающийся по траектории из точки
О, попадает в точку встречи By. Упредительный треугольник ОВцВу яв-
ляется пространственным.
Определим координаты точек и Ву в прямоугольной системе ко-
ординат. Координату точки Вц обозначим через Хц, уц, Н^ а точки Ву
через ху, уу, Ну. Тогда:
*у = Хц+5Д
Уу=уЛ^у,
Hy=Hn + SZ’
(14.3)
где sx, sv, sz — проекции вектора упрежденного пути, пройденного са-
молетом-целью.
Для их определения можно воспользоваться следующими соотноше-
ниями:
6
[ (14-4)
О
где Уцх, Уцг — соответствующие проекции скорости цели;
т — время полета снаряда до упрежденной точки (упре-
дительное время).
Значение упредительного времени т зависит от упрежденной даль-
ности Dy, т. е.
r=/(Dy). (14.5)
Из совместного решения уравнений (14.3) — (14.5) находятся ко-
ординаты точки встречи, а затем и углы установки пушки по азимуту <рп
и в вертикальной плоскости ец.
Рассмотрим конкретную задачу об определении точки встречи. Для
этого воспользуемся гипотезой движения цели, согласно которой цель со-
вершает прямолинейный равномерный полет. В этом случае уравнения
(14.3) — (14.5) заменяются следующей системой уравнений:
-Гц + ^цх/1(Ху’ Уу’ ^у)--«у = 0; ’
+ У у, Ну)-уу = 0;
+ Уу, //у) —//у = 0. ,
(14.6)
Из решения системы уравнений (14.6) в СРП находятся значения
Ху, уу и Ну, определяющие точку встречи. Так как уравнения (14.6) яв-
ляются трансцендентными, то для их решения в СРП применяются раз-
личные численные методы. Если СРП реализован на аналоговых вычис-
лительных элементах, то применяется метод последовательных прибли-
жений; при построении СРП на цифровых элементах используют либо
метод последовательных приближений, либо метод «наискорейшего
спуска» [6, 10].
Решение задачи о точке встречи на аналоговом СРП
При решении уравнений на аналоговых СРП но методу последова-
тельных приближений необходимо найти такие корни X*, у} и Ну,
при которых система уравнений (14.6) обращалась бы в тождество.
Составим обобщенную блок-схему аналогового СРП, реализующую
методом подбора вещественные корни решения системы уравнений
(14.6). Будем считать, что решение системы уравнений осуществляется
на следящих системах и вычислительных блоках с некоторыми текущими
ошибками ei, 62, ез. Тогда систему (14.6) можно представить в виде:
Реализуем систему уравнений (14.7) на трех следящих системах I,
II, III (рис. 14.6).
Рассмотрим подробнее следящую систему I, на которой определяет-
ся корень х*. Как видно из схемы к вычислительному блоку ВБ подходят
сигналы 1)цж, хц, а па его выходе образуется сигнал ошибки ei, поступаю-
щий на измерительный элемент ИЭ. Сигнал с выхода измерительного-
элемента усиливается усилителем мощности У и поступает на двига-
тель Дв. Двигатель, отрабатывая сигнал ошибки ец посылает через ре-
дуктор Р сигнал х* на вычислительный блок до тех пор, пока сигнал
ошибки не станет равным нулю. Аналогично построены и следящие сис-
темы II и III, отрабатывающие корни Уу и Ну. Сигналы Уу и
Л/*у поступают на вычислительный блок следящей системы I. Иначе го-
воря, все следящие системы СРП являются взаимосвязанными, т. е. ре-
шение одного уравнения зависит от решения двух других и на вычисли-
тельном блоке реализуется функция 1 Д1 = хц-|--иПЛ./1 (ху, Уу, Ну)-
1 На вычислительных блоках систем II и III реализуются функции:
/=2 = '</ц + 1>цуЛ(ху> У у, HyJ, /г3 = Я,1 + г'цг/з(ху> У у, //*).
Как видно из этого анализа при равенстве нулю сигналов ei, е2 и ез
следящие системы СРП решают систему уравнений (14.7). При решении
уравнений на. следящих системах имеем:
Е- *
ej = r х — ху;
s2 = F2 — у у',
z3=f3-h;.
(14.8)
Разложим уравнения (14.8) в ряд Тейлора и, пренебрегая членами
выше первого порядка малости, получим:
31=^ дху 4 OF д^у4 ьн-
UXy дуу дНу
_ др2 2 дху дхУ4 дГ2 С>Уу дУу4 дГ2 дНу д^у; (14.9)
= - дГ ’ ®3 Д-Д4 дД3 Дуу4 dFn Д//у.
дху дУу дНу У
Перепишем систему уравнений (14.9) в виде:
sj=йц Дху 4- а 12 Д у у 4- а13 д Ну; е2— «21 Д-^у 4~ «ггД^у 4- «гзД-^у! £3 = «31ДХу 4“ «32 Д Уу 4~ «33 Д ^у, (14.10)
df\ д/ц
где ап-—, «12 —1-и т. д.
дху дуу
Коэффициенты «is и «1з характеризуют взаимное влияние следящих
систем и именуются коэффициентами взаимной чувствительности. Коэф-
фициенты а22 и «зз характеризуют собственную чувствительность следя-
щих систем. При проектировании следящих систем необходимо доби-
ваться уменьшения коэффициентов взаимной чувствительности и уве-
личения коэффициентов собственной чувствительности. Для этого
выбирают наиболее рациональную систему координат или изменяют
отрабатываемые величины с помощью линейных преобразований.
Введем новые переменные в следящие системы [10]:
®2 = ^21sl 4-^22е2“|_^23Ез;
^3= ^31S1 4“ ^23$2_h ^33®3- ,
(14.Н)
Подставив в уравнения (14.11) значения ei, &2 и ез, согласно выражени-
ям (14.10) получим:
®1==^И («11ДХу 4" «12ДУу 4“«1зД^у) 4- Ьп{аЧ\1^Ху 4"«22Д{/у'4‘
4“ «23Д^у) 4“ ^13 («31 Дху 4- «ЗзД^/у 4“ «ззД^у) >
й2= Ь21 («цДЛГу 4- а^Уу 4-«13^y) 4- ^22 («21ДХу + «22^Уу +
+ «2зД^’у)+^2з(«31Д^у4-«32ДУу4-«ЗзЛЛГу);
= ^31 («И ДЛ’у 4“ «12ДУ у 4- «13 Д^у) + ^32 («21 Д^У + «2аДУу +
4- «2зД^у) 4- ^33 («31ДХУ 4- «з2Д У у 4- «ззД^у),
или
8j = 4“ «21*12 4* «31*1з) Д-^у 4“ («12*11 4“ «22*12 4“ «32*1з) ДУу +
4- («13*11 + «23*12 4“ «33*1з) Д^у;
^2 = («11*21 4 ’ «21*22 4“ «?>1*2з) ДХу 4~ («12*21 4~ «22*22 4~ «32*2з) Д£/у 4~ jg^
4~ («13*21 4~ « 23*22 4" «33*2з) Д-^у!
83 = (апЬ31 4" «21*32 + «31*3з) ДХу 4- (« 12*31 4- «22*32 4* «32*3з) ДУу4~
4~ («13*31 4~ «23*32 4~ «33*3з) Д*/у
Матрицу коэффициентов взаимной чувствительности запишем в
виде
«1А14- «21*124“ «31*13 «12*11 4“ «22*12 4“ «32*13 «13*11 4“ ачФп 4“ «33*13
«11*214“ «21*22 4” «31*23 «12*21 4“ «22 *22 4“ «32*23 «13*11 4“ «23*22 4“ «33*23 • (14.14)
«11*31 4- «21*32 4" «31*33 «12*31 4“ «22*32 4" «32*33 «13*31 4" «23*32 4“ «33*33
Для случая отсутствия взаимного влияния коэффициенты собствен-
ной чувствительности должны быть максимальны (допустим равны еди-
нице), а коэффициенты взаимной чувствительности должны быть мини-
мальны (допустим равны нулю). Тогда матрицу (14.14) следует при-
равнять следующей диагональной матрице
Р .0 0 0 0 1 0 0 1 (14.15)
Перепишем матрицу (14.14) в виде
«и о12 а13 *11 *12 *13
«21 «22 «23 *21 *22 *23 • (14-16)
«31 «32 «33 *31 *32 *33
Матрица (14.14) будет диагональной тогда, когда матрица коэффи-
циентов при bij будет обратной относительно матрицы a,-j, а, следова-
тельно,
*п *12 *13 1 «п «12 «13 -1
*21 *22 *23 1 — «21 «22 «23 (14.17)
*31 *32 *33 «31 «32 «33
Таким образом, за счет линейного преобр азования выражения
(14.17) матрица коэффициентов взаимной чувствительности становится
диагональной, а следящие системы :—развязанным одна относительно
другой.
Тогда: Л (ху, t/y, //- b^F,-’-b^F.A-b^F^O;
f2(xy, Уу, Hy)=b21Fl-\-b22F2-\-b23F3=0;
/3(*у> Уу> ^У) = ^31Л4-W4 +^33^3 = 0-
(14.18)
Необходимо заметить, что уравнение (14.18) справедливо лишь при
работе следящих систем в линейной зоне ее элементов (т. е. при малых
углах рассогласования е3). При больших углах рассогласования разло-
жение функций Fj в ряд Тейлора (14.9) с оставлением только членов
первого порядка малости недопустимо, так как влияние членов второго
порядка становится достаточно ощутимым.
Блок-схема решения задачи о точке встречи с применением линейно-
го преобразования при малых углах рассогласования ец ег, ез изображе-
на на рис. 14.7, где все элементы следящих систем, за исключением вы-
числительного блока ВБ и блока линейных преобразований БЛП, обо-
значены передаточными функциями Wj (s).
Для большинства СРП передаточную функцию разомкнутой следя-
щей системы можно представить в виде
s(TyS 4- 1) (72Bs2 + 2£,1B7\Bs + 1)
(14.19)
где ka — передаточный коэффициент потенциометра;
ky — коэффициент усиления усилителя;
/гдп— передаточный коэффициент двигателя;
kp — передаточный коэффициент редуктора;
Ту — постоянная времени усилителя;
ТдВ — постоянная времени двигателя;
|дВ•— степень колебательности двигателя.
Рис. 14.7. Блок-схема решения урав-
нений (14.7) на аналоговом СРП с
применением линейного преобразова-
ния
По структурной схеме рис. 14.7 выбираются параметры следящих
систем, которые в дальнейшем уточняются по полной схеме СРП (см.
рис. 14.6) методом математического моделирования на аналоговой вы-
числительной машине.
Пример 14.1. Для следящих систем найти среднюю квадратическую ошибку в опре-
делении точки встречи при малых углах рассогласования.
Пусть уровни спектральных плотностей координат и скоростей цели имеют сле-
дующие значения: 5цз: = 0,4 м2-с; St, =2 м2/с; т=4 с. Тогда средняя квадратическая
ошибка СРП по одному из каналов будет:
-/17 *пр^1(» 2
Е! = I/ —, ну , . , г5ил(“) + tSj, (oj)ldM,
Л J 1 + ^np^l (j'°) I- ILV 1
" 0
где l?7! (До)—передаточная функция разомкнутой следящей системы, определяемая по
формуле (14.19);
£пр — передаточный коэффициент блока преобразования (см. рис. 14.7).
Примем, что параметры следящей системы имеют следующие значения:
7’,те = 0>08 с; Едв = 0,6; Ту — 0,005 с; knkykARkv = 50 1/с.
При этих параметрах ei = 10,l м. Аналогичным образом находятся ошибки е2 и е3.
Для простоты вычислений будем считать их равными еь В этом случае средняя квад-
ратическая ошибка в определении точки встречи с помощью СРП
е = е2 _|_ е2 — 17,5 М.
Решение задачи о точке встречи на цифровом СРП
При решении уравнений (14.6) на цифровых СРП могут быть ис-
пользованы различные методы. Одним из наиболее распространенных
является метод итераций [10], при применении которого систему урав-
нений (14.6) преобразуем к виду:
или
— АДх^ х2, х3);
F,, (Xj, -^з)>
x3 = F3(x1, Х2, Х3),
= (%], х2, х3) (/=1, 2, 3).
(14.20)
Допустим, что система уравнений (14.20) в некоторой области зна-
чений хр х2, хз имеет единственное решение х*, х*, х*, а х[0), х<0) ,
х^0) —числа соответственно близкие к х*, х*, х*. Исходя из этих при-
ближенных значений, при некоторых ограничениях на функции Fb F2,
F3 можно найти приближенные ззачения х* с заданной точностью.
Уточнение решения может быть выполнено методом итераций,
заключающемся в том, что. по х<°>, х(,°\ х(,0) находится следующее
приближение
x^ = Fi(x{°\ х(°), х<<») (/=1,2,3). (14.21)
Затем полученные значения хР1 подставляются вместо х(0) и опре-
деляются
x^ = Fi (х]Р, xj, xf3Ij}) (/=1, 2, 3) и т. д. (14.22)
Если найдено k-e приближение х<*\ x<ft), х(/\ то (&ф-1)-е прибли-
жение определяется как
x[.ft+1) = Fz(x(ft), х<*>, х<‘)) (/= 1, 2, 3). (14.23)
Метод итераций сходится к искомому решению, если при k—>со
х<М->х* (f=l, 2, 3).
Для того, чтобы получить решение с заданной точностью, процесс
следует продолжать до тех пор, пока два последовательных приближе-
ния будут совпадать с требуемой точностью.
Прежде, чем сформировать условия сходимости метода, введем не-
которые понятия и обозначения. Будем считать Xi, х2, х3 компонентами
трехмерного вектора х~ (хь х2, х3). Норму вектора х определим сле-
дующим образом:
|] х = шах | х; | (/= 1, 2, 3). (14.24)
Далее назовем расстоянием между векторами х' и х" значение
р (х', х") = [| х'— х" = шах | х). — х) |
L
и примем, что в некоторой выпуклой области D значений хь х2, х3 функ-
ции ЕДх) имеют непрерывные первые производные:
и система уравнений (14.7) имеет единственное решение. Предположим
также, что при начальном приближении х(°) все следующие приближе-
ния не выходят из области D.
Для сходимости метода итераций при решении системы (14.7) до-
статочно выполнения одного из следующих условий:
(Z = l, 2, 3); (14.25)
i=i
3
0=1, 2,3); (14.26)
i=i
<1 (Z, j=l,2, 3).
(14.27)
Причем в этих случаях за х(°> можно принимать любой вектор из ок-
рестности редО: р(х, х*) =||х—х*||г^г{/=1 или 2, или 3 в зависимости от
того, какое из условий (14.25) — (14.27) рассматривается], а
|| х— х*||1 = тах | — л*|;
3
||x-x*i)2=2
(14.28)
1=1
Неравенства (14.25) —(14.27) соответственно означают, что первая,
вторая или третья нормы матрицы
меньше единицы.
Приведенные достаточные условия сходимости метода итераций яв-
ляются практически удобными. Реализация данного метода на ЦВМ.
представлена в виде блок-схемы, приведенной на рис. 14.8, из которой
видно, что данный метод не требует большого объема памяти машины и
при выполнении одного из ус-
ловий (14.25) — (14.27) быстро
сходятся к решению.
§ 14.3. РЕАЛИЗАЦИЯ
МАТЕМАТИЧЕСКИХ ЗАВИСИМОСТЕЙ
О ТОЧКЕ ВСТРЕЧИ НА АНАЛОГОВЫХ
ВЫЧИСЛИТЕЛЬНЫХ УСТРОЙСТВАХ
Рассмотрим эту задачу, на
примере применения прибора
управления зенитным огнем, не
требующем определения даль-
ности до цели.
На рис. 14.9 показано дви-
жение цели в пространстве из
точки Ц в точку В. В точке О
находится пушечная установка.
На высоте Ям проведем плос-
кость, параллельную исходной
плоскости и будем ее имено-
Рис. 14.8. Блок-схема вычислений на ЦВМ по
методу итераций
вать как К-плоскость [12]. Тогда мгновенное положение цели на К-плос-
кости будет характеризоваться точкой Цt; скорость иц соответствует ско-
рости им.
Рис. 14.9. Геометрическое представление
треугольника скоростей на К-плоскости
Рис. 14.10, Основные геометрические
обозначения для составления матема-
тических зависимостей ПУАЗО
Горизонтальная дальность до фиктивной цели (точка IK на плоско-
сти К) определяется с помощью следующего соотношения:
OU2=tfMctgsu.
Из подобия треугольников (9ЦВ и О)Ц\ВХ найдем
П1В1 0Ц _ 0Ц3
ЦВ 0ЦГ 0Ц2 ’
(14.29)
откуда
£м _ ^Mctgeu
Н ctg ец
С помощью оптических или инфракрасных визиров определяются не
только углы рц и ЕЦ> но и их угловые скорости и Ш£ц- Зная эти па-
раметры, можно определить скорость vM. Для этого воспользуемся тре-
угольником скоростей BiUiC в К-плоскости, откуда найдем:
Ц1С = г'м = “₽ц//мс1§
(14.30)
(14.31)
ШЕ "м
СВ1==< =—а—
м sin2 ец
Для наглядности спроектируем плоскость М с треугольником ско-
ростей на горизонтальную плоскость Г (рис. 14.10). Обозначим угол ли-
нии визирования через ц. Тогда на основании рис. 14.10 можно записать
(14.33)
(14.32)
?ц = Рц-Н,
где дд— курсовой угол цели.
Из треугольника Ц1СВ1 найдем соотношения:
' . V Ctg ец
SIH fX=--=
COS [X
vu
'е
И
»м vM sin2 е.
из которых определим
Нм ец
Ц_________
sin р.
(14.34)
м
или
“г Нм
^M=—7^--------•
sin2 ец cos p.
Приравнивая выражения (14.34) и (14.35), получим
“я ctgeu <п
рц_____=______Ц
sin pi sin2 £ц cos pi
(14.35)
(14.36)
С помощью этих соотношений можно определить значения скорости
цели на К-плоскости и угла линии визирования ц.
Из суммы соотношений (14.34) и (14.35) имеем
8 СМ» £Ц 1
2 ц
У/и =
UM. - - М » . П
\ Sin2 Ед COS pl
sin /л
(14.37)
При Ям = 2
“Е “В ctg £Ц
_____ ц_____ни_________
sin2 £ц cos (л_sin pi
Из выражения (14.36) найдем
СО п
Рп
р =----У— Sin ец cos гц.
=ц
(14.38)
(14.39)
Рис. 14.11. Упрощенная принципиальная схема электромеханического СРП
e
ц
Таким образом для реализации математических зависимостей
(14.38) и (14.39) можно применять механические устройства в виде двух
сумматоров, с выхода которых снимаются параметры р и vM-
Рассмотрим одну из возможных схем реализации данных математи-
ческих зависимостей на аналоговом СРП (рис. 14.11), [9], [12]. Углы мес-
та цели ец и азимута |3Ц поступают от оптического или инфракрасного
визира в виде углов поворота к кулачковым механизмам 1, 2 и фрикци-
онному устройству 10. На выходе механизма 1 имеем тригонометриче-
скую функцию 1/sin ец, а на выходе механизма 2 — функцию sin2e4.
Сигналы, пропорциональные ец и sin2eT„ соответственно в виде перемеще-
ния и угла поворота поступают на фрикционное устройство 3, с выхода
которого снимается сигнал, пропорциональный /sin2 ец. Сигнал, про-
порциональный углу места цели, поворачивает кулачковый механизм 6
и на его выходе образуется функция cos ец. Этот сигнал поступает на
фрикционное устройство 10, где образуется функция ctg ец, посту-
пающая в свою очередь на фрикционное устройство 9, на выходе которо-
о С tД
го образуется сигнал, пропорциональный ,г-___. Данный сигнал и
sin р.
сигнал с выхода фрикционного устрой-
ства 4 на сумматоре 14 образуют сиг-
нал, пропорциональный фиктивной ско-
рости цели цм (на К-плоскости), по
формуле (14.38). Разность же этих сиг-
налов па сумматоре 13 образует сиг-
нал, пропорциональный углу ц [см.
формулу (14.39)].
На выходе кулачкового механиз-
ма 5 образуются функции sin ц и cos ц.
Сигнал рц поступает на сумматор 11,
где реализуется разность сигналов Рц
и ц [по формуле (14.33)] и образуется
курсовой угол цели t/ц.
Значения наименьшего расстояния
до К-плоскости определяются на диске
8 с помощью механического блока пе-
ремножения (МБМ) 7. Величина кур-
Рис. 14.12. К определению уг-
лов установки прицела и пушек
сового угла цели с выхода сумматора
11 поступает на диск 12.
Таким образом механические элементы 1—14 образуют счетно-ре-
шающее устройство первой группы—пунктирный прямоугольник I на
рис. 14.11 (на рис. 14.1 эти элементы заключены в прямоугольник 4).
Скорость цели vM, курсовой угол цели и наименьшее расстояние
ctg 8цmax на К-плоскости служат данными для элементов счетно-ре-
шающего устройства второй группы, вычисляющих параметров углов ус-
тановки прицела 8Пр, Рпр и оружия еп, рп (на рис. 14.1 прямоугольник 6).
На рис. 14.12 дано геометрическое построение этих углов. В точке Ц
находится цель; В — точка встречи снаряда с целью. Тогда расстояние
ЦВ = х=г»мт,
(14.40)
где т — время полета снаряда.
Задавая фиктивную скорость пм на кулачковые механизмы 24 и 25, с
помощью сумматора 26, следящих устройств 22, 22', 23 и 23', блока МБП
28, кулачкового механизма 29 и электрических двигателей 27 и 30 опре-
деляются углы установки прицела |3Пр и епр. Вычислительные элементы
33, 36, 32, 34, 37, 38, 39 и электродвигатели 35 и 40 обеспечивают выра-
ботку углов установки пушки |3ц, еп. Эта группа элементов отличается
от группы элементов, служащих для определения углов рПр и 8Пр нали-
чием устройства 31, которое обеспечивает уменьшение скорости враще-
ния кулачка 24 по сравнению со скоростью от кулачка 33 на величину,
равную сц,т [см. формулу (14.40)]. На рис. 14.11 все элементы выделены
штриховым прямоугольником II.
Баллистические поправки и значения s = uMr вводятся элементами
15—21 счетно-решающего устройства третьей группы. Скорость цели ом
поступает на блок перемножения МБП, куда подается сигнал Н/Нм от
ручки 17 и с выхода МБП снимается на шкалу 15 значение об истинной
скорости цели оц.
, Если дальность до цели определяется радиолокатором или дально-
мером и поступает на шкалу 18, то скорость цели определяется автома-
тически с помощью элементов 1, 17, 19 и 18. В вычислителе 20 определя-
ются время полета снаряда т и не-
обходимые баллистические поправ-
ки Д. Блок МБП выполняет пере-
множение времени т на скорость це-
ли цм. На рис. 14.11 элементы 15—
21 заключены в штриховой прямо-
угольник III.
Рис. 14.13. Основные обозначения для со-
ставления математических зависимостей
ПУ АЗО М-9 и М-10
Рис. 14.14. Принципиальная схема сглажи-
вающего фильтра ПУАЗО М-9 и М-10
Рассмотрим теперь реализацию математических зависимостей о точ-
ке встречи на аналоговых вычислительных устройствах на примере аме-
риканских ПУАЗО М-9 и М-10 (США)1 [10].
В ПУАЗО М-9 и М-10 координаты цели йц, ец, (Зц измеряются радио-
локационной станцией или оптическим визиром. Эти данные поступают
на счетно-решающий прибор, где вычисляются угол азимута |3п, угол мес-
та еп и наклонная дальность Оц в сферической системе координат
(рис. 14.13).
Данные о движении цели и решение задачи о точке встречи в прибо-
ре производятся в прямоугольной системе координат Oxyz, причем ось
Ох направлена на восток, а ось Оу на север [10]. В этом случае из тре-
угольников ОВцВ] найдем
cos ец; 1
ЛГц = Ц1 sin вц. ]
Далее по.треугольнику OBiCi вычисляются координаты цели:
хц=а1ц cos 1
г/ц=д<ц sin рц. /
(14.41)
(14.42)
1 ПУАЗО М-9 и М-10 предназначены для управления огнем соответственно 90-мм
и 120-мм зенитных пушек.
Параметры движения цели определяются дифференцированием сиг-
налов Хц, уц и На: vx = ; ц dt ; } (14.43) ц dt
Первоначальные данные о цели в виде сигналов £)ц, ец, |3Ц, посылае-
мых РЛС, содержат флюктуационную составляющую, а сигналы о цели,
снимаемые с оптического визира, наряду с постоянной составляющей
имеют и случайную составляющую. Поэтому для уменьшения влияния
флюктуационной или случайной составляющей в СРП сглаживаются сиг-
налы на фильтре RC (рис. 14.14). В зависимости от времени наблюдения
Тнабл постоянные времени фильтра изменяются (см. табл. 14.1).
Передаточная функция фильтра имеет следующий вид:
W ($)=Н47',Л+Т7Т5) У -ф (27\ 4- 2Т3) s + 1 ]: [(87’1Т27'3 + 4Г2Т3Т4 +
-ф 2Т\Т2Т3 + 7y6) № + (27^5 + 47\Т\ + 4Т37\ + 2Т2Т3 + 27\7\ + 4Т,Т3 +
+ Г2 Г5)я24-(Г6 + 2Л + 2Л + 2Г2 + 2Л + Л)* + 1 ], П4.44)
где T2—R2C2; Л=/?3С3; Т4=^С2, T5=R2C3, T6=--R£3,
T7=R2CV
Передаточную функцию (14.44) можно представить также как
72S2 + + 1
(r;s + i)(^ + i)2 ’
(14.44а)
где
Т = V4Т3Т7 4- Т7Т5; е = — Гз + ?7 .
V 4Т3Т7 + Т5Т7
В табл, 14.1 приведены данные о постоянных времени сглаживаю-
щего фильтра при двух временах наблюдения: 7’Набл= 10 с и ГНабл = 20 с..
Таблица 14.1
Время наблюдения, с Л, С Ts> С Г3, С Т„ с т5. с Ге, с Л, с
10 4,73 15,1 8,5 8,35 2,68 1,48 8,56
20 0,866 14,65 4,05 3,04 1,28 0,266 4,2
Для передаточной функции (14.44а) и постоянной времени наблю-
дения Тнабл=Ю с получим
(17,7)2й-2 + 2-0,965-17,7s+ 1
Vv IS ) — .
' (66,7s + I) (15,4s + 1)2,
Упрежденные координаты цели находятся в соответствии с приня-
той гипотезой о движении цели и временем полета снаряда т. Так как в.
ПУАЗО М-9 и М-10 принята гипотеза о прямолинейном и равномерном
движении цели, то:
Ху=Хц+<УхцТ;
Уу = УЛ^у11Х’
(14.45)
По этим упрежденным координатам вычисляются углы установки
пушки фп, ₽п и установки взрывателя пВз- Для определения угла рп вос-
пользуемся соотношением
или
t/y sin —- лу cos Рп = 0. (14.46)
Из решения трансцендентного уравнения (14.46) определяется угол
Рп установки пушки по азимуту. Затем определяется проекция упреж-
денной дальности из треугольников OLC2 и В2ЛС2:
dy = xy sin Зпуу cos fin. (14.47)
Понижение снаряда под линией стрельбы в воздушной среде можно>
определить по формуле:
А=4-^2(!+^у), (!4-48)
где k — коэффициент, учитывающий влияние на снаряд сопротивления
воздуха.
Из построений на рис. 14.13 найдем баллистическую высоту
Я6 = //У+А.
Из треугольника 0ЛВ2 определим
(14-49)
Ду
или
//6cos<pn — iZycos<prt = 0. (14.50)
По значениям Не и dy согласно уравнению (14.50) в СРП вычисляет-
ся значение угла возвышения пушки фп. Из треугольников 0МВ2 и
ВуМВ2 найдем'
Dy=dy cos5y—sin sy. (14.51)
С целью упрощения СРП вместо угла еу в уравнение (14.50) под-
ставляется значение <рп, но с соответствующими поправками fi (dy, срп, т)
и h (dy, фп, т) тогда получим
£>y=fllycos?n + ^sin?n-/1(flfy, ?п, т)-/2(£/у, ?п, т). (14.52)
Будем считать, что упрежденная дальность является функцией от т,
тогда
£>у=Д(т). (14.53)
Подставив выражение (14.53) в формулу (14.52), получим
Д(г)-аГусо5?11-//у sin^ + ZJ^, ?п, т)+/2(йГ}„ ?п, т). (14.54)
Из уравнения (14.54) определяется упрежденное время т. Поправка
на установку взрывателя «вз определяется по формуле
«в3--=т4-дга3, (14.55)
где Дп3 — поправка на время заряжения.
В свою очередь эта поправка может быть найдена с помощью вы-
ражения
Д«3 = 17тг3, (14.56)
где VT —скорость изменения времени полета снаряда;
т3 — время заряжания пушки.
Из выражения (14.55) и (14.56) нетрудно найти зависимость
«вз — Т-1ЛТз=0. (14.57)
Уравнения (14.46), (14.50), (14.54) и (14.57) решаются в СРП с
помощью следящих систем, а уравнение (14.47)—на решающем уси-
лителе.
Упрощенная принципиальная схема счетно-решающего прибора по-
казана на рис. 14.15. Оператор по данным РЛС или оптического визира
вводит в СРП данные о цели (угол азимута рц — маховиком 1, угол мес-
та цели 8Ц — маховиком 4 и дальность до цели —маховиком 8). На
тригонометрический потенциометр поступает сигнал дальности Оц после
двух решающих усилителей 6 и 7.
На выходе потенциометра 3 создаются два напряжения, пропорцио-
нальные Яц=Пцз1п ец и sin 8Ц. Сигнал дальности — образуется
на выходе решающего усилителя 9. Далее он инвертируется на блоке 12,
где образуется сигнал +d4. Сигналы —Иц и + dl( поступают на тригоно-
метрический потенциометр 2, с выхода которого снимаются напряжения,
пропорциональные x4=d4sin рц и £/ц=^цсо5 |3Ц.
Контроль вводимых параметров осуществляется приборами 10 и 11.
Тригонометрические потенциометры 2 и 3 входят в визирную колонку 5
(на схеме рис. 14.15 выделена в штриховой прямоугольник).
Данные о цели хц, уц, Нц-поступают на сглаживающие фильтры 14,
16, 18, на выходе которых установлены дифференциаторы 20, 21 и 22.
Эти фильтры имеют одинаковую структуру и отличаются лишь своими
постоянными времени. При времени .наблюдения ГНабл = 10 с оператор
нажимает кнопку 19 и включает в цепь верхние фильтры, а при увели-
чении Тнабл до 20 с включаются нижние фильтры. После дифференци-
рующих усилителей 20, 21 и 22 получаются напряжения, пропорциональ-
ные составляющим скорости цели щ-ц, г!Уц, 1///
На выходе дифференциаторов установлены потенциометры 23, 24 и
25, на которых умножаются соответствующие переменные на время поле-
та снаряда т. Напряжение, пропорциональное т, в виде угла поворота по-
лучается при решении уравнения (14.54) с помощью следящей системы,
состоящей из ряда решающих блоков, усилителя мощности 47, электро-
двигателя 50 и редуктора 54. Таким образом на щетках потенциометров
получаются напряжения, пропорциональные г’у t и -о//цТ. Эти
напряжения суммируются и на выходе усилителей 13, 15 и 17 образуются
напряжения, пропорциональные упрежденным составляющим:
•^у=А + ^/; ^ = ^ + ^5 Ну = нЛ'1)н^-
На входы усилителей 13 и 15 поступают поправки на базу (соответ-
ственно Дхб и At/g), а на усилитель 17 поступают поправки
дЛ/^дЯ^+д^б+д^+д/Ун, (14.58)
где AHV — поправка на изменение начальной скорости снаряда;
ДДб — поправка на базу;
— поправка на ветер;
ДЛп — поправка на плотность воздуха.
В результате на выходе усилителей образуются упрежденные со-
ставляющие с соответствующими поправками.
На усилителях 26, 27 и 28 производится инвертирование напряжений
и на их выходах получаютя сигналы ху, уу и Ну.
Тригонометрические потенциометры 31 и 32 приводятся во враще-
ние от следящей системы, образованной электронным усилителем 35,
усилителем мощности 47, электродвигателем 48 и редуктором 52, и ре-
шающей уравнение (14.46). В результате на выходе редуктора получает-
ся угол поворота пушки по азимуту [Зп- С помощью сельсинов значение
этого угла передается следящей системе горизонтальной наводки пушки.
На выходе потенциометра 31 образуются напряжения, пропорцио-
нальные ху cos рп и Ху sin |3Г1, а на выходе потенциометра 32 — напряже-
ния, пропорциональные cos рп и —yysinpn. Сигналы xycosfJn и
—Уу sin [Зц совместно с сигналом поправок
+ . (14.59)
где &I7wi — поправка на ветер; Д/7д— поправка на деривацию, поступают
на суммирующий усилитель 35.
Сигналы sin рп и —уу cos рп поступают на суммирующий усили-
тель 36. Сюда же подаются поправки в дальности
Д/72= Д/7даг-|-Д/7у-j-Д/7Й, (14.60)
где ДПИ2— поправка на ветер;
Д/7В— поправка на изменение начальной скорости;
A/7fl.— поправка на изменение плотности воздуха.
В результате этого на выходе усилителя 36 получается напряжение,
пропорциональное упрежденной дальности — dy. Это напряжение инвер-
тируется усилителем 39 и поступает на тригонометрический потенцио-
метр 41. На тригонометрический потенциометр 42 в свою очередь посту-
пает напряжение, пропорциональное Яб, полученное после суммирующе-
го усилителя 37, где складываются значения Ну и h. Потенциометры 41 и
42 приводятся во вращение от следящей системы, состоящей из сумми-
рующего усилителя 44, усилителя мощности 47, электродвигателя 49 и
редуктора 53, и решающей уравнение (14.50) относительно угла возвы-
шения фп. Одновременно с этим электродвигатель 49 через редуктор 53
приводит во вращение тригонометрические потенциометры 33 и 43 и
сельсины следящей системы вертикальной наводки пушки. С выхода по-
тенциометра 43 сигнал — t/y cos фп через инвертор 45 поступает на сум-
мирующий усилитель 46. На этом же усилитель с выходе потенциометра
33 подается сигнал Яузтфп и сигналы поправок fi(dy, фп, т), fzfdy, фп,
т). После сложения их образуется результирующий сигнал, который
поступает через усилитель мощности 47 на электродвигатель 50 следя-
щей системы. Электродвигатель через редуктор 54 поворачивает потен-
циометр обратной связи 29 до тех пор, пока снимаемое с него напряже-
ние не установит на выходе суммирующего усилителя 46 напряжение,
равное нулю.
Как уже указывалось, данная следящая система решает уравнение
(14.54). В результате этого на выходе редуктора 54 получается угол по-
ворота вала, пропорциональный времени полета снаряда т.
Установка взрывателя производится в соответствии с решением
уравнения (14.57) следящей системой, состоящей из суммирующего уси-
лителя 40, усилителя мощности 47, электродвигателя 51, редуктора 55 и
потенциометра обратной связи 38. На входе усилителя 40 происходит
суммирование сигналов, получаемых в результате перемножения на по-
тенциометре 34 сигнала т, который снимается с потенциометра 30, и сиг-
нала п, который снимается с потенциометра обратной связи 38.
Рис. 14. 15. Схема реализации математических зависимостей о точке встречи на электронных и электромеханических устройствах ПУАЗО
М-9 и М-10
§ 14.4 РЕАЛИЗАЦИЯ МАТЕМАТИЧЕСКИХ ЗАВИСИМОСТЕЙ
О ТОЧКЕ ВСТРЕЧИ НА ЦИФРОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИНАХ
Математические зависимости о точке встречи реализуются на ЦВМ
в виде рабочей программы, состоящей из подпрограмм обработки заме-
ров о данных цели и определения точки встречи по методу итераций (см.
§ 14.2). Будем считать, что РЛС измеряет угол азимута рц, угол места
цели ец и дальность до цели Данные обрабатываются в системе за-
меряемых параметров (рц, ец, Дц). После этого их можно перевести в лю-
бую другую систему координат и определить скорости движения цели
vx, vy, vz [2].
Пусть на интервале времени (Z, tn) получены замеры координат
Рт, Рт<; ещ, ..., ецп; Дць ..., Дцп с частотой замеров v. Эти данные мож-
но представить в виде:
ею 4+^;
(14.61)
где £ц(Ср, /), Ец(Се, t}, Da(CD, t) — истинные значения замеренных вели-
чин;
^р — флюктуационные составляющие.
Будем считать, что все составляющие £ являются нормально рас-
пределенными независимыми между собой случайными величинами, не-
коррелированными между последовательными замерами. Кроме того,
математические ожидания этих случайных величин равны нулю и зада-
ны их средние квадратические значения [7].
Величины Ср, Се, CD являются неизвестными, которые следует
оценить, используя полученные замеры. Если считать, что самолет-цель
совершает прямолинейный полет, тогда в качестве функции рц, ец, £>ц
можно принять полиномы первого порядка. Представим их в следующем
виде:
Рц—Cpo-f-Cpi (7 — 4),
ец—C6o + Csi (7 — 70),
(14.62)
Mi—Сфо + ст {I—4),
где 4 — середина интервала наблюдения.
Для определения значений Сро, Cpi, ее0, СЕ1, CM, CD1, восполь-
зуемся методом наименьших квадратов [8], по которому для каждой из
координат минимизируем разность:
л I
(14.63)
где зр/, аг,, ар; —средние квадратические значения замеров соответ-
ствующих координат.
Используя необходимые условия минимума, получим системы сле-
дующих алгебраических уравнений относительно неизвестных
Сро, Cpi, СЕо, Csi, Сдо, С pi:
a?J
d 1
Hl
(®цу-Со-Се1/;.)2=О;
(ец7.-Сз0-Сг1/у)2=О;
'I
(14.64)
У СПо-СД1/7)2 = О;
6GD0 *"* °Dj
7 = 1
п
~£~ У (Da}~ CD0 -CD= 0;
0Gz>i >“ ао/
7=1
Таким образом, решая систему уравнений (14.64), получим значения
коэффициентов, отнесенные к середине интервала наблюдения /0,
(14.65)
12^2 ТА/
7 = 1
и их средние квадратические величины:
п2
144И 2
J-1
n2(rfi— I)2
П2
144.4 2
7 = 1
(14.66)
И2 (П2 — 1)2
«2
144.4 2 ф2оу
7-1
П2(П2— 1)2
где п — число замеров; n = tj —10 (здесь tj — время поступления /-го за-
мера,
‘о
п
Формулы (14.65) и (14.66) являются рекурентными и их можно ис-
пользовать по мере поступления замеров.
Для простоты вычислений будем считать, что средние квадратиче-
ские значения единичных замеров являются постоянными от замера к
замеру, а частота замера v= 1. При этих условиях получим средние квад-
ратические ошибки определенных координат:
’•"V
(14.67)
Из формул (14.67) следует, что по мере увеличения числа замеров п
средние квадратические значения а<з , и одц уменьшаются. На рис.
14.16 приведены графики зависимости отно-
сительных средних квадратических ошибок
от числа замеров.
Перейдем к прямоугольной системе ко-
ординат хц, z/ц и Яц, для чего воспользуемся
зависимостями:
= ец;
хц = Da cos ей cos
Уц=-ОцСО5 у, sin Рц.
Рис. 14.16. График зависимо-
сти относительных средних
квадратических ошибок от
(14.68)
числа замеров
Соответственно с этим средние квадратические значения , % и
айц будут определяться формулами:
3ЯЦ = К sin2 еп 4ц + (£>ц С08 5ц)2^ц;
% = /(cos cos Рц)2сФц + (Оц5т ед cos рц)2
+ созйц sin
У ~ V(cos sin ₽ц)2°Ьц 4-(^Ц sin ец sin у V( 4-
(79ц cos ец cos у2орц;
(14.69)
Значения составляющих скорости цели можно получить дифферен-
цированием выражения (14.68):
Vy
г, =. Al = cos е cos 8 A^L _ иц sjn е cos L Al —
х* dt ц ц dt ц ц ц dt
— Ducossusin?„-^- ;
7(£il:=;Cos е sin-1Ц Оц sin Вц sin
dt dt dt
4 £>ц cos ец cos ?ц АА ;
АА=sin е АА 4. D cos вц-А- .
dt 1 dt 1 ц 1 dt
Математическое ожидание составляющих скорости
подстановкой значений Cpt, CS1 , CD] из выражений
dD-sJdt, d^/dt, d^Jdt в соотношения (14.70):
А
цели получим
(14.65) вместо
12-'22 тА/
=cos e„ cos B„--3—--------n sin g cos 3
« n(n2— 1)
— D„ cos e„ sin ----------
Ц Ц ц л(Я2-1)
v., = cos e sin 3„---I-----------D„ sin e cos 4
J'u д >ц Л(Л2_ 1) 11 11 гц
П («2— 1)
(И.71)
п(п2 — 1 )
12^ S
«_ 1 J
п
4 D„ cos sn sin 4---1------;
1 ц “ ц Zl(n2— 1)
12ч2£т.Оц;. 12v2 2«/ц/
= sin eu----’ 7—----- 4 D,, COS e„-—------- ,
ц n(«2-l) ц ц п(й2-1)
ёц, рц и Дц — обработанные координаты (см. формулы (14.67)].
Средние квадратические ошибки определения скоростей будут1:
Vz
ц
где
(cos ец СОЗ У2°оц + (.4 sin 4 cos ?ц + ₽Ц cos su sin ?ЦМЦ+
л |2-r2
2
ЛЦ
+( — £>ц sin S,xcos рц — cos ^„cos^+Dj,, sin ец sin £Ц)Ч2Ц+
+ (— Д COS ец sin p„+£>цёц sin ец sin Рц — Л)црц cos ец cos ?ц)2^ц +
+ A sin 4 с»3 ?ц)М + A cos вц sin рц)2з| ;
ц рц
4Уц^(соз eusin 81,)24ц+(-®ц sin 4 sin ?ц + ?ц cos ец cos ₽ц)24+
+ (- A sin ®ц sin (Зи - 7?ц£ц cos ец sin 8Ц - /ДД sin ец cos ?ц)2з2ц
+ (— A cos Вц cos 8ц - /?ц£ц sin ец cos ₽ц - D$a cos ец sin ?ц)2з|ц
+ (ОЦ sin su sin ?ц)\- +(ОЦ cos ец cos ?ц)2з- ;
II ГЦ
Чц~аЬц sinM’fl» СО32ецец4(/;ц cos ец-Пц$ц sin ец)2з?ц4
+ (/9цсозец)2о|ц,
(14.70)
} (14.72)
1 Формулы (14.72) приведены без учета математических ожиданий перекрестных
произведений.
где a- =oCD ; о- =оС£1 и зл =3ср1 [см. формулы (14.66)]. На основании
°ц 1 ец ри
полученных математических зависимостей можно составить блок-схему
подпрограмм обработки данных о цели на ЦВМ (рис. 14.17).
Пример 14.2. Вычислить средние квадратические ошибки определяемых коорди-
нат D, е и f> самолета-цели по данным радиолокационных замеров к концу интервала
наблюдения.
Будем считать, что единичные замеры поступают с частотой 1 Гц, а средние квад-
ратические значения являются постоянными от замера к замеру. Зададимся следующи-
ми значениями исходных ошибок: о р =оЕ=0,01 рад, Ол = 100 м и п=100.
В этом случае имеем /о = 50 с.
По формулам (14.67) для £=100 -с получим средние квадратические ошибки обра-
ботки результатов измерений координат цели
с» = 0,002 р?д, с. =0,002 рад, ап =20 м.
1 ц "ц ц
Из примера видно, что обработка радиолокацион-
ных замеров по 100 точкам с помощью метода на-
именьших квадратов уменьшает первоначальные
ошибки'измерений к концу интервала наблюдений в
пять раз.
§ 14.5. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ДВИЖЕНИЯ
БАЛЛИСТИЧЕСКОЙ РАКЕТЫ ПО ЗАМЕРАМ
РАДИОЛОКАЦИОННОЙ СТАНЦИИ
При перехвате воздушных целей необ-
ходимо знать координаты ее траектории в
точке встречи с поражающим ее снарядом
или ракетой. Параметры траектории цели
измеряются с помощью радиолокационной
станции и поступают на ЦВМ, где произво-
дится их обработка и пролонгация траекто-
рии до точки встречи. Применим метод наи-
меньших квадратов для случая, когда тра-
ектория представляется полиномом третьей
степени по каждой из измеряемых коор-
динат, т. е.
Hi (С > 4 — COyi С,У1 [t — /0) ф- Ciyi (t —
- 4))2+Сз^-4))3 4=1, 2,3). (14.73)
Замеры Xi=yi(С ,t) +£г- будем считать
полученными на интервале времени 0^/^
^tn, при этом первый замер получен при
/=0.
Рис. 14.17. Блок-схема програм-
мы обработки данных о цели
на ЦВМ
Полином (14.73) написан относительно времени t0=-^— , что
соответствует середине интервала наблюдения. По аналогии с ранее
изложенным в § 14.4, получим систему алгебраических уравнений отно-
сительно неизвестных COyi, Ciyi, CzVi, C5yi:
(14,74)
d
dC iyi
COyl C\yl (tj tg) C2yi (tj — tg)2
-Сг^.-Л)зр==О;
rj
*)C%yi
cyt — Clyi [tj t0) — C.lyi (tj /0)2
(14.74)
-c3^(/y-^3]2=0;
dCsyt
^2" [-*7 ---- Coyi (tj tg) C2yi (tj tg)2
OT=o.
Для простоты записи у yi опустим индекс. Очевидно, что необхо-
димо решить три системы уравнений типа (14.74) для определения па-
раметров каждой определяемой координаты [3]. Поскольку системы за-
писываются аналогично, то достаточно выписать решение только для од-
ной системы.
Таким образом, решение системы (14.74) имеет следующий вид:
3 (3n2-7)2>;
ey ==
Г t ;-20,2 2V
1 _______________/-1 J .
4n (n2 — 4)
5v2 5(3/0-18л2+3J) У лг.т. —28>2(3л2 —7) У х.т?
1st
150,2
n (n2—l)(n2— 4) (n2 — 9)
S х$—(п2 —!) 2 xj
! (14.75)
С2у =
n (n2 — 1) (л2 — 4)
140И 20v2 Tg х.тз_(3п2_7)2
C = - -l _ 7-1_________________1
3if Л(п2— 1)(П2 — 4) («2 — 9)
где п — количество замеров; v — частота замеров; т3-=/3-—to (здесь tj —
время поступления /-го замера); х$— значение параметра, замеренного
в момент времени tj.
Средние квадратические ошибки определяемых параметров вычис-
ляются по формулам:
9 (3/12—7)2 2 °yj + 400,4 2 - 40,2 (3//2 _ 7)
2 __ ______________1_______________1__________________________1_______
’С,3— 16п2(П2 — 4)2
25 v4
2
°С,0 =
25 (3«4 — 18//2 + 31)2 2 a2jt2 + 784,4 (Зл2 _ 7)2 х
7=1
[• (14.76)
д2 (П2 — 1)2 (Я2 __ 4)2 („2 — 9)2
xS а1 Л/-280,2 (3„4 _ 18л2 + 31) (3„2 __ 7) у Лт4
У J J У J J
3 = ^
П2 (И2 — 1)2 („2 _ 4)2 („2 — 9)2
225И
2
aC,.y--
144И 2 4/4 + <л2 - ч2 2 4/ --24v2 » S 4/4
7 = 1 7 = 1 7 = 1
«2 («2 — 1)2 (л2 — 4)2
19 60(M 40(М 2 4/4 + <3«2 ~ 7)2 2 4/4 -
а2 _____________7 = 1__________/=1_______
СгУ «2 ( „2 _ 1 )2 („2 _ 4)2 („2 _ 9)2
-40ЛЗп2-7)2 0^4
_________________7=1 _
. п2(п2— 1)2 (и2 — 4)2 («2 — 9)2
{ (14.76)
п
При вычислении сумм У z}Tj (й=1, 2,..., 6) можно использовать.
J 1 '
рекурентные соотношения.
Введем следующие обозначения:
1 1
/« = 2^-4; щл=2^;
1 1
1 1
(14.77)
и после подстановки их получим следующие соотношения:
п
1
п (п — 2)
п
fZn = /*-1 — у- С^_! Л Z, 4- — (Л.2 — 3/Z 4“ 3) Л
4'vz o\d йен ow
1
п
^77 («3 - 4га2 - 6га - 4) zn\
(14.78)
п
«2 5 । 5 /• 5 z I 5 г z 1 [
qn — qл_!----тп-1 ч-----fn-i------сп-1~]-----bn-i------\ ^;+
2-> 2'У 4>з 1 I6v4 32^5^
1
(га4 — 5га3Л Юга2— 10ra-f-5) zn\
i-,z kz 3 z . 15 z j^z । 15
— kn—\ qn^i Л „ /Tin—1 f n—1 "T cn—1
4 4\2 2v3
л
+ I] 6ft4+ 1 5fl^2Qfl2 + 15/1 -Q) Zn’
1
1
&2=-!-(-г1 + г2);
2^
#2—-тут (—zi+zv;
OZ'*°
С2 = 1 4-Д (Z14 Z..\'
_ 1 1б'Л (Zl + Zt)
1 б4-.б (Zl+Z2,
(14.78)
J
Приводимые соотношения позволяют уточнять определяемые пара-
метры по мере поступления замеров. Средние квадратические ошибки
определяемых параметров находятся по формуле
^(т) = 4о4-т2^! -HVC2+tVC3 4 244(Со, С2)т24-2М(СР С3)Л (14.79)
где М(Со, С2), Л1(С1, С3) — математические ожидания произведений со-
ответствующих коэффициентов.
В рассматриваемом случае
Ж С2)=
15v2a2
И(п2—4) ’
М (Ср С3)=__141^(3^
1 П(п2— 1) («2 — 4) (ZJ2 — 9)
(14.80)
Пролонгация траектории снаряда или ракеты, поражающей цель,
производится также с помощью полученного полинома третьей степени
f/пр =сйу+cly(t+±f-}+с2, 4- ,^)2+cZy [t + ,
где /набл — время наблюдения РЛС.
Отсчет времени t ведется от конца интервала наблюдения. Средние
квадратические ошибки прогнозируемых параметров определяются по
формуле
^набл 2 ।
—j
^ир(0= °с0£,+ 4
1 Сабл
2 /
(14.81)
где Л1(С,, Cfe) —математические ожидания произведений коэффициентов.
На рис. 14.18 показаны участок
наблюдения и обработки информа-
ции о цели I, участок пролонгации
II и зона встречи снаряда или раке-
ты с целью III. Обработка данных и
пролонгация траектории выполнена
в системе измеряемых координат.
В случае необходимости получен-
ные параметры пересчитываются в
прямоугольную систему координат
по формулам, приводимым в § 14.4.
Рис. 14.18. Определение траектории
полета воздушной цели
§ 14.6. МАТЕМАТИЧЕСКИЕ ЗАВИСИМОСТИ ДЛЯ РЕШЕНИЯ ЗАДАЧИ
ПРИЦЕЛИВАНИЯ С САМОЛЕТОВ-ИСТРЕБИТЕЛЕЙ
ПРИ СТРЕЛЬБЕ ПО ВОЗДУШНЫМ И НАЗЕМНЫМ ЦЕЛЯМ
Решение задачи прицеливания при стрельбе по воздушным целям с
самолетов-истребителей заключается в определении необходимого на-
правления пуска снаряда (ракеты), при котором снаряд (ракета) попа-
дает в цель. Для определения этого направления необходимо знать ха-
рактер движения цели и истребителя, а также соответствующие баллис-
тические коэффициенты, задаваемые в виде параметров.
Выведем математические зависимости, с помощью которых решает-
ся задача прицеливания при стрельбе по воздушным целям. Условие при-
целивания при движении цели и истребителя в горизонтальной плоско-
сти изобразим в виде упрежденного треугольника ОУВ (рис. 14.19). Как
Рис. 14.19. Построение упредительно-
го треугольника при стрельбе с истре-
бителя по воздушной цели
Рис. 14.20. к
определению
угла скольже-
ния истребите-
ля
видно из этого рисунка, цель летит из точки В в точку У со скоростью
цц. Истребитель летит из точки 0 в точку У со скоростью ци и в точке 0
открывает стрельбу из пушек для попадания снарядами в упрежденную
точку, где будет находиться цель.
Обозначим через т время полета снаряда до упрежденной точки.
Тогда, приняв гипотезу о прямолинейном равномерном движении цели,
из треугольника ОУВ на основании теоремы синусов найдем
-^А=---------------- , (14.82)
СцТ (VcH.cp + t'„)T
где г)—угол упреждения;
ец— курсовой угол цели, который остчитывается против движе-
ния часовой стрелки в направлении вектора скорости цели;
fcH.cp— средняя скорость полета снаряда.
Из выражения (14.82) получим
sin Ц =---—------sin ец. (14.83)
^СН.Ср “Г
При малом значении ц имеем
П =-----------sin ец. (14.84)
^сн.ср ~
От действия на снаряд силы тяжести его траектория искривляется,
и для попадания снаряда в точку У ось ствола пушки должна быть на-
правлена вдоль линии ОА. Здесь h — понижение снаряда; <р — угол при-
целивания.
При полете истребителя вектор скорости истребителя не совпадает
с направлением его оси за счет появления угла скольжения |3. Для оп-
ределения поправки на угол скольжения рассмотрим треугольник, об-
разованный векторами скорости истребителя и снаряда (рис. 14.20). Из
этого треугольника по теореме синусов найдем
sin 3 = sin (180° — р.) (14 85)
^снО ^сн.а
где Усн.о — начальная скорость снаряда;
Усн.а — абсолютная скорость снаряда, определяемая по формуле
VcH.a = 4- VCH 0. (14.86)
Средняя скорость снаряда зависит от баллистической функции Ст:
цен ср =--------------> (14.87)
н’р Ст(Сн, Dy, vCH.a)
где Си — баллистический параметр;
Dy— упрежденная дальность.
При малых углах скольжения из выражения (14.85) получим
= (14.88)
^сн.а
Далее будем определять формулы для вычисления угла прицелива-
ния. Из треугольника ОУ А (см. рис. 14.19) найдем
sin <р sin (90° — Ф) (14.89)
h Dy ’
где ф —угол рыскания истребителя. При малых углах прицеливания
й СР = cos ф. ^У (14.90)
Понижение снаряда на дальности Dy при полете в пустоте ляется следующим образом: вычис-
h=^, 2 (14.91)
но
^сн.а (14.92)
откуда
h = - 2t,CH.a (14.93)
Для учета понижения снаряда в воздухе введем поправочный коэф-
фициент Cg. Тогда выражение (14.93) можно переписать в виде
gD^.
h=~ у-с (14.94)
2vCH.a е
Коэффициент Cg зависит от баллистического параметра Сн, даль-
ности полета Dy и скорости цСн.а.
Таким образом, выражение (14.94) в окончательной форме примет
вид
k = JpLCg(CH, D, (14.95)
2vCH.a
Суммарная поправка вычисляется по формуле
Ъ=ч + Н<Г (14.96)
, Упрежденную дальность можно определить из треугольника ОУВ
в виде
Д=/ Дц + К*)2 - 2т>цтОц cos (180° - вц). (14.97)
Таким образом, с помощью формул (14.84), (14.86) — (14.88),
(14.90), (14.95) и (14.96) решается задача прицеливания при стрельбе
из пушек с самолетов-истребителей по воздушным целям.
Прицеливание при стрельбе управляемыми ракетами с самолета по
воздушной цели отличается от прицеливания при стрельбе из пушек.
При пуске управляемых ракет необходимо определить суммарный угол
упреждения г] s и, учитывая диапазоны разрешаемых дальностей пуска
и углов пеленгов цели, т. е.:
7)р min <С Dy <7 Dp maxi' . . (14.98)
CC|Cmax|,. ’ (14.99)
навести самолет на метку цели с помощью прицела и выпустить ракету.
Приведенные выше математические зависимости для решения зада-
чи прицеливания можно упростить, если воспользоваться гиростабили-
зированным прицелом [5]. В этом случае будем пользоваться формулой
(14.83) и вторым уравнением связи снаряда с целью (14.37), записанным
в виде
Dy ~-~vp sin ®ц— % sin ’I- (14.100)
Из этих двух зависимостей можно получить следующее выражение:
—-^-=sinp. (14.101)
^сн.ср
При малых углах упреждения выражение (К4.101) примет вид
_£н_Д!а_=Т1. (14.102)
^сн.ср
Введем в выражение (14.103) обозначение
^сн.ср
тогда получим
К = (14.103)
d Sn
где —— = (ов — угловая скорость линии визирования.
dt
Формула (14.103) определяет уравнение гироскопической системы
прицела. Здесь под К понимается коэффициент чувствительности прице-
ла, имеющий размерность времени.
Рассмотрим одну из возможных схем реализации гироскопического
прицела. На рис. 14.21 изображена кинематическая схема оптического
визира гироскопического прицела {5]. Ротор гироскопа состоит из медной
чашки 2, шарнира Гука 5 и зеркала 6, приводимых во вращение от элек-
тродвигателя 3 через редуктор 4. Шарнир Гука позволяет ротору гиро-
скопа и связанному с ним подвижному зеркалу отклоняться относитель-
но неподвижного корпуса прицела. В качестве системы, управляющей
поворотом ротора, применены четыре электромагнита 1.
При изменении тока в отклоняющих катушках меняются магнитные
потоки Ф], Ф2, Ф3 и Ф4, пронизывающие медную чашку. От их взаимо-
действия с токами Фуко в медной чашке создается тормозной момент,
вызывающий процессию гироскопа, а следовательно, и отклонение под-
вижного зеркала на угол тр. При повороте зеркала 6 на угол гр относи-
тельно поперечной оси падающие лучи на неподвижное зеркало 7 откло-
няются на угол 2тр. После их преломления в линзе 11 лучи попадают на
Рис. 14.21. Кинематическая схема гироскопического прицела
наклонный оптический отражатель 12 и летчик 14 увидит изображение
цели 13, смещенное на угол упреждения ц относительно сетки прицела
8. Изображение сетки 9 с помощью оптической системы и лампочки под-
света 10 также попадают на отражатель 12.
На рис. 14.21 показано формирование угла упреждения ц в гироско-
пическом прицеле по азимуту относительно нулевой линии визирования
15. Из рисунка видно, что, отклоняя подвижное зеркало 6, можно управ-
лять отклонением изображающей сетки в поле зрения летчика. Для вве-
дения необходимых поправок пластина 8 с сеткой перемещаются от сле-
дящих приводов, связанных с счетно-решающим прибором прицела.
Управление токами электромагнитов происходит от СРП прицела. В ре-
зультате этого оптическая система отрабатывает суммарную угловую по-
правку на угол упреждения ц [см. формулу (14.103)].
Угол отклонения гироскопа при возникновении прецессии щ зависит
от величины внешней силы F, приложенной к гироскопу, т. е.
(14.104)
где kr— коэффициент пропорциональности.
Уравнение гироскопа запишем в виде
H№wr = Fr,
(14.105)
где Но, —кинетический момент гироскопа;
<ог — угловая скорость прецессии оси гироскопа;
г — радиус медной чашки.
При слежении за целью сеткой прицела, имеем
= =ш (14.106)
dt
Из выражения (14.105) с учетом зависимости (14.104) найдем
(14-107)
ЯгГ
Сравнивая выражения (14.103) и (14.107) и имея в виду соотноше-
ние (14.106), получим
/СШв = т), (14.108)
ЛС
где ’] = ’1Г и /С=---.
krr
Из последнего соотношения найдем, что
(14.109)
Кг
В выражении (14.109) отношение яйчярТря ппгтпяпимм и яя-
висит лишь от конструкции гироскопа, а коэффициент К определяется
дальностью полета до цели £>ц и средней скоростью полета снаряда, т. е.
его баллистическими данными, зависящими в свою очередь от высоты
полета самолета.
Обычно коэффициент Л' с достаточной степенью точности можно
аппроксимировать зависимостью
(ною)
где К0 — некоторый постоянный коэффициент;
/1 (Пп) и /2 (//ц) — функции, зависящие соответственно от дальности
до цели (fi) и высоты ее полета (f2).
Поправки на углы скольжения р и атаки а вычисляются по форму-
лам, аналогичным формулам (14.88):
н = (14.111)
^сн.а
(14.112)
В заключение укажем, что в гироскопическом прицеле и его счетно
решающем приборе реализуются
математические зависимости
(14.108), (14.110) — (14.112).
Структурная схема такого прице-
ла изображена на рис. 14.22. В
нее входят радиодальномер 1,
оптическая визирная головка 2,
счетно-решающий прибор 3, дат-
чики углов атаки и скольжения и
высотомер 5.
На рис. 14.23 показана струк-
турная схема истребителя с оп-
тическим прицелом АСП [5] и
Рис. 14.22. Структурная схема гироскопи-
ческого прицела
устройством для измерения па-
раметров до цели радиолокационной станции РП-1. Радиолокатор РП-1
формирует метку цели на специальном фотоэлектронном оптическом
преобразователе. С помощью гироскопического прицела АСП произво-
дится прицеливание по искусственной метке цели.
При практических расчетах, связанных с определением прицелива-
ния по воздушным целям, обычно интересуются суммарной средней квад-
ратической ошибкой прицеливания, которая при независимых составля-
ющих может определяться по формуле
%> = / ОТ, + 4аВ) (14.113)
где —средняя квадратическая ошибка определения упрежденной
точки по прицелу;
анав—средняя квадратическая ошибка наведения самолета на цель
(ошибка пилотирования летчика).
•ч
РП-1
Канал
сопровождения
по
углу места
Канал
сопровождения
по азимуту
Искусственная цепь
Оптическое
устройство
Схема'
L. канал
— "данных %wo~
Вых координат
, СЗетоВое
изображение
цели и инди-
кация даль-
ности
Канал
сопровождения
по дальности
ВВода углов упреж-
дения и прицели-
вания \
!РЦ
АСП
Рис. 14.23. Структурная схема радиолокационного прицела РП-1, сопряжен-
ного с оптическим прицелом АСП
Пример 14.3. Определить ошибку прицеливания с истребителя по воздушной цели
летящей со скоростью оц = 400 м с под курсовым углом ец = 30°, с помощью полуавтома-
тического прицела с радиодальномером, если дальность до цели Дц=3000 м.
Из формулы (14.84) найдем ошибку в определении точки встречи
sin гц Уц 51п Ец sin Иц cos ец
. । ^'си.ср 4" , i \9 4"
^сн.ср + v„ (^сн.ср + ^и)2 (»CH.cp + vH)2 ^си.ср 4" -’и
С помощью этого выражения можно найти среднюю квадратическую ошибку опре-
деления точки встречи
2 sin2 ец 2 и2 sin2 ец 2
Т| (»сн.ср 4-Ии)2 "а (г»сн.ср 4- Пи)4 сск.ср
Иц sin2 Ец 2 Cos2 гЦ 2
(^сн.ср 4- н (^сн.ср 4- пи)2 ц
Будем считать, что средние квадратические ошибки в определении параметров
цели и истребителя имеют следующие значения:
а =40 м/с; цснср = 50 м/с; т’и = 10 м/с; о. =0,1 рад.
ц “ц
Тогда средняя квадратическая ошибка определения упрежденной точки при цСиср =
=550 м/с имеет следующие составляющие:
а2 = 0,4-10—3 + 0,1 -10~3 + 0,004-10—3 + 1,2-10—3 рад, или = 4- тыс.
Если принять, что средняя квадратическая ошибка наведения летчика на цель
составит С»нав = 3 тыс., то по форме (14.113) находится ошибка прицеливания истреби-
теля по воздушной цели
апр = 42 + З2 = 5 тыс.
Ошибку стрельбы по воздушным целям можно найти по значениям
прицельного (<Тпр) и технического (сгт) рассеивания, т. е.
° = У < + 4 (14.114)
Пример 14.4. По данным примера 14.3 определить ошибку стрельбы с самолета
по воздушной цели из неподвижной пушечной установки.
По формуле (14.1114) при <тт=3 тыс. (см. гл. XII) найдем
а = 52 + З2 = 5,85 тыс.
Следует указать что при стрельбе по наземным целям и отсут-
ствии ветра используются те же математические зависимости, что и при
стрельбе по воздушным целям, но вместо оц следует поставить цн.ц—
скорость движения наземной цели.
Для учета скорости ветра могут быть внесены соответствующие по-
правки^ Например, истинная скорость движения наземной цели опреде-
ляется по формуле
г’и.ц = 1//ЛfH.a + w2 —2TyH IlWCOS р, (14.1 15)
где он.р — скорость наземной цели;
w — скорость ветра;
р — угол между векторами скоростей ин.ц и w.
По теореме синусов найдем, что
sin 8 =—sin р, (14.116)
VH. ц
где 6 — угол между векторами скоростей он.ц и уи.ц.
Курсовой угол цели определяется по формуле
cos ?и.ц= cos р cos X, (14.117)
где X — угол пикирования самолета.
Формулы (14.115}—(14.117) должны быть добавлены к системе
уравнений (14.84), (14.86) —(14.88), (14.90), (14.95) и (14.96).
Точность стрельбы по малоразмерным наземным целям с самолетов
«/Милан» и «Корсар» с пикирования можно оценить с помощью данных
табл. 14.2 [4].
По данным табл. 14.2 можно найти среднюю квадратическую ошиб-
ку стрельбы из неподвижной пушечной установки по малоразмерной на-
земной цели а=4,8 тыс.
Таблица 14.2
Тип самолета Дальность стрельбы, м Угол пикирования, град Максимальные значения ошибки, м
по дальности по азимуту
1900 17 55 0
„Милан” 1300 17 25 0
900 20 20 20
1700 19 30 0
„Корсар” 1200 20 30 0
1000 18 15 0
Пример 14.5. Определить ошибку прицеливания при стрельбе по наземной цели
с пикирования. Будем считать, что техническое рассеивание при стрельбе из неподвиж-
ной пушечной установки от=3 тыс.
Из формулы (14.114) можно найти, что
®пр = К°2 — =?
Если принять, что 0=4,8 тыс. (по данным испытаний самолетов «Милан» и «Кор-
сар») , то
чпр = У 4,82 — 32 = 3,75 тыс.
Уменьшение ошибки прицеливания в этом случае связано с повышением точности
наведения самолета на цель при пикировании.
В настоящее время на истребителях и многоцелевых самолетах при-
меняются не отдельные прицельные устройства, а комплексные прицель-
но-навигационные системы [11]. На рис. 14.24, а и б показаны прицельно-
навигационные системы самолета «Ягуар»: первая устанавливается на
французских самолетах; вторая — на английских [13]—[16]. В каждую ив
этих систем входят навигационные устройства (выделены на рис. 14.24, а
и б штриховыми прямоугольниками), выводящие самолет в район цели
и прицельные средства для обеспечения стрельбы из пушек и пуска уп-
равляемых и неуправляемых ракет по воздушным и наземным целям.
Параметры полета собственного самолета определяются по данным
гироплатформ, вычислителей аэродинамических данных, доплеровского
радиолокатора, датчиков углов атаки и скольжения, указателя курса и
Рис. 14.24. Структурные схемы прицельно-навигационных систем самолета «Ягуар»:
а — французский вариант: / — магнитный зонд; 2—сдвоенная гироплатформа; 3 — резервный гиро-
компас; 4 — приемник воздушного давления; 5 — датчик температуры торможения; 6—вычислитель,
аэродинамических данных; 7 — доплеровский радиолокатор; 8 — оптический прицел; 9 — вычислитель,
управления оружием; 10— лазерный дальномер; 71 — навигационный вычислитель; 12—навигацион-
ный индикатор; 13 — навигационная система «TACAN»; 74 — указатель системы «TACAN»; 15 — ан-
тенна системы «TACAN»; 16— указатель курса и скольжения в пространстве; б — английский ва-
риант: 1 — антенна системы «TACAN»; 2 — магнитный зонд; 3 — гирополукомпас; 4 — инерциальная
гироплатформа; 5 — радиовысотомер; 6—приемник воздушного давления; 7 — датчик температуры
торможения; 8 — датчик углов атаки и скольжения; 9 — вычислитель аэродинамических данных;
10 — оптический прицел; 11 — вычислитель навигационных данных и управления оружием; 12—ин-
дикатор с движущей картой; 13—индикатор обстановки в горизонтальной плоскости; 14 — навига-
ционная система «TACAN»
т. п. [11]. Параметры цели находятся по данным визирных устройств и
дальномеров (оптическому прицелу, лазерному дальномеру и др.) с по-
мощью вычислителя управления оружием.
Прицельно-навигационные системы обеспечивают высокий уровень
автоматизации процессов прицеливания при стрельбе и пуске ракет и
упрощают пилотирование самолета при решении боевых задач. За счет
этого повышается точность пилотирования самолета в процессе прицели-
вания и уменьшаются ошибки наведения стнав.
Применение различных визирных средств и бортовых цифровых вы-
числительных машин позволяет также повысить точность прицеливания
(уменьшить суммарную среднюю квадратическую ошибку сгПр). При-
цельно-навигационные системы обеспечивают решение задач прицелива-
ния и в сложных метеорологических условиях (при плохой визуальной
видимости цели). Эффективность выполнения боевого задания самоле-
тами с прицельно-навигационными системами существенно возрастает
(см. гл. XV).
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ XIV
1. Артиллерийская вычислительная система «FALKE» «Artilkrier and Schau»^
1969, № 4 с. 131 — 133.
2. Б а к у т П. А. и др. Вопросы статистической теории радиолокации. М., «Со-
ветское радио», 11963, т. I, 424 с., 1964, т. II, 1079 с.
Березин И. С., Жидков II. С. Методы вычислений. М., Физматгиз, 1965,
т. I, 464 с., т. II, 639 с.
4. Демонстрационные испытания самолетов «Милан» и «Корсар» в Швейцарии
(«Interavia Letter», № 7520, 1972, с. 1—2).
5. Ермолаев Г. И., Т а м у л и н А. Т., Прагер И. Л., Сафронов Е. В.
Основы радиолокации и радиолокационное оборудование летательных аппаратов. М.,
«Машиностроение», 1967, 299 с.
6. Клейн М. Л., Морган Г. С., Аронсон М. Г. Цифровая техника для
вычислений и управления. М., ЙЛ, 1960, 386 с.
7. Кузьмин С. 3. Цифровая обработка радиолокационной информации. М.,
«Советское радио», 1967, 400 с.
8. Л и н н и к Ю. В. Метод наименьших квадратов и основы математико-стати-
стической теории обработки наблюдений. М., Физматгиз, 1962, 349 с.
9. Преснухин Л. II., Юдин Д. Б., Серебровский Л. А. Основы
теории и проектирования приборов управления. М., Оборонгиз, 1960, 263 с.
10. Преснухин Л. Н., Соломонов Л. А., Четвериков В. Н.,
Шаньги и В. Ф. Основы теории и проектирования вычислительных приборов и ма-
шин управления. М., «Высшая школа», ,19'7-0, 631 с.
11. Чембровский О. А., Топчеев Ю. И., Самойлович Г. В. Общие
методы проектирования систем управления летательных аппаратов. М., «Машино-
строение», 197,2, 4Г4 с.
12. Control Device for Anti-Aircraft Guns. United States Patent Office. Patented
June 24, 1969, 3, 452, 184.
13. Jaguar Equipment. «Aircraft Engineering», VIII, 1968.
14. Les equipments dn. Jaguar. «L’aeronautique et L’astronautique» VI, 1968.
15. Some Jaguar Systems. Smith Jndustries — Autostabiliser and Fuel Ganging
Systems. «Aircraft Engineering», VIII, 1968.
16. Specto Avionics — Йеай — up Displey. «Aircraft Engineering», XI, 1968.
Глава XV
БОЕВАЯ ЭФФЕКТИВНОСТЬ РАКЕТНЫХ
И СТВОЛЬНЫХ КОМПЛЕКСОВ
При разработке ракетных и ствольных систем ставится задача соз-
дания таких комплексов, которые обеспечивали бы поражение заданных
целей в различных условиях боевого применения при минимальных эко-
номических затратах.
Боевые задачи, решаемые комплексами, состоят из множества собы-
тий. Ракетный зенитный комплекс должен обнаружить и захватить воз-
душную цель радиолокационной станцией обнаружения, передать дан-
ные о координатах цели радиолокационной станции сопровождения.
В свою очередь, РЛС сопровождения также должна захватить цель и
обеспечить не только сопровождение и подсвет цели, но и выдавать па-
раметры о ее движении в счетно-решающий прибор командного пункта.
При достижении этими параметрами определенных значений (вхож-
дение цели в зону возможного поражения) производится наводка уста-
новки по азимуту и углу места цели и пуск ракеты. Далее ракета на-
водится на цель и при некоторой допустимой величине промаха дистан-
ционный взрыватель подрывает боевую часть ракеты. Если в результате
подрыва обеспечиваются требуемые плотность и средняя энергия оскол-
ков боевой части, то цель поражается.
Из сказанного видно, что на всех этапах перехвата воздушной цели
приходится иметь дело с осуществлением вполне определенных собы-
тий, поэтому их количественная оценка может быть получена в виде не-
которых числовых значений вероятностей выполнения этих событий. Для
рассматриваемого нами случая к ним следует отнести: вероятности
обнаружения, захвата, сопровождения и подсвета цели; вероятности
наведения ракеты, срабатывания дистанционного взрывателя и пораже-
ния цели осколками боевой части.
Решение боевой задачи зенитным комплексом возможно лишь при
безотказной работе его аппаратуры, которая характеризуется надеж-
ностью действия РЛС, стартовой позиции, СРП командного пункта и
некоторых других устройств.
Как известно [11, 18], надежность действия комплекса определяется
вероятностью того, что данная аппаратура в поставленных условиях
эксплуатации будет безотказно работать в течение заданного времени.
Успешность выполнения боевого задания при вероятностном харак-
тере выполнения отдельных этапов комплексом и безотказность работы
его аппаратуры может быть оценена с помощью интегрального критерия
эффективности. В этом случае под показателем боевой эффективности
комплекса понимается числовое значение критерия эффективности.
Конкретный вид показателя эффективности зависит от типа боевых за-
дач, решаемых комплексом.
Для ракетных и ствольных зенитных комплексов показателем бое-
вой эффективности является вероятность поражения воздушной цели.
Показателем эффективности авиационных ракетных и пушечных комп-
лексов многоцелевых истребителей является вероятность поражения
воздушных и малоразмерных наземных целей (танки, бронетранспорте-
ры, стартовые позиции ракет и т. п.). Если стрельба из пушек и пуск
ракет ведется по крупным целям (железнодорожные узлы, мосты, воен-
ные склады и т. д.), то в качестве критерия боевой эффективности следу-
ет принимать математическое ожидание нанесенного целям ущерба, за-
висящее от числа попаданий снарядов и ракет в военный объект [5].
Использование противником средств активной обороны существен-
ным образом влияет на показатель боевой эффективности комплекса.
Выполнение самолетами противника противовоздушного маневра требу-
ет либо увеличения числа пусковых установок ракет и зенитных батарей,
либо учета маневра в зоне наведения ракеты. При применении против-
ником средств пассивной обороны в виде аппаратуры радиопротиводей-
ствия на самолетах, атакующих наземные цели, необходимо также уве-
личивать средства противовоздушной обороны. Все это приводит к зна-
чительному росту затрат на средства вооружения {6, 7, 12].
Существенное влияние на эффективность комплексов может оказы-
вать тактика применения средств противодействия. Например, если чис-
ло средств перехвата у противника велико, то применение «ловушек» 1
наиболее целесообразно. С уменьшением числа перехватчиков количество
ловушек следует сокращать. Или, если полет многоцелевых истребите-
лей к цели за линией фронта может совершаться на различных высотах
и с применением маневров, то от их умелого сочетания повышается эф-
фективность средств нападения. Например, сперва полет бомбардиров-
щиков производится на большой высоте, затем на малой, а при подлете
к цели бомбометание проводится с кабрирования. Возможны и другие
режимы полета бомбардировщика. Отсюда следует, что изменение так-
тических решений в ходе выполнения военной операции усложняет
оценку эффективности ракетных и ствольных комплексов обороны или
нападения [7, 14].
Большое влияние на величину показателя эффективности оказывает
рациональное взаимодействие ракетных и ствольных комплексов в виде
отдельной группы. Например, оборона объекта на дальних рубежах
обеспечивается истребителями ПВО, на средних — зенитными ракетами
и на ближних—малокалиберной зенитной артиллерией. При взаимо-
связанных действиях этих средств вооружения увеличивается число сби-
тых самолетов противника. В случае слабой взаимосвязи боевых дей-
ствий собственные истребители-перехватчики могут быть поражены зе-
нитными ракетами или снарядами МЗА. В этом случае показатель
эффективности, средств обороны уменьшается. При прорыве фронта ис-
требители-перехватчики прикрывают многоцелевые истребители нападе-
ния и при согласованности действий этой группы самолетов повышается
значение показателя эффективности средств нападения (7, 14].
§ 15.1. ЭФФЕКТИВНОСТЬ КОМПЛЕКСОВ
Как указывалось выше, под показателем эффективности боевых
комплексов понимается вероятность выполнения боевого задания (по-
ражения цели, математическое ожидание нанесенного ущерба) записан-
ная в интегральной форме, т. е.
Ек = f Р (Xj, х2..., x^dxxdx2.. .dxn, (15.1)
хЛх
где р—функция плотности вероятности решения комплек-
сом боевой задачи;
х1; х2,..., хп — управляющие переменные комплекса;
X — область изменения переменных х, (1=1,2, ..., и).
1 Здесь под «ловушками» понимаются сбрасываемые с самолетов уголковые отра-
жатели или ракеты со специальными линзами, имитирующие ложные цели.
Выполнение боевой задачи состоит в реализации т последователь-
ных этапов, на каждом из которых решается частная задача. Поэтому
Р(хь х2,..., х„) = П P/iy-i^o х2,...,х„), (15.2)
где ру, y_j (1 j — функции плотностей условных вероятностей
решения частных задач на каждом этапе.
Здесь условно обозначено, что каждая из р;. j зависит от всего
набора переменных хг-. В действительности в каждой из этих функций те
или иные х{ могут быть равны нулю. При слабой корреляции, что прак-
тически всегда имеет место, область X может быть разбита на сумму
непересекающихся областей, таких что
х^Х^, ^Х^Х. (15.3)
С учетом выражений (15.2) и (15.3) формула (15.1) примет вид
£К= J J ... f Pi(Xi, х2,..., х„)р2 ]!(%!, л2,..., х„)..,
Xi б-^i Xi Е ^2 х# G Хп
-х^- • •’ dxi- .o'x„ = IF1IF21i. (15.4)
где
J J ... J xn)dx1dx2.. .dxn
-Vi 6 Xi Xi E Xn E
представляет собой условные вероятности реализации комплексом
последовательных этапов решения боевой задачи.
В формуле (15.4) под Wm понимаются частные критерии эффектив-
ности:
1^1=р(Д1)—вероятность события Лр,
Wm । т-\~ Р (Hm-i} р [Ат | Нт_л] —вероятность наступления события
Ат, которое может произойти с событием (гипотезой) Hm-i.
Здесь p(Hm_i) — вероятность Hm-i-гипотезы, а р(Ат| НП1-',) — услов-
ная вероятность наступления события Ат при //„,-1-гипотезе.
Будем полагать, что надежность системы, участвующей в реализа-
ции /-го этапа решения боевой задачи, и вероятность реализации этого
безотказным комплексом статистически независимы. В этом случае каж-
дую р?.! y_t можно представить как произведение собственно этой плот-
ности условной вероятности на функцию плотности вероятности безот-
казной работы комплекса на этом же этапе r3(xi, х2, хп). Такая за-
пись предполагает статистическую независимость функции rj на каждом
этапе и зависимость каждой из них от одного и того же множества пе-
ременных, что и Последнее не приводит к какому-либо ограни-
чению, ибо множество {хг} и может быть всегда расширено нужным об-
разом при условии тождественного равенства нулю отдельных х,- для
некоторых функций и rj [14].
Таким образом, вместо выражения (15.2) можно записать
р(хп х2,. .., xr„) = n Pyty-if-*!, ^2,- • , х„)г^х1г х2,..хя). (15.5)
/=1
Будем теперь считать, что в комплексе отсутствует общее резервиро-
вание (см. § 15.5) и оно осуществляется в пределах лишь каждого из
отдельных устройств. Тогда формула (15.4) при учете выражения (15:5)
примет вид
т
(15.6)
7 = 1
где
Pj = \ [ • • [ rj(xi,x<2,...,xn}dx}dx3...dxn.
X, С: X, Х2 ё Хг Хп ё хп
При заданной величине эффективности комплекса Ек область ин-
тегрирования выражения (15.3) представляет собой множество допус-
тимых значений переменных {хг}, которые обеспечивают выполнение
боевого задания с заданным показателем эффективности. Для зенитных
ракетных и ствольных комплексов эта область называется областью пе-
рехвата воздушных целей (см. рис. 13.40) с вероятностью выполнения
боевого задания не ниже заданной.
Авиационные комплексы нападения обеспечивают поражение мало-
размерных наземных и воздушных целей или наносят заданную величи-
ну ущерба крупным целям в радиусе боевого применения многоцелевых
истребителей [14]. Во всех этих боевых задачах показатель эффективно-
сти определяется по формуле (15.6).
Если считать, что боевая задача решается комплексом на четырех
этапах, то формула (15.6) примет вид
Ek^W.W.WsW^^P^, (15.7)
где UT2, — вероятности реализаци первых трех этапов боевого
задания;
— вероятность поражения цели;
Рг, Р2, Р3 — вероятность надежной работы аппаратуры комплекса
на первых трех этапах;
—вероятность надежности действия взрывателя ракеты
или безотказности стрельбы из установки самолета
(наземной батареи).
Необходимо отметить, что предпоследний (третий) этап боевого за-
дания характеризуется вероятностью выхода ракеты в некоторую допус-
тимую область фазового пространства, связанную с целью или вероят-
ностью попадания снарядов в цель. Если ошибки наведения подчиняются
нормальному закону распределения (см. § 15.2, 15.6, 15.7), то вероят-
ность выхода ракеты в зону срабатывания взрывателя будет
VE3 — Ф* / ~ ~Ф* (
\ ал J \
где Ф*—функция Лапласа (см. приложение 1);
hi, h2— заданные ошибки наведения (промах), допустимые диапа-
зоном срабатывания дистанционного взрывателя;
Ан — математическое ожидание ошибки наведения (промаха);
щ— средняя квадратическая ошибка наведения (промаха).
В этом случае Ps есть вероятность надежности действия системы
наведения ракеты или следящей системы пушечной установки (батареи).
§ 15.2. ОПРЕДЕЛЕНИЕ ВЕРОЯТНОСТИ ПОПАДАНИЯ
В ЦЕЛЬ ПРИ СТРЕЛЬБЕ СНАРЯДАМИ УДАРНОГО ДЕЙСТВИЯ
Боевая эффективность пушечных батарей в значительной степени
определяется точностью попадания снарядов в цель и вероятностью ее
поражения. Точность попадания снарядов в цель площадью Sn зависит
от суммарного закона рассеивания снарядов f(x, у) для заданной даль-
(15.8)
ности стрельбы, которое в свою очередь определяется техническим и при-
цельным рассеиванием.
Явление рассеивания состоит в том, что траектория каждого снаря-
да или ракеты в одних и тех же условиях стрельбы отличается одна от
другой. Причины, вызывающие рассеивание, весьма разнообразны и их
анализ возможен только с учетом типа оружия и условий стрельбы. Для
артиллерийских снарядов, например, причинами технического рассеива-
ния являются: разнообразие начальных скоростей и весов снарядов,
мертвые хода в механизмах наводки, влияние упругости лафета и т. д.
Существенное влияние на рассеивание траектории оказывает способ
стрельбы (одиночная стрельба, залповая, очередями). Прицельное рас-
сеивание зависит от скорости и маневра цели, точности приборной реа-
лизации формульных зависимостей, решающих задачу о точке встречи
и т. п.
В теории стрельбы [1, 17] принято считать, что техническое и при-
цельное рассеивание подчиняются нормальному закону распределения
случайных величин. Рассмотрим теперь различные способы стрельбы из
артиллерийских систем.
Рассеивание при одиночной стрельбе
При большом числе одиночных выстрелов в одних и тех же услови-
ях (т. е. фиксированных установках прицела и одной и той же цели)
имеет место «пучок» траектории полета снарядов и как следствие откло-
нения точек попадания снарядов от точки прицеливания.
Рис. 15.1. Определение
вероятности попадания снаряда в цель
Если координаты точек попадания каждого последующего выстре-
ла не зависят от координат предыдущих выстрелов, то такие выстрелы
принято называть независимыми. Из существа одиночной стрельбы сле-
дует, что выстрелы в этом случае являются независимыми.
Для определения вероятности попадания в мишень (цель) одного
снаряда при допущении, что главные полуоси эллипса суммарного рас-
сеивания параллельны осям выбранной системы координат Оху (рис.
15.1, а), установим законы распределения случайных величин X и Y в
виде
1.1--- тху-
= —~~~ е ; (15.9)
]/ 2 л с х
[у—гПуУ-
1
Ш = ——е у , (15.10)
V 2лаи
где тх, ту — математические ожидания;
Ох, Оу — средние квадратические отклонения случайных величин.
Учитывая независимость случайных величин, найдем f(x, у) —
= J(x)f(y). Тогда суммарный закон распределения величин Хи Ув кар-
тинной плоскости будет
1 Г(*~тхУ (‘у—mg)sl
f(x, у)=~-------е 1 °- у (15.11)
2 .И<зхзу
где
„ 1Z 2 I 2
ях—' Зхт~г °хпр>
- l/" 2 I 2 .
ay=r ayt-vay^ (15.12)
тх^™хЛтх^
ту —тут~\~ тУ п?- .
Здесь тхт, туч, ожт, оут —• математические ожидания и средние квад-
ратические отклонения технического рассеивания; т-щ» т.уар, <тжпр, оуПр—
математические ожидания и средние квадратические отклонения при-
цельного рассеивания.
Математические ожидания величин являются систематическими, а
средние квадратические отклонения определяются случайными ошиб-
ками.
Если суммарный закон (15.11) задан, то вероятность попадания
снаряда в элементарную площадку dxdy (см. рис. 15.1, а) равна
dp=f(x, у) dxdy.
Поэтому вероятность р попадания снаряда в цель, площадь которой
5Ц, будет
(У-ту)31
у idxdy. (15.14)
5Ц 5Ц
Интеграл (15.14) не выражается через элементарные функции, поэ-
тому для его вычисления используются функции Лапласа.
Сущность вычисления вероятности р по таблицам Лапласа состоит
в следующем. Разделим площадь цели на прямоугольники, параллель-
ные осям координат (см. рис. 15.1, а), и найдем вероятности pj попада-
ния снаряда в /-й прямоугольник, положение которого задано координа-
тами а, р, у и б, т. е.
Pj — ——Се 2’х dx—2=—Се ”« dy. (15.15)
]/ 2лаж J V 2лау £
Формулу (15.15) запишем через функцию Лапласа1
1 Функцию Лапласа можно записать в виде
Ф* (х) = —L_ С е~ dt.
^2яЬ
Таблицы функций Лапласа приведены в приложении 1.
<)£_Q/7QQ
Так как события попадания снаряда в рассматриваемые прямо-
угольники являются несовместными, то, пользуясь теоремой сложения
вероятностей, можно получить
Р=Р1 + Рг+ • • • • - = 2 РР (15.17)
Когда площадь цели имеет сложную конфигурацию, а рассеивания
(ож и Сту) значительно превосходят соответствующие линейные размеры
цели, то сперва вычисляют вероятность попадания в прямоугольник рп₽
(со сторонами, параллельными выбранной системе координат), описан-
ной вокруг цели. Затем полученную вероятность умножают на отноше-
ние площади цели к площади прямоугольника Snp, т. е.
р=р^-^-. (15.18)
Данный прием основан на том допущении, что при большом рассеи-
вании на малой площади распределение точек попадания подчиняется
закону равной вероятности.
Если использовать не средние квадратические, а вероятные откло-
нения _
EX = ^XV‘2- Е„=?-1уУ2, (15.19)
где р = 0,477, и из них найти ох и ov, то формула (15.11) примет вид
(х—тхУ- (у-т-уУ
f(x, у) ——гд—-е
Л‘£.хс.у
Под вероятным отклонением Е понимают половину длины участка,
симметричного относительно центра рассеивания, вероятность попадания
в который равна 0,5.
Закон распределения суммы случайных величин Z = X + Y (или ком-
позиция законов распределения) определяется в виде
1 [z-(mx+my')]2
f(z} = — — 1------------е 2 . (15.21)
v 2it (4 + 4)
Пример 15.1. Определить вероятность попадания снарядом в мишень, размеры
которой приведены на рис. 15.2, если средние квадратические отклонения суммарного
рассеивания Сх = иу = 2 м. Площадь цели Su = 0,2 м2. Будем считать, что прицеливание
производится по центру мишени (Т. пр), а центр рассеивания снарядов (Ц. р) смещен
влево на 0,15 м.
По формуле (15.16) найдем
По таблице (см. приложения 1) найдем
р = (0,0793 4-0,0199) (0,0596 4- 0,0596) = 0,0118.
Используя выражение (15.18), получим вероятность попадания снарядом в мишень
0,2
р = 0,0118 — те: 0,008.
0,3
Перейдем теперь к рассмотрению рассеивания в пространстве, харак-
терное для зенитной стрельбы. В этих случаях рассеивание характери-
зуется системой трех случайных величин: X, Y, Z. Зависимости между
случайными величинами этой системы определяются типом взрыватель-
ного устройства. Для дистанционных взрывателей первого типа (уста-
новка взрывателя производится до выстрела) случайные величины X, Y,
Z независимы, так как координата х точки разрыва снаряда, определяе-
мая установкой взрывателя, не зависит от того, какое значение приняли
координаты у и z и поэтому
/(л, у, z)= f И f (у) f (z)=
(2л)3;2аЛ-ауОг
(15.22)
Для дистанционных взрывателей второго типа (радио- и оптические
взрыватели) случайная величина X зависит от Y и Z, так как момент
подрыва в этом случае определяется расстоянием до цели. В связи с этим
/(х, у, z)=—2— е L ау az J—_J--------е 2 °х\у (15.23)
2л %
где — среднее квадратическое отклонение случайной величины X,
при условии, когда Y и Z приняли определенное значение;
тх v — условное математическое ожидание.
Определение вероятности попадания снарядом
в малоразмерную цель
Для определения вероятности попадания в малоразмерную цель
воспользуемся теоремой о среднем значении подынтегральной функции
y0)dJcdy = f(x0, Уо)5ц,
(15.24)
где х0, уо — координата некоторой точки внутри области 5Ц.
При mx=mv=0 имеем
2 2
*0 + уо
1 2 «2 с г Ч 2 „2 2
р^= ——е L х У е L х Д-1. (15.25)
Совместим любую точку в плоскости с центром рассеивания, тогда
Хо=г/о = О и формула (15.25) примет следующий вид:
у
(15.26)
Будем считать, что рассеивание снарядов (ракет) подчиняется зако-
ну Релея, тогда площадь цели можно представить равновеликой пло-
щадью круга радиуса гц. В этом случае
— е Г 2а /
(15.27)
Если ввести в выражение (15.27) обозначение
t, то
]/^ 2а
p — ‘l j 1 —e
(15.28)
Формула (15.28) справедлива лишь в тех случаях, когда центр рас-
сеивания совмещен с центром круга радиуса гц.
В тех случаях, когда имеется систематическая ошибка а =
гпх~^т2у, вероятнсть попадания вычисляется по закону Райса
где Jo —) —функция Бесселя пулевого порядка.
\ а2 /
Вероятность попадания снаряда (ракеты) в этом случае будет опре-
деляться по формуле
(15.30)
Вычисление суммарного среднего квадратического отклонения
при произвольном расположении эллипсов прицельного
и технического рассеиваний
Выше на рис. 15.1, б показано произвольное расположение эллипсов
прицельного и технического рассеиваний относительно осей координат
Оху:
ах = VA cos2 у. 4- В sin 2р. ф-С sin2 р;
(15.31)
ау = VA sin2 р. — В sin 2р. + С cos2 р,
2В
„ 1 4. 2В
где р =—arctg------------ ;
2 А — С
А = аХТ cos2 ут + Пр cos2 yftp 4-а^ sin2 рт-{- 4 пр sin2 р„р;
В = (si-т — Орт) sin рт cos Рт 4- (4 пр — 4 lip) sin Р„р cos p.„p;
C=^„ sin2 y... + apTcos2 pT4-4np sin2p.np + oynpcos2 уйр.
Пример 15.2. Определить суммарное среднее квадратическое отклонение, если
Зл-Пр = 5 тыс.; ау — 3 тыс.; и.пр—15°;
аА..г = 3 тыс.; ауТ — 2,2 тыс.; ;лт = 30о.
Пользуясь формулой (16.31), найдем:
А = 31,86 тыс2; В = 5,85 тыс2; С = 15,96 тыс2;
аг= 1/31,86-0,896 л- 5,85-0,592 4- 15,93 0,097 = 5,82 тыс.;
= ]/з1,86-0,0896 — 5,85-0,592 4- 15,86-0,097 = 3,76 тыс;
Рассеивание при стрельбе залпами
Рассеивание при стрельбе залпами характеризуется двумя видами
ошибок:
— случайными (неповторяющимися) для каждого снаряда в залпе
(или ошибками первой группы) ф
1 В теории стрельбы пеповторяющиеся ошибки часто называют индивидуальны-
ми [5]. Эти ошибки .оказывают влияние на один выстрел и характеризуют рассеивание
внутри залпа. Повторяющиеся ошибки называют групповыми, так как они смещают всю
группу выстрелов в залпе.
— повторяющимися, постоянными для каждого снаряда в залпе и
случайными от одного залпа к другому (или ошибками второй группы).
Если в залпе доля повторяющихся ошибок велика, то выстрелы в
залпе будут сильно зависимыми.
Пользуясь этими понятиями, запишем для случайных величин Х, и
У, z-ro выстрела следующие зависимости:
где Xtt, У,, —ошибки первой группы;
ЛД, У;2 —ошибки второй группы.
Математические ожидания случайных величин в рассматриваемом
случае будут
УИ [XJ = тх = тх
М[ГД = ту = ту.,
а их средние квадратические отклонения
(15.33)
(15.34)
Рис. 15.2. Мишень для опреде-
ления вероятности попадания
Зависимость между выстрелами i и / при стрельбе залпами принято
характеризовать коэффициентом корреляции раздельно по координатам
х и у, т. е.
где Kx.Xj, К у .у; — корреляционные характеристики, учитывающие вза-
имное влияние между выстрелами.
Напомним, что чем больше удельный вес ошибок второй группы, то
тем больше будет коэффициент корреляции.
Для п выстрелов можно составить корреляционную матрицу вида
°i к13...к1п
°2 ^23 • * - ^2л
2 (15.36)
33 .--Кзн
2
Найдем значение где центрированные случайные
величины можно представить как
Xt = X t — тх, Xj = Xj~mx.
(15.37)
На основании зависимостей (15.32)
кх.Х]=м [(ha+K) (iZi+xA)]=
+ (15.38)
Так как случайные величины Xi2, Xj, и Х-ц независимы, то последние
три члена в выражении (15.38) равны нулю. Поэтому
К^. = Л1[А^] = 42. (15.39)
Положив зх. = ах., получим
%3jC>=% = 41 + 4a- (15.40)
Подставив соотношения (15.39) и (15.40) в выражения (15.35),
найдем:
<4
4.^=^-^-; (15.41)
°Х1 +
а2
(15.42)
На основании формул (15.41) и (15.42) можно сделать вывод о том,
что коэффициенты корреляции характеризуют долю группового рассеи-
вания в общем рассеивании. При аЖ1 —(^, = 0 выстрелы в залпе связаны
функционально = 1), а при <тЖ2=оУ2=0 выстрелы независимы
(одиночная стрельба).
При практических вычислениях для п выстрелов пользуются нор-
мированной корреляционной матрицей вида
Иг Пз-.-П«
I Г23- • -Г2л
1 ...г3л
1
(15.43)
Все диагональные элементы этой матрицы равны единице, так как
ах. = Кх ..г. • Коэффициенты корреляции выстрелов изменяются от О
до 1.
Рассеивание при стрельбе очередями
Рассеивание при стрельбе очередями вызывается разбросом траекто-
рии каждого отдельного выстрела (или ошибками каждого отдельного
выстрела в очереди) и ошибками, возникающими из-за влияния преды-
дущих выстрелов на последующие. Поэтому на плоскости рассеивание
при стрельбе очередями характеризуется системой 2п случайных величин
(где п — число выстрелов в очереди).
Числовые характеристики рассеивания при стрельбе очередями воз-
можно. получить только на основании специальных стрельб. Характер-
ным для картины рассеивания на плоскости при стрельбе очередями яв-
ляется то, что можно выделить рассеивание первых, вторых и третьих
и т. д. выстрелов.
Обработкой результатов стрельб получают нормированные корреля-
ционные матрицы отдельно по координатам х и у, т. е.
1 rU)
1 Г23 • r1n
1 . . . Г3/1
(15.44
При решении большинства практических задач, связанных с опре-
делением рассеивания при стрельбе очередями можно пользоваться ос-
редненными значениями коэффициентов корреляции, полученными г.'
следующим формулам [5]:
Для большинства практических задач значения коэффициентов кор-
реляции W и мало отличаются друг от друга, поэтому можно опре-
делить значение коэффициента корреляции по формуле '
г ==]Лг<хМ»).
(15.47
Пример 15.3. При стрельбе из пушки по воздушной цели короткими очередями
получены экспериментальные характеристики рассеивания. В результате их обработки
найдены следующие корреляционные матрицы [5]:
1 0,9 0,8 0,6 — 0,2 1 0,8 0,6 — 0,1 — 0,5
1 0,9 0,7 0,4 1 0,7 0,3 0,2
1 0,8 0,8 ;||г(^Ц = 1 0,8 0,4
1 0,6 1 0,6
1 1 (
(15.48.
Пользуясь матрицей (15.48), найдем:
) _ /Уэ2 + 0,82 + 0,62 + 0,22 + 0,93 I-0,72 + 0,42 + 0,82 + 0,82 + 0,62 _
~ V 10 =
= 0,704;
(.V) _ 1 f0,82 + 0,62 + 0,12 + 0,52 4- 0,72 + 0,32 + 0,22 + 0,82 + 0,42 + 0,62
Г ~ |/ 10 =
= 0,551,
откуда г = У' 0,704-0,551 «0,62. (15.4&I
§ 15.3. ЗАКОНЫ ПОРАЖЕНИЯ ЦЕЛЕЙ
Законы поражения целей обычно рассматриваются применительно
к двум типам снарядов: ударного и дистанционного действий.
Ударные снаряды поражают цель при непосредственном в нее по-
падании, а дистанционные могут поражать цели и при их разрыве на не-
котором расстоянии.
Для оценки эффективности поражения цели недостаточно распола-
гать только характеристиками рассеивания снарядов, необходимо так-
же знать и характеристики уязвимости цели. Уязвимость целей опреде-
ляется прочностью их конструкции и разрушительной мощью снаряда
(боевой части).
Рис. 15.3. Уязвимые отсеки са-
молета
При стрельбе ударными снарядами уязвимость одиночной цели оп-
ределяется функцией G(m), являющейся условной вероятностью пора-
жения цели при условии попадания в нее т снарядов. Обычно функцию
G (т) принято именовать «законом поражения цели» [5].
При стрельбе снарядами дистанционного действия уязвимость оди-
ночной цели зависит от координат х и у точки разрыва снаряда (боевой
части ракеты). Обозначим эту вероятность функцией G(x, у) и назовем
«координатным законом поражения цели». Необходимо также отметить,
что координатный закон зависит и от условий (углов) подхода снаряда
(ракеты) к цели в момент разрыва [1, 5].
Анализ уязвимости цели будем рассматривать на примере некото-
рого гипотетического самолета. При действии по самолету осколочных
боевых частей зенитных ракет или артиллерийских снарядов можно вы-
делить такие отсеки самолета, при попадании в которые самолет пора-
жается. На рис. 15.3 такие отсеки выделены штриховкой. К ним можно
отнести кабину летчика 1, двигатель 2, органы управления самолетом 3,
проводку к органам управления 4. Попадание же в другие отсеки может
не привести к поражению самолета.
Координатный закон поражения
В общем виде координатный закон поражения есть функция коорди-
нат точек разрыва п снарядов, взятых относительно цели, т. е.
У1, х2, у2, z2;...; х{, yh zy...-, хп, уп, zn). (15.50)
Если рассматривать координатный закон поражения при допущении,
что снаряды поражают цель независимо один от другого, то в этом слу-
чае каждый снаряд поражает цель как бы вновь независимо от того, ка-
кое повреждение ей нанесли предыдущие снаряды (т. е. не учитывается
накопление ущерба).
При отсутствии накопления ущерба функция
yh zi)=Q1(xh уь zz). (15.51)
Тогда функция (15.50) запишется в виде
G„(Xi, У1> zi'> Уъ, г2;...; xt, yh zp...-, х„, уп, zn) =
= (А), -15.52
Z-1
где p(Ai} —вероятность не поражения цели при разрыве снаряда в теч-
ке с координатами xit yi, Zf.
В этом случае имеем:
;/?(А1)=1-С1(л1, yt, гу);
./?(А2)=1 — Gx(x2, у2, z2)-,
£(Д3)=1 —Ог(х3, у3, z3); } (Ьэ.-:3-
P(An)=l-Gl(xn, y„, z„\ J
Подставляя значения р(Аг) в формулу (15.52), получим выражение
для координатного закона поражения, не учитывающего накопление
ущерба,
Оп(хъ уъ zY; -х2, у2, z2,..xh yh zp...\ xn, yn, zn} =
^l-dl-G^X!, yt, 2!)][1 -Gj(x2, y2, z2)]...
... [1-Gi(-rf, yh zi)].. .[l-Gj^, yn, (15.54
Рассмотрим метод вычисления функции Gt (xit yi} zt) = G(x, у, z) для
снарядов осколочного действия.
Необходимые исходные характеристики снаряда получают на оснс-
вании опытов — подрывов снарядов в специальной мишенной обстановке
и в бронекамере. В результате серии подобных опытов в зависимости от
углов разлета определяют весовые данные осколков q-:, их количеств?
Шг и начальные скорости vOi. Эти данные могут быть представлены в ви-
де следующей таблицы.
4/+1 — и Qu Q21 Qat Qki
ти т-а mki
(P0i)i (voa)i ? • •
Здесь индексом k обозначено число весовых групп осколков.
Опыты показывают, что образовавшиеся в результате взрыва бое-
вой части осколки сосредоточиваются в основном в сравнительно узко?.!
диапазоне углов разлета между углами ф1 и ф2 (рис. 15.4). Плотность ос-
колков п(ф) в пределах этих углов является примерно постоянной и оп-
ределяется следующими соотношениями:
( 0, если Ф<СФ1 и 6 О ф2; )
Я(Ф)=1 , г (15.5-Э:
[С, если Ф1<2Ф<СФ2, I
где С — постоянное число.
Дистанционный снаряд разрывается при некоторой скорости снаря-
да. Скорость снаряда в момент разрыва влияет на направление движе-
ния осколков (углы разлета) и, следовательно, на плотность осколков
п(ф).
Назовем углы, ограничивающие область разлета осколков с учетом
скорости снаряда, динамическими углами разлета осколков фд1 и с
(рис. 15.5). Если считать, что осколки в пределах своего поражающего
действия имеют прямолинейную траекторию и вектора скорости оскол-
ков равны, тогда углы фД1 и грдг определяются соотношениями:
Ур _ . up _ ______
sin Ф,(1 sin (11—фЛ1) ’ sin 4,2 sin (ф2—^л2>
(15.56)
где ipi и ip2—статические углы разлета осколков;
vc — скорость снаряда в момент разрыва;
Ир— начальная скорость осколка.
Легко найти также начальную скорость осколка с учетом скорости
снаряда в виде
Чш+ + 2^0 008(4'1-^1). (15.57)
вопрос учета движения цели в координатном
законе
Рассмотрим
Рис. 15.4. Область разлета ос-
колков боевой части ракеты:
Лр — точка разрыва снаряда
поражения, для чего предварительно введем
понятие области опасных разрывов.
Пусть в момент разрыва осколочного
снаряда (точка Лр на рис. 15.5) цель нахо-
дится в точке Лц и ее движение определяет-
ся. вектором v4. Определим, при каком зна-
чении dp может быть обеспечена встреча
Рис. 15.5. Сечение области раз-
лета осколков
одиночного осколка с целью, если положение точки разрыва относитель-
но цели задано расстоянием р и углом ср.
Решим эту задачу при условии, что вектор скорости осколка и вектор
скорости цели лежат в одной плоскости, проходящей через точки Лр, Лц,
Лв и что скорость i-го осколка по траектории не меняется и равна
Удо-
с Введем обозначение
По теореме косинусов в соответствии с рис. 15.5 получим
+р2 — р cos ср (15.58)
или
d\ Г1 - (—У]4-2с/р — соз ср — р2=0. (15.59)
р I Ui / J
В действительных условиях стрельбы при разрыве снаряда на малых
высотах, где осколки из-за плохой формы и большого сопротивления воз-
духа быстро теряют свою скорость удг =^const и существенно уменьшается
в зависимости от расстояния с?р. Поэтому действительная область разлета
осколков будет ограничена в сечении не прямыми линиями, а кривыми,
которые являются траекториями полета крайних осколков.
Учет переменности в зависимости от dp усложняет решение за-
дачи встречи осколка с целью. Для упрощения решения этой задачи
обычно переходят к так называемому относительному движению оскол-
ка, т. е. считают, что осколок движется по относительной траектории со
скоростью Vot=vp+( —v4). В этом случае цель остается в той точке, в
которой она была в момент разрыва снаряда.
Располагая необходимыми данными по параметрам траектории по-
лета осколков при v;ii^const и полагая v4= const, можно найти область
разлета осколков в относительном движении.
Сечение области разлета осколков в относительном движении показа-
но на рис. 15.6. На этом рисунке совместим с целью Ац сечение области
разлета осколков в относительном движении в виде зеркального отобр.а1
жения (сечение ЛЛЦВ) и рассмотрим возможность попадания осколков
в цель при условии разрыва снаряда внутри этого сечения. В соответ-
ствии с приведенными на рисунке построениями видно, что любой разрыв
снаряда внутри этого сечения является опасным для цели.
Так, например, пусть снаряд разорвался в точке ЛР1. Построим для
этой точки сечение области разлета осколков в относительном движении
(Д1ДР)В2)- Из построения следует, что цель находится в пределах этого
сечения и, следовательно, осколки при разрыве снаряда в точке Лр, будут
попадать в цель. Если же точка разрыва снаряда находится вне сечения
ААцВ (точка ЛР2), то осколки не попадут в цель. Таким образом, любой
разрыв снаряда в области ААДВ является опасным для цели. Поэтому об-
ласть, построенную по сечению ААЦВ приведенным выше способом (с уче-
том размеров цели), принято называть областью опасных разрывов.
Пусть разрыв снаряда произошел в области опасных разрывов на
расстоянии г от цели, площадь которой в направлении, перпендикуляр-
ном к вектору относительной скорости осколков, равна 5Ц. Определим
для этого случая вероятность попадания т осколков в цель.
Случайная величина X — число попавших осколков в цель при
п(т|>) = const характеризуется следующими свойствами:
а) число осколков, попавших в цель на расстоянии г от точки разры-
ва снаряда, зависит только от ее площади;
б) число осколков, попавших в цель, не зависит от числа непопавщ.их
осколков;
в) вероятность попадания одного осколка в элементарную площадь
цели велика по сравнению с вероятностью попадания двух и более оскол-
ков.
Дискретная случайная величина, обладающая указанными свойства-
ми, как известно из теории вероятностей, подчиняется закону Пуассона
[1], согласно которому вероятность попадания ровно т осколков в цель
равна
где а — математическое ожидание числа попавших осколков в цель.
Найдем величину а, которая для заданного расстояния равна произ-
ведению плотности осколков «(фо) на площадь цели,
Для общего числа осколков можно написать:
где N — общее число осколков;
5Сф—площадь сферы, ограниченная углом ф0 (рис. 15.7).
Из рис. 15.7 следует, что элементарная площадка сферы равна
dS^=r2 sin '-od,a. (15.60)
Поэтому
2ir фо 2
5сф = г2 da J sin i>0rf(0=2.n(cos601—cos%2) г2. (15.61)
О Фш
Таким образом, математическое ожидание числа попавших оскол-
ков в цель выражается формулой
а =--------------------- . (15.62)
2я (cos Ф01 — cos Ф02) г2
Найдем выражение для вероятности попадания хотя бы одного ос- ’
колка. Для этого положим т = 0 и из формулы (15.62) определим ве-
роятность того, что ни один осколок не попал в цель, т. е.
А = = (15.63)
Поэтому вероятность хотя бы одного попадания будет
/?!=!—е-а=1—е 2*<“s^-“s^)’-\ (15.64)
Однако не всякий попавший осколок
нию. Поэтому при определении функции
G(x, у, z) необходимо рассматривать не
математическое ожидание числа попав-
ших осколков, а число попавших пора-
жающих осколков а*, которое равно про-
изведению математического ожидания
числа попавших осколков на вероятность
поражения одним осколком р:
а*=ар. (15.65)
в цель приводит к ее пораже-
Рис. 15,7. К определению элемен-
тарной площади сферы
Для некоторых видов целей вероят-
ность р рассматривают как функцию от
энергии осколка Е. Пусть задана энергия
осколка Ео, при которой цель поражается, тогда полагай
( 1, если Е~>Е0-, 1
? (0, если Е<^Е0, J
(15.66)
можно найти то расстояние от точки разрыва до цели, при котором цель
может быть поражена попавшим осколком. Это расстояние называют
убойным интервалом.
Рассмотрим вопрос определения убойного интервала. Энергию ос-
колка запишем в виде
E-=kva, (15,67)
где цв — скорость осколка в момент встречи с целью.
В свою очередь
Ч (15.68)
где
/2 I 2 ,
Г’ц + 'Сд,- - Г-'цЦл/COS фЛ1-.
Здесь г) — коэффициент, учитывающий баллистические характерис-
тики осколков.
Подставляя значение vB в формулу (15.68) и полагая Е = Е0, полу-
чим формулу для определения убойного интервала:
г0=-1п fOZ'j— . (15.69)
kvmJ 1
Таким образом, в пределах убойного интервала вероятность пораже-
ния цели равна вероятности хотя бы одного попадания; вне его эта ве-
роятность равна нулю, т. е.
р1==1-е-< (15.70)
Реальная цель может иметь различные по уязвимости отсеки (см.
рис. 15.3). При расчетном определении вероятности поражения находят-
ся области уязвимости целей. Под областью уязвимости понимается
плоская область, состоящая из проекций всех элементов цели, имеющая
различную уязвимость, на плоскость, перпендикулярную относительной
скорости полета снаряда.
Пусть известны значения уязвимости цели G(r) для каждого /-го от-
сека. Вероятность поражения цели в этом случае равна вероятности по-
ражения хотя бы одного из этих k отсеков:
k *
G(r) = I-e’"ie^"2...e~^:= 1-е \ (15.71)
или
k
-Ъа1
G(x, у, z)=l — е 1=1 . (15.72)
Координатные законы поражения различных целей G (х, у, г) мож-
но определять и экспериментальным путем с помощью сферических
проекторов [5].
Закон поражения цели снарядом ударного действия
Снаряды ударного действия поражают цель при непосредственном
попадании. Поэтому для такого типа снарядов рассматривают закон по-
ражения не в зависимости от координат точек попадания, а от числа по-
павших снарядов в цель т, т. е. в виде функции G (т).
Функцию G(m), характеризующую вероятность поражения цели от
числа попавших снарядов, называют законом поражения цели снарядом
ударного действия. Очевидно, G(0)=0; G(oo) = l, т. е. G(m) является не-
убывающей функцией аргумента т.
Числовой характеристикой закона поражения является среднее не-
обходимое число попаданий со, показывающее, сколько необходимо в
среднем попаданий снарядов ударного действия для поражения цели.
Число попаданий, при котором цель поражается, является случай-
ной величиной. Пусть эта случайная величина X, тогда со = ЛфС].
Найдем зависимость со от функции G(m). Для этого будем считать,
что в цель может попасть неограниченное число снарядов, среди кото-
рых будут лишние (т. е. цель до попадания этих снарядов уже была по-
ражена) .
Условимся называть попадание в цель «необходимым», если оно
происходит по еще непораженной цели, и «излишним», если оно произо-
шло по уже пораженной цели. Свяжем с каждым попавшим снарядом
случайную величину, равную У,. В этом случае:
v Г 1, если попадание оказалось «необходимым»;
А / •= <
I 0, если попадание оказалось «излишним».
Пусть X — число попаданий до поражения цели. Величина X есть
случайная величина, равная
X = X1 + X2+...+?G+.... (15.74)
Очевидно, что Xi = l, так как первое попадание всегда необходимо.
Найдем математическое ожидание случайной величиной Xt. Ряд
распределения случайной величины Х{ имеет вид
О
G(Z-l)
l-G(f-l)
Справедливость данной таблицы, очевидна, так как при поражении
цели (i—1)-снарядом, попадание i-ro снаряда является излишним. Тогда
математическое ожидание случайной величины Xi будет
M[Xi]=G(i- 1)0-|-1 — G (г—1)= 1—G (i—1). (15.75)
Применяя к выражению (15.74) теорему сложения математических
ожиданий, найдем среднее необходимое число попаданий
СЮ
и==/И[А4^[1 - Q{j.— 1)]. (15.76)
г = 1
Или, обозначая i—1=т, получим
« = Х [l-G(m)J. (15.77).
т=0
На рис. 15.8 по зарубежным данным [1, 14] построены зависимости
необходимого числа попаданий снарядов для поражения самолетов раз-
личных типов. Из рисунка следует, что для поражения истребителя весом
до 8 т необходимо попадание одного снаряда калибра 30 мм, а для пора-
жения бомбардировщика весом более 40 т количество снарядов калиб-
ра 30 мм возрастает до десяти.
Допущение о независимости поражения цели снарядом ударного
действия (отсутствие накопления ущерба) означает, что вся площадь це-
ли разбивается на две резко различные в части уязвимости отсека; отсек,
попадание в который хотя бы одного снаряда приводит к поражению
цели (уязвимый отсек) и отсек, попадание в который любого количества
снарядов не приводит к поражению цели.
Таким образом, при допущении отсутствия накопления ущерба функ-
ции G(m) равна вероятности хотя бы одного попадания в уязвимый от-
сек цели:
G (т} = 1 — (1 — уУ",
(15.78)
где у — вероятность попадания в уязвимый отсек.
Функция (15.78) именуется показательным законом поражения
цели.
При равновероятном распределении точек попадания по площади
цели вероятность у равна отношению площади уязвимого отсека к пло-
щади всей цели 5Ц:
(15.79)
Можно показать, что в этом случае
(15.80)
Рис. 15.8. Количество попаданий снарядов различных
калибров для поражения самолетов:
/ — истребитель весом до 8 т; 2 — истребитель с весом более
3 т; 3 — бомбардировщик весом от 20 до 40 т; 4 — бомбарди-
ровщик весом более 40 т
.Действительно, для поражения цели при отсутствии накопления ущерба
достаточно в среднем одного попадания в уязвимый отсек цели, т. е.
1—о>у. (15.81)
Откуда
'( 5у
Таким образом, формулу (15.78) можно записать в виде
(15.82)
Если учесть, что (1----—^е-1, то
G(m)^l-e “ . (15.83)
На практике встречаются такие цели, закон поражения для которых
не является строго показательным, но близким к нему. Такие законы
могут быть приближенно заменены показательными, подобранными так,
чтобы сохранилось неизменным оу [14].
§ 15.4. ОПРЕДЕЛЕНИЕ ВЕРОЯТНОСТИ ПОРАЖЕНИЯ ЦЕЛЕЙ
Как уже указывалось, вероятность поражения цели зависит от ве-
роятности попадания снарядов или осколков боевой части в цель и ее
уязвимости (определяются законами поражения).
Для ударных снарядов вероятность поражения цели можно опреде-
лить с помощью следующей математической зависимости:
с© со
№п = J J /(-V, y)G(x, y)dxdy. (15.84)
—со —оо
Для дистанционных снарядов вероятность поражения определяется
по формуле
VTn = J J J f(x, у, z)G(x, у, z)dxdydx. (15.85)
—со —со —со
Вид стрельбы (одиночная, очередью при независимых или зависи-
мых выстрелах) оказывает определенное влияние на вероятность пора-
жения цели. Поэтому приводить рабочие формулы для определения ве-
роятности поражения цели будем для различных видов стрельбы.
Стрельба одним, ударным снарядом
При выстреле одним ударным снарядом функцию G(x, у) можно
представить в виде
(1, если (х, y)GS-
G(x, z/) = L \ \ ' (15.86)
1 J (0, если (х, z/)(tSy, 1 7
где Sy — уязвимая площадь цели, т. е. такая часть площади цели, при
попадании в которую одного снаряда цель поражается.
Подставляя выражение (15.86) в зависимость (15.84), получим
^п= y)dxdy.
(15.87)
Из сравнения формул (15.87) и (15.14) следует, что вероятность по-
ражения при одном выстреле вычисляется так же, как и вероятность по-
падания, но вместо всей площади цели 5Ц в расчет принимается только-
уязвимая площадь Sy.
Учитывая соотношения (15.80), формулу (15.87) можно переписать
в виде
1^п=— J J/(x, y)dxdy. (15.88)
Стрельба артиллерийскими снарядами по цели обычно ведется оче-
редями. Тогда вероятности поражения цели можно определять при не-
зависимых и зависимых выстрелах.
Стрельба очередью при нескольких независимых выстрелах
В этом случае будем считать, что выстрелы происходят в одинако-
вых условиях. Тогда примем за Но— гипотезу (событие), состоящую
в том, что в цель не попало ни одного выстрела при п независимых вы-
стрелах; через Hi обозначим гипотезу, состоящую в том, что в цель
попал один снаряд; через Н2 — гипотезу, состоящую в том, что в цель
попало два снаряда; через Нт— гипотезу, состоящую в том, что в цель-
лопало т снарядов. Будем также считать, что нам известны вероятности
этих гипотез:
Л’(^о) = /’ол; Р(Нх]=р^ Р(^ч^Р-1п\-- •: Р(Нт) = Ртп,
а также вероятности поражения цели при условии попадания в нее од-
ного, двух и т. д. снарядов, т. е.
(7(1); G(2); G(3),..G(n). (15.89)
Тогда по формуле полной вероятности найдем
^u = /’onG(O) + /’i«G(I) ФАлС(2)+ • • • +/’mnG(^)+ • • +PmnO(ti).
Так как G(0) = 0, то
(15-90>
т = 1
Последняя формула называется формулой Колмогорова, впервые
предложившего такой способ вычисления вероятности поражения цели
при независимых выстрелах.
Формулу (15.90) можем представить в другом виде [5]:
1ГП = 2 C™pmqn-mG(rn), (15.91)
т - 1
где р— вероятность попадания в цель при одном выстреле;
<7=1—р—вероятность непопадания в цель при одном выстреле;
С ™— число сочетаний из п выстрелов по т попаданий.
Рассмотрим формулу для вычисления вероятности поражения цели
при п выстрелах для случая, когда p=^ const (например, из-за изменения
расстояния цель-пушка). Но по-прежнему будем считать выстрелы неза-
висимыми. Пусть, как и при выводе формулы (15.91) справедливы гипо-
тезы Но, Н2, ..., Нт, а вероятности поражения при условии попадания
соответственно равны
G(0); G( 1); G(2);...; G(m);. . .; G(«).
Из теории вероятностей известно, что при повторении испытаний с
переменными значениями вероятностей отдельных событий вероятность
наступления ровно т событий из п равна коэффициенту при zm в разло-
жении функции
= + (15.92)
i=i
где pi — вероятность наступления г-го события; ^ = 1—Pi.
Функция q>m будет нами применена и для вычисления вероятностей
т попаданий при п выстрелах. Пусть, например, производятся три вы-
стрела. При первом выстреле вероятность попадания равна pit при вто-
ром— р2, при третьем — р2. Тогда, применяя формулу (15.92), получим
(<71 + ?Р1) (<72 + ZP2} (<7з + zpp = qxq,q3 + (Piflfa ф- Яхр2^ + * ф-
+ (йМз + Р^РЛ Pi<hP^ z^PiPiP?^- (15.93)
Здесь, в соответствии с тем, что вероятность наступления события
ровно т раз из п испытаний равна коэффициенту при zm, получим соот-
ношения: q\q2q2 — вероятность ни одного попадания при трех выстрелах;
Р1Р2<7з + ^1Р2^з + /?з^2?1 — вероятность ровно одного попадания при трех
выстрелах и т. д.
С учетом условных вероятностей G(m) для трех выстрелов, полагая,
что G(m) =zm, имеем
(0) 4- (р&д3 + qtp2q3 %- O(l) +
+ (АМз+?1ЛРз + PiQ^ G (2) + puPP-fi (3). (15.94)
Таким образом, вероятность поражения при трех выстрелах вычис-
ляется по формуле
^з=П^+0(*Ш
Z =1
(15.95)
По аналогии для п выстрелов имеем
^=Г][?г+О(«)А]. (15.95а)
Практический интерес в формулах (15.91) и (15.95а) имеют два част-
ных случая.
Первый случай. Для поражения цели достаточно одного попадания,
т. е. G(m) =1. Тогда из формулы (15.91) получим
^П=АЛ +Ал+ • • +РтЛ • + аял== 1 ~Яп (15.96)
или
W„=\-[\-р)\ (15.97)
где qn — вероятность ни одного попадания при п выстрелах.
Аналогично по формуле (15.95а) найдем
1 ~ П (1 - А)= 1 ~ -qn, (15.98)
где q\, q2, , qn — вероятности непопадания соответственно при первом,
втором и т. д. выстрелах.
Второй случай. Закон поражения цели — показательный (см., напри-
Рис. 15.9. Графики зависимости по-
ражения воздушной цели от числа
выпущенных снарядов при м=1
ния снаряда р\ в зону поражения
ваемом случае принято ю=1. Из
числа снарядов с одного до трех г
ли увеличивается на 66%.
мер, книгу [5]). Для показательного
закона поражения исчерпывающей
числовой характеристикой является
среднее необходимое число попада-
ний со. Поэтому формулы (15.97) и
(15.98) можно записать в виде
И7п=1-(1-—Г; (15.99)
\ со /
ra=l-f](l . (15.100)
i=i
На рис. 15.9 показаны графики
зависимости поражения цели Жп от
числа выпущенных снарядов п при
пяти значениях вероятности попада-
цели [14]. Иначе говоря, в рассматри-
рис. 15.9 видно, что при увеличении
;ля pi =0,5 вероятность поражения це-
Пример 15.4. Определить вероятность поражения самолета цели при стрельбе оче-
редью состоящей из независимых 20 выстрелов, если р=0,1; <о = 2.
По формуле (15.99) найдем
I 0,1\20
= 0,642.
Стрельба очередью при зависимых выстрелах
Зависимыми выстрелами будем называть такие, при которых веро-
ятности попадания в цель последующих снарядов зависят от того, имеет
ли место попадания предыдущих снарядов. Зависимость выстрелов
имеет место при стрельбе очередями и залпами.
Пусть производится только два зависимых выстрела и требуется
определить вероятность попадания в цель. Рассмотрим события Ai и
Аг— попадания снарядов в цель соответственно при первом и втором
выстрелах. Будем также считать, что заданы вероятности этих событий
= р{А^=рг.
Исходя из теоремы умножения вероятностей для зависимых собы-
тий, имеем
р(АхАг}^р{А^р(Аг | ДД
При этом условии вероятность попадания в цель по теореме сложе-
ния вероятностей будет
р(Д1 + Л)=РИ1) + р(Л)-р(Д1)р(Д2 I Д/). (15.101)
Отметим, что для независимых событий приведенная формула мо-
жет быть представлена в виде вероятности хотя бы одного попадания.
Действительно, для независимых (но совместных) событий имеем
/ДА1 +A) = /?(A)4-/7(,42) — p(AJp (Д2).
Прибавим к правой части единицу и вычтем ее, тогда получим
р(Д1-[_Д2)=1-1-|-р(Д1) + р(Д2)_ р(Д1)р(Д2)=
= 1-[1-р(Д1)][1-/,(Д2)]=1-П[1-^(Д/)]. (15.102)
<=1
Методом индукции формулу (15.102) можно записать для трех вы-
стрелов (события Д1, Д2, Д3) и для п выстрелов:
wр (Ar-{- H2-f- Дз)=Р (21J4-/’ (Д2) + р (Дз) — /?МИ2)~
-/1(Д1Д3)-/;(Д2Дз)+/?(Д1Д2Д3); (15.103)
- 2 Р Ш - 2 Р (Ai-Л’) + 2 Р (ApW - . .. +
/=i i=i
+ (_1)«-12/>(Д1Д2...Дг.). (15.104)
Для независимых выстрелов эти формулы определяют также веро-
ятность хотя бы одного попадания соответственно при трех и п выст-
релах.
Выразим зависимость между выстрелами соотношением
_ p(Aj | Лу)
rz i -
(15.105)
Р (Л)
Этот коэффициент для независимых выстрелов равен единице [так
как в этом случае р(Дг-|Д;) = р(Дг-)].
Для трех зависимых выстрелов вероятность попадания с учетом ко-
эффициентов pij запишется в виде
4-р+ (Л3) — р(Д2) Р12—р(Д1)р(А) ?18 —
— р(А^р(А^ P23 + ^(^i)jO(A)p(A) Р12Р23, (15.106)
где pi2 — коэффициент, характеризующий зависимость между 1- и 2-м
выстрелами; pi3 — коэффициент, характеризующий зависимость между
1- и 3-м выстрелами; р23— коэффициент, характеризующий зависимость
между 2- и 3-м выстрелами.
Допустим, что pi2 = pi3 = P23 = p. Умножим правую и левую части
уравнения (15.106) на р. Тогда в соответствии с принятым допущением
получим
Р1Го = ^(Д1) р + р(Д2) р + Р (А) Р —/?(Лт) /7 (Л2) р2—ц(Д1)/?(Л3) р2 —
—/?(л2) р(Д3) рНиАЖЛШАз) р3- (15.107)
Введем обозначения:
рр(А1)==р1; р/7(Л2)-=^2; рр(Д3)=р3, (15.108)
тогда
pW^/7i+a+a-?i?2 — АРз~ Р1Р3+Р1Р2Р3 (15.109)
Полученное выражение преобразуется в вероятность хотя бы одного
попадания
3 ~
pU73=l-ПД-А-) (15.110)
1-1
ИЛИ
{3 1
i-Пп-ртп- (15.1Н)
Далее, обозначив )5(A) =Pi, получим для п выстрелов
^п=— 1-П(1-РА)
₽ 1
(15.112)
или по аналогии с предыдущим для показательного закона поражения
найдем
W —
(15.113)
Вероятность поражения цели за стрельбу при зависимых выстрелах
вычисляется также в схеме двух, трех и т. д. групп ошибок.
Ограничимся вычислением вероятностей поражения только для схе-
мы двух групп ошибок. Применительно к двум группам ошибок вероят-
ность поражения цели при фиксированных координатах центра рассеи-
вания будет равна вероятности поражения для п независимых выстре-
лов. Пусть эта вероятность будет обозначаться как IFn(xr, уг). Так как
в схеме двух групп ошибок координаты центра рассеивания (хг, уг) яв-
ляются случайными величинами от одной группы выстрелов к другой,
то /(хг, yF)W(xF, yF)dxdy будет вероятностью поражения цели при усло-
вии попадания точки с координатами хг и yF в пределы прямоугольника
dxdy.
Взяв двойной интеграл от полученного выражения, получим общую
«формулу для вычисления вероятности поражения цели в схеме двух
трупп ошибок:
оо от
J /К, К-Ж К, yr)dxdy.
— —оо
Если 1Кп(хг, г/г) записать для показательного закона, то при
ja#=const получим
Если р = const, то
ОО «Э
f /(^,Z/r)[l -(l~^ydxdy. (15.115)
— со —ОО
Двойной интеграл (15.115) можно вычислить численным методом.
Обычно вероятности поражения целей определяют по специальным
таблицам и графикам, а также используют приближенные методы. Сущ-
ность одного из приближенных методов, рассмотренного в книге [5], со-
стоит в следующем. Вероятность поражения цели за стрельбу зависимы-
ми выстрелами представляют в виде
^п=йй7;,+(1 -
(15.116)
тде Го — вероятность поражения цели при независимых выстрелах (ко-
эффициент корреляции г = 0);
VP'"—'Вероятность поражения цели при функционально зависимых
выстрелах (коэффициент корреляции г=1).
Коэффициент k зависит от коэффициента корреляции выстрелов г и
^величины
пр
<0
М
(15J17)
где п — число выстрелов;
р — вероятность попадания в цель при одном выстреле.
Коэффициент k определяется с помощью таблиц (см. приложение 2)
по значениям г и М. В формуле (15.116) соответствующие вероятности
поражения вычисляются по выражениям:
(15.118)
Пример 15.5. Определить вероятность поражения самолета при стрельбе очередью
и зависимых выстрелах с коэффициентом корреляции г = 0,5 по данным примера .15.4.
Вероятность поражения цели при независимых выстрелах была вычислена в приме-
ре 15.4 и составила К1/ = 0,642.
Для определения вероятности поражения при функционально зависимых выстре-
лах воспользуемся второй формулой (15.118), Тогда
, Г / 1 \20
Гп=0,1 1 — 11 — — = 0,0612.
По формуле (15.117) определим
2
Затем по значениям М = 1 и г=0,5 по таблице (см. приложение 2), найдем fe=0,9I.
Подставляя полученные значения в формулу (15.116), получим
ТГП = 0,91-0,0642 + 0,09-0,0642 = 0,59.
Определенное Wn при зависимых выстрелах незначительно отличается от 1ГП' при
независимых выстрелах (см. пример 15.4), из-за малости коэффициента корреляции.
Пример 15.6. Определить вероятность поражения гипотетического самолета весом
12 т при стрельбе ударного действия снарядами из
Рис. 15.10. Расположение суммарного эллип-
са рассеивания при стрельбе из пушечной
установки бомбардировщика по атакующе-
му истребителю
20-мм пушки с подвижной установ-
ки бомбардировщика, если сум-
марное рассеивание o'.t = 5,82; оэ,=
=-3,76 (см. пример 15.2).
Площадь цели в картинной
плоскости составляет 5Ц = 8 м2.
Стрельба производится очередью-
20 выстрелов с дальности 1000 м.
Соответствующее этому случаю
стрельбы положение цели и эллип-
са суммарного рассеивания пока-
заны на рис. 15.10.
По графику^ рис. 15.8 (кри-
вая 3) найдем а = 18. По парамет-
рам -суммарного рассеивания (см..
пример 15.2) -на дальности 1000 м
найдем: сгх=5,82 м ffv=3,76 м.
Далее по формуле (15.26) вычис-
лим вероятность попадания в цель
одного снаряда
8
р =-------------------- = 0,0612;
г 2-3,14-5,82-3,76
по формуле (15.99) найдем
Гп=1- 1-
0,0612\20
18 /
= 0,09.
Для повышения эффективности стрельбы в этом случае целесообразно установить
на самолете пушку калибра 30 мм и увеличить длину очереди до п = 50. Тогда необхо-
димое число попаданий для поражения истребителя составит со = 5 и вероятность по-
ражения будет ТГП=0,448.
Для стрельбы одним дистанционным снарядом
Дистанционные снаряды поражают цель не только при непосредст-
венном попадании, но и при разрыве около цели за счет воздействия
ударной волны, осколков или кумулятивного действия. При стрельбе по
воздушной цели для вычисления вероятности ее поражения следует
пользоваться формулой (15.85).
Подставляя в формулу (15.85) выражение (15.23), получим
1 Г(х-тг)’ (у—туУ- (z—тг)Д
-I - 2 2 1 2 1 2
1ГП=-------—----- i ( \е L °х °г J О(х, у, z)dxdydz.
(2 л) охауаг J J
— ОС —оо
(15.119)
Формула (15.119) получена при условии, что координаты точки раз-
рыва снаряда (боевой части) являются независимыми случайными ве-
личинами.
Вероятность IFn по формуле (15.119) может быть найдена числен-
ным интегрированием или по функциям Лапласа, когда {тх = ту =
= mz = 0). Значение функции G(x, у, z) определяется соотношением
[1, если (х, у, z)^Bv
Г’ 2 (0, если (х, у, z)(f. Вц,
(15.120)
= k\
где Вц — эллипсоид равной плотности, уравнение которого
।____________________________________, &
а2 а2
-v У
с полуосями а, b и с, пропорциональными средним квадратическим от-
клонениям,
a = ksr, b-=k^„. c = k<3r.
Исходя из соотношения (15.120), получим
1 Р Л л 2 а2 а2 а2
^п =------77------ fffe Х У Z1 dxdydz. (15.121)
(2л)3'2аха,/сг J J J
Вц
После преобразований тройной интеграл (15.121) приводится к
виду
— _£L
— ke 2. (15.122)
Если считать, что координата х точки разрыва, направленная по
вектору скорости снаряда, зависит от координат у и z,
то
у, z)=f(y, z)f(x [ у, z),
где f(x\y, z) —условный закон распределения координаты х, определяе-
мый точностью действия взрывателя.
Поэтому
оо “ rvats/.z)
J j f{y, z) J fl(x I y, z)O(x I y, z)dx dydz. (15.123)
-Ч’Д'/.г)
Здесь cpi(i/, z) и ф2(г/, z)—координаты точек, определяемые урав-
нениями области опасных разрывов (см. § 15.3).
Если взрыватель идеальный (т. е. когда область разрывов снарядов,
вызываемая его действием, полностью согласована с областью поражаю-
щих разрывов), то
h(l/)
j’ f {х \ у, Z)dX=\
9^(y,z)
и при этом G(x\y, z) не зависит от х. Тогда при этих допущениях трой-
ной интеграл (15.123) приводится к двойному
ОО ос
J J f(y, z)G(y, z)dydz. (15.124)
— ОО —co
Таким образом, для идеального взрывателя и независимости зако-
на поражения от координаты х вероятности поражения цели рассчиты-
ваются как бы при отсутствии рассеивания вдоль координаты х.
Для определения вероятности поражения цели управляемыми раке-
тами или снарядами с неконтактными взрывателями, как это следует
из формулы (15.124), необходимо найти произведение вероятности попа-
дания ракеты в зону цели, где обеспечивается определенная средняя
энергия разлета осколков на вероятность pi попадания хотя бы од-
ного осколка в какой-либо уязвимый отсек цели:
^п=^пР^1, (15.125)
где pi — определяется по формуле (15.71), a U7np по формуле (15.8).
При проектировании систем управления ракет и их боевых частей
довольно часто требуется найти расстояние между целью и эпицентром:
взрыва, при котором обеспечивается поражение цели (рис. 15.11).
Рис. 15.11. Определение радиуса эпицентра взрыва по воздушной цели
При согласованной диаграмме направленности дистанционного
взрывателя с картиной разлета осколков боевой части и пренебрежении
Рис. 15.12. Графики зависимостей расстояний
эпицентров взрывов зарядов боевых частей
от веса взрывчатого вещества, обеспечива-
ющих поражение воздушных целей:
1 — легкого истребителя весом порядка 8 т; 2 —
истребителя весом более 8 т; 3 — бомбардиров-
щика весом более 40 т
дух» и «поверхность — воздух»).
временем срабатывания взры-
вателя и инициирования бое-
вой части будем считать эта-
расстояние равным промаху
ракеты (см. гл. XIII). Тогда,
пользуясь графиками (рис.
15.12), составленными по за-
рубежным данным [14], мож-
но определить по йтах потреб-
ные значения веса взрывчатого
вещества боевой части, обеспе-
чивающей поражение воздуш-
ных целей. Или, наоборот, по<
заданному весу взрывчатого-
вещества боевой части можно
найти максимально допусти-
мый промах ракеты.
На рис. 15.12 показаны
границы рационального приме-
нения весов взрывчатых ве-
ществ боевых частей для раз-
личных типов снарядов (зенит-
ной артиллерии, управляемых
ракет классов «воздух — воз-
Пример 15.7. Определить вес взрывчатого вещества боевой части гипотетической
зенитной ракеты, обеспечивающей поражение истребителя весом 6 т, если ее точность,
наведения характеризуется промахом Лтах=20 м (см. пример 13.6).
По графикам рис. 15.12 находим бвв=70 кг.
§ 15.5. НАДЕЖНОСТЬ ДЕЙСТВИЯ РАКЕТНЫХ
И СТВОЛЬНЫХ КОМПЛЕКСОВ
Как уже выше указывалось, оценка боевой эффективности ракет-
ных и ствольных комплексов не может быть проведена без учета его на-
дежности, под которой понимают способность комплекса к безотказной
работе в течение заданного промежутка времени и в определенных ус-
ловиях эксплуатации [5, 8, 10, 11, 18].
Будем считать, что каждый комплекс состоит из нескольких взаимо-
связанных установок (радиолокационные станции, ракетные установки,
батареи зенитной артиллерии и т. п.). В свою очередь в каждую из уста-
новок входят различные устройства. Например, в пушечную башню са-
молета (см. рис. 1.18) входят основные приводы горизонтального и вер-
тикального наведения, по два электромашинных и магнитных усилителя,
блоки сельсинов-датчиков и сельсинов-приемников, коробка включате-
лей и реле, электрические устройства ограничения углов поворота ору-
жия, автоматы перезарядки пушек и др. И, наконец, устройства разде-
ляются на отдельные элементы: резисторы, потенциометры, конденсато-
ры, транзисторы, диоды штырьевые разъемы и т. п. В соответствии с
приведенным выше расчленением боевых комплексов на составные со-
ставляющие следует анализировать и их надежность.
Сначала будем определять надежность действия отдельных элемен-
тов. Надежность элемента до первого внезапного отказа *, найдем при
условии, что он начал работать в момент 1=0 и вышел из строя (отка-
:зал) в момент / = т. Очевидно при рассмотрении работы множества од-
нотипных элементов время т есть величина случайная (Го). Поэтому на-
дежность элемента можно характеризовать вероятностью P(t), т. е. ве-
роятностью того, что данный элемент в данных условиях эксплуатации
будет работать безотказно в течение определенного времени t. Ненадеж-
ность элемента есть функция Q (/) = 1 — Р (!).
Время работы элемента до момента отказа будем называть време-
нем безотказной работы. Обычно в теории надежности находят среднее
время безотказной работы t.
На практике [18] вероятность безотказной работы элемента (надеж-
ность) P(t) определяют по функции плотности распределения времени
‘безотказной работы f(f), либо по функции интенсивности отказов Л(/).
Функция f(t) является дифференциальным законом распределения
«случайной величины и равна производной от функции ненадежности
элемента (так как последняя обладает всеми свойствами интегральной
•функции случайной величины):
/ «1=Q' т = [ 1 - Р Ж = - Р' (0- (15.126)
При испытаниях на надежность функцию [(/) определяют по участ-
кам времени At Для каждого участка [(/) равна отношению числа от-
казавших элементов Ап(/), приходящихся на этот участок At к числу
всех испытуемых элементов Л/:
/W==^fr- (15-127)
Учитывая тот факт, что f(t) есть производная от функции ненадеж-
ности, выражение
f(t)dt (15.128)
является вероятностью того, что элемент, начавший работать в момент
времени 1 = 0, откажет на участке времени (t 1 + AZ). Исходя из этого,
надежность работы элемента равна
P(/)=l- = (15.129)
о I
1 В аппаратуре комплексов наряду с внезапными отказами (выход из строя рези-
сторов, ламп, транзисторов; обрывы проводников, пайки и т. п.) существуют постепен-
ные отказы, вызываемые изменением параметров элементов в результате износа и ста-
рения. В данном параграфе рассматриваются методы расчета надежности ракетных и
ствольных комплексов лишь при внезапных отказах. С оценкой надежности комплексов
при постепенных отказах можно ознакомиться в работах [11, 15, 18].
Функция интенсивности отказов есть отношение
(15.130)
Р(О
Имея в виду выражения (15.129), а также учитывая, что
(15.131)
где «(/) —число исправных элементов к заданному моменту времени tr
получим
Х(/)=_^1_. (15.132)
п (t) М
Таким образом, интенсивность отказов физически есть отношение
числа отказавших элементов на участке времени (t £+Д() к числу ис-
правных элементов, оставшихся ко времени t и, следовательно, произве-
дение является условной вероятностью отказа элемента на участ-
ке (t, t+M) при условии, что до момента t он работал исправно.
Найдем выражение для надежности элемента через функцию ин-
тенсивности отказа. Исходя из выражений (15.126) и (15.129), получим
(15.133)
* \1)
откуда
t
\KP(t}=-\\(t\dt,
6
или потенцируя
t
— f
P{t} = ^ 0 . (15.134)
Вероятность безотказной работы элемента оценивается с помощью
выражения (15.129) или через интенсивность отказов, определяемых
выражением (15.134), и является важнейшим показателем надежности
элемента. Наряду с этим показателем, на практике используется в каче-
стве показателя надежности среднее время безотказной работы элемен-
та (средний срок службы элемента).
Найдем выражение для среднего срока службы элемента в виде
(15.135)
6
или, учитывая, что )(/) = —получим
t-— — IP’ (/) dt-.
о
Интегрируя это выражение по частям, найдем
7=-/P(/)J -\-°^P(t)df. (15.136)
о 6
Первый член выражения (15.136) равен нулю, так как при /->-
—>~<х функция P(t) убывает значительно быстрее (при конечном матема-
тическом ожидании), чем возрастает t, поэтому
7=^P(t)dt. (15.137)
б
Если %(/) =const = %, то на основании формулы (15.134) получим
Р(г!) = е-^. (15.138)
Формулу (15.138) в теории надежности принято именовать экспо-
ненциальным законом надежности [5, 10, 11].
Подставляя в формулу (15.137) полученное выражение, найдем
o' о
Таким образом, исходя из формулы (15.138), найдем
t
Т. (15.140)
Итак, основной характеристикой надежности элементов является
интенсивность отказов.
По данным фирмы «Hughes» [14] на значения коэффициентов интен-
сивности отказов элементов существенное влияние оказывают их разме-
щение (в лаборатории, на самолете или ракете), а также условия рабо-
ты (на земле или в воздухе). Интенсивность отказов с учетом поправоч-
ных коэффициентов фирмы «Hughes» будет определяться в виде
P=k\ (15.141)
где Л— интенсивность отказов элементов устройств, установленных на
самолетах или ракетах (в воздухе);
К-—интенсивность отказов элементов устройств, установленных на
самолетах или ракетах (на земле).
В табл. 15.1 приведем соответствующие значения интенсивностей от-
казов к и поправочных коэффициентов k для различных элементов и
устройств (по зарубежным источникам).
Надежность комплексов определяется не только составом их от-
дельных элементов, устройств, установок и характеристиками их надеж-
ности, но и способами включения (параллельное, последовательное, по-
следовательно-параллельное). Для повышения надежности действия
комплексов применяется введение в его отдельные составляющие ре-
зервных устройств. Резервные устройства включаются на различных
уровнях (на элементном, на уровнях устройств и установок).
Как будет показано дальше, введением параллельных резервных
устройств на различных уровнях удается значительно повысить надеж-
ность действия всего комплекса.
Расчет надежности отдельных устройств, установок
и комплексов при нерезервированных элементах
Рассмотрим способы оценки надежности отдельных устройств с раз-
личными схемами соединения элементов. Для устройства с последова-
тельно соединенными элементами Э; (рис. 15.13, а), отказ хотя бы одно-
го элемента равносилен отказу всего устройства. Будем считать, что
нам известны надежности безотказной работы каждого элемента, вхо-
дящих в систему из k элементов, т. е.
Л, р2,..., Л,..., рк.
Тогда по теореме умножения вероятностей для независимых событий
Таблица 15.Г
Поправочные коэффициенты
в воздухе
Наименование элемента ХЛО0, 1/4 в лаборатор- в наземных
ных условиях условиях самолет ракета
Конденсаторы: г 0,01
бумажные 0,92 1 2 5
керамические 0,1 0,92 1 2 5
фарфоровые танталовые 0,09 0,6 0,92 0,85 1 1 2 4 5 25
фольговые 0,1 0,85 1 4 25
переменные емкости . . . -. Диоды: 0,16 0,83 0,95 1 5 1,5 42 2,6
общего типа 0,2 1
мощные 0,2 ' 0,8 1 4 25
Транзисторы: 0,5 0,9 8,5
общего типа 1 2,5
переключающие 0,4 0,9 1 2,5 8,5
Электровакуумные приборы: 1,5—3 0,81 6,5
приемно-усилительные . . . 1 80
генераторные Резисторы: 30 0,71—0,65 0,92 1 20-40 1000
угольные композиционные 0,043 1 2 5
угольные пленочные .... 0,03 0,92 1 2 5
прецизионные 0,125 0,92 1 2 5
потенциометры Катушки индуктивности: 0,1 0,01 0,85 0,82 1 4 25
низкочастотные 1 6 70
высокочастотные 0,01 0,82 1 6 7
Трансформаторы: накальные 0,2 0,82 1 6 70
мощные 0,2 0,82 1 6 70
импульсные 0,15 0,82 1 6 70
Микроэлектронное оборудо-
вание: вычислительные машины . 0,06 0,9 1 2,5 8,5
обычные схемы 0,1 0,9 1 2»5 8,5
Плавкие предохранители: Переключатели: 0,5 0,83 1 5 42
тумблеры кнопочные 0,05 0,06 0,83 0,83 1 1 5 5 42 42
поворотные Реле: 0,17 0,83 1 5 42
общего типа 0,25 0,71 1 20 1000
миниатюрные 0,25 0,74 1 12 340
мощные Выводные соединения: 0,30 0,004 0,73 0,76 1 15 550 220
пайки 1 10
скрутки . сварные 0,02 0,9 0,71 0,65 i 1 20 40 1000 5500
Электромеханические детали: 0,5 0,73 15
общего типа 1 550
счетчики . 1,4 0,71 1 20 1000
двигатели 1,25 0,73 1 15 550
Механические детали: 0,76 0,76 220 220
гироскопы сельсины 10 5,5 1 1 10 10
двигатели следящих систем 12,5 0,71 1 2 U 1000
Зубчатые и другие типы ме- ханических передач 8,2—15,5 0,76—0,67 1 10-30 220—2800
Соединительные разъемы 10-штырьковые 1,2 0,71 1 20 1000
получим характеристику надежности всего устройства в виде
k
= = (15.142)
1=1
Для устройства с параллельно соединенными элементами Эг- (рис.
15.13, б) надежность безотказной работы всего устройства можно опре-
делить через произведение ненадежности элементов, т. е.
Qi.--=QlQ2...Qi...Qk
или, переходя от ненадежности к надежности, получим
ь
- П (1 - Л). (15.143)
1=1
В случае, если надежности всех k параллельно соединенных эле-
ментов одинаковы (Л), выражение (15.143) примет вид
В общем случае в устройствах комплексов могут применяться как
последовательное, так и параллельное соединения элементов. Одна из
возможных схем подобного соединения показана на рис. 15.13, в. Для
определения ее надежности введем в рассмотрения пять отдельных
групп элементов.
Первая группа последовательно соединенных элементов даст
к
для второй и четвертой групп элементов получим
п т
Лту= 1 - П(1 -^4; ^ivу= 1 -П(1 -Р^-
Первая и вторая группы соединены последовательно и образуют
третью группу элементов (рис. 15.13, н). Тогда
Рш у =Р\ уРц у- (15.145)'
В свою очередь третья и четвертая группы образуют через две па-
раллельно соединенных группы результирующее устройство комплекса.
Надежность рассматриваемого устройства можно оценить по фор-
муле
Py=l-(l-/>niy)(l-Pivy). (15.146)
Аналогичным образом можно оценить и надежность устройств с
другими схемами соединения элементов.
Пример 15.8. Оценить надежность на первом часе работы некоторого гипотетиче-
ского устройства ракеты, имеющей структурную схему (см. рис. 15.13, в) и состоящую
из последовательно соединенных обычных микроэлектронных элементов, четырех парал-
лельно соединенных импульсных трансформаторов и двух параллельно соединенных
микроэлектронных реле. На выходе устройства применен соединительный 10-штырько-
вый разъеги.
По исходным данным и материалам табл. 15.1 составим табл. 15.2. Затем по фор-
муле (15.139) определим соответствующие значения средних сроков службы. Далее по
формуле (15.140) определим значения надежности групп элементов для последователь-
ного соединения. Соответствующие числовые значения приведены в предпоследнем
столбце табл. 15.2.
По формуле (15.144) определены значения надежности действия параллельно
соединенных элементов. Эти значения занесены в последний столбец табл. 15.2.
По формуле (15.145) определим
РШу = 0,99868-0,99999 = 0,99867,
а по формуле (15.146)
Pv у = 1 — (1 — 0,00123) (1 — 0,00001) = 0,99999.
Результирующее значение надежности устройства ракеты определится как
РУ = Рv у рv J у = о, 99999 0 ,9988 = 0,99879.
Таблица 15.2
Наименование ’ элемента 1 Количество элементов X• 10е, 1/ч (на земле) fe X -10% 1/ч (в воз- духе) Л ч р р
на элемент на все элементы при 1 последовательном сое- динении и на один । элемент при парал- лельном соединении
на все элементы
Обычные микроэлектрон- ные элементы 6 о,1 0,6 8,5 51 1,96-104 0,99995 Р1у=о, 99868
Импульсные трансформато- ры , 4 0,15 0,15 70 10,5 9,5-104 0,99999 РПу=0,99999
Миниатюр- ные реле . . . 3 0,25 0,25 340 85 1,18-104 0,99992 П1уу=0,99999
Соединитель- ный 10-штырь- ковый разъем 1 1,2 1,2 1000 1200 8,34-102 0,9988 PVIy=0,9988
Расчет надежности отдельных устройств комплексов
при резервированных элементах и устройствах
Резервирование — один из основных способов повышения надежно-
сти устройств комплексов, получающееся за счет введения избыточных
элементов по отношению первоначальной структуры устройства.
Существует несколько способов резервирования элементов. Наибо-
лее распространенным являются постоянные резервирования и резерви-
рование с замещением [12]. При постоянном резервировании резервные
дополнительные элементы присоединяются параллельно основным и при
их отказах перестройки структуры не происходит, так как дополнитель-
ные элементы все время включены в работу (рис. 15.14, д). При резер-
вировании с замещением происходит отключение неисправного элемен-
та и вместо него включается исправный элемент (рис. 15.14, б).
Основной элемент
Основной элемент
°) 6)
Рис. 15.14. Структурные схемы соединения элементов при различных способах
резервирования
Формула для определения вероятности безотказной работы схемы
(рис. 15.14, а) при постоянном резервировании имеет вид
Рс=1-П(1-^э/), (15.147)
i=i
где P9i — надежность дополнительных элементов.
Формулу для определения вероятности безотказной работы схемы
(рис. 15.14, б) при резервировании замещением запишем в виде
/>с==1_(1_рэ.о)рп
1-П(1
1-1
(15.148)
где Рп — надежность элемента переключения.
Пример 15.9. Оценить надежность схем резервирования (постоянное и с замеще-
нием) для элемента, обладающего надежностью Рэ.о = 0,9, если число дополнительных
элементов равно трем, а надежность переключателя Рп=0,95 [6].
Для схем с постоянным резервированием по формуле (15.447) найдем
Рс = 1 —(1 — 0,9)4 = 0,99990.
При резервировании с замещением получим
Р, = 1 — (1 — 0,9) 0,95 [1 — (1 — 0,9)3] = 0,9950.'
Из данного примера видно, что схема с постоянным резервированием обладает
большей надежностью, нежели схема с замещенным, из-за более низкой надежности
переключателя. Повысить надежность действия этой схемы можно было бы введе-
нием для каждого дополнительного элемента своего переключателя. В этом случае
Рс= 1 —(1 — 0,9) (1 — 0,95-0,9)3 = 0,9997.
До сих пор нами рассматривались схемы с резервированием одного
основного элемента. В ракетных и ствольных комплексах, наряду с та-
ким резервированием, применяются схемы, где резервированию подле-
жат отдельные устройства комплексов. В ряде случаев несколько после-
довательных устройств могут быть выполнены по схеме общего резер-
вирования, как это показано на рис. 15.15, а. При таком включении
устройств для отказа функционирования схемы достаточно, чтобы в
каждой последовательной цепи имели место неисправности хотя бы по
одному устройству.
Можно рассмотреть и схему раздельного резервирования, когда
каждое последовательно включенное устройство имеет самостоятельный
резерв (рис. 15.15, б). Отказ такой схемы может наступить при отказе
какого-либо основного и всех резервирующих его устройств.
Очевидно, надежность резервированных устройств зависит от числа
резервированных устройств т (или кратности резервирования).
а)
Рис. 15.15. Структурные схемы общего и раздельного резервирований устройств
Вероятности безотказной работы устройств при использовании схе-
мы общего резервирования могут быть вычислены по формуле
А = 0 L «"1
(15.149)
На рис. 15.16, а сплошными линиями показаны графики зависимо-
сти вероятностей безотказной работы различного числа устройств при
общем резервировании для значений кратности резервирования m = 0, 1,
2 и надежности основного устройства Ру=0,9.
Рис. 15.16. Графики надежности устройств:
а — с общим и раздельным резервированием; б—с последовательным соединением устройств
Из рис. 15.16, а видно, что по мере усложнения системы увеличение
кратности резервирования становится рациональным способом повыше-
ния надежности устройств.
При раздельном резервировании вероятность безотказной работы
может быть получена на основании теоремы умножения, т. е.
п Г т
^разд=П 1-П^
i=l . й=о
(15.150)
На рис. 15.16, а штриховыми линиями нанесены графики значении
надежности устройств при их раздельном резервировании для т=1 и 2
и Ру=0,9 [18]. Как видно, раздельное резервирование является более эф-
фективным при большем числе устройств, нежели общее резервиро-
вание.
Для сравнительной оценки на рис. 15,16, б приведены графики зави-
симостей надежности действия последовательно соединенных устройств
при различных значениях п и Pv.
Расчет надежности установок,
ракетных
и ствольных комплексов
Надежность установок и ракетных и ствольных комплексов опреде-
ляется по структурным схемам и с помощью формул (15.142), (15.143),
(15.148), (15.149), (15.150). Рассмотрим определение надежности неко-
торых условных комплексов. В виде первого примера определим мате-
матические зависимости для оценки надежности оборонительного пушеч-
ного комплекса самолета-бомбардировщика, структурная схема которо-
го показана на рис. 15.17 (схема составлена на основе рис. 1.18).
Стрелок с помощью оптического визира 7 следит за атакующим
истребителем (целью) и передает соответствующие данные на СРП 3.
Радиолокационный дальномер 2 также следит за целью (после ее захва-
та) и выдает данные о дальности до цели в СРП. Счетно-решающий
прибор вырабатывает необходимые поправки и через следящую систе-
му 4 передает их на пушечную башню 5. Из пушек 6 башни, наведенной
в упрежденную точку, производится стрельба на поражение истребите-
ля противника (рис. 15.17, а).
Будем считать, что заданы надежности действия: оптического визи-
ра— Pi; РЛС — Рг; СРП — Р3; следящей системы — Р4; пушечной баш-
ни — Р5; пушки — Рб-
Определим сначала надежность действия Русг и Русц:
PycI_l_U-P1)(l_P2); (15.151)
РУсп = Р3Р4Р5Р6. (15.152)
Пользуясь структурной схемой (см. рис. 15.17, а) и формулами
(15.151) и (15.152), можно определить надежность действия всего комп-
лекса
Рк = [ 1 — (1 — PJ (1 — Р2)] Р3Р4Р5Р5. (15.153)
Перейдем теперь к рассмотрению второго примера, заимствованно-
го из работы [5]. Самолет-истребитель, вооруженный двумя ракетами
класса «воздух—-воздух» наводится на воздушную цель с помощью на-
земной РЛС 1 (рис. 15.17, б). По данным этой радиолокационной стан-
ции наземный СРП 2 наводит истребитель 3 в район цели (этап дальне-
го наведения). Бортовая РЛС 4 захватывает цель и далее следует этап
самонаведения истребителя на цель. Затем независимо друг от друга
производится пуск двух ракет. Каждая из ракет снабжена системой
управления 5, дистанционным взрывателем 6, подрывающем боевую
часть 7. Боевые части ракет обеспечивают поражение цели.
Надежность последовательно соединенных элементов схемы 1, 2, 3
и 4 определяется в виде
Рус1 = Л^^4, (15.154)
а надежность двух параллельно соединенных ракет
РуСп-1-(1-Р5Р6Р7)2. (15.155)
Общая надежность комплекса определяется с помощью формул
(15.154) и (15.155):
Рк = ЛААА[1-(1-ААА)2]- (15.156)
В рассмотренных нами двух случаях повышение надежности комп-
лексов может быть получено резервированием отдельных устройств в
установках (т. е. за счет увеличения значений Л, где 1=1; 2...) или ре-
зервирования отдельных элементов в устройствах.
Рис. 15.17. Структурные схемы комплексов:
а — оборонительного пушечного комплекса самолета-бомбардировщика; б — истребителя-пере-
хватчика ПВО
Аналогичным образом могут быть найдены формулы для. опреде-
ления надежности действия и других комплексов обороны или напа-
дения.
§ 15.6. БОЕВАЯ ЭФФЕКТИВНОСТЬ РАКЕТНЫХ
И СТВОЛЬНЫХ КОМПЛЕКСОВ
Боевая эффективность ракетных и ствольных комплексов опреде-
ляется вероятностью поражения целей, рассчитываемой с помощью фор-
мулы (15.6). По данной формуле вычисляется вероятность поражения
цели в предположении,, что все этапы боевой деятельности комплекса,
предшествующие поражению цели, выполнялись с определенной вероят-
ностью. При этом учитывается надежность действия всех установок
комплекса.
Методику определения боевой эффективности (показателя эффек-
тивности) будем рассматривать на некоторых условных примерах комп-
лексов обороны или нападения. В качестве средств поражения будут
применяться артиллерийские снаряды и управляемые ракеты.
Комплексы обороны
Комплексы обороны предназначены для перехвата и поражения
воздушных целей противника. В соответствии с этим определением в
комплексы обороны входят: истребители-перехватчики, вооруженные
ракетами и пушками, зенитные артиллерийские батареи и ракеты. Сред-
ства обороны самолета-бомбардировщика в виде пушечных установок
и установок радиопротиводействия также относятся к оборонительному
комплексу, но для самолета нападения.
В качестве первого примера рассмотрим оборонительный зенитный
комплекс, состоящий из перехватчика (самолет или зенитная ракета) с
комбинированной системой наведения (на начальном участке полет ЛА
осуществляется по командам с Земли, а далее — с переходом на само-
наведение) [14].
Пользуясь формулой (15.6), выпишем
(15.157)
где Ч^обн — вероятность обнаружения воздушной цели, станцией
обнаружения;
й/захв, — вероятность захвата станцией сопровождения;
Wд.Нав — вероятность реализации этапа дальнего наведения;
И^захв.г.с — вероятность захвата цели головкой самонаведения;
Й^сам — вероятность вывода ЛА системой самонаведения в зону
стрельбы пушечным вооружением или пуска ракеты
класса «воздух — воздух» (или реализация этапа само-
наведения для зенитной ракеты);
Wn — вероятность поражения цели пушечным вооружением
боевой частью ракеты «воздух — воздух» или боевой
частью ракеты «поверхность — воздух»;
А’рлс, — вероятность надежности действия РЛС обнаружения;
А’рлСз—вероятность надежности действия РЛС сопровождения
цели;
Т’д.яав — вероятность надежности действия бортовой аппаратуры
дальнего наведения;
Рг.с— вероятность надежности действия бортовой РЛС голов-
ки самонаведения;
Рр — вероятность надежности действия аппаратуры ракеты в
режиме самонаведения;
Рвзр — вероятность надежности действия дистанционного взры-
вателя и средств подрыва боевой части.
Вероятность обнаружения воздушной цели определяется с помощью
формулы (1.4) или по графику (см. рис. 1.12, а) для дальности до цели
Йц. Вероятность захвата также определяется согласно рис. 1.12, б.
Будем условно считать, что 1Робн=0,999 и W73a£B = 0,99. Для нагляд-
ности изложения этого примера воспользуемся некоторыми условными
числовыми данными. Считаем, что воздушная цель летит на высоте Н=
= 15 км со скоростью 2,5 М. Перехват происходит зенитной ракетой при
нулевом параллаксе. Информация о положении цели и перехватчика
поступает в систему командного наведения с периодом т = 5 с. Ошибку
определения координат цели и перехватчика примем равной: ак = 500 м.
Закон изменения средней скорости перехватчика оср, от угла накло-
на его траектории к поверхности Земли 0 представим в виде графика
(рис. 15.18, а). Здесь же приведены кривые изменения средней перегруз-
ки ракеты пСр и средней скорости сближения перехватчика и цели пСбЛ
в зависимости от угла 0.
Для определения вероятности дальнего наведения воспользуемся
формулой
W =
™ Д.нав
ф*
/ h „ ft ,-r \ / h — h п \
/ Д]________________д j ф* / Да_______________________________ - 1
\ Ч ) \ Ч
(15.158)
где и АЛ2—значения границ дальнего наведения;
Ад — математическое ожидание ошибки дальнего наведения;
члд — средняя квадратическая ошибка дальнего наведения го-
ловкой самонаведения при £> = 5>захв.
ния векторов скоростей ракеты,
цели и сближения
При определении будем счи-
тать, что ракета отрабатывает коман-
ды дальнего наведения без запаздыва-
ния. Примем также, что время движе-
ния ракеты по командам наведения в
упрежденную точку равно времени по-
лета цели от момента старта ракеты до.
точки встречи. В этом случае
АД. = ^Ч, (15.159)
1 есбл
где <вл —• угловая скорость линии визи-
рования;
Оц— дальность до цели.
Угловую скорость линии визирования определим, пользуясь второй
формулой системы (13.63) и обозначениями, показанными на рис. 15.19
v sin т] — sin [л
(15.160)
В соответствии с формулой (15.160) ошибка измерения угловой ско-
рости линии визирования будет
» Be sin ч + 5тто cos -п
8со1 =--------—!--------!--------1
— sin [Л — 5|ЛЧЦ COS U.
D
(15.161)
На основании выражения (15.161) найдем среднюю квадратическую
величину отклонения угловой скорости
оО)д = 1//ГЧ (4 sin2 л cos2 г) -)-2Z?^® sin Ц cost] -|-=4ц sin2(u.-|-
4~44 cos2[i —2ДОцр. sin p. cosp.). (15.162)
По формулам (15.159) и (15.162) получим выражение для опреде-
ления средней квадратической величины промаха
зЛ =—j/"sin2 т] + а^©2 cos2 Ц -|-2<ОР7|т> sin Г) COST]—sin2 р +
л есбл
4-cos(( -]- 2£>г,и®ц sin [X cos |Л. (15.163)
Выразим углы т] и р через угол
vu V
---— cos£ --— cos £
с1г[л = —--------; ctgn = —----------- (15.164)
sin $ sin $
Средние квадратические ошибки определения скоростей, курсовых
углов цели и перехватчика, а также взаимные корреляционные связи
могут быть выражены следующими соотношениями:
(15.165)
Обычно в системах наведения для уменьшения динамической ошиб-
ки, связанной с маневром цели, «запоминают» наибольшее количество
измерений параметров движения цели и перехватчика. Поэтому ограни-
чимся тем случаем, когда оценка указанных величин может быть полу-
чена на основании двух соседних измерений. Имея это в виду и подстав-
ляя выражения (15.164) и соотношения (15.165) в формулу (15.163),
получим
V2Z) - Л2 fl-ф —)(1 — cosijsin £)—— (cos f— sin $), (15.166)
Л г'сблТ V \ № J k
' V
где k= —.
Для вычисления ’РР'д.нав по формуле (15.158) необходимо определить
допустимое значение промаха ракеты в момент захвата цели головкой
самонаведения. В этом случае можно воспользоваться формулой
(15.167)
При расчетах будем считать, что дальность захвата головкой само-
наведения £)захв = 30 км, а ошибка определения угловой скорости линии
визирования оЮл =0,1 град/с. Примем также постоянную времени кон-
тура самонаведения Тс = 0,1 с и допустимое значение промаха ракет
/гпр = 5 м.
При выводе формулы (15.167) было принято, что ускорение дейст-
вует перпендикулярно линии визирования. Пользуясь приведенными
формулами и соответствующими числовыми значениями, были вычисле-
ны значения Ц7д.нав в зависимости от угла 0 (рис. 15.18, б). Из графика
^д.нав (9) видно, что при выбранной схеме перехвата вероятность даль-
него наведения уменьшается при приближении рубежа перехвата к стар-
товой позиции.
Для повышения ТГя.нав целесообразно в систему управления ракетой
вводить экстраполятор, сглаживающий измерения (см. гл. XIV).
Примем для рассматриваемых условий наведения lVjT„aB = 0,9. Для
определения вероятности самонаведения можно воспользоваться форму-
лой (15.8):
пу ______ ф* /^1 ^сам\ ф* / ^2 ^сам
сам w I I I
\
/4сам 4 сам
(15.168)
где йсам — математическое ожидание допустимого промаха, при кото-
ром обеспечивается поражение цели;
h\ и A2 — заданные границы динамических ошибок самонаведения
( + 5 м и —5 м);
Злсам—’Среднее квадратическое значение величины промаха, вы-
званного ослеплением головки самонаведения.
Величину о^сам определим по формуле (13.326), представленной в
виде
= -^ащ. (15.169)
сам л v
VOTH
При оценочных расчетах можно считать, что
Пос.=ЗГсг^н. (15.170)
Подставив выражение (15.170) в формулу (15.169), получим
ОлсаМ = 97'сг’°™3“л-
Для принятых нами значений
0;г =9-0,Г2-400 0,1 = 3,6 м.
'сам ’ ’ ’
Тогда по формуле (15.168) и таблицам (см. приложение 1) при /гСам = 0,
Й1=Л2, получим 1^сам=0,85.
Максимальное значение промаха
Лтах = 3-3,6 + 5= 15,8 м.
Если считать, что вес взрывчатого вещества боевой части ракеты
Gbb=60 кг, то при ее действии по легкому истребителю вероятность его
поражения для/гтах= 15,8 м будет 1 (см. рис. 15.12).
Примем, что вероятность захвата головкой самонаведения цели
^Гзахв = 0!95.
Будем также условно считать, что установки комплекса имеют сле-
дующие характеристики надежности действия:
Ррлс, = Ррлсг = 0,999; Рл.нав=0,98; Рг.с = 0,998; Рр = 0,96; Рв3р^1.
Тогда по формуле (15.157) определим показатель боевой эффектив-
ности комплекса перехвата:
£’к=0,999-0,99-0,9-0,95-0,85-1-0,999-0,999-0,98-0,998-0,96-1 =
= 0,66. (15.171)
Пример 15.10. Оценить эффективность стрельбы из подвижной пушечной установки
бомбардировщика по атакующему истребителю-перехватчику. Будем считать, что кор-
мовая пушечная установка имеет одну пушку калибра 30 мм. По атакующему истре-
бителю сделано 50 выстрелов на средней дальности 1000 м. Суммарное рассеивание
ffx = 5,82 тыс.; оЬг = 3,76 тыс.; со = 5.
В рассматриваемом случае вероятность поражения IFH = O,448 (см.'пример 15.6).
Эффективность перехвата оценим по формуле
+ = ^Захв'^сопр^'п-Ррлс^’срп^к.у , (15.172)
где И7зах — вероятность захвата цели радиолокатором бомбардировщика;
И7СОпр — вероятность сопровождения цели;
Wn — вероятность поражения цели;
Т’рлс — надежность действия РЛС;
-РСРП—надежность действия СРП;
Рк.у —-надежность действия кормовой установки и пушки.
Вероятность захвата цели радиолокационным дальномером определяется по гра-
фикам ТГэахв=f (Ра), аналогичным по своему виду графикам, показанным на
рис. 1.12, б. В рассматриваемом нами примере будем считать, что = 0,98.
Вероятность сопровождения цели при стрельбе определяется харак-
теристиками процесса слежения прицелом за целью, влиянием силы от-
дачи пушки, трением в механических передачах прицела и башни, диа-
пазонами угловых скоростей и ускорений вращения оружия, мощностью
привода и т. п.
На рис. 15.20 (кривая 2) показана одна из возможных реализаций
процесса слежения за целью. Здесь (кривые 1 и 4) выделена зона до-
пустимых углов рассогласования (—ео, ер). Из графиков рис. 15.20 вид-
но, что существуют такие критические значения углов рассогласования,
при которых происходит срыв процесса слежения (выделены на рисун-
ке штриховкой).
Рис. 15.20. Одна из. возможных реализаций процесса слежения
прицелом бомбардировщика при стрельбе по атакующему истре-
бителю
Если считать по кривой 3, что to является началом процесса слеже-
ния, то время слежения представляет собой интегральный закон рас-
пределения случайной величины t\
= (15.173)
Величину F'(f)=f(t) назовем плотностью распределения процесса
слежения. Следовательно, есть вероятность слежения за целью
на участке времени от t до t + dt.
Рассмотрим функцию £(f), связанную с f(t) и F(t) следующим со-
отношением:
(I5J74)
Тогда l(t)dt — есть условная вероятность слежения за целью на участке
dt. Действительно
f р(В | Л), (15.175)
где р(А) —вероятность того, что за целью не было слежения;
р(В|Л) —условная вероятность, что за целью было слежение на
участке от t до t + dt при условии, что до момента t за
целью не следили.
Выражение (15.175) перепишем в виде
= | А), (15.176)
откуда
; р(В I А)= /(0- -dt (15.177)
. 1 1 1 — F(t)
ИЛИ
р(В | (15.178)
Для определения вероятности слежения за целью воспользуемся
тем, что /(/)=-[l-^W, (15.179)
тогда , = (15.180) v 1 — F(t) 1— F(t)
Интегрируя выражение (15.180) в пределах от to до tK, получим
- f
1-F(t)=e ‘°. . (15.181)
Здесь под tK понимается время окончания процесса слежения за
атакующим истребителем.
Вероятность сопровождения цели при стрельбе из кормовой башни
бомбардировщика по истребителю определим по формуле (15.181) в
виде
'к
-J
И7С0Пр=1-е ‘° . (15.182)
Зная законы измерения F'(t) и F(t) (которые определяются из
рис. 15.20), по формуле (15.182) можно определить IFconp- Найдем
U7C0Itp при нормальном законе распределения. В этом случае:
F'(/)=-----; (15.183)
~\F2jx
(т—т(У
1 г--------А—
^\е * dx- (15.184)
К 2л £
1Гсопр = Ф* f ~ - Ф* (-1 J?) . (15.185)
\ °t ] \ °t )
Для иллюстрации рассматриваемого вопроса примем И^сопр = 0,95. Вероятности
надежности действия будем считать следующими: Ррлс =0,999; РСРП=0,999; Рк.у = 0,98.
По формуле (15.172) определим показатель боевой эффективности оборонитель-
ного комплекса бомбардировщика
£1{ = 0,98.0,95 0,448-0,999-0, 999-0,999 = 0,416.
Пример 15.11. Определить эффективность стрельбы из четырехпушечной батареи
малокалиберной зенитной артиллерии по низковысотному самолету.
Эффективность поражения низковыаотного самолета будем вычислять по фор-
муле
£к = ^обн^захв^сопР^п^РСЛ д Т’рлс 7’СРПРб, (15.186)
ООН СОпР 4 '
где Я%6н, Ч^захв—вероятности обнаружения и захвата воздушной цели;
IP'conp — вероятность сопровождения воздушной цели;
Ррлс,;бн’
Wn —вероятность поражения цели;
Ррлс — вероятности надежности действия РЛС в режимах обнаруже-
сопР ния и захвата цели;
Рсрп — надежность действия СРП;
Рб — надежность действия батареи.
Пусть 1Есбн = 0,999; ГГзахв = 0,99; ТГсопр = 095;
Т7П = 0,85; ^рлсо6н = ^РЛСсопр = Т’срп ~~ 0,999;
Рб = 0,9б.
Тогда
£к = 0,999-0,99-0,95-0,85-0,9993-0., 96 = 0,816.
Комплексы нападения;
Комплексы нападения предназначены для поражения наземных и
морских малоразмерных или площадных целей с воздуха. В комплекс
нападения входят многоцелевые истребители, вооружаемые ракетами,
пушками, бомбами, и бомбардировщики, вооружаемые ракетами и бом-
бами |[Г4]. Эффективности комплексов'нападения оцениваются по сле-
дующим выражениям, полученным с помощью формулы (15.6):
для самолетов с ракетами
^к = ^ов>к.у1Гйа>р1ГйРрлсРс.мРг.сРрРвз₽. (-15; 1.87)
где U7o6h, И7к у — вероятности обнаружения наземной (морской) це-
ли РЛС и выдачи ее координат в прицельное
: устройство; , у
^нав — вероятность наведения самолета;
— вероятность вывода ракеты в район цели;
IV „— вероятность поражения цели;
Ррлс, Лм — надежности действия РЛС и системы управления
самолетом;
Ргс, Рвзр — надежности действия головки самонаведения, ра-
кеты и взрывателя; ; ;
для самолетов с пушками
£\ = ^G6HU7K.ylV;anriIPp.ncPCMP,,pPn, (15.188)
где Рпр, Ра — надежности действия прицела и пушки.
Рассмотрим методы обнаружения малоразмерных и площадных на-
земных и морских целей. "
Перед атакой многоцелевыми истребителями и бомбардировщика-
ми малоразмерных целей производится их обнаружение в некотором
районе Sp. Если считать, что цель расположена в любой точке района
Sp, тогда условная вероятность ее обнаружения в районе 5’р к моменту
t + dt будет определяться зависимостью
^otH=f СРобнЖ уУ-?(х, y}dxdydt, (15.189)
V
где робн — условная вероятность обнаружения цели;
ф(х, у)—условная плотность вероятности обзора местности;
f (x, у)—условная точность распределения координат цели в мо-
мент t, если цель не была обнаружена для этого момента
времени;
Ф(х, у) — площади, осматриваемые наблюдателем или РЛС в еди-
ницу времени.
Обозначим
Y'Xi=J СРовнЧ*, «/)№, #)?(-*, y)dxdy,
sp
тогда выражение (15.189) примет вид
^обн=у(*ж
(15.190)
(15.191)
Из сравнения выражений (15.178) и (15.191) видно, что вероятность
обнаружения малоразмерной цели можно представить в виде
U7o6h=1 —е ° . (15.192)
Если считать, что цель расположена в районе Зр с равной вероят-
ностью, то
'Н-Х, y)=f(x, у)=~ .
Имея это в виду, формула (15.190) примет вид
f y)dxdy. (15.193)
s₽ lspJ
При <p(x, г/)=пОбз — постоянной скорости обзора, из выражения
(15.193) получим
. (15.194)
Гб:.,? 5Р
Подставим соотношение (15.194) в выражение (15.192). Тогда
ЛбТ'обз'н
lFofH=l-e 5₽ , (15.195)
где tH — время наблюдения (обзора).
Пример 15.12. Определить эффективность комплекса нападения на малоразмерную
наземную цель при стрельбе из пушки, если:
1П„Сн = 0,9; 1Гк.у=0,9; 1Гнав = 0,95; Дрлс = 0,999; Рсм = 0,99;
Рп!, .-= 0,99; Рп = 0,98.
Вычислим вероятность обнаружения малоразмерной наземной цели в районе диа-
метром 20 км при рОбн=0,95, с/Оба = 10,8-104 м/с на дальности .0=120 км при времени на-
блюдения /==400 с.
Для этих значений найдем:
2 0,65-10,8.ЮМОР
Sp= ——-------= 314 км2; 1Гобн= 1-е 314-10= =0(7>
Подставив соответствующие значения в формулу (15.189), получим
Ек = 0,9-0,9-0,950-0,7-0,999-0,99-0,99-0,96 = 0,679.
§ 15.7. БОЕВАЯ ЭФФЕКТИВНОСТЬ ГРУППИРОВОК РАКЕТНЫХ
И СТВОЛЬНЫХ КОМПЛЕКСОВ
Для повышения эффективности боевого применения комплексов
обычно их объединяют в группировки [2, 7, 8, 9, 13, 16], в которые мо-
гут входить как однотипные средства нападения или защиты, так и раз-
личные. Например, средства защиты участка фронта от воздушного
нападения обычно состоят из нескольких стартовых позиций с однотип-
ными ракетами, объединенными в подразделение ПВО. Можно предста-
вить и группировку комплексов ПВО, состоящую из нескольких старто-
вых позиций зенитных ракет, батарей МЗА и аэродромов с истребителя-
ми-перехватчиками '(см. рис. 1.1).
В первом случае комплекс защиты обеспечивает поражение целей
на некоторых рубежах, определяемых возможностями ракет. При по-
ражении нескольких стартовых позиций ракет боеспособность средств
обороны значительно снижается. Кроме того, применение противником
мощных средств радиопротиводействия может существенным образом
уменьшить показатель эффективности обороняемого участка.
Во втором случае рубежи перехвата относительно линии фронта
можно увеличить за счет применения истребителей-перехватчиков или,
наоборот, уменьшить за счет МЗА. В этом случае противнику обеспе-
чить поражение средств ПВО значительно труднее. Поэтому боеспособ-
ность средств обороны повышается. Применение противником средств
радиопротиводействия во втором случае мало эффективно, так как они
не оказывают действия на МЗА с оптическими визирами и истребители-
перехватчики с пушечным воооружением.
При применении однотипных средств нападения или защиты возни-
кает задача определения состава боевых средств, способных поразить
заданные цели. Для поражения одиночной цели независимыми пусками
ракет (выстрелами или вылетами истребителей-перехватчиков) показа-
тель эффективности комплекса может быть определен с помощью сле-
дующего выражения:
Ек («)=1 -(1 -£к)л, (15.196)
Здесь £к — показатель эффективности при пуске одной ракеты.
Будем считать, что заданный показатель боевой эффективности
комплекса Ек*(«)- Тогда, подставив его в выражение (15.196), получим
£*(«)= 1-(1-£кД.
Из данного выражения можно найти потребный состав средств во-
оружения (количество ракет п, обеспечивающее заданную боевую эф-
фективность) . Для этого перепишем его в виде
1 -£1(д)= П— ЕкЕ
ig Г1— /Д(«)1
и получим п = - [ J. (15.197)
При стрельбе по площадной цели п обобщенными выстрелами сред-
няя доля поражения возрастает:
(15.198)
где М — средняя доля поражения при одном выстреле.
Из выражения (15.198) найдем
lg,17'”,(")l . (15.199)
lg(l —Л1) v ’
где М*(п) —заданная величина ущерба площадной цели.
Пример 15.13. Определить количество зенитных ракет, необходимых для пораже-
ния самолета противника с £„*=0,9, если одна ракета поражает цель с £„=0,6[2].
Применив формулу (15.197), найдем
т. е. для выполнения задачи необходимо иметь три ракеты.
Пример 15.14. Определить число многоцелевых истребителей, необходимых для по-
ражения 80% площади цели, если один многоцелевой истребитель средствами вооруже-
ния поражает 30% ее площади.
По формуле (15.197) найдем
1К(1 - 0,8) л г
п =----------^4,5.
1g (1-0,3)
т. е. для выполнения задачи необходимо пять многоцелевых истребителей.
При соединении в единую группировку различных по своему соста-
. ву средств вооружения боевая эффективность группировки определяется
с помощью теорем сложения и умножения вероятностей.
Рассмотрим определение показателя боевой эффективности груп-
пировки комплексов (см. рис. 1.1).
Будем считать, что в группировку ПВО входят: п.МЗА батарей МЗЛ;
лзур стартовых позиций зенитных ракет и пип истребителей-пере-
хватчиков. Все эти средства используются для перехвата одной воздуш-
ной цели противника [14].
На дальних рубежах перехвата воздушная цель атакуется истреби-
телями ПВО. Вероятность ее уничтожения можно оценить по формуле
^Hn^l-fl-fun,)"™, (15.200)
где /Тип, —вероятность перехвата воздушной цели противника одним
истребителем-перехватчиком.
На средних рубежах перехвата используются зенитные управляе-
мые ракеты. Вероятность уничтожения цели в этом случае можно опре-
делить по формуле
* /?:йр I- il- W:,'P. (15.201)
где £3ур,— вероятность перехвата воздушной цели одной зенитной ра-
кетой.
На ближних рубежах перехвата по цели ведут стрельбу батареи
МЗЛ. В этом случае вероятность уничтожения цели равна
£мза==1-(1-£мза1)''мза( (15.202)
где £мза, —вероятность уничтожения цели одной батареей МЗА.
Вероятность выполнения боевого задания нападающей воздушной
целью (или преодоление ею средств ПВО) можно представить в виде
Лпво —(1 — £ип)(1 — £"зур)(1 —£мза)- (15.203)
Эффективность противодействующей группировки комплекса ПВО
определяется по следующему выражению:
£гк=1—£"пво- (15.204)
Большое количество средств перехвата, сосредоточенных на полосе
фронта, требует обеспечение определенного уровня боевой готовности
£б.г- Поэтому окончательную оценку эффективности группировки комп-
лексов следует определять по формуле
£'гк= 1 — fnBofe.r. (15.205)
Боевую готовность средств перехвата можно определить по форму-
ле (1.2), располагая средними временами нахождения всех средств
ПВО в боевом и небоевом состояниях.
Определим показатель боевой эффективности группировки комплек-
са нападения при атаке наземной цели (см. рис. 1.3) [14]. В этом слу-
чае вероятность сбития истребителя-перехватчика огнем самолета при-
крытия определяется выражением
^ип - W, зал.пр + (1 - зал.ир) (1 - М73ал. ип) W2 за;,пр> (15.206)
гд'е ^1зал.пр> ^2 зал.пр—вероятности поражения истребителя-перехватчи-
ка первым и вторым залпами прикрытия соот-
ветственно;
М^мл.ип — вероятность поражения самолета прикрытия от-
ветным залпом истребителя-перехватчика.
Вероятность поражения истребителя-перехватчика самолетом при:
крытия будет
Гне с6 = 1 - ^сб. ип = ( 1 - Г! зал.пр) [ 1 - ( 1 - зал. Ип) ^2 зал.пр]- (15-207)
Вероятность проникновения самолета нападения к цели после пре-
одоления ПВО можно определить по формуле (15.203), учитывая, что
£'иП = М^не сб. ИпП^пер. ИП- (15.208)
Здесь lFnep.ип — вероятность перехвата истребителем-перехватчи-
ком самолета нападения с расходованием оставшегося боекомплекта.
Имея в виду эти зависимости, найдем показатель эффективности
группировки комплекса нападения, атакующего наземную цель:
£’гк = ^'б.г^пвоИ?/обн> (15.209)
где И70бн — вероятность обнаружения цели самолетом нападения, когда
атакует цель только один самолет из группы.
В свою очередь вероятность обнаружения зависит от вида приме-
няемых средств, т. е.
ГоСн- 1 _ (1- U7cnT)(l - М7₽лс)(1 - UW (15.210)
где W7onT> U/рлс, И7ик—соответственно вероятности обнаружения це-
ли оптическими, радиолокационными и инфракрасными средствами са-
молета нападения.
Пример 15.15. Определить вероятность выполнения боевого задания многоцелевым
истребителем по наземной цели в' условиях преодоления группировки комплекса ПВО
противника. Будем считать, что ПВО противника состоит из шести 20-мм скорострель-
ных пушек и двух стартовых позиций ракет (с каждой стартовой позиции можно
пустить по цели только одну ракету). Кроме того, примем, что многоцелевой истреби-
тель при его полете может быть атакован двумя истребителями-перехватчиками, воору-
женными ракетами и пушками.
Критерий эффективности в этом случае будет
£ = ^ПВО^б г^оба^порТ’пВО'^о'ш-Рпор , (15.211)
где £пво —вероятность преодоления многоцелевым истребителем средств ПВО;
£б.г — боевая готовность средств перехвата;
Гоби — вероятность обнаружения наземной цели;
РПВО— надежность действия системы ПВО;
Роен — надежность действия бортовой аппаратуры обнаружения; наземной цели;
Рпор — надежность действия ракеты класса «воздух — поверхность».
При расчетах будем считать, что:
^мзд, = 0’05; £‘зур1 = 0,3; £ИП1 — 0,15.
Тогда по формулам (15.200)—(15.202) найдем:
£ип=г1-(1 — 0,15)2 = 0,28; -
Взур = 1-(1-0,3)2 = 0,51;
£мза = 1 - (1 ~ 0,05)6 = 0,27.
Вероятность преодоления ПВО определим по формуле (15.203)
£пво = С1 — 0,28) (1 — 0,51) (1 — 0,271) = 0,25.
Приняв W"o6H = 0,95; ТГпЭр = 0,9; РПВО=0,99; Роб„ —0,95; по формуле (15.211)
найдем
£ = 0,26-0,95-0,9-0,99-0,95-0,98 = 0,2.
Из этого примера видно, что вероятность успешного выполнения боевого задания
многоцелевым истребителем невелика, так как группировка комплексов ПВО обладает
высокой эффективностью. Для повышения эффективности многоцелевого истребителя
необходимо частичное подавление обороны ПВО другими средствами вооружения (см.
§ 15.8).
§ 15.8. ВЛИЯНИЕ ПРОТИВОДЕЙСТВИЯ ПРОТИВНИКА
И ЭКОНОМИЧЕСКИХ ЗАТРАТ НА ОБОБЩЕННУЮ ОЦЕНКУ
БОЕВОЙ ЭФФЕКТИВНОСТИ КОМПЛЕКСОВ
Противодействие противника может быть двух видов — активное и
пассивное. К активным средствам противодействия будем относить ма-
невр цели, применение средств вооружения для подавления средств на-
падения или обороны, средства радиопротиводействия (передатчики по-
мех, тепло-радиоловушки) и т. п. К пассивным средствам противодейст-
вия можно отнести дипольные помехи, сбрасываемые с самолетов,
применение поглощающих покрытий для самолетов нападения, средств
маскировки для зенитных батарей, стартовых позиций ЗУР и т. д.
Противодействие противника — один из основных факторов, суще-
ственно влияющих на эффективность выполнения боевого задания на-
падающей стороной. От учета этого фактора могут изменяться не толь-
ко тактика применения средств нападения (обороны) и состав комплек-
сов в группе, но и характеристики средств вооружения.
Оценки влияния средств противодействия проиллюстрируем на зе-
нитном комплексе обороны от воздушного нападения [см. формулу
(15.157)].
В случае применения противником I ложных целей в виде «лову-
шек» снижается эффективность захвата истинной цели головкой само-
наведения, т. е.
тг
^захва=-^. (15.212)
Тогда формула (15.157) примет вид
5К = ^0бн^захвЯд.нав ^са^п^РЛС^РЛсЛ.нав^.е^взр- (15.213)
Если противник применяет средства вооружения на самолете для
уничтожения перехватчика или зенитной ракеты ПВО, то вероятность
поражения воздушной цели уменьшается:
^пор-=^иор(1-^уничг), (15.214)
где И7уШ1ЧТ — вероятность уничтожения перехватчика или зенитной раке-
ты ПВО.
Имея это в виду, формулу (15.157) следует переписать в виде
^к=1Гобни7ЗЗХВ1Р7я.нав1Гсам117п (1 -Г^/^РрлсА.нав X
ХЛ.с^взр. (15.215)
Рациональное применение средств радиопротиводействия может су-
щественным образом повысить эффективность комплекса нападения.
На рис. 15.21, а показано изменение вероятности поражения
бомбардировщика с некоторой гипотетической системой оборонительно-
го вооружения в зависимости от веса аппаратуры радиопомех GIIOM,
установленных на его борту [19].
Так как полезная нагрузка самолета ограничена, то возникает за-
дача рационального ее распределения между бомбовой нагрузкой и ап-
паратурой радиопомех. С одной стороны, важно причинить противнику
наибольший ущерб (т. е. увеличить вес бомбовой нагрузки Сб0М), с дру-
гой — необходимо с наибольшей вероятностью поставить этот груз к це-
ли. Оптимальные соотношения в решении этой задачи можно характе-
ризовать некоторым параметрам
Q = (l— (15.216)
где М — процент общего разрушения цели, причиненный бомбардиров-
щиком.
На рис. 15.21, б приведен график зависимости параметра Q от от-
носительного веса полезной нагрузки
. (15.217)
б6 :шб
Расчет графика сделан для максимальной полезной нагрузки СПОл =
= 4500 кг. Из рис. 15.21, б видно, что при минимальном значении Q =
= 0,8 будем иметь Опом/Сбомб = 0,55 или GII(,4 = 2750 кг. В этом случае ве-
роятность поражения бомбардировщика, вооруженного аппаратурой ра-
диопомех, условным комплексом ПВО составит IFn=0,057.
Рис. 15.21. Влияние веса аппаратуры радиопомех и бомбовой нагрузки бомбардиров-
щика на эффективность его поражения средствами ПВО
Пример 15.16. Оценить эффективность перехвата воздушной цели комплексом ПВО
в условиях активного противодействия:
а) противник применяет пять ложных целей (1 = 5);
б) противник применяет подвижную пушечную установку на самолете, обеспечи-
вающую уничтожение средств перехвата с вероятностью 1КунИчт = 0,2.
По формуле (16.213) и данным, приведенным в выражении (15.171); найдем:
. 0,850
£к = 0.999-0,99-0,99-0,95- - 1-0,999-0,999-0,98-0,998-0,96-1 =0,148.
D
Как видно, показатель боевой эффективности комплекса перехвата уменьшается
в 4,5 раза.
В случае применения подвижной пушечной установки для поражения ракет напа-
дения эффективность перехвата определяется по формуле (15.215). После подстановки
в нее соответствующих значений получим
£к = 0,999-0,99-0,9-0,95-0,85(1 — 0,2) 0,999-0,999-0,98-0,998-0,96-1 = 0,539-
В этом случае показатель боевой эффективности комплекса уменьшается в 1-,2 раза.
Определение показателя боевой эффективности
при огневом противодействии
Влияние активного противодействия противника в виде ответной
стрельбы можно учитывать на основе применения теории игр (т дуэль-
ных операций). Будем считать, что в дуэльном бою сталкиваются две
боевых стороны: А — пушка; В — танк, вооруженный пушкой.
Сделаем некоторые допущения: моменты выстрелов каждой из сто-
рон известны; каждая из сторон может провести неограниченное число
выстрелов; снаряды достигают цель мгновенно. В указанных условиях
найдем вероятность поражения пушки Wa.A и танка ТГп.в в двух вариан-
тах боя:
1) первой открывает огонь пушка;
2) первым открывает огонь танк.
Для первого случая имеем pi, р2, рп — вероятности поражения
танка при стрельбе из пушки, соответственно первым, вторым и т. д.
снарядами; qt, q2, .... qn — вероятности поражения танка, соответственно
первым, вторым и т. д. снарядами.
Для первого варианта боя вероятности поражения будут опреде-
ляться выражениями:
танка
+ + (15.218)
пушки
^ц.д = (1 - Pi) <714- (1 - pj (1 - р2)(1 - qj ?2 + (1 - Pi)(l - р2) X
X (1 - А)(1 - <72М + • • •• (15.219)
Для второго варианта боя вероятности поражения будут опреде-
ляться выражениями:
пушки
^п.л=^1+(1-^1)(1-а)^+(1 -?i)(1-^)(1-л)(1 -а>)<7з+ • •
(15.220)
танка
Гп.в=(1 -<74 а + (1- ?i)(1 -?2)(1 — А) Аг +
+ (1-<71)(1-^)(1-^)(1-а)/?3+.... (15.221)
Будем считать, что:
Pl = P2= • • • = Рг=Р\
qx = q2--=.. ,=qn=q.
В этом случае выражение (15.218) примет вид суммы членов гео-
метрической прогрессии, т. е.
^п.в = /?4-(1 - р) (1 -'?)/’ + (! -д)2(1 ~^)р +
...+(l-p)"-i(l-e-1/’
или
WK.B=--------------------------.
1 — (1 —р)(1--9) P + q — pq
По аналогии получим:
Wn.A=^-~^ .. ; ‘
p + q — pq
-----------------q_--------------- .
p + q— pq
п?* _ (1 —9)P
w n.B----------.
p + q—pq
_ Найдем выражения для 1Гп.в при ограниченном числе выстрелов.
Для этого умножим и разделим выражение (15.222) на
(15.222)
(15.223)
(15.224)
(15.225)
(15.226)
1—(1—р)(1—q), тогда получим
Г„.в = р [ 1 - (1 - р) (1 - q) + (1 + pf (1 - q? + • + (1 - РУ-1 (1 - <7)Л-Ч=
4 (1 - PT' (1 ~ <4 + • • + (1 - Р'Г-1 (1 - 9)”-1]}, (15-227)
откуда
Wn.B = p (15.228)
1 — (1— P)(l — ?)
Аналогично найдем
ГП.А=(1 -р) q -1-4-.^ 4-^. ; (15.229)
1-(1 — />)(! — ?)
W:..A = (l-q)p 1r(1/rP)"(?~9f • (15-230)
1 —(1—д)(1 —9)
При /1 = оо из формул (15.228) — (15.231) получим формулы
(15.223) — (15.226).
Определение показателя эффективности при случайных
моментах выстрелов и неравновозможных моментах открытия огня
Расчеты вероятностей по схеме фиксированных моментов выстрелов
достаточно просты, однако определение моментов выстрелов для реаль-
ного боя представляет определенные трудности вследствие того, что в
ряде случаев моменты выстрелов могут быть случайными и точно зара-
нее не могут быть определены.
Допустим, что стороны А и В производят выстрелы, удовлетворяю-
щие следующим условиям:
а) число выстрелов за промежуток времени t, t+At каждой из сто-
рон не зависит от времени t, а зависит только от величины At;
б) моменты выстрелов независимы друг от друга;
в) вероятность одновременного производства двух и более выстре-
лов за элементарный промежуток времени At пренебрежительно мала
по сравнению с вероятностью производства одного выстрела.
Рассмотрим при этих допущениях стрельбу очередью в течение ма-
лого промежутка времени At. К моменту t + At можем иметь следующие
события:
— сторона А произведет выстрел и уничтожит сторону В;
— сторона В произведет выстрел и уничтожит сторону А;
— сторона А произведет выстрел, но не уничтожит сторону В;
— сторона В произведет выстрел, но не уничтожит сторону А;
— ни одна из сторон не произведет выстрел.
Найдем вероятности этих событий.
Вероятность события Cj равна произведению вероятностей двух
событий:
1) события, состоящего в том, что за промежуток времени произой-
дет хотя бы один выстрел;
2) события поражения цели при условии, что хотя бы один выстрел
произошел.
(15.233)
Вероятность первого события в соответствии с законом Пуассона
равна
1- (15.232)
где А, — плотность потока выстрелов (скорострельность).
Вероятность второго события — р. Поэтому вероятность события С(
равна
= — е-ш).
Разложим в ряд величину е~ши, ограничиваясь двумя первыми чле-
нами разложения (что справедливо при малых Л/), получим
/г(С1)=рХдЛ
Тем же путем найдем:
p{C2) = q\Lt-,
/?(С3) = (1 —р)
р(С4) = (1 - q) Ад/; |
р(С5)=1- 2ХдЛ J
Отметим, что
JP(C1) + /J(C2)+...+p(C5)=1.
Событие поражения стороны В к моменту t+M, может наступить
либо на начальном участке времени А/, либо за оставшееся время t,
поэтому
Рв (/ + Д/1) = рв (Д/) + {[ 1 — (&9] [ 1 — Ра (Д*)1} Рв (О , (15.234)
где в соответствии с выражениями (15.233) имеем:
Р^М', рА{^ = Як^-
Или, учитывая, что рв(А/)рА(А/) =0, получим
Рв(i + Д^) = Р'--^ + [1 — pW —#Хд/] pR(f). (15.235)
После преобразования и перехода к пределу Д/->0, получим
— (15.236)
dt
По аналогии определим
^.=?Х-Х(р + ?)рл(/). (15.237)
„ dp dp
При —— =———О
dt dt
рл —Um рA(t) получим:
для постоянных значений /?s=lini рв (/) и
£->оо
Рв = —!7—
р + q
Рл = —^—
p+q
(15.238)
где Рв + Р^ 1-
При различной скорострельности сторон А и В таким же образом
можно показать, что:
+ ^q
где Л.1 и ?v2 — скорострельность сторон А и В.
Для оценки результата боя двух сторон нри неравновозможных мо-
ментах открытия огня будем считать, что если одна из участвующих в
бою сторон А или В находится в обороне, то она имеет перед наступаю-
щей стороной преимущество в возможности первой произвести выстрел.
В этом смысле пушка в обороне имеет преимущество перед танком.
Пусть вероятность того, что сторона А первый произведет выстрел,
равна R. Тогда, очевидно, вероятность того, что сторона В первой про-
изведет выстрел равна 1—R. Поэтому по формуле полной вероятности,
исходя из выражений (15.223) — (15.226), получим вероятности пора-
жения сторон в дуэльном бою в виде:
Рл = (1-/?)Гд4-/№л J
или
д д
где & = p-^q — pq.
Аналогично могут быть выведены формулы для расчета рА и рв
при заданном R в случае, когда const и g=0=const, а также при раз-
ной скорострельности (плотности огня) участвующих в бою сторон.
(15.240)
(15.241)
Экономические затраты и обобщенный критерий эффективности
группировок комплексов
Экономические затраты значительно влияют на оценку ракетных и
ствольных комплексов. Поэтому в качестве одного из основных оценоч-
ных показателей в последнее время стали принимать стоимость комп-
лексов. При этом необходимо учитывать суммарные затраты: стоимость
ракет и снарядов; амортизацию пусковых установок или самолетов-но-
сителей, РЛС обнаружения и сопровождения, СРП, командных пунктов;
расходы на эксплуатацию комплексов и обслуживающий их личный
состав.
В общем случае стоимость группировки комплексов можно оценить
с помощью следующей зависимости [14]:
С’гк — N
(1+gj ^ад+с,
т / т \ |
+ ОГ.ВСГ.Л+ 2°я.э.о.Сг+ Gr.X + 2G—I GKCKUco6, (15.242)
Z-1 \ i=l / J
де Gr в — вес горючего и вооружения ЛА;
Сд.э.о. —вес двигательных установок, экипажа и оборудования;
GK — относительный вес конструкции ЛА;
q — относительный вес ступеней носителя на 1 кг веса ЛА;
— стоимость 1 кг ступени носителя и элементов оборудова-
ния ЛА;
Сс п — стоимость стартовой позиции (аэродрома), приходящаяся
на 1 кг стартового веса ЛА;
К — количество силовых установок на ЛА;
Сг в — стоимость 1 кг горючего и вооружения ЛА;
Ск — стоимость 1 кг конструкции ЛА;
jV — количество комплексов в группировке;
т—количество устройств, на которые делятся двигатели и обо-
рудования;
Соб — стоимость средств обеспечения группировки комплексов
(ангары, подъездные пути, контрольное оборудование
и т. п.);
£ — количество устройств, на которые делятся ступени ракет
или носителей.
Стоимость группировок комплексов подразделяется на стоимости
отдельных комплексов и установок. При таком разделении удобнее ана-
лизировать тенденции изменения стоимости группировок.
Стоимость установок комплексов в зависимости от их веса можно
аппроксимировать прямыми линиями. На рис. 15.22, а, б и в показаны
зависимости стоимости (в условных единицах): конструкции ЛА — Cv,
двигателя — Сд, оборудования — СОб и вооружения — Св, построенные на
основании обработки данных о весах и стоимостях различных устройств
американской военной техники [14]. Штриховыми линиями проведены
аппроксимирующие зависимости.
Приблизительные линейные зависимости стоимости стартовых пози-
ций от веса стартующих с них ЛА распространяются также на старто-
вые позиции и аэродромы. Это объясняется тем,' что с увеличением ве-
сов ЛА необходимы более мощные сооружения, обеспечивающие их без-
опасную и надежную эксплуатацию.
Следует отметить, что стоимость установок и самого комплекса су-
щественно зависит от массовости производства. На рис. 15.23 показан
характер зависимости относительной стоимости ЛА от массовости про-
изводства [14].
Сравнительный анализ боевой эффективности группировки комплек-
са и стоимости позволяет получить график Сгк =/(£гк) (рис. 15.24).
Из этого графика видно, что стремление увеличить эффективность каж-
дого комплекса может привести к большой стоимости создания груп-
Рис. 15.23. Графики зависимости от- Рис. 15.24. Графики зависимости боевой
носителыюй стоимости ЛА от массо- эффективности комплекса от его стоимости
вости его производства
пировки. Анализ выражения (15.242) показывает, что минимум функции
стоимости группировки определяется (в частности для ракетных комп-
лексов), в основном, минимумом веса ЛА и величины СОб- Это следует из
того, что остальные величины при заданной схеме решения боевой за-
дачи в данном составе оборудования меняются сравнительно мало. Па-
раметры оборудования можно_варьировать в диапазоне допустимых зна-
чений, но удельные стоимости Сод; остаются почти неизменными.
Величина Сн; определяется с учетом оптимального разбиения обще-
го веса ступеней ракеты или самолета на веса отдельных устройств и
сохраняется при этом практически неизменной. Также мало изменяется
в процессе минимизации стоимости функция Ск.
В этой главе было показано, что тактико-технические характеристи-
ки комплексов оказывают большое влияние на их боевую эффективность
(критерий эффективности). Соответственно с этим изменяется и их стои-
мость (критерий стоимости)—см. рис. 15.24. Поэтому для определения
оптимальных характеристик комплексов и их группировок необходимо
объединить эти критерии в один обобщенный критерий эффективности,
который представляет собой некоторую условную боевую эффективность
группировки комплексов, приходящуюся на единицу стоимости [6]. В ка-
честве одного из возможных обобщений воспользуемся следующим [12]:
FrK = -|^- , (15.243)
^ГК
где FfK — обобщенный критерий эффективности группировки комплек-
сов.
Для определения оптимальных значений £гк t И CrKopt найдем
шах ДГк, т. е. максимальное значение обобщенного критерия эффек-
тивности. Функция Крк будет максимальной, когда <^гк 1 д£Гк £гк л (15.244)
дСгк Сгк дСгк СрК
откуда <^гк _ £гк opt дСгк Скг opt Геометрически данное соотношение означает, что max Кгк (15.245) опреде-
ляется такой точкой Мо (см. рис. 15.24), в которой касательная к кри-
вой Егк =/(Сгк ) проходит через начало координат. Соответствующие
этой точке значения эффективности и стоимости будут оптимальными.
В настоящее время применяется и другой обобщенный критерий эф-
фективности группировки комплексов (в виде стоимости атаки /ат для
комплексов нападения, или стоимости активной обороны /Об— Для
комплексов обороны) [14].
Проиллюстрируем эти понятия на некоторых критериях. Будем счи-
тать, что некоторая цель, обороняемая перехватчиками, подвержена на-
падению со стороны самолетов противника. Качество выполнения этой
боевой задачи нападающей стороной оценивается величиной /ат, пред-
ставляющей собой стоимость атаки, а для средств обороны стоимостью
обороны /об- При этом предполагается, что ряд самолетов нападения
уменьшает полезность цели па некоторую постоянную величину и с не-
которой другой величиной вероятности выводит из строя центры напа-
дения перехватчиков. Каждый из атакующих самолетов с различной ве-
роятностью может быть поражен перехватчиками.
Стоимость средств обороны и нападения различны и определяются
типом ЛА, наземными средствами обеспечения, вероятностью выполне-
ния боевого задания и применяемыми средствами вооружения для пора-
жения целей. Таким образом, «качество» выполнения нападающей сто-
роной боевого задания тем выше, чем меньше величина /ат. Действия
активной обороны увеличивают величину /ат; ухудшая выполнение бое-
вого задания нападающей стороной.
Вероятности поражения наземной цели и вероятности поражения
бомбардировщика при активной обороне приведены в табл. 15.3 [14].
Таблица 15.3
Условия полета бомбардировщика Характеристики летных данных бомбардировщика Вероятность поражения цели Вероятность поражения бомбардиров- щика одним перехватчиком
оборона малых высот оборона больших высот
Большая высота высокие 0,9 0,3 0,4
низкие 0,3 0,4 0,5
Малая высота высокие 0,3 0,2 0,1
низкие 0,1 0,3 0,2
Из данных табл. 15.3 видно, что повышение летно-тактических ха-
рактеристик бомбардировщика повышает примерно в три раза вероят-
ность поражения им наземной цели. Вероятность поражения бомбарди-
ровщика средствами обороны в меньшей степени зависит от его летно-
тактических характеристик и высоты полета.
Если считать, что бомбардировщик с высокими летно-тактическими
характеристиками имеет условную стоимость, равную 2,5, а бомбарди-
ровщик с низкими характеристиками, стоимость, равную 1, то можно
оценить влияние активной обороны /об на стоимость атаки /ат бомбар-
дировщиков.
На рис. 15.25 [14] кривыми I, II и III показаны зависимости /ат =
= F(fos) для обороны малых высот соответственно пяти, трех и одного
объектов, кривыми IV, V, VI показаны те же зависимости, но для оборо-
ны больших высот также пяти, трех и одного объектов.
Оценим влияние стоимости активной обороны /Об на стоимость ата-
ки /ат тактических баллистических ракет (табл. 15.4) [14].
По данным табл. 15.4 на рис. 15.26 построены графики зависимости
/ат = -Р(/об) Для обороны трех и семи целей. Атака производится такти-
ческими ракетами с различными видами боевых зарядов (кривые I и II)
и их оптимальному сочетанию (кривые III). Здесь же проведена грани-
ца, разделяющая плоскость интенсивности активной обороны на два
участка: слабая оборона и сильная оборона.
Из рис. 15.26 следует, что при оптимальном сочетании тактических
ракет с малым и большим боевыми зарядами наблюдается некоторое
улучшение результатов атаки.
В заключение рассмотрим стоимость атаки условных наземных це-
лей многоцелевыми истребителями с различными вариантами бортового
вооружения. В табл. 15.5 приведены данные по вероятностям преодоле-
ния ПВО, выполнения боевого задания (Е гк ) и стоимости атаки в от-
носительных единицах [14].
По данным табл. 15.5 на рис. 15.27 построена кривая 1, показываю-
щая стоимость атаки условной наземной цели одним самолетом. Здесь
же для сравнения приведена кривая 2 — стоимость атаки одного само-
лета, действующего в составе двух самолетов, при этом один из само-
летов атакует наземную цель, а второй — подавляет средства ПВО. Кри-
вая 3 соответствует стоимости атаки одного самолета, действующего в
составе группы из трех самолетов; здесь два самолета группы подавля-
ют средства ПВО.
Из рис. 15.27 видно, что стоимость атаки наземной цели сильно
уменьшается при полете группы самолетов: одного, атакующего назем-
ную цель, а других — прикрывающих его боевые действия. Последнее
показывает на необходимость применения многоцелевых истребителей,
атакующих наземные цели в составе боевой группы, состоящей из са-
молетов нападения и самолетов прикрытия.
Таблица 15.5
Вариант вооружения Вероятность преодоления ПВО и эффективность группировки комплекса ' нападения Стоимость атаки без учета надежности действия ракет класса „воздух — по-. верхностЬ"
£пво £гк
Бомбы Бомбы и две ракеты класса «воз- 0,26 0,2 г
дух — поверхность» ; . . . . 0,52 0,4 1,15
Бомбы и аппаратура радиопомех . . Бомбы, две ракеты класса «воз- 0,82 о,65 1,25
дух — поверхность» и аппаратура ра- диопомех ... . . . 0,9 0,72 1,4
тактических баллистических- ракет
Рис, 15.27. Графики зависи-
мости атаки наземной цели
многоцелевым истребителем,
действующим одиночно
(кривая 1) и в составе груп-
пы (кривые 2 и 3)
СПИСОК ЛИТЕРАТУРЫ К ГЛАВЕ XV
1. Алексеев В. А. Теория стрельбы . зенитной артиллерии. М., «Воен-
издат», 1946, 270 с. .
2. Андреев И. И., Татарченко Е. А. Применение математических мето-
дов в военном деле. М., «Воениздат», 1967, 243 с.
3. А ф о н и н А. М. и др. Беспилотные летательные аппараты. М., «Машино-
строение», 19457, 439 с.
4. В а кин С. А„ Шустов Л. Н. Основы радиопротиводействия и радиотех-
нической разведки. М, «Советское радио», 1968, 448 с.
б. Вентцель Е. С. Введение в исследование операций. М., «Советское ра-
дио», 1564, 33’8 с.
6. Вентце ль Е. С. Исследование операций. М., «Советское радио», 1972,
551 с.
7. Д у р о в В. Р. Боевое применение и боевая эффективность истребителей-пере-
хватчиков. М., «Воениздат», 1972, 279 с.
8. Кофман А. Методы и модели исследования операций. М., «Мир», 1966,
523 с.
9. Неупокоев Ф. К. Стрельба зенитными ракетами. М., «Воениздат», 1970.
351 с.
10, Овчаров Л. А. Прикладные задачи теории массового обслуживания. М„
«(Машиностроение», 1969, 3124 с.
11. По ловко А. М. Основы теории надежности. М., «Наука», 1964, 446 с.
12. Роси и М. Ф. Статистическая динамика и теория эффективности систем уп-
равления. М., «Машиностроение», 1970, 335 с.
13. Фендриков Н. М., Яковлев В. И. Методы расчетов боевой эффектив-
ности вооружения. М., «Воениздат», 1971, 224 с.
14. Ч е м б р.о в с к и й О. А., Топчеев Ю. И., Самойлович Г. В. Общие
принципы проектирования систем управления. М., «Машиностроение», 1972, 414 с.
15. Чуев Ю. В. и др. Основы исследования операций в военной технике. И.,
«Советское радио», 4965, 594 с.
16. Чуев Ю. В. Исследование операций в военном деле. М., «Воениздат»,
1970, 256 с.
17. Шерстобитов В. В,, Динер И. Я. Сборник задач по стрельбе зенит-
ной артиллерии. М., «Воениздат», 19А8, 255 с.
18. Шишонок Н. А., Репкин В. Ф., Б ар винский Л. Л. Основы тео-
рии надежности и эксплуатации радиоэлектронной техники. М., «Советское радио», 1964,
551 с.
19. Шлейзингер Р. Д. Радиоэлектронная война. М:, «Воениздат», 1963, 318с.
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ 1
f-
ЗНАЧЕНИЯ ФУНКЦИИ ЛАПЛАСА Ф/,, = ___"\е 2 dt
( * V 2«
х * ф(-г) X ф ф(.г) X * ф(-г) X * ф(х) X * ф(.г) X * Фи)
0,00 01 02 03 04 05 06 07 08 09 0,10 И 12 13 14 15 16 17 18 19 0,20 21 22 23 24 25 26 27 28 29 0,30 31 32 33 34 35 36 37 38 39 0,40 41 42 43 44 0,0000 0040 0080 0120 0160 0199 0239 0279 0319 0359 0,0398 0438 0478 0517 0557 0596 0636 0675 0714 0753 0,0793 0832 0871 0910 0948 0987 1026 1064 1103 1141 0,1179 1217 1255 1293 1331 1368 1406 1443 1480 1517 0,1554 1591 1628 1664 1700 0,45 46 47 48 49 0,50 51 52 53 54 55 56 57 58 59 0,60 61 62 63 64 65 66 67 68 69 0,70 71 72 73 74 75 76 77 78 79 0,80 81 82 83 84 85 86 87 88 89 0,1736 1772 1808 1844 1879 0,1915 1950 1985 2019 2054 2088 2123 2157 2190 2224 0,2257 2291 2324 2357 2389 2422 2454 2486 2517 2549 0,2580 2611 2642 2673 2703 2734 2764 2794 2823 2852 0,2881 2910 2939 2967 2995 3023 3051 3078 3106 3133 0,90 91 92 93 94 95 96 97 98 99 1,00 01 02 03 04 05 06 07 08 09 1,10 И 12 13 14 15 16 17 18 19 1 ,20 21 22 23 24 25 26 27 28 29 1,30 31 32 33 34 0,3159 3186 3212 3338 3264 3289 3315 3340 3365 3389 0,3413 3438 3461 3485 3508 3531 3554 3577 3599 3621 0,3643 3665 3686 3708 3729 3746 3770 3790 3810 3830 0,3849 3869 3888 3907 3925 3944 3962 3980 3997 4015 0,4032 4049 4066 4083 4099 1,35 36 37 38 39 1,40 41 42 43 44 45 46 47 48 49 1,50 51 52 53 54 55 56 57 58 59 1,60 61 62 63 64 65 66 67 68 69 1,70 71 72 73 74 75 76 77 78 79 0,4115 4131 4147 4162 4177 0,4192 4207 4222 4236 4251 4265 4279 4292 4306 4319 0,4332 4345 4357 4370 4382 4394 4406 4418 4429 4441 0,4452 4463 4474 4484 4495 45С5 4515 4525 4535 4545 0,4554 4564 4573 4582 4591 4599 4608 4616 4625 4633 1,80 81 82 83 84 85 86 87 88 89 1,90 91 92 93 94 95 96 97 98 99 2,00 02 04 06 08 2,10 12 14 16 18 2,20 22 24 26 28 2,30 32 34 36 38 2,40 42 44 46 48 0,4641 4649 4656 4664 4671 4678 4686 4693 4699 4706 0,4713 4719 4726 4732 4738 4744 4750 4756 4761 4767 0,4772 4783 4793 4803 4812 0,4821 4830 4838 4846 4854 0,4861 4868 4875 4881 4887 0,4893 4898 4904 4909 4913 0,4918 4922 4927 4931 4934 2,50 52 54 56 58 2,60 62 64 66 68 2,70 72 74 76 78 2,80 82 84 86 88 2,90 92 94 96 98 3,00 3,10 3,20 3,30 3,40 3,50 3,60 3,70 3,80 3,90 4,00 4,50 5,00 0,4938 4941 4945 4948 4951 0,4953 4956 4959 4961 4963 0,4965 4967 4969 4971 4973 0,4974 4976 4977 4979 4980 0,4981 4982 4984 4985 4986 0,49865 49903 49931 49952 49165 49977 49984 49989 49993 49995 0,499968 499997 0,49999997
ПРИЛОЖЕНИЕ 2
ЗНАЧЕНИЯ КОЭФФИЦИЕНТА k ДЛЯ ВЫЧИСЛЕНИЯ ВЕРОЯТНОСТИ
ПОРАЖЕНИЯ ЦЕЛИ ПРИ. ЗАВИСИМЫХ ВЫСТРЕЛАХ
м Г
0,5 0,55 0,6 0,65 0,7 0,75 0,8 0,85 0,9 0,95
0,02 1,00 1,00 0,99 0,99 0,98 0,96 0,94 0,91 0,87 0,82
0,04 1,0 0,99 0,99 0,98 0,96 0,93 0,90 0,86 0,83 0,78
0,06 0,99 0,99 0,98 0,96 0,94 0,91 0,87 0,84 0,79 0,75
0,08 0,98 0,97 0,96 0,94 0,91 0,87 0,84 0,80 0,76 0,72
0,10 0,98 0,97 0,95 0,92 0,89 0,85 0,81 0,77 0,73 0,69
0,20 0,97 0,95 0,93 0,90 0,87 0,82 0,77 0,71 0,65 0,58
0,40 0,95 0,93 0,90 0,87 0,83 0,78 0,72 0,64 0,54 0,43
0,60 0,93 0,91 0,88 0,85 0,80 0,75 0,68 0,59 0,49 0,35
0,80 0,92 0,90 0,87 0,83 0,78 0,74 0,66 0,58 0,47 0,34
1,00 0,91 0,88 0,85 0,81 0,77 0,72 0,65 0,57 0,47 0,32
1,50 0,89 0,86 0,83 0,79 0,74 0,69 0,63 0,55 0,45 0,32
2,00 0,88 0,85 0,82 0,78 0,73 0,68 0,62 0,54 0,45 0,32
2,50 0,88 0,85 0,82 0,78 0,73 0,68 0,62 0,55 0,45 0,32
3,00 0,88 0,86 0,82 0,78 0,74 0,69 0,62 0,56 0,46 0,33
4,00 0,90 0,87 0,84 0,80 0,76 0,71 0,64 0,57 0,47 0,34
5,00 0,92 0,89 0,86 0,82 0,78 0,73 0,67 0,59 0,49 0,36
6,00 0,93 0,91 0,88 0,84 0,80 0,75 0,69 0,61 0,51 0,37
7,00 0,94 0,92 0,89 0,86 0,82 0,77 0,71 0,63 0,53 0,38
8,00 0,95 0,93 0,90 0,87 0,83 0,78 0,72 0,64 0,54 0,39
9,00 0,96 0,94 0,91 0,88 0,84 0,80 0,74 0,66 0,56 0,41
10,00 0,96 0,94 0,92 0,89 0,86 0,81 0,75 0,67 0,57 0,42
ПРИЛОЖЕНИЕ 3
ТАБЛИЦА ПЕРЕВОДА РАЗМЕРНОСТЕЙ ФИЗИЧЕСКИХ ВЕЛИЧИН
В СИСТЕМУ СИ
Физическая величина Размерность величины Коэффициент перевода
Принятая в книге По системе СИ
Механические единицы
Масса кгс • с2/м кг 9,81
Длина м м 1
Время с с 1
Плоский угол градус (°) рад 0,0174
Расход кг/с кг/с 1
Сила КГС Н 9,81
Момент силы кгс • м Н • м 9,81
Момент инерции кгс • м • с2 кг • м2 9,81
Импульс силы кгс-с П-с 9,81
Единичный импульс кгс-с/кг Нс/кг 9,81
Давление кгс/см2 Па 9,81-104
Работа; энергия кгс-м Дж 9,81
Мощность кгс - м/с Вт 9,81
Коэффициент динами- кгс-с/м2 Н-с/м2 9,81
ческой вязкости
Коэффициент кинема- м2/с м2/с 1
тической вязкости
Тепловые единицы
Количество теплоты ккал Дж 4,187-103
Удельная теплоемкость ккал/(кг-К) Дж/(кг-К) 4,187-103
Энтальпия ккал/кг Дж/кг 4,187-103
Продолжение прил. 3
Физическая величина Размерность величины Коэффициент перевода
Принятая в книге По системе СИ
Энтропия ккал/К Дж/К 4,187-103
Удельная энтропия ккал/(кг-К) Дж/(кг-К) 4,1Н/103
Тепловой поток ккал/м2 Дж/м2 4,187-103
Удельный тепловой по- Г ккал/(м2-с) Вт/м2 4,187-103
ток 1 ккал/(м2-ч) Вт/м2 1,163
Коэффициент тепло- f ккал/(м2-с-К) Вт/(м2-К) 1,187-103
отдачи 1 ккал/(м2-ч-К) Вт/(м2-К) 1,163
Коэффициент тепло- ( ккал/(м-с-К) Вт/(м-К) 4,187-103
проводности 1 ккал/(м-ч-К) Вт/(м-К) 1,163
Коэффициент темпе- / м2/с м2/с 1
ратуропроводности { м2/ч м2/с 2,78-10-4
Коэффициент лучеис- ккал/ (м2-ч- К4) Вт/(м2-К4) 1,163
пускания Газовая постоянная кгс-м/(кг-К) Дж/(кг-К) 9,81
Примечания. 1. В книге по причинам, указанным в предисловии, термин «вес тела» (сна-
ряда, топлива, ракеты и т. п.) используется как характеристика силы тяжести с размерностью
«кгс» и как характеристика объекта, определяемая взвешиванием, с размерностью «кг» [в послед-
нем случае характеристика соответствует массе международного прототипа килограмма (кг)]. Это
относится и к производным величинам: расход (кг/с), единичный импульс (кгс с/кг) и т. п.
2. Для иллюстрации пользования таблицей перевода размерностей могут быть приведены сле-
дующие примеры: 4 кгс=9,81 Н; 1 кгс • с2/м = 9,81 кг; 1 кгс/см2=9,81 104 Па; 1 кгс-м=9,81 Дж;
1 кгс • м/с=9,81 Вт; I ккал/кг=4,187 - 103 Дж/кг и т. д.
3. При переводе единиц с большей точностью необходимо увеличить число значащих цифр
в переводном множителе, например, принять его равным 9,806... и т. д. (соответственно точности
величины ускорения свободного падения).